/







































































































































































Text
УДК 625.7/8.08
Дорожные машины. Хархута Н. Я- и др. Изд-во «Машиностроение», 1968.416 стр. Табл. 42.
Илл. 235. Библ 76 назв.
В книге приводятся теория, конструкции
и расчет дорожных машин. В ней представлена
широкая номенклатура машин, служащих для
земляных работ, добычи и переработки каменных
материалов, приготовления бетонов, а также для
устройства оснований и усовершенствованных
дорожных покрытий. Уделено также внимание
машинам для ремонта и содержания дорог.
В книге рассматривается взаимодействие рабо-
чих органов машин с обрабатываемыми материалами
и дается расчет и выбор их основных параметров
с учетом свойств этих материалов. Приводятся
также расчеты основных узлов машин на проч-
ность.
Книга предназначена для студентов механи-
ческой специальности автомобильно-дорожных выс-
ших учебных заведений и может быть использована
так же как студентами аналогичной специальности
политехнических и инженерно-строительных инсти-
тутов, так и инженерно-техническими работниками,
связанными с производством и эксплуатацией
дорожных машин.
Рецензент канд. техн, наук Ф. П. Катаев
и кафедра строительных и дорожных машин ЛИСИ
3—2—7
19—68
ПРЕДИСЛОВИЕ
Книга является учебником по курсу «Дорожные машины»
для студентов механической специальности автомобильно-дорожных выс-
ших учебных заведений. Учебник составлен в соответствии с программой
этого курса, утвержденной Министерством высшего и среднего специаль-
ного образования СССР.
За последние годы издан ряд учебников и учебных пособий, на базе
которых в настоящее время строится учебный процесс по подготовке
инженеров-механиков по строительным и дорожным машинам. Перед
авторами настоящей книги была поставлена задача создания компактного
учебника, который при сравнительно небольшом объеме содержал бы
необходимые сведения по теории, конструкциям и расчету дорожных
машин. В учебнике значительное внимание уделено процессам взаимо-
действия рабочих органов машин с обрабатываемыми материалами. При
этом принимались во внимание физико-механические свойства материалов.
При составлении учебника учтены опыт проектирования и результаты
исследований ряда научно-исследовательских и проектных учреждений,
а также высших учебных заведений, изложенные в трудах и в вышедших
ранее учебниках и учебных пособиях.
Наличие в настоящее время ряда атласов чертежей по землеройным
и дорожным машинам, по экскаваторам, а также машинам для измельче-
ния и грохочения полезных ископаемых позволило основное внимание
обратить не на описание конструкций машин, а на их расчет, в котором
главное место занимает выбор основных параметров рабочих органов.
Номенклатура дорожных и строительных машин весьма обширна,
что вызывает значительные трудности при составлении таких учебников.
В книге машины сгруппированы главным образом по технологическому
признаку.
Отдельные части книги написали: введение, § 1—4, 6—12, 14, 15,
25—34, 44 и 47 — проф. докт. техн, наук Н. Я. Хархута; § 38; 43; 45;
46 и 48 — канд. техн, наук М. И. Капустин; § 16—24 — доц. канд.
техн, наук В. П. Семенов; § 35—37, 40—42, 50—51 — канд. техн,
наук И. М. Эвентов; § 5 и часть § 3 — канд. техн, наук Ю. А. Бром-
берг; § 13 и 39 — канд. техн, паук Ю. М. Васильев и § 49—
инж. М. П. Костельов.
Редактор
ВВЕДЕНИЕ
В настоящее время строительное производство немыслимо
без его механизации, т. е. без применения специальных машин. Огромный
размах строительства в Советском Союзе повлек за собой и рост произ-
водства таких машин. В результате появилась совершенно новая отрасль
машиностроения, которая за короткий срок, начиная с тридцатых годов,
сделала огромные успехи. Сейчас создан большой парк дорожных машин;
включающий в себя самые разнообразные машины. Эта отрасль машино-
строения продолжает развиваться. При этом имеет место тенденция к по-
вышению мощностей машин и к автоматизации связанных с их работой
производственных процессов.
Как для организации правильной эксплуатации машин, так и для их
производства требуется большое количество специалистов. Поэтому в ряде
высших учебных заведений организована подготовка инженеров-меха-
ников по строительным и дорожным машинам. С этой целью создан спе-
циальный курс: «Дорожные и строительные машины, механическое обо-
рудование предприятий строительной индустрии». Впервые этот курс
был прочитан в феврале 1929 г. в Московском институте инженеров
транспорта (МИИТ) проф. А. И. Анохиным. До этого времени ни в СССР,
ни за границей подобных курсов не существовало.
Успешное проектирование дорожных машин возможно лишь в случае,
если инженер-механик обладает достаточной теоретической подготовкой.
Первостепенное значение имеют вопросы взаимодействия рабочих органов
той или иной машины с обрабатываемыми ею строительными материалами.
Только с учетом этого взаимодействия возможен правильный выбор пара-
метров машины, обеспечивающий высокую производительность и эконо-
мичность работы. Вместе с тем установить элементы такого взаимодей-
ствия возможно лишь на базе знания свойств строительных материалов и,
в частности, грунтов.
К параметрам машин относятся основные элементы ее характеристики
(вес, габариты, рабочие и транспортные скорости и т. п.). Большое зна-
чение имеют принципиальная конструктивная схема машины, а также
конструкция и размеры ее рабочих органов.
Настоящий курс имеет целью систематизировать и обобщить имею-
щийся обширный материал по теории и расчету дорожных машин. Про-
цессом обучения предусмотрены как курсовое проектирование, так и про-
изводственная практика, в процессе которых происходит детальное
знакомство с конструкциями машин, их применением и условиями
работы.
Строительное производство относится к одной из древнейших отра-
слей деятельности человека. Оно стояло на достаточно высоком уровне
еще задолго до нашей эры. Широко известны такие образцы строительного
искусства, как египетские пирамиды, земляные плотины в Индии и благо-
ВВЕДЕНИЕ
5
устроенные дороги Римской империи. Так, общее протяжение последних
к началу нашей эры составило около 78 000 км. Возведение всех этих
сооружений в условиях того времени осуществлялось вручную рабами
и покоренными народами, а в дальнейшем — крепостными. Первые серь-
езные попытки механизировать труд в строительстве относятся к началу
XIX в., чему в значительной степени послужило изобретение паровой
машины. Так, в 1809 г. в Петербурге Бетанкуром была предложена пла-
вучая землечерпалка, которая затем успешно работала в Кронштадтском
порту.
В 1835 г. появился первый паровой экскаватор. Однако развитие
дорожного машиностроения в то время шло крайне медленно. Так,
к 1859 г. мировой парк экскаваторов состоял всего из семи машин, из
которых четыре работали в России. Первые дробилки появились в 1858 г.,
однако ввиду плохого качества получаемого щебня они крайне медленно
внедрялись в производство. В 1875 г. был построен первый грейдер-эле-
ватор, а в 1887 г. — первый грейдер. Обе эти машины работали на кон-
ной тяге.
Развитию строительных и дорожных машин способствовало изобре-
тение гусеничного ходового механизма и двигателей внутреннего сгора-
ния, в частности дизелей. Первые экскаваторы на гусеничном ходу по-
явились в 1912 г. и с этого времени они широко стали применяться на
строительстве.
Первые годы нашего века являются началом развития автомобиле-
строения. Эта новая отрасль промышленности стала расти бурными тем-
пами. С появлением автомобилей потребовалось широкое строительство
дорог. При этом изменился тип дорожных покрытий, т. е. появились усо-
вершенствованные покрытия, устраиваемые с применением битумных
материалов и цементного бетона. Для расширяющегося дорожного строи-
тельства необходимы дорожные машины.
В дореволюционной России объем дорожно-строительных работ был
мал, кроме того, почти все работы выполнялись вручную. Дорожное
машиностроение начало развиваться только после Великой Октябрьской
социалистической революции. В 1926 г. на Онежском заводе в г. Петро-
заводске было организовано производство грейдеров, скреперов, утюгов
и т. п. В 1930 г. дорожное машиностроение осуществлялось уже на четы-
рех заводах. Выпуск машин и число занятых их производством заводов
непрерывно расширялись и продолжают расширяться в настоящее время.
Сейчас строительное и дорожное машиностроение является большой от-
раслью машиностроительной промышленности, которая включает в себя
научно-исследовательские институты и многочисленные проектные орга-
низации.
Развитие дорожного машиностроения было невозможным без органи-
зации научно-исследовательской работы, направленной на разработку
теории и методов расчета машин. В тридцатых годах научно-исследова-
тельская работа по дорожным машинам была сосредоточена в ДорНИИ.
Здесь большой вклад в дело развития теории машин внесли профессора
А. И. Анохин, М. Н. Летошнев, инженеры В. А. Кондрашков, Г. Д. Кур-
ков, В. А. Либин, Н. В. Кустов и др. В настоящее время исследователь-
ская работа ведется ВНИИстройдормашем, ВНИИземмашем, в Союздор-
НИИ и в ряде высших учебных заведений (МАДИ, ХАДИ, МИСИ,
ЛИСИ, ЛПИ и т. д.).
Крупные научно-исследовательские работы по разработке грунтов
выполнены акад. В. П. Горячкиным, профессорами Н. Г. Домбровским,
М. X. Пигулевским, А. Д. Далиным, Е. Р. Петерсом, А. Н. Зелениным и др.
6
ВВЕДЕНИЕ
По теории вибрационных машин заслуживают внимания работы
профессоров Д. Д. Баркана, А. Е. Десова, инж. Л. П. Петрунькина и др.
Дорожные машины работают в тяжелых условиях, которые характе-
ризуются большим диапазоном изменений температуры воздуха, постоян-
ной возможностью подвергнуться воздействиям осадков, передвижением
в условиях бездорожья, работой на влажных, а иногда на сильно пыле-
ватых грунтах и т. п. При этом надо еще учесть, что строительные объекты
часто имеют значительную протяженность и потому места работы машин
отдалены от ремонтных баз. Все это должно учитываться при проектиро-
вании машин.
Дорожные машины должны быть просты по конструкции и обладать
достаточной надежностью в работе и необходимой долговечностью. Мон-
таж и демонтаж машины, а также выполнение необходимых ремонтных опе-
раций не должны вызывать больших затруднений. Надежность характе-
ризуется временем непрерывной работы машины до первого планового
ремонта, а долговечность — временем работы машины до капитального
ремонта или до ее списания.
Простота выполнения ремонтных операций, экономичность работы
и снижение стоимости изготовления самой машины зависят от того, на-
сколько полно проведена унификация машин. Поэтому проектирование
машин должно производиться с максимальным использованием одних
и тех же или в крайнем случае подобных агрегатов, узлов и механизмов.
Парк унифицированных машин легче снабжать запасными частями и на
базе готовых агрегатов проще организовать их ремонт. Кроме того, изго-
товление однотипных агрегатов обходится значительно дешевле, чем
разнотипных. Поэтому унификация является сейчас главнейшей задачей
дорожного машиностроения.
В настоящее время совершается переход от проектирования отдельных
машин к проектированию и внедрению комплекса машин. Это позволит
наиболее широко унифицировать машины и упорядочит их выпуск и при-
менение в строительстве. Комплексное проектирование производится на
базе типажа машин. Типаж разрабатывается для каждого вида оборудо-
вания. Им предусматриваются ряды машин каждого вида, которые могут
полностью удовлетворить запросы строительного производства. Типажом
оговаривается значение тех главных параметров машин, от которых за-
висят основные показатели их работы. Так, главными параметрами экска-
ваторов и скреперов являются емкости ковшей, автогрейдеров — длины
ножей, бульдозеров — тяговые усилия и т. д.
При проектировании и внедрении новых машин необходимо оценить
их эксплуатационные качества. Главным показателем является произво-
дительность машины. Под производительностью понимается продукция,
выдаваемая машиной за 1 ч работы. Различают теоретическую, техни-
ческую и эксплуатационную производительность.
Теоретическая (расчетная) производительность не учитывает потери
времени, а также те потери, которые имеют место ввиду различия действи-
тельных и расчетных параметров машины, например скоростей движения.
Кроме того, не учитываются и возможные потери перемещаемого машиной
материала, например грунта, при передаче его с одного рабочего органа
на другой. Теоретическая производительность Пр определяется примени-
тельно к каждому виду машин с учетом специфики технологического
процесса. При определении технической производительности уже учиты-
ваются некоторые потери. Поэтому
Пт = кПр м3/ч. (I. 1)
ВВЕДЕНИЕ
7
Здесь k — коэффициент, учитывающий потери производительности, свя-
занные с конструкцией самой машины.
Эксплуатационная производительность дополнительно учитывает
те потери времени, которые имеют место из-за неизбежных перерывов
в работе, связанных с заправкой и смазкой машины, с подготовкой ее
к работе и производством заключительных операций. Эти потери могут
быть оценены коэффициентом использования машины по времени ke\
обычно ke = 0,85. Тогда эксплуатационная производительность
Пэ = кеПт м3!ч. (1.2)
Важным показателем работы машины является себестоимость еди-
ницы продукции, которая определяется по формуле
Щ = (1.3)
где С — себестоимость одного часа работы машины в руб.
Повышение производительности машин и снижение себестоимости
единицы продукции является важной народнохозяйственной задачей.
Такая задача поставлена как перед эксплуатационниками, так и перед
конструкторами машин. Повысить производительность дорожных машин
можно путем увеличения размеров их рабочих органов, уменьшения вре-
мени, затрачиваемого на совершение рабочих операций, и снижения не-
производительных потерь.
Непроизводительные потери зависят главным образом от организа-
ции работ. Однако некоторая их доля часто является следствием неудач-
ной конструкции машины в целом или отдельных ее узлов. Уменьшить
время, затрачиваемое на совершение рабочих операций, можно путем по-
вышения скоростей движения рабочих органов, а в ряде других случаев,
как, например, при землеройно-транспортных машинах, и скоростей дви-
жения самих машин. Следует заметить, что такое повышение не может
идти беспредельно. Часто оно ограничивается определенными максималь-
ными значениями скоростей, выше которых ухудшается работа машины,
а в некоторых случаях начинает даже снижаться ее производительность.
Поэтому в большинстве случаев производительность того или иного типа
машин повышают путем увеличения размеров их рабочих органов, что,
однако, неизбежно влечет за собой повышение мощности установленного
двигателя. В связи с этим в дорожном машиностроении наблюдается не-
прерывное повышение мощностей выпускаемых машин.
Годовая выработка парка машин может быть увеличена путем исполь-
зования их в течение круглого года. Круглогодичное строительство, т. е.
ликвидация сезонности в строительстве, является весьма важной пробле-
мой. Такие машины, как экскаваторы, бульдозеры и дробилки, уже давно
работают в течение круглого года. В настоящее время поставлена задача
расширения номенклатуры таких машин.
Возможность использования машины в зимнее время, т. е. при низ-
ких температурах воздуха, должна учитываться при их проектировании
и изготовлении. При этом должны применяться системы, облегчающие
запуск двигателей, должна быть улучшена система смазки всех трущихся
частей машины, необходимо отеплить кабины операторов и т. п. Неко-
торые ответственные узлы тех машин, которые предназначены для работы
при очень низких температурах и которые обычно выполняются из угле-
родистой стали, следует выполнять из низколегированных сталей, а литые
детали — из стали спокойной плавки.
8
ВВЕДЕНИЕ
Пуск в производство всякой новой машины может быть осуществлен
лишь в том случае, если в результате будет иметь место экономический
эффект. Последний может принять форму снижения себестоимости еди-
ницы получаемой продукции, повышения качества последней, повышения
производительности, улучшения условий труда и т. п.
Эффективность новой машины устанавливается путем сравнения ее
с наиболее экономичной применяемой до нее машиной. При этом наиболее
характерным показателем экономической эффективности является срок
окупаемости, определяемый как
^=4-
Здесь 1 - те капиталовложения, которые необходимы для пуска новой
машины в производство;
Е — ожидаемая от внедрения машины годовая экономия.
Сравнение отдельных типов машин производится еще по другим пока-
зателям. Так, определяется удельная энергоемкость машины
= <L5>
где W — мощность установленных на машине двигателей; удельная ме-
таллоемкость машины
(L6)
где G — вес машины в кГ\
определяется также часовая выработка продукции на одного рабочего
^=4- (L7)
где п — число обслуживающих машину рабочих.
Создание новой машины начинается с составления технического зада-
ния на ее проектирование. Этим заданием обусловливается область при-
менения машины, устанавливается основная ее характеристика и в том
числе производительность и выводятся технико-экономические показа-
тели ее работы. В техническом задании определяется также потребность
в таких машинах и обосновывается экономическая целесообразность их
выпуска. По утверждении задания разрабатывается технический проект
машины, а затем и рабочие чертежи. По этим чертежам завод изготовляет
головной образец, который проходит сначала заводские, а затем приемоч-
ные испытания. Продолжительность последних устанавливается в зави-
симости от типа машины. По результатам этих испытаний делается за-
ключение о возможности пуска машины в серийное производство. Это
производство осуществляется лишь в случае положительного решения
и устранения обнаруженных при испытаниях конструктивных недо-
статков.
Строительное производство крайне разнообразно и состоит из про-
цессов различного вида. Здесь имеют место подготовительные работы,
которые ведутся в целях подготовки строительной площадки или полосы
к возведению на них инженерных сооружений. Большое место в строи-
тельном процессе занимают различного вида земляные работы. Процессы,
сопровождающие постройку автомобильных дорог, включают в себя про-
изводство смесей, состоящих из щебня или гравия с различного рода
ВВЕДЕНИЕ
9
вяжущими материалами. Поэтому производится добыча и дробление
каменных материалов. Весьма важным процессом является уплотнение
грунтов и дорожных покрытий. В настоящее время широко распростра-
нено строительство различного рода инженерных сооружений из сбор-
ного железобетона. При этом части железобетонных конструкций изгото-
вляются на специальных заводах или полигонах.
На заводах производится также переработка каменных материалов
и приготовление различного рода черных смесей, асфальтобетона и це-
ментного бетона. Эти заводы снабжены специальным оборудованием.
Поэтому работы, связанные со строительством дорожных покрытий,
разделяются на заводские или базовые и линейные. К линейным относятся
работы по укладке и уплотнению бетона и черных смесей непосредственно
в дорожное покрытие.
Во время эксплуатации дороги содержатся, т. е. произвс.дгтся ряд
операций, направленных к сохранению их в хорошем состоянии, а по
прошествии определенного срока они подвергаются ремонту. Содержание
и ремонт дорог относятся к специальной службе, которая снабжена пред-
назначенными для этой цели машинами.
Механизация разнообразных и часто сложных процессов строитель-
ного производства требует применения различных машин. Поэтому парк
дорожных машин состоит из машин разного назначения, которые могут
быть разделены на следующие группы:
1. Машины для подготовительных и земляных работ, которые про-
изводят копание грунта. Процессы копания весьма разнообразны. Они
определяются не только характером строительного производства, но и
свойствами грунтов. К этим машинам относятся бульдозеры, скреперы,
автогрейдеры, грейдер-элеваторы, экскаваторы и т. п.
2. Машины для добычи и переработки каменных материалов. Ка-
менный материал в большинстве случаев является основным строитель-
ным материалом. После добычи каменные материалы подвергаются пере-
работке, т. е. дроблению и разделению по степени крупности. Добыча
камня осуществляется при помощи бурильных молотков, станков ударно-
канатного бурения и т. п. Для этой цели также используются компрессоры
и другое вспомогательное оборудование. Для дробления камня и разде-
ления щебня по фракциям служат дробилки, мельницы, а также различ-
ного рода сортировочные и моечные машины.
3. Машины для уплотнения грунтов и дорожной одежды. Уплотнение
является весьма важным элементом технологического процесса, от каче-
ства выполнения которого зависит долговечность сооружений. К этой
группе машин относятся катки, трамбующие и вибрационные машины.
4. Машины и оборудование, предназначенные для строительства
усовершенствованных дорожных покрытий облегченного типа. Этот тип
покрытия значительно дешевле усовершенствованных покрытий капи-
тального типа — асфальтобетона и цементобетона и вместе с тем допускает
достаточно интенсивное движение транспорта. Поэтому покрытия этого
типа получили весьма большое распространение. При устройстве этих
покрытий применяются: оборудование битумных баз (битумохранилища,
котлы, битумные насосы, битумные плавильни, парообразователи, машины
для приготовления эмульсий и т. п.) и машины, предназначенные для
линейных работ (распределители щебня и гравия, автогудронаторы,
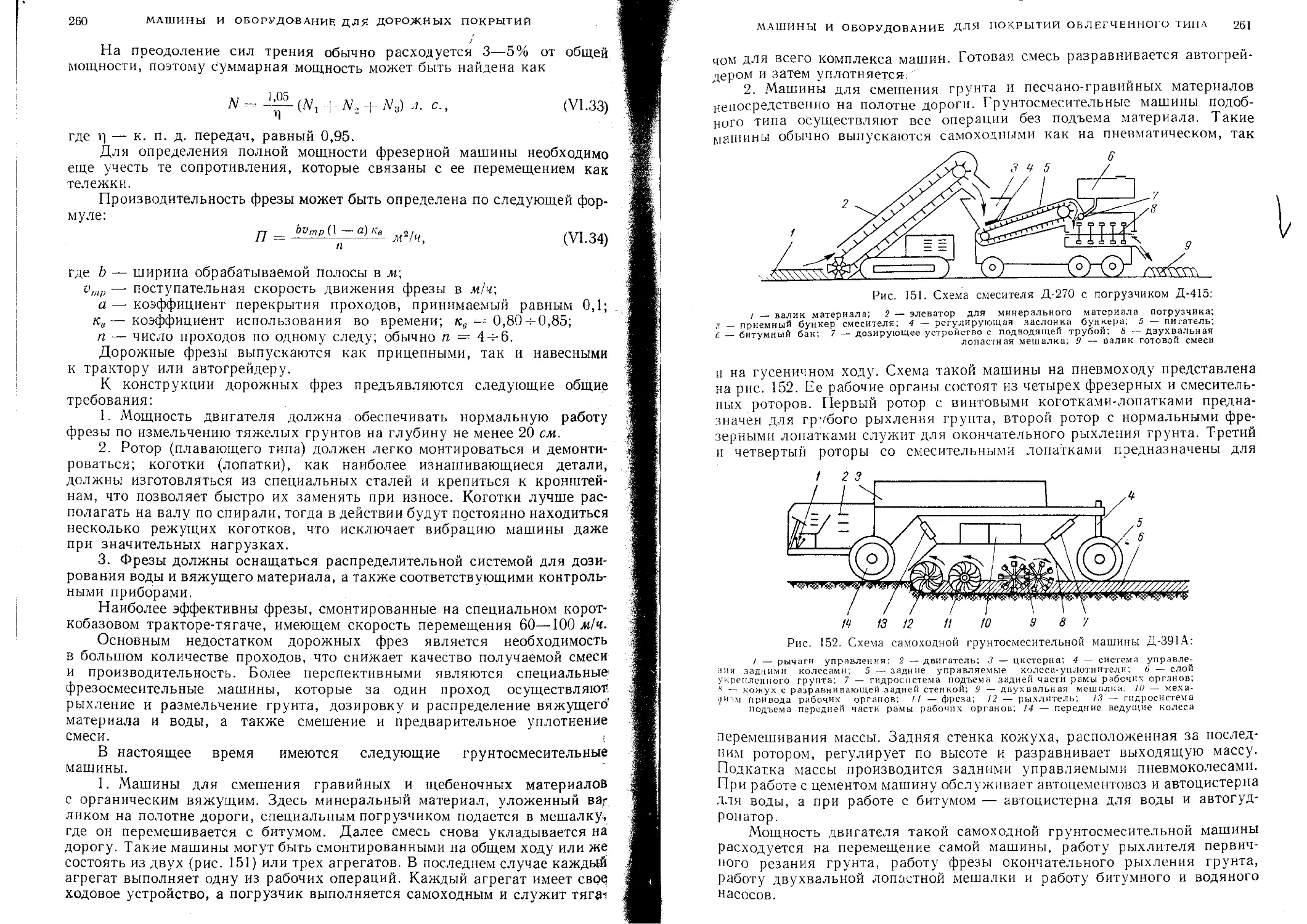
машины для постройки покрытий по методу смешения и т. п.).
5. Машины для приготовления и распределения асфальтобетона (сме-
сители, укладчики). Этот вид оборудования применяется при устройстве
асфальтобетонных дорожных покрытий.
10 ВВЕДЕНИЕ
6. Машины для приготовления бетона и строительства цементобетон-
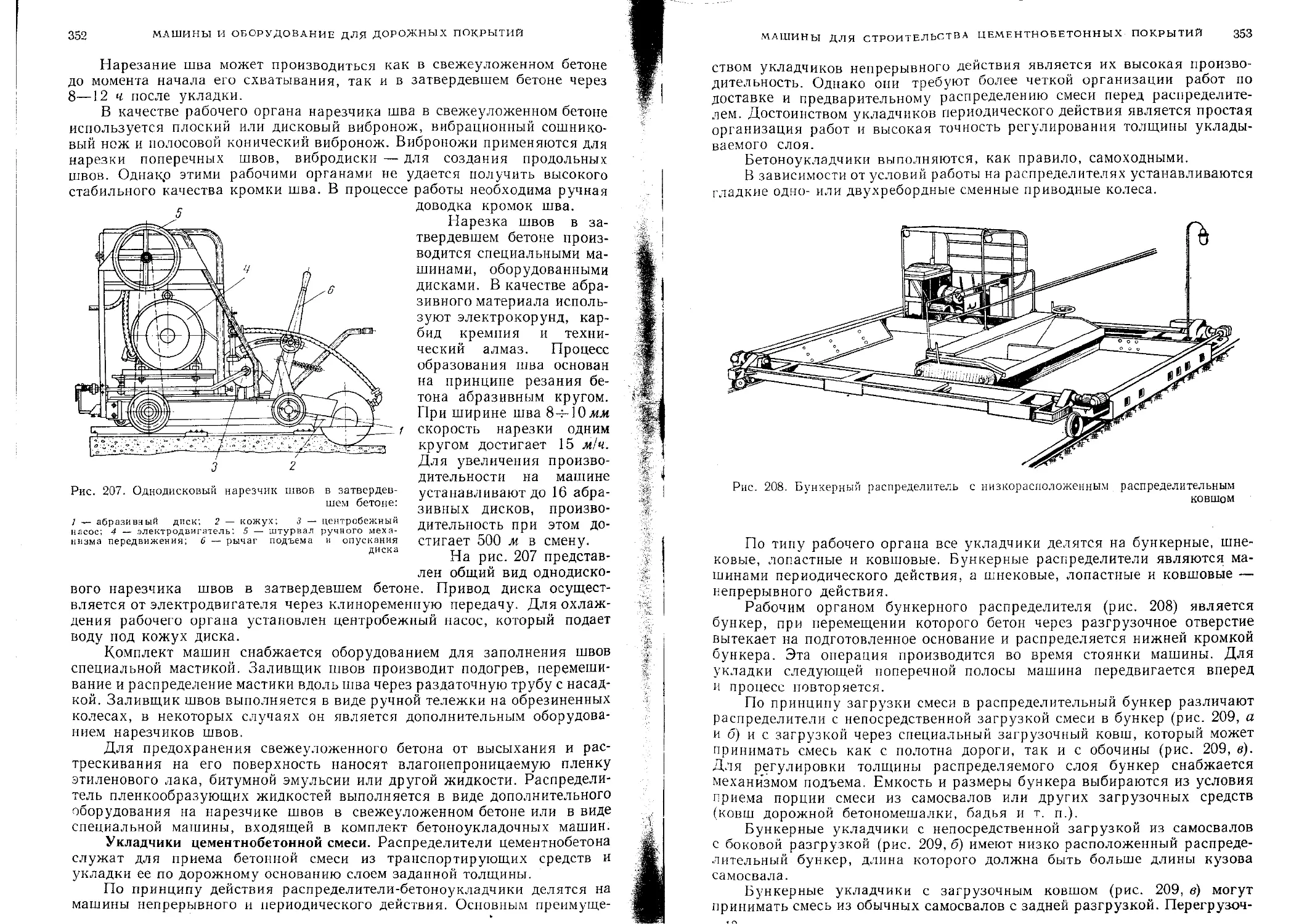
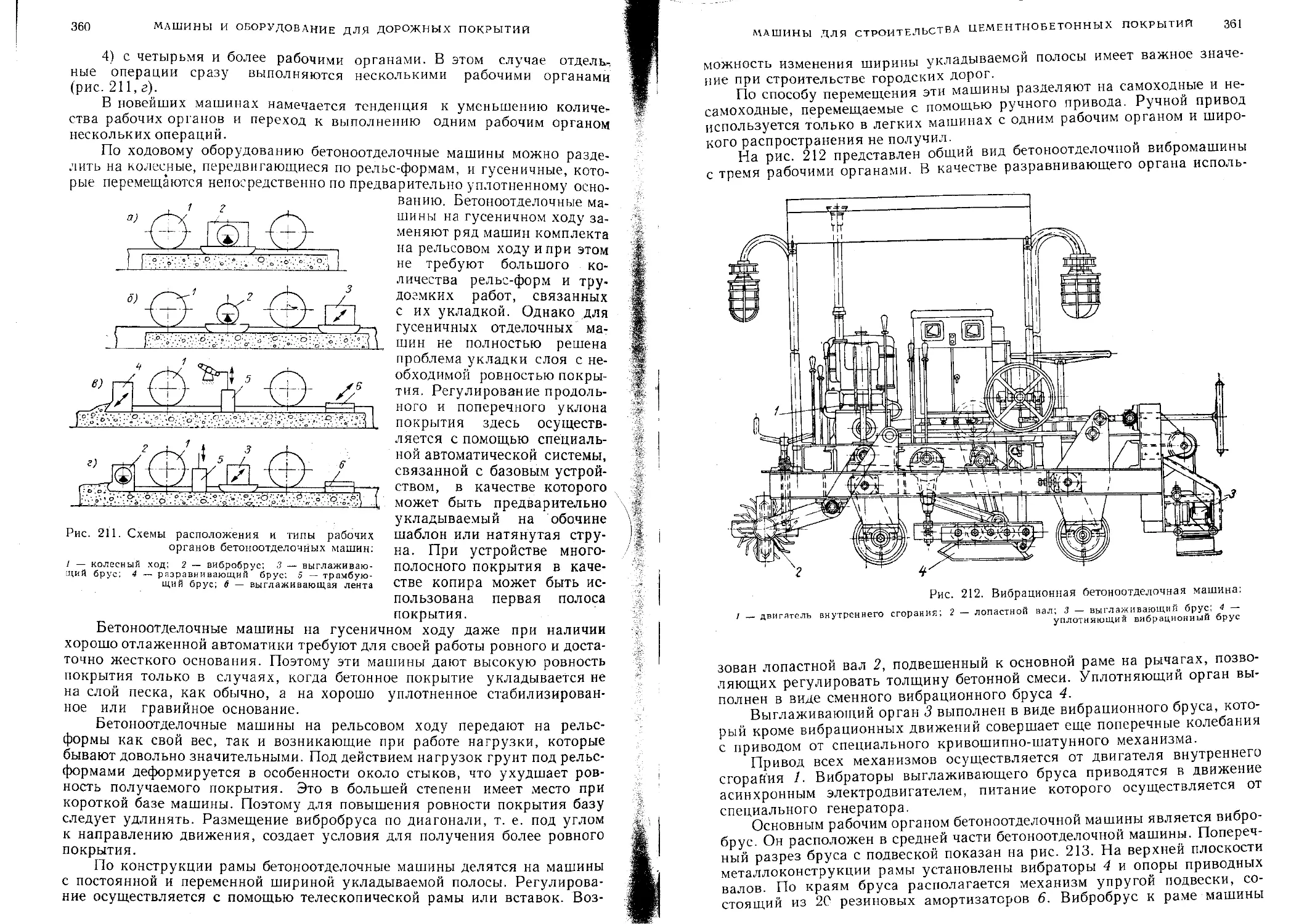
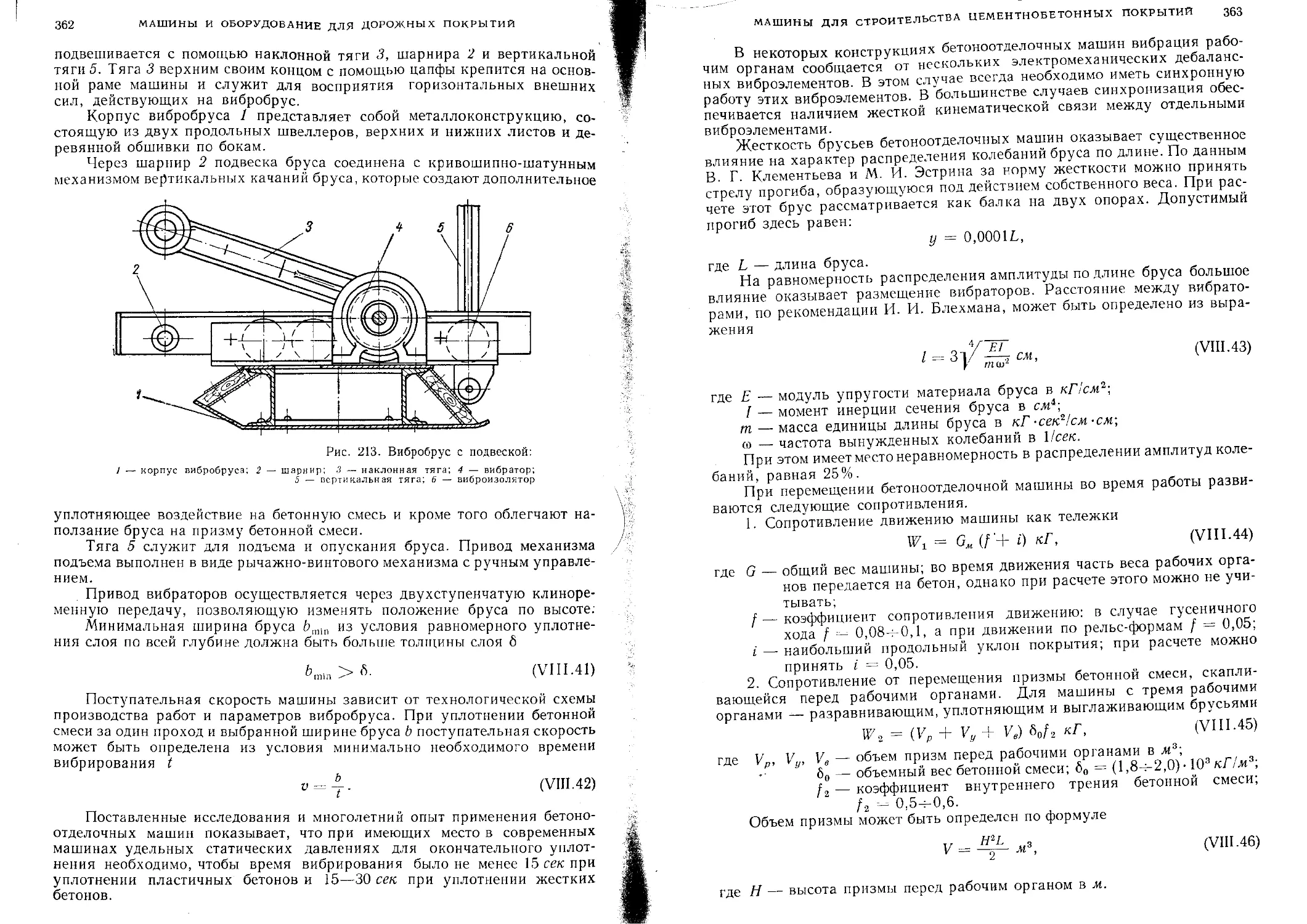
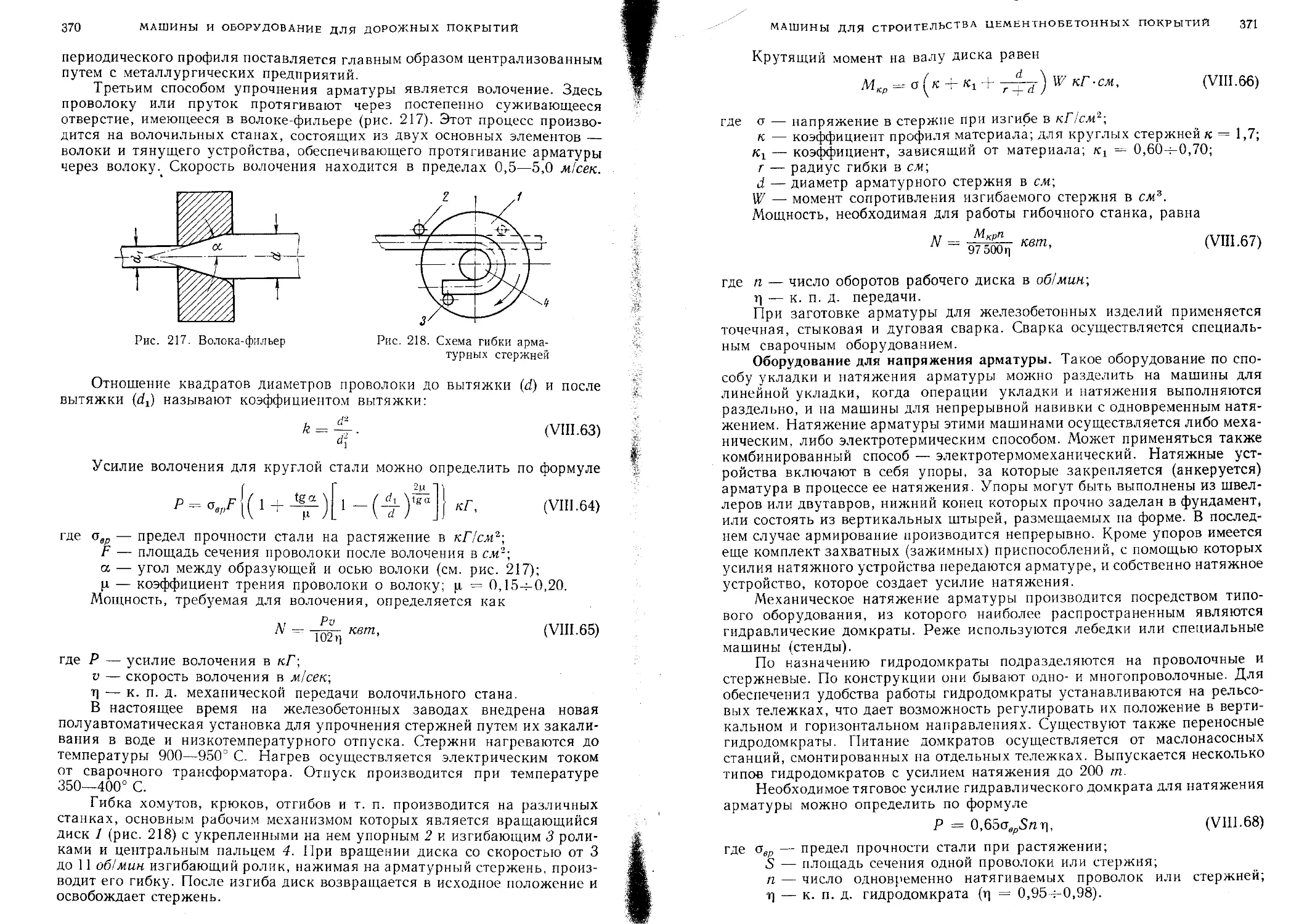
ных дорожных покрытий (бетоносмесители, распределители, бетоноуклад-
чики, нарезчики швов и т. п.).
7. Оборудование заводов и полигонов сборных железобетонных кон-
струкций. В настоящее время метод строительства из сборного железобе-
тона, в том числе предварительно напряженного, получил исключительно
большое распространение. Изготовлением служащих для этого конструк-
тивных деталей занимаются специальные заводы и полигоны, которые
имеют оборудование для правки, резки и натяжения арматуры, формова-
ния и уплотнения изделий, их пропаривания и т. п.
8. Машины для содержания и ремонта дорог (снегоочистители, щетки,
дорожные ремонтеры, пескораспределители и т. п.).
Большая часть из всего перечисленного выше оборудования создана
в сравнительно недавнее время. Эти машины позволили значительно по-
высить уровень механизации работ, который в настоящее время близок
к ста процентам.
ЧАСТЬ I
МАШИНЫ
ДЛЯ ЗЕМЛЯНЫХ РАБОТ
Глава I. РАБОЧИЕ ОРГАНЫ И ХОДОВОЕ
ОБОРУДОВАНИЕ
§ 1. ОБЩИЕ ВОПРОСЫ
Земляные работы являются самым распространенным
видом работ строительного производства. Они применяются в транспорт-
ном, гидротехническом, промышленном и городском строительствах,
а также в сельском хозяйстве. Вместе с тем они принадлежат к весьма
важным видам работ, от качества выполнения которых во многом зависит
устойчивость и продолжительность службы устроенных на грунтовых ос-
нованиях таких инженерных сооружений, как автомобильные и железные
дороги, плотины, дамбы и т. п.
В СССР ежегодно выполняется около 6 миллиардов кубометров
земляных работ. Такой огромный объем работ может быть выполнен
лишь при полной их механизации.
Основными видами земляных работ являются возведение насыпей,
разработка выемок, рытье каналов, траншей и котлованов. Эти работы
могут выполняться в самых разнообразных условиях, и грунт, необхо-
димый для возведения земляных сооружений, может перевозиться на
различные расстояния. Так, в условиях транспортного и, в частности,
автодорожного строительства низкие насыпи высотой до 1,5 м могут
возводиться из боковых резервов, а высокие насыпи, которые обычно
имеют место на подходах к таким искусственным сооружениям, как
мосты и путепроводы, как правило, сооружаются из грунта, доставляемого
из специальных карьеров.
Для выполнения земляных работ применяются разнообразные ма-
шины. Технологический процесс этих работ примерно одинаков и состоит
из следующих основных элементов: копания, транспортировки грунта
к месту укладки или в отвал разравнивания, уплотнения и профилирова-
ния, т. е. окончательной отделки земляного сооружения. Копание грунта,
т. е. отрыв его от основного массива, может производиться как после пред-
варительного рыхления специальными машинами-рыхлителями, так и
без этого.
В соответствии с элементами технологического процесса используется
следующее оборудование для земляных работ:
1) землеройные машины, к числу которых относятся экскаваторы,
бульдозеры, скреперы, автогрейдеры и грейдеры, грейдер-элеваторы,
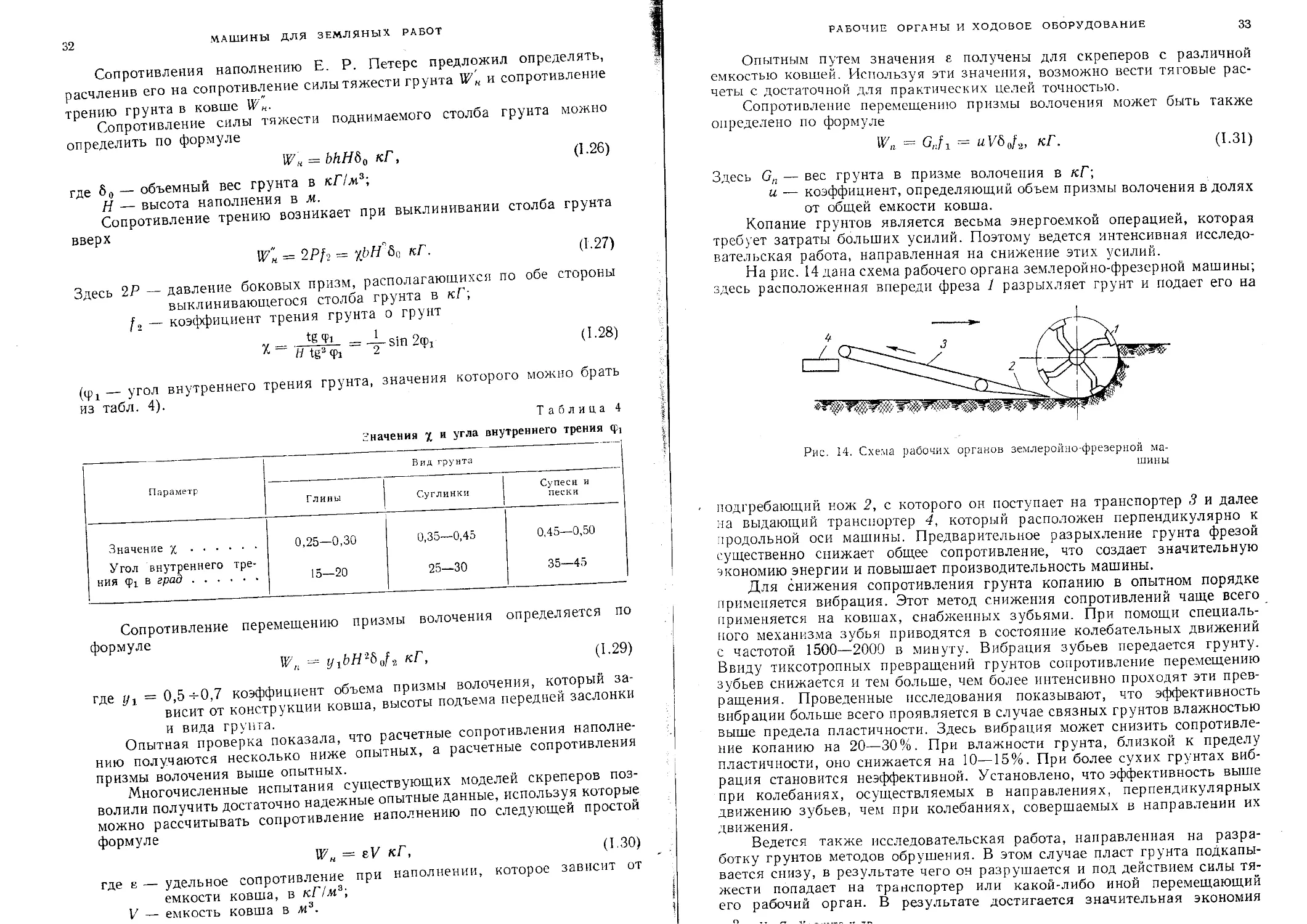
а также землеройно-фрезерные машины;
2) транспортные машины, к которым относятся автомобили, земле-
возы и транспортеры;
3) машины для уплотнения грунта — катки, трамбующие и вибра-
ционные машины.
РАБОЧИЕ ОРГАНЫ И ХОДОВОЕ ОБОРУДОВАНИЕ
13
Разравнивание, а отчасти и профилирование грунта обычно произ-
водится бульдозерами, автогрейдерами и грейдерами, а также специаль-
ными профилировщиками.
Землеройные машины производят разработку грунта. Вынутый из
забоя грунт может быть погружен в транспортные средства (автомобиль,
землевоз и т. п.) или доставлен к месту его укладки самой землеройной
машиной. Те машины, которые производят не только разработку, но и
перемещение грунта, называются землеройно-транспортными. К числу
землеройно-транспортных машин относятся: бульдозеры, скреперы, авто-
грейдеры, грейдеры и грейдер-элеваторы.
Перемещение грунта землеройно-транспортными машинами может
осуществляться в ковшах, тогда эти машины называются ковшовыми,
или путем волочения его перед ножами или отвалами — тогда эти машины
называются ножевыми. К ковшовым землеройно-транспортным машинам
относятся скреперы, а к ножевым — бульдозеры, автогрейдеры, грейдеры
и грейдер-элеваторы.
Транспортные машины обычно работают совместно с экскаваторами,
а иногда и с грейдер-элеваторами. Машины для уплотнения грунта при-
меняются как при возведении насыпных земляных сооружений — насы-
пей, дамб, плотин и т. п., так и при подготовке грунтовых оснований в це-
лях повышения их устойчивости.
Во всех случаях целью работы является достижение той плотности
грунта, которая (применительно к данному виду работ) обусловливается
специальными нормами.
По характеру работы машины для земляных работ могут быть под-
разделены на машины непрерывного и циклического действия. Машины
непрерывного действия совершают рабочий процесс непрерывно. К ним
относятся: грейдер-элеваторы, автогрейдеры и грейдеры, а также ротор-
ные многоковшовые экскаваторы. Одноковшовые экскаваторы и скреперы
являются машинами циклического действия.
§ 2. ФИЗИКО-МЕХАНИЧЕСКИЕ СВОЙСТВА ГРУНТОВ
Грунты .обрабатываются землеройными, землеройно-транспортными
и уплотняющими машинами. Рабочие органы последних непрерывно или
периодически находятся во взаимодействии с грунтами. Эффективность
работы машин зависит от того, насколько правильно при их проектиро-
вании учтены свойства грунтов. Особенно важно знать те сопротивления,
которые оказывает грунт обрабатывающим его рабочим органам машин,
а также зависимость этих сопротивлений от различных факторов, к числу
которых главным образом относятся скорости воздействия, форма ра-
бочих органов, их размеры и т. п. Только при полном учете свойств грун-
тов возможно создание высокопроизводительных и вместе с тем экономич-
ных машин.
Грунт представляет собой систему, состоящую из минеральных ча-
стиц, пространство между которыми в той или иной степени заполнено
водой и воздухом. Поэтому в грунтах принято различать три фазы: твер-
дую, жидкую и газообразную. Твердая фаза содержит частицы различ-
ного размера и формы, которые по крупности разделяют на глинистые
(мельче 0,005 мм), пылеватые (0,05—0,005 мм) и песчаные (2—0,05 мм).
Глинистые частицы представляют собой тончайшие пластинки, форма
пылеватых частиц приближается к сферической, а песчаные частицы (в за-
висимости от их происхождения) могут быть округлыми или угловатыми.
Свойства грунтов в значительной степени зависят от того, в каком
14
МАШИНЫ ДЛЯ ЗЕМЛЯНЫХ РАБОТ
соотношении находятся эти частицы. Особенное влияние оказывает наи-
более мелкая фракция грунтов — глинистая.
Количественное содержание в грунтах твердых частиц того или
иного размера называется гранулометрическим или меха-
ническим составом. Гранулометрические составы природных грунтов
крайне разнообразны.
Твердые — минеральные частицы взаимодействуют с имеющейся
в грунтах жидкой фазой — водой. Молекулы воды адсорбируются на
поверхностях частиц и образуют прочно удерживаемые на них пленки,
которые, в отличие от свойств воды остального объема, обладают проч-
ностью на сдвиг и пределом текучести. Воду этих пленок принято назы-
вать прочно связанной водой. В непосредственной близости
от этих пленок располагается вода, удерживаемая уже меньшими силами,
которую называют рыхло связанной. Далее размещается вода,
на которую уже не оказывают влияние исходящие от поверхностей ми-
неральных частиц силы. Эта вода находится под воздействием только силы
тяжести и называется свободной.
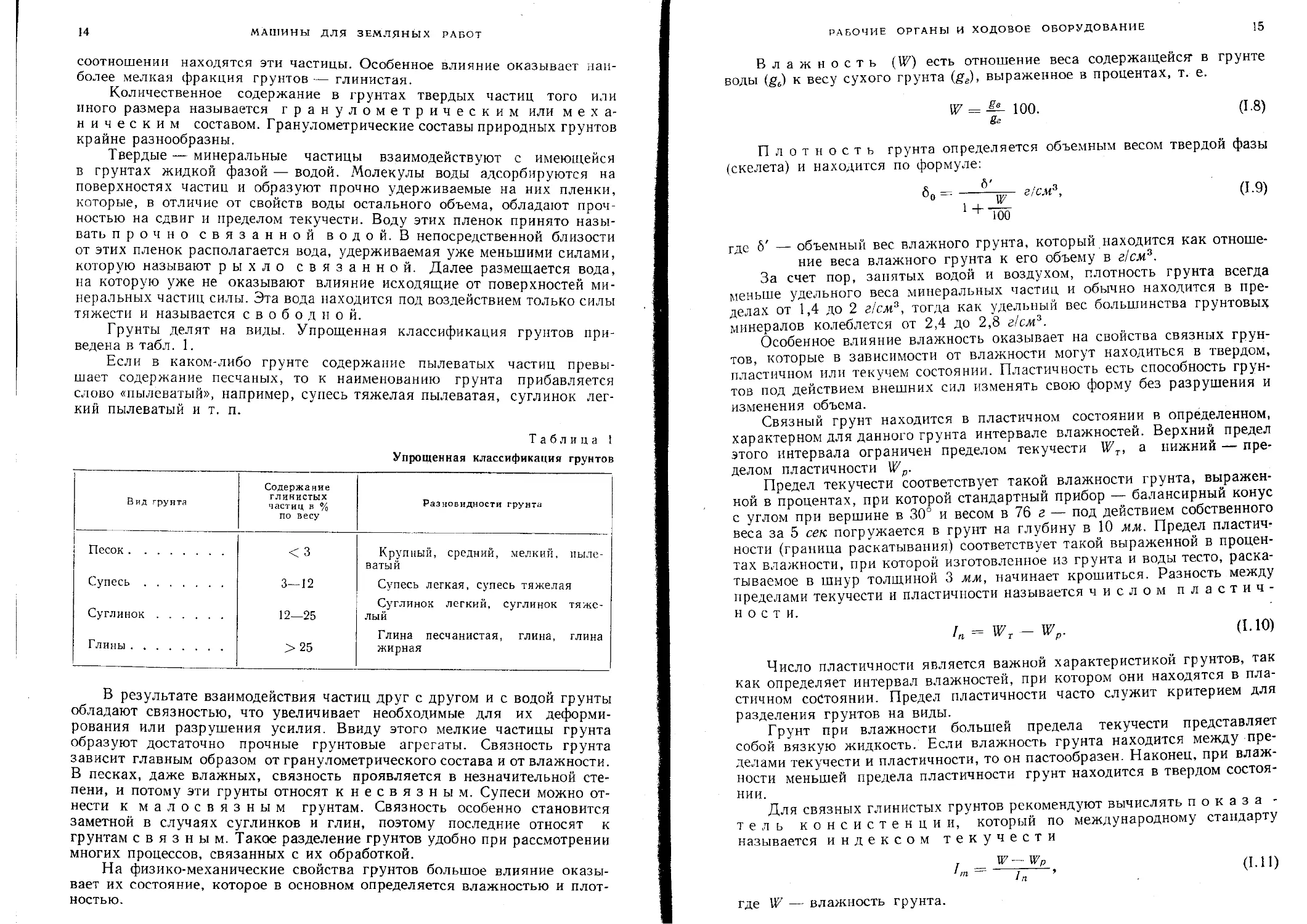
Грунты делят на виды. Упрощенная классификация грунтов при-
ведена в табл. 1.
Если в каком-либо грунте содержание пылеватых частиц превы-
шает содержание песчаных, то к наименованию грунта прибавляется
слово «пылеватый», например, супесь тяжелая пылеватая, суглинок лег-
кий пылеватый и т. п.
Таблица 1
Упрощенная классификация грунтов
Вид грунта Содержание глинистых частиц в % по весу Разновидности грунта
Песок Супесь Суглинок Глины < 3 3—12 12—25 >25 Крупный, средний, мелкий, пыле- ватый Супесь легкая, супесь тяжелая Суглинок легкий, суглинок тяже- лый Глина песчанистая, глина, глина жирная
В результате взаимодействия частиц друг с другом и с водой грунты
обладают связностью, что увеличивает необходимые для их деформи-
рования или разрушения усилия. Ввиду этого мелкие частицы грунта
образуют достаточно прочные грунтовые агрегаты. Связность грунта
зависит главным образом от гранулометрического состава и от влажности.
В песках, даже влажных, связность проявляется в незначительной сте-
пени, и потому эти грунты относят к несвязным. Супеси можно от-
нести к малосвязным грунтам. Связность особенно становится
заметной в случаях суглинков и глин, поэтому последние относят к
грунтам связным. Такое разделение грунтов удобно при рассмотрении
многих процессов, связанных с их обработкой.
На физико-механические свойства грунтов большое влияние оказы-
вает их состояние, которое в основном определяется влажностью и плот-
ностью.
РАБОЧИЕ ОРГАНЫ И ХОДОВОЕ ОБОРУДОВАНИЕ
15
Влажность (W7) есть отношение веса содержащейся в грунте
воды (g6) к весу сухого грунта (ga), выраженное в процентах, т. е.
W = 100. (1.8)
Плотность грунта определяется объемным весом твердой фазы
(скелета) и находится по формуле:
где б' — объемный вес влажного грунта, который находится как отноше-
ние веса влажного грунта к его объему в г/см3.
За счет пор, занятых водой и воздухом, плотность грунта всегда
меньше удельного веса минеральных частиц и обычно находится в пре-
делах от 1,4 до 2 г/см3, тогда как удельный вес большинства грунтовыд
минералов колеблется от 2,4 до 2,8 г/см3.
Особенное влияние влажность оказывает на свойства связных грун-
тов, которые в зависимости от влажности могут находиться в твердом,
пластичном или текучем состоянии. Пластичность есть способность грун-
тов под действием внешних сил изменять свою форму без разрушения и
изменения объема.
Связный грунт находится в пластичном состоянии в определенном,
характерном для данного грунта интервале влажностей. Верхний предел
этого интервала ограничен пределом текучести Ц7Т) а нижний — пре-
делом пластичности Wp.
Предел текучести соответствует такой влажности грунта, выражен-
ной в процентах, при которой стандартный прибор — балансирный конус
с углом при вершине в 30° и весом в 76 г — под действием собственного
веса за 5 сек погружается в грунт на глубину в 10 мм. Предел пластич-
ности (граница раскатывания) соответствует такой выраженной в процен-
тах влажности, при которой изготовленное из грунта и воды тесто, раска-
тываемое в шнур толщиной 3 мм, начинает крошиться. Разность между
пределами текучести и пластичности называется числом пластич-
ности.
In=Wr—Wp. (1.10)
Число пластичности является важной характеристикой грунтов, так
как определяет интервал влажностей, при котором они находятся в пла-
стичном состоянии. Предел пластичности часто служит критерием для
разделения грунтов на виды.
Грунт при влажности большей предела текучести представляет
собой вязкую жидкость. Если влажность грунта находится между пре-
делами текучести и пластичности, то он пастообразен. Наконец, при влаж-
ности меньшей предела пластичности грунт находится в твердом состоя-
нии.
Для связных глинистых грунтов рекомендуют вычислять показа -
тель консистенции, который по международному стандарту
называется индексом текучести
= w~wp (ЕН)
где W — влажность грунта.
16
МАШИНЫ ДЛЯ ЗЕМЛЯНЫХ РАБОТ
При lm > 1 грунт находится в текучем состоянии; при 1т <0, т. е.
когда его влажность менее предела пластичности, он находится в твердом
состоянии; промежуточные значения 1т характеризуют пластичное со-
стояние грунтов.
Различают следующие консистенции грунтов в зависимости от зна-
чения их показателя:
Твердая ..................................... 0
Полутвердая ................................. 0—0,25
Тугопластичная............................... 0,25—0,5
Мягкопластичная ............................. 0,50—0,75
Текучепластичная ............................ 0,75—1
Текучая ........................................... 1
Получаемая в результате уплотнения грунтов плотность в значитель-
ной степени зависит от их влажности. Установлено, что каждой нагрузке
на грунт соответствует такая оптимальная влажность, при которой дости-
гаемая плотность является максимальной. Таким образом, оптимальная
влажность грунта будет зависеть от нагрузки на него. При более низких
или высоких влажностях получаемая плотность будет снижаться, и тем
значительнее, чем больше влажность грунта отличается от опти-
мальной.
Для оценки степени уплотнения грунты испытывают в приборе стан-
дартного уплотнения. Сущность этого метода состоит в том, что помещен-
ный в стальной стакан грунт в три слоя при разных влажностях уплотняют
последовательными ударами падающей гири. Размеры стакана, вес и вы-
сота падения гири, а также число ударов стандартизированы. Получаемая
в результате такого уплотнения наибольшая плотность называется мак-
симальной стандартной плотностью 5тах, а соот-
ветствующая ей влажность — оптимальной влажностью^,.
При разработке грунты разрыхляются, что приводит к увеличению
их объема. Это свойство характеризуется коэффициентом разрыхления k„,
который представляет собой отношение объема разрыхленного грунта
к тому объему, который грунт занимал в естественном залегании. Для
большинства видов грунтов коэффициент разрыхления находится в пре-
делах 1,1—1,3. При этом чем большей связностью обладает грунт, тем
выше коэффициент разрыхления. Коэффициент разрыхления мерзлых
грунтов примерно равен 1,5—1,6.
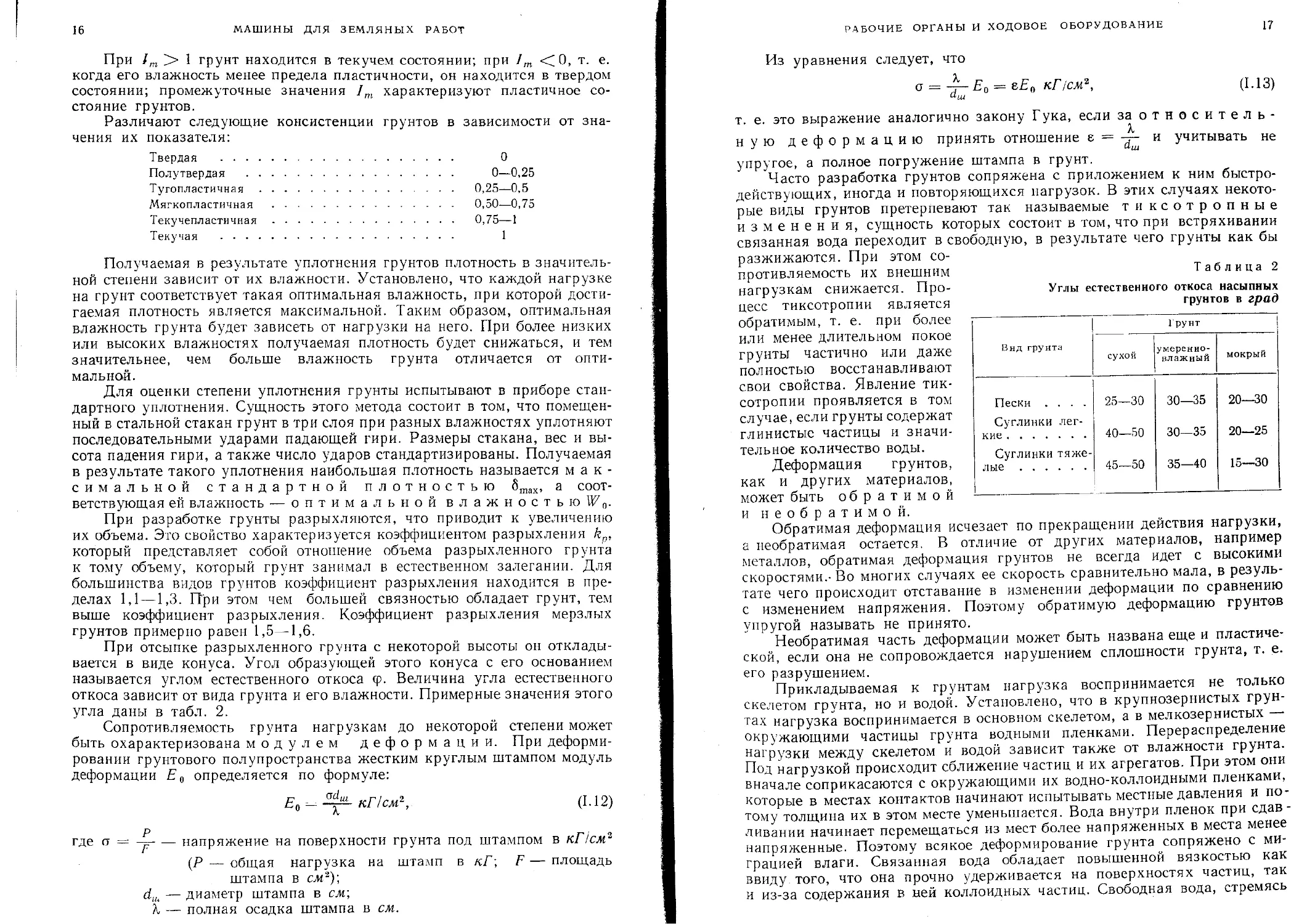
При отсыпке разрыхленного грунта с некоторой высоты он отклады-
вается в виде конуса. Угол образующей этого конуса с его основанием
называется углом естественного откоса <р. Величина угла естественного
откоса зависит от вида грунта и его влажности. Примерные значения этого
угла даны в табл. 2.
Сопротивляемость грунта нагрузкам до некоторой степени может
быть охарактеризована модулем деформации. При деформи-
ровании грунтового полупространства жестким круглым штампом модуль
деформации Е „ определяется по формуле:
Ео -- кГ/см2, (1.12)
где о = — напряжение на поверхности грунта под штампом в кГ!см2
(Р — общая нагрузка на штамп в кГ; F — площадь
штампа в см'-);
— диаметр штампа в см;
К — полная осадка штампа в см.
РАБОЧИЕ ОРГАНЫ И ХОДОВОЕ ОБОРУДОВАНИЕ
17
Из уравнения следует, что
о = Ео = е£0 кПсм\
(1.13)
т. е. это выражение аналогично закону Гука, если за относитель-
. А,
ную деформацию принять отношение е = -т- и учитывать не
упругое, а полное погружение штампа в грунт.
Часто разработка грунтов сопряжена с приложением к ним быстро-
действующих, иногда и повторяющихся нагрузок. В этих случаях некото-
рые виды грунтов претерпевают так называемые т и ксотропные
изменения, сущность которых состоит в том, что при встряхивании
связанная вода переходит в свободную, в результате чего грунты как бы
разжижаются. При этом со-
противляемость их внешним
нагрузкам снижается. Про-
цесс тиксотропии является
обратимым, т. е. при более
или менее длительном покое
грунты частично или даже
полностью восстанавливают
свои свойства. Явление тик-
сотропии проявляется в том
случае, если грунты содержат
глинистые частицы и значи-
тельное количество воды.
Деформация грунтов,
как и других материалов,
может быть обратимой
и необратимой.
Таблица 2
Углы естественного откоса насыпных
грунтов в град
Вид грунта Грунт
сухой умеренно- влажный мокрый
Пески .... 25—30 30—35 20—30
Суглинки лег- кие 40—50 30—35 20—25
Суглинки тяже- лые 45—50 35—40 15—30
Обратимая деформация исчезает по прекращении действия нагрузки,
а необратимая остается. В отличие от других материалов, например
металлов, обратимая деформация грунтов не всегда идет с высокими
скоростями.- Во многих случаях ее скорость сравнительно мала, в резуль-
тате чего происходит отставание в изменении деформации по сравнению
с изменением напряжения. Поэтому обратимую деформацию грунтов
упругой называть не принято.
Необратимая часть деформации может быть названа еще и пластиче-
ской, если она не сопровождается нарушением сплошности грунта, т. е.
его разрушением.
Прикладываемая к грунтам нагрузка воспринимается не только
скелетом грунта, но и водой. Установлено, что в крупнозернистых грун-
тах нагрузка воспринимается в основном скелетом, а в мелкозернистых —
окружающими частицы грунта водными пленками. Перераспределение
нагрузки между скелетом и водой зависит также от влажности грунта.
Под нагрузкой происходит сближение частиц и их агрегатов. При этом они
вначале соприкасаются с окружающими их водно-коллоидными пленками,
которые в местах контактов начинают испытывать местные давления и по-
тому толщина их в этом месте уменьшается. Вода внутри пленок при сдав-
ливании начинает перемещаться из мест более напряженных в места менее
напряженные. Поэтому всякое деформирование грунта сопряжено с ми-
грацией влаги. Связанная вода обладает повышенной вязкостью как
ввиду того, что она прочно удерживается на поверхностях частиц, так
и из-за содержания в ней коллоидных частиц. Свободная вода, стремясь
18
МАШИНЫ ДЛЯ ЗЕМЛЯНЫХ РАБОТ
удалиться из напряженной зоны, вынуждена проходить через тонкие ка-
пилляры и потому тоже испытывает большие сопротивления. Все это
приводит к тому, что движение воды, а следовательно, и деформация
грунта, становятся возможными с ограниченными скоростями. Поэтому
грунты относят к упруго-пластично-вязким материалам, т. е. к телам,
деформация которых зависит не только от величины нагрузки, но и от
ее временных параметров. Под последними понимаются скорость
изменения напряженного состояния и продолжительность действия
нагрузки.
Под скоростью изменения напряженного со-
стояния vU3 понимается первая производная от напряжения о по
времени £
Vu3==HF' (Ы4)
Если напряжение по времени изменяется равномерно, то скорость
изменения напряженного состояния определяется как
vU3 = кПсм2'Сек. (1.15)
Деформация грунтов складывается из множества взаимоперемещений
как отдельных грунтовых частиц, так и их агрегатов. При деформации
несвязных грунтов большое значение имеет трение между частицами,
так как оно в сильной степени тормозит развитие деформации.
Если на поверхности грунта установить жесткий плоский штамп и
непрерывно увеличивать на него нагрузку, то при сравнительно малых
напряжениях на поверхности вся развивающаяся деформация сосредо-
точивается в небольшом объеме грунта, расположенном вблизи подошвы
штампа. По мере роста напряжения деформация распространяется на все
большую глубину. Наконец наступает момент, когда, несмотря на про-
должающееся увеличение напряжений, дальнейший рост деформируемой
зоны прекращается, так как потенциальные возможности такого роста,
которые определяются не только напряжением, но и диаметром штампа,
исчерпываются. Предельная глубина той зоны, на которую еще распро-
страняется действие нагрузки, составляет 3,5г(ш (где <1Ш — диаметр
штампа).
Если теперь измерить плотность грунта под штампом, то ока-
жется, что в определенной зоне, которая непосредственно к нему приле-
гает и с внешней стороны ограничивается поверхностью, близкой к поверх-
ности полусферы, плотность грунта будет одинаковой и больше той, кото-
рую имеет окружающий эту зону грунт. Расположенный в этой зоне грунт
получил название уплотненного ядра.
После сформирования это ядро существенно изменяет дальнейший
ход развития деформации. До образования уплотненного ядра деформация,
т. е. погружение штампа, в основном происходит за счет уплотнения грунта
и таким образом сопровождается изменением его объема. При даль-
нейшем погружении штамп будет перемещаться вместе с уплотненным
ядром, причем это перемещение будет происходить из-за пластических
сдвигов грунта в стороны, которые развиваются несколько ниже уплот-
ненного ядра. Эти сдвиги приводят к разрушению грунтового массива,
ввиду чего вокруг штампа появляются кольцевые и радиальные трещины,
а затем происходит выпирание грунта.
Таким образом, на определенной стадии развития деформации грунта
происходит качественный переход от развития ее с изменением объема
РАБОЧИЕ ОРГАНЫ И ХОДОВОЕ ОБОРУДОВАНИЕ
19
к развитию без изменения последнего. Этот переход совпадает с оконча-
нием формирования уплотненного ядра и характеризует собой начало раз-
рушения. То напряжение, при котором начинается такое разрушение,
называется пределом прочности ор.
Рабочие органы землеройных машин работают за пределом прочности,
а машины для уплотнения грунтов — до предела прочности. Поэтому
важно знать, от каких факторов зависят пределы прочностей грунтов,
а в тех случаях, где это необходимо, и уметь определять их численные Зна-
чения.
Пределы прочности зависят от вида и влажности грунта. Фактор
влажности оказывает особенное влияние на предел прочности грунта, и
особенно в случае связных грунтов, где со снижением влажности предел
прочности прогрессивно возрастает. Предел прочности растет с увеличе-
нием диаметра штампа и с повыше-
нием плотности грунта, а также
с ростом скорости изменения на-
пряженного состояния. Последняя
зависимость показана на графике
(рис. 1). На основе этого графика
можно сделать вывод, что в полу-
логарифмических координатах за-
висимость предела прочности от ско-
рости изменения напряженного со-
стояния может быть отображена
прямой линией. Поэтому скорость
изменения напряженного состояния
оказывает влияние на предел проч-
ности главным образом при ее малых
значениях. Чем выше значения ско-
Рис. 1. Зависимость предела прочности
тяжелого пылеватого суглинка от скоро-
сти изменения напряженного состояния
рости, тем меньше ее влияние.
Воздействие на грунты рабочих органов некоторых машин связано
с приложением к ним циклических нагрузок. Под циклической нагрузкой
понимаются следующие друг за другом процессы нагружения и раз-
грузки грунта. В общем случае характер изменения напряжений во вре-
мени при этом может быть самым различным. Однако при рассмотрении
воздействия на грунты различных машин в большинстве случаев эти
изменения могут быть приняты как линейные. При этом повышение и сни-
жение напряженного состояния могут следовать непосредственно друг
за другом либо между концом нагрузки и началом разгрузки будет иметь
место пауза, в течение которой напряжение остается примерно постоян-
ным. Такой случай соответствует, например, перекатыванию по грунту
пневматического колеса.
Зависимость между напряжением и деформацией при циклических
нагрузках может быть отображена в виде диаграмм (рис. 2). Изменения
в деформации грунта все время отстают от соответствующих им измене-
ний в напряжениях, и тем больше, чем с более высокой скоростью при-
кладывается нагрузка. Поэтому вид диаграммы в сильной степени зависит
от скорости изменения напряженного состояния. На него оказывает
также влияние предварительное упрочнение грунта. Последнее дости-
гается последовательным нагружением грунта циклическими нагруз-
ками.
Деформация неупрочненных грунтов, нагружаемых с небольшой
скоростью изменения напряженного состояния — менее 0,1 кГ/см2-сек,
начинает развиваться одновременно е повышением напряжения. При этом
20
МАШИНЫ ДЛЯ ЗЕМЛЯНЫХ РАБОТ
в случае связных грунтов до напряжений, близких к пределу прочности,
деформация прямо пропорциональна действующему напряжению
(рис. 2, а). При нагрузке упрочненных и неупрочненных грунтов с более
высокими скоростями изменения напряженного состояния имеет место
запаздывание в развитии деформации (отрезок О А = о1; рис. 2, б),
после чего хотя на участке кривой АВ деформация и развивается со все
возрастающей скоростью, все же ее развитие отстает от изменения напря-
жения. Ввиду этого деформация продолжает расти еще и после того, как
напряжение начало снижаться, т. е. за точкой В. Этот процесс дальнейшего
развития деформации называется последействием нагру-
жения. При таких скоростях изменения напряженного состояния,
которые соответствуют, например, перекатыванию колес землеройно-
транспортных машин, кат-
ков ит. п., около 50%
всей деформации разви-
вается в процессе после-
действия. На рис. 2, в
представлена диаграмма,
соответствующая весьма
быстрому нагружению, ко-
торое, например, имеет
место при ударе о грунт
жесткой плиты. Здесь де-
формация часто достигает
максимума уже тогда,
когда нагрузка успела сни-
Деформаиия Деформация Деформация
Рис. 2. Зависимость между напряжением и дефор-
мацией при циклических нагрузках: а — медленное
нагружение; б — быстрое нагружение; в — ударная
нагрузка
зиться до нуля.
Обратимая часть деформации всегда начинает восстанавливаться лишь
после понижения напряжения на какую-то определенную для данных усло-
вий нагружения величину. Такое запаздывание связано с повышением
под нагрузкой сцепления между отдельными частицами грунта и их агре-
гатами. Далее восстановление обратимой части деформации идет со все
возрастающей скоростью (кривая CD). Хотя в точке D грунт оказывается
уже полностью разгруженным, процесс восстановления деформации все
еще продолжается, что уже целиком относится к явлению обратного
упругого последействия. Чем выше скорость изменения напряженного
состояния, тем все большая часть обратимой деформации восстанавли-
вается в процессе обратного упругого последействия.
Отрезок оси OF выражает полную деформацию (погружение штампа),
а отрезки ОЕ и EF — необратимую и обратимую ее части. Площадь диа-
граммы OABCD соответствует затраченной на деформирование грунта
работе.
Деформирование циклической нагрузкой даже хорошо уплотнен-
ных и упрочненных грунтов, когда большая часть или даже почти вся
деформация обратима, всегда связано с затратой работы, которая при этом
рассеивается.
Установлено, что к процессу нагрузки линейная зависимость между
напряжением и деформацией может быть применена лишь в случае неупроч-
ненных связных грунтов, нагружаемых до предела прочности с весьма
малыми скоростями изменения напряженного состояния — менее
0,05 кПсм'1 - сек. Процесс разгрузки линейной зависимости не подчиняется.
Если рассматривать не сам ход течения деформации, а ее результаты,
под которыми понимаются полная деформация с учетом последействия,
деформация, а также обратимая и необратимая ее части, то здесь приме-
РАБОЧИЕ ОРГАНЫ И ХОДОВОЕ ОБОРУДОВАНИЕ
21
некие линейной зависимости возможно лишь по отношению к связным
грунтам, нагружаемым с одинаковыми скоростями до напряжений менее
предела прочности. Несвязные грунты и здесь линейной зависимости не
подчиняются.
Кривая нагрузки в координатах напряжение — деформация при
больших скоростях деформации всегда располагается выше, чем при
малых скоростях. По мере роста скорости разрушение грунта происходит
при все уменьшающейся величине деформации, т. е. грунт приобретает
хрупкие свойства.
На графике (рис. 3) показаны результаты опытов по выяснению влия-
ния скорости изменения напряженного состояния на величину относи-
тельной деформации е. Относительная деформация представляет собой
отношение абсолютной величины погружения штампа к его диаметру.
мере роста скорости изменения напряженного
графика видно, что по
состояния vU3 полная де-
формация и ее необрати-
мая часть убывают и осо-
бенно сильно в области
небольших скоростей из-
менения напряженного
состояния — до 0,3—
0,4 кГ!смг-сек. Обратимая
часть деформации остает-
ся практически постоян-
ной. Поэтому понижение
скорости изменения напря-
женного состояния грунта
при циклической нагруз-
ке принципиально экви-
валентно соответствую-
Рис. 3. Зависимость деформаций связного грунта от
скорости изменения напряженного состояния:
1 — полная деформация; 2 — необратимая часть деформа-
ции; 3 — обратимая деформация; I — зона работы катков;
U — зона ударных нагрузок
щему повышению напряжения. Из этого графика видно, что если
превзойти ту область скоростей изменения напряженного состояния, при
которых они оказывают еще существенное влияние на деформацию, то
дальнейшее повышение скорости уже практически не будет сказываться
на результатах. Эти свойства грунтов следует учитывать при выборе
скоростей работы машин.
При нагрузке грунтов равновесие между внешними и внутренними
силами устанавливается постепенно, в течение более или менее длитель-
ного времени. Поэтому при относительно небольшом времени действия
нагрузки равновесное состояние может быть достигнуто лишь при по-
вторных нагрузках. При этом происходит упрочнение грунта, т. е. с уве-
личением числа повторностей деформация грунта постепенно снижается.
Такой характер изменения деформации грунтов при повторных нагрузках
отображает их вязко-пластичные свойства. Если материалы не обладают
вязкими свойствами, то вся соответствующая данной нагрузке необрати-
мая деформация развивается за однократное приложение нагрузки и
Дальнейшее ее повторение вызывает лишь обратимую деформацию. В иде-
ально вязких телах необратимая деформация при повторных нагрузках
не меняется. Грунты занимают промежуточное положение. При этом чем
большее количество глинистых частиц они содержат, тем выше их вяз-
кость и, следовательно, тем в меньшей степени затухает от цикла
к циклу необратимая деформация. Ввиду этих свойств уплотнение
грунтов может быть произведено лишь при многократном повторении на-
грузки.
22
машины для земляных работ
Для практических целей представляет интерес закономерность на-
копления необратимой деформации грунта при повторных нагрузках.
Опытным путем установлено, что если к грунту через штамп приклады-
вать повторные циклические нагрузки с одним и тем же максимальным
напряжением и при одной и той же скорости изменения последнего, то
накопленная деформация пропорциональна логарифму числа повтор-
ностей приложения нагрузки. Если продолжительность пауз между на-
грузками меньше времени, которое требуется для полного восстановле-
ния обратимой части деформации, то на накопленную необратимую
деформацию оказывает влияние частота приложения нагрузки. По мере уве-
личения частоты накопленная деформация несколько снижается. Это про-
исходит потому, что при недостаточной продолжительности пауз про-
цесс обратного упругого последействия еще не успевает закончиться и
потому возникают как бы встречные движения грунтовых агрегатов и,
кроме того, последние в меньшей степени находят новые «пути» для взаимо-
перемещений, в результате чего эти взаимоперемещения становятся короче.
Частота приложения нагрузок имеет значение при деформировании
грунтов, обладающих тиксотропными свойствами. Установлено, что
имеют место такие частоты, при которых происходят интенсивные тиксо-
тропные превращения грунтов, сопровождающиеся обильным выделе-
нием влаги и ослаблением связей между его частицами и агрегатами.
При таких частотах эффективность действия нагрузок значительно повы-
шается. Этим свойством грунтов следует воспользоваться как при их уплот-
нении, так и при их разработках.
§ 3. РАБОЧИЕ ОРГАНЫ ЗЕМЛЕРОЙНО-ТРАНСПОРТНЫХ
МАШИН И ИХ ВЗАИМОДЕЙСТВИЕ С ГРУНТОМ
Рабочие органы землеройно-транспортных машин в основном слу-
жат для вырезания грунта и отделения его от основного массива. Они
часто выполняют также операции перемещения грунта либо перед собой,
либо в сторону, а в случае транспортирования грунта на большие рас-
стояния они выполняются в виде ковшей.
В зависимости от назначения машин рабочие органы землеройно-
транспортных машин могут выполняться в виде прямого (рис. 4, б) или
дискового (рис. 4, в) ножей, которые отделяют грунт от основного массива
и подают его на отвальную поверхность, в ковш или на транспортер;
ковша (рис. 4, г и д), режущая кромка которого может быть снаб-
жена зубьями, которые разрушают грунт, что облегчает врезание в него
самой режущей кромки;
зуба или зубьев (рис. 4, а), которые здесь являются самостоятель-
ными рабочими органами и служат для рыхления грунта.
Прямой нож часто выполняется вместе с отвалом, который служит
как бы его продолжением. В этом случае вырезанный грунт движется
либо вдоль отвала, либо впереди него. Зубья могут применяться в виде
самостоятельного рабочего органа, как это, например, имеет место у рых-
лителя или кирковщика, или же ими могут оснащаться ножи и ковши.
Сопротивление копанию зависит от углов, которые образуются ра-
бочими органами машин с поверхностью грунта. При этом различают:
угол резания 6, угол заострения (J и задний угол а (рис. 4). От правиль-
ного выбора этих углов и особенно угла резания зависит эффективность
работы землеройных машин. Численные значения этих углов выбираются
применительно к каждому виду землеройных машин. Прямые ножи
РАБОЧИЕ ОРГАНЫ И ХОДОВОЕ ОБОРУДОВАНИЕ
23'
(рис. 5, а) характеризуются еще центральным углом <о, углом опроки-
дывания гр и углом установки его в плане <р (рис. 5, б), который еще
называется углом захвата или углом атаки.
Рис. 4. Рабочие органы землеройных машин: а — зуб; б — отвал с режущим
ножом; в —дисковый нож; г — ковш экскаватора с зубьями и сплошной полу-
круглой режущей кромкой; б — ковш скрепера; е — рабочий орган землеройной
машины с роторным рыхлителем
Кроме углов, рабочие органы машин характеризуются еще следую-
щими параметрами:
прямые ножи — длиной L, шириной В и радиусом кривизны г;
дисковые ножи — диаметром D и радиусом кривизны г;
ковши — емкостью q, шириной В, высотой Н и длиной L;
зубья — шириной и длиной, а также расстояниями между ними.
Рис. 5. Углы прямого ножа-отвала
Принято различать процессы чистого резания и процессы копания.
В отличие от первых последние включают в себя не только отделение
стружки грунта от основного массива, но и перемещение грунта вдоль или
впереди отвала или в ковше.
Работу режущих частей рабочих органов землеройно-транспортных
машин можно уподобить процессу отделения стружки грунта при помощи
клина (рис. 6). Под действием горизонтальной силы Р± перед клином
24
МАШИНЫ ДЛЯ ЗЕМЛЯНЫХ РАБОТ
вначале происходит сжатие пласта грунта, а затем, когда напряжение в этом
пласте превысит предел прочности, под некоторым углом к горизонту
происходит скол грунта. Поверхность скола соответствует плоскости
действия наибольших касательных напряжений, и характеризующий ее
угол лр! определяется не только углом резания 6, но и видом грунта и его
состоянием, т. е. его плотностью и влаж-
ностью.
В зависимости от свойств грунта
форма вырезанной стружки может быть
разной. При влажных связных грунтах
сколов не происходит и стружка от
Рис. 6. Работа клина
Рис. 7. Формы стружек
грунта
основного массива отделяется в виде слитного пласта (рис. 7, а). При
сухих связных грунтах пласт раскалывается на куски неправильной
формы, ввиду чего дно борозды получается неровным (рис. 7, б). Стружка,
подобная изображенной на рис. 6, образуется при связных грунтах,
влажность которых мала или несколько ниже оптимальной. При несвяз-
ных грунтах первоначальная их структура разрушается и грунт скапли-
вается перед клином (рис. 7, в).
В общем виде на клин действуют
(рис. 8): касательная сила Рх, под воз-
"---- действием которой происходит его пе-
---д----—_____________ремещение суммарная реакция грунта R,
£ \ вес пласта грунта Q и силы трения —
у от движения пласта грунта по клину У
\ и клина по дну борозды Г2. Суммарная
Рис. 8. Силы, действующие на клин реакция грунта R складывается из со-
противления грунта сжатию и отделе-
нию стружки от основного массива.
При проектировании машин необходимо правильно выбрать мощ-
ность двигателя, что возможно сделать только если известна горизон-
тальная сила РА. При известных величине и направлении суммарной
реакции грунта R решение такой задачи не вызывает затруднений. Однако
как величина этой реакции, так и ее направление зависят от многих
факторов: угла резания, угла заострения, степени затупления режущей
кромки, толщины стружки, а также от вида и состояния грунта. Учесть
эти факторы не представляется возможным, тем более, что в процессе
отделения стружки как величина реакции, так и ее направление не остаются
стабильными. Вместе с тем по абсолютной величине эта реакция намного
превышает все другие виды сопротивления, и потому ошибка в ее опре-
делении существенно влияет на результат расчета. Эти трудности за-
ставляют при определении сопротивлений грунта резанию привлекать
опытные данные.
РАБОЧИЕ ОРГАНЫ И ХОДОВОЕ ОБОРУДОВАНИЕ 25
Основоположником теории сопротивлений грунтов резанию яв-
ляется акад. В. П. Горячкин. В результате исследования работы плуга
для определения касательной силы Pt им предложена формула
Pj — pG i kbh -f- ebhv2, (1.16)
где p — коэффициент трения плуга о грунт;
G — вес плуга;
k — удельное сопротивление почвы резанию;
h — глубина резания (толщина стружки);
b — ширина срезаемого слоя;
v — скорость движения плуга;
г. — коэффициент, учитывающий энергетические потери, возникаю-
щие ввиду движения грунта по отвалу.
При работе плуга первый член формулы составляет около 40%, вто-
рой — 55% и третий — около 5% общего сопротивления.
Ввиду больших различий в устройстве плуга и рабочих органов
землеройно-транспортных машин непосредственное применение к по-
следним этой формулы приводит к значительным ошибкам. Поэтому
Н. Г. Домбровским для практических расчетов рекомендовано поль-
зоваться упрощенным выражением:
Рг = kobh = kuF, (1.17)
где F ~~ bh — площадь вырезаемой стружки;
£0— удельное сопротивление резанию или копанию.
Под резанием понимается отделение стружки от массива. Связанное
с этим процессом сопротивление называется сопротивлением грунта реза-
нию. Когда говорят о копании грунта, то рассматривают не только отде-
ление стружки от массива, но и ее движение по рабочему органу. При этом
иногда учитывают также и те сопротивления, которые связаны с напол-
нением ковшей. Поэтому сопротивление копанию всегда выше сопроти-
вления резанию.
При дальнейшем рассмотрении конкретных землеройно-транспорт-
ных машин в зависимости от того, на какие элементы расчленяется рабо-
чий процесс, будут рассматриваться сопротивления как резанию, так и
копанию.
Многочисленные опыты показали, что удельное сопротивление ко-
панию находится в зависимости от вида и состояния грунта, геометрии
режущего органа, величины сечения, формы и соотношения между
размерами стружки. На него оказывают также влияние скорость резания,
наличие и расстановка на режущей кромке зубьев, а также траектория
движения рабочего органа и, в частности, ковшей.
Удельное сопротивление резанию и копанию повышается по мере
увеличения содержания в грунте глинистых частиц и понижения влаж-
ности. Определенные опытным путем значения удельного сопротивления
копанию обычно даются применительно к различным категориям грунта.
Многочисленными опытами А. Н. Зелениным установлена прямая про-
порциональность между удельным сопротивлением копанию и числом
ударов так называемого динамического плотномера (ударника
ДОРНИН). Поэтому, если для данного рабочего органа знать удельное
сопротивление копанию на каком-то грунте, то, испытав динамическим
плотномером другой грунт, можно найти для последнего численное зна-
чение удельного сопротивления копанию.
Динамический плотномер представляет собой стальной стержень
с площадью сечения в 1 см2. На расстоянии 10 см от того его конца,
26
МАШИНЫ ДЛЯ ЗЕМЛЯНЫХ РАБОТ
который устанавливается на поверхности грунта, имеется бурт, о который
ударяют гирей весом 2,5 кг, падающей с высоты 400 мм. Эта гиря дви-
жется по верхней части стержня, как по направляющей. Испытание со-
стоит в определении того числа ударов, которое необходимо для погруже-
ния стержня в грунт на глубину 10 см. За характеристику грунта при-
нимается необходимое для такого погружения число ударов.
Удельное сопротивление грунта копанию возрастает с увеличением
угла резания 6. При этом до 6 = 30ч-35° оно растет медленно, а затем
быстро. Однако при чрезмерном снижении угла резания увеличивается
необходимый для подъема грунта на определенную высоту путь, что ведет
к росту непроизводительных потерь. Поэтому оптимальные углы резания,
как правило, находятся в пределах б = 25ч-35°. Во избежание трения
нижней грани клина о поверхность грунта задний угол а выбирают рав-
ным 5—8°. Образующийся при этом угол заострения |3 обычно удовлет-
воряет условиям прочности.
Д. И. Федоровым было исследовано влияние формы режущей кромки.
Сравнение работы прямых, криволинейных с зубьями и криволинейных
без зубьев режущих кромок выявило преимущества последних. Оказалось,
что при некоторых условиях лучшие результаты дают режущие кромки,
которые как в поперечном сечении, так и в плане очерчены по дуге. При
этом, по мере приближения к ковшу, целесообразно постепенно увеличи-
вать радиус дуги, что создает благоприятные условия для движения
грунта. При таких очертаниях режущей кромки действующее усилие
передается на небольшой участок средней ее части, что обеспечивает
высокое удельное давление, т. е. давление на 1 см длины кромки, и сама
форма ножа обеспечивает быстрое врезание его в грунт.
При одном и том же грунте и геометрии режущего органа удельное
сопротивление копанию снижается с ростом сечения стружки даже в том
случае, если форма и соотношения между размерами ее сечения остаются
постоянными. Так, по данным Н. Г. Домбровского, увеличение емкости
ковша одноковшового экскаватора с 0,15 до 15 м3 снижает удельное со-
противление копанию на 25—30%. Опытами, проведенными в Ленинград-
ском филиале ВНИИ Стройдормаша с грейдер-элеваторами, установлено,
что увеличение сечения стружки в 3 раза снижает удельное сопротивление
грунта копанию на 30—40%.
На удельное сопротивление грунта копанию оказывает также влияние
форма стружки. Различают три формы стружек: блокированную, когда
грунт вырезается по трем плоскостям, полублокированную, где грунт
вырезается по двум плоскостям, и деблокированную, где грунт вырезается
Практически по одной плоскости (рис.9). А. Н. Зелениным установлено,
что наибольшее удельное сопротивление имеет место в случае блокирован-
ной формы, а наименьшее — при деблокированной форме. Полублокиро-
ванная стружка занимает промежуточное положение.
Опытами также установлено, что при одном и том же сечении стружки
удельное сопротивление копанию зависит от отношения ширины стружки b
к ее толщине (глубине резания) h (рис. 9). С увеличением этого отноше-
ния удельное сопротивление копанию снижается.
Ранее уже отмечалось, что зависимость предела прочности грунта
от скорости изменения напряженного состояния характеризуется лога-
рифмической кривой (см. рис. 1). Поэтому влияние скорости на удельное
сопротивление грунта копанию особенно сказывается при малых ее зна-
чениях. При тех скоростях изменения напряженного состояния, которые
соответствуют обычно применяемым скоростям резания (0,5—2,0 м/сек),
влияние скорости сказывается уже значительно слабее. Так, при росте
РАБОЧИЕ ОРГАНЫ И ХОДОВОЕ ОБОРУДОВАНИЕ
27
этих скоростей до 6—10 м/сек, т. е. в 3—5 раз, удельное сопротивление
резанию в среднем повышается на 30—40%.
Режущие кромки в некоторых случаях, как, например, на ковшах
экскаваторов, снабжаются зубьями. Выдвинутые вперед зубья должны
разрушать, а следовательно, и разрыхлять грунт и тем самым облегчать
врезание в него режущей кромки ковша. В плотных связных грунтах
острые зубья снижают общее сопротивление копанию сравнительно не-
значительно— на 6—15%. Они предохраняют режущую кромку от из-
носа, но вместе с тем затрудняют поступление грунта в ковш при гори-
зонтальных и слабо наклонных траекториях его движения. В малосвяз-
ных грунтах зубья всегда увеличивают сопротивление копанию. При
широкой расстановке зубьев сильно изнашивается режущая кромка, а
узкая расстановка ввиду увеличения общей ширины зубьев повышает
сопротивление копанию. Поэтому Н. Г. Домбровский рекомендует расстоя-
Рис. 9. Формы стружек: а — блокированная; б — полублокированная;
в — деблокированная
ние между зубьями выбирать равными 1,2—1,3 ширины зуба. Ширина
зуба выбирается из соображений прочности с таким расчетом, чтобы на-
грузка на 1 см его режущей кромки не превосходила 700 кг.
На удельное сопротивление копанию оказывает влияние траектория
движения ковшей, поэтому удельные сопротивления при прямых и об-
ратных лопатах отличаются от удельного сопротивления при драглайне.
На удельное сопротивление грунта копанию большое влияние оказы-
вает износ режущей кромки. Сопротивление вдавливанию в грунт какой-
либо площадки, и в том числе режущей кромки, пропорционально их
площади. Поэтому по мере износа возрастает и сопротивление копанию.
Кроме того, износ, т. е. затупление режущей кромки, приводит к такому
резкому увеличению той составляющей сопротивления копанию, которая
перпендикулярна к направлению его, что приводит к выталкиванию ковша
из грунта. Так, наблюдения Ю. А. Ветрова показали, что износ зубьев
может привести к увеличению этой составляющей в 8 раз. Для того чтобы
снизить вредное действие износа, при проектировании рабочих органов
надо стремиться к уменьшению толщин режущих кромок и к повышению
их износоустойчивости. Для этой цели следует рекомендовать режущие
кромки рабочих органов землеройных машин изготовлять из высоко-
прочных и износоустойчивых материалов или же применять наплавку
их твердыми сплавами. Следует обеспечивать также их самозатачивание
при износе.
Итак, на удельное сопротивление резанию оказывают влияние раз-
личные факторы. Поэтому формулу (1.17) нельзя рассматривать как
универсальную, т. е. пригодную для расчетов горизонтальных соста-
вляющих усилий копания во всех случаях только по площади вырезаемой
стружки и подобранному по грунту удельному сопротивлению копанию.
Однако несмотря на это, формула может быть с успехом использована
для практических расчетов, если при определении значения удельного
сопротивления копанию для каждого вида машин привлекать опытные
28
МАШИНЫ ДЛЯ ЗЕМЛЯНЫХ РАБОТ
данные. Поэтому в дальнейшем, при рассмотрении каждого вида рабочего
оборудования землеройных и землеройно-транспортных машин, на осно-
вании имеющихся опытных данных, в зависимости от вида грунта, будут
приводиться свои значения удельного сопротивления копанию. Пользуясь
этими значениями, можно тяговые расчеты производить с достаточной
точностью.
Если прямой клин повернуть вокруг
вертикальной оси так, чтобы его лезвие
составило острый угол с направлением
движения, то получится косой трехгран-
ный клин (рис. 10). Этот клин можно
рассматривать как состоящий из трех прос-
тых клиньев. При движении в направле-
нии оси X клин, расположенный в плоско-
сти ZOX с углом наклона 6', подни-
мает пласт, а клин, расположенный в
плоскости YOZ с углом наклона 0, повора-
чивает пласт; вместе с тем клин, распо-
ложенный в плоскости X0Y с углом
захвата <р, подрезает пласт и отодвигает
Рис. 10. Схема косого клина его в сторону.
Теоретическим путем В. П. Горяч-
киным показано, что для перемещения
косого клина требуются меньшие усилия, чем для клина простого. Этот
вывод получил экспериментальное подтверждение. Оказалось, что удель-
ное сопротивление копанию зависит от угла захвата ср. Минимальное
сопротивление соответствует углу захвата около 20''. Изменяя угол
захвата, можно достигнуть снижения этого сопротивления на 20—25°.
Рис. 11. Профили отвала
Копание грунта косо установленными отвалами нашло широкое рас-
пространение. Этот принцип осуществлен при работе автогрейдеров и
универсальных бульдозеров.
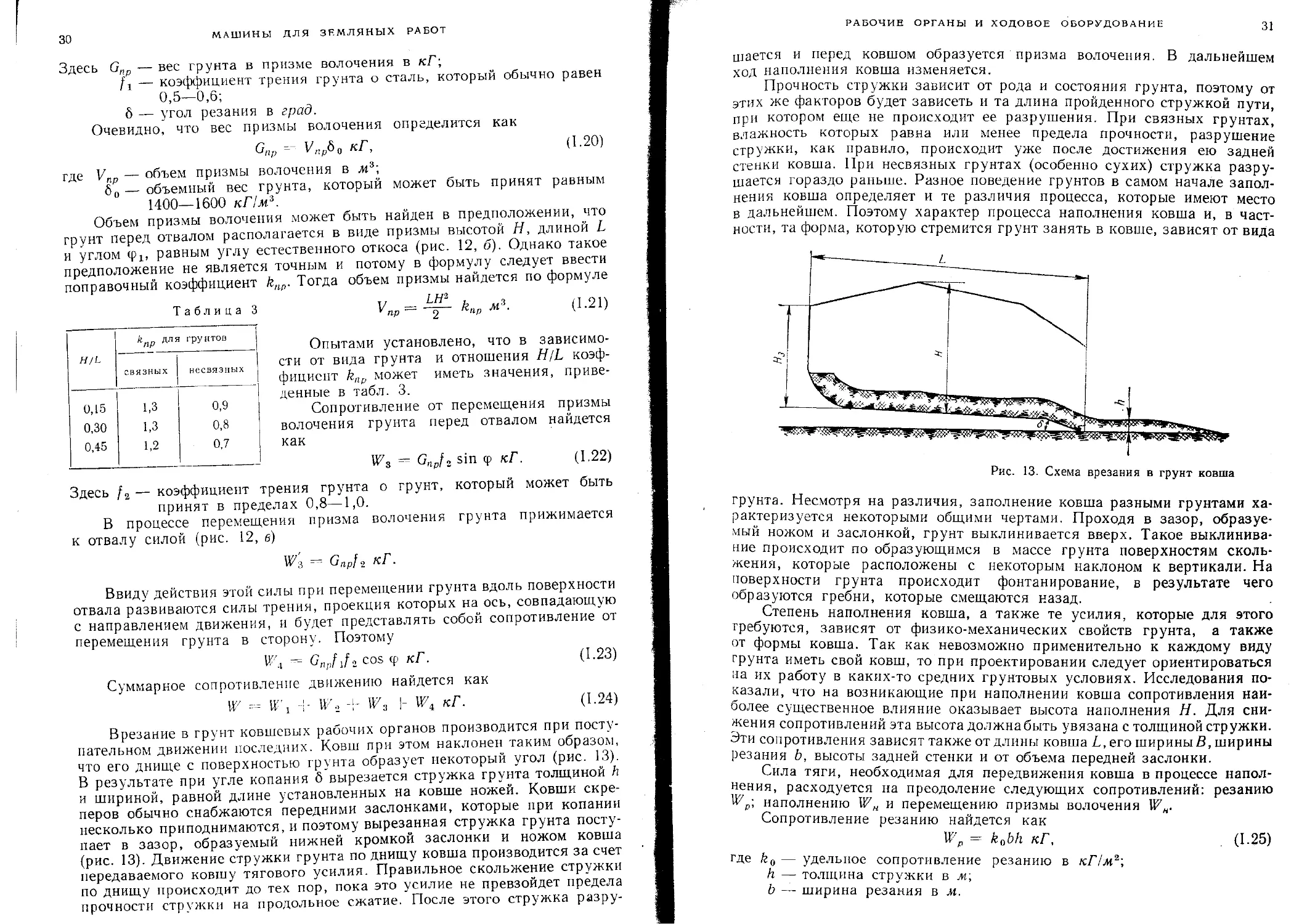
При копании грунта прямым отвалом (угол захвата ср = 90°) режущая
кромка ножа подрезает пласт грунта, который в виде стружки продви-
гается вверх по отвалу. В верхней части отвала стружка разрушается
и грунт, падая вниз, образует так называемую призму воло-
чения. Величина подъема стружки определяется как ее проч-
ностью, так и профилем отвала. При несвязных и малосвязных сухих
грунтах разрушение стружки начинается сразу же по ее отделе-
нии от массива. При перемещении стружки по ножу и отвалу можно
РАБОЧИЕ ОРГАНЫ И ХОДОВОЕ ОБОРУДОВАНИЕ
29
Рис. 12. Силы, действующие на отвал
выделить три зоны: формирование стружки, движение ее по отвалу и
разрушение.
При копании грунта косо установленным отвалом (угол захвата ср <Д
90') дополнительно имеет место движение грунта вдоль отвала, т. е.
в сторону. Здесь при повышении ско-
рости движения грунта в сторону
призма волочения уменьшается. На
рис. И изображены профили отвалов:
с постоянным радиусом кривизны
(рис. 11, а) ис профилем, образуемым
сопряжением части дуги окружности с
прямой (рис. 11, би в). Опытным путем
установлено, что лучшее перемещение
грунта в стороны имеет место при
профиле, показанном на рис. 11, а, а
худшее — при профиле, изображенном
на рис. 11 ,в. Поэтому там, где перемеще-
ние грунта в стороны является одним
из основных элементов рабочего про-
цесса, примером чему служат автогрей-
деры, отвалы следует изготовлять с по-
стоянным радиусом кривизны. Машины,
предназначенные в основном для про-
дольного перемещения грунта, напри-
мер неуниверсальные бульдозеры, снаб-
жаются отвалами с переменным радиу-
сом кривизны и обычно такими, где
дуга окружности сопряжена с прямой.
Для определения мощности двига-
теля необходимо знать те сопротивле-
ния, которые испытывает отвал при
выполнении им процесса копания и
перемещения грунта. Обычно при расче-
тах общее сопротивление принято раз-
делять на элементы. В наиболее общем
случае — при косо поставленном от-
вале — можно выделить следующие
элементы общего сопротивления W: ре-
занию IFp перемещению грунта вверх по
отвалу IF.,; перемещению призмы грунта
перед отвалом 1F3; перемещению грун-
та в сторону IF4.
Сопротивление грунта резанию определяется как (рис. 12, а)
№г = k0 Lh sin ср кГ, (1.18)
где kQ — соответствующее данному отвалу удельное сопротивление
грунта лобовому резанию в кПяг-,
L — длина отвала или ширина вырезаемой стружки грунта в м;
h — толщина стружки в м;
<р — угол захвата в град.
Сопротивление от перемещения грунта вверх по отвалу, согласно
схеме на рис. 12, б, представляет собой проекцию на горизонтальную
ось той силы трения, которая развивается от движения грунта по отвалу,
IFa = cos2 6 sin <p кГ. (1.19)
30
МАШИНЫ ДЛЯ ЗЕМЛЯНЫХ РАБОТ
Здесь Gnp — вес грунта в призме волочения в кГ;
— коэффициент трения грунта о сталь, который обычно равен
0,5—0,6;
6 — угол резания в град.
Очевидно, что вес призмы волочения определится как
Gnp =~ VnPba кГ, (1.20)
где Vnp — объем призмы волочения в м3',
60 — объемный вес грунта, который может быть принят равным
1400—1600 кГ/м3.
Объем призмы волочения может быть найден в предположении, что
грунт перед отвалом располагается в виде призмы высотой И, длиной L
и углом <р1; равным углу естественного откоса (рис. 12, б). Однако такое
предположение не является точным и потому в формулу следует ввести
поправочный коэффициент knp. Тогда объем призмы найдется по формуле
Таблица 3 Vnp=~k,lpM3. (1.21)
для грунтов Опытами установлено, что в зависимо-
H/L связных несвязных сти от вида грунта и отношения H/L коэф-
фициент knp может иметь значения, приве-
денные в табл. 3.
0,15 1,3 0,9 Сопротивление от перемещения призмы
0,30 1,3 0,8 волочения грунта перед отвалом найдется
0,45 1,2 0.7 как
— sin <р кГ. (1.22)
Здесь /2 — коэффициент трения грунта о грунт, который может быть
принят в пределах 0,8—1,0.
В процессе перемещения призма волочения грунта прижимается
к отвалу силой (рис. 12, б)
№з - Gnpf2 кГ.
Ввиду действия этой силы при перемещении грунта вдоль поверхности
отвала развиваются силы трения, проекция которых на ось, совпадающую
с направлением движения, и будет представлять собой сопротивление от
перемещения грунта в сторону. Поэтому
Кд GnpfJi cos <р кГ. (1.23)
Суммарное сопротивление движению найдется как
!! == 1! \ И 2 И":! I- 1Г ( кГ. (1.24)
Врезание в грунт ковшевых рабочих органов производится при посту-
пательном движении последних. Ковш при этом наклонен таким образом,
что его днище с поверхностью грунта образует некоторый угол (рис. 13).
В результате при угле копания б вырезается стружка грунта толщиной h
и шириной, равной длине установленных на ковше ножей. Ковши скре-
перов обычно снабжаются передними заслонками, которые при копании
несколько приподнимаются, и поэтому вырезанная стружка грунта посту-
пает в зазор, образуемый нижней кромкой заслонки и ножом ковша
(рис. 13). Движение стружки грунта по днищу ковша производится за счет
передаваемого ковшу тягового усилия. Правильное скольжение стружки
по днищу происходит до тех пор, пока это усилие не превзойдет предела
прочности стружки на продольное сжатие. После этого стружка разру-
рабочие органы и ходовое оборудование
31
шается и перед ковшом образуется призма волочения. В дальнейшем
ход наполнения ковша изменяется.
Прочность стружки зависит от рода и состояния грунта, поэтому от
этих же факторов будет зависеть и та длина пройденного стружкой пути,
при котором еще не происходит ее разрушения. При связных грунтах,
влажность которых равна или менее предела прочности, разрушение
стружки, как правило, происходит уже после достижения ею задней
стенки ковша. При несвязных грунтах (особенно сухих) стружка разру-
шается гораздо раньше. Разное поведение грунтов в самом начале запол-
нения ковша определяет и те различия процесса, которые имеют место
в дальнейшем. Поэтому характер процесса наполнения ковша и, в част-
ности, та форма, которую стремится грунт занять в ковше, зависят от вида
грунта. Несмотря на различия, заполнение ковша разными грунтами ха-
рактеризуется некоторыми общими чертами. Проходя в зазор, образуе-
мый ножом и заслонкой, грунт выклинивается вверх. Такое выклинива-
ние происходит по образующимся в массе грунта поверхностям сколь-
жения, которые расположены с некоторым наклоном к вертикали. На
поверхности грунта происходит фонтанирование, в результате чего
образуются гребни, которые смещаются назад.
Степень наполнения ковша, а также те усилия, которые для этого
требуются, зависят от физико-механических свойств грунта, а также
от формы ковша. Так как невозможно применительно к каждому виду
грунта иметь свой ковш, то при проектировании следует ориентироваться
на их работу в каких-то средних грунтовых условиях. Исследования по-
казали, что на возникающие при наполнении ковша сопротивления наи-
более существенное влияние оказывает высота наполнения Н. Для сни-
жения сопротивлений эта высота должнабыть увязана с толщиной стружки.
Эти сопротивления зависят также от длины ковша L, его шириныВ, ширины
резания Ь, высоты задней стенки и от объема передней заслонки.
Сила тяги, необходимая для передвижения ковша в процессе напол-
нения, расходуется на преодоление следующих сопротивлений: резанию
наполнению WH и перемещению призмы волочения WH.
Сопротивление резанию найдется как
= kobh кГ, . (1.25)
где k0 — удельное сопротивление резанию в кПм1',
h — толщина стружки в м\
Ь — ширина резания в м.
32
МАШИНЫ ДЛЯ ЗЕМЛЯНЫХ РАБОТ
Сопротивления наполнению Е. Р. Петерс предложил определять,
расчленив его на сопротивление силы тяжести грунта и сопротивление
трению грунта в ковше
Сопротивление силы тяжести поднимаемого столба грунта можно
определить по формуле
= bhH80 кГ, (1.26)
где 6 о — объемный вес грунта в кПя3-,
Н — высота наполнения в м.
Сопротивление трению возникает при выклинивании столба грунта
вверх
W"H = 2Pfi = урНё, кГ. (1.27)
Здесь 2Р — давление боковых призм, располагающихся по обе стороны
выклинивающегося столба грунта в кГ;
f2 — коэффициент трения грунта о грунт
(Ф1— угол внутреннего трения грунта, значения которого можно брать
из табл. 4).
Таблица 4
Значения / и угла внутреннего трения qj7
Параметр Вид грунта
Глины Суглинки Супеси и пески
Значение % 0,25—0,30 0,35—0,45 0,45—0,50
Угол внутреннего тре- ния фх в град 15—20 25—30 35—45
Сопротивление перемещению призмы волочения определяется по
формуле
Wn = У1ЬН^2 кГ, (1.29)
где У1 = 0,5 4-0,7 коэффициент объема призмы волочения, который за-
висит от конструкции ковша, высоты подъема передней заслонки
и вида грунта.
Опытная проверка показала, что расчетные сопротивления наполне-
нию получаются несколько ниже опытных, а расчетные сопротивления
призмы волочения выше опытных.
Многочисленные испытания существующих моделей скреперов поз-
волили получить достаточно надежные опытные данные, используя которые
можно рассчитывать сопротивление наполнению по следующей простой
формуле
== еУ кГ, (1.30)
где е — удельное сопротивление при наполнении, которое зависит от
емкости ковша, в кГ/м3;
V — емкость ковша в м3.
РАБОЧИЕ ОРГАНЫ И ХОДОВОЕ ОБОРУДОВАНИЕ
33
Опытным путем значения е получены для скреперов с различной
емкостью ковшей. Используя эти значения, возможно вести тяговые рас-
четы с достаточной для практических целей точностью.
Сопротивление перемещению призмы волочения может быть также
определено по формуле
= GJX = «Г60/2, кГ. (1.31)
Здесь Gn — вес грунта в призме волочения в кГ\
и — коэффициент, определяющий объем призмы волочения в долях
от общей емкости ковша.
Копание грунтов является весьма энергоемкой операцией, которая
требует затраты больших усилий. Поэтому ведется интенсивная исследо-
вательская работа, направленная на снижение этих усилий.
На рис. 14 дана схема рабочего органа землеройно-фрезерной машины;
здесь расположенная впереди фреза 1 разрыхляет грунт и подает его на
Рис. 14. Схема рабочих органов землеройно-фрезерной ма-
шины
подгребающий нож 2, с которого он поступает на транспортер 3 и далее
на выдающий транспортер 4, который расположен перпендикулярно к
продольной оси машины. Предварительное разрыхление грунта фрезой
существенно снижает общее сопротивление, что создает значительную
экономию энергии и повышает производительность машины.
Для снижения сопротивления грунта копанию в опытном порядке
применяется вибрация. Этот метод снижения сопротивлений чаще всего
применяется на ковшах, снабженных зубьями. При помощи специаль-
ного механизма зубья приводятся в состояние колебательных движений
с частотой 1500—2000 в минуту. Вибрация зубьев передается грунту.
Ввиду тиксотропных превращений грунтов сопротивление перемещению
зубьев снижается и тем больше, чем более интенсивно проходят эти прев-
ращения. Проведенные исследования показывают, что эффективность
вибрации больше всего проявляется в случае связных грунтов влажностью
выше предела пластичности. Здесь вибрация может снизить сопротивле-
ние копанию на 20—30%. При влажности грунта, близкой к пределу
пластичности, оно снижается на 10—15%. При более сухих грунтах виб-
рация становится неэффективной. Установлено, что эффективность выше
при колебаниях, осуществляемых в направлениях, перпендикулярных
движению зубьев, чем при колебаниях, совершаемых в направлении их
движения.
Ведется также исследовательская работа, направленная на разра-
ботку грунтов методов обрушения. В этом случае пласт грунта подкапы-
вается снизу, в результате чего он разрушается и под действием силы тя-
жести попадает на транспортер или какой-либо иной перемещающий
его рабочий орган. В результате достигается значительная экономия
34
МАШИНЫ ДЛЯ ЗЕМЛЯНЫХ РАБОТ
в затрачиваемой работе и создается непрерывность в разработке грунта,
что ведет к значительному повышению производительности.
Определение тех усилий, которые развиваются при взаимодействии
рабочих органов землеройных машин с грунтом, производится не только
в целях выбора мощности двигателя или тягача, но и для расчета отдель-
ных узлов и деталей машины на прочность.
Применение статического расчета при проектировании узлов машин
в ряде случаев уже является недостаточным. Поэтому необходимо прове-
дение дополнительных расчетов, учитывающих динамические нагрузки,
которые зависят от тяговых качеств машины и режима ее работы. Поль-
зуясь полученными на основании анализа работы машин расчетными поло-
жениями и современной теорией прочности, конструктор должен выби-
рать наиболее выгодную форму детали, с учетом фактического распреде-
ления в ней напряжений. При проектировании основным является вопрос
выбора расчетных положений машины и определение тех расчетных на-
грузок, которые воспринимаются ее отдельными узлами. Однако опреде-
ление тех действительных нагрузок, которые воспринимаются отдельными
элементами машины в процессе ее работы, часто связано с большими
трудностями.
Усилия, действующие на узлы и элементы машины, могут быть раз-
делены на три категории: нормальные, случайные и аварийные.
Нормальными являются такие усилия, которые имеют место при
обычных условиях эксплуатации. По этим усилиям должны произво-
диться расчеты машины на долговечность.
Случайные усилия представляют собой совокупность самого небла-
гоприятного сочетания одновременно действующих нагрузок и служат ос-
новой для расчета элементов машины на прочность.
Аварийными нагрузками следует считать такие нагрузки, которые
возможны только при некоторых исключительных обстоятельствах. При
их действии может произойти поломка конструкции. Эти нагрузки при-
нимаются во внимание при проектировании различного рода предохра-
нительных устройств.
Таким образом, расчет элементов машин на прочность производится
по случайным нагрузкам. Эти нагрузки представляют собой совокупность
различных активных сил, действующих на рабочий орган машины. Узлы
и детали машины должны воспринимать эти нагрузки без возникновения
в них пластических деформаций.
Определение случайных нагрузок производится при таких положе-
ниях машины и, в частности, ее рабочего органа, при которых в рассмат-
риваемых узлах возникают наибольшие напряжения. Эти положения
называются расчетными. Выбор расчетных положений должен произво-
диться на основании анализа общей схемы действующих сил и характера
изменения их в процессе работы машины.
При расчете на прочность к проектируемому узлу или к элементу
конструкции машины прикладываются усилия, соответствующие приня-
тым расчетным положениям, и определяются те напряжения, которые воз-
никают в опасных сечениях. Эти напряжения сравниваются с допускае-
мыми.
Допускаемые напряжения определяются, исходя из выбранного пре-
дельного состояния. В качестве основного предельного состояния обычно
принимают потерю несущей способности =
где <7S — предел текучести материала в кГ1см2\
k = kjtzk.3 — общий коэффициент запаса прочности;
РАБОЧИЕ ОРГАНЫ И ХОДОВОЕ ОБОРУДОВАНИЕ
35
£—0,95-И, 15—коэффициент условий работы, учитывающий сте-
пень ответственности узла, а также неблагоприятные условия
работы;
k„ — 1,1 ч-1,2 — коэффициент однородности, учитывающий возмож-
ность снижения фактического предела текучести;
кя— 1,14-1,15 — коэффициент перегрузки, учитывающий возмож-
ность более высокой действительной нагрузки по сравнению
с расчетной.
Общий запас прочности k зависит от назначения машины и режима
ее работы. Так, например, для землеройных машин общий коэффициент
запаса прочности может быть принят равным k = 1,3 -:-1,4.
Случайные нагрузки могут быть статическими и динамическими.
Динамические нагрузки, как правило, возникают при неустановившемся
движении машины (при разгоне, торможении, ударах рабочего органа
о препятствие и т. п.). Нагрузки, возникающие при взаимодействии рабо-
чих органов машин с обрабатываемой ими средой, например землеройных
машин с грунтом, часто носят динамический характер.
При неустановившемся движении возникают силы инерции. Если
причиной замедления движения машины является возрастание сопротив-
ления на рабочем органе, то силы инерции будут направлены в сторону
движения и на рабочий орган будут действовать дополнительные усилия,
равные инерционным силам, но имеющие противоположное направление.
В этих случаях силы сопротивления копанию грунта будут больше тех,
которые имеют место при установившемся процессе.
Если при установившемся движении нагрузки зависят в основном
от веса машины и навесного оборудования, крутящего момента двигателя
и т. п. и могут быть определены сравнительно легко, то динамические на-
грузки обычно зависят от большого числа факторов и потому определение
их обычно затруднено. К таким факторам относятся величины и соотноше-
ния движущихся масс, упругость элементов, величины зазоров, характер
привода и т. п. Определение этих нагрузок производится как на основании
анализа работы рассматриваемого узла или элемента машины, так и в
результате опытных данных. При приближенных расчетах на прочность
динамические нагрузки учитываются введением в расчет так называемого
коэффициента динамичности kg, который всегда больше единицы. Тогда
динамическая нагрузка определяется как;
Рд = kdPc, (1.32)
где Рс — нагрузка, соответствующая установившемуся процессу.
Величина коэффициента динамичности обычно выбирается на основе
опытных данных.
В настоящее время при расчете машин на прочность делается попытка
отыскать развивающиеся динамические нагрузки теоретическим путем.
При этом рассматривается расчетная схема, состоящая из масс, соединен-
ных между собой упругими элементами. Такими массами являются отдель-
ные агрегаты машины, а упругими элементами — соединительные звенья.
§ 4. ХОДОВОЕ ОБОРУДОВАНИЕ
И ОБЩИЕ ПОЛОЖЕНИЯ ТЯГОВОГО РАСЧЕТА
Строительные и дорожные машины снабжаются колесным или гусе-
ничным ходовым оборудованием. Колесный ход может быть создан как
на базе колес с жестким, практически недеформируемым ободом, так и на
базе колес, снабженных пневматическими шинами.
36
МАШИНЫ ДЛЯ ЗЕМЛЯНЫХ РАБОТ
Проходимость машин при
глубиной той колеи, которая
Рис. 15. Распределение напряже-
ний под колесом с жестким обо-
дом: а — неподвижное колесо;
б — движущееся колесо
По условиям эксплуатации строительных и дорожных машин и осо-
бенно землеройно-транспортных ходовое оборудование должно обеспе-
чивать максимальную их проходимость по рыхлым, а иногда и сильно
увлажненным грунтам.
прочих равных условиях определяется
образуется в результате взаимодействия
с грунтом их ходового устройства.
Для обеспечения необходимой прохо-
димости эта глубина не должна пре-
восходить допустимого предела. В общем
случае глубина колеи пропорциональна
той вертикальной нагрузке, которая .дей-
ствует на ходовое устройство машины,
и обратно пропорциональна как попе-
речным размерам поверхности площади
контакта этого устройства с грунтом,
так и модулю деформации грунта.
Поэтому при постоянной нагрузке сле-
дует стремиться к увеличению поверхно-
сти контакта. При постоянной поверх-
ности контакта проходимость машины
определяется теми удельными давления-
ми, которые на ней развиваются. Эти
давления не должны превосходить допу-
стимых пределов.
На рис. 15 показана схема распре-
деления напряжений под колесом с жест-
ким ободом. В случае неподвижного ко-
леса (рис. 15, а} эпюра напряжений на
поверхности грунта симметрична относи-
тельно вертикальной оси. На последней
расположен и максимум напряжений. При
движении колеса имеет место иная кар-
тина. Ранее уже указывалось, что при раз-
грузке восстановление обратимой деформации грунта начинается не сразу
и происходит со сравнительно небольшими скоростями. Надо также
учесть, что на процесс восстановления обратимой деформации накла-
дывается процесс последействия нагружения. Все это приводит к тому,
что нагрузка на грунт при достаточно большой скорости движения колеса
не может передаваться по всей поверхности контакта колеса с грунтом,
так как фактически в задней части этой поверхности такого контакта нет.
Поэтому нагрузка передается только через переднюю часть этой поверх-
ности.
Если колесо ведомое, то под действием силы тяги Т максимум напря-
жений сдвигается по отношению к вертикальной оси несколько вперед.
Таким образом, можно сказать, что если в случае неподвижного колеса,
напряжения, которые развиваются от действия нагрузки на колесо Р,
на поверхности контакта распределяются крайне неравномерно, то при
движущемся колесе эта неравномерность усиливается.
Для определения максимальной величины напряжения под движу-
щимся колесом может служить формула
кГ/см2.
(1.33)
РАБОЧИЕ ОРГАНЫ И ХОДОВОЕ ОБОРУДОВАНИЕ
37
Здесь q = ----удельное линейное давление (В — ширина колеса)
в кПсм',
Еа — модуль деформации грунта в кПсм*-,
R — радиус колеса в см.
Формула является интерпретацией выражения Герца—Беляева, вы-
веденного для определения напряжений на контакте плоскости и перека-
тываемого по ней цилиндра. Для определения модулей деформации грунта
можно пользоваться данными табл. 5.
В отличие от жесткого, колесо, снабженное пневматической шиной,
при перекатывании по поверхности не только
ность, но и само сжимается. Если поверх-
ность, по которой движется это колесо,
легко деформируется, что имеет место, на-
пример, при рыхлом грунте, то деформация
пневматика относительно мала и он ведет
себя как жесткое колесо. Наоборот, при
движении по практически недеформируемой
поверхности, например, по цементно-бетон-
ному дорожному покрытию, сжимается только
колесо.
Площадь контакта между пневматичес-
ким колесом и твердой поверхностью может
рассматриваться как эллипс. Для шин срав-
нительно больших размеров (10,5—20 и
более) отношение осей эллипса находится
в пределах от 1 : 4 до 1 : 2.
деформирует эту поверх-
Рис. 16. Распределение напря-
жений под пневматическим ко-
Распределение напряжений по поверх-
ности контакта движущейся шины схемати-
чески изображено на рис. 16. На основе проведенных
лесом
опытов можно
полагать, что напряжения распределяются по эллипсоиду.
Более благоприятное распределение напряжений и большая площадь
контакта приводят к тому, что, по сравнению с жестким колесом, здесь
как средние, так и максимальные напряжения всегда ниже. Поэтому ма-
шины, снабженные колесами на пневматиках, всегда обладают большей
проходимостью, чем машины с жесткими колесами. Это, а также эластич-
ность шин, позволяющая производить движение машин с высокими ско-
ростями, привели к тому, что в настоящее время почти все строительные
и дорожные машины выпускаются с колесным ходом, оборудованным
Т а б л иц а 5
Значение модулей деформации грунтов оптимальных влажностей
Состояние грунта Относитель- ная плотность ty^max Модуль деформации грунта в кГ/сМ2
связного несвязного
Совершенно рыхлый 0,65 5—10 5—10
Очень рыхлый 0,75 10—20 10—20
Рыхлый 0,80 20—40 20—30
Недоуплотненный 0,85 40—80 30—60
Почти плотный 0,90 80—100 60—100
Плотный 0,95 100—200 100—150
38
МАШИНЫ ДЛЯ ЗЕМЛЯНЫХ РАВОТ
пневматическими шинами. Жесткие колеса еще применяются на тяжелых,
преимущественно полустационарных машинах, передвижение которых
производится в редких случаях и при малых скоростях движения.
Оказываемое пневматикой на грунт удельное давление, или напряже-
ние на поверхности контакта шины с грунтом складывается из двух со-
ставляющих: давления воздуха и давления, развивающегося за счет жест-
кости самой шины.
В. П. Ковальчук учитывает влияние жесткости шин введением ста-
тического коэффициента жесткости £. Тогда среднее напряжение на по-
верхность контакта определится по формуле
° ср = кГ/смг, (1.34)
где pw — давление воздуха в шине в кПсм2.
Для шин больших размеров £ имеет следующие значения:
pw в кПсм"......... 1 2 3 4 5 6
g.................. 0,6 0,5 0,4 0,3 0,2 0,15
Формула (1.34) не учитывает жесткости той поверхности, по которой
перекатывается шипа. Поэтому она верна только для случая перекаты-
вания колеса по весьма жесткой поверхности. Для расчета максималь-
ного напряжения на контакте шины с поверхностью любой жесткости
в основу может быть положена формула Н. М. Беляева
с1пах = 1//Л—5-н-лг--ггг кГ/слг2, I1-35)
max |
где q — удельное линейное давление в кГ'см\
Р — общая нагрузка на колесо в кГ;
R — радиус шины в см\
&! и й'2 — коэффициенты упругости той поверхности, по которой дви-
жется шина, и самой шины в слг!кГ.
В общем виде
О = —др—- см-1кГ,
(1.36)
где р — коэффициент Пуассона, Е — модуль Юнга кГ’см1.
Коэффициент ynpjгости грунта можно определять, пользуясь сле-
дующей формулой:
„ 0,405
и, = — -— смЧкГ.
1 Ей
(1-37)
Коэффициент упругости шины может быть найден как
02
0,055
Ри>
/~
' paD'!B
смЧкГ,
(1.38)
где D = 2R — диаметр шины в см.
Эти формулы получены в результате анализа взаимодействия шины
с грунтовой поверхностью. При этом предположено, что грунтовая по-
верхность и шина деформируются по линейному закону. В итоге с доста-
точной точностью напряжение на контакте шины с грунтовой поверх-
ностью можно рассчитать, пользуясь формулами (1.35), (1.37) и (1.38).
РАБОЧИЕ ОРГАНЫ И ХОДОВОЕ ОБОРУДОВАНИЕ
39
При перекатывании колеса возникают сопротивления. Эти сопротив-
ления являются следствием деформации как поверхности, по которой про-
исходит перекатывание колеса, так и самой шины. При этом должно быть
учтено также сопротивление трения, возникающее в подшипниках колеса.
В настоящее время разработаны методы определения этих сопротивлений.
Пользоваться ими затруднительно не только ввиду их сложности, но также
и потому, что движение колес может происходить в самых разнообразных
условиях, учесть которые бывает весьма затруднительно. Поэтому рас-
чет сопротивления перекатыванию колеса лучше всего вести, пользуясь
опытными данными.
Под коэффициентом сопротивления перекатыванию понимается от-
ношение необходимой для устойчивого движения колеса силы тяги Т
к нормальной реакции грунта /?2
f = T^- 0^
Очевидно, что нормальная реакция может быть определена как
/?2 = Р + GK кГ,
где Р — общая нагрузка на колесо в кГ, GK — вес колеса в кГ.
Следует подчеркнуть, что коэффициентом / учитывается суммарное
сопротивление от всех перечисленных выше факторов, а не только чистое
сопротивление качению. Значения коэффициентов сопротивления каче-
нию можно выбирать на основании данных табл. 6.
Т абл ица 6
Коэффициенты сцепления и сопротивления качению
Поверхность движения Коэффициент сцепления Коэффициент сопротивления качению
шины высокого давления ШИНЫ низкого давления гусенич- ного хода шины высокого давления шины низкого давления гусенич- ного хода
Рыхлый грунт 0,85—0,90 0,75—0,80 0,90—1,03 0,15—0,20 0,15—0,18 0,10—0,15
Плотный грунт 0,90—0,93 0,80—0,85 0,95—1,С5 0,05—0,10 0,07—0,10 0,08—0,10
Рыхлый песок 0,40—0,60 0,40—0.60 0,40—0,55 0,30—0,35 0,30—0,35 0,15
Асфальтобетонное покры- тие (сухое) 0,30—0,45 0,45—0,55 — 0,010—0,026 0,015 0.03 -
Цементнобетонное покры- тие (сухое) 0,35—0,45 0,60—0,75 — 0,010—0,020 0,015 0,03
Приложенный к ведущему колесу крутящий момент может быть реа-
лизован лишь в случае достаточного сцепления колеса с той поверхностью,
по которой оно движется. В противном случае будет иметь место проскаль-
зывание колеса по этой поверхности, т. е. его буксование. Сцепные ка-
чества оцениваются коэффициентом сцепления. Под последним понимается
отношение той максимальной окружности силы Ттю1, которая еще может
иметь место без проскальзывания колеса, к нормальной реакции грунта
на колесо R2, т. е.
^ = -4^- 0-40)
Очевидно, что для нормального передвижения колеса всегда необ-
ходимо соблюдать условие
Т < Ттах. (1.41)
40
МАШИНЫ ДЛЯ ЗЕМЛЯНЫХ РАБОТ
L
Рис. 17. Схемы поворота двухосных машин: а — с
двумя управляемыми колесами; б — со всеми управ-
ляемыми колесами
Здесь Т — тяговое условие, которое необходимо иметь для передви-
жения колеса с учетом преодоления не только сопротивления качению,
но и уклонов.
Коэффициенты сцепления зависят как от состояния той поверхности,
по которой происходит движение колеса, так и от типа шины. От того, на-
сколько хорошо будет обеспечено сцепление шины с поверхностью дороги,
зависят не только воз-
можность реализации мощ-
ности имеющегося двига-
теля, но и безопасность
движения. Поэтому для
повышения сцепления при-
нимается ряд мер. Так, по-
верхности асфальтобетон-
ных и других дорожных
покрытий устраиваются
шероховатыми, а предна-
значенные для движения
по грунту шины снабжа-
ются протектором с глубо-
кими рисунками. При этом
наибольшее сцепление со-
ответствует шинам с ри-
сунком типа «елка».
Изменение направле-
ния движения колесных
машин осуществляется
путем поворота управляе-
мых колес относительно
рамы машины. Управляе-
мыми могут быть как пе-
редние, так и задние ко-
леса, а также все колеса
машины. Поворот осуще-
ствляется во время движе-
ния машины, т. е. на
ходу. Некоторые машины
не имеют поворотных ко-
лес. В этих случаях пово-
рот осуществляется за счет
разности скоростей вращения колес правого или левого борта или же вра-
щением их в противоположных направлениях. Такой поворот называется
бортовым. По этому же принципу производятся повороты гусеничных ма-
шин. Устройство поворотного механизма машин с управляемыми колесами
аналогично устройству автомобиля (рис. 17, а). Для того чтобы обеспе-
чить движение колес без скольжения, они должны перемещаться по дугам
концентрических окружностей. Из этого условия вытекает, что угол пово-
рота внутреннего колеса 0 должен быть больше угла поворота наружного
колеса а. Разные углы поворота колес достигаются введением в механизм
шарнирного четырехугольника ABCD (рулевой трапеции). Если В —
ширина колеи, a L — база колесного хода, то правильная работа меха-
низма обеспечивается при условии
= ctga — ctgp. (1.42)
РАБОЧИЕ ОРГАНЫ И ХОДОВОЕ ОБОРУДОВАНИЕ
41
Весьма важной характеристикой машины является радиус пово-
рота Rn, который согласно рис. 17 можно найти как
о____________________________________
Кп “ sin а •
(1.43)
Маневренность машины со снижением радиуса поворота повышается,
так как появляется возможность работать на более узких полосах. По-
этому всегда надо стремиться к
тому, чтобы получить этот ра-
диус возможно более малым.
Угол а обычно принимается в
пределах 40—45°.
В случае трехосных машин
неизбежно некоторое скольжение
колес. Для его уменьшения рас-
стояние между неуправляемыми
второй и третьей осями должно
быть снижено до возможного ми-
нимума.
Машины со всеми управляе-
мыми колесами (рис. 17, б) обла-
дают значительно большей мане-
вренностью, так как радиус их по-
ворота снижается в 2 раза. Кроме
того, когда колеса повернуты
параллельно, возможно боковое
(косое) движение машины, что
удобно при объезде препятствий.
Машины, созданные на базе
одноосных тягачей, изменяют на-
правление движения путем пово-
рота передней оси (рис. 18). По-
ложение колес относительно этой
оси остается неизменным. При
повороте оси на угол а = 90° ма-
шина совершает поворот на месте,
чем достигается высокая ее мане-
вренность. Вместе с тем устойчивость этих машин при поворотах
ниже, чем машин с поворачивающимися колесами. Снижению устой-
чивости способствует то обстоятельство, что шарнир О устраивается таким
образом, чтобы передняя ось могла поворачиваться в вертикальной
плоскости.
Для поворота оси требуются значительно большие усилия, чем для
поворота колеса, ввиду чего поворот этой оси, как правило, механизи-
руется.
В вертикальной плоскости колеса устанавливаются с некоторым
развалом, который обеспечивается углом у (рис. 19). Шкворни колес на-
клонены под углом (3 = 2 э-8°.
Наклон способствует также более устойчивому прямолинейному дви-
жению машины, так как каждый поворот колес обязательно сопрово-
ждается необходимостью поднятия передка машины. Поэтому наклон
облегчает также возврат колес в положение, соответствующее прямо-
линейному движению машины. В плоскости, параллельной продоль-
ной оси машины, шкворень наклонен под углом а, что снижает усилия
42
МАШИНЫ ДЛЯ ЗЕМЛЯНЫХ РАБОТ
в рулевом механизме и обеспечивает устойчивое положение колеса.
У машин, движущихся с высокими скоростями, колеса устанавливаются
так, что они в плане имеют так называемую сходимость, которая обеспе-
чивается углом б. Сходимость измеряется разностью (б — а), которая
обычно равна нескольким миллиметрам.
У машин с бортовым поворотом изменение направления движения
обеспечивается разностью окружных скоростей колес внешнего (забегаю-
щего) и внутреннего (отстающего) бортов
(рис. 20). Радиус поворота может быть
определен как
В
Сз — и0
_£о
2В2
(v3 + v0) л, (1.44)
где В — колея колесной тележки в м;
Lo — база тележки в м;
v3 — окружная скорость колес внеш-
него (забегающего) борта в м/сек\
v0 — окружная скорость колес вну-
треннего (отстающего) борта
в м/сек.
При v0 = 0
+ (1.45)
Таким образом, на величину радиуса
Рис. 19. Схемы установки колес поворота существенное влияние оказывает
база тягача Lo.
По такому же принципу осуществляется и поворот гусеничного хода.
Выше было показано, что развивающееся на поверхности контакта
шины с грунтом максимальное напряжение снижается с уменьшением
давления в шине и с повышением ее диаметра. Зависимость от диаметра
особенно проявляется при работе на рыхлом грунте, когда шина работает
как жесткое колесо. Поэтому для повыше-
ния проходимости машин в настоящее время
имеет место тенденция к снижению давле-
ния в шине и к постановке на машины шин
больших размеров.
Широкое распространение начинают при-
обретать шины с регулируемым давлением.
Такое регулирование осуществляется центра-
лизованно — из кабины оператора — и мо-
жет производиться как на ходу, так и во
время стоянки машины. При проходе ма-
шины по рыхлому или влажному грунту
давление воздуха в шинах снижается и те
бина колеи, а следовательно, и сопротивление движению. При выходе
машины на твердую поверхность давление в шинах повышается, что умень-
шает их деформацию и тем самым увеличивает срок службы. Современные
модели шин низкого давления позволяют изменять давление воздуха в них
от 0,5 до 2,5 кГ/см '-, а в шинах высокого давления — от 2 до 5—6 кГслг.
На строительных и дорожных машинах находят применение также ароч-
ные шины, которые от обычных отличаются большей шириной профиля,
Рис. 20. Схема машины с бор-
товым поворотом
самым уменьшается глу-
что улучшает их сцепление с грунтом.
РАБОЧИЕ ОРГАНЫ И ХОДОВОЕ ОБОРУДОВАНИЕ
43
В месте контакта с поверхностью грунта шина деформируется. При
этом она нагревается и тем больше, чем выше скорость движения. Во избе-
жание быстрого износа шин деформация не должна превышать допустимые
пределы, которые зависят от скорости движения. Поэтому подбор шин
обычно производится по тем допускаемым на нее нагрузкам, которые
устанавливаются паспортными данными. При подборе шин в случаях,
когда скорости движения превосходят 40 км/ч, расчетную нагрузку
по сравнению с фактической целесообразно повысить на 10—20%. На
машине обычно устанавливаются шины одинаковых размеров, поэтому
выбор их типоразмера должен производиться по наибольшей нагрузке
на колесо.
Схемы расстановки колес в плане могут быть различными. Наиболее
часто встречающиеся схемы представлены на рис. 21. В зависимости от
принятой схемы несколько изменяется средний коэффициент сопротивле-
Рис. 21. Схема расстановок колес в плане
ния движению по рыхлому снегу. Эти изменения связаны с тем, что зад-
ние колеса часто движутся по следу передних, т. е. по уже несколько
уплотненному грунту, и поэтому здесь коэффициент сопротивления дви-
жению оказывается ниже.
Если — коэффициент сопротивления перекатыванию передних
колес по рыхлому грунту, а /£р — средний коэффициент сопротивления
перекатыванию всей тележки, то при расстановке колес по схеме на
рис. 21, а, б, в fcp = fcp = 0,7/4; ftp = 0,8/х.
Гусеничный ход обладает большой площадью контакта с грунтовой
поверхностью. Ввиду этого оказываемое на грунт удельное давление здесь
ниже, чем при колесном ходе. Поэтому гусеничные машины, как правило,
обладают большей проходимостью по рыхлым и особенно переувлаж-
ненным грунтам. Вместе с тем эти машины, по сравнению с колесными,
тихоходны и при движении имеют место значительные потери на трение
внутри самого механизма гусениц.
Поэтому, несмотря на небольшое удельное давление, а следова-
тельно, и глубину колеи, сопротивление движению гусениц в большинстве
случаев выше, чем колес.
Более высокому сопротивлению движению способствует также и
местные неровности пути, преодоление которых часто сопровождается
продольными наклонами как гусеничного хода, так и всей машины
в Целом. Эти недостатки послужили причиной для постепенного вытесне-
ния гусеничного движителя колесным, устроенным с применением пнев-
матических шин. Однако такая замена не всегда возможна. Машины
с большими нагрузками на ходовое устройство и предназначенные для
работы на слабых грунтах в настоящее время делаются и еще долгое
время будут устраиваться на гусеничном ходу.
Опорная поверхность траков гусеничного хода может быть гладкой
или снабженной грунтозацепом (рис. 22). В последнем случае проскаль-
44
МАШИНЫ ДЛЯ ЗЕМЛЯНЫХ РАБОТ
зыванию гусениц противостоят не только развивающиеся на поверхности
контактов траков с грунтом силы сцепления, но и сопротивление верхнего
слоя грунта срезу, который может произойти на поверхности, располо-
женной на глубине L.
Гусеничный ход может быть выполнен в виде жесткой рамной много-
опорной конструкции (рис. 22, а) или быть гибким безрамным малоопор-
ным (рис. 22, б). В первом случае ведомое и ведущее колеса, а также опор-
ные ролики монтируются на специальной раме, а во втором такая рама
отсутствует.
Жесткая гусеница обеспечивает более равномерное распределение
давления, чем гибкая, и потому может быть устроена несколько меньшей
ширины. При наезде на препятствие заклинки траков, а следовательно,
Рис. 22. Типы гусениц
и торможения хода не проис-
ходит, но имеет место наклон
всей машины. При такой кон-
струкции можно обеспечить
надежную защиту механиз-
мов гусеницы от пыли, но
потери на трение выше, чем
при гибкой гусенице. Жест-
кая конструкция гусениц
применяется на машинах,
предназначенных для движе-
ния по слабым грунтам, и
в случаях, когда наклоны
всей машины большого зна-
чения не имеют.
Имеется также промежуточный тип гусеницы — полужесткий. Здесь
устраивается рама, но опорные ролики попарно объединяются в шарнирно
подвешенные подвижные блоки, снабженные амортизационными пружи-
нами.
При наездах на препятствия блоки перекашиваются и тем самым
гусеничная лента может «вписываться» в неровности пути.
Различают внешние и внутренние сопротивления передвижению
гусеничного хода. К числу внешних относятся сопротивления, связанные
со смятием грунта и преодолением уклонов. К внутренним относятся
те сопротивления, которые возникают в самих механизмах гусеничного
хода ввиду сил трения. Для жестких гусениц внутренние сопротивления
обычно составляют 20—30% от внешних сопротивлений. Метод расчета
развивающихся сопротивлений сложен и вместе с тем недостаточно наде-
жен. Поэтому при определении общего сопротивления движению гусе-
ничного хода лучше всего пользоваться опытными данными. Опытами уста-
новлено, что коэффициент сопротивления движению повышается со сниже-
нием модуля деформации грунта или с повышением удельного давления.
При одинаковом удельном давлении он несколько возрастает с увеличе-
нием поперечных размеров площади контакта гусеницы с грунтом, т. е.
с ростом ширины или длины гусеницы.
Коэффициент сцепления гусеничного хода с грунтом мало зависит
от его влажности. При движении по горизонтальному участку коэффи-
циенты сопротивления движению и сцеплению могут быть приняты
согласно табл. 5. При движении по весьма рыхлым или очень влажным
грунтам сопротивление движению колесных машин, как правило, выше,
чем гусеничных, а при движении по плотным грунтам и по дорогам —
ниже.
РАБОЧИЕ ОРГАНЫ И ХОДОВОЕ ОБОРУДОВАНИЕ
45
Максимальное удельное давление, оказываемое на грунт со стороны
гусеничного хода, зависит не только от веса машин, но и от тех усилий,
которые воспринимаются ее рабочими органами. Поэтому при работе
машины положение равнодействующей всех усилий Р смещается, как
правило, относительно оси симметрии гусениц на какую-то величину а
Рис. 24. Схема поворота гусе-
ничного хода
е. в плане смещена на
(рис. 23). Для определения максимального удельного давления можно
предположить, что распределение давлений вдоль гусениц происходит по
закону треугольника, откуда уже следует, что длина загруженной части
гусеницы I равна утроенному расстоянию от равнодействующей до края,
т. е.
I = 3 ----а) см.
Если ширина гусеницы равна Ь, то мак-
симальное удельное давление для случая,
когда точка приложения равнодействую-
щей Р находится на продольной оси ма-
шины, найдется по формуле
оП1ах =---r-f--г кГ!см2. (1.46)
зб(-Н
В тех случаях, когда равнодействую-
щая всех нагрузок на машину несимме-
трична относительно ее продольной оси,
величину с, максимальное удельное давление может быть найдено в пред-
положении, что центры давлений гусениц О; и О2 и точка приложения
равнодействующей О находятся на одной прямой. Распределение нагру-
зок между гусеницами будет обратно пропорциональным плечам этой
прямой.
Поворот гусеничной машины аналогичен повороту машин, изобра-
женных на схеме (рис. 20). Возможность поворота гусеничных машин как
во время движения, так и на месте обеспечивает высокую маневренность.
Поворот осуществляется выключением или затормаживанием одной из
гусениц. При этом центром поворота всей машины становится центр опор-
ной поверхности заторможенной гусеницы. Согласно рис. 24 радиус по-
ворота Р определится по формуле
Р В Ч -Ь2-м.
(1.47)
46
МАШИНЫ ДЛЯ ЗЕМЛЯНЫХ РАБОТ
Если G — общее давление на обе гусеницы, то, предполагая его рав-
номерное распределение по их поверхности, можно найти момент сил
сопротивления повороту заторможенной гусеницы в виде
Mt = -^-pZ = -2^кг-м, (1.48)
где р — коэффициент сопротивления повороту гусеницы на грунте;
можно полагать, что р = 0,5 s-0,7.
Общий момент сопротивления повороту всей машины можно найти,
если учесть еще то дополнительное сопротивление, которое развивается
при движении второй незаторможенной гусеницы. Момент этого сопро-
тивления можно определить по
формуле
кГ-м, (1.49)
где / — коэффициент сопроти-
вления движению гу-
сеницы, который мо-
жет быть определен со-
гласно данным табл. 6.
Необходимая для осущест-
вления поворота мощность мо-
Рис. 25. Движение машины на уклон жет быть найдена по сумме мо-
ментов Mj и М2.
При работе машин на уклонах возникают дополнительные сопротив-
ления, связанные с необходимостью преодоления подъемов. Согласно схеме,
приведенной на рис. 25, это сопротивление находится по формуле
GT = G sin а кГ,
где G — вес машины в кГ, а — угол наклона местности.
При малых а можно полагать, что sin а <=> tgcc. Тогда необходимое
для движения машины дополнительное тяговое усилие найдется по формуле
W2 = GT = G tg a = Gi кГ, (1.50)
где i — tga = -------уклон местности, который измеряется как отноше-
ние высоты подъема h к его протяженности (заложению), измерен-
ной по горизонтали.
При работе землеройно-транспортных машин возникают еще сопротив-
ления, связанные с копанием грунта. Эти сопротивления являются са-
мыми большими и потому должны учитываться в первую очередь. Выше
было показано, что при прочих равных условиях они зависят от типа рабо-
чего органа. Методы численного определения этих сопротивлений будут
даны ниже при рассмотрении конкретных машин.
При трогании с места или повышении скорости движения развивается
сопротивление от преодоления сил инерции W,, которое может быть рас-
считано по формуле
7.-° - 7-хГ, (1.51)
1 л g dt л g t 7
где G — вес машины в кГ;
g — ускорение силы тяжести в см/сек2;
v —скорость машины в см/сек;,
РАБОЧИЕ ОРГАНЫ И ХОДОВОЕ ОБОРУДОВАНИЕ
47
t — время разгона в сек\
% — коэффициент, учитывающий инерцию вращающихся масс транс-
миссии и двигателя.
При проектировании машины весьма важно правильно выбрать мощ-
ность двигателя или тягача, что можно сделать лишь при полном учете
развивающихся сопротивлений. Такой учет и определение необходимой
мощности и является задачей тягового расчета.
В случае землеройно-транспортных машин следует различать два
режима работы — тяговый, или рабочий, и транспортный. Тяговый ре-
жим соответствует процессу копания грунта, а транспортный — его пере-
возке. В каждый момент времени внешние сопротивления должны урав-
новешиваться той окружной силой, которая развивается на ходовом
устройстве. Уравнение, которым обусловливается это равновесие, назы-
вается тяговым балансом. При тяговом режиме кроме сопротивлений
движению и инерционных сил необходимо учесть еще сопротивление
грунта копанию, и потому этот баланс может быть представлен следую-
щей формулой:
Рк = G (f + i + -g-) + WK кГ, (1.52)
где Рк — развивающаяся на движителе (ходовом устройстве) окружная
сила в кГ.
Для землеройно-транспортной машины характерной является та
величина тягового усилия, которая может быть израсходована на опера-
цию копания. Согласно уравнению тягового баланса при установившемся
режиме работы, на горизонтальном участке эта величина может быть
найдена по формуле
WK = Рк - Gf кГ.
По аналогии с тяговым балансом уравнение баланса мощности для
тягового режима работы может быть написано в следующем виде:
N = Nf ± Nt + N6 + ЛА/ + NK л. с. (1.53)
Здесь N — мощность, подводимая к движителю, в л. с.;
— мощность, необходимая для преодоления сопротивления
движению, в л. с.;
N; — мощность, необходимая для преодоления подъема, в л. с.;
ЛАб — мощность, затрачиваемая на буксование движителя, в л. с.\
Nj — мощность, необходимая для преодоления инерции, в л. с.;
— мощность, расходуемая на копание грунта, в л. с.
Определение мощностей У/, Nh N}- и NK не вызывает затруднений,
так как они могут быть найдены по соответствующим им сопротивлениям
и значению скорости движения.
Мощность, подводимая к движителю,
Л'Д =- Пт Л. С.,
где Nе — мощность двигателя в л. с.; r]m — к. п. д. трансмиссии.
Мощность, затрачиваемая на буксование, может быть определена
по формуле
гДе vT и vg — теоретическая и действительная скорости движения ма-
шины в км'ч;
\ — коэффициент буксования.
48
МАШИНЫ ДЛЯ ЗЕМЛЯНЫХ РАБОТ
Потери мощности могут быть оценены по величине тягового к. п. д.,
представляющего собой отношение той мощности, которая расходуется
на копание грунта NK, к мощности двигателя Ne
= (1-55)
Этим коэффициентом учитываются потери мощности в трансмиссии
и при буксовании машины. Здесь рассматривается как потерянная и та
мощность, которая идет на перемещение самой машины.
Рис. 26. Тяговая характеристика ма-
шины
Тяговой баланс при транспорт-
ном режиме работы отличается от ба-
ланса при тяговом режиме тем, что
ввиду возможной большой скорости
движения учитываются потери, свя-
занные с сопротивлением воздуха.
Вместе с тем, при этом режиме отсут-
ствует сопротивление грунта копанию
и ввиду малости не учитываются по-
тери на буксование. Поэтому тяго-
вый баланс может быть представлен
следующей формулой:
(1.56)
Здесь F — площадь лобового сопротивления машины, которая опреде-
ляется как проекция машины на плоскость, перпендикуляр-
ную направлению движения. Величина F может быть опре-
делена приближенно как произведение ширины колеи на
высоту машины в м2;
kw — коэффициент сопротивления, который может быть принят
равным 0,6—0,7;
v — действительная скорость движения машины в км/ч.
Сопротивление воздуха должно учитываться при скорости движения
свыше 50 км/ч.
Баланс мощности на транспортном режиме выразится в виде
NK = -J- Ni + + Nw л, c.t
(1-57)
где Nw — мощность, необходимая для преодоления сопротивления воз-
духа, в л. с.
В результате испытаний землеройно-транспортных машин может
быть построена их тяговая характеристика (рис. 26). Под тяговой харак-
теристикой понимается зависимость мощности, расходуемой на копание NK,
часового расхода топлива GT и действительной скорости движения и
от силы тяги WK на рабочем органе при изменении последней от нуля до
максимального значения. Такая характеристика строится на разных пере-
дачах при установившемся режиме работы машины на горизонтальной
поверхности.
Тяговые характеристики могут быть получены также и теорети-
ческим путем.
Пользуясь тяговой характеристикой, можно найти максимальное
значение силы тяги, на которое рабочее оборудование машины должно
рассчитываться на прочность, а также определить возможные режимы
РАБОЧИЕ ОРГАНЫ И ХОДОВОЕ ОБОРУДОВАНИЕ
49
работы- Диаграмма (рис. 26) построена применительно к ступенчатой си-
стеме трансмиссии и может быть использована при выборе ряда передач.
При бесступенчатой трансмиссии теоретически возможно получение бес-
конечно большого числа промежуточных значений. Поэтому при бессту-
пенчатой трансмиссии (применительно к данным конкретным условиям)
может быть достигнут наиболее экономичный режим работы машины.
5. СИСТЕМЫ УПРАВЛЕНИЯ МАШИН
Системы управления предназначены для периодического включения
и выключения различных механизмов машины (муфт, фрикционов, тормо-
зов, рулевого управления и др.).
По назначению они могут быть разделены на следующие системы:
а) управления установкой рабочего органа (например, опускание и подъем
отвала бульдозера или ковша скрепера, поворот отвала автогрейдера);
б) управления муфтами и тормозами; в) рулевого управления; г) управле-
ния двигателем.
В зависимости от конструктивного выполнения различают системы
управления: а) механические — редукторные или рычажные; б) канатно-
блочные; в) гидравлические; г) пневматические; д) электрические; е) ком-
бинированные (гидромеханические, электропневматические и т. п.). Гид-
равлические, пневматические и электрические управления могут быть
снабжены системами следящего действия.
В навесных и прицепных машинах наибольшее распространение имеют
канатно-блочные и гидравлические системы; в самоходных машинах —
редукторные и гидравлические. В настоящее время в отечественном и зару-
бежном дорожном машиностроении все более широкое распространение
получают гидравлические системы управления.
Передачи в системах управления характеризуются кратковремен-
ностью периодов работы и большой частотой включений.
Операции, выполняемые системой управления при включении узлов
трансмиссии (муфт, тормозов) и рулевого управления, являются не энерго-
емкими и практически не влияют на общий баланс мощности. В то же время
такие операции как опускание и подъем рабочего органа (отвала бульдозера
или ковша скрепера и др.) более энергоемки и к тому же они по времени
совпадают с максимальным использованием мощности двигателя при вы-
полнении машиной основных технологических процессов. Поэтому воз-
можность совмещения этих операций должна быть проверена по балансу
мощности.
Основными параметрами систем управления рабочими органами яв-
ляются: величина усилия, развиваемая на рабочем органе, скорость дви-
жения рабочего органа, число включений в час, продолжительность работы
в течение цикла, к. п. д. системы управления и быстрота срабатывания.
Быстрота срабатывания механизма управления характеризуется временем
запаздывания включения управляемого механизма.
Правильный выбор основных параметров позволяет определить по-
требную мощность системы управления, обеспечивающую работоспособ-
ность и высокую производительность машины.
В современных машинах мощность, потребляемая системой управле-
ния, находится в пределах 5—100 кет; скорость перемещения рабочих
органов составляет 0,2—0,6 м/сек; к. п. д. системы находится в пределах
60—80%.
При проектировании систем управления следует учитывать воздей-
ствие динамических нагрузок на систему управления
50
МАШИНЫ ДЛЯ ЗЕМЛЯНЫХ РАБОТ
Редукторная система управления с приводом от двигателя
применяется на таких землеройно-транспортных машинах, как автогрей-
деры и грейдер-элеватор, а в других машинах эта система практически
применения не нашла. Кинематическая схема этой системы управления
показана на рис. 27. В этих системах применяются червячные, цилиндри-
ческие и планетарные редукторы. Наибольшее распространение получили
червячные редукторы с самотормозящейся червячной парой. Они обеспе-
чивают фиксацию рабочего органа. При передаче мощности от одного
двигателя редукторная система управления выполняется с разветвле-
нием мощности.
Канатно-блочная сис-
тема управления применяется на
скреперах, бульдозерах и на раз-
Рис. 28. Схемы канатно-блочных сис-
тем управления: а — с полиспастом;
б — с зубчатой передачей
Рис. 27. Схема редукторной системы
управления:
/ — двигатель; 2 — механизм реверса; 3 —
карданный вал; 4 — редуктор
личном навесном тракторном оборудовании (кусторезах, корчевателях
и т. п.). Основными частями этой системы управления являются: лебедка,
тормоз, направляющие блоки и канатный полиспаст (рис. 28). Редуци-
рующим звеном, вместо канатного полиспаста, может служить зубча-
тый редуктор. Достоинством канатно-блочной системы управления яв-
ляется простота конструкции, а недостатком — громоздкость, низкий
к. п. д., а также невозможность принудительного заглубления рабо-
чих органов. В зависимости от числа управляемых частей рабочего органа
применяются один, два или три каната. Соответственно и лебедка может
иметь один, два или три барабана.
Применяемые в канатно-блочных системах управления лебедки можно
классифицировать по следующим признакам:
по расположению лебедки на тракторе — переднее или заднее;
по числу барабанов — одно-, двух-, трехбарабанные;
по расположению оси барабанов по отношению к продольной оси тя-
гача — параллельное (продольное) и перпендикулярное (поперечное) рас-
положение;
по системе включения — ручное, пневматическое.
В настоящее время подавляющее число лебедок землеройно-транс-
портных машин по отношению к трактору имеет заднее расположение.
При поперечном расположении лебедки значительно уменьшается число
перегибов канатов и число направляющих блоков.
Составной частью лебедки является муфта включения. Наибольшее
распространение получили одноконусные и двухконусные фрикционные
и пневмокамерные муфты включения, отличающиеся компактностью и
РАБОЧИЕ ОРГАНЫ И ХОДОВОЕ ОБОРУДОВАНИЕ
51
простотой конструкции. Пневмокамерные муфты по сравнению с конус-
ными обеспечивают большую плавность включения, не требуют частой
регулировки, менее металлоемки.
R В канатно-блочных системах управления применяют стальные канаты
с металлическим сердечником компаундной конструкции. Канаты на до-
рожных машинах работают в тяжелых условиях, испытывая большие
динамические перегрузки при интенсивности работы до 300—400 включе-
ний в час. Для уменьшения износа канатов при проектировании необхо-
димо стремиться улучшать условия работы каната, для чего следует уве-
личивать диаметры блоков и уменьшать число перегибов, разгружать ка-
наты подъема рабочих органов при транспортировке машины и т. п.
При выборе каната и диаметра барабана можно пользоваться следую-
щей зависимостью:
«= 4’ (L58>
где D — диаметр блока;
d — диаметр каната;
а — коэффициент;
а = 15-Г-18 —для легкого режима работы;
а = 20-:-25 —для среднего » » ;
а = 25-е 30 — для тяжелого » »
К легкому режиму можно отнести режим работы канатно-блочных
систем таких машин, у которых включение системы производится сравни-
тельно редко. К среднему режиму относятся часто включаемые канатно-
блочные системы, а к тяжелому, режиму — работы тех часто включаемых
систем, где действуют большие Нагрузки.
Коэффициент полезного действия канатно-блочной системы опреде-
ляется величиной к. п. д. отдельных узлов:
Чс =
где т|л — к. п. д. лебедки;
Цр — к. п- д. редуцирующего звена;
Цо — к. п. д. направляющего блока;
п — число блоков, исключая блоки, входящие в полиспаст.
К- п. д. лебедок зависит от конструктивной схемы и качества их
изготовления и колеблется в пределах 0,75—0,25.
Гидравлическая система управления применяется в дорож-
ных машинах для воздействия на муфты, фрикционы, тормоза и рулевые
устройства. Гидравлические системы управления получают все большее
распространение благодаря своим преимуществам по сравнению с канатно-
блочной и редукторной системами. К преимуществам относятся: незави-
симость относительного расположения агрегатов; легкость включения и
выключения; возможность обеспечения большого передаточного отноше-
ния; наличие устройств, предохраняющих систему от перегрузов; возмож-
ность сравнительно простого осуществления автоматических следящих
устройств.
Недостатком гидросистемы управления является то, что ее работа
в некоторой степени зависит от температуры окружающего воздуха; кроме
того, отдельные узлы и детали требуют высококачественной технологиче-
ской обработки и соответствующего обслуживания в эксплуатации. Пол-
ный к. п. д. гидросистемы доходит до 0,85—0,92.
Гидравлические системы управления делят на насосные и безнасос-
ные. В насосной системе насос приводится в действие от общего двигателя
машины или от отдельного двигателя.
52
МАШИНЫ ДЛЯ ЗЕМЛЯНЫХ РАБОТ
Потребная мощность насосной гидросистемы управления зависит от
характера операций, которые она выполняет. Ориентировочно можно
принимать мощность гидросистемы для машин непрерывного действия
(автогрейдеров, грейдер-элеваторов) равной 5—10% от мощности дви-
гателя, а для машин циклического действия (скреперов, бульдозеров)
равной 30—40% от мощности двигателя.
Схема насосной системы гидравлического управления показана на
рис. 29. Рабочая жидкость, поступающая из масляного бака 1, нагнетается
насосом 2 через обратный клапан 3 в аккумулятор 5, одновременно жид-
кость подводится к золотникам распределителя 6. После того как давление
в аккумуляторе достигает рабочего, автоматически открывается клапан-
пилот 7 и жидкость без давления сливается в бак. Этим осуществляется
Рис. 29. Схема насосной системы гидравлического
управления
стоит из цилиндра, в котором может
разгрузка насоса и умень-
шается его износ. Если кла-
пан-пилот или система его
управления выходятизстроя,
избыточная жидкость, пода-
ваемая насосом, сливается
в бак через предохранитель-
ный клапан 4, включенный
параллельно и настроенный
на несколько большее давле-
ние, чем клапан 7. При оста-
новке насоса обратный кла-
пан 3 закрывается и система
удерживается под давлением,
чему способствует наличие
аккумулятора. Последний со-
перемещаться поршень. При
нагнетании рабочей жидкости поршень перемещаясь сжимает пружину,
чем не только обеспечивается необходимое давление жидкости при закры-
том обратном клапане, но и ее резерв, благодаря чему становится возмож-
ной кратковременная работа механизма управления при выключенном
насосе. Перемещение поршня в рабочем цилиндре 8 осуществляется рабочей
жидкостью при открывании золотника распределителя 6. Жидкость, на-
ходящаяся в другой полости цилиндра, вытесняется через распределитель
в масляный бак. Фильтр 9 служит для очистки жидкости от посторонних
включений. Давление в сети контролируется манометром 10, установлен-
ным за обратным клапаном. В насосных системах управления давление
в гидросистеме составляет 30—100 кГ/см2.
Безнасосные системы управления просты по конструкции, отличаются
большой надежностью и долговечностью, применяются в основном для
маломощных машин и механизмов. Здесь давление в сети создается мус-
кульным усилием оператора, что ограничивает область применения без-
насосного гидравлического управления.
Схема безнасосной системы показана на рис. 30. При нажатии на
педаль 1 рабочая жидкость, находящаяся в цилиндре-датчике 2, через
трубопровод 4 вытесняется в рабочий цилиндр 5, поршень которого связан
с исполнительным механизмом. Утечки жидкости пополняются из бачка 3.
Обратный клапан 6 предотвращает возврат жидкости из цилиндра обратно
в бачок. Безнасосное гидравлическое управление является более быстро-
действующим, чем рычажное или пневматическое, так как обладает боль-
шей жесткостью, чем пневматическое, и кинематика его более проста, чем
у рычажного. Время действия составляет 0,15—0,2 сек. В дорожных ма-
РАБОЧИЕ ОРГАНЫ И ХОДОВОЕ ОБОРУДОВАНИЕ
53
шинах безнасосное гидравлическое управление часто применяется в соче-
тании с насосным управлением.
Рабочая жидкость, используемая в безнасосных системах, отличается
от рабочей жидкости, применяемой в насосных системах. Эту жидкость
иногда называют тормозной жидкостью, она состоит из 50% глицерина и
50% этилового спирта. Рабочая температура тормозной жидкости обычно
не превышает температуры окружающего воздуха, поэтому к ней предъ-
являются повышенные требования по сравнению с жидкостями насосных
систем, рабочая температура которых значительно выше температуры
окружающей среды. Основным требованием является незначительное из-
менение вязкости в зоне температур ±40° С. Изменения вязкости суще-
ственно влияют на к. п. д. системы.
Усилия в рабочих цилиндрах, согласно законам гидростатики, на-
ходятся в зависимости от усилия на поршне, соединенном с педалью.
Если:
р — давление жидкости в системе в кПсм2;
Р — усилие, развиваемое рабочим цилинд-
ром в кГ;
Рп — мускульное усилие на пе-
дали в кГ;
е — ход поршня рабочего ци-
линдра в см;
D — диаметр цилиндра-дат-
чика в см;
а — диаметр рабочего цилин-
дра в см;
in — передаточное число рычага
Рис. 30. Схема бензонасосной системы гид-
равлического управления
S
педали;
— ход педали в см;
V — объем жидкости в см3,
то давление жидкости в системе определяется по формуле
(1.59)
Давление жидкости обычно равно 30—40 кПсм2, а при резком нажа-
тии на педаль может достигать 60—80 кПсм2.
Отсюда усилие в рабочем цилиндре равно
Р = РД^.КГ. (1.60)
Объем жидкости, вытесняемой из цилиндра-датчика и поступающей
в рабочий цилиндр, определяется по формуле
v = 161)
Отсюда ход поршня рабочего цилиндра:
4V
С = ИЛИ’ П°Дставляя В формулу (1.61), получим
e = (1б2)
Обычно требуемое усилие в рабочем цилиндре известно, поэтому при
Расчете находится диаметр рабочего цилиндра. При этом давление в си-
стеме может быть принято максимальным 60—80 кПсм2.
Пользуясь формулой (1,60), можно найти диаметр цилиндра-датчика.
При этом in обычно выбирается равным 3—4 при ножном управлении и
54
МАШИНЫ ДЛЯ ЗЕМЛЯНЫХ РАБОТ
6—8 — при ручном рычаге. Максимальное усилие на рычаге управления
не должно превышать 10—12 кГ, а на педали — 25—30 кГ.
Пневматическая система управления получает все большее
распространение благодаря ряду преимуществ перед гидравлическим.
Основными преимуществами пневматического управления является боль-
шая плавность включений и возможность аккумулирования энергии. Дав-
ление в системе пневматического управления не превышает 7—8 кПсм2,
в то время как в гидроприводе достигает 65—100 кПсм2. Поэтому при пнев-
матическом управлении размеры цилиндров и трубопроводов получаются
большими и ввиду этого оно может применяться лишь при небольших
усилиях.
Схема пневматического управле-
ния показана на рис. 31. В качестве
исполнительного устройства приме-
няют цилиндры 6 или диафрагмен-
ные пневмокамеры 7. Такие каме-
ры, отличающиеся простотой уст-
ройства и надежностью, применяют
в пневматических тормозах грузо-
вых автомобилей и в управлении тор-
мозами и фрикционами экскаваторов
и дорожных машин. Сжатый воздух
от компрессора 1 после водо- и масло-
отделителя 2 поступает в ресивер 4,
откуда распределителем 5 может
быть направлен в цилиндр или ка-
меру. Под действием сжатого воздуха
3
Рис. 31. Схема пневматического управ-
ления:
1 — компрессор; 2 — масло- и влагоочисти-
тель; 3 — манометр; 4 — ресивер; 5 — рас-
пределитель; 6 — цилиндр; 7 — рабочая ка-
мера; 8 — ленточный тормоз
диафрагма пневмокамеры прогибается и давит на тарелку со штоком.
Шток воздействует на соответствующий рычаг. Возврат диафрагмы после
снятия давления осуществляется пружиной.
Пневматическая система открывает большие возможности для осу-
ществления автоматизации управления. Особенно легко это достигается
при сочетании пневматического управления с дистанционным электри-
ческим.
Часовой расход воздуха пневмосистемы может быть определен по
формуле
W = mnWL м3/ч, (1.63)
где т — среднее количество включений одного потребителя в час;
п — количество потребителей;
W4 — расход воздуха на одну операцию в м3.
Расход воздуха на одну операцию составляет:
для цилиндра
= s м3, (1.64)
для камеры
= у (О2 J- Dd ф- d~) S
(1.65)
где D — наружный диаметр диафрагмы в
dn — диаметр поршня в м\
d — диаметр тарелки штока в м;
S — ход штока или поршня в м.
Потребная часовая производительность компрессора
Лл = рГл3/ч, (1.66)
РАБОЧИЕ ОРГАНЫ И ХОДОВОЕ ОБОРУДОВАНИЕ 55
где Р = 1,34-1,4 — коэффициент запаса, учитывающий утечки и неравно-
мерность работы системы.
Необходимый объем ресивера определяется по формуле
V = — м3, (1.67)
Pniax Pmln
где ос 1,14-1,2 — коэффициент запаса;
WceK — секундный расход сжатого воздуха пневмосисте-
мой в м3!сек\
t == 20-:-30 — время, потребное для подкачки ресивера, в сек;
Ртах> Ртт — максимальное и минимальное давления в ресивере,
обыЧНО ргаах T’mln 0,35/21Пах.
Внутренний диаметр трубопроводов
d = 2 /5 (168>
где и — скорость воздуха в воздухопроводе, которая принимается для
магистральных трубопроводов, равна 10 м/сек, а для ответвлений
10—20 м/сек.
В современных лебедках применяют пневмокамерные муфты вклю-
чения. Часовой расход воздуха для пневмокамериых муфт определяется
по формуле:
W = 60ymVKp, (1.69)
где т — количество включений в мин\
VK — объем пневмокамерной муфты в л;
у = 1,24-1,3 — коэффициент неравномерности работы системы;
р — давление сжатого воздуха в кГ/см2.
На практике обычно находят применение комбинации различных си-
стем управления: гидромеханические, гидро-пневмоэлектрические и др.
Такие комбинации дают большие возможности для дистанционного управ-
ления и для автоматизации управления с применением электроники.
Большими достоинствами в отношении широкого диапазона усилий,
скоростей и мощности, а также возможности автоматизации отличаются
электрические системы управления. Применение электрических систем
управления возможно для стационарных машин при наличии электри-
ческой сети и для самоходных машин с дизельэлектрической уста-
новкой.
Привод рулевого управления. В настоящее время на самоходных
пневмоколесных машинах применяются следующие виды привода рулевого
механизма: ручной, где используется только мускульная сила водителя;
с приводом от двигателя, где обычно используется гидравлическая на-
сосная система; с применением гидравлических и пневматических серво-
усилителей.
Схема ручного рулевого управления без усилителей показана на
Рис. 32. Здесь вращение рулевого колеса (штурвала) 1 передается через
червячную пару 2 на вал сошки 3. Нижний конец сошки перемещает про-
дольную рулевую тягу 4, которая, воздействуя на рычаг 7, поворачивает
цапфу 5 левого колеса. Поперечная рулевая тяга И обеспечивает одновре-
менный поворот цапфы правого колеса 9. Рычаги поворотных цапф 6
([ 10, балка 8 передней оси и поперечная рулевая тяга 11 образуют шарнир-
ный четырехзвенный механизм, называемый рулевой трапецией.
Этот тип рулевого управления может применяться только на сравни-
тельно небольших машинах.
56
МАШИНЫ ДЛЯ ЗЕМЛЯНЫХ РАБОТ
При проектировании рулевого управления этого типа кинематическая
схема и передаточное число системы выбираются так, чтобы поворот
управляемого колеса от нейтрального положения на угол 40—45° соот-
ветствовал повороту рулевого колеса на 1,5—2,5 оборота. Это условие
обеспечивается при угловом передаточном числе iy = 18н-24. Здесь мень-
шее значение выбирается для легких машин, а большее — для тяжелых.
Усилие на рулевом колесе, приклады-
ваемое водителем при повороте автомобиля,
может быть найдено, если известно iy и сум-
марный момент сопротивления повороту
управляемых колес
Л1 х — 2Л4С — 2(Л4К -J- Л4СК) кГ-см,
где Мс — суммарный момент сопротивления
повороту одного колеса, состоя-
щий из момента трения скольже-
ния шины вокруг центра кон-
такта Мск и момента сопротивле-
ния качению Мк.
Момент сопротивления качению Мк при-
ближенно может быть определен по фор-
муле
где G,
Мк — GKfr1 кГ-см,
— вес, приходящийся на одно управляемое колесо;
/ — коэффициент сопротивления качению;
Tj — радиус поворота колеса вокруг шкворня в см (рис.
Момент трения скольжения ориентировочно может быть
из выражения
32).
определен
Мск = СкЧ>счгк кГ-см,
где срсч — коэффициент сцепления шины с дорогой;
гк — радиус колеса в см.
Таким образом, можно получить:
Ms= 2Ме = 2GK 4- фсчгк) кГ-см.
Усилие на рулевом колесе составляет
2 кГ,
(1-70)
Р,
(1-71)
управления.
составляет:
20—35 кГ\ на
грунтовой
где Rw — радиус рулевого колеса в сж;
= 0,54-0,7 — общий к. п. д. рулевого
Усилие на рулевом колесе при повороте
на асфальте: на месте 40—60 кГ; в движении
площадке в движении 30—50 кГ.
Следует иметь в виду, что усилие на рулевом колесе увеличивается
с уменьшением давления в шинах при повороте на дорогах с твердым
покрытием и несколько уменьшается при повороте на грунте.
В случае тяжелых машин для их поворота используется мощность
двигателя. Схема рулевого управления с применением гидравлической
насосной системы показана на рис. 33. Эта система применяется на дорож-
ных катках. Водитель рычагом управления изменяет положение золот-
ника в распределителе 3, и масло из бака 6 насосом 5 подается к силовому
гидроцилиндру 4, который, воздействуя на рычаг 2, осуществляет поворот
управляемого вальца 7. Для прекращения поворота вальца необходимо
РАБОЧИЕ ОРГАНЫ И ХОДОВОЕ ОБОРУДОВАНИЕ
57
золотник вернуть в исходное положение, а для выравнивания вальца
золотник должен быть перемещен в противоположную сторону.
Достоинством такой системы является простота конструкции, лег-
кость управления машиной и надежность работы, а недостатком — отсут-
ствие чувствительности при повороте машины. Кроме того, поворот при
неработающем двигателе становится практически невозможным.
Рис. 34. Схема рулевого управления с системой сле-
дящего действия
Рис. 33. Схема рулевого управ-
ления с применением гидрав-
лической насосной системы:
/-трубопровод, 2 - рычаг, з~ В некоторых случаях такой механизм
5индреде5Н-Тасос —Лма?ляный снабжают системой следящего действия,
бак, — управляемый валец катка В ЭТИХ СИСТемаХ уГЛЫ поворота KOjieC прО-
порциональны усилию водителя. Примером
применения системы следящего действия
является рулевой механизм одноосного тягача, используемого для полу-
прицепных землеройных машин (рис. 34). При повороте рулевого колеса,
связанного с червячным редуктором 2, золотник / занимает положение,
обеспечивающее подачу масла к той или другой полости цилиндров 4
поворота вертикальной цапфы поворотной оси 3 тягача. Штоки обоих
цилиндров при этом одновременно производят вращение поворотной
цапфы в одну сторону. При повороте
колес тягача на угол, требующий пере-
хода штоков через нейтральные край-
ние положения 00° и 00", производится
автоматическое переключение золотни-
ков 5 рычагами 6, на которые дейст-
вуют тяги цилиндров. Возврат золот-
ников 5 в исходное положение осуще-
ствляется пружинами. Следящее дей-
ствие системы обеспечивается обрат-
ной связью штурвала с поворотной
Цапфой.
Рис. 35. Схема рулевого управления
с гидроусилителем
Получила распространение на мощных тягачах и тяжелых самоход-
ных машинах система рулевого управления с гидро- или пневмоусили-
телем. Усилители должны удовлетворять следующим требованиям: 1) при
выходе их из строя управление машиной должно осуществляться обыч-
ным способом; 2) необходимо наличие системы следящего действия;
запаздывание в срабатывании усилителя должно быть минимальным.
Упрощенная схема гидроусилителя показана на рис. 35.
При повороте рулевого колеса червяк 1 стремится повернуть сектор 2
Червячного колеса и рычаг 5, который тягой 6 должен осуществить поворот
58
МАШИНЫ ДЛЯ ЗЕМЛЯНЫХ РАБОТ
колес. Если сопротивление повороту колес велико и усилие водителя
на штурвале оказывается недостаточным, червяк, подобно винту в гайке,
будет перемещаться в осевом направлении вместе с золотником распре-
делителя 7 и откроет доступ масла (сжатого воздуха) через трубопровод 8
в цилиндр-усилитель 3. Поршень переместится в цилиндре 3 и своим што-
ком через зубчатую рейку 4 и зубчатый сектор, рычаг 5 и тягу 6 повернет
колеса, одновременно с этим червячный сектор, воздействуя на червяк,
переместит его вместе с золотником распределителя в исходное положение
и прекратит движение поршня. При повороте штурвала в противополож-
ную сторону в таком же порядке произойдет обратный поворот колес.
По сравнению с пневматическими гидравлические усилители имеют
ряд преимуществ, к числу которых относятся: возможность получения
больших давлений, что уменьшает габариты рабочих цилиндров, и большая
скорость срабатывания (время запаздывания не превышает 0,02 —0,04 сек).
При определении производительности насоса для гидросистемы уси-
лителя следует учесть, что рабочий цилиндр должен успевать поворачивать
колеса быстрее, чем это может сделать водитель. В противном случае при
быстрых поворотах система будет работать как ручная, т. е. без помощи
усилителя. Поэтому условием работы гидроусилителя будет следующее
неравенство:
Qno6(l - dl)vn, (1.72)
где Q — производительность насоса в м3/сек;
Лоб = 0,75-4-0,8 — объемный к. п. д. насоса;
dM — диаметр штока цилиндра в см\
D — диаметр цилиндра усилителя в см-,
vn — скорость поршня рабочего цилиндра в м!сек\
6 = 0,05-4-0,10 — коэффициент утечки в золотнике.
Скорость поршня может быть найдена по формуле
v„ = лбЕЛш tg у см/сек,
где пш — 0,5 4-1,0 — максимальная кратковременная скорость враще-
ния рулевого колеса в об/сек;
у — угол наклона винтовой линии червяка.
Подставляя значение vn в предыдущее выражение, получим формулу
для определения производительности насоса
(D- - d2lu) dtllnul tg у
Q ---п----тт-----см3 сек. (1-73)
4Чоб(1— 6) v ’
Давление в системе и размеры гидроцилиндров выбираются, исходя
из величины сопротивления повороту колес, по методике расчета силового
гидропривода.
Литература
1. Домбровский Н. Г. и Панкратов С. А. Землеройные машины. Ч. 1.
Одноковшовые экскаваторы. М., Госиздат литературы по строительству, архитектуре
и строительным материалам, 1961.
2. Алексеева Т. В., Артемьев К. А..Бромберг А. А. и др. Машины
для земляных работ. Теория и расчет. М., изд. «Машиностроение», 1964.
3. Цытович Н. А. Механика грунтов. М., Госиздат литературы по строительству,
архитектуре и строительным материалам, 1963.
4. X а р х у т а Н. Я. и Иевлев В. М. Реологические свойства грунтов. М.,'
Автотрансиздат, 1961.
5. В о щ и н и н А. И. и С а в а в и и И. Ф. Гидравлические и пневматические устрой-
ства на строительных и дорожных машинах. М., изд. «Машиностроение», 1965.
6. 3 е л е н и н А. Н. Резание грунтов. М., изд. АН СССР, 1959.
Глава II. МАШИНЫ ДЛЯ ПОДГОТОВИТЕЛЬНЫХ РАБОТ
И ЗЕМЛЕРОЙНО-ТРАНСПОРТНЫЕ МАШИНЫ
§ 6. БАЗОВЫЕ ТЯГАЧИ
В целях достижения наибольшей унификации строитель-
ных и дорожных машин разработаны ряды колесных и гусеничных тягачей,
на базе которых и производится проектирование новых землеройно-транс-
портных и других машин. Наличие таких рядов позволяет создавать на-
весное и самоходное оборудование путем его агрегирования с соответствую-
щими базовыми тягачами. При этом достигается максимальная унифика-
ция основных узлов машин. Разработанный ВНИИстройдормашем типаж
машин рассчитан на использование базовых тягачей.
По сравнению с гусеничными, колесные тягачи более маневренны и
позволяют иметь скорость движения в 3—5 раз больше. Это повышает
их производительность и на 20—50/6 снижает стоимость единицы работы.
Поэтому развитию колесных тягачей в настоящее время уделяется боль-
шое внимание.
Критерием для разделения тягачей или тракторов на классы служит
номинальное тяговое усилие, которое определяется в диапазоне скорости
6—9 клич, для колесных тягачей и 5—8 км/ч для гусеничных тракторов,
С повышением тягового усилия увеличивается также и мощность двигателя.
Колесные тягачи разделяются на одноосные и двухосные. Ряды этих
тягачей состоят из 6 одноосных и 9 двухосных машин. Расчеты показывают,
что наличие такого количества типоразмеров тягачей может полностью
удовлетворить запросы строительного и дорожного машиностроения.
§ 7. МАШИНЫ ДЛЯ ПОДГОТОВИТЕЛЬНЫХ РАБОТ
Строительные площадки или полосы должны быть подготовлены для
развертывания на них строительных работ. Поэтому вначале проводятся
так называемые подготовительные работы: корчуются пни, производится
очистка площадки или полосы от кустарника, удаляются валуны и т. п.
если в дальнейшем намечается разработка грунтов землеройно-транспорт-
ными машинами, то часто производится их предварительное рыхление.
Подготовительные работы производятся машинами, которые в зависи-
мости от назначения разделяются на рыхлители, корчеватели, корчева-
тели-собиратели и кусторезы.
Рыхлители предназначены для рыхления грунтов на больших
площадях или полосах. Они применяются также для удаления из грунта
крупных камней, взламывания старых дорожных одежд, мерзлого грунта
И Т. и.
Рыхлители выпускаются двух типов: навесными и прицепными. В пер-
вом случае рабочее оборудование рыхлителя подвешивается к корпусу
60
МАШИНЫ ДЛЯ ЗЕМЛЯНЫХ РАБОТ
заднего моста и к раме трактора в трех или четырех точках, а во втором
случае оно монтируется на специальной одноосной тележке, снабженной
колесным ходом, который в настоящее время, как правило, устраивается
с применением пневматических шин. По
Рис. 36. Схема навесного рыхлителя
сравнению с прицепными, навес-
ные рыхлители обладают тем
преимуществом, что здесь для
заглубления зубьев в грунт ис-
пользуется вес трактора, тогда
как прицепные рыхлители снаб-
жаются для этой цели баллас-
том. Кроме того, навесные рых-
лители более маневренны. Бла-
годаря этим преимуществам в
настоящее время рыхлители, как
правило, выпускаются навесны-
ми. Зубья рыхлителей на раме
укреплены жестко или имеют
шарнирное крепление. В по-
следнем случае они в нужном
положении удерживаются специальным механизмом и при надобности,
например при проходе через валун, могут быть откинуты.
В зависимости от назначения рыхлителя и вида выполняемых работ,
число зубьев может быть различным и обычно находится в пределах от
одного до пяти. На тяжелых работах, например при рыхлении мерзлых
грунтов, применяются однозубые рыхлители. Поэтому зубья должны
быть съемными, что необходимо для регулирования их числа. Рых-
ление однородных грунтов может
телями. Сами зубья выполняют-
ся прямыми или изогнутыми и
обычно снабжаются съемными на-
конечниками.
Механизмы заглубления уст-
раиваются гидравлическими или
канатными. Канатное управление
применимо только на прицепных
рыхлителях. Гидропривод обла-
дает тем преимуществом, что он
обеспечивает принудительное за-
глубление с передачей на зубья
производиться пятизубыми рыхли-
веса трактора.
Схема навесного рыхлителя приведена на рис. 36. Оборудование
рыхлителя предусматривается применительно к гусеничным тракторам
класса 5; 9 и 15 m. Максимальная глубина рыхления равна соответственно
0,5; 0,75 и 1,0 м. Известны машины, рассчитанные на глубину рыхления
около 2,0 м. Навесные рыхлители имеют гидравлическое управление.
Для лучшего использования как рыхлителя, так и самого трактора, к пе-
редней части последнего обычно навешивается оборудование бульдозера.
Одновременно это способствует более равномерному распределению давле-
ния под гусеницами трактора.
Схема прицепного рыхлителя видна из рис. 37. Здесь показано рабо-
чее положение рыхлителя. При переводе его в транспортное положение
стойки-зубья выглубляются из грунта, для чего служит гидравлический
или канатный привод. При канатном приводе перевод в рабочее положение
осуществляется за счет силы веса опускаемых частей рыхлителя.
МАШИНЫ ДЛЯ ПОДГОТОВИТЕЛЬНЫХ РАБОТ 6]
Для снижения сопротивления при работе толщины стоек-зубьев
должны быть минимальными — выбранными по условиям прочности.
Обычно толщина равна 60—100 мм. Стойки имеют прямоугольное попереч-
ное сечение. Наконечники зубьев отливаются из марганцовистой стали
и имеют угол заострения в пределах 20—30°. Наконечники должны быть
длинными и узкими. Конструкция крепления стоек позволяет изменять
их вылет, что необходимо для получения разной глубины рыхления.
Задний угол должен быть не менее 5—7°, а угол резания (рыхления)
в начале заглубления составляет 60—80 ', а затем "снижается до 40—50°.
Для беспрепятственного рыхления грунта зубья должны быть удалены
от гусениц трактора-тягача на расстояние, равное (1,5-4-2,0) —
максимальная глубина рыхления).
Действующая на зуб реакция грунта может быть разложена на гори-
зонтальную Р01 и вертикальную Р02 составляющие. Если G — общий вес
машины, a R — реакция грунта, то согласно схеме (рис. 36)
-01У-0г/1'- (П.1)
Очевидно, что устойчивая работа рыхлителя определяется условием
R<13, (II.2)
в противном случае произойдет выглубление зубьев и подъем всей системы
относительно передней кромки гусеницы.
Максимальное значение горизонтальной составляющей Р01 равно мак-
симальному тяговому усилию трактора. Вертикальная составляющая для
начала заглубления Р02 = 0,2РО1. Опорная реакция грунта равна весу
трактора со всем оборудованием.
Необходимая для работы рыхлителя сила тяги определяется по сопро-
тивлению грунта рыхлению. Последнее находится по формуле
= BHk0 кГ, (П.З)
где В — ширина рыхления в м;
Н — глубина рыхления в м;
k0 — удельное сопротивление рыхлению, которое в зависимости от
вида грунта может быть принято в пределах 6000—12 000
В случае навесного рыхлителя сила тяги на крюке трактора не должна
быть менее величины, обусловленной формулой (П.З). В случае прицеп-
ного рыхлителя необходимо учесть еще сопротивления, связанные с его
передвижением, как тележки
= GK (f + О кГ. (II.4)
Здесь GK — рабочая нагрузка на колеса рыхлителя в кГ\
f = 0,1-н0,2 — общее сопротивление перекатыванию;
i — уклон местности.
Для определения нагрузки на колеса необходимо учесть не только
с Рыхлителя, но и усилия, действующие на его зубья (рис. 37). При этом
адо принять худший случай, когда вертикальная составляющая дей-
вующеГо со стороны грунта усилия направлена вниз. Тогда из уравнения
ментов относительно точки О можно получить
G, = R = ~ р^!г кг. 111.51
62
МАШИНЫ ДЛЯ ЗЕМЛЯНЫХ РАБОТ
где G — вес рыхлителя в к.Г\
Ро« — вертикальная составляющая общего давления на зубья;
Р01 — горизонтальная составляющая общего давления на зубья, ко-
торую можно принять равной силе тяги трактора.
Можно полагать, что Ро2 = Р01 ctg б, где б — угол резания (рыхления).
Рыхление грунта производится последовательными проходами рых-
лителя в продольном или поперечном направлениях. При особенно тя-
желых грунтах рыхление производится в обоих направлениях. Число
проходов по одному месту при движении в одном направлении не должно
быть более двух, так как при большем числе проходов из-за уплотнения
грунта под зубьями снижается глубина рыхления.
Рис. 38. Схемы для определения максимальных усилий, развивающихся при
подъеме (а) и заглублении (б) рыхлителя
Производительность рыхлителя определяется по формуле
(П.6)
где В — ширина полосы рыхления с учетом необходимого перекрытия
соседней полосы в м;
Н — глубина рыхления в .и;
L — длина захватки (участка), на которой работает рыхлитель, в м;
v — рабочая скорость рыхлителя в ж/ч;
tn — время, затрачиваемое на поворот, в ч;
п — число проходов по одному месту;
ke — коэффициент использования времени.
Производительность рыхлителя часто удобно определять в лга/ч
„ vB (1 — пЛп) , о ,
/7 —Д——шч м3/ч,
(II.7:
где л, — число поворотов в час.
Для выбора параметров гидравлической системы необходимо найти;
максимальные усилия, которые развиваются при подъеме и заглублении;
зубьев рыхлителя.
Расчетные схемы представлены на рис. 38. Очевидно, что макси-
мальные усилия будут соответствовать моменту начала подъема трактора
относительно крайних точек опоры гусеничного хода. Из уравнения
моментов относительно этих точек можно найти, что максимальные уси-
лия подъема и заглубления R'av равны
= ПГ И ^max = (II.8)
МАШИНЫ ДЛЯ ПОДГОТОВИТЕЛЬНЫХ РАБОТ
63
2 — клык-собиратель; 3 —- рама;
5 — блоки механизма воз-
1 — двуплечий рычаг;
4 — малый двуплечий рычаг; _ ___ __________ ____
врата; 6 — прицепное устройство; 7 — лебедка; 8 — стойки
неподвижных ябойм полиспастов; 9 — неподвижная обойма
полиспаста механизма поворота; 10 — неподвижная обойма
полиспаста механизма подъема: 11 —канат механизма
подъема; 12 — канат механизма поворота; 13 — подвижная
обойма полиспаста механизма подъема; 14 — ось двуплечих
рычагов; 15 — упорный ролик механизма возврата; 16 —
подвижная обойма механизма поворота
Расчет на прочность отдельных узлов рыхлителя, в том числе и гидро-
цилиндров, производится с учетом возможного действия динамических
нагрузок. Последние возникают при внезапных наездах на непреодолимое
препятствие, резком торможении и поворотах, а также при включении
и выключении муфты сцепления. Коэффициент динамичности может быть
принят в пределах 1,5—2,0.
Корчеватели предназначены для корчевки пней диаметром
до 50 см, расчистки участков от корней и крупных камней, удаления сва-
ленных деревьев и кустарника. Они могут быть применены также для рых-
ления плотных грунтов.
Корчеватель является
сменным навесным обору-
дованием к гусеничному
трактору, которое сходно
с бульдозером. В отличие
от последнего здесь отвал
выполнен в виде решетки
и снабжен внизу зубьями.
Подобно бульдозеру, отвал
установлен на раму, кото-
рая шарнирно закреплена
на гусеничных тележках
трактора. Подъем и опус-
кание отвала производят-
ся канатно-балочной или
гидравлической система-
ми. Корчевка пней произ-
водится за счет толкаю-
щего усилия трактора
средними зубьями отвала,
который при канатно-
блочной системе управле-
ния заглубляется под дей-
ствием собственного веса,
а при гидравлической системе — принудительно. Рабочее оборудова-
ние этого типа может служить также корчевателем-собира-
т е л е м. Здесь возможно производить очистку площадки или полосы
от выкорчеванного ранее кустарника, пней, камней и т. п. При такой
работе отвал опирается на скользящие опоры, которыми и ограничивается
ег<) погружение в грунт.
На рис. 39 показан корчеватель с рычажным рабочим органом. У него
снаожсчшые клыками двуплечие рычаги могут поворачиваться на закреп-
•чеиных на раме осях. Поворот осуществляется шестикратным полиспастом,
подвижная обойма которого установлена на конце рычага, а неподвиж-
ная на стойке. Канат полиспаста наматывается на один из барабанов
тракторной лебедки. Рама шарнирно соединена с прицепным устройством
трактора ДТ-54 и может поворачиваться пятикратным полиспастом, канат
Которого запасовывается на другом барабане тракторной лебедки.
Корчевка пней может производиться одним из следующих трех спо-
°оов; заглублением клыков и удалением пня за счет толкающего усилия
Рактора; заглублением клыков под пень и извлечением его только путем
°ворота рычагов при опущенной на грунт раме; заглублением клыков под
ень и удалением его путем поворота рычагов с одновременным поступа-
ельным движением трактора. Первый и третий способы пригодны для
64
МАШИНЫ ДЛЯ ЗЕМЛЯНЫХ РАБОТ
корчевки сравнительно небольших пней. Пни большого диаметра корчуют
вторым способом, при этом усилие на клыках достигает 45 т.
Если к пню приложить горизонтальное усилие, то сопротивление кор-
чеванию зависит от его диаметра:
Диаметр пня в см . . . . 10 20 30 40 50
Усилие в т .......... 1,8—2,0 5,0—5,5 7,5—9,5 10,5—16,0 18.0—21,0
Общее сопротивление перемещению корчевателя в рабочем положе-
нии может быть найдено по формуле
W = + W2 + W:! кГ, (II.9)
где IEj — сопротивление грунта рыхлению в кГ;
— сопротивление, связанное с корчеванием пней, в кГ;
— сопротивление движению трактора с рабочим оборудованием
корчевателя в кГ.
Сопротивление грунта рыхлению определяется по формуле
^\=к0ВНкГ, (П.10)
где В — ширина отвала в м;
И — глубина рыхления (погружения зубьев) в м;
k0 — удельное сопротивление грунта рыхлению, которое может быть
принято равным 2000—2500 кГ1м2 для дернового покрова и
грунта без корней и 5000—10 000 кГ,'мг для грунтов со значи-
тельным содержанием корней.
Следует отметить, что расположенный между зубьями грунт разрых-
ляется не полностью, что несколько снижает сопротивления.
Сопротивление, связанное с корчеванием пней U/7,, может быть опре-
делено по диаметру пня и усилию, необходимому для его удаления.
Наконец, сопротивление движению может быть найдено по формуле
Г3 = (GTP + Go5) (f + i) кГ, (11.11)
где GTp и G^ — вес трактора и навесного оборудования корчевателя
в кГ;
f — коэффициент сопротивления передвижению, который
может быть принят равным 0,1—0,15;
i — уклон.
Работа корчевателя возможна лишь при соблюдении следующих не-
равенств:
7\ka^ W и Т, (П.12)
где Tj — толкающее тяговое усилие трактора на первой передаче в кГ;
kd = 1,5ы-2,0 — коэффициент динамичности;
Ф,.ч — коэффициент сцепления гусениц трактора с грунтом, который
зависит от рода грунта и конструкции гусениц.
При несоблюдении второго неравенства будет иметь место перебуксовыва-
ние трактора.
Рама и отвал корчевателя рассчитываются на усилие T^kg. На это же
усилие рассчитываются и зубья корчевателя. При этом предполагается,
что эта сила приложена к концу одного зуба. Зуб отвала должен быть про-
верен также на прочность при работе по удалению валуна. В этом случае,
кроме силы l\kd, на него действует также вертикальное усилие подъ-
ема Р_. котопое может быть определено по весу валуна. Опасным будет
МАШИНЫ ДЛЯ ПОДГОТОВИТЕЛЬНЫХ РАБОТ
65
„ние зуба в месте его заделки. Общий изгибающий момент определяется
Сак сумма изгибающих моментов от сил Ttkd и Рп.
К Кусторезы служат для срезки кустарника и деревьев диаметром
20__25 см — в случаях лиственных пород и до 30—35 см — при хвойных
Д°родах. Кусторезы имеют рабочий орган, выполненный в виде отвала,
который в нижней части снабжается режущим ножом, а впереди — колу-
ом (рис. 40). Этот отвал монтируется на универсальной раме и является
Рис. 40. Кусторез:
/ — клинообразный отвал; 2 — полиспаст; 3 — ограждение; 4 — лебедка;
5 — толкающая рама; 6 — режущие ножи
навесным оборудованием к трактору. Он может иметь канатное или гидрав-
лическое управление. Ножи часто выполняются пилообразными. Срезка
Деревьев и кустарника производится при поступательных перемещениях
машины. Благодаря тому, что отвал в плане выполнен в виде треуголь-
ника, при таком перемещении его ножи все глубже погружаются в ствол
Дерева и, наконец, его перерезают.
Кусторез может также иметь рабочий орган, подобный косилке.
Срезка кустарника при этом производится ножом, совершающим перпен-
дикулярно направлению перемещения трактора возвратно поступательные
Движения. Нож выполнен в виде пластины, снабжен зубьями и установлен
на специальных лыжах. Установка его по высоте может изменяться. В пе-
редней части машины имеется собиратель, который служит для сбора сре-
занного кустарника. При таком устройстве рабочего органа срезка кустар-
ника возможна при пониженных поступательных скоростях трактора.
Для снижения этих скоростей на машине устанавливается ходоумень-
шитель. Управление рабочими органами машины — гидравлическое.
66
МАШИНЫ ДЛЯ ЗЕМЛЯНЫХ РАБОТ
Наибольшее распространение получили кусторезы с отвалом. Успещ-
ная работа этих машин возможно лишь при определенных условиях.
Со стороны кустореза на перерезаемое дерево действует сила тяги
трактора Т (рис. 41), которая может быть разложена на перпендику-
лярную к поверхности ножа силу Р — Т sin а и действующую вдоль
ножа силу F = Т cos а. Сила Р скалывает дерево, а сила F его перерезает.
Между деревом и ножом развивается также сила трения Рт = Рр =
Тр sin а, где р, — коэффициент трения
может быть принят равным 0,25. Очевидно,
Рис. 41. Схема сил, действующих на кусторез
ножа о древесину, который
что должно иметь место нера-
венство F > Рт или Г cos
а '_> Тр sin а, откуда ctg
а > р. В противном слу-
чае нож «завязнет» в дре-
весине. Обычно а 30°.
Со стороны дерева на
кусторез действует сила
1\ = Т. Под действием
сил 7\ и Рт кусторез стре-
мится повернуться отно-
сительно центра тяжести.
Момент сил здесь найдет-
ся по формуле
Мпов = Tjl-, -ф Рт12 =
= Т (/j + /2р sin а) кР-м.
Противодействуют повороту силы сцепления, развивающиеся между гу-
сеницами трактора и грунтом. Момент этих сил определится так:
Муд = ~2~ ЙР«Ч а кГм,
(11.13)
где G — передающийся на гусеницы вес машины в кГ\
срсч — коэффициент сцепления гусениц трактора с грунтом.
Для работы кустореза должно иметь место неравенство
Муд > Мпов. (11.14)
Производительность кустореза определяется по формуле
где В — ширина захвата в м;
v — рабочая скорость движения в м/ч;
ks — коэффициент использования рабочего времени;
пх — число поворотов на длине участка работы;
tn — время одного поворота в мин-,
п — 1ч-3 — число проходов по одному месту.
§ 8. НАЗНАЧЕНИЕ И КЛАССИФИКАЦИЯ
ЗЕМЛЕРОЙНО-ТРАНСПОРТНЫХ МАШИН
Землеройно-транспортные машины предназначены для выполнения
земляных работ. Ими возводятся насыпи, устраиваются выемки, профили-
руется земляное полотно и т. п. Они применяются в различных областях
строительного производства при гидротехническом, транспортном и гра-
жданском строительствах.
МАШИНЫ ДЛЯ ПОДГОТОВИТЕЛЬНЫХ РАБОТ
67
Рабочий процесс землеройно-транспОртных машин состоит из следую-
их элементов: копания грунта, его транспортирования и выгрузки. Ха-
рактерной отличительной особенностью этих машин (в отличие от земле-
ройных), является то, что все элементы рабочего процесса выполняются
Рри их передвижении. К землеройно-транспортным машинам относятся
бульдозеры, скреперы, автогрейдеры, грейдер-элеваторы и землеройно-
фрезерные машины.
Землеройно-транспортные машины устраиваются самоходными или
прицепными. В случае самоходного варианта базовый тягач является со-
ставной частью машины либо машина снабжается ходовым и силовым
оборудованием оригинальной конструкции.
В зависимости от вида рабочего оборудования землеройно-транспорт-
ные машины разделяются на ковшовые (скреперы), ножевые (бульдозеры,
автогрейдеры и грейдер-элеваторы) и фрезерные (землеройно-фрезерные
машины). Ножевые машины транспортируют грунт перед собой либо
удаляют его в стороны. В последнем случае может осуществляться по-
дача грунта на транспортер (грейдер-элеваторы).
Землеройно-транспортные машины могут иметь ручное и механизиро-
ванное управление. Механизированное управление, в свою очередь, разде-
ляется на механическое и гидравлическое.
Землеройно-транспортные машины работают в весьма разнообразных
и часто тяжелых условиях. Последние особенно часто возникают при транс-
поотном строительстве. Тяжелые условия работы обусловливаются часто
чередующимися крутыми подъемами и спусками, движением по рыхлым,
а иногда и переувлажненным грунтам, а также работой на сухих сильно
пылящих грунтах. При этом необходимо также учесть, что работы часто
ведутся на участках, расположенных на больших расстояниях от про-
мышленных центров и хорошо оснащенных мастерских. Все это застав-
ляет к конструкции машин предъявлять определенные требования.
Землеройно-транспортные машины должны быть прежде всего воз-
можно более просты в обслуживании и надежны в работе. Они должны
обладать высокой проходимостью по рыхлым грунтам, пескам и т. п.
Вместе с тем, для полной реализации мощности двигателя, коэффициент
сцепления ходового устройства с грунтом должен быть достаточно высоким.
Этим требованиям удовлетворяют шины низкого давления больших раз-
меров с рисунком протектора типа прямая или косая елка. Эти требо-
вания должны быть также учтены и при проектировании гусеничного
хода.
Машины должны быть достаточно устойчивыми как в продольном,
так и в поперечном направлениях, т. е. при движении по косогорам, угол
которых с горизонтом достигает 40—45°.
Все механизмы машин должны быть надежно защищены от пыли.
Необходимо также принимать меры конструктивного порядка для очистки
рабочих органов этих машин от налипшего грунта. Устраивать эти ма-
шины надо так, чтобы по выполнении ими рабочего цикла все дополни-
тельные операции, как, например, разравнивание грунта и т. п., были
сведены к минимуму. Необходимо, чтобы эти машины отвечали требова-
ниям транспортабельности, т. е. чтобы их переброска с одного объекта
на другой не была трудоемкой.
Земляные работы часто могут выполняться землеройными или же
землеройно-транспортными машинами различных типов. Для выбора луч-
Щего типа машины в каждом конкретном случае необходимо сопоставить
эффективность работы разных машин. Такое сопоставление необходимо
также и при проектировании машин, так как пуск в серийное производство
68
МАШИНЫ ДЛЯ ЗЕМЛЯНЫХ РАБОТ
каждого нового образца может быть оправдан только в том случае, если
эффективность его работы окажется выше существующих машин и если
связанные с его разработкой и производством затраты будут окуплены
в определенный срок.
Сопоставление эффективности работы землеройно-транспортных ма-
шин различных типов может быть произведено по техническим и экономи-
ческим показателям их работы. Одним из основных показателей является
их производительность. Под производительностью понимается тот объем
грунта в кубических метрах, который вынимается машиной в единицу
времени — обычно за 1 ч. Главным экономическим показателем работы
машины является стоимость единицы работы, т. е. стоимость вынутого
и уложенного в земляное сооружение кубометра грунта. Естественно,
что на эти показатели в сильной степени влияют условия работы, т. е.
вид и состояние грунта, дальность его транспортирования, состояние пути
и т. п. Поэтому сравнение этих показателей следует производить при ра-
боте машин в одинаковых условиях.
При проектировании землеройно-транспортных машин, а также машин
для уплотнения следует обратить особое внимание на безопасность их
работы вблизи бровок насыпей, в кюветах и т. п. При такой работе может
произойти сползание грунта, которое при недостаточной поперечной устой-
чивости машины часто приводит к ее опрокидыванию. Опрокидывание
машины может произойти и при ее поворотах, в тех случаях, когда ширина
насыпи менее удвоенного радиуса поворота машины. Поэтому снижение
радиуса поворота машины не только увеличивает ее маневренность, но и
создает условия для более безопасной работы.
§ 9. БУЛЬДОЗЕРЫ
Бульдозеры предназначены для копания грунта и перемещения его
на сравнительно небольшие расстояния — до 50—100 .-и. Они применяются
для возведения невысоких насыпей, разработки выемок, выравнивания
рельефа местности, разравнивания грунта и всевозможных сыпучих мате-
риалов, засыпки рвов и траншей, планировочных работ и т. п. Возмож-
ность применения бульдозеров на разнообразных работах послужила при-
чиной весьма широкого их распространения. Они относятся к наиболее
часто встречающимся землеройно-транспортным машинам.
Бульдозеры представляют собой колесный или гусеничный трактор,
оборудованный отвалом (рис. 42). Отвал относится к числу сменного на-
весного оборудования и при необходимости может быть заменен отвалом
кустореза, корчевателем-собирателем, снегоочистителем и т. п.
Бульдозер состоит из базовой машины, которой может служить гусе-
ничный трактор или двухосный тягач, рамы, отвала и системы управ-
ления.
Рабочий процесс бульдозера состоит из операций копания, перемеще-
ния и разравнивания грунта. При копании режущая часть отвала заглуб-
ляется в грунт и одновременно бульдозер движется вперед. Вырезаемый
со дна забоя грунт накапливается перед отвалом, образуя призму воло-
чения. По достижении призмой грунта высоты отвала последний выглуб-
ляется и бульдозер перемещает эту призму к месту разгрузки. Далее про-
изводится разравнивание этой призмы грунта. Для этого, не прекращая
движения, отвал несколько приподнимается. Операция разравнивания
может производиться и при движении бульдозера в обратном направлении.
Для этого на месте разгрузки бульдозер несколько сдает назад, отвал при-
поднимается и затем движением всей машины вперед заводится за призму
МАШИНЫ ДЛЯ ПОДГОТОВИТЕЛЬНЫХ РАБОТ
69
грунта, а затем опускается до нужного уровня. После этого включается
задний ход, во время которого и происходит разравнивание грунта.
По назначению бульдозеры разделяются на машины общего назна-
чения, т. е. предназначенные для выполнения разных работ, и на машины
Рис. 42. Универсальный бульдозер с канатным управлением:
/ __ лебедка: 2 — направляющий блок; 3 — трактор; 4 — подъемник; 5 — полиспаст;
6 — боковой толкатель; 7 — отвал; S — толкающие брусья рамы
специального назначения. Последние служат для каких-либо определен-
ных видов работ — снегоочистки, работы на торфяных разработках и т.п.
Классификация бульдозеров по номинальному тяговому усилию и
мощности двигателя дана в табл. 7. Под номинальным тяговым усилием
понимается то наибольшее тя-
говое усилие, которое может
быть реализовано на плотном
грунте при коэффициенте бук-
сования не выше 7% для гусе-
ничных и 20% для колесных
машин. Следует заметить, что
имеет место тенденция к повы-
шению мощности бульдозеров.
Гак, сейчас имеется гусеничный
бульдозер со сдвоенными дви-
гателями общей мощностью
875 л. с. и пневмоколесная ма-
шина мощностью 1650 л. с. По-
этому приведенная классифика-
Таблица 7
Классификация бульдозеров по номинальному
тяговому усилию
Т ип Т яговое усилие в т Мощность двигателя в кет
Сверхтяжелые .... >30 >300
Тяжелые 20—30 150—300
Средние 14—20 75—150
Легкие 3—14 35—75
Малогабаритные . . . <3 <35
ция до некоторой степени условна и в дальнейшем будет изменяться.
По типу ходового устройства базовой машины бульдозеры разделяются
на гусеничные и колесные, а по месту размещения рабочего органа они
Могут быть с передним и задним расположением отвала.
Отвал обычно устанавливается перпендикулярно к направлению дви-
жения бульдозера. Некоторые типы машин позволяют его поворачивать
в плане на некоторый угол, что дает возможность перемещать грунт в сто-
роны. Такие машины называются бульдозерами с поворотным отвалом
или универсальными.
70
МАШИНЫ ДЛЯ ЗЕМЛЯНЫХ РАБОТ
По системе управления бульдозеры разделяются на машины с канат-
ным и гидравлическим управлением. При канатном управлении подъем
отвала осуществляется канатом, который наматывается на барабан трак-
торной лебедки, а опускание отвала производится под действием собствен-
ного веса. Устройство канатного управления показано на рис. 42. Лебедка I
обычно размещается в задней части трактора и приводится в движение
от вала отъема мощности. Канат пропускается через направляющие
блоки 2 и затем через блоки полиспаста. Неподвижная обойма полиспаста
укрепляется на раме тягача, а подвижная — на отвале.
Гидравлическое управление позволяет производить принудительное
заглубление отвала в грунт, что особенно важно при работе на тяжелых
Рис. 43. Бульдозер с гидравлическим управлением:
1 — отвал; 2 — гидроцилиндры; 3 — гидронасос; 4 — упряжной шарнир: 5 — тол-
кающий брус рамы; 6 — лыжи
грунтах. Система может включать в себя один или два гидроцилиндра
двойного действия (рис. 43). Корпусы гидроцилиндров через стойки шар-
нирно укреплены на раме трактора. При одном гидроцилиндре для этой
цели обычно применяется универсальный шарнир. Штоки цилиндров
укрепляются на раме бульдозера. Для подъема и опускания отвала исполь-
зуются гидроприводы с рабочим давлением 30—100 кГ/см*. Подвод масла
к цилиндрам осуществляется резиновыми шлангами или металлическими
трубками, свернутыми в виде компенсатора. Для ограничения опускания
отвала служат лыжи.
Наклон отвала вперед или назад может осуществляться гидроцилинд-
рами или путем перестановки соответствующих упоров вручную.
На рис. 44 изображен профиль отвала бульдозера. Основными пара-
метрами отвала являются: угол резания 6, который у существующих
машин находится в пределах 40—75°; угол опрокидывания ф = 30-н80°;
угол наклона е0 = 70-ь 90°; угол установки козырька радиус кривизны
отвальной поверхности /?; высота отвала В; высота отвала с козырьком Вк\
длина прямой части отвальной поверхности а\ длина отвала L.
Параметры отвала оказывают значительное влияние на сопротивле-
ние грунта копанию и волочению. При правильно выбранных параметрах
сформированная при вырезании стружка грунта должна двигаться вверх
по поверхности отвала и обрушиваться по направлению его движения,
т. е. вперед. При неправильном профиле отвала могут иметь место случаи,
МАШИНЫ ДЛЯ ПОДГОТОВИТЕЛЬНЫХ РАБОТ
71
когда грунт будет двигаться не по отвалу, а выпирать сквозь призму воло-
чения, что значительно повысит необходимое тяговое усилие.
Сопротивления, связанные с отделением грунта от массива, снижаются
с уменьшением угла резания, однако при этом возрастает сила, необходи-
мая для заглубления отвала в грунт. Для формирования стружки грунта
необходимо иметь какую-то минимальную призму волочения, поэтому
на этот процесс влияет длина прямой части отвальной поверхности а.
Последняя должна обеспечивать формирование стружки, после чего ее
длина уже большого значения не имеет.
Обычно величина а выбирается равной
высоте ножа, т. е. при проектирова-
нии ножа и крепления его к отвалу
получается чисто конструктивно.
На сопротивление грунта подъему
оказывает влияние радиус кривизны
отвальной поверхности R. Чтобы со-
противление подъему было минималь-
ным, этот радиус должен быть пере-
менным. Однако, ввиду трудностей
изготовления такого отвала, его обычно
выполняют по дуге окружности радиуса
R «= В.
//
V-1
Рис. 44. Профиль отвала и схема
его установки в плане
В результате проведенных иссле-
дований для бульдозеров общего назна-
чения рекомендуют брать угол резания
6 = 55°, угол опрокидывания ф = 75° и
угол наклона е0 = 75°.
Длина отвала L должна превышать
ширину машины не менее чем на 100 мм
с каждой стороны. В случае бульдозеров
с поворотным отвалом это требование
должно удовлетворяться также и при по-
вороте отвала на угол <р = 75°. Такая
длина 'отвала обеспечит бульдозеру возможность работать в траншеях.
Однако отвалы большей длины нежелательны, так как они приведут к
снижению величины возможной удельной силы тяги, т. е. той силы тяги,-
которая приходится на единицу длины отвала, что затруднит работу буль-
дозеров на тяжелых грунтах. Вместе с тем, при проектировании отва-
лов следует предусмотреть возможность установки на них специальных
удлинителей, что обеспечит большую производительность при работе
их на легких грунтах.
Для полного использования мощности базовой машины высоту от-
вала В следует выбирать в зависимости от номинальной силы тяги Т буль-
дозера и вида грунта. При этом для средних грунтовых условий можно
пользоваться данными, приведенными в табл. 8.
Номинальные тяговые усилия можно определить по формуле
(11.16)
т = о<рсц кГ,
где G — вес бульдозера в кг-,
Фсц — коэффициент сцепления, который может быть принят равным
0,9 для гусеничных машин и 0,6 — для колесных.
Козырек предохраняет грунт от пересыпания его через отвал. Его
высота Нк может быть принята равной (0,1 -г-0,2) В.
72
МАШИНЫ ДЛЯ ЗЕМЛЯНЫХ РАБОТ
Отвалы неповоротного бульдозера обычно по концам имеют прива-
ренные щеки, которые предотвращают высыпание грунта и тем самым повы-
шают его производительность. Эти щеки одновременно служат ребрами
жесткости.
Необходимая для работы бульдозера сила тяги расходуется на прео-
доление следующих сопротивлений грунта: резанию Ц71; перемещению его-
как вверх по отвалу W2, так и перед отвалом Ц73. В случае бульдозера
с поворотным отвалом необходимо учесть также сопротивление, возни-
кающее от перемещения грунта вдоль отвала, т. е. в сторону ИД.
Эти сопротивления могут быть найдены
по приведенным ранее расчетным формулам
(1.18), (1.19), (1.22), (1.23). При расчете со-
противления резанию толщину стружки
можно принимать равной 8—12 см.
Удельное сопротивление грунта лобо-
резанию составляет (в кГ/см2):
грунта I категории
II »
» Ш »
Таблица 8
Значения высоты отвала
в мм
Номинальное Высота отвала
тяговое усилие
базовой машины
CQ о о.
Ф а:
с н
•о о ф ф
— —
6 400 400
10 500 500
30 800 700
50 900 800
100 1100 1000
150 1200 1100
вому
Для
0.7—1,0
1,0—1,8
1,8—2.0
Кроме этих сопротивлений возникает
еще сопротивление от перемещения бульдо-
зера как тележки, которое может быть рас-
считано по формуле
Ц75 = G (J + /) кГ. (11.17)
Таким образом, общее сопротивление
в конце процесса зарезания неповоротного
бульдозера найдется по формуле
W = 117, + К Ц73 + W-n кГ.
Максимальное сопротивление, возникающее при работе поворотного
бульдозера, будет равно
W == Г, -и Г2 + W3 + Г4 + Ц7. кГ.
При работе бульдозера по транспортированию грунта имеют место
его непрерывные потери за счет соскальзывания с краев отвала в боковые
валики. Для сохранения заданной производительности бульдозера необ-
ходимо компенсировать эти потери постоянным заглублением отвала на
величину /г,, которая может быть определена по формуле
ft, м
где Vnom — объем потерянного грунта на 1 м пути движения буль-
дозера в м3;
L — длина отвала в м.
Можно считать, что объем потерянного грунта составляет около 3% от
общего объема призмы волочения в случае связных грунтов и около 6% —
при грунтах несвязных.
Это постоянное заглубление отвала в грунт необходимо учитывать
при движении бульдозера на уклон, который может достигать i 0,Зч-0,4.
В этом случае (при полной загрузке отвала грунтом) необходимое тяговое
усилие может оказаться выше, чем при заборе грунта в забое.
Для увеличения производительности во время забора грунта в забое
необходимо стремиться к полному использованию мощности двигателя.
МАШИНЫ ДЛЯ ПОДГОТОВИТЕЛЬНЫХ РАБОТ
73
Такой режим работы бульдозера, где резание грунта производится при
постоянном заглублении отвала в грунт, не отвечает этому требованию.
Здесь, в начале процесса набора грунта, мощность двигателя недоисполь-
зуется, а в конце двигатель оказывается перегруженным. Поэтому при
рациональном режиме работы отвал вначале заглубляют на большую глу-
бину, а затем, по мере образования призмы волочения, постепенно снижают
толщину стружки. При такой работе бульдозера путь набора грунта сни-
жается в 1,5 раза и полностью используется мощность двигателя. Хорошие
результаты дает спаренная работа двух бульдозеров, движущихся таким
образом, чтобы их отвалы являлись как бы продолжением друг друга и
зазор между ними не превышал 0,3—0,4 м. В этом случае значительно
снижаются потери грунта и производительность увеличивается еще за
счет того, что находящийся между отвалами грунт также уносится вместе
с призмой волочения. Работу одиночного бульдозера следует организовы-
вать так, чтобы его движение происходило по одному следу. Тогда полу-
чающиеся по бокам валики грунта образуют своеобразную траншею,
что снижает потери.
Производительность бульдозера при резании и перемещении грунта
определится по формуле
saooVnpkekyK^,
11 =-----=—-— л8/?, (11.18)
1 Ц
где Vnp — объем грунта в призме волочения, определяемый по фор-
муле (1.21) в лг’;
ke — коэффициент использования бульдозера по времени, обычно
равный 0,80—0,90;
kUKJ — коэффициент, учитывающий влияние на производительность
уклона местности; при движении под уклон kyKjl = 1,3ч-1,8,
а при движении на уклон kyKJl =-- 0,8ч-0,5;
Тц — длительность цикла в сек.
Длительность цикла найдется по формуле
Г,. = — 4- — + — 4' 4 + 4 сек,
1' t'o Vn С '°
где /р> 1п и 10 — длина пути резания, перемещения грунта и обратного
хода в м;
vlt vn и v0 — соответствующие им скорости м/сек;
tc — время, затрачиваемое на переключение передачи
(обычно 3—5 сек);
4 = 2—3 сек — время опускания отвала.
Если в схеме работы бульдозера предусмотрены его повороты, то
при определении времени цикла должно быть учтено затрачиваемое на
это время.
При планировочных работах производительность бульдозера найдется
по формуле
П = 3600Z Sin °>5) fea ДО ] д)
где / — длина планируемого участка в м;
L — длина отвала в м;
Ф — угол поворота отвала в плане;
v — рабочая скорость движения бульдозера в м/сек.
к — число проходок по одному месту.
74
МАШИНЫ ДЛЯ ЗЕМЛЯНЫХ РАБОТ
Производительность бульдозера можно повысить путем увеличения
размеров отвала и снижения потерь грунта. Последнее может быть осу-
ществлено путем постановки на концы отвала открылков и лобовых
щитков.
Для расчета механизма подъема и основных частей бульдозера на
прочность, а также для проверки его устойчивости необходимо выявить те
силы, которые воздействуют на него во время работы.
Для расчета отдельных деталей и агрегатов бульдозерного оборудо-
вания на прочность (отвала, толкающих брусьев и т. п.) должны быть
выявлены те максимальные усилия, которые могут возникнуть в отдель-
ные моменты работы машины. При этом разным агрегатам соответствуют
различные опасные моменты и положения рабочего оборудования, в связи
с чем приходится рассматривать несколько расчетных схем.
Рис. 45. Схема сил, действующих на бульдозер
Вначале следует рассмотреть момент соответствующий окончанию
процесса копания грунта, когда призма волочения уже сформировалась,
но вместе с тем отвал еще заглублен на какую-то глубину. Предполагается,
что работа производится на горизонтальном участке. Этот момент соот-
ветствует наибольшему сопротивлению. Схема сил, действующих на на-
весное оборудование при неповоротном отвале с канатным управлением
в этот момент времени, представлена на рис. 45.
На отвал бульдозера действует результирующая сил сопротивления
копанию Ро, сила веса навесного оборудования G, сила со стороны меха-
низма подъема отвала, натяжение полиспаста S и реакция в упряжном
шарнире О—R, которая может быть разложена на горизонтальную Rx
и вертикальную Ry составляющие.
Согласно проведенным исследованиям направление действия
силы Ро зависит от угла резания, а также от вида и состояния грунта. При
наивыгоднейшем угле резания 50° и заглублении отвала на 10—12 см
результирующая приложена на высоте 0,2Н и при плотных грунтах
направлена под углом v = 15н-20°. При рыхлых грунтах можно пола-
гать v = 0. Эта результирующая может быть разложена на горизонталь-
ную Р01 и вертикальную Р„2 составляющие. (При нормальной работе
бульдозера обычно Ри1 = (0,6-4-0,8) Тн, где Тн — номинальное тяговое
усилие трактора. Однако здесь при выявлении максимальных усилий сле-
дует принять
Р<Н =:: Т р,
МАШИНЫ ДЛЯ ПОДГОТОВИТЕЛЬНЫХ. РАБОТ
75
Рис. 46. Схема сил, действующих на бульдозер в на-
чале подъема загруженного грунтом отвала
где Тр — максимальное (расчетное) тяговое усилие трактора с учетом
динамического характера его приложения, которое может быть
найдено по формуле
Тр = kaG^clv (11.20)
здесь G6 — вес бульдозера в кГ;
<р — коэффициент сцепления; для гусеничного хода cpfI( =
0,8-=-1,0;
kd = 1,5 — коэффициент динамичности.
Проектируя все силы на горизонтальную ось, можно найти горизон-
тальную составляющую реакции в упряжном шарнире О
Rx = Р91 4' S cos 0 =
= Tp + S cos 0. (11.21)
Вертикальная реак-
ция Ru найдется из урав-
нения равновесия относи-
тельно точки приложения
силы Ро
Ryli + G (1Х- /2) -
— Rxm — Sr0 = 0;
„ T.rm 4- Sr0 — G (li — /а)
(11.22)
Вертикальная составляющая сил сопротивления копанию опреде-
лится по формуле
Л2 = Рп tg -v ~ 0,ЗРО1 кГ. (П.23)
Наконец, сила натяжения подъемного полиспаста найдется из условия
равновесия системы относительно упряжного шарнира
Sr — POiR — Pnlm — Gl2 = 0;
~ Ди/и -4- Г?/2
(П.24)
Найденная таким образом сила S определяет то значение натяжения
полиспаста, которое обеспечивает постоянное положение отвала в рабо-
чем состоянии. Для подъема отвала на ходу из рабочего положения в транс-
портное к нему должна быть приложена другая сила Sn, которая по своей
величине превышает силу S.
Согласно схеме на рис. 46, сила подъема Sn определяется из условия
равновесия относительно упряжного шарнира О
, бх/з Рpli -4- Gla -4- Р
,п==---------------------------
(II. 25)
где Gx — вес поднимаемого с отвалом грунта; G, = FL&a кГ F — пока-
занная на схеме площадь поперечного сечения грунта в м'2;
L — длина отвала в м и 60 — объемный вес грунта в кГ:ял',
76
МАШИНЫ ДЛЯ ЗЕМЛЯНЫХ РАБОТ
Рс — сила сопротивления грунта сдвигу, которая действует по по-
верхности раздела поднимаемого грунта и части призмы, остаю-
щейся на месте; Р, = Tpf2 + BLC кГ (Тр — максимальная
сила тяги бульдозера в кГ;'/2 = 0,8ч-1,0 — коэффициент тре-
ния грунта о грунт; В — высота отвала в см; С = 0,-1 --
0,6 кПсм2 — коэффициент сцепления грунта при сдвиге);
здесь длина отвала L выражается в см;
G — вес навесного оборудования бульдозера.
При некоторых (критических) значениях усилия подъема SKP и недо-
статочной устойчивости машины может произойти ее опрокидывание
относительно передней кромки гусениц (точка Д). Из условия равновесия
системы относительно этой точки критическое значение силы подъема
Skp=^kF, (11.26)
где GT — вес трактора в кг.
Очевидно, что выглубление отвала становится возможным при соблю-
дении следующего неравенства:
Sn<SKp. (II.27)
Наибольшее, т. е. расчетное значение силы подъема, может быть
определено по мощности двигателя трактора. На эту силу следует рассчи-
тывать полиспаст и детали рамы бульдозера.
Бульдозер с гидравлическим управлением осуществляет принуди-
тельное заглубление отвала. Максимальная сила, действующая по што-
кам гидроцилиндров, определяется из условия опрокидывания буль-
дозера относительно точки В (рис. 46). Значение этой критической силы
заглубления можно найти из условия равновесия системы относительно
этой точки. По найденной таким образом критической силе рассчитывается
система гидравлического управления, а рабочее оборудование бульдозера
проверяется на прочность.
В случае бульдозера с поворотным отвалом при угле захвата 0 < <р <j
< 90° появляется еще боковая составляющая от результирующей силы
копания. Эту боковую составляющую Р03 можно найти, пользуясь схемой
на рис. 12, с учетом того, что результирующая Р03 действует в плоскости,
перпендикулярной плоскости отвала. Боковая составляющая P(i:i стре-
мится повернуть бульдозер относительно вертикальной оси, проходящей
через его центр тяжести. Такому повороту препятствуют силы сцепления,
развивающиеся между гусеницами машины и поверхностью грунта. По-
этому бульдозер следует проверить на устойчивость тем же методом, ко-
торый был применен при проверке устойчивости кустореза.
Для расчета отдельных частей навесного оборудования бульдозера
на прочность необходимо выбрать расчетные положения.
Основным расчетным положением может быть принято предположе-
ние внезапного наезда отвалом на непреодолимое препятствие. В этом
случае полное буксование машины наступает прежде ее остановки. Поэтому
максимальное тяговое усилие может быть определено по условию сцепле-
ния с учетом дополнительного действия инерционных сил. Учесть действие
последних можно путем введения коэффициента динамичности. Таким
образом, для определения развивающегося при таком наезде максималь-
ного усилия Р01 — Т„ может служить выражение (П.20).
При этом следует рассмотреть два варианта: случай, когда отвал упи-
рается в препятствие средней частью, и случай, когда отвал упирается
МАШИНЫ ДЛЯ ПОДГОТОВИТЕЛЬНЫХ РАБОТ
77
в препятствие краем. Первое расчетное положение служит проверкой на
прочность отвала, а второе — для расчета толкающих брусьев и подкосов.
Схема для проверки на прочность отвала приведена на рис. 47, а.
Внешняя сила Рп приложена посередине отвала в нижней его части.
Поэтому следует считать, что эта нагрузка воспринимается только очер-
ченным на схеме нижним поясом жесткости, момент инерции и момент
сопротивления которого относительно осей инерции хх и zz может быть
Рис. ч/. охемы для расчета на прочность z-*
оборудования бульдозера Рог
определен графоаналитическим способом. Опасным будет сечение I—/
(рис. 47, б). Для расчета силу следует привести к центру тяжести сече-
ния 01 (рис. 47, а). В результате на отвал будут действовать силы Д и Р2
и проявившийся ввиду такого приведения крутящий момент МкР = Рха —
— РгЬ. Сила Р± будет изгибать отвал в плоскости ее действия. Она яв-
ляется наиболее опасной. Изгибающий момент здесь будет равен
Л4„3 = кГсм. (11.28)
Другая сила Р2 будет также изгибать отвал, но уже в плоскости, перпен-
дикулярной к только что рассмотренной.
При гидравлическом управлении для проверки сечения отвала сле-
дует еще рассмотреть случай его заглубления максимальной силой при
одновременном движении машины вперед. Здесь горизонтальная сила POi
(рис. 47, г) может быть определена по сцепному весу
= G04,:u кГ, (11.29)
а появившаяся в результате заглубления максимальная приложенная
78
МАШИНЫ ДЛЯ ЗЕМЛЯНЫХ РАБОТ
к отвалу вертикальная сила Р02 найдется из условия вывешивания трак-
тора относительно точки В (рис. 46)
Р02 = + кЛ (и.зо)
н т »в
Силы Рт и P02 переносятся к центру тяжести сечения и дальнейший --
расчет производится так же, каки в предыдущем случае.
При расчете толкающих брусьев / и 2 (рис. 47, б) и подкосов 3 и‘4
предполагается, что сила Рп = Тр = каОбусц приложена к краю от-
вала. Можно полагать, что в этот момент, кроме силы Рп, может также
еще действовать вертикальная сила Ро„ «=< 0,2Р01. На отвал действует
также еще сила подъема S, которую можно найти, рассматривая равно-
весие всех сил относительно упряжного шарнира О. Из условия равно-
весия системы, подобному тому, как это было рассмотрено выше [фор-
мулы (П.21) и (11.22)], могут быть найдены реакции в упряжных шарни-
рах R'x и R'. Опасным сечением бруса будет являться сечение II—II.
Изгибающие моменты в этом сечении найдутся: в вертикальной плоскости
Мд = R'RkP-см; в горизонтальной плоскости Мг = Rxc кГ-см. Брусья
должны быть также проверены на продольный изгиб.
При расчете подкоса следует допустить неравномерное распределение
нагрузки между ними. Например, для подкоса 4 худшим будет случай,
когда подкос 3 и толкающий брус 2 не работают. Тогда, из условий равно-
весия отвала относительно точки крепления толкающего бруса I, сила,
действующая на подкос, найдется по формуле
Эта сила должна быть разложена на составляющие, направленные вдоль
оси подкоса и перпендикулярно этой оси. На действие первой составляю-
щей подкос следует проверять на продольную устойчивость, а вторая
составляющая будет оказывать поперечный изгиб.
Если рама бульдозера с неповоротным отвалом образуется толкаю-
щими брусьями и отвалом (рис. 47, б), то рама бульдозера с поворотным
отвалом состоит из двух соединенных между собой изогнутых брусьев,
образующих как бы арку (рис. 47, в). Отвал присоединяется к раме с по-
мощью имеющего сферическую головку шарнирного соединения. Поло-
жение отвала относительно шарнира фиксируется боковыми упорами.
Худший случай будет соответствовать наезду на препятствие краем от-
вала, когда угол захвата равен 90°. Тогда этот край подвергается действию
усилия, которое может быть определено по формуле (11.20).
Максимальное усилие, действующее на сферическую головку шаро-
вого шарнира рамы, найдется в предположении, что упор В не работает.
Тогда отвал может быть уподоблен рычагу, поворачивающемуся вокруг
шарнира упора А. В этом случае сила, действующая на сферическую го-
ловку рамы, найдется по формуле
(IL32>
Далее раму можно рассматривать как шарнирную арку.
§ 10. СКРЕПЕРЫ
Назначение и классификация. Скреперы являются землеройно-транс-
портными машинами, предназначенными для послойной разработки грунта
и транспортирования его на расстояния до 500 .и, а в случае самоходных
машин даже до 5—8 км. Скреперы обычно устраиваются так, что операция
МАШИНЫ ДЛЯ ПОДГОТОВИТЕЛЬНЫХ РАБОТ
79
разгрузки у них сочетается с разравниванием грунта, поэтому применение
для такого разравнивания специальных средств обычно не требуется.
Скреперами можно разрабатывать грунты до IV категории включи-
тельно. При этом для облегчения копания грунты III—IV категорий реко-
мендуется предварительно разрыхлять рыхлителями. Скреперы исполь-
зуются в различных областях строительного производства; в транспортном,
гидротехническом, промышленном и т. д. Они применяются для возведе-
ния насыпей, дамб, разработки выемок, вскрышных работ и т. п.
Рабочий процесс скреперов состоит из операции копания, во время
которой происходит набор грунта в ковш, транспортирования груженого
Рис. 48. Схемы устройства и работы скреперов: 1 — с принудительной раз-
грузкой; II —полупринудительной разгрузкой; III — со свободной разгруз-
кой; а — загрузка; б — транспортное положение; в — разгрузка
скрепера, перед чем ковш приводился в транспортное положение, раз-
грузки грунта и транспортирования разгруженного скрепера назад в забой
(рис. 48).
Скреперы принято классифицировать по емкости ковша, способу их
передвижения, схеме подвески ковша, способу загрузки и разгрузки и по
системе управления.
В зависимости от емкости ковша скреперы бывают малой (до 5 л3),
средней (6—15 м3) и большой (> 15 м3) емкости.
По способу передвижения скреперы разделяются на прицепные, полу-
прицепные и самоходные. Прицепные скреперы работают с гусеничным
или двухосным колесным трактором или тягачом и большей частью выпол-
няются двухосными, а в некоторых случаях — одноосными.
Полуприцепные скреперы обычно устраиваются одноосными, поэтому
часть своего веса они передают на тягач, что повышает его сцепной вес
и улучшает тем самым тяговую характеристику. Полуприцепные скреперы,
как правило, рассчитываются на работу с одноосными тягачами, хотя в от-
дельных случаях для этой цели применяются также и двухосные тягачи.
Полуприцепной скрепер с одноосным тягачом (рис. 50) представляет собой
весьма маневренную тележку с небольшим радиусом поворота, способную
развивать скорость до 45—60 км/ч. Эти машины получили наибольшее рас-
пространение.
Самоходные скреперы исполняются колесными или гусеничными.
Здесь тяговое и рабочее оборудование представляет собой одну машину
80
МАШИНЫ ДЛЯ ЗЕМЛЯНЫХ РАБОТ
и потому, в отличие от полуприцепной машины, тягач отдельно использо-
ван быть не может.
По схеме подвески ковша скреперы разделяются на машины рамной
конструкции, где имеется специальная рама, на которой и укрепляется
ковш, и на скреперы безрамной конструкции, где рамой является сам
ковш.
Загрузка грунта в ковш может происходить под действием давления
срезаемой стружки и в результате работы специального загрузочного
скребкового конвейера (рис. 49), установленного в передней части ковша.
В последнем случае необходимое при заполнении ковша тяговое усилие
снижается на 20—25%.
По способу разгрузки скреперы разделяются на машины с принуди-
тельной, полупринудительной и свободной разгрузкой (рис. 48). В первом
случае грунт выталкивается перемещающейся задней стенкой, что обеспе-
Рис. 49. Схема скрепера со скребковым кон-
вейером
чивает наилучшую очистку
ковша. Однако при этом разви-
ваются большие усилия и за-
трачивается значительная ра-
бота. При полупринудительной
разгрузке днище ковша вместе
с задней стенкой поворачивает-
ся вокруг своей передней части,
что обеспечивает хорошую очи-
стку боковых стенок ковша, но
само днище и задняя стенка при липких влажных грунтах очищается не-
удовлетворительно. При свободной разгрузке грунт выгружается путем
опрокидывания всего ковша. Здесь условия очистки ковша от грунта наи-
худшие, поэтому этот способ применим лишь при емкости ковша до
2—3 .и3.
По системе управления различают скреперы с канатным и гидравличе-
ским управлением. При канатном управлении подъем ковша осуще-
ствляется натяжением каната, а его опускание производится под действием
собственного веса. Гидравлическое управление позволяет осуществлять
принудительное заглубление ковша в грунт.
Общий вид полуприцепного скрепера представлен на рис. 50. Рабочим
органом машины служит ковш, который снабжен ножом. Нож в плане мо-
жет иметь прямоугольную, ступенчатую и полукруглую формы (рис. 51, а,
б, в). Ступенчатая форма ножа при некотором выглублении ковша позво-
ляет иметь стружку меньшей ширины. Кроме основного ножа к боковым
стенкам ковша крепятся еще вспомогательные ножи, которые как бы под-
резают грунт, что снижает общее усилие резания, так и понижают потери
грунта, которые могут иметь место, за счет перемещения призмы волоче-
ния вбок.
В передней части ковша имеется заслонка, которая увеличивает его
геометрическую емкость и обеспечивает необходимый для наполнения на-
пор грунта. Последний создается ввиду пропуска грунта в щель, которая
образуется между нижней частью заслонки и ножом. Заслонка может быть
самооткрывающейся (плавающей) или управляемой. Самооткрывающаяся
заслонка устроена и подвешена к ковшу так, что она самопроизвольно
поднимается под влиянием усилия, действующего на нее со стороны призмы
волочения грунта. Подъем и фиксирование в определенном положении
управляемой заслонки производится при помощи специального подъем-
ного механизма, который в случае канатного управления может быть бло-
кирован с механизмом подъема и опускания ковша. Каждому виду грунта
МАШИНЫ ДЛЯ ПОДГОТОВИТЕЛЬНЫХ РАБОТ
81
10 11
82
МАШИНЫ ДЛЯ ЗЕМЛЯНЫХ РАБОТ
соответствует определенная величина подъема заслонки, которая обеспе-
чивает наилучшее заполнение ковша. Однако регулирование высоты
подъема заслонки возможно лишь в случае управляемого варианта. По-
этому скреперы, как правило, снабжаются только управляемыми заслон-
ками.
Следует стремиться к возможно более полному заполнению ковша
скрепера грунтом. Степень заполнения зависит от большого количества
факторов, из которых главными являются физико-механические свойства
грунта, соотношение между основными размерами ковша, форма ковша,
а также конструкция заслонки. Основным параметром не только ковша, но
и всего скрепера является емкость. Кроме
того, к числу основных параметров ковша
относятся его ширина В, высота Н и
длина L (рис. 52).
Процесс заполнения ковша грунтом
исследовали неоднократно. Установлено
Рис. 51. Формы ножей скре-
пера
Рис. 52. Схема ковша скрепера
также, что характер заполнения зависит от физико-механических
свойств грунтов. Н. А. Артемьев процесс заполнения ковша разделяет
на фазы. Во время первой фазы грунт, двигаясь по направлению к задней
стенке ковша, заполняет часть общего объема ковша. Во время второй
фазы заполняется объем заслонки и, наконец, наступает момент, когда
дальнейшее наполнение ковша становится возможно лишь путем продавли-
вания вновь поступающего грунта через уже находящийся в ковше грунт.
Это происходит во время третьей фазы заполнения.
Выше уже отмечалось, что наилучшая форма ковша соответствует той
форме, которую приобретает грунт при его свободной укладке, т. е. когда
задняя стенка отсутствует. Эта форма зависит от природы и состояния
грунта. Ввиду невозможности иметь ковши для каждого вида грунта, при
его проектировании следует ориентироваться на какие-то средние условия.
На сопротивление наполнению огромное влияние оказывает высота
ковша И, под которой понимается расстояние от днища до наиболее высо-
кой его точки (рис. 52). По мере роста высоты сопротивление заполнению
прогрессивно возрастает, подчиняясь примерно кубической зависимости.
Поэтому высоту следует выбирать возможно меньших значений, добиваясь
получения необходимого объема в основном за счет ширины и длины ковша.
Для перевозки скрепера по железной дороге ширина его ограничена
железнодорожным габаритом и должна быть увязана с шириной колес тя-
гача или трактора. Для лучшей проходимости скрепера ширину колеи его
задних колес целесообразно делать равной ширине колес колесного или
гусеничного хода тягача. Тогда минимальная ширина ковша, измеренная
по поверхности его наружных стенок, определится по формуле:
МАШИНЫ ДЛЯ ПОДГОТОВИТЕЛЬНЫХ РАБОТ
83
при одиночных колесах скрепера
В = Вт 4- Вш Ь 2Д<? мм; (11.33)
при сдвоенных колесах скрепера
В = Вт 4" 2ВШ 4" 2Аз мм,
где Вг — ширина колеи тягача в мм;
Вш — ширина пневматической шины в мм;
Де = ЗОд-60 мм — необходимый зазор между внутренней поверх-
ностью шины и боковой стенкой ковша.
При такой ширине ковша возможно рыть траншеи с вертикальными
стенками и колеса будут всегда следовать по срезанной ковшом поверх-
ности грунта, что облегчит их передвижение и будет способствовать получе-
нию одинаковой по ширине ковша стружки грунта. Кроме того, при этом
колеса будут уплотнять выгруженную из ковша призму грунта. Вообще
ширину ковша следует выбирать возможно большего значения, так как
такое стремление при одной и той же емкости ковша позволит снизить его
высоту, что, в свою очередь, позволит уменьшить энергоемкость. При вы-
боре высоты ковша Н ориентировочно можно полагать
Н = тВ мм,
причем т 0,4-г-0,6.
Высоту задней стенки обычно выбирают в пределах Н3 = (0,4-г-0,5) Н.
Между длиной ковша и его высотой может быть принято соотношение
L = (1,4н-1,8) Н.
Здесь меньшее значение коэффициента соответствует ковшам средней
емкости, а большее — ковшам малой емкости.
Тяговый расчет скрепера. Возникающие при работе скрепера сопро-
тивления в сильной степени зависят от совершаемой операции. Максималь-
ное сопротивление развивается в процессе наполнения ковша грунтом и
особенно в конце наполнения, а минимальные сопротивления обычно соот-
ветствуют обратному движению порожнего скрепера в забой. Если мощ-
ность двигателя скрепера выбирать по максимальному значению сопротив-
ления, то в остальное весьма продолжительное время работы она не будет
использоваться, что является невыгодным. Поэтому, для преодоления раз-
вивающихся при наполнении ковша, хотя и очень больших, но кратковрег
менных сопротивлений применяют специальные тракторы-толкачи или
устанавливают воздействующий на заднюю ось скрепера дополнительный
двигатель. В связи с этим определение сопротивлений для транспортного
и рабочего режимов следует производить раздельно.
Сопротивление перемещению груженого скрепера может быть опреде-
лено по формуле
WT = (Ge+ GJ (f + i) кГ, (П.34)
где Gc — вес скрепера в кГ;
Go — вес грунта в ковше в кГ;
f — коэффициент сопротивления перекатыванию скрепера;
i — уклон местности.
Вес грунта в скрепере
Ga = qkH60 кГ,
где q — геометрическая емкость ковша в ,u:i;
kH — коэффициент наполнения, который может быть принят равным
единице;
60 1300ч-1600 к-Пм3 — объемный вес грунта в скрепере.
84
МАШИНЫ ДЛЯ ЗЕМЛЯНЫХ РАБОТ
Сопротивление, возникающее при рабочем режиме, определяется по
формуле
Wpa6 - WT + Wp + WH + W"H + кГ, (11.35)
где — сопротивление перемещению скрепера как тележки,
которое может быть найдено по формуле (11.34), в кГ\
WH и WH — сопротивление силы тяжести грунта и сопротивление
грунта в ковше, определяемые по формулам (1.26) и
(1.27) в кГ;
Wn — сопротивление перемещению призмы волочения, которое
может быть рассчитано по формуле (1.31). При этом
относительный объем призмы волочения, т. е. ее объем
по отношению к полной емкости ковша, может быть
принят равным 0,2—0,3 при несвязных грунтах и 0,1 —
при связных грунтах в кГ~,
Wp — сопротивление грунта резанию, которое определяется
по формуле (1.25), причем выбор значений удельного
сопротивления резанию k0 (в кПсм1) следует произво-
дить, руководствуясь следующими данными, в кПсм2:
Несвязные и слабосвязные грунты (пески, супески)........0,5—0,7
Связные грунты (суглинки) ..............................0,7—1,0
Высокосвязные грунты (тяжелые суглинки, глины) .... 1,0—1,5
Сопротивление наполнению может быть подсчитано на ссновании опыт-
ных данных по формуле (1.30), т. е. можно предположить, что
W'H + К = WH = eV кГ.
Значения удельных сопротивлений е кГ!м3 даны ниже
Емкость ковша скрепера в .и3..................
е связного грунта ............................
е несвязного » ...............................
3 6 10
1100 7501 650
950 650 550
Работа полуприцепного и самоходного скреперов без толкача становится
возможной при условии
PK^Wpa6, (11.36)
где Рк — максимальная окружная сила на шинах ведущих колес скрепера.
Для прицепных скреперов необходимо условие
Дпах > WpaS, (11.37)
где Т’тах — максимальное тяговое усилие на крюке тягача.
Если применяется толкач, то должны быть соблюдены неравенства
(Рк Тт) kp > 1Ерыб и (Т + Тт) kp > Wpa6, (11.38)
где Тт — толкающее усилие толкача;
kp — 0,85—0,90 — коэффициент одновременности работы толкача и
скрепера.
Необходимо также произвести проверку возможности реализации
тягового усилия по сцеплению:
Д-цФсц Рк раб
Дпах = Wpae, (11.39)
где GtM — сцепной вес самоходного скрепера или тягача;
Фсч — коэффициент сцепления.
МАШИНЫ ДЛЯ ПОДГОТОВИТЕЛЬНЫХ РАБОТ
85
Необходимая мощность двигателя самоходного скрепера, рассчитан-
ного на работу без толкача, определится по формуле
Ndg = л. с., (11.40)
• и 11
где v — скорость скрепера в м!сек\
г) — к. п. д. передач.
Режимы работы и производительность. Копание грунта и наполнение
ковша может осуществляться различными способами: при постоянной тол-
щине стружки (работа тонкой стружкой), путем неоднократного подъема и
опускания ковша (гребенчатая схема работы), быстрым заглублением
ковша на значительную глубину (до 30—40 см) с последующим постепен-
ным его подъемом (клиновая схема работы). Наиболее рациональным режи-
мом является работа по клиновой схеме, так как в этом случае в процессе
врезания и наполнения механическая работа расходуется более равно-
мерно и имеющий место в конце процесса «пик» мощности сглаживается,
а необходимый для наполнения ковша путь скрепера сокращается по
сравнению с работой тонкой стружкой в 2 раза, а по сравнению с работой
по гребенчатой схеме — на 30—40%. При этом способе работы возможно
добиться также и максимального коэффициента наполнения kH - 1,Он-1,1.
Часовая производительность скрепера определится по формуле
я = 60£%Ч, Л1з/ч, (П,41)
% 7 г(
где q — геометрическая емкость ковша в .и3;
k„— 0,8—1,0 — коэффициент наполнения скрепера;
k„ — 0,85—0,90 — коэффициент использования рабочего времени;
kp — коэффициент разрыхления грунта;
7';, — продолжительность рабочего цикла ъ,мин.
Ти = —1—|—-—|—-—I—— ntn -J- <2,ttwg мин.
4 Ui С-2 с'з ^4 ги
^з', h — длины путей заполнения ковша грунтом,
транспортирования грунта, разгрузки и дви-
жения порожнего скрепера в .и;
ту; и2; о-) и о, — соответствующие этим длинам путей скорости
движения скрепера в м!мин\
/„ == 0,08н-0,1 мин — время, необходимое для переключения ско-
рости;
п — число переключений скоростей за время рабо-
чего цикла (обычно п = 4н-5);
tnoe = 0-3 мин — время, затрачиваемое на один поворот.
Следует иметь в виду, что скорости движения скрепера вследствие бук-
сования всегда ниже номинальных значений. Максимальные потери ско-
рости на буксование соответствуют процессу врезания и составляют 20—
30%.
Длина пути наполнения скрепера
qkHkn
1 bhkp
м,
где kn = 1,2—^1,5—коэффициент, учитывающий потери грунта за счет
образования боковых валиков и призмы волочения;
Ь — ширина ножа скрепера в м;
h — средняя толщина стружки в м.
86
МАШИНЫ ДЛЯ ЗЕМЛЯНЫХ РАБОТ
Длина пути разгрузки обычно составляет 3—10 м.
Для повышения производительности скреперов предпринимается ряд
конструктивных мероприятий, которые в основном направлены на увели-
чение коэффициента наполнения и снижение времени цикла. Коэффициент
наполнения при прочих равных условиях зависит от формы ковша. По-
этому при проектировании скреперов соотношения между параметрами
ковша должны быть оптимальными. Снижение времени цикла производится
путем повышения транспортных скоростей движения. Применение колес-
ных тягачей на пневматических шинах и самоходных машин позволяет
иметь большие скорости движения, обеспечивающие их высокую произ-
водительность.
В современном скреперостроении наблюдается стремление к повыше-
нию емкости ковша и в связи с этим — к увеличению мощности двигателя.
Так, в настоящее время имеются самоходные скреперы с емкостью ковша
свыше 40 м3 и суммарной мощностью двигателей в 980 л. с.; ведутся работы
по созданию скреперов с емкостью ковшей в 75 и 100 м3.
Для увеличения производительности созданы агрегаты, состоящие из
одноосного тягача и двух сцепленных с ним скреперов, имеющих емкость
ковшей в 46 м3. Ковши могут заполняться грунтом одновременно или
поочередно. Большой вес таких машин заставляет принимать меры к по-
вышению их проходимости. Поэтому увеличиваются размеры шин и сни-
жается давление воздуха в них. Последнее устанавливается равным 2,5—
3 ат. На скреперах применяется дизель-электрический привод, при кото-
ром электродвигатели постоянного или переменного тока устанавливаются
на каждом колесе скрепера или тягача.
Создана также универсальная самоходная гусеничная машина скре-
пер-бульдозер. Здесь ковш расположен между гусеницами, а перед его
заслонкой имеется отвал бульдозера. Управление ковшом и отвалом ги-
дравлическое. Скрепер предназначен для тяжелых работ и применяется
для транспортирования грунта на сравнительно небольшие расстояния
(0,7—1,0 км).
Силы, действующие на скрепер. Силы, действующие на скрепер,
можно разделить на две группы (рис. 53): активные, к числу которых при-
надлежат силы тяжести скрепера с грунтом G,, сила тяги тягача Т и тол-
кающая сила толкача ТТ, и реактивные — реакции грунта, действующие
на рабочий орган Р01 и Р0.2, реакции грунта, действующие на колеса: вер-
тикальные Rn и R3 и горизонтальные FA и FB. Силы Р01 и Рт должны опре-
деляться с учетом сопротивлений наполнению ковша.
Сила тяжести изменяется по мере наполнения ковша грунтом и при-
обретает максимальнее значение в конце наполнения. Она может быть
легко определена как сумма сил тяжестей отдельных агрегатов и деталей
скрепера и грунта.
Сила тяги приобретает максимальное значение в конце наполнения.
Максимально возможные значения силы тяги следует определять по мощ-
ности двигателя, установленного на тягаче, или по условиям сцепления
ходового устройства с грунтом [см. формулу (11.20)]. При полуприцепном
и самоходном скрепере силу тяги удобно рассматривать как окружную
силу, а в случае прицепного варианта местом ее приложения является
дышло. Здесь надо иметь в виду, что при канатном управлении, во время
перевода ковша из рабочего положения в транспортное, сила тяги пере-
дается не только по дышлу, но и по канату подъема ковша.
Толкающее усилие толкача следует принимать равным его наиболь-
шему значению, рассчитанному по сцеплению ходового устройства с грун-
том, с учетом коэффициента динамичности kd = 1,5 [по формуле (11.20) 1.
МАШИНЫ ДЛЯ ПОДГОТОВИТЕЛЬНЫХ РАБОТ
87
При работе скрепера его нож находится под воздействием давления
стружки грунта, развивающейся от движения этой стружки — силы тре-
ния, и горизонтальной и вертикальной составляющих сопротивления
грунта резанию. Все эти силы можно суммировать и полученную равнодей-
ствующую разложить по двум направлениям, получив в результате гори-
зонтальную составляющую реакции грунта P0L и вертикальную составля-
ющую Р02.
Горизонтальная составляющая может быть определена из условия
тягового баланса скрепера в предположении, что призма волочения отсут-
ствует и, следовательно, на ее перемещение работа не затрачивается,
Рп = (Т 4- Тт) — WT кГ, (П.42)
где WT — сопротивление от перемещения скрепера как тележки в кГ.
Рис. 53. Схемы сил, действующих на скрепер: а — полуприцепной;
б — прицепной
Для получения максимального значения Р01, очевидно, следует пред-
положить, что движение скрепера осуществляется по горизонтальному
участку пути, т. е. что i = 0.
Сопротивление перемещению скрепера как тележки найдется по фор-
муле
WT = (7?„ + Р3) f кГ.
Вертикальная составляющая Р0.2 й'процессе работы скрепера меняется
как по направлению, так и по величине.
При зарезании сила Р02 действует вверх, а в конце наполнения и при
выглублении ножа изменяет знак и действует вниз. Определение абсолют-
ного значения этой силы удобно производить, пользуясь зависимостью
~ Ф^О!-
При резании и наполнении ковша "ф = 0,2, а при выглублении ф = 0,4д-
-—0,5.
Действующие на передние и задние колеса вертикальные реакции
грунта и Р3 должны определяться с учетом действия силы Р02
88
МАШИНЫ ДЛЯ ЗЕМЛЯНЫХ РАБОТ
из уравнений моментов всех сил относительно переднего и заднего коле-
са и из уравнения, полученного в результате проекции всех сил на верти-
кальную ось. Горизонтальные реакции FA и FB представляют собой сопро-
тивления передвижению переднего и заднего колес и могут быть опреде-
лены по формулам:
Fa = Rnf кГ\ FB = Raf кГ.
Выбор расчетных положений. На основании приведенной выше схемы
действия сил и анализа работы скрепера могут быть выбраны положения
для расчета основных узлов на прочность.
Активные силы, т. е. тяговое и толкающее усилия тягача и толкача,
а также сила тяжести приобретают наибольшее значение в конце заполне-
ния ковша. В этом положе-
нии будут наибольшими и
реакции грунта, действую-
щие на рабочий орган. По-
этому конец заполнения
ковша будет являться расчет-
ным положением для провер-
ки на прочность рамы скре-
пера, деталей ковша, сцеп-
ного устройства, хобота и
ходовой части. При этом
силу Рдг следует полагать дей-
ствующей на ковш сверху
вниз, как показано на рис.53.
Прочность этих агрега-
тов надо также проверить,
предположив внезапный наезд задних колес груженого скрепера на не-
преодолимое препятствие. В этом расчетном положении силу тяги следует
определить по условию сцепления ходового устройства машины с грун-
том, с учетом коэффициента динамичности kd = 1,5.
Расчет механизма подъема ковша целесообразно проводить, предпола-
гая начало выглубления ковша, т. е. подъем его в транспортное положе-
ние. В этом расчетном положении будут действовать те же силы, что и
в конце наполнения. При расчете предполагают, что сила тяжести ковша,
а также и вертикальная реакция Р02 полностью воспринимаются подъем-
ным канатом или гидроцилиндром подъема ковша (рис. 50). Действующее
по канату или штоку гидроцилиндра подъемное усилие Sn может быть опре-
делено согласно расчетной схеме (рис. 54). Здесь Gn — вес передка, а
и Тш — приложенные к шкворню — вертикальное и горизонтальное уси-
лия для случаев прицепного и полуприцепного скреперов. В случае полу-
прицепного скрепера действует еще момент Мш (см. рис. 53, а), который
может быть определен по формуле
Л-1„, - Gy/j + FAhlu — Rnl2 — ТЬШ.
После определения действующих на шкворень усилий Тш и RM (см.
рис. 53) усилие Sn можно найти, рассматривая равновесие системы относи-
тельно точки О (рис. 54).
При подъеме заслонка увлекает за собой часть грунта, который затем
высыпается. Поэтому усилие подъема заслонки (рис. 55, а) расходуется на
преодоление сил тяжести заслонки G3 и грунта G1P, а также силы трения
грунта о грунт, которая развивается по плоскости раздела объема грунта,
МАШИНЫ ДЛЯ ПОДГОТОВИТЕЛЬНЫХ РАБОТ
89
поднимающегося вместе с заслонкой, и грунта, остающегося в ковше.
Однако эта сила незначительна и потому сю можно пренебречь.
Сила тяжести грунта в заслонке приближенно может быть определена
по формуле
Gsp = kKHbBS0 кГ,
где В — ширина заслонки в м;
бй — объемный вес грунта в кГ/м3',
kK — 0,8 — коэффициент, учитывающий конфигурацию заслонки.
Далее, из рассмотрения равновесия системы относительно оси пово-
рота заслонки О определяется усилие подъема Sn, которое должно разви-
ваться канатным или гид-
равлическим механизмом.
В скрепере с полупри-
нудительной разгрузкой уси-
лие, необходимое для опро-
кидывания ковша Sp, при-
обретает максимальное зна-
чение вначале процесса. Его
можно найти из уравнения
моментов сил относитель-
но оси опрокидывания Ох
(цис. 55, б). В уравнение мо-
ментов кроме усилия Sp вхо-
дят: сила тяжести днища Gd
и сила тяжести грунта Gsp,
которая определяется в пред-
положении полного заполне-
ния ковша.
В случае скрепера с принудительной разгрузкой ковша необходимое
для выталкивания грунта усилие Р расходуется на преодоление сил тре-
ния грунта о днище ковша и на преодоление сопротивления качения роли-
ков задней заслонки по днищу, и потому оно приобретает максимальное
значение в начале процесса. Очевидно, что (рис. 55, в)
Р = GSPK + Gcrfp кВ,
где GCT — вес задней стенки в кГ\
fp = 0,10-4-0,15 — коэффициент сопротивления движению роликов.
При свободной разгрузке ковша сила, необходимая для его подъема,
определяется из уравнения моментов относительно оси опрокидывания.
При расчетах производится проверка на прочность таких основных
частей скрепера как рама, ковш, заслонка, задняя стенка, ходовое и при-
цепное устройство. Эти детали рассчитываются на действия найденных
выше усилий обычными методами.
§ 11. АВТОГРЕЙДЕРЫ
Автогрейдеры относятся к числу наиболее распространенных дорож-
ных машин. Они применяются как при строительстве дорог, так и при их
содержании. Автогрейдерами можно производить профилирование земля-
ного полотна, планировку насыпей, выемок и откосов, устройство корыт,
отрывку и очистку кюветов и канав, перемешивание грунта или гравийных
материалов с такими вяжущими как жидкие битумы и цемент, очистку до-
рог от снега, планировку дорог. и площадок и т. п. Автогрейдеры
90
МАШИНЫ ДЛЯ ЗЕМЛЯНЫХ РАБОТ
применяются не только на дорожных работах, но и при строительстве
аэродромов.
Автогрейдеры являются самоходными машинами. Они появились
сравнительно недавно. До этого выпускались только грейдеры, которые
имеют сходную с автогрейдерами общую конструктивную схему. Грейдеры
являются прицепными и потому значительно дешевле автогрейдеров.
Для их передвижения, как правило, используются гусеничные тракторы.
Они широко используются для профилирования и содержания сельско-
хозяйственных дорог.
Общая конструктивная схема автогрейдера представлена на рис. 56.
Рабочим органом машины является отвал, который в нижней части снабжен
ножом. Креме отвала автогрейдер имеет еще. кирковщик, который приме-
няется для рыхления старого дорожного покрытия или грунта. Для воз-
Рис. 56. Конструктивная схема автогрейдера:
/ — двигатель; 2 — рычаги управления; 3— коробка управления: 4 —редуктор подъема
отвала; .5 —механизм поворота отвала; 6 — редуктор подъема кирковщика; 7 — редук-
тор рулевого механизма; 8— кирковщик: 9 — тяговая рама; 10 — поворотный круг;
11 — отвал; 12 — балансир
можности выполнения автогрейдером различных работ подвеска отвала
обеспечивает самые разнообразные его установки как в вертикальной, так
и в горизонтальной плоскости. Обеспечивается также его вынос в стороны.
Изменение положения отвала в горизонтальной плоскости осуществляется
вращением поворотного круга вокруг его вертикальной оси, а в вертикаль-
ной плоскости — подъемом или опусканием правого или левого краев
тяговой рамы. Для выноса отвала в стороны тяговая рама, к которой
подвешен поворотный круг, специальным механизмом поворачивается
в горизонтальной плоскости вокруг вертикальной оси крепления передней
ее точки. Передние колеса автогрейдера могут наклоняться относитель-
но передней оси, что облегчает работу машины на косогорах. Задние
мосты автогрейдера подвешены к основной раме посредством опорных
балансиров и реактивных штанг. Передний мост подвешен к раме посред-
ством шкворня. Наличие последнего и балансиров позволяет автогрейдеру
приспосабливаться к неровностям пути при его движении. Скорость дви-
жения машины может изменяться от 2—3 до 40—50 км/ч.
Основным видом работ, для которых предназначен автогрейдер, яв-
ляется профилирование земляного полотна. При этом земляное полотно
возводится из грунта, вынутого из боковых кюветов. Такое профилирова-
ние осуществляется последовательными проходами автогрейдера по каж-
дой стороне дороги. Рабочий процесс машины состоит из вырезания грунта
МАШИНЫ ДЛЯ ПОДГОТОВИТЕЛЬНЫХ РАБОТ
91
Классификация автогрелдеров (ГОСТ 9420—60)
Т ип Класс Вес в т Мощность i двигателя в л. с.
Легкий 1 7—9 63—75
Средний 11 10—12 90—100
Т яжелый 111 13—15 160—180
Особо тяжелый . . IV—V 17—23 375—430
из кювета и перемещения его к оси дороги. Эти рабочие операции ведутся
при различной установке во время следующих друг за другом проходов
машины.
При зарезании угол установки ножа в плане (угол захвата <р — см.
рис. 5) зависит от трудности разработки грунта. Обычно <р = 30-ь60°. Отвал
наклоняется в вертикальной плоскости таким образом, чтобы тот край
ножа, которым производится зарезание грунта, был ниже. Это обеспечивает
подъем вырезанного грунта из кювета. При перемещении грунта угол <р
увеличивается, что способствует передвижению грунта к оси дороги на
большее расстояние. Для повышения этого расстояния отвалы снабжаются
сменными удлинителями. Для планировки внешних откосов кюветов ма-
шины снабжаются специальными откосниками, прибалчиваемыми к отва-
лам. Иногда автогрейдеры Таблица 9
снабжаются сменным навес- .. . .
-. Классификация автогрелдеров (ГОСТ 9420—60)
ным оборудованием, после________________________ ____________
установки которого машина
может работать как грейдер- £ я
элеватор и снегоочиститель, Тип u * о g
бульдозер, многоножевойсме- « g
ситель, роторный снегоочи- _______________________m s ии
ститель и т. п. Некоторые
ВИДЫ ЭТОГО оборудования Легкий................... 1 7 9 63—75
(бульдозер и снегоочисти- Средний......... 11 10—12 90—100
тель) могут быть установлены Тяжелый......... III 13—15 160—180
дополнительно, т. е. без сня- Особо тяжелый . . IV—V 17—23 375—430
тия отвала. Остальные виды
монтируются взамен отвала.
Автогрейдеры классифицируют по их весу и мощности двигателя
(табл. 9). Классификация по весу в большей степени характеризует экс-
плуатационные качества этих машин, так как между весом и сцепным весом
существует определенная связь, а сцепной вес определяет тяговые возмож-
ности автогрейдеров.
Легкие автогрейдеры применяются для содержания дорог и их теку-
щего ремонта; средние машины применяются при ремонте и строительстве
дорог при грунтах до III категории включительно. Тяжелые типы автогрей-
деров предназначены для больших объемов работ и могут работать в тяже-
лых грунтовых условиях. Наибольшее распространение получают тяже-
лые автогрейдеры.
Характерным параметром автогрейдеров является длина отвала,
которая характеризует эксплуатационные возможности машины и, в част-
ности, эффективность использования ее на профилированных работах.
У современных автогрейдеров длина отвала без удлинителя обычно нахо-
дится в пределах 3000—4300 мм.
По системе управления автогрейдсры разделяют на механические,
гидравлические, комбинированные (механико-гидравлические, пневмо-
электрические и т. п.).
Наибольшее распространение получили машины с гидравлической
системой управления.
Автогрейдеры могут быть с двумя или тремя колесными осями. Ходо-
вым оборудованием, как правило, служит пневмоколесный ход. Для повы-
шения проходимости некоторые автогрейдеры снабжаются централизован-
ным регулированием давления воздуха в шинах. При слабых или очень
рыхлых грунтах давление воздуха в шинах снижается, а при движении по
твердому дорожному покрытию, во избежание большого износа шин, —
92
МАШИНЫ ДЛЯ ЗЕМЛЯНЫХ РАБОТ
повышается. Отдельные модели машин имеют комбинированное ходовое
оборудование, при котором ведущие оси снабжаются легкой гусеничной
лентой.
По управлению ходовыми колесами автогрейдеры разделяются на ма-
шины с одной передней управляемой осью и со всеми управляемыми осями.
Автогрейдеры характеризуются так называемой колесной формулой,
которую принимают в следующем виде:
АХ5ХВ,
где А — число осей с управляемыми колесами;
Б — число ведущих осей;
В — общее число осей.
Так, например, колесная формула трехосного автогрейдера, имеющего
одну переднюю управляемую ось и две задних ведущих оси, будет 1x2x3.
Эти автогрейдеры обладают более или менее постоянным сцепным весом и
хорошей устойчивостью и потому получили наибольшее распространение.
Часто также применяются автогрейдеры с колесной формулой 2x2x2,
которые имеют высокую маневренность и просты по конструкции. Этот тип
автогрейдера обладает наибольшим относительным сцепным весом, так как
он равен весу машины.
В качестве двигателя на автогрейдер устанавливаются обычно трак-
торные двигатели внутреннего сгорания. Силовая передача включает
в себя многоступенчатую коробку перемены передач, раздаточную коробку
и демультипликатор. Этими агрегатами обеспечивается несколько рабочих
и транспортных скоростей. Имеются автогрейдеры с гидромеханическими
трансмиссиями и в том числе машины с гидродвигателями, вмонтирован-
ными в ведущие колеса.
Основные рамы автогрейдеров в настоящее время выполняют преиму-
щественно в виде однобалочной сварной конструкции с расположением
балки на продольной оси машины. Это дает возможность повысить углы
установки отвала ножа в вертикальной плоскости и облегчает его вынос
в стороны. Иногда, в случае трехосной конструкции, рама выполняется
шарнирной. Шарнир располагается между первой и второй осью — вблизи
последней, и позволяет получать «изломы» рамы в горизонтальной пло-
скости на угол до 15°. При таком изломе передние колеса сдвигаются отно-
сительно задних, что повышает маневренность и устойчивость машины
в горизонтальной плоскости. Шарнир позволяет также отделять переднюю
часть машины от задней и использовать последнюю в качестве тягача.
Задние мосты автогрейдера устраиваются как без дифференциала,
так и с дифференциалом, допускающим его блокирование. Последняя
конструкция предпочтительнее, так как снижает буксование машины
при прохождении криволинейных участков пути, что особенно важно при
ее транспортных перемещениях.
Типажем предусмотрено наличие 5 классов автогрейдеров (табл. 9),
для которых рекомендовано гидравлическое управление рабочими орга-
нами. Самый тяжелый тип автогрейдера имеет колесную формулу 3x3x3.
Основные параметры автогрейдера. Кроме главного параметра —
общего веса машины G к числу основных параметров относится сцепной
вес Gcit, мощность двигателя N, сила тяги Т, колесная схема, рабочие vp
и транспортные ит скорости движения, а также то максимальное давление
Р 2, которое межет оказать нож на грунт при передаче на него части веса
машины. Общий вес автогрейдера связан со сцепным весом следующим
соотношением:
Gw = $G,
(11.43)
МАШИНЫ ДЛЯ ПОДГОТОВИТЕЛЬНЫХ РАБОТ
93
где 5 — коэффициент: при колесных формулах 3x3X3 и 2x2x2 g = 1,
а при колесной формуле Гх2хЗ £ = 0,70-х0,75.
Максимальная свободная сила тяги автогрейдера может быть опреде-
лена по сцепному весу
Т = ОсцФо, или Т = |q>f4G. (11.44)
Ниже приведены значения коэффициентов сцепления <р полученные
в результате испытаний автогрейдеров на различных поверхностях.
Растительный покров........................0,6—0,8
Свежесрезанный грунт ..............0,6—0,9
Рыхлый грунт .................... .........0,8—0,9
Сухое асфальтобетонное покрытие ...........0,6—0,8
Свободное тяговое усилие может быть использовано для срезания
стружки грунта. Тогда должно иметь место следующее уравнение:
Fk0 = (11.45)
где F — сечение стружки в м2;
ku — удельное сопротивление грунта копанию; если учесть не только
резание, но и перемещение грунта как перед отвалом, так и
вдоль него, то можно полагать k0 = 20 000х~30 000 к.Пм2.
Уравнение (11.45) позволяет определить то сечение стружки, которое
может иметь место при данном весе машины.
При профилировочных работах ввиду больших площадей сечений
кюветов последние выполняются за п проходов. Если FK — общая пло-
щадь поперечного сечения кювета в м2, то
Fn = mFK, (11.46)
где m = 1,3 — коэффициент, учитывающий неравномерность в сечении
стружки при отдельных проходах автогрейдера.
Тогда из уравнений (11.45) и (11.46) можно определить необходимый
общий вес машины
G = ^«1» кГ. (П.47)
ёфсцЯ
Число проходов по вырезанию стружки обычно составляет п — 5-г-6.
Развивающаяся на ведущих колесах общая мощность
N = Nn + Nf + N6 л. с., (И.48)
где Nn — мощность, расходуемая па вырезание грунта (полезная мощ-
ность) в л. с.;
Nf — мощность, расходуемая на передвижение автогрейдера как
тележки, в л. с.;
Nc — мощность, расходуемая на буксование, в л. с.
Полезная мощность
с- (IU9}
где vp — фактическая рабочая скорость движения автогрейдера в км/ч.
Мощность, расходуемая на передвижение автогрейдера как тележки,
определяется по формуле
Gfvr.
Nf = л. с. (11.50)
94
МАШИНЫ ДЛЯ ЗЕМЛЯНЫХ РАБОТ
Коэффициент сопротивления движению автогрейдера можно полагать
f = 0,07-4-0,10.
Мощность, расходуемая на буксование с учетом формулы (1.54),
определяется по формуле
a Gvo
No = (фсч + /)777^-6-270 л- с-
(11.51)
Необходимая мощность двигателя найдется по формуле
No =
N
1]Tpkm
Л. С,
(11.52)
где Ц,,. — к. п. д. трансмиссии;
k,n = 0,9 — коэффициент снижения мощности двигателя ввиду не-
установившейся нагрузки.
Выбранную таким образом мощность двигателя необходимо проверить
по транспортному режиму. Для этого лучше всего определить ту макси-
Рис. 57. Схема отвала автогрейдера
Таблица 10
Основные размеры отвалов
Тип авто* грейдера Примерная длина отвала L в мм Высота отвала В в мм
Особо тяжелый 3600—4300 600—700
Тяжелый . . , 3400—3700 500—600
Средний . . . 3000—3400 500
мальнуютранспортную скорость, которую может развить автогрейдер, дви-
гатель которого имеет мощность Ng
c'ruix
270ЛДь,1О
Gf
км!ч.
(11.53)
Здесь f = 0,04-4-0,05 следует принимать соответствующим движению
машины по дороге с твердым покрытием.
Если рассчитанная таким образом скорость оказывается недостаточ-
ной, что бывает весьма редко, то тогда по заданной максимальной транс-
портной скорости цшах, пользуясь выражением (11.53), находят необходи-
мую мощность двигателя Ng, которую в дальнейшем и принимают.
К основным параметрам отвала относится его длина L и высота В.
Длина отвала должна позволять вырезать из кювета стружку грунта и
перемещать ее в сторону на такое расстояние, при котором станет невоз-
можным самопроизвольное ссыпание грунта назад в кювет. Высота отвала
должна обеспечивать возможность формирования валика грунта и пере-
мещения его перед отвалом.
Многолетней практикой применения автогрейдеров, а до них — грей-
деров выработаны такие параметры отвалов, которые обеспечивают выпол-
нение этих условий (табл. 10).
Выше уже отмечалось, что отвалы автогрейдеров изготовляются
с постоянным радиусом кривизны г (рис. 57). Угол резания 6 для выполне-
ния разных работ меняется в пределах 30—80°. Обычно он равен 30—45".
Изменения этого угла производятся вручную через интервалы, примерно
МАШИНЫ ДЛЯ ПОДГОТОВИТЕЛЬНЫХ РАБОТ
95
равные 5°. Угол опрокидывания гр составляет 65—70°. Должно иметь место
следующее равенство:
5 + <о + гр — л.
Угол захвата устанавливается в зависимости от выполняемой операции
и обычно составляет 30—45° при вырезании грунта, 60—75° — при пере-
мещении грунта в сторону и 90° — при планировочных работах. Чем тяже-
лее грунт, тем меньше должен быть угол захвата при вырезании.
Угол наклона ножа в вертикальной плоскости (угол зарезания) при
резании обычно находится в пределах 0—30°. При планировке вертикаль-
ных откосов, когда нож выносится в стороны, за пределы рамы машины,
угол зарезания может достигать 90°.
Ширина колеи Во и база машины Lo (рис. 58) должны выбираться
таким образом, чтобы обеспечить свободное маневрирование отвалом.
Так, расстояние А от шарнира тяговой рамы по оси вращения поворотного
круга определяется из условия полноповоротности отвала. Поэтому мини-
мальный размер базы автогрейдера будет равен
Во min = D -j- р L2 — В2 -j- 2е мм, (11.54)
где е = 50 мм — минимальный размер между шиной и отвалом;
минимальная база трехосного автогрейдера
LQ — La 4—2—!—2~ мм> (П.55)
где А — зазор между колесами.
У трехосных машин обычно Lo = (1,4ч-1,7) L, а у двухосных Lo =
= (1,3-г-1,5) L.
96
МАШИНЫ ДЛЯ ЗЕМЛЯНЫХ РАБОТ
Вырезанный грунт не должен попадать под задние колеса машины,
поэтому ширина колеи Во должна быть увязана с длиной ножа.
Если автогрейдер имеет одну управляемую ось, то его радиус поворота
7? = —^мм, (И.56)
sin р ’ ' '
где |3 — угол поворота внешнего управляемого колеса.
Тяговый расчет. Ранее был дан метод расчета необходимой мощности
двигателя по предельно возможной силе тяги машины, которая зависит от
сцепного веса. Необходимую мощность двигателя можно также найти по
параметрам отвала машины и характеристике ее рабочего процесса.
При работе автогрейдера по вырезанию и одновременному перемеще-
нию грунта необходимая сила тяги найдется по формуле
W = + Wf + Wp + Wnp + We + Го кГ,
где WT — сопротивление перемещению автогрейдера как тележки, кото-
рое может быть найдено по формуле (II. 17) в кГ;
Wj — сопротивление сил инерции при трогании с места, определяе-
мое по формуле (1.51) в кГ;
Wp — сопротивление грунта резанию в кГ\
Wnp — сопротивление перемещению призмы волочения, которое на-
ходится по формуле (1.22) в кГ\
— сопротивление от перемещения грунта вверх по отвалу, кото-
рое рассчитывается по формуле (1.19) в кГ;
1Е0 — сопротивление от перемещения грунта вдоль отвала (в сто-
рону), которое может быть найдено по формуле (1.23) в кГ.
При зарезании ножом автогрейдера вырезается стружка треуголь-
ного сечения, поэтому сопротивление резанию найдется по формуле
Wp^k0^^Kl\ (11.57)
где йтах — максимальная толщина стружки в м;
I — длина заглубленной в грунт части ножа в м.
Удельное сопротивление грунта резанию здесь может быть принято равным
k0 = 15 ООО-г-20 ООО кГ/м2.
При планировочных работах
Wp = k„Lh кГ, (II.58)
где h — глубина резания в см.
Можно полагать, что k0 =-- 104 (1: 2,0) кПм1.
Необходимо, чтобы сила тяги на ведущих колесах превышала общее
сопротивление, т. е. Рк 1F.
Для реализации этого тягового усилия должно соблюдаться неравен-
ство Рк < ф,ч G,,..
Если автогрейдер снабжается таким сменным оборудованием, как
грейдер-элеватор, снегоочиститель и т. п., то путем поверочного расчета
необходимо убедиться в возможности работы этого оборудования. Методы
определения тех сопротивлений, которые возникают при работе этих видов
оборудования, даны в соответствующих разделах книги.
Производительность автогрейдеров. Производительность автогрейдера
выражается в объеме вырезанного и перемещенного грунта за единицу
времени в метрах отпрофилированной дороги или в квадратных метрах
спланированной площади, если автогрейдер используется на профилиро-
ванных работах.
МАШИНЫ ДЛЯ ПОДГОТОВИТЕЛЬНЫХ РАБОТ
97
Часовая производительность по объему вырезанного грунта может
бЫть выражена зависимостью
П = -ф- м3/ч, (11.59)
где у — объем призмы грунта, вырезанной и перемещенной отвалом за
один проход в М3.
ke — 0,80-4-0,90 — коэффициент использования времени;
t — время рабочего цикла в ч.
Объем призмы грунта может быть рассчитан по сечению вырезаемой
стружки и длине обрабатываемого участка. Время рабочего цикла опреде-
ляется по формуле
t = -Д- ( Ч -Ь О + + ^)-
где — время прохода по участку, которое определяется по его
длине и скорости движения машины, в мин;
и — время подъема и опускания отвала, в мин;
— продолжительность поворота автогрейдера в конце участка,
включая время, затрачиваемое на переключение скоростей,
в мин;
Автогрейдер может работать так называемым челночным способом,
т. е. без поворотов машины. При таком способе работы машина в обратном
направлении движется задним ходом, а отвал поворачивается на 180°. Та-
кая работа машины выгодна на коротких участках, где велико относи-
тельное значение времени, затрачиваемого на поворот.
Производительность в километрах отпрофилированной дороги опре-
делится по формуле
П = -^км’ч, (П.60)
I
где L — длина участка в км; I — время, используемое для его профилиро-
вания в ч,
t = — Н—st (и —- 1) ч
оср 60 ' ’
где п = 12-4-16 — необходимое для профилирования дороги число про-
ходов;
vcp — средняя скорость движения автогрейдера. При проходах, где
производится резание грунта, обычно vcp = 3-4-4 км/ч, а при
проходах, на которых осуществляется перемещение грунта,
vcP = 6ы-8 км/ч, поэтому vcp = 4-т-б км/ч. Скорости заднего
хода обычно находятся в пределах 6—13 км/ч, а передние транс-
портные скорости равны 25—45 км/ч.
Производительность автогрейдера по кирковке определяется тем же
методом, что и производительность рыхлителей [см. формулы (Н-6) и
Повысить производительность автогрейдеров возможно путем сокра-
щения времени рабочего цикла и увеличения объема вырезаемого грунта.
Сокращение времени цикла связано с повышением скоростей движения
машины, а увеличить объем грунта можно путем изменения в большую сто-
рону сечения стружки. Оба метода ведут к повышению требуемой мощности
двигателя, а следовательно, и к увеличению необходимого сцепного и об-
щего веса машины.
4 Н. Я. Хархута и'др.
98
МАШИНЫ для ЗЕМЛЯНЫХ РАБОТ
Поэтому в настоящее время имеет место тенденция к переходу на строи-
тельство тяжелых и особо тяжелых машин. Применение гидравлического
управления позволяет передавать на отвал значительную часть веса
машины, что способствует заглублению отвала в грунт. При проектирова-
нии механизмов управления в настоящее время стремятся к повышению
скоростей подъема и поворота отвала и выноса его в сторону, что в конеч-
ном счете также ведет к повышению производительности этих машин.
При этом механизмы управления отвалом устраиваются таким образом,
чтобы обеспечить максимальную его подвижность, и вынос в сторону
Рис. 59. Силы, действующие на автогрейдер
устраивается так, чтобы
возможно было срезать
грунт с вертикальных
забоев. Это увеличивает
универсальность машины
и расширяет возможные
области ее применения.
Общая схема сил, дей-
ствующих на автогрейдер.
На рис. 59 представлена
схема сил, действующих
в процессе резания грун-
та. Автогрейдер устроен с
применением самой рас-
пространенной колесной
формулы: 1x2x3. Дей-
ствующие на автогрейдер
силы можно разделить на
активные и реактивные.
К активным силам
относятся сила тяжести G
и окружная сила на ве-
дущих колесах к реактивным силам принадлежат: вертикальные
реакции на колесах и К2, силы сопротивления грунта перекатыванию
колес 7^ и F реакция грунта, действующая на отвал N, которая может
быть разложена на горизонтальную Р01 и вертикальную Р02 составляющие,
а также боковые реакции, направленные вдоль осей автогрейдера Si и S2.
Последние образуются за счет сил сцепления, развивающихся на поверх-
ностях контактов колес с грунтом.
Здесь допускается, что реакция грунта N направлена перпендику-
лярно отвалу, а реакции и Т?2 на правых и левых колесах равны и на-
правлены по их вертикальным осям. Кроме того, допускается, что реакции
R2 на всех ведущих колесах одинаковы.
Известными являются силы Рк и G, а неизвестными — Rx\ Яг\ Ff,
F„; Р01; Р02; SL и 52. Определить эти неизвестные силы можно по уравне-
ниям равновесия:
= 0; 4- 2F2 + P0l sin a — '2P* = 0; (11.61)
2K = 0; Sj — 2S2 - P01 cos <p = 0; (11.62)
2 Z = 0; + 2R, — G — />02 = 0,
(11.63)
2<=0; G/1+P02(^-4cos<p)-2/?2(z,„ + -^)=0; (11.64)-
Мг=0; P01/2 —2S2(L„+= o. (Ц.65)
МАШИНЫ ДЛЯ ПОДГОТОВИТЕЛЬНЫХ РАБОТ
99
При этом должны быть учтены следующие соотношения между силами:
Р02 = Р01 ctg a; F, - RJ; Р2 = R.J. (11.66)
По реакциям R, и R.2 можно подобрать тип и размер шин. Этим расче-
том устанавливается также распределение общей нагрузки автогрейдера
в рабочем положении по отдельным ссям. У современных машин в нерабо-
чем положении имеет место следующее распределение силы тяжести по
осям: на переднюю ось приходится 30—35% общей нагрузки, а на задние
оси 65—70%. У двухосной машины нагрузка на переднюю ось достигает
40—45 %.
Сила Р01 стремится повернуть машину вокруг центра тяжести. Такому
повороту препятствуют силы сцепления и S.2. Поэтому должна быть
проверена устойчивость машины в горизонтальной плоскости во время
работы. При таком расчете следует принять максимальное значение Р01,
которое может быть определено из следующего уравнения:
Р01 = (Gc„ + Р02) фсц. (П.67)
Устойчивость машины определится неравенством
Ро/з < *51^1 + R‘2 (2/4 + /о)- (11.68)
Здесь горизонтальные силы и S2 должны быть определены по условиям
сцепления:
Si = Ri<PC4 и S2 = R2 qy,{. (11.69)
Основные положения расчета автогрейдера на прочность. Для выяв-
ления сил, действующих на автогрейдер, следует рассмотреть два расчет-
ных положения. Первое положение соответствует работе автогрейдера по
резанию грунта. В отличие от схемы на рис. 59 предполагается, что отвал
машины настолько заглублен в грунт, что ее передняя ось вывешена, т. е.
что Rj = 0, а к задним колесам приложено максимальнее окружное уси-
лие, которое может быть определено по условию их сцепления. Определе-
ние действующих на автогрейдер при этом расчетном положении сил
производится аналогично тому, как это было сделано выше при рассмотре-
нии расчетной схемы.
Второе расчетное положение предполагает, что автогрейдер исполь-
зуется на планировочных работах, т. е. движется на повышенной скорости
(10—\2км!ч), и при этом под его отвал попадает непреодолимое препятствие.
При выявлении развивающихся динамических нагрузок предполагается,
что масса препятствия по сравнению с массой автогрейдера велика. При
этих условиях дополнительно приложенное к центру тяжести машины
инерционнее усилие
Pi =- v у ст кГ,
(11.70)
где о — скорость автогрейдера в момент встречи с препятствием в с.и/сек;
т — масса автогрейдера в кГ -ceiP/см;
с — приведенная жесткость автогрейдера, которая может быть при-
нята в пределах 600—2000, в kPjcm. Меньшее значение относится
к машинам весом в 8 т, а большее — к автогрейдерам весом 18 т.
С учетом силы Р;- надо также рассмотреть общую расчетную схему
(аналогичную рис. 59) и в результате найти другие силы, действующие на
машину.
Для расчета тяговой рамы во втором расчетном положении опреде-
ляются усилия, действующие в переднем шаровом шарнире (точка О2).
Эти усилия находятся из условий равновесия рамы. При этом можно
ГОО
МАШИНЫ ДЛЯ ЗЕМЛЯНЫХ РАБОТ
предположить, что тяги подвески заднего конца рамы к основной раме
машины находятся в одной вертикальной плоскости. Тяговая рама рас-
считывается. на разрыв.
Расчет отвала производится во втором расчетном положении. При этом
предполагается, что наезд на непреодолимое препятствие происходит как
краем отвала, так и его серединой. Расчет отвала автогрейдера аналогичен
расчету отвала бульдозера.
Расчет основной рамы машины производится при двух расчетных по-
ложениях. Здесь также необходимо найти усилия, действующие в шаро-
_ , ,, вом шарнире О,, а также
силы, передающиеся на раму
Средние скорости движения механизмов через тяги подвески тяговой
автогрейдера рамы. Следует также учесть
Наименование операции Размер- ность Скорости при управлении
I S h ф 4) 3 г гидрапли-1 ческом
Подъем отвала . . . 8—18 9—20
Опускание отвала . . см/сек 6—8 7—9
Подъем кирковщика 8—13 6—15
Боковой вынос ножа 2—5 1—4
Наклон колес .... град/сек 3—5 2—4
и вес рамы.
Расчет механизмов упра-
вления. Для того чтобы обес-
печить бесперебойную ра-
боту машины, необходимо
иметь достаточные скорости
управления различными ра-
бочими органами автогрей-
дера. Так, например, при
перегрузке двигателя, когда
есть опасность его остановки,
надо быстро разгрузить отвал
путем подъема его из грунта.
Быстрое управление отвалом
бывает также необходимым
при планировочных работах, когда требуется менять его установку
в соответствии с рельефом местности. Скорости движения различных
рабочих органов можно выбирать пользуясь данными табл. 11.
Подъем и опускание отвала производится кривошипным механизмом,
реечным механизмом или штоком гидравлического цилиндра. При механи-
зированном управлении наибольшее распространение получил криво-
шипный механизм, несмотря на то, что здесь отвал поднимается с перемен-
ной скоростью.
При расчете механизма подъема определяют подъемное усилие S„,
необходимую для выполнения этой операции мощность и производят расчет
деталей этого механизма на прочность.
Подъемное усилие рассчитывается при выглублении отвала, опущен-
ного в грунт одним концом. Предполагается, что угол захвата равен 90° и
на отвал действуют силы Р01 и Рог. Сила Р01 находится из рассмотрения
расчетной схемы на рис. 60. Тогда, согласно схеме этого рисунка,
„ pll + Р02^2 Ро1Ц _
S., ------------------------------ кГ,
<з
(П.71)
где Gr. р — вес тяговой рамы с отвалом в кГ.
Здесь можно принять Р02 = 0,5Ро1 кГ.
Расчет деталей подъемного механизма на прочность производится
применительно к случаю вывешивания передней оси автогрейдера на отвале
упором последнего в твердый грунт.
Поворот отвала в горизонтальной плоскости осуществляется зубчатым
редуктором или гидравлическим приводом. Последний может быть выпол-
нен в виде гидродвигателя. В связи с тем, что поворот отвала производится
МАШИНЫ ДЛЯ ПОДГОТОВИТЕЛЬНЫХ РАБОТ
101
лишь при полном его выглублении из грунта, затрачиваемая на это мощ-
ность незначительна и потому может не рассчитываться. При расчете дета-
лей поворотного механизма на прочность следует полагать, что отвал выне-
сен в сторону и к его концу приложена максимально возможная сила Р01,
которая рассчитывается по формуле
(11.67). Тогда, с учетом коэффициента
динамичности kd, момент на поворот-
ном круге определится по формуле
Мп.к = kdP0Xl кГм, (11.72)
где I — расстояние от конца отвала
до центра поворотного круга в м.
При работе 'автогрейдера на ко-
согоре, например, на откосе кювета
производится наклон передних (ве-
домых) колес, который придает маши-
не большую устойчивость (рис. 61, б).
Механизм наклона позволяет изме-
Рис. 60. Расчетная схема для определе-
ния усилия подъема отвала автогрейдера
пять угол наклона колес к нормали |3 в пределах 0—30°.
При отсутствии наклона (рис. 61, а) имеет место составляющая Q,
которая складывается с боковой силой S — Sv Последняя развивается
за счет резания грунта.
Рис. 61. Схема сил, действующих на переднюю ось автогрейдера
на косогоре
Поэтому общая сила, которая заносит переднюю ось машины вниз по
косогору, становится равной
Q + 5 = -^-sina4-S1, (11.73)
где Gn — нагрузка на переднюю ось с учетом силы тяжести последней,
в к Г.
Если колеса наклонены, то Q = 0 и потому положение машины на
косогоре становится более устойчивым.
Наклон колес осуществляется за счет действия силы тяжести машины,
а выведение колес из наклонного положения в вертикальное производится
за счет работы двигателя.
102
МАШИНЫ ДЛЯ ЗЕМЛЯНЫХ РАБОТ
При выпрямлении колес центр приложения силы тяжести передней
оси поднимается на величину Ah (рис. 61, е)
Д/i = -^-(1 — cospmax) см, (11.74)
где D — диаметр колеса в с.ч;
Ртах = 30° — максимальный угол наклона колеса.
Затрачиваемая для выпрямления колес работа найдется по формуле
, G :1 Д/z G,, п-, г->
Л — —[да- 2бсг( cosp) кГ-м,
и необходимая мощность в л. с. определится по формуле
N ~ C0SP)> (П.75)
где — время выпрямления колес рассчитывается по данным табл. 14
в сек;
ц — к. п. д. механизма подъема.
По полученной таким образом мощности N и выбранному tn произво-
дится расчет механизма подъема колес на прочность. Этот механизм может
быть выполнен в виде зубчатой пе-
редачи (ведущее зубчатое колесо и
зубчатый сегмент) или приводится
в действие гидравлическим ци-
линдром.
Расчет ходового оборудова-
ния. На ходовое устройство авто-
грейдера действуют усилия, яв-
ляющиеся следствием как силы
тяжести машины, так и сил, дей-
ствующих со стороны грунта на
отвал (рис. 59).
Тележка заднего моста в
обычных условиях находится под
воздействием реакций Р2 и боко-
вых сил S2. Кроме того, оси находятся под воздействием крутящих мо-
ментов Mj и М 2. Ранее для упрощения было принято, что реакции со
стороны грунта для передних и задних колес тележки одинаковы.
Однако в действительности, ввиду действия подводимого от двигателя
крутящего момента, реакции не одинаковы.
Балансир представляет собой систему зубчатых передач, где враще-
ние ходовым колесом передается от центральной шестерни через промежу-
точные зубчатые колеса (рис. 62).
Реакции /?2 и /?2 находятся из уравнения равновесия системы относи-
тельно оси подвески балансира с учетом того, что
Rz Н~ Rz = GT,
где GT — часть действующей на тележку силы тяжести машины в пГ
(11.76)
(11.77)
МАШИНЫ ДЛЯ ПОДГОТОВИТЕЛЬНЫХ РАБОТ
103
где 1 — передаточное число от ведущего вала балансира к осям ведущих
колес;
1] — к. п. д. балансирной передачи;
L bx] \ i гс /]’
(11.78)
R, =- GT 0,5 г гс
(11.79)
здесь е — расстояние ст оси подвеска балансира до горизонтальной оси
колес.
При больших крутящих моментах отношение R2/R? может достигать
1,8-2.
Такое распределение нагрузок по осям тележки должно быть учтено
при расчете корпуса балансира и проверки на прочность осей ведущих
колес.
При проверке деталей балансира и тележки на прочность необходимо
также учесть возможность случайного перераспределения нагрузок на
колеса в транспортном положении машины, когда, ввиду особенностей
рельефа пути, контакт отдельных колес с грунтом может нарушиться.
Здесь следует рассмотреть все варианты возможного отрыва от поверхности
грунта как отдельных колес, так и осей тележки. Для каждого варианта
необходимо из условия равновесия системы найти наиболее неблагоприят-
ные нагрузки, на которые надлежит и ориентироваться в дальнейшем.
§ 12. ГРЕЙДЕР-ЭЛЕВАТОРЫ
И ЗЕМЛЕРОЙНО-ФРЕЗЕРНЫЕ МАШИНЫ
Грейдер-элеваторы относятся к машинам непрерывного действия.
Они послойно срезают грунт и подают его на расстояние в несколько мет-
ров либо непосредственно к месту укладки, либо в транспортные средства.
Вырезание грунта производится ножом, а его перемещение — ленточным
транспортером. Грейдер-элеваторы применяются для возведения невысо-
ких насыпей автомобильных и железных дорог преимущественно в равнин-
ной местности, устройства выемок и каналов. Грейдер-элеваторы являются
наиболее производительными машинами, чему в значительной степени
способствует разделение функций резания и транспортирования грунта
между двумя рабочими органами — ножами и транспортерами.
По типу рабочего органа эти машины разделяются на грейдер-элева-
торы с дисковым ножом и машины с системой прямых или полукруглых
ножей. Дисковые ножи могут быть неповоротными или поворотными.
По расположению транспортера грейдер-элеваторы разделяются на
машины с поперечным и диагональным расположением транспортера.
Кроме того, иногда эти машины снабжаются поворотными транспортерами
или грунтометателями.
Грэйдер-элева’торы с системой прямых или полукруглых ножей и диа-
гональным расположением транспортеров называются стругами или диа-
гональными грейдер-элеваторами, и обычно выдают грунт только в транс-
портные средства. Последними могут служить перемещающиеся вместе
с машиной отвальные мосты или метатели.
Грейдер-элеваторы могут быть прицепными, полуприцепными (полу-
навесными), навесными и самоходными. Прицепные грейдер-элеваторы
работают в одном агрегате с тракторами и в настоящее время постепенно
104
МАШИНЫ ДЛЯ ЗЕМЛЯНЫХ РАБОТ
МАШИНЫ ДЛЯ ПОДГОТОВИТЕЛЬНЫХ РАБОТ
105
вытесняются полуприцепными и самоходными машинами. Ходовым устрой-
ством грейдер-элеваторов служат колеса, оборудованные пневматическими
шинами.
Навесные грейдер-элеваторы выполняются в виде сменного обору-
дования к автогрейдерам. Самоходные грейдер-элеваторы обычно вы-
полняются с использованием одноосных тягачей и реже имеют специаль-
ное ходовое устройство и силовой привод. По типу привода грейдер-эле-
ваторы разделяются на машины с механической трансмиссией, с гидропри-
водом или же с многомоторным дизель-электрическим приводом.
Рабочий процесс грейдер-элеваторов, т. е. вырезание и перемещение
грунта, осуществляется последовательными проходами машины по обра-
батываемому участку с поворотами в конце последнего. Некоторые машины
позволяют пройзводить работу челночным способом. Здесь в конце участка
поворачивается рабочий орган, а машина движется задним ходом.
Общий вид грейдер-элеватора представлен на рис. 63. Рабочим органом
является дисковый плуг 8, который подвешен к плужной балке 9. Послед-
нюю можно поднимать и опускать механизмом 1 и тем самым регулировать
глубину заглубления. Ленточный транспортер5подвешен к основной раме 7
при помощи цепей и канатов. Механизмом управления 3 можно регули-
ровать высоту подъема верхней или нижней его секции. Нижняя часть
транспортера поддерживается скользящей по грунту лыжей. Вырезанный
дисковым ножом грунт попадает на транспортер. Поэтому высота и даль-
ность его разгрузки зависят от установки транспортера. Длина последнего
обычно может изменяться при помощи вставки. Для очистки транспортера
от налипшего грунта имеется скребок и специальное очистное устройство,
которое состоит из движущейся поперек транспортера цепи с укреплен-
ными на ней скребками.
Двигатель 6 через редукторы и карданные валы приводит в движение
верхний барабан 4 транспортера. Движение механизмом управления
передается через коробку управления 2.
Ввиду большой нагрузки от транспортера правые колеса машины
устраиваются сдвоенными. Устойчивость машины может быть повышена
выдвижением в сторону задней полуоси.
Полуприцепные грейдер-элеваторы не имеют передних осей, а опи-
раются на трактор. Для уменьшения потери грунта кроме дискового ножа
устанавливается еще лемех, который направляет вырезанный грунт на
транспортер.
Типажом предусматриваются два типа полуприцепных машин к од-
ноосным тягачам, рассчитанных на работу с одноосными тягачами мощ-
ностью 240—300 и 375—430 л. с. Производительность этих машин соот-
ветственно составит 1000 и 1600 м9/ч.
Производительность. Производительность грейдер-элеватора зависит
от способа его работы и длины участка. Чем длиннее участок, тем произво-
дительность машины выше, так как снижаются относительные потери вре-
мени на повороты машины. При работе в отвал при двухсторонних резер-
вах, т. е. когда отсутствуют потери на холостой ход, производительность
определится по формуле
WhbLk,^
П --= ------ м3/ч, (11.80)
—---k tnoe
где h и b — толщина и ширина срезаемой стружки грунта в предполо-
жении ее прямоугольного сечения в м;
106
МАШИНЫ ДЛЯ ЗЕМЛЯНЫХ РАБОТ
kn — коэффициент, учитывающий потери на просыпание грунта;
kn = 0,9ч-0,95 — для машин с дисковым ножом и kn -
= 0.95 : 0,98 — для машин, имеющих систему ножей;
кф — коэффициент, учитывающий отклонение формы сечения
стружки от прямоугольной; для дисковых ножей k$ 0,85,
для машин с системой ножей кф «« 1;
L — длина обрабатываемого участка в м;
v — средняя скорость движения машины в м/мин-.
1,гов — время, затрачиваемое на поворот, в мин.
Рис. 64. Параметры дискового
ножа автогрейдера' а — установка
ножа в вертикальной плоскости;
б — установка ножа в плане
При работе в отвал и одностороннем
резерве
60hbknki-L
П -= - д-----------------Ms/4, (11.81)
. ~~ \ ' ~Г Мпов
J "хол
где vXOA — скорость холостого хода в
м/ми.н.
При погрузке грунта в транспорт
циклического действия
60ЬМХпкф
/7 = —-----------------------м3/ч,
~ г tnoe + (W 1)0
(11.82)
режущая кромка
образуется
где т — число транспортных единиц, по-
гружаемых на длине пути L;
tM — время, необходимое для смены
транспортного средства.
Основные параметры и тяговый рас-
чет. К основным параметрам грейдер-эле-
ваторов относятся размеры и углы уста-
новки дискового ножа, а также возмож-
ные вылет и высота установки транспор-
тера. Дисковый нож вогнут по сфере, а его
конусной заточкой. Обычно применяются
дисковые ножи, имеющие диаметры D = бОО-т-1200 мм. Применение
ножей большего диаметра оказалось нецелесообразным. Радиус кривизны
ножа устанавливается равным (0,85-4-1,0) D.
Радиус кривизны ножа может быть определен согласно схеме рис. 64.
C'J
sin -j-
D
27
(11.83)
О • w
2sm^-
Угол заострения обычно находится в пределах р = 15:-20 . Установка
ножа характеризуется углом установки у — в вертикальной плоскости
и углом захвата <р— в горизонтальной плоскости. Угол установки у зави-
сит от угла резания 5.
Оптимальные значения углов установки ножа приведены в табл. 12.
Задний угол а не должен быть менее 3°.
При работе машины необходимо не только с наименьшими усилиями
вырезать грунт, но и с минимальными потерями подавать его на транспор-
тер. Последнее условие выполняется в случае, если вырезаемый пласт
МАШИНЫ ДЛЯ ПОДГОТОВИТЕЛЬНЫХ РАЬШ
грунта попадает на середину транспортера. Это имеет место, если правильно
выбрано расстояние от наиболее приближенной к транспортеру кромки
ножа до переднего края транспортера
0,2£)2.
Таблица 12
Оптимальные значения углов
6 и <р в град
Вид грунта Угол реза« НИЯ д Угол захва- I та (f
Глинистый .... 20 40.
Суглинистый . . . 25 45
Супесчаный . . . 35 50
Песчаный .... 40 50
где В — ширина транспортера (рис. 64).
Зазор между ножом и транспортером должен быть минимальным
m = Зч-6 см. Нож заглубляется в грунт на глубину h = (0,44-0,5)D.
При таком заглублении и оптимальных углах установки ножа сечение
стружки колеблется в пределах 0,15—
0,30 D.
Для средних условий может быть
принято F "
Основные, возникающие при работе
грейдер-элеватора сопротивления, свя-
заны с копанием грунта и с перемеще-
нием машины как тележки.
Сопротивление грунта копанию
Wp = Р01 = = O,2Wo кГ. (11.84)
Удельное сопротивление грунта ко-
панию здесь можно принять k0 =
= (1,1-н 1,3) кПсм2 для грунта II ка-
тегории и k„ = (1,4ч-1,7) кГ/см2 для
грунта III категории.
Сопротивление перемещению грейдера-элеватора как тележки най-
дется с учетом вертикальной составляющей сопротивления копанию, кото-
рая
может быть принята как доля горизонтальной составляющей
WT = [(С + 4- да (/ + i), (П.85)
где С1№ — вес находящегося на транспортере грунта в кГ;
ф == 0,5 — отношение вертикальной составляющей сопротивления
копанию грунта к горизонтальной;
f — 0,10-4-0,15 — коэффициент сопротивления перекатыванию;
i — уклон местности
<и-86)
где П — производительность грейдер-элеватора в м3!ч\
= 1600ч-1800 кГ/м3 — объемный вес грунта;
L — длина ленты транспортера в м;
— скорость ленты транспортера в м!сек.
При определении мощности двигателя надо также еще учесть мощ-
ность, расходуемую на привод транспортера и подъем плужной балки,
ввиду того, что эти движения обычно производятся во время работы ма-
шины.
Мощность, расходуемая на привод транспортера, найдется по формуле
NTP^. ^^nH + fnpni+-^) л. с., (П.87)
где П — производительность грейдер-элеватора в т/ч;
Н — высота подъема грунта транспортером в м;
108
МАШИНЫ ДЛЯ ЗЕМЛЯНЫХ РАБОТ
fnp 0,05 — приведенный коэффициент сопротивления движению
ленты с учетом трения в подшипниках;
v — скорость ленты транспортера в м!сек\
1] = 0,5:0,7 — к. п. д. транспортера.
Мощность, затрачиваемая на подъем плужной балки, определяется
по формуле
^.6 = -g- л. с., (11.88)
где G6 — часть силы тяжести балки, воспринимаемая канатами или цепями !
подъемного механизма в кГ\ 1
v — скорость подъема в м/сек-,
г) — к. п. д. механизма подъема. 1
В случае прицепных машин привод транспортера и механизмов управ- 1
ления производится от отдельного двигателя. 1
Внешние силы и расчет на прочность. В рабочем положении на грей- |
дер-элеватор с дисковым ножом действуют следующие силы (рис. 65). Ак- I
Рис. 65. Силы, действующие на грейдер-элеватор
тивные: вес тягача GT, вес 1
транспортера с грунтом Сг+г, 1
вес рамы, рабочего оборудо- 1
вания и остальных частей ма- I
шины G3 и сила тяги на веду- |
щих колесах Рк; пассивные: 1
составляющие сопротивле- I
ния грунта копанию Р01; Р02 j
и Р03, вертикальные реакции (
колес /?t; R2; R3 и боко- (
вые реакции колес Sr; S.2; ;
S3 и S4 и сопротивления пе-
рекатыванию колес F^, F2; .
F3 и
Определение неизвест-
ных сил производится из
уравнений равновесия подоб-
но тому, как это имело место
в случае автогрейдера. При
этом направленная в сторону,
противоположную движению
машины, составляющая ко-
пания Р01 может быть опре-
делена из уравнения тягового баланса для самоходной машины
Р01 = Р« - WT
и для прицепного грейдера-элеватора
Ли = т -
где Т — сила тяги на крюке тягача.
Вертикальная Р02 и боковая Роз составляющие сопротивления копа-
нию могут быть определены как
Лп = ФЛ)! и Л)3 == ф'Лп. (И.91)
Значения фиф' зависят от положения дискового ножа и могут быть
найдены по углам захвата и установки.
Определить соотношения между реакциями на левые и правые колеса
машины возможно по положению ее общего центра тяжести.
(11.89)
(11.90)
МАШИНЫ ДЛЯ ПОДГОТОВИТЕЛЬНЫХ РАБОТ
109
Расчет на прочность отдельных узлов машины производится в пред-
положении внезапного наезда нижней точкой ножа на непреодолимое пре-
пятствие. При этом рассматриваются два варианта — нож опущен на пол-
ную глубину и нож находится на уровне поверхности грунта. Коэффициент
динамичности при этом принимается равным kg = 1,3. Для определения
развивающихся в этом положении усилий рассматривается расчетная схема,
аналогичная схеме на рис. 65. Здесь рассчитывается нож с кронштейном,
плужная рама и основная рама машины.
Основная рама проверяется на прочность в предположении наезда на
непреодолимое препятствие задних колес машины, рабочее оборудование
которой находится в транспортном положении.
Должен быть рассмотрен также случай работы машины на косогоре,
поперечный уклон которого близок к предельно допустимому по условиям
устойчивости.
Рис. 66. Диагональный грейдер-элеватор _
/ — трактор; 2 — ножи; 3 — транспортер; 4 — двигатель; 5 — гидроцилиндр
вид машины представлен на рис. 66. Рабочий орган этой машины состоит
из системы трех ножей: вертикально поставленного подрезающего, пла-
нирующего ножа, который установлен перпендикулярно направлению
движения машины с постоянным углом резания 30—35°, и косо располо-
женного подгребающего ножа. Система этих ножей! обеспечивает выреза-
ние стружки грунта и подачу ее .на транспортер. В связи с тем, что
ширина захвата ножа больше ширины транспортера, обеспечивается не-
прерывность подачи грунта с минимальными потерями. Вместе с тем, бо-
ковое смятие стружки грунта при поступлении ее на транспортер
несколько повышает сопротивление копанию. Транспортер и гидравличес-
кая система управления приводятся в движение от отдельного устано'
вленного на машине двигателя.
Необходимая сила тяги определяется по сопротивлениям грунта ко-
панию, передвижению машины как тележки и работе, затрачиваемой на
подъем грунта транспортером. Сопротивление копанию может быть най-
дено по формуле
Wp = bkkn кГ, (11.92)
где Ь и h — ширина и глубина резания грунта;
£0 1,5~н2,5 кПсм2 — удельное сопротивление копанию с уче-
том сопротивлений, связанных с деформацией стружки при
подаче грунта на транспортер.
Сопротивление движению машин как тележки и работа, затрачивае-
мая на подъем грунта транспортером, рассчитывается тем же методом, что
и в случае грейдер-элеватора с дисковым ножом.
но
МАШИНЫ ДЛЯ ЗЕМЛЯНЫХ РАБОТ
>= 0/ =
Составляющая сопротивления копа- 1
нию, которая действует в направлении, 1
противоположном движению машины (Ро1), ,
может быть определена по значению сво- .
бодной силы тяги, как это было сделано в
случае машины с дисковым ножом. На
основе анализа работы косого клина
3. Е. Горбузовым выведены выражения для
определения поперечной Риз и вертикаль-
ной Р03 составляющих. Применительно к
суглинистым грунтам и обычно применяе-
мым углам установки ножей можно по-
лагать, что \
Р02 = (0,3-0,4) Р01 и Роз - (0,2-0,3) Рп. j
(Н-93) J
Расчет агрегатов и деталей этих 1
грейдер-'элеваторов на прочность произ- ?
водится в предположении наезда ножами
на непреодолимые препятствия. При этом
учитывается коэффициент динамичности
k„ 1,3. )
Землеройно-фрезерные машины. Зем-
леройно-фрезерные машины относятся к .
числу машин, имеющих рабочий орган ро-
торного типа. Они предназначены для по-
слойной разработки грунта в выемках и
каналах и применяются главным образом
в гидротехническом строительстве. Здесь
грунт разрабатывается консольно закре-
пленной впереди машины цилиндричес-
кой фрезой 1 (см. рис. 14), которой он
уже в разрыхленном состоянии подается
на подгребающий нож 2, ас него на при-
емный транспортер 3. Далее грунт пере-
гружается на расположенный перпендику-
лярно к направлению движения машины
выдающий транспортер 4. Работа этой ма-
шины аналогична работе грейдер-элева-
тора с системой прямых ножей. Основ-
ное различие принципиальных схем этих
машин состоит в том, что здесь ножевая
система заменена фрезой, снижающей
тяговое сопротивление настолько, что при
ширине захвата фрезы в 3 м имеется воз-
можность разрабатывать забой высотой
до 2 м. Общий вид машины представлен
на рис. 67.
Диаметр фрезы выбирается в зависимо-
сти от высоты забоя Н по формуле
--= 0,8/7. (11.94)
Окружная скорость фрезы выбирается
равной 1,5—2,0 м!сек. Ширина захвата
МАШИНЫ ДЛЯ ПОДГОТОВИТЕЛЬНЫХ РАБОТ 111
должна быть больше ширины гусеничного хода. Расстояние между смеж-
ными ножами фрезы по условию наименьшего расхода энергии выби-
рается в пределах (2,5-ь4) Ь, где b — ширина режущей кромки ножа.
Необходимая мощность двигателя
N = NP+ Nn.T + N„.T + Ne.M + NT, (11.95)
где No — мощность, расходуемая на копание грунта;
т и Ng.T — мощности, расходуемые на приводы приемного и вы-
дающего транспортеров, которые могут быть рас-
считаны по формуле (11.87);
Ne. м — мощность, расходуемая на работу вспомогательных
механизмов (механизм подъема рабочих органов и т. п.),
которая составляет 5—7% от общей мощности;
NT — мощность, расходуемая на перемещение машины.
Затрата мощности на копание грунта определится по формуле
Np= 270000г] Л' С’’ (И.96)
где П — производительность машины грунта, измеренная в плотном
теле в м3/ч;
k0 = 5000д-25 ООО к,Г!м2 — удельное сопротивление копанию в к.Г1м?",
11 = 0,50ч-0,65 — к. п. д., учитывающий потери, связанные не только
с механизмом привода фрезы, но и с ее трением о поверхность
забоя.
При перемещении машины в рабочем положении необходимо учитывать
также работу, затрачиваемую на срезку грунта. Такая срезка произво-
дится откосниками и подгребающим ножом. Последним срезаются «гре-
бешки» грунта, образующиеся между ножами фрезы. Поэтому
NT = NT1 + + NT3 л. с., (Н.97)
где А'п — мощность, расходуемая на перемещение машины как гусенич-
ной тележки, в л. с.;
NTi — мощность, затрачиваемая на срезку грунта откосниками,
в л. с.
NTi — мощность, необходимая для срезки «гребешков» грунта,
в л. с.
(И'981
И
у „ = __ л с (П.99)
г3 270000Щ ’ '
где Fx — поперечное сечение стружки грунта, срезаемой откосниками, вм2;
v — скорость движения машины в лтМ;
k0 — удельное сопротивление копанию; здесь k0 = 5000 и-8000 кПмг;
т|г — к. п. д. ходового механизма;
F — поперечное сечение траншеи;
е = 0,05-4-0,10 — отношение площади поперечного сечения «гре-
бешков» к сечению траншеи.
Наиболее рациональным приводом для машин такого рода является
многомоторный дизель-электропривод.
112
МАШИНЫ ДЛЯ ЗЕМЛЯНЫХ РАБОТ
а) 5)
Рис. 68. Схема разработки грунта
обрушением: а — при вскрышных ра-
ботах; б — при отрыве траншей
Разработка грунта обрушением. Метод разработки грунта обруше-
нием предложен Н. Г. Домбровским, Г. В. Родионовым и В. М. Владими-
ровым. Сущность метода состоит в том, что разрабатывается не весь объем
грунта, а специальным органом делается врубовая щель, благодаря чему
определенный объем грунта обруши-
вается и при этом измельчается
(рис. 68, а). Применяя этот метод,
можно значительно сократить расход
энергии на копание грунта. Несмотря
на то, что несколько увеличивается ра-
бота, затрачиваемая на подъем грунта,
энергетический баланс при правильно
выбранной высоте забоя складывается
в пользу этого метода.
В настоящее время на базе трак-
тора ДЭТ-250 спроектирована машина,
которая позволяет производить работу по отрывке траншей по схеме, при-
веденной на рис. 68, б. Здесь боковые прорези траншеи прорезаются на-
клонными профилирующими шнеками. Вторым рабочим органом машины
является ковшевой ротор, прорезающий центральную прорезь и выгре-
бающий тот грунт, который обрушился в траншею.
Рис. 69. Зависимость предела проч-
ности грунта при одноосном сжа-
тии от отрицательной температуры:
/ — песок; 2 — суглинок
§ 13. РАЗРАБОТКА МЕРЗЛЫХ ГРУНТОВ
ЗЕМЛЕРОЙНЫМИ МАШИНАМИ
Физико-механические свойства мерзлых грунтов и, в частности, их
прочность существенно зависят от количества содержания в них незамерз-
шей воды, т. е. от температуры.
В песках и супесях вся вода практически замерзает при температуре
до —3° С. В суглинках и особенно в глинах, даже при весьма низких
отрицательных температурах (—30ч-50“ С),
может содержаться еще определенное ко-
личество незамерзшей воды.
При замерзании грунта происходит
резкое увеличение его прочности и осо-
бенно при температурах в пределах от О
До —7' С, когда замерзает значительная
часть содержащейся в грунте воды (рис. 69).
В мерзлом состоянии песок при большей
прочности обладает более высокой хруп-
костью, чем мерзлые суглинки и глины.
Последние, особенно при небольших отри-
цательных температурах, обнаруживают
большую вязкость, что значительно за-
трудняет их разработку машинами удар-
ного действия.
Трудоемкость земляных работ в зим-
нее время повышается ввиду более вы-
сокой прочности грунта, что вызывает
перед разработкой; существующего ограничения как в содержании, так и
в размерах мерзлых комьев; тяжелых погодных условий (отрицательные
температуры, снегопады и т. п.).
Подготовка мерзлого грунта к разработке осуществляется оттаива-
нием грунта (термическое оттаивание, оттаивание паром, электрооттаива-
ние, засоление и т. п.) или его рыхлением.
необходимость его рыхления
МАШИНЫ ДЛЯ ПОДГОТОВИТЕЛЬНЫХ РАБОТ
113
Рыхление грунта может производиться машинами ударного действия;
машинами, разрушающими мерзлый грунт резанием; взрывным способом;
гидродинамическим способом (при сверхскоростных истечениях жидкости)
или тепловым резанием мерзлого грунта.
Машины ударного действия производят разрушение грунта путем
последовательных ударов рабочего органа о грунт. По характеру действия
различают машины ударного действия со свободным падением рабочего
органа (клин-молот, шар-молот) и машины с принудительным внедрением
рабочего органа в мерзлый грунт. Принудительное внедрение клина про-
изводится ударами по нему свободнопадающего груза (ударный клин),
а также многочастотными ударными органами дизельмолотов (клин с ди-
зель-мол отом) или вибраторов (виброклин).
К машинам, рыхлящим мерзлый грунт резанием, относятся: ба-
ровые машины, имеющие рабочие органы в виде бесконечной цепи
с установленными на ней резцами; дисковые или фрезерные машины
с рабочим органом в виде диска с резцами, а также цепные и роторные
траншейные экскаваторы, приспособленные для разработки мерзлых
грунтов.
Наименее энергоемким из существующих в настоящее время способов
разрушения мерзлых грунтов является взрывной способ. Так, энергоем-
кость разрушения мерзлых грунтов взрывом в 10—13 раз меньше, чем
при резании. Однако по условиям работ в большинстве случаев он не
может быть применен.
Одними из наиболее перспективных являются машины, производя-
щие рыхление мерзлых грунтов методом крупного ударного скола. Рабо-
чим органом здесь является клин, забиваемый в грунт специальным меха-
ническим копром. Средняя энергоемкость подобных машин при разруше-
нии мерзлого грунта составляет 0,4—0,8 квт-ч/м3. Производительность
этих машин обычно составляет 45—120 мл в смену. К этой группе машин
относятся также и навесные рыхлители (например, навесной рыхлитель
на тракторе ДЭТ-250 типа Р:МГ-2), являющиеся эффективными машинами
для рыхления мерзлого грунта толщиной до 60—100 см. Производитель-
ность составляет 40:—200 м3 в смену.
Эффективными машинами являются также роторные траншейные
экскаваторы, приспособленные для разработки мерзлых грунтов. Однако
энергоемкость последних выше, чем машин ударного действия, и состав-
ляет 5—8 квт-ч/м3. Преимущество роторных траншейных экскаваторов
заключается в том, что при помощи этих машин грунт одновременно отде-
ляется от массива и транспортируется в отвал или в транспортные средства,
в то время как при разработке грунта сколом необходимы машины для
уборки грунта в отвал. То же имеет место при разработке мерзлого грунта'
баровыми и фрезерными машинами. Уборка отдельных блоков мерзлого
грунта, нарезанных баровыми машинами, должна осуществляться другими
средствами. Блоки мерзлого грунта практически не могут быть исполь-
зованы при устройстве большинства земляных сооружений и вывозятся
в отвалы.
Степень разрушения грунта ударными нагрузками определяется его
физико-механическими свойствами, геометрией рабочего органа и накоп-
ленной к моменту удара кинетической энергией. Кинетическая энергия
в свою очередь зависит от массы рабочего органа и его скорости. Для обес-
печения нормальной работы экскаватора с емкостью ковша 0,65—1,0 м3
темп работы по рыхлению верхнего мерзлого слоя должен быть не менее
15 м3/ч. Для достижения такой производительности необходимая работа
Ударов должна быть не менее 7500—8000 кГ-м.
114
МАШИНЫ ДЛЯ ЗЕМЛЯНЫХ РАБОТ
Разрушение мерзлого грунта при внедрении клина носит скачко-
образный характер. Вначале происходит упругая деформация грунта,
а по достижении определенного напряжения развивается пластическая
деформация, которая приводит к разрушению грунта на некоторую глу-
бину. Далее процесс повторяется.
Глубину внедрения клина h при свободном падении рабочего органа
или в результате ударов свободно падающего груза определяют, исходя
из равенства живой силы удара и работы силы, затрачиваемой на разру-
шение грунта.
/г=|
QHn
CM,
(11.100)
где Q — вес падающей части рабочего органа в кГ;
Нп — высота падения в см;
Ь — ширина клина в см;
о,, — предел прочности грунта в кПсм2-,
k0, kr — безразмерные коэффициенты, зависящие от геометрии ра-
бочего органа и физико-механических свойств грунта
(табл. 13 и 14).
Разрушение грунта обычно наступает при заглублении клина на глу-
бину, составляющую 1/3—1/2 обшей толщины мерзлого слоя.
Эффективность работы машин удар-
ного разрушения мерзлого грунта опре-
деляется правильным выбором основ-
ных параметров рабочего оборудова-
ния: формы и размеров клина, вели-
чины одного удара, отношения массы
клина к массе груза. Форма клина
определяется высотой клина Н, углом
его заострения а и шириной/?. Высота
клина зависит от глубины промерзания.
При глубине промерзания до 1,3—1,5 м
клинья существующих машин для удар-
ного разрушения мерзлых грунтов
имеют высоту в среднем 0,8—1,2 м..
Угол заострения клина а при сколе
грунта назначается в пределах 20—30э; при этом лучше работает
односкосный клин. Д. П. Волков установил, что для получения надеж-
ного скола грунта расстояние между клином и краем забоя должно иметь
отношение
Значение коэффициента k{
Ширина клина b в СМ ^0
5 0,5—0,6
10 0,4—0,5
15 0,3—0/1
20 0,2—0,3
30 0,1—02
1за6 = (2-4-2,5) b см. (11.101)
При этом b не должно превышать 400—500 мм, так как в противном слу-
чае сильно возрастает масса клина. Для повышения 1заВ рабочий орган
выполняют из двух-трех жестко скрепленных между собой клиньев.
Большое значение для эффективности работы машин с принудитель-
ным внедрением рабочего органа ударами свободно падающего груза
имеет правильный выбор массы клина и падающего груза. Отношение
массы клина к массе ударного груза обычно принимают равным 0,2—0,4,
и оно не должно быть более 0,6—0,7.
Общая энергоемкость разрушения зависит как от работы единичного
удара, так и от количества ударов. Общая энергоемкость процесса сни-
жается при росте работы единичного удара в большей мере, чем за счет
увеличения количества ударов.
МАШИНЫ ДЛЯ ПОДГОТОВИТЕЛЬНЫХ РАБОТ
115
Табл иц а 14
Значение коэффициента k1
Грунт Влажность В % Температура грунта в град
—3 —10 —15 —25
6 0,1—0,2 0,2—0,3 0,3—0,4 0,4—0,5
Несвязный 11 0,2—0,3 0,4—0,5 0,5—0,6 0,6—0,7
18 0,6—0,7 0,7—0,9 0,8—0,9 0,8-1,0
17 0,2—0,4 0,4—0,5 0,5 -0,8 0,6—0,9
Связный 25 0,3—0,5 0,4—0,6 0,6—0,9 0,8—1,0
50 0,1—0,2 0,2—0,4 0,3—0,5 0,4—0,7
Для забивки клиньев при разработке мерзлых грунтов применяются
следующие установки:
1. Грузы, смонтированные в одно целое с клиньями, которые под-
нимаются при помощи лебедки трактора. При этом к одному грузу обычно
прикрепляется несколько клиньев. Так, например, трехклинный рыхли-
тель сконструирован как навесное оборудование к трактору С-80, имеет
вес 3,6 т и падает по направляющим с высоты 2,8 м. Достоинством таких
устройств является их простота, а недостатком —значительные динами-
ческие воздействия на раму ма-
шины.
2. Установки с механическим
копром. Клинья изготовляются ли-
тыми из стали, так как сварные
конструкции не выдерживают дина-
мических нагрузок.
3. Установки, в которых удар-
ным механизмом служит дизель-мо-
лот. Преимуществом применения
дизель-молота является большое ко-
личество ударов в единицу времени.
Вместе с тем энергия одного удара
невелика и, кроме того, дизель-молот
трудно запускать!в зимних условиях.
Рис. 70. Схема навески виброклина на
трактор:
/ — противовес; 2 — несущая рама; 3 —
тросы подвески виброклина; 4 — направляю-
щая рама; 5 — вибратор; 6 — клин
4. Установки с виброклином (рис. 70). Большое количество ударов
в единицу времени (730—850 колебаний в минуту) и большая возмущаю-
щая сила 12—18 т являются значительным преимуществом машин подоб-
ного типа. К недостаткам относится быстрый выход из строя электромо-
тора вибратора и других элементов конструкции, подвергающихся дей-
ствию вибрации.
Для разрушения мерзлых грунтов резанием применяются фрезы,
цепные пилы (бары), шнеки или одиночные резцы, смонтированные на
ковшевой цепи траншейных экскаваторов, а также многоковшевые роторы.
Резание мерзлых грунтов осуществляется резцом, который весьма
быстро приобретает большую поверхность износа. Поэтому усилия, воз-
никающие на задней грани, превышают те, которые развиваются на пе-
редней грани. При работе на мерзлом грунте на резец действуют: сила
116
МАШИНЫ ДЛЯ ЗЕМЛЯНЫХ РАБОТ
сопротивления резания — Рр, которая приложена к грани; сила Рп,
стремящаяся отжать резец от грунта, и сила Рт, направленная вдоль пло-
щадки затупления (рис. 71).
Усилия резания Рр для резцов шириной от 1 до 10 см можно рас-
считывать по формуле л. п. леленина
Рр = ch (1 + 0,55S) (1
Рис. 71. Силы, действующие на резец при
резании мерзлого грунта: а — острый резец;
б — профиль изношенной площадки резца
совпадает с траекторией резца; в — резец с
затупленной режущей кромкой; г — про-
филь изношенной площадки, который не
совпадает с траекторией резца
необходимая для работы фрезерных м
При скорости подачи в пределах 20—1
<11.102)
где С — коэффициент сопротивляе-
мости резанию (табл. 15);
h — глубина резания в см;
3 ;— ширина режущего про-
филя в см;
а — угол резания в град;
pi — коэффициент, учитываю-
' щий влияние условий ре-
зания (при блокирован-
ном резании р. = 1,0; при
полублокированном у —
= 0,7 н-0,75).
Машины фрезерного типа про-
резают щели в мерзлом грунте.
Недостатком оборудования подоб-
ного типа является необходимость
иметь фрезы большого диаметра D#
Оф = (2,5-ь 3) Нп см, (11.103)
где Нп — глубина прорези в см.
При большом диаметре диск
фрезы оказывается неустойчивым
и часто выпучивается. Мощность,
1шнн, зависит от скорости подачи.
0 м!ч она составляет 11—30 кет.
Таблица 15
Значение коэффициента С
Грунт Влажность в % Температура грунта в град
—3 —5 —10 —15
12 55—70 90—95 130—145 170—185
Супесь 15 120—140 170—180 200—225 240-255
20 140-180 210—230 270—290 340—360
10 37—43 43—50 43—50 43—50
Суглинок 20 145—155 185—195 225—240 265—275
30 130—145 155—165 220—235 265—275
17 80—90 100—110 160—165 190—195
Глина 24 120—125 145—155 185—195 210—230
31 145—155 160— 165 200—215 220—235
МАШИНЫ ДЛЯ ПОДГОТОВИТЕЛЬНЫХ РАБОТ
117
Для разработки мерзлых грунтов в последнее время стали применять
машины с рабочим органом в виде режущих цепей — баров. Бары обычно
являются навесным оборудованием к тракторам (рис. 72) или многоковше-
вым экскаваторам. Цепи баров приводят в движение через редуктор от
вала отбора мощности. Недостатком этих машин является абразивный
износ шарниров цепи и возникновение при работе значительных динами-
ческих нагрузок. Усилие, действующее на бары Р, можно найти в предпо-
ложении, что вся полезная мощность двигателя расходуется на резание
грунта и преодоление трения, по фор- _ _
Рис. 72. Схема баровой машины на тракторе:
/ — гидроцилиндр подъема и опускания бары; 2 —
редуктор, <3 — бара
Рис. 73. Схема расстановки резцов
н клиньев рабочего органа на экска-
ваторе ЭТУ-353
где Рн — сила натяжения цепи, слагающаяся из силы первоначального
натяжения и натяжения от центробежных сил, в кГ\
Рр — равнодействующая сил резания в кГ;
Рт — равнодействующая сил трения в кГ-,
г]ч — к. п. д. цепи и ведомой звездочки;
Ч„ер — к. п. д. передачи; ,
п — число оборотов ведущей звездочки в об/лшя;
А? о — радиус ведущей звездочки в см.
Для снижения энергоемкости процесса разрушения грунта на цепях
устанавливаются не только резцы, но и клинья. Резцы прорезают в грунте
канавки, в оставшиеся между канавками объемы грунта скалываются,
клиньями. На рис. 73 представлена схема расстановки резцов и клиньев.
Скорость движения цепи составляет 0,5—0,8 м!сек.
При увеличении толщины срезаемого слоя грунта снижается энерго-
емкость процесса резания, но при этом необходимо,, чтобы все элементы
рабочих органов обладали высокой прочностью и жесткостью. Этому
условию удовлетворяют приспособленные для работы в зимних условиях
некоторые типы траншейных роторных экскаваторов. Рабочим органом
здесь служит ротор с ковшами, который опирается на сдвоенное пневма-
тическое колесо. Ковши оборудованы резцами (клыками). Внутри ротора
установлен криволинейный роторный транспортер. Производительность
такой машины достигает 250 м в смену.
Сопротивление резанию может быть найдено по формуле
Рр = VpFJt кГ, (II. 105)
Д' Р 1 х
118 МАШИНЫ ДЛЯ ЗЕМЛЯНЫХ РАБОТ
где ол — прочность мерзлого грунта при испытании его на одноосное
сжатие;
Fcp — среднее сечение стружки, снимаемой резцом, в см2;
k—коэффициент учитывающий условия резания (при свободном
резании k = 0,5, при блокированном резании k = 1,5).
Сила трения по задней грани резца
Рт = — кГ, (11.106)
где а — ширина площадки затупления в см;
= 0,3 — коэффициент трения:
k« — 2,5-е3,0 — коэффициент сопротивления внедрению резца;
S2 — подача на один резец, которая определяется по формуле:
5г = -|^сл1, (11.107)
где — скорость рабочего хода, в .и/'лшн;
г — число резцов в одном ряду в шт.;
п — число оборотов ротора в минуту.
Необходимо также учесть сопротивления, развивающиеся при сре-
зании ковшом оставшихся между резцами объемов грунта, и силы трения
ковша о грунт, которые определяются обычными методами.
§ 14. АВТОМАТИЗАЦИЯ РАБОЧИХ ПРОЦЕССОВ
ЗЕМЛЕРОЙНЫХ МАШИН
Автоматизация управления рабочими процессами землеройных машин
производится в целях наиболее полного использования мощности двига-
теля, повышения качества работ и облегчения труда обслуживающего
персонала.
Нагрузка на рабочие органы землеройно-транспортных машин,
а следовательно, и необходимая мощность меняются в зависимости от
толщины срезаемого слоя грунта, и поэтому даже при однородных грунтах
нагрузка является переменной. При работе таких машин как скреперы
и бульдозеры нагрузка изменяется в процессе копания еще и потому, что
возникают дополнительные сопротивления, связанные с наполнением ков-
шей или с ростом призмы волочения.
При снижении нагрузки ниже той величины, которая соответствует
номинальной мощности привода, возникают неиспользуемые резервы
мощности. Наоборот, в моменты времени, когда нагрузка превышает номи-
нальное значение, имеет место перегрузка двигателя. Для использования
конструктивных возможностей машины всегда выгодно работать на ре-
жиме, близком к полному использованию мощности двигателя. Поэтому
необходимо менять режим работы машины. Такая перемена режима может
происходить за счет изменения как толщины срезаемой стружки грунта,
так и скорости резания. У землеройно-транспортных машин изменение
скорости резания возможно только путем изменения скорости движения
всей машины.
Изменение толщины срезаемой стружки, или, что тоже, регулирова-
ние заглубления ножа или отвала машины в грунтможет быть осуществлено
установкой автоматического регулятора давления. Чувствительным эле-
ментом последнего является золотник (рис. 74). Положение золотника
изменяется в зависимости от давления в цилиндре динамометра, уста-
новленного в узле крепления отвала и гидравлического цилиндра испол-
МАШИНЫ ДЛЯ ПОДГОТОВИТЕЛЬНЫХ РАБОТ
119
нительного органа, который изменяет положение отвала. Для того чтобы
переходный процесс от одного режима к другому носил плановый харак-
тер, гидроцилиндр (сервомотор) имеет обратную связь с золотником, ко-
торая осуществляется через специальный механизм —изодром. Последний
состоит из заполненного маслом цилиндра, который соединен со штоком
гидроцилиндра. В цилиндре может перемещаться поршень, имеющий кали-
брованное отверстие (жиклер). Поршень связан с рычагом обратной связи,
а последний — с втулкой золотников.
При изменении внешнего воздействия на отвал происходит отклонение
золотника 3 от нейтрального положения, вследствие чего поршень гидро-
Рис. 74. Гидравлический усилитель
с изодромом:
/ — золотниковый распределитель; 2 —
гильза; 3 — золотник; 4 — окно; 5 —
гидроцилиндр (сервомотор); 6 — корпус
изодрома; 7 — поршень изодрома; 8 —
калиброванное отверстие (жиклер); 9 —
рычаг обратной связи
Рис. 75. Схема устройства для автоматического
регулирования угла наклона отвала:
/ — рама автогрейдера; 2 — гидроцилиндр. регу-
лируемый вручную; 3 — гидроцилиндр, регулируе-
мый автоматически; 4 — устройство маятникового
типа; 5 — сельсин маятника; 6 — отвал: 7 — клапаны,
регулируемые вручную; 8 и 12 —- электрические
сервоклапаны; 9 — сельсин селектора узла; 10 —сель-
син маятника; // — усилитель
цилиндра начинает перемещаться. Вместе с ним смещается цилиндр изо-
дромного устройства. Если эти смещения происходят медленно, то масло
успевает перетекать через калиброванное отверстие 8 из одной полости
корпуса изодрома 6 в другую полость, и тогда поршень 7 не смещается.
При быстром движении происходит смещение поршня. При этом, ввиду
обратной связи, гильза золотника смещается так, что происходит закры-
тие окон. По мере такого закрытия скорость поршня гидроцилиндра сни-
жается. В конце процесса под действием пружины поршень изодрома.
Устанавливается в нейтральное положение. В такое же положение уста-
навливается и гильза золотника.
Изменение скорости резания может производиться автоматическим
регулятором, который поддерживает постоянную мощность привода путем
изменения передаточного числа ходового механизма.
Для планирования и разравнивания дорожных оснований необходимо
угол наклона автогрейдера поддерживать постоянным. В противном слу-
чае не может быть достигнуто нужное качество работ. Для этой цели раз-
работан автоматический механизм, принципиальная схема которого изоб-
ражена на рис. 75.
В этом механизме один из цилиндров подвески отвала регулируется
вручную, а второй цилиндр — автоматически. На отвале укреплен чув-
ствительный элемент маятникового типа. Ротор сельсина соединен
120
МАШИНЫ ДЛЯ ЗЕМЛЯНЫХ РАБОТ
с шарниром маятника, а статор прикреплен к кожуху маятника, который
установлен на отвале автогрейдера. При изменении положения ножа ста-
тор перемещается с кожухом, а маятник и ротор остаются неподвижными,
поэтому выходной сигнал сельсина пропорционален наклону ножа.
Требуемый угол наклона задается оператором и автоматически под-
держивается механизмом. Угол устанавливается управляемым вручную
гидроцилиндром. Такой же угол устанавливается и на селекторе, который
расположен в кабине оператора. Вырабатываемый в этом устройстве
электрический сигнал сравнивается с сигналом, полученным от чувстви-
тельного элемента маятникового типа. Разница в импульсах между этими
двумя сигналами обеспечивает получение сигнала ошибки, который уси-
ливается и затем подается на электрогидравлический сервоклапан. Послед-
ний воздействует на гидроцилиндр 3, который и перемещает нож в требуе-
мое положение. Такое перемещение происходит до того момента, когда
сигнал ошибки становится равным нулю.
Величина выходного сигнала сельсина селектора зависит от угла
поворота его ротора, который, в свою очередь, определяется требуемым
углом.
§ 15. МАШИНЫ ДЛЯ ГИДРАВЛИЧЕСКОЙ РАЗРАБОТКИ ГРУНТА
Гидромеханическим способом разработки грунтов называют такой
способ, при котором все процессы — разработка грунта в карьере, пере-
мещение его к месту укладки и, наконец, сама укладка грунта в насыпь
или в отвал — производятся с помощью воды. При этом грунт можно раз-
рабатывать двумя способами: размывать его подаваемой гидромонитором
струей воды или всасывать из-под воды землесосным снарядом. В обоих
случаях грунт, перемещаясь с водой, образует так называемую пульпу,
которая перемещается по каналам, лоткам или трубам к месту его укладки.
Укладка производится при уменьшении скорости потока пульпы.
Применение гидромеханизации выгодно на открытых сосредоточен-
ных разработках при наличии благоприятного рельефа местности, источ-
ников воды и электроэнергии. В связи с этим она нашла широкое приме-
нение в гидротехническом строительстве при намыве плотин и дамб. При
благоприятных условиях стоимость разработки грунта таким способом
в 2—3 раза меньше, чем при применении экскаваторов.
Разработанный гидромониторами грунт может перемещаться в виде
пульпы самотеком или под напором. В последнем случае размытый гидро-
монитором грунт стекает в приямок, откуда пульпу засасывают пере-
движной землесосной установкой и под напором подают ее на участок
намыва. При работе землесосного снаряда пульпа подается под на-
пором.
При размыве грунта гидромониторами оборудование состоит из насо-
сов, гидромониторов, землесосной установки, труб, лотков и вспомога-
тельного оборудования.
Насосы служат для забора воды из водоемов и подачи ее к гидромо-
ниторам. Для этой цели применяются центробежные насосы, развивающие
напор в 90—100 м вод. ст. с высотой всасывания до 4 ли потребляющие
мощность 800—1400 кет. Производительность таких насосов составляет
от 2000 до 5000 м3!ч. Для создания разрежения во всасывающей линии
этого насоса, что особенно важно в период пуска, служит вакуум-насос,
который вместе с электродвигателями входит в комплект насосного
агрегата.
МАШИНЫ ДЛЯ ПОДГОТОВИТЕЛЬНЫХ РАБОТ
121
Насос должен быть рассчитан на создание напора, который склады-
вается из следующих составляющих:
/7 = й14-/1г+^з-и, (11.108)
где h г — необходимый напор воды у гидромонитора в м;
h.2 — потери напора в водоводе в м;
h3 — напор, необходимый для преодоления высоты между забоем
и зеркалом воды в водоеме в м.
Мощность насоса может быть определена по формуле
lOOOQHk _
3600-102ц Квт’
(11.109)
где Q — расход воды в м3/ч;
Н — расчетный напор насоса в м;
г] — 0,85 к. п. д. насоса;
k 1,1 — 1,3 — коэффициент запаса;
Гидромониторы служат для создания выбрасываемой с большой
скоростью плотной струи воды. Они могут иметь ручное и гидравлическое
управление (рис. 76). При вскрышных работах чаще применяют гидро-
мониторы с ручным управлением. При помощи фланца I гидромонитор
присоединяют к водопроводу. На ствол 6 навинчивается насадка 7. Для
направления струи воды в нужную точку забоя гидромонитор имеет два
шарнира: горизонтальный, обеспечивающий его поворотом на 360°, и шаг
ровой, который служит для поворота гидромонитора в вертикальной пло-
скости. Гидромонитор установлен на салазках. Большое значение имеет
компактность струи. Чтобы получить такую компактность и повысить
скорость воды, стволу придана коническая форма. Скорость движения
'22
МАШИНЫ ДЛЯ ЗЕМЛЯНЫХ РАБОТ
воды из насадки гидромонитора зависит от напора воды и определяется по
формуле
v = kc]/r2gh1 м/сек, (11.110)
где g — ускорение силы тяжести;
/г, — напор воды в м;
kc — коэффициент скорости, который для конических насадок равен
0,90—0,95.
Дальность полета струи может быть определена из уравнения пара-
болы
Рис. 77. Землесос:
1 — всасывающий патрубок; 2 —
корпус; 3 — рабочее колесо; 4 —
муфта; 5— электродвигатель; 6 —
подвески
, V- . о
I = — sin 2а л,
g
(11.111)
где а — угол наклона гидромонитора к го-
ризонту.
Наибольшая дальность соответствует
а = 45°.
Опытным путем установлено, что струя
эффективно размывает грунт на расстоянии,
равном 1/3 максимального полета. Если
расстояние от гидромонитора до забоя пре-
вышает эту величину, то эффективность раз-
мыва грунта снижена.
Таблица 16
Расход воды, необходимые напор и уклон
подошвы забоя при разработке грунта
гидромониторами
Грунт Расход воды в для размыва 1ма грунта Необхо- димый напор воды в м Необхо- димый уклон подошвы забоя в %
Песок 6—9 30—40 3—6
Супесь .... 6—9 30—70 2—3
Суглинок . . . 7—12 50—120 1,5—2
Гравий .... 8—15 30—120 8—12
На размыв гидромонитором 1 м3 грунта в среднем затрачивается
4—8 квт-ч электроэнергии. Расход воды, необходимые напор и уклоны
подошвы забоя при разработке грунта гидромониторами даны в табл. 16.
В случае перемещения под напором пульпа забирается специальным
предназначенным для перекачки воды с грунтом центробежным земле-
сосом. Общий вид землесоса представлен на рис. 77. Производительность
таких насосов, определенная при перекачке воды, обычно составляет
3000—4000 м3!ч, напор 50—70 м вод. ст., а необходимая мощность дви-
гателя 800—1000 кет.
Требуемая производительность землесоса может быть определена по
формуле
ПТР = kQyansPke м3!ч, (11.112)
где Qfd — расходы воды в ,и"‘ на 1 м3 разработанного грунта;
Пгр — часовая производительность установки, вычисленная по объему
разработанного грунта, м3/ч;
.ЛАШИНЫ ДЛЯ ПОДГОТОВИТЕЛЬНЫХ РАБОТ
123
kg = 0,7ъ-0,8 — коэффициент использования оборудования по вре-
мени;
k = 1,1н-1,2 — коэффициент запаса.
Необходимая мощность двигателя
li7 i/d Ч гр
N = —Що— кет,
102т) ’
(11.113)
где —расход электроэнергии на транспортирование 1 м3 грунта;
1) — к. п. д. землесоса.
Согласно Б. М. Шкундину, при производительности землесоса в пре-
делах 60—300 м31ч
Wl/d = 3(L + 0,04Я„) квт-ч/м3, (11.114)
где L — дальность транспортирования в .и;
Нп— геометрическая высота подъема пульповода (разность отметок).
Рис. 78. Схемы намыва насыпей: а — с транспортированием пульпы самоте-
ком в открытом лотке; б — с транспортированием пульпы под напором по
трубам:
/ — гидромотор; 2 — щиты; 3 — лоток; 4 — дренажный колодец; 5 — насосная
станция; 6 — сбросная канава; 7 — дренажный колодец; 8 — землесос; Я— трубы
К вспомогательному оборудованию относятся трубы, водозапорное
оборудование и т. п. Для целей гидромеханизации применяют стальные
трубы с электросварным спиральным ковшом. На пульповодах приме-
няются обратные клапаны прямоточного типа. Трубы соединяются друг
с другом при помощи быстроразъемных соединений. В качестве компенси-
рующих устройств обычно применяются сальниковые компенсаторы. Вы-
пуск воды и пульпы из трубопроводов осуществляется через быстродей-
ствующие задвижки. Для выпуска периодически накапливающегося в тру-
бах воздуха устанавливаются вантузы. Для повышения концентрации
пульпы гидромонитора применяют сгустители. В последних поток пульпы
разделяется на две части: верхнюю с небольшой концентрацией мелких
фракций грунта и более концентрированную нижнюю, которая содержит
крупные фракции. Верхняя часть направляется в отвал, а нижняя —
в насыпь. Этим снижается стоимость перемещения грунта по трубам.
На рис. 78 представлены характерные схемы намыва земляных соору-
жений (насыпей) грунтом, разрабатывае.мым в забое гидромониторами.
Производительность гидромонитора значительно повышается в том слу-
чае, если разрабатываемый грунт подвергается рыхлению. Рыхление грун-
тов может производиться путем предварительного насыщения их водой,
124
МАШИНЫ ДЛЯ ЗЕМЛЯНЫХ РАБОТ
которая нагнетается под напором 2—3 атм по трубам, устанавливаемым
на расстоянии 3—7 м от верхней бровки забоя. Для рыхления и подачи
грунта к гидромонитору могут применяться также экскаваторы или буль-
дозеры.
По соображениям техники безопасности, в настоящее время стре-
мятся к осуществлению дистанционного управления гидромонитором для
поворота его ствола в горизонтальной и вертикальной плоскостях. Для
этой цели применяется гидромонитор с гидравлическим управлением
(рис. 76, б).
В случае, когда разрабатываемый грунт находится под водой или
имеется возможность его затопления, то в качестве средства механизации
здесь применяется плавучий землесосный снаряд (рис. 79). Грунт вместе
с водой засасывается через приближенную к дну забоя всасывающую
трубу 6, которая снабжена специальным рыхлителем. Пульпа, консистен-
ция которой обычно колеблется от 1 : 6 для рыхлых грунтов до 1 : 15 —
Рис. 79. Плавучий землесосный снаряд:
1 — свая; 2 — свайный аппарат; 3 — палубная надстройка;
4 — портальная рама; 5 — стрела; 6 — всасывающая труба;
7 — металлический понтон
для супесей с гравием и для
суглинков, засасывается
землесосом и направляется
по трубам (пульповодам)
к месту укладки. Разра-
ботка грунта произво-
дится по так называемому
способу папильонирова-
ния. Последнее осущест-
вляется с помощью двух
свай, которые закреплены
в находящемся на корме
понтона свайном аппа-
рате. С носа понтона впе-
ред и в разные стороны
заводятся два якоря. Снаряд подтягивается к одному из якорей,
при этом он вращается вокруг упертой в дно сваи. Вторая свая в это время
приподнята. После поворота до предела опорная свая меняется и снаряд
подтягивается к другому якорю, заброшенному в противоположную сто-
рону. В результате снаряд находится в непрерывном веерообразном дви-
жении, продвигаясь одновременно вперед.
Скорость движения пульпы не должна быть ниже определенной кри-
тической скорости, при которой частицы начинают уже выпадать из потока.
При скорости более критической движение пульпы становится турбулент-
ным, и в потоке появляются вертикальные токи воды, которые поддержи-
вают частицы грунта во взвешенном состоянии. Скорость пульпы опре-
деляется уклоном. Поэтому уклоны не должны быть ниже тех значений,
которые приведены в табл. 18.
Гидромониторные работы могут начинаться ранней весной, когда
грунт еще не полностью оттаял. В этом случае мерзлый грунт должен быть
предварительно разрыхлен взрывным способом.
В настоящее время дистанционное и автоматическое управление осу-
ществляется только на плавучих землесосных снарядах большой произ-
водительности. На них при помощи обычных магнитных станций управ-
ления с общего пульта осуществляется дистанционный пуск и остановка
землесоса и управление всеми водоводными задвижками.
Контроль концентрации пульпы в трубах можно осуществлять с по-
мощью радиоактивных изотопов, например кобальта (Сови). Здесь концен-
трация определяется при помощи тарировочных кривых, по числу гамма-
МАШИНЫ ДЛЯ ПОДГОТОВИТЕЛЬНЫХ РАБОТ
125
квантов, достигших счетчика при прохождении их через пульповод от
расположенного на противоположной стороне от счетчика контейнера
с радиоактивным изотопом.
Литература
1. Алексеева Т. В., Артемьев К. А., Бромберг А. А. и др.
Машины для земляных работ. Теория и расчет. Под ред. А. А. Бромберга. М., изд. «Маши-
ностроение», 1964.
2. Артемьев К. А. Основы теории копания грунта скреперами. Москва—Сверд-
ловск, Машгиз, 1963.
3. Абезгауз В. Д. и Гальперин М. И. Разработка мерзлых грунтов
при механизированном рытье траншей. М., Гостехиздат, 1962.
4. Бромберг А. А., Вощинин Н. П., Пиковский Я- М. и др.
Машины для земляных работ. Атлас конструкций. Под ред. А. А. Бромберг. М., Машгиз,
1959.
5. Гарбузов 3. Е., Ильгисонис В. К., М а т у ш е в Г. А. и др.
Землеройные машины непрерывного действия. Конструкции и расчет. М.—Л., изд. «Маши-
ностроение», 1965.
6. Д о м б р о в с к и й Н. Г. и Гальперин М. И. Землеройно-транспорт-
ные машины. М., изд. «Машиностроение», 1965.
7. Ж у р и н В. Д. и Юфон А. П. Оборудование гидромеханизации. М., Гос-
стройиздат, 1960.
8. Катаев Ф. П., Вейцман М. И., Веденеев Д. Д. и др. Механи-
зация и автоматизация строительства автомобильных дорог. М., изд. «Транспорт», 1955.
9. Н у р о к Г. А. Гидромеханизация горных работ. М., Гостехиздат, 1959.
10. Расчет бульдозера (разработан А. А. Яркиным и В. А. Гольдштейном при уча-
стии и под руководством И. П. Бородачева). М., ВНИИстройдормаш, 1963.
11. Расчет скрепера (разработан Д. И. Плешковым и В. А. Гольдштейном под руко-
водством И. П. Бородачева). ВНИИстройдормаш, 1961.
12. Расчет автогрейдера (разработан В. М. Гольдштейном, научный руководитель
И. П. Бородачев). М., ВНИИстройдормаш, 1963.
13. Сев ров К- П., Лозовой Д. А. и др. Дорожностроительные машины.
М., изд-во «Машиностроение», 1965.
14. Сизов В. Н. Строительные работы в зимних условиях. М., Госстройиздат,
1958.
15. Справочник конструктора дорожных машин. Под ред. И. П. Бородачева. М.,
изд. «Машиностроение», 1965.
16. Ульянов Н. А. Основы теории и расчета колесного движителя землерой-
ных машин. М., Машгиз, 1962.
17. Хархута Н. Я., Васильев Ю. М. Устойчивость и уплотнение грун-
тов дорожных насыпей. М., Автотрансиздат, 1964.
Глава III. ЭКСКАВАТОРЫ
§ 16. НАЗНАЧЕНИЕ И КЛАССИФИКАЦИЯ
ЭКСКАВАТОРОВ
Экскаватором называется землеройная машина, предна-
значенная для разработки грунтов и полезных ископаемых с последую-
: щим перемещением их и выгрузкой в отвал или в транспорт. Экскаваторы
' относятся к числу наиболее распространенных машин: они применяются
в гражданском, гидротехническом и в транспортном строительствах. По
принципу действия рабочего оборудования экскаваторы делятся на ма-
шины прерывного (циклического) действия и машины непрерывного дей-
ствия. К. первой группе относятся все одноковшовые, а ко второй — много-
ковшовые экскаваторы (цепные и роторные), а также машины с рабочим
органом специального типа (землеройные фрезерные машины и др.).
Характерным для работы одноковшовых экскаваторов является по-
следовательная сменяемость отдельных операций за полный цикл. За ра-
бочим ходом ковша (его наполнением) следует подъем и горизонтальное
перемещение наполненного ковша к месту разгрузки, разгрузка ковша,
горизонтальное перемещение порожнего ковша к месту забоя, опускание
ковша в исходное положение для следующего цикла.
У экскаваторов непрерывного действия все операции по резанию
грунта и его перемещению непрерывны. В связи с этим производитель-
ность одноковшовых экскаваторов ниже, а удельный расход энергии на 1 м3
'выемки на 20—40% выше, чем у экскаваторов непрерывного действия.
В связи со значительным ростом объема работ на открытых разработ-
ках полезных ископаемых, в ирригационном, дорожном, промышленном
и транспортном строительстве перспективным планом развития экскава-
торостроения предусматривается увеличение парка машин с одновремен-
ным повышением их надежности и долговечности. ВНИИземмашем разра-
ботана типизация экскаваторов и кранов по восьми размерным группам.
В основу типизации и унификации положен принцип агрегатного кон-
струирования, что позволит увеличить число унифицированных узлов
для данной размерной группы и между отдельными размерными группами.
Унифицированные узлы одноковшовых экскаваторов могут быть исполь-
зованы при изготовлении роторных экскаваторов и специальных кранов.
§ 17. ОДНОКОВШОВЫЕ ЭКСКАВАТОРЫ
В настоящее время одноковшовые экскаваторы выпускаются на гу-
сеничном, пневмоколесном и шагающем ходах. Согласно общепринятой
классификации они разделяются на следующие группы.
1. Экскаваторы-краны для строительных работ. В зависимости от
емкости ковша и грузоподъемности они могут быть малой, средней и боль-
ЭКСКАВАТОРЫ
127
щой мощности. Экскаваторы-краны малой мощности имеют емкость
ковша 0,1—1,75 м3, грузоподъемность 0,75—45 т и вес машины 1,5—
70 т. Экскаваторы-краны средней мощности с емкостью ковша 2—3 м3 об-
ладают грузоподъемностью 60—80 т и весом машины 85—115 т.
Экскаваторы-краны большой мощности, имеют емкость ковша 3,25—
6 м3, грузоподъемность 100—150 т и собственный вес 125—250 т. Смен-
ным оборудованием для этой группы экскаваторов является, как правило,
крановое оборудование, поэтому они и называются экскаваторы-
краны.
Экскаваторы-краны малой и средней мощности преимущественно
изготовляются универсальными, т. е. они снабжаются несколькими видами
сменного рабочего оборудования. К видам рабочего оборудования отно-
сятся: прямая и обратная лопаты, струг, скребок, драглайн, кран, грейфер,
копер, трамбующие плиты и т. п. Экскаваторы-краны большой мощности
выполняются полу универсальными, т. е. они снабжаются двумя-тремя
видами рабочего оборудования, которыми обычно служат: прямая лопата,
драглайн и кран. Различные виды сменного рабочего оборудования экска-
ваторов представлены на рис. 80. Прямая лопата является основным видом
рабочего оборудования. Экскаватор, оборудованный прямой лопатой, раз-
рабатывает грунт, находящийся выше уровня стоянки машины. При обо-
рудовании обратной лопатой экскаватор разрабатывает грунт, находя-
щийся ниже опорной поверхности самого экскаватора. Обратная лопата
применяется для рытья котлованов, траншей и небольших каналов. Рабо-
чее оборудование драглайна применяется при рытье котлованов, каналов,
выемок, траншей, т. е. при разработке грунта, расположенного ниже
стоянки машины. Этот вид оборудования для шагающих экскаваторов яв-
ляется единственным, а для гусеничных, строительных и карьерных экска-
ваторов — одним из основных видов рабочего оборудования. Грейфером
обычно снабжаются экскаваторы с объемом ковша до 2 ле3, т. е. экскава-
торы малой и средней мощности. Экскаваторы, оборудованные грейфером,
применяются для рытья глубоких котлованов и колодцев с вертикальными
стенками и для перегрузки сыпучих материалов. Крановое оборудование
устанавливается на экскаваторах с емкостью ковша до 8 м3. Экскаваторы-
краны используются для погрузочно-разгрузочных и монтажных работ.
В качестве стрелового оборудования здесь используется как нормальная
стрела драглайна, так и удлиненная стрела со специальными наголовни-
ками. При вертикальном расположении стрелы и дополнительном наго-
ловнике экскаватор может быть использован как гусеничный башенный
кран. Оборудованием струга снабжаются обычно экскаваторы с емкостью
ковша до 1,0 м3 и очень редко большей мощности. Струг используется
Для планировочных работ и разработки грунта при небольшой высоте
забоя. Оборудование скребка аналогично оборудованию струга. Разница
лишь в том, что вместо ковша здесь применен отвал. Скребок используется
Для планировочных работ и засыпки траншей. Оборудование копра при-
дается универсальным экскаваторам малой мощности с емкостью ковша
не более 1,0 м3 и используется для забивки свай. Рабочим оборудованием
здесь служат: стрела кранового типа, направляющая стойка, распорный
ригель и подвешенная на крюке баба. Экскаваторы, оборудованные кор-
чевателем, используются для корчевки пней в дорожном строительстве.
Снабжаются ими экскаваторы с емкостью ковша до 1 м3.
2. Экскаваторы карьерные применяются для разработки плотных
и скальных грунтов, на открытых разработках полезных ископаемых,
а также на крупных стройках для рытья котлованов под сооружения;
изготовляются с ковшом емкостью 2—8 м3 и имеют гусеничное ходовое
128
МАШИНЫ ДЛЯ ЗЕМЛЯНЫХ РАБОТ
оборудование; выпускаются в виде специальных лопат, иногда имеют
только крановое оборудование.
3. Вскрышные экскаваторы предназначены для вскрышных работ
при открытой разработке рудных месторождений, каменного угля и дру-
Рис. 80. Виды сменного рабочего оборудования одноковшовых экскавато-
ров: а — прямая лопата; б — обратная лопата; в — драглайн; г — грей-
фер; дне — кран; ж — струг, з — скребок; и — копер; к — корчеватель
гих полезных ископаемых. Ковши этих машин имеют емкость 6—53 ж®.
Собственный вес машин достигает 2650 т. Карьерные и вскрышные экска-
ваторы имеют многомоторный привод чаще постоянного тока, выполнен-
ный по системе генератор-двигатель.
4. Шагающие драглайны бывают средней и большой мощности с ем-
костью ковша 4—50 м3 и весом машины 170—4500 т. Длина стрел шага-
ЭКСКАВАТОРЫ
129
ющих драглайнов достигает 150 м. Они используются на вскрышных рабо-
тах, а также для производства земляных работ на крупных гидротехни-
ческих строительствах. Шагающий ход обеспечивает малое удельное дав-
ление на грунт, большую устойчивость и маневренность.
Кроме указанных выше групп экскаваторов существуют специальные
типы машин: тоннельные, шахтные, башенные, плавучие и др.
§ 18. КОНСТРУКТИВНЫЕ СХЕМЫ
И ПРОЦЕССЫ РАБОТЫ ОДНОКОВШОВЫХ ЭКСКАВАТОРОВ
Одноковшовый экскаватор состоит из следующих основных узлов:
/рабочего оборудования (ковша, рукояти, стрелы); силового привода
и механизмов, устанавливаемых на поворотной платформе; ходового обо-
рудования.
По характеру связи ковша со стрелой можно выделить две группы ра-
бочего оборудования: ковш с жесткой связью (прямая и обратная лопаты,
струг, планировщик, и т. п.) и ковш с гибкой связью (драглайн, грейфер,
: кран и т. п.). Основным
видом оборудования ОДНО-
КОВШОВЫХ экскаваторов яв-
/ ляется оборудование пря-
мой лопаты.
Схема экскаватора
представлена на рис. 81.
Ковш 1 упреплен на рукоя-
ти 2 и подвешен через бло-
ки 9. Стрела 3 в нижней
части шарнирно связана
с вращающейся платфор-
мой 8, а верхняя часть
стрелы 4 подвешена на
канатах 5 под углом у к
горизонту (у^45ч-60с).
Рукоять 2 предназначена д
ля закрепления на ней ковша и перемещения
его по забою во время работы. Она может вращаться в вертикальной плос-
кости относительно оси напорного вала 6 и совершать возвратно-посту-
пательные движения вдоль своей оси. Конструкция рукояти может быть
однобалочной (внутренняя рукоять) или двухбалочной (внешняя рукоять).
Однобалочная рукоять представляет собой сварную конструкцию, вы-
полненную из листовой стали или стального проката стандартных про-
филей. Поперечное сечение может быть прямоугольным или круглым. Пе-
редний конец рукояти шарнирно или жестко соединяется с ковшом.
Однобалочная рукоять проста по конструкции, но применяется только
Для машин со сравнительно небольшой емкостью ковшей. Двухбалочные
(внешние) рукояти состоят из двух балок прямоугольного или круглого
сечения, соединенных между собой концевыми вставками.
Стрелы универсальных экскаваторов изготовляются сварными из
листовой стали или штампованных и гнутых профилей. По сравнению
С решетчатыми конструкциями такие стрелы технологичны в изготовлении
и обладают высокой усталостной прочностью. Стрелы могут быть одно-
балочными — при внешней рукояти и двухбалочными — при внутренней
рукояти. Двухбалочные стрелы изготовляются цельностержневыми и шар-
нирно сочлененными. Последние состоят из двух секций 3 и 4 шарнирно
соединенных между собой (рис. 81). В месте их соединения устанавливается
5 Н. Я. Хархута и др.
J 30
МАШИНЫ ДЛЯ ЗЕМЛЯНЫХ РАБОТ
седловой подшипник. Двухбалочные цельностержневые стрелы подвеши-
ваются с помощью полиспастной подвески или с помощью вант. В послед-
нем случае угол наклона стрелы не изменяется. Ванты обычно изготов-
ляются из канатов закрытой конструкции. При помощи стрелового поли-,
е)
з)
Рис. 82. Стрелы драглайнов: а — симметричная; б — несимметричная;
в—с дополнительными подвесками; г—с дополнительной опорной стой-
кой; д — с фермой треугольного очертания; е —форма поперечного сечения
стрелы; ж — системы решеток; з — вантовая стрела
спаста стрела может подниматься и опускаться и тем самым изменять угол
наклона к горизонту. В шарнирно соединенных стрелах верхний конец
нижней секции стрелы жестко соединяется с двуногой стойкой 7 мощными
тягами, образуя жесткий треугольник. Верхняя часть стрелы, шарнирно
соединенная с нижней, подвешивается через ванты или посредством поли-
спаста.
Стрелы драглайнов (рис. 82) изготовляются решетчатыми или ван-
товыми. Решетчатые стрелы представляют собой жесткие пространствен-
ЭКСКАВАТОРЫ
13И
ные конструкции, состоящие из трех или четырех ферм. Вантовые стрелы
имеют центральный жесткий пояс. В вертикальной плоскости стрелы могут
быть симметричными и несимметричными. В длинных стрелах, где изги-
бающий момент и прогиб от действия собственного веса относительно велик,
рекомендуется стрелы разгружать моментом обратного знака. Это может
быть достигнуто за счет эксцентричного расположения нижней опоры
стрелы (эксцентриситет е), а также введением дополнительных подвесок,
подвесок со стойкой или подвеской фермы не за голову, а за вершину
треугольной вертикальной фермы. По форме поперечного сечения стрелы
могут быть прямоугольными, трапецеидальными и треугольными. Приме-
няемые при изготовлении стрел системы решеток показаны на рис. 82.
При небольших стрелах пояса и решетки часто выполняют из труб.
В стреловых конструкциях, где число сжатых элементов велико, труба
является наилучшим типом сечения. Для стрел экскаваторов, работающих
в условиях низких температур, применяют низколегированные стали и уг-
леродистые стали спокойной плавки с ограниченным содержанием углерода.
Стрелы экскаваторов испытывают большие динамические нагрузки, по-
этому в их элементах возникают переменные напряжения. При проектиро-
вании и изготовлении стрел следует принимать меры, направленные к сни-
жению концентраций напряжений; это особенно важно для стрел, изго-
товляемых из низколегированных сталей. Трехрешетчатые вантовые
стрелы с центральным жестким поясом состоят из одной вертикальной
и двух наклонных вантовых ферм, имеющих один общий жесткий пояс
трубчатого сечения. Для изготовления вант применяются высокопрочные
канаты закрытой конструкции с большим приведенным модулем упругости
при растяжении (£ 1,6-10® кПсмг). Для уменьшения прогиба стрелы
как в вертикальной, так и в горизонтальной плоскостях ванты предва-
рительно натягиваются.
Ковши представляют собой коробчатую конструкцию. Они изготов-
ляются цельнолитыми, сварными или комбинированными. Ковши состоят
из двух боковых стенок, передней стенки или козырька и задней стенки.
Снизу ковш закрывается днищем. Цельнолитые ковши, выполненные из
высокомарганцовистой стали, надежны в эксплуатации, но тяжелы по
весу, дороги и поэтому не всегда рентабельны. Большое распространение
имеют сварные ковши со сменным козырьком, который изготовляется из
высокомарганцовистой стали. Эти ковши достаточно надежны, просты
в изготовлении и имеют по сравнению с литыми значительно меньший
вес. В целях снижения веса ковши иногда изготовляются из легких спла-
вов, а для усиления бронируют листовой сталью толщиной до 8 мм.
Передняя стенка ковша может быть выполнена с козырьком плоской формы,
который снабжается зубьями или по предложению Д. И. Федорова —
козырьком овальной формы без зубьев. Ковши Д. И. Федорова позволяют
снизить возникающее при копании сопротивление грунта.
Подвеска рабочего оборудования осуществляется при помощи полиспа-
стов. Они должны позволять изменять угол наклона стрелы, осуществлять
подъем и опускание ковша, открывание его днища, а иногда осуществлять
напорное усилие. При работе прямой лопаты угол наклона стрелы обычно
устанавливается постоянным, поэтому необходимо иметь две рабочие
(основные) лебедки и одну лебедку установочную. На рис. 83 показана
запасовка каната подъема ковша при независимом напоре. Канат 1 закреп-
ляется на барабане 2 подъемной лебедки и проходит на блок двуногой
стойки 3, далее огибает блок головки стрелы 4, блок ковша 5 и через
левый блок головки стрелы направляется к месту закрепления на стреле
с помощью коуша 6. Канат подъема стрелы для всех типов напорного
*
132
МАШИНЫ ДЛЯ ЗЕМЛЯНЫХ РАБОТ
механизма запасовывается одинаково. Один конец каната закрепляется
на барабане 7, а затем последовательно огибая блоки на двуногой стойке 9
и голове стрелы 10 закрепляется вторым концом с помощью коуша 11
на двуногой стойке. Для обратной лопаты схема запасовки канатов пока-
зана на рис. 84. Драглайн имеет несколько канатов: подъемный, служа-
щий для подъема ковша при выгрузке; тяговый, с помощью которого
ковш перемещается при копании грунта и удерживается в воздухе при
перемещении на выгрузку; разгрузочный для предотвращения опрокиды-
канат подвески и
На рис. 85 показана
этих канатов.
вания ковша и
подъема стрелы,
схема запасовки
Рис. 83. Схема запасовки канатов при оборудовании прямой лопаты:
1 — подъемный канат; 2 — барабан подъемной лебедки; 3 — блок на двуногой стойке; 4 —
блоки на стреле; 5 — блок на ковше; 6 — коуш на.стреле; 7 — барабан подъема стрелы; 8 — канат
подъема стрелы; 9 — блоки на двуногой стойке; 10 — блоки на стреле; 11 — коуш на двуногой
стойке
Для грейферного оборудования схема запасовки канатов показана
на рис. 86. Поддерживающий канат 2 одним концом закрепляется на бара-
бане подъемной лебедки 1, проходит через блоки 3 головы стрелы и вторым
концом закрепляется на верхнем шарнире ковша. С помощью замыка-
ющего каната 10 ковш при черпании закрывается и осуществляется его
подъем на выгрузку. Этот канат закреплен одним концом на тяговом бара-
бане 9, проходит через блоки 11, расположенные в голове стрелы, затем
через блоки полиспаста ковша 12 и закрепляется с помощью коуша 13
на верхнем шарнире ковша. Канат подъема стрелы 8 закрепляется одним
концом на барабане подъема стрелы 5, последовательно огибает блоки
на двуногой стойке 6, блоки на оттяжке стрелы 7 и вторым концом закреп-
ляется на двуногой стойке.
§ 19. ПРИВОД И МЕХАНИЗМЫ
[ Различают машины с одномоторным и многомоторным приводом. При
'одномоторном приводе все механизмы приводятся в движение от одного
двигателя. При многомоторном приводе механизмы приводятся отдель-
ными двигателями. В качестве двигателей на одноковшовых экскаваторах
применяются как двигатели внутреннего сгорания, так и электрические
двигатели. Привод также может быть комбинированным (дизель-электри-
ческим, дизель-гидравлическим и т. п.).
Двигатели внутреннего сгорания устанавливаются при одномоторном
приводе, который для машин малой мощности получил большое распро-
странение. Для экскаваторов используются дизели автотракторного типа.
Дизельные экскаваторы успешно применяются на объектах с небольшим
объемом работы, где отсутствует электроэнергия. У некоторых типов
ЭКСКАВАТОРЫ
133
Рис. 84. Схема запасовки канатов при оборудовании обратной
лопаты:
/ — барабан главной лебедки: 2 — подъемный канат; г 3 — блоки
на передней стойке; 4 — блоки на рукояти; 5 — тяговый барабан;
6 — тяговый канат; 7 — блоки на стреле; 8 — блок ковша;
Рис. 85. Схема запасовки канатов при оборудовании драглайна:
/ — подъемный барабан; 2 — блок на стреле; 3 — подъемный канат; 4 — подвеска ковша
5 — тяговый канат; 6 — блоки наводящего устройства; 7 — тяговый барабан; 8 — блоки на от-
тяжке стрелы; 9 ~ блоки и коуш на двуноге; 10 — канат подъема стрелы; И — барабан подъема
стрелы
10
13
к ан ат ;
блоки на
4 — коуш на
5 — барабан
стрелы; 6 —
ке стрелы; 8 — канат подъема
кающий канат;
Рис. 86. Схема
запасовки кана-
та при оборудо-
вании грейфера:
! — подъемный барабан:
2 — подъемный
3 — головные
стреле;
ковше;
подъема _ .
блоки на двуногой стой-
ке; 7 — блоки на оттяж-
стрелы; 9 — тяговый барабан; 10 — замы-
— головные блоки на стреле; 12 — блоки на ковше:
13 — коуш на ковше
134
МАШИНЫ ДЛЯ ЗЕМЛЯНЫХ РАБОТ
экскаваторов предусмотрена замена двигателя внутреннего сгорания элек-
тродвигателем с незначительным изменением кинематической схемы. Вклю-
чение отдельных механизмов и изменение вращения в одномоторном при-
воде производится с помощью фрикционных муфт и реверса. Для дости-
жения плавности переходных режимов начали применять турбомуфты,
турботрансформаторы и электромагнитные муфты скольжения.
Привод от электрических двигателей применяется при наличии элек-
троэнергии. Сменным силовым оборудованием дизельных экскаваторов
служит одномоторный привод переменного тока с асинхронным двигателем.
Преимуществами этого привода являются его постоянная готовность
к работе, простота управления и обслуживания и высокий к. п. д. Вместе
Рис. 87. Схема реверсивного механизма с
коническими зубчатыми колесами:
/ — вертикальный вал; 2 — зубчатые колеса;
3 — коническое колесо вертикального вала;
4 — конические колеса горизонтального вала;
5 — ведомые шкивы муфты; 6 — ведущие шкивы;
7 — подшипники; 8 — главный трансмиссионный
вал
с тем этот привод так же, как и
двигатель внутреннего сгорания,
имеет жесткую внешнюю харак-
теристику.
Многомоторный привод, рас-
считанный на работу от перемен-
ного тока, применяется редко.
Широкое распространение для
экскаваторов средней и большой
мощности получил многомотор-
ный привод постоянного тока, ха-
рактерной чертой которого яв-
ляется наличие генераторов для
каждого двигателя. Этот привод
позволяет регулировать скорость
вращения в широких пределах и
отличается высокой надежностью
в работе. Однако здесь относи-
тельно большая мощность затра-
чивается на управление работой
электродвигателей. Кроме того,
генераторы имеют большие габариты, и разгон двигателей при пуске не-
сколько замедлен. Эти недостатки устраняются применением привода,
работающего по системе генератор — двигатель и имеющего электрома-
шинный усилитель.
Комбинированный привод в экскаваторах применяется в связи с осо-
быми требованиями и специфическими условиями работы машины. Наи-
более частой комбинацией является дизель-электрический и дизель-гидрав-
лический приводы. Дизель-гидравлический привод широко применяется
в экскаваторах малой мощности, а в последние годы стал применяться
и на более мощных экскаваторах.
При одномоторном приводе от двигателя внутреннего сгорания вра-
щение возможно только в одном направлении. Поэтому для изменения
направления вращения обязательна установка реверсивного механизма.
Обычно этот механизм служит для реверсирования не только поворотного,
но и ходового механизмов. Опускание ковша и стрелы производится под
действием их силы тяжести, поэтому эти механизмы не требуют установки
специальных реверсов. Реверсирование движения осуществляется кони-
ческими или цилиндрическими зубчатыми колесами, а также планетарными
передачами. Наибольшее распространение получили механизмы с кони-
ческими зубчатыми колесами. Схема такого механизма показана на рис. 87.
Лебедка, предназначенная для подъема ковша, называется подъемной
или главной лебедкой, а лебедка, с помощью которой осуществляется
экскаваторы
135
тяга ковша (при оборудовании драглайна), называется тяговой. Бара-
баны этих лебедок могут монтироваться на одном общем валу или на раз-
дельных валах. В зависимости от этого различают одновальные и двух-
вальные конструкции лебедок. В последнем случае эти лебедки устанавли-
ваются на поворотной платформе друг за другом. При одновальной
конструкции возможно все механизмы сдвинуть назад и этим снизить вес
противовеса и габариты поворотной платформы. При такой конструкции
улучшается также доступ к тем механизмам, которые расположены под
поворотной платформой. Однако здесь усложняется конструкция лебедки
и затрудняется обслуживание расположенных на поворотной платформе
механизмов. Двухвальная лебедка по конструкции проще, удобнее при
монтаже и демонтаже и может быть установлена при меньшей ширине
поворотной платформы. Вместе с тем двухвальная лебедка требует более
удлиненной платформы и противовес получается тяжелее. Для боль-
шинства универсальных строительных экскаваторов с емкостью ковша
ниже 2 At3 применяются одновальные лебедки. Двухвальные лебедки
нашли применение при экскаваторах с большей емкостью ковша. При
одновальных лебедках подъемный и тяговый барабаны свободно устанав-
ливаются на валу на подшипниках качения и имеют независимое включе-
ние. Последнее производится фрикционными муфтами. Для остановки
служат тормоза.
Подъемная и тяговая лебедки могут быть нереверсивными и ревер-
сивными. Реверсирование осуществляется специальным механизмом или
путем установки (вместо обычных лебедок) лебедок кранового типа.
Барабаны могут быть цилиндрическими, коническими и с криволинейной
образующей. Применение конических барабанов с криволинейной образу-
ющей позволяет в процессе подъема ковша выгодно изменять действующие
усилия и его скорости. Небольшая конусность барабана способствует также
правильному навиванию каната, что повышает его долговечность. Гладкие
и нарезные барабаны делаются из расчета однослойной навивки. Для
удобства монтажа и замены рабочего оборудования барабаны часто
делаются из двух половин, соединяемых болтами.
Напорные механизмы. Необходимые условия и скорости напора обес-
печивают напорные механизмы. Ими снабжаются все типы прямых лопат,
за исключением самых малых моделей, где напорное усилие создается
движением стрелы. Напорные механизмы могут быть независимыми, за-
висимыми и комбинированными. Независимым называется такой меха-
низм, где необходимые усилия и скорости напора не зависят от силы,
натяжения и скорости каната механизма подъема. При многомоторном
приводе кинематическая схема механизма независимого напора весьма
проста. При одномоторном приводе этот механизм выполняется с канатной
или с цепной передачей. Канатный привод предпочтительней, так как
амортизирует действие динамических нагрузок. На рис. 88, а показана
схема независимого напора. От звездочки напорного- механизма 2 через
цепь 4 движение передается к напорному барабану 5. Выдвижение рукояти
осуществляется навиванием напорного каната 6 на напорный барабан 5.
Для перемещения рукояти в обратном направлении реверсируется направ-
ление вращения напорного вала.
На рис. 88, б показана схема зависимого канатно-реечного напорного
механизма. Здесь скорости подъема и напора зависят друг от друга. При
выдвижении рукояти 11 подъемный канат 12 сматывается с барабана и
уменьшает скорость подъема ковша. Возвратное Движение рукояти осу-
ществляется включением возвратного барабана 13 и навиванием на него
возвратного каната 7. При комбинированном напоре (рис. 88, в) второй
136
МАШИНЫ ДЛЯ ЗЕМЛЯНЫХ РАБОТ
конец подъемного каната 12 закрепляется не на стреле, как это имеет
место в случае независимого напора, а на напорном барабане 5. Поэтому
при подъеме ковша дополнительное напорное усилие создается за счет
силы тяжести ковша.
Механизм поворота. Вращения поворотной платформы экскаватора
относительно ее вертикальной оси обеспечивает механизм поворота. При
Рис. 88. Схемы напорных механизмов: а — независимый канатный напор; б — зависи-
мый напор; в — комбинированный канатный напор при одновальной лебедке:
/ — вал; 2 — звездочка напорного механизма; 3 — подъемная лебедка; 4 — цепь; 5 — бара-
бан напорной лебедки; 6 — канат; 7 — возвратный канат; 8 — блок; 9 — блоки головы стрелы;
10 — блок ковша; 11 — рукоять; 12 — подъемный канат; 13 — возвратный барабан
одномоторном приводе к механизму поворота относятся передачи от вала
реверса до зубчатого венца нижней рамы. Зацепление зубчатого венца
с ведущей шестерней может быть наружным и внутренним.
На рис. 89, а показана схема механизма поворота. При многомотор-
ном приводе поворотное устройство может приводиться одним или двумя
двигателями. В экскаваторах большой мощности механизм поворота
обычно состоит из двух параллельно работающих механизмов, передающих
вращение на общий зубчатый венец. На рис. 89, б показана схема такого
механизма. Сдвоенный параллельно работающий механизм уменьшает
суммарный маховой момент, что позволяет снизить габариты и повысить
надежность и долговечность механизма. Поворотная платформа экска-
ватора нагружается осевыми и радиальными силами и опрокидывающим
моментом. Передача усилий от поворотной платформы к нижней раме осу-
ЭКСКАВАТОРЫ
137
ществляется через оси опорных роликов или непосредственно через ролики
(или шарики).
' Для восприятия радиальных нагрузок и опрокидывающего момента
служит центральная цапфа и так называемые ролики-захваты. За послед-
ние годы в экскаваторах и кранах находят широкое применение шарико-
вые опорно-поворотные устройства. В них отсутствуют центрирующая
цапфа и ролики-захваты. Эти устройства являются более компактными,
имеют меньший вес, улучшают работу зубчатых передач, обеспечивают
большую надежность и долговечность и простоту монтажа и демонтажа.
По числу рядов тела качения могут быть однорядными, двухрядными
Рис. 89. Схемы механизмов поворота и поворотных устройств: а — при одномоторном
приводе; б — при многомоторном приводе; в — передача усилий через оси опорных роли-
ков; г — передача усилий непосредственно через ролики; д — ролики-захваты:
/ — вертикальный реверсивный вал; 2 — промежуточный вал; 3 — вал поворотного меха-
низма; 4 — зубчатые колеса; 5 — кулачковая муфта; 6 — тормоз; 7 — двигатели
и многорядными. Наиболее распространенным является двухрядное
шариковое опорно-поворотное устройство.
Ходовой механизм. При одномоторном приводе ходовой механизм
состоит из двух частей — верхней и нижней. Верхняя часть этого меха-
низма, т. е. кинематическая цепь до вертикального вала, является общей
с механизмом поворота. От вертикального вала движение передается на
вертикальный ходовой вал и далее на горизонтальный ходовой вал.
Горизонтальный ходовой вал состоит из двух полуосей и средней части,
соединенных между собой при помощи кулачковых муфт. Муфты имеют
независимое включение, что обеспечивает возможность поворота экскава-
тора. При многомоторном приводе гусеницы обычно приводятся от одного
двигателя. Вместе с тем каждая из гусеничных тележек некоторых моделей
экскаваторов большой мощности приводится от индивидуального дви-
гателя.
Ходовое оборудование. В экскаваторах ходовое оборудование приме-
няется трех типов: гусеничное, пневмоколесное и шагающее. Наиболее
Р спространенным является гусеничное ходовое оборудование. В зави-
симости от веса машины оно может быть двух-, четырех-, шести- и восьми-
гусеничным. При работе экскаватора на слабых и средних грунтах, где
138
МАШИНЫ ДЛЯ ЗЕМЛЯНЫХ РАБОТ
маловероятно появление больших сосредоточенных усилий, применяются 1
многоопорные гусеницы рамной конструкции. В случае карьерных экска- ,
ваторов, работающих на плотных грунтах, применяются безрамные мало-
опорные гусеницы.
В последние годы, для машин малой мощности наметилась тенденция ?
замены гусеничного хода пневмоколесным. Пневмоколесный ход значи-
тельно проще по конструкции, дешевле и долговечнее. Он допускает боль-
шие скорости передвижения. Машины на пневмоколесном ходу не раз-
рушают дороги. Однако они обладают меньшим сцепным весом и тяговым
усилием, имеют худшую проходимость в условиях бездорожья и при работе
требуют специальных опорных устройств.
Как отмечалось выше, шагающее ходовое оборудование позволяет
получать малые удельные давления на грунт и повышает маневренность. .
К его недостаткам относятся большие габариты ходового устройства,
малая скорость передвижения и цикличность действия. Основными узлами
шагающего ходового устройства являются: опорная база, лыжи и меха- :
низм шагания. Ходовое устройство может быть кривошипно-крейцкопф- ;
ным, кривошипно-шатунным, эксцентриковым и гидравлическим. Недо-
статки механических передач (кривошипных и эксцентриковых) состоят ,
в том, что здесь неизбежно наличие длинного и громоздкого ходового .
вала, пересекающего всю машину. Кроме того, все эти механизмы имеют •
постоянную высоту подъема, что неудобно при наличии препятствий раз-
личного размера. Развивающиеся динамические нагрузки довольно зна-
чительные. В гидравлических передачах имеется возможность регули- ;
ровать шагающий ход в зависимости от высоты препятствия. Это позволяет
снизить динамические нагрузки и уменьшить расход энергии.
Рабочие процессы. Рабочий цикл прямой лопаты состоит из следую-
щих операций: копание, поворот на выгрузку, выгрузка, поворот в забой
и опускание ковша. Вспомогательной операцией служит передвижка экска-
ватора, которая осуществляется по мере переработки забоя. В зависимости
от типа экскаватора и емкости ковша, вида рабочего оборудования и усло-
вий работы продолжительность рабочего цикла колеблется в пределах
от 15 до 60 сек. В случае прямой лопаты угол наклона стрелы составляет
50—60°. При легких грунтах угол может быть снижен до 35—45°. Копание
начинается с подошвы забоя. При этом ковш опускается на грунт вблизи
гусеничного хода. Угол между рукоятью и вертикалью составляет 10—20°.
Такое положение ковша способствует лучшему врезанию его режущей
кромки в грунт. В начале копания работает только подъемный механизм.
В дальнейшем периодически производится включение напорного меха-
низма.
Операция копания занимает в среднем до 30% продолжитель-
ности всего цикла (5—20 сек). Поворот на выгрузку производится плавным
включением поворотного механизма. Обычно эта операция совмещается
с подъемом ковша, но должна начинаться не раньше чем ковш полностью
выйдет из забоя. Во время поворота рукоять устанавливается в такое поло-
жение, чтобы удобно было произвести выгрузку.
Торможение должно быть плавным. Продолжитетькость рк-юна,
а затем торможение обычно составляет 2—3 сек. Открытие днища ковша
при выгрузке осуществляется с помощью рычажного механизма, а на экска-
ваторах больших мощностей — с помощью специального привода. Днище
может быть свободно падающим, где открытие ковша осуществляется под
действием веса днища и грунта, и маятниковым. В последнем случае ковш
открывается отклонением днища, что позволяет снижать высоту разгрузки.
Выгрузка может производиться в отвал или в транспортные средства.
ЭКСКАВАТОРЫ
139
В некоторых случаях, например при работе в отвал, выгрузка может
совмещаться с поворотом. При разгрузке в транспорт большой емкости
точной фиксации ковша не требуется и днище может открываться уже
в процессе торможения механизма. Чем меньше расстояние между осью
экскаватора и транспортным средством, тем удобнее выгрузка и меньшие
нагрузки на рабочее оборудование машины. Поворот в забой может начи-
наться еще во время выгрузки. Опускание ковша осуществляется одно-
временно с поворотом со скоростью значительно большей, чем скорость
подъема ковша. Надо следить за тем, чтобы не было удара ковша о грунт
и набегания канатов. Длина передвижек экскаватора зависит от его мощ-
ности и вида грунта. На тяжелых грунтах лучше всего работать корот-
кими, но частыми .передвижками. Перед передвижкой поверхность грунта
должна быть хорошо спланированной. На слабых грунтах иногда прибе-
гают к укладке настила. Производительность прямой лопаты зависит от
высоты забоя. Последняя, как правило, не должна быть ниже (0,7-г-1,0)
Нн (Нн — высота напорного вала).
В случае обратной лопаты копание осуществляется включением
тяговой лебедки, при этом ковш подтягивается к стреле. Толщина стружки
регулируется натяжением подъемного каната. После наполнения ковш
подтягивается к стреле и тяговая лебедка затормаживается. Затем вклю-
чается подъемная лебедка, и при выходе всей системы из забоя включается
поворотный механизм. При выгрузке тяговый канат растормаживается,
и включается подъемная лебедка. При этом ковш выбрасывается вперед.
Продолжительность рабочего цикла обратной лопаты на 10—25% больше,
чем у прямой лопаты. При оборудовании драглайном копание может
быть осуществлено путем включения тяговой лебедки. При этом предва-
рительно выбирается слабина у подъемного каната. Угол резания регули-
руется тяговыми цепями и разгрузочным канатом. При копании ковш
врезается в грунт под действием собственного веса. Путь наполнения
обычно равен трем длинам ковша. После наполнения ковша включается
подъемная лебедка и происходит быстрый отрыв ковша от грунта. Для
уменьшения радиуса поворота ковш подтягивается к стреле и одновре-
менно осуществляется поворот на выгрузку. При выгрузке тяговый канат
ослабляется, и ковш, повиснув на подъемных канатах, опрокидывается для
разгрузки. Обратный поворот в забой происходит при опрокинутом
ковше с одновременным его опусканием. Затем тяговая лебедка расторма-
живается, и ковш падая врезается в грунт, что способствует его лучшему
наполнению при последующей операции койания.
§ 20. ВЫБОР МОЩНОСТИ ДВИГАТЕЛЯ
И ОПРЕДЕЛЕНИЕ ПРОИЗВОДИТЕЛЬНОСТИ
ОДНОКОВШОВЫХ ЭКСКАВАТОРОВ
Одноковшовые экскаваторы относятся к машинам периодического
действия и потому характеризуются большими колебаниями нагрузки
в течение одного рабочего цикла. Этому обстоятельству способствует
совмещение некоторых операций. Так, подъем ковша совмещается с пово-
ротом на выгрузку, а копание — с напорным движением. Для определе-
ния мощности, затрачиваемой на работу отдельных механизмов, необхо-
димо найти те сопротивления, которые возникают при совершении
отдельных рабочих операций. Большие сопротивления развиваются
при копании грунта. Общее сопротивление грунта копанию по отношению
к направлению движения ковша может быть разложено на касатель-
ную Р01 и нормальную Ро„ составляющие (рис. 90). Касательная
140
МАШИНЫ ДЛЯ ЗЕМЛЯНЫХ РАБОТ
Рис. 90. Схемы для определения усилий, действующих на рабочее оборудование: а — прямая лопата; б - обратная
лопата; в — драглайн
ЭКСКАВАТОРЫ
141
составляющая сопротивления копанию в общем виде может быть выра-
жена следующей зависимостью:
Р01 = Рр + Рт + Рв, (HI. 1)
где Рр — сопротивление грунта резанию;
Рт — сопротивление трению ковша о грунт при движении ковша
и наполнении его грунтом;
Рд — сопротивление перемещению призмы волочения.
Согласно методу, разработанному Н. Г. Домбровским, определение
касательной составляющей сопротивления грунта копанию можно про-
изводить, пользуясь упрощенной формулой
Р,п = kobc кГ, (III.2)
где k0— удельное сопротивление грунта копанию, учитывающее допол-
нительные сопротивления, связанные с наполнением ковша
в кПсм?. k0 зависит от вида и состояния грунта и типа рабо-
чего оборудования.
В процессе копания эта составляющая сопротивления Р01 непрерывно
меняется как ввиду неоднородности грунта, так и вследствие изменения
толщины стружки. Поэтому при расчете принимается какая-то средняя
толщина стружки. Этот метод дает вполне приемлемые результаты, так
как значения удельного сопротивления грунта копанию найдены в резуль-
тате многочисленных опытов. Этот метод несколько видоизменен
Е. Р. Петерсом. Умножив обе части уравнения (III.2) на длину пути L,
можно получить
PnL = kobcL. (III.3)
Левая часть этого равенства представляет собой работу Ар, а правая —
объем срезанного грунта V. При V = 1 А = k0. Таким образом, удельное
сопротивление резанию k0 может быть представлено как работа, необхо-
димая для выкапывания единицы объема грунта. Этот способ расчета менее
удобен и потому не получил распространения.
Усилия на зубьях ковша прямой лопаты (рис. 90). Для определения
усилия воспользуемся уравнением объема стружки, которым устанавли-
вается равенство между объемом вырезанного грунта и объемом грунта
в ковше
qkH +qnp = bcLkp, (111.4)-
где q — емкость ковша в м3;
qnp — объем призмы волочения в м3;
kH — коэффициент наполнения ковша;
Ь — ширина ковша в м;
с — толщина стружки в м;
L — длина траектории хода ковша в м;
kp — коэффициент разрыхления, равный отношению объема рыхлого
грунта к его объему в естественном залегании.
Полное сопротивление копанию имеет две составляющие. Усилие
определяется в конце копания, когда зубья ковша находятся на уровне
напорного вала, т. е. на высоте Нн. Предполагается, что здесь ковш пол-
ностью заполнен грунтом. При этом принимается kH = 1; qnp = 0 и L =
= Нн, тогда
q
С ~ bHHkp" м-
142
МАШИНЫ ДЛЯ ЗЕМЛЯНЫХ РАБОТ
По величине с можно определить и составляющую общего сопротив-
ления Р01
Р
01
kpq
крНн
кГ.
(Ш.5)
При расчетах можно принять, что для средней глины k0 = 1,6 кГ1см*'>
для тяжелой глины k„ = 2,5 кГ/см.2', для скальных пород k,} — 3,5 кГ/см?.
Нормальная составляющая Р0з может быть выражена через каса-
тельную силу Р01
POi ==tyPOi кГ. (Ш.6) ,
Коэффициент ф зависит от вида грунта, типа рабочего оборудования,
положения ковша, состояния режущей кромки и т. п. При оборудовании
прямой лопатой можно принять: ф = 0,5 в начале копания; ф = 0,2 —
в конце копания.
Усилия на зубьях ковша обратной лопаты. Здесь толщину стружки с
принимают такой же, что и в случае прямой лопаты. Удельное сопротив-
ление грунта копанию может быть принято k0 = 3,5 кГ/см2.
Усилия на зубьях ковша драглайна. Длина пути наполнения ковша L
может быть найдена по формуле
L = — I ,. — 1к м, (111.7)
cos а т- к ’ ' '
где L — длина пути наполнения ковша в м;
1С — длина стрелы в м;
1Т, ц — длина тяговых цепей в м;
1К — длина ковша в м.
Можно полагать, что
L (3 ч- 5) 1К м.
(Ш.8)
При работе на откосе с углом а 25° усилие на зубьях ковша дра-
глайна можно найти по формуле (III.2).
При этом толщина стружки с может быть определена по уравнению
объема стружки (Ш.4) в предположении kH = 1.
Тогда усилие на зубьях ковша найдется по формуле
Р
01
^0 (? + ?/;р)
kpL
(111.9)
Нормальная составляющая сопротивления копанию Рр2 может быть
найдена по формуле (III.6) в предположении ф = 0,6. При расчетах зна-
чения параметров могут быть приняты согласно табл. 17.
При оборудовании драглайна должны быть предъявлены определен-
ные требования к весу ковша. Нормальная составляющая усилия копа-
ния Р02 стремится вытолкнуть ковш из грунта. Поэтому для заглубления
ковша нужно, чтобы его вес был больше составляющей Р02, т. е.
ёк Рог — фЛн —
'Н’и (<7 + Чпр)
kpL
Поэтому минимальный вес ковша gK m]n будет равен
а _ <4 + Ум) , г
8к m!n “ * K1
(III. 10)
(111.11)
ЭКСКАВАТОРЫ
143
Таблица 17
Расчетные значения параметров
— Параметры Грунты
легкие средние тяжелые
Угол откоса забоя в град Коэффициент разрыхления kp Объем призмы волочения Угол наклона стрелы в град Сопротивление копанию в кГjcxfi 45 1,2 0,5<? 30 1 — 1,5 40 1,3 0,2? 30 2,0—3,0 30 1,4 0,1? 30 3,5—5,0
Пользуясь этой зависимостью, можно также решать и обратные задачи,
т. е. по данному весу ковша определить вид грунта, для разработки кото-
рого ковш пригоден. Этот вид грунта характеризуется удельным сопротив-
лением копанию, равным
^(q-gqnp) KJ ,СМ
(Ш.12)
Можно также найти соотношение между весом ковша и тяговым
усилием. Для этого нужно рассмотреть условия равновесия ковша во
время копания (рис. 90, в). Проектируя все силы на направление дей-
ствия силы тяги ST и на перпендикулярную к этому направлению ось,
будем иметь:
Ли + ёк+гsin а = ST; 1
рог = gK+ecosa, /
(III. 13)
где ST — величина тягового усилия. Условия равновесия сил относительно
точки О выразятся в виде
SyTj. ёк+г? к-
При отношении — = 2 S = 2§к+г, т. р. максимальное тяговое уси-
лие не должно превышать удвоенного веса ковша с грунтом. В противном
случае может произойти опрокидывание ковша.
Следовательно, 5гшах < 2gK+e, а обычно
ST = Р01 + ёк+г sin « кР-
Мощность, затрачиваемая на процесс копания. При расчете механиз-
мов подъема и напора с прямой лопатой необходимо определить:
подъемное усилие полиспаста S„; усилие в канате SK; скорость подъ-
ема vn; мощность, расходуемую на подъем N„; активное и пассивное напор-
ные усилия Sh, S"; мощность напорного механизма АД. Расчетная схема
представлена на рис. 90, а. Подъемное усилие S„ определяют в поло-
жении III, когда зубья ковша находятся на уровне оси напорного вала,
при этом рукоять приблизительно горизонтальна. Определяя сумму
моментов всех сил относительно оси напорного вала, можно получить
I "I- ёк+г^к^г Н- кГ. (111.14)
144
МАШИНЫ ДЛЯ ЗЕМЛЯНЫХ РАБОТ
Усилия в канатах будут максимальными в положении IV, когда
нагруженный ковш находится в самом верхнем положении, а рукоять
выдвинута до отказа. Подъемное усилие для этого положения Sn можно
найти тем же методом. ^Максимальные усилия можно получить, учитывая
динамический характер нагрузки. При одномоторном приводе
S„max = l,5Sra. (III. 15)
При многомоторном приводе этот коэффициент может быть снижен до 1,3.
Максимальное усилие в канате механизма подъема найдем по формуле
с _______________________________ Sn max
max Ki ,
тЧп
где т — кратность полиспаста;
т|(1 — к. п. д. полиспаста.
Скорость подъема ковша vn при независимом напорном механизме
выбирается по опытным данным для следующих моделей машин (м/сек):
малых 0,40—0,50; средних 0,50—0,90; тяжелых 0,90—1,60.
При зависимом напорном механизме скорости подъема ковша должны
быть увеличены на 10—15%.
Мощность, необходимая для работы механизма подъема, опреде-
ляется по формуле
Активное напорное усилие, т. е. усилие, которое необходимо для
работы напорного механизма, определяется при трех расчетных положе-
ниях. Первое расчетное положение / соответствует началу копания. Угол
наклона стрелы равен 60°, рукоять опущена, ковш пустой. Активное
напорное усилие должно преодолеть реакцию грунта Ро, и составляю-
щую той силы SK, которая действует в полиспасте подъема ковша. Заглуб-
лению ковша способствует его вес и вес рукояти. Сила SK определяется
из уравнения моментов относительно оси напорного вала. Активное напор-
ное усилие S° может быть найдено аналитическим путем или графически —
построением многоугольника тех сил, которые действуют на ковш с руко-
ятью.
При расчетном положении III (рис. 90) угол наклона стрелы для
малых моделей экскаваторов принимается равным 60°, а для больших
моделей — 45°. Предполагается, что рукоять полностью выдвинута и нахо-
дится в горизонтальном положении. Активное напорное усилие должно
преодолеть силы Ро., и составляющую силы натяжения полиспаста подъема
S“ = Ро2 + S„ tg ф. (Ш.16)
Ввиду того, что в этом положении напорный механизм работает мало,
принимается, что
Pos^O,2P01.
Пассивное напорное усилие определяется в целях расчета тормозных
устройств. Предполагается, что рукоять полностью выдвинута, а ковш
поднят на максимальную высоту (положение IV). Это усилие находится
из уравнения равновесия, которое составляется из проекций веса ковша
и рукояти и силы натяжения подъемного полиспаста на направление
рукояти.
При расчетном положении IV рукоять выдвинута, стрела под углом
60°, ковш находится в наивысшем положении. В этом случае Р01 и Ро,
ЭКСКАВАТОРЫ
145
равны нулю. Усилие подъемного полиспаста Sn находится из уравнения
моментов всех сил относительно оси напорного вала. Для расчета меха-
низма напора берется наибольшее значение S°, полученное из расчета
в указанных трех положениях. Скорость усилия напора vaH выбирается
такой, чтобы обеспечить полное выдвижение рукояти за время копания,
т. е.
иа < м/сек,
н ‘к
где 1Х. р — наибольший ход рукояти в м\
tK — продолжительность копания в сек.
> Скорость возвратного хода рукояти принимается в полтора-два
' раза большей. Мощность напорного механизма
где г]к — к. п. д. механизма напора.
Расчетным положением для определения необходимого тягового усилия
при обратной лопате является положение III (рис. 90, б). Здесь груженый
ковш находится у бровки забоя. На ковш действует максимальное зна-
чение реакции грунта Р01. Тяговое усилие определяется из уравнения
моментов всех сил относительно шарнира крепления рукояти к стреле
(точка О)
$т max ~ ~Z~ (P01r 1 ёк+ггк 4“ gffр "Ь $пгп)> (Ш-17)
'Г
где rT, rlt гп — плечи действующих сил относительно точки О. Усилие
подъема стрелы Sn может быть найдено при том же расчетном положении
из уравнения моментов всех сил, действующих на рабочее оборудование
относительно шарнира пяты стрелы (точки OJ,
Sntп 4 Sr?т = Лип 4- 4~ gpfр 4~ ёсСс (III. 18)
Производится проверка Sn еще для двух расчетных положений:
II и IV (рис. 90, б). В положении II ковш предполагается полностью
загруженным, а в положении IV — порожним. В обоих случаях считается,
что на подъем расходуется 60% мощности двигателя, а остальная мощность
затрачивается на поворот. Время подъема рабочего оборудования из по-
ложения //в положение, соответствующее выгрузке грунта, не должно
превышать времени, необходимого для поворота платформы на угол 70°.
Обычно скорость подъема выбирается в пределах 0,25—0,35 м/сек.
При оборудовании драглайном усилие в тяговом канате опреде-
ляется по формуле
Зт = Р01 + ёк+г sin а кГ, (III. 19)
где а — угол откоса, предельное значение которого находится в пределах
30—50°, причем меньшие значения соответствуют тяжелым
грунтам.
Подъемное усилие принимается равным 70—80% от силы тяги.
Скорости тяги принимаются равными (.«/сек): для малых моделей
0,7—0,9; для средних моделей 0,9—1,3; для тяжелых моделей 1,3—2,3.
Скорость подъемного каната выбирается приблизительно в 1,5 раза
больше. Скорость подъема должна обеспечивать возможность полного
подъема ковша за время, в течение которого поворотная платформа
146 МАШИНЫ ДЛЯ ЗЕМЛЯНЫХ РАБОТ
поворачивается на угол в 60—70°. При многомоторном приводе минималь-
ное усилие подъема принимается в зависимости от веса груженого ковша
Sn^ (1,5- 1,7) кГ. (111.20)
Механизм поворота. Производительность экскаватора в значительной
степени зависит от скорости поворота, так как время поворота доходит
до 70%, а у мощных драглайнов и до 80% от общего времени цикла.
Поэтому для увеличения производительности необходимо стремиться
к сокращению времени поворота. Верхний предел скорости поворота
у малых машин ограничен мощностью двигателя и возможностями опера-,
тора, а у мощных экскаваторов — сцеплением опорной поверхности экска-'
ватора с грунтом. Важнейшими характеристиками поворотного меха-
низма являются: моменты инерции всей вращающейся части экскаватора
при груженом ковше Jг и порожнем ковше ]п, угловая скорость вра-
щения <в, угловое ускорение е, угол поворота 0, к. п. д. механизма г\мех,
время поворота tn, а также мощность, затрачиваемая на вращение.
Моменты инерции вращающейся части экскаватора зависят от вида и поло-
жения рабочего оборудования. При определении моментов инерции при-
нимается, что ковш груженый, а стрела наклонена под обычным для
данного вида оборудования углом. Для прямой лопаты предполагается,
что рукоять горизонтальна и выдвинута на 2/3 своего хода для машин
малой и средней мощности и на 3/4 хода для машин большой мощности.
При обратной лопате угол наклона стрелы принимается равным 60°.
Приведенный к оси вращения общий момент поворотной платформы может
быть выражен как
Мтв = Мст Мз + Мд, (III.21)
где Мст — момент от преодоления сил трения в опорно-поворотном
устройстве, а также от ветровой нагрузки и случайного
наклона поворотной платформы;
Мд — момент, расходуемый на преодоление сил инерции вращаю-
щихся частей двигателя и механизма поворота;
Мд — динамический момент, расходуемый на преодоление сил
инерции всей поворотной платформы вместе с механизмами
и рабочим оборудованием.
Последняя составляющая является основной, так как равна 80—85%
от общего момента. Удельные значения момента от сил трения и момента
от преодоления сил инерции вращающихся частей двигателя и механизма
составляют соответственно 10—15 и 2—3%. Поэтому общий момент пово-
ротной платформы может быть выражен в виде
М = 1,2/Иб кГ-м. (III.22)
Величина динамического момента в общем виде определяется по формуле
Мд = Цг = Je кГ'м’ (Ш.23)
где tn — время разгона или торможения механизма вращения в сек;
— момент инерции в кГ-м-сек2;
ютах — максимальная угловая скорость, при определении которой
предполагается, что поворот состоит из разгона и торможения.
Момент инерции поворотной платформы при груженом ковше най-
дется по формуле
7г = «Г-л<-сек2, (III.24)
ЭКСКАВАТОРЫ
147
где G — вес расположенных на поворотной платформе отдельных узлов
экскаватора;
г — расстояние от центра тяжести этих узлов до оси вращения пово-
ротной платформы.
'Тогда мощность, расходуемая на поворот платформы, найдется по формуле
1.2<comax
Nnoe ~~ 75т],„„
Выбор мощности двигателя экскаватора должен производиться в пред-
положении совмещения отдельных операций рабочего цикла. Так, при
оборудовании.прямой лопаты совмещается работа подъемного и напорного
механизмов или работа подъем-
ного и поворотного механизмов.
Поэтому общая мощность двига-
теля должна выбираться по наи-
большему значению следующих
двух формул:
W = .Vn + AfH; (III.25)
Рис. 91. Распределение давления гусениц
на грунт
N --=Nn + Nnoe, (Ш.26)
где N п, Nн и Nnog — мощности, рас-
ходуемые на подъем, напор и по-
ворот. При оборудовании обратной
лопаты и драглайна аналогично
должны сравниваться мощности,
расходуемые на подъем и пово-
рот, с тем значением, которое соответствует работе тягового механизма.
। Ходовой механизм. Удельное давление на грунт определяет возмож-
’ ность работы экскаватора на слабых грунтах. Поэтому при проектирова-
нии экскаваторов необходимо это давление свести к минимуму. В случае
, гусеничного хода среднее удельное давление на грунт может быть найдено
по формуле
= кГ/г>м2’
где G — равнодействующая всех сил давления на грунт в кГ;
L — длина опорной части гусеницы в см;
b — ширина гусеничной ленты в см.
Ввиду того, что в процессе работы экскаватора загрузка гусениц
весьма неравномерна, максимальное удельное давление отличается от
среднего. Рассмотрим в качестве примера жесткую рамную гусеничную
тележку и предположим, что по длине опорной поверхности гусеницы
давление распределяется по линейному закону. Распределение давления
будет зависеть от положения равнодействующей. Если последняя про-
ходит через точку О, (рис. 91), то нагрузка на гусеницу 1 будет больше,
чем на гусеницу II. Она может быть определена по формулам
G, = 4 (i . (Ш.27)
G„ =4-(’ (Ш.28)
148
МАШИНЫ ДЛЯ ЗЕМЛЯНЫХ РАБОТ
Если равнодействующая переместится в точку 02, то нагрузка на
гусеницы определится по формулам
Gn = -f- ( 1 + ; (111.29)
Gf = -J- (i — - Sg a* ). (Ш.30)
Анализ работы экскаватора показывает, что удельные давления на
грунт принимают максимальные значения в том случае, если равнодей-
ствующая находится на оси симметрии экскаватора (точка О3). Макси-
мальное удельное давление для этого случая может быть рассчитано по
приведенной выше формуле (1.46). Это значение и должно быть сопостав-
лено с тем давлением, которое допускается для данного вида грунта.
Сопротивление передвижению колесных и гусеничных экскаваторов
может быть определено по методам, приведенным в § 5. Мощность дви-
гателей экскаваторов выбирается исходя из потребностей, связанных
с выполнением рабочих операций. Поэтому тяговый расчет делается в целях
определения тех скоростей передвижения, которые можно получить при
выбранной таким образом мощности двигателя.
Определение производительности экскаватора. Теоретическая про-
изводительность экскаватора может быть определена по формуле
QT = QOqn = q м31ч, (Ш.31)
где q — емкость ковша в м3;
п — число рабочих циклов за 1 ч;
Т — продолжительность одного цикла в сек.
Продолжительность одного цикла определяется по формуле
Т ~ 1к Ф" tn Ф~ t-пов Ф* tpaa Ф t-nog ф" tDni
где tK — время копания в сек;
tn — время подъема ковша в сек;
tnoe — время поворота груженого ковша в сек;
— время разгрузки в сек;
tnoe — время поворота порожнего ковша в сек;
ton — время опускания ковша в забой в сек.
Время подъема и поворота груженого ковша, а также время поворота
и опускания порожнего ковша могут быть полностью или частично сов-
мещены.
Техническая производительность экскаватора определяется по следу-
ющей формуле:
QT = 60<7nfeK -±~ kT м31ч. (Ш.32)
Яр
Здесь kH — коэффициент наполнения ковша;
kp — коэффициент разрыхления грунта;
kT — коэффициент влияния трудности разработки.
Эксплуатационная производительность может быть определена по
формуле
Q3 = QTks = 60qtikH-j^- kTke м31ч, (Ш.ЗЗ)
ЭКСКАВАТОРЫ
149
где k„— коэффициент использования экскаватора по времени. Коэф-
фициенты feH, kp и kT зависят от категории грунта и приблизительно могут
быть определены по данным табл. 18.
Таблица 18
Ориентировочное значение коэффициентов kH, kp и kT
Категория грунта Значения коэффициентов
кР kep - kHkr
I 1,05 1,10 1,0 1,0
II 1 — 1,05 1,20 0,95 0,90
III 0,90 1,25 0.80 0,70
IV 0,85 1,3—1,35 0,70 0,50
При работе в забое для прямых лопат вводится еще коэффициент
забоя k3. Его значение определяется в зависимости от категории грунта
и высоты забоя. Для грунта IV категории и при высоте забоя больше
высоты напорного вала k3 = 1.
§ 21. СТАТИЧЕСКИЙ РАСЧЕТ ОДНОКОВШОВЫХ ЭКСКАВАТОРОВ
Целью статического расчета экскаватора является определение усло-
вий уравновешивания поворотной платформы, проверка устойчивости
экскаватора и определение реакций опорных катков, катков-захватов
и центрирующей цапфы.
Для уравновешивания поворотной платформы служит противо-
вес, который выбирают из условия, согласно которому равнодейству-
ющая всех сил, действующих со стороны поворотной платформы, не должна
выходить за пределы опорно-поворотного круга. Однако полностью урав-
новесить поворотную платформу нельзя. Поэтому предполагается, что
неуравновешенная часть нагрузки будет восприниматься катками-захва-
тами. Руководствуясь этим соображением, вес противовеса выбирают по
условным расчетным схемам. Противовес рассчитывается для прямой
лопаты и проверяется для других видов рабочего оборудования. Следует
стремиться к тому, чтобы выбранный противовес удовлетворял по возмож-
ности большему числу сменного рабочего оборудования. Если это Не
удается, то выбирают противовесы для отдельных групп оборудования.
При расчете определяются два значения силы тяжести противовеса. Одно
значение соответствует возможности опрокидывания поворотной плат-
формы «вперед», т. е. в сторону рабочего оборудования, а другое значение
определяется исходя из возможности опрокидывания платформы «назад»,
т. е. в сторону противовеса. Выбранная сила тяжести противовеса не
должна быть меньше того значения, которое соответствует опрокидыванию
платформы вперед, и вместе с тем не должна превышать того значения,
которое соответствует опрокидыванию платформы назад. При несоблюде-
нии этого условия надлежит пересмотреть компоновку оборудования на
поворотной платформе.
При оборудовании прямой лопаты сила тяжести противовеса при опро-
кидывании поворотной платформы «вперед» определяется при наклоне
стрелы, равном 35—40”. Предполагается, что ковш груженый, рукоять
горизонтальна и выдвинута на а/8 своего хода в случае малых и средних
150
МАШИНЫ ДЛЯ ЗЕМЛЯНЫХ РАБОТ
машин и Полностью выдвинута в случае машин большой мощности. Сопро-
тивление грунта копанию не учитывается, так как предполагается, что
оно воспринимается роликами-захватами. Вес противовеса gnl в этом
случае найдется из уравнения равновесия относительного переднего катка
(точка В) нагруженного экскаватора (рис. 92, а).
„ вл+г (гк+г ~ а) + gp (гр ~ а) + gc (ге — а) — ga (га — а) „
gnl — r Т' , (.111.04)
где gc — вес стрелы; gp — вес рукояти; gK+s — вес ковша с грун-
том;
ga — вес всех агрегатов, находящихся на поворотной плат- >
форме;
С> гп< га — расстояния до оси вращения центров тяжести стрелы,
противовеса и агрегатов.
Рис. 92. Расчетная схема для определения противовеса при оборудовании прямой лопаты:
а — при опрокидывании поворотной платформы вперед; б — при опрокидывании поворот-,
ной платформы назад
Расчетная схема для определения силы тяжести противовеса при
опрокидывании поворотной платформы назад дана на рис. 92, б. Здесь
стрела расположена под углом к горизонту 55—60°, ковш разгружен,
оперт на грунт и находится у пяты стрелы. Сила тяжести противовеса нахо-
дится из уравнения моментов всех сил относительно заднего опорного
катка (точка А)
ёс (гс + °) - ga (га ~ а)
(111.35),
Если в результате окажется, что gn2 Z>gnl, то силу тяжести про-
тивовеса следует выбирать между этими значениями — ближе к gnl.
Когда gnl > gn2, то произойдет опрокидывание платформы назад. Это
указывает на то, что агрегаты и механизмы на поворотной платформе
слишком выдвинуты вперед. Пользуясь методом веревочного многоуголь-
ника, противовес можно определить графически.
При оборудовании обратной лопаты сила тяжести противовеса, пре-
пятствующего опрокидыванию поворотной платформы вперед, выби-
рается согласно расчетной схеме (рис. 93, а). Здесь предполагается, что
груженый ковш вышел из забоя, и экскаватор начинает поворот на выгрузку.
Определение силы тяжести противовеса производится из уравнения момен-
ЭКСКАВАТОРЫ
151
тов всех сил относительно переднего опорного катка (точка В). При опре-
делении силы тяжести противовеса, способной опрокинуть платформу
назад, предполагается, что ковш при максимальном вылете опущен на
землю. Для определения противовеса следует составить уравнение равно-
весия относительно заднего опорного катка (точка А на рис. 93, б). При
этом предполагается, что вес ковша полностью воспринимается грунтом
и в опрокидывании платформы участвует половина веса рукояти и стрелы.
По найденным таким образом значениям сил тяжести противовеса окон-
чательный его выбор производится так же, как и в случае прямой лопаты.
Рис. 93. Расчетная схема для определения противовеса
при оборудовании обратной лопаты: а — при опрокиды-
вании поворотной платформы вперед; б — при опрокиды-
вании поворотной платформы назад
В случае оборудования драглайном при рассмотрении возможности
опрокидывания платформы вперед предполагается, что производится
подъем груженого ковша, а стрела по отношению к горизонту наклонена
под углом 30°.
Сила тяжести противовеса при опрокидывании назад определяется
при опущенном на грунт ковше и при угле наклона стрелы 45—50°.
! Устойчивость экскаватора характеризуется коэффи-
циентом устойчивости ky, который определяется
(Ш-36)
где — момент сил, удерживающих экскаватор от опрокидывания;
Мо — момент сил, способствующих опрокидыванию экскаватора.
При нормальной устойчивости ky = 1,1ч-1,2. Меньшее значение этого
коэффициента указывает на возможность опрокидывания экскаватора,
а большие значения — на имеющие место недоиспользуемые резервы
устойчивости при проектировании рабочего оборудования. Следует
различать так называемую рабочую устойчивость экскаватора., т. е.
устойчивость в направлении рабочего оборудования и собственную
152
МАШИНЫ ДЛЯ ЗЕМЛЯНЫХ РАБОТ
устойчивость, или устойчивость в направлении противовеса. Обычно устой-
чивость в рабочем положении определяется для случая, когда рабочее
оборудование располагается поперек к гусеничному ходу. Устойчивость
в транспортном состоянии проверяется на максимальном уклоне и подъеме,
которые определяются тяговым расчетом.
Устойчивость прямой лопаты проверяется в двух рабочих положе-
ниях. Первое положение соответствует концу копания, когда рукоять
горизонтальна и выдвинута до конца, а угол наклона стрелы а = 35 ч-40°.
Опрокидывание машины возможно относительно края гусеничного хода
(точка А) на рис. 94.
В этом положении на ковш действует сила Р01, которая опреде-
ляется из уравнения равновесия относительно оси напорного вала всех
Рис. 94. Расчетная схема к проверке устойчивости экскаватора
при оборудовании прямой лопаты
сил, действующих на-ковш и рукоять. При этом сила подъема Sn опреде-
ляется по мощности двигателя. При многомоторном приводе при рассмо-
трении устойчивости следует учесть также напорное усилие, развиваю-
щееся при взятии рукояти «на себя» и способствующее опрокидыванию
машины. Однако это усилие учитывают только при расчете машин боль-
шой мощности, для которых проверка на устойчивость особенно важна.
Проверку устойчивости следует провести также в транспортном
положении. При этом рассматриваются случаи движения экскаватора
на подъем и под уклон. В обоих случаях рабочее оборудование повернуто
в сторону движения, а рукоять вертикальна. При движении на подъем
угол наклона стрелы принимается равным а = 50 ч-60°, а при движении
под уклон а = 35 ч-40°. В обоих случаях учитывается давление ветра,
которое способствует опрокидыванию. Удельная ветровая нагрузка при-
нимается равной q = 25 кГ'м2, а общая сила от действия ветра
We=qF кГ, (III.37)
где F — наветренная поверхность экскаватора в mF.
Устойчивость обратной лопаты проверяется по двум расчетным
схемам. В первом случае (рис. 95, а) предполагается, что происходит
отрыв ковша у бровки забоя. Тяговый барабан при этом заторможен,
и вся мощность двигателя расходуется на подъем. В случае одномоторного
привода при определении по мощности двигателя максимального усилия
подъема принимается в расчет коэффициент динамичности, равный 1,3.
Из уравнения моментов всех сил относительно оси шарнира пяты
стрелы определяют реакцию грунта Р01, которую полагают направлен-
ЭКСКАВАТОРЫ
153
ной перпендикулярно прямой, соединяющей ось шарнира пяты стрелы
с зубом ковша,
D $п maxrs giSc ёргР ёкгк
^01 —
г»
(111.38)
Опрокидывание машины происходит относительно точки А. Опро-
кидывающий момент Мт определяется по формуле
= gP (г5 — а2) + gc (г3 — а2) + gK (г4 — а2) + Poi4 (111.39)
Рис. 95. Схема для проверки устойчивости экскаватора при
оборудовании обратной лопатой: а — при отрыве препятствия;
б — при разгрузке липкого грунта
Удерживающий момент
= ёп(г1 + а2> + ga(r2 + а2) + ёта2- (Ш.40)
Второе расчетное положение соответствует разгрузке липкого грунта
на максимальном вылете ковша (рис. 95, б).
Устойчивость драглайна проверяется в положении, соответствую-
щем повороту на выгрузку (рис. 96). Угол наклона стрелы принимается
минимальным (amln = 25ч-30°). Предполагается, что ковш подтянут
к голове стрелы, и экскаватор работает на уклоне с углом у = 10-5-12°.
В случае машин большой мощности у принимается не более 7°. Опрокиды-
вающий момент находится с учетом центробежных сил, вызванных пово-
ротом
Мо = Мс + Ми,
гДе Мс — момент сил относительно точки А от весов рабочего оборудова-
ния, грунта и ветровой нагрузки;
Л1„ — момент от сил инерции;
М,= IgK+£,(rK + AKtgy) + ge(rc + Mgy)lcosу кГ-м. (111.41)
154
МАШИНЫ ДЛЯ ЗЕМЛЯНЫХ РАБОТ
Силы инерции (центробежные силы) рассчитываются с учетом всех
вращающихся масс. При этом узлы, расположенные на платформе, рас-
сматриваются как отдельные сосредоточенные массы. Предполагается
также, что масса стрелы распределена равномерно по ее длине. Инерцион-
ная нагрузка от веса ковша с грунтом
Рик = ^гк
Рис. 96. Схема к расчету устойчивости при оборудовании драг-
лайна
а инерционный момент от этой нагрузки
MK+e = -^«>2rKhK. (Ш.42)
Элементарная сила инерции стрелы определяется по формуле
_ 8с dx (oi -р х) to2
glc cos a
Рис. 97. Схема для определения реакции опорных катков,
катков-захватов и центрирующей цапфы
и, следовательно, момент от силы инерции выразится в виде
lc cos а
Me - f (ai +x)(h + xtga)dx кГ-м.
Clio U J
0
При приближенных расчетах сила инерции стрелы может быть учтена
путем введения коэффициента динамичности в статический момент опро-
кидывания
Мо = kMc кГ-м, (III.43)
где k = 1,3-н-1,4 — коэффициент динамичности.
ЭКСКАВАТОРЫ
155
Наибольшие значения нагрузки на опорно-поворотное устройство
имеет место при оборудовании крана, драглайна и грейфера. Тем не менее
эти определения следует проводить для всех видов рабочего оборудова-
ния. На рис. 97 представлена расчетная схема, составленная примени-
тельно к оборудованию прямой лопаты. Предполагается, что стрела
расположена под углом а = 25ч-30° и сила Р01 определяется в пред-
положении, что мощность двигателя расходуется только на подъем
ковша.
Реакция передних катков находится в предположе-
нии отсутствия катков-захватов и центрирующей цапфы из уравнения
моментов всех сил относительно оси вращения платформы.
Реакция центрирующей цапфы гаах находится
из уравнения суммы проекций всех сил на вертикальную ось. Усилия,
действующие на катки-захваты, можно найти из условия равновесия всех
действующих сил относительно переднего катка.
§ 22. РАСЧЕТ РАБОЧЕГО ОБОРУДОВАНИЯ И ОСНОВНЫХ УЗЛОВ
Расчет ковшей. Ковши представляют собой коробчатую конструкцию
переменной жесткости и поэтому расчет их точными методами теории упру-
гости представляется весьма сложным. Наиболее надежным способом
оценки прочности является метод экспериментального исследования
напряжений в отдельных элемен-
тах ковша в лабораторных и на-
туральных условиях.
Приближенная расчетная схе-
ма представлена на рис. 98. От-
дельные элементы ковшей пред-
ставлены в виде плоских рамных
систем. При этом схема на рис. 98, а
относится к цельнолитому ковшу.
Если предположить, что жесткость
задней стенки значительно больше
жесткости передней и боковых
стенок, то расчетную схему мож-
но представить в виде трижды
статически неопределимой рамы.
Для ковша, у которого передняя
и боковые стенки изготовлены из
одного листа, расчетной схемой
будет двухшарнирная арка. У тех
ковшей, у которых передняя и
Рис. 98. Расчетные схемы ковшей: а — цель-
нолитых; б — с. жесткой задней стенкой;
я — с передней и боковой стенками из одного
листа; г — с соединением передней и задней
стенок посередине боковой стенки
задняя стенки соединены посере-
дине боковой стенки, каждый ковш может рассчитываться как арка со
свободным перемещением одной из ее опор. Определение нагрузок произ-
водится в двух расчетных положениях. Первое положение соответствует
началу копания. Здесь на среднюю часть режущей кромки действуют
максимальные напорное и подъемное усилия (рис. 99, а).
Второе расчетное положение соответствует концу копания. Здесь
ковш максимально выдвинут и перпендикулярно к его режущей кромке
Действует сила Ро, представляющая собой реакцию при отрыве грунта
(рис. 99, б). Эта сила может быть определена графически (рис. 99, в).
Однако до этого необходимо найти реакцию седлового подшипника N,
156
МАШИНЫ ДЛЯ ЗЕМЛЯНЫХ РАБОТ
что может быть определено из уравнения
д/ _ £кгк ~4~ gprp -р тахгн $п п
(Ш.44)
Определение усилий в тяге S, и давления в шарнире Sul может быть
Рис. 99. Расчетные положения ковшей: а — первое расчетное положение; б — вто-
рое расчетное положение; в — определение усилий графическим методом
произведено из уравнения суммы моментов всех сил относительно шарнира
или графическим методом.
Расчет рукоятей. Рукоять подвержена изгибу в вертикальной и гори-
зонтальной плоскостях, кручению, сжатию и растяжению. Наиболее
Гр
Рис. 100. Расчетная схема рукояти прямой лопаты
характерным является копание на уровне напорного вала (рис. 100, а).
Здесь предполагается, что рукоять выдвинута так, что канаты подъема
расположены вертикально, и усилие копания приложено к крайнему зубу
ковша. Учитывается возможность случайного включения поворотного
ЭКСКАВАТОРЫ
157
механизма, в результате которого появляется горизонтальная сила К
(рис. 100, г). Сила Р01 определяется по мощности двигателя. При этом,
в случае многомоторного привода, учитывается коэффициент динамич-
ности. Учитывается также возможность одновременного действия напор-
ного усилия S“. Горизонтальная сила К определяется исходя из пред-
положения уравновешивания ее тормозом поворотного механизма
k = кГ, (111.45)
'|Л1
где Мт — приведенный к оси вращения платформы тормозной момент
в кГ-м;
R — расстояние от конца зуба до оси вращения платформы в м;
— к. п.'д. механизма от тормоза до оси вращения поворотной
платформы.
Реакция седлового подшипника находится из уравнения суммы
моментов всех сил относительно зуба ковша (точка О на рис. 100, б)
дг _ $п тахгп ёкгк Hprp Serg
Внешнюю рукоять можно рассматривать как балку, заделанную
в ковше и нагруженную силой N.
Силы Р01 и К приложены эксцентрично и потому вызывают не только
изгиб в вертикальной и горизонтальной плоскостях, но и скручивание
рукояти. Крутящий момент, действующий на рукоять от этих сил, может
быть заменен эквивалентной парой сил, которая вызовет дополнительный
изгиб рукояти в вертикальной плоскости. При этом значение силы R будет
равно
гэ _ । kd
* ~ 2b о '
Сила S„, вызванная усилиями напора и подъема, приложена по отно-
шению к рукояти с эксцентриситетом, равным h/2, что необходимо учи-
тывать. Надо также учесть возможность неравномерной передачи на каж-
дую балку усилия Se. Поэтому предполагается, что на наиболее нагружен-
ную ветвь действует сила не 1l2Se, a 2/3Se.
Максимальное напряжение в опасном сечении определится по фор-
муле
= + (1IL47>
где F — площадь поперечного сечения одной балки рукояти.
Изгибающий момент в сечении т—т от вертикальной нагрузки опре-
деляется по формуле
а изгибающий момент от горизонтальной нагрузки
,, k
!•
Поскольку здесь рассмотрен наиболее тяжелый случай, то при выборе
Допускаемого напряжения коэффициент запаса принимается минималь-
ным.
Расчет внутренней рукояти производится аналогичным путем. Здесь
напряжения в балке обычно в несколько раз превышают те значения.
158
МАШИНЫ ДЛЯ ЗЕМЛЯНЫХ РАБОТ
которые соответствуют внешней рукояти, в связи с чем внутренняя
рукоять применяется только при малых моделях.
Вторым расчетным случаем для рукояти прямой лопаты может слу-
жить период разгона или торможения механизма вращения с груженым
ковшом при полном вылете рукояти. Здесь в горизонтальной плоскости
действуют инерционные нагрузки, которые определяются по массам
ковша с грунтом и рукояти. В результате в седловом подшипнике возни-
кает реакция, по которой рукоять рассчитывается как консольная балка,
заделанная одним концом.
Рукояти экскаваторов испытывают в процессе работы переменные по
величине и направлению нагрузки, поэтому расчет на статическую проч-
ность должен сопровождаться проверкой на выносливость. Здесь должно
соблюдаться условие
о < [<тгк] < кПсм\ (III.48)
где а — действующее в рассматриваемом сечении напряжение в кГ1смг\
агк — предел выносливости в кГ/слг;
п — запас прочности, который ориентировочно может быть принят
1,2—1,5.
Предел выносливости огк при г < 1 может быть приближенно опрег
делен по следующей зависимости:
2а_,
°"' - (1 _ г) * + п (1 _|_ г) ’
где а_х — предел выносливости при симметричном цикле;
f “ qmin .
tfmax ’
ц — коэффициент чувствительности металла к асимметрии цикла
(для стали марки Ст. 3 и низколегированной ц >=» 0,2).
Для симметричного цикла, т. е. когда г = —1,
' 4-1
Пгк - —,
где k — коэффициент концентрации напряжений.
Для пульсирующего цикла, когда г = О,
Значение предела усталости при симметричном цикле для листовой
стали с прокатной коркой = 0,33ов, где ов — предел прочности стали.
Эффективные коэффициенты концентрации напряжений зависят от формы,
состояния поверхности и многих других факторов. Например, для основ-
ного металла в зоне перехода сварных швов эффективные коэффициенты
концентрации напряжений приобретают следующие значения: у стыко-
вого шва k = 1,4; у лобового — k =~ 2,4ч-3,0; у продольного флангового
шва k = 3,0ч-3,5.
В том случае, если [огк] > [о], то расчет на выносливость не про-
изводится.
Расчет рукояти обратной лопаты производится в основном по тому же
методу. Опасными будут сечения п—п и т—т, т. е. места крепления ковша
к рукояти и рукояти к стреле (рис. 101). Сечение п—п следует проверять
на действие максимального тягового усилия ST max, которое соответствует
тому моменту, когда тяговые канаты направлены по отношению к оси
рукояти под углом у = 90°. Предполагается, что происходит отрыв
ЭКСКАВАТОРЫ
159
Рис. 101. Расчетная схема рукояти обратной
лопаты
препятствия при заторможенном барабане подъема. Усилия Ро и f( при-
ложены эксцентрично к средней кромке крайнего зуба и вызывают допол-
нительные напряжения от кручения. Для сечения т—т опасным будет
случай отрыва препятствия в момент, когда стрела и усилие в полиспасте
направлены перпендикулярно к рукояти (« = р « 90°). Отрыв препят-
ствия производится под действием максимального усилия в полиспасте
подъема S„max и заторможенном тяговом канате. Учитывается также экс-
центричное приложение сил Рй и К. Кроме того, сечение т—т должно
быть проверено на действие максимальных динамических нагрузок, воз-
никающих при торможении поворотной платформы. При этом предпола-
гается, что полностью нагру-
женный ковш находится в верх-
нем положении и угол между
стрелой и рукоятью минимален.
Усилия в тяговом и подъемном
канатах определяются с учетом
веса грунта и рабочего оборудо-
вания.
Расчет стрел. Стрелы уни-
версальных и карьерных экска-
ваторов изготовляются преиму-
щественно сварными из листовой
стали; они могут быть цельно-
стержневыми и шарнирносочле-
ненными. Стрелы подвержены
сжатию, изгибу и кручению. В
вертикальной плоскости расчет-
ная схема цельностержневой
стрелы может быть представле-
на в виде двухопорной шарнирно закрепленной балки. Опорами служат
нижний шарнир стрелы и крепление стрелового полиспаста.
Первым расчетным положением стрелы является случай отрыва
препятствия при самом тяжелом сочетании действующих на стрелу нагру-
зок. Стрела расположена под минимальным рабочим углом к горизонту,
а рукоять перпендикулярна к стреле и полностью выдвинута (рис. 102, а).
При наличии раздельного привода механизмов подъема и напора на стрелу
действует максимальное усилие подъема S„raax и напора SH max. При общем
приводе усилие напора предполагается максимальным SH max, а усилие
подъема — равным рабочему значению Sn. На стрелу еще действуют,
нагрузки от ее веса, веса рукояти и ковша, реакция грунта Р01 и боковое
усилие 7<, приложенные к ковшу. Опасное сечение т—т расположено
под напорным валом. Суммарные напряжения в этом сечении определяются
по приведенному напряжению осум
асуи = V"°2 + Зт2 < [о] кПсм2. . (Ш.49)
Нормальные напряжения о находятся по формуле
(III. 50)
где Мизг — изгибающий момент в сечении т—т;
Мизг = Ryry ±
где е — возможный эксцентриситет осевой силы относительно центр?
тяжести сечения т—т.
= Мшг Rx
W - F ’
160
МАШИНЫ ДЛЯ ЗЕМЛЯНЫХ РАБОТ
Напряжения от кручения т определяются по формуле
т = кГ/см2,
Ир
(III.51)
где Угк — крутящий момент, создаваемый боковой силой.
Второе расчетное положение соответствует копанию грунта на уровне
напорного вала (рис. 102, б).. При этом предполагается, что рукоять за-
нимает горизонтальное положение и полностью выдвинута, а канаты
подъема перпендикулярны к оси стрелы. Стрела установлена под мини-
мальным углом, а напорный механизм заторможен. Принимается, что
действует максимальное усилие подъема 5„шах, а усилие реакции грунта Ро
и боковое усилие К приложены к крайнему зубу ковша, т. е. эксцентрично.
При этих условиях из уравнения моментов всех сил относительно режу-
щей кромки зубьев (точка О) определяется действующая на стрелу сила N.
Усилие подъема стрелы Sn_ с определяется из уравнения суммы моментов
всех сил относительно шарнира пяты (точка О,).
ЭКСКАВАТОРЫ
161
Реактивные силы Rx и Ru стрелы определяются из уравнения суммы
проекций всех сил, действующих на стрелу по направлениям осей X и Y.
Опасным сечением является сечение т—т.
В горизонтальной плоскости на стрелу действуют инерционные силы,
возникающие при разгоне и торможении механизма поворота, а также
ветровая нагрузка. Опасным сечением в этой плоскости является сечение
у пяты стрелы.
Инерционные нагрузки определяются по массам ковша с грунтом,
рукояти и самой стрелы, расстояниям центров тяжестей этих рабочих
органов от оси вращения поворотной платформы и по величине углового
ускорения.
При расчете на прочность стрелы обратной лопаты первым расчетным
положением будет отрыв препятствия при копании в момент, когда
рукоять перпендикулярна стреле. Второе расчетное положение соответ-
ствует моменту отрыва препятствия у бровки забоя. В горизонтальной
плоскости стрела рассчитывается в предположении разгона и торможения
механизма поворота платформы с полностью нагруженным или разгру-'
женным ковшом, но при максимальном вылете рукояти.
Стрелы экскаваторов, так же как и рукояти, должны проверяться
на выносливость. Такая проверка проводится для тех же опасных сечений,
которые рассчитывались на прочность с учетом максимального значения
коэффициента концентрации напряжений и коэффициентов асимметрии
цикла. Коэффициент запаса в формуле. (III.48) принимается таким же,
как и в случае рукоятей. Стрелы драглайнов могут быть решетчатыми,
состоящими из трех или четырех плоских ферм, и вантовыми — с одним
жестким центральным поясом. При расчете могут быть рассмотрены сле-
дующие расчетные положения:
1. Производится отрыв груженого ковша с подхватом, при этом стрела
наклонена под минимальным углом к горизонту, а ковш расположен на
расстоянии, равном 3/4 от его возможного (максимального) вылета; коэф-
фициент динамичности, развивающийся за счет несколько ослабленных
канатов, принимается равным 1,3; в горизонтальной плоскости действуют
инерционные силы от разгона поворотной платформы.
2. Ковш подтянут к голове стрелы и начинается торможение поворот-
ной платформы.
В обоих случаях на стрелу действуют следующие нагрузки: собствен-
ный вес стрелы gc, который принимается сосредоточенным или распре-
деленным по длине стрелы, вес ковша с грунтом, усилия в канатах подъема
стрелы, а также инерционные силы, вызванные началом поворота или тор-
можения поворотной платформы. Учитывается также и ветровая нагрузка.
При расчетах стрел на прочность следует учесть еще так называемые
случайные и аварийные нагрузки. К случайной нагрузке может быть
отнесено внезапное натяжение подъемного каната, вызванное падением
груженого ковша с бровки забоя. Аварийные нагрузки возникают при
«переподъеме» ковша из-за несвоевременного выключения подъемного
Механизма.
После проверки или выбора необходимых размеров отдельных сече-
ний стрелы производится проверка ее общей устойчивости при действии
сжимающих сил. В вертикальной плоскости стрела при этом рассматри-
вается как шарнирно закрепленный стержень, а в горизонтальной — как
Консольный стержень с одним заделанным, а другим свободным концом.
При расчете устойчивости стрела рассматривается как составной стер-
жень. Расчет производится по приведенной гибкости с учетом изменения
сечения по длине стрелы.
6 Н. Я. Хархута идр.
162
МАШИНЫ ДЛЯ ЗЕМЛЯНЫХ РАБОТ
Расчет двуногой стойки производится при положении рабочего обору- I
дования, соответствующего максимальному усилию в полиспасте подъема 1
стрелы. При оборудовании прямой лопатой расчетным является случай,.!
представленный на рис. 103, в. При этом учитывается динамический харак- 1
тер нагрузки. Усилия, действующие в стойках двуноги, можно определить I
графически. При проектировании определяется оптимальная высота i
двуногой стойки. При увеличении ее высоты усилие в полиспасте подъема I
стрелы уменьшается, но вместе с тем возрастают габариты высоты машины, |
что ухудшает ее транспортабельность. Смещение головы стойки вперед 1
уменьшает угол между осью стрелы и подвеской, а следовательно, увели-..|
чивает нагрузки на стрелу и двуногую стойку. Эти положения следует |
Рис. 103. Расчет двуногой стойки и поворотной платформы
учитывать при проектировании. Для того чтобы увеличить высоту двуноги 1
и вписаться в железнодорожный габарит высоты, применяют составные
или складные стойки. j
Расчет поворотной платформы. На поворотной платформе смонтиро- я
вано силовое оборудование и все основные механизмы экскаватора. Кроме |
того, на ней закреплена пята стрелы и размещен противовес. Платформа 1
может быть изготовлена литой, сварной или комбинированной. На экска- з
ваторах малой мощности часто применяются поворотные платформы балоч- J
ной конструкции. Они состоят из двух основных продольных балок, 1
связанных поперечными балками. На экскаваторах малой и средней мощ- <
ности применяются цельносварные или цельнолитые поворотные плат- j
формы, а на экскаваторах большой мощности поворотные платформы •
делаются комбинированными, состоящими из литой или сварной средней
части и сварных боковых балок, присоединенных к ней с помощью сварки
или болтов. Поворотная платформа относится к наиболее нагруженным
элементам экскаватора. На нее кроме собственного веса действуют усилия ;
в канатах подъема и тяги, реактивные силы в пяте стрелы, инерционные :
силы, возникающие при вращении платформы, и ветровая нагрузка.
Действующие на платформу нагрузки являются динамическими, поэтому
при расчете вводится коэффициент динамичности. Поворотная платформа ;
должна быть не только прочной, но и жесткой. \
На рис. 103, а, б показана схема сил, действующих на поворотную 1
платформу. Здесь Rc — реакция в пяте стрелы; gn — вес противовеса; ]
ga, gi’ gi и т. д. — собственные веса агрегатов и механизмов; So и ]
ЭКСКАВАТОРЫ
163
усилия от канатов подъемного механизма и механизма подъема стрелы,
которые передаются на поворотную платформу через двуногую стойку;
5 и S„,r — усилия в канатах механизма подъема и подъема стрелы; Ре —
усилие от ветровой нагрузки. Необходимо учесть также те инерционные
усилия, которые возникают при разгоне и торможении платформы.
Реактивные силы в центральной цапфе Н„ и на катках Rn к и Rs к
должны определяться в зависимости от конструкции опорно-поворотного
устройства. В конструкциях с центральной цапфой горизонтальные
силы воспринимаются последней и находятся из уравнения суммы
проекций всех сил на горизонтальную ось.
В конструкциях без центральной цапфы горизонтальные силы создают
дополнительный опрокидывающий момент и увеличивают реактивные
силы на опорах Rn. к и R3.K. Точный расчет поворотной платформы весьма
сложен, поэтому обычно ее рассчитывают как систему перекрестных балок,
т. е. предполагают, что она состоит из ряда продольных и поперечных балок,
шарнирно уложенных Друг на друга (рис. 103, г). Расчет производится
по методу сил в предположении равенства перемещений в точке пересе-
чения продольных и поперечных балок в направлении, перпендикулярном
плоскости рамы. При ориентировочном определении размеров поворотной
платформы ее можно рассматривать как балку, работающую на изгиб под
действием вертикальной нагрузки с опасным сечением под передними
или задними катками. Для платформы балочной конструкции в расчетное
сечение вводят только продольные балки. При этом запасы прочности
должны быть увеличены.
Расчет нижней рамы. Нижняя рама служит опорой для поворотной
платформы и потому воспринимает от нее нагрузки. Для экскаваторов
малой и средней мощности нижние рамы изготовляются чаще всего ли-
тыми.
В случае экскаваторов большой мощности нижние рамы изготовляются
сварными. Монтажные соединения выполнены с применением высокопроч-
ных болтов. Рамы изготовляются из радиальных и кольцевых балок
коробчатого сечения и обладают большой жесткостью. Расчет их произ-
водится методами строительной механики. При этом они рассматриваются
как пространственные внутренне статически неопределимые системы.
Приближенный расчет нижних рам экскаваторов малой и средней
мощности производится на изгиб без учета кручения путем расчленения
рамы на отдельные свободно опертые двухопорные балки, без учета про-
межуточных поперечных связей между ними.
§ 23. ЭКСКАВАТОРЫ НЕПРЕРЫВНОГО ДЕЙСТВИЯ
Экскаваторы непрерывного действия могут классифицироваться по
типу рабочего оборудования, по направлению движения рабочего органа
и емкости ковшей. По типу рабочего оборудования эти экскаваторы раз-
деляются на роторные и цепные и машины с рабочим органом специального
типа (например фрезерные).
По характеру движения рабочего органа экскаваторы разделяются
на машины поперечного копания и продольного копания. Движение
машин поперечного копания производится в направлении, перпендикуляр-
ном направлению движения ковшей. У экскаваторов продольного копа-
ния направление движения рабочего органа (ротора или цепи) совпадает
с направлением перемещения самого экскаватора. Многоковшовые экска-
ваторы некоторых типов устраиваются поворотными. У них рабочий орган
(ротор или цепь) может поворачиваться относительно базы машины.
164
МАШИНЫ ДЛЯ ЗЕМЛЯНЫХ РАБОТ
Цепные экскаваторы поперечного копания могут быть малой, средней
и большой мощности. Емкости ковшей равны: 15—150; 200—450; 500—
3000 л. Экскаваторы строятся на железнодорожном или гусеничном ходу
и применяются для разработки полезных ископаемых, на крупных гидро-
технических стройках, а также для рытья и очистки каналов. Они могут
Рис. 104. Схемы экскаваторов непрерывного действия
быть с верхним и нижним копанием, т. е. разрабатывать грунты ниже
(рис. 104, а) и выше (рис. 104, б) своей стоянки. Нижняя ветвь цепи (рабо-
чая) движется по жестким направляющим или свободно провисает. Экска-
ваторы, у которых рабочая ветвь цепи движется по жестким направляю-
щим, позволяет получать при разработке грунта точно спланированные
откосы. Поэтому эти экскаваторы могут применяться для работы в одно-
родных грунтах и при планировке откосов. Экскаваторы со свободно про-
висающей цепью могут применяться для разработки неоднородных грун-
тов, имеющих твердые включения. В этом случае свободно провисающая,
ЭКСКАВАТОРЫ
165
цепь позволяет ковшам обходить препятствия и тем самым предохраняет
от разрушения ковши и цепь.
Рабочее оборудование экскаваторов поперечного копания в горизон-
тальной плоскости может быть поворотным и неповоротным. Поворотные
экскаваторы являются более универсальными (они могут разрабатывать
породу в углах забоя), но они более сложны по конструкции и значительно
тяжелее по весу.
Цепные экскаваторы продольного копания (траншейные экскаваторы)
обычно изготовляются на гусеничном или пневмоколесном ходу
(рис. 104, в). Они предназначаются для рытья траншей и каналов шири-
ной 0,15—2 м и глубиной 1,2—8 м. Мощность двигателя находится в пре-
делах 16—300 л. с.
Рабочее оборудование цепных экскаваторов выполняется или в виде
закрепленных на цепи ковшей (многоковшовые), или в виде закрепленных
ножей и скребков (скребковое оборудование). Более распространенным
является многоковшовое рабочее оборудование, но в ряде случаев, напри-
мер при работе в липких грунтах и узких траншеях, ковши разгружаются
плохо, в этом случае предпочтительнее применять скребковое рабочее
оборудование. Скребковые рабочие органы находят применение также
при разработке мерзлого грунта.
Рабочий орган экскаватора располагается либо по центральной оси,
либо сбоку машины. У некоторых машин он может перемещаться поперек
траншеи. Рабочее оборудование может быть выполнено в виде навесного
или полуприцепного. В первом случае оно жестко связано с базовой маши-
ной, а во втором — верхний конец соединяется с базовой машиной шар-
нирно, а нижний свободно опирается на дно траншеи. В последнем случае
дно траншеи получается более ровным, так как поверхностные неровно-
сти, по которым движется машина, не оказывают на ровность существен-
ного влияния. Когда необходимо отрыть траншею с ровным дном и с точно
заданным уклоном, применяют специальные автоматизирующие устрой-
ства.
Роторные траншейные экскаваторы (рис. 104, г). При прокладке
магистральных трубопроводов и кабелей широкое распространение полу-
чили роторные траншейные экскаваторы. Рабочим органом является ротор,
к наружным граням которого жестко прикреплены ковши с зубьями.
По сравнению с цепными траншейными экскаваторами они имеют более
высокий к. п. д. и большую производительность. По мере увеличения
глубины траншеи сильно возрастают габариты ротора, поэтому эти экска-
ваторы предназначены для рытья сравнительно неглубоких траншей.
Отрываемые траншеи могут быть прямоугольного и трапециевидного про-
филя с минимальной шириной траншеи 0,2 м. Ходовая часть может быть
пневмоколесной или гусеничной. Рабочее оборудование устраивается
навесным или полуприцепным. Отечественные роторные экскаваторы
выполняются с полуприцепным рабочим органом.
Роторные карьерные (роторные поворотные) экскаваторы (рис. 104, д).
За последние годы как за рубежом, так и в СССР эти экскаваторы полу-
чают все большее распространение. Особенно это относится к поворотным
роторным экскаваторам как к наиболее производительным машинам.
Роторные экскаваторы при равной производительности имеют значительно
меньший собственный вес по сравнению со всеми другими типами экска-
ваторов. Удельный расход энергии составляет приблизительно 60% от
энергии, расходуемой многоковшовыми цепными экскаваторами. Особенно
эффективно их применение при разработке грунтов II и III категорий.
Суточная производительность в этих условиях достигает 80—100 тыс. м3.
166
МАШИНЫ ДЛЯ ЗЕМЛЯНЫХ РАБОТ
Они имеют еще и то преимущество, что позволяют в случае необходимости I
производить выборочную выемку пород и полезных ископаемых. 1
Рабочим органом является ротор, устанавливаемый на стреле. В совре- 1
менных экскаваторах роторы имеют диаметры 1,6—16 м. По окружности
ротора, на определенном расстоянии друг от друга укрепляются ковши.
Роторы могут быть ячейковыми, когда к ковшам примыкают специальные i
разгрузочные поверхности (ячейки), по которым грунт перемещается вниз J
к приемной части ленточного транспортера (рис. 105, а). В последние 1
годы стали применять так называемые безъячейковые роторы, в которых ;
отсутствуют примыкающие к ковшам камеры, в результате чего угол сек- (
тора разгрузки ковшей значительно увеличивается (рис. 105, б). Это позво-, j
лило увеличить скорости вращения роторного колеса, а следовательно, |
и производительность экскаватора. Кроме того, увеличение угла разгрузки |
улучшило работу экскава- 1
торов в условиях вязких 1
грунтов. I
Современные ротор- 1
ные экскаваторы, как пра- |
вило, изготовляются с не- 1
выдвигающейся стрелой, 1
при этом упрощается и 1
примерно на 20% облег- 1
чается конструкция ма- 1
шины. Опыт работы пока- |
зывает, что при выборе ]
рациональной схемы pa- I
боты такой экскаватор может обеспечивать такую же производительность, ;]
что и машина с телескопической стрелой. Поворотные роторные экскава- i
торы разрабатывают грунт как выше, так и ниже уровня стоянки маши-
ны. Высота верхнего копания современных роторных экскаваторов дости- (
гает 50 м и более, а наибольшая глубина нижнего копания составляет j
0,4—0,5 от высоты верхнего копания. По существу глубина нижнего 1
копания определяется возможностью ленточного транспортера подавать >
породу вверх под большим углом его наклона. Современные ленточные 1
транспортеры специальной конструкции позволяют поднимать породу j
под углом наклона к горизонту до 40°. ' j
Рис. 105. Схемы ротора: а — с
ячейками; б — без
ячеек
§ 24. ОБЩИЙ РАСЧЕТ МНОГОКОВШОВЫХ ЭКСКАВАТОРОВ J
Определение производительности. Теоретическая производительность 1
выражается в объеме рыхлого грунта, выработанного за 1 ч непрерывной 1
работы и зависит только от параметров экскаватора 1
QT = 0,06^z ж3/ч, (III.52) j
где q — емкость ковша вл; 1
z — число разгружений ковша в 1 мин. ]
Число разгружений ковша в 1 мин может быть определено в зави- 4
симости от скорости движения ковшей vK и шага ковшей Т 1
60щ-
Т ‘
Техническая производительность Q'T определяется за 1 ч непрерывной I
работы экскаватора в грунте определенной категории. Особенности раз- 1
ЭКСКАВАТОРЫ
167
рабатываемого грунта определяются коэффициентом влияния грунта k2
Qr := 0,Q6zqke, (III.54)
где k2 kHk.. ~k~,
kH — коэффициент наполнения ковшей;
kT — коэффициент трудности разработки;
kp — коэффициент разрыхления грунта при его разработке.
Значения /гг в зависимости от категории грунта могут быть следующие:
Грунт 1 категории.......................... 0,90
» II » 0,80
» Ш » 0,60
. » IV » 0,45
Эффективная или эксплуатационная производительность определяется
объемом выработанного грунта определенной категории за 1 ч работы
с учетом использования экскаватора по времени
Q:, = Qrke = 0fif5qzk2ke мЧч, (III.55)
где k„ — коэффициент использования рабочего времени, который учи-
тывает все простои и перерывы в работе экскаватора.
Выбор параметров экскаваторов. Для экскаваторов поперечного копа-
ния теоретическая производительность <?r определяется по заданной
эксплуатационной производительности. По значению теоретической произ-
водительности определяется емкость ковша q
(II1.S6)
где 2 — число ссыпок в минуту; оно может быть принято в зависимости
от глубины забоя и категории грунта по табл. 19.
Найденная емкость ковша ок-
ругляется до ближайшей стан-
дартной емкости. По выбранной
стандартной емкости ковша мо-
жет быть уточнено и действитель-
ное число ссыпок z. Шаг ковшо-
вой цепи t и шаг ковшей Тк опре-
деляются ориентировочно. Абсо-
лютная скорость движения ковша
и определяется геометрической
суммой скорости движения ковше-
вой цепи vK и скорости движения
экскаватора v3. Эти скорости взаи-
Т а б л иц а 19
Число ссыпок
Глубина забоя в м Число ссыпок в минуту 2 грунтов
рыхлого МЯГКОГО средней плотности
До 10 м. 34 28 22
10—20 м 30 24 20
Свыше 20 м 26 20 18
мосвязаны и должны выбираться
с учетом основных параметров, исходя из того, чтобы возможно было осу-
ществить перекрытие срезаемого грунта движущимися ковшами (рис. 106).
Скорость ковшевой цепи может быть выбрана в пределах vx = (0,4-=-
-н 1,1) м/сек. Сечение стружки f определяется по формуле
Ст sin а
60г//
/ = 66 =
(III.57)
где а — угол наклона ковшовой рамы к горизонту;
И — высота забоя в м.
Для машин продольного копания число ссыпок г выбирается ана-
логично. Скорость движения ковша vK выбирается обычно в пределах
168
МАШИНЫ ДЛЯ ЗЕМЛЯНЫХ РАБОТ
Рис. 106. Схема движения ковшей экскаваторов поперечного
копания
Рис. 107. Схемы к расчету устойчивости многоков-
шового экскаватора поперечного копания
ЭКСКАВАТОРЫ
169
v = (0,7т-0,8) м/сек для тяжелых грунтов и vK = (1,0ч-1,2) м/сек для
легких грунтов. Скорость движения экскаватора V, определяется по
формуле
1'3 = ' 606/7 ’ (Ш.58)
где b и Н соответственно ширина и глубина траншеи.
Поскольку глубина траншеи Н может изменяться, то для сохранения
постоянной производительности необходимо на экскаваторе иметь
несколько значений скоростей v3. Максимальное ее значение оэпих опре-
деляется при минимальной глубине траншеи ffmln и наклоне ковшовой цепи
под углом а 15ч-20°, а минимальное значение — при Нтах и угле
наклона ковшовой цепи а = 50ч-55°. Сечение стружки определяется по
формуле
, о, QT sin а
; = б6 = -Ж7Г--
Для роторных экскаваторов толщина стружки в процессе копания
изменяется, поэтому при расчетах принимают усредненное ее значение.
Окружная скорость ковша vK выбирается в пределах vK = (0,9ч-2,0) м/сек.
Скорость передвижения экскаватора v3 может быть определена по фор-
муле
(111.59)
где b и Н ширина и глубина траншеи. Скорость иэ здесь должна быть
тоже различной. При Н = ^-|- : Dp v3 имеет минимальное значение,
а при И «а 0,2ОЛ v3 принимает максимальное значение. Здесь Dp —
диаметр ротора. Сечение стружки определяется по той же формуле
/=^=^7-. (III.60)
' оОгл
Расчет устойчивости. Многоковшовые экскаваторы поперечного копа-
ния рассчитывают на устойчивость в направлении, перпендикулярном
движению машин, для трех случаев (рис. 107, а, б, в): 1) в рабочем поло-
жении опрокидывание возможно в сторону ковшовой рамы; кроме соб-
ственного веса всех элементов при расчете устойчивости учитывается
ветер, при этом принимается Р„ = 25ч-40 кГ/м2. учитывается также усилие
резания Рр и дополнительные усилия от веса грунта в ковшах; 2) в трап--
спортном положении расчет устойчивости производится для положения
с поднятой ковшовой рамой при действии ветра; принимается Рв =
= ЮОч-200 кГ/м2 в случае действия его в направлении ковшовой рамы
или в сторону противовеса; 3) рассматривается также монтажное поло-
жение; при снятом рабочем органе опрокидывание возможно в сторону
противовеса. Кроме собственных весов учитывается ветер при Р'в =
— 100д-200 кГ/м2, направленный в сторону противовеса. Коэффициент
запаса устойчивости определяется как отношение удерживающего момента
к моменту опрокидывающему. Он принимается равным ф = 1,3ч-1,4.
Для машин продольного копания расчет устойчивости проводится
в двух положениях — рабочем и транспортном. При расчете устойчивости
роторного экскаватора проверяются три положения: 1) рабочее, при
котором учитывается помимо основных нагрузок сила резания ротора
и ветер при Р„ = 25 :- 40 кГ/м2\ 2) нерабочее или транспортное, при
котором учитывается ветер при Р' = 100 д-200 кГ/м1, оказывающий
170
МАШИНЫ ДЛЯ ЗЕМЛЯНЫХ РАБОТ
давление в сторону роторной стрелы или противовеса; 3) монтажное,
которое соответствует снятой роторной стреле и ветровой нагрузке,
действующей в сторону противовеса.
Вес противовеса для многоковшовых экскаваторов определяется, так
же, как и для одноковшовых, исходя из того, чтобы равнодействующая
всех весов и сил на поворотной платформе не выходила за пределы
опорно-поворотного круга.
Литература
1. Домбровский Н. Г., Панкратов С. А. Землеройные машины. М.,
Госстройиздат, 1961.
2. Гарбузов 3. Е., Ильгисонис В. К., Мутушев Г. А. и др.
Землеройные машины непрерывного действия. Л., изд. «Машиностроение», 1965.
3. Крутиков И. П. Экскаваторы. М., изд. «Машиностроение», 1964.
4. К о х П. И. Одноковшовые экскаваторы. М., изд. «Машиностроение», 1963.
5. Станковский А. П. Строительные машины и оборудование. М., Госстрой-
издат, 1964.
6. Г а р б у з о в 3. Е. Универсальные одноковшовые экскаваторы. М.—Л., Маш-
гиз, 1952.
7. Справочник по кранам под ред. А. И. Дукельского. Т. 1. М.—Л., Машгиз, 1961.
8. Винокурский X. А. Стальные конструкции в тяжелом машиностроении.
Свердловск, Машгиз, 1960.
9. Г о х б е р г М. М. Металлические конструкции подъемно-транспортных машин.
М.—Л., изд. «Машиностроение», 1964.
10. П е т е р с Е. Р. Основы теории одноковшовых экскаваторов, М., Машгиз, 1955.
11. Панкратов С. А. Конструкция и основы расчета главных узлов экскава-
торов и кранов. М., изд. «Машиностроение», 1962.
Глава IV. МАШИНЫ ДЛЯ УПЛОТНЕНИЯ ГРУНТОВ
§ 25. ФИЗИЧЕСКИЕ ОСНОВЫ ПРОЦЕССА
УПЛОТНЕНИЯ ГРУНТОВ МАШИНАМИ
Уплотнение грунтов относится к числу наиболее важнб!х
элементов технологического процесса возведения земляного полотна
автомобильных и железных дорог, плотин и т. п. От качества выполнения
этого процесса зависит дальнейшая их служба. Для получения достаточной
устойчивости, для каждого из этих сооружений установлены требования
к плотностям их грунтов. При этом в основу оценки степени уплотнения
положен метод стандартного уплотнения и потому требования к плотно-
стям грунтов обычно выражены в виде коэффициента уплотнения, т. е.
в долях от максимальной стандартной плотности. (6тах). Для верхних
слоев грунтов земляного полотна автомобильных дорог требования к плот-
ностям высоки — здесь плотность грунта должна быть не ниже (0,98ч-
1,0) 6тах. Для нижних слоев насыпей она может быть снижена до 0,95dmax.
Плотности грунтов насыпей железных дорог в зависимости от расположе-
ния рассматриваемого слоя в насыпях должны находиться в пределах
(0,90~-0,98) бтах, а плотности грунтов плотин устанавливаются в каждом
конкретном случае. Следует заметить, что достижение такой высокой
плотности как (0,98 ч-1,0)бгаах связано со значительными трудностями
и может быть осуществлено лишь при правильном выборе как параметров
применяемых машин, так и режима их работы. Уплотнение грунтов должно
производиться только специальными предназначенными для этой цели
машинами. Попытка использовать для этого землеройно-транспортные
машины и совместить этот процесс с выведением насыпей показала, что
плотности грунтов получаются недостаточными и уплотнение неравномер-
ным и потому этот способ может служить только для предварительного
уплотнения грунтов, что, конечно, облегчает работу основных машин.
Огромное значение при уплотнении имеет влажность грунтов. Каж-
дой действующей на грунт нагрузке соответствует своя оптимальная влаж-
ность, при которой требуемая плотность может быть достигнута при наи-
меньшей затрате механической работы. При недостаточной влажности для
достижения требуемой плотности необходимо применять ряд мер, к числу
которых относится, например, снижение толщины уплотняемого слоя.
Надо заметить, что очень сухие грунты вообще не могут быть доведены до
требуемой плотности. Та оптимальная влажность грунта Ц70, которая
определяется методом стандартного уплотнения, соответствует работе
средних машин. Оптимальная влажность, соответствующая работе тяжелых
машин, обычно равна (0,8—0,9) 1У0.
Грунты уплотняются укаткой, трамбованием, вибрацией и вибро-
трамбованием.
172
МАШИНЫ ДЛЯ ЗЕМЛЯНЫХ РАБОТ
При укатке по грунту перекатывается валец или колесо, на поверх-
ности контакта которых с грунтом имеет место какое-то удельное давление
(напряжение), за счет которого и развивается необратимая деформация
грунта. На этом принципе основана работа всех катков. При трамбовании
грунт уплотняется падающей массой, которая была перед тем поднята
на какую-то высоту и в момент встречи с грунтовой поверхностью обладает
определенной скоростью. Таким образом, трамбование связано с ударом
рабочего органа машины о грунт. При вибрировании уплотняющая масса
находится либо на поверхности уплотняемого слоя (поверхностные вибра-
торы), либо внутри его (глубинные вибраторы). В результате специаль-
ного механизма она приводится в состояние колебательного движения.
Часть кинетической энергии этой массы расходуется на колебание грунта,
которое вызывают относительные смещения его частиц, чем достигается
их более плотная упаковка. При вибрировании не происходит отрыва
массы от уплотняемой поверхности или он весьма незначителен. Если воз-
мущения массы превзойдут определенный предел, то будет иметь место
ее отрыв от поверхности грунта, что приведет к частым ударам массы
о грунт. В этом случае вибрирование перейдет в вибротрамбование. От
трамбования этот процесс отличается высокой частотой ударов. Несмотря
на малую высоту падения массы, ввиду развивающихся высоких скоростей
движения, энергия удара может быть значительной.
Во всех случаях воздействие на грунт рабочих органов машины свя-
зано с приложением к нему циклической нагрузки. Приблизительные зна-
чения параметров этой нагрузки при различных методах уплотнения даны
в табл. 20. Предполагается, что грунты имеют оптимальные влажности.
Таблица 20
Параметры циклической нагрузки при различных методах уплотнения
Метод уплотнения Параметры циклической нагрузки
Максимальное напряжение в кГ/см- Скорость изме- нения напря- женного состояния в кГ/смг -сек Общее время напряженного состояния грун- та за один цикл в сек
Укатка катками на пневматиче- ских шипах 6—10 5—60 0,10—0,40
Трамбование 5—18 450—2000 0,016—0,030
Вибрирование 0,3—0,9 10—90 0,01—0,30
Вибротрамбование 0,5—0,9 45—450 0,008—0,011
Из таблицы видно, что, по сравнению с укаткой, трамбование при мало
отличающихся максимальных напряжениях характеризуется большей
быстротой процессов. Вибротрамбование отличается от трамбования
меньшими напряжениями, однако эффект воздействия повышается вслед-
ствие тиксотропных свойств грунтов.
Деформация, а следовательно, и эффект уплотнения, зависит как от
скорости изменения напряженного состояния, так и от продолжительности
действия нагрузки, а следовательно, и от числа повторностей ее прило-
жения.
Характер взаимодействия рабочих органов машин с грунтом гаков,
что он может быть сведен к схеме нагрузки полупространства грунта
жестким круглым штампом. Поэтому в этом случае применимы те
МАШИНЫ ДЛЯ УПЛОТНЕНИЯ ГРУНТОВ
173
основные положения, которые получены в результате анализа такого
деформирования.
Удельные давления на поверхности контактов рабочих органов машин
с уплотняемыми грунтами не должны быть выше их пределов прочностей,
но вместе с тем они не должны быть и низкими, так как в противном случае
снижается эффект уплотнения. Лучший эффект получится в тех случаях,
когда удельные давления на поверхности контакта с рабочими органами
уплотняющих машин равны (0,9-4-1,0) ор (ор — предел прочности). Исклю-
чением из этого правила являются машины, действие рабочих органов
которых основано на глубоком проникании их в уплотняемый слой грунта
(кулачковые и решетчатые катки). Значения пределов прочности для грун-
тов оптимальной влажности приведены в табл. 21.
Таблица 21
Пределы прочности грунтов в кГ/см'1 в конце процесса уплотнения
Грунты При укатке катками на пневмомашинах При трамбовании штампом диаметром 70—100 см
Малосвязные (песчаные, супесчаные, пыле- ватые) 3—4 3—7
Средней связности (суглинистые) 4—6 7—12
Высокой степени связности (тяжелосугли- нистые) 6—8 12—20
Весьма связные (глинистые) 8—10 20—23
Эффект от работы машин для уплотнения грунтов зависит от того,
насколько правильно выбрана толщина уплотняемого слоя. При излишне
больших толщинах слоев требуемые плотности грунтов не достигаются.
При слишком малых толщинах слоев снижается производительность
машин и возрастает стоимость работ.
Профессором Н. Н. Ивановым теоретическим путем установлено, что
предельная глубина, на которую еще распространяется действие нагрузки,
составляет 3,5dM (dtu—диаметр штампа). Позднее этот вывод получил
экспериментальное подтверждение. В пределах этой зоны, на которую
еще распространяется действие нагрузки, следует различать еще такую
зону, где в процессе уплотнения грунтов деформация по глубине распре-
деляется еще более или менее равномерно. Эту зону можно назвать
активной, а ее глубину — глубиной активной зоны.
Созданию такой зоны способствуют массовые пластические сдвиги грунто-
вых частиц и агрегатов, которые развиваются по объему грунта, а также
то, что уплотняемый слой расположен на более жестком основании, кото-
рым служит ранее уплотненный грунт. Наличие жесткого основания при-
водит к концентрации сжимающих напряжений по оси сосредоточенной
нагрузки, а также к меньшему перепаду напряжений по глубине, т. е.
к их выравниванию.
Глубина активной зоны /г0 зависит от поперечных размеров штампа
в плане, величины напряжения, скорости изменения напряженного состоя-
ния, а также от вида и влажности грунта. Эта зависимость при IV7 < IV0
и о -д' Ор может быть выражена в виде
U7 ( —'l
hn == aBtnin 2L (1 - е °? см, (IV. 1)
W о
174
МАШИНЫ ДЛЯ ЗЕМЛЯНЫХ РАБОТ
где 8т1п — минимальный поперечный размер поверхности контакта
рабочего органа машины с уплотняемым грунтом в см.\
W и Wo — влажность и оптимальная влажность грунта в %;
е — основание натуральных логарифмов;
аир — постоянные; коэффициент ос зависит от скорости изме-
нения напряженного состояния: при укатке а = 2,0, при
трамбовании и вибрировании а = 1,1; для связных грун-
тов р = 3,65.
В случае несвязных грунтов глубина активной зоны в 1,2—1,5 раза
выше.
В пределах активной зоны реализуется около 80% всей деформации
грунта и только 20% ее приходится на объем грунта, расположенный вне
этой зоны. Поэтому толщина уплотняемого слоя грунта не может быть
больше глубины активной зоны, так как в противном случае не будет
достигнута требуемая плотность грунта.
Оптимальная толщина уплотняемого слоя грунта Шп) находится
в тесной связи с глубиной активной зоны. Под оптимальной понимается
такая толщина, при которой требуемая степень уплотнения достигается
с наименьшей затратой механической работы и наибольшей производи-
тельностью машины. Глубина активной зоны определяет собой верхний
предел оптимальных толщин слоев уплотняемого грунта. В тех случаях,
когда при уплотнении грунтов необходимая плотность не превышает
0,95бтах, оптимальная толщина слоя может быть принята равной глубине
активной зоны (7/0 = й0). При этом такая плотность достигается относи-
тельно легко и не требует большого количества проходов машин.
Минимальный размер рабочего органа машины в плане определяет
собой максимальное значение оптимальной толщины слоя грунта, т. е.
как бы потенциальные возможности уплотнения, которые, однако, могут
быть реализованы лишь в том случае, если напряжение на поверхности
грунта будет близким к пределу прочности. При меньших значениях
напряжений оптимальная толщина слоя снизится.
Если требуемая плотность грунта велика и составляет (0,98-ь1,0) бтах,
то оптимальная толщина слоя равна половине глубины активной зоны
(Г/о = 0,5ftfl). Эта плотность может быть достигнута и при толщине слоя,
равной глубине активной зоны, но при этом число проходов должно быть
увеличено в 3 раза по сравнению с тем случаем, когда требуемая плотность
равна 0,956шах. Поэтому уплотнение грунтов при таких, больших толщи-
нах слоев становится экономически невыгодным.
Снижение толщины уплотняемого слоя грунта, по сравнению с опти-
мальной величиной, при сохранении тех же размеров рабочего органа
и той же величины развивающегося на поверхности грунта напряжения,
как правило, влечет за собой излишнюю затрату удельной работы, т. е.
работы, необходимой для уплотнения единицы объема грунта.
Анализ формулы (IV. 1) показывает, что снижение напряжений до
(0,5н-0,6) Ор практически не отражается на глубине активной зоны, а
следовательно, и на оптимальной толщине уплотняемого слоя. Вместе с тем
надо заметить, что всякое снижение напряжений приводит к увеличению
необходимого числа повторностей приложения нагрузки.
В результате уплотнения должна быть получена не только требуемая
плотность грунта, но и прочная его структура. Это может быть достигнуто
лишь при соблюдении определенного режима работы. В первую очередь
это относится к удельному давлению, которое должно быть близким к пре-
дел у прочности грунта, но не превышать последний не только в конце
уплотнения, по и в течение всего процесса. Если нарушить это правило
МАШИНЫ ДЛЯ УПЛОТНЕНИЯ ГРУНТОВ 375
и сразу выбрать то давление, которое должно иметь место лишь в конце
процесса уплотнения, когда грунт уже плотен и прочен, то при первых
проходах будет происходить разрушение структуры, и особенно вблизи
поверхности. Это затруднит дальнейшее формирование плотной и прочной
структуры, и достигнутые в конечном итоге плотность и прочность будут
ниже тех, которые получаются при постепенном возрастании удельного
давления. О разрушении структуры, например, свидетельствует сильное
волнообразование перед вальцами или колесами катков, а также выпира-
ние грунта со стороны.
Таким образом, можно сказать, что удельное давление
рабочего органа машины должно постепенно
повышать с я от прохода к проходу в случае
катков или от удара к удару при трамбующих
машинах. Такой процесс повышения удельного давления до некоторой
степени производится автоматически за счет постепенного снижения глу-
бины колеи при укатке и времени удара — при трамбовании. При этом
удельные давления возрастают в 1,5—2 раза, а необходимо, чтобы они
стали выше в 3—4 раза. Поэтому уплотнять грунты нужно двумя маши-
нами — легкой и тяжелой. Легкая машина должна служить для предва-
рительного уплотнения, а тяжелая — для окончательного доведения
грунта до требуемой плотности. Применение предварительного уплотне-
ния снижает примерно на 25% общее потребное число проходов или ударов
по одному месту. Если еще учесть, что в начале процесса применяются более
легкие средства, то все это дает экономию до 30% от общей стоимости работ
по уплотнению.
Переход на уплотнение более тяжелой машиной не должен вызывать
резкого повышения напряжения на поверхности грунта. Поэтому лучший
эффект достигается в том случае, когда напряжение на поверхности при
первом воздействии более тяжелой машины будет равно напряжению,
соответствующему последнему воздействию более легкой машины. При
укатке катками на пневмошинах это требование удовлетворяется в случае,
когда предварительное уплотнение производится катком, нагрузки на
каждое колесо которого в 2 раза меньше, чем при основном уплотнении,
и давление в шинах снижено в 1,5—2 раза. При трамбующих машинах
предварительное уплотнение можно производить машиной, вес рабочего
органа которой в два раза меньше, или той же машиной, которой произ-
водится и основное уплотнение, но при снижении в 4 раза высоты падения
рабочего органа. Во время предварительного уплотнения надо совершить
30—40% общего необходимого числа проходов.
Предварительного уплотнения можно не применять, если грунт в про-
цессе возведения насыпи был уплотнен землеройными или землеройно-
транспортными машинами до плотности не ниже 0,908roax, что имеет место,
например, при скреперных работах.
При укатке определенное влияние оказывает скорость движения
катков. При разных скоростях движения оптимальная плотность грунта
практически достигается за одно и то же количество проходов. Этот вывод
подтвержден непосредственными испытаниями и следует из реологических
свойств грунтов. Так, в п. 2 было показано, что скорость изменения напря-
женного состояния практически влияет на величину необратимой деформа-
ции лишь до определенных значений. Те скорости, которые имеют место
при укатке, уже находятся вне сферы их влияния.
Вместе с тем обнаружено, что при больших скоростях движения
формируется менее прочная структура грунта, что объясняется несколько
большими действующими на грунт сдвигающими усилиями. Проведенные
176
МАШИНЫ ДЛЯ ЗЕМЛЯНЫХ РАБОТ
исследования позволили разработать рациональный скоростной режим
укатки, при котором качество уплотнения не только не снижается, но и
несколько повышается. При таком режиме первый проход и два последних
прохода должны совершаться на малой скорости (1,5—2,5 км/ч), а все
промежуточные проходы — на большой скорости (8 — 10 км/ч). При таком
режиме производительность повышается примерно в 2 раза. Конструкции
катков должны позволять производить уплотнение грунтом на рациональ-
ном скоростном режиме.
§ 26. ПРИЦЕПНЫЕ КАТКИ
Катки могут быть прицепными, полуприцепными и самоходными.
Для уплотнения грунтов практически применяются только прицепные и
полуприцепные катки. Самоходные катки служат для уплотнения дорож-
ных оснований и покрытий.
Рабочими органами катков являются вальцы или колеса. В зависимо-
сти от конструкции вальцов катки разделяются на катки с гладкими валь-
цами, кулачковые, решетчатые и сегментные. Катки могут быть снабжены
также колесами на пневматических шинах. Наибольшее распространение
получили кулачковые катки и катки на пневматических шинах.
По сравнению с другими машинами, служащими для уплотнения
грунтов, катки являются наиболее простыми, но вместе с тем производи-
тельными и экономичными. Поэтому они получили весьма широкое распро-
странение. Вместе с тем максимальные толщины слоев грунта, которые
могут быть уплотнены, при работе катками ниже, чем при трамбовании
и вибрировании. Кроме того, для успешной работы катков и особенно
прицепных необходим широкий фронт работ.
Катки с гладкими вальцами и на пневматических шинах пригодны
для уплотнения как связных, так и несвязных грунтов. Кулачковые и
сегментные катки могут уплотнять только связные грунты. Решетчатые
катки пригодны для уплотнения гравелистых, обломочных и мерзлых
грунтов. Параметры катков должны быть подобраны применительно к свой-
ствам тех грунтов, для уплотнения которых они предназначаются. Выбор
параметров может быть произведен на основе результатов анализа взаимо-
действия рабочих органов катков с уплотняемым грунтом.
Катки с гладкими вальцами. Катками с гладкими вальцами можно
уплотнять грунты при толщинах слоев в плотном теле не более 15—20 см.
Поэтому они в настоящее время практически вытеснены более совершен-
ными катками на пневматических шинах. Вместе с тем получили большое
распространение вибрационные катки с гладками вальцами. Поэтому сле-
дует рассмотреть некоторые элементы взаимодействия гладкого вальца
с грунтом.
Максимальные напряжения, развивающиеся на поверхности кон-
такта вальца с грунтом, могут быть найдены по формуле (1.33).
При укатке, так же как и при других методах уплотнения, должно
соблюдаться общее правило, согласно которому напряжение на поверх-
ности при перекатывании по ней вальца катка не должно превышать пре-
дела прочности грунта. Это условие может быть написано в виде
(IV.2)
Здесь — предел прочности, значения которого для различных грунтов
приведены в табл. 21. В конце уплотнения связные грунты при опти-
МАШИНЫ ДЛЯ УПЛОТНЕНИЯ ГРУНТОВ
177
мальной влажности имеют модуль деформации £0 = 150ч-200 кГ'см2,
а несвязные Е 0 = 100150 кПсм?. Лучший эффект уплотнения имеет
место в случае, когда отах (0,8-е-О,9) ор. Для расширения области
применения обычно предусматривается возможность изменения веса
катка путем догрузки его балластом.
Глубина активной зоны при укатке равна примерно двум диаметрам
штампа (2,0dM) или, что то же, удвоенному минимальному поперечному
размеру поверхности контакта катка с грунтом, т. е. длине хорды, стя-
гивающей погруженную в грунт часть окружности вальца. Из этих сообра-
жений, с учетом значения модулей деформации, для определения глубины
активной зоны можно получить сле-
дующие простые, формулы:
в случае связных грунтов
/г,,-0,3(j|r| см, (IV.3)
для несвязных грунтов
h(> = 0,35,”' см, (IV.4)
где R — радиус вальца катка
в см;
q — линейное удельное
давление в кПсм;
W и Wo — влажность и опти-
мальная влажность грунта в %.
Из формул видно, что глубина
активной зоны, а следовательно,
Рис. 108. Кулачковый каток:
/ — рама; 2 — залец; 3 — бандаж; 4 — ку-
лачки; 5 — люк для загрузки балласта: 6 —
скребки для очистки кулачкое
и оптимальная толщина уплотняе-
мого слоя грунта в равной сте-
пени зависят как от удельного ли-
нейного давления, так и от радиуса
вальца катков. Поэтому последние
следует выбирать возможно большими. Однако по технологическим
соображениям вряд ли возможно иметь R > 80—90 см. Ширина вальца
в существующих конструкциях прицепных катков обычно выбирается по
формуле
b (0.7-4-0,8) D см, (IV.5)-
где D = 2R — диаметр катка в см.
Однако при этих условиях катки недостаточно устойчивы и поэтому
ширину вальцов лучше выбирать, руководствуясь условием
b >(1,0-г-1,2) D см. (IV.6)
Вместе с тем, при излишне большом значении b ухудшаются условия дви-
жения на поворотах и значительно возрастает вес катка.
Необходимое число проходов катка должно устанавливаться в резуль-
тате пробной укатки. Обычно при уплотнении несвязных грунтов оно
равно 4—6, а в случае связных грунтов достигает 10—12.
Кулачковые катки. Кулачковые катки отличаются от гладких тем, что
на своей поверхности несут кулачки (шипы) (рис. 108). Напряжения на
поверхности контакта кулачков с грунтом в несколько раз больше, чем
напряжения под катком с гладкими вальцами. Поэтому кулачковые катки
эффективны только при уплотнении связных грунтов преимущественно
178
МАШИНЫ ДЛЯ ЗЕМЛЯНЫХ РАБОТ
комковатых и не дают никакого эффекта при работе на несвяз-
ных грунтах, где вследствие высоких напряжений имеет место интен-
сивное перемещение грунта из-под кулачков в стороны и вверх. При работе
кулачки врезаются в грунт на значительную глубину. Поэтому уплот-
няются только те объемы грунта, которые расположены ниже плоскости
погружения кулачков, а верхняя часть грунта при этом разрыхляется.
Эта верхняя часть слоя может быть уплотнена лишь после отсыпки поверх
нее нового слоя грунта. Ввиду интенсивного уплотнения нижней части
слоя, заглубление кулачков по мере увеличения числа проходов посте-
пенно уменьшается. Поэтому при легких и средних типах кулачковых
катков толщина верхней неуплотненной части слоя сравнительно неве-
лика и составляет 4—6 см.
По оказываемому на грунт удельному давлению кулачковые катки
разделяются на легкие р = 4-1-20 кПсм2-, средние р = 20-1-40 кГ/см*-,
тяжелые р = 40-1-100 кГ/см2.
Опыт эксплуатации катков показал, что при излишне высоком удель-
ном давлении эффект уплотнения снижается. Он недостаточен также
и при малых давлениях. Поэтому удельные давления должны быть опти-
мальными. На основе практики строительства и эксплуатации кулачко-
вых катков можно рекомендовать следующие значения удельных давле-
ний для грунтов оптимальной влажности (кГ/см2):
Легкие и средние суглинки (в том числе пылеватые) . . 7—15
Средние и тяжелые » » » » » . . 15—40
Тяжелые суглинки и глинистые грунты (в том числе пы-
леватые) ..........................................40—60
Удельное давление рассчитывается в предположении передачи веса
катка на один ряд кулачков, расположенных по образующей вальца.
На самом деле в работе участвуют также и кулачки соседних рядов,
поэтому фактическое удельное давление, как правило, будет ниже рас-
четного не менее чем в 1,5—2 раза. Что касается общего веса катков,
то он может выбираться до 10—18 т и даже более. Однако следует ука-
зать, что на производстве хорошо себя зарекомендовали катки весом 5—6 tn.
Сухие связные грунты могут уплотняться катками, имеющими
несколько большие удельные давления и общий вес.
Большое значение имеют также размеры опорных поверхностей
кулачков. За однократное действие кулачка уплотнение распространяется
на глубину 2,5 Ь (Ь — минимальный размер опорной поверхности кулачка).
Таким образом, размеры активной зоны увеличены по сравнению с обыч-
ными ее значениями (-~2&). Это объясняется тем, что в этом случае ввиду
больших удельных давлений образуется весьма плотное грунтовое «ядро»,
которое как бы удлиняет кулачок. При последующих проходах этот
уплотненный слой как бы наращивается, что происходит за счет сдавли-
вания с ним рыхлого грунта, расположенного выше. Такое «наращива-
ние» плотного слоя может идти до величины, примерно равной 4Ь. Поэтому
для выбора минимального поперечного размера опорной поверхности
кулачка можно рекомендовать следующую формулу:
b > 0,25Я„ см, (IV.7)
где Нп — толщина уплотняемого слоя грунта в плотном теле в см.
Длина кулачков определяет собой ту глубину, на которую они могут
погрузиться в грунт при укатке. Поэтому при уплотнении рыхлых грун-
тов длина кулачков автоматически ограничивает верхний предел удель-
ного давления. После превышения этого предела каток начинает опи-
раться на грунт не только кулачками, но и поверхностью вальца. Оче-
МАШИНЫ ДЛЯ УПЛОТНЕНИЯ ГРУНТОВ
179
видно, что этот верхний предел зависит не только от длины кулачка, но
и от свойств грунта.
В случае излишне большой длины кулачков при первых проходах
катка, когда грунт находится еще в рыхлом состоянии, будут развиваться
избыточные напряжения, которые повлекут за собой выдавливание грунта
в стороны, что снизит эффект уплотнения и повысит необходимое тяговое
усилие. Это затруднит также «наращивание» слоя при последующих
проходах катка. Вместе с тем при недостаточной длине кулачки не смогут
погружаться в грунт на необходимую глубину, и потому нижняя часть
уплотняемого слоя останется непроработанной.
Длины кулачков L следует назначать такими, чтобы после полного
погружения в грунт расстояние от опорной плоскости этих кулачков
до поверхности ранее уже уплотненного грунта превышало 2,56. Это
расстояние и определяет собой ту толщину слоя грунта, которая без
«наращивания» может быть доведена до требуемой плотности.
Если через Нр обозначить оптимальную толщину слоя грунта в рых-
лом состоянии, а через hp — ту глубину, на которую нижний уже ранее
уплотненный слой остался разрыхленным, то имеет место следующее
соотношение:
L = (Нр + hp) — 2,5b см. (IV.8)
Для катков среднего веса можно принять hp = 5 см. Толщину слоя
удобнее измерять в плотном теле. Если оптимальную толщину слоя в плот-
ном теле обозначить Но, то
До = Нр (1 — е) см,
где е — относительная необратимая деформация грунта, необходимая для
доведения его от рыхлого состояния до требуемой плотности.
Опыты показывают, что часть слоя грунта, определяемая величи-
ной hp, обычно находится в совершенно рыхлом состоянии. На такой
грунт и должно быть рассчитано погружение кулачков. Поэтому можно
принять е = 0,35.
Тогда на основании (IV.8) для расчета оптимальной толщины слоя
может быть предложена следующая формула:
Но - 0,65 (L 4- 2,56 — hp) см. (IV.9)
При чрезмерно высоких удельных давлениях возрастет величина 6„, что
снизит толщину уплотняемого слоя грунта.
Из анализа работы кулачковых катков следует, что уплотнение
будет эффективным в том случае, когда грунты вначале достаточно рыхлы.
Это условие обеспечивает глубокое проникание кулачков и постепенное
наращивание плотного грунта. Кулачковые катки являются мало пригод-
ными для уплотнения уже сравнительно плотных грунтов, так как в этом
случае имеет место неполное проникание кулачков и, следовательно, не
обеспечивается проработка слоя на всю его толщину.
Формы кулачков существующих типов катков весьма разнообразны.
Однако, как это следует из принципа работы, эта форма на получаемую
плотность грунта влияния не оказывает. Вместе с тем должны быть выдви-
нуты определенные требования к форме опорной поверхности кулачков.
Она должна быть выбрана такой, чтобы при перекатывании обеспечива-
лись одинаковые максимальные напряжения во всех точках поверхности
контакта, что обеспечивает равномерное уплотнение грунтов. Этому
требованию отвечают реверсивные (т. е. симметричные) кулачки
180
МАШИНЫ ДЛЯ ЗЕМЛЯНЫХ РАБОТ
и преимущественно те их виды, опорная поверхность которых очерчена
из центра катка по дуге окружности. Налипание на кулачки грунта
должно быть сведено к минимуму. Поэтому кулачки не должны иметь
ребер, впадин, резких выступов и т. п.
Число кулачков на вальце катка должно быть возможно большим,
что снизит необходимое число проходов. Однако наличие большого коли-
чества кулачков повлечет за собой повышение общего веса катка и уси-
лит склонность грунта к налипанию. Сравнительные испытания катков
с различным количеством кулачков показали, что удовлетворительная
работа имеет место в том случае, когда число кулачков, приходящихся
на 1 м2 поверхности вальца, составляет 20—25. Эти данные относятся
к легким и средним каткам, опорные поверхности кулачков которых
имеют площади от 20 до 40 см2. Расположение кулачков на поверхности
вальца должно быть шахматное.
Длина кулачков L и диаметры вальцов D должны находиться в пре-
делах оптимальных соотношений. Может быть рекомендован следующий
предел этого отношения:
-2-= 5,5-^7. (IV. 10)
Эта формула может служить для выбора диаметра вальца. Ширина вальца
может быть выбрана по формулам (IV.5) и (IV.6).
Необходимый общий вес катка может быть определен в предположе-
нии, что грунт нагружается только через один ряд кулачков. Тогда
Q = pFz кГ, (IV. 11)
где Q — общий вес катка в кГ;
F — опорная поверхность кулачка в см2;
р — выбранное удельное давление на опорной поверхности кулачка
в кГ/см2;
г — число кулачков в ряду, расположенном по образующей вальца.
Кулачковые катки целесообразно изготовлять с расчетом возможности
изменения их веса балластировкой. Это позволит один и тот же каток
использовать при уплотнении легких и тяжелых суглинков, а также
грунтов разной влажности.
Вследствие значительного пластического течения грунта из-под опор-
ных поверхностей кулачков уплотняется не только тот грунт, который
непосредственно расположен под этой опорной поверхностью, но также
и объемы, расположенные вблизи, что расширяет активную зону. Это
позволяет сократить необходимое число проходов. Испытания катков пока-
зали, что для достижения грунтом уплотняемого слоя плотности, рав-
ной 0,95бтах, достаточно однократного перекрытия всей поверхности слоя
кулачками. Это условие выполняется при числе проходов
« = (IV.12)
где S — поверхность вальца катка в см2;
F — опорная поверхность кулачка в см2;
т — общее число кулачков;
k — коэффициент, учитывающий неравномерность перекрытия поверх-
ности кулачками; в среднем k = 1,3.
В тех случаях, когда требуемая плотность грунта составляет (0,98:-
-н1,0) 6тах, число проходов по сравнению с формулой (IV. 12), должно
быть увеличено в 2—3 раза.
МАШИНЫ ДЛЯ УПЛОТНЕНИЯ ГРУНТОВ 181
Кулачковые катки, как правило, работают в сцепке из нескольких
штук. Формула (IV. 12) выведена в предположении работы одного катка,
поэтому при работе в сцепке в зависимости от взаимного расположения
в ней катков в эту формулу должны быть внесены соответствующие кор-
рективы.
Необходимое для работы кулачковых катков тяговое усилие най-
дется по формуле
Т = Qn (f + i) кГ, (IV. 13)
где Q — вес катка с балластом в кГ\
п — число катков в сцепке;
f— коэффициент сопротивления перекатыванию; f = 0,15-;-0,25 —
при первых проходах и f = 0,10н-0,15 — при последних про-
ходах;
г — уклон местности.
Производительность катка может быть определена по формуле
П= м3/ч, (IV. 14)
4+^ .
где. Li — длина укатываемого участка в м\
Но — толщина уплотняемого слоя в плотном теле в м\
b — ширина вальца в м;
i]e = 0,85 — коэффициент использования катка по времени;
0,2 — величина перекрытия катком следа предыдущего прохода в м;
v — рабочая скорость в л/ч;
ttl — время, затрачиваемое на поворот, в ч.
Рама и дышло катка рассчитываются на растяжение от максималь-
ного тягового усилия того трактора или тягача, на работу с которым
рассчитан каток. Коэффициент динамичности при этом принимается рав-
ным 1,5.
Катки на пневматических шинах. В настоящее время пневматические
катки применяются для уплотнения не только грунтов, но и гравийных
и щебеночных оснований, а также черных смесей и асфальтового бетона.
При этом, в отличие от катков, имеющих жесткие гладкие вальцы, катки
на пневматических шинах не подвергают дроблению щебень и гравий,
что и является большим преимуществом этих катков. Типы и размеры
этих катков весьма разнообразны. Так, вес тех прицепных катков, кото-
рые предназначены для уплотнения грунтов аэродромов, достигает 100,
120, а в отдельных случаях и 200 m. Наибольшее распространение полу-
чили катки весом 20—25 и 40—50 т.
Катки на пневматических шинах при условии правильного выбора
их параметров пригодны для уплотнения как связных, так и несвязных
грунтов. Оптимальные толщины уплотняемых слоев здесь больше, чем
при уплотнении гладкими и кулачковыми катками. Кроме того, для
Доведения грунтов до одной и той же плотности требуется меньшее число
проходов, что повышает производительность катков.
Общий вид прицепного катка на пневматических шинах представлен
на рис. 109.
Наибольшее распространение получили катки с независимой
подвеской отдельных колес, что обеспечивает равномерное уплотнение
грунта, а при неровной поверхности предохраняет шины от перегрузки.
Ось каждого колеса жестко связана с балластным контейнером, передняя
часть которого шарнирно подвешена к траверсе рамы машины.
182
МАШИНЫ ДЛЯ ЗЕМЛЯНЫХ РАБОТ
Расчет давления на поверхности контакта пневматического колеса
с грунтовой поверхностью может производиться по формуле (1-34), а также
по более точной формуле (1.35).
При первых проходах, когда грунт еще находится в рыхлом состоя-
нии, деформация пневматической шины по сравнению с деформацией
грунта весьма мала, ввиду чего его работа подобна работе жесткого колеса.
По мере уплотнения грунта удельное значение деформации шины все
более возрастает и при плотных грунтовых поверхностях имеет место
обратная картина, т. е. здесь в основном деформируется уже шина.
Рис. 109. Каток на пневматических шинах
Под пневматической шиной грунт находится в напряженном состоя-
нии более продолжительное время, чем под жестким колесом. При рав-
ных диаметрах жесткого колеса и пневматика последний ввиду эластич-
ности имеет большую площадь контакта с поверхностью грунта и эта
площадь загружена значительно равномернее. Все это способствует повы-
шению эффекта уплотнения грунтов.
Для определения глубины активной зоны надо найти минимальный
поперечный размер поверхности контакта шины с грунтом. Таким разме-
ром является малая ось эллипса, которую можно определить, предполо-
жив, что в конце процесса уплотнения перекатывание пневматика произ-
водится по абсолютно жесткой поверхности, т. е. что деформируется
только шина.
Если Р — общая нагрузка на пневматическое колесо, включая его
вес в кГ, а а и b — большая и малая оси эллипса отпечатка шины в см,
то будет иметь место следующее равенство:
Р^^-осркГ. (IV. 15)
Здесь оср — среднее напряжение на поверхности контакта. Распределе-
ние напряжений по поверхности контакта может быть принято происхо-
дящим по закону эллипсоида. Поэтому соотношение между максималь-
ным атах и средним напряжениями определяется по формуле:
<hp = 4 кГ 1сМ^ (IV. 16)
МАШИНЫ ДЛЯ УПЛОТНЕНИЯ ГРУНТОВ
183
Полагая соотношение между осями эллипса равным 1 : 3, на основа-
нии формулы (IV. 15) с учетом зависимости (IV. 16) можно получить
Тогда, учитывая формулу (IV. 1), можно найти глубину активной зоны
7 _2.5-^И /—р~
йв = 1,6-j—И — е °" J V см. (IV.18)
Из формулы (IV. 18) видно, что снижение давления в шине понижает
напряжение на .поверхности грунта, что уменьшает глубину активной
зоны. С другой стороны, при постоянной нагрузке на колесо это сниже-
ние влечет за собой увеличение площади контакта шины с грунтом и, сле-
довательно, повышение глубины активной зоны. Жесткость самой шины
всегда несколько снижает эффект от понижения давления. Так, при сни-
жении давления в шине от 6 до 2 атм, т. е. в 3 раза, напряжение на поверх-
ности грунта понижается с 7 до 4 кПсм2, т. е. уже не в 3, а в 1,8 раза.
При той же нагрузке на колесо поперечные размеры площади контакта
с грунтом увеличиваются примерно в 1,7 раза, что во столько же раз
повышает глубину активной зоны.
Формулу для определения глубины активной зоны можно также полу-
чить, пользуясь результатами испытаний какой-либо модели катка. Так,
сопоставление результатов испытаний катка Д-263 с имеющими место при
деформировании грунта общими закономерностями позволило для расчета
глубины активной зоны получить следующую формулу:
h0 = 0,18^ с-, (IV. 19)
где Р — нагрузка на колесо в кГ\
pw — давление в шинах в кПсм%‘,
С — коэффициент жесткости шины, значения которого приведены
на стр. 38.
Постоянный коэффициент перед знаком радикала имеет размер-
ность смЧкГ. Формула может служить для расчета глубины активной
зоны при уплотнении связных грунтов, оптимальной и менее, чем опти-
мальная, влажности. При этом предполагается, что пневматические колеса
сдвоены и общая нагрузка на них равна 2Р.
Таким образом, глубину активной зоны можно рассчитывать по фор-
мулам (IV. 18) и (IV. 19). Обе формулы дают вполне приемлемую для прак-
тических расчетов точность. Тем не менее надо отметить, что форму-
лой (IV. 18) в большей степени учитывается действительная картина
работы пневматической шины, и поэтому ее надо рекомендовать в пер-
вую очередь.
Для повышения проходимости и эффекта работы пневматические
шины выгодно иметь возможно большего диаметра. Большой диаметр
колеса позволит увеличить площадь контакта с грунтом, а тем самым
и глубину активной зоны.
Следовательно, как правило, должны применяться шины больших
размеров. Нагрузку на колесо также желательно иметь возможно большей.
С ростом нагрузки увеличивается обжатие пневматической шины, а следо-
вательно, и глубина активной зоны. Нагрузка ограничивается прочностью
шины, а также теми тяговыми средствами, для работы с которыми
предназначен каток.
184
МАШИНЫ ДЛЯ ЗЕМЛЯНЫХ РАБОТ
Вследствие относительно малой скорости движения катков и значи- I
тельного снижения в связи с этим динамических нагрузок, допустимые |
пределы давлений на колеса возможно принимать несколько большими 1
по сравнению с теми их значениями, которые обычно лимитируются пае- 1
портными данными. Верхний предел нагрузки должен быть ограничен 1
такими их значениями, при которых смятие шины не превышает 15%. <
Под смятием здесь понимается отношение абсолютной величины дефор- !
мации шины к диаметру ее сечения (к высоте профиля), выраженное#**
в процентах. / ?
Здесь также следует считать, что лучший эффект уплотнения соот- |
ветствует такому случаю, где максимальное напряжение на поверхности ।
близко к пределу прочности грунта. -1
Давление воздуха в шинах автомобилей и дорожностроительных 1
машин, как правило, не более 6 кГ/см2. Поэтому при уплотнении |
связных грунтов, предел прочности которых превышает 12 кГ/см\ еле- I
дует рекомендовать катки, снабженные авиационными шинами, кото- 1
рые допускают повышение давления воздуха до 12 и даже 14 атм.. 1
Конструкция катка должна позволять регулировать давление в шинах, |
а в случае самоходных катков необходимо обеспечить, чтобы эта операция j
могла совершаться на ходу. |
При уплотнении песков и малосвязных грунтов ввиду относительно 1
более низких пределов прочностей этих грунтов давление в шинах не J
должно превышать в первом случае 2 кПсм*, а во втором случае — 3— I
4 кГ/см2. Во избежание большого износа шин должны быть также сни- I
жены и нагрузки на колеса катков. <
Спаренные колеса по сравнению с одиночными дают большую пло- j
щадь следа и поэтому способны уплотнять слои грунта больших толщин. J
Поэтому прицепные катки должны быть одноосными. Ввиду особенностей ]
конструкции стандартных колес и их дисков все колеса ряда не могут быть
вплотную поставлены друг к другу. Между ними всегда будут иметь место
какие-то зазоры. Для повышения эффекта уплотнения последние должны !
быть сведены к минимуму. j
Зазор желательно иметь не выше 0,4В (В — ширина колеса) и никак )
не больше (0,5ч-0,7) В. При зазоре менее 0,4В он на эффекте уплотнения
практически не отражается.
Необходимое число проходов при уплотнении связных грунтов обычно \
составляет 6—8. При несвязных грунтах оно в 2 раза меньше.
При тяговых расчетах коэффициент сопротивления перекатыванию
следует выбирать равным / 0,2 — при первых проходах и f 0,08-е-
-н-0,1 — при последних проходах. Время разгона катка можно полагать
равным 2—3 сек.
Выбор тягача надо производить с расчетом возможности преодоления
возникающих при работе катков максимальных сопротивлений. Коэффи-
циент использования силы тяги тягача
„ GK(J+0
•Ir - т
(IV. 20)
должен быть возможно более близким к рг =- 0,8-4-0,9,
где ТТ — сила тяги на крюке тягача при выбранной скорости его движе-
ния в кГ;
Gx — сила тяжести катка в кГ.
В случае самоходного катка должны быть увязаны между собой тяго-
вое усилие, возникающие сопротивления и сцепной вес. Такую увязку
МАШИНЫ ДЛЯ УПЛОТНЕНИЯ ГРУНТОВ
185
можно произвести, пользуясь тем же методом, что и в случае самоходных
скреперов.
Расчет на прочность отдельных узлов катка производится в предпо-
ложении реализации полной силы тяги тягача с учетом коэффициента
динамичности ka = 1,5.
Катки решетчатые и сегментные. Решетчатые катки появились
сравнительно недавно и сразу хорошо зарекомендовали себя как эффек-
тивное средство для работы в зимнее время, а также для уплотнения гра-
велистых и глинистых комковатых грунтов. Катки изготовляются при-
цепными. По конструкции они сходны с гладкими или кулачковыми кат-
ками и отличаются от них тем, что их вальцы выполнены из решетки.
Последняя сварена из прутков низколегированной стали. Решетка может
быть также выполнена литой. В этом случае валец собирается из отдель-
ных звеньев. Решетка имеет квадратные отверстия со стороны квадрата 15
или 20 см. Балласт обычно размещается на раме катка и выполняется
в виде бетонных кубов. Общий вес катка с балластом составляет 25—30 т.
Каток может уплотнять грунт слоями толщиной до 40 см.
Вальцы секторного катка имеют вырезы, вследствие чего окружность
их прерывается впадинами. Их собирают из звеньев, сдвинутых таким
образом, чтобы впадины располагались в шахматном порядке. Такой
каток работает подобно кулачковому и по сравнению с последним имеет
значительно большие опорные поверхности. Поэтому при достаточном
общем весе он может прорабатывать слои грунта значительно большей
толщины. Эти катки могут быть также самоходными.
§ 27. ТРАМБУЮЩИЕ МАШИНЫ
При трамбовании грунт уплотняется за счет энергии падающей массы.
В момент соприкасания ее с грунтом начинается удар. Здесь за очень
короткий промежуток времени движение трамбовки получает конечное, а не
малое изменение, вследствие чего должны развиваться очень большие
напряжения на поверхности контакта трамбовки с грунтом.
Можно написать уравнение
j Pdt — М (Oj — и2), (IV.21)
о
где . М — масса трамбовки;
ог и v2 — скорости трамбовки до и после удара;
Р — развивающееся в процессе удара усилие;
t — текущее время;
т — время удара.
Из этого уравнения видно, что если знать время удара и закономер-
ность изменения напряжения во времени, то может быть определена
развивающаяся при ударе сила, а следовательно, и возникающее на
поверхности контакта напряжение. По напряжению можно найти необра-
тимую деформацию и, следовательно, оценить эффект уплотнения. Соот-
ветствующая началу удара скорость может быть определена по формуле
Uj = У2gH м/сек, (IV.22)
где Н — высота падения трамбовки, в м.
Скорость v2 = 0, так как удар трамбовки о грунт может быть принят
абсолютно неупругим.
В отличие от вполне упругих тел развитие деформации грунта все
время отстает от соответствующего изменения напряжения. Поэтому
186
МАШИНЫ ДЛЯ ЗЕМЛЯНЫХ РАБОТ
деформация достигает максимума тогда, когда напряжение уже значи-
тельно снизилось. В некоторых случаях максимум деформации соответ-
ствует полному спаду напряжений. Удар начинается с момента начала
контакта трамбовки с грунтом. За конец удара логично принять момент
достижения деформацией своего максимального значения. Этот отрезок
времени и есть время удара, за которое происходит превращение кинети-
ческой энергии трамбовки в другие виды энергии. Кинетическая энергия
трамбовки в начале удара определяется ее массой и скоростью, а в конце
удара она равна нулю. По окончании удара начинается процесс восста-
новления обратимой деформации, т. е. процесс обратного упругого после-
действия, который уже ничего общего с явлением удара не имеет.
Во время удара вблизи поверхности грунта напряжение возрастает
за весьма короткое время, измеряемое несколькими миллисекундами. Ско-
рость роста напряжений достигает при этом нескольких тысяч кГ/смг-сек..
По мере удаления от поверхности процесс растягивается во времени,
а максимальное напряжение непрерывно снижается. Вслед за волной
напряжения по объему грунта начинает распространяться волна дефор-
мации.
Установлено, что скорости распространения волн напряжений и дефор-
маций зависят от состояния грунта, т. е. от его плотности и влажности,
и не зависят ни от удельного импульса, ни от скорости трамбовки в момент
удара. Отдельные точки фронта этих волн движутся с различными ско-
ростями. Наибольшие значения скоростей соответствуют началам этих
процессов, а наименьшие — движению гребней этих волн. При плотных
грунтах возникновение напряженного состояния распространяется по
объему грунта в пределах активной зоны со средней скоростью 400—
600 м/сек, а гребни волн напряжений и деформаций — со скоростью
80—150 м/сек. В случае рыхлых грунтов эти скорости в 2—3 раза
меньше.
Время удара тесно связано с продолжительностью деформации грунта
и потому зависит от тех же факторов, которые влияют на эту продолжи-
тельность. Сюда надо отнести величину самой деформации и скорость ее
течения. Та деформация, которая успевает развиться за время удара,
определяется степенью податливости грунта внешним нагрузкам и потому
зависит от вида и состояния грунта и в первую очередь от его плотности
и влажности. Величина деформации зависит также от интенсивности воз-
действия на грунт внешней нагрузки. Поэтому деформация и время удара
растут по мере увеличения веса трамбовки и высоты ее падения. Для дан-
ного вида и состояния грунта время удара можно принимать зависящим
только от величины удельного импульса. Под удельным импульсом пони-
мается отношение полного импульса удара к площади трамбовки. По мере
увеличения удельного импульса время удара повышается.
Влажность грунта оказывает влияние на время удара лишь когда
она выше оптимальной величины. Значения времени удара для грунтов
разных видов и плотностей, полученные в результате испытаний трамбую-
щих машин, представлены в табл. 22.
Время удара для плотных грунтов в 2 раза меньше тех его значений,
которые соответствуют рыхлым грунтам. Отсюда можно сделать тот прак-
тически важный вывод, что в процессе уплотнения грунта трамбованием
напряжение на их поверхностях увеличивается примерно в 2 раза.
Имея значения удельного импульса удара i и времени удара т, можно
найти максимальную величину напряжения, развивающегося во время
удара. Предполагая, что в процессе удара рост и спад напряжения проис-
ходят по линейному закону и что деформация достигает максимума уже
МАШИНЫ ДЛЯ УПЛОТНЕНИЯ ГРУНТОВ
187
Таблица 22
Значения времени удара в сек
Состояние грунта Несвязные грунты Связные грунты
Вес трамбовки в к Г
500 500 950 1200 1500
Рыхлое 0,024 0,035 0,065 0,076 0,110
Плотное 0,012 0,017 — — —
тогда, когда напряжение снизилось на какую-то величину, можно найти,
что
СТтах — ~~ К-Г/СМ?.
max т
(IV.23)
Удельный импульс i может быть найден из выражения
i == к Г -сек/см2, (IV. 24)
где А4 — масса трамбовки в кГ-сек21с м\
— скорость трамбовки в момент удара в см-сек',
F — площадь основания трамбовки (площадь контакта с грунтом)
В СМ2',
k — коэффициент, учитывающий запаздывание развития деформа-
ции по отношению к развитию напряжения, а также нелиней-
ность изменения последнего.
Коэффициент k зависит от скорости трамбовки в момент удара и величины
удельного импульса. Для средних условий k = 1,7-1-2.
В случае свободного падения трамбовки максимальное напряжение
в процессе удара определится по формуле
= (IV.25)
где Q — вес трамбовки в кГ;
Н — высота ее падения в см\
g — ускорение силы тяжести в см!сек2.
Эффект уплотнения грунтов при их трамбовании логично полагать
зависящим от величины удельного импульса. Это положение и следует
положить в основу практических расчетов. При трамбовании, так же как
при укатке и других видах уплотнения, развивающиеся на поверхности
грунта напряжения не должны превышать пределов прочности. В против-
ном случае верхняя часть слоев будет разрыхляться, а активная зона
переместится в глубину, что с точки зрения рационального использования
механической работы оказывается негодным. Здесь предел прочности
лучше всего задавать не предельными напряжениями, а предельными
Удельными импульсами. Опытным путем получены следующие значения
предельных удельных импульсов (кГ-сек/см2) применительно к грунтам
оптимальной влажности:
Малосвязные (песчаные, супесчаные пылеватые) .... 0,05—0,07
Средней связности (суглинистые) ...................... 0,07—0,12
Высокой связности (тяжелосуглинистые)................. 0,12—0,20
Весьма связные (глинистые) ........................... 0,20—0,27
188
МАШИНЫ ДЛЯ ЗЕМЛЯНЫХ РАБОТ
Трамбованием можно уплотнять как связные, так и несвязные грунты.
Преимуществом этого способа по сравнению с укаткой является возмож-
ность уплотнения грунтов слоями большой толщины, в силу чего этот
способ уплотнения является наиболее целесообразным при работе в зим-
них условиях.
Для определения глубины активной зоны при уплотнении связных
грунтов может быть использована формула (IV. 1), в которой отношение
напряжений можно заменить отношением удельных импульсов. При этом
надо учесть и влияние влажности грунта. Тогда глубина активной зоны ha
определится по формуле:
[17 / —3,7 —— |
/г» = — е р J см, (IV.26)
где i и ip — удельный импульс трамбовки и предельный импульс
в кГ -сек/см2;
fimln — минимальный размер трамбовки в плане в см.
Формула может служить и для выбора оптимальной толщины уплот-
няемого слоя грунта, однако в том случае, если требуемая его плотность
не превышает 0,956гаах. При уплотне-
нии несвязных грунтов оптимальная
толщина слоя может быть принята
большей в 1,5 раза при сравнительно
небольших толщинах слоев (0,4—0,8 .и)
и в 1,2 раза — при слоях большой тол-
щины (0,8—1,2 м). Для достижения
более высокой плотности грунта (0,98—
1,0) бтах оптимальную толщину уплот-
няемого слоя следует принимать рав-
ной половине глубины активной зоны.
Сопоставление расчетных величин с
опытными показывает, что формула
Таблица 23
Значения коэффициента k
Требуемая плотность грунта 6/6max Связный грунт Несвяз- ный грунт
0,95 4 2
0,98 7 4
1,00 14 10
позволяет получить вполне приемлемую для практических целей точность.
При проектировании трамбующих машин оптимальную толщину слоя
не следует выбирать излишне большой. По мере увеличения толщины
уплотняемого слоя вес трамбовки прогрессивно возрастает, что ведет
к повышению веса самой машины. Наиболее целесообразной толщиной
слоя при уплотнении связного грунта трамбующими машинами можно
считать слой в 0,6—0,8 м.
Для определения необходимого числа ударов трамбовок можно поль-
зоваться приближенной формулой:
khip
ihQ ’
(IV.27)
где п — необходимое число ударов;
h. — толщина уплотняемого слоя грунта в см;
h0 — оптимальная толщина слоя в см;
k — коэффициент, зависящий от оптимальной плотности и вида
грунта. Значения этого коэффициента приведены в табл. 23.
Рабочие органы трамбующих машин — плиты или молоты — могут
как сменное оборудование устанавливаться на экскаваторах или на спе-
циально приспособленных для этого машинах. Использование экскава-
торов для уплотнения грунта является экономически невыгодным, так
как обходится весьма дорого и ведет к сильному износу7 этих машин.
МАШИНЫ ДЛЯ УПЛОТНЕНИЯ ГРУНТОВ
[89
На рис. 110 представлена трамбующая машина, выполненная на базе
гусеничного трактора. Ее рабочими органами являются две плиты, пооче-
редно поднимаемые и свободно сбрасываемые специальным механизмом.
Движение плит осуществляется по направляющим. Трактор снабжен
ходоуменьшителем, подобранным таким образом, чтобы на каждую точку
поверхности грунта приходилось 4—6 ударов плиты. При весе каждой
плиты в 1300 кГ и высоте падения 1,3 м машина может уплотнять связ-
ные грунты толщиной до 0,6 кг.
Разработана конструкция трамбующей машины, рабочим органом
которой являются пять дизель-молотов, навешиваемых сзади на трак-
тор. За границей получили некоторое распространение взрывные трам-
Рис. ПО. Трамбуюш.ая машина
бовки, работающие по циклу Ленуара, т. е. без предварительного сжатия
рабочей смеси, что обусловливает возможность работы этих трамбовок
только на легких дорогих сортах топлива. При вспышке топлива трам-
бовка ввиду того, что ее ось наклонена, подпрыгивая вверх, одновре-
менно продвигается также и вперед.
Машины с дизель-молотами и взрывные трамбовки могут работать
только на предварительно уплотненных грунтах. На рыхлых грунтах,
ввиду большой их податливости, в дизель-молотах не достигается необ-
ходимая для вспышки топлива степень сжатия, а недостаточная высота
прыжков, при взрывных трамбовках делает невозможным их продвиже-
ние вперед.
При расчете машин по заданной толщине уплотняемого слоя основ-
ные параметры, т. е. массу плиты или молота, высоту, его падения и раз-
меры в плане, выбирают по приведенным выше формулам. Минимальный
размер рабочего органа в плане не должен быть менее 0,9/i (h — толщина
уплотняемого слоя). Его не рекомендуется выбирать также и излишне
большим, так как в противном случае уплотнение будет энергетически
невыгодным. Верхним пределом этого размера следует полагать \,2h.
Масса рабочего органа и высота его падения подбираются по выбранному
по условиям уплотнения значению удельного импульса. По энергетиче-
ским соображениям выгодно увеличивать массу трамбовки, а не высоту
его падения. Однако последняя не должна быть ниже 0,3—0,4 м —
У машин, где падению рабочего органа ничто не препятствует,
190
МАШИНЫ ДЛЯ ЗЕМЛЯНЫХ РАБОТ
и 0,6—0,8 м — у машин, где падение рабочего органа тормозится нали-
чием каната, раскручиванием лебедки и т. п.
Производительность трамбующих машин может быть найдена по
формуле
П = м9/ч, (IV.28)
где Вп — ширина уплотняемой полосы в м;
v — скорость движения машины в м!ч\
h — толщина уплотняемого слоя в плотном теле в л;
п — определяемое по формуле (IV.27) необходимое число проходов;
т]а 0,85 — коэффициент использования машины по времени;
— коэффициент, учитывающий потери времени на повороты, ревер-
сирование машины и т. п.; обычно % = 0,80-Ю,90.
Пример. Требуется подобрать параметры трамбующей плиты, при-
годной для уплотнения грунтов высокой степени связности и оптимальной
влажности. Толщина слоя составляет 0,6 м.
Согласно приведенным выше рекомендациям можно полагать Bmln =
— h — бОсек. Для такого грунта ip 0,15 кГ-сек/см?, а удельный импульс
можно выбрать равным i — 0,12 кГ-сек/см2. Глубина активной зоны опре-
делится по формуле (IV.26)
( -3 7-С\ / г?0'12 \
Ло= l,15mln-^ 1 — е ' 1р )= 1,1-60 1 —е °’!5 ) 62 см,
т. е. выбранные параметры обеспечивают уплотнение грунта в слое задан-
ной толщины.
Плиту в плане можно полагать квадратной, поэтому общий потреб-
ный импульс удара найдется по формуле:
/ = Pi = 602 • 0,12 = 430 кГ-сек.
Вес плиты найдется по формуле:
1 = М и — — 1/ 2g Н, откуда G — - .
Полагая, что Н = 80 см.
§ 28. ВИБРОТРАМБУЮЩИЕ МАШИНЫ
Вибрационные машины применяются для уплотнения не только грун-
тов, но и других строительных материалов, к числу которых в первую
очередь относится бетонная смесь. Однако этот способ уплотнения не
является универсальным, т. е. его применение для уплотнения некото-
рых материалов может не дать должного эффекта. Уплотнение вибрацион-
ными машинами достигает цели лишь тогда, когда уплотняемые мате-
риалы имеют определенные свойства.
При уплотнении материала вибрированием масса вибратора при-
водится в состояние колебательных движений. Вслед за вибратором
за счет его кинетической энергии вводятся в состояние колебатель-
ных движений и расположенные в зоне его действия частицы уплотняе-
мого материала. Поэтому они оказываются под воздействием инерцион-
ных сил. Величина этих сил пропорциональна массам частиц. Так как
последние не одинаковы, то за счет разности в силах инерции, в местах
МАШИНЫ ДЛЯ УПЛОТНЕНИЯ ГРУНТОВ
191
контактов частиц возникают напряжения. До известных пределов эти
напряжения будут уравновешиваться силами сцепления и внутреннего
трения материала, а в грунтах — и прочностью связующих пленок.
После превышения этих пределов возникнут взаимоперемещения частиц.
Те силы, с которыми частицы отрываются друг от друга, пропорцио-
нальны инерционным силам, поэтому они определяются не только раз-
ностью масс соседних частиц, но также и теми ускорениями, которые раз-
виваются при колебательных движениях. Таким образом, относительное
перемещение частиц наступит тем скорее, чем больше будет разница
в массах отдельных частиц, составляющих материал, и чем слабее будут
силы связей между частицами. Поэтому вибрирование применимо к уплот-
нению материалов, состоящих из частиц разных размеров со слабыми
связями между ними. К таким материалам относятся несвязные и мало-
связные грунты и бетонные смеси. Последние особенно хорошо уплот-
няются вибрированием, так как обладают ярко выраженными тиксотроп-
ными свойствами, в результате чего при встряхивании они приобретают
свойства жидкости.
Связные грунты, между частицами которых имеют место значитель-
ные силы связей, могут быть уплотнены вибрированием лишь после раз-
рушения этих связей, что при обычном оборудовании практически невоз-
можно.
Итак, в процессе колебательных движений происходит отрыв отдель-
ных частиц грунта от общей массы колеблющегося слоя. Оторвавшиеся
частицы, находясь под воздействием сил тяжести, будут стремиться занять
положение, соответствующее их наименьшему потенциалу, т. е. переме-
щаться вниз. Неоторвавшиеся частицы образуют общую массу, совер-
шающую вынужденные колебания, но, ввиду действующих сил инерции
и продолжающегося отрыва отдельных частиц, сплошность этой массы
все более нарушается и тем самым понижается прочность связей частиц,
оставшихся в сцеплении. В результате этого при интенсивном вибриро-
вании оказывается, что большая часть частиц находится в состоянии
относительных перемещений. При этом чем крупнее частицы, тем на боль-
шие расстояния они перемещаются, что в результате и приводит к полу-
чению более плотной их упаковки.
Колебательные движения могут характеризоваться несколькими пара-
метрами: амплитудами, скоростями, ускорениями и частотами. Уплот-
нение грунта, как и других материалов, зависит главным образом от вели-
чины ускорения его частиц. Влияние на эффект уплотнения грунтов ока-
зывает также частота колебаний. Оказалось, что в известном интервале
частот (175—300 гц) происходят интенсивные тиксотропные превращения
как в супесчаных, так и в суглинистых грунтах, благодаря которым резко
снижаются связи между отдельными частицами и их агрегатами, что ведет
к значительному повышению эффекта приложенных к грунтам внешних
сил. Поэтому грунты целесообразно было бы уплотнять вибрационными
машинами, работающими в этом интервале частот. Однако в настоящее
время достижение этого интервала еще связано с большими трудностями.
По характеру силового воздействия на грунт вибрационный метод
уплотнения является «пассивным». Здесь частицы вводятся в состояние
колебательных движений и затем предоставляются самим себе, так как их
взаимосдвиги происходят в основном под действием переменных по вели-
чине и направлению инерционных сил и сил тяжести, а постороннее
силовое воздействие относительно незначительно. Поэтому этот метод не
эффективен по отношению к связным грунтам, так как уплотнение послед-
них может быть осуществлено только при наличии значительной активной
192
МАШИНЫ ДЛЯ ЗЕМЛЯНЫХ РАБОТ
силы, действующей извне в одном направлении и в течение более или
менее длительного времени.
На эффект уплотнения грунтов вибрированием существенно влияет
их влажность. При вибрировании происходит миграция влаги снизу
вверх. Опыты позволили установить, что в среднем при вибрировании
оптимальная влажность равна (1,1 —1,2) 1Е0 (U'z0— оптимальная влаж-
ность, определенная методом стандартного уплотнения). В случае возмож-
ности удаления поднявшейся на поверхность воды метод также эффекти-
вен при уплотнении переувлажненных несвязных грунтов. При влаж-
ностях менее оптимальных значений эффект уплотнения сильно снижается
и тем больше, чем ниже влажность грунта. Если влажность грунта менее
(0,7-=-0,8) Wo, то возможность доведения грунта до плотности 0,95бгаах
становится сомнительной даже в случае продолжительного вибрирования
и применения тяжелых вибраторов.
Если увеличивать возмущающую силу, то будут возрастать ампли-
туды колебаний как вибратора, так и грунта. До определенных значений
возмущающей силы колебания вибратора будут носить гармонический
или же близкий к нему характер. Затем они приобретут беспорядочный
характер, т. е. здесь будут иметь место уже периодические удары пло-
щадки машины о грунт.
Амплитуда и характер колебаний вибраторов зависит от отношения
возмущающей силы Р к их весу Q. Под возмущающей силой понимается
та сила, которая отрывает вибратор от поверхности уплотняемого мате-
риала. Эта сила развивается соответствующим механизмом и, изменяясь
по периодическому закону, переменна во времени. В данном случае
имеется в виду амплитудное (максимальное) значение этой силы, соответ-
ствующее какому-то определенному моменту времени периода колебаний.
Р
Таким образом, при каком-то отношении -п- k„, которое можно
назвать критическим, колебания претерпевают качественные изме-
нения. При k > kQ происходят отрыв плиты от поверхности грунта и затем
удары ее о поверхность грунта. Следует заметить, что ввиду отставания
в развитии деформации грунта отрыв имеет место и при k <Z k0, однако
он незначителен и потому не оказывает влияния на характер движения
вибратора.
Машины, у которых k <Z kB относятся к вибрационным,
а при k\>k0 к вибротрамбующим. При вибротрамбующих
машинах уплотнение грунта происходит как ввиду развивающихся при
ударе напряжений, так и за счет колебательных движений частиц грунта.
От трамбовок эти машины отличаются малыми импульсами ударов
и высокими частотами их.
Для уплотнения грунтов, как правило, применяются вибротрамбую-
щие машины. Они так же, как и вибрационные, применимы для уплот-
нения только несвязных и малосвязных грунтов. Вибрационные машины
не получили распространения из-за трудности их передвижения. Однако
они широко применяются при уплотнении таких материалов как бетон-
ные смеси.
Рабочим органом вибротрамбующей машины является плита, на кото-
рой монтируются агрегаты возбудителя колебаний, а иногда и двигатель.
Последний часто укрепляется на подмоторной плите, которая располо-
жена над основной плитой и опирается на нее через амортизаторы.
Разновидностью вибротрамбующих машин являются вибрационные
катки. Здесь рабочим органом служит жесткий валец, который также
специальным механизмом вводится в состояние колебательных движений.
МАШИНЫ ДЛЯ УПЛОТНЕНИЯ ГРУНТОВ 193
При работе вибротрамбующих машин напряжение на поверхности
грунта обычно не превышает 0,5—0,8 кГ/см2, но ввиду тиксотропных пре-
вращений грунтов даже такие незначительные нагрузки при благоприят-
ных условиях приводят к получению высокого эффекта.
К основным параметрам вибротрамбующих машин относятся их вес,
возмущающая сила, частота колебаний и поперечные размеры рабочего
органа — плиты, а в случае вибрационного катка — диаметр и ширина
вальца.
Получаемые плотности грунтов находятся в зависимости от массы
вибратора. По мере роста последней плотность грунта увеличивается.
При недостаточной массе требуемая плотность грунта не может быть достиг-
нута ни снижением толщины уплотняемого слоя, ни увеличением продол-
жительности вибрирования. Чем выше масса, тем быстрее достигается
соответствующая ей предельная плотность грунта, а также тем с большей
скоростью идет процесс распространения уплотнения в глубину.
С достаточной для практических целей точностью можно полагать,
что предельная глубина действия вибротрамбующей машины, на которой
еще может быть достигнута максимальная стандартная плотность грунта,
равна минимальному поперечному размеру площади контакта его рабо-
чего органа с грунтом. Если требуемая плотность равна 0.956тах, то эта
глубина примерно в 1,5 раза больше. С учетом этих соображений и следует
выбирать размеры плит вибрационных катков. Однако размерами поверх-
ности контакта определяются потенциальные возможности уплотне-
ния, которые, однако, могут быть реализованы лишь в случае, когда
масса вибратора не ниже определенной величины, зависящей от вида
и состояния грунта. В противном случае глубина эффективного действия
вибратора снижается примерно прямо пропорционально уменьшению его
массы.
Массу, т. е. вес вибротрамбующей машины, целесообразно выбирать
по удельному статическому давлению
р = кГ/м2, (IV.29)
где Q — вес машины в кГ\
F — опорная площадь плиты в м2.
Для достижения предельных глубин уплотнения удельные статиче-
ские давления не должны быть ниже следующих значений (в кГ/м2):
В случае переувлажненных песков......................... 300—400
При песках оптимальной влажности ....................... 600—1000
В случае супесчаных грунтов оптимальной влажности....... 1000—2000
Вес вибратора может быть сосредоточен на площадке либо частично
размещен выше ее и амортизирован от колебаний площадки упругими
(обычно пружинными) элементами. В первом случае в колебаниях уча-
ствует вся масса вибратора, а во втором колеблется • лишь часть этой
массы, что снижает инерционные потери.
Критические отношения возмущающей силы Р к силе тяжести вибра-
тора Q зависят от частоты и имеют следующие значения:
Частоты колебаний в 1/мин 750—1500 1500—3000 3000—5000
Критические отношения . . . 0,9—1,0 1,0—1,4 1,4—2,3
В случае несвязных грунтов этим отношениям соответствует амплитуда
колебаний, равная 0,3—0,4 мм.
При проектировании вибротрамбующих машин отношение возмущаю-
щей силы к весу выбирают в зависимости от удельного статического
]94
МАШИНЫ ДЛЯ ЗЕМЛЯНЫХ РАБОТ
давления с учетом частоты колебаний. При этом можно пользоваться |
следующими данными: I
Удельное статическое давле- ' 1
ние в кГ/м2 ........ 2500—3500 1500—2500 500—1500 " 1
Отношение . возмущающей си- - 1
лы к весу (А) ....... 3,0—2,5 6,0—3,0 12—6 1
Чем выше частота колебаний, тем большим должно быть это отноше- |
ние. Однако здесь влияние частоты учитывается автоматически ввиду 1
того, что, как это будет показано ниже, частоту выбирают в зависимости |
от удельного статического давления. |
Если вибрационная машина снабжена таким ходовым устройством, I
при котором ее перемещение производится наклоном виброэлементов, т. е, |
за счет горизонтальной составляющей возмущающей силы, то при чрез? |
мерно больших отношениях возмущающей силы к весу может иметь место, ]
потеря управления. I
При некоторых частотах затухание колебаний снижается до мини- i
мума, а амплитуды достигают максимального значения. Эти частоты знд- j
чительно меньше тех, при которых происходят интенсивные тиксотропные 1
превращения грунтов. При этом имеет место как бы резонанс колебаний 1
вибратора со значительной массой грунта, тогда как при частотах, coot- I
ветствующих интенсивным тиксотропным превращениям, колебания лока- i
лизируются в значительно меньших объемах грунта.
При таких квазирезонансных частотах возрастают амплитуды, а еле-
довательно, и ускорения, что повышает эффект уплотнения. Поэтому надо' J
стремиться к работе на этих частотах, которые невелики и потому легко
достижимы. Чем больше масса вибратора, тем ниже квазирезонансные <
частоты колебаний системы вибратор—грунт и тем, следовательно, мень- ;
ших значений должны выбираться частоты вынужденных колебаний. Из i
этих соображений могут быть рекомендованы следующие значения частот
колебаний вибрационных машин:
Удельные статические давления в кГ/м2 . . . 500—1000 1000—2000
Частота колебаний в \!мин .......... 2000—1200 1200—900
Необходимое время вибрирования, т. е. то время, в течение которого
грунт в нижней части уплотненного слоя заданной толщины может быть
доведен до требуемой плотности, зависит от вида грунта и его состояния, !
а также от веса вибратора, возмущающей силы и частоты колебаний.
Наименьшая продолжительность вибрирования соответствует влаж-
ности грунта (1,1—-lt2) IE0. При повышении Или снижении влажности тре-
буемая продолжительность вибрирования возрастает, что в первом случае
происходит из-за необходимости удаления избытков воды.
Чем выше вес машины, тем предельная плотность грунта, соответ-
ствующая его параметрам, достигается за более короткое время. При про-
чих равных условиях время вибрирования будет меньше, когда параметры
вибраторов (возмущающая сила, вес и частота колебаний) соответствуют
их оптимальным значениям.
Необходимую продолжительность вибрирования можно найти, поль-
зуясь формулой:
t^-^мин, (IV .30)
где п — частота колебаний вибратора в минуту;
с — необходимое для доведения грунта до требуемой плотности число
повторностей приложения нагрузки; для несвязных грунтов с =
=- 1,5 • 103ч-5 • 103.
МАШИНЫ ДЛЯ УПЛОТНЕНИЯ ГРУНТОВ
195
Нижний предел с относится к наиболее благоприятным условиям
уплотнений. Верхний предел относится к грунтам, имеющим пониженную
влажность, а также к вибраторам, имеющим малую массу, которая тем
не менее еще достаточна для доведения грунта до требуемой плотности.
Общий вид вибротрамбующей машины представлен на рис. 111. На
опорной плите установлены вибраторы (виброэлементы), которые приво-
дятся во вращение от двигателя через клиноременную передачу. Для
амортизации двигателя служат пру-
жины.
Виброэлементы могут быть нена-
Рис. 111. Самоходная вибрационная машина:
/ — опорная плита; 2 — амортизационные пружины; 3 — маховичок; 4 — кли-
ноременная передача; 5 — двигатель; 6 — виброэлементы
ствия (рис. 112). В последнем случае виброэлемент состоит из двух вра-
щающихся в разные стороны с одинаковой угловой скоростью эксцентрик
ков, расположенных таким образом, что в каждый момент времени гори-
зонтальные составляющие центробежных сил уравновешены, а верти-
кальные составляющие суммируются. При ненаправленных колебаниях
опорная плита совершает круговые колебательные движения, а в случае
вибратора направленного действия колебания происходят только в на-
правлении оси вибратора 00 (рис. 112, а). Центробежная сила эксцентрика
(дебаланса) определится по формуле:
Ро --- mv*r = кГ> (IV .31)
где т и G — масса (в кПсекЧсм и вес эксцентрика (дебаланса) в кГ;
г — радиус вращения его центра тяжести в см\
со и /г — угловая скорость вращения эксцентрика в Мсек и его число
оборотов В 0б1лЧ1Н.
Возмущающая сила соответствует проекции центробежной силы
В случае вибратора ненаправленного действия:
Рх = Pocos со/ кГ;}
о • \ г (IV.32)
Ру = Posm со/ кГ, j
*
196
МАШИНЫ ДЛЯ ЗЕМЛЯНЫХ РАБОТ
т. е. возмущающая сила переменна по величине, а ее амплитудное значе-
ние равно центробежной силе.
В случае вибратора направленного действия:
Рх = 0; 1
Р,, 2P0sin<o^ кГ, ) (IV.33)
т. е. здесь амплитудное значение возмущающей силы равно удвоенной
центробежной силе.
Если корпус вибратора направленного действия повернуть относи-
тельно шарнирной оси его крепления (рис. 112, а), то его вертикальная
ось 00 наклонится и перейдет в по-
ложение OjO,. При этом изменится
направление суммарной возмущаю-
щей силы. Если угол наклона виб-
роэлемента а, то горизонтальная и
вертикальная составляющие колеба-
ний будут соответственно равны:
Рх = 2P0sin co^sina кГ; 1
D OD • / г (IV.34)
Ру- 2P0sin<o/cosa кГ. J
За счет горизонтальной соста-
вляющей Рх может происходить пе-
ремещение вибратора. На этом прин-
ципе и основано передвижение само-
ходных площадочных вибрационных
машин (рис. 111). Те виброэлементы,
корпуса которых могут наклоняться
для получения поступательного дви-
жения машины, называются маятни-
ковыми.
поверхностного вибратора может быть
определено по формуле
7\ - ^G кГ, (IV.35)
где G — вес вибратора в кГ;
— коэффициент сопротивления его перемещению.
Когда вибратор не работает, то коэффициент является коэффициен-
том трения плиты по грунту. При стальных или чугунных плитах без
учета сопротивления от перемещения образовавшейся призмы грунта
можно полагать, что = 0,6-ьО,7.
Когда вибратор перемещается в рабочем состоянии, т. е. плита совер-
шает колебательные движения, то коэффициент сопротивления перемеще-
нию /, несколько изменяется. Опытным путем установлено, что при прочих
равных условиях коэффициент сопротивления зависит от скорости пере-
мещения вибратора, амплитуды его колебаний, а в случае эксцентрико-
вого возбудителя колебаний при скоростях менее 2 м!мин — еще от
направления вращения эксцентриков.
Коэффициент сопротивления растет по мере увеличения скорости.
При скоростях движения более 4—5 м/мин можно полагать, что коэффи-
циент сопротивления стабилизируется. Стабильное значение коэффи-
циента /д 0,5 и следует принять за расчетное.
Расчет силы тяги, необходимой для преодоления уклонов и пере-
мещения, образовавшейся перед машиной призмы грунта, производится
общепринятыми методами.
МАШИНЫ ДЛЯ УПЛОТНЕНИЯ ГРУНТОВ
197
Мощность двигателя расходуется еще на колебательные движения
машины и грунта, а также на преодоление трения в подшипниках вибро-
элементов. Ввиду того, что сопротивления колебательным движениям
изучены еще недостаточно, мощность двигателя целесообразно назначать
на основе результатов испытаний существующих конструкций машин.
Можно считать, что при оптимальных параметрах машины необходима
мощность в 5—7 л. с. на 1 т веса колеблющихся частей вибратора.
Производительность вибрационной машины может быть определена
по формуле
П (IV .36)
Рис. ИЗ. Прицепной вибрационный каток
где (В — 0,2) — ширина вибрационной плиты с учетом необходимого пере-
крытия следа предыдущего прохода в л/ч;
v — скорость движения машины в м/ч;
h. — толщина уплотняемого слоя в плотном теле в м;
п — необходимое число проходов; обычно п = 2;
т]в = 0,7-н0,8 — коэффициент использования машины по вре-
мени с учетом поворотов.
На рис. 113 представлен вибрационный прицепной каток. Каток
эффективен при уплотнении несвязных и, в частности, гравелистых грун-
тов. При статическом линейном удельном давлении q О 40—50 кПсм он
может быть применен и для уплотнения связных грунтов. По сравнению
с аналогичным катком, работающим без вибрации, здесь толщина уплот-
няемого слоя может быть увеличена на 40—50% при уплотнении несвяз-
ных грунтов и на 20—30% — при уплотнении связных грунтов. Такое
повышение толщины слоя обусловливается вибрационными воздействиями
и более глубоким погружением катка в грунт, что увеличивает попереч-
ные размеры поверхности контакта его с грунтом.
В заключение следует отметить, что наиболее производительными
машинами являются катки и особенно с гладкими вальцами и кулачковые
среднего типа. При их применении стоимость работ — наименьшая.
Однако при необходимости доведения грунта до требуемой плотности
(0,98—1,0) 6тах более экономичными являются катки на пневматических
шинах. Наибольшая производительность и наименьшая стоимость работ
служат основными причинами того, что из всех средств для уплотнения
грунтов катки получили наибольшее распространение. К.их положитель-
ным качествам следует отнести простоту устройства и ухода за ними
198
МАШИНЫ ДЛЯ ЗЕМЛЯНЫХ РАБОТ
в процессе эксплуатации. Однако этими катками можно уплотнять грунты]
при сравнительно малых толщинах слоев и, кроме того, для рентабельной]
их работы требуется наличие определенного фронта работ. > j
Трамбование является универсальным способом уплотнения грунтов, '
но и наиболее дорогим. Этот недостаток может быть устранен путем созда-
ния производительных и простых по конструкции трамбующих машин.
Вибротрамбующие машины по своим показателям занимают проме-
жуточное положение между катками и трамбующими механизмами.
Наблюдается рост производительности и геометрических размеров
кузовов и ковшей транспортных и землеройно-транспортных машин.
Поэтому экономически выгодным становится повышение толщины уплот- .
няемых слоев. Очевидно, что перспективными могут быть признаны такие :
виды машин для уплотнения грунтов, которые при проектировании новых
моделей путем подбора соответствующих параметров позволят повысить
толщину уплотняемого слоя грунта без повышения стоимости работы. 3
Рост толщин слоев уплотняемого грунта неизбежно связан с повыше- ’
нием веса машин, при этом вес катков гладких и кулачковых, а также/
вибротрамбующих и вибрационных машин увеличивается примерно прямо
пропорционально квадрату толщины уплотняемого слоя. В такой же зави-
симости находится и вес рабочих органов трамбующих машин, но вес
самих машин повышается в меньшей степени. Вес катков на пневмати-
ческих шинах тоже увеличивается. Так, при повышении толщины уплот-
няемого слоя в 3 раза вес пневмокатка увеличивается примерно в 6 раз.
Соответствующий анализ показывает, что даже пр:: значительном
увеличении веса глубина активной зоны, а следовательно, и толщина слоя
связного грунта в плотном теле при уплотнении его катками с гладкими
и кулачковыми вальцами практически не может быть более 30 см.
Вместе с тем при использовании па ппевмокатках шин больших раз-
меров глубина активной зоны может быть увеличена до 75—85 см. Стои-
мость уплотнения единицы объема грунта при этом не повышается, а может
быть даже несколько снижена. То же относится к трамбующим и вибра-
ционным машинам. В случае трамбующих машин имеет место определен-
ная тенденция к снижению стоимости единицы работы по мере повышения
толщины уплотняемого слоя. Поэтому эти машины и следует считать
перспективными, причем основное внимание надо уделить пневмокаткам
и трамбующим машинам, которые, кроме того, еще и универсальны.
Литература
1. Хархута Н. Я. Машины для уплотнения грунтов. М.—Л., Машгиз, 1953.
2. Хархута Н. Я. и Васильев Ю. М. Устойчивость и уплотнение грун-
тов дорожных насыпей. М., Автотрансиздат, 1964.
ЧАСТЬ II
МАШИНЫ И ОБОРУДОВАНИЕ
ДЛЯ ДОРОЖНЫХ ПОКРЫТИЙ
Глава V. МАШИНЫ ДЛЯ ДОБЫЧИ И ПЕРЕРАБОТКИ
КАМЕННЫХ МАТЕРИАЛОВ
Дорожные покрытия подразделяются на усовершенство-
ванные и покрытия простейших технических типов. По работоспособности
усовершенствованные покрытия разделяются на капитальные и облегчен-
ные. Выбор того или иного вида покрытия производится в зависимости от
состава и интенсивности автомобильного движения. Капитальные покры-
тия могут быть асфальтобетонными и цементобетонными. Облегченные
покрытия строятся из приготовленных в установках или непосредственно
на дорогах черных гравийно-песчаных смесей.
Асфальтобетоны, цементобетоны и черные смеси приготавливаются
на заводах, снабженных для этой цели специальным оборудованием. По-
этому работы, связанные со строительством этих покрытий, разделяются
на заводские, или базовые, и линейные. К линейным относятся работы
по укладке и уплотнению бетонов и черных смесей непосредственно в до-
рожное покрытие.
Покрытия простейших технических типов разделяются на переходные
и покрытия низших типов. Последние обычно не допускают круглогодич-
ной эксплуатации.
По прошествии определенных сроков эксплуатации дорожные покры-
тия подвергаются ремонту. Ремонтные работы относятся к специальной
службе, задачей которой является организация не только ремонта, но
и содержания дорог.
Таким образом, работы по постройке дорожных покрытий связаны
с применением специальных машин и с использованием материалов, при-
готавливаемых на подсобных предприятиях, оснащенных соответствующим
оборудованием.
§ 29. ФИЗИКО-МЕХАНИЧЕСКИЕ СВОЙСТВА
КАМЕННЫХ МАТЕРИАЛОВ
Строительство дорожных оснований и покрытий связано с расходом
большого количества различных каменных материалов, главным образом
щебня и гравия. Добыча и переработка этих материалов производится
на специализированных предприятиях, оснащенных предназначенным для
этой цели оборудованием.
Такие производственные процессы, как бурение и дробление камен-
ных материалов, связаны с их разрушением. Эти процессы необходимо
проводить при минимальной затрате механической работы, что возможно
лишь при учете физико-механических свойств каменных материалов.
По геологическому происхождению каменные породы разделяются
на изверженные (магматические) осадочные (пластовые) и метаморфиче-
МАШИНЫ ДЛЯ ДОБЫЧИ И ПЕРЕРАБОТКИ КАМЕННЫХ МАТЕРИАЛОВ 201
ские (видоизмененные). К изверженным породам относятся граниты, дио-
риты, базальт, диабаз и др., а к осадочным породам относятся известняки,
песчаники и ракушечник. Мрамор, гнейс и глинистые сланцы являются
метаморфическими породами.
Геологическое происхождение в общем определяет физико-механиче-
ские свойства каменных пород, однако они зависят еще также от степени
выветривания пород. Поэтому, например, прочность для одного и того же
вида породы может колебаться в очень широких пределах. Из всех свойств
пород наиболее важными для проектирования машин являются прочность
на сжатие и модуль упругости. Ввиду того, что разрушение горных пород
может производиться различными методами, важно иметь сведения об
их прочностных.свойствах также и при других видах деформирования,
например при изгибе и растяжении. Значения этих параметров, характери-
зующих сопротивляемость горных пород деформированию, даны в табл. 24.
Таблица 24
Прочность на сжатие и модуль упругости горных пород
Горные породы Временное сопротивле- ние при сжатии, кГ/см2 Модуль упруго- сти при сжатии, кГ /см2 Предел прочности (в долях от времен- ного сопротивления при сжатии)
при растяжении при изгибе при сдвиге
Гранит 600—3700 (500 6 600) 103 0,02—0,04 0,08 0,09
Диабаз 800—4500 (600 : 800) 10’ 0,07 — —
Известняк 200—2000 (300-6400) 103 0,04—0,10 0,08—0,10 0,20
Песчаник 250—2200 (300-6500) 103 — — —
Для характеристики прочности горных пород при их разрушении
широкое распространение получила шкала М. М. Протодьяконова. Со-
гласно этой шкале породы делятся на 10 категорий (в высшей степени
крепкие, очень крепкие, крепкие, довольно крепкие, средние и т. д.).
Основанием для отнесения данной породы к той или иной категории
служит коэффициент относительной крепости /, который представляет
собой отношение временного сопротивления при сжатии данной породы
к сопротивлению условной породы, принятой за эталон. Б качестве послед-
него принята порода, разрушающаяся при действии статической нагрузки
в 100 кГ/см2. Таким образом, если какая-либо порода по этой шкале харак-
теризуется коэффициентом относительной крепости f = 6, это значит,
что она разрушается при напряжении в 600 кГ/см1.
§ 30. МАШИНЫ И ОБОРУДОВАНИЕ
ДЛЯ БУРО-ВЗРЫВНЫХ РАБОТ В КАРЬЕРАХ
Буро-взрывной способ добычи каменных материалов в карьерах от-
носится к числу наиболее дешевых, а потому и распространенных. При
этом способе в горной породе пробуриваются цилиндрические углубления
Диаметром до 75 мм — шпуры или более 75 мм — скважины, которые и
служат для размещения взрывчатых веществ (ВВ) в той горной породе,
которая подлежит разрыхлению или выбросу. Шпуры имеют глубину
менее 5 .я, а скважины могут иметь глубину более 5 м.
202 МАШИНЫ И ОБОРУДОВАНИЕ ДЛЯ ДОРОЖНЫХ ПОКРЫТИИ
Взаимодействие
Рис. 114.
бурового инструмента с гор-
ной породой: а — ударное
бурение; б — вращательное
бурение
При взрыве происходит чрезвычайно быстрое химическое превраще-
ние взрывчатого вещества, сопровождающееся выделением энергии и обра-
зованием сжатых газов, за счет расширения которых и производится меха-
ническая работа разрушения горной породы. При взрыве стенки камеры
испытывают динамическое давление — удар, в результате которого обра-
зуется ударная волна, распространяющаяся во все стороны и оказываю-
щая на горную породу дробящее действие. По воздействию на среду ВВ
разделяются на метательные и бризантные. Превращение метательных ВВ.
происходит в форме взрывного горения со ско-
ростью в несколько сотен метров в секунду,
а бризантных — в форме детонации. В по- ,
следнем случае по взрывчатому веществу со •
сверхзвуковой скоростью проходит ударная
волна.
При буро-взрывных работах главным обра-
зом механизируют бурение шпуров и сква-
жин. Машины для бурения подразделяются
на ударные и вращательные.
К ударным относятся пневматические и элек-'
трические буровые молоты, а к вращательным—'
электрические и пневматические сверла. Кроме'
того, различают еще ударно-вращательный
способ бурения, характеризующийся одновре-
менным вращением и ударным действием буро-
вого инструмента.
При ударном бурении рабочий инструмент:
(долото) под действием развивающейся при'
ударе силы Р внедряется в породу на глу-
бину Д/й (рис. 114, а). Внедрению инструмента'
противодействует реакция породы Р1 и равно-
действующая сил трения бурового инструмента
о породу lFr, т. е.
р = + wr кГ. (V.1)
Последующий удар ввиду особенностей
устройства инструмента производится при не-
котором повороте долота на угол р, и потому,
кроме внедрения инструмента в каменную по-'
роду, происходит также скалывание заштрихованного на чертеже объема.
При вращательном бурении (рис. 114,6) имеет место сначала упругая
деформация (в области 7), затем образуется ядро разрушения 2, и, наконец,
происходит скалывание объема 3. Приложенное к буру осевое усилие Рас
противодействует его выскальзыванию по плоскости скалывания и обеспе-
чивает определенную толщину срезаемого слоя. При вращательном буре-”
нии разрушение породы происходит главным образом за счет скалывания,
что по сравнению с ударным способом уменьшает энергоемкость процесса.
Процесс разрушения породы здесь непрерывен, и пылеобразование сни-
жено. Вместе с тем для эффективной работы на лезвии инструмента необ-
ходимо создать достаточные для разрушения породы усилия, что возможно
только в случае некрепких горных пород.
Самым распространенным является ударно-вращательный способ бу-
рения. Инструментами, основанными на таком принципе действия, яв-
ляются пневматические бурильные молотки (перфо-
раторы), которые могут быть ручными и колонковыми. Ручные перфора-
МАШИНЫ для ДОБЫЧИ И ПЕРЕРАБОТКИ КАМЕННЫХ МАТЕРИАЛОВ 203
торы, т. е. перфораторы, предназначенные для работы с руки, в зависи-
мости от веса разделяются на легкие (до 20 кг), средние (20—25 кг) и тя-
желые (25—30 кг). Колонковые буровые молотки укрепляются на специаль-
ных колонках или буровых тележках и имеют вес от 50 до 100 кг. Легкие
и средние перфораторы предназначены для бурения пород с коэффициен-
том относительной крепости соответственно / = 10 и / = 15. Для бурения
пород с / )> 20 применяются тяжелые ручные и колонковые перфораторы.
Глубина шпуров в зависимости от типа перфоратора может достигать
2—5 м-
По частоте ударов перфораторы делятся на обычные (менее
2000 удар!мин) и высокочастотные (более 2000 удар/мин).
Очистка шпура от каменной мелочи может производиться путем про-
дувки его сжатым воздухом или промывки водой.
На рис. 115 представлена принципиальная схема пневматического
перфоратора для бурения шпуров. Ударная часть — поршень-ударник 3 —
не связана с буром. Под действием сжатого воздуха поршень-ударник со-
вершает возвратно-поступательные движения внутри цилиндра 4. Эти
движения обеспечиваются воздухораспределительным устройством, ко-
торое попеременно подает воздух то по одну, то по другую сторону поршня.
При движении вниз поршень наносит удар по хвостовику 2 бура. Этот
удар передается на рабочую часть бура — коронку 1, которая и разру-
шает горную породу. При движении вверх поршень-ударник, а вместе
с ним и бур при помощи специального поворотного механизма поворачи-
ваются на небольшой угол. В последних моделях перфораторов поворотное
устройство не связано с движением поршня. Здесь поворот бура осуще-
ствляется укрепленной на корпусе перфоратора пневматической тур-
бинкой.
Воздухораспределительное устройство может быть золотниковым и
клапанным. Золотник перемещается перпендикулярно к струе воздуха, и
воздушные каналы открываются и закрываются постепенно. Клапаны
перемещаются в направлении струи воздуха, и поэтому отверстия откры-
ваются и закрываются сразу.
Типы пневматических буров показаны на рис. 116. Рабочий инстру-
мент состоит из хвостовика 1, стержня 2 и коронки 3. Коронки часто
армируют наплавкой-из твердых сплавов 4. Длина стержня бура зависит
от глубины - шпура. Стержни изготавливаются из высокоуглеродистой
стали обычно многогранного сечения. Для подачи воздуха или воды
стержни имеют каналы. Инструмент может быть выполнен цельным
(рис. 116, б) или составным (рис. 116, а). В последнем случае коронка
устраивается съемной. Ее соединение со стержнем может быть конусным
или резьбовым. Съемную коронку изготавливают из высококачественной
легированной стали. Коронки могут быть выполнены в виде долота 5,
Двойного долота 6, а также крестообразными 7 и звездчатыми 8 (рис. 116,
'<) Последние два типа коронок применяются для бурения крепких- и
весьма крепких пород. При трещиноватых породах следует применять
коронки, выполненные в виде двойного долота. При бурении пород средней
крепости угол заточки а = 110°, а при бурении весьма крепких пород
а = 120°. Угол бокового уклона перьев р = 3-г5° (рис. 116, г). >
В настоящее время в СССР выпускаются ручные перфораторы весом
°т 13 до 30 кг, которые имеют частоту от 1800 до 2700 удар1мин. При дав-
лении воздуха в 5 кПсм- работа удара составляет 2,5—8 кГм.
Бурение осуществляется комплектом буров, отличающихся длиной
стержня. По мере углубления шпура бур заменяется более длинным, но
с меньшим диаметром коронки. . . .
204
МАШИНЫ И ОБОРУДОВАНИЕ ДЛЯ ДОРОЖНЫХ ПОКРЫТИЙ
Сжатый воздух подается от компрессора. С повышением давления
воздуха скорость бурения возрастает, но при этом растет также и расход
воздуха. Современные ручные перфораторы в зависимости от их мощ-
ности расходуют воздух в количестве 2—5м3/мин при 1700—1800 удар!мин.
В процессе работы буры быстро изнашиваются, поэтому в непосред-
ственной близости к месту производства работ организуется их восстанов-
ление. Затупленные съемные коронки затачиваются на специальных стан-
ках, имеющих два карборундовых круга. Один из кругов имеет плоскую
Рис. 115. Принципиаль-
ная схема пневматичес-
кого бурильного молотка
(перфоратора)
Рис. 116. Типы пневматических буров: а — со-
ставной; б — цельный; в — типы коронок; г — углы
заточки
цилиндрическую поверхность, а второй — профильную двухконусную
поверхность, обеспечивающую заточку коронок крестоообразной формы.
Цельные стальные буры и долота после предварительного нагрева в спе-
циальных печах восстанавливаются на бурозаправочных станках. Буро-
заправочные станки представляют собой небольшие ковочные машины,
приводимые в движение сжатым воздухом. После восстановления буры
подвергаются термической обработке.
Для бурения скважин применяются станки ударно-ка-
натного бурения. Здесь рабочий орган — буровой снаряд —
периодически поднимается на некоторую высоту (0,6—1,2 л) и затем,
падая, ударяет о дно скважины, разрушая породу. Частота ударов состав-
ляет около 60 удар!мин. Такой метод пригоден для бурения горных пород,
коэффициент относительной крепости которых f = 12-е 15. Вес бурового
снаряда находится в пределах 500—3000 кГ.
Принципиальная схема станка ударно-канатного бурения представ-
лена на рис. 117. Буровой снаряд 1 подвешен на канате 2. Канат пере-
кинут через головной блок 3 мачты 4, проходит под оттяжным блоком 5,
затем огибает направляющий блок 6 и закрепляется на подъемном бара-
бане 7. Периодические подъемы и падения снаряда в скважине 10 вызы-
ваются качательными движениями оттяжного блока, которые развиваются
МАШИНЫ ДЛЯ ДОБЫЧИ И ПЕРЕРАБОТКИ КАМЕННЫХ МАТЕРИАЛОВ 205
за счет вращения кривошипной шестерни 9. Подъем снаряда происходит
во время движения пальца кривошипа 8 в нижнее положение, при этом
оттяжной блок, опускаясь, оттягивает часть каната и поднимает буровой
снаряд. Когда при дальнейшем вращении шестерни палец переходит
в верхнее положение, оттяжной блок приподнимается и освобождает канат,
а буровой снаряд падает на дно скважины. В скважину заливают воду.
Вода смешивается с измельченной породой, образуя так называемый
шлам, который периодически вычерпывается из скважины желонкой. По
мере углубления скважины
канат сматывают с подъем-
ного барабана.
Буровой снаряд состоит
из долота, штанги и канат-
ного замка, которые соеди-
няются между собой резьбо-
вым соединением. Долото
разрушает породу; оно изго-
тавливается из углеродис-
той инструментальной стали.
Головка долота может быть
плоской, крестообразной или
фасонной. Штанга служит
для увеличения веса снаряда;
она представляет собой мас-
сивный стальной стержень,
который соединяется с одной
Рис. 117. Принципиальная схема станка ударно-
канатного бурения: а — подъем бурового сна-
ряда; б — падение бурового снаряда
стороны с долотом, а с дру-
гой стороны — с канатным
замком. Последний служит
для присоединения каната к
буровому снаряду.
Желонка изготавливается
в виде трубы, нижний конец которой за-
крыт башмаком, снабженным ударником и клапаном. При опускании же-
лонки ударник открывает клапан, и шлам заполняет трубу. При подъеме
клапан закрывается.
Часовая производительность станка определяется как
П = 60 vk0 см/ч,
(V.2)
где v — скорость бурения в см/мин-,
ke — коэффициент использования ртанка во времени; ke = 0,55-^0,65.
Значение v может быть найдено по формуле
v = 0,7 см!мин, (V.3)
где G — вес бурового снаряда в кГ;
Н — высота подъема снаряда в м;
п — число ударов в мин;
а — удельная работа, необходимая для выбуривания единицы объема
породы, в кГм/см3;
d — диаметр скважины в см.
В зависимости от коэффициента f удельная работа бурения принимает
следующие значения:
Коэффициент относительной крепости 15 8—10 5—6 3—4
Удельная работа бурения в кГм/см3 7 10 14 19
206 МАШИНЫ Н ОБОРУДОВАНИЕ ДЛЯ ДОРОЖНЫХ ПОКРЫТИЙ
Необходимый вес бурового снаряда определяют по эмпирической
формуле
G = gcd кГ, (V-4)
где d — диаметр скважины в мм\ • -ц
gc — необходимый вес снаряда, приходящийся на 1 мм диаметра
скважины, в кГ:
Для слабых пород (/—1-5-2) ...................Яс=2
» пород средней крепости ([=3+5).............gc=3=4
» крепких пород (f=6-rlfl) ..................—44-7
Около 75% общего веса бурового снаряда обычно приходится на
штангу.
Мощность привода станка ударно-канатного бурения определяется
по формуле
N = квт’ <V-5)
где G и Н — соответственно вес и высота подъема бурового инструмента
в к Г и м;
t — время подъема бурового инструмента в сек;
т] — к. п. д. передачи, г] = 0,8-е-0,9;
k — коэффициент запаса мощности; k = 1,5 + 2.
Бурение скважины может производиться также станками ударно-вра,-.
щательного действия. Привод такого станка обычно устраивается паев-*
матическим.
Применяется также термическое бурение. Здесь термобур, который
в своей нижней части снабжен горелкой, непрерывно опускается на дна
скважины. Разрушение породы производится высокотемпературными га-
зовыми струями. В качестве горючего применяется жидкое топливо в смеси
с кислородом или воздухом. Разрушение породы происходит ввиду нерав:
номерного прогрева породы по глубине, что влечет за собой неодинаковое
расширение поверхностных слоев. Разрушенная в виде мелких частиц
порода выносится из скважины продуктами сгорания и паром, в который
превращается подаваемая для охлаждения горелки вода. Образующиеся
в камере горелки газы имеют температуру 2200—3500°. Они истекают
через сопла со сверхзвуковой скоростью 1800—2000 м!сек. Этот способ
эффективен только в однородных по составу крепких горных породах.
Здесь скорость термического бурения в 8—10 раз выше, чем при ударно-
канатном бурении. Термический способ позволяет уширять скважину до
400—500 мм в любой ее части.
Созданы также термобуры для разбуривания негабаритных кусков
породы.
§ 31. ДРОБИЛКИ
Типы дробилок. Дробилки служат для измельчения каменных пород,
руды и других полезных ископаемых. При дроблении преодолеваются
внутренние силы сцепления каменного материала и образуются новые
поверхности. Процесс дробления характеризуется степенью измельчения
г =4’ <V6>
где D — средний диаметр кусков исходного материала;
d — средний диаметр раздробленных кусков (получаемого продукта).
МАШИНЫ ДЛЯ ДОБЫЧИ И ПЕРЕРАБОТКИ КАМЕННЫХ МАТЕРИАЛОВ 207
Механическое дробление может осуществляться раздавливанием
куска каменного материала, зажатого между двумя плитами, раскалыва-
нием его острыми гранями сближающихся поверхностей, истиранием
между двумя двигающимися параллельно друг другу поверхностями,
а также изломом, при котором куски породы разрушаются изгибом и уда-
ром, когда по расположенному на твердой подкладке куску камня ударяет
рабочий орган машины. Обычно в дробилках сочетаются эти виды дробле-
ния. Во всех случаях разрушение каменной породы происходит при до-
стижении в ней напряжения, превышающего предел прочности.
Получаемый в результате дробления каменный материал в зависи-
мости от крупности кусков может быть разделен на:
Щебень крупный с размером кусков ................ 40—70 мл
» нормальный » » .............. 20—40 »
Клинен с размером кусков ....................... 10—20 »
Каменная мелочь с размером кусков................. 3—5 »
Высевки с размером кусков ..........................менее 3 »
Обычно получение мелких фракций возможно лишь в результате примсне-'
ния двухступенчатого дробления, т. е. когда каменный материал пропу-
скается через две дробилки.
Дробление относится к числу
наиболее дорогих производ-
ственных процессов, поэтому
технологический процесс
строится таким образом,
чтобы не пропускать через
дробилку лишний каменный
материал. Это достигается
предварительным отделением
от него тех мелких фракций
камня, которые уже не под-
лежат дроблению.
По основным конструктивным схемам дробилки разделяются на сле-
дующие типы (рис. 118).
щ ековые (рис. 118, а), где камень дробится между двух плит,
одна из которых неподвижна, а другая периодически приближается и от-
ходит. При сближении происходит раздавливание каменного материала,
а при отходе раздробленный камень проваливается в выходную Щель'.
Плиты имеют рифленую поверхность, ввиду чего раздавливание сочетается
с изгибом. Иногда плиты не только сближаются, но и получают относиг
тельное параллельное перемещение. В этом случае каменный материал
дополнительно еще истирается.
Конусные (рис. 118,6), где дробление каменного материала
происходит в пространстве между двумя конусами. Внешний конус не-
подвижен, внутренний — вращается. При этом он посажен на вал эксцен-
трично или совершает круговые маятникообразные (гирационные) движе-
ния. Здесь происходит непрерывное раздавливание каменного материала,
а при рифленых конусах также и его излом.
Валковые (рис. 118, с), где раздавливание камня происходит
при проходе его через зазор между вращающимися навстречу друг другу
валками или между валком и корпусом дробилки. В случае рифленых
валков одновременно с раздавливанием происходит также раскалывание
камня.
Ударного действия, где дробление камня происходит при
Ударе о него молотков, как это имеет место в молотковых дробилках
208
МАШИНЫ И ОБОРУДОВАНИЕ ДЛЯ ДОРОЖНЫХ ПОКРЫТИЙ
75 74 13 12 11 10 9 8
Рис. 119. Щековая дробилка с простым качанием
щеки
(рис. 118, е). В ударно-метательных дробилках, имеющих увеличенную
камеру дробления, куски камня после удара о них молотков (билов) от-
брасываются на колосниковую решетку или на отбойные плиты и рико-
шетируют от них.
Конструкции дробилок. Щековые дробилки относятся к машинам
периодического действия. По характеру движения качающейся щеки
различают дробилки с простым и сложным качанием щеки.
В случае дробилки с простым качанием щеки (рис. 119) каждая точка
последней движется по дуге окружности, описываемой вокруг оси 3.
Здесь крутящий момент подводится к эксцентриковому валу 5. Подвешен-
ный к этому валу шатун 12
совершает качательные дви-
жения. При этом примыкаю-
щая к шатуну передняя рас-
порная плита 13 обеспечи-
вает качательные движения
подвижной щеки 14 с укреп-
ленной на ней дробящей пли-
той 15. При движении ша-
туна вверх упирающиеся в
него концы распорных плит
поднимаются, и подвижная
щека 14 сближается с непо-
движной щекой 2, укреплен-
ной на станине 1. При движе-
нии шатуна вниз плиты отхо-
дят друг от друга. При этом
пружина 8 оттяжного устрой-
ства 11 возвращает щеку и
не дает образоваться зазору
между распорными плитами и шатуном с распорной щекой. Задняя рас-
порная плита 10 упирается в устройство, предназначенное для регу-
лирования выходной щеки, а следовательно, и размера получаемого про-
дукта.
Регулировочное устройство обычно состоит из переднего клина 9 и
регулировочного клина 6, который может быть подтянут или опущен
винтом 7. Регулирование выходной щели в больших пределах произво-
дится заменой распорных плит.
С каждым нажимом подвижной щеки раздробленный камень опу-
скается все ниже и наконец выпадает в выходную щель.
При сближении плит (рабочий ход) преодолеваются весьма большие
сопротивления, а отход плит друг от друга (холостой ход) происходит
в условиях весьма малых сопротивлений. Поэтому большое внимание
должно быть обращено на получение необходимой равномерности хода.
Для достижения последней на эксцентриковом валу устанавливаются два
тяжелых маховика 4.
Отличительной особенностью дробилок со сложным качанием щеки
(рис. 120) служит различие траекторий точек подвижной щеки 2 и ша-
туна 4. Здесь верхняя часть шатуна, на котором укреплена подвижная
щека, посажена на эксцентриковый вал 3, а нижняя часть опирается на
распорную плиту 5. Поэтому траектории точек шатуна, расположенных
вблизи вала, приближаются к окружности, а точки, находящиеся вблизи
распорной плиты, движутся по дуге окружности, описываемой, как из
центра, из задней опорной точки распорной плиты. Промежуточные точки
МАШИНЫ ДЛЯ ДОБЫЧИ И ПЕРЕРАБОТКИ КАМЕННЫХ МАТЕРИАЛОВ 209
подвижной щеки движутся по овалам, которые по мере приближения к рас-
порной плите становятся все более вытянутыми. Дробящая щека 1 яв-
ляется неподвижной. Характер движения подвижной щеки создает свое-
образные условия дробления, благодаря чему камень подвергается не
только раздавливанию, но и истиранию. Поэтому эти дробилки предна-
значены для дробления неабразивных горных пород с пределом прочности
ниже zouu Ki /см, тогда как
дробилки с простым качанием
щеки могут дробить более проч-
ные горные породы, в том числе
и абразивные.
В последнее время появи-
лись дробилки с двумя подвиж-
ными щеками (рис. 121), кото-
рые эксцентрично подвешены
на двух приводных валах и
совершают сложные качания.
Валы дробилок соединены друг
с другом зубчатыми колесами,
поэтому движения щек проис-
ходят симметрично. Здесь уст- ,
ранен основной недостаток дро-
билок со сложным качанием
щеки — большой износ нижней
части дробящей плиты подвиж-
ной щеки, который имеет место
вследствие значительного пере-
мещения ее относительно не-
подвижной щеки.
При движении вниз щеки
раскрываются и сообщают раз-
дробленному материалу допол-
нительную скорость, что уве-
личивает производительность.
В отличие от дробилок с одной
подвижной щекой они пред- Ри>
ставляют собой почти полно-
120. Щековая дробилка со сложным кача-
нием щеки
стью уравновешенную систему.
Дробящие плиты устраиваются рифлеными, что способствует более
эффективному разрушению каменного материала за счет его изгиба. При
дроблении очень прочных пород плиты выполняются гладкими во избе-
жание возникновения больших боковых давлений. Дробящую поверх-
ность плиты часто делают выпуклой, что способствует выходу наиболее
ценного щебня — кубовидной формы. Щебень удлиненной формы (ле-
щадка) весьма нежелателен, так как приготовленные на нем бетоны обла-
дают низкой прочностью. Плиты небольших дробилок, предназначенных
для дробления сравнительно слабых пород камня с пределом прочности
до 800 кГ!смг, изготавливаются из отбеленного чугуна, а в остальных слу-
чаях материалом для их изготовления служит марганцовистая сталь
с содержанием марганца 12—14%. Плиты изнашиваются в основном в ниж-
ней части, поэтому они изготавливаются с расчетом возможности их пово-
рота верхней, неизношенной частью вниз.
При попадании в дробилку недробимого предмета произойдет авария.
Чтобы избежать поломки наиболее дорогих частей дробилки, например
210 МАШИНЫ И ОБОРУДОВАНИЕ ДЛЯ ДОРОЖНЫХ ПОКРЫТИЙ
шатуна, устраиваются предохранительные детали, которые рассчиты-
ваются по уменьшенному на 30—40% запасу прочности. Предохранитель-
ные устройства должны быть расйоложены возможно ближе к месту возник-
Рис. 121. Дробилка с двумя подвижными щеками
новения усилий, т. е. под-
вижной щеке дробилки.-
Чаще всего предохрани-
тельной деталью служит
распорная плита, которая•
разрушается после превы-
шения определенного пре-
дела усилия.
Щековые дробилки
маркируются по разме-
рам в плане загрузочного
отверстия. Типажом пре-
дусмотрено по 6 типораз-
меров дробилок с простым
и сложным качанием щеки.
Размеры загрузочного
отверстия находятся в пределах от 400 X 600 до 2100 X 2500 мм -—
для дробилок с простым качанием щеки и от 160 X 250 до 1200 X
1500 мм — для дробилок со
Конусные дробилки
относятся к машинам непре-
рывного действия, т. е. они
не имеют холостого хода и по-
тому при прочих равных усло-
виях в два раза производи-
тельнее щековых дробилок.
По основной конструктивной
схеме конусные дробилки
разделяются на дробилки с
крутым конусом и дробилки
с пологим конусом.
Дробилки с крутым ко-
нусом (рис. 122) служат для
крупного дробления. Дробя-
щий конусзакреплен на глав-
ном вертикальном валу,верх-
ний конец которого подве-
шен в траверсе, а нижний
конец свободно входит в
эксцентричное отверстие ста-
кана. Вследствие этого вал
дробящего конуса описывает
коническую поверхность. Ре-
сложным качанием.
Рис. 122. Дробилка с крутым конусом:
I _ нижняя часть станины; 2 — эксцентрик; 3 — сред-
няя часть станины; 4 — броня; 5 — верхнее кольцо;
6 — корпус дробящего конуса; 7 — броня; 8 — обойма
верхнего подвеса; 9 — разрезная гайка; 10 — колпак;
// _ броня траверсы; 12 — траверса; 13 — вал дро-
бящего конуса; 14, 15 — конические шестерни; 16------
корпус приводного вала; 17 — приводной вал; 18 —
эксцентриковый стакан
гулирование величины вы-
ходной кольцевой щели осу-
ществляется гайкой, кото-
рая расположена в верхней
части вала. Дробящий конус
этих машин может быть на-
сажен на эксцентричную втулку, вращающуюся относительно неподвиж-
ной оси. Здесь геометрическая ось дробящего конуса описывает
МАШИНЫ Для ДОБЫЧИ И ПЕРЕРАБОТКИ КАМЕННЫХ МАТЕРИАЛОВ 211
цилиндрическую поверхность. Дробилки с крутым конусом маркируются
по наибольшей ширине загрузочного отверстия.
Дробилки с пологим конусом (рис. 123) предназначены в основном
для мелкого и среднего дробления. Здесь нижний конец вала вставлен
в высокий стакан-эксцентрик. Вертикальные составляющие усилий дроб-
ления, которые ввиду большого угла конуса весьма значительны, воспри-
нимаются сферическим подпятником. При попадании недробимых предме-
тов неподвижный конус за
счет сжатия пружин припод-
нимается, что увеличивает
выпускную щель, через ко-
торую и происходит удале-
ние этого предмета. Дробил-
ки характеризуются нали-
чием зоны параллельности
в нижней части конусов, бла-
годаря которой щебень полу-
чается более равномерным по
крупности. Здесь вал дробя-
щего конуса представляет
собой консоль, и его ось
описывает коническую по-
верхность. Эти дробилки
маркируются по Диаметру
нижнего основания дробя-
щего конуса.
Валковые дробилки
предназначены для мелкого
дробления и могут быть с
гладкими, рифлеными или
зубчатыми валками. Их изго-
тавливают с отдельным при-
водом каждого валка или с
приводом только одного вал-
ка. В последнем случае вра-
щение ко второму валку пе-
редается зубчатой передачей.
Размер выпускной щели регу-
лируется передвижением под-
/ — вал: 2 — стакан-эксцентрик; 3 — коническая ше-
стерня; 4 — подвижный конус; 5 — пружины; 6 — не-
подвижный конус; 7 — опорное кольцо; 8 — кольцо ре-
гулирования выпускной щели; 9 — сферический под;
пятник; 10 — ведомая коническая шестерня
шипников одного из валков. Подшипники упираются в пружины,
которые предохраняют дробилку от’ поломки — при попадании недро-
бимого предмета валки расходятся и предмет выпадает из дробилки. По-
движным устраивается один валок или оба валка. В последнем случае
горизонтальные инерционные усилия уравновешиваются и работа дро-
билки становится более равномерной.
Молотковые дробилки относятся к машинам непрерывного дей-
ствия. Они отличаются малым расходом энергии и могут быть с нормаль-
ным (300—2000 об/мин) и с повышенным (до 3000 об/мин) числом оборотов
ротора. Окружная скорость молотков обычно 25—55 м/сек, а степень
измельчения 10—15. Чем крупнее и прочнее каменный материал, тем
большей должна быть скорость вращения ротора. Вес молотков колеблется
от 3 до 150 кг. Более мелкое дробление щебня достигается постановкой
большого количества небольших молотков. Молотки могут быть шарнирно
и жестко укреплены на роторе. По числу роторов дробилки разделяются
212
МАШИНЫ И ОБОРУДОВАНИЕ ДЛЯ ДОРОЖНЫХ ПОКРЫТИЙ
на однороторные (одновальные) и двухроторные (двухвальные). Молотки
на роторе могут располагаться в одной плоскости (однорядные) и в не-
скольких плоскостях (многорядные). К достоинствам дробилок относятся
компактность конструкции, малый вес, высокие производительность и
степень измельчения камня. К недостаткам следует отнести быстрый износ
молотков, вследствие чего эти дробилки обычно применяют для дробления
материалов, предел прочности которых не превышает 1000 кПсм.”-.
Теории дробления. При проектировании дробилок требуется нахо-
дить те сопротивления, которые возникают при дроблении камня. Про-
Рис. 124. Разделение куба на
части
цесс дробления, т. е. разрушения твердых
тел, весьма сложен и поэтому, несмотря на
то что он исследуется уже длительное время,
изучен еще недостаточно. Для определения
необходимой работы используются две гипо-
тезы: поверхностная гипотеза Риттингера,
выдвинутая в 1867 году, и объемная ги-
потеза В. Л. Кирпичева, разработанная в
1874 году.
Согласно гипотезе Риттингера «работа
дробления прямо пропорциональна поверх-
ности кусков продукта, полученной в про-
цессе этой операции».
На примере куба видно (рис. 124), что
при разделении каждой из его сторон на п
частей образуется 3 (и — 1) новых поверхностей. Если работа, необхо-
димая для разделения тела по одной плоскости, равна А, то при степени
дробления i = п затраченная работа составит
Ап - ЗА(п~ 1).
Если в другом случае степень дробления этого тела i = т, то здесь по-
требуется работа
(V.7)
Ат = ЗА (т — 1).
Отношение работ при достаточно больших пит будет
Ап _ п — 1 п
Ат т — 1 ~ т
Таким образом, работа прямо пропорциональна степени дробления. Этой
гипотезой устанавливается лишь соотношение работ, но не определяется
их абсолютная величина. Поэтому использование этой гипотезы затрудни-
тельно.
При выводе формулы (V.7) предполагалось, что поперечные размеры
исходного материала равны, т. е. что Dn ^Dm. Для случая, когда они
не равны, может служить формула, предложенная Т. И. Мухой:
Ап _ (л — 1) _ Рп
Ат ~ (т — 1) ’
Согласно гипотезе В. Л. Кирпичева при прочих равных условиях
«работа внутренних сил пропорциональна объемам подобных тел». Здесь
имеются в виду линейно деформируемые тела.
Из теории упругости известно, что работа деформации
V
2Е
(V.8)
(V.9)
МАШИНЫ ДЛЯ ДОБЫЧИ И ПЕРЕРАБОТКИ КАМЕННЫХ МАТЕРИАЛОВ 213
где г'всЖ — предел прочности при сжатии в к.Г!смг\
V — объем деформируемого тела в см3;
Е — модуль упругости при сжатии в кГ!смг.
При разрушении двух подобных тел, отличающихся друг от друга
только размерами,
где /j и /2 — сходственные стороны этих тел.
Если при этом тело подвергалось действию каких-то средних сил PY
и Р2, а перемещения были соответственно равны s, и s2, то так как А = Ps
и перемещения пропорциональны линейным размерам, уравнение (V.10)
можно представить в виде
_ PiSi РЛ Vi
Р 2S2 Р 2^2
откуда
Р, Ц
к=^-- <v-n)
Таким образом, из этой гипотезы следует, что «тела геометрически
подобные имеют сопротивления пропорциональные квадратам их сход-
ственных размеров». Эта гипотеза, в отличие от гипотезы Риттингера,
позволяет определять численные значения работы дробления, и поэтому
она применяется для практических расчетов. Как показали исследования,
при крупном и среднем дроблении гипотеза В. Л. Кирпичева оказывается
достаточно точной. При мелком дроблении, где величина вновь образуемой
поверхности относительно велика, оказывается более точной поверхност-
ная гипотеза Риттингера.
Механика дробилок. При проектировании дробилок необходимо найти
требуемую для выполнения рабочего процесса мощность двигателя, про-
верить производительность, выбрать оптимальное число оборотов, а для
расчета на прочность узлов и отдельных деталей — определить те макси-
мальные усилия, которые развиваются при раздавливании камня. При
анализе работы дробилки делается допущение, что куски питания и куски,
получаемые в результате дробления (продукт дробления), имеют шаро-
образную форму, а в случае щековой дробилки принимается, что неподвиж-
ная щека вертикальна, а подвижная щека движется параллельно самой
себе.
Механика дробилок разработана в трудах советских ученых —
Я. Б. Левинсона, В. А. Баумана и др'
Для осуществления процесса дробления необходимо обеспечить захват
исходного материала, т. е. камня, рабочими органами установки. На ка-
мень, сжимаемый между двумя щеками (рис. 125, а) или валками (рис. 125,
б), по нормали к поверхности этих щек или к касательным валков дей-
ствуют сжимающие усилия Р, вертикальные составляющие которых стре-
мятся вытолкнуть камень вверх. Выталкиванию препятствуют вертикаль-
ные составляющие развивающихся на поверхности контактов сил тре-
ния fP. Очевидно, что условие захвата камня в обоих случаях обусловлено
неравенством
2P/cos ~ 2Р sin ,
где f — коэффициент трения;
а — угол захвата.
214
МАШИНЫ И ОБОРУДОВАНИЕ ДЛЯ ДОРОЖНЫХ ПОКРЫТИЙ
Отсюда
tg-y </,
или
а < 2<р,
(V.12)
где ср — угол трения.
В случае щековых дробилок f = 0,15 ч-0,25 и потому ее < 15 ч-24°.
При валковых дробилках / = 0,3ч-0,35 и а < 17 h-18j.
По углу захвата можно найти, что наибольший размер кусков пита-
ния валковой дробилки с гладкими валками не должен быть более /?,
Рис. 125. Определение угла захвата
в случае: а — щековой дробилки;
б — валковой дробилки; в — конус-
ной дробилки
где R — радиус валка. Поэтому эти дробилки предназначены в основном
для мелкого дробления. Для повышения предельного размера кусков пи-
тания применяют рифленые валки или снабжают валки зубьями. Однако
рифленые валки подвержены большому износу.
Угол захвата конусных дробилок (рис. 125, в):
а = cq + а2 < 2ф.
Здесь обычно принимают а = 21—23°.
Производительность дробилки определяется возможностями разгрузки
ее от дробленого продукта. Если щека отходит на величину s (рис. 126, а),
то за это время может выпасть заштрихованная на чертеже призма мате-
риала высотой h. Однако эта возможность может быть реализована лишь
в случае, если время выпадения призмы будет меньше или равно времени
отхода щеки. Очевидно, что максимальная производительность дробилки
будет соответствовать равенству времени отхода щеки и выпадения призмы.
Время отхода щеки в секундах
^от 2 ' п п сек, (V. 13)
МАШИНЫ ДЛЯ ДОБЫЧИ И ПЕРЕРАБОТКИ КАМЕННЫХ МАТЕРИАЛОВ 215
где п — число оборотов вала дробилки в мин.
Время, необходимое для выпадения призмы, может быть определено
из уравнения
/г = 4-^- (V-14)
Принимая tom = /в и имея в виду, что
h = ~rS— см,
tg а
из уравнений (V.13) и (V.14) можно найти
п = 665 об/мин.
Рис. 126. Схема к определению производительности дробилок:
а —щековой; б — конусной
Ввиду того, что здесь не учтено тормозящее действие сил трения,
оптимальное значение п для дробилок с простым качанием щеки несколько
понижают:
и = 470 обмин. (V.15)
Такие числа оборотов будут соответствовать максимальной произво-
дительности дробилки. При их снижении, так же как и при повышении,
производительность дробилки снижается.
В случае конусной дробилки (рис. 126, б и 125, в)
h = ——г— см и s =- 2г см,
tg Щ + tg «...
где г — эксцентриситет в см.
Поэтому формула (V.15) здесь интерпретируется в виде
п = 470 Уtg + tg а* об/мин.
(V.16)
Число оборотов дробилки с пологим конусом подбирается с таким
расчетом, чтобы каждый кусок получаемого продукта был обязательно
пропущен через зону параллельности. Поэтому время прохождения куском
этой зоны должно быть больше времени, затрачиваемого на один оборот
вращающегося эксцентрика. Рассматривая перемещение куска в зоне па-
раллельности как движение по наклонной плоскости и учитывая силы
трения, можно показать, что это условие соблюдается, если
_ , sin у — f cos у <,
1330 I/------—j-----— об/мин,
(V.17)
216
МАШИНЫ И ОБОРУДОВАНИЕ ДЛЯ ДОРОЖНЫХ ПОКРЫТИЙ
где е — длина зоны параллельности в cai;
f — коэффициент трения скольжения куска породы по поверхности
дробящего конуса;
у — угол наклона к горизонту образующей дробящего конуса в зоне
параллельности.
Обычно принимают е Q,08DK; f 0,35; у «=> 40е.
Число оборотов валковой дробилки не должно превышать величины,
определяемой формулой
«шах = 310 У Об/мин, (V.18)
где А — удельный вес дробимой породы в кПсм3',
г и R — соответственно радиусы исходного материала и валка в см.
Производительность дробилки определяется объемом выпадающего
материала. Для щековой дробилки площадь F выпадающего материала
определится (см. рис. 126, а):
р (2е н-s) . 2e-\-s s 2
Если длина зева дробилки равна Ь, то объем выпадающего материала
где dc„ — средний размер получаемого продукта в м.
Часовая производительность будет равна
П = 60 Упц = ма/ч, (V. 19)
где р — коэффициент заполнения объема призмы щебнем; р — 0,3 ч-0,6.
Здесь все линейные размеры следует принимать в м, а п — в об/мин.
Подобным же образом для дробилки с крутым конусом можно
получить
/7 = 34°пРн^срр 3 /у. 20)
tg oi + tg аа ' ’
Здесь, как и в предыдущем случае, все линейные размеры даны в м. При
выводе этой формулы принято, что средний диаметр выходной щели при-
ближенно равен диаметру нижнего основания дробящего конуса DK
(см. рис. 125, в). В этом случае можно принять р = 0,4.
Производительность дробилки с пологим конусом найдется в предпо-
ложении выпадения на 1 оборот объема материала
V ^DHdl м3,
где d — размер получаемого продукта в м. Здесь также принято, что
средний диаметр выходной щели равен диаметру нижнего основания дро-
бящего конуса.
Часовая производительность такой дробилки будет
П = 60pnDK/d м3!ч. (V.21)
Производительность валковой дробилки определяется объемом про-
дукта, пропускаемого через щель между валками (см. рис. 125, б):
V — еЬо\1 м3, (V.22)
МАШИНЫ ДЛЯ ДОБЫЧИ И ПЕРЕРАБОТКИ КАМЕННЫХ МАТЕРИАЛОВ 217
где L — длина валка в м;
v — окружная скорость валков в м/сек.',
е — ширина щели в м.
Коэффициент разрыхления р для твердых и средних пород может быть
принят равным 0,2—0,3, а для мягких пород — 0,3—0,5.
Выражая скорость через число оборотов, можно получить следующую
формулу для определения часовой производительности валковой дро-
билки:
П = 370eL/?«|x м3/ч.
Следует учесть неизбежную при дроблении раздвижку валков, что
увеличивает щель в среднем на 25%.
Поэтому производительность этой дробилки может быть определена
по формуле
П = 460eL/?np м3/ч. (V.23)
Часовая производительность молотковой дробилки при дроблении
пород средней твердости со степенью дробления i = 15—20 может быть
определена по следующей эмпирической формуле:
П = (30-45) DpLp м3/ч, (V.24)
где Dp — наружный диаметр ротора, описываемый молотком, в м;
L — длина ротора в м.
Расчеты необходимой мощности двигателя основывают на гипотезе
В. Л. Кирпичева.
Для нахождения работы дробления по формуле (V.9) необходимо
уточнить понятие о дробимом объеме. За дробимый объем принимают
разность между объемами поступающего в дробилку исходного материала
и выходящего продукта. В случае щековой дробилки дробимый объем
определится:
V = = ^(Р2 — d2) см3. (V.25)
b и ba o'
Здесь объем исходного материала и получаемого продукта представляет
произведение объема одного шаровидного куска на число таких кусков,
помещающихся по длине b зева дробилки.
В случае дробилки с крутым конусом при определении дробимого
объема учитывается, что куски исходного материала и продукта распо-
лагаются по длине кольцевой щели. Здесь
V = = t —с/Ч) cm3, (V.26)
b D 6 d 6 ' с
где Dc и dL — средние диаметры щели в плоскостях входа материала и
выхода продукта (см. рис. 125, в).
Применительно к валковой дробилке дробимый объем найдется (см.
Рис. 125, б):
У = 3121._£_2|!..Ч_ = 2^.(£)2_е2)сл1з. (V.27)
После определения дробимого объема отыскание по формуле (V.9)
Работы А, затрачиваемой на дробление камня за одно нажатие щеки ще-
ковой дробилки, не вызывает затруднений.
218 МАШИНЫ И ОБОРУДОВАНИЕ для ДОРОЖНЫХ ПОКРЫТИЙ
При числе оборотов вала п расход мощности на дробление будет
An гт2а2 (О2 — </2)п6
1 ~ 100-60.102 = 12.100-60-102£ квт. (V.28)
Здесь и далее значения всех входящих в формулу параметров следует
брать в кГ и см.
В случае дробилки с крутым конусом работа, затрачиваемая на дроб-
ление камня за 1 оборот дробящего конуса, может быть найдена по фор-
муле (V.9) с учетом выражения (V.25). Окончательно мощность двигателя,
необходимая для дробления камня, может быть выражена формулой
~ квт- (V.29)
Для определения мощности, затрачиваемой на дробление в дробилке
с пологим конусом, А. А. Липманом выведена следующая формула:
о2 _.зх2С_О2п
= 12.100.60-102£ Квт' (V.30)
Для валковой дробилки мощность, расходуемая на дробление, опре-
деляется в предположении непрерывного ее питания. Здесь работа, соот-
ветствующая 1 обороту валков, найдется как
. . 2л/? г
Ах = Ао д кГ -см,
где Ао — работа, затрачиваемая на раздавливание одного ряда камней.
<г V
-’'и' .'/' кГ-см,
и ,2с
где V — определяемый по формуле (V.26) дробимый объем.
Мощность при этом равна
_ А'п (°2 - ®2) ,v
60.100.102 370 0000Д Квт' (V.31)
Здесь надо еще учесть мощность, теряемую за счет трения породы о валки:
ЛА = (V.32)
где f — коэффициент трения породы о валок; / = 0,3.
Мощность, необходимая для дробления породы в молотковой дро-
билке среднего и крупного дробления, может быть определена по эмпири-
ческой формуле В. А. Олевского:
N — 0,\D^_Ln квт (V.33)
или по формуле
А «=0,1/77, (V.34)
где i — степень измельчения породы;
П — производительность дробилки в т/ч.
Во всех случаях расходуется также мощность на преодоление сил
трения, развивающихся в цапфах валов, качающихся щек, валков и т. п.
Эта мощность может быть найдена обычными методами. Однако по сравне-
нию с мощностью, затрачиваемой на дробление, она незначительна и
потому часто находится в пределах точности расчета последней.
Для прочностных расчетов необходимо определить те максимальные
усилия, которые развиваются в дробилке при нормальной работе.
МАШИНЫ для ДОБЫЧИ и ПЕРЕРАБОТКИ КАМЕННЫХ МАТЕРИАЛОВ 219
В случае щековой дробилки, согласно результатам опытов В. А. Ба-
умана, принимается, что максимальное усилие'раздавливания приложено
на расстоянии (см. рис. 125, а)
I = -у- Н см.
Величина максимального усилия может быть найдена в предположении,
что оно возрастет прямо пропорционально сближению щек. Если А — ра-
бота, затрачиваемая на дробление при одном сближении, то максимальное
усилие дробления Ршах определится:
Ртах = ~ КГ, (V.35)
где s — ход щеки.
Подставляя значение А, можно получить
Лпах = «Г- ' (V-36)
Максимальное усилие, действующее в дробилке с крутым конусом, на-
ходят в предположении раздавливания куска породы с наибольшим попе-
речным размером Dmax. Здесь
Р — __^тах ° веж геях
,nax S “ г0 - 2£г„ ’ б
о С JfC 111 а л Г'
3,8£r0 Kl ’
(V.37)
где г0 — эксцентриситет, соответствующий верхней части дробящего ко-
нуса, в см.
В дробилке с пологим конусом вертикальные составляющие усилий
дробления стремятся приподнять неподвижный конус, а вместе с ним й
всю верхнюю часть машины. Такому поднятию препятствует затяжка пру-
жины. Максимальное усилие возникает при попадании недробимого пред-
мета. Здесь это усилие уравновешивается упругими силами пружин.
Поэтому вертикальная составляющая максимального усилия оказывается
равной сумме сил упругости всех пружин при наибольшей величине их
сжатия.
Расчет основных деталей дробилок на прочность. По максимальному
усилию дробления Ртах графическим или аналитическим путем могут быть
найдены усилия, действующие в основных частях щековых дробилок. Так,
действующее вдоль распорной плиты сжимающее усилие Т (см. рис. 125, а)
может быть найдено:
Т = Рт3х-^кГ, (V.38)
а действующее вдоль шатуна растягивающее усилие
Q = 2Т cos р кГ, (V.39)
где р — угол между распорной плитой и шатуном.
Учитывая возможность перегрузки дробилки при попадании в нее
недробимых предметов, расчетные усилия принимают в 1,5 раза больше
тех величин, которые получены в предположении действия максимального
дробящего усилия.
220 МАШИНЫ И ОБОРУДОВАНИЕ ДЛЯ ДОРОЖНЫХ ПОКРЫТИЙ
Дробящие плиты рассчитывают как пластины, опертые по периферии,
с действующей в центре нагрузкой Ррас — 1,5Ря,ах.'
h. =
Р-ри( см,
(V.40)
а b
b ' а
где h — толщина дробящей плиты в см;
а и b — длина и ширина плиты в см;
— предел прочности материала щек при изгибе в кГ!смг;
р — поправочный коэффициент; р = 2 — для чугуна и р = 0,4 —
для стали.
При таком расчете наличие рифлений на плите не учитывается, что
идет в запас прочности.
Качающиеся щеки рассчитываются на изгиб как балки на двух опо-
рах при действии силы Ррас посредине этой балки или на расстоянии 1/3
от одной из ее опор. При этом, меняя точку приложения силы, надо про-
верить несколько сечений этой щеки. Распорные плиты рассчитывают на
сжатие и на продольный изгиб, а в случаях, когда они имеют криволиней-
ную конфигурацию, еще и на поперечный изгиб.
Шатун проверяется на растяжение силой Qpac = 1,5Q, а эксцентри-
ковый вал рассчитывается на одновременное действие изгиба и кручения.
Станину дробилки рассчитывают как жесткую раму, передняя и задняя
стенки которой равномерно загружены нагрузкой от силы Ррас.
§ 32. МЕЛЬНИЦЫ
Мельницы применяются для тонкого измельчения каменных материа-
лов в порошок. Помол осуществляется раздавливанием этого материала
между частями мельниц. Часто это раздавливание сопровождается ударом.
Обычно степень измельчения не превышает 10. При необходимости повы-
шения степени измельчения применяют двухступенчатый помол.
Обычно применяемые мельницы разделяют на:
шаровые (рис. 127), представляющие собой вращающийся бара-
бан, в который наряду с каменным материалом загружаются стальные
шары; здесь размол осуществляется истиранием материала между шарами
Рис. 127. Шаровые мельницы с разгрузкой
через: а — цапфу; б — диафрагму
и футеровкой барабана, а также
ударом при падении шаров;
стержневые, отличаю-
щиеся от шаровых тем, что здесь
вместо шаров служат стержни;
вибрационные, где
шаровым мельницам сообщают
колебательные движения;
б е г у н к о в ы е, в которых материал измельчается перекатываю-
щимися по кольцевой дорожке массивными бегунками.
Наибольшее распространение получили шаровые мельницы, которые
могут быть с диафрагмой и без нее (см. рис. 127). В первом случае
при перекрытии решетки диафрагмы имеется возможность более длитель-
ного пребывания материала в мельнице, а следовательно, и более тонкого
ее помола. Футеровкой обычно служат укрепленные на стержнях
стальные плиты. Привод мельниц осуществляется через зубчатую
пару.
МАШИНЫ ДЛЯ ДОБЫЧИ И ПЕРЕРАБОТКИ КАМЕННЫХ МАТЕРИАЛОВ 221
Мельницы изготавливают однокамерными и двухкамерными. В первой
камере двухкамерной мельницы производится грубый помол материала,
а во второй — тонкий помол. Из первой во вторую камеру материал по-
ступает через отверстия в перегородке.
Помол может быть сухим или мокрым. В последнем случае он произ-
водится в присутствии какой-либо «активной» жидкости, например воды,
которая ввиду физико-химического «сродства» с разрушаемым материалом
и наличия в последнем микротрещин ускоряет процесс размола, повышает
его тонкость и снижает энергоемкость.
Длину барабана мельницы обычно выбирают в пределах (0,7-:- 1,5) D,
где D — ее диаметр. Диаметр шаров составляет 50—125 мм. Шары из-
готавливаются из высокомарганцовистой или хромистой стали. В мель-
ницы обычно загружают шары двух размеров. Общий объем шаровой за-
грузки составляет 40—50% от рабочего объема мельницы.
Чтобы процесс помола был эффективным, шары должны падать
с максимальной высоты. Это условие соблюдается в случае, когда число
оборотов мельницы выбирается равным (0,7-н0,8) пкр. 'Здесь пкр — кри-
тическое число оборотов, т. е. число оборотов, при которых вес шара урав-
новешивается центробежной силой, вследствие чего его падения не про-
исходит. Критическое число оборотов может быть найдено из уравнения
где т — масса шара в ------•
см ’
R — радиус мельницы в см\
v — линейная скорость ®
Учитывая, что
nRnK„ ,
v = —3Q - м/сек,
можно найти
пкр = об/мин. (V. 41)
V R
Ввиду того, что производительность мельницы теоретическим путем
определить невозможно, ее находят по производительности другой, уже
известной мельницы:
П --=11^ У'® м" ч, (V.42)
где П1 — производительность известной мельницы объемом и диа-
метром Dt в м3/ч;
V2 — объем рассчитываемой мельницы в м3.
На основании опытных данных установлена следующая энергоем-
кость процесса помола (в квт-ч на 1 т получаемого продукта):
При грубом помоле ..............................0,8—1,2
» тонком » ............................1,2—2,0
» весьма тонком помоле ........................2,0—6,0
Пользуясь этими данными, можно по производительности мельницы
найти необходимую мощность двигателя. При этом надо иметь в виду, что
пусковая мощность примерно в 3,5 раза превышает ту, которая соответ-
222 МАШИНЫ И ОБОРУДОВАНИЕ ДЛЯ ДОРОЖНЫХ ПОКРЫТИЙ
ствует установившемуся режиму. Расход шаров за счет их износа на 1 т
получаемого продукта составляет 0,9—1,6 кг.
При размоле некоторых материалов, особенно при мокром помоле.
весьма эффективны вибрационные мельницы. Здесь корпус шаровой мель»
ницы опирается на пружинную опору, и при помощи возбудителя экс-
центрикового типа ему сообщаются колебательные движения.
§ 33. ГРОХОТЫ И ГРАВИЕМОЙКИ
а
1G
определе-
скорости
б — усло-
Рис. 128. Схемы для
ния: а — предельной
движения частицы;
вий ее незастревания в отвер-
стии
Процесс грохочения и конструкции грохотов. Такие строительные
материалы, как бетон и асфальтобетон, состоят из щебня вполне опреде-
ленного фракционного состава. Для того чтобы иметь возможность обес-
печить нужное соотношение между отдельными фракциями, щебень или
гравий вначале надо рассортировать по фракциям. Этот процесс назы-
вается сепарацией или грохочением, а при-
меняемое для этой цели механическое обору-
дование называется грохотами. Получаемый
после дробления щебень и особенно такой
естественный материал, как гравий, часто
содержат большое количество пылевых час-
тиц, которые существенно снижают качество
бетонов. Поэтому такие частицы необходимо
отделить, что осуществляется промывкой
материала в специальных гравиемоечных
машинах.
Сепарация обычно осуществляется про-
пуском материала через сито, которое имеет
отверстия определенного размера. Для осу-
ществления сепарации, очевидно, прежде
всего необходимо наличие относительного
движения сыпучей смеси по ситу. Это воз-
можно лишь в случае, если движение сита
будет достаточно энергичным, в результате
чего частицы материала отстанут от сита.
Такое условие будет выполнено лишь тогда,
когда развивающиеся при движении силы '
будут превышать силы трения, имеющие
инерции частиц материала
место на контактах этих частиц с поверхностью сита. Если G — силд
тяжести частиц, то на горизонтальном сите это условие выразится в виде
Q
— a~>fG или a>fg.
(V.43)
Ускорение а = fg называется критическим.
С другой стороны, проскакивание частицы материала сквозь отвер-
стие сита может иметь место, если ее относительная скорость не будет
столь велика, чтобы она перелетела через это отверстие.
На рис. 128 даны схемы для определения предельной скорости частицы
и условий ее незастревания в отверстии.
Пусть v — относительная скорость частицы (рис. 128, а), тогда ее
движение будет происходить по параболе Ох—О2. Путь, пройденный ча-
стицей, характеризуется координатами х и у:
x = vt^D----y = -^-gP-------£
МАШИНЫ ДЛЯ ДОБЫЧИ И ПЕРЕРАБОТКИ КАМЕННЫХ МАТЕРИАЛОВ 223
Отсюда можно найти
V = - 4) /4 мм!сек-
Полагая, что диаметр частицы d равен диаметру отверстия D, и имея
в виду, что g = 9810 мм/сек, выражение для скорости примет вид:
г ~ 50 I d мм, сек. (V.44)
Эта скорость является предельной. При больших значениях скорости
частицы, имеющие диаметр, близкий к диаметру отверстия, уже не смогут
пройти сквозь последнее. При выводе этой формулы не были учтены сопро-
тивления. Поэтому фактическая предельная скорость несколько больше,
ее обычно полагают равной
v75]^d мм/сек. (V.45)
Здесь все рассуждения велись в предположении, что сито горизонтально.
При движении частицы вниз по ситу, угол наклона которого к горизонту
составляет около 10°, предельная скорость будет на 10—15% ниже зна-
чения, определяемого формулой (V.45).
При некоторых условиях возможно застревание частиц материала
в отверстиях сита. Так, выбрасывание частиц материала из отверстия
может произойти, если ускорение сита превышает некоторую величину.
На основании схемы рис. 128, б условие выбрасывания частицы из отвер-
стия может быть написано в виде:
Ри = — ah>GR.
g
где G — сила тяжести частицы;
R — радиус отверстия.
Учитывая, что h = R ctg а, можно получить
а > g tg а. (V.46)
Неравенством (V.43) было установлено условие, обеспечивающее отно-
сительное движение материала по ситу. Очевидно, что в идеальном случае
отверстия не будут задерживать процесс просеивания, если
g tg « < fg,
откуда tg а < f или а < <р, (V.47)
где ф — угол трения.
Согласно схеме рис. 128, б из ге'ометрнческих соотношений с уче-
том (V.47) можно получить
А = sin а = . (V.48)
г К1 -г tg- u V1 + tg2 <р и । + /г
Это неравенство обеспечивает условие незастревания частиц в отверстиях
сита. При наклонном сите неравенство (V.46) примет вид
а > g tg (а — Р), (V.49)
где р — угол наклона сита.
Из предыдущих условий (V.45) и (V.48) следует, что со снижением
величины зерна трудность грохочения повышается, так как мелкие зерна
имеют большую склонность к перелетам через отверстия и легче застре-
вают в них. Эти трудности увеличиваются с повышением влажности
материала.
224
МАШИНЫ И ОБОРУДОВАНИЕ ДЛЯ ДОРОЖНЫХ ПОКРЫТИЙ
Качество грохочения может быть оценено коэффициентом качества
П = (V.50)
где U — фактический выход материала через отверстия сита;
А — действительное содержание мелких фракций в исходном мате-
риале.
Материал, прошедший сквозь просеивающую поверхность сита, назы-
вается нижним сортом, а материал, не прошедший сквозь сито, — верхним
сортом. Таким образом, коэффициент качества представляет отношение
фактически полученного количества нижнего сорта к количеству, которое
могло бы иметь место при идеальном просеивании материала.
Выше были рассмотрены условия просеивания и пезастревания мате-'
риала в отверстиях сита в предположении движения изолированной ча-
Рис. 129. Типы грохотов: а — наклонный качающийся; б — горизонтальный
с дифференциальным движением сита; в — наклонный вибрационный (инерционный);
г — горизонтальный вибрационный (инерционный); д — качающийся гирационный;
е — барабанный (вращающийся)
Условные обозначения:
1 — кузов с ситом; 2 — подвески; 3 — эксцентрик; 4 — шатун; 5 — дебаланс; 6 — пружина;
7 — эксцентриковый вал; 8 —- противовес; 9 — приводной шкив
стицы. На самом деле зерна материала движутся по ситу в большой
массе, причем часто крупные частицы закрывают мелким частицам доступ
к отверстиям, что усложняет процесс сепарации материала.
По характеру действия грохоты разделяются на неподвижные и по-
движные. Неподвижные грохоты обычно представляют собой наклонную
по отношению к горизонту решетку и служат для предварительного отде-
ления камня, подлежащего дроблению. Все грохоты, предназначенные для
сепарации как дробленого, так и естественного материала, устраиваются
подвижными, так как движение сита улучшает и ускоряет сортировку.
Подвижные грохоты обычно снабжаются расположенными друг под дру-
гом двумя-тремя ситами, что позволяет одновременно получать несколько
фракций щебня.
По принципу действия грохоты разделяются (рис. 129) на плоские
и барабанные (вращающиеся). В первом случае сито представляет собой
плоскость, которая совершает качательные движения (рис. 129, а—д),
а во втором случае оно образует цилиндрическую поверхность или поверх-
ность усеченного конуса (рис. 129, а), где относительное движение мате-
риала и сита осуществляется вращением грохота. При цилиндрическом
грохоте движение материала вдоль оси осуществляется за счет наклонного
положения последней; в случае конического грохота его ось устанавли-
вается горизонтально.
МАШИНЫ ДЛЯ ДОБЫЧИ И ПЕРЕРАБОТКИ КАМЕННЫХ МАТЕРИАЛОВ 225
Плоские грохоты разделяются на качающиеся и вибрационные (инер-
ционные). Качающиеся грохоты могут быть с наклонным и горизонталь-
ным расположением сита. При наклонном расположении (рис. 129, а)
ввиду большой длины подвесок 2 по сравнению с эксцентриситетом экс-
центрика 3 сито 1 совершает качательные движения, близкие к прямо-
линейным, и движение материала вдоль пего осуществляется под совмест-
ным действием составляющих силы тяжести и развивающихся при кача-
нии сил инерции. При горизонтальном расположении (рис. 129, б) ввиду
наличия угла а сито совершает дифференциальные движения, т. е. его
движение в одну сторону отличается от движения в другую сторону. При
этом материал подбрасывается, вследствие чего и происходит его продви-
жение вдоль сита.
Вибрационные (инерционные) грохоты могут быть подразделены на
собственно вибрационные (рис. 129, в и г) и гирационные (рис. 129, д).
У первых амплитуда колебаний зависит от параметров возбуждения и
упругой подвески, а также от массы грохота и находящегося на нем мате-
риала, а у вторых она задана жесткой кинематической цепью. Вибрацион-
ные грохоты могут иметь наклонные (рис. 129, в) и горизонтальные
(рис. 129, г) расположения сита. Наклон необходим для продвижения
материала вдоль сита при простом дебалансе, под действием которого
кузов грохота совершает круговые колебательные движения. Горизон-
тальное сито устраивают при дебалансах направленного действия с на-
клонной осью. Здесь продвижение материала осуществляется за счет того,
что направленные колебания совершаются под некоторым углом к верти-
кали.
Качающиеся грохоты относятся к числу тихоходных. Так, обороты
их эксцентрикового вала обычно находятся в пределах 300—500 об/мин.
Частота вынужденных колебаний вибрационных грохотов равна 900—
3000 Имин, в связи с чем они относятся к числу быстроходных машин.
Работа грохотов изучена, главным образом, благодаря трудам со-
ветских ученых Л. В. Левенсона, В. А. Баумана, И. И. Блехмана,
Г. Ю. Джанелидзе и других, которыми исследована работа машин различ-
ных типов, а также условия и характер движения по ситу частиц мате-
риала.
Вибрационным грохотам соответствует самый высокий коэффициент
качества (0,90—0,98), а барабанным грохотам — самый низкий (0,60).
Качающиеся грохоты занимают промежуточное положение. Здесь коэффи-
циент качества равен 0,7—0,8.
Производительность грохотов, необходимая мощность двигателя и рас-
четы на прочность. Производительность грохотов определяют по коли-
честву пропущенного через них материала. Производительность плоских
качающихся грохотов определяют по формуле
П = ЗбООрВйи м3/ч, (V.51)
где В и h — соответственно ширина сита и толщина слоя материала в м;
обычно принимают h. = (1 ч-2) d, где d — наибольший диа-
метр кусков питания;
v — средняя скорость подачи сыпучей смеси в м/сек\ обычно
v = 0,05ч-0,25 м/сек-,
р — коэффициент разрыхления сыпучей смеси; в процессе ка-
чания р = 0,4 ч-0,6.
Производительность вибрационного грохота находят по формуле
77 = 0,7F<7&i&2/j3 м3/ч, (V.52)
8 Н. Я- Хархута и др.
226 МАШИНЫ И ОБОРУДОВАНИЕ ДЛЯ ДОРОЖНЫХ МАШИН
где F — площадь сита в м2;
q — удельная производительность на 1 м~ сита в ма/ч (табл. 25);
— коэффициент, учитывающий мокрый способ грохочения
(табл. 25);
k2 — коэффициент, учитывающий трудность грохочения исходного
материала (табл. 25);
k3 — коэффициент, учитывающий качество отсева (табл. 26).
Таблица 25
Значение удельной производительности и коэффициентов ki и й.
Показатель При р Фзмере отверстия сита В мм
в 5 10 20 40 60 80
Удельная производительность для горизонтального грохота q в м:<ч . . 2,5 4,0 10 21 36 48 60
Удельная производительность для наклонного грохота q в м3/ч .... 1,8 2,8 7,5 15 29 44 52
Коэффициент kt Коэффициент /г2для: 3,4 3,0 2,1 1,5 1,0 1,0 1,0
материала трудного грохочения 0,60 0,65 0,85 0,70 0,85 0,80 0,80
материала среднего грохочения 0,75 0,80 0,75 0,80 1,00 1,00 1,00
материала легкого грохочения 1,0 1,0 1,25 1,5 2,4 2,4 2,4
Т аблица 26
Значения коэффициента кз
Коэффициент качества 0,95 0,93 0,85 0.8Э 0.75
&3 0,64 0,80 1,15 1,30 1,50
На производительность грохота существенное влияние оказывает
направление дебаланса. При прямом вращении направления движения
материала и сита совпадают, что увеличивает производительность, но
снижает коэффициент качества.
Производительность барабанного грохота можно определять по сле-
дующей формуле:
П = 0,7pn tg(2а) \R'>/rI м3'ч, (V.53)
где п — число оборотов грохота в мин, которое выбирается в зависимости
от радиуса грохота R в м по эмпирической формуле п = -Дг -+
V R
об!мин-,
Vr
а — угол наклона оси грохота; а = 4ч-7°;
h — средняя толщина слоя материала, обычно h = 2D—2d, где
D — диаметр отверстия, d — средний поперечный размер про-
пускаемых через грохот кусков материала;
р — коэффициент разрыхления; р = 0,6ч-0,8.
Мощность двигателя плоских грохотов может быть подсчитана в пред-
положении расхода ее на преодолении вредных сопротивлений и на сооб-
МАШИНЫ ДЛЯ ДОБЫЧИ И ПЕРЕРАБОТКИ КАМЕННЫХ МАТЕРИАЛОВ 227
щение движущемуся по ситу материалу кинетической энергии. Здесь
должно быть учтено периодическое подбрасывание частиц материала. При
подсчете вредных сопротивлений учитываются потери на трение в цапфах
эксцентрика качающегося грохота и дебаланса вибрационного грохота.
Однако такие расчеты обычно дают несколько заниженные результаты,
поэтому при выборе мощности двигателя надо ориентироваться на опыт
эксплуатации уже имеющихся грохотов.
Выбор упругих подвесков вибрационного грохота должен произво-
диться при условии совпадения собственных колебаний кузова с выну-
жденными колебаниями, возбуждаемыми вращением дебалансов.
Для возможности прочностных расчетов необходимо найти действую-
щие в отдельных деталях и узлах грохотов усилия. В случае качающихся
Рис. 130. Гравиемойка-сортировка
грохотов эти усилия могут быть определены по мощности двигателя. При
расчете вибрационного грохота необходимо учесть развивающуюся при
вращении дебалансов возмущающую силу. В обоих случаях надо учиты-
вать инерционные нагрузки, которые весьма значительны, особенно в слу-
чае вибрационных грохотов.
Гравиемойки. Гравиемойки относятся к промывочным машинам, пред-
назначенным для промывки гравия и щебня в целях удаления из них гли-
нистых примесей. Одновременно производится и разделение этих мате-
риалов по фракциям.
Гравиемойки представляют собой систему перфорированных бара-
банов, выполненных из листовой стали (рис. 130). Барабаны смонтированы
на одной раме и имеют отверстия разного диаметра. Гравиемойка имеет
моечные секции, выполненные из сплошного листа без отверстий. В эти
секции введена водопроводная труба. Материал попадает сначала в моеч-
ные секции, а оттуда — в сортировочные секции. При небольшом загряз-
нении промывка материала может быть осуществлена в вибрационных
и в барабанных грохотах путем подвода к ним воды.
§ 34. ДРОБИЛЬНО-СОРТИРОВОЧНЫЕ УСТАНОВКИ
И ЗАВОДЫ
В связи с большим развитием сборного железобетона, которым в на-
стоящее время уже заменены и продолжают заменяться металлоконструк-
ции, сильно возросла потребность в щебне, гравии и других материалах,
применяемых при изготовлении железобетонных деталей. Одновременно
возросли также и требования к этим материалам — к чистоте грануло-
метрии и к форме частиц. Удовлетворить возросшую потребность
228 МАШИНЫ И ОБОРУДОВАНИЕ ДЛЯ ДОРОЖНЫХ ПОКРЫТИЙ
и повышение требования оказалось возможным только в результате орга-
низации специализированных предприятий по производству щебня —
дробильно-сортировочных заводов. Продукцией таких заводов обычно
является уже отсортированный по фракциям щебень.
Дробилыю-сортировочные заводы представляют комплекс машин и
оборудования, расположенного в соответствии с принятым технологи-
ческим процессом. По производительности они классифицируются на:
заводы малой производительности — до 50—100 тыс. м3/год;
заводы средней производительности — 100—250 тыс. м31год;
заводы большой производительности — более 250 тыс. м3!год.
Рис. 131. Технологические схемы: а — одностадийное дробление с открытым циклом;
б — одностадийное дробление с замкнутым циклом; й — двухстадийное дробление; г —
трехстадийное дробление
Условные обозначения: 1 — щековая дробилка; 2 — ленточный транспортер; 3 — грохот;
4 — бункер; 5 — конусная дробилка; 6 — валковая дробилка
Заводы могут быть передвижными и стационарными. Производитель-
ность передвижных заводов обычно не превышает 30—50 тыс. м3!год,
но эти заводы мобильны и могут сравнительно легко перебазироваться
с одного места на другое.
Дробильно-сортировочные заводы могут работать по так называемому
открытому и замкнутому циклам (рис. 131). При открытом цикле камен-
ный материал проходит через дробилку только один раз, и неизбежно
получающийся при дроблении сверхмерный материал повторному дробле-
нию не подвергается. При замкнутом цикле весь сверхмерный материал
подвергается повторному дроблению и грохочению, т. е. он может про-
ходить через дробилку несколько раз. Замкнутый цикл обеспечивает
получение равномерного щебня, но зато требует установки добавочных
ленточных транспортеров и увеличения производственной площади завода.
Процесс дробления может быть одностадийным, двухстадийным, трех-
стадийным, а иногда и четырехстадийным. При одностадийном дроблении
(рис. 131, а и б) каменный материал пропускается через одну или несколько
параллельно установленных однотипных дробилок, после которых он
поступает на сортировку. Эти схемы применимы на заводах небольшой
производительности и при условии, что поступающий для дробления
камень имеет сравнительно небольшие размеры. При двухстадийном
(рис. 131, в) и трехстадийном (рис. 131, г) дроблениях сверхмерный ма-
МАШИНЫ ДЛЯ ДОБЫЧИ И ПЕРЕРАБОТКИ КАМЕННЫХ МАТЕРИАЛОВ 229
териал направляется в другие дробилки. Здесь для первой стадии дробле-
ния устанавливаются щековые или конусные дробилки с крутым конусом,
а для второй и третьей стадий — щековые дробилки со сложным качанием
щеки, конусные — с пологим конусом, валковые и молотковые дробилки.
Больше всего распространено двухстадийное дробление, однако для
получения щебня, необходимого для изготовления железобетонных изде-
лий, лучше всего применять трехстадийное и даже четырехстадийное дроб-
ление. На заводах большой производительности приходится устанавливать
две и более параллельно работающих однотипных дробилок. Поэтому
различают однониточную, двухниточную и трехниточную схемы заводов.
Параллельно включенные на всех или какой-либо одной стадии дробле-
ния машины выдают продукт на один транспортер.
Оборудование на заводе может иметь горизонтальную (партерную)
и вертикальную компоновку. В последнем случае каменный материал под-
нимается вверх один раз — в самом начале технологического процесса,
а затем постепенно опускается вниз, последовательно проходя все стадии
дробления и другие операции на отдельных агрегатах завода. При ком-
поновке необходимо стремиться возможно более полно использовать
рельеф местности с таким расчетом, чтобы продвижению материала спо-
собствовал его вес. Этому принципу будет соответствовать размещение
грохота под дробилкой, дробилки второй стадии дробления — под гро-
хотом и т. п. Дробление — весьма дорогой процесс, поэтому при разра-
ботке схемы технологического процесса необходимо стремиться к тому,
чтобы не загружать дробилку мелкими фракциями, которые уже не под-
лежат дроблению. Поэтому перед каждой дробилкой целесообразно сорти-
ровать материал на грохоте, чтобы допускать в нее камень или щебень
только таких размеров, которые исключают его непосредственное приме-
нение.
В процессе проектирования завода вначале составляется так называе-
мая качественная схема завода. На этой стадии устанавливается техно-
логическая схема и необходимая для ее осуществления номенклатура
оборудования. После этого разрабатывается количественная схема, где
устанавливается уже количество необходимого оборудования и его марка.
Разработаны типовые (инвентарные) стационарные и полустационар-
ные дробильно-сортировочные заводы, основанные на использовании се-
рийно выпускаемых промышленностью дробилок, грохотов и подъемно-
транспортного оборудования. Особенно широкое распространение полу-
чили инвентарные заводы производительностью 30 и 100 m/ч имеющие
аналогичные технологические процессы и размещение оборудования.
Передвижные дробильно-сортировочные установки могут состоять из
одного или нескольких передвижных агрегатов. На рис. 132 показана
схема передвижной двухагрегатной дробильно-сортировочной установки
производительностью до 45 ,ч3,ч.
Материал через бункер 1 и питатель 2 загружается в камнедробилку 3.
Дробленый щебень транспортером 5 подается на загрузочный транс-
портер 12 второго агрегата. Далее он сепарируется на вибрационном гро-
хоте 16. Не прошедшие сквозь сито грохота крупные фракции возвра-
щаются на загрузочный транспортер при помощи транспортера воз-
врата 11.
Бетонную смесь приготавливают из щебня и песка высокого качества.
Поэтому из их общей массы необходимо удалить неполноценный, не отве-
чающий техническим требованиям материал. Этот процесс носит название
обогащения. Обогащение песка производится путем его промывки в дра-
говых пескомойках и спиральных классификаторах. В драговых
230 МАШИНЫ И ОБОРУДОВАНИЕ для ДОРОЖНЫХ ПОКРЫТИЙ
пескомойках песок при помощи укрепленных на бесконечной цепи плоских
лопаток непрерывно перемещается в воде вверх по дну наклонно постав-
ленного корыта и выгружается через его борт. Спиральный классифика-
тор предназначен для разделения и второй мойки мокрого песка и его
обезвоживания. Здесь песок перемешивается и перемещается в потоке воды
одним или двумя параллельно расположенными шнеками. Глинистые ча-
стицы и мелкий песок удаляются вместе с водой.
Рис. 132. Передвижная дробильно-сортировочная установка СМ-739/740: а — агрегат
первичного дробления; б — агрегат вторичного дробления
Условные обозначения: ? — загрузочный бункер; 2 — пластинчатый питатель; 3 — дро-
билка СМ-741; 4 — шкаф с электроприборами; 5 — ленточный транспортер; 6 — дышло; 7, 10, 21
и 23 — винтовые домкраты; 8 — рукоять домкрата; 9 ~ рама; 11 — транспортер возврата; 12 — за-
грузочный транспортер; 13 — электродвигатель; 14 — конусная дробилка СМ-561; 15 — электро-
двигатель грохота; 16 — виброгрохот СМ-742; 17 — желоб; 18 — шкаф с электроприборами; 19 —
дышло; 20 — рама; 22 — тормозная тяга
Обогащение щебня может быть механическим и гидравлическим. Раз-
деление каменного материала в механических классификаторах основано
на разной высоте откоса слабых и достаточно прочных зерен щебня при
их падении на цилиндрическую поверхность вращающегося барабана.
Классификаторы могут быть однобарабанными и двухбарабанными. В по-
следнем случае прочный материал проходит вторичное разделение на ниж-
нем барабане, в результате чего, не считая отходов, можно получить два
сорта щебня, отличающегося по прочности, а не один сорт, как в однобара-
банном классификаторе.
Неполноценные зерна щебня и гравия могут быть удалены гидравли-
ческим способом — путем обогащения в тяжелых суспензиях. Суспензия
МАШИНЫ ДЛЯ ДОБЫЧИ И ПЕРЕРАБОТКИ КАМЕННЫХ МАТЕРИАЛОВ 231
состоит из взвешенного в воде тонкомолотого материала большого удель-
ного веса (например, ферросилиция, имеющего удельный вес 6.5 -г5,2 г/см3,
или магнетита с удельным весом 5,2—4,9 г/см3). Нужный удельный вес
суспензии подбирается изменением соотношения между водой и порошком
утяжелителя. В подобранной соответствующим образом суспензии полно-
ценные зерна гравия или щебня оседают на дно сосуда (осадок), а примеси
и слабые зерна всплывают (всплыв), после чего их удаляют. Исходный
материал предварительно промывается и отсортировывается от мелких
фракций. После обогащения как всплыв, так и осадок обезвоживаются и
в целях удаления с них суспензии, которая затем снова идет в дело,
промываются.
При дроблении, грохочении и механической классификации выде-
ляется большое количество каменной пыли, которая вредно влияет на
здоровье обслуживающего персонала. Поэтому большое внимание должно
быть уделено устройствам для отсасывания ныли. Иногда применяется
так называемое гидрообеспыливание, которое сводится к предваритель-
ному увлажнению камня.
Современные дробильно-сортировочные заводы представляют собой
полностью механизированные предприятия с централизованным управле-
нием. Управление отдельными агрегатами автоматизируется. Так, напри-
мер, автоматизирован процесс загрузки дробилок. При этом в одну из
стенок камнедробилки вмонтирован фотоэлемент, а в противоположную —
источник света. При полной загрузке камень перекрывает луч света и
питатель отключается. Осуществляется также автоматическое выключение
дробилки при поломке предохранительной детали и контроль за цагревом
подшипников. При повышении температуры масла до 50° на пульт управ-
ления подается сигнал, а дальнейшее ее повышение влечет за собой оста-
новку дробилки. Автоматически при помощи центробежного реле регу-
лируется число оборотов дробилки, а при помощи струйных реле — подача
масла в систему смазки. При недостаточной подаче масла включается ре-
зервный масляный насос.
Дальнейшее усовершенствование дробильно-сортировочных заводов
идет в направлении развития автоматизации, имеющей целью повышение
качества продукции и повышение производительности. Работа заводов
оценивается технико-экономическими показателями, из которых главными
являются годовая производительность, годовой выпуск в т и в руб на
одного рабочего и на 1 л2 площади, себестоимость продукции, а также
показатели, характеризующие использование производственных возмож-
ностей и т. п.
Литература
1. Суханов А. Ф. Назаров П. П. и др. Буровзрывные работы. Под ред.
А. Ф. Суханова, М., Госгеолтехиздат, 1962.
2. Справочник по буровзрывным работам на строительстве. Под ред. акад. Н. В. Мель-
никова. М., Госстройиздат, 1962.
19$ 3. М о с т к о в В. М. Основы теории пневматического бурения. М., Углетехиздат,
4. Б е р е п о в Д. И. Дробильное оборудование обогатительных и дробильных
фабрик. М., Металлургиздат, 1958.
5. Левенсон Л. Б. и Цигельный П. М. Дробильно-сортировочные
машины и установки. М.. Госстройиздат, 1952.
6. О л е в с к и й В. А. Конструкция и расчеты грохотов. М., Металлургиздат, 1955.
7. Макаров В. И. и Соколов В. П. Машины для дробления и сорти-
ровки материалов. Справочник. М.—Л., изд-во «Машиностроение», 1966.
Глава VI. МАШИНЫ И ОБОРУДОВАНИЕ
ДЛЯ СТРОИТЕЛЬСТВА
УСОВЕРШЕНСТВОВАННЫХ ДОРОЖНЫХ
ПОКРЫТИЙ ОБЛЕГЧЕННОГО ТИПА
§ 36. ОБОРУДОВАНИЕ ДЛЯ ПРИЕМА, ХРАНЕНИЯ
И ПОДОГРЕВА ОРГАНИЧЕСКИХ
ВЯЖУЩИХ МАТЕРИАЛОВ
Применяемые при строительстве усовершенствованных до-
рожных покрытий органические вяжущие материалы — битумы (нефтя-
ные и сланцевые) и дегти — доставляются к битумохранилищам в железно-
дорожных цистернах или бункерных полувагонах. Пек и твердые вязкие
битумы перевозятся также и навалом.
Наполнение вязким битумом цистерн и бункеров на крекинг-заво-
дах производится при температуре 200—230° С.
Для перевозки вяжущих материалов применяют двухосные и четырех-
осные цистерны грузоподъемностью 25 и 50 т. Цистерны имеют термоизо-
ляцию и змеевики для парообогрева. При сливе вязких битумов из цистерн
их нагревают до температуры 60—80° С, а жидкие битумы, если темпера-
тура наружного воздуха выше 10° С, сливают без подогрева.
На железнодорожной платформе устанавливаются по 4 бункера вме-
стимостью по 10 м3 битума. Они имеют обогревательные рубашки, через
которые пропускается пар, расплавляющий тонкий слой битума, приле-
гающий к стенке, и при опрокидывании бункера битум свободно вывали-
вается из него. Бункера по сравнению с цистернами требуют меньше вре-
мени и пара для прогрева битума. Расход пара на разогрев 1 т битума
в бункерных вагонах составляет 8 кг летом и 11 кг зимой, а в цистернах —
от 10 до 40 кг летом и до 135 кг зимой. Продолжительность разогрева
битума в цистернах достигает 8 ч.
Для разогрева битума используются передвижные парообразо-
ватели, нагреватели- циркуляторы, перенос-
ные змеевики и электрогрелки.
Выполненные в последнее время исследования показывают большую
эффективность применения виброподогревателей для разо-
грева битума. Поданным В. Д. Портнягина и Н. В. Михайлова при разо-
греве вязкого битума БН-Ш неподвижным подогревателем при температур-
ном напоре At = 35° коэффициент теплоотдачи равен 40,5 вт1м?-град,
при вибрирующем подогревателе с частотой 10 гц и амплитудой 20 мм коэф-
фициент теплоотдачи возрастает до 415 вт/м3-град, т. е. более чем в 10 раз.
Из выпускаемых нашей промышленностью парообразова-
телей широко применяется прицепной парообразователь, состоящий
из парового котла с жаровыми трубами, форсунок для сжигания топлива,
машины и оборудование для покрытий облегченного типа 233
насоса для подачи воздуха к форсункам, водяного насоса для подачи воды
и откачивания конденсата и бензинового двигателя мощностью 3 л. с.
для привода всех агрегатов. Поверхность котла изолирована слоем стек-
лянной ваты и обшивкой из листовой стали. Все оборудование монтируется
на двухосной тележке на пневматических колесах. Парообразователь поз-
воляет получить пар давлением в 8,5 атм через 15 мин после начала ра-
боты котла. Поверхность нагрева котла — 12,5 ж2, температура пара —
176° С, производительность — 500 кГ/ч.
Рис. 133. Нагреватель-циркулятор:
I — котел; 2 — кран; 3 — форсунки; 4 — дымовая труба; 5 —трубопровод; б —двигатель;
7 — вентилятор; 8 — битумный насос; S — топливный бак
Нагреватели-циркуляторы (рис. 133) обладают вы-
сокой производительностью. Скорость нагрева в них в 5—6 раз выше,
чем в парообразователях. В нагревателе-циркуляторе нагрев битума про-
исходит в котле с жаровыми трубами, по которым проходят горячие газы.
Битум поступает из разгружаемой цистерны в распределительную камеру,
расположенную в нижней части котла, и, омывая жаровые трубы, попадает
в сборную камеру, расположенную в верхней части котла. Нагретый би-
тум возвращается обратно в цистерну и своим теплом разогревает новый
объем битума. Циркуляция битума происходит до тех пор, пока в цистерне
не разогреется достаточное количество вяжущего материала, после чего
насос начинает выдавать горячий битум по назначению.
Топка нагревателя-циркулятора имеет три форсунки для сжигания
Дизельного топлива, подаваемого топливным насосом под давлением 7—
8 атм. Воздух к форсункам подается вентилятором. Для привода венти-
лятора, топливного и битумного насосов используется двигатель мощ-
ностью 3 л. с.
симссти от
постройки (рис.
земное; б — полуямное; в — ямное
0
234 МАШИНЫ И ОБОРУДОВАНИЕ ДЛЯ ДОРОЖНЫХ ПОКРЫТИЙ
Нагреватели-циркуляторы, в отличие от парообразователей, могут
нагреть битум до рабочей температуры — 130—160° С, однако начальная
температура поступающего в них битума должна быть не менее 60—80° С.
Поэтому целесообразно совместить работу нагревателя-циркулятора с ра-
ботой парообразователя, используемого для предварительного нагрева
битума до текучего состояния.
Битумохранилища служат для приема, хранения и разо-
грева битума. Они могут быть постоянными или временными, а в зави-
134) — наземными, Полуниными и
ямными.
По способу подогрева разли-
чают битумохранилища с газо-
вым, паровым и электрическим
подогревом.
Хранилища постоянного типа
применяются при длительном хра-
нении битума в больших количе-
ствах. Такие хранилища обычно
устраиваются на крупных дорож-
ных стройках и в городских до-
рожных хозяйствах. Вместимость
их — 500 м3 и более.
Хранилище наземного типа
(рис. 134, а) устраивается в том
случае, если высота уровня грун-
товых вод не позволяет заглу-
биться в землю. Хранилище вре-
менного типа устраивается из
грунта на площадке, очищенной
от дерна. Земляной валик отсы-
пается послойно по контуру и каж-
дый слой уплотняется. Откосы
валика в этом случае устраиваются полуторные с шириной поверху не
менее 0,5 .и, высота хранилища обычно 1,0—1,5 м.
Из временных земляных битумохранилищ экономически наиболее вы-
годными являются хранилища полуямного типа (рис. 134, б), так как
здесь весь грунт, вынутый из котлована, используется для устройства
валика. Глубина таких хранилищ — 2,0—2,5 м. В земляных хранилищах
ямпого типа (рис. 134, в) котлован обносится небольшим валиком высотой
около 0,5 м. Глубина котлована достигает 3 м. Чтобы предохранить битум
от загрязнения и обводнения, хранилища устраиваются с облицованными
стенками и дном.
Для облицовки хранилищ временного или постоянного типа исполь-
зуются доски, кирпич, цемент, грунтоцемент, железобетон и другие
материалы.
Из различных способов подогрева битума в хранилищах наибольшее
распространение получил паровой подогрев, являющийся безопасным в по-
жарном отношении и удобным для регулирования температуры нагрева
вяжущего материала. Давление пара не превышает 8 атм. Паровые змее-
вики прокладываются по днищу и в наиболее углубленной части храни-
лища — приямке, где осуществляется полный нагрев битума до текучего
состояния, при котором его можно перекачивать насосом. Змеевики состоят
из отдельных секций, и при необходимости часть их может отключаться.
Для интенсивного нагрева выгоднее использовать перегретый пар, а не
МАШИНЫ и оборудование для покрытий облегченного ТИПА 235
насыщенный, так как последним можно осуществить нагрев до темпера-
туры, не превышающей 100' С.
При газовом подогреве теплоносителем являются дымовые горячие
газы, образующиеся при сжигании топлива. К битумохранилищу горя-
чие газы могут поступать из жаровых труб битумоплавильных котлов,
от газогенераторной установки или от газовой горелки.
На рис. 135 показана схема битумохранилища, подогреваемого горя-
чими газами от расположенных рядом битумоплавильных котлов. Из
котлов газы поступают по наклонным и далее по горизонтальным жаро-
Рис. 135. Битумохранилище с газовым подогревом:
/ — битумоплавильные котлы; 2 — дымовая труба; 3 — битумный насос; 4 —на-
клонные жаровые грубы; 5 — патрубок; 6 — резервуар; 7 — дымосос; 3 — жа-
ровые трубы резервуара; 9 — топка
вым трубам, уложенным на дне хранилища. Имеющийся в хранилище
дымосос обеспечивает тягу для движения газов по трубам. Наклонные
части жаровых труб изолированы асбестом, предохраняющим битум от
воспламенения.
В битумохранилище битум разогревается только до температуры
60—80° С, а далее он перекачивается насосом в битумоплавильные котлы,
где обезвоживается и нагревается до рабочей температуры. К насосу
битум поступает по приемному патрубку, снабженному фильтром. Шарнир-
ное крепление патрубка позволяет забирать битум с любого уровня.
При электроподогреве применяются пластинчатые и трубчатые нагре-
ватели.
Пластинчатые нагреватели состоят из стальных пластин, изолирован-
ных друг от друга прокладками из листового асбеста. Толщина пла-
стин — 0,35-0,60 мм. Пластины собираются в пакеты, которые жестко
закрепляются в битумохранилище на глубине в 15—20 см от уровня
битума. С изменением уровня пакетные нагреватели опускаются.
235
МАШИНЫ И ОБОРУДОВАНИЕ для ДОРОЖНЫХ ПОКРЫТИЙ
Поглощаемая таким пакетным нагревателем' мощность равна 5,5 кет,
а требуемое напряжение тока составляет 50—60 в. Главным недостатком
пластинчатых нагревателей является ослабление пластин при нагрева-
нии, что может привести к замыканию.
Трубчатые электронагреватели состоят из спиралей, помещенных
внутри асбестоцементных труб. Длина труб — 3000 мм, диаметр наруж-
ный — 200 мм и внутренний — 180 мм. Трубчатые электронагреватели
характеризуются простотой конструкции и надежностью в работе. Недо-
статком их является громоздкость и значительный удельный вес на еди-
ницу мощности.
На практике большее применение находят пластинчатые электрона-
греватели, которые используются также для подогрева битума, прибы-
вающего в железнодорожных цистернах и бункерных полувагонах.
Обезвоживание и полный нагрев вяжущего материала до рабочей
температуры осуществляется, как правило, не в битумохранилищах,
а в битумоплавильных котлах, обладающих более высоким тепловым
к. п. д. Битумоплавильные котлы выпускаются емкостью от 5 до 20 л3
и комплектуются обычно по три штуки. Такие битумоплавильни, состоя-
щие из трех котлов, выпускаются нашей промышленностью с емкостью
котла 6000 и 15 000 л, а для мелких дорожных работ выпускаются пере-
движные битумоплавильные котлы емкостью 200—5000 л. Некоторые би-
тумоплавильные котлы замуровываются в общую кирпичную кладку,
но с отдельными топками и каналами на каждый котел, другие битумо-
плавильни не требуют кирпичной обмуровки, так как их котлы снабжены
термоизоляцией и имеют выносные металлические топки.
На рис. 136 приведена схема битумоплавильни порционного действия.
Подача битума в котлы производится шестеренчатым насосом, приводи-
мым в действие электродвигателем мощностью 4,5 кет.
Котлы оборудованы жаровыми трубами и горизонтальными дымохо-
дами и устанавливаются на опорах, из которых передние — непод-
вижные, а задние — подвижные, выполненные в виде катков. Такое
устройство опор позволяет котлам свободно удлиняться при нагревании.
Приставные топки приспособлены для сжигания твердого и жид-
кого топлива и снабжены форсунками и установкой для воздушного дутья
с двигателями мощностью 7 кет..
Внутри битумоплавильных котлов имеются перемешивающие уст-
ройства, предназначенные для равномерного перемешивания обводнен-
ного битума при нагревании, ускорения выпаривания влаги и предотвра-
щения вспенивания. Перемешивающее устройство состоит из коромысла
с лопастями, качающегося вокруг шарнира, закрепленного на неподвиж-
ном кронштейне. Коромысло совершает 20 кол/мин. Привод перемешиваю-
щих устройств всех трех котлов осуществляется от общего двигателя
мощностью 2,8 кет.
Механическое перемешивание не полностью устраняет ценообразо-
вание, что не позволяет эффективно использовать геометрическую емкость
котла и производить быстрый нагрев вяжущего материала. Для обезво-
живания 10 т битума приходится затрачивать иногда двое суток.
В последнее время для борьбы с пенообразованием с успехом исполь-
зуется специальный препарат — пеногаситель СКТН-1 (полисилокса-
новый каучук). Опыт показал, что достаточно ввести две-три капли этого
материала на 10 т битума, чтобы полностью устранить вспенивание
битума при нагревании и в 2—3 раза ускорить процесс обезвоживания
битума, дегтя и минеральных масел. Рекомендуется применять СКТН-1
с молекулярным весом от 20 до 35 тыс.
МАШИНЫ И ОБОРУДОВАНИЕ ДЛЯ ПОКРЫТИЙ ОБЛЕГЧЕННОГО ТИПА 237
Кроме указанных битумоплавилен, являющихся плавильнями пор-
ционного действия, в настоящее время выпускаются более совершенные
битумоплавильни непрерывного действия (рис. 137). Она состоит из
одного котла 2, цилиндрической топки 5 и насосной станции 1, смонти-
Рис. 136. Битумоплавильни порционного действия:
/ — котел; 2 — топка; 3 — воздуходувка; 4 — двигатель; 5 — по-
движная опора; 6 — неподвижная опора
рованных на одной общей раме. Котел разделен перегородкой на две не-
равные части. В большей части котла, прилегающей к топке, где установ-
лены две П-образные жаровые трубы 10, битум разогревается горячими
газами, поступающими из топки. Меньшая часть котла, прилегающая
к насосной станции, служит сборником готового нагретого битума.
Топливо из топливного бака 4 подается в топку через форсунку 6
топливным насосом 7. Топка внутри выложена огнеупорным кирпичом.
На концах жаровых труб имеются задвижки для регулирования потока
горячих газов.
238 МАШИНЫ И ОБОРУДОВАНИЕ ДЛЯ ДОРОЖНЫХ ПОКРЫТИЙ
Насосная станция имеет два шестеренчатых битумных насоса: один —
для циркуляции битума внутри котла, а второй — для выдачи готового
битума. Насосы оборудованы паровыми рубашками.
Из битумохранилища битум с температурой 70—80° С поступает в
большую часть котла, где горячими газами, проходящими по одной из
жаровых труб, нагревается до температуры 90—110° С. Далее битум
направляется в камеру второй жаровой трубы. В этой камере битум дви-
жется по спиральному ходу между жаровой трубой и кожухом и нагре-
вается до рабочей температуры 160—170° С. Отсюда битум подается на-
сосом на лоток, расположенный в верхней части котла, а с лотка — в
Рис. 137. Битумоплавильня непрерывного действия
малую часть котла — сборник. По лотку битум растекается тонким слоем,
что ускоряет отделение водяного пара от битума. Образующийся конден-
сат водяным насосом 9 отводится в водяной бак 3. Установка имеет венти-
лятор 8.
Циркуляционный насос используется для циркуляции битума внутри
котла и размыва остатков его на дне.
Емкость битумоплавильни — 14 м3, производительность при влаж-
ности битума 5% составляет 3 т/ч.
Тепловой расчет битумоплавильни и битумохранилищ производится
по той же методике, которая принята для теплового расчета асфальтосме-
сителей и теплоносителей.
Для перекачки битума широко используется битумный насос шесте-
ренчатого типа. Литой из чугуна корпус насоса имеет паровую обогрева-
тельную рубашку. Внутри корпуса установлены две шестерни, при вра-
щении которых битум засасывается через отверстие в корпусе и нагне-
тается через нижнее выпускное отверстие. Число оборотов шестерен —
300 об/мин. Производительность насоса — 400 л/мин, вес — 98 кг, мощ-
ность двигателя — 6 л. с.
Производительность насоса выбирается в соответствии с требуемой
скоростью заполнения резервуара (битумного котла, дозатора, гудро-
натора и т. п.).
Если полезная емкость резервуара — Vp в л, а заданное время за-
полнения — t3 в ч, то требуемая производительность насоса будет
Пн = ЖГ л/мин. (VI. 1)
МАШИНЫ И ОБОРУДОВАНИЕ ДЛЯ ПОКРЫТИЙ ОБЛЕГЧЕННОГО ТИПА 239
Для определения давления, развиваемого насосом, необходимо рас-
считать величину напора. Ниже приводится методика расчета.
По производительности насоса находят скорость движения битума
по трубам.
Секундный расход битума:
Пн ~ 60 36006, л^сек' (^1-2)
где tj, — время разгрузки. Скорость движения битума по * = Т- юоо 4 трубам диаметром d„w будет = м/сек. (VI.3) 1000j<p v
Сопротивление движению жидкости по трубам зависит от режима
потока, характеризуемого безразмерным критерием Рейнольдса — Re.
Re = -^, (VI .4)
где v — кинематическая вязкость жидкости, зависящая от рода жидкости
и температуры и определяемая опытным путем.
Имеющиеся опытные данные динамической вязкости р, для битума
Бакинского нефтеперегонного завода приведены в табл. 27, из которой
видно, что с падением температуры ниже 100° С вязкость битума резко
возрастает. Так как плотность битума практически равна единицу, вели-
чина кинематической вязкости для битума численно равна величине его
динамической вязкости и, таким образом, данные табл. 27 соответ-
ствуют также величине V.
Таблица 27
Динамическая вязкость битума в пз
Темпе- ратура битума, °C При глубине проникания иглы пенетрометра * Темпе- ратура битума. °C При глубине проникания иглы пенетрометра *
120° | 110“ 93“ 62° 120° 110“ 93“ 62“
150 1,5 — 1,5 2,8 100 22,0 25,0 25,0 48,0
140 1,8 — 2,0 3,0 90 60,0 61,0 — —
130 3,0 — 3,5 4,5 80 100,0 100,0 120,0 270,0
120 ПО * с 5,0 9,0 и. ГОСТ 9,0 11501—65. 5,5 9,5 6,6 11,0 70 480,0 480,0 650,0 680,0
Если величина Re <2320, поток имеет ламинарный характер, если
же Re > 2320 — турбулентный.
При ламинарном режиме потери напора по длине трубопровода про-
порциональны первой степени скорости и определяются по формуле
hw = л, (VI.5)
^тр
где 1тр — длина труб в м; g 9,81 м/сек2.
240
МАШИНЫ И ОБОРУДОВАНИЕ ДЛЯ ДОРОЖНЫХ ПОКРЫТИЙ
При турбулентном режиме потери напора по длине принимаются
пропорциональными квадрату скорости и находятся по формуле
и 1 I
К ~dmp' W М’
(VI.6)
где кс — коэффициент сопротивления по длине.
Имеется ряд формул для расчета величины [5].
Для гладких труб по исследованиям ВТИ
(lg Re)2,0
(VI .7)
Для разных состояний труб (новые, загрязненные, старые) при из-
менении диаметра от 0,10 до 0,15 м коэффициент изменяется в интер-
вале от 0,03 (для новых труб) до 0,04 (для старых труб).
Кроме потерь напора по длине необходимо учесть местные потери
^hM, обусловленные наличием в магистрали закруглений, кранов,
вентилей и т. д. Местные сопротивления находятся обычными методами.
Для подъема битума на высоту hn потребуется напор
м. (VI.8)
Таким образом, суммарный напор определится величиной
+ 2 >г„ + hn м. (VI.9)
Чтобы величину напора в м выразить в атм, нужно полученное зна-
чение разделить на 10. Для транспортирования битума применяются
трубы диаметром 75—100 мм.
Мощность двигателя, требуемая для работы насоса, находится по
формуле
N =__________ кет (VI 10)
102-1000ц ’ ’
где у — объемный вес битума; у — 1 кПл;
1] — к. п. д. трансмиссии от двигателя к насосу; ц = 0,8.
Насосная установка и вся система битумной коммуникации должны
обогреваться паром. В последнее время в ряде дорожных хозяйств исполь-
зуется также электрообогрев.
§ 36. МАШИНЫ ДЛЯ РОЗЛИВА БИТУМНЫХ МАТЕРИАЛОВ
Битум, приготовленный в битумохранилище или битумоплазильне,
в дальнейшем направляется в смесительные или эмульсионные установки
или на трассу строящейся дороги. В первых случаях битум транспорти-
руется, как правило, по трубам, .а в последнем — в специальных транспорт-
ных средствах — битумовозах и гудронаторах, прицепляемых к тягачу.
Битумовоз состоит из цистерны для вяжущего материала, системы по-
догрева и насоса. В задней стенке цистерны вварены жаровые трубы.
Обогревается цистерна двумя стационарными керосиновыми горелками.
Битум в цистерну подается насосом из битумоплавильни или битумохра-
нилища. Нашей промышленностью выпускаются битумовозы с цистер-
нами емкостью 7000 и 15 000 л.
На трассе дороги битум используется при производстве работ мето-
дами пропитки, поверхностной обработки или смешения на месте. При
МАШИНЫ И ОБОРУДОВАНИЕ ДЛЯ ПОКРЫТИЙ ОБЛЕГЧЕННОГО ТИПА 241
всех этих работах битум должен быть равномерно распределен по поверх-
ности каменного материала под давлением 2,5—6,0 атм. Розлив и равно-
мерное распределение битума также осуществляются гудронатором. Таким
образом, гудронаторы предназначаются для транспортирования битумных
материалов (битумы, эмульсии) на расстояния до 300 км и равномерного
распределения их по поверхности покрытия.
Равномерное распределение вязкого битума возможно лишь в случае,
если он находится в горячем состоянии, поэтому гудронаторы должны
иметь систему подогрева.
Гудронаторы разделяются на прицепные и самоходные (автогудрона-
торы). В зависимости от системы привода битумного насоса выпускаются
гудронаторы с приводом от двигателя автомобиля, на шасси которого смон-
тирован гудронатор, или с приводом от отдельного двигателя.
Норма розлива вяжущего материала при производстве указанных
работ изменяется от 0,5 до 13 л!м1. Ее можно регулировать путем изме-
нения поступательной скорости гудронатора или производительности
насоса. Действительно, величина нормы розлива qp выражается следую-
щей формулой:
qp = -^AlM\ (VI. 11)
где Пн — производительность насоса в л!мин\
v — поступательная скорость гудронатора в м/мин;
I — ширина розлива в м.
В гудронаторах с одним двигателем, который приводит не только
ходовое оборудование, но и насос, изменение скорости вызывает также
аналогичное по характеру изменение производительности насоса, что
не позволяет точно регулировать норму розлива. Применение двух дви-
гателей — одного для трансмиссии ходовой части и другого для привода
насоса — исключает этот недостаток.
В зависимости от назначения применяются гудронаторы с разной
емкостью бака. При использовании гудронаторов на дорожно-ремонтных
работах емкость цистерны не превышает 400 л, а в гудронаторах, предна-
значенных для дорожно-строительных работ, емкость цистерны прини-
мается от 3000 л и до 15 000—20 000 л.
Из автогудронаторов с одним двигателем в настоящее время наиболь-
шее распространение получил автогудронатор с цистерной емкостью
3600 л (рис. 138). Все агрегаты здесь монтируются на шасси автомобиля.
Цистерна 1 эллиптической формы выполнена из листовой стали и снаб-
жена термоизоляцией из стеклянной ваты слоем 30 мм, закрытой снаружи
металлическим кожухом. В верхней части цистерны имеется горловина 2
с фильтром, через которую производится наполнение цистерны битумом.
Внутри цистерны расположены жаровые трубы 4 и указатель уровня 3.
Наполнение цистерны битумом может производиться также насосом 7
автогудронатора через распределительную систему 5, имеющую
краны 6 и 8.
Схема распределительной системы автогудронатора приведена на
рис. 139. Система включает в себя насос шестеренчатого типа, один боль-
шой и два малых крана, циркуляционный и розливный трубопроводы
и распределительную трубу с соплами.
Установкой кранов в различные положения можно осуществить на-
полнение резервуара, внутреннюю циркуляцию вяжущего материала,
необходимую для перемешивания в процессе подогрева, и розлив его через
распределительную трубу.
242
МАШИНЫ И ОБОРУДОВАНИЕ ДЛЯ ДОРОЖНЫХ ПОКРЫТИЙ
Насос установлен в задней части автогудронатора и приводится во
вращение от коробки передач через коробку отбора мощности. Коробка
отбора мощности имеет две передачи прямого хода и одну — обратного
хода. Это позволяет получить 8—10 ступеней норм розлива в пределах
0,5—7,0 л/м1. Ширину розлива можно менять от 1 до 7 м путем установки
сменных труб. Предусмотрено также ручное распределение битума гиб-
Вид а
Рис. 138. Автогудронатор Д-251
ким шлангом. Управление автогудронатора состоит из шести рычагов,
которыми осуществляется переключение большого и малого кранов,
подъем, а также поворот и смещение распределительных труб в сторону.
Система подогрева видна из схемы, приведенной на рис. 140. Она со-
стоит из топливного бака 6 емкостью 25 л, двух жаровых труб 2 с топочными
камерами, вытяжной трубы 1, предохранительного клапана 5, двух ста-
ционарных 3 и одной переносной 9 керосиновых горелок. В баке имеются
топливные фильтры 4. Топочные камеры расположены у входных отвер-
стий жаровых труб и выложены огнеупорным материалом. Подача керо-
сина к горелкам производится воздухом от ресивера 7 тормозной системы
автомобиля. К ресиверу воздух подается от компрессора 8. Производи-
тельность автогудронатора — 30 т/смену. Рабочие скорости движения
находятся в пределах 5—20 км!ч, а транспортная скорость достигает
65 км/ч.
МАШИНЫ и оборудование для покрытии ОБЛЕГЧЕННОГО типа
243
Рис. 139. Схема распределительной системы автогудронатора:
- наполнение; // — циркуляция; III — розлив в обе стороны; IV — розлив правый; V — розлив левый; VI — роз-
в ручным распределителем; VII — розлив с перепуском излишков битума в цистерну; VIII — отсос битума из рас-
пределительной системы; /X — перекачивание битума из емкости в емкость; X — опорожнение системы
244
МАШИНЫ И ОБОРУДОВАНИЕ ДЛЯ ДОРОЖНЫХ ПОКРЫТИЙ
Автогудронаторы с отдельным двигателем для привода насоса вы-
пускаются нашей промышленностью с емкостью цистерн 5000 л. Для
привода насоса использован двигатель мощностью 30 л. с. В конструктив-
ном отношении этот автогудронатор мало отличается от автогудронаторов
емкостью 3600 л, его производительность составляет 22 т!смену. Рабо-
чие скорости находятся в пределах 4—25 км/ч, транспортная скорость
достигает 60 км/ч.
Прицепные гудронаторы имеют только распределительную систему
и насосную установку и, как правило, не имеют собственной цистерны
для вяжущего материала. Они присоединяются к автоцистернам и рас-
Рис. 140. Схема системы подогрева автогудронатора
пределяют находящуюся в них жидкость. Благодаря этому прицепные
распределители имеют малые габариты и малый вес и выгодно отли-
чаются от автогудронаторов в экономическом отношении, поскольку авто-
мобили-тягачи, работающие с ними, могут использоваться на других
работах, когда отсутствует надобность в распределении вяжущих мате-
риалов. Агрегаты прицепного гудронатора включают насосную установку
с двигателем мощностью 30 л. с. и распределительную систему и монти-
руются на одноосном автомобильном прицепе. В трансмиссии от двигателя
к насосу предусмотрены цилиндрический редуктор с двумя передачами
прямого вращения и одной — обратного, а также предохранительное
устройство, отключающее насос при перегрузке или попадании в него по-
стороннего предмета. Производительность насоса — 1470 л/.ип«.
Распределительная система позволяет осуществить все операции по
внутренней циркуляции и распределению вяжущего материала. Ширина
розлива при использовании распределительных труб разной длины может
меняться от 1 до 7 м с интервалами 0,5 м. Нормы розлива меняются от
0,55 л/мг до 7 лДи? при ширине розлива 7 м и до 10 л/м2 — при ширине
розлива 4 м. Разогрев битума, застывшего в битумной коммуникации
и распределительной системе, производится переносной керосиновой
горелкой.
МАШИНЫ И ОБОРУДОВАНИЕ ДЛЯ ПОКРЫТИЙ ОБЛЕГЧЕННОГО ТИПА 245
Гудронатор работает совместно с автоцистерной емкостью 15 000 л.
Битумная коммуникация автоцистерны присоединяется к коммуникации
распределителя. Цистерна смонтирована на шасси двухосного полупри-
цепа и буксируется седельным автотягачом.
К автоцистерне придается подкатная тележка с дышлом, используе-
мая при буксировке автоцистерны трактором или тягачом, не имеющими
седельно-сцепного устройства. Для подогрева битума в цистерне имеются
две жаровые трубы и две стационарные керосиновые горелки. Керосин
в топливном баке находится под давлением воздуха от компрессора авто-
мобиля или ручного насоса, что необходимо при работе с тягачом, не имею-
щим пневмосистемы.
Производительность гудронаторов рассчиты-
вается по формуле
Пгидр = ^-л/ч, (VI. 12)
где Уц — полезная емкость цистерны, л;
k6 — коэффициент использования машины по времени; kg = 0,85;
Т — продолжительность одного рейса в ч.
Величина Т состоит из времени наполнения цистерны времени гру-
женого пробега /гР, времени холостого пробега Л. и времени розлива вяжу-
щего материала tp:
T=tH+tlp + tx-{-tp. (У1ЛЗ)
Мощность двигателя, необходимого для работы "насоса,
рассчитывается по формуле (VI.10). При расчете напора hc в формулу
(VI.9) необходимо ввести дополнительный член hp, учитывающий требуе-
мый напор (давление) жидкости при розливе (5—6 атм или 50—60 м вод.
ст.). Таким образом,
he = hw + 2 hM + hn + hp м. (VI. 14)
§ 37. МАШИНЫ ДЛЯ ПРИГОТОВЛЕНИЯ ДОРОЖНЫХ ЭМУЛЬСИЙ
Наряду с применением битумов и дегтей в чистом виде в качестве вяжу-
щего материала при строительстве и ремонте дорожных покрытий имеет
место их использование также в эмульгированном виде, т. е. раздроблен-
ными в воде. Кроме вяжущего материала и воды в состав эмульсии входит
в небольшом количестве (1—2%) вещество, называемое эмульгатором,
которое предохраняет капельки от слияния. В качестве эмульгаторов
используются древесный деготь, бардяной концентрат, соапсток, стеарин,
асидол и другие продукты химического производства нефтяной промышлен-
ности и отходы рыбной промышленности.
В отличие от битумов и дегтей, применяемых в горячем состоянии,
эмульсии применяются в холодном виде. Это позволяет производить работы
с эмульсиями в холодную погоду и с влажным каменным материалом и тем
самым удлинить дорожно-строительный сезон и увеличить коэффициент
годового использования парка машин. Применение эмульсии в ряде слу-
чаев позволяет уменьшить расход вяжущего материала до 30—35%.
Для получения эмульсии применяются эмульсионные машины, назы-
ваемые в технической литературе гомогенизаторами, диспергаторами,
коллоидными мельницами, эмульсаторами и т. п. В дальнейшем эмуль-
сионные машины будем называть гомогенизаторами.
246
МАШИНЫ И ОБОРУДОВАНИЕ ДЛЯ ДОРОЖНЫХ ПОКРЫТИЙ
На рис. 141 показано устройство однороторного двухдискового гомо-
генизатора. Он состоит из чугунного корпуса с двумя боковыми крышками,
внутри которого покоится на подшипниках ротор с двумя дисками. На
одном диске имеются четыре радиальных выступа, выполняющих роль
перемешивающих и нагнетающих лопастей.
Внутренняя поверхность корпуса выполнена конической и имеет
одинаковую конусность с рабочими поверхностями дисков ротора. Регу-
лирование зазора между коническими поверхностями дисков и корпуса
Рис. 141. Однороторный двухдисковый гомогенизатор:
/ _ крышка; 2 — стопорная гайка; 3 — штурвал; 4 — регулировочная гайка; 5 — втулки;
6 — замок; 7 — стакан; 8 — приемный канал; 9, 13 — крышки корпуса; 10 — корпус; 11, 12 —
диски ротора; 14, 20 — кронштейны; 15 — патрубки; 16 — кожух; 17 — теплоизоляция; 18 — элек-
тронагреватели; 19 — лопасти; 21 — вал; 22 — стопор; 23 — винт
осуществляется специальным механизмом. При вращении штурвала про-
исходит осевое перемещение вала с ротором и благодаря конусности
поверхностей ротора и корпуса изменяется величина рабочего зазора
между ними. Величина зазора Л для данной конструкции механизма нахо-
дится по формуле
Х = (VI. 15)
где ф — угол поворота штурвала в град;
а — угол у основания конуса ротора в град',
s — шаг регулировочной гайки в мм.
В зависимости от размеров гомогенизатора угловая скорость ротора
изменяется от 3000 до 15 000 об!мин.
Эмульгируемые жидкости поступают по приемному каналу в левой
крышке внутрь машины и под действием центробежных сил вращающегося
ротора продавливаются с большой скоростью через зазор. Готовая эмуль-
сия вытекает из каналов, имеющихся в нижней части крышек корпуса.
В трехступенчатом гомогенизаторе конструкции Л. Л. Хотунцева
и В. С. Пушкина (рис. 142) на валу 10 шпонками 1 укреплены параллельно
МАШИНЫ И ОБОРУДОВАНИЕ ДЛЯ ПОКРЫТИЙ ОБЛЕГЧЕННОГО ТИПА 247
248 МАШИНЫ И ОБОРУДОВАНИЕ ДЛЯ ДОРОЖНЫХ ПОКРЫТИЙ
три диска: один — с рифленой поверхностью 5 и два — с гладкими кони-
ческими поверхностями 6. На внутренней поверхности корпуса напротив
дисков укреплены три кольца: одно — с рифленой 24 и два — с кони-
ческой поверхностями 21. Между гладкими кольцами вставлены распор-
ные кольца 23, а между дисками — распорные кольца 9. В рабочем поло-
жении выступы рифленого диска входят в выточки рифленого кольца.
Рис. 143. Многощелевой гомогенизатор
На обоих гладких конических кольцах и на внутренней поверхности пра-
вой крышки корпуса укреплены перегородки 22, а на каждом из трех
дисков — по шесть нагнетательных лопаток 25.
Изменение ширины рабочего зазора между дисками и кольцами осу-
ществляется специальным регулировочным механизмом. Он состоит из
регулировочных гаек 14 и 15, установочной гайки 16, распорной втулки 13,
стопорной гайки 17, кольца со шкалой 18 и указателя 19. Вращением
гаек 14 и 15 поступательно перемещается втулка 11, а вместе с ней и диски.
Корпус 4 состоит из внутреннего 8 и наружного 7 цилиндров и кры-
шек 3. Внутреннее пространство в корпусе используется для пара, обо-
гревающего гомогенизатор. Ротор приводится во вращение электродви-
гателем мощностью 7 кет посредством клиноременной передачи 12. Про-
изводительность этого гомогенизатора — 3 т/ч.
Эмульгируемые жидкости, поступающие по приемному патрубку 2
внутрь машины, проходят три ступени эмульгирования — вначале про-
МАШИНЫ И ОБОРУДОВАНИЕ ДЛЯ ПОКРЫТИЙ ОБЛЕГЧЕННОГО ТИПА 249
Рис. 144. Лопастная мешалка для битумных
эмульсий
давливаются через зазор между рифлеными поверхностями, а затем после-
довательно через оба зазора между гладкими коническими поверхностями.
Готовая эмульсия вытекает из патрубка 20.
Многоцелевой гомогенизатор конструкции В. В. Назарова отли-
чается от однороторного двухдискового гомогенизатора тем, что ротор
и статор (рис. 143) имеют несколько (3—5) концентрических конических
поверхностей, образующих соответствующее количество зазоров (щелей),
через которые проходят эмульгируемые жидкости. В зазоры жидкости
поступают через пазы в статоре,
ротора. Распределение жидкое!
диском. При вращении штур-
вала поступательно переме-
щается резьбовой стакан, а
вместе с ним и вал с ротором.
В результате изменяется вели-
чина зазоров. Вал приводится
во вращение электродвигате-
лем посредством клиноремен-
ной передачи. Мощность элек-
тродвигателя — 12 кет. Про-
изводительность гомогенера-
тора — 4 пг/ч.
На некоторых активных
эмульгаторах битумные эмуль-
сии могут быть получены и
в мешалке. Корпус ме-
шалки имеет коническое дно
и обогревательную рубашку
(рис. 144). На внутренней по-
верхности корпуса укреплены
две пары неподвижных лопа-
стей.
Перемешивающее устройство расположено внутри и состоит из четы-
рех пар лопастей, установленных под разными углами к плоскости вра-
щения. Лопастной вал вращается со скоростью 84 об/мин.
Пусковая мощность мешалки N равна сумме двух мощностей — рабо-
чей Np и инерционной Nu:
а готовая эмульсия вытекает из каналов
и по пазам осуществляется лопастным
N = Np+ Nu.
(VI.16)
Рабочая мощность затрачивается на преодоление сил трения жид-
костей, а инерционная —на преодоление сил инерции. Для расчета рабо-
чей мощности пользуются полуэмпирической формулой
/Vр (2 ( \ &
pu-D5 \ ц / ’
(VI. 17)
где Np — рабочая мощность в кГм'сек’,
р — динамическая вязкость жидкости в кГ•сек/м?',
р — плотность жидкости в кГ -секЧм*-,
w — угловая скорость в 1/сек;
D — размах лопастей в м.
Для четырехлопастных мешалок в зависимости от угла наклона ло-
пастей величина С изменяется в интервале 4,4—8,5, а показатель степени а
Равен 0,2.
250
МАШИНЫ и оборудование для дорожных покрытий
Инерционная мощность для одной лопасти рассчитывается по формуле
(2 л)3
N. =-------& ' кГм/сек, (VI. 18)
где 1гл — высота лопасти в м.
Для пары лопастей эту величину нужно удвоить, тогда окончательно
будем иметь:
V.2, = 3,87£)4 n3phA кГм/сек. (VI.19)
При большем количестве нар лопастей в мешалке эта мощность соот-
ветственно увеличивается.
Пусковая мощность может в 2—3 раза превосходить рабочую мощ-
ность.
При значительных скоростях вращения вследствие образования
воронки в жидкости могут обнажиться верхние лопасти или, наоборот,часть
жидкости может выплеснуться из мешалки.
Первое требование — чтобы не обнажились верхние лопасти — вы-
полняется, если
К----~-^h0M, (VI.20)
а второе требование — чтобы жидкость не выплеснулась — выполняется,
если
м> (VL21)
где hc — высота уровня жидкости в сосуде в м;
h0 — расстояние от дна сосуда до верхнего края лопасти в м;
Н — высота сосуда в ж;
R. — радиус сосуда в м;
со — угловая скорость мешалки в 1/сек;
g — ускорение силы тяжести в м/сек*.
Производительность мешалки Пм находится по формуле
Пм = Етзмсж т/ц, (у1 22)
где V — объем одной порции в лг;
у — удельный вес жидкости в т/м3;
ke — коэффициент использования мешалки во времени;
Т — продолжительность цикла в сек.
Т = И + /2 + t3 сек,
где Н — время подачи материалов в мешалку в сек;
— время перемешивания в сек;
t3 — время опорожнения мешалки в сек.
Пневматическое эмульгирование (барботи-
рование) осуществляется в открытом баке, на дне которого располо-
жены трубы с отверстиями. Воздух (или пар), выходящий из отверстий,
поднимается кверху и увлекает за собой капельки жидкости. Для лучшего
перемешивания отверстия в трубах размещают по винтовой линии. Диа-
метр отверстий — 3—6 мм. Трубы располагаются строго горизонтально,
чтобы воздух (или пар), выходящий из отверстий, преодолевал одинаковое
гидравлическое сопротивление. Давление воздуха должно быть достаточ-
ным, чтобы создать нужный напор в трубопроводе для преодоления сопро-
МАШИНЫ и оборудование для покрытий облегченного ТИПА 25!
тивления трения и гидростатического сопротивления столба эмульги-
руемых жидкостей в баке.
Ориентировочно давление воздуха можно рассчитать по формуле
Р 1,2йср1О-4 кПсм\ (VI.23)
где hc — высота слоя жидкости в баке в м:
у — удельный вес воздуха в кПм3.
Расход воздуха определяется по формуле
V = KFP м:,1ч, (VI.24)
где F — свободная поверхность бака в м2\
К — опытный коэффициент, равный 50.
Ориентировочно расход воздуха составляет 0,8 мЧмин на 1 мг по-
верхности бака.
Кроме эмульсионной машины для производства эмульсий требуется
вспомогательное оборудование. Весь комплект оборудования для произ-
водства эмульсий входит в состав эмульсионной установки
(рис. 145).
Обезвоживание и подогрев битума осуществляются в обычных битумо-
плавильных котлах 4. Для приготовления эмульгатора предусмотрены
котлы 2 с мешалками и паровым обогревом. Для подачи в котлы вязкого
эмульгатора используется шнеколопастной насос 1. У котлов установлены
дозаторы для эмульгатора и водного раствора едкого натра. Извлечение
кристаллического едкого натра из металлических бочек осуществляется
при помощи пара. При этом бочка устанавливается разгрузочным отвер-
стием над горловиной одного из резервуаров 7, и в отверстие через сопло
подается струя пара. Резервуары 7 служат для хранения водного рйствора
едкого натра. В состав установки входят также гомогенизатор 5, резер-
вуары с перемешивающим устройством для водного раствора эмульга-
тора 3, резервуары для эмульсии 6 и водоумягчительное оборудование 8.
Приготовление эмульсий осуществляется следующим образом. Эмуль-
гатор, приготовленный в котлах, разбавляется водой и перекачивается
насосом в резервуары 3, где он подогревается до температуры 70—80° С.
Из этих резервуаров водный раствор эмульгатора самотеком поступает
в гомогенизатор 5. Сюда же одновременно поступает из битумоплавильни
битум с температурой 140—150° С. Готовая эмульсия вытекает непрерыв-
ным потоком из гомогенизатора в резервуары 6 для хранения и оттуда
отпускается потребителю. Концентрация битума в эмульсии регулируется
изменением величины струй.
Приготовление дорожных эмульсий может осуществляться при помощи
акустического вибратора (рис. 146). Здесь в состав комплекта оборудова-
ния входят насос 2 с электродвигателем /, помещенный в рабочий бак 6,
вибратор 8, резервуар для эмульсий 9, всасывающий 3 и нагнетательный 4
трубопроводы с контрольным манометром 5. Для возбуждения колебаний
в жидкости используется гидродинамический вибратор. Он состоит из
штуцера, сопла и вибрирующей пластины с заостренным краем. Пластина
зажата между двумя стойками, а заостренный край находится на расстоя-
нии 3 мм от щели сопла. Рабочая величина щели — 1,5—2 мм. Струя
жидкости, выходящая из сопла под давлением, вызывает колебания за-
крепленной пластины.
Битум и водный раствор эмульгатора, нагретые до рабочей темпера-
туры, подаются в нужной пропорции в рабочий бак. Уровень жидкостей
в баке должен быть таким, чтобы вибратор оказался погруженным в жид-
кость. Затем включается насос, и жидкости под давлением 6—8 ашм
252
МАШИНЫ И ОБОРУДОВАНИЕ ДЛЯ ДОРОЖНЫХ ПОКРЫТИЙ
Рис. 145. Принципиальная схема эмульсионной установки
МАШИНЫ И ОБОРУДОВАНИЕ для покрытий ОБЛЕГЧЕННОГО ТИПА 253
подаются через сетчатый фильтр 7 к вибратору. Пройдя через вибратор,
жидкости вновь возвращаются в бак. Непрерывная циркуляция продол-
жается до тех пор, пока в рабочем баке не образуется эмульсия. Продол-
жительность цикла составляет примерно 10 мин. Готовая эмульсия пере-
качивается насосом из рабочего бака в резервуар.
Гидродинамический вибратор работает эффективно, если он настроен
в резонанс, т. е. когда частота собственных колебаний пластины совпа-
дает с частотой вынужденных колебаний.
Рис. 146. Акустическая эмульсионная установка
Частота вынужденных колебаний пластины определяется по формуле
fs = , (VI.25)
где hK — расстояние между соплом и заостренным краем пластины;
и — скорость истечения жидкостей.
Здесь
и = 7^, (VI.26)
где Vc — объем жидкостей, протекающих за время 1С;
sc — поперечное сечение щели сопла.
Собственная частота колебаний пластины при консольном креплении
находится по формуле
г = 1/ £_ (VI.27)
с 2 К12 г Р ’
где dn — толщина пластины;
I — длина пластины;
Е — модуль упругости;
р — плотность.
Акустическая мощность вибратора находится по формуле
IV = 981 • 10’4РVc вт, (VI.28)
где Р — давление жидкости в атм;
Vc — объем жидкости, проходящей через сопло, в смЧсек.
254
МАШИНЫ и ОБОРУДОВАНИЕ ДЛЯ ДОРОЖНЫХ ПОКРЫТИЙ
§ 38. МАШИНЫ ДЛЯ РАСПРЕДЕЛЕНИЯ
ДОРОЖНО-СТРОИТЕЛЬНЫХ МАТЕРИАЛОВ
Строительство покрытий связано с большими объемами работ по рас-
пределению строительных материалов. Для механизации распределения
дорожно-строительных материалов при строительстве современных до-
рожных покрытий применяются специальные машины. К ним относятся
распределители песка, цемента, щебня и гравия и распределители вы-
севок. При отсутствии специальных машин распределение каменных мате-
риалов производится автогрейдерами и иногда бульдозерами. Однако
при этом имеет место низкое качество работ и кроме того значительно
повышается их трудоемкость.
Распределители являются составной частью комплекта машин, пред-
назначенных для строительства дорожного полотна. Качество дорожного
покрытия в значительной мере зависит от качества распределения мате-
риалов. Особое значение имеет распределение материала слоем заданной
толщины.
К машинам для распределения предъявляются следующие основные
требования:
1) материал должен распределяться равномерным слоем по всей
ширине полосы;
2) производительность распределителя должна соответствовать об-
щей производительности комплекта машин по строительству дорожного
покрытия;
3) емкость приемных устройств должна соответствовать грузоподъ-
емности транспортных средств;
4) управление машиной должно быть механизировано и по возмож-
ности автоматизировано;
5) распределители должны обеспечивать создание требуемого профиля
дорожного покрытия и его продольного уклона;
6) при укладке слоя должен быть обеспечен необходимый припуск
по толщине слоя с учетом его окончательного уплотнения специальными
средствами.
Для укладки щебеночных и гравийных материалов могут быть исполь-
зованы асфальтоукладчики и распределители цементно-бетонной смеси.
Однако такое их использование не является рентабельным, поэтому для
этих целей применяются специальные машины, предназначенные для
равномерного распределения каменных материалов при строительстве
щебеночных и гравийных дорожных оснований и покрытий дорог, а также
для ремонтных работ. В некоторых случаях одновременно с распределе-
нием материала предусматривается его предварительное уплотнение.
Укладчики щебня должны обеспечивать получение слоя необходимой
толщины и ширины, а также требуемую ровность поверхности уклады-
ваемого слоя.
Укладчики могут быть навесными, прицепными и самоходными. Навес-
ные укладчики представляют собой бункер, который подвешивается
к кузову самосвала. Прицепные укладчики рассчитываются на совместную
работу с автосамосвалами, тракторами и автогрейдерами. По конструкции
ходовой части прицепные укладчики подразделяются на ползунковые,
где в качестве ходового оборудования служат лыжи (полозья), и колес-
ные. Прицепные укладчики снабжаются щелевым, шнековым или тарель-
чатым распределительным органом.
Навесные и прицепные укладчики используются на работах сравни-
тельно небольшого объема. Наличие большого сопротивления перемеще-
МАШИНЫ И ОБОРУДОВАНИЕ ДЛЯ ПОКРЫТИЙ ОБЛЕГЧЕННОГО ТИПА
255
256 МАШИНЫ И ОБОРУДОВАНИЕ ДЛЯ ДОРОЖНЫХ ПОКРЫТИИ
Конструкция самоходного укладчика
ставлена на рис. 147. Щебень или гравий
Рис. 148. Навесной распределитель каменной ме-
лочи в рабочем положении:
1 — приводной ролик; 2 — натяжное устройство; 3 —
бункер; 4 — винтовой зажим; 5 — заслонка с механиз-
мом управления; 6 — барабан питателя; 7 — цепная
передача привода; 8 — редуктор; 9 — кузов самосвала
нию часто приводит к буксованию тягача и порче подстилающего слоя.
Большим недостатком этих укладчиков является плохая маневренность
и подача к ним каменного материала только с одной стороны.
Самоходные укладчики обычно снабжаются гусеничным ходом. Они
являются наиболее эффективными, обеспечивают высокое качество рас-
пределения и поэтому применяются при производстве больших объемов
работ. Их технологическая схема аналогична схеме асфальтоукладчиков,
на гусеничном ходу пред-
из транспортных средств по-
ступает в приемный бункер 2,
откуда самотеком распреде-
ляется по полотну дороги.
Для регулировки толщины
укладываемого слоя уста-
навливаются регулирующие
заслонки. Некоторые рас-
пределители снабжаются
разравнивающим брусом 5.
В качестве уплотняющего
органа используется трамбу-
ющая или вибрационная
плита /, имеющая механизм
привода 4. Рабочие органы
по аналогии с асфальтоуклад-
чиками устанавливаются на
специальной раме, шарнирно
соединенной с основной ра-
мой укладчика. Привод
укладчика осуществляется от
двигателя внутреннего сго-
рания 3.
Нашей промышленно-
стью выпускается самоход-
ный щебнеукладчик на гу-
сеничном ходу, который
уплотнение слоя материала
толщиной от 20 до 250 мм при ширине полосы в 3,1 и 3,6 м. Он выпол-
няется в двух конструктивных вариантах. В первом исполнении (см.
рис. 147) укладчик загружается со стороны уложенного и уплотнен-
ного слоя и используется при строительстве щебеночных или гравийных
оснований дорог на песчаном подстилающем слое. Во втором исполнении
машины загрузка бункера производится со стороны подготовленного
основания. Такая конструкция применяется при строительстве щебеноч-
ных и гравийных дорог на твердом основании. В этом случае распреде-
литель может использоваться для распределения и уплотнения черного
щебня и черных смесей.
Укладчик оборудован разравнивающим брусом плужного типа с боко-
выми ограничителями, которые служат для установки ширины полосы
распределения. Предварительное уплотнение материала осуществляется
виброплитами. Машина позволяет получать как горизонтальный, так
и односкатный поперечный профиль.
Для распределения каменной мелочи размером 3—15 мм исполь-
зуются специальные распределители. Они выполняются главным образом
в виде навесного сменного оборудования, рассчитанного на работу с само-
обеспечивает укладку и предварительное
МАШИНЫ И ОБОРУДОВАНИЕ ДЛЯ ПОКРЫТИЙ ОБЛЕГЧЕННОГО ТИПА 257
Рис. 149. Принципиальная схе-
ма распределительного устрой-
ства дозатора цемента
ходными шасси, тягачами, автопогрузчиками и автосамосвалами. Дози-
рование распределяемого материала осуществляется с помощью регули-
руемой выходной щели или распределительного валика. Для ликвидации
зависания смеси в бункере часто применяются специальные устройства —-
побудители.
Производительность современных самоходных распределителей дости-
гает 400 т/ч. Некоторые распределители снабжаются грохотами для отсева
крупных частиц материала.
Отечественной промышленностью выпускается навесной распреде-
литель Д-336 (рис. 148), представляющий собой бункер, подвешенный
к кузову самосвала. Роторный питатель, установленный в нижней части
бункера, приводится во вращение от заднего
колеса самосвала.
При устройстве дорожных оснований
из укрепленных грунтов возникает необхо-
димость в дозировании и распределении
цемента. Для этой цели служат специальные
распределители (дозаторы), принимающие
цемент из транспортных средств и распреде-
ляющие его в предварительно разрыхленный
грунт. Распределители цемента выпускаются
навесными, прицепными и самоходными как
на гусеничном, так и на колесном ходу.
Распределительное устройство этих
машин (рис. 149) состоит из шнекового или
роторного дозатора, представляющего собой
вал 4 с резиновыми лопастями 3, и сошни-
ков 5. Приемный бункер 1 оборудован воро-
шителем 2. Для приема цемента из цементо-
возов с пневматической разгрузкой распре-
делители оборудуются приемником, снабжен-
ным фильтрами.
Прицепные распределители перемещаются гусеничными или колес-
ными тягачами с ходоуменьшителем. Полуприцепные и самоходные рас-
пределители имеют рабочую скорость передвижения не более 500—900 м/ч.
Привод дозатора осуществляется от самостоятельного двигателя,
двигателя тягача или шасси. Применение гидропривода позволяет регу-
лировать норму распределения независимо от скорости перемещения
машины.
Отечественной промышленностью выпускается распределитель цемента
Д-343Б в виде прицепной машины к трактору ДТ-54АС с ходоумень-
шителем. При ширине распределения 2,45 м производительность машины
составляет 400 мЧч.
§ 39. МАШИНЫ ДЛЯ ПОСТРОЙКИ ПОКРЫТИЙ
ПО МЕТОДУ СМЕШЕНИЯ НА ДОРОГЕ
В дорожном строительстве дорожные основания и покрытия часто
устраиваются методом смешения материалов. При этом обработка грун-
тов, а также гравийных и щебеночных материалов производится как
органическими вяжущими материалами (битум, деготь, битумные эмуль-
сии), так и неорганическими вяжущими материалами (цемент, известь).
В настоящее время особенно широко стал применяться метод укрепления
грунтов цементами, в результате чего грунты приобретают водостойкость,
морозоустойчивость и достаточную механическую прочность.
9 н. Я. Хархута и др.
258
МАШИНЫ И ОБОРУДОВАНИЕ для ДОРОЖНЫХ ПОКРЫТИЙ
Для измельчения грунта, распределения вяжущего материала и пере-
мешивания его с грунтом применяются специальные машины и установки, 1
В результате перемешивания должна быть получена однородная по своему 1
составу смесь. , 3
При постройке оснований и покрытий применяются следующие спо- j
собы перемешивания: j
1. Способ смешения на дороге, при котором материалы перемеши- 1
ваются непосредственно на полотне дороги последовательными проходами i
смесительных машин; некоторые материалы еще до начала работ уклады- j
ваются по ширине проезжей части или в виде валика по оси дороги. 1
2. Способ смешения в передвижной установке. Здесь грунт или |
гравий, предварительно уложенный на
агрегатом в движущееся смесительное
дороге, подается специальным 1
устройство, где он и смеши- J
вается с вяжущими материа- 1
лами. I
Наиболее однородными по- |
лучаются смеси при смешении ^я
в стационарных установках, |
Вместе с тем наименьшую стой- 1
мость имеют те основания й 1
покрытия, которые построены 1
методом смешения на дороге, «
При работах по способу смете- '
ния на дороге распределение >
неорганических вяжущих мате- ;-
риалов производится распреде-
лителями цемента. 1
лесителями следующих типов:
Рис. 150. Схема к расчету мощности при ра-
боте фрезы
Смешение может производиться
ножевыми, фрезерными, лопастными и барабанными. Ножевые и фрезер-
ные мешалки используются при смешении грунтов и гравийных материалов
непосредственно на дороге. Лопастные и барабанные мешалки применяются
в передвижных и стационарных установках. Рабочими органами ножевых
смесителей является ряд ножей, установленных в такой последователь-
ности, чтобы обеспечить многократные перемещения материала при про-
ходе машины. Ножи устанавливаются попарно с таким расчетом, чтобы
их первая пара раздвигала валик материала, а вторая пара снова соби-
рала его в валик на оси дороги. Необходимое число проходов машины для
полного перемешивания материала обычно составляет 20—30.
Более эффективным рабочим органом является фреза. Фреза пред-
ставляет собой вал с коготками для измельчения грунта (рис. 150, а).
Движение фрезы является сложным, состоящим из вращения когот-
ков относительно оси барабана с окружной скоростью voKp в
см/сек и поступательного движения оси барабана вместе со
всей машиной со скоростью vmp в см/сек. При работе фрезы с принуди-
тельным вращением барабана в сторону поступательного движения
(рис. 150,6) при v0Kp > vmp величина подачи s равна
s===60V^ VI29)
пгс '
где гс — количество коготков фрезы;
п — число оборотов барабана фрезы в мин.
Из формулы (VI.29) следует, что чем меньше отношение -^(т. е.
Л \ УокР /
тем меньше подача, т. е. толщина стружки. При постоянной vmp толщина
МАШИНЫ И ОБОРУДОВАНИЕ ДЛЯ ПОКРЫТИЙ ОБЛЕГЧЕННОГО ТИПА 259
стружки уменьшается с увеличением числа оборотов барабана и установ-
кой на фрезе большего количества коготков. Толщина стружки также
уменьшается с понижением поступательной скорости. На некоторых
фрезах предусмотрена возможность изменения числа коготков, что позво-
ляет в лучшей мере измельчать и смешивать различные грунты.
Необходимая для работы фрезы мощность двигателя может быть
рассчитана по методу А. Д. Далина. Мощность затрачивается на
резание грунта, отбрасывание его в сторону, на подталкивание фрезы, на
преодоление сил трения и на вращение барабана.
Основная часть мощности расходуется на резание грунта:
к$£тр л. с., (VI.30)
где b — ширина фрезеруемой полосы в см;
h — глубина рыхления в см;
vmp — скорость поступательного движения машины в м1сек;
к0 — удельное сопротивление грунта резанию в кПсмг.
Удельное сопротивление грунта резанию зависит от размеров стружки,
скорости.резания, а также от вида и состояния грунта. При расчетах можно
принимать следующие значения этого сопротивления:
Для грунтов I категории ...............к0=О,7—0,8 кГ!слР
» » II » ...............к0=1,3—1,4 »
» » III » .................к0=2—2,2 кГ/см2
При фрезеровании предварительно разрыхленного грунта эти значения
уменьшаются на 15—20%.
Мощность, расходуемая на отбрасывание грунта, может быть найдена
по формуле
= ЙЙ-л с ’ <VL31)
где кот — коэффициент отбрасывания, принимаемый равным 0,75 для
узких коготков и 1,0 — для широких;
vpe3 — скорость резания в см/сек;
т — масса отбрасываемого за одну секунду грунта в кГ-сек2/см.
Скорость резания равна
ирез — Vqkp — Vmp CM.CCK.
При фрезах, режущих сверху вниз, принимается знак минус. Масса т
может быть найдена как
bhvmpf> кГ-сек"
~~ g см ’
где 6-— объемный вес грунта в кГ!см3;
g — ускорение силы тяжести в см/сек2.
Мощность, расходуемая на подталкивание фрезы, т. е. на ее пере-
мещение, находится по следующей эмпирической формуле:
*1 (N i Ns) Утр с
(VI. 32)
где Kt — коэффициент, равный 0,15—0,20.
260 МАШИНЫ И ОБОРУДОВАНИЕ ДЛЯ ДОРОЖНЫХ ПОКРЫТИЙ
На преодоление сил трения обычно расходуется 3—5% от общей
мощности, поэтому суммарная мощность может быть найдена как
1 0е»
v .\:.i Ж с., (VI.33)
где 1] — к. п. д. передач, равный 0,95.
Для определения полной мощности фрезерной машины необходимо
еще учесть те сопротивления, которые связаны с ее перемещением как
тележки.
Производительность фрезы может быть определена по следующей фор-
муле:
Л = мЧч, (VI.34)
где b — ширина обрабатываемой полосы в м\
vmp — поступательная скорость движения фрезы в .и/ч;
а — коэффициент перекрытия проходов, принимаемый равным 0,1;
кв—коэффициент использования во времени; к6 — 0,80-^0,85;
п — число проходов по одному следу; обычно п = 4-еб.
Дорожные фрезы выпускаются как прицепными, так и навесными
к трактору или автогрейдеру.
К конструкции дорожных фрез предъявляются следующие общие
требования:
1. Мощность двигателя должна обеспечивать нормальную работу
фрезы по измельчению тяжелых грунтов на глубину не менее 20 см.
2. Ротор (плавающего типа) должен легко монтироваться и демонти-
роваться; коготки (лопатки), как наиболее изнашивающиеся детали,
должны изготовляться из специальных сталей и крепиться к кронштей-
нам, что позволяет быстро их заменять при износе. Коготки лучше рас-
полагать на валу по спирали, тогда в действии будут постоянно находиться
несколько режущих коготков, что исключает вибрацию машины даже
при значительных нагрузках.
3. Фрезы должны оснащаться распределительной системой для дози-
рования воды и вяжущего материала, а также соответствующими контроль-
ными приборами.
Наиболее эффективны фрезы, смонтированные на специальном корот-
кобазовом тракторе-тягаче, имеющем скорость перемещения 60—100 м/ч.
Основным недостатком дорожных фрез является необходимость
в большом количестве проходов, что снижает качество получаемой смеси
и производительность. Более перспективными являются специальные
фрезосмесительные машины, которые за один проход осуществляют,
рыхление и размельчение грунта, дозировку и распределение вяжущего4
материала и воды, а также смешение и предварительное уплотнение
смеси. :
В настоящее время имеются следующие грунтосмесительные
машины.
1. Машины для смешения гравийных и щебеночных материалов
с органическим вяжущим. Здесь минеральный материал, уложенный ва,г
ликом на полотне дороги, специальным погрузчиком подается в мешалку,
где он перемешивается с битумом. Далее смесь снова укладывается на
дорогу. Такие машины могут быть смонтированными на общем ходу или же
состоять из двух (рис. 151) или трех агрегатов. В последнем случае каждый
агрегат выполняет одну из рабочих операций. Каждый агрегат имеет cbqq
ходовое устройство, а погрузчик выполняется самоходным и служит тяга-!
МАШИНЫ И ОБОРУДОВАНИЕ ДЛЯ ПОКРЫТИЙ ОБЛЕГЧЕННОГО ТИПА 261
чом для всего комплекса машин. Готовая смесь разравнивается автогрей-
дером и затем уплотняется.
2. Машины для смешения грунта и песчано-гравийных материалов
непосредственно на полотне дороги. Грунтосмесительные машины подоб-
ного типа осуществляют все операции без подъема материала. Такие
машины обычно выпускаются самоходными как на пневматическом, так
Рис. 151. Схема смесителя Д-270 с погрузчиком Д-415:
1 — валик материала; 2 — элеватор для минерального материала погрузчика;
,? _ приемный бункер смесителя; 4 — регулирующая заслонка бункера; 5 — питатель;
6 — битумный бак; 7 — дозирующее устройство с подводящей трубой; Я — двухвальная
лопастная мешалка; 9 — валик готовой смеси
и на гусеничном ходу. Схема такой машины на пневмоходу представлена
на рис. 152. Ее рабочие органы состоят из четырех фрезерных и смеситель-
ных роторов. Первый ротор с винтовыми коготками-лопатками предна-
значен для грубого рыхления грунта, второй ротор с нормальными фре-
зерными лопатками служит для окончательного рыхления грунта. Третий
и четвертый роторы со смесительными лопатками предназначены для
Рис. 152. Схема самоходной грунтосмесительной машины Д-391А:
/ — рычаги управления; 2 — двигатель; 3 — цистерна; 4 — система управле-
ния задними колесами; 5 — задние управляемые колеса-уплотнители; 6 — слой
укрепленного грунта; 7 — гидросистема подъема задней части рамы рабочих органов;
4 — кожух с разравнивающей задней стенкой; 9 — двухвальная мешалка; 10 — меха-
уи-’м привода рабочих органов; // — фреза; 12 — рыхлитель; 13 — гидросистема
подъема передней части рамы рабочих органов; 14 — передние ведущие колеса
перемешивания массы. Задняя стенка кожуха, расположенная за послед-
ним ротором, регулирует по высоте и разравнивает выходящую массу.
Подкатка массы производится задними управляемыми пневмоколесами.
При работе с цементом машину обслуживает автоцементовоз и автоцистерна
Для воды, а при работе с битумом — автоцистерна для воды и автогуд-
ронатор.
Мощность двигателя такой самоходной грунтосмесительной машины
расходуется на перемещение самой машины, работу рыхлителя первич-
ного резания грунта, работу фрезы окончательного рыхления грунта,
работу двухвальной лопастной мешалки и работу битумного и водяного
насосов.
262
МАШИНЫ И ОБОРУДОВАНИЕ ДЛЯ ДОРОЖНЫХ ПОКРЫТИЙ
Мощность двигателя, необходимая для перемещения грунтосмеси-
тельной машины, определяется обычным методом. Найденная таким обра-
зом мощность должна быть проверена на возможность ее реализации по
сцепному весу. Мощности, затрачиваемые на работу фрез, находятся по
приведенному выше методу А. Д. Далина. Мощность, затрачивае-
мая на работу лопастной мешалки, может быть определена по эмпириче-
ской формуле И. П. Керова, полученной им на основе опытных данных:
N, = 0,0480 л. с., (VI.35)
где G — вес грунта, находящегося между лопастями роторов мешалки,
в кг.
Производительность машины может быть определена по формуле
(VI.28), при этом п = 1.
Литература
1. Кантарович 3. Б. Основы расчета химических машин и аппаратов. М.,
Машгиз, 1962.
2. Ник и шина М. Ф., Э в е н т о в И. М. и др. Дорожные эмульсии. М.,
изд-во «Транспорт», 1964.
3. П и конский Я. М., Полосин-Никитин С. М., В о щ и н и н Н. П.,
Баловнев В. Н. Дорожные машины и оборудование. М., Машгиз, 1960.
4. Эвентов И. М. и Назаров В. В. Эмульсионные машины и установки.
М.—Л., изд-во «Машиностроение», 1964.
5. Киселев Г1. Г. Справочник по гидравлическим расчетам. М.—Л., Госэнерго-
издат, 1957.
Глава VII. МАШИНЫ ДЛЯ СТРОИТЕЛЬСТВА
АСФАЛЬТОБЕТОННЫХ ПОКРЫТИЙ
§ 40. КЛАССИФИКАЦИЯ И КОНСТРУКТИВНЫЕ СХЕМЫ
АСФАЛЬТОБЕТОННЫХ СМЕСИТЕЛЕЙ.
АСФАЛЬТОБЕТОННЫЕ ЗАВОДЫ
Асфальтобетонные покрытия являются наиболее распро'
страненным видом усовершенствованных дорожных покрытий капиталь-
ного типа. Для приготовления асфальтобетонных смесей, из которых стро-
ятся покрытия, применяются специальные асфальтосмесители. Асфальто-
бетонная смесь состоит из минерального материала (щебня, песка, порошка)
и вяжущего материала (битума или дегтя). В случае, если щебень заме-
няется гравийным материалом, такая смесь называется уже не асфаль-
тобетоном, а черной гравийной смесью.
Для получения качественной смеси требуется точное дозирование
исходных материалов, строгое соблюдение температурного режима, тех-
нологии работ и тщательное перемешивание минеральных материалов
с вяжущими. Поэтому на всех асфальтосмесителях, независимо от типа
и конструкции, имеются сушильное и смесительное оборудование, транс-
портные приспособления и контрольные приборы и на большинстве
асфальтосмесителей — дозаторы.
Асфальтобетонные смесители выпускаются производительностью от 3
до 250 т!ч и более. По производительности они подразделяются на сме-
сители малой производительности (до 15 т/ч), смесители средней произ-
водительности (до 60 т/ч) и смесители большой производительности (до 100
и более т!ч).
Смесители малой производительности используются на работах по
ремонту покрытий автомобильных дорог и являются большей частью
передвижными. Смесители средней и большой производительности выпу-
скаются полустационарные и стационарные. Полустационарные смесители
эксплуатируются обычно на одном месте 2—3 года, а затем демонтируются
и перевозятся на новый строительный объект. Стационарные смесители
используются на постоянно действующих асфальтобетонных заводах.
В зависимости от характера размещения агрегатов смесители разде-
ляются на два типа: башенный и партерный. В смесителях башенного типа
все агрегаты располагаются по технологической линии один под другим
и исходные материалы, поднятые наверх, далее в процессе производства
перемещаются вниз под действием силы тяжести.
В смесителях партерного типа все агрегаты размещаются не по верти-
кали, а по площади и обрабатываемые материалы от одного агрегата к дру-
гому подаются транспортными средствами (транспортерами, элеваторами,
шнеками и т. п.).
264
МАШИНЫ И ОБОРУДОВАНИЕ ДЛЯ ДОРОЖНЫХ ПОКРЫТИЙ
Кроме указанной классификации, асфальтосмесители разделяются
по технологической схеме на две группы; смесители со свободным пере-
мешиванием и смесители с принудительным перемешиванием. Каждая из
этих групп может состоять из смесителей
Рис. 153. Общий вид смесителя со свободным пе-
ремети ванием
периодического и непрерыв-
ного действия. В смесителях
периодического действия при-
готавливается определенный
по весу замес и время пере-
мешивания ничем не ограни-
чено. При этом для приго-
товления смесей различного
состава не требуется каких-
либо перестановок элементов
смесителя.
В смесителях непрерыв-
ного действия приготовление
смесей различного состава
связано с необходимостью
перестановки лопастей. Кроме
того, время перемешивания
ся перестраивать дозаторы. Смесители
ограничено.
Для приготовления но-
вого состава смеси приходит-
непрерывного действия целесо-
образно использовать в условиях, где не приходится часто изменять со-
став смеси. Достоинством этих смесителей является стабильность состава
приготавливаемой в них смеси. В этих смесителях, как правило, авто-
матизированы все элементы технологического процесса.
Рис. 154. Разрез смесителя со свободным перемешиванием
Смесители периодического действия со свободным перемешиванием
промышленностью в настоящее время не изготовляются, однако они в боль-
шом количестве имеются в дорожном хозяйстве.
Смесители со свободным перемешиванием (рис. 153) в основном исполь-
зуются для приготовления крупнозернистых смесей. Разрез такого сме-
сителя представлен на рис. 154. Он состоит из цилиндрического вращаю-
щегося барабана, разделенного внутри перегородкой 3 на две части:
сушильную 1 и смесительную 2. Барабан опирается кольцевыми бандажами
МАШИНЫ ДЛЯ СТРОИТЕЛЬСТВА АСФАЛЬТОБЕТОННЫХ ПОКРЫТИЙ 265
на ролики, закрепленные на раме. В торцовой стенке сушильной части
имеется отверстие, используемое как для топки, так и для загрузочного
бункера. Из бункера в барабан поступает минеральный материал. Внутри
барабана имеется шнек 4, который продвигает материал к смесительной
части барабана, а приваренные к шнеку отгребные ковши 5 отбрасывают
материал обратно. При помощи имеющихся элеваторных лопастей 6 высу-
шенный и нагретый материал сбрасывается на перепускной лоток и посту-
пает в смесительную часть. На внутренней смесительной части барабана
имеются перемешивающие лопасти 7 и шнек 8, передвигающий материал
к выпускному отверстию, расположенному в торце барабана. У торцовой
стенки имеются, как и в сушильной части барабана, элеваторные лопасти,
подающие приготовленную смесь на выпускной лоток.
Топка представляет металлический полый барабан, выложенный
внутри огнеупорным кирпичом. В топке расположена форсунка.
В загрузочный бункер дозированные вне машины минеральные мате-
риалы подаются элеватором, скиповым подъемником или ленточным транс-
портером.
В сушильной части материалы высушиваются и обогреваются горя-
чими газами, поступающими из топки. Здесь применен прямоточный метод
обогрева, т. е. направления движения газов и материалов совпадают.
Подача порции битума производится самотеком из битумного ковша через
трубу с отверстиями, расположенную внутри смесительной части барабана.
Рабочая температура битума составляет 160—180° С, вес одного замеса —
2,5—3,0 т. Продолжительность перемешивания равна 10—15 мин, произ-
водительность смесителя составляет 12—15 т/ч.
Основными недостатками смесителей этого типа являются:
1) пониженное качество перемешивания материала;
2) выдувание потоком газов минерального порошка, что нарушает
состав смеси;
3) прямоточная система подогрева;
4) отсутствие точной дозировки материалов.
Иногда для уменьшения потерь минерального порошка, которые состав-
ляют около 10%, его подают шнеком непосредственно в смесительную
часть.
К числу машин периодического действия, имеющих принудительное
перемешивание, относятся смесители производительностью 25—30 тч
(рис. 155) и производительностью 8—10 т/ч. (рис. 157).
В смесителе, представленном на рис. 155, смесительный агрегат
отделен от сушильного барабана. Песок и щебень поступают на двухсек-
ционный качающийся питатель, а отсюда — на холодный элеватор,
который подает эти материалы в сушильный барабан. Барабан цилиндри-
ческой формы диаметром 1,2 л и длиной 4,8 л вращается со скоростью
12 об/мин. Топка расположена со стороны разгрузочного отверстия бара-
бана, и горячие газы движутся навстречу движению материалов. Таким
образом, здесь осуществлен более эффективный противоточный метод
обогрева. Ускорению сушки способствуют также имеющиеся внутри
барабана лопасти, часть которых расположена параллельно, а другая
часть — под углом к оси барабана. Из сушильного барабана материалы,
нагретые до 225—250° С, поступают на горячий элеватор 1, который подает
их на грохот 2. Отсортированные на грохоте на три фракции материалы
поступают в соответствующие секции бункера 3. В четвертую секцию
бункера по специальному элеватору 4 подается минеральный порошок.
Под бункером находится весовой дозатор 5, после которого материалы
в нужных количествах поступают в лопастную мешалку 6. Битум,
266
МАШИНЫ И ОБОРУДОВАНИЕ ДЛЯ ДОРОЖНЫХ ПОКРЫТИЙ
нагретый до температуры 160—180° С, взвешивают на битумных весах
и по битумной системе 8 подают насосом в мешалку. На смесителе
имеется также пылеулавливающая установка. Все агрегаты смонтиро-
ваны на общей раме 7.
Каменный материал перемешивается вначале без битума в течение
10—20 сек, а затем — с битумом до получения качественной смеси. Время
перемешивания одного замеса весом 600 кГ составляет около 1,5 мин.
Температура смеси равна 130—160° С.
Рис. 155. Асфальтосмеситель периодического действия производительностью
25—30 т!ч
Устройство лопастной мешалки показано на рис. 156. Она состоит из
сварного корыта, внутри которого укреплены два вала, несущих на себе
лопасти. Внутренняя рабочая поверхность корыта оборудована съем-
ными плитами. Валы вращаются со скоростью 75 об/мин. Лопасти укреп-
лены на валах попарно под углом 45° к оси вала. Благодаря этому материал
движется не только по окружности, но и вдоль оси мешалки, что способ-
ствует его более интенсивному перемешиванию. Однако при такой кон-
струкции и расстановке лопастей перемешивание материала в средней части
мешалки является недостаточным. Поэтому Ш. Л. Кравцовым разрабо-
тана такая схема размещения лопастей, при которой смесь с краев мешалки
перемещается к середине, а здесь лопасти одного вала перемещают мате-
риал вправо, а второго вала — влево. Применение этой системы способ-
ствует улучшению перемешивания и позволяет уменьшить количество
лопастей.
МАШИНЫ ДЛЯ СТРОИТЕЛЬСТВА АСФАЛЬТОБЕТОННЫХ ПОКРЫТИЙ
267
Смесители имеют пылеулавливающие установки, состоящие обычно
из двух циклонов, вентилятора и бункера для сбора пыли.
Смеситель производительностью 8—10 т/ч (рис. 157) относится к сме-
сителям башенного типа. Он имеет технологическую схему, аналогичную
схеме смесителя на 25—30 m/ч, но по компоновке они несколько отли-
чаются.
На верхнем ярусе размещены сушильный барабан с топкой и гро-
хот 3. Сюда подводятся также два элеватора: один 2 — для щебня и песка,
а второй 7 — для минерального порошка. На элеватор 2 минеральный
материал подается питателем 1. С элеватора 7 минеральный порошок
подается в бункер 4. На нижнем ярусе находятся дозаторы 5 для минераль-
Рис. 156. Мешалка смесителя:
/ — редуктор; 2 — корпус мешалки; 3 — лопасть; 4 — наконечник
ных и вяжущих материалов, мешалка 6 и топливное оборудование. Здесь
также имеется пылеулавливающая установка 8.
Сушильный барабан и грохот имеют коническую форму, поэтому при
вращении материал перемещается поступательно. Минеральные материалы
проходят весовую дозировку, а битум — объемную, которая осуществ-
ляется в баке с поплавковым устройством. Бак снабжен паровым подо-
гревом. Вес одного замеса — 400 кГ.
Образцами машин непрерывного действия являются выпускаемые
нашей промышленностью смесители производительностью 40—50 т/ч и
производительностью 4—6,5 т/ч.
Первый смеситель состоит из нескольких самостоятельных агрегатов
с партерным размещением. Технологическая схема этого смесителя пока-
зана на рис. 158.
Каменный материал загружается в двухсекционный бункер 1, откуда
качающимся питателем 2 подается на холодный элеватор 3, а оттуда —
в сушильный барабан 4. Топка 5 в сушильном барабане расположена со
стороны, противоположной поступлению материалов, и нагрев их горячими
газами до 200—220 °C осуществляется противоточным способом. Жидкое
топливо (мазут, нефть), сжигаемое в топке, подается в форсунки насосом
низкого давления, а воздух — вентилятором высокого давления. Отхо-
дящие из сушильного барабана газы очищаются от пыли в циклонах и уда-
ляются через дымовую трубу в атмосферу. Задержанная в циклонах пыль
268
МАШИНЫ И ОБОРУДОВАНИЕ ДЛЯ ДОРОЖНЫХ ПОКРЫТИЙ
Рис. 157. Асфальтосмеситель периодического действия производительностью 8—10 т/ч
Рис. 158. Технологическая схема асфальтосмесителя непрерывного действия
производительностью 40—50 т/ч
МАШИНЫ ДЛЯ СТРОИТЕЛЬСТВА АСФАЛЬТОБЕТОННЫХ ПОКРЫТИЙ
269
поступает на горячий элеватор 7 и через виброгрохот 8 — в соответству-
ющий отсек горячего бункера 10.
Из сушильного барабана щебень и песок поступают на горячий эле-
ватор 7 и далее на плоский двухъярусный виброгрохот 8, где они сорти-
руются на фракции 0—5, 5—15 и 15—35 мм. Эти фракции поступают
в три отсека горячего бункера 10, а сверхмерный материал (крупнее 35 мм)
направляется с грохота в специальный бункер 9. В четвертый отсек горя-
чего бункера из механизированного склада 11 непрерывно поступает
заполнитель — минеральный порошок. Под горячим бункером располо-
жен весовой дозатор 12, откуда порции материала весом в 450 кГ перио-
дически (через 32,5—40,5 сек) доставляются шнеком 14 на элеватор 13,
а с него — в мешалку 15.
Рис. 159. Асфальтосмеситель непрерывного действия производительно- .
стью 4,0—6,5 т/ч-.
1 — форсунка; 2 — топка; 3 — сушильный барабан; 4 — ковшевой элеватор;
5 — элеватор для заполнителя
Пыль из кожухов виброгрохота и весового дозатора улавливается
пылеулавливающей системой и подается в бункер 6, а из него она поступает
на элеватор 7 и используется в качестве минерального порошка.
Битум из битумоплавильни 18 непрерывного действия непрерывно
подается в мешалку поршневым насосом-дозатором 16. Перемешивание
в мешалке минеральных материалов с битумом происходит непрерывно
и продолжается 2,0—2,5 мин. Готовая смесь выгружается через выходное
отверстие мешалки, перекрываемое затвором 17 на время смены транспорт-
ных средств.
Автоматизированы следующие операции: взвешивание минеральных
материалов, перепуск материалов с весов в элеватор, нагрев материалов
в сушильном барабане, дозированная подача битума в мешалку и уда-
ление пыли из бункера циклона.
В смесителе (рис. 159) передвижного типа все агрегаты смонтированы
на платформе двухосного прицепа на пневмоколесном ходу.
Весь технологический процесс, начиная с приема материала и кончая
выдачей готовой смеси, осуществляется непрерывно. Два ковшовых
элеватора подают щебень и песок в два бункера, из которых качающимися
питателями определенные порции материала подаются в сушильный бара-
270
МАШИНЫ И ОБОРУДОВАНИЕ ДЛЯ ДОРОЖНЫХ ПОКРЫТИЙ
бан. Сушильный барабан противоточного типа обогревается форсункой;
воздушного распыления. Топливом служит мазут. Из сушильного бара-
бана нагретые материалы выгружаются в мешалку непрерывного дей-
ствия, куда непрерывно поступают минеральный порошок и горячий битум,
Порошок подается специальным элеватором и дозируется шнековым
дозатором, а битум подается по трубопроводам и дозируется шестеренчатым
насосом.
Корпус 1 насоса (рис. 160) состоит из трех находящихся в постоян-
ном зацеплении шестерен (ведущей 5, промежуточной 2 и дозирующей 3),
из которых крайняя 3 может перемещаться в осевом направлении, в резуль-
тате чего длина зацепления зубьев будет изменяться. С изменением длины
зацепления будет меняться производительность насоса, а следовательно,.
Рис. 160. Насос дозатора битума
и количество битума, поступающего в мешалку. При полном зацеплении
производительность насоса будет максимальной. Установка шестерни
в требуемом положении производится перед началом работы насоса спе-
циальным регулировочным механизмом 4 винтового типа. При работе
насоса битум всасывается через канал 6 и выдается по нагнетательным
каналам 7 и 8, причем регулируемое количество битума выдается из
канала 7 дозирующей шестерней 3, а постоянное количество — из канала 8.
промежуточной шестерней 2.
Существенным недостатком рассматриваемого смесителя является то,
что все компоненты смеси дозируются по объему, а не по весу, что снижает
точность дозировки.
Вопросу улучшения качества асфальтобетонной смеси в настоящее
время уделяется исключительное внимание. Появился новый способ пере-
мешивания, заключающийся в следующем. Битум под давлением до
20 атм распыляется в смесителе в виде тумана из мельчайших капель.
Частицы каменного материала под воздействием быстро вращающихся
лопастей мешалки (до 200 об/лин) приобретают большую скорость и под-
брасываются вверх на значительную высоту. Во время полета частицы
легко и со всех сторон обволакиваются тонкими слоями битума. При этом
способе перемешивания значительно снижается расход битума.
На рис. 161 показана технологическая схема установки, работающей
по новому способу перемешивания. Битум подается насосом 2 из битум-
ного котла 1 по нагнетательному битумопроводу 3 в импактор 4, пред-
ставляющий собой цилиндрический сосуд, внутри которого находится
сетчатый фильтр 5 с мелкими отверстиями. Из фильтра битум попадает
МАШИНЫ ДЛЯ СТРОИТЕЛЬСТВА АСФАЛЬТОБЕТОННЫХ ПОКРЫТИЙ
271
в дозатор 6, а из него насосом 7 высокого давления нагнетается в распре-
делительные сопла 10, расположенные в мешалке 9. На соплах имеются
насадки, распыляющие битум. Отсчет количества битума, поступающего
в мешалку, учитывается по шкале 11. Излишек битума из импактора воз-
вращается по специальному битумопроводу 8 обратно в котел.
В настоящее время в практику строительства начинает внедряться
метод вибрационного перемешивания асфальтобетонных смесей. Как пока-
зали исследования и опыт эксплуатации вибросмесителей, при совместном
воздействии на асфальтобетонную смесь вибрации и принудительного
перемешивания резко повышается эффект перемешивания.
Интенсификации перемешивания способствует также увеличение вре-
мени перемешивания, скорости вращения лопастей и введение в смесь
поверхностно-активных веществ, понижающих поверхностное натяжение
Рис. 161. Схема установки с разбрызгиванием битума
на границе битум — минеральный материал, чем создаются условия для
более полного обволакивания битумом минерального материала. Вместе
с тем с увеличением времени перемешивания уменьшается производи-
тельность смесителя.
Помимо мероприятий по повышению качества смеси в настоящее
время ведутся большие теоретические и экспериментальные работы по
усовершенствованию конструкции смесителей, уменьшению металлоем-
кости и энергоемкости и повышению производительности труда при работе
на асфальтосмесителях. Развитие техники идет по пути повышения произ-
водительности смесителей за счет увеличения геометрических размеров,
создания компактных, мобильных, легко монтируемых и демонтируемых
машин и автоматизации управления.
Система автоматического управления на асфальтосмесителе должна
обеспечить:
1) точное дозирование минеральных и вяжущих материалов;
2) строгое и последовательное выполнение всех операций техноло-
гического процесса при разных составах асфальтобетона;
3) соблюдение температурного режима при сушке и перемешивании
материалов;
4) соблюдение требуемого времени перемешивания;
5) учет количества приготовленных замесов.
При автоматизации асфальтосмесителей широко используется элек-
тропневматическая система, при которой исполнительными элементами
служат пневмоцилиндры, управляемые электровоздушными клапанами.
Находит также применение электромеханическая система, разработанная
СоюздорНИИ, в которой в качестве исполнительных элементов исполь-
зованы электровинты.
272 МАШИНЫ И ОБОРУДОВАНИЕ ДЛЯ ДОРОЖНЫХ ПОКРЫТИЙ
На рис. 162 представлена схема автоматического управления сме-
сителем с электропневматической системой, разработанная ВНИИстрой-
дормашем. На пульте управления 1 расположены кнопки управления авто-
матической системой, дистанционная система регулирования технологи-
ческого процесса, дистанционная весовая головка 2, блок высокочастот-
ных электронных реле 11, световая сигнализация, переключатели бункеров
и количества замесов и кнопки звукового сигнала. Выключение всех
двигателей производится также с пульта управления машиниста.
Весовая головка учитывает весовое количество минеральных мате-
риалов. поступающих из четырехсекционного бункера. Она имеет пять
Рис. 162. Схема автоматического управления смесителем
стрелок, из которых четыре дозирующие, которые устанавливаются в соот-
ветствии с заданным составом смеси, а пятая — указывающая отдози-
рованное количество. Затвор каждой секции’бункера управляется пневмо-
цилиндром 5. Пневмоцилиндры используются также для поворота кранов
дозаторов поверхностно-активных веществ 6 и битума 7. Необходимое
количество битума устанавливается по линейке поплавкового устройства
в мерном баке путем соответствующего перемещения ртутного переклю-
чателя. При заполнении заданного объема битумом противовес поплавка
размыкает контакт ртутного выключателя. Дозатор поверхностно-актив-
ных веществ (петролатума) работает так же, как и дозатор битума. Для
управления пневмоцилиндрами предусмотрен блок электровоздушных
клапанов 10, включаемых соответствующими промежуточными реле.
Суммарный вес последовательно дозируемых порций минеральных
материалов учитывается циферблатной весовой головкой 4, соединенной
рычажной системой с весовым бункером. Передача сигналов поворота
стрелки весовой головки на аналогичную головку, размещенную на пульте
управления, осуществляется сельсинной связью, представляющей два
МАШИНЫ ДЛЯ СТРОИТЕЛЬСТВА АСФАЛЬТОБЕТОННЫХ ПОКРЫТИЙ
273
X
а.
274
МАШИНЫ И ОБОРУДОВАНИЕ ДЛЯ ДОРОЖНЫХ ПОКРЫТИЙ
синхронных электродвигателя. Продолжительность открытия весового
бункера, перемешивания в мешалке и открытия затвора 8 мешалки
обеспечивается командным электропневматическим 3 прибором КЭП-12,
имеющим электродвигатель с постоянным числом оборотов. При включен-
ном электродвигателе загорается сигнальная лампа. Питание сжатым возду-
хом пневмоцилиндров и пневмопобудителя для аэрации минерального по-
рошка осуществляется компрессорной установкой 9 производительностью
1 м3!мин и степенью сжатия до 7 атм.
При приготовлении асфальтобетона требуется выполнить, кроме основ-
ных технологических операций по приготовлению смеси, и ряд вспомога-
тельных операций, связанных с приготовлением и переработкой материа-
лов, составляющих асфальтобетонную смесь. Для этих целей сооружаются
специальные асфальтобетонные заводы. В состав асфальтобетонного завода
всегда входят цехи: битумный, смесительный, транспортный и складское
хозяйство. На ряде заводов имеются дополнительно дробильно-сортиро-
вочный цех и цех по приготовлению минерального порошка. В последнее
время на асфальтобетонных заводах организуются эмульсионные цехи.
На асфальтобетонном заводе могут устанавливаться один или несколько
асфальтосмесителей.
На рис. 163 показана типовая схема асфальтобетонного завода с двумя
смесителями производительностью 25—30 т/ч. На заводе есть также
эмульсионный цех. Территория завода занимает площадь 2—2,5 га.
Завод расположен у железнодорожной магистрали, по которой поступают
все исходные материалы. Вдоль железнодорожного пути размещены склады
материалов и битумохранилище. Смесители расположены параллельно
и на близком расстоянии друг от друга, что сокращает пути перемещения
материалов. Эмульсионный цех размещен на площадке между битумными
котлами и асфальтосмесителями. Это сокращает путь перемещения битума
из битумных котлов к эмульсионному оборудованию, а также — эмуль-
сии в мешалки.
Для внутризаводской транспортировки щебня и песка на крупных
заводах используются траншейные ленточные транспортеры, а для мине-
рального порошка — шнеки.
Битум и эмульсия транспортируются по трубам. Все работы на асфаль-
тобетонных заводах полностью механизированы, а основные операции
технологического процесса имеют дистанционное управление. Имеются
также полностью автоматизированные асфальтобетонные заводы. Вместе
с тем не полностью механизированы работы по разгрузке поступающих
по железной дороге или водным путям минеральных материалов. Не решен
также вопрос о механизации приема и подачи вязких эмульгаторов в эмуль-
сионный цех. Для этих работ требуется еще создавать эффективные сред-
ства механизации.
§ 41. ТЕОРИЯ АСФАЛЬТОБЕТОННЫХ СМЕСИТЕЛЕЙ
И ИХ РАСЧЕТ НА ПРОЧНОСТЬ
Основными агрегатами асфальтосмесителей, от которых зависит каче-
ство получаемой смеси, являются мешалка и сушильный барабан. Боль-
шую роль в получении качественной смеси и затрате энергии на переме-
шивание наряду с факторами, характеризующими смесь и ее компоненты
(вязкость битума, состав смеси, коэффициенты внешнего и внутреннего
трения минеральных частиц и др.), играют конструктивные и кинематиче-
ские параметры мешалки и режим перемешивания (продолжительность
прпрмешивания. последовательность поступления материалов и др.).
МАШИНЫ ДЛЯ СТРОИТЕЛЬСТВА АСФАЛЬТОБЕТОННЫХ ПОКРЫТИЙ
275
Оптимальные значения параметров мешалки должны обеспечить
возможность получения высококачественной смеси при наименьшем удель-
ном расходе энергии на единицу продукции. Проектируемая мешалка
должна вместе с тем обладать малой металлоемкостью, компактностью
и долговечностью.
Рассмотрим методику расчета сопротивлений, возникающих в мешалке
в процессе перемешивания, и потребной для преодоления этих сопротив-
лений мощности. В настоящее время нет общепринятой методики расчета
мешалок асфальтосмесителей. Причиной этого являются сложность про-
цесса перемешивания минеральных материалов с вяжущими и влияние
на этот процесс большого числа факторов. Можно отметить два пути, по
которым направлены исследования процесса перемешивания. По первому
из них в основу исследования положен учет небольшого числа факторов,
характеризующих процесс и позво-
ляющих, пользуясь законами меха-
ники, установить расчетную формулу
для требуемой мощности. Этот метод
расчета, как показала практика, при-
водит к завышенному результату.
По второму пути направлены ис-
следования, в основу которых поло-
жена гипотеза, . что сопротивления,
возникающие в процессе перемешива-
ния минеральных материалов с биту-
мом, близки по своей природе к со-
противлениям, имеющим место при движении твердого тела в вязкой
жидкости. Это позволяет при изучении процесса перемешивания исподы
зовать законы гидродинамики.
Примером расчета по первому способу может служить методика,
предложенная К. П. Северовым. По этой методике принимается, что на
частицу материала (рис. 164), находящуюся на лопасти, установленной
под углом а к плоскости вращения, действуют сила тяжести G и центро-
Q
бежная сила инерции Р, причем Р -= ~ <»2х кГ. В плоскости движения
частицы.под действием этих двух сил возникают следующие силы:
1) сила трения о днище корыта
= ^Gsin ф 4- -у- t')2x( f кГ; (VII. 1)
2) составляющая сила веса
W2 = G cos <р кГ;
3) сила трения о лопасть
= WJ cos а кГ;
4) сила трения, обусловленная действием веса,
= WJ cos q> ctg а кГ,
(VI 1.2)
(VI 1.3)
(VII.4)
где ф — угол поворота лопасти в рад;
со — угловая скорость вращения лопасти в Мсек;
f— коэффициент внешнего трения частицы о металл;
х — расстояние от частицы др оси вращения лопастей в м;
g — ускорение силы тяжести в м/сек2.
276
МАШИНЫ И ОБОРУДОВАНИЕ ДЛЯ ДОРОЖНЫХ ПОКРЫТИЙ
Суммарное сопротивление
F = + Wa — W2 — Wt =
= G (1 + f ctg a) ~~ + f sin ф — cos кГ. (VII.5)
Элементарная работа dA, затрачиваемая на преодоление суммар-
ного сопротивления при повороте лопасти на бесконечно малый угол <йр,
будет:
dA = (Fj + F3) Rdq — (F2 + FJ x dtp кГм.
(VI 1.6)
Полная работа при повороте лопасти на угол от ср = 0 до <р = л — ф
после подстановки значений сопротивлений и интегрирования будет;
А = G (1 + f ctg a) [fR (0,24ш2х + 1,71) —
— 0,71x] кГм,
(VI 1.7)
где R — радиус лопасти в м;
ф — угол выхода лопасти
Для расчета мощности с
Рис. 165. Схема к выводу формулы
для мощности
из зоны действия днища в рад.
учетом геометрических размеров лопасти
рекомендуется следующая формула:
N = 0,105nz6y sin a (1 + / ctg a) X
X l(/?3 — г3) (0,0009ffln2 — 0,24) +
+ 0,86/J? (R2 — r2) ] кГм/сек, (VII.8)
где N — мощность в кГм/сек-,
г — начальный радиус лопасти в лг,
b — ширина лопасти в м;
п — число оборотов лопастей в 1мин-,
z — число лопастей;
у — объемный вес материала в кПм3.
Расчет мощности по формуле (VII.8) для смесителя производитель-
ностью 25—30 m/ч при исходных данных г = 0,165 м\ Ь = 0,185 м;
R == 0,325 м; z = 16; п = 73 об/мин; а = 45°; / = 0,6 и у = 2200 кГ/м3
приводит к величине N = 18,8 кет, а для смесителя производительностью
8—10 т/ч при исходных данных г = 0,142 м; b = 0,17 м; R = 0,292 м;
z --= 16; п = 75 об!мин-, а. = 45°; f = 0,6 и у = 2200 кГ/м‘‘ — к величине
N = 12,0 кет.
Формула (VI 1.8) не в полной степени учитывает влияние свойств
вяжущего материала. По опытам И. П. Керова введение битума в смесь
снижает потребляемую мощность при перемешивании на 10—12%.
Если отождествить процесс движения лопасти при перемешивании
смеси с процессом движения пластины в вязкой жидкой среде, то формула
для мощности выводится следующим образом.
Выделим на лопасти, вращающейся с угловой скоростью <о, элемен-у
тарную площадку dF (рис. 165), причем
dF = b dx м2,
(VI 1.9)
где Ь — длина элементарной площадки, а dx — ее ширина.
Сопротивление, действующее на элементарную площадку, согласно
закону Ньютона будет равно
dP = с dFv2 кГ, (VII. 10)
где у — удельный вес жидкости в кГ!м3;
и — скорость вращения площадки в м/сек-,
с — коэффициент сопротивления среды.
МАЩИЙЫ ДЛЯ СТРОИТЕЛЬСТВА АСФАЛЬТОБЕТОННЫХ ПОКРЫТИЙ 277
Так как
v = хю м/сек, (VI 1.11)
то сопротивление будет равно
dP = с btaWdx кГ. (VII. 12)
Интегрируя выражение (VII. 12) в пределах от х = г до х = R, най-
дем сопротивление, действующее на всю лопасть:
R
Р = с -у bar J x2dx = с bar (R3 — г3) кГ. (VII. 13)
Г
Мощность, требуемая для вращения элементарной площадки будет
dN - dPv кГм/сек,
а для вращения всей лопасти
л л
N = | dPv = j с ~ ba>3x3dx == Г ~ кГм/сек. (VII. 14)
Если при этом учесть.число лопастей, равное 2z и к. п. д. передачи от
двигателя к мешалке, равный т], формула для мощности примет следующий
окончательный вид:
N = д. с. (VII. 15)
300§т| 4 1
По опытам С. А. Королько коэффициент с при приготовлении асфаль-
тобетонных смесей зависит от числа оборотов лопастей п. Для дорожных
мешалок при п = 60—70 об/мин с == 6 и при п = 70—80 об/мин с = 5.
Кроме рассмотренных выше двух способов расчета мощности можно
воспользоваться теорией анализа размерностей. Приняв, что на величину
мощности влияют параметры
d—диаметр окружности, описываемой лопастью, в м;
п — число оборотов лопасти в 1 сек;
р — плотность смеси в кГ-секРм2;
ц — «кажущаяся вязкость» (внутреннее трение) смеси в кГ-сек/м2,
можно написать:
(VI 1.16)
А в этой формуле выражена в кГм/сек.
Приравнивая показатели степени для одних и тех же основных единиц
(кГ, м, сек) в обеих частях уравнения (VII. 16), получим систему из трех
уравнений:
s + t = 1;
а — 4s — 2/ = 1;
2s + t — - —1. ,
(VII.17)
Выразим в этой системе уравнений все показатели степени через какой-
либо один из них, допустим а, тогда будем иметь:
а — 3 , 5 — а „ а -4- 1
5 2 ; ! > < Р 2 •
278 машины И ОБОРУДОВАНИЕ для ДОРОЖНЫХ ПОКРЫТИЙ
Подставляя эти значения в выражение (VII.16), получим
g-М а—3 5—а
N~—dan 2 р 2 |л 2 . (VII.18)
Введя в выражение (VII. 18) коэффициент пропорциональности А, получим
окончательное уравнение для мощности:
а4-1 а—3 5—а
N = Adan 2 р 2 ц 2 . (VII. 19)
В уравнении (VI 1.19) имеются две неизвестные величины: а и А, кото-
рые находятся опытным путем.
Для дорожных мешалок ширина лопасти принимается кратной ее
диаметру, а 4,56 и А = 150. Тогда уравнение (VII. 19) для одной пары
лопастей принимает вид:
N = 150 <Д'56п2’78р°’78рЛ22 кГм!сек. (VII.20)
Примерные значения показателей р и и приведены в табл. 28.
Таблица 28
Значения показателей плотности и внутреннего
трения для асфальтобетонных смесей
Виды смесей р, кГ•сек2/м* ц. к.Г-сек/м2
Сухие 160—120 1100—1200
С битумом .... 130—180 950—1000
Примечание, нистым смесям. Нижние пределы относятся к мелкозер-
Формула (VII.20) является полуэмпирической. Для ориентировочных
расчетов мощности можно воспользоваться следующими эмпирическими
формулами, составленными И. П. Кировым на основе обобщения данных
по большому количеству действующих асфальтосмесителей:
N = 0,048Q„ л. с. — для QM <Z 1400 кГ; (VII.21)
N = 40 + 0,024Q., л. с. — для QM >1400 кГ,
где Q,, — вес замеса в кГ. ,
Техническая производительность мешалки порционного действия,
находится по формуле ,
Лп = 4>т/Ч, (VII.22X
где QM — вес замеса в т; i
Т — время на приготовление одного замеса в ч.
Время Т зависит от продолжительности отдельных операций:
т = А+А±А (VII.23)
где (3 — время загрузки исходных материалов в мин;
tn — время перемешивания в мин;
te — время выгрузки готовой смеси в мин.
МДШЙНЫ: ДЛЯ СТРОИТЕЛЬСТВА АСФАЛЬТОБЕТОННЫХ ПОКРЫТИЙ 279
Для мешалки производительностью 12—15 m/ч при весе замеса
2,5—3,0 т продолжительность отдельных операций составляет t3 =
= 2—4 мин; tn = 5—6 мин; tg = 3—5 мин и общее время цикла Т —
= 10—15 мин =0,17—0,25 ч. Наименьшее время требуется при приготов-
лении крупно- и среднезернистых смесей, а наибольшее — при мелкозер-
нистой смеси.
Для мешалки непрерывного действия техническая производитель-
ность рассчитывается по аналогичной формуле:
Пн -- m/ч, (VII.24)
I п
где Q„ — вес материала в мешалке в т, определяемый по геометрической
емкости мешалки v и объемному весу у; QM = vy;
tn — время перемешивания в ч.
Так как емкость мешалки равна произведению площади поперечного
сечения F на длину I, формула для производительности может быть пред-
ставлена в следующем
виде:
Пн = Fsny т/ч, (VI 1.25)
где F — площадь попереч-
ного сечения ма-
териала в ме-
шалке в м2 (при
расчете прини-
мается равной гео-
метрическому се-
чению мешалки);
sn —скорость подачи
(перемещения) ма-
териалов в ме-
шалку в м/ч;
у — объемный вес сме-
си в т/м2.
Рис. 166. Графики для определения геометрических
размеров мешалки
Изменение скорости подачи достигается изменением шага винтовой
линии и скорости вращения лопастей. Если требуется рассчитать эксплуа-
тационную производительность асфальтосмесителя, нужно величину тех-
нической производительности умножить на коэффициент использования
во времени к„ = 0,9.
Рассмотрим основные параметры мешалок. Исходным параметром,
определяющим все основные элементы мешалки, является производитель-
ность, которая должна быть задана. По величине производительности,
пользуясь формулами (VII.22) и (VII.24), определяют вес замеса, а по весу
замеса QM — геометрическую емкость корпуса мешалки. Для мешалок пе-
риодического действия И. П. Керов рекомендует следующие эмпирические
формулы для определения длины L, ширины В и высоты Я:
L = 750 + 0,67QM мм;
В - 830 - 0,37Q, мм;
(VII.26)
(VI 1.27)
Н = 448 + 0,385QM мм.
(VI 1.28)
Эти формулы представлены в виде графиков на рис. 166. По этим
графикам также могут быть определены размеры корпуса мешалки в зави-
симости от веса замеса.
280
МАШИНЫ И ОБОРУДОВАНИЕ ДЛЯ ДОРОЖНЫХ ПОКРЫТИЙ
Мешалки изготавливаются двухвальными, обеспечивающими более
интенсивное перемешивание, чем одновальные. Валы во всех асфальтосме-
сителях вращаются в противоположные стороны.
К. П. Севров рекомендует пользоваться расчетными формулами,
в основу которых положен определяющий параметр 2? — наибольший
радиус лопасти.
Радиус лопасти R в зависимости от веса замеса QM находится из сле-
дующей зависимости:
r - (V1L29>
где у — объемный вес смеси в кГ/м3;
kn — коэффициент наполнения корыта смесью;
Q.v — вес замеса в кГ.
Длина корыта
L = 4,25 R м. (VI 1.30)
Размеры ширины Ьл и высоты h„ лопастей: Ьл = 0,422? м; (VII.31)
h, = 0,52? м. (VII. 32)
Расстояние между смежными парами лопастей (шаг) S = 0,752? м. (VI 1.33)
Число оборотов лопастей в 1 мин 45,3 д, 11. — —об/мин, V R (VII.34)
где R — радиус лопасти в м.
Число пар лопастей на обоих валах изменяется в интервале
z = 14-Г-20. (VII.35)
Для мешалки непрерывного действия М. В. Климец также рекомендует
выбирать все размеры в зависимости от радиуса лопасти R.
Величина R (рис. 167) в зависимости от веса замеса Q.u находится из
формулы
" у7 (1,21 - 1,41) У2КН М- (VII.36)
Расстояние между лопастными валами 2 = 1,50 2? м. Ширина корпуса мешалки В = 1 + 22? м. Высота части корпуса над лопастным валом h. = 1,352? м. (VI 1.37) (VI 1.38) (VI 1.39)
Общая высота корпуса Н = h + 2? = 2,35 2? м. (VI 1.40)
МАШИНЫ ДЛЯ СТРОИТЕЛЬСТВА АСФАЛЬТОБЕТОННЫХ ПОКРЫТИЙ 281
Длина корпуса находится из формулы
(VII.41)
где площадь смесительной камеры F определяется из зависимости
F = /?2 — 0,5 — sin 2<p)j м2. (VII.42)
Шаг лопастей
5 = ~ м. (VII.43)
В мешалках непрерывного действия геометрические размеры и кине-
матические элементы подбираются такими, чтобы наряду с заданной
производительностью было обеспечено требуемое время перемешивания
для получения качественной смеси. Это время зависит от свойств приготав-
ливаемой смеси.
Из деталей мешалки расчету и про-
верке на прочность подвергаются лопаст-
ные валы и рычаги лопастей.
Валы рассчитываются на сложную
деформацию при одновременном действии
изгибающего и крутящего моментов (см.
формулу (VI 1.50). Наиболее опасным яв-
ляется случай, когда между одной из ло-
пастей и стенкой корыта заклинится проч-
ный кусок щебня или посторонний пред-
мет.
Расчет рычагов лопастей производится
на максимальный изгибающий момент для
случая, когда большая часть крутящего
(~0,8 Мкр), передается на лопасть.
Рассмотрим методику расчета мощности, требуемой для привода су-
шильного барабана. Введем обозначения: Q6 — вес барабана и QM — вес
материала в барабане. Тогда, учитывая, что барабан опирается на четыре
ролика, нормальное давление на каждый ролик составит (рис. 168):
Р = <Ц + 0^ кГ
4 cos а
В
Рис. 167. Основные размеры ме-
шалки
момента, действующего на вал
причем
Q. - -f- кГ,
где L — длина барабана в м;
D — диаметр барабана в м;
Т— объемный вес материала в барабане в кПм3-,
а — угол наклона радиуса-вектора ролика к вертикали в град;
Р — коэффициент наполнения барабана материалом (Р = 0,3).
Сопротивление от трения бандажей барабана о ролики будет
w = (Q.6 + QM) ? г (VII.44)
1 4 г i cos ос lK ’ v
где гг — радиус ролика в м;
' fK — коэффициент трения качения (для стали fK = 0,02 .- 0,05) в см.
282
МАШИНЫ И ОБОРУДОВАНИЕ ДЛЯ ДОРОЖНЫХ ПОКРЫТИЙ
Сопротивление от трения скольжения в опорных подшипниках осей
роликов будет
IV2 = 4Р/ кГ,
(VII.45)
где г 2 — радиус подшипника в м;
f—коэффициент трения скольжения (f = 0,1).
Кроме рассмотренных двух сопротивлений необходимо учесть еще
сопротивление подъема материала ребордами при вращении барабана.
При подъеме материала вес его создает момент, противодействующий вра-
щению, и ц. т. материала переместится из положения С (рис. 168, а) в по-
ложение С\ (рис. 168, б), высота подъема ц. т. будет равна отрезку СС,.
Рис. 168. Схема сил, действующих на сушильный барабан:
а — положение материала на невращающемся барабане;
б — положение материала на вращающемся барабане
Сопротивление, возникающее в этом случае, находится из уравнения мо-
ментов сил относительно оси вращения барабана:
W3R = QMb, (VI 1.46)
где 2? — радиус барабана в м;
b — плечо силы веса материала относительно точки О в м.
Угол 9, на который поворачивается ц. т., принимается равным 45°.
При этом условии
Ь ^0,56/? м. (VII.47)
Следовательно,
IVз - 0,56Q,„ кГ. (VI 1.48)
Мощность, необходимая для вращения барабана, найдстся по фор-
муле ।
N6 = ——------------ v6 л. с., (VI1.49)
где Vb — окружная скорость барабана в м/сек.
т] — к. п. д. трансмиссии от двигателя к барабану.
Для сушильного барабана основными параметрами, подлежащими
расчету, являются объем, длина и диаметр. Из существующих методов
расчета объема барабана наиболее распространенным является метой
расчета по часовому напряжению по влаге, представляющему собою коли-
чество влаги в кГ, которое может быть выпарено в течение 1 ч. Величина
напряжения А имеет размерность кГ/м3-ч и находится опытным путем.'
МАШИНЫ ДЛЯ СТРОИТЕЛЬСТВА АСФАЛЬТОБЕТОННЫХ ПОКРЫТИЙ 283
При расчетах дорожных сушильных барабанов принимается А = 200-н
250 кГ/м3-ч. Объем сушильного барабана Vq находится по формуле
v6 = м3- (Vii.so)
где Wo — количество удаляемой из каменного материала влаги в кГ/ч-,
W — относительная влажность высушиваемого материала;
П — производительность барабана в кГ/ч.
Длина барабана Ьб определяется из условия обеспечения минималь-
ного времени, необходимого для просушки материала. Ось сушильного
барабана обычно устанавливается (рис. 169) под небольшим углом к гори-
зонту (а = 3—5°). При вращении барабана материал, поднятый лопастями,
падает по вертикали и при этом перемещается на расстояние
АВ = hcp tg а м,
где hcp — средняя высота подъе-
ма в м. 1
Введем обозначения: t—вре-
мя, необходимое для подогрева
материала (£ = 2 — 4 мин), т —
число падений частиц материала
за один оборот барабана (т = 2),
п — число оборотов барабана в
1 мин. Тогда длина барабана будет
равна
L5 = mhiptn tg а м. (VII.51)
Обычно hcp = Q,6D6, поэтому
можно найти только в случае, если
исключить D6 из формулы (VII.51),
бана п ввести окружную скорость:
Рис. 169. Схема перемещения материала в
барабане
по формуле (VII.51) длину барабана
будет известен его диаметр D6. Чтобы
можно вместо числа оборотов бара-
м/сек.
nDon
Vs ~ ““30~
Для сушильных барабанов v6 = 0,75—0,85 м/сек.
Таким образом, заменив в формуле (VI 1.51) п через v0 и hcp через Do,
получим
L6 = 5,7 mtv6 tg а м. (VII.52)
Диаметр сушильного барабана находится из выражения
су = -у— м/сек,
откуда
D6 = 1,14 1/ м.
f ‘*б
(VII.53)
В асфальтобетонных смесителях отношение диаметра сушильного
барабана к его длине находится обычно в пределах = 1/4 -е 1/7.
^б
Из деталей сушильного барабана на прочность рассчитываются кор-
пус барабана, бандажи и ролики. Зубчатый венец рассчитывается на проч-
ность зубьев. Неблагоприятными условиями работы корпуса является
случай, когда он загружен только на участке между бандажами и зубча-
тый венец находится посредине барабана.
284 МАШИНЫ И ОБОРУДОВАНИЕ ДЛЯ ДОРОЖНЫХ ПОКРЫТИЙ
Влиянием незагруженных концевых участков можно пренебречь.
Принимая нагрузку от веса материала QM равномерно распределенной'
по длине барабана L6, находим величину нагрузки, приходящейся на еди-
ницу длины с учетом веса барабана:
7 = кГ;СМ.
Нагрузка между опорными бандажами будет равна
Qi =
где Lo — расстояние между бандажами в см.
Максимальный изгибающий момент от этой нагрузки
М, = - q ~ кГ-см.
От веса зубчатого венца Qa изгибающий момент равен
М2 -= кГ-см.
Суммарный изгибающий момент
М„3 - 44, М2 кГ-см.
Крутящий момент, приложенный к барабану при его вращении, находится
по общеизвестной формуле
М,.„ = 71 620— кГ-см.
hP П ;
где V — мощность, требуемая для вращения барабана во время работы,
в л. с.; .
п — число оборотов барабана в 1 мин.
Расчетный момент с учетом одновременного действия изгибающего и
крутящего моментов равен
Мр = С),35М;э + 0,65 /ЛСТлС кГ-см. (VII.54) (
Момент сопротивления сечения барабана, имеющего форму кольца, нахот 1
дится по формуле
где D,-. — наружный диаметр барабана в см;
d6 — внутренний диаметр барабана в см;
— толщина стенки барабана в см.
Напряжение материала в стенке корпуса барабана определяется зави-
симостью
ст = A < R, кГ/см2, (VII.55)
где Re — допускаемое напряжение в кГ!см2.
Вычисленное по формуле (VI 1.55) напряжение ст получается незначитель-
ным (менее 150 кГ/см2) и всегда меньше допускаемого.
МАШИНЫ ДЛЯ СТРОИТЕЛЬСТВА АСФАЛЬТОБЕТОННЫХ ПОКРЫТИЙ 285
При расчете корпуса барабана нужно помимо прочности обеспечить
небольшой прогиб, определяющий нормальную работу опорных и ведущих
устройств барабана. Стрела прогиба, отнесенная к 1 пог. м длины барабана,
не должна быть более 1/3 мм.
Стрела прогиба для этого барабана находится по формуле
р 5 , QaA)
= "384 ЁГ 48Е/ СМ’
где Е — модуль упругости в кПсм2’,
/ — экваториальный момент инерции:
/ = 4 W-C$CM*.
Величина Е для стали при разной температуре Т° С характеризуется
следующими данными:
Т°, С........... 100 200 300 400
Е. кГ/см* 1 2 3.I 2 000 000 I 1 950 000 I 1 880 000 | 1 790 000
Общий прогиб на всю длину барабана в мм'.
10/о < 4- Ьо, (VII.56)
где Lo сказывается в м.
Если при расчете прогиб окажется большим, чем это предусмотрено
формулой (VI 1.56), нужно увеличить диаметр барабана D5.
Бандажи сушильного барабана являются одной из ответственных
деталей. От правильного выбора размеров и материала бандажей зависит
нормальная работа других деталей барабана и степень износа бандажей и
опорных роликов.
По степени связи между бандажом и барабаном различают три вида
крепления:
1) бандажи, скрепленные с барабаном в нескольких точках;
2) бандажи, скрепленные с барабаном по всей окружности;
3) бандажи, одетые на барабан свободно.
Третий вид крепления используется при медленно вращающихся
барабанах и возможном тепловом расширении их, как это имеет место в су-
шильных барабанах. Величина зазора между бандажом и корпусом бара-
бана при свободной посадке определяется по формуле
&D6 = а4 (t — t0) D6 м,
где осл — коэффициент линейного расширения материала;
t — наибольшая температура нагрева барабана;
ta — температура барабана во время монтажа.
Внутренний диаметр бандажа в этом случае должен быть
О0 > D + АО = О [ 1 4- a., (t — t0) ] м.
Бандажи, надетые свободно и воспринимающие нормальные нагрузки,
являются наиболее экономичными с точки зрения расхода металла.
В месте соприкосновения бандажа и ролика возникают контактные
напряжения (рис. 170). При цилиндрической форме этих деталей ширина
полосы смятия находится по формуле
26=4 |/р . -Д- см (VII.57)
286
МАШИНЫ И ОБОРУДОВАНИЕ ДЛЯ ДОРОЖНЫХ ПОКРЫТИЙ
и максимальное давление
- I-
где ру — удельная нагрузка на единицу длины цилиндра в кПсм\
Ег и Е.,— модули упругости цилиндров в кПсм2\
и — коэффициент Пуассона;
г и R — радиусы цилиндров в см.
Ролики изготавливаются обычно из более мягкого материала, чем
бандажи, чтобы обеспечить большую износостойкость наиболее дорогой
детали — бандажей, замена которых связана с большими трудностями.
Рис. 170. Схема распределе-
ния контактных напряжений
в бандаже и ролике
ления максимального изги-
бающего момента
Следует заметить, что и при одинаковом материале ролики вследствие более
быстрого вращения скорее изнашиваются.
Величина удельной нагрузки принимается в зависимости от скорости
вращения барабана. Практикой установлено, что для медленно вращаю-
щихся барабанов (2—3 об/мин) ру =~ 2000 кПсм и для быстро вращаю-
щихся, при бандажах из качественной стали (Ст. 5 или Ст. 6), —ру =
= 1000 кПсм. Максимальное давление р0 не должно превосходить следу-
ющей величины:
р0 < l,67adon кГ/см2. (VI1-59)
При расчетах принимаются следующие нормы допускаемых напряже-
ний оЙ0П : 4000 кГ/см2 — для стали Ст. 4; 5000 кПсм2 — для стали Ст. 5
и 6000 кПсм2 — для стали Ст. 6.
Для определения сечения бандажа необходимо знать величину макси-
мального изгибающего момента. Тогда необходимый момент сопротивления
F = -тлд см3. (VII.60)
а
По величине W в зависимости от профиля бандажа находится требуемое
сечение. Величина о принимается 1000 кГ/см2.
Максимальный изгибающий момент для различных случаев крепле-
ния бандажа рассчитывается по различным формулам. При выводе этих
формул принимается обычно, что к бандажу приложены силы симметрично
относительно вертикальной плоскости, проходящей через центр бандажа
(рис. 171). Поэтому рассматриваются силы, действующие на одну половину
МАШИНЫ ДЛЯ СТРОИТЕЛЬСТВА АСФАЛЬТОБЕТОННЫХ ПОКРЫТИЙ 287
бандажа, при этом к поверхностям сечения, образованным разрезом, прила-
гаются момент Ма и продольная сила эквивалентные силам, действо-
вавшим в сечении разреза в целой балке.
Порядок расчета рассмотрим на конкретном примере, когда барабан
радиусом R — 600 мм имеет два бандажа и на каждый из них приходится
вес Q = 3000 кГ. Барабан крепится к бандажу в шести точках (см. рис. 171),
расположенных на одинаковом расстоянии друг от друга. Число точек
крепления для половины бандажа т = 3. Угол между осью роликов и вер-
тикалью равен 30°. Реакция опорного ролика направлена по радиусу
бандажа в точке касания ролика с бандажом и величина ее
2 cos 30”'
3000 „
—— = - 1730 кГ.
2
(VI1.61)
В каждой точке крепления бандажа действует составляющая веса Р =
= Q/6 = 500 кГ, а в ключевом сечении Р/2 =~- 250 кГ.
Прежде чем найти интересующие нас моменты в любом сечении бан-
дажа, находим величины Л10 и по формулам:
_ 22L [т + (я_ р) tg р] ctg кГ.см-
А'о= [4 + (л - ₽) tg₽] кГ-
В нашем примере:
т = 3; 6 = = 60°; ~ =" 30°’’ ct£ 4“ = l’732; = 150° =
- 2,61 рад; tg 0 = —0,57; л — 0 = 0,53 рад7 (л — 0) tg 0 = —0,3;
cos 0 = —0,866 и, следовательно:
Мо 25 500 кГ-см;
No —96 кГ.
Выражения для определения момента в любом сечении бандажа будут
иметь вид:
0 < ср < 60°; М = Мо — N0R (1 — cos ф)-R sin ср кГ-см;
60°<ф<12.°; М = Мо — N0R(\ — cos ф) — ~ R sincp—
— PR (sincp—sin60°) кГ-см;
120° < ф < 150°;
Al = мо — R0R( 1 — cos ф)--4 sin ф —
— PR (sin ф — sin 60°) — PR (sin ф — sin 120°) кГ-см;
150° < ф < 180°;
М = А10 — Л'0Я(1 — созф)----7?sinф —
— PR (sin ф — sin 60°) — PR (sin ф — sin 120°) —
— TR sin (Ф—150°) кГ-см.
288 МАШИНЫ И ОБОРУДОВАНИЕ ДЛЯ ДОРОЖНЫХ ПОКРЫТИЙ
Чтобы найти величину максимального изгибающего момента Mmax,
нужно по этим формулам найти момент для ряда сечений при ф = 10°, 20°,
30° и т. д. и принять наибольшую из полученных величин.
В нашем примере при <р = 150° (sin 150° = 0,5; cos 150° = —0,867)
величина Л1тах будет равна Л4тах = 25 500—250-120-0,5 — 96-120Х
X 1,867 — 500-120 (0,5 — 0,867) — 500-120 (0,5 — 0,867) =- 33 050 кГ-см.
Если принять о = 1000 кПсм?, необходимый момент сопротивления
IE = 33 см'3. По этому моменту сопротивления подбираются профиль и
размеры балки.
Ширина бандажа
Ь = — см, (VII.62)
Ру
где ру — удельное давление на единицу длины барабана в кПсм,.
При прямоугольном сечении балки имеем
IE = -^- см2, (VII.63)
откуда высота балки
h = I см- (V1L64>
Проверку бандажа на смятие можно не производить, учитывая малую ве-
личину реакции роликов Т.
Диаметр опорных роликов d находится по эмпирическим формулам:
для стальных роликов
d = (15х‘20) слг;
для чугунных роликов
см’ (VIL65)
где Т — реакция в кГ;
— ширина ролика в см.
Ширина ролика принимается на 2—3 см больше ширины бандажа.
§ 42. ОСНОВЫ ТЕПЛОВЫХ РАСЧЕТОВ МАШИН И ОБОРУДОВАНИЯ
ДЛЯ ПОСТРОЙКИ ДОРОГ С ПРИМЕНЕНИЕМ ОРГАНИЧЕСКИХ
ВЯЖУЩИХ МАТЕРИАЛОВ
При строительстве усовершенствованных дорожных покрытий ши-
роко используются вяжущие материалы органического происхождения
(битумы, каменноугольные дегти, сланцевое масло, древесная смола, бар-
дяной концентрат и др.). Большинство этих материалов вследствие боль-
шой вязкости не могут применяться без предварительного разогрева до
требуемой температуры. Некоторые технологические процессы, как при-
готовление горячих и теплых смесей из минеральных материалов с органи-
ческими вяжущими, приготовление эмульсий и др., требуют соблюдений
определенного теплового режима на всех стадиях производства. При при-
готовлении асфальтобетонных смесей приходится разогревать не только
битум, но и производить сушку и подогрев каменного материала. В каче-
стве теплообменников используются сушильные барабаны, змеевики (в кот-
лах, хранилищах, резервуарах, мешалках) и обогревательные рубашки
(в насосах, гомогенизаторах, мешалках, дозаторах и т. д.).
МАШИНЫ ДЛЯ СТРОИТЕЛЬСТВА АСФАЛЬТОБЕТОННЫХ ПОКРЫТИЙ 289
Теплоносителем служат водяной пар, газы от сжигания жидкого и
твердого топлива, горячая вода, соляровое масло и электрический ток.
Главной задачей теплотехнических расчетов дорожных машин явля-
ется расчет требуемого количества тепла для данного процесса и на основе
этого подбор параметров оборудования. Расчет должен обеспечить получе-
ние высокого технологического к. п. д. за счет уменьшения тепловых по-
терь и рационального использования топлива и тепловой энергии.
Под технологическим коэффициентом т],„ понимается доля тепла, ис-
пользуемая для технологических целей (подогрев, сушка):
где Q, — количество тепла, затраченного на технологический процесс,
в ккал!ч-,
Qi — количество тепла, подведенного к установке, в ккал!ч.
Сушильные барабаны. Количество тепла, выделяющегося при полном
сгорании 1 кГ топлива, называется высшей теплотой сгорания Qe и нахо-
дится по формуле Д. И. Менделеева:
(?в = 81СР + 300Др — 26 (0р— 8₽) ккал!кг-, (VII.66)
здесь в правой части приведены составляющие рабочей массы твердого
или жидкого топлива: Ср — углерод, Нр — водород, 0р — кислород и
Sp — сера.
Практически часть тепла уносится с водяным паром, поэтому вводится
условная характеристика тепла — низшая теплота сгорания Q^:
Qh = Qb~ QgH2o ккал!кг, (VII.67)
где g = 9НР — Wp — вес водяного пара в кг, образующегося при сгора-
нии 100 кг топлива, здесь Wp — вес воды в кг.
Для мазута Qh = 9800 ккал!кг.
Для возможности сравнения разных видов топлива по их теплотвор-
ной способности вводят понятие «условное топливо», т. е. такое топливо,
которое при сгорании выделяет 7000 ккал!ч. Количество воздуха в кг,
необходимое для сжигания 1 кг топлива:
Lm = 0,115СР Д 0,346Яр + 0,043(Sp — Ор) кг/кг. (VII.68)
Для полного сгорания топлива требуется некоторый избыток воз'
духа. Под коэффициентом избытка воздуха понимается отношение
(VII.69)
где Ьф — фактическое количество воздуха.
В расчетах принимается аиз = 1,2. Количество пара IV^, необходи-
мое для распыления 1 кг жидкого топлива, находится по формуле
№ф = кг кг,
где i — теплосодержание 1 кг пара перед форсункой в ккал/кг (находится
по таблицам теплотехнических справочников в зависимости от
давления).
10 н. я. Хархута и др.
290
МАШИНЫ И ОБОРУДОВАНИЕ ДЛЯ ДОРОЖНЫХ ПОКРЫТИЙ
При тепловом расчете сушильного барабана с противоточным нагре-
вом барабан условно можно разделить на три зоны (рис. 172): зону подо-
грева материала I, зону испарения влаги из материала II и зону нагрева
материала до требуемой температуры III. Количество требуемого за 1 ч
работы тепла находится для каждой зоны следующим образом.
В зоне I материал нагревается от начальной температуры О до тем-
пературы (2, при которой происходит интенсивное испарение влаги (О =
= 100° С).
Количество тепла, необходимое для нагрева каменного материала:
Qi схПб (С — Q) ккал/ч,
где с,. — удельная теплоемкость каменного материала, см —
= 0,2 ккал!кг -град;
Пб — производительность сушильного барабана в кг/ч.
Минеральный
материал
tyx t? hJ
I II Ш
Q 1г tz i
i
Горячие
^гозы
3
Рис. 172. Схема теплового процесса в сушиль-
ном барабане
WM — влажность каменного материала в
В этой же зоне, в том
же интервале изменения тем-
ператур, происходит нагрев
влаги, находящейся в камен-
ном материале. Необходимое
для этого количество тепла
Qi = ceWMn6 (/2 — Q) ккал/ч,
где св— удельная теплоем-
кость воды; св =
= 1 ккал/кг -град-,
Суммарное количество тепла, расходуемого в зоне I:
Qi = Qi + Qi ккал/ч.
В зоне II происходит испарение влаги из каменного материала, при
этом температура материала не изменяется и остается равной /2. Коли-
чество расходуемого на испарение влаги тепла:
Qu = WMn6re ккал/ч,
где г6 — скрытая теплота парообразования; при t2 = 100° С; гв =
= 542 кал/кг.
Кроме этого, в зоне II происходит нагрев паров воды. Затрачиваемое на
это тепло равно
Qu = cnW.Jl6 (Q — /2) ккал/ч,
где с„ — удельная теплоемкость водяного пара; сп = 0,46 ккал/кг-град’,
Г—температура пара, уходящего из барабана с горячими газами,
в СС.
Общее количество тепла, расходуемое в зоне II:
Qu = Qu + Qii ккал/ч.
В зоне III высушенный каменный материал нагревается от темпе-
ратуры Т2 до рабочей температуры Q. Требуемое для этого количество
тепла:
Qin = cMIl6{t3 — t2) ккал/ч.
Общее количество тепла на подогрев влажного каменного материала во
всех зонах сушильного барабана:
Q = Qi + Qu + Qin ккал/ч.
МАШИНЫ ДЛЯ СТРОИТЕЛЬСТВА АСФАЛЬТОБЕТОННЫХ ПОКРЫТИЙ 291
Кроме полезно используемого тепла Q в сушильном барабане имеются
потери тепла в окружающую среду и потери с уходящими газами. Потери
тепла в окружающую среду находятся по формуле
Q„ = k6F6 (t6 — 4) ккал/ч,
где F6 — наружная поверхность барабана, соприкасающаяся с внешней
средой в м2;
t0 — температура барабана в °C; если барабан без изоляции 16 =
= 120-^-210° С; при наличии изоляции t6—- 100-е 120° С;
te — температура наружного воздуха в °C;
k6 — коэффициент теплопередачи через стенку барабана в
ккал/м2ч•град, который находится по эмпирической формуле
/гб „------------------ -----------------------.
io 4g
В расчетах можно принять t6 ~ 150е С; tg = 20° С, тогда k6 =
-= 20 ккал/м2-ч-град.
Потери тепла с уходящими газами рассчитываются по формуле
Qyx = (gKi + g2c2 -!-.•+ gncn) tyxB ккал/ч,
где g1; g2, . . gn — веса составных частей продуктов сгорания 1 кг
топлива в кг/кг;
со сг> - - сп — удельные теплоемкости составных частей продук-
тов сгорания в ккал/кг-град',
В — расход топлива в кг/ч.
Значения g( и сг берутся из теплотехнических справочников.
С учетом этих потерь количество тепла, затрачиваемое за 1 ч работы
сушильного барабана, равно
<2б = Qi + Qu + Qin + Qn + QyX ккал/ч. (VII.70)
Это количество тепла необходимо получить при сгорании топлива, пода-
ваемого в форсунку сушильного барабана. Для расчета требуемого коли-
чества топлива берется низшая теплота сгорания по формуле (VII.67).
Рассмотрим порядок расчета температуры горячих газов в разных
зонах сушильного барабана.
Количество тепла, отдаваемое продуктами сгорания в сушильном
барабане при охлаждении их на 1°, уменьшится на величину
q0 — , — ккал/ч-град,
/ г /ух
где t, — температура в топке; t. — 1300 : 1600° С;
tux — температура уходящих газов.
Перепад температур в зоне III будет
М = J11L ° с,
Чо
и температура нагрева у входа материала в зону II будет
/з — /'2 — &/•
Из уравнения теплового баланса в зоне II
<7о (4 — /':) = WMn5r* 4- (4 — /2)
292
МАШИНЫ И ОБОРУДОВАНИЕ ДЛЯ ДОРОЖНЫХ ПОКРЫТИЙ
находим температуру t2 у входа материала в зону I:
__ ^3 м^б
9 о 4" сп^мП6
В зоне 1 уравнение теплового баланса выражается формулой
7о ~ ^л) + cnWMn6 (t2 - tyx) == Q1(
откуда находим
, _ Ч (?0 + cnVnni) ~ *?! ор
ух~ да^с,г№мПб
Чем ниже температура уходящих газов, тем эффективнее используется
тепло в сушильном барабане. В современных сушильных барабанах tyx <
< 200° С. Размеры топки сушильного барабана находятся по результатам
теплового расчета, приведенным выше. Количество воздуха, поступающего
в топку в течение 1 ч, равно
Veo3d = v<i>B м31ч,
где Уф — объемный расход воздуха на сжигание 1 кг топлива в м3/кг;
В — расход горючего в кг/ч.
По этой величине находится площадь поперечного сечения топки
где и2 — скорость воздуха в горловине топки; = 2н-3 м/сек.
Так как топка имеет цилиндрическую форму, диаметр ее Dm будет
равен
Dm = = У -Qjgg м.
Объем топочного пространства
где рт. н — тепловое напряжение топочного пространства в ккал/м3-ч;
рт. н = 800 000ч-1 200 000 ккал/м3-ч = 0,8-4-1,2 Гкал/мЛ-ч\
Qh — низшая теплота сгорания в ккал/кг.
Чтобы найти длину топки 1т, необходимо учесть, что объем топоч-
ного пространства Vm. п состоит из собственного объема топки Утги части
объема сушильного барабана V?,, примыкающей к топке. Длина этой части
барабана равна примерно 1/3 длины всего барабана.
Таким образом,
Vm = Vm.n-V6M3-
4
Потеря тепла топкой в окружающую среду составляет
Qn. т ~ kmFт (Ч ^в) ККЛл!ч,
где Fm — поверхность топки в м2;
/г—температура топки в °C; t. = 1300-ь 1600° С;
te — температура воздуха в °C;
km—коэффициент теплопередачи в ккал/м2•чград.
(VII.71)
к стенке
стенки 04 =
МАШИНЫ ДЛЯ СТРОИТЕЛЬСТВА АСФАЛЬТОБЕТОННЫХ ПОКРЫТИЙ 293
Если топка имеет трехслойную изоляцию и металлический кожух, то
/г ____________________________!___________
СС1 Ах ^3 ^2
где й] — коэффициент теплоотдачи от газов
в ккал/м2-ч-град; в случае кирпичной
= 9ч-10 ккал!м2 - ч-град',
6Х; 62; 63 — толщины изоляционных слоев в м;
X,,; Х3 — коэффициенты теплопроводности изоляционных слоев
в ккал!м • ч-град; для асбеста А = 0,16ч-0,17 ккал!м-чх
хград', для стеклянной ваты л = 0,083 ккал! м-ч-град',
а 2 — коэффициент теплоотдачи от металлического кожуха
к воздуху; а2 = 4,6 ккал!м2 ч•град.
Теплообменники. Для подогрева жидкостей используются змеевики
и обогревательные рубашки.
Змеевики являются одним из простейших теплообменных
устройств и представляют собой прямые трубы, соединенные коленами,
или спирально согнутую трубу, витки которой расположены по винтовой
линии. Недостатком змеевиков является большая их длина и накаплива-
ние в нижней части конденсата, который ухудшает теплообмен. Давле-
ние пара в змеевиках — 3—5 атм. Длина одного витка
^вит == h3M Zll)SM М,
где D3M — диаметр витка змеевика в ж;
h3M — шаг змеевика в м.
Общая длина змеевика L при количестве витков пзм будет равна
L ~ Пзм^вит ~ иВзмПзм = —j М,
изм
где F3M — поверхность нагрева в м2\
(F., — наружный диаметр трубы змеевика в м.
Уравнение теплопередачи для змеевика:
Q — зм (/ср Fp) ккал!ч,
где tcp — средняя температура пара, равная среднеарифметической тем-
пературе пара и конденсата, в °C;
tcp — средняя температура обогреваемой жидкости в °C;
k3M— коэффициент теплопередачи в ккал!м2 • ч • град.
' а1 ! , (VII.72)
‘ А, 1 а.;
где — коэффициент теплоотдачи от насыщенного пара к трубам;
cXi = 10 000 ккал!м2 - ч-град',
сс2 — коэффициент теплоотдачи от труб к жидкости; для битума
при tcp = 10ч-110° С а., = 74,7 и при i'cp = 110ч- 150 е С а2 =
= 83,5 ккал!м2 -ч - град',
6 — толщина стенки в м; обычно 6 = 0,004 м\
X — коэффициент теплопроводности; 2. = 40ч-50 ккал! м-ч-град.
Из уравнения теплопередачи находим
м2.
k3M (tcp - tcp)
294 МАШИНЫ И ОБОРУДОВАНИЕ ДЛЯ ДОРОЖНЫХ ПОКРЫТИЙ
Обогревательные рубашки. Такие теплообменники
применяются большей частью в тех случаях, когда внутри аппарата не-
возможно установить змеевики. Рубашка представляет собою двойную
стенку, во внутреннюю полость которой подается пар или горячая жид-
кость. Высота рубашки должна быть не менее высоты уровня нагреваемой
жидкости в аппарате. При расчете обогревательных рубашек должны быть
заданы количество нагреваемой жидкости, ее начальная и конечная тем-
пературы и поверхность рубашки. Расчету подлежат время хр нагрева
жидкости до заданной температуры и коэффициент теплопередачи k.
Время г,, равно
хр kF^Kt~ ‘l’ (VII.73)
где — средняя разность температур (средний температурный напор)
в град;
Fp — поверхность теплообмена в м2;
k — коэффициент теплопередачи, который находится по формуле,
аналогичной (VII.72).
При этом
А/ 9'-9’ 6'
Ыср =----2--’ если ОГ с 2;
9'-9’ 9' о
i\tCp ---д—, если > 2,
lgV
где 0' — максимальная разность температур пара и нагреваемой жидкости
(в месте поступления пара);
9" — минимальная разность температур (в месте выхода пара).
Обогревательные рубашки с давлением до 16 атм и температурой
нагрева до 200° С изготовляются из стали марок Ст.2 и Ст.З.
Гудронаторы. Тепловой расчет гудронаторов сводится к решению
двух задач: 1) расчету теплоизоляции поверхности цистерны гудронатора,
обеспечивающей минимальную потерю тепла битумом; 2) расчету отопи-
тельной системы, обеспечивающей нагрев битума в цистерне гудронатора
до заданной температуры за определенное время.
При расчете теплоизоляции поверхности цистерны принимают, что
при температуре наружного воздуха te = 10° С температура битума tx
понизится в течение 1 ч до температуры С,.
Тогда количество тепла, отдаваемое битумом, будет равно
Q = g6c6 (tx — С) ккал.ч, (VII.74)
где g6 — вес битума в кг;
сб—удельная теплоемкость битума; при температуре 150—180' С
сб 0,454-0,54 ккал1кг-град.
Это тепло проходит через поверхность цистерны, поэтому можно написать:
Q = kFu (t6 — te) ккал!ч, (VII.75)
где t6 — средняя температура битума в СС; t5 = tl +;
F,( — поверхность цистерны в м2; Fч = F6 -ф 2Fдн.
Боковая поверхность при эллиптической форме цистерны
Fo = лЛ j/ 2 (а2 + t>2) - м2,
МАШИНЫ ДЛЯ СТРОИТЕЛЬСТВА АСФАЛЬТОБЕТОННЫХ ПОКРЫТИЙ
295
где L — длина цистерны в м;
а и Ь — полуоси эллипса в м;
FdH — площадь днища в м2; F Эн = лаЬ;
k— коэффициент теплопередачи в ккал/м2•чград
Из последнего выражения (VII.75) находим
k =____« — .
F« (td - te)
С другой стороны, при многослойной стенке по аналоги!
(VII.71) можно написать:
____________! =___2____
1 61 I 62 63 1_Fц (ts td)
П1 + + и + а,
откуда находим толщину изоляционного слоя 62;
где «j — коэффициент теплоотдачи от битума к стенке; аг —
= 83,5 ккал/м2-ч-град;
6j — толщина металлической стенки цистерны; = 0,004 лг,
— коэффициент теплопроводности стали; = 40 --//>/) ккал/м- ч-град-,
б2 — искомая толщина изоляционного слоя в м;
— коэффициент теплопроводности искомого изоляционного слоя,
зависящий от рода материала: для асбеста Х2 = 0,16-э-
н-0,17 ккал/м-ч-град; для стеклянной ваты /. 2 =
= 0,6*38 ккал/м-ч-град;
63 — толщина стенки кожуха; 63 = 0,001—0,002 м;
Z3 — коэффициент теплопроводности стали; Х3 =
= 40—50 ккал/м-ч-град;
и2 — коэффициент теплоотдачи от металлического кожуха к воздуху.
Из этого уравнения находим толщину изоляционного слоя 62.
Коэффициент теплоотдачи от металлического кожуха к воздуху зави-
сит от скорости движения цистерны vu и находится по следующей эмпи-
рической формуле:
^0,805
а, = 3,645 ккал/м2-ч-град, (VII.78)
где Оц — средний диаметр цистерны в м;
сц — скорость движения цистерны, равная 4—5 м/сек.
При расчете отопительной системы, состоящей из жаровых труб,
принимают, что битум, находящийся в цистерне гудронатора, должен
нагреться от температуры (примерно 120° С) до температуры t2 (не
более 180° С) за 0,5 ч (при емкости цистерны до 10 000 л) или за 1 ч (при
емкости цистерны более 10 000 л).
Количество тепла Q, необходимое для нагрева битума в коли-
честве g0 кг за 0,5 ч при указанной разности температур, равно
Q = ёбСб(/^ — Л) ккал,
где удельная теплоемкость битума сб = 0,5 ккал/кг-град. При нагреве
за 1 ч потребуется в два раза больше тепла (2Q). В случае использования
для подогрева нефтяных форсунок имеют место следующие потери тепла
(по опытным данным):
а) от химической неполноты сгорания q1 = 2д-3%;
б) от механической неполноты сгорания q2 = 5%;
в) от лучеиспускания бака q3 = 6н-8%;
г) с уходящими газами qt = 15%.
(VII.76)
с формулой
(VII.77)
296 МАШИНЫ И ОБОРУДОВАНИЕ ДЛЯ ДОРОЖНЫХ ПОКРЫТИЙ
Общая сумма потерь составит в процентах
Qn — Qi + <72 4~ "Т Я*
и в калориях
^пУн !
Яп. к = ~7qq- ккал!кг,
где Qh находится по формуле (VII.64).
Следовательно, полезно используемое тепло при сгорании 1 кг топ-
лива на подогрев битума будет
„р (100 — qn)
Япол = Qh 3—100 ккал. кг.
Часовой расход нефти составит
В = кг/ч.
Я пол
Количество воздуха, требуемое для сжигания топлива, находится по фор-
муле (VI 1.68).
Температура горения топлива 1г может быть найдена из следующего
выражения
Qh Яп. к 4~ Qe ~Ь Qm —
= teiC + g& ч- • • • + gncn) ts = ts 2 giCi,
i
где Qe — теплота, внесенная в топку 1 кг воздуха, в ккал!кг-,
Qm — теплота, внесенная 1 кг топлива, в ккал!кг\
gi — веса составных частей продуктов сгорания 1 кг топлива в кг!кг\
ct — удельные теплоемкости этих продуктов.
В этой формуле значения и су берутся из теплотехнических спра-
вочников, a Q„ и Qm определяются по формулам:
Qa = И Qm =
где св и tg—удельная теплоемкость и температура воздуха;
с,п и tm — удельная теплоемкость и температура топлива;
<хиз — коэффициент избытка воздуха.
Таким образом,
t Яп. к аизс</в ' cmQi
1г п •
2 s/Ci
1
Зная температуру горения, можно найти необходимую поверхность жаро-
вых труб по формуле
В 2 gici
FmP = -v- Mi’ <VIL79)
где i6 — средняя температура битума в °C;
tyx— температура уходящих газов; tyx = 300ч-350° С;
k — коэффициент теплопередачи от жаровых труб к битуму
в ккал!м2 - ч-град-.
k = —-----, (VII .80)
ах + X аа
МАШИНЫ ДЛЯ СТРОИТЕЛЬСТВА АСФАЛЬТОБЕТОННЫХ ПОКРЫТИИ 297
здесь «1 — коэффициент теплоотдачи от горячих газов к железу; сс1 =
= 20ч-60 ккал/м2-ч-град;
6 — толщина стенок жаровых труб; 6 = 0,0005 м;
7 — коэффициент теплопроводности железа; X = 40ч-
ч- 50 ккал/м • ч град',
а2 — коэффициент теплоотдачи от железа к битуму; а2 =
= 83,5 ккал/м2-ч-град.
Задавшись диаметром труб, можно по формуле (VI 1.79) определить их
длину.
При расчете геометрической емкости цистерны нужно учесть коэф-
фициент расширения битума, равный 0,0017.
§ 43. УКЛАДЧИКИ АСФАЛЬТОБЕТОННОЙ СМЕСИ
Асфальтоукладчики предназначены для приема асфальтобетонных
или черных смесей из транспортных средств, распределения по дорож-
ному основанию и предварительного их уплотнения. Смеси должны рас-
пределяться слоем заданной толщины. Кроме того, должен быть выдержан
соответствующий поперечный и продольный профиль дорожного
покрытия.
По принципу перемещения асфальтоукладчики делятся на прицеп-
ные и самоходные. Прицепные укладчики перемещаются за счет тягового
или толкающего усилия автомобиля-самосвала и имеют небольшую про-
изводительность, пониженное качество выполняемых работ и приме-
няются только при небольших объемах работ (преимущественно ремонт-
ных). Самоходные укладчики могут иметь гусеничный, пневмоколесный
или колесногусеничный ход. Иногда они выполняются на специальном
гусеничном ходу.
По характеру воздействия на смесь укладчики асфальтобетонной
смеси подразделяются на машины с уплотняющим органом или без уплот-
няющего органа. В качестве уплотняющего органа наибольшее распро-
странение получили трамбующий и вибрационный брусья. По типу при-
емного устройства для укладываемой смеси различают асфальтоуклад-
чики с приемным бункером и без него. В качестве разравнивающего
органа применяются шнеки и разравнивающие брусья.
Основным параметром асфальтоукладчика является его производи-
тельность, выраженная весом укладываемого за 1 ч материала. В нашей
стране выпускаются два типоразмера самоходных асфальтоукладчиков на
гусеничном ходу, снабженных приемным бункером с регулирующей
заслонкой, уплотняющим и выглаживающим брусьями. Тяжелый асфаль-
тоукладчик производительностью 100—200 т/ч (рис. 173) предназначен
для больших объемов работ при повышенных требованиях к их качеству,
легкий— производительностью 25—50 т/ч— служит для производства
небольших объемов работ при пониженных требованиях к их качеству.
Технологическая схема легкого асфальтоукладчика изображена на
рис. 174, а. Смесь из автосамосвала 1, перемещаемого во время выгрузки
толкающим усилием роликов 2, выгружается в приемный бункер. Из бун-
кера смесь через разгрузочное отверстие 4 в дне бункера поступает на
полотно дороги. Равномерность поступления смеси регулируется пово-
ротом днища бункера 3 и положением заслонки 5, устанавливаемой на
различной высоте при помощи регулировочных винтов 6. Уплотняющий 7
и выглаживающий 8 брусья производят предварительное уплотнение
смеси. Кроме того, уплотняющий брус окончательно разравнивает смесь
и удаляет ее излишек.
298
МАШИНЫ И ОБОРУДОВАНИЕ ДЛЯ ДОРОЖНЫХ ПОКРЫТИЙ
Рис. 173. Тяжелый асфальтоукладчик производительностью 100 —200 ш,
МАШИНЫ ДЛЯ СТРОИТЕЛЬСТВА АСФАЛЬТОБЕТОННЫХ ПОКРЫТИЙ
299
Технологическая схема тяжелого асфальтоукладчика, представленная
на рис. 174, б, отличается от предыдущей схемы наличием скребкового
питателя 12 и распределительного шнека 10. Основные рабочие органы —
уплотняющий брус 7 и выглаживающая плита 8 — установлены на несу-
щей раме 9, которая шарниром И связана с гусеничной тележкой уклад-
чика. Второй опорой несущей рамы служит выглаживающая плита 8.
Шарнирное крепление рамы рабочих органов компенсирует некоторые
перекосы основной рамы при движении по неровностям основания.
Выглаживающая плита по длине разделена на две части (рис. 175),
соединенные внизу шарниром
мощью этих механизмов
можно получить плоский го-
ризонтальный, односкатный
или двухскатный профили.
Винтами 3 поднимаются или
опускаются края выглажи-
вающей плиты, благодаря
чему производится регули-
ровка толщины укладывае-
мого слоя смеси по всей ши-
рине укладываемой полосы.
Схемы сил, действующих
на асфальтоукладчик со сто-
роны уплотняемой среды,
даны на рис. 176. При дви-
жении машины рабочая по-
верхность выглаживающей
плиты скользит по покры-
тию, образуя угол атаки а
(рис. 176, а). Для задан-
ной толщины укладываемого
слоя h 2 величина угла атаки
определяется равновесием
несущей рамы рабочих органов. При движении укладчика на раму дей-
ствует ее сила тяжести G, равнодействующая нормального давления
смеси на выглаживающую плиту V и сила трения плиты о смесь F.
Сумма моментов всех внешних сил относительно точки О (точка шар-
нирного крепления рамы рабочих органов к основной раме) при устано-
вившемся равновесном положении (см. рис. Г76, а) равна
GlT — A73cos (а — у) ф- Flz sin (а — у) = О, (VII.81)
где у — угол наклона линии ОВ к горизонту.
Если р — угол трения плиты при ее движении по смеси, то сила
трения
F = Vtgp. (VII.82)
После преобразований выражение (VII.81) примет вид:
д? = Дк------. (VII .83)
/г cos (р — у 4- а)
При движении плиты смесь уплотняется и толщина укладываемого
слоя уменьшается с h3 до /г2 (рис. 176, б). Нормальное давление pt со сто-
роны смеси на выглаживающую плиту зависит от степени предваритель-
300
МАШИНЫ и ОБОРУДОВАНИЕ ДЛЯ ДОРОЖНЫХ ПОКРЫТИЙ
Рис. 175. Схемы регулирования поперечного профиля
укладываемого слоя смеси: а — горизонтальный плоский;
б— наклонный плоский; в—двухскатный
Рис. 176. Схемы сил, действующих со стороны уплотняемой среды: а — на раму ра-
бочих органов асфальтоукладчика; б — на выглаживающую плиту
МАШИНЫ ДЛЯ СТРОИТЕЛЬСТВА асфальтобетонных покрытий
301
ного уплотнения и увеличивается по мере уменьшения толщины уплот-
няемого слоя под плитой. В первом приближении принимается линейный
закон распределения нормальных давлений. В этом случае давление
в любой точке под плитой
Pi = P1 + K^-, (VII .84)
где Pt — давление под передней кромкой плиты;
A/t — деформация укладываемого слоя смеси;
к — коэффициент, определяющий зависимость между приращением
давления и относительным уплотнением.
Максимальное давление под задней кромкой плиты
р2=Р1 + к^=^-. (VII.85)
При угле а наклона плиты к горизонту
/i3 h2 + b sina, (VII.86)
где Ь — ширина плиты.
Тогда выражение (VI 1.85) приводится к виду:
. Ь SIP ОС /МП О"7\
р, = р, + к т—п—.----• (VII .87)
Суммарная реакция уплотняемой среды на выглаживающую плиту
N = £1+Дд bL=(p + — 'j bL, (VII.88)
2 \ 2 /г2 + b sin а ) ' '
где L — длина плиты.
Уравнением равновесия плиты будет служить равенство выраже-
ний (VII.83) и (VII.88):
/ , кЬ sin а \ Gl, cosp ,л,гт Qn\
+ “Г • Л,-/, since ) bL -= ПГ • cosI^Y+a)' ’ (VIL89)
откуда
bsina. (VII .90)
Gli cosp
l2bL cos (p — Y + “)
Этим выражением определяется зависимость толщины укладываемого
слоя h 2 от угла наклона выглаживающей плиты. При а< риу <р, что
всегда практически имеет место, выражение (VI 1.90) приводится к виду:
h2 = cb sin а, (VII.91)
где с — коэффициент, зависящий от геометрических параметров асфальто-
укладчика и свойств укладываемой смеси;
О/j cos р
12Ы. cos (р — у + а)
Таким образом, с повышением угла а увеличивается толщина укла-
дываемого слоя и, наоборот, снижение а приводит к уменьшению толщины
слоя до тех пор, пока не наступит равновесие действующих сил. Расчеты
показывают, что чем меньше угол у, тем чувствительнее регулировка тол-
щины слоя. Для осуществления этого следует возможно ниже располагать
302
МАШИНЫ И ОБОРУДОВАНИЕ ДЛЯ ДОРОЖНЫХ ПОКРЫТИИ
шарнир рамы О. При средней толщине укладываемого слоя для асфальто-
укладчика производительностью в 100 т/ч а = 0°15'-н0° 40' и у = 3-^6°.
Вес несущей рамы с рабочими органами выбирается из условия
создания среднего удельного давления плиты на смесь рсп —0,1 —
4-0,2 кПсм2:
= <VIK93)
Для уменьшения давления часть веса несущей рамы может переда-
ваться на основную раму укладчика через специальную канатную под-
веску. Таким образом, толщина слоя зависит от передаваемого через плиту
веса и угла ее установки. Поэтому заранее установленные параметры
позволят во время работы укладчика при постоянной скорости его движе-
ния автоматически поддерживать постоянной толщину укладываемого
слоя смеси независимо от местных неровностей дорожного основания.
Следует заметить, что на толщину укладываемого слоя, которая опреде-
ляется свойствами укладываемой смеси и степенью уплотнения ее трамбую-
щим брусом, существенное влияние оказывает величина давления под
передней кромкой плиты рх. Степень уплотнения при прочих равных усло-
виях зависит от частоты ударов трамбующего бруса и скорости передви-
жения укладчика. При постоянной частоте колебаний бруса общее коли-
чество ударов, приходящихся на каждую точку поверхности, а следова-
тельно, и плотность асфальтобетона, зависят от скорости движения
укладчика. Поэтому при изменении этой скорости во избежание измене-
ния толщины укладываемого слоя следует проводить регулировку угла
наклона плиты.
Привод асфальтоукладчиков осуществляется от двигателей внутрен-
него сгорания. Кинематическая схема укладчика производительностью
100 т/ч приведена на рис. 177. Коробка передач обеспечивает шесть скоро-
стей вперед и три — назад. От коробки передач вращение передается на
главный трансмиссионный вал и далее на все рабочие органы. Независи-
мый привод правого и левого питателя, разравнивающих шнеков и гусе-
ничного хода, наличие регулировки шиберных заслонок бункера обеспечи-
вают качественное регулирование подачи смеси на укладываемую полосу.
Тяговое усилие, необходимое для работы гусеничного асфальтоуклад-
чика, расходуется на преодоление следующих сопротивлений.
1. Сопротивление перемещению укладчика как тележки, равное
Г, = (G, + GCJK) (/, + /) кГ, (VII.94)
где GM — вес укладчика в кГ;
GCM — вес асфальтобетонной смеси, равный грузоподъемности авто-
самосвала, в кГ;
fn — коэффициент сопротивления перемещению машины; при дви-
жении по основанию покрытия или нижнему слою асфальто-
бетона = 0,03ч-0,07;
i — наибольший продольный уклон покрытия; i = 0,07.
2. Сопротивление сил трения рабочих органов по укладываемой смеси,
равное
Г2 = Gpf1 кГ, (VII.9 5)
где Gp — вес рабочих органов в кГ;
/1 — коэффициент трения скольжения рабочих органов по уклады-
ваемой смеси; = 0,5—0,6.
МАШИНЫ ДЛЯ СТРОИТЕЛЬСТВА АСФАЛЬТОБЕТОННЫХ ПОКРЫТИЙ
303
3. Сопротивление от перемещения призмы смеси, увлекаемой уплот-
няющим брусом:
W3=GnpfeKF, (VII.96)
। де Gnp — вес призмы смеси в кГ;
fe — коэффициент внутреннего трения укладываемой смеси; fe =
= 0,7^0,8.
Рис. 177. Кинематическая схема тяжелого асфальтоукладчика:
/ _ трамбующий брус; 2 — эксцентриковый вал; 3 — шнеки; 4 — привод гусеничного хода;
5 — бортовые фрикционы гусеничного хода; 6 — двигатель; 7 — муфта привода трамбующего
бруса; 8 — коробка передач; 9 — топливный насос; 10 — воздуходувка; 11 — фрикционы привода
шнеков и питателя; 12 — предохранительная муфта обратного хода питателя; 13 -— привод питателя;
14 — привод шнеков
4. Для укладчиков с бездонным бункером необходимо учесть сопро-
тивление W4, возникающее при перерезывании поступающего из бункера
потока смеси:
W^- FFtib кГ, (VII.97)
где kc — удельное сопротивление перерезывания призмы асфальтобетон-
ной смеси; kc = 7500 кПм1;
F — площадь выходного сечения бункера в м2;
h — высота столба смеси в бункере в м;
6 — объемный вес неуплотненной смеси; 6 = 1800 кПм3.
5. Разгрузка смеси из автосамосвалов в укладчик производится, как
правило, на ходу. При этом самосвал подталкивается укладчиком, вслед-
ствие чего возникает дополнительное сопротивление W3 перемещению
груженого самосвала как тележки, определяемое обычным методом.
6. При возобновлении движения после вынужденных остановок пре-
одолеваются сопротивления сил инерции укладчика и автосамосвала с рас-
пределяемой смесью. Величина такого сопротивления
= Gm + GcM + Ga -3£- кГ, (VII.98)
S tn
304
МАШИНЫ И ОБОРУДОВАНИЕ ДЛЯ ДОРОЖНЫХ ПОКРЫТИЙ
где Ga — вес автосамосвала в кГ;
g — ускорение силы тяжести в м/сек2;
vp — рабочая скорость передвижения машины в м/сек;
tp — время разгона; tp = 1ч-2 сек.
Общее сопротивление перемещению W является суммой всех отдель-
ных сопротивлений, имеющих место в данной машине. Кроме того, необхо-
димо проверить возможность передвижения укладчика по условиям сцеп-
ления. Условие отсутствия пробуксовки для гусеничных укладчиков имеет
вид:
GMtpcti^W, (VII.99)
где tpfq — коэффициент сцепления гусениц с покрытием; <рсц = 0,3—0,5.
При определении мощности двигателя асфальтоукладчика, кроме
мощности, идущей на преодоление сопротивлений перемещению, необхо-
Рис. 178. Схема сил, действующих
на трамбующий брус асфальтоуклад-
чика
димо учесть мощность привода отдель-
ных механизмов укладчика: пластинча-
того питателя, шнека, трамбующего
бруса, вспомогательных механизмов
и механизмов управления.
Мощность привода пластинчатого
питателя Nn расходуется на перемеще-
ние и подъем материала, а также на
преодоление сил трения нижних слоев
смеси, увлекаемых полотном питателя,
по верхним слоям, находящимся в бун-
кере. При горизонтальном положении
питателя мощность может быть опре-
делена по формуле
= бЧИОО)
где П — производительность асфальтоукладчика в т/ч;
L — максимальный путь перемещения смеси в м;
а — коэффициент, учитывающий расход смеси через распредели-
тель; для скребкового питателя а = 1;
со — коэффициент, характеризующий свойства смеси; для асфальто-
бетонной смеси <> = 2 :3.
Уточненное значение мощности привода питателя можно определить
по наибольшему сопротивлению на приводной звездочке питателя.
Мощность привода распределительного шнека NUI также может быть
подсчитана по формуле (VII. 100). При этом принимают а = 0,6; L =
= 0,5В и св = 5.
Мощность привода трамбующего бруса N-6p расходуется на преодоле-
ние сил трения от действия давления поджимной пружины S.,,, и сопротив-
ления перемещению призмы смеси 1У3 перед трамбующим брусом (рис. 178),
а также на преодоление сил Р сопротивления среды при ее уплотнении
подошвой трамбующего бруса.
Сила трения трамбующего бруса о выглаживающую плиту равна
FTP = (S„p + W3)f2 *Г, (VII. 101)
где Snp — усилие поджатия пружины в кГ;
№я — сопротивление перемещению смеси перед брусом, определяемое
по формуле (VI 1.96);
— коэффициент трения трамбующего брсса о плиту; f2 = 0,2 ч-
ч-0,3.
МАШИНЫ ДЛЯ СТРОИТЕЛЬСТВА АСФАЛЬТОБЕТОННЫХ ПОКРЫТИЙ 305
Сила трения трамбующего бруса при его возвратно-поступательном
движении об асфальтобетонную смесь равна
F"TP=W3fiKr, (VII. 102)
где /1 — коэффициент трения бруса по бетонной смеси; = 0,5-э-0,6.
Суммарное сопротивление сил трения
Frp = FTP + FTP. (VII. 103)
Удельное сопротивление со стороны смеси при движении бруса вниз
при малой ширине бруса можно принять постоянным, равным рг. Это удель-
ное давление по своей величине равно давлению под передней кромкой
выглаживающей плиты. Тогда суммарная сила давления бруса на смесь
при его движении вниз
р = Р1?брКГ, (VII.104)
где FfiP — площадь контакта трамбующего бруса со смесью в см2.
Работа суммарной силы трения за один оборот вала привода
Атр = 4rFrp кГм, (VII. 105)
где г — эксцентриситет вала привода трамбующего бруса в м.
Работа уплотнения смеси за один оборот вала привода равна
Ауп = 2r Р кГм. (VII. 106)
Суммарная работа
А — Атр А-Ауп. (VII. 107)
Мощность привода трамбующего бруса
Л'ор ТоУ.бШдг; квт’ (VII. 108)
где п — число оборотов вала привода бруса в мин-,
Лбр — к. п- Д- трансмиссии привода;
Р — коэффициент, учитывающий неравномерность нагрузки за счет
сил инерции и веса самого бруса; р = 1,3-г-1,4.
Мощность привода вспомогательных механизмов (топливный насос,
воздуходувка, мешалка и т. п.) не превышает 1,5—2,0 квт.
Мощность двигателя находится как сумма мощности, расходуемой на
преодоление тяговых сопротивлений, и мощности, необходимой для при-
вода всех механизмов. Транспортная скорость укладчика определяется по
выбранной мощности двигателя.
Производительность укладчиков непрерывного действия определяется
по формуле
П = НВир8кв т/ч, (VII. 109)
или
П = Виркв м2/ч, (VI 1.110)
где h — толщина укладываемого слоя в м;
В — ширина слоя в м;
vp — рабочая скорость укладчика в м/ч;
6 — объемный вес укладываемого материала в т/м5;
k6 — коэффициент использования рабочего времени; k6 = 0,7-е0,95.
306
МАШИНЫ И ОБОРУДОВАНИЕ ДЛЯ ДОРОЖНЫХ ПОКРЫТИЙ
§ 44. САМОХОДНЫЕ КАТКИ ДЛЯ УПЛОТНЕНИЯ
ДОРОЖНЫХ ОСНОВАНИЙ И ПОКРЫТИЙ
К числу материалов, которые подлежат уплотнению при устройстве
дорожных оснований, относятся пески, песчано-гравийные смеси и щебень.
Все эти материалы являются несвязными, состоящими из отдельных частиц,
крупность которых находится в пределах от 0,05 до 2 мм у песков и от 2
до 60—80 мм у гравийных смесей и щебня. При уплотнении происходит
сближение частиц и их взаимная заклинка. Уплотнению препятствуют
развивающиеся на контактах частиц силы трения, а также наличие сцеп-
ления на этих контактах. Благодаря тому, что таких контактов множе-
ство и силы сопротивления взаимному смещению частиц различны, при
действии нагрузки такие смещения не происходят во всех местах одно-
временно, а устанавливается какая-то их очередность. При этом в первую
очередь смещения происходят там, где сопротивления минимальны. После
возрастания нагрузки смещения появляются в новых местах. Такой харак-
тер деформации создает впечатление наличия между частицами вязких
связей, хотя на самом деле они отсутствуют. Поэтому уплотнение слоев
этих материалов не происходит за однократное приложение циклической
нагрузки. Для завершения процесса нагрузка должна прикладываться
многократно.
Для дорожных покрытий применяются асфальтобетонные смеси,
битумоминеральные смеси и цементобетон. Наличие такого вяжущего
материала, как битум, коренным образом изменяет свойства щебня и гра-
вия, являющихся в составе асфальтобетона и битумоминеральных сме-
сей тем скелетом, который воспринимает нагрузки.
Наличие битума приводит к образованию между частицами минераль-
ного материала достаточно прочных и вместе с тем вязких связей. Поэтому
эти материалы относятся к упруго-вязко-пластичным материалам и для
своего уплотнения требуют многократного приложения циклических нагру-
зок. Свойства асфальтобетонных и битумоминеральных смесей в сильной
степени зависят от температуры. Обычно укладка и уплотнение горячих
смесей происходит при температуре 60°—110°. Укладка теплых смесей,
приготовленных на менее вязких и жидких битумах, производится при
более низких температурах. По мере уплотнения ввиду падения темпера-
туры смесей вязкость повышается на несколько порядков, и поэтому осо-
бенно важно еще до более значительного охлаждения смеси успеть уплот-
нить ее до требуемой плотности. В противном случае уплотнение вообще
становится невозможным. При выборе параметров машин, служащих для
уплотнения этих материалов, особенно важно иметь в виду быстрое воз-
растание сопротивлений смесей внешним нагрузкам, которое происходит
не только ввиду сближения отдельных частиц и образования более плотной
структуры, но и из-за непрерывного охлаждения смеси.
Применяемые при устройстве дорожных покрытий цементобетоны
могут иметь разную жесткость. Следовательно, связи между частицами
будут разной прочности. Однако все цементобетоны при встряхивании
или вибрации обладают ярковыраженными тиксотропными свойствами.
В результате таких воздействий связи между частицами этих бетонов
полностью разрушаются и сами бетоны по своим свойствам приближаются
к свойствам тяжелой жидкости. Поэтому для уплотнения цементобетонов
вибрационный метод становится не только пригодным, но и единственным
технически целесообразным и экономически выгодным.
В настоящее время ввиду высоких скоростей движения автотранс-
порта предъявляются повышенные требования к ровности поверхности
МАШИНЫ ДЛЯ СТРОИТЕЛЬСТВА АСФАЛЬТОБЕТОННЫХ ПОКРЫТИЙ 3Q7
дорожных покрытий. Эта ровность в значительной мере зависит от каче-
ства уплотнения покрытия. Следовательно, машины для уплотнения
должны отвечать определенным требованиям. Эти требования в первую
очередь касаются интенсивности воздействия рабочих органов машин на
слой уплотняемого материала. При излишне высоких удельных давлениях
на поверхностях контактов рабочих органов с материалом будет иметь
место его пластическое течение (выдавливание) из-под рабочих органов,
что при укатке влечет за собой еще и волнообразование, значительно
ухудшающее ровность поверхности. Следует отметить, что все дорожно-
строительные материалы укладываются и уплотняются слоями, толщины
которых иногда весьма незначительны. Поэтому развивающиеся под рабо-
чими органами напряжения не локализируются внутри слоя, а передаются
на его основание, которое может быть слабым. В этих случаях излишне
интенсивные воздействия повлекут за собой неровности уже не только
поверхности уплотняемого слоя, но и его основания, что значительно ухуд-
шит качество работы. Вместе с тем при незначительных удельных давле-
ниях не будет достигнута требуемая плотность уплотняемого слоя. Отсюда
можно сделать вывод, что при уплотнении дорожных оснований и покры-
тий давления под рабочими органами машин должны быть оптимальными.
Ввиду того, что сопротивляемость материалов в процессе их уплотнения
возрастает, должны также возрастать и удельные давления. Поэтому еще
даже в большей степени, чем в случае грунтов, становится актуальным
предварительное уплотнение материалов более легкими средствами.
Уплотнение дорожных оснований и покрытий может осуществляться
укаткой и вибрационными методами. Применяемые для этого средства меха-
низации могут быть разделены на катки и вибрационные машины. Катки
устраивают только самоходными. Они могут быть с гладкими вальцами
и на пневматических шинах. На некоторых гладких катках один из валь-
цов при помощи специального механизма вводится в состояние колеба-
тельных движений. Такие катки называются вибрационными
в отличие от обычных, называемых катками статического
д е й с т в и я. Последнее название условно, так как при работе этих
катков на поверхности уплотняемых материалов развиваются цикличе-
ские нагрузки с высокой скоростью изменения напряженного состояния.
Поэтому, строго говоря, эти катки никак нельзя назвать статичес-
кими.
Вибрационные машины главным образом применяются для уплотне-
ния покрытий, устраиваемых из цементобетонных смесей. Часто вибра-
ционными агрегатами снабжают машины, которые служат не только для
уплотнения, но и для выглаживания бетонной поверхности, а иногда и
Для распределения бетона.
Катки на пневматических шинах для уплотнения асфальтобетонных
и черных смесей стали применять недавно. В отличие от катков с гладкими
вальцами эти катки не дробят щебень и поэтому могут уплотнять смеси,
составленные из слабых каменных материалов. Кроме того, при движении
пневмокатков уплотняемый материал получает более равномерное обжа-
тие, поэтому склонность его к волнообразованию меньше, чем при катках
с гладкими вальцами, что допускает более высокие скорости движения.
Особенно эффективны эти катки при уплотнении асфальтобетонных сме-
сей с высоким содержанием щебня.
Катки на пневматических шинах с успехом применяют также при
уплотнении щебеночных и гравийных дорожных оснований. Песчаные
основания могут быть уплотнены этими катками при пониженных давле-
ниях в шинах.
308
МАШИНЫ И ОБОРУДОВАНИЕ ДЛЯ ДОРОЖНЫХ ПОКРЫТИЙ
При движении катков поверхность уплотняемого материала подвер-
гается воздействиям циклических нагрузок. Развивающиеся при этом
максимальные напряжения могут быть рассчитаны по приведенным фор-
мулам (1.33) и (1.35). При таком расчете модули деформаций щебеночных
и гравийных оснований можно принимать равными 300 кГ/см2 в начале
уплотнения и 1000 кГ/см2 —в конце процесса. Асфальтобетонные смеси
укладываются тонким слоем 4—8 см, поэтому при перекатывании валец
катка деформирует не только сам слой, но и его основание. Поэтому при
расчете развивающихся на поверхности контакта напряжений следует
принимать какой-то эквивалентный модуль деформации, который меньше
модуля основания и несколько больше модуля горячего асфальтобетона.
Эквивалентный модуль деформации в начале уплотнения равен 200—
250 к.Г/см\ а в конце — 500—800 кГ/см\
Выше отмечалось, что для получения ровного и плотного дорожного
покрытия удельные давления на поверхности не должны превышать допу-
скаемых пределов. Эти пределы для катков с гладкими жесткими вальцами
даны в табл. 29.
Таблица 29
Допустимые значения удельных давлений в кГ/см1
при укатке слоев различных материалов
Вид уплотняемого материала В начале уплотне- ния В конце уплотне- ния
Щебеночное основание . . 6—7 30—45
Гравийное основание . . 4—6 25—30
Асфальтобетон горячий 4-5 30—35
Грунт, укрепленный це- ментом 3—5 40—50
Грунт, укрепленный би- тумом 3—4 10—15
Т аблица 30
Оптимальные толщины
укатываемых слоев в см
Удельное линей- ное давление 1 кГ/см 1 1 Щебень и гра- ! вий । Битумощебеноч- ные и битумо- гравийные смеси | Асфальтобетон
20—40 8—12 6—7 4-5
41-60 12—15 8—10 5-6
61—80 15—20 10 — 12 6—8
При уплотнении дорожных оснований и покрытий катками на пневма-
тических шинах давление в них в начале укатки устанавливается равным
2—3 кГ/см2, а в конце укатки — 5,5—6 кГ/см2.
По мере уплотнения слоя материала его сопротивляемость внешней
нагрузке постепенно повышается, а следовательно, снижается с каждым
проходом глубина погружения вальца катка. Это, с одной стороны, ведет
к непрерывному повышению развивающегося на поверхности контакта
максимального напряжения, а с другой — снижает глубину активной
зоны. Последняя определяется минимальным поперечным размером поверх-
ности контакта вальца с уплотняемым материалом. Таким минимальным
размером является полухорда, стягивающая ту часть окружности вальца,
которая погружена в материал. Величина этой полухорды снижается по
мере уплотнения. Оптимальную толщину уплотняемого слоя следует выби-
рать по глубине активной зоны. Здесь в связи с большой жесткостью уплот-
няемых материалов оптимальные толщины слоев меньше, чем при уплот-
нении грунтов. В зависимости от удельного линейного давления они могут
ориентировочно определяться по табл. 30.
По величине удельного линейного давления катки разделяются на:
легкие — с удельным давлением менее 40 кГ/см, весом 5 т и двига-
телем мощностью до 25 л. с.;
МАШИНЫ ДЛЯ СТРОИТЕЛЬСТВА АСФАЛЬТОБЕТОННЫХ ПОКРЫТИЙ 309
средние — с удельным линейным давлением 40—60 кПсм, весом 6—
Юти двигателем мощностью 30—40 л. с.-,
тяжелые — с удельным линейным давлением свыше 60 кГ/см, весом
бодее Юти двигателем мощностью свыше 40 л. с.
Легкие катки применяются для предварительной подкатки основа-
ний и покрытий, а также для уплотнения тонкослойного песчаного асфаль-
тобетона на тротуарах, велосипедных дорожках и т. п. Средние катки слу-
жат для промежуточного уплотнения оснований и покрытий, а также для
окончательного уплотнения усовершенствованных покрытий облегченного
типа. Тяжелые катки служат для окончательного уплотнения гравийных
и щебеночных оснований и асфальтобетонных покрытий.
Рис. 179. Схемы расположения вальцов катков в плане
По числу и расположению вальцов катки разделяются (рис. 179) на:
1) одновальцовые (рис. 179, а), а также одновальцовые с поддерживаю-
щими вальцами (рис. 179, б) или колесами (рис. 179, в);
2) двухвальцовые с одним (рис. 179, г) или двумя ведущими вальцами;
3) трехвальцовые двухосные (рис. 179, <?);
4) трехвальцовые двухосные с дополнительным вальцом малого диа-
метра (рис. 179, е);
5) трехвальцовые трехосные с одним (рис. 179, ж) или тремя
(рис. 179, з) ведущими вальцами.
Одновальцовые катки относятся к легкому типу. При отсутствии
поддерживающих вальцов или колес двигатель и трансмиссия располо-
жены внутри вальца, а рычаги управления вынесены на рукоятку дышла,
при помощи которого вручную производятся повороты катка. Поддер-
живающие вальцы или колеса делают управляемыми; при их помощи и
производятся повороты катка.
Двухвальцовые катки (тандем) имеют вальцы одинаковой ширины
и бывают легкого, среднего и тяжелого типов. Наиболее совершенным
типом является каток с двумя ведущими вальцами. В этом случае ведущие
вальцы иногда выполняются несколько большего диаметра, чем ведомый.
Один из вальцов при помощи специального механизма может поворачи-
ваться вокруг вертикальной оси, чем достигаются повороты катка. В связи
с поворотами ширина вальцов не может быть выбрана излишне большой,
так как в противном случае на поверхности покрытия появятся дефекты,
310
МАШИНЫ И ОБОРУДОВАНИЕ ДЛЯ ДОРОЖНЫХ ПОКРЫТИЙ
и обычно ограничивается 1300 мм. Катки этого типа удобны в эксплуа-
тации и поэтому получили большое распространение.
Трехвальцовые двухосные катки выполняются среднего и тяжелого
типов. Задние ведущие вальцы имеют диаметр примерно в 1,5 раза больше,
чем передний, и через них передается 2/3 веса катка. Поэтому удельное
линейное давление здесь в 2 раза больше, чем под передним вальцом.
Уплотнение материала производится в основном задними вальцами,
а воздействие переднего вальца, который является направляющим, в рас-
чет не принимается. Задняя ось снабжена дифференциалом, что позволяет
легко проходить по кривым малого радиуса без повреждения уплотняемого
покрытия. Ширина переднего вальца делается такой, чтобы при движе-
нии катка его след перекрывался задними вальцами. Каток имеет хорошую
поперечную устойчивость, и, кроме того, такое расположение вальцов
способствует удачной компоновке отдельных агрегатов, благодаря чему
доступ к ним облегчается. Крупным недостатком катков этого типа
является большая сложность в организации работы. Здесь при максималь-
ном количестве проходов весьма трудно обеспечить необходимую и одина-
ковую плотность слоя по всей ширине дорожного основания или покры-
тия; обычно количество проходов здесь, больше, чем при катках
типа тандем. Поэтому эти катки постепенно вытесняются катками типа
тандем.
Кроме того, существуют катки с дополнительным вальцом малого
диаметра для повышения ровности поверхности дорожного покрытия.
При наезде этого вальца на неровность последняя заглаживается ввиду
передачи через валец значительной части веса катка. В случае необходи-
мости этот валец может быть поднят и выключен из работы. По соображе-
ниям компоновки он не может быть выбран достаточно большого диаметра,
вследствие чего постановка вальца часто не достигает цели. Поэтому этот
тип катка не нашел распространения.
Трехвальцовые трехосные катки имеют вальцы одинаковой ширины
и выполняются тяжелого и, реже, среднего типов. Наиболее совершенным
является каток со всеми ведущими вальцами. Здесь качество работы
является наиболее высоким, и поэтому они находят все большее приме-
нение.
Катки относятся к числу наиболее старых и вместе с тем широко рас-
пространенных дорожно-строительных машин. Многолетний опыт их
эксплуатации позволил выработать технико-эксплуатационные требова-
ния к их конструкции:
1) они должны обеспечивать получение необходимой плотности и
ровности поверхности;
2) должны быть приспособлены к перевозке на трейлерах;
3) необходимо иметь возможность регулировать вес катка;
4) оператор должен иметь хороший обзор при движении как вперед,
так и назад;
5) обороты двигателя должны регулироваться на всех режимах
работы, а сам двигатель должен быть приспособлен к работе при большой
запыленности воздуха и температуре до 4-50° С;
6) необходимо предусмотреть одинаковое количество скоростей дви-
жения катка как вперед, так и назад;
7) необходимо иметь возможность торможения катка с выключенным
двигателем на уклоне i = 0,25;
8) каток должен быть поворотлив; трогание с места, остановка и ревер-
сирование движения должны быть плавными;
9) усилие на рычагах управления не должно быть более 6 кГ.
МАШИНЫ ДЛЯ СТРОИТЕЛЬСТВА АСФАЛЬТОБЕТОННЫХ ПОКРЫТИЙ
311
Поверхность вальцов катков, предназначенных для уплотнения
асфальтобетона, должна быть высокого качества и во избежание налипания
на них асфальтобетонной массы смазываться смесью мазута с керосином
или с нефтью. Конусность вальцов и разность в их диаметрах допускается
не более 3 мм.
Общая конструктивная схема катка и примерная компоновка его
агрегатов видны из рис. 180. Передний направляющий валец 1 обычно
делают сдвоенным, что облегчает его поворот в горизонтальной плоскости.
На задние вальцы катка 6 обычно приходится несколько большая нагрузка,
чем на передний валец, поэтому они имеют больший диаметр. Для очистки
вальцов от налипшего материала служат скребки 2 и 5. Вальцы могут
быть литыми из стали или чугуна или сварными. По своей конструкции
они могут быть цельными или разборными. Для повышения веса катка
к дискам разборных вальцов обычно прибалчивают литые чугунные сек-
торы. Передний валец обычно имеет возможность наклоняться в верти-
кальной плоскости на угол до 30—35°, что достигается введением в кон-
струкцию крепления вальца к раме катка 12 охватывающей вилки, кото-
рую шарнирно (при помощи пальца) соединяют со шкворнем 3. Это позво-
ляет наезжать одной стороной вальца на неровности покрытия.
В качестве двигателя 4 обычно служит дизель, ось которого перпен-
дикулярна или параллельна оси катка. Поперечное расположение двига-
теля характерно для двухосных двухвальцовых катков.
Трансмиссии катков выполняются механическими или гидромехани-
ческими. Последние могут быть гидростатическими и с турботрансформа-
торами. Наличие турботрансформатора обеспечивает плавное реверси-
рование движения, что способствует получению ровной поверхности и
постоянству режима работы двигателя. Кроме того, здесь облегчается
управление и сокращается число ступеней в коробке передач 8.
Двигатель обычно снабжают муфтой сцепления 11, что облегчает его
запуск, особенно при холодной погоде. Все катки имеют коробку пере-
дач 8, реверсивный механизм 9 и бортовые передачи 7. На катках, где дви-
гатель имеет муфту сцепления, реверсивный механизм может устанавли-
ваться как до коробки передач, так и после нее. При отсутствии муфты
сцепления реверсивный механизм устанавливается перед коробкой. Вообще
реверсивный механизм предпочтительнее размещать после коробки пере-
дач, так как в этом случае трансмиссия лучше защищена от перегрузок.
Реверсивный механизм обычно снабжается двумя фрикционными
Дисковыми муфтами и состоит из конических или цилиндрических шесте-
рен. Управление происходит одним рычагом, причем имеются три поло-
жения: нейтральное и включение правой или левой муфты.
Бортовая передача предназначена для передачи крутящего момента
на ведущие вальцы катка. Наибольшее распространение получили пере-
дачи с цилиндрическими шестернями. Крутящий момент от двигателя
к коробке передач передается муфтой 10.
Рулевое управление служит для поворотов катка. Для осуществления
поворота приводится во вращение шкворень. В результате связанный
с этим шкворнем валец поворачивается в горизонтальной плоскости.
Привод рулевого управления может быть ручным, механизированным
и гидравлическим. При ручном и механизированном управлениях пере-
дача вращательного движения шкворню от штурвала или привода осуще-
ствляется через червячную пару. Иногда в кинематическую цепь допол-
нительно включается еще коническая пара. При гидравлическом приводе
шкворень через насаженный на него рычаг соединяется со штоком гидрав-
лического цилиндра. Выбор привода рулевого механизма зависит от сил,
312
МАШИНЫ И ОБОРУДОВАНИЕ ДЛЯ ДОРОЖНЫХ ПОКРЫТИЙ
Рис. 180. Трехвальцовый двухосный каток
МАШИНЫ Для СТРОИТЕЛЬСТВА АСФАЛЬТОБЕТОННЫХ ПОКРЫТИЙ
313
развивающихся при повороте переднего вальца. Если эти силы настолько
велики, что, несмотря на постановку механизма с большим передаточным
отношением, необходимое усилие на штурвале все же превышает допусти-
мый предел (5^-8 кГ), то рулевое управление требуется механизировать.
Силы, действующие на ведомый и ведущий вальцы катка, показаны
на рис. 181. Воздействие на уплотняемый материал ведомого и ведущего
вальцов различно.
На поверхность материала со стороны ведомого вальца действуют
вертикальная нагрузка и вес вальца Gx, а также передаваемое рамой
толкающее усилие Тг. Эти силы вызывают реакцию грунта, которая может
быть разложена на вертикальную Рх и горизонтальную F\ составля-
ющие. Очевидно, что
<4 = 7?! и 7\ = Л-
Реактивная сила гх действует на валец со стороны материала. Следова
тельно, со стороны вальца будет действовать какая-то равная ей и направ
ленная в противоположную сторону сила Fi, которая будет сдвигать ма
териал, т. е. способствовать волно-
образованию. Поэтому ведомый
валец не может обеспечить хорошую
ровность поверхности.
На ведущий валец действует вер-
тикальная нагрузка и вес вальца б2,
крутящий момент М, а также реак-
ция со стороны рамы катка Т2-
Здесь, как и в предыдущих случаях,
реакция грунта может быть разло-
жена на вертикальную R2 и горизон-
тальную F2 составляющие. Причем
G2 = R2 и Т2 = F2.
Рис. 181. Силы, действующие на ведо-
мый и ведущий вальцы катка
Уплотнение материала происходит под воздействием вертикальных
сил бх и G2. Ведущий валец отличается от ведомого тем, что здесь горизон-
тальная составляющая силы, действующей со стороны вальца на уплот-
няемый материал (F'), направлена в сторону, обратную движению катка,
т. е. воздействует на уже хорошо сопротивляющийся сдвигу уплотнен-
ный материал. Поэтому волнообразование перед ведущим вальцом прак-
тически отсутствует. Таким образом, высокая ровность поверхности будет
соответствовать ведущему вальцу катка, а не ведомому. Ввиду этого
в настоящее время стремятся к исключению из конструкции катков ведо-
мых вальцов. Практика применения катков без ведомых вальцов показы-
вает, что им соответствует высокая ровность поверхности, в несколько раз
превышающая ту, которая имеет место при укатке катками с ведомыми
вальцами.
На ровность поверхности оказывает также влияние число вальцов
катка, расстояние между ними, их диаметр, а также распределение веса
между вальцами. Самая высокая ровность поверхности соответствует
трехвальцовым каткам типа тандем, т. е. каткам с последовательным рас-
положением вальцов, особенно если все они являются ведущими. Такие
катки обычно называют катками безволновой укатки. Если в конструкции
имеются ведомые вальцы, то для повышения ровности покрытия нагрузка
на них должна быть меньше, чем на ведущие вальцы. Ровность повышается
при росте базы катка, т. е. при увеличении расстояния между осями
314
МАШИНЫ И ОБОРУДОВАНИЕ ДЛЯ ДОРОЖНЫХ ПОКРЫТИИ
30% 30%
Рис. 182. Схема перераспределения веса
трехвальцового катка при наезде на не-
ровности
вальцов, однако при чрезмерно большой базе ввиду повышения радиуса
поворота ухудшается маневренность катка.
На рис. 182 показано процентное перераспределение веса между
вальцами трехвальцового катка при наезде на неровности. Как видно из
приведенной схемы, при наезде на неровность нагрузка на валец повы-
шается, что особенно относится к среднему вальцу. Повышение давления
способствует устранению этой неровности.
Выше, при рассмотрении процессов укатки грунта, было показано,
что вальцы должны выбираться возможно большего диаметра. Это пра-
вило относится также и к укатке дорожных покрытий. Чем больше диа-
метр вальцов, тем большей может быть выбрана толщина уплотняемого
слоя материала и тем меньше глубина колеи, что уменьшает сопротивле-
ние движению, а следовательно, и волнообразование. Это правило должно
особенно распространяться па катки,
предназначенные для уплотнения
щебеночных и гравийных материа-
лов, где толщина уплотняемого слоя
значительна. Верхний предел диа-
метра вальца ограничен конструк-
тивными соображениями.
Во избежание волнообразования
первые проходы по еще рыхлому
материалу должны производиться
на малой скорости (2,0—2,5 км/ч), а
последующие (для повышения произ-
водительности) — на более высокой
скорости (4—12 км/ч). Такой скоро-
стной режим особенно должен выдер-
живаться при уплотнении асфальто-
бетона. При перемене направления
движения образуется неровность. По-
этому к устройству реверсов катков,
предназначенных для уплотнения
асфальтобетона, предъявляются по-
вышенные требования. Реверсивные
быстрое, но плавное изменение напра-
вления движения катка. Для улучшения ровности поверхности повышают
скорости укатки до 8—12 км/ч. Это позволяет удлинить одновременно
обрабатываемые участки и тем самым снизить число реверсирований.
Обычно коробкой передач предусматривается 3 скорости движения
катков. При этом по рекомендации В. Н. Анисимова для более полного
использования мощности двигателя скорость движения на первой пере-
даче должна составлять 25—35% от скорости на последней передаче.
Катки, кроме предназначенных только для уплотнения асфальтобе-
тона, должны быть рассчитаны на укатку того материала, который требует
затраты наибольшего тягового усилия. Таким материалом является рых-
лый щебень. При этом общее сопротивление движению может быть най-
дено как
механизмы должны обеспечивать
F = Fj + F2 + F3 кГ,
(VII.Ill)
где — сопротивление передвижению катка как тележки с учетом пре-
одоления уклонов, рассчитываемое по формуле (П.4); коэффи-
циенты сопротивления перемещению (/л) могут быть выбраны
по табл. 31, а уклон принимается в пределах i = 0,05-^0,08;
МАШИНЫ ДЛЯ СТРОИТЕЛЬСТВА АСФАЛЬТОБЕТОННЫХ ПОКРЫТИЙ
315
W? — сопротивление от преодоления сил инерции при трогании
с места, рассчитываемое по формуле (1.51); для учета инерцион-
ных сопротивлений вращающихся масс полученное значение
следует повысить на 10—15%;
W3 — дополнительное сопротивление, развивающееся при движении
катка на криволинейных участках.
Таблица 31
Коэффициенты сопротивления перемещению катка fn
Уплотняемый материал ( %
________________________________________________________________________________ _ I_
Рыхлый щебень________________________________________________________________________! 0,15—0,20
Плотный щебень........................... 0,06 — 0,08
Асфальтобетон (первый проход)............ 0,12—0,15
Асфальтобетон (последние проходы) .... 0,05—0,06
Величина W3 находится по формуле
Г3 = k.G,,
где G1 — вес катка, приходящийся на направляющие вальцы, в кГ;
kT — опытный коэффициент сопротивления; в случае рыхлого щебня
kt = 0,3; для плотной поверхности kt = 0,2.
В некоторых случаях на катке устанавливается кирковщик, который
служит для рыхления старого щебеночного или гравийного основания
или покрытия. Здесь возникает добавочное сопротивление
IV4 = nFk0 kF, (VII. 112)
где п — число кирок;
F — лобовая площадь одной кирки;
k0 — удельное сопротивление киркованию; k0 = 1,5-=-2,5 кПсмъ.
Необходимая сила тяги катка должна быть
(VII.ИЗ)
Необходимо проверить возможность ее реализации по условиям сцепле-
ния:
Т < G„(<pa! кГ,
где Gt4 — сцепной вес катка, равный весу, приходящемуся на ведущие
вальцы, в кГ;
Феи — коэффициент сцепления; гр —- 0,5 :-0,6.
При уплотнении слоя любого материала коэффициент сопротивления
Движению катка от прохода к проходу непрерывно снижается, а затем
стабилизируется. Стабилизация коэффициента указывает на то, что дефор-
мация слоя материала стала постоянной, т. е. практически обратимой.
Следовательно, стабилизация указывает на бесполезность дальнейшего
процесса укатки. На этом принципе основаны приборы для определения
момента окончания укатки. Такой прибор показывает, когда дальнейшая
укатка становится неэффективной, но он никак не определяет достаточ-
ности уплотнения. Последняя может быть установлена лишь непосред-
ственным определением плотности материала и сравнением ее с требуемой
316
МАШИНЫ И ОБОРУДОВАНИЕ ДЛЯ ДОРОЖНЫХ ПОКРЫТИЙ
величиной. Если плотность окажется недостаточной, то окончательное
уплотнение материала следует произвести уже более тяжелым катком.
Производительность самоходных катков может быть найдена по фор-
муле
Z7 = ~ °) Л{2/ч, (V11.114)
где В — ширина укатываемой полосы в м;
а — величина перекрытия следа предыдущего прохода; а = 0,20ч-
-ч0,25 м;
v:p — средняя скорость движения катка в к.и/щ
п — необходимое число проходов катка; при уплотнении асфальто-
бетона п = 25ч-30, а при уплотнении щебеночных оснований
Рис. 183. Схема для определе-
ния момента, необходимого для
поворота направляющего вальца
и покрытий п = 40ч-60.
Средняя скорость должна определяться
с учетом реверсирования, на которое затра-
чивается 1—2 сек.
При повороте направляющего вальца на
его контакте с поверхностью развиваются
силы трения, которые преодолеваются ме-
ханизмом рулевого управления.
Если Pj — часть веса катка, приходя-
щаяся на передний валец,
в кР;
G„ — вес самого вальца в kF,
то общая реакция поверхности согласно
схеме на рис. 183 определится как
Ri = Pi + Gs kF.
При разрезном вальце момент сил тре-
ния, препятствующий повороту вальца, равен
Mmp = F-^=^f кГ-м, (VII.115)
где = Rj — общая нагрузка со стороны вальца на поверхность в кГ;
F — сила трения, развивающаяся на поверхности контакта
вальца с поверхностью, в kF;
f— коэффициент трения скольжения; f = 0,5 : 0,6.
Момент на шкворне, развиваемый поворотным механизмом, будет
равен моменту сил трения, т. е.
Мпов = Мтр.
При разрезном вальце этот момент будет в два раза меньше.
Момент на штурвале ручного управления найдется как
Мшт = ^кГ-м, (VII.116)
где i — передаточное число механизма ручного управления;
ц — к. п. д. этого механизма.
Усилие на штурвале равно
Ршт=-^*Г, (VII. 117)
где г — радиус штурвала в м.
Вал рулевого управления рассчитывают на кручение, а передаточные
механизмы — общепринятыми методами.
МАШИНЫ ДЛЯ СТРОИТЕЛЬСТВА АСФАЛЬТОБЕТОННЫХ ПОКРЫТИЙ 317
Расчет на прочность деталей подвески направляющего вальца произ-
водится в предположении наезда краем этого вальца на препятствие. При
этом передаваемое на валец толкающее усилие определяется в предположе-
нии полной отдачи мощности двигателя при движении катка на первой
передаче. Тогда это усилие окажется равным
Т= 270р- кГ, (VII. 118)
где N — мощность двигателя в л. с.;
v — скорость движения катка на первой передаче в км!ч\
т] — к. п. д. трансмиссии катка.
Согласно схеме на рис. 184 реакция пре-
пятствия на направляющий валец найдется
как
R = kaT кГ,
где kg — коэффициент динамичности; ka =
= 1,5.
Шкворень подвергается совместному
действию кручения и изгиба. Опасным се-
чением будет место его заделки в раму.
Здесь изгибающий и крутящий моменты
будут соответственно равны:
Л1 ыэ = R (h!UP - hup) кГ • см,
Мкр = RC кГ-см.
Суммарный момент, действующий в
опасном сечении шкворня, найдется по фор-
муле
М = ]/"М2из + М.2Р кГ-см.
Рис. 184. Схема сил, действую-
щих на валец при наезде на
препятствие
Шкворень должен быть проверен также на
срез от силы Т.
Вилка направляющего шкворня подвергается изгибу. Опасным сече-
нием здесь будет сечение /—I (рис. 184). Изгибающий момент в этом сече-
нии будет равен
Миз = (Л3 — hnp) кГ см.
Муфты, детали коробки передач, реверса и бортовых передач рассчи-
тываются обычными методами. К этим узлам и деталям предъявляются
те же требования, что и к деталям автомобилей и тракторов.
Рабочими органами катков на пневматических шинах являются колеса,
оборудованные шинами с гладким протектором. Для уплотнения основа-
ний и покрытий применяются только самоходные катки, которые обычно
устраиваются двухосными. Каждая ось катка несет на себе от 4 до 7 колес.
Зазоры между колесами должны быть минимальными и не превышать
0,5В, где В — ширина профиля колеса. Общий вес таких катков обычно
находится в пределах от 15 до 35 т. Вес может меняться в зависимости от
балласта катка.
Скорости движения катков обычно изменяются в пределах от 3 до
25 км/ч. Расположение колес на осях принимается таким, чтобы при
одном проходе катка без пропусков перекрыть всю укатываемую полосу.
318
МАШИНЫ И ОБОРУДОВАНИЕ ДЛЯ ДОРОЖНЫХ ПОКРЫТИЙ
Для этого продольные оси колес передней и задней оси в плане 1
несколько сдвинуты относительно друг друга; поэтому колеса второй оси 1
движутся по полосам, которые оказываются в промежутках между коле- 1
сами первой оси. • |
Современные катки позволяют на ходу изменять давление в шинах.
Для этого они оборудованы системой централизованной подкачки шин,
управление которой произво- j
дится из кабины оператора. |
Давление в шинах меняется |
в пределах от 2,5—3,0 до' I
5,5—6,0 кПсм-. Возможность |
изменения давления в шинах |
делает каток универсаль-. 1
ным в смысле возможности 1
использования его на уплот- 1
нении различных материа- Я
лов и, главное, позволяет в Я
процессе уплотнения посте- 1
пенно повышать удельное 1
давление на поверхности, тем 1
самым создавая условия для 1
получения плотного, проч- |
ного и ровного дорожного I
покрытия. 1
Передняя ось катка обыч- 1
но устраивается управляв- |
мой, а задняя несет на себе ведущие колеса. Часто ведущими являются 3
не все колеса задней оси, а всего лишь два. Большое значение имеет под-
веска колес. Если колеса закреплены на осях так, что их смещения друг |
относительно друга оказываются невозможными, то при наезде одного 1
колеса даже на незначительное препятствие оно будет перегружено. .1
В этих случаях шины обычно не выдерживают такой перегрузки и J
выходят из строя. Поэтому подвеска отдельных колес должна быть не- 1
зависимой. Это требование осуществляется различными способами. За- J
служивает внимания применение гидравлической системы подвески j
(рис. 185), которая обеспечивает постоянный контакт всех колес катка |
с поверхностью. I
§ 45. ВИБРАЦИОННЫЕ МАШИНЫ ДЛЯ УПЛОТНЕНИЯ
ДОРОЖНЫХ ПОКРЫТИЙ
Для уплотнения дорожных покрытий в последнее время широкое
применение находят вибрационные машины. К ним относятся виброкатки,
поверхностные вибромашины, бетоноотделочные машины и глубинные
вибраторы. Эти машины применяются при уплотнении цементобетонных
и асфальтобетонных покрытий, щебеночных и гравийных оснований дорог,
а также слоев грунта, укрепленного цементом.
Вибромашины могут быть самоходными, прицепными, навесными
и переставляемыми. Прицепные и самоходные вибрационные катки приме-
няются при уплотнении как асфальтобетонных покрытий, так и при уплот-
нении различного рода оснований дорог. Поверхностные вибромашины ?
служат для уплотнения грунтов, щебеночных и гравийных оснований и |
покрытий дорог. Для уплотнения цементобетонных покрытий применяются Я
специальные бетоноотделочные машины (финишеры). При толщине покры-
МАШИНЫ ДЛЯ СТРОИТЕЛЬСТВА АСФАЛЬТОБЕТОННЫХ ПОКРЫТИЙ 319
тий свыше 25 см для уплотнения бетонной смеси используются глубинные
вибраторы.
Привод вибрационной машины осуществляется как от двигателей
внутреннего сгорания, так и от электродвигателей. В настоящее время
находит применение также комбинированный привод: дизель-электриче-
ский, дизель-гидравлический и электропневматический.
Для придания рабочему органу машины колебательных движений
устанавливается специальный возбудитель колебаний — вибратор. Коле-
бания от вибратора через рабочую плиту, валец или корпус вибратора
передаются уплотняемой среде.
Рис. 186. Основные принципиальные схемы дебалансов вибраторов: а — секторный
дебаланс; б — дебаланс в виде эксцентричного диска; в — виброэлемент с раз-
движными дебалансами; г и д — регулируемые стержневые виброэлементы; е —
схема двухвального вибратора направленного действия; ж — схема одновального
вибратора направленного действия
По принципу действия различают центробежные, инерционные и
вибраторы ударного действия. В центробежных вибраторах возмущающая
сила создается за счет вращения неуравновешенных масс. Возмущающая
сила инерционных вибраторов развивается в результате возвратно-посту-
пательного движения масс. В вибраторах ударного типа возмущающая
сила возникает при соударении подвижных масс.
Все механические вибраторы можно разделить на регулируемые и
нерегулируемые, одночастотпые и поличастотные, направленного и нена-
правленного действия.
Основные принципиальные схемы дебалансов вибраторов показаны на
рис. 186. Сечение неуравновешенных частей —дебалансов — чаще всего
имеет форму кольцевого сектора, круга или прямоугольника. Оптималь-
ная форма и размеры дебалансов выбираются из условия минимума веса
дебаланса и его момента инерции при заданной величине возмущающей
силы.
В гл. IV было показано, что возмущающая сила виброэлемента в каж-
дый момент времени равна проекции на вертикальную ось той центробеж-
ной силы, которая развивается при вращении дебаланса, а амплитудное
значение возмущающей силы Р равно центробежной силе, т. е.
Р = mza2 = z<o2 кГ, (VII.119)
320
МАШИНЫ и ОБОРУДОВАНИЕ ДЛЯ ДОРОЖНЫХ ПОКРЫТИЙ
где Gd — вес дебаланса в кГ;
со — угловая скорость вращения в 1/сек;
z — эксцентриситет, т. е. радиус вращения центра тяжести деба-
ланса, в см.
Для удобства расчетов из уравнения (VII. 119) обычно выделяют вели-
чину
Мк = Gdz кГ-см, (VII.120)
которую условно называют кинетическим моментом дебаланса.
Кинетический момент секторного дебаланса (рис. 186, а) равен
=-|-66 (Я? — flt)sin-^- кГ-см, (VII.121)
где b — толщина дебаланса в см;
R— наружный радиус дебаланса в см;
Rt — внутренний радиус дебаланса в см;
а. — центральный угол сектора;
6 — удельный вес материала дебаланса в кПсм.\
Для дебаланса, выполненного в виде эксцентрично установленного
диска (рис. 186, б), кинетический момент равен
Мк = кГ-см, (VII.122)
где D — диаметр диска в см;
z — эксцентриситет ц. т. диска в см.
Кинетический момент вибратора, выполненного в виде уравновешен-
ного диска с дебалансными массами, установленными с постоянным шагом а
(рис. 186, г и д'), равен геометрической сумме кинетических моментов-
отдельных дебалансных масс.
В вибраторах ненаправленного действия вектор центробежной силы Q
вращается с угловой скоростью о>, тогда проекции этого вектора на оси
координат х и у найдутся как
Рх = Q sin cot;
Ру^ О cos cot, (VII. 123)
В регулируемых вибраторах величина центробежной силы при
постоянной частоте вращения вала вибратора может регулироваться изме-
нением эксцентриситета или веса дебаланса.
Для раздвижных дебалансов (рис. 186, в) суммарная возмущающая
сила равна
P-2Qcos-|-» (VII. 124)
где р — угол между осями дебалансов.
Различают регулируемые вибраторы с плавным и ступенчатым изме-
нением центробежной силы. Наиболее совершенными являются регули-
руемые вибраторы с плавным изменением, осуществляемым на ходу
машины.
В вибраторах направленного действия возмущающая сила имеет
определенное направление и изменяет только свою величину. Направлен-
ные колебания можно получить установкой двух дебалансных валов, вра-
щающихся в противоположные стороны с равным числом оборотов. При
этом горизонтальные составляющие центробежных сил взаимно уравно-
вешиваются (рис. 186, е). Вертикальные составляющие создают суммар-
ную возмущающую силу, изменяющуюся по закону
Р = 2Q sin о/. (VII.125)
МАШИНЫ ДЛЯ СТРОИТЕЛЬСТВА АСФАЛЬТОБЕТОННЫХ ПОКРЫТИЙ
32 I
Направленные колебания можно осуществить и при одновальном
вибраторе, установив его на специальной маятниковой подвеске (рис. 187).
На вибромашину в этом случае передается только
бежной силы, действующая по оси подвески у.
По оси х центробежная сила уравновешивает-
ся силами инерции маятниковой подвески и
на вибромашину не передается. Для полного
уравновешивания горизонтальных сил длина
подвески I выбирается из условия
/ = — см, (VII.126)
та ' ’
где 1 — момент инерции вибратора с подвес-
кой относительно оси подвеса О в
кГ-см- сек2;
т — суммарная масса вибратора с подвес-
кой в кГ -сек2!см;
а — координата ц. т. вибратора с подвес-
кой в см.
Одновальный вибратор направленного
действия показан на рис. 186, ж. Здесь два
составляющая центро-
Рис. 187. Схема вибратора
с маятниковой подвеской
дебалапса вращаются в противоположные сто-
роны с одинаковой угловой скоростью. Сум-
марная возмущающая сила равна геометричес-
кой сумме вертикальных составляющих центробежных сил. По сравне-
нию с двухвальными такие вибраторы более компактны и имеют меньшие
габариты, однако они более сложны по конструкции.
Рис. 188. Схемы бегунковых
(поводковых) вибраторов: а — одно-
частотного; б — поличастотного
В дебалансных вибраторах центробежная сила дебалансов полностью
передается на подшипники вала вибратора. С целью разгрузки подшип-
ников предложена конструкция бегункового вибратора (рис. 188, а).
Здесь дебаланс 1, выполненный в виде цилиндрического ролика, катится
по внутренней поверхности беговой дорожки 2. Движение к ролику от
водила 3 передается через специальный поводок 4. Центробежная сила,
возникающая при вращении водила, передается непосредственно на
корпус виброэлемента. Подшипники ролика нагружены только тем
11 W а У anwm и ИО.
322
МАШИНЫ И ОБОРУДОВАНИЕ ДЛЯ ДОРОЖНЫХ ПОКРЫТИИ
усилием, которое необходимо для преодоления сопротивления перекаты-
ванию его по беговой дорожке.
В случае применения дебалансных роликов (рис. 188, б) возникают
две центробежные силы различной частоты. Одна возмущающая сила раз-
вивается вследствие вращения ц. т. ролика относительно оси О, а вторая —
ввиду вращения ролика относительно своей оси Движение ролика
в этом случае можно представить состоящим из поступательного вместе
с центром ролика и вращательного относительно этого центра.
При поступательном движении центробежная сила Pj изменяется
с частотой вращения водила <оо. Ее амплитудное значение определяется
из выражения
Pi = Pi + P'i = (М - m)Pwo кГ, (VII. 127)
где Р' — составляющая центробежной силы от массы М, сосредоточен-
ная в точке О, в кП;
Р" — составляющая центробежной силы от массы т, приложенная
в ц. т. дебаланса (в точке А), в кГ;
М —масса уравновешенной части ролика в кГ-сек2/см;
т — масса дебаланса ролика в кГ-секЧсм;
R — радиус центра ролика в см.
Вторая сила, изменяющаяся с частотой <»р, возникает вследствие
вращения неуравновешенного ролика вокруг своей оси;
Рч = те сор кГ, (VII.128)
где е — эксцентриситет дебалансной части ролика в см;
Юр — абсолютная угловая скорость вращения ролика в Мсек, равная
wp = 4<°o- (VII.129)
При установке нескольких дебалансных роликов различного диаметра
результативная возмущающая сила равна геометрической сумме состав-
ляющих возмущающих сил. Большое значение при этом имеют начальные
углы установки дебалансных роликов.
В существующих конструкциях поличастотных бегунковых (поводко-
вых) вибраторов дебалансные ролики свободно перекатываются по беговой
дорожке только за счет сил трения. Уменьшение сил трения при вибрации,
чему способствует наличие масла в корпусе вибратора, силы инерции при
пуске, а также противодействующий момент дебалансной части создают
условия для проскальзывания ролика относительно беговой дорожки.
Это вызывает уменьшение частоты вращения ролика и в некоторых слу-
чаях — его остановку. Наличие скольжения изменяет характер результа-
тивной возмущающей силы, делает ее переменной и не позволяет иметь
стабильный режим вибрации. Параметры бегунковых поличастотных
вибраторов необходимо выбирать с учетом отсутствия отрыва и скольже-
ния ролика. При заданных параметрах необходимо создавать условия,
при которых коэффициент трения ролика по беговой дорожке корпуса
вибратора будет больше минимального.
В ряде вибромашин широко распространено применение выдвижных
дебалансов. Последние рекомендуются для вибромашин, подвергающихся
частому включению, особенно тех, где приводом служит двигатель вну-
треннего сгорания. При этом выдвижные дебалансы значительно умень-
шают пусковой момент двигателя. Принципиальная схема их устройства j
приведена на рис. 189. ••
МАШИНЫ Для СТРОИТЕЛЬСТВА АСФАЛЬТОБЕТОННЫХ ПОКРЫТИЙ
323
Для возбуждения колебаний вибромашин применяются также пла-
нетарные бесподшипниковые одночастотные и поличастотиые вибраторы.
Принципиальные схемы их изображены на рис. 190. Различают вибра-
торы с наружной и внутренней обкаткой. В виброэлементе с наружной
обкаткой (рис. 190, а) дебаланс, приводимый во вращение двигателем,
обкатывается своей наружной поверхностью внутри втулки, закрепленной
в корпусе вибратора. В вибраторах с внутренней обкаткой (рис. 190, б)
пустотелый ролик обкатывается своей
Рис. 189. Конструкция вибратора с вы-
движным дебалаисом:
1 — выдвижной дебаланс; 2 — обойма; 3 —
стержень; 4 — пружины; 5 — втулка; 0 —
регулировочное кольцо
Рис. 190. Принципиальные схемы
вибраторов планетарного типа:
а — с наружной обкаткой; б — с
внутренней обкаткой
Наличие дебалансного ролика позволяет получить поличастотный
режим вибрации. Низкая частота равна частоте вращения вала привода,
высокая — частоте обкатываний бегунка. При заданном числе оборотов
приводной штанги п0 число обкатываний бегунка с внешней обкаткой равно
= n°' (VII.130)
1Ув - (Ар
а при обкатке ролика вокруг центрального стержня (внутренняя обкатка)
(V11.131)
где dp — наружный диаметр ролика в см\
De — внутренний диаметр втулки в см\
D — диаметр внутренней поверхности ролика в см\
ас — наружный диаметр стержня в см.
При малой разнице диаметров обкатывающихся поверхностей высокая
частота стремится к бесконечности. Сейчас уже достигнуты частоты до
300—350 гц.
324 МАШИНЫ И ОБОРУДОВАНИЕ ДЛЯ ДОРОЖНЫХ ПОКРЫТИЙ
В некоторых вибрационных машинах находят применение вибро-
ударные механизмы. Во время работы вибромашины подвижная часть
сообщает плите вибрационные колебания (через опорные пружины) и
ударные импульсы (через шабот). Таким образом, виброударный механизм
оказывает одновременно как ударное, так и вибрационное воздействия.
Устойчивый режим работы имеет место в тех случаях, когда отношение
числа оборотов виброэлемента к числу ударов представляет собой целое
число. Устойчивость работы ударного механизма зависит от соотношения
масс подвижной части и плиты, жесткости опорных пружин и начального
зазора.
Ударный режим работы оказывает более интенсивное воздействие на
уплотняемую среду и значительно повышает эффективность уплотнения
до ожно-строительных материалов по сравнению с обычным вибрацион-
ным режимом. Виброударные механизмы применяются в машинах для
изготовления железобетонных изделий, в вибромолотах для погружения
свай и шпунта, а также в ручном инструменте.
Кроме механических нашли распространение гидравлические, пнев-
матические, электромагнитные и электродинамические вибраторы.
Все уплотняемые материалы представляют собой упруго-вязко-
пластичные системы, свойства которых в настоящее время недостаточно
изучены. Нет также и обоснованной теории деформирования таких сред.
Поэтому при выборе мощности двигателя, определении амплитуд колеба-
ний и т. п. лучше всего руководствоваться опытными данными. Вместе
с тем в настоящее время разработаны методы расчета, основанные на пред-
положении, что уплотняемый материал обладает только упругим или
только вязким сопротивлением, а иногда учитываются как упругие, так
и вязкие свойства. Однако во всех случаях исходные зависимости упро-
щаются, так как в противном случае задача становится неразрешимой.
Результатами решения таких задач можно пользоваться главным образом
для относительного сопоставления различных вариантов при проектиро-
вании вибрационных машин.
Предполагая колебания гармоническими, а уплотняемую среду —
абсолютно упругой и имеющей вязкое сопротивление, находят ту мощность
двигателя, которая необходима для работы вибратора. Эта мощность рас-
ходуется на сообщение колебательного движения уплотняемой среде,
а также на преодоление трения в подшипниках виброэлементов.
Мощность, необходимая для сообщения уплотняемому материалу
колебательных движений при наличии вязкого сопротивления и направ-
ленных колебаний вибратора, в общем виде может быть определена по
следующей формуле:
,т Расо , /Л7Т1 1 о оч
= 1Л02 = ТГоУ5Ш * квт> (VII.132)
где а — амплитуда колебаний вибромашины в м;
— круговая частота колебаний в 1/сек;
с — коэффициент вязкого сопротивления уплотняемой среды
в кГ -сек!м;
Р — амплитудное значение возмущающей силы вибратора в кГ;
<р — угол сдвига фаз, который может быть определен из выражения
= (VI1-133)’
где k — условная жесткость уплотняемого материала в кПм\
т — масса вибромашины в кГ-сек/Чм.
МАШИНЫ ДЛЯ СТРОИТЕЛЬСТВА АСФАЛЬТОБЕТОННЫХ ПОКРЫТИЙ 325
Коэффициент вязкого сопротивления зависит от площади рабочей
плиты вибромашины.
Удельное сопротивление с0, т. е. сопротивление плиты, площадь
которой равна 1 ;и2, по данным М. П. Зубанова равна: для асфальто-
бетонной смеси с0 = 80 кГ-сек/м3-, для жесткой цементобетонной смеси
с() = 40 :-60 кГ -сек/м3.
Если площадь плиты равна F, то коэффициент вязкого сопротивления
с — caF кГ-сек/м. (VII.134)
Для вибромашины с ненаправленными колебаниями, например для
глубинного вибратора, необходимо суммировать мощность, расходуемую
на колебания во взаимно перпендикулярных плоскостях.
Мощность, расходуемая на преодоление сил трения в опорах, опре-
делится как
ЛЕ = iKw квгп' (VII. 135)
где d — диаметр вала подшипника в м\
п — число оборотов вала в об/мин-,
f — условный (приведенный к валу) коэффициент трения подшипни-
ков. При расчетах можно принять для всех типов подшипников
качения / = 0,005^-0,010.
Общая мощность привода виброэлемента
дг__Fi Ч~ Л'а
>1
где т] — к. п. д. трансмиссии привода.
Общий расчет деталей и узлов вибромашины на прочность произво-
дится с учетом динамических нагрузок. При расчетах необходимо учесть,
что в случае резонанса отдельных деталей, т. е. при совпадении их соб-
ственных частот колебаний с вынужденными, в них возникают большие
дополнительные напряжения. Поэтому при проектировании следует опре-
делять собственные частоты колебаний основных деталей машины. При
этом в первом приближении все детали и узлы вибромашины можно пред-
ставить в виде балок, пластин или мембран с определенным характером
распределения масс.
Так собственная частота поперечных колебаний ненагруженной балки
на двух жестких опорах определяется по формуле
= 1/сек, (V1I.136)
г- /- 1 т0
где Е — модуль упругости материала балки в кПсм1',
/ — момент инерции сечения относительно оси, перпендикулярной
к плоскости изгиба в слЕ;
I — длина балки в см\
тп — масса единицы длины балки в кГ-сек1/см?.
Коэффициент а зависит от характера опор балки и от распределения
сосредоточенных масс. Для балки с равномерно распределенной массой
на двух шарнирных опорах а = л; при одном жестко заделанном, а другом
свободном конце а = 1,9; при обеих жестко заделанных опорах а = 4,7
и т. д.
326 МАШИНЫ И ОБОРУДОВАНИЕ ДЛЯ ДОРОЖНЫХ ПОКРЫТИЙ
Частота собственных колебаний прямоугольной пластины опреде-
ляется по формуле
4/4 Х'сек' (VII. 137)
где а — длина пластины в с .и;
т — масса единицы площади в кГ-сек2/см3;
К — жесткость пластины при изгибе в кГ-см.
Здесь
К = 12(7^И2) • см, (VII. 138)
где 6 — толщина пластины в см;
Е — модуль деформации материала пластины в кГ!см2;
р. — коэффициент Пуассона; р = 0,3.
Коэффициента в этом случае зависит от характера закрепления краев
пластины. Для пластины, опирающейся по всему контуру,
«=9,87(1+4); (VII. 139)
для пластины, защемленной по всему контуру,
а = 22,37 у 1 + 0,6-g- +4> (VII.140)
где b — ширина пластины в см.
Для надежной безопасной работы узла или детали должно выпол-
няться условие:
1,3со<со„<0,7а>. (VII.141)
При уплотнении гравийных, щебеночных и асфальтобетонных покры-
тий широкое применение нашли самоходные вибрационные катки. Вибро-
катки имеют меньшую металлоемкость и энергоемкость, большую мане-
вренность и транспортабельность по сравнению с невибрационными кат-
ками и в то же время обеспечивают требуемую степень уплотнения и
необходимую ровность покрытия.
Асфальтобетон, уплотненный виброкатками, при правильном подборе
параметров катка и режимов вибрации имеет большую плотность и меха-
ническую прочность, а следовательно, меньшую водонасыщаемость, чем
при уплотнении обычными катками. Важным является и то, что при вибро-
уплотнении не происходит дробления скелетного материала, что позволяет
использовать местные слабые горные породы.
Однако при уплотнении виброкатками верхнего слоя асфальтобетон-
ного покрытия происходит выдавливание битума на поверхность, что
недопустимо при устройстве шероховатых покрытий. Для самоходных
катков наблюдается явление потери тяговой способности или управляемо-
сти, что налагает определенные ограничения на выбор параметров. Значи-
тельный шум, возникающий при работе катка, и передача вибраций ок-
ружающим сооружениям и коммуникациям ограничивают применение
вибрационных катков в городских условиях и на промышленных пло-
щадках. Важную роль играет также амортизация механизмов катка
и рабочего места оператора. Все эти причины ограничивают использование
вибрационных катков.
МАШИНЫ ДЛЯ СТРОИТЕЛЬСТВА АСФАЛЬТОБЕТОННЫХ ПОКРЫТИЙ 327
Виброкатки для уплотнения дорожных покрытий выполняются само-
ходными одновальцовыми, двухвальцовыми и трехвальцовыми. В послед-
нем случае третий валец является дополнительным (прицепным или навес-
ным). Наибольшее распространение получили двухвальцовые самоходные
вибрационные катки. Вибрационным может быть как ведущий, так и упра-
вляемый валец. При наличии вибрации резко уменьшаются условные ко-
эффициенты трения и спепления вальца с уплотняемой смесью, что резко
снижает определяемую по сцеплению силу тяги катка в тех случаях, когда
вибровалец является ведущим.
Если вибровалец является ведо-
мым,то это явление приводит к | ,
потере управления. Для ликвида-
Рис. 191. Принципиальная схема вибрационного двухвальцового самоходного катка:
/ — двигатель внутреннего сгорания; 2 — рама катка; 3 — вибровалец; 4 — механизм При-
вода; 5 — управляемый валец; 6 — механизм управления
ции этих недостатков в некоторых случаях в качестве вибрационного при-
меняется третий (навесной или прицепной) валец.
В нашей стране предусматривается выпуск самоходных виброкатков
весом 125, 400, 1500 и 4000 кг.
Самоходный вибрационный каток показан на рис. 191. Вибрационный
каток отличается от обычного моторного катка наличием дебалансного
вибратора ненаправленного действия, установленного в заднем привод-
ном вальце, упругой подвески вибровальца и механизма привода вибра-
тора, выполняемого обычно в виде клиноременной передачи.
В настоящее время теория уплотнения дорожных покрытий вибро-
катками еще не разработана, поэтому выбор основных параметров следует
производить, исходя из опытных данных.
При проектировании катков следует обеспечивать возможность регу-
лирования частоты колебаний и величины возмущающей силы в более
или менее широких пределах. Это позволит применять каток для уплот-
нения различных материалов и каждый раз выбирать наиболее выгодный
режим работы.
За последнее время имеет место тенденция к повышению частот коле-
баний. Для самоходных виброкатков рекомендуется частота 50—70 гц.
328 МАШИНЫ И ОБОРУДОВАНИЕ ДЛЯ ДОРОЖНЫХ ПОКРЫТИЙ
Дальнейшее увеличение частоты ограничивается техническими возмож-
ностями создания надежной и долговечной конструкции вибратора катка.
Характер колебаний не оказывает существенного влияния на степень
уплотнения. Поэтому в виброкатках, за редким исключением, исполь-
зуются вибраторы с круговыми колебаниями.
Возмущающая сила выбирается в пределах
Р = (4 ч- 6) G кГ, (VII.142)
где G — вес колеблющихся частей катка в кГ.
При таком соотношении между Р и G амплитуда колебаний вальца
самоходного катка находится в пределах 0,3—0,7 мм. Следует заметить,
что при а = 0,3н-0,4 мм вибровалец работает практически без отрыва от
уплотняемой среды, а при большей амплитуде наблюдается отрыв катка
и переход в режим вибротрамбования. При излишне больших амплитудах
колебаний наблюдается потеря тяговой способности и боковой устойчи-
вости.
Рекомендуемые рабочие скорости перемещения находятся в преде-
лах 1,2н-2,2 км/ч. В некоторых случаях рабочая скорость движения катка
достигает 6 км/ч. При этом необходимое число проходов по одной полосе
несколько повышается. Предварительная подкатка уплотняемого мате-
риала производится обычным катком или виброкатком с выключенным
вибратором.
Выбор геометрических параметров, тяговый и прочностные расчеты,
определение мощности и т. д. производится теми же методами, что и для
обычных прицепных и самоходных катков.
Глубинные вибраторы применяются для уплотнения бетонных сме-
сей при строительстве дорожных и аэродромных покрытий повышенной
толщины, а также при изготовлении железобетонных изделий и массивных
бетонных строительных конструкций.
По частоте различают вибраторы нормальной (50 гц) и повышенной
(150—300 гц) частоты.
В качестве привода используются асинхронные двигатели нормальной
и повышенной частоты, портативные двигатели внутреннего сгорания, пнев-
матические и гидравлические двигатели. По передаче мощности от дви-
гателя к вибромеханизму различают вибраторы со встроенным двигателем
и вибраторы с гибким валом. По характеру перемещения глубинные вибра-
торы можно разделить на ручные и перемещаемые в пакетах с помощью
кранов или других транспортных средств.
В СССР производятся электромеханические и пневматические вибра-
торы. Конструкция электромеханического вибратора представлена на
рис. 192, а. Внутри круглого корпуса на подшипниках качения установлен
дебалансный вал. Привод вала вибратора осуществляется от асинхронного
двигателя, вмонтированного в тот же самый корпус. Мощные подвесные
глубинные вибраторы со встроенным двигателем имеют планетарный бес-
подшипниковый вибромеханизм с внутренней обкаткой.
Вибраторы с гибким валом (рис. 192, б) применяются при уплотнении
бетонной смеси в густоармированных конструкциях. В этих вибраторах
двигатель соединяется с вибромеханизмом гибким валом длиной около
3,6 м. В качестве возбудителя колебаний используются дебалансные и пла-
нетарные вибромеханизмы с внешней и внутренней обкаткой. Конструк-
ция рабочей части (наконечника) с внутренней обкаткой приведена на
рис. 192, в.
Планетарный пневматический вибратор показан на рис. 192,г. Он
состоит из цилиндрического наконечника, внутри которого смонтирован
МАШИНЫ ДЛЯ СТРОИТЕЛЬСТВА АСФАЛЬТОБЕТОННЫХ ПОКРЫТИЙ
329
планетарный возбудитель с внутренней обкаткой. Сжатый воздух посту-
пает к двигателю по внутреннему шлангу. Изменением давления воздуха
производится регулирование частоты колебаний. Применение дебалансного
бегунка позволяет получать поличастотный режим вибрирования с часто-
той до 350 гц.
Рис. 192. Основные типы глубинных ручных вибраторов: а — элек-
тромеханический вибратор со встроенным двигателем; б — внешний
вид вибратора с гибким валом; в — рабочий наконечник вибратора
с гибким валом; г — пневматический планетарный вибратор с вну-
тренней обкаткой
Производительность глубинного вибратора можно определить по
формуле
П = лД2Н кпк, м^/ч (VII. 143)
11 -j- г.,
где 7? — радиус действия вибратора в
И — глубина уплотняемого слоя, равная высоте активной части кор-
пуса вибратора, в ж;
330
МАШИНЫ И ОБОРУДОВАНИЕ ДЛЯ ДОРОЖНЫХ ПОКРЫТИЙ
— время вибрирования на одном месте; ti = 60-ь 120 сек',
t2 — время перестановки вибратора; Z3 — 5-ы10 сек\
кп — коэффициент перекрытия уплотняемой зоны. При перестановке
вибратора в шахматном порядке kn =- 0,82;
кв — коэффициент использования вибратора во времени.
Радиус действия вибратора определяется опытным путем или на основе
закона распространения кольцевых волн в среде с вязким сопротивлением.
Мощность привода вибратора можно определить по формуле (VII. 132).
При проектировании ручных глубинных вибраторов следует обратить
внимание на размещение вибромеханизма в корпусе вибратора. Оно должно
быть таким, чтобы обеспечивать равномерную амплитуду колебаний по
длине виброэлемента. Вместе с тем рукоять вибратора не должна под-
вергаться колебательным движениям.
Литература
[.Абросимов К. Ф., Бромберг Л. А. и Катаев Ф. П. Машины
для строительства дорог. М., Машгиз, 1962.
2. А н о х и н А. И., Петерс Е. Р., Эвептов И. М., X а р х у т а Н. Я.
и др. Дорожные машины. М., Дориздат, 1950.
3. Бро м б е р г А. А., Баловней В. И., В о щ и н и н Н. П. и др. Дорож-
ные машины. Атлас конструкций. М., Машгиз, 1960.
4. Вейдман М. И., Волков А. Е. и Левицкий Е. Ф. Строитель-
ство автомобильных дорог. Ч. 3. М., Автотрансиздат, 1961.
5. Гезенцвей Л. Б. Асфальтовый бетон. М., Госстройиздат, 1964.
6. Климец М. В. Смесители асфальтобетона. М., Машгиз, 1952.
7. Колышев В. И. Автоматизация асфальтобетонных заводов. М., Автотранс-
издат, 1961.
8. П и к о в с к и й Я. М., Полосин-Никитин С. М., В о щ и н и н Н. П.
и Балов и ев В. И. Дорожные машины и оборудование. М., Машгиз, 1960.
9. К а н т а р о в и ч В. В. Основы расчета химических машин и аппаратов. М.,
Машгиз, 1960.
10. Касаткин А. Г. Основные процессы и аппараты химической технологии.
М., Госхимиздат, 1960.
11. Теплотехнический справочник. Т. 1. М.—Л., Госэнергоиздат, 1957.
12. Справочник конструктора дорожных машин. Под ред. И. П. Бородачева. М.,
изд-во «Машиностроение», 1965.
13. Лыков А. В. Теория сушки. М., Госэнергоиздат, 1950.
14. Б а р к а н Д. Д. Виброметод в строительстве. М., Госстройиздат, 1959.
15. Гол ь дштей н Б. Г. и П е т р у н ь к и и Л. П. Глубинные вибраторы
для уплотнения бетона. М., изд-во «Машиностроение», 1966.
16. Г о н ч а р е в и ч И. Ф. и Сергеев П. А. Вибрационные машины в строи-
тельстве. М., Alaшгиз, 1963.
17. 3 у б а н о в М. П. Вибрационные машины для уплотнения бетонных смесей
и грунта. М.-Л., изд-во «Машиностроение», 1964.
18. И в а н о в Н. Н. Строительство автомобильных дорог. Ч. 2. М., Автотранс-
издат, 1957.
19. С е в р о в К. П., Лозовой Д. А. и др. Дорожно-строительные машины.
М.. изд-во «Машиностроение», 1965,
20. Наумец Н. И. Жир кович С. В, Основы теории строительных машин.
Куйбышев, изд-во КИСИ, I960.
Глава VIII. МАШИНЫ ДЛЯ СТРОИТЕЛЬСТВА
ЦЕМЕНТНОБЕТОННЫХ ПОКРЫТИЙ
§ 46. БЕТОНОСМЕСИТЕЛИ
Бетоносмесители служат для приготовления бетонной
смеси. Бетонная смесь состоит из крупного заполнителя (щебня разных
фракций или гравия, иногда керамзита), мелкого заполнителя — песка,
вяжущего материала — цемента и воды. Растворосмесители предназна-
чены для приготовления цементного раствора, который в отличие от бетона
не включает в себя крупный заполнитель.
Приготовление из этих компонентов смеси производится путем их
перемешивания, что является ответственной операцией, оказывающей
существенное влияние на качество получаемого бетона. В результате сме-
шивания необходимо получить однородную смесь, обладающую вполне
определенными свойствами. Однородной считается смесь, любая проба
из которой, взятая в достаточно большом по сравнению с размерами самого
крупного заполнителя объеме, имеет один и тот же постоянный состав.
Основной характеристикой бетонной смеси, определяющей возмож-
ность смешения, укладки, уплотнения и дальнейшей обработки, является
ее подвижность. По степени подвижности различают очень жесткие, жест-
кие, умеренно жесткие, пластичные и литые бетонные смеси. Величина
подвижности бетонной смеси регулируется количеством цемента и весо-
вым соотношением между цементом и водой, т. е. так называемым водо-
цементным отношением. Показателем подвижности для литых и пластич-
ных бетонов является величина осадки конуса. У жестких смесей их под-
вижность определяется измерением условной вязкости.
По назначению все смесительные машины делятся на бетоносмеси-
тели и растворосмесители.
По характеру загрузки компонентов и выдачи готовой смеси разли-
чают бетоносмесители непрерывного и цикличного действия. В машинах
непрерывного действия загрузка компонентов и выход готовой смеси про-
изводятся непрерывным потоком. В машинах цикличного действия опе-
рации загрузки, перемешивания и выдачи готовой смеси осуществляются
последовательно.
Бётономешалки непрерывного действия (рис. 193, а) более просты
по конструкции, менее металлоемки и энергоемки, занимают меньшую
производственную площадь и за счет исключения времени на загрузку
и выгрузку смеси имеют повышенную производительность. Основным их
недостатком является меньшая точность дозировки составляющих, по-
этому целесообразно использовать их там, где нет частой смены состава
бетона.
По способу перемешивания все смесители. можно разделить на сме-
сители со свободным (гравитационным), принудительным перемешиванием
332 МАШИНЫ И ОБОРУДОВАНИЕ ДЛЯ ДОРОЖНЫХ ПОКРЫТИЙ
и виброперемешиванием. В бетоносмесителях используются все три спо-
соба перемешивания, в растворосмесителях — только принудительный
способ и виброперемешивание.
Бетоносмесители со свободным перемешиванием служат для приго-
товления пластичных бетонных смесей, имеющих водоцементное отноше-
ние порядка 0,5—0,6 и выше. Основным достоинством этих машин яв-
ляется простота конструкции, небольшая удельная мощность и возмож-
ность перемешивания смеси с заполнителями, размер которых даже
Рис. 193. Принципиальные схемы бе-
тоносмесителей: а — бетоносмеситель
с цилиндрическим барабаном непре-
рывного действия с гравитационным
перемешиванием; б — бетоносмеситель
корытообразный непрерывного действия с прину-
дительным перемешиванием; в — бетоносмеситель
циклического действия со свободным перемешива-
нием и двухконусным смесительным барабаном;
г — бетоносмеситель циклического действия с ча-
шевидным барабаном и принудительным переме-
шиванием.
несколько превышает 100 мм. Основными недостатками этих машин
являются некоторая неоднородность смеси и повышение времени переме-
шивания.
При водоцементном отношении менее 0,5 при свободном перемеши-
вании наблюдается так называемое явление грануляции. Мелкий запол-
нитель гранулируется в прочно удерживающие воду комья, разрушить
которые можно только механическим воздействием. Такое воздействие
и осуществляется в бетоносмесителях принудительного перемешивания.
Жесткие бетонные смеси с водоцементным отношением до 0,3 могут пере-
мешиваться только в бетоносмесителях принудительного действия. При-
менение жестких смесей позволяет сократить расход цемента и ускоряет
сроки распалубки бетонных изделий.
Приготовление еще более жестких смесей возможно только в вибро-
бетоносмесителях. Здесь за счет вибрационного воздействия удается
несколько повысить подвижность смеси и улучшить процесс перемеши-
вания. Вибрационное воздействие способствует получению однородной
смеси, ускоряет процесс выгрузки и уменьшает износ внутренней полости
мешалки и лопастей.
МАШИНЫ ДЛЯ СТРОИТЕЛЬСТВА ЦЕМЕНТНОБЕТОННЫХ ПОКРЫТИЙ 333
Типоразмер смесителей циклического действия определяется по
объему готового замеса в литрах. Типажом предусмотрены бетоносмеси-
тели циклического действия емкостью 65, 100, 165, 330, 880 и 1600 л.
Главным параметром бетономешалок непрерывного действия служит про-
изводительность готовой продукции в час. Типажом предусматриваются
бетоносмесители непрерывного действия производительностью 5, 15, 30,
60 и 120 м3/ч.
По характеру исполнения смесители подразделяются на стационар-
ные и передвижные. Передвижные предназначены для малых объемов
работ. Стационарные смесители имеют более высокую производительность
и устанавливаются на стационарных и полустационарных заводах по
приготовлению бетонов и растворов.
По назначению бетоносмесители можно разделить на строительные,
дорожные и автобетоносмесители. Строительные смесители служат для
приготовления бетона для промышленного и жилищного строительства
и обычно устанавливаются на заводах или строительных площадках,
т. е. работают на одном месте. Дорожные бетоносмесители служат для
приготовления бетонной смеси непосредственно на линии — у места ее
укладки. По мере строительства дороги они передвигаются на рельсовом
или гусеничном ходу. Дорожные бетономешалки имеют специальные меха-
низмы для загрузки компонентов, выгрузки и распределения готовой
смеси по поверхности дороги. Автобетономешалки служат для транспор-
тирования отдозированной сухой смеси на значительные расстояния и пере-
мешивания ее с водой по пути следования. При движении машины смеси-
тельный барабан автобетономешалки вращается с небольшим числом
оборотов для предотвращения расслоения бетонной смеси.
По расположению оси барабана в пространстве различают бетоно-
смесители с горизонтальной, вертикальной и наклонной неподвижной
осью и бетоносмесители с наклоняющейся, т. е. подвижной осью враще-
ния. В последнем случае наклон барабана производится для загрузки
компонентов и выгрузки готовой смеси.
По конструкции смесительного барабана различают бетоносмесители с
цилиндрическим,чашевидным, корытообразным, грушевидным барабанами.
Имеются также барабаны сложной формы, представляющие собой ком-
бинацию цилиндра с усеченными конусами. Барабаны грушевидной формы
применяются в бетоносмесителях малой емкости с наклоняющимся бара-
баном. Цилиндрические барабаны используются в бетоносмесителях с гори-
зонтальной осью вращения. Чашевидные и корытообразные смесительные
барабаны применяются в бетоносмесителях принудительного перемеши-
вания. Барабаны сложной конфигурации характерны для стационарных
бетоносмесителей большой емкости.
Дорожные бетономешалки с неподвижной горизонтальной осью вра-
щения барабана выполняются с двух- и трехкамерными смесительными
барабанами. Такие бетономешалки обладают большой производитель-
ностью и лучшим качеством перемешивания. В этих случаях смеситель-
ный 'барабан поперек своей оси разделен диафрагмами на две или три ка-
меры. Перемешивание смеси осуществляется за счет установки на внутрен-
ней поверхности барабана специальных лопастей ковшового типа. Кроме
того, имеются направляющие лопасти, которые служат для создания про-
дольного движения смеси, т.е.для перемещения материала из одной камеры
в другую.
Бетоносмесители принудительного перемешивания по типу и распо-
ложению перемешивающего органа подразделяются на лопастные и пла-
нетарные. Лопастные смесители (рис. 193, б) представляют собой корыто-
334 МАШИНЫ И ОБОРУДОВАНИЕ ДЛЯ ДОРОЖНЫХ ПОКРЫТИЙ
образный корпус, внутри которого вращается один или два вала с лопа-
стями. Этот тип смесителей используется для приготовления цементных
и известковых растворов и применяется также в некоторых конструкциях
бетоносмесителей. В планетарных бетоносмесителях (рис. 194) переме-
шивание осуществляется лопатками, насаженными на вертикальные вра-
щающиеся валы. При этом происходит перемешивание смеси. В противо-
точных смесителях материал дополнительно перемешивается за счет
вращения в обратном по отношению к лопаткам направлении цилиндри-
ческой чаши. Кроме вращающихся лопаток на специальных держателях
устанавливаются неподвижные лопатки. Они предназначены для очистки
вертикальных стенок и дополнительного перемешивания смеси. Для пре-
дохранения лопаток от поломок, что может иметь место в случае их закли-
Рис. 194. Кинематическая схема бетоносмеси-
теля циклического действия с принудительным
перемешиванием:
нивания, лопатки снабжены пре-
дохранительными устройства-
ми. Планетарные бетоносмеси-
тели дают смесь высокого ка-
чества при малом времени
перемешивания. Вместе с тем
для своей работы они требуют
большую удельную мощность.
Основным рабочим узлом
бетоносмесителя является сме-
сительный барабан. Стенки сме-
сительного барабана выполня-
ются из листовой конструкци-
онной стали. Стенки барабана
/ — двигатель; 2 — клиноременная передача; 3 —
редуктор; 4 — муфта; 5 — конические передачи;
6 — верхний вал привода; 7 — механизм привода
смесительной чаши; 8 — опорные ролики; 9 — сме-
сительные лопатки; 10 — вертикальный вал
нов бетоносмесителей со свободным
для защиты от износа покры-
ваются с внутренней стороны
облицовкой из листов износо-
стойкой стали. Внутри бараба-
перемешиванием (рис. 193, в)
укрепляются лопасти двух типов: приемные (направляющие) и перемеши-
вающие. Приемные лопасти служат для перемещения материала в сред-
нюю часть барабана. Перемешивающие лопасти имеют форму ковшей и слу-
жат для перемешивания составляющих бетонной смеси. Лопасти изго-
товляются из конструкционной стали и крепятся кронштейнами, которые
на заклепках или болтах устанавливаются на внутренней стенке барабана.
Для увеличения долговечности поверхность переднего края ковшей на-
плавляется твердым сплавом.
В качестве привода как правило применяются асинхронные электро-
двигатели. При отсутствии электроэнергии привод бетоносмесителей
малой емкости может осуществляться от двигателей внутреннего сгора-
ния. Вращение от электродвигателя к зубчатому венцу смесительного бара-
бана обычно передается через клиноременную передачу и редуктор. Меха-
низм наклона барабанов бетономешалок имеет пневматический, гидравли-
ческий или механический привод.
Основным показателем бетоносмесительных машин периодического
действия является объем готового замеса V3. Производственная емкость
смесительного барабана определяется суммарным объемом сухих
составляющих смеси, загружаемых в барабан. При этом между объемом
готового замеса и производственной емкостью имеет место зависимость
Уб-
К,
Кв
(VI 11.1)
МАШИНЫ ДЛЯ СТРОИТЕЛЬСТВА ЦЕМЕНТНОБЕТОННЫХ ПОКРЫТИЙ 335
где k„ — коэффициент выхода; ke = 0,65 -ь0,70 для бетонной смеси
и k„ = 0,85-н0,95 для растворов.
Геометрический объем смесительного барабана Уг в 2,3—3,0 раза
больше производственного объема. Это соотношение оказывает существен-
ное влияние на качество перемешивания. При заданной емкости бетоно-
смесителя можно легко определить все его геометрические размеры.
Скорость вращения смесительного барабана следует поддерживать
достаточно малой, с тем чтобы свести к минимуму вредное влияние цен-
тробежной силы. Уравнение равновесия частицы, лежащей на поверхности
лопасти, имеет вид
(VIII.2)
G sin а = mRw2 Ц- fG cos а,
где G — сила тяжести частицы смеси в кГ;
кГ -сек-
т — масса частицы в -------•
м ’
R — радиус смесительного барабана в м;
а — угол наклона лопасти к горизонту; сс = 45е;
f — коэффициент трения смеси о сталь; f = 0,6;
со — угловая скорость вращения смесительного барабана.
Имеется в виду, что
(VIII.3)
со = 1 / сек,
Эи
где п — число оборотов барабана в минуту.
Из уравнения (VIII.2) можно получить
п 30 1/g (sin a —/'cos 7)
л г R
Мощность привода смесительного барабана бетоносмесителя со сво-
бодным перемешиванием затрачивается на перемешивание материала
и на преодоление сил трения в опорах.
Сила трения, приведенная к радиусу бандажа, выразится в виде
= 4Рср ( 77 + 77-) (VШ.4)
где — радиус опорного ролика в см;
/j — коэффициент трения качения ролика по бандажу; f± = 0,002-н
0,005 см;
f — коэффициент трения оси ролика; для подшипников скольжения
f = 0,1;
r-i — радиус оси ролика в см;
4Р — суммарная сила нормального давления в месте контакта в кГ.
Согласно схеме на рис. 195, можно найти, что
4Р _Gt + G, (VIII.5)
ГсР cos a v
Здесь Gt — вес смесительного барабана в кГ;
G2 — вес перемешиваемого материала в кГ;
а — угол установки опорных роликов; а = 30°.
Очевидно, что
G2 = 6 И, кГ,
где 6 — объемный вес выдаваемого материала; 6 = 2200 кГ!м3.
336
МАШИНЫ И ОБОРУДОВАНИЕ ДЛЯ ДОРОЖНЫХ ПОКРЫТИЙ
При вращении барабана смесь
Сила сопротивления, создаваемая
к ободу бандажа, равна
смещается в направлении вращения,
смещением материала, приведенная
Ц/2 •= кГ, (VII1.6)
где R — радиус бандажа в м;
Ь — плечо действия силы веса
степени
лопаток
смещенного материала в м.
Величина смещения b зависит от подвижности смеси, формы и
наполнения смесительного барабана, формы и расположения
и т. п. При предварительных расче-
тах можно принять
b = (0,54-0,6) R.
Общая мощность привода сме-
сительного барабана
(11^+ Ж,) У /VIII -74
N = 1021] квт’ (V111-7)
где v — окружная скорость бандажа
барабана в м!сек\
1] — к. п. д. трансмиссии.
При одномоторном приводе при
выборе мощности двигателя необхо-
димо учесть мощность, идущую на
привод вспомогательных механиз-
мов и привод системы управления.
Точный расчет мощности при-
вода бетоносмесителя принудитель-
ного перемешивания представляет
большие трудности. Для приближенных расчетов можно пользоваться
упрощенным способом. В основу его положено предположение, что со-
противление движению лопатки в бетонной смеси пропорционально
площади лобовой проекции F,-,
= k\xFt кГ,
(VIII.8)
где k — коэффициент удельного сопротивления; для бетонной смеси при
скорости движения лопатки v = 0,7ч-0,8 м'сек можно принять
k = 2,0ч-2,4 кПсм2-,
р — коэффициент, учитывающий глубину погружения лопатки в смесь;
при погружении на полную высоту р = 1, а при погружении
на полуторную высоту лопатки р — 2.
Суммарная мощность бетоносмесителя принудительного действия
зависит от ее основной схемы и в общем виде может быть выражена фор-
мулой
N - s -йг <V,1L9)
1=1
где Wt — сопротивление перемещения отдельного элемента в кГ\
vt — скорость перемещения соответствующего элемента в м!сек\
п — число перемешивающих органов—лопаток.
Производительность бетоносмесителя циклического действия зависит
от объема готового замеса, времени цикла приготовления смеси и коэф-
МАШИНЫ ДЛЯ СТРОИТЕЛЬСТВА ЦЕМЕНТНОБЕТОННЫХ ПОКРЫТИЙ
337
фициента использования машины по времени. Часовая производитель-
ность этого бетоносмесителя
П = ПобоТГ-^Г-+ТТ Mi'4’ <vm. ю>
где V3 — объем готового замеса в л;
ke — коэффициент использования машины по времени; k„ = 0,65 = 0,70;
/j — продолжительность загрузки барабана; = 10 = 20 сек;
— продолжительность перемешивания; t.2 = 60 = 90 сек;
t3 — продолжительность выгрузки готовой смеси из барабана; t3 =
= 10=15 сек для опрокидывающего барабана и t3 = 15 = 20 сек
для барабана с неподвижной осью;
ti — время возврата барабана в исходное положение.
Наибольшее время в цикле занимает время перемешивания. Величина
этого времени зависит от конструкции смесительного барабана, жесткости
смеси, емкости барабана. В каждом отдельном случае существует опти-
мальное время перемешивания. Значительное превышение времени пере-
мешивания приводит к расслоению смеси. Расслоение возникает тем быст-
рее, чем жестче смесь и чем больше в ней крупного заполнителя. Для сред-
них бетоносмесителей с емкостью 160—300 л это время равно 60—80 сек.
Производительность бетоносмесителей непрерывного действия опре-
деляется по формуле
П = QQnFSake м3/ч, (VIII.11)
где п — число оборотов барабана или лопастного вала в минуту;
F — площадь сечения потока материала в барабане в м2;
S — шаг лопастей в м;
к — коэффициент, учитывающий тормозящее действие трения мате-
риала о стенки корпуса смесителя и о винтовые поверхности;
а = 0,5.
Площадь сечения потока материала в барабане определяется по фор-
муле
F _ ф м\ (VIII. 12)
где ф — коэффициент заполнения сечения; ф -= 0,2 = 0,3;
D — диаметр барабана в м.
§ 47. ЗАВОДЫ ДЛЯ ПРИГОТОВЛЕНИЯ БЕТОННЫХ СМЕСЕЙ
Бетонные смеси приготавливают на специально организованных
предприятиях — бетонных заводах. На этих заводах производится точное
дозирование составляющих бетонной смеси и их перемешивание. Завод
имеет также специальные складские помещения для хранения щебня
разньТх фракций, песка и цемента. Значительное место в технологическом
процессе завода занимают транспортные операции.
По назначению заводы разделяются на заводы сухой смеси и заводы
готового бетона. Продукцией завода сухой смеси является тщательно
отдозированная порция щебня, песка и цемента, рассчитанная на один
замес. Эта порция доставляется на место укладки бетона, где и перемеши-
вается в бетономешалке с добавлением воды. Заводы сухой смеси нашли
широкое применение за границей при строительстве цементобетонных
дорожных покрытий. Преимуществом этого способа работы является
338
МАШИНЫ И ОБОРУДОВАНИЕ ДЛЯ ДОРОЖНЫХ ПОКРЫТИЙ
возможность получения непосредственно на месте работ свежего бетона,
что значительно повышает качество дорожного покрытия. Вместе с тем
строительная стоимость покрытия здесь несколько выше, чем при доставке
на место работ готового бетона. Применение сухой смеси особенно эффек-
тивно при большой дальности перевозки бетона. Продукцией завода го-
тового бетона является уже перемешанный с водой бетон, который и
доставляется транспортными средствами на место его укладки. Способ
строительства дорожных и аэродромных покрытий из готового бетона
получил за границей более широкое распространение, чем метод сухой
смеси. Здесь еще применяется промежуточный способ, при котором пред-
варительное перемешивание бетона производится на заводе, а оконча-
тельное — в автобетономешалках, которыми бетонная смесь доставляется
на место работ. В настоящее время в СССР все бетонные работы произ-
водятся только путем доставки на место работ готового бетона.
По продолжительности действия бетонные заводы разделяются на
стационарные, полустационарные (инвентарные) и передвижные. Ста-
ционарные заводы обычно рассчитываются на длительную, практически
постоянную работу на одном месте. Полустационарные заводы устраи-
ваются сборно-разборными и работают на одном месте обычно от одного
года до трех лет. Передвижные заводы имеют небольшую производи-
тельность и могут в течение одного строительного сезона перемещаться
с одного объекта на другой.
По принципу работы они разделяются на заводы циклического и
непрерывного действия. Наиболее совершенными и производительными
являются заводы непрерывного действия. По устройству и управлению
заводы могут быть неавтоматизированными, когда все агрегаты управ-
ляются вручную, частично автоматизированными, где автоматизировано
управление некоторыми главными операциями технологического процесса,
например дозированием материалов, и полностью автоматизированными.
В последнем случае процесс приготовления бетона осуществляется по
заданной программе с соблюдением определенной дозировки материалов,
времени перемешивания и т. д. Здесь имеет место так называемая обратная
связь, при которой установленный для контроля качества продукции
специальный агрегат, при обнаружении отклонения бетона от заданных
норм автоматически изменяет параметры технологического процесса.
Первой технологической операцией бетонного завода является прием
исходных материалов: цемента, песка и щебня, а также организация их
хранения. При доставке цемента в специальных саморазгружающихся
вагонах его разгружают в специальные приемные бункера закрытого
транспорта. Здесь для перемещения цемента по горизонтали на короткие
расстояния служат шнековые устройства. Из приемных бункеров цемент
поступает на склад. Если цемент привозится в вагонах навалом, то его
выгрузка производится специальными разгрузчиками. Последние за счет
создаваемого вакуум-насосом разрежения засасывают цемент специаль-
ным заборным устройством.
Для разгрузки песка и щебеночных материалов служат специальные
разгрузочные машины, рабочими органами которых является скребок
или скребковый транспортер.
Складирование песка и щебня обычно производится как в открытых
складах, так и в складах бункерного типа, а для хранения цемента служат
специальные склады силосного типа. Общий вид инвентарного силосного
склада представлен на рис. 196. Здесь для хранения цемента служат две
силосных башни, которые при перебазировании завода перевозятся в сборе.
Склад рассчитан на загрузку цемента как из автоцементовозов, так и при
МАШИНЫ ДЛЯ СТРОИТЕЛЬСТВА ЦЕМЕНТНОБЕТОННЫХ ПОКРЫТИЙ 339
помощи сжатого воздуха. Выдача цемента производится через шиберный
затвор и в аэрожелоб. После этого цемент элеваторами подается в верхний
аэрожелоб и далее в смесительное отделение (цех) завода.
Для транспортирования цемента в пределах завода широкое приме-
нение получил различного вида пневмотранспорт. При этом для гори-
зонтального транспорта часто применяются аэрожелоба. Здесь цемент
смешивается с капиллярно-
распыленным воздухом, в
результате чего приобретает
высокую подвижность и те-
кучесть. Движение цемента
по аэрожелобу происходит
под действием силы тяжести
при незначительных углах
наклона оси аэрожелоба
(3—7°) к горизонту. Желоб
состоит из кожуха, который
вдольоси разделен керамичес-
кой перегородкой (рис. 197).
Цемент из силосного склада
поступает в верхнюю часть
желоба и смешивается с воз-
духом, который нагнетается
вентилятором и просачивает-
ся сквозь керамическую пе-
регородку. Воздух выходит
в нижней части желоба через
матерчатые фильтры. Ско-
рость движения цемента в
зависимости от угла наклона
оси желоба находится в пре-
делах 0,7—1,3 м!сек.
На несколько большие
расстояния по горизонтали
(до 200 м), а также вверх по
вертикали (до 25—30 м) це-
мент может подаваться спе-
циальным пневмотранспор-
том. Здесь цемент переме-
щается вначале шнековым
Рис. 196. Склад цемента:
/ — приемный бункер; 2 — элеватор; 3 — привод эле-
ватора; 4 — аэрожелоб верхний; 5 — фильтр; 6 — си-
лосный бак; 7 — аэрожелоб нижний
устройством, а затем в смесительной камере смешивается с воздухом,
который подается при давлении 2—4 ат. Цементо-воздушная смесь далее
следует к месту разгрузки по трубам. Воздух из этой системы выходит
через специальные фильтры, где и очищается от цемента. Щебень и песок
обычно подаются транспортерами.
Наиболее важной частью завода являются дозирующее и смесительное
отделения. Качество бетонной смеси во многом определяется точностью
дозирования ее составляющих. Особенно важна точность дозировки це-
мента и воды. В настоящее время на заводах дозирование щебня, песка
и цемента, как правило, производится весовой аппаратурой. Дозирование
воды может производиться объемными аппаратами. Весовые дозаторы
могут иметь ручное или автоматическое управление. На заводах цикли-
ческого действия они обычно представляют собой подвешиваемый
к рычажным весам мерник, который наполняется материалом из
340
МАШИНЫ И ОБОРУДОВАНИЕ ДЛЯ ДОРОЖНЫХ ПОКРЫТИЙ
расположенного над ним бункера. Подача материала из последнего
регулируется открытием специального затвора. При автоматическом упра-
влении такое регулирование производится специальным механизмом.
На заводах непрерывного действия поступление материалов в смеси-
тельное отделение производится непрерывным потоком. Установленные
здесь дозаторы автоматически поддерживают подачу постоянного коли-
чества материала в единицу времени. В настоящее время разработан ряд
типовых проектов бетонных заводов разной производительности, которые
в основном и используются. Поэтому проектирование главным образом
сводится к привязке по месту типового завода. Здесь разрабатываются
фундаменты и транспортные линии, выбирается расположение складов
и т. п.
Рис. 197. Схема аэрожелоба:
1 — кожух; 2 — пористая керамическая перегородка;
3 — вентилятор; 4 — цементный силос’. 5 — фильтры
выхода воздуха
При разработке типовых проектов бетонных заводов следует ориен-
тироваться на проверенное и хорошо зарекомендовавшее себя оборудо-
вание. Оборудование и его
тип (бетоносмесители, дози-
рующие устройства, транс-
портные средства и т. п.)
выбираются по заданной про-
изводительности завода на ос-
новании утвержденных норм
выработки. Когда необхо-
димая производительность
может быть достигнута
установкой одного большого
бетоносмесителя или двух
менее производительных бе-
тоносмесителей, то предпоч-
тение отдают последнему
варианту, так как в случае
непредвиденных технических неполадок, завод, хотя и при уменьшенной
производительности, все же сможет давать продукцию. Вместе с тем число
установленных агрегатов не должно быть излишне большим, так как
в противном случае будет трудно подавать к ним материалы и организо-
вать их техническое обслуживание. Поэтому при больших производи-
тельностях завода лучше выбирать меньшее количество более производи-
тельных агрегатов.
После выбора оборудования приступают к его компоновке. Заводы
могут иметь горизонтальную (партерную) и вертикальную (башенную)
компоновку. В первом случае оборудование размещается на большей
производственной площади, примерно на одном уровне в порядке, опре-
деляемом технологическим процессом. Здесь при переходе от одного агре-
гата к другому материал может подниматься и опускаться несколько раз.
При вертикальной компоновке все оборудование и аппаратура рас-
положены в одной башне. Материал, будучи однажды поднятым в расход-
ные бункера, далее перемещается вниз по отдельным операциям техноло-
гического процесса. Перемещения происходят под действием собственного
веса. Такие заводы занимают небольшую площадь, но зато имеют значи-
тельную высоту (до 30 м).
Схема размещения оборудования на заводе башенного типа видна
из рис. 198. Здесь фракции щебня и песок поочередно подаются транс-
портом / в расходные бункера 3. Загрузка этих бункеров производится
через распределительное устройство 2. Цемент подается пневмотранс-
портной установкой 11 в специальные бункера. После дозирования со-
МАШИНЫ ДЛЯ СТРОИТЕЛЬСТВА ЦЕМЕНТНОБЕТОННЫХ ПОКРЫТИЙ
341
ставляющие бетона, через загрузочное устройство 8 направляются в один
из бетоносмесителей. После перемешивания бетонная смесь поступает
в раздаточный бункер, а затем в автотранспорт, которым и доставляется
к месту его укладки. Емкость раздаточного бункера или его отсеков должна
быть кратной емкости транспортных средств.
На заводах такого типа можно выделить следующие четыре отделения,
которые расположены на отдельных этажах башни: 1) надбункерное,
где находятся агрегаты пнев-
мотранспортной установки
цемента, распределительное
устройство и транспортер;
2) дозировочное, в котором
расположены бункера и до-
заторы; 3) смесительное, где
установлены бетономешалки
и 4) раздаточное, в котором
расположен раздаточный бун-
кер. Этот завод относится
к предприятиям цикличес-
кого действия.
На рис. 199 изображена
схема бетонного завода не-
прерывного действия. Здесь,
так же как и в предыдущем
случае, материалы, необхо-
димые для изготовления бе-
тона, подаются транспорте-
ром в расходные бункера.
Однако в отличие от завода
циклического действия здесь
установлены дозаторы непре-
рывного действия, которые
автоматически дозируют со-
ставляющие бетона — обыч-
но три фракции щебня, песок
и цемент, и подают их на
сборный транспортер. В ре-
зультате последний несет на
себе несколько слоев раз-
Рис. 198. Размещение оборудования на заводе ба-
шенного типа:
/ — ленточный транспортер; 2 — распределительное
устройство; 3 — расходные бункера; 4 — баки для
воды; 5 — дозатор хлористого кальция; 6 — дозатор
воды; 7 — дозаторы щебня, песка и цемента; 8 — за-
грузочное устройство; 9 — батономешалки; 10 — раз-
даточный бункер; 11 — пневмотранспортная установка
для цемента
личных материалов, соотношение между площадями поперечных сече-
ний которых точно соответствует составу бетона. Сборный транспортер
доставляет эти материалы в бетономешалку непрерывного действия, из
которой готовая бетонная смесь непрерывно поступает в раздаточный бун-
кер, а оттуда в транспортные средства. Заводы подобного типа обычно
имеют высокую производительность (100—120 лг3/ч) и являются стацио-
нарными.
Необходимость иметь достаточно большой запас материалов, рассчи-
танный на работу заводов в течение 15—20 дней, обусловливает наличие
довольно больших складов песка и щебеночных материалов, под которые
отводится значительная площадь. Операции складирования и подачи
этих материалов в расходные бункера должны быть полностью механизи-
рованы. На открытых складах штабеля щебня имеют линейное протя-
жение или секторное расположение. Последнее предпочтительнее, так как
при этом экономится площадь и облегчается подача материала на наклон-
342
МАШИНЫ И ОБОРУДОВАНИЕ ДЛЯ ДОРОЖНЫХ ПОКРЫТИЙ
«S
ный главный транспортер, которым
он затем транспортируется в расход-
ные бункера. Для обеспечения по-
дачи материала со склада в рас-
ходные бункера под штабелями
располагают траншеи, в которых раз-
мещают вспомогательные транспор-
теры. Последние предназначены для
подачи отдельных фракций щебня
и песка на главный транспортер.
Траншеи перекрывают настилом, ко-
торый затем убирают по мере разра-
ботки штабеля. Из штабеля на вспо-
могательный транспортер материал
поступает под действием собствен-
ного веса и частично подается буль-
дозером.
Подача материала из открытых
штабелей на главный транспортер
может также осуществляться через
загрузочный бункер ковшовыми по-
грузчиками, экскаваторами с грей-
дерным ковшом и другими аналогич-
ными средствами.
На стационарных и полуста-
ционарных заводах большой про-
изводительности, рассчитанных на
круглогодичную работу, хранение
щебня и песка производится в бун-
керных складах, так как в открытых
штабелях эти материалы в зимнее
время смерзаются, что сильно ослож-
няет работу завода. В этих случаях
траншея с транспортером распола-
гается под бункером, что и обеспе-
чивает полную механизацию подачи
щебня и песка в дозировочное отде-
ление завода.
На автоматизированных бетон-
ных заводах применяется целый
ряд автоматических устройств. Так,
степень наполнения бункера кон-
тролируется специальными указа-
телями уровня. В настоящее время
разработан целый ряд датчиков для
контроля уровня сухих сыпучих
материалов, которые по принципу
устройства могут быть подразде-
лены на механические (мембран-.
ные, колокольные, моторные),
электрические (электродные и еМ-'
костные) и радиоактивные (по-
зиционной системы и следящей
системы).
МАШИНЫ ДЛЯ СТРОИТЕЛЬСТВА ЦЕМЕНТНОБЕТОННЫХ ПОКРЫТИЙ 343
В мембранных датчиках мембрана прогибается под давлением мате-
риала и замыкает электрические контакты. Колокольный датчик пред-
ставляет собой защищенный прочным стальным грушевидным корпусом
контактный механизм. Датчик подвешивается внутри бункера. При напол-
нении последнего он отклоняется от вертикального положения, и кон-
тактный механизм переключает контакты сигнализации. Моторный датчик
имеет синхронный электродвигатель, который при помощи гибкого вала
и муфты связан с контактным устройством. Гибкий вал опускается в бункер
на заданный уровень. При наполнении последнего материал защемляет
гибкий вал и при этом муфта обеспечивает замыкание контактов, которые
находятся на связанной с прибором качающейся траверсе.
Электрические электродные датчики подают сигнал при замыкании
двух электродов. Такое замыкание производится материалом при заполне-
нии им бункера. Ввиду того, что материал связан с заземленным бунке-
ром, то связь датчика устраивается обычно однопроводной. Емкостные
датчики основаны на изменении их емкости при заполнении бункера ма-
териалом.
Радиоактивные датчики состоят из источника и приемника излучения,
расположенных друг против друга. При заполнении пространства между
ними каким-либо материалом интенсивность излучения, которая реги-
стрируется приемником, резко снижается, что и служит сигналом о напол-
нении бункера.
Применяемые на бетонных заводах автоматические весовые дозаторы
могут быть подразделены на однофракционные и многофракционные,
а также на дозаторы циклического и непрерывного действия. Многофрак-
ционные дозаторы производят последовательное дозирование отдельных
составляющих бетонной смеси, что несколько удлиняет цикл работы.
На заводах циклического действия применяются однофракционные или
многофракционные дозаторы циклического действия, а на заводах непре-
рывного действия — однофракционные дозаторы непрерывного дей-
ствия.
Дозаторы циклического действия могут быть основаны на применении
электропневматической или фотоэлектронной систем. В обоих случаях
необходимая точность и высокая производительность дозатора обеспе-
чивается тем, что отвешивание порции материала производится в два
приема: сначала производится так называемое грубое взвешивание, когда
отмеряется примерно 90% необходимого количества материала, а затем
наступает фаза точного взвешивания.
На рис. 200 представлен общий вид и схема электропневматического
дозатора. Здесь весовой мерник, в котором отвешивается требуемая пор-
ция материала, подвешен к рычагам, соединенным со шкальными коромыс-
лами 5. Последние расположены в весовом шкафу. Во взвешивании каждый
раз участвует одно из шкальных коромысел, а наличие нескольких позво„-
ляет последовательно осуществлять дозирование различных фракций
щебня и песка. Нужные дозы каждой фракции устанавливаются пере-
движейием по коромыслам гирь 6. Неучаствующие во взвешивании коро-
мысла заперты арретивами, которые дистанционно управляются пневмо-
цилиндрами. Нагрузка от весового бункера при помощи рычагов пере-
дается циферблатному указателю и затем через передаточный рычаг 4 —
главному коромыслу 3. Последнее связано с каждым из шкальных коромы-
сел и несет на себе ртутный переключатель 8, который имеет два кон-
такта — для грубого и точного взвешивания. Контакты замыкаются и
размыкаются в зависимости от того, какое положение имеет главный
рычаг — наклонное или горизонтальное.
344
МАШИНЫ И ОБОРУДОВАНИЕ ДЛЯ ДОРОЖНЫХ ПОКРЫТИЙ
В электрическую цепь вместе с ртутными переключателями включены
электровоздушные клапаны, которые производят впуск или выпуск
воздуха из полостей пневмоцилиндров, и в зависимости от этого последние
открывают или закрывают заслонку бункера, откуда материал поступает
в весовой мерник. Когда вес материала достигает примерно 90% нужной
дозы, главное коромысло выпрямляется, и один из контактов ртутного пере-
ключателя разрывает цепь электровоздушного клапана, и пневмоцилиндр,
прикрывая затвор, снижает интенсивность подачи материала. По дости:;:е-
Рис. 200. Схема весового автоматического многофракционного доза-
тора циклического действия:
1 — весовой шарнир; 2 — весовой шкаф; 3 — главное коромысло весов;
4 — передаточный рычаг; 5 — шкальные коромысла; 6 — передвижные гири;
7 — арретиры; 8 — ртутный переключатель; 9 — рычаг; 10 — циферблатный
указатель
нии «точного» веса разрывается вторичная цепь того же клапана и подача
материала в весовой мерник прекращается.
В дозаторах, устроенных на основе фотоэлектрических систем, интен-
сивность подачи материала в мерник регулируется фотоэлементом. При
освещении последнего прямым светом происходит интенсивная подача •
материала, а по достижении «грубого веса» фотоэлемент начинает осве-о
щаться отраженным светом, поэтому интенсивность подачи материала'
снижается и прекращается совсем, когда по достижении точного веса!
освещение фотоэлемента прекращается. Фотоэлементы размещаются на:-
так называемых рабочих стрелках циферблата, число которых равна
числу составляющих бетона. Эти стрелки неподвижны. Флажок-отражат f
тель размещается на контрольной стрелке, которая движется по мере !
поступления материала в мерник. При этом движении и меняется освещен
ние очередного фотоэлемента. . г
Дозаторы непрерывного действия могут быть одноступенчатого и
двухступенчатого типа. Одноступенчатые дозаторы сочетают в одном агреп >
гате устройство для взвешивания материала и регулирования его подачи- I
(рис. 201, а), а двухступенчатые факторы для взвешивания и регулиро<'3
вания материала снабжены самостоятельными агрегатами (рис. 201, б)-31
Двухступенчатые дозаторы предпочтительнее, так как обеспечивают болеет
точное дозирование. : ‘Г
МАШИНЫ ДЛЯ СТРОИТЕЛЬСТВА ЦЕМЕНТНОБЕТОННЫХ ПОКРЫТИЙ
345
Дозаторы должны обеспечивать подачу в единицу времени постоян-
ного количества материала, т. е. необходимо всегда соблюдать следующее
условие:
Q = vFS = const, (VI11.13)
где Q — количество подаваемого материала в единицу времени в кПсек-,
v — скорость подачи материала в м/сек-,
F — сечение потока движущегося материала в л'2;
б — объемный вес материала в кПм3.
При случайных изменениях Q поддерживать его постоянство можно,
регулируя сечение потока либо скорость подачи материала. Первый тип
Рис. 201. Принципиальные схемы автоматических дозаторов непрерывного действия:
а — одноступенчатого; б — двухступенчатого типа:
1 — приводной барабан; 2 — воронка; 3 — заслонка; 4 — коромысло весов; 5 — весовой
ролик; 6 — ведомый барабан; 7 — опорная призма; 8 — тензометрический датчик; 9 — передаточ-
ные звенья; 10 — электродвигатель; 11 — шнек
дозатора обычно устраивается с подвижной заслонкой (рис. 201, а), кото-
рая тем или иным способом связана с весовым коромыслом. Дозаторы
с регулированием скорости подачи материала обычно устраиваются одно-
ступенчатыми. У них в зависимости от давления транспортера на коро-
мысло весов регулируется скорость движения его ленты. Двухступенчатые
Дозаторы устраивают с регулированием площади сечения потока мате-
риала на транспортере, которое осуществляют путем изменения скорости
поступления его через подающий механизм — шнек или вибратор. Послед-
ние при помощи электрических, а часто и механических передаточных
звеньев связаны с весовым коромыслом. При избыточном весе скорость
вращения шнека или интенсивность работы вибратора снижаются, а при
недостатке в весе повышаются.
Весовой транспортер может опираться на коромысло весов через
весовой ролик 5 или быть полностью подвешенным к весовому рычагу.
В первом случае на чувствительный элемент—ролик передается часть
веса несущей ветви транспортера, а во втором случае на весовой рычаг
передается весь вес транспортера. Системы с весовым роликом не обеспе-
чивают высокой точности взвешивания ввиду того, что длина участка
ленты, воспринимаемой роликом, непостоянна и зависит от величины
346 МАШИНЫ И ОБОРУДОВАНИЕ ДЛЯ ДОРОЖНЫХ ПОКРЫТИИ
прогиба ленты, ее упругости, высоты слоя и гранулометрии дозируемого
материала. Имеет место еще промежуточный случай, когда на чувстви-
тельный элемент передается половина или какая-либо постоянная часть
веса транспортера (рис. 201, б). Такие системы называют дозаторами с кон-
сольным весовым транспортером.
Взвешивание может быть механическим, где для этой цели служат
рычажные весы (рис. 201, а), и производимым различного рода электри-
ческими датчиками. Механическое взвешивание обладает инерцион-
ностью, и, кроме того, точность работы этой системы снижается из-за
того, что при этом меняется угол наклона транспортера, что особенно
имеет место в консольных конструкциях и в системах с чувствительным
роликом.
Взвешивание при помощи электрических датчиков безынерционно
и потому при хорошо отработанной конструкции датчика и отлаженной
системе вспомогательных электрических устройств (усилителей, регу-
ляторов и т. д.) может быть достигнута высокая точность взвешивания.
Электрические датчики могут быть тензометрическими и индуктив-
ными.
Схема двухступенчатого дозатора непрерывного действия с тензо-
метрическими весами представлена на рис. 201, б. Здесь сила тяжести
весового транспортера распределяется между опорной призмой 7 и приз-
мой тензометрического датчика 8. Материал из воронки 2 подается на транс-
портер шнековым устройством 11, которое приводится в действие электро-
двигателем постоянного тока 10. Лента транспортера движется с постоян-
ной скоростью. При изменении веса материала соответственно меняются и
обороты шнекового устройства. Для этого тензодатчиком регулируется
сила тока в обмотке возбуждения электродвигателя.
Изменение дозы материала в случае дозаторов как циклического,
так и непрерывного действия может производиться дистанционно путем
введения в систему дополнительных устройств. При дистанционном управ-
лении груз на коромысле весов перемещают при помощи следящей системы
или действие груза заменяют силой электромагнита. Для нагружения коро-
мысла весов применяют также аппараты, использующие давление сжатого
воздуха, или гидравлические устройства.
Полностью автоматизированные бетонные заводы с программным упра-
влением обычно работают по следующей технологической схеме. Соста-
вляющие бетона — песок и щебень — поступают в закрытый склад тран-
шейного типа, а цемент — в склад силосного типа. Песок и щебень разных
фракций поочередно подаются на транспортер, который распределяет их
по бункерам. Подача этих материалов автоматизируется. С этой целью
в каждом бункере устанавливаются указатели уровня. По наполнении
бункера подается сигнал, и транспортер переключается на подачу другого
сорта материала уже в следующий бункер. Одновременно в соответству-
ющее положение устанавливается поворотная воронка. Степень наполне-
ния бункеров постоянно автоматически контролируется. Аналогичным
образом производится подача цемента. Песок и щебень дозируются автома-
тическими дозаторами непрерывного действия. Отдозированные материалы
направляются в бетоносмеситель непрерывного действия, а оттуда через
скопной бункер — в автомобиль-самосвал, который автоматически взве-
шивается. По его наполнении до заданного веса подача смеси прекращается
и автомобиль получает сигнал на выезд. - л .
Требуемый состав смеси кодируется перфорированием на специальном
карточке, которая закладывается в программное устройство, которое
дистанционно управляет дозаторами. ; '
МАШИНЫ ДЛЯ СТРОИТЕЛЬСТВА ЦЕМЕНТНОБЕТОННЫХ ПОКРЫТИЙ 347
Стационарные, а в некоторых случаях и полустационарные бетонные
заводы часто переводятся на круглогодичную работу. Для этих целей
завод должен быть приспособлен для работы в зимнее время.
Зимняя работа бетонного завода осложнена тем, что ввиду низкой
температуры воздуха, если не принять к тому надлежащих мер, на складах
смерзаются составляющие бетона — песок и щебень. Кроме того, переме-
шивание сухой смеси с водой в бетономешалке становится практически
невозможным. Для того чтобы обеспечить работу завода в зимних усло-
виях, предпринимается ряд мер:
1) производится предварительный подогрев воды до температуры
80 -95 С, а при необходимости и минеральных составляющих бетона
до температуры 40—60е С;
2) в качестве добавок к бетону применяются растворы солей (хлори-
стого натрия или хлористого кальция);
Рис. 202. Схемы обогрева минеральных составляющих бетона: а — на
складе дымовыми газами; б — в установке для подогрева песка
3) бетоносмесительные установки утепляются специальными щитами,
а внутри башни завода устанавливаются водяное или калориферное ото-
пление;
4) утепляются водопроводная и паропроводные системы завода и т. п.
В некоторых случаях в зимнее время завод переходит на приготовле-
ние так называемого холодного бетона, т. е. бетона с повышенным содержа-
нием солей. Этот бетон приготовляется на неутепленных автоматизирован-
ных заводах или установках с обязательным местным электрообогревом
всех электровоздушных клапанов.
Во всех случаях рекомендуется производить отопление траншей,
в которых размещены ленточные транспортеры. Для того чтобы снова
разделить смерзшиеся мелкие фракции щебня и песка, их рекомендуется
пропускать через виброгрохот.
Оттаивание и подогрев щебня и песка может производиться на складе
закрытым паром, т. е. так называемым сухим способом при помощи уло-
женных на площадке по бокам транспортерной траншеи и под ней плоских
и объемных вертикальных регистров; при этом регистры устанавливаются
попарно с шагом в 1 м. Давление пара в регистрах составляет 2,5—3 кГ/см2.
Здесь тепло пара передается обогреваемому материалу через стенку трубы.
Затем тепло распространяется ввиду теплопроводности минеральных
частиц и воздуха. Длина участка обогрева определяется производитель-
ностью завода. Опыт показывает, что за 15—20 ч каменный материал и
песок прогреваются в слое высотой 2—3 м над регистрами. Штабели
материалов для уменьшения теплоотдачи сверху должны быть прикрыты
брезентом или щитами.
Применяется также прогрев материала продувкой через него дымовых
газов (рис. 202, а). При этом материал складируется на складе полубун-
348
МАШИНЫ И ОБОРУДОВАНИЕ ДЛЯ ДОРОЖНЫХ ПОКРЫТИЙ
керного типа, который снабжен транспортерной траншеей. Дымовые газы,
смешанные с воздухом, при температуре 200—250е из специальной топки
нагнетаются вентилятором в расположенный вдоль бункера раздаточный
короб 1, из которого они проходят сквозь толщу материала, подогревают
его и выходят в атмосферу. Здесь может быть налажена циркуляция дымо-
вых газов. Для этого в нижних частях стенок бункера прокладываются
всасывающие короба 2.
Опыт применения различных способов обогрева показал, что при
производительности завода, равной 100 м3!сутки, требуется иметь длину
склада при обогреве дымовыми газами около 20 м, а при обогреве паровыми
регистрами — около 30 м. Коэффициенты полезного действия здесь близки
соответственно 0,7 и 0,5. Таким образом, обогрев дымовыми газами, с точки
зрения тепловых затрат, оказывается более выгодным.
Составляющие бетона и особенно песок могут обогреваться в выпу-
скаемых для этой цели промышленностью сушильных барабанах
(рис. 202, б). Здесь ковшовым элеватором 6 материал подается в сушильный
барабан 4. С противоположной стороны расположена топка 3. Дымовые
газы удаляются в расположенную на противоположной стороне барабана
дымовую коробку 5. Таким образом, нагрев и сушка материалов здесь
устроены на принципе противотока. Производительность такой установки
в случае нагрева песка составляет 35—50 м31ч. Нагрев материалов в таких
установках как по производительности, так и по расходу топлива является
более эффективным, чем в случае нагрева их непосредственно на складе.
Для определения расхода топлива и затрат, необходимых для нагрева
различных материалов, надо подсчитать потребное для этой цели коли-
чество тепла. Часовой расход тепла на нагрев воды найдется по формуле
Qe = Ace(/K— tH) V = 103 (tK — t4)V ккал, (VIII.14)
где А — плотность воды; А = 1000 кГ/м3-,
св —удельная теплоемкость воды; св = 1 кал!кГ -град-,
V — объем нагреваемой воды в м31ч\
tK и tH — соответственно конечная и начальная температура воды.
Часовой расход тепла на нагрев мерзлых каменных материалов или
песка определится из выражения
Q3 = V63 [с3 (tK — tH) ia (0,5/M 80 + ^)], (VIII. 15) !
где V — объем подогреваемого материала в ,и:!; ;
6Э — плотность сухого заполнителя в кГ!м3-, ; ?
с3 — удельная теплоемкость заполнителя в ккал!кГ -град\
i3 — относительная весовая влажность заполнителя в %;
0,5 — удельная теплоемкость льда в ккал/кГ\ }
80 — скрытая теплота плавления льда в ккал!кГ.
Надо также найти необходимую поверхность нагрева. При обогрев?(
воды и каменных материалов горячими газами эта поверхность опреде- ,
ляется выражением ,
»’
где Q — часовой расход тепла, определяемый по формулам (VIII.14) и
(VIII.15);
k — коэффициент теплопередачи нагревательного прибора ‘
в ккал/м~ ч град, значения которого приведены в табл. 32;' }
tr — температура теплоносителя пара или дымового газа; ' t
tM — средняя температура нагреваемых материалов.
МАШИНЫ ДЛЯ СТРОИТЕЛЬСТВА ЦЕМЕНТНОБЕТОННЫХ ПОКРЫТИЙ 349
Расход топлива (в кГ) на нагрев материалов найдется по формуле
где е — теплотворная способность топлива в ккал/кГ',
т] — к. п. д. нагревательного устройства (см. табл. 32).
Таблица 32
Значения коэффициентов теплопередачи и к. п. д. нагревательных устройств
Нагревательное устройство k, ккал/м2 -ч- град п
Паровые регистры (глухие) 1200 0,5
Радиаторы паровые с давлением 1—3 кГ/см- 2200 —
Калориферы огневые с гладкими стальными трубами 6100 0,5
Огневые жаровни (раздаточные короба) .... 2300 0,7
Дальнейшее совершенствование бетонных заводов направлено на.
развитие автоматизации их работы. При этом совершенствуются агрегаты
программного управления технологическим процессом. Основное внимание
уделяется заводам непрерывного действия как наиболее производительным.
Здесь надлежит еще повысить точность дозировки с тем, чтобы обеспечить
постоянство состава бетона, а при необходимости — быстрое изменение
этого состава. Ведется работа также и по совершенствованию как кон-
струкции отдельных агрегатов, так и всего завода с тем, чтобы обеспечить
бесперебойный круглогодичный выпуск бетона.
§ 48. МАШИНЫ ДЛЯ ЛИНЕЙНЫХ РАБОТ
Современный способ постройки цементнобетонных покрытий включает
операции по подготовке основания, установку рельс-форм, укладку бетон-
ной смеси на основание, распределение и уплотнение бетонной смеси,
отделку поверхности покрытия, устройство швов расширения и сжатия,
заполнение их мастикой и операции по уходу за свежеуложенным бетоном.
Технологический процесс выполняется поточным способом с помощью
комплекта основных машин, в который входят: профилировщик основа-
ний, распределитель бетонной смеси, бетоноотделочная машина и нарезчик
температурных швов. Кроме этого, при полной механизации используется
ряд вспомогательных машин для подготовительных и заключительных
операций строительства покрытия. К ним относятся: бульдозеры или авто-
грейдеры, автосамосвалы или автобетономешалки, дорожные бетоно-
мешалки', автоцистерны, передвижные тенты, механизмы для очистки и
заливки швов, розлива эмульсии, комплект рельс-форм, машины для
транспортирования оборудования, для укладки рельс-форм.
Общая схема процесса постройки цементнобетонного покрытия изо-
бражена на рис. 203. В каждом отдельном случае состав машин выбирается
в зависимости от технологического процесса, способа производства работ
и конструкции машин основного комплекта. Существенную роль при этом
имеет технологический процесс приготовления и транспортирования бетон-
ной смеси, конструкция основания и самого покрытия (применение
350
МАШИНЫ И ОБОРУДОВАНИЕ ДЛЯ ДОРОЖНЫХ ПОКРЫТИЙ
армированных покрытий, а также покрытия с предварительным напря-
жением). В этом случае в комплект входят дополнительные машины
для раскладки и предварительного напряжения арматуры.
Имеются конструкции машин, выполняющих две или несколько
операций одновременно. Так, например, бетоноотделочная машина на
Рис. 203. Общая схема процесса строительства цементнобетонного покрытия:
1,8 — самосвал; 2 — бульдозер; 3 — уплотняющая машина; 4, 13— автомобильный кран;
5 — поливочная машина; 6 — профилировочная машина; 7 — распределитель бетонной
смеси; 9 —бетоноотделочная машина; 10 — нарезчик швов; 11 — тент; 12 — машина для
розлива эмульсии
машинами на рельсовом
f 2
Рис. 204, Рельс-форма:
1 — стальной листовой фасон-
ный лист; 2 — узкоколейный
рельс; 3 — удерживающий
штырь; 4 — опорная коробка
гусеничном ходу выполняет функции распределения, уплотнения и от- яВ
делки покрытия. При этом отпадает необходимость в рельс-формах и jK
машинах для их укладки и транспортирования. Дорожная бетономешалка яв
на гусеничном ходу выполняет функции приготовления и укладки бетон- в
ной смеси. 'ЯВ
Современные комплекты основных машин являются самоходными «К
или гусеничном ходу. Имеются также маши- ..ди
ны на колесном ходу, прицепные или пере- S
мещаемые вручную. Все основные машины
обычно имеют регулировку ширины укла- •
дываемой полосы. Управление рабочими орга- Ж
нами — механическое или гидравлическое. Я
Отечественная промышленность выпускает ЯК
комплект машин на рельсовом ходу, состоя- 'Ж
щий из профилировщика оснований, распре- ®
делителя бетона, бетоноотделочной машины, Ж
нарезчика швов и комплекта рельс-форм. Я
Рельс-формы являются основанием, по ко- .ж
торому перемещаются машины основного ком- 'Ж
плекта, а также служат опалубкой для уклады- зи
ваемой бетонной смеси. Они собираются Из »
звеньев длиной по 4 м. Поперечное сечение Ц
рельс-формы изображено на рис. 204. Ж
С помощью автокранов производится рас- ,Ц
кладка рельс-форм вдоль полосы строящегося
покрытия. Подготовка основания и точная установка рельс-форм — весьма
трудоемкая операция, от качества выполнения которой полностью зависит >g
ровность покрытия. Машина для установки рельс-форм (рис. 205) пол-
ностью механизирует этот трудоемкий процесс. Она производит планй-
ровку песчаного подстилающего слоя, уплотняет подстилающий слой, Ж
укладывает и стыкует звенья и закрепляет их металлическими ш4Й- Ж
рями.
Профилировочные машины служат для разработки корыта в целинном
грунте и профилирования его подошвы, разравнивания и уплотнения на-
сыпного подстилающего слоя, а также могут быть использованы для прЬ-
филирования стабилизированного основания.
МАШИНЫ ДЛЯ СТРОИТЕЛЬСТВА ЦЕМЕНТНОБЕТОННЫХ ПОКРЫТИЙ
351
По типу рабочего органа различают фрезерные и ножевые профили-
ровщики на пневмоколесном или гусеничном ходу. Ножевые профили-
ровщики снабжаются уплотняющим вибрационным брусом.
Рис. 205. Машина для установки рельс-форм:
/ — механизм вертикального подъема; 2 — планировщик-виброуплотнитель; <3 — устано-
вочная балка; 4 — механизм привода каретки; 5 — электромолоток; 6 — оптический ме-
ханизм, 7 — подвижная опора; 8 — кран; 9 — каретка крана; 10 — механизм горизон-
тального перемещения
Принципиальные схемы профилировочных машин представлены на
рис. 206. Рабочим органом профилировщика ножевого типа является отвал
с профилирующим ножом. При движении машины производится срезание
и частичное перераспределение
грунта. Механизм подъема и
опускания отвала позволяет
регулировать величину заглуб-
ления. Максимальное заглубле-
ние от поверхности, рельс-
формы 500 мм.
В профилировочной ма-
шине Д-239 рабочим органом
является фрезерный барабан и
подгребальные ножи. Грунт,
вырезанный ножами, отбрасы-
вается по профилирующему
ножу на горизонтальный ло-
ток скребкового транспортера.
Подъемом и опусканием рамы
регулируется глубина резания
грунта.
Выбор параметров и расчет
профилирующих машин прово-
дится аналогично землеройным
машинам.
Конструкция и расчет
укладчиков цементнобетонной
Рис. 206. Принципиальные схемы профилиро-
вочных машин: а — ножевой; б — фрезерной:
1 — отвал с профилирующим ножом; 2 — уплот-
няющий вибробрус; 3 — ходовые катки; 4 — рельс-
формы; 5 — передние балансирные тележки; 6 —
фрезерный барабан; 7 — наклонные профилирую-
щие ножи; 8 — горизонтальный скребковый транс-
портер; 9 — задние балансирные тележки
смеси и бетоноотделочных машин даны в следующем разделе.
Нарезчики швов служат для создания продольных и поперечных швов
в монолитном покрытии с целью предупреждения образования в нем тре-
щин, связанных с температурными деформациями покрытия в процессе
твердения бетона и эксплуатации покрытия.
353
МАШИНЫ И ОБОРУДОВАНИЕ ДЛЯ ДОРОЖНЫХ ПОКРЫТИЙ
Нарезание шва может производиться как в свежеуложенном бетоне
до момента начала его схватывания, так и в затвердевшем бетоне через
8—12 ч после укладки.
В качестве рабочего органа нарезчика шва в свежеуложенном бетоне
используется плоский или дисковый вибронож, вибрационный сошнико-
вый нож и полосовой конический вибронож. Виброножи применяются для
нарезки поперечных швов, вибродиски — для создания продольных
швов. Однакр этими рабочими органами не удается получить высокого
стабильного качества кромки шва. В процессе работы необходима ручная
доводка кромок шва.
Нарезка швов в за-
твердевшем бетоне произ-
водится специальными ма-
шинами, оборудованными
дисками. В качестве абра-
зивного материала исполь-
зуют электрокорунд, кар-
бид кремния и техни-
ческий алмаз. Процесс
образования шва основан
на принципе резания бе-
тона абразивным кругом.
При ширине шва 8~10мм
скорость нарезки одним
кругом достигает 15 м!ч.
Для увеличения произво-
дительности на машине
устанавливают до 16 абра-
зивных дисков, произво-
дительность при этом до-
стигает 500 м в смену.
На рис. 207 представ-
лен общий вид однодиско-
5
Рис. 207. Однодисковый нарезчик швов в затвердев-
шем бетоне:
] — абразивный диск; 2 — кожух; 3 — центробежный
насос; 4 — электродвигатель: 5 — штурвал ручного меха-
низма передвижения; 6' — рычаг подъема и опускания
диска
вого нарезчика швов в затвердевшем бетоне. Привод диска осущест-
вляется от электродвигателя через клиноременную передачу. Для охлаж-
дения рабочего органа установлен центробежный насос, который подает
воду под кожух диска.
Комплект машин снабжается оборудованием для заполнения швов
специальной мастикой. Заливщик швов производит подогрев, перемеши-
вание и распределение мастики вдоль шва через раздаточную трубу с насад-
кой. Заливщик швов выполняется в виде ручной тележки на обрезиненных
колесах, в некоторых случаях он является дополнительным оборудова-
нием нарезчиков швов.
Для предохранения свежеуложенного бетона от высыхания и рас-
трескивания на его поверхность наносят влагонепроницаемую пленку
этиленового лака, битумной эмульсии или другой жидкости. Распредели-
тель пленкообразующих жидкостей выполняется в виде дополнительного
оборудования на нарезчике швов в свежеуложенном бетоне или в виде
специальной машины, входящей в комплект бетоноукладочных машин.
Укладчики цементнобетонной смеси. Распределители цементнобетона
служат для приема бетонной смеси из транспортирующих средств и
укладки ее по дорожному основанию слоем заданной толщины.
По принципу действия распределители-бетоноукладчики делятся на
машины непрерывного и периодического действия. Основным преимуще-
МАШИНЫ ДЛЯ СТРОИТЕЛЬСТВА ЦЕМЕНТНОБЕТОННЫХ ПОКРЫТИЙ 353
ством укладчиков непрерывного действия является их высокая произво-
дительность. Однако они требуют более четкой организации работ по
доставке и предварительному распределению смеси перед распределите-
лем. Достоинством укладчиков периодического действия является простая
организация работ и высокая точность регулирования толщины уклады-
ваемого слоя.
Бетоноукладчики выполняются, как правило, самоходными.
В зависимости от условий работы на распределителях устанавливаются
гладкие одно- или двухребордные сменные приводные колеса.
Рис. 208. Бункерный распределитель с низкорасположенным распределительным
ковшом
По типу рабочего органа все укладчики делятся на бункерные, шне-
ковые, лопастные и ковшовые. Бункерные распределители являются ма-
шинами периодического действия, а шнековые, лопастные и ковшовые —
непрерывного действия.
Рабочим органом бункерного распределителя (рис. 208) является
бункер, при перемещении которого бетон через разгрузочное отверстие
вытекает на подготовленное основание и распределяется нижней кромкой
бункера. Эта операция производится во время стоянки машины. Для
укладки следующей поперечной полосы машина передвигается вперед
и процесс повторяется.
По принципу загрузки смеси в распределительный бункер различают
распределители с непосредственной загрузкой смеси в бункер (рис. 209, а
и б) и с загрузкой через специальный загрузочный ковш, который может
принимать смесь как с полотна дороги, так и с обочины (рис. 209, в).
Для регулировки толщины распределяемого слоя бункер снабжается
механизмом подъема. Емкость и размеры бункера выбираются из условия
приема порции смеси из самосвалов или других загрузочных средств
(ковш дорожной бетономешалки, бадья и т. п.).
Бункерные укладчики с непосредственной загрузкой из самосвалов
с боковой разгрузкой (рис. 209, б) имеют низко расположенный распреде-
лительный бункер, длина которого должна быть больше длины кузова
самосвала.
Бункерные укладчики с загрузочным ковшом (рис. 209, в) могут
принимать смесь из обычных самосвалов с задней разгрузкой. Перегрузов-
354 МАШИНЫ И ОБОРУДОВАНИЕ ДЛЯ ДОРОЖНЫХ ПОКРЫТИЙ
ный ковш может быть расположен как в передней части укладчика, так
и сбоку. Распределительный бункер может быть с затвором или бездонным.
Бункеры с низким расположением, предназначенные для приема бетонной
смеси из самосвалов с боковой разгрузкой, обычно выполняются бездон-
ными. Корпус бункера имеет поперечные диафрагмы для повышения его
прочности и жесткости.
Рабочим органом шнекового распределителя (рис. 209, г) являются
шпеки, расположенные в передней части машины. При равномерном дви-
жении машины вперед вращающиеся шнеки разравнивают бетонную смесь
предварительно выгруженную из транспортных средств на дорожное
основание. Непосредственно за шнеками расположена профилирующая
заслонка, которая срезает избыток бетонной смеси и придает уложенному
слою соответствующий поперечный профиль. Кроме того, она создает
Рис. 209. Принципиальные схемы бетоноукладочных машин на рельсовом ходу: а и б —
бункерные укладчики с непосредственной загрузкой; в — бункерный укладчик с загру-
зочным ковшом; г — шнековый бетоноукладчик; д — лопастной и ковшовый укладчик;
/ — рельс-формы; 2 — рама укладчика; 3 — распределительный бункер; 4 — загрузочный
ковш; 5 — шнеки; 6 — распределительная лопасть; 7 — разравнивающий ковш; 8 — уплотняющий
брус; 9 — профилирующая заслонка
подпор смеси, что позволяет реализовать усилие, необходимое для пере-
мещения бетона шнеком поперек укладываемой полосы. Дополнительное
перемешивание бетонной смеси шнеками повышает качество покрытия.
Регулирование толщины слоя производится подъемом и опусканием
шнеков. Механизмом подъема шнеков также регулируется и поперечный
профиль будущего покрытия. Реверсирование вращения шнеков и неза-
висимый привод каждого шнека позволяют равномерно распределять
материал по всей ширине покрытия.
В лопастных распределителях (рис. 209, д) рабочий орган представ-
ляет собой плоскую или изогнутую лопасть 6 или ковш 7. Совершая воз-
вратно-поступательное движение поперек полосы, рабочий орган разрав-
нивает смесь, предварительно уложенную на основание покрытия. Лопасть
имеет независимый привод поворота и в любой точке может изменить угол
наклона. Специальное устройство поворачивает лопасть в крайних поло-
жениях таким образом, что устраняется скопление бетонной смеси у рельс-
форм. Правильное сочетание скоростей перемещения всей машины и рабо-
чего органа позволяет получить гладкую поверхность требуемого про-
филя.
Шнековые и лопастные укладчики часто снабжаются вибрационным
брусом для предварительного уплотнения уложенной бетонной смеси.
Распределители можно разделить на машины с постоянной или пере-
менной шириной распределения. Изменение ширины распределяемого
слоя производится регулированием ширины рамы. Для этой цели в раме
машины предусматриваются сменные вставки различной длины. Иногда
поперечные балки рамы устраиваются телескопическими. Регулирование
ширины укладываемого слоя особенно необходимо при строительстве бетон-
ных покрытий в городских условиях.
МАШИНЫ ДЛЯ СТРОИТЕЛЬСТВА ЦЕМЕНТНОБЕТОННЫХ ПОКРЫТИЙ 355
При укладке покрытий большой ширины необходимо придавать по-
верхности покрытия двухскатный, односкатный или плоский профиль.
Получение различного профиля обеспечивается углом наклона рельсов
распределительного бункера или соответствующей конфигурацией профи-
лирующей заслонки или шнека. Односкатный профиль достигается уста-
новкой рельс-форм на различных уровнях.
В качестве привода рабочих органов, механизмов управления и пере-
движения используются двигатели внутреннего сгорания. Для улучшения
ходовых качеств все ходовые колеса являются приводными.
В бункерных распределителях (рис. 210, а) смесь вытекает из бункера
и распределяется его нижней кромкой. Усилие, необходимое для переме-
щения распределительного бункера, складывается из сопротивления пере-
резания столба смеси, сопротивления, связанного с перемещением бункера
Рис. 210. Принципиальная схема рабочего процесса укладчика:
а — бункерного; б — шнекового
по рельсам, и инерционного сопротивления, развивающегося при трогании
бункера с места.
Сопротивление перерезания столба бетонной смеси
= kb кГ, (VIII. 17)
где k — удельное сопротивление перерезания призмы материала, вытека-
ющего из выпускного окна бункера; для цементнобетонной смеси
k = 600 ч-900 кПм и зависит от свойств распределяемой смеси
и конструкции бункера;
Ь — ширина срезаемой призмы в м.
Сопротивление перемещению бункера по рельсам
= (G6uH + GCM) / кГ, (VIII. 18)
где G6i/H — вес бункера в кГ,
GCM — вес бетонной смеси в бункере в кГ;
,.f — приведенный коэффициент сопротивления перемещению бун-
кера по рельсам; f = 0,05.
Сопротивление сил инерции при трогании с места может быть найдено
по формуле
IV3 = Сбун±всм ив кГ^ (VIII. 19)
S tp
где g — ускорение силы тяжести в м/сек2-,
v6 — скорость передвижения бункера в м/сек',
tp — время разгона; tp = 0,5 ч-1,5 сек.
356
МАШИНЫ И ОБОРУДОВАНИЕ ДЛЯ ДОРОЖНЫХ ПОКРЫТИЙ
Суммарное сопротивление перемещению бункера V
№б = + Г3. (VIII.20) J
Мощность привода механизма перемещения -
N° = l^~Kem' (VIII.21)
ivzr|o
где т|0- — к. п. д. механизма привода перемещения бункера.
Сопротивление, необходимое для перемещения самого распределителя,
складывается из сопротивления передвижению всей машины с учетом
преодоления уклона и сопротивления сил инерции при трогании с места.
Сопротивление передвижению всей .машины с учетом преодоления
уклона
= (G.„ -г GCM) (/„, + i) кГ, (V 111.22)
где GM — вес машины в кГ;
fM — коэффициент сопротивления перемещению машины; при движе- ~
нии машины по рельс-формам fM 0,05; £
i — продольный уклон; i = 0,05. s
Сопротивление сил инерции всей машины при трогании с места
определяется по формуле, аналогичной (VIII.19).
Общее сопротивление передвижению распределителя
W = 4-
Транспортная скорость машины, как правило, выше рабочей. В боль-
шинстве случаев она большого значения не имеет, поэтому мощность дви-
гателя здесь следует выбирать таким образом, чтобы обеспечивать выполне-
ние рабочих операций, т. е.
Nd = N5. (VIII.23)
По этой мощности и может быть определена транспортная скорость
машины. Однако в некоторых случаях, например при устройстве цементно-
бетонных дорожных покрытий, по условиям работы загрузка бетона
в укладчик может производиться на некотором расстоянии от места рас-
пределения. Поэтому для повышения производительности транспортная
скорость задается и по ней выбирается мощность двигателя.
В этом случае мощность, необходимая для перемещения распредели-
теля,
= тйг- квт> <V1IL24>
1 vZ 11 -Гр
где vmp — транспортная скорость машины в м/сек;
Пмр — к. п. д. транспортной передачи привода.
Тогда мощность двигателя бункерного распределителя выбирается
из условия
NTp<Kd>Ks. (VIII.25)
Мощность двигателя бункерного распределителя с загрузочным ков-
шом выбирается из условия одновременного выполнения операций пере-
мещения распределительного бункера и подъема загрузочного ковша,
заполненного бетонной смесью. Максимальная мощность, расходуемая
на подъем загрузочного ковша, возникает в момент его опрокидывания
и равна
N» = ~^Kem’ (VIII.26)
1UZ Г]п
МАШИНЫ ДЛЯ СТРОИТЕЛЬСТВА ЦЕМЕНТНОБЕТОННЫХ ПОКРЫТИЙ 357
где Sn — максимальное усилие в канатах подъема перегрузочного ковша
в кГ\
vn — скорость подъема ковша в ж/сек;
— к. п. д. трансмиссии механизма подъема ковша.
В машинах с профилирующим брусом (рис. 210, б) распределение
осуществляется перемещением призмы смеси самим рабочим органом по
ходу машины и в поперечном направлении с помощью шнека, лопасти или
ковша. Таким образом, при работе шнекового укладчика бетонная смесь,
находящаяся перед укладчиком, распределяется шнеком в поперечном
направлении. Окончательное профилирование покрытия осуществляется
профилирующими заслонками, которые перемещают перед собой призму
бетонной смеси.
Суммарное сопротивление передвижению шнекового укладчика скла-
дывается из сопротивления передвижению машины, двигающейся по рельс-
формам, сопротивления перемещению призмы бетонной смеси перед про-
филирующими заслонками и сопротивления, возникающего при распределе-
нии бетона шнеком.
Сопротивление перемещению машины найдется по формуле
- GM (/ ф кГ. (V1II.27)
При движении по рельс-формам / -= 0,05-:-0,08.
Сопротивление перемещению призмы бетонной смеси перед профили-
рующими заслонками
W: = G6emf6 кГ, (VIII.28)
где G6en — вес призмы бетонной смеси в кГ;
f6 — коэффициент внутреннего трения бетонной смеси; /б = 0,5ч-0,6.
Сопротивление перемещению бетонной смеси шнеком (рис. 210, б)
найдется по формуле
= (VIII.29)
о пш
где Glu — секундная весовая производительность шнека в кПсек\
пш — число оборотов шнека в минуту;
L — длина шнека в м;
S — шаг шнека в м.
Полное сопрстивление перемещению машины
W = We + Г7 + We кГ. (V1II.30)
При известном суммарном сопротивлении IF с помощью выражения
(VIII.24) легко может быть определена мощность двигателя укладчика,
идущая на его перемещение.
Мощность привода шнеков определяется производительностью и сум-
марной длиной перемещения материала, которые являются частью общей
производительности укладчика и ширины укладываемого слоя. Тогда
мощность привода шнека
= квт’ (VIII.31)
О/ и Г|ш
где Q — производительность распределителя в т!ч\
L — ширина полосы распределения в м;
а — коэффициент, учитывающий долю общей производительности
распределителя, перемещаемую непосредственно шнеком;
а < 1;
358 МАШИНЫ И ОБОРУДОВАНИЕ ДЛЯ ДОРОЖНЫХ ПОКРЫТИЙ <о — коэффициент сопротивления движению; для бетонной смеси и липких абразивных материалов со = 4, гравия, песка, цемента со = ,3,2, асфальтобетонной смеси со = 5; Щ, — к. п. д. механизмов привода шнека. С другой стороны, при заданных параметрах шнека момент силы Ws
относительно оси шнека
М = г8гб, (VIII.32)
где гб — расстояние от оси шнека до центра тяжести перемещаемого объема бетонной смеси в л. Мощность, необходимая для привода шнека, м' Д1<о 2nGqLгq /\Ttii Nlu 102i;w 102St;w Кв,П’ (VIII.33)
где co — круговая скорость вращения шнека, <о = ^1,'се/с. (VIII.34) Ом Мощность двигателя шнекового распределителя Nd = NM + А'ш. (VIII.35) При движении лопасти ковшового (лопастного) укладчика мощность
затрачивается на преодоление сопротивлений поперечному перемещению
бетонной смеси, передвижению ковша (лопасти), установленного на спе-
циальной каретке, и передвижению самого укладчика.
Сопротивление поперечному перемещению бетонной смеси перед ков-
шом
Г0 = 85Vf6 кГ, (VIII.36)
где V — объем смеси перед лопастью или ковшом в м3; 6б — объемный вес смеси в кГм3. Сопротивление передвижению каретки с ковшом Г10 = (GK + Г9) (4 + /4) Р (VIII.37)
где G — вес каретки с ковшом в кГ;
р — коэффициент трения качения катков каретки по направляющим
ковшовой рамы; ц = 0,06-: 0,08 см;
D — диаметр ходовых колес каретки в см;
f — приведенный коэффициент трения подшипников катков; f = 0,05;
d — диаметр цапф ходовых катков каретки в см;
р — коэффициент, учитывающий внецентренное по отношению к опор-
ным каткам приложение внешних сил GK и IV9, перекосы, за-
грязнение и защемление в направляющих; |3 1,8 : 2,5.
Сопротивление передвижению самого укладчика определяется по
формуле (VIII.27).
По этим сопротивлениям определяется мощность двигателя ковшового
укладчика.
Производительность бункерных укладчиков с загрузочным ковшом
может быть найдена по формуле
П = --360°7 j T м3!ч, (VIII.38)
“Г *2 “Г *3 I М
МАШИНЫ ДЛЯ СТРОИТЕЛЬСТВА ЦЕМЕНТНОБЕТОННЫХ ПОКРЫТИЙ
359
а бункерных укладчиков с непосредственной загрузкой бункера
П = 36О29 - ,из/¥. (VIII.39)
Здесь Q — емкость бункера в >и3;
tx — время выгрузки бетонной смеси из транспортных средств в сек;
t, — время перегрузки смеси из ковша в бункер в сек;
Л, — время распределения смеси по одной полосе и возврата бун-
кера в исходное положение в сек;
/4 — время перехода укладчика на очередную позицию в сек.
Производительность укладчиков непрерывного действия определяется
по формуле
П = hBvpS k6 т!ч (VIII.40)
или
П = Bvnke мЧч,
где h — толщина укладываемого слоя в м;
В — ширина слоя в м;
vp — рабочая скорость укладчика в м/ч;
о — объемный вес бетонной смеси; 6 = 2,Од-2,2 т/м3-,
ke — коэффициент использования рабочего времени; ke = 0,7-ъ0,95.
Машины для отделки цементнобетонных покрытий. Бетоноотделоч-
ные машины предназначены для разравнивания, профилирования, уплот-
нения и отделки бетонной смеси при строительстве цементнобетонных по-
крытий. Бетоноотделочная машина входит в комплект машин по строи-
тельству бетонных дорог, аэродромов и промышленных площадок и следует
непосредственно за бетоноукладчиком.
В зависимости от типа бетоноотделочные машины могут обрабатывать
бетонную полосу шириной 2,5—9 м односкатного или двухскатного про-
филя и толщиной 15—30 см за один или несколько проходов. Для выполне-
ния основных рабочих операций бетоноотделочная машина снабжена рядом
рабочих органов.
В качестве разравнивающего органа используются лопастной вал,
шнек или плоский отвал, представляющий собой брус, совершающий гори-
зонтальные качательные движения большой амплитуды в направлении,
перпендикулярном движению машины. Уплотняющий орган может быть
выполнен в виде трамбующего бруса, трамбующих молотков или вибра-
ционного бруса. Широкое распространение получили вибрационные брусья,
особенно с вибраторами высокой частоты, что позволяет укладывать жест-
кие бетонные смеси.
Для окончательной отделки, т. е. для выравнивания и выглаживания
бетонной поверхности, используют выглаживающую ленту или брус, ко-
торым придают качательные движения в горизонтальной плоскости,
а также выглаживающие плиты с вертикальными высокочастотными коле-
баниями малой амплитуды.
По количеству рабочих органов бетоноотделочные машины можно
разделить на машины:
1) с одним рабочим органом, выполненным в виде вибрационного или
трамбующего бруса (рис. 211, а);
2) с двумя рабочими органами — уплотняющим и выглаживающим
брусьями (рис. 211, б);
3) с тремя рабочими органами — разравнивающим, уплотняющим и
выглаживающим брусьями (рис. 211, в).
360
МАШИНЫ И ОБОРУДОВАНИЕ ДЛЯ ДОРОЖНЫХ ПОКРЫТИЙ
4) с четырьмя и более рабочими органами. В этом случае отдель-.
ные операции сразу выполняются несколькими рабочими органами
(рис. 211, г).
В новейших машинах намечается тенденция к уменьшению количе-
ства рабочих органов и переход к выполнению одним рабочим органом
нескольких операций.
По ходовому оборудованию бетоноотделочные машины можно разде-
лить на колесные, передвигающиеся по рельс-формам, и гусеничные, кото-
рые перемещаются непосредственно по предварительно уплотненному осно-
Рис. 211. Схемы расположения и типы рабочих
органов бетоноотделочных машин:
ванию. Бетоноотделочные ма-
шины на гусеничном ходу за-
меняют ряд машин комплекта
на рельсовом ходу и при этом
не требуют большого ко-
личества рельс-форм и тру-
доемких работ, связанных
с их укладкой. Однако для
гусеничных отделочных ма-
шин не полностью решена
проблема укладки слоя с не-
обходимой ровностью покры-
тия. Регулирование продоль-
ного и поперечного уклона
покрытия здесь осуществ-
ляется с помощью специаль-
ной автоматической системы,
связанной с базовым устрой-
ством, в качестве которого
может быть предварительно
укладываемый на обочине
шаблон или натянутая стру-
на. При устройстве много-
/ — колесный ход; 2 — вибробрус; 3 — выглаживаю- ПОЛОСНОГО ПОКРЫТИЯ В КЭЧе-
ЩИЙ брус; 4 — разравнивающий брус; 5 — трамбую- г а
щий брус; б — выглаживающая лента СТВ6 КОПИрЗ М0Ж6Т ОЫТЬ ИС"
пользована первая полоса
покрытия.
Бетоноотделочные машины на гусеничном ходу даже при наличии
хорошо отлаженной автоматики требуют для своей работы ровного и доста-
точно жесткого основания. Поэтому эти машины дают высокую ровность
покрытия только в случаях, когда бетонное покрытие укладывается не
на слой песка, как обычно, а на хорошо уплотненное стабилизирован-
ное или гравийное основание.
Бетоноотделочные машины на рельсовом ходу передают на рельс-
формы как свой вес, так и возникающие при работе нагрузки, которые
бывают довольно значительными. Под действием нагрузок грунт под рельс-
формами деформируется в особенности около стыков, что ухудшает ров-
ность получаемого покрытия. Это в большей степени имеет место при
короткой базе машины. Поэтому для повышения ровности покрытия базу
следует удлинять. Размещение вибробруса по диагонали, т. е. под углом
к направлению движения, создает условия для получения более ровного
покрытия.
По конструкции рамы бетоноотделочные машины делятся на машины
с постоянной и переменной шириной укладываемой полосы. Регулирова-
ние осуществляется с помощью телескопической рамы или вставок. Воз-
МАШИНЫ ДЛЯ СТРОИТЕЛЬСТВА ЦЕМЕНТНОБЕТОННЫХ ПОКРЫТИЙ
361
можность изменения ширины укладываемой полосы имеет важное значе-
ние при строительстве городских дорог.
По способу перемещения эти машины разделяют на самоходные и не-
самоходные, перемещаемые с помощью ручного привода. Ручной привод
используется только в легких машинах с одним рабочим органом и широ-
кого распространения не получил.
На рис. 212 представлен общий вид бетоноотделочной вибромашины
с тремя рабочими органами. В качестве разравнивающего органа исполь-
Рис. 212. Вибрационная бетоноотделочная машина:
/ — двигатель внутреннего сгорания; 2 — лопастной вал; 3 — выглаживающий брус; 4 —
уплотняющий вибрационный брус
зован лопастной вал 2, подвешенный к основной раме на рычагах, позво-
ляющих регулировать толщину бетонной смеси. Уплотняющий орган вы-
полнен в виде сменного вибрационного бруса 4.
Выглаживающий орган 3 выполнен в виде вибрационного бруса, кото-
рый кроме вибрационных движений совершает еще поперечные колебания
с приводом от специального кривошипно-шатунного механизма.
Привод всех механизмов осуществляется от двигателя внутреннего
сгорай'ия 1. Вибраторы выглаживающего бруса приводятся в движение
асинхронным электродвигателем, питание которого осуществляется от
специального генератора.
Основным рабочим органом бетоноотделочной машины является вибро-
брус. Он расположен в средней части бетоноотделочной машины. Попереч-
ный разрез бруса с подвеской показан на рис. 213. На верхней плоскости
металлоконструкции рамы установлены вибраторы 4 и опоры приводных
валов. По краям бруса располагается механизм упругой подвески, со-
стоящий из 20 резиновых амортизаторов 6. Вибробрус к раме машины
362
МАШИНЫ И ОБОРУДОВАНИЕ ДЛЯ ДОРОЖНЫХ ПОКРЫТИЙ
подвешивается с помощью наклонной тяги 3, шарнира 2 и вертикальной
тяги 5. Тяга 3 верхним своим концом с помощью цапфы крепится на основ-
ной раме машины и служит для восприятия горизонтальных внешних
сил, действующих на вибробрус.
Корпус вибробруса 1 представляет собой металлоконструкцию, со-
стоящую из двух продольных швеллеров, верхних и нижних листов и де-
ревянной обшивки по бокам.
Через шарнир 2 подвеска бруса соединена с кривошипно-шатунным
механизмом вертикальных качаний бруса, которые создают дополнительное
Рис. 213. Вибробрус с подвеской:
1 — корпус вибробруса; 2 — шарнир; 3 — наклонная тяга; 4 — вибратор;
5 — вертикальная тяга; 6 — виброизолятор
уплотняющее воздействие на бетонную смесь и кроме того облегчают на-
ползание бруса на призму бетонной смеси.
Тяга 5 служит для подъема и опускания бруса. Привод механизма
подъема выполнен в виде рычажно-винтового механизма с ручным управле-
нием.
Привод вибраторов осуществляется через двухступенчатую клиноре-
менную передачу, позволяющую изменять положение бруса по высоте;
Минимальная ширина бруса Ьт10 из условия равномерного уплотне-
ния слоя по всей глубине должна быть больше толщины слоя б
6mln > б. (VIII.41)
Поступательная скорость машины зависит от технологической схемы
производства работ и параметров вибробруса. При уплотнении бетонной
смеси за один проход и выбранной ширине бруса b поступательная скорость
может быть определена из условия минимально необходимого времени
вибрирования t
v = (VIII. 42)
Поставленные исследования и многолетний опыт применения бетоно-
отделочных машин показывает, что при имеющих место в современных
машинах удельных статических давлениях для окончательного уплот-
нения необходимо, чтобы время вибрирования было не менее 15 сек при
уплотнении пластичных бетонов и 15—30 сек при уплотнении жестких
бетонов.
МАШИНЫ ДЛЯ СТРОИТЕЛЬСТВА ЦЕМЕНТНОБЕТОННЫХ ПОКРЫТИЙ 363
В некоторых конструкциях бетоноотделочных машин вибрация рабо-
чим органам сообщается от нескольких электромеханических дебаланс-
ных виброэлементов. В этом случае всегда необходимо иметь синхронную
работу этих виброэлементов. В большинстве случаев синхронизация обес-
печивается наличием жесткой кинематической связи между отдельными
виброэлементами.
Жесткость брусьев бетоноотделочных машин оказывает существенное
влияние на характер распределения колебаний бруса по длине. По данным
В. Г. Клементьева и М. И. Эстрина за норму жесткости можно принять
стрелу прогиба, образующуюся под действием собственного веса. При рас-
чете этот брус рассматривается как балка на двух опорах. Допустимый
прогиб здесь равен:
у = 0,0001L,
где L — длина бруса.
На равномерность распределения амплитуды по длине бруса большое
влияние оказывает размещение вибраторов. Расстояние между вибрато-
рами, по рекомендации И. И. Блехмана, может быть определено из выра-
жения
/ = 31/^4 см> (VIII.43)
где Е — модуль упругости материала бруса в кГ!см2-,
/ — момент инерции сечения бруса в см1-,
т — масса единицы длины бруса в кГ -секЧсм-см;
со — частота вынужденных колебаний в Мсек.
При этом имеет место неравномерность в распределении амплитуд коле-
баний, равная 25%.
При перемещении бетоноотделочной машины во время работы разви-
ваются следующие сопротивления.
1. Сопротивление движению машины как тележки
= GM (/'+ i) кГ, (VIII.44)
где G — общий вес машины; во время движения часть веса рабочих орга-
нов передается на бетон, однако при расчете этого можно не учи-
тывать;
f — коэффициент сопротивления движению: в случае гусеничного
хода f — 0,08-4-0,1, а при движении по рельс-формам f = 0,05;
i — наибольший продольный уклон покрытия; при расчете можно
принять i = 0,05.
2. Сопротивление от перемещения призмы бетонной смеси, скапли-
вающейся перед рабочими органами. Для машины с тремя рабочими
органами — разравнивающим, уплотняющим и выглаживающим брусьями
^2 = Wp + Vy + V,) кГ, (VIII.45)
где Vp, Vy, — объем призм перед рабочими органами в Л13;
60 — объемный вес бетонной смеси; <50 = (1,8-4-2,0) • 103 кГ/м3',
f2 — коэффициент внутреннего трения бетонной смеси;
/2 - 0,5-г-0,6.
Объем призмы может быть определен по формуле
(VIII.46)
где Н — высота призмы перед рабочим органом в м.
„ Н!- 3
V = м ’
364 МАШИНЫ И ОБОРУДОВАНИЕ для ДОРОЖНЫХ ПОКРЫТИЙ
3. Сопротивление от трения рабочих органов при их перемещении
по бетонной смеси
== (Gp -р Gy Ge) р2 кГ, (VI11.47)
где Gp, Gy, Gs — вес разравнивающего, уплотняющего и выглаживаю-
щего брусьев в кГ;
|д2 — коэффициент трения рабочегооргана по бетонной смеси'
р,2 = 0,5.
4. Инерционное сопротивление, возникающее при трогании машины
с места
= (VIII.48)
где v — скорость перемещения машины в м/сек;
tp — время разгона машины; t = 1,5 4-2 сек;
g — ускорение силы тяжести; g = 9,81 м/сек1.
Суммарное максимальное сопротивление перемещению
W = Гх + Г2 + Г3 + Г4. (VIII.49)
Развивающееся при движении тяговое усилие необходимо проверить
на возможность его реализации по условиям сцепления
где <рС£( — коэффициент сцепления колес с рельсом (ф = 0,25) или гусе-
ницы с дорожным основанием (ф„( = 0,4н-0,7);
GCn — сцепной вес машины, который при всех ведущих колесах равен
весу машины за вычетом той его части, которая передается ра-
бочими органами непосредственно бетонной смеси.
Мощность двигателя бетоноотделочной машины складывается из той
мощности, которая необходима для передвижения машины, и мощности
привода рабочих органов и вспомогательных механизмов.
Мощность, необходимая для передвижения машины,
= (VIII.50)
где v — максимальная рабочая скорость машины в м/сек;
г], — к. п. д. трансмиссии ходового механизма.
Для предварительных расчетов мощность привода вибробруса можно
определить по эмпирической формуле
Л'., ~ kF кет, (VIII.51)
где F — площадь вибробруса в м2;
k — коэффициент; k = 1,0л-1,3 квт/м\
Мощность привода трамбующего бруса определяется из условия пол-
ной передачи им энергии колебаний бетонному покрытию. В этом случае
потребляемая мощность равна мощности, расходуемой на подъем бруса и
на преодоление сопротивлений сил трения в цапфах привода,
= --тетчы1 'vnL52>
где G — вес бруса в кГ;
h — размах колебаний бруса в м;
Р — возмущающая сила возбудителя бруса в кГ;
f — коэффициент трения опор вибровала; f = 0,005-4-0,01;
d — диаметр цапфы возбудителя в м;
h — число колебаний бруса в минуту;
т]3 — к. п. д. привода.
МАШИНЫ ДЛЯ СТРОИТЕЛЬСТВА ЦЕМЕНТНОБЕТОННЫХ ПОКРЫТИЙ 365
Мощность привода поперечных горизонтальных колебаний рабочего
органа определяется теми сопротивлениями трения по лобовой поверхно-
сти и подошве, которые возникают при движении бруса как вдоль, так и
поперек укладываемой полосы. При движении самой машины перед рабо-
чим органом образуется призма, которая давит на рабочие органы с уси-
лием W2, определяемым по формуле (VIII.45). Сам рабочий орган давит на
укладываемую смесь силой собственного веса G, следовательно, суммар-
ная сила сопротивления поперечным качаниям
Wn = (W2 + G) р..3 кГ. (VIII.53)
Необходимо учесть также мощность, расходуемую на преодоление
инерционных сил, возникающих за счет неравномерности движения рабо-
чего органа. Эти потери могут быть учтены коэффициентом ku. Тогда сум-
марная мощность поперечных колебаний найдется по формуле
квт' (VIII. 54)
где % — частота поперечных колебаний в сек-
S — амплитуда поперечных колебаний в я;
р4 — к. п. д. привода механизмов.
Общая мощность привода найдется как сумма отдельных составля-
ющих с учетом мощности, идущей на привод вспомогательных механизмов
и механизмов системы управления,
N = + Ne + Ny,
где Ne — мощность привода вспомогательных механизмов; Ns = Зч-5 квт-,
Ny — мощность привода системы управления; при наличии системы
гидропривода Ny = 5ч-7 квт.
Производительность бетоноотделочной машины по отделке полосы
в случае, когда работа выполняется за один проход, может быть определена
по формулам:
П = 60 с ke м/ч 1
или I (VIII,55)
П = 60v„B8ks м3/ч, J
где vp — рабочая скорость машины в м1мин;
В — ширина обрабатываемого покрытия в м;
д — толщина покрытия в м;
ke — коэффициент использования времени; k„ = 0,80 чО,85.
При обработке покрытия за несколько проходов первый проход совер-
шается на минимальной скорости и1( последующие — на более высокой v2-
Время, необходимое для отделки участка длиной L, составит
где п — число повторных проходов;
vTp — транспортная скорость заднего хода в я/лпи;
£(1 — длина пути одного хода в м\
I-,, - - L - Ln + Lp.
Здесь Ln — длина участка перекрытия уплотненного покрытия; Ln ~ 1 л;
Lp — расстояние между первым и последним рабочими органами
в м.
366 МАШИНЫ И ОБОРУДОВАНИЕ ДЛЯ ДОРОЖНЫХ ПОКРЫТИЙ
Общее число рабочих циклов в час
60
п ~ t ’
Производительность машины в этом случае
П = nLke м/ч 1
или „ з, f (VIII.56)
П = nLBf>ks м3‘Ч. J v ’
§ 49. ЗАбОДЫ И ПОЛИГОНЫ
ДЛЯ ИЗГОТОВЛЕНИЯ БЕТОННЫХ КОНСТРУКЦИЙ
Современное строительство характеризуется возведением всевозмож-
ных сооружений из сборных железобетонных конструкций заводского изго-
товления. По объему производства и применения сборного железобетона
Советский Союз значительно превзошел передовые капиталистические
страны.
Изготовление бетонных и железобетонных изделий состоит из следу-
ющих основных операций: 1) приготовления бетонной смеси; 2) изготовле-
ния арматуры (гнутых стержней, каркасов, проволочных пакетов, сеток);
3) армирования изделия; 4) формования изделия, т. е. укладки бетонной
смеси и ее уплотнения; 5) твердения бетонного изделия; 6) распалубки и
хранения готовой продукции.
Приготовление бетона и изготовление арматуры могут производиться
централизованно — на специальных крупных заводах товарного бетона
или арматуры. Неотъемлемой и основной частью производства на бетонных
и железобетонных заводах и полигонах являются операции по формова-
нию, армированию и твердению изделий.
Классификация заводов и полигонов. Существуют различные техно-
логические схемы изготовления сборных железобетонных изделий. Основ-
ными являются стендовая, поточно-агрегатная и конвейерная схемы. При
стендовой схеме изделие формуется и твердеет на стационарных постах,
а все материалы и механизмы перемещаются от одного изделия к другому.
Стендовая технология чаще применяется на заводах и полигонах малой
мощности с широкой номенклатурой изделий или при производстве круп-
ных деталей. Основным недостатком является низкий съем продукции с еди-
ницы площади и более низкий уровень механизации. К достоинствам отно-
сится возможность применения простого универсального оборудования.
При поточно-агрегатном способе формы с изделиями перемещаются
от поста к посту, на которых выполняются очередные производственные
операции. Продолжительность выполнения операций на отдельных постах
может быть различной. Стоимость первоначальных затрат на оборудование
относительно невелика, вследствие этого его можно легко переналадить на
другой вид изделий. Это определило широкое распространение такого
способа производства. Его недостатком является относительно невысокая
степень механизации и необходимость применения ручного труда.
Поточно-агрегатная технология предусматривает два способа изготов-
ления изделий: 1) формование изделий и их теплообработка с последующей
распалубкой; 2) формование изделий с немедленной распалубкой (изделие
остается на поддоне) и последующей теплообработкой. Последний способ
позволяет пользоваться одним комплектом бортовой оснастки, что дает
возможность снизить расход металла па изготовление форм.
Для крупносерийного стабильного выпуска однотипной продукции
ограниченного наименования на заводах большой мощности используется
конвейерный способ производства. Он характеризуется тем, что изделие
МАШИНЫ ДЛЯ СТРОИТЕЛЬСТВА ЦЕМЕНТНОБЕТОННЫХ ПОКРЫТИЙ 367
перемещается от поста к посту в принудительном ритме, который опреде-
ляется наиболее длительной операцией на одном из постов конвейера.
Для ускорения хода конвейера операции стараются расчленить так, чтобы
время их выполнения было примерно одинаковым. Достоинством заводов
с конвейерной технологией является высокий уровень механизации и авто-
матизации, а к недостаткам относятся большая металлоемкость, слож-
ность оборудования и трудность его переналадки на выпуск изделий дру-
гого типа.
В последнее время в нашей стране получил распространение способ
изготовления тонкостенных часторебристых железобетонных изделий мето-
дом непрерывного вибропроката на про-
катных станах конструкции Н. Я- Козлова.
Прокатная установка представляет собой по-
луавтоматическую линию непрерывного дей-
ствия, которая состоит из комплекта меха-
низмов и приспособлений, выполняющих
в определенной технологической последова-
тельности все операции по производству же-
лезобетонных изделий. Изделия выходят с
прокатной установки непрерывным потоком.
Все технологические процессы на установке
взаимосвязаны и подчинены единому ритму—
скорости движения формующей ленты.
Перспективным является также метод
виброштампования. Здесь изделие формуется
в неподвижной форме опускающимся виб-
роштампом (рис. 214).
Для усиления бетонных изделий, под-
вергающихся растяжению, применяется
стальная арматура. Для повышения сцепле-
Рис. 214. Схема устройства
виброштампа:
/ — пуансон: 2 — вибратор; 3 —
пригрузка; 4 — амортизатор; 5 —
матрица; 6 — готовое изделие
ния ее с бетоном применяют арматуру пери-
одического профиля, которая лучше сцепляется с бетоном, чем арма-
тура круглого профиля. Расход металла на 1 м3 изделий соста-
вляет от 40 до 200 кг. Эффективным методом повышения прочности
железобетона является применение предварительно напряженной арма-
туры. Здесь за счет натяжения арматуры в бетоне возникают напряжения
сжатия. При работе конструкции это повышает предел прочности бетона
на растяжение. Обычно величина предварительного натяжения арматуры
создается с таким расчетом, чтобы вызванное этим натяжением сжатие
бетона было в пределах 40—60 кГ/см2. Напряжение арматуры обычно про-
изводится еще до укладки бетона в форму.
Арматурная сталь, предназначенная для изготовления предвари-
тельно напряженных железобетонных изделий, поступает в виде прово-
локи диаметром до 14 мм, свернутой в бухты.
Величина натяжения арматуры не должна выходить за пределы упру-
гих реформаций стали. Поэтому напряжение в арматуре принимается не
более 90% от предела текучести для мягких сталей и 65% от предела
прочности при растяжении для твердых мало эластичных сталей, не име-
ющих выраженной площадки текучести.
Оборудование для изготовления и обработки арматуры. Это оборудо-
вание предназначено для очистки, резки, гибки, правки, сварки и упрочне-
ния арматурной стали.
Очистка арматуры от окалины и ржавчины производится или механи-
ческим путем (быстровращающимися щетками) или посредством травления
368
МАШИНЫ И ОБОРУДОВАНИЕ ДЛЯ ДОРОЖНЫХ ПОКРЫТИЙ
в ваннах с водным раствором соляной или серной кислоты с последующей
промывкой в воде и нейтрализацией в известковом растворе.
Правка и резка арматуры выполняется на правильно-отрезных стан-
ках-автоматах. На рис. 215 показана принципиальная схема такого станка.
Проволока с бухты протягивается с помощью вращающихся роликов через
правильный барабан, проходит между ножами дискового типа и поступает
в выходную часть станка. Конец проволоки, упираясь в кулачок отмери-
вающего устройства, включает ножи, которые отрезают пруток заданной
длины. Скорость резания ножей соответствует скорости вращения роликов,
благодаря чему обеспечивается непрерывная правка и резка проволоки.
Имеются также станки с периодической подачей проволоки, где резка
осуществляется ножами гильотинного типа. В момент резки проволока
Рис. 215. Принципиальная схема станка для правки и резки арматурной стали:
/ — бухта; 2 — барабан для правки; 3 — тянущие ролики: 4 — нажимной винт; 5 — вра-
щающиеся ножницы; 6 — направляющие приемного устройства; 7 — отмеривающее устройство;
8 — отрезанные стержни; 9 — электродвигатель привода подачи и резки; 10 — электродвигатель
правки
находится в неподвижном состоянии, а ролики пробуксовывают, что приво-
дит к их быстрому износу. Конструкция станков с непрерывной подачей
является более прогрессивной.
Производительность станков с дисковыми ножами составляет
Q = 60nDnqK т/ч, (VIII.57)
где D —диаметр тянущих роликов в м;
п — число оборотов тянущих роликов в об/мин-,
q — вес 1 пог. м арматурной стали в т\
к — коэффициент, учитывающий проскальзывание роликов (к =
= 0,95 -0,98).
Иногда прочностные показатели стали повышаются механическим
путем, поэтому на некоторых заводах арматурная сталь проходит стадию
упрочнения. Одним из способов упрочнения является вытягивание арма-
туры в холодном состоянии до появления в ней напряжения, несколько
превышающего предел текучести. В результате такой вытяжки на 3,5—
5,5% длины прутка сталь получает наклеп, ее предел текучести повы-
шается.
Упрочнение арматуры производится на станках Авакова путем скру-
чивания стержней на определенный угол. Для упрочнения путем растяже-
ния стержней большого диаметра (16—40 мм) предназначена установка
гидравлического типа 6597-е. Она имеет два спаренных гидродомкрата,
развивающих усилие до 90 пг при ходе 550 мм. Существуют также уста-
новки, в. которых вытягивание арматуры осуществляется механической
МАШИНЫ ДЛЯ СТРОИТЕЛЬСТВА ЦЕМЕНТНОБЕТОННЫХ ПОКРЫТИЙ 369
парой гайка — ходовой винт (рис. 216) Здесь вдоль винта необходимо
развить усилие
Р = FoKi кГ, (VIII.58)
где F — сечение прутка арматуры;
ок — напряжение в прутке, которое должно быть равно пределу теку-
чести или несколько его превосходить;
i — число одновременно вытягиваемых прутков.
Окружное усилие, действующее по гайке и отнесенное к диаметру
винта, найдется как
Г -- Р tg (а -|), (VIII.59)
где а — угол подъема винтовой линии;
Ф — угол трения пары винт—гайка.
1 — электродвигатель; 2 — редуктор; 3 — винт; 4 — гайка; 5 — арматур-
ный стержень; 6 — гидроцилиндр; 7 — поршень; 8 маховик отключения
гидроцилиндра; 9 — шток с маховиком
Крутящий момент находится по формуле
Мкр = Trcp - Prcp tg (а V Ф), (VIII.60)
где гср — средний радиус резьбы винта, равный
(VIII.61)
здесь г — наружный радиус резьбы;
/у — внутренний радиус резьбы.
Мощность двигателя равна
АГл.„п
ттт—х- квт,
97 500т)
(VIII.62)
где п — число оборотов винта в об/мин-,
г) — к. п. д. передачи;
Мкр — крутящий момент в кГ-см.
Для целей вытяжки используются также гидравлические и гидромеха-
нические установки.
Вторым способом упрочнения арматурной стали является холодное
сплющивание (профилирование), которое осуществляется путем прокаты-
вания гладкой арматуры между профилирующими валками. При этом про-
исходит наклеп стали, который повышает поверхностную прочность арма-
турного стержня па 20—30%, что позволяет соответственно уменьшить
расход арматуры в железобетоне. Кроме того, в результате этой операции
арматуре придается периодический профиль, что значительно повышает
ее сцепление с бетоном. Однако этот способ является энергоемким, поэтому
на заводах и полигонах практически не применяется. Арматурная сталь
370
МАШИНЫ И ОБОРУДОВАНИЕ ДЛЯ ДОРОЖНЫХ ПОКРЫТИЙ
периодического профиля поставляется главным образом централизованным
путем с металлургических предприятий.
Третьим способом упрочнения арматуры является волочение. Здесь
проволоку или пруток протягивают через постепенно суживающееся
отверстие, имеющееся в волоке-фильере (рис. 217). Этот процесс произво-
дится на волочильных станах, состоящих из двух основных элементов —
волоки и тянущего устройства, обеспечивающего протягивание арматуры
через волоку. Скорость волочения находится в пределах 0,5—5,0 м/сек.
Рис. 218. Схема гибки арма-
турных стержней
Отношение квадратов диаметров проволоки до вытяжки (d) и после
вытяжки (dj) называют коэффициентом вытяжки:
Ф
(VIII.63)
Усилие волочения для круглой стали можно определить по формуле
( Г — ”11
г-«.,Н(1 + -^Я1-(ф),"]| -Г,
(VIII. 64)
где овр — предел прочности стали на растяжение в кГ/см2;
F — площадь сечения проволоки после волочения в см-;
а — угол между образующей и осью волоки (см. рис. 217);
ц — коэффициент трения проволоки о волоку; н = 0,15-^0,20.
Мощность, требуемая для волочения, определяется как
квт’ (VIIL65)
где Р — усилие волочения в кГ;
v — скорость волочения в м/сек;
т] — к. п. д. механической передачи волочильного стана.
В настоящее время на железобетонных заводах внедрена новая
полуавтоматическая установка для упрочнения стержней путем их закали-
вания в воде и низкотемпературного отпуска. Стержни нагреваются до
температуры 900—950° С. Нагрев осуществляется электрическим током
от сварочного трансформатора. Отпуск производится при температуре
350—400° С.
Гибка хомутов, крюков, отгибов и т. п. производится на различных
станках, основным рабочим механизмом которых является вращающийся
диск 1 (рис. 218) с укрепленными на нем упорным 2 и изгибающим 3 роли-
ками и центральным пальцем 4. При вращении диска со скоростью от 3
до 11 об/мин изгибающий ролик, нажимая на арматурный стержень, произ-
водит его гибку. После изгиба диск возвращается в исходное положение и
освобождает стержень.
МАШИНЫ ДЛЯ СТРОИТЕЛЬСТВА ЦЕМЕНТНОБЕТОННЫХ ПОКРЫТИЙ
371
Крутящий момент на валу диска равен
Mkp^o^k + k1 + t~)w кГ-см, (VIII.66)
где о — напряжение в стержне при изгибе в кГ/см2;
к — коэффициент профиля материала; для круглых стержней к = 1,7;
— коэффициент, зависящий от материала; = 0,60-н0,70;
г — радиус гибки в см;
d — диаметр арматурного стержня в см;
W — момент сопротивления изгибаемого стержня в см3.
Мощность, необходимая для работы гибочного станка, равна
" “ в; (vni.67)
где п — число оборотов рабочего диска в об!мин;
т] — к. п. д. передачи.
При заготовке арматуры для железобетонных изделий применяется
точечная, стыковая и дуговая сварка. Сварка осуществляется специаль-
ным сварочным оборудованием.
Оборудование для напряжения арматуры. Такое оборудование по спо-
собу укладки и натяжения арматуры можно разделить на машины для
линейной укладки, когда операции укладки и натяжения выполняются
раздельно, и на машины для непрерывной навивки с одновременным натя-
жением. Натяжение арматуры этими машинами осуществляется либо меха-
ническим, либо электротермическим способом. Может применяться также
комбинированный способ — электротермомеханический. Натяжные уст-
ройства включают в себя упоры, за которые закрепляется (анкеруется)
арматура в процессе ее натяжения. Упоры могут быть выполнены из швел-
леров или двутавров, нижний конец которых прочно заделан в фундамент,
или состоять из вертикальных штырей, размещаемых па форме. В послед-
нем случае армирование производится непрерывно. Кроме упоров имеется
еще комплект захватных (зажимных) приспособлений, с помощью которых
усилия натяжного устройства передаются арматуре, и собственно натяжное
устройство, которое создает усилие натяжения.
Механическое натяжение арматуры производится посредством типо-
вого оборудования, из которого наиболее распространенным являются
гидравлические домкраты. Реже используются лебедки или специальные
машины (стенды).
По назначению гидродомкраты подразделяются на проволочные и
стержневые. По конструкции они бывают одно- и многопроволочные. Для
обеспечения удобства работы гидродомкраты устанавливаются на рельсо-
вых тележках, что дает возможность регулировать их положение в верти-
кальном и горизонтальном направлениях. Существуют также переносные
гидродомкраты. Питание домкратов осуществляется от маслонасосных
станций, смонтированных на отдельных тележках. Выпускается несколько
типов гидродомкратов с усилием натяжения до 200 т.
Необходимое тяговое усилие гидравлического домкрата для натяжения
арматуры можно определить по формуле
Р = 0,65crepSn т]» (VIII. 68)
где овр — предел прочности стали при растяжении;
5 — площадь сечения одной проволоки или стержня;
п — число одновременно натягиваемых проволок или стержней;
т] — к. п. д. гидродомкрата (г| = 0,95ч-0,98).
372 МАШИНЫ И ОБОРУДОВАНИЕ ДЛЯ ДОРОЖНЫХ ПОКРЫТИЙ
Величина хода поршня гидродомкрата определяется по формуле
L=el+A, (VIII.69)
а
где е = — относительное удлинение проволоки;
о — действующее напряжение в проволоке;
Е — модуль упругости стали;
А — величина хода поршня, необходимая для выбора свобод-
ного провисания проволок или стержня;
I — Длина натягиваемой проволоки.
Расчетное напряжение в арматуре обычно составляет 65% от предела
прочности стали при растяжении.
Для предварительного натяжения арматуры применяется также элек-
тротермический способ, при котором удлинение стержней производится
путем их нагрева электрическим способом.
Источниками тока для нагрева служат свароч-
ные или специальные трансформаторы. Нагре-
тые стержни укладываются на упоры формы
и охлаждаются. Охлаждение приводит к со-
кращению длины и, следовательно, натяжению
арматуры. Нагрев арматуры можно произ-
водить и после укладки ее в формы.
На заводах и полигонах железобетонных
изделий для электронагрева арматуры приме-
няются большей частью несложные по кон-
струкции установки, работающие на перемен-
ном токе низкого напряжения (20—60 в) про-
мышленной частоты. На рис. 219 приведена
схема электротермического натяжения арма-
турного стержня с автономным электропита-
нием от передвижной электростанции ПЭС-50
(мощность 50 квт, напряжение 380 в).
Нагрев контролируется по удлинению
арматуры. При достижении заданного удлине-
ния подвижный контакт нажимает на конечный выключатель, который
прекращает подачу тока. Максимальная температура нагрева не превы-
шает 400—450° С. Продолжительность нагрева в зависимости от силы
тока и размера стержней колеблется в пределах от нескольких секунд до
2—5 мин. Затрата электроэнергии составляет 3—6 квт-ч на 1 м3 бетона.
Расчетное удлинение стержня определится выражением
Рис. 219. Схема электротер-
мического натяжения стерж-
ней:
/ — нагреваемый стержень;
2 — трансформатор ТС-500; 3 —
электростанция ПЭС-50; 4 —
неподвижный контакт; 5 —по-
движный контакт; 6 — конеч-
ный выключатель
А/ = см,
с Л
(VIII. 70)
где — расчетная величина напряжения арматуры;
Е — модуль упругости стали;
/ — длина нагреваемой части стержня;
— коэффициент, учитывающий различные потери (податливость
штырей формы, смятие бетона, воздушное охлаждение и т. д.);
Я = 1,03^1,07.
Для создания такого удлинения температура нагрева в °C должна быть
равна
t = ^~, (VIII.71)
где а = (12 : 14) 10 6 — коэффициент линейного расширения стали.
МАШИНЫ ДЛЯ СТРОИТЕЛЬСТВА ЦЕМЕНТНОБЕТОННЫХ ПОКРЫТИЙ 373
Она может быть также определена по следующей формуле:
/ = (VIII. 72)
При подборе электросварочного аппарата необходимо знать требуемую
для нагрева силу тока, которая равна
1 Vgc + gf 7J/ (VIII.73)
I 0,860/?(Г ’ v ’
где G — вес одновременно нагреваемых стержней в /сг;
с — удельная теплоемкость стали; в пределах температур 0—400° С
с = 0,12 ккал!кг • град;
а — коэффициент теплоотдачи с поверхности стержня в окружаю-
щую среду; а =" Юн-40 ккал!мг ч-град;
F — суммарная поверхность нагреваемых стержней в л2;
Rt — сопротивление стержня при температуре t в ом;
Т — продолжительность нагрева в ч.
Сопротивление стержня при температуре t° С найдется как
Rt = Ro (1 + ₽ М), (VIII.74)
где Rn — сопротивление стержня при комнатной температуре (20° С);
A t = t — 20° С — разность температур;
Р — температурный коэффициент сопротивления; Р 0,002 л-
л-0,004 град~1 (при 20° С).
Ro = р 4 ’ <vnL75)
здесь р — удельное сопротивление стали; р «=* 0,2 ом-мм2/м;
L — длина стержня в м;
S — площадь поперечного сечения стержня в мм2.
Если известна сила тока, то по формуле (VIII.73) можно найти про-
должительность нагрева Т. Продолжительность нагрева (в мин) зависит от
диаметра стержня d (в мм) и может быть приближенно определена по эмпи-
рической формуле
Т =: 0,2d. (VIII.76)
Среднюю величину силы тока также можно найти по эмпирической зависи-
мости
/ = 55d а, (VIII.77)
здесь d также следует выражать в мм.
Расход электроэнергии для нагревания одного стержня без учета по-
терь тепла может быть определен по формуле
IV = квт-ч, (VIII.78)
где tp — рекомендуемая температура нагрева арматуры в °C;
(0 — температура окружающей среды в С.
Необходимую мощность трансформатора можно найти по формуле
V = Gc ква, (VIII.79)
ooU 1
здесь G следует выражать в кг, а Т — в ч.
I
376 МАШИНЫ И ОБОРУДОВАНИЕ ДЛЯ ДОРОЖНЫХ ПОКРЫТИЙ
d — внутренний диаметр подшипников в ел;
D — диаметр колеса в см; Я
р = 2,5 — коэффициент, учитывающий потери на трение реборд. 'у
Для определения мощности двигателя питателя можно воспользо-
ваться формулой
М = квт, (VIII.82)
где Nс — суммарная мощность на валу привода барабана;
k — коэффициент запаса; k = 1,15-4-1,20;
г) — к. п. д. привода.
Суммарная мощность равна
Nc = N± + V2 + V3. (VIII.83)
Мощность Nlt необходимая для преодоления бортового сопротивления
движению бетона, вычисляется (см. рис. 221) по выражению е
Mi = v квт, (VIII.84) #
где h — высота выходного отверстия, регулируемого заслонкой, в м;
— длина бортов бункера и копильника в м;
/, = 0,80-4-0,85 — коэффициент трения бетона о стенки бортов;
v — скорость ленты питателя в м!сек;
6 = 0,75^-0,76 — коэффициент бокового давления;
у — объемный вес бетона в т/мл. 2
Мощность М2, идущую на преодоление сопротивления в зоне активного а
давления бетона на ленту (в зоне бункера и копильника), можно найти по J
формуле
N^fJ^Ketn. (VIII.85)
здесь /, = 0,05 — коэффициент трения ленты о поддерживающий лист;
Р — суммарная сила активного давления бетона на ленту в кГ,
равная
Р = q6F6 + qKFK. (V1I1.86)
Удельное давление q6 бетона на ленту в бункере прямоугольного сечения
определяется по формуле
<?б = ЛХ «Г/м*, (VIII.87)
2fem(a + b)
где т = 0,6 — коэффициент подвижности материала;
fs — коэффициент внутреннего трения бетона;
а и Ь — стороны нижнего отверстия бункера в м.
Удельное давление бетона на ленту в копильнике равно
qK = 1000уЯ„ кГ/м2, (VIII.88)
где Нк — высота слоя бетона в копильнике в м.
Площади давления бетона на ленту соответственно в бункере и в ко-
пильнике равны:
F6 = ab м2; (VIII.89) |
FK = В (12 — а) м2, Л
где В — ширина выходного отверстия копильника в м; Я
/2 — размер от оси приводного барабана до задней стенки бункера в м. Я
МАШИНЫ ДЛЯ СТРОИТЕЛЬСТВА ЦЕМЕНТНОБЕТОННЫХ ПОКРЫТИЙ
377
Мощность N 3, расходуемая на преодоление всех неучтенных сопротив-
лений, определяется но формуле
М3=-^Квт, (VIII .90)
где Q — вес бетона в бункере и копильнике в кг;
L — расстояние между осями барабанов питателя в м.
Производительность ленточного питателя может быть определена по
формуле
П =~ ЗбООВ/гиу т/ч. (VIII.91)
Оборудование для уплотнения бетонной смеси. Уплотнение бетонной
смеси может производиться вибрированием, вибропрокатом, виброштампо-
ванием, прессованием, центрифугированием и вакуумированием. Наиболее
распространенным способом является вибрирование. Вакуумирование
используется очень ограниченно. Бетонная смесь является тиксотропным
материалом, поэтому она разжижается и приобретает свойства тяжелой
жидкости. Переход в жидкое состояние является следствием ослабления
связей между частицами, т. е. уменьшения внутреннего трения бетонной
смеси. Такое превращение происходит в результате воздействия на смесь
импульсов, сообщаемых вибратором. Частицы смеси при вибрировании
сближаются и выжимают воздух, что обеспечивает получение плотного бе-
тона.
Эффективность вибрирования во многом зависит от чистоты и ампли-
туды колебаний. Для уплотнения бетонной смеси обычно применяют вибра-
торы с частотой колебаний от 3000 до 20 000 кол/мин и амплитудой 0,1 —
3 мм, причем высоким частотам соответствуют меньшие значения ампли-
туд. Дальнейшее повышение частоты нецелесообразно, так как эффект воз-
действия вибрации па бетонную смесь зависит не только от частоты, но и
от амплитуды колебаний. При частотах выше 20 тыс. кол!мин из-за малости
амплитуды вибратор уже не в состоянии привести в движение частицы
бетонной смеси.
Повышению уплотнения смеси способствует поличастотное (обычно
двухчастотное) вибрирование, создающее одновременно колебания двух
частот: высокой с малой амплитудой и низкой частоты с большой амплиту-
дой. В СССР выпускаются двухчастотные ручные вибраторы с пневматиче-
ским приводом, у которых низкая частота составляет 1500—3000, а высо-
кая — 10 000—18 000 кол/мин.
Существующие вибраторы для уплотнения бетонной смеси по способу
воздействия на последнюю могут быть подразделены на наружные (при-
крепляемые), поверхностные, внутренние (глубинные) и станковые (вибро-
площадки).
По роду привода и питающей энергии различают вибраторы электро-
механические, электромагнитные, пневматические и гидравлические.
Иногда встречаются вибраторы с приводом от двигателя внутреннего сго-
рания.
У-плотнение бетона в условиях заводов и полигонов производится
главным образом на виброплощадках (вибростолах). При больших изде-
лиях, когда последние на виброплощадку установить невозможно, уплот-
нение производится внутренними вибраторами (вибробулавами). Выбирая
размеры вибробулавы, используемой при изготовлении железобетонных
изделий (ферм, балок, колонн), следует учитывать, что расстояние в свету
между стержнями арматуры составляет для густоармированных конструк-
ций 40—100, для среднеармированных — 100—300, для малоармирован-
ных — более 300 мм.
378 МАШИНЫ И ОБОРУДОВАНИЕ ДЛЯ ДОРОЖНЫХ ПОКРЫТИЙ
В некоторых случаях при производстве железобетонных изделий
в формах используются наружные (переносные) вибраторы. Они
крепятся к форме или опалубке, которая передает колебания бетонной
смеси.
Поверхностные вибраторы применяют в основном при изготовлении
тонкостенных конструкций и изделий, так как они способны уплотнять
бетонную смесь небольшого слоя (200—300 мм).
Некоторые £ведения и расчет внутренних, наружных и поверхностных
вибраторов приведены в гл. VII. п. 45.
Виброплощадки предназначены для уплотнения плит, балок, ферм и
других железобетонных деталей, помещенных в формы. Вибрационная
площадка представляет собой ста-
ционарную вибрирующую раму,
которая снабжена устройствами
для закрепления на ней форм.
Через амортизаторы рама опирает-
ся на фундаментную опору. Коле-
бания виброплощадки создаются
закрепленными на вибрационной
раме вибраторами, которые при-
водятся в действие от электро-
двигателя.
Существующие виброплощадки
можно классифицировать по сле-
дующим признакам.
1. По типу вибровозбуди-
теля — виброплощадки с электро-
механическими и электромагнит-
ными вибраторами. Пневматичес-
кие и гидравлические вибраторы
еще не получили широкого прак-
тического применения.
2. По форме колебаний — пло-
щадки с круговыми (рис. 222, а)
или направленными колебания-'
ми. Последние могут быть верти-
кальными (рис. 222, б, в и г) и гори-
зонтальными. Чаще всего встреча-
ются виброплощадки с вертикаль-
но направленными колебаниями.
3. По режиму работы — резонансные (рис. 222, в), где вибратор кре-
пится к виброраме через упругую подвеску, и нерезонансные. В последнем
случае вибратор укрепляется на раме жестко.
4. По грузоподъемности — виброплощадки малые (до 1,0 т), средние
(1—5 т) и большие (5—25 т).
5. По способу крепления форм — площадки с механическими, элек-
тромагнитными и пневматическими прижимами.
Главным параметром виброплощадок считается грузоподъемность,
а к числу других основных параметров относятся частота и амплитуда
колебаний.
Многочисленными исследованиями и практическим опытом установ-
лено, что наилучшее уплотнение бетонной смеси имеет место на вибропло-
щадках с вертикально направленными колебаниями, имеющими ампли-
туду 0,4—0,8 мм при частоте 3000 кол/мин.
Рис. 222. Принципиальные схемы вибропло-
щадок: а — с круговыми колебаниями; б —
с направленными колебаниями; в — с ударно-
вибрационными направленными колебаниями
и активной упругой подвеской; г — с ударно-
вибрационными направленными колебаниями
и упругой подвеской дополнительных масс
Условные обозначения: 1 — вибрирующий стол;
2 — основной амортизатор; 3 — вибратор; 4 —
амортизатор вибратора (или пригрузки); 5 —
пригрузка
МАШИНЫ ДЛЯ СТРОИТЕЛЬСТВА ЦЕМЕНТНОБЕТОННЫХ ПОКРЫТИЙ
379
В настоящее время разработаны унифицированные виброплощадки
безрамной конструкции с направленными вертикальными колебаниями,
имеющими частоту 3000 кол!мин и оптимальную амплитуду 0,6 мм, способ-
ные уплотнять очень жесткие бетонные смеси. Эти виброплощадки, собран-
ные из типовых виброблоков грузоподъемностью 1,0 т в одно-, двух- и
трехрядные площадки требуемой грузоподъемности, выполнены по единой
схеме и обеспечивают формование железобетонных изделий различной
длины и ширины (табл. 33). Виброблоки связаны между собой карданными
валами, которые приводятся во вращение от электродвигателя через син-
хронизатор. Один виброблок имеет максимальный кинетический момент
64 кГ-см (мощность электродвигателя 3,5 квт) и представляет собой двух-
вальный вибратор, жестко соединенный с пневматическими или электро-
магнитными приспособлениями для автоматического закрепления формы.
Таблица 33
Виброплощадки типажного ряда
Показатели Однорядные
СМ-865 — - СМ-845
Грузоподъемность в т Кинетический момент в кГ-см .... Вес вибрирующих частей в кг ... Общий вес в кг . . Количество электродвигателей в шт. Общая мощность в квт Габариты формуемых изделий в м . 2 128 720 1359 1 7 3X1 4 256 1440 2550 1 14 6,6X1 8 512 2889 5200 2 28 13,8X1 12 768 4320 7500 1+1 28+14 21X1
Показатели Двухрядные Трехрядные
СМ-866 СМ-868 СМ-870 СМ-817 СМ-816 СМ-818
Грузоподъемность в т ........ Кинетический момент в кГ-см . . . . Вес вибрирующих частей в кг . . . Общий вес в кг Количество электродвигателей в шт. Общая мощность в кет Габариты формуемых изделий в м 4 256 1440 2750 2 14 3X3 8 512 2889 5200 28 6,6X3 16 1024 5760 10 500 4 56 13,8X3 24 1536 8640 15 000 2Ц-2 564-28 21X3 12 768 4320 7700 3 42 6,6X4,5 24 1536 8640 15 500 2+2 56+28 13,8X4,5
Из унифицированных виброблоков создана также двухчастотная виб-
роплощадка на 3000/6000 кол/мин для изготовления железобетонных
тюбингов.
Из типажного ряда промышленностью пока освоены виброплощадки
СМ-865- и СМ-868.
Кроме этих виброплощадок выпускаются СМ-475У (грузоподъемность
2 т), СМ-476Б (5 т), 6668А/3 (7 т), 5917 (10 т), СМ-615 (10 m), 6691С/1
(15 т) и 7151/1 (24 т).
Расчетную схему виброплощадки можно представить в виде системы
с двумя степенями свободы (рис. 223).
Здесь тг — масса вибрирующей части площадки и изделия;
т,_ — масса основной рамы и фундамента;
X] и х2 — соответственные перемещения масс гп1 и т2;
380 МАШИНЫ И ОБОРУДОВАНИЕ ДЛЯ ДОРОЖНЫХ ПОКРЫТИЙ
(VIII.92)
(VIII.93)
т1 и та
Рис. 223. Расчетная схема
вибро площадки
Ki — суммарная жесткость амортизаторов;
ТС, — жесткость основания под фундаментом;
Ро— амплитудное значение возмущающей силы.
Уравнения движения системы можно записать в виде
+ Ki (*! — х2) =- Ро sin <о/;
т.,х2 + Ki (х1 — х2) -г К2х2 = 0.
При составлении этих уравнений предполагается, что массы
являются сосредоточенными и движутся только вдоль оси х, рама является
абсолютно жесткой, амортизатор деформируется линейно и силы сопро-
тивления колебательным движениям малы. Частные решения этих уравне-
ний имеют вид:
х± = аг sin со/; (VIII.94)
х2 = а2 sin со/, (VIII.95)
где ад и а2 — максимальные амплитуды коле-
баний масс пг± и т2,
со — круговая частота вынужденных
колебаний.
После подстановки xt и х2 в уравнения
(VIII.92) и (VIII.93) можно найти:
Рп (т2ш2 + Ki — KJ
а. = ------------"' ; ----------------------(VIII.96)
(/Q — /п1со2)(т2со2 + Кг — К2) — Л)
а., - --------------------------------г-----т (VIII.97)
(/<! — т1со2)(т2со“ + — К2) —
Ввиду сделанных допущений эти формулы следует считать прибли-
женными. Расчеты по этим формулам затруднений не вызывают, так как
массы т1 и тг известны, а жесткость Kt вычисляется обычным способом.
Для определения жесткости грунта, которая весьма условна, можно
пользоваться приближенной формулой
К2 = 65ОСо VF кГ/cm, (VIII.98)
где Со — коэффициент упругости основания, определяемый по табл. 34,
в кПсм3\
F — площадь основания фундамента в см2',
650 — размерный коэффициент.
Масса вибрируемых частей mt складывается из массы колеблющихся
частей виброплощадки те, массы формы (поддона) тф и массы формуемого
изделия тбет:
т1 = тв + тф + тбетп. (VIII.99)
Коэффициент п носит название коэффициента присоединения формуе-
мой массы. Им учитывается та часть массы бетона, которая во время работы
виброплощадки находится в состоянии колебательных движений. Обычно
п = 0,2-:0,3.
В качестве амортизаторов на виброплощадках используются различ-
ные пружины или резиновые опоры. Если две массы соединены через
несколько параллельных пружин, то общая жесткость системы будет
равна сумме жесткостей всех амортизаторов. При последовательном соеди-
нении амортизаторов общую жесткость системы можно найти из выраже;
ния
4 = '“ЧТ + ~1Г' (VIII.100)
А А1 А о Аз
где Kt, К2, К3, . . . , Кп — жесткость каждого амортизатора.
МАШИНЫ ДЛЯ СТРОИТЕЛЬСТВА ЦЕМЕНТНОБЕТОННЫХ ПОКРЫТИЙ
381
Таблица 34
Значения коэффициента упругости основания Сп, полученные
при нагрузке 0,2 кГ/см1
Грунты си, к Г/с .и3 Г рунты сп, кГ/см.3
Пески: пылеватые, очень влаж- ные и насыщенные во- дой мелкие средней крупности, круп- ные и гравелистые . . - _ о ! ! ьэ О 00 1 1 11 cd "ю ф i Глины, суглинки и супеси: и пластичном состоянии, близком к границе те- кучести пластичные твердые 0,5—1,0 1,0—2,0 2,0—3,0
Мощность, расходуемая на уплотнение бетонной смеси, может быть
найдена по формуле
>. Р ЮО1 sind л гпт 1 л 11
= 10,2.1000 Квт' (УШ -101)
где Р — максимальная возмущающая сила в кГ\
б — угол сдвига фаз; 6 = 20-е30°.
При этом
Р = тд<£>2е =- кГ,
здесь тд — масса дебаланса вибратора в кГ-секг1см\
в — эксцентриситет дебаланса в см.
При определении необходимой мощности можно также пользоваться
опытными данными, согласно которым при частоте около 3000 кол1мин
мощность равна
У = 0,07Мкн„ квт, (VIII. 102)
где Мкин— кинетический момент дебалансов в кГ-см.
Для защиты обслуживающего персонала от вредного воздействия
вибрации рабочие места виброплощадок должны иметь амплитуды не
более 0,007 мм.
Минимально необходимый вес фундамента вместе с весом рамы пло-
щадки, при котором колебания рабочих мест не превышают установлен-
ной нормы, определится из выражения
G _ g^K, ±aLK± кГ (VIII. 103)
а.2ы- '
Принимается, что при частоте колебаний виброплощадки, равной
50 гц, .амплитуда вынужденных колебаний фундамента должна составлять
не более одной четверти допускаемой амплитуды колебаний рабочих мест,
т. е. а2 С 2 мк.
Если виброплощадка состоит из унифицированных виброблоков,
то данный расчет можно вести для одного виброблока.
Дополнительным критерием безопасного действия вибрации может
служить отношение частоты вынужденных колебаний w виброплощадки
к частоте собственных колебаний сос = По существующим нор-
мам это отношение не должно быть меньше 4.
382 МАШИНЫ И ОБОРУДОВАНИЕ ДЛЯ ДОРОЖНЫХ ПОКРЫТИЙ
Пример. Требуется найти вес фундамента виброплощадки, близ-
кой по параметрам СМ-868 и состоящей из унифицированных вибробло-
ков, при котором колебания рабочих мест обслуживающего персонала
не будут превышать санитарной нормы.
Расчет ведется на один виброблок. Последний имеет четыре упругих
опоры, жесткость каждой из которых (включая большую и малую пружины)
равна —420 кГ/см. Суммарная жесткость всех опор виброблока состав-
ляет — 1700 кТ/см, амплитуда колебаний — 0,6 мм, круговая частота —
300 Мсек. Допускаемая амплитуда колебаний фундамента равна 0,002 мм.
Площадь опорной поверхности фундамента под одним виброблоком —
около 2,5 м2.
Принимая по табл. 34 Со = 2,0 кГ!см3, найдем жесткость основания
К 2 = 650-2 |'25 000 = 205 000 кГ/см.
Вес фундамента вместе с весом опорной рамы, приходящейся на один
виброблок, должен быть равен
г 981(0,06-1700 + 205 000.0,0002) „
С'^Л ~ 0,0002-90 000 ~ К1 '
Массу колеблющихся частей виброблока можно найти по формуле
(VIII.99) или из выражения
m =-. — (Qc -i- ₽Q) - -^(360 + 0,7-1000) = 1,08 кГ-секЧсм,
ё З'-3 *
где Qc — собственный вес колеблющихся частей виброблока;
Q — грузоподъемность одного виброблока;
Р — коэффициент соотношения между весом формы с бетоном и при-
веденным весом бетона; по опытным данным 0 «=» 0,7.
1 /”1700 on -7 1 /
v -г7й=39,7 Мсек.
L т 1,08
Г> ш 300 7 г
В результате = 7,5, что вполне допустимо.
Литература
1. Технические указания по строительству автомобильных дорог в зимних условиях.
(ВСН 120—65). М., Оргтрансстрой, 1966.
2. Катаев Ф. П., Вейцман М. И., Веденеев Д. Д., Защу к И. В.
и Ко л ыш ев В. И. Механизация и автоматизация строительства автомобильных
дорог. М., изд-во «Транспорт», 1965.
3. Строительные машины. Справочник. Под ред. В. А. Баумана. М., изд-во «Машино-
строение», 1965.
4. Г е р ш б е р г О. А. Технология бетона и железобетонных изделий. М., Пром-
стройиздат, 1957.
5. С а п о ж н и к о в М. Я. Машины промышленности строительных материалов.
Атлас конструкций. М., Машгиз. 1961.
6. Сапожников М. Я. Механическое оборудование для производства строи-
тельных материалов и изделий. М., Машгиз, 1962.
Глава IX. МАШИНЫ ДЛЯ РЕМОНТА И СОДЕРЖАНИЯ
ДОРОГ
§ 50. МАШИНЫ ДЛЯ РЕМОНТА
И ЛЕТНЕГО СОДЕРЖАНИЯ АВТОМОБИЛЬНЫХ ДОРОГ
Автомобильные дороги, как и другие инженерные соору-
жения, требуют постоянного ухода и своевременного устранения повреж-
дений и неисправностей, появившихся в процессе эксплуатации. Повре-
ждения дорог, а также износ покрытия происходят от воздействия нагру-
зок от автомобильного транспорта и влияния природно-климатических
факторов.
Содержание и ремонт автомобильных дорог имеют целью обеспечить
автотранспорту возможность безопасного, удобного и непрерывного дви-
жения в течение круглого года с заданными скоростями и нагрузками.
Различают три вида ремонта дорог: капитальный, средний и текущий.
При капитальном ремонте выполняются работы по исправлению
земляного полотна, полному возмещению износа и восстановлению ров-
ности покрытия, а также устраиваются новые и перестраиваются старые
асфальтобетонные покрытия на дорогах. Все эти работы осуществляются
машинами, которыми строятся новые дороги: бульдозерами, скрепе-
рами, автогрейдерами, асфальтосмесителями, асфальтоукладчиками, кат-
ками и др.
При среднем ремонте выполняются работы по возмещению износа,
восстановлению профиля щебеночных и гравийных покрытий и проезжей
части грунтовых дорог. Эти работы также производятся дорожно-строи-
тельными машинами, но менее мощными в связи с меньшим объемом
сосредоточенных работ. На этих работах используются грейдеры, авто-
грейдеры, бульдозеры, передвижные установки для приготовления ас-
фальтобетона и цементобетона, распределители строительных материа-
лов и др.
К текущему ремонту относятся работы по предупреждению и устра-
нению мелких повреждений дороги: ямочный ремонт, заделка трещин,
ремонт швов и др. Текущий ремонт проводится на всем протяжении до-
роги. 'Для выполнения этих работ применяются дорожные ремонтеры.
Работы по содержанию сводятся к уходу за дорогой и поддержанию
ее в чистоте. Покрытия дороги систематически очищаются от пыли, грязи,
снега, устраняются гололедицы на проезжей части дороги. Для этих
целей используются специальные машины: поливочно-моечные и под-
метально-уборочные, дорожные щетки, кюветоочистители, снегоочисти-
тели, пескоразбрасыватели и др. Помимо этого применяется оборудование,
навешиваемое на некоторые дорожные машины, автомобили и тракторы
(щетки, откосники, косилки и т. п.).
384 МАШИНЫ И ОБОРУДОВАНИЕ ДЛЯ ДОРОЖНЫХ ПОКРЫТИЙ
Ремонт и содержание играют большую роль в обеспечении нормаль-
ного технического состояния дорог. Они приостанавливают развитие по-
вреждений и устраняют причины разрушения. Однако, несмотря на исклю-
чительную важность, эти работы не обеспечены в полной мере средствами
механизации, и некоторые виды их выполняются вручную или малоэф-
фективным оборудованием. Это вынуждает многие дорожные организа-
ции проектировать и изготавливать нужное оборудование собственными
силами.
Трудности в создании средств механизации для содержания и теку-
щего ремонта обусловлены сравнительно малыми удельными объемами
работ на 1 км дороги и наличием на дорогах разных препятствий (дорож-
ных знаков, километровых столбов и т. п.), ограничивающих работу
машин. В настоящее время усилия конструкторов и дорожников направ-
лены к тому, чтобы создать недостающие машины для полного комплекта
механизации работ и повысить эффективность и маневренность имеющихся
машин.
Машины для очистки кюветов. Для очистки кюветов от наносов и ила
и восстановления их первоначального профиля используется оборудова-
ние, навешиваемое на тракторы, автомобили, автогрейдеры или . специ-
ально предназначенные для этих целей машины. Навесное оборудование
обычно состоит из консольно укрепленного сбоку машины отвала, имею?
щего форму в соответствии с профилем кювета. При очистке неглубоких
кюветов можно использовать откосник автогрейдера.
Из специальных машин используется кюветоочистительная машина
непрерывного действия на базе трактора «Беларусь» (рис. 224). Рабочий
орган машины, состоящий из скребков 4, укрепленных на цепи 3, шарнирно
подвешен к основной (подвижной) раме. Скребковая цепь имеет форму
профиля очищаемого кювета и приводится в движение от вала отбора
мощности двигателя трактора посредством цепной передачи 5, кардан-
ного вала 6 и редуктора 7. Размеры очищаемого кювета: ширина по дну —
0,5 м, глубина — 0,8 м. Рабочий орган имеет гидравлическое управление.
При помощи двух гидравлических цилиндров 1 и 2 можно устанавливать
скребковую цепь в рабочее и транспортное положения и изменять заглуб-
ление скребков в грунт. Скорость скребковой цепи равна 1,94 и 2,72 м/сек;
рабочая скорость машины — 0,35— 1,16 км/ч; производительность—45 м3/ч,.
Подметально-уборочные машины. Эти машины предназначаются для
уборки пыли и грязи с проезжей части усовершенствованных дорожных
покрытий (асфальтобетонных и цементобетонных). Подметально-убороч-
ные машины широко используются в крупных городах при подметании
улиц и площадей.
Уборка осуществляется установленными на машине вращающимися
щетками цилиндрической или конической формы. Помимо щеток на маши-
нах имеются обеспыливающие устройства и оборудование для подачи
убираемого мусора в бункер.
Обеспыливание покрытия в процессе уборки выполняется путем увлаж-
нения или пневматическим способом, а подача мусора — при помощи
механического или пневматического транспортера.
Нашей промышленностью выпускаются поливо-уборочные машины
с системой увлажнения и осваиваются машины с пневматическим обеспы-
ливанием.
Рабочее оборудование машины с системой увлажнения (рис. 225)
монтируется на шасси автомобиля и имеет две конические щетки диамет-
ром 900 мм, установленные за кабиной водителя, главную цилиндричес-
кую щетку диаметром 700 мм, подвешенную за задними колесами, транс-
МАШИНЫ ДЛЯ РЕМОНТА И СОДЕРЖАНИЯ ДОРОГ
385
Рис. 224. Машина для очистки кюветов:
'идравлические цилиндры; 3 и 4 — скребки: 5, 6 и 7 — трансмиссия
13
СТ YanvvTa и ттп
386
МАШИНЫ И ОБОРУДОВАНИЕ ДЛЯ ДОРОЖНЫХ ПОКРЫТИЙ
портер, мусоросборник и систему увлажнения. Рабочее оборудование
имеет гидравлическое управление. Лотковые (конические) щетки соби-
рают мусор с боков очищаемой полосы к середине, а цилиндрическая
щетка подает мусор на шнек, который перемещает его к транспортеру.
По транспортеру мусор поступает в сборник. Производительность ма-
шины — 15 тыс. мЧч.
Наряду с самоходной машиной для подметания междугородных дорог
применяют прицепные (к автомобилям) дорожные щетки с увлажнитель-
ным устройством. К изогнутой раме, опирающейся на одно переднее и два
задних колеса, шарнирно присоединена цилиндрическая щетка шириной
Рис. 225. Принципиальная схема подметально-уборочной машины:
1 — цилиндрическая щетка; 2 — шнек; 3 — транспортер; 4, 9, 11 — конические
редукторы; 5, 8 — конические (лотковые) щетки; 6 — двигатель; 7 — коробка отбора
мощности; 19 — раздаточная коробка
1,95 м и прикреплен бак для воды емкостью 550 л. Производительность
щетки — 12 000—24 000 м2/ч. Вода к распределительной трубе поступает
самотеком.
Цилиндрические щетки используются также и при уборке с дороги
снега. В этом случае они монтируются сзади плужного отвала снего-
очистителя и располагаются под углом к продольной оси автомобиля.
В настоящее время осваиваются подметально-уборочные машины
с пневматическим обеспыливанием. Помимо этого ведутся работы по соз-
данию вакуумных машин, которые в будущем смогут вытеснить в неко-
торых областях щеточные подметально-уборочные машины. За рубежом
вакуумные машины используются на уборке взлетно-посадочных полос
на аэродромах. Выпускаются также специальные машины для собирания
на дорогах листьев и бумаги и электромагнитные уборочные машины для
уборки с покрытия металлических предметов.
Рассмотрим параметры цилиндрических щеток, установленных под
прямым углом к направлению движения.
При вращении щетки без скольжения и одновременном поступа-
тельном ее перемещении прутки ворса будут перемещаться в пространстве
по обыкновенной циклоиде. На рис. 226, а показана траектория свободного
конца прутка при одном полном его обороте. Если обозначить радиус щетки
через и угол поворота радиуса Л1О1 — через <р, то уравнения траек-
тории в параметрическом виде примут вид:
х = R... (ср — sin <р) лг;
„ ,, (IXJ)
у = RUi (1 — cos ф) м.
МАШЩ1Ы ДЛЯ РЕМОНТА И СОДЕРЖАНИЯ ДОРОГ
387
Рабочим участком траектории является дуга ВС, длина которой для дан-
ного диаметра щетки зависит от величины деформации прутка h. В зави-
симости от состояния покрытия величина h изменяется в интервале 1,0—
2,5 см.
На рис. 226, б показаны два крайних рабочих положения прутка.
Центральный угол ДГЭСЦС = ₽, соответствующий этим крайним положе-
ниям прутка, по опытным данным составляет примерно 2,6 01; где
Рис. 226. Схемы к расчету количества рабочих прутков: а — траектория пере-
мещения конца прутка ворса цилиндрической щетки; б — крайние рабочие по-
ложения прутка
Знание величины угла (31 позволяет определить в каждый данный момент
рабочее количество прутков 1в. Для этого Л. М. Гусев рекомендует следую-
щую эмпирическую формулу:
где В — ширина захвата в ж;
d — диаметр прутка в м (для стального ворса d = 0,4 ч-0,5 мм\,
сщ — окружная скорость конца прутка в ж/сек;
им — поступательная скорость машины в м/сек.
Скорость конца прутка при постоянных поступательной и окружной ско-
ростях будет меняться благодаря криволинейной форме траектории, дос-
тигая максимума в нижней точке рабочего участка.
Мощность N, требуемая для привода цилиндрической щетки, в общем
случае слагается из мощности:
а) на преодоление трения ворса о поверхность дорожного покрытия —
N mpi
б) на деформацию ворса —
в) на преодоление сопротивления воздуха —
г) на уборку мусора — NM.
Таким образом,
М = Nтр -f- Nd + Ne -j- NM л. с. (IX.4)
Учитывая сравнительно небольшую угловую скорость дорожной щетки
и малое сопротивление перемещению убираемого мусора при расчете мощ-
ности для подбора двигателя можно пренебречь величинами Ng и NM.
Для расчета мощности N т Л. М. Гусев рекомендует следующую
формулу:
Nтр " 75^ С., (IX.5)
*
388 МАШИНЫ И ОБОРУДОВАНИЕ ДЛЯ ДОРОЖНЫХ ПОКРЫТИЙ
где Р — вертикальное давление деформируемого ворса на дорожное
покрытие в кГ;
f — коэффициент трения ворса о покрытие;
т] — к. п. д. трансмиссии от двигателя к щетке;
и vut — соответственно поступательная и окружная скорости щетки
в м/сек.
Коэффициент трения / зависит от диаметра материала прутка; для
прутка диаметром 0,82—1,82 мм из высокоуглеродистой стали f = 0,34
и для прутка диаметром 0,63—1,00 мм из малоуглеродистой стали f =
= 0,40. Для определения Р Л. М. Гусев рекомендует эмпирическую фор-
мулу
Р== l,2-10-4DU{(^y h'\[l +0,18(^-2)]arccos(l-А-) кГ-
(IX.6)
где Ощ и гщ — диаметр и радиус щетки в м;
I — свободная длина прутка в мм;
Е — модуль упругости материала ворса в кПсм2;
I — момент инерции сечения прутка в с .и1;
h — величина деформации прутка в см.
Для стальной проволоки Е = 2,1 -106 кПсм\
Мощность, затрачиваемая на деформацию ворса, определяется по эмпи-
рической формуле
.,3/2 _рг
Nd — 1,345-10“7/в 4?—- ф л. с., (IX.7)
Д'L
где п — число оборотов щетки в об/мин;
ф = arc sin -Гщ — у 3- рад. (IX.8)
Приведенная методика расчета мощности цилиндрических щеток
применима и для расчета требуемой мощности для конических щеток.
Техническая производительность П,ц цилиндрической щетки опре-
деляется по формуле
Пщ = Вплк„3600 м2/ч, (IX.9)
где В — ширина полосы, очищаемой за один проход машины, в м;
v„ — поступательная скорость машины в м/сек;
кп—коэффициент перекрытия смежных проходов; кп = 1,10-ь1,15.
Поливочно-моечные машины. Для поливки и мойки дорожных усовер-
шенствованных покрытий применяются специальные поливочные, моеч-
ные и поливочно-моечные машины, монтируемые обычно на автомобиль-
ных шасси. Эти машины используются также для поливки придорожных
зеленых насаждений и для тушения пожаров.
Нашей промышленностью выпускаются поливочно-моечные машины
с цистернами емкостью 4000 и 6000 л. Ширина поливки для большинства
машин составляет 18 м при расходе воды 0,25 л/м2. Рабочая скорость ма-
шины при поливке — 13—17,5 км/ч, производительность — 70 тыс. м2/ч.
В поливочно-моечной машине вода из цистерны подается центробеж-
ным насосом к трем распределительным насадкам, из которых два уста-
новлены спереди машины и один — справа перед задним колесом. Насадки
крепятся специальными угольниками, перестановкой которых можно
установить насадки под любым углом к поверхности покрытия. Сечение
выходного отверстия насадки определяется из условия обеспечения тре-
буемой производительности машины.
МАШИНЫ ДЛЯ РЕМОНТА И СОДЕРЖАНИЯ ДОРОГ 389
Производительность машины равна
Пм - л/сек, (IX.10)
где В — ширина поливки в ж;
vM — рабочая скорость машины в м/сек-,
Qo — удельный расход воды в л/м2.
Расход воды через насадок находится по формуле
Q„ = И -pjj 1 л2й'Я л!сек, (IX. 11)
где F — площадь выходного отверстия насадка в см2-,
Н — напор воды у насадка в м\ обычно Н = 30 м;
р — коэффициент, равный 0,9;
g — ускорение силы тяжести в м!сек2.
Из уравнений (IX.10) и (IX.II) находим площадь сечения отверстия на-
садка:
F = - см2.
(IX. 12)
В расчетах принимается В = 20 м и vM = 5 м!сек. Насадки должны рас-
полагаться таким образом, чтобы рабочие струи частично перекрывались
для получения наибольшей сплошной ширины поливки при заданном
удельном расходе воды.
§ 61. МАШИНЫ ДЛЯ ЗИМНЕГО СОДЕРЖАНИЯ
АВТОМОБИЛЬНЫХ ДОРОГ
Физико-механические свойства снега. Для полной механизации работ
по зимнему содержанию автомобильных дорог используется комплекс
разнообразных машин. Сюда относятся снегоочистители, снегопогруз-
чики, льдоскалыватели и пескоразбрасыватели. Наибольший объем работ
по зимнему содержанию приходится на снегоочистители, которые эксплуа-
тируются почти в течение всего зимнего сезона. Снегопогрузчики на заго-
родных дорогах применяются редко и преимущественно в местах, огра-
ничивающих или вовсе исключающих возможность переброски снега
снегоочистителями на значительные расстояния от проезжей части. Они
используются также для уборки снежных валов с обочин дорог. Снего-
погрузчики применяются в основном на участках дорог, проходящих
в населенных пунктах.
Скалыватели разрушают и удаляют сильно уплотненный снег и лед
с проезжей части асфальтобетонных и цементобетонных дорог, а песко-
разбрасыватели используются для посыпки песком обледенелых дорог.
На конструктивные и эксплуатационные параметры машин для зим-
него содержания дорог большое влияние оказывают условия работы и
физико-механические свойства снежного покрова или льда. Различают
условия в равнинной местности и условия в горной местности, резко
различающиеся между собой по снегозаносимости, проходимости, воз-
можному маневрированию машины и другим факторам. В настоящее
время у нас создаются специальные конструкции снегоочистителей,
пригодных для работы в горных условиях.
Снежный покров на дорогах может образоваться либо из снежных
осадков, либо из снежных заносов. Структура и свойства снега в обоих
случаях неодинаковы. Снег, выпадающий на дорогу, образует рыхлый
390 МАШИНЫ И ОБОРУДОВАНИЕ ДЛЯ ДОРОЖНЫХ ПОКРЫТИЙ
снежный покров плотностью не более 0,15—0,20 г!см3. Толщина покрова
за один снегопад не превышает 20—25 см. При снежных заносах обра-
зуется очень плотный снежный покров, который с течением времени может
достигнуть толщины в несколько метров и плотности, превышающей
0,5—0,6 г/см3.
Плотность снега в полевых условиях определяется специальным
прибором — весовым плотномером. Плотность зависит от температуры
снега и уделыГого давления на него. По опытам И. В. Крагельского изме-
нение плотности снега в зависимости от удельного давления при одно-
стороннем сжатии круглым штампом площадью 100 см" характеризуется
данными табл. 35, а при всестороннем сжатии в цилиндре площадью
20 см“ — данными табл. 36.
Таблица 35
Плотность снега при одностороннем сжатии в г/см3
Температура, °C При удельном давлении в кГ/см2
0,05 о,1 0,2 0.4 0,6 0,8
—18,8 0,34 0,35 0,38 0,20 0,41 0,41
—1,3 0,38 — 0,46 0,56 0,58 0,59
Таблица 36
Плотность снега при всестороннем сжатии в г/см3
Температура, °C При удельном давлении в кГ/см2 Т емпература. °C При удельном давлении в кГ/см2
0,3 0,5 1,о 2,0 0,3 0,5 1.0 2.0
—1,5 0,467 0,493 0,513 0,528 —11 0,435 0,456 0,480 0,491
—3 0,462 0,487 0,506 0,520 —16 0,426 0,458 0,465 0,480
-5 0,455 0,470 0,500 0,510 —21 0,420 0,435 0,462 0,470
Из данных табл. 35 и 36 видно, что с увеличением давления плот-
ность снега возрастает независимо от характера сжатия, причем вначале
возрастание плотности идет более интенсивно, а при некотором давлении
оно стабилизируется. Максимальная плотность, достигнутая при уплот-
нении снега, равна 0,74 г/см3. Снег лучше уплотняется при отрицательной
температуре, близкой к нулю.
Снег обладает высокой пластичностью, а упругость его весьма незна-
чительна и во много раз меньше упругости льда (0,09—0,06 кПсм2).
Другим показателем, характеризующим сопротивляемость снега при
проникновении в него твердого тела, является твердость. Для снега
плотностью 0,42 г!см3 твердость равна 85 кПсм?. С увеличением плотности
и понижением температуры твердость снега возрастает.
Из механических показателей, характеризующих свойства снега и
имеющих значение для расчета сопротивлений, возникающих при работе
снегоуборочных машин, существенными являются коэффициенты сцепле-
ния, скалывания, внешнего и внутреннего трения и сопротивления раз-
рыву, скольжению и перекатыванию колеса.
МАШИНЫ ДЛЯ РЕМОНТА и содержания ДОРОГ
391
Значения коэффициентов скалывания, сцепления и сопротивления
разрыву для разных состояний снега приведены в табл. 37.
Таблица 37
Физико-механические показатели снега
Состояние снега Плотность, г/см* Коэффициент сцепления, кГ/м3 Коэффициент сопротивле- ния разрыву, кГ / м2 Коэффициент скалывания
Свежевыпавший 0,12—0,20 0,50 0 0,007—0,016
Слегка уплотненный 0,20—0,30 75—175 до 275 0,015—0,030
Плотный 0,35—0,45 — — 0,040—0,140
Очень плотный 0,45—0,55 — 0,15—0,25
Коэффициент сцепления зависит, помимо плотности снега, и от его
влажности; для сухого снега этот коэффициент больше. Влажность снега
определяется калориметрическим способом.
Значения коэффициентов трения снега о металл и внутреннего трения
снега приведены в табл. 38 и 39.
Таблица 38
Коэффициент трения снега о металл
Плотность снега, г/см3 При температуре в °C
—4 ОТ —16 до —30 ОТ —1 ДО 4-2
0,10 0,100 0,140 0,180
0,20 0,085 0,097 0,110
0,30 0 070 0,080 0,090
0,40 0,055 0,065 0,075
0,45 0,040 0,048 0,056
0,50 0,025 0,033 0,040
0,55 0,015 0,021 0,030
Таблица 39
Коэффициент внутреннего трения снега
Плотность снега, г/см3 При температуре в °C
от 4-2 ДО 0 от —1 до —6 -10
0,10 0,27 0,29 0,34
0,20 0,30 0,33 0,36
0,30 0,35 0,39 0,46
0,40 0,40 0,44 0,50
0,45 0,42 0,46 0,52
0,50 0,43 0,49 0,53
0,55 0,45 0,50 0,57
С увеличением плотности снега коэффициент внешнего трения убы-
вает, а коэффициент внутреннего трения возрастает. С понижением тем-
пературы снега внутреннее трение возрастает, а внешнее трение в проме-
жутке температур от +2 до —4 убывает, а далее, с дальнейшим пониже-
нием*'температуры, возрастает.
При перемещении твердого тела по снежной поверхности имеет место
не только внешнее трение между поверхностями тела и снега, но и смятие
последнего. Вследствие этого коэффициент сопротивления движению
по снегу больше коэффициента внешнего трения. Величина смятия зави-
сит от удельного давления и глубины погружения тела. В практических
расчетах можно принять, что сопротивление снега смятию возрастает
прямо пропорционально глубине погружения тела. Удельное сопротив-
ление смятию равно ^600 кГ/м?.
392
МАШИНЫ И ОБОРУДОВАНИЕ ДЛЯ ДОРОЖНЫХ ПОКРЫТИЙ
Таблица 40
Коэффициент сопротивления
скольжению металлической лыжи
по снегу
Состояние снега Значение коэффициента
Свежевыпавший сухой 0,12
Свежевыпавший влажный ...... 0,25
Уплотненный . . . 0,15
Коэффициент сопротивления лыж скольжению и коэффициент сопро-
тивления перекатыванию пневматического колеса по снежной поверх-
ности приведены в табл. 40 и 4i.
Коэффициент сцепления колеса с
заснеженной поверхностью асфальто-
бетонного покрытия в зависимости от
состояния снежного покрова и типа
шин изменяется от 0,06 до 0,35, в то
время как для этой же поверхности,
очищенной от снега, коэффициент сцеп-
ления равен 0,50—0,65.
Для ледяной поверхности при
плотности льда 0,90 г/см3 и темпера-
туре от —12 до —16е С установлены
следующие механические показатели:
сцепление — 32,5 кГ/см2-, временное
сопротивление на разрыв —24 кГ!см\
срез — 16,5 кПсм1.
Удаление снежного покрова с поверх-
временное сопротивление на
Плужные снегоочистители.
ности дороги механизированным способом осуществляется плужными
или роторными снегоочистителями. У плужных снегоочистителей рабочим
элементом, удаляющим снег, служит плуг, монтируемый в передней
части автомобиля или трактора, а у роторных снегоочистителей — спе-
циальной конструкции метатель, вращающийся со скоростью 300—
400 об!мин.
Таблица 41
Коэффициент сопротивления перекатыванию
пневматического колеса по снегу
Характеристика поверхности Значение коэффициента
Обледенелая поверхность . . . . Укатанная снежная поверхность плотностью 0,45—0,60 г/сл3 0,06—0,08 0,8—0,10
Укатанная снежная поверхность плотностью 0,25—0,35 г/сл3 Рыхлая снежная целина плотностью 0,15—0,25 г/сж3 Поверхность, покрытая рыхлым мокрым снегом 0,15—0,20 0,20—0,25 0,30
Плужные снегоочистители (рис. 227) разделяются на одноотвальные,
отбрасывающие снег на одну сторону, и двухотвальные, которые могут
отбрасывать снег на одну или на обе стороны. Некоторые марки плужных
снегоочистителей помимо переднего отвала 2 имеют одно или два боко-
вых отвала (крыла) 3, отодвигающих снег за пределы земляного полотна.
Оборудование снегоочистителя монтируется на шасси автомобилей 1
или на рамах тракторов 4.
Снегоочистители на автомобилях используются для патрульной
службы по очистке дорог во время снегопадов и метелей. Ими можно уда-
лять снег плотностью до 0,20—0,25 г'см3 при глубине снежного покрова
до 40 см. На таком снежном покрове снегоочистители работают со ско-
ростью 20—25 км/ч.
Тракторные плужные снегоочистители, обладающие высокой тяговой
характеристикой, используют для расчистки дорог от больших снежных
МАШИНЫ ДЛЯ РЕМОНТА И СОДЕРЖАНИЯ ДОРОГ
393
заносов: Они могут работать на очень плотном снежном покрове (0,5 г’см2 3
и более) и толщиной 1,0—1,2 м. Рабочая скорость снегоочистителя в этих
условиях не превышает 3,0—3,5 км!ч.
К достоинствам автомобильных плужных снегоочистителей отно-
сятся:
Г) сравнительно большая рабочая скорость, благодаря чему снег
отлетает на значительное расстояние (до 7—10 м) и образуемые после
прохода снегоочистителя снежные валы имеют пологую форму;
Рис. 227. Схемы плужных снегоочистителей: а — одно-
отвальный; б — одноотвальный с крылом; в — двухот-
вальный; г — двухотвальный с крылом
2) большая мобильность, позволяющая быстро перебазировать сне-
гоочиститель с одного участка работ на другой;
3) возможность использования автомобиля по прямому назначению
после демонтажа снегоочистителя.
Достоинствами тракторных снегоочистителей являются:
1) возможность работы в тяжелых снеговых условиях;
2) возможность использования трактора на других работах после
демонтажа снегоочистителя.
Промышленностью выпускаются плужные снегоочистители, монти-
руемые на автомобилях и тракторах.
Схема одноотвального плужного снегоочистителя показана на
рис.-228. Снегоочиститель смонтирован на автомобиле и состоит из от-
вала 1, расположенного в передней части машины, и крыла 4, подвешен-
ного с правой стороны. Отвал цилиндрической формы изготовлен из ли-
стовой стали толщиной 4 мм. Он соединен посредством толкающей рамы 6
с лонжеронами автомобиля и опирается на катки 7. Высота отвала —
1100 мм, длина — 3500 мм, угол установки отвала в плане изменяется
в интервале 45—90°, угол резания — 35—60°.
Боковое крыло одним концом присоединено к каретке на вертикально
перемещающейся стойке, а вторым — свободным — при помощи
396 МАШИНЫ и ОБОРУДОВАНИЕ для дорожных ПОКРЫТИЙ
случае при действии сил внешнего и внутреннего трения частица займет
положение М 2- При этом сила F должна будет совершить работу на длине
пути М2М", а сила F’— на длине М3АГ. Обе силы пропорциональны
силе N, прижимающей отвал к снегу, т. е. F = fN и F' = f’N, где f_
коэффициент внешнего, a f — коэффициент внутреннего трения, причем
сила F имеет направление, обратное относительной скорости перемеще-
ния частицы по отвалу, а сила F' направлена в сторону, противополож-
ную F.
Так как сумма работ обеих сил равна нулю, имеем
FM^M" — F’~M7M' = 0.
Из рис. 229 видно, что
М2М' = yWpVf' tg ф;
М 2М " — М'М" — М 2М' == М ' ctg а — М ' tg ф,
Рис. 230. Схема перемещения снега плуж-
ным снегоочистителем
ром снег в своем движении наименее отклонится
где а — угол установки отвала
в плане.
Подставляя эти значения в уравне-
ние работ, после преобразования по-
лучим:
tg ф == Л 0 ctg а, (IX.13)
где
А - f
Уравнение (IX.13) позволяет
найти наивыгоднейшее значение угла
в плане, т. е. такого угла, при кото-
от нормали Л41М', а
следовательно, быстрее сойдет с отвала
Обозначим
в сторону.
а + ф = (3.
Подставив полученное отсюда значение ф в уравнение (IX.13), после
преобразования получим
= (ЬХ-14)
Чтобы найти минимальное значение функции 0, выражение (IX. 14) про-
дифференцируем по а. После некоторых преобразований будем иметь
_ (1 — 40) (tg2« —Ло)
4“ fg* а + Л5
Приравняем полученную производную нулю:
(1 - 40) (tg2a — Ао) - 0.
Отсюда
tg а0 = V~An,
(IX.15)
где через ап обозначено наивыгоднейшее значение угла а.
Полученное значение а0 и есть минимум функции 0, так как вторая
производная от 0 по а положительна.
МАШИНЫ ДЛЯ РЕМОНТА И СОДЕРЖАНИЯ ДОРОГ 397
При установке отвала под углом а0 получается наибольший к. п. д.
перемещения снега по отвалу.
Под к. п. д. понимается отношение полезной работы, затрачиваемой
на перемещение снега на расстояние М ±С, ко всей работе на перемещение
Лр2:
Tsycos р
Г| =---.
После выражения sx и sy через длину отвала и известные углы и сокраще-
ния подобных членов получим
(1ХЛ6>
Наибольшее значение ц будет при наименьшем значении tg |3, что имеет
место, когда отвал установлен под углом а0.
Рассмотренный нами характер движения снега лишь схематично от-
ражает действительную траекторию, которая представляет собою слож-
ную пространственную кривую. При малых скоростях движения снего-
очистителя, как это имеет место у тракторных снегоочистителей, снег за
период времени, пока он не сместится в сторону, может несколько раз под-
ниматься по отвалу и сходить с него. При больших скоростях снегоочи-
стителя снег скользит по поверхности отвала вверх и в сторону и, достиг-
нув верхнего наружного обреза, со значительной начальной скоростью
сходит с отвала. Наибольшая дальность полета снега получится, если ско-
рость частицы снега в момент отрыва с отвала будет наклонена к горизонту
под углом около 45°.
У большинства снегоочистителей отвал имеет цилиндрическую форму,
однако применяются также отвалы с конической и винтовой поверхно-
стями. Последние придают снегу большую устойчивость в полете и увели-
чивают дальность полета.
При цилиндрической форме отвала радиус кривизны R может быть
найден из неравенства
R^-L-m, (IX. 17)
2 cos -j-
где В — наибольшая высота отвала в м;
у — наименьший угол резания в град.
Высота передней части отвала принимается для тракторных снего-
очистителей на 30—40 см больше максимальной толщины убираемого снеж-
ного покрова. Высота заднего конца отвала принимается больше высоты
переднего конца примерно на 50 см, так как в этом месте отвала накапли-
вается больше снега.
У автомобильных снегоочистителей высота заднего конца отвала
больше чем в четыре раза превышает высоту переднего конца и у ско-
ростных снегоочистителей достигает 3 м.
Длина отвала выбирается такой, чтобы ширина захвата при наимень-
шем угле в плане была на 30—40 см больше ширины хода автомобиля
или трактора, на котором монтируется снегоочиститель.
Тяговое усилие, необходимое для работы тракторных плужных сне-
гоочистителей, рассчитывается по той же методике, что и для землеройных
398
МАШИНЫ И ОБОРУДОВАНИЕ ДЛЯ ДОРОЖНЫХ ПОКРЫТИЙ
машин типа бульдозеров или автогрейдеров. Удельное сопротивление
снега резанию принимается по табл. 42.
Автомобильные плужные снегоочистители во время работы преодо-
левают следующие сопротивления.
1. Сопротивление перемещению автомобиля и плуга
1У1 = Ga (fa + i) + Gn (fn + i) кГ,
(IX.18)
где Ga — вес автомобиля в кГ;
Gn — вес плуга в кГ\
[а — коэффициент
fn — коэффициент
Таблица 42
Удельное сопротивление
снега резанию
Плотность снега, г!см.’А Удельное сопротив- ление. кГ/м2
0,2 160
0,3 320
0,4 950
0,5 2100
сопротивления движению автомобиля; f = 0,05;
сопротивления скольжению плуга; fn = 0,15ч-
4-0,25;
i — максимальный уклон дороги.
2. Сопротивление снега резанию
W2 = Koah кГ,
где к0 — коэффициент сопротивления резанию в
кПя1',
а — ширина захвата снегоочистителя в м;
h — толщина снежного покрова в м.
3. Сопротивление снега перемещению по от-
валу
U73 = lahv2 кГ,
где v„ — рабочая скорость снегоочистителя в
м/сек;
В — коэффициент пропорциональности; В = 0,54-2,5
Требуемая сила тяги Т равна
кГ -сек'2
м4
т = w, + W2 + W3 = Ga{fa + i) + Gn(fn + i) +
+ ah (k0 + |n2) кГ.
(IX. 19)
Полученная по формуле (IX. 19) сила тяги не должна превышать
тяговое усилие снегоочистителя по сцепному весу:
(IX.20)
где Осц — сцепной вес снегоочистителя в кГ;
фсц — коэффициент сцепления колеса автомобиля со снежной по-
верхностью дороги.
Обычно = 0,204-0,45, но во время эксплуатации снегоочисти-
теля его можно увеличить, если надеть цепи на ведущие колеса.
Техническая производительность плужного снегоочистителя опре-
деляется сечением удаляемого снежного покрова и величиной рабочей
скорости снегоочистителя:
П = ЮООГл мЧч, (IX.21)
где Fc — сечение снежного покрова в м2;
им — рабочая скорость снегоочистителя в км/ч.
Роторные снегоочистители. Как правило, они имеют два рабочих
органа, один из которых срезает снежный покров и подает его к средней
части машины, а второй захватывает этот снег и отбрасывает в сторону.
Исключение составляют фрезерные снегоочистители, у которых совме-
щены в одном рабочем органе операции по вырезанию и отбрасыванию
МАШИНЫ ДЛЯ РЕМОНТА и содержания ДОРОГ
399
снега. Однако эти снегоочистители не находят большого применения глав-
ным образом из-за малой производительности, высокой энергоемкости,
сложной конструкции рабочего органа и небольшой дальности отброса
снега. По типу рабочих органов роторные снегоочистители (рис. 231)
подразделяются на шнеко-роторные (рис. 231, а), фрезерно-роторные
(рис. 231, б) и плужно-роторные (рис. 231, в). Наибольшее распростране-
ние получили шнеко-роторные снегоочистители, у которых для выреза-
ния снега имеются два или три шнека. Эти снегоочистители конструктивно
более просты и надежны в работе, но менее приспособлены для срезания
сильно уплотненного снежного покрова. В этих условиях более эффек-
тивно работают фрезерно-роторные снегоочистители или плужно-ро-
торные со специальными рыхлителями.
Устройство шнеко-роторного снегоочистителя показано на рис. 232.
Рабочее оборудование крепится к шасси автомобиля 4 посредством тол-
Рис. 231. Схемы рабочих органов роторных снегоочистителей: а —
шнеко-роторный; б — фрезерно-роторный; в — плужно-роторный
Условные обозначения: / — шнеки; 2 — направляющая труба; 3 — ротор; 4 —
ленточная фреза; 5 — плуг; 6 — рыхлитель
кающей рамы 6. При этом обычно используются трехосные автомобили
повышенной проходимости. Рабочий орган, укрепленный в передней
части автомобиля, состоит из трех шнеков 8 и ротора 7, заключенных
в общий корпус.
Шнеки изготовлены из стальных труб, к которым приварены витки
с правым и левым направлением спирали, что обеспечивает подачу снега
от краев очищаемой полосы к середине, где расположен ротор. Шнеки
приводятся во вращение посредством цепной передачи.
Ротор диаметром 975 мм состоит из стальной ступицы с шестью крон-
штейнами, к которым прикреплены шесть лопастей. Он заключен во
вращающийся кожух / с направляющей трубой 2, имеющей форму улитки.
Поворотом улитки достигается изменение направления полета снега
вправо или влево от оси машины и угол вылета. Подъем и опускание ра-
бочего органа и поворот улитки осуществляется гидравлическими цилин-
драми 3. Ротор вращается со скоростью 425 об/мин. Привод рабочих
органов и ходового оборудования осуществляется от двигателя 5 мощ-
ностью 150 л. с., расположенного сзади кабины. Ширина полосы, очища-
емой снегоочистителем, — 2,5 м; максимальная толщина снежного по-
крова — 1,2 дальность отброса снега — 24 м; производительность —
625 т/ч.
На шнеко-роторном снегоочистителе производительностью 1500 т/ч
установлен самостоятельный двигатель мощностью 300 л. с. для привода
только рабочего оборудования.
400 МАШИНЫ И ОБОРУДОВАНИЕ ДЛЯ ДОРОЖНЫХ ПОКРЫТИЙ
Фрезерно-роторный снегоочиститель выпускается на базе трактора
«Беларусь» и предназначен для работы в городских условиях. На таких
снегоочистителях чаще применяются горизонтальные фрезы ленточного
типа, однако в некоторых моделях устанавливаются две фрезы барабан-
ного типа с вертикальными осями вращения.
Плужно-роторный снегоочиститель с разрыхляющим устройством
выпускается нашей промышленностью на базе трактора мощностью
Рис. 232. Шнеко-роторный снегоочиститель: а —вид сбоку; б — вид спереди
140 л. с. и предназначен для очистки от снега сильно заносимых участков
дорог в равнинной и горной местностях. Снегоочиститель имеет два ротора,
расположенных впереди трактора, с самостоятельными поворотными кожу-
хами (улитками). Подача снега к роторам осуществляется плугом, на
котором укреплены роторы. Разрыхляющее устройство используется
для разрушения снежного козырька, образуемого в процессе работы сне-
гоочистителя, когда высота снежного покрова превышает высоту рабочего
органа, и для рыхления большой плотности снега. В трансмиссию трак-
тора включен демультипликатор для получения требуемых рабочих
скоростей. Минимальная рабочая скорость трактора получается 0,36 км/ч.
Производительность снегоочистителя — 850 т/ч. На всех роторных снего-
очистителях управление гидравлическое.
МАШИНЫ ДЛЯ РЕМОНТА И СОДЕРЖАНИЯ ДОРОГ
Расчет параметров ротора. На частицу снега, находящуюся на вра-
щающейся лопасти, действуют следующие силы:
1) сила тяжести G = mg в кГ~,
2) сила инерции 1 = тЛ в кГ\
3) кориолисова сила инерции 1К = 2тсопл в кГ\
4) силы трения Fx = fG и F, = fIK в кГ,
где т — масса частицы снега в кГ-секЧм’,
<и — угловая скорость ротора в 1/сек;
х — расстояние от частицы снега до оси вращения ротора в м;
vr — относительная скорость снега по лопасти в м!сек\
f — коэффициент трения снега о металл.
Сопоставление этих сил показывает, что сила тяжести снега G, а также
вызываемая ею сила трения Fx невелики по сравнению с остальными
силами, поэтому ими можно пренебречь. Направив ось х вдоль лопасти
и принимая начало координат на оси вращения ротора, можно написать
следующее дифференциальное уравнение движения снега:
т-^г = т<о2х — 2mwf . (IX.22)
Сократив на т, получим
-J- + 2uf~ — щД = 0. (IX.23)
Для данного дифференциального уравнения характеристическое уравне-
ние имеет вид:
п2 + 2ш/п — ы2 = 0. (IX.24)
Корни этого уравнения будут:
п1 = <0 (}/ 1 + f2 — /) соку; (IX.25)
п3 = —w (J/ 1 -{- f2 -У f) - —сок.,, - / и к3 = У1 + У + f. (IX.26)
Таким образом, общий интеграл уравнения (IX.22) будет
х—- — С2К'ШК2‘, (IX.27)
где С, и С2— произвольные постоянные.
Дифференцируя это уравнение по времени t, найдем относительную
скорость
Vr = С^лк,ех'! - (IX .28)
Решим совместно уравнения (IX.27) и (IX.28) с учетом граничных
условий: t = 0; х = г0 и гу -- 0, где г0 — начальный радиус лопасти.
Тогда произвольные постоянные С\ и С2:
Q Г 0^2 . Q Г 0^1
•
Уравнения (IX.27) и (IX.28) получат окончательный вид:
х =----С»---+ К1е“к=м') .и; (IX .29)
v (е^>> М‘сек. (IX.30)
Г <! + «2 ' 7
402 МАШИНЫ И ОБОРУДОВАНИЕ для ДОРОЖНЫХ ПОКРЫТИЙ
С практической стороны важнее всего момент, когда снег находится
на конце лопасти. Чтобы попасть туда, снег затрачивает наибольшее
время на перемещение и вместе с тем приобретает наибольшую скорость.
По мере поворота ротора вторые слагаемые в правой части уравнений
(IX.29) и (IX.30) все меньше сказываются на перемещении х и скорости v
и при угле поворота 90° величины их не превышают 5—6% величин пер-
вых слагаемых. Это дает основание в практических расчетах пренебречь
этими слагаемыми и принять
vr = ; 2 е 1 м/сек.
г «1 + к2
(IX.31)
(IX.32)
Найдем относительную скорость, которую получает частица снега,
находясь на конце лопасти. Для этого в уравнении (IX.29) нужно принять
х = R и затем решить его совместно с уравнением (IX.30), тогда
vr = 7?сок1 м, (IX.33)
где 7? — конечный радиус лопасти.
Время т перемещения частицы снега по лопасти находится из уравне-
ния (IX.31), если принять х == R:
т = _J_ In + сек. (IX.34)
#1 СО L 0^2 J
Угол поворота (угол разгрузки) ротора <рр, соответствующий времени т,
равен
ф рад. (IX.35)
С увеличением коэффициента трения f и отношения R : г возрастают
время и угол разгрузки. Если f = 0 и к2 = Ki = Ь т0
<рр = In ^2 -у-) рад. (IX.36)
Величина <рр играет большую роль в работе ротора: если не будет обеспе-
чена разгрузка лопасти за время т, часть снега не успеет сойти с лопасти,
что повлечет за собой снижение производительности снегоочистителя.
С другой стороны, очевидно, что угол между двумя смежными лопастями
ротора не должен быть более %, в противном случае ротор в некоторые
периоды времени в течение каждого оборота будет вращаться вхолостую.
Отсюда следует, что число лопастей на роторе z должно быть
(IX .37)
Чтобы создать сплошной поток выбрасываемого снега и этим повысить
производительность машины, нужно, чтобы разгрузка лопасти начиналась
до того, как полностью разгрузится предыдущая лопасть. Верхний пре-
дел для величины г пока не установлен, и ориентировочно можно счи-
тать
z
(3,5-*-4,0) л.
(IX.38)
МАШИНЫ ДЛЯ РЕМОНТА И СОДЕРЖАНИЯ ДОРОГ 403
Снег, выбрасываемый ротором, состоит из комьев размером до 20 см
и мелких частиц в виде снежной пыли. Чем крупнее частица, тем дальше
она отлетает в сторону. Если пренебречь сопротивлением воздуха, даль-
ность отброса снега может быть определена по формуле
с' sin 20
---+^tg9 м, (IX.39)
где 0— угол наклона направляющей трубы к горизонту; 0 = 40ч-453;
Н — высота трубы над поверхностью дороги в м;
vr — скорость снега на конце лопасти в м/сек.
Помимо сопротивления воздуха на дальность полета снега влияют
скорость и направление ветра, поэтому работу роторного снегоочистителя
нужно организовать так, чтобы снег выбрасывался в направлении ветра.
Расчет мощности, требуемой для работы роторного снегоочистителя.
При работе снегоочистителя затрачивается мощность на преодоление сле-
дующих сопротивлений:
1) сопротивления перемещению автомобиля или трактора, на
котооых смонтирован снегоочиститель;
2) сопротивления, возникающего при работе питателя (шнека);
3) сопротивления, возникающего при работе роторов.
Сопротивление ITj находится по формуле
= (Ga + Go) (/а + г) кГ; (IX.40)
соответствующая мощность на преодоление этого сопротивления будет
с., (1Х.41)
где Ga — вес автомобиля (трактора) в кГ\
Go — вес снегоочистительного оборудования в кГ;
vM — рабочая скорость снегоочистителя в км/ч-,
fa — коэффициент сопротивления движению;
i — максимальный уклон дороги.
Общая мощность N 2, затрачиваемая на преодоление сопротивлений
при работе шнека, слагается из мощности N'2, расходуемой на вырезание
снега, и N2 — на перемещение снега:
N2 = N'2 + N'2 л. с. (1Х.42)
Величина первой мощности находится по формуле
М = К° л- с., (IX.43)
а второй мощности — по формуле
n: = ,7. с-> (IX.41)
2 270 tg <х0
где к0 — коэффициент сопротивления снега резанию в кГ/м2-,
D — диаметр витков шнека в мл,
d — диаметр вала шнека в лг;
Ьш — длина шнека в .и;
— число оборотов снега в об/мин',
s — шаг шнека в ж;
Пш — производительность шнека в т/ч\
е — угол трения снега о металл;
а0 — угол подъема винтовой линии.
404 МАШИНЫ И ОНОРУЛОВАНИЕ ДЛЯ ДОРОЖНЫХ ПОКРЫТИЙ
Производительность шнека равна
Пш = 60 т/ч, (IX. 45)
Где у — удельный вес снега в т/л3;
— коэффициент наполнения шнека снегом; = 0,3-с-0,4.
^Мощность N9, затрачиваемая на работу ротора, слагается из мощ-
ности N3, требуемой на отбрасывание массы снега и мощности N"3 на пре-
одоление сопротивления трения снега о стенки кожуха N'.j.
На отбрасывание массы снега М требуется затратить энергию
Mv2„
А=-^кГм, (IX.46)
где va — абсолютная скорость частицы в м/сек.
Учитывая (IX.33), имеем
= |/ /?®cos + 7?2<o2Kj = l м/сек. (IX.47)
Величина массы М может быть определена по производительности
ротора Пр. Принимая Пр в кГ/ч и учитывая, что за 1 ч ротор совершает
60 п оборотов, находим вес снега в роторе:
<1Х.48)
Тогда масса снега М равна
. (IX.49)
60ng м
Подставляя полученные значения в (IX.46), получим
А = + кГ-м. (IX.50)
2 • 60/щ
Учитывая, что со = имеем
оО
Время, затрачиваемое на эту работу, равно времени одного оборота
ротора:
С = — сек. (IX.52)
р п
Следовательно,
~ с- «х-5з)
Сопротивление от трения возникает под действием центробежной силы,
прижимающей снег к внутренней поверхности кожуха, и равно
W2 = fMRm2 кГ. (IX.54)
Мощность, требуемая для определения этого сопротивления, будет
(1Х-55)
МАШИНЫ ДЛЯ РЕМОНТА И СОДЕРЖАНИЯ ДОРОГ 405
Таким образом,
Техническая производительность снегоочистителей равна
Псн = 1000В/гвЛ1у m/ч, (IX.57)
где В — ширина захвата в м\
h — толщина удаляемого снежного покрова в м;
— рабочая скорость снегоочистителя в км/ч;
у — удельный вес снега в т/л3.
Производительность ротора принимается равной технической произ-
водительности снегоочистителя.
При нормальной работе снегоочистителя скорость вращения ротора
и шнеков связана с поступательной скоростью машины. Из сопоставления
производительности каждого агрегата можно установить, что поступа-
тельная скорость снегоочистителя при определенных геометрических
размерах, определенной угловой скорости ротора и заданной плотности
снега находится в гиперболической зависимости от сечения удаляемого
снежного покрова. На глубоком и плотном снегу поступательная скорость
снегоочистителя не превышает 0,4—0,5 км/ч. В реальных условиях работы
редко бывают случаи, когда снежный покров на большой протяженности
участка имеет одинаковую толщину и плотность, поэтому для обеспече-
ния эффективности работы снегоочистителя в разнообразных условиях
ходовая часть трансмиссии машины должна позволять плавно изменять
рабочие скорости в значительном диапазоне. Это достигается применением
турбомуфт.
При конструировании роторного снегоочистителя особое внимание
должно уделяться распределению веса машины по ее осям. Крепление
впереди снегоочистителя рабочего оборудования весом 2,0—2,5 т вызы-
вает перегрузку передней оси, затрудняет управление машиной и огра-
ничивает ее маневренность. Необходимо стремиться приблизить центр
тяжести к центру машины и по возможности уменьшить вес рабочего обо-
рудования. Чтобы исключить выглубление рабочего оборудования из
снежного массива при работе на тяжелом снегу, в системе управления
машиной следует предусмотреть гидравлические цилиндры двойного
действия для подъема и опускания рабочей части, которые позволяют
в случае надобности жестко соединить рабочее оборудование с машиной
и тем самым передать часть веса машины на рабочее оборудование.
Не следует добиваться увеличения дальности отброса снега сверх
той, которая требуется для условий, где будет работать снегоочиститель.
Если снегоочиститель предназначается для очистки автомобильных дорог,
дальность отброса ограничивается 25 м, при очистке аэродромов она может
доходить до 50 м.
Пример.
Дано: В = 2,6 м; h = 1,2 м; п = 425 об/мин; (со = 44,4 1/сек); Пр~
= Пт = 625 m/ч; R = 0,49 лг; г0 = 0,15 м; у ~ 0,4 т/ж3; fa =- 0,03.
При заданной производительности и известных параметрах снеж-
ного покрова из формулы (IX.57) можно определить рабочую скорость
машины:
v" = Тбббвлу ТоббДГб’ЛУ 0,5 КМ14’
406
МАШИНЫ И ОБОРУДОВАНИЕ ДЛЯ ДОРОЖНЫХ ПОКРЫТИЙ
Мощность, требуемую для работы
(12.53) и (1.2.55):
ротора, находим по формулам
N3
ПснпЧ? /1 + 4 , fa \ „ „
10е \ 485 39 /
Учитывая, что
К, = V^+Ta ~ fa = ГГ+W - 0,03 1,
получим
625-1 000-4252-0,493 Г 2 0,03 \
10е к 485 + 39“ )
= 135 л. с.
Найдем некоторые кинематические параметры ротора. Относительная
скорость снега на конце лопасти по формуле (IX.33) равна
vr = R<£>Ki = 0,49-44,4-1 = 21,6 м/сек.
Угол разгрузки находим по формуле (IX.35):
Ф. = —In [A. = in/^49 2\ _ j 88 д
W кг [ Го J \ 0,15 /
т. е. = 108°.
Время перемещения частицы снега по лопасти равно
Скалыватели. Для удаления уплотненного снега или снежно-ледяного
наката с асфальтобетонных и цементнобетонных дорожных покрытий при-
меняются специальные ножи-скалыватели, которые могут совершать
возвратно-поступательное движение или закрепляться наглухо. Скалы-
ватели входят в комплект сменного рабочего оборудования снегоубороч-
ных машин. Нашей промышленностью скалыватели из двух неподвижных
ножей выпускаются к снегоуборочной машине на базе трактора «Бела-
русь». В передней части трактора укреплен одноотвальный плуг, в задней
части — цилиндрическая щетка, а между передними и задними колесами
под рамой трактора — ножи-скалыватели.
В гидроцилиндрах подъема и опускания ножей предусмотрено уст-
ройство, предохраняющее их от поломок при наезде машины на препят-
ствия. Этим устройством регулируется также сила прижатия ножей
к поверхности покрытия. Оно состоит из клапана, включенного в гидро-
цилиндр. Изменением натяжения пружины клапана регулируется давле-
ние масла в гидроцилиндре, а следовательно, давление ножа на поверх-
ность скалываемого снега. В случае встречи ножа с препятствием воз-
растет давление масла в полости цилиндра за поршнем, клапан сожмет
пружину и откроет проходное отверстие, через которое масло перетечет
в другую полость и приподнимет поршень, а вместе с ним и нож-скалыва-
тель.
При расчете требуемого тягового усилия учитывается сопротивление
снега скалыванию
W± = bhKCK кГ
и сопротивление трения ножа о снег
IF2 == fP кГ,
МАШИНЫ ДЛЯ РЕМОНТА И СОДЕРЖАНИЯ ДОРОГ
407
где b — ширина захвата зубьев в м;
h — толщина удаляемого слоя снега в м;
Кск — удельное сопротивление скалыванию; Кск — 5 кПсм2;
Р — сила прижатия ножа в кГ;
/ — коэффициент трения снега о металл, принимаемый по табл. 38.
Пескоразбрасыватели. Обледенение дороги резко снижает сцепление
колес автомобиля с поверхностью дороги, в результате чего нарушаются
устойчивость машины и безопасность движения. Если на сухом асфальто-
бетонном покрытии коэффициент сцепления колес автомобиля равен
0,6—0,7, то при обледенении он сни-
жается до 0,06—0,08. Для борьбы с
этим поверхность покрытия иногда
посыпают хлористым натрием или хло-
ристым кальцием. Однако эти веще-
ства применяются редко, так как они
Рис. 234. Схема сил, действующих на
частицу материала при вращении диска
Рис. 233. Принципиальная схема пескораз-
брасывателя
содействуют коррозии рам и кузовов автомобилей. Наиболее распро-
страненным и дешевым способом борьбы со скольжением является посыпка
обледеневшего покрытия песком. Для россыпи песка используются песко-
разбрасыватели (рис. 233).
Рабочее оборудование пескоразбрасывателя монтируется в задней
части автомобиля и состоит из горизонтального металлического диска 3,
вращающегося на вертикальной оси. На верхней рабочей поверхности
диска приварены радиальные ребра. Бункер для песка 5, укрепленный
на шасси автомобиля, имеет наклонные стенки, а на дне — отверстие,
к которому примыкает лоток 4. Лоток, имеющий опору 6, совершает под
действием эксцентрикового механизма 8 возвратно-поступательное дви-
жение и проталкивает песок из бункера к диску. Вал эксцентрикового
механизма приводится во вращение от вала диска посредством ременной
передачи 2. Привод диска осуществляется от коробки отбора мощности 7
автомобильного двигателя через конический редуктор 1. Диаметры дис-
ков на разных машинах колеблются от 0,60 до 0,70 м, а число оборотов —
от 300 до 600 об!мин.
Песок поступает на некотором расстоянии от центра диска и под дей-
ствием центробежной силы продвигается вдоль ребер к наружной кромке,
преодолевая при этом сопротивление трения о поверхность диска.
Изменение скорости россыпи материала достигается переключением
рабочей скорости пескоразбрасывателя.
408 МАШИНЫ И ОБОРУДОВАНИЕ ДЛЯ ДОРОЖНЫХ ПОКРЫТИЙ
Производительность пескоразбрасывателя равна 12—14 тыс. м2/ч.
Расчет параметров диска пескоразбрасывателя. На частицу мате-
риала М (рис. 234), находящуюся на вращающемся диске, действуют
следующие силы: сила тяжести mg; центробежная сила инерции лш2х;
кориолисова сила инерции 2ти-^-; сила трения о поверхность диска
под действием силы тяжести fmg и кориолисовой силы инерции 2fm^~,
где т — масса частицы в кГ-секЧм;
л- — расстояние от рассматриваемой точки до центра диска в м;
ы — угловая скорость диска в 1/сек;
t — время в сек;
g — ускорение силы тяжести, равное 9,81 м/сек2;
f — коэффициент трения песка о металл.
Дифференциальное уравнение движения частицы примет вид:
т = тсгх — 2maf ~ — fmg; (I X. 58)
сократив на т и поделив на со2, будем иметь:
-т^?г + 2/-т^7?— (х-ДЛ =0. (IX. 59)
<1 1 d (wt) \ ш2 / v '
Введем обозначения:
<о/ = у; х — =- 2,
тогда
dz dx d-z d2x
dy d (cd<) ’ dy2 d (<nt)2
Напишем дифференциальное уравнение (IX.59) в новых обозначе-
ниях:
я?
~ + 2f~— г — 0. (IX.60)
dy 1 dy '
Характеристическое уравнение имеет вид:
к2 + 2/к — 1 = 0.
Находим корни этого уравнения:
= -f +
К 2 = f | / “ 1 .
Общий интеграл уравнения (IX.60) равен
z1- C1e‘|!;-i (IX.61)
Подставляя в это уравнение значения г, у, Kj и к2, получим
х = -ф + С,г м, (IX.62)
или
х--^ = Cie{n~l)(a' + C^(n+h,,yt м, (IX.63)
где п = у I -f- р .
МАШИНЫ ДЛЯ РЕМОНТА И СОДЕРЖАНИЯ ДОРОГ
409
Прежде чем найти величину постоянных интегрирования Сг и С.2,
сопоставим оба слагаемых левой части уравнения (IX.63). Так как число
оборотов диска не бывает меньше 300 об/мин, а наибольшее значение коэф-
фициента трения f = 0,5, то
Полученная величина составляет 1 % от значения х, не превышающего
радиуса диска 0,5 м, поэтому в практических расчетах ею можно прене-
бречь и принять
х = C,e{n-f}at + С2е-<л + п“' м.
(IX.64)
Скорость перемещения частицы песка будет
fx =4г = ci — —
Для нахождения
при t = 0 х = г0-,
где г0 — радиус ребра диска;
и0 — начальная скорость частицы.
Тогда получим:
— С2 (п 4- f) we- (n+f) м/сек.
Сг и С2 воспользуемся граничными
= v0,
(IX.65)
условиями:
n~f
___________Л,
2п 2п ш
с - г п ' f
~ Г° 2п
о
Окончательно будем иметь:
Х ~ \Г<1 ~2п
--11 ) р(п________
2пш /
го
va \ — («+/) шг
2лы Л
(IX.66)
. п- — f- п 4-
0 2п 2ч
е <лН)6>' м/сек.
(IX.67)
Есди подставить в эти уравнения возможные значения величин п,
f, ы и t, окажется, что величина е1п~;>а1 в 50 раз больше величины
е— (m + f)»!, поэтому при инженерных расчетах можно пользоваться
более простыми формулами:
*-(Г"Т+ 2^)e'"’""' <1Х'68>
v, - (г. '-аД “ + «''««
(IX.69)
410
МАШИНЫ И ОБОРУДОВАНИЕ ДЛЯ ДОРОЖНЫХ ПОКРЫТИЙ
Найдем относительную скорость частицы материала вдоль ребра
в момент, когда она сойдет с диска. Для этого в уравнении (IX.68) нужно
принять х = г. При таком условии, решая это уравнение совместно с
уравнением (IX.69), получим
vr = г (п — /') <о. (IX.70)
Абсолютная скорость, с которой частица материала сойдет с диска,
равна (рис. 235)‘
Va = Уо; + V2 = У Г2 (н — /)2<О2 + Г2(й2 =
= г(о]/(п — /)2 + 1 м/сек,
(IX.71)
где V, — окружная скорость.
Из формул (IX.70) и (IX.71) видно, что скорость перемещения ча-
стицы вдоль ребра не зависит от начальной скорости о0, однако началь-
ная скорость, как и величина г0, влияет на величину угла срр, на который
Рис. 235. Угол разлета частиц
песка
повернется диск за время движения по нему
частицы.
Найдем угол фр, для чего предваритель-
но определим среднюю скорость частицы vcp:
Vcp = M/ceK.
(IX.72)
Время движения частицы по диску
равно
г — г0 2 (г — г0) со
т =------—---------=—-----------сек,
Va + ra> v (п — f)2 + 1
(IX.73)
а угол поворота равен
®0 = сот =------2(г7Го) ь._ рад. (IX.74)
Ио + ГСО ]Л(П - ()2 + 1
Когда частица сойдет с диска, кроме скорости va она будет обладать
также и скоростью машины vM, и относительно поверхности дороги ее
полная скорость будет равна геометрической сумме
о = va + vM м/сек. (IX.75)
С этой начальной скоростью частица будет продолжать свое движение в
воздухе по параболической кривой.
Расчет мощности, требуемой для работы диска пескоразбрасывателя.
Энергия расходуется на сообщение скорости перемещаемому материалу
(N j и на преодоление силы трения материала одно и ребра диска (М2), т- е-
N = Nj, + М2. (IX.76)
Мощность Лу определяется по формуле
Л/ , е
N1 270.2gr] •’
(IX.77)
где П — производительность диска в т/ч.-,
т] — к. п. д. привода.
МАШИНЫ ДЛЯ РЕМОНТА И СОДЕРЖАНИЯ ДОРОГ
411
Мощность, затрачиваемая на преодоление сил трения, пропорцио-
нальна весу материала на диске и длине ребра:
*'.~EWL('+Jir)AC- <1х-78>
Техническая производительность пескоразбрасывателя Пт нахо-
дится по формуле
Пт = BvM м2/ч, (IX.79)
где В — ширина посыпки в м;
vM — скорость пескоразбрасывателя в м/ч.
Эксплуатационная производительность значительно меньше техни-
ческой и зависит не только от времени, затрачиваемого непосредственно
на россыпь, но и от времени загрузки бункера песком, времени холостого
пробега от места работы к складу песка, а также от коэффициента исполь-
зования пескоразбрасывателя в течение смены. Этот коэффициент учиты-
вает простои пескоразбрасывателя по организационным и техническим
причинам и в расчете принимается равным 0,90—0,95. Среднее время, за-
трачиваемое на загрузку в пескоразбрасыватель 5—5,5 т песка, равно
8 мин, а чистое время россыпи этого количества песка — 20 мин.
Пример.
Исходные данные: п = 300 об'мин: со = 31,4 1/сек; г = 0,35 м;
г0 = 0,1 м; v0 = 0; vM = 12 км/ч = 3,3 ж/сек; Н = 0,6 м; П = 15 т/ч-,
f = 0,5; т| = 0,85; п = ]/1 /- = 1,2.
Относительная скорость движения частицы по диску (IX.70) будет
vr = г (п — /) со = 0,35 (1,2 — 0,5) 31,4 = 7,7 м/сек.
Окружная скорость равна
ив = гео = 0,35-31,4 = 11 м/сек.
Полная скорость точки на кромке диска (IX.71) составит
va = ]/V -J- = У7,72 + И2 = 13,4 м/сек.
Скорость частицы в момент, когда она сойдет с диска и начнет дви-
гаться в воздухе в вертикальной плоскости, совпадающей с продольной
осью машины, равна алгебраической сумме скоростей va и vM:
v = va + vM = 13,4 + 3,3 = 16,7 м/сек.
Найдем угол поворота срр. Средняя скорость частицы равна
у0 4“ Га О 4- 13,4 с 7 ,
4,, = —= ----------2---- = 6,7 м'сек-
Время движения частицы по диску (IX.73) будет
т = -—= °--5-д _0’10 = 0,04 сек.
иср о,7
Тогда угол <рр по формуле (IX.74) составит
Фр = сот = 31,4-0,04 = 1,26 рад,
или фр = 73°.
Определим величину мощности, требуемой для вращения диска.
Величина по формуле (IX.77) равна
Н/'а-М _ 15 (13.42
270-“ 270-2-9,81-0,85 ’ ’
412
МАШИНЫ И ОБОРУДОВАНИЕ ДЛЯ ДОРОЖНЫХ ПОКРЫТИЙ
величина N2 по формуле (IX.78) будет
!П (г - г0)
270т]
0.5-15(0,35 — 0,10)
270-0,85
(1 +31,42-g^) =0,3 л. с.
Тогда полная мощность равна
N = (Vj + Л+ - 0,6+ 0,3 = 0,9 л. с.
Литература
1. Абросимов К. Ф., Бромберг А. А. и Катаев Ф. П. Машины
для строительства дорог. М., Машгиз, 1962.
2. Баловнев В. И., Засов И. А. и Карабан Ю. Л. Машины для
содержания и ремонта автомобильных дорог. М., изд-во «Машиностроение», 1964.
3. Г у с е в Л. М. Исследование работы щеточных устройств с цилиндрическими
щетками подметально-уборочных машин. Ленинградский НИИ Академии коммунального
хозяйства им. К. Д. Панфилова, 1958.
4. Эв е н то в И. М. Снегоочистители. М.—Л., Машгиз, 1954.
5. Ш а л м а н Д. А. Снегоочистители. Л., изд-во «Машиностроение», 1967.
ПРИЛОЖЕНИЕ
Условные обозначения и переводные коэффициенты
основных расчетных величин
Расчетная величина Примененная размерность Размерность в системе СИ Переводный коэффициент
Сила кГ Н (ньютон) 1 н & 0,1 кГ 1 кГ = 9,81 н
Момент силы / кГ -м н-м (ньютон-метр) \н-м да 0,1 кГ-м 1 кГ -м = 9,81 н-м да 10 н-м
Работа кГ-м дж (джоуль) 1 дж ~0,1 кГ -м 1 кГ-м = 9,81 дж да 10 дж
Мощность кГ-м/сек л. с. вт (ватт) квт (киловатт) 1 вт да 0,1 кГ-м/сек 1 кГ-м/сек = 9,81 am да 10 вт 1 л. с. = 0,735 квт
/Масса к Г -сек '/м кг 1 кГ = 9,81 кГ-сек^/м да да 10 к Г -сек?/м 1 кГ'сек^/м да 0.1 кГ
Напряжение, удельное давле- ние кГ/см? Н/Мр или кн/м- 1 н/.и2 да 10‘5 кГ/см- 1 кГ/слР да 100 кн/м1
Жесткость ли- нейная, линейное удельное давле- ние кГ/см н/м 1 н/м да 10*3 кГ/см 1 кГ/см да 1000 н/м
/
ОГЛАВЛЕНИЕ
Предисловие .............................................................. 3
Введение .................................................................. 4
Часть I
МАШИНЫ ДЛЯ ЗЕМЛЯНЫХ РАБОТ
Глава I. Рабочие органы
и ходовое оборудование................................................... 12
§ 1. Общие вопросы .................................................. —
§ 2. Физико-механические свойства грунтов .......................... 13
§ 3. Рабочие органы землеройно-транспортных машин и их взаимодействие
с грунтом........................................................... 22
§ 4. Ходовое оборудование и общие положения тягового расчета........ 35
§ 5. Системы управления машин ...................................... 49
Литература .................................................... 58
Глава II. Машины для подготовительных работ и землеройно-транспортные
машины..................................................................... 59
§ 6. Базовые тягачи ................................................ —
§ 7. Машины для подготовительных работ.............................. —
§ 8. Назначение и классификация землеройно-транспортных машин ... 66
§ 9. Бульдозеры..................................................... 68
§ 10. Скреперы ..................................................... 78
§ 11. Автогрейдеры ................................................. 89
§ 12. Грейдер-элеваторы и землеройно-фрезерные машины.............. 103
§ 13. Разработка мерзлых грунтов землеройными машинами............. 112
§ 14. Автоматизация рабочих процессов землеройных машин............ 118
§ 15. Машины для гидравлической разработки грунта.................. 120
Литература .................................................... 125
Глава П1. Экскаваторы..................................................... 126
§ 16. Назначение и классификация экскаваторов........................ —
§ 17. Одноковшовые экскаваторы....................................... —
§ 18. Конструктивные схемы и процессы работы одноковшовых экскаваторов 129
§ 19. Привод и механизмы............................................. 132
§ 20. Выбор мощности двигателя и определение производительности одно-
ковшовых экскаваторов ..... ..................................... 139
§ 21. Статический расчет одноковшовых экскаваторов................. 149
§ 22. Расчет рабочего оборудования и основных узлов................ 155
§ 23. Экскаваторы непрерывного действия ............................ 163 -
§ 24. Общий расчет многоковшовых экскаваторов...................... 166
Литература ................................................... 170
Глава IV. Машины для уплотнения грунтов.................................. 171
§ 25. Физические основы процесса уплотнения грунтов машинами......... —
§ 26. Прицепные катки ............................................. 176
§ 27. Трамбующие машины ............................................185
§ 28. Вибротрамбующие машины....................................... 190
п............................................................. 198
ОГЛАВЛЕНИЕ
415
Часть II
МАШИНЫ И ОБОРУДОВАНИЕ
ДЛЯ ДОРОЖНЫХ ПОКРЫТИЙ
Глава V. Машины для добычи и переработки каменных материалов............... 200
§ 29. Физико-механические свойства каменных материалов................ —
§ 30. Машины и оборудование для буро-взрывных работ в карьерах .... 201
§ 31. Дробилки........................................................ 206
§ 32. Мельницы........................................................ 220
§ 33. Грохоты и гравиемойки........................................... 222
§ 34. Дробильно-сортировочные установки и заводы...................... 227
Литература ...................................................... 231
Глава VI. Машины и оборудование для строительства усовершенствованных
дорожных покрытий облегченного типа........................................ 232
§ 35. Оборудование для приема, хранения и подогрева органических вяжу-
щих материалов ........................................................ —
§ 36. Машины для розлива битумных материалов.......................... 240
§ 37. Машины для приготовления дорожных эмульсий...................... 245
§ 38. Машины для распределения дорожно-строительных материалов • - - 254
§ 39. Машины для постройки покрытий по методу смешения на дороге - • • 257
Литература .................................................... 262
Глава7 VII. Машины для строительства асфальтобетонных покрытий........... 263
§ 40. Классификация и конструктивные схемы асфальтобетонных смесителей.
Асфальтобетонные заводы ............................................... —
§ 41. Теория асфальтобетонных смесителей и их расчет на прочность .... 274
§ 42. Основы тепловых расчетов машин и оборудования для постройки
дорог с применением органических вяжущих материалов.................. 288
§ 43. Укладчики асфальтобетонной смеси • ........................... 297
§ 44. Самоходные катки для уплотнения дорожных оснований и покрытий 306
§ 45. Вибрационные машины для уплотнения дорожных покрытий .... 318
Литература ................'.................................... 330
Глава VIII. Машины для строительства цементнобетонных покрытий - . 331
§ 46. Бетоносмесители.................................................. —
§ 47. Заводы для приготовления бетонных смесей....................... 337
§ 48. Машины для линейных работ - '.................................. 349
§ 49. Заводы и полигоны для изготовления бетонных конструкций........ 366
Литература ..................................................... 382
Глава IX. Машины для ремонта и содержания дорог ........................... 383
§ 50. Машины для ремонта и летнего содержания автомобильных дорог • • —
§ 51. Машины для зимнего содержания автомобильных дорог............. 389
Литература ...................................................... 412
Приложение 413