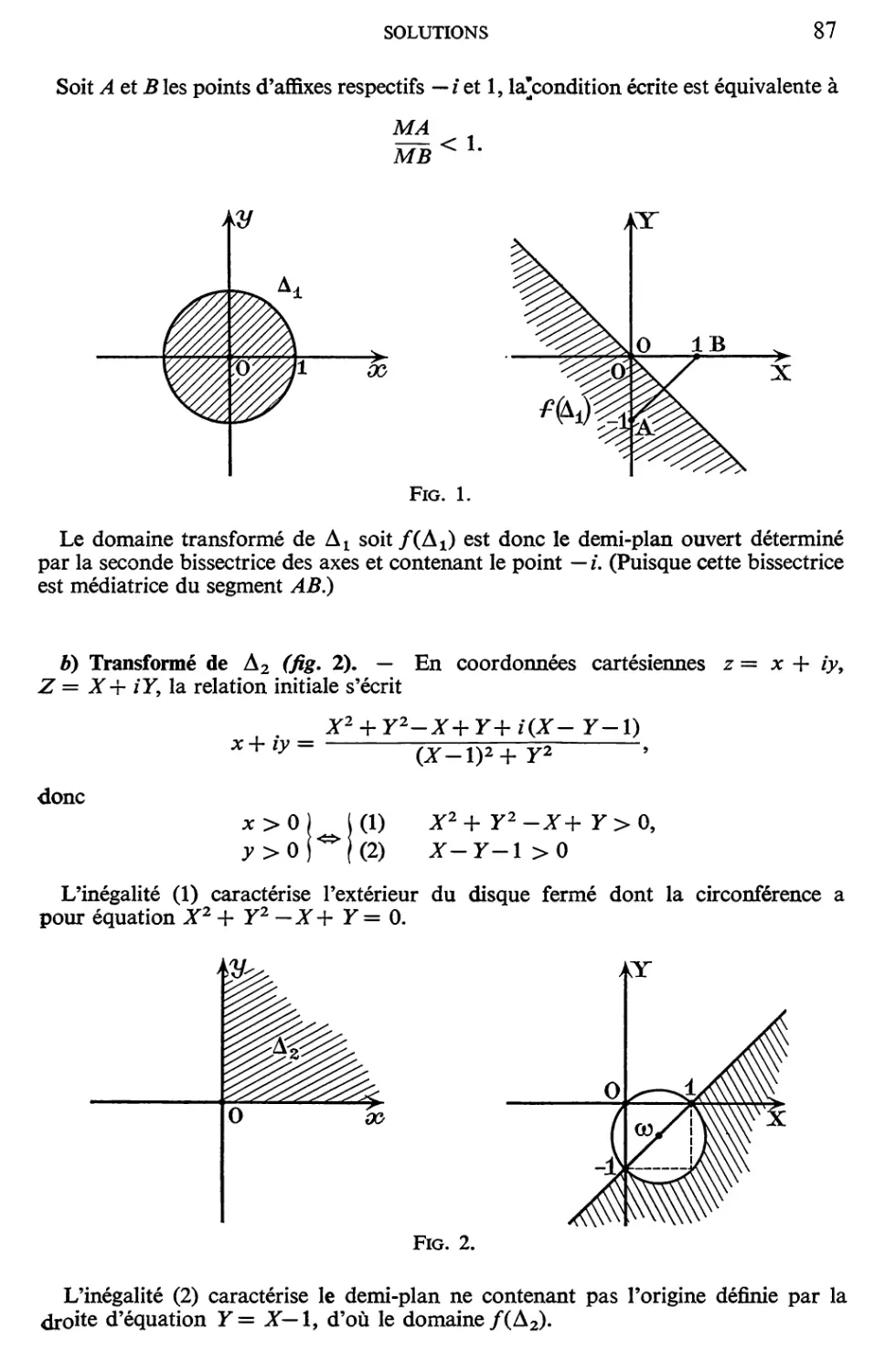
/











































































































































































































































































Text
J. GENET et G. PUPION
,
,
1 1
1
, ,. ,.
RESUME DE COURS ET EXERCICES CORRIGES
PREMIER CYCLE UNIVERSITAIRE
.....
TOME 2
variable complexe - calcul différentiel et intégral
VUIIERT
analyse D10derne 2
fonctions d'une variable .complexe
. , .
IntegratIon
calcul différen tiel
équations aux dérivées partielles
Des mêmes auteurs
Analyse moderne. - Tome 1 : Espaces métriques, séries, systèmes différentiels.
Volume 16x24 cm, de 344 pages . . . . . . . . . . . . 47,78 F
Analyse moderne. - Problèmes corrigés de MP2.
Volume 16 X 24 cm, de 208 pages . . . . . . . . . . . . 35,83 F
Ces problèmes ont été choisis afin de servir d'illustration aux deux tomes
d'Analyse moderne.
En préparation
GENET, PUPION ET REPUSSARD : Probabilités, Statistiques et Sondages,
à l'usage des économistes et des ingénieurs. Cours moderne et exercices
avec solutions.
analyse moderne
résumé de cours
.
et exerCIces
. ,
corrIges
par
J. Genet
et
G. Pupion
agrégé de l'Université,
docteur ès sciences mathématiques,
maître de conférences à
l'Université de Pau
agrégé de l'Université,
docteur ès sciences mathématiques,
maître de conférences à
l'Université de Bordeaux
TOME
2
fonctions d'une variable complexe
intégration
calcul différentiel
équations aux dérivées partielles
,
à l'usage des étudiants du 1 er Cycle des Universités scientifiques, des classes préparatoires
aux grandes Écoles et de la première année des maîtrises de Mathématiques
LIBRAIRIE VUIBERT
Boulevard Saint-Germain, 63
75005 - PARIS
ISBN: 2-7117-2111-6.
La loi du Il mars 1957 n 9 autorisant, aux termes des alinéas 2 et 3
de l'article 41, d'une part, que les « copies ou reproductions strictement
réservées à l'usage privé du copiste et non destinées à une utilisation
collective» et, d'autre part, que les analyses et les courtes citations dans
un but d'exemple et d'illustration, « toute représentation ou reproduction
intégrale, ou partielle, faite sans le consentement de ['auteur ou de ses
ayants droit ou ayants cause, est illicite » (alinéa 1 cr de l'article 40).
Cette représentation ou reproduction, par quelque procédé que ce
soit, constituerait donc une contrefaçon sanctionnée par les articles 425
et suivants du Code Pénal.
(ê) Librairie Vuibert, 1974
Utilisation et numérotation des exercices
Les exercices sont numérotés à l'aide de trois chiffres. Par exemple, l'exer-
cice p.q.r. se rapporte au chapitre p, paragraphe q et est le r e correspondant
à ce paragraphe. La résolution de cet exercice fait nécessairement appel à
l'une des propriétés développées au paragraphe q du chapitre p, mais peut
utiliser des connaissances «antérieures ».
Les symboles .,.. et ... sont relatifs à la difficulté des exercices proposés.
. Exercices faciles. (Application immédiate du cours ou exercice tech-
nique.)
.. Exercices de difficulté moyenne.
... Exercices plus difficiles. (Ces derniers sont conseillés à titre de révision
en début de Maîtrise.)
Principales notations
lN : l'ensemble des entiers naturels.
lN* = lN -{O}.
7L anneau des entiers relatifs.
/R : corps des réels (et espace métrique muni de la distance euclidienne
s'il n'y a pas d'autre indication).
/R+ = {x; XE IR, x;> O}.
JR.: = JR.+ -{O}.
q; corps des complexes.
/Rn espace vectoriel sur JR. des n-uples ordonnés (Xl' ..., Xj, ..., x n ), Xj E IR.
q;n : espace vectoriel sur q; des n-uples ordonnés (Xl' ..., X j , ..., X n ), Xi E C.
[X] : partie entière du réel x.
1 : x f(x) = y désigne l'application f qui à X fait correspondre y.
1 - S(j) <=> à 1 correspond la série de Fourier S(/).
: symbole utilisé pour la convergence.
Un U <=> Un tend vers U lorsque n tend "ers l'infini.
n -+ 00
TABLE DES MATIÈRES
1. INTÉGRALES DE RIEMANN IMPROPRES ........................ Il
1. Généralités. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
II. Propriétés des intégrales impropres ............... 13
III. Critères de convergence pour I:+<X>!(X)dXo ........ 15
Vo Critères de convergence pour I:i(X)dX. .......... 17
Enoncés des exercices .................................. 19
Solutions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
2. FONCTIONS D'UNE VARIABLE COMPLEXE. FONCTIONS HOLOMORPHES 53
1. Fonctions d'une variable complexe ............... 53
II. F onctions holomorphes ....................... . . . 54
III. Développement en série de Laurent. .............. 56
IV. Propriétés diverses .............................. 59
Énoncés des exercices .................................. 61
Solutions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
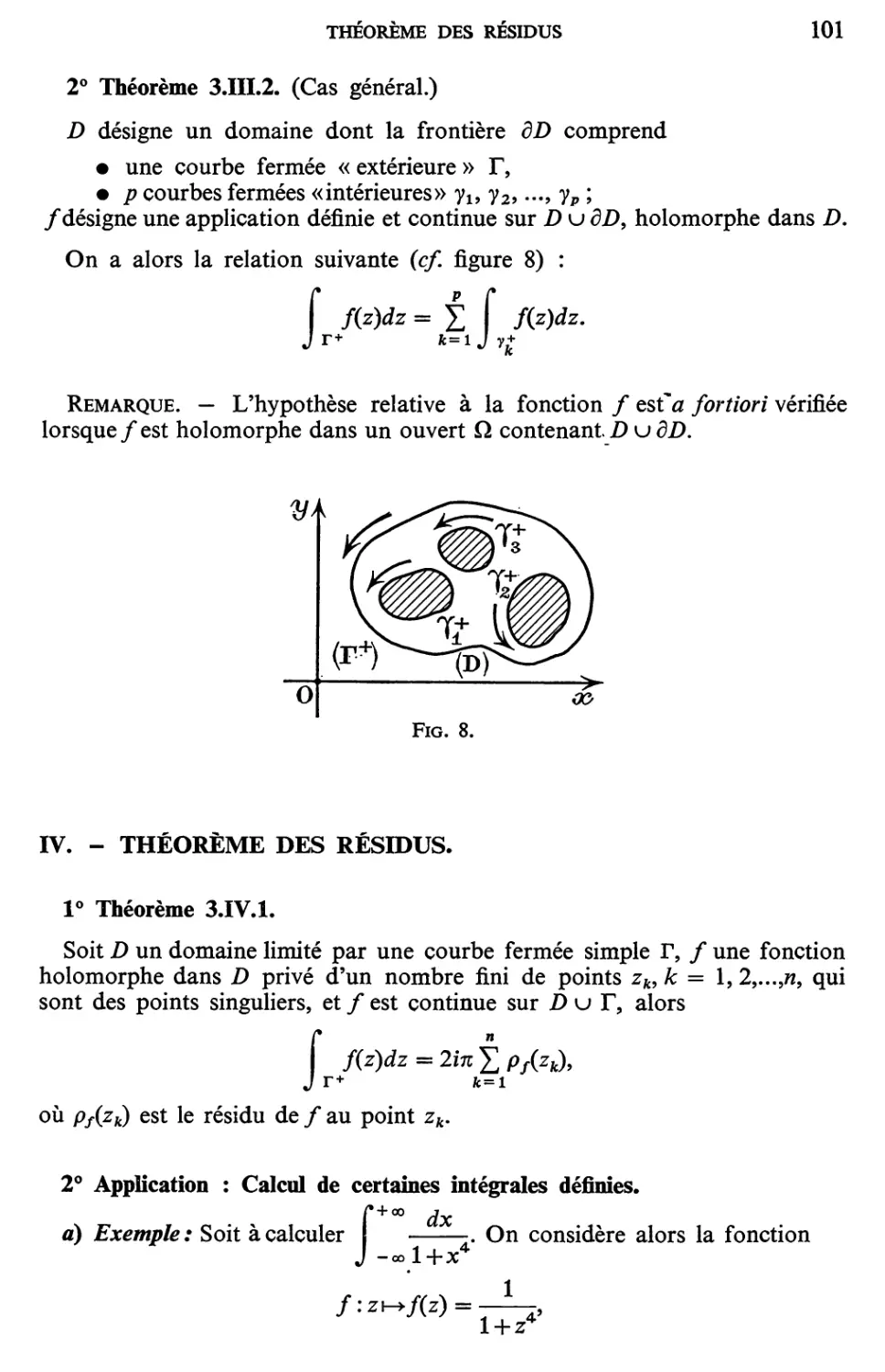
3.
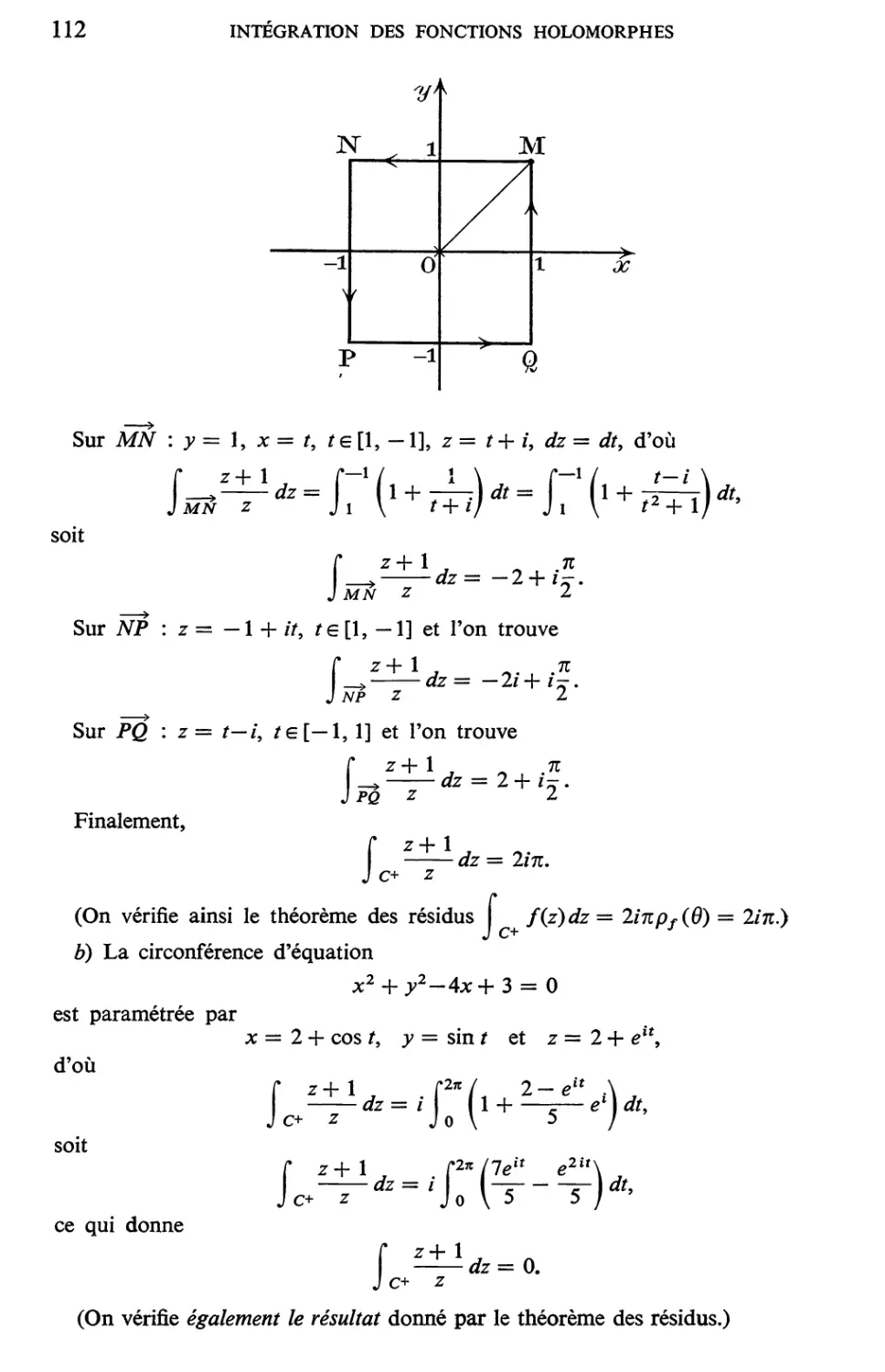
INTÉGRATION DES FONCTIONS HOLOMORPHES. THÉORÈMES DE
CAUCHY ET DES RÉSIDUS ................................
1 D ' fi . t . d .
. e nI Ions Iverses .............................
II. Intégrale I f(Z )dz. ............................
AB
III. Théorème de Cauchy . . . . . . . . . . . . . . . . . . . . . . . . . . . .
IV. Théorème des résidus ...........................
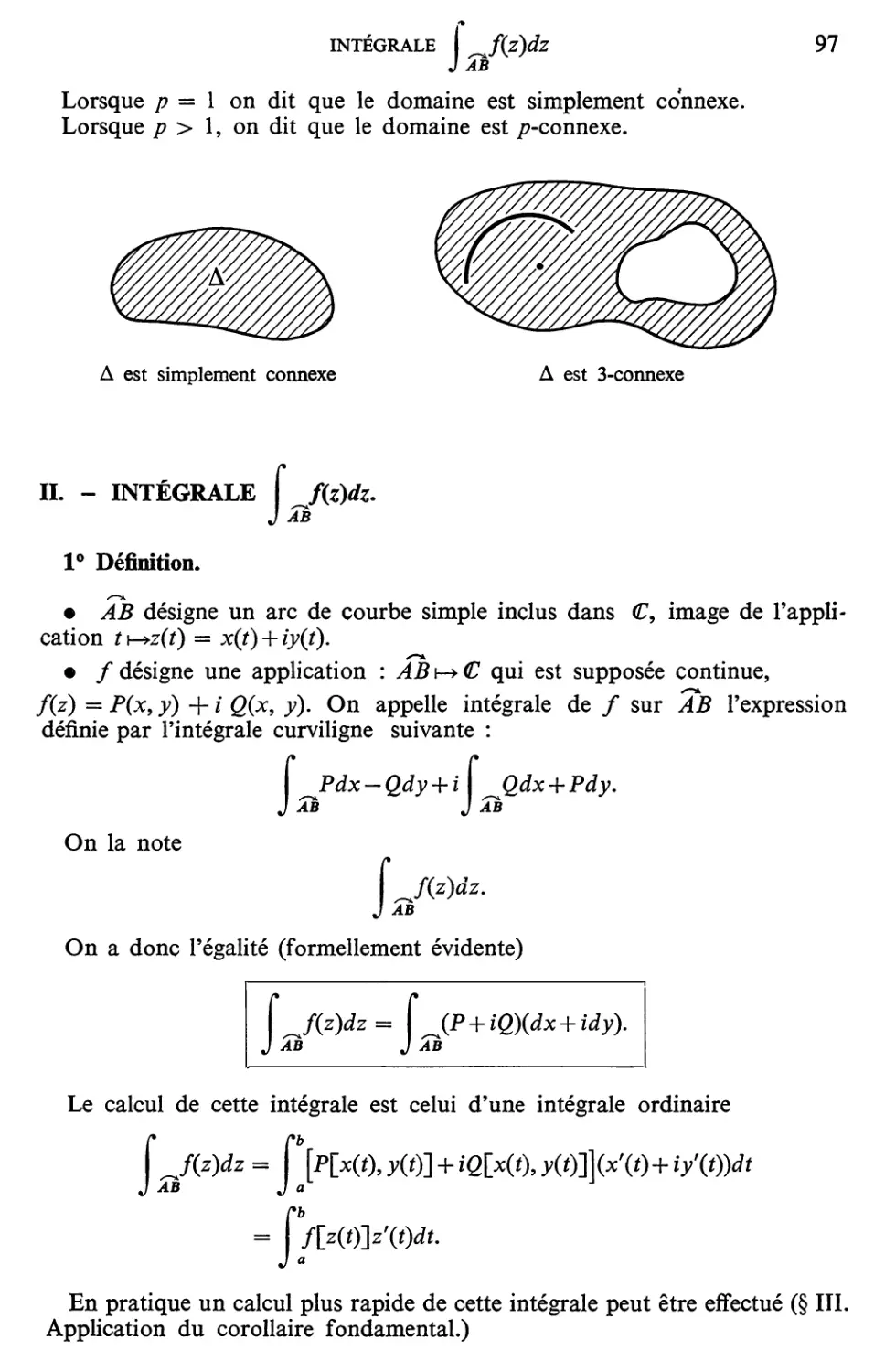
95
95
97
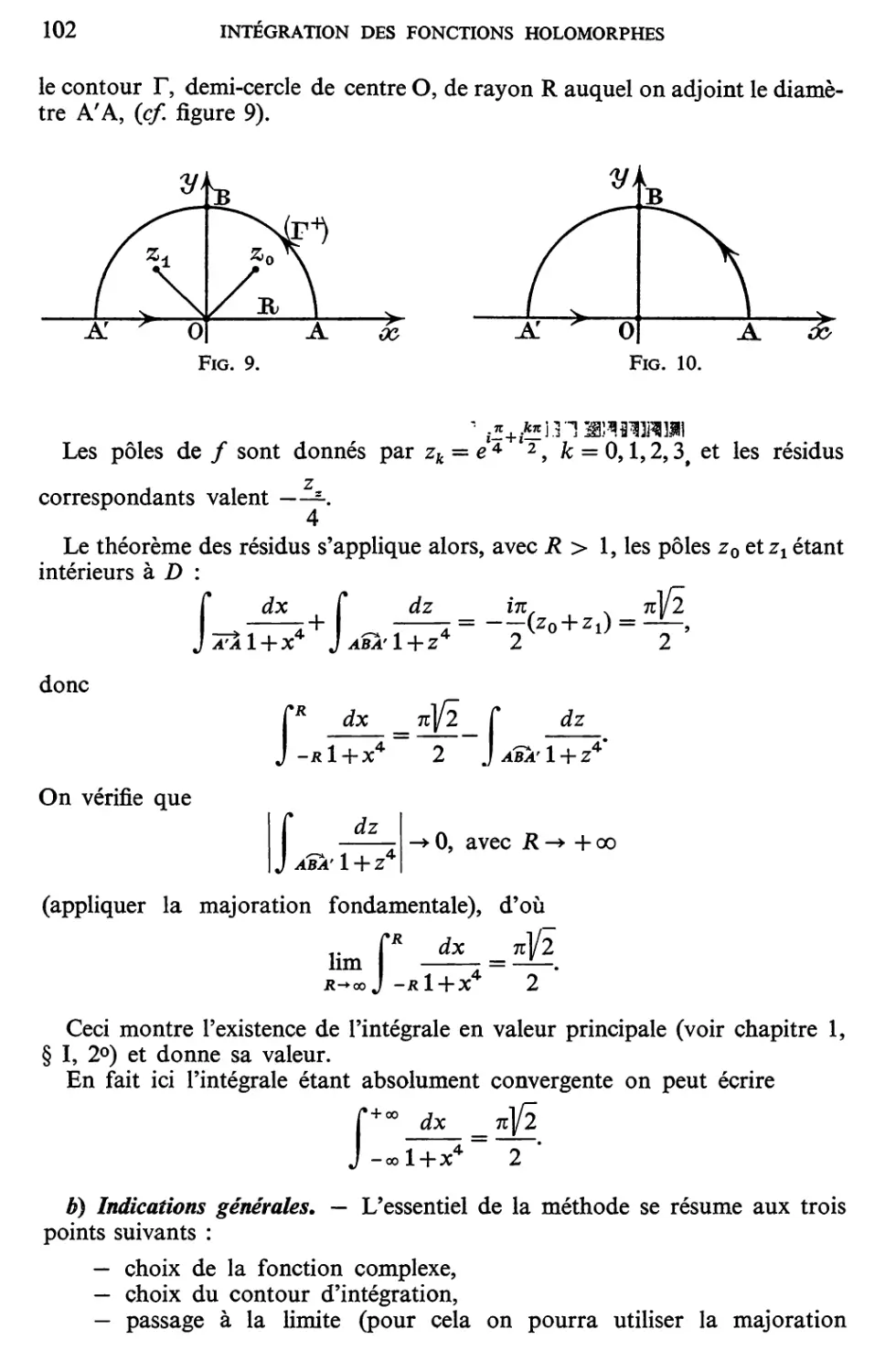
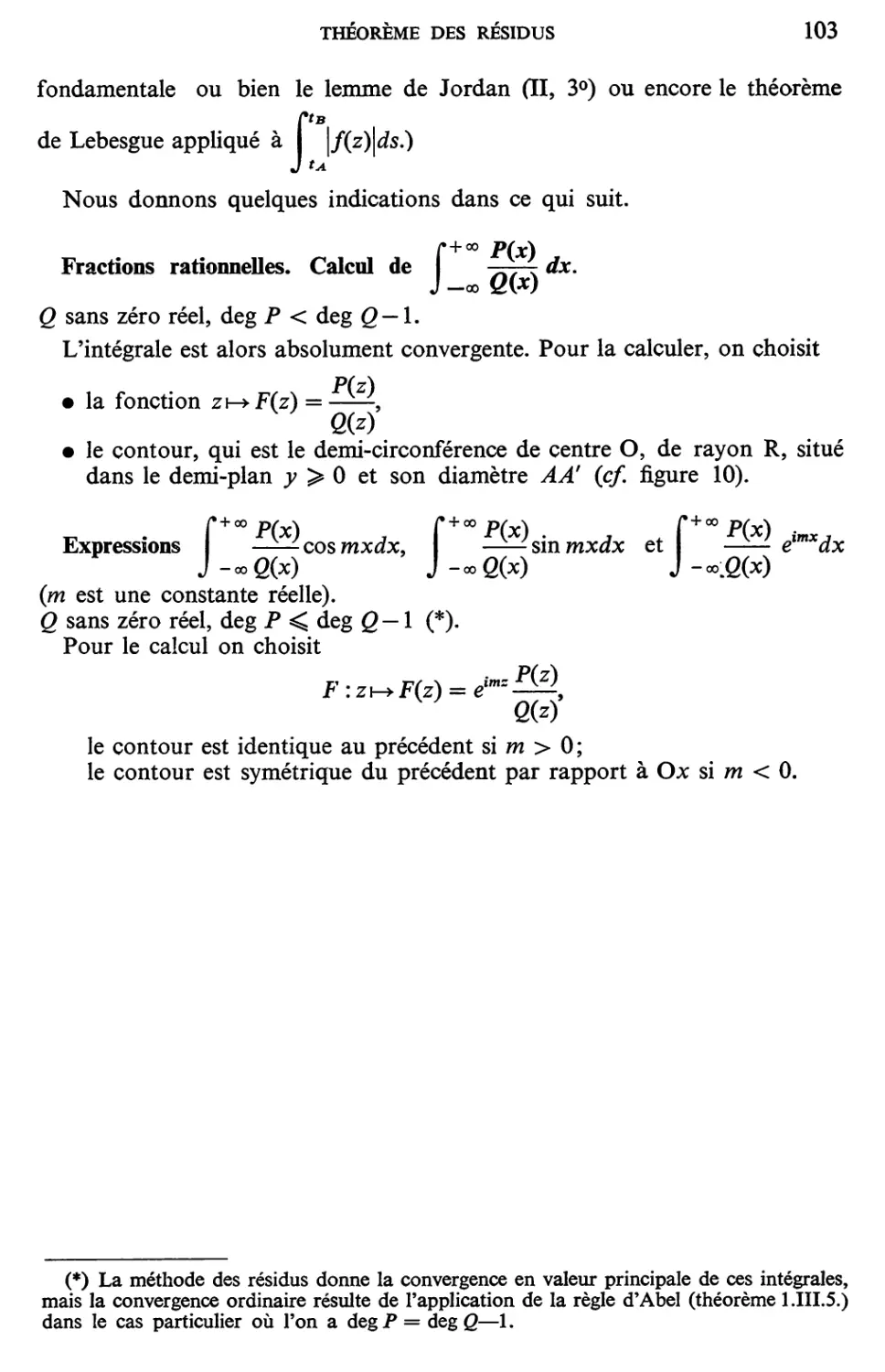
99
101
Énoncés des exercices .................................. 104
Solutions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 109
4. FORMULES INTÉGRALES DE CAUCHY. ApPLICATIONS. PROPRIÉTÉS
DES FONCTIONS HOLOMORPHES. . . . . . . . . . . . . . . . . . . . . . . . . . . .. 133
1. - Formules de Cauchy.......................... . . . 133
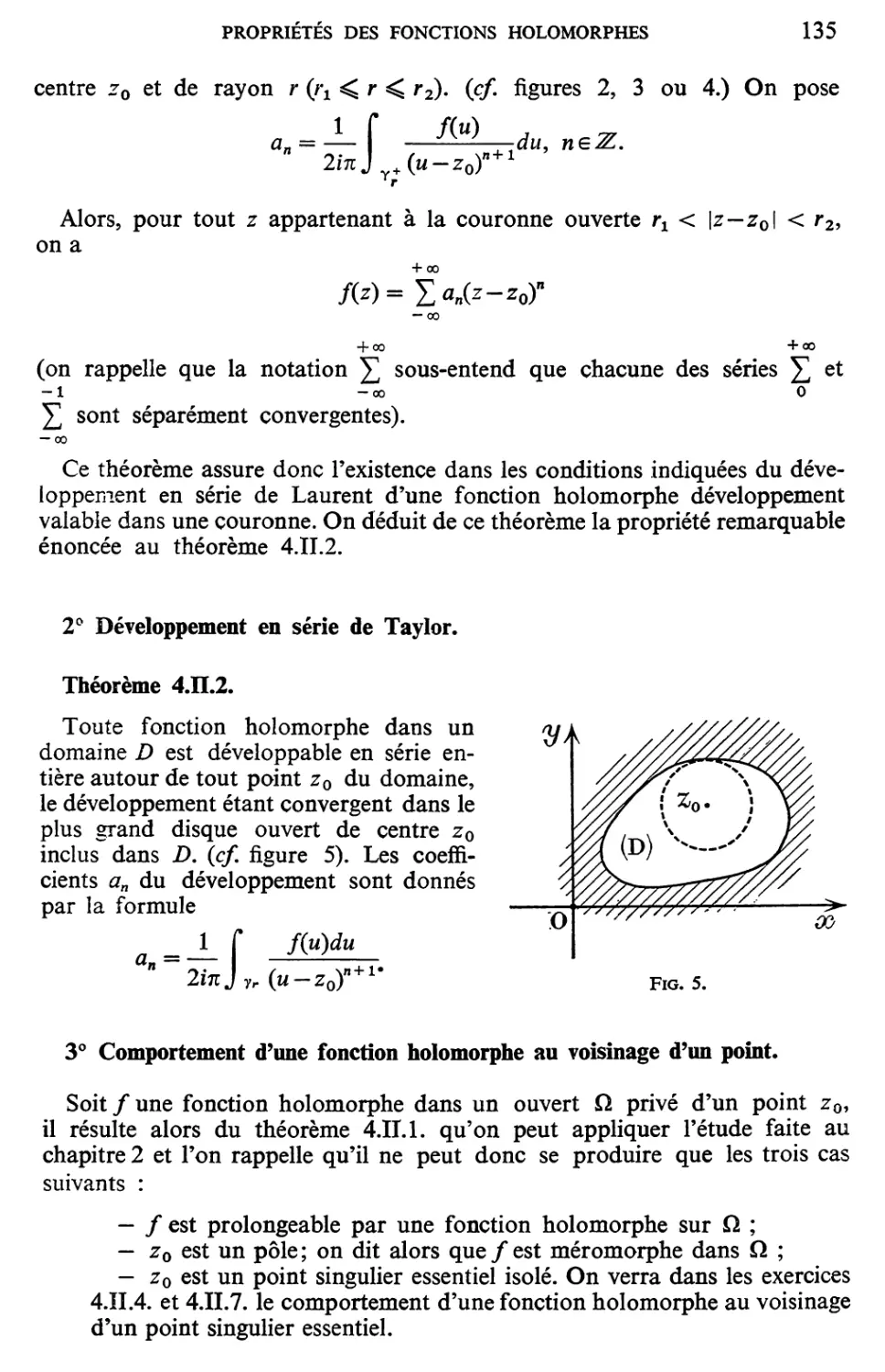
II. - Propriétés des fonctions holomorphes ............. 134
Énoncé des exercices ................................... 137
Sollltions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 140
8
TABLE DES MATIÈRES
5.
EXEMPLES DE FONCTIONS MUL TIFORMES . . . . . . . . . . . . . . . . . . . . . .
1. Introduction. Fonction réciproque de z Z = Z2 ..
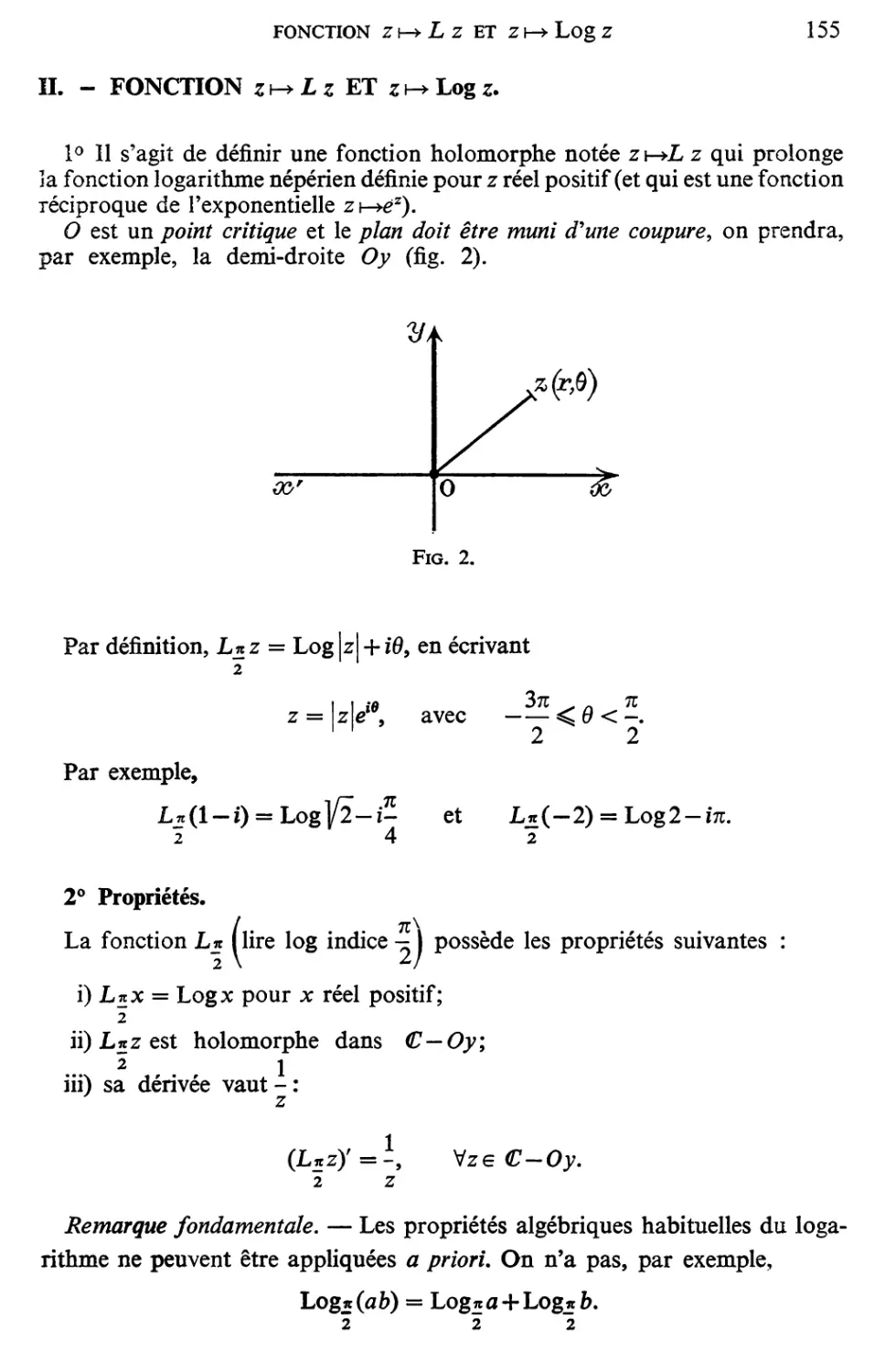
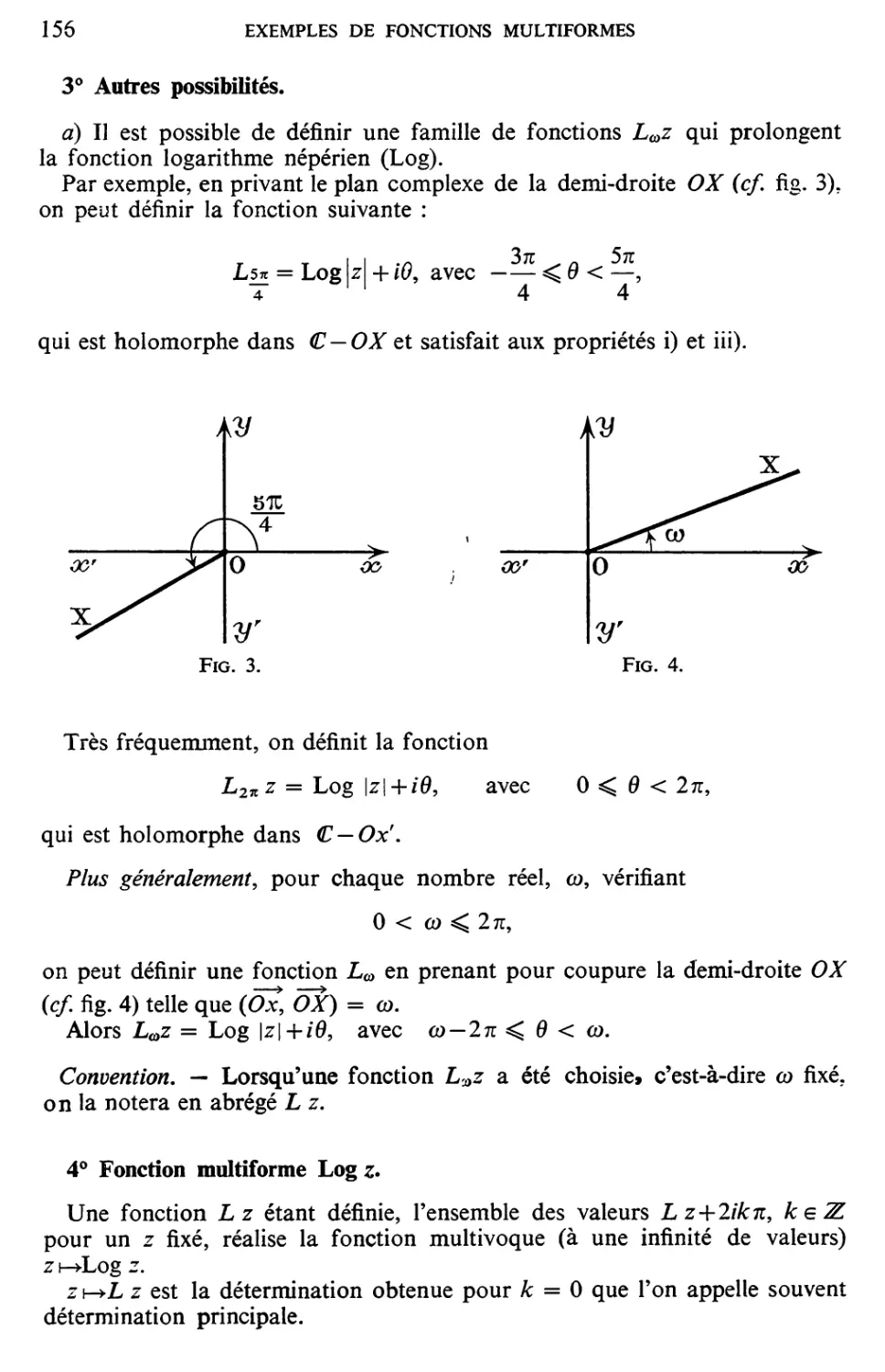
II. Fonction z L z et z Log z . . . . . . . . . . . . . . . . . . . .
III F . ex' 1
. onctIon z z , ex ree ..........................
IV. Extensions diverses . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
153
153
155
157
157
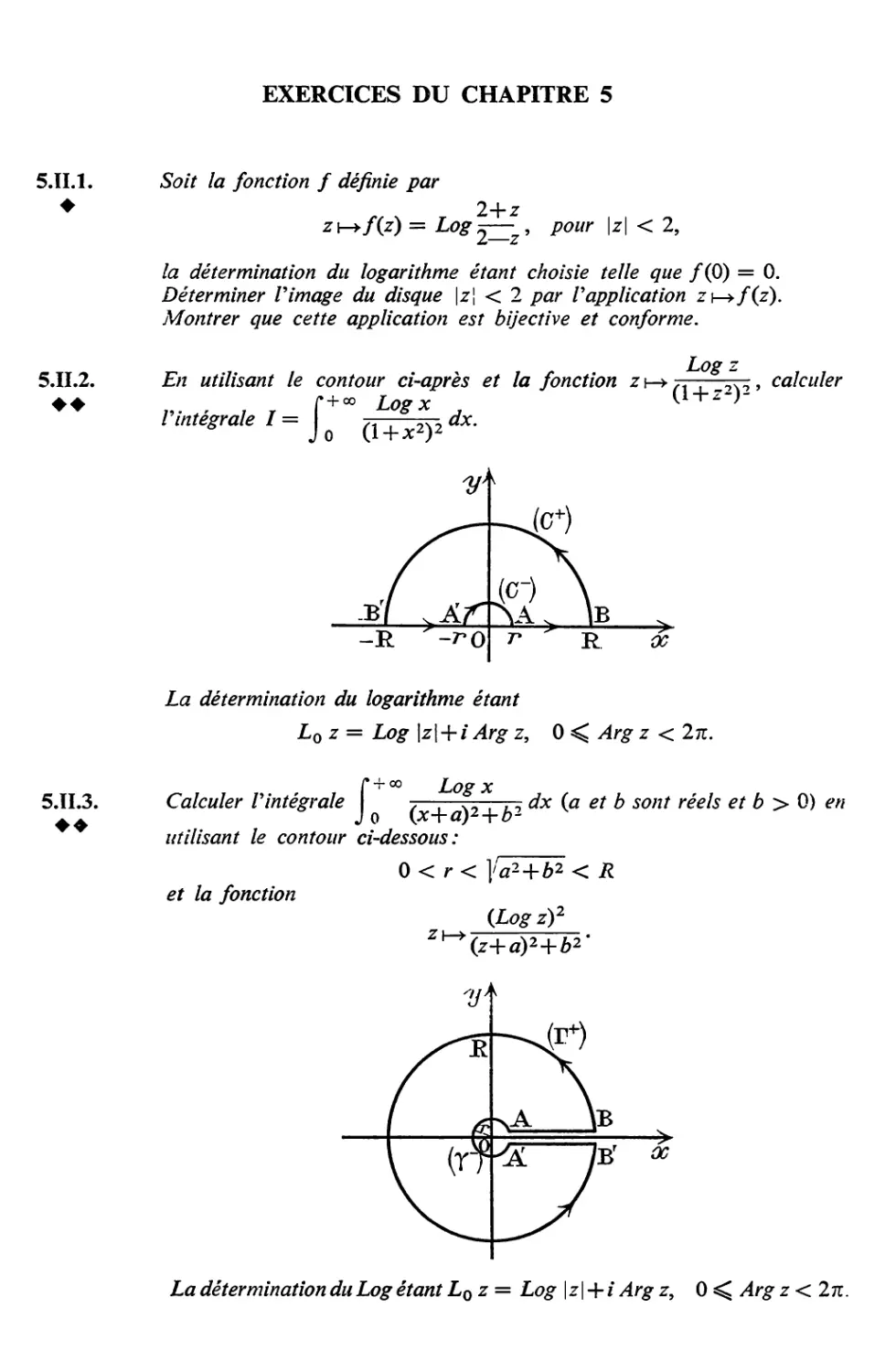
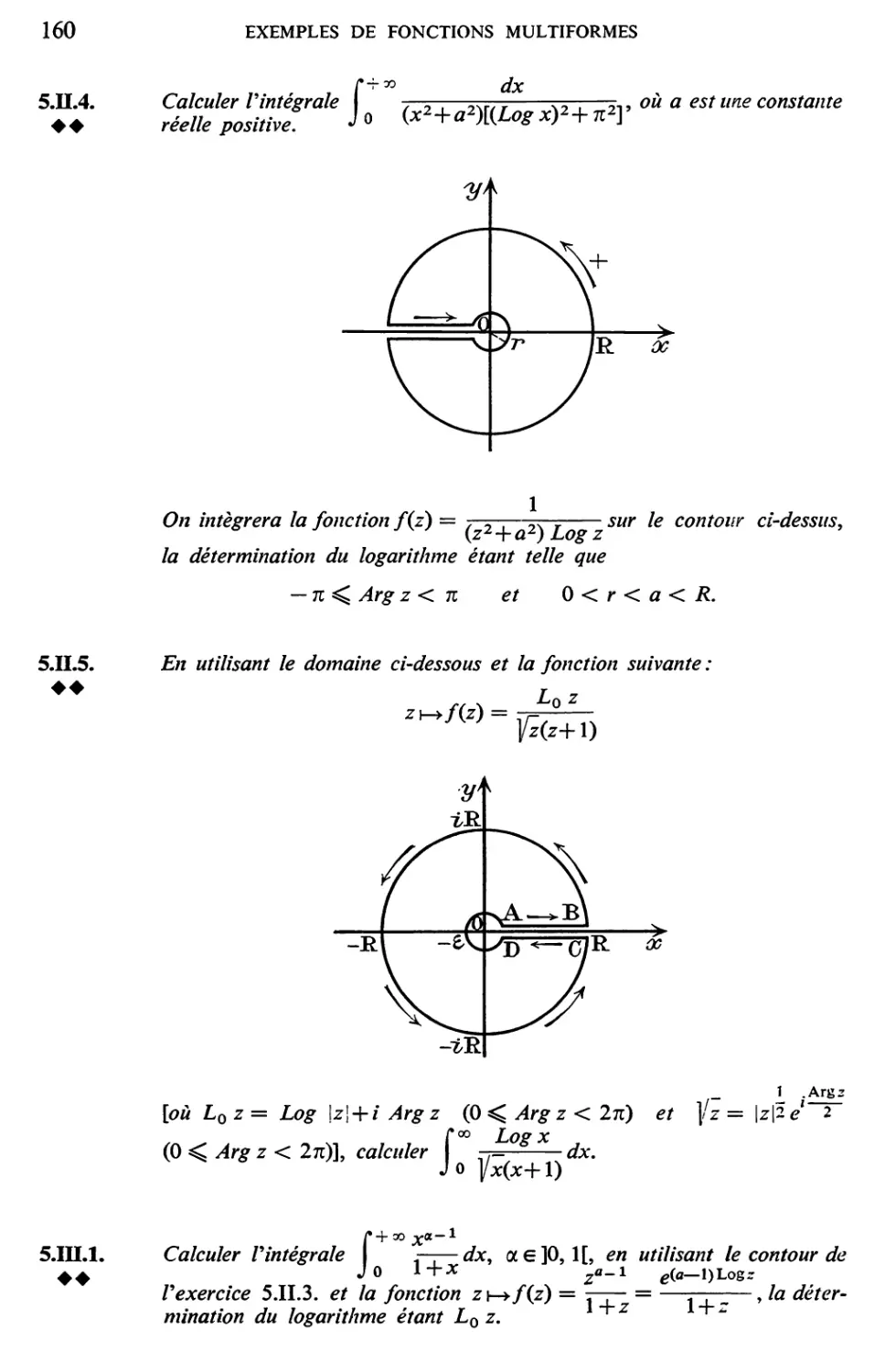
Énoncés des exercices .................................. ] 59
Solutions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 162
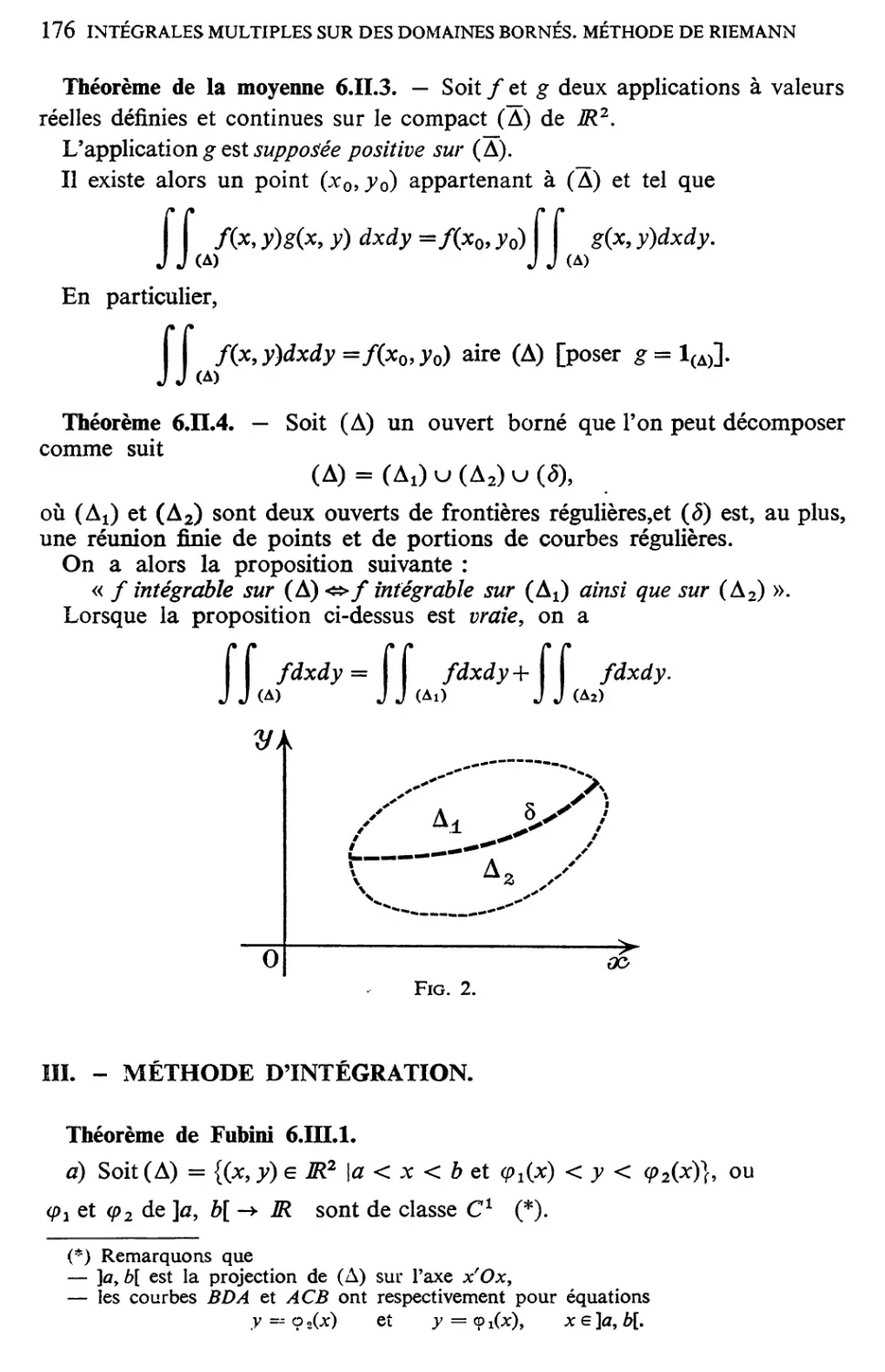
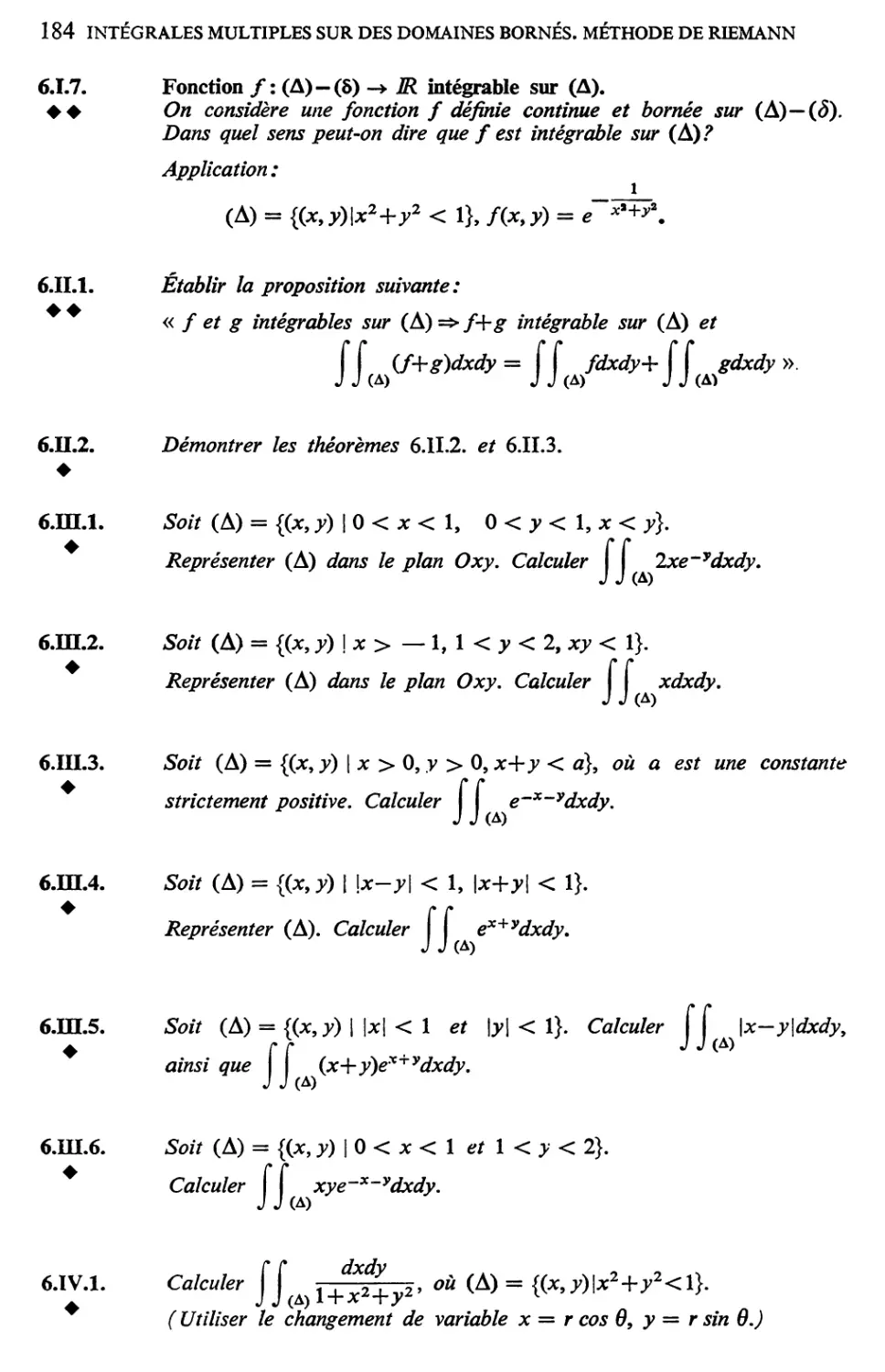
6.
INTÉGRALES MULTIPLES SUR DES DOMAINES BORNÉS. MÉTHODE DE
RIEMANN ..............................................
A) Intégrales doubles. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
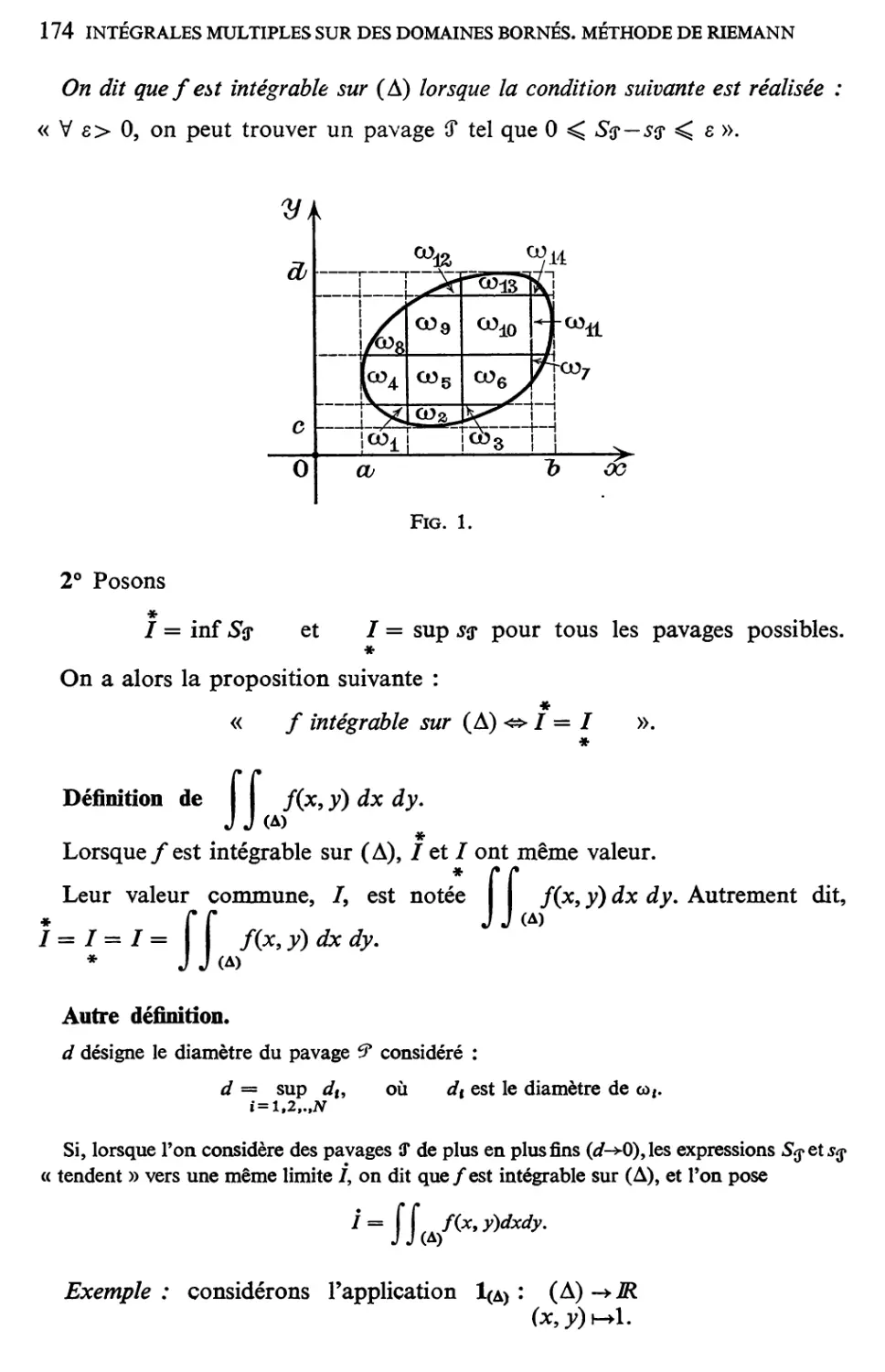
1. Fonctions intégrables sur un ouvert borné . . . . . . .
II. Propriétés des fonctions intégrables.. . . . . . . . . . . . . . .
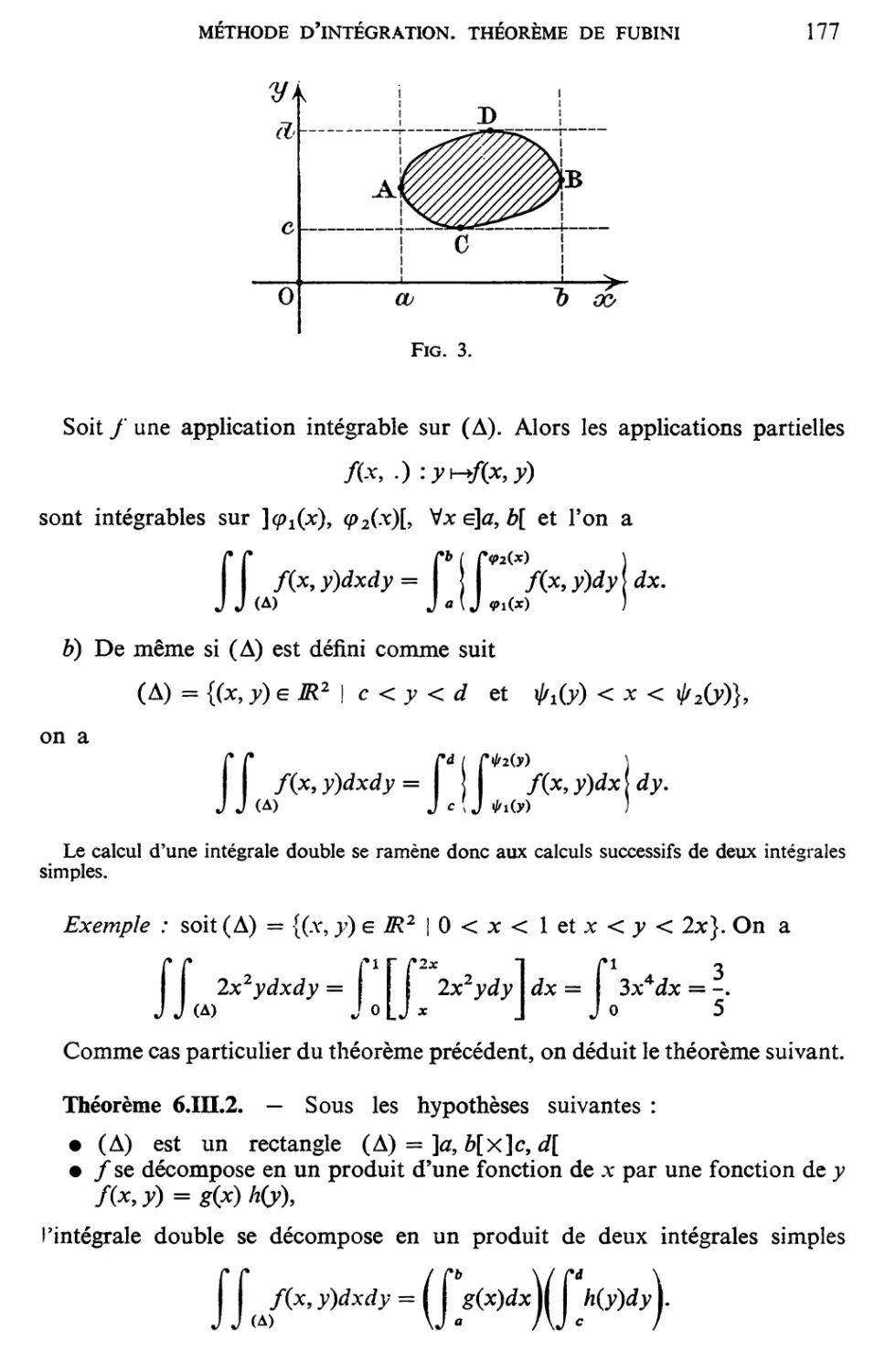
III. Méthode d'intégration. Théorème de Fubini .......
IV. Changement de variable. . . . . . . . . . . . . . . . . . . . . . . . . .
B) Intégrales triples ....................................
v. - Définition de f f f !(x,y,z) dx dy dz ..............
VI. - Calcul d'intégrales triples.... . . . . . . . . . . . . . . . . . . . . .
E ' , d .
nonces es exerCIces ..................................
Sol u ti 0 ns . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7.
INTÉGRALES MULTIPLES. ÉTUDE GÉNÉRALE. . . . . . . . . . . . . . . . . . . . .
A) Intégration au sens de Riemann .......................
1 . 1 n tr 0 du cti 0 n ....................................
II. Cas des fonctions positives ......................
III. Fonctions de signe variable .....................
IV. Intégration de la limite d'une suite de fonctions intégra-
bles. Théorème de Lebesgue ..........................
B) Intégration au sens de Lebesgue ......................
V. Définitions diverses......... . . . . . . . . . . . . . . . . . . . .
VI. Fonctions mesurables ..........................
VII. Ensembles mesurables ................... . . . . . . .
VIII. Fonctions intégrables au sens de Lebesgue . . . . . . .
IX. Définition de f f A!(X,y) dx dy .................
x. Suites de fonctions intégrables ..................
Énoncés des exercices ..................................
Solutions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
173
173
173
175
176
178
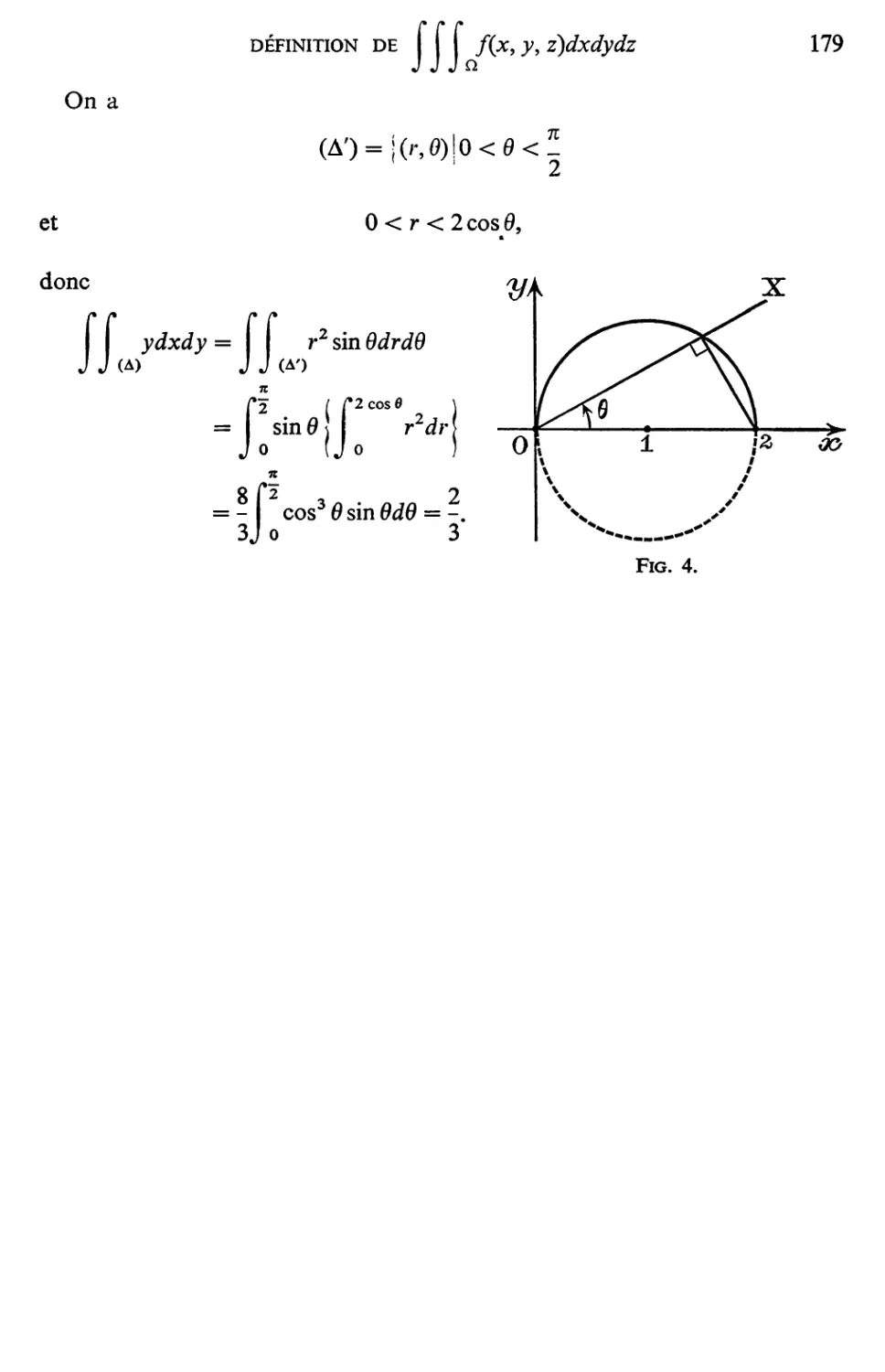
179
179
180
182
187
203
203
203
205
207
208
208
208
209
210
210
211
212
214
220
TABLE DES MATIÈRES
9
8. FORMES DIFFÉRENTIELLES DANS JR.3. ROTATIONNEL. DIVERGENCE. 237
1. Formes différentielles dans un ouvert U de IR 3 ... 237
II. Dérivée d'une forme différentielle de classe CI dans U. 239
III. Rotationnel et divergence ........................ 240
IV. Primitive d'une forme différentielle définie dans U. 241
Énoncés des exercices .................................. 243
Solutions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. 248
9. COURBES ET SURFACES RÉGULIÈRES DANS JR.3(X).
INTÉGRALES l Pidxi ET l Pijdxidxj ................ 263
y SI,)
1. - Courbes régulières dans IR 3 ..................... 263
II. - Intégration d'une forme différentielle de degré 1 sur un
arc de courbe orientée ............................... 264
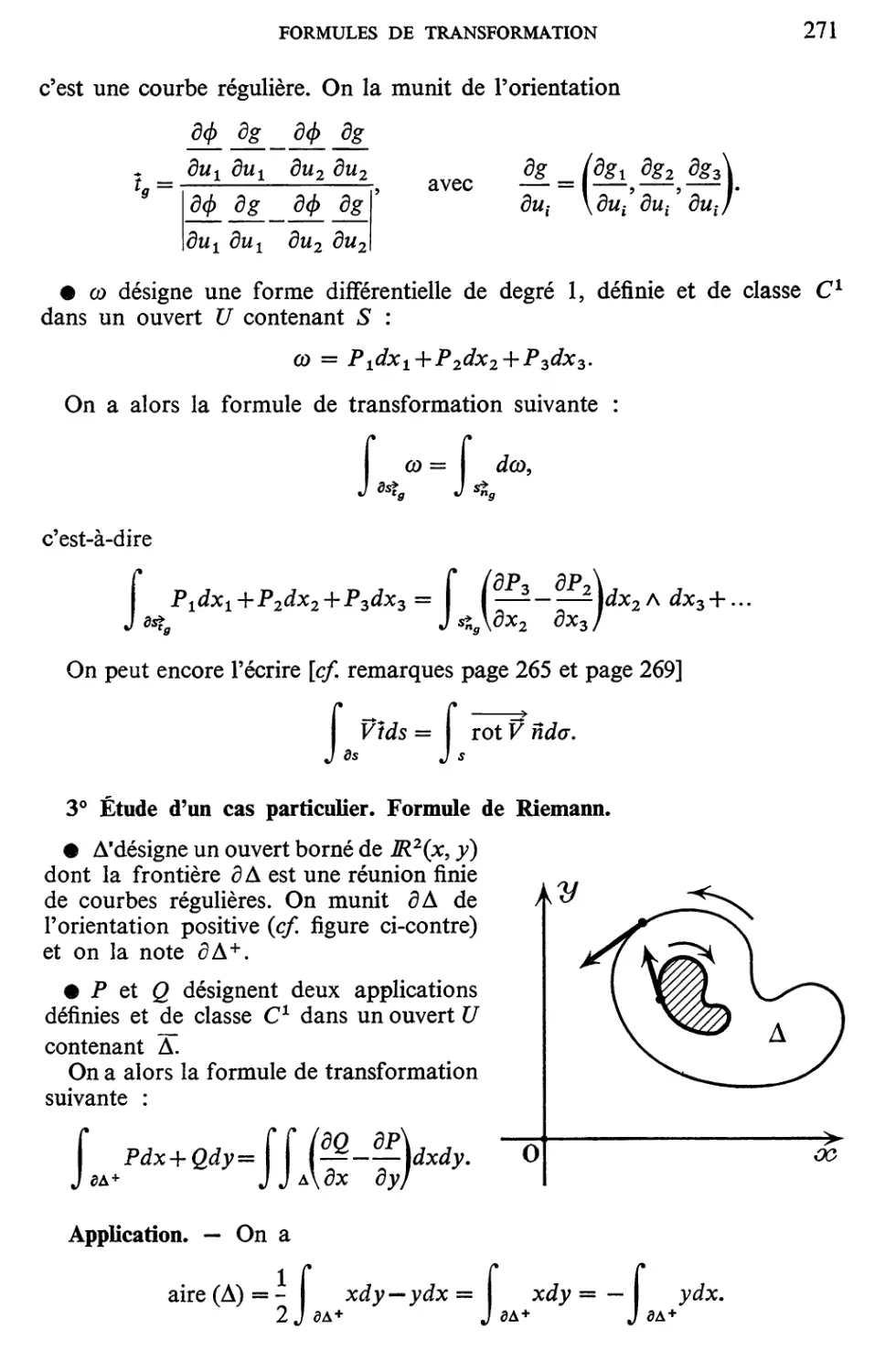
III. - Surfaces régulières dans IR 3 ..................... 265
IV. - Intégration d'une forme différentielle de degré 2 sur un
lTIOrCeau de surface orientée .......................... 267
V. - Formules de transformation ..................... 269
Énoncés des exercices .................................. 273
Solutions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. 280
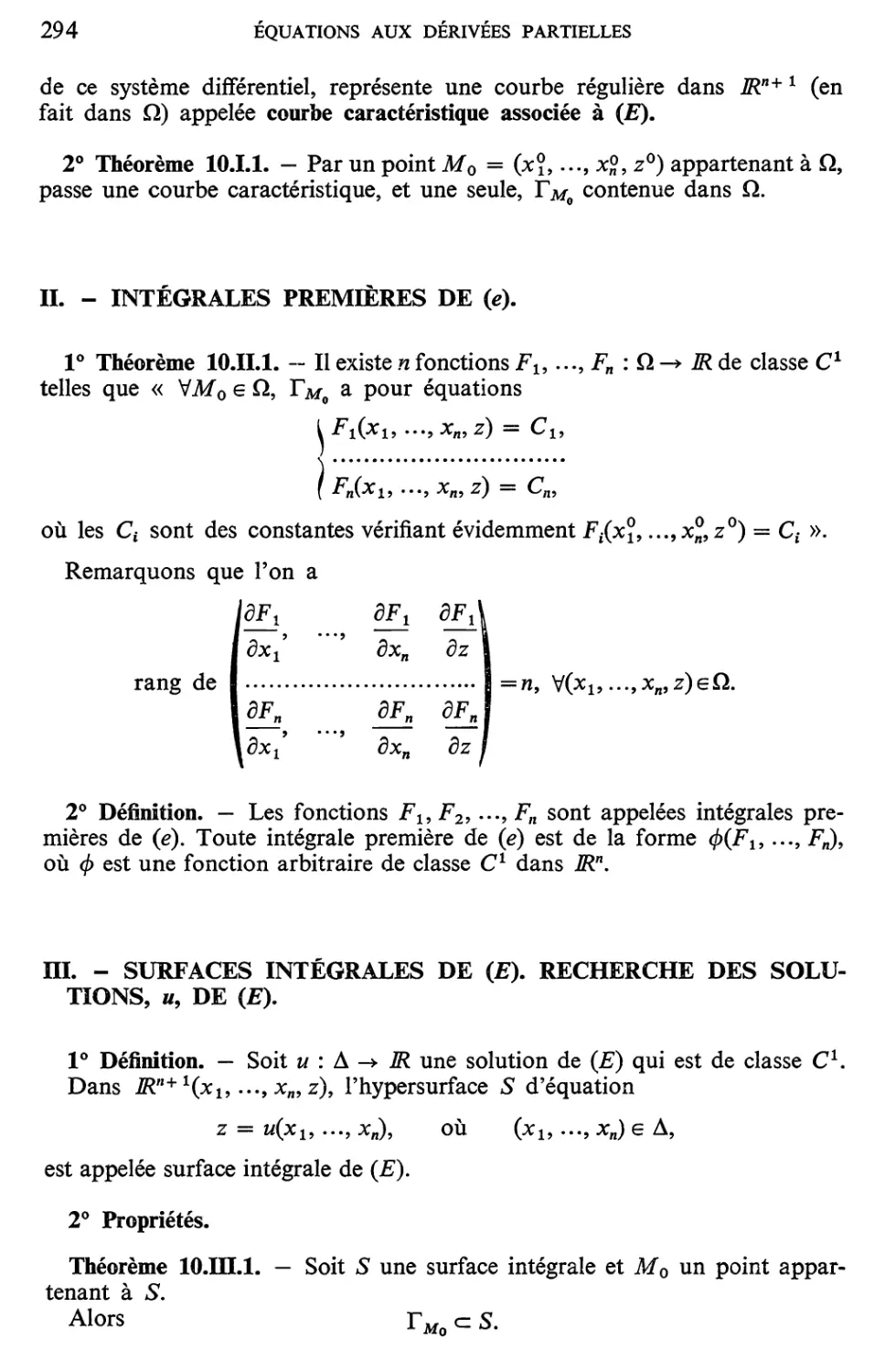
10. ÉQUATIONS AUX DÉRIVÉES PARTIELLES ....................... 293
A) Équations aux dérivées partielles du premier ordre du type
au
(E) : L b ïC x, u)- = c( x, u) . . . . . . . . . . . . . . . . . . . . . . . . . . . .. 293
i ax.
1
1 - Courbes caractéristiques associées à (E) ........... 293
II. - Intégrales premières ............................ 294
III. - Surfaces intégrales ............................. 294
B) Équations aux dérivées partielles du second ordre ....... 297
IV. Généralités. Surfaces caractéristiques. Classification. 297
V. Équations elliptiques . . . . . . . . . . . . . . . . . . . . . . . . . . .. 300
VI. Équations hyperboliques ........................ 303
VII. Équations paraboliques ......................... 305
Énoncés des exercices .................................. 306
Solutions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 317
APPENDICE
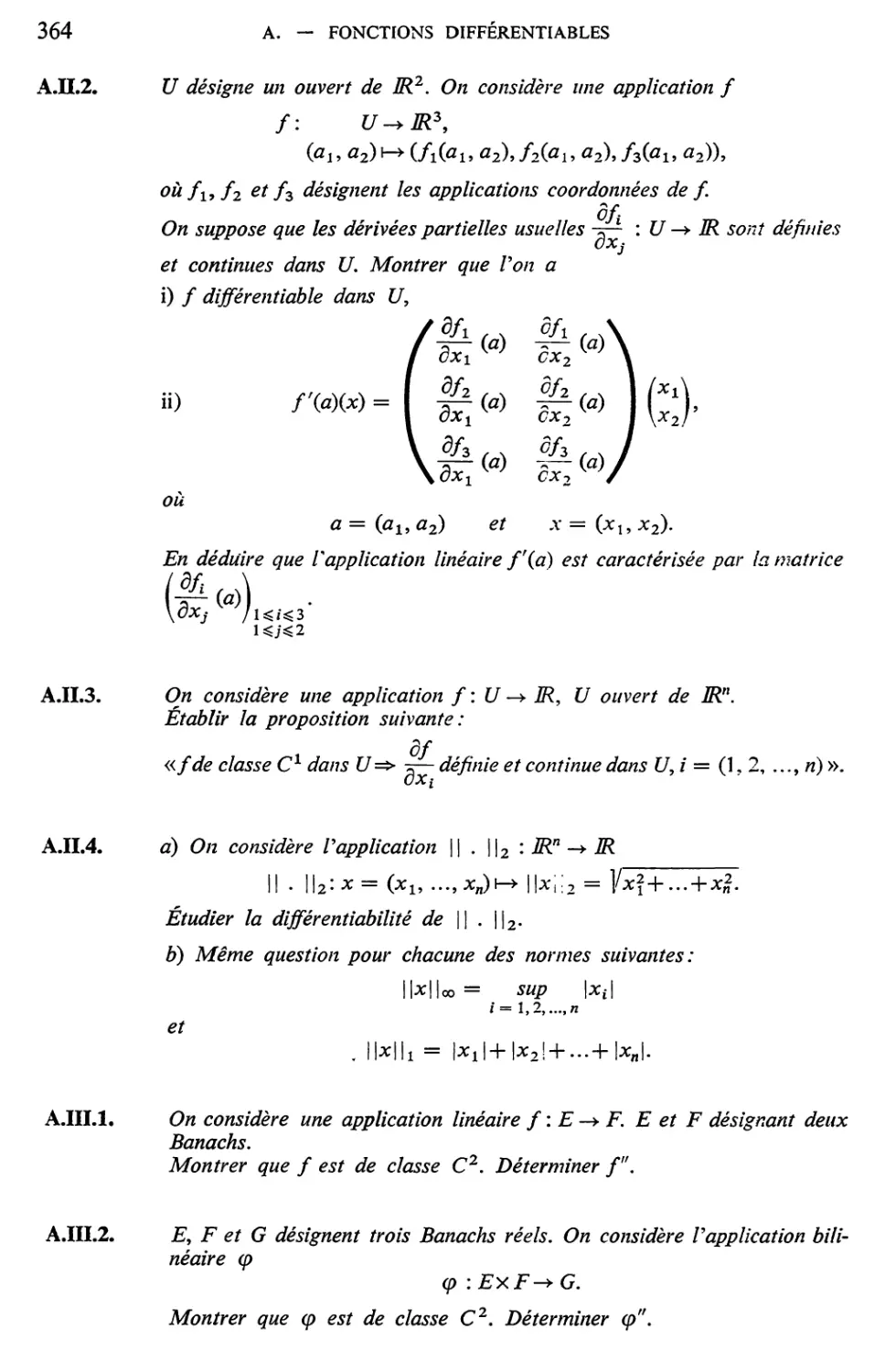
A. FONCTIONS DIFFÉRENTIABLES D'UN BANACH E DANS UN BANACH F
, -
1 G ' , l . t '
. enera 1 es .....................................
II. Étude du cas particulier E = IRn et F = IRP ......
III. Notions sur les dérivées secondes .. . . . . . . . . . . . . . . .
E . c '
xerCl es proposes .....................................
357
357
358
360
362
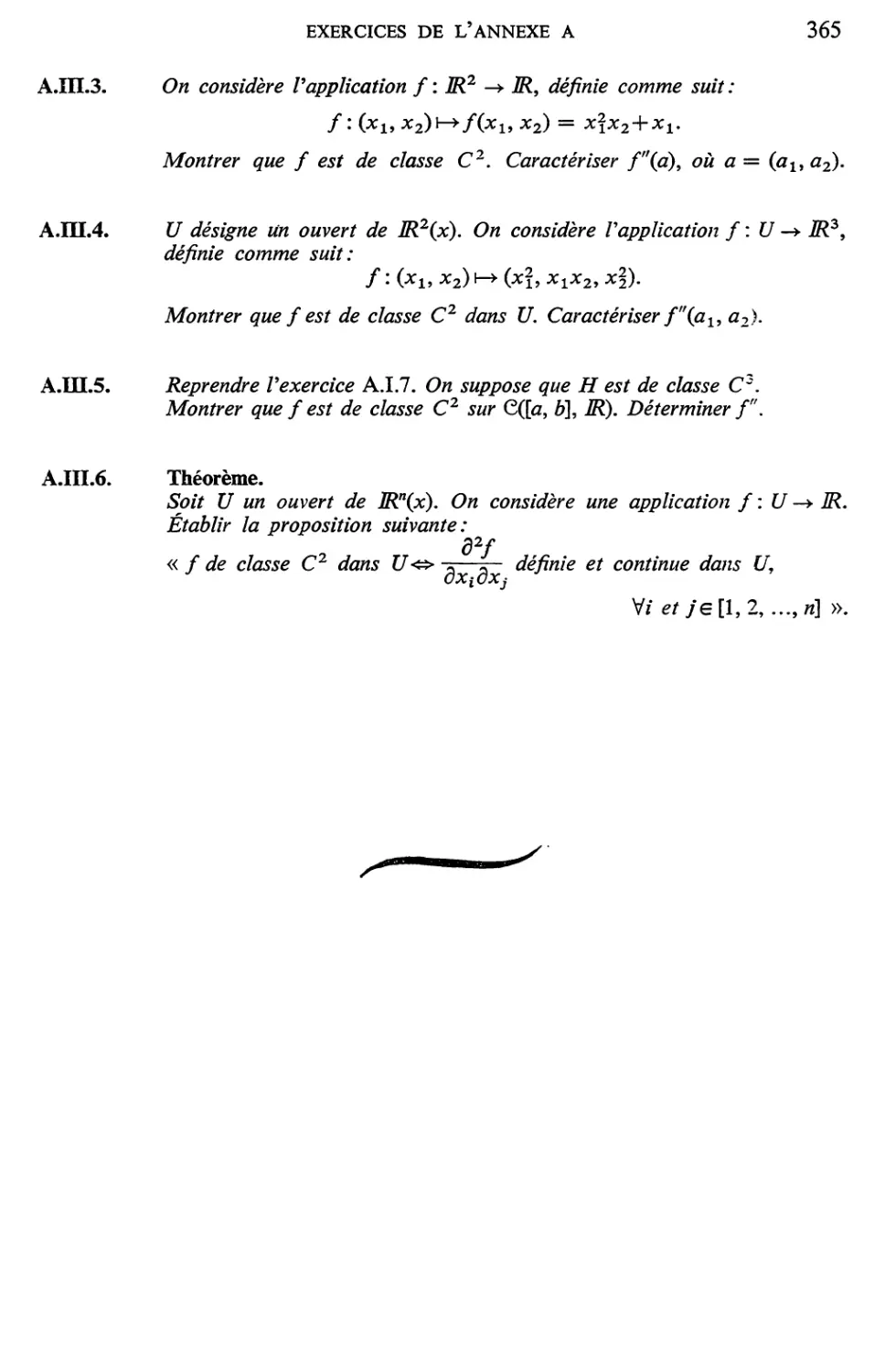
F ' , IR n
ORMES p- LINEAIRES ALTERNEES SUR . . . . . . . . . . . . . . . . . . . . . .
1. - Forme p-linéaire définie sur IRn ..................
II. - Produit extérieur de formes p ou q-Iinéaires alternées
sur IRn ........................ . . . . . . . . . . . . . . . . . . . . .. 368
- - -
III. Formes p-linéaires alternées f; A V 2 A ... A V p . . . . .. 369
IV. - Volumes p-dimensionnels . . . . . . . . . . . . . . . . . . . . . . . .. 372
V. - Orientation d'une sous-variété linéaire dans /Rn affine 373
Exercices proposés ................. ...... .............. 374
B.
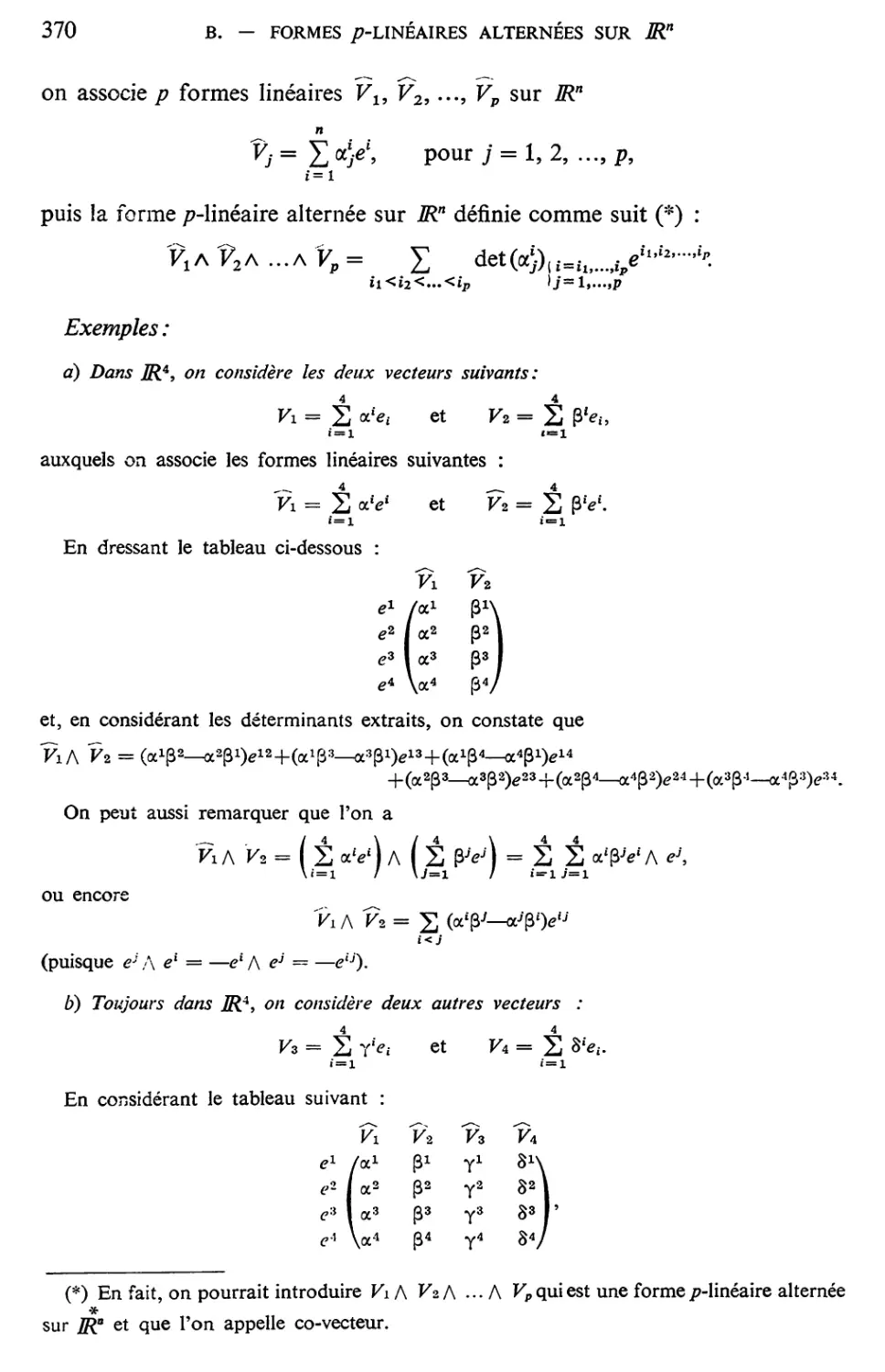
c.
SOUS-VARIÉTÉS DE IRn .....................................
1. Difféomorphisme. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
II. Sous-variété de IRn, de dimension p ..............
Ill. Espace vectoriel tangent .........................
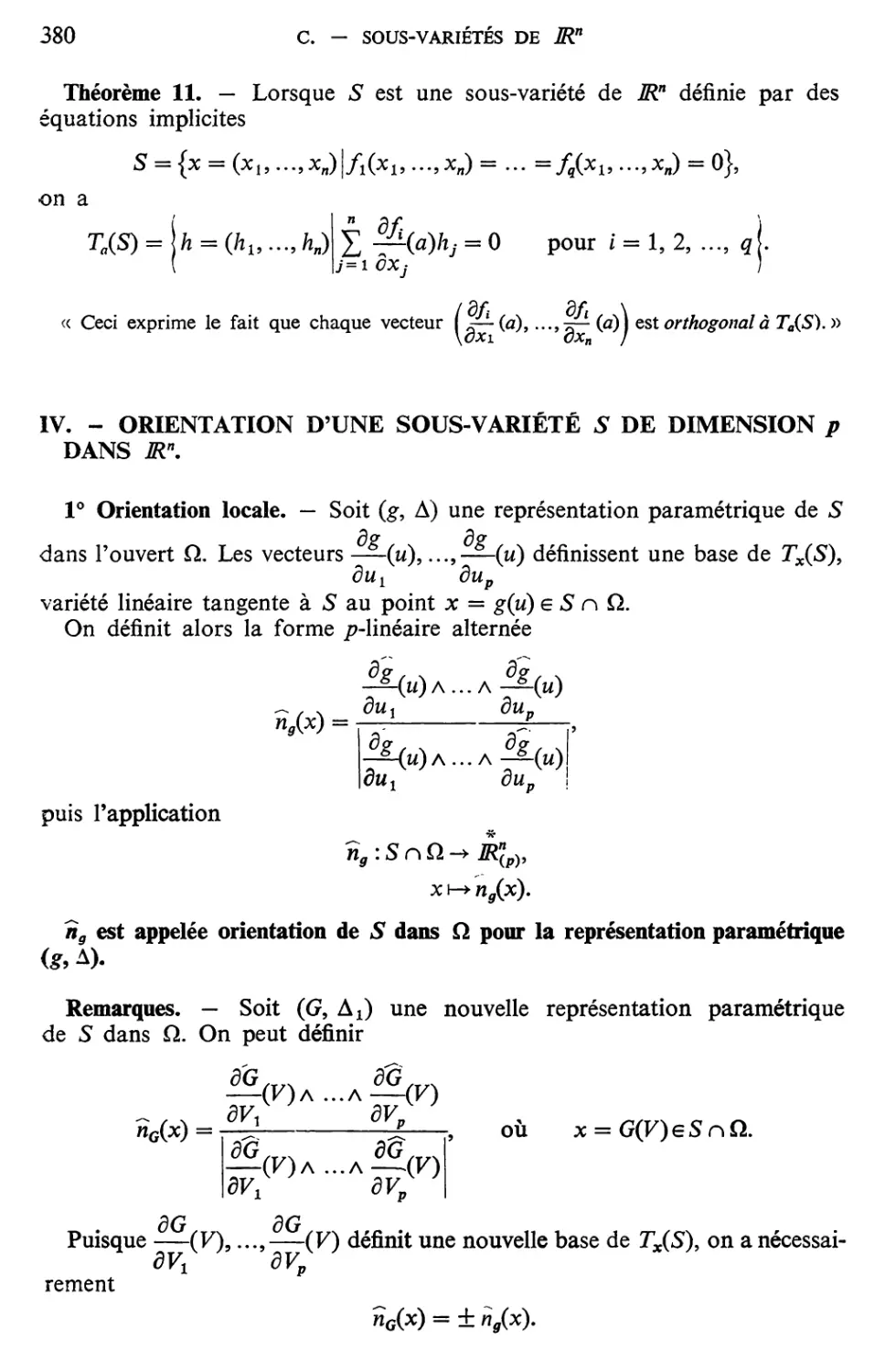
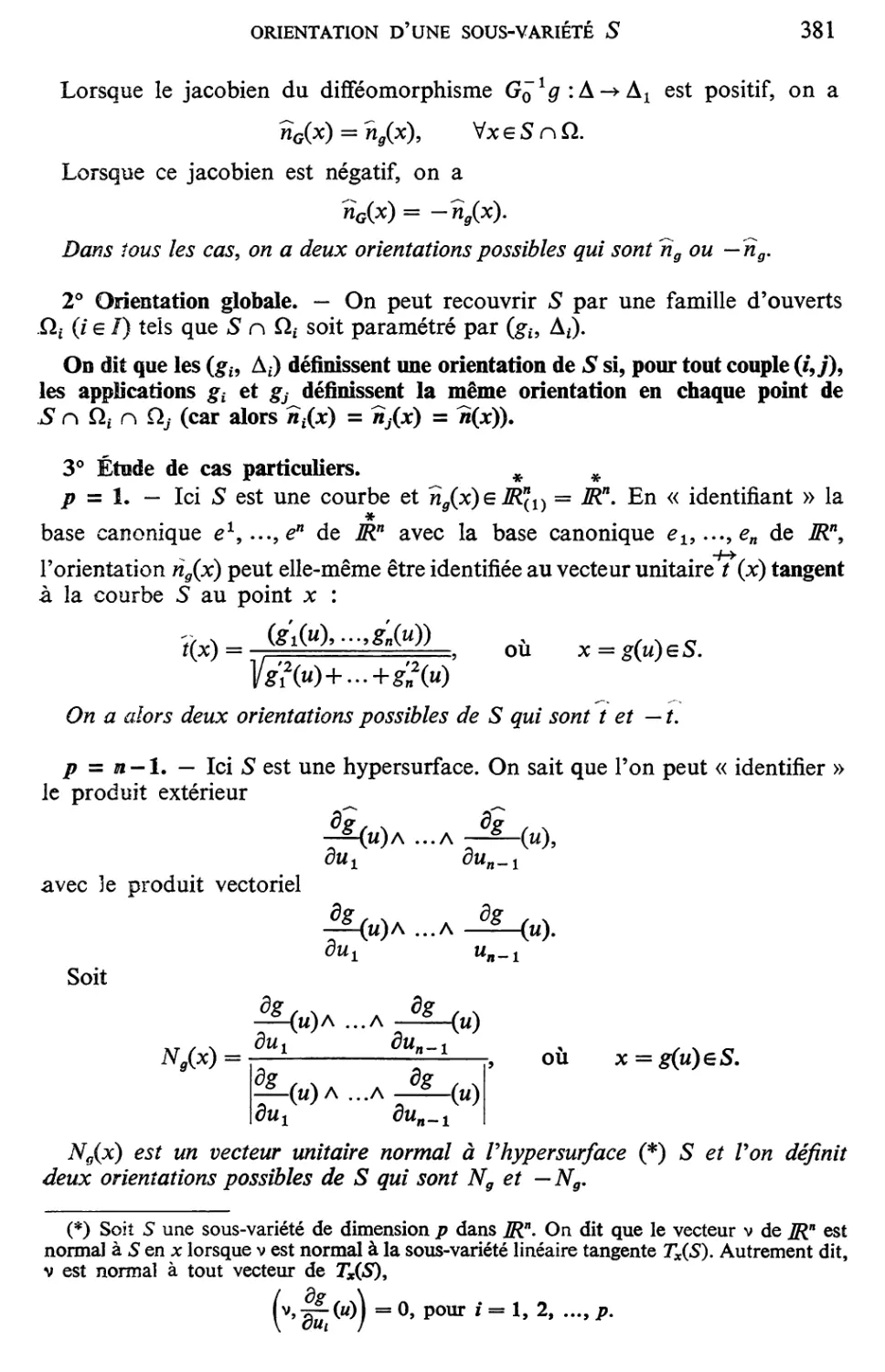
IV. Orientation d'une sous-variété de dimension p dans IRn
V. Élément d'aire d'une sous-variété de dimension p dans
IRn .................................................
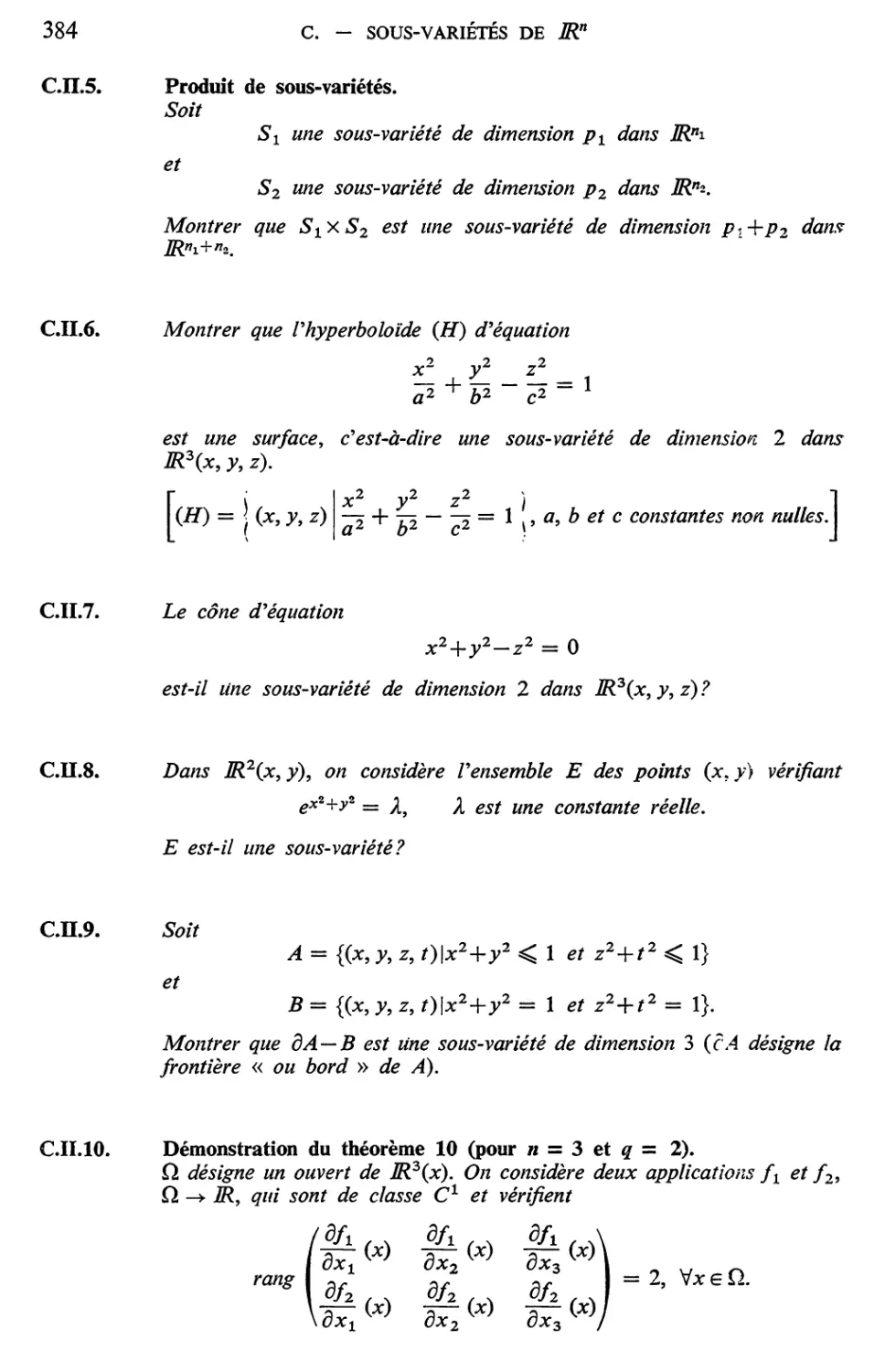
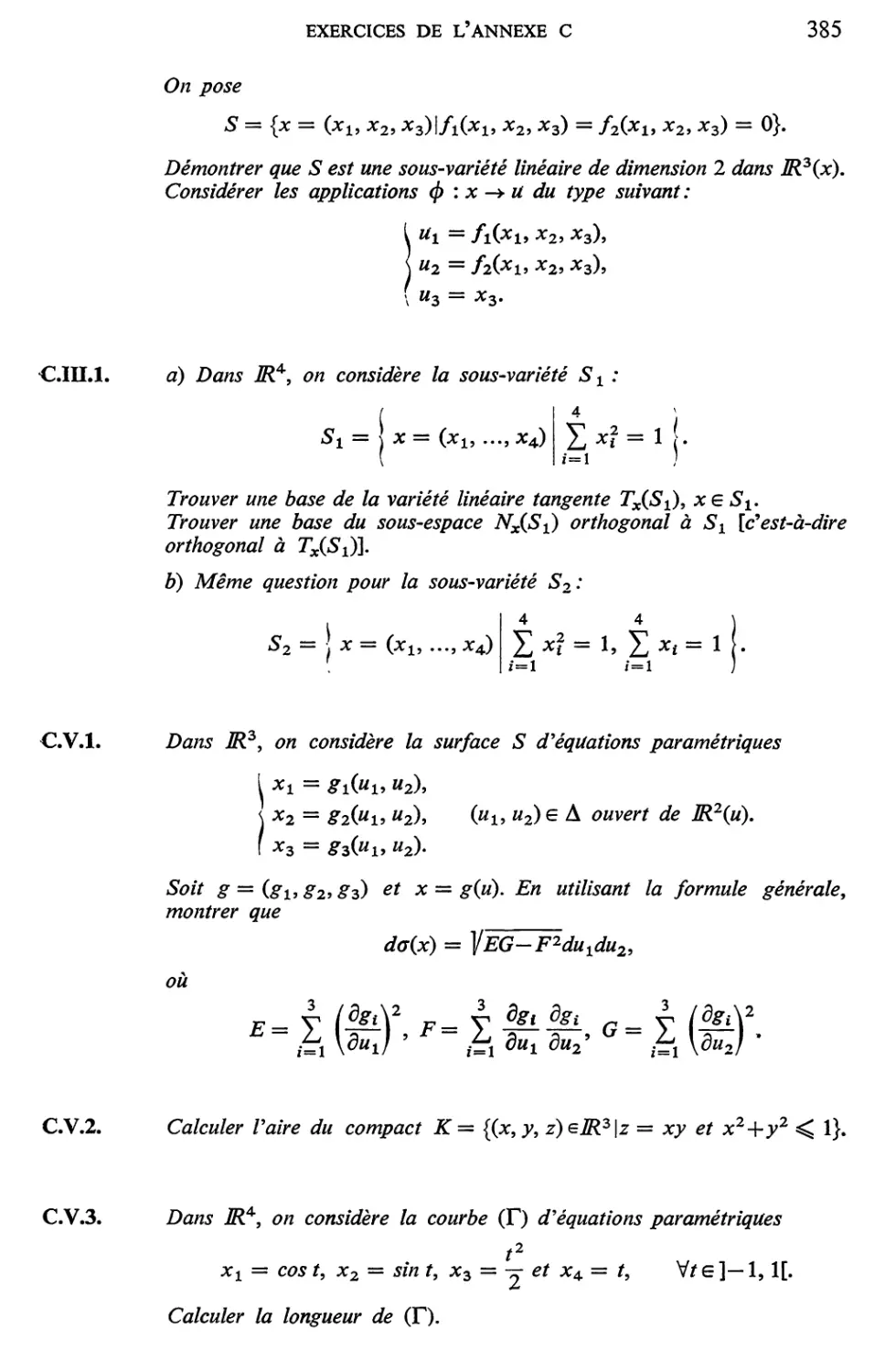
E . ,
xerClces proposes .....................................
D.
FORMES DŒFÉRE ELLES ............................. ......
1. Formes différentielles de degré p. Généralités ......
II. Dérivation d'une forme différentielle ..............
III. Intégration d'une forme différentielle ..............
IV. Formules de transformation ......................
366
366
377
377
377
379
380
382
383
387
387
388
390
391
1.
rnTÉG ESDERŒMANN
IMPROPRES
Ce chapitre figure ici car certains résultats doivent être connus en vue du
calcul d'intégrales définies par la méthode des résidus. Le cas des intégrales
impropres absolument convergentes sera revu comme cas particulier dans une
théorie de l'intégration plus générale.
1. - GÉNÉRALITÉS.
1 0 Intégrales impropres. - L'intégrale impropre (ou généralisée) est en
fait une expression qui est une limite d'intégrale de Riemann dans les deux
conditions types suivantes a) et b) et dans celles qui s'en déduisent c). f désigne
une fonction d'une variable réelle à valeurs dans IR ou C.
I -. + 00
a) Définition de a f(x)dx lorsque f est intégrable sur [a, X], V X > a
(par exemple f est continue sur [a, ooD.
f -. + 00 I x
f(x)dx est la limite finie (lorsqu'elle existe!) de f(x)dx, pour X +00.
a I -.+ a
On dit alors que l'intégrale impropre f(x)dxestdéfinie(ouconvergente).
I x a
Lorsque f(x)dx n'a pas de limite finie pour X + 00, on dit que l'intégrale
a I -. + 00
impropre a f(x)dx n'est pas définie.
On dit aussi qu'elle est divergente.
Exemples :
I -'+oo d
1° Étudions l'intégrale impropre x 2 .
o l+x
I x dx n
On a = ArctgX -, donc
o 1 +X2 x-.+ 2
I -. + 00 dx 1t
o 1+x 2 = 2 .
L'intégrale impropre est définie (ou convergente).
12
INTÉGRALES DE RIEMANN IMPROPRES
I +oo dx I x dx
2° Étudions -. On a - = Log(1 +X) + 00, donc l'in-
o 1+x ol+x X-'+oo
f +oo d
tégrale impropre n'est pas définie. (On dit aussi qu'elle est di-
vergente.) 0 1 + x
f -'+OOd
3° L'intégrale [C( constante positive] est
a x Œ
définie (ou convergente) pour C( > 1,
- non-définie (ou divergente) pour ri., <: 1.
b) Définition de I:bf(X)dx, lorsque f est intégrable sur [a, b-e], Ve > 0
(par exemple, f est continue sur [a, b[ et devient infinie pour x b<:c).
f-+/(t)dt estlalimitefinie (lorsqu'elle existe l) de fb-/(X)dX, pour e -)- 0+. On
dit ;lors que l'intégrale impropre I-+/(X)dX est définie (ou convergente).
Lorsque f:- f(x)dx n'a pas de lirite finie pour e -)- 0 + on dit que l'inté-
grale impropre f:f(X)dX n'est pas définie. On dit aussi qu'elle est divergente.
Exemple.
L'intégrale f -+b dx fi [où f3 est une constante positive] est
a (b-x)
définie (ou convergente) pour {3 < 1,
non-définie (ou divergente) pour p ;> 1.
Comparer ce résultat avec l'exemple 3 du a).
c) Généralisation. - A partir des types élémentaires a) et b) on définit de
manière évidente les expressions symbolisées par
f a f b f +ex> f -'+ex> f -.b
, , , , , etc. ,
- ex> -.a a - ex> a
f -. + 00 f X"
par exemple -+_1(t)dt correspond à x} oo x/(t)dt.
X" + 00
f a f b f +oo
En pratique, des notations ordinaires " peuvent
employées s'il n'y a pas de confusion possible. - 00 a a
être
2 0 Convergence en valeur principale de Cauchy.
f + 00
a) Définition de vp -00 f(x)dx lorsque f est intégrable sur [-R, R], VR
(par exemple, f est continue sur ] - 00, 00 D.
PROPRIÉTÉS DES INTÉGRALES IMPROPRES
13
vp f: :f(X)dX est la limite finie (lorsqu'elle existe .1) de I:i(X)dX pour R --+ 00'
Exemple: vp f:!(X)dX = 0 lorsque f est une fonction impaire.
b) Définition de vp(c) I:f(X)dx (a<c<b) lorsque f est intégrable sur [a, C-E]
et [c+e, b], Ve>O (par exemple, f est continue dans [a, c[u]c, b] et devient
infinie pour x -+ c).
f b f C-2 f b
vp(c) f(x)dx est la limite finie (lorsqu'elle existe !)de f(x)dx+ f(x)dx
a a c+ 2
pour 8 -+ 0+.
f 2 dx
Exemple: vp(O) - = og 2. En effet,
-1 x
f - 2dX f 2dX f 2dX
- + - = - = Log 2.
-IX 2X IX
Ce mode de convergence en valeur principale se rencontrera pratiquement lors de l'appli-
cation du théorème des résidus. On notera aussi que la formule de réciprocité de Fourier
(dans l'étude de la transformation de Fourier) fait intervenir une limite en valeur principales
J OO J OO
L'existence de _>_oof(t)dt, par exem ; entraîne celle de vp ->-00 f(t)dt et les valeur.
sont égales; donc si l'on sait que J f(t)dt existe, on peut obtenir sa valeur 1 en
J OO -oo
calculant vp _>_oof(t)dt. La réciproque est inexacte, l'existence de la limite en valeur prin-
cipale n'entraîne pas l'existence de l'intégrale impropre.
Contre-exemple: x H cp(x), cp fonction impaire polynomiale.
3 0 Remarque relative au comportement de f. - Sans hypothèse supplé-
:::: t: d: ::::n:u: : :::: :: li : ::::i: e:t::: :t r:; f or ::;:
X oo 0
est convergente alors Iim f(x) = O. (Voir exercices 1.1.8 et suivants.)
x 00
II. - PROPRIÉTÉS DES INTÉGRALES IMPROPRES f <J)f(X)dX.
Pour éviter de surcharger ce résumé dans toute la suite nous ne formulerons
les propriétés et résultats généraux que pour le type a) du paragraphe 1°.
Pour les autres types b) et c) les résultats généraux sont évidemment les mêmes.
14
lN rÉGRALES DE RIEMANN IMPROPRES
Le premier point important est de savoir si les règles habituelles du calcul
intégral s'appliquent aux intégrales impropres.
Les théorèmes suivants donnent une réponse positive sous certaines hypo-
thèses.
Théorème 1.11.1.
I -. + 00 I + 00 I c I -+ + 00
Si a j(x)dx est défini, on a a j(x)dx = !(x)dx + c j(x)dx.
Théorème 1.11.2.
I -+ + 00
L'existence de deux des trois termes (f + g)dx,
entraîne l'existence du troisième. a
On a alors la décomposition suivante :
f -+ + 00 I -+ + 00
a fdx, a gdx,
I +ex> I +oo I +oo
a (J+g)dx = a jdx+ a gdx.
Théorème 1.11.3.
Si f est de classe Co sur [a, + 00[, g de classe CI sur [ex,P[ avec g(ex) = a,
g([ex,PD c [a,+oo[ (éventuellement P = +00) alors les intégrales suivantes
sont de même nature :
J -+ + ex>
a j(x)dx
et
J -+/1
/Z j(g(t»g'(t)dt
et quand il y a convergence les intégrales sont égales.
Remarque. - Par un changement de variable du type X = 1 , une inté-
b-x
I -+b I + 00
grale impropre du type a est donc ramenée à la forme /Z et inversement.
Théorème 1.11.4.
Soitf et g des fonctions de classe CI sur [a, + 00[, l'existence de deux des
trois termes suivants :
f -+ + 00 I -+ + 00
Ig' dx, gf' dx, linl [f(x)g(x)];
a a x +oo
entraîne celle du troisième et la validité de la formule d'intégration par parties
I -+ + 00 J -+ + 00
Ig' dx = lÎ1n Lf(x)g(x)]; - f'gdx.
a x oo a
CRITÈRES DE CONVERGENCE POUR f +<X>f(X)dX 15
III. - CRITÈRES DE CONVERGENCE DE L'INTÉGRALE IMPROPRE
f: + <X>f(x)dx.
D'après la définition même, la question est réglée en déterminant la limite f:f(x)dx, pour
X + 00. Cependant cette méthode est conditionnée par l'obtention d'une primitive; or il
est souvent impossible d'obtenir explicitement une primitive ou bien son obtention est tech-
niquement très difficile, d'où l'intérêt des critères de convergence suivants portant sur la
fonction donnée f.
1 0 Critère de Cauchy.
Théorème 1.lll.1.
Pour que l'intégrale impropre f -++<X>j(X)dX soit convergente il faut et il
suffit que a
'v'B > 0, 3X 2 tel que X' et X" > X f.=> f X"j(X)dX 8.
X'
2 0 Fonctions positives.
Théorème 1.111.2. (Théorème de comparaison.)
Si l'on a 0 f g, la convergence de f-> + <X> g( X )dx entraîne
f-++ <X>j(x)dx. a
La divergence de f:+<X>j(X)dX entraîne celle de f:+<x> g(x)dx.
Théorème 1.m.3. (Théorème d'équivalence.)
Soit f et g deux fonctions positives telles que f g. Alors, les intégrales
impropres f:+<X>j(X)dX et f:+<X>9(X)dX sont d/7nême nature, c'est-à-dire
simultanément convergentes ou divergentes.
[On a évidemment le même résultat si lim j = À., constante non nulle.]
X oo 9
celle de
Théorème 1.m.4. (Critères de Riemann.)
Si j '" A pour x --+ + C() (A et ri. constantes positives), alors
x«
ri. > 1 entraîne la convergence de l'intégrale f:+<X>j(X)dX,
ri. 1 entraîne la divergence de l'intégrale f:+<X>j(X)dX.
16
INTÉGRALES DE RIEMANN IMPROPRES
COlnparaison avec une série à terlnes positifs. - Sous la condition 1 posi-
tive décroissante, l'intégrale I:+<X>f(X)dX est de même nature que la série de
terme général Un = 1(11,).
3 0 Fonctions à signe variable.
I -. + 00
a) Convergence absolue. - Si f(x)ldx est
I +oo a
a f(x)dx est absolument convergente.
convergente on dit que
Théorème t.III.4.
La convergence absolue entraîne la convergence.
f -+ + 00
Pour étudier le comportement (et éventuellement la convergence) de a If(x)ldx,
on pourra utiliser les théorèmes relatifs aux fonctions positives ( III.2°).
Exemple :
I -+ + ocsin x
-dx est convergente pour a > 1, puisqu'il y a absolue convergence.
1 xŒ.
Pour a = 1 il Y a convergence sans qu'il y ait l'absolue convergence. (Voir
exercice 1.111.4.)
b) Semi-convergence. - Si l'intégrale I....+<X>f(X)dX est convergente sans que
I:+<X>lf(X)!dX le soit on dit qu'il y a s mi-convergence.
Le problème de la convergence d'une intégrale impropre relative à une fonction de signe
variable peut parfois être résolu en utiHsant le théorème 1.111.5, ci-dessous.
Théorème t.Ill.S. (Critère d'Abel.)
Soit 1 et g de classe Co sur [O,oo[ telles que
i) 1 ;> 0 est décroissante, tendant vers 0 (*),
ii) g satisfait à
f X II
g(x)dx K., 'v'X', X" E [A, 00[;
x'
alors l'intégrale f: <X>f(x)g(x)dx est convergente.
(*) L'absence de la condition « tendant vers 0 » dans l'énoncé du critère d'Abel pour les
séries (tome 1, chapitre V, page 155) n'a pas été remarquée à la relecture, le lecteur aura
certainement corrigé de lui-même cette omission, d'autant plus que cette condition est déjà
utilisée quelques lignes plus loin.
f -+b
CRITÈRES DE CONVERGENCE POUR a f(x)dx
17
La démonstration de ce théorème résulte du second théorème de la moyenne sous la forme
suivante :
Second théorème de la moyenne. - Soit f et g intégrables sur [a, b], f étant positive
décroissante alors 3c E [a, b] tel que
f>(x)g(x)dx = f(a) J: g(x)dx.
Exemple : Les intégrales
f: +oof(x) sinxdx, f:+ f(X)COSXdX
sont convergentes lorsque f est décroissante sur [a, 00 [ et tend vers zéro pour
x + 00.
En particulier,
f + 00 sin x
-dx est semi-convergente lorsque ri., 1.
l x Œ
IV. - CRITÈRES DE CONVERGENCE DE L'INTÉGRALE IMPROPRE
f -. b
a f(x)dx.
Ils sont analogues à ceux développés dans le paragraphe précédent.
a) La condition de Cauchy s'écrit alors
f b 'v'rI., > 0, 38 0 > 0
f(x)dx convergente <=> l "./ './ f b-e" ji( )d -
a te que 8 8 80 => X X <; rI.,.
b - e'
b) Relativement aux fonctions positi,es, les théorèmes 1.111.2. et 1./11.3.
se transposent de façon évidente. En particulier,
f et g > O( f -. b f -.b
f.:'o + g => a f(x)dx et a g(x)dx
sont de même nature.
Le critère de Riemann, important en pratique, se modifie comme suit
18
INTÉGRALES DE RIEMANN IMPROPRES
Théorème I.IV.I.
Sif(x) ,.., B fi pour x --+ b [B et f3 sont des constantes positives], alors
(b-x)
f3 < 1 entraîne la convergence de I:bf(X)dX,
f3 ;> 1 entraîne la divergence de f:f(X)dX.
c) Relativement aux fonctions de signe ,ariable, on peut transposer de
façon évidente les notions d'absolue et de semi-convergence.
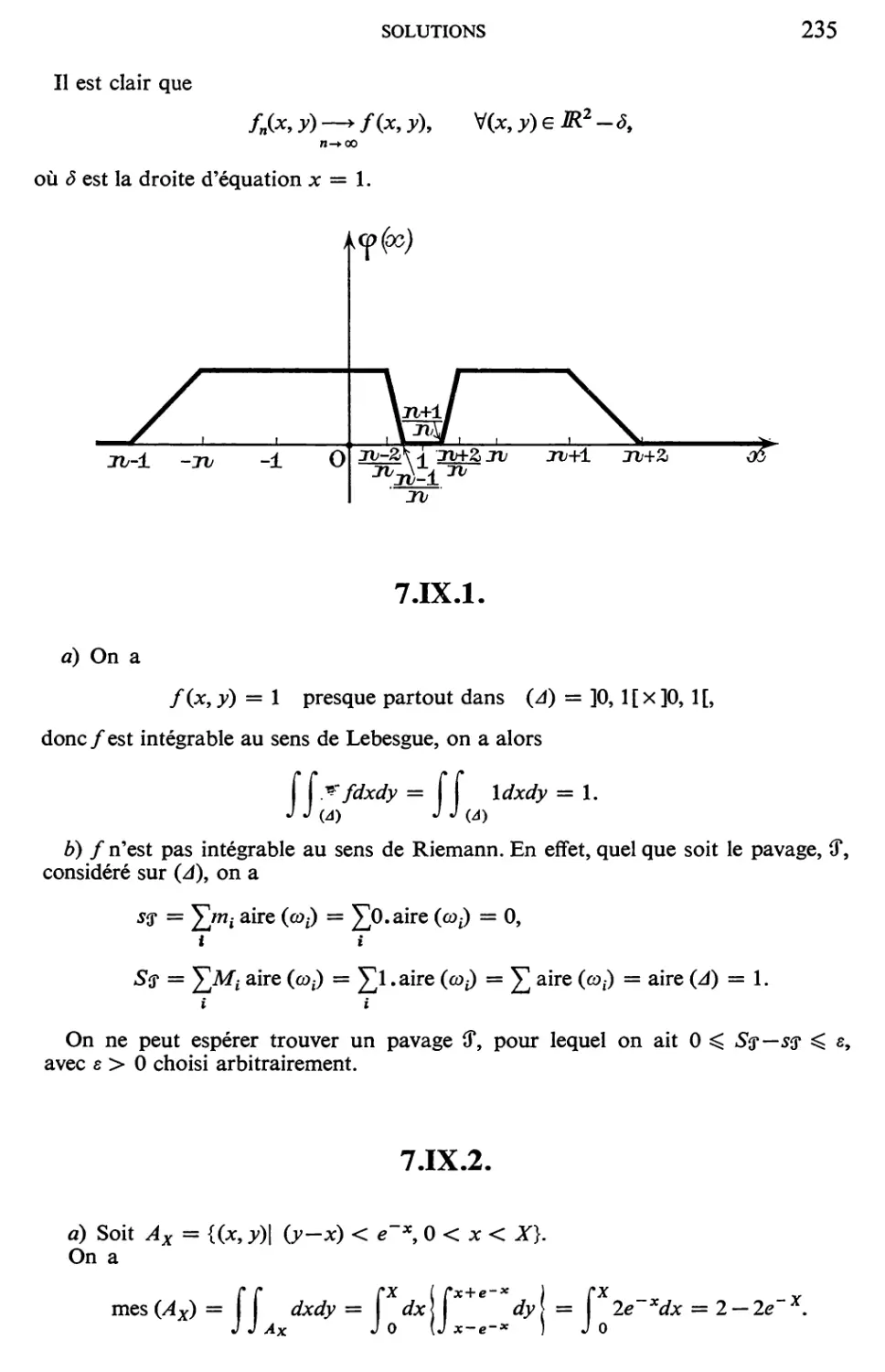
1.1.1.
.
1.1.2.
.
1.1.3.
..
1.1.4.
..
1.1.5.
.
1.1.6.
.
EXERCICES DU CHAPITRE 1
Déterminer la nature des intégrales suivantes:
f +oo f -++oo xdx f OOLogx f +oo
a) 0 e-xdx, 0 (x 2 + 1)2' 1 X dx, 0 X'e- x dx;
f I f l f l X
b) Logxdx, V ' (1 )2 dx;
O 0 1 - x 2 0 - X
c) f + 00 e-Xdx, f + 00 xe-Xi dx, f 2 Log Ix-II dx, f oo V dx .
-00 -00 0 0 x (x + 1)
Calculer leur valeur lorsqu'elles sont définies (c'est-à-dire convergentes).
Déterminer les constantes a et Xo pour que la fonction f définie, pour
x ;> 0, par
f(x) = a V ,
et
f(x) = x 2 + 12,
soit de classe CI sur ]0, 00[.
Montrer que les intégrales suivantes ont un sens:
f +oo dx f +OOXdX
-> f(x) O f(x)
et donner leur valeur.
o x Xo,
x > Xo ,
Calculer f X ( .!. - Arcsin ! ) dx et étudier la limite pour X --+ + 00.
1 X x f +GO ( 1 1 )
En déduire la nature de ['intégrale 1 x - Arcsin X dx.
. Trouver la limite de
f 3X sin t
F(x) = dt pour x 0+_
x t
,. ., f i sin t .
En dedulre que ['Integrale dt est divergente.
o t
Calculer
f b d X
VP(o) -(a<O<b),
QX
f 2 xdx
VP(I) 0 x 2 - 1 '
f +GO xdx
vp _oox 2 +1.
Pour que VP(o) f:/(X)dX existe il laut, et il suffit, que 1 soit au voisinage
de 0 la somme d'une fonction impaire, i, et d'une fonction paire, p, telle
que f b p(x)dx existe.
o
20
1.1.7.
..
1.1.8.
..
1.1.9.
..
INTÉGRALES DE RIEMANN IMPROPRES
Partie finie d'une intégrale divergente.
Soit J a f(x)dx une intégrale divergente. On suppose que f admet un
O
développement à partie polaire au voisinage de l'origine du type
An Al
f{x) = Ii + ... + - + g(x),
X X
où g est une fonction continue sur [0, b].
a) Montrer que
f:f(x)dx = 1(8) + F(8),
où I(t;) devient infini lorsque e o+, alors que F{e) tend vers une limite
finie L dans les mêmes conditions.
L est appelée partie finie de l'intégrale divergente et l'on écrit
L = Pf J a f(x) dx.
O
b) Calculer
f I dx
PI O x 3 {1 + X2) .
c) Montrer que
PI [f a [f{x) + g{X)]dX ] = Pf f a f(x)dx + pf J ",a g{x)dx.
o O O
J -++ 00
Soit f de classe el sur [a, + 00[, f et f' étant telles que f{x) dx
f +oo a
et a f'{x) dx existent. Démontrer alors que 1 a une limite nulle
pour x + 00.
Un exemple de fonction f tel que f +OOf(X)dX soit convergente bien
que f(x) -/-+- O. 0
x-+ 00
On considère la fonction f définie et continue sur [0, + oo[ telle que,
pour tout n entier, n 1,
1 1
n - 1 + 2n--I{n-l)2 < x < n - 2 n n 2 ' f{x) = 0;
1
n - 2 n n 2 x n,
1
n < x < n + 2 n n 2 '
1
n + 2 1J n 2 < x < n + 1
f linéaire, f{n) = n 2 ;
f linéaire, f( n + 2n 2 ) = 0;
1
2n+l{n+ 1)2 t f{x) = o.
Établir que l'intégrale f + 00 f{x)dx est convergente. Quelle remarque
peut-on faire? 0
t.I.I0. ·
...
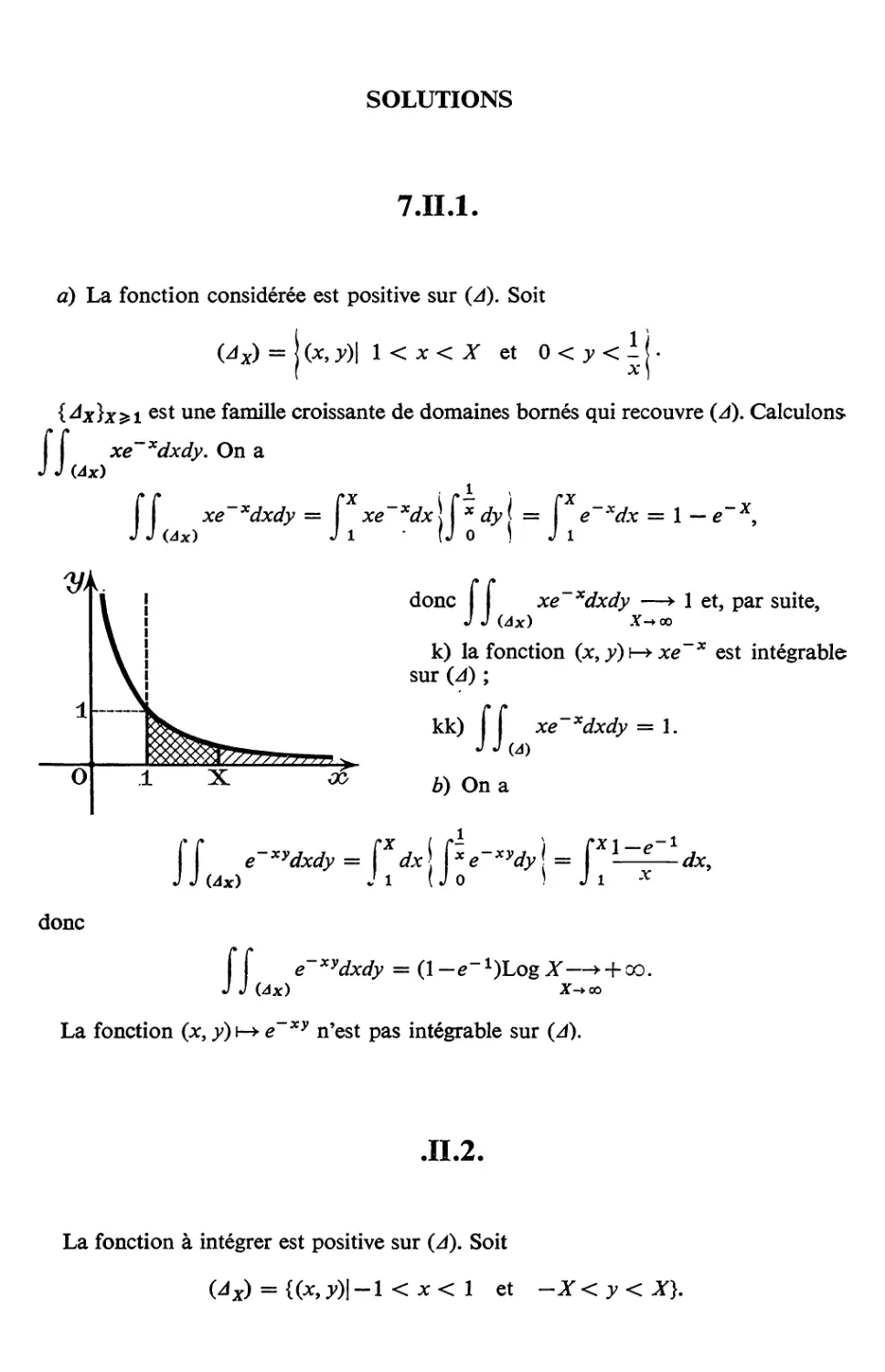
t.ll.t.
.
t.II.2.
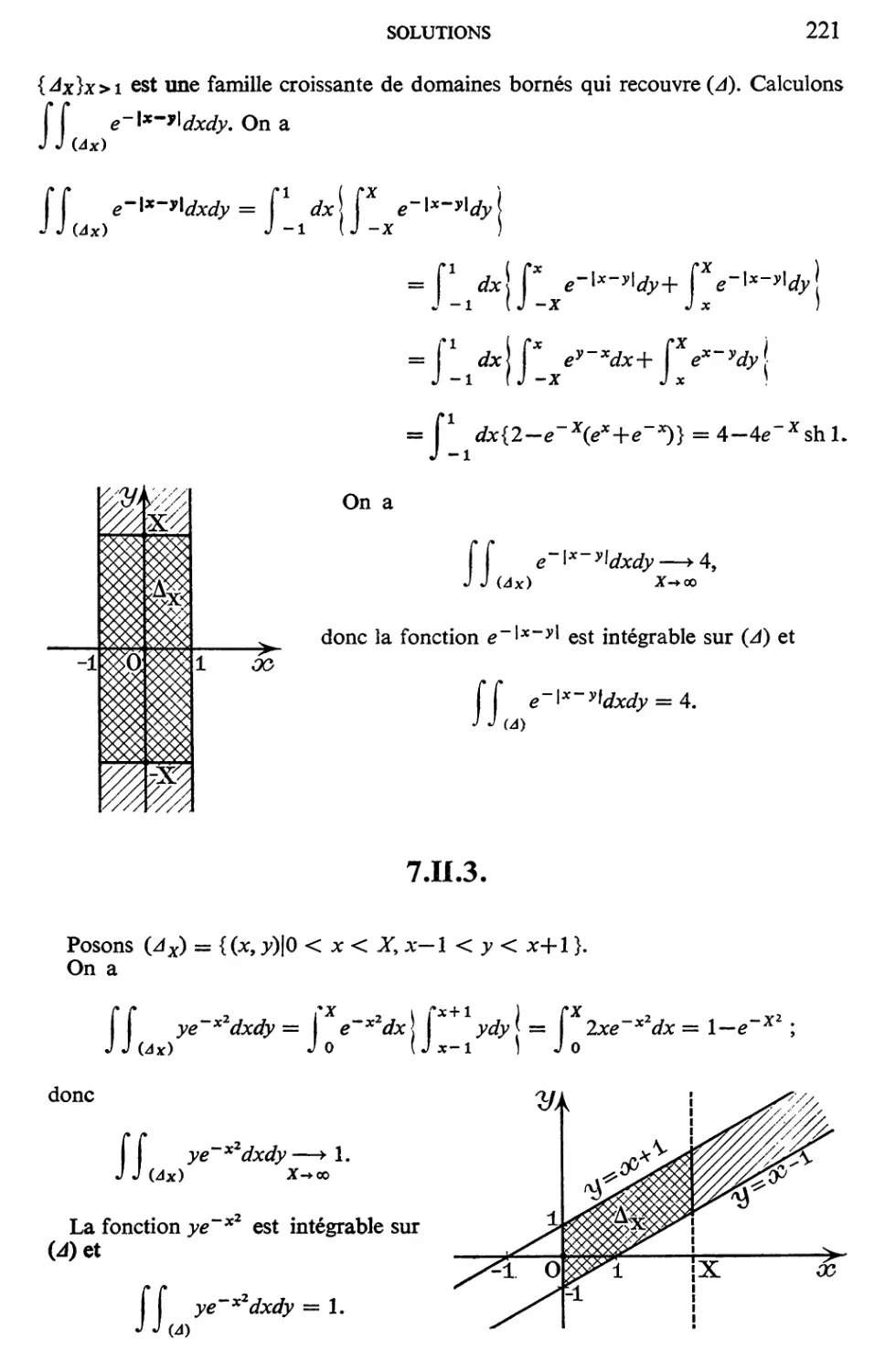
t.II.3.
t.m.t.
.
1.11i.2.
.
EXERCICES DU CHAPITRE 1
21
Soit f une fonction de la variable réelle x telle que
(Hl) f est définie continue pour x 0, sauf peut-être pour des valeurs
isolées de la variable pour lesquelles elle devient infinie, mais f est
telle que f: I(t) dt a un sens pour tout x > 0 et 3 B tel que
f:/(t)dt l B, \:Ix ;> 0;
(H 2 ) 3xo > 0 tel que, pour x Xo, f garde un signe constant.
Montrer que les hypothèses (Hl) et (H 2) entrainent l'existence de
J;+oo/(t)dt.
Montrer sur un exemple que l'hypothèse (Hl) ne suffit pas pour assurer
le résultat.
J -++ 00
Soit t f(t) une fonction définie sur 1R+ telle que f(t) dt soit
convergente. 0
f -++ 00
Montrer que [f(t) - I(t + a)] (a est une constante strictement
-+0
positive) est convergente et donner sa valeur sous la forme d'une inté-
grale ordinaire.
J -++ 00 dx J -++ 00 dx
Montrer que les intégrales 2 x + 1 et 2 1 _ x sont divergentes.
J -++OO ( 1 1 )
Que peut-on dire de 2 x + 1 + 1 _ x dx?
f x dx J -++OO dx
Calculer 3 1 (X> 2). En déduire que l'intégrale 3 1 est
2X - 2 x-
convergente, puis calculer sa valeur.
Intégrales J: xŒe-xdx.
Montrer que cette intégrale est convergente, 'v' (X constante positive.
(Remarquer que Xcx e- x 0, 'v' (X > O.)
x-+ + 00
Déterminer la nature des intégrales impr opres s uivantes:
f + :r:x2dx et J + :VX 2 +1e- x dX,
(Remarquer que Ixl < x 2 + 1, 'v'x.)
22
t.Ill.3.
.
I.IV.t.
.
t.IV.2.
.
1.IV.3.
.
INTÉGRALES DE RIEMANN IMPROPRES
Soit X vérifiant n 'Tt X < (n + 1) 'Tt (n E lN).
1 0 Vérifier que l'on a
f x sin x f x sin x dx,
- dx = Ul + u2 + ... + un +
o x x
(1)
où
f P'Tt sin x
u p = -dx.
(p-l)1t x
2 0 Établir successivement les relations suivantes:
f 'Tt sin x
u" = (-1)"-1 0 x+(P-l)'Tt dx ;
2 2
- < IUpl < (p 1) ·
pn - 'Tt
En déduire que (u,,) est une série alternée convergente.
3 0 Montrer qlle l'on a
(2)
(3)
(4)
f x sin x dx ./ 2
IU n +1\ < -.
n'Tt X n n
4 0 Déduire de ce qui précède les résultats suivants:
f ->+ 00 sin x
l'intégrale - dx est convergente;
o x
f ->+ 00 sin x
l'intégrale 0 x dx est divergente.
.
Déterminer la nature des intégrales impropres suivantes:
f ooe- x
V - dx,
o x
f + 00 dx
-00 V Ix 3 + 11'
f + 00 Log 1 x- 11
V dx,
- 00 x 4 + 1
f + 00 Log x-
V dx.
o .x + 1
Étudier si les intégrales impropres suivantes ont un sem:
" 4
f -?+ 00 dx f -?+ oo.V x + 1 - 'Tt
V ' " dx, f 2 V tgx dx,
O x(1 + eX) -?O -?O
J dx
:V tg x(l- tg x) '
.
f +ex> X2
X 1 dx.
O e- L
.
Étudier suivant les valeurs de et, nombre réel, la nature de l'intégrale
impropre
f -+ + ex> sin x
-ex dx.
-+0 x
l.IV.4.
.
l.IV.S.
..
l.IV.6.
...
1.IV.7.
...
EXERCICES DU CHAPITRE 1
23
Applications
a) En déduire la nature des intégrales de Fresnel
f +oo
o cos X 2 dx,
f +oo
o sin x 2 dx.
f +oo
b) Étudier la nature de l'intégrale sin Xœ dx suivant les valeurs de et.
O
. L'intégrale f I sin dx est-elle convergente?
-+0 x
TC 1:
On considère les intégrales J 2 Log sin x dx et f -+ï Log cos x dx.
O 0
Montrer qu'elles ont un sens et sont égales.
Déterminer leur valeur commllne en calculant leur somme.
On considère les intégrales
TC
ln = f 2 sin 2nx Log sin x dx,
O
n E IN* ,
et
TC
J n = J 2 cos 2nx Log sin x dx,
-+0
n EIN*.
1 0 Montrer que ln et J" ont un sens. TC
0" . .. " J 2 sin (2n - 1) x
2 Etablzr quei.2nJ" = - K,,_ l' ou K,,_ 1 = . dx.
O szn x
Montrer que Kn-l = K" et en déduire la valeur de J n .
3 0 Calculer Il' établir que nI" = - Ln' où
TC
L = f 2 sin2 nx cotg X dx.
n -+0
En déduire 1 2 .
Calculer L" - Ln- 1 et en déduire 1".
f -+l Log t Log (1 - t)
. 1 0 Montrer que l'intégrale impropre 1 = t dt est
con enre. O
On établira les majorations suivantes:
O LogtLog(l-t)./ 2L ]0 ]
< t ..... - og t, pour te, '
et
LogtLog(l-t) [ 1 [
0< t <; - Log 4 Log (l-t), pour tE 2,1 ·
24
l.IV.S.
..
1.IV.9.
1...
INTÉGRALES DE RIEMANN IMPROPRES
2 0 ( ) J .YLOgtLOg(l-t) d
o n pose J x, y = t.
x t
Calculer J(x, y) à l'aide d'une intégration par parties et d'un développe-
Log (l-t)
ment en série entière de la fonction t .
t
+00 1
En déduire que 1 = L 3.
n=ln
Soit a nombre réel positif, 11. entier strictement supérieur à 1. On pose
J ->a dx
ln = n .
° Van - JC'I
1 0 Montrer que cette intégrale est convergente et ne dépend pas de a..
, n
2 0 Demontrer que 1 ln _ 1 .
11.-
3 0 Soit f une fonction définie et de classe el sur [0, a], avec f (0) = o
la dérivée f' étant positive. On note M et m respectivement le maximum
et le minimum de f' sur [0, a].
J a f' (X) dX
En utilisant l'intégrale n , délnontrer la double
inégalité ° V[f(a)]n - [f(x)]n
ln J a dx ln
M"<::: 0 V [f(a)]n _ [f(x)]n "<::: m.
Application : Démontrer que
'Tt J 6 dx 1t
-< <
2 0 V cos 2 x- cos 2 fJ 2 cos fJ
(0 < e < ).
Soit t f(t) une fonction définie sur IR+ telle que
i) f est intégrable sur tout intervalle fini,
ii) lim f(t) = A,
t O+
J + 00 f(t) .
- dt eXiste, 'v' lI.. > o.
ex t
J +OOf(t)-f(tX)
Montrer que l'intégrale dt est convergente pour X > 0
O t
et a pour valeur A Log x.
[On considérera cette intégrale comme la limite de
iii)
J x f(t ) - f(tx)
dt, pour B 0+ et X + 00,
e t
et ['on sera amené à utiliser le second théorème de la moyenne.]
Applications: f(t) = et et f(t) = cos t.
EXERCICES DU CHAPITRE 1
25
l.IV.lO.
..
f ->7t dx
1 0 Montrer que ['intégrale A = 1 a un sens.
-+0 ( . 2 ) -
sin x 3
f x dt
En déduire que 1 a un sens, 'v' x o.
-+0 (1 + t 2 ) (sin 2 t) 3
2 0 Établir que, pour tout n entier positif, on a
f -+( +1)1t dx A
1 <-
n 2
->n'Tt (1 + x 2 ) (sin 2 x) 3"
f + 00 dx
et démontrer que l'intégrale 1 est convergente.
->0 (1 + x 2 ) (sin 2 x) 3"
Quelle remarque fait-on?
SOLUTIONS
1.1.1.
Les résultats sont résumés dans le tableau ci-dessous:
1 re colonne : fonctions,
2 e colonne: expression de l'intégrale définie correspondante,
3 e colonne : limite de l'expression précédente pour ]es conditions imposées, quand
elle existe,
4 e colonne: conclusion.
a) Les intégrales définies sont calculées de la borne inférieure donnée jusqu'à X.
1 Expression 1
Fonction f de l'intégrale définie Limite Conclusion
f >(X)dx pour X oo
e- x l-e- x 1 Conv. Valeur 1
x 1 1 1 1
(x 2 + 1)2 2 2(1 + X2) 2 Conv. Valeur 2:
Log x 1 +00 Div.
- (Log X)2
x 2
n n'X n - p
Jéle -x , -x L . nI Conv. Valeur nI
n. - e ( _ )'
p=o n p.
b) Les intégrales définies sont calculées (selon le cas considéré) sur [a+E, b], ou sur
[a, b-E].
Expression de
Fonction f(x) r f(x)dx, Limite Conclusion
a+e: pour 8 0 +
ou f f(x)dx
Log x 8 [Log 8-1]-1 -1 Conv. Valeur -1
1 Arcsin (1- e) 'Tt 'Tt
Vl-x 2 - Conv. Valeur 2
2
x 8 t.Log 8+ 11- e +00 Div.
(1- X)2 e
SOLUTIONS
27
c) Ces exemples comportent dellx cas et l'on décompose chaque lois l'intégrale en
deux intégrales de type a) ou b).
f +oo e-X dx converge, mais f o e-X dx diverge,
o -00
donc f + : e- x dx est divergente.
f: oo xe- x2 dx =
donc
f o xe-x," dx = _!,
-00 2
l + : xe-x' dx est convergente, sa valeur étant o.
f lLOg(l-X)dX=-1 et f 2 Log(x-l)dx=-l,
o 1
f:LOg(l-X) dx est convergente, sa valeur étant -2.
f I dx Tt f +oo dx Tt
lC = 2 Arctg 1 = - et - = -,
->0 V x (x+l) 2 1 Vx(x+l) 2
f +oo dx
lC est convergente, sa valeur étant n.
o V x (x+l)
et
donc
donc
1.1.2.
La condition de continuité pour f sur ]0, 00 [ revient à écrire
a Vxo = x +12.
De même, la condition pour que 1 soit dérivable sur ]0, oo[ revient à imposer la
dérivabilité au point Xo ; donc
(a ) o = (x 2 + 12) o'
et ceci assure simultanément la continuité de f' sur ]0,+00[.
Le système obtenu
aVxo = x + 12,
a = 4xoVxo,
permet d'obtenir Xo = 2 et a = 8V2 .
J + 00 dx
L'intégrale impropre 1 = O f(x) se décompose en
1 J 2 dx f +c.o dx
sV2 -->-0 + 2 x2+12.
Le calcul immédiat des primitives montre que ces deux intégrales sont conver-
. 1 nV3 , 1 nV3
gentes et de valeurs respectives 4 et 18' d'ou 1 = 4 + .
28
INTÉGRALES DE RIEMANN IMPROPRES
1.1.3.
x Arcsin ! est bien défini pour x 1.
x
Le calcul de l'intégrale se ramène à celui de
f x Arcsin dx, pUisque f x ! dx = Log X.
1 X 1 X
Considérons, pour lI.. > 1,
f: Arcsin dx = (x Arcsin ): + f: VX: l '
donc
f x 1 1 1 X+ V X2-1
Arcsin - dx = X Arcsin X - oc Arcsin - + Log V ·
ex X lI.. lI.. + lI.. 2 - 1
On en déduit, en faisant tendre lI.. vers 1, que
f x . 1 d . 1 V 2 n
1 ArcSln X x = X Arcsln X + Log (X + X -1) - 2:.
Alors
f x ( 1 Ar . 1 ) d n Ar . 1 X
-- cSln- x=--X cSln-+Log ,
1 X x 2 X X + V X2-1
f ->+OO ( 1 1 )
d'où l'on conclut que l'intégrale - - Arcsin - dx est convergente et a
n l ,x x
pour valeur 2 - 1- Log 2.
1.1.4.
D'après la formule de Mac-Laurin
. x 3 . ( 3n fJ )
sin x = x+ TI sin 2 + x,
puisque sin e; + ex) <; 1 et x 0,
x 3
X - 6" sin x <; x.
(Cette dernière inégalité étant bien connue.)
SOLUTIONS
29
Alors, pour t > 0,
1 t sin t 1
ï-6 t2 t'
d'où
J 3X ( 1 t ) J 3X sin t J 3X dt
- - _ 6 dt - t 2 dt - t '
x t x x
soit
2 J 3X sin t
Log 3 - 3" x 2 x t2 dt Log 3,
donc
J 3X sin t
lim --"2 dt = Log 3.
x-+o+ x t
J I sin t J 3X sin t
Ceci entraîne que l'intégrale dt est divergente sinon la limite de - t 2 dt
->0 t x
pour x -+ 0+ serait nulle. (Condition de Cauchy.)
1.1.5.
J b dx (J -£ dx f b dX )
Par définition VP(o) - = lim - + -,
a X £->0 a X £ X
d'où
J b dx b
vp(o) a X = Log jQj.
J 2 xdx J I -£ xdx
On trouve de même VP(l) 2 l ' en calculant les deux intégrales 2 1
oX - 0 x-
J 2 xdx . .. d X 1 2 b . . ' d .
et 2 1 . Comme une prImitIve e 2 1 est _ 2 Log lx - 11, on 0 tient Imme la-
l+eX - X -
tement
J 2 xdx . ( 1 2s- S2 ) Log 3
VP(l) O X2_' = ! 2 Log 2s+s 2 + 2 '
c'est-à-dire
J 2 xdx 1
VP(l) 0 x2-1 = 2 Log 3.
P 1 d ." . , 1 J R xdx 0 d ..
our a emlere Integra e on constate que -R 1 + x 2 = , 'ou
J + 00 xdx
vp -00 1+x2 = o.
On remarque que les trois intégrales considérées ne sont pas des intégrales impropres
convergentes. On verra dans l'exercice suivant une situation générale.
30
INTÉGRALES DE RIEMANN IMPROPRES
1.1.6.
Soit x f(x). f est la somme d'une fonction paire et d'une fonction impaire notées
respectivement p et i telles que
. ( ) f(x)-f(-x)
X l X = 2
et
( ) f(x)+f(-x)
x px= 2 ·
Calculons
1 1 (8) = f:/(x)dx + f: 1 /(X)dX,
où a < -al < 0 < al < b. En tenant compte de la décomposition de f,
f(x) = p(x) + i(x),
il vient
f a l
]1(B) = 2 £ p(x)dx,
d'où le résultat, si f b p(x)dx existe, on a Hm ]1(B) = 2 f at p(x)dx et donc
f b O O
VP(o) af(x)dx existe, sa valeur étant, par ailleurs,
f: O p(x)dx + r ,," op(x)dx + f /(X)dX
(si l'on a 0 < - a < b).
Réciproquement, si la limite, en valeur principale, existe, l'expression de 11(8),
obtenue précédemment, montre que
Hm f a1p(X)dX existe,
l: o+ l:
donc f b p(x)dx est convergente.
....0
La propriété est donc une condition nécessaire et suffisante.
SOLUTIONS
31
1.1.7.
a) II suffit de calculer une primitive de f, soit h. Alors
- An A 2
h(x) = (n-l)x n - l + ... - X + A l Log X + gl(X),
où g 1 est une primitive de g, donc
f:f(X)dX = 1(8) + F(8),
avec
An A 2
1(8)= ( 1) 1 +...+--AILogB
n- Bn- B
et
An A 2
F(8)=g1(a)-gl(B)- ( 1) 1 -...--+A1Loga.
n- a n - a
Puisque Iimg l (8) = gl(O), on a bien Iim F(B) = L pour B 0+ alors que I(B)
devient infini dans les mêmes conditions.
b) Dans l'exemple proposé, on décompose d'abord la fraction rationnelle obtenant
ainsi :
1 1 1 x
=---+ ,
x 3 (I+x 2 ) x 3 X 1+x2
d'où
f i xdx 1
F(B) = E: 1+x2 - 3'
donc
J .l xdx 1
L= 0 1+x 2 -'3'
soit
1 1
L = - Log 2 - -.
2 3
c) On a les relations suivantes (cf. a)
f)f(X) + g(x)]dx = 1(8) + F(8), où F(8) '':0+ Pf f >o [f(x) + g(x)]dx.
f af(X)dX = 1 1 (B) + FI(B), où Fl(B) Pf J e a f(x)dx,
E: E: -+0+ ->-0
f a g(x)dx = 1 2 (8) + F 2 (B), OÙ F 2 (8) PI f a g(x)dx.
E: E: -+0+ ->-0
32
INTÉGRALES DE RIEMANN IMPROPRES
On a évidemment
1 1 (8) + 1 2 (8)-1(8) = F(8) -F 1 (8) -F 2 (8).
La limite de la fonction l l (8) +1 2 (8) -1(8) (pour 8 0+) est évidemment infinie,
à moins que 1 1 (8) +1 2 (8) -1(8) = o.
Cette limite, qui doit être égale à celle de F(8)-F 1 (8)-F 2 (8), est nécessairement
finie, donc Il (8) + 1 2 (8) - 1(8) = 0 et, par suite,
F(8) = F l (8)+F 2 (8).
Par passage à la limite, on obtient pour e 0+
P.f f a [f(x) + g(x)]dx = Pf f a f(x)dx + Pf f a g(x)dx.
O O o
Remarquons que la partie finie n'est pas invariante par changement de variable.
On le voit sur l'exemple
1
f 1 dX f a du
Pf - = 0, Pf - = - Log a (a > 0),
o x 0 u
alors que l'on passe de l'une à l'autre par le changement de variable x = au.
1.1.8.
La fonction f étant de classe el sur [a, X], f' est donc continue sur [a, X], on peut
écrire alors
f(X)-f(a) = f:f'(X)dX,
d'où
f +oo
Iim f(X) = f(a) + f'(x)dx = L,
x->- + 00 a
le second membre ayant un sens par hypothèse.
f +oo
Nécessairenlent, L = 0 sinon l'intégrale a f(x)dx serait divergente (cf. 1, 3°),
f +oo
ce qui est en contradiction avec l'hypothèse a f(x)dx existe.
1.1.9.
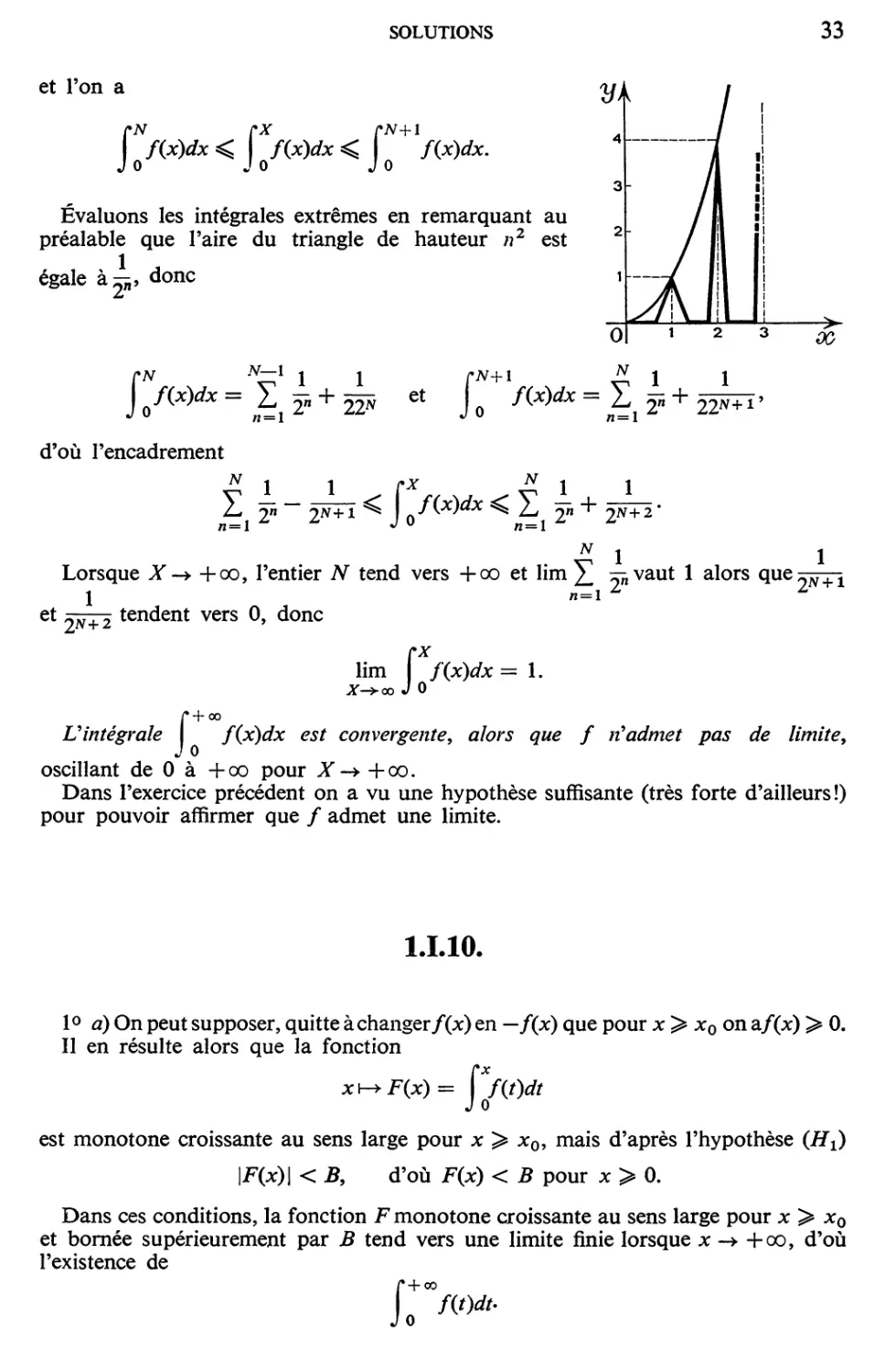
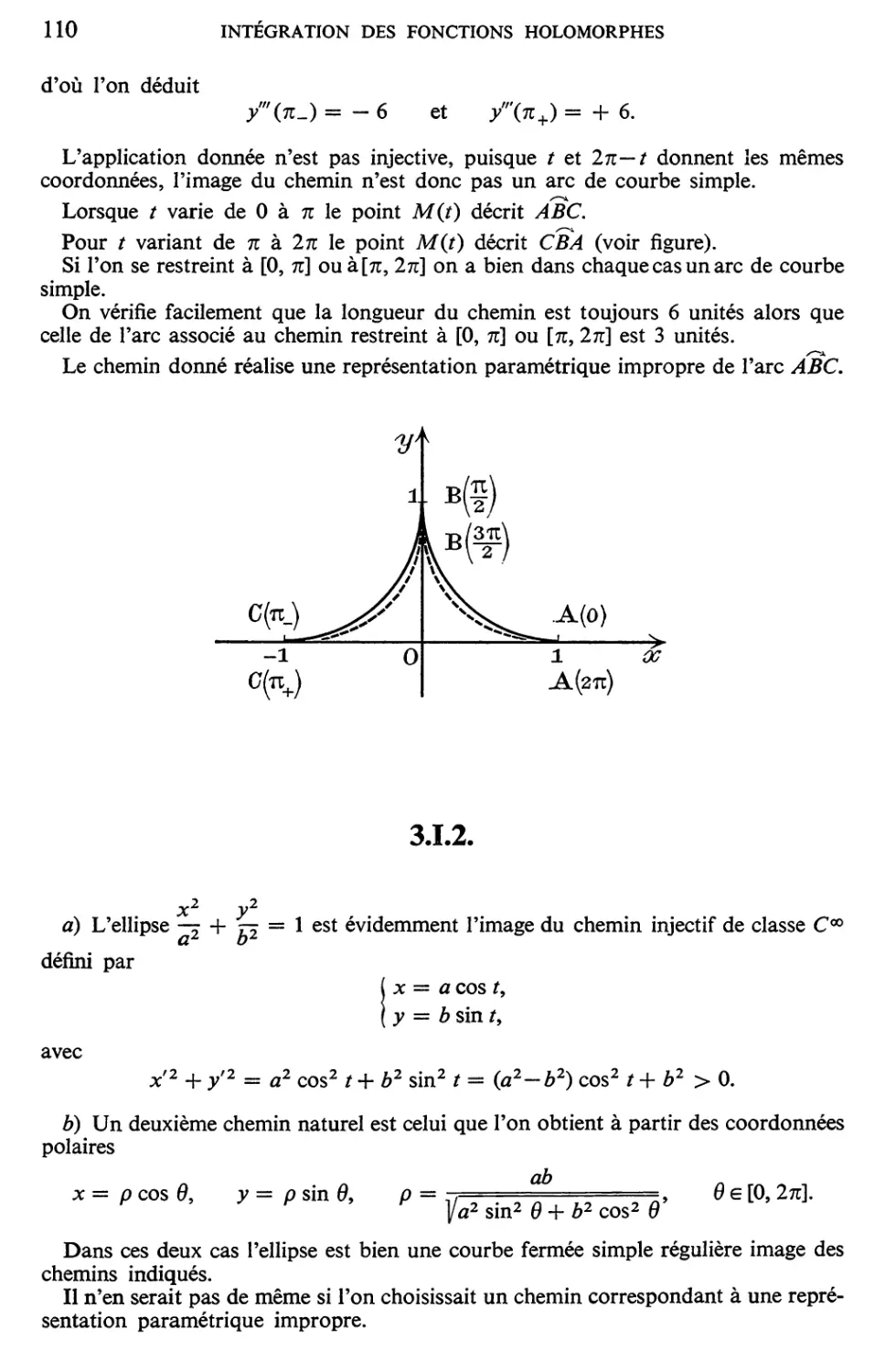
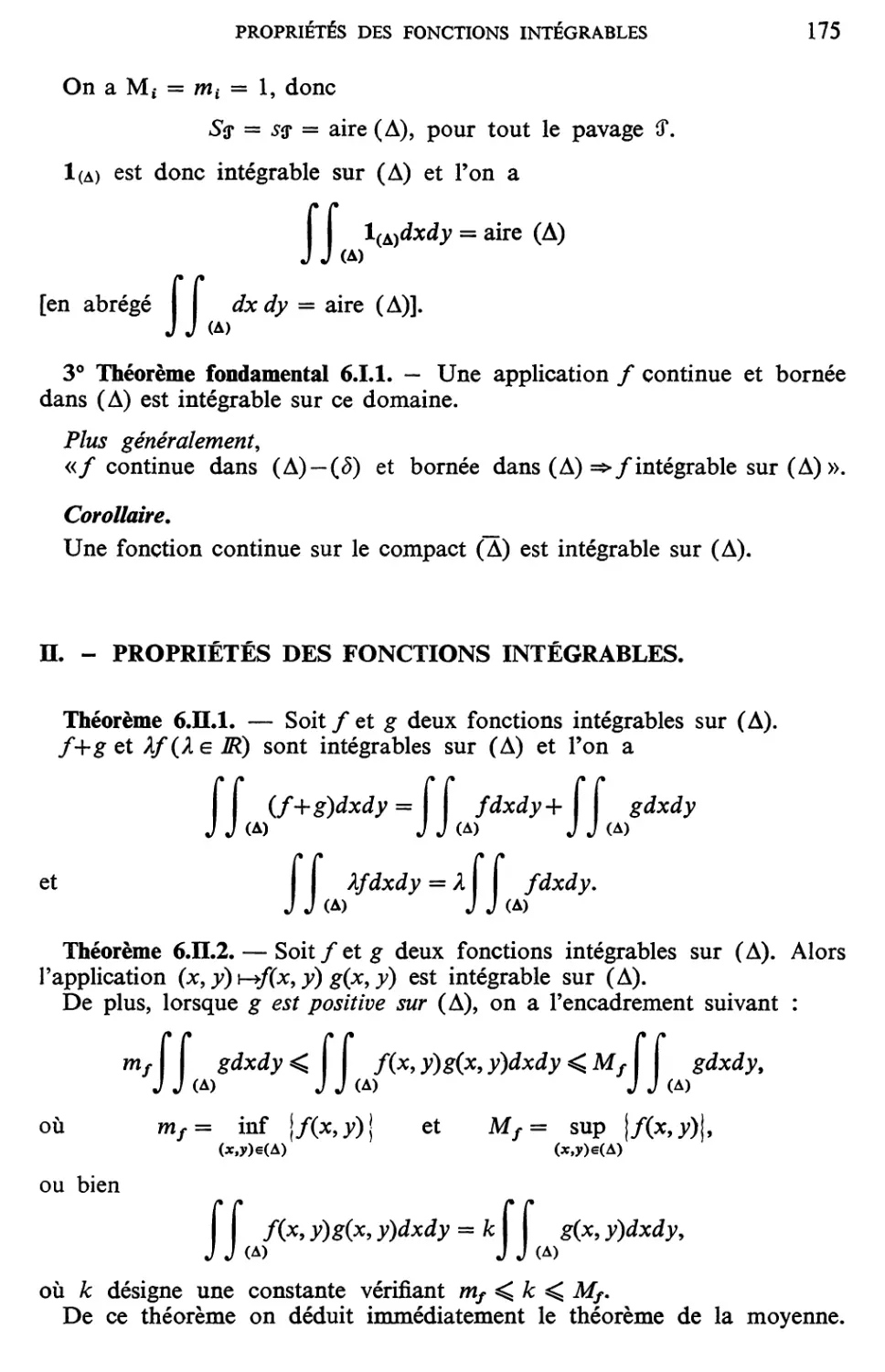
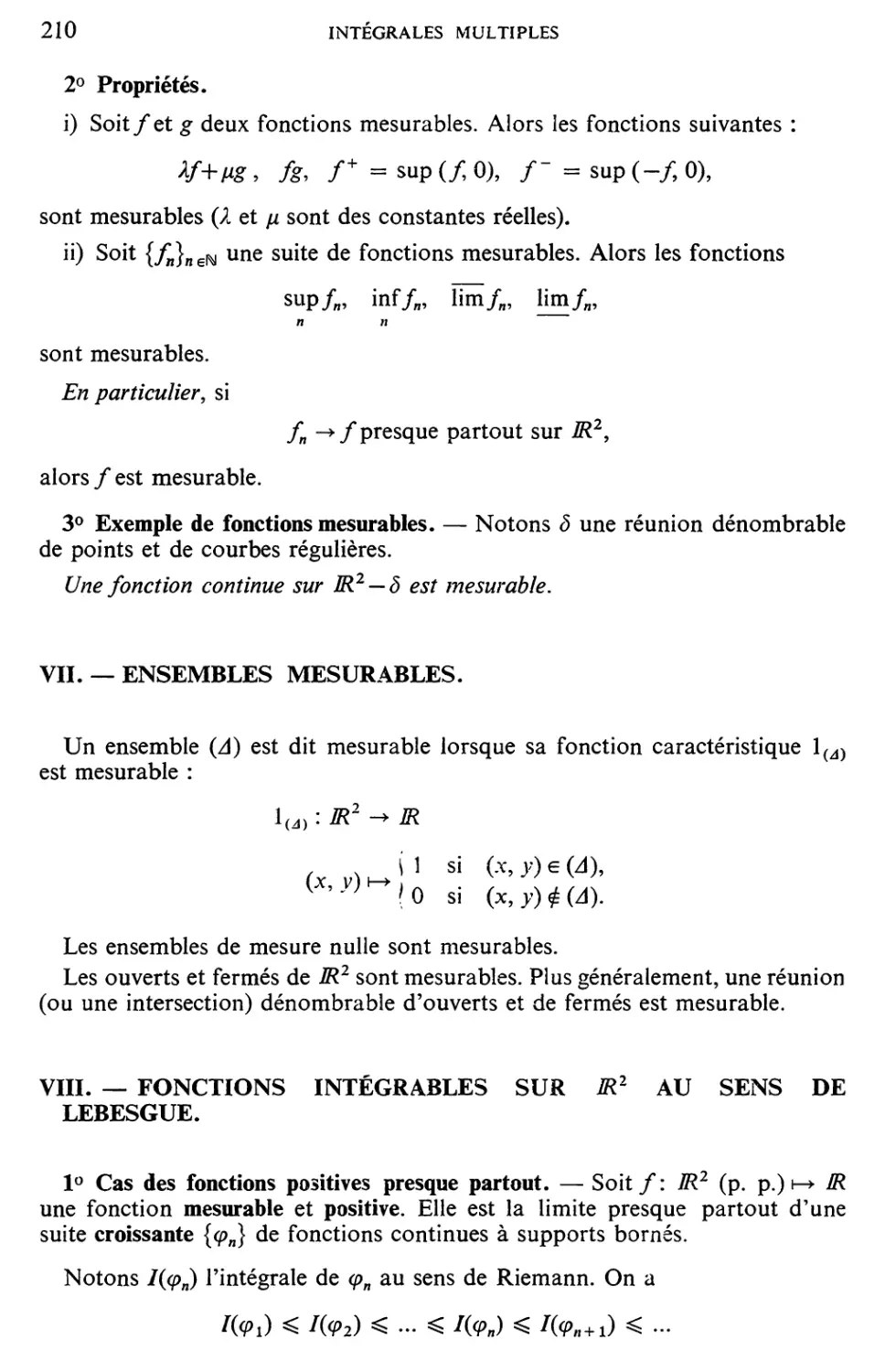
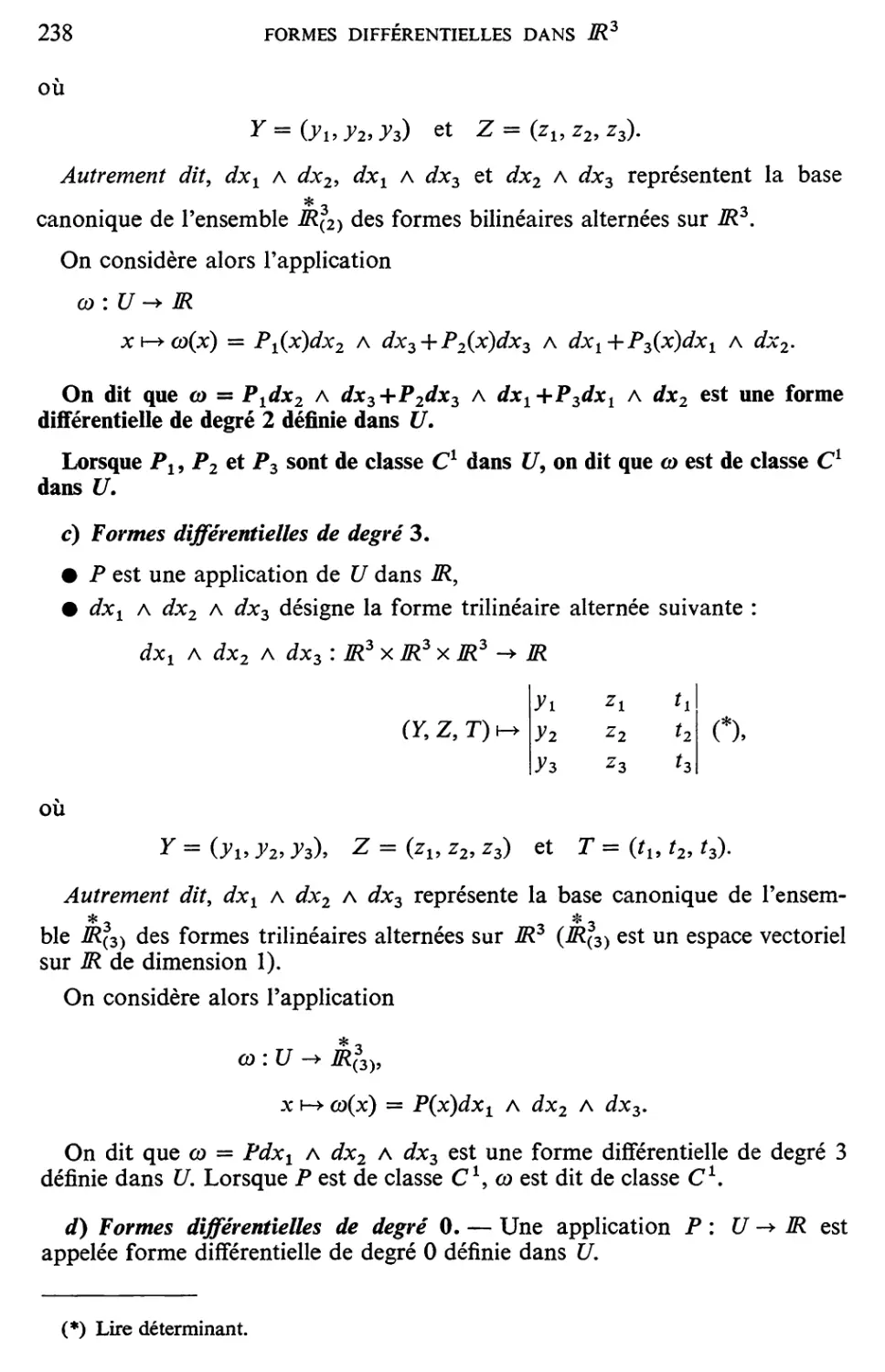
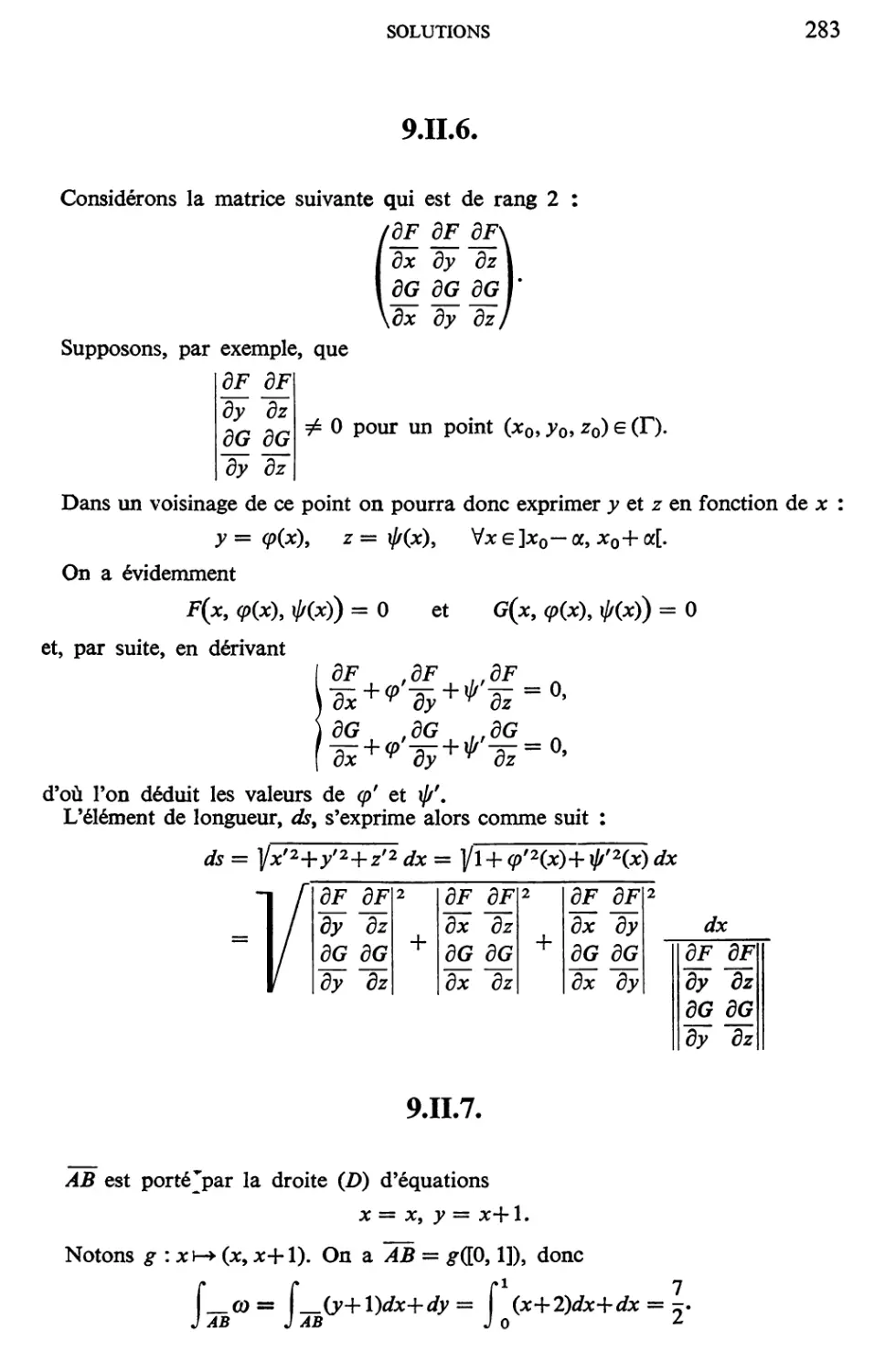
Le graphe de la fonction est une ligne polygonale en « dents de scie » dont les
sommets sont sur la parabole y = x 2 .
Quel que soit X > 0 il existe N, tel que
N X<N+l
SOLUTIONS
33
Y 1
1
1
4 -------- 1
"
.!
.1
3 .1
.1
_1
.1
2 -1
1
1
1
1
1
1
1
1
1
0 2 3 X
et l'on a
f N r x f N+l
f(x)dx f(x)dx f(x)dx.
o w 0 0
Évaluons les intégrales extrêmes en remarquant au
préalable que l'aire du triangle de hauteur 11 2 est
égale à ;n ' donc
f N 1"-1 1 1
f(x)dx = L 2 n + 22 N
o n=1
et
f N+ 1 NIl
f(x)dx = L 2 n + 22 N + 1 '
o n=1
d'où l'encadrement
NIl f x NIl
L 2 n - 2N+I < f(x)dx L 2 n + 2 N + 2 .
n=1 0 n=1
1 . d . ;, 1 1 1
Lorsque X + 00, 'entier N ten vers + 00 et hm L 2 n vaut alors que 2 N + 1
1 n=1
et 2 N + 2 tendent vers 0, donc
lim f Xf'(X)dX = 1.
X OO 0
L'intégrale r+ 00 f(x)dx est convergente, alors que f n'admet pas de limite,
&> 0
oscillant de 0 à + 00 pour X + 00.
Dans l'exercice précédent on a vu une hypothèse suffisante (très forte d'ailleurs!)
pour pouvoir affirmer que f admet une limite.
1.1.10.
1° a) On peut supposer, quitte àchangerf(x) en - f(x) que pour x Xo on af(x) o.
Il en résulte alors que la fonctÏon
Xf--+ F(x) = f/(t)dt
est monotone croissante au sens large pour x Xo, mais d'après l'hypothèse (Hl)
IF(x)j < B, d'où F(x) < B pour x o.
Dans ces conditions, la fonction F monotone croissante au sens large pour x Xo
et bornée supérieurement par B tend vers une limite finie lorsque x +00, d'où
l'existence de
f +oo
o f(t)dt.
34
INTÉGRALES DE RIEMANN IMPROPRES
d'où
I:sin tdt = 1- cos x,
I:sintdt = 1- cosx< 2.
On a donc les hypothèses (H 1), visiblement on n'a pas l'hypothèse (H 2).
I: sin t dt = 1 - cos x n'admet pas de limite lorsque x + 00, d'où la conclusion.
b) On a
1.11.1.
I;+oo f(t)dt convergente entraîne que I;+oof(t+a)dt est convergente et égale
à I:+oof(U)dU (changement de variable t + a = ll, théorème l.II.2.), donc
f +OOf(t)dt- f +oof(t+a)dt= f+oo[f(t)-f(t+a)]dt
o 0 0
(théorème 1.11.1), et l'on a de plus
I:oo [I(t)-f(t + a)] dt = I:f(t)dt.
1.11.2.
Les intégrales proposées sont bien divergentes. En effet,
I x d + X l = ILog(x+1)lf = Log (X+l) - Log 3 + 00
2X X OO
et I X 1 dX = -ILog(x-l)lf= -Log(X-l) -00.
2 -x X oo
f ->+OO ( 1 1 )
Que peut-on dire de 2 x + 1 + 1- x dx?
On a
I:[ X 1 + 11X ] dx=Log(X+l)-Log3-Log(X-l)
= Log = - Log 3 - Log 3.
X OO
L'intégrale proposée est donc convergente, de valeur - Log 3. Remarquons que
formellement elle se présente comme étant la « somme de deux intégrales diver-
gentes ».
SOLUTIONS
35
1.11.3.
La décomposition en éléments simples sur le corps des réels donne l'identité sui-
vante
(1)
3
x 3 +1
3 1 x -2
- (x+l)(x 2 -x+l) = x+l - x 2 -x+l'
d'où l'on déduit
f x dx f x dx 1 f x 2x - 1 3 f x dx
3 0 x 3 +1 = 0 x+l - 2 0 x 2 -x+l dx+ 2 0 x 2 -x+l
1 3 2 2x-l x
= ILog(x+l)I -2ILog(x2-x+l)I +2 V3 Arctg V3 0
l ') l 2X - 1 1
= Log(X+l)-2 Log (X--X+l)+v 3 / Arctg V3 -Arctg- 113 !'
donc
j X dx X+l 1(; 1 2X-l 'TC !
3 3+1 =LOg V +V 3 Arctg lh + 6
o x X 2 -X+l V 3
et, par suite,
f x dx 1 [ 'TC 'TC ] 2 'TC
3 V3 - + - --
o x 3 + 1 X-:>-oo 2 6 - V3 ·
L'intégrale proposée est donc convergente, de valeur ·
3V 3
Relnarqlle. - On déduit formellement de (1) la relation suivante:
3 f ->OO dx = f -:>-oo dx _ f ->OO x - 2 dx.
o x 3 +1 0 x+l 0 x2-x+l
Autrenlent dit, l'intégrale étudiée se présente comme étant la différence de deux
intégrales divergentes.
1.111.1.
Puisque xl3e- x 0, 'v' f3 > 0, on peut écrire en posant f3 = ex + 2 :
x-:>- + 00
X./ K .. )
x::t..e-- 2 pour x + 00 (K est une constante posItIve.
x
f + 00 dx
L'intégrale 2 étant convergente, il en est de même de l'intégrale proposée.
1 x
36
INTÉGRALES DE RIEMANN IMPROPRES
1.111.2.
a) L'inégalité Ixl, X 2 + 1 entraîne e-x", e .e- 1X1 . Or l'intégrale f + : e- 1X1 dx
est convergente ( eIJe se décompose en f + 00 e -x dx et f o eX dX ) , donc
f +oo 0-00
e-xt. dx est convergente.
b) Décomposons l'intégrale en f o e _X2 dx et f + 00 e _X2 dx.
-00 0
Pour étudier f oo V x 2 + 1 e- x dx, remarquons que
V x 2 + 1 e- X e- x , 'v' xe] - 00,0].
Il Y a divergence de f oo e- x dx, donc de J oo V x 2 + 1 e- x dx et, par suite, diver-
gence de l'intégrale donnée.
1.111.3.
1 0 La relation (1) résulte immédiatement de la décomposition suivante :
f x sin x f 1t sin x f 27t sin x f n7t sin x ( X sin x
-dx= -dx+ -dx+ ...+ -dx+ -dx.
., 0 x 0 X 7t X (II-1)7t X & nit X
2 0 On a
f Im sin x
u p = -dx.
(P-I) x
La relation (2) se déduit immédiatement de la relation ci-dessus :
en faisant le changement de variable 1I = X - (p - 1) 'TC [remarquer que
sin (u + (p - 1) 'TC) = ( -l)P-I sin u].
R l e. sin x . . [0 ] d
emarquons que a 1onctlon x + (p -1) 'TC est positive sur , 'TC, onc
J 1'C .
sin x dx 0
o x + (p - 1) 'TC
et, par suite,
f 1t sin x
IUpl= o x+(p-1)'TC dx .
SOLUTIONS
37
Pour établir la relation (3), il suffit de constater que l'on a
sin x sin x sin x
1t + (P-l) n x + (p -1) n (p -1) n'
'v' x E [0, n],
car alors
1 f 1t f 1t sin x 1 f 1t
- sin x dx + (p 1) dx ( 1) sin x dx,
pn 0 0 x - n p - 1t 0 _ .
ou bien
2 2
pn lu pl (p+ l)n .
La série alternée (un) possède les propriétés suivantes
2
. 1 u n + 1 1 1 uni, car 1 u n +ll < - < 1 uni, cf. (3),
nn
. Un 0, cf. (3),
n 00
donc elle est convergente. Autrement dit,
S ( noté fUn ) .
(5) Ul + U2 + ... +U n n oo 1
3° Rappelons que nn X < (n + 1) n. On a alors
f x sin x f x-mt sin U
- dx = (- l)n du (poser u = x - n1t),
n1t X 0 II + n'Tt
d'où l'on déduit
f x sin x dx f x-nx sin u f ft: sin u 1
= + du < + du = lunl
mt X 0 U n'Tt 0 U nn
et, par suite [cf. (3)],
f x sin x dx .
nft X n'Tt
4° a) Compte tenu du résultat ci-dessus, ainsi que de (5), on déduit immédiatement
de (1)
f x sin x 00
o x dx S = L Un'
x oo n=l
f -+oo sin x
donc l'intégrale - dx est convergente.
o x
(Retrouver ce résultat en utilisant le critère d'Abel.)
f -+oo sin x
l'intégrale - dx, on utilise
o x
f x Isin xJ
dx Iu l \ + ... + Iunl.
o x
b) Pour étudier
l'inégalité
38
INTÉGRALES DE RIEMANN IMPROPRES
I.IV.I.
a)
J I e-x ( e- X 1 )
-+0 V; dx est convergente 1/:; """ v:; pour x -+ 0+ ,
J + 00 e- x ( e- X )
1 v:; dx est convergente v:; < e- x pour X -+ + 00 ,
donc
f + 00 e- x
o V x dx est convergente.
1
b) La fonction x 1-+ V est continue dans .IR - {- 1} et devient infinie pour
Ix 3 + 11
1 L ,. , 1 J + co dx . 1 . h
x -. mtegra e V sera convergente SI, et seu ement SI, c acune
-co Ix 3 + 11
des intégrales suivantes :
J -2 dx f -l dx J I dx f +co dx
-co V Ix 3 + 11' -2 V Ix 3 + 11' -1 V Ix 3 + 11' 1 V Ix 3 + 11
est convergente.
J -2 dx f OO dx
Montrons que les intégrales V et V sont convergentes.
oo Ix 3 +11 1 Ix 3 +11
1
,..".,
Vlx 3 + 11
1
---'"3 pour x - 00.
Ixl 2
f -2 dx
Or l'intégrale _ 1 1 3 est convergente, donc
-+-co x-
2
J -2 dx
V est convergente.
-+-00 Ix 3 + 11
De même,
J -++OO dx
V est convergente.
1 Ix 3 + 11
f -+--1
Montrons que les intégrales
-2
On a
dx J I dx
V 3 et V 3 sont convergentes.
lx +11 ->-1 lx +11
1
-
Vlx 3 +11
1 1
,.."., pour x - 1.
Vlx+ Il (x 2 -x+ 1) V3 Vlx+ 11
SOLUTIONS
39
Les intégrales
f -+-l dx f I dx
-2 V ix-II et -+--1 V ix-II
étant convergentes (Cf. théorème l.IV.1. avec p= à) il en sera de même des intégrales
f -+-l dx J 1 dx
-2 V lx3+ll et -+--1 V lx 3 +11 ·
c) II faut étudier les trois situations x - 00, x 1, x 00. L'intégrale proposée
sera convergente si, et seulement si, chacune des intégrales suivantes :
f -oo
Log Ix- 11 J "->-l Log Ix-II f b Log Ix-II
V dx, V dx, 1/ dx,
x 4 + 1 a x 4 + 1 -+1 X 4 + 1
f ->-+ 00 Log Ix-II
dx (a < 1 < b)
b Vx 4 + 1
est convergente.
f a Log Ix-II f -++oo Log Ix-II
Montrons que les intégrales dx et dx sont
convergentes. On a -)--00 V x 4 + 1 b V x 4 + 1
et
Log Ix-II
V x 4 + 1
Log Ixl K
2 < (K est une constante), 'v' x e]- 00, a].
x Ixl 2
'"
Log Ixl
x 2
pour x -00
L'intégrale f a dx étant convergente, il en est r' de même pour
->--00 lx I 1-
f a Log Ixl · f a Log Ix-II
2 dx et, par sUite, V dx est convergente.
-+-00 X -+-00 x 4 + 1
f -+l Log Ix-II f b Log Ix-II
Montrons que les intégrales V dx et V dx sont conver-
gentes. On a a x 4 + 1 -+1 X 4 + 1
Log Ix-II 1
V '" ,(.; Log lx -11,
x 4 + 1 V2
Les intégrales f -+l Log Ix-II dx et f b Log Ix-II dx étant convergentes, il
a -+1
en sera de même pour les intégrales
pour x 1.
f -+l Log Ix-II
dx
a V x 4 + 1
et
f b Log Ix-II dx.
-+1 Vx 4 +1
d) II faut étudier les deux situations x 0 + et x 00.
40
INTÉGRALES DE RIEMANN IMPROPRES
· f I Log x
L'Intégrale V - dx est convergente. En effet
-)-0 x + 1
Log x
VX+l '" Log x pour x-+O+.
f -7OO
L'intégrale 1
Log x
1 dx est divergente. En effet,
Vx+ 1
Log x 1
V x + 1 > V ' V x E [A, 00[,
f ->oo dx
A est une constante convenable et 1 est divergente.
f Log x dx
En synthétisant les résultats précédents, on en déduit que l'intégrale -> 00
est divergente. ->0 V x + 1
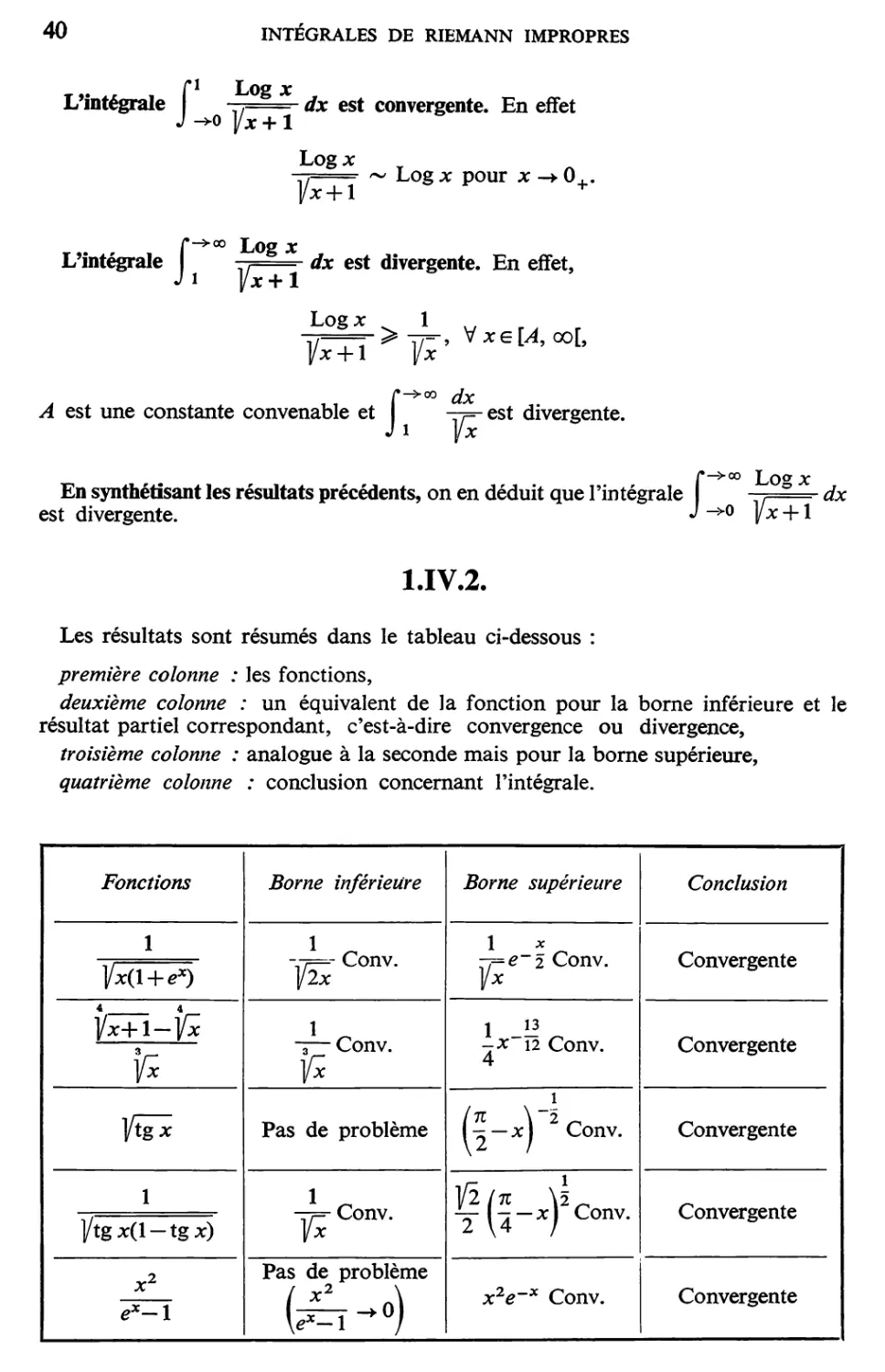
1.IV.2.
Les résultats sont résumés dans le tableau ci-dessous :
première colonne : les fonctions,
deuxième colonne : un équivalent de ]a fonction pour la borne inférieure et le
résultat partiel correspondant, c'est-à-dire convergence ou divergence,
troisième colonne : analogue à la seconde mais pour la borne supérieure,
quatrième colonne : conclusion concernant l'intégrale.
Fonctions
Borne inférieure
Borne supérieure
Conclusion
1
V x(l+e X )
1
--- Conv.
V2x
1 x
Vx ri Conv.
Convergente
4 4
V x+l -1G
1;;
1
-;-- Conv.
tG
1 13
4X- 12 Conv.
Convergente
Vtgx
Pas de problème
1
( _ x ) -2 Conv.
Convergente
x 2
eX-l
1
1G Conv.
Pas de problème
C : 2 1 -+0)
1/2 ( 1t )
2: 4 -x Conv.
Convergente
1
Vtg x(l- tg x)
x 2 e- x Conv.
Convergente
SOLUTIONS
41
I.IV.3.
1 0 Il suffit d'étudier les intégrales
J I sin x
l(ex) = - dx
o+ XIX
et
J + 00 sin x
J(ex) = - dx.
1 XIX
sin xl, ,.,
a) Pour x 0+ f"t>J xC'L-I ' d'ou (cf. theoreme 1.IV.l avec b = 0 et p = ex-l).
SI
ex 2,
l(ex) est divergente et si ex < 2,
1(':1.) est convergente.
sin x . .
b) Pour x -+ + 00, -----;- est le sIgne variable.
x
Si ex > 0 , le critère d'Abel s'applique et l'on en déduit que J (ex) est convergente.
Si ex 0, l'intégrale J (ex) est divergente.
[En effet, on a
(1)
J .. n1C sin x
dx = III + u 2 + ... + Un'
o X
où
f P 1C sin x J 1C sin u
(2) u - - dx = (-I)P du [poser u = x-(p - 1)].
P - (p-l)1C xC( 0 [u + (p- 1) n]Q
De la relation (2), on déduit
l 1C sin u J 1C sin u 2
lu 1 = du du = -
p ./o[u + (p-l) 7t"']cx o[n + (p-l)n]C'L pcxn cx '
donc
upf:lJo 0
lorsque
p -+ 00 (car a 0).
La série (un) est divergente, donc u l + u 2 + ... + Un ne tend vers aucune limite
. J ;.1Csin x
finie lorsque n -+ 00 et, par suite, - dx ne tend vers aucune limite finie
o Xcx
lorsque Iln -> 00.
L'intégrale J(a) est bien divergente.]
c) En synthétisant les résultats relatifs à l(a) et J(a), on obtient le résultat suivant:
J . + 00 sin x
dx est convergente pour 0 < a < 2 et divergente dans les autres cas.
o x
Remarquons que l'intégrale est absolument convergente pour 1 < a < 2, semi-
convergente, pour 0 < a 1 (cf exercice 1.111.3).
2 0 Application aux intégrales de Fresnel.
Il suffit d'effectuer le changement de variable légitime x = V X, alors
J + 00 J + 00 cos X J + 00 J + 00 sin X
cos x 2 dx = --1 dX et sin x 2 dX = - V - dX.
o 0 2V X 0 0 2 X
42
INTÉGRALES DE RIEMANN IMPROPRES
Dans les deux cas (X = d'OÙ la convergence.
La valeur de ces intégrales sera calculée plus loin par la méthode des résidus.
3° Application aux intégrales du type J: sin x« dx.
- Pour C( = 0 , l'intégrale est divergente.
1
- Pour C( > 0, on pose x = XC'L et il vient
J + 00 1 J + 00 sin X
sin XIX dx = - 1 dX.
-70 ex -70 1--
X (X
Il Y a convergence si, et seulement si, 0 < 1 - !. < 2, c'est-à-dire SI IX > 1.
ex
- Pour Cl < 0 le même changement de variables donne cette fois
J + 00 . 1 J + 00 sin X
Sln CZ dx = - - dX
-70 Cl -70 1-.!.
X ex
(échange des bornes d'où le signe).
1 1
Il Y a convergence si, et seulement si, 0 < 1 - - < 2, c'est-à-dire si - 1 < -.
ex
soit Cl < - 1.
En résumé, J'intégrale converge si, et seulement si, 1 Cli > 1.
1.IV.4.
1
Le changement de variable x = - est légitime et n'altère pas la nature de l'inté-
u
grale (théorème 1.11.3)
J I 1 f -7+ 00 sin u
sin - dx s'écrit alors du,
-70 X 1 U
Or cette dernière intégrale est absolument convergente, puisque
sin u 1 !.
u 2 u 2
et
J +OOdU
"2 est convergente.
1 U
L'intégrale étudiée est donc aussi absolument convergente. On remarquera que
l'intégrale existe sans que la fonction x 1-+ sin admette une limite pour x -+ 0+0
SOLUTIONS
43
I.IV.5.
Les fonctions x Log sin x et x Log cos x sont de signe constant (négatiO sur
[0, ], on peut appliquer le critère des équivalents :
Log sin x Log x, pour x 0+.
n
Or f 2 Log x dx est une intégrale convergente, donc J i Log sin x dx est con-
O O
vergente.
Le changement de variable x 1-+ - x transforme
n n
f - J -
2. 2
Log sin x dx en Log cos x dx.
O 0
On a donc bien le résultat : les deux intégrales proposées ont un sens et sont égales.
Soit 1 ]eur valeur commune
n n
f - -
2. 2
21 = 0 Log SIn xdx + Jo Log cos xdx
(écriture ordinaire, puisqu'il n'y a pas de confusion).
Le théorème 1.11.2. s'applique, il vient
n
2I = J:LOg (sin x cos x) dx,
c'est -à -dire
n
2I = f: [Log sin 2x - Log 2] dx.
n
Alors 21 = - Log 2 + J: Log sin 2x dx la dernière intégrale étant nécessai-
rement convergente (théorème 1.11.2.).
En posant 2x = X, on obtient
1t 1 f n
21 = - 2 Log 2 + 2 O Log sin X dX.
n
J n f i
Comme Log sin X dX = 2 Log sin X dX =
o o
1t
1t - X), on en conclut que 1 = - 2 Log 2.
21 (changement de X en
44
INTÉGRALES DE RIEMANN IMPROPRES
1.IV.6.
1 0 Considérons les majorations suivantes :
Isin 2nx Log sin xl ILog sin xl et Icos 2nx Log sin xl ILog sin xl.
Au voisinage de x = 0, Log sin x est équivalent à Log x. Les intégrales
n n
J o ILog sin xl dx et f o ILog xl dx sont donc de même nature.
. , 1t
Or J 2 'Log xl dx est convergente. ·
-70
En effet,
n 7t
J 2 ILogxl dx = lim J 2 -Logxdx = lim [X(1-Logx)] = 2 1t ( 1 - Log 2 ) ,
o £ O £ £-70
1t
donc J 2 ILog sin xl dx est convergente et, par suite, ln et J n sont donc absolument
-70
convergentes.
2° Puisque les intégrales considérées ont un sens (théorème 1.11.2.), on a
n
J 2 . sin (2n - 1) x
2nJ n + Kn- 1 = (2n cos. 2nx Log sin x + . dx
o sin x
1t
f 2 . sin 2nx cos x
= (2n cos 2nx Log sin x + . -cos 2nx) dx
o sIn x
7t
= [sin 2nx Log sin x - sin 2nx] = 0
(car, au voisinage de x = 0, sin 2nx Log sin x est équivalent à 2nx Log x, donc tend
vers zéro avec x).
Par ailleurs,
7t 7t
K K J 2sin(2n+1)X-Sin(2n-1)X J 2 2 2 d
n- n 1 = . dx = cos nx x
o sIn x 0
1t
= [ sin 2nx ] 2 = 0
nO'
d'où
1t
Kn = KI = -
2
et
. 1t
J. = - -.
n 4n
3° On a
1t
Il = f: 2 sin x cos x Log (sin x) dx = f: Log (sin 2 x) 2 sin x cos x dx.
SOLUTIONS
45
En po;ant sin 2 x = u, il vient Il = f: ILogl udu = Log u - ulà, c'est-à-dire
Il = - '2 (changement de variable légitime, théorème 1.11.3.).
On a
7r:
f 2 ( o. sin 2 nx cos X )
nln + Ln = n sin 2nx Log sIn x + . dx
o sin x
(puisque les intégrales ont un sens), d'où
7r:
f 2 [ . . cos 2nx cos x cos x ]
nln + Ln = n sin 2nx Log sin x - 2. + 2. dx
o sin x sin x
1
= '2 [(Log sin x) (1 - cos 2nx)] = [sin 2 nx Log sin x] = 0
(surtout ne pas séparer en deux intégrales non convergentes car le théorème 1.11.2.
ne s'applique plus dans ce cas), d'où
7r: 7r:
21 2 = -L 2 = - f: 4 sin x cos 3 xdx = - f: sin 2x(1 + cos 2x)dx
7r: 7r:
f 2 ( SIn 4X ) d _ [ COS 2x cos 4X ] 2
= - : sin 2x + . 2 x - + 2 + 8 0 '
c'est-à-dire
1
1 2 = - -.
2
Calculons Ln - Ln- l.
7r:
f - 1
Ln - Ln-l = : 2 [cos (2n - 2)x - cos 2nx] cotg x dx
7r:
= f 2 sin (2n -1) x cos x dx = f 2[Sin 2nx + sin (2n - 2)x] dx,
0-0
soit
7r:
_ _ _ ! [ COS 2n x cos (21l - 2)X ] 2
Ln L"-l - 4 + + 1 '
n Il- 0
donc
(- l)n - 1 (- 1)" - 1 - 1
4(L n - L n - 1 ) = - - 1
Il Il-
1 .
1 \ 2(n - 1)' n pair,
=> Ln - Ln-l = 4n(n -1) [2n -1 + (-l)n] = ) 1 . .
, 2n ' n ImpaIr.
On en déduit
1 1
L2p-L2p-l = L2p-I-L2P-2 = 2(2p -1) => L2p-L2p-2 - 2p -1 '
46
INTÉGRALES DE RIEMANN IMPROPRES
par suite,
1 1 1 1 1 1
L 2P = L 2 + 2p-l + 2p-3 + ... + 3= 1 + 3+ 5+ ... + 2p-l
et
t 1 1 1 1
L 2p + 1 = L 2P + 2(2p+ 1) = 1 + 3 + 5 +... + 2p-1 + 2(2p +1).
Alors
1 ( 1 1 )
1 2P = - 2p 1+ 3 +...+ 2p -l..
1 ( 1 1 1 )
/2P+l = - 2p+ 1 1 + 3+ ...+ 2p+ 1 + 2(2p+ 1) .
1.IV.7.
10 tH Il t est une fonction croissante de t pour t < 1, d'où pour 0 < t <
la majoration lit < 1 1 = 2, donc, pour 0 < t < à, on a
1- 2
f ' du
_ 1 2t
o -u
. d ( Log t ) 1 - Log t . .
L'expression dt t = t 2 est posItIve pour 0 < t 1, d'où
1
Log-
Logt 2 1
t ;> 1 = - Log 4 pour 2 t < 1.
2
ou
-Log (l-t) 21.
Par suite, puisque Log t < 0 pour 0 < t < 1, on a
Log t. Log (l-t) . 1
o < t - 2 Log t, SI 0 < t 2'
Log t. Log (l-t) .1
o < t - Log 4 · Log (1- t), SI 2 1 < 1.
1
Évidemment .r: Log t dt = f Log (1 - t) dt (changement de variable 1 - t = U
2
dans la seconde intégrale)
1 1
f 2 f 2 1 1 1
o Log t dt = [t Log t] - 0 J;ègc:::r: dt = 2 Log 2: - 2:.
SOLUTIONS
47
Donc 1 converge et, par définition même de la valeur d'une intégrale impropre
convergente, on a
. f y Log t. Log (l-t)
1 = hm J(x, y), avec J(x, y) = dt.
X-7+O x(O<X<.'/<l) t
Y-71-0
2° Calculons J(x, y) par intégration par parties, en prenant
II = Log t,
Log (1- t) + 00 t n
dv = dt = - L - dt pour - 1 t < 1,
t n=on+l
donc, a fortiori, pour 0 < t < 1, d'où
dt
du=-
t
et
+ 00 t n + 1
V = - L (n + 1)2
IJ=O
et, par suite,
[ + 00 t n + l ] y J - y + 00 t n
J(x. y) = - n o (n + 1)2 Log t x + x n o (n + 1)2 dt
+ 00 y"+ 1 + 00 xa+ 1 + 00 f y tn
- - n?;o (n + 1)2 Log y + n o (n + 1)2 Log x + n o x (n + 1)2 dt
( +00 yn ) ( +00 xn )
= - y n o (n + 1)2 Log y + n o (n + 1)2 x Log x
+ 00 y"+ 1 + 00 x"+ l
+ n o (n + 1)3 - n o (n + 1)3 .
+ 00 t n + 00 t n
3° n o (n + 1)2 n o (n + 1)3 sont des séries convergentes pour t = 1.
Leurs sonlmes sont donc fonctions continues de t sur [0, 1]. (Résultat connu.)
Par suite,
( +00 n )
Iim y L y Log y = 0,
)'-71-0 n=O (11 + 1)2
+ 00 x n
Hm " ( + 1)2 x Log x = 0,
x->+O 11.
n=O
. + 00 yll + 1 + 00 1
hm L (n + I)J = L n 3 '
y->1-0 n=O n=1
+ 00 xn + 1
Hm " - 0
X-7 +0 i.J (1'l + 1)3 - ,
n=O
d'où
+00 1
1 = L n3 .
n=1
48
INTÉGRALES DE RIEMANN IMPROPRES
I.IV.8.
1 0 La fonction à intégrer est continue sur [0, a[.
n n-t 1 1
Lorsque x a, on a Van - x n "-J a -;- n;; (a - x) -;; ,la fonction est donc équivalente
1
à K (a - x) n pour x a, comme n > 1 on en déduit que l'intégrale est convergente.
En posant x = at, ln s'écrit
r adt f-+l dt
ln = 0 Va"-ant n = ° V l- t n '
puisque a > 0, le changement de variable étant légitime.
2 0 Pour t E [0, 1], on a
n n
o 1/ 1-t V l- t n 1,
d'où
f 1 dt f I dt
_ 1 <: ln <: n ,
° °V l- t
soit
(1)
n-l
1 ln -.
n
3° D'après le 1 0 l'intégrale ln ne dépend pas de la constante a > 0 qui y figure.
Prenons f(a) au lieu de a, alors
ln = f-+!(Q) Il I(a) dt .
° V[f(a)]n - tll
Puisque f est monotone sur [0, a], le changement de variable t = f(x) est légitime
(théorème 1.11.2.), alors
f ->-a f'(x)dx
ln =
° V[f(a)]n - [f(x)]n
Sur [0, a] on a l'encadrement
o m f'(x) M,
d'où.. en posant
r ->-a n
ln =
-- ° V[f(a)]n - [f(xr"
dx
(2)
ln ln
M <: ln <: m .
SOLUTIONS
49
Application. On a x 1-+ cos x est décroissante pour 0 C;;;; x C;;;; (J C;;;; ' mais
cos 2 x-cos 2 0 = sin 2 0-sin 2 x et la fonction x..-+ sin x est croissante, elle vérifie par
ailleurs les hypothèses précédentes, avec
J' (x) = cos x, m = cos 0 et M= 1.
En utilisant la double inégalité (2) pour n = 2, il vient alors
f e dx 1 2
1 2 C;;;; V C;;;; _ 0 '
o cos 2 X -cos 2 0 cos
soit, puisque 1 2 = (calcul immédiat),
'TC f o dx 7r
2 ocos 2 X - cos 2 () 2 cos e.
I.IV.9.
Étudions
F ( X ) = f X J(t) - J(tx) dt
,8 et'
nous avons
F(X, 8) = f x J(t) dt _ f XX J(u) du,
E t EX U
en posant tx = u, donc
F(X, 8) = f EX J(t) dt _ f XX J(t) dt.
e: t x t
Rernarque. - On remarquera que si l'on écrit
(1) f + 00 J(t) - J(tx) dt = f -700 J"(t) dt _ f + 00 J(tx) dt
->-0 t ->-0 t ->-0 t
le changement de variable u = tx donne à nouveau l'intégrale f + 00 J(u) du et l'on
, .. r + 00 J (t ) - J( tx) -+0 u
en dedulralt que dt = o.
. ->-0 t
Or ce résultat est absurde; il provient du fait que la décomposition (1) n'est pas
légitime, Je théorème 1.11.2. n'étant pas applicable, chacune des intégrales étant
d . . J(t) A (h h ' .. )
Ivergente, pUIsque _.- f"toJ - ypot ese Il
R ' F(X t ) e t f +OOj"(t) d . (h h ' ... )
evenons a , 8. omme - t eXiste ypot ese III , on a
IX t
f XXJ(t)
Iim -dt = 0,
X-++ 00 X t
50
INTÉGRALES DE RIEMANN IMPROPRES
ainsi
J + OOf(t) - f(tx) . J EX f(t)
dt = hn1 - dl.
O t E-+O+ E 1
Utilisons 1 'hypothèse ii)
Va>O,380 tel que tE]0,80[ => A-a<f(t)<A+a,
d'où, en intégrant sur [e, ex] pourvu que sup (8, ex) < 80,
(A- ex) Log x <;; f" Xf(t) dt <;; (A + ex) Log x si x > 1
. E t
ou bien
(A + a) Log x J E XI(t) dt (A- a) Log x SI X < 1.
E t
Alors 'v' al > 0, 3 eo tel que 'v' 8 E ]0, 80[, on ait
1 J EXf(t)
- dt - A Log x < al
1 E t
(où al = Gt Log x). C'est la définition même de la linlite, d'où
J + 00 I(t) - f(tx)
dt = A Log x.
->0 t
On peut obtenir directement ce résultat par application du premier théorème de
la moyenne, puisque la fonction t ! a un signe constant sur [8, 8X].
t
J EXf(t) J EXdt
Alors - dt = f(rO -, où '1 est compris entre 8 et 8X (ou 8X et é;, si x < 1).
EtE t
Or, lim /(17) = A et lim J EX dt = Log x, d'où le résultat.
E-+O E-+O E t
Pour les applications t et et t cos t, on vérifie immédiatement les hypothèses i)
à iii). On a donc
J + 00 et - e tx
dt = Log x
o t
et
J +OO cos 1 - cos tx
dt = Log x.
-+0 t '
puisque dans chaque cas A = 1.
1.IV.I0.
1 0 Tout revient à prouver que les deux intégrales
1t
J 2 dx
-+0(sin 2 X)3
et
J -+1t dx
(sin 2 x)j
2
ont un sens.
SOLUTIONS
51
1t
L ,. ] f 2 dx d fin . [ a: 1 1 0 .1'
Integra e . lest e le en euet, ( . 2 ) 1 l"'toJ 2 pour x -+ +, CJ.
O (Sln 2 x)"3 sin x"3 x"3
théorème UV.I., avec b = 0 et {3 = ] et
1t
r 1t dx f i du
[poser II = 1t -x],
., (sin 2 x)1 = O(sin2 u){
2
donc l'intégrale A est bien définie.
La fonction t -+
1
2 devient infinie sur [0, + co[ pour les valeurs n'TC.
(1 + t 2 ) (sin 2 t)3
Pour montrer que
f x dt
o !
(1 + t 2 ) (sin 2 t) 3
a un sens il suffit de prouver que, pour tout n entier supérieur ou égal à 0, on a
f -+(n+l)7t dt
1 a un sens,
-+n7t _
(1 + t 2 )(sin 2 t)3
maIs
1
0< 1 <
(1 + t 2 ) (sin 2 t)3
1
1
(sin 2 t) 3
et
f <n+ 1)" dl 1 = f It dl 1
n7t _ 0
(sin 2 t) 3 (sin 2 t) 3
(car sin 2 t est périodique de période n) entraînent le résultat.
2° Pour nn < x < (n + l)n, on a les relations suivantes :
O 1 1 d "
< 1 + 2 < 22, ou
x n 1t
1 1 1
o < 1 < n 2 1t 2 1
(l+x 2 )(sin 2 x)3 (sin 2 x)3
et
f <n+l)7t dx < f (n+ 0 1t dx __
1 n 2 n 2 7t 1 - n 2 n 2 .
n7t - n -
(1 + x 2 )(sin 2 x)3 (sin 2 x)3
1
Posons .f(x) = 1 . On a alors la majoration suivante
(1 + x 2 ) (sin 2 x) 3
f x A ( COI )
f(t)dt S = 2 L 2: ' 'v'x E [0,00].
o n n=ln
52
INTÉGRALES DE RIEMANN IMPROPRES
La fonction f étant positive sur [0, 00[, on en déduit que f: f(t)dt est définie.
Sur [0, + 00[, f(x) devient infinie pour les valeurs nn (n entier positif ou nul) et
J +OO
cependant f(x) dx existe.
-+0
On a encore ici un exemple analogue à celui de l'exercice 1.1.9., fn'a pas de limite
pour x-+-+ 00.
2.
FONCTIONS D'UNE V ARlABLE
COMPLEXE
FONCTIONS HOLOMORPHES
1. - FONCTIONS D'UNE VARIABLE COMPLEXE.
1 0 Généralités.
a) Il s'agit d'étudier des applications d'un sous-ensemble E de C dans C.
Une telle application est définie par
z f(z) =f(x+iy) = P(x,y)+iQ(x,y) (P = Rej; Q = Imf).
Exemples : Z Z = x-iy, z e= = eXcosy+iexsiny.
b) C est muni de la distance naturelle d(zl' Z2) = I Z l- Z 21. - Les propriétés
générales concernant les limites et la continuité vont alors s'appliquer auto-
matiquement. On rappelle l'essentiel, dans ce qui suit, sous une forme adaptée
à la situation particulière considérée ici.
2 0 Limites.
a) Définition. - Soitf définie dans un voisinage de z 0 , Z 0 exclu, la définition
habituelle donne
limf=L<=> 'v'B>O, 3a>0, tel que O<lz-zol<a If(z)-LI<B.
z-+ Zo
Cette définition est équivalente à
lim Ref = Re L et lim lmf = lm L, pour (x, y) (xo, Yo).
b) Propriétés. - Tous les théorèmes généraux sur les limites sont applicables.
(Somme, produit, etc.)
3 0 Continuité.
a) Définition. - On a
f continue au point Zo limf(z) = f(zo).
=-+zo
54 FONCTIONS D'UNE VARIABLE COMPLEXE. FONCTIONS HOLOMORPHES
Cette définition est équivalente à
Re f et lm f sont continues au point (x 0, y 0).
b) Propriétés. - Tous les théorèmes généraux (somme, produit, etc.) sur
la continuité locale ou globale sont applicables.
4 0 Dérivation.
Soit f définie dans un ouvert Q contenant z 0, on a
f dérivable au point zoç>lim f(z)-f(zo) = Î.o,
z-+%o Z-Zo
)"0 constante complexe finie que l'on note alors J'(zo).
II. - FONCTIONS HOLOMORPHES.
Dans tout ce qui suit, Q désigne un ouvert de C.
1 0 Définition.
«fholomorphe dans Q <=> f dérivable en tout point de Q. »
2 0 Conditions de Cauchy.
Théorème 2.n.l.
On a la proposition suivante
P et Q de classe el dans Q et
f = P + iQ holomorphe dans Q <=> oP _ ôQ oQ oP
---, -=--
ox oy ox oy
(appelées conditions de Cauchy).
Par exemple, z z est holomorphe dans C,
mais z Z n'est holomorphe dans aucun ouvert de C.
3 0 Opérations algébriques usuelles.
a) Si f et g sont holomorphes dans l'ouvert Q, alors
f+ g et fg sont holomorphes dans Q,
f est holomorphe dans a-jzlg(z)=OI.
g
Les règles classiques de calcul des dérivées sont applicables ·
(J+g)' = J' +g',
(fg)' = f'g+fg',
etc.
FONCTIONS HOLOMORPHES
55
b) Si 1 est holomorphe dans un voisinage de Zo et si g est holomorphe dans
un voisinage de I(z 0), alors
gof:z g[f(z)] est holomorphe dans un voisinage de ZOe
4° Exemples de fonctions holomorphes.
i) Tout polynôme P(z) est holomorphe dans C.
ii) Toute fraction rationnelle P(z) est holomorphe dans q;-). zAo
Q( z) \ J = 1 ]
où les Zj sont les pôles de la fraction.
iii) e::', sin z, cos z, sh z, ch z, sont holomorphes dans C.
i'V) tg z est holomorphe dans q;_Î (2K+l) 1t j
(K=-OO 2
et
th z est holomorphe dans q; - î (2K + 1) 1t. j .
K=-OO 2z
La propriété d'holomorphie énoncée en i) et ii) résulte immédiatement
des propriétés algébriques a) sachant que l'app]ication z z est holomorphe
dans C.
La propriété d'holomorphie énoncée en iii) résulte du théorème suivant
Théorème 2.11.2.
Considérons une série entière (anz n ) dont le rayon de convergence R est non
nul [an E C].
CX)
La somme z fez) = L an zn de la série entière est une fonction holomorphe
n=O
dans le disque ouvert DR(O) = {z; fzl < R}.
Dans ce disque ouvert la fonction 1 admet une dérivée, f', qui est la somme
de la série « dérivée» :
CX)
f'(z) = L na n z n - 1 , 'v'z vérifiant Izi < R (*).
n=l
00 zn
Par exemple eoz = L - est holomorphe dans C (puisque R = 00)
n=O n!
00 n-l
( OZ ) ' Z oz
et e = L.. n- = e .
n= 1 n!
Ren1arques.
1 0 L'application répétée de ce théorème montre que la somme d'une série
entière possède une dérivée holomorphe à tout ordre.
2 0 Il sera énoncé au chapitre IV une propriété fondamentale des fonctions
holomorphes qui est une réciproque de ce théorème.
(*) On sait que la « série dérivée» a même rayon de convergence que la série initiale.
56 FONCTIONS D'UNE VARIABLE COMPLEXE. FONCTIONS HOLOMORPHES
III. - DÉVELOPPEMENT EN SÉRIE DE LAURENT.
1 0 Définitions.
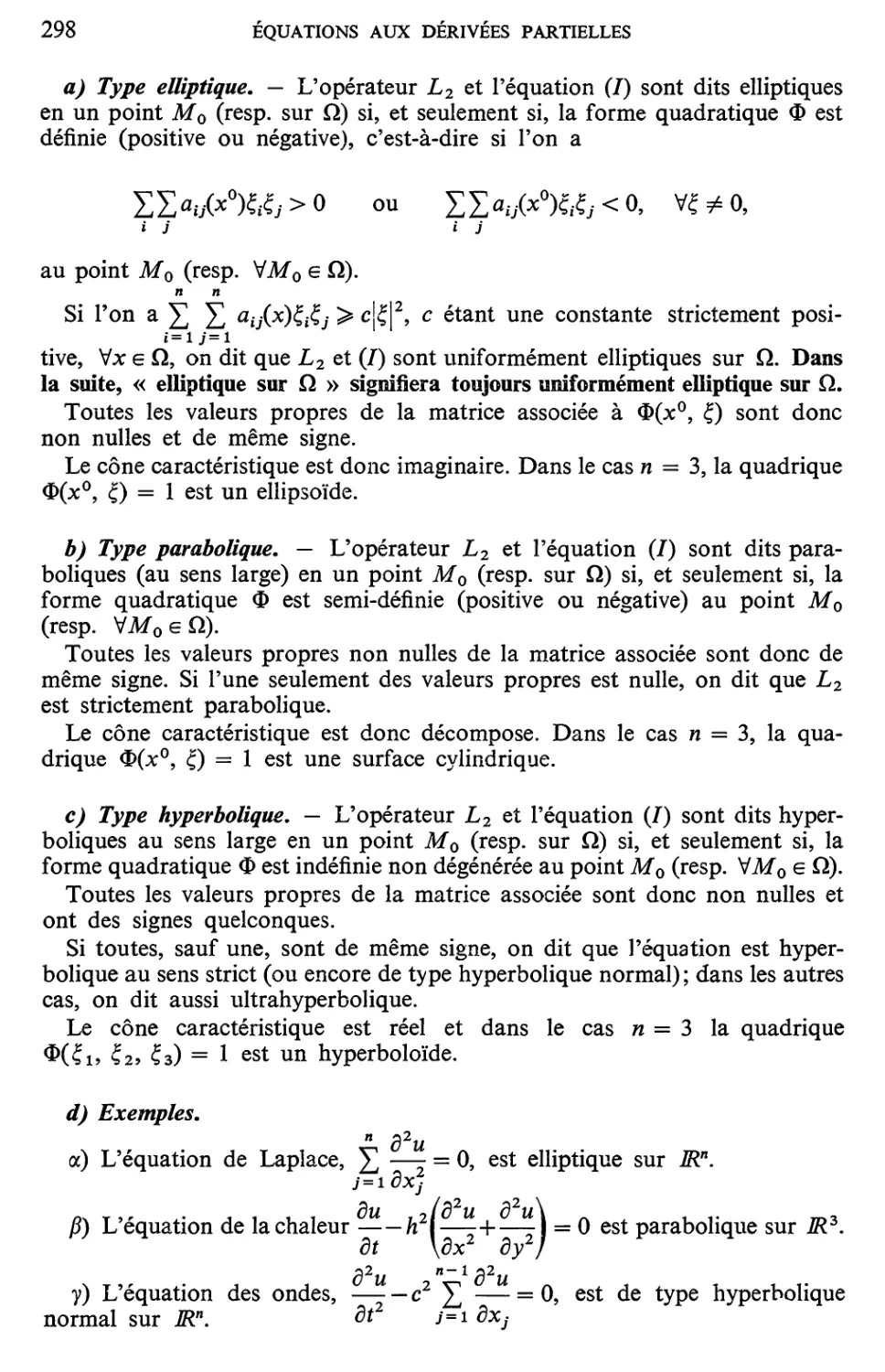
a) On appelle série de Laurent dans la couronne C zo (r, r') (centre Zo, rayons
r et r', avec 0 < r < r') toute série de la forme
y
..,---....,
", "",
" ....
, ....
1 ,.'--', \
, 1 Zo \ ,
1 :,. 1 1
\ \/\,,' J
\ ;"'1....- T 1
\ 1 /
'_ J? ,"
r-.,'......--...',
+ -1 00
L an(z-zo)n = L an(z-zo)n+ L Qn(z-zo)n,
-00 -00 n=O
o
1
la première série étant une série entière en
Z-Zo
convergente pour Iz-zoi > r, la seconde étant une
série entière en z-zo convergente pour Iz-zoi < r'.
()()
b) On dit qu'une fonction f de la variable z est
développable en série de Laurent dans la couronne C Zo (r, r') pour exprimer
que
+00
fez) = an(z - zo)n, \/z E C=o (r, r'),
-00
les deux séries entières en
1
et z - z 0 étant respectivement convergentes
z-zo
pour Iz-zoi > r et Iz-zo! < r'.
e) On dit qu'une fonction f de la variable z est développable en série de
Laurent au voisinage du point Zo pour exprimer que f est développable dans
le disque ouvert pointé
C=o(r)=jz; Iz-':o!<r, z#zo ,
où r est une constante positive.
2 0 Propriétés.
a) Toute fonction développable en serIe de Laurent dans une couronne
est holomorphe dans cette couronne et admet une dérivée holomorphe à tout
ordre dans cette couronne. Une réciproque importante sera donnée au chapitre
IV (théorème 4.11.1.).
b) On établit aussi que si f est développable en série de Laurent dans une
couronne ce développement est unique.
3° Exemples fondamentaux.
a) Fonction z 1 .
a-z
Pour 0 1 z 1 < a, le développement se réduit à une série entière C:1 -
1 00 zn
a-z = a R + 1 .
DÉVELOPPEMENT EN SÉRIE DE LAURENT
57
Pour 1 z 1 > a, le développement est une série entière en .!.
Z
Au voisinage de a, le développement se réduit au seul terme - 1.
z-a
b) Fractions rationnelles.
Le développement au voisinage d'un pôle Zj d'ordre aj est de la forme
j A 00
L k + L an(z-Zj)n,
k = 1 (z - Z j)Œk 0
la serie entière étant convergente pour 1 Z - Zj 1 inférieure au minimum des
distances de Zj aux autres pôles.
4 0 Développement des fonctions usuelles.
a) Pour les fractions rationnelles on procède à la décomposition en éléments
simples, puis on applique les résultats de l'exemple fondamental a) pour les
différents éléments et compte tenu de la couronne envisagée.
b) D'une manière générale on peut utiliser les développements en série
1
entière en et effectuer les opérations usuelles.
Z-Zo
Exemples :
z e z2
,
_ 00 ( _ 1)n
e z2 = L pour 1 Z 1 > o.
on! z2n
50 Pôles et points singuliers essentiels isolés.
Supposons f développable en série de Laurent au voisinage d'un point Z 0
00 00 00
fez) = L an(z-zo)n = L a_ m + L an(z-zo)n,
11=-00 m=l(Z-Zo)m n=O
\/z vérifiant 0 < Iz-zoi < r'.
Trois cas sont à envisager :
i) la série en 1 a tous ses termes nuls: a _ m = 0, 'v'm E JN*. - Dans
z-zo
ce cas la fonction f peut être prolongée par continuité en une fonction
holomorphe dans le disque {z Ilz-zol < r'} (cf. théorème 2.11.2.).
ii) la série en 1 ne comporte qu'un nombre fini de termes non nuls:
z-zo
00
" a_ m _ a_ 1 a-mo
L.J - +...+ ·
m=l (z_zo)m Z-Zo (z_zo)mo
Dans ce cas, on dit que Zo est un pôle d'ordre mo de la fonction f
58 FONCTIONS D'UNE VARIABLE /COMPLEXE. FONCTIONS HOLOMORPHES
Les fractions rationnelles P(z) entrent évidemment dans ce cadre;
Q(z)
jii) la série en 1 admet une infinité de termes non nuls.
z-zo
Dans ce cas, on dit que z 0 est un point singulier essentiel isolé de la
fO;Jction.t:
Par exemple,
.!. 00 1
e:z: 2 = L +1, 'v'z 0,
m=l m!z2m
donc 0 est un point singulier.
6 0 Résidu.
a) Définition. - On appelle résidu de la fonction / au point Zo [notation
Pj(zo)] le coefficient a-l' dans le développement en série de Laurent de / au
voisinage de Zo (lorsqu'un tel développement existe).
Exernple :
j(z) = = !+ f anz n au voisinage de 0,
SIn z Z 0
d'où Psin = (0) = 1.
b) Calcul pratique des résidus. - La méthode générale consiste à calculer
le déve]oppement en série de Laurent et à déterminer par ce calcul le coefficient
a_le
Dans le cas d'un pôle on peut utiliser les formules suivantes
z 0 pôle simple :
a-l = lim{z-zo)f(z);
:z:-+:z:o
Zo pôJe d'ordre n : a_ 1 = lim 1 [(z-zo)'y(z)]<n-l).
%-+%0 (n -1)!
Ceci s'applique évidemment aux fractions rationnelles.
On peut aussi utiliser le théorème suivant
Théorème 2.m.1.
Supposons que la fonction/puisse être décomposée sous la forme suivante:
j(z) = g(z) , où g et h sont holomorphes dans un voisinage du point singulier zoo
h(z)
On a alors la proposition suivante :
g(zo) valeur finie Ç> Zo pôle simple de j et pizo) = g(zo) .
h'{zo) h'(zo)
PROPRIÉTÉS DIVERSES
59
IV. - PROPRIÉTÉS DIVERSES.
1 0 Fonctions holomorphes et fonctions harmoniques.
Théorème 2.IV.l.
Sifest holomorphe dans un ouvert Q alors P = Refet Q = lmfsont des
fonctions harmoniques dans Q (c'est-à-dire sont de classe C 2 et vérifient
ô 2 u 02U
],équation de Laplace f1u-+- = 0 dans Q).
ox 2 ôy2
Théorème 2.IV.2.
Si P (resp. Q) est une fonction harmonique de classe C 2 dans un ouvert
simplement complexe Q (*) on peut associer à P (resp. Q) une autre fonction
harmonique, définie à une constante additive près, telle que
fez) = P(x, y) + iQ(x, y).
soit holomorphe dans Q.
La recherche de la fonction harmonique associée peut se faire par la méthode
générale.
Si P est donné, Q a pour différentielle totale
dQ = - ap dx+ ap dy, d'où l'obtention de Q.
oy ox
On peut aussi utiliser la technique suivante :
on détermine une solution cp par identification en essayant d'técrire
P(x,y) = p( z;z , z 2/ )
sous la forme
<p(z)+q>(ZJ
2
,
où <p est holomorphe.
Toutes les solutions sont alors données par cp(z)+iC, C est une constante.
2 0 Transformation conforme.
Théorème 2.IV .3.
Soit f : z fez) = Z holomorphe dans un ouvert connexe (*) et telle que
f'(zo) 0, Zo E Q, alors la transformation z Z conserve les angles avec
leur sens au point ZOe
(*) La propriété de connexité pour un sous-ensemble 0 de C est équivalente à la suivante :
« 'v' Ml et M 2 E 0,3 une ligne polygonale d'extrémités Ml et M 2 qui est contenue dans Q. »
La propriété « simplement connexe» pour un sous-ensemble 0 de C peut être définie par
.Q contient tous les points de l'intérieur d'une ligne polygonale fermée simple contenue dans O.
(V oir aussi chapitre 3, 1, c.)
60 FONCTIONS D'UNE VARIABLE COMPLEXE. FONCTIONS HOLOMORPHES
On dit qu'une telle transformation est conforme.
(V oir exercice 2.4.0. pour l'étude de la réciproque.)
3 0 Fonction homographique.
La fonction homographique est définie par
21---+ Z = az + b
,
cz+d
ad - bc ¥= O.
On considèrera ici le plan complexe comme possédant un seul point à
.
l'infini. Il sera noté C.
On a alors les résultats suivants :
. .
i) l'application z H-Z est une bijection de C sur C ;
ii) elle possède toujours deux points doubles distincts ou confondus;
iii) elle conserve le birapport de quatre nombres Zj, j = 1, 2, 3, 4 ;
iv) !'ensen1ble des droites et des cercles du plan est transformé en /ui-
nlême ,.
Le cas particulier c = 0 correspond évidemment à celui des similitudes.
(V oir exercices 2.IV.8. et suivants pour d'autres propriétés intéressantes.)
2.1.1.
.
2.1.2.
..
2.11.1.
..
2.11.2.
.
2.11.3.
.
2.11.4.
.
2.11.5.
.
2.11.6.
..
EXERCICES DU CHAPITRE 2
Soit P et Q les deux paraboles d'équations respectives y = x 2 et y = 2x 2 ,
A le sous-ensemble ollvert de C limité par P et Q. On considère la fonc-
tion z f(z) = 1 si Z E Ll et f(z) = 0 si z Ll.
Montrer que la limite de f lorsque z 0, en restant sur une droite issue
de l'origine est indépendante de cette droite choisie. Peut-on en conclure
que f admet une limite lorsque z O?
Trouver la limite de ( 1 + ) m, Z E ([; lorsque m _ + <X) .
Formes diverses des conditions de Cauchy.
Écrire les conditions de Cauchy lorsque z = reiO et f(z) = P(r, 0) + iQ (r, 0).
Mêmes questions pour
z = x + iy, fez) = p (x, y)eiw(x,y) et pour z = reiO, fez) = p(r, O)e iw (r,6).
Soit P la fonction de deux variables définie par
x
(x, y) P(x, y) = 2 + 2 .
X Y
Déterminer les fonctions réelles (x, y) Q(x, y) telles que
z = x + iy ((J(Z) = P(x, y) + iQ (x, y),
soit une fonction holomorphe dans C - {O}.
Soit (x, y) Q (x, y) = cos x sh y. On peut trouver P(x, y) tel que la
fonction f(x + iy) = P(x, y) + iQ (x, y) soit holomorphe dans C.
Trouver les fonctions z f(z), holomorphes dans C dont la partie réelle
ne dépend que de r = Izi.
Si P + iQ est une/onction holomorphe les faisceaux de courbes P(x,y) = À
et Q (x, y) = Il sont orthogonaux.
Fonctions non holomorphes.
Si au point z = x + iy la fonction z f(z), [fez) = z= P(x,y) + iQ(x,y)]
n'est pas holomorphe (on dit aussi n'est pas monogène), on note Z' m le
62 FONCTIONS D'UNE VARIABLE COMPLEXE. FONCTIONS HOLOMORPHES
2.ll. 7.
.
2.D.8.
...
2.m.1.
.
2.111.2.
.
2.111.3.
.
nombre complexe dérivée de Z dans la direction de coefficient angu-
laire m.
Montrer que ['image de Z décrit un cercle (r) lorsque m varie.
Comment caractériser le cas des fonctions holomorphes à l'aide de (r)?
O ' a a
perateurs oz et oz .
Soit les opérateurs différelltiels suivants:
a 1 ( 0 iÔ )
oz = 2 ox + oy .
of
Montrer que f, /zololnorphe au point Zo, entralne oz (zo) = 0 et
, of of
f (zo) = az (zo) = ax (xo, Yo), où Zo = Xo + iyo.
a 1 ( ai A )
oz = 2 ax - oy ,
Appliquer ce résultat aux fonctions
ZHo z et z Ho ax + if3y, a, f3 E IR.
00
Soit f(z) la somme de la série entière f(z) = L anz n , an E ([ et Z E <C
o
supposée convergente sûr le disque ouvert D = {z ;Izl < I}.
Montrer que, si les conditions suivantes sont remplies:
00
al ¥= 0 et Lnlanl lall,
2
alors f est injective sur D (on dit aussi que f est univalente Sllr D) et que
de plus la série est convergente sur le disque fermé.
Développer en série de Laurent dans une courOllne de centre 0 la fonctioll
1
ZHo z2-4z+ 3'
en envisageant les différents cas possibles.
Développer en série de Laurent, dans les conditions indiquées,
j(z) = Z2 l ' dans la couronne Ci (1, );
z -
j(z) = z3 _ 1 ' dans la couronne C l(r l , r2), avec 0 < rl < 1 < r2 < V3.
1
La fonction z Ho Z4 _ 1 est-elle développable en série de Laurent dans la
couronne de centre 1 et de rayons 1 et 2?
2.111.4.
.
2.m.5.
.
2.IV.t.
.
2.IV.2.
.
2.IV.3.
.
2.IV.4.
.
2.IV.5.
..
2. IV .6.
.
EXERCICES DU CHAPITRE 2
63
Déterminer les pôles (et l'ordre de multiplicité) ou les points singuliers
essentiels isolés des fonctions suivantes:
1
Z* + l'
1
(e Z + 2) 2 '
1
e Z - .
1
(z2 + z + 1)2'
1
z
sh z'
sin z'
Reprendre l'exercice précédent; calculer le résidu relatif à chaque pôle
ou à chaque point singulier isolé.
S h ' (.; oP oP .
i P est une fonction armonique, ver("er que Pl = xa + y a est aussI
une fonction harmonique. x y
Retrouver le résultat en remarquant que Pl est la partie réelle d'une
fonction holomorphe.
Si P es une fonction harmonique, Log [ ( P ) 2 + ( P ) 2] est également
harmonique. x y
Montrer que, sif est holomorphe dans un ouvert Q, on a .d(11/ 2 ) = 411'/2.
Le carré du module d'une fonction holomorphe est-il une fonction har-
monique?
Fonctions sous-harmoniques.
Une fonction u de classe e 2 dans un ouvert Q est dite sous-harmonique
dans Q si, et seulement si, .du ;> 0 en tout point de n.
Montrer que si f est holomorphe, le module de f est une fonction sous-
harmonique. Si f est holon20rphe les fonctions I/IP,p ;> 0, et Log (1 + 1/12)
sont sous-harmoniques (cf. exercice précédent).
Vérifier que la fonction (x, y) Ho P(x, y) = Log (x 2 + y2) est une fonction
harmonique dans C-{O}. Montrer qu'il n'existe pas de fonction Q de
classe el dans C-{O} telle que P+ iQ soit holomorphe dans C-{O}.
(On supposera que Q existe, on calculera dQ et l'on montrera une contra-
diction en intégrant l dQ, avec (1) cercle de centre 0, de rayon a > O.)
(r+)
Comparer ce résultat avec celui du théorème 2.IV.2.
Soit (I) un arc de courbe simple orienté issu de l'origine. Montrer que
l'arc (r') transformé de (I) par z Ho zn, n E lN, n ;> 2 admet en 0 une
demi-tangente OT' définie par (Ox, OT') = n( Ox, OT), où OT est la
demi-tangente en 0 à (I).
Comparer ce résultat avec celui du théorème 2.IV.3.
64
2.IV.7.
..
2.IV.8.
..
2.IV.9.
.
2.1V.I0.
..
2.IV.ll.
..
FONCTIONS D'UNE VARIABLE COMPLEXE. FONCTIONS HOLOMORPHES
Détermination des transformations conformes.
Soit b une transformation ponctuelle de classe CI dans un d0/11aine D, le
déterminant fonctionnel ne s'annulant pas dans D, c'est-à-dire
b : (x, y) (X, Y), X = ({J (x, y) et Y = t/J (x, y),
({J et t/J de classe CI dans D, avec
a({J ot/J _ 0({J ot/J ¥= 0 dans D.
oX a y a y a x
Soit Zo = Xo + iyo un point de D, en écrivant que les transformées des
droites d'équations x = Xo, y = Yo, d'une part, et x- y = Xo- Yo,
x+ y = Xo + Yo, d'autre part, sont orthogonales,. nlontrer que l'on a,
soit ({J + it/J, soit ({J - it/J holomorphe dans D.
1 0 S . Z z + i D , . l ,/".' l , 1 . .
Olt z = 1 . etermlner es tranSjOrlneS par app [cation
z-
z Z des domaines suiva/lts:
Al = {ZE <C; Izi < 1},
A 2 = {z = x+ iy; x > 0 et y > O},
.d 3 = {z = x + iy; 0 < y < l}.
2° Déterminer le transfornlé du donlaÙze
.d = {z = x+ iy; x-y-l > O},
par l'application z Z = Z2.
Fonction homographique.
Déterminer les points doubles de la tra/lSfo/"111atioll homographique
az+b
z Z = cz + d ' c ¥= O.
Soit C( et f3 les affixes de ces points lorsqu'ils sont distincts, Inontrer que
l'on a alors
Z-C( z-C(
Z - f3 = k z _ f3 ' k est une constante non nulle,
et interpréter géométriquement ce résultat.
Soit y l'affixe du point double lorsque C( = f3.
Montrer que l'on a
1 1
Z - + h, h est une constante non nulle,
- y z- y
et interpréter géométriquement ce résultat.
az+ b
Soit z Z = cz + d ' z = x + iy.
Calculer ZZ -1, en fonction de z et z. Déterminer les transfornlatio/ls
homographiques qui transforment l'axe réel y = 0 en le cercle unité
IZI = 1 et le demi-plan y > 0 en le disque ouvert IZI < 1.
Déterminer les transformations homographiques qui conservent le cercle
et le disque unité (on utilisera le calcul de l'exercice précédent 2.IV.I0.).
SOLUTIONS
2.1.1.
Soit D une droite quelconque passant par l'origine d'équation y = Àx. Pour x
« assez petit », soit 0 < lx 1 < C( le point d'affixe z = x+ iy reste dans la région
extérieure à .d, par suite
lim f(z) = o.
z O
zeD
On ne peut en déduire que f admet une limite pour z 0 (et l'exemple proposé
est en fait un contre-exemple). En effet fn'a pas de limite au point O. Tout disque
ouvert de centre 0 contient à la fois des points pour lesquels f(z) = 0 et f(z) = 1,
donc quel que soit 8 > 0 on ne peut trouver C( tel que
o < Izi < C( => If(z) 1 < 8.
2.1.2.
) m
, . z
EcrIvons Z = (1+ m ' avec z = x+iy.
Si z est réel (<=> y = 0) alors lim Z = é".
Cas général : On cherche la limite de IZI et Arg Z. On a
m m
_ ( m + X)2 + y2 ) 2 _ ( 2x x 2 + y2 ) 2.
IZI - m 2 - 1 + m + m 2 '
donc
Pour m + 00
m ( 2x x 2 + y2 )
Log IZI = 2" Log 1 + m + m 2 ·
( 2x x 2 + y2 ) 2x
on a Log 1 + - + 2 '" -,
m m m
si
x 1= 0,
d'où
lim Log IZI = x,
soit
lim IZI = eX.
Si
x=o
,
y 1= 0,
lim Log 1 ZI = 0,
soit
lim IZI = 1 = (é")o.
Puisque
-+ 0, Arg ( 1 + ) -+ Arg 1 = 0 (2n).
ln m
.
66 FONCTIONS D'UNE VARIABLE COMPLEXE. FONCTIONS HOLOMORPHES
On peut donc utiliser
y
Arg Z = m Arc tg + J
m .x
donc
my
Arg Z""" m = y,
pour
m + 00,
alors
lim Arg Z = y.
On en conclut que dans tous les cas : la limite de Z est é (cos y+ i sin y), c'est-à-
dire e Z , ce qui généralise le résu]tat connu dans le cas réel.
2.11.1.
On peut utiliser les deux techniques suivantes :
1 0 Transformation des conditions de Cauchy à l'aide des changements de variable
ou de fonctions.
2 0 Détermination directe des conditions nécessaires d'existence d'une!dérivée
indépendante de la direction choisie en un point donné.
Cas de z = re i6 et f(z) = P(r, 8) + iQ (r, 8).
Première méthode. - Les formules x 2 + y2 = r 2 , y = tg e entraînent par diffé-
. . x
rentIatlon
dr= dx+ dy= cos (Jdx+ sinedy
r r
et
-y x -sine c ose d
d(J = 2 + 2 dx + 2 + 2 dy = dx + - x.
x y x y r r
Par suite,
oP = cos (J oP _ Sin r () P (J oP. oP cos (J oP
a x ôr u et a y = sIn (J ôr + r a (J
oQ oQ
et l'on a les formules analogues pour ox et oy .
Les conditions de Cauchy :
oP oQ
ô x = oy '
oP oQ
ôy = - ox '
sont donc équivalentes à
oP L) sin e oP oQ. (J oQ cos e
or cos U - -r a e = or sIn + 0 e r '
oP sin (J + cos (J oP = _ oQ cos () + sin e oQ .
or r a e or r a e
(1)
(2)
SOLUTIONS
67
Les deux équations (1) et (2) permettent d'obtenir et de manière élémentaire.
Le déterminant étant égal à ! on obtient aisément
r
(3)
oP 1 oQ
or = r 00 '
1 oP oQ
r Ô 0 = - or'
qui sont les conditions cherchées.
Deuxième méthode. - En un point fixé Zo étudions la dérivée dans la direction
o = Cte.
1- 10 P-Po . Q -Qo
= + 1 ,
Z - Zo z - Zo z - Zo
avec z - Zo = (r - ro) e i60 , d'où
1 . 1 - fo oP . 0 . oQ . 0
lm = - e- Z 0 + z - e-' o.
z-+-z Z - Zo or or
o
0=6 0
Étudions maintenant la dérivée dans la direction r = Cte.
1- 10 = P- Po + i Q- Qo ,
z - Zo z - Zo z - Zo
avec
z - Zo = ro (e i6 - e-i6 o ),
soit
1-/0 1 [ P-Po . Q- Qo ]
=- . . +z . . .
z - Zo ro e Zo - e'oo e Zo - e-zoo
Lorsque 0 0 0 , e i6 - e i6 0 est équivalent à i(O - Oo)e iOo , d'où
1 . 1 - fo i oP . 0 1 oQ . 0
lm = - - - e-' 0 + - - e-' o.
z-?zo Z - Zo ro 00 ro 00
r = ro
La dérivée étant indépendante de la direction choisie, les deux expressions trouvées
sont identiques, d'où
oP 1 oQ
or = r a 0
et
oQ 1 oP
ar = - r ôO .
Cas de z = x +iy et f(z) = p(x, y)eiro(x,y).
Première méthode. - Puisque P = P cos ro et Q = p sin ro, en dérivant par
rapport à x, puis y, on obtient
oP op. oro
- = cos ro - - p sm ro -
OX ôx ôx'
oP op. ôro
- = cos ro- - psmro-
ôy ôy ôy
et
oQ . op oro
= sIn ro + P cos ro ,
oy uy uy
ôQ . op ôro
oy = sIn ro Ô y + P cos ro ôy '
68 FONCTIONS D'UNE VARIABLE COMPLEXE. FONCTIONS HOLOMORPHES
d'où, en traduisant les conditions de Cauchy,
(4)
op. oro . a P oro
cos ro ox - p sIn ro ox = sIn ro oy + p cos ro oy '
. a p oro op. oro
sm ro ô x + P cos ro ox = - cos ro oy + P sm ro oy .
(5)
Les deux équations (4) et (5) donnent de manière élémentaire
(6)
op _ oro
8x - p oy
et
a p oro
8y = - P ox .
." . 1 - 10 pei(f) - poe iwo
Deuxlelne methode. - A partIr de = + .(y ) ' que l'on écrit
1 .c z - Z o x - X o 1 - Yo
sous a lorme
1 - 10 (p - Po) e iw Po (ei(f) - ei(f)o)
= +
z - Zo z - Zo z - Zo
,
on obtient
1 . 1 - 10 ° a p oro °
lm = e'Wo - + ip - e,(f)o
Z-+Zo z- Zo ox 0 ox
Y=Yo
et
1 . 1 - 10 . op. 8ro
lm = - ie'(f)o - + poe,(f)o-
z zo Z- Zo oy oy'
x=xo
on obtient, en identifiant, les conditions (6).
Cas de z = re i6 et f(z) = p(r, 8)e i (f) (r,8).
Première méthode. - On développe les calculs à partir des formules (6) à l'aide de
x = r cos () et y = r sin e. On obtiendra ainsi
(7)
1 op 1 oro
p or = r oe
et
1 op oro
p of} = - r or .
Deuxième méthode. - La même technique que dans les cas précédents donne
1 . 1 - 10 O ( -8 ) op oro ° -8 )
lm = e' (f)o 0 - + ip - e'«(f)o 0
z-+zo Z - Zo or 0 or
(J = 6 0
et
1 . 1 - 10 e i «(f)o-8o) op Po ( -8 oro
lm = - i - + - e i (f)o 0) - ,
z-+zo Z - Zo ro 8 f} ro of}
P=Po
ce qui entraîne à nouveau les conditions (7).
SOLUTIONS
69
2.11.2.
D'après les conditions de Cauchy, il est nécessaire que LlP soit nul, c'est-à-dire
que P soit harmonique, donc que l'on ait
0 2 P 0 2 P
IlP = ox 2 + oy2 = o.
dans l'ouvert considéré
On vérifie ici que LlP = 0 dans IR? - {O, O}.
Déterminons Q(x, y) en tenant compte des conditions de Cauchy
ap oQ
(1) ox (x, y) = oy (x, y),
oQ oP
(2) ax (x, y) = - oy (x, y),
oQ 2xy y
(2) <=> ox (x, y) = (x 2 + y2)2 <=> Q(x, y) = - x 2 + y2 + K(y).
'v' (x, y) E IR.2- {O,O}.
Alors, (1) <=> K'(y) = O'<=> K(y) = Ka qui est une constante réelle.
y
En résluné : Q(x, y) = - 2+ 2 + Ka,
x y
Ka est une constante réelle,
donc
x- iy. x- iy . 1 .
j(z) = P(x, y) + iQ(x, y) = 2+ i + zKa = ( . ) ( +. ) + ,Ka = :: + zKa.
x y x- zy X zy .:.,
En se reportant au théorème 2.IV.2, on constate que C-{O} n'est pas simplement
connexe, mais que le résultat dans ce cas est cependant valabJe.
2.11.3.
La fonction Q(x, y) = cos x sh y vérifie
IlQ = 0, 'v'(x, y) E IR 2 = <C,
donc on peut trouver P vérifiant
IlP = 0, 'v'(x, y) E IR 2
et tel que f(z) = P(x, y) + iQ(x, y) soit holomorphe dans IR 2 .
En utilisant les conditions de Cauchy,
oP oQ
ox (x, y) = ay (x, y),
oQ oP 'v'(X,Y)E IR 2 ,
ax (x, y) = - ay (x, y),
70 FONCTIONS D'UNE VARIABLE COMPLEXE. FONCTIONS HOLOMORPHES
on obtient
oP
- = cosxch y
OX '
puis P = sin x ch y + Ko, Ko est une constante réelle.
Alors
j(z) = P(x, y)+ iQ(x, y) = sin x ch y+ i cos x sh y+ Ko
= sin x cos iy+ cos x sin iy+ Ko
= sin (x + iy)+ Ko = sin z+ Ko.
Dans ce cas on vérifie le théorème 2.IV.2, puisque q; est simplement connexe.
2.11.4.
Soit j(z) = P(r, (J)+iQ(r, (J). La condition imposée est équivalente à = O.
Or les conditions de Cauchy en coordonnées polaires s'écrivent (cf. exercice 2.11.1.)
1 oP oQ oP 1 oQ
r 0(J = - ()r et 8r = r a-(j'
d'où l'on déduit d'abord = 0, c'est-à-dire Q = cp«(J), ensuite
oP oQ
r or = 0(J = a = Cte,
puisque les fonctions r G o P et ° o Q (J ne dépendent respectivement que de r et de (J. On
en déduit donc r
P = a Log r+ rx
et
Q = a (J+ /3,
rx et f3 étant des constantes réelles, d'où
P+ iQ = a[Log r+ ;0]+ C.
On verra au chapitre 5 que sous certaines conditions cette fonction peut être
appelée logarithme de z.
2.11.5.
Soit M un point d'intersection des courbes
(r;) : P(x, y) = À,
(r' IL)
Q(x, y) = J1,
).. et Il fixés.
La normale en M à (r;..) est définie par
( Op
grad P = ox '
OP )
oy ,
SOLUTIONS
71
de = même la normale en M à (r' Jl) est donnée par
( ÔQ
grad Q = ox '
oQ )
oy ·
Les conditions de Cauchy entraînent que l'on a
->
grad P . grad Q = 0,
d'où le résultat cherché.
2.11.6.
Posons m = tg <p, la direction du coefficient angulaire nI est caractérisée par z- Zo
= ile ilp , où il E m.. La dérivée, dans cette direction, s'obtient en cherchant la limite
de
f(z)- f(zo)
À icp ,lorsque A. -+ o.
lie
Or on a
f(z)- f(zo) P-Po 0 . Q-Qo 0
ile icp = -r- e- ICP + 1 il e-lq>,
avec
P-Po
A.
P(xo+ A. cos <p,yo+ il sin q»-P(xo Yo)
A.
et
Q-Qo
A.
Q (xo + il cos q>, Yo + A. sin q» - Q (xo, Yo)
A.
On en déduit
J o P-Po oP ) oP ( ) .
lm A. = _ 0 (xo, Yo cos q> + _ 0 Xo, Yo sIn <p
l O X Y
et
1 . Q - Qo oQ ) oQ ( ) 0
lm A. = _ 0 (xo, Yo cos q> + _ 0 Xo, Yo SIn q>,
 O X Y
d'où
z' ln = ( : cos ({J + sin ({J) ri", + i ( cos ({J + sin ({J) ri",.
En cherchant les parties réelles et imaginaires on obtient alors
oP ( Op OQ ) oQ .
et = ex cos 2 q> + oy + ox cos q> sin q> + oy sln 2 q>
et
p = Q x COS2 q> + ( - oP + Q ) cos ({J sin ({J - ap sin 2 ({J.
(/ ox oy 8y
72 FONCTIONS D'UNE VARIABLE COMPLEXE. FONCTIONS HOLOMORPHES
En passant à l'angle 2cp les expressions de ex et /3 s'écrivent
(1)
( OP OQ ) ( OP OQ ) . ôP oQ
2a = - - - cos 2<p + - + - SIn 2({J + - +
OX oy oy ox ox oy
et
2/3 = ( OP + OQ ) cos 2cp + ( OQ _ OP ) sin 2<p + aQ _ ap
oy ox oy ox ox oy ,
Xo et Yo étant fixés et qJ variant de 0 à 2n, les équations (1) et (2) sont les équations
paramétriques en ({J du cercle (r) ayant pour centre le point de coordonnées
(2)
1 ( OP OQ )
2: ox + oy ·
! ( OQ _ OP )
2 OX oy
et pour rayon R
1
= ! [( OP _ OQ ) 2 + ( OP + OQ ) 2 ] 2.
2 ox GY oy OX
(Puisque 2a = A cos 2({J + B sin 2 qJ + C et 2/3 = B cos 2 ({J - A sin 2 ({J + C', on véri-
fier que (2a - C)2 + (2/3 - C')2 = A 2 + B 2 .)
Etudions l'exemple de la fonction z Z
oP oQ
ox = - oy = 1
et
oP èQ
oy = ox = O.
Pour tout point Zo = (xo+ iyo) les coordonnées du centre de (r) sont (0,0) et le
rayon de (r) vaut 1, il s'agit donc du cercle unité.
Pour qu'une fonction soit holomorphe il faut que la dérivée Z soit indépendante
de la direction, autrement dit il faut que le point représentatif de Z soit fixe. Ceci
ntraîne que le rayon de (r) doit être nul.
( OP OQ ) 2 ( OP OQ ) 2 ...
Or - - - + -- + - = 0 est équIvalent a
8x oy oy ox
oP _ oQ _ 0
ex oy - ,
oP oQ
oy + ox = o.
On retrouve les conditions de Cauchy.
Inversement si la fonction est holomorphe les conditions de Cauchy ont lieu et
R = O. Cette dernière condition est donc caractéristique des fonctions holomorphes
(P et Q étant évidemment supposés de classe el conformément à la définition).
2.11.7.
1 holomorphe au point Zo entraîne la validité des conditions de Cauchy en ce point.
Or
of = ! ( 01 i Of ) = ! ( OP _ oQ ) + ( 8 Q + OP )
oz 2 OX + oy 2 OX oy 2 ox oy'
of
donc oz = o.
SOLUTIONS
73
Par ailleurs, on a
af = ! ( OP + Q ) + ! ( oQ _ OP )
oz 2 ox oy 2 OX GY
et, compte tenu des conditions de Cauchy, on a donc
! = oP + i oQ = f'
oz ox ox
au point considéré.
Pour Z Z on a % = 1, donc cette fonction n'est holomorphe en aucun point de C.
Pour z ax+ if3y, on obtieTlt
of 1
oz = 2 (a- 13),
d'où œ = /3 est la seule possibilité, c'est-à-dire fez) = œz.
2.11.8.
1 0 Il s'agit d'établir que
Zl E D, Z2 E D : Zl Z2 => f(zl) "1= f(z2).
Forn1ons f(Z2)- f(Zl)' il vient
!(Z2) - !(Zl) = (Z2 - Zl) [al + an(z -1 + ZlZ -2 + ... + Z _1)].
d'où
00
(1) If(Z2) - f(zl) 1 = IZ 2 - z l l al + L a n (zi- 1 + ... + Z -l) ·
2
00
Étudions le module de la série L a n (z2 + 1 + ... + z - l) ': on a
2
lan(z -l + ZIZ -2 + ... + z -l)1 1Zla n lr n - l où Izi = r,
donc
100 00
I lL an(z -l + ... +Z -l) L nlanlr n - 1 .
2 2
00 00
Comme L n\a n lr n - 1 < L nlanl, puisque r < 1, on en conclut que
2 2
cc
L nlan\r n - 1 < la 1 1,
2
d'après la condition imposée.
74 FONCTIONS D'UNE VARIABLE COMPLEXE. FONCTIONS HOLOMORPHES
En appliquant lu+vl lul-Ivl, SI lui Ivl on déduit alors de (1)
(2) 1!(Z2) - !(Zt)! IZ2- Z tl (Ia tl - nlanlr n - t ).
L'expression entre parenthèses étant strictement positive, (2) montre immédiatement
que l'on a
!(Z2) = !(Zl) => Z2 = Zl'
d'où la propriété demandée.
2° On veut établir que, sous les conditions données, la série:(anznrest convergente
pour Izi = 1. Il suffit donc d'étudier la série (Ia n !); on a
nlanl
lanl la o l+la 1 1+ l..J-,
o 2 n
d'où
m 1
L lanl laol + la 1 1 + 2 !a 1 1,
o
puisq ue
00 n 1 ail 1 1 00 1
L - _ 2 L nlanl 2 - laI!.
2 n 2
Ainsi on a
m 3
L lanl laol+ 2 lal!'
o
ce qui assure la convergence absolue de la série (aJ et la propriété demandée.
2.m.1.
On décompose d'abord la fraction rationnelle
1 1 1
Z2 - 4z + 3 - 2(z -1) - 2(z - 3).
Couronne Co (0,1).
On a alors un développement de Taylor valable dans le disque ouvert (0,1)
1 00
- = Lz n
l-z
o
et
1 1 00 z"
3 - z = "3 L 3 ft '
o
d'où
1 1 00 ( 1 )
z2-4z+3 = 2 t 3 n + t -1 zn,
pour Izi < 1.
SOLUTIONS
75
Couronne Co (1,3).
On a alors
1 1 1 00 1
-=--- -
z- 1 z 1 - l...J zn + 1 '
1-- 0
z
pour Izi > 1,
et
1 00 zn
3 - z = L 3 n + 1 '
o
Izi < 3,
d'où
1 1 0 1 00 zn
- zn-l " -
Z2 - 4z + 3 - 2 - "2 3 n + 1 '
1 < Izi <f3.
L.
Couronne Co (3, 00).
Le développement de 1 du cas précédent reste toujours vaJable. Par contre
z-
1 1 00 3 n
z - 3 = [ 3 ] = L zn+ 1 '
zl-- 0
z
Izi > 3,
d'où
2 3 2 1 ( 1 - 3 1 n ) zn - l.
Z - z+ = -
-O'J
2.111.2.
. 1
FonctIon Z2 + 1 ·
En décomposant la fraction rationnelle, on obtient
1 i 1 i 1
--=--.-+-.-
Z2 + 1 2 z - i 2 z + i.
Posons z - i = Z, il vient
1 i 1 i 1
Z2 + 1 = - 2 . Z + 2. 2i + Z.
Puisque jZj < , a fortiori, < 1, d'où le développement de 2i1 Z :
1 00 (_ l)nzn
2i+ Z = (2i)n+ 1 '
pour IZI < 2.
76 FONCTIONS D'UNE VARIABLE COMPLEXE. FONCTIONS HOLOMORPHES
Ainsi
1 i i n -1 ( . ) ft
Z2 + 1 = - 2(z - i) + '0 2n+l Z - 1 ,
dans Ci (1, ).
On remarquera que ce développement est d'ailleurs valable dans la couronne
ouverte Ci (0, 2),
. Z
Fonction 3 1 -
z - z
Les pôles de f(z) = z3 _ 1 sont évidemment les raCInes cubiques de l'unité
1, j et j2, d'où la décomposition de la fraction rationnelle,
z 1 ( 1 j2 j )
=- +-+
z3 - 1 3 z - 1 z - j z - j2 ·
Dans la couronne C 1 (rl, r2), avec 0 < Yl < 1 < Y2 < V3, (cf. figure) la fonction
est donc développable en série de Laurent. En posant z-l = Z, on voit qu'il s'agit
. 1 1
de développer les expreSSIons Z + 1 _ j et Z + 1 _ j2 -
Or
1 1 1 00 ( - l)n zn
Z + 1 - j = 1 - j . Z = L (1 - j)n+ 1
1+- 1 . 0
-J
et, en changeant j en j2,
1 00 (-I)nzn
Z + 1 - j2 = (1 - P'),,+ 1 ·
Or
ix
1 - j = V3 e -6"
et
ix
I-j2 = V3e6,
d'où
1 1 (n+1) ix
- e 6
(1 - j)n+ 1 - 3 n; 1
et
1 _ 1 -{n+l} =
(1 - j2)n+1 - 3 n 1 e ,
donc
3 1 00 ( l) n [ ix 2x. i1t 21t ]
Z _ _ "" - (n+l)6"-T ' -{n+ 1) 6" + Ti n
3 _ 1 - Z + n+l e + e Z,
z 0 3
SOLUTIONS
77
c'est-à-dire
( ) 11 ( nTC 'Tt ) 11
3z 00 2 - 1 cos - - - Z
l " 6 2.-
z3 - 1 = Z + L..J n+l '
o 3
donc finalement
3z 1 00 2 (- 1)11 . n TC 11
z3 - 1 = z - 1 + L n+l SIn 6 (z - 1) ·
o 3
2.lll.3.
1 2zkx
Lesquatrepôlesdelafonctionz z4-1 sontdonnésparzk = e 4 ,k= 0,1,2,3.
A l'intérieur de la couronne indiquée il existe deux points z 1 = i, z 3 = - i, pour
lesquels la fonction n'est pas holomorphe. Elle ne peut donc pas être développable
dans cette couronne (III, 2°).
2.111.4.
a) Les pôles de z4 1 vérifient
. in: iK n:
--+-
z4 + 1 = O<=> z4 = - 1 = e-in+2iKn:<=> Z = e 4 2.
On obtient quatre pôles z l, Z2, z3 et z4 en donnant à l'entier relatif K, quatre valeurs
successives. Par exemple, K = 0, 1, 2, 3,
Zl = e
4
,
in:
Z2 = e 4 ,
3ix
Z3 = eT
et
Sin:
Z4 = e 4 .
ix
78 FONCTIONS D'UNE VARIABLE COMPLEXE. FONCTIONS HOLOMORPHES
Remarquons que K = 4 donne à nouveau le pôle z 1. En effet,
ix 2 .
-- + IX
e 2
=e
i'TC
2 - Z
- 1.
1
b) Les pôles de (Z2 + z + 1)2 sont définis par
Z2 + z + 1 = 0 <=> z = j ou z = j2
( j = _ ! + ïV3 et j2 = _ ! _ ;113 )
2 2 22.
l En écrivant (Z2 + z + 1) sous la forme (z - j) (z - j2) on constate que l'on a
1 1
(z2 + Z + 1)2 - (z - j)2 (z - j2)2 ·
Autrement dit, j et j2 sont des pôles d'ordre 2.
c) Les pôles de sont déterminés par sin z = 0, c'est-à-dire ZK = Kn, K E?L.
sin Z
d) Les pôles de h z doivent vérifier
s Z
sh z = o<=> - i sin iz = o<=> sin iz = o<=> iz = Kn, KE 7L <=> Z = ihn, h E 7L
(en effet sh z = - i sin iz, 'v'z E C).
z
A h = 0 correspond Z = 0 qui n'est pas un pôle car - h tend vers une limite finie
o s z
lorsque z .
Z
shz =
Z
Z3 Z5
Z + 3! + 5! + ...
1
Z2 Z4
1 + 3! + 5! + ...
;=;0 1.
En résumé, la fonction h z admet une infinité dénombrable de pôles qUI sont
s z
. . .,
- 4i n
,
- 3in
,
- 2l n,
- in, ln, 2in, 3ln, 4ln,...
1
e) Les pôles de la fonction (e Z + 2)2 sont définis par la relation suivante
e Z + 2 = 0 <=> e Z = - 2 <=> e Z = 2e ix <=> e Z = e Log 2+ix <=> z = Log 2 + in + 2iKn
(en effet, eZl = e Z 2<=> Zl = Z2 + 2lKn, K E 7L).
1
La fonction (e Z + 2)2 admet donc une infinité dénombrable de pôles
ZK = Log2+ in(2K+ 1), 'v'KE7L,
qui sont d'ordre 2 car
(z-ZK)2
e Z + 2 = e Z - eZIC. = (z - zK)e ZK + 2! e ZK + ...
=> (e% + 2)2 = (z - ZK)2 [e%K + Z K e%K + ...f
SOLUTIONS
79
f) En utiIisan(e Z = f Z," , '</ZE C, on obtient
n =0 n.
.!.' 00 1 1
z2 _ __
- n o n! z2n,
v z non nul.
Nous: constatons que z = 0 est un point singulier essentiel isolé de la fonction
--.- 1
Z e z2 .
2.111.5.
,. a) Si une fonctionf(z)l= « z ) admet un pôlesimp1ezo, son résidu correspondant pz.
-...- Il Z
est donné par la formule suivante:
g(zo)
pZo = h'(zo) .
Ici g(z) = 1 et h'(z) = 4z 3 , donc
1 - Zp
pZ p = 4Z3 = ,
p
p = 1, 2, 3, 4
(puisque z: = -1).
En particulier,
1 1 3i7t
PZl = 3i7t = 4 e 4 ·
4e 4
b) Si une fonction f(z) admet un pôle Zo d'ordre m, son résidu correspondant
est donné par la formule suivante :
1 ! dm-l i
pZo = (m _ 1)! dzm-l «z - zo) m f(z)) z=zo.
Calculons le résidu correspondant au pôle j qui est d'ordre 2.
On a
. 2 (z - j)2 (z - j)2 1
(z-J) f(z) = (z2+z+ 1)2 = (z_j)2(Z_j2)2 = (z_j2)2 '
donc
l , d ( 1 ) l 2 2 2 2 2i
Pj = 1! ? dz (z - j2)2 z=j = U2 - j)3 = U - 1)3 = 3U - j2) = 3V3i = - 31/3 .
c) Même méthode qu'en a) :
1 1
pZ rc = cos zK = cos Kn = (- 1)K.
80 FONCTIONS D'UNE VARIABLE COMPLEXE. FONCTIO S HOLOMORPHES
d) Même méthode qu'en a).
Les pôles simples zK sont définis par
ZK = iKn,
K E 7L*.
Alors, on a
_ iKn _ iKn _ K.
pZ K - h .K - K - (- 1) lKn.
c 1 n cos n
e) Nous avons vu que (cf. exercice 2.111.4.)
[ Z Z ] 2
(e Z + 2)2 = (z - ZK)2 e ZK + ! K e ZK + ... = (z - ZK)2 e 2ZK [1 + (z - zK) + ...],
donc
1
-
(e Z + 2)2
1 1 1
(z - zK)2 e 2ZK 1 + (z - zK) + ... - (z - zK)2 e2ZK [1 - (z - zK) + ...]
e-2ZK e- 2ZK
+ ...
z-zK
- (z- zK)2
et, par suite,
1
P = - e- 2ZK = - -
ZK 4'
car e=k + 2 = O.
f) Nous avons vu que
1
e z2 =
00 1 1
') -.-
J-J 11' Z 2n .
n=O .
. 1
Le coefficIent de - est nul, donc Po = O.
Z
2.IV.l.
P étant une fonction harmonique, elle est partie réeIle d'une fonction holomorphe
dans tout domaine simplement connexe (théorème 2.1V.2.).
P est alors de classe Coo en utilisant la remarque 2 du paragraphe III (et le théorème
4.1.2. du chapitre 4).
L'expression Pl est donc a fortiori de classe C 2 et les calculs qui suivent sont légi-
times. Successivement, on a
OPl oP a 2 p 02p
---+x-+y-
OX - OX OX2 oxoy'
OPl oP 02p 02p
oy = oy + y oy2 + x oxoy '
02Pl a 2 p 03p 03p
ox2 = 2 OX2 + x ox3 + y ox 2 0Y
SOLUTIONS
8r.
et
02Pl 02p 03p 03p
--2-+y-+x
Oy2 - Oy2 Oy3 OX8 y 2'
donc
o 0
LlP 1 = 2LlP + x ox (LlP) + y 8y (f1P).
Comme f1p = 0 par hypothèse, on conclut LlP 1 = o.
Autre méthode.
, oP oQ, ,
Soit f(z) = P(x, y) + iQ(x, y); f est holomorphe alors f (z) = _ 0 + i , c est-a-
oP oP x ox
dire f'(z) = ox - i oy (condition de Cauchy).
Or f holomorphe entraîne f' holomorphe et la fonction z zf' est également
holomorphe.
Or
1 oP oP ( OP OP )
zf = x ox + y oy + i y ox - x 8y ,
oP 8P.
donc Pl = :Re (zf') est bien harmonique et il en est de même de y OX - x oY '
(qUi n'est autre que x + y ).
2.IV.2.
Le calcul est analogue à celui de l'exercice précédent.
En posant Pl = Logu, avec u= ( r + ( r = I grad Pj2, on calculera.
OPl OPI 82Pl 02Pl
OX ' oy , pUIS ox 2 ' 8y2 ·
On trouve ainsi
OPl 1 ou
ox = "il . ox '
82PI = _ ( OU ) 2 + ! . 2U
ox 2 u 2 ox U ox 2
et les relations analogues en y, d'où l'on déduit
1 [( OU ) 2 ( OU ) 2 ] 1 [ 02 U OlU ]
LlP--- - +- +--+-
1 - u 2 ox oy U ox 2 oy2
donc
(1)
1 \ -> 1 2 1
LlP l = - 2 grad U + - Au.
u u
82
FONCTIONS D'UNE VARIABLE COMPLEXE. FONCTIONS HOLOMORPHES
Or
Ou _ 2 ( _ 02p + p 02 P )
OX - OX ox 2 oy oxoy
et
_0 2U = 2 [( 02 P ) 2 + P q3P + ( 02P ) 2 oP 03 P ]
ox 2 ox 2 OX ox 3 oxoy + oy ox 2 0y ·
02U
On obtiendra de mên1e oy2 .
On vérifie alors que /lu peut se mettre sous la forme
fut = 21 grad 1 2 + 21 grad r + 2 grad P grad L\P;
02p 02p .
rmais P étant harmonique /lP = 0 et ox 2 = - oy2 ' ce qUI permet
(2) L\u = 41 grad : 12.
En effectuant 1 grad U 1 2 , on obtient
d'écrire
1_> 1 2 [( 02P ) 2 ( 02p ) 2 ] ôP 2
(3) ! grad u = 4u OX2 + oxoy = 4u grad ox '
, en tenant compte de la propriété : P est harmonique.
Alors
4 oP 2 4 OP I 2
/lp = - - grad- + - grad-
1 u OX U ox'
soit P 1 = 0, ce qui établit la propriété.
On peut faire une remarque analogue à celle qui a été indiquée à l'exercice précé-
. dent. Pl est la partie réelle d'une fonction holomorphe qui est ici une détermination
.de la fonction multiforme Logf'(z) dans un domaine où /'(z) o. Ceci nécessite de
se reporter au chapitre 5 où se trouvent les indications sur de telles fonctions.
2.IV.3.
1
Puisque Ifl = (p2 + Q2)2, on a
01/1 2 ( OP OQ )
ax = 2P oX + 2Q OX '
0 2 11'12 _ ( OP ) 2 02p 02Q ( OQ ) 2
ox 2 - 2 ox + 2P ox 2 + 2Q ox 2 + 2 OX '
0 2 1/1 2
:avec le terme analogue en Oy2 ' on obtient
L\(IfI 2 ) = 2 [( : r + ( : r + ( r + ( r] + 2PL\P + 2QL\Q.
SOLUTIONS
83'.
Comme P et Q sont des fonctions harmoniques on peut conclure
Ll( 1/1)2 = 41f' 1 2 .
On en déduit que le carré du module d'une fonction holomorphe n'est jamais.
une fonction harmonique, sauf le cas trivial où cette fonction holomorphe est
constante.
2.IV.4.
p
Ifl P est une fonction sous-harmonique. - Soit v = Ifl P = u 2 avec u = p2 + Q2;.
02V
le calcul de ox 2 donne
\ -2 ( OP OQ ) 2
2 p(p - 2)u 2 P -;;;;- + Q-
a v OX ox
GX 2 = J P -1 (( OP ) 2 ( OQ ) 2 a2p 02 Q )
r + pu 2 OX + ox + P ox 2 + Q ox2 '
donc
, p -2 [( oP aQ ) 2 ( OP OQ ) 2 ]
1 p(p - 2)u2 P - + Q - + P - + Q -
ox ox oy GY
, p 2 [( OP ) 2 ( OQ ) 2 ( OP ) 2 ( OQ ) 2 ]
Av = + pu 2 - (p2 + Q2) ax + ax + ay + (Jy
p
\ + pu2-1(p p + QLlQ).
Les conditions de Cauchy et P = Q = 0 entraînent l'expression réduite sui-
vante :
1 -2 [( oP OQ ) 2 ( OP è Q ) 2 ]
l p 2 U 2 P -,,- + Q - + P - + Q-
, ox ax ay ay
Llv = / + 2pu -2 [(P 2 + Q2) (( : r + ( r)
( OP Q OQ ) 2 ( OP Q OQ ) 2 ]
-P-+ - -P-+-
OX ox oy oy.
En développant la dernière expression entre crochets on constate que tous les
termes se réduisent donc à
-2 [( oP OQ ) 2 ( OP OQ ) 2 ]
Llv = p 2 U 2 P - + Q - + P - + Q-
ox ox oy oy'
ce qui démontre bien la propriété. En prenant le cas particulier p = 1 on voit que
le module d'une fonction holomorphe est une fonction sous-harmonique.
84 FONCTIONS D'UNE VARIABLE COMPLEXE. FONCTIONS HOLOMORPHES
Cherchons à quelle condition ce module peut être harmonique. En supposant
IPI+ IQI 0 la condition Llv = 0, avec p = 1, entraîne
( p oP +Q OQ ) 2 + ( p oP + Q OQ ) 2 = 0
ox ox oy oy ,
-c'est-à-dire {conditions de Cauchy)
(p2 + Q2) [( = r + ( r] = 0,
ce qui est équivalent à
oP _ oQ _ 0
ox - ox - ,
"Soit j(z) = C.
Le calcul fait est d'ailleurs général: aucune puissance du module n'est harmonique
sauf dans le cas banal où j(z) = constante.
Log (1 + 1/12) est une fonction sous-harmonique. - Soit
w=Log(1+lfI 2 )=Logv, avec v=1+P2+Q2.
Le calcul de l'exercice 2.IV.2. est alors valable jusqu'à la formule (1), u étant
remplacé par v (puisque les dérivées de la constante 1 sont nulles).
On écrira donc
1 1 1
Llw = - 2 grad vl 2 + - Llv.
v v
En tenant compte des conditions de Cauchy on vérifie que
-) -)
Igrad vl 2 = 4(P 2 + Q2) Igrad PI2 et Llv = 4 Igrad PI2
d'où l'on déduit que
l1w = [- :2 (v-l) + ] \ grad P12,
soit
4 1
Llw = "2 grad PI2
v
west donc bien sous-harmonique.
2.IV.5.
, On vérifie immédiatement que (x, y) Log (x 2 + y2) est une fonction harmonique
dans CC-{O}. Supposons qu'il existe une fonction Q de classe Ci dans CC-{O}, telle
que P+ iQ soit holomorphe dans CC-{O}.
On a nécessairement
oQ oP -2y
OX = - oy - - x 2 + y2
et
oQ oP 2x
oy = ox = x 2 + y2'
d'où
-2ydx+ 2xdy
dQ = dans C - { O}.
x2 + y2
SOLUTIONS
85
Si (r) est une courbe simple d'extrémités A et B situés dans C-{O}, on a alors
f r""À dQ = Q (B) - Q (A)
AB
et cette valeur est nulle pour toute courbe fermée; en particulier, on aurait sur le
cercle r (0, a)
f dQ = O.
r+
Or le calcul, immédiat en posant x = cos t, y = sin t, donne
f dQ = 4n,
r+
d'où la contradiction.
On remarquera que C-{O} n'est pas simplement connexe d'où l'importance de
l'hypothèse « domaine simplement connexe » dans le théorème 2.IV.2. qui ne peut
s'appliquer ici.
2.IV.6.
Si z(t) représente l'arc (r) les hypothèses entraînent
----+ ----+
z(O) = 0 et (Ox. OT) = Arg z'(O) [si z'(O) 0],
en choisissant t = 0 comme valeur du paramètre à l'origine.
L'arc (r') transformé de (r) est alors défini par t zn(t) et la tangente à l'origine
----+ ;-;:t.
à (r') peut être obtenue en cherchant la limite de (Ox, OM') lorsque M (t) -+ O.
----+ ----+
[On ne peut appliquer la relation (Ox, OT') = Arg Z'(O), puisque l'on a ici préci-
sément Z'(O) = nzn-l(O)z'(O) = O.]
Or
----+ zn
(Ox, OM') = Iim Arg z = Iim Arg -
t O t O t
et
zn Z
Arg t = n Arg t (mod. n) (puisque t réel).
Ainsi
---7 --+ ----+
(Ox, OT') = n Arg z'(O) = n (Ox, OT).
On en déduit que la transformation z zn n'est pas conforme au point O.
On voit donc l'importance de l'hypothèse !'(zo) '1= 0 dans l'énoncé du théorème
2.IV.3.
86 FONCTIONS-D'UNE VARIABLE COMPLEXE. FONCTIONS HOLOMORPHES
or..
2.IV.7.
Les onditions d'orthogonalité entraînent les relations suivantes
\ (1)
<
1 (2)
?_Cf? ocp + ot/J ot/J - 0
ox oy ox 8y - ,
( OCP ) 2 _ ( OCfJ ) 2 + ( 0t/1 ) 2 _ ( 0t/J ) 2 = 0
ox oy ox GY ,
les valeurs des dérivées étant prises au point (xo, Yo).
La première condition donne
(3)
ocp = k at/1
ox oy
et
ot/1 ocp
ox = - k oy '
,. l ,. . . ocp ot/1 ocp ot/J 0 A 1 d ,., ocp ot/J
ecrlture egItln1e, pUIsque _ 0 _ 0 - _ 0 entrame que es erlvees et
x Y (IY X oy oy
ne s'annulent pas simultanément.
En reportant les expressions (3) dans (2) on obtient
(e - 1) [( r + ( r] = 0,
, .. d . k 2 1 d ' .. l " . d o cp a t/J
c est-a- 1re =, apres a men1e remarque au SUjet e _ 0 et-;;;-.
y oy
Si k:= 1, on retrouve les conditions de Cauchy: Lafonctionf est holomorphe dans D.
Si k =-1, on constate que la fonction f est holomorphe (j = cp- it/J) et la trans-
formation donnée change le sens des angles.
Ainsi, sous les hypothèses faites, les seules transformations conformes, que l'on
peut obtenir sont celles qui proviennent des fonctions holomorphes.
2.IV.8.
, z+i . Z+i
1 0 En resolvant Z = z _ l ' on obtIent z = Z -1 et cecI va nous permettre
d'étudier directement les transformés des domaines indiqués.
a) Transformé de Ll 1 (fig. 1). - On a
Izi < 1 <=>
Z+i
Z - 1 < 1.
SOLUTIONS
87
Soit A et B les points d'affixes respectifs - i et 1, la:condition écrite est équivalente à
MA
MB < 1.
y
FIG. 1.
Le domaine transformé de 1 soit f(Ll 1 ) est donc le demi-plan ouvert déterminé
par la seconde bissectrice des axes et contenant le point - i. (Puisque cette bissectrice
est médiatrice du segment AB.)
b) Transformé de Ll 2 (fig. 2). - En coordonnées cartésiennes z = x + iy,
Z = X + iY, la relation initiale s'écrit
. X 2 +y 2 _X+Y+i(X- Y-l)
x + zy = (X -1)2 + y2 ,
donc
x > 0 <=> ! (1)
Y > 0 (2)
X 2 + y2_X+ Y>O,
X-Y-l>O
L'inégalité (1) caractérise l'extérieur du disque fermé dont la circonférence a
pour équation X 2 + y 2 - X + y = o.
y
œ
FIG. 2.
L'inégalité (2) caractérise le demi-plan ne contenant pas l'origine définie par la
droite d'équation Y = X-l, d'où le domaine f( 2).
88 FONCTIONS D'UNE VARIABLE COMPLEXE. FONCTIONS HOLOMORPHES
c) Transformé de Ll3 (fig. 3). - La condition 0 < y < 1 est équivalente à
X-Y-l
o < (X _ 1)2 + Y2 < 1,
c'est-à-dire
! X - Y - 1 > 0,
X 2 + y2 - 3X + y + 2 > o.
y
o
FIG. 3.
Le domaine f(Ll 3 ) est donc obtenu à partir de la droite d'équation Y = X-l
et du cercle
( 3 ) 2 ( ] ) 2 1
X - 2: + y + 2. - 2 = o.
Dans ces trois exemples on remarquera que les courbes frontières transformées
des courbes frontières droites ou cercles sont bien des droites ou des cercles ( IV,
3°, propriété IV).
2° Soit Z = X + i Yet z = x + iy. La relation Z = Z2 entraîne donc
X= x 2 _y2,
Y= 2xy.
La transformée de la droite x- y-l = 0 est la courbe d'équation paramétrique
x= x 2 -(x-l)2, Y= 2x(x-1),
x 2 -1
c'est-à-dire la parabole Y = 2 .
Le domaine cherché est donc l'extérieur de la parabole de foyer 0 et de directrice
¥= -1.
2.IV.9.
Les points doubles sont définis par l'équation
z(cz + d) = az + b,
soit
cz 2 + z(d-a) -b = 0,
équation du second degré qui possède toujours deux racines distinctes ou confondues.
SOLUTIONS
89
(Dans le cas c 0 ces racines sont à distance finie; si c = 0 une racine est le point
à l'infini : les transformations étudiées sont les similitudes qui ont été exclues par
l'hypothèse du texte : c O.)
1 0 Soit ex, les deux racines quand elles sont distinctes.
nous obtenons
Z-a
Formons Z - {3'
(a - ca)z + b - ad
Z - a = cz + d '
d'où
Z - a (a - ca)z + b - ad a - ac z - a
Z - f3 = (a - c{3)z + b - {3d = a - pc x z - {3
( . b - ad b - {3d )
pUIsque - a et a _ {3c = {3 ;
a- ac
donc nous avons
Z - a z - a a - ac
(1) Z {3 = k {3 ' avec k = f3 -
- z- a- c
O · k k (a - ac)2 . k 0
n peut exprImer sous la forme = d b et l'on a bIen .
a - c
Soit donc A et B les points doubles, M et nz les images Z et z, la relation (1) se
traduit géon1étriquement par
= Ikl : ,
(MB, MA) = Arg k + ( mB , mA) (mod. 2n).
On en déduit la construction géométrique de M lorsque m est donné : M est à
l'intersection du cercle du faisceau à points limites A, B définis par
MA mA
- = I kl - = Cte
MB mB
et:de l'arc de cercle passant par A et B défini par
-> ->
(MA, MB) = - Arg k + (mA, mB) = Cte
(mod. 21t).
a-d
2 0 Cas des racines confondues. - Alors (d - a)2 + 4bc = 0 et y = 2C-
Formons
1 cr+d cr+d
Z - ')' = z(a - yc) + b - yd = (a - yc)(z - y)
( puisque b - yd = _ Y ) .
a- yc
On peut donc écrire
1 cy + d
= x
Z - y a - yc
1 c
+ ,
z - y a - yc
on vérifie que cy + d = 1, d'où le résultat cherché
a- yc
90 FONCTIONS D'UNE VARIABLE COMPLEXE. FONCTIONS HOLOMORPHES
1 1 2c
Z - y = z - y + a + d '
2c
avec h = a + d 1= o.
soit
1
(2) Z _ y
1
--+h
z- Y ,
On interprète géométriquement cette relation (2) en posant
Z'= 1
z- y
et
,
z -
1
z- y'
et en étudiant la transformation
('b)
1
U .
u- y
Cette transformation ('b) est le produit de la translation u ll-}' par la trans-
position circulaire de centre 0, de puissance 1, d'axe Ox (on appelle transposition
---?
circulaire de centre w, de puissance p et d'axe wt le produit commutatif de la symé-
---?
trie par rapport à wt par l'inversion de centre w et de puissance p).
2.IV.I0.
Le calcul de ZZ est immédiat à partir de la relation
- -
- (az+b) (az+b)
ZZ = __ -
(cz+d)(cz+d)
et l'on obtient
- -
- (laI 2 -lcI 2 )lzI 2 +23te [(ab-cd)z]+ IbI 2 -ldl-
ZZ -1 = Icz:f-dl 2
a) La condition IZI = 1 pour z = x réel entraîne
ZZ-l =0,
donc
(laI 2 -lcI 2 )x 2 +(ab+ba-cd-dc)x+ Ib1 2 -ld1 2 = 0,
ceci doit avoir lieu, quel que soit x, d'où l'on déduit les conditions nécessaires
lai = Ici,
Ibl = Idl
et
- -
3te (ab) = 3te (cd),
qui sont équivalentes à :
I = 1
c '
I = 1
et
3te ( ) = 3te ( ).
(On suppose que l'on a Ici 0, ce qui est loisible, et Ibl 0, sinon la condition
SOLUTIONS
91
'1bl = Idl entraîne Z = qui ne répond pas à la question.)
Les nombres comple es et '!. ayant même module et rmême ! l partie réeIJe sont
a c .. ·
:soit égaux, soit conjugués. L'égalité ne convient visiblement pas, on a donc
: =( )= .
h) La condition ZZ-l<O pour z=x+iy;y>O entraîne, compte tenu des
conditions déjà trouvées,
- - --
[ab-ba-(cd-cd)]y = ki,
où k est un réel positif. Cette expression s'écrit aussi
2i[lm b- lm (cd)]y = ki.
Comme on a
lm (a b) = lal 2 x lm ( ) = Icl 2 x lm ( ) = -lcl 2 x lm ( ),
on en déduit
lm ( ) = 41 12 > 0,
soit
lm ( ) < o.
c) Conclusion. - Si l'on pose = - C, Z doit nécessairement s'écrire
z=
c
b
z+-
a . z-'
= e 'W -,
d z-Y
z+-
c
avec lm , > 0,
a a d 6 -
(puisque - = 1 on pose - = eiCJ), de plus - = -...=- = - ,).
cee a
On vérifie maintenant que l'expression trou"ée est suffisante : pour z réel on a
bien IZI = 1, pour z = x+iy, y > 0, on a
z- ,
- < 1, puisque lm , > 0,
z- ,
-
le segment formé par les images de , et , admettant Ox pour médiatrice. Toutes les
transformations homographiques cherchées sont donc de la forme
z- ,
Z = eiCJ) _ ,
z- ,
avec
lm , > o.
92 FONCIIONS D'UNE VARIABLE COMPLEXE. FONCTIONS HOLOMORPHES
2.IV.l1.
On utilise le calcul fait au début de l'exercice 2.IV.I0.
a) La condition IZI = 1 pour Izi = 1, entraîne
laI 2 - Icl 2 + 2 3te ([ab - cd]eill') + Ibl 2 - Idl 2 = o.
(En posant z = eill'.)
On a donc
!a1 2 + Ibl 2 - (lcl 2 + Id1 2 ) + 2 [3te (ab - cd) cos qJ - lm (ab - cd) sin qJ] = o.
Ceci doit avoir lieu, quel que soit qJ, d'où l'on déduit les conditions nécessaires
suivantes :
- - --
9te (ab - cd) = 0, lm (ab - cd) = 0, lal 2 + Ibl 2 = Icl 2 + [dI 2 ,
qui sont équivalentes à
(1)
- -
ab = cd
et
(2)
lal 2 + Ibl 2 = Icl 2 +lldI 2 .
En supposant e et b différents de 0 (ce qui est légitime pour c, si l'on suppose b:= 0),
on trouve la transformation Z = eiCJ)z qui est une solution évidente. On peut écrire
= = À à partir de (1).
e b
Soit a = Àe, d = Àb, (2) entraîne alors
1Il1 2 1el 2 + Ibl 2 = lel 2 + IÀ121b1 2 ,
soit
(1 - IÀI2)(lbI 2 - Ic1 2 ) = o.
Alors, ou bien IÀI = 1, ou bien Ibl = lei.
La première hypothèse permet d'écrire
d
Àez + -=-
Z = À = À(cz + d) = À ( puisque À. = )
cz + d cz + d 1\,
et cette solution ne convient pas.
Il reste donc seulement Ibl = lei qui entraîne Idl = lai (que l'on supposera diffé-
rent de 0).
La condition (1) donne alors
- -
ab cd
---
- - -,
aa dd
d
( ).
soit
e
- -
d'où l'expression de z
b
z+ -
a a
z= de '
-z+ 1
d
SOLUTIONS
93
qui peut s'écrire
z+ (
. - e ico -
- z( + l'
a b
en posant d = e fCD et a = (.
.....
Si a et d sont nuls on trouve 1 immédiatement
b e iO
z- - --
- cz - z'
expression qui ne convient pas (car ï (zl < 1 => IZI > 1).
b) La condition Izl < 1 => IZI < 1 peut être maintenant utilisée. L'expression
de ZZ - 1 s'écrit avec les nouvelles notations
IZI 2 _ 1 = (1- 1( 2)[lzI2 - 1]
Iz' + 11 2
et la condition imposée entraîne l' 1 < 1.
c) Conclusion. - La forme générale cherchée est nécessairement
. z + ,
z= eH/) - , avec 1'1 < 1.
z' + 1
On vérifie aisément qu'elle est suffisante.
Remarque. - II est intéressant d'interpréter géométriquement cette relation en
introduisant les points A( - 0 et B ( - ), Bétantl'inversedeA dans l'inversion (0, 1).
1 mA
On a alors OM = ID · mB ' où M et m sont respectivement les images de Z
et de z (voir figure).
r
--"
3.
INTÉGRATION DES FONCTIONS
HOLOMORPHES
THÉORÈMES DE CAUCHY
ET DES RÉSIDUS
1. - DÉFINITIONS DIVERSES.
10 Chemin (*).
C'est une application continue t z(t) de l'intervalle [a, b] dans lE.
z(a) et z (h) sont respectivement l'origine et l'extrémité du chemin. Le chemin
est dit de classe Cl (resp. C l par morceaux) lorsque t z(t) est de classe Cl
(resp. CI par morceaux).
On rappelle que l'expression «de classe C 1 par morceaux» signifie que
l'intervalle [a , b] peut être divisé en un nombre fini d'intervalles [t j , j+I] sur
lesquels t z(t) est de classe C l , c'est-à-dire à dérivée continue.
2 0 Arc de courbe simple.
C'est l'image d'un chemin injectif de classe Cl par morceaux.
Un arc de courbe simple que l'on a « dessiné» dans le plan complexe est
souvent noté AB (ou BC, etc.) étant entendu que
A = z(a)
et
B = z(b).
Donnons deux exemples.
Figure l, on a
.
zeAB <=> z = zo+re t, où tErril' ri2].
Figure 2, on a
zeCD <=> Z = ZO+t(Zl-Z0)' avec te[0,1J.
(*) Ici lE est identifié à IR2. Cette définition se généralise pour un chemin [a, b]HIR".
Pour une étude plus approfondie de ces notions géométriques, voir chapitre 9.
'96
INTÉGRATION DES FONCTIONS HOLOMORPHES
y
.k---
//
//
:t f ___
y
X D
o
x
o
œ
FIG. 1.
FIG. 2.
Tout arc de courbe simple a une longueur, L, donnée par l'expression
'Suivante :
L= I:IZ'(t)!dt = I:V X '2(t)+y'2(t) dt,
'si }' on pose z(t) = x(t) + iy(t).
Arc de courbe fermée simple. - C'est l'image d'un chemin de classe el par
morceaux et qui satisfait aux propriétés suivantes (*) :
. sa restriction à ]a, b[ est injective,
. z(a) = z(b).
Un arc de courbe fermée simple r est noté (cf, figures 3 et 4)
r+ lorsque son orientation est celle du sens trigonométrique,
r- lorsque son orientation est inverse de celle du sens trigonométrique.
y
11
o
œ
o
00
FIG. 3.
FIG. 4.
3 0 Domaine.
Tout sous-ensemble Ll ouvert connexe de C est appelé domaine.
Dans ce qui suit nous limiterons l'étude au cas où la frontière 0 Ll est une
Téunion finie de points et de courbes.
La frontière 0 d'un domaine se répartira donc comme suit
. une courbe « extérieure» (sauf si Ll = C),
. p - 1 courbes ou points «intérieurs» (p ;> 1).
(*) La restriction à tout compact [el, ] inclus dans ]a, b[ définit un arc de courbe simple.
INTÉGRALE J . ,..."f(z)dz 97
AB
Lorsque p = 1 on dit que le domaine est simplement co'nnexe.
Lorsque p > 1, on dit que le domaine est p-connexe.
il est simplement connexe
il est 3-connexe
II. - INTÉGRALE f f(Z)dZ.
AB
1 0 Définition.
. AB désigne un arc de courbe simple inclus dans C, image de l'appli-
cation t z(t) = x(t) + iy(t).
.....-:A.
. f désigne une application : AB H lE qui est supposée continue,
.....-:A.
fez) = P(x, y) + i Q(x, y). On appelle intégrale de f sur AB l'expression
définie par l'intégrale curviligne suivante:
f PdX-QdY+ i f ,-QdX+PdY.
AB AB
On la note
f f(Z)àZ.
AB
On a donc l'égalité (formellement évidente)
f ,-f(Z)dZ = f (p+ iQ)(dx+ idy).
AB AB
Le calcul de cette intégrale est celui d'une intégrale ordinaire
f f(z )dz = f b [P[ x( t), y( t)J + iQ[ x( t), y( t) J] (x' (t) + i y' (t))dt
AB a
= fi[ z( t)]Z' (t)dt.
En pratique un calcul plus rapide de cette intégrale peut être effectué (9 III.
Application du corollaire fondamental.)
98
INTÉGRATION DES FONCTIONS HOLOMORPHES
Exemples :
a) Calculons f dz (cf figure 1). - Sur l'arc ÂÈ on a Z - zo+re it
AB z - Z 0
avec etl t et2, donc dz = ireitdt et, par suite,
f dz f cx 2 ireit f cx 2
- dt = i dt = i(et 2 - et l ) = iw.
I.t .
AB Z - Zo CXl re CXl
b) Calculons f r--i.ZdZ (cf figure 2). - Sur CD on a z = ZO+t(Zl-ZO)' avec
CD
o t 1, donc dz = (Zl -zo)dt et le calcul donne
f zdz = f i [Zo + t(z,-zo)] (zl-zo)dt= (zi-z ).
CD 0
c) Calculons f dz (cf figure 5). - Ici z = zo+re it , avec 0 t 2n.
r+ z-zo
11 k---
o X
FIG. 5.
Nous sommes placés dans le cas a) avec w = 2n :
f dz 2 .
= ln.
r+ z-zo
2 0 Propriétés de l'intégrale.
a) Égalités classiques.
f r--i.(À/l + Jlf2)dz = Il I ,-.fl dZ + Jl f r--i.' 'v' CEAB f2 dz ,
AB AB AB
f r--i..f(Z)dZ = f f(Z)dz+ f r--i.f(Z)dZ.
AB AC CB
'v' Il et f1 E lE,
b) Inégalités.
f ,-.f(Z)dZ f tB1f(Z)ldS, où ds= Iz'(t)l= VX'2(t) + y'2(t)
AB tA
THÉORÈME DE CAUCHY
99
De cette inégalité on déduit la majoration fondamentale en pratique
f r--i.J(Z)dZ ML,
AB
r--... .....-...
où L est la longueur de l'arc AB et M un nlajorant de If(z) 1 pour z E AB.
c) Changement de variable. - Soit <p : z Z = <p(z), <p holomorphe
dans un domaine D appliquant biunivoquement D sur Il = qJ(D) et telle que
qJ'(z) 0 dans D, alors
f f(z)dz = f f[cp-\Z)] dZ = f f[t/f(Z)] t/f'(Z)dZ,
AB ;p qJ'( qJ -leZ») ;p
.....-... .....-...
où (X P = qJ(AB) et t/f fonction réciproque de qJ.
3 0 Lemme de Jordan.
Soit y; un arc de cercle centré en Zo, de rayon e et d'angle au centre ro
(cf. figure 1, avec e = r et w = C(2 - (Xl) etfune fonction holomorphe dans un
voisinage de Zo alors l'intégrale l(e) = f fez) dz est définie pour B assez
petit (0 < e < GO) et l'on a 1'; z - Zo
lim f f( z ) dz = iwf(z 0).
e O y; z-zo
ill. - THÉORÈME DE CAUCHY.
1 0 Théorème 3.111.1. (Cas particulier.)
Soit f une fonction holomorphe dans un ouvert Q et r+ une courbe
fermée simple orientée incluse dans Q ainsi que son intérieur (cf. figure 6),
alors l fez )dz = o.
r+
Remarque. - L'hypothèse relative à f peut être améliorée sous la forme
suivante :
f est holomorphe dans un domaine D simplement connexe, de frontière
r, courbe fernlée simple et f est continue sur Dur le résultat
l fez )dz = 0 est encore valable.
r+
100
INTÉGRATION DES FONCTIONS HOLOMORPHES
FIG. 6.
. /-lB
o
FIG. 7.
Corollaire fondamental. - Sifest holomorphe dans un domaine simplement
connexe D alors pour tous A et B points de D l'intégrale f ,- j(Z)dZ ne
dépend pas de l'arc de courbe joignant A et B. AB
f ,-,.. j(z)dz = f j(z)dz
AMB ANB
(cf. figure 7)
f ,-,a,!(Z)dZ est alors noté f ZBf(Z)dZ.
AB %A
On peut donc définir la fonction «primitive»
F(z) = f z f(u)du,
%0
'v'z E D [zo fixé dans (D)] qui vérifie F'(z) = I(z).
G désignant une primitive de f, on a alors
f Z 2 f (Z)dZ = G(Z2)-G(Zl)' VZ 1 et VZ 2 E(D).
%1
Par exemple,
f Z2 e Z dZ = e Z2 _e Z ', VZ 1 et VZ 2 E C,
%1
f Z 2 Z2 Z2
zdz = --.! - ,
%1 2 2
'v'z 1 et 'v'Z2 E C.
(Comparer cette méthode à celle de 9 II, 1°, b.)
THÉORÈME DES RÉSIDUS
101
2 0 Théorème 3.111.2. (Cas général.)
D désigne un domaine dont la frontière aD comprend
. une courbe fermée «extérieure» r,
. p courbes fermées «intérieures» '}'l, '}'2, ..., '}'p ;
fdésigne une application définie et continue sur Du aD, holomorphe dans D.
On a alors la relation suivante (cf. figure 8) :
f r/(z)dz = kt f y/(z)dZ.
k
REMARQUE. - L'hypothèse relative à la fonction f esf'a fortiori vérifiée
lorsque f est holomorphe dans un ouvert Q contenant_D u aD.
y
o
œ
FIG. 8.
IV. - THÉORÈME DES RÉSIDUS.
1 0 Théorème 3.IV.l.
Soit D un domaine limité par une courbe fermée simple r, f une fonction
holomorphe dans D privé d'un nombre fini de points Zk, k = 1,2,...,n, qui
sont des points singuliers, et f est continue sur Dur, alors
l f(z)dz = 2in f p,(zJ,
r+ k=l
où Pf(Zk) est le résidu de f au point Zk.
2° Application : Calcul de certaines intégrales définies.
a) Exemple: Soit à calculer 5 +00 dx . On considère alors la fonction
-co 1+x 4
1
f:z f(z)= ,
1+z 4
102
INTÉGRATION DES FONCTIONS HOLOMORPHES
le contour r, demi-cercle de centre 0, de rayon R auquel on adjoint le diamè-
tre A' A, (cf. figure 9).
'YB
œ
FIG. 9.
FIG. 10.
i!!.+ l1C j.1'" J3 i ]P1U"
Les pôles de f sont donnés par Zk = e 4 2, k = 0, 1,2,3. et les résidus
z
correspondants valent _-2..
4
Le théorème des résidus s'applique alors, avec R > 1, les pôles Zo et Zl étant
intérieurs à D :
f dx + f dz = - in (ZO+Zl) = nV2
A,1 1 +x 4 AM' 1 +Z4 2 2 '
donc
f R dx nV2 f dz
-Rl+x 4 =2-. AM'1+z 4 .
On vérifie que
f dz 4 -+0, avec R-+ +00
AM' 1 + z
(appliquer la majoration fondamentale), d'où
lim f R dx 4 = nV 2 .
R-+oo -R 1 +x 2
Ceci montre l'existence de l'intégrale en valeur principale (voir chapitre 1,
9 1, 20) et donne sa valeur.
En fait ici l'intégrale étant absolument convergente on peut écrire
f +oo dx = nV2
4 ·
-ool+x 2
b) Indications générales. - L'essentiel de la méthode se résume aux trois
points suivants :
choix de la fonction complexe,
choix du contour d'intégration,
passage à la limite (pour cela on pourra utiliser la majoration
THÉORÈME DES RÉSIDUS
103
fondamentale ou bien le lemme de Jordan (II, 3°) ou encore le théorème
de Lebesgue appliqué à f tB1f(z)ldS.)
tA
Nous donnons quelques indications dans ce qui suit.
J + 00 P(x)
Fractions rationnelles. Calcul de -00 Q(x) dx.
Q sans zéro réel, deg P < deg Q - 1.
L'intégrale est alors absolument convergente. Pour la calculer, on choisit
P(z)
. la fonction ZI---? F(z) = -,
Q(z)
. le contour, qui est le demi-circonférence de centre 0, de rayon R, situé
dans le demi-plan y ;> 0 et son diamètre AA' (cf. figure 10).
I + 00 P(x) f + 00 P(x) f + 00 P(x)
Expressions - cos mxdx, - sin mxdx et - e imx dx
-00 Q(x) -00 Q(x) -oo Q(x)
(m est une constante réelle).
Q sans zéro réel, deg P deg Q -1 (*).
Pour le calcul on choisit
F : z F(z) = e im :: ;}
le contour est identique au précédent si m > 0;
le contour est symétrique du précédent par rapport à Ox si m < O.
(*) La méthode des résidus donne la convergence en valeur principale de ces intégrales,
mais la convergence ordinaire résulte de l'application de la règle d'Abel (théorème 1.111.5.)
dans le cas particulier où l'on a deg P = deg Q-l.
EXERCICES DU CHAPITRE 3
3.1.1. Étudier les chemins suivants (classe, longueur) ainsi que les arcs de
. courbe qu'ils peuvent définir:
lOt E [0, 2n], x = cos 3 t, y = sin 3 t,
2 0 tE [0, 2n], x = cos 3 t, y = Isin 3 tl.
3.1.2. Soit r l'ellipse d'équation cartésienne
. x2 y2
a 2 + b 2 - 1 = O.
Trouver des chemins dont elle est l'image.
3.11.1.
.
3.U.2.
.
3.U.3.
.
Calcul explicite de f f(z)dz.
1+
1° '}'+ représente le segment AB [A et B d'affixes respectifs Zo et Zl].
Donner une représentation paramétrique propre de AB. Calculer expli-
citement
f dz
-, lorsque Zo = 1
1+ Z
et Zl = 2 + i.
2° '}'+ désigne la circonférence de centre 1 + i et de rayon 2, orientée
dans le sens direct.
Donner une représentation paramétrique propre de '}' +. En déduire la
valeur de f y'" (1 :: z )2 ' ,
Calcul d'intégrales.
Calculer l'intégrale
f z+ 1
-dz
,
c+ z
dans chacun des cas suivants .
a) C est le périmètre du carré de centre 0 dont un SO/l1met est le
point (1, 1);
b) C est la circonférence d'équation
x 2 + y2-4x+ 3 = O.
2 2
r étant l'ellipse d'équation :2 + 2 -1 = 0; calculer de deux façons
différentes l'intégrale f dz et en déduire la valeur de l'intégrale
r+ z
f 21t dt
o a 2 cos 2 t + b 2 sin 2 t.
3.11.4.
..
3.11.5.
.
3.n.6.
.
3.111.1.
..
3.111.2.
..
3.ill.3.
..
EXERCICES DU CHAPITRE 3
105
En intégrant e Z le long d'une courbe convenable du plan con1plexe, montrer
que l'on a, pour a et b réels, l'inégalité suivante:
le bz -eazl Ib - allzleXSUp(a,b),
lorsque x = Re z est supposé positif. Qu'obtient-on si x est négatif?
, J e-z
Etudier l'intégrale ""2 dz, où r+ est le demi-cercle 'de centre 0,
r+ z
de rayon R, x ;> 0 lorsque R devient infini.
Lemmes de Jordan.
1 0 Soit z f(z) une fonction continue dans le secteur 8 l Arg z 8 2 .
Si lim zf(z) = 0, on a alors lim f f(z):dz = o, où r est un arc
\ zl-> 00 r-+ 00 r+
de cercle de centre 0 et de rayon r contenu"dans le secteur considéré.
....
2 0 Énoncer et démontrer la propriété analogue pour r tendant vers O.
Soit L une droite orientée passant par 0 telle que (Ox, L) = œ, avec
1t
lœl < 4 ·
Montrer que l'on a
J e-z2 dz = J + 00 e- X2 dx = V 1t ,
L+ -00
en utilisant le théorème de Cauchy. (On admettra ici que J + ex> e- x2 dx = v;r.)
, 1t-OO
Etudier le cas particulier 1 œ 1 = 4 .
En appliquant le théorèlne de Cauchy au contour ci-après et à la fonction
z e- z2 , donner la valeur des intégrales suivantes:
Y - Y -
+ 00 x 2 x 2 3 + 00 x 2 x 2 3
Jo e-2" cos 2 dx, Jo e-z sin --y dx.
Retrouver les valeurs obtenues en appliquant le résultat de l'exercice 3.111.1.
7J
x
o
Appliquer le théorème de Cauchy à la fonction z 1---+- e- z2 et au contour
rectangulaire ci-après (a est un réel strictement positif). Après avoir
106
3.ill.4.
...
3.ill.5.
...
INTÉGRATION DES FONCTIONS HOLOMORPHES
démontré que J e-Z2 et J e-Z2 tendent vers 0 pour R tendant vers +00,
AA' BB'
en déduire la valeur de
r + 00
e- x2 cos ax dx.
.1 0
.B'
A
'B(-R)
o
A(R) X
Intégrales de Fresnel.
En appliquant le théorème de Cauchy au contour ci-après et à la fonction
z 1---+- e- Z2 trouver la valeur des intégrales (de Fresnel)
J:oo cos x 2 dx et J:oo sin x 2 dx.
Retrouver cette valeur en appliquant un résultat de l'exercice 3.11/.1.
11
x
e iz
En "l..intégrant la fonction z 1---+- - sur le contour ci-après, puis en fai-
z
sant tendre e vers 0 et R vers +00, trouver la valeur de l'intégrale
f + 00 sin x
-dx.
o x
1/
x
3.IV.l.
.
3.IV .2.
.
3.IV.3.
..
3.IV .4.
...
EXERCICES DU CHAPITRE 3
107
1 0 Ya désigne la circonférence de centre 1 + i et de rayon a (a est une
constante strictement positive).
Donner la valeur de l'intégrale
I(a) = f Y Z(Ze: 1) dz.
(Discuter selon les valeurs de a.)
2° Soit Ll = {ZE C; Ixl < 1 et Iyl < 4}.
Donner la valeur de l'intégrale suivante:
f Z dz
ô + sh Z
[a â + désignant la frontière de â orientée positivement].
Calculer l'intégrale
1 = f e
2in y+ d
_ 1 z,
z-
où y est le cercle de centre 0 et de rayon R, avec R 1,
a) par application directe du théorème des résidus; 1
b) en effectuant d'abord le changement de variable Z = - .
u
Calcul de coefficients de Fourier.
Soit la fonction réelle de la variable réelle x suivante:
xi--+f(x) = h2; X 2 , A. est lin paramètre réel strictement positif.
s cos x
Calculer les coefficients de Fourier de f.
(Pour calculer les diverses intégrales, on fera le changement de variable
e ix = Z et l'on obtiendra des intégrales sur le cercle trigonométrique.)
f étant une fonction holomorphe dans Izi < R, R > 1
manières différentes les intégrales
f ( 2 + 1 + Z2 ) f(z) dz
c+ - Z z'
où C est le cercle trigonométrique.
En déduire la valeur des intégrales
f 27t ()
cos 2 - f(e i6 ) dO
o 2
évaluer de deux
et
J 27t 0
o sin 2 2 f (e i6 ) dO.
Application : Quelles sont les valeurs des intégrales
J:" cos 2 eC° s 6 cos (sin 0) dO et f: sin 2 e Cos 6 sin (sin 0) dO?
108
3.IV .S.
...
3.IV .6.
..
3.IV.7.
..
3.IV .8.
...
INTÉGRATION DES FONCTIONS HOLOMORPHES
On généralise l'exercice précédent en considérant les
J ( 1 + Z2 ) f(z) d
2 + n+ 1 z,
c+ Z z
Donner les valeurs de
J 21t ()
cos 2 - f(ei6)e-in6 d()
o 2
intégrales
n E IN* .
et
J 21t ()
o sin 2 2 f(ei6)e-in6 dO.
D ' . l A l l ,. l fi . ze iz l
etermlner es po es et es reSluUS corresponuants ue a onctlon z 1 + Z2.
Montrer que f --. f(z) dz -+ O.
BCA R -+ 00
f + 00 xe ix f + 00 x sin x
En déduire la valeur de -00 x 2 + 1 dx, puis de 0 x 2 + 1 dx.
A (-R) 0
x
Intégrales de fractions rationnelles.
Calculer par la méthode des résidus les intégrales suivantes:
J +OO dx f +oo dx et f +oo dx
-00 (x 2 + a 2 ).<x 2 + b 2 )' 0 1.. + x n 0 (1 + x 2 )n,
n est un entier positif.
Intégrales de fonctions trigonométriques f 21t F (cos 8, sin 8)d8.
Cakukr 0
f 21t d ()
o 1 - 2a cos 0 + cos2 () ' a E ]0, 1 [
(on posera z = e i6 et l'on appliquera le théorème des résidus).
SOLUTIONS
3.1.1.
1 0 Ce chemin est de classe Coo car les fonctions t cos 3 t et t sin 3 t sont de
classe C 00 .
On a
x' = - 3 sin t cos 2 t et y' = 3 sin 2 t cos t,
X'2 + y'2 = 9 sin 2 t cos 2 t
et la longueur de ce chemin est donc
J 21t
L = 0 3 Isin t cos tldt,
d'où
1t
L = 12 J: sin t cos tdt,
soit
L = 6.
Sur [0, 2n] le chemin est injectif, puisque cos 3 t = cos 3 u, sin 3 t = sin 3 u entraînent
t = u + 2kn, soit t = u, puisque sur [0, 2n] on a nécessairement k = o.
L'image de ce chemin est un arc de courbe simple fermé dont la longueur est
6 unités. Cet arc n'est pas régulier car X'2 + y'2 = 0 pour t = k 2 1C .
2 0 Ce chemin est de classe CI car
x' = - 3 cos 2 t sin t, y' = 38 sin 2 t cos t,
avec 8 = 1 pour tE [0, n], 8 = -1 pour tE [n, 2n], mais il n'est pas de classe Coo
le calcul des dérivées successives de y donne, en effet,
y" = 38 [2 sin t cos 2 t- sin 3 t] et y'" = - 3y' + 68 [cos 3 - 2 cos t sin 2 t],
110
INTÉGRA TION DES FONCTIONS HOLOMORPHES
d'où l'on déduit
y'" (n_) = - 6
et
y"'(n +) = + 6.
L'application donnée n'est pas injective, puisque t et 2n- t donnent les mêmes
coordonnées, l'image du chemin n'est donc pas un arc de courbe simple.
Lorsque t varie de 0 à n le point M(t) décrit ABC.
/"""
Pour t variant de n à 2n le point M(t) décrit CBA (voir figure).
Si l'on se restreint à [0, n] ouà[n, 2n] on a bien dans chaque cas un arc de courbe
simple.
On vérifie facilement que la longueur du chemin est toujours 6 unités alors que
celle de l'arc associé au chemin restreint à [0, n] ou [n, 2n] est 3 unités.
/""'..1.
Le chemin donné réalise une représentation paramétrique impropre de l'arc ABC.
1/
1 B ( )
B (3:)
.A(o)
-1 0 1 X
o (1t+) Â(21t)
3.1.2.
2 2
a) L'ellipse :2 + 2 = 1 est évidemment l'image du chemin injectif de classe Coo
défini par
x = a C?S t,
y = b sIn t,
avec
X'2 + y'2 = a 2 cos 2 t + b 2 sin 2 t = (a 2 -b 2 ) cos 2 t + b 2 > o.
b) Un deuxième chemin naturel est celui que l'on obtient à partir des coordonnées
polaires
ab
P= V '
a 2 sin 2 () + b 2 cos 2 ()
Dans ces deux cas l'ellipse est bien une courbe fermée simple régulière image des
chemins indiqués.
II n'en serait pas de même si l'on choisissait un chemin correspondant à une repré-
sentation paramétrique impropre.
x = P cos (),
y = p sin (),
() E [0, 2n].
SOLUTIONS
111
3.11.1.
1 0 AB admet la représentation paramétrique propre suivante
z = Zo + À(Zl-ZO), où À E [0,1]
(pour À = 0, on obtient Z = Zo, c'est-à-dire le point A; pour À = 1, on obtient
Z = Z l, c'est-à-dire le point B).
Alors dz= (zl-zo)dÀ et l'on a
J dz = (Zl-ZO) J I dÀ .
ABZ oZO+2(Zl- Z O)
J dz
Calculons 1 = - pour Zo = 1 et Zl = 2 + i.
AB Z
Dans ce cas z= 1+ 2(I+i) et l'on a
1 J I dÀ J I (1 + À) - iÀ
l+i = o l+À(I+i) = o (1+À)2+À2 dÀ
J I (1 + À) . J I À
= o 2Â2+2À+l dÀ - z o 2À2+2À+l dÀ ,
expressions que l'on peut calculer de façon élémentaire.
2 0 '}' + peut admettre la représentation paramétrique suivante
Z = 1 + i + 2e i6 , où 0 <; e < 2n,
donc dz = 2ie i6 de et
J zdz J 211: [ -1 + i ] -1 + i e- i62 11: 1 12
y+ (1 + i - Z )2 = 0 2 e - i6 + i de = 2 _ i 0 + i el 011: = 2; 'Tt.
3.11.2.
a) Soit MNPQ la frontière du carré considéré (voir figure). Sur QM :
x = 1, Y = t, -1 < t < 1, z = 1 + it et dz = idt,
J z+1 J 12+it J +l ( l-it )
QM z dz = i -1 1 + it dt = i -1 1 + 1 + t 2 dt,
donc
J z + 1 ( n )
Q}J z dz=i 2 +2
(puisque
[- Log (1 + t2)] 1 = 0).
112
INTÉGRATION DES FONCTIONS HOLOMORPHES
11
N
1
l'tl
-1
o
1
x
p
-1
Q
Sur MN : y = 1, x = t, t E [1, - 1], z = t + i, dz = dt, d'où
f z + 1 f -l ( 1 ) f -l ( t- i )
MN z- dz = 1 1 + t + i dt = 1 1 + t 2 + 1 dt,
soit
f z+1 n
dz = - 2 + i 2 -.
MN z
Sur NP z = -1 + if, tE [1, -1] et l'on trouve
f z+ 1 n
_>-dz = -2i+ i 2 -.
NP z
Sur PQ : z = t-i, tE [-1, 1] et l'on trouve
f z+1 n
-dz = 2+ i 2 -.
PQ z
Finalement,
f z + 1 dz = 2in.
c+ z
(On vérifie ainsi le théorème des résidus f j(z)dz = 2inpf (f) = 2in.)
c+
b) La circonférence d'équation
x 2 + y2 - 4x + 3 = 0
est paramétrée par
x = 2 + cos t, y = sin t et z = 2 + e it ,
d'où
J z + 1 J 211: ( 2 - e it . )
c+ z- dz = i 0 1 + 5 e dt,
soit
f z + 1 . f 211: ( 7eit e2it )
-dZ=l --- dt
c+ z 0 5 5 '
ce qui donne
f z+1
- dz = O.
c+ z
(On vérifie également le résultat donné par le théorème des résidus.)
SOLUTIONS
113
3.11.3.
Utilisons les deux chemins définis à l'exercice 3.1.2.
Pour x = a cos t, y = b sin t, on a
J dz _ J 21t - a sin t + ib cos 1
- . ,
r+ z 0 a cos t + Z sin t
c' est-à -dire
J dz = J 21t (b2 -a 2 ) sin t cos t +iab d
r+ z 0 a 2 cos 2 t +b 2 sin 2 t t.
En coordonnées polaires z = p( O)e i 8 , on a
J dz J 21t p'(O)ei8+ ip(O)e i8
- - dO
r+ z - 0 p(O)e f8 '
soit
J dz J 21t dp 0 J 21t
- = - +z dO.
r+ z 0 p 0
La première intégrale du second membre étant nulle [p(2n) = p(O) = a], il reste
J r+ = 2in.
On en déduit
J 21t dl
o a 2 cos 2 t +b 2 sin 2 t
2n
ab ·
On constate aussi que l'intégrale correspondant à la partie réelle est nulle, mais
ceci pouvait être prévu en utilisant les symétries par rapport à t = n et t = ; .
3.11.4.
Intégrons u e" le long du segment de droite AB d'extrémités A(az) et B(bz).
On a
d'une part,
J ---7 e"du = lebZ-eQZI,
AB
d'autre part,
J ---7 e"du <; 1 ABI e SUP 3te u
AB
114
INTÉGRATION DES FONCTIONS HOLOMORPHES
d'après la majoration fondamentale) où la borne supérieure est prise pour u par-
courant AB; donc
lebZ-eQZI Ib-allzlesup 3te u.
Sur AB, on a u = Àz d'où 3te u = Àx, donc
sup 3te II = X sup (a, b), si x ;> 0
et
sup 3te u = x inf (a, b), si x ()
et ceci justifie les deux inégalités suivantes
lebz-eazi Ib-allzle x sup (a,bJ, si x ;> 0
et
lebZ-eQZI Ib-allzle x inf (a,bJ, si x o.
3.11.5.
En posant z = Re i8 il vient
1t
f e-z _ J ..2, . e-Rcos 8 e -iRsin 8
? dz - _ l R 18 d (),
r+ z- _: e
2
ce qui entraîne
or
1t
f e-z 1 f -
_ 2 dz - 2 e-Rcos8 dO
r+ z R _ '
2
J e-Rcos6 d() n, puisque e-Rcos6 1, alors
2
la limite de l'intégrale est donc nulle lorsque R -+ +00.
3.11.6.
1° Sur r+ on a
z = re i8 , avec Ol et < 0 13 O 2 ,
d'où
f f(z)dz = ir f fJ f(rei8) e i8 dO,
r+ Œ
donc
1 f r+f(z)dzl (13- et) r M r ,
f e-Z n
-dz R '
r+ z2
SOLUTIONS
115
où M r = sup If(re i8 ) \ = If(reil') \ [puisque la fonction est continue M r est atteint
8e(cz,PI
pour une valeur y(r)].
Mais
Hm zf(z) -+ 0, donc lim rlf(reil') 1 = 0,
1 z 1-+0 r-+oo
ce qui justifie l'énoncé.
2 0 Propriété analogue pour r -+ 0, la démonstration étant identique.
Si
lim zf(z) = 0,
Izl-+O
alors
lim f f(z)dz = o.
r->O r+
3.rn.1.
..........
Intégrons la fonction z e- z2 sur le contour OAB.
y
AR) x
f /""'.1. e- z2 dz + J ......-:t. e-=2dz + J e- z2 dz = 0,
OA AB BO
d'après le théorème de Cauchy, puisque la fonction à intégrer est holomorphe dans C.
J .......... e-z2 dz = iR J a e-R2(cos28+isin28) e i8 dO.
AB 0
On en déduit
(1)
J e-z2 dz ,R J a e-R2cos28 dO <; R œe-R2cos2cc
AB 0
(puisque 0 :E;; 0( < : entraîne cos 20( > 0).
Autrement dit
lim f e-z2 dz = 0, car Re-R2 cos 2a -+0.
R-+oo AB
Par suite,
lim J e-z2 dz = lim f R e-x2 dx,
R-+oo OB R-+oo 0
116
INTÉGRATION DES FONCTIONS HOLOMORPHES
donc
f '" f +OO lC
e- Z2 dz = 2 e- x2 dx = V 1!,
L 0 -------
c..;
.,:..- .
en utilisant la symétrie de la fonction et du contour.
'Tt
Cas ex = 4 . - Les majorations obtenues en (1) sont encore valables, malS ne
. R2 2 nR d
permettent plus de conclure, pUIsque Ra.e- cos IX = 4 ten vers + co.
1t
Étudions l'intégrale 1 = f: e- R ' cos 28 dO. Elle s'écrit aussi sous la forme
Sur [0, ], on a la
1t
1 J 2 R I).
1 = '2 0 e- - sm lfJ dq>.
2
majoration sin q> > - q>, d'où
1!
2R2
--lfJ
e-R2 sin lfJ < e 1t .
Par suite,
2R2
f 2 --lfJ 1!
o <; 21 0 e 1t dq> 2R2
(en calculant l'intégrale élémentaire).
La majoration provenant de (1) est donc remplacée par
f _Z2 d ./ 1!
ABe z 4R '
ce qui établit
Iim f .-.e-Z2 dz = 0
R->oo AB
1!
et assure la validité du résultat obtenu pour le cas a. = 4 .
On remarquera que l'application du théorème de Lebesgue à la fonction
q> e- R2 sin lfJ permet de conclure.
3.llI.2.
Le raisonnement est analogue à celui employé à l'exercice précédent et l'on retrouve
f e-z'dz= V 1t ,
.6.+ 2
où A + est la demi-droite telle que «(h, A +) = : .
SOLUTIONS
117
Sur Ll +, on a
[ n . n ] i; Y3 -ix
z = x cos 6" + i sIn 6 = xe = x -2 + 2"
et
( ) 2 . 1V l
? n . n x 1_
Z2 = x- cos - + i sIn - = - + - x 2
3 3 2 2 .
On en déduit
in x 2 il/3
J e-z2 dz = e 6" J +OO e -i-2 x2 dx,
6+ 0
soit
in x 2 Y - Y -
--- +00 -- 3 3
f ,,+ e-z'dz = e 6 Jo e 2 [cos "2 x 2 - isin 2" x 2 ] dx,
donc
- - v - Y - in
+ 00 /3 3 n --
J e-.).2 ( COS L x 2 - i sin - x 2 ) dx = - e 6
022 2
et, en identifiant parties réelles et imaginaires, il vient
J + 00 2 x 2 Y3 V 3n
e- X cos dx = -
024
et
J + 00 x 2 Y 3 Y
x" .
o e - .. SIn -2 dx = 4.
3.11183.
Le théorème de Cauchy appliqué au rectangle donné entraîne :
(1) J -> e-z2 dz + f e-z2 dz + J e-z2 dz + J -> e-z2 dz = O.
BA AA' A'B' B'B
puisque z e- z2 est holomorphe dans lE.
--+
Explicitons les intégrales sur BA et A' B'
J e-Z2dz = f R e-x2dx
BA -R
et
( ia ) 2 cr
R - x+- - R
J e-Z2dz=- J e 2 dx=-e 4 J e-x2e-iaxdx.
A'B' -R -R
Démontrons maintenant que
lim J e-z2dz = 0
R-+oo AA'
et
lim J --? e-z2 dz = o.
R-> 00 BB'
118
INTÉGRA TION DES FONCTIONS HOLOMORPHES
Il suffit d'étudier la première intégrale, la seconde étant obtenue par changement
de R en - R dans la première.
-) a
Sur AA', on a z = R + iy, 0 <; y <; 2' d'où
e-Z2 = e-R2-2iRV Y2
et
l e-zS I = e-- RS e"':" Ys e- R1
. ,
donc
J e-z2 dz ae- R2 .
AA'
Ce dernier terme a pour limite 0 d'où le résultat.
Ainsi, d'après (1)
J R + J R
lim e- x2 dx = e 4 Hm e- x2 e- iax dx.
R-+oo -R R->-oo -R
f +oo Y -
Mais . -00 e- x2 dx existe et vaut n, d'où
J R -
lim e- x2 [cos ax- i sin ax] = V n e 4.
R --700 -R
Alors
J R Y n -
lim e- X2 cos axdx = 2 e 4,
R-+oo 0
puisque J R e-X2 sin ax dx = 0 la fonction étant impaire.
-R
On en conclut
Y - a2
J +OO n -4
o e-x 2 cosaxdx = 2 e ·
3.llI.4.
Intégrales de Fresnel.
Puisque la fonction z e- z2 est holomorphe dans ([; on a J e-z2 dz = O.
r+
Cette intégrale se décompose en J .-.. e- z2 dz + J ,-'" e- z2 dz - J ___ e- zs dz.
OA AB OB
Explicitons chacun de ces termes
J .-.. e- z2 dz = J R e-X2 dx,
OA 0
i1t
J e- zz dz = e 4" J R e-ix2dx
OB 0
et
1t
J --- e _::2 dz = iR J 4 e-R2 e 2i cp e icp d qJ.
AB 0
SOLUTIONS
119
Majorons cette dernière intégrale, nous obtenons
1t
f ,....,.. e-r dzl R f 4 e-R2 cos 2qJ dqJ,
AB 0
l'intégrale qui apparaît a été étudiée dans l'exercice 3.1I!.1. (cas IX = : ) où l'on a
vu que
1t
o f 4 e-R2cos2lp drn 1C
0 't' 4R2 ,
donc
f ÂB r z2 dz < 4 .
Ainsi
;rt
J ..+co 4 J +OO
o e- x2 dx = e 0 e- ixl dx.
On en déduit
f +oo 1/ -
e-;x 2 dx = JL::.e ,
o 2
soit
f +oo V21C f +oo V2n
cos x 2 dx = et sin x 2 dx = ,
o 4 0 4
ce résultat pouvait être obtenu directement en écrivant J t rz2 dz = V n, résultat
valable même dans le cas (0;, l) = : établi à l'exercice 3.lII.1.
3.Ill.5.
iz
Sur le contour et à l'intérieur la fonction z est holomorphe.
z
Le théorème de Cauchy donne alors
J eiz dz = O.
r+ z
Décomposons l'intégrale sur r+
f eiz dz = f e iz dz + f _ e iz dz +
r + z AB z BB' Z
f eiz
-dz +
B' A' Z
f eiz
-dz
A-g Z
et explicitons la première et la troisième de ces intégrales. Nous obtenons
f eiZ dz = f R eiX dx et I = _ I -R e ix dx = _ I R e-Ix dx,
AB Z £ X B'A' _£ X £ X
120
INTÉGRA TION DES FONCTIONS HOLOMORPHES
donc
f eiz f eiz f Rsin x
-4-dz + -dz = 2i -dx.
AB Z B' A' Z t X
Par ailleurs,
f eiz f eiz
-dz = - ,.....,..-dz.
A'A z AA' Z
iz
La fonction z possède un pôle simple à l'origine- dont le résidu est 1.
z -
D'après le lemme de Jordan (11,3°), on a
lim f eiz dz = -in.
t->O Ar;; Z
De plus, il est clair que f eiz dz tend vers 0 lorsque R tend vers l'infini, puisque
BB' Z
f eiz dz f 7t e-R sin e dO,
BB' Z 0
la dernière intégrale tendant vers 0 (théorème de Lebesgue: e- R sine 0, sauf aux
points 0 et 1! et e- R sine 1, donc f 7t e-R sinO dO f 7t OdO = 0) d'où le résultat
00'
lim [ f Rsin x ]
t->O 2i -dx = in,
R->oo t X
donc
f + 00 sin x n
-dx = -.
o x 2
3.IV.l.
Notons Lla le disque ouvert de centre 1 + i, de rayon a.
z
1 0 La fonction z(ze+ 1) admet les pôles simples z = 0 et z = _-1, avec les résidus
correspondants
P - e - l
-l-- .
Pour 0 <a< V 2, le domaine borné Lla de frontière 'l'a ne contient aucun pôle,
donc
Po = 1
et
f y >(:: l) dz = o.
Pour 1!2<a< V S, le domaine Lla contient le pôle Z = 0, donc
f y: z(:: 1) dz = 2i1tpo = 2i1t.
SOLUTIONS
121
Pour a> V 5, le domaine Lla contient les deux pôles, donc
l y :Z<:: 1) dz = 2in[po+ p- d:= 2in<l-e-l).
Pour a = 112 ou 115, l'intégrale n'est pa définie.
.y
1
-1
o
.1.
x
-1
i
z
2 0 La fonction z - h admet les pôles simples suivants
s z ....
...-3in,
(voir exercice 2.III.4d).
Le domaine Ll contient les pôles -i'Tt, in, donc
l h z dz = 2in[p-i1t+ Pi1t] = 2in[ - in+ in] = o.
8+S Z
-2in
,
- i'Tt,
in,
2in,
3in,
4in, ...
3.IV.2.
1 0 Calcul direct. - Le théorème des résidus applicable ici (si R 1) donne
-.
1
2 l eZ l dz = LR k ,
zn y+ z-
où les Rk sont les résidus des pôles situés à l'intérieur du contour y + .
1
La fonction Z e Z I possède un point singulier essentiel isolé à l'origine et un
z-
pôle simple z = 1.
Le résidu RI au point z = 1 a pour valeur e.
122
INTÉGRATION DES FONCTIONS HOLOMORPHES
Pour obtenir le résidu au point 0 formons le développement de Laurent, nous
obtenons
1
00 1
L n !zn
n=O
et
1
- - "zn.
z-1 - -
n=O
00
e Z =
En effectuant le produit de ces deux développements, on s'intéresse uniquement
1 . d l n 1 d , "
au terme en -. Il provIent es termes --,--n et - z pour n = , 2, ..., ou
z n.z
co 1
Ro = - L , = l-e.
1 n.
Conclusion.
Si R < 1, seul le résidu Ro intervient, donc
1
1 f eZ
2 -:- _ 1 dz = l-e.
ln y+z-
Si R > 1, alors Ro+Rl = 1, d'où
1
1 f eZ
2 -:- _ 1 dz = 1.
ln y+z-
2° Le changement de variable indiqué entraîne
1
1 f eZ 1 f eU du
1 = 2in y+ z-l dz = 2in r- - 1. u 2 '
--1
Li
où r- est le cercle de centre 0, de rayon , parcouru dans le sens négatif;:donc
1= f eU du
2in r+ u(l- u) ·
eU
La fonction u u(l- u) admet deux pôles simples u = 0 et u = 1 de résidus
respectifs 1 et - e d'où le résultat
1 . 1 .
= 1 SI R < 1, SOIt R > 1
et
. 1 .
1 = 1- e SI R > 1, SOIt R < 1,
en appliquant le théorème des résidus.
3.IV.3.
En écrivant la série de Fourier sous la forme
00
i + L (a" cos nx+b n sinnx),
1
SOLUTIONS
123
les coefficients sont donnés par
)ln = an+ib n = J !(X)einXdX,
f(x) étant une fonction impaire ici on obtiendra une série de sinus.
eix+e- ix . eix-e ix
En posant z = e ix , dz = ieixdx, cos x = 2 ' sIn x = 2i - , l'intégrale
devient
on l ( 1 )
_ -IZ - Z - dz
Î'n - 2 . J . 1 ( Ir
m 'zl=1 sh 2 À.+ 4 z+;
étendue au cercle unité parcouru dans le sens direct, soit
2 J (1_z2)zn
Î'n = + - dz.
n Izl=l (z2+ 1)2 + 4z2 sh 2 À
La fraction rationnelle à intégrer est holomorphe, sauf en deux pôles symétriques
par rapport à 0, à l'intérieur et sur le cercle unité puisque n > o. Pour obtenir les
pôles on écrit
(z2+1)2 = _4Z2 sh 2 À et z2+1-2Bizsh À = 0,
les zéros sont Bi sh )I.::l:i ch À, soient Zl = ie-j" Z2 = iei., -Zl et -Z2.
1 X
Seuls z l et - z 1 sont à l'intérieur du cercle, puisque À > o.
Le résidu Rl vaut
2 (1-z1)z
-x
'Tt (Zl- Z 2)(2z l )(ZI +Z2)'
pour Z = Zl,
et
, 2 (1- zr)( -1)nz
Rl = - X
'Tt 2z l (Zl +Z2)(Z2- Z l) ,
pour Z = -Zl
soit
(1 - zr)z f - 1
R I =
'Tt(zy- z )
et
R = (-l)n+ IR I .
124
INTÉGRATION DES FONCTIONS HOLOMORPHES
Explicitons RI' en fonction de À,
l- z r= l+e 2 )., Z -l = in- 1 e-(n-l»)., ZT-Z = 2sh:2À,
in-12 ch Àe-). e-(n-l»). in-l
RI = 2n sh 2À = 2n sb À e- n ).
D'après le théorème des résidus, on a
1'n = 2in[I+(-I)n+I]R I .
Si n est pair,
n = 2k, Yn = 0,
donc
a2k = b 2k = 0;
si n es t impair,
4 .2k+ l
2k 1 l -(2k+ l»).
n= + 'Y2k+l= 2shÀ e ,
e-(2k+ l)l 4e-(2k+ 1»).
y 2 k + 1 = 4( - l)k 2 sh À i =? a2 k + l = 0 et b 2 k + 1 = (- l)k 2 sh À '
d'où la série de Fourier
00 2e-(2k+ l»).
L (-I)k sh À sin (2k+ l)x.
k=O
3.IV.4.
1 0 Soit
J f(z)
1 = 8 (28Z+ Z2+ 1) 2 dz.
I z l=l Z
Sur le cercle unité, Z = e i6 , dz = ie i6 dO, 0 variant de 0 à 2n, donc on a
J 2ït f( e i6 )
1 = 8 (e i6 + 8)2 ---:- ie i6 dO
o e 2le '
soit
J 21t ( ) 2
1 = 8i 0 e 2 + 8e 2 f(e i6 )dO.
Si 8 = 1,
J 27t 0
1 = 4i cos 2 - f(e i6 )dO
o 2
et si 8 = - 1,
1 = 4i J:7< sin 2 f(e i6 )dO,
Par ailleurs la fonction (z+ 8)2 f( ) est holomorphe dans Izl < 1, sauf à l'origine
z
où elle possède un pôle double si j(O) O. Cherchons le résidu en développant
:2 (1 + 28Z+ Z2) [f(O)+ Zff (0)+ -; f" (0)+ O(z2) ].
SOLUTIONS
125
il vient
1(0) 28f(0) + 1'(0) (1)
"2+ +0 ,
z z
donc
Ro = 28f(0) + f'(O).
L h " d ' . d 1 °' ' ( ) 2f(z) d
e t eoreme es rest us app lque a z+ 8 2 onne
z
1 = 2i1t8[28f(0) + f'(O)],
ce résultat étant encore valable si ((O) = 0, f' (0) 0 ou j(O) = f' (0) = o.
En comparant avec les expressions déjà trouvées il vient
pour 8 = 1,
f 21t () 1t
o cos 2 2 / ( ei O )d9 = 2 [2f(0)+ 1'(0)]
et, pour 8 = - 1,
f:" sin 2 /(eiO)d9 = [2f(0)-f'(0)].
2 0 Application. - Si l'on choisitj(z) = e Z les hypothèses précédentes sont vérifiées,
alors
f(e i6 ) = ecos6+isin6 = ecos 6 [cos (sin ())+ i sin (sin (})],
2f(0) + 1'(0) = 2+ 1 = 3,
2f(0)- f'(O) = 1,
donc, en identifiant partie réelle et partie imaginaire dans les deux formules précé-
dentes, on obtient
f b () 31t
cos 2 - e Cos 6 cos (sin (})d() = -
o 2 2
et
f 21t () n
o sin 2 '2 e Cos 6 cos (sin (})d() = 2 ;
les intégrales portant sur les expressions en sin (sin ()) étant nulles.
3.IV.5.
D'une part, ln = 8 f (2sz+ 1 + Z2) Z ; dz s'écrit, en posant e iO = z,
I z l=l Z
f 21t i -i
ln = 8i 0 (e 2 + 8e 2)2f(ei6)e-in6d()
(par un calcul analogue à celui du 1 0 exercice 3.IV.4.).
D'autre part, (1 + 2sz+ Z2) Z ; présente un pôle multiple si 1(0) =ft o.
z
126
INTÉGRATION DES FONCTIONS HOLOMORPHES
Dans tous les cas formons le développement de Laurent.
D'abord
zn zn + 1
f(z) = f(O) + zf'(O) + ...+ n! f(n)(o)+ (n+ 1) ! f(n+ 1) (O)+O(Zn+ l),
(1 +28Z+z 2 )f(z) = f(O) + [28f(0)+ f'(O)]z+ ... +a n + 1 Zn + l+o(zn+ t).
Le coefficient a n + 1 est obtenu ainsi :
f(n+I)(O) 28 f(n-l)(o)
a n + 1 = (n+ 1)! + n! f(n)(o) + (n-l)! .
Envisageons les cas suivants possibles :
1(0) 0, 0 est pôle d'ordre n+ 2, le résidu est
R = 1 [ f<n-l)(0)+2 f<n)(0)+ r+l(0) ] .
a (n-l)! n n(n+ 1)
1(0) = 0, f(z) présente un zéro d'ordre p < n+2,
f(z) = ZPf1 (z), fI (0) 0;
o est pôle d'ordre n+2-p, le résidu est toujours donné par Ra.
1(0) = 0, f(z) présente un zéro d'ordre p n+2, f(n-1)(0) = fn(O) = 0,
fez) r ,
(1 + 8Z+ Z2) n+ 2 est holomorphe dans tout Izl 1; le theoreme de Cauchy donne 0
z
pour l'intégrale, mais Ra est alors nul et redonne aussi o.
Dans tous les cas,
1
Ra = (n+ 1)! [n(n+ l)f(n-l) (0)+ 28(n+ l)fn(o) + f(n+ 1)(0)].
D'après le théorème des résidus, on a
2in8
ln = (n+ 1)! [n(n+ l)f(n-l)(0)+28(n+ l)f(n) (0)+ f(n+ l)(O»)
Pour 8 = - 1, il vient
f 21t () n
o cos 2 2f (ei6)e-in:}dO = 2(n+l)! [n(n+l)f(n-l)(O)+2(n+l)jtJ(0)+f(n+I)(0)].
Pour 8 = 1, il vient de même
f 2'" sin 2 f( e i6 )e- in6d() = 7l: [ - n( n + 1 )f<n - 1) (0)+ 2(n + 1)f"(0) - f(n +1) (0)].
o 2 2(n+ 1)!
On peut appliquer ces résultats à e Z :
'v' z, f(n)(o) = 1,
d'où
f 21t e.o n(n 2 +3n+3)
cos 2 -ee ' e-inOd(} =
0 2 2(n+ 1)! '
SOLUTIONS
127
soit
f 21t () n(n 2 + 3n+ 3)
cos 2 -ecos6+i(sin6-n6)d(} =
o 2 2(n + 1) ! '
donc
f 21t () n(n 2 + 3n+ 3)
cos 2 -e co56 cos (sin (}-n(})d() =
o 2 2(n+ 1)!
et de même
f 21t. () . n(l + n- n 2 )
o sln 2 "2eCOS6cos (sIn (}-nf))d8 = 2(n+ 1)! ·
En faisant n = 0 on retrouve les résultats de l'exercice 3.IV.4.
3.IV.6.
e iz
La fonction z fez) = z2+ 1 admet les pôles simples z = i et z = -i, fez) étant
g(z) .
de la forme h(z) ' on obtIent
g(i) e- l
Pt = h'(i) = 2i
et
g( - i) e e
P-i = h'(-i) = -2i = - 2f
Pour R > 1, le domaine borné Ll de frontière (ABCA) contient le pôle z = i
donc
(1)
f eiz f eiz
2+ 1 dz+ -.. 2+ 1 dz = 2inpi = ne-le
ABZ BCAZ
Le segment AB peut être paramétré en posant z = x avec - R x R, (1) entraîne
alors
(2)
f R efx f eb
2+ 1 dx+ --... 2 + 1 dz = ine- l .
-Rx BCAZ
Supposons que l'on ait
f efz
I(R) = 2 +1 dz R ) O.
BCAZ -+00
En faisant tendre R vers +00, on déduit de (2)
f +oo eix
-00 x 2 + 1 dx = ine- l ,
ou
f +oo cos x f +oo sin x
-00 x 2 + 1 dx+ i -00 x 2 + 1 dx = ne- l
et par suite
f -OO cos X
+00 x 2 + 1 dx = ne-le
128
INTÉGRA TION DES FONCTIONS HOLOMORPHES
Il reste à montrer que I(R) R->aJ O. - L'arc BCA admet la représentation para-
métrique suivante
z = Re i6
,
avec 0 0 n,
donc
f eiz f 7t eiR(COs6+isin 6)
I(R) = BCA Z 2 + 1 dz = R 2 e 2iB + 1 iRe i6 dO
et, par suite,
f 1t eiR(cos C + isin C) f 1C Re- Rsin 6
II(R)I 0 R2 e 2:6+ 1 iR e i6 dO = 0 IR2e2i6+ li dO
f 1C Re-Rsin 6 f 1C R nR
0 R2- 1 dO 0 R.2 1 dO = R2- 1 .
1 I(R) 1 est majorée par une expression qui tend vers zéro lorsque R -? 00; donc on a
lim I(R) = O.
R -> 00
Autre méthode: Utiliser le lemme de Jordan.
3.IV.7.
a) Pour la première intégrale la méthode est celle donnée dans le texte (IV, 2°).
On trouvera
f +oo dx n
_oo(x 2 +a 2 )(x 2 +b 2 ) = ab(a+b)'
a b (a et b ;> 0),
f +oo dx n
-00 (x 2 + a 2 )2 = 2a3 ' si a = b
(résultat qui entre d'ailleurs dans le cas général).
b) Pour la deuxièm(intégrale on utilise la fonction z f--+ 1 zn et le contour ci-après :
y
B
o
x
On vérifiera que { l Z n tend vers 0 lorsque R tend vers +00.
'" AB Z
SOLUTIONS
129
i1t
i1t +-;
Un seul pôle est à l'intérieur du contour: c'est le point en et le résidu vaut - e
Il
Par ailleurs, on a
f dx f dz f R dx 2i1t J R dx
DA l+x n - 6B l+z2 = 0 l+xn- e n 0 l+xn '
d'où
i1t
( 2i1t ) f + 00 dx - 2ine n
l-e n =
o l+xn Il'
ce qui entraîne
f: oo I Xxn = n
n SIn-
n
c) Pour la troisième intégrale, on écrit
f +oo dx I f +OO dx
o (l+x2)n- 2 -00 (l+x2)n'
on applique alors exactement la méthode développée au IV, 2°.
On trouve ainsi
f +00 dx
-00 (1 +x2)n =2inRh
où Ri est le résidu au point i, pôle d'ordre n de la fonction considérée.
Pour calculer ce résidu on applique la formule générale indiquée au chapitre 2,
g III, 6°)
1 [ 1 ] (n-1)
R.=
1 (n - 1)! (z + i)n z = 1 ·
On obtient alors
1
Ri = (n_l)! (-I)n- I n(ll+ 1)...(2n-2)(2i)-2n+l,
soit
(2n-2)! .
Ri = 2 2n - 1 [(n-l) !]2 l,
donc
f +oo dx n(2n-2)!
o (1 + x2)n = 2 2n - 2 [(n-l) !]2 ·
3.IV.8.
On remarque que le dénominateur s'écrit
D = (cos {1-a)2+1-a 2 .
En posant e i6 = z, on a 2 cos {1 = z+!.
Puisque, a E ]0, 1[, on peut écrire a = :os IX, avec IX E ] 0, t.
130
INTÉGRATION DES FONCTIONS HOLOMORPHES
D prend alors la forme
( 1 ) 2
D _ z+ ; - 2a
- 4
. .,
+ sln- 0:,
soit
D= 4 2 [(z2-2aZ+l)2+4z2Sin2 ct],
donc
1
D = 4z 2 (z2-2az+l+2izsin 0:)(z2-2az+I-2;zsin a),
c'est-à-dire
1
D = 4z 2 (Z2_2z (cos Œ+i cos Œ)+ 1)(z2-2z (cos 0:-; sin Cl)+ 1),
soit
D = 4 2 (z2-2zé z +l)(z2-2ze- I "+1),
l'intégrale à calculer s'écrit donc
J 4zdz
-; r + (z2-2ze ia + 1)(z2-2ze- ia + 1)'
où r+ est le cercle trigonométrique.
Le dénominateur se décompose en
(z- Z 1)(Z- Z 2)(Z- Z l)(Z- Z 2)
et à l'intérieur du cercle unité n'interviennent que les racines de module inférieur à 1,
soit Z 1 et Z 1 (qui existent toujours, puisque Z lZ2 = 1).
Le théorème des résidus donne alors
- i J r +f(z)dz = - i[2in(R" l + R Z1 )] = 2n(R 1 + R ).
Calculons Rl et R : nous avons pour Rl'
4z 1 4z 1
RI = (Zl-Z2)[zy-2zle-ia+ 1] = (Zl-Z2)[2zleia-2z1e-i:l]'
puisque
zy-2z l e ia +l = 0,
donc
-i -i(Zt-Z2)
Rl = ( ) . =. 1 1 2'
Z 1 - Z 2 sIn 0: sIn 0: Z 1 - Z 2
de même pour R nous avons
, i i(z 1 - Z 2)
RI = (ZI-Z2) sin 0: = sin Cllzl- z 2J 2 '
d'où
, - 2Im ( z t - z .,)
R +R - -
1 1 -, 1 Z 1 - Z 21 2 sin. el '
Zl et Z2 sont racines de z2-2ze 1a +J = 0, donc
. (Zl- Z 2)2 = 4e 2iœ -4 = 8i sin Cle ia ,
SOLUTIONS
131
d'où
Iz l - z 2 1 == 2V2 sin 0:
et
i ( + )
Zl-Z2 = 28 V 2 sin o:e 2 4,
avec 8= + 1,
Je signe étant déterminé par le fait que Iz II < 1 < Iz 21.
Alors nous avons
Im(Zl-Z2) = 2e V 2 sin oc sin G + )
et
-4e V 2 sin oc sin ( + : )
Rl +R = 8 sm 2 0:
- eV2 sin oc sin ( + )
2 sin 2 a.
L'intégrale cherchée a
donc pour valeur
. ( 0: n )
-4ne sIn 2+"4
sin 0: V2 sin 0:
,
ce qui entraîne e = - 1 car cette valeur doit être positive (comme oc E ] 0, [),
donc
[ . 0: 0: ]
I 2 1t dO _ 2nV2 sIn 2+ cos 2
o 1- 2a cos 0+ cos 2 (} - sin 0: V 2 sin 0: '
et, en revenant à la constante a, nous obtenons
I 2 1t dO nV2 [ VI a + V I+a] .
o 1- 20 cos 0 + cos 2 0 - 2
(1-a )4
Remarque. - L'intégrale proposée peut être également calculée en utilisant tg = t
et en appliquant le théorème des résidus à l'intégrale de la fraction rationnelle ainsi.
obtenue.
""'--
4 FORMULES INTÉGRALES
.
DE CAUCHY
, ,
AP.PLICATIONS : PROPRIETES
DES FONCTIONS HOLOMORPHES
1. - FORMULE DE CAUCHY.
1 0 Théorème 4.1.1.
Soit f holomorphe dans un domaine D contenant une courbe simple
fermée r dont l'intérieur A est inclus dans D alors, pour tout a appartenant
à A, la formule suivante s'applique :
f(a) = f fez) dz
2in r+ z-a
(cf. figure 1).
/e
Y'(D) G;;) f&
:p-- /
'. (I),/
....- - -,'
()
FIG. 1
FIG. 2
Corollaire. - Sifest holomorphe dans un domaine D contenant la couronne
d'équations rI Iz-zoi r2 (r2 > r 1 > 0), pour tout point a appartenant
à la couronne ouverte, on a
f(a) = f fez) dz - J !(z)d z,
2in c+ z-a 2in c+ z-a
2 1
134 FORMULES INTÉGRALES DE CAUCHY. APPLICATIONS
FIG. 3
OÙ CI = {Z, Iz-zoi = f l }
(cf. figures 2, 3 ou 4).
FIG. 4
et
C 2 = {Z, Iz-zol = r2}
2 0 Théorème 4.1.2. (cas des dérivées).
Si f est holomorphe (donc de classe COO) dans un domaine D contenant
une courbe fermée simple r dont l'intérieur L\ est inclus dans D, ses dérivées
successives en un point a de A sont données par
f (II) ( ) - n! J . f(z) d
a - - n+l Z
2in r+ (z-a)
(cf. figure 1).
Remarque. - Il résulte du théorème 4.1.2. que les dérivées de f au point a
sont majorées comme suit
I f(II)(a) ! n! ML
21tlll+l'
où M est un majorant de f sur r,
L est la longueur de r,
1 est la distance de a à r (1 > 0).
3 0 Application.
Si f est holomorphe dans q; et bornée dans q; alors f est une constante.
ll. - PROPRIÉTÉS DES FONCTIONS HOLOMORPHES.
1 0 Développement en série de Laurent.
Théorème 4.11.1.
Soitfune fonction holomorphe dans un domaine D contenant la couronne
d'équations rl <: Iz-zoi r 2 (0 < rI < r2) et "Ir un cercle quelconque de
PROPRIÉTÉS DES FONCTIONS HOLOMORPHES
135
centre Zo et de rayon r (rI , '2). (cf figures 2, 3 ou 4.) On pose
an = f f(u) du, neZ.
2 i TC ( u - Z ) n + 1
y+ 0
r
Alors, pour tout z appartenant à la couronne ouverte 'l < Iz-zoi < '2,
on a
+00
fez) = L an(z-zo)n
-00
+00 +
(on rappelle que la notation L sous-entend que chacune des séries L et
-1 -00 0
L sont séparément convergentes).
-00
Ce théorème assure donc l'existence dans les conditions indiquées du déve-
loppen1ent en série de Laurent d'une fonction holomorphe développement
valable dans une couronne. On déduit de ce théorème la propriété remarquable
énoncée au théorème 4.11.2.
2° Développement en série de Taylor.
Théorème 4.n.2.
Toute fonction holomorphe dans un
domaine D est développable en série en-
tière autour de tout point Zo du domaine,
le développement étant convergent dans le
plus grand disque ouvert de centre Zo
incl us dans D. (cf figure 5). Les coeffi-
cients an du développement sont donnés
par la formule
1 f f(u)du
an = 2in Yr (u-z o t+ 10
FIG. 5.
3 0 Comportement d'une fonction holomorphe au voisinage d'un point.
Soit f une fonction holomorphe dans un ouvert n privé d'un point Zo,
il résulte alors du théorème 4.II.1. qu'on peut appliquer l'étude faite au
chapitre 2 et l'on rappelle qu'il ne peut donc se produire que les trois cas
suivants :
- f est prolongeable par une fonction holomorphe sur n ;
- z 0 est un pôle; on dit alors que f est méromorphe dans Q ;
- Zo est un point singulier essentiel isolé. On verra dans les exercices
4.11.4. et 4.11.7. le comportement d'une fonction holomorphe au voisinage
d'un point singulier essentiel.
136
FORMULES INTÉGRALES DE CAUCHY. APPLICATIONS
4° Inégalités de Cauchy.
Théorème 4.11.3.
Soit f une fonction holomorphe dans un domaine contenant l'origine,
\1(r) le maximum de Ifl sur le cercle Izi = r inclus dans D, alors, \ln E IN,
j(n)(o)
on a r n lanl M(r), où an = .
n!
Si l'une des inégalités devient une inégalité pour une valeur n = no, alors f
est le monôme anoz no .
5° Théarème du module maximal.
Théorème 4.11.4. - Si f est holomorphe dans un domaine D et sur sa
frontière et n'est pas une constante, le maximum de son module dans le
domaine et sur sa frontière est atteint en un point de la frontière.
Conséquence. - Sif(z) 0 dans le domaine D le minimum du module est
également atteint en un point de la frontière.
6° Fonctions entières.
Définition. - Une fonction holomorphe dans tout le plan complexe
est dite une fonction entière. Il résulte du théorème 4.11.2. la propriété
suivante :
Propriété. - l'ensemble des fonctions entières est identique à celui des séries
entières dont le rayon de convergence est infini.
Théorème 4.111.5. (de Liouville).
Une fonction entière pour laquelle
sup If(re ifP )/
lim fPe[O,21t) - 0 k > 0
k '
r-+oo r
est un polynôme de degré inférieur à k.
(On retrouve en particulier la propriété énoncée en application 1, 3°.)
EXERCICES DU CHAPITRE 4
4.1.1. Soit f une fonction holomorphe dans un disque ouvert D, C une circon-
. férence de centre a et intérieure à D. Montrer que f(a) est la valeur
moyenne de f[par rapport à 0 = Arg (z- a)] de ses valeurs prises sur C.
4.1.2. En utilisant la formule de Cauchy, donner la valeur des intégrales sui-
. vantes:
'Tt
sin "4 z
f c+ (z2-1) dz,
f e1CZ
r+ (1 + Z2)2 dz,
C : X2+y2_2x = 0;
r : 4x 2 +y2_2y = O.
4.1.3. Formule de Poisson.
.. Soit f holomorphe dans un domaine D contenant l'origine, C la circon-
férence de centre 0, de rayon R contenue dans D ainsi que son intérieur.
. , R 2
On considère Zo tel que Zo = roe l9 0 (ro < R) et Zo = -=-.
Zo
A partir de la formule de Cauchy donnant f(zo) et de la relation
f fez), dz = 0,
e+ z - Zo
établir la forlnule de Poisson:
1 f 21C R2-r5 .
f(zo) = 2 - R2 2 R (0 0)+ 2 f(Re I9 )dO.
'TC 0 - r 0 cos - 0 r 0
En déduire une formule qui donne la valeur en un point [intérieur à C]
d'une fonction harmonique dont la valeur est donnée sur C.
4.1.4.
..
1 0 Établir que ton a
R- izl R 2 -lz1 2 R+ Izi
R+ Izi <; !Re i9 -zI 2 <; R-lzl '
2° En utilisant la formule de Poisson (exercice 4.1.3.), démontrer que
si u est une fonction harmonique positive ou nulle dans le disque Izi < R,
on a
pour Izi < R.
R- Izi R+ Izi
R+ Izl u(O, 0) <; u(x, y) <; R- Izi u(O, 0),
(z = x+ iy).
3° En déduire que si u est harmonique et positive ou nulle dans un disque
Dr(a) (a = rx+i/3), on a
1
3 u(et, /3) <; u(x, y) <; 3u(et, /3) dans Dr (a).
2
138
4.11.1.
.
4.n.2.
..
4.11.3.
..
4.11.4.
..
4.11.5.
...
FORMULES INTÉGRALES DE CAUCHY. APPLICATIONS
Déterminer la série de Taylor au point 0 des fonctions suivantes:
1
ZH> (l-z)2
1
ZH> ( ·
z-I)(z- 2)
En déduire la valeur des intégrales
l dz l dz
c+ zn(l- Z)2 ' c+ zn(z-I)(z- 2) ' n E JN,
où (C) est une circonférence de centre 0 et de rayon inférieur à 1.
Prolongement analytique.
Soit f holomorphe dans un ouvert connexe D et Xo E D.
Démontrer que les assertions suivantes sont équivalentes:
i) fn(xo) = 0, 'ln EJN,
ii) f(x) == 0, dans V Xo voisinage de Xo,
iii) f(x) == 0, dans D.
En déduire que si deux fonctions holomorphes dans un ouvert connexe D
coincident au voisinage d'un point de D elles coïncident dans D.
Soit f line fonction méromorphe dans un domaine D, r Elne courbe
fermée contenue dans D ainsi que son intérieur, aucun zéro ou pôle de f
ne se trouvant sur r.
Établir la formule
l f'(z) dz = N-P
2in r+ j(z)-a '
où N (resp. P) est la som/ne des ordres de multiplicité des racines de
l'équation j(z)-a = 0 (resp. somme des ordres de multiplicité des pôles
de f) situés à l'intérieur de r.
1
On considère la fonction Z H> cp(z) = cos - dans un voisinage de l'origine.
Quelle est la nature du point O? z
Montrer que si z tend vers 0 en restant sur l'axe inzaginaire, cp(z) devient
infini. 1
Montrer que l'équation cos - = a, a une infinité de solutions pOlir toute
z
valeur de a c0.71prise entre -1 et 1. 1
Plus généralement, établir que l'équation cos - = A (A complexe) adl11et
z
une infinité de solutions au voisinage de l'origine et ceci, quel que soit
le nombre A.
Formule de Gutzmer.
Soit f holomorphe dans un domaine contenant l'origine, "Ir circonférence
de centre O. de rayon r contenue dans D ainsi que son intérieur.
Démontrer que
+ 00 1 J 21t
" l a 12r2n = - Ij(re i6 )1 2 dO
'f) n, 2n 0 '
où les an sont les coefficients du développement de Taylor de f.
4.11.6.
.
4.11.7.
..
4.11.8.
..
4.II.9.
...
4.11.10.
...
EXERCICES DU CHAPITRE 4
139
Inégalité de Cauchy.
Utiliser le résultat de l'exercice 4.11.5. pour démontrer le théorème 4.11.3.
Théorème de Weierstrass.
Soit f holomorphe dans un disque pointé 0 < Iz 1 < r, telle que 0 soit un
point singulier essentiel isolé.
Montrer que, 'v'B > 0, l'image du disque pointé 0 < Izi < B est dense
dans q;.
Lemme de Schwarz.
Soit f fonction holomorphe dans le disque Iz 1 < 1 et telle que 1(0) = 0,
et If(z) 1 < 1 pour Izl < 1.
Démontrer que
a) I/(z) 1 Izl, pour tout z tel que Izi < 1,
b) si pour un Zo 0, on a If(zo) 1 = IZol, alors
fez) = Àz, avec 1,11 = 1.
Théorème des trois droites.
Soit f une fonction holomorphe et bornée dans la bande 0 Re z 1.
Si l'on a If(iy) 1 Al et I/(l+iy)1 A 2 , montrer que
If(x+iy)1 Af- x A 2 , 'v'XE [0,1].
(On étudiera d'abord le cas particulier Al = A 2 = 1 en utilisant la
fonction auxiliaire z e£z'l(z) et en faisant tendre e vers O.)
On considère une fonction f holomorphe dans le disque-unité: Izi 1
P fez) .
et un polynôme Q(z) = zP + L ak zP - k tel que z g(z) = Q( z ) SOIt
k=l
holomorphe dans le disque-unité.
1 0 Soit ÀjU = 1, 2, ..., p) les zéros de Q(z) supposés tous distincts de O.
On pose
h(z) = [ il l ÀjZ ] fez).
I)'JI l ",,-À j
a) Établir Ih(O) 1 Ig(O)I.
b) En appliquant la formule de Cauchy à h(z) démontrer que l'on a
(1)
1 J 21t
Jg(O) 1 2n 0 If(e i6 )ldO.
2 0 Étendre l'inégalité (1) au cas où Q(z) est de la forme
Q(z) = zqj(z-À j ), q étant un entier positif.
3 0 Établir l'inégalité
1 J 21t
Ig(O) 1 2 ----p If(pei6) IdO,
np 0
(2)
dans le cas où l'on considère le disque Izi p au lieu de Izi 1.
SOLUTIONS
4.1.1.
II suffit d'écrire la formule de Cauchy
1 f f(z)
I(a) = 2in c+ z- a dz
et de paramètrer le cercle C+ à l'aide de z = a+ re i8 .
II vient alors
1 f 27t j(a + re i8 ). i8
I(a) = 2 --=- i8 Ire dO,
ln 0 re
c'est-à-dire
1 f 27t
I(a) = 2n 0 I(a + re i8 ) dO,
ce qui traduit précisément la propriété indiquée.
4.1.2.
La première intégrale s'écrit sous la forme
. n
f sIn 4 z f f (z)
1 = dz = - dz
c+ Z2 - 1 c+ z- 1 '
. n
sIn 4 z
avec fez) = +1 fonction holomorphe dans fE-{-}. . n
z SIn 4
La formule de Cauchy est alors applicable et l'on obtient 1 = 2inf(1) = 2in -'-'
. . 1/2 -
SOIt 1 = ln ""2.
(y_1)2 1
Pour la seconde intégrale on constate que r est l'ellipse x 2 + 4 - 4 = o.
L'intérieur contient le point z = i (qui est d'ailleurs le centre de l'ellipse) et ne
contient pas z = - i.
L'intégrale J = f r+ (1 :2)2 dz s'écrit sous la forme
f fez)
J = (")2 dz,
r+ Z-l
e 7tZ
avec/(z) = (z+i)2 holomorphe dans fE-{-i}.
SOLUTIONS 141
La formule de Cauchy - pour la dérivée d'ordre 1- est alors applicable et
J = 2inf'(i).
, n ( z+i ) -2 n+l
Or f ( ) d o nc f ' ( i ) = -.
z = (z+ i)3 e ftZ , 4
et
(in-l)n
J= ·
2
4.1.3.
Formule de Poisson.
Dans les conditions indiquées, on a
1 f fez)
dz = f(zo)
_ln c+z-zo
(formule de Cauchy)
et
f f(z dz = 0
2ln c+ z-z 0
(théorèn1e de Cauchy puisque Iz' 01 > R entraîne que la fonction sous l'intégrale
est holomorphe pour Izi R),
donc 2inf(zo) = f [ 1 + l , ] fez) dz.
c+ Z-Zo z-z 0
Explicitons, en fonction de Zo, l'expression entre crochets, nous obtenons
1 1 1 Zo
K(z,zo) = + , = +
Z-Zo z-z 0 Z-Zo zZo -R2
1
Zo
+ - -
zZo -zz
z-zo
puisque sur C+ on a Izl = R, donc
1 [ z Z 0 ] 1 R 2 - r 0 2
K(z, zo) = - - - - =-
z Z-Zo z-zo Z Iz-zol2
et
1 R2_r02
- Z R2 - 2roR cos«(J- (Jo) + ro2'
1 f R2-ro2
f(zo) = 2in c R2_2roR cos(lJ-lJo)+ro 2 .
fez) dz
z '
c'est-à-dire, en posant z = Re i8 ,
.8 1 f 2ft R2-ro2 f i8 d(J
f(roe ' 0) = 2 - R 2 + 2 2 R «(J (J ) (Re) ·
n 0 ro - ro cos - 0
En prenant la partie réelle des deux membres de cette relation on obtient alors
. 1 J 27t (R2-ro2)P(R cos (J, R sin (J)
(1) P(ro cos (Jo, ro SIn (Jo) = _ 2 R2 + 2 2 R «(J (J) dO,
n 0 ro - ro cos - 0
cette formule donne la valeur, en un point (xo, yo) intérieur à C, d'une fonction
harmonique dont la valeur sur C est connue.
142
FORMULES INTÉGRALES DE CAUCHY. APPLICATIONS
R2-r 2
L' xpression (R, O)H- R2+ 2-2 R «(J- ) ' avec r < R, est appeJée noyau de
POisson. r r cos Ci
La formule (1) donne la solution du problème de Dirichlet suivant :
Trouver une solution u de Llu = 0 telle que u! c = ({J(x, y), ({J étant une fonction
donnée. On remarquera que le noyau a été aussi écrit sous la forme
!ZI2-!zoI2
Iz-z o l2 .
4.1.4.
1 0 A partir de la double inégalité suivante :
R'-!zl < IR'eiO-zl <; R'+ Izl, pour
on constate immédiatement que
1 1 1
(R'+ IZ\)2 IR'e i8 -zI 2 (R'-lz\)2 '
d'où le résultat suivant :
R' -izi R'2_lzI 2 R' + Izi
R'+lzl IR'e i8 -zI 2 R'-lzl '
Izi < R' < R,
(1)
Izl < R' < R.
2 0 Écrivons la formule de Poisson (trouvée à l'exercice précédent) sous la forme
1 J 27t R'2_lzI2 , i
f(z) = 2n 0 \R'e i8 -zI 2 feR e 8) dO.
En prenant la partie réelle on a donc
1 J 27t R'2_lzI2
(2) u(x, y) = 2n 0 ï R'e iO - Zl2 u(R'cos 0, R'sin (J) dO,
compte tenu de l'hypothèse u(x, y) ;> 0 dans Izi < R, on a u(R'cos (J, R'sin 0) ;>0,
puisque R' < R, alors
R' -Izl ( ' () ,. l) R'2_lzI 2 , (J ,. l)
R' + Izi u R cos , R sin u) IR'e i9 -zI 2 ueR cos ,R sm u)
./ R' + Izi ( ' (J ,. l)
R' -izi u R cos , R sin u),
d'où, en intégrant,
1 R' + Iz 1 J 27t , l}'. l} (J 1 R' + Iz 1 J 27t ( ' (J ,. l) (J
2n . R' -Izl 0 ueR cos u,R sm u) d u(x,y) 2n . R' -Izl 0 u R cos ,R slnu)d ,
mais 2 1 J 27t u(R'cos O,R'sin (J) dO = u(O,O) (en faisant z = 0 dans la relation (2),
no.
par suite
R'-Izi R'+lzl
R' + Izl u(O,O) u(x,y) R' _ Izl u(O,O)
SOLUTIONS
143
Cette double inégalité est donc obtenue 'v' R', R' < R, en passant à la limite sur R'
on en déduit donc la double inégalité demandée :
(3)
R-izi R+ Izi
R+ Izl u(O,O) <; u(x,y) <; R-izi u(O,O).
3° Soit ZH- v(Z) = u(Z+a), les hypothèses faites sur u entraînent donc
v est harmonique dans le disque de centre 0 et de rayon r
v 0 dans ce même disque.
On peut donc appliquer le résultat (3) du 2°, c'est-à-dire
r-IZI r+IZI
r+ IZI u(r:t.,f3) u(x,y) r-IZI u(r:t.,f3).
Si l'on impose à z d'être tel que Iz- al < i on a donc 121 < ;.
r
r- !ZI 2 1
Alors r+ IZI ---,. ;> 3" et
r+ 2
d'où le résultat énoncé dans le texte.
r+IZI
r-IZ I 3,
4.11.1.
En dérivant le développement
1
_ 1 = l+z+z2+ ...+z"+ ..., Izi < 1,
-z
on obtient immédiatement
(1)
(l Z)2 = 1+2z+3z 2 +...+(1I+1)z"+..., Izl < 1.
Pour la seconde fraction rationnelle on opère à partir de la décomposition suivante :
111
=-+-
(z-l) (z- 2) l-z z-2.
Comme
1 1 00 n
2 - _ 2 L Z 2 '" on obtient
z- =
o
(2)
1
(z-l) (z- 2)
- f ( 1- 2}+1 ) zn.
11=0
144
FORMULES INTÉGRALES DE CAUCHY. APPLICATIONS
D'après la formule de Cauchy pour les dérivées et le théorème 4. ILl, on peut
écrire
1 f dz f(n-l)(O)
2in c+ zn(l- z)2 = (n-l)! = an-le
oùf(z) = (1 z)2 et an-l est son coefficient dans le développement en série de Taylor
autour de l'origine.
En utilisant (1) on voit donc que f n(1dZ )2 = 2n iTc.
c+ z -z
Le procédé est identique pour la seconde intégrale.
On utilise le développement (2) pour constater que l'on a
fc+ zn (Z-:;(Z-2 ) = 2in (1- n ).
4.11.2.
Il est immédiat que iii => i.
II suffit donc d'établir que i => ii et que ii => iii.
JO i) entraine ii). - La série de Taylor f (z- o)n f(n) (zo) converge vers f(z)
n=O n.
dans un voisinage V Zo de Zo puisque f est holomorphe dans D et Zo E D.
Or ce développement vaut 0, puisque j'(n)(zo) = 0, 'v'n E IN, donc f(z) = 0 dans un
voisinage V=o de Z0 0
2° ii) entraine iii). - Soit Ll = {zo, Zo E D, 3 V=o tel que f(z) = 0 dans V=o};
Montrons que â est ouvert dans le sous-espace D.
Il suffit de vérifier que Ll est voisinage de chacun de ses points. Ceci est immédiat,
puisque 'v' z E Ll il existe un voisinage ouvert V z inclus dans â sur lequel f(z) = o.
Établissons maintenant que Ll est un fermé du sous-espace D. Soit z E-Ll n (D),
alors 3 (Zj}, Zj E D avec lim Zj = z.
Mais f étant holomorphe f(n)(z) = Iimf(n)(zj) ceci pour tout nEIN, or f(n) (Zj) = 0,
puisque Zj E â donc (n(z) = 0, 'v'n E IN, alors f(a) = 0 dans un voisinage de z
d'après (1) précédent donc z E â et Ll est bien fermé dans D.
Ainsi Ll est à la fois ouvert et fermé dans le sous-espace D, or D est supposé
connexe, donc soit Ll = D soit Ll = 0, comme ce dernier cas n'a pas lieu il
reste â = D. On a donc bien f(z) = 0 en tous les points de D ce qui conclut la
démonstration.
4.11.3.
Il suffit d'appliquer Je théorème des résidus à la fonction z <p(z) = f{;Z)
donc de rechercher les points singuliers de ({J. ,Z - a
l{J présente uniquement des pôles, provenant des pôles de la fonction f' et des
zéros de la fonction z f(z)-a.
SOLUTIONS
145
Soit F(z) = {(z)-a, F(z) peut s'écrire
F(z) = (z-al)...(z-a n ) G(z),
(z-b1)...(z-b p )
(1)
où G n'admet plus de pôles ni de zéros dans le domaine considéré (chaque a et chaque b
intervient un nombre de fois égal à son ordre de multiplicité).
E dé . ( ) ffi 1 . F'(z) . 1 .
n rivant 1 et en e ectuant e quotient F (z) ' 1 vient
F'(z) n 1 p 1 G'(z)
F (z) = j 1 z-aj - j 1 z-b j + G (z) '
le quotient Zl--+ 'g est holomorphe dans le domaine étudié, puisque G est holomor-
phe et ne présente pas de zéros.
1
Si Qj est un zéro de F d'ordre aj le terme - apparaît a j fois,
z-aj
si b J est un pôle de F d'ordre PJ le terme z 1 b. apparaît Pj fois,
J
donc
] . 1 d F' , . d
aj est pô e slmp e e F de rest u a J
et
F'
b j est pôle simple de F de résidu - f3j.
F'
Appliquons alors le théorème des résidus à la fonction F' on obtient
1 J F'(z)
2in r+ F(z) dz = L (XJ - L Pj = N-P,
c'est-à-dire
J f'ez) d7 = N-P
2in r+ f(z)- a .. .
ReI11QrqU? - On déduit aisément de ce résultat le théorème de d'Alembert. Pour
a = 0 et f polynôme de degré 11 on établit N = 11.
On utilise le fait que pour Izi = R, on peut écrire
f'ez) 11 t(z)
-=-+-
f (z) z z'
1
It(z) 1 < et < 2'
a lors
N = J dz + r e(z) dz
2in r+ z 2in J r+ z '
d'où N = n+ )1.,
avec
2na 1
IÀ.I <; 2n = et < 2'
donc
N= n.
146
FORMULES INTÉGRALES DE CAUCHY. APPLICATIONS
4.11.4.
IOLe développement en série de Laurent de Z H- cos ! au voisinage de l'origine
s' rit Z
1 00 ( _ l)n
cos - = L (2 )' 2n .
Z 0 /l.Z
Le point 0 est donc un point singulier essentiel isolé.
. 1 --- i 1 i 1
2° SOIt z = iy, - = - et cos - = cos - = ch -, donc lorsque y tend vers 0 on a
1 z y z y y
lim ch - = +00, ce qui justifie l'énoncé.
y
3° Il suffit de résoudre cos Z = a, a E [-1,1].
En posant a = cos et, on obtient
Z = (-I)ket+kn,
1
z=
(-I)kC( +kn'
soit
donc, 'v'a E [---1,1], nous avons la famille de solutions suivante
1
z =
k (-I)ket+ kn.
4° Dans le cas général cos Z = A se résoud en passant à la forme exponentielle
eiZ+e- iz = 2A.
Soit u 2 -2Au+ 1 = 0,
u = e iz
,
u=A -+- B
où
B 2 = A2-1
En écrivant les nombres complexes A ::l: B sous la forme exponentielle re i {}, on
obtient
e iZ = re i8 = e Log r+i8 <=> iZ = Log r+ i(J+ 2ikn,
donc
1 1
z - - ---
- Z - (J+2kn-i Log r
. 1 1 2 _ 1
et, par sUIte, I Z - «() + 2kn)2 + (Log r)2 ·
On en déduit que les racines de cos! = A situées dans un voisinage Izl < 8 de
l'origine sont telles que z
1 2
(Logr)2+ 1(J+2knI2 8 ,
1
ce qui entraîne une infinité de valeurs pour k définies par ((J+ 2kn)2 ;> 2" --- (Log r)2
d'où le résultat 1 8
'v' A l'équation cos - = A admet une infinité de racines dans tout voisinage de
l'origine. Z
SOLUTIONS
147
Sur cet exemple particulier, on a un aperçu du comportement spécial d'une fonction
possédant un point singulier essentiel isolé. D'une part (point 1), elle peut tendre vers
l'infini comme pour un pôle, d'autre part (point 4), elle peut prendre une infinité
de fois toute valeur donnée.
On verra à l'exercice 4.11.7. (théorème de Weierstrass) un résultat général.
4.11.5.
.f étant hoJomorphe pour Izi <; r, on peut écrire
00
fez) = L anz",
o
la série étant (:tbsolument et uniformément convergente pour Izi <; r (en fait le rayon
de convergeTIce de ce développement est R avec R > r d'après le théorème 4.11.2,
où R est le rayon du plus grand disque ouvert de centre 0 contenu dans D. Néces-
sairement R > r).
Considérons z g(z) = an r: r.
y2
Cette série converge absolument et uniformément pour - <; r, donc pour Izi ;> r
z
r 2
et son domaine de convergence est donné par jzl > R .
?
r-
Le produitfg est holomorphe dans la couronne R < Izi < R. II est donc dévelop-
pable en série de Laurent dans cette couronne et le terme constant ao est donné par
1 J dz
ao = _ 2 . f(z)g(z)-.
ln "i't z
Pour expliciter l'intégrale en fonction de f seulement, écrivons z = re i8 il vient
co
fez) = L Qny n e in8
o
et
co
g(z) = L a:yne-in9,
o
donc g(re i6 ) = f(ye i 8 ), par suite
J dz J 21t
f(z)g(z) - = i If(re i8 )i 2 dO.
"it z 0
Alors
1 J 21t
ao = 2n 0 If(re i8 ) 1 2 dO.
148
FORMULES INTÉGRALES DE CAUCHY. APPLICATIONS
Par ailleurs les deux séries considérées étant absolument convergentes dans la
couronne on peut faire leur produit et déterminer ainsi directement ao
'Y.> ( 2n ) 00
ao = (anz n ) an r zn = la n l 2 r 2n ,
d'où la formule demandée
00 1 f 2
" la 1 2 r 2n = - If(re i8 ) 1 2 dO.
n 2n 0
4.11.6.
Soit M (r) le maximum du module defsur le cercle Izi = r, la formule de {"exercice
précédent entraîne
00
L la n l 2 1"2n < M 2 (r),
o
c'est-à-dire
lanlr n M(r),
où
f(n) (0)
a =
Il n!
De plus, si l'une des inégalités devient une égalité pour Il = no, tous tes autres
termes de la série (la n l 2 r 2n ) sont nécessairement nuls, alorsf(z) se réduit au monôme
anozno. (Résultat du théorème 4.11.3.)
4.11.7.
. .
Soit BE. le disque ouvert pointé 0 < Iz 1 < e et son in1age par f soit f(8 , ).
.
Supposons quef(B t ) ne soit pas dense dans C. Il existe donc un disque ouvert B (a),
. .
(et > 0) tel que Bu.(a) nf(B£) = 0, alors 'v'z E B£ on a If(z)-al ;> \J..
Considérons alors la fonction
1
z F(z) = f(z)-a '
.
cette fonction est holomorphe et bornée dans B£. _
Par suite, F est prolongeable à l'origine par une fonction holomorphe F d'après un
résultat sur le comportement d'une fonction holomorphe au voisinage d'lun point
(chapitre 2 et chapitre 4, 3 0 ), donc F est holomorphe dans B£ et : est méromorphe
F
SOLUTIONS
149
dans ce même disque, ce qui entraîne que l'on a
1 r
[= -= + a meromorphe dans Bt'
F
--.-
résultat contraire à l'hypothèse faite; donc [(B t ) = C.
Remarque. - Le résultat énoncé par le théorème de Picard est plus fort que celui
qui vient d'être obtenu.
En effet le théorème de Picard qui s'énonce ainsi :
.
l'image par [ de toute couronne Bt est lE tout entier ou lE privé éventuellement
.
d'un seul point, se traduit par [(B t ) = lE ou lE- {À}.
On a vu un exemple de la première situation dans l'exercice 4.11.4, la fonction
1
z e Z donne un exemple de la seconde, puisque cette fonction ne prend jamais
la valeur o.
4.11.8.
a) Soit [holomorphe dans Izi < 1 teIJe que [(0) = 0 et 1 [(z) 1 < 1 pour Izl < 1.
La condition f(O) = 0 entraîne que le développement en série de Taylor de [ dan
le disque (0,1) s'écrit
I)
fez) = z L Qp ZP - 1 = Z ((J(z),
1
où qJ est holomorphe dans le même disque.
fez) 1 I/(z) 1 l ,
qJ(z) = - est telle que 1 (p(z) 1 = 1 1 -, ou r = Izi.
z z r
Comme ({J est holomorphe on a aussi 1 ({J(z) 1 ! pour Izi r (théorème du module
maximal 4.11.4); donc IJ(z) 1 , 'v'r tel que Izi < r < 1 en passant à la limite r --+ 1,
on obtient r
I/(z) 1 Izl, 'v'z tel que Izl < 1.
h) Si pour Zo 0 on a, I[(zo) 1 = Izo 1 alors 1 ({J(zo) 1 = 1 pour un Zo tel que Izo 1 < 1,
ce qui contredit le théor me du module maximal applicable à ({J, à moins que ({J ne
soit une constante de module égal à 1; donc fez) = Àz, avec IÀ\ = 1.
4.11.9.
Cas Al = A 2 = 1. - Suivant l'énoncé on considèrera d'abord le cas particulier
Al = A 2 = 1, en utilisant la fonction z e tz2 fez).
Nous avons \ [(z)e tz2 \ = 1[(z)le t (x 2 _. y2 ) (z = x+iy),
150 FORMULES INTÉGRALES DE CAUCHY. APPLICATIONS
donc If(z)e tz2 / /f(z) le e- i\ pour XE [0, 1],
et If(z)e tz2 / M eee- y2,
puisque f est supposée bornée dans ]a bande 0 x 1.
On en déduit qu'il existe Yo tel que Iy! > Yo entraîne If(z)e t =21 1.
La fonction z F(z) = e tZ2 f(z) est donc bornée par 1 pour /yl > Yo.
Sur le rectangle [0, 1] x [- Yo,Yo], F est holomorpl:e et le théorème du module
maxima] s'applique.
Or pour x = 0 le module de F est borné par 1 et pour x = 1 le module est borné
par et;.
On en conclut que sur la bande [0,1] X ]-00, +00[, on a IF(z) 1 et, soit
If(z) 1 et; le - tz2 1.
Comme ceci est valable, 'v' B > 0, on en déduit, en passant à la limite en B,
If(z) 1 1,
'v'z tel que Re z E [0,1].
Cas général. - On introduit maintenant la fonction
f(z)
<p(z) = At-%A
et l'on vérifie que <p possède bien les propriétés exigées dans le cas particulier:
. ({J est holomorphe dans la bande 0 Re z 1,
. ({J est bornée dans la même bande, puisque
\Ai-ZI :::Ii Al- x
et
IA I = A 2 ,
1 ( . )1 - If(iy) 1 1
· <p lY - A 1 ,
(1+ . ) - If(l+iy)1 --/ 1
· ({J lY - A ,
2
donc 1 ({J(X+ iy) 1 1, pour XE [0,1],
d'où l'on déduit
1!(x+iy)1 Al- x A .
4.11.10.
f(z) est holomorphe dans Je disque Iz\ 1 ainsi que
f(z)
g(z) = Q(z)
p
et Q(z) = zP + L ak zP - k .
k=l
SOLUTIONS
151
1° a) Inégalité Ih(O) 1 ;> Ig(O)1. - On a
Q(z) = II (z- À j ) fI (z- À}) => (1) h(z) = fI (1- z) fI (z- À. i ) g{z)
'Àj' l \Àj,\>l IÂjl l IÀ},1>1
=> h(O = fI ( - } j') g{O)
IÂj'I> 1
et !h(O) 1 = Ig{O) \ fI \ Àj'),
IÂj'I> 1
donc Ih(O)!;> Ig(O) 1 (l'égalité n'ayant jamais lieu d'ailleurs).
b) Majoration de 11l(0)1. - Puisque h{z) est holomorphe dans le disque unité
appliquons ]a formule de Cauchy sous la forme
F(O) = J F(z) dz.
21n cr z
h(O) = J h(z) dz
21n cr z '
lz{O) = J 21t h(ei8) dO
2n 0
1 J 21t
Ih{O)1 < 2n 0 Ih{e i8 ) \ dO.
AJors
soit aussi
donc
1-zJ:.
Lorsque Izi = 1, on a
z-À.
:}
1
z-1J - l 'Z-À j
- z =1
z-À. - z- À.
:} :}
donc pour izl = 1, Ih(z) 1 = I/lz) 1.
On en déduit immédiatement
1 J 21t
Ig(O) 1 < 2n 0 I/(e i8 ) IdO.
(1)
2 0 Q est de la forme Q = Z Q 1Cj (z- ÀJ). Posons = <p(z).
z
<p(z) est holomorphe dans le disque unité, puisque
1
({J = Q nj (z- )"j) = g nj(z- } j).
On pose maintenant Q1 = nj(z- } j)
cil = g est holomorphe dans le disque unité.
(1) s'applique donc à ({J, g et QI' d'où
donc
1 J 21t
Ig(O \ 2n 0 \ ((J(e i8 ) IdO,
Ifl
Icp\=w
1 J 21t
Ig(O) \ < 2n 0 l{e i8 ) de.
et
\zl = 1 => I({JI = III,
mais
152
FORMULES INTÉGRALES DE CAUCHY. APPLICATIONS
3° On pose z = p;, fez) = f(p ) = ((J( ) holomorphe pour lçl 1,
Q(z) = pP'ÇP + L OK pp-K'ÇP-K,
Q(z) = pP Ql( )' Ql('Ç) = 'ÇP + L a 'ÇP-K,
f(z) ((J('Ç) 1
g(z) = Q(z) devient pPQ1('Ç) = pp gl('Ç),
pour <p, QI' gl les hypothèses initiales sont satisfaites relativement au disque-unité.
Alors (1) est valable :
Igl(O)1 < _ 2 1 f 21t 1 ({J(e i6 ) 1 dO => (2) Ig(O) 1 < 2 f 21t If(pe i6 ) 1 dO.
n 0 np 0
r
5.
EXEMPLES DE FONCTIONS
MULTIFORMES
1. - INTRODUCTION. FONCTION RÉCIPROQUE DE Z Z = Z2.
1 0 Position du problème.
Z étant fixé, l'équation Z2 = Z admet deux solutions Z1 et Z 2, on ne peut
donc définir une fonction réciproque (nécessairement univoque, c'est-à-dire
ne prenant qu'une valeur pour toute valeur Z fixée). On pourrait dire par contre
qu'il existe deux fonctions réciproques, à condition de pouvoir les distinguer
sans ambiguïté, ou encore qu'il s'agit« d'une fonction réciproque multivoque(*))
à deux valeurs, ces deux valeurs étant fournies par les deux fonctions réciproques
appelées alors déterminations.
2 0 Notion de point critique et de coupure.
Pour distinguer les deux déterminations, on rencontre une difficulté majeure
(qui n'existe pas dans le cas réel) à savoir que l'on peut passer par continuité
d'une déternlination à l'autre. En effet si Z = re i9 ((J défini modulo 2 n), on
peut écrire
Zl(Z) = V; e iŒ1 ,
(J
ct 1 = - (lnod 2n),
2
et
Z 2(Z) = V; e iŒ2 ,
(J
ct2 = -+n (mod2n).
2
Une variation de l'argument de Z d'une anlplitude 2n (<< rotation» sur une
courbe fermée simple entourant l'origine 0) sans changer Z changera = l (Z) en
z 2(Z), par exemple.
Il apparaît ainsi la nécessité d'éviter de telles « rotations» autour de 0, que l'on
appellera pour cette raison point critique. Pour ce faire on utilisera le plan
complexe privé d'une demi-droite issue du point critique appelée coupure.
(*) Le terme « fonction muItivoque » représente ici un abus de langage. Il serait préférable
de dire mu/ti-application.
154
EXEMPLES DE FONCTIONS MULTIFORMES
3 0 Réalisation pratique (fig. 1).
Soit Ox' choisie comme coupure. Si z = re iO on écrira, par définition,
(1J;) 1 = V; ei
et
(1J;)2 = V;ei +i" = -0;;)1'
en imposant - n < (J < n.
œ'
(Vz)i
œ
FIG. 1.
Les fonctions ( )1 et (V )2 satisfont aux propriétés suivantes:
i) : si x réel positif,
et
( ( ) ) 1 = iV I.X V I_ ! si x réel négatif.
V X 2 = -l Ixl
ii) ( )l et ( )2 sont holomorphes dans (C-Ox'.
iii)
(1J;)1 = 2( )1 '
d - 1
dZ (VZ)2 = 2(V;)2 "
La fonction ZI-+CV l est donc un prolongement holomorphe dans (C-Ox'
de la fonction x H-V x définie sur l'axe réel positif.
Remarque fondamentale. - A priori on ne peut écrire (*)
( V Z IZ2 )1 = ( V Z 1 )1 ( )1.
II est donc conseillé de revenir systématiquement à la définition avant
d'emp]oyer de telles formules.
(*) Contre-exemple: Pour z 1 = z. = j = -à + i 3 , on a
( V Z IZ2 ) 1 = ( )l = -j et (JtÇJl(JQl = ( )l =j.
FONCTION z L Z ET Z Log z
155
II. - FONCTION z L z ET z Log z.
1 0 II s'agit de définir une fonction holomorphe notée z r-+L z qui prolonge
la fonction logarithme népérien définie pour z réel positif (et qui est une fonction
Téciproque de l'exponentielle z eZ).
o est un point critique et le plan doit être muni d'une coupure, on prendra,
par exemple, la demi-droite Oy (fig. 2).
v
X/'
FIG. 2.
Par définition, L!}. z = Log Izi + iO, en écrivant
2
z = Izlei8, avec
3n n
-- < (} < -.
2 2
Par exemple,
L i (l-i) = Log V2-i : et
L}!(-2) = Log2-in.
2
2 0 Propriétés.
La fonction L (lire log indice ) possède les propriétés suivantes
i) L!!.x = Logx pour x réel positif;
2
ii) L!!z est holomorphe dans fE-Oy;
. . . ) 2 d , . , 1
III sa envee vaut - :
z
(LJ!z)' = !,
2 Z
'v'ZE fE-Oy.
Remarque fondamentale. - Les propriétés algébriques habituelles du loga-
rithme ne peuvent être appliquées a priori. On n'a pas, par exemple,
Log,! (ab) = Log a+Log.!b.
222
156
EXEMPLES DE FONCTIONS MULTIFORMES
3 0 Autres possibilités.
a) 1) est possible de définir une famille de fonctions Looz qui prolongent
la fonction logarithn1e népérien (Log).
Par exemple, en privant le plan complexe de la demi-droite OX (cf. fige 3)
on peut définir la fonction suivante:
3n 5n
L S1t = Log Izi + iO, avec -- < f} < -,
444
qui est holomorphe dans tE - 0 X et satisfait aux propriétés i) et iii).
X' {X} ro' 0 œ
H' Y'
FIG. 3. FIG. 4.
y
Très fréqueInlnent, on définit la fonction
L 21t Z = Log Izi + iO,
qui est holomorphe dans (E-Ox'.
Plus généralement, pour chaque nombre réel, (J), vérifiant
avec
o 0 < 2n,
o < (J) < 2 n,
on peut définir une fonction Loo en prenant pour coupure la demi-droite OX
(cf. fige 4) telle que (Ox, OX) = (J).
Alors Looz = Log Izi + iO, avec (J) - 2 n < 0 < (J).
Convention. - Lorsqu'une fonction L z a été choisie, c'est-à-dire (J) fixé
on la notera en abrégé L z.
4 0 Fonction multiforme Log z.
Une fonction L z étant définie, l'ensemble des valeurs L z+2ik1r, k E Z
pour un z fixé, réalise la fonction multivoque (à une infinité de valeurs)
z Log z.
z L z est la détermination obtenue pour k = 0 que l'on appelle souvent
détermination principale.
FONCTION za ( ':J. RÉEL)
157
III. - FONCTION za (CI réel).
1 0 Définition et propriétés.
Faisons un choix de L z, par exelnple,
3n 'TC , .
L!!z = Log Izi + iO, avec - - < () < - {fIge 2).
222
Le chai x de L z étant fait, on peut définir za :
aL =
za = e 2
,
qUI satisfait aux propriétés suivantes:
i) e]]e coïncide avec x a pour z = x réel positif,
ii) e]]e est holomorphe dans tE - Oy,
iii) sa dérivée vaut CJ. za- 1 :
( (Œ-l)L Z )
(za)' = CJ.z a - 1 c'est-à-dire ae 2, 'v'z E tE - Oy.
2 0 Remarque.
Évidemment le cas CJ( = permet de retrouver la fonction Z H étudiée
directement au paragraphe 1.
IV. - EXTENSIONS DIVERSES.
1 0 Fonction L(z-a).
En posant Z = z-a, on constate que pour chaque ro on peut définir une
fonction Lw(=-a),
Lw(=-a) = Log Iz-al+i arg (z-a), avec w-2n < arg (z-a) < ro,
holomorphe dans tE - aX (fig. 5) et qui coïncide avec Log (x - a) pour
z = x > a.
y
v
ry
X 2
X'l1/ 0
Y'
FIG. s.
œ
X' Q;
:x;
ro' lh 0
Y'
FIG. 7.
FIG. 6.
158
EXEMPLES DE FONCTIONS MULTIFORMES
2 0 Fonction V(z-a)(z-h), a et b réels, a < b.
Il s'agit ici de définir une fonction holomorphe qui coïncide avec
V(x-a) (x-b) pour z = x réel et x a ou x b.
Pour cela il suffit de définir LCJ)l (z - a) et LCJ)2( z - b), puis de poser
1 1
V (z - a)(z - b) = e2Lt,Jl(z-a)+2Lc"2(Z-b).
Cette fonction est holoiTIorphe dans lE-aX I - bX 2 (fig. 6).
Si l'on prend (Ol = (02 = 21r, la fonction correspondante sera holomorphe
dans lE - ab (fig. 7).
3 0 Fonction V<b-z)(z-a), a et b réels, a < b.
En posant Z = (b-z) (z-a) et en considérant la fonction L, on peut définir
la f oncti on
1
V(b-z)(z-a) = e 2I ..7:(b-Z)(Z-a),
y
ro'
Qj
o -"
œ
'
FIG. 8.
qui est holomorphe dans lE-ax' -bx et qui coïncide avec l / (b-x)(x-a)
pour a z = x b (fig. 8).
5. II.1.
.
5.11.2.
..
5.11.3.
..
EXERCICES DU CHAPITRE 5
Soit la fonction f définie par
2+z
z f(z) = Log 2- z' pour Izl < 2,
la détermination du logarithme étant choisie telle que j(O) = O.
Déterminer l'image du disque Izl < 2 par l'application z j(z).
lWontrer que cette application est bijective et conforme.
Logz
En utilisant le contOllr ci-après et la fonction z (1 + Z2)2 ' calculer
, . , J + 00 Log x
1 Illtegrale 1 = 0 (1 + x 2 ) 2 dx.
y
x
La détermination du logarithnze étant
Lo z = Log Izl+i Arg z, 0 Arg z < 2n.
J +OO Log x
Calculer l'intégrale 0 (x+a)2+b 2 dx (a et b sont réels et b > 0) en
utilisant le contour ci-dessolls:
o < r < V a 2 +b 2 < R
et la fonction
(Log Z)2
z (z+a)2+b 2 .
/!J
La détermination du Log étant Lo z = Log Izl+i Arg z, 0 Arg z < 2n.
160
5.11.4.
..
5.11.5.
..
5.111.1.
..
EXEMPLES DE FONCTIONS MULTIFORMES
I + 'Y) dx
c,alculer l i tégrale ( 2 + 2)[(L X)2 + 2 ]' OÙ a est line constante
reelle positive. 0 x a og 'Tt
y
1
On illtègrera la jOllction j(z) = ( 2+ 2) L sur le contour ci-dessus,
z a og z
la détermination du logarit/lIne étant telle que
- n Arg z < n
et
o < r < a < R.
En utilisant le do/naine ci-dessous et la jonction suivante:
Loz
z j(z) = lC
V z(z+ 1)
.y
t,R
-R
-"tR
1 . Arg z
[où Lo z = Log IzJ+i Arg z (0 Arg z < 2n) et 1/; = Izl2 e'--r-
I oo Log x
(0 Arg z < 2n)], calculer V dx.
o x(x+ 1)
I + X> x cx - 1
Calculer l'intégrale 1 _ + dx, (X e ]0, 1 [, en utilisant le contour de
o x za_l e(a-I) Logz
l'exercice 5.11.3. et la jOllction z r-+ j(z) = 1 + = 1 + _ , la déter-
nlination du logarithme étant Lo z. z ..
S.IV.1.
...
S.IV .2.
...
EXERCICES DU CHAPITRE 5
161
Calculer l'intégrale f i 4 dx ,
o V x 3 (l-x)
a) en la ramenant à l'intégrale d'une fraction rationnelle,
1
b) par la méthode des résidus en considérant la fonction z Ho J. 1
et le contour ci-dessous: Z4(t - z)::'
-.R
-tR
f i xndx
Calculer l'intégrale V '
o x 3 (l-x)
a) par récurrence en utilisant le résultat de l'exercice 5.IV.I.,
b) par la méthode des résidus: le contour est identique à celui de l'exer-
cice 5.IV.l. et la fonction est
zn
ZHo .3.. l.
z4(l-z)4
SOLUTIONS
5.11.1.
2+z
L'application z H- Z = Log 2- z est la composée des applications
2+z
ZH-U=-
2-z'
application homographique,
et de
uH- Z = Log u telle que Log 1 = O.
La transformation homographique est composée des applications élémentaires
zH- Zl = 2-z,
4
Z l H-Z 2 =-,
Zl
1
Z 2 H-U= -1+-,
Z2
obtenues en décomposant la fraction
2+z 4
2-z = -1+ 2 - z .
a) Le disque ouvert 1 z 1 < 2 a pour image, par z H- z 1, le disque ouvert 1 z - 21 < 2.
b) Le disque ouvert Iz-21 < 2 a pour image, parz 1 H-z 2 ,ledemi-plandéfinipar
Re Z > 1.
e) Le demi-plan Re z > 1 a pour image, par Z2 H- u, le demi-plan Re z > 0,
soit .
Étudions maintenant UH- Z = Log u. En écrivant u = re i8 , il vient
Z = Log r+ iO+ 2ik1t.
Pour u e on a
O<r<oo
et
1t 1t
- 2 <0<2.
On prendra donc comme coupure la demi-droite Ox' (x 0) avec k = 0, la déter-
mination utilisée est donc L (paragraphe II, 3°).
L'image de est donc la bande définie par
1t 1t
- 2. < lm z < 2:.
1t 1t
Conclusion. - L'image de Izl < 2 par z H- j(z) est la bande - 2 < lm z < 2 .
f est bijective et conforme. - La transformation homographique z H- II est bijec-
tive : pour u donné il y a une valeur, et une seule, de z telle que 2 2 + z = lI.
-z
SOLUTIONS
163
La relation Z = L u = Log r+ i(J entraîne que u Z est bijective sur Re z > 0,
donc .f est une application bijective.
La transformation z Ho f(z) est conforme car f est une fonction holomorphe de z
4
dans le disque ouvert Izi < 2 et sa dérivée, f'(z) = 4 ." ne s'annule pas dans ce
domaine. - z-
5.11.2.
C . d ' I l". Log z f( ) ,. L 0 z
onSl erons a lonctlon z (l+z2)2 = z que nous ecrlvons (l+z2)2 pour
mettre en évidence la détermination choisie du logarithme.
Cette fonction est holomorphe dans lE - { Ox' } privé des pôles doubles
z = i et z = - i.
A l'intérieur du contour considéré intervient seulement le pôle z = i dont le résidu
se calcule facilement
= 1 . [( _ . ) 21' ( )] ' = ( Lo z ) ' = n+2i
a - 1 I Z Z J' z ( . ) 2 8 .
Z l z+z i
Appliquons le théorème des résidus, en décomposant l'intégrale sur le contour r+,
il vient
(1) f f(Z)dz+ f f(z)dz+ f ->f(z)dz- f f(z)dz = - + i1C 4 2 ·
AB c+ B'A' c+ -
Explicitons la première et la troisième intégrale :
f f R Log x
Ahf(z)dz = r (1 + X2)2 dx
et
f f -R Log !xl+in
_>f(z)dz = - (1 + 2)2 dx,
B'A' -r X
ceci d'après le choix de la détermination du logarithme, d'où
f f R Log x . f R dx
f(z)dz = r (l+x2)2 dx+zn r (l+x2)2 .
Étudions maintenant la deuxième intégrale figurant au premier membre de (1).
Pour zE C+ on a Lo z = Log R+i(), 0 () n, d'où
ILo Zl2 = (Log R)2+ (J2 (Log R)2+ n 2 .
Comme
1 1
11+z212 (R2-1)2 '
pUisque Iz2+11 R 2 -1,
on en déduit
1-
[(Log R)2 + n 2 ] 2
If(z)lc+ (R2-1)2 '
164
EXEMPLES DE FONCTIONS MULTIFORMES
d . , . r. l ' Log R 1
cette ermere expression est equlva ente a R4 ' on en conc ut
Hm f f(z)dz = o.
R-+oo c+
La quatrième intégrale du premier membre de (1) se majore de manière analogue.
On a toujours
ILo Zl2 = (Log r)2+ (12 (Log r)2+ n 2
et
1 1
(1 +Z2)2 (l-r 2 )2 '
d'où
f [(z)dz nr[(Log r)2+ n2]1-
c+ (l-r 2 )2 '
la dernière expression étan.t équivalente à nr Log r (pour r -+ 0), on en conclut
lim f f(z)dz = o.
r-+O cr
F alement en passant à la limite (r -+ 0 et R -+ + 00) dans (1), on obtient
f +co Log x . f +oo dx n in 2
2 0 (1+x2)2 dx+zn 0 (l+x2)2 = - 2 + 4'
donc
f +oo Log x 'Tt
o (l+x2)2 dx = - 4
et
j +00 dx 1t
o (1+x2)2 = 4 .
Ces résultats peuvent être obtenus par voie élémentaire. On remarquera que le
résultat sur la première intégrale entraîne l'existence de cette intégrale impropre,
existence qu'il n'a pas été nécessaire d'établir a priori.
5.11.3.
C . d ' 1 C:. f, ( ) (Log z) 2 1 d ' · . d 1
Onsl erons a J.onctlon z 1--+ J ,z = (z+ a)2 + b 2 avec a etermmatlon u oga-
rithme Lo z = Log Izl+i Arg z (0 Arg z < 2n).
Cette fonctionfest holomorphe dans C-{ Ox} privé des points Zl = -a+ib,
Z2 = - a- ib. Ces deux derniers points sont des pôles simples et sont situés à l'inté-
rieur du contour indiqué.
SOLUTIONS
165
Puisque les pôJes sont simples les résidus sont donnés par
(L o Z 1)2
Pl = 2z 1 +2a
et
(Lo Z2)2
P2 = 2z 2 +2a
[ F(zo) ]
en utiJisant p(zo) = G'(zo) , donc
-i
Pl = 2b [Log r+ i(n- C()]2
et
z
P2 = 2b [Log r+ i( n+ œ)] -,
avec r = Va 2 +b 2 ,
b
tg œ = -
a
et
o < œ < n.
On en déduit la valeur de 2in(pl + P2)
4n
2in(pl + P2) = b œ(n-i Log r).
Appliquons maintenant le théorème des résidus à la fonction f pour je contour
donné, il vient
(1) I f(z)dz+ l [(z)dz- I [(z)dz- l [(z)dz= 4n b œ (n-iLOgr).
AB r+ A' B' ')'+
Explicitons les intégrales I [(Z)dZ et I ->f(z)dz :
AB A'B'
l I R (Log X)2 l r R (Log x+ 2in)2
AfJ[(z)dz = r (x+a)2+b2 dx et A'B f(z)dz = ., r (x+a)2+b 2 - dx.
On vérifiera ensuite très facilement que l'on a
r (Log R)2+4n 2
'Ii r+[(z)dz 2nR (R+a)2-b 2 et
l 1 (Log r)2+4n 2
')'+f(z)dz 2nr Ib 2 -(a+r)2: '
ce qui entraîne
lim l [(z)dz = 0 et
R -y. 00 r+
lim l f(z)dz = o.
r-+O ')'+
En passant à la limite dans la relation (1), on obtient donc
l + 00 (Log X)2 l + 00 (Log x+ i2n) 2 4n œ .
o (x+a)2+b 2 dx - 0 (x+a)2+b 2 dX=b(n-zLogr).
Il suffit de développer l'expression sous la seconde intégrale, d'identifier les parties
réelles et imaginaires pour conclure :
I +OO Log x 1 b
o (x+a)2+b 2 = 2b Arc tg a Log (a 2 +b 2 ),
la seconde intégrale étant élémentaire.
On remarquera, comme à l'exercice précédent, que cette méthode montre que
l'intégrale considérée a un sens sans qu'il ait été nécessaire de l'étudier préalablen1ent.
166
EXEMPLES DE FONCTIONS MULTIFORMES
5.11.4.
Soit
1
z f(z)-
- (z2+a 2 )lLog z.
R x
Pôles simples:
z = + ia
et
z = 1.
Résidus :
R. =
la
1
( i Tt ) ,
2ia Loga+2:.
. ln
pUisque Log la = Log a + 2'
-1
R- ia = ( )
2ia Log a-i
et
1
RI = 1+a 2 .
L'intégrale prise sur le grand cercle tend vers 0 pour R -+ +00, car
1 1
If(z)llzl=R (R2-a 2 ) Log R => RI!(z) 1. -+ 0 pour R -+ O.
L'intégrale prise sur le petit cercle tend vers 0 pour r -+ 0, car
1
I f(z)!lz l =r (2 2) L => rlf(z) 1 -+ 0 lorsque r -+ O.
, a - r og r
Il reste donc
[J -r dx J - R dx ]
lim -R (x 2 +a 2 )[Log (-x)+in] + -r ( x 2 +a 2 ) [Log (-x)-in] = 2in: LRk'
Soit
J R -2indx [ -n ( 1 ) 1 ]
lim = 2in - +.
r (x 2 +a 2 )[(Logx)2+n 2 ] 2a (Loga)2 + :2 l+a 2
Finalement on a
J +OO dx
o (x 2 + a 2 ) [(Log X)2+ n 2 ]
1!
2a [(Log a)2 + :2]
1
1 + a 2 ·
SOLUTIONS
167
5.11.5.
La fonction z f(z) est méromorphe dans te-{Ox}.
Tout nombre complexe z de te-{Ox} s'écrit de façon unique sous la forme sui-
vante :
z = pe i8 , où p = Izl et 0 < lJ = Arg z < 2n.
lJ = 0 sur la lèvre supérieure de Ox et lJ = 2n sur la lèvre inférieure de Ox.]
La fonction f admet dans te - {Ox} le pôle z = -1 et l'on a
L o (-I) Log l-ll+in
p - 1 = = ] ;7t = 1r.
V-t 1 2 e 2
Sur AB : On a
z = x, Izi = x et Arg z = 0,
donc
J '" f R Log x
f(x)dz = 1/ dx.
AB £ x(x+ 1)
--?
Sur CD : On a
z = x, Izi = x et Arg z = 2n,
donc
f f(Z)dZ = f £ Log x+ 2in dx = f R Log x+ 2in dx
CD R lIx e i7t (x+ 1) £ Vx(x+ 1)
(puisque e i7t = -1).
Utilisons le théorème des résidus. On aura alors
f j(z)dz = 2inp-l = 2in 2 ,
A BCDA
ou
f j(Z)dz + f - f(z)dz + r f(z)dz + f - f(Z)dZ = 2in 2 ,
AB BC .. CD DA
ou encore
f R2 Log x+2in f f
V dx+ J(z)dz+ f(z)dz = 2i7t 2 ,
£ x(x+ 1) BC DA
or
f f(z)dz -+ 0
BC R-:>-oo
et
f f(z)dz -+ 0
DA £-+0
[remarquer que 1 Lo(re i8 ) 1 = ILog r+ilJl ILog rl+ lJ ILog rl+2n], donc
f oo 2 Log x+2in dx = 2in 2
o ]G(x+ 1)
168
EXEMPLES DE FONCTIONS MULTIFORMES
et, par suite,
J 00 Log x dx = 0
o Vx(x+ 1)
(égaler les parties réelles).
Ce résultat pouvait d'ailleurs être prévu directement. En effet, décomposons
l'intégrale en somme de deux intégrales l'une de bornes 0 et 1 l'autre de bornes 1 et 00
Cette dernière s'écrit
1
Lo g -
f +oo Log X J I X
dx- +
1 ]G(l+x) - O ( !+I )
x
1
en changeant x en -, donc
x
dx
x 2 '
J + 00 Log X J I Log x
1 Vx(1+x) dx = - 0 Vx(l+x) dx.
Par suite l'intégrale donnée est bien nulle.
5.111.1.
Le contour utilisé est celui de l'exercice 5.11.3. et la fonction est
e(a-l)Loz
z j(z) = l+z ·
Cette fonction est holomorphe dans q; - { Ox} privé de z = -1, pôle simple
dont le résidu s'obtient immédiatement
P = - e ia1C
-1 ·
En appliquant le théorème des résidus et en décomposant le contour (voir exer-
cice 5.11.3.) on constate que l'on a
J J f Rxa_l
j(z)dz- j(z)dz + (l-e 2ia1C ) -dx = -2ine ia n:.
r+ y+ . r 1 + x
Par ailleurs,
J r+ f(z )dz 1 1tR: , expression qui tend vers 0 pour R + 00, puisque a < 1;
J f(z)dz 2 1 1tra , expression qui tend vers 0 pour r -+ 0, puisque 0 < Q.
y+ - r
En passant à la limite dans l'égalité obtenue par le théorème des résidus, il vient
donc
J +OO xa-l
(1- e 2ia n:) - dx = - 2ine ia1t
o 1 +x '
SOLUTIONS
169
d'où
f +<x> Xa-l 2i1t 1t
o 1 +x dx = eia1C-e-ia1t = sin an .
On fera évidemment la remarque analogue à celle des exercices 5.11.2. et 5.11.3.
5.IV.l.
a) Pour le calcul direct on pose _ 1 x = t 4 , d'où l'on tire
-x
t 4 4t 3 dt
x = l+t 4 et dx = (l+t 4 )2 .
L'intégrale proposée devient alors
1 = f + co 4dt .
o 1 + t 4
La décomposition de la fraction rationnelle à partir de
l+t 4 = (l+t 2 )2-2t 2 = (l-t V2+ t 2 )(1+tV2-+t 2 )
permet d'obtenir
f +<x> 4dt V2 l+t V2+t 2 - - -
1 + t4 = _ 2 Log V2 + V2 [Arc tg (1 + t V2)- Arc tg (1- t V2)],
o I-t 2+t 2
d'où 1 = 1tV2.
b) La fonction z'- .3. 1 J est multiforme, les deux points z = 0 et z = 1
z4(I-z)4
étant deux points critiques, mais on ne change pas de détermination si l'on effectue
un même nombre de tours autour de chacun d'eux. En effet, les arguments varient
respectivement de 2kn et 2k'n, donc au total
3 1 1t
4 2k1t + 4 2k ' 1t = 2k1t+ 2(k' -k) 4
et c'est bien un multiple entier de 21t si k' = k.
On choisira la détermination réelle pour XE [0, 1].
La fonction est alors holomorphe dans le domaine considéré et le théorème de
Cauchy permet d'écrire
(1)
f f(z)dz + f f(z)dz = O.
r+ ABB'A'
L'intégrale sur le contour ABB' A' se décompose en
f f(z)dZ + f -... f(z)dz + f f(z)dz + f - f(z)dz.
AB BB' B' A' A' ri
170
EXEMPLES DE FONCTIONS MULTIFORMES
,.......,..
Sur le demi-cercle AA', on a Izi = r et
f 2rer
[(z)dz <;, .
ÂÂ' Vr3(1- r)
,.......,..
Sur le demi-cercle BB', on a Iz-ll = r et
f 2rer
f(z)dz <; 4 .
BB' Vr(l-r)3
On en déduit lim f r-A. f(z)dz = lim f f(z)dz = 0, lorsque r o.
AA' BB'
Explicitons les intégrales f f(z)dZ et f f(z)dz.
AB A'B'
4 4
Sur AB, on a V z 3(1-z) = Vx 3 (I-x).
_> 4
Sur A'B', la valeur de V z 3(I-z) peut être obtenue de deux manières. L'une
consiste à faire tourner le point z de 2re autour de 0, l'autre, de - 2re, autour du
point 1.
Dans le premier cas la variation de l'argument de 1- z est nulle, celle de Z3 est 61t
4 3
et l'on obtient pour Vz 3 (I-z) la valeur e 2 Vx 3 (1-x).
Si l'on utilise la seconde possibilité c'est la variation de l'argument de z3 qui est
nulle alors que l'argument de 1- z varie de - 2re, donc
i1t
4 __ 4 . .
V z 3(1-z) = e 2 Vx 3 (I-x)'
on retrouve bien la valeur précédente.
Ceci entraîne donc
f i1t f i-:t f I d
f(z)dz = - e 2 f(z)dz = - e 2 4 x __ .
B A AB 0 Vx 3 (I-x)
Finalement, en passant à la limite dans la relation (1) (r 0 et R + 00), il vient
( i1t ) f i dx ,.. dz
l-e 2 4 = -lim 4
o V x 3 (l- x) R--->-a:> J r+ V z3(l- z)
Il reste donc à chercher la limite de l'intégrale du second membre. Cherchons la
limite de zf(z) (qui existe puisquefest développable en série de Laurent pour Izl > 1)
pour z 00
zf(z) =
z
4
V z3 (I-z)
4 i 4
Soit z = x > 1, la valeur de V z 3(1-z) est alors e--;;; Vx 3 (x-1), d'où
i1t
lim zf(z) = e 4 .
SOLUTIONS
171
D'après le théorème des résidus appliqué au point à l'infini, on a donc
J _dz =-f 4 dz
= +2ine 4 ,
r+ V z 3(1- z) .. r- V z 3(1- z)
i7:
i7:
d'où la limite cherchée égale à 2irce 4 .
Ainsi
( i,," ) i,,"
1- e 2 1 = - 2i 1t e 4 ,
donc
i7't
1 = 2 ne4 _
17":
e 2 -1
n
. n
sin 4
soit
J = nV2.
5.IV.2.
J I X'dx
a) Soit ln = 4 , on intègre par parties en posant u =
o Vx 3 (I-x)
dv = dx et v = x-le
On obtient alors
3
[ .x'I(x-l) ] 1 J l(n-l)X+4-n
1 n-l d
n = 4 - 4 X x,
Vx 3 (I-x) 0 0 Vx 3 (I-x)
x"
4
Vx 3 (1-x)
d'où
/n = (n- ) /n-1-(n-l)/",
soit
n/n = (n- )/n-1'
En utilisant cette relation à partir de 10 = rcVZ (résultat de l'exercice S.IV.I.),
il vient immédiatement
(n- )(n-l- )... _
ln = , nV2.
n.
b) Le calcul est identique à celui de l'exercice S.IV.l. au paragraphe b) corres-
pondant. Le seul point à revoir est la limite de
f rJ(z)dz, lorsque R -. 00.
172
EXEMPLES DE FONCTIONS MULTIFORMES
En employant la même méthode (qui revient à chercher le résidu du point à l'in-
fini), l'expression znf(z) figurant sous l'intégrale s'écrit
irr 3 1
e 4 z-4(z-I)-4 z n
1
et l'on peut développer en série de Laurent en posant z = -.
On trouvera ainsi U
J 2 . ( 1 ) ( 1 ) ( 1 ) i7t
lim r-!(z)dz = 4 4 + 1 ... 4 +n-l e 4 ,
d'où le résultat ci-dessus.
6.
INTÉGRALES MULTIPLES
SUR DES DOMAINES BORNÉS
MÉTHODE DE RIEMANN
A. - Intégrales doubles
ff I(x,y) dx dy
(4)
Intégrales doubles ff f(x, y)dxdy,
(A)
. ( ) est un ouvert borné de JR2(X, y) dont la frontière est régulière (*),
. f est une application ( ) JR qui est continue dans ( )-(<5), où (<5)
désigne une réunion finie de points et de portions de courbes régulières.
1. - FONCTIONS INTÉGRABLES SUR UN OUVERT BORNÉ (d).
1 0 On considère un« pavage» de l'ouvert( ) par des domaines élémentai-
res roi (i = 1, 2,..., N) :
N
( ) = u roi (voir figure 1).
i= 1
Posons
Mi = sup f(x, y)J
(x,y)eO>i
et
1ni = inf !f(x, y) 1.
(x,y)eO>i
On considère alors les expressions suivantes :
N
S!f = L Mf aire (roi) [éventuellement 8'1 = + 00]
i=1
et
N
s'1 = L mi aire (roi) [éventuellement S'1 = - 00].
i=1
(*) ô Il est une réunion finie de points et de portions de courbes régulières [chapitre IX].
174 INTÉGRALES MULTIPLES SUR DES DOMAINES BORNÉS. MÉTHODE DE RIEMANN
On dit que f e t intégrable sur (A) lorsque la condition suivante est réalisée:
« 'v' 8 > 0, on peut trouver un pavage tel que 0 < Sff - Sff < 8 ».
'Y
c
o
Q;
œ
FIG. 1.
2 0 Posons
*
1 = inf S'S
et
1 = sup s'S pour tous les pavages possibles.
*
On a alors la proposition suivante :
«
*
f intégrable sur (A) <=> 1 = 1
*
».
Définition de ff f(x, y) dx dy.
(A)
*
Lorsque f est intégrable sur (A), 1 et 1 ont même valeur.
Leur valeur commune, J, est noté: f f f(x, y) dx dy. Autrement dit,
j = 1 = 1 = ff f(x, y) dx dy. (A)
* (A)
Autre définition.
d désigne le diamètre du pavage 9 considéré:
d = sup d"
i= l,2,.,N
où
d, est le diamètre de 6),.
Si, lorsque l'on considère des pavages 'S de plus en plus fins (d-+O), les expressions Sff et s,!
(( tendent» vers une même limite Ï, on dit que f est intégrable sur (â), et l'on pose
j = ff f(x, y)dxdy.
(A)
Exemple: considérons l'application l(A): (A) IR.
(x, y) Hl.
PROPRIÉTÉS DES FONCTIONS INTÉGRABLES
175
On a Mi = mi = 1, donc
S,! = S,! = aire (il), pour tout le pavage .
1 (A) est donc intégrable sur (il) et l'on a
ff l(A)dxdy = aire ( )
(A)
[en abrégé ff dx dy = aire (il)].
(A)
3 0 Théorème fondamental 6.1.1. - Une application f continue et bornée
dans (il) est intégrable sur ce domaine.
Plus généralement,
«1 continue dans (il)-(b) et bornée dans (il) => fintégrable sur (il) ».
Corollaire.
Une fonction continue sur le compact (il ) est intégrable sur (il).
II. - PROPRIÉTÉS DES FONCTIONS INTÉGRABLES.
Théorème 6.11.1. - Soit f et g deux fonctions intégrables sur (il).
f+g et À/(À E IR) sont intégrables sur (il) et l'on a
ff (f+g)dxdy = ff fdXdy+ ff gdxdy
(A) (A) (A)
et ff Àfdxdy = A ff fdxdy.
(A) (A)
Théorème 6.II.2. - Soit / et g deux fonctions intégrables sur (il). Alors
l'application (x, y) f(x, y) g(x, y) est intégrable sur (il).
De plus, lorsque g est positive sur (il), on a l'encadrement suivant
mf ff gdxdy < ff f(x, y)g(x, y)dxdy < M f ff gdxdy,
(A) (A) (A)
où mf = inf ff(x,Y) et Mf = sup ff(x,y)J,
(x,y)e(A) (x,y)e(A)
ou bien
ff f(x, y)g(x, y)dxdy = k ff g(x, y)dxdy,
(A) (A)
où k désigne une constante vérifiant mf < k < Mf.
De ce théorème on déduit immédiatement le théorème de la moyenne.
176 I TÉGRALES MULTIPLES SUR DES DOJ\1AINES BORNÉS. MÉTHODE DE RIEMANN
Théorème de la moyenne 6.11.3. - Soit f et g deux applications à valeurs
réelles définies et continues sur le compact ( ) de IR 2 .
L'application g est supposée positive sur ( ) .
Il existe alors un point (x 0, y 0) appartenant à ( ) et tel que
ff f(x, y)g(x, y) dxdy = f(xo, Yo) ff g(x, y)dxdy.
(A) (A)
En particulier,
ff f(x, y)dxdy = f(xo, Yo) aire ( ) [poser g = I(A)].
(A)
Théorème 6.11.4.
comme suit
Soit (il) un ouvert borné que l'on peut décomposer
( ) = (il l ) U (il 2 ) U (<5),
où (il l ) et ( 2) sont deux ouverts de frontières régulières,et (<5) est, au plus,
une réunion finie de points et de portions de courbes régulières.
On a alors la proposition suivante :
« f intégrable sur ( ) <:!> f integrable sur ( l) ainsi que sur (il 2 ) ».
Lorsque la proposition ci-dessus est vraie, on a
fI fdxdy = If fdXdy+ fI fdxdy.
(A) (Al) (A2)
.,..".....--------........
------ ... ...
,-- ,
" \
" ' 1
,'d u;;,
" .1,,-",/
, f//IIIJ',
, ...-- ,
'------ â '
, ,
\ '
, 2 "
, "
"...... .-.-'
......-----.....--
o
ro
FIG. 2.
III. - MÉTHODE D'INTÉGRATION.
Théorème de Fubini 6.111.1.
a) Soit (il) = {(x, y) E IR 2 la < x < b et qJl(X) < y < qJ2(x)1, ou
<Pl et cP 2 de ]a, b[ -? IR sont de classe el (*).
(*) Remarquons que
- ]a, b[ est la projection de (il) sur l'axe x' Ox,
- les courbes BDA et ACB ont respectivement pour équations
y =-= ? 2(X) et y = Cf> l(X}, X E ]a, b[.
MÉTHODE D'INTÉGRATION. THÉORÈME DE FUBINI
177
Y.
.A
1
,
C ---------
1 C
1
1
ro
1
: D
((, --------- --------
1
1
1
1
o
OJ
FIG. 3.
Soit j. une application intégrable sur (il). Alors les applications partielles
f(.1C, .) : y f(x, y)
sont intégrables sur ] I(X), 2(X)[, 'Ix E]a, b[ et l'on a
ff f(x, y)dxdy = f b f 'Pz<"'f(X, y)dyl dx.
(4) Q l(X)
b) De même si (il) est défini comme suit
(il) = {(x, y) E 1R 2 1 c < y < d et V11(Y) < x < 1/12(y)}'
on a
ff f(x, y)dxdy = f d j f ",z<Yf(x, y)dxl dy.
(4) c \ 1/11 (y)
Le calcul d'une intégrale double se ramène donc aux calculs successifs de deux intégrales
sinlples.
Exemple: soit (il) = {(x, y) E IR2 1 0 < x < 1 et x < y < 2x}. On a
ff 2x2ydxdy = r I [f 2'" 2x2YdY ] dx = f 13x4dx = .
(4) &1 0 x 0 5
Comme cas particulier du théorème précédent, on déduit le théorème suivant.
Théorème 6.Ill.2. - Sous les hypothèses suivantes:
. (il) est un rectangle (il) = ]a, b[x]c, d[
. f se décompose en un produit d'une fonction de x par une fonction de y
f(x, y) = g(x) h(y),
J'intégrale double se décompose en un produit de deux intégrales simples
f f<â{(X, y)dxdy = (f:g(X)dX )(f: h(y)d Y ).
178 INTÉGRALES MULTIPLES SUR LES DOMAINES BORNÉS. MÉTHODE DE RIEMANN
Exemple : Calculer
ff eXydxdy, où (â) = ]0, I[ x ]1, 2[.
(A)
On a
f f<A)exYdxd Y = (f: édx ) (f>d Y ) = (e-l).
IV. - CHANGEMENT DE VARIABLES.
On considère le changement de variables
x = hl(u, v),
{ y = h 2 (u, v),
où hl et h 2 sont deux fonctions réelles définies et de classe CI dans un ouvert
borné (â') de IR 2 (u, v) et qui satisfont aux conditions suivantes:
i) (â) est le transformé de (â') par l'application (u, v) (x, y) ;
ii) le jacobien D(hl' h 2 ) est non nul dans (A').
D( u, v)
Autrement dit, on a
oh! oh 2
D(h 1 , h 2 ) = det au au 0 'v'( ) ( A' )
=1=, u, v e a .
D(u, V) oh l oh 2
av ov
On a alors la relation suivante :
ff f(x, y)dxdy = fI f[hl(U, v), h 2 (u, v)] D(h 1 , h 2 ) dudv.
(A) (A') D( u, v)
Remarquer que l'on remplace dxdy par 1 D : ») I dudv, c'est-à-dire 1 :: : I dudv.
Cas particulier. - Si l'on utilise les coordonnées polaires,
x = r cos 0, y = r sin 0 (r 0),
on a dxdy = rdrdO.
Exemple : Calculer
ff ydxdy, où (â)= f(x,y)lx 2 +y2_2x<0 et y>Oi.
(A)
DÉFINITION DE f f f !(X, y, z)dxdydz
179
On a
1 l n
(Ll') = ' l ' (r,O),O < 0 <-
1 2
et
0< r < 2cosO,
.
donc
1t
f 2 , I 2 cos 8
= 0 sin (1 / 0 1'2 dl' j
1 1 2
1
,
1
,
"
" '
, "
' ... ;-"
...._---;
œ
fI ydxdy = ff r2 sin OdrdO
(A) (A')
7t
8 f 2 3 2
= - cos 0 sin OdO = -.
303
FIG. 4.
180 INTÉGRALES MULTIPLES SUR DES DOMAINES BORNÉS. MÉTHODE DE RIEMANN
B. - Intégrales triples
III n/(x,y,z) àx dy dz
v. - DÉFINITION DE l l f nfdxdydZ.
Lorsque
. Q désigne un ouvert borné de IR3 dont la frontière oa est une réunion
finie de points, de portions de courbes régulières et de portions de surfaces
régulières (*),
. f désigne une application a -+ IR, qui est continue dans a- 00, où 00
désigne une réunion finie de points, de courbes régulières et de surfaces
régulières.
Soit {J' un pavage de a (**).
On dira que f st intégrable sur a lorsque la condition suivante est réalisée :
« 'v' e > 0, 3
tel que
o S'j-s'j 8 ».
Les propriétés développées aux paragraphe, 1 et II se transposent aisément.
En particulier,
volume de Q = f f f ndxdydz.
VI. - CALCUL D'INTÉGRALES TRIPLES.
Le calcul d'une intégrale triple se ramène à celui d'une intégrale double (théo-
rème de Fubini).
Soit (A) la projection de a sur Oxy :
(A) = {(x, y) E IR 2 1 (x, y, z) E a}.
(*) Dans le cas de IR"(n> 3), ôo. est une réunion finie de points et de compacts portés
par des sous-variétés de dimension inférieure ou égale à n-l.
(**) Le borné 0. est inclus dans le parallélépipède la, C([ x ]b, [ x ]e, y[. Considérons
une partition de chacun de ces intervalles ]a, (X[, ]b, [, ]e, y[ :
a = ao <al <. <ap-l <a p = (x,
b = b o <b 1 <. <b q _ 1 <b q = ,
c = Co <c 1 <. < Cr-l <Cr = y.
On peut alors définir un pavage 'S de 0. en considérant la restriction à 0. de chacun des
parallélépipèdes [ah ai+l] x [bJ, b J + 1] X [c", C"+l].
CALCUL D'INTÉGRALES TRIPLES
181
En écrivant a sous la forme suivante :
a = {(x, y, z) 1 (x, y) E (A)
et
qJl(X, y) z qJ 2(X, y),
on a,
fff fdxdxdy = ff I f 'P2(X'Y!(x,y,Z)dZldXdY.
n (A) lf'1 (x,)')
Exemples .-
1 0 Calculer f f f n2xzdxdydz, où
a = {(x, y, z) 1 x > 0, y > 0, z > 0, x + y + z < 1}.
On a
(A) = {(X,y)E IR 2 1 x> 0, y> 0, x+y < 1},
donc
a = {(x, y, z) 1 (x, y) E (A)
et
o < z < l-x-y}.
Par suite,
f f f n2xzdxdydz = f f(AJf:-X-Y2XZdZ!dXdY = f fA)X(1-X-y)2 d X d Y .
2° Soit F une fonction positive et intégrable sur un ouvert borné (A) de
IR 2 . Soit Q = {(x, y, z) 1 (x, y) E (A) et 0 < z < F(x, y)}.
On a évidemment
f fAt(X,Y)dXd Y = f f f ndxdydz = volume de Q.
Autrement dit, l'intégrale double est égale au volume de Q.
Remarque. - Dans un changement de variable
x = hl (u, v, w), y = h 2 (u, v, w), Z = h3(u, v, w),
on substitue à dxdydz l'expression D(x, y, z) dudvdw, où le jacobien
D(u, v, w)
oh! ôh 2 oh3
- -
ou au ou
D(x, y, z) ah! oh 2 oh3
- - - -
D(u, v, w) ov ov ov
ah! oh 2 oh 3
-
oW £1W ow
est supposé non nul sur a' dont le transformé est a.
EXERCICES DU CHAPITRE 6
6.1.1. Aire d'un ouvert borné de frontière régulière.
.. (A) désigne un domaine borné d'intérieur non vide.
Soit (A un domaine borné de frontière polygonale et tel que (A e) :::> (A).
Soit (A') un domaine de frontière polygonale et tel que (Ai) c: (A).
On pose
*
A = inf {aire (Ae)} et A = sup {aire (A')}.
(Âe) (Â) * (A )c:(A)
*
On dit que (d) admet une aire lorsque A = A = A.
*
La valeur commune A est alors appelée aire de (d) : aire (4) = A.
On suppose que oA est une portion de courbe régulière:
« oA = fera, b]), où [a, b] est un intervalle compact et
f : [a, b] -4- JR.2
t (li(t),f 2 (t»)
est une application de classe el vérifiant la condition
«
Iff (t) 1 + If (t) 1 =1= 0,
'v' t E [a, b]
».
On considère une partition de [a, b] en n intervalles égaux:
a = to < t 1 < ... < t n - 1 < t n = b,
et l'on pose
b-a
t i 1 -t. =-
+ 1 n
M = sup {11{(t)I}+ sup {1/ (t)I}.
tE [a, p] tE [a, b]
11/(t)- I(t i) Il désigne la distance euclidienne dans IR 2 de I(t) à
1° a)
I(t , ).
Montrer que l'on a
Ilf(t)- f(t /) Il 2M(:- a) ,
'v't E [tb t i + 1].
b) ,Ir. l r ,] I( ) ,] r 4M(b-a)
ri ueslgne e carre ue centre t l et ue côte ·
Vérifier que l'on a n
n
oA c uri.
;=1
2° (A:) = (A)u C l ri) a une frontière polygonale, donc une aire;
n
(A:,) = (A)- u ri a lui aussi une frontière polygonale, donc une aire.
;=1
Montrer que
16M 2 (b-a)2
o aire (A:)-aire (A ) .
n
En déduire que (A) admet une aire.
3° Généraliser lorsque 0 A est une réunion finie de points et de portions
de courbes régulières.
6.1.2.
..
6.1.3.
..
6.1.4.
..
6.1.5.
..
EXERCICES DU CHAPITRE 6
183
.Je-
Étude de 1 et 1.
* N
Soit un pavage de (A) U Wi = (Ll) et soit ' lin pavage de (Ll) :
M ;=1
u roj = (A).
j=l
On définit alors le pavage + ' : U (roi (') ro;) = (A).
;,j
a) Montrer que
S3' + J\1 < Sff,
En déduire la relation
Sff+ff' ;> s .
'*
sff' < I 1< Sff,
.x-
b) Établir la proposition suivante:
'v' et '.
*
f borné et intégrable sur (A) <=> 1 = I.
*
Soit (A) un ouvert borné de IR 2 . Établir la proposition suivante:
« 1 continue sur (A) => 1 intégrable sur (A) »
(remarquer que 'v'e > 0, 3 tel que Mi-mi < e).
(A) désigne un ouvert borné, de Irontière oA régulière.
On peut trouver line la/nille d'ouverts (A:,) (n E lN), telle que
- . 1
(A!,) c (A), aire (A- A;J < - (cf. exercice 6.1.1.).
n
Établir la proposition
« 1 continue et bornée sur (A) => 1 intégrable sur (A) ».
Établir la proposition suivante:
«1 borné et intégrable sur (A) => III borné et intégrable sur (A) ».
[Remarquer que 0 < Mi(lfD-mi(I/D < Mi(f)-mi(J).]
6.1.6. a) Soit
.. (A) = {(x, y) 1 0 < x < 1, 0 < y < 1, x < y}
et 1 : (A) -+ IR,
1
(x,y) sin -.
x-y
Montrer que 1 est intégrable sur (A).
b) Même question pour la fonction g: (A) -+ JR. définie comme suit
1 2 1
sin 12x-ll si x :F 2:
g : (x, y) 1
. 0 si x = 2.
184 INTÉGRALES MULTIPLES SUR DES DOMAINES BORNÉS. MÉTHODE DE RIEMANN
6.1.7. Fonction f: (â) - ( ) -+ IR intégrable sur (â).
. . On considère une fonction f définie continue et bornée sur ( ) - (<5).
Dans quel sens peut-on dire que f est intégrable sur ( )?
Application:
1
( ) = {(x,y)lx 2 +y2 < 1}, j(x,y) = e- xIJ + y2 .
6.11.1.
..
6.11.2.
.
6.ID.l.
.
6.ID.2.
.
6.111.3.
.
6.ID.4.
.
6.ID.S.
.
6.III.6.
.
6.IV.l.
.
Établir la proposition suivante:
« f et g intégrables sur ( ) => f+ g intégrable sur ( ) et
ff (f+g)dxdy = ff fdXdy+ ff gdxdy».
(A) (A) (A)
Démontrer les théorèmes 6.11.2. et 6.11.3.
Soit (Ll) = {(x, y) 1 0 < x < 1, 0 < y < 1, x < y}.
Représenter ( ) dans le plan Oxy. Calculer ff 2xe-Ydxdy.
(A)
Soit ( ) = {(x, y) ! x > - 1, 1 < Y < 2, xy < 1}.
Représenter ( ) dans le plan Oxy. Calculer ff xdxdy.
(A)
Soit (L\) = {(x, y) 1 x > 0, y > 0, x+ y < a}, où a est une constante
strictement positive. Calculer ff e-x-y dxdy.
(A)
Soit (L\) = {(x, y) 1 !x- yi < 1, Ix+ yi < 1}.
Représenter (L\). Calculer ff eX+Ydxdy.
(A)
Soit (L\) = {(x, y) 1 Ixl < 1 et Iyl < 1}. Calculer ff Ix- yldxdy,
ff (
ainsi que (x+y)ex+Ydxdy.
(A)
Soit (L\) = {(x, y) 1 0 < x < 1 et 1 < Y < 2}.
Calculer ff xye-X-Ydxdy.
(A)
ff dxdy 'A 2 2 }
Calculer (A) 1 + x 2 + y2 ' ou (il) = {(x, y) lx + y < 1 .
(Utiliser le changement de variable x = r cos (J, y = r sin (J.)
6.IV.2.
.
6.IV.3.
.
6.IV.4.
.
6.IV.5.
.
6.VI.l.
.
6.VI.2.
.
6. VI.3.
.
6. VI.4.
..
EXERCICES DU CHAPITRE 6
185
Calculer ff dxdy
(A) (x 2 + y2)3/2'
où (A) = {(x, y)lx+y > 1, X 2 +y2 < 1, x < y}.
(Utiliser le changement de variable x = r cos (J, y = r sin (J.)
Aire de l'ellipse.
\ x2 y2 )
Soit (Ll) = ! (x, y) 1 a 2 + b 2 < 1 . Calculer
aire (A) = ff dxdy,
(A)
en utilisant le changement de variable suivant:
x y
X = a' y = b (a et b sont des constantes positives).
Soit (A) = {(x, y) lx > 0, y > 0, x+ y < 1}. Calculer
x-y
ff eX+Y dxdy
(A)
en utilisant le changement de variable
u=x+y, v=x-y.
Soit (A) = {(x, y) lx > 0, x < y < 1}. Ca lculer
ff VX2+y2 dxdy
(A)
en utilisant les coordonnées polaires.
Soit Q = {(x, y, z) E JR.31x > 0, y > 0, z > 0, x+ y+ z < 1}. Calculer
III n zdxdydz.
Soit Q= {(x,y,z)lx 2 +y2 < 1,0<z<x 2 +y2}. Calculer
III n(x 2 + y2 ) dxdydz.
Calculer le volume de Q = {(x, y, z)lx 2 + y2+Z2 < 1, X 2 +y2-x < O}.
Soit Qt,R = {(x, y, z)le 2 < X2+ y2+Z2 < R 2 }. Calculer
fff dxdydz
nt,R VX2+y2+zi.
(Pour cela on utilisera les coordonnées sphériques
x = r cos (J cos qJ, y = r cos (J sin qJ, z = r sin (J.)
186 INTÉGRALES MULTIPLES SUR DES DOMAINES BORNÉS. MÉTHODE DE RIEMANN
6. VI.S.
..
t X2 y2 Z2 1
Soit n = (x, y, z)lx > 0, y > 0, z > 0, 2" + b 2 + 2: < l ,.
a c,
a) Calculer le volume de Q. '
b) Calculer J f fnXyzdxdydz.
( Utiliser le changement de variable X = , y = , Z = .)
SOLUfIONS
6.1.1.
1 0 a) Soit te[t"tl+ 1 ]' on a
11(t)-/l(t i ) = (t-ti)/l(e l), où tl < eP) < ti+l:J
donc
b-a
Ifl(t)-/l(t i ) 1 It-tiIM It i + 1 -t i IM= -M.
n
De même
b-a
1/2(t)-/2(t l ) 1 - M,
n
donc
V 2 - M
Il [(t)- I(t i ) Il = 1 fl (t)- fl (t i ) 12+ 1/2(t)- 12 (t l ) 1 2 , 'v't E [ti' t i + 1].
n
b) Soit P un point de oA, on a
3t E [a, b]
tel que
P = f(t),
t appartenant à un intervalle [th t i + 1].
On a (d désignant la distance euclidienne dans JR2)
d(P,f(t i » = 11/(t)- f(t i ) 1 1 2M(b-a)
n
et, par suite, PEri.
2° On a
(4:) = (A )u ( . Yi ) .
1=0
En utilisant la propriété suivante :
« aire ( . Pj ) faire (P j ), pour tous les polygones P., »,
J=l j=l
on obtient
n
aire (A:) aire (A + L aire (ri),
i=l
ou bien
(1)
n 16M 2 (b-a)2
aire (A:)-aire (A ) L
i=l n 2
16M 2 (b-a)2
n
.
De plus, on a
(2)
(A:) :) (A => aire (A:) aire (A ,
188 INTÉGRALES MULTIPLES SUR DES DOMAINES BORNÉS. MÉTHODE DE RIEMANN
(1) et (2) entraînent
(3) /. A . ( A../ 16M 2 (b-a)2
o aIre (il:) - aIre il:.) .
11
En utilisant les majorations suivantes :
* '*
A ;> A, (A:) ;> A, (L\ ) A,
'* *
on déduit immédiatement de (3) la relation suivante :
o A-A 16M 2 (b-a)2
n
.x-
'*
et, par suite (pour n -+ + 00), A = A.
* *
Autrement dit, (A) admet bien une aire de valeur A( = A = A).
.x-
3° Généralisation évidente. Chaque point isolé de 0 A sera le centre d'un carré
d ", 1
e cote -.
n
6.1.2.
a) Posons
Mi = sup f(x, y), Mj = sup f(x, y), M;; = sup f(x, y).
(x, y) EW (x,y)Ew'J (X,y)EWi() W'j
On a M;j M h donc
S + ' = L L M?i aire (roi (\ roj) L L Mi aire (roi (') roj)
i j i j
= 4: Mi ( 4: aire (roi (') ro j» ) = 4: Mi aire (roi) = S
l J l
et, par suite,
(1)
s + , S'J,
pour tout et tout 3".
Démonstration analogue pour montrer que l'on a
(2) s + ' ;> S ', pour tout et tout 3".
On en déduit
(3)
s ' s +'J' S +'J' S'J,
pour tout 3' et tout '.
On a évidemment
(4)
De plus [cf (3)]
(5)
s ' 1
.x-
et
*
1 S .
'*
'v' et 3", s ' S => 1 l.
'*
SOLUTIONS
189
En synthétisant les résultats énoncés en (4) et (5), on obtient finalement le résultat
demandé.
*
S ' ] 1 Sff.
*
b) Si f est intégrable
« 'v' e > 0, 33' tel que 0 Sff- Sff e »,
* *
donc 0 ]-] e et, par suite, ] = 1.
* *
*
Sil=l,
*
Ve > 0, on peut trouver et ' tel quelO S'S-s'S' e,
donc
o Sff+'S' -Sff+ ' Sff-Sff' e
et, par suite,
o Sff+'S'-Sff+ ' e.
On en déduit que f est intégrable [considérer le pavage j' + 3"].
6.1.3.
f continue sur le compact 1\ , est uniformément continue
(1) «'v'8 > 0, 3et t > 0, tel que d(P, P') et => If(P)-f(P') 1 e »
(d : distance eucIidieIll1e dans IR 2 ).
Considérons un pavage = (Wi);el de diamètre inférieur à et.
(1) entraîne (2)
(2)
If(P)- f(P') 1 8, 'v' P et p' E Wi.
Posons
Mt = supf(P)
PeCJJi
et
mi = inf f(P),
PeCJI
(2) entraîne la majoration suivante
Mi-mi e.
On a alors
Sff-Sff = L (M i - 111 i) aire (COi) e L aire (Wi) = G aire (A)
l I
et, par 3uite, f est bien intégrable.
190 INTÉGRALES MULTIPLES SUR DES DOMAINES BORNÉS. MÉTHODE DE RIEMANN
6.1.4.
f est continue sur le compact A , donc intégrable sur (A ). 'v' 8 > 0, on peut trouver
un pavage (w5)jeJ de (A ) tel que
(1) L (M.i-mj) aire (wj) G
jeJ
[remarquer que (Ll ) est un polygone dont la frontière est une réunion finie de seg-
ments parallèles aux axes de référence Ox 0E Oy].
Considérons un pavage (W )keK de (Ll)-(A ) :
= (W;)jeJ u (ro'k)keK définit un pavage de (A) et l'on a
S -s = L (Mj-mj)aire (wj)+ L (Mk-mk) aire (wZ),
j k
d'où l'on déduit [cf (1)]
(2) Sff-S <; 8+ L (Mk-mk) aire (w ).
k
La fonction f étant bornée sur (A)
If(x, y) 1 <; M, 'v'(x, y) E (A),
on déduit de (2) la majoration suivante
S -s <; 8+2M L aire (w )
k
et, par suite,
2M
S -s B + -.
n
En choisissant n assez grand, on obtient
S!f-S <; 28.
Autrement dit, f est bien intégrable sur (A),
6.1.5.
Si f est borné et intégrable, on a
« 'v' B > 0, 3 = (Wi)ieI tel que
L (Mi(f)-mt(f) aire (ro,) 8 »,
iei
donc
L (Mt(lfD-mi(lfl)) aire (roi) L (Mi(f)-mi(f» aire (Wi) 8
iel iei
et, par suite,
S (lfl)-s (lfl) B.
Autrement dit, Ifl est intégrable.
SOLUTIONS
191
6.1.6.
f et g satisfont aux conditions du théorème 6.1.1., elle ssont donc intégrables.
6.1.7.
On notera ff fdxdy la valeur de l'intégrale d'une fonction 7, bornée sur (A) et
(4)
qui coïncide avec f sur (A)- (£5).
Autrement dit, par convention, on pose
ff fdxdy = ff fdx dy,
(4) (4)
valeur indépendante du choix de f sur (£5).
6.11.1.
Soit = (Wi)iel un pavage de (Ll). En utilisant la majoration suivante :
Milf+g) <; Mi([)+Mi(g),
on obtient
Stj(f+g) Stj(f)+Stj(g)
et, par sui te,
(1)
* * *
l(f+g) l(f)+l(g) = l(f)+I(g).
De même, on a
(2)
l(f+g) l(f)+l(g).
.:.
De (1) et (2), on déduit
*
l(f)+l(g) l(f+g) l(f+g) = 1(f)+I(g),
*
donc
*
l(f+g) = l(f+g) = l(f)+I(g).
.Jo
Autrement dit, f+g est intégrable sur (A) et l'on a
I(f+g) = l(f)+l(g).
6.11.2.
a) Démontrons le théorème 6.11.2. - Soit = «(J)i)iel un pavage de (A) tel que
(1) 0 Stj(g)-l(g) B.
On a
mfg(x, y) <; f(x, y)g(x, y) <; Mfg(x, y), 'v'(x, y) E Wh
192 INTÉGRALES MULTIPLES SUR DES DOMAINES BORNÉS. MÉTHODE DE RIEMANN
donc
rnfMiCg) <; Mi(fg) M.,Mi(g)
et, par suite,
(2) mfSff(g) Sff(fg) MfSff(g).
De (1) et (2), on déduit
(3) mfI(g)-mf.B Sff(Jg) Mf I(g) + Mfe.
De même, on a
(4) m f l(g)-mf.8 Sff(Jg) < M f [(g)+M J 8.
On sait que l'on a
Sff(Jg) < [(Jg) < Sff(Jg),
donc, de (3) et (4), on déduit
mfI(g)-mf.B <; I(Jg) MfI(g)+Mf.e.
Cette dernière majoration étant valable pour tout 8 > 0, on a bien
(S)
mfI(g) <; [(Jg) <; MJI(g).
b) Démontrons le théorème 6.TI.3. - La relation (5) peut s'écrire sous la forme
suivante :
mf ff gdxdy < ff Jgdxdy MJ ff gdxdy.
(4) (4) (4)
En posant g(x, y) = 1, 'v'(x, y) E (A), on obtient
mf aire (A) ff fgdxdy M, aire (Ll),
(Â)
ou bien
ff fgdxdy = K aire (A),
(4)
K constante vérifiant m f <; K M.J.
La fonction f étant continue sur le compact (A ) on peut trouver un point (xo, Yo)
te] que f(xo, Yo) = K.
On a alors
ff fgdxdy = J(xo, Yo) aire (Ll).
(4)
6.111.1.
L'intervalle ]0, I[ est la projection de (Ll) sur l'axe y' Oy.
Remarquons que pour y fixé: 0 < y < 1, on a [cf. figure] 0 < x < y.
On peut donc présenter (A) sous la forme suivante :
(Ll) = {(x, y) 1 0 < y < 1, 0 < x < y}.
SOLUTIONS
193
x
Appliquons le théorème de Fubini. Ici
c = 0, d = 1, t/J 1 (y) = 0 et t/J 2 (y) = y,
donc
ff 2xe-Ydxdy = f I dy I f Y 2xe-Ydxl = f I e-Yy2dy
(4) 0 (0 0
= -e- Y (y2+ 2 Y + 2 )1: = 2-5e- 1
6.111.2.
L'intervalle ]1, 2[ est la projection de (A) sur l'axe y' OJ.
Pour y fixé, 1 < y < 2, on a dans (A)
1
-1<x<-.
y
1
._-
__ UV- y
---
----..
o
œ
Ici
c = 1, d = 2,
1
1/1 l (y) = - 1 et t/J 2 (y) = -,
y
donc
1 1
f f (A) xdxdy = f: dy ) f y 1 xdx = f: dy t x; y 1 = f: (:2 - 1) dy = - l.
194 INTÉGRALES MULTIPLES SUR DES DOMAINES BORNÉS. MÉTHODE DE RIEMANN
6.111.3.
L'intervalle ]0, a[ est la projection de (Ll) sur l'axe x' Ox.
Pour x fixé, 0 < x < a, on a sur (A) 0 < y < a-x, donc
JJ J a ! r a-x 1 J a j J a-x 1
e-X-Ydxdy = dx e-X-Ydy = e-xdx e-Ydy
(4) 0.. 0 \ 0 0
= J: rr(1-eX-")dx = l-e- a -ae- a .
x
6.111.4.
Décomposons le carré (A) en deux triangles Tl et T 2 :
Tl = {(x, y) E (A)I x > O},
T 2 = {(x, y) E (A)I x < O}.
On a évidemment
(1)
JJ eX+Ydxdy = JJ eX+Ydxdy+ JJ eX+Ydxdy.
(4) Tl T 2
Calcul de J J Tl er+Ydxdy. - L'intervalle ]0, I[ est la projection de Tl sur x'Ox.
Pour x fixé, 0 < x < 1, on a dans Tl' x-l < y < l-x, donc
JJ J I { J I--X ! J I j J I-x 1
eX+Ydxdy = dx ' eX+Ydy = eXdx e7dy
T 1 0 t x-l 0 x-l
et, par suite,
(2)
J J Tl er+Ydxdy = sh I+e.
SOLUTIONS
195
De même on montre que l'on a
(3) f f 1'2 eX+!Idxdy = sh l-e- J
(1), (2) et (3) donnent alors le résultat cherché.
Remarquons que le changement de variable
u = x+ y, v = x- y
conduit immédiatement au résultat cherché.
>,
A rSJ /,."
,.,.
,.
,.
,.
,.,.
,.,. I '
6.111.5.
a) On décompose le carré (A) en deux triangles Tl et T 2 :
Tl = {(x, y) E (A)i x > y}, T 2 = {(x, y) E (A)I x < y}.
On a ff Ix-Yldxdy = ff (x-y)dxdy+ ff (y-x}dxdy,
w
car Ix-YI = x-y sur Tl
et Ix-yi = y-x sur T 2 .
,.
r5J ,.,.
,.,.
1 ,.,.,.
,.
,.
T2,
œ' -1 1 X
,/ -1
,
,.
,.
,.,. ?:J '
196 INTÉGRALES MULTIPLES SUR DES DOMAINES BORNÉS. MÉTHODE DE RIEMANN
Il reste à calculer f f T, (x- y)dxdy, puis f f T. (y- x)dxdy parles méthodes usuelles.
Par exemple, on peut écrire
f f T, (x- y)dxdy = f l dx ! f l (x- y)dy!.
b) On a
ff (x+y)ex+Ydxdy = ff xex+Ydxdy+ ff yex+Ydxdy.
Pour calculer, par exemple, ff xex+ y dxdy, il suffit de remarquer que le domaine
(4)
d'intégration (Ll) est le « rectangle» ]-1, 1[ x]-I, I[ et que la fonction à intégrer
se décompose sous la forme g(x)h{y), telle que
xe X + y = xe X . e Y .
On a donc
f fA) xex+Ydxdy = U l xeXdx) U l eYd Y ) = 2e- 1 (e-e- 1 ) = 2-2e- 2 .
6.111.6.
Le domaine d'intégration est un « rectangle» (A) = ]0, I[ x]l, 2[. La fonction
à intégrer se décompose sous la forme g(x)h(y) :
xye- X - Y = (xe-X) . (ye- Y ).
On a donc
f f(4) xye-x-Ydxdy = U: xe-Xdx) U: ye-Yd Y ) = (l-2e- 1 ) (2e- 1 -3e- 2 ).
6.IV.l.
Posons x = r cos 0, y = r sin O. Il faut alors remplacer dxdy par rdrdO. On a
ff dxdy ff rdrdO
(4) l+x2+J'2 = (4') l+r2 '
où (A') est le transformé de (A) dans l'application (x, y) 1--+ (r, 0).
Pour un point quelconque M(r, 9) appartenant à (Ll), il est clair que l'on a
o < 0 < 2n.
SOLUTIONS
197
Pour a fixé, c'est-à-dire sur OX, on a
o r < 1,
donc
ff rdrde - f 2n d (J \ f I rdr 1_
(4') 1 + r 2 - 0 0 1 + r 2 \ - 'Tt Log 2.
6.IV.2.
Posons x = r cos lJ, y = r sin (J et remplaçons dxdy par rdrde.
On a
ff dxdy ff rdrd(J ff drd(J
(A) (x 2 + y2)3/2 = (4') r 3 = (4') --,:2'
où (Ll') est le transformé de (Ll) par l'application (x, y) H (r, (J).
Si M(r, (J) E (Ll), on a 0 < (J < . Pour (J fixé, c'est-à-dire sur la demi-droite OX
on a
1
. <r<1
cos e+ sin (J ,
donc
n n
ff drde f 4 dO 1 f I 1 r d = f 4 0 d(J {cos (J+sin (J-1} = 1- 'Tt 4 _
(4') = 0 ,
cos 8 + sin 8
"\. X
,
,
,
,
"
œ+y=f'"
,
-1
198 INTÉGRALES MULTIPLES SUR DES DOMAINES BORNÉS. MÉTHODE DE RIEMANN
6.IV.3.
Soit x y
X = - et Y= - on a
a a'
ox ax aO
D(x, y) oX oY
= ab
D(X, Y) = oy oy - ,
Ob
oX oY
donc
1 D(x, y)
dxdy = 1 D(X, Y) dXdY = abdXdY.
Le transformé (A') de (d) est le cercle d'équation X 2 + y 2 < 1.
Par suite,
aire (Ll) = II dxdy = II abdXdY = ab II dXdY
(A) (4') (4)
= ab aire (A') = nab.
6.IV.4.
Posons u = x+ y, v = x- y, c'est-à-dire
u v u v
x = 2 + 2' y = 2 - 2.
On a
dxdy =
D(x, y) 1
D(u, v) dudv = 2 dudv.
La droite x = 0 est transformée en la droite d'équation v = -u.
La droite y = 0 est transformée en la droite d'équation v = u.
La droite x+ y = 1 est transformée en la droite d'équation u = 1.
'Y
1
1 \.\'
1 rv:.,'
1 /,f"/
1 N"
1 "/
1 "
,
,
,
,
,
,
,
,
,
,
,
,
,
0,'
,
,
,
,
,
,
,
"
,
,
1 x
1','2.,
l ,
l ','.J
l ,
l "
l '.
SOLUTIONS
199
Le don1aine (A') a donc la forme indiquée ci-dessus.
Compte tenu des remarques précédentes, on a
ff x- y 1 ff 1 f I \ f u ! 1
e X + Y dxdy = - eU dudv = - du eU dv
(A) 2 (4') 2 0 1 -LI \
1 f I 1
="2 0 du {u(el-e- 1 )} = 2. sh 1.
6.IV.5.
Utilisons les coordonnées polaires
ff VX2+y2 dxdy = ff r.rdrdO = ff r2drdO,
(4) (A') (A)
où (A') est le transformé de (A) par l'application (x, y) 1--+ (r, 0).
Pour M(r, (J) E (il), on a : < (J < ; . Pour (J fixé, c'est-à-dire sur OX, on a
0< r< -J- o [ y= l<=>r= -J- ()] ,
sin , sIn
donc
7t 1 7t
2 sin 8 1 2 d ()
ff r2drdO = f dO f r2dr = _ 3 f . 3 0
(4') 0 sIn
4 4
[ ] 7t _
1 2 cos () 1 + cos 0 2 1/ 2 1 2 + V2
= 12 1 sin 2 (J +Log I l-cos (J 1 = 6" + 12 Log 2-112
[remarquer que l'on a, en posant u = cos 0,
f dO r sin OdO r du ]
sin 3 0- -.(1-cos 2 0)2- -.(u 2 -1)2.
'Y
,.,'
-:::::- ,."
,,1 ,."
1 :J,."
,."
,."
,."
,."
,."
,,"
1
x
200 INTÉGRALES MULTIPLES SUR DES DOMAINES BORNÉS. MÉTHODE DE RIEMANN
6. VI.I.
Le calcul de J J l 0 zdxdydz se ramène à celui d'une intégrale double en procédant
de la façon suivante :
Soit ( ) la projection de Q sur le plan Oxy :
( ) = {(x,Ylx > 0, y > 0, x+y < l}.
Pour (x, y) fixé dans (Ll), on a
(x, y, Z)EQ <=> 0 < Z < l-x-y,
donc
l Jf 0 zdxdydz = l {4) dxdy \ I:-X-Y zdz 1 = l I(4) (l-x-y)2dxdy.
On conduit alors le calcul de l'intégrale double de façon usuelle
IJ (1-x-y)2dxdy = I l dx I I-X (l-x-y)2dy 1 = 12
) 0 lOI
et l'on obtient
III (0) zdxdydz = ;4 .
6. VI.2.
Soit (A) la projection de Q sur le plan OX} :
(Ll) = {(x, y)lx 2 + y2 < l}.
Pour (x, y) fixé dans ( ), on a
(X,y,Z)EQ <=> 0<Z<X 2 +y2,
donc
IIIo (X 2 +y2)dxdydz = J I(4) (x 2 + y2)dxdy ! I:'+r dz 1.
ou bien
l l Jo (X 2 +y2)dxdydz = l {4) (X 2 +y2)2dxdy.
Le calcul de l'intégrale double se conduit aisément en utilisant les coordonnées
polaires
f J(4) (X2+ y2)2dxdy = l r4,/SdrdO = I:" dO ! I:rSdr! = .
SOLUTIONS
201
6. VI.3.
Il faut calculer l'expression suivante :
vol (Q) = f f f fi dxdydz.
Soit (â) la projection de Q sur le plan Oxy; on a
(Ll) = {(x,y)lx 2 +y2- x < O}.
Pour (x, y) fixé dans (Ll), on a
(X,y,Z)EQ <=> -V1-X 2 _ y 2 < z< V1-x 2 _y2,
donc
1 l' )
' l-xt-y (
vol (Q) = fff dxdydz = ff àxdy ) f dz \'
n & \ - V l-xt- y 2 }
ou bien
vol(Q) = 2 f f <A)VI-x2 y2dxdY.
En utilisant les coordonnées polaires (cf. exemple du paragraphe IV), on obtient
Tt
vol (Q) = 2 JJ V1-r2 rdrdfJ = 2 f 2 de J cos9 V1 _ r2 rdr!
(&') 0 f 0 ,
1t
2 J 2 . 3 fJ fJ n 4
= 3 0 (1- SIn )d = 3" - 9.
6. VI.4.
Utilisons les coordonnées sphériques
x = r cos fJ cos lp, y = r cos fJ sin lp, Z = r sin (),
où
r ;> 0,
TC n
- 2: <; fJ <; 2 ' 0 <; lp < 2TC.
On a
1 D(x, y, z) () 2 fJ fJ
dxdydz = 1 D(r, (), lp) drd dlp = r cos drd dlp,
donc
fff dy ffJ
= r cos (}drdfJd<p,
nt,R V x 2 + y2 + Z2 nt,R
où Q;'.R est le transformé de Q par (x, y, z) (r, fJ, lp),
, 'Tt n i
Qr.R = ! (r, fJ, lp)le < r < R, - 2" <; fJ 2' 0 lp < 21t '
202 INTÉGRALES MULTIPLES SUR DES DOMAINES BORNÉS. MÉTHODE DE RIEMANN
Q;',R est un hyperrectangle
Q;.R = Je, R[ x [-i, il X [0, 2n[,
donc
J J J n ,/ cos ()drd()d = (J rdr). (J cos ()d()). (I:7< d )
et, par suite,
III dxdydz 2 ( 2 2 )
= n R -e
!1t,R VX2+ y2+ Z2 .
6. VI.5.
x y z
a) Soit x= a' Y= b' Z= c. On a
D(x, y, z)
dxdydz = D(X, Y, Z) dXdYdZ = abc dXdYdZ.
Le transformé Q' de Q est le huitième de la sphère de centre (0, 0, 0) et de J ayon
Q' = {(X, Y, Z)!X 2 + Y2+Z2 < 1, X > 0, y > 0, Z > O},
donc
vol (Q) = III n dxdydz = abc III n' dXdYdZ = abc vol (Q') = abc.
b) On a
III n xyzdxdydz = a 2 b 2 c 2 III n' XYZdXdYdZ.
Pour calculer cette dernière intégrale double utilisons les coordolUlées sphériques
(cf exercice 6.VI.4.). On obtient, en posant X = r cos (J cos qJ, Y = r cos (J sin qJ,
Z = r sin 0,
J'Jin' XYZdXdYdZ = (I: r 5 dr) .(I: cos 3 () sin () ).(I: cos sin d )
1 1 1 1
= 5.4.2 = 40
et, par suite,
J - II a2b2c2
!1 xyzdxdydz = 40 .
7.
INTÉGRALES MULTIPLES
A. - Intégrales doubles ff f(X,)1 dx d)1
(L1)
Intégrales doubles ff f(x, y)dxdy lorsque
(Li)
. (LI) est un ouvert non (nécessairement) borné de IR 2 (x, y) dont la frontière est régu-
lière (*) ;
. f est une application (LI) IR qui est continue dans (LI) - ( ) (* *) et adn1et (éventuelle-
ment) un «ensemble polaire» (* * *) p, constitué au plus par une réunion finie de points et
de portions de courbes régulières.
1. - INTRODUCTION.
Premier cas : (A) non borné, f localel11ent bornée.
On se propose, par exemple, de donner un sens à l'expression
ff e-X-)Odxdy, où (Li) = {(x, y) E .m 2 1x > 0 et 0 < y < x J.
(.d)
Soit (A x ) = { (x, y) E (A)IO < x < X et 0 < y < x}, où X est une constante
positive. On constate que (A x) «tend à
recouvrir» (A) lorsque X + 00. Il est 'Y
donc naturel de calculer ff e-x-}"dxdy,
(Ax)
puis de chercher si cette expression admet
une limite lorsque X + 00.
On a
;'
;):
f f - x - J ' 1 1 1 - \" 1 -., X"
e - ( xc r = -- e . +-e -.
r? ?'
(Ax) --
o
FIG. 1.
(*) Cf: page 263.
(**) (c5) désigne une réunion finie de points et de portions de courbes régulières,
(***) p = n A 2, oÜ An = -[ (x, y) E (LI) ! 'f(x, y)! ;;:: Il J.
204
INTÉGRALES MULTIPLES
donc
Jf -x-Y d d 1
e x y -.
(.dx) X-+ + 00 2
On pourra tout naturellement poser Jf e-x-Ydxdy = , à condition que
(.d)
le résultat obtenu (iCi ) soit indépendant de la famille recouvrante {Ax} choisie.
Par exemple, il est nécessaire que l'on ait
ff e-x-Ydxdy ,
(.d),o) R-+oo 2
où (AR) = {(x, y)lx > 0, 0 < y < x, x 2 +y2 < R2} [en
effet (AR) tend à recouvrir (LI) lorsque R -? co].
x
FIG. 2.
En fait il en est bien ainsi car la fonction à
intégrer est positive sur (Li).
Second cas : (Li) borné, f non bornée.
On se propose de donner (par exemple) un sens à l'expression
f f .- dxdy , où (A) = {(x, y) E JR21 0 < x < 2 et 0 < y < X2}.
( )Vyl/lx-ll
On constate que la fonction à intégrer devient infinie dans un voisinage du
point 0 ainsi que dans un voisinage della courbe (F) d'équation x = 1,
o < y < 1.
Soit (A x ) = ) (x, y) E (A) 1 x > l et ix-II> i , où X est une constante
positive supérieure à 1. ... 1 1
On constate que (Ax) «tend à recouvrir» 1 1 :
(Li) lorsque X + 00. 41-------1-----
Il est donc naturel de considérer l'intégrale 1 1
1 1
1 1
1 1
1 l 'i'
1 1 / ;;
1 1 ;iA
1 ------ ,
//
1 / /'l
1 ,/ ///.
/ 7/ ,','/
01 11 2
1 1
ff dxdy
(.dx)VyVlx-11 '
puis de chercher sa limite (si elle existe !) lorsque
X 00.
Dans le cas présent, un calcul élémentaire
montre que
ff dxdy 4
(Llx)Vy 11 x7oo3.
x
FIG. 3.
CAS DES FONCTIONS POSITIVES
205
On pourra tout naturellement poser
ff dxdy 4
(.d)"VY V lx-11 - 3 '
à condition que le résultat soit indépendant de la famille {Li x } choisie.
En fait il en est bien ainsi car la fonction à intégrer est positive sur (Li).
Cas générai.
On peut vouloir donner un sens à l'expression suivante :
ff sin xydxdy
1R2(x2+1)(y2+1) V \x-II Vx 2+y2 ·
Ici, (Li) = IR 2 est non borné.
f devient infini dans un voisinage de 0 ainsi que de la courbe d'équation
x = 1.
II. - CAS DES FONCTIONS POSITIVES.
. (Li) désigne un ouvert (borné ou non) dont la frontière oLi est régulière.
. f désigne une application continue et positive (Li) - (£5) J--» IR, où (£5) est
une réunion finie de points et de portions de courbes régulières.
. {Li X }XeA désigne une famille (*) croissante d'ouverts bornés de (Li) qui
« recouvre» (Li). Plus précisément,
i) oLi x est régulière pour tout X E A,
{Li x') c {Li X") lorsque X' < X", U {Li x) = (Li) ;
XeA
ii) f est continue et bornée sur (Li x), 'v' X E A.
On a deux possibilités.
a) II f(x, y)dxdy 1, limite finie.
(.dx) X-++oo
b) ff f(x, y)dxdy 1 = + 00.
(.dx) X-+oo
Dans les deux cas la valeur de 1 est indépendante du choix de la famille
recouvrante envisagée.
(*) A désigne un sous-ensemble de IR « non borné à droite ». Par exemple A = rD. + co [,
A = JN..
206
INTÉGRALES MULTIPLES
Définitions.
i) Lorsque ff f(x, y)dxdy -+ 1, limite finie, on dit que la fonction f
(.dx) X -+ + 00
est intégrable sur (Li) et l'on écrit
ff f(x, y)dxdy = 1.
(.d )
ii) L orsque ff f(x,y)dxdy -+ +00, on dit quefn'estpasintégrable
(Ltx) X-+ + 00
sur (Li).
Exemples :
a) e- X - Y est intégrable sur (A) = {(x, y)lx > 0 et 0 < y < x} (cf 1,
premier cas).
b) fV 1 est intégrable sur (LI) = {(x, y)1 0 < x < 2 et 0 < y < x 2 }
y Ix-II
(cf. l, second cas).
Théorème de comparaison 7.11.1. - Soit f et g deux applications définies
positives et continues sur (A), privé éventuellement d'une réunion finie de
points et de portions de courbes régulières que l'on notera b. On suppose que
l'on a
o f(x, y) g(x, )'),
'V(x, .r) E (A) - b.
On a alors les propositions suivantes:
i) g intégrable sur (A) => f intégrable sur (A), et
o ff J(x, y)dxdy ff g(x, y)dxdy ;
(.d) ( )
ii) .f non intégrable sur (A) => g non intégrable sur (.1).
..\. pplications.
a) On a vu que e- X -}' est intégrable sur le domaine non borné
(A) = { (x, y) lx > 0 et 0 < r < x :
Or
-X-Y
e _:\:_\'
----=-==: :::::; e . .,
1/ x 2 + 1
'v'(X, \.) E (il,.
e- x - r
donc -=-.=-=-:: est intégrable sur (A).
1 i ., , 1
, X-Tl
FONCTIONS DE SIGNE VARIABLE
207
Remarquer que l'on ne peut arriver à ce résultat en utilisant la définition. En effet, on ne
peut calculer explicitement II v= dxdy.
(Lix) x2+l
l
b) On a vu que l C V est intégrable sur
V y Ix-II
(LI) = {(x, y)1 0 < x < 2 et 0 < y < x 2 }.
e- X
On en déduit que v - V est intégrable sur (LI).
y Ix-II
III. - CAS DES FONCTIONS DE SIGNE VARIABLE.
Lorsque f est de signe variable dans (A), la limite de
ff f(x, y)dxdy
(Li x)
(si elle existe !) peut dépendre de la famille recouvrante {A x} X E A choisie.
En fait, on a deux cas à envisager.
1 0 J J If(x, y)ldxdy tend vers 1, limite finie, quand X tend vers l'infini.
(Ltx)
Dans ce cas, on a
J J f(x, y)dxdy 1', limite finie,
(Lix) x oo
et la valeur de l'est indépendante de la famille recouvrante choisie. On dit
que f est intégrable sur (Li) et l'on pose
ff f(x, y)dxdy = l'.
(Li)
2 0 ff If(x, y)ldxdy tend vers + 00 quand x tend vers + co.
(Lix)
La valeur de l' (si eUe existe!) dépend du choix de la famille {Ax }x E A. On peut
toujours trouver une famille recouvrante (L1 ) pour laquelle f f . !(x y)dxdy
(.1x)
n'admet pas de limite.
Dans ce cas on dit que! e t non intégrable sur (A).
De la définition résulte le théorème suivant.
208
INTÉGRALES MULTIPLES
1rhéorè e 7.111.1.
. (Li) désigne un domaine de IR 2 (x, y) (non nécessairement borné) de
frontière régulière ;
. f désigne une application (A) IR continue sur (A) - b, où b est (au plus)
une réunion finie de points et de portions de courbes régulières.
On a alors la proposition suivante :
«f intégrable sur (Li) <=> IJI intégrable sur (Li) ».
IV. - INTÉGRA1rION DE LA LIMITE D'UNE SUl1rE DE FONCTIONS
INTÉGRABLES.
Théorème de Lebesgue (forme réduite) 7.IV.I. - Soit {j;,}neN une suite de
fonctions intégrables sur (Li), qui converge simplement vers une fonction J
sur (Li) - b :
fn(x, y) f(x, y),
'v'(x, y) E (Li) - b.
n -+ 00
Si l'on peut trouver une fonction g intégrable sur (Li) telle que
, f,,(x, y) 1 g(x, y),
'v'(X, y) E (A) - b
alors
lim ff fn(x, y)dxdy = ff lim fn(x, y)dxdy.
IJ-+ 00 (Li) (Li) n-+ 00
B. - Intégration au sens de Lebesgue
V. - DÉFINITIONS DIVERSES.
1° Ensembles de mesures nulles. - Considérons un rectangle
r = ]a, b[ x ]e, d[.
L'expression (b-a)(d-c) est appelée mesure (ou aire) de r. On la notera mes (r).
Soit A un sous-ensemble de JR.2 ; on dit que A est de mesure nulle lorsque la
condition suivante est satisfaite : «'v' 8 > 0, on peut trouver une famille dénom-
brable {r II } II e de rectangles telle que
00
A c l rra et
11=0
00
l mes (r n ) < 8».
n=O
On écrit usuellement mes (A) = O.
Exelnple. - Soit b une réunion dénombrable (ou finie) de points et de
portions de courbes régulières. On a mes (b) = O.
2° Fonctions définies presque partout. - Une application f: JR.2 - B J--» IR.
est dite définie presque partout sur IR 2 , lorsque B est de mesure nulle [en abrégé,
f est définie sur IR2 (p. p.)].
De même, une application f: (Li) - B J--» IR est dite définie presque partout
sur (Li), lorsque B est de mesure nulle [en abrégé, f est définie sur (Li) (p. p.)].
3° Fonctions égales presque partout. - Deux fonctions
f et g : JR2 (p. p.) JR.
sont dites égales presque partout lorsqu'elles sont égales sauf sur un ensemble
de mesure nulle:
f(x,y) = g(x,y), V(X,Y)EJR 2 -C, où mes(C) = o.
VI. - FONCTIONS MESURABLES.
1° Définition. - Une fonction f: IR 2 (p. p.) JR. est dite mesurable lors-
qu'elle est la limite presque partout d'une suite croissante { lpn }n e de fonctions
continues à supports bornés (*) :
lpn(x, y) f(x, y), 'v'(x, y) E IR 2 - E, où mes (E) = 0,
n -+ 00
avec qJlI+l(X, y) qJn(x, y), V(x, y) E IR 2 , et supp (qJn) est borné.
(*) supp (f!Jn) = {(x, y) E IR2IPn(x, y) i= 0 :..
210
INTÉGRALES l\-fUL TIPLES
2° Propriétés.
i) Soit f et g deux fonctions mesurables. Alors les fonctions suivantes :
À/+p,g, fg, f+ = sup (f, 0), f- = sup (-f, 0),
sont mesurables (JI. et p, sont des constantes réelles).
ii) Soit {h}n eN une suite de fonctions mesurables. Alors les fonctions
sup fn' inf fn' limf1l' limfn,
n 1J
sont mesurables.
En particulier, si
/" -+- f presque partout sur IR 2 ,
alors f est mesurable.
3° Exemple de fonctions mesurables. - Notons b une réunion dénombrable
de points et de courbes régulières.
Une fonction continue sur IR 2 - b est Inesurable.
VII. - ENSEMBLES MESUR..c\BLES.
Un ensemble (.1) est dit mesurable lorsque sa fonction caractéristique 1(.1)
est mesurable :
.,
1 (.d) : /R- -+- IR
\ 1 SI (x, y) E (.1),
(x, y) 1--> 1 0 SI (x, y) r!= (LI).
Les ensembles de mesure nulle sont n1esurables.
Les ouverts et fermés de IR 2 sont mesurables. Plus généralement, une réunion
(ou une intersection) dénombrable d'ouverts et de fermés est mesurable.
VIII. - FONCTIONS INTÉGRABLES SUR IR 2 AU SENS DE
LEBESGUE.
1° Cas des fonctions p03itives presque partout. - Soit f: m 2 (p. p.) fR
une fonction mesurable et positive. Elle est la limite presque partout d'une
suite croissante {<Pn} de fonctions continues à supports bornés.
Notons 1(<Pn) l'intégrale de <Pn au sens de Riemann. On a
1«(fJl) [(<P2) ... I(<Pn) I(<PIJ+ 1) ...
DÉFINITION DE f f (Li) f dx dy
211
Deux cas sont à envisager :
l({Jn) 1, limite finie, et 1({J1l) + 00.
n 00
Dans le premier cas, on dit que f est intégrable sur IR 2 et l'on pose
f f L'!:2 f(x, y)dxdy = 1.
Dans le second cas, on dit que.f est non intégrable sur IR2.
2° Cas général: f de signe ,.ariable. - Soit f: IR 2 (p. p.) IR qui est
supposée mesurable. Notons f + = sup (f, 0) et f - = sup ( - f, 0). On sait
que f + et f - sont mesurabIes. De plus,
.f = f + - f - .
On dit que f est intégrable sur IR 2 , si et seulement si, f + et f - sont intégrables
sur IR 2 . On pose alors
ff fdxdy = I r j"""" dxdy - ff f- dxdy.
2 .. .J - 2
Remarquons qu'une fonction intégrable au sens de Riemann est nécessai-
rement intégrable au sens de Lebesgue.
Par la suite, lorsque l'on parlera de fonctions intégrables il s'agira de fonc-
tions intégrables au sens de Lebesgue.
Théorème 7.VIII.l. - Soit/une fonction J11esurable. - On a la proposition
suivante :
/ intégra ble sur JR.2 <=> I.fl intégrable sur IR 2 .
Théorème 7. VIII .2. - Soit f et g deux fonctions J11esurables qui vérifient
la condition suivante:
If(x, y)1 g(x. r) presque partout dans m 2 .
On a la proposition suivante:
« g intégrable sur IR l => f intégrable sur IR 2 ».
Théorème de Fubini 7.VIII.3. - Lorsque f est intégrable sur JR2, les appli-
cations partielles f(x, .) : y f(x. y) sont intégrables sur 1R(y).. pour presque
tous les x, et l'on a
ff " f
1 \ ,
.,1(x, y)dxdy = 1 1 .{(x, y)dJ' \ dx.
-
212
INTÉGRALES MULTIPLES
IX. - DÉFINITION DE ff fdxdy.
( )
Soit (Li) un sous-ensemble de IR 2 et soit f une application
(Li) (p. p.) r-+ IR.
A
Notons f l'application qui prolonge f par 0 dans C(Li) :
A 2
f : IR (p. p.) JR.
(x, y) H ! { X, y),
si (x, y) E (Li) presque partout,
si (x, y) E C (A), complémentaire de (Li).
A
On dit que f est mesurable sur (Li) lorsque f est mesurable sur JR.2.
A
On dit que f est intégrable sur (Li) lorsque f est intégrable sur IR 2 .
On pose alors
ff fdxdy = J " f Îdxdy.
(Lt) R2
Aire d'on domaine mesorable. - Soit (A) un domaine mesurable. Si sa
fonction caractéristique l(Lt) est intégrable sur JR.2, on dit que (Li) a une mesure
finie (ou bien, une aire finie) et l'on pose
mes (..1) = f f 1Ii 21 (,J)dxd Y .
Propriété. - Soit (Li l ) et (Li 2 ) deux domaines de mesure finie; on a
mes (Li 1 U Li 2 ) = mes (Lil)+mes (Li 2 )-mes (Al t1 .1 2 ).
X. - SUITE DE FONCTIONS INTÉGRABLES.
Théorème de Beppo-Lévi 7.X.I. - Soit une suite croissante de fonctions
ln : (A) (p. p.) IR. telle que
ff fndxdy K, Vn E IN,
(Lt)
K étant une constante et (A) (*) un sous-ensemble mesurable de JR.2.
Alors,
i) il existe une fonction limite f définie comme suit
fn(x, y) f(x, y) presque partout dans (LI);
JI -. co
(*) Par exemple (LI) est un ouvert de IR. 2 . Cf. VII.
SUITE DE FONCTIONS INTÉGRABLES
213
ii) f est intégrable sur (A) et
ff fndxdy If fdxdy.
(.d) n-to GO (.d)
Théorème de Lebesgue 7.X.2. - Soit {J;.} une suite de fonctions intégrables
sur un sous-ensemble mesurable de IR 2 , que l'on notera (A).
Si l'on peut trouver une fonction g intégrable sur (A) telle que
1J;.(x, y)1 g(x, y),
'v'(x, y) E (A) presque partout,
.alors
i) {J;.} converge simplement presque partout sur (A) vers une fonction f
notée lim /".
n -to GO
ii) l im ff fn(x, y)dxdy = ff limfn(x, y)dxdy.
n-to 00 (.d) (.d) n-+ 00
Lemme de Fatou 7.X.3. - Soit {J;.} une suite de fonctions: (A) (p. p.) Ho IR,
positives, intégrables et qui tendent vers une fonction limite f presque partout
dans (A), qui est un sous-ensemble mesurable de IR. 2 .
Lorsque la condition suivante est réalisée :
f I fndxdy K, 'v'n E IN, K étant une constante,
J (.d)
la fonction limite f est intégrable et
ff fdxdy li m ff fndxdy.
(.d) - (.d)
7.11.1.
.
7.11.2.
.
7.11.3.
.
7.11.4.
..
7.11.5.
.
EXERCICES DU CHAPITRE 7
\ 1 '
Soit (LI) = 1 (x, y) E JR21 x > 1 et 0 < y < x !.
a) Montrer que xe-x est intégrable sur (LI). Calculer f f xe-Xdxdy.
b) Montrer que e- xy est non intégrable sur (L1). (Li)
a) Montrer que la fonction (x, y) e -Ix - YI est intégrable sur
]-1, l[x]-oo, 00[.
b) Montrer qu'elle n'est pas intégrable sur IR 2 .
Montrer que la fonction ye- X2 est intégrable sur
(L1) = {(x, y)lx > 0, x-l < y < x+ 1 }.
Calcul de f:: e- x2 dx.
1° Calculer f r e-x2-y2dxdy, oÙ C R ={(x,y)lx 2 +y2<R2}.En
.1 CR
déduire que (x, y) e- x2 - y2 est intégrable sur IR 2 et calculer
If IR2 e- X2 - y2 dxdy.
2° Soit (L1 x) = ]- X, X[ x]- X, X[. Montrer que /'on a
r J ' e-.'t2-y2dxdy = (f X e- x2 dx ) 2 .
. (Ltx) -x
J .. + 00
3° Utiliser les résultats des questions }O et 2° pour calculer -00 e- x2 dx,
x 2
puis J .. + e - -dx.
-00
Montrer que la fonction est intégrable sur ]1, 2[ x]O, IL.
V X - 1
' / .. Loa y
Calculer f - _.-:. dxdy.
, ... ]1,2[x]O.1[ l/x-l
7.11.6.
..
7.11.7.
.
7.ll.8.
.
7.11.9.
.
7.111.1.
.
EXERCICES DU CHAPITRE 7
215
Montrer que V x . est intégrable sur
1-x (X 2 +y2)
(Li) = {(x,y)1 0 < x < 1,0 < Y < x}.
ff xdxdy
Cakurer .
(Lt) V1-x (X 2 +y2)
Montrer que (x, y) ( 1 ) n'est pas intégrable sur IR2, pour tout
X2+y2 a:
(X réel.
Montrer que la fonction
X cos 2 x e-x+y2
(x,y) -
V1-x (X 2 +y2)
est intégrable sur (Li) = {(x, y)IO < x < 1,0< y < x}.
(Utiliser les résultats de l'exercice 7.1/.6.)
Montrer que la fonction
e-x2-y2 -V xy
(x, y) (x 2 +1)(y2+1)
est intégrable sur (Li) = {(x, y)lx > 0 et y > O}.
(Comparer la fonction proposée avec e - x 2 - y2.)
a) Montrer que la fonction f définie par
1
(x, y)
V l-x 2 -y2
est intégrable sur (Li) = {(x, y)lx 2 + y2 < l}.
ff dxdy
Cakuœr / .
(.d) t 1-x 2 -y2
b) Montrer que la fonction g, définie par
. x
( ) SIn xy e
x, y V '
1 -x 2 _y2
est intégrable sur (Li).
216
7.m.z.
.
7.ill.3.
.
7.m.4.
..
7.ill.S.
..
7.111.6.
...
INTÉGRALES MULTIPLES
a) Soit (Li) = {(x, y)IO < x < 1, 0 < y < x}. Montrer que la fonction
. 1
x Sln-
f: (x, y) 1-+ x-y
VI X (X 2 +y2)
est intégrable sur (LI). (Utiliser les résultats de ['exercice 7.11.6.)
b) Dans quel sens peut-on dire que la Jonction
. 1
xSln 2x _ 1
g : (x, y) 1-+
. VI-x (X 2 +y2)
est intégrable sur (Li) ?
Montrer que la fonction sin xy 1-+ e- x2 - y2 est intégrable sur IR.2.
Montrer que la fonction
( ) cos xy
x, y 1-+
V lsin XI(y2+ 1)
est intégrable sur ]0, 1 [ x ]0, 00 [.
Montrer que la fonction
1
f: (x, y) 1-+ V
X2+y2+Z2
est intégrable sur QR = {(x, y, z)IO < X2+y2+Z2 < R2}.
Calculer III dxdydz (R est une constallte réelle positive).
!2R V X 2 +y2+Z2
n n
1: 1: ai .XiX .
Montrer que e i =l j=l J J est intégrable sur IR" si, et seulement si, la
matrice sY/11étrique, A = (au) 1 i n, a toutes ses valeurs propres négatives..
1 j n
n n
II l 1: 1: aijXi,XJ
Calculer alors ... Ilinei=lj=l dXtdx2...dx n .
n n n
(On rappelle que L L aijXiXj = L lkxf?)
i=1 j=l k=l
7.111.7.
...
7.IlI.8.
..
7.111.9.
..
7.IV.l.
.
7.IV.2.
.
7.IV.3.
.
EXERCICES DU CHAPITRE 7
217
Existence et calcul de ff f(x, y)dxdy où f(x, y) = e- x - Y(x+y)n
(J)
et (Li) = {(x, y)lx > 0 et y > O}. (On pourra utiliser le changement
de variable 1/ = X, U = x+y et remarquer que f: t"e-tdt = n!.)
a) Montrer que la fonction fa. définie par
sin x sin y
(x, y) (X 2 +y2)ex
est intégrable sur JR.2 pour 1 < (X < 2.
b) Étudier le problème analogue dans JR.3 pour la fonction g ex
sin x sin y sin z
(x, y) (X 2 +y2+Z2)ex ·
f désigne une fonction continue dans IR 2 . On pose
oF oF
Calculer oX ' ôy
F(X, Y) = f:f: f(x, y)dxdy.
o2F
et 8X8Y.
Soit (LI) Ull domaine borné. Montrer que
ff ( 1+ x+y ) n dxdy ff eX+Y
(J) n n-. 00 (J)
(utiliser le théorème de Lebesgue).
Montrer que
ff nexy
sin x xy dxdy 1
] 0, [ x ] 0,1 [ ne + 1 n -. ex>
(utiliser le théorème de Lebesgue).
Soit (11) = {(x, y)lx > 0 et y > O}. Montrer que
ff e'lx n 2
dxdy -
(J) (e nX + y)(x 2 + 1)(y2 + 1) n-+ ex> 4
(utiliser le théorème de Lebesgue).
218
7 .IV .4.
.
7.V.l.
..
7. V .2.
.
7. V .3.
.
7. V .4.
..
7.VI.l.
...
INTÉGRALES MULTIPLES
Montrer que la suite,
ff xen(x2+y2 )
u n = dxdy,
]O,2[ x ]O,l[ V II-xl (xe'l(x 2 + y2 ) + 1)
converge vers une limite, que l'on déterminera.
Délnontrer que la droite (D), d'équation x = 1, est bien de mesure nulle..
En déduire que la fonction
1
f: (x, y) (x-l)(x 2 +y2)
est continue presque partout.
Montrer que tp, x tp, est un sous-ensemble de Inesure nulle dans JR.2.
Montrer que la fonction
! x2y si (x, y) Lf fP, X fP"
f:(x,Y)1-+ 0 tt=
si . (x, y) E fP, x fR,
est presque partout égale à une fonction continue.
00
Montrer qu'une réunion dénombrable U l'n de portions de courbes régu-
n=l
fières est de mesure nulle.
[Pour chaque YK, on peut trouver 'v'8 > 0 une famille finie de rectangle ri
telle que
N
YK c U ri' avec
i= 1
N
L mes (ri) < 8 cf. exercice 6.1.1.]
i= 1
Soit 1: (x, y) 1--+ (X-l)2 X2+y2 r Trouver une suite croissante {ln }ne N de
fonctions continues à supports bornés telle que
fn(x, y) f(x, y) presque partout dans IR 2 .
n -+ co
En déduire que f est mesurable.
7.IX.I.
.
7.IX.2.
..
EXERCICES DU CHAPITRE 7
219
On considère la fonction f: ]0, 1 [ X ]0, 1 [ IR.
\ 1
f: (x, y) f 0
si (x, y) f/22,
si (x, y) E rp,2.
a) Montrer que f est intégrable au sens de Lebesgue.
b) Montrer que f n'est pas intégrable au sens de Rielnann.
a) Calculer Ines (A), oÙ A = {(x, y)1 Iy-xl < e- x , x > O}.
b) Montrer que toute fonction f: A IR satisfaisant aux conditions
suivantes est intégrable sur A :
- elle est continue, sauf au plus sur une réunion dénombrable b de points
et de courbes régulières ;
- elle vérifie 1 f 1 Kea.x, 'v'(x, y) E A - b (K et IX constantes avec (X < 1).
SOLUTIONS
7.11.1.
a) La fonction considérée est positive sur (L1). Soit
1 \
(LI x) = 1 (x, y)1 1 < x < X et 0 < y < x \ ·
{LfX}X l est une famille croissante de domaines bornés qui recouvre (L1). Calculons
ff xe-Xdxdy. On a
(.dx)
ff f x ' f .!. \ f x
xe-Xdxdy= xe-xdx xdY = e-xdx=l-e- x ,
(Lix) l' { 0 l 1
.
1
1
1
1
1
1
1
1
1
1
1 -----
.1
x
donc ff xe-Xdxdy ---+ 1 et, par suite,
(Lix) x -+ 00
k) la fonction (x, y) xe-x est intégrable
sur (L1) ;
kk) ff xe-Xdxdy = 1.
(Li)
b) On a
o
J " f r x { J .! \ f x 1 - - 1
e-xYdxdy = dx' x e-XYdy = e dx,
(.dx) ,,1 (0 1 X
donc
fJ e-xYdxdy = (l-e-l)LogX- +CX).
(Lix) X -+ 00
La fonction (x, y) 1-+ e- xy n'est pas intégrable sur (L1).
.11.2.
La fonction à intégrer est positive sur (L1). Soit
(Lf x ) = {(x,y)l-l < x < 1 et -X< y < X}.
SOLUTIONS
221
{LlX}X>l est une famille croissante de domaines bornés qui recouvre (LI). Calculons
JJ e-Ix-,Idxdy. On a
(Llx)
f J e-IX-'ldxdy = J I dx J x e-Ix-:vldy{
., (LI x) -1 t -x
:;!tJ );;;
/: X/
v
y
v
x
x
â'/')<
XJ(
A)',
.....
-1 0 1 X
?9<
)(
x
/
% /h'/
//
- f I dx! J x e-Ix-Yldy+ J x e-1X-Y1dy)
., -l -x x
1 j J x J x'
= J dx eY-Xdx+ eX-Ydy
-1 -x x \
= J I dx{2-e-X(ex+e- } = 4-4e- X sh 1.
-1
On a
JJ e-IX-Yldxdy--+4,
(Lix) X-+oo
donc la fonction e- 1x - Y1 est intégrable sur (LI) et
fJ e-IX-Yldxdy = 4.
(Li)
7.If.3.
Posons (LI x) = {(x, y)IO < x < X, x-l < y < x+ 1 }.
On a
JJ 2 J '9>X 2 l J tax + 1 } J x 2 2
ye- X dxdy = e- X dx} ydy ( = 2xe- X dx = l-e- X ;
(Li Je) 0 t x - l , 0
donc
JJ ye-X2dxdy --+ 1.
(Llx) X -+ 00
La fonction ye- X2 est intégrabIe sur
(LI) et
x
JJ ye-X2dxdy = 1.
(LI)
222
INTÉGRALES MULTIPLES
7.11.4.
1 ° En utilisant les coordonnées polaires, on a
f f CR e-(x 2 + y2 )dxdy = f f CR e- r2 rdrdO = J:1t dO! f: e-r2rdr ,
donc
f f CR e-(x 2 + y2 )dxdy = n(1-e- R2 ).
La fonction e-(x 2 +y2) est positive sur IR 2 . { CR }R>O est une famille croissante de
domaines bornés qui recouvre IR 2 et
ff e-(x2+y2)dxdy ---+ 11:,
CR R-+- 00
donc e-(x 2 +y2) est intégrable sur JR.2 et l'on a
(1)
r f e-(x2+y2)dxdy = 11:.
o. 1m 2
2° Pour calculer f r e- X2 _ y2 dxdy il suffit de remarquer que le domaine d'inté-
.. (.dx)
gration (L1 x) = ] - X, X[ x ] - X, X[ est un «rectangle» et que la fonction à intégrer
se décompose sous la forme g(x)h(y) :
-x2-y2 _ -x2 _y2
e - e .e .
On a donc
f r,!X) e- X2 _ y2 dxdy = U:x e- x2 dx).U:x e- y2 d Y ),
ou bien
(2)
ff e-X2_y2dxdy = (f X e- x2 dx ) 2.
(.dx) -x
30 La fonction e- x2 - y2 est intégrable sur JR.2, et {L1x}x>o recouvre JR.2, donc
ff e-X2_y2dxdy ---+ ff e-x2_y2dxdy = 11: [cf (1)]
(.dx) x-+- 00 1m 2
et, par suite [cf (2)],
I x e-x2dx ---+ v .
-x X-+-CfJ
SOLUTIONS
223
On en déduit que la fonction positive x 1-+ e- x2 est intégrable sur IR. et que
J + 00 V -
e- x2 dx = 77:.
-00
En considérant le changement de variable x = I ' on obtient
V 2
V - J + 00 -x 2 1 J + 00 - u 2
77: = e dx = V - e 2 du,
-00 2 -00
ou bien
J + 00 u 2 -
1 e - 2: du = V 2n.
-00
7.11.5.
La fonction est de signe constant sur ]1. 2[ x]O, l[ = (LI). Elle admet un
x-l
ensemble polaire constitué par Ies segments AB et BC (qui sont respectivement
portés par les droites x = 1 et y = 0).
Soit (Llx) = ]1+ , 2[ x]}, 1[.
y
A
1 1 : 13
)( 1 1
o
B 1+l..
X
c X
On a
JJ Log y (J 2 dX ) (J I )
dxdy = 1 · 1 Logydy
(.dx>Vx-l l+xVx-l X
= ( 2- 2 )( -l-!LOgX+ ) ---+ -2,
Vx X X X oo
donc la fonction (x, y) V est intégrable sur ]1, 2[x ]0, 1[ et
x-l
JJ Logy d d - 2
x y --
]1,2[X]O,1[ V X- l .
224
INTÉGRALES MULTIPLES
7.11.6.
La fonction V x est de signe constant sur (.d). Elle admet un ensemble
l-x(x 2 +y2)
polaire constitué par le point (0, 0) et le segment AB (qui est porté par la droite
d'équation x = 1).
Soit (.d x ) = {(X, y) l < x < I- l et 0 < y < xj. {.dx}x>o recouvre (,1). Cal-
culons II xdxdY . On à
( x) VI X(X 2 +y 2 )
1
fI xdxdy - I l-x xdx I x dy
(..:Ix) VI X (X 2 +y2) - VI x / 0 X 2 +y2 j
I l-! dx 7T: (V V I ) ' 7T:
= Arctg 1 x V - = - 1 - - - - ---+ - .
.!. l-x 2 X X x-+oo2
x
On en déduit que la fonction proposée est intégrable sur (L1) et que l'on a
ff xdxdy = .
., ftI (.d) VI X (X 2 +y2) 2
7.11.7.
Dans l'exercice considéré ici le domaine d'intégration est non borné. De plus, la
fonction (X2 y2}X admet un ensemble polaire constitué par le point (0,0) pour ex> o.
SOLUTIONS
225
Soit C x = ! (x, y)1 i < V X 2 +y2 < X l, {Cx}x>o est une famille croissante
de domaines bornés qui recouvre (LI).
La fonction (X2 Y 2)« est continue et bornée dans C x.
Calculons ff ( XdY?)" en utilisant les coordonnées polaires; nous obtenons
Cx x-+y-
ff dxdy { [ X2-2Œ_' 1 ] SI
= 1 - ex X 2 - 2x
Cx (x 2 + y2)Π4n Log X SI
ex :f:. 1,
ex = 1.
Dans tous les cas, on a
f r dxdy
+ 00.
el CX (x 2 + y2)ΠX -+ co
La fonction ( 1 ) n'est donc pas intégrable sur IR 2 .
X2+y2 x
7.11.8.
On a
X cos 2 xe- x + y2 x
o l e. - , 'v'(x, y) E (LI).
V1-x 2+y Vl-x 2+y
La fonction x est intégrable sur (LI) (cf. exercice 7.11.6), donc la fonc-
l-x(x 2 +y2)
tion proposée est elle-même intégrable sur (LI) [cf théorème 7.11.1].
7.11.9.
La jonction (x, y) 1-+ e- x2 - y2 est intégrable sur JR.2 (cf exercice 7.11.4.) donc sur (LI),
puisque (LI) c JR.2.
Or
,-
e-X2_y2_\ xy
o -x 2 _y2
(x 2 +1)(y2+1) e ,
\f(x, y) E (LI),
donc la fonction proposée est intégrable sur (LI) (cf théorème 7.11.1.).
226
INTÉGRALES MULTIPLES
7.111.1.
a) La fonction f admet un ensemble polaire qui est constitué par la circonférence
de centre 0 et de rayon 1.
Soit (Li x) = ! (x, y)lx 2 + y2 < 1- ( , {Li x h> 1 est une famille croissante de domai-
nes bornés, qui recouvre (LI).
Dans (LI x), la fonction f est continue et bornée donc intégrable. Calculons
II dxdy
(Li ) VI-x 2 -y2
en utilisant les coordonnées polaires.
On obtient
f ( X) VI ::_Y2 = 2n [1- V - ;J ,
expression qui tend vers 2n lorsque X 00 ; donc la fonction f est intégrable sur (LI)
et l'on a
ff f(x, y)dxdy = 2n.
(Li)
b) On a
Ig(x, y) 1 e .f(x, y),
\f(x, y) E (LI),
donc Igi est intégrable sur (LI) (théorème 7. II .1) et, par suite, g est elle-même inté-
grable (théorème 7. III .1).
7.111.2.
a) Soit qJ: (LI) 1-+ IR définie comme suit:
x
qJ(x, y) = . .
VI -x (X 2 +y2)
SOLUTIONS
227
On sait que (fJ est intégrable sur (LI) (cf. exercice 7. II.6). On a
Il (x, y) 1 (fJ(x, y),
'v'(x, y) E (LI),
donc Il 1 et, par suite, 1 sont intégrables sur (LI).
b) Considérons le segment AB défini comme suit
, IIi
AB = ( (x, y)lx = 2:' 0 < y < 2 .
La fonction g est continue dans (LI) - , où = AB. De plus, on a
Ig(x, y)1 (fJ(x, y),
'v'(x, y) E (LI) - .
Or (fJ est intégrable sur (LI), donc tgl et g sont elles-mêmes intégrables sur (LI).
(On sait que la valeur de ff g(x, y)dxdy est indépendante des valeurs arbitraires
(.d)
que l'on peut donner à g sur = AB.)
7.111.3.
La fonction proposée est continue sur JR.2 et
(sin xye- X2 _y2( e-:x2-y2,
'v'(x, y) E JR.2.
Or e- x2 - y2 est intégrable sur JR.2 (cf. exercice 7.11.4.), donc la fonction proposée est
elle-même intégrable sur JR.2.
7.111.4.
La fonction 1 est continue dans (LI) et
cosxy V
Vsinx(y2+1) Vx(y2+1)'
[ en effet, sin x ::;::; x, lorsque x E [ 0, ]] .
Pour montrer que 1 est intégrable sur (LI), il suffit donc de s'assurer que la fonction
\f(x, y) E (LI)
1
g : (x, y) H> g(x, y) = lC '
V x (y 2 + 1)
est intégrable sur (LI).
228
INTÉGRALES MULTIPLES
Montrons que g est intégrable sur (L1). - Soit
(LI x) = ] , 1 [ X ]0, X[, (X> 1)
et calculons fI gdxdy.
(Li x)
On a
y
r r ff dxdy
udxdy =
. (Lix) b (.dx) 1! (y2 + 1)
= ( r : d ) · (I X y ) ,
.. x Vx oy-+l
donc
ff g(x, y)dxdy = 2 ( 1- ,:-: ) Arctg X n
(.dx) V X X oo
et, par suite, la fonction g est jntégrable sur (L1).
"7.111.5.
La fonction f est continue mais non bornée sur DR. Son ensemble polaire est
constitué par le point 0(0, 0, 0). Pour savoir si f est intégrable sur Q R il suffit de
calculer ff f(x, y, z)dxdydz, où
!2x ,R
QX,R = : (x, y, z) 1-2 < X 2 +y2+Z2 < R2 j, X> R.
On a (cf. exercice 6. VI.4., avec e = .l )
fff fdxdydz = 2n ( R2 - 1-2 ) ---+- 2nR2,
!2X,R X-+oo
donc f est intégrable sur il R et
l f f uRfdxdydz = 2nR2,
SOLUTIONS
229
7.111.6.
On peut trouver un repère orthonormé tel que
,,'2
aijxiXj = AKXK ,
i,j K
)"K val ur propre de (aij),
la matrice de passage, P, appartenant au groupe orthogonal, on a
,
Xl Xl Xl
,
X2 X2 X2
= P-l =tp
,
XII XII X n
Idet PI = 1.
Utilisons le changement de variable (Xl' ..., X n ) 1-+ (x , ..., x ), lorsque la fonction
!aijXiXj
e ij est intégrable sur IRn. On a
d d D( Xl' ..., X n) d ' d 1 d PI d ' d '
Xl". X n = , , Xl... x n = et Xl... Xn,
D(xt, ..., Xn)
donc
J l !:.aijXiXj l l ).Kx'1.
ij K = 1 , ,
... e dXI ... dX2 =... e dXl ... dXn.
IRI1(x) 1R"{x')
Dans IR."(x') considérons l'hypercube
(L1x) = ]-X, X[x]-X, X[x... x]-X, X[.
On a
J J K l;.KX d ' d ' - (I X ;.l x ? d ' ) (J X Ânx:.2 d ' )
... e Xl... X n - e Xl." e X n .
( x) -x-x
Si un )"K alt moins est positif ou nul, par exemple )wl 0, on aura
I x "'2
e.l w1X1 dXl 00
-X X oo
et, par suite,
f J ;: ).KX'i
K=l , ,
... e dXI ... dXn 00.
{LI x} X-+oo
230
INTÉGRALES MULTIPLES
'2
l.. 'KXK D ( ) !.aijXiXj
La fonction e K =l Xl' ...,X" n'est pas intégrable sur IRn(x'), donc e ij
D(xt, ..., x )
n'est pas intégrable sur IRn(x).
Si tous les À K sont négatifs on a (cf. exercIce 7.11.4., question 3°)
f x 1 f V -).K X
'2 2 TC
e AKX Kdx = _ _ e - y dy---+-
-x V -À. K -v -lx X X-+oo V }"K
et, par sui te,
n'2 V
1: ÂKX K ( -l ) nnn
K-l d ' d '
... e - Xl." X n ---+- ·
f f<L!X) X-+OO 1\)'2... lx
n
1: '2 ( )
La fonction e X = /"KXK D Xl, ..., X n est intégrable sur IRn(x'), donc la fonction
D(xl, ..., x )
1:. aijXiXJ
e ij est intégrable sur IRn(x) et l'on a
f ... f aijXiXj _ 1/ ( -l)nnn - V ( -l)nnR
e dXI...dxn - - .
R"(x) Àt;..2...À. K det A
7.111.7.
Considérons le changement de variable
u = X,
v = x+y.
On a
dxdy = D(x, y) dudv = dudv
D(u, v)
et, par suite,
ff (x+y)ne-X-Ydxdy = ff vne-Vdudv,
(Li) (.1')
où (LI') est le transformé de (LI)
(LI') = {(u, v)( u > 0, v-u> O},
'UI
SOLUTIONS
231
donc
f {LI) (x+y)ne-x-Ydxdy = f: vne-Vdv\f: duj = f: v n +1e- v dv = (n+l)!.
7.111.8.
a) Soit (.dl) = {(x, y)lx 2 +y2 > 1} et (.d2) = {(x, )')(0 < X 2 +y2 < 1}.
On a
I Sin x sin Y I 1
(x2+ y2):X (x2+ y2):X '
'v'(x, y) E (.dl),
et
I Sin x sin Y I Ixllyl
(x2+ y2):X (X2+y2):X '
- Pour (X > 1, la fonction 1 est intégrable sur (.dl) (1).
(X 2 +y2):X
- Pour 0( < 2, la fonction ( Ix llyl ) est intégrable sur (L1 2 ) (2).
X2+y2. :x
'v'(x, y) E (.d2).
En résumé, la fonction h est intégrable sur IR 2 (x, y) pour 1 < (X < 2.
b) Démonstration analogue. On calculera
fff dxdydz fff Ixllyllzl d d d
1 <x2+ y 2+z2<X2 (X2+y2+Z2)1X et ...!. <x2+y2+z2< 1 (X2+y2+Z2)1X X y Z,
X 2
en utilisant les coordonnées sphériques.
glX est intégrable sur IR3(x, y, z) lorsque < 0( < 3.
7.111.9.
On a évidemment
oF f y
ox (X, Y) = o!(X, y)dy,
oF J x o2F
oy (X, Y) = o!(x, Y)dx, oXoy (X, Y) =f(X, Y).
(1) Calculer ff dxdy en utilisant les coordonnées polaires.
1 <x2 +y2 <X2 (x 2 +y2):X
ff lx Ily Idxdy
(2) Calculer 1 en utilisant les coordonnées polaires.
- <x2+ y 2< 1 (X 2 +y2):X
X 2
232
INTÉGRALES MULTIPLES
7 .IV .1.
On a
( x+y ) n
1+- ex+y,
n 1I t.
'v'(x, y) E (Li).
Peut-on en déduire que
II ( 1 + x+y ) ndXdy II eX+Ydxdy?
(Li) n n 00 (.1)
La réponse est affirmative car on peut trouver une fonction g intégrable sur (Li)
et telle que
( ) n
x+y
1 + -----,:z g(x, y),
'v'(x, y) E (Li)
(poser g(x, y) = eX+ y ).
Remarquons que e X + Y est intégrable car continue et bornée sur le domaine borné (Li).
7 .IV .2.
Utilisons le théorème de Lebesgue. On a
. ne XY . ] 1t [
SIn x xy sin x, 'v'(x, y) E 0'- 2 X ]0, 1[,
ne + 1 n oo
et
. ne xy ] n [
sin x Isin xl = g(x, y), 'v'(x, y) E 0, 2 - x ]0, 1 [
Ile xy + 1
( g étant intégrable sur ] 0, ; [ x ]0, l[) ; donc
II . ne XY If .
]0 !t [ ]0 1 [ SIn x dxdy ] 0 1t [ X ] 0 1 [ Sin xdxdy = 1
, 2 x, ne XY + 1 n 00 ' 2 '
7 .IV .3.
Utilisons le théorème de Lebesgue
e nx 1
, 'v'(x, y) E (Li) ;
(e"." + y) (x 2 + 1)(y2+ 1) n oo (x 2 + 1)(y2+ 1)
SOLUTIONS
233
et
e"X 1
(e llx +y)(x 2 +l)(y2+l) (x 2 +1)(y2+l ) = g(x, y)
(g étant intégrable sur (L1) (*)) ; donc
ff enxdxdy ---+ f r dxdy = n 2 (*).
(Lt)(e nx +y)(x 2 +1)(y2+l)1:-+OO ., (Lt)(x 2 +l)(y2+1) 4
7 .IV .4.
On a
xe n (x 2 + y2) 1
,
V ll-xl(xe'l(X 2 + y2 )+1) n-+oo li ll-xi
'v'(x, y) E (L1) - c5, où c5 est le segment x = 1, 0 < y < 1, et
1 xe'l(x2 + y2) 1
, 'v'(x, y) E (L1) -b.
I V ll-xl(xe n (X 2 + y2 )+1) V II-xl
La fonction (x, y) Ho / 1 est intégrable sur ]0, 2[ x]O, 1 [ ; donc
1ll-xl
ff dxdy
II ---+- = 4
n n-+oo ]O,2[x ]O,1[ V II-xl .
7.V.l.
a) Considérons la famille de rectangles r n
r" =] - :3 ' 1: 3 [ x ]-n, n[,
8 > 0 n E IN*
, .
II est clair que mes (r n) = 48 2 .
rz
(*) Soit (L1x) = {(x, y) 10 < x < x, 0 < y < X}, {L1x}x > ° recouvre (L1) et
ff g(x, y)dxdy = (f X dx ) (f X dy ) = (Arctg X)2 n 2 ;
(.dx) 0 1 +X2 0 1 +y2 X-+oo 4
donc g est intégrable sur (L1) et
ff g(Xt y)dxdy = 1C 2 .
(od) 4
234
INTÉGRALES MULTIPLES
On a
00 00 ( 00 1 )
De U r n et L mes (r n ) =K8 où K= 4L n 2 ;
n=l n=l 1
donc D est bien de mesure nulle.
b) La fonction f est continue dans JR.2 - D.
D est de mesure nulle donc f est continue presque partout.
7 . V .2.
Tout ensemble dénombrable de points E = a9 1 Pa est de mesure nulle. (En effet,
11 00 00
si r n est le carré de centre P n et de côté , on a EcU r n' avec L mes (r n) = K8..
n n=l n=l
, GO 1 )
ou K = L 2.
n= 1 Il
f/2 x f/2 est dénombrable donc il est de mesure nulle.
7.V.3.
On a
f(x, y) = x 2 y,
'v'(x, y) E IR 2 -(12 X (/2,
f/2 x f/2 est de mesure nulle, donc! = g presque partout dans IR2, où g : (x, y) x 2 y.
7.V.4.
Démonstration analogue à celle de l'exercice 7.V.2.
7.VI.I.
Soit qJn : JR. Ho JR. (n E IN *) une application dont le graphe est représenté ci-des.
sous.
On peut alors définir une suite {f n } 'f. de fonctions continues à support compact:
! qJn(x)f(x, y) si x #= 1,
ln : (x, y) fn(x, y) = 0 . 1
SI X = .
SOLUTIONS
235
II est clair que
fn(x, y) f(x, y),
n 00
'v'(x, y) E IR 2 -&t
où est la droite d'équation x = 1.
<p(X)
:tl;-1 - Th
-1
o
v
7.IX.I.
a) On a
f (x, y) = 1 presque partout dans (L1) = ]0, 1 [ x ]0, 1 [,
donc f est intégrable au sens de Lebesgue, on a alors
II .1F fdxdy = II 1dxdy = 1.
( ) ( )
b) f n'est pas intégrable au sens de Riemann. En effet, quel que soit le pavage, ,
considéré sur (L1), on a
Sfj' = Lmi aire (coi) = LO.aire (COi) = 0,
i i
Sfj' = LM i aire (coi) = L1.aire (CO) = L aire (coi) = aire (L1) = 1.
i i
On ne peut espérer trouver un pavage , pour lequel on ait 0 Sfj'-S 8,
avec 8 > 0 choisi arbitrairement.
7.IX.2.
a) Soit Ax = {(x, y)\ (y-x) < e- x , 0 < x < X}.
On a
mes (A x) = II dxdy = I x dx I x+e-" dy! = I x 2e-Xdx = 2 - 2e- x.
Ax 0 x-e- X J 0
236
INTÉGRALES MULTIPLES
Pour X 00, on a mes (A x ) 2, donc
mes (A) = 2.
b) Pour 0( < 1, la fonction (x, y) 1--+ e"x est intégrable sur A (en effet,
r r eC1.Xdxdy = [ 1- 1 ] ---+ )
. lit Ax 1-(X e(l-a)X x-+oo 1-(1. ,
donc f est elle-même intégrable sur (LI).
r
8.
FORMES DIFFÉRENTIELLES
DANS ]R3
ROTATIONNEL. DIVERGENCE
1. - FORMES DIFFÉRENTIELLES DÉFINIES DANS UN OUVERT U
DE IR3.
1 0 Définitions.
a) F ormes différentielles de degré 1.
. Pl' P 2 et P 3 sont trois applications de U dans IR ;
. dx l , dX 2 et dX3 désignent trois formes linéaires définies comme suit
dXi : JR.3 IR
x = (X1' X2, X3) Xi (i = 1, 2, 3).
*
Autrement dit, dx l , dX 2 et dX3 représentent la base canonique de JR.3 (dual
de IR 3 ).
On considère alors l'application
*3
ro:U IR ,
X = (Xl' X2, X3) 1-+ ro(x) = P 1 (x)dx I +P2(x)dx2+P3(X)dX3.
On dit que (J) = P l dx 1 +P2dx2 +P3dx3 est une forme différentielle de degré 1
définie dans U. Lorsque Pl' P 2 et P 3 sont de classe el dans U, on dit que (J)
est de classe el dans U.
b) Formes différentielles de degré 2.
. Pl' P 2 et P 3 sont trois applications U JR. ;
. dXi 1\ dX j désigne la forme bilinéaire alternée (*) suivante:
dXi 1\ dX j : JR.3 x JR.3 IR,
(Y, Z) Ho YiZj-YjZi'
(*) On vérifie immédiatement que dXi A dXj = - dXj A dXi.
238
FORMES DIFFÉRENTIELLES DANS IR 3
où
y = (YI' Y2, Y3) et Z = (2 1 , 22' 23).
Autrement dit, dX I A dX2, dX I A dX 3 et dX2 A dX3 représentent la base
canonique de l'ensemble m}2) des formes bilinéaires alternées sur IR 3 .
On considère alors l'application
w: U-+ IR
x Ho co(x) = PI(x)dx2 A dX 3 +P 2 (x)dx 3 A dX 1 + P 3 (x)dx 1 A dX2.
On dit que (J) = P l dX 2 A dX3+P2dx3 A dX I +P 3 dx 1 A dX 2 est une forme
différentielle de degré 2 définie dans U.
Lorsque Pl' P 2 et P 3 sont de classe el dans U, on dit que (J) est de classe el
dans U.
c) Formes différentielles de deg,lIé 3.
. P est une application de U dans IR,
. dX I A dX 2 A dX3 désigne la forme trilinéaire alternée suivante:
dXI A dX 2 A dX3 : IR 3 x IR 3 X IR 3 -+ IR
Yi 21 t 1 1
(Y, Z, T) Ho Y2 22 t 2 (*),
Y3 23 t 3
,
OU
y = (YI' Y2, Y3), Z = (21,22,23) et T = (th t 2 , t 3 ).
Autrement dit, dX I A dX2 1\ dX3 représente la base canonique de l'ensem-
*
ble IR}3) des formes trilinéaires alternées sur IR3 (IR.t3) est un espace vectoriel
sur IR. de dimension 1).
On considère alors l'application
*3
co : U IR(3)'
X H- co(x) = P(x)dx 1 1\ dX2 1\ dX3.
On dit que co = PdXI 1\ dX2 1\ dX3 est une forme différentielle de degré 3
définie dans U. Lorsque P est de classe Ci, co est dit de classe Ci.
d) Formes différentielles de degré O. - Une application P: U IR est
appelée forme différentielle de degré 0 définie dans U.
(*) Lire déterminant.
DÉRIVÉE D'UNE FORME DIFFÉRENTIELLE DE CLASSE Ci DANS U 239
2 0 Remarques.
a) Une forme différentielle (non nulle) définie dans un ouvert U de JR.3 est
nécessairement de degré inférieur ou égal à 3.
b) Une forme différentielle définie dans U de degré supérieur à 3 est nulle.
II. - DÉRIVÉE dro D'UNE FORME DIFFÉRENTIELLE ro DÉFINIE
ET DE CLASSE el DANS U.
1 0 Définitions.
a) ro est de degJ"é 0, w = P, où P est une application de U dans JR. de classe Ci.
On note dro la forme différentielle suivante:
oP oP oP
dro = dP = -dx I +-dx 2 +-dx 3 .
oX l oX 2 OX3
h) ro est de degré 1, (fJ = P l dx 1 +P 2 dx 2 +P 3 dx 3 .
On note dro la forme différentielle suivante:
dm = dP I A dX I +dP 2 A dX2+dP3 A dx 3 ,
c'est-à-dire
( 3 OP I ) ( 3 èP 2 ) ( 3 èP3 )
d(fJ = .L T-:dXi A dXI + .L T-:dXi A dX2 + .L T-:dXi A dX3,
=luX =luX =luX
que l'on peut écrire après réduction (*)
( èP 3 èP2 ) ( èP1 OP3 ) ( OP2 OP1 )
dro = --- dX2 A dX3 + --- dX3 A dX I + --- dX 1 A dX2,
èX2 èX3 OX3 èXI èXI OX2
dro est appelé forme différentielle dérivée de (fJ.
c) ro est de degré 2, (fJ = P l dx 2 A dX 3 +P2dx3 A dX I +P 3 dx 1 A dx 2 .
On note dro la forme différentielle suivante:
dro = dP I A dX2 A dX 3 + dP 2 A dX3 A dX I + dP 3 A dX 1 A dx 2 ,
(*) On sait que dXi A dXj = -dxj A dXi et dXi A dxi, = 0 (cf. exercice 8.1.6).
240
FORMES DIFFÉRENTIELLES DANS IR 3
que l'on peut écrire, après réduction (*),
d ( OP1 OP2 OP 3 )d
(J) = -+-+- Xl A dX2 A dX3.
OXI OX2 OX3
d) (JJ est de degré 3, (J) = PdXI A dX2 A dX3. Sa dérivée dw est une forme
différentielle de degré 4. Elle est nécessairement nulle.
2° Théorème fondamental 8.11.1. - Soit (J) une forme différentielle définie
et de classe e 2 , dans l'ouvert U. On a la relation suivante C :::) :
d(dw) = O.
(On écrit d 2 (J) = O.)
III. - ROTATIONNEL ET DIVERGENCE.
->
1° Considérons un champ de vecteurs V(x) = (P1(X), P2(X), P 3 (x)), qui est
défini et de classe el dans un ouvert U de IR 3 (x).
)
->
Rot V. - On appell e rotatiol1nel V le champ de vecteurs suivant:
rot -j; = ( OP3 _ OP2 ÔPl _ oP 3 OP2 _ èP 1 )
OX2 OX3' oX 3 ox 1 ' oX l OX2
(cf II, 1°, b).
Div V. - On appelle divergence de V, la fonction suivante:
U IR d . - V OPI oP 2 oP 3
: IV = -;:--+-+-;:--
OX 1 oX 2 OX 3
(cf. 9 II, 1°, c).
2° gradf. - L'application f désigne une application définie et de classe Ci
dans l'ouvert U, f: U IR.
On appelle gradient f, le champ de vecteurs suivant:
--> ( of ôf è f )
grad f = _ 0 ' _ a ' -:::;-- ·
Xl X 2 OX3
(*) On sait que dXl A dXl A dX3° = 0 :
dXl 1\ dx 3 A dX2 = dxl A (dX3 1\ dX2) = dXl A (-dX2 1\ dX3)
= -dXl A dX2 1\ dX3, etc.
(cf. exercices 8.1. 7 et 8.1.8).
(**) Vérification immédiate.
PRIMITIVE D'UNE FORME DIFFÉRENTIELLE DÉFINIE DANS U 241
3° Propriétés. - On a le formulaire suivant (c,f. exercice 8. III .1) :
:>-
--> ->
a) rot grad = 0 ('v'f de classe e 2 ) ;
--+ ->-
b) div rot = 0 ('v'V de classe e 2 ) ;
:>- ->
-> --> -> -7
c) rotfV = gradf A V + frot V [A désigne le produit vectoriel] ;
-> -7 --7-7
div fV = f div V + gradf. V ;
:>- :>-
-> -> -> -7 -> ->
div (VI A V 2 ) = rot VI . V 2 - VI rot V 2 ;
:>- --> -->
gradfg = f grad g+ g gradf
-:> -:> -+
('v'f, g, V, VI et V 2 de classe Ci).
IV. - PRIMITIVE Œ D'UNE FORME DIFFÉRENTIELLE (J) DÉFINIE
DANS U.
1° Définition. - Une forme différentielle r:J.. (définie et de classe CI dans U)
est dite primitive de 0) lorsque l'on a drJ.. = 0).
Théorème 8.IV. 1 - Une forme différentielle Q) de classe C 2 admet une
primitive si, et seulement si, dO) = O.
2° Différentielle totale exacte. - Lorsque 0) = P 1 dx 1 +P2dx2+P3dx3
admet pour primitive une fonction f: U IR de classe CI, on dit que Q) est
une différentielle totale exacte.
Autrement dit,
Q) = PtdXI +P2dx2+P3dx3 } 3lfd 1 e l d U 1 dif
d ..a-.' t . Il t t 1 t <=> e casse ans te que = 0)
lueren le e 0 a e exac e
<=> 3/ de classe Ci dans U tel que
lf lf q *
-;::;:-dx 1 +- 0 dX2+- 0 dX3 = P1dx I +P2dx2+P3dx3 ( ).
OXI X2 X3
Théorème 8.IV.2. - Soit 0) une forme différentielle de degré 1, définie et
de classe et dans U:
(J) = Pldxl +P2dx2+P3dx3.
(*) Ceci nécessite Ô ô / = Pi dans U.
Xt
242
FORMES DIFFÉRENTIELLES DANS IR 3
On a la proposition suivante :
oP. oP.
« 0) différentielle totale exacte <=> _ 0 1 - _ 0 } = 0, 'v' i, j = 1, 2, 3 ».
X j Xi
3° Une forme différentielle (J) de degré q est dite fermée lorsque
dO) = O.
Théorème 8.IV.3. - Soit 0) une forme différentielle de degré q (q 1)
définie et de classe el dans un ouvert U de IR 3 (x). On a la proposition suivante:
« dw = 0 <=> 3a de degré q - 1 tel que 0) = d1Yv );.
-:>
Corollaire. - V désigne un champ de vecteurs de classe Ci dans un ouvert U
de IR 3 . On a la proposition suivante (cf. exercice 8. III . 4) :
)
-:> ---+ -:> --+
« div V = 0 <=> 3 W de classe el dans U tel que V = rot W».
8.1.1.
.
8.1 .2.
.
8.1.3.
.
8.1.4.
.
8.1.5.
.
8.1.6.
..
EXERCICES DU CHAPITRE 8
et, e 2 et e 3 désignent la base canonique de IR 3 .
a) Calculer dXl(ei), pour i = 1, 2, 3.
b) Calculer co(x)(et) = (Pl(x)dxl + P2(x)dx2 + P3(x)d x 3)(e 1).
De quel espace dXl A dX2+dxt A dX3 est-il un élén1ent ?
Calculer (dXl A dX2+dxl A dX3)(el, e2), puis
(dXl A dX2+dxl A dX3)(el +e2, el +2e3),
el, e2, et e 3 représentant la base canonique de m?
Soit co : U --+ IR, U ouvert de IR3,
x co(x) = Pl(x)dx2 A dX3+P2(X)dx3 A dXl+P3(X)dxl A dX2.
Calculer co(x)(e3, el +e2).
Soit COl(X) = xîdxl+X dx2+(1-xî)dX3
et C02(X) = XIdx2 A dX3+dx3 A dXl.
Calculer co 1 (x)(e 1), puis co2(x)(el +e2, e2+e3), et, e2 et e3 représentant
la base canonique de IR?
L'écriture suivante :
xldx2+(1-xi)dx3+X dxl A dX2
Il' a aucun sens. Pourquoi ?
Définition de f A g lorsque f et g sont deux formes linéaires définies
sur JR.3.
* *
f et g désignent deux [orlnes linéaires définies sur m? ([ et g E IR 3 = IRtl).
On définit la [orme bilinéaire alternée [ A g con1me suit :
[ Ag: JR.3 x JR.3 --+ IR
(Y, Z) [(Y)g(Z)- [(Z)g(Y).
244
FORMES DIFFÉRENTIELLES DANS IR 3
1 0 Montrer la concordance de cette définition avec celle dOllnée dans le
cours pour dx i A dXj.
2 0 Vérifier que l'on a dXl A dXl = 0 et dX2 A dXl = -dXl A dX2.
3 0 GÉNÉRALISATION. - Montrer que l'on a
fAf=O
et
g A f = - f A g.
4 0 Définir co 1 A C02, oÙ (J) 1 et co 2 sont deux fornles différentielles de
degré 1, définies dans un ouvert U de IR3.
8.1.7.
..
Définition de fI A /2 A /3, où fi (i = 1, 2, 3) est une forme linéaire
sur JR.3.
* *
fi, f2 et f3 désignent trois for Ines linéaires: fi E IR? = IRtl).
On définit la fornle trilinéaire alternée fi A 12 A f3 conl1ne suit :
fi A f2 A 13 : IR3 x IR3 X JR.3 -+ IR.
(YI, Y2, Y 3 ) L Ûi,j,k/ l (Y i )/2(Y j )/3(Y k ),
i,j,k
oÙ (Ji,j,k désigne la signature de la permutation i, j, k sur 1, 2, 3.
1 0 Montrer la concordance de cette définition avec celle d011née dans le
cours pour dXl A dX2 A dX3.
2 0 Montrer que l'on a
dXI A dXl A dX3 = 0, dXl A dX3 A dX2 = -dxl A dX2 A dX3.
3 0 GÉNÉRALISATION. - Montrer que l'on a
Il A fI A /2 = 0, fI A f3 A 12 = - Il A 12 A 13, etc.
4 0 Définir COI A C02 A C03, oÙ COI, C02 et C03 sont trois lorlnes différen-
tielles de degré 1 définies sur un ,nême ouvert U de IR 3 .
8.1.8.
...
*3 *3 *3
Définition de / A g lorsque lE IR(2) et g E IR(I) = IR .
1 désigne une forme bilinéaire alternée, f: IR. 3 x IR 3 IR, g désigne une
forme linéaire, g : IR3 f-)o IR.
Oll définit alors la lorme trilinéaire alternée f A g corn/ne suit
* 3
f Ag: IR 3 x IR 3 X IR 3 IR, (/ A g E IR(3» :
(YI, Y2, Y3) f(Yl, Y2)g(Y 3 )-[(Yl, Y3)g(Y2) +/(Y 2 , Y3)g(Y 1 ).
8.11.1.
.
8.11.2.
.
8.11.3.
.
8.11.4.
..
8.11.5.
...
8.11.6.
...
EXERCICES DU CHAPITRE 8
245
1 0 Montrer que l'on a (cf. exercices 8.1.6 et 8.1.7)
(dXl A dX2) A dX3 = dXl A dX2 A dX3.
2 0 GÉNÉRALISATION. - fI et f2 désignent deux forl11es linéaires. On
pose f = Il A f2. Montrer que /'on a
(fI A 12) A g = fI A f2 A g.
3° Définir COI A CO 2, où COI et C02 sont deux for/11es différentielles de
degrés respectifs 2 et 1, définies dans U.
Soit (!) = xdx + ydy + zdz. Calculer d(:).
Soit (:) = XydX2 A dX3. Calculer dm.
CO désigne une forme différentielle de degré 3 définie et de classe CI dans
lin ouvert U de IR3. Montrer que dco = O.
CO est une forme différentielle de degré 1 définie et de classe CI dans un
ouvert U de 1R 3 (x, y, z). u et v désignent deux applications de classe CI
dans U.
a) Établir la proposition suivante:
« co = udv => co A dO) = 0 ».
b) On suppose que co = dx+xdy+/(x)g(y)dz.
Déterl11Ïner les fonctions f et g pour que
co = udv.
(:) 1 et (:) 2 désignent deux formes différentielles de degrés respectifs p et q,
elles sont définies dans un mê111e ouvert U de 1R 3 (x).
Établir les propriétés suivantes :
i) (:)2 A COI = (-l)PqCOI A 0)2;
ii) d«(:)l A (02) = dcol A C02+( -l)P(Ol A d(:)2 (ici (:)1 et C02 sont
supposés de classe CI).
(0 désigne une for/ne différentielle de degré 1 définie dans un ouvert U
de lR 3 (x).
(X désigne llne forme différentielle de degré q (1 q < 3) définie dans U.
Établir la proposition suivante : «il existe line forme différentielle, p,
de degré q -1 définie dans U "telle que (X = (!) A P <=> (:) A (X = 0 ».
246
8.111.1.
.
8.111.2.
..
8.111.3.
.
8.111.4.
..
8.111.5.
.
FORMES DIFFÉRENTIELLES DANS IR 3
Établir les propriétés énoncées dans le paragraphe III :
)
-)-
rot grad = 0,
--7
div rot = 0,
etc.
Équations de Maxwell.
(X, P et y désignent trois formes différentielles définies et de classe CI
dans un ouvert U de m,4(x l, X 2, X 3, t) :
. a = (Eldxl+E2dx2+E3dx3) A cdt+B 1 dx2 A dX3+B 2 dx3 A dXl
+ B 3 dxI A dX2;
. P = (-Hldxl-H2dx2-H3dx3) A cdt+D l dx2 A dX3+D 2 dx3 A dXI
+ D 3 dxl A dX2;
. y = (Jldx2 A dX3+J 2 dx3 A dXI +J 3 dxl A dX2) A dt
- pdXl A dX2 A dX3,
c et p désignant des constantes.
Établir les propositions suivantes :
-)- ",-
- 1 oB -> -)-
«da = 0 <=> rot E + - _ 0 = 0 et div B = 0 » ;
c t
-)-
- 4n-)- 10D
«dP+4ny = 0 <=> rot H = -J+ - _ 0 »,
c c t
oÙ
-)-
E = (El, E2, E 3 ), B = (BI, B2, B3),
-)- -)- -'>-
H = (H1, H2, H3), J = (JI, J 2 , J3), D = (Dl, D 2 , D 3 ).
Montrer que l'on a
-)- ---+
-7 -)--)--+
div (VI A V2) = rot VI. V 2 - VI. rot V 2 .
-)-
V désigne lill c!zal11p de vecteurs défini et de classe CI dans un ouvert U
de IR3. Établir la proposition suivante :
->-
-)- -+ -)- -)-
« div V = 0 <=> 3 W tel que V = rot W».
-)-
Soit L1 = di v grade On a dans IR?(x, y, z) :
0 2 0 2 0 2
LI = ox 2 + oy2 + OZ 2.
8.IV.1.
.
8.IV.2.
..
8.IV.3.
..
8.IV.4.
.
EXERCICES DU CHAPITRE 8
247
Vérifier la relation suivante :
)
L1(fg) = fL1g+gL1f+2 gradf.gradg.
Montrer que toute forme différentielle OJ de degré 3, définie et de classe CI
dans un ouvert U de IR3(x) admet des primitives.
Les fonnes différentielles suivantes admettent-elles des primitives :
C01(X) = 2XIX 2 dx2 A dX3+x dx3 A dxl,
C02(X) = x1dx1 A dX2+x 2 dx1 A dX3,
1
ro3(X) = V (dx 1 /\ dX2+dx 2 /\ dX3+dx3 /\ dXl) ?
XI+x +x3
Facteur intégrant.
(:) désigne une forme différentielle de degré 1, définie et de classe CI
dans un ouvert U de IR3(x).
f désigne une application U --+ IR de classe CI.
On dit que f est un facteur intégrant pour co lorsque les conditions suivante.."
sont réalisées :
f (x) ¥: 0, 'v' x E U, fco est fer/né.
a) Établir la proposition suivante :
« co a un facteur intégrant => co A dco = 0 ».
b) Détern1iner f(u) de classe CI pour que la forme différentielle
f(XI +X2+ X 3)[(X2 +X3)X2x 3 d x l +(X3+ X 1)X3 X 1 d x 2+(Xl +x2)x1x 2 d x 3]
soit une différentielle totale exacte dF. Trouver F.
f (x 1 + x 2 + x 3) est alors un facteur intégrant de
co(x) = (X2+X3)X2X3dx1 +(X3+X1)X3X1dx2+(Xl +x2)xlx2dx3.
Montrer que les formes différentielles suivantes sont des différentielles
totales exactes définies dans un ouvert U de IR.3(x, y, z) :
OJ1(X, y, z) = (y+z)dx+(z+x)dy+(x+y)dz,
C02(X, y, z) = [z Log Iz/(ydx+xdy)-xydz]
xyz
et
C03(X, y) = Arctg l dx+Log V x 2 +y 2 dy.
x
Dans chaque cas, déterminer F pour que dF = co.
SOLUTIONS
8.1.1.
a) On a
dXl(el) = dXl(l, 0, 0) = 1 et dXI(e2) = dXl(O, 1,0) = 0
et, d'une manière générale,
0 SI i ¥: j,
dXi(e J ) = {1 SI i = f.
b) On a
3
co(x)(el) = L PïCx)dxi(el) = P1(x)
i= 1
(voir Je paragraphe a).
8.1.2.
*
a) dXl A dX2 +dX1 A dX3 est un élément de 1R(2), avec IZ 3.
b) On a el = (1,0,0, ...,0) et e2 = (0,1,0, ...,0).
Considérons donc la matrice suivante :
el e2
dXl 1 0
dX2 0 1
dX3 0 0
.
,
.
dx n 0 0
dXl A dX2(et, el) est le déterminant d'ordre 2 qui se déduit de façon évidente de la
matrice ci-dessus, en ne considérant que les lignes 1 et 2 :
1
dXl A dX2(el, e2) =
o
o
= 1.
1
SOLUTIONS
249
De même, en considérant le déterminant d'ordre 2 formé à l'aide des lignes 1 et 3,
on obtient
1
dXI A dX3(el.. e2) =
o
o
o = o.
Par suite,
(dXI A dX2+dxI A dX3)(el, e2) = 1.
e) On a el+e2 = (1,1,0,0, ...,0) et el+2e3 = (1,0,2,0, ...,0).
Considérons alors la nlatrice suivante:
el +e2
el + 2e 3
dx 1 1 ]
dX2 1 0
dX3 0 2
dX4 0 0
dXn 0 0
d'où l'on déduit en considérant les déternlinants extraits:
1
dXI A dX2(el +e2, el +2e3) =
1
1
(/" 1 A dX3(el +e2, el +2e3) =
o
1
= -1
o '
11 = 2
21
et, par suite,
(dXI A dX2+dxI A dX3)(el +e2, el +2e3) = 1.
8.1.3.
Considérons la matrice suivante:
e3 el +ez
dx 1 ( 0
dX2 0
dX3 1
i ).
d'où l'on déduit
dX2 A dX3(e3, el +e2) = -1, dXI A dX2(e3, el +e2) = 0,
dXI A dX3(e3, el +e2) = -1 <=> dX3 A dXl(e3, el +e2) = 1
et, par suite,
Cù(x)(e3, el +e2) = -Pt(X)+P2(X).
250
FORMES DIFFÉRENTIELLES DANS IR 3
8.1.4.
a) On a
COl(x)(el) = XrdXl(el)+x dx2(el)+(1-xr)dx3(el)
= XI.1 +x .O+(1-XT).O = xI.
b) On a
C02(x)(el +e2, e2+e3) = xrdx2 A dX3(el +e2, e2+e3)+dx3 1\ dXl(el +e2, e2+ e 3).
En considérant les déterminants extraits de la matrice suivante:
el +e2 e2+e3
dXl( 1 0 ).
dX2 1 1
dX3 0 1
On obtient
({)2(x)(el +e2, e2+e3) = xI.1 +( -1) = xI-le
8.1.5.
Les deux vecteurs xldx2+(1-x )dx3 et X dXl A dX2 n'appartiennent pas au
même espace.
8.1.6.
1 0 Soit Y = (YI; Y2, Y3) et Z = (Zl, Z2, Z3). On a
dxi(Y)dXj(Z)-dxi(Z)dXj(Y) = YiZj-YjZi = dXi A dXj(Y, Z).
2 0 et 3 0 On a évidemment
* *
1 A 1= 0, 'v'/E IRn, et 1 A g = -g A f, 'v'/et gE IRn.
En particulier,
dXl A dXl = 0 et dX2 A dXt = -dXl A dX2.
4 0 Par définition, on a
(COI A OJ2)(X)(Y, Z) = COl(X)(Y)C02(X)(Z)-COl(X)(Z)OJ2(X)(Y).
SOLUTIONS
251
Si l'on pose
3
Q)l(X) = L Pi(x)dxi et
i= 1
3
C02(X) = L Qj(x)dxj,
j=l
il est aisé de vérifier que
WI 1\ W2 = C PidXi) 1\ ct! QjdX j ) = it jt! PiQjdx i 1\ dX j
L (PiQj-PjQi)dxi A dXjo
1 i<j<3
8.1.7.
Dén10nstrations analogues à celles de l'exercice précédent. Remarquer que l'on a
fi A f2 A f3(Yl, Y2, Y3) = fl(Yl)f2(Y2)f3(Y3)- fl(Yl)f2(Y3)f3(Y2)
+ fI (Y 2)f2( Y 3)f3( YI) - fI (Y 2)f2( Y 1)f3( Y 3)
+ fi (Y 3)f2( Y 1)f3( Y 2) - fi (Y 3)f2( Y 2)j.3( Y 1).
Soit Yi = (y , y , y ), pour i = 1, 2, 3. En posant!ï = dXi et en utilisant la relation
suivante :
dXi(Y j ) = yI, où Yj = (yi, y , y ) -
on obtient
dXl A dX2 A dX3(Yl, Y2, Y3) = det (YI, Y2, Y3).
8.1.8.
Démontrons le cas général, c'est-à-dire la question 2°.
Posons f = fI A f2 et g = f3. On a [cf exercice 8.1.6.]
fi A f2(Y i , Yj) = fl(Y i )f2(Y j )-fl(Y j )f2(Y i ) ;
donc
(fi A f2) A f3(Yl, Y2, Y3) = [fI(Yl)f2(Y2)-fl(Y2)f2(Yl)]f3(Y3)-
- [fi ( y 1)f2( Y 3) - fI ( Y 3)f2( YI)] f3( y 2)
+ [fi (Y 2)f2( Y 3) -fi (Y 3)f2( Y 2)] f3( YI).
Cette valeur est bien égale à fI A f2 A f3(Yl, Y2, Y3) [cf exercice 8.1.7.]; donc
(fI A [2) A f3 = fi A f2 A f3-
252
FORMES DIFFÉRENTIELLES DANS IR 3
En particulier, on obtient le résultat de la question 1 0 :
(dXl A dX2) A dX3 = dXl A dX2 A dX3.
3 0 Il est clair que Cù 1 A Cù2 doit être défini comme suit:
*3
COl A 0)2 : U 1R(3)
X CO 1 (X) A C02(X),
où
Cùl(X) A C02(X) : (YI, Y2, Y3) COl(X)(YI, Y2) C0 2(X)(Y 3 )
-COl(X)(YI, Y3)C02(X)(Y2)+ Cùl(X)(Y2, Y3) C0 2(X)(YI).
REMARQUE. - En posant
OJI(X) = Pl(x)dx2 A dX3+P2(X)dx3 A dXI+P3(X)dxI A dX2
et
Cù2(X) = QI(x)dxI+Q2(X)d x 2+Q3(X)d x 3,
on obtient évidemment
«(al 1\ (02)(X) = (OI(X) 1\ (02(X) = Ct 1 P;{x)Q;(x) )dX 1 1\ dX2 1\ dX30
8.11.1.
On a
dCù = dx A dx+dy A dy+dz A dz = O.
Remarquons que w = drx, où rx = (X2+y2+Z2) ; donc d(') = d 2 rx ==0.
8.11.2.
On a
.,
do) = dxi A dX2 A dX3 = 2XldxI A dX2 A dX3.
8.11.3.
Si (:) est de degré 3 sur IR 3 , do) sera de degré 4 sur IR 3 , donc do) = O.
SOLUTIONS
253
8.11.4.
a) On a de!) = du A dv, donc
co A dco = udv A du A dv = 0
(cf. exercice 8.1.7., question 3°).
b) Dérivons 0), nous obtenons
dco = dx A dy+d(f(x)g(y» A dz
= dx A dy+f'(x)g(y)dx A dz+f(x)g'(y)dy A dz.
On en déduit
(0 A dw = (f(x)g'(y)-xf'(x)g(y)+f(x)g(y»dx A dy A dz.
Pour que (1) = udv, il est nécessaire que l'on ait co A dw = 0, c'est-à-dire
f(x)g'(y)-xf'(x)g(y)+ f(x)g(y) = 0,
ou
xf'(x)-f(x) _ g'(y)
f(x) - g(y) .
Cela nécessite
g'(y) = Kg (y), avec K constant,
xf'(x) = (K+ l)f(x).
On obtient g(y) = Î.iK Y et f(x) = ,ulxI K + 1, ). et ,u sont des constantes réelles.
Pour f et g ainsi obtenues on a bien co = udv, prendre
1
ll= --lxI K + 1 e KY et v= Ixl-Ke-KY_)wpKz.
K
8.11.5.
a) Pour établir la propriété i) envisageons les différents cas possibles.
Pour p+q > 3, on a COI A W2 = C02 A (01 = o.
Pour p+ q 3, il faut étudier
p = 1, q = 1; p = 1, q = 2 et p = 2, q = 1.
Par exelnple pOlir p = 1 et q = 2, on a
roi A (02 = (Pldxl+P2dx2+P3dx3) A (Qldx2 A dX3+Q2dx3 A dXl+Q3dxl A dX2)
= ( t PiQi ) dX l A dX2 A dX3
1= 1
254
FORMES DIFFÉRENTIELLES DANS JR3
et
C02 A COI = (Qldx2 A dX3+Q2dx3 A dXl+Q3dxl A dX3) A (Pldxl+P2dx2+P3dx3)
= ( .t PiQi ) dXl A dX2 A dX3.
= 1
Dans le cas envisagé ici on a bien
(J)2 A COI = (-l)pqcol A C)2.
REMARQUE. - La propriété i) résulte immédiatement de la propriété suivante:
* *
(1) 12 A fI = (-l) pQ fl A f2, où fi E IR'(p) et f2 E IR'(q).
Pour démontrer la relation (1), il suffit de se reporter à la définition de fi A f2 :
(fI A f2)(Y l , Y2, ..., Y p + q ) =
L
ailoooipip+l...ip+qfl(Yiu ..., Yi p ) f2(Yi p +u ..., Yi p + q )
il <i2<...<ip
ip+l <ip+2<...<ip+q
où G'il...ipip+ l o .. i p+q est la signature de la permutation ib i 2 , ..., ip, ip+ l, ..., ip+q
sur [1, 2, ..., p+ q].
b) Pour établir la propriété ii) il suffit d'envisager les différents cas possibles.
- Pour p+q > 2, on a d(COI A (J)2) = dCOl A (J)2 = COI A dC02 = o.
- Pour p + q 1, on a p = 1, q = 1. Il nous suffira donc de vérifier la propriété
énoncée lorsque
C)l=
3
"P.dxo et
i= 1
3
C02 = L Qjdx j .
j=l
8.11.6.
a) Établissons la propriété suivante:
« el = co A P => CO A el = 0 ».
On a
(J) A el = CO A (co A P) = (J) A C) A P = o.
b) Établissons maintenant la proposition réciproque:
« co A el = 0 => 3p tel que el = co A fi ».,
en envisageant le seul cas non trivial q = 2.
Notations. - On pose
co = Pldxl+P2dx2+P3dx3,
el = Q1dx2 A dX3+Q2dX3 A dXl+Q 3 dxl A dX2
SOLUTIONS
255
et
p = )"IdxI+À 2 dx2+À 3 dx3.
On cherche les applications )"i telle que 0) A P = a, c"est-à-dire telles que l'on ait
O-P3À2+P2) 3 = QI,
P3; I+O-PIÀ3 = Q2
et
-P2ÀI+PIÀ2+0= Q3.
Pour x fixé dans IR3(x), on a un système de trois équations à trois inconnues.
Supposons, par exemple, P3 O. Nous aurons des solutions si, et seulement si,
la condition de compatibilité suivante est vérifiée:
P3
o
QI
Q2 =0
,
Q3
o
-P3
I-P2 Pl
3
c'est-à-dire si L PiQi = O.
i= 1
Or, cette dernière condition est bien réalisée, puisque 0) A (X = o.
8.111.1.
->
Démontrons, par exemple, l'identité rot grad = O.
Soit V(x) = (PI(X), P2(X), P3(X». On sait que
->
-> ( àP2 OPI OP3 oP 2 OPI OP3 )
rot V(x) = -(x)--(x),-(x)--(x),-(x)- (x) .
OXI OX2 OX2 OX3 OX3 OXI
Soit une fonction F de classe C2 dans un ouvert U de IR 3 (x). Par définition,
) ( oF oF oF )
gradF(x) = :;-(x),- o (x)' o -(x),
OXI X2 X3
donc
5 ( 0 oF 0 oF )
rot grad F(x) = -;--;-(x) -:-- a -(x), ...,... = (0,0,0).
UXIUX2 OX2 XI
[ ) ( OF ) ]
Poser V = grad F, c'est-à-dire Pi = oXi .
256
FORMES DIFFÉRENTIELLES DANS IR 3
8.111.2.
a) Dérivons el
da = [t dEi /\ dX i ] /\ cdt+(dBl) /\ dX2 /\ dX3+'"
[ ( OE. oE. oE. )]
- l..J _ 0 £ dXl + _ 0 £ dX2+ _ 0 dX3 A dXi A cdt+
i=l Xl X2 X3
( aBI oBI OBI ÔBI )
+ -dXl+ -dX2+ -dX3+ dt A dX2 A dX3+."
OXI OX2 OX3 ot
= [( OE2 _ OEI ) dXI A dX2+". ] A cdt+
OXI OX2
+ oB l dt A dX2 A dX3+."+ ( t O Bi ) dXI A dX2 A dX3.
ot i=l Xi
Pour avoir d'X = 0, il faut et il suffit que chaque composante soit nulle, c'est-à-dire
que
- ---+
( OE2 OEI ) OBI ) -). oB
--- c+- = 0, etc. crotE+- = 0,
OXI OX2 ot ot
3 oB ' <=> ( -+
L ---.J = 0 div B = O.
i = 1 OX i
b) Démonstration analogue pour établir la seconde proposition.
8.111.3.
-). ---+
Soit VI = (Pl, P2, P3) et V2 = (Q 1, Q2, Q3). En écrivant les composantes de
-).
---+ ---+ -+ -).
VI A V2, rot VI et rot V2, on obtient la relation demandée.
8.111.4.
a) On a la proposition suivante:
)
-+ -+ -?
« V = rot W => div V = 0 ».
)
-+ -+
En effet, on sait que div rot H = 0, 'v' H de classe C2.
SOLUTIONS
257
b) Établissons la proposition réciproque suivante :
-). -).
«div V = 0 => :3 Wtel que V = rot W».
Soit V = (Pl, P2, P3). On a
div V = t aP i = O.
i= 1 0X i
On cherche W = (QI, Q2, Q3) tel que
Pl = OQ3 _ OQ2 P2 = OQl _ OQ3
OX2 OX3 ' OX3 OX1
et P3= OQ2 _ 0Ql .
OXI OX2
En posant
J J 0
QI(XI, X2, X3) =2 P2(Xl, X2, t)dt- P 3 (Xl, u, x3)du,
xg x
J X 3
Q2(XI, X2, X3) = - PI(XI, X2, t)dt
xO
3
et
Q3(Xl, X2, X3) = 0 (où xg et X sont des constantes réelles).
On obtient le résultat demandé.
On peut aussi considérer (J) = P 1 dx2 A dX3+.", remarquer que dm = 0, en
déduire qu'il existe el = Q1dxl +... tel que da = w.
On ob tien t alors le résultat demandé.
8.111.5.
En écrivant
02fg 02g 02f of og
OX2 = f OX2 +g OX2 +2 OXOX '
ainsi que les deux autres relations relatives à y et à z, on obtient le résultat demandé.
8.IV.1.
(f) est une forme différentielle de degré 3 définie et de classe CI dans un ouvert U
de JR.3.
dm est donc de degré 4, c'est-à-dire nul: d(f) = o.
Par suite (f) admet une primitive.
258
FORMES DIFFÉRENTIELLES DANS IR 3
8.IV.2.
Les formes différentielles roi admettent une primitive si, et seulement si, dmi = O.
Dans les exemples considérés, on a
d(f)I(X) = 4x 2 dxI A dX2 A dX3 0,
d(f)2(X) = -dXI A dX2 A dX3 0
et
Xl +X2+X3
dC03(X) = - dXI A dX2 A dX3 O.
(xî+X +X )3/2
8.IV.3.
a) Si f est un facteur intégrant pour co, la dérivée de fco
(f(f) = fPldxl +fP 2 d x 2+fP3dx3)
doit être nulle.
Autrement dit,
d(f(f) = df A (f)+fd(f) = O.
On en déduit successivement les relations suivantes :
(df A (f)+ fd(f) A (f) = 0, fd(f) A (f) = 0 et dco A co = O.
b) Premier procédé. Méthode usuelle. - Soit
(f) = (X2+ X3)X2X3dx 1 + (x 3 + XI)X 3Xldx2+ (X 1 + X2)X Ix 2 dx 3.
On cherche f de classe CI tel que
f(XI+X2+X3)CO(X) = dF(x)
et, par suite,
d[f(XI+X2+X3)(f)(X)] = d 2 P(x) = o.
Autrement dit, on cherche un facteur intégrant d'un type particulier.
On doit avoir
3 oF
fco = dF= L dXi
i= 1 uXi
et, par suite,
(1)
oF
(X2+ X 3)X2 X 3f(Xl+ X 2+ X 3) = - ô (Xl, X2, X3),
Xl
SOLUTIONS
259
(2)
oF
(X3+ X I)X3 X I!(XI+X2+X3) = _ 0 (Xl, X2, X3),
X2
(3)
oF
(XI+X2)XIX2!(XI+X2+ X 3) = (Xl, X2, X3).
(lX3
En uti1isant la relation de Schwarz:
o ( OF ) a (aF )
OX2 8XI = OXI , OX2 '
on déduit de (1) et (2) la relation suivante:
(X2+X3)X2 X 3!'(XI + X2+ X3)+ (2X2X3+ x ) f(x 1 + X2+ X3)
= (X3+ XI)X3Xlf'(XI + X2+ X3)+ (2 X 3 X I + x ) f(XI +X2+ X3)
et, par suite, en posant u = XI+X2+X3,
uf'(u)+2f(u) = O.
On a alors
feu) = K , avec K constant.
u 2
La détermination de F s'opère aisément à partir de (1), (2) et (3).
On a J'implication suivante:
J (X2+X3)X2X3
(1) F(XI, X2, X3) = K ( + + )2 dXl + tp(X2, X3),
Xl X2 X3
où tp est une fonction arbitraire de classe CI.
En reportant cette expression dans (2) on obtient
tp(X2, X3) = KX2X3+ H(X3),
où H est une fonction arbitraire de classe CI et, par suite,
(X2+ X3)X2 X 3
F(XI, X2, X3) = -K +K X 2 X 3+H(X3).
XI+X2+X3
En reportant cette expression dans (3), on a H'(X3) = 0, ou bien H(X3) = K' = Cte.
Fina1ement F est déterminé comme suit
F(xl, X2, X3) = K XIX2X3 +K', avec K' constant.
XI+X2+X3
Second procédé. - Posons u = Xl+X2+X3. On a
(4)
(f) = Ud(XIX2X3)-XIX2X3du,
donc
dco = du A d(XIX2X3)-d(XIX2X3) A du = 2du A d(XIX2X3).
260
FOR:MES DIFFÉRENTIELLES DANS IR3
L'application f doit vérifier la relation suivante :
d(fro) = 0,
c'est-à-dire
df A ro + fdro = O.
En remarquant que l'on a df= f'(u)du et, en remplaçant ro par son expression
[cf (4)], on obtient
f'(u)du A [Ud(XtX2X3)-XtX2X3du]+2f(u)du A d(XtX2X3) = 0,
ou encore (puisque du A du = 0)
[uf'(u)+2f(u)]du A d(XtX2X3) = O.
On a donc nécessairement
uf'(u)+2f(u) = 0,
d'où l'on déduit
Kt
f(u) = u 2 ' avec KI constant.
Détermination de F. - On a [cf (4)]
KI ( XIX2 X 3 )
dF = fro = - [Ud(XtX2X3)-XtX2X3du] = Kld ,
u 2 u
donc
XIX2X3
F(x) = Kt +K2, avec K2 constant.
Xl+X2+X3
8.IV.4.
Dans chaque cas, on a dro i = 0, donc les formes différentielles proposées sont des
différentieIIes totales exactes.
a) On
dFl = rot = (x+y+z)(dx+dy+dz)-xdx-ydy-zdz,
donc
1 1
FI(X, y, z) = 2(x+y+Z)2- 2(X2+y2+ Z 2)+Kl
(K 1 est une constante arbitraire).
b) On a
oF2 OF2 OF2
dF2 = -dx+ -dy+ -dz = ro2
8x 8y 8z
- 2 1 2 [zLog Izl(ydx+xdy)-xydz];
xyz
SOLUTIONS 261
donc
(1) OF2 _ Log Izi
ox - x 2 y ,
(2) OF2 _ Log Izi
Oy - xy2 ,
(3) 8F2 1
-= ---
8z xyz
En intégrant (3) par rapport à la variable z, on a
F2 = - 1.. Log Izl + tp(x, y),
xy
où tp est une fonction arbitraire de classe CI.
En reportant cette expression dans (1), on obtient
orp
_ 0 (x, y) = 0,
.x
donc tp(x, y) = H(y), H étant une fonction arbitraire, et,fpar suite,
F2 = _1.. Log Izl+H(y).
xy
En reportant cette expression dans (2), on obtient
H'(y) = 0,
c'est-à-dire H(y) = K2, K2 étant une constante arbitraire, et, par _suite,
F2(X, y, z) = _1- Log Izl+K2.
xy
c) On doit avoir
OF3 OF3 Y V
dF3 = -dx+ -dy = C03 = Arctg-dx+Log X 2 +y 2 dy,
OX oy x
donc
a:: = Arctg et a 3 = Log V x 2 + y2 .
En utilisant un procédé d'intégratio n anal ogue à celui développé en - b, on obtient
F3(X, y) = y Log V X 2 +y2_y+X Arctg + K3,
x
K3 étant une constante.
,-
--/
9.
COURBES ET SURFACES
RÉGULIÈRES DANS IR 3(X) :
l '' P .dx. , l P. .dx./\ dx.
1 1 l,] 1 ]
1 l,]
Y s
1. - COURBES RÉGULIÈRES DANS IR3.
1 0 On appelle courbe régulière (r), un ensemble de points de IR3 qui peuvent
être considérés comme l'image d'une app1ication injective, g telle que
g : ]a, b[ -+ IR 3
U (X 1 ,X 2 ,X 3 ) = (gl(U),g2(U),g3(U)) (*),
qui satisfait aux conditions suivantes
. g est de classe Cl [<=> gl, g2 et g3 de classe CI];
( g (u» ) [ 3 ]
. rang de g (u) = 1, Vu E ]a, b[ <=>.L Ig;(ul 0), Vu E ]a, b[ .
g3(U) t= 1
Autrement dit, (r) = gOa, bD. On dit que (g, ]a, b[) est une représentation
paramétrique de (r).
2 0 En tout point x = g(u) de (r), on peut lui associer les deux vecteurs
unitaires tangents i g et - ig, où
-+ 1 ",
tg = V (gl(U),g2(U),g3(U»).
g 2(U) + g'i(u) + g 2(U)
On dit que i g est l'orientation de la courbe (r) définie par g.
Pour une autre représentation paramétrique (g', ]a', b'D, on aurait ig' = ig
ou i g ' = - i g .
bg(œ)
W=9 )
(*) Éventuellement a = -00, b = 00.
264
COURBES ET SURFACES RÉGULIÈRES DANS JR3(X)
3 0 Théorème 9.1.1. - On considère deux applications :
FI et F 2 de Q dans 1R, Q étant un ouvert de JR3,
qui vérifient les conditions suivantes
. elles sont de classe C 1 ;
8Fl oF l oF I
- - -
. rang de 8XI OX2 OX3 =2, V(X I ,X2,X3)En.
8F 2 oF 2 8F 2
- - -
OXI OX2 8X3
Alors l'ensemble (r) = {(Xl, X2, X3) E QIFI(Xl, X2, X3) = F 2 (X I , X2, X3) = O}
est une courbe régulière dans JR3 (s'il est non vide!)
) )
grad F lx A grad F 2x
) )
1 gradF 1x A gradF 2x l
est un vecteur unitaire tangent à (r) au point X = (Xl' X2, X3).
)
[On rappelle que le vecteur grad Fx a pour composantes
( aF (x), aF (x), aF (X» ) . ]
oX I oX 2 OX3
ll. - INTÉGRATION D'UNE FORME DIFFÉRENTIELLE DE DEGRÉ 1
SUR lJNE PORTION DE COURBE ORIENTÉE :
f CO(1) = f + Pldxl +P2dx2+P3dx3.
1t g 7tg
1 0 y tg désigne une « portion» de (rt g ), c'est-à-dire
. y = g([ et, P]), où [et, P] c: ]a, b[;
. y a l'orientation induite par (rt g ) (*>.
Par définition, on a
f 3 f fJ 3
.,r i l Pidx i = "i l P i (gl(U),gz(U),g3(U») Ûu)du.
9
,...
(*) On dit aussi que y a l'orientation AB, où A = g(a.) et B = g( ).
SURFACES RÉGULIÈRES DANS IR3
265
Remarquer que Xi est remplacé par gi(U) et dX i est remplacé par g (u)du.
La valeur de f W(l) est indépendante de la représentation paramétrique
')I g
Cg, ]a, hD considérée, dans la classe des représentations para métriques qui
donnent l'orientation tg.
2 0 Longueur d'une portion de courbe régulière. - L'expression ds = Ig'(u)ldu
est appelée élément de longueur de la courbe (r) au point x = g(u).
La longueur de la portion de courbe y est l'expression suivante:
f: !g'(u)!du = f: Vg'1 2 (U) +gi(u) +gi(u) du.
3 0 Circulation d'un champ de vecteur le long d'une portion de courbe.
L'expression f W(l) = f '> . Pidx i est souvent notée f Vtgds, oÙ
"tg ')Itg 1-1 ')1
V( x) = (Pl(X), P 2 (x), P 3 (x)).
On l'appelle circulation du champ de vecteurs V(x) le long de Y tg.
m. - SURFACES RÉGULIÈRES DANS IR3.
1 0 On appelle surface régulière, S, un ensemble de points de JR3(X) qui
peuvent être considérés comme l'image d'une application injective g définie paF
g: Ll -+ JR3, Ll étant un ouvert connexe de JR2(U),
u = (Ul, U2) (Xl' X2, X3) = (gl(Ul, U2), g2(Ub U2), g3(UI, U2))
qui satisfait aux conditions suivantes :
. g est de classe el [<=> gl, g2 et g3 de classe el];
. rang de
ag l (U)
au!
a g 2 (u)
au!
a g 3 (u)
OUI
a g 1 (u)
OU2
a g 2 (u) = 2,
OU2
a g 3 (u)
oU 2
'v'u = (u l' u 2 ) E d.
266
COURBES ET SURFACES RÉGULIÈRES DANS IR3(X)
2 0 En tout point x = g(u) de S, on peut lui associer
a) un sous-espace vectoriel tangent (*) engendré par
ag og
-Cu) et -Cu),
ou! oU 2
où
og ( Ogl Og2 a g 3 )
- .
- - -, -, - ,
ou. au. au. au.
J J J J
ce sous-espace vectoriel est de dimension 2 dans IR 3 ;
b) deux vecteurs hg et - ïi g qui sont de longueur 1 et orthogonaux au sous-
espace \'ectorie] tangent :
ïi =
9
og og
-(u) A -Cu)
OUI oU 2
og og
-:-(u) A -Cu)
ou! aU2
On dit que ng est l'orientation de la surface S définie par g.
ng est appelé vecteur unitaire normal à S au point x = g(u) pour la représen-
tation paramétrique (g, Ll).
Pour un autre paramétrage (g', Ll') on aurait
n' - n
g - g
ou bien
ng' = -ng.
3 0 Théorème 9.111.1. - On considère une application F: Q IR, Q étant
un ouvert de IR 3, qui vérifie les conditions suivantes
. elle est de classe CI;
( oF oF OF )
. rang de -, -, - = 1,
OX! oX 2 oX 3
V(X l , X2, x 3 ) EQ.
Alors l'ensemble S = {(Xl' X2, X3) E QIF(x l , X2, X3) = O} est une surface
régulière dans IR 3,
gradFx est un vecteur unitaire normal à S au point x.
IgradF 1
4 0 Corollaire.
Soit ({J une application de classe C l : Ll --+ IR, Ll étant un ouvert de IR2(X, y),
telle que acp et acp ne soient pas simultanément nuls.
8x oy
Alors, l'ensemble des (x, y, z) tels que z = ({J(x, y) est une surface régulière.
(*) On dit aussi variété linéaire tangente.
INTÉGRATION D'UNE FORME DIFFÉRENTIELLE DE DEGRÉ 2 267
IV. - INTÉGRATION D'UNE FORME DIFFÉRENTIELLE DE DEGRÉ 2
SUR UNE PORTION DE SURFACE ORIENTÉE :
f W(2) = f P1dx2A dX 3 +P2dx3 A dX1 +P 3 dx 1 A dX2.
g g
1 0 S;g désigne une portion de S;9' autrement dit,
. s = g (Ll 1 ), où Ll l est un compact inclus dans Ll;
. S a l'orientation induite par S;g.
W(2) est une forme différentielle de degré 2 définie dans un ouvert li conte-
nant S :
W(2) = Pl dx 2 A dX3 + P 2 dx 3 A dX I + P 3 dx IA dX2.
Notons w* = g-I(W(2») la forme différentielle de degré 2 :
*
co* : L1 -+ IRf2)'
U = (u 1 , u2) F(U1' u2)du l A dU2
qui est définie dans l'ouvert Ll de lR 2 (Ul' U2) et que l'on déduit de W(2) en
remplaçant Xi par gi(Ul, U2) et dXi par
8g. og.
---..!:. du 1 + --1.. du 2.
OU1 OU2
[Par exemple, pour w = xîdx2 A dX3 et
g:u = (Ul,U2) (X1,X2,X3) = (U ,Ul +U2,U1U2),
on aura
co*{u) = uid(u 1 +U2) A d(U1U2) = u1(du l + dU 2) A (u 2 du l +u l du 2 )
= u1(u 1 -u2)du l A dU 2 = F(u 1 , U2)du1 A dU2
(en effet, dUl A dUl = dU2 A dU2 = 0 et dU2 A dUI = -dUl A dU2).]
Par définition, on a
f W(2) = f g -l( W(2»)'
S g .!11
autrement dit
f P1dx2 A dX3 +P 2 dx 3 A dX I +P 3 dx 1 A dX 2 = f F(UI' U2) du l du 2.
S g .!11
o
Remarquer Ll I = g-l(S).
La valeur de f west indépendante du choix de la représentation para-
g
métrique considérée (g, Ll) dans la classe des représentations paramétriques
donnant l'orientation ii g à S.
268
COURBES ET SURFACES RÉGULIÈRES DANS JR.3(X)
Exemple: On considère la surface régulière S = (XI,X2,X3)lx3 = xi+x .
Notons s la portion de S définie par xi + x 1.
On se propose de calculer
f xldx2 A dX3,
sachant que l'orientation choisie est celle de la normale unitaire v(x) vérifiant
v(O, 0, 0) = (1, 0, 0).
Ici, S admet une représentation paramétrique (g, JR.2)
g : JR.2(U) -+ JR.3(X),
(u I , u 2 ) (Xl' x 2 , X3) = (U l , U2, ui +u ),
qui est compatible avec l'orientation choisie v(x).
En effet (0, 0, 0) est l'image par g de (0, 0) et l'on a
ôg (0, 0) A ag (0, 0)
au 1 aU2 = (1,0, 0).
ag (0, 0) A ag (0,0)
OUI OU2
On a alors
s = g(Ll I ),
où
Ll 1 = ;(Ul, u 2 )1
uî+u < 1
et
ro*(u) = g-I(W)(U) = U l dU2 A d(ui +u )
d d ) 2 d d (*)
= Ul du 2 A( 2u I U 1 + 2U 2 U2 = -2u 1 Ul A U2 .
Par suite,
f xldx2 Adx3 = ff -2uîduldu2-
st ,11
2 0 Aire d'une portion de surface régulière. - L'expression
og og
du = -Cu) A _(u) dUldu2
OUI OU2
est appelée élément d'aire de la surface S au point x = g(u).
L'aire de la portion s est l'expression suivante :
. ff og og ff V 2 d
aIre (s) = -Cu) A -Cu) du 1 du 2 = EG-F dUl u 2 ,
,11:0U1 oU 2 Al
(*) On rappelle que dUl/\ dUl = dU2 /\ dU2 = 0 et que dU2!\ dUl = -dUl /\ dU2.
FORMULES DE TRANSFORMATION
269
( Og a g ) 3 [ a g . ] 2
E = -(U), -CU) = L ----!(U) ,
OUI aU l i=l aU 1
F = ( ag (u), ag (u» ) = t agi (u). agi (u),
aUI OU2 i=1 aU 1 aU 2
( ag Og ) 3 [ og. ] 2
G = -(u), -(u) = L ----!(u)
aU2 OU2 i=l OU2
[ici (.,.) désigne le produit sca]aire dans IR 3].
REMARQUE. - L'expression
f P l dx 2 A dX 3 +P 2 dx 3 A dX1 +P 3 dx I A dX 2
Sng
est souvent notée
fViigdO', où V(x) = (Pl (X), P 2 (X), P 3 (x».
On l'appelle flux du champ de vecteurs V(x) à travers la portion de surface s.
v. - FORMULES DE TRANSFORMATION
Soit Q un ouvert de IR3 et w une forme différentielle de degré 3 définie
et continue dans Q :
()) = PdXl A dX2 A dX3.
Par définition, on a
f dw = f P(X1' X2, x3)dx1dx2dx3
n+ n
et
f n- dm = - f ,t(Xl,X2,X3)dxldx2dx3.
1 0 Théorème de divergence 9.V.l.
- Soit Q = {XE IR314>(x) < O}, où 4>: IR3 --+ IR est de classe C l et vérifie
la relation
3 04>
14>(x)1 + L -(x) 0, 'v'x.
i==1 OX.
270
COURBES ET SURFACES RÉGULIÈRES DANS JR.3(X)
La frontière oQ est donc une surface d'équation <fJ(x) = o. On la munit
de l'orientation (dite extérieure)
:>
_ grad </J
n=
Igrad 1
et on la note oQ , ou encore oQ+.
- (j) désigne une forme différentielle de degré 2, définie et de classe el
dans un ouvert U contenant Q :
(j) = P l dx 2 A dX3 +P2dX3 A dX 1 +P3dxI A dX2.
On a alors la formule de transformation suivante
f (j) = f dw,
ôn+ n+
c'est-à-dire
f Pldx2 A dx 3 +P 2 dX 3 A dX I +P 3 dx I A dX 2
ôn
f ( OPI OP2 oP 3 )
= -+-+- dXl Adx 2 Adx 3 .
n+ OX 1 OX 2 8X3
On peut encore l'écrire [cf remarque page 269]
f Viidu = f div V dv,
ôn n
'\
ou
dv = dXldx2dx3
et
V(x) = (P 1 (x), P 2 (x), P 3 (x)).
2 0 Formule de Stokes.
. S désigne une surface paramétrée par (g, Ll) [cf page 265].
. s désigne une portion de S telle que
s = {x E S/</J(Ul, U2) O},
où </J : f!.. --+ IR est de classe C l et vérifie a</J + a</J =ft 0, Vu E f!.. ;
OUI OU2
on munit s de l'orientation ng et on la note S;9.
. os désigne la frontière (ou bord) de s dans S
as = {x E S/</J(Ul, U2) = O};
FORMULES DE TRANSFORMATION
271
c'est une courbe régulière. On la munit de l'orientation
tg =
O<p og 04> og
-----
OUI OUI OU 2 OU 2
,
O<p og 04> og
-----
OUI au! OU 2 oU 2
avec
og _ ( Og1 Og2 og3 )
-- -,-,- .
au. au. au. au.
1 £ £
. w désigne une forme différentielle de degré l, définie et de classe e l
dans un ouvert U contenant S :
ro = Pldxl+P2dx2+P3dx3.
On a alors la formule de transformation suivante
f ro = f dro,
ôst
9 9
c'est-à-dire
f f ( OP3 OP2 )
Pldxl +P2dx2+P3dx3 = --- dX 2 A dX3+".
ôst g S 9 oX 2 OX3
On peut encore l'écrire [cf remarques p age 2 65 et page 269]
f Vids = f rot V iidu.
ôs s
3 0 Étude d'un cas particulier. Formule de Riemann.
. d'désigne un ouvert borné de JR.2(X, y)
dont la frontière 0 d est une réunion finie
de courbes régulières. On munit a Ll de y
l'orientation positive (cf figure ci-contre)
et on la note 8Ll +.
. P et Q désignent deux applications
définies et de classe el dans un ouvert U
contenant A.
On a alors la formule de transformation
suivante :
f PdX+Qdy= ff ( OQ _ OP ) dXdY.
ôA+ Â OX oy
o
x
Application. - On a
aire (A) =! f xdy- ydx = f xdy = - f ydx.
2 ôÂ+ ôA+ ôÂ+
272
COURBES ET SURFACES RÉGULIÈRES DANS JR.3(X)
4 0 Propriété des formes différentielles fermées.
. w désigne une forme différentielle de degré 2, définie et de classe CI
dans un ouvert U de JR.3(X).
. s désigne une portion de surface régulière quelconque s'appuyant sur
une courbe régulière r; fermée et orientée : as = (r).
On choisit sur chaque portion s une orientation ii compatible avec i.
On a la proposition suivante :
« w fermé <=> la valeur de f west indépendante du choix de s dans U ».
Lorsque la proposition ci-dessus est vraie, on a alors
w = drx
et
f w = f rx,
rt
où rx est une forme différentielle de degré 1 définie et de classe C 2 dans U.
REMARQUE. - Soit V un champ de vecteurs défini et de classe e l dans U..
Corrélativement on peut dire que
« div V = 0 <=> flux de V à travers s; est indépendant du choix de s »
et, lorsque cette proposition est vraie, on a
V = rot w et r Viidu = f Wnds,
s (r)
où W désigne un champ de vecteurs de classe C 2 dans U.
9.1.1.
.
9.1.2.
.
EXERCICES DU CHAPITRE 9
[,,' image de ['application g définie par
g : IR-{I} JR.3
U (Xl' X2, X3) = (u, 1 l u' I+U 2 )
est-elle une courbe régulière?
Dans JR.3 Cx, y, z), on considère la courbe cr) d'équations
x = cos u,
y = sin u,
où
II E IR.
z = u,
Montrer que cr) est une courbe régulière.
Déterminer les orientations possibles de cr).
9.1.3. Représentation paramétrique impropre.
. Montrer que ['image cr) de ['application g définie par
g : JR. -+ JR.3
u Cx, y, z),
9.1.4.
.
9.1.5.
.
9.n.l.
..
oÙ
x = t 3 ,
1
y = l+t 6
et
z = 2t 6 -1
est une courbe régulière que ['on notera cr).
(g, JR.) est-elle une représentation paramétrique de Cr)?
Soit cr) = {Cx,y,Z)EJR.3 1 x2+y2+z2-3=Oetx2+y2_2z=O}.
Montrer que cr) est une courbe régulière.
Déterminer les orientations possibles de Cr).
Dans JR.3 Cx, y, z) on considère ['ensemble cr Q) des (x, y, z) qui vérifient
X 2 +y2+Z2 = 1 et x+y+z = a,
a étant une constante réelle donnée.
cr Q) est-elle une courbe régulière?
Dans JR.3 Cx, y, z) on considère ['image 1 de ['application u H (x, y.. z):
x = Vl- u,
y = u 2 ,
z = u 3 + 1,
où
II E [ - 1, 1].
Montrer que 1 peut être considérée comme une portion de courbe régulière.
274
9.IT.2.
.
9.IT.3.
.
9.IT.4.
.
9.11.5.
.
9.IT.6.
..
COURBES ET SURFACES RÉGULIÈRES DANS IR3(X)
Dans IR3 Cx, y, z), Cr) désigne la courbe régulière d'équations
x = cos u,
y = sin u,
où
u E IR.
z = u,
On donne à Cr) l'orientation tg, où g est l'application
g:u Cx,y,z).
}' est la portion de Cr) définie par 0 u 2.
Calculer f -ydx+xdy+zdz.
Y't
9
cr) désigne la droite d'équations
x+y+z = 0,
? x-y+l = O.
L'orientation choisie pour Cr) est celle des y croissants [autrement dit,
celle définie par l'application g : y Cx, y, z)].
a) Déterminer le vecteur tangent tg.
b) }' désigne la portion de droite définie par -1 Y 1 et V désigne
le champ de vecteUrs suivant:
V = (y, 0, 1).
Calculer la circulation de V le long de }' orienté c'est-à-dire l'expression
f
'Y V tgdS.
Dans IR3 Cx, y, z) on considère la courbe régulière Cr) d'équations
x = cos u,
y = sin u,
où
u E IR.
z = u,
Calculer la longueur de la portion de courbe, }', définie par 0 u 1.
Dans IR 3 Cx), on considère la courbe régulière d'équations
u 3
Xl = -3'
X - U 2
2- ,
où
u E IR.
X3 = 4u,
Calculer la longueur de la portion de courbe, }', définie par lui 1
On considère une courbe régulière Cr) d'équation cartésienne
FCx, y, z) = 0,
t Gex, y, z) = O.
Exprimer son élément de longueur ds.
9.11.7.
.
9.111.1.
.
9.ID.2.
.
9.111.3.
.
9.111.4.
.
9.IV.t.
..
EXERCICES DU CHAPITRE 9
275
Dans JR.2(X, y), on considère la forme différentielle suivante:
w = (y+ l)dx+dy,
AB désigne le segment de droite joignant A (0, 1) à B (1, 2) et orienté
de A vers B.
[Autrement dit, l'orientation choisie est celle déduite de g, où g(œ) = A,
g(P) = B, avec œ < p.]
Calculer f - 00.
AB
Dans JR.3(X, y, z), S désigne l'image de l'application
g : JR.2 -+ JR.3
(u, v) (x, y, z),
où
x = u+ v,
y = u 2 +V 2 ,
z = u-v.
a) Vérifier que S est une surface régulière.
b) Déterminer ng au point (2, 2, 0).
c) Déterminer le sous-espace vectoriel tangent au point (2, 2, 0).
a) Vérifier que S = {x E JR.31x3 = xy- X2} est une surface régulière.
b) Déterminer les deux vecteurs unitaires normaux à S au point (1, 1, 0).
c) Trouver une base du sous-espace vectoriel tangent en ce point.
Soit (C) = {(x, y, Z)E JR.3Ix 2 +y2_z2 = O}.
Le cône (C) est-il une surface régulière?
Soit S = {(x, y, z) E JR.31z = qJ(x, y)}, où qJ est une application définie
et de classe CI dans un ouvert Ll de JR.2(X, y).
S est une surface régulière,. déterminer les deux vecteurs unitaires nor-
maux à S au point (x, y, z) E S.
Le plan (II) d'équation
x+y+Z = 1
( 1 1 1 )
est muni de ['orientation n(x, y, z) = V3 ' V3 ' V3 ·
T désigne la portion de plan définie par
x 0,
y 0,
Z O.
Calculer
f xdy A dz+ 2ydx 1\ dz- 2zdx A dy.
T
276
9.IV.2.
..
9.IV.3.
..
9 .IV .4.
.
9.IV.5.
.
9.IV.6.
.
9.IV.7.
..
COURBES ET SURFACES RÉGULIÈRES DANS JR.3(X)
Dans JR. 3 (x), 8 désigne la sphère d'équation
xi+x +x = 1.
On la munit de l'orientation n(x) (x E S) qui coïncide avec (0, 1, 0) au
point (0, 1, 0).
s désigne la portion de sphère définie par x 3 o.
Calculer
f x2dx3 A dXl.
è
n
s désigne la portion de surface latérale de cylindre définie par
x 2 + y2 = 1, 1 z 2.
On la munit de ['orientation n(x, y, z) = (x, y, 0).
Calculer
f xdy A dz- ydx A dz- 2zdx A dy.
8 désigne la surface régulière qui admet la représentation paramétrique
suivante:
x = u+v, y = U 2 +V 2 , Z = u-v, où (u, v) E JR.2.
s désigne la portion de surface définie par (u, v) E [-1, 1] X [-1, 1].
Calculer
f dx A dy+dz A dx,
s
ng
où g désigne ['application (u, v) (x, y, z).
8 désigne la surface régulière d'équation
z = qJ(x, y), où qJ : Ll JR., Ll étant un ouvert de JR.2(X, y).
Montrer que son élément de surface du est défini comme suit:
OqJ oqJ
p = OX et q = oy .
du = Vl+p2+q2 dxdy,
où
Calculer ['aire de ['ellipsoïde (S) définie par
(8) = {(x, y, z) E JR.3Ix 2 + y2+ 2Z2 = 1}.
a) (S) désigne la sphère d'équation
X 2 +y2+Z2 = 1.
On la munit de ['orientation n(x, y, z) = (x, y, z).
---?
80it V le champ de vecteurs suivant:
---? 2
V = (z , 0, 1).
9. V .1.
.
9. V.2.
...
9.V.3.
..
EXERCICES DU CHAPITRE 9
277
---+
Calculer le flux de V à travers la sphère orientée, c'est-à-dire l'expression
f ---+-7
sVnda.
b) s désigne la portion de (S) définie par
X 2 +y2-x 0, Z o.
Calculer
f
s Vnda.
a) .... Soit (J) la for/ne différentielle définie, dans JR.3(X, y, z), comme suit :
.A
w = x 2 dyA dz+y 2 dz A dx+(-2z+a)(x+y)dx A dy,
a est une constante réelle donnée.
Soit D le domaine de JR.3(X, y, z) défini comme suit:
D = {(x, y, z)lx 2 +y2+Z2 < a 2 , x 2 +y2-ax < 0, z > o}.
Calculer dw. En déduire la valeur de
f w.
ôD+
b) On considère le champ de vecteUrs suivant:
V = (x 2 , y2, (- 2z+ a) (x + y)).
---+
Calculer div V. En déduire la valeur du flux sortant de D.
Soit n lin ouvert borné de JR.3(X) dont la frontière an est une surface
régulière. 11, désigne le vecteur unitaire normal à an et dirigé vers
l'extérieur.
Établir la relation suivante:
1 f ->
volume de Q = 3 {JQ Vnda,
Vérifier que l'on a
où
V = (x, y, z).
Vn = p cos 0,
où p = V XI+x +x et 8 désigne l'angle que fait le rayon vecteur avec
la normale extérieure.
Que peut-on en déduire? Donner une interprétation géométrique.
On considère l'intégrale
1= f (1+x2)cp(x)dYA dz+2xYqJ(x)dzA dx-3zdxA dy,
étendue à une portion de surface s limitée par une courbe fermée régulière
et orientée (Ii). L'orientation n choisie sur s est compatible avec t.
278
9.V.4.
.
9. V .5.
..
9.V.6.
...
COURBES ET SURFACES RÉGULIÈRES DANS IR3(X)
a) Déterminer qJ de manière que 1 ne dépende que du contour (Ii).
b) On choisit qJ vérifiant qJ(O) = O. Montrer que, dans ce cas, 1 est égal
à l'intégrale curviligne J:
f 2X2(X2+3) x(x 2 +3)
J = rt (x2+ 1)2 yzdx- x2+ 1 zdy.
Dans IR2(X, y), on considère la circonférence (C) d'équation
x 2 +y2-1 = O.
1 0 Vérifier que la forme différentielle w, définie par
1
w : (x, y) co(x, y) = (x 2 + y2+ 1)2 (xdx+ ydy),
admet une primitive. En déduire la valeur de f w.
(c+)
2° Calculer f ydx+ xdy
(c+)
en paramétrant (C+);
en utilisant la formule de Riemann.
. Ll désigne un ouvert borné de JR.2(X, y) de frontière régulière.
-)
. V désigne un champ de vecteurs défini et de classe CI dans IR z ..
Établir les formules suivantes:
i) f ôA vi:ds = I I A div Vaxdy.
-)
n désignant la normale unitaire à a Ll orientée vers l'extérieur de Ll...
ds désigna nt l'élé ment de long ueur de a Ll.
ii) f (jgradg.i:-ggrad ! :!)ds = f I (fLlg-gLlf)dxdy, où fet g
{JÂ+ -' Â 0 2 0 2
sont deux fonctions définies et de classe CI dans JR.2 et Ll = az + a 2
( laplacien) . x y
Soit
1
w = (X 2 +y2+Z2)3/2 [xdyA dz+ydzA dx+zdxA dy].
Vérifier que dw = O.
1 0 Soit Q un ouvert borné de JR.3(X, y, z) dont la frontière ôQ est une
surface régulière.
Calculer I w lorsque TI ne contient pas le point (0, 0, 0).
{JQ+
EXERCICES DU CHAPITRE 9
279
2° S,. désigne la sphèr.e de centre (0, 0, 0) et de rayon r.
( X Y Z )
On la munit de l'orientation n = -, -, - .
r r r
Vérifier que ['on a
J W = 41t.
s
En déduire que l'on a J W = 41t, lorsque Q contient le point (0, 0, 0).
ôn+
3° Donner une interprétation qui utilise la notion de flux.
SOLUTIONS
9.1.1.
La matrice (1, (1-u)-2, 2u) est de rang 1, 'v'u E IR-{l}, donc l'image de y est
une courbe régulière.
9.1.2.
La matrice (cos u, sin u, u) est de rang 1, 'v'u E IR, donc (r) est une courbe-régulière.
Orientations possibles : -
t:= V(X ,X ,X ) = ( _ S U , C O V u , V 1_ ) et - .
x?+x£+x V2 2 2
9.1.3.
6t 5
La matrice (3t 2 , - (1+t 6 )2 ' 12t 5 ) n'est pas de rang 1 pour t = O.
En fait cr) peut être considérée comme l'image de l'application h :
h : IR --+ IR3
1 2
Il 1-+ (Xl' X2, X3) = (u, 1 + u 2 ' 2u -1).
La matrice Cx (u), x (u), x;(u» est de rang 1, Vu E IR, donc (h, IR) est une repré-
sentation paramétrique de (r) qui est une courbe régulière.
« On dit que (g, IR) est une représentation paramétrique impropre de (r). »
9 .1.4.
Ici Fi (X, y, z) = X2+ y2+ Z2- 3
(r) est non vide
et
F 2 (x,y,z) = X2+y2_2z
pour y = 0 on a z = 1 et X = + V 2.
On a la propriété suivante :
( 2X 2y 2z )
rang 2x 2y _ 2 = 2, 'v'(x, y, z) E (r).
SOLUTIONS
281
"[En effet, en remarquant que « (x, y, z) E (r) :;)0 Z > 0 », on vérifie que
2y 2z 1
2y -21 = -4y(l+z) 0, pour y ¥= 0,
2x "z 1
et 2x :""21 = - 4x(1 + z) =ft 0, pour y = 0, puisqu'alors x = ::1: V2, z = 1.]
Donc (r) est une courbe régulière (cf. théorème 9.1.1.).
Orientations possibles de (r)
1l=
) )
grad Fl A grad F 2
1 grad F A grad F 1 -
1
/ (-y, x, 0) et -no
t x 2 + y2
9.1.5.
(r Q) est non vide lorsque le plan (P) d'équation x+ y+ z- a = 0, intercepte la
sphère (S) de centre 0 (0, 0, 0) et de rayon 1, c'est-à-dire lorsque la distance de 0 à (P)
est inférieure à 1 :
lai 1
113 < ·
Pour - V'3 < a < V3, (r a) est une circonférence donc une courbe régulière.
Pour a = 113 ou a = - V 3, (r a) se réduit à un point
(r V3) = Pl ( V; , 3 , V; ) et (r -V3) = P 2 (_ V; , _ V; , - ).
On vérifie qu'alors on a
( 2X 2y 2Z )
rang 1 1 1 < 2.
9.11.1.
Si J'on pose 1- u = t 2 , il est clair que 1 est porté par la courbe régulière (r) d'équa...
tions
x = t, Y = (t 2 -1)2, Z = (l-t 2 )3+1,
Notons g l'application suivante :
g : JR. -4 JR.3
, (x,y,z);
(g, IR) est une:représentation paramétrique de (r) et l'on a
1 = g([ 0, V2]).
t E IR.
1 est bien une portion de courbe régulière.
282
COURBES ET SURFACES RÉGULIÈRES DANS IR3(X)
9.11.2.
On a
l -ydx+xdy+zdz = I 2 -sinud(cosu)+cosud(sinu)+udu = I 2 (1 + u)du = 4.
YC tI 0 0
9.11.3.
a) (r) a pour équations
x=y-l, y=y, z= 1-2y, où YEIR.
Autrement dit, (r) est représentée par (g, IR), où
g : Y 1-+ (y-l, y, 1-2y).
Orientation de tg : On a
(x', y', z') ( 1 1 2 )
tg = VX'2+ y '2+ Z '2 = V6 ' V6 ' - V6 .
---?
b) Soit V = (y, 0, 1), on a
l V ds = l ydx+O.dy+ l.dz = I l ydy-2dy = -4.
y Y -l
9.11.4.
Calcul de la longueur de courbe y.
Longueur de 'Y = I:VxI2+yI2+zI2du = Vï.
9.11.5.
Calcul de la longueur de 1.
I l I l 14
Longueur de "i = VX;2+ X ,£+X;2du = (u 2 +2)du:= .
-l -1'"
SOLUTIONS
283
9.11.6.
Considérons la matrice suivante qui est de rang 2 :
oF oF oF
---
ox oy oz
oG oG oG ·
ox oy oz
Supposons, par exemple, que
oF oF
--
oy oz
oG oG 0 pour un point (xo, Yo, zo) E (r).
--
oy oz
Dans un voisinage de ce point on pourra donc exprimer y et z en fonction de x :
y = cp(x), z = tfr(x), 'v'x E ]xo- et, xo+ œ[.
On a évidemment
F( x, cp(x), tfr(x») = 0
et, par suite, en dérivant
et
G( x, cp(x), tfr(x») = 0
oF , oF ,IL' oF
-+CP-+o/-=O
ox oy oz '
oG , oG ,IL' oG 0
ox + cp oy + '1' oz = ,
d'où l'on déduit les valeurs de cp' et tfr'.
L'élément de longueu r, ds, s'exprim e alors comme suit:
ds = VX'2+ y'2+ Z'2 dx = VI + cp'2(X) + 1/!'2(X) dx
oF oF 2 oF oF 2 oF oF 2
oy oz ox oz OX oy
oG oG + oG oG + oG oG
oy oz ox oz ox oy
dx
oF ôF
oy 8z
ôG oG
ôy oz
9.11.7.
AB est porté :par la droite (D) d'équations
x = x, y = x+ 1.
Notons g : x.-+ (x, x+ 1). On a AB = g([O, 1]), donc
J -O) = J -(Y+1)dX+d Y = J l (x+2)dx+dx = 2 .
AB AB 0
284
COURBES ET SURFACES RÉGULIÈRES DANS IR3(X)
9.111.1.
a) On a
rang ( ;u ;v ) = 2, 'v'(u, v) E JR.2(U, v),
1 -1
donc S est une surface régulière.
b) Orientation de ng : On a
--?
og og
-A-
-+ ou OV
ng = --?-
og og
-A-
ou OV
c) Pour u = 1 et v = 1, on a le point considéré (2, 2, O)"et
.-
1
n" = Vs (-2, 1, 0).
1
V (-u-v, 1, v-u).
1+2u 2 +2v 2 .
Le sous-espace vectoriel tangent est orthogonal à ce vecteur, donc il admet pour
base deux vecteurs libres VI et V 2 tels que
-+ -) -+
V 1 n g = V 2 n g = ...0.
Par exemple,
VI = (1, 2, 0)
et
V 2 = (1, 2, 1).
9.111.2.
a) Soit F(Xl, X 2 , X3) = X2+X3-xî.
On a
( oF oF OF )
rang - ô '- ô '- ô = 1, 'v'(Xl, X2, X3) E S,
Xl X2 X3
donc S est une surface régulière.
b) Orientations de S : On a
-+ grad F
n = I gradF I -
1
V (- 2X h 1,1) et -no
2+4xj
En particulier, au point (1, 1, 0) on a les deux orientations suivantes:
-+ 1
no = V6 (- 2, 1, 1) et
-no.
SOLUTIONS
285
c) Pour obtenir une base du sous-espace vectoriel tangent à S au point (1, 1, 0)
---+ ---+
il suffit de trouver deux vecteurs libres V 1 et V 2 tels que
---+
Vtno = V2no = o.
Par exemple,
V 2 = (1,2,0)
et
V 2 =(O,1,-1).
9.111.3.
On a
rang (2x, 2y, - 2z) = 0, au point 0 (0, 0, 0).
Le cône épointé est une surface régulière.
9.111.4.
Ici F = z- qJ(x, y), donc
( oF oF OF )
rang ox ' oy ' oz = 1,
Orientations de S :
;; = Vl+: 2 +Q2 (p, Q, -1) et
'v'(x, y, z).
-n
où
ocp
p :z:: - et
ox
oq>
q = oy .
9.IV.l.
Le plan (II) admet la représentation paramétrique suivante :
x=x, y=y, z=l-x-y.
Notons
g : (x, y)H- (x, y, z) = (x, y, l-x-y)
et soit
.d = {(x, y) E JR.21, x > O,.v > 0 et x+y < l}.
On a
T 1:= g(.d)
et
( 1 1 1 )
ng = V3 ' V3 ' V3 = n,
286
COURBES ET SURFACES RÉGULIÈRES DANS JR.3(X)
donc
f n xdy A dz+ 2ydx A dz- 2zdx A dy
= f L+XdYA (-dx-dy)+2ydxA (-dx-dy)+(2x+2y-2)dxA dy
= f r./ 3X - 2)dx A dy = f tpx- 2)dxdy = - .
9.IV.2.
s peut être paramétré comme suit :
Xl = Xl' X 2 = X2, X3 = V l-x i-x ,
t où (Xl' X2) E b. = {(Xl' x2)lxi+x < 1}.
Ce paramétrage conserve l'orientation choisie.
[En effet, en notant g : (Xl' X2)1---+ (Xl' X2, Vl-xi-x ), on a
ng =
ag og
-A-
OXl OX2
a; a;
-A-
OXl OX2
= (Xb X2, Vl-xi-x )
et, par suite,
ng (0, 0, 1) = (0, 0, 1) = n (0, 0, 1).]
On a alors
f x2dx3/\ dXl = ff X2 ( - V Xl dXl- V X2 dX2 ) /\ dXl
A+ l-xi-x l-xi-x
= ff X dXl A dX2 = ff X dXldx2.
A+ Vl-xi-x A VI-XI-X
Le calcul de l'intégrale double s'effectue de façon élémentaire en utilisant les coor-
données polaires.
9.IV.3.
s peut être paramétrée comme suit
X = cos (J, y = sin (J,
z= z..
où «(J, z) E [0, 21t[x [1, 2] = .
Ce paramétrage conserve l'orientation choisie.
SOLUTIONS
287
[En effet, en notant g : (0, z)1-+ (cos 0, sin 0, z), on a
og og
00 A oz
n g - = ( COS 0 ' sin 0 ' 0 ) = n. ]
- og og
00 A oz
Donc
J XdYA dz-ydxA dz-2zdxA dy
s
= J J A+ cos Od(sin O)A dz-sin Od(cos O)A dz-2zd(cos O)A d(sin 0)
= J J A+ l.dO A dz = J J A dOdz = 21t.
9.IV.4.
Soit b. = {(u, v)llul < 1, Ivl < 1}; on a Ll = ]-1, l[x ]-1, 1[, donc
J dXA dy+dzA dx = JJ (du+dv)A (2udu+2vdv)+(du-dv)A (du+dv)
A+
9
= J J A+ (2v- 2u+ 2)du A dv = f f A (2v- 2u+ 2)dudv = 8.
9.IV.5.
S admet la représentation paramétrique suivante :
x = x,
y = y,
z = cp(x, y),
autrement dit, elle est représentée par l'application
g : (x, y) 1-+ (x, y, cp(x, y».
On a
a; a; ( ) ( 0 )
ax A ay = A = (-p, -q, 1),
donc
a-> F
du = A dxdy = V l+p2+q2 dxdy.
OX oy
288
COURBES ET SURFACES RÉGULIÈRES DANS JR.3(X)
9.IV.6.
Paramétrons l'ellipsoïde (S) :
x = cos e cos ({J,
y = cos 0 sin q>,
1
z = V2 sin 0,
06
(fJ, cp) E [- , ] x [0, 2n[ = Ll.
Ona
ai ai
00 A oq> =
- sin e cos q>
- sin 0 sin q>
1
V2 cos fJ
( - cos e sin qJ )
A cos fJ ocos cp ,
donc
og og ( 1 . )
du = oe A oq> dOdq> = 2 cos 4 e + sm 2 0 cos 2 0 dOdq>
et, par suite,
aire (8) = J J A ( COS4 fJ + sin 2 fJ cos 2 fJ) dfJdcp
7t
= 2n J 2 ( COS4 fJ + sin 2 fJ cos 2 fJ) dO.
2
9.IV.7.
a) Para métrons (S) :
x = cos (J cos q>,
y = cos 0 sin q>,
z = sin 0,
où
(fJ, cp) E [- , l x [0, 2n[ = Ll.
Cette représentation paramétrique donne une orientation inverse de l'orientation
choisie.
[En effet, en notant g : CO, ({J) (x, y, z), on a
a; og
MA
ng = a; ag. = (- cos (J cos cp, - cos (J sin cp, - sin fJ) = - n.]
oe A oq>
SOLUTIONS
289
Donc
J V;da = - J z2dy A dz + 0 · dz A dx + 1 . dx A dy
(S) Sn
9
= - J f + sin 2 Od(cos 0 sin rp) A d(sin 0) + d(cos 0 cos rp) A d(cos o sin rp)
= J t.+ (sin 2 0 cos 2 0 cos rp + sin 0 cos O)dO A drp
= f fA (sin 2 0 cos 2 0 cos rp + sin 0 cos O)dOdrp = O.
b) On a
s = g(A'), où A' = )(0, rp)IO < 0 < , 0 < rp < 01.
(En effet, x 2 + y2-x < 0 <=> cos 0 < cos ({J.)
Donc
f s V;!Ju = f f A'+ (sin 2 0 cos 2 0 cos rp + sin 0 cos O)dOdrp = ; + 1 .
9. V.I.
a) On a d(j) = 0, donc
f (j) = f d(j) = J o = O.
ôD+ D+ D+
b) Soit n la normale unitaire à aD dirigée vers l'extérieur de D. On a div V = 0,
donc
f f
flux sortant de D = Vn du = div V dxdydz = o.
ôD D
9. V.2.
CI) On a div V = 3, donc
J V. -;du = f div V dxdydz = 3 J dxdydz = 3 volumes de Q.
ôn n n
b) On a
-?
V.n= IVllnlcosO= VXI+X +x XlxcosO= pcosO,
donc
volume de Q = J p cos (}du.
ôn
290
COURBES ET SURFACES RÉGULIÈRES DANS JR.3(X)
Interprétation géométrique.
Le cône élémentaire a une surface de base égale à da et une hauteur OH égale
à p cos (J. Son volume élémentaire est donc égal à P cos (Jdu.
« Sur la figure ci-contre, (P) est le plan tangent à oQ au point M. »
/p'\
/"\. L \
<./ """---\
\ \
\ ....H \\ ->
Th
// \
/./ \
o \ \
\ \
\ \\
\ >
\ ./
\ ./
\ .//
\.,../
9. V.3.
a) Pour que la valeur de 1 soit indépendante du choix de s, il faut et il suffit que
dw = 0, c'est-à-dire
(1+x 2 )<;o'+4x<;o-3 = 0
et, par suite,
3x+x 3 +K
<;o(x) = (x2+ 1)2 .
b) La condition <;0(0) = 0 impose K = 0, c'est-à-dire
3x+x 3
l{J(x) = (x2+ 1)2 .
Pour ce choix de <;0 on a 1 = J (utiliser le théorème de Stokes).
9. V.4.
1° On a
_! d(X 2 + y2 +1) __!d ( 1 )
w - 2 x (x2+ y2+ 12) - 2 x 2 + y2+ l '
donc
f 1 ff dx A dy 1 ff dxdy
(c+)w = -2 A+X2+y2+1 = -2 Ax2+y2+1'
où
Ll = {(x,Y)lx 2 +y2 < 1}.
SOLUTIONS
291
et, par suite,
f w = - 'Tt Log 2 .
(c+) 2
2 0 Paramétrons (C), de façon:à conserver son orientation positive :
x = cos 0, y = sin 0, avec 0 e < 2n.
On a donc
f ydx+ xdy = f 2 '"sin ()d (cos ()) + cos ()d (sin ())
(c+) 0
f 2it
= 0 (cos 2 () - sin 2 ())df) = O.
Utilisons la formule de Riemann. - On a
f ydx+xdy = f f [ : (x)- a o (y) ] dxdy = O.
(c+) .. A uX y
9. V.5.
a) Soit V(x, y) = (P(x, y), Q(x, y).
La formule i) est la formule de divergence dans IR2(X, y). On a
f V.;dS = f Pdy-Qdx = ff ( a ap + Q ) dXA dy
ôA {JA+ A+ X uY
= f Ir. ( : + ; ) dxdy = f Ir. div Vdxdy
b) La formule ii) se déduit de i) en posant
V = fgradg,
pUIS
-> :-.
V = g gradj:
9. V.6.
1 0 west défini et de classe el dans IR3(X, y, z)- {O}.
On a dw = 0, donc
f w = f dw = 0,
ôn+ n+
lorsque Q (adhérence de Q) ne contient pas 0(0, 0, 0).
292
COURBES ET SURFACES RÉGULIÈRES DANS IR3(X)
2° Paramétrons la sphère Sr (r est une constante strictement positive) :
x = r cos 0 cos ({J, y = r cos 0 sin ({J, z = r sin 0,
où
«(J, <p) E [ - , ] X [0, 2n[ = Ll.
Soit g : (0, ({J) Ho (x, y, z). Le paramétrage (g, Ll) donne l'orientation inverse de
celle choisie :
-)
ng =
a; a;
NJA8qJ
og og
00 A olp
= -ne
On a donc
J w = - J 13 {r cos (J cos <pd(r cos (J sin <p) Â d(r sin (})+ ...}
Sr,X â+ r
= J cos OdO A dlp = J cos OdOdlp = 4n.
A+ A
Supposons que il contienne le point 0 (0, 0, 0).
Notons Sr une sphère de centre 0 et de rayon r dont l'adhérence Sr est contenue
dans Q.
Soit Q* = Q- Sr ; Q* ne contient pas le point 0, donc (cf. question 10) on a
J O) = o.
ônt
Or og = 00+ + Sr,-;', donc
J O) = - J O) = J O) = 4n.
ôn+ Sr,- Sr,
3 0 Considérons le champ de vecteurs V :
( X Y Z )
V = 3' 3' 3 ,
r r r
où
r = V X2+y2+Z2.
Soit une surface fermée ( = 00); le flux du champ de vecfeurs V à travers
(orienté vers l'extérieur) est égale à 0 lorsque et son intérieur ne contiennent pas 0
(!1 $ 0) et est égal à 4n lorsque l'intérieur de contient le point o.
(En effet, J V. -;da = J 0).)
I=ôn ôn+
/
10.
ÉQUATIONS
, ,
AUX DERIVEES PARTIELLES (*)
,
A. - Equations aux dérivées partielles
du premier ordre
Équation du type
(E)
n ou
L blxI'''.' X n , u)- = C(XI' ..., X n , u).
i= l ox.
1
Problème. - Soit Il un ouvert de IR.n(Xl, ..., x n ) et il = Il x ]et, [ un ouvert cylindrique
de IRn+I(XI, ..., X n , z). Il s'agit d'étudier les solutions, u, de l'équation (E) lorsque b l et c
sont des fonctions : il IR. de classe CI. L'un des b l, au moins, est supposé non nul sur il.
1. - COURBES CARACTÉRISTIQUES ASSOCIÉES A (E).
1 0 Définition. - Considérons le système différentiel (e) associé à (E)
( dX 1
1 - = b l (Xl' ..., X n , Z),
dt
(e) dx" = b,,(x lo ..., x"' Z),
dt
dz
- = C(X 1 , ..., X n , Z)
dt
( que l'on écrit usuellement dX 1 = ... = dXn = dZ ) .
b l b n c
Toute solution,
Xl = ({JI(t),
X n - ({Jn(t),
Z = qJn+ l (t),
(*) Les exercices de ce chapitre apportent un complément théorique important à ce cours.
294
ÉQUATIONS AUX DÉRIVÉES PARTIELLES
de ce système différentiel, représente une courbe régulière dans IRn + 1 (en
fait dans Q) appelée courbe caractéristique associée à (E).
2 0 Théorème 10.1.1. - Par un point Mo = (x , ..., x , Zo) appartenant à Q,
passe une courbe caractéristique, et une seule, r Mo contenue dans Q.
II. - INTÉGRALES PREMIÈRES DE (e).
1 0 Théorème 10.11.1. -- Il existe n fonctions F 1 , ..., Fn : Q -+ IR de classe CI
telles que « 'v' M ° E Q, r Mo a pour équations
\ Fl(Xl, ..., Xn> z) = Ci'
1 (; : ...::: : . ) ..... :.
où les Ci sont des constantes vérifiant évidemment FïCx , ..., x , zo) = Ci ».
Remarquons que l'on a
oF l
,
oX I
. . .,
oF l
oX n
oF t
oz
rang de
= n, 'v'(x 1 ,..., X n , z) E Q.
oF n
-,
oX l
. . . ,
oF n
oX n
oF n
oz
2 0 Définition. - Les fonctions FI' F 2 , ..., F,z sont appelées intégrales pre-
mières de (e). Toute intégrale première de (e) est de la forme l!>(F t , ..., F n ),
où 4> est une fonction arbitraire de classe CI dans IRn.
nI. - SURFACES INTÉGRALES DE (E). RECHERCHE DES SOLU-
TIONS, u, DE (E).
1 0 Définition. - Soit u : Ll IR une solution de (E) qui est de classe CI.
Dans IR'I+ 1(x 1, ..., X n , Z), l'hypersurface S d'équation
z = u( XI' ..., x n),
où
(x 1, ..., X n ) E Ll,
est appelée surface intégrale de (E).
2 0 Propriétés.
Théorème 10.lll.l.
tenant à S.
Alors
Soit S une surface intégrale et Mo un point appar-
r Mo C S.
SURFACES INTÉGRALES DE (E)
295
Théorème 10.111.2. - Toute famille de courbes caractéristiques s'appuyant
sur une courbe donnée A, régulière et non caractéristique, engendre une sur-
face intégrale.
r M4
rl\{
3
r Ii
A
3 0 Recherche des solutions u de (E). - Les surfaces intégrales de (E) ont
pour équation
4>[F 1 (x t , ...,xz), ...,F n (x 1 , ...,xz)J = 0,
où 4> est une fonction arbitraire de classe C1.
[On écrit symboliquement 4>(C 1, ..., C n ) = O.]
On résout alors en z l'équation 4>(C 1, ..., C n ) = 0 et l'on obtient la solution
générale de (E) :
z = u(x 1 , ..., x n ).
Exemple: On se propose de déterminer U vérifiant l'équation aux dérivées
partielles suivante
(E')
2 0U ou
xy _+X2y_ = (X2 + y2)U.
ox oy
Ici Xl = X et X 2 = y.
On associe à (E') le système différentiel
(e')
dx = dy =
xy2 x2y
dz
(X2 + y2)'
qUI admet les intégrales premières suivantes :
x 2 _ y2 = C t ,
z
- = C 2 .
xy
296
ÉQUATIONS AUX DÉRIVÉES PARTIELLES
[En effet, on a
xdx = ydy<:>d(x 2 - y2) = O<:>x 2 - y2 = C 1
et
d(xy) xdy+ ydx dz Il 1
= = -<:> Log z = Log xyl + constante.]
xy xy z
Les surfaces intégrales ont pour équation (*)
C 2 = H( C 1), où H est de classe C 1 dans IR,
c'est-à-dire
z = xyH(x 2 _ y2).
,
B. - Equations aux dérivées partielles
linéaires du second ordre
IV. GÉNÉRALITÉS. SURFACES CARACTÉRISTIQUES. CLASSIFI-
CATION.
1 0 Soit Q un ouvert borné de lR. n (x), x = (Xl' X 2 , ..., x n ) de frontière on
suffisamment régulière (**). Le type général d'une équation aux dérivées par-
tielles linéaire du second ordre est donné par
n n 02U n ou
(1) L(u) = L L aij(x) + L bi-+cu =f, avec
i=lj=l ox.ox o i=l oX o
J
( a. 0 = a .. )
J J ·
Soit £2 = i i au a 2 . On associe à l'opérateur £2 en tout point M o(XO),
i= 1 J o = 1 ox.(}x 0
J
[Mû En ], la forme quadratique à n variables ç = (Çl'''.' çn) :
(<1»
n n
<I>(xo, ç) = L L aij(xo)çic;j.
i= 1 j= 1
Dans le cas n = 2 et n = 3 on pourra donner des interprétations géomé-
triques élémentaires.
(*) Dans cet exemple, on a posé ljJ(Cl, C2) = C2 - H(Cl).
(**) Par exemple, ôn, réunion finie de compacts appartenant à des sous-variétés de IRn
de dimension n-l.
GÉNÉRALITÉS. SURFACES CARACTÉRISTIQUES
297
2° Surfaces caractéristiques et cônes caractéristiques.
Surfaces caractéristiques. - Par définition, ce sont les surfaces de 1R 1I
d'équation
S(x 1 , X2, ..., x n ) = 0,
qui satisfont à l'équation aux dérivées partielles du premier ordre
n n oS as
L L aij(x)-- = o.
i=lj=l ox.ox.
& }
(S)
Cône caractéristique en un point. - Le point M o(xo) étant un point donné
de Q, l'ensemble des normales en Mo à toutes les surfaces caractéristiques
passant par Mo est le cône (C Mo ) d'équation
(C)
n n
<1> (x ° , ç) = L L aij(xo)ÇiÇ j
i= 1 j= 1
(çj = Xj-xJ).
Le cône supplémentaire, soit (C o)' est appelé cône caractéristique au
point Mo. Les surfaces caractéristiques sont donc définies comme étant tan-
gentes en chaque point au cône caractéristique correspondant.
(S)
Cas de n = 2. [Notation (x, y) au lieu de (Xl' X2).]
02U 02U 02U
A 2+ 2B -+ C 2+". =1;
ox oxoy oy
A( r +2B ( ) ( )+c( r = 0;
A ç 2+2Bç1]+C1]2 = 0;
A1]2 - 2Bç1] + Cç2 = O.
Exemple:
(I)
(CM)
(C )
Dans ce cas, les surfaces caractéristiques sont des courbes.
On peut les chercher sous la forme
S(x,y) = y-f(x),
l'équation (S) se décompose alors en deux équations du premIer ordre à
coefficients réels ou complexes et l'on tire
dl
- = r 1 (x,y)
dx
et
dl
- = r 2 (x, y).
dx
Le cône caractéristique en un point est formé de deux droites réelles ou
. ..
ImagInaIres.
3 0 Classification des équations. - Elle s'obtient en appliquant les résultats
classiques de l'Algèbre concernant les formes quadratiques.
298
ÉQUATIONS AUX DÉRIVÉES PARTIELLES
a) Type elliptique. - L'opérateur L 2 et l'équation (1) sont dits elliptiques
en un point Mo (resp. sur Q) si, et seulement si, la forme quadratique <1> est
définie (positive ou négative), c'est-à-dire si l'on a
LLaij(xO) iÇj > 0
i j
ou
L L aij(xo)Çi j < 0, 'v' -# 0,
i j
au point Mo (resp. 'VMo E Q).
n n
Si l'on a L L aij(x) i j clçl2, c étant une constante strictement posi-
i= 1 j= 1
tive, 'v'X E Q, on dit que L 2 et (1) sont uniformément elliptiques sur Q. Dans
la suite, « elliptique sur Q » signifiera toujours uniformément elliptique sur Q.
Toutes les valeurs propres de la matrice associée à <1> {x 0 , ) sont donc
non nulles et de même signe.
Le cône caractéristique est donc imaginaire. Dans le cas n = 3, la quadrique
<1> (x 0 , ç) = 1 est un ellipsoïde.
b) Type parabolique. - L'opérateur L 2 et l'équation (1) sont dits para-
boliques (au sens large) en un point Mo (resp. sur Q) si, et seulement si, la
forme quadratique <1> est semi-définie (positive ou négative) au point Mo
(resp. 'v' M 0 E Q).
Toutes les valeurs propres non nulles de la matrice associée sont donc de
même signe. Si l'une seulement des valeurs propres est nulle, on dit que L 2
est strictement parabolique.
Le cône caractéristique est donc décompose. Dans le cas n = 3, la qua-
drique c!>(X O , ç) = 1 est une surface cylindrique.
c) Type hyperbolique. - L'opérateur L 2 et l'équation (1) sont dits hyper-
boliques au sens large en un point Mo (resp. sur Q) si, et seulement si, la
forme quadratique <1> est indéfinie non dégénérée au point Mo (resp. 'v' M 0 E Q).
Toutes les valeurs propres de la matrice associée sont donc non nulles et
ont des signes quelconques.
Si toutes, sauf une, sont de même signe, on dit que J'équation est hyper-
bolique au sens strict (ou encore de type hyperbolique normal); dans les autres
cas, on dit aussi ultrahyperboJique.
Le cône caractéristique est réel et dans le cas n = 3 la quadrique
<1>( ç 1, ç 2, 3) = 1 est un hyperboloïde.
d) Exemples.
n 02
a) L'équation de Laplace, L = 0, est elliptique sur IRn.
j= 1 ox.
}
(3) L'équation de la chaleur au _h 2 ( a 2 u + a 2 u ) = 0 est parabolique sur IR 3 .
ot ox 2 oy2
02U 2 n-l 02u
'}') L'équation des ondes, - - C L - = 0 est de type hyperbolique
normal sur IRn. ot 2 j = 1 OX j ,
GÉNÉRALITÉS. SURFACES CARACTÉRISTIQUES
299
, . 02U 02U
8) L'equatlon - + y- = 0 est
oy2 ox 2
- elliptique sur le demi-plan des y positifs,
- parabolique sur l'axe Ox,
- hyperbolique normale sur le demi-plan des y négatifs.
4 0 Problèmes posés. - Ils sont différents suivant les types d'équations.
a) Type elliptique. - Problèmes de Dirichlet, Neumann et plus généra-
lement Fourier.
Dirichlet. - Trouver une solution u, telle que
Lu = f sur 0 U lôn = ({J, ({J étant donné.
Neumann.
Lu = f sur Q
du _ _ Il, ( du d , . , 1 ) Il,' d '
0/ dn erlvee norma e , 0/ etant onne.
dn ôn
Fourier.
Lu = f sur 0
( au + p dU ) = 0, 0 étant donné.
dn ôn
II existe des problèmes plus complexes qui se rencontrent naturellement
en Physique et en Mécanique, par exemple.
Problèmes mêlés. - Si 00 est la réunion de deux sous-ensembles rI
et L2, on impose
U =({J
:El
et
du =1/1.
d n 1:E2
Problème d'interface. - Soit 0 la réunion de deux ouverts Q1 et O 2 ayant
un morceau de frontière commun L (figure ci-après). On impose
\ L i = J;, dans Qi'
( ui;{Jni -:E= lI'i'
i = 1, 2,
i = 1, 2,
aInSI que les conditions dites d'interface
OUI = _ oU 2
an 1: on :E
UII:E = U 2 1:E
et
nl-
Ce genre d'énoncé correspond aux cas où les milieux physiques en cause
sont de nature différente.
Ces prob]èmes ne sont évidemment pas envisagés dans le cadre de cet
ouvrage.
300
ÉQUATIONS AUX DÉRIVÉES PARTIELLES
b) Type hyperbolique. - Problème de Cauchy. - Trouver une solution u
telle que
u = qJ
:£
et
du = t/J,
dn :£
qJ et V1 données.
L surface donnée (L non caractéristique, on démontre en effet que, dans
le cas où L est caractéristique, le problème est impossible ou indéterminé).
Ce problème est du type « conditions initiales» analogue à celui des équations
différentielles.
Problème mixte. - Trouver une solution u satisfaisant à des conditions
initiales et à des conditions aux limites (analogues à la condition de Dirichlet).
c) Type parabolique. - Les problèmes sont ceux du problème hyperbolique
. 1 d . . du ,/,
en supprImant a con Ition - = V'.
dn :£
Il n'est pas possible ici d'aborder des méthodes et résultats généraux concer-
nant les problèmes énoncés ci-dessus.
Nous nous bornerons à quelques méthodes et résultats pour les équations
usuelles dans le cadre classique (*).
V. - ÉQUATIONS ELLIPTIQUES.
1 0 Problème de Dirichlet. - La notation Ck,œ (0) désigne l'espace des fonc-
tions de classe C k sur 0 et dont les dérivées d'ordre k satisfont à une condition
de Lipschitz d'exposant ex sur 0 (ex E ]0, 1]).
10.V.l. Théorème d'existence et d'unicité (Schauder) (**). - Soit
n n 0 2 n a
L 2 = L L aij(x) , LI = L bij-+cl et L= L 2 +L 1 .
i = 1 j= 1 OX.OX. j= 1 OX.
J J
Avec les hypothèses suivantes :
n n
. L 2 est elliptique sur Q : L L aij(x)çiÇj Alçl2, 'v'XEQ,
i= 1 j= 1
. les coefficients de LI et de L 2 appartiennent à Co,œ( Q ),
. c(x) 0, 'v'x E Q,
. oQ = S est de classe C ( *** )
2,œ ,
(*) Les théories actuelles se développent à partir du point de vue des solutions généralisées
ou solutions faibles - point de vue plus adapté aux problèmes et qui s'est révélé extrêmement
efficace et fécond - en utilisant des espaces fonctionnels spéciaux. Un aspect en est donné
dans le programme du certificat C 2 de Maîtrise.
(**) Cet énoncé est une condition suffisante simple d'existence, les résultats de Schauder
sont plus généraux.
(***) Il existe pour tout point M de S un système de coordonnées (yI, ..., Yn) telquel'équa-
tion de S s'écrive au voisinage de M sous la forme: YI = F(y2, ..., Yn), F étant de classe C2,œ.
ÉQUATIONS ELLIPTIQUES
301
le problème Lu = f, uls = ({J admet une solution, et une seule, u E C 2tCX ( Q)
pour toutes fonctions f E COtcx(Q) et ({J E C 2t CX (8).
Remarques.
1 0 L'unicité d'une solution dans la classe C 2 (Q) n Co( Q ) peut être obtenue
sous des hypothèses plus faibles. (Voir remarque suivant le théorème 10.V.3.)
2 0 Les conditions du théorème sont évidemment satisfaites lorsque C i + 1
remplace Ci ,cx.
10.V.2. Théorème d'existence et d'unicité (équation de Laplace). - Sous
les conditions
. f de classe Co ,a:, ({J de classe Co ta:,
. oQ de classe C 1,
. l'équation du = f, ulôn = ({J admet une solution unique appartenant à
C 2 (Q) n Co( Q) .
10.V.3. Théorème du maximum et du minim um. - Soit
n n 02
£2 = L L aij(X)
i= 1 J .= 1 OX.OX.
J
supposé elliptique sur Q
(t 1 jt 1 aij(x)çiÇj ..tIW, 'IxeQ).
alors toute solution u de Lu = f telle que U E C 2 (Q) n Co( Q ) atteint son
maximum et son minimum sur la frontière S de Q, c'est-à-dire
infu(x) u(x) supu(x), YXE Q .
xeS xeS
Remarques.
1 0 Ceci s'applique évidemment aux fonctions harmoniques déjà étudiées
(chap. 2.IV).
2 0 De cette propriété on déduit l'unicité de la solution du problème de
Dirichlet.
2 0 Méthodes élémentaires. Exemples.
a) Méthode de Fourier. - Le principe est de développer la solution éven-
tuelle Il en série de Fourier, puis de déterminer les coefficients du développement
pour que u satisfasse à l'équation.
302
ÉQUATIONS AUX DÉRIVÉES PARTIELLES
Exemple: Soit Q = ]0, n[ x ]0, n[ c IR2(X, y). Trouver u tel que
(1) 02U 02U f, ' . t'".' . " 1
----z+----z+yu = , y etant une constante InferIeure a .
. ox oy
f (2) u lan = 0,
où f est de classe C 1 sur ]0, n[ x ]0, n[.
On cherche u sous la forme
(3)
00 00
u(x, y) = L L (Xn,m sin nx sin mYe
n= 1 m= 1
Chaque fonction (x, y) un, m(X, y) = sin nx sin my vérifie la condition (2).
On cherche alors la suite double {(Xn, m} pour que (3) satisfasse à (1).
Si l'on pose an,m = f 1t f " f(x, y) sin nx sin mydxdy (coefficients de Fou-
n 2 0 0
rier de f), on a
00 00
f(x,y) = L L an,msinnxsinmy
n= 1 m= 1
(puisque f est de classe CI).
Un calcul formel et une identification dans (1) donnent alors
-a
(X = n,m
n,m n2 + m 2 _y
II reste à justifier ce calcul en étudiant la convergence uniforme des séries
obtenues par dérivation terme à terme (ceci dépend des an, nu en général on
ne peut affirmer, par exemple, que
02U 00 00 n 2 . .
----z = - L L 2 2 Qn,m sIn nx sIn my).
OX n=lm=lm +n
b) Formule de Poisson (cas du cercle) 0 - Le problème: Déterminer une
fonction harmonique telle que ulc = <P, où C est un cercle donné, est résolu
par la formule de Poisson (chapitre 4, exercice 4.1.3.).
Ce résultat n'est qu'un aspect d'une méthode générale d'utilisation d'une
fonction dite fonction de Green associée au contour donné (exercice lO.V.6.).
VI. - ÉQUATIONS HYPERBOLIQUES.
La notation habituelle de la variable dans IRn+ 1 = JR. x JR.n est (t, x) où
x = (Xl' X2, ..., x n ), ceci permettant de mieux mettre en évidence le caractère
hyperbolique, la variable t représentant le temps.
ÉQUATIONS HYPERBOLIQUES
303
1 0 Problème de Cauchy.
lO.VI.l. Théorème d'existence et d'unicité (Cauchy-Kowalewska). - Soit
a n a
LI = bo(t,x)-+ L bj(t,x)-+e(t,x)I
ot j = 1 OX .
J
n n 02
L 2 = L L aij(t, x)
i=I J .=1 OX.OX.
L J
et
0 2
L= 2- L2 +LI.
ot
Avec les hypothèses
. L 2 est elliptique sur Q,
. les coefficients de LI et de L 2 sont analytiques (c'est-à-dire développables
en série entière au voisinage de tout point),
. la surface S est une surface analytique non caractéristique,
le problème de Cauchy :
1 au =I ,
'U,s = <p, 0/
1 anis
( :n dérivée normale) admet une solution analytique unique lorsque f,
sont des fonctions analytiques.
Lu = f,
<p et t/J
Remarques.
1 0 Ce théorème est vrai, sous forme locale, pour des équations qui ne sont
pas nécessairement hyperboliques. Cependant, pour les équations elliptiques,
le problème de Cauchy global n'est pas bien posé (au sens de Hadamard).
II ne se rencontre d'ailleurs pas dans les problèmes courants de la Physique.
2 0 II existe des résultats (théorèmes de Sobolev) analogues à celui de Schau-
der: existence et unicité d'une solution de classe C 2 , la surface porteuse des
données de Cauchy n'étant pas caractéristique. Les conditions imposées sont
assez complexes et ne seront pas énoncées ici.
(E)
2 0 Équation des cordes vibrantes (une variable d'espace). - On a
02U 202U
--e -=0.
ot 2 ox 2
La solution générale [c'est-à-dire l'ensemble de toutes les fonctions satis-
faisant à (E)] est donnée par
u(t, x) = cI> 1 (x + et) +<I>2(X-et),
où <1> 1 et <1>2 sont de classe C 2 . On utilise cette solution générale pour résoudre
les problèmes posés.
304
ÉQUATIONS AUX DÉRIVÉES PARTIELLES
a) Problème de Cauchy. - Il existe une solution, et une seule, de (E)
telle que
u(O, x) = f(x)
et
au
-(O,x) = g(x),
ot
où f et g sont respectivement de classe C 2 et C1.
Cette solution est donnée par
1 1 f x+et
u(t, x) = -[f(x+ et) + f(x-et)] +- g(ç)dç.
2 2e x-et
b) Problème mixte. - Il existe une solution, et une seule, de (E) telle que
au
u(O, x) = f(x), -(0, x) = g(x),
ot
u( t, 0) = u( t, 1) = 0, 1 est une constante strictement positive donnée,
où f et g sont respectivement de classes C 2 et CI et f satisfaisant aux « condi-
tions de raccord » :
f(O) = f(l) = o.
Cette solution est donnée par
1 1 f x+ct
u(t,x) = -[F(x+et)+F(x-et)]+- G(ç)dç,
2 2e x-et
où F et G sont les prolongements impairs périodiques, de période 21, de f
et de g.
Remarque. - La fonction f de classe C2 (resp. g de classe CI) n'entraîne
pas que F (resp. G), soit de classe C 2 (resp. CI) sur 1R. On a seulement F de
classe C2 (resp. G de classe CI) sur IR privé des points kl (k E Z). Autrement
dit, Fil, par exemple, n'existe pas sur les droites x + et = kl, donc F n'est pas
de classe C2 dans la bande (t, x) E [0, oo[ X [0, 1].
Ceci ne se produit évidemment pas si f, par exemple, est donnée précisément
comme restriction d'une fonction impaire 21-périodique de classe C 2 sur 1R.
3 0 Méthode de séparation des variables. - Le principe est de chercher
d'abord des solutions sous la forme f(t)g(x), x = (x 1, ..., x n ).
Dans le cas de l'équation des cordes vibrantes (problème mixte), si l'on
pose u(t, x) = f(t)g(x), on obtient
fil - Ac 2 f = 0 et g" - Ag = o.
La résolution de ces deux équations différentielles, en tenant compte des
conditions aux limites, donne une infinité de solutions qui s'écrivent
nnet . nnet
fn(t) = ancos-+bnsln-
1 1
et
( ) . nnx
gn X = Sln-.
l
ÉQUATIONS PARABOLIQUES
305
On se ramène alors à la méthode de Fourier en déterminant les an et b n pour
co
que la série u(t, x) = L f,,(t)gn(x) satisfasse aux conditions initiales (exercices
n=O
10. V.S. et suivants).
VII. - ÉQUATIONS PARABOLIQUES.
Les méthodes particulières sont analogues à celles décrites ci-dessus (sépa-
rations des variables) et les propriétés des solutions du problème mixte sont
analogues à celles des solutions des équations elliptiques.
Nous nous bornons à l'équation étudiée au programme : équation de la
chaleur ou de diffusion. Elle s'écrit de la façon suivante
dans le cas d'une variable
02U _ K ou
-- -
ox 2 ot
et, plus généralement,
au
âu = K-.
ot
1 E r , d bl ". l , , · AU 1 0 2 U d 1 1
o nonce u pro eme D1Ixte pour equation ot = K ox 2 ans e rectang e
(0, T) x (0, 1). - II s'agit de déterminer u tel que
au 1 02U
ôt - Kox 2 '
u(O, x) = ((J(x),
u(t,O) = V11 (t),
u(t,l) = V12(t), 'v't E [0, T],
({J, V11 et V12 étant de classe CI et satisfaisant aux « conditions de raccord» :
({J(O) = V11 (0)
et
((J(I) = V12(O).
10.VII.l. Théorème d'existence et d'unicité. - Sous les hypothèses ci-dessus
le problème mixte admet une solution, et une seule, de classe C 2 en x et CI en t
à l'intérieur du rectangle [0, T] x [0, l].
10.VII.2. Théorème du maximum (et du minimum). - Toute solution du
problème mixte continue sur le rectangle fermé [0, T] x [0, 1] atteint son
maximum (et son minimum) sur le segment [0, 1] ou sur les segments x = 0,
x = l, 'v't E [0, T].
10.1.1.
.
10.1.2.
.
10.ll.l.
.
10.ll.2.
.
EXERCICES DU CHAPITRE 10
a) Intégrer le système différentiel suivant:
dx
dt = x,
dy
di = y,
du V
dt = X 2 +y2.
b) (E) désigne l'équation aux dérivées partielles suivante:
Ou au
x ox + y oy - V x 2 + y2 = o.
Déterminer la courbe caractéristique associée à (E) qui passe par le
1
point Mo O.
1
a) Intégrer le système différentiel suivant:
(e)
dx dy
du
2xyu 2 ·
-=-=-
y x
b) Déterminer la famille des courbes caractéristiques associées à l'équa-
tion aux dérivées partielles suivante:
(E)
au ou
y - + x - + 2xyu 2 = O.
ox oy
Pour chacun des systèmes différentiels suivants, trouver deux intégrales
premières:
dx dy dz
a) - = - = ,
x Y V X2+y2
dx dy dz
b) y = x = - 2 xyz 2 '
c)
dx
- = x+ z
dt '
dz
dt = x+y+2z.
dy
(ii = y+z,
Trouver n intégrales premières du système différentiel suivant:
dXl = dX2 =
Xl X2
du
Xl +X2+ ...+x n '
dXn
---
- -
X n
qui soient indépendantes.
lO.ill.l.
.
lO.ill.2.
.
lO.ill.3.
.
lO.ill.4.
..
lO.ill.5.
..
lO.ill.6.
..
EXERCICES DU CHAPITRE 10
307
On considère l'équation aux dérivées partielles suivante:
au au
x ox + y oy - V x 2 + y2 = o.
(El)
Trouver deux intégrales premières (indépendantes) du système diffé-
rentiel associé. En déduire la solution générale de (El).
On considère l'équation aux dérivées partielles suivante:
au au
y - + x - + 2xyu 2 = o.
ox oy
Trouver deux intégrales premières du système différentiel associé. En
déduire la solution générale de l'équation aux dérivées partielles proposée.
Intégrer les équations aux dérivées partielles suivantes:
au au
x - + y - = u.
ox oy
(l+xy) ( X AU. _ y aU ) + (X 2 +y2)U = 0
ox oy ,
a)
b)
où u est une fonction inconnue des variables x et y.
Trouver la solution générale des équations suivantes:
au ou au
a) X2 X 3 + X3 X l _ 0 + XlX2 _ 0 + XlX2 X 3 = o.
uXl X2 X3
au au 2 aU
-X2 - + Xl _ a + (1+x 3 ) _ 0 = 2X311,
uXl X2 X3
où u est une fonction inconnue des variables Xl' X2 et X3.
b)
Soit
Ou Ou
y -ax + x oy + u = o.
Déterminer la surface intégrale de (E) qui contient le cercle C d'équations
X 2 +y2 = 1 et u= 1.
(E)
.
On considère l'équation aux dérivées partielles ci-dessous:
ou au
x--+y--=x+y.
ox oy
Déterminer la surface intégrale qui contient la droite D d'équations
x=l
et
u = o.
308
10.ill.7.
...
10.ill.8.
.
..
lO.ill.9.
..
lO.IV.l.
.
lO.IV.2.
..
ÉQUATIONS AUX DÉRIVÉES PARTIELLES
Équation aux différentielles totales.
On se propose de déterminer z : (x, y) z(x, y), en fonction de x et y,
sachant que l'on a
(et)
P(x, y, z)dx+ Q(x, y, z)dy+ R(x, y, z)dz = o.
1 0 Établir la proposition suivante:
-'>
(et) a des solutions <=> V . rot V = 0, où V = (P, Q, R).
2 0 Lorsque la proposition ci-dessus est vraie, donner un procédé d'inté-
gration.
Changement de variables.
On considère l'équation aux dérivées partielles suivante:
(E)
au au
x - + y - = V x 2 + y2.
ox oy
Faire le changement de variable x = r cos (), y = r sin ().
En déduire la solution générale de (E).
Déterminer la surface intégrale de
au au
(x+u) ox + (y+u) oy = x+y+2u,
qui contient la courbe (y) d'équations
x = v,
y=v
et
z = v 2 .
Déterminer les éléments caractéristiques (surfaces, cônes)
a) pour l'équation des cordes vibrantes:
1 02U 02U
c2 ot 2 - ox 2 = 0,
b) pour l'éqllation
02U 02U 1 au
- - 4x 2 - - - - = O.
ox 2 oy2 x ox '
intégrer cette équation à l' aide du changement de variable
X=X2_y et Y=x 2 +y;
c) pour l'équation des ondes:
1 02U 02U o.u
c 2 ot 2 = ox 2 + oy2 .
On considère l'équation
02U 02U 02U
(E) A ox 2 + 2B oxoy + c oy2 = 0,
lO.IV.3.
..
10.IV.4.
..
10.IV.S.
.
EXERCICES DU CHAPITRE 10
309
où A, B et e sont des fonctions de x et de y. On effectue le changement
de variable:
x = ({J(x, y)
y = 1jJ(x, y),
et
où ({J et .p sont supposées de classe e 2 et telles que le jacobien
a ({J o.p a ({J ot/!
ox oy - oy ox
soit différent de o.
Que devient (E) dans ce changement de variable?
En déduire une forme canonique de (E) dans le cas hyperbolique normal.
Quel est le type de l'équation
02U 02U 02U
x 2 ox 2 + 2xy oxoy + y2 oy2 = O?
Déterminer les surfaces caractéristiques et, à l'aide d'un changement de
variable convenable, intégrer l'équation.
Équations à coefficients constants.
Soit
(E)
02U 02U 02U
A ox 2 + 2B oxoy + e oy2 = 0,
où A, B et e sont des constantes réelles non toutes nulles.
Effectuer le changement de variable
X = x+ et y, Y = x+ /3y, et et /3 sont des constantes avec et =f:: /3,
et montrer que (E) peut être réduite à l'une des formes suivantes:
02U
axa Y = 0,
02U
oX 2 = 0,
02U 02U
oX 2 + oY2 = 0,
cas hyperbolique,
cas parabolique,
cas elliptique.
En déduire la solution générale de (E) dans ces trois cas.
On considère l'équation
02U 02U
ot 2 - ox 2 = O.
Montrer que le problème de Cauchy où les données initiales sont portées
par une caractéristique n'est pas déterminé.
310
10.IV.6.
..
10.V.l.
...
10.V.2.
.
lO.V.3.
..
ÉQUATIONS AUX DÉRIVÉES PARTIELLES
Problème de Cauchy pour une équation elliptique (exemple de Hadamard).
1 0 Vérifier que la fonction,
sin nx sh nt
Uo : (t, x) uo(t, x) = k+ 1 '
n
est une solution du problème de Cauchy suivant:
au (0 ) = sin nx
u(O, x) = 0, a t ' x n k '
02U 02U
pour l'équation de Laplace ot 2 + ox 2 = O.
2 0 Soit U une solution du problème de Cauchy:
02U 02U aU
ot 2 + ox 2 = 0, u(O, x) = ({J(x), ot (0, x) = 1/I(x),
où ({J et 1/1 sont des fonctions données.
Montrer en utilisant Uo qu'une telle solution est instable au sens suivant:
une petite variation dans les conditions initiales entraîne une variation
arbitrairement grande dans un voisinage quelconque de t = 0
(t = 0 exclu) de la solution.
Théorème du maximum-minimum (pour l'équation de Laplace à deux
variables).
Soit u harmonique sUr un domaine borné Q telle que u E C 2 (Q) n Co( Q ).
Montrer que les valeurs de u sur Q ne peuvent être supérieures à
M = sup u(x, y).
ôQ
[On supposera qu'il existe P(xo, Yo) E Q tel que u(xo, Yo) = Ml > M
et l'on considèrera la fonction
M1-M 2 2
V : (X, y) v(X, Y) = u(X, Y) + 2d 2 (X + y ),
où
X = x-xo,
d = diam (Q).
y= y-Yo
et
L'expression de Llv fait alors apparaître une contradiction. ]
En déduire ['énoncé du théorème du maximum.
Théorème de Harnack.
Utiliser le théorème du maximum pour établir la propriété suivante:
Si une suite {un} de fonctions harmoniques un E C 2 (Q) n Co( Q ) converge
uniformément sur Q (Q supposé borné) alors la suite {un} converge
unifornlément sur Q.
Unicité et stabilité de la solution du problème de Dirichlet.
En appliquant le théorème du maximum, établir
a) l'unicité de la solution du problème de Dirichlet dans la classe
C 2 (Q) n Co( Q ),
b) la dépendance continue de la solution par rapport à la donnée sur la
frontière.
10.V.4.
...
10.V.S.
..
10.V.6.
..
EXERCICES DU CHAPITRE 10
311
Problème de Dirichlet pour le cercle.
Soit r le cercle de centre 0 et de rayon R. On cherche à déterminer
(x,y) f(x,y) telle que Llf= 0 à l'intérieur de r etf(x,y) Ir = g«(J),
g fonction donnée de l'angle polaire (J.
On écrit f sous la forme suivante:
00 IV n
\A.n Z
f(z) = (lo + Rn ,
1
(ln = an - ibn.
1 ° En passant en coordonnées polaires, montrer que l'on a
f(re iO ) = <I>(r, (J) + i'¥(r, (J),
où
(1)
r n
<1>(r, (J) = ao + L Rn (an cos n(J+b n sin n(J),
avec <I>(R, (J) = g( (J). En déduire l'expression des an et des b n en fonc-
tion de g.
2° Établir que l'on a
(2) <I>(r, 0) = J 1t [ + ;;. cos n(O-u)] g(u)du.
3° Retrouver à l'aide de (2) la formule
<I>(r, 0) = J K(r, 0 - u)g(u)du,
où K(r, w) est le noyau de Poisson (cf. exercice 4.1.3.).
Transformer le laplacien (à deux dimensions) en coordonnées polaires
(r, (J) et utiliser la méthode de séparation des variables pour obtenir la
solution du problème de Dirichlet pour le disque Q de centre 0 et de
rayon R, la donnée sur oQ étant g«(J). Comparer avec la question 1° de
l'exercice précédent.
Notion de fonction de Green.
Soit Q domaine borné de frontière r et la fonction
(P, M) G(P, M),
MEr, PEQ,
telle que
i) G(P, M) 0 lorsque P Po E r, avec Po M, c'est-à-dire
'v'e > 0,3'1 tel que d(P, Po) < '1 => 1 G(M, P)- G(M, Po) 1 < e, 'v'M
tel que d (M, Po) > 11.
ii) lim J r G(P, M)ds = 1, lorsque P -4- Po.
Si de plus G satisfait à la condition iii) :
iii) P --+- G(P, M) est harmonique sur Q,
on dit que G est une fonction de Green associée au contoUr r.
312
10.V.7.
..
10.VI.l.
..
ÉQUATIONS AUX DÉRIVÉES PARTIELLES
1 0 a) Soit f une fonction continue, établir que f r f (M)G(P, M)ds a
pour limite f(P 0) lorsque P tend vers Po.
b) En déduire que
g(P) = f rf(M)G(P, M)ds
est la solution du problème de Dirichlet
i1u = 0, ulr = f.
[On admettra les dérivations sous l'intégrale.]
2 0 En pratique, pour obtenir une fonction de Green relative à un contour
donné r, on peut chercher la limite d'une fonction harmonique, égale
1
à 2e sur un arc de longueur 28 et nulle sur le reste du contour, lorsque
8 O. Appliquer cette méthode pour déterminer la fonction de Green
relative à un cercle (0, R) en développant en série de Fourier la fonc-
tion 2n-périodique: (J t( ({J, (J) telle que
1
t( ({J, (J) = 2e '
t( ({J, (J) = 0,
et
(J E ]({J- e, ({J+ e[,
(J ]({J- e, ({J+ e[,
et en déterminant la fonction harmonique à l'intérieur du cercle égale
à t«({J, (J) sur le cercle. (On admettra le passage à la limite pour e 0
dans la série obtenue.)
Vérifier que la fonction
1 y
[(x, y), ç] G(x, y, ç) = n (x- ç)2 + y2 ' ç E AB,
est une fonction de Green pour le segment AB [A = (a, 0), B = (b, 0)]
de l'axe Ox.
En déduire que la fonction
1 f b Y
x,y F(x,y) = n a (x_ç)2+ y 2 f (ç)d ç
est une solution du problème de Dirichlet suivant:
Llu = 0, 'v'(x, y) E JR2- ([a, b] X {O}),
lim u(x, y) = f(x), x E ]a, b[,
y->O+
et
lim u(x, y) = -f(x), x E ]a, b[.
y->O_
Équation des cordes vibrantes. Méthode des caractéristiques.
1 0 Déterminer les caractéristiques de l'équation
02U 1 02U
ox2 - c2 ot 2 = 0
(cf. exercice 10.IV.I., a).
10. VI.2.
..
10.VI.3.
..
EXERCICES DU CHAPITRE 10
313
2° On appelle Ll l'intérieur du t
triangle déterminé par Mo(xo, to),
les deux caractéristiques issues de
Mo et l'axe des x (figure ci-contre)
et r la frontière de L\.
A l'aide de la formule de Riemann
appliquée à
f f A ( : - c12 ::) dxdt = 0, 0
retrouver la solution du problème
de Cauchy:
( ) f(xo+ ct o )+ f(xo- ct o ) 1 f xo+ct o ( )d
u Mo = 2 + _ 2 g x x.
c xo-ct o
a) Montrer que, pour le problème de Cauchy, on peut toujours se ramener
à des conditions initiales nulles à l'aide d'un changement de fonction.
b) Montrer que la solution U (x, t, -r) du problème de Cauchy homo-
gène (second membre de l'équation nul)
\ 02 U 1 0 2 U
-----0
ox 2 c 2 ot 2 - ,
(PT:) U(x,O, -r) = 0,
J aU
\ ot (x, 0, -r) = v(x, -r),
où -r est un paramètre, donne la solution u du problème de Cauchy non
homogène,
au 1 02U
(P) ox 2 - c 2 ot 2 = v(x, t), u(x, 0) = 0,
par la formule u(t, x) = I: U(x, t- -r, -r)d-r.
En déduire que l'on peut toujours ramener un problème de Cauchy à un
problème homogène.
au
ot (x, 0) = 0,
Équation des cordes vibrantes.
Unicité de la solution du problème mixte (cas du rectangle). - En
appliquant la formule de Riemann à l'intégrale
t fIA ( : - c 12 :: ) ; dtdx = 0,
où Ll est l'intérieur du rectangle OABC,
établir l'unicité de la solution du problème
mixte
02U 1 02U
ox2 - c 2 ot 2 = o.
au
ot (0, x) = g(x),
u(t, 1) = 1/I(t).
u(O, x) = f(x),
u(t, 0) = P (t),
o
ACt)
x
314
ÉQUATIONS AUX DÉRIVÉES PARTIELLES
10. VI.4.
...
Équation des ondes dans IR 4 .
Il s'agit de déterminer la solution u de classe C 2 de l'équation
u : (t, x, y, z) u(t, x, y, z),
02U
(1) ot 2 - Llu = v(t, x, y, z),
telle que
u(O, x, y, z) = f(x, y, z),
au
ot (0, x, y, z) = g(x, y, z),
où v, f et g sont des fonctions données respectivement de classe Co, C 2
et CI.
1 0 On note u' la fonction des variables (x', y', z') E IR 3 dépendant des
paramètres t, x, y, z et r définie par
(x', y', z') u'(x', y', z') = u(t, x+rx', y+ry', z+rz').
On donne les éléments suivants:
L la sphère X'2+ y '2+ Z '2 = 1, du l'élément de surface,
Q la boule ouverte X'2+ y '2+ Z '2 < 1, dw l'élément de volume,
?
n vecteur unitaire à L extérieur à Q.
En posant ïi(t, r, x, y, z) = f 1: u'du montrer que
02U 0 2
(E) ot 2 ("il .r) - or 2 (u .r) = 0,
en établissant
et
a 2 f
r or 2 1: ru' du =
0 2 f
r ot 2 1: ru' du =
0 3 f 3'
at 2 0r Q r u dw
0 3 f 3'
ot 2 0r Q r u dw.
2 0 a) Intégrer l'équation (E) sous la forme:
ru = F(t+ r, x, y, z)+ G(t- r, x, y, z)
et en déduire que
1 oF
u(t, x, y, z) = 2n ot (t, x, y, z).
b) En calculant,
a _
or (ru)t=o
et
a
ot (rü)t=o,
de deux manières différentes montrer que l'on a
2F;(r, x, y, z) = f rfdu + r rgdu
ur 1: . 1:
et en déduire que
a f ",
4nu(t, x, y, z) = ot 1: tf(x+ tx , y+ ty , z+ tz )du
+ f 1: tg(x+ tx', y+ ty', z+ tz')du.
10.VI.S.
..
10.VI.6.
.
10.VI.7.
..
10.VIT.I.
.
EXERCICES DU CHAPITRE 10
315
Phéno mène de propagation des discontinuités.
En utilisant la méthode de séparation des variables, déterminer la solution
du problème mixte
02U 1 02U
-----0
ox 2 c 2 ot 2 -
au
u(x, 0) = f(x), ot (x, 0) , 0,
u(O, t) = u(l, t) = 0,
où f est la fonction définie par
XE [0, ],
f(x) = -(x-l),
XE[ ,l].
f(x) = x,
nx
Même question que dans l'exercice précédent avec f(x) = sin T.
Équation des « télégraphistes ».
Soit
(E)
02Z 02Z oZ
----2--z-0
ox 2 ot 2 ot -.
1 0 Faire sUr (E) les transformations successives z = ue- t et v = x+ t,
w = x- t. Donner la solution générale de (E).
2 0 On se propose de chercher la solution de (E) satisfaisant aux conditions
aux limites (L)
(L)
z(O, t) = 0, 'v't E IR+,
z(n, t) = 0, 'v't E IR+,
et
et aux conditions initiales
z(X,O) = X, VXE [O, ]
(1)
z(x, 0) = 1t - X, V X E [ , 1t] ,
[Par solUtion de (E) on entend fonction satisfaisant à (E) dans le domaine
]0, n[ X IR+.]
Utiliser la méthode de séparation des variables pour obtenir la fonction
cherchée.
Oz
ot (x, 0) = 0, 'v' XE ]0, n[.
Vérifier que les changements de variable et de fonction,
x
x= -,
y
1
y= --
y'
x 2
V = u Vye 4Y ,
laissent invariante l'équation de diffusion
02U oU 0
ox 2 - oy = .
316
10.Vll.2.
.
10.Vll.3.
..
ÉQUATIONS AUX DÉRIVÉES PARTIELLES
Chercher des intégrales particulières de l'équation
02U aU
(E) ox 2 - oy = 0,
de la forme e Qx + by .
On pose
00 An
e Âx +).2y = L --, Vn(x, y).
o n.
Montrer que les V n sont solutions de ['équation (E).
Déterminer la distribution des températures dans une tige homogène OA,
de longueur a, dont les extrémités sont à température nulle, la température
initiale en un point x de OA étant donnée par
f( ) - x(a-x)
x - a 2 ·
SOLUTIONS
10.1.1.
a) On a
x = Aet,y = J1e t
(A et p, sont des constantes arbitraires),
donc
u = V À,2+ Jl 2 e t +v,
v est une constante arbitraire.
b) Les courbes caractéristiques associées à (E) vérifient le système différentiel
suivant :
dx dy
----
- -
x y
du
V (= dt).
X 2 +y2
Elles ont pour équations respectives
x = Ae t ,
y = jlet,
u = V A 2 + Jl 2 e t +v.
La courbe caractéristique qui passe par le point M o (l, 0, 1) correspond à A = 1,
Jl = 0 et v = 0 (faire t = 0 en Mo).
On obtient
x = et
,
y=o
et
u = et
,
ou bien
x- u = 0,
y = o.
Il s'agit d'une droite.
1001.2.
a) On a
1
o = ydy-xdx = 2d(y2_X2),
donc en intégrant
(1)
Y 2 X 2 - K
- - l'
K 1 est une constante réelle.
On a aussi
du ( 1 )
o = 2xdx + ? = d x 2 - - ,
u- u
donc
(2)
1 2
--x = K
u 2,
K 2 est une constante réelle.
318
ÉQUATIONS AUX DÉRIVÉES PARTIELLES
La solution générale du système différentiel est alors déduite de (1) et de (2) :
(3)
et
1
u = x2+K2.
x = x,
y= + VK I +X 2
b) Les courbes caractéristiques associées à (E) vérifient le système différentiel (e).
Elles sont donc définies par (3).
10.11.1.
a) On a
dx dy
---
x y
donc en intégrant on obtient
(1)
y
- = KI' KI est une constante réelle.
x
On a aussi
xdx ydy dz
-=-= - - ,
x 2 y2 VX 2 +y2
donc
xdx+ ydy
X 2 +y2
dz
- VX 2 +y2'
ou
dz = dVX 2 +y2
et, par suite, en intégrant on obtient
(2)
z- V x 2 + y2 = K 2 , K 2 est une constante réelle.
Les équations (1) et (2) fournissent deux intégrales premières du système diffé-
rentiel proposé.
b) Utilisons les résultats de l'exercice 10.1.2., question a, en posant u = z.
On obtient les deux intégrales premières suivantes :
1 2
--x = K 2 .
Z
y2_x 2 = Kl
et
c) On a
dx dy
dt = dt '
donc
(3)
x-y = KI'
K 1 est une constante réelle.
SOLUTIONS
319
On a aussi
dx dy dz
dt + dt = dt '
donc
(4) x+ y- z = K 2 , K 2 est une constante réelle.
Les équations (3) et (4) fournissent deux intégrales premières du système diffé-
rentiel étudié.
10.11.2.
On a
dX l +dX2+ ...+dx n du
= ,
Xl +X2+ ."+X n Xl +X2+ ...+X n
donc
du = dX l +dX2+ ...+dx n
et, par suite, en intégrant on obtient
(1)
U-X l - X 2- .,,-X'I = Kl.
On a aussi
dx. dX1
r. , P our i = 2 ' 3 ' ... , n '
Xi = Xl
donc
(2)
X.
--.!. = Ki' avec i = 2,3, ..., n.
Xl
Les équations (1) et (2) nous donnent n intégrales premières du système différentiel
étudié. .
10.111.1.
Notons (el) le système différentiel associé à (El)
dx dy du
x = y = VX2 + y2 .
(el)
Il admet les intégrales premières suivantes (exercice 10.11.1., a)
i = K l ,
t u- VX 2 +y2 = K 2 0
<1> désignant une application quelconque de classe C 1 , la « solution générale»
de (El) est donnée par K 2 = <I>(K 1 ), c'est-à -dire que l'on obtient
u = VX2+y2+cl> ( ).
320
ÉQUATIONS AUX DÉRIVÉES PARTIELLES
10.ill.2.
Le système différentiel associé à l'équation aux dérivées partieIIes admet les inté-
grales premières suivantes (exercice 10.11.1., b) :
) y2_x2 = K 1 ,
1 2
--x = K 2 .
U
<1> désignant une application quelconque de classe cI, la « solution générale»
de l'équation aux dérivées partielles est donnée par K 2 = <I>(K 1 ), c'est-à-dire que
l'on obtient
1
u= ·
x 2 + <I>(y2- x 2 )
10.111.3.
a) Le système différentiel associé,
dx dy du
-----
- -
x y u
admet les deux intégrales premières suivantes :
y
-= K 1
X
et
u
- = K 2 .
X
Soit <1> une fonction quelconque de classe CI. La « solution générale» de l'équa-
tion aux dérivées partielles est donnée par K 2 = <I>(K 1), c'est-à-dire que l'on a
u = x<l> ( ).
b) Le système différentiel associé,
dx
x(l+xy)
dy
y(l+xy)
= -
du
x2+ y2'
admet l'intégrale première évidente suivante :
xy = K 1
(elle se déduit de = - ;') .
On a alors
xdx ydy du
=- =- ,
x 2 (1+K1) y2(1+KI) X 2 +y2
SOLUTIONS
321
d'où l'on déduit
xdx- ydy
(X 2 + y2)(1 + KI)
du
x2+ y2
et, par suite,
1 .,., 1
(1 + K 1 )u -r- 2 (x-- y-) = K ,
K' étant une constante réelle,
ou encore
., .,
x- - y-
2u+ l+xy = K 2 ,
( 2 K' )
remplacer Kl par xy et pour K 2 = 1 +Kl .
La « solution générale» est alors donnée par K 2 = <I>(K 1), c'est-à-dire
y2_x 2
2u = 1 +xy + <I>(x, y),
où <1> est une fonction arbitraire de classe el.
10.111.4.
a) Écrivons le système différentiel auquel satisfont les caractéristiques associées
suivantes :
dXl dX2 dX3
------- -
- - -
du
X2 X 3 X3 X l XI X 2
,
X l X2 X 3
dont on va rechercher trois intégrales premières.
On a
Xl dx l +x2dx2+x3dx3
Xl dx l = X2 dx 2 = X3 dx 3 = -du = 3
d'où l'on déduit les intégrales premières suivantes :
F I (Xl, X2, X3, u) = -2xî+x +x = Kb
F 2 (Xl, x 2 , x 3 , u) = xî-2x +x = K 2 ,
F 3 (XI, X2, X3, il) = XI+X -2x = K 3 ,
F 4 (Xb X 2 , X3, Il) = Il+ (XI+X +X ) = K 4 0
En fait, les trois premières intégrales premières sont dépendantes, c'est-à-dire que
oF l oF l oF l oF l
----
OXl 8X2 8X3 oU
oF 2 oF 2 oF 2 oF 2
- - - - est de rang 2.
OXI 8X2 aX3 au
oF 3 8F 3 aF 3
---
OXI OX2 oX 3
322
ÉQUATIONS AUX DÉRIVÉES PARTIELLES
La « solution générale» est alors donnée par K4 = <I>(K I , K 2 ), où <1> est une fonc-
tion quelconque de classe el, donc
1
II = - _ ( X2 + X2 + X2 )+ <I> ( -2x2 + X2 + X2 x2-2x2 + X2 )
6 1 2 3 l 2 3' 1 2 3 .
b) Écrivons le système différentiel associé
dXl dX2 dX 3 du
--=-= 2=-'
X2 Xl 1+x3 2X3
dont on déduit les intégrales premières évidentes
(1) xI+x = KI et u-Log (l+x ) = K 2 .
Il reste à déterminer une troisième intégrale première indépendante des précédentes.
Premier procédé. - On a
dXI _ dX3
V - 1+ x 2 3 '
+ Kl-XI
d'où l'on déduit
Ar . Xl Ar
c SIn V - = c tg X3+ K 3
KI
et, par suite,
Ar . Xl Ar
c sIn V - c tg x 3 = K3.
X2 + X2
1 2
Second procédé. - On a
-X2 dx l
X
Xl dx 2 dX3
= ,
X2 1 + x2
1 3
donc
-X2 dx I +Xl dx 2 dX3
= ,
XI+X l+x
ou bien
XId( )
X2 + X2
1 2
dX3
= 1 + X '
ou encore
d( )
1 + ( : r
En intégrant la forme différentielle, on obtient
dX3
- 1 + x .
X2
Arc tg - = Arc tg X3+K4,
Xl
ou
(2)
X 2 -X t X3
= Ks.
Xl +X2 X 3
SOLUTIONS 323
Ayant obtenu trois intégrales premières, la solution générale est donnée par
K 2 = <I>(K I , K s ), où <1> est une fonction arbitraire de classe el, donc
LI = Log (I+X )+<I> ( XI+X , X2 X1X3 ) .
Xl X2 X 3
10.111.5.
Les courbes caractéristiques satisfont au système différentiel suivant :
dx dy du
y = x= -1(= dt).
On a X" = x, donc
(1)
) x = ete t + {3e- t ,
y = ete t - {3e- t ,
u = -t+'}',
et et {3 sont des constantes,
'}' est une constante.
Pour t = 0, on doit avoir (x, y, u) E C, c'est-à-dire que l'on a
(et + {3) 2 + (et - {3) 2 = 1,
')' = 1,
ou bien
(2)
1
et 2 + {32 = 2'
'}' = 1.
En exprimant Cl., f3 et '}' en fonction de x, y, u et t, on obtient
x+y t
a= -e-
2 '
{3 = x- y et
2 '
'}' = u+ t
et, par suite,
(3)
(x+ y)2e- 2t + (x- y)2e 2t = 2,
1 = u+t.
En éliminant t entre les deux relations de (3), on obtient
(x+y)2e2U-2+(x_y)2e2-2U_2 = 0,
qui est l'équation de la surface intégrale cherchée.
10.111.6.
Premier procédé.
caractéristiques
Écrivons le système différentiel auquel satisfont les courbes
(0)
dx dy du
-= -= - (= dt).
x y x+ y
324
ÉQUATIONS AUX DÉRIVÉES PARTIELLES
(1)
Ce système différentiel admet la solution générale suivante
) x = rxe t ,
y = f3e t ,
u = exe t + f3e t + y.
Pour t = 0, il faut que l'on ait (x, y, u) E D, c'est-à-dire que l'on ait
(2)
ex=l
et
ex+ 13 + y = o.
En exprimant et, 13 et y en fonction de x, y, II et t, on obtient
ex = xe-t, 13 = ye- t et y = u-x-y
et, par suite,
(3)
1 = xe- t
et
l+ye- t +u-x-y = O.
Éliminons t entre les deux relations de (3). On obtient l'équation de la surface
intégrale cherchée
y
1+ -+u-x- y = 0
x '
que l'on peut écrire comme suit
y
u = x+y-l--.
x
Second procédé. - Cherchons deux intégrales premières du système différentiel
associé (0).
On à la relation suivante :
dx dy
---
x y
d'où l'on déduit, en intégrant,
(4)
y
- = Ki.
X
On a aussi
dx dy
----
- -
x y
du
--
x+y
dx+ dy
x+y
d'où l'on déduit
du = dx+ dy
et, par suite, on obtient
(5)
ll-X-y = K 2 .
La « solution générale» est obtenue pour K 2 = <I>(K t ), c'est-à-dire
II = x+y+cl)( ),
(6)
où <1> est une fonction quelconque de classe el.
Cherchons <1> pour que la surface intégrale d'équation
u = X+y+cl)( )
SOLUTIONS
325
contienne la droite D. On doit avoir
x=l
et
u = 0,
donc
o = 1 + y+ <I>(y),
ou bien
<1> (y ) = - 1- y.
Remplaçons <1> par son expression dans (5). On obtient l'équation de la surface
intégrale cherchée :
y
ll=x+y-l--.
x
10.111.7.
1 0 La fonction (x, y) z vérifiant (ex), on a
ôz p
ox = - R
et
oz Q
GY = - R .
On doit donc nécessairement avoir
( _ P ) = ( _ Q ) <=> R ( OQ _ P ) + P ( OR _ ÔQ ) + Q ( a! _ OR ) = 0
ay R GX R 8x oy oy oz oz ox
-
<=> V. rot V = 0,
->
où V = (P, Q, R).
2 0 Lorsque cette condition est vérifiée, on a
I x P
z = - -dx+K,
Xo R
K est une constante réelle.
10.111.8.
Posons x = r cos (J et y = r sin O. On a
èu Ou ox au ay ou ou .
ar = - - + --:::\ "";\ = ox cos 0 + - sin 9,
OX or oy or oy
donc
Ou au au
r or = x OX + y oy .
L'équation (E) s'écrit alors sous la forme suivante
au au
r"";\ = r ou bien ar = 1.
or '
326
ÉQUATIONS AUX DÉRIVÉES PARTIELLES
En intégrant, par rapport à la variable r, on obtient
II = r+ H«(}),
H étant une fonction arbitraire de classe el, ou bien
u = VX 2 + y2 +H(Arc tg ),
ou encore
u = VX2+y2+G( ),
où G est une fonction arbitraire de classe el.
10.111.9.
Le système différentiel associé peut s'écrire sous la forme suivante:
(0)
dx
- = x+ l/
dt '
dy
- = Y + u
dt '
du
\ - = x+y+2u
dt
dx dy du
[en effet - = - = (= dt)].
, x+u y+u x+y+2u
Sa « solution générale »,
(1)
\ x = ex+ {3e t + ye 3t ,
,y = (J(- pe t + ye 3t ,
\ II = - ex+ 2ye 3t ,
est l'équation des courbes caractéristiques.
Pour t = 0, on doit avoir (x, y, u) E (y), c'est-à-dire
v = ex+ {3+ y,
v = ex- {3+ y,
v 2 = - ex+2y.
Ayant exprimé ex, f3 et y, en fonction de v et t (*), il suffit de reporter ces valeurs
dans (1) pour obtenir l'équation de la surface intégrale sous forme paramétrique
(2)
x = f(v, t),
y = g(v, t)
et
u = h(v, t).
(*) IX, et y désignant les inconnues, (2) est un système de Cramer.
SOLUTIONS
327
lO.IV.l.
Dans les deux premiers exemples donnés les surfaces caractéristiques sont des
courbes de IR? et les cônes caractéristiques se réduisent à deux génératrices.
a) L'équation des surfaces caractéristiques est
( S ) 2 _ ( aS ) 2 = o.
ox e 2 ot
En cherchant S sous la forme S(x, t) = t- (}(x), on trouve
0' 2 =
e 2 '
soit
x
(}=+-+k
-e '
d'où les deux fan1iIIes de droites d'équations
x
t = - +kl
e
et
-x
t = - +k2.
e
En tout point (xa, ta) passent deux « surfaces » caractéristiques d'équations res-
pectives
X-Xa
t-t a =
e
et
( X-X a )
t-t a = - e .
Le cône C Mo a pour équation
., t 2
(X-Xa)-- c 2 (t-t a ) = 0
et le cône caractéristique C o
2 1 2
(t- ta) - e 2 (X-Xa) r = 0,
cette équation est du type hyperbolique normal dans IR?
b) L'équation des surfaces caractéristiques est
( 2 -4x2( r = o.
On voit que l'équation est du type hyperbolique normal pour XE IR?- {Oy}.
Sur l'axe des y eUe serait du type parabolique si e11e était définie dans ce cas
(ce qui n'a pas lieu vu le coefficient D.
En procédant comme indiqué au paragraphe IV, 2°, a, on obtient
S(X, y) = y- [(x),
avec
df
-= 2x
dx
et
df
- = -2x
dx '
d'où les deux familles de paraboles d'équations
y = X 2 +C 1 et y = -X 2 +C 2 .
328
ÉQUATIONS AUX DÉRIVÉES PARTIELLES
En tout point (xo, Yo) passent deux « surfaces» caractéristiques d'équations
y-Yo = x 2 -xij et y-Yo = -x 2 +xfi.
En tout point (xo, Yo), avec Xo 0, les deux surfaces caractéristiques ont des
normales non confondues (sur Oy en effet les normales se confondent avec Oy lui-
même).
L'équation du cône C l \!o est
(x-xo)2-4x5(Y-YO)2 = 0
et celle du cône caractéristique C.:1o
(y- YO)2 - 4x5(X- XO)2 = o.
En posant X = x 2 - y et Y = x 2 + y, on obtient immédiatement
ôu au ou
ox = 2x ax + 2x oy '
02U [ 02 U 02U 02 U ] ( ôU aU )
ôx 2 = 4x 2 aX2 +2 oXoy + èY2 +2 ax + ôY ,
ô 2 u 02U ô 2 u 02U
oy2 = oX 2 -2 oXoY+ ôY2 .
L'équation devient alors
02U
16x 2 oXoY = 0,
d'où la solution générale il = F(X) + G(Y), c'est-à-dire
u = F(x 2 -y)+G{x 2 +y).
c) L'équation des surfaces caractéristiques est donnée par
(S)
:2 ( 2 - ( r - ( r = o.
Cherchons S(t, x, y) sous la forme
Set, x, y) = t-f(x, y),
il vient
( : 2 + ( : r = :2 .
Cette équation s'interprète géométriquement : la normale (p, q, -1) à une sur-
1 . 1 .
face (S) fait avec Ot un angle a dont la tangente est éga e a + -, pUisque
c
-1 -c
cos a = = ---
Vp2+q2+1 Vl+c 2
(c > 0)
et
-1
Icotg al = = c.
Vp - 2+ 2
Les plans tangents à (S) font donc avec le plan (Ox,Oy) un angle constant. Ces
surfaces sont appelées surfaces à pente constante.
SOLUTIONS
329
Évidemment il existe des cônes de révolution, par exemple les cônes qui ont pour
son1mets x = xo, y = Yo et z = Zo et dont l'axe est parallèle à Oz, le demi-angle
, n
au sommet etant 2 - r:t...
L'intégration de (8), équation du premier ordre non linéaire, nécessite une technique
qui n'est pas au programme et nous ne l'aborderons pas.
En un point Mo les cônes C!'t1o et C o ont respectivement pour équation
1 2 2 2
c 2 (t-t O ) -[(x-xo) +(y-Yo) ] = 0
et
c 2 (t- t 0)2 - [(x- XO)2 + (y- y 0)2] = 0,
ce sont des cônes de révolution d'axe paraIJèle à Oz dont les demi-angles au sommet
. n
sont respectlven1ent et 2 - r:J...
lO.IV.2.
Le changement de variables indiqué permet le calcul des nouvelles dérivées X 2112 '
""2 0 ., u
o II -U d 1 . h b . 1 ,. d .
aXoy et oY2 e a manIère a Itue le et l'equation eVlent
[ ( OCfJ ) 2 OCfJ OqJ ( 8 CfJ ) 2 ] Ô2U
(E) A ox + 2B ôx ay + C oy ôX2
[ 0 CfJ ot/J ( 0 qJ ôt/J èt/J 0 CfJ ) a CfJ ôt/J ] a 2 u
+2 A ox OX + B ox oy + OX oy + C oy GY oxay
[ ( ot/J ) 2 0 t/J ot/J ( et/J ) 2 ] 0 2 U
+ A OX + 2B ox oy + C oy 0 Y2 = o.
Dans le cas hyperbolique normal il existe deux familles de surfaces caractéris-
tiques; on peut donc prendre comme expression pour qJ et V1les expressions S(x, y)
des surfaces caractéristiques.
L ffi . d 02 U 0 2 U 1 1 1 , ,. "
es coe Cients e ôX 2 et 0 Y2 sont a ors nu s et equatlon se ramene a
ô 2 u
oXoY = 0,
d'où la solution générale suivante
u(x, y) = F[cp(x, y)] + G[t/J(x, y)].
L'exercice précédent fournit une illustration de ce résultat (10.IV.1., b).
330
ÉQUATIONS AUX DÉRIVÉES PARTIELLES
lO.IV.3.
En posant S(x, y) = y- f(x), l'équation des surfaces caractéristiques s'écrit
x 2 f'2_2xff'+f2 = 0, soit (xf'-f)2 = 0,
d'où l'on tire
f(x) = kx,
soit
y
- - k = o.
x
L'équation est donc du type parabolique.
A priori, la technique du changement de variable utilisée à l'exercice lü.IV.2. ne
peut s'appliquer puisqu'iJ n'existe pas ({J et .p. Nous allons poser tout de même
X = et Y = .p(x, y),
x
1 . d '. d X Y c. . l . ft . 1 ffi . d a2 u
a conSl eratlon e = X Journlssant une SImp 1 cation pour e coe Clent e aX 2
(qui va s'annuler) et .p étant une fonction à déterminer pour obtenir des simpli-
fications supplémentaires.
On peut refaire un calcul direct ou utiliser le résultat général de l'exercice 10.IV.2.
La nouvelle équation s'écrit toutes réductions faites
-2 [y ] a;aUy + [X2 ( r + 2xy + y2 ( r] : = o.
En choisissant ljJ telle que 1jJ = 0, donc Y = 1jJ(y) et, par exemple, Y = Y on
obtient uX
02U 02U
y2 oY2 = 0, donc oY2 = o.
On en déduit u = YF(X) + G(X), puisque II doit être linéaire en Y, d'où la solution
générale de J'équation proposée
U = yF ( ) + G ( ),
F et G étant deux fonctions de classe C 2 .
lO.IV.4.
Appliquons la formule générale de l'exercice 10.IV.2., avec ({J(x, y) = x+ ay et
.p(x, y) = x+ py il vient immédiatement
? ?
o-u o-u
(E) (A+2Ba+Ca 2 ) oX 2 +2[A+B(a+p)+Cap] axa y
02U
+(A+2BP+CP2) oy2 = O.
SOLUTIONS
331
On choisit alors C( et fJ pour obtenir le maximum de réductions pour l'expression
du premier membre.
En supposant d'abord C 0 nous avons les trois cas suivants
1° B 2 -AC> 0, équation de type hyperbolique. - L'équation
(1) A+2BÀ+CÀ2 = 0,
admet deux racines distinctes ÀI et À 2 .
Prenons (J. = Àl et fJ = À 2 alors (E) s'écrit
(B 2 -AC) 02U
-4 C oXoY = 0,
d'où la solution générale suivante :
II = F(x+ Àly)+ G(x+ À 2 y).
2° B 2 -AC = 0, équation de type parabolique. - L'équation
(1)
A+2BÀ+CÀ2 = 0,
B B
C' on posera C( = - C ' quel que soit /3, on a
admet la racine double
A+B(C(+fJ)+CC(fJ = A+BC(+ f3[B+ CC(] = 0
AC-B 2
(puisque A + B':/., = C = 0).
Pour [3 -# - l'expression A + 2E [3 + C [32 est positive.
L'équation donnée est alors équivalente à
02U
oY2 = 0,
d'où la solution générale
II = (x+ fJy)F(x+ cty)+ G(x+ C(y).
3° B 2 -AC < 0, équation elliptique. - L'équation (1) n'a pas de racines réelles.
On prend alors C( et /3 tels que
,A+2BC(+CC(2 = A+2BfJ+Cf32,
? A + B( C(+ fJ)+ CC(fJ = 0,
avec C( fJ ce système est équivalent à
2B
C(+/3 = - C'
R _ 2B 2 -AC
C(p - C2 .
L'équation
(1')
"2 2B '] 2B 2 -AC _
Ii. + C JI. + C2 - 0
admet bien deux racines réelles distinctes Al et À 2 (puisque le discriminant est
332
ÉQUATIONS AUX DÉRIVÉES PARTIELLES
A , AC - B 2 0) l d '] R '] d " . 1 ' "
Ll = C 2 > et 'on pren C( = l'''l et fi = 1'''2. Dans ces con lhons 'equatlon
proposée est équivalente à
è 2 u a 2 u
OX2 + oY2 = 0,
dont la solution générale est formée des parties réelles (ou imaginaires) de l'ensemble
des fonctions holomorphes.
On vérifiera que le cas C = 0 conduit également à l'une des situations précédentes
des questions 1 0 ou 2°.
Si A = C = 0, on a le cas 1 ° (puisqu'alors B 0).
Si C = 0, A =F 0, on échange le rôle de x et y et on obtient le cas 2°.
Dans le cas 3° en effet on ne peut avoir C = o.
On remarquera que cette étude et les résultats sont un cas particulier de l'étude
générale faite dans le cas hyperbolique à l'exercice 10.IV.2. où les coefficients sont
non constants.
10.IV.S.
Soit x- t = )1.(= Xo - t 0) une caractéristique (r 0) passant par Je point (x 0, t 0) et
supposons donnés
lI(t, x) !ro = u(x- À, x) = ({J(x),
ou l ou au ]
(t, x)lr o = _ a (t, x)- (t, x) = t/f(x).
un x ut ro
Le changcn1ent de variable,
T= x-t
et
x = x+ t,
transforn1e l'équation en l'équation réduite
a2Ul
oXoT = 0
(1)
et ]es conditions initiales deviennent
(3)
Ul(T, X)/r o = 11l(À, X) = ({Jl(X),
OUl OUl
oT (T, X)lr o = oX ()I., X) = .p l(X)
[ . au! 1 ( al! au )]
pUIsque oT = 2 ox - ot .
(2)
La solution générale de (1) étant
lll(T, X) = F(X)+G(T),
on doit avoir
((Jl(X) = F(X) + G()I.)
et
.PI(X) = G'(À),
SOLUTIONS
333
donc, ou bien t/J 1 (X) est ne constante t/J 1 (X) = C et il y a une infinité de solutions
données par
111(T, X) = G(T)- G(A.) + ((Jl(X)
et
G f (A.) = C,
ou bien t/I 1 (X) C et le problème est impossible.
lO.IV.6.
IOLe calcul des dérivées secondes,
02uo 2 sin nx sh n t
ox 2 = -n n k + 1 '
02U 2 sin nx sh ll t
2 = 12 k+ 1 '
ut Il
montre que
02uo 02uo
ox 2 + ot 2 = o.
De plus, il est immédiat que
Uo(O, x) = 0,
oUo sin nx
(0, x) = k .
ut n
2 0 Soit II une solution du problème de Cauchy proposé, considérons la pertur-
bation sin :x pour la fonction t/J et le problème de Cauchy correspondant
12
au sin nx
ll = 0, u(O, x) = ({J(x), (0, x) = tjJ(x) + k .
ut n
IJ résulte de la question lOque Un = u+ Uo est une solution de ce problème, autre-
ment dit, LI subit une perturbation définie par
sin nx sh nt
uo(t, x) = nk+ 1 .
. sh n1:
SOIt t = 1: pour n +00, on a sh n1: +00 et 1ë+1 +00.
n
Par ailleurs, pour n 00, sin nx oscille de - 1 à 1 (x kn).
Ainsi uo(t, x) oscille de -00 à +00, 'v'1: 0, pou.r 1" +00.
. SIn nx
On ne peut donc dIre que lorsque t/ln(x) = t/J(x) + k converge vers tf/(X) (pour
n (0) un(t, x) converge vers u(t, x). n
On remarquera aussi que cette perturbation d'ordre lk pour la dérivée de II reste
12
même petite pour les dérivées successives de 1/1 jusqu'à l'ordre k-l.
10. V.I.
Soit M = sup u(x, y) et supposons qu'il existe des valeurs de Li telles que u(x, y) > M
an
à l'intérieur de Q . Alors 3P(xo, Yo), P E Q tel que u(xo, Yo) = Ml > M, où Ml est
le maximum de u sur Q (puisque u continue sur un compact). En effectuant une trans-
lation des axes on peut considérer que P est la nouvelle origine et ceci ne change pas
334
ÉQUATIONS AUX DÉRIVÉES PARTIELLES
le Laplacien, donc u(X, Y) est encore harmonique et son maximum Ml a lieu pour
X = Y = O.
D'une part,
v(O,O) = Ml
et
Ml-M
v(X, Y)lr u(x, y)lr + 2 '
puisque sur (r) on a X 2 +y2 d 2 , d'où
M+Ml
v(X, y)lr 2 < Ml'
donc, comme la fonction u, v atteint son maximum à l'intérieur de Q , d'autre part,
calculons v, où
v(X, Y) = u(X, Y) + ...
Il vient
M 1 -M Ml-M
v = u + d 2 = d 2 > O.
Mais alors v ne peut atteindre son maximum en un point à l'intérieur de Q (v étant
de classe e 2 , comme u), car nécessairement en un tel point les dérivées secondes ne
peuvent être positives d'où la contradiction et l'énoncé du théorème 10.V.3. dans le
cas particulier des fonctions harmoniques.
10. V.2.
Soit {un} une suite de fonctions harmoniques sur Q continues sur Q (compact
de /Rn). On note ln la restriction de U II à oQ. L'hypothèse faite est {ln} converge uni-
formément vers f sur oQ, donc
Va> 0, 3N e
tel que
n Ne => sup Ifn-fl a.
ôn
On peut aussi écrire cette propriété sous la forme
'v'a > 0, 3N e
tel que
'v'n, m NB => SUp 1 fm-ln 1 a
ôn
({ln} est une suite de Cauchy pour la norme de la convergence uniforme) à ln (resp. f m)
correspond la solution Un (resp. U m) et à f m -ln correspond la solution U m - Un (linéa-
rité de l'équation).
D'après le principe du maximum (et du minimum), on a
sup Ium-unl sup Ifm-In!,
fi ôn
d'où le résuJtat cherché.
SOLUTIONS
335
10. V.3.
a) Unicité. - Soit deux solutions U 1 et U2 telles que
lllir = u 2 lr,
avec
Llul = Llu2 = f.
Si l'on pose w = U2-Ul, on a évidemment
w= 0
,
wlr = 0,
donc w = 0 sur Q d'après le principe du maximum (et du minimum), d'où U 1 = U2.
b) Stabilité. - Démonstration immédiate analogue à la précédente en considérant
U1 et U2 tels que
ullôn = Il
et
u 2 1ôn = 12.
La fonction w = U2- U l est telle que
Llw = 0
et
wl ô n=/1-/2'
donc
sup I/l-/21 B=>SUP Iwl B.
an n
10. V.4.
1 0 En remplaçant C( par a n - ibn et z par re iO il vient immédiatement
00 n
f(re i8 ) = ao-ib o + L (an-ibn) n e in8 ,
n=l
d'où, en prenant la partie réelle <I>(r, 0),
00 r ll
<I>(r, 0) = ao + L Rn (an cos nO+ b n sin nO).
n=l
Comme I(Re iO ) = g(O), on a nécessairement
00
g(O) = ao + L (an cos nO+b n sin nO),
n=l
ce qui permet de conclure que les an et les b n sont les coefficients de Fourier de g.
On en déduit
1 f 1t 1 f 1t 1 f 1t .
ao = _ 2 g(u)du, an = - g(u) cos nlidu et b n = - g(u) SIn nudu.
n n n
336
ÉQUATIONS AUX DÉRIVÉES PARTIELLES
2° En remp]açant les expressions de ail et de b n dans le développement de <1>, on
obtient
1 [ 1 f 7t 00 r n f 7t ]
<I>(r, 0) = n 2 -11: g(u)du + Rn -11: cos n(O-u)g(ll)du ,
c'est-à-dire
(2)
1 f +7t [ 1 00 r n ]
<I>(r, 0) = 1t -11: 2 + t Rn cos n(O-u) g(U)dll.
(Puisque g est continue, donc bornée sur [ - n, n], la série est normalement conver-
1 rn r n
gente 1 Rn cos n( f)- u)g(u) < M Rn et l'on peut intervertir sommation et intégration.)
3 0 Il s'agit donc de calculer la somme de la série + Ï : cos nw, qui apparaît
1 00 r n 1
comme la partie réel1e de la série:2 + L Rn e inro , cette dernière a pour somme
1 }I"e iro .. r 1 =n
2: + 1- }I"e ic () ' ou ).. = R .
La partie réelle de cette expression vaut
1 1.. [cos w-À] l-À2
:2 + 1-2}..coSW+À2 = 2[1-2}l"cosco+ÎL. 2 ]'
donc
1 f 7t
<I>(r, B) = -
2n -7t
1
r 2
1- -
R2
2 2 g(U)dll,
r r
- cos ( f)-u ) + -
R R2
soit
<I>(r, 0) = f 1I: K(r, O-u)g(u)du,
avec
1 R2-r 2
K(r co) = -
, 2nR2-2rRcosw+r 2 .
On retrouve bien ainsi la formule de l'exercice 4.1.3. avec Je noyau de Poisson.
10. v.s.
En posant x = r cos 0, y = r sin 0, r 2 = x 2 + y2 et tg 0 = , on a
a II = au + ôu - y = au cos f) _ Oll sin 0
ox or r of) X 2 +y2 or of) r '
ou au y au x . l) au cos f) AU
oy = or r + oe X2+ y2 = SIn {7 èr + -r oe
SOLUTIONS
337
et
02U
=
ox 2
a 2 u
sin 2 () èu 2sin () cos () au 2 () 02U 2sin () cos () 02U sin 2 () a 2 u
r êr + r 2 o() + cos or 2 - r oro() + r 2 O()2 '
cos 2 () AU 2 sin e cos () au, . 2 () 02U 2 sin () cos () 02U cos 2 0 è 2 u
- r2 () T SIn 2 + '"' () + 2 '"' 0 "' ''
r or 0 ur r oru r 0-
oy2
donc
A Ô 2 u 1 au 1 a 2 Li
olt = -;;-- + - - + - -
or 2 r or r 2 0()2'
(r, ()) Uer, G) = u(r cos (), r sin ()) satisfait ainsi à l'équation
a 2 U 1 oUI 0 2 U
or 2 + r or + r 2 a02 = o.
Cherchons des solutions sous la forme
Uer, 0) = <p(r )t/!( ()),
il vient
1 1
<p"t/! + r <p't/! + r 2 <pt//' = o.
Soit
1./1 Il _
tp - -
1
<p" + -<p'
r
1
-qJ
r 2
On a nécessairement
(1)
1./1" = ; l/J
et
(2)
" 1, Â
({J + - (, p + - If) = o.
r r 2 'f'
La fonction (r, 0) Uer, ()) ne dépend que du point et les différentes coordonnées
polaires possibles du point doivent donner le même résultat, donc
(3)
V/( ()+ 2kre) = 1./1 ( ())
et
(4)
({J( - r )t/J( ()+ 2kre+ TC) = ({J(r )t/J( ()).
Autrement dit, tjJ est 2re-périodique, et de plus
((J(r) !/1(0+ n)
<p( _r) = t/J«() = C, C est une constante,
mais
tfJ( ()+ Tc) = C .p( ()+ 2re) = C
tp«() => tjJ«()+ Tc) ,
d'où
c 2 = tp«() + 2n:) = 1
t/J( 0) .
338
ÉQUATIONS AUX DÉRIVÉES PARTIELLES
Les deux possibilités sont
C = 1, alors 1/1 admet la période n; C = - 1, t/J est 2 n-périodique;
c'est le seul cas à envisager car la donnée sur le cercle g : 0 H- g(O) est 2n-périodique.
On remarque alors que ({J est une fonction impaire d'après (4) et l'on peut se borner
à l'intervalle 0 y R.
L'équation (1) n'admet de solutions 2n-périodiques que si la condition À = - n 2 ,
n E lN a lieu.
On en déduit
tfJ" +n2tfJ = 0, soit t/J = An cos nO+ Bn sin nO.
L'équation (2) prend la forme
y2 ({J" + Y({J' - n 2 ({J = 0,
équation du type d'Euler dont l'intégrale générale (obtenue en cherchant des solu-
tions particulières du type y H- ya) s'écrit
({J(r) = Cnyn+Dny-n.
L'existence de ((J(O) entraîne que Dn = O.
Finalement, on a le système de solutions suivant
tfJ(O) = An cos nO+ Bn sin nO,
{ ((J(r) = Cnyn,
soit
Un(r, 0) = (cx n cos nO+ fJn sin nf))r n .
On cherchera donc la solution du problème de Dirichlet sous la forme
00
u(Y, f)) = CXo + L yn (cx n cos nf)+ fJn sin nf)).
n=l
Ceci nous ramène à l'exercice précédent lO.V.4. car nous obtenons Je développe-
ment en série de Fourier de g(f)) en écrivant
00
g(f)) = ueR, f)) = CXo + L Rn (CX n cos nf)+ fJn sin nO),
n=l
donc
1
CXn = Rn an
et
1
fJn = Rn b m
où an et b n sont les coefficients de Fourier de g.
10. V.6.
1 0 a) L'intégrale J " rf(M)g(P, M)ds peut être décomposée en deux intégrales
sous la forme
où
f f(M)g(P, M)ds+ f f(M)g(P, M)ds,
AB P
....--...
r' = CM
et
,-....\.
AB = {ME ri d(Po, M) > 11}.
SOLUTIONS
339
La sec on de intégrale tend vers 0 lorsque P -+ PoE r, car f(M) continue sur le
compact Q y est bornée et l'on a
If(M) 1 C=> l f(M)g(P, M)dsl C81(r),
r'
où 1er) est la longueur de (r) puisque
....-.&.
Ig(P, M) 1 8, 'v' M AB et 'v' P tel que d(P, Po) 11,
....-.&. ...--...
AB ayant été choisi tel que M AB=> IMPol > 11.
Ceci provenant précisément de la propriété i).
Il reste donc à étudier la première intégrale.
En appliquant la .formule de la moyenne, il vient
I ...--Lf(M)G(P, M)ds = f(M l ) I G(P, M)ds
AB AB
= f(M 1 ) [I r G(P, M)ds- l r' G(P, M)dS].
Lorsque P -+ Po et que la distance d(M l, Po) tend vers 0, on a
f(M l ) -+f(Po), l G(P, M)ds -+ 1 (hypothèse ii) et l G(P, M)ds -+ o.
r r'
Ainsi
Iim l f(M)G(P, M)ds = f(Po).
P->Po r
b) On suppose maintenant PH- G(P, M) est harmonique (hypothèse iii) en admet-
tant que l'on a
Li [I] = l [ Li] ,
on peut écrire
or pG(P, M) = 0,
Lig(P) = l r LipG(P, M)f(M)ds,
d'où g(P) = 0 et g(Po) = f(Po).
La formule g(P) = l rf(M)G(P, M)ds donne bien la solution du problème de
Dirichlet
u= 0
et
ulr = f.
2° La fonction £ de la variable e se développe en série de Fourier sous la forme
1 1 00 [ COS nq> sin nq>. ] .
_ 2 + - L cos ne + sIn ne sIn n8.
TC 8TC 1 n n
Les coefficients de Fourier de b étant donnés par
a = 2 sin n8 cos nqJ b = 2 sin n8 sin nq> .
n 2nTC8' n 2nTC8
340
ÉQUATIONS AUX DÉRIVÉES PARTIELLES
La fonction harmonique égale à b t sur la circonférence est donc définie par
1 00 r n
G.(r, (J, <p) = 2n + Rn [ail cos n(J+b n sin n(J].
Lorsque 8 --+ 0 on a
1 . 1
lm an = 11: COS ncp
et
lim b n = sin nqJ,
11:
donc
1 1 00 r n
Iim G.(r, (J, <p) = 2n + n Rn [cos nO cos n<p+ sin n(J sin n<p],
soit
1 1 00 r n
G(r, 0, qJ) = _ 2 + - L R n cos n(O- qJ).
'Tt 'Tt 1
On retrouve le noyau de Poisson
G(r, 0, qJ) = K(r, 0- qJ)
(exercices 4.1.3. et 10.V.4.)
1 R2-r 2
et G(r 0 (f) ) - -
, , 't' - 2'Tt R 2 - 2r R cos (0 - qJ) + ,. 2
donne la solution du problème de Dirichlet pour le cercle par la formule
g(r, (J) = f ,. G(r, (J, <p)f(<p)d<p.
On peut vérifier sur l'expression de G les trois propriétés i), ii) et iii) énoncées pour
la fonction de Green.
lO.V.7.
1 0 Il s'agit de vérifier les axiomes i), ii) et iii).
i) Soit
Po = (xo,O),
M = ( , 0),
P = (x, y),
Xo E ]a, b[,
Xo,
1 Y
alors G(P, M) = - ( )? + ? a pour limite 0, puisque P --+ Po<=> y --+ 0 et
'Tt x- - y-
x- --+ Xo- ç O.
ii) f r G(P, M)ds s'exprime ici par
1 J b yd
'Tt a (x- )2+ y2
SOLUTIONS
341
et cette intégrale vaut
b-x x-a
Arc tg - - Arc tg -.
y y
Lorsque P -+- Po, X --+ Xo E ]a, b[ et y --+ 0 suivant le signe de y, on a les limites
suivantes :
y 0 + : [ - (- )] = 1
et
y 0_ : [- - ] = -1.
La fonction considérée est donc une fonction de Green, dans un sens un peu plus
général que celui donné au problème 10.V.6., si l'on vérifie maintenant le point iii) :
P G(P, M) est harmonique dans IR 2 -{[a, b] x O}.
iii) On remarque que
G(P, M) = lm [ 1t( Ç) ]
et la fonction
1
Z -
z-
est holon10rphe pour z , la partie imaginaire est donc harmonique dans le plan
privé du point ( , 0).
2° II reste à appliquer le résuJtat b) de l'exercice lO.V.6. La fonction
1 J b Y ...
(1) (x, y) F(x, y) = Tc a (x- )2+ y2 f( )dÇ
est donc une fonction harmonique qui prend sur AB la valeur f(x) en se restreignant
au demi-plan y > 0 (d'après le résultat ii de la question 1°).
On remarquera que pour y < 0 la fonction prend la valeur - f(x). (y --+ 0_), ainsi
l'expression (1) donne bien la solution du problème de Dirichlet indiqué. On voit
de plus que F tend vers 0 lorsque (x, y) tend vers l'infini.
10. VI.l.
1 ° Les caractéristiques sont les droites d'équations
( X-xo )
t- t o = - c ·
x-xo
t-t o =
c
et
2° Appliquons la formule de Riemann à l'intégrale
JJ ( 02U 1 02 U )
A ox 2 - c 2 ot2 dxdt = O.
Elle donne
(1)
J 1 ou Ou
--dx+ -dt= 0
r+ c 2 a t OX '
342
ÉQUATIONS AUX DÉRIVÉES PARTIELLES
où
-) -> ->
r+ = {AB} U {BMo} U {MoA}.
a) Sur AB on a
dt = 0 et
Ou
ot (0, x) = g(x),
donc
l 1 ou au 1 I xo+ct o
2 ot dx + _ a dt = 2 g(x)dx,
AB c X C xo-ct o
puisque les abscisses de A et de B sont respectivement Xo- ct o et xo+ cto.
b) Sur BM on a dt = - dx et l'intégrale curviligne est donc égale à
c
1 l Ou Ou
-- -) _ 0 dx+ _ 0 dt,
c BMo x t
dont la valeur est évidemment _! (UMo - uB).
c) Sur Mol on a dt = dx et l'onc trouve que l'intégrale curviligne correspondante
1 c
vaut -(uA - UMo).
c
Finalement la condition (1) entraîne
(2)
1 I xo-ct o 2 1
? g(x)dx- - uMo + - (UB+ uA) = 0,
c- xo.-ct o C C
mais
llMo = u(t o , x o ), UA = u(O, x o - cto) = f(x o - cto)
uB = u(O, xo+ cto) = f(x o + cto).
et
On tire donc de (2)
( ) _f(xo+cto)+f(xo-cto) I xo+cto ( )d
LI to, Xo - 2 + 2 g x x.
C Xo-ct 0
On retrouve bien la solution obtenue par l'intégrale générale. Cette méthode des
caractéristiques est fondamentale dans Je cas hyperbolique car elle est encore appli-
cable au cas des coefficients non constants. On obtient alors une équation intégrale
équivalente au problème posé.
10. VI.2.
a) Il suffit de faire le changement
Il(X, t) = f(x) + tg(x)+u*(x, t)
pour le problème
(Pl)
( 1 02U 02U
, c 2 at 2 - ax2 = v (t,x),
( J u(x, 0) = f(x),
Ou
ot (x, 0) = g(x),
SOLUTIONS
343
qui devient alors
1 1 02U* ô 2 u*
e 2 ot 2 - ox 2 = v*(t, x),
u*(x, 0) = 0,
ou*
a/ex, 0) = 0,
avec v*(t, x) = v(t, x)+ f"(x) + tg"(x).
La méthode est évidemment générale.
Pour
(P!)
au
Lu = v, u(O, x) = ([J(x), ot (0, x) = t/J(x)
[où x = (x 1, ..., x,,)], on a
ou: i :
Lu* = v* u* ( O X ) = 0 _ ( 0 X ) = 0
, , , ot' ,
avec v* = Lu-Lf-L(tg).
b) Il suffit de vérifier que
(t, x) 1--+ u(t, x) = f U(x, t- -r, -r)d-r
est solution du problème (P).
En effet
Ou r t 0 U
u(O, x) = 0, _ a (t, x) = U(x, 0, t) + (x, t- 7:, 7:)d7:,
t .. 0 vt
soit
au f t au
at (t, x) = 0 ot (x, t- 7:, -r) d-r
puisque U(x, 0, t) = 0,
donc
ou
ct (0, x) = O.
Par ailleurs
02U f t Ô2U
ox 2 = 0 ox 2 (x, t- 7:, 7:)d7:,
en admettant les dérivations sous le signe somme,
02U oU f t 02U
et ot 2 = ot (x, 0, t) + 0 ot 2 (x, t- 7:, 7:)d7:,
soit
02U f t 02U
ot 2 = v(x, t) + 0 ot 2 (x, t--r, 7:)d7:,
1 0 2 "" ')
U 0 - u ( ) d , .. 1 ' 1 h h '
donc e 2 ot 2 - ox 2 = V x, t, ou e resu tat c erc e.
Comme la précédente, cette méthode est généraJe.
On en déduit qu'un problème de Cauchy non-homogène peut être ran1ené à un
problème homogène. D'après le point a) on se ramène à un problème non-homogène
à conditions initiales nulles; puis d'après b) on peut transformer ce problème en un
problème homogène.
344
ÉQUATIONS AUX DÉRIVÉES PARTIELLES
10. VI.3.
Supposons qu'il existe deux solutions U1 et U2 au problème mixte pour la bande
rectangulaire = {(x, t) f(x, t) E [0, 1] x [0, cor}, alors u = Ul -1l2 satisfait au pro-
blèlne mixte où toutes les conditions sont nulles avec Du = 0, donc
ff ( 02u 1 02 U ) OU
A + ox 2 - e 2 ot 2 ot dudt = 0,
r+ étant le contour rectangulaire OABC [BC est déterminé par le point M(x 0' t 0)]'
on aura
! f [( OU ) 2 + ( OU ) 2 ] dx + f au u dt = 0
2 r+ è t e 2 ox e 2 r+ è t ox .
Étudions chacun des termes de cette intégrale curviligne, obtenus en décomposant
le contour
k)
1 f [( Ôll ) 2 1 ( aU ) 2 J
2 01 at + e 2 OX dx = 0,
puisque
êu
- ( Ox ) =o
at '
et
Ou
u(O, x) = 0 => ox (0, x) = 0,
kk)
f OU Ou
_ 8 _ 0 dt = 0,
AB t X
pUIsque
au
u(/, t) = 0 => at (l, t) = 0,
de même
kkk)
f OU au
_ 8 _ 0 dt = o.
co t x
II reste finalement
f cB [( ; r + :2 ( : r]
dt = 0
,
qui entraîne
AU
ôt (t o , x) = 0
et
Ou
ox (t o , x) = o.
Con1me ceci est valable, quel que soit le point (xo, t o ) choisi, on a donc
au au
at (t o , xo) = 0 et ax (t o , xo) = 0,
c'est-à-dire
u(t o , xo) = 0,
d'où l'unicité de la solution.
'r/(xo, t 0) E ,
SOLUTIONS
345
10. VI.4.
5 ""2 ""2
1 0 Posons u(t, r, x, y, z) = u' da, alors (E) 0 0 ') (ü .1")- 0 0 ., (il. r) = O.
1: t- r-
Démonstration.
a) Posons
, ( au' au' ÔU' ) ( ôu' ôu' ÔU' )
v= gradu <=> V= _ a "- a ,, = r , l'- a ' r-;:;:-
x y oz ox y cz
(t, 1"', X, Y et z étant fixés et x', y' et z' étant seuls variables), donc sur L on a
0 ' , , "",
-> -7 U, uU, UU, ou
V. n = r-x +r y +r-;;-z = r
ax oy oz cr
et, par suite,
5 au' f -7 -?-
1"'2 _ a da = r V . nda
1: r &-:E
et
5 "", 5 [ ,.. '), '" '), '" 2 ' ]
OU o-u c-u 0 il
1"'2 da = 1'" div (V)dw = 1"'3 5 "3? + 2 + _ 0 ') dû),
1: cr Q Q ux- CY z-
donc, en utilisant (1), on obtient
5/ 2 a;; du = 5 n r3 ' dw = :t 22 (f n r3u'dw),
ce qui entraîne
(2)
5 a ' '" 3 (5 )
U 2 U 0 3 ,
_ a r _ a da = '" 2 a r u dw .
r:E r of r Q
Or nous avons l'identité évidente
(3)
0 2 5 '" f a ,
, 0 ') il
1'" - ru da = "";\ r- da,
01"'2 1: or :E cr
.
donc
(4)
., ""3
u- 5 ' 0 5 3'
1'" 0 2 ru da = "" 2 '" 1'" Il dw.
1'" 1: ot or Q
b) Établissons la relation suivante :
5 r2u' da = 5 r3u'do).
1: or fi
(5)
En effet, nous avons, d'une part,
r 2 5 E Il' du = r 2 5 /X'2+ y'2 + Z'2)U' du = r 2 5 I;[X'(X' u')+ y'(y'lI') + z'(z'll')]du
346
ÉQUATIONS AUX DÉRIVÉES PARTIELLES
donc
., { , 2 J [ G ( , ' ) 0 " a ( , ' )] d
y- u da = r x u + 31 (y u ) + _ 0 ' Z U (j)
.J 1: Q OX uy Z
J [ , 0 ' 0 ' ]
, , ou , u , II
= r 2 3u + rx - + ry - + rz dw
Q GX oy oz
J [ 2' 3 ( ,ou' , ou' _, Ou' )]
= Q 3r U + r x Ox + y GY + oz dw,
d'autre part,
o J 3 ' J [ ." 3 OU' ] r [ 2' 3 ( ,au' , ou' , OU' )] d
- r udw= 3r-u+r - dw= 3r u+r x--;;-+y -+z w.
or Q Q or '" Q ex oy oz
L'égalité (5) est bien vérifiée.
De (5) nous déduisons immédiatement la relation
(6)
""., J ., J 0 3 J
0- , (j- 2 , 3 ,
r ru da = 0 2 r Li da = 0 20 r II do).
ot:E t 1: t r Q
c) En con1parant (4) et (6), nous obtenons
0 2 J 02 J
r - ru'da = r - ru' da
ot 2 :E or 2 1: '
soit
0 2 0 2
o t 2 (1" . Li) - or 2 (r . ïï) = o.
2° a) L'intégration de l'équation (E) nous donne
ru(t, x, y, z, r) = F(t+ r, x, y, z)+ G(t- r, x, )', z),
si r = 0, nous obtenons
o = F(t, x, y, z)+ G(t, x, y, z),
donc
G(t, x, y, z) = - F(t, x, y, z)
et, par suite,
ru = F(t+r, x, y, z)-F(t-r, x, y, z).
Nous en déduisons
o _ ou _, ,
or (ru) = r or + u = Ft(t+r, x, y, z)+ Ft [t-r, x, y, zJ,
pour r = 0, nous avons
u(t, 0, x, y, z) = 2F;(t, x, y, z),
or
u(t,O, x, y, z) = JE u(t, X, y, z)d(j = 4nu(t, x, y, z),
donc
4nu(t, x, y, z) = 2F;(t, x, y, z).
SOLUTIONS
347
b) Nous avons évidemment
:r (rU)t=o = :r J r,ru(O, x+rx', y+ry', z+rz')da
o J ' , ,
= or 1: rf (x+rx, y+ry, z+rz )da
et
o - ) ( ou ) J o U ( , , ,
ot (ru t=O = r ot t=O = 1: r ot 0, x+rx , y+ry, z+rz )du
= J r,rg(x+rx', y+ry', z+rz')da
donc
[( :r + :t )(rU)l=o = 2F;(r,x,y,z) = :r J/f da + J/gda
et, par suite,
2F;(1, x, y, z) = %t J /f(x+ tx', y+ ty', z+ tz')da + J /g[x+ tx', y+ ty', z+ tz']da.
Conclusion.
4nu(t, x, y, z) = :t J /f(x+ tx', y+ ty', z+ tz')da + J /g(x+ tx', y+ ty', z+ tz')da.
10. VI.5.
En posant u(x, t) = qJ(x).p(t), on obtient la condition
qJ" 1.p"
q; = c 2 If = À (À étant une constante),
d'où les deux équations différentielles suivantes :
qJ"- ÀqJ = 0
et
.p" - Àc 2 t/1 = O.
En distinguant les trois cas À = 0)2, À = 0 et } = - 0)2 on constate, en tenant
compte des conditions aux limites que seul le cas À = - w 2 doit être envisagé sous
la. condition sin roI = 0, ce qui donne ro = '7 ' d'où l'infinité de solutions élémen-
taires :
. nnx ( Ilnct . Ilnct )
un(x, t) = sin T An cos 1 + B" sin 1 '
An et B,. sont des constantes à déterminer.
On cherche donc la solution sous la forme
( ) _ sin nnx [ COS nnct sin nnct ]
LI x, t - Li 1 An 1 + Bn 1 '
x=l
348
ÉQUATIONS AUX DÉRIVÉES PARTIELLES
An et Bn étant déterminés de telle manière que u satisfasse aux conditions initiales
(puisque cette série satisfait par construction même aux conditions aux limites).
a) La condition initiale u(x, 0) = f(x) impose
(1)
00
f( . nnx
x) = L.J An sin T.
n=l
Soit F la fonction impaire 2/-périodique qui coincide avec f sur [0,1], l'égalité (1)
montre que An doit être le coefficient de Fourier de F, donc on a
An = an(F).
b) La condition initiale ; (x, 0) = 0 impose que l'on ait
co
-nc" . 1Znx
o = --r- L.J n sin T Bm
1
ce qui entraîne Bn = O.
Le calcul de An est immédiat à partir de la formule
2 J I . nnx
a,lF) = 1 of(x) sin T dx.
On obtient
41 . nn
A,z = 22 sin _ 2 '
n n
donc
( -1)P41
A 2P + l = (2p+ 1)2n2 et
La solution El est donc déterminée par la série
A 2P = o.
41 ( -l)P . (2p+ l)nx nct
(2) u(x, t) = 1t 2 .P O (2p+ 1)2 sm 1 cos (2p+ 1) T.
Il reste à s'assurer que la série converge et qu'elle définit une fonction de classe e 2
en x et en t.
L'expression (2) montre que la série est normalement convergente sur IR. x IR
. 1 ' , 1 ., 41
pUisque e terme genera est majore pa n 2 (2p+ 1)2 ·
Calculons maintenant la dérivée x en dérivant formellement (2), il vient
èu ( ) _ 4 (-l)P (2p+ l)nx (2 1) nct
x, t - L.J 2 + 1 cos 1 cos:p+ 1 .
ox n p=o :p
Écrivons cette série sous la forme
(2')
au 2 00 (-l)P [ (2p+ l)n (2p+ l)n ]
èx (x, t) = 1t p o 2p+ 1 cos 1 (x-ct)+cos 1 (x+ct)
2 1. . f3
= - L.J 2 + 1 [sin p+sln p],
n p=o :p
SOLUTIONS
349
où
x-et n
1Y..p = pn+(2p+ l)n 1 = (2p+ l)e -"2
et
x+et n
f3p = pn+(2p+ 1)n 1 = (2p+ 1)<p - 2 '
avec
() x-et n
=n +-
1 2
et
(x+ et) n
<p=1t 1 + 2 .
La série se présente donc ainsi :
ÔU (x t) = _ f [ Sin (2p+ 1)0 + sin (2p+ 1 )<P ] .
8x' 1t p=O 2p+ 1 2p+ 1
, . . .. . ,. ( sin (2p+ 1)(} )
Po r cette serie le crltere d'Abel est applIcable car chacune des senes 2p+ 1
( SIn (2p+ 1)<P ) . .t":. b . ... ( . 1 . d ,. . ()) } '
et 2p+ 1 satIslalt len au crItere cas partIcu 1er es serIes CX n sin n et on
peut affirmer la convergence uniforme sur tout compact ne contenant pas de points
o = kn et <P = k'n, soit
x-et k 1 x+et , 1
-- et 1 = k - --,
1 2 2
d"où
x-et = (k- )l et x+et = (k'- )l.
On retrouve ainsi les points d'abscisse k"l + qui sont des points de discontinuité
des dérivées premières de F, prolongement impair 2/-périodique de f.
, Ou
On aura le resultat analogue pour ot .
Par contre le calcuJ des dérivées secondes à partir de la série (2) fournit des séries
dont le terme général ne tend pas vers zéro, la dérivation terme à terme est donc
inutilisable pour ces dérivées.
Autrement dit, les séries (2) et (2') représentent la solution et la dérivée en x (2)
[(2") analogue la dérivée en t] l'ensemble des points x + et = kl + excepté.
Ce qui vient d'être établi pour les dérivées premières iIJustre la remarque faite
au paragraphe VI, 2°, b, en précisant cependant que les discontinuités ici n'ont pas
Heu au point kl mais pour la fonction f elle-même qui n'est pas de classe C 2 et, par
suite, a fortiori pour le prolongement F.
II est facile de transformer l'expression de (2) en faisant apparaître u sous la forme
F(x-et)+F(x+et)
ll=
2
(3)
il suffit d'exprimer le produit 2 sin (2p+ 1) nt cos (2p+ 1) n;t en la somme suivante:
sin (2p+ 1) ; (x+et)+sin (2p+ 1) 7- (x-et).
350
ÉQUATIONS AUX DÉRIVÉES PARTIELLES
o
x-ct=-L+ l
Les séries ainsi obtenues sont alors
précisément Jes séries de Fourier de
F(x-et) et de F(x+et).
De toutes façons (3) ne définit pas
non pl us une fonction de classe CI,
1
les points x + et = kl +:2 devant
être exceptés pour les dérivées pre-
mières.
On a ici un exemple de « propa-
gation des discontinuités » le long
des caractéristiques (voir figure ci-
contre).
t
l
x+c-t=-(+ ?
."
X+cl = ?:
/..
. l
x-ct= -
r.I
"L )
10. VI.6.
L'exercice est identique au précédent, la donnée de f étant cette fois la suivante :
f ) . nx
x (x = sIn/.
On trouve immédiatement, pour la série définissant u,
. nx net
u(x, t) = sIn / cos l'
II est donc de classe Coo en (x, t). Ceci iJIustre aussi la remarque du paragraphe VI,
2 0 , b, f étant donnée comme la restriction d'une fonction impaire 2/-périodique de
classe C 00 .
10.VI.7.
1 0 z = ue - t entraîne
Oz Ou t Oz Ou
---e- -= -e-t-ue- t
ox - ox ' ot ot '
82Z 02U 82Z 02U cU
- = -e- t - = -e- t -2- e-t+ue- t
ox 2 ox 2 ' ot 2 ot 2 ot '
d'où la nouvelle expression de (E)
02U 02U
(El) ox 2 - ot 2 = o.
En posant v = x+ t et w = x- t, on obtient
8 2 u
ovow = 0,
SOLUTIONS
351
dont la solution générale est donnée par
u = F(x- t)+ G(x+ t).
La solution générale de (E) est donc z telle que
z(x, t) = e-tF(x-t)+e-tG(x+t).
2 0 Pour résoudre (E) avec les conditions données on s'intéresse à (El) avec les
nouvelles conditions
u(x, 0) = x, si x E [ 0, l
u(x,O) = :n:-x, si x E [ , :n: l
En effectuant le calcul par la méthode de séparation des variables on trouve la
série trigonométrique
1l(0, t) = 0, u(n, t) = 0,
""
ou
(x, 0) = u(x,O).
ot
(1)
00
ll(X, t) = L sin nx (An cos nt+ Bn sin nt).
n=l
(On peut aussi appliquer un résultat de l'exercice 10. VI.5. en faisant c = 1 et
1 = n.)
An est donc le coefficient de Fourier de la fonction F impaire 2n-périodique coïn-
cidant avec u(x, 0) sur [0, n].
O .. ) 4. nn
n a ainsI An = on(F = sin _ 2 ' soit
n n
4( - 1 )P
A 2P + l = n(2p+l)2
et
A 2p = 0;
nB n est donc le coefficient de Fourier an de F [puisque
ôu 00. . au
_ a = L sin nx(nBn cos nt-nA" Slllllt) et que _ a (x, 0) = ll(X,O)],
t n= 1 t
1
alors BII = - an(F).
Il
La série (1) s'explicite donc par
00 4( - I)P [ 1. ] .
(2) u(x, t) = p o :n:(2p+ 1)2 cos nt + 2p+ 1 sm nt sm nx.
On obtient donc z :
_ _ t 00 4( - I)P [ sin nt ] .
z(x, t) - e L (2 +1)2 cos nt + 2 +1 sin nx.
p=o n .p .p
A partir de cette expression, on peut faire les mêmes calculs de : ' : et les
mêmes remarques qui ont été développés à l'exercice 10.VI.5.
(3)
352
ÉQUATIONS AUX DÉRIVÉES PARTIELLES
10. VII.l.
a) On effectue d'abord le changement de fonction
1)
.\:-
V --
II = - e 4y
y
Le calcul des dérivées donne
au ( 0 v X ) 1 -
- = - - - v - e 4y
ax ax 2y y ,
2t = ( 02 V _ V _ aV ) ! e- :: + ( GV _ V )
ox 2 ax 2 2y 2y OX y ax 2y
-x
X -e
2yy
1)
x-
4y
,
soit
""1 ? 1 X2 [ a 2 ""1 ? ]
o-u _ _ e - 4y _ ov _ + vx-
ax 2 - y 8x 2 y ox 2y 4y2.
Comme on a
1)
x-
au = ! e - 4y [ a v _ + VX 2 ]
ay y ay 2y 4y2
l'équation (E) devient
(E')
0 2 V av x 0 v
------==0
ax 2 ay y ax .
b) Le changement de variable proposé entraîne
av 1 èV
ox = y ax '
(E') s'écrit donc
a 2 v 1 a 2 v
ax 2 = y2 aX2
et
eV x av 1 aV
-- _--..l...--
ay - y2 eX 1 y2 è Y.
1 a 2 V 1 a v
y2 aX2 - y2 ay = 0,
a 2 v oV
soit aX 2 - a y = 0 et ceci justifie la propriété énoncée.
10. VII.2.
Le calcul est immédiat et donne
a 2 -b = 0
,
d'où les solutions particuJières suivantes :
u(x, y) = eax+a y.
SOLUTIONS
353
(x, y) e ÀX + À2 y est solution de (E) quel que soit À, donc, pour tout À, on a
( a 2 a ) .2 00 À n ( a 2 a ) 00 À n ( a 2 V n a V n )
- - - (e ÀX + A y) = - - - - JI: (x y) => - - - - = 0
aX 2 ay '0 n! aX 2 ay n' '0 n! aX 2 oy ,
. , . a 2 V n a V n 'v'
ce qUI necessite aX 2 - - ay = 0, n.
Les V n étant des polynômes, les séries utilisées sont normalement convergentes
sur tout compact et les dérivations des séries sont légitimes.
On peut expliciter les premiers polynômes :
x 2 x 3
Vo(x, y) = 1, Vl(x, y) = x, V 2 (x, y) = y + 2' V 3 (x, y) = xy + 6.
10. VII.3.
On applique la méthode de séparation des variables pour le problème
a 2 u au
K ax 2 - at = 0,
u(O, t) = u(a, t) = 0,
u(x, 0) = f(x).
qJ" VJ"
En écrivant u(x, t) = <p(x)VJ(t), on obtient K q; = 1ii et l'on trouve que les seules
solutions satisfaisant à u(O, t) = u(a, t) = 0 sont données par
n 2 x 2 t 2
-K-
VJ(t) = e a 2
et
( ) . nnx
<p x = sIn - .
a
La solution u est donc cherchée sous la forme
00 n2x2t2
u(x,t) = L C n e- K (j2 sin n:x ,
n=l
C n étant une constante à déterminer.
En revenant à la condition initiale, u(x, 0) = f(x), on en déduit que les C n sont
nécessairement les coefficients de Fourier bn(F) de la fonction Fimpaire, 2a-périodique,
égale à f sur [0, a].
Ces coefficients se calculent par la formule habituelle et l'on obtient
C 2p = 0
et
8
C 2P + 1 = n3(2p+ 1)3 '
d'où
(1)
8 00 _K (2+1 2x2t . (2p+ l)nx
u(x, t) = n 3 L e a SIn
p=o (2p+ 1)3 a
354
ÉQUATIONS AUX DÉRIVÉES PARTIELLES
Pour vérifier que u satisfait à l'équation de la chaleur iJ reste à calculer les déri-
, a 2 u au
vees ax 2 et al .
En dérivant terme à tenne on constate que les termes généraux, à une constante
multiplicative près, sont de la forme
1 - K(2 p + 2 1)2 x 2 t . (2p+ 1)1tx
2p+ 1 e a SIn a .
La convergence uniforme de ces séries est donc assurée (règle d'Abel) sur tout
compact ne contenant pas de points nx = kn, c'est-à-dire tel que x = ka, ce qui
a
est naturel, puisque la fonction F n'est pas de classe C 2 sur IR (aux points ka la
dérivée seconde à gauche vaut - 2 et la dérivée seconde à droite + 2; voir remarque
paragraphe VI, 2 0 ).
-/
APPENDICE
A. - Fonctions différentiables dans des Banachs.
B. - Formes p-linéaires alternées S1.Ir /Rn.
Volume p-dimensionneI.
c. - SOlls-variétés de /Rn.
,
Elément d'aire d'une sous-variété de dimension p.
D. - Formes différentielles.
Intégration d'lIne forme différentielle de degré p sur
une sOlls-variété orientée de dimension p.
Formule de Stokes : f dw = f w.
(50) (85)0
A. - FONCTIONS
DIFFÉRENTIABLES
. E et F sont deux Banachs définis sur IR,
. Lc(E, F) est muni de la norme III . III,
. f est une application de U dans F, Oll U est un ouvert de E.
1. - GÉNÉRALITÉS.
1 0 Fonction différentiable en un point.
On dit qu'une fonction f est différentiable en un point, a E U, s'il existe
g E Lc(E, F), tel que
Ilf(x) - f(a) - g(x - a)IIF = o(llx - ailE).
g est alors unique. On l'appelle dérivée (ou différentielle) de J en a et on
le note j.'(a) [ou df(a)).
Il est clair que la somme de deux applications différentiables en un même
point a est elle-même différentiable en ce point et
(ft + fz)'(a) = J;(a)+ J;(a).
2 0 Fonctions différentiables dans un ouvert U.
On dit que f est différentiable dans l'ouvert U si elle est différentiable en
tout point de U. On définit alors l'application
f' (ou dl) : U Lc(E, F),
a f'(a).
Remarquons qu'une fonction différentiabIe dans un ouvert est nécessairement continue
dans cet ouvert (cf. exercice A.I.4.).
On dit qu'une application.f est de classe CI dans l'ouvert U lorsque sa
dérivée J'est définie et continue dans U.
358
A. - FONCTIONS DIFFÉRENTIABLES
Exemples:
- Sifest une application linéaire et continue de E dans F, alorsfest différentiable dans E
et f'(a) = f.
- Si f: U F est une appJ ication constante, alors eIIe est différentiabIe dans U et
f'(a) = O.
3 0 Différentiabilité d'une fonction composée. - Introduisons un troisième
Banach, G, et l'application g
g : V -+- G, où V est un ouvert de F contenant .f(U).
On peut définir alors la fonction composée
qJ = go f: U G.
Théorème 1. - Si f est différentiable en a et g est différentiable en b = f(a),
alors qJ = g 0 f est différentiable en a et l'on a
(p'(a) = g'[f(a)] o.f'(a).
[Remarquons qu'il suffit d'utiliser la règle usuelIe de dérivation à condition de conserver
l'ordre des lettres g et f. En effet,
cp(x) = g[f(x)]
=>
'(x) = g'[f(x)]f'(x).]
Il. - ÉTUDE DU CAS OÙ E = /Rn ET F = /RP.
1 0 On peut caractériser f: U /RP à l'aide de ses p applications coor-
données .fl,f2, ...,fp :
f:x = (X t, ...,xn) f(x) = (!t(x t , ...,x n ), ...,f;lx t , ...,x n )),
où h: U /R.
En abrégé on écrira f = (ft,f2, ...,fp).
Théorème 2. - Supposons que f soit différentiable en a. Alors
. ) 1 d ,., . II II a fi
1 es erlvees partie es usue es;- sont définies en Q, pour tout i et tout j,
uX.
J
ii) l'application linéaire f'(a) : /R.n /RP est caractérisée dans les bases
canoniques de lR. n et /R.P par la matrice ( a fi (a) )
àXj 1 i p.
1 j "
ÉTUDE DU CAS OÙ E = IRn ET F = m p
359
Autrement dit, on a
J' (a)
afl (a) ... afl (a)
ax 1 aX n
al;, (a) ... al;, (a)
ox 1 aX n
(V oir exercice A.II.2.)
Théorème 3. - On a la proposition suivante
f de classe CI dans U J; définie et continue dans U, Vi et j.
OX.
J
2 0 Étude d'un cas particulier: p = 1. Considérons une application
J: U IR, qui est supposée de classe CI. Alors, J' (a) est une forme linéaire
sur IRn caractérisée par la matrice colonne
af (a)
OXI
af (a)
ox"
(cf. théorème 8.11.1.).
En notant h = (hl' ..., 11ft) un vecteur de /Rn, on obtient alors
f'(a)(h) = f af (a)hio
i= 1 OX.
1
En introduisant le projecteur dXi :
/Rn IR,
h = (h l, ..., h n ) 1---+' hi'
on obtient
JI of
f'(a)(h) = L -(a)dxi(h),
i= 1 OX.
1
Vh E IR"
et, par suite,
, " af
f (a) = L - (a)dxi'
i= 1 OX.
1
ou encore
JI of
df(x) = L -(X)dXi
i= 1 OX.
1
[noter x au lieu de a et df(x) au lieu de f'(x)l.
360
A. - FONCTIONS DIFFÉRENTIABLES
3 0 Soit J: U 1R, où U est un ouvert de IRn et soit x : Q IRn, où Q est
un ouvert de IRP tel que x(Q) c U
X:U = (u 1 , ...,Uq) x(u) = (X 1 (U 1 , ...,u q ), ...,x n (u 1 , ...,u q )).
On définit alors l'application composée qJ = fo x : Q IR.
Lorsquefet x sont différentiables, il en est de même defo x et l'on a
d[/a xJ(u) = al (x(u»dx1(u) + ... + al (x(u»dxn(u).
aX 1 aX n
[Comparer cette expression avec
dl(x) = al (X)dXl + ... + al (x)dX n
aX I aX n
et en déduire son invariance.]
III. - NOTIONS SUR LES DÉRIVÉES SECONDES.
1 0 Généralités. - Lorsque fest de classe Cl dans l'ouvert U de E, on définit
l'application
J' : U Lc(E, F) = [E, F], muni de la norn1e III . III (*),
a J' (a).
Lorsque J'est différentiabJe en un point a de U, sa dérivée est appelée
dérivée seconde de f en a. On la note f"(a) [ou d 2 f(a)].
Remarquons que f"(a) E Lc[E, Lc(E, F)] = [E, (E, F)] et peut être considérée
comme une application bilinéaire continue de E X E à valeurs dans F :
f"(a) : E x E F,
(x, y) f"(a)(x, y).
LorsqueJ" est définie et continue dans U, on dit quefest de classe C2 dans U.
2 0 Étude du cas où E = IRn ET F = 1R.
Théorème 4. - On considère une application f: U IR, U ouvert de IRn.
On a la proposition suivante :
« 1 de classe C 2 dans U.ç:. a 2 1 définie et continue dans U, Vi et j ».
ax.ax.
J
(*) Cf. Tome 1, chapitre 4, paragraphe III.
NOTIONS SUR LES DÉRIVÉES SECONDES
361
De pl us, lorsque la proposition ci-dessus est vraie, on a
" n n ô21
f (a)(x, y) = L L (a)XiYj,
i=l j=l ÔX.ÔX.
1 J
où
x = (x l' ..., X n )
et
y = (y l, ..., y n).
3 0 Étude du cas où E = IRn et F = IRP. - L'application f: U IR" est
caractérisée par ses p applications coordonnées fl,f2, ...,f" (voir le para-
graphe II, 1 0).
On peut écrire
f = (fl, .. .,f,,),
d'où l'on déduit le théorème suivant
Théorème 5.
«f de classe C 2 dans U <=>!ï de classe e 2 dans U, Yi E [1, 2, ..., p]».
De pIus, lorsque la proposition ci-dessus est vraie, on a
f"(a) = (f (a), .. .,f;(a))
et, par suite,
" ( n n ô 2 Il n n a 21;, )
f (a)(x, y) = .L .L (a)xiYj, ...,.L .L (a)xiYj ·
=1 ) =1 ox.ax. 1=1 ) =1 ax.ox.
1 ) 1 )
A.LI.
A.I.2.
_..\.1.3.
A.I.4.
A.I.5.
A.I.6.
EXERCICES DE L'ANNEXE A
Soit U lin ouvert de IR. On considère une application f: U /R.
Établir la proposition suivante:
« f dérivable en a EU<=> f différentiable en a ».
On considère une application linéaire continue f : E F, E et F désignant
deux Banachs définis sur 1R. Établir les propriétés suivantes:
i) f est différentiable dans E,
ii) f'(a) = f
E et F désignent deux Banachs définis sur IR, U un ouvert de E. On consi-
dère une application constante f
f:U F,
a f(a) = V vecteur constant, 'v' a E U.
Montrer que f est différentiable sur U. Calculer f'.
E et F sont deux Banachs réels, U un ouvert de E.
Soit j.: U F. Établir la propriété suivante:
« f différentiable dans U => f continue dans U».
Soit U un ouvert convexe d'un Banach réel E. On considère l'application
f: U IR. Établir la propriété suivante:
« f admet un maximum en Xo, Xo EU=> f'(xo) = 0 ».
Dérivée d'une application bilinéaire continue.
E, F et G désignent trois Banachs réels. Soit
cp : Ex F G,
(Xl' X2) CP(XI, X2),
une application bilinéaire et continue, c'est-à-dire telle que
Ilcp(Xl' x2)II G < Kll x l11 E · Ilx 2 1I f .,
'v'x l et X2,
(K étant une constante).
Montrer que cP est différentiable. Calculer sa dérivée.
A.I.7.
A.I.8.
A.I.9.
A.[I l.
EXERCICES DE L'ANNEXE A
363
Soit [a, b] Un intervalle compact de IR.
C([a, b], IR) désigne l'espace vectoriel des applications continues
[a, b] IR. On le munit de la norme de la convergence uniforme Il . IlL 00 :
IlfllLoo = Slip IJ(x) 1, JE C([a, b], IR).
xe[a,b]
1 0 Vérifier que C([a, b], IR) est un Banach.
2° Soit H: IR IR une application de classe e 2 .
a) Montrer que l'application J définie par
J : C([a, b], IR) IR,
<p 1--+ f: H(<p(x))dx,
est une application différentiable.
Déterminer f'«({Jo).
b) Est-ce que J est de classe el?
Fonctions convexes.
Soit Q un ouvert convexe de lRlI et 1 : Q IR. On dit que l'application f
est convexe sur Q si, et seulement si,
J[txo + (1- t)x l] < tJ(xo) + (1- t )J(x l)'
'v'xo et XIE Q et 'v't E [0, 1].
Établir la proposition suivante:
« J convexe sur Q <=> J(x) J(xo) + J'(xo)(x- xo), 'v'x et Xo E Q ».
Dérivées à valeur dans un Banach et différentielles.
F désigne un Banach défini sur le corps C des complexes. Soit f: C F.
On définit (lorsque cela est possible) la « dérivée usuelle » de l'appli-
cation J:
J' (a) = lim I(a+ h)- 1 (a) ,
Iz->O h
autrement dit,
l , J(a+h)-J(a) - J' (a) o.
h F /z->O
Quelle relation simple existe-t-il entfte la « dérivée usuelle» J' (a) et la
différentielle de 1 en a que l'on notera dans cet exercice dl(a)?
(Ali préalable, on montrera que 1 dérivable en a<=>I différentiable en a.)
On considère l'application 1
1: IR2 IR2,
('l' '2) J('l, '2) = ('1- ç , 2'lc;2).
L'application 1 est différentiable dans IR2. Pourquoi?
Caractériser l' (a).
364
A.ll.2.
A.II.3.
A.II.4.
A.III.t.
A.III.2.
A. - FONCTIONS DIFFÉRENTIABLES
U désigne un ouvert de JR2. On considère line application 1
1: u IR 3 ,
(a l' a2) (Il (a b a2), 12 (a 1, a2), 13(ab a2)),
où Il, 12 et 13 désignent les applications coordonnées de f.
O 1 ,1'.' . Il Il ôh U IR ,1 ' fi .
11, suppose que tes uerlvees partie es usue es : sont ue lues
UXj
et continues dans U. Montrer que l'on a
i) 1 différentiable dans U,
ii)
f'(a)(x) =
ail (a)
aXl
012 (a)
OXI
013 (a)
OX l
où
a = (al' a2)
f1 (a)
CX2
f2 (a)
OX2
/3 (a)
OX2
( ),
et
.X = (Xb X2).
En déduire que fapplicatioll linéaire l' (a) est caractérisée par hl nlalrice
( ah (a) ) .
OXj 1 i 3
1 j 2
On considère une application 1: u IR, U ouvert de IRII.
Établir la proposition suivante:
«1 de classe el dans U => : définie et continue dans U, i = (1, 2, ..", n) ».
a) On considère ['application Il . 112 : /Rn IR
Il. 112: X = (X b ..., Xn) Ilx; 2 = lIxI+...+x .
Étudier la différentiabilité de Il . 11 2 .
b) Même question pour chacune des nOJ"/nes suivantes:
IlxllO'J = sup IXi 1
i = 1, 2, ..., n
et
. Il xiiI = Ix 1 1+ Ix 2 !+...+ Ixnl.
On considère une application linéaire f : E F. E et F désignant deux
Banachs.
Montrer que 1 est de classe e 2 . Détern1iner 1".
E, F et G désignent trois Banachs réels. On considère l'application bili-
néaire cp
cp : ExF G.
Montrer que cp est de classe e 2 . Déterlniner cp".
A.III.3.
A.ill.4.
A.ill.5.
A.III.6.
EXERCICES DE L'ANNEXE A
365
On considère l'application f : IR2 -+ IR, définie comme suit:
f: (Xl' X2) f(Xl, X2) = XI X 2+ X l.
Montrer que f est de classe C 2 . Caractériser f"(a), où a = (ab a2).
U désigne un ouvert de IR 2 (x). On considère l'application f: U 1R 3 ,
définie COlnme suit:
f: (Xb X2) (xI, XI X 2, x ).
Montrer que f est de classe e 2 dans U. Caractériser f"(al, a2).
Reprendre l'exercice A.I.7. On suppose que H est de classe C 3 .
Montrer que f est de classe e 2 sur C([a, b], IR). Déterminer f".
Théorème.
Soit U un ouvert de IRn(x). On considère une application f: U /R.
Établir la proposition suivante:
ô 2 f
« f de classe C 2 dans U <=> a a définie et continue dans U,
Xi Xj
'v'i et je [1, 2, ...,n] ».
.
B. - FORMES p-LINÉAIRES
ALTERNÉES SUR IR II
VOLUME p-DIMENSIONNEL
La base canonique de IRn est notée el' e 2 , ..., en.
*
Soit IRn le dual de IRn. Sa base duale est notée el, e 2 , ..., en.
1. - FORME p-LINÉAIRE DÉFINIE SUR /Rn. GÉNÉRALITÉS.
*
1 0 Définition de IR(p).
Une forme p-linéaire alternée définie sur IRn est une forme linéaire f qui
vérifie la condition suivante :
f(X a (1), Xa (2), ..., Xa (p») = Gaf(X l, X 2' ..., X p ), 'v'X i E IRn,
Gq désignant la signature de la permutation rI.
.'.
...
L'ensemble des formes p-linéaires alternées sur IRn est un espace vectoriel IR'(p)
d d . . C p n ! . 1 / /
e ImenSlon n = , SI P n.
p!(n- p)!
*
Pour p > Il, on a IR(p) = : 0 .
Pour p = l, une forme linéaire est considérée comme une I-forme linéaire
.x- -x-
alternée. Autrement dit, IR(I) = IR n .
Exemple p = 2 : Une forme bilinéaire alternée sur IRn est une forme bili-
néaire
J: IRn x IR" IR, qui vérifie .{(V l' V 2) = - J( V 2, V l)' 'v' V 1 et V 2 E IRn.
* n . 1 d d . . n(n -1)
IR(2) est un espace vectorle e Imenslon .
2
FORME p-LINÉAIRE DÉFINIE SUR IR"
367
*
2 0 Base canonique de IR( ). - Soit il' i 2 , ..., ip une suite d'indices prIS
dans [1,2, ..., n] et telle que il < i 2 < ... < ip.
On définit alors e it ,Ï2,...,i p qui est une forme p-linéaire alternée sur IRn.
e ibÏ2 ,...,i p : IR n x IR n x ... x IR n ---+ IR,
(X l' X 2, o.., X p) e ibÏ2 ,..o,i p (X l' X 2, 000' X p) = det (x \.
n
où X j = L x ei' avec i = il' i 2 , ..0' ip et j = 1,2, 00.' p.
i= 1
-1:-
L'ensemble des eit,h,...,i p constitue une base de IR'(p) appelée base canonique.
Remarquons que les expressions e i t,i2,..o,i p (X l' X 2' .. 0' X p) sont les déter-
minants d'ordre p extraits de la matrice suivante .
X p
Xl
p
.,
x-
p
Xl X 2
el x xi
e 2 x 2 x
1
en x x
x n
p
dont les colonnes sont les composantes des vecteurs Xl' X 2 , ..., X p dans la
base canonique el' e2, ..., en de IRn.
Exemples:
-x-
a) L'ensemble IR'( 2) des formes bilinéaires alternées sur IR-! est un espace vectoriel de
dimension C = 6. Sa base canonique est donnée par e 12 , e1:J, e l 4, e 23 , e 2 -1 et e 34 0
.1 4
Soit X = xKeK et Y = yKeK' deux vecteurs de IR 4 0
1\=1 /\=1
Pour déterminer e i1i2 (X, Y), il suffit de dresser le tableau suivant :
X y
el ( X: Yl )
e2 X" y2
e3 x 3 y3
e 4 x 4 y4
et l'on en déduit
e l2 (X, Y) = x 1 y2-x 2 yl,
e 23 (X, Y) = x 2 y3_x 3 y2,
e l3 (X, Y) = x l y3-x 3 yt,
e 24 (X, Y) = x 2 y4_X-Iy2,
e l4 (X, Y) = x 1 y4_x 4 yl
e 34 (X, Y) = x 3 y4_x 4 y3.
'*
b) IR 4 est un espace vectoriel de dimension C: = 1 et de base canonique e l234 . Pour
4
déterminer e l234 (Xl, X2, X3, X4), où X j = xjel E IR4, il suffit de dresser le tableau suivant:
i=l
Xl X2 X3 X4
el c 1 Xl X)
x 2 3 4
e2 x 2 x 2 2 2
1 2 X 3 x 4
e3 x 3 3 x 3 x 3
l x 2 3 4
e4 x 4 4 x xl
1 x 2
368
B. - FORMES p-LINÉAIRES ALTERNÉES SUR IRn
et l'on en déduit
e 1234 (X1, X2, X 3 , X4) = det (xj)1 i 4.
1 J 4
* * *
c) Pour p = 1, on sait que IRt 1) = IR4 dual de IR4. 1R.11) admet pour base canonique
el, e 2 , e 3 et e qui est bien la base duale de el, e2, e3 et e4. En effet, en considérant le tableau
suivant :
x
; Π)'
où
4
X = xie"
iCil
on ren1arque que ei(X) = Xi.
3. Longueur d'une forme p-linéaire alternée sur IRn.
-x.
Soit Je IR.'(p), alors
J=
L
il <i2<...<ip
À,.. . e Ï1 'Ï2....,il'
JI , 2,.. .. p
et l'on pose
I JI = V " À, . .
L.J J1t J 2,....£p,
Ï1 <i2 <... <il'
appelé longueur de f.
II. - PRODUIT EXTÉRIEUR DE FORMES p OU q-LINÉAIRES ALTER-
NÉES SUR IRn : fA g.
1 0 J désigne une forme p-linéaire alternée sur IRn
J:(Xl' ...,X p ) J(X 1 , ...,X p ), Xl' ...,XpE IR n ,
g désigne une forme q-linéaire alternée sur IRn :
g : (X p+ l' ..., X p+q) H- g(X p+ l' ..., X p+q), X p+ l' ..., X p+q E /Rn.
On définit alors f A g (lire f extérieur g) qui est une forme (p + q )-linéaire
alternée sur IRII
f Ag : (Xl' ..., X p + q ) L 8 a f(X a (1)' ..., Xa(p»g(Xa(p+ 1)' ..., Xa(p+q»'
aeA
où A désigne l'ensemble des permutations u de [1, 2, ..., p +q] qui vérifient
0"(1) < 0"(2) < ... < u(p)
et
u(p +1)< O"(P +2)<...< u(p +q).
FORMES p-LINÉAIRES ALTERNÉES VI A V 2 A ... A V p
369
Exemples:
a) f et g désignent deux formes bilinéaires alternées sur IR". Alors, [!\ g est UGe forme
4-linéaire alternée sur IR", définie par
[!\ g : (Xl, X 2, X3, X4) [(Xl, X 2)g(X3, X4) -[(Xl, X3)g(X 2, X4)
+[(Xl, X4)g(X2, X3)+[(X2, X3)g(Xl, X4)
-[(X2, X4)g(XI, X3)+[(X3, X4)g(XI, X2)
où Xl, X2, X3 et X4 E IR".
b) f est une forme bilinéaire alternée sur IR" et g est une forme linéaire (donc l-linéaire
alternée) sur IR". Alors, [!\ g est une forme 3-linéaire alternée sur IR" définie comme suit:
[!\ g : (Xl, X2, X3) [(Xl, X2)g(X3)-f(Xt, X3)g(X2)+[(X2, X3)g(X:),
où Xl, X2 et X3 sont des vecteurs de IR".
2 0 Théorème 6.
i) Si! et g sont deux formes respectivement p et q linéaires alternées sur lR n ,
on a
g A/= (-l)pql Ag.
ii) Si h est une y-forme linéaire alternée sur IR1J, on a
(lA g) A h = lA (g A h), noté fA g A h.
;c. .
iii) Si fl,f2, . ..,Iv sont v formes linéaires (/;, E !Rn = IR(l»)' on a la propo-
sition suivante
Il A 12 A ... A Jo = 0 <=> Il,12' ...,/0 linéairement indépendants.
En particulier,
/;, =Jj pour i j => Il.A 12 A ... A Iv = O.
Exen'lple :
* *
Les formes ]inéaires el, e 2 , ..., el! constituent la base canonique de !Rn = IR(l),.
donc e Ï1 A e i2 A ... A e ip est une forme p-linéaire alternée sur IR'J
.x.
e i1 A e i2 A A e ip E IR I!
... (p).
Plus précisément on établit l'égalité suivante (cf. exercice A.V.2.) :
e i1 A e i2 A ... A e ip = e11Lt...i p .
III. - FORMES p-LINÉAIRES ALTERNÉES V l A V 2 1\ ... A J7p.
1 0 A p vecteurs VI' V 2 , ..., VI' de IRn
11
v. = lJ.i.e. ,
J l..J J£
i= 1
pour j = 1, 2, ..., p,
370
B. - FORMES P-LINÉAIRES ALTERNÉES SUR IRn
----..
on associe P formes linéaires VI' V 2, ..., V p sur /Rn
n
V. = "rJ..ï.e i
) L.J ) '
i= 1
pour j = 1, 2, ..., p,
puis la Îorl11e p-linéaire alternée sur IRn définie comme suit (*) ·
Vll\ V 2 A ...A .V p = L det(œ )'i=Ï1,...,ipeÏ1,i2,...,i
it<i2<...<ip lj=l,...,p
Exemples:
a) Dans IR4, 0/1, considère les deux vecteurs suivants:
4
VI = (Xiei
i=l
et
4
V2 = teï,
'==1
auxquels on associe les formes linéaires suivantes :
....__ 4
VI = (Xie i
i=l
En dressant le tableau ci-dessous
et
4
V2 = iei.
i==l
----.. ----..
VI V2
:: ( :: : )
e 3 cx3 3
e 4 (X4 4
et, en considérant les déterminants extraits, on constate que
- -
V1/\ V2 = «(X1 2----(X2 1)e12+«(Xl 3----(X3 1)e13+«(X1 4----(X4 1)e14
+ «(X 2 3----(X3 2)e23 + «(X 2 4----(X4 2)e2-1 +(o:3 .J-œ4(3:J)e: 4.
On peut aussi ren1arquer que l'on a
Vl /\ 'V2 = ( .t (Xiei ) /\ ( t jej ) = .t t (Xi jei /\ e j ,
C=l }=1 1=-1 J=l
ou encore
' ---
VI!\ V2 = «(Xi }----(Xj i)eij
i< j
(puisque e j /\ e i = _e i !\ e j = -eU).
b) Toujours dans IR4, 011 considère deux autres vecteurs .
4
V3 = yiei
i=l
En considérant le tableau suivant :
el ( (Xl
e 2 (X2
e 3 (X3
e. J (X -1
et
4
V4 = 8 i ei.
;=1
---
VI
,,;"-, ----.. ---
V2 V3 V4
1 yI a)
2 y2 8 2
3 3 8 3 '
Y
4 y4 8 4
(*) En fait, on pourrait introduire VI /\ V 2/\ ... /\ V p qui est une forme p-linéaire alternée
.x-
sur /RD et que l'on appelle co-vecteur.
-.... /"-. /"-.
FORMES p-LINÉAIRES ALTERNÉES V l A V 2 A ... A V p
371
on constate que VI/\ V; /\ V; /\ qui est une forme 4-linéaire alternée sur IRn vérifie
-.... -.... /"-. /"-.
VI/\ V2/\ Vs /\ V4 = det (VI, V2, V3, V4)e I2S4 .
Par suite,
............ ............ -.... .
1 VI /\ V2/\ Vs /\ V41 (lire longueur) = Idét (VI, V2, V3, V4)1.
2 0 Théorème 7. - Les lettres V l , V 2 , ..., V p désignent p vecteurs de IRn.
On a la proposition suivante :
/"-. -.... ,,'"
VlA V 2 A ...A V p = 0 <=> VI' V 2 , ..., V p linéairement indépenàants.
Théorème 8. - Soit E un sous-espace vectoriel de IRn. Considérons deux
bases distinctes de E, qui sont
VI' V 2 , ..., V p
On a la relation suivante :
et
W 1 , W 2 , ..., W p .
,...................... -.................................... ...............
VI A V 2 A . . . A V p = cW l A W 2 A ... A W p , c étant une constante réelle.
Corollaire. - Soit
VIA V 2 A ...A V p
n=
IV 1 A V 2 A ...A Vpl
On a n = + 11'.
et
, _ W 1 A 'W 2 A ... A W p
n -!W 1 A W 2 A ...A Wpi.
3 0 Relation entre le produit vectoriel V 1 A V 2 A ... A V n _ 1 et le produit
-.... -.... -.... ,
extérieur VI A V 2 A ... A V n - I . - Etantdonnén-l vecteurs VI' V 2 .. ..., V n - 1
de IRn, on a
n
V. = rJ}.e.
) ) t'
i= 1
pour j = 1, 2, ..., n - 1,
on peut définir la matrice suivante
œ (X 1 1
(Xn - 1
(X2 (X 2 1
1 (Xn - 1
ty"n (X n 1
1 (Xn - 1
puis le vecteur W de IRn dont les composantes dans la base canonique sont
constituées par les co-facteurs de la dernière colonne. West appelé produit
vectoriel de V l , V 2 , ..., V n - l . On le note VI A V 2 A ... A V 12 - 1 . Autre-
men t dit,
w= VIA V 2 A ...A V n - 1 .
Remarquons que l'on a
( X) = det(V 1 , V 2 , ..., V n - b X), 'v' XE IR n ,
(.,.) désignant le produit scalaire dans IRn.
372
B. - FORMES P-LINÉAIRES ALTERNÉES SUR IRn
Cas de n = 3. - Soit
VI = (x l' x 2 , X3)
et
V 2 = (YI' Y2, Y3).
On a alors
V 1 A V 2 = (X2Y3- X 3Y2)e l +(X3YI-XIY3)e2+(X1Y2-X2Yl)e3
et
/'. - ". 12 13 23
VIA V 2 = (XtY2- X 2Yl)e +(X 1 Y3- X 3Y1)e +(X2Y3-X3Y2)e ·
En identifiant e l2 avec e 3 , e 13 avec -e 2 et e 23 avec el' on peut identifier
--.. .........
V 1 A V 2 et V 1 A V 2.
IV. - VOLUME p-DIMENSIONNEL.
1 0 Considérons dans IRn un p-parallélépipède P de sommet X 0 et engendré
par V l' V.:, ..., V p :
p
p = X E /Rn 1 X = X 0 + L Â i : ,
i= 1
"
OU
o <; )I.i <; 1, i = 1, 2, ..., p.
Son volume p-dimensionnel v(P) est défini par l'égalité suivante
v(P) = IV 1 A V 2 A ...A !.
2 0 Considérons dans IRn unp-simplexe Q de sommets Xo, Xl' ..., Xp.
n
Q = : XE ./Rnlx = L Ài(Xi-X O )'
i= 1
"
ou
n
L Ai <; 1 et Ai ;> O.
i= 1
Son volun1e p-dimensionnel est donné par l'égalité suivante
v(Q) = 1(Xt-X o ) A (X 2 -X O ) A ... A (Xp-Xo! .
p!
Applications.
a) Dans JR.3 considérons le triangle QI de sommets
Xo = (1,1,1), Xl = (2, 1,0), X2 = (0,0,-1).
Sa surface V(Ql) est donnée par la formule générale
,,-.... ......-.... ,,-.... ,,-....
(Q ) = 1 (Xl-XO) /\ (X2-XO) 1
v l 2! '
or
Xl-Xo = el-e3,
X2-XO = -el-e2-2e3,
donc
-......-.... ,,-.........-.
(Xl-XO) /\ (X2-XO) = (e l -e 3 ) /\ (-e l -e 2 -2e 3 )
= -el /\ eL-3e l /\ e 3 -e 2 /\ e 3 = -eI2-3e13-e23
et, par suite,
vu
V(Ql) = T.
ORIENTATION D'UNE SOUS-VARIÉTÉ LINÉAIRE
373
b) Toujours dansJR3, considérons le tétraèdre Q2 de sommets Xo, Xl, X2 et Xs = (1,2, -1).
Son volume v(Q 2) est donné par la formule générale
,- ..... .-...... ...-- -
( Q ., ) = 1 (XI-XO) /\ (X 2-Xo) /\ (Xs-Xo) 1 = -.!. Id t (X _ x x _v X v )1
v, - 3! 3! e 1 0, 2 AO, S-AO .
En effet,
(Xl XO) /\ (X2 XO) /\ (Xs-"Xo) = dét (XI-XO, X2-XO, Xs-Xo)e 12S .
On obtient V(Q2) = 5.
v. - ORIENTATION D'UNE SOUS-VARIÉTÉ LINÉAIRE DANS IRn
AFFINE.
On considère la sous-variété linéaire, S, engendrée par (p+ 1) vecteurs
V o , V 1 , ..., V p :
s = {X E JR:ff!X = Â 1 (V 1 - V o )+." +À.p(V p - Vo)},
À. i E IR.
On peut donner à S J'orientation V 1 - V 0, ..., V p - V 0' c'est-à-dire
,,-.... --- ......-..........-.... ,,-.... "'.....
__ (V l - Vo) A (V 2 - V o ) A ... A (V p - V o )
ns = "'-""-"" ......-..........-.... ......-..........-.... ,
I(Vl-Vo)A (V 2 -V o )A ...(Vp-V o )\
ou bien son orientation opposée - Îis.
B.I.1.
B.I.2.
B.I.3.
B.I.4.
B.I.5.
B.Il.l.
B.II.2.
EXERCICES DE L'ANNEXE B
-x-
Écrire la base canonique de JR( ).
-x- -
Même question pour JR( ) et IR( ).
On désigne par f la forme bilinéaire alternée sur IR3, qui est la son1n1e
i-
des vecteurs de la base canonique de IR.( ).
a) Dans JR3, Oll considère les vecteurs suivants:
x = (1, 1, 0)
Calculer f(X, Y).
b) Calculer la longueur de f.
Y = (1, 2, 1).
et
V l , V 2 et V 3 désignent une base de IR3. Soitfuneforlnebilinéairealternée
sur IR? Montrer que f est déterminée par la connaissance de J( VI' V 2 ),
f(V l , V 3 ) et f(V 2 , V 3 ).
VI' V 2 et V 3 désignent une base de IR3.
a) Soit g une forme tri linéaire alternée sur IR 3 . Montrer que g est déter-
Ininée par la connaissance de g(V l , V 2 , V 3 ).
b) Exprimer g(XJ, X 2 , X 3 ) lorsque
4
X j = L cxjV i , pour j = 1, 2, 3,
;=1
en fonction de œj et de g(V l , V 2 , V 3 ).
c) Exprimer g(V l , V 2 , V 3 ) sachant que
4
V j = L f3J e i' pour j = 1, 2, 3.
i= l
Soit f = e l4 _ 2e 34 , où e i l i 2 désigne les vecteurs de la base canonique
-x-
de IR(i,). Exprimer f(et +e2, e3- e 4).
oK- -x-
a) Soit f E JR( ) et g E IR 3 . Définir fA g.
-x-
b) Même question pour f et g E IR( ).
-::- -x-
I et g E IRn = IR('I). Définir fA g.
Vérifier que el A e 2 = e l2 , pllis que el A e 2 A e 3 = e l23 .
B.II.3.
B. II.4.
B.II.5.
B.II.6.
B.II. 7.
B.II.8.
EXERCICES DE L'ANNEXE B
375
On considère les formes suivantes:
*
f= e l2 +2e I4 , e i l i 2 vecteur de la base canonique de ./R(ih
et
-
g = e l +e 2 -2e 3 +e 4 , e i vecteur de la base canonique de IR 4 .
Exprimer fAg dans la base canonique de IR(1h puis calculer If Agi.
*
Soit f= e l2 +e I4 , où e i l i 2 est un vecteur de la base canonique de ./R(1h
. *
et g = e l - e 3 , où el. est un vecteur de la base canonique de IR 4 .
Calculer fAg(el +e2+ e 3, el +e2, e 4 ).
*
el, e 2 , e 3 et e 4 désignent la base canonique de IR 4 .
Calculer leI A e 2 A (el + e 2 ) 1.
f, g et Iz désignent des formes respectivement p, q et r linéaires alternées
sur IRn. On suppose que p et q sont impairs.
.i\1ontrer que l'on a
fA gA h = -hA gA f.
e i l i 2...ip désigne un vecteur de base de IR(:). Montrer que l'on a
e l2 A e l3 = 0
e 2 A e 124 = o.
et
-:f-
a) Soit f E IR( ). Établir la proposition suivante:
« f décomposable en un produit de formes linéaires => fA f = 0 ».
b) Soit
f= flA f2 A ...A fp et g = glA g2A ...A gp,
*
où fi et gi E ./Rn.
Montrer que l'on a
_ 2fA g si p est pair,
(f+g)A (f+g) - 0 si p est impair.
e) En déduire que e 12 +e 34 n'est pas décomposable.
8.11.9. Soit
Il
fl = L
i=1
Il
f2 = L bie i ,
;=1
a.e i
l.
al et b i E IR,
et
*
1 2 n -1' . l b . d IR n
e , e , ..., e uesignant a ase canonIque e . *
Déterminer les composantes de fI A f2 dans la base canonique de IR(' ).
376
B.m.t.
B.III.2.
S.IV.t.
B. V .1.
B. - FORMES p-LINÉAIRES ALTERNÉES SUR IRn
On considère deux vecteurs de IR 3 suivants:
V 1 = el- e 2+ e 3
V 2 = el- 2e 3.
et
,,-........... "-......,.,,...-.....
Exprimer VI A V 2 . Calculer 1 VI A V 2 1 ainsi que 1 VI A V 2 (longueur
du produit vectoriel).
Dans IR 4 , on considère un sous-espace vectoriel E de base V l , V et V 3 .
a) Montrer que
W I = V l + V 2 , W 2 = V 2 + V 3 et W 3 = V 3 + VI
définit une base de E.
b) (V b V 2 , V 3 ) et (Wb W 2 , W 3 ) définissent-ils la même orientation
de E?
Dans IR3, 0/1, considère les vecteurs VI = (1,1, 1) et V 2 = (1,0, -1).
Calculer l'aire du parallélogramme P défini par
P={XE IR3 I X = À I V 1 +À 2 V 2 }, où 0<; Âi 1.
Dans IR3 affine, on considère le plan (TI) passant par les points
M I (l, 1, 1), M 2 (1, 2, 1) et M 3 (0,0, 1).
a) Déterminer les orientations possibles du plan (n). [Considérer par
-- --- ----.-
exemple (OM 2 -OM I )A (OM 3 -OM l ).]
b) Calculer l'aire du triangle MIM2M3.
c) Calculer le volume du tétraèdre OMIl,,,f2M3.
d) Déterminer les orientations possibles de la droite (D) passant par
les points Ml et M 2 .
c. - SOUS-VARIÉTÉS DE /R'f
1. - DIFFÉOMORPHISME.
1 0 Q et Q' désignent deux ouverts de IRn et f une bijection de Q sur Q'.
Lorsque f et f- l sont de classe CI, on dit que 1 est un difféomorphisme de Q
sur Q'.
2 0 Théorème d'inversion locale 9. - Soit U un ouvert de IRn. On considère
une application 1 = ([1,/2, ...,f,,) de classe Cl :
[: U --+ IRn,
U = (u l , ..., un) I(u) = (fl(U), ...,f,,(u)).
Si, en un point a E U, le jacobien,
D(fl> . ..,f..) ( a) = det ( afi (a) ) ,
D(u 1 , ..., un) aXj l i n
l j n
est non nul, alors f est localement nn difféomorphisme [autrement dit, il existe
un ouvert « assez petit » Q contenant a, :).el que f soit un difféomorphisme
de Q sur J(Q)].
Corollaire. - En considérant 1- 1 :J(Q) --+ Q, on constate que le système
) Xl = Il(ul, ..., Un), ) Ul = gl(Xl, ..., X Il )
. . . . . . . . . . . . . . . .. est localement équivalent à . . . . . . . . . . . . . . . . .
X n = !n(Ul, ..., un) Un = gn(Xl, ..., X n ),
où les gi :J(Q) --+ IR sont de classe el.
II. - SOUS-VARIÉTÉ DE IRn, DE DIMENSION p.
1 0 Soit S un sous-ensemble de IRn. On dit que S est une sous-variété de
dimension p dans IRn, si pour chaque a E S, on peut trouver un ouvert Qa
contenant a pour lequel l'une ou l'autre des conditions suivantes est réalisée.
378
c. - SOUS-VARIÉTÉS DE /Rn
Première définition.
fi existe un difféomorphisme, <1>, défini sur Qa, et qui envoie localementlS
.sur un sous-espace vectoriel V de dimension p.
Autrement dit,
<1>( S () Qa) = V () <I>(Qa),
-où
V = {y = (y 1, ..., y Il) E /Rn 1 y p + 1 = Y p + 2 = ... = y n = O}.
Seconde définition. - Il existe un ouvert A de IRP(u l' ..., U p ) et une appli-
-cation g = (gl, ..., gn) de classe Cl
g : A IRI1(X 1, ..., X n ),
U = (U l, ..., U p ) g(U) = (g 1 (U), ..., gl7(U)),
telle que
i)
ii)
rang
g(Ll) = S () Qa,
gl (U) ... a g 1 (u)
au 1 oU p
= p,
'v'u E A.
ag.n (u) ... agn (u)
au 1 au p
On dit alors que (g, Ll) est une représentation paran1étrique de S dans l'ou-
.vert Qa.
Remarques.
Les deux définitions énoncées ci-dessus sont, bien entendu, équivalentes.
- Une sous-variété S de dimension 1 dans IRn est appelée une courbe.
- Une sous-variété S de dimension n - 1 dans IRn est appelée une hyper-
-surface.
Exemples de sous-variétés.
a) Le sous-ensemble SI de IR4 défini comme suit
81 = lx EJR41x1 = COS t, X2 = sint, Xa = t, X4 = 1 1 t 2 ;' où -1 < t < 1,
est une sous-variété de IR4, de dimension 1, c'est-à-dire une courbe.
Ici,
11 = ]-1, 1 [ et g : t (cos t, sin t, t, lI t 2) .
b) Soit S2 = {x EIR4Ix +x +x;+x: = 1}. A tout point, a = (al, ..., a4) de S2vérifiant
.Q4 > 0, associons l'ouvert Oa = 0 = {xlxî+x +xi < 1}.
Alors, en posant
A { ( ) /R 3' 2 + 2 1') 1 1
IJ.. = U = lI!, U2, U3 E lUI l/ 2TU3 < i
.et
g : il->IR4
ul-+ (Xl = Ul, X2 = U2, X3 = U3, X4 = V 1-u.i-u -U5)'
<>n constate que (g, il) définit une représentation paramétrique de S 2 () Oa.
ESPACE VECTORIEL TANGENT
379'
Pour un point a = (al, ..., a4) de S2 vérifiant a4 = 0 (et al 0, par exemple), on peut
lui associer l'ouvert na = {xlx +x +xa < 1}.
En posant
gl : Ô. _> IR-1,
U (Xl = V1-llt-U -U , X2 = Ul, X3 = U2, X4 = 113),
on constate que (gl, d) définit une représentation paramétrique de S (") Oa.
En synthétisant les résultats précédents, on constate que S 2 est une sous-variété de dimen-
sion 3 dans IR4, c'est-à-dire une hypersurface.
2 0 Théorème des équations implicites 10 (cf. exercice C.II.I0). - Soit []
un ouvert de IRn(x) et S un sous-ensemble de U défini par des équations impli-
cites suivantes :
s = {x = (Xl' ...,xn)lfl(X l , ...,X II ) = ... =j;iXt, ...,X n ) = O},
où les /;, : U IR sont de classe el et vérifient
ail (x) ... a/l (x)
ox 1 oX n
rang
=q..
'v'X E S.
ah (x)... ah (x)
ox 1 oX n
Alors, S est une sous-variété de IR", de dimension (n - q).
III. - ESPACE VECTORIEL TANGENT.
Soit S une sous-variété de dimension p dans /R"(X). A tout point a de S
on peut associer un ouvert Qa tel que S (") Qa ait une représentation para-
métrique (g, A) :
g : A IRn(x), A est un ouvert de IRP(u),
u = (u l , ..., u p ) g(u) = (gl(U), ..., gn(u)).
L'application g est de classe el, donc différentiable. Soit Ua tel que g'(ua) = a.
L'image g o(IRP) de l'application linéaire g o : /RP /Rn, est un sous-espace
vectoriel de dimension p dans IRn. On l'appelle espace vectoriel tangent ou
variété linéaire tangente. Il est indépendant du choix de la représentation para-
métrique. On le note Ta(S) :
Ta(S) = g o( /R P ).
Il admet, en particulier, comme base, le système de vecteurs suivant :
og o og
-(ua), -(uo),..., -(Uo),
au 1 OU Z OU p
où
a g ( ) ( Ô g 1 ( ) og Z ) a gn ( \ )
- £10 = Llo, -(UO, ...,- UO) .
OUi OUi OUi OUi 1
380
c. - SOUS-VARIÉTÉS DE /Rn
Théorème Il. Lorsque S est une sous-variété de /Rn définie par des
équations implicites
S = {x = (Xl' ...,x n )lfl(X 1 , ...,X n ) = o.. =/q(X I , ..o,Xn) = O},
.on a
, n ah
TaCS) = \ h = (hl' ..., h n ) ?: -;:-(a)h j = 0
J = 1 OX.
J
pour i = 1, 2, ..., q!-
« Ceci exprime le fait que chaque vecteur ( : l (a), ..., (a») est orthogonal à riS).»
IV. - ORIENTATION D'UNE SOUS-VARIÉTÉ S DE DIMENSION P
DANS /Rn.
1 0 Orientation locale. - Soit (g, Ll) une représentation paramétrique de S
dans l'ouvert Q. Les vecteurs ag (u), ..., ag (u) définissent une base de T,.(S),
au 1 au p
variété linéaire tangente à S au point x = g(u) E S n Q.
On définit alors la forme p-linéaire alternée
ag ag
-(u) A 000 A -Cu)
..-.... ( ) _ au 1 au p
ng X - _ ....... ,
ag ag 1
U)A 0" A -Cu)
ÔU 1 au p !
puis l'application
",.
Îig : S fi Q lR.'(p),
X ng(x).
ng est appelée orientation de S dans Q pour la représentation paramétrique
(g, ).
Remarques. - Soit (G, Ll l ) une nouvelle représentation paramétrique
de S dans Q. On peut définir
.... -,
aG aG
-(V)A ...A -(V)
..-.... ( ) _ aV 1 av p
nG x - ,,;"-, __ ,
aG ôG
-(V)A ...A -(V)
ôV 1 a V p
Puisque aG (V), ..., aG (V) définit une nouvelle base de T,.(S), on a nécessai-
oV I av p
rement
"
ou
x = G(V) E S fi Q.
nG(x) = + ng(x).
ORIENTATION D'UNE SOUS-VARIÉTÉ S
381
Lorsque le jacobien du difféomorphisme Go 1 g : Ll Ll i est positif, on a
nG(x) = ng(x), 'ix ES n Q.
Lorsque ce jacobien est négatif, on a
n (x) = - ng(x).
Dans fous les cas, on a deux orientations possibles qui sont ng ou -lige
2 0 Orientation globale. - On peut recouvrir S par une famille d'ouverts
.Qi (i E 1) tels que S n Qi soit paramétré par (gi, Ll i ).
On dit que les (gi, Ll i ) définissent une orientation de S si, pour tout couple (i,j),
les applications g i et gj définissent la même orientation en chaque point de
.S fi Qi n Qj (car alors Îii(x) = Îij(x) = n(x)).
3 0 Étude de cas particuliers. * *
p = 1. - Ici S est une courbe et ng(x) E IR(l) = IR n . En « identifiant» la
*
base canonique el, ..., en de IRn avec la base canonique el' ..., en de IRn,
l'orientation iig(x) peut elle-même être identifiée au vecteur unitaire7 (x) tangent
à la courbe S au point x :
..-' ( ) (g'l(U), ...,g:(u))
t x = ,
V '2 '2
gl (u)+ ... +gn (u)
où
x = g(u) ES.
On a alors deux orientations possibles de S qui sont t'et - 1.'
p = n -1. - Ici S est une hypersurface. On sait que l'on peut « identifier»
le prod uit extérieur
ôi ôg
U)A ...A (u),
oU l oU n - l
avec Je produit vectoriel
ôg
U)A ...A
OUI
ag ( u).
U n - l
Soit
og ôg
-::4U)A ...A ( u)
N ( x ) = OUI OU n - 1
9 og ôg'
-CU) A ...A (U)
ÔUI ÔU n - l
IVg(X) est un vecteur unitaire normal à l'hypersurface
deux orientations possibles de S qui sont N g et - Nge
,
ou
x = g(U) eS.
(*) S et l'on définit
(*) Soit S une sous-variété de dimension p dans IRn. On dit que le vecteur v de IRn est
norma] à S en x lorsque v est normal à la sous-variété linéaire tangente T,,(S). Autrement dit,
'V est normal à tout vecteur de T,,(S),
(v, : (u») = 0, pour i = 1. 2, .... p.
382
c. - SOUS-VARIÉTÉS DE IR"
V. - ÉLÉMENT D'AIRE D'UNE SOUS-VARIÉTÉ S DE DIMENSION p
DANS IRn.
Soit (g, Ll) une représentation paramétrique de S dans l'ouvert Q de IRn.
L'élément de volume (ou d'aire) p-dimensionnel de S en x = g(u) est noté
da(x). Il est donné par la formule suivante :
!ag au ai
da = -A --S2.-A ...A - du! dU2... dUpe
aUl au z 8u p
Cas particuliers.
n = 3, p = 2.
S est appelé une surface. Ici g est défini par trois applications coordonnées
g b g 2 et g 3 :
g : Ll IR 3 ,
U = (UI, Uz) g(u) = (gl(Ul, uz), g2(U I , U 2 ), g3(U 1 , llz)).
On vérifie que da = VEG-F 2 dulduz, où
E = ( (U), (U) ) , F = ( (U)' (U) ) '" G = ( ag (u), g (U) ) ,
au 1 ou 1 au 1 aU2 aU 2 OU z .
(., .) désignant le produit scalaire dans IR3 [cf exercice 9.V.l.].
. n = 3, p = 1.
S est une courbe de représentation paramétrique (g, D,.) :
g : D,. IR3 (D,. intervalle ouvert de IR),
u g(u) = (gl(U), gz(u), g3(U)),
dcr est noté ds, on l'appelle élément de longueur d e la courbe S en x = g(u) :
ds = Vg?(u) + gl(u) + g'l(u) du.
'C.I.1.
C.II.1.
C.IJ .2.
C.II.3.
C.II .4.
EXERCICES DE L'ANNEXE C
Trouver un difféomorphisme g : ] - 1, 1 [ ] -1, 1 [ tel que g' s'annule
dans ] - 1, 1 [.
Comparer ce résultat avec celui du théorème d'inversion locale.
Équation cartésienne d'une surface.
Dans IR3, on considère l'ensemble L des points (x, y, z) tels que z = f(x, y),
f désignant une application de classe e l .-
f: Ll IR, Ll ouvert de IR 2 .
.:Votons a un point quelconque de L. Montrer que l'application
Ll x ]-00, oo[ IR 3 (u, v, w),
<1> : (x, y, z) (u, v, w),
1: ;
\ W = z- f(x, y),
sur 4>(Qa), Qa désignant un ouvert
où
définit un difféomorphisme de Qa
de IR3(X, y, z) qui contient a.
En déduire que L est une sous-variété de IR3(X, y, z) de dimension 2.
On dit que L est une surface.
.\1ontrer que S = {(x, y, z)lx 2 + y2 = 1} est une sous-variété de dimen-
sion 2 dans IR3(X, y, z) (c'est-à-dire une surface que l'on appelle cylindre
de révolution autour de l'axe Oz).
Pour cela utiliser chacun des procédés suivants:
la première définition donnée dans le cours, paragraphe II;
la seconde définition donnée dans le cours, paragraphe II;
le théorème 10.
Soit M = {(x, y, z)lx 2 +2y2+Z2 = 1, avec z # + 1}.
a) Montrer que M est une sous-variété de dimension 2 dans IR3.
b) Montrer que sa fermeture M est, elle aussi, une sous-variété de
dimension 2.
Sous-variétés linéaires.
Dans IR s , on considère la sous-variété linéaire suivante.-
S = {x = (Xl' ..., XS)IXl +X2+X3+X4 = 0 et XS-2Xl = O}.
Déterminer sa dimension. Trouver une base.
384
C.ll.S.
C.II.6.
C.II.7.
C.ll.S.
c. - SOUS-VARIÉTÉS DE /Rn
Produit de sous-variétés.
Soit
8 1 une sous-variété de dimension Pl dans /Rn 1
et
8 2 une sous-variété de dimension P2 dans /Rn2.
Montrer que 8 1 X 8 2 est une sous-variété de dimension Pl + P2 dan.
IRn 1 + n2.
Montrer que l'hyperboloiâe (H) d'équation
x 2 y2 Z2
-+---=1
a 2 b 2 c 2
est une surface, c'est-à-dire une sous-variété de dinlension 2 dans
IR3(X, y, z).
[ ) x 2 y2 Z2 ) ]
(H) = ( (x, y, z) a 2 + b 2 - c 2 = 1 \' a, b et c constantes non nulles.
Le cône d'équation
X 2 +y2_z2 = 0
est-il line sous-variété de dimension 2 dans IR3(X, y, z)?
Dans /R2(X, y), on considère l'ensemble E des points (x, y} vérifiant
e x2 + y2 = À À est une constante réelle.
,
E est-il une sous-variété?
C.II.9. Soit
C.II.I0.
A = {(x, y, Z, t)lx 2 +y2 1 et Z2+t 2 1}
et
B = {(x, y, Z, t)lx 2 +y2 = 1 et Z2+t 2 = 1}.
Montrer que aA - B est line sous-variété de dimension 3 (ê A désigne la
frontière « ou bord » de A).
Démonstration du théorème 10 (pour n = 3 et q = 2).
Q désigne un ouvert de /R3(X). On considère deux applications Il et 12,
Q IR, qui sont de classe el et vérifient
( ail (x)
aXl
rang af2
-(x)
aXl
ail (x)
aX2
al 2 (x)
aX2
afl (x)
aX3
al 2 (x)
aX3
= 2, VXEQ.
C.Ill.l.
-C.V.1.
c. V .2.
C.V.3.
EXERCICES DE L'ANNEXE C
385
On pose
S = {x = (Xl' Xz, x3)lfl(Xl, Xz, X3) = fz(xl, Xz, X3) = O}.
Démontrer que S est une sous-variété linéaire de dimension 2 dans lR 3 (x).
Considérer les applications cp : x u du type suivant:
\ Ul = fI (Xl' Xz, X 3 ),
1 U2 = f2(XI, X2, X3),
\ U3 = X3.
a) Dans lR 4 , on considère la sous-variété S 1 :
\ ,
8 1 = ) X = (x 1> ..., X4) ;t xl = 1 1.
\ 1=I}
Trouver une base de la variété linéaire tangente Tx(S l)' X E S 1.
Trouver une base du sous-espace Nx(S l) orthogonal à S 1 [c'est-à-dire
orthogonal à Tx(S l)].
b) Même question pour la sous-variété S 2 :
8 2 = ) X = (Xl' ..., X itl xl = 1, itl Xi = 1 !.
Dans lR 3 , on considère la surface S d'équations paramétriques
\ Xl = gl(Ul, uz),
J X2 = gZ(Ul' uz),
( X3 = g3(U l , u 2 ).
(Ul, uz) E Ll ouvert de lRZ(u).
Soit g = (gl, g2, g3) et x = g(u). En utilisant la formule générale,
montrer que
du(x) = VEG-FZduldu2,
où
E = t ( Ogi ) 2, F= t agi agi , G = r. ( a g i ) 2..
;=1 OUl ;=1 ÔUl aU2 ;=1 aU2
Calculer l'aire du compact K = {(x, y, z) EIR 3 1z = xy et xZ+ y2 1}.
Dans lR 4 , on considère la courbe (r) d'équations paramétriques
t Z
Xl = cos t, X2 = sin t, X3 = 2 et X4 = t, VtE]-I,I[.
Calculer la longueur de (r).
386
c. V.4.
C.V.5.
c. - SOUS-VARIÉTÉs DE IRn
Dans IR 4 on considère la sous-variété S d'équations para111étriques
Xl = cos t b X2 = sin t b x3 = cos t 2 et X4 = sin (2'
"I(t l, t 2) E IR. 2 (t).
Vérifier que S est une sous-variété de dimension 2.
Calculer son volume 2-dimensionnel.
Calculer le volume de l'hypersphère SR' de rayon R
SR = {XE IRn(x)IXI+X +".+X R}.
.-;
D. FORMES DIFFÉRENTIELLES
INTÉGRATION DE FORMES
DIFFÉRENTIELLES DE DEGRÉ P
SUR DES SOUS-VARIÉTÉS
DE DIMENSION p
1. - FORlVIES DIFFÉRENTIELLES DE DEGRÉ p. GÉNÉRALITÉS.
1 0 Définition.
.
Soit U un ouvert de IRn(x) et w une application U IR.(p) :
w : x = (x l, ..., x n ) w(x),
OJ est appelé forme différentielle de degré p, définie sur U.
.
Pour p > ll, on a w = 0 car IR.'(p) = {o}.
.
. Po r p n, w(x) appartient à IR.'(p) qui admet pour base canonIque
eLI,".' P(il < i 2 < ... < i p ), donc
W ( x ) = p. . ( x ) eiI,...,i p
l..J 1 I,...,lp
il <...<ip
(décomposition unique).
On sait que
eil,...,i p = e il A e Î2 A ... A e ip
(cf. page 369).
On sait aussi que dXi est le projecteur :
dXi : x = (x 1, ..., x n ) Xi = ei(x), ou bien
dXi = e i .
Par suite, co(x) se décompose de façon unique sous la forme suivante
w(x) = L Pil,...,ip(x)dxil A dX i2 A ... A dx ip '
il <...<ip
où
p. .: U IR.
lb...,lp
388
D. - FORMES DIFFÉRENTIELLES
2 0 Opérations sur les formes différentielles.
a) Somme. - On désigne par Wl et W2 deux formes différentielles de même
degré P sur un même ouvert U de IRn(x), on définit la somme W l + Cù 2 :
W 1 + W2 : x Ho W 1 (x) + W2(X),
qui est une forme différentielle de degré P sur U.
b) Multiplication par une fonction réelle. - On désigne par (0 une forme
différentielle de degré P sur U ouvert de IRn(x).
Considérons une application f: U IR. On définit alors la forme différen-
tielle f W
fw : x f(x)w(x),
qui est une forme différentielle de degré P sur U.
c) Produit extérieur. - On désigne par Wl et W2 deux formes différentielles
respectivement de degrés P et q sur un même ouvert U de IRn(x).
On définit le produit extérieur W 1 A W 2 :
Wl A W2 : x Wl(X) A W2(X),
qui est une forme différentielle de degré P + q sur U.
Théorème 12. - Wb Cù2, W3 désignent trois formes différentielles définies
sur un même ouvert U de IRn(x) et de degrés respectifs Pl' P2, P3.
f désigne une application : U IR. On a les propriétés suivantes :
i) (w l + (2) A W3 = W 1 A W3 + W2 A ûJ3
(nécessairement ici degré de W 1 = degré de W 2) ;
ii) (JWI) A 002 = !(W I A (2) = Wl A (Jw 2 ) noté JWl A W2;
iii) W 1 A (w 2 A (3) = (w 1 A W 2) A W3, noté W 1 A W2 A W3;
iv) W2 A W 1 = (- 1 )PIP2 W 1 A W2.
Conséquence. - Lorsque west une forme différentielle de degré impair,
on a W A W = o.
En particulier, pour Po et qo E [1, 2, ..., v], on a
dx. = dx.
"Po 1Qo
=>
dX iI A dX i2 A ... A dXiv = O.
II. - DÉRIVATION D'UNE FORME DIFFÉRENTIELLE.
*
IR.'(p) est muni de la norme euclidienne 1. 1 appelée longueur et définie
ci-dessous :
l ".il e i1 ,oo.,i p j - V " .il 2
L..J it,...,ip - L..J it,...,ip.
it<...<ip h<oo.<ip
DÉRIVATION D'UNE FORME DIFFÉRENTIELLE
389
Soit w une forme différentielle de degré p sur U ouvert de IRn(x)
'*
w : U lR(p),
x L PiI,...,i p (x)dx il A dX i2 A ... A dXip.
il <...<ip
On a évidemment
I w ( x )1 = V P . ( x ) .
L..J 11t...,lp
il<...<ip
-
Étudions la dérivée de l'application w : U lR(p). - On a la proposition
suivante :
« w de classe c n dans U <=> tous les P i1 ,...,i p sont de classe c n dans CI »,
ainsi que le théorème fondamental énoncé ci-dessous.
Théorème 13.
a) Soit w une forme différentielle de degré p, définie et de classe C l dans
un ouvert U de IRn(x) :
w(x) = L P i t,...,i p (x)dx i1 A dX i2 A ... A dx ip .
il <...<ip
Sa dérivée (*) dw est une forme différentielle de degré p + 1, continue dans U.
Elle vérifie la relation suivante :
dro(x) =. L. \ f aPit....,ip(Xl' ...,xn) dx) A dX i1 AdxhA ... A dx ip .
tl <...<tp K= 1 8XK
c'est-à-dire
dw(x) = L dP i1 ,...,i p A dX i1 A dX i2 A ... A dXip.
Î1 <... < ip
b) Lorsque west de classe C 2 (<=> tous les Pilt...,i p sont de classe C 2 ), on a
d 2 w = o.
Si west une forme différentielle de degré 11, définie et de classe C 1 dans
un ouvert U de IRn, on a évidemment dw = O.
Primitive.
k l ) On dit qu'une forme différentielle (X est une primitive de w lorsque
da, = w.
Lorsque west de degré 1, a, est une fonction.
k 2 ) Une forme différentielle west dite fermée lorsque dw = O.
k 3 ) Soit w une forme différentielle de classe Cl.
.",
(*) On considère ici l'application 6) : U IR'(p). Par suite,
'*
dc.ù : U H CcURn, IR'(p») (cf. page 357).
.390
D. - FORMES DIFFÉRENTIELLES
On a la proposition suivante :
« w est fermé <=> W admet une prÙnitive ».
III. INTÉGRATION D'UNE FORME DIFFÉRENTIELLE w DE
DEGRÉ p SUR TOUT OU PARTIE D'UNE SOUS-VARIÉTÉ ORIEN-
TÉE S DE DIMENSION p.
1 0 Intégration locale.
. S désigne une sous-variété de dimension p telle que
Sc U,
U ouvert de IRn(x).
On suppose que S peut être paralnétrée dans son enselnble par (g, Ll) :
g : Ll IRn(x),
Ll ouvert de IRP(u),
où
Xl = gl(Ul, .., u p ), ..., X n = gn(Ul, .., u p );
S = g(Ll) est munie de l'orientation ng définie par (g, Ll). On la notera Siz g .
. w désigne une forn1e différentielle de degré p, définie et de classe CI
dans l'ouvert U
OJ : x w(x) = L Pil,...,ip(Xl, ..., Xn)dX il A dX i2 A ... A dx ip .
il <...<ip
. w* = g- l( w) désigne la forme différentielle suivante qui est définie et
de classe CI dans Ll
00* :ll OO*(U) = L Pil,...,i p [gl(U 1 , ...,u p ), .., gn(u l ,. .,U p )]
il <...<ip
( f a g i1 (U)dUK ) A . . A ( f agiP (U)dUK )
K=10UK K=IOUK
[remarquons que w::: = g-l(W) se déduit forlnellelnent de w en remplaçant
p og.
Xi par g;(UI'. ., u p ) et dX i par L --2...(U)dUK].
K=10LlK
On vérifie que l'on a
w:::(u) = F(u l , . ., up)du 1/\ dU 2 A .. A du p ,
où F : Ll IR est de classe Co.
Pa,. définition,
f w = f F(u l ,. ., U p ) dU l, dU2, · ., dUpe
Sng
FORMULES DE TRANSFORMATION
391
2° Intégration globale.
. S désigne une sous-variété de dimension p telle que
S c U, U ouvert de IRn(x).
On suppose que S est une sous-variété orientable de dimension p qui est
paramétrée par (gi, Ll i ) dans chaque ouvert Qi de IRn(x).
L'orientation définie par les (gh Ll i ) est notée ;;g [g = {gi}ieI].
. {Xi}ieI désigne une famille d'applications de classe CO',)
Xi : IRn(x) IR,
telles que
LXïCx) = 1,
ieI
'v'x EU,
support de Xi c Qi, 'v'i E 1.
. W désigne une forme différentielle de degré p, définie et de classe el
dans U
W : x w(x) = L PiJ,...,i p (x)dx i1 A dx iz A . · A dx ip .
il <... <ip
On a évidemment
W = LXi W = LW i
ieI ieI
(en posant W i = XiW).
Par définition,
f W = L f Wi = L J F;(Ul'..' up)du l dU2 · · du p ,
Sn ieI Sn t"'\Qi ieI i
g 9i
où
W; = gi- 1 (W i ) = F;(u 1 , . ., u p )du 1 A dU 2 A . . A dUpe
3° Soit K un relativement compact de S. Muni de l'orientation induite
on le notera Kng. On a
f W = L f Wi = L l F i (U 1 ,. ., u p )du 1 , du z ,. ., dUpe
Kn ieI Kn t"'\Qi ieI g-l(Kt"'\Qi)
g 9 i
IV. - FORMULES DE TRANSFORMATION.
1 ° Théorème de divergence.
. 0 désigne un ouvert borné de IRn(x) défini comme suit
o = {x E IRn(x)IcI>(x) < O},
où <1> : /Rn IR est une application de classe C l telle que
n 0cI>
L -(x) 0,
i= 1 ox.
£
'v' x E IR n .
392
D. - FORMES DIFFÉRENTIELLES
telle que
. Le bord (ou frontière) 00 de l'ouvert 0 est une sous-variété de dimen-
sion n-l qui admet une représentation paramétrique (g, il)
g : il JR.n(x), il ouvert de JR.n- leu),
( og a g og ) .
det grad<l>,-,-,.., > 0,
OUI OU2 OU n - 1
(g, ) définit sur 00 une orientation ng qui sera dite positive; 00 muni de
cette orientation sera notée 00+.
. w désigne une forme différentielle de degré n -1, définie et de classe CI
dans 0 (adhérence de 0).
11
W : x w(x) = L P1z(X) dx il A dX i2 A.. A dXin_1.
11= 1
il <."<ip
On a alors la relation suivante dite formule de divergence :
f J J [ ( IJ+I0Ph ( ]
w = dw = l..J -1) - x) dX 1 dx 2 . .,dxn.
{JO + 0+ 0 h=l OX h
2 0 Formule de Stokes (forme locale).
. S désigne une sous-variété de dimension p telle que
S c U, U ouvert borné de IRn(x).
Elle admet une représentation para métrique (g, il) et on lui donne l'orien-
tation ng.
. K désigne un relativen1ent compact de S. Il est défini par les relations
suivantes :
Xl = gl(Ul, ..., u p ), ..., X ll = gll(u 1 , ..., u p ) et <I>(UI' . ., u p ) 0
[où <l> : JR.P(u) IR est de classe Cl et vérifie
p 0<1>
L-(u) O, 'v'uEil].
i = 1 au.
£
. oK désigne le bord (ou frontière) de K. C'est une sous-variété de dimen-
sion p -1, on le munit de l'orientation
,,;"-, v ou ' V = ( _ 1) 1J+ 1 ael> Og A . . A _ ai ai ai.
_\1 9 = : , - v " / ' l..J '" '" A A.. A -
Il = 1 OU h OUÏ! OUih -1 OUih + 1 OUi p
w désigne une forme différentielle de degré p -1, définie et de classe CI
dans l'ouvert U.
On a alors la formule suivante, dite de Stokes :
f w = f dw.
ôK N Kn
9 9
LIBRAIRIE-VUIBERT, dépôt légal: 3506, 4 e trimestre 1973
FD - Imprimerie AIençonnaise - 2, rue Édouard-Belin, 61002 Alençon - B. P. 57
ISBN: 2 -7117 -2111-6