/




















































































































Author: Проскурин А.А.
Tags: автоматика и телемеханика спорт радиотехника
ISBN: 5-7030-0058-0
Year: 1988




Text
^просиурин МОДУЛЬНАЯ
АППАРАТУРА
РАДИОУПРАВЛЕНИЯ
ББК 32.96+75.7
П82
Рецензент кандидат технических паук В. II. 11 с у р ц е в
Проскурин А. А.
П82 Модульная аппаратура
ДОСААФ, 1988.—126 с., ил.
70 к.
радиоуправления.— М.:
В книге представлены схемы двух модификации приемопередающего комплекса «Сиг-
нал-1», предназначенного для радиоуправления моделями самолетов, кораблей и иной техники;
рассмотрены примеры замены электромеханически! о комлндоапнарата электронными устрой-
ствами, описана методика налаживания электронных блоков и модулей. Предлагаются для
самостоятельного изготовления также некоторые раднолюби i ельские конструкции, отмеченные
дипломами на всесоюзных выставках и конкурсах.
Книга рассчитана на всех, увлекающихся коне i рунровапием радиоуправляемых моде-
лей, а также на занимающихся в кружках технического гворчества, работающих при Домах
пионеров и школьников.
п 2402020000—038 91 RR
11 072(02)—88
ББК 32.96 | 75.7
6Ф6
ISBN 5—7030—0058—0
© Издательство ДОСААФ СССР, 1988
Стр.
Предисловие ........................................................ 5
Вступление ......................................................... 8
Немного о радиотелемеханике .................................... 8
Выбор игрушки для радиоуправляемой модели......................8
Понятие об индивидуальном и групповом радиоуправлении
моделями.........................................................8
Принципы подачи команд ......................................... 9
1. Простейшая аппаратура радиоуправления моделями...................11
1.1. Структурная схема приемопередающего комплекса
«Сигнал-1» . 11
1.2. «Сигнал-1» варианта 1......................................12
1.3. «Сигнал-1» варианта 2......................................19
1.4. Радиоуправляемая модель «Планетоход-7».....................23
1.5. Преимущества и недостатки «Сигнала-1»......................25
1.6. Радиоуправляемая модель на восемь команд...................26
2. Цифровые модули в аппаратуре радиоуправления и их элементная
база................................................................37
2.1. Модул иная система в радиотелемеханике.....................37
2.2. Основные понятия цифровой техники..........................38
2.3. Логические элементы........................................39
2.4. Счетчики импульсов.........................................41
2.5. Триггеры...................................................44
2.6. Дешифраторы................................................44
2.7. Регистры...................................................44
2.8. Замена микросхемы К176ИЕ8..................................47
2.9. Особенности монтажа и эксплуатация микросхем . >...........47
3 Модули передающей аппаратуры дискретного управления..............49
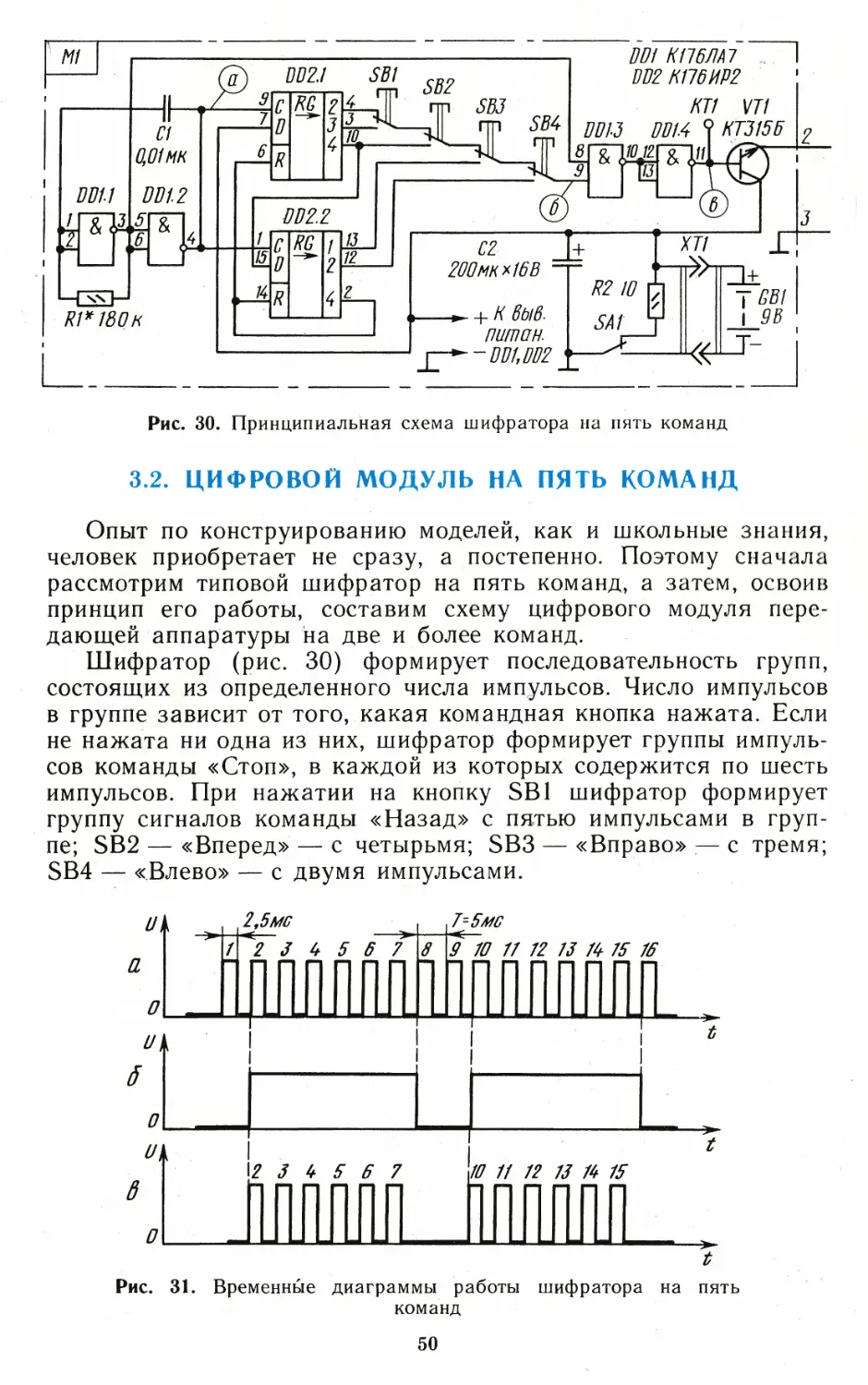
3.1. Шифратор команд. Виды дискретных команд....................49
3.2. Цифровой модуль на пять команд.............................50
3.3. Цифровой модуль для группового радиоуправления.............53
3.4. Модуль с одновременной подачей трех команд.................56
3.5. Что такое дискретно-пропорциональное управление?...........59
3.6. Модуль дискретно-пропорционального управления..............60
3.7. Модуль для яхты............................................62
3.8. О выборе передатчика «Сигнал-1» для работы с цифровыми
модулями....................................................... 65
3.9. Модуль передатчика «Сигнал-1»..............................65
3.10. Структурная схема передающей аппаратуры из модулей .... 65
3.11. О выборе частоты тактового генератора шифратора и мульти-
вибратора ..................................................... 66
4. Модули приемной аппаратуры.......................................67
4.1. Что такое дешифратор?..................................... 67
4.2. Пятикомандный модуль-дешифратор............................68
4.3. Вариант пятикомандного дешифратора.........................70
4.4. Помехозащитный модуль......................................73
4.5. Модуль первого оператора для группового радиоуправления .... 75
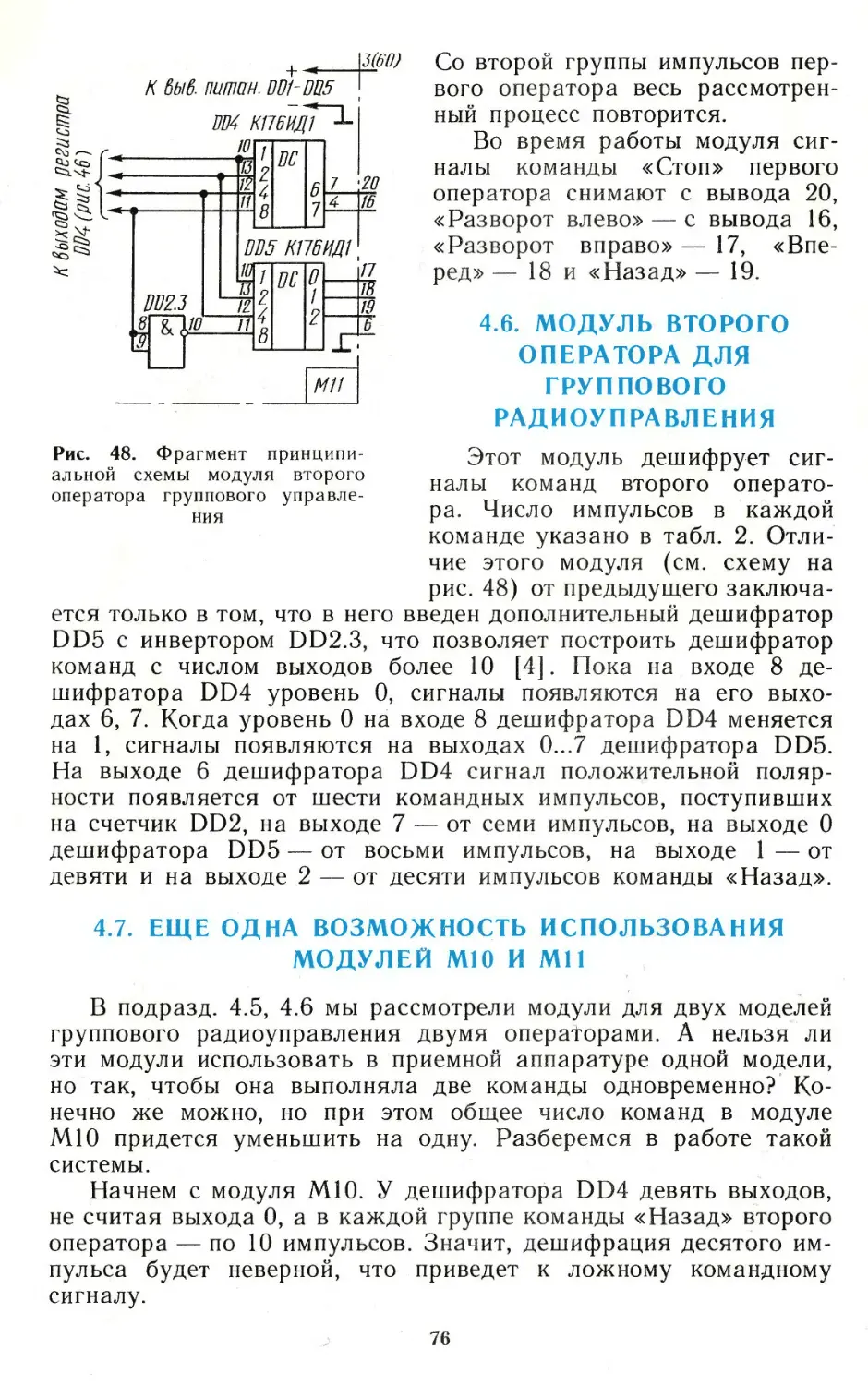
4.6. Модуль второго оператора для группового радиоуправления . . . 76
4.7. Еще одна возможность использования модулей М10 и Mil . . . • . 76
3
4.8. Помехозащитный модуль для моделей группового
управления ......................................................77
4.9. Дешифратор трех одновременных команд........................80
4.10. Помехозащитный модуль для шестикомандного дешифратора ... 81
4.11. Дополнительный трехкомандный помехозащитный модуль .... 81
4.12. Модуль дискретно-пропорционального дешифратора.............83
4.13. Модуль дешифратора для яхты................................86
4.14. Модуль приемника «Сигнал-1»................................88
4.15. Модуль приемника с логическим элементом....................89
4.16. Модуль приемника «Сигнал-1» с реле.........................91
4.17. Налаживание модулей дешифраторов...........................92
4.18. О выборе числа импульсов в группе команды «Стоп»...........93
5. Усилители тока 95
5.1. Зачем нужен усилитель тока?.................................95
5.2. Модуль указателя поворотов..................................96
5.3. Модуль УТ на три команды....................................97
5.4. Модуль УТ на четыре команды.................................98
5.5. Модуль УТ на пять команд....................................98
5.6. Пятикомандный модуль УТ для двух команд одновременно .... 99
5.7. Пятикомандный модуль УТ для группового радиоуправления ... 99
5.8. Модуль УТ на три команды для яхты..........................100
5.9. Модуль УТ для пропорциональной команды.....................101
5.10. Транзисторный модуль УТ на четыре команды.................103
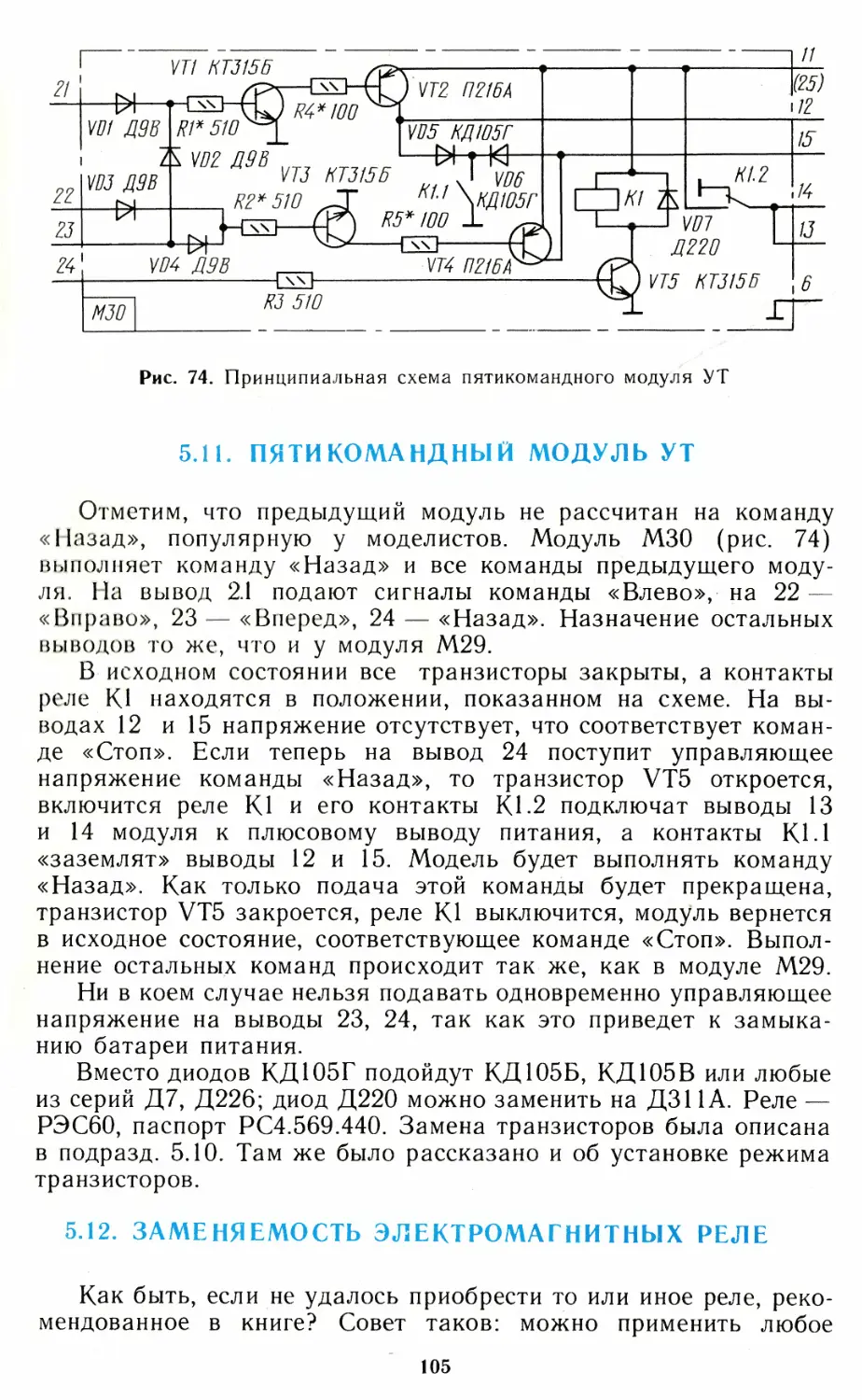
5.11. Пятикомандный модуль УТ...................................105
5.12. Заменяемость электромагнитных реле........................105
5.13. Устройство для налаживания УТ.............................110
6. Вспомогательные узлы.............................................111
6.1. Общие сведения.............................................111
6.2. Коммутационный узел на три команды.........................111
6.3. КУ на четыре команды.......................................112
6.4. Пятикомандный КУ............................................ИЗ
6.5. Второй вариант пятикомандного КУ . '.......................113
6.6. Третий вариант пятикомандного КУ...........................114
6.7. Пятикомандный КУ Для группового радиоуправления............114
6.8. КУ на две одновременные команды............................114
6.9. Узел исполнительного электродвигателя......................114
6.10. Узел с двумя электродвигателями...........................115
6.11. Узел источника питания на 6 В.............................115
6.12. Узел источника питания на 9 В.............................115
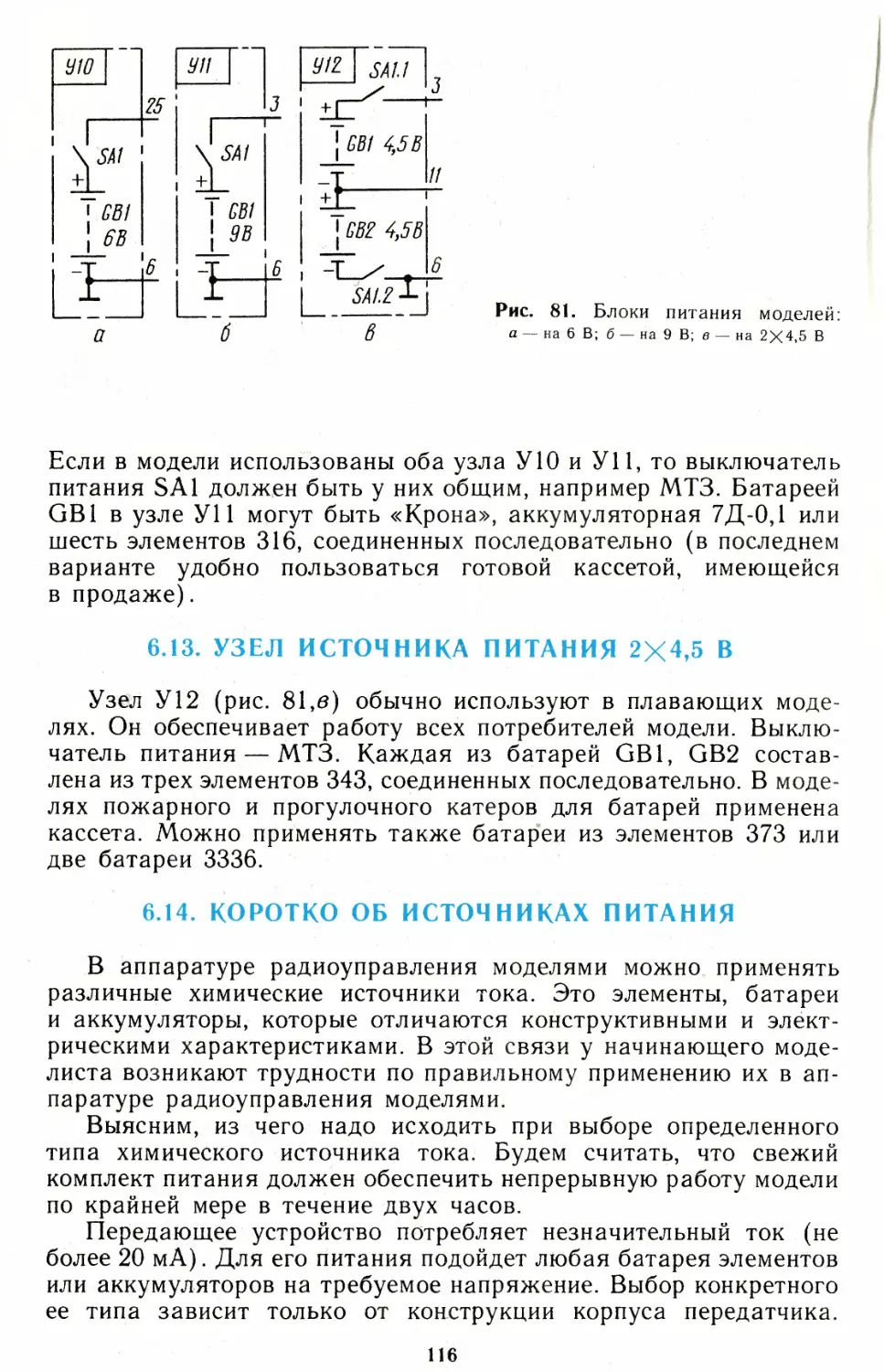
6.13. Узел источника питания 2X4,5 В............................116
6.14. Коротко об источниках питания.............................116
6.15. Модуль преобразователя напряжения.........................118
7. Структурные схемы приемных устройств.............................120
Литература..........................................................125
Наибольшей популярностью у детей, как известно, пользуются
электрифицированные игрушки — модели автомобилей, плането-
ходов, танков, катеров и т. д. Многими из них можно управлять
с пульта, соединенного с моделью кабелем, за такими игрушками
надо ходить. Поэтому интерес к ним быстро пропадает. Другое
дело, когда игрушкой управляют дистанционно, без проводов,
используя для этой цели дискретную или пропорциональную
аппаратуру.
Обычно аппаратуру пропорционального управления исполь-
зуют в спортивных моделях, так как только такая аппаратура
позволяет обеспечить пропорциональность между углом откло-
нения ручки управления на пульте и углом отклонения исполни-
тельного механизма на модели. Аппаратура пропорционального
управления сложна и дорога. Изготовление и налаживание ее
требует высокой радиолюбительской квалификации.
Аппаратура дискретного управления намного проще. Поэтому
ее широко используют в игрушечных моделях. Изготовить и на-
ладить такую аппаратуру несложно и в любительских условиях.
Однако перед тем как начать изготовление передатчика для
управления моделями как пропорциональной, так и дискретной
системы, необходимо получить разрешение Государственной ин-
спекции электросвязи. Для получения такого разрешения нужно
подать в инспекцию через местную радиошколу или комитет
ДОСААФ заявление-анкету с двумя фотокарточками и ходатай-
ство местного комитета ДОСААФ. К заявлению должна быть
приложена принципиальная схема радиопередатчика. Разреше-
ние может быть выдано только радиолюбителям, достигшим
16-летнего возраста.
Для передачи сигналов управления следует использовать
тональную телеграфию с шириной полосы излучаемых частот не
более 25 кГц. Передатчик должен работать только в разрешенных
для передачи команд телеуправления диапазонах: 28...28,2 МГц,
144...146 МГц, 420...435 МГц и на частоте 27,12 МГц±0,6 %.
Стабильность частоты передатчика должна быть не хуже 0,06 %.
Как видите, требования, предъявляемые к этой аппаратуре,
весьма жестки, и для того чтобы изготовленный вами комплекс
их удовлетворял, налаживать его необходимо по приборам.
В первую очередь вам понадобится генератор высокочастотных
сигналов, например Г4-17. Кроме этого, нужны генератор звуковой
5
Рис. 1. Приемопереда-
ющий комплекс «Сиг-
нал-!»
частоты, ампервольтметр, электронно-лу-
чевой осциллограф однолучевой, а еще
лучше двухлучевой. Для налаживания и
макетирования устройств потребуется
блок питания, обеспечивающий напряже-
ние, регулируемое в пределах 1...9 В, и ток
нагрузки около 300 мА, и комплементар-
ное* напряжение 2X4,5 В при токе нагруз-
ки каждого плеча не менее 1 А. Очень хо-
рошо иметь также измеритель статиче-
ского коэффициента передачи тока тран-
зисторов и индикатор напряженности
электромагнитного поля.
Как видите, парк необходимых измери-
тельных приборов довольно широк. Навер-
ное, каких-либо приборов у вас не окажет-
ся. В этом случае советуем обратиться в
ближайший радиоклуб ДОСААФ или в ра-
диокружок при Дворце пионеров, Доме
комсомольца, школе, домоуправлении и
т. п. Некоторые приборы можно приобрес-
ти в специализированных магазинах или
через базы Союзпосылторга, а некоторые,
наиболее простые,— изготовить самосто-
ятельно.
Радиолюбителям, не имеющим опыта
в изготовлении передатчиков, но желаю-
щим построить радиоуправляемую модель,
лучше всего начать свое техническое твор-
чество с использования готового, на-
строенного приемопередающего комплекса
«Сигнал-1» (рис. 1). Комплекс предна-
значен для радиоуправления различными
моделями и игрушками на сравнительно
небольшом расстоянии. В состав этого
своеобразного радиоконструктора входят передатчик, приемник,
набор антенн и устройство (в инструкции оно названо командо-
аппаратом), с помощью которого модель, оснащенная двумя
электродвигателями, может выполнять в определенной последо-
вательности пять команд.
Передатчик работает на частоте 27,12 МГц (возможное от-
клонение не превышает ±0,6 %) и излучает тонально-модули-
рованные телеграфные сигналы мощностью не более 10 мВт.
Чувствительность приемника выпуска до 1980 года не хуже
* Широко используемое сейчас название «двуполярное» напряжение никак
нельзя признать удачным, так как тогда пришлось бы согласиться с существова-
нием некоего «однополярного» напряжения.
6
100 мкВ, модифицированного — 50 мкВ. При таких параметрах
аппаратуры дальность действия ее на открытой площадке при
отсутствии железобетонных сооружений, линий электропередач
и других поглощающих или рассеивающих энергию радиоволн
объектов превышает 20 м.
Дискретная аппаратура «Сигнал-1» пользуется популярностью
у радиолюбителей, ее можно встретить в лабораториях и кружках
автоматики и телемеханики, в школах и внешкольных учрежде-
ниях, она очень удобна при изготовлении радиоуправляемых
моделей в пионерском лагере.
В этой книге подробно рассказано о принципе работы и конст-
рукции аппаратуры «Сигнал-1», а также различных вспомога-
тельных устройств, позволяющих расширить возможности радио-
управляемой модели, описаны возможные дополнения и изменения
в приемной части комплекса для более полного его использования.
В прилагаемой к комплексу инструкции слишком кратко расска-
зано о работе аппаратуры и используемых в ией деталей. Кроме
того, есть неточности в схеме подключения устройства, исполняю-
щего команды, к электродвигателям модели.
В этой книге автор предпринял попытку внедрить модульный
принцип конструирования дискретной аппаратуры радиоуправ-
ления моделями иа базе готового настроенного приемопередаю-
щего комплекса «Сигнал-1».
В заключительной части книги вы познакомитесь с вариан-
тами структурной схемы приемопередающего комплекса аппара-
туры на различное число команд, используемого в радиоуправляе-
мых моделях.
ВСТУПЛЕНИЕ
Немного о радиотелемеханике
Радиотелемеханика — управление механизмами и аппаратами
на расстоянии. Комплекс аппаратуры для формирования сигна-
лов управления, передачи их в эфир, приема их и выделения для
подачи на исполнительный механизм называют командной радио-
линией.
В наши дни благодаря бурному прогрессу науки и техники
радиотелемеханика достигла больших высот. Подтверждением
этому являются успешные действия нашего «Лунохода» и других
космических аппаратов, управляемых по командам с Земли из
Центра управления космическими полетами.
Управление моделями по радио — это малая радиотелемеха-
ника. Здесь тоже имеется своего рода «центр управления», из
которого оператор посылает команды, а модель их выполняет.
Выбор игрушки для радиоуправляемой модели
Торговые организации предлагают покупателям широкий
ассортимент игрушек. Это легковые, грузовые автомобили и авто-
фургоны, гусеничные луноходы, планетоходы, вездеходы, танки,
прожекторные и зенитные установки и т. д. Есть игрушки пла-
вающие — это пожарный и прогулочный катера, буксир, яхта и др.
Однако далеко не все игрушки могут быть использованы под
радиоуправляемую модель. Объясняется это тем, что не в каждую
можно вместить приемную аппаратуру и батарею питания. По-
этому прежде чем приобрести игрушку, предназначаемую для
радиоуправляемой модели, необходимо оценить, какую приемную
аппаратуру можно в нее поместить, где будут установлены бата-
рея питания, антенна, исполнительные механизмы. Нужно, как
говорят, продумать все до мелочей, чтобы потом не тратить усилий
на «засовывание слона в спичечную коробку».
Понятие об индивидуальном и групповом радиоуправлении
моделями
Вам, возможно, приходилось видеть, как управляют моделью
на расстоянии, или самим доводилось ею управлять. Как правило,
процесс управления моделью связан с определенной игровой
8
ситуацией, например, с проведением модели по намеченному
сложному маршруту. Если в этой ситуации участвует только одна
модель, то действия оператора будем называть индивидуальным
управлением моделью, потому что в этом случае один человек
управляет моделью, а другие наблюдают.
Теперь рассмотрим другой случай. Допустим, что в игровой
ситуации участвуют одиовремеиио несколько операторов, причем
каждый независимо от других может управлять только своей
моделью. Здесь мы имеем дело с групповым радиоуправлением
моделями. Оно намного интереснее индивидуального потому, что
позволяет создать такие интересные игровые ситуации, как воз-
душный бой, танковая атака, работа самосвалов и экскаватора
в карьере, морской порт, синхронное радиоуправление моделями
и другие.
Смысл игры «воздушный бой» заключается в следующем.
К хвостовому оперению каждого самолета привязывают бумаж-
ную ленту длиной около двух метров. Победителем боя становится
тот, кому удалось срезать ленту противника винтом своего само-
лета и благополучно посадить его на землю. В «танковой атаке»
игрушечные радиоуправляемые таики, преодолевая препятствия,
достигают намеченного рубежа. Победителем соревнования назы-
вают участника, который прошел дистанцию быстрее, с меньшим
числом штрафных очков.
Синхронным называют такое управление, когда радиоуправ-
ляемые модели одиовремеиио выполняют команды операторов.
Например, движение моделей вперед или назад, их маневриро-
вание (повороты) по определенному маршруту и графику, зара-
нее составленному судьей, проводящим соревнование. Эта игра
в чем-то подобна синхронному плаванию.
Групповое радиоуправление моделями—направление новое
и интересное. В нем могут принимать участие два и более опера-
торов одновременно. Для группового радиоуправления не обяза-
тельно иметь столько передатчиков, сколько моделей участвует
в игре. В этой книге рассмотрен пример группового радиоуправ-
ления несколькими моделями от одного передатчика «Сигнал-1».
Принципы подачи команд
Существует несколько принципов подачи команд в пере-
дающих устройствах для управления моделями [1, 2, 3]. Из них
мы рассмотрим всего три.
Принцип последовательной подачи команд заключается в том,
что при каждом иажатии на единственную командную кнопку
в передатчике модель выполняет команды в раз и навсегда за-
данной последовательности. Число команд, выполняемых моделью,
зависит от конструкции комаидоаппарата, и они, как правило,
чередуются с определенным циклом. Этот принцип подачи команд
использован в приемопередающем комплексе «Сигнал-1».
9
Сущность принципа последовательной независимой подачи
команд состоит в том, что в передатчике имеется не одна, а не-
сколько командных кнопок, и при нажатии на одну из них или на
две (и более) одновременно модель выполняет соответствующую
команду. На этом принципе подачи команд может быть построен
передатчик на восемь команд.
А при использовании принципа одновременной подачи двух
и более дискретных или дискретно-пропорциональных команд
передатчик снабжают электронным коммутатором, который с ча-
стотой 50...200 Гц поочередно переключать командные каналы,
по которым передаются команды.
В последующих главах вы узнаете, что рассмотренным прин-
ципам подачи команд соответствуют определенные виды модуля-
ции сигнала несущей частоты передатчика.
Модуляция — это процесс изменения одного или нескольких
параметров (амплитуды, частоты, фазы, длительности импульса
и т. д.) сигнала высокой частоты (несущей), необходимый для
передачи командных сигналов на управляемую модель. В [2] рас-
сказано о многих видах модуляции; мы же рассмотрим три из
них: импульсную, кодоимпульсную и широтноимпульсную.
Импульсная модуляция заключается в том, что командный
сигнал низкой частоты преобразуют в импульсы тока, которые
модулируют сигнал несущей частоты передатчика.
Кодоимпульсная (числоимпульсная) модуляция применяется в
цифровых системах телеуправления. Каждой команде в передат-
чике соответствует определенное число импульсов в группе. Эти
группы с неизменной амплитудой, длительностью и формой им-
пульсов модулируют колебания несущей частоты.
В широтноимпульсной модуляции во время подачи команды
изменяется длительность (ширина) импульсов, модулирующих
колебания несущей частоты передатчика. Этот вид модуляции
используют как в дискретной, так и в пропорциональной аппарату-
ре радиоуправления.
L ПРОСТЕЙШАЯ АППАРАТУРА
РАДИОУПРАВЛЕНИЯ МОДЕЛЯМИ
1.1. СТРУКТУРНАЯ СХЕМА ПРИЕМОПЕРЕДАЮЩЕГО
КОМПЛЕКСА «СИГНАЛ-1»
Знакомство с ним начнем с рассмотрения структурной схемы
передатчика и приемного устройства (рис. 2).
Передатчик состоит из задающего генератора ВЧ 3, модулято-
ра 2 и источника питания 1. Когда контакты командной кнопки SA1
в передатчике находятся в положении, показанном на схеме, на-
пряжение питания на модулятор и задающий генератор не посту-
пает и антенна WA1 ие излучает электромагнитной энергии.
В момент замыкания контактов SA1 в передатчике его антенна
начинает излучать в пространство электромагнитные колебания.
Таким образом, прн нажатии на кнопку передатчик излучает
в эфир импульсно-модулированный радиочастотный сигнал, часто-
та модуляции которого соответствует частоте следования импуль-
сов, вырабатываемых модулятором.
Приемное устройство, устанавливаемое на телеуправляемую
модель, состоит из собственно приемника 4, настроенного на
несущую частоту передатчика, и комаидоаппарата 6, подключенно-
го к маршевым электродвигателям Ml, М2 модели. Приемник
Рис. 2. Структурная схема приемопередающего комплекса «Сигнал-]»
11
и командоаппарат с электродвигателями модели питаются от
отдельных источников постоянного тока 5, 7. Приемная антенна
WA2 принимает сигналы передатчика, приемник их усиливает до
уровня, достаточного для срабатывания реле. Через контакты
реле напряжение питания поступает на командоаппарат, который
в зависимости от выполняемой команды подключает к источнику
тока один или оба маршевых двигателя модели, и она выполняет
соответствующий маневр.
С начала выпуска приемопередающего комплекса «Сигнал-1»
завод-изготовитель постоянно занимается его модификацией. По-
этому у радиолюбителей «Сигналы-1» могут оказаться не только
последнего, но и ранних выпусков. Все модификации «Сигнала-1»
нет смысла рассматривать, но на двух из них следует остано-
виться. Сначала познакомимся с устройством и работой аппара-
туры «Сигнал-1» выпуска до 1980 года — варианта 1.
1.2. «СИГНАЛ-1» ВАРИАНТА 1
В задающем генераторе передатчика (рис. 3) работает тран-
зистор VT1. Колебательный контур L1C2C3, настроенный на
частоту 27,12 МГц, подключен параллельно коллекторному р-п
переходу транзистора. Конденсаторы С4 и С5 образуют емкост-
ный делитель, обеспечивающий положительную обратную связь
по переменному току между коллектором и эмиттером транзисто-
ра, поэтому генератор возбуждается. Антенну WA1 подключают
через разъем ХТ1 к контуру генератора.
Рис. 3. Принципиальная схема передатчика «Сигнал-1» варианта 1
Резисторы R1 и R2 образуют делитель, с которого на базу
транзистора поступает напряжение смещения. Цепь резисторов
R2, R3 подключена к плюсовому выводу батареи питания GB1
через транзистор VT2, входящий в состав симметричного мульти-
вибратора. Мультивибратор генерирует импульсы тока, близкие
12
по форме к прямоугольным. Транзисторы мультивибратора по-
очередно открываются и закрываются с частотой, определяемой
в основном емкостью конденсаторов С6, С7 и сопротивлением
резисторов R5, R6. Когда открыт транзистор VT2, включается
генератор ВЧ. При закрывании этого транзистора колебания
генератора срываются.
Номиналы конденсаторов С6, С7 и резисторов R5, R6 подобра-
ны так, что частота следования импульсов тока мультивибратора
равна 1000 Гц. С этой частотой, следовательно, включается
и выключается задающий генератор высокой частоты, а в момент
размыкания контактов SB1 передатчик прекращает работу.
Рис. 4. Принципиальная схема приемника «Сигнал-1»
варианта 1
Приемник (рис. 4) состоит из сверхрегенеративного детектора
на транзисторе VT1 и двуступенного усилителя 34, собранного
на транзисторах VT2, VT3. Сверхрегенеративный приемник нашел
широкое применение в дискретной аппаратуре. Он не требует боль-
шого числа деталей, имеет высокую чувствительность, экономи-
чен, надежен в работе, прост в налаживании. К недостаткам надо
отнести слишком широкую полосу пропускания (от 250 до 600 кГц)
13
и, как следствие,— плохую помехозащищенность. Широкая полоса
пропускания приемника приводит к тому, что он начинает при-
нимать сигналы чужого передатчика, работающего на близкой
частоте. Плохая помехозащищенность приемника этого типа
создает определенные трудности использования его в пропорцио-
нальной аппаратуре с широтноимпульсной модуляцией (за исклю-
чением аналоговой системы, в которой величину отклонения ру-
лей определяет частота модулированного сигнала).
Транзистор сверхрегенеративного детектора работает в режи-
ме прерывистой генерации. Колебания в его контуре возникают не
непрерывно, как, скажем, в контуре гетеродина, а как бы вспыш-
ками, частота которых лежит в пределах 30...80 кГц. Эту час-
тоту называют частотой гашений сверхрегенератора. Работа
сверхрегенеративного детектора подробно описана в [ 1,2]. А здесь
добавим лишь, что благодаря именно ему приемник обладает
большой чувствительностью. На нагрузке детектора выделя-
ется низкочастотный командный сигнал, который после «очист-
ки» от напряжения частоты гашения подается на вход усили-
теля 34.
Колебательный контур L1C3 сверхрегенеративного детектора
настроен, как и колебательный контур задающего генератора
передатчика, на частоту 27,12 МГц. Режим работы транзистора по
постоянному току устанавливают подстроечным резистором R2,
а частоту гашения настраивают подборкой элементов цепи R1C4.
Конденсатор С2 создает положительную обратную связь между
коллектором и эмиттером транзистора, необходимую для работы
детектора.
Нагрузкой сверхрегенеративного детектора является резис-
тор R1. Выделяющийся на нем сигнал частотой 1000 Гц (часто-
та импульсов модулятора передатчика) через резистор R3,
образующий с конденсатором С7 фильтр частоты гашения, под-
водится к входу усилителя 34.
Трансформатор Т1 служит нагрузкой усилителя. Колеба-
ния 34, индуцируемые в его вторичной обмотке, усиливает по
току транзистор VT3. При этом срабатывает электромагнитное
реле К1 и его контакты KL1 замыкают цепь питания электро-
двигателя М3 комаидоаппарата.
Оксидный* конденсатор С9 сглаживает пульсации тока в кол-
лекторной цепи транзистора VT3, предотвращая дребезжание
якоря реле при приеме командного сигнала. Конденсатор С6 за-
щищает цепь питания от высокочастотных колебаний сверхре-
генератора.
* Определяющим в названии конденсаторов принято считать материал ди-
электрика между обкладками (бумажный, слюдяной, воздушный и т. п.). В соот-
ветствии с этим принципом ГОСТ 21415--75 изменил старое название «электро-
литический» на новое — «оксидный», так как в этих конденсаторах диэлектри-
ком служит оксидная пленка.
14
Командоаппарат состоит из электродвигателя М3 и про-
граммного диска с токосъемными пружинящими контактами,
включенными в цепи электродвигателей управляемой модели.
По окружности программного диска, изготовленного из фольги-
рованного гетинакса, нарезаны 18 косых зубьев. На поверхности
диска вытравлены по окружности площадки фольги разной
конфигурации, замыкающие в определенной последовательности
токосъемные контакты. При каждом командном сигнале храпо-
вой механизм устройства, связанный с электродвигателем М3,
поворачивает программный диск на угол 20° (на один зуб) и таким
образом изменяет программу работы электродвигателей модели.
Предположим, что программный диск находится в положении,
показанном на рис. 4. В этом случае оба электродвигателя
(Ml и М2) модели обесточены, так как все токосъемники, кроме
первого, не соприкасаются с замыкающими площадками на
программном диске, и модель неподвижна. Это соответствует
команде «Стоп».
При следующем командном сигнале диск повернется на один
зуб (1/18 часть оборота) и его площадка замкнет токосъемники
1 п 2. Включится левый по схеме электродвигатель, и модель
будет выполнять команду «Вправо». По следующему сигналу
программный диск повернется еще на один зуб. Окажутся замк-
нутыми между собой токосъемники 1, 2, 3 и 4, 5. В результате
включатся оба электродвигателя и модель до следующего сигна-
ла будет двигаться вперед.
При последующих командных сигналах модель выполнит
команды «Стоп», «Влево», «Вперед», «Стоп», «Реверс М2» (дви-
жение назад влево), «Вперед» и снова «Стоп». Вы можете
самостоятельно проследить по схеме подключение к источнику
питания GB2 того или иного электродвигателя.
Усвоив принцип работы командоаппарата и накопив некото-
рый опыт управления моделью, можно научиться пропускать
ненужные положения-команды. Например, после «Стоп» выпол-
нять команду «Вперед», пропустив положение «Вправо». Для
этого командную кнопку передатчика надо кратковременно на-
жать не один, а два раза подряд. Каждое нажатие на командную
кнопку передатчика должно длиться не более 1 с; при несоблюде-
нии этого условия модель будет «рыскать». .
Если требуется пропустить три запрограммированные коман-
ды, следует нажать на короткое время на кнопку передатчика
четыре раза подряд.
Если электродвигатели модели создают повышенный уровень
помех из-за искрения щеток, то приемник, а значит, и командо-
аппарат станут неуправляемыми — приемник будет срабатывать
не по команде передатчика, а от помех. Для их устранения
электродвигатели придется поместить в экранирующие коробки
или подключить их к командоаппарату через помехозащитные
фильтры, о которых будет рассказано позже.
15
Е 50
Рис. 5. Печатная плата передатчика «Сигнал-1» варианта 1
Детали передатчика смонтированы на печатной плате (рис. 5).
Все резисторы, используемые в нем,— МЛТ-0,125 или МЛ Т-0,25.
Конденсаторы С1...С5 — К10-7В, С6 и С7 — тоже КЮ-7В (можно
КМ-6 или КЛС). Дроссель L2 — Д-0,1 или самодельный. Для
изготовления дросселя надо на резистор МЛТ-0,5 сопротивлением
не менее 500 кОм намотать 80...85 витков провода ПЭВ-2 0,12.
Контурная катушка L1 задающего генератора намотана на
полистироловом каркасе диаметром 7 мм с подстроечником диа-
метром 2,8 и длиной 12 мм из феррита 600НН. Обмотка содержит
8,5 витка провода ПЭЛШО 0,18 (можно ПЭВ-2 0,15 или 0,2),
намотанных виток к витку у основания каркаса.
В задающем генераторе можно использовать высокочастот-
ные транзисторы серий П416, ГТ308 со статическим коэффициен-
том передачи тока не менее 60, а в модуляторе (VT2, VT3) —
низкочастотные транзисторы серий МП39...МП42 со статическим
коэффициентом передачи тока 40...60.
Антенна передатчика изготовлена из двух отрезков длиной
по 200 мм стальной упругой проволоки диаметром 2 мм. При
сборке антенны отрезки соединяют резьбовой муфтой. Это сделано
для удобства транспортирования антенны в упаковочной коробке.
Источником питания служит батарея «Крона».
Детали приемника смонтированы на печатной плате (рис. 6).
Постоянные резисторы — МЛТ-0,125 или МЛТ-0,25; подстроеч-
ный резистор R2 — СПЗ-1. Конденсаторы С1...С4, С7—КТ;
16
К КТ! kKSAL1,XT2
! К ХТ2 78
------------------------------------------------------
Рис. 6. Печатная плата приемника «Сигнал-1» варианта 1
С6 — КЛС; оксидные конденсаторы С5, С8 и С9 — К50-3 или
К50-12, К50-6. Контурная катушка L1 точно такая же, как в за-
дающем генераторе передатчика. По конструкции самодельный
дроссель L2 аналогичен L2 в передатчике, но обмотка должна
содержать 30 витков (индуктивность около 20 мкГн) провода
ПЭВ-2 0,12.
Трансформатор Т1 приемника намотан в броневом магнито-
проводе СБ-18 из карбонильного железа. Первичная обмотка
содержит 400 витков провода ПЭВ-2 0,1, вторичная 850 витков
такого же провода.
Для самодельного трансформатора можно использовать сталь-
ной магнитопровод Ш6Х9, оставив прежнее число витков. Все
транзисторы могут быть П403, П422 или из серий П416, ГТ308 со
статическим коэффициентом передачи тока не менее 75.
Электромагнитное реле К1 — РСМ-1 (паспорт РФ4.500.020)
с небольшой доработкой. Нужно снять кожух, боковыми кусач-
ками удалить одну группу контактов — это позволит уменьшить
ток срабатывания реле — и надеть кожух на место. Вместо ука-
занного на схеме подойдет реле РЭС15 (паспорт РС4.591.003).
Приемная антенна — отрезок стальной упругой проволоки длиной
250 мм и диаметром 1,5 мм.
17
Приемник питает батарея «Крона», а командоаппарат и тяго-
вые двигатели — батарея 3336 или любая другая напряжением
3...6 В.
Налаживают сначала приемник, а затем — передатчик. При-
ступив к налаживанию приемника, прежде всего подстроечным
резистором R2 устанавливают на эмиттере транзистора VT2
напряжение 6 В (относительно общего провода). Измеряют
общий ток, потребляемый приемником от батареи. Он должен
быть в пределах 12... 15 мА. Если он значительно больше или
меньше указанного значения, то это означает ошибку в монтаже
или неисправность какой-либо детали.
Затем подают на вход приемника (на гнездо ХТ1) от генера-
тора сигналов (ГС) сигнал частотой 27,12 МГц и напряжением
100 мкВ с частотой модуляции 1000 Гц, а к выходу приемни-
ка, между выводом 3 и общим проводом, подключают через кон-
денсатор емкостью 0,1...0,5 мкФ высокоомные головные теле-
фоны. Вращая подстроечник контурной катушки L1, добиваются
наиболее громкого звука в телефонах и срабатывания реле К1.
Уменьшают выходное напряжение генератора вдвое и повторя-
ют настройку контурной катушки L1. Если вместо телефонов
использовать осциллограф, точность настройки будет выше.
Налаживание передатчика сводится к проверке работоспо-
собности мультивибратора и настройке задающего генератора
на частоту 27,12 МГц. Чтобы проверить работу мультивибратора
(проверять нужно при устанавленной антенне передатчика), дос-
таточно между коллектором транзистора VT2 или VT3 и общим
проводом включить через конденсатор емкостью 0,1...0,5 мкФ го-
ловные телефоны. Если мультивибратор работает, то в телефонах
будет слышен звук частотой около 1000 Гц.
После этого на приемник устанавливают антенну, а к его
выходу (так же, как и при проверке мультивибратора) подклю-
чают головные телефоны. Удаляют подстроечник из катушки L1
и включают питание. Разместив передатчик на расстоянии 1 м от
приемника, ввинчивают подстроечник катушки L1 и добиваются
появления в телефонах слабого звука с частотой мультивибра-
тора. Замечают положение подстроечника в момент появления
звука. Затем продолжают ввинчивать подстроечник. Громкость
звука должна возрастать. Устанавливают подстроечник в поло-
жение наибольшей громкости, при этом должно сработать реле
в приемнике.
Для более точной настройки контура на частоту 27,12 МГц
необходимо расстояние между приемником и передатчиком по-
степенно увеличивать (антенны передатчика и приемника во вре-
мя настройки должны находиться в вертикальном положении),
добиваясь каждый раз максимума громкости. Если реле при-
емника будет срабатывать на расстоянии 20 м (при отсутствии
вблизи железобетонных сооружений, линий электропередач и
других сооружений, поглощающих или рассеивающих энергию
18
радиоволн), настройку передатчика «Сигнал-1» считают закон-
ченной.
Подробно о настройке передатчика на частоту 27,12 МГц
можно прочитать в [1, 2].
Чтобы во время эксплуатации аппаратуры настройка конту-
ров не нарушалась, подстроечники фиксируют в каркасах кату-
шек, например, каплей расплавленного парафина.
1.3. «СИГНАЛ-1» ВАРИАНТА 2
Первое отличие новой аппаратуры от ранее выпускавшейся —
использование кремниевых транзисторов взамен германиевых.
Это улучшило характеристики аппаратуры, в частности повысило
стабильность рабочей частоты передатчика при изменении темпе-
ратуры окружающей среды. Кроме того, приемник стал вдвое
чувствительнее (50 мкВ вместо 100), что позволило при той же
мощности передатчика (до 10 мВт) увеличить дальность связи.
В приемнике электромагнитное реле заменено транзистором,
повысившим надежность работы приемника. Командоаппарат
остался прежним.
А теперь познакомимся подробнее с передатчиком и при-
емником нового комплекта аппаратуры «Сигнал-1» по их прин-
ципиальной схеме.
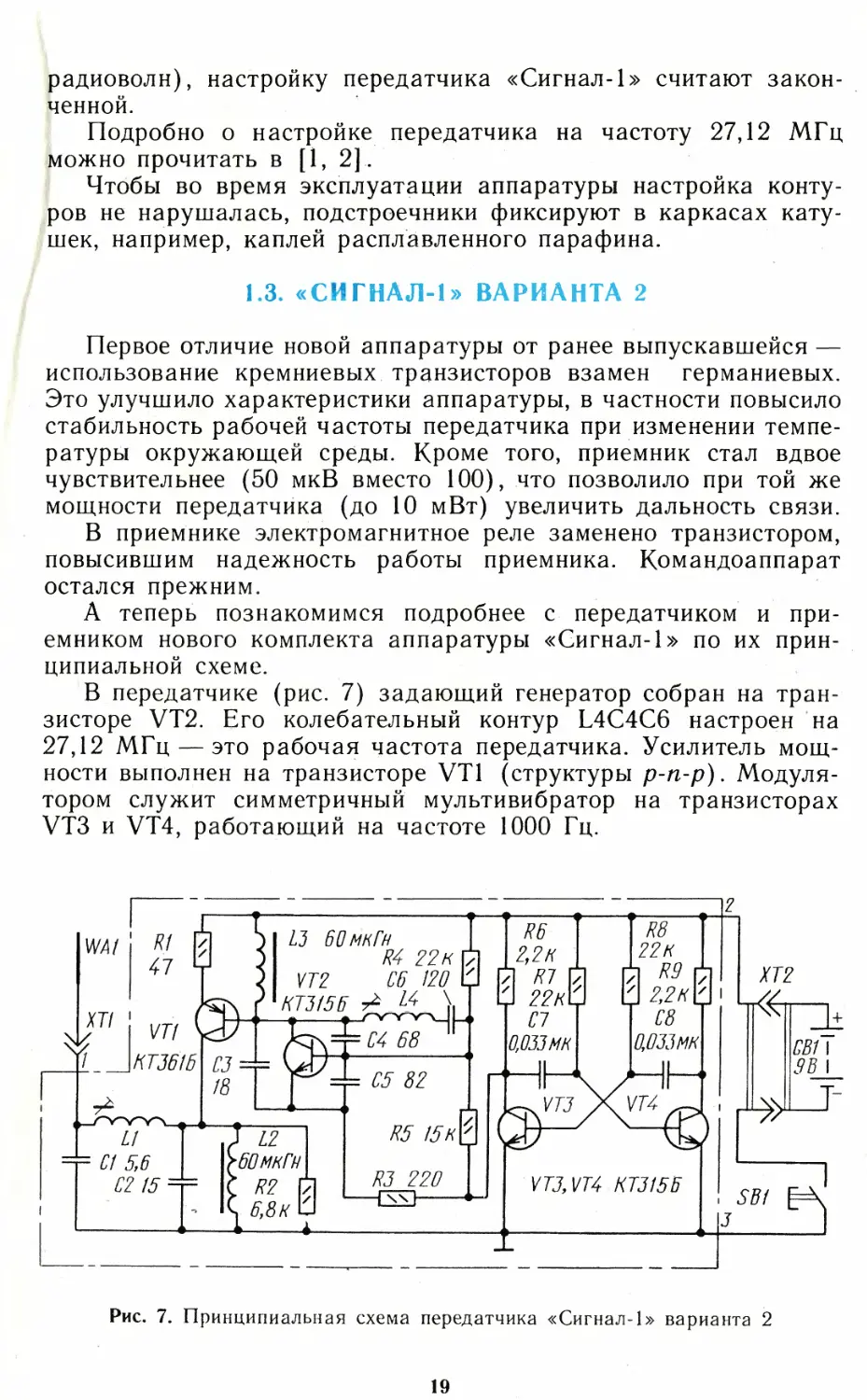
В передатчике (рис. 7) задающий генератор собран на тран-
зисторе VT2. Его колебательный контур L4C4C6 настроен на
27,12 МГц — это рабочая частота передатчика. Усилитель мощ-
ности выполнен на транзисторе VT1 (структуры р-п-р). Модуля-
тором служит симметричный мультивибратор на транзисторах
VT3 и VT4, работающий на частоте 1000 Гц.
Рис. 7. Принципиальная схема передатчика «Сигнал-1» варианта 2
19
Нагрузкой транзистора задающего генератора служит дрос-
сель L3. С него импульсно-модулированный сигнал поступает
на базу транзистора VT1 усилителя мощности, а с его нагрузоч-
ного дросселя L2, зашунтированного резистором R2,— через
катушку индуктивности L1 в антенну. Эта катушка совместно
с конденсаторами Cl, С2 образует колебательный контур,
необходимый для оптимального согласования передатчика с его
антенной WA1 (ее подключают через разъем ХТ1).
Режим работы транзисторов генератора и усилителя мощности
по постоянному току определен делителем R4R5, с которого на
базу транзистора VT2 снимается напряжение смещения, и ре-
зисторами R1 и R3.
Длительность пачки радиочастотных импульсов зависит от
продолжительности нажатия на кнопку. С целью более экономного
расходования энергии батареи питания нажатие на кнопку
должно быть кратковременным. Каждому нажатию соответствует
посылка только одного командного сигнала — он достигает прием-
ника и после преобразования воздействует на командоаппарат.
Рис. 8. Принципиальная схема приемника «Сигнал-1» варианта 2
Принципиальная схема приемника и соединение его с командо-
аппаратом и электродвигателями показаны на рис. 8. На транзис-
торе VT1 собран сверхрегенеративный детектор, такой же как
в предыдущем варианте. Выделенный им командный сигнал 34
через фильтр R3C9 и конденсатор С8 поступает на вход дву-
ступенного усилителя 34. Усилитель выполнен на транзисторах
VT2 и VT3 по схеме с непосредственной связью.
Транзистор VT4 работает выпрямителем переменного тока.
Оксидный конденсатор С13 сглаживает пульсации выпрямленного
20
напряжения. Через резисторы R12 и R13, образующие нагруз-
ку транзистора VT4, протекает ток, постоянная составляющая
которого пропорциональна амплитуде сигнала. Падение напря-
жения на резисторе R13 открывает транзисторы VT5 и VT6,
включая электродвигатель М3 храпового механизма командо-
аппарата.
Резистор R6 и конденсатор С1 образуют фильтр, предотвра-
щающий ложные срабатывания приемника из-за возможных
паразитных связей между его выходными и входными цепями.
Конденсатор Cl I препятствует возбуждению усилителя 34 на
высшей звуковой частоте.
Рис. 9. Печатная плата передатчика «Сигпал-l» варианта 2
Детали передатчика смонтированы на печатной плате (рис. 9).
Все резисторы передатчика — МЛТ-0,125 (или ВС-0,125).
Конденсаторы Cl, С2 — КД-1 или КТ-1, остальные — KI0-7B или
КМ-4. Дроссели L2, L3 —-Д-0,1. Об изготовлении дросселей
было рассказано в подразд. 1 2 (детали передатчика). Каждая
из катушек LI, L4 намотана на полистироловом каркасе диамет-
ром 7 мм с подстроечпиком диаметром 2,8 мм и длиной 12 мм
из феррита 600НН. Катушка L1 содержит 18,5, a L4 — 7,5 витка.
Обе катушки намотаны виток к витку у основания каркаса.
Провод катушек LI, L4 — ПЭЛШО 0,3 или ПЭВ-2 0,3...0,4.
Транзисторы VI2 VT4 — из серии КТ315 с любым буквен-
ным индексом (кроме них подойдут КТ312Б, КТ312В, КТ340А...
КТ340Д, КТ342А, КТ342Б, КТ349А...КТ349В, КТ343А, КТ343Б,
КТ3102); VT1 — КТ361А...КТ361 К; его можно заменить на
КТ357В, КТ357Г, КТ313А, КТ313Б, КТ350А, КТ351А, КТ351Б,
21
КТ352А, КТ352Б. Статический коэффициент передачи тока всех
транзисторов — не менее 50.
О настройке катушки L4 было рассказано в подразд. 1.2.
Положение подстроечника катушки L1 выбирают таким, чтобы
дальность действия передатчика (при настроенном приемнике)
была не менее 25 м.
Рис. 10. Печатная плата приемника «Сигнал-1» варианта 2
Детали приемника смонтированы на печатной плате (рис. 10).
На ней установлены конденсаторы КД-1 (С4, С5, С7), КЮ-7В
(С2, С6, С8, С9, СЮ), К50-6 (Cl, СЗ, CH, С12, С13). Все резисто-'
ры, кроме R1,— МЛТ-0,125; R1 — СПЗ-1. Транзисторы VT1...VT3,
VT5 — любые из серии КТ315, a VT4 — из КТ361. Транзистор }
VT6—КТ814А, его можно заменить любым из серий КТ816,
КТ818.
Характеристики катушки L1 и дросселя L2 указаны в подразд.
1.2 (детали передатчика).
Печатная плата приемника будет в дальнейшем использована
как с командоаппаратом, так и без него (с модулями). В этой
связи проводники от контактных точек 3...6 платы имеют двойное
обозначение. Без скобок показаны обозначения для установки
в модель «Планетоход-7», описанную ниже (устанавливать
резисторы R16, R17 не нужно), а в скобках и с резисторами
R16, R17 — для вариантов с модулями.
Налаживание этого приемника состоит из установки рабочей
22
точки транзистора VT1 резистором R1 и настройки контура L1C4
на частоту передатчика 27,12 МГц.
Устанавливают движок резистора R1 в среднее положение.
Отключают двигатели Ml, М2 модели. Включают батареи GB1,
GB2. Ток, потребляемый приемником, не должен превышать 15 мА.
Изменяя положение движка резистора R1, устанавливают напря-
жение на эмиттере транзистора VT1, равное 4,5 В. Затем подают
на вход приемника (вывод на плате) от ГСС сигнал частотой
27,12 МГц и напряжением 100 мкВ, с частотой модуляции
1000 Гц, а к выходу усилителя 34, между точкой КТ1 и общим
проводом, подключают через конденсатор емкостью 0,1...0,5 мкФ
высокоомные головные телефоны. Вращая подстроечник контур-
ной катушки L1, добиваются наиболее громкого звука в теле-
фонах. Уменьшают выходное напряжение генератора до 50 мкВ
и повторяют настройку контура L1C4.
По окончании настройки фиксируют положение подстроечника
в катушке L1 каплей парафина.
1.4. РАДИОУПРАВЛЯЕМАЯ МОДЕЛЬ «ПЛАНЕТОХОД-7»
Итак, вы познакомились с двумя вариантами приемопередаю-
щего комплекса «Сигнал-1». Каждый из этих вариантов приемной
аппаратуры можно с успехом использовать не только в колесных,
гусеничных моделях, но и в плавающих. Какой вариант приемной
аппаратуры и в какую модель устанавливать, решают, исходя
из реальных условий.
В качестве примера расскажу об оснащении приемной аппа-
ратурой «Сигнал-1» раннего выпуска готовой игрушки-модели
«Планетоход-7» с дистанционным управлением.
В нем установлены два маршевых (тяговых) двигателя ДИ 1-2
и две сигнальные лампы накаливания МН1-0,068 (указатели
поворотов). Через шестеренчатые редукторы электродвигатели
приводят в движение гусеницы. Источник питания тяговых
двигателей и комаидоаппарата — батарея из четырех элементов
«Салют-1» (343), соединенных последовательно. Батарея «Крона»
питает приемник. Они размещены в батарейных отсеках, под
съемной крышкой, в нижней части модели.
Командоаппарат укреплен иа кронштейне в передней час-
ти основания модели (устанавливать командоаппарат надо та-
ким образом, чтобы плоскость программного диска была располо-
жена продольно-вертикально по отношению к корпусу модели,
а толкатель находился над диском), а приемник—в средней.
Чтобы предотвратить ложные срабатывания аппаратуры из-за
искрения коллектора электродвигателей, они подключены к ко-
маидоаппарату через помехозащитные фильтры и, кроме того,
электродвигатель комаидоаппарата зашуитирован оксидным кон-
денсатором СЮ (на рис. 4 он показан штриховыми линиями).
23
L!
ЮмкГн
К комамооаппарапи/
L2
]ОмкГн
Рис. 11. Принципиальная схема помехопо-
давляющего фильтра для одного
электродвигателя
Рис. 12. Монтажная плата с установленными на ней деталями помехопо-
давляющего фильтра и резисторов
На рис. 11 изображена схема фильтра для одного электродви-
гателя, а на риС. 12 — монтажная плата с деталями этих цепей
для обоих электродвигателей и резисторами Rl, R2, гасящи-
ми избыточное напряжение в цепях питания ламп левой и пра-
вой фар.
Конденсаторы С1...С4 — КЮ-7В или БМ, резисторы R1 и R2 —
МЛТ-0,25. Дроссели L1...L4 — Д-0,1 или самодельные. Для само-
дельных дросселей потребуется четыре подстроечника диаметром
2,8 мм длиной 12 мм из феррита 600НН. На каждый из них надо
намотать виток к витку по 25 витков провода ПЭВ-2 0,35. Выклю-
чатель SA1 питания приемной аппаратуры — тумблер МТ-3.
Антенна приемника установлена в отверстии, просверленном
в передней части корпуса.
Прежде чем скрепить верхнюю и нижнюю части корпуса мо-
дели, проверяют исправность работы приемной аппаратуры. Для
этого проводник от контакта 2 токосъемника (см. рис. 4) временно
отключают и изолируют. Под модель подкладывают брусок такой
толщины, чтобы гусеницы не касались пола. Подключают к пере-
датчику и приемнику антенны, включают питание и, отойдя от
модели на один-два метра, кратковременным нажатием на кнопку
передатчика подают командный сигнал. При этом программный
диск должен повернуться на один зуб. Подают еще несколько
24
кратковременных сигналов, но уже с большего расстояния.
Убеждаются в четкой реакции программного диска. Теперь можно
припаять отключенный проводник токосъемника, полностью
собрать модель и начать тренировки по ее управлению на рас-
стоянии.
1.5. ПРЕИМУЩЕСТВА И НЕДОСТАТКИ «СИГНАЛА-1»
Рассмотреть этот вопрос необходимо для понимания того,
что побудило автора к созданию новой аппаратуры радиоуправ-
ления, свободной от недостатков, присущих прнемопередающему
комплексу «Снгнал-1».
Сначала о преимуществах. Это — простота конструкции пере-
датчика и приемника «Сигнал-1», небольшие масса и размеры
приемной аппаратуры радиоуправления, наличие необходимого
числа команд для модели.
А теперь рассмотрим недостатки. Их немало. Во-первых,
модель выполняет команды в строго определенной последователь-
ности, отсюда определенные неудобства управления.
Во-вторых, командоаппарат ие обеспечивает выполнение очень
нужной команды «Назад».
В-третьих, электромеханическая часть комаидоаппарата все
же не очень надежна. Электродвигатель комаидоаппарата во вре-
мя работы потребляет ток 400...600 мА, заметно сокращая время
работы источника питания, тем более, что от него питаются
и двигатели, приводящие модель в движение.
В-четвертых, наличие двух источников тока в модели приводит
к дополнительным трудностям, связанным с приобретением
различных типов химических элементов. К тому же одна батарея
теряет свою работоспособность раньше другой.
В-пятых, используемый в передатчике «Сигиал-1» принцип
подачи команд является малоэффективным. Расскажем об этом
подробнее.
Мы рассмотрели устройство радиоуправляемой модели «Пла-
нетоход-7», которая может выполнять в определенной после-
довательности одну из пяти команд. Накопив опыт по управ-
лению этой моделью, вы научились пропускать промежуточные
команды. Для этого приходилось кратковременно нажимать иа
кнопку передатчика не один раз, а несколько. Конечно же такой
способ управления моделью утомителен и неоперативен. Это
серьезный недостаток передатчика «Сигиал-1», но чтобы изба-
виться от него, придется изменить принцип подачи команд. Одна-
ко попытаемся сделать это так, чтобы для передачи команд можно
было использовать готовый, настроенный передатчик «Сигиал-1».
Об этом будет рассказано ниже. А сейчас рассмотрим еще
одну радиоуправляемую модель иа восемь команд, в которой
используется последовательно независимый принцип подачи
команд.
25
1.6. РАДИОУПРАВЛЯЕМАЯ МОДЕЛЬ НА ВОСЕМЬ КОМАНД
Это игрушечный автофургон, который выполняет команды:
«Малая скорость вперед», «Большая скорость вперед», «Стоп»,
«Назад», «Влево», «Вправо», «Фары», «Сигнал». Модель выполня-
ет команды в любой последовательности. Исключение: перейти
на движение назад можно только через команду «Малая скорость
вперед». Ошибочное нажатие на кнопку «Назад», когда модель
движется на большой скорости вперед, могло бы вызвать поломку
редуктора тягового двигателя. Поэтому схема дешифратора
выполнена так, что такой переход невозможен — модель лишь
останавливается. Последние четыре команды можно подавать
как во время движения игрушки, так и тогда, когда она стоит.
Команду «Стоп» модель выполняет после нажатия в любой
последовательности на кнопки «Большая скорость вперед»
и «Назад». После остановки модель начинает движение только
по команде «Малая скорость вперед».
Мощность передатчика 5 мВт. Радиус действия приемопере-
дающей аппаратуры около 10 м.
Рис. 13. Принципиальная схема передатчика на восемь команд
Передатчик состоит из задающего генератора и модулятора —
симметричного мультивибратора на транзисторах VT1 и VT2
(рис. 13). Нагрузкой транзистора VT2 служит задающий ге-
нератор, выполненный на транзисторе VT3. Кнопки SB1...
SB7 соответствуют командам: «Фары», «Сигнал», «Влево»,
«Вправо», «Большая скорость вперед», «Малая скорость вперед»,
«Назад».
26
Задающий генератор собран по схеме «индуктивной трех-
точки». Режим работы его транзистора устанавливают подбор-
кой элементов делителя R11R12. Контур L2C5 настроен на
частоту 14,05 МГц, a L3C7 — на 28,1 МГц (на вторую гармо-
нику).
В исходном состоянии напряжение на базе транзисторов
VT1...VT3 близко к нулю. Но стоит нажать на одну из кнопок
SB1...SB7, как прямоугольные импульсы с коллектора транзистора
VT2 через П-образный фильтр, состоящий из дросселя L1
и конденсаторов СЗ, С4, начинают поступать на задающий
генератор. Он начинает вырабатывать модулированные этими
импульсами колебания с частотой 28,1 МГц, которые с катушки
L4 через согласующий контур L5C8 попадают в антенну WA1.
Антенна передатчика излучает импульсно-модулированный радио-
частотный сигнал.
Приемник (рис. 14) состоит из сверхрегенеративного детек-
тора, усилителя 34 и дешифратора команд. Детектор собран на
транзисторе VT1, включенном по схеме с общей базой. Чувстви-
тельность приемника не менее 10...15 мкВ на частоте 28,1 МГц.
В колебательном контуре L1C4 выделяется сигнал с частотой
передатчика.
После усиления и детектирования на резисторе R1 выделяется
34 составляющая командного сигнала. Сигнал с частотой гашения
подавляет фильтр R2C7, а командный сигнал поступает через
конденсатор С8 на вход усилителя 34. В процессе управления
игрушкой расстояние между моделью и передатчиком все время
меняется. Это приводит к непостоянству амплитуды командного
сигнала на входе усилителя 34. Для четкой работы дешифратора
необходимо, чтобы командный сигнал имел амплитуду в пределах
3...3,5 В.
Эту задачу выполняет усилитель 34, работающий в режиме
ограничения сигнала и собранный на транзисторах VT2, VT3.
В эмиттерную цепь обоих транзисторов включены термостабили-
зирующие ячейки C9R7 и C10R10. Усилитель охвачен отрицатель-
ной обратной связью через резистор R8.
Задачей дешифратора является выделение переданной коман-
ды и подключение соответствующих исполнительных элементов
к источнику питания. Рассмотрим работу ячейки дешифратора,
выполненной на транзисторах VT4, VT5 и выделяющей команду
«Фары». Нагрузкой транзистора VT4 служат лампы накаливания
HL1 и HL2. Контур L3C13 настроен на среднюю частоту
команды «Фары». Сопротивление резистора R12 влияет на частот-
ную характеристику контура L3C13.
В исходном состоянии, когда командный сигнал отсутствует,
транзисторы VT4, VT5 закрыты. Если через резистор R12 на базу
транзистора VT5 поступит командный сигнал «Фары», то напря-
жение на контуре L3C13 увеличится, оба транзистора откроют-
ся и включатся лампы HL1 и HL2. По окончании действия
27
'WAI
LB ДО,6
Cl Ю
Рис. 14. Принципиальная схема приемника на восемь команд
командного сигнала транзисторы закроются и лампы погаснут.
Аналогично работает ячейка дешифратора на транзисторах
VT6, VT7, выделяющая команду «Сигнал».
Ячейка дешифратора команды «Влево» выполнена на тран-
зисторе VT8. В исходном состоянии реле К1 обесточено. Электро-
двигатель Ml выключен. При поступлении через резистор R15
сигнала команды «Влево» транзистор VT8 открывается, реле
К1 срабатывает и двигатель Ml через редуктор поворачивает
передние колеса влево. Как только колеса повернутся на угол 30°
относительно продольной оси модели, конечный выключатель SF1
подключит цепь базы транзистора VT8 к плюсовому проводу
питания, транзистор VT8 закроется, а реле отпустит якорь.
Для поворота колес в противоположную сторону с передатчи-
ка подают команду «Вправо». Это приводит к тому, что через
резистор R16 на базу транзистора VT9 приходит командный
сигнал с резонансной частотой контура L6C19. Как только перед-
ние колеса повернутся вправо до упора, конечный выключатель
SF2 замкнет цепь базы транзистора VT9 на плюсовой провод
питания. При этом транзистор VT9 закроется, а реле К2 отпустит
якорь.
28
Если подать укороченную команду «Влево» (или «Вправо»),
то передние колеса повернутся на угол, меньший 30°. В этом
случае транзистор VT8 (или соответственно VT9) закроется по
окончании командной посылки, а не от срабатывания конечного
выключателя SF1 (SF2).
Ячейка дешифратора, собранная на транзисторах VT10...VT12,
может находиться в одном из четырех состояний. При включении
питания все транзисторы закрыты. При этом контакты КЗ. 1 реле КЗ
и К4.1 реле К4 находятся в положении, показанном на схеме.
Электродвигатель М2 подключен к батарее GB1, и модель вы-
полняет команду «Малая скорость вперед».
При подаче команды «Назад» через резистор R17 на базу
транзистора VT10 поступает командный сигнал. Под действием
этого сигнала транзистор VT10 открывается. Срабатывает реле
КЗ и подключает двигатель М2 к батарее GB2. Модель выполняет
команду «Назад». По окончании командного сигнала транзистор
VT10 останется открытым и модель будет продолжать выполнять
команду «Назад».
Переключение происходит с поступлением через резистор R22
на базу транзистора VT12 командного сигнала «Большая
скорость вперед». В этом случае сработает реле К4. Группа
контактов К4.1 выключит электродвигатель М2, и модель остано-
вится, выполняя команду «Стоп».
29
Для того чтобы модель начала движение, подают команду
«Малая скорость вперед». Тогда командный сигнал через ре-
зистор R20 поступит на базу транзистора VT11, он откроется
и напряжение на его коллекторе повысится (останется отрица-
тельным, но уменьшится по абсолютному значению). В результате
этого транзисторы VT10 и VT12 закроются и обесточатся реле
КЗ и К4. Модель будет выполнять команду «Малая скорость
вперед».
Теперь можно подать сразу команду «Большая скорость
вперед». Откроется транзистор VT12, сработает реле К4 и дви-
гатель М2 через резистор R23 подключится к минусовому
выводу батареи GB2. На электродвигатель М2 будет подано
напряжение около 6 В. Модель будет выполнять команду «Боль-
шая скорость вперед». Чем меньше сопротивление резистора R23,
тем быстрее будет двигаться модель.
Для уменьшения уровня помех, возникающих при работе
двигателя Ml, служит конденсатор С18. В цепь двигателя М2
включен фильтр L8C23C24L9.
Транзисторы КТ301Ж в передатчике можно заменить на КТ315
с любым буквенным индексом; вместо П416Б подойдут любые
транзисторы из серии КТ351, КТ352, КТ361. Статический коэф-
фициент передачи тока транзисторов VT1, VT2 не менее 50,
a VT3 — 60...100. Конденсаторы С1...С4—КЮ-7В или КЛС,
МБМ; С5...С7 — КТ-1, С8 — КПМ-МП. Резисторы — МЛТ-0,125
или ВС-0,125 (можно МЛТ-0,25).
Дроссель L1 — Д-0,1. Его можно изготовить самостоятельно,
намотав внавал 80...90 витков провода ПЭВ-2 0,1 на резистор
МЛТ-0,5 сопротивлением не менее 100 кОм. Катушки L2...L5
намотаны на полистироловых каркасах диаметром 8 мм длиной
12 мм с подстроечниками СЦР-1. Катушка L2 содержит 12 витков
провода ПЭВ-2 0,35 с отводом от 4-го витка, считая от нижнего
по схеме вывода. Катушка L3 состоит из 14 витков провода
ПЭВ-2 0,51 с отводом от середины. Обе половины намотаны
виток к витку. Поверх L3 расположена катушка L4 — по два
витка провода ПЭВ-2 0,51,намотанных с шагом 1 мм на каждой
половине катушки L3. Катушка L5 содержит 12 витков провода
ПЭВ-2 0,51, уложенных виток к витку.
Антенной служит телескопическая указка-ручка или отрезок
медной проволоки диаметром 2...3 мм длиной 500...600 мм.
Рис. 15, а. Конструкция командных
кнопок
30
Рис. 15, б. Печатная плата передатчика на восемь команд
31
Рис. 16. Способ креп-
ления тороидальной
катушки
Источник питания GB1 — батарея «Крона».
Печатная плата, чертеж которой показан на
рис. 15,6, изготовлена из фольгированного ге-
тинакса толщиной 2 мм. Толстыми линиями на
рисунке показаны прорези между токопрово-
дящими площадками. Детали смонтированы со
стороны печатных проводников. На плате
предусмотрены семь отверстий под командные
кнопки и пять для винтов, которыми устанав-
ливают зазор между платой и фальшпанелью.
Корпус передатчика использован готовый, от
приемника «Мальчиш».
Несколько слов о конструкции кнопок. Они
изготовлены на базе магиигов от магнитных
шашек или шахмат. В каждой кнопке исполь-
зовано два магнита (рис. 15,а). Один из
них — 5 — вклеен в нлату •/. 11оверх него в
плату впаяны две скобы 6 из медной луженой проволоки диа-
метром 0,8 мм. Между магнитом и скобами вложен кружок из
лакоткани или полиэтиленовой пленки. Второй магнит 2 с
приклеенным к его торцу медным луженым диском 3 вложен в
отверстие фальшпанели 1. Магниты обращены один к другому од-
ноименными полюсами. При нажатии на кнопку (ею служит сам
магнит 2) диск 3 замыкает скобы 6, являющиеся контактами вы-
ключателя.
В приемнике вместо транзистора МП39Б можно применить
любые из серий МП39...МП42 (VT2, VT3, VT5, VT6, VT8...VT12).
Статический коэффициент передачи тока транзистора VT1 —
не менее 80, остальных — от 40 до 100. Конденсаторы Cl, С4 —
КТ-1 или КД-1, С2 — КПК-МП; СЗ, С5...С7, С12...С28 — КЮ-7В
или КЛС, МБМ, С8...С11—К50-6. Постоянные резисторы —
МЛТ-0,125; R23 — проволочный, он представляет собой отрезок
нихромового провода диаметром 1 мм. Динамическая головка
ВА1 — 0,25ГД-10.
Катушка L1 содержит 15 витков провода ПЭВ-2 0,51...0,7,
намотанных виток к витку у основания каркаса. Каркас с под-
строечником СЦР-1 полистироловый диаметром 8 мм длиной
12 мм. Дроссель L2 — Д-0,1 или самодельный, состоящий из
30...35 витков провода ПЭВ-2 0,1, намотанных внавал на резисто-
ре МЛТ-0,5 сопротивлением не менее 100 кОм. Катушки L3...L7,
L10, L11 намотаны каждая на магнитопроводе из трех склеенных
колец типоразмера К7Х4Х2 из феррита 1000НН. Обмотка каж-
дой катушки содержит по 300...400 витков провода ПЭВ-2 0,08...
0,1. Можно использовать кольца других размеров примерно того
же сечения из феррита с магнитной проницаемостью 1000...2000.
На рис. 16 показан способ крепления выводов тороидальных
катушек, обеспечивающий жесткую установку их на монтажную
плату.
32
Рис. 17. Печатная плата приемника на восемь команд
Реле К1...К4—РЭС10, паспорт РС4.524.302. Перед сборкой
приемника необходимо отрегулировать все реле так, чтобы они
срабатывали при напряжении 5,5 В.
Лампы HL1, HL2 — СМ6-0,2. Источники питания GB1, GB2 —
батареи 3336, GB3 — «Крона». Выключатель SA3 — имеющийся
2 7-159
33
в игрушке. Для поворота колес использована рулевая машинка
от аппаратуры радиоуправления РУМ-2. Модель привадит в дви-
жение электродвигатель ДП-10, установленный в игрушке.
Антенной служит отрезок медной проволоки длиной 250...
300 мм диаметром 2...3 мм. Чертеж печатной платы приемника
изображен на рис. 17.
Приемник предварительно собирают на макетной плате.
Вместо каждого резистора, отмеченного на схеме звездочкой,
впаивают два: постоянный сопротивлением вдвое меньше указан-
ного на схеме и включенный последовательно с ним переменный
(используют средний и любой крайний выводы) с сопротивлением,
указанным на схеме. В цепь эмиттера транзистора VT2 вместо
постоянного резистора R7 включают переменный сопротивлением
1 кОм, а вместо R10 — постоянный резистор сопротивлением
10 кОм. Налаживание начинают с усилителя 34 при напряжении
питания 6,5 В — это минимальное напряжение, при котором при-
емник еще способен работать.
Все переменные резисторы устанавливают на максимум со-
противления и убеждаются, что контакты конечных выключате-
лей SF1, SF2 разомкнуты. К контрольной точке КТ1 подключают
осциллограф, а к минусовому выводу конденсатора С8 — звуко-
вой генератор, настроенный на частоту 1000 Гц. Амплитуда
сигнала с выхода генератора — около 10 мВ. Регулируя резисто-
ры R6, R7, R8, R10, поочередно добиваются двусторонне-
го ограничения синусоиды на экране осциллографа таким обра-
зом, чтобы длительность импульсов равнялась длительности
паузы.
Затем проверяют работоспособность устройства при напря-
жении на выходе генератора, равном 3 мВ. Если теперь синусо-
ида не будет ограничена сверху или снизу, усилитель налажен
правильно. После замены временных резисторов на постоянные
еще раз проверяют качество работы усилителя 34.
Ячейки дешифратора настраивают на частоты, указанные
в табл. 1.
Таблица I
Команда Средняя частота контура, Гц Ширина по- лосы, Гц (ус- тановочный резистор) Контур Число витков катушки Емкость конденса- тора, мкФ
«Фары» 2500 400(R12) L3C13 400 0,015
«Сигнал» 3200 400(R13) L4C14 385 0,015
«Влево» 4050 400(R15) L5C17 370 0,01
«Вправо» 4700 400(R16) L6C19 350 0,01
«Назад» «Малая скорость 9050 700(R17) L7C22 300 0,024
вперед» «Большая скорость 6500 700(R20) L10C26 315 0,068
вперед» 5600 600(R22) L11C27 330 0,068
34
Ячейку дешифратора на транзисторах VT4, VT5 налаживают
следующим образом. К коллектору транзистора VT5 подключают
осциллограф, устанавливают напряжение выходного сигнала зву-
кового генератора, равное 3 мВ, и, перестраивая генератор
от 1000 до 10 000 Гц, определяют резонансную частоту контура
L3C13 по резкому возрастанию размаха синусоидального коле-
бания на экране. Этот контур устанавливают на расчетную
резонансную частоту подборкой конденсатора С13. Лампы HL1,
HL2 должны светить при входном сигнале с частотой 2300...
2700 Гц. Ширину частотной полосы устанавливают подборкой
резистора R12. Аналогично налаживают остальные ячейки де-
шифратора (о ячейке на транзисторах VT10...VT12 расскажем
отдельно).
Чтобы подобрать резистор R19, осциллограф подключают
к коллектору транзистора VT11 и устанавливают на генераторе
среднюю частоту контура L10C26. Переменный резистор, времен-
но включенный последовательно с резистором R19, переводят
в положение минимального сопротивления. Затем, вращая движок
резистора в сторону увеличения сопротивления и наблюдая
одновременно за экраном осциллографа, подбирают резистор
RI9 так, чтобы дальнейшее увеличение сопротивления переменно-
го резистора не приводило к увеличению размаха колебаний
на экране осциллографа.
Ячейку дешифратора на транзисторах VT10...VT12 налажива-
ют так. Вместо резисторов R18 и R21 припаивают переменные
резисторы по 100 кОм каждый и устанавливают их движки
в положение максимума сопротивления. На звуковом генераторе
устанавливают среднюю частоту контура L7C22 и впаивают
тумблер между выходом ЗГ и конденсатором С9. Уменьшают
немного сопротивление резистора R18, а затем на короткий
промежуток времени замыкают и снова размыкают контакты
тумблера. Если реле налаживаемой ячейки сработает и останет-
ся в этом состоянии, то ее работу считают удовлетворительной.
Если же нет, то еще уменьшают сопротивление резистора R18 и
снова на короткое время включают тумблер. Заставить реле КЗ
отпустить якорь можно выключением питания (батареи GB3) или
подачей на вход ячейки дешифратора кратковременного сигнала
с частотой контура L10C26. Надежного открывания транзистора
VT12 добиваются аналогично подборкой резистора R21.
После этого приступают к налаживанию сверхрегенеративного
детектора. Осциллограф подключают к точке КТ1. Устанавливают
на ВЧ генераторе несущую частоту 28,1 МГц, частоту модуляции
1000 Гц, выходное напряжение 500 мВ. Наматывают на вывод
антенны приемника два витка провода в ПВХ изоляции. Один
конец провода оставляют свободным, а другой вставляют
в выходное гнездо генератора.
Подбирая резистор R3, конденсатор С4 и положение подстроеч-
ника катушки L1, добиваются появления на экране осциллографа
2:
35
модулированных колебаний. Уменьшают выходное напряжение
генератора так, чтобы колебания на экране осциллографа были
чуть заметны, и подборкой элементов R3, С4 и положения под-
строечника катушки L1 добиваются максимума размаха колеба-
ний на экране.
Чувствительность сверхрегенеративного детектора зависит от
статического коэффициента передачи тока транзистора VT1,
а также точности настройки контура L1C4 на несущую частоту.
Учтите, что с изменением емкости конденсатора С2 и сопротивле-
ния резистора R3 частота настройки контура L1C4 смещается
от своего первоначального значения.
В заключение все переменные резисторы заменяют на соот-
ветствующие постоянные, переносят детали на печатную плату
и проверяют работу приемника в целом. Ротор конденсатора
С2 фиксируют каплей нитрокраски, а подстроечник катушки L1 —
парафином.
На монтажную плату передатчика детали устанавливают
со стороны печатных проводников. Вместо резисторов R2...R9
припаивают переменный резистор сопротивлением 22 кОм. Уста-
навливают подстроечники катушек в среднее положение, за-
крепляют монтажную плату в корпусе и подключают антенну.
Замыкают цепь одной из кнопок SB1...SB7, включают источник
питания и к коллектору транзистора VT2 подключают осцилло-
граф. Перемещая движок переменного резистора из одного край-
него положения в другое, убеждаются в работе мультивибратора.
Если в одном из крайних положений генерация срывается,
необходимо подобрать конденсаторы Cl, С2 другой емкости или
транзисторы с большим статическим коэффициентом передачи
тока.
Подключают осциллограф к точке КТ1 приемника, переменный
резистор в передатчике устанавливают в среднее положение
и, вращая подстроечники катушек L2...L5 и ротор конденсатора
С8, а также подбирая резистор R12, добиваются, чтобы на экра-
не осциллографа были видны колебания мультивибратора. Уда-,
ляют передатчик от приемника на расстояние, при котором раз-
мах колебаний мультивибратора на экране осциллографа будет
минимальным, и повторяют операцию настройки катушек снова.
Точные значения сопротивления резисторов R2...R9 для пере-
датчика подбирают методом сравнения частоты мультивибратора
и звукового генератора. Для этого вход «У» подключают к точ-
ке КТ1 приемника, а «X» к выходу звукового генератора.
На генераторе устанавливают поочередно среднюю частоту ко-
мандных сигналов и подбирают соответствующий резистор таким,
чтобы на экране осциллографа была неподвижной окружность
или эллипс (фигура Лиссажу). Удобно сначала впаивать пере-
менный резистор, определять необходимое сопротивление, из-
мерять его и окончательно впаивать постоянный резистор с таким
же сопротивлением.
2. ЦИФРОВЫЕ МОДУЛИ В АППАРАТУРЕ
РАДИОУПРАВЛЕНИЯ И ИХ ЭЛЕМЕНТНАЯ БАЗА
2.1. МОДУЛЬНАЯ СИСТЕМА В РАДИОТЕЛЕМЕХАНИКЕ
Из года в год дискретная аппаратура радиоуправления стано-
вится совершеннее. Если несколько десятков лет назад узлы
радиоуправляемых моделей собирали на лампах, то сейчас
в радиомоделизме все шире применяют интегральные микросхемы.
Микросхема — это миниатюрный электронный блок, содержа-
щий в своем корпусе транзисторы, диоды, резисторы и другие
элементы, соединенные по определенной схеме. Общее число
элементов в микросхеме может достигать нескольких десятков
и даже сотен. Применение микросхем позволило создать новую —
модульную — систему радиотелемеханики.
Это система приемопередающей аппаратуры радиоуправле-
ния состоящая из нескольких функционально и конструктивно
законченных модулей, каждый из которых выполняет одну или
несколько функций. Например, модуль «сверхрегенеративный
приемник» преобразует сигнал передатчика в командный и уси-
ливает до нужного уровня. Число модулей в системе может быть
разным в зависимости от поставленной задачи.
Какие же цели преследовал автор при создании модульной
системы дискретной аппаратуры радиоуправления?
Во-первых, создание структурно гибких конструкций радио-
управляемых моделей, в которых число налаживаемых узлов было
бы минимальным. Для достижения этой цели, а также для того,
чтобы сохранить доступность и облегчить повторяемость системы,
в конструкциях использованы не только широко распространен-
ные цифровые микросхемы, но и готовые настроенные пере-
датчик и приемник от приемопередающего комплекса «Сигнал-1».
Таким образом, в налаживании нуждаются только некоторые
модули приемной части модели.
Во-вторых, выбор метода кодирования команд, при котором
процесс налаживания аппаратуры состоял бы из одной-двух
простейших операций.
В-третьих, создание высокоэкономичных конструкций моделей,
работоспособность которых сохранялась бы при понижении
напряжения питания почти наполовину. Решение этой задачи
оказалось возможным благодаря использованию в модулях циф-
ровых микросхем серии К176, характерной очень малым потреб-
ляемым током. В результате срок службы источника питания,
обеспечивающего работу всего приемного устройства, удалось
увеличить в несколько раз.
Модульная система [5] обеспечивает большое число вариантов
схем передающих и приемных устройств при одном и том же
конструктивном исполнении механизма модели, а также большое
число вариантов компоновки узлов аппаратуры в ее корпусе.
37
Достоинством модульной системы является и то, что она допускает
налаживание и испытание модулей до установки их в блок.
Следует отметить и такое преимущество системы, как легкость
постепенной модернизации модулей приемного и передающего
устройств. Из модулей системы можно составить множество
экспериментальных устройств.
*
2.2. ОСНОВНЫЕ ПОНЯТИЯ ЦИФРОВОЙ ТЕХНИКИ
Наибольшее употребление в цифровой электронной технике
имеют сигналы в виде последовательности импульсов. Импульсным
называют сигнал, напряжение которого очень быстро, скачком
изменяется от одного значения до другого. Наибольшее при-
менение получили периодические импульсные сигналы, напряже-
ние которых принимает в каждый текущий момент одно из
двух постоянных значений, которые принято называть уровнями.
Такие импульсы называют прямоугольными, а уровни — высоким
и низким или, иначе, уровнем логической 1 и уровнем логиче-
ского 0. Напряжение уровня 1 всегда по абсолютному значению
больше напряжения уровня 0.
Переход от низкого уровня к высокому принято называть
положительным перепадом, а от высокого к низкому — отрица-
тельным. Время между двумя соседними положительными (или
отрицательными) перепадами называют периодом повторения
импульсной последовательности и обозначают буквой Т. Каждый
период состоит из длительности импульса, обозначаемой буквой т,
и длительности паузы. Отношение Т/т принято называть скваж-
ностью импульсов. Если импульсы и паузы по длительности
одинаковы, то скважность равна 2 — такую последовательность
импульсов часто называют меандром. •
Для определенности импульс, начинающийся с положительно-
го перепада, называют положительным, а с отрицательного —
отрицательным. Начало импульса — это его фронт, окончание —
спад*.
Основным звеном цифровой техники является логический
элемент — электронное устройство, способное выполнять простей-
шие логические операции. У логических элементов и других
цифровых устройств серии К176 при напряжении питания 9 В
уровень логического 0 не превышает 0,3 В, а уровень 1 —
не менее 8,2 В. Уровнями сигналов на входе и выходе цифро-
вых логических устройств,. выраженными в двоичной системе
* В литературе прошлых лет по импульсной технике в ходу были исторически
сложившиеся термины «передний фронт» и «задний фронт». На практике более
удачными и удобными в пользовании оказались термины «фронт» и «спад». Они
короче и точнее отражают смысл (действительно, понятие «передний фронт» —
это тавтология, а «задний фронт»— не имеет смысла).
38
счисления, характеризуют логическое состояние и работу всех
цифровых микросхем.
В последующих подразделах будет коротко рассказано о ра-
боте микросхем, которые использованы в модулях системы
радиоуправления моделями, описанной в книге.
2.3. ЛОГИЧЕСКИЕ ЭЛЕМЕНТЫ
Во всех цифровых модулях приемной и передающей аппара-
туры работает микросхема К176ЛА7. Она содержит в одном
корпусе четыре взаимно независимых логических элемента 2И-НЕ.
На принципиальной схеме микросхему К176ЛА7
так, как показано на рис. 18,а.
изображают
Все элементы и устройства цифро-
вой техники принято для единообразия
изображать на схеме так, что входы
всегда расположены слева, а выходы —
справа. Над выводами на схеме ставят
цифры, означающие номер того или
иного вывода согласно цоколевке ми-
кросхемы.
1(ифра 2 в названии элемента озна-
чает число его входов. Буква И после
цифры 2 указывает вид выполняемой
элементом логической операции — ло-
гическое умножение (коньюнкцию) сиг-
налов, действующих на входах. Эту
операцию на схеме обозначают зна-
ком &, который вписывают в изобра-
жение элемента. Символ НЕ означа-
ет, что выходной сигнал элемента
инвертирован (сдвинут по фазе на 180°)
по отношению к входным или, иначе го-
воря, если на обоих входах элемента
присутствует уровень логического 0, то
на выходе будет уровень логической 1,
и наоборот. Условный знак инверсии
сигнала — кружок у выходного вывода
в изображении элемента. Если у вы-
2И-НЕ
Входы Вых.
№ вывода
/ J
0 0 /
/ 0 /
0 1 /
/ / 0
б
Рис. 18. Микросхема К176ЛА7:
а — графическое обозначение;
б — таблица состояний;
в — временные диаграммы
хода кружок отсутствует, значит, инвер-
сии нет и сигнал на выходе будет в
той же фазе, что и на входах. Такой
элемент называют элементом 2И.
Процесс реализации логического
умножения, выполняемого элементом 2И-НЕ, удобно показывать
в виде таблицы состояний, которая указывает состояние входов
и выхода элемента в текущий момент. Состояния выражают
цифрами 0 и 1 в двоичной системе счисления (рис. 18, б). Из
39
КГ76ЛЛ9
Рис. 19. Графи-
ческое обозначе-
ние микросхемы
К176ЛА9
этой таблицы видно, например, что высокий уро-
вень на выходе элемента 2И-НЕ будет лишь тогда,
когда хотя бы на одном из выходов присутствует
сигнал логического 0.
Операцию логического умножения можно так-
же проиллюстрировать временными диаграммами,
показанными на рис. 18,в. Допустим, что на выход
логического элемента (выводы 1,2) действуют сиг-
налы А и Б. Тогда на выходе элемента (вывод 3) в
моменты t\ и /3 появятся отрицательные перепады
напряжения (сигнал В). По этим диаграммам
легко проследить работу логического элемента.
Работа остальных логических элементов микро-
схемы К176ЛА7 аналогична рассмотренной.
Функциональными аналогами микросхемы
К176ЛА7 являются микросхемы К561ЛА7 и К164ЛА7, К564ЛА7.
Микросхемы К176ЛА7 и К561ЛА7 изготовляют в пластмассовом
корпусе, а К164ЛА7 и К564ЛА7 — в металлокерамическом.
Микросхема КД76ЛА9 (ее схемное изображение показано на
рис. 19) содержит в одном корпусе три трехвходовых логических
элемента ЗИ-НЕ. В работе такой элемент ничем не отличается от
2И-НЕ. Точно так же, если хотя бы на
Рис. 20. Микросхема КД76ЛЕ5:
а — графическое обозначение;
—таблица состояний;
в — временные диаграммы
одном из входов действует уровень 0,
то на входе будет уровень 1. Низкий
выходной уровень появится при на-
личии уровня 1 на всех трех входах
одновременно.
Функциональными аналогами
микросхемы К176ЛА9 являются
К561ЛА9, а также К164ЛА9 и
К564ЛА9, выполненные в металло-
керамическом корпусе.
В цифровых модулях использо-
вана также микросхема К176ЛЕ5.
Эта микросхема состоит из четырех
логических элементов 2ИЛИ-НЕ.
Схемное изображение элементов этой
микросхемы показано на рис. 20,а.
Двухвходовый элемент ИЛИ выпол-
няет логическую функцию сложения
двух сигналов — дизъюнкцию. Эту
операцию обозначают символом 1,
который ставят в схемное изобра-
жение элемента. О том, как понимать
символ инверсии НЕ, вы уже зна-
ете из рассказа об элементе 2И-НЕ.
Таблица состояний элемента ИЛИ
40
КП ВЛAl
Ур!-—-
УрО
(Г=
BfalX t
УрГ—
УрО'-_=^
Рис. 21. Инвертор:
а — графическое обозначение; б — условное обозначение элемента 2И-НЕ, включенного инвертором;
в — временные диаграммы
представлена на рис. 20, б, а временные диаграммы —
на рис. 20, в.
Функциональными аналогами микросхемы К176ЛЕ5 являются
К561ЛЕ5 и выполненные в металлокерамическом корпусе
К164ЛЕ5 и К564ЛЕ5.
Очень широкое применение в цифровых модулях находит
логический элемент НЕ, часто называемый инвертором. Его
логическая функция — инверсия входного сигнала. Инвертор
изображают на схеме так, как показано на рис. 21, а. Функцию
инвертора могут успешно выполнять логические элементы 2И-НЕ,
ЗИ-НЕ, 2ИЛИ-НЕ. Для этого достаточно все входы элемента
соединить вместе. На рис. 21, б показано условное обозначение
элемента 2И-НЕ, включенного инвертором. Временная диаграмма
представлена на рис. 21, в. Нетрудно догадаться, что, если на
вход инвертора подать отрицательный (т. е. начинающийся
с отрицательного перепада) импульс, то на выходе получим
положительный.
2.4. СЧЕТЧИКИ ИМПУЛЬСОВ
Общее предназначение счетчика как устройства цифровой
техники состоит в том, чтобы формировать выходной импульс
всякий раз, как только на счетный вход поступило определенное
число входных импульсов. Если на выходе счетчика импульс
появляется после прихода, например, пяти входных, то говорят,
что коэффициент счета К=5. Счетчики, работающие в двоичной
системе счисления, называют двоичными, а в десятичной —
десятичными.
Микросхема К176ИЕ1 является 6-разрядным двоичным
счетчиком. На рис. 22, а показано его схемное графическое
обозначение. Вход R счетчика предназначен для установки
счетчика в нулевое состояние. Для этого нужно подать на этот
41
Рис. 22. Микросхема К176ИЕ1:
а— графическое обозначение; б— временные диаграммы
вход уровень 1. Вход С — счетный. Счетчик срабатывает по
отрицательному перепаду входной импульсной последовательно-
сти на входе С. При этом на соответствующем выходе появля-
ются положительные импульсы (рис. 22, б). Частота следования
импульсов с выхода 1 меньше, чем на входе С, в 2 раза, т. е. К= 2;
на выходе 2 — в 4 раза; на выходе 4 — в 8 раз и т. д.
Функциональным аналогом микросхемы К176ИЕ1 является
К164ИЕ1, выполненная в металлокерамическом корпусе.
Микросхема К176ИЕ8 является десятичным счетчиком
импульсов, совмещенным с дешифратором. Его схемное обозна-
чение показано на рис. 23, а. Работу счетчика К176ИЕ8 по-
ясняет временная диаграмма, изображенная на рис. 23, б.
Счетчик переключается по отрицательному перепаду импульсов
на входе СР, если на вход CN подать высокий уровень. Если,
наоборот, на вход СР подать низкий уровень, то счетчик будет
переключаться положительными перепадами импульсов, подава-
емых на вход CN.
Для установки счетчика в исходное, нулевое, состояние на
вход R подают кратковременный положительный установочный
импульс. После установки счетчика в исходное состояние и при
отсутствии входных счетных импульсов на выходах 0 и Р по-
является уровень 1. Дальнейшую схему состояний счетчика
поясняет временная диаграмма (рис. 23, б).
Функциональным аналогом микросхемы К176ИЕ8 является
К561ИЕ8, выполненная в пластмассовом корпусе.
42
Ufa# *
о
о
Рис. 23. Микросхема К176ИЕ8:
а — графическое обозначение; б — временные диаграммы
2.5. ТРИГГЕРЫ
В корпусе микросхемы К176ТМ2 содержатся два одинаковых
D-триггера (рис. 24, а). Триггер — это устройство, переключаемое
подачей импульса в нулевое либо в единичное состояние. Один
из выходов триггера — прямой, второй (с кружком) — инверсный.
Для установки триггера в нулевое состояние (уровень 0 на
прямом выходе) надо подать сигнал 1 на вход R, а в единичное —
на вход S. Вход D — информационный, а С — счетный. На
рис. 24, б показана таблица состояний D-триггера. X — любой
уровень сигнала на входах С и D. Триггер переключается по
положительному перепаду на входе С.
КП6ТМ2
0_- прямой выход
Q - инверсный выход
Входы Выходы
с в в £ Q Q
_Г 0 0 0 1 0
1 0 0 0 1
X X / 0 0 1
X X 0 / 0
б
Рис. 24. Микросхема К176ТМ2:
а — графическое обозначение;
б — таблица состояний
Если соединить инверсный выход Q с входом D, то триггер
будет работать в счетном режиме, т. е. переключаться на каждый
входной импульс со входа С.
Функциональными аналогами микросхемы К176ТМ2 являются
К561ТМ2, К164ТМ2, К564ТМ2, которые выполнены в металло-
керамическом корпусе.
2.6. ДЕШИФРАТОРЫ
Дешифраторы используют для преобразования сигналов
из одного кода в другой. Сигналы в коде 1-2-4-8 преобразует
в десятичный дешифратор К176ИД1. Его условное графическое
обозначение представлено на рис. 25, а, а работа — в таблице
на рис. 25, б. Каждому сочетанию уровней на входах (а каждое
из них есть десятичное число первого разряда, выраженное
в двоичной форме) соответствует уровень 1 на выходах.
2.7. РЕГИСТРЫ
Регистры предназначены для хранения информации, выра-
женной в цифровом виде. К176ИР2 — это два четырехразрядных
статических сдвиговых регистра, выполненных в одном корпусе
(рис. 26, а).
44
КП6ИД1
/ £ 4 8 DC
о
Входы Выходы
1 8 4 8 0 г J 4 Cj 6 1 8 9
0 0 0 0 / 0 0 0 0 0 0 0 0 0
J 0 0 0 0 1 0 0 0 0 0 0 0 /7
0 / 0 0 0 0 j 0 0 0 0 0 0 0
j 0 0 0 0 0 / 0 0 0 0 0 0
0 0 j 0 0 0 0 0 0 0 0 0 0
/ 0 0 0 0 0 0 0 / 0 0 0 0
0 0 0 0 0 0 0 0 / 0 0 0 0
J 1 0 0 0 0 0 0 0 0 0
0_ 0 0 j 0 0 0 0 0 0 0 0 0
0 0 1 0 0 0 0 0 0 0 0 0 1
в
Рис. 25. Микросхема К.176ИД1:
(I — графическое обозначение; б — временные диаграммы
Условием записи информации в первый разряд регистра
является наличие на входе D уровня 1, а на входе R— 0, при
этом на всех выходах регистра будет уровень 0. Рассмотрим рабо-
ту регистра, когда на вход С поступают положительные импульсы
с некоторым периодом повторения, равным Т (рис. 26, б). С при-
ходом на вход С уровня 1 на выходе первого разряда появится
высокий уровень. Затем такой же уровень через время Т появится
на выходах 2, 3 и 4 регистра. Такое состояние выходов регистра
при воздействии входных импульсов останется до тех пор, пока
на вход R не поступит хотя бы короткий сигнал 1 или пока не
сменится уровень на входе D.
По сигналу 1 на входе R на всех выходах одновременно уста-
новится уровень 0. Как только на входе R снова установится
уровень 0, процесс записи сигналов в разряды регистра повто-
рится.
Если изменить уровень на входе D с высокого на низкий
в момент, когда на всех выходах сигнал 1, то с фронтом каждого
очередного импульса с входа С уровень 0 будет появляться
последовательно на выходах 1, 2, 3 и 4 регистра.
Регистр К176ИР2 может работать и как счетчик К176ИЕ8,
совмещенный с дешифратором. Для этого достаточно после
появления уровня 1 на выходе 1 изменить уровень на входе D с 1
на 0. В этом случае каждый входной импульс будет «перемещать»
уровень 1 с одного выхода на следующий в сторону возрастания
их номера. Если же изменить уровень на входе D с 1 на 0 после
появления уровня 1 на выходе 2 регистра, то высокий уровень
45
Ufa A 1 2 3 4 5 6 7 8 9 10 111213 /4 15 16
6
0.
0.
Uffbixk
Рис. 26. Микр осхема К176ИР2:
a — графическое обозначение; б — временные диаграммы
при каждом входном импульсе будет «перемещаться» в сторону
возрастания номера на двух выходах попарно.
Если на вход С подавать не положительные, а отрицательные
импульсы, то переключение регистра будет происходить по отри-
цательным перепадам входных импульсов.
Так как в одном корпусе микросхемы К176ИР2 находятся
два четырехразрядных сдвиговых регистра, то, соединив выход
4 одного регистра с входом D другого, получим восьмиразрядный
статический сдвиговый регистр.
Функциональными аналогами микросхемы К176ИР2 являются
К164ИР2 и К564ИР2, выполненные в металлокерамическом кор-
пусе.
Универсальный четырехразрядный регистр К176ИРЗ позво-
ляет производить запись, сдвиг и считывание как последователь-
46
ной, так и параллельной информации. Услов-
ное графическое обозначение этого регистра по-
казано на рис. 27. Регистр имеет два входа — С1,
С2 —- для синхроимпульсов. Для записи после-
довательной информации в первый разряд регист-
ра используют вход DO, подав уровень 0 на вход
S. Сдвиг записанной информации происходит по
положительному перепаду импульса, подаваемого
на вход С1. По отрицательным перепадам импуль-
сов со входа С2 и при высоком уровне на входе S
в регистр можно записать параллельную информа-
цию, поступающую на входы D1...D4.
Если объединить входы С1 и С2 и на вход
DO подать высокий уровень, то при низком уров-
не на входе S будет происходить сдвиг инфор-
мации, а при высоком — запись.
Функциональным аналогом микросхемы
К176ИРЗ является К164ИРЗ, выполненный в ме-
таллокерамическом корпусе.
/Г 176ИРЗ
Рис. 27. Графи-
ческое обозна-
чение микросхе-
мы К176ИРЗ
2.8. ЗАМЕНА МИКРОСХЕМЫ К176ИЕ8
Если по каким-либо причинам не удалось приобрести микро-
схему К176ИЕ8, то ее в цифровых модулях приемной аппара-
туры (за исключением модуля М7) можно заменить своеобраз-
ным «тандемом» из двух микросхем К176ИЕ1 и К176ИД1, как
это показано на рис. 28.
Для замены микросхемы К176ИЕ8 в модуле М7 необходимо к
микросхемам К176ИЕ1 и К176ИД1 добавить два логических
элемента — ЗИ-НЕ и 2И-НЕ — и два германиевых диода
(рис. 29) *. По работе этот узел аналогичен микросхеме К176ИЕ8
в модуле М7. С приходом на счетный вход С счетчика DD1 один-
надцатого отрицательного импульса на всех входах элемен-
та DD3.1 появится уровень 1, а на его выходе — уровень 0. По-
этому напряжение высокого уровня с выхода инвертора DD4.1
через диод VD2 поступит на установочный вход R счетчика DD1
и на выходах 1, 2, 4 и 8 счетчика DD2 появится уровень
логического 0.
2.9. ОСОБЕННОСТИ МОНТАЖА И ЭКСПЛУАТАЦИИ
МИКРОСХЕМ
Общая особенность микросхем КМОП, к которым отно-
сятся и микросхемы серий К176, К164, К561, К564,— их относи-
тельно невысокая стойкость к перегрузкам по входу. Заряды
* Такая замена становится эквивалентной потому, что возможности счет-
чика К176ИЕ8 в приемных модулях использованы не полностью.
47
001 К176ИЕ1 DD2 КП6ИД1
DC 2 2
1 с СТ2 3 10 1 з 15
2 4 13 t 2 4 8 z 1
1— Z 5 12 v 6_
13 R ч- 8 10 11 J 6 1
Рис. 28. Принципиальная схема устрой-
ства, заменяющего микросхему К176ИЕ8
002 КП6ИД!
К вьМ out КП6ИЕ1
003 КП6ЛА9
Рис. 29. Принципиальная
схема устройства, заме-
няющего микросхему
К176ИЕ8 в модуле М7
004 КП6 ЛЮ
статического электричества, обычно имеющиеся на инструмен-
тах, одежде, паяльнике, способны вывести из строя микросхему
еще до ее монтажа на плату. Поэтому при работе с микро-
схемами КМОП необходимо соблюдать меры предосторожности.
Паять микросхемы следует низковольтным паяльником, вклю-
ченным в сеть через переходной трансформатор с заземленной
вторичной обмоткой и корпусом паяльника.
Бытует мнение, что на микросхемы КМОП губительно ска-
зывается замыкание выходов на плюсовой или минусовой вывод
питания. На самом деле для современных микросхем КМОП
(кроме преобразователей уровней) такой опасности не суще-
ствует при напряжении питания, не превышающем номинальное.
Длительное замыкание приводит лишь к увеличению рассеивае-
мой мощности и поэтому нежелательно, а кратковременное совер-
шенно безопасно. Поэтому базовые цепи транзисторов можно
подключать к выводам микросхем непосредственно (без токо-
ограничительного резистора). Однако для повышения надежно-
сти работы модулей, описанных в этой книге, выходной ток микро-
схем в самом неблагоприятном случае не превышает 6 мА.
Номинальное напряжение питания микросхем серии К176
9 В±10 %, однако, как показала практика работы с ними, их
работоспособность сохраняется при снижении напряжения пи-
48
тания до 5 В (а иногда даже до 4,5 В). Верхний допустимый
предел по питающему напряжению 12 В.
У микросхем К176ИР2, К176ИЕ8, К176ИД1 с плюсовым
выводом источника питания соединяют вывод 16, а с минусо-
вым — 8. У остальных микросхем, которые упомянуты в этой
книге, с плюсовым выводом питания соединяют вывод 14, а с ми-
нусовым — 7.
3. МОДУЛИ ПЕРЕДАЮЩЕЙ АППАРАТУРЫ
ДИСКРЕТНОГО УПРАВЛЕНИЯ
3.1. ШИФРАТОР КОМАНД. ВИДЫ ДИСКРЕТНЫХ КОМАНД
Шифратор — электронное устройство, которое формирует
командные сигналы в аналоговой (непрерывной) цифровой или
аналого-цифровой форме. В иностранной литературе шифра-
тор нередко называют кодером или импульсным блоком пере-
датчика [1, 2], используемым обычно в пропорциональной аппа-
ратуре.
Отметим сразу, что речь пойдет только о дискретных коман-
дах в радиолюбительской телемеханике. К дискретным командам
принято относить такие, которые направлены на выполнение
моделью одиночных, разовых действий. Например, команда
«Вперед» — включение ходового электродвигателя, «Стоп» —
выключение двигателя, «Фары» — включение фар, «Сигнал» —
подача звукового сигнала и т. д.
Команды называют однопозиционными, если на их выполне-
ние рассчитано одиночное действие оператора; таковы все пере-
численные выше команды. Иногда используют многопозицион-
ные команды. Такой может быть трехпозиционная команда
«Вперед», если предусмотрено, что первое нажатие на кнопку
передатчика обеспечивает движение модели вперед на малой
скорости, второе — на средней, третье — на максимальной.
Еще один пример многопозиционной команды: исполнительный
релевой механизм отклоняется от среднего положения в каж-
дую сторону с шагом в 5... 10 угловых градусов при каждом
нажатии.
Для передачи на модель дискретных команд при последо-
вательной и последовательно независимой подаче используют,
как правило, один канал радиосвязи и одну несущую частоту
передатчика. Однако, если необходимо передавать одновремен-
но несколько дискретных команд, то число каналов связи при
одной несущей может быть увеличено. Например, при одновре-
менной подаче трех команд оператор использует три канала
радиосвязи при одной несущей частоте передатчика. Кроме
дискретных используют также дискретно-пропорциональные
команды, о которых рассказано ниже.
49
w
RG
Ю.
001.2
0011
002.2
RG
Ct
0,01mk
002.1 SOI
Ji
12
0
R
R1*180k
02
200MK* 16 В =r
Рис. 30. Принципиальная схема шифратора на пять команд
15
/4
I
DO! КП6ЛМ ...
002 K116ИР2
KT1 V77
0013 001.4 7 КТ315Б z
питан.
TGBI
I 9B
R2 Ю
XT1
&
0
3.2. ЦИФРОВОЙ МОДУЛЬ НА ПЯТЬ КОМАНД
Опыт по конструированию моделей, как и школьные знания,
человек приобретает не сразу, а постепенно. Поэтому сначала
рассмотрим типовой шифратор на пять команд, а затем, освоив
принцип его работы, составим схему цифрового модуля пере-
дающей аппаратуры на две и более команд.
Шифратор (рис. 30) формирует последовательность групп,
состоящих из определенного числа импульсов. Число импульсов
в группе зависит от того, какая командная кнопка нажата. Если
не нажата ни одна из них, шифратор формирует группы импуль-
сов команды «Стоп», в каждой из которых содержится по шесть
импульсов. При нажатии на кнопку SB1 шифратор формирует
группу сигналов команды «Назад» с пятью импульсами в груп-
пе; SB2 — «Вперед» — с четырьмя; SB3 — «Вправо» .— с тремя;
SB4 — «Влево» — с двумя импульсами.
Рис. 31. Временные диаграммы работы шифратора на пять
команд
50
При включении питания выключателем SA1 тактовый гене-
ратор, собранный на логических элементах DD1.1, DD1.2,
вырабатывает последовательность прямоугольных импульсов
с частотой 200 Гц и скважностью (отношением периода к дли-
тельности импульса), равной двум. Частота генератора зависит
от емкости конденсатора С1 и сопротивления резистора R1.
С приходом на вход С регистра DD2.1 второго импульса
(рис. 31,а) тактового генератора на выходе 2 этого регистра
появляется уровень 1 (рис. 31,6), который через замкнутые
контакты кнопок SB1...SB4 поступает на нижний по схеме вход
элемента DD1.3 и разрешает прохождение тактовых импульсов
через элемент DD1.3 и инвертор DD1.4 на вход усилителя тока
на транзисторе VT1.
Восьмой тактовый импульс вызовет появление на четвертом
выходе регистра DD2.2 уровня 1, который переведет оба регистра
в нулевое состояние, и на всех их выходах, а также на нижнем
входе элемента DD1.3 появится уровень 0. Прохождение такто-
вых импульсов через элемент DD1.3 будет запрещено. Девятый
импульс вызовет появление уровня 1 на выходе 1 регистра
DD2.1, а с десятого по шестнадцатый и далее весь рассмотрен-
ный процесс будет повторяться.
Итак, за время действия шестнадцати импульсов тактового
генератора на базу транзистора VT1 поступят две группы
командных импульсов по шесть в каждой (рис. 31, в). Каждая
группа этой последовательности соответствует команде «Стоп».
Промежуток времени между группами, равный 12,5 мс, необ-
ходим для опознания командных сигналов дешифратором
приемника, установленного на модели.
Если нажать на командную кнопку SB1, то длительность
импульса на нижнем входе элемента DD1.3 станет меньше на
один тактовый период, чем при команде «Стоп», а следовательно,
в каждой группе импульсов шифратора будет по пять тактовых
импульсов, что соответствует команде «Назад». Подобным обра-
зом при нажатии на последующие кнопки формируются группы
импульсов остальных команд.
Каждый импульс группы, поступивший на базу транзисто-
ра VT1, открывает его, и напряжение питания от батареи GB1
поступает на вывод 2 модуля.
Как только будет выключено напряжение питания и подвиж-
ный контакт выключателя SA1 примет положение, показанное
на схеме, оксидный конденсатор СЗ быстро разрядится через
резистор R2. Если бы не было резистора R2, то напряжение на
конденсаторе СЗ уменьшалось бы сравнительно медленно и ан-
тенна передатчика некоторое время излучала бы не группы ко-
мандных сигналов, а неупорядоченную последовательность им-
пульсов. Это могло бы привести к сбоям в работе модели и
выполнению ложной команды. Замыкать конденсатор СЗ непо-
средственно (без резистора R2) тоже нельзя, так как импульс
51
разрядного тока может вывести из строя (оплавить) контакты
выключателя SA1.
Если случайно нажать одновременно или с небольшим про-
межутком времени на две или более командных кнопки, то ши-
фратор сформирует последовательность групп сигналов, соответ-
ствующую наименьшему номеру нажатой кнопки.
Теперь уже легко догадаться, что, если подвижный контакт
кнопки SB3 подключить к нижнему по схеме входу элемента DD1.3,
исключив командную кнопку SB4, то получим шифратор на че-
тыре команды. Таким же путем можно составить принципиальную
схему шифратора на три и две команды.
Если же потребуется построить шифратор на девять команд,
то придется ввести в пятикомандный вариант шифратора еще
один четырехразрядный сдвиговый регистр К176ИР2. Его вход
С нужно соединить с выходом тактового генератора. Проводник,
идущий к выходу 4 регистра DD2.2, надо от вывода 2 от-
ключить и соединить его с входом R дополнительного регистра,
а выход 4 соединить с входом D дополнительного регистра;
объединенные входы R всех регистров соединить с выходом
4 дополнительного регистра. От выходов 3 и 4 регистра DD2.2,
а также от выходов 1 и 2 дополнительного регистра нужно под-
вести проводники к дополнительным кнопкам SB5...SB8, соблю-
дая рассмотренный выше принцип работы шифратора. Необ-
ходимо также подвести напряжение питания к дополнитель-
ной микросхеме.
Какие же команды, кроме уже известных, можно передавать
с помощью девятикомандного шифратора? Это, в первую оче-
редь, зависит от характера и возможностей модели. Вот не-
сколько вариантов команд: «Малый ход», «Полный ход», «По-
ворот башни», «Включение прожекторов», «Подъем ракеты»,
«Пуск ракеты», «Опускание ракеты», «Пулемет — огонь!»,
«Включение сирены», «Вращение антенны», «Колокол громкого
боя», «Включение ходовых огней», «Опускание шлюпки», «Под-
нятие якоря».
Транзистор VT1 в модуле можно использовать любой из се-
рии КТ315 со статическим коэффициентом передачи тока не ме-
нее 40; подойдут и другие кремниевые маломощные транзисторы
с примерно такими же параметрами. Конденсаторы: С1 — КМ-4
или КЛС, С2—К50-6. Командные кнопки SB1... SB4—КМ1-1
или другие с переключающимися контактами. Выключатель
питания SA1—МТ-1. Разъем ХТ1 использован от бывшей в
употреблении батареи «Крона». Источник питания GB1 —ба-
тарея «Крона».
Налаживание модуля сводится к подборке сопротивления ре-
зистора R1. Для этого вход у осциллографа подключают к точке
КТ1 (см. рис. 30). Общий вывод осциллографа соединяют с об-
щим проводом модуля. Включают напряжение питания модуля
и устанавливают развертку осциллографа так, чтобы на экране
52
было видно несколько устойчивых импульсов тактового генера-
тора. Подбирая резистор R1, добиваются периода повторения 5 мс
при скважности импульсов, равной 2.
3.3. ЦИФРОВОЙ МОДУЛЬ ДЛЯ ГРУППОВОГО
РАДИОУПРАВЛЕНИЯ
Рассмотренный в предыдущем разделе пятикомандный шиф-
ратор не способен формировать одновременно более одной коман-
ды. Для моделей же группового радиоуправления необходим
шифратор, который может формировать одновременно команд-
ные сигналы двух операторов. На рис. 32 представлена прин-
ципиальная схема шифратора на десять команд. Этот шифратор
формирует вначале командные сигналы пяти команд первого
оператора, а затем пяти команд второго, после чего снова пять
первого и пять второго и т. д. Частота, с которой чередуются
командные сигналы обоих операторов, равна 20 Гц, поэтому
исполнительные механизмы моделей не успевают реагировать
на смену .циклов работы шифратора, и создается эффект, что
модели, управляемые операторами, выполняют разные команды
одновременно. Команды, их соответствие нажимаемым кнопкам
и число импульсов в группах каждой команды для рассматри-
ваемого шифратора указаны в табл. 2.
Таблица 2
Команда Первый оператор Второй оператор
Нажатая кнопка Число импульсов в группе Нажатая кнопка Число импульсов в группе‘
«Стоп» — 1 — 6
«Разворот влево» SB1 2 SB5 7
«Разворот вправо» SB2 3 SB6 8
«Вперед» SB3 4 SB7 9
«Назад» SB4 5 SB8 10
Тактовый генератор собран на логических элементах DD1.1
и DD1.2. Он вырабатывает прямоугольные импульсы с частотой
200 Гц скважностью, равной 2 (рис. 33, а). Счетчик DD2 выпол-
няет функцию распределителя импульсов. Для получения на
выходах распределителя импульсов длительностью от одного
тактового периода до десяти использован узел на диодах VD1...
VD18. Во время работы модуля на аноде диода VD10 форми-
руются импульсы с длительностью, равной одному тактовому
53
MZ
VOI- VD20
Д9В 002
КП6ИЕ8
VD/0
0031
VD19 KT!
9
DO 1.4
0
CP
CTIO
DC
2.
/4
VDZ^' 5Z
[Si__qp____Г
УОЗ^ \7VDI1
DO 1.2
DDL!
a
0,0/MK
Rl* 180 к
DO! КП6ЛЕ5
003 КП6ЛА9
1К быв. + -—
питон.
001-004 "*1
02 200мк*/6в
CN
r-R
VW *2 ,00K
-----\5dj
V0I4 wSB6
O’
6
It
8
9
R4 Ю
SM
7
13
0
n
14
004 КП6ИР2
XT!
T GBI
3_9B
—। Цш
V09^. W-VD/8
DD3.3
VT1
КТ315Б
0
Рис. 32. Принципиальная схема шифратора группового радиоуправления
периоду (рис. 33, б), на аноде диода VD11—двум периодам,
на диоде VD12 — трем и т. д. За чередование командных сигна-
лов операторов отвечает четырехразрядный сдвиговый регистр
DD4. Назначение остальных элементов уже известно.
При включении' напряжения питания на выходе 0 счетчика
DD2 и на нижнем по схеме входе элемента DD3.1 (инвертор
DD3.3 преобразует уровень 0 с выхода 1 регистра) присутствует
уровень 1. Это значит, что элемент DD3.1 готов к пропусканию
со входа на выход импульсов тактового генератора. Через неко-
торое время после включения питания тактовый генератор на-
чинает вырабатывать импульсы, которые одновременно поступают
на вход СР счетчика DD2 и верхний вход элемента DD3.1.
Первый импульс тактового генератора появится на выходе эле-
мента DD3.1 (рис. 33,е) и на базе транзистора VT1. Этот импульс
(1 на рис. 33,з) является сигналом команды «Стоп» первого
оператора.
Через 5 мс (один период тактового генератора) уровень 1
возникает на выходе 1 счетчика DD2. Это значит, что элемент
DD3.1 будет закрыт (уровнем 0 на его среднем входе). Затем
с каждым следующим импульсом тактового генератора высокий
уровень будет «переходить» на остальные выходы счетчика DD2.
В это время элементы DD3.1 и DP3.2 будут закрыты.
После 9-го тактового импульса уровень на выходе 1 регист-
ра DD4 изменится с 0 на 1, а на нижнем входе элемента
DD3.1 — с 1 на 0 (рис. 33, в), и элементы DD3.1 и DD3.2 останут-
ся закрытыми. Затем уровень 1 будет на выходах дешифратора
54
Z/|
б п П I
/?1 J_________________L1________________U_________________I J_________________________
t
Уд
б ---------------------- —
/71______________________________________________________________________J----------
t
Uk
и I
о
и
Рис. 33. Временные диаграммы работы модуля М2
55
«перемещаться» в сторону возрастания их номера. По окончании
19-го тактового импульса уровень 1 появится на выходе 2 ре-
гистра DD4 (рис. 33, д) и даст разрешение на прохождение
импульсов через элемент DD3.2.
20-й тактовый импульс вызовет появление уровня 1 на сред-
нем входе элемента DD3.2 (с выхода 0 счетчика DD2 через
диоды VD10...VD14 и замкнутые контакты кнопок SB5...SB8).
Этот уровень изменится на 0 после 25-го тактового импульса
(третий импульс на рис. 33, г). За время присутствия высокого
уровня на среднем входе элемента DD3.2 на вход элемента
DD1.4 (рис. 33, е), а также на его выход (рис. 33,з) пройдут
шесть импульсов команды «Стоп» второго оператора.
После 29-го импульса уровень 1 появится и на выходе 3
регистра DD4 (рис. 33,ж). Он запретит прохождение через
элемент DD1.4 на базу транзистора VT1 импульсов с 30-го по
36-й второго оператора (рис. 33,е). По окончании 39-го такто-
вого импульса уровень 1 на короткое время появится на выходе 4
регистра DD4 (рис. 33,и) и переведет регистр и счетчик DD2
в исходное состояние. С 40-го импульса весь рассмотренный
процесс по формированию командных сигналов для обоих опе-
раторов вновь повторится.
Итак, за цикл работы шифратора на его выходе (рис. 33,з)
появится один импульс команды «Стоп» первого оператора
и шесть импульсов этой команды второго оператора.
Налаживание модуля аналогично описанному в 3.2.
Импульсы можно наблюдать на экране осциллографа, под-
ключенного к КТ1. Если, например, при нажатой кнопке SB2
вместо трех импульсов будет четыре, параллельно диоду VD2
нужно включить резистор сопротивлением 100 кОм.
Еще один пример: если командные кнопки второго оператора
находятся в положении, показанном на схеме, и на экране осцил-
лографа вместо шести импульсов будут видны семь, значит,
параллельно с одним из диодов VD12, VD13 нужно подключить
такой же резистор, как и в первом примере. К какому именно
диоду — определяют опытным путем. Если все диоды идентичны
по параметрам, подключения резисторов скорее всего не потре-
буется.
Диоды Д9В в модуле можно заменить любыми из этой серии
или серии Д2. Кремниевые диоды здесь непригодны.
3.4. МОДУЛЬ С ОДНОВРЕМЕННОЙ ПОДАЧЕЙ
ТРЕХ КОМАНД
Шифратор, схема которого показана на рис. 34, разработан
для радиоуправляемых яхт «Гренада», «Фламинго» и «Арлекин»,
распространяемых через торговую сеть. Однако он с успехом
может быть использован и в других моделях, выполняющих
три команды одновременно.
56
М3
£7 0,01мк
0013
001.1 001-2
01* 180 К
001 КП6ЛЕ5
002,003 КП6ИР2
004 КП6ЛА9
005 КП6ИД1
15
/4
RG
4
D
002.2
002.1
9
ю
D
004.3
13
003.1
wSB6
RG
003.2
RG
R
15
' &
I Fv43
004.2
402
9
П_
R
КТ1
Q
004.1
40! 001.4
/4
11
ХТ1
R2 Ю
\GB1
\9В '
V77 КТ315Б
005
ю
ОС
15 g
77
8
-Кбыб.
питан.
. 001-005
Я
V03
Рис. 34. Принципиальная схема шифратора на три одновременные команды
SA1
14
15
6
Познакомимся с работой этого модуля на примере форми-
рования сигналов команд «Стоп» (гребной винт неподвижен),
«Грот-стоп» и «Руль-стоп». Этим командам соответствует поло-
жение командных кнопок SB1...SB6, показанное на схеме.
При включении питания на всех входах элементов DD4.1...
DD4.3 присутствует низкий логический уровень, поэтому элемен-
ты закрыты. Спустя некоторое время тактовый генератор, собран-
ный на логических элементах DD1.1, DD1.2, начнет вырабаты-
вать последовательность прямоугольных импульсов с частотой
250 Гц и скважностью, равной 2. Положительные импульсы
(рис. 35,а) с выхода элемента DD1.3 — буферного формиро-
вателя — поступают на вход десятиразрядного сдвигового ре-
гистра DD2, DD3.1, а также на верхние по схеме входы элемен-
тов DD4.1...DD4.3. Каждый импульс тактового генератора
будет поочередно (сверху вниз по схеме) вызывать появление
на выходах регистров DD2.1, DD2.2, DD3.1 уровня 1, который
через замкнутые контакты кнопок SB1...SB6 поступит на средние
входы элементов совпадения DD4.1...DD4.3.
Десятый тактовый импульс вызовет появление уровня 1 на
выходе 1 дешифратора DD5 (рис. 35,в) и разрешит прохожде-
ние тактовых импульсов с 11-го по 19-й через элемент DD4.1
(рис. 35,г). Это соответствует командному сигналу «Стоп» на
базе транзистора VT1 (рис. 35,л). 20-й импульс тактового гене-
ратора изменит уровень на выходе 3 дешифратора DD5 с 0 на 1
(рис. 35,е) и, как только на выходе 4 регистра DD2.1 появится
третий импульс (рис. 35,д), тактовые импульсы команды «Грот-
стоп» (рис. 35,ж) пройдут через элемент DD4.2 на базу транзи-
стора VT1 (рис. 35,л).
57
Рис. 35. Временные диаграммы работы модуля М3
58
30-й тактовый импульс вызовет появление на выходе 7 де-
шифратора DD5 уровня 1 (рис. 35, и), и с появлением на выходе
1 регистра DD3.1 четвертого импульса (рис. 35,з) 39-й импульс
пройдет через элемент DD4.3 (рис. 35,к) — командный сигнал
«Руль-стоп» появится на базе транзистора VT1. 40-й импульс
переведет все регистры в первоначальное состояние и с 41-го весь
рассмотренный процесс по формированию командных сигналов
повторится. Табл. 3 поможет вам самостоятельно рассмотреть
работу шифратора для остальных команд. Вместо микросхемы
К176ЛЕ5 можно использовать К176ЛА7.
Таблица 3
Команда Нажатая кнопка Число импульсов в группе
«Стоп» — 9
«Вперед» SB1 8
«Назад» SB2 7
«Грот-стоп» — 6
«Грот вправо» SB3 5
«Грот влево» SB4 4
«Руль вправо» SEJ5 3
«Руль влево» SB6 2
«Руль-стоп» » 1
При правильно выполненном монтаже и исправных деталях
налаживание модуля сводится к подборке резистора R1 таким,
чтобы период повторения импульсов тактового генератора был
равен 4 мс при скважности 2.
3.5. ЧТО ТАКОЕ ДИСКРЕТНО-ПРОПОРЦИОНАЛЬНОЕ
УПРАВЛЕНИЕ?
Сначала очень коротко о пропорциональной команде. Если
положение какого-либо исполнительного механизма на модели,
например руля катера, меняется по закону изменения положения
рычага управления передатчика, то говорят, что модель выпол-
няет пропорциональную команду оператора. Чаще всего, и это
естественно, зависимость положения исполнительного механизма
от положения органа управления делают линейной (прямо про-
порциональной) .
В пропорциональной аппаратуре, как правило, используют
широтно-импульсную модуляцию (ШИМ). Ширина модулирую-
щих командных импульсов в передатчике изменяется при изме-
нении положения рычага управления. Демодулятор модели выра-
батывает сигнал, перемещающий рабочий орган исполнительного
механизма в соответствии с шириной модулирующих импульсов
принятого ШИМ сигнала.
В ряде случаев выгодно (с точки зрения простоты и стоимос-
ти аппаратуры радиоуправления) использовать для управления
59
ООН
001.2
Ci
6800
R1* 150 К
a
К выв. ~
питан.
001-004 +
Рис. 36. Принципиальная схема дискретно-пропорционального шифратора
001 КП6ЛЕ5
002 КП6ИР2
005 К116ТМ2
004 КП6ЛА9
004.1
конкретной моделью дискретно-пропорциональное управление.
Так, например, для включения, выключения и реверсирования
(изменения направления вращения ротора) электродвигателей
модели вполне достаточно только дискретных команд, а для
управления рулевым механизмом необходима пропорциональ-
ная команда. Движение такой модели гораздо более естественно,
она более маневренна, управлять ею намного легче и приятнее.
Шифратор дискретно-пропорциональной системы управления по-
строен таким образом, что он способен формировать одновремен-
но как дискретные, так и пропорциональную команды. О таком
шифраторе и пойдет дальнейший рассказ.
3.6. МОДУЛЬ дискретно-пропорционального
УПРАВЛЕНИЯ
Его схема представлена на рис. 36. Предположим, что при
включении напряжения питания движок переменного резистора
R3 и подвижный контакт переключателя SA1 находятся в сред-
нем положении. На инвертирующем выходе (вывод 2) триггера
DD3 появляется высокий уровень (рис. 37,в), который разре-
шит прохождение на базу транзистора VT1 только импульса,
поданного на объединенные два верхних по схеме входа эле-
мента DD4.2. Через некоторое время импульсы тактового гене-
60
ратора (он собран на
элементах DD1.1 и
DD1.2) начнут по-
ступать на вход вось-
миразрядного сдви-
гового регистра
DD2.1, DD2.2 и на
верхний вход эле-
мента DD4.2. На вы-
ходах регистра будет
поочередно появ-
ляться уровень 1.
Высокий уровень с
выхода 3 регистра
DD2.1 (рис. 37,6) за-
пустит одновибратор,
собранный на эле-
ментах DD1.3, DD1.4,
и на выходе инверто-
ра DD4.3 появится
положительный им-
пульс, который до-
стигнет базы тран-
зистора VT1 (рис.
37,6). Длительность
2,5мс
1,25мс
Рис. 37. Временные диаграммы работы модуля М4
этого импульса зависит от положения движка переменного ре-
зистора R3. Эта часть выходного сигнала и будет пропорциональ-
ной командой.
Как только на выходе 4 регистра DD2.2 возникнет высокий
уровень, оба регистра возвратятся в исходное состояние и на пря-
мом выходе триггера DD3 уровень изменится с 0 на 1 (рис. 37,г).
Это означает, что элемент DD4.1 готов пропустить тактовые
импульсы на выход. На выход пройдут пять импульсов — с 11-го
по 15-й команды «Стоп» (рис. 37, 6). С 16-го тактового импульса
весь рассмотренный процесс по формированию пропорциональ-
ного импульса и сигналов команды «Стоп» вновь повторится.
Если в процессе работы шифратора оператор станет изме-
нять положение движка переменного резистора R3, то длитель-
ность пропорционального импульса будет изменяться. При пере-
мещении движка резистора R3 вправо по схеме длительность
будет увеличиваться. При крайнем правом положении движка
длительность сигнала одновибратора равна 10 мс, при среднем —
6 мс, а при крайнем левом — 2 мс. Резистор R2 ограничивает
минимальную длительность импульса. При изменении длитель-
ности импульса одновибратора перемещается спад импульса,
а не его фронт.
В положении 1 переключателя SA1 в каждой группе бу-
дет по четыре тактовых импульса, что соответствует команде
61
001 К176ЛЕ5
ПП(-002,003 КП6ИР2
004 КПВИД1
005 КП6ЛА9
М5
001.3
V01
т козою
•г
001.1
ЗАЗ
С1
6800
\GBt
\9В
R3 4Д1к
HL1,
АЛ102Б
R4*2,2K R5 Юк
КТ1 (ц
а
75
14
О
УТ! КТЗ/56
R
003.1
004
К быб. -
питон.
001-005 +
1МК*16В
SA1
£
R
0_
R
2J
15
14
Рис. 38. Принципиальная схема шифратора для яхты
001.2
RG
001.4
Н4-
У02
’ Д9В
. У03 ДЭВ
R7
100К
ХТ1
RV450K
R2 24к
002.2
01 кот”
SA2
Ход”
R6 10
СЗ
200мк*
*16 В
RG
003.2
RG
ОС
«Вперед», в положении 3 в группе будет три импульса — коман-
да «Назад».
В качестве переключателя SA1 в шифраторе использован
МПН-1; годится и любой другой малогабаритный на три поло-
жения и одно направление. Переменный резистор R3— СПО-0,5
группы А.
Для налаживания модуля осциллограф подключают к КТ1,
включают напряжение питания модуля и подборкой резистора
R2 (движок переменного резистора R3 должен быть в левом
по схеме положении) добиваются длительности пропорциональ-
ного импульса 2 мс. Переводят движок резистора R3 в правое
положение и проверяют максимальную длительность импульса.
После этого убеждаются в соответствии числа импульсов в груп-
пе во всех трех положениях переключателя SA1.
3.7. МОДУЛЬ для яхты
В разд. 3.5
чи трех команд
был рассмотрен цифровой модуль для пода-
одновременно, разработанный для моделей яхт
62
Рис. 39. Временные диаграммы работы модуля М5
«Гренада», «Фламинго» и «Арлекин», на которые можно устано-
вить аппаратуру радиоуправления. Этот модуль может формиро-
вать только дискретные команды для поворота руля яхты, что не
позволяет водить яхту любым курсом, как о том сказано в ин-
струкции. Чтобы использовать полностью возможности модели,
необходимо пропорционально управлять ее гротом, стакселем,
ходовым винтом и рулем. Однако пропорциональная аппарату-
ра на такое число команд весьма сложна и дорога. Изготовить
и наладить ее может только моделист высокой квалификации.
Учитывая, что модель парусно-моторной яхты «Гренада» и дру-
гие рассчитаны на начинающих моделистов-любителей, для ее
вождения на первых порах вполне достаточно иметь упрощенный
вариант, радиоаппаратуры, позволяющий дискретно управлять
гребным винтом и шкотом, а пропорционально — поворотом руля.
Стакселем в этом случае управляет не оператор, как это описа-
но в [1], а воздушный поток, причем стаксель отклоняется в
63
сторону действия силы ветра на угол, соответствующий длине
шкота.
Рассмотрим работу модуля (рис. 38) на примере формирова-
ния сигналов команд «Шкот-стоп», «Стоп» и «Руль-стоп», при
этом движок переменного резистора R5 и подвижные контакты
переключателей SAI, SA2 должны находиться в положении, по-
казанном на схеме.
При включении напряжения питания на объединенных сред-
нем и нижнем входах элемента DD5.3 появится уровень логиче-
ской 1 (рис. 39, г). Затем импульсы тактового генератора, собран-
ного на элементах DD1.1, DD1.2 с частотой 400 Гц и скваж-
ностью, равной 2, поступят на вход 12-разрядного сдвигового
регистра DD2.1, DD2.2, DD3.1. По третьему тактовому импуль-
су уровнем 1 с выхода 3 регистра DD2.1 (рис. 39,6) запустится
одновибратор (он собран на элементах DD1.3, DD1.4) и на базу
транзистора VT1 через элемент DD5.3 и диод VD3 пройдет про-
порциональный импульс управления рулем (рис. 39, и).
После одиннадцати тактовых импульсов уровень 1 появится
на нижнем входе элемента DD5.1 (рис. 39, е), а через некоторое
время — и на его среднем входе (рис. 39, д), и импульсы команды
«Шкот-стоп» через элемент DD5.1 и диод VD1 пройдут на выход
(рис. 39, и).
Далее уровень 1 появится на среднем входе элемента DD5.2
(рис. 39, з), а спустя некоторое время — и на нижнем его входе
(рис. 39, ж), и на выход поступят импульсы команды «Стоп»
(рис. 39, и). Наконец, уровень 1 появится на выходе 7 дешифра-
тора DD4 (на схеме не показан) и все элементы DD5.1...DD5.3
будут закрыты. По фронту 49-го тактового импульса все регистры
возвратятся в исходное состояние и весь рассмотренный цикл
формирования сигналов команд повторится.
Выполнение остальных дискретных команд можно рассмотреть
самостоятельно, руководствуясь табл. 4.
Таблица 4
Команда Положение переключа- теля SA1 Положение переключа- теля SA2 Число импуль- сов в группе
«Стоп» — 2 2
«Вперед» — 3 3
«Назад» — 1 4
«Шкот-стоп» 2 — 8
«Шкот травить» 3 — 6
«Шкот выбрать» 1 — 7
Обращаем внимание на то, что для команды «Шкот-стоп»
использовано восемь импульсов, а для «Стоп» — два. Цель такого
распределения импульсов будет раскрыта в следующей главе.
64
WZ1/
XTI
Рис. 40. Пр инципиальная
схема модуля передатчика
«Сигнал-1» варианта 2
Передатчик
„Сигнал-/ ”
бариант2
3.8. О ВЫБОРЕ ПЕРЕДАТЧИКА
«СИГНАЛ !» ДЛЯ РАБОТЫ
С ЦИФРОВЫМИ МОДУЛЯМИ
В первом разделе были рассмотрены
два варианта принципиальной схемы пе-
редатчика «Сигнал-1». Какой же из них
может быть использован для совместной
работы с цифровыми модулями?
Вспомним, что у передатчика вариан-
та 1 мультивибратор выполнен на тран-
зисторах структуры р-п-р, а у варианта 2—
п-р-п. Поэтому напряжение на коллекторе
транзисторов мультивибратора в первом
варианте отрицательно, а во втором — по-
ложительно. Учитывая, что на коллекторе транзистора усилителя
тока всех рассмотренных цифровых модулей напряжение положи-
тельно, а также принимая во внимание, что выходная мощность
передатчика «Сигнал-1» варианта 2 больше варианта 1, то оста-
новим выбор на передатчике варианта 2.
3.9. МОДУЛЬ ПЕРЕДАТЧИКА «СИГНАЛ !»
Обратимся к рис. 7. На нем изображена принципиальная
схема передатчика «Сигнал-!» варианта 2. Посмотрите: вывод
от контактной точки 2 подключен к верхнему гнезду разъема ХТ2.
К этому выводу в дальнейшем будет подключен эмиттер тран-
зистора усилителя тока всех модулей шифратора (кроме модуля
М5, где подключен коллектор). А вывод от контактной точки 3
(подключенный к подвижному контакту выключателя SB1 (будет
подключен к общему проводу устройства. Представим теперь
передатчик «Сигнал-1» (варианта 2) в виде модуля (рис. 40).
Назовем его модулем передатчика и присвоим ему номер 6, так
как до этого уже были рассмотрены пять модулей шифратора.
Напомним, что в модуль Мб не входят источник питания и команд-
ная кнопка.
3.10. СТРУКТУРНАЯ СХЕМА ПЕРЕДАЮЩЕЙ АППАРАТУРЫ
ИЗ МОДУЛЕЙ
На рис. 41 представлена структурная схема передающей аппа-
ратуры, составленная из первого и шестого модулей. Если теперь
начертить на листе бумаги принципиальные схемы обоих состы-
кованных модулей, то можно будет коротко рассмотреть прин-
цип работы этого передающего устройства.
Во время работы шифратора (модуля Ml) на эмиттере тран-
зистора VT1 появляются командные импульсы. Каждый импульс
запускает мультивибратор, который вырабатывает импульсы
3 7-159
65
WAI
\z XTI
zY
Шифратор । j
pue.JO
передатчик
„ Сигнал-1 ”
рис. 40
Рис. 41. Структурная схема передающей
аппаратуры из модулей
с частотой 1000 Гц и скважностью 2. Антенна WA1 передатчика
«Сигнал-1» (модуля Мб) излучает в пространство импульсно-
модулир-ованный радиочастотный сигнал команды.
Зная, по какому принципу происходит стыковка шифратора
с модулем передатчика, можно без труда составить структурную
схему нужного передающего устройства, состоящего из модуля
Мб и одного из рассмотренных шифраторов.
А теперь перейдем к очень важному подразделу, касающе-
муся частотной совместимости работы передающего и приемного
устройств.
3.11. О ВЫБОРЕ ЧАСТОТЫ ТАКТОВОГО ГЕНЕРАТОРА
ШИФРАТОРА И МУЛЬТИВИБРАТОРА
В каждом шифраторе есть тактовый генератор, вырабаты-
вающий прямоугольные импульсы: в первом модуле с частотой
200 Гц, в третьем — 250 Гц и в четвертом — 400 Гц. Почему
выбраны именно эти частоты? Чтобы ответить на этот вопрос,
займемся простыми вычислениями при условии, что скважность
импульсов равна 2.
Вычислим длительность тактового импульса для частоты
200 Гц.
= 0,0025 с = 2,5 мс,
где ТТ — период тактовых колебаний, с;
частота, Гц.
Так как тактовый импульс запускает мультивибратор, выра-
батывающий сигнал частотой 1000 Гц, то длительность импульса
мультивибратора:
= 0,0005 с = 0,5 мс,
где Гм — период колебаний мультивибратора, с;
FM — частота, Гц.
Это значит, что в одном импульсе тактового генератора содер
жатся тт : тм = 5 импульсов мультивибратора.
66
Для тактовой частоты 400 Гц в одном импульсе тактового
генератора содержатся уже не пять, а только два импульса муль-
тивибратора.
Как показывает практика, если в одном тактовом импульсе
укладывается менее двух импульсов мультивибратора, работа
всего приемопередающего комплекса становится неустойчивой,
ухудшается его помехозащищенность. Казалось бы, самый
простой выход из положения — понизить тактовую частоту.
И этот выход вполне приемлем, но только для простых систем с
малым числом команд. Для моделей с большим числом команд
цикл работы (цикл — это число тактовых импульсов за время
между двумя смежными исходными состояниями шифратора)
будет таким протяженным во времени, что становится слишком
заметным запаздывание в выполнении команды моделью. Так,
например, при тактовой частоте 100 Гц и цикле 50 импульсов
(как у модуля М5) задержка будет:
-^5° = °,5 с.
1Поэтому приходится соответственно увеличивать частоту муль-
тивибратора передатчика. Это решение тоже имеет свои недо-
статки. Оно требует замены в готовом передатчике двух конденса-
торов и точной подгонки частоты и скважности колебаний муль-
тивибратора подборкой резисторов в цепи базы транзисторов.
Все эти трудности натолкнули автора на мысль отказаться
от мультивибратора вообще. Как показали эксперименты, система
оказалась более надежной, схематически более простой, заметно
более экономичной по питанию. Она устойчиво работает при
частоте тактового генератора 400 Гц.
В дальнейшем передатчик «Сигнал-1» мы будем использовать
как с мультивибратором, так и без него.
Для того чтобы удалить мультивибратор, нужно выпаять
с платы передатчика (см. рис. 9) транзисторы VT3, VT4, кон-
денсаторы С7, С8 и резисторы R6...R9, а общую точку резисторов
R3 и R5 соединить с общим проводом. Когда необходимо исполь-
зовать передатчик с мультивибратором, а когда без него — будем
оговаривать в каждом конкретном случае.
При использовании передатчика без мультивибратора потре-
буется внести соответствующие коррективы и в приемник. Об
этом будет рассказано в следующем разделе.
4. МОДУЛИ ПРИЕМНОЙ АППАРАТУРЫ
4.1. ЧТО ТАКОЕ ДЕШИФРАТОР?
Во время управления моделью оператор, манипулируя ор-
ганами управления передатчика, посылает в эфир командные
сигналы. Приемник, установленный на модели, эти сигналы
3* 67
К выв.
питан.
001,002
“*1 Т DOH
R!
5,1 M
C2
3(60)
CO
200MK*10B i
002 К116ИЕ8
14
CN
i Cl 100
K1.1
DOI К176ЛА7
Ml
13
15
СГ10
VC
M02У DO
R2 100K
Рис. 42. Принципиальная схема де-
шифратора на пять команд
принимает, усиливает до оп-
ределенного значения, после
чего они поступают на де-
шифратор.
Дешифратор—электронное
устройство, способное распо-
знавать командные сигналы
передатчика и приводить в
действие исполнительные ме-
ханизмы модели, выполня-
ющие опознанные команды.
Если дешифратор рассчитан
только на одну команду, то
его называют простым. Ино-
гда дешифратор называют
демодулятором [1, 2]. Прин-
цип работы начнем рассмат-
ривать с дешифратора на
пять команд.
№
4.2. ПЯТИКОМАНДНЫЙ МОДУЛЬ-ДЕШИФРАТОР
В практике радиолюбителя-моделиста может случиться так,
что во время сборки радиоуправляемой модели случайно будет
выведен из строя командоаппарат комплекса «Сигнал-1». Чаще
всего это случается с контактной системой при пайке выводов.
И если попытки его восстановления не дадут положительных
результатов, вместо комаидоаппарата можно воспользоваться
модулем (это уже седьмой по порядку модуль), описанным в этом
разделе. Выходы модуля подключают ж входу усилителя тока
(о нем будет рассказано ниже).
Принципиальная схема модуля показана на рис. 42. Контак-
ты К1.1 реле К1 размещены в приемнике «Сигнал-1». Этим кон-
тактам в момент их замыкания (при нажатии на командную
кнопку в передатчике) свойственен нежелательный эффект, на-
зываемый «дребезгом контактов». Суть его состоит в том, что
реально контакты, прежде чем окончательно сомкнуться, несколь-
ко раз размыкаются и замыкаются. При этом ток через контакты
приобретает прерывистый, импульсный характер. Таким образом,
образуется не один перепад напряжения, а несколько. Цифровое
устройство отреагирует на эти перепады, в результате чего будет
сформирована ложная команда.
Для устранения такой возможности в модуль введен узел,
выполненный на элементе DD1.1, резисторе R1 и конденсато-
ре С1. «Дребезг контактов» длится около 0,5 с.
При включении питания счетчик DD2 устанавливается в исход-
ное состояние (импульс установки формирует цепь R2C2) и на
выходе 0 появляется уровень 1. Напряжение на обкладках кон-
68
денсатора Cl почти равно напряжению питания. Такое состояние
устройства считаем исходным — оно соответствует команде
«Стоп».
Если теперь, выполняя какую-либо другую команду, срабо-
тает реле К1 и контакты К1 1 замкнутся, то на выходе элемента
DD1.1 возникнет уровень 1. Счетчик DD2 переключится и уровень
1 возникнет на его выходе 1, что соответствует команде «Влево».
Конденсатор С1 разрядится.
Если в результате «дребезга» контакты К11 на короткое
время разомкнутся, то уровень сигналов на выходе инвертора
DD1 изменится, так как конденсатор С1 не успеет зарядиться
за время, пока контакты остаются разомкнутыми. Таким обра-
зом, на время «дребезга» контактов триггер остается в преж-
нем единичном состоянии. Как только реле К1 отпустит якорь и
контакты KL1 разомкнутся, конденсатор С1 начнет заряжаться,
и через некоторое время на выходе элемента DD1.1 появится
уровень 0.
Следующее замыкание — размыкание контактов К11 приведет
к появлению уровня 1 только на выходе 2 счетчика DD2, что
будет соответствовать команде «Стоп». Так каждое последую-
щее срабатывание реле К1.1 будет «перемещать» уровень 1 на вы-
ходе счетчика-дешифратора DD2 в сторону возрастания их
номера. Уровень 1 на выходе 9 соответствует команде «Вперед».
Десятое срабатывание реле переведет счетчик в исходное со-
стояние.
Управляющее напряжение на выводе 8 модуля соответствует
команде «Вправо», на выводе 9 — «Вперед», на выводе 10 —
«Назад». Как видим, команда «Вперед» повторяется дваж-
ды. Это сделано для большей оперативности управления мо-
делью. Таким же способом можно добиться повторения других
команд.
Налаживание модуля сводится к подборке конденсатора С1
таким, чтобы при каждом замыкании контактов К1-1 модуль
четко отрабатывал команды, не допуская ложных. Модуль сле-
дует налаживать при напряжении питания 5 В. Это минимальное
напряжение, при котором модуль еще способен работать. Реле
на время налаживания надо включать любым тумблером.
Включают питание и измеряют напряжение на выводе 0 счет-
чика DD2 — оно должно быть немного менее 5 В. Затем вклю-
чают и выключают тумблер управления реле. Уровень 1 дол-
жен появиться на выходе 1 счетчика. Включая и выключая тум-
блер, убеждаются в «перемещении» уровня 1 с одного выхода
на другой. При нечетком срабатывании счетчика следует кон-
денсатор С1 заменить на другой, большей емкости. В заключе-
ние проверяют работу модуля при напряжении питания, рав-
ном 9 В.
Вместо диода Д9В можно использовать любой из серий Д9
или Д2.
69
Рис. 43. Принципиальная схема вари
анта пятикомандного дешифратора
4.3. ВАРИАНТ
ПЯТИКОМАНДНОГО
ДЕШИФРАТОРА
Этот модуль (рис. 43) рас-
считан на совместную работу с
модулем Ml шифратора (см.
рис. 31). Дешифратор отраба-
тывает в любой последователь-
ности команды «Влево», «Впра-
во», «Вперед», «Назад» и
«Стоп».
Рассмотрим работу дешиф-
ратора на примере сигналов
команды «Стоп». Каждая груп-
па этой команды состоит из
шести импульсов тактового ге-
нератора. Допустим, что до
прихода первой группы счетчик
DD2 находился в исходном
состоянии, т. е. на его выходе
О—уровень 1. Первая группа
импульсов с 1-го по 6-й пройдет через инвертор DD1.1 (рис. 44, а).
По спаду первого импульса будет запущен одновибратор, собран-
ный на элементах DD1.2 и DD1.3, и на его выходе появится уро-
вень 0 (рис. 44, б). Импульсы с 1-го по 6-й, поступившие на
счетчик DD2, вызовут «перемещение» уровня на выходах в сто-
рону возрастания их номера.
Через время, равное 6Т (устанавливают подборкой резистора
R1), на выходе одновибратора появится уровень 1, по которому
счетчик-дешифратор вернется в исходное состояние. Затем на
вход дешифратора поступит вторая группа импульсов (с 9-го
по 14-й) этой же команды и весь рассмотренный процесс повто-
рится. Нетрудно догадаться, что уровень 1 будет поочередно
появляться на всех выходах счетчика DD2, кроме выхода 6 для
команды «Назад», для команды «Вперед» — кроме выходов 5
и 6, для команды «Вправо» — кроме выходов 4...6, а «Влево» —
кроме выходов 3...6.
Мы рассмотрели работу модуля М8 на примере команды
«Стоп» в случае, когда на вход дешифратора поступают только
импульсы команды. В реальных условиях работы на вход дешиф-
ратора вместе с командными поступают и импульсы помех, кото-
рые вызывают сбои в работе системы и ложные команды. При-
рода возникновения импульсов помех разнообразна. Они иногда
зарождаются в самом приемнике, особенно в сверхрегенератив-
ном, а чаще всего их источником являются некоторые медицин-
ские приборы, газосветные установки, сварочные аппараты, иск-
рящие коллекторы электрических машин (включая и электро-
70
Рис. 44. Временные диа-
граммы работы модуля М8
двигатели модели), а также разряды атмосферного электриче-
ства.
Рассмотрим работу этого модуля на примере команды «Впе-
ред» в условиях импульсной помехи.
Поскольку импульсы помехи не синхронизированы с такто-
выми импульсами и чаще всего носят случайный характер, они
могут занимать в дешифруемом сигнале самое различное поло-
жение по отношению к командным импульсам. Мы рассмотрим
из всех возможных лишь два наиболее вероятных и, пожалуй,
наиболее неприятных случая, когда импульсы помехи либо встрое-
ны между любыми командными импульсами группы, либо при-
строены к группе (находятся между группами).
Допустим, что во вторую группу команды «Вперед» встроен
один импульс, а к четвертой группе пристроены два импульса
помехи. Тогда уровень 1 от первой группы появится поочередно
на выводах 16...18 модуля, от второй группы — на выводах 16... 19,
от третьей — вновь на выводах 16... 18, а от четвертой — на выво-
дах 16...20. Таким образом, за время рассмотренных четырех
групп импульсов модель выполнит команду «Вперед», затем «На-
зад», снова «Вперед» и «Стоп».
Так как ложные из-за помех команды кратковременны, мо-
дель, в общем, выполняет основную команду, но ее движение
становится неестественным — неплавным, рыскающим, неуверен-
ным. Для борьбы с этими помехами приходится принимать спе-
циальные меры: от введения в модель помехозащитных фильтров
до разработки сложных помехоустойчивых дешифраторов.
В подразд. 3.2 сказано о том, что пятикомандный шифратор
можно преобразовать так, чтобы он формировал сигналы от двух
71
до девяти команд. Так как рассмотренный дешифратор тоже
пятикомандный, давайте подумаем, что нужно сделать для
того, чтобы модуль М8 мог дешифровать сигналы от двух до девя-
ти команд. Разве не очевидно, что для двух команд — «Вперед»
и «Стоп» — в дешифраторе нужно просто использовать только
два выхода счетчика DD2: для первой — выход 2, а для вто-
рой — 3. Кроме этого, длительность сигнала одновибратора надо
установить равной трем периодам импульсов тактового генера-
тора, т. е. 15 мс.
Если оставить длительность импульса одновибратора рав-
ной 6Т (30 мс), как в пятикомандном дешифраторе, система
вполне могла бы работать, но вероятность сбоев от пристроен-
ных импульсов помех за время 30 мс была бы вдвое выше, чем
при 15 мс.
Теперь легко видеть, что для трех команд потребуются выходы
2, 3 и 4 счетчика-дешифратора DD2, а длительность сигнала
одновибратора должна быть равной четырем периодам импуль-
сов тактового генератора. Напомним, что для тактового гене-
ратора в шифраторе, вырабатывающего импульсы с частотой
200 Гц, период повторения равен 5 мс. Для четырех и более
команд используемые выходы счетчика DD2 и длительность сиг-
нала одновибратора можно вычислить самостоятельно.
20
16'
2 йп2
3 ы V01,
«Ж
VD4
£|—— > М юо к
ml V07 X
15
001.1
RG
RG
10
11
4 У06_
_ V08
14
R2
001.2
т
VBfl
ОН
V012
V016
U-l ЮО к j
____ R3
-Н“| юок
У013^
V015
ФН
R4
100К
15
14
DD2.1
RG
RG
10
ZJ
VD17 Д220
—Н—
: ОШ
200мк*
, *16 В
питан.
- 001.002
VD1-V016 ДЭВ
001,002 КП6ИР2
3(60)
21
23
7
0
R
0
0
М9
Рис. 45. Принципиальная схема помехозащитного модуля
72
4.4. ПОМЕХОЗАЩИТНЫЙ МОДУЛЬ
Его схема показана на рис. 45. Этот модуль соединяют с мо-
дулем М8 соответствующими выводами 16...20, 3 и 6.
Рассмотрим работу устройства на примере команды «Стоп»
без помех. В каждой группе сигнала этой команды по шесть так-
товых импульсов. Уровень 1 первых пяти импульсов поочередно
с входных выводов 16... 19 модуля будет записан последователь-
ным кодом в первые разряды регистров DD1.1, DD1.2, DD2.1,
DD2.2, и в момент записи на их выходе 1 появится высокий уро-
вень. Через диоды VD3, VD6 и VD9 этот уровень попадет на
установочный вход R регистров DD1.1, DD1.2 и DD2.1 и они
перейдут в исходное состояние — на их выходе 1 установится
уровень 0. С приходом шестого импульса группы уровень 1 по-
явится на входном выводе 20 и в исходное состояние будет пере-
веден регистр DD2.2. С приходом второй и далее групп импульсов
процесс будет повторяться. Итак, при команде «Стоп» ни на
одном из выходных выводов 21...24 модуля управляющего напря-
жения в виде высокого уровня не появится.
Теперь давайте рассмотрим работу модуля при команде «Впе-
ред» без помех (в группе четыре импульса). В этом случае от
первой группы импульсов уровень 1 поочередно поступит на
вход С трех регистров DD1.1, DD1.2, DD2.1. На их выходе 1 по-
явится высокий уровень. Затем на вход модуля придут сигналы
второй группы этой команды. Высокий уровень возникнет на
выходе 2 этих регистров. Уровень 1 с выхода 2 регистра DD2.1
через диоды VD1, VD5 и VD13 поступит на вход R регистров
DD1.1, DD1.2 и DD2.2 соответственно, переведет их в исходное
состояние и запретит дальнейшую запись сигналов в них.
От третьей группы команды уровень 1 появится на выходе 3
регистра DD2.1. После четвертой группы уровень 1 появится
на выходе 4 регистра DD2.1. Этот уровень поступит на выходной
вывод 23 модуля и будет действовать на нем непрерывно, до
отпускания командной кнопки.
Итак, только после четвертой группы импульсов на выводе 23
модуля появляется управляющее напряжение команды «Вперед»,
которое воздействует через усилитель тока (о нем мы расскажем
в следующем разделе) на ходовой электродвигатель модели.
Регистры DD1.1, DD1.2, DD2.1, DD2.2 подсчитывают группы
сигналов команд, а так как регистры четырехразрядные, то управ-
ляющее напряжение команд появляется на одном из выходных
выводов модуля только после четвертой группы импульсов
команды.
Остается упомянуть о назначении диодов VD1...VD16. Эти
диоды совместно с резисторами R1...R4 выполняют логическую
функцию ИЛИ и вместе с регистрами образуют узел защиты
от импульсов помехи, т. е. предотвращают появление на выходе
модуля ложного командного сигнала.
73
Чтобы удостовериться в этом, еще раз проследим работу
модуля для команды «Вперед» с встроенным во вторую группу
импульсом помехи и двумя импульсами, пристроенными к чет-
вертой (как в примере из подразд. 4.3). От первой группы им-
пульсов (в ней отсутствуют импульсы помехи) уровень появится
на выходе 1 регистров DD1.1, DD1.2 и DD2.1. Так как вторая
группа сигналов на входе дешифратора содержит один импульс
помехи, т. е. пять импульсов, как у команды «Назад», то уро-
вень 1 появится на выходе 2 этих регистров и запись в них будет
запрещена. После третьей группы (не содержащей помех) вы-
сокий уровень появится на выходе 3 регистра DD2.1. Четвертая
группа (с двумя импульсами помехи) будет равносильна команде
«Стоп». Поэтому сигнал, поступивший на входной вывод 20 моду-
ля, переведет все регистры в исходное состояние, что будет соот-
ветствовать команде «Стоп». За четвертой группой последуют
очередные, поэтому дальнейшая работа модуля будет зависеть
от комбинации импульсов помех и импульсов групп команды
«Вперед».
Как видим, если в группах импульсов команды присутствуют
импульсы помехи, система не выдает ложных команд, а только
переводит модель в режим «Стоп». Как только пойдут группы
без помех, модель начнет выполнять заданную команду. Если
в каждом цикле работы узла защиты (цикл — четыре группы
импульсов) присутствует только один импульс помехи, а в от-
дельных случаях — даже два, то система выдает заданную коман-
ду без перехода в режим «Стоп». Все сказанное распространя-
ется и на все остальные четыре команды при условии, что по-
мехи — случайные (стохастические).
Диод VD17 препятствует прохождению отрицательных им-
пульсов на информационные входы D регистров по цепи пита-
ния. Конденсаторы Cl, С2 уменьшают пульсации напряжения
питания во время работы приемного устройства модели.
3(60)
Рис. 46. Принципиальная схема модуля первого оператора группового
радиоуправления
003 К176ИРЗ
I » । КМ
питан.
г-— - 001-004
004 К176ИД1 [-
74
Вместо диодов Д9В можно использовать любые из серий Д9
и Д2, а диод Д220 можно заменить на Д311А. Конденсаторы
Cl, С2 — К50-6. При исправных элементах и безошибочной сборке
модуль в налаживании не нуждается.
4.5. МОДУЛЬ ПЕРВОГО ОПЕРАТОРА ДЛЯ ГРУППОВОГО
РАДИОУПРАВЛЕНИЯ
В подразд. 3.3 мы познакомились с шифратором, используе-
мым в групповом радиоуправлении моделями. А сейчас рассмот-
рим работу дешифратора (рис. 46) первого оператора этой си-
стемы на примере выполнения команды «Назад». Напомним, что
у этой команды в каждой группе по пять тактовых импульсов.
/Z7Z
Рис. 47. Временные диаграммы работы
модуля М10
В исходном состоянии до прихода командных импульсов на
вход (вывод 4) модуля на всех выходах счетчика DD2 и дешиф-
ратора DD4 (кроме выхода 0) будет низкий уровень. Первый
же импульс от первого оператора (с 1-го по 5-й), появившийся
на выходе инвертора DD1.1 (рис. 47, а), запустит одновибратор,
собранный на элементах DD1.2, DD1.3. На выходе одновибра-
тора появится отрицательный перепад (рис. 47,6). Импульсы,
поступившие на счетчик DD2, вызовут появление на его выходах
1 и 4 уровня 1.
Через время ЮТ на выходе одновибратора возникнет уровень
1, по которому произойдет запись информации в регистре DD3
и на выходе 5 дешифратора DD4 появится уровень 1 (рис. 47, в).
Через некоторое время на входе модуля появятся импульсы
команды «Назад» от второго оператора. И на этот раз одно-
вибратор выработает сигнал длительностью ЮТ, счетчик под-
считает импульсы второго оператора, информация запишется в
регистре, и на выходе 5 дешифратора DD4 появится уровень 0.
75
3(60)
к бы6. питан. DD/-DU5
Рис. 48. Фрагмент принципи-
альной схемы модуля второго
оператора группового управле-
ния
Со второй группы импульсов пер-
вого оператора весь рассмотрен-
ный процесс повторится.
Во время работы модуля сиг-
налы команды «Стоп» первого
оператора снимают с вывода 20,
«Разворот влево» — с вывода 16,
«Разворот вправо» — 17, «Впе-
ред» — 18 и «Назад» — 19.
4.6. МОДУЛЬ ВТОРОГО
ОПЕРАТОРА ДЛЯ
ГРУППОВОГО
РАДИОУПРАВЛЕНИЯ
Этот модуль дешифрует сиг-
налы команд второго операто-
ра. Число импульсов в каждой
команде указано в табл. 2. Отли-
чие этого модуля (см. схему на
рис. 48) от предыдущего заключа-
ется только в том, что в него введен дополнительный дешифратор
DD5 с инвертором DD2.3, что позволяет построить дешифратор
команд с числом выходов более 10 [4]. Пока на входе 8 де-
шифратора DD4 уровень 0, сигналы появляются на его выхо-
дах 6, 7. Когда уровень 0 на входе 8 дешифратора DD4 меняется
на 1, сигналы появляются на выходах 0...7 дешифратора DD5.
На выходе 6 дешифратора DD4 сигнал положительной поляр-
ности появляется от шести командных импульсов, поступивших
на счетчик DD2, на выходе 7 — от семи импульсов, на выходе 0
дешифратора DD5 — от восьми импульсов, на выходе 1 — от
девяти и на выходе 2 — от десяти импульсов команды «Назад».
4.7. ЕЩЕ ОДНА ВОЗМОЖНОСТЬ ИСПОЛЬЗОВАНИЯ
МОДУЛЕЙ М10 И МП
В подразд. 4.5, 4.6 мы рассмотрели модули для двух моделей
группового радиоуправления двумя операторами. А нельзя ли
эти модули использовать в приемной аппаратуре одной модели,
но так, чтобы она выполняла две команды одновременно? Ко-
нечно же можно, но при этом общее число команд в модуле
Ml0 придется уменьшить на одну. Разберемся в работе такой
системы.
Начнем с модуля М10. У дешифратора DD4 девять выходов,
не считая выхода 0, а в каждой группе команды «Назад» второго
оператора — по 10 импульсов. Значит, дешифрация десятого им-
пульса будет неверной, что приведет к ложному командному
сигналу.
76
Чтобы этого не происходило, необходимо из модуля М2 шиф-
ратора (см. рис. 32) исключить командную кнопку SB8 и диоды
VD9, VD18. Подвижный контакт кнопки SB7 нужно соединить
с выводом 2 элемента DD3.2. Теперь остается решить, под какие
дополнительные три команды (четвертая — «Стоп») использовать
командные кнопки SB5...SB7, с учетом того, что в каждой группе
команды «Стоп» второго оператора девять импульсов. Кроме
этого, решить, под какие команды будут использоваться выходы
7...9 дешифратора DD4 в модуле М10 (рис. 46), при этом сигнал
команды «Стоп» снимают с выхода 6.
Итак, с учетом изменений в модуле М2 ясно, что модуль Ml О
способен дешифровать все девять команд, формируемых модулем
М2, причем одновременно одну из пяти команд первого опера-
тора и одну из четырех дополнительных (бывших командами
второго оператора).
Если же в модели использовать модуль Mil вместо М10, то
никаких изменений в шифраторе (см. рис. 33) не потребуется.
Надо лишь решить, под какие команды использовать выходы
1...5 дешифратора DD4 (рис. 48). Следует отметить, что модуль
Mil с соответствующим шифратором способен дешифровать сиг-
налы пятнадцати команд. Десять из них мы уже только что рас-
смотрели, сигнал одиннадцатой можно снимать с выхода 3 дешиф-
ратора DD5, двенадцатый с выхода 4, тринадцатый — 5, четыр-
надцатый — би пятнадцатый — с выхода 7.
4.8. ПОМЕХОЗАЩИТНЫЙ МОДУЛЬ ДЛЯ МОДЕЛЕЙ
ГРУППОВОГО УПРАВЛЕНИЯ
Модуль, о котором пойдет сейчас речь (рис. 49), используют
в моделях группового радиоуправления с двумя ходовыми электро-
двигателями. При включении одновременно двух двигателей на
плюсовом проводе питания микросхем создается большое паде-
ние напряжения, которое может приводить к сбою в работе де-
шифратора. Для устранения этого недостатка пришлось изме-
нить схему известного нам модуля М9.
Во-первых, в модуле Ml2 управляющее напряжение любой
команды (кроме «Стоп») снимают с двух выходов каждого ре-
гистра, что позволило включать тяговые двигатели модели не
одновременно, а с промежутком в 300 мс. В результате падение
напряжения в цепи питания удалось уменьшить вдвое.
Во-вторых, для большей четкости работы помехозащитного
модуля с разными модулями дешифратора изменен способ управ-
ления регистрами модуля — добавлены четыре логических эле-
мента 2ИЛИ-НЕ DD1.1 ...DD1.4. Теперь сигналы команды «Стоп»
проходят не через разделительные диоды, как в модуле М9, а не-
посредственно поступают на R-входы всех регистров.
Рассмотрим работу модуля М12 на примере команды «Раз-
ворот влево» без помех. В исходном состоянии к выводу 20
77
R1
100K
VD2 '
r-BH
V0I-V0I2 Д9В
V01
15
16
7
100K
DO 1.2
V/74
DOH
EG
EG
002.1
12___1_
11____
2
10
002.2
V013 Д220
-т-K т
~200MK*
-1- *160 -1-
3(60)
26
1J
29
VD6
V08 VD9
Ж-41
114~7
VDIL vo ii
001.3
6
VZ77
15
16
Ш4
EG
0
R
EG
D_
R
питан.
001~D03
30
R4 100 к
12
11
10
'32
33 .
003.2
DO! КП6ЛЕ5
002,003 КП6ИР2 _C
0
Рис. 49. Принципиальная схема помехозащитного модуля для моделей
группового управления
поступают сигналы команды «Стоп» длительностью 150 мс и
скважностью 2. Эти сигналы достигают R-входов регистров и под-
тверждают их устойчивое исходное состояние. При этом на
всех выходах регистров, а значит, и на выходе модуля — уро-
вень 0.
Если теперь на выводе 16 модуля появится первый сигнал
команды «Разворот влево», то на выходе 1 регистра DD2.1
появится уровень 1. После второго сигнала этой команды
уровень 1 появится на выходе 2 этого регистра и через диод
VD4 на верхнем по схеме входе элемента DD1.2, а через диоды
VD5, VD7 — на верхнем входе элемента DD1.3 и через диоды
VD5, VD12 — на верхнем входе элемента DD1.4. Этим самым
запрещается прохождение сигналов на входы С регистров
DD2.2, DD3.1 и DD3.2. В момент окончания третьего сигнала
команды «Разворот влево» на выходе 3 регистра DD2.1 и выводе
26 модуля появится управляющее напряжение этой команды,
которое включит один из тяговых двигателей модели. Через
300 мс по спаду четвертого сигнала этой команды управляющее
напряжение появится на выходе 4 этого же регистра и на выводе
27 модуля — будет включен второй тяговый двигатель и модель
выполнит команду «Разворот влево». Сигналы следующих групп
этой команды не изменят состояния модуля.
Иначе будет обстоять дело, когда, например, во второй
и третьей группах команды «Разворот влево» окажется, поло-
78
Рис. 50. Фрагмент принципиальной
схемы модуля дешифратора трех одно-
временных команд
Рис. 51. Временные
ди шрам мы работы
модуля MI3
жим, по одному импульсу помехи. В этом случае сигнал первой
группы будет соответствовать поданной команде и уровень 1 по-
явится на выходе 1 регистра DD2.1, а сигнал второй группы с
помехой будет соответствовать команде «Разворот вправо» и
уровень 1 теперь появится на выходе 1 регистра DD2.2. По
окончании третьей группы (с помехой) уровень 1 появится на
выходе 2 регистра DD2.2, и будут закрыты элементы DD1.1,
DD1.3 и DD1.4. Это будет означать, что очередные группы
команды «Разворот влево», не содержащие помех, не достигнут
входа С верхнего регистра DD2.1 и на выводах 26...33 будет
уровень 0. Такое состояние модуля в практике встречается очень
редко. Чтобы его устранить, оператор должен на короткое время
отпустить командную кнопку передатчика, а затем вновь на-
жать.
Выводы 17, 28, 29 используются для команды «Разворот
вправо», 18, 30, 31 — «Вперед» и 19, 32, 33 — «Назад». При
этом на входные выводы модуля Ml2 поступают группы сигналов
с частотой 3 Гц, а на выходных выводах получаются управляю-
щие напряжения команд в виде напряжения уровня 1.
Если входные сигналы команд «Разворот влево» или «Разво-
рот вправо» подать на соответствующие усилители тока указа-
теля поворотов, то во время выполнения этих команд одновре-
менно будут мигать и лампы указателя поворотов.
Частоту следования групп сигналов (3 Гц) нужно иметь
в виду и при составлении структурных схем приемных устройств
79
питан-
W Д9В
RG
9
W/ Д9В
VOJ Д9В
R
RG
0
V02
001,002 КП6ИР2
40
V08 Д9Вш
—-------
V09 Д9В
RG
41 ।
RG
46
47
48
V06 Д9В
f /4
M14
49
10
11
0922
VO 10 Д9В
Рис. 52. Принципиальная схема помехо-
защитного модуля для шестикомандного
дешифратора
моделей, которые могут пе-
ремещаться по воде с малой
и большой скоростью. На-
пример, если к выводу 18
модуля подсоединить усили-
тели тока тяговых двигате-
лей, то контакты усилителей
будут с этой частотой под-
ключать электродвигатели к
источнику питания, и модель
будет двигаться с малой
скоростью. Однако при по-
явлении управляющего на-
пряжения команды «Вперед»
на выводах 30, 31 модуля
другие усилители тока под-
ключат электродвигатели к
источнику питания непосред-
ственно и модель будет дви-
гаться уже с большой ско-
ростью. Сигналы с частотой
3 Гц, поступающие на выво-
ды 18, 19, могут быть также
использованы для управле-
ния устройством звуковой
имитации работы двигателя
внутреннего сгорания.
При исправных радиоэле-
ментах модуль в налажива-
нии-не нуждается.
m
0
R
9
Ю
4.9. ДЕШИФРАТОР ТРЕХ ОДНОВРЕМЕННЫХ КОМАНД
Этот дешифратор (рис. 50) разработан для модели парусно-
моторной яхты «Гренада». Он рассчитан на совместную работу
с шифратором, описанным в подразд. 3.4. В отличие от модуля
М10 здесь использованы все выходы дешифратора DD4. На
выводе 34 выделяется напряжение команды «Руль-стоп», на 35 —
«Руль влево», на 36 — «Руль вправо», на 37 — «Грот влево»,
на 38 — «Грот вправо», на 39 — «Грот-стоп», на 40 — «Назад»,
на 41 —«Вперед» и на 42—«Стоп». Принцип работы модулей
М10 и М13 аналогичен. Отличие в работе состоит лишь в том,
что модуль Ml0 дешифрует две команды одновременно, а мо-
дуль М13 — три.
На рис. 51 показаны: а — импульсы команд «Стоп», «Грот-
стоп» и «Руль-стоп» на выходе инвертора DD1.1 (см. рис. 46);
б — импульсы на выводе КТ2.
80
4.10. ПОМЕХОЗАЩИТНЫЙ МОДУЛЬ
ДЛЯ ШЕСТИ КОМАНДНОГО ДЕШИФРАТОРА
В подразд. 4.4 и 4.8 были рассмотрены модули М9 и М12 для
защиты от помех в пятикомандном дешифраторе. А этот модуль
(рис. 52) способен «пропустить» шесть команд. Он может рабо-
тать совместно с девятикомандным модулем М13, но число отра-
батываемых системой команд в этом случае не превысит шести.
Входы модуля Ml4 соединяют с соответствующими выходами
модуля М13. Выводы 34...36 модуля М13 и 48, 56 модуля М14
оставляют свободными.
Остается добавить, что на выводе 46 модуля М14 форми-
руется управляющее напряжение команды «Грот влево», на 47 —
«Грот вправо», на 49 — «Назад» и на 50 — «Вперед». Команда
«Грот-стоп» выполняется при отсутствии управляющего напря-
жения на выводах 46 и 47, а «Стоп» — на выводах 49 и 50. Ра-
боту модуля в условиях помех читатель уже в состоянии рассмот-
реть самостоятельно.
При исправных элементах модуль в налаживании не нуж-
дается.
4.11. ДОПОЛНИТЕЛЬНЫЙ ТРЕХКОМАНДНЫЙ
ПОМЕХОЗАЩИТНЫЙ МОДУЛЬ
В предыдущем разделе мы рассмотрели шестикомандный по-
мехозащитный модуль. Для того чтобы полностью реализовать
возможности модуля М13, к модулю Ml4 нужно добавить по-
мехозащитный трехкомандный модуль. Именно такой модуль
(рис. 53) и описан ниже.
3(60)
002.1
L t
2.
Cl 330
DD2
КП 6Л KI
002.2
С2 330 ‘J’
М!5 00/ КП6ИР2 003 КП6ТМ2
44
6
45(48)
Рис. 53. Принципиальная схема дополнительного помехозащитного модуля
81
На входной вывод 34 модуля подают сигналы команды «Руль-
стоп», на 35 — «Руль влево» и на 36 — «Руль вправо». Сигналы
двух последних команд вызывают появление на выходе 4 регист-
ров DD1.1 и DD1.2 напряжения высокого уровня. Если это на-
пряжение подать непосредственно на электронный ключ (как
в модуле М14), то исполнительный механизм с рулевой машин-
кой «РУМ-2» при напряжении питания 6 В повернет руль яхты
на 45° относительно продольной оси за время около 0,7 с. Как
видите, это время очень мало и оператору очень трудно уловить
промежуточные положения руля яхты во время ее движения
по воде.
Чтобы увеличить время, отводимое для поворота руля, нужно
или увеличить передаточное отношение редуктора привода руля,
или на вход усилителей тока, выполняющих команды поворотов
руля, подавать не управляющее напряжение высокого уровня,
а сигналы определенной длительности и периода повторения.
Реализация первого варианта связана со значительным допол-
нительным расходом энергии от батареи питания, утяжелением
редуктора и увеличением его размеров. Поэтому задачу лучше
решать схематическим путем.
Каждый из D-триггеров DD3.1, DD3.2 делит частоту вход-
ного сигнала пополам. В исходном состоянии при подаче на-
пряжения питания на прямом выходе триггеров (выводы 1,
13) появится уровень 0, что будет соответствовать команде
«Руль-стоп». С приходом импульса четвертой группы коман-
ды «Руль влево», поступившего на вывод 35, на выходе 4 ре-
гистра DD1.1 появится уровень 1, который разрешит прохожде-
ние следующих импульсов групп этой команды через элемент
DD2.1 на вход с D-триггера DD3.1. В момент окончания им-
пульса четвертой группы на прямом выходе триггера DD3.1 по-
явится уровень 1, и исполнительный механизм начнет повора-
чивать руль.
По спаду импульса пятой группы этой команды высокий
уровень напряжения на прямом выходе триггера DD3.1 сме-
нится на низкий, усилитель тока выключится, а руль останет-
ся в некотором промежуточном положении. Затем по спаду им-
пульса шестой группы усилитель тока вновь включится, руль
опять начнет поворачиваться, а в конце седьмого импульса уси-
литель тока выключится и руль остановится. Таким образом,
руль яхты отклоняется скачкообразно, проходя угол от сред-
него положения до крайнего за 2 с, что при определенных на-
выках в управлении яхтой позволяет оператору устанавливать
руль в любое промежуточное положение. Время поворота ру-
ля можно увеличить еще в два раза — для этого понадобится
еще один D-триггер. Выводы 45, 48 модуля оставим пока сво-
бодными.
Диод VD7 не позволяет находиться обоим триггерам в еди-
ничном состоянии, иначе при наличии импульсов помехи на
82
(60)
VD5 ДЭВ
005.1
0061
RG
15
0
/4
К быв. питан.
001-006
04,05 +
200mk* =4=
DD1.1
004.4
DD1.2
0DI.3
RG
О
R
RO
002.3
002.1
0
R
V/7/
003.1
KT4
0032
RO
004.1
R3*
02
0,68 мн
01
0,1 мк
R1150 К
R2*180к
6
VO 2 Г
15
/4
RG
7
0
0
R
03 1mk*!6B
KT3
MIO
001,004 К176ЛА7
002 КП6ЛЕ5
003,005,006 КП6ИР2
14—
m.2
V04 Д9В
-W
6
КТО
( П1Г
\итЪ
002.4
0022
1Z
004.2
0043
R433K
< XT!
10
Рис. 54. Принципиальная схема дискретно-пропорционального дешифратора
исполнительный механизм управления рулем может пройти лож-
ная команда. При исправных элементах модуль в налаживании
не нуждается.
4.12. МОДУЛЬ ДИСКРЕТНО-ПРОПОРЦИОНАЛЬНОГО
ДЕШИФРАТОРА
Конечно же, постоянное «улавливание» нужного курса яхты,
неизбежное при дискретном управлении рулем, как это описано
в предыдущем разделе, весьма утомительно для оператора. По-
этому вполне естественно стремление управлять рулем пропор-
ционально, а для управления ходом вперед и назад достаточно
дискретных команд. Такой шифратор — М4 — был уже нами рас-
смотрен, а сейчас расскажем о дешифраторе к нему. На рис. 54
показана его принципиальная схема. Рассмотрим процесс де-
шифрации команд на примере команды «Стоп» и пропорциональ-
ного импульса управления рулем.
В исходном состоянии (при отсутствии входных импульсов)
на всех выходах регистров DD3.1, DD3.2, DD5.1, DD6.1, DD6.2
будет уровень 0, что соответствует команде «Стоп». Поскольку
положение руля модели соответствует положению движка резис-
83
Пропорциональный импульс
U
i
nip
utu
Рис. 55. Временные диаграммы ра-
боты модуля Ml6
тора R5 (движок резистора
механически связан с рулевой
машинкой), допустим, что они
находятся в среднем положе-
нии — «Руль прямо».
Вот на выходе инвертора
DD1.1 появился первый про-
порциональный импульс (рис.
55,а). Он запустит одновибра-
тор, собранный на элементах
DD1.2, DD1.3, и поступит на
счетный вход С регистров
DD3.1, DD3.2, а также на
верхний по схеме вход элемен-
та DD2.2. Так как в этот момент
на втором входе этого элемен-
та будет уровень 1, то импульс
через элемент не пройдет.
В момент окончания импульса
уровень 1 появится на выходе
1 регистра DD3.1.
Через время 5Т (рис. 55,6)
на выходе одновибратора (вы-
ход элемента DD1.3) появится
уровень 1, и регистр DD3.1
установится в исходное состоя-
ние. Затем на выходе инвер-
тора DD1.1 появятся сигналы команды «Стоп», первый из кото-
рых снова запустит одновибратор DD1.2, DD1.3. Импульсы
команды вызовут поочередное появление уровня 1 на выходах
регистров DD3.1, DD3.2. Уровень 1 с выхода 3 регистра DD3.1
(рис. 55, в) вызовет появление высокого уровня на выходе 1 ре-
гистров DD5.1, DD6.1, тем самым даст разрешение на прохожде-
ние канального импульса через элемент DD2.2. Через время 5Т
по фронту сигнала первого одновибратора (рис. 55,6) регистры
DD3.1, DD3.2 установятся в исходное состояние.
Появившийся на выходе элемента DD2.2 положительный про-
порциональный импульс запустит на этот раз и второй одно-
вибратор, собранный на элементах DD4.2 и DD4.3. Длительность
его импульса зависит от емкости конденсатора СЗ и сопротив-
ления резисторов R3, R5. Если предположить, что импульс этого
одновибратора точно равен по длительности входному пропор-
циональному импульсу, то на крайних выводах резистора R4
будут действовать противофазные, но одинаковые по амплитуде
и длительности импульсы (рис. 55, д, е). Поэтому на выходе —
на выводе 55 модуля — появится постоянное напряжение, равное
половине напряжения питания, т. е. сигнал рассогласования
отсутствует.
84
}3(60)
VD6 Д9В
Cl
1мк*10В
_^+K быв.
питан. Г
001-007 Л
мп I
VD1 Д9В
R! 100 К
1
11
и
15
2 00 мк*
006.1
0062
006.3
С6
200мк*16В
------------•—о КТ4
006.4
2
I
55
ООН
007.2
0073
56
ХТ1
\\____ R5
С4 1МК*16В
001,002,007 КП6ЛА7
003
004
005
006
К116ИЕ1
К176ИРЗ
К176ИД1
К176ЛЕ5
Рис. 56. Принципиальная схема дешифратора для яхты
С5
R4 33к
6 42
Если же длительности будут разными, на выводе 55 появится
сигнал рассогласования той или иной полярности, в зависимости
от того, длиннее или короче будет входной пропорциональный
импульс. Двигатель рулевой машинки будет вращаться в ту
сторону и до тех пор, пока движок резистора R5 не займет по-
ложение, при котором сигнал рассогласования станет равным
нулю.
В момент окончания пропорционального импульса узел, со-
бранный на элементах DD2.3 и DD2.4, выработает короткий
импульс (рис. 55, ж), который переведет регистр DD5.1 в исход-
ное состояние (уровень 0 на выходе 1). Это означает, что эле-
мент DD2.2 закрыт. Через время 5Т регистры DD3.1, DD3.2 воз-
вратятся в исходное состояние.
Затем на вход модуля придет вторая группа команды «Стоп»
и весь рассмотренный процесс повторится.
Предлагается самостоятельно рассмотреть процесс дешифра-
ции команд «Вперед» и «Назад» как без помех, так и с ними.
При этом следует учесть, что управляющее напряжение первой
команды появляется после четвертой группы на выводе 53 мо-
дуля, а второй — 54.
В заключение отметим, что сигналы команд «Стоп», «Впе-
ред» и «Назад» одновременно служат синхроимпульсами про-
порциональных импульсов.
Резисторы R3, R4 в модуле — СПЗ-1. В качестве резистора
R4 в рулевой машинке используется резистор от аппаратуры
«Супронар».
4.13. МОДУЛЬ ДЕШИФРАТОРА ДЛЯ ЯХТЫ
Этот модуль М17 (рис. 56) рассчитан на дешифрацию сиг-
налов семи команд, формируемых модулем М5. Синхроимпуль-
сами пропорциональных импульсов управления рулем служат
сигналы дискретных команд «Стоп», «Вперед» и «Назад». Осталь-
ные команды, выполняемые этим модулем: «Шкот-стоп», «Шкот
травить», «Шкот выбрать» (в [7] дано подробное разъясне-
ние этой команды).
Сопоставив принципиальные схемы этого модуля и Ml6, мы
заметим, что оба одновибратора, узлы формирования импульсов
обнуления здесь не претерпели изменения.
Модуль Ml7 дешифрирует шесть дискретных команд, поэтому
вместо традиционного регистра, выполняющего функцию счета
командных импульсов, использован узел из счетчика DD3, регист-
ра DD4 и дешифратора DD5. Кроме того, учитывая, что синхро-
импульсами пропорциональных импульсов являются сигналы
дискретных команд «Стоп», «Вперед» и «Назад», к входу R счет-
чика DD3 подключена цепь R1C1VD1, формирующая в момент
включения питающего напряжения кратковременный импульс,
устанавливающий счетчик в нулевое состояние.
86
вторая группа
Рис. 57. Временные диаграммы работы модуля Ml7
Uw
г
о.
В качестве примера рассмотрим процесс дешифрации сле-
дующих команд: «Руль», «Шкот-стоп», «Назад». Допустим, что
на вход модуля поступила первая группа импульсов этих команд
(рис. 57, а). Пропорциональный импульс, первый в группе, будет
учтен счетчиком DD3, но на выходе элемента DD6.2 не появится,
потому что на нижнем по схеме входе этого элемента будет уро-
вень 1. Через время 9Т уровень 1 появится на выходе одно-
вибратора DD1.2, DD1.3 (рис. 57, б) и через диод VD2 на вхо-
дах С1 и С2 регистра DD4. Информация, поступившая с выходов
счетчика DD3 на входы регистра DD4, сдвинется на один шаг.
На выходе 1 дешифратора DD5 появится уровень 1. После этого
на выходе инвертора DD2.2 появится первый импульс обнуления,
который установит счетчик DD3 по входу R (рис. 57, в) в исход-
ное состояние.
Затем на выходе элемента DD1.1 появятся импульсы сле-
дующей команды. Их просчитает счетчик DD3 и результат пе-
редаст на входы регистра DD4. Одновременно первый из них
запустит одновибратор DD1.2, DD1.3, и через 9Т информация
в регистре DD4 сдвинется еще на один шаг и на выходе 8 дешиф-
ратора (и на выводе 42 модуля) появится уровень 1 второй
команды. После этого на выходе элемента DD2.2 появится второй
обнуляющий импульс, который снова установит счетчик DD3
в исходное состояние.
Появление входных импульсов следующей команды вызовет
смену уровня на выходе 8 дешифратора DD5 с 1 на 0, а на вы-
ходе 4 — с 0 на 1. Высокий уровень появится на выводе 38 мо-
дуля. Третий импульс обнуления установит счетчик DD3 в исход-
ное состояние. Уровень 1 с выхода 4 дешифратора DD5 разрешит
прохождение через элемент DD6.2 пропорционального импульса
следующей группы.
87
Следующая группа импульсов повторит весь рассмотренный
процесс дешифрации с той лишь разницей, что второй пропор-
циональный импульс запустит и второй одновибратор DD7.2,
DD7.3, а по спаду пропорционального импульса устройство, со-
бранное на элементах DD6.3, DD6.4, выработает короткий по-
ложительный импульс, который сдвинет информацию в регистре
DD4 и установит в исходное состояние счетчик DD3. Уровень
1 переместится с выхода 4 на выход 1, запретив прохождение
сигнала через элемент DD6.2.
Как работает одновибратор и как формируется сигнал рас-
согласования на выводе 55 модуля, вы уже знаете. Но так как
во время дешифрации второго пропорционального импульса им-
пульс одновибратора DD1.2, DD1.3 еще продолжается, то пятый
импульс обнуления (рис. 57, в) подтвердит исходное состояние
счетчика DD3.
На выводе 37 модуля появляются сигналы команды «Вперед»,
38 — «Назад», 40 — «Шкот травить», 41 — «Шкот выбрать»,
а 56 — «Стоп».
Теперь после анализа работы всех рассмотренных цифровых
модулей приемной и передающей аппаратуры вам, возможно,
удастся составить принципиальную схему шифратора и дешиф-
ратора на большее число пропорциональных команд.
Помехозащитным для модуля Ml7 служит модуль Ml4 (его
выводы 39 и 42 оставляют свободными), причем пропорциональ-
ная команда4 от помех не защищена. Вывод 55 модуля М17 под-
ключают непосредственно к электронным ключам.
4.14. МОДУЛЬ ПРИЕМНИКА «СИГНАЛ-1»
На рис. 8 представлена принципиальная схема приемника
«Сигнал-1» варианта 2 (обведена штрих-пунктирной линией).
Чтобы его можно было использовать совместно с рассмотренны-
ми модулями дешифратора (кроме М7), необходимо заменить
конденсаторы CIO, С13, резисторы R5, R11 и между выводами
4 и 5, 5 и 6 подключить резисторы R16, R17. Только в этом слу-
чае приемник сможет выделять сигналы шифратора и модуля-
тора.
На рис. 58 показана принципиальная схема приемника «Сиг-
нал-1» варианта 2 с указанными изменениями. Его печатная
плата показана на рис. 10.
В подразд. 3.11 мы говорили о том, что передатчик «Сигнал-1»
варианта 2 можно будет использовать без модулятора. Для ра-
боты с передатчиком без модулятора из приемника необходимо
изъять элементы R10...R17, С13 и VT4...VT6 и ввести инвертор
на логическом элементе серии К176. Вход инвертора нужно под-
ключить к плюсовому выводу конденсатора С12, а выход —
к выводу 4 модулей дешифратора. В качестве инвертора можно
88
WAI
Рис. 58. Принципиальная схема приемника «Сигнал-1» варианта 2
использовать свободный элемент 2И-НЕ или 2ИЛИ-НЕ. Вывод
5 приемника М18 не используется.
Налаживание модуля приемника сводится к подборке резис-
торов R5, R11 такими, чтобы при напряжении питания 5 и 9 В
не наблюдались разрывы в командных импульсах групп. Наблю-
дение ведут на экране осциллографа, подключенного к выво-
ду 4 модуля. Вместо транзистора КТ814А можно использовать
КТ361 с любым буквенным индексом со статическим коэффи-
циентом передачи тока не менее 40.
4.15. МОДУЛЬ ПРИЕМНИКА
С ЛОГИЧЕСКИМ ЭЛЕМЕНТОМ
До сих пор мы ориентировались на готовый настроенный
приемник «Сигнал-1» варианта 2. Если же вы не смогли при-
обрести готовый приемник «Сигнал-1» варианта 2, то тогда вам
придется его изготавливать и настраивать самим. Но коли так,
давайте поговорим о недостатках приемника «Сигнал-1» вари-
анта 2.
После его изготовления необходимо установить положение
рабочей точки транзистора VT1, затем подстроечником катуш-
ки L1 установить колебательный контур L1C4 на частоту пере-
датчика и подборкой резисторов R5, R11 добиться отсутствия
разрывов в импульсах. Такой процесс налаживания может за-
труднить малоопытного радиолюбителя.
89
Готовый приемник обладает посредственной чувствительно
стью — 50 мкВ, содержит очень много деталей. Такой важный
параметр, как отношение уровня полезного сигнала (команд-
ного) к уровню шума, получается очень низким — не более 2.
С уменьшением напряжения питания крутизна фронта и спада
импульсов уменьшается, что отрицательно сказывается на работе
цифровых микросхем.
Все эти соображения приводят к тому, что, если уж делать
приемник самостоятельно, то надо постараться устранить если
не все, то наиболее значимые из перечисленных недостатков.
Поэтому был разработан новый приемник, схема которого пред-
ставлена на рис. 59.
WA1
Рис. 59. Принципиальная схема приемника с логическим элементом
0 01-6
т ктз15б
R6 / к
СИ 5600
Этот приемник при налаживании требует всего одну опера-
цию. Чувствительность его улучшена в десять раз (около 5 мкВ).
Достаточно взглянуть на схему, чтобы убедиться, что приемник
содержит существенно меньшее число радиодеталей, чем «Сиг-
нал-1» варианта 2. Отношение сигнала к шуму на выходе сверх-
регенератора не менее 40. При снижении напряжения питания
до 6 В крутизна перепадов импульсов остается неизменной.
На транзисторе VT1 собран сверхрегенератор. Колебатель-
ный контур L1C3 настроен на частоту передатчика (27,12 МГц).
Частоту гашения задает цепь R1C1, а положение рабочей точки
транзистора VT1 определяет резистор R1. Нагрузкой сверхреге-
нератора служит резистор R3. Конденсаторы С7, С8 отфильтро-
вывают частоту гашения. Дроссель L3 препятствует прохожде-
нию сигнала с частотой гашения на вход усилителя 34. Конден-
сатор С9 разделительный. Г-образный фильтр R3C6 предотвра-
щает попадание составляющей с частотой гашения и сигналов
команд в цепь питания.
90
Усилитель 34 выполнен на транзисторе VT2. Элемент DD1.1
выполняет функцию дополнительного усилителя. Реально в прием-
нике может работать любой свободный логический элемент, не
используемый в дешифраторе.
Принцип детектирования и усиления командных сигналов,
а также настройка контура L1C3 на частоту передатчика схожи
с описанными в подразд. 1.3, где речь шла о приемнике «Сиг-
нал-1» варианта 2. От емкости конденсатора С9 зависит крутизна
фронта и спада импульсов на коллекторе транзистора VT2. По-
этому в каждом конкретном случае его нужно подбирать. При
правильно подобранных элементах R1, С5 и настроенном контуре
L1C3, а также при длине антенн приемника 400 мм, а передат-
чика 700 мм и параллельном их расположении на расстоянии
1 м амплитуда сигнала в точке КТ1 должна быть не менее 400 мВ.
При этом отношение сигнал/шум достигает 40.
Контурная катушка L1 намотана на полистироловом каркасе
диаметром 7 мм с подстроечником диаметром 2,8 мм и длиной
12 мм из феррита 600НН. Обмотка содержит 7 витков провода
ПЭЛШО 0,18, намотанных виток к витку у основания карка-
са. Дроссели L2, L3 — Д-0,1, но их можно изготовить и само-
стоятельно. Для изготовления дросселя L2 нужно на резисторе
МЛТ-0,5 сопротивлением не менее 500 кОм намотать внавал
40...45 витков провода ПЭВ-2 0,1. Взамен дросселя L3 можно
использовать катушку L7, используемую в контуре L7C22 прием-
ного устройства на 8 команд (см. рис. 14). Характеристики ка-
тушки указаны в табл. 1.
Конденсаторы С2 — КТ-1; С1, СЗ, С5...С8, СЮ, СП — КМ-4
или КМ-5; С9—К50-6. Все резисторы МЛТ-0,125. Антенна та-
кая же, как у приемника «Сигнал-1».
4.16. МОДУЛЬ ПРИЕМНИКА «СИГНАЛ-1» С РЕЛЕ
В подразд. 4.2 мы говорили о пятикомандном модуле М7
дешифратора, в котором предусмотрена пара разомкнутых кон-
тактов реле К1, установленного в приемнике «Сигнал-1» ва-
рианта 2. Давайте выясним, как выглядит этот модуль приемни-
ка, каким должно быть это реле и как оно должно быть под-
ключено, чтобы во время приема сигналов команд передатчика
«Сигнал-1» реле срабатывало.
WAI
Рис. 60. Принципиальная схема приемника
«Сигнал-1» с реле
91
Рис. 61. Типовая структурная схема приемопередающего комплекса
Для этого обратимся к рис. 8. Если исключить из этой схемы
батарею питания GB2, выключатель SA1.2, командоаппарат,
тяговые двигатели модели Ml, М2 и между выводами 4 и 5 вклю-
чить обмотку реле, а выводы 5 и 6 замкнуть, то мы получим
модуль М20, фрагмент которого показан на рис. 60. Реле К1 —
РЭС10, паспорт РС4.524.308.
4.17. НАЛАЖИВАНИЕ МОДУЛЕЙ ДЕШИФРАТОРОВ
Структурная схема одного из вариантов приемопередающего
комплекса на цифровых модулях показана на рис. 61. На схеме
показаны только соединения модулей между собой. Налаживание
нужно вести при настроенных передатчике и приемнике «Сиг-
нал-1» варианта 2 при напряжении питания 9 В. Перед началом
налаживания необходимо убедиться в отсутствии ошибок при
сборке модулей и их соединении между собой.
Начинают с модуля М8 дешифратора (см. рис. 43). Коман-
ды этого модуля формирует шифратор Ml. Во время налажи-
вания командные кнопки в передатчике должны находиться
в положении команды «Стоп». Начинают с измерения потреб-
ляемого модулем М8 тока. Он не должен превышать 2 мА. После
этого подключают вход Y осциллографа к КТ1. При правильно
выбранном режиме развертки и синхронизации на экране осцил-
лографа должна быть видна неподвижная группа импульсов
команды «Стоп». По масштабной сетке осциллографа отмечают
начало и конец отрезка, занимаемого шестью периодами импуль-
сов тактового генератора.
Затем подключают вход Y осциллографа к КТ2 и подборкой
резистора R1 устанавливают длительность сигнала одновибра-
тора равной длине отрезка, отмеченного ранее по масштабной
сетке.
Модули М10, МП и М13 налаживают аналогично рассмот-
ренному. Длительность сигнала одновибратора для них должна
быть 10Т. Не забудьте при налаживании модулей М10 и МН
подключить к передатчику «Сигнал-1» цифровой модуль М2, а при
налаживании М13 — М3. Во время налаживания командные
кнопки должны находиться в положении команды «Стоп».
92
Модуль Ml6 налаживают при подключенном к передатчику
модуле М4, у которого переключатель SA1 должен находиться
в положении, показанном на рис. 36. Налаживание модуля Ml6
начинают с установки длительности сигнала первого одновибра-
тора, равной 5Т (подборкой резистора R1), по методике, опи-
санной для модуля М8. Затем движок переменного резистора
R3 в шифраторе (см. рис. 36) устанавливают в крайнее нижнее
по схеме положение. Осциллограф подключают к КТ4 дешифра-
тора (см. рис. 54) и убеждаются в наличии пропорционального
импульса. Если подключить вход Y осциллографа к точке КТ5,
то на экране должны быть видны короткие обнуляющие им-
пульсы. После этого вход Y осциллографа подключают к КТ6
и замыкают выводы резистора R5. Подборкой резистора R3
устанавливают длительность сигнала второго одновибратора
2 мс.
Если теперь подключить осциллограф к КТЗ и добиться от-
сутствия напряжения рассогласования подстроечным резисто-
ром R4, это будет означать, что дешифратор настроен. Остается
только снять перемычку с резистора R5.
Налаживание модуля М7 аналогично налаживанию Ml6
с той лишь разницей, что к передатчику «Сигнал-1» нужно под-
ключить модуль М5, у которого переключатели SAI, SA2 должны
находиться в положении, показанном на рис. 38, а движок пере-
менного резистора R3 — в крайнем левом по схеме положении.
Длительность сигнала первого одновибратора должна быть
9Т. Длительность сигнала второго одновибратора 2 мс устанав-
ливают подборкой резистора R3. Установку длительности сиг-
налов выполняют по методике налаживания модуля Ml6. От-
сутствия импульсов рассогласования добиваются подстроечным
резистором R4. Ток, потребляемый каждым из рассмотренных
дешифраторов, не должен быть более 2 мА.
4.18. О ВЫБОРЕ ЧИСЛА ИМПУЛЬСОВ В ГРУППЕ
КОМАНДЫ «СТОП»
В конце подразд. 3.7 было отмечено, что для команды «Шкот-
стоп» использовано восемь импульсов, а для команды «Стоп» —
только два. Из каких же соображений исходят при выборе числа
импульсов в группе для перевода любого исполнительного меха-
низма в режим команды «Стоп»?
Этот вопрос решают при разработке шифратора и дешифра-
тора после анализа работы модели в целом в дежурном режиме.
Это такой промежуточный режим, в котором модель находится
с момента включения питания ее электронного блока до момента
включения передатчика. Дежурный режим на практике встречает-
ся довольно часто, а модель в нем порой пребывает подолгу,
и здесь нет ничего противоестественного — ведь электронный
блок в дежурном режиме потребляет от батарей ничтожный
93
ток. Кстати, в такой режим попадает модель, по той или иной
причине оказавшаяся вне зоны действия передатчика.
В дежурном режиме модель оказывается во власти помех.
Представьте себе такую вполне реальную картину. Вы приходите
с радиоуправляемой моделью быстроходного катера на берег
обширной акватории с тем, чтобы насладиться послушным вы-
полнением моделью ваших команд, чтобы потренироваться или
посоревноваться с товарищами в виртуозном управлении кате-
ром. Вы щелкаете тумблером включения питания модели и бе-
режно опускаете ее на воду. И — что это?! Вы видите, как модель,
а она выполняет ложную команду, навязанную помехами, на
большой скорости удаляется от берега. Вы лихорадочно мани-
пулируете тумблерами и кнопками передатчика... А модель,
красиво переваливая через встречную волну, тем временем выхо-
дит из зоны «радиовидимости» и скрывается из виду.
Устойчивости модели к помехам добиваются разными спо-
собами, и наилучший из них тот, который не приводит к усложне-
нию и удорожанию аппаратуры. Проведенные эксперименты
показали, что на вход дешифратора поступают кратковремен-
ные, чаще всего одиночные импульсы помехи. А раз так, то напра-
шивается вопрос: а нельзя ли в дежурном режиме использовать
сигнал помехи в качестве командного сигнала «Стоп»? Ока-
зывается, можно.
Обратим внимание на схему модуля М10 (см. рис. 46). Здесь
сигнал команды «Стоп» снимают с выхода 1 дешифратора DD4.
Этот сигнал в дальнейшем поступает на установочные входы
регистров модуля М12 (рис. 50) и устанавливает их в исходное
состояние в случае, если запись сигналов произошла вследствие
воздействия импульсов помех. Таким образом, поставленная
цель достигнута, но какой ценой? Узел’опознавания команд пер-
вого оператора в модуле' М10 приходится выполнять на трех
микросхемах, а это, конечно же, сказывается на стоимости прием-
ной аппаратуры. Поэтому иногда приходится обходиться более
простыми техническими решениями (как это сделано в модуле
М8, рис. 43) и мириться с недостаточной помехоустойчивостью
модели.
Однако есть еще одно техническое решение в борьбе с лож-
ными командами при работе модели в дежурном режиме. Если
принять во внимание характер помех на входе дешифратора, то
вероятность ложного срабатывания можно уменьшить путем уве-
личения числа импульсов в группах команд. - Например, для
пятикомандной аппаратуры в каждой группе команды «Влево»
принять не два тактовых импульса, а четыре, для команды
«Вправо» — пять и т. д. В этом случае в модуле Ml придется
использовать 12-разрядный регистр сдвига, а в модуле М8 сиг-
налы команд снимать с соответствующих выводов дешифратора
DD3. Кроме того, длительность сигнала одновибратора нужно
установить 8Т.
94
Эти меры приведут к тому, что сигналы, вызванные им-
пульсами помехи и появляющиеся на выходах 1...3 дешифра-
тора, влияния на работу электронных ключей оказывать не
будут.
При желании еще надежней защитить систему от ложного
срабатывания в дежурном режиме в помехозащитном модуле
необходимо использовать восьмиразрядные регистры сдвига. При
этом, правда, время до начала выполнения каждой команды
увеличится вдвое.
Мы рассмотрели вопрос о защите от помех для дискретных
команд. Для пропорциональных команд используют другие
методы борьбы с помехами. Эти методы весьма сложны и мы не
будем их касаться.
5. УСИЛИТЕЛИ ТОКА
5.1. ЗАЧЕМ НУЖЕН УСИЛИТЕЛЬ ТОКА?
Микросхемы серии К176 могут обеспечить выходной ток,
не превышающий 8... 10 мА, тогда как для работы исполнитель-
ных механизмов модели или для срабатывания реле, управ-
ляющих этими механизмами, необходим ток до нескольких со-
тен миллиампер. Для того чтобы довести выходной ток моду-
ля дешифратора до необходимого значения, используют про-
межуточное звено — усилитель тока. Усилитель тока можно по-
строить на электронной лампе, транзисторе, тринисторе и на
других элементах. В радиоуправляемых моделях широко ис-
пользуют транзисторный усилитель тока. Его схема показана на
рис. 62.
Рис. 62. Принципиальная схема транзисторного
ключа
Полезная нагрузка включена в коллекторную цепь транзи-
стора VT1. Нагрузкой может служить обмотка электромагнит-
ного реле, лампа накаливания, электродвигатель и т. д. Для
ограничения базового тока транзистора включен резистор R1.
Если на входе усилителя тока низкий уровень, то транзистор
закрыт. При этом его сопротивление велико и через нагрузку
протекает незначительный ток — обычно меньше 1 мА. Это
значит, что если нагрузкой служит лампа накаливания, то она
светиться не будет. Чтобы лампа светилась, необходимо на
95
вход усилителя подать высокий уровень. Тогда транзистор
VT1 откроется, его сопротивление уменьшится почти до нуля
и все напряжение источника питания будет приложено к на-
грузке.
Итак, если на входе усилителя уровень 0, то транзистор за-
крыт, нагрузка обесточена, если 1 — открыт и на нагрузке выде-
ляется полезная мощность. Усилитель тока (УТ) позволяет ком-
мутировать нагрузку очень быстро, быстродействие измеряется
долями микросекунды. Одним управляющим сигналом можно
переключать несколько нагрузок.
5.2. МОДУЛЬ УКАЗАТЕЛЯ ПОВОРОТОВ
В подразд. 4.8 мы упомянули о том, что модели, в которых
использованы модули М10, МП, можно снабдить световым
указателем поворотов — во время выполнения команд «Разворот
влево» или «Разворот вправо» бортовая лампа будет мигать
с частотой 3 Гц. Лампы надо подключать к выводам 16 и 17 моду-
лей М10, МП через усилитель тока, схема которого показана
на рис. 63.
Рис. 63. Принципиальная схема модуля
указателя поворотов
Модуль состоит из двух усилителей на транзисторах VT1,
VT2. Лампы накаливания HL1, HL2 включены в коллекторную
цепь каждого транзистора. Резисторы Rl, R2 ограничивают
базовый ток транзисторов. К выводу 11 модуля подключают
плюсовой вывод источника питания напряжением 4,5...6 В,
имеющегося в модели.
Указанные на схеме транзисторы можно заменить любыми
из серии КТ315. Лампы СМ6-0,2.
При налаживании подбирают резисторы Rl, R2 так, чтобы
ток базы открытого транзистора не превышал 6 мА.
Если не удастся приобрести лампы СМ6-0,2, указатель пово-
ротов можно собрать на лампах МН2,5-0,15, но они потребляют
столь большой ток, что транзисторы VT1 и VT2 могут выйти из
строя. Поэтому ток, потребляемый каждой нагрузкой, придется
«разложить» на два транзистора, включив их параллельно.
Для того чтобы не перегружать лампу избыточным напряже-
96
Рис. 64. Вариант принципиальной схемы
электронного ключа указателя поворотов
нием — ведь она на 2,5 В,— последовательно с ней включают
ограничительный резистор сопротивлением в несколько ом мощ-
ностью 0,5 Вт или, что еще лучше, включают последовательно
с лампой еще одну такую же. Схема такого усилителя тока по-
казана на рис. 64.
В этом модуле при налаживании базовый ток каждого
транзистора устанавливают до 6...8 мА подборкой резисторов
R1 и R2 при высоком уровне напряжения на входе.
Рис. 65. Принципиальная схема модуля
усилителя тока на три команды
5.3. МОДУЛЬ УТ НА ТРИ КОМАНДЫ
На рис. 65 показана схема двух усилителей тока, работающих
независимо один от другого. Когда транзисторы VT1, VT2 закры-
ты, через обмотку реле KI, К2 ток не протекает, что 'соответ-
ствует команде «Стоп». При поступлении на вывод 49 управ-
ляющего напряжения команды «Грот влево» открывается тран-
зистор VT1 и реле К1 срабатывает. Аналогично срабатывает
----Д311А
w/ дэв
-. {X
VD2 ДЭВ W* 510
К! '•—
___К2
l/r/i-r-i 2К
1/7
(25)
V/7J Д9В
R2*5!0
Рис. 66. Принципиальная схема
модуля УТ на четыре команды
) VT2-1-
КТ315Б
4 7-159
97
Рис. 67. Принципиальная схема модуля
УТ на пять команд
Налаживание этого модуля
предыдущего.
реле К2, когда на вывод 47 по-
ступает управляющее напря-
жение команды «Грот вправо».
Такой же модуль используют
и для выполнения команд
«Вперед» и «Назад» (управля-
ющие напряжения этих команд
подают на выводы 49, 50 со-
ответственно в одной модели и
53, 54 в другой).
Диоды VD1, VD2 защища-
ют транзисторы от всплесков
ЭДС самоиндукции, возникаю-
щих при закрывании транзи-
сторов. Вместо Д220 можно
использовать диоды Д311А.
Вместо указанных на схеме
транзисторов подойдут любые
из серии КТ315 или КТ3102.
Реле К1,К2 — РЭС10, паспорт
РС4.524.317.
не отличается от налаживания
5.4. МОДУЛЬ УТ НА ЧЕТЫРЕ КОМАНДЫ
Если сопоставить принципиальные схемы модулей М22 и
М23 (рис. 66), то можно заметить, что в модуль М23 введена
цепь из четырех разделительных диодов, которая дает возмож-
ность отрабатывать четыре команды вместо трех.
Команда «Стоп» выполняется, когда на входах сигналы
отсутствуют и оба транзистора закрыты. При поступлении на
вывод 57 модуля управляющего напряжения команды «Влево»
открывается транзистор VT1 и срабатывает реле К1; реле К2
срабатывает от сигнала команды «Вправо» на выводе 58. Когда
на вывод 59 приходит сигнал команды «Вперед», открываются
оба транзистора и срабатывают оба реле.
Вместо диодов Д9В можно использовать любые из серий
Д9, Д2. Реле — такие же, как в модуле М22.
5.5. МОДУЛЬ УТ НА ПЯТЬ КОМАНД
Этот модуль (рис. 67) отличается от предыдущего тем, что
в нем имеется дополнительный усилитель, выполненный на тран-
зисторе VT3. Модуль отрабатывает одну из пяти команд в лю-
бой последовательности. Вывод 21 предназначен для сигнала
команды «Влево», 22 — «Вправо», 23 — «Вперед» и 24 —
«Назад». Одновременная по-
дача сигналов команд на
выводы 23 и 24 недопусти-
ма, так как при срабатыва-
нии реле К2 и КЗ окажется
замкнутым источник пита-
ния тяговых двигателей мо-
дели.
Реле KI, К2 такие же, как
в модуле М22; реле КЗ —
РЭС9, паспорт РС4.524.203
или другое с двумя группами
контактов на переключение
и напряжением срабатыва-
ния 4...5 В. Базовый ток
транзисторов VT1...VT3 мо-
жет быть 6...8 мА.
Рис. 68. Принципиальная схема модуля
УТ для двух одновременных команд
5.6. ПЯТИКОМАНДНЫЙ МОДУЛЬ УТ ДЛЯ ДВУХ команд
ОДНОВРЕМЕННО
Этот модуль (рис. 68) может быть использован в пяти-
командной модели как с последовательным выполнением команд,
так и выполняющей две команды одновременно (например, во
время движения модель может поворачивать влево или вправо).
На смежные выводы 7, 8 (или 8, 9, или 9, 10) модуля нельзя
подавать два управляющих сигнала разных команд, иначе си-
стема будет переходить в режим команды «Стоп».
Устройство и работа модуля пояснений не требует. В нем
можно использовать реле с одной группой контактов на переклю-
чение, например РЭС10, паспорт РС4.524.317, а также реле
с одной группой на замыкание, например РЛ-1, паспорт
8И4.500.007. Можно использовать и реле разных типов в одном
модуле. Например, KI, К2 — РЭС10, паспорт РС4.524.317,
а КЗ, К4 — РЭС60, паспорт РС4.569.440. Все эти варианты
замены реле позволяют расширить возможности этого модуля?
делают его в определенной степени универсальным. Эти воз-
можности описаны в следующем разделе. Ток базы транзисто-
ров до 6...8 мА.
5.7. ПЯТИ КОМАНДНЫЙ МОДУЛЬ УТ ДЛЯ ГРУППОВОГО
РАДИОУПРАВЛЕНИЯ
Принципиальная схема этого модуля представлена на
рис. 69. В исходном состоянии, при отсутствии сигналов команд
на выводах 26...33, все транзисторы закрыты, что соответствует
4*
99
М26 VT1-VT4 KT3I55; R1-R8 510
Рис. 69. Принципиальная схема модуля
УТ на пять команд группового радио-
управления
контакты Kl.l, К2.1 реле KI, К2,
команде «Стоп». В этом мо-
дуле сигналы команд при-
ходят на пары выводов с
временным сдвигом 300 мс.
Ток базы транзисторов до
6...8 мА. Все реле—РЭС10,
паспорт РС4.524.317.
5.8. МОДУЛЬ УТ НА ТРИ
КОМАНДЫ ДЛЯ ЯХТЫ
Модуль (рис. 70) разра-
ботан для дискретной аппа-
ратуры радиоуправления ях-
той. На яхте два таких мо-
дуля: один управляет рулем,
другой — гротом. Рассмот-
рим работу рулевого мо-
дуля.
Допустим, что в момент
подачи на модуль питающе-
го напряжения плоскость
руля совпадает с продоль-
ной осью яхты, и качалка,
а также герконы SF1, SF2
находятся в положении, указанном на схеме. Руль яхты при
этом неподвижен.
Если теперь на вывод 43 модуля поступит управляющее
напряжение команды «Руль влево», то сработает реле К1 и кон-
тактами К1.1 включит электродвигатель Ml. Якорь электродви-
гателя через редуктор связан с качалкой и рулем яхты, поэтому
качалка и руль начнут поворачиваться вокруг своей оси. Через
некоторое время укрепленный на левом конце качалки маг-
нит приблизится к геркону SF1 и он замкнется. В этот момент
Рис. 70. Принципиальная схема модуля УТ на три команды
100
напряжение питания с вывода 3 модуля через замкнутые контакты
SF1 и диод VD3 поступит на вывод 45 и далее на регистры моду-
ля М15. В результате на выводе 43 модуля М27 появится уро-
вень 0, реле К1 отпустит якорь и электродвигатель Ml выклю-
чится. Качалка и руль останутся в этом крайнем положении.
Повторение оператором команды «Руль влево» не изменит со-
стояния модуля.
Для того чтобы руль яхты повернуть в противоположную сто-
рону, необходимо подать команду «Руль вправо». Этот сигнал
придет на вывод 44 модуля М27, сработает реле К2 и снова
включит двигатель, но теперь его якорь будет вращаться в проти-
воположную сторону. Качалка и руль начнут поворачиваться
в противоположную сторону. Если сигнал этой команды будет
кратковременным, то механизм остановится, не дойдя до край-
него правого положения.
При продолжительной команде правый магнит качалки замк-
нет геркон SF2 и реле К2 выключится.
Точно так же работает модуль при выполнении команд «Грот
влево» и «Грот вправо». Для этих команд используют выводы
46, 47.
Рулевая машинка с электродвигателем Ml, редуктором и ка-
чалкой использована от аппаратуры «РУМ-2». Такая же руле-
вая машинка применена для управления гротом.
Для уменьшения уровня помех, создаваемых электродвига-
телем Ml, в его цепь включен фильтр L1C1C2L2. Дроссели L1
и L2 одинаковые, их можно изготовить самостоятельно, Магни-
топроводом дросселя служит стержень диаметром 2,5 мм и дли-
ной 12 мм из феррита 600НН. Обмотка состоит из 20 витков
провода ПЭВ-2 0,35. Намотку ведут виток к витку. Магниты
для качалок—от магнитных шашек или шахмат. Герконы
МКА-27101 от реле РЭС82, РЭС83 или РЭС84. Можно также
использовать герконы КЭМ-1 или КЭМ-2. Конденсаторы С1,
С2 — КМ-5 или КЛС. Ток базы транзисторов до 6...8 мА.
5.9. МОДУЛЬ УТ ДЛЯ ПРОПОРЦИОНАЛЬНОЙ КОМАНДЫ
В реальных условиях во время управления моделью оператор
изменяет положение движка переменного резистора R3 в шиф-
раторе (см. рис. 36). Поэтому на выходе дешифратора (вывод
55, рис. 54) появляются импульсы рассогласования, которые
и поступают на вывод 55 модуля М28 (рис. 71) рулевого ме-
ханизма.
Задача блока усилителей тока состоит в том, чтобы различить
полярность импульсов рассогласования. При появлении на входе
модуля положительных импульсов руль модели должен откло-
няться в одну сторону, а при появлении отрицательных — в дру-
гую. При отсутствии сигнала рассогласования руль должен оста-
ваться неподвижным.
101
1 w
I 0,68 м к
02
0,68 м к
УТ!
KT36I5
VTZ
KT3156
> R4 +
I 5,6 К ~
Рис. 71. Принципиальная схема модуля УТ для пропорциональной команды
VTJ KT36I6
V74 KT3155
=F 10 мн *16 В
5,6 К
K2
VD1
Д220
R6 1,5 К
04
10 MK * 16 В
05,06
200MK*
*!6B
VD3
Д220 +
VD2 Д220
Рис. 72. Временные диаграммы работы модуля М28
Положительными будут импульсы рассогласования (рис.
72, в) тогда, когда длительность пропорционального импульса,
принятого приемником (рис. 72, а), больше длительности сигнала
выходного одновибратора (рис. 72, б). Этот импульс рассогла-
сования откроет транзистор VT2, и конденсатор СЗ быстро заря-
дится (рис. 72, г). Это приведет к тому, что транзистор VT3
тоже откроется и реле К2 включится. Контакты этого реле (на
схеме рис. 71 не показаны) подключат электродвигатель рулевой
машинки. А так как якорь электродвигателя связан через редук-
тор с механизмом привода руля и с движком переменного рези-
стора R4 (см. рис. 54) выходного одновибратора дешифратора,
то движок начнет перемещаться вниз по схеме, а руль — пово-
рачиваться вправо.
Через некоторое время конденсатор СЗ модуля М28 разря-
102
дится и транзистор VT3 закроется. Реле К2 отпустит якорь
и электродвигатель остановится.
Затем на вход модуля М28 поступит второй импульс рассогла-
сования. Он будет короче первого потому, что сопротивление
переменного резистора выходного одновибратора увеличилось,
а следовательно, увеличилась и длительность сигнала этого
одновибратора. Снова на время действия импульса рассогласо-
вания откроется транзистор VT2, зарядится, но уже до несколь-
ко меньшего напряжения, конденсатор СЗ, а значит, на более
короткое время сработает реле К2. Поэтому перемещение руля
будет тоже меньше.
Наконец наступит такой момент, когда длительность сигна-
ла выходного одновибратора станет равной пропорциональному
и на выходе модуля Ml6 импульса рассогласования не будет,
а значит, транзисторы в модуле М28 останутся закрытыми, руль
будет неподвижен.
Стоит только оператору изменить сопротивление управ-
ляющего резистора в передатчике и тем самым изменить дли-
тельность пропорционального импульса, как вновь на входе
модуля М28 появятся импульсы рассогласования. Руль модели
поворачивается импульсно. Угол поворота в каждом импульсе
зависит от длительности импульса рассогласования и от емкости
конденсаторов СЗ, С4. Чем они больше, чем на больший угол
отклонится руль в каждом импульсе: при емкости 1 мкФ — 2°,
а при 10 мкФ — до 6°. Эти значения соответствуют напряжению
источника питания 6 В.
Конденсаторы Cl, С2 разделительные. Резисторы R5, R6 огра*
ничивают токи базы транзисторов VT3, VT4. Диод VD3 не про-
пускает к модулю отрицательных импульсов, образующихся при
работе электродвигателя рулевой машинки. Конденсаторы С5,
С6 уменьшают пульсации напряжения питания.
Конденсаторы Cl, С2 — КМ-6, остальные—К50-6. Вместо
Д220 в модуле можно использовать диоды Д311А. Транзисторы
КТ315Б можно заменить на КТ3102 с любой буквой, а КТ361Б —
на КТ3107 также с любой буквой. Статический коэффициент
передачи тока всех транзисторов — не менее 40. Реле KI, К2 —
РЭС55А, паспорт РС4.569.604.
При исправных элементах и правильной сборке модуль в на-
лаживании не нуждается.
5.10. ТРАНЗИСТОРНЫЙ МОДУЛЬ УТ НА ЧЕТЫРЕ
КОМАНДЫ
Если у радиолюбителя не оказалось реле, модуль электри-
ческих ключей можно собрать на транзисторах. В качестве при-
мера рассмотрим модуль на четыре команды, выполняемые
в любой последовательности: «Стоп», «Влево», «Вправо» и «Впе-
ред» (рис. 73). На вывод 60 поступает управляющее напряжение
103
Рис. 73. Принципиальная схема
модуля УТ на четыре
команды
команды «Влево», 61 — «Впра-
во», 62 — «Вперед». К выводам
12, 13 и 14, 15 подключают тяго-
вые двигатели модели. На вывод
11 (25) подают напряжение пита-
ния 6 В.
Рассмотрим работу модуля на
примере выполнения команды
«Вперед». В исходном состоя-
нии все транзисторы закрыты
и напряжение питания на выводы
12 и 15 не поступает. Электро-
двигатели обесточены, что соот-
ветствует команде «Стоп». Если
теперь на вывод 62 поступит
управляющее напряжение коман-
ды «Вперед», то откроются тран-
зисторы VT1, VT3. Вслед за ними
откроются транзисторы VT2, VT4
и на выводы 12 и 15 поступит напряжение питания, включатся
оба тяговых электродвигателя — модель будет выполнять
команду «Вперед». По окончании действия команды «Вперед»
все транзисторы закроются и модель перейдет в режим коман-
ды «Стоп».
Недостатком модуля является падение напряжения около
1 В на каждом из мощных транзисторов VT2, VT4, когда они
бткрыты. Это приводит к уменьшению мощности электродвига-
телей и уменьшению скорости перемещения модели. Повысить
скорость перемещения модели можно путем увеличения напря-
жения питания, подводимого к выводу 11 модуля. Но увели-
чение напряжения питания потребует увеличения числа элемен-
тов в батарее питания, а значит, увеличения массы и размеров
модели. Поэтому повышать напряжение питания более чем до
9 В не следует.
При повышенном напряжении питания нужно транзисторы
VT2, VT4 устанавливать на теплоотводящие пластины площадью
не менее 25 см2 каждая. Иначе транзисторы могут перегреться
и выйти из строя в случае, когда модель остановится, натолкнув-
шись на препятствие, или на гребные винты плавающей модели
намотаются водоросли.
Вместо КТ315Б можно использовать любые транзисторы
из этой серии, а вместо П4Б—любые из серий КТ814, П216,
а также П217Г, КТ818В, КТ818Г. Транзисторы КТ814А...КТ814Г
даже при напряжении питания 6 В должны быть установлены
на теплоотводящие пластины площадью не менее 10 см2. Диоды
могут быть любыми из серий Д9 или Д2.
Налаживание сводится к установке тока базы транзисторов
VT1, VT3 — до 6...8 мА, a VT2, VT4 — до 20...40 мА.
104
УТ2 П2/6А
VD5 КД105Г
УТ1 КТ3156
R4*!00
Rl* 510
VD3 Д9В
VT3 6Т3155
R2* 510
УТ4 02/6А
R3 510
МЗО
61.1
100
Рис. 74. Принципиальная схема пятикомандного модуля УТ
х' У06
\КД105Г
5.11. ПЯТИ КОМАНДНЫЙ МОДУЛЬ УТ
Отметим, что предыдущий модуль не рассчитан на команду
«Назад», популярную у моделистов. Модуль МЗО (рис. 74)
выполняет команду «Назад» и все команды предыдущего моду-
ля. На вывод 2.1 подают сигналы команды «Влево», на 22 —
«Вправо», 23 — «Вперед», 24 — «Назад». Назначение остальных
выводов то же, что и у модуля М29.
В исходном состоянии все транзисторы закрыты, а контакты
реле К1 находятся в положении, показанном на схеме. На вы-
водах 12 и 15 напряжение отсутствует, что соответствует коман-
де «Стоп». Если теперь на вывод 24 поступит управляющее
напряжение команды «Назад», то транзистор VT5 откроется,
включится реле К1 и его контакты К1.2 подключат выводы 13
и 14 модуля к плюсовому выводу питания, а контакты К1.1
«заземлят» выводы 12 и 15. Модель будет выполнять команду
«Назад». Как только подача этой команды будет прекращена,
транзистор VT5 закроется, реле К1 выключится, модуль вернется
в исходное состояние, соответствующее команде «Стоп». Выпол-
нение остальных команд происходит так же, как в модуле М29.
Ни в коем случае нельзя подавать одновременно управляющее
напряжение на выводы 23, 24, так как это приведет к замыка-
нию батареи питания.
Вместо диодов КДЮ5Г подойдут КДЮ5Б, КД 105В или любые
из серий Д7, Д226; диод Д220 можно заменить на Д311А. Реле —
РЭС60, паспорт РС4.569.440. Замена транзисторов была описана
в подразд. 5.10. Там же было рассказано и об установке режима
транзисторов.
5.12. ЗАМЕНЯЕМОСТЬ ЭЛЕКТРОМАГНИТНЫХ РЕЛЕ
Как быть, если не удалось приобрести то или иное реле, реко-
мендованное в книге? Совет таков: можно применить любое
105
Таблица 5
Реле (рис. 75) Паспорт Сопротивление обмотки, Ом Ток, мА (напряжение, В), не более Рабочее напряжение, В
сраба- тывания отпускания рабочее значение
РЭСЮ PC4.524.308* 108...132 35 5 58... 100 7...12
(а) РС4.524.311* 108...138 35 5 58... 150 7...18
РС4.524.321* 108...138 35 5 58... 150 7...18
РС4.524.303 ПО...132 50 7 75...100 9...12
РС4.524.304 40...50 80 11 120... 145 5,5...6,5
РС4.524.312 ПО...125 50 7 75...92 9...11
РС4.524.315 40...50 80 11 120...145 5,5-6,5 1
РС4.524.317 19...23 125 15 195...248 4-5,2
РС4.524.322 110-150 50 7 75...150 9...18
РС4.524.325 40...50 80 11 120...255 5,5-11,5
РЭС15 РС4.524.002 130...184 30 7 39...46 6-7,5
(б) РС4.524.003 280...380 21 5 27...33 8,9-10,9
РС4.524.004 612...828 14,5 3,5 19...22 13,5-16
РС4.524.005 324...396 60 14 73...85 2,5-3,1
РЭС9 РС4.524.203 24...32 108 18 165...233 5-7
(в) РС4.524.214 32...38 95 15 140...192 5-7
РС4.524.216 24...32 108 18 165-233 5-7
РС4.524.219 32...38 95 18...25 140...192 5...7
РС4.524.226 24...38 108 18 165...233 5-7
РЭС34 РС4.524.374 385...515 75 11,5 120...145 5,4-6,6
(г) РС4.524.377 385...515 75 11,5 120-145 5,4...6,6
РЭС47 (д) РФ4.500.421 38...44 90 13 130...230 5-9
Окончание табл, b
Реле (рис. 75) Паспорт Сопротивление обмотки. Ом Ток. f мА (напряжение. В), не более Рабочее напряжение, В
сраба- тывания отпускания рабочее значение
РЭС48 PC4.590.204 37,5-.46,5 79,5 10,5 120...210 5...9
(е) РС4.590.216 37,5...46,5 79,5 10,5 120...210 5...9
РЭС59 (ж) ХП4.500.021 НО...150 11 1,4 18...22 2,1...2,7
РЭС60 РС4.569.439 55...60 51 И 95...110 5...8
(з) РС4.569.440 32,4...39 60 13 70...95 3,5...4,5
РЭС55А РС4.569.604 57...77 (2,5) (0,3) — 4,5...5,5
{и) РС4.569.605 31...39 (1,72) (0,2) — 2,7...3,3
РС4.569.608 80...110 (2,75) (0,3) — 5,4...6,6
РС4.569.609 57...77 (2,12) (0,25) — 4,5...5,5
РС4.569.610 31...49 (1,46) (0,18) — 2,7...3,3
РС4.569.612 80...110 (2,6) (0,4) — 4,5...5,5
РЭС55В РС4.569.628 80...110 (3,25) (0,35) — 5,4...6,6
(к) РС4.569.629 57...77 (2,5) (0,3) — 4,5...5,5
РС4.569.630 31...39 (1,72) (0,2) — 2,7...3,3
РС4.569.633 80...НО (2,75) (0,3) — 5,4...6,6
РС4.569.634 '57...77 (2,12) (0,25) — 4,5...5,5
РС4.569.635 31...39 (1,46) (0,18) — 2,7...3,3
РЛ-1 (л) 8И4.500.007 80...90 (2,75) (0,3) — 3,2...4,7
С одной группой контактов на замыкание.
Рис. 75. Габаритные чертежи и цоколевка малогабаритных реле
108
другое, обеспечивающее те же переключения, имеющее тот же
(или, в крайнем случае, несколько больший) ток срабатывания
и габариты, позволяющие установить это реле на модель. Однако
воспользоваться этим советом в большинстве случаев оказыва-
ется непросто.
Обратимся к табл. 5 и рис. 75 и допустим, что вам не уда-
лось приобрести реле РЭС60, паспорт РС4.569.440 для модуля
МЗО. В таблице указано, что у реле РЭС60 две группы контактов
на переключение. Ток срабатывания его 60 мА при напряжении
3,5...4,5 В. Сопротивление обмотки постоянному току 36 Ом.
Попытаемся найти замену этому реле. Вот, например, РЭС9, пас-
порт РС4.524.203. Оно по параметрам близко к заменяемому,
кроме одного: у РЭС9 ток срабатывания 108 мА. А это приведет
к тому, что включить в цепь нагрузки транзистора КТ315Б будет
нельзя, так как предельно допустимый коллекторный ток этого
транзистора только 100 мА.
Рис. 76. Принципиальная схема усилителя тока
на реле РЭС9
Поэтому под реле РЭС9 придется преобразовать схему усили-
теля тока так, как это показано на рис. 76. Здесь ток реле «раз-
ложен» на два транзистора VT1, VT2 так же, как и в устрой-
стве, схема которого показана на рис. 64. Транзисторы откры-
ваются одним управляющим сигналом. Общий входной ток блока
УТ не должен превышать 6...8 мА.
Можно также вместо двух маломощных транзисторов в УТ
использовать один более мощный, например из серии ГТ404.
Но здесь свои ограничения: при токе базы транзистора ГТ404А,
равном 6...8 мА (увеличивать этот ток не следует, иначе будет
снижена надежность приемной части модели), для четкой работы
реле может оказаться недостаточным напряжение питания
устройства. Повышение этого напряжения ведет к дополнитель-
ным трудностям с батареей питания.
Рассмотрим еще один вариант замены реле: вместо одного
реле с двумя группами контактов применим два реле с одной
группой. Иногда такая замена оказывается предпочтительной.
Обратим внимание на рис. 77. Здесь один усилитель тока разделен
на два, управляемых одним сигналом. Оба реле — К1 и К2 —
с одной группой контактов на переключение. Таким образом,
можно заменить реле РЭС9 или РЭС60 на два РЭС55А или
109
Рис. 77. Принципиальная схема усилителя
тока на двух реле
РЭС15. Общий входной ток обоих транзисторов не должен пре-
вышать 6...8 мА.
К сожалению, реле на напряжение срабатывания 2,5...3,5 В
мало распространены и приобрести их трудно. Как выход из
положения можно рекомендовать доработку реле РЭС10 с напря-
жением срабатывания 4... 12 В. Для этого реле разбирают: акку-
ратно снимают кожух, подключают обмотку реле к источнику
тока напряжением 3,5 В, а к контактам 3,5 — омметр (на диапа-
зоне сотни ом). Пинцетом отгибают на небольшой угол пластины,
выполняющие роль возвратной пружины якоря. Как только реле
сработает и стрелка прибора укажет нулевое сопротивление,
отключают обмотку и вновь включают. Если теперь реле не сра-
ботает, еще отгибают пластины. Таким образом добиваются
четкого срабатывания реле.
5.13. УСТРОЙСТВО ДЛЯ НАЛАЖИВАНИЯ УТ
Если вы собрали модуль УТ из деталей, рекомендованных
в описании, то налаживание его не представит трудности. При
вынужденной замене некоторых элементов или несоответствии
параметров транзисторов налаживание может осложниться.
В этих случаях мы рекомендуем' собрать наладочное устрой-
ство, схема которого показана на рис. 78.
Логический элемент DD1 задает входной уровень 1 для цепи
базы транзистора в налаживаемом модуле. Переменным рези-
стором R1 регулируют ток базы, а миллиамперметр РА1 пока-
зывает значение этого тока. Второй миллиамперметр РА2 (он
не входит в состав модуля и его включают только на время нала-
живания) показывает ток через обмотку реле. Микросхему DD1
питают от батареи питания дешифратора. Для примера рассмот-
рим настройку модуля УТ М22, схема которого показана на
рис. 65. После подачи питания на модуль и наладочное устрой-
ство замечают базовый ток, показываемый миллиамперметром
РА1. Вращают ручку переменного резистора R1, увеличивая
базовый ток транзистора VT1 модуля. Отмечают коллекторный
ток по миллиамперметру РА2. Если этот ток достиг предельно
допустимого значения для транзистора, а реле К1 не срабаты-
вает, то подбирают другое реле, имеющее большее сопротивление
обмотки.
но
Если реле четко срабаты-
вает при токе, меньшем допус-
тимого для транзистора, то ре-
ле считают подходящим. Нала-
дочное устройство отключают
от модуля, омметром измеряют
сопротивление между точками
А и Б, и резистор R1 модуля
М22 заменяют на другой со
значением сопротивления, бли-
жайшим к измеренному.
Аналогично устанавливают
режим транзистора VT2 мо-
дуля.
В наладочном устройстве
можно использовать любые
магнитоэлектрические милли-
амперметры с током полного от-
клонения стрелки 10... 15 мА
(РА1) и 100...200 мА (РА2).
Рис. 78. Принципиальная схема устрой-
ства для налаживания УТ
6. ВСПОМОГАТЕЛЬНЫЕ УЗЛЫ
6.1. ОБЩИЕ СВЕДЕНИЯ
Как уже было сказано в начале книги, представление приемо-
передающей аппаратуры в виде модулей неслучайно. Оно очень
удобно для описания работы комплекса и для выбора практиче-
ских вариантов этого комплекса.
Для того чтобы показать возможные варианты построения
вспомогательных узлов модели — коммутационных устройств,
цепей исполнительных электродвигателей, источников питания,
их тоже будем представлять в виде неких структурных элементов,
подобных модулям. Однако не все эти элементы мы вправе
называть модулями в соответствии с определением, данным в
подразд. 2.1. Например, коммутационный узел конструктивно
размещен внутри реле, а все реле уже отнесены к тому или иному
модулю УТ. Поэтому такие элементы мы будем называть вспомо-
гательными узлами (или короче — узлами) и обозначать на схеме
символом У со своим порядковым номером. На структурных
схемах узел будет выглядеть подобно модулю.
6.2. КОММУТАЦИОННЫЙ УЗЕЛ НА ТРИ КОМАНДЫ
В подразд. 5.4 мы говорили о модуле М22 усилителей тока,
выполняющем три дискретные команды радиоуправления яхтой.
Схема коммутационного узла (КУ) этого модуля показана на
111
УЗ VDiyW КД105Г
Рис. 79. Коммутационные узлы электронных ключей:
а — на три команды; б — на четыре команды; в — на пять команд, вариант 1; г — на пять команд,
вариант 2; д — на пять команд, вариант 3; е — для группового радиоуправления; ж — на пять команд,
вариант 4
рис. 79, а. Вывод 25 соединяют с плюсовым выводом источника
питания, вывод 6 — с минусовым, к выводам 51 и 52 подключают
ходовой электродвигатель яхты.
На схеме контакты К1.1 и К2.1 реле КД, К2 показаны в поло-
жении команды «Стоп». При срабатывании реле К1 модель вы-
полняет команду «Вперед». Если теперь после перехода через
команду «Стоп» сработает реле К2, то модель выполнит команду
«Назад». Команде «Стоп» соответствует и такое состояние, когда
одновременно срабатывают оба реле. Но этот вариант нежела-
телен, так как требует потребления энергии от батарей моду-
лем М22.
Модели пожарного и прогулочного катеров, а также буксира
оборудованы двумя тяговыми электродвигателями. Во время вы-
полнения команды «Вперед» (или «Назад») включаются оба
электродвигателя, в результате чего модель плывет быстрее, чем
с одним. Этот узел также принадлежит модулю М22. Маневри-
руют эти модели с помощью руля.
6.3. КУ НА ЧЕТЫРЕ КОМАНДЫ
В подразд. 5.5 был описан модуль М23 усилителей тока. В этом
модуле работает коммутационный узел У2 (рис. 79, б). В не-
112
которых плавающих моделях используют два источника пита-
ния напряжением по 4,5 В, соединенные последовательно. В узле
I У2 с выводом 3 соединяют плюсовой вывод батареи, с выво-
дом 6 — минусовой, с выводом 11 — ее средний общий вывод.
К выводам 12 и 13 подключают первый электродвигатель, а 14
и 15 — второй.
Контакты К1.1 и К2.1 показаны на схеме в положении команды
I «Стоп». Срабатывание реле К1 приведет к включению первого
электродвигателя и модель будет выполнять команду «Влево»,
срабатывание К2 (после промежуточной команды «Стоп») при-
ведет к выполнению команды «Вправо». Срабатывание обоих
реле соответствует движению модели вперед.
В этом узле использованы реле с одной группой контактов на
замыкание. Можно использовать и реле с переключающими
контактами, оставив ненужные контакты неподключенными.
6.4. ПЯТИКОМАНДНЫЙ КУ
Предыдущий узел не может отрабатывать команду «Назад».
Более широкие возможности имеет КУ модуля М24. Схема узла
показана на рис. 79,6.
Контакты реле показаны в положении «Стоп». При срабаты-
вании реле К1 будет включен один электродвигатель и модель
выполнит команду «Влево». Если после команды «Стоп» срабо-
тает реле К2, то модель выполнит команду «Вправо». Команда
«Вперед» будет выполнена (после команды «Стоп»), если сра-
ботают оба реле К1 и К2. Срабатывание реле КЗ приведет к
реверсивному включению обоих электродвигателей и выполнению
команды «Назад».
Диоды VD1, VD2— КДЮ5 или Д7 с любым буквенным ин-
дексом. Заметим, что одновременное срабатывание реле КЗ и К1
(или К2) недопустимо, так как приведет к короткому замыканию
источника питания.
6.5. ВТОРОЙ ВАРИАНТ ПЯТИКОМАНДНОГО КУ
Назначение выводов этого узла (рис. 79,г) нам уже известно.
Этот узел принадлежит модулю М25, который, как указано в под-
разд. 5.7, может выполнять не только одну из пяти команд в лю-
бой последовательности, но и две одновременные. Узел У4 как
раз рассчитан на две команды одновременно.
При срабатывании реле К1 узел переходит из положения
«Стоп» в положение команды «Влево», при срабатывании К2 —
«Вправо», КЗ — «Вперед» и К4 — «Назад». При одновременном
срабатывании реле К1 и КЗ выполняются команды «Влево» и
«Вперед», а К2 и К4 — «Вправо» и «Назад».
из
L1 Юм к Гн
L2 ЮмкГн
6.6. ТРЕТИЙ ВАРИАНТ
ПЯТИКОМАНДНОГО КУ
L1 ЮмкГн
!2
13
С1 0,015 МК
: С2 0,015МК
L2 ЮмкГн т
L3 ЮмкГн
=t=C3 0,015 м к
С4 0,015мк =4=
14 ЮмкГн
У9
М1
М2
Рис. 80. Узлы исполнительных
электродвигателей:
а — с электродвигателем; б — с двумя
электродвигателями
Этот узел в отличие от предыду-
щего рассчитан на выполнение од-
ной из пяти команд в любой последо-
вательности. Он (рис. 79,д) может
быть реализован в модуле М25 при
использовании разных реле (с од-
ной и двумя группами контактов).
Команда «Стоп» соответствует
показанному на схеме положению
контактов. Когда срабатывает реле
К1, проходит команда «Влево»,
К2 — «Вправо», КЗ — «Вперед» и
К4 — «Назад».
6.7. ПЯТИКОМАНДНЫЙ КУ ДЛЯ
ГРУППОВОГО УПРАВЛЕНИЯ
В моделях группового радио-
управления работает узел Уб (рис.
79,е) модуля М26. Команда «Раз-
ворот влево» выполняется при сра-
батывании реле KI, К4; «Разворот
вправо» — К2, КЗ; «Вперед» — К1,
КЗ и «Назад» — К2, К4.
6.8. КУ НА ДВЕ ОДНОВРЕМЕННЫЕ КОМАНДЫ
Мы говорили в подразд. 5.7 о том, что если в модуле М26
использовать, реле с одной группой контактов на замыкание,
то модель см'ожет выполнять две команды одновременно. Схема
такого узла показана на рис. 79,ж. Выполняемые этим узлом
команды аналогичны рассмотренным в подразд. 6.6.
6.9. УЗЕЛ ИСПОЛНИТЕЛЬНОГО ЭЛЕКТРОДВИГАТЕЛЯ
Схема этого узла показана на рис. 80,а. Элементы C1L1L2C2
образуют фильтр, препятствующий прохождению помех, возни-
кающих на коллекторе электродвигателя Ml, в цепи питания.
Этот узел можно использовать для привода руля или грота
в аппаратуре радиоуправления яхтой. Удобнее всего приобрести
готовую рулевую машинку с редуктором [3] от аппаратуры
РУМ-2. Привод руля или грота яхты можно изготовить и само-
стоятельно, использовав игрушечный электродвигатель ДП-10
с редуктором Р1. Однако этот электродвигатель потребляет
114
гораздо больший ток (около 250 мА) и во время работы создает
более интенсивные помехи, чем электродвигатель от РУМ-2. По-
этому для самодельной рулевой машинки придется опытным
путем подобрать такие конденсаторы Cl, С2 и катушки LI, L2,
чтобы помехи, проникшие в цепь источника питания, не нарушали
работу приемной аппаратуры радиоуправления.
Проще всего подобрать эти детали с помощью осциллографа,
подключенного к выводам 51, 52 узла У8. Во время работы
электродвигателя на экране видны импульсы помехи. Подбирая
элементы фильтра, добиваются наибольшего подавления помех.
Необходимо учесть, что с увеличением индуктивности дросселей
L1 и L2 уменьшается напряжение, подводимое к электродви-
гателю Ml (это напряжение тоже полезно контролировать).
Допустимое падение напряжения на дросселях 1 В. Увеличение
емкости конденсаторов фильтра также снижает амплитуду помех,
однако при этом увеличивается и амплитуда импульса их зарядки,
что может привести к подгоранию контактов реле.
Дроссели LI, L2 — Д-0,15. Близкий по характеристикам дрос-
сель можно изготовить самостоятельно. На стержне диаметром
2,5 мм и длиной 12 мм из феррита 600НН наматывают 15 витков
провода ПЭВ-2 0,35. Намотку ведут виток к витку по всей длине
стержня. В процессе подборки индуктивности, возможно, придется
применить более толстые стержни и большее число витков. Кон-
денсаторы КМ-5 или КЛС, КЮ-7В.
6.10. УЗЕЛ С ДВУМЯ ЭЛЕКТРОДВИГАТЕЛЯМИ
Этот узел (рис. 80,6) обычно используют в плавающих моде-
лях с двумя тяговыми двигателями. Однако его можно применять
и в сухопутных моделях, выполняющих две команды одновремен-
но; в этом случае электродвигатель Ml используют для поворота
рулевых колес, а М2 — как тяговый. Все, что было сказано о
борьбе с помехами в предыдущем подразделе, в полной мере
относится и к этому узлу.
6.11. УЗЕЛ ИСТОЧНИКА ПИТАНИЯ НА 6 В
Для обеспечения работы тяговых электродвигателей модели,
а в некоторых случаях для питания преобразователя напряжения
с 6 на 9 В (о нем будет сказано ниже) используется узел источника
питания, схема которого показана на рис. 81, а.
Батарею GB1 можно составить из четырех элементов 373 или
343, соединенных последовательно. Выключатель SA1 — КМ-1
или любой другой, лучше миниатюрный.
6.12. УЗЕЛ ИСТОЧНИКА ПИТАНИЯ НА 9 В
Этот узел (рис. 81, б) обеспечивает работу всех модулей
приемной аппаратуры, за исключением УТ и электродвигателей.
115
Рис. 81. Блоки питания моделей:
а — на 6 В; б — на 9 В; в — на 2X4,5 В
Если в модели использованы оба узла У10 и УН, то выключатель
питания SA1 должен быть у них общим, например МТЗ. Батареей
GB1 в узле УН могут быть «Крона», аккумуляторная 7Д-0Д или
шесть элементов 316, соединенных последовательно (в последнем
варианте удобно пользоваться готовой кассетой, имеющейся
в продаже).
6.13. УЗЕЛ ИСТОЧНИКА ПИТАНИЯ 2X4,5 В
Узел У12 (рис. 81,в) обычно используют в плавающих моде-
лях. Он обеспечивает работу всех потребителей модели. Выклю-
чатель питания — МТЗ. Каждая из батарей GB1, GB2 состав-
лена из трех элементов 343, соединенных последовательно. В моде-
лях пожарного и прогулочного катеров для батарей применена
кассета. Можно применять также батареи из элементов 373 или
две батареи 3336.
6.14. КОРОТКО ОБ ИСТОЧНИКАХ ПИТАНИЯ
В аппаратуре радиоуправления моделями можно применять
различные химические источники тока. Это элементы, батареи
и аккумуляторы, которые отличаются конструктивными и элект-
рическими характеристиками. В этой связи у начинающего моде-
листа возникают трудности по правильному применению их в ап-
паратуре радиоуправления моделями.
Выясним, из чего надо исходить при выборе определенного
типа химического источника тока. Будем считать, что свежий
комплект питания должен обеспечить непрерывную работу модели
по крайней мере в течение двух часов.
Передающее устройство потребляет незначительный ток (не
более 20 мА). Для его питания подойдет любая батарея элементов
или аккумуляторов на требуемое напряжение. Выбор конкретного
ее типа зависит только от конструкции корпуса передатчика.
116
Иное дело — модель. Здесь основной фактор — ток, потребля-
емый двигателями рулевых машинок и ходовыми. У трехдвига-
тельных моделей он может достигать 500 мА, а если модель встре-
чает препятствие движению, то 800...900 мА. Кроме этого, нема-
ловажный фактор — возможность размещения батареи в модели.
У некоторых моделей, описанных в книге, предусмотрен батарей-
ный отсек на определенный тип элементов.
Исходя их этих соображений, мы и выбрали рекомендуемые
выше источники питания, однако это не значит, что нельзя ис-
пользовать некоторые другие. Кроме этого, нередко нужных эле-
ментов или батарей нет в продаже и волей-неволей приходится
искать им замену. Для облегчения их выбора укажем основную
характеристику — электрическую емкость — для некоторых
наиболее распространенных химических источников тока. Галь-
ванические элементы (напряжение 1,5 В): 316 — 0,65 А* ч,
343 —1,7 А- ч, 373 — 6,5 А- ч, батареи элементов: 3336
(4,5 В) —0,5 А- ч, «Крона ВЦ» (9 В) —0,6 А- ч; ртутно-цин-
ковые элементы (1,3 В): РЦ-63 — 0,74 А- ч, РЦ-73— 1,3 А• ч,
РЦ-83 — 2,1 А- ч; аккумуляторы (1,25 В): Д-0,115 — 0,115 А- ч,
Д-0,25 — 0,25 А- ч, ЦНК-0,2 — 0,2 А- ч, ЦНК-0,45 — 0,45 А- ч,
ЦНК-0,85 — 0,85 А- ч; батарея аккумуляторов 7Д-0,115-У1.1
(8,75 В) — 0,115 А- ч.
Как видно, вариантов состава блока питания может быть
несколько. Можно использовать и два источника: один для пита-
ния электронного блока модели, а другой, более мощный,—
для питания исполнительных электродвигателей. Как крайний
случай, возможно параллельное соединение элементов или акку-
муляторов; электрическая емкость такой батареи равна емкости
элемента, умноженной на их число в батарее.
В заключение раздела — несколько советов.
Химические источники тока в аппаратуре радиоуправления
старайтесь использовать в прерывистом режиме: если они рабо-
тают в модели не сразу до полного истощения, а по два часа
ежедневно, то «чистое» время службы увеличивается в 1,5...2 раза.
Не рекомендуется оставлять элементы и аппаратуру с ними в
неблагоприятных условиях, например, вблизи радиаторов отоп-
ления или там, где они могут подвергаться действию прямых сол-
нечных лучей. Работоспособные элементы необходимо изымать
из аппаратуры, если ожидается длительный перерыв в работе.
Подробно с конструкциями и электрическими параметрами
химических источников тока можно познакомиться в [6].
Как показала практика, гальванические элементы в ряде слу-
чаев можно подзаряжать подобно аккумуляторам, что позволяет
неоднократно использовать один и тот же комплект питания.
Как это делать, вы можете узнать из статей в журнале «Радио»:
И. Алимов «Регенерация гальванических элементов и батарей» —
1972, № 6, с. 55, 56; Б. Богомолов «Восстановление элементов
марганцево-цинковой системы»— 1981, № 7, 8, с. 75.
117
M3I
60
R1 1к
VT1
KT3I55
V01 -V04 ДОНА
С1 200мк*10В
R2 Юк
0,015 Мк
04 200мк*ЮВ
VT2
КТ361Б
мтз
КТ315В
R3 Юк
VT4
КТ3150
R4 1К
VT5
КТЗ/56
СЗ
0,015 мк
VT6
КТ361Б
=f= С5
500мк*
*10 В 1
с
Рис. 82. Принципиальная схема преобразователя напряжения
6.15. МОДУЛЬ ПРЕОБРАЗОВАТЕЛЯ НАПРЯЖЕНИЯ
Если в модели используют две батареи химических элементов
с различной энергоемкостью (или две одинаковые, но нагружен-
ные по-разному), то одна из них почти всегда теряет работоспо-
собность раньше другой. Из-за этого приходится постоянно конт-
ролировать напряжение обоих источников тока и один из них
заменять чаще. Это приводит к дополнительным трудностям
в приобретении и замене элементов.
Избавиться от этого в ряде случаев поможет преобразователь
напряжения, который питается от источника напряжением 6 В
и вырабатывает напряжение 9 В. От шестивольтового источ-
ника питаются усилители тока и тяговые двигатели модели,
а 9 В подают на приемник «Сигнал-1» и цифровой модуль
приемной аппаратуры. Таким образом, одна батарея обеспе-
чивает работу всей модели в целом. Преобразователь напряже-
ния потребляет ток около 30 мА.
На транзисторах VT3, VT4 собран симметричный мульти-
вибратор (рис. 82). Он вырабатывает импульсы прямоуголь-
ной формы. Частота следования импульсов зависит в основном
от емкости конденсаторов С2, СЗ и сопротивления резис-
торов R2, R3. Эти импульсы с коллектора транзистора VT3
поступают на базу составного транзисторного ключа VT1VT2.
Ключ перезаряжает конденсатор С1 от источника питания, причем
заряжается конденсатор через транзистор VT2, а разряжа-
ется через нагрузку преобразователя, подключенную к выводам
60 и 6, и транзистор VT1. Поскольку транзисторы ключа
VT1VT2 открываются попеременно, на половину периода
колебаний мультивибратора, на нагрузке происходит сложение
напряжения на входе преобразователя с напряжением за-
ряженного конденсатора С1. Правый по схеме ключ VT5VT6
работает точно так же. Выходное напряжение без нагрузки
примерно равно 10 В. Максимальный ток нагрузки 50 мА.
Подводить к преобразователю напряжение более 6 В опасно, так
как выходное напряжение может превысить 12 В, и микросхемы,
118
WAI
ms ' 3 tie 3_ М9 3 изо
/ Iff 21
17 Помехоза- ??
Приемник 9 Дешиф- 1fl щитный
ратор 19 модуль 29 УТ
20
(Рис59) 6 (Рис 93) 6 (Рис.95) 6 (Рис. 79)
Рис. 83. Структурная схема приемного устройства на
пять команд, вариант
Рис. 84. Структурная схема приемного устройства на пять команд, вариант 2
Рис. 85. Структурная схема приемного устройства на
пять команд, вариант 3
WA1
те 3_ не 3 Н9 3_ Н29
1_ 16 21
Приемник 17 Помехоза- ??
п „Сигнал-1 4 Десииф- 18 (цитпный 23 УЛ
вариант! ратор 19 20 модуль 24
(Рис 58) 6 (Рис.93) 6 (Рис.95) £ (Рис.61)
"
11 УГГ 12 УГГ У12\ 21
Узел комму- ттщии 13 19 15 Узел дбига- мелей блок питания и
6 (Рис.79,6) 6 (РисВОД) (Рис.81,6) 6
Рис. 86. Структурная схема приемного устройства на пять команд, вариант 4
119
питающиеся от преобразователя, будут выведены из строя. Вместо
транзисторов КТ315Б можно использовать любые из серии КТ315
или КТ3102А...КТ3102Е, а вместо КТ361Б — КТ361В...КТ361Е.
Конденсаторы С2, СЗ — КЮ-7В; остальные — К50-6. Вместо ди-
одов Д311А подойдут Д220А.
При исправных элементах и безошибочной сборке преобразо-
ватель начинает работать сразу после подачи напряжения на его
выводы 25, 6.
7. СТРУКТУРНЫЕ СХЕМЫ ПРИЕМНЫХ
УСТРОЙСТВ
Итак, мы рассмотрели назначение, устройство и работу узлов
аппаратуры радиоуправления моделью, выполненных в виде
модулей. А сейчас логично будет перейти к рассказу о структуре
различных вариантов приемной части комплекса, устанавлива-
емой непосредственно на модели. Для этого рассмотрим несколько •
наиболее характерных структурных схем.
Схема пятикомандной приемной аппаратуры для модели танка
Т-34 (электрифицированная игрушка) показана на рис. 83. В этой
модели есть батарейный отсек для установки четырех элементов
373. Такая батарея дает возможность собрать радиоуправляемую
модель танка с одним источником питания У10, который питает
модуль М25, узел У9 маршевых электродвигателей и модуля
М31 преобразователя напряжения. От выходного напряжения
модуля М31 питаются приемник М20 и дешифратор М7. Если в
узле У10 использованы другие элементы, например 343, то такой
приемный блок более подойдет для установки на плавающую
модель. ’ j
Модули М7 и М20 связывает по сигналу реле К1: оно установ-
лено в приемнике, а контакты К1.1 входят в дешифратор.
Передатчиком для этих моделей может служить «Сигнал-1»
любого года выпуска (без переделки).
Схема пятикомандного приемного блока для моделей пожар-
ного и прогулочного катеров показана на рис. 84. Оба катера
имеют батарейный отсек на шесть элементов 343. Тяговые двига-
тели плавающей модели потребляют существенно меньший ток,
чем у колесных или гусеничных моделей, поэтому приемный блок
питается от одного источника питания У12. В передатчике этого
комплекса надб установить модули Ml и Мб.
Подобную пятикомандную приемную аппаратуру (рис. 85)
можно установить в игрушку «Планетоход-7». Однако в этом слу-
чае придется использовать два блока питания. В передающем
устройстве для этой модели — те же модули Ml и Мб.
Схема приемной пятикомандной аппаратуры для патрульного \
катера с двумя ходовыми электродвигателями показана на рис. 86.
Источником питания служат две батареи 3336, соединенные после-
120
Рис. 87. Структурная схема приемного устройства на
пять команд, вариант 5
Рис. 88. Структурная схема приемного устройства первого оператора для
группового радиоуправления
WA1
М18
ul
Приемник
99
„Сигнал-1
и /
Вариант
2
т т
Цеишф- ратир (Рис.26) 20 П12\ Помета- щитный. (Рис.29) J 27 Юб\ УТ (Рис£9) 77] I Узел комму- mau.au. (РисТЭр) ZJ 11 ХУ I Узел ввига- телей (Рис.90,6)
16 28 12
17, 717 29 13
1(Г <7/7 19
19 31 15
б 32 33 6 6
блок
питания
Указатель
поворо-
тов
(Рис.61,6)
Рис. 89. Структурная схема приемного устройства второго оператора для
группового радиоуправления
121
довательно. Передающее устройство для управления патрульным
катером собрано на модулях Ml и Мб.
На рис. 87 изображена структурная схема приемного устрой-
ства пятикомандной модели пожарного катера с указателями
поворотов. Передающее устройство собрано на базе модулей Ml
и Мб.
Схема приемного устройства для модели пожарного катера
для первого оператора показана на рис. 88, а для второго — на
рис. 89. В этих моделях есть батарейный отсек для элементов 343,
поэтому модели питаются от одного источника каждая. В пере-
дающем устройстве для обоих операторов работают модели М2
и Мб.
Если приобрести сборную электромеханическую модель яхт
«Гренада» или «Фламинго», то, собрав к ней приемное устройст-
во по структурной схеме рис. 90, получим радиоуправляемую мо-
дель, выполняющую девять команд. Источником питания на на-
пряжение 6 В служат четыре элемента 373, а на 9 В — «Кро-
на» или шесть элементов 316, соединенных последовательно. Пе-
редающее устройство этой модели собрано на базе модулей
М3 и Мб.
Имея в распоряжении рулевую машинку от аппаратуры «Суп-
ронар», можно собрать модель с дискретно-пропорциональным
управлением. В качестве основы можно предложить модель
сторожевого катера или катамарана. Приемное устройство для
модели собирают по структурной схеме, показанной на рис. 91.
При этом необходимо заменить переменный резистор в рулевой
машинке на другой, сопротивлением 10 кОм. Блок питания
1 (УН) —батарея «Крона» или аккумуляторная 7Д-0,1, а
блок питания 2 (У 10) составлен из элементов 343. В передающем
устройстве для этих моделей работают модули М4, Мб.
Если удастся приобрести две рулевые машинки: одну от РУМ-2
для привода шкота, другую от «Супронара» для привода руля,
то в яхту можно установить приемное устройство по структурной
схеме рис. 92. В блоке питания У10 используют четыре элемента
373, а в У11 — шесть элементов 316. В передающем устройстве
для этой модели установлены модули М5 и Мб.
Мы рассмотрели несколько вариантов структурной схемы при-
емного устройства для различных моделей. Описанный в книге
набор модулей позволяет собрать много других вариантов при-
емного устройства. Мы надеемся, что читатели смогут это сделать
самостоятельно.
В заключение несколько советов начинающим моделистам.
Необходимо устанавливать антенну приемника в модели как
можно дальше-от тяговых двигателей, которые во время работы
создают помехи. Провод от антенны следует прокладывать дальше
от проводов питания электродвигателей, а плату приемника моде-
ли устанавливать по возможности ближе к вводу антенны и даль-
ше от электродвигателей.
122
Рис. 90. Структурная схема приемного устройства на три одновременные
команды
Рис. 91. Структурная схема приемного устройства дискретно-пропорциональ-
ного управления
123
Рис. 92. Структурная схема приемного устройства для яхты
Для подведения напряжения от батарей целесообразно приме-
нять разъемы.
Приемное устройство модели по выбранной структурной схеме
следует вначале смонтировать на макетной плате, проверить ра-
боту с теми источниками питания, с какими модель реально будет
работать, убедиться, что аппаратура бесперебойно выполняет
все команды, и только тогда приступать к изготовлению оконча-
тельного варианта печатных плат приемного устройства.
При пайке микросхем надо пользоваться паяльником мощ-
ностью не более 40 Вт. Продолжительность пайки одного вывода
не должна превышать 2 с. Монтаж следует вести луженым прово-
дом ПЭВ-2 диаметром 0,1...0,3 мм.
После окончания монтажа передатчика или приемника обя-
зательно удаляют кисточкой, смоченной в спирте или ацетоне,
остатки флюса — они могут быть причиной неудовлетворительной
работы узлов аппаратуры.
Необходимо учесть, что первоначальная настройка передат-
чика и сверхрегенеративного детектора нарушается при изменении
длины передающей и приемной антенн.
Окончательно налаживают модель на открытой площадке с
помощником, роль которого сводится к наблюдению за выполне-
нием команд оператора.
Литература
1. Гюнтер Миль. Электронное дистанционное управление моделями.—
М.: ДОСААФ, 1980.
2. Войцеховский Я. Дистанционное управление моделями.— М.:
Связь, 1977.
3. Васильченко М. Е., Дьяков А. В. Радиолюбительская теле-
механика.— М.: Энергия, 1979.
,4 . Алексеев С. Применение микросхем серии К176.— Радио, 1984,
№ 4...6.
5. Свобода И. Модульные транзисторные усилители и приемники.—
М.: Энергия, 1976.
6. Химические источники тока. Учебный плакат.— Радио, 1976, № 6...11.
7. Гюнтер Миль. Модели с дистанционным управлением.— Л.: Судо-
строение, 1984.
8. Потапов В., Хухра Ю. Пилотажные радиоуправляемые модели
самолетов.— М.: ДОСААФ, 1965.
9. Отрященко Ю. Азбука радиоуправления моделями.— М.: Детская
литература, 1965.
10. Плотников В. В. Аппаратура радиоуправления моделями.— М.:
Энергия, 1980.
11. Путятин Н. Н. Радиоуправляемые модели.— М.: Энергия, 1976.
12. Зуев В. П. Модельные двигатели.— М.: Просвещение, 1973.
13. К а т и и Л. Н. Проектирование радиоуправляемых моделей кораблей
и судов.— М.: ДОСААФ, 1969.
14. В а с и л ь ч е н к о М. Е., Дьяков А. В. Радиолюбительская теле-
механика.— М.: Радио и связь, 1986.
15. Гюнтер Миль. Электрические приводы для моделей.— М.: ДОСААФ,
1986.
16. Ильин В. А. Телеуправление и телеизмерение.— М.: Энергоиздат,
1982.
17. Туте вич В. Н. Телемеханика.— М.: Высшая школа, 1985.
18. Пышки н И. М., Дежурный И. И., Талазин В. Н. и
Ч ви л ев Г. Д. Системы подвижной радиосвязи.— М.: Радио и связь, 1986.
19. Справочник по слаботочным электрическим реле. / Сост. И. Г. Иглов-
ский, Г. В. Владимиров.— Л.: Энергоатомиздат, 1984.
20. Справочник. Элементы индикации. / В. С. 3 г у р с к и й, Б. Л. Л и-
с и ц и н.— М.: Энергия, 1980.
125
21. Справочник по электрическим конденсаторам. / Под ред. И. И. Чет-
верткова и В. Ф. Смирнова.— М.: Радио и связь, 1983.
22. Справочник. Полупроводниковые приборы. Транзисторы. / Под ред.
Н. Н. Горюнов а.— М.: Энергоиздат, 1982.
23. Справочник. Полупроводниковые приборы — диоды, тиристоры, оптрон-
ные приборы. / Под ред. Н. Н. Горюн ов а.— М.: Энергоатомиздат, 1984.
24. Справочник радиолюбителя-конструктора.— М.: Радио и связь, 1983.
25. Справочник. Интегральные микросхемы. / Под ред. Б. В. Т а р а б р и-
н а.— М.: Радио и связь, 1984.
26. Борисов В., Проскурин А. Аппаратура радиоуправления моде-
лями «Сигнал-1».— Радио, 1982, № 8.
27. Борисов В., Проскурин А. «Сигнал-1» своими руками.— Радио,
1983, № 12.
28. Борисов В., Проскурин А. Модифицированный «Сигнал-1».-
Радио, 1984, № 6.
29. Проскурин А. Передатчик для двоих.— Моделист-конструктор,
1986, № 1...3.
30. Проскурин А. Четыре реле на воссмо команд.— Моделист-конст-
руктор, 1981, № 6, 7.