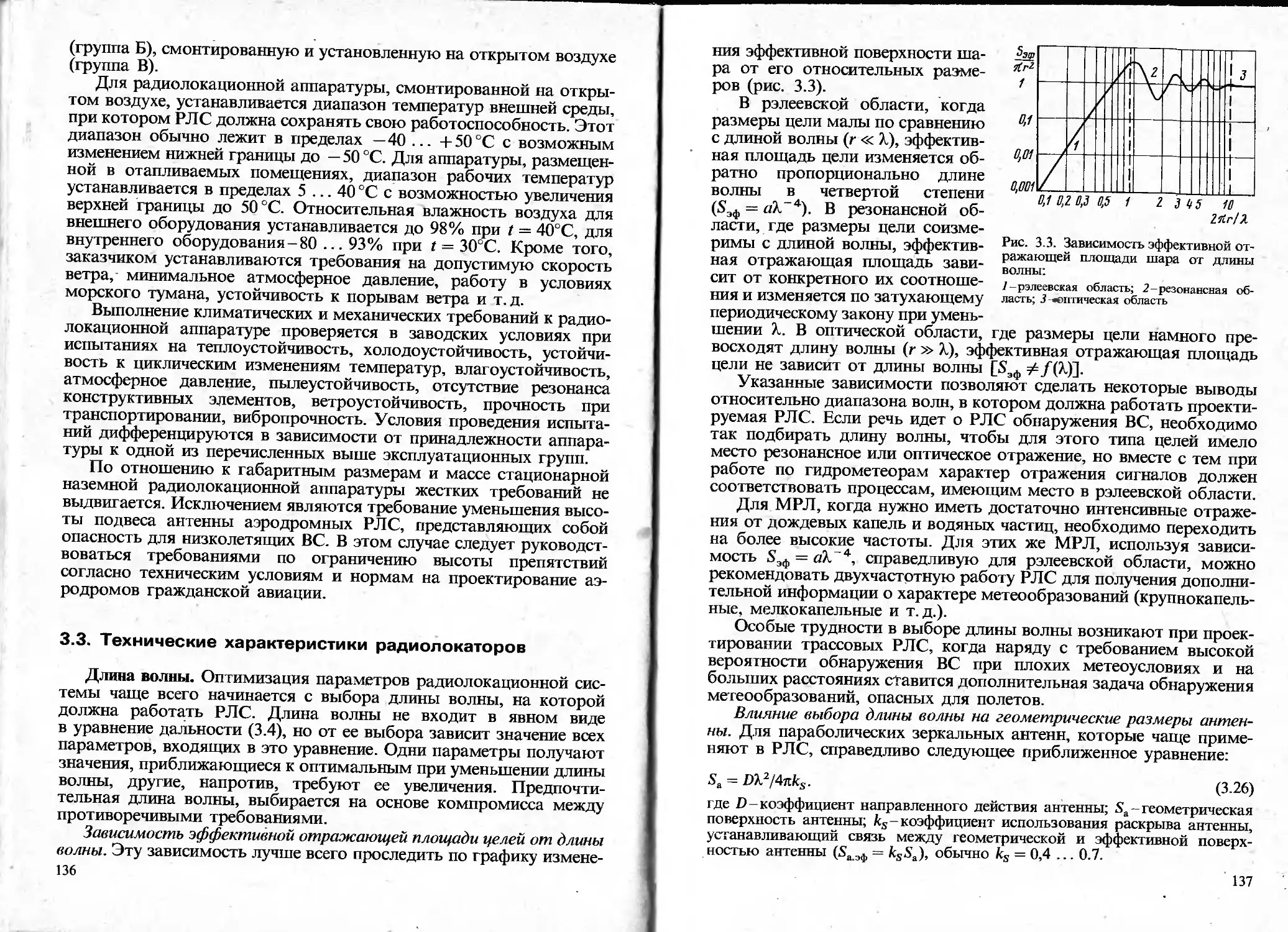
/

Author: Перевезенцев Л.Т. Огарков В.Н.
Tags: техника средств транспорта управление предприятиями, организация производства, торговли и транспорта авиация радиолокация авиатехника гражданская авиация
ISBN: 5-277-00610-9
Year: 1991



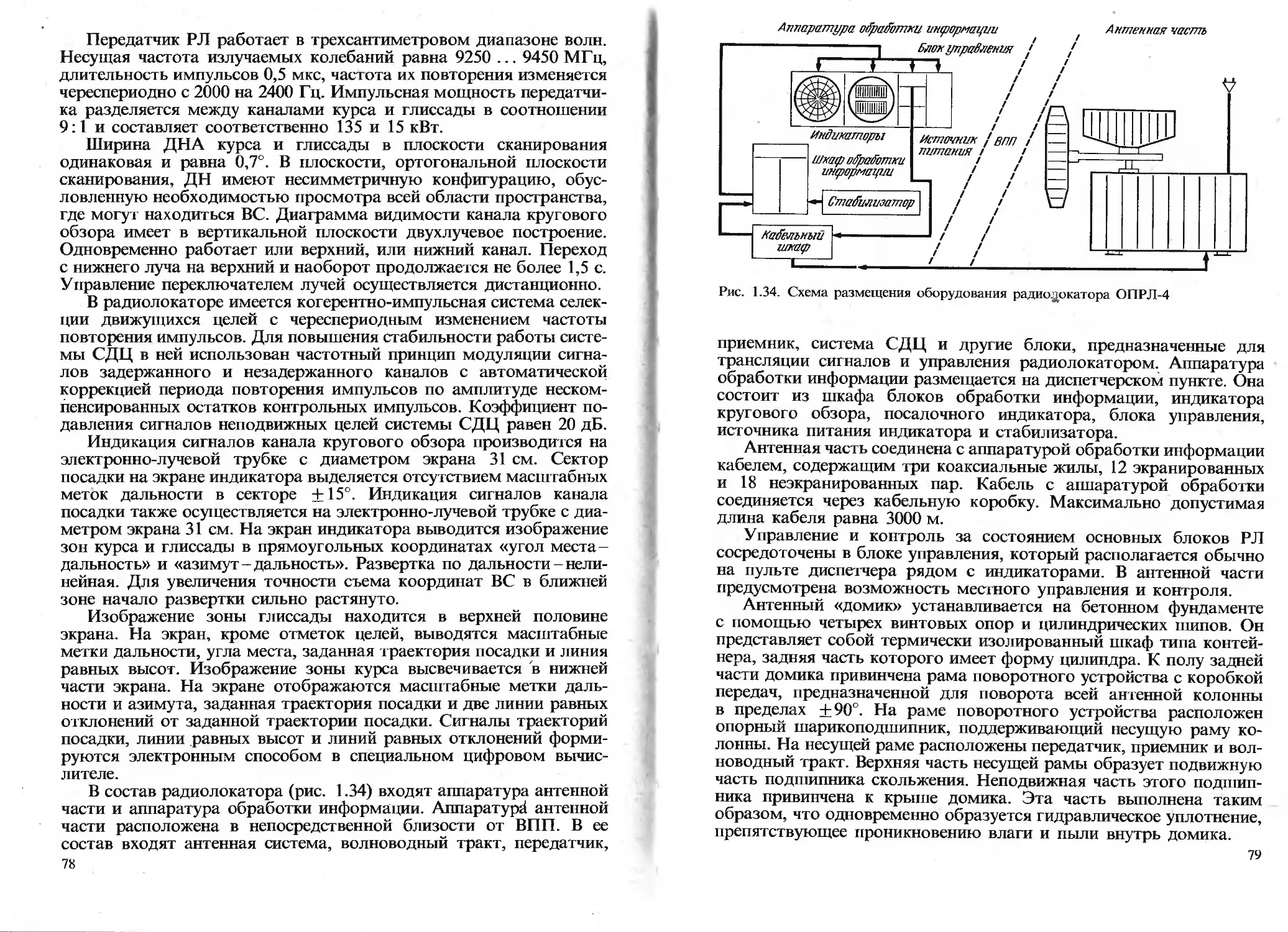
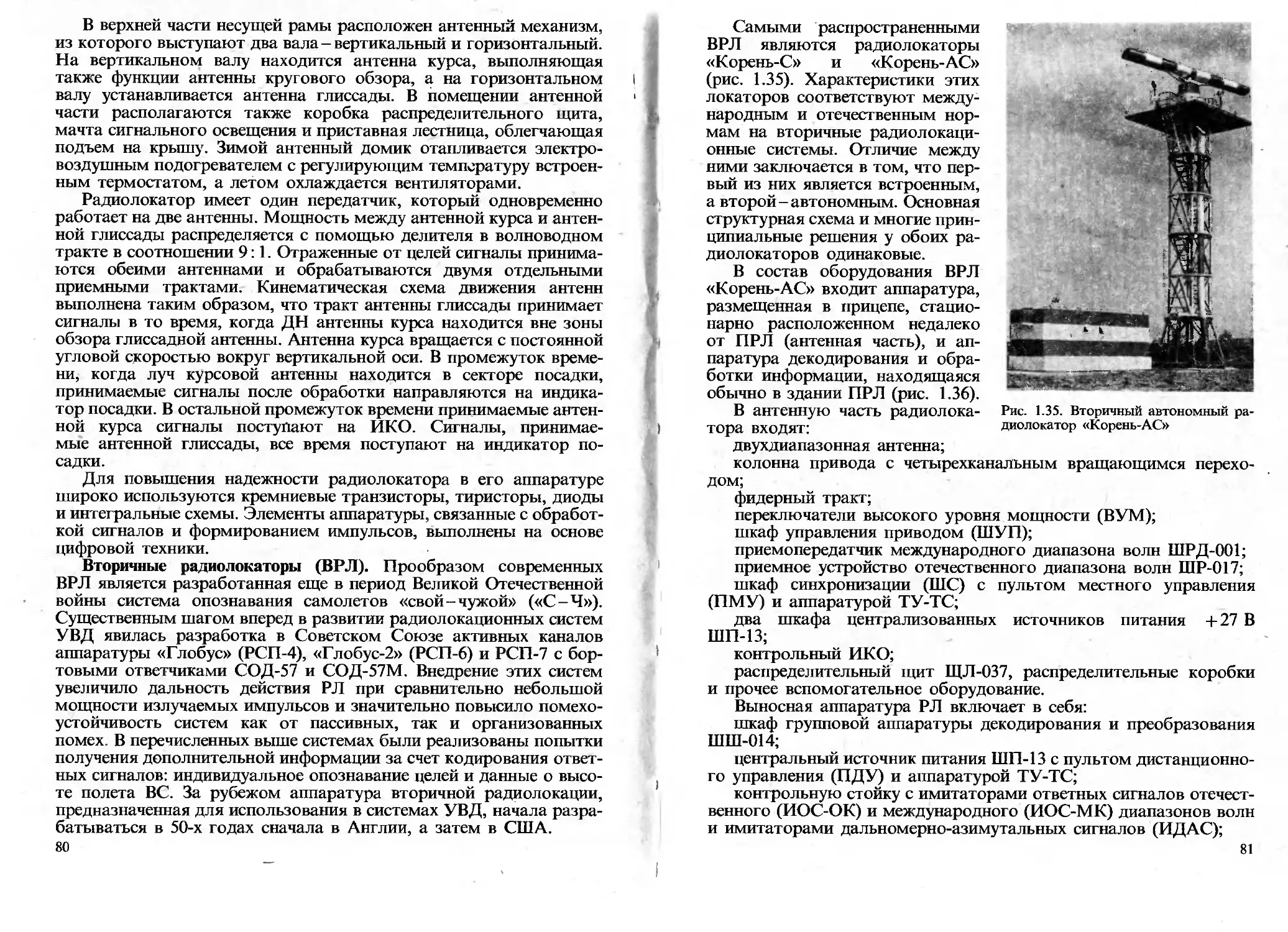
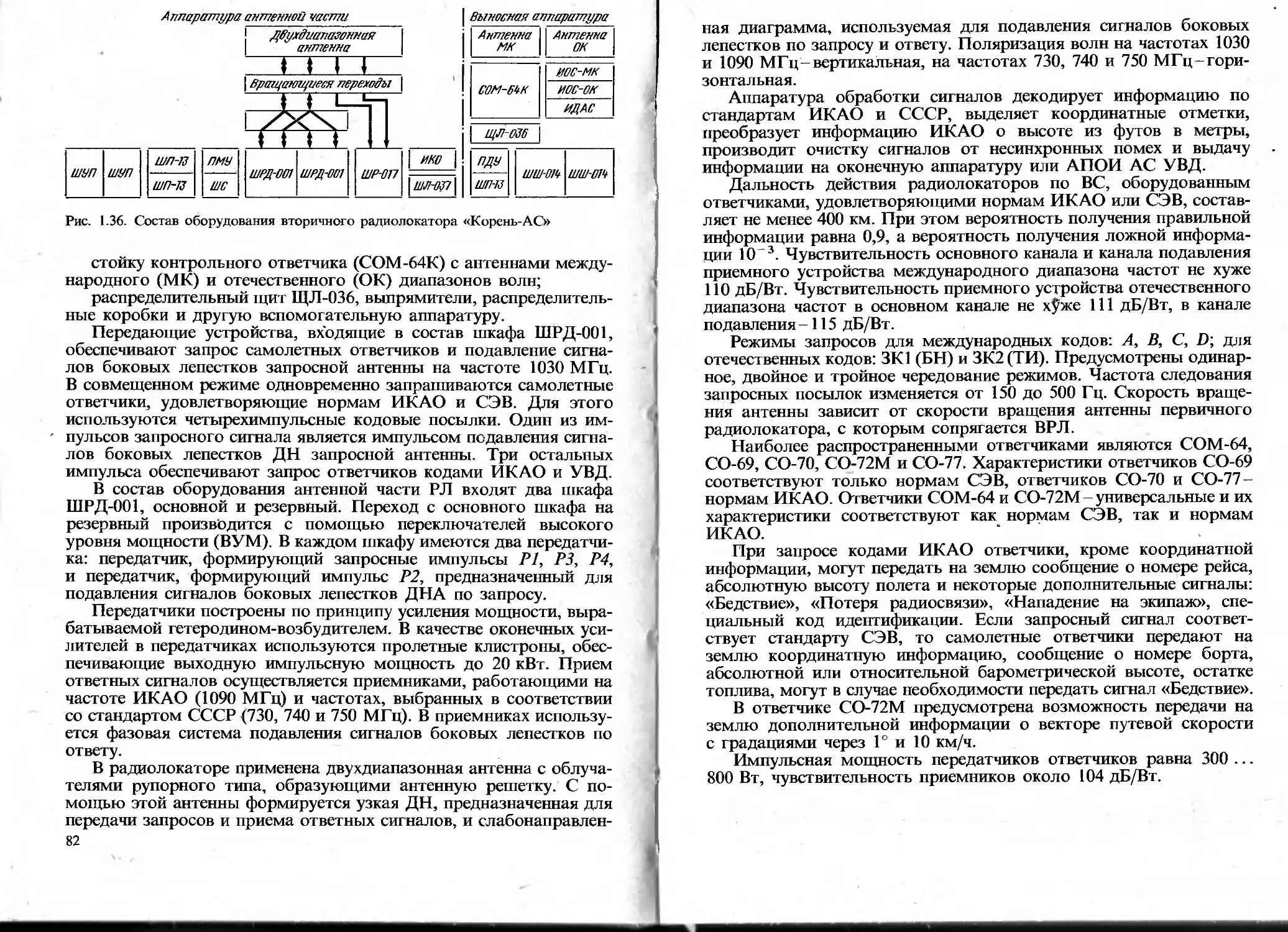
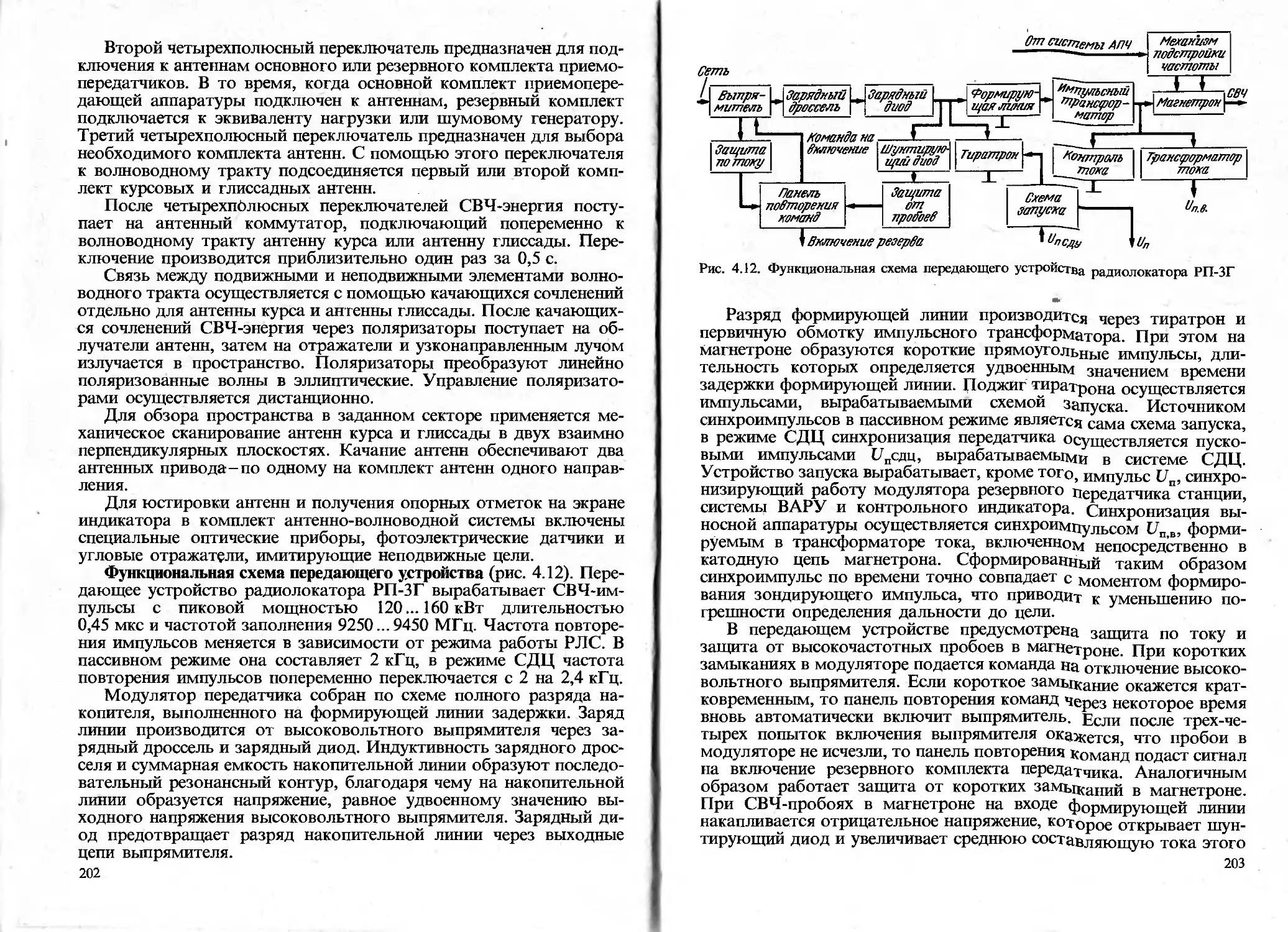
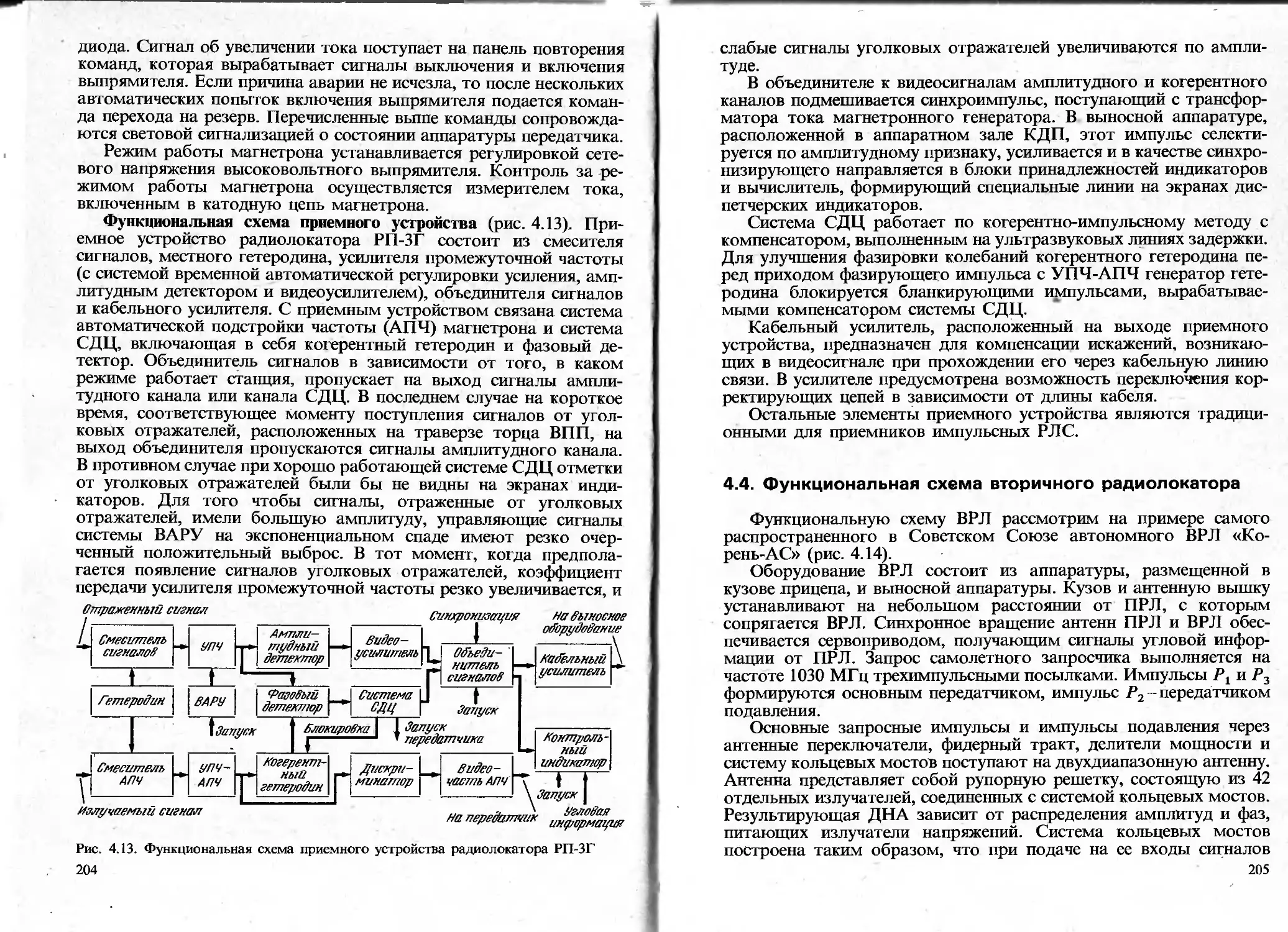
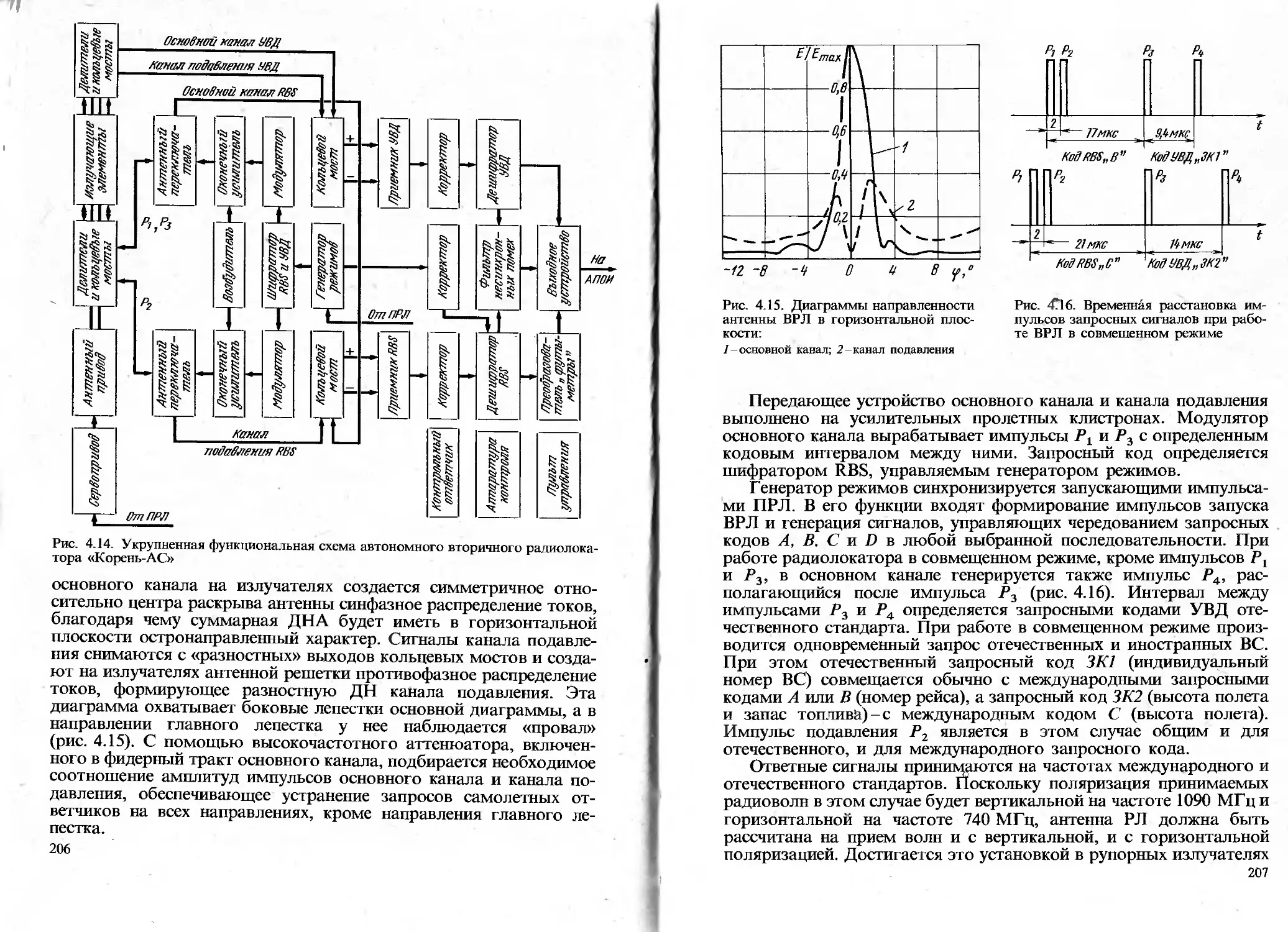
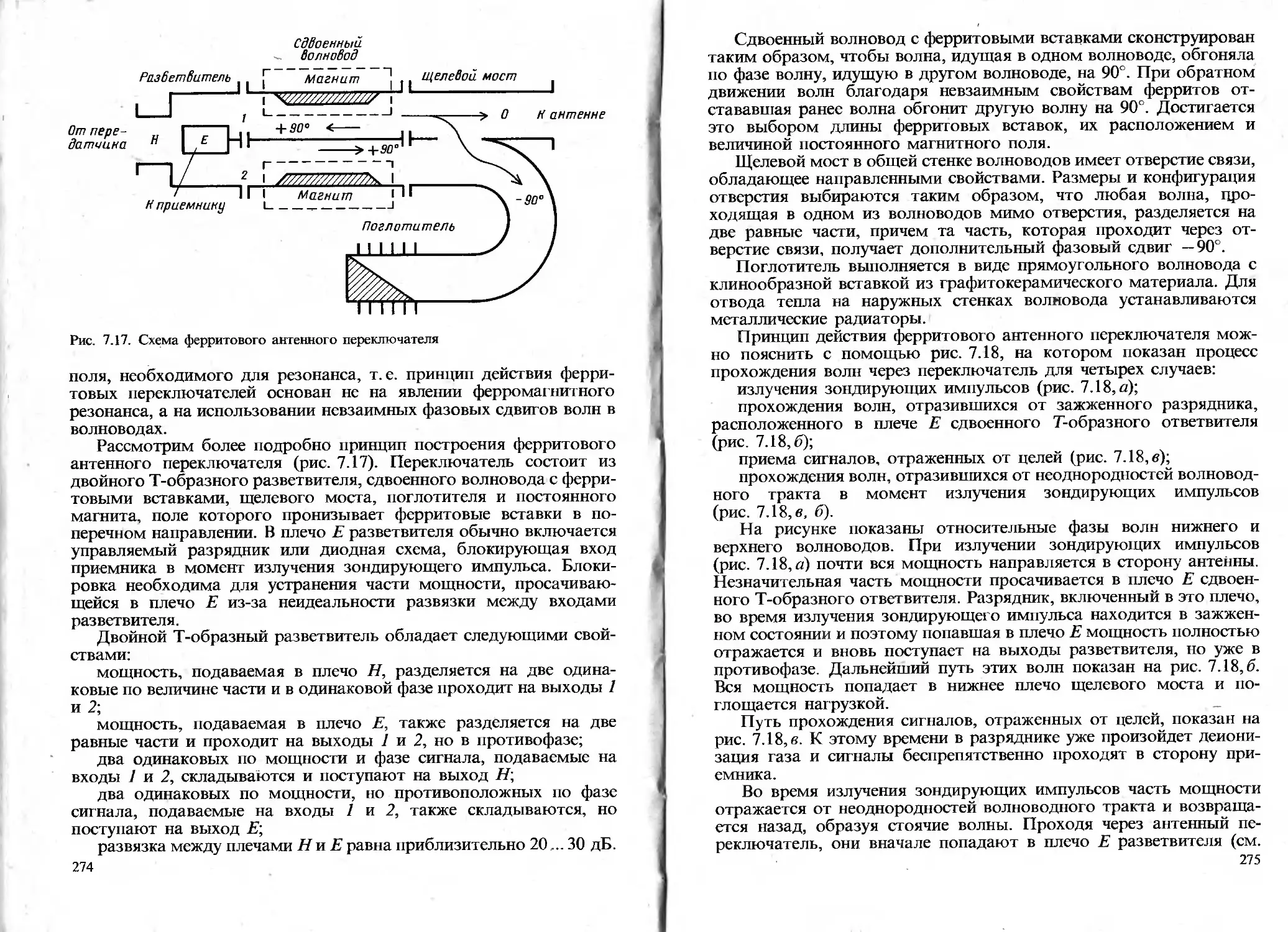
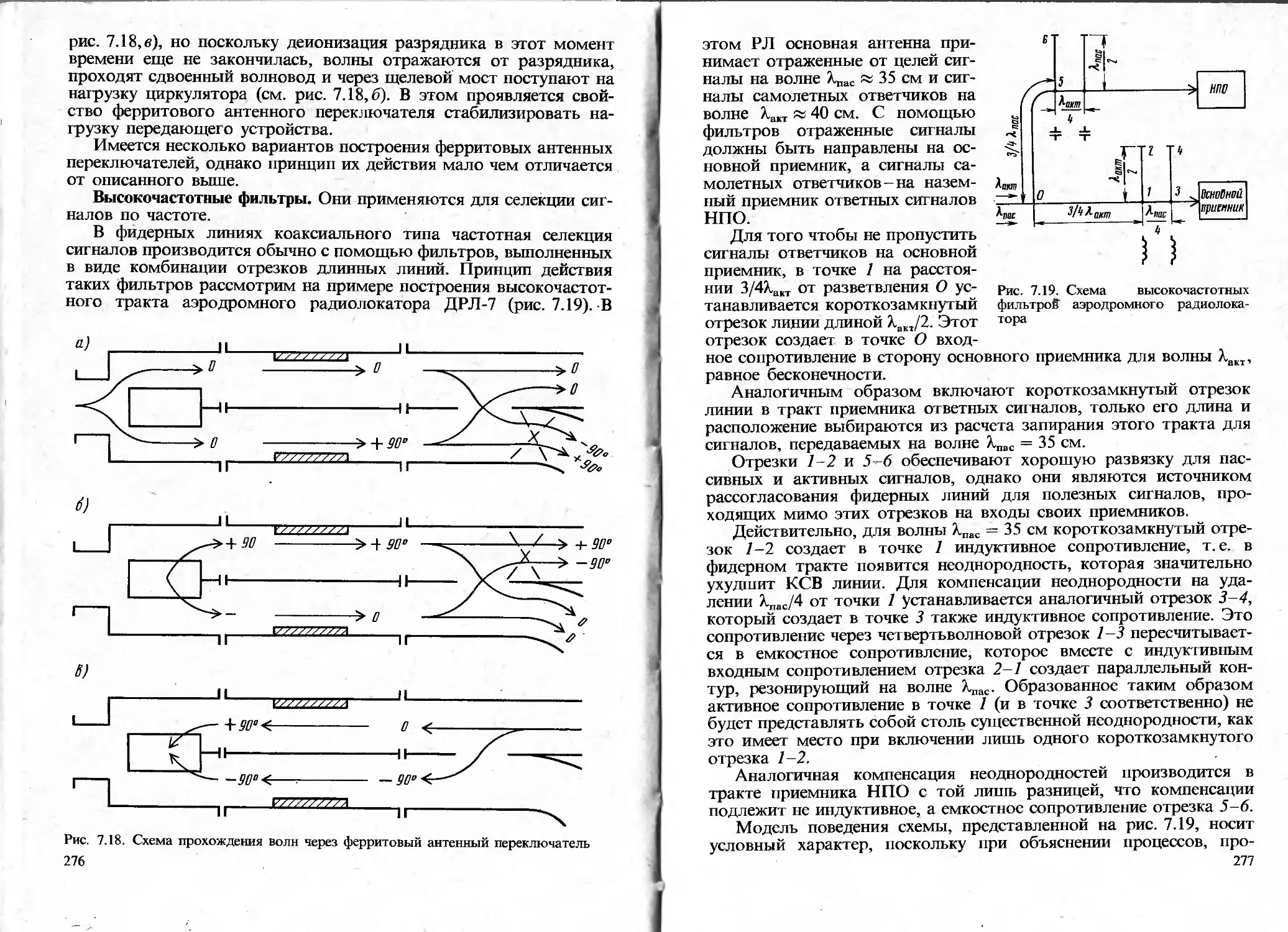
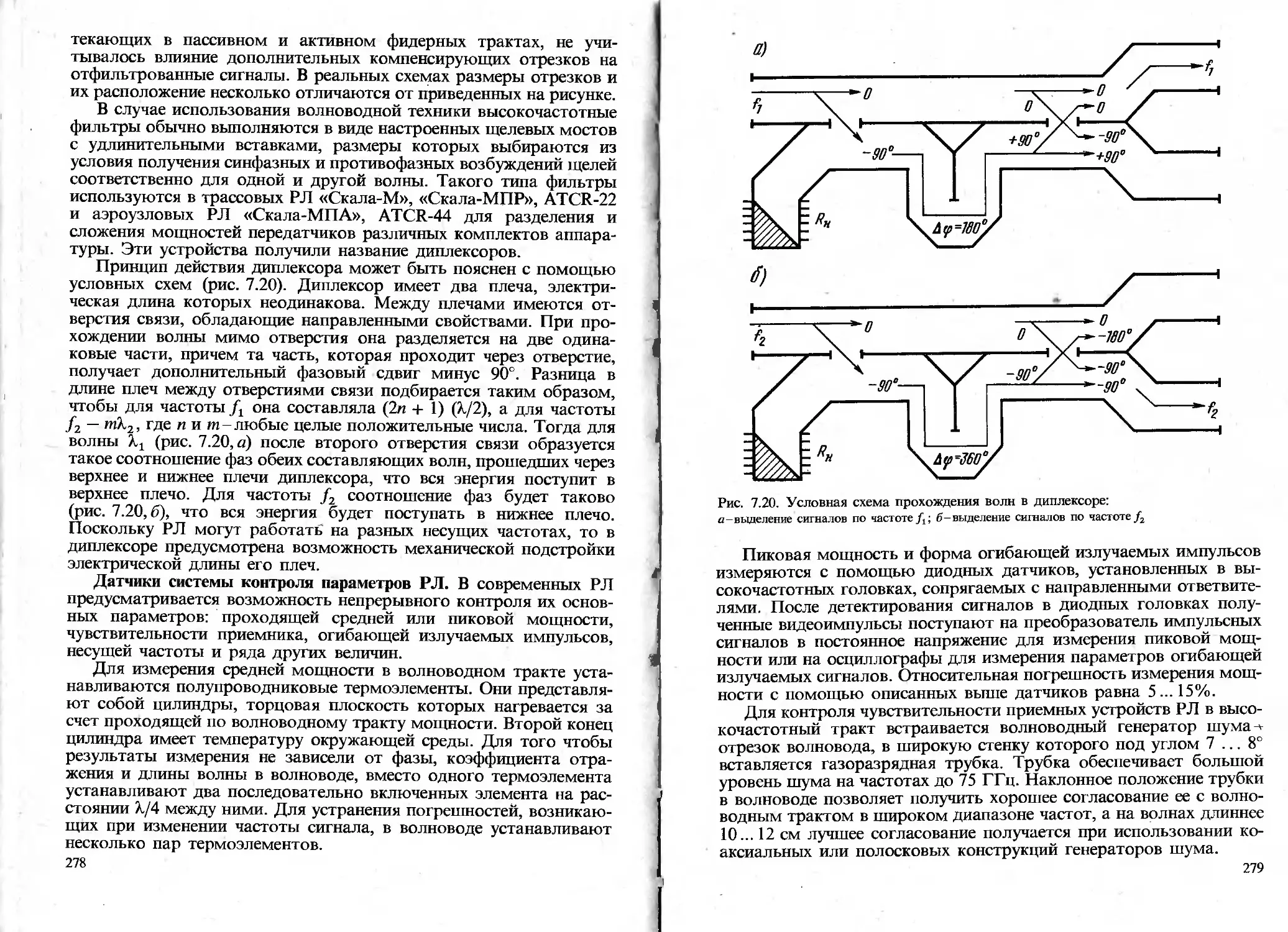
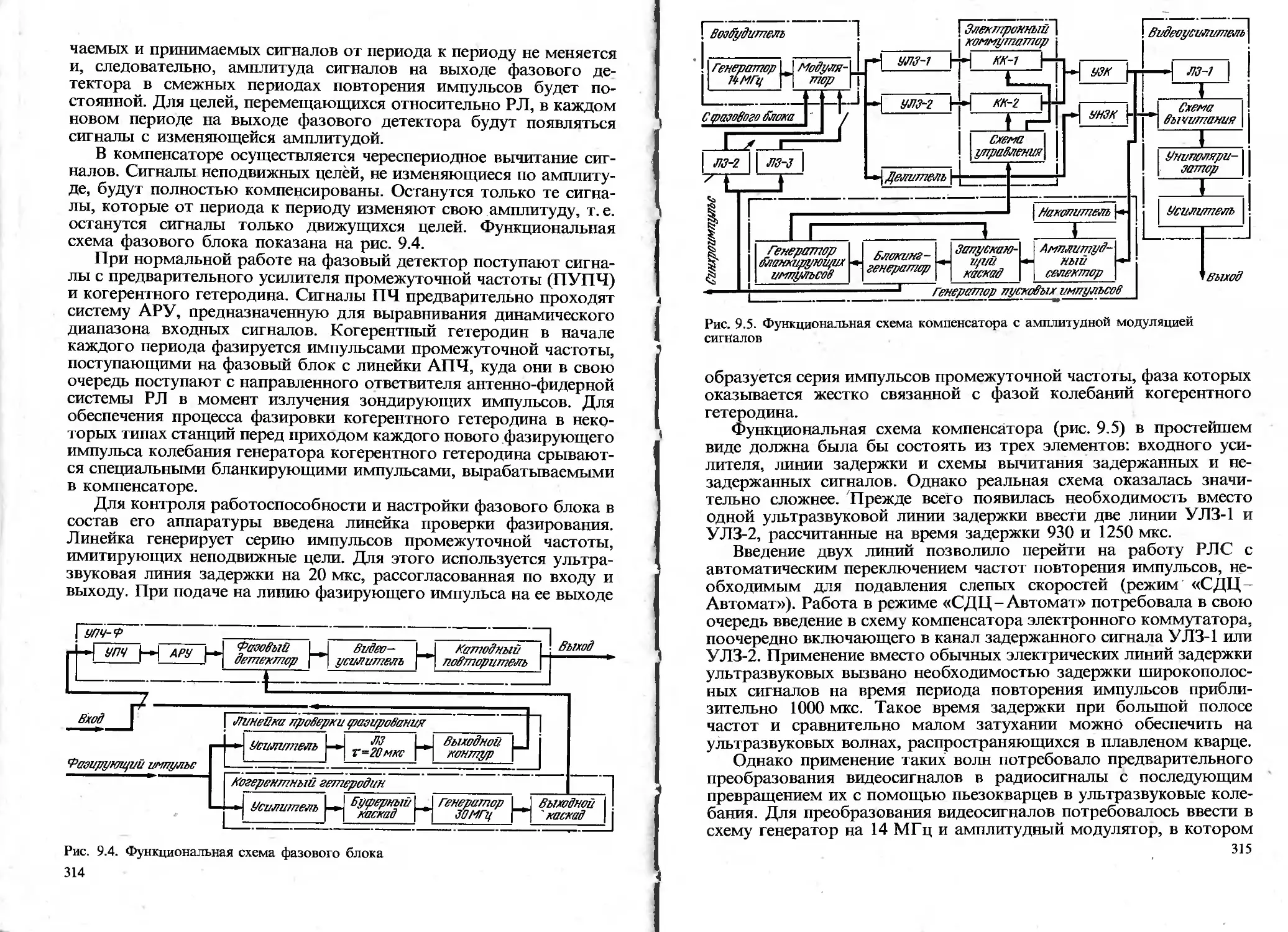
Text
Л.т. ПЕРЕВЕЗЕНЦЕВ
В. Н. ОГАРКОВ
Радиолокационные
системы
аэропортов
ИЗ^ТЕ.ЛЬСтаО.^РАНСП-ОРТ'
Л.Т. ПЕРЕВЕЗЕНЦЕВ
В. Н. ОГАРКОВ
Радиолокационные
системы
аэропортов
ИЗДАНИЕ ВТОРОЕ,
ПЕРЕРАБОТАННОЕ И ДОПОЛНЕННОЕ
Допущено
Управлением учебных заведений МГА
в качестве учебника для студентов
высших учебных заведений
гражданской авиации
МОСКВА "ТРАНСПОРТ" 1991
УДК 629 7.621.396.966:651.71 (075.8)
Перевезенцев Л. Т., Огарков В. Н. Радиолокационные системы
аэропортов' Учеб, для вузов гражданской авиации.-2-е изд., псрераб.
и доп.-М.: Транспорт, 1991.-360 с.
Изложены общие принципы построения наземных радиолокацион-
ных систем гражданской авиации, сведения о технической реализации
этих принципов, описаны структурные и функциональные схемы совре-
менных радиолокационных станций. Приведены также сведения о по-
строении и принципе действия основных узлов, входящих в состав
радиолокационных станций различного назначения.
1-е изд. вышло в 1981 г., 2-е изд. переработано в соответствии
с новой программой курса, в нем отражены последние достижения
радиолокационной техники.
Для студентов радиотехнических факультетов вузов гражданской
авиации, а также студентов смежных специальностей. Может быть
полезен специалистам, эксплуатирующим радиолокационную аппа-
ратуру.
Ил. 180, табл. 10, библиогр. 11 назв.
Главы 1...9 написаны Л.Т. Персвсзенцевым, главы 10, 11-
В. Н. Огарковым.
Рецензент: заведующий кафедрой транспортного радиообору-
дования МИИГА А. А. Кузнецов
Заведующий редакцией Л.В. Васильева
Редактор И.В. Иванова
3206040000-219 _____
П----------------200-91
049(01)-91
ISBN 5-277-00610-9
© Издательство «Транспорт», 1981
© Л. Т. Перевезенцев, В. Н. Огарков,
1991, с изменениями и дополнениями
ПРЕДИСЛОВИЕ
Радиолокационные станции, поскольку они являются основным
средством получения оперативной информации о местоположении
воздушных судов в любой момент времени независимо от метеоро-
логических условий. В связи с этим действующими учебными
планами для студентов факультетов радиотехнического профиля
высших учебных заведений гражданской авиации предусматри-
вается изучение курса «Радиолокационные системы аэропортов».
Задача курса-изучение принципов построения наземных радио-
локационных систем и ознакомление с конкретными радиолока-
ционными станциями, применяемыми в гражданской авиации для
сбора данных, необходимых для управления воздушным движе-
нием.
Парк радиолокаторов, находящихся в эксплуатации, все время
пополняется новыми типами оборудования, и техника выполнения
отдельных элементов радиолокаторов непрерывно совершенствует-
ся. Появились новые радиолокационные станции и комплексы,
использующие более современные принципы формирования зонди-
рующих сигналов, получения, обработки и отображения информа-
ции о воздушной обстановке. Существенные изменения произошли
в элементной базе. На смену радиолокаторам второго поколения
пришли радиолокаторы третьего поколения. В системах обработки
и отображения информации широкое применение нашла цифровая
и микропроцессорная техника. Новые разработки радиолокацион-
ной аппаратуры основаны на использовании принципа адаптации
к условиям внешней среды и помеховой ситуации. Большие измене-
ния произошли в идеологии построения вторичных радиолокацион-
ных систем.
Все эти обстоятельства определили необходимость изменения
содержания курса «Радиолокационные системы аэропортов» и
соответственно написания нового варианта учебника.
При разработке структуры учебника авторы учитывали, что он
предназначен в первую очередь для студентов вузов эксплуатацион-
ного профиля. Поэтому описание принципов, методов и схем
построения радиолокационных станций рассматривается в учебнике
с позиции нужд эксплуатации. В то же время исключены все
разделы, в которых рассматриваются специальные вопросы техни-
ческой эксплуатации радиолокационной техники, поскольку в вузах
гражданской авиации этот материал изучается в дополнительных
курсах, предусмотренных учебным планом.
з
ВВЕДЕНИЕ
Безопасность и регулярность полетов воздушных судов (ВС),
а также экономические показатели воздушного движения самолетов
гражданской авиации в значительной степени определяются радио-
техническими средствами обеспечения полетов. С помощью радио-
технических средств диспетчеры службы движения эксплуатацион-
ных авиапредприятий решают такие важнейшие задачи, как управ-
ление движением ВС на земле и в полете, предотвращение конф-
ликтных ситуаций в воздухе, обеспечение безопасных интервалов
между воздушными судами в вертикальной и горизонтальной
плоскостях, принятие своевременных мер по оказанию помощи
экипажам при особых случаях в полете.
Среди радиотехнических средств обеспечения полетов особое
место занимают радиолокационные станции (РЛС), обладающие
информационными свойствами, которые в большинстве случаев
выдвигают их на первое место по эффективности использования
в автоматизированных и неавтоматизированных системах управле-
ния воздушным движением (УВД). К таким характерным свойствам
относятся:
высокая оперативность получения данных о координатах само-
летов и дополнительной полетной информации, необходимой для
УВД (номер рейса, высота, запас топлива, вектор скорости, сигналы
об аварийных ситуациях);
достаточно высокая степень объективности полученных данных,
поскольку субъективный фактор в радиолокационных станциях
проявляется лишь на последней стадии переработки информации
при считывании ее диспетчером;
полнота информации о состоянии воздушной обстановки во всей
контролируемой зоне управления;
наглядность представления информации о местоположении са-
молетов и в некоторых случаях даже траекторий их движения, так
как радиолокационное изображение воздушной обстановки на экра-
нах индикаторов РЛС, как правило, является как бы уменьшенной
моделью реального расположения самолетов в пространстве;
высокая точность и надежность наземных РЛС, поскольку усло-
вия работы аппаратуры на земле в стационарных условиях позволя-
ют использовать резервирование, уменьшить диапазон климатичес-
ких воздействий на оборудование, увеличить размеры антенн, защи-
тить антенны от аэродинамических нагрузок, облегчить условия
обслуживания аппаратуры.
Потребители радиолокационной информации предъявляют к
РЛС различные зачастую противоречивые требования, удовлетво-
4
рить которые одновременно одна РЛС не может. Поэтому они
дифференцируются по определенным группам в зависимости от
функций различных служб, использующих информацию РЛС. В со-
ответствии с таким распределением все РЛС разделяются на опре-
деленное число видов. В некоторых случаях разрабатываются ра-
диолокационные комплексы (РЛК), совмещающие функции двух
или большего числа видов радиолокационных станций.
Кроме РЛС, информация которых непосредственно использует-
ся для УВД, в гражданской авиации нашли применение и другие
виды РЛС, как, например, посадочные, обзора летного поля, метео-
рологические, вторичные. Первые из них используются для контро-
ля за процессом захода самолетов на посадку. Радиолокаторы (РЛ)
обзора летного поля позволяют диспетчеру по рулению в условиях
плохой видимости определять взаимное расположение ВС, находя-
щихся на стоянках, рулежных дорожках, взлетно-посадочной полосе
(ВПП). Метеорадиолокаторы обнаруживают очаги гроз и ливневых
осадков, оказывая тем самым большую помощь диспетчерам аэро-
портов в обеспечении безопасности полетов. Вторичные РЛ позво-
ляют получать дополнительную полетную информацию о ВС, без
которой невозможно эффективное функционирование автоматизи-
рованных систем УВД.
Начало развития радиолокационных систем в Советском Союзе
относится к тридцатым годам нынешнего столетия. Непосредствен-
ным толчком к созданию радиолокационных методов обнаружения
объектов послужило развитие военной авиации и возникновение
в связи с этим необходимости заблаговременного обнаружения ВС
противника. Этим объясняется и то обстоятельство, что основным
заказчиком и потребителем радиолокационной техники и в нашей
стране, и за рубежом были на первых этапах развития радиолока-
ции различного рода военные ведомства.
Важным этапом в развитии радиолокационных средств в нашей
стране следует считать опыты Центральной радиолаборатории
(ЦРЛ) в январе 1934 г., впервые в Советском Союзе доказавшие
экспериментальным путем возможность обнаружения ВС с по-
мощью отраженных от них радиоволн. Руководителем этих работ
был инженер Ю. К. Коровин. В дальнейшем было принято решение
дублировать работы ЦРЛ аналогичными работами в другой науч-
но-исследовательской организации. К исследованиям был привлечен
Ленинградский электротехнический институт (ЛЭФИ). Непосред-
ственным руководителем работ был назначен начальник радиосек-
тора института инженер Б. К. Шембёль. В качестве основного на-
правления был принят метод непрерывного излучения радиоволн.
В 1934, 1935 гг. ЛЭФИ был изготовлен экспериментальный
макет зенитной установки, представлявший собой систему с двумя
параболическими антеннами диаметром 2 м. Приемник и излучаю-
щая аппаратура на магнетроне были смонтированы у основания
антенн. Первые испытания макета показали, что с его помощью
5
можно обнаружить легкие самолеты на расстоянии 6 км. При этих
же испытаниях было впервые замечено, что сила приема отражен-
ных от поверхности самолета радиоволн все время менялась, что
объяснялось сложным видом диаграмм направленности (ДН) вто-
ричного излучения.
Не меньшее значение для развития радиолокационной техники
имели также исследования по радиообнаружению самолетов, про-
водимые для службы противовоздушной обороны. Идея обнару-
жения самолетов с помощью радиоволн в системе ПВО возник-
ла у инженера П. К. Ощепкова. Во второй половине 1933 г.
П. К. Ощепков в своем докладе изложил принципы противовоздуш-
ной обороны на основе новых технических средств обнаружения
самолетов с применением радиоволн. В феврале 1934 г. Управление
ПВО заключило с ЛЭФИ договор на изучение отражений электро-
магнитных волн от различных поверхностей, разработку аппарату-
ры радиообнаружения и проведение первых опытов по обнаруже-
нию самолетов.
В июле 1934 г. ЛЭФИ предъявил для испытаний радиоаппарату-
ру под условным названием «Рапид», состоящую из излучающего
устройства непрерывного действия, рассчитанного на волну 4,7 м,
приемного устройства суперрегенеративного типа и приемной ан-
тенны в виде горизонтального вибратора. Индикация целей осу-
ществлялась с помощью наушников по характерным биениям,
обусловленным интерференцией прямой и отраженной волньь При-
емная аппаратура устанавливалась на расстоянии 11 ... 50 км от
излучающей установки. Результаты испытаний аппаратуры показа-
ли, что самолет обнаруживался во всех случаях, когда он находился
в зоне радиусом до 3 км от приемного устройства и высоте полета
до 1000 м.
Разработка, изготовление и испытание аппаратуры «Рапид»
явились важным этапом в истории отечественной радиолокации.
Если опыты ЦРЛ в январе 1934 г. впервые в СССР доказали
возможность обнаружения ВС с помощью отраженных от них
радиоволн, то работы ЛЭФИ показали уже реальную возможность
создания средств радиолокации с определенными тактическими
характеристиками. Считается, что аппаратура «Рапид» представля-
ла собой первую в СССР практически действующую систему радио-
обнаружения самолетов. На базе этой системы в 1937 ... 1938 гт.
была создана аппаратура «Ревень», которая представляла собой
систему радиообнаружения самолетов линейного типа.
Излучающие и приемные станции системы «Ревень» монтирова-
лись на автомашинах и располагались на местности линейно так,
чтобы расстояние между ними не превышало 35 км. Такое размеще-
ние станций создавало так называемую «электромагнитную заве-
су», пронизывая которую самолеты обнаруживались по интерфе-
ренции прямого и отраженного сигналов. В сентябре 1939 г. аппара-
тура радиообнаружения самолетов «Ревень» была принята на вб-
6
оружение под названием РУС-1 (радиоулавливатель самолетов).
Аппаратура прошла боевую проверку в системе ПВО Ленинграда
во время войны с Финляндией и во время Отечественной войны-в
системе ПВО Дальнего Востока и Закавказья. Дальнейшее произ-
водство РУС-1 было прекращено, так как к этому времени появи-
лись более совершенные станции дальнего обнаружения, работаю-
щие в импульсном режиме.
Следующий значительный шаг в развитии отечественной радио-
локационной техники был связан с успешными работами Ленин-
градского физико-технического института (ЛФТИ) по созданию
импульсной установки обнаружения самолетов. Первая эксперимен-
тальная импульсная установка радиообнаружения была создана
ЛФТИ в течение 1936 ... 1937 гг.
Новый экспериментальный макет, изготовленный институтом
в 1938 г., имел передатчик, выполненный на генераторной лампе
с импульсной мощностью 50 кВт. Макет работал на волне 3,7 м
с длительностью импульсов 10 мкс и частотой повторения 900 Гц.
Антенна излучающего устройства состояла из пяти директоров
и трех рефлекторов, укрепленных на мачте высотой 12 м. Приемная
станция располагалась на расстоянии 1 км от излучающей и имела
такую же антенну. Во время испытаний обе антенны были ориенти-
рованы на самолет (цель). Испытания, проведенные в августе
1938 г., показали, что, несмотря на конструктивное несовершенство
изготовленного макета, ВС при высоте полета 1500 м обнаружива-
лось на расстоянии до 50 км. Это был несомненный успех радиоло-
кационной техники, показавший, что проблема дальнего радиооб-
наружения ВС с научно-технической точки зрения решена. Кроме
того, было доказано неоспоримое преимущество импульсных ра-
диолокационных устройств перед аппаратурой, работавшей на
принципе непрерывного излучения. В 1941 г., учитывая большой
вклад в создание первых станций дальнего обнаружения самолетов,
группе сотрудников ЛФТИ Ю. Б. Кобзареву, П. А. Погорелко и
Н. Я. Чернецову была присуждена Государственная премия.
После 1938 г. шла доработка макета импульсного радиолокато-
ра. Был изготовлен подвижной вариант радиообнаружителя. Этот
вариант получил название «Редут». Испытания, проведенные в
1939 г., показали, что с помощью установки «Редут» можно обнару-
живать ВС, летящие на высоте 7500 м, на удалении до 100 км.
В июле 1940 г. станция «Редут» под названием РУС-2 была принята
на вооружение войск ПВО.
Радиолокатор РУС-2 имел некоторые конструктивные недостат-
ки, связанные прежде всего с наличием двух отдельных антенн-
приемной и передающей. Для улучшения эксплуатационных качеств
станции необходимо было перейти к одной антенне, что позволило
бы исключить один автомобиль с вращающейся кабиной, отказать-
ся от системы синхронизации поворота антенн и перейти от враща-
ющейся кабины к вращающейся антенне. В мае 1941 г. промышлен-
7
ность изготовила первые два радиолокатора с совмещенной антен-
ной. Это был так называемый «упаковочный» вариант РУС-2
(«Пегматит»), предполагающий перевозку радиоаппаратуры в укла-
дочных ящиках. В дальнейшем эта станция была принята на
вооружение под названием РУС-2с.
Начальный период войны в развитии радиолокации по дальнему
обнаружению ВС характеризовался ускоренной организацией се-
рийного производства радиолокаторов РУС-2 и РУС-2с. До конца
войны было выпущено около 600 таких радиолокаторов. Послево-
енный период развития радиолокационной техники характеризуется
прежде всего расширением сферы ее использования. Кроме приме-
нения в военном деле, значительную роль радиолокация стала
играть в различных отраслях народного хозяйства и в развитии
науки.
В гражданской авиации наземные радиолокационные средства
стали широко использоваться для УВД, обеспечения посадки в
сложных метеорологических условиях, получения данных о состоя-
нии атмосферы, для обзора летного поля и т.д.
Рассмотренные ранее радиолокаторы РУС-1, РУС-2, РУС-2с,
а также пришедшие им на смену П-3, П-8, П-10, П-12 были
предназначены для обеспечения боевой деятельности войск ПВО,
бомбардировочной и истребительной авиации. Дальнейшее разви-
тие реактивной авиации, в том числе и Гражданского воздушного
флота, поставили на очередь вопрос об аэродромном обеспечении
безаварийной посадки ВС. Необходимо было организовать службу
регулирования подхода ВС к аэродрому, очередности их посадки
и управление посадкой.
Первой аэродромной системой управления воздушным движени-
ем и посадкой была разработанная в 1947 ... 1950 гг. радиолокацион-
ная система «Материк». В нее входили обзорный радиолокатор
ОРЛ-1, диспетчерский радиолокатор ДРЛ-1, автоматический радио-
пеленгатор АРП-IM, посадочная радиомаячная аппаратура и обо-
рудование командно-диспетчерского пункта.
Обзорный радиолокатор ОРЛ-1 работал в метровом диапазоне
волн, обеспечивал дальность действия более 100 км, точность по
азимуту ± 2°, по дальности +1 км. Импульсная мощность передат-
чика составляла 80 ... 100 кВт. Антенна представляла собой четыре
отдельных устройства типа волновой канал, расположенных попар-
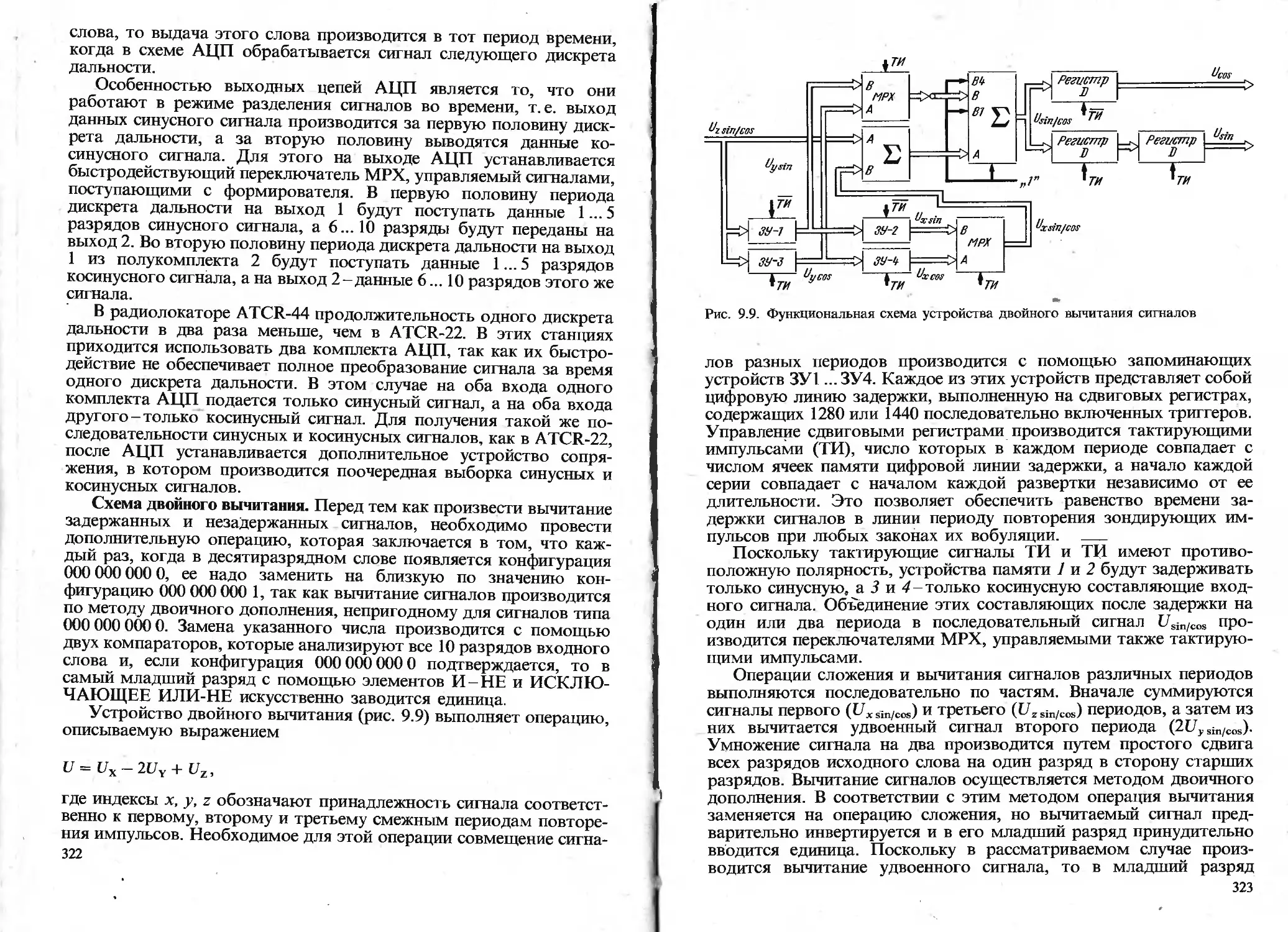
но в двух горизонтальных плоскостях. Диспетчерский радиолокатор
ДРЛ-1 в системе «Материк» был одним из основных средств
оперативного управления заходом ВС на посадку. Дальность дейст-
вия его была приблизительно 30 км, импульсная мощность излуче-
ния 30 кВт. Система «Материк» успешно прошла испытания и под
названием СП-50 долгие годы эксплуатировалась на аэродромах
ВВС и гражданской авиации.
В 1953 г. в эксплуатацию была введена подвижная радиолокаци-
онная система посадки самолетов РСП-4 («Глобус»), в которую,
8
кроме обзорного радиолокатора ОРЛ-4 и диспетчерского радиоло-
катора ДРЛ-4, входили также посадочные радиолокаторы ПРЛ-4,
а затем ПРЛ-5. Радиолокатор ОРЛ-4 в конструктивном отношении
был аналогичен обзорному радиолокатору ОРЛ-1, но отличался от
него устройством синфазного и противофазного подключения двух-
этажной антенной решетки. Это позволяло уменьшить провалы
в многолепестковой вертикальной ДН антенны и обеспечить тем
самым непрерывное наблюдение за ВС во всей зоне подхода
аэродрома. Радиолокатор работал в метровом диапазоне волн
и позволял обнаруживать ВС на удалении до 80 км. Мощность
передатчика в импульсе была равна 100 кВт, длительность импуль-
сов примерно 3 мкс.
Передатчик РЛ был выполнен на генераторе, собранном на двух
электронных лампах, и на модуляторе с накопительной искусствен-
ной длинной линией и вращающимся дскровым разрядником.
Антенная система состояла из четырех директорных антенн, распо-
ложенных в два яруса. Индикатор кругового обзора (ИКО) был
выполнен на электронно-лучевой трубке с большим послесвечением.
Синхронное вращение линии развертки с антенной достигалось за
счет механического вращения отклоняющих катушек, соединенных
с помощью гибкого валика с приводом вращения антенны. Опыт
эксплуатации радиолокатора ОРЛ-4 показал достаточно высокую
его надежность, однако некоторые тактические характеристики, и,
в частности, дальность действия, разрешающая способность по
азимуту, точность по азимуту для всевозрастающих требований
диспетчерской службы УВД нуждались в существенном улучшении.
Диспетчерский радиолокатор ДРЛ-4, входящий в систему
РСП-4, работал в сантиметровом диапазоне волн. Дальность дейст-
вия в зависимости от высоты полета составляла 20-40 км. Точность
по дальности была не хуже 250 м, по азимуту-не более 2,5°.
Разрешающая способность составляла соответственно 400 м и 2°.
Мощность передатчика в импульсе была равна 40 кВт при длитель-
ности импульсов 0,7 мкс. Передатчик РЛ был выполнен на маг-
нетроне. Модулятор собран по схеме с емкостным накопителем.
В качестве ключа использовались электронные модуляторные
лампы.
Оригинальной была антенная система. Она состояла из двух
параболических антенн, направленных в противоположные сторо-
ны. Одна из антенн имела постоянный угол наклона оси диаграммы
направленности в вертикальной плоскости, а у другой антенны этот
угол мог меняться в пределах 0-12°. Рефлекторы антенны имели
одинаковую конструкцию и представляли собой параболоиды вра-
щения размерами 3 х 2 м. Благодаря специальной конструкции
облучателей ширина ДН в вертикальной плоскости первой антенны
была достаточно широкой, а у второй-узкой (1°). Частота вращения
антенн в горизонтальной плоскости составляла 30 об/мин. При
помощи коммутатора антенны поочередно подключались к главно-
9
му волноводу через каждые 378° угла поворота антенной системы.
Существенным недостатком ДРЛ-4 были малая дальность дейст-
вия, отсутствие защиты от сигналов местных предметов и сильных
метеообразований, а также невысокая эксплуатационная надеж-
ность.
Посадочные радиолокаторы ПРЛ-4 и ПРЛ-5, а затем ПРЛ-5М
имели приблизительно одинаковые технические характеристики.
Они использовались для руководства посадкой ВС при плохих
метеорологических условиях и в системе РСП-4 являлись основным
средством, обеспечивающим точное выдерживание посадочного
курса и глиссады планирования. Радиолокаторы имели два канала-
курсовой и глиссадный, которые по очереди через каждые 0,5 с
переключались с помощью антенных коммутаторов, что позволяло
получить информацию о трех координатах цели: наклонной даль-
ности, азимуте и угле места.
Особый интерес в этих РЛ вызывает антенная система. Для
управления положением ДН использовался метод электронного
сканирования с механическими фазовращателями, изменяющими
скорость распространения волны, возбуждающей антенную решет-
ку, представляющую собой совокупность линейно расположенных
вибраторов. В качестве отражателей применялись неподвижные
параболические цилиндры. Цилиндр, расположенный вертикально,
использовался для антенны глиссады, а расположенный горизон-
тально-для антенны курса.
Рассматриваемые радиолокаторы для того времени имели впол-
не удовлетворительные характеристики и при эксплуатации зареко-
мендовали себя с положительной стороны. Существенным их не-
достатком было отсутствие системы селекции движущихся целей.
В шестидесятых годах на эксплуатацию в гражданскую авиацию
была принята радиолокационная система посадки самолетов
РСП-7, состоящая из обзорного диспетчерского радиолокатора
ДРЛ-7, посадочного радиолокатора ПРЛ-7 и автоматического ра-
диопеленгатора АРП-6. Диспетчерские и посадочные РЛ этих систем
в гражданской авиации использовались или автономно, или в
комплексе.
Существенным отличием и преимуществом диспетчерского РЛ
системы РСП-7 перед предшествующими образцами РЛ аналогич-
ного назначения были увеличенная дальность действия (80 км),
наличие системы селекции движущихся целей и возможность пере-
хода в активный режим работы. Начиная с 1963 г. эти станции стали
поступать в подразделения гражданской авиации в виде автоном-
ных сдвоенных комплектов различных модификаций. Одна из
последних модификаций этих РЛ ДРЛ-7СМ была принята на
эксплуатацию в гражданской авиации в 1977 г. Основной особен-
ностью ДРЛ-7СМ является наличие у него вторичного канала,
удовлетворяющего требованиям УВД, и возможность сопряжения
с аппаратурой отображения радиолокационной информации
10
«Знак», позволяющей выводить на экраны диспетчерских индикато-
ров не только координатную, но и дополнительную полетную
информацию в цифровом виде.
Посадочный радиолокатор ПРЛ-7 также имел систему СДЦ
и активный канал. Кроме того, в этом РЛ были предусмотрены
режим кругового обзора и определения высоты целей. Для обзора
пространства в необходимом секторе использовалось механическое
сканирование диаграмм направленности. В РЛ предусматривалась
защита от сигналов гидрометеоров с помощью поляризационных
решеток и компенсации сигналов медленноперемещающихся целей.
В дальнейшем эти РЛ были заменены на более точные и надежные
посадочные радиолокаторы РП-2Е, РП-2Ф, РП-ЗФ, РП-ЗГ, РП-4Г
и РП-5Г производства ЧСФР. Последние две модификации, приня-
тые на эксплуатацию в 1983 и 1989 гг., выполнены на транзисторной
и микроэлектронной элементной базе. Радиолокатор РП-5Г обеспе-
чивает автоматическое сопровождение ВС От четвертого разворота
до точки приземления. Предусмотрено отображение отклонения ВС
от заданной траектории посадки в цифровом виде непосредственно
на экране индикатора рядом с отметкой цели.
Обзорные радиолокаторы П-3, П-8, П-10, П-12, ОРЛ-1, ОРЛ-4
работали в метровом диапазоне волн и имели поэтому при ограни-
ченных размерах антенны неудовлетворительные значения разре-
шающей способности и точности по азимуту. В связи с этим были
предприняты попытки создания РЛ дальнего обнаружения и наве-
дения, работающих в сантиметровом диапазоне волн. Первым
таким РЛ, принятым на эксплуатацию в 1949 г., был РЛ дальнего
обнаружения П-20. Он определял три координаты целей: азимут,
наклонную дальность и высоту, при этом высота определялась
с помощью V-образного луча, идея которого была предложена
проф. М. А. Бонч-Бруевичем еще в 1938 г. Станция имела пять
приемопередающих каналов. Три канала работали на антенну,
формирующую вертикальный веерный луч, а два канала-на антен-
ну с наклонным лучом. Импульсная мощность излучения передат-
чика каждого канала составляла 1 МВт, длительность импульсов-
около 1 мкс. Ширина ДН антенны в плоскости сканирования для
разных лепестков лежала в пределах от 0,5 до 3°. Дальность
обнаружения целей составляла 190 км. Точность определения высо-
ты целей ±500 м, что не удовлетворяло требованиям УВД на
трассах. Поэтому в последующих модификациях такого типа РЛ
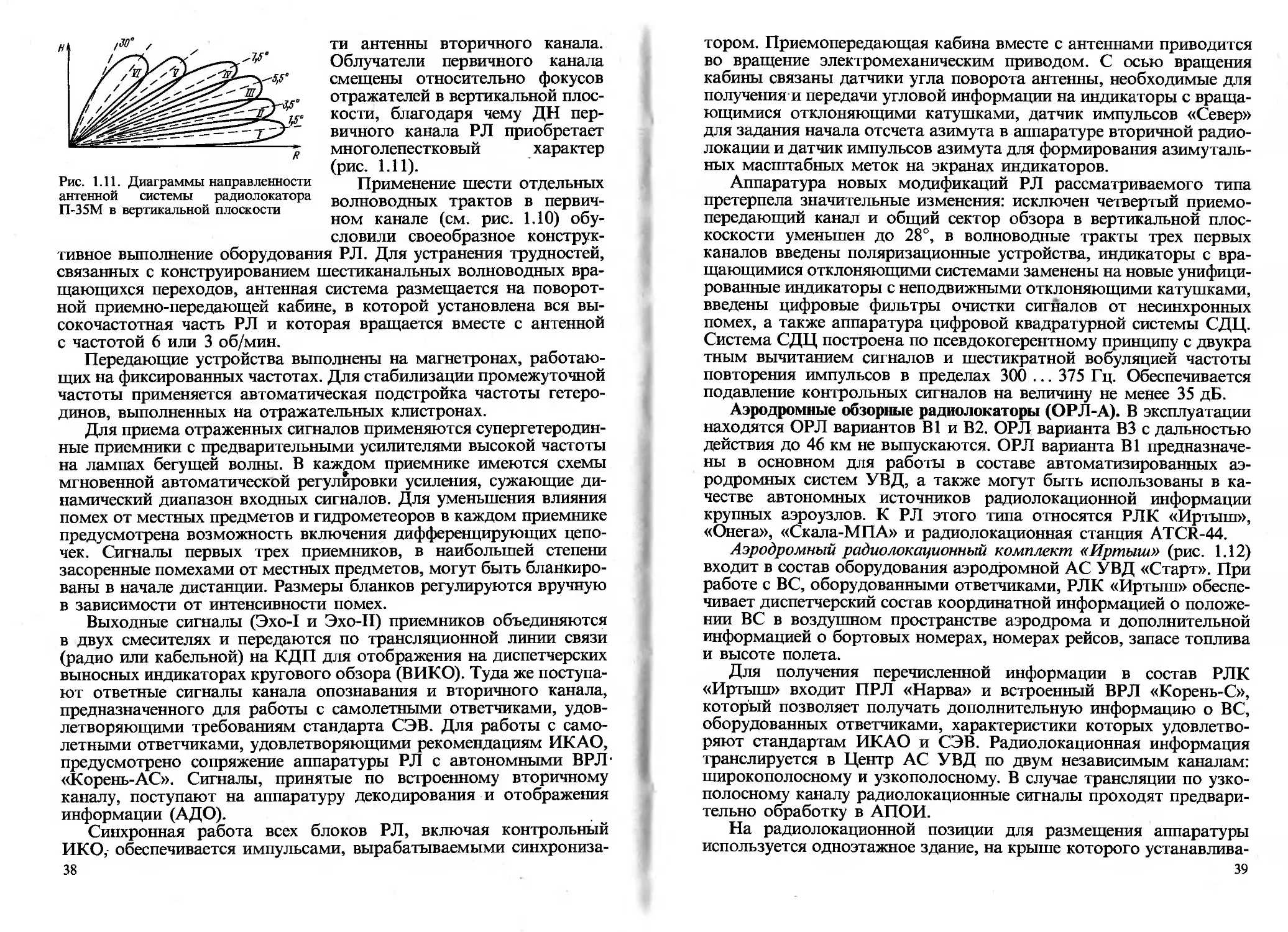
(П-30, П-35, П-35М) разработчики отказались от применения антенн
с V-образным лучом, оставив без изменения многоканальный прин-
цип построения РЛ. Последняя модификация этой серии РЛ имеет
эффективную цифровую систему селекции движущихся целей и
устройство защиты от помех, вызываемых отражениями сигналов
от гидрометеоров.
За последние годы для крупных аэропортов гражданской авиа-
ции была создана новая серия обзорных радиолокаторов (ОРЛ),
11
работающих в дециметровом диапазоне волн. В 1969 г. была
закончена разработка радиолокационного комплекса «Утес», пред-
назначенного для УВД на трассах. В состав комплекса входила
аппаратура первичного и вторичного каналов. Первичный канал
работал на волне 23 см и обеспечивал выдачу информации о двух
координатах ВС независимо от оборудования их бортовыми ответ-
чиками. Вторичный канал был рассчитан на работу с самолетными
ответчиками, удовлетворяющими международным нормам и нор-
мам СССР. Радиолокационные комплексы «Утес» и «Утес-М» были
установлены в аэропортах; расположенных в районах с большой
интенсивностью воздушного движения.
Для небольших аэропортов в 1969 г. в Советском Союзе был
разработан специальный обзорно-посадочный радиолокатор, сов-
мещающий в себе функции аэродромного и посадочного РЛ. В
дальнейшем этот РЛ был доработан в ЧСФР и под названием
ОПРЛ-4, начиная с 1973 г., стал поступать в СССР для оснащения
аэропортов местных воздушных линий, однако опыт совмещения
функций обзорного и посадочного РЛ оказался неудачным и в
настоящее время эти РЛ сняты с эксплуатации.
В семидесятых годах для гражданской авиации был разработан
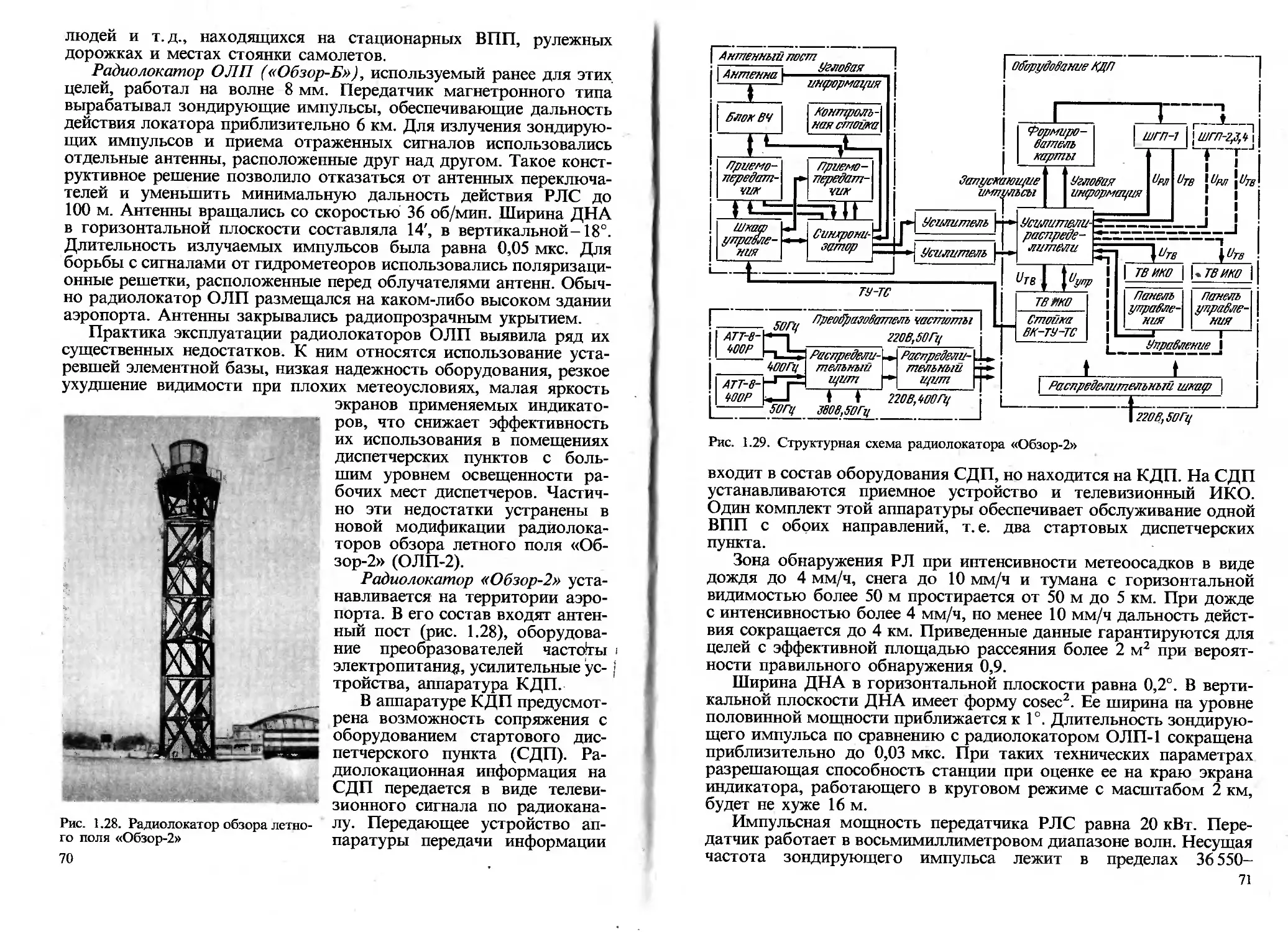
радиолокатор обзора летного поля (ОЛП). Благодаря использова-
нию в нем миллиметрового диапазона волн и очень коротких
импульсов удалось получить разрешающую способность по азиму-
ту и дальности, достаточную для контроля за расположением ВС
и автотранспорта на летном поле. В 1987 г. закончились испытания
новой модификации ОЛП, получившей название «Обзор-2». Этот
РЛ отличается от предыдущих образцов лучшими техническими
характеристиками, более совершенной системой обработки и
отображения информации и новой элементной базой.
Для определения местоположения опасных для полетов метео-
образований в аэропортах гражданской авиации используется ин-
формация, получаемая с помощью метеорологических РЛ. Начало
разработки первого специализированного отечественного метеоро-
логического РЛ относится к 1959 г. Этот РЛ получил наименование
МРЛ-1. Несколько позднее был разработан МРЛ-2. В 1974 г.
закончились эксплуатационные испытания РЛ градозащиты и
штормооповещения МРЛ-5. Кроме специализированных РЛ, инфор-
мация о метеообстановке может поступать к диспетчерам УВД
непосредственно от первичных РЛ. В связи с этим в последние годы
наметилась тенденция оснащения современных трассовых радиоло-
кационных комплексов специальными метеоканалами, предназна-
ченными для обработки сигналов, отраженных от метеообъектов,
и выделения контуров метеообразований, опасных для полетов ВС.
В связи с увеличением плотности воздушного движения в неко-
торых зонах страны и наметившейся тенденцией к увеличению
интенсивности полетов во многих зонах начиная с 1977 г. в Совет-
ском Союзе началось внедрение автоматизированных систем УВД.
12
Основой таких систем являются электронные цифровые вычисли-
тельные машины, обрабатывающие радиолокационные данные и
информацию о планах полетов. Для обеспечения автоматизирован-
ных систем оперативной информацией о состоянии воздушной
обстановки промышленность разработала и освоила серийный вы-
пуск ряда новых РЛС, таких, например, как трассовые радиолока-
ционные комплексы «Скала-М» и «Скала-МПР», аэродромные
комплексы «Иртыш», «Онега» и «Скала-МПА», вторичные авто-
номные РЛ «Корень-АС». Импортные районные и аэродромные
автоматизированные системы УВД, введенные в эксплуатацию
в конце 70-х и в начале 80-х годов, были оснащены РЛ типа
ATCR-22 и ATCR-44 фирмы «Селения» (Италия). Отличительной
чертой этих РЛ было широкое использование новой элементной
базы, адаптивность по отношению к помехам, наличие аппаратуры
первичной обработки информации, представление радиолокацион-
ных сигналов в цифровом виде. л
Для большинства первичных радиолокаторов АС УВД отечест-
венного производства характерно двух- или трехкомплектное по-
строение с использованием основного (нижнего) и дополнительного
(верхнего) каналов обзора пространства и цифровых систем селек-
ции движущихся целей, построенных по истинно когерентному
методу. В радиолокационном комплексе «Онега», разработанном
в конце 70-х годов, впервые для РЛ гражданской авиации был
использован принцип излучения зондирующих сигналов с внутри-
импульсной частотной модуляцией и последующим сжатием отра-
женных сигналов в приемнике. Дальнейшее развитие этот принцип
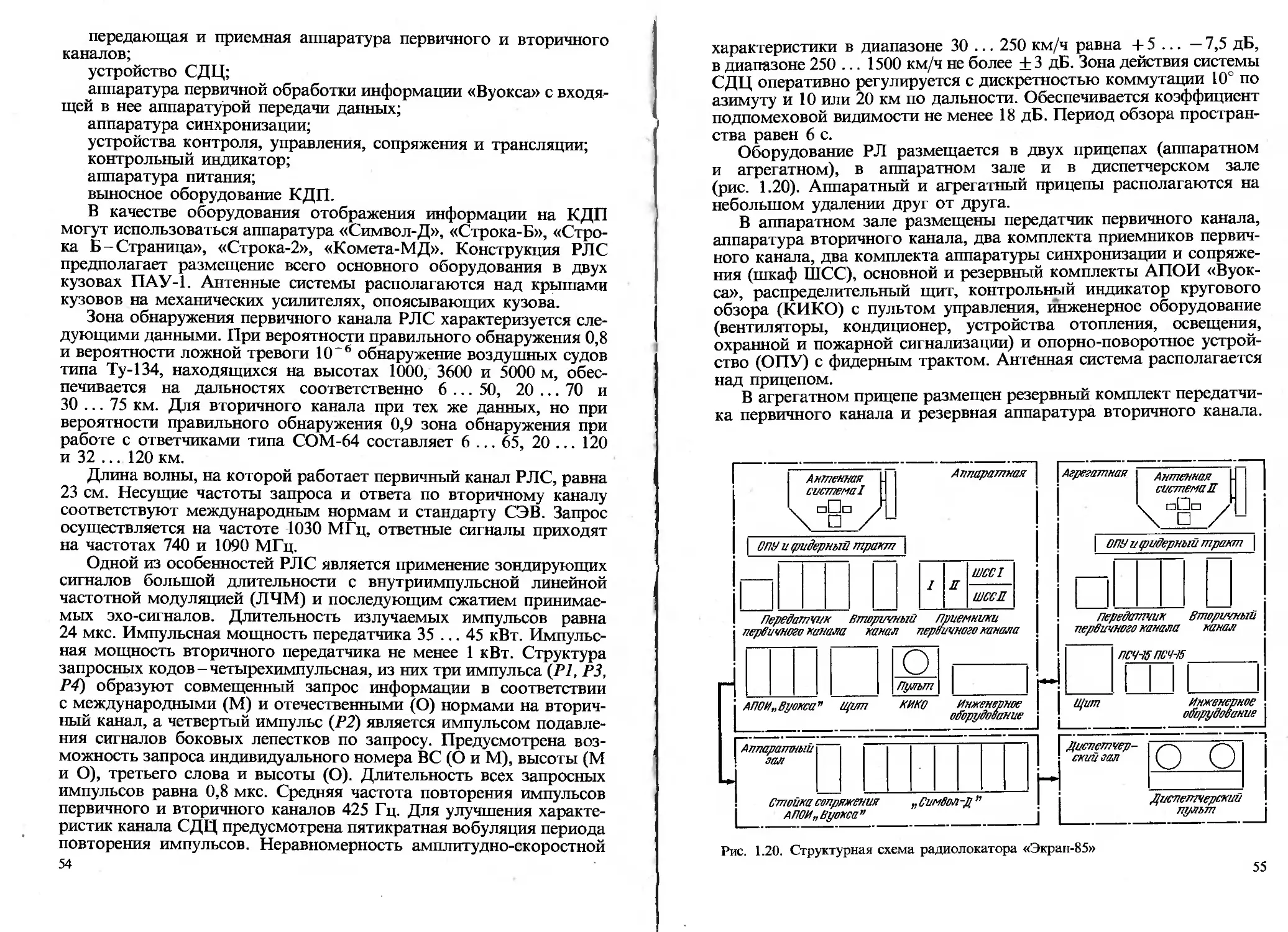
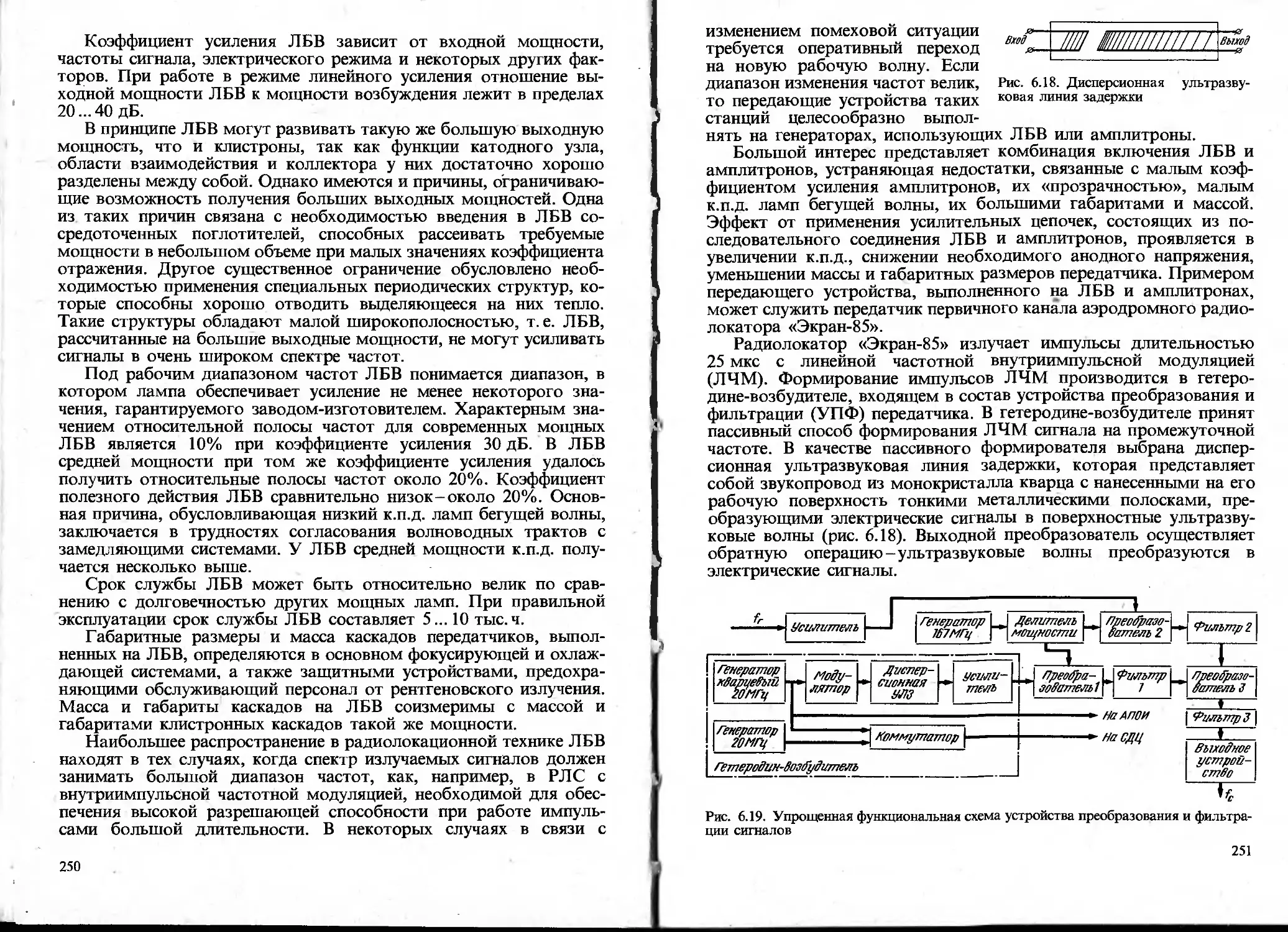
нашел при разработке аэродромного РЛ «Экран-85», эксплуатаци-
онные испытания которого успешно закончились в 1987 г.
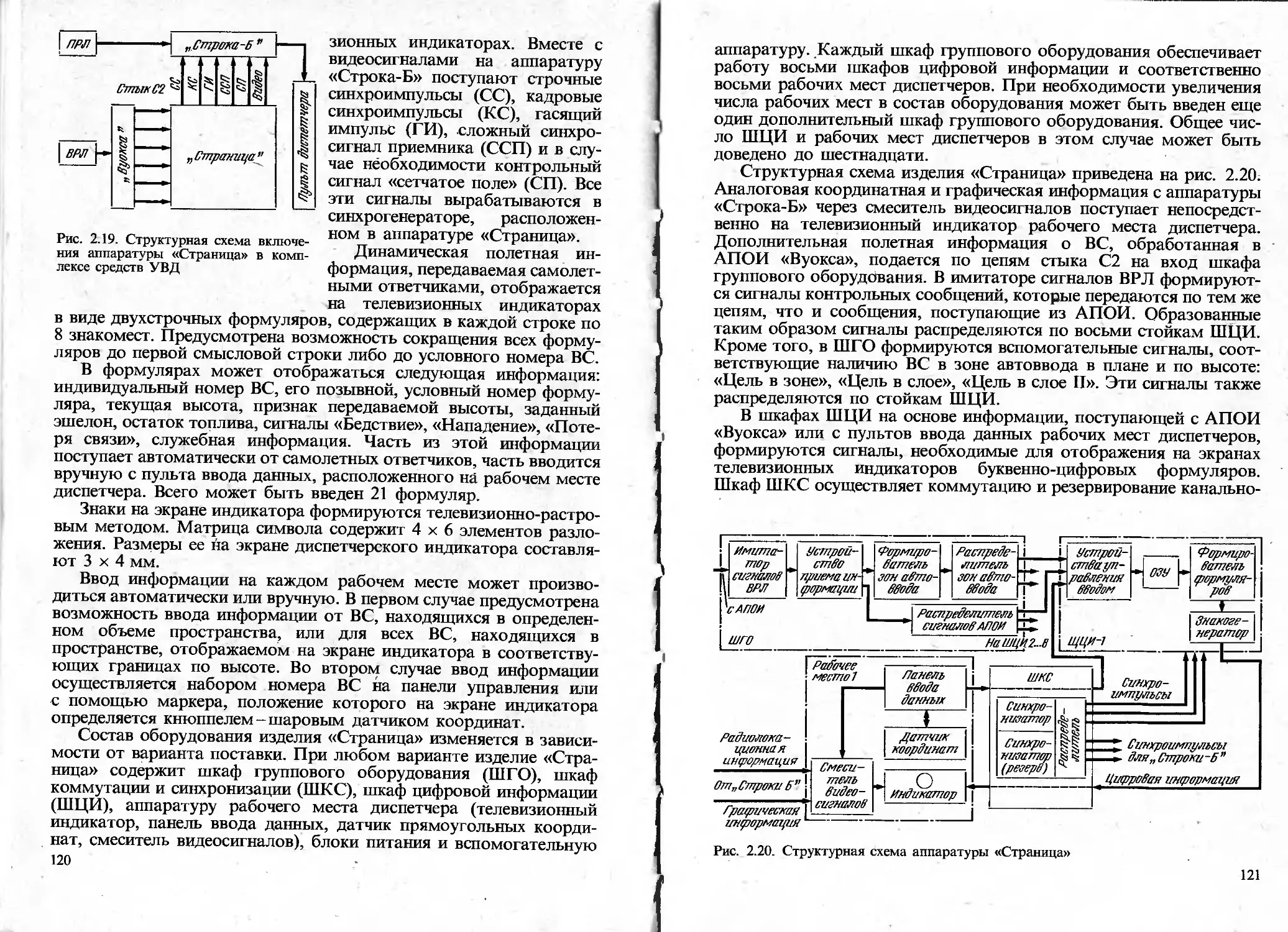
Существенные изменения претерпели средства отображения ра-
диолокационной информации. В 1971 г. промышленность приступи-
ла к серийному выпуску аппаратуры преобразования радиолокаци-
онных сигналов в телевизионные «Строка-Б». В дальнейшем функ-
циональные возможности этой аппаратуры были значительно рас-
ширены, проведена замена элементной базы на более совершенную,
введены устройства, позволяющие отображать на экранах телевизи-
онных индикаторов дополнительную полетную информацию в циф-
ровом виде. Новые модификации такой аппаратуры стали выпус-
каться промышленностью под названием «Страница» (1981 г.) и
«Строка-2» (1986 г.).
Для отображения координатной и знаковой информации на
«темновых» индикаторах разработаны и серийно выпускаются
устройства отображения радиолокационной информации типа
«Знак» (1977 г.) и более совершенная аппаратура «Символ»
(1980 г.). В автоматизированных системах УВД оперативная радио-
локационная информация о воздушной обстановке отображается на
специализированных индикаторах, изображение на которых синте-
зируется электронными вычислительными машинами.
13
Для отображения аналоговой радиолокационной информации
аэродромных РЛ в 1971 ... 1973 гг. была разработана аппаратура
«Комета-МД», позволяющая вести наблюдение за воздушной об-
становкой в условиях больших внешних засветок рабочего места
диспетчера. Экран таких индикаторов был выполнен на потенциа-
лоскопах с видимым изображением и обладал очень большой
яркостью. В 1980 г. начался выпуск одной из модификаций аэро-
дромных РЛ, получивших название ДРЛ-7СК и оснащенных инди-
каторами типа «Комета-МД».
Начиная с 1975 г. в Московской районной диспетчерской службе
успешно эксплуатировался комплекс «Центр-1 - Район-1», который
входил в состав неавтоматизированной системы УВД внеаэродром-
ной зоны. Он обеспечивал автоматический сбор, объединение и рас-
пределение по рабочим местам радиолокационной информации,
поступающей от трех разнесенных на трассе вспомогательных
диспетчерских пунктов и одного центрального lyiK. Информация
отображалась на мозаичных индикаторах телевизионного типа
с повышенным стандартом развертки. В дальнейшем в связи с внедре-
нием районных автоматизированных систем УВД эксплуатация
комплекса «Центр-1-Район-1» была прекращена.
Внедрение аэродромных автоматизированных систем УВД 4
«Старт», «Старт-2», трассовых автоматизированных систем «Трас-
са» и «Стрела», а также импортных автоматизированных систем
«Теркас» стимулировало разработку аппаратуры первичной обра-
ботки и аппаратуры передачи радиолокационной информации.
В 70-х годах в СССР были разработаны устройства первичной
обработки информации АНИС-250 для аэродромных РЛ и
АНИС-400 для трассовых РЛ. Особенностью этой аппаратуры было
использование в ней принципа весовой обработки радиолокацион-
ных сигналов. Несколько позже были разработаны устройства
первичной обработки, выполненные на базе мини- и микроЭВМ,
использующие критерийный принцип обработки сигналов. Для
комплексов средств первичной и вторичной радиолокации в 1980 г.
была разработана унифицированная аппаратура обработки радио-
локационной информации «Вуокса». В импортных автоматизиро-
ванных системах УВД «Теркас», принятых на эксплуатацию в Со-
ветском Союзе в 1979 ... 1980 гг., для первичной обработки сигналов
радиолокаторов ATCR-22, ATCR-44 и «Скала-М» использовалась
аппаратура СХ-1100 фирмы Stansaab (Швеция). Трансляция обра-
ботанных сигналов на большие расстояния во всех автоматизиро-
ванных системах осуществлялась с помощью аппаратуры передачи
данных, работающей по принципу двойной относительной фазовой
или частотно-кодовой манипуляции.
В настоящее время ведутся интенсивные работы по совершенст-
вованию и обновлению существующего парка РЛС страны. Особое
внимание обращается на разработку дискретно-адресных систем
вторичной радиолокации, антенных устройств с электронным ска-
14
пированием ДН, систем предупреждения столкновений ВС в возду-
хе, автоматизированных систем УВД.
Одновременно с чисто техническими задачами научно-исследо-
вательские организации гражданской авиации и радиопромышлен-
ности решают проблемные вопросы создания перспективных радио-
локационных средств обеспечения полетов.
Оценивая общее состояние и перспективы совершенствования
отечественной и зарубежной радиолокационной техники, можно
выделить следующие основные тенденции в развитии радиолокаци-
онных средств УВД, наметившиеся в последние годы:
совершенствование систем с активным ответом и повсеместное
внедрение вторичных РЛС;
разработка РЛС, предназначенных для работы в автоматизиро-
ванных системах УВД;
оптимизация технических параметров РЛС в соответствии с
назначением РЛС; <*
внедрение радиолокационных систем с электронным сканирова-
нием диаграмм направленности антенн;
совершенствование систем обработки сигналов и подавления
помех;
разработка и внедрение адаптивных систем подавления помех;
применение специализированных ЭВМ и микропроцессоров для
обработки сигналов и управления обзором пространства;
повышение надежности РЛС за счет использования твердотель-
ной электроники, унификации элементов и резервирования;
внедрение модульного принципа построения РЛС;
введение в состав аппаратуры РЛС систем автоматического
встроенного контроля параметров РЛС и средств автоматического
обнаружения неисправностей;
разработка и внедрение систем дистанционного управления РЛ.
Совершенствование средств отображения радиолокационной
информации идет по пути повышения их информативное™ и улуч-
шения эргономических показателей. Первостепенными задачами
совершенствования индикаторов являются:
увеличение яркости и контрастности изображения;
получение слитных немелькающих изображений;
' унификация средств отображения и повышение их надежности;
совершенствование и широкое внедрение в эксплуатацию совме-
щенных аналого-цифровых индикаторов для отображения инфор-
мации первичных и вторичных РЛС; совершенствование устройств
отображения «синтезированной» радиолокационной информации;
разработка принципиально новых средств отображения инфор-
мации, использующих плоские экраны, на дискретных элементах;
ведение цветовой индикации.
Значительный прогресс в области совершенствования радио-
локационной техники и средств отображения информации наметил-
ся в связи с внедрением автоматизированных систем УВД.
15
Глава 1. ОБЩИЕ СВЕДЕНИЯ
О НАЗЕМНЫХ РАДИОЛОКАЦИОННЫХ СИСТЕМАХ
1.1. Назначение и классификация радиолокаторов
Основным назначением радиолокационных систем в гражданс-
кой авиации является обеспечение служб УВД оперативной инфор-
мацией о координатах ВС, а также дополнительной информацией
о воздушной обстановке.
Понятие «система» применительно к радиолокационному обору-
дованию не имеет однозначной трактовки. Определение «радио-
локационная система» может трансформироваться в зависимости
от постановки задачи и иерархического уровня проводимых иссле-
дований. Обычно под радиотехнической системой понимают сово-
купность совместно действующих объектов, объединенных для
выполнения общей задачи. Такая трактовка понятия «система»
позволяет рассматривать каждую отдельную РЛС как систему,
состоящую из отдельных узлов (антенны, волноводного тракта,
передатчика, приемника),, каждый из которых состоит в свою
очередь из отдельных элементов (резисторов, конденсаторов, тран-
зисторов, микросхем и т. д.). Этот подход удобен для проектиров-
щиков, разрабатывающих какой-либо тип РЛС в соответствии
с заданными тактическими характеристиками.
При общем обзоре радиолокационных средств и их классифика-
ции более целесообразно исходить из того, что все РЛС или
некоторые их группы составляют радиолокационные системы, об-
разующие вместе с навигационными, связными, светотехническими
и т. д. средствами единую информационную систему боле высшего
порядка, позволяющую решать задачи УВД, взлета, посадки или
управления движением ВС по летному полю. Радиолокационная
информационная система районого центра УВД может состоять,
например, из нескольких первичных трассовых РЛС, встроенных или
автономных вторичных радиолокационных каналов, метеорадио-
локаторов. Автоматизированная аэродромная система УВД может
обслуживаться радиолокационной информационной системой, сос-
тоящей из нескольких аэродромных или аэроузловых радиолокаци-
онных станций, вторичных и посадочных радиолокаторов. Можно
говорить о радиолокационной системе посадки, включающей в себя
аэродромный и посадочный радиолокаторы. В отдельном разделе
учебника будет рассматриваться радиолокационная система с ак-
тивным ответом, состоящая из наземного запросчика и бортовых
ответчиков.
16
Характерной особенностью развития радиолокационной техни-
ки за последние годы является разработка так называемых радио-
локационных комплексов (РЛК), представляющих собой совокуп-
ность первичной и вторичной РЛС, аппаратуры первичной обработ-
ки радиолокационных сигналов, аппаратуры трансляции сигналов,
устройств отображения информации и т. д. Чаще всего РЛК разра-
батываются для контроля и руководства движением ВС на трассах
и в аэродромных зонах. Радиолокационные комплексы (РЛК) в от-
личие от РЛС осуществляют выполнение возложенных на них задач
в более полном объеме.
В связи с многообразием функций радиолокаторов (РЛ) и проти-
воречивостью требований, предъявляемых к ним различными
потребителями радиолокационной информации (диспетчерами рай-
онных диспетчерских служб, подхода, круга, посадки, руления,
старта), существует тенденция к увеличению числа видов РЛС.
Наряду с этими имеется противоположная тенденция, выражаю-
щаяся в стремлении унифицировать радиолокационную аппаратуру
для повышения экономичности и удобства ее эксплуатации. В ре-
зультате противоборства этих стремлений, а также постоянно
действующего процесса обновления техники и внедрения более
прогрессивных технических решений в гражданской авиации в
настоящее время используется -евыше 20 видов различных РЛС
и несколько видов находится в стадии проектирования, производст-
ва или ввода в эксплуатацию.
Классификация существующих и перспективных радиолокацион-
ных средств УВД может производиться в зависимости от постанов-
ки задачи по различным признакам: по принципу взаимодействия
с целью (первичные, вторичные, вторичные с адресным запросом),
по характеру обзора контролируемого пространства (РЛС кругово-
го обзора, секторные, РЛС с программированным обзором, моно-
импульсные), по способу сканирования диаграмм направленности
антенн (механическое, электронное, смешанное сканирование), по
числу определяемых координат целей (одно-, двух-, трехкоординат-
ные РЛС), по характеру излучаемых сигналов (импульсные РЛС,
непрерывного действия, импульсные с внутриимпульсной модуля-
цией), по назначению в системе УВД (трассовые, аэродромные,
посадочные) и т.д.
Специалисты по эксплуатации радиолокационных средств граж-
данской авиации наиболее часто используют классификацию РЛС,
основанную на объединении их по принципу тактического назначе-
ния в системах УВД. При этом ввиду существенных отличий
в характере получаемой информации и специфики построения аппа-
ратуры первичные и вторичные РЛ, несмотря на то, что они могут
иметь одно и то же тактическое назначение, рассматриваются
отдельно.
Первичные радиолокаторы (ПРЛ) объединяются в следующие
группы:
17
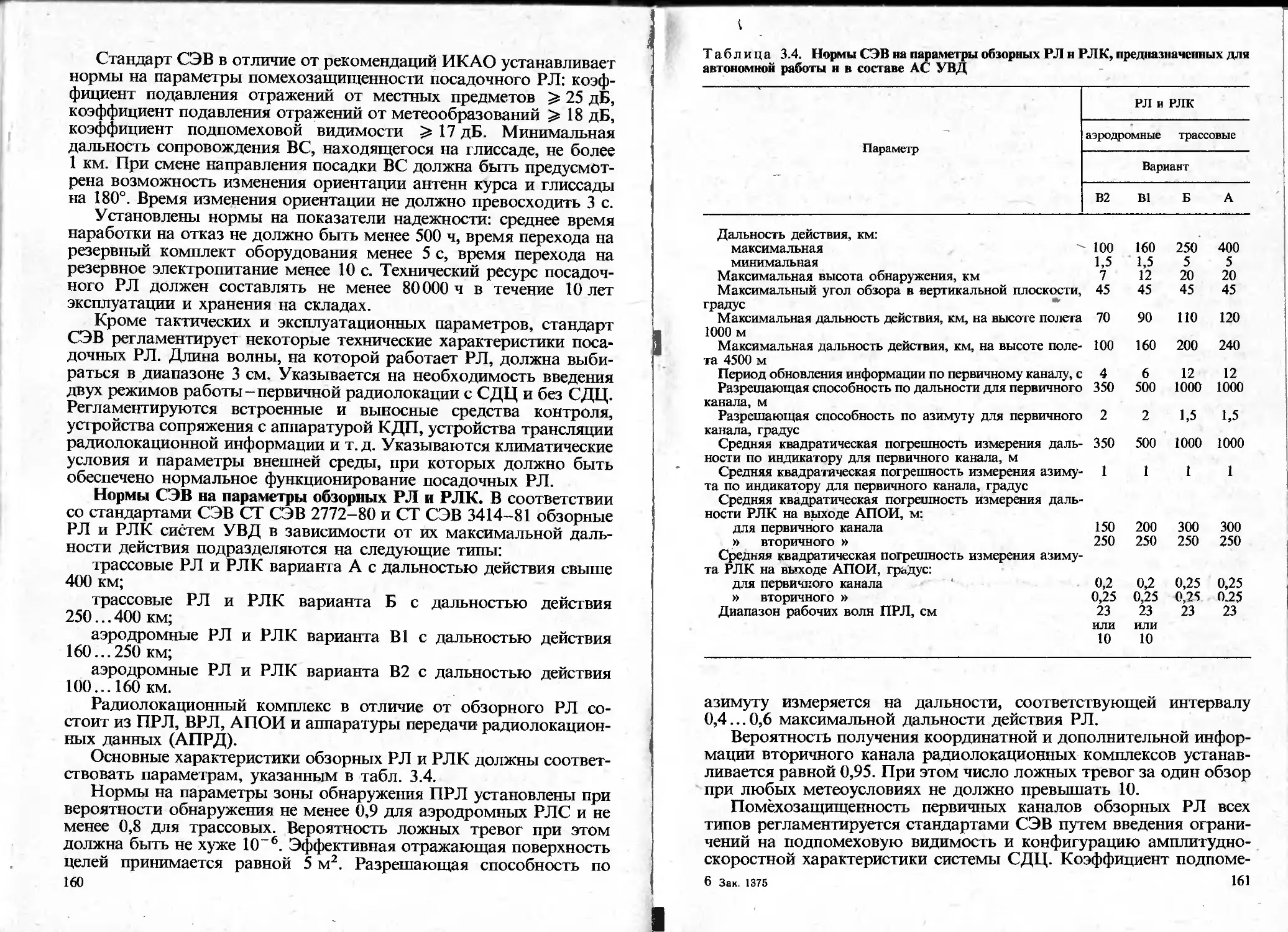
трассовые обзорные радиолокаторы ОРЛ-Т (вариант А) с мак-
симальной дальностью действия «400 км;
трассовые обзорные радиолокаторы ОРЛ-Т (вариант Б) с мак-
симальной дальностью действия «250 км;
аэродромные обзорные радиолокаторы ОРЛ-А (варианты Bl, В2
и ВЗ) с максимальной дальностью действия 160, 100 и 46 км
соответственно;
посадочные радиолокаторы;
радиолокаторы обзора летного поля;
метеорологические радиолокаторы (МРЛ);
комбинированные обзорно-посадочные радиолокаторы.
Вторичные радиолокаторы (ВРЛ) могут обслуживать районные
и аэродромные зоны УВД. По принципу построения они разделяют-
ся на автономные и встроенные. По характеру взаимодействия
с бортовыми ответчиками ВРЛ разделяются на радиолокаторы
с общим и дискретно-адресным запросом, по системе кодирования
запросных и ответных сигналов и видам передаваемой информа-
ции-на ВРЛ, удовлетворяющие нормам, принятым в СССР и стра-
нах-членах СЭВ (режим УВД), и нормам ИКАО (режим RBS).
Некоторые ВРЛ могут работать в совмещенном режиме. В этом
случае их характеристики одновременно удовлетворяют стандар-
там СЭВ и ИКАО.
Трассовые обзорные радиолокаторы ОРЛ-Т с дальностью дейст-
вия 400 и 250 км предназначены для контроля и управления воздуш-
ным движением на трассах. Информация, получаемая с помощью
трассовых РЛ, используется диспетчерами районных центров УВД
(РЦ УВД) и в некоторых случаях диспетчерами диспетчерских
пунктов подхода (ДПП) и главных диспетчерских пунктов подхода
(ГДПП).
Трассовые ОРЛ позволяют службе движения:
обнаруживать и определять местоположение ВС;
контролировать выдерживание экипажами ВС заданных коридо-
ров и времени прохождения контрольных точек на трассе и в зоне
подхода;
предупреждать опасные сближения ВС;
обнаруживать местоположение метеообразований, опасных для
полетов;
оказывать помощь экипажам при потере ими ориентировки
путем определения координат ВС и передачи экипажу указаний по
дальнейшему следованию ВС в заданную точку пространства;
опознавать принадлежность ВС и получать дополнительные
данные о них путем использования встроенных вторичных каналов,
работающих с самолетными ответчиками.
Основное требование, которое предъявляется к трассовым ОРЛ,
заключается в обеспечении большой дальности действия при доста-
точно хорошей точности и разрешающей способности. В случае
если трассовый ОРЛ предназначен для обеспечения информацией
18
автоматизированных центров УВД, в него часто встраивается вто-
ричный канал. В некоторых случаях предусматривается сопряжение
первичного трассового ОРЛ с автономным вторичным радиолока-
тором. Образованные таким образом радиолокационные комплек-
сы располагаются или в непосредственной близости от районного
центра автоматизированной системы УВД, или находятся на радио-
локационных позициях, расположенных за несколько сотен кило-
метров от центра УВД. В последнем случае радиолокационные
сигналы преобразуются аппаратурой первичной обработки инфор-
мации в цифровую форму и передаются в центр управления по
узкополосным линиям связи.
Аэродромные обзорные радиолокаторы ОРЛ-А вариантов В1,
В2 и ВЗ предназначены для контроля и управления воздушным
движением в районе аэродрома и для вывода ВС в зону действия
посадочного РЛ. Информация, получаемая с помощью аэродром-
ных ОРЛ, используется диспетчерами аэродромных центров АС
УВД, диспетчерами пунктов подхода (ДПП), главных диспетчерс-
ких пунктов подхода (ГДПП), диспетчерских пунктов круга (ДПК),
диспетчерских пунктов системы посадки (ДПСП) и местных диспет-
черских пунктов (МДП).
Технические характеристики аэродромных ОРЛ должны обеспечи-
вать разрешающую способность и точность определения координат
ВС в соответствии с международными и отечественными нормами.
Кроме того, они должны иметь эффективные средства подавления
сигналов, отраженных от местных предметов и гидрометеоров.
Аэродромные ОРЛ должны обнаруживать и определять местополо-
жение целей, находящихся на небольших высотах и на близком
удалении от РЛ. Требования к максимальной дальности действия
аэродромных ОРЛ дифференцируются в зависимости от конкретно-
го назначения и класса аэропорта, где предполагается установить
РЛ. Для крупных аэропортов со сложной организацией воздушного
пространства и большой интенсивностью полетов необходимо ис-
пользовать аэродромные ОРЛ варианта В1 с максимальной даль-
ностью действия % 160 км. Эти РЛ, как правило, обслуживают
аэродромные центры АС УВД.
В менее крупных аэропортах целесообразно устанавливать аэрод-
ромные ОРЛ варианта В2 с максимальной дальностью действия
а 100 км. Для того чтобы обеспечить необходимой информацией
только диспетчера круга, достаточно в соответствии с рекомен-
дациями ИКАО иметь РЛ варианта ВЗ с дальностью действия
46 км.
Такие радиолокаторы в настоящее время в Советском Союзе не
выпускаются. Их функции в гражданской авиации обычно выполня-
ют обзорные аэродромные ОРЛ вариантов В1 и В2.
Посадочные радиолокаторы. Они предназначены для контроля
с земли за выдерживанием ВС заданной линии курса и глиссады
планирования на последней посадочной прямой, а также для управ-
19
ления поездкой путем передачи экипажу команд, корректирующих
траекторию их снижения.
Посадочные РЛС могут использоваться или как автономное
средство обеспечения посадки, или как средство контроля за посад-
кой ВС в аэропортах, оборудованных радиомаячными системами
посадки. В первом случае диспетчер полностью руководит заходом
на посадку, во втором случае-только контролирует заход и в необ-
ходимых случаях информирует экипаж о положении ВС относитель-
но линии курса и глиссады планирования.
Необходимость и целесообразность применения посадочного РЛ
в аэропортах гражданской авиации независимо от характера его
использования обусловлены рядом его достоинств по сравнению
с радиомаячными системами посадки. Достоинства посадочных РЛ
следующие:
его функционирование не зависит от бортового оборудования;
позволяет непрерывно наблюдать с земли за эволюциями траек-
тории приближающегося ВС вплоть до его приземления;
обеспечивает наблюдение с земли за всеми ВС в зоне посадки,
и риск столкновения ВС может быть в этом случае минимизирован;
обеспечивает удовлетворительный контроль последовательных
посадок ВС с небольшими промежутками по расстоянию в случаях,
когда ухудшение погоды, недостаток топлива или повреждение ВС
делают необходимой безопасную и быструю посадку;
точность РЛ мало зависит от перемены погоды, изменения
снежного покрова земной поверхности, рельефа местности и других
факторов;
РЛ, оснащенные поворотными устройствами, могут обеспечи-
вать посадку с любого направления, в том числе и не оборудованно-
го радиомаячной системой;
позволяют производить фоторегистрацию посадок ВС, необхо-
димую для разбора полетов, расследования авиационных проис-
шествий, обучения диспетчерского и летного состава и т. д.
Основной недостаток посадочного РЛ-малая эффективность
как автономного средства посадки, связанная прежде всего с боль-
шими ошибками визуального съема информации о координатах ВС,
субъективизмом в выработке команд диспетчером посадки и значи-
тельным временем, необходимым для принятия решения и передачи
команды на борт ВС. В гражданской авиации посадочный РЛ
используется в основном как контрольное средство обеспечения
посадки и как резервное средство с ограниченными возможностями
для основной радиомаячной системы посадки.
Потребителями информации, получаемой с помощью посадоч-
ных РЛ, являются пункты диспетчеров посадки (ПДП), диспет-
черские пункты систем посадки (ДПСП) и местные диспетчерские
пункты (МДП) местных воздушных линий.
Основное требование, предъявляемое к посадочным РЛ,-полу-
чение максимально возможной точности определения отклонения
20
ВС от заданной траектории посадки по азимуту и углу места
и определения наклонной дальности от начала ВПП до цели.
Радиолокаторы обзора летного поля (РЛС ОЛП). Они предназна-
чены для контроля и руководства движением ВС и спецавтотранс-
порта, находящихся на стационарных взлетно-посадочных полосах
(ВПП), рулежных дорожках и местах стоянки самолетов, в условиях
плохой видимости. Информация, получаемая с помощью этого РЛ,
используется диспетчерами по рулению диспетчерских пунктов
руления (ДПР) и диспетчерами старта стартовых диспетчерских
пунктов (СДП).
Радиолокатор устанавливается на территории аэропорта. На
экране индикатора РЛ видно взаимное расположение ВС, находя-
щихся на стоянках, рулежных дорожках, ВПП, а также перемещение
автомобилей и других видов транспорта по летному полю.
Основное требование, которое предъявляется к РЛ ОЛП,-полу-
чение возможно большей разрешающей способности радиолокаци-
онного изображения летного поля и находящихся на нем объектов
при любых погодных условиях. Наилучшим образом этим требова-
ниям удовлетворяют РЛ, работающие в миллиметровом диапазоне
длин волн.
Метеорологические радиолокаторы (МРЛ). Они предназначены
для обнаружения и определения местоположения очагов гроз и лив-
невых осадков, а также их скорости и направления перемещения.
Метеорадиолокаторы оказывают большую помощь диспетче-
рам службы движения в обеспечении безопасности полетов по
трассам, в зоне аэродрома, а также при посадке и взлете в сложных
метеорологических условиях. Данные о метеообстановке командно-
му, летному составу, работникам службы движения и аэродромной
службы поступают от авиационных метеорологических центров
(АМЦ) и станций (АМСГ). В оперативном отношении эти центры
и МРЛС подчиняются командирам авиапредприятий. Обслужива-
ние РЛС производится силами авиационных метеорологических
центров и МРЛС. Базы ЭРТОС МРЛС не обслуживают.
Требования, предъявляемые к МРЛ, определяются спецификой
объектов, с которыми работают эти РЛ. Радиолокатор должен
указывать местоположение и определять основные параметры ме-
теообразований, опасных для полетов ВС.
Обзорно-посадочные радиолокаторы (ОПРЛ). Выполняют одно-
временно функции аэродромных и посадочных РЛ в небольших
аэропортах местных воздушных линий. Необходимость и возмож-
ность создания такого типа РЛ определяются некоторыми специфи-
ческими условиями работы малых аэропортов МВЛ. Особенности
радиолокационного обеспечения большинства из них заключаются
в следующем:
малые аэропорты МВЛ обслуживаются в основном ВС, имею-
щими сравнительно небольшие скорости и малые высоты по-
летов;
21
в некоторых аэропортах МВЛ иногда отсутствует стационарная
ВПП, и курс посадки ВС может оперативно изменяться в пределах
360° в зависимости от направления ветра и состояния поверхности
отдельных участков летного поля;
штатный состав диспетчеров местных диспетчерских пунктов,
особенно аэропортов с небольшой интенсивностью движения, огра-
ничен;
для повышения рентабельности аэропортов МВЛ стоимость
радиотехнических средств обеспечения полетов, а также затраты на
их эксплуатацию должны быть относительно небольшими;
численность и квалификация технического персонала аэропортов
МВЛ обычно недостаточны для обслуживания больших комплексов
радиотехнических средств, характерных для аэропортов высших
и средних классов.
Потребителями информации, получаемой с помощью ОПРЛ,
являются диспетчеры местных диспетчерских пунктов (МДП) мест-
ных воздушных линий. Требования, предъявляемые к такого типа
РЛ, определяются их функциональным назначением и указанной
выше спецификой МВЛ. Поскольку эти требования противоречивы,
совмещение различных функций в одном РЛ вызывает большие
трудности.
Вторичные радиолокаторы. В системах УВД предназначены для
получения дополнительной полетной информации, поступаю-
щей с борта ВС, оборудованных радиолокационными ответчи-
ками.
В гражданской авиации наметилась тенденция все более широко-
го внедрения ВРЛ. Первичные радиолокаторы (ПРЛ), принцип
действия которых основан на определении координат целей путем
приема части энергии, отраженной от этих целей, не позволяют
решать целый ряд задач УВД в современных условиях с большой
плотностью и интенсивностью воздушного движения. Главный не-
достаток ПРЛ, используемых для УВД, заключается в их малой
информативности: ПРЛ определяют, как правилб, только две коор-
динаты цели; дополнительная информация о номере ВС (рейса),
барометрической высоте, запасе топлива, состоянии функциониро-
вания бортовых систем передается в этом случае на землю по
обычным каналам, связи во время радиообмена между экипажами
ВС и диспетчерами службы движения. Кроме того, ПРЛ при малом
энергетическом потенциале обладает недостаточно большой даль-
ностью действия, особенно при плохих метеоусловиях. Значитель-
ные флуктуации отраженных сигналов затрудняют обработку ра-
диолокационной информации в автоматизированных системах
УВД.
Потребителями информации, получаемой с помощью ВРЛ,
являются диспетчеры РДС, ДПП, ГДПП, ДПК. Требования к
ВРЛ определяются рекомендациями ИКАО и стандартами СССР
и СЭВ.
22
1.2. Основные виды современных радиолокаторов
и их краткая характеристика
Трассовые обзорные радиолокаторы (ОРЛ-Т, вариант А). В
настоящее время в Советском Союзе в качестве трассовых обзор-
ных радиолокаторов большой дальности действия используются
отечественные радиолокационные комплексы «Скала-М», «Ска-
ла-МПР», а также иностранные радиолокаторы ATCR-22 итальянс-
кой фирмы «Селения».
Радиолокационный комплекс «Скала-М» (рис. 1.1) предназначен
для контроля и управления воздушным движением на трассах
и в зонах подхода крупных аэроузлов. Он может использоваться
в автоматизированных и неавтоматизированных системах УВД
в качестве источника радиолокационной информации для диспетче-
ров районных центров УВД и пунктов подхода.
В состав РЛК «Скала-М» входит ПРЛ, встроенный в него
вторичный канал «Корень-С», удовлетворяющий требованиям
стандартов одновременно ИКАО и СЭВ, аппаратура первичной
обработки информации (АПОИ); аппаратура передачи данных
(АПД) и автоматический радиопеленгатор АРП-АС или АРП-75.
Дальность действия ПРЛ и ВРЛ при нулевых углах закрытия
и вероятности правильного обнаружения по первичному каналу 0,8
и по вторичному каналу 0,9 на высотах 10000, 6000 и 1200 м
Рис. 1.1. Радиолокационный комплекс «Скала-М»
23
соответственно равна 340, 250 и 120 км. Зона: обзора в вертикальной
плоскости лежит в пределах 0,5 ... 45°. Темп обновления и выдачи
информации 10 или 20 с.
Аппаратура ПРЛ состоит из антенно-волноводной системы,
передающих и приемных устройств, аппаратуры обработки прини-
маемых сигналов, аппаратуры синхронизации, управления и конт-
роля. Аппаратура вторичного канала состоит из антенно-фидерного
устройства (АФУ), приемного устройства отечественного канала
(ОК), приемопередающего устройства международного канала
(МК), аппаратуры декодирования и преобразования, аппаратуры
встроенного контроля, системы управления и источников питания.
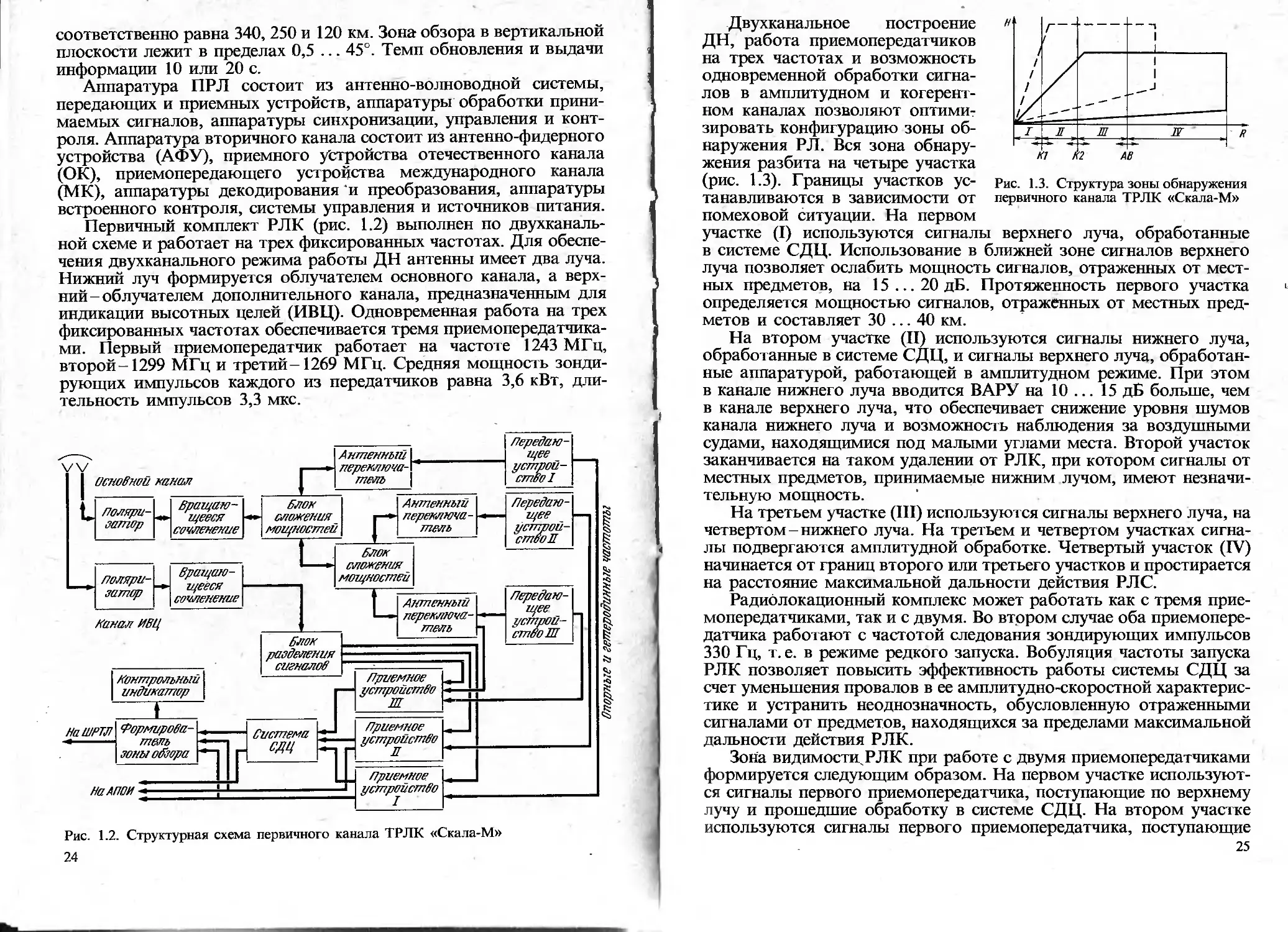
Первичный комплект РЛК (рис. 1.2) выполнен по двухканаль-
ной схеме и работает на трех фиксированных частотах. Для обеспе-
чения двухканального режима работы ДН антенны имеет два луча.
Нижний луч формируется облучателем основного канала, а верх-
ний-облучателем дополнительного канала, предназначенным для
индикации высотных целей (ИВЦ). Одновременная работа на трех
фиксированных частотах обеспечивается тремя приемопередатчика-
ми. Первый приемопередатчик работает на частоте 1243 МГц,
второй-1299 МГц и третий-1269 МГц. Средняя мощность зонди-
рующих импульсов каждого из передатчиков равна 3,6 кВт, дли-
тельность импульсов 3,3 мкс.
Рис. 1.2. Структурная схема первичного канала ТРЛК «Скала-М»
24
Опорные о гетеродинные частоты
Двухканальное построение
ДН, работа приемопередатчиков
на трех частотах и возможность
одновременной обработки сигна-
лов в амплитудном и когерент-
ном каналах позволяют оптими-
зировать конфигурацию зоны об-
наружения РЛ. Вся зона обнару-
жения разбита на четыре участка
(рис. 1.3). Границы участков ус-
танавливаются в зависимости от
помеховой ситуации. На первом
Рис. 1.3. Структура зоны обнаружения
первичного канала ТРЛК «Скала-М»
участке (I) используются сигналы верхнего луча, обработанные
в системе СДЦ. Использование в ближней зоне сигналов верхнего
луча позволяет ослабить мощность сигналов, отраженных от мест-
ных предметов, на 15 ... 20 дБ. Протяженность первого участка
определяется мощностью сигналов, отраженных от местных пред-
метов и составляет 30 ... 40 км.
На втором участке (II) используются сигналы нижнего луча,
обработанные в системе СДЦ, и сигналы верхнего луча, обработан-
ные аппаратурой, работающей в амплитудном режиме. При этом
в канале нижнего луча вводится ВАРУ на 10 ... 15 дБ больше, чем
в канале верхнего луча, что обеспечивает снижение уровня шумов
канала нижнего луча и возможность наблюдения за воздушными
судами, находящимися под малыми углами места. Второй участок
заканчивается на таком удалении от РЛК, при котором сигналы от
местных предметов, принимаемые нижним лучом, имеют незначи-
тельную мощность.
На третьем участке (III) используются сигналы верхнего луча, на
четвертом-нижнего луча. На третьем и четвертом участках сигна-
лы подвергаются амплитудной обработке. Четвертый участок (IV)
начинается от границ второго или третьего участков и простирается
на расстояние максимальной дальности действия РЛС.
Радиолокационный комплекс может работать как с тремя прие-
мопередатчиками, так и с двумя. Во втором случае оба приемопере-
датчика работают с частотой следования зондирующих импульсов
330 Гц, т. е. в режиме редкого запуска. Вобуляция частоты запуска
РЛК позволяет повысить эффективность работы системы СДЦ за
счет уменьшения провалов в ее амплитудно-скоростной характерис-
тике и устранить неоднозначность, обусловленную отраженными
сигналами от предметов, находящихся за пределами максимальной
дальности действия РЛК.
Зона видимости РЛК при работе с двумя приемопередатчиками
формируется следующим образом. На первом участке используют-
ся сигналы первого приемопередатчика, поступающие по верхнему
лучу и прошедшие обработку в системе СДЦ. На втором участке
используются сигналы первого приемопередатчика, поступающие
25
по нижнему лучу и обработанные в системе СДЦ. На третьем
участке используется сумма сигналов, поступающих по верхнему
и нижнему лучам и обработанных в амплитудном канале соответст-
венно первого и второго приемопередатчиков.
На четвертом участке используется сумма сигналов первого
и второго приемопередатчиков, поступающих по нижнему лучу
и обработанных в амплитудном канале. При отказе любого из двух
приемопередатчиков его место занимает третий и принцип форми-
рования зоны видимости остается прежним.
При работе РЛК с тремя приемопередатчиками первые два
работают с частотой повторения зондирующих сигналов 330 Гц,
а третий -1000 Гц. Для обработки в системе СДЦ используются
сигналы третьего приемопередатчика. Увеличенная частота следо-
вания зондирующих сигналов повышает эффективность работы
СДЦ за счет уменьшения влияния на работу СДЦ флуктуаций
местных предметов и вращения антенн. При отказе одного из трех
приемопередатчиков РЛК переходит в режим работы с двумя
приемопередатчиками.
Аппаратура первичного канала РЛК работает следующим обра-
зом. Высокочастотные сигналы передатчиков, оконечные каскады
которых выполнены на мощных усилительных клистронах, подают-
ся через антенные переключатели на два устройства сложения
мощностей, позволяющих объединить сигналы трех передающих
устройств для передачи их в общий тракт и далее через вращающе-
еся сочленение - в устройство управления поляризацией к облучате-
лю нижнего луча.
Принятые нижним лучом сигналы проходят те же устройства
волноводного тракта, что и при передаче зондирующего сигнала.
При этом устройства сложения мощностей фильтруют отраженные
сигналы и в зависимости от несущей частоты передают их через
антенные переключатели на соответствующие приемные устрой-
ства. Приемные устройства имеют два канала. Первый канал
служит для обработки сигналов основного луча, второй-для обра-
ботки сигналов, поступающих по верхнему лучу. Канал ИВЦ
работает только на прием. Сигналы канала ИВЦ проходят поляри-
зационное устройство, вращающееся сочленение и после блока
разделения сигналов поступают на три приемника. В каждом
приемнике сигналы усиливаются по высокой частоте, преобразуют-
ся в сигнал промежуточной частоты и подаются на предваритель-
ные усилители промежуточной частоты (УПЧ). Дальнейшее усиле-
ние и обработка сигналов производятся в двухканальном УПЧ. В
одном канале усиливаются и обрабатываются сигналы верхнего
луча, а в другом-нижнего луча. Построение каналов аналогичное.
Каждый канал имеет по два выхода: один-для видеосигналов,
прошедших амплитудную обработку, второй-для сигналов проме-
жуточной частоты, предназначенных для подачи на фазовые детек-
торы системы СДЦ. Переключение выходов производится с по-
26
мощью автоматических ключей, работающих по жесткой програм-
ме. На первом участке зоны обнаружения к фазовым детекторам
подаются сигналы верхнего луча, на втором участке-нижнего луча.
_ На одном фазовом детекторе выделяется синфазная составляющая,
на другом-квадратурная. Обе составляющие поступают на вход
цифровой части системы СДЦ для дальнейшей обработки.
После этого сигналы амплитудных и когерентных каналов по-
ступают в аппаратуру первичной обработки информации, объединя-
ются с сигналами ВРЛ и через модемы передаются в узкополосную
линию связи для их трансляции на аппаратуру обработки и отобра-
жения радиолокационной информации, расположенную в Центре
АС УВД. Если РЛ обеспечивает информацией автономный команд-
но-диспетчерский пункт (КДП), то после объединения амплитудных
и когерентных сигналов в формирователе зоны обзора они передаю-
тся на автономный КДП с помощью широкополосной радиотранс-
ляционной линии (ШРТЛ).
Аппаратура трассового РЛК «Скала-М» имеет высокую стои-
мость, развертывание комплекса требует больших капитальных
затрат, эксплуатационные расходы значительные. Поэтому комп-
лексы «Скала-М» в настоящее время используются в автоматизиро-
ванных системах УВД с высокой интенсивностью воздушного
движения.
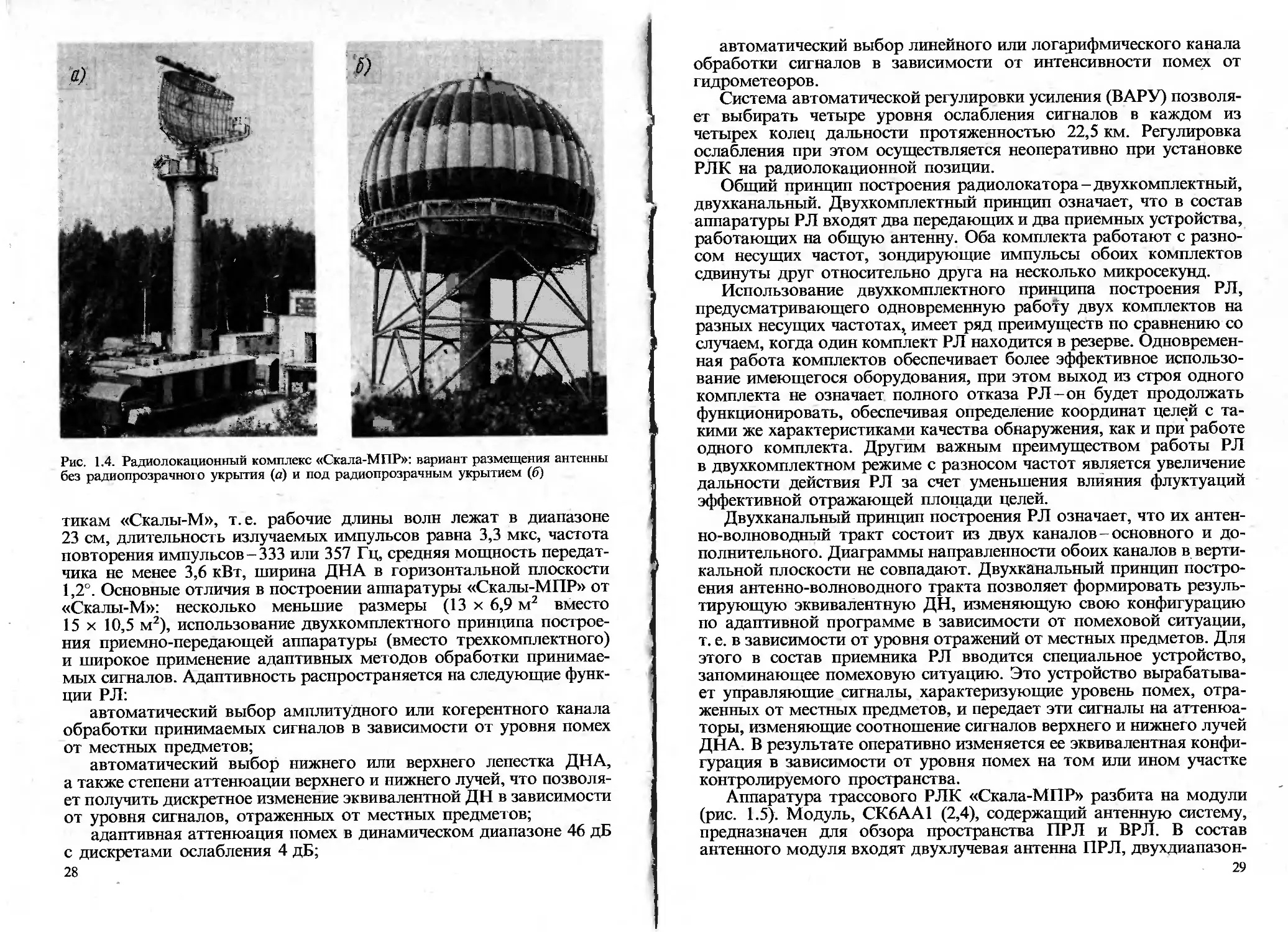
Радиолокационный комплекс «Скала-МПР» предназначен для ра-
боты на трассах со средней интенсивностью воздушного движения.
Он может использоваться автономно или в составе районных
автоматизированных систем УВД. Комплекс имеет несколько мо-
дификаций. Одна из них предусматривает размещение аппаратуры
комплекса в полуприцепах-фургонах, а антенных систем и опорно-
поворотного устройства - на круглой металлической башне без
радиопрозрачного укрытия (рис. 1.4, а). Второй вариант предпола-
гает размещение приемно-передающей аппаратуры в стационарном
здании, а антенной системы и опорно-поворотного устройства-на
металлической эстакаде с радиопрозрачным укрытием (рис. 1.4,6).
В состав комплекса входят первичный и вторичный каналы,
АПОИ, системы узкополосной и широкополосной передачи данных,
выносное оборудование КДП. Комплекс может сопрягаться с аппа-
ратурой отображения «Символ», «Строка-Страница», «Строка-Б»,
унифицированными темновыми индикаторами трассовых радио-
локаторов. При работе в системе АС УВД «Стрела» или «Трасса»
комплекс сопрягается с автоматическими радиопеленгаторами
АРП-75 или АРП-АС.
Дальность действия первичного канала при вероятности пра-
вильного обнаружения 0,8 и вторичного канала при вероятности 0,9
по самолетам, находящимся на высоте 10 000 м, составляет не менее
350 км. Вероятность ложной тревоги при этом равна 10~6. Темп
выдачи информации равен 10 с. Остальные характеристики первич-
ного канала комплекса приблизительно соответствуют характерис-
27
Рис. 1.4. Радиолокационный комплекс «Скала-МПР»: вариант размещения антенны
без радиопрозрачного укрытия (а) и под радиопрозрачным укрытием (б)
тикам «Скалы-М», т. е. рабочие длины волн лежат в диапазоне
23 см, длительность излучаемых импульсов равна 3,3 мкс, частота
повторения импульсов-333 или 357 Гц, средняя мощность передат-
чика не менее 3,6 кВт, ширина ДНА в горизонтальной плоскости
1,2°. Основные отличия в построении аппаратуры «Скалы-МПР» от
«Скалы-М»: несколько меньшие размеры (13 х 6,9 м2 вместо
15 х 10,5 м2), использование двухкомплектного принципа построе-
ния приемно-передающей аппаратуры (вместо трехкомплектного)
и широкое применение адаптивных методов обработки принимае-
мых сигналов. Адаптивность распространяется на следующие функ-
ции РЛ:
автоматический выбор амплитудного или когерентного канала
обработки принимаемых сигналов в зависимости от уровня помех
от местных предметов;
автоматический выбор нижнего или верхнего лепестка ДНА,
а также степени аттенюации верхнего и нижнего лучей, что позволя-
ет получить дискретное изменение эквивалентной ДН в зависимости
от уровня сигналов, отраженных от местных предметов;
адаптивная аттенюация помех в динамическом диапазоне 46 дБ
с дискретами ослабления 4 дБ;
28
автоматический выбор линейного или логарифмического канала
обработки сигналов в зависимости от интенсивности помех от
гидрометеоров.
Система автоматической регулировки усиления (ВАРУ) позволя-
ет выбирать четыре уровня ослабления сигналов в каждом из
четырех колец дальности протяженностью 22,5 км. Регулировка
ослабления при этом осуществляется неоперативно при установке
РЛК на радиолокационной позиции.
Общий принцип построения радиолокатора-двухкомплектный,
двухканальный. Двухкомплектный принцип означает, что в состав
аппаратуры РЛ входят два передающих и два приемных устройства,
работающих на общую антенну. Оба комплекта работают с разно-
сом несущих частот, зондирующие импульсы обоих комплектов
сдвинуты друг относительно друга на несколько микросекунд.
Использование двухкомплектного принципа построения РЛ,
предусматривающего одновременную работу двух комплектов на
разных несущих частотах, имеет ряд преимуществ по сравнению со
случаем, когда один комплект РЛ находится в резерве. Одновремен-
ная работа комплектов обеспечивает более эффективное использо-
вание имеющегося оборудования, при этом выход из строя одного
комплекта не означает полного отказа РЛ-он будет продолжать
функционировать, обеспечивая определение координат целей с та-
кими же характеристиками качества обнаружения, как и при работе
одного комплекта. Другим важным преимуществом работы РЛ
в двухкомплектном режиме с разносом частот является увеличение
дальности действия РЛ за счет уменьшения влияния флуктуаций
эффективной отражающей площади целей.
Двухканальный принцип построения РЛ означает, что их антен-
но-волноводный тракт состоит из двух каналов - основного и до-
полнительного. Диаграммы направленности обоих каналов в верти-
кальной плоскости не совпадают. Двухканальный принцип постро-
ения антенно-волноводного тракта позволяет формировать резуль-
тирующую эквивалентную ДН, изменяющую свою конфигурацию
по адаптивной программе в зависимости от помеховой ситуации,
т. е. в зависимости от уровня отражений от местных предметов. Для
этого в состав приемника РЛ вводится специальное устройство,
запоминающее помеховую ситуацию. Это устройство вырабатыва-
ет управляющие сигналы, характеризующие уровень помех, отра-
женных от местных предметов, и передает эти сигналы на аттенюа-
торы, изменяющие соотношение сигналов верхнего и нижнего лучей
ДНА. В результате оперативно изменяется ее эквивалентная конфи-
гурация в зависимости от уровня помех на том или ином участке
контролируемого пространства.
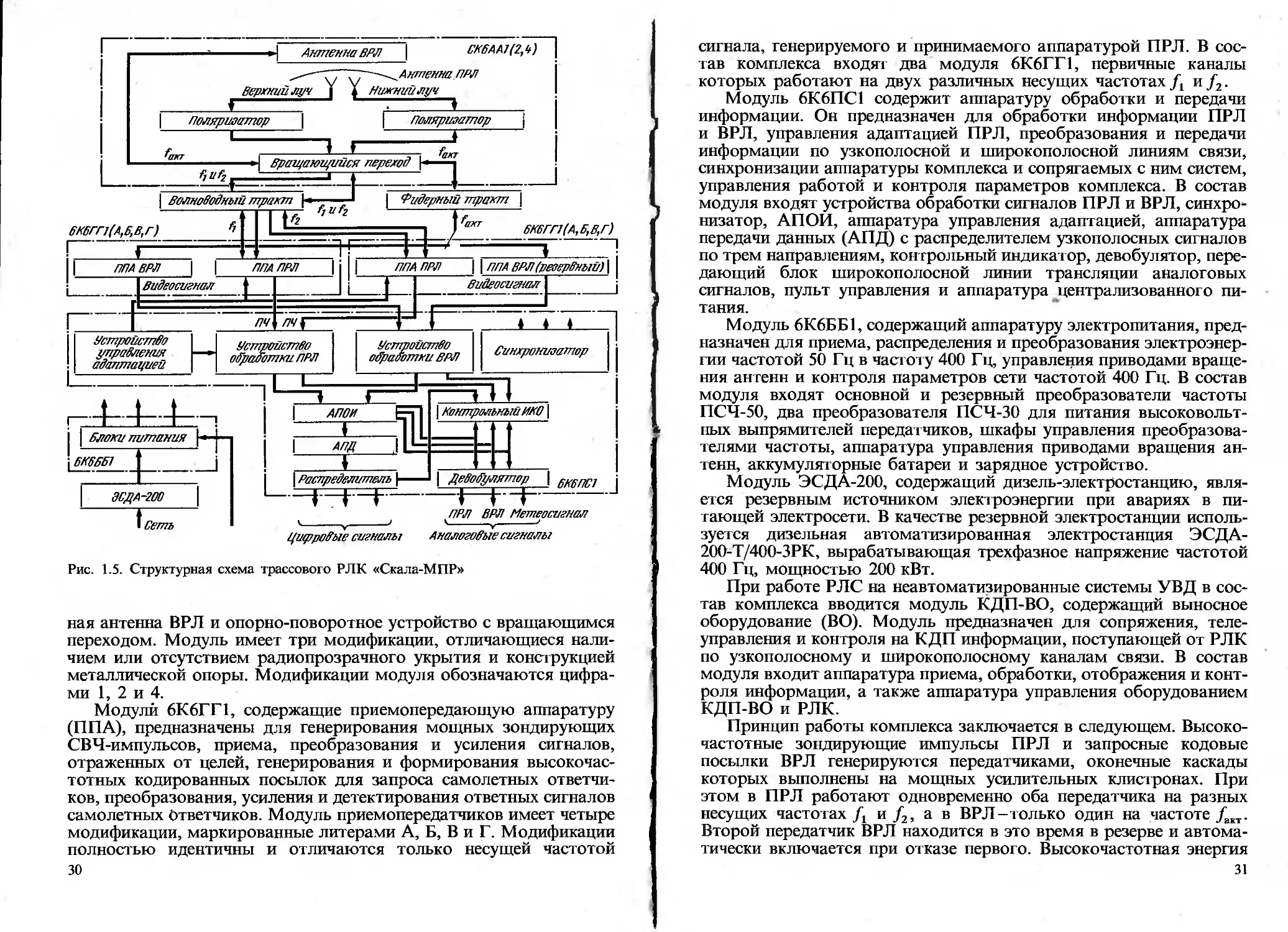
Аппаратура трассового РЛК «Скала-МПР» разбита на модули
(рис. 1.5). Модуль, СК6АА1 (2,4), содержащий антенную систему,
предназначен для обзора пространства ПРЛ и ВРЛ. В состав
антенного модуля входят двухлучевая антенна ПРЛ, двухдиапазон-
29
f
| Антенна ВРЛ
СКБААЦ2,Ь)
\ ~~—-^Антенна.1
Верхний луч [ j Нижний луч
поляризатор
------[-----
Поляризатор
fgnr
fjUfz
♦ »
] Враи/ающийся переход
| Волнододный тракт |>
fjOfz
| Фидерный троят |
6КБГП(А,Б,В,Г)
fi
'аят
6К6ГГ1(А,Б,В,Г')
ППА ПРЛ
♦__________
J | ППА ВРЛ (резервный) |
Видеосигнал
ППА ПРЛ
Устройство
управления
адаптацией
♦ ......"1"
ППА ВРЛ | |____
Видеосигнал |
ПУ{~
йство
ЭСДА-200 |
Сеть
_____£
АПОИ
Устройство
одра сотки ВРЛ
Синхронизатор
АПД
| Контрольный ИКО |
| Распределитель | | Деводулятор | Bpen(;j J
, Ц1РЛ ВРЛ Метеосигнал
Цифровые сигналы Аналоговые сигналы
Рис. 1.5. Структурная схема трассового РЛК «Скала-МПР»
ная антенна ВРЛ и опорно-поворотное устройство с вращающимся
переходом. Модуль имеет три модификации, отличающиеся нали-
чием или отсутствием радиопрозрачного укрытия и конструкцией
металлической опоры. Модификации модуля обозначаются цифра-
ми 1, 2 и 4.
Модули 6К6ГГ1, содержащие приемопередающую аппаратуру
(ППА), предназначены для генерирования мощных зондирующих
СВЧ-импульсов, приема, преобразования и усиления сигналов,
отраженных от целей, генерирования и формирования высокочас-
тотных кодированных посылок для запроса самолетных ответчи-
ков, преобразования, усиления и детектирования ответных сигналов
самолетных Ответчиков. Модуль приемопередатчиков имеет четыре
модификации, маркированные литерами А, Б, В и Г. Модификации
полностью идентичны и отличаются только несущей частотой
30
J
сигнала, генерируемого и принимаемого аппаратурой ПРЛ. В сос-
тав комплекса входят два модуля 6К6ГГ1, первичные каналы
которых работают на двух различных несущих частотах^ и/2.
Модуль 6К6ПС1 содержит аппаратуру обработки и передачи
информации. Он предназначен для обработки информации ПРЛ
и ВРЛ, управления адаптацией ПРЛ, преобразования и передачи
информации по узкополосной и широкополосной линиям связи,
синхронизации аппаратуры комплекса и сопрягаемых с ним систем,
управления работой и контроля параметров комплекса. В состав
модуля входят устройства обработки сигналов ПРЛ и ВРЛ, синхро-
низатор, АПОИ, аппаратура управления адаптацией, аппаратура
передачи данных (АПД) с распределителем узкополосных сигналов
по трем направлениям, контрольный индикатор, девобулятор, пере-
дающий блок широкополосной линии трансляции аналоговых
сигналов, пульт управления и аппаратура централизованного пи-
тания.
Модуль 6К6ББ1, содержащий аппаратуру электропитания, пред-
назначен для приема, распределения и преобразования электроэнер-
гии частотой 50 Гц в частоту 400 Гц, управления приводами враще-
ния антенн и контроля параметров сети частотой 400 Гц. В состав
модуля входят основной и резервный преобразователи частоты
ПСЧ-50, два преобразователя ПСЧ-30 для питания высоковольт-
ных выпрямителей передатчиков, шкафы управления преобразова-
телями частоты, аппаратура управления приводами вращения ан-
тенн, аккумуляторные батареи и зарядное устройство.
Модуль ЭСДА-200, содержащий дизель-электростанцию, явля-
ется резервным источником электроэнергии при авариях в пи-
тающей электросети. В качестве резервной электростанции исполь-
зуется дизельная автоматизированная электростанция ЭСДА-
200-Т/400-ЗРК, вырабатывающая трехфазное напряжение частотой
400 Гц, мощностью 200 кВт.
При работе РЛС на неавтоматизированные системы УВД в сос-
тав комплекса вводится модуль КДП-ВО, содержащий выносное
оборудование (ВО). Модуль предназначен для сопряжения, теле-
управления и контроля на КДП информации, поступающей от РЛК
по узкополосному и широкополосному каналам связи. В состав
модуля входит аппаратура приема, обработки, отображения и конт-
роля информации, а также аппаратура управления оборудованием
КДП-ВО и РЛК.
Принцип работы комплекса заключается в следующем. Высоко-
частотные зондирующие импульсы ПРЛ и запросные кодовые
посылки ВРЛ генерируются передатчиками, оконечные каскады
которых выполнены на мощных усилительных клистронах. При
этом в ПРЛ работают одновременно оба передатчика на разных
несущих частотах^ и /2, а в ВРЛ-только один на частоте /акт.
Второй передатчик ВРЛ находится в это время в резерве и автома-
тически включается при отказе первого. Высокочастотная энергия
31
двух передатчиков ПРЛ объединяется в устройстве сложения мощ-
ностей внешнего волноводного тракта. Далее высокочастотная энер-
гия ПРЛ канализируется через вращающийся переход и поляриза-
тор на облучатель нижнего луча основной антенны и излучается
в пространство. Таким образом реализуется двухкомплектный двух-
частотный режим работы первичного канала РЛК. Одновременно
запросные импульсы, генерируемые передатчиком вторичного канала,
через вращающийся переход поступают в антенную систему ВРЛ
и также излучаются в пространство. Антенна ВРЛ рассчитана на
работу с волнами, имеющими вертикальную поляризацию. Антенна
ПРЛ излучает волны с различной поляризацией. Изменение поляри-
зации от линейной до круговой производится оперативно. При этом
поляризация волн на несущих частотах fr и f2 получается ортого-
нальной.
Сигналы, отраженные от целей, принимаются основной антен-
ной ПРЛ и по волноводным каналам верхнего и нижнего лучей
поступают на входы приемников ПРЛ, рассчитанных на работу
с сигналами fx и/2. На входе каждого из приемников осуществляет-
ся адаптивное объединение сигналов верхнего и нижнего лучей по
программе, определяемой уровнем мешающих сигналов местных
предметов в каждом дискретном участке контролируемого про-
странства. Сигналы, управляющие адаптивными сумматорами, вы-
рабатываются устройствами адаптации, находящимися в модуле
6К6ПС1. Управление в каждом полу комплекте, работающем на
своей несущей частоте Д или/2, осуществляется раздельно в зависи-
мости от зафиксированных в этих комплектах помеховых ситуаций.
Усиленные и преобразованные на промежуточную частоту (ПЧ)
эхо-сигналы поступают на входы фазовых детекторов устройств
обработки сигналов ПРЛ, где производится их селекция по ско-
рости перемещения целей.
В устройстве обработки предусмотрена адаптивная селекция
когерентного или амплитудного канала в зависимости от помехо-
вой ситуации. На тех участках пространства, где помехи от местных
предметов отсутствуют, предпочтение отдается амплитудному ка-
налу, что позволяет полностью исключить возможность пропада-
ния полезных сигналов из-за появления слепых скоростей нулевого
порядка.
После устройств обработки ПРЛ сигналы двух полукомшпжтов
объединяются, подвергаются дополнительной очистке в АПОИ
и через аппаратуру передачи данных (АПД) и распределитель
цифровой информации поступают в узкополосные телефонные ка-
налы кабельных линий связи. После АПОИ сигналы передаются
в виде цифровых кодограмм, содержащих, кроме информации
о координатах ВС, также дополнительную информацию о номере
ВС, высоте и остатке топлива, получаемую по каналу ВРЛ. На
выходе АПОИ имеется также информация о границах метеообразо-
ваний, получаемая в результате обработки сигналов ПРЛ. Кроме
32
цифровых сигналов, на выходе
АПОИ имеются широкополосные
аналоговые сигналы, которые пос-
ле девобуляции могут в случае
необходимости транслироваться
по широкополосным линиям свя-
зи на автономный КДП или через
модуль КДП-ВО-на аппаратуру
отображения информации «Сим-
вол», «Строка-Страница», «Стро-
ка-Б», «Трасса», унифицирован-
ные индикаторы трассовых РЛС.
Для контроля за качеством ин-
формации в аппаратуру комплек-
са введен контрольный индика-
тор, на котором можно увидеть
раздельно и в сумме аналоговую
информацию первого и второго
полукомплектов приемопередат-
чиков ПРЛ, аналоговую инфор-
мацию, имеющуюся на выходах
капала ВРЛ и АПОИ, а также
дешифрованную цифровую ин-
формацию, поступающую в узко-
полосные телефонные линии Ри^ Еб Трассовая радиолокационная
СТо-НЦИЯ А 1
связи.
Трассовые радиолокаторы ATCR-22 (рис. 1.6) итальянской фир-
мы «Селения» используются в Советском Союзе в качестве источ-
ника радиолокационной информации для районного центра ав-
томатизированной системы УВД «Теркас». В состав оборудования
радиолокационной позиции АС УВД «Теркас», кроме ПРЛ
ATCR-22, входит ВРЛ «Корень-АС», аппаратура первичной обра-
ботки информации СХ-1100, аппаратура трансляции радиолокаци-
онных сигналов по узкополосным линиям связи GH-2054, а также
устройства основного и резервного питания. Дополнительным
источником информации о координатах целей являются автомати-
ческие радиолокаторы АРП-75, располагающиеся невдалеке от
радиолокационных позиций.
Дальность действия РЛС ATCR-22 при высоте подвеса антенны
25 м, эффективной площади рассеяния целей 10 м2, вероятности
правильного обнаружения 0,8, вероятности ложной тревоги 10“6
и высоте расположения целей 12 км равна 350 км. При тех же
данных, но для целей, расположенных на высоте 6 км, дальность
действия РЛС равна 300 км. Скорость обзора пространства равна
6 об/мин, импульсная скорость передатчика одного комплекта
1,8 МВт, длительность зондирующих импульсов 3 мкс, средняя
частота повторения импульсов 365 Гц (при шестикратной вобуля-
2 Зак. 137Г1 33
ции периода повторения импульсов), длина волны, на которой
работает станция, равна 23 см. Поляризация радиоволн при этом
может быть или линейной горизонтальной, или круговой.
Основная аппаратура РЛ размещается в стационарном одно-
этажном помещении, в котором находятся также часть оборудова-
ния ВРЛ, АПОИ, модемы и устройства первичного и резервного
питания. Для уменьшения влияния климатических воздействий на
антенну она размещается в радиопрозрачном укрытии.
Передающие устройства РЛ (рис. 1.7) размещаются в трехсек-
ционных шкафах. Трехсекционный шкаф содержит стойки высоко-
вольтного выпрямителя 1, модулятора 2 и магнетрона 3. Здесь же
находится система водяного охлаждения анода магнетрона. Аппа-
ратура приемников размещается в двухсекционном шкафу и состоит
из аналоговой 4 и цифровой 5 частей.
Центральная стойка служит для сопряжения обоих комплектов
РЛ между собой, с антенной группой и с периферийными устрой-
ствами. В состав оборудования центральной стойки входят блок
управления и контроля антенными механизмами 8, блок контроля
параметров РЛ 9, блок распределения видеосигналов, сигналов
запуска и меток азимутальной информации 10, источники питания
11, панель распределения мощности 12. Антенная группа состоит из
радиопрозрачного укрытия, антенны, волноводных каналов основ-
ного 6 и дополнительного 7 лучей и опорно-поворотного устрой-
ства с вращающимся переходом.
Упрощенная структурная схема радиолокатора ATCR-22 пока-
зана на рис. 1.8. Общий принцип построения структурной схе-
мы- двухканальный, двухкомплектный с одновременной работой
Комплект В
Рис. 1 7 Состав оборудования радиолокатора ATCR-22
34
Рис. 1.8. Упрощенная структурная схема радиолокатора ATCR-22
обоих комплектов на разных несущих частотах и разнесением
зондирующих импульсов во времени.
В состав РЛ входят два приемно-передающих комплекта (А и В),
антенна и волноводный тракт, включающий в себя основной и до-
полнительный каналы. Комплект А работает на несущей частоте/,,
комплект В-на частоте /2. Объединение и разъединение сигналов/,
и /2 производятся с помощью диплексоров, расположенных в основ-
ном и дополнительном каналах волноводного тракта. Разность
между частотами/j и /2 выбирается таким образом, чтобы флуктуа-
ции эффективной отражающей поверхности целей на этих частотах
имели неодинаковый характер. Работа РЛ в двухкомплектном
режиме с разносом несущих частот позволяет получить дополни-
тельное увеличение дальности действия РЛ за счет уменьшения
флуктуаций целей в результирующем сигнале, полученном на выхо-
де цифровой части приемников при сложении сигналов отдельных
комплектов РЛ.
Антенна РЛ имеет два облучателя, расположенных один над
другим, выше и ниже фокуса отражателя. Облучатели вместе
с отражателем двойной кривизны формируют в вертикальной
плоскости два луча-нижний (основной) и верхний (дополнитель-
ный). В соответствии с этим волноводный тракт РЛ имеет два
канала - основной и дополнительный. Основной канал работает на
передачу и прием сигналов, а дополнительный-только на прием.
Двухканальное построение антенно-волноводного тракта позволяет
производить на входе аналоговой части приемника весовое объеди-
нение сигналов основного и дополнительного каналов и тем самым
как бы изменять конфигурацию эквивалентной диаграммы направ-
ленности антенны. Сигналы объединяются по адаптивной програм-
ме в зависимости от помеховой ситуации. Для тех участков контро-
лируемого пространства, где наблюдаются сильные отражения от
2* 35
местных предметов, используются в основном сигналы верхнего
луча (дополнительного канала), для участков, где влияние местных
предметов незначительно, работа производится нижним (основ-
ным) лучом. Весовое соотношение сигналов основного и дополни-
тельного каналов устанавливается автоматически на входе каждого
приемника с помощью устройства, называемого фиксатором помех.
Передающие и приемные устройства обоих комплектов совер-
шенно одинаковы. Передатчики выполнены на магнетронах с жид-
костным охлаждением. Приемные устройства содержат аналоговую
и цифровую части. В цифровой части приемника осуществляется
предварительная обработка сигналов: селекция движущихся целей,
обнаружение метеообъектов, подавление сигналов, отраженных от
гидрометеоров, автоматическое переключение когерентного и неко-
герентного каналов, нормализация уровня ложных тревог. Выход-
ные сигналы обоих комплектов суммируются и подаются на АПОИ
или на оконечные устройства широкополосных кабельных или
радиорелейных линий для трансляции сигналов в центры УВД.
При выходе из строя одного из комплектов приемопередающей
аппаратуры РЛ не теряет работоспособности, уменьшается лишь
его максимальная дальность действия.
Трассовые обзорные радиолокаторы (ОРЛ-Т, вариант Б). Среди
радиолокаторов этого класса наиболее широкое распространение
в гражданской авиации получили ОРЛ П-35М (рис. 1.9) и их
последующие модификации. Эти РЛ имеют в своем составе не-
Рис. 1.9. Радиолокационная станпия П-35М
36
Антенна подавления
Рис. 1.10. Упрощенная структурная схема радиолокатора П-35М
сколько приемопередатчиков десятисантиметрового диапазона и
столько же волноводных каналов в антенной системе, включающей
в себя два параболических отражателя. Диаграмма направленности
антенны имеет в вертикальной плоскости 6 (для П-35М) или
5 отдельных взаимно перекрывающихся лепестков, обеспечиваю-
щих обзор пространства по вертикали до 30°. Каждый из приемо-
передатчиков работает на своей частоте, импульсная мощность
одного передатчика равна приблизительно 800 кВт. Период обзора
пространства может устанавливаться 10 или 20 с. Частота повторе-
ния импульсов равна 375 Гц, длительноегь зондирующих импуль-
сов-2,7 мкс. Максимальная дальность действия РЛ по самолету
типа Ту-154, находящемуся на высоте 10 км, при вероятности
правильного обнаружения 0,5 и ложной тревоги 10“ 6 составляет
280 км.
Радиолокатор (рис. 1.10) состоит из шести отдельных ПРЛ
и двух ВРЛ, объединенных в одно целое. Применение шести
отдельных первичных каналов обусловлено необходимостью полу-
чения заданной максимальной дальности действия РЛ при ограни-
ченных возможностях генерирования большой мощности передат-
чиками и канализации этой мощности через волноводный тракт,
имеющий ограничения на максимальную пиковую мощность. Каж-
дый канал приемопередающей аппаратуры (ППА) имеет отдельный
приемопередатчик, работающий на своей несущей частоте и излуча-
ющий и принимающий импульсы СВЧ-мощности через индивиду-
альный облучатель приемно-передающей антенны. Антенная систе-
ма состоит из двух отражателей параболического типа, шести
облучателей первичного канала, двух облучателей вторичного кана-
ла и слабонаправленной щелевой антенны, предназначенной для
подавления сигналов боковых лепестков диаграммы направленнос-
37
Рис. 1.11. Диаграммы направленности
антенной системы радиолокатора
П-35М в вертикальной плоскости
ти антенны вторичного канала.
Облучатели первичного канала
смещены относительно фокусов
отражателей в вертикальной плос-
кости, благодаря чему ДН пер-
вичного канала РЛ приобретает
многолепестковый характер
(рис. 1.11).
Применение шести отдельных
волноводных трактов в первич-
ном канале (см. рис. 1.10) обу-
словили своеобразное конструк-
тивное выполнение оборудования РЛ. Для устранения трудностей,
связанных с конструированием шестиканальных волноводных вра-
щающихся переходов, антенная система размещается на поворот-
ной приемно-передающей кабине, в которой установлена вся вы-
сокочастотная часть РЛ и которая вращается вместе с антенной
с частотой 6 или 3 об/мин.
Передающие устройства выполнены на магнетронах, работаю-
щих на фиксированных частотах. Для стабилизации промежуточной
частоты применяется автоматическая подстройка частоты гетеро-
динов, выполненных на отражательных клистронах.
Для приема отраженных сигналов применяются супергетеродин-
ные приемники с предварительными усилителями высокой частоты
на лампах бегущей волны. В каждом приемнике имеются схемы
мгновенной автоматической регулировки усиления, сужающие ди-
намический диапазон входных сигналов. Для уменьшения влияния
помех от местных предметов и гидрометеоров в каждом приемнике
предусмотрена возможность включения дифференцирующих цепо-
чек. Сигналы первых трех приемников, в наибольшей степени
засоренные помехами от местных предметов, могут быть бланкиро-
ваны в начале дистанции. Размеры бланков регулируются вручную
в зависимости от интенсивности помех.
Выходные сигналы (Эхо-1 и Эхо-П) приемников объединяются
в двух смесителях и передаются по трансляционной линии связи
(радио или кабельной) на КДП для отображения на диспетчерских
выносных индикаторах кругового обзора (ВИКО). Туда же поступа-
ют ответные сигналы канала опознавания и вторичного канала,
предназначенного для работы с самолетными ответчиками, удов-
летворяющими требованиям стандарта СЭВ. Для работы с само-
летными ответчиками, удовлетворяющими рекомендациям ИКАО,
предусмотрено сопряжение аппаратуры РЛ с автономными ВРЛ-
«Корень-АС». Сигналы, принятые по встроенному вторичному
каналу, поступают на аппаратуру декодирования и отображения
информации (АДО).
Синхронная работа всех блоков РЛ, включая контрольный
ИКО, обеспечивается импульсами, вырабатываемыми синхрониза-
38
тором. Приемопередающая кабина вместе с антеннами приводится
во вращение электромеханическим приводом. С осью вращения
кабины связаны датчики угла поворота антенны, необходимые для
получения и передачи угловой информации на индикаторы с враща-
ющимися отклоняющими катушками, датчик импульсов «Север»
для задания начала отсчета азимута в аппаратуре вторичной радио-
локации и датчик импульсов азимута для формирования азимуталь-
ных масштабных меток на экранах индикаторов.
Аппаратура новых модификаций РЛ рассматриваемого типа
претерпела значительные изменения: исключен четвертый приемо-
передающий канал и общий сектор обзора в вертикальной плос-
коскости уменьшен до 28°, в волноводные тракты трех первых
каналов введены поляризационные устройства, индикаторы с вра-
щающимися отклоняющими системами заменены на новые унифици-
рованные индикаторы с неподвижными отклоняющими катушками,
введены цифровые фильтры очистки сигналов от несинхронных
помех, а также аппаратура цифровой квадратурной системы СДЦ.
Система СДЦ построена по псевдокогерентному принципу с двукра
тным вычитанием сигналов и шестикратной вобуляцией частоты
повторения импульсов в пределах 300 ... 375 Гц. Обеспечивается
подавление контрольных сигналов на величину не менее 35 дБ.
Аэродромные обзорные радиолокаторы (ОРЛ-А). В эксплуатации
находятся ОРЛ вариантов В1 и В2. ОРЛ варианта ВЗ с дальностью
действия до 46 км не выпускаются. ОРЛ варианта В1 предназначе-
ны в основном для работы в составе автоматизированных аэ-
родромных систем УВД, а также могут быть использованы в ка-
честве автономных источников радиолокационной информации
крупных аэроузлов. К РЛ этого типа относятся РЛК «Иртыш»,
«Онега», «Скала-МПА» и радиолокационная станция ATCR-44.
Аэродромный радиолокационный комплект «Иртыш» (рис. 1.12)
входит в состав оборудования аэродромной АС УВД «Старт». При
работе с ВС, оборудованными ответчиками, РЛК «Иртыш» обеспе-
чивает диспетчерский состав координатной информацией о положе-
нии ВС в воздушном пространстве аэродрома и дополнительной
информацией о бортовых номерах, номерах рейсов, запасе топлива
и высоте полета.
Для получения перечисленной информации в состав РЛК
«Иртыш» входит ПРЛ «Нарва» и встроенный ВРЛ «Корень-С»,
который позволяет получать дополнительную информацию о ВС,
оборудованных ответчиками, характеристики которых удовлетво-
ряют стандартам ИКАО и СЭВ. Радиолокационная информация
транслируется в Центр АС УВД по двум независимым каналам:
широкополосному и узкополосному. В случае трансляции по узко-
полосному каналу радиолокационные сигналы проходят предвари-
тельно обработку в АПОИ.
На радиолокационной позиции для размещения аппаратуры
используется одноэтажное здание, на крыше которого устанавлива-
39
Рис. 1.12. Аэродромный РЛК «Иртыш»
ется радиопрозрачный купол, предназначенный для уменьшения
ветровых нагрузок на антенную систему, расположенную под купо-
лом. В здании имеется несколько помещений: аппаратный зал,
антенная комната, вентиляционная камера, агрегатная и помещение
для запасного имущества. На крыше здания над антенной комнатой
установлено поворотное устройство с антенной ПРЛ и антенной
ВРЛ «Корень-С». Антенна ВРЛ «Корень-С» устанавливается на
основной антенне ПРЛ. Максимумы ДН антенн ПРЛ и ВРЛ
в азимутальной плоскости совмещены.
При переходе с основной антенны кругового обзора на резерв-
ную РЛК «Иртыш» осуществляет работу только по первичному
каналу. Электропитание аппаратуры осуществляется от сетевого
преобразователя типа ВПЛ-30, расположенного в агрегатном зале.
Преобразователь ВПЛ-30, позволяющий получать напряжение
220 В, 400 Гц, имеет автоматический резерв.
Тактические и технические параметры РЛК комплекса «Иртыш»
имеют следующие значения. Максимальная дальность действия по
первичному каналу с основной антенной по ВС типа Ту-154 при
вероятности правильного обнаружения 0,9 и вероятности ложных
тревог 10“6 для высот 1200, 6000 и 10000 м соответственно равна
40
80, 125 и 150 км. По вторичному каналу при вероятности правиль-
ного обнаружения 0,9 и вероятности ложной тревоги 10“6 в режиме
RBS (ИКАО) и УВД (СССР) для высот 1000, 4000 и 10000 м
максимальная дальность действия соответственно равна НО, 200
и 200 км. Импульсная мощность передатчика первичного канала
равна 250 кВт, вторичного канала 20 кВт. Частота излучаемых
колебаний передатчика парных импульсов равна 837,5 МГц, пере-
датчика СДЦ-883 МГц, передатчика ВРЛ-1030 МГц. Частота
повторения импульсов ВРЛ 500 Гц, канала парных импульсов-
500 Гц, канала СДЦ-1250/833/1000 Гц. Длительность импульсов
ВРЛ 0,8 мкс, канала парных импульсов - 2,4 мкс, канала СДЦ-
1,2 мкс. Несущая частота принимаемых сигналов ВРЛ (режим
УВД)-740 МГц, ВРЛ (режим RBS)-1090 МГц. Частоты остальных
приемников соответствуют частотам передатчиков. Частота враще-
ния антенны равна 10 об/мин. Ширина ДНА первичного канала
в горизонтальной плоскости равна 1,8°.
Структурная схема первичного канала РЛК «Иртыш» (рис. 1.13)
имеет два самостоятельных канала - парных импульсов (ПИ) и
СДЦ. Третий передатчик-резервный для обоих каналов. При нор-
мальной работе резервный передатчик работает на эквивалент
антенны. Он может работать на любой частоте приемных устройств
каналов ПИ и СДЦ.
Передатчик канала ПИ работает в режиме одиночных импуль-
сов с частотой повторения 500 Гц.
Название канала ПИ связано с тем, что в первых образцах
рассматриваемых аэродромных РЛС, не имеющих современного
встроенного вторичного канала и работающих в автономном режи-
УСВЧ
ZIZ
Приемник
ПИ
Видеосигнал ПИ
| Антенна |
Антенный
переключа-
тель
От АПЧ
♦
На АПЧ j pgpegammi<
ПИ
Блок
очистки
вращаю-
щийся
переход
Формирова-
тель
разверты-
вающих
напряжений
Устройство Полосковые
— сложения
мощностей
коммута-
торы
Антенный
переключа-
тель
♦
На апч
От апч
Передатчик
СДЦ
— 1 Запуск^
Запуск
Запуск
Передатчик
резервный
Запускающий
и видео сигналы
На апои
и Центр
---1—1----АС УВД
Контроль--|
ный ико I
БФТ Запуск
УСВЧ
Компенсатор
Азимутальные метки
Развертывающие напряжения Видео СДЦ Видео ПАСС
Рис. 1.13. Структурная схема первичного канала РЛК «Иртыш»
41
ме, этот канал формировал парные импульсы с кодовыми интерва-
лами, соответствующими отечественным запросным кодам ЗК1
и ЗК2. Таким образом, канал ПИ обеспечивал работу РЛС одно-
временно в двух режимах - активном и пассивном. Для обработки
ответного сигнала в активном режиме использовался специальный
приемник ответных сигналов. Поскольку в РЛК «Иртыш» входит
канал, обеспечивающий активный режим работы, то необходимость
в формировании парных импульсов отпала, а прежнее название
канала осталось без изменения.
При переходе первичной РЛС в аварийный режим передатчик
СДЦ вырабатывает одиночные импульсы с частотой повторения
500 Гц. При этом отраженные эхо-сигналы поступают в приемном
устройстве канала СДЦ на амплитудный детектор (АД), чем обеспе-
чивается работа приемного устройства канала СДЦ в пассивном
режиме.
Импульсы запуска, синхронизирующие работу всего радиолока-
тора, вырабатываются блоком формирования и трансляции (БФТ),
причем блок запуска работает в режиме синхронизации от компен-
сатора. Запускающие импульсы, поступающие на приемопередат-
чик вторичного канала, опережают синхронизирующие импульсы,
поступающие в приемные и передающие устройства канала ПИ, на
84 мкс, а поступающие на приемопередающие устройства канала
СДЦ и контрольные индикаторы - на 90 мкс. Благодаря введению
этих задержек обеспечивается совмещенный режим работы первич-
ного и вторичного каналов РЛК.
Импульсы, поступающие из БФТ, запускают все передатчики,
схемы ВАРУ приемных устройств, контрольный индикатор, блок
очистки от помех, а также вместе с видеосигналом-АПО И и аппа-
ратуру отображения информации Центра АС УВД.
Переключение основных и резервных приемных и передающих
устройств осуществляется с помощью полосковых коммутаторов
и переключателей. С выходов полосковых коммутаторов передат-
чиков высокочастотные импульсы поступают на соответствующие
антенные переключатели, предназначенные для передачи зондирую-
щих импульсов в антенную систему, а отраженных сигналов-в
приемные устройства. Резервный передатчик во время работы
основного передатчика находится в горячем резерве.
Приемопередающие устройства соединены с облучателем антен-
ны с помощью высокочастотных трактов и устройства сложения
и разделения мощностей, представляющего собой систему высоко-
частотных фильтров и трехдецибельных мостов. Они обеспечивают
одновременную работу двух приемно-передающих устройств на
один облучатель антенны. Подключение к блоку высокочастотных
элементов фидерных трактов основной и резервной антенн произво-
дится с помощью блока коммутации антенн. Антенна имеет зерка-
ло двойной кривизны с раскрывом 7 х 14 м. Вертикальный раскрыв
7 м обеспечивает необходимую крутизну нижней кромки ДНА.
42
При установке РЛК «Иртыш»
в аэропортах с гористой мест-
ностью предусмотрена возмож-
ность доукомплектования его ап-
паратурой «верхнего луча», кото-
рая позволяет получить макси-
мум ДН верхнего луча на 5° выше
относительно максимума нижне-
го луча. Обзор пространства в
секторах, в которых находятся
горные массивы, осуществляется
путем излучения зондирующих
импульсов по нижнему лучу и
Рис. 1.14. Построение зоны обнаруже-
ния РЛК «Иртыш»:
/-режимы СДЦ, активный; И-СДЦ (коге-
рентный), СДЦ (амплитудный), ПИ, актив-
ный; /7/-ПИ, активный
приема отраженных сигналов по
верхнему лучу. Принятый эхо-сигнал поступает на транзисторные
УВЧ каналов ПИ и СДЦ и далее на соответствующие приемные
устройства, выполненные по обычной супергетеродинной схеме.
Схема автоматической подстройки частоты (АПЧ) предназначе-
на для поддержания постоянной разности частот передающих
устройств и гетеродина, расположенного в блоке подстройки
частоты.
В приемных устройствах происходит преобразование высоко-
частотных сигналов в импульсы промежуточной частоты, их усиле-
ние и детектирование. Для устранения сигналов, отраженных от
местных предметов, приемное устройство канала ПИ может блан-
кироваться на время, соответствующее дальности до 50 км. Время
бланкирования устанавливается на границе сильных отражений от
местных предметов. Таким образом, прием эхо-сигналов обеспечи-
вается в ближней зоне когерентным выходом приемника СДЦ,
в средней зоне-когерентным и амплитудным выходами приемника
СДЦ и приемником парных импульсов, в дальней зоне-приемни-
ком парных импульсов. Кроме того, на всех дальностях использу-
ются сигналы, принимаемые по вторичному каналу комплекса.
Построение зоны обнаружения РЛК «Иртыш» показано на
рис. 1.14.
Для устранения слепых скоростей приемное устройство СДЦ
работает с переменным периодом повторения. Поскольку синхрони-
зация блока запуска БФТ осуществляется от компенсатора, то
в случае выхода из строя двух комплектов компенсирующих
устройств предусмотрена аварийная работа РЛС от блока запуска,
который в этом случае будет работать в режиме автономного
генерирования от собственного задающего генератора. При этом
видеосигнал с выхода приемного устройства СДЦ поступает на
БФТ, минуя компенсатор.
С выходов приемных устройств ПИ, СДЦ и компенсатора
видеосигналы поступают на БФТ, где они смешиваются с импульса-
ми запуска для последующей трансляции на АПОИ и аппаратуру
43
отображения Центра АС УВД. Блок формирования и трансляции
состоит из двух комплектов, каждый из которых содержит блок
запуска и блок формирования и трансляции. Видеосигналы с БФТ
поступают также на контрольный индикатор и блок очистки, где
они очищаются от несинхронных помех.
Для выработки развертывающих напряжений и калибрационных
меток служит аппаратура формирования и трансляции напряжений
развертки и масштабных меток. Датчики угловых меток выполнены
на магнитном барабане, жестко связанном с приводом вращения
антенны. На магнитном барабане имеются 14 дорожек (7 основных
и 7 резервных). На дорожке барабана записаны импульсные сигна-
лы, необходимые для получения развертывающих напряжений и
азимутальных меток. При вращении антенны, а следовательно,
и барабана импульсы считываются магнитными головками, усили-
ваются и по линии трансляции поступают на блок формирования
напряжений развертки и масштабных меток.
Аппаратура управления РЛК «Иртыш» обеспечивает местное
и дистанционное управление включением, резервированием и
контролем состояния функциональных устройств РЛК. Дистанци-
онное управление и сигнализация о состоянии аппаратуры РЛК
осуществляются по кабельной линии связи с помощью аппаратуры
телеуправления и телесигнализации (ТУ-ТС).
Для повышения надежности работы РЛК предусмотрена воз-
можность как функционального, так и некомплектного автомати-
ческого и ручного резервирования. Основным режимом резервиро-
вания является автоматический. Для этого применен сквозной
допусковый функциональный контроль основных устройств радио-
локатора. Схема контроля любого функционального устройства
разделяется на две основные части: схему оценки контролируемого
параметра и схему выработки сигнала подтверждения работоспо-
собности устройства.
Контроль передающих устройств осуществляется по принципу
непрерывного измерения импульсной мощности и среднего тока
генератора.
Работоспособность приемных устройств РЛК оценивают с по-
мощью коэффициента шума приемника. В компенсирующем
устройстве измеряется амплитуда нескомпенсированного остатка
контрольного сигнала. Контроль блока запуска осуществляется по
принципу оценки амплитуды запускающих импульсов на выходе
блока.
Надежность всех схем контроля приблизительно па порядок
выше общей надежности контролируемого блока.
Аэродромный радиолокационный комплекс «Онега» (рис. 1.15)
предназначен для контроля и управления воздушным движением
в районе аэродромов со средней интенсивностью полетов. Он
может использоваться как автономно, так и в составе аэродромных
автоматизированных систем УВД. Оборудование комплекса состо-
44
Рис. 1.15. Аэродромный РЛК «Онега»
ит из двух антенных систем первичного и вторичного каналов,
основной и резервной приемопередающей аппаратуры ПРЛ и ВРЛ,
цифровой системы СДЦ, аппаратуры первичной обработки инфор-
мации «Вуокса», аварийной дизель-электростанции, выносной аппа-
ратуры индикации и управления. В качестве аппаратуры отображе-
ния могут использоваться индикаторы «Символ», «Знак», «Строка-
Страница». Трансляция сигналов на выносное оборудование, уда-
ленное на расстояние до 5 км, осуществляется по кабельным лини-
ям, более 5 км-по радиотрансляционным линиям.
Максимальная дальность действия первичного канала комплек-
са при работе в автономном режиме, когда вероятность правильно-
го обнаружения устанавливается равной 0,6 при вероятности лож-
45
ной тревоги 10“6 по целям с эффективной площадью рассеяния
10 м2, находящимся на высоте 12000 м, равна 160 км. Для тех же
условий, но при работе в составе АС УВД, когда вероятность
обнаружения равна 0,9 и ВС находятся на высоте 9000 м, макси-
мальная дальность действия ПРЛ составляет 100 км. По вторич-
ному каналу Лтах - 160 км при Рпо = 0,95 и Рлт = 10- 6 и высоте
12000 м.
Период обзора пространства равен 6 с. Импульсная мощность
передатчика ПРЛ равна 100 кВт, ВРЛ-12 ... 15 кВт. Первичный
канал комплекса рассчитан на работу в десятисантиметровом диа-
пазоне волн, вторичный-в соответствии с нормами ИКАО и СЭВ.
Использование десятисантиметрового диапазона позволило при
незначительных размерах антенны (6 х 4 м) получить узкую ДН
(1,2°) и большой коэффициент усиления антенны (32 дБ) первичного
канала. Нижняя кромка диаграммы направленности ПРЛ в верти-
кальной плоскости имеет при этом высокую крутизну, что позволя-
ет снизить уровень помех от местных предметов и «ангелов».
Высокая помехозащищенность первичного канала обеспечивает-
ся также рядом оригинальных решений, принятых при разработке
структурной схемы РЛ. К ним относятся:
введение двухлепестковой ДНА в вертикальной плоскости и со-
ответственно приемных каналов верхних и нижних углов места;
регулируемые поляризаторы;
цифровая квадратурная система СДЦ с программным выбором
зоны действия;
цифровой фильтр защиты от метеопомех;
нормализатор ложных тревог;
применение зондирующего сигнала большой длительности
(24 мкс) с внутриимпульсной частотной модуляцией и последующее
сжатие отраженных сигналов в дисперсионном фильтре приемного
тракта до 1 мкс.
Двухлучевая ДНА формируется двумя облучателями и отража-
телем в виде зеркала двойной кривизны. Над первичной антенной
устанавливается антенна вторичного канала, выполненная в виде
линейной фазированной решетки, состоящей из большого коли-
чества рупорных излучателей. Приемные тракты верхних и нижних
углов первичного канала идентичны. На малых дальностях на вход
аппаратуры цифровой обработки радиолокационной информации
поступают сигналы из приемного тракта верхних углов, на больших
дальностях-из приемного тракта нижних углов. Коммутация сиг-
налов происходит на видеочастоте, граница переключения выбира-
ется неоперативно.
Передающее устройство первичного канала выполнено на мощ-
ном усилительном многорезонаторном пролетном клистроне с ко-
эффициентом усиления 50 дБ. Для получения высокой фазовой
стабильности передаваемых и принимаемых сигналов, необходимой
для эффективного подавления помех от местных предметов в систе-
46
ме СДЦ, напряжение возбуждения клистрона, опорное напряжение
фазового детектора и напряжение гетеродина приемного тракта
формируются одним и тем же кварцевым генератором.
Для формирования сложного сигнала с линейной частотной
модуляцией (ЛЧМ) в передающем устройстве используется пассив-
ный метод. Осуществляется он с помощью дисперсионной линии,
представляющей собой кварцевую пластину х-среза с размерами
130 х 130 х 5 мм, на поверхности которой фотохимическим спосо-
бом нанесены две системы электродов с равномерной и неравномер-
ной расстановкой их вдоль пластины. Дисперсионные свойства
линии определяются неравномерным преобразованием частоты в
системе электродов при прохождении ультразвуковых волн через
кварцевую пластину. Несущая частота, на которой производится
преобразование, равна 20 МГц. Девиация частоты внутри импульса
ЛЧМ длительностью 24 мкс достигает 2 МГц. Сжатие импульса до
1 мкс на приемном конце осуществляется аналогичной линией, но
включенной в обратном направлении. Поскольку работа импульса-
ми большой длительности приводит к увеличению минимальной
дальности действия радиолокационной станции, то для наблюдения
за целями, расположенными на небольших расстояниях от РЛС,
в передатчике формируется дополнительный короткий монохрома-
тический импульс (MX) длительностью 1 мкс. Для выделения на
приемном конце эхо-сигналов, получаемых от импульса MX, гене-
рация этих импульсов производится на несущей частоте, отличной
от частоты, на которой излучаются импульсы ЛЧМ.
Интервал между импульсами ЛЧМ и MX устанавливается
равным 2 ... 3 мкс.
Средняя частота повторения импульсов выбирается равной
700 Гц с двадцатипроцентной пятикратной вобуляцией, необходи-
мой для улучшения амплитудно-скоростной характеристики коге-
рентного канала станции.
В качестве эффективного средства подавления помех от местных
предметов применяется цифровая квадратурная система СДЦ с
двукратной череспериодной компенсаций сигналов. Коэффициент
подавления помех системой СДЦ равен 35 дБ, коэффициент под-
помеховой видимости-23 дБ.
Вторичный канал комплекса может работать в режимах УВД,
RBS и совмещенном режиме УВД-RBS, при котором запрос
осуществляется совмещенными кодовыми посылками. Запрос и по-
давление сигналов боковых лепестков ДНА по запросу обеспечива-
ется одним передатчиком. Коммутация каналов запроса и подавле-
ния осуществляется быстродействующим p-i n-диодным пере-
ключателем.
Выходные сигналы приемников вторичного канала международ-
ного и отечественного диапазонов волн через АПОИ и аппаратуру
передачи данных вместе с сигналами первичного канала передаются
на комплексе аппаратуры отображения информации.
47
Радиолокационный комплекс «Скала-МПА (АРЛК-11)» предназ-
начен для управления воздушным движением в аэродромной или
аэроузловой зоне с большой интенсивностью воздушного движе-
ния. При разработке комплекса предполагалось, что он будет
основным источником радиолокационной информации для перспек-
тивных аэродромных автоматизированных систем УВД. Принцип
построения, структурная схема и конструктивное выполнение ком-
плекса ничем не отличаются от «Скалы-МПР» (см. рис. 1.4, б и 1.5).
Изменениям подверглись лишь некоторые технические и тактичес-
кие характеристики: импульсная мощность передатчиков первично-
го канала уменьшена до 1 МВт, длительность импульсов-до 2 мкс,
частота повторения импульсов увеличена до 714 Гц. Соответствен-
но изменилась и зона обнаружения комплекса по первичному
каналу. Максимальная дальность действия по целям, находящимся
на высоте 12 000 м и имеющим эффективную площадь рассеяния
10 м2, при вероятности правильного обнаружения 0,9 и вероятности
ложной тревоги 10“ 6 равна 160 км. Остальные характеристики
комплекса остались в основном без изменения. Комплекс прошел
государственные испытания и принят на эксплуатацию в гражданс-
кой авиации.
Аэродромная радиолокационная станция ATCR-44 итальянской
фирмы «Селения» используется в Советском Союзе в качестве
источника радиолокационной информации для аэродромных авто-
матизированных систем УВД «Теркас». Принцип построения,
структурная схема и конструктивное выполнение этой станции
практически не отличаются от трассовой радиолокационной стан-
ции ATCR-22 (см. рис. 1.7... 1.9). Отличия распространяются лишь
на некоторые тактические и технические характеристики и кон-
структивное выполнение передающих устройств.
Максимальная дальность действия РЛ при вероятности правиль-
ного обнаружения 0,9, вероятности ложных тревог 10 “б, высоте
подвеса антенны 25 м по целям с эффективной площадью рассеяния
10 м2, находящимся на высоте 6000 и 12000 м, равна соответствен-
но 175 и 200 км. Скорость обзора пространства увеличена до
12 об/мин, длительность импульсов уменьшена до 1,2 мкс, средняя
частота повторения импульсов увеличена до 770 Гц. Импульсная
мощность передатчика одного комплекта уменьшена до 450 кВт.
Соответственно изменилась конструкция передающего устройства,
что позволило поместить его вместо трехсекционного в двухсек-
ционный шкаф и вместо жидкостного применить воздушное охлаж-
дение. Использование повышенной частоты повторения импульсов
привело к существенному улучшению качества работы системы
СДЦ. Остальные параметры РЛ не претерпели существенных изме-
нений.
Аэродромные РЛ варианта В2 предназначены для работы в аэ-
ропортах со средней и малой интенсивностью воздушного движе-
ния. В Советском Союзе этот класс станций представлен различны-
48
ми модификациями РЛ типа ДРЛ-7 («Экран»), в частности, послед-
ними вариантами ДРЛ-7СМ и «Экран-85».
Аэродромная радиолокационная станция ДРЛ-7СМ имеет два
канала: первичный и вторичный. Первичный канал может работать
в пассивном режиме (Пас), смешанном режиме (СДЦ + Пас) и ак-
тивном режиме (Акт), при котором основной передатчик излучает
парные импульсы с определенным кодовым интервалом между
ними, рассчитанным на декодирование его самолетными ответчика-
ми, отвечающими на запросы, но не передающими на землю
дополнительную полетную информацию, представляющую интерес
для диспетчеров УВД. Вторичный канал рассчитан на работу
кодами УВД в соответствии с нормами СЭВ. Первичный канал
работает на волнах, приблизительно равных 35 см. Имеется воз-
можность переключения восьми фиксированных несущих частот, из
них двух-оперативно. Вторичный канал в соответствии с нормами
СЭВ передает запросы на несущей частоте 1030 МГц, а ответы
получает на частоте 740 МГц. Импульсная мощность передатчика
первичного канала равна 230 кВт, вторичного канала-800 Вт. Пе-
риод обзора пространства равен 6 с.
Частота повторения зондирующих импульсов первичного кана-
ла в пассивном и активном режимах равна 550 Гц, в режиме
СДЦ-1 - 800 Гц, СДЦ-2 -1075 Гц, СДЦ-Автомат - череспериодно
800 и 1075 Гц. Частота повторения импульсов передатчика вторич-
ного канала и частота запуска индикаторных устройств равны
550 Гц при работе первичного канала в пассивном и активном
режимах, а в режиме СДЦ соответствуют половине частоты повто-
рения импульсов в первичном канале, т. е. равны 400, 537,5 и
458,5 Гц. При работе первичного канала в активном режиме пере-
датчики вторичного канала выключаются. Длительность импуль-
сов, излучаемых передатчиком первичного канала, в пассивном
режиме равна 2 мкс, в СДЦ-1 мкс, в активном режиме за один
период излучаются два импульса длительностью по 1 мкс. Дли-
тельность импульсов передатчиков вторичного канала равна
0,8 мкс.
Применение дециметрового диапазона волн в первичном канале
при сравнительно небольших размерах антенны (6 x3 м) обуслови-
ло большую ширину ДНА (4°) и значительный уровень боковых
лепестков (2%). Это же обстоятельство определило интерференци-
онный характер ДНА в вертикальной плоскости. Зона обнаружения
первичного канала станции по самолету Ан-24 на высоте 1000 м
простирается от 6 до 50 км, на высоте 3600 м-от 20 до 70 км. По
вторичному каналу соответствующие дальности равны 6 ... 65
и 20 ... 120 км.
В состав оборудования РЛ входят аппаратный кузов с двумя
комплектами приемопередающей аппаратуры и контрольным инди-
катором, агрегатный кузов с двумя комплектами преобразователей
ПСЧ-15 и распределенными щитами, два прицепа с антеннами
49
и передатчиками активного канала, аппаратура КПД и дизель-
агрегат.
Питание РЛ осуществляется от сети 380 В, 50 Гц, напряжение
которой подается через дизельную электростанцию ЭСДА-100 на
распределительный щит первого комплекта, находящийся в агрегат-
ной. С него напряжение подается на распределительный щит второ-
го комплекта, и оттуда-в аппаратный кузов для питания вспомога-
тельных устройств. С распределительных щитов напряжение внеш-
ней сети подается также на преобразователи ПСЧ-15, вырабатыва-
ющие напряжение 220 В, 400 Гц, которое используется для питания
основной аппаратуры радиолокатора. При отсутствии в комплекте
РЛ электростанции ЭСДА-100 напряжение внешней сети подается
непосредственно на распределительный щит первого комплекта.
Структурная схема радиолокационной станции показана на
рис. 1.16. На прицепах с антенно-фидерными устройствами, кроме
приводов вращения антенн, располагаются также передатчики вто-
ричного канала (УПАК), обеспечивающие запрос бортовых ответ-
чиков типа СОМ-64 и подавление сигналов боковых лепестков ДНА
по запросу.
Антенная система (рис. 1.17) состоит из параболической антен-
ны с комбинированным облучателем для пассивных и активных
сигналов и щелевой антенны, предназначенной для подавления
сигналов боковых лепестков по ответу. В состав привода вращения
антенны входит блок управления приводом, вращающийся токо-
съемник, сельсин-датчик сигналов угловой информации и фото-
модулятор, предназначенный для формирования сигналов азиму-
тальных масштабных меток.
Рис. 1.16. Структурная схема аэродромного радиолокатора ДРЛ-7СМ
50
В аппаратном кузове находят-
ся два одинаковых комплекта ос-
новной аппаратуры (рис. 1.18), а
также вспомогательная аппарату-
ра, обеспечивающая коммутацию
сигналов трансляции, электро-
снабжение, поддержание необхо-
димой температуры в кузове и
управление комплектами. К ос-
новной аппаратуре относятся фи-
дерный тракт, передатчик первич-
ного канала, приемник первично-
го канала, приемник вторичного
канала (НПО), аппаратура син-
хронизации, трансляции и ото-
бражения радиолокационной ин-
формации.
Фидерный тракт обеспечивает
прием и передачу по первичному
каналу, прием по вторичному ка-
налу и прием сигналов с антенны
подавления боковых лепестков по
приему.
Передатчик первичного кана-
Рис. 1.17. Антенная система радиоло-
катора ДРЛ-7СМ
ла предназначен для формирования мощных высокочастотных
импульсов. Возможны три режима работы передатчика: пассивный,
СДЦ и активный. В последнем случае передатчик вырабатывает
парные импульсы.
При работе передатчика первичного канала в активном режиме
передатчик вторичного канала не работает.
Приемное устройство первичного канала предназначено для
усиления сигналов, отраженных от целей, выделения сигналов
движущихся целей в фазовом канале приемного устройства, комму-
тации видеосигналов амплитудного и фазового каналов, накопле-
ния или очистки этих сигналов от несинхронных помех и выдачи
сигналов на аппаратуру трансляции и отображения информации.
При работе передатчика первичного канала в активном режиме
приемное устройство первичного канала обрабатывает отраженные
от цели парные импульсы и преобразует их в одиночные импульсы
для отображения отметок целей на экране индикатора.
Приемное устройство вторичного канала осуществляет усиление
сигналов самолетных ответчиков по основному каналу и каналу
подавления и передачу видеосигналов на аппаратуру трансляции
и отображения. В приемном устройстве из совокупности сигналов,
принятых главным и боковым лепестками ДН основной антенны,
выделяются только те сигналы, которые принимаются главным
лепестком.
51
Рис. 1.18. Комплект основной аппаратуры радиолокатора ДРЛ-7СМ
Аппаратура синхронизации, трансляции и отображения инфор-
мации является общей для первичного и вторичного каналов. Она
синхронизирует работу всех устройств РЛ с помощью запускающих
импульсов, усиление и обработку видеосигналов, полученных при-
емными устройствами, и отображает обработанные сигналы на
экране контрольного ИКО. В состав аппаратуры КДП входят шкаф
сопряжения и управления, стабилизатор сетевого напряжения 220 В,
стойка контрольного ответчика, аппаратура отображения информа-
ции «Знак», аппаратура связи, пульты дистанционного управления
и дежурного техника.
Основное отличие ранее выпускающихся модификаций РЛС
типа ДРЛ-7 от описанной выше заключается в отсутствии у них
вторичного канала, удовлетворяющего требованиям УВД, блока
памяти и очистки сигналов от несинхронных помех, а также блока
трансляции и запуска. Выносное оборудование не предусматривало
возможности сопряжения станции с аппаратурой совмещенного
отображения первичной и вторичной радиолокационной станции
«Знак».
Аэродромная радиолокационная станция «Экран-85» (рис. 1.19)
по своим функциональным возможностям, тактико-техническим
характеристикам, структурной схеме и конструктивному выполне-
нию значительно отличается от ДРЛ-7СМ. При разработке РЛС
была поставлена задача модернизировать РЛС серии ДРЛ-7 с уче-
том накопленного опыта их производства и эксплуатации. Модер-
низация РЛС шла по следующим направлениям:
перевод аппаратуры на новую элементную базу;
введение вторичного канала, удовлетворяющего международ-
ным требованиям и стандарту СЭВ;
улучшение показателей качества системы СДЦ;
обеспечение сопряжения с новыми и перспективными средствами
обработки и отображения радиолокационной информации;
введение системы автоматического контроля параметров и об-
наружения неисправностей;
улучшение эксплуатационных характеристик.
РЛС успешно прошла государственные испытания и стала посту-
пать на эксплуатацию в подразделения гражданской авиации. РЛС
«Экран-85» предназначена для получения информации о воздушной
обстановке в районах аэродромов с малой и средней интенсив-
ностью полетов, а также может быть использована в качестве
резервного источника радиолокационной информации для аэро-
дромных автоматизированных систем УВД.
В состав оборудования РЛС входят:
антенно-фидерное устройство первичного и вторичного каналов
с блоком вращающихся переходов;
система привода вращения антенных систем;
Рис. 1.19. Аэродромный радиолокатор «Экран-85»
53
передающая и приемная аппаратура первичного и вторичного
каналов;
устройство СДЦ;
аппаратура первичной обработки информации «Вуокса» с входя-
щей в нее аппаратурой передачи данных;
аппаратура синхронизации;
устройства контроля, управления, сопряжения и трансляции;
контрольный индикатор;
аппаратура питания;
выносное оборудование КДП.
В качестве оборудования отображения информации на КДП
могут использоваться аппаратура «Символ-Д», «Строка-Б», «Стро-
ка Б-Страница», «Строка-2», «Комета-МД», Конструкция РЛС
предполагает размещение всего основного оборудования в двух
кузовах ПАУ-1. Антенные системы располагаются над крышами
кузовов на механических усилителях, опоясывающих кузова.
Зона обнаружения первичного канала РЛС характеризуется сле-
дующими данными. При вероятности правильного обнаружения 0,8
и вероятности ложной тревоги 10“6 обнаружение воздушных судов
типа Ту-134, находящихся на высотах 1000, 3600 и 5000 м, обес-
печивается на дальностях соответственно 6 ... 50, 20 ... 70 и
30 ... 75 км. Для вторичного канала при тех же данных, но при
вероятности правильного обнаружения 0,9 зона обнаружения при
работе с ответчиками типа СОМ-64 составляет 6 ... 65, 20 ... 120
и 32 ... 120 км.
Длина волны, на которой работает первичный канал РЛС, равна
23 см. Несущие частоты запроса и ответа по вторичному каналу
соответствуют международным нормам и стандарту СЭВ. Запрос
осуществляется на частоте 1030 МГц, ответные сигналы приходят
на частотах 740 и 1090 МГц.
Одной из особенностей РЛС является применение зондирующих
сигналов большой длительности с внутриимпульсной линейной
частотной модуляцией (ЛЧМ) и последующим сжатием принимае-
мых эхо-сигналов. Длительность излучаемых импульсов равна
24 мкс. Импульсная мощность передатчика 35 ... 45 кВт. Импульс-
ная мощность вторичного передатчика не менее 1 кВт. Структура
запросных кодов - четырехимпульсная, из них три импульса (Р7, РЗ,
Р4) образуют совмещенный запрос информации в соответствии
с международными (М) и отечественными (О) нормами на вторич-
ный канал, а четвертый импульс (Р2) является импульсом подавле-
ния сигналов боковых лепестков по запросу. Предусмотрена воз-
можность запроса индивидуального номера ВС (О и М), высоты (М
и О), третьего слова и высоты (О). Длительность всех запросных
импульсов равна 0,8 мкс. Средняя частота повторения импульсов
первичного и вторичного каналов 425 Гц. Для улучшения характе-
ристик канала СДЦ предусмотрена пятикратная вобуляция периода
повторения импульсов. Неравномерность амплитудно-скоростной
54
характеристики в диапазоне 30 ... 250 км/ч равна + 5 ... — 7,5 дБ,
в диапазоне 250 ... 1500 км/ч не более ±3 дБ. Зона действия системы
СДЦ оперативно регулируется с дискретностью коммутации 10° по
азимуту и 10 или 20 км по дальности. Обеспечивается коэффициент
подпомеховой видимости не менее 18 дБ. Период обзора простран-
ства равен 6 с.
Оборудование РЛ размещается в двух прицепах (аппаратном
и агрегатном), в аппаратном зале и в диспетчерском зале
(рис. 1.20). Аппаратный и агрегатный прицепы располагаются на
небольшом удалении друг от друга.
В аппаратном зале размещены передатчик первичного канала,
аппаратура вторичного канала, два комплекта приемников первич-
ного канала, два комплекта аппаратуры синхронизации и сопряже-
ния (шкаф ШСС), основной и резервный комплекты АПОИ «Вуок-
са», распределительный щит, контрольный индикатор кругового
обзора (КИКО) с пультом управления, инженерное оборудование
(вентиляторы, кондиционер, устройства отопления, освещения,
охранной и пожарной сигнализации) и опорно-поворотное устрой-
ство (ОПУ) с фидерным трактом. Антенная система располагается
над прицепом.
В агрегатном прицепе размещен резервный комплект передатчи-
ка первичного канала и резервная аппаратура вторичного канала.
Рис. 1.20. Структурная схема радиолокатора «Экран-85»
55
Там же расположены два преобразователя сетевой частоты ПСЧ-15,
распределительный щит и инженерное оборудование. Над прицепом
располагается резервная антенна.
Выносное оборудование сосредоточено в аппаратном и диспет-
черском залах. В аппаратном зале располагается .стойка сопряжения
АПОИ «Вуокса» и аппаратура отображения воздушной обстановки
«Символ-Д». В диспетчерском зале устанавливается унифицирован-
ный пульт УВД «Пульт-2» с двумя радиолокационными индикато-
рами отображения первичной аналоговой и вторичной буквенно-
цифровой информации.
Антенная система представляет собой зеркало двойной кривиз-
ны с несколькими облучателями, обеспечивающими двухлучевой
режим работы станции и одновременную работу первичного и вто-
ричного каналов с подавлением сигналов боковых лепестков по
запросу и ответу. В отечественном канале для подавления сигналов
боковых лепестков используется щелевая антенна, конструктивно
жестко соединенная с отражателем. Опорно-поворотное устройство
антенны, состоящее из опоры и редуктора, располагается в кузове.
В опоре имеется токосъемник, датчик угловой информации и датчик
импульсов «Север». С редуктором соединены два электродвигателя,
один из которых является резервным.
При пуске антенны или сильном ветре возможна совместная
работа двух двигателей.
Передающее устройство первичного канала выполнено в виде
трехкаскадного усилителя. Первый каскад представляет собой тран-
зисторный усилитель, второй выполнен на лампе бегущей волны,
третий-на амплитроне. Охлаждение-воздушное. В модуляторе
используется несколько электровакуумных приборов. Остальные
активные элементы станции выполнены в твердотельном исполне-
нии. Формирование и сжатие Л ЧМ-сигналов производятся с по-
мощью дисперсионных ультразвуковых линий задержки. Девиация
частоты ЛЧМ-сигналов равна 1 МГц.
Передатчик вторичного канала состоит из транзисторного воз-
будителя и трехкаскадного усилителя, выполненного на металло-
керамических лампах. Переключение излучаемой мощности из
запросных каналов в канал подавления в момент формирования
импульса Р2 производится с помощью быстродействующего ком-
мутатора, что позволило отказаться от дополнительного передат-
чика подавления сигналов боковых лепестков.
Приемники РЛС выполнены на полупроводниковых приборах
и микросхемах. В приемнике первичного канала предусмотрена
временная автоматическая регулировка усиления, работающая в
секторном режиме от 0 до 360° с дискретностью 30°. Имеются также
накопители импульсных сигналов для подавления несинхронных
помех. Система СДЦ собрана на базе приборов с переносом
зарядов по схеме однократного или двукратного вычитания сигна-
лов в квадратурных каналах.
56
Система телеуправления и телесигнализации (ТУ-ТС) рассчита-
на на передачу 48 сигналов и 48 команд. Предусмотрена возмож-
ность допускового контроля семи основных параметров. Система
контроля проводит обнаружение неисправностей до уровня функ-
ционально законченного устройства с отображением результатов
контроля на пульте управления РЛС. Электропитание станции
осуществляется по двум независимым фидерам 3 х 380 В, 50 Гц
с автоматическим переходом в случае неисправности на резервную
цепь. Электропривод антенны, АПОИ и аппаратура КДП получают
питание от сети 50 Гц. Вся остальная аппаратура питается от сети
400 Гц, напряжение для которой вырабатывается преобразователя-
ми частоты ПСЧ-15к.
Потребляемая станцией мощность 40 кВ • А.
Посадочные радиолокаторы. Все посадочные РЛ, эксплуатируе-
мые в настоящее время, представляют собой трехкоординатные
РЛС с механическим сканированием ДН двух антенных систем
в горизонтальной и вертикальной плоскостях.
Передающее и приемное устройства подключаются то к антенне
курса, то к антенне глиссады, а выход приемного устройства
синхронно переключается в том же такте для отображения на
индикаторе то курсового, то глиссадного изображения. Таким
образом, трехкоординатная посадочная РЛС фактически представ-
ляет собой соединение двух двухкоординатных РЛС, у которых
приемно-передающая аппаратура объединена и работает последо-
вательно то с каналом курса, то с каналом глиссады.
Наиболее широкое распространение получили посадочные РЛС
РП-ЗФ, РП-ЗГ и РП-4Г фирмы «Тесла» (ЧСФР). Прошла государст-
венные испытания и принята на эксплуатацию также новая станция
РП-5Г производства той же фирмы.
Посадочные РЛС РП-ЗФ и РП-ЗГ по сравнению с ранее выпус-
кавшейся станцией РП-2Ф имеют несколько улучшенные тактичес-
кие характеристики. Это улучшение достигнуто в основном за счет
значительного увеличения размеров антенн, применения специаль-
ных профилей отражателей и повышения точности их изготовления.
Увеличение размеров антенн потребовало коренной переработки
конструкции антенных механизмов, их усложнения и увеличения
стоимости всей РЛС в целом. Для повышения надежности РЛС
и улучшения условий ее эксплуатационного обслуживания в РП-ЗГ
предусмотрен двойной комплект антенных устройств, один из
которых является резервным. Остальные изменения несущественны,
поэтому рассмотрим принцип построения и характеристики поса-
дочных радиолокаторов РП-ЗФ и РП-ЗГ на примере РП-ЗГ.
Радиолокатор РП-ЗГ (рис. 1.21) может работать в качестве
самостоятельной посадочной РЛС, а также как составная часть
радиолокационной информационной системы аэродромной АС
УВД. Обзор пространства осуществляется двумя параболическими
57
антеннами, сканирующими соот-
ветственно в горизонтальной и
вертикальной плоскостях. Необ-
ходимая диспетчеру посадки ин-
формация отображается на инди-
каторе в виде отклонений отме-
ток целей от линии курса и линии
глиссады, причем эти линии фор-
мируются электронным путем и
отображаются на одном экране
со сдвигом по вертикали. Для
уничтожения мешающих сигна-
лов от местных предметов ис-
пользуется когерентно-импульс-
ная система селекции движущихся
целей. Подавление сигналов от
гидрометеоров осуществляется с
помощью поляризаторов, распо-
ложенных в волноводном тракте
антенной системы и изменяющих
поляризацию излучаемых радио-
волн от линейной до круговой по
Рис. 1.21. Посадочный радиолокатор желанию диспетчера. Для увели-
РП-ЗГ чения надежности работы основ-
ные блоки РЛ дублированы.
Оборудование станции функционально разделено на две основ-
ные части (рис. 1.22): оборудование антенной части, расположенной
в непосредственной близости от ВПП, и аппаратура обработки
сигналов с диспетчерскими индикаторами, которая выносится на
расстояние до 3000 м. Обе части связаны одним коаксиальным
кабелем и одним кабелем связи. Все управление РЛС может быть
полностью дистанционным с использованием элементов автомати-
ки. Контроль основных параметров РЛС, определяющих ее работо-
способность, может также производиться дистанционно с помощью
Рис. 1.22. Состав основного оборудования радиолокатора РП-ЗГ
58
Рис. 1.23. Структурная схема аппаратуры антенной части посадочного радио-
локатора РП-ЗГ: w
/-синхроимпульсы; 2-фазирующий импульс; 3-смесь видеосигналов с синхроимпульсами;
4-напряжение ВАРУ; 5-напряжение угловой информации; б-сигнал возбуждения сельси-
нов; 7-сигналы угловых меток
аппаратуры шкафа обработки сигналов. Питание РЛС осуществля-
ется от сети переменного тока 3 х 380 В, 50 Гц с использованием
вращающихся преобразователей 50/400 Гц со стабилизацией напря-
жения.
Радиолокационная станция РП-ЗГ, как и все посадочные радио-
локационные станции, работает на волне, равной приблизительно
3 см. Дальность действия станции 20 км, сектор обзора по азимуту
+ 20 ... —10°, по углу места +9 ... —Г. Один полный просмотр
пространства антенной курса и антенной глиссады производится за
0,89 с. Ширина диаграммы направленности антенны курса в гори-
зонтальной плоскости и антенны глиссады в вертикальной плоскос-
ти равна приблизительно 0,6 и 0,45°. Длительность излучаемых
импульсов равна 0,45 мкс, частота их повторения в пассивном
режиме-2000 Гц, в режиме СДЦ изменяется череспериодно и при-
нимает значения 2000 и 2400 Гц. Точность и разрешающая способ-
ность по дальности, азимуту и углу места удовлетворяют тре-
бованиям ИКАО. Импульсная мощность передатчика равна
150 кВт.
Приемное устройство не имеет в своем составе предварительно-
го усилителя высокой частоты, поэтому коэффициент шума прием-
ника получается низким (6 ... 8 дБ).
Принимая во внимание условия размещения отдельных блоков
РЛ, всю его аппаратуру можно разделить на три части: группу
блоков антенного домика, аппаратуру обработки сигналов и аппа-
ратуру отображения радиолокационной информации. В соответст-
вии с этим делением на рис. 1.23 показана упрощенная структурная
схема одного комплекта аппаратуры антенного домика, а на
рис. 1.24 представлена упрощенная структурная схема аппарату-
59
3 *380 В, 5 О Гц
Рис. 1.24. Структурная схема аппара-
туры обработки и отображения инфор-
мации посадочного радиолокатора
РП-ЗГ:
/-сигналы угловых меток; 2-напряжение
угловой информации; 3-смесь видеосигна-
лов с синхроимпульсами; 4-синхроимпуль-
сы; 5-напряжение возбуждения сельсинов;
б-сигналы, необходимые для работы инди-
катора
ры обработки и отображения ра-
диолокационных сигналов.
Передающее устройство РЛ
выполнено на магнетроне, кото-
рый запускается модулятором,
вырабатывающим мощные им-
пульсы, формируемые с помо-
щью искусственной линии задерж-
ки. Синхронизация модулятора
производится либо от автоном-
ного источника, либо внешними
синхроимпульсами, вырабатывае-
мыми в синхронизаторе системы
СДЦ.
СВЧ-импульсы с магнетрона
поступают в волноводную трассу
и далее через коммутатор на ан-
тенны курса и глиссады. Часть
волноводной трассы является об-
щей для приема и передачи. Раз-
деление канала приема и передачи
осуществляется с помощью ан-
тенного переключателя, выпол-
пенного в виде ферритового цир-
кулятора. Кроме своего основно-
го назначения, циркулятор так-
же стабилизирует нагрузку маг-
нетрона, поглощая волны, отраженные от неоднородностей волно-
водного тракта. В волноводном тракте имеются два четырехпо-
люсных переключателя, которые позволяют производить переком-
мутацию СВЧ-каналов основного и резервного приемопередатчи-
ков и выбирать антенную систему первого и второго направления
посадки.
Для обеспечения работы системы АПЧ и СДЦ в волноводном
тракте имеется ненаправленный ответвитель, с помощью которого
часть энергии зондирующего импульса отбирается на смеситель
АПЧ и преобразуется в промежуточную частоту 50 МГц. После
усиления импульс промежуточной частоты направляется для выра-
ботки сигналов, управляющих частотой магнетронного генератора.
В случае если полученная после преобразования промежуточная
частота будет отличаться от 50 МГц, дискриминатор системы АПЧ
вырабатывает сигнал ошибки, который будет управлять механиз-
мом подстройки частоты магнетрона.
В волноводном тракте предусмотрена также возможность под-
ключения ряда измерительных приборов для контроля за величиной
излучаемой мощности, измерения коэффициента шума приемника
и проверки качества работы системы СДЦ.
60
Антенная система посадочного радиолокатора РП-ЗГ состоит из
двух комплектов курсовых и глиссадных антенн. Отражатели ан-
тенн выполнены в виде несимметричных вырезок из параболоидов
вращения. Облучатели рупорного типа с поляризаторами, состоя-
ние которых можно изменять дистанционно.
С электромеханическим приводом, обеспечивающим качание
антенн, связан вращающийся антенный коммутатор, сельсины-дат-
чики напряжения угловой информации и система формирования
угловых меток. Кроме того, специальные электромеханические
устройства антенного привода вырабатывают гасящие импульсы,
предназначенные для запирания индикаторов в момент перекомму-
тации антенн, а также стробирующие импульсы, переключающие
каналы курса и глиссады в аппаратуре обработки радиолокацион-
ных сигналов, индикаторах и других устройствах.
Система формирования и передачи напряжения угловой инфор-
мации состоит из четырех сельсинов-датчйков, возбуждение для
которых вырабатывается в вычислительном устройстве аппаратуры
обработки радиолокационных сигналов. В случае автономной рабо-
ты аппаратуры антенной части РЛ напряжение возбуждения сельси-
нов вырабатывается в блоке принадлежностей контрольного инди-
катора.
Система формирования угловых меток вырабатывает сигналы
в те моменты времени, когда оси антенн курса и глиссады проходят
направления на нулевой, первый и двадцатый километры заданной
траектории снижения заходящих на посадку ВС. Сигналы угловых
меток после дополнительного формирования в блоке принадлеж-
ностей индикатора и детекторе угловой информации аппаратуры
обработки радиолокационных сигналов отображаются на экранах
контрольных и диспетчерских индикаторов.
Отраженные от ВС сигналы принимаются антеннами РЛ и через
волноводный тракт поступают на вход приемника. Приемник вы-
полнен по супергетеродинной схеме. В нем предусмотрена ручная
и автоматическая временная регулировка усиления.
Для выделения движущихся целей на фоне отражений от мест-
ных предметов в РЛ используется когерентно-импульсная система
СДЦ. Часть блоков этой системы, в частности когерентный гетеро-
дин с фазовым детектором, расположена в сдвоенном шкафу
основной аппаратуры антенной части. Остальные блоки размещены
в специальном шкафу СДЦ, расположенном в непосредственной
близости от основной аппаратуры. С выхода системы СДЦ и с вы-
хода амплитудного (пассивного) канала приемника видеосигналы
поступают на сумматор. На входе сумматора в зависимости от
установленного режима работы производится выбор пассивного
сигнала или сигнала СДЦ для трансляции его по кабелю на
аппаратуру обработки радиолокационных сигналов. В сумматоре,
кроме переключения входных сигналов, осуществляется их смеши-
вание с синхронизирующими импульсами. Амплитуда синхроим-
61
пульсов устанавливается в два раза больше, чем амплитуда видео-
сигналов, с тем расчетом, чтобы в аппаратуре обработки можно
было бы легко произвести их амплитудную селекцию.
Для контроля работоспособности РЛ в помещении антенной
части установлен специальный контрольный индикатор. Все необхо-
димые для его работы сигналы формируются в блоке принадлеж-
ностей этого индикатора. Видеосигнал на индикатор передается
транзитом через блок принадлежностей непосредственно с суммато-
ра сигналов, минуя кабельный усилитель. Смесь видеосигналов
с синхронизирующими импульсами по коаксиальному высокочас-
тотному кабелю поступает на блок разделения сигналов, располо-
женный в устройстве обработки информации (см. рис. 1.24).
В этом блоке производится выделение синхронизирующих им-
пульсов.
В детекторе угловой информации детектируется напряжение
частотой 10 кГц, огибающая которого несет информацию об угло-
вом положении антенн курса и глиссады. В этом же блоке форми-
руются сигналы угловых меток положения нулевого, первого и
двадцатого километров. Блок формирования меток дальности гене-
рирует импульсы однокилометровых и опорных пятикилометровых
масштабных меток.
Для отображения на экранах индикаторов специальных линий,
облегчающих диспетчеру процесс считывания координат заходящих
на посадку самолетов, в аппаратуре обработки сигналов предусмот-
рено специализированое аналоговое вычислительное устройство.
Вычислитель генерирует сигналы заданной траектории посадки
и линий равных отклонений от этой траектории. Для работы
вычислителя на его входы подаются напряжение угловой информа-
ции, синхронизирующие импульсы и стробирующие сигналы. Кро-
ме сигналов специальных линий, вычислительное устройство выра-
батывает напряжение частотой 10 кГц для возбуждения сельсинов
угловой информации, находящихся в аппаратуре антенной части.
Все перечисленные выше блоки аппаратуры обработки сигналов
имеют 100%-ный резерв.
Аппаратура отображения информации состоит из диспетчерс-
ких, дополнительных выносных и контрольных индикаторов. Все
индикаторы, кроме контрольного, связаны с аппаратурой обработ-
ки сигналов через разделительные шины. Максимальное расстоя-
ние, на которое индикаторы могут быть удалены от аппаратуры
обработки сигналов, составляет 200 м.
Для управления РЛ и контроля за его работоспособностью
в состав аппаратуры обработки сигналов и аппаратуры отображе-
ния информации введены специальные блоки управления и контро-
ля. Все команды, переданные с блока управления аппаратуры
отображения информации, имеют преимущество перед командами,
передаваемыми с других пультов управления. Питание РЛ осу-
ществляется от трехфазной сети переменного тока напряжением
62
380 В, частотой 50 Гц. Это напряжение используется непосредствен-
но для питания электродвигателей, стабилизаторов, реле, контак-
торов, а также для освещения и отопления. Для питания всей
основной радиоаппаратуры используется сеть переменного тока
115 В, 400 Гц от преобразователей частоты МАН 6000.
Посадочная РЛС РП-4Г по своим тактическим характеристикам
мало чем отличается от РП-ЗГ. При разработке этой РЛС особое
внимание было обращено на модернизацию элементной базы и
внедрение цифровых методов формирования сигналов. В оборудо-
вании станции широко используются полупроводниковые приборы,
микросборки и микросхемы. Применение электровакуумных прибо-
ров сведено к минимуму. Особое внимание было обращено на
состав и форму отображения информации, представляемой диспет-
черскому составу.
Все оборудование РЛС разделено на три части:
аппаратуру антенной части с двумя антенными колоннами, на
которых располагаются антенны курса и глиссады;
аппаратуру технического зала;
аппаратуру отображения информации диспетчерского пункта
посадки.
Антенный домик с антенными колоннами располагается в не-
посредственной близости от середины ВПП. Технический зал может
быть удален от антенного домика на расстояние, не превышающее
6000 м. Связь между ними осуществляется по комбинированному
коаксиальному и многопроводному кабелю. Выносные диспетчерс-
кие индикаторы могут располагаться на удалении до 200 м от
технического зала.
В состав оборудования антенной части входят сдвоенный
комплект приемопередающей аппаратуры, аппаратура СДЦ и по-
давления помех, цифровой преобразователь сигналов угловой ин-
формации, контрольный индикатор, кабельные усилители, аппара-
тура коммутации сигналов и устройства энергопитания. В техничес-
ком зале расположены блоки обработки информации, генератор
сигналов для формирования специальных линий на экранах инди-
каторов, выносной контрольный индикатор и шкаф управления
инженерным оборудованием. В диспетчерском зале организуются
два рабочих места диспетчеров. Они оснащены выносными индика-
торами, пультами управления и блоками электронного оборудова-
ния индикаторов и их электропитания. В случае необходимости
количество рабочих мест диспетчеров может быть удвоено.
Зона видимости РЛ по самолетам с эффективной площадью
рассеяния 10 м2 при вероятности правильного обнаружения 0,9
показана на рис. 1.25. Антенна курса при этом сканирует в секторе
+ 15°, антенна глиссады-от —1 до +9°. Увеличение дальности
действия до 30 км достигнуто за счет введения двухкомплектного,
двухчастотного режима работы, при котором оба передатчика
работают одновременно и формируют зондирующие импульсы со
63
Рис. 1.25. Зона видимости радиолока-
тора РП-4Г в вертикальной (а) и гори-
зонтальной (б) плоскостях
сдвигом во времени 1 мкс на раз-
ных несущих частотах с разносом
150 МГц в диапазоне 9250...
9450 МГц. Импульсная мощность
передатчиков станции в этом слу-
чае равна 2 х 150 кВт. Остальные
тактические и технические харак-
теристики станции в основном
остались такими же, как у РП-ЗГ.
Для удобства работы диспет-
черского состава на экраны инди-
каторов выведена дополнитель-
ная статическая информация, об-
легчающая процесс определения
координат целей и принятия ре-
шения по управлению заходом
самолетов на посадку. В качестве
диспетчерских индикаторов при-
меняются унифицированные мо-
ниторы, выполненные на электрон-
но-лучевых трубках с круглым эк-
раном. В верхней части экрана
отображается информация, полу-
чаемая с помощью глиссадной
антенны, в нижней-курсовой. Информация воспроизводится в ко-
ординатах «угол места-дальность» и «азимут-дальность». Мас-
штаб индикатора по дальности равен 40 км. Для увеличения точ-
ности определения координат целей вблизи точки посадки раз-
вертка по дальности выбрана нелинейной: расстояние от нулевого
километра до десятого растянуто на половину диаметра экрана
индикатора. Кроме масштабных меток дальности, на экраны ин-
дикаторов выводится изображение нескольких специальных линий.
Сигналы, необходимые для отображения этих линий, формируются
вычислителем, который представляет собой последовательно-па-
раллельное счетно-решающее устройство, управляемое микропро-
цессором. Для индикатора глиссады формируются сигналы семи
линий:
заданная линия посадки;
две линии постоянной высоты;
две линии допустимых отклонений ВС от заданной траектории
посадки, которые согласно требованиям ИКАО располагаются
параллельно глиссаде от нулевого километра до отметки 2,2 км;
две линии допустимых отклонений ВС от заданной траектории
посадки, которые согласно требованиям ИКАО располагаются под
определенным углом к глиссаде, начиная с отметки 2,2 км до
Отметки 10 км.
Для индикатора курса также формируются семь линий:
64
заданная линия посадки;
две постоянные линии допусков ИКАО на отклонение воздуш-
ного судна от заданной траектории посадки;
две линии равных линейных отклонений от заданной траектории
посадки;
две линии равных угловых отклонений от заданной траектории
посадки.
По желанию диспетчера на экран индикатора могут выводиться
все или часть из указанных выше линий.
Посадочная PJIC РП-5Г представляет собой новую модифика-
цию радиолокаторов серии РП фирмы «Тесла». Она удовлетворяет
рекомендациям ИКАО, стандарту СЭВ и действующим нормам
годности на аппаратуру, предназначенную для оснащения аэропор-
тов гражданской авиации СССР. При модернизации станции особое
внимание обращалось на развитие цифровых устройств обработки
информации, на состав и форму представления этой информации,
диспетчеру посадки. Предприняты определенные меры по улучше-
нию эксплуатационных характеристик станции.
В состав оборудования станции, как и в РП-4Г, входят антенная
часть, состоящая из двух антенных систем и антенного домика
с электронной аппаратурой; технический зал с аппаратурой обра-
ботки, регистрации и отображения информации на контрольных
индикаторах и диспетчерский пункт, в который вынесены два
индикатора телевизионного типа с пультом управления.
В комплект дополнительного оборудования входит программ-
ное обеспечение для диагностической системы контроля работо-
способности станции. »
Помещение антенной части и технический зал связаны друг
с другом специальным комбинированным кабелем, по которому
передаются радиолокационные сигналы, а также сигналы управле-
ния, диагностики и индикации. Максимально допустимая длина
кабеля равна 6000 м. Расстояние между техническим залом и дис-
петчерским пунктом не должно превышать 200 м.
Тактические и технические характеристики РЛС аналогичны
РП-4Г. Станция работает на волне 3,2 см. Необходимая дальность
действия 20 км по самолетам типов Л-410, Ан-24, Як-40 гарантиру-
ется при интенсивности дождя 10 мм/ч и вероятности ложных
тревог 10“5. Ширина ДН в плоскости сканирования для курсовой
антенны равна 0,8°, для глиссадной-0,5°. Поляризация обеих ан-
тенн плавно регулируется от линейной до круговой. Разрешающая
способность и точность определения координат целей удовлетворя-
ют требованиям ИКАО.
В РЛС предусмотрен двухкомплектный режим работы с разно-
сом несущих частот. Импульсная мощность, генерируемая передат-
чиками в этом случае, равна 2 х 150 кВт. Средняя частота, повторе-
ния импульсов равна 2 кГц при восьмикратной вобуляции, необхо-
димой для получения приемлемой формы амплитудно-скоростной
3 Зак. 1375 65
Рис. 1.26. Структурная схема оборудования антенной части посадочного радиолокатора РП-5Г
характеристики системы СДЦ. При плохой погоде частота повторе-
ния импульсов может быть увеличена до 3,3 кГц.
Приемное устройство выполнено по супергетеродинной схеме.
Коэффициент шума приемника не превышает 7 дБ, промежуточная
частота равна 30 МГц. Для уменьшения динамического диапазона
входных сигналов предусмотрена временная регулировка усиления
приемного тракта перед смесителями путем введения в волновод-
ный тракт переменного затухания с помощью p i-w-диодов. Бла-
годаря предпринятым мерам коэффициент подавления неподвиж-
ных целей удалось увеличить до 30 дБ, а коэффициент подпомехо-
вой видимости-до 23 дБ. Коэффициент подавления сигналов ме-
теообразований равен 24 дБ.
Структурная схема РЛС показана на рис. 1.26 и 1.27. У РЛС
имеются две антенные системы: основная и резервная. Антенны
курса и глиссады вместе с антенными приводами и датчиками
сигналов угловой информации монтируются на цилиндрических
Рис. 1.27. Структурная схема выносного оборудования посадочного радиолокатора
РП-5Г
3*
67
колоннах, расположенных в непосредственной близости от антенно-
го домика. С помощью коммутатора каждые 0,4 с производится
переключение курсового и глиссадного каналов. В помещении
антенной части расположены два одинаковых комплекта радио-
электронной аппаратуры, сетевые распределительные устройства
и контрольный индикатор телевизионного типа с пультом управле-
ния. Здесь же- находятся оборудование вентиляции, рабочее место
для ремонта блоков, запасные части и инструмент.
Передатчики РЛС работают одновременно на разных несущих
частотах nf2. Сигналы передатчиков объединяются в диплексоре,
после чего зондирующие импульсы через роторный переключатель
передаются на рабочий комплект курсовых и глиссадных антенн.
Передаваемые и принимаемые сигналы разделяются с помощью
циркулятора. В канале приема сигналов перед смесителем пре-
дусмотрены аттенюаторы, выполненные на p-i-n-диодах. Аттеню-
аторы осуществляю! временную автоматическую регулировку уси-
ления приемного тракта, что позволяет сократить динамический
диапазон амплитуд входных сигналов. Управляющие сигналы для
ВАРУ формируются в устройствах, выполненных на базе цифровой
техники.
Для подавления сигналов местных предметов предусмотрена
когерентно-импульсная система СДЦ. Оконечные устройства систе-
мы СДЦ сосредоточены в АПОИ. Там же находятся нормализатор
ложных тревог, цифровые детекторы и объединитель сигналов
обоих каналов. Для подавления сигналов медленно перемещающих-
ся целей в когерентном гетеродине предусмотрена возможность
изменения опорной частоты. Изменение частоты на +1 кГц позво-
ляет осуществлять сдвиг амплитудно-скоростной характеристики
системы СДЦ в пределах + 60 км/ч. Для подавления сигналов,
отраженных от гидрометеоров, в канале промежуточной частоты
предусмотрен логарифмический усилитель.
Управляющие автоматы антенного домика вместе с автоматами
технического зала и микроЭВМ пульта управления образуют сис-
тему управления и диагностики РЛС. Информация о техническом
состоянии блоков РЛС выводится на экран индикаторов телевизи-
онного типа. Для преобразования радиолокационной информации
в телевизионные сигналы используется цифровой преобразователь.
Сигналы с выхода АПОИ поступают в аппаратуру передачи данных
(АПД) и по комбинированному подземному кабелю передаются
в технический зал. На обоих концах кабеля предусмотрены уст-
ройства защиты оборудования РЛС от перенапряжений, возникаю-
щих при атмосферных разрядах.
В техническом зале находятся два одинаковых шкафа с элект-
ронным оборудованием, шкаф аппаратуры регистрации радиоло-
кационной информации, печатающее устройство, пульт управления
и два телевизионных индикатора. Каждый шкаф с электронным
оборудованием содержит вычислитель координат целей, микро-
68
ЭВМ для автоматического сопровождения целей, микроЭВМ для
управления содержанием информации, выводимой на экраны инди-
каторов, цифровой телевизионный преобразователь сигналов, мик-
роЭВМ для диагностики состояния аппаратуры станции и управле-
ния станцией. На диспетчерском пункте имеются два индикатора
телевизионного типа с пультом управления. Число рабочих мест на
диспетчерском пункте при необходимости может быть удвоено.
Телевизионные индикаторы имеют полезный диаметр экрана
400 мм. Растр содержит 1024 х 1024 элементов. Графическая и бук-
венно-цифровая информация выводится на экран из памяти цифро-
вого телевизионного преобразователя. Применение индикаторов
телевизионного типа позволило наблюдать радиолокационное
изображение и буквенно-цифровое изображение дополнительной
информации при ярком дневном свете. В верхней части индикатора
экрана высвечиваются линия глиссады, изображение движущихся
отметок целей, масштабные метки дальности,, линии допустимых
отклонений воздушных судов от глиссады, линия постоянной высо-
ты (высоты круга). В нижней части экрана высвечиваются линия
курса, изображение движущихся отметок целей, линии равных
отклонений от заданной траектории посадки, линии допустимых
отклонений воздушных судов от заданной траектории посадки
дифференцированно по типам самолетов, масштабные метки даль-
ности.
В самом верху экрана в буквенно-цифровом виде воспроизводит-
ся специальная диспетчерская информация и оперативная информа-
ция о метеорологической обстановке и состоянии ВПП. В средней
части экрана между глиссадным и курсовым изображениями
отображаются формуляры двух целей, введенных в автоматическое
сопровождение с помощью аппаратуры вторичной обработки ра-
диолокационной информации, расположенной в шкафах техничес-
кого зала. В каждом формуляре отображаются номер сопровожде-
ния, бортовой номер воздушного судна, отклонение цели от за-
данной траектории посадки по высоте и по курсу. Здесь же обозна-
чены области, где должен производиться автоматический ввод
целей в сопровождение. Формуляры соединены с изображениями
целей штриховыми линиями. В самой нижней части экрана индика-
тора отображаются строка текста с данными о состоянии блоков
радиолокационной станции, полученными с помощью диагности-
ческой системы, дата и текущее время.
Процесс захода на посадку записывается в памяти цифрового
регистратора, расположенного в техническом зале. Информация,
записанная в памяти, может быть выведена на индикатор, на печать
в виде протокола о заходе ВС на посадку или сохраняться в памяти.
Перерывы в электропитании не приводят к потере записанной
информации.
Радиолокационные станции обзора летного поля (РЛС ОЛП). Они
предназначены для обнаружения ВС, спецавтотранспорта, групп
69
людей и т.д., находящихся на стационарных ВПП, рулежных
дорожках и местах стоянки самолетов.
Радиолокатор ОЛП («Обзор-Б»), используемый ранее для этих
целей, работал на волне 8 мм. Передатчик магнетронного типа
вырабатывал зондирующие импульсы, обеспечивающие дальность
действия локатора приблизительно 6 км. Для излучения зондирую-
щих импульсов и приема отраженных сигналов использовались
отдельные антенны, расположенные друг над другом. Такое конст-
руктивное решение позволило отказаться от антенных переключа-
телей и уменьшить минимальную дальность действия РЛС до
100 м. Антенны вращались со скоростью 36 об/мин. Ширина ДНА
в горизонтальной плоскости составляла 14', в вертикальной-18°.
Длительность излучаемых импульсов была равна 0,05 мкс. Для
борьбы с сигналами от гидрометеоров использовались поляризаци-
онные решетки, расположенные перед облучателями антенн. Обыч-
но радиолокатор ОЛП размещался на каком-либо высоком здании
аэропорта. Антенны закрывались радиопрозрачным укрытием.
Практика эксплуатации радиолокаторов ОЛП выявила ряд их
существенных недостатков. К ним относятся использование уста-
ревшей элементной базы, низкая надежность оборудования, резкое
ухудшение видимости при плохих метеоусловиях, малая яркость
Рис. 1.28. Радиолокатор обзора летно-
го поля «Обзор-2»
70
экранов применяемых индикато-
ров, что снижает эффективность
их использования в помещениях
диспетчерских пунктов с боль-
шим уровнем освещенности ра-
бочих мест диспетчеров. Частич-
но эти недостатки устранены в
новой модификации радиолока-
торов обзора летного поля «Об-
зор-2» (ОЛП-2).
Радиолокатор «Обзор-2» уста-
навливается на территории аэро-
порта. В его состав входят антен-
ный пост (рис. 1.28), оборудова-
ние преобразователей частоты i
электропитание, усилительные ус-
тройства, аппаратура КДП.
В аппаратуре КДП предусмот-
рена возможность сопряжения с
оборудованием стартового дис-
петчерского пункта (СДП). Ра-
диолокационная информация на
СДП передается в виде телеви-
зионного сигнала по радиокана-
лу. Передающее устройство ап-
паратуры передачи информации
| Оборудование КДП
| Антенна |-
блох ВЧ
Контроль-
ная стойла
Антенный пост
Угловая
информация
Приемо-
передат-
чик
Приемо-
передат-
чик
Шкаф 1*1
управле- -W
ния
Синхрона-:
затор —
ТУ-ТО
АТТ-В-
ЧООР
Формиро-
ватель
j карты
4 Угловая
информация
Запускающие
импульсы
Усилитель
Усилитель
епп, Преобразователь частоты
Ои/ Ц
___________220В,50Гц I
Распределив^, Распредели- LL*.
—-? тельный у*
щит * щит j*
Г F 220В,ЧОО Гц j
ЧОО Гц тельный
тельный
____I____,___J______
I ШГП-1 \ШГП-2Д,ч\\
брл
дтв
Upji
дтв\
'ТВ I
ТВПКО
Стойка
ВК-ТУ-ТС
\итв \дтв
твик о | \„твико |
Панель
управле-
ния
Панель
управле-
ния
Управление I
| Распределительный шкаф |
220В, 50Гц
Рис. 1.29. Структурная схема радиолокатора «Обзор-2»
входит в состав оборудования СДП, но находится на КДП. На СДП
устанавливаются приемное устройство и телевизионный ИКО.
Один комплект этой аппаратуры обеспечивает обслуживание одной
ВПП с обоих направлений, т. е. два стартовых диспетчерских
пункта.
Зона обнаружения РЛ при интенсивности метеоосадков в виде
дождя до 4 мм/ч, снега до 10 мм/ч и тумана с горизонтальной
видимостью более 50 м простирается от 50 м до 5 км. При дожде
с интенсивностью более 4 мм/ч, но менее 10 мм/ч дальность дейст-
вия сокращается до 4 км. Приведенные данные гарантируются для
целей с эффективной площадью рассеяния более 2 м2 при вероят-
ности правильного обнаружения 0,9.
Ширина ДНА в горизонтальной плоскости равна 0,2°. В верти-
кальной плоскости ДНА имеет форму cosec2. Ее ширина на уровне
половинной мощности приближается к 1°. Длительность зондирую-
щего импульса по сравнению с радиолокатором ОЛП-1 сокращена
приблизительно до 0,03 мкс. При таких технических параметрах
разрешающая способность станции при оценке ее на краю экрана
индикатора, работающего в круговом режиме с масштабом 2 км,
будет не хуже 16 м.
Импульсная мощность передатчика РЛС равна 20 кВт. Пере-
датчик работает в восьмимиллиметровом диапазоне волн. Несущая
частота зондирующего импульса лежит в пределах 36 550-
71
36880 МГц. Частота повторения импульсов равна 10000 Гц. Часто-
та вращения антенны 60 об/мин. Структурная схема радиолокаци-
онной станции «Обзор-2» показана на рис. 1.29.
Антенна РЛ размещается под радиопрозрачным укрытием. Под
антенной на металлической башне устанавливается все остальное
оборудование антенного поста: два приемопередатчика (основной
и резервный), шкаф синхронизации, шкаф управления, стойка конт-
роля параметров и блок высокой частоты. У основания башни
в специальном помещении располагаются преобразователи частоты
питающих напряжений АТТ-8-400Р с распределительными щитами.
Трансляция радиолокационных сигналов на КДП производится
по двум кабелям. Расстояние между антенным постом и помещени-
ем КДП при использовании промежуточных кабельных усилителей
может достигать 3 км. Предусмотрена возможность дистанционно-
го управления радиолокатором с КДП. Для этого в состав оборудо-
вания станции введены система телесигнализации и телеуправления
(ТУ-ТС) и соответствующий дополнительный канал проводной
связи. Предусмотрено автоматическое резервирование функцио-
нальных устройств антенного поста, за исключением привода вра-
щения антенны, резерв которого включается вручную. Для умень-
шения риска нарушения санитарных норм облучения обслужива-
ющего персонала и пассажиров в аэропорту СВЧ-волнами пре-
дусмотрена возможность автоматического выключения передатчи-
ков в трех произвольно выбранных секторах просматриваемого
пространства.
Передающие устройства РЛС выполнены на магнетронах. Мо-
дулятор собран по схеме с частичным разрядом емкостного накопи-
теля.
Приемник работает по супергетеродинной схеме с двойным
преобразованием частоты. Первая промежуточная частота равна
700 МГц. В приемнике имеются системы ВАРУ, ШАРУ и АПЧ
первого гетеродина, собранного на отражательном клистроне.
Оборудование КДП включает в себя аппаратуру приема радио-
локационных сигналов, преобразования их в телевизионный сигнал
и отображения полученных таким образом сигналов на индикато-
рах кругового обзора телевизионного типа (ТВ ИКО). Преобразо-
вание производится с помощью запоминающих электронно-луче-
вых трубок типа графекон. На считывающем конце графекона
используется телевизионная развертка на 1125 строк при 25 кадрах
в секунду. Для удобства работы диспетчеров на экране телевизион-
ных индикаторов отображается также схема расположения ВПП,
рулежных дорожек, перрона и мест стоянки самолетов. Сигналы,
необходимые для отображения схемы, формируются в аппаратуре
электронной карты местности.
Число шкафов графеконного преобразования сигналов (ШГП)
и диспетчерских индикаторов (ТВ ИКО) зависит от принятой схемы
построения аэропорта. В случае использования одной ВПП в состав
72
оборудования КДП включаются три шкафа графеконного преобра-
зования, четыре ТВ ИКО и две панели управления изображением.
При двух ВПП количество шкафов преобразования сигналов увели-
чивается до четырех, ТВ ИКО-до пяти, а пультов управления-до
трех.
Элементная база РЛС в основном твердотельная. Широко ис-
пользуются микросхемы и транзисторы. РЛС рассчитана на кругло-
суточную работу с перерывами на проведение регламентных работ.
Метеорологические радиолокаторы (МРЛ). Метеорологическое
обеспечение систем УВД обычно организуется на базе использова-
ния информации, получаемой от РЛС аэрологического зондирова-
ния, пунктов штормового предупреждения, образующих так назы-
ваемое штормовое кольцо, и МРЛ, оснащенных аппаратурой на-
копления и передачи метеоинформации. Службе движения аэропор-
тов необходима информация о ветре, температуре воздушных
слоев, характере и границах метеообразиваний, данные о погоде
в районе аэродрома и на трассах, сведения о возникновении опас-
ных метеоявлений, кратковременные и долговременные прогнозы
погоды. Основным источником оперативной информации для авиа-
ционных метеорологических центров являются МРЛ.
В зависимости от их функционального назначения МРЛ разделя-
ются на три класса. К первому классу относятся МРЛ, предназна-
ченные для обнаружения зон облаков и осадков с целью штормово-
го оповещения об опасных метеоявлениях. МРЛ второго класса
предназначены для измерения количества и интенсивности атмо-
сферных осадков, контроля за результатами активных воздействий
на дождевые и грозовые облака. С помощью МРЛ третьего класса
ведут наблюдение за недождевой облачностью и измерение ее
границ, контроль за результатами активных воздействий на не-
дождевые облака. Некоторые из существующих в настоящее время
МРЛ могут одновременно выполнять функции РЛС, относящихся
к различным классам.
По принципу действия и методам получения информации МРЛ
можно разделить на одноволновые, двухволновые, поляризацион-
ные и доплеровские.
Наиболее широкое распространение получили двухволновые
метеорадиолокаторы МРЛ-1, одноволновые МРЛ-2 и двухволно-
вые МРЛ-5 с их одноволновыми модификациями МРЛ-4 и МРЛ-6.
Эта МРЛ позволяют определить вертикальный и горизонтальный
разрезы метеорологических образований, верхнюю и нижнюю гра-
ницы облаков, интенсивность выпадающих осадков и водность
облаков, тенденцию развития метеорологических образований. Они
определяют также термодинамическое состояние тропосферы (зоны
конвекции, восходящие потоки воздуха, высоту тропопаузы и т. д.).
Радиолокатор МРЛ-1 имеет два независимых канала. Первый
канал работает на волне 8 мм, второй-на волне 3,2 см. Мощность
передатчика первого канала равна 65 кВт, второго-210 кВт.
73
Первый канал используется
для определения высоты нижней
границы облаков, вызывающих
ливневые осадки, а также для оп-
ределения верхней границы плот-
ных облаков, дающих моросящие
осадки. Дальность действия этого
канала до 10 км. Второй канал
используется для обнаружения
ливней и гроз в радиусе до
300 км.
В радиолокаторе используется
одна двухдиапазонная параболи-
ческая антенна с диаметром рас-
крыва 3 м. Диаграммы направ-
ленности антенны для обоих ка-
налов симметричны и имеют ши-
рину для первого канала 13', для
второго канала 44'. Метеороло-
гическая информация отображает-
Рис. 1.30. Метеорологический радио- ся на ИКО и на индикаторах
локатор МРЛ-5 «дальность - высота» и «даль-
ность-амплитуда». Для выделе-
ния областей с наибольшей интенсивностью метеообразований,
а также для измерения их интенсивности в состав приемного
устройства МРЛ введен блок «ИЗО -ЭХО» и измеритель мощности
отраженных сигналов (ИМОС).
Радиолокатор МРЛ-2 в отличие от МРЛ-1 имеет только один
канал трехсантиметрового диапазона, обеспечивающий дальность
действия по кучево-дождевым облакам до 300 км. Все оборудование
МРЛ размещается в стационарном здании; антенное устройство
устанавливается на крыше здания под радиопрозрачной сферичес-
кой оболочкой, защищающей параболическое зеркало от атмосфер-
ных воздействий.
Радиолокатор МРЛ-5 (рис. 1.30) является специализированным
двухволновым РЛ градозащиты и штормооповещения с высокой
метеорологической эффективностью. Один канал МРЛ работает на
волне 3,2 см, другой-на волне 10 см. По сравнению с радиолокато-
рами МРЛ-1 и МРЛ-2 этот РЛ обладает более высоким энергетичес-
ким потенциалом и более совершенной аппаратурой обработки
и регистрации метеорологической информации. Импульсная мощ-
ность передатчика первого канала равна 250 кВт, второго кана-
ла-800 кВт. Частота повторения зондирующих импульсов - 500 или
250 Гц, длительность импульсов соответственно 1 и 2 мкс.
Диаграммы направленности антенн симметричны в Е и Н плос-
костях. Их ширина зависит от режима работы РЛ. В режиме
градозащиты ДНА первого и второго каналов одинаковы и их
74
ширина равна 1,5°. В режиме штормооповещения ДНА первого
(сантиметрового) канала уменьшается до 0,5°. Поляризация поля
антенн линейная, в первом канале-вертикальная, во втором-гори-
зонтальная.
Конструктивно оборудование РЛ размещается в унифицирован-
ном прицепе ПАУ-1, разделенном внутри на два отсека-индикатор-
ный и приемопередающий. На крыше прицепа под радиопрозрач-
ным укрытием установлена антенная система с механизмами вра-
щения и качания. Для устойчивости прицепа при больших ветровых
нагрузках на боковых стенках кузова помещены две упорные
фермы. Система электроснабжения предусматривает питание аппа-
ратуры МРЛ либо от промышленной сети 380 В, 50 Гц, либо от
автономной сети 220 В, 50 Гц. вырабатываемой дизельной электро-
станцией ЭСД-20, размещенной в специальном прицепе.
Антенно-волноводная система МРЛ (рис. 1.31) состоит из двух-
диапазонной антенны, волноводного тракта первого канала и вол-
новодного тракта второго канала. Особенностью антенны является
совмещение двух рабочих каналов в одном антенном блоке. Антен-
на содержит большой и малый параболические отражатели и сдво-
енный двухдиапазонный облучатель (рис. 1.32). Рабочая поверх-
ность большого отражателя выполнена из сплошного металличес-
кого листа. Малый отражатель выполнен из двух слоев поляризо-
ванной ткани, в которую вмонтирована металлизированная сетка,
состоящая из параллельных проводников. Благодаря такой структу-
ре ткани она прозрачна для волн, поляризация которых ортого-
нальна проводникам сетки, и отражает волны с поляризацией,
параллельной проводникам. Таким образом, малый отражатель
Рис. 1.31. Структурная схема радиолокатора МРЛ-5
75
Рис. 1.32. Схема построения антенной
системы радиолокатора МРЛ-5
является прозрачным для волн
второго канала, а для волн перво-
го канала эквивалентен сплошной
металлической поверхности. Та-
кая конструкция антенны обеспе-
чивает работу МРЛ в режиме
градозащиты, при котором гра-
довые очаги выявляют путем
сравнения отраженных сигналов
на разных несущих частотах. Ши-
рина ДН двухдиапазонной антен-
ны на волнах 3,2 и 10 см одинако-
вая. При переходе к режиму
штормооповещения малый отра-
жатель снимают и ширина ДН
сантиметрового канала уменьша-
ется до 0,5°.
Электропривод антенны состоит из двух систем управления-по
азимуту и по углу места. Он обеспечивает вращение антенн по
азимуту с регулируемой частотой 0 ... 6 об/мин, сканирование по
углу места в пределах —1 ... +95° с регулируемым периодом
сканирования 24 ... 72 с, секторное, программное и ручное скани-
рование по азимуту и углу места.
Передающие устройства МРЛ выполнены на магнетронах. При-
емные устройства обоих каналов в схемном и конструктивном
отношениях максимально унифицированы и отличаются друг от
друга только СВЧ трактом. В приемниках имеются системы АПЧ,
автоматической стабилизации усиления, логарифмирования сигна-
лов промежуточной частоты. Мощность отраженных сигналов из-
меряется по высокой частоте с помощью калиброванных аттенюа-
торов, собранных на р- i-п-диодах. В целях автоматизации процесса
измерения радиолокационной отражаемости метеоцелей произво-
дится коррекция затухания сигналов по расстоянию. При работе
МРЛ в режиме грозозащиты на индикатор подаются сигналы,
пропорциональные логарифму отношения отражаемостей метеоце-
лей в трех- и десятисантиметровом диапазонах. По логарифму
отношения сигналов определяется размер градовых частиц.
Устройство отображения информации МРЛ включает в себя два
идентичных индикатора ИКО/ИДВ («азимут - наклонная даль-
ность»/«горизонтальная дальность-высота») и индикатор типа А.
Один из совмещенных индикаторов используется метеорологом,
другой служит для фоторегистрации полученных радиолокацион-
ных изображений. Фиксируется также информация, выводимая на
световое табло. Вся радиоэлектронная аппаратура станции выпол-
нена в основном на микросхемах и транзисторах.
Обзорно-посадочные радиолокаторы (ОПРЛ). Они предназначе-
ны для контроля за движением ВС и УВД в аэродромной зоне
76
Рис. 1.33. Обзорно-посадочный радио-
локатор ОПРЛ-4
аэропортов местных воздушных линий, вывода ВС в сектор посадки
и непосредственного контроля за движением ВС и УВД при их
заходе на посадку. Такие РЛ являются многоцелевыми комбиниро-
ванными, поскольку они одновременно выполняют функции аэ-
родромных и посадочных РЛ.
В Советском Союзе некоторое распространение получили обзор-
но-посадочные радиолокаторы ОПРЛ-4 (рис. 1.33), разработанные
фирмой «Тесла» (ЧСФР).
Радиолокаторы ОПРЛ-4 осуществляют непрерывный круговой
обзор пространства в зоне аэродрома и одновременно позволяют
управлять посадкой ВС, причем направление посадки может опера-
тивно изменяться.
Основная часть аппаратуры РЛ, расположенная в помещении
антенной части рядом с ВПП, работает без постоянного присутст-
вия обслуживающего персонала. Включение, выключение и конт-
роль работоспособности этой части аппаратуры осуществляются
дистанционно. Информация о воздушной обстановке в зоне аэ-
родрома и в секторе посадки отображается на двух индикаторах:
кругового обзора и совмещенном курсовом и глиссадном инди-
каторе.
Дальность действия РЛ по самолетам Ан-24 при вероятности
правильного обнаружения цели
0,9 на ИКО равна 50 км при хо-
рошей радиолокационной види-
мости и 30 км при дожде с интен-
сивностью 4 мм/ч. Частота вра-
щения антенны курса равна 15
или 30 об/мин. Период качания
антенны глиссады составляет со-
ответственно 4 и 2 с. Активный
сектор сканирования антенны глис-
сады лежит в пределах — 1 ... +7°.
Всю антенную систему можно
повернуть в горизонтальной плос-
кости на + 90°, т. е. РЛ позволяет
осуществить контроль за поло-
жением ВС при заходе их на по-
садку с любого направления. Вре-
мя, необходимое для поворота
антенной системы из одного край-
него положения в другое, равно
приблизительно 6 мин. Антенну
глиссады можно повернуть отно-
сительно горизонтальной оси на
180°.
Время поворота антенны глис-
сады 1 мин.
77
Передатчик РЛ работает в трехсантиметровом диапазоне волн.
Несущая частота излучаемых колебаний равна 9250 ... 9450 МГц,
длительность импульсов 0,5 мкс, частота их повторения изменяется
череспериодно с 2000 на 2400 Гц. Импульсная мощность передатчи-
ка разделяется между каналами курса и глиссады в соотношении
9:1 и составляет соответственно 135 и 15 кВт.
Ширина ДНА курса и глиссады в плоскости сканирования
одинаковая и равна 0,7°. В плоскости, ортогональной плоскости
сканирования, ДН имеют несимметричную конфигурацию, обус-
ловленную необходимостью просмотра всей области пространства,
где могут находиться ВС. Диаграмма видимости канала кругового
обзора имеет в вертикальной плоскости двухлучевое построение.
Одновременно работает или верхний, или нижний канал. Переход
с нижнего луча на верхний и наоборот продолжается не более 1,5 с.
Управление переключателем лучей осуществляется дистанционно.
В радиолокаторе имеется когерентно-импульсная система селек-
ции движущихся целей с череспериодным изменением частоты
повторения импульсов. Для повышения стабильности работы систе-
мы СДЦ в ней использован частотный принцип модуляции сигна-
лов задержанного и незадержанного каналов с автоматической
коррекцией периода повторения импульсов по амплитуде неском-
пенсированных остатков контрольных импульсов. Коэффициент по-
давления сигналов неподвижных целей системы СДЦ равен 20 дБ.
Индикация сигналов канала кругового обзора производится на
электронно-лучевой трубке с диаметром экрана 31 см. Сектор
посадки на экране индикатора выделяется отсутствием масштабных
меток дальности в секторе +15°. Индикация сигналов канала
посадки также осуществляется на электронно-лучевой трубке с диа-
метром экрана 31 см. На экран индикатора выводится изображение
зон курса и глиссады в прямоугольных координатах «угол места-
дальность» и «азимут- дальность». Развертка по дальности - нели-
нейная. Для увеличения точности съема координат ВС в ближней
зоне начало развертки сильно растянуто.
Изображение зоны глиссады находится в верхней половине
экрана. На экран, кроме отметок целей, выводятся масштабные
метки дальности, угла места, заданная траектория посадки и линия
равных высот. Изображение зоны курса высвечивается в нижней
части экрана. На экране отображаются масштабные метки даль-
ности и азимута, заданная траектория посадки и две линии равных
отклонений от заданной траектории посадки. Сигналы траекторий
посадки, линии равных высот и линий равных отклонений форми-
руются электронным способом в специальном цифровом вычис-
лителе.
В состав радиолокатора (рис. 1.34) входят аппаратура антенной
части и аппаратура обработки информации. Annaparypd антенной
части расположена в непосредственной близости от ВПП. В ее
состав входят антенная система, волноводный тракт, передатчик,
78
Рис. 1.34. Схема размещения оборудования радиолокатора ОПРЛ-4
Антенная часть
приемник, система СДЦ и другие блоки, предназначенные для
трансляции сигналов и управления радиолокатором. Аппаратура
обработки информации размещается на диспетчерском пункте. Она
состоит из шкафа блоков обработки информации, индикатора
кругового обзора, посадочного индикатора, блока управления,
источника питания индикатора и стабилизатора.
Антенная часть соединена с аппаратурой обработки информации
кабелем, содержащим три коаксиальные жилы, 12 экранированных
и 18 неэкранированных пар. Кабель с аппаратурой обработки
соединяется через кабельную коробку. Максимально допустимая
длина кабеля равна 3000 м.
Управление и контроль за состоянием основных блоков РЛ
сосредоточены в блоке управления, который располагается обычно
на пульте диспетчера рядом с индикаторами. В антенной части
предусмотрена возможность местного управления и контроля.
Антенный «домик» устанавливается на бетонном фундаменте
с помощью четырех винтовых опор и цилиндрических шипов. Он
представляет собой термически изолированный шкаф типа контей-
нера, задняя часть которого имеет форму цилиндра. К полу задней
части домика привинчена рама поворотного устройства с коробкой
передач, предназначенной для поворота всей антенной колонны
в пределах +90°. На раме поворотного устройства расположен
опорный шарикоподшипник, поддерживающий несущую раму ко-
лонны. На несущей раме расположены передатчик, приемник и вол-
новодный тракт. Верхняя часть несущей рамы образует подвижную
часть подшипника скольжения. Неподвижная часть этого подшип-
ника привинчена к крыше домика. Эта часть выполнена таким
образом, что одновременно образуется гидравлическое уплотнение,
препятствующее проникновению влаги и пыли внутрь домика.
79
В верхней части несущей рамы расположен антенный механизм,
из которого выступают два вала - вертикальный и горизонтальный.
На вертикальном валу находится антенна курса, выполняющая
также функции антенны кругового обзора, а на горизонтальном
валу устанавливается антенна глиссады. В помещении антенной
части располагаются также коробка распределительного 1цита,
мачта сигнального освещения и приставная лестница, облегчающая
подъем на крышу. Зимой антенный домик отапливается электро-
воздушным подогревателем с регулирующим температуру встроен-
ным термостатом, а летом охлаждается вентиляторами.
Радиолокатор имеет один передатчик, который одновременно
работает на две антенны. Мощность между антенной курса и антен-
ной глиссады распределяется с помощью делителя в волноводном
тракте в соотношении 9:1. Отраженные от целей сигналы принима-
ются обеими антеннами и обрабатываются двумя отдельными
приемными трактами. Кинематическая схема движения антенн
выполнена таким образом, что тракт антенны глиссады принимает
сигналы в то время, когда ДН антенны курса находится вне зоны
обзора глиссадной антенны. Антенна курса вращается с постоянной
угловой скоростью вокруг вертикальной оси. В промежуток време-
ни, когда луч курсовой антенны находится в секторе посадки,
принимаемые сигналы после обработки направляются на индика-
тор посадки. В остальной промежуток времени принимаемые антен-
ной курса сигналы поступают на ИКО. Сигналы, принимае-
мые антенной глиссады, все время поступают на индикатор по-
садки.
Для повышения надежности радиолокатора в его аппаратуре
широко используются кремниевые транзисторы, тиристоры, диоды
и интегральные схемы. Элементы аппаратуры, связанные с обработ-
кой сигналов и формированием импульсов, выполнены на основе
цифровой техники.
Вторичные радиолокаторы (ВРЛ). Прообразом современных
ВРЛ является разработанная еще в период Великой Отечественной
войны система опознавания самолетов «свой-чужой» («С-Ч»),
Существенным шагом вперед в развитии радиолокационных систем
УВД явилась разработка в Советском Союзе активных каналов
аппаратуры «Глобус» (РСП-4), «Глобус-2» (РСП-6) и РСП-7 с бор-
товыми ответчиками СОД-57 и СОД-57М. Внедрение этих систем
увеличило дальность действия РЛ при сравнительно небольшой
мощности излучаемых импульсов и значительно повысило помехо-
устойчивость систем как от пассивных, так и организованных
помех. В перечисленных выше системах были реализованы попытки
получения дополнительной информации за счет кодирования ответ-
ных сигналов: индивидуальное опознавание целей и данные о высо-
те полета ВС. За рубежом аппаратура вторичной радиолокации,
предназначенная для использования в системах УВД, начала разра-
батываться в 50-х годах сначала в Англии, а затем в США.
80
Самыми распространенными
ВРЛ являются радиолокаторы
«Корень-С» и «Корень-АС»
(рис. 1.35). Характеристики этих
локаторов соответствуют между-
народным и отечественным нор-
мам на вторичные радиолокаци-
онные системы. Отличие между
ними заключается в том, что пер-
вый из них является встроенным,
а второй-автономным. Основная
структурная схема и многие прин-
ципиальные решения у обоих ра-
диолокаторов одинаковые.
В состав оборудования ВРЛ
«Корень-АС» входит аппаратура,
размещенная в прицепе, стацио-
нарно расположенном недалеко
от ПРЛ (антенная часть), и ап-
паратура декодирования и обра-
ботки информации, находящаяся
обычно в здании ПРЛ (рис. 1.36).
В антенную часть радиолока-
тора входят:
«И
Рис. 1.35. Вторичный автономный ра-
диолокатор «Корень-АС»
двухдиапазонная антенна;
колонна привода с четырехканальным вращающимся перехо-
дом;
фидерный тракт;
переключатели высокого уровня мощности (ВУМ);
шкаф управления приводом (ШУП);
приемопередатчик международного диапазона волн ШРД-001;
приемное устройство отечественного диапазона волн ШР-017;
шкаф синхронизации (ШС) с пультом местного управления
(ПМУ) и аппаратурой ТУ-ТС;
два шкафа централизованных источников питания +27 В
ШП-13;
контрольный ИКО;
распределительный щит ЩЛ-037, распределительные коробки
и прочее вспомогательное оборудование.
Выносная аппаратура РЛ включает в себя:
шкаф групповой аппаратуры декодирования и преобразования
ШШ-014;
центральный источник питания ШП-13 с пультом дистанционно-
го управления (ПДУ) и аппаратурой ТУ-ТС;
контрольную стойку с имитаторами ответных сигналов отечест-
венного (ИОС-ОК) и международного (ИОС-МК) диапазонов волн
и имитаторами дальномерно-азимутальных сигналов (ИДАС);
81
ШУП ШУП
ШП-13 ПМУ
ШП-13 шс
Аппаратура антенной части
1 Двухдиапаоонная
антенна
\ вращающиеся переходы |
гЙЙ1
Выносная аппаратура
Антенна мн Антенна ОН
СОМ-бВК нос-мн
иос-он
ИДАС
щл-озв
ШРД-001 ШРД-001 шр-оп
I ПНР |
\шл-оз1\
пду
ШП-13
шш-он
ШШ-01Ч
Рис. 1.36. Состав оборудования вторичного радиолокатора «Корень-АС»
стойку контрольного ответчика (СОМ-64К) с антеннами между-
народного (МК) и отечественного (ОК) диапазонов волн;
распределительный щит ЩЛ-036, выпрямители, распределитель-
ные коробки и другую вспомогательную аппаратуру.
Передающие устройства, входящие в состав шкафа ШРД-001,
обеспечивают запрос самолетных ответчиков и подавление сигна-
лов боковых лепестков запросной антенны на частоте 1030 МГц.
В совмещенном режиме одновременно запрашиваются самолетные
ответчики, удовлетворяющие нормам ИКАО и СЭВ. Для этого
используются четырехимпульсные кодовые посылки. Один из им-
пульсов запросного сигнала является импульсом подавления сигна-
лов боковых лепестков ДН запросной антенны. Три остальных
импульса обеспечивают запрос ответчиков кодами ИКАО и УВД.
В состав оборудования антенной части РЛ входят два шкафа
ШРД-001, основной и резервный. Переход с основного шкафа на
резервный производится с помощью переключателей высокого
уровня мощности (ВУМ). В каждом шкафу имеются два передатчи-
ка: передатчик, формирующий запросные импульсы Р1, РЗ, Р4,
и передатчик, формирующий импульс Р2, предназначенный для
подавления сигналов боковых лепестков ДНА по запросу.
Передатчики построены по принципу усиления мощности, выра-
батываемой гетеродином-возбудителем. В качестве оконечных уси-
лителей в передатчиках используются пролетные клистроны, обес-
печивающие выходную импульсную мощность до 20 кВт. Прием
ответных сигналов осуществляется приемниками, работающими на
частоте ИКАО (1090 МГц) и частотах, выбранных в соответствии
со стандартом СССР (730, 740 и 750 МГц). В приемниках использу-
ется фазовая система подавления сигналов боковых лепестков по
ответу.
В радиолокаторе применена двухдиапазонная антенна с облуча-
телями рупорного типа, образующими антенную решетку. С по-
мощью этой антенны формируется узкая ДН, предназначенная для
передачи запросов и приема ответных сигналов, и слабонаправлен-
82
ная диаграмма, используемая для подавления сигналов боковых
лепестков по запросу и ответу. Поляризация волн на частотах 1030
и 1090 МГц-вертикальная, на частотах 730, 740 и 750 МГц-гори-
зонтальная.
Аппаратура обработки сигналов декодирует информацию по
стандартам ИКАО и СССР, выделяет координатные отметки,
преобразует информацию ИКАО о высоте из футов в метры,
производит очистку сигналов от несинхронных помех и выдачу
информации на оконечную аппаратуру или АПОИ АС УВД.
Дальность действия радиолокаторов по ВС, оборудованным
ответчиками, удовлетворяющими нормам ИКАО или СЭВ, состав-
ляет не менее 400 км. При этом вероятность получения правильной
информации равна 0,9, а вероятность получения ложной информа-
ции 10 3. Чувствительность основного канала и канала подавления
приемного устройства международного диапазона частот не хуже
110 дБ/Вт. Чувствительность приемного устройства отечественного
диапазона частот в основном канале не х^же 111 дБ/Вт, в канале
подавления-115 дБ/Вт.
Режимы запросов для международных кодов: А, В, С, D; для
отечественных кодов: ЗК1 (БН) и ЗК2(ТИ). Предусмотрены одинар-
ное, двойное и тройное чередование режимов. Частота следования
запросных посылок изменяется от 150 до 500 Гц. Скорость враще-
ния антенны зависит от скорости вращения антенны первичного
радиолокатора, с которым сопрягается ВРЛ.
Наиболее распространенными ответчиками являются СОМ-64,
CO-69, CO-70, СО-72М и СО-77. Характеристики ответчиков СО-69
соответствуют только нормам СЭВ, ответчиков СО-70 и СО-77-
нормам ИКАО. Ответчики СОМ-64 и СО-72М - универсальные и их
характеристики соответствуют как нормам СЭВ, так и нормам
ИКАО.
При запросе кодами ИКАО ответчики, кроме координатной
информации, могут передать на землю сообщение о номере рейса,
абсолютную высоту полета и некоторые дополнительные сигналы:
«Бедствие», «Потеря радиосвязи», «Нападение на экипаж», спе-
циальный код идентификации. Если запросный сигнал соответ-
ствует стандарту СЭВ, то самолетные ответчики передают на
землю координатную информацию, сообщение о номере борта,
абсолютной или относительной барометрической высоте, остатке
топлива, могут в случае необходимости передать сигнал «Бедствие».
В ответчике СО-72М предусмотрена возможность передачи на
землю дополнительной информации о векторе путевой скорости
с градациями через 1° и 10 км/ч.
Импульсная мощность передатчиков ответчиков равна 300 ...
800 Вт, чувствительность приемников около 104 дБ/Вт.
Глава 2. УСТРОЙСТВА ОБРАБОТКИ, ТРАНСЛЯЦИИ И
ОТОБРАЖЕНИЯ РАДИОЛОКАЦИОННОЙ ИНФОРМАЦИИ
2.1. Аппаратура первичной обработки информации
Первичная обработка радиолокационной информации пре-
дусматривает проведение следующих процедур:
выделение полезного сигнала из помех и принятие решения
о наличии или отсутствии цели в рассматриваемом дискретном
участке контролируемого пространства;
измерение координат целей;
объединение координатной и дополнительной информации вто-
ричного канала;
преобразование полученной информации в вид, удобный для
дальнейшей обработки и передачи по каналам связи.
В некоторых случаях на АПОИ возлагается решение дополни-
тельных задач, часть из которых можно отнести к задачам вторич-
ной и даже третичной обработки информации. К дополнительным
задачам относятся:
межобзорная обработка информации первичного и вторичного
каналов для выделения целей, движущихся с определенной ско-
ростью;
объединение координатной информации первичного и вторично-
го каналов;
кодирование и преобразование информации метеоканалов РЛК
с целью устранения ее избыточности и приведения к виду, пригод-
ному для передачи по узкополосным линиям связи;
преобразование и выдача в каналы связи информации, поступа-
ющей от автоматических радиопеленгаторов;
преобразование и выдача в аппаратуру передачи данных допол-
нительной информации о состоянии аппаратуры РЛК сигналов
переключения запросных кодов, бланкирования информации в за-
данных зонах контролируемого пространства, передачи сигналов
управления радиолокаторами и т.д.
Современные типы АПОИ классифицируются по дальности
действия соответствующих радиолокационных средств или по виду
обрабатываемой информации. По дальности действия АПОИ под-
разделяется на типы А и Б для трассовых РЛС с дальностью
действия соответственно свыше 400 и 250 км и В1 и В2 для
аэродромных РЛС с дальностью действия свыше 160 и 100 км.
По виду обрабатываемой информации АПОИ может быть
подразделена на три группы. К первой группе относится АПОИ,
84
предназначенная для обработки радиолокационной информации
первичных РЛС, ко второй группе-вторичных РЛС и к третьей
группе-для обработки радиолокационной и полетной информации
РЛК, содержащих первичные и вторичные каналы обнаружения
целей. Все отечественные серийно выпускаемые типы АПОИ отно-
сятся к третьей группе.
В эксплуатации находится несколько вариантов АПОИ аэ-
родромных и трассовых РЛС отечественного производства, а также
экстрактор СХ-1100 шведской фирмы Stansaab, разработанный для
АС УВД «Теркас». Необходимость преобразования радиолокацион-
ной информации к виду, удобному для обработки на ЭВМ, привела
к создайию первой отечественной АПОИ «АНИС» для АС УВД
«Старт». В АПОИ «АНИС» впервые в мировой практике реализо-
ван алгоритм квазиоптимальной (весовой) обработки информации,
позволяющий достичь высоких характеристик по обнаружению
и точности определения координат целей, rib только для выбранной
угловой ширины пакета принимаемых сигналов. В дальнейшем
были разработаны модификации АПОИ «АНИС» для аэродромных
и трассовых РЛК («АНИС-250» и «АНИС-400»). В указанных
вариантах АПОИ для реализации квазиоптимального алгоритма
использовались аналоговые схемы, что объяснялось отсутствием
необходимой элементной базы и практически исключало возмож-
ность встроенного функционального контроля АПОИ.
АПОИ «АНИС-250» и «АНИС-400» (рис. 2.1). Они обеспечива-
ют вероятность правильного обнаружения 0,9 при вероятности
ложных тревог 10 6 по собственным шумам приемника при отно-
шении сигнал/шум, равном 3 для центрального импульса нефлукту-
ирующего пакета, состоящего из 10 ... 12 импульсов. Вероятность
дробления пакетов при этом равна 0,04. Разрешающая способность
по дальности равна 450 м для первичного канала и 900 м для
вторичного. Разрешающая способность по углу определяется шири-
ной ДН радиолокационной станции, увеличенной на 1-2 дискрета
передачи- угловой информации. Рабочая дальность для АПОИ
«АНИС-250» равна 250 км, для «АНИС-400»-400 км. Максималь-
ное число целей, которое может располагаться на одном азимуте, не
должно превышать 63. Вероятность искажения дополнительной
информации, обрабатываемой АПОИ, не более 10~2.
АПОИ СХ-1100. Предназначена для выделения полезной ин-
формации из сигналов первичных радиолокационных станций
ATCR-22/44, вторичных автономных радиолокационных станций
«Корень-АС» и РЛК «Скала-М».
В Советском Союзе АПОИ СХ-1100 входит в состав оборудова-
ния радиолокационных позиций трассовых и аэродромных АС УВД
«Теркас». Используются два незначительно отличающиеся друг от
друга вида АПОИ СХ-1100. Отличия определяются типом ПРЛ:
ATCR-22/44 или «Скала-М». АПОИ СХ-1100 обеспечивает вероят-
ность правильного обнаружения сигналов 0,9 при вероятности
85
ложных тревог 10 ~б. Вероятность
дробления пакетов при этом рав-
на 0,04. Разрешающая способ-
ность по дальности зависит от
числа элементарных дискретов
дальности и может изменяться
в пределах от 220 до 1000 м. Чис-
ло целей, находящихся на одном
азимуте, не может превосходить
1024. Вероятность потерь правиль-
ной дополнительной информации
равна 0,05, вероятность искаже-
ния дополнительной информации
равна 10~2.
АПОИ (рис. 2.2) состоит из
двух совершенно одинаковых
комплектов (Экстрактор-1 и
Экстрактор-2) и шкафа тестового
оборудования (ШТОБ). Когда
один из комплектов находится в
рабочем состоянии, другой экстра-
ктор находится в резерве. Пере-
ключение из резервного состоя-
ния в рабочее производится ав-
томатически в стойке шкафа тес-
Рис. 2.1. Аппаратура первичной обра- тового оборудования. С ВЫХОДОВ
ботки информации «АНИС-400» экстракторов очищенные и пре-
образованные в двоичную форму
сигналы поступают в модемы GH-2054 для дальнейшего преобра-
зования сигналов и трансляции их по узкополосным линиям связи.
Сюда же подключается контрольный индикатор, предназначенный
для проверки работоспособности и настройки экстракторов.
Вся аппаратура одного комплекта экстрактора может быть
разделена на три группы: общее оборудование, канал обработки
информации первичного радиолокатора и канал обработки инфор-
мации ВРЛ (рис. 2.3). Кроме того, в состав экстрактора входят
панель управления и источники питания. Общее оборудование
экстрактора может быть в свою очередь разделено на три группы:
группу отсчета местоположений отметок, группу буфера отметок
и группу вывода данных об отметках (рис. 2.4).
В группе отсчета местоположений имеется узел центральной
синхронизации (УЦС), счетчик азимута (СЧАЗ), память экстракто-
ра (ПЭК). В группе буфера отметок можно выделить память буфера
и логику буфера. Если экстрактор сопрягается с радиолокаторами
ATCR-22/44, то в состав группы буфера отметок вводится дополни-
тельное устройство сопряжения с нормализатором ложных тревог
радиолокационных станций.
86
Рис. 2.2. Состав оборудования аппаратуры СХ-1100
Группа вывода данных об отметках целей содержит блок управ-
ления экстрактором (БУЭК), классификатор отметок целей (КОТ),
смеситель отметок ПРЛ и ВРЛ и устройство передачи данных
(УПД). Все эти блоки работают на общую шину экстрактора,
откуда сообщения в последовательном коде подаются на модемы
GH-2054.
Канал обработки информации ПРЛ состоит из первичного
видеоадаптера (ПВА), группы квантования сигналов и группы
обработки отметок целей (рис. 2.5). Первичный видеоадаптер ис-
пользуется только в том случае, если экстрактор сопрягается
с первичными каналами РЛК «Скала-М». На вход канала обработ-
ки информации ПРЛ поступают синхронизирующие импульсы от
РЛ, различные виды видеосигналов и контрольные сигналы из
шкафа тестового оборудования. Канал обработки информации
обменивается сигналами с аппаратурой группы отсчета местополо-
жений целей. Выходной сигнал канала обработки поступает в па-
мять буфера группы буфера отметок целей.
Канал обработки информации вторичного радиолокатора состо-
ит из адаптеров аппаратуры декодирования (ААД 1, 2), узла
контроля правильности кода (КПК) и группы обработки отметок
ВРЛ (рис. 2.6). Узел контроля правильности кода используется
только в том случае, если на вход экстрактора поступают сигналы,
принятые от ответчиков, удовлетворяющих требованиям ИКАО.
Импульсы синхронизации I Контрольные сигналы
Панели управления
Видеосигнал ПРЛ Канал ПРЛ
Азимутальные импульсы \ Offwee одоруаоВрние ___Ji На модемы и контрольный
Импульсы синхронизации индикатор
видеосигнал ВРЛ канал ВРЛ Источники питания
f Контрольные сигналы
Рис. 2.3. Упрощенная структурная схема одного комплекта АПОИ СХ-1100
87
Рис. 2.4. Состав общего оборудования экстрактора:
МАИ-малые азимутальные импульсы; ИПА импульсы привязки азимута
При приеме сигналов от ответчиков, удовлетворяющих стандартам
СССР или СЭВ, контроль правильности кодов осуществляется
непосредственно в аппаратуре декодирования и обработки инфор-
мации самого вторичного радиолокатора. На вход капала обра-
ботки информации ВРЛ поступает декодированная информация
вторичного радиолокатора в параллельном коде по 48 жилам.
Канал обменивается сигналами с аппаратурой группы отсчета
местоположений отметок целей. Выходные сигналы канала обра-
ботки информации ВРЛ поступают в память буфера общей аппара-
туры экстрактора.
Для проверки работоспособности экстрактора используются два
режима - «Автономная проверка» и «Неавтономная проверка». В
первом случае вместо видеосигнала ПРЛ и ВРЛ вводится тестовая
информация, имитирующая радиолокационный сигнал. Во втором
случае имитированный сигнал смешивается с радиолокационным.
Разработка новых трассовых автоматизированных систем УВД
потребовала создания более совершенных отечественных образцов
АПОИ. Поэтому в 1974-1975 гг. на конкурсной основе была задана
разработка двух новых систем АПОИ, значительную часть логичес-
ких операций которых выполняли специализированные вычислите-
ли, выполненные на базе мини- и микроЭВМ.
АПОИ, выполненная на базе миниЭВМ. Ее назначение-обра-
ботка сигналов радиолокационных комплексов «Скала-М», «Ска-
ла-МПР» и автоматических радиолокаторов АРП-75 и АРП-АС.
АПОИ производит следующие основные операции:
очистку сигналов от шумов и импульсных несинхронных помех;
частичную очистку полезных сигналов от помех, вызываемых
гидрометеорами;
Рис. 2.5. Состав оборудования канала обработки сигналов ПРЛ
88
Рис. 2.6. Состав оборудования канала обработки сигналов ВРЛ
кодирование координат целей;
фильтрацию поступающей информации по скорости перемеще-
ния целей для подавления сигналов неподвижных и малоподвижных
объектов;
преобразование полярных координат целей в прямоугольные;
выборочное бланкирование локальных зон контролируемого
пространства; •
сокращение избыточности полетной информации, получаемой
от бортовых ответчиков;
отождествление полетной информации, координатной информа-
ции ПРЛ и координатной информации ВРЛ;
статистическая обработка сигналов метеоканалов радиолокаци-
онных комплексов;
кодирование сигналов границ метеообъектов;
прием, обработка и преобразование сигналов автоматических
радиопеленгаторов;
формирование сообщений и выдача их в аппаратуру передачи
данных через узкополосные каналы связи;
трансляцию через аппаратуру передачи данных информации
о состоянии и режимах работы радиолокационных комплексов;
прием через аппаратуру передачи данных управляющей ин-
формации о режимах работы радиолокационных комплексов;
автоматический контроль за состоянием и автоматическое пе-
реключение на резервный комплект АПОИ при отказе рабочего
полукомплекта.
АПОИ обеспечивает вероятность обнаружения целей по первич-
ному каналу РЛК не хуже 0,98 при вероятности ложных тревог 10-6
и при отношении сигнал/шум, равном 3. Число импульсов в пачке
отраженных сигналов должно быть при этом не менее 11.
Максимальное число ВС на одном азимуте по каналу ВРЛ не
должно превышать 63. Вероятность дробления пакетов равна 0,02,
вероятность искажения дополнительной информации-менее 0,02,
вероятность потерь дополнительной информации-0,08. Число
каналов обработки информации равно 4. Один дискрет дальности
составляет 400 м и соответствующая разрешающая способность-
600 м.
В состав оборудования АПОИ входят две двойные стойки
с электронными блоками, два спецвычислителя и два пульта
управления.
89
Рис. 2.7. Структурная схема одного полукомплекта АПОИ
Комплект АПОИ (рис. 2.7) состоит из двух идентичных полу-
комплектов, каждый из которых может решать все функциональные
задачи обработки информации и управления. Функции обработки
информации в АПОИ реализованы как аппаратными, так и про-
граммными средствами. Устройства, реализующие аппаратную
часть алгоритмов обработки информации, размещены в следующих
конструктивно законченных блоках: обработки сигналов первично-
го канала радиолокационного комплекса; обработки сигналов вто-
ричного канала радиолокационного комплекса; обработки сигналов
радиолокационных метеоканалов и автоматических радиопеленга-
торов; имитаторов и синхронизаторов; управления и коммутации
сигналов; загрузки.
Программная часть алгоритмов обработки информации реали-
зована на базе спецвычислителя- вычислительной машины класса
«мини». Связь машины с периферийными узлами АПОИ осущест-
вляется с помощью блока загрузки и устройства обмена (УО),
входящего в состав аппаратуры спецвычислителя.
Блок обработки сигналов ПРЛ работает следующим образом.
На первом этапе обработки производится бинарное амплитудное
квантование сигналов по системе с двумя порогами и автоматичес-
ким выбором порогов. Быстрый порог обеспечивает наилучшее
выделение полезных сигналов на фоне метеопомех, медленный
порог-на фоне тепловых шумов. Затем бинарные сигналы кванту-
90
ются по времени и фильтруются по минимальной и максимальной
длительности. На втором этапе обработки осуществляется авто-
матический выбор амплитудного или когерентного канала по си-
стеме с динамической картой помех. Карта помех содержит 1024
ячейки памяти (32 сегмента по дальности и 32-по азимуту).
Третий этап обработки-обнаружение пачек сигналов по системе
скользящего окна. В качестве критериев обнаружения используются
критерий начала пачки «и из т», концы пачки «к из т», где к < п,
и критерий минимальной ширины пакета. Длина скользящего окна
т выбирается равной 9. Критерии начала п и конца к пачки
устанавливаются устройством управления критериями (УУКР), на-
ходящимся в блоке управления и коммутации сигналов. Предусмат-
ривается автоматический выбор критерия начала пачки в зависи-
мости от помеховой ситуации.
При обнаружении начала пачки происхрдит фиксация азимута
цели с поправкой на текущий критерий. При обнаружении конца
пачки информация об азимуте выдается в блок загрузки и далее
в специальный вычислитель при условии, что пачка имеет азиму-
тальную ширину не менее заданного критерия минимальной про-
тяженности. При выдаче сообщения в спецвычислитель происходит
также привязка к сообщению специального признака наличия пачки
сигналов, получаемых по вторичному каналу.
Четвертый этап обработки сигналов - программный. По дан-
ным, поступающим в спецвычислитель, производится расчет поляр-
ных координат, проверка на объединение со вторичной целью,
пересчет координат в прямоугольные, межобзорная обработка,
приоритетная обработка, упаковка в сообщение, выдача данных
через узел сопряжения с аппаратурой связи (УСАС) в аппаратуру
передачи данных.
Межобзорная обработка предполагает селекцию сигналов по
скорости перемещения целей за несколько периодов обзора прост-
ранства.
Блок обработки сигналов ВРЛ содержит обработчик координат-
ных сигналов активного канала (ОКСАК) и обработчик полетной
информаций (ОПИ). Обработка координатной информации в аппа-
ратной части ВРЛ в основном аналогична обработке пачек ПРЛ.
Отличия заключаются в следующем:
сигналы ВРЛ поступают в двоичном виде и поэтому не подвер-
гаются амплитудному квантованию;
сигналы ВРЛ сопровождаются некоторыми признаками (между-
народный или отечественный канал, сигнал бедствия и т.д.), ко-
торые должны запоминаться вместе с координатной пачкой;
при обработке сигналов ВРЛ используется дополнительный
критерий качества пачки, для хранения информации о котором
должны быть предусмотрены дополнительные разряды памяти.
Программная обработка целей в ВРЛ состоит в том, что
производится расчет полярных координат, поиск соответствующей
91
первичной цели, поиск полетной информации, пересчет координат
в прямоугольные, упаковка объединенной информации в сообще-
ние, приоритетная обработка и выдача информации в аппаратуру
передачи данных.
Полетная информация, поступающая по вторичному каналу,
обрабатывается следующим образом. Поступающие в устройство
обработки полетной информации сигналы отечественного канала
ВРЛ при их первом поступлении передаются с помощью блока
загрузки непосредственно в спецвычислитель. При повторном
поступлении ее в том же режиме запроса она выдается повторно
с признаком подтверждения. При последующих поступлениях ин-
формация подавляется.
Информация международного канала при первом поступлении
запоминается в ОПИ, при повторном поступлении в том же режиме
запроса в пределах одной пачки принимаемых сигналов выдается
в спецвычислитель. При последующих поступлениях информация не
обрабатывается. Далее полетная информация проходит програм-
мную обработку в вычислителе и объединяется с соответствующей
координатной информацией.
Блок обработки сигналов метео и пеленгов включает в себя два
устройства: обработчик сигналов метео (ОСМ) и обработчик сигна-
лов пеленга (ОСП).
Устройство ОСМ производит накопление, статистическую обра-
ботку сигналов метеоканала первичного радиолокатора и выдачу
обработанной информации в канал загрузки. В результате обработ-
ки происходит выделение контуров метеообъектов и устраняется
избыточность обрабатываемых сигналов. При отсутствии метео-
каналов в составе оборудования РЛ в качестве входных сигналов
блока ОСМ могут быть использованы сигналы, вырабатываемые
блоком обработки сигналов ПРЛ.
Устройство ОСП осуществляет прием информации от аппарату-
ры связи автоматического пеленгатора и выдачу обработанной
информации в канал загрузки. Блок имитаторов и синхронизаторов
содержит узел трансляции и имитации синхросигналов (УТИ С),
узел имитации координатных сигналов (УИКС) и узел обработки
сбоев (УОСБ). УТИС обеспечивает генерацию служебных сигналов,
необходимых для работы АПОИ, прием и распределение синхро-
информации радиолокационных комплексов, имитацию синхрони-
зации РЛС в режиме автономного контроля.
УИКС обеспечивает прием от спецвычислителя через селектор-
ный канал информации о контрольных точках и генерацию сигна-
лов, имитирующих цели. Имитируются координатные сигналы
первичных и вторичных каналов РЛК, метеосигналы и полетная
информация ВРЛ.
УОСБ в рабочем режиме осуществляет объединение сигналов
сбоя для каждого функционально законченного узла. Выходом
УОСБ является байт состояний. Каждый разряд этого байта отра-
92
жает состояние определенного узла АПОИ. В тестовом режиме
УОСБ транслирует состояние всех шин контроля узла, указанного
с выходного регистра АПОИ.
Блок управления и коммутации сигналов включает в себя узел
трансляции сигналов режимов работы ВРЛ (УТРЖ), узел управле-
ния критериями (УУКР), узел управления резервом (УУР), устрой-
ство сопряжения с аппаратурой связи (УСАС), узел управления
пультом, предназначенным для оперативного управления АПОИ
и ее диагностики (УУПОУД). С блоком управления и коммутации
сопрягаются узел выходной коммутации (УВКМ) и пульт оператив-
ного управления и диагностики (ПОУД).
Узел УТРЖ осуществляет трансляцию сигналов переключения
режимов запроса вторичных радиолокаторов. Узел УУКР обеспечи-
вает прием от спецвычислителя команд на установку критериев
обработки сигналов ПРЛ и ВРЛ, а также их оперативную смену
в течение одного зондирования. Критерии могут устанавливаться
независимо для четырех произвольных зон дальности. Команды на
переключение критериев подаются в блок обработки сигналов ПРЛ
и узел ОКСАК блока обработки сигналов ВРЛ.
Узел УУР обеспечивает аппаратное обнаружение ряда отказов,
контроль работоспособности и переключение рабочего и резервного
комплектов АПОИ.
Устройство УСАС введено в состав АПОИ для электрического
и логического сопряжения селективного канала устройства обмена
спецвычислителя с двумя комплектами аппаратуры передачи дан-
ных. Непосредственно с УСАС связан узел УВКМ, выполняющий
функции выходной коммутации сигналов. Через УВКМ сигналы
диагностики подаются на пульт техника.
Пульт ПОУД предназначен для оперативного визуального конт-
роля и диагностики работы одного комплекта АПОИ. Он состоит
из двух частей: узла управления (УУПОУД), расположенного в бло-
ке управления и коммутации сигналов, и выносной панели (собст-
венно ПОУД), на которой расположены индикаторные светодиоды
и органы управления. ПОУД выполняет следующие функции: в ра-
бочем режиме визуально отображает информацию о состоянии
АПОИ, предназначенную для передачи на пульт техника; в режимах
диагностики визуально отображает информацию, передаваемую по
любой из внутренних магистралей АПОИ-выходного регистра,
загрузчика и одного из каналов устройства обмена вычислителя;
при автономной настройке АПОИ имитирует работу основных
узлов спецвычислителя.
АПОИ, выполненная на базе микроЭВМ. Используется для
обработки сигналов трассовых РЛС ОРЛ-Т варианта Б и вторичных
радиолокаторов типа «Корень-АС». По своим эксплуатационным
характеристикам она приближается к АПОИ, выполненной на базе
мини-ЭВМ, а по некоторым параметрам превосходит эту АПОИ.
Вероятность дробления пакетов снижена до 0,001, несколько улуч-
93
шена точность по азимуту и разрешающая способность по даль-
ности. Вероятность объединения информации ПРЛ и ВРЛ равна
0,95 (вместо 0,99 у АПОИ, выполненной на мини-ЭВМ). Число
каналов обработки информации уменьшено до 1 вместо 4 у рас-
смотренной ранее АПОИ.
АПОИ на базе микроЭВМ, в принципе, не имеет жестких
ограничений по сопряжению с различными типами радиолокацион-
ного оборудования, но имеет худшие аппаратурные возможности:
отсутствие автоматического выбора канала, автоматического изме-
нения порогов. Тем не менее использование традиционных методов
первичной обработки в сочетании с применением микропроцессоров
для выполнения ряда функций АПОИ, в том числе для межобзор-
ной обработки информации, позволило получить достаточно высо-
кие вероятностные характеристики по первичному и вторичному
каналам: вероятность правильного обнаружения 0,96 при вероят-
ности ложных тревог 10 “б, вероятность потерь правильной допол-
нительной информации 0,09, вероятность искажения дополнитель-
ной информации 0,02 и вероятность объединения координатной
и полетной информации 0,9. Однако реализованный в АПОИ
алгоритм межобзорной обработки, основанный на стробировании
сигналов по минимальной скорости целей, обладает высокой веро-
ятностью подавления малоскоростных целей. Это накладывает
ограничения на применение данной АПОИ в аэродромных автома-
тизированных системах УВД и трассовых АС УВД с высоким
уровнем автоматизации.
Параллельно с разработкой сложных специализированных вари-
антов АПОИ, предназначенных для обработки радиолокационной
информации в трассовых и аэродромных автоматизированных сис-
темах УВД, была создана также универсальная, массовая и дешевая
АПОИ «Вуокса» (рис. 2.8), предназначенная для работы со всеми
существующими и вновь разрабатываемыми отечественными ра-
диолокаторами УВД. По сложившейся к тому времени концепции
АПОИ «Вуокса» должна была перерабатывать информацию любой
РЛС так, чтобы ее можно было использовать в неавтоматизи-
рованных системах УВД без дополнительной вторичной обра-
ботки.
С другой стороны, необходимость поиска компромисса между
удовлетворением требований различных систем, а также массо-
вости и дешевизны аппаратуры привела к упрощению структуры
АПОИ. Одновременно с реализацией в «Вуоксе» таких перспектив-
ных идей, как двухступенчатая организация обработки, включение
дешифратора ВРЛ в состав аппаратуры АПОИ, организация авто-
матического порога, разработчики отказались от межобзорной
обработки информации как в первичном, так и во вторичном
каналах.
Серийно выпускаемая аппаратура «Вуокса» выполняет следую-
щие операции:
94
Рис. 2.8. Аппаратура первичной обработки информации «Вуокса»
выделение сигналов первичных РЛС на фоне шумов приемника;
очистку радиолокационной информации от помех, вызванных
отражениями от местных предметов, метеообразований и несин-
хронных ответных сигналов;
обнаружение ответных сигналов, поступающих с выхода прием-
ников ВРЛ отечественного и международного диапазонов;
декодирование информации, поступающей по вторичному кана-
лу в режимах УВД, УВД-M, RBS;
вычисление центров радиолокационных пакетов в полярных
координатах с последующим преобразованием их в прямоугольные;
привязку дополнительной информации вторичного канала к со-
ответствующим координатам целей;
объединение координат целей, получаемых по первичному и вто-
ричному каналам;
95
формирование стандартного' сообщения и передачу его через
узкополосную линию связи с помощью аппаратуры передачи
данных;
трансляцию аналоговой координатной информации по широко-
полосной линии связи.
Тактико-технические характеристики аппаратуры «Вуокса» в ос-
новном соответствуют требованиям, предъявляемым стандартами
к такого рода аппаратуре. Вероятность обнаружения целей при
отношении сигнал/шум, равном 3, при вероятности ложных тревог
10-6 равна 0,92. Вероятности дробления пакетов - 0,02, потерь
правильной дополнительной информации-0,04, искажения допол-
нительной информации-10 ~2, объединения координатной и полет-
ной информации-0,95, объединения информации ПРЛ и ВРЛ-0,9.
Число каналов обработки информации равно 3, максимальное
число обрабатываемых целей на одном азимуте-63.
Аппаратура имеет 100%-ное резервирование по основному трак-
ту обработки информации. Обеспечено местное, централизованное
и дистанционное управление аппаратурой. Переключение комплек-
тов осуществляется как автоматически, так и вручную. Принцип
обработки радиолокационной информации-критерийная обработ-
ка радиолокационных пакетов.
В состав АПОИ «Вуокса» (рис. 2.9) входят стойка сопряжения
ВН-01, две стойки обработки информации ОД-21, передающая
часть аппаратуры передачи данных ВП-01 (2 шт.), стойка сопряже-
ния ВН-02 и приемная часть аппаратуры передачи данных ВП-02
(2 шт.). Стойки ВН-01, ОД-21 и блоки ВП-01 располагаются на
радиолокационной позиции, стойка ВН-02 и блоки ВП-02-на КДП.
Возможно размещение всей аппаратуры на КДП, при этом аппара-
тура передачи данных исключается. Стойка сопряжения ВН-01
$
I
§
&
*
'S-
£
К
£
I
I
t
&
$
&
L.
Й
I
§
§
220В, 50Гц 220В, 5О Гц
Радиолокационная позиция
Рис. 2.9. Состав оборудования АПОИ «Вуокса»
96
~ Стойка сопряжения ВН-02 |
ВП-02 ВП-02
I комплект Пкомплект
Т I
220В,50Гц 220В,50Гц
Технический зал кдп
управляет включением основных и резервных комплектов аппарату-
ры ОД-21 и ВП-01, обеспечивает сопряжение и коммутацию сигна-
лов РЛС, ОД-21, ВП-01. Через стойку сопряжения осуществляются
электропитание всей аппаратуры и трансляция обработанных сигна-
лов на КДП.
На стойку сопряжения от РЛС поступают сигналы запуска первич-
ного (запуск ПК) и вторичного (запуск ВК) каналов, азимутальная
информация в виде малых азимутальных импульсов (метки МАИ),
тридцатиградусных меток (метки 30°) и импульса (метка «Север»),
сигналы приемников вторичного канала международного (Вых.
Прм МД) и отечественного (Вых. Прм ОД) диапазонов, сигналы
приемника первичного канала с когерентного (Вых. Прм 1 ПК)
и амплитудного (Вых. Прм 2 ПК) выходов, сигналы переключения
когерентных и амплитудных выходов приемника первичного канала
(переключение зоны ПК), запросные коды и питающее напряжение
380 В, 50 Гц.
Если в составе выходной информации РЛ отсутствуют сигналы
МАИ (последовательность 4096 импульсов за 1 оборот антенны),
тридцатиградусные метки и метка «Север», то эти сигналы посту-
пают на АПОИ «Вуокса» с аппаратуры «Модуль», предназначенной
для преобразования информации об угловом положении антенны
радиолокатора в указанную выше последовательность азимуталь-
ных меток и метку «Север».
Выходными сигналами стойки ВН-01 являются координатные
обработанные сигналы первичного и вторичного каналов (КС-ПК
и КС-ВК), цифровой информационный код, задержанные импульсы
запуска средств отображения информации, импульсы предваритель-
ного запуска и указанные выше сигналы азимутальной информации.
Кроме того, в линию передаются команды разрешения на дистан-
ционное управление и сигналы дистанционного включения и
выключения аппаратуры. Предусмотрен отдельный широкополос-
ный выход на контрольный индикатор кругового обзора (Вых. на
КИКО).
Цифровой сигнал представляет собой 96-разрядное сообщение
в последовательном двоичном коде, содержащее все необходимые
данные о каждом ВС. Этот сигнал передается по узкополосной
линии связи. Обработанные координатные сигналы первичного
и вторичного каналов являются аналоговыми, широкополосными
и передаются с помощью коаксиального кабеля на выносные
аналоговые индикаторы, предназначенные для отображения только
координатной информации.
Стойка ОД-21 предназначена для обработки первичной и вто-
ричной информации, поступающей через аппаратуру сопряжения
ВН-01 от радиолокационных станций, и выдачи обработанной
информации через ту же аппаратуру сопряжения на командно-дис-
петчерский пункт по широкополосным и узкополосным каналам
связи.
4 Зак, 1375 97
Аппаратура обработки информации имеет два самостоятельных
канала: обработки сигналов ПРЛ и канал обработки сигналов ВРЛ.
В каждом канале процесс обработки координатной информации
осуществляется путем последовательного трехстуненчатого повы-
шения порога. На первом этапе осуществляется выделение полезно-
го сигнала из шумовых и помеховых сигналов в текущем периоде
излучения РЛС. Эта задача выполняется для канала ПРЛ входным
пороговым устройством ПРЛ, а для канала ВРЛ-дешифраторами
международного и отечественного каналов. Второй этап позволяет
осуществить предварительное обнаружение пакета ответных сигна-
лов за счет накопления и анализа их повторяемости в различных
периодах излучения зондирующих импульсов. Эту функцию обна-
ружения осуществляют интеграторы соответствующих каналов
ПРЛ и ВРЛ. В интеграторах используется метод критерийной
обработки информации типа «движущееся окно».
Порогом на третьем этапе обработки являются ограничитель-
ные условия, которые накладываются на протяженность пакета по
азимуту. При этом пакеты импульсов, имеющие слишком большую
и слишком малую протяженность, отбрасываются. Анализ протя-
женности пакета по азимуту происходит в устройствах анализа
пакета соответствующих каналов после получения всей сопутству-
ющей информации о данном пакете. Обработка координатной
информации на втором и третьем этапах построена по одному
и тому же алгоритму, поэтому блоки интегратора и устройства
анализа пакета одинаковые и взаимозаменяемые.
Источником информации для канала ПРЛ являются амплитуд-
ные выходы приемников верхних и нижних углов места и канала
СДЦ. Сигнал «Переключение зоны ПК» определяет временные
интервалы, в которых используются сигналы выходов этих прием-
ников и канала СДЦ.
Источником информации в канале ВРЛ являются приемники
отечественного и международного диапазонов. Функцию входного
устройства (первой ступени обработки) здесь выполняет дешифра-
тор. С выхода дешифратора снимаются координатные сигналы,
а также все сигналы, сопутствующие полетной информации, и сиг-
налы самой полетной информации (номер ВС, высота, остаток
топлйва и т.д.).
Дальше обработка координатной информации в канале ВРЛ
происходит так же, как и в канале ПРЛ.
Кроме обработки координатной информации, в канале ВРЛ
осуществляются прием и привязка полетной информации. Для
этого в канале ВРЛ имеется специальное устройство, на вход
которого поступают сигналы, сопутствующие полетной информа-
ции, и информация с выхода регистров дешифратора. Задача
специального устройства-прием, привязка поступившей информа-
ции к формуляру цели и хранение ее до завершения обработки
пакета. Привязка полетной информации к формуляру осуществля-
98
ется с помощью записи адреса полетной информации в ОЗУ
и записи признака принятой информации в формуляр цели.
При поступлении пакетов ответных сигналов от одной цели по
каналам ПРЛ и ВРЛ в схеме объединения осуществляется анализ
взаимного расположения этих ответов по дальности. Если объеди-
нение не произошло, то после завершения обработки пакета в кана-
ле ВРЛ устройство анализа пакета делает два обращения в ОЗУ за
полетной информацией и вместе с координатными сигналами пере-
дает ее параллельно-последовательным кодом в устройство выдачи.
При объединении информации по окончании обработки пакета
в одном из каналов информация не передается в устройство выдачи
до тех пор, пока не закончится обработка пакета от этой же цели
в другом канале.
Устройство выдачи является буфером, в котором происходит
накопление обработанной информации, распределение ее в соответ-
ствии с кодограммой сообщения и выдача сообщения в узкополос-
ную линию связи. Кроме того, в устройстве выдачи происходит
преобразование полярных координат цели в прямоугольные, а так-
же пересчет информации о высоте полета, поступившей из приемни-
ка международного диапазона, из футов в метры. Выдача информа-
ции в модем осуществляется 96-разрядным сообщением.
Для контроля за работоспособностью аппаратуры в составе
стойки ОД-21 имеется устройство индикации и формирования
контрольных пакетов. С помощью этого устройства осуществляет-
ся сквозной тестовый контроль аппаратуры. При этом в режиме
контрольного пакета имеется возможность визуального наблюде-
ния всех этапов обработки контрольного пакета.
Блоки ВП-01 и ВП-02 входят в состав частотно-кодовой аппара-
туры передачи данных (ЧКАПД), предназначенной для организации
симплексной передачи дискретной информации от АПОИ на КДП
по выделенным проводным, радиорелейным и кабельным линиям
связи по одному, двум или трем направлениям. Блок ВП-01 являет-
ся передающей частью ЧКАПД и предназначен для приема данных
от стойки сопряжения по стыку С2, передачи модулированной
информации через стойку сопряжения в линию связи, синхрониза-
ции работы по тактам и циклам (сообщениям), кодирования инфор-
мации и сопряжения с каналом связи.
Блок ВП-02 - приемная часть ЧКАПД. Он предназначен для
сопряжения с линией связи, демодулирования аналоговых сигналов
и преобразования их в цифровой код, декодирования информации,
синхронизации сообщения по циклам и тактам, накопления сообще-
ния и выдачи его через стойку сопряжения на аппаратуру отображе-
ния информации.
Стойка сопряжения ВН-02 располагается на приемной стороне
АПОИ и обеспечивает сопряжение каналов связи, аппаратуры
передачи данных и средств отображения информации. Аппаратура,
входящая в состав стойки сопряжения, коммутирует входные и вы-
4* 99
ходные сигналы АПД, управляет основным и резервным комплек-
тами АПД, корректирует сигналы, поступающие с кабельной ли-
нии, преобразует сигналы углового положения антенны РЛС по
длительности и амплитуде, размножает сигналы АПД по трем
направлениям.
Выходными сигналами стойки сопряжения ВН-02 являются ази-
мутальные сигналы (метки МАИ, метки 30°, метка «Север»), цифро-
вая информация о ВС и обработанные аналоговые координатные
сигналы вторичного и первичного каналов РЛС (КС-ВК и КС-ПК).
В качестве средств отображения информации может быть использо-
вана аппаратура «Строка-Б-Страница», «Строка-2», «Символ»,
«Старт», «Старт-2».
2.2. Аппаратура трансляции радиолокационной информации
В гражданской авиации используется аппаратура трансляции
радиолокационных сигналов двух видов: аппаратура трансляции
радиолокационных сигналов на небольшие расстояния (2-10 км) на
выносные индикаторы РЛС; аппаратура трансляции радиолокаци-
онных сигналов на большие расстояния (от десятков до нескольких
сотен километров) с целью сбора информации многих РЛС о воз-
душной обстановке по всей трассе или по всему заданному району
и сосредоточения ее в каком-либо центре УВД.
В первом случае передача радиолокационных сигналов осущест-
вляется, как правило, по широкополосным кабельным каналам.
Аппаратура трансляции при этом вместе с выносными индикатора-
ми непосредственно входит в состав радиолокационной станции.
Структурная схема аппаратуры трансляции координатных сиг-
налов по широкополосным кабельным линиям связи содержит на
передающем конце кабельный усилитель и усилитель-корректор на
приемном конце. В некоторых случаях частотно-зависимая коррек-
ция затухания линии предусматривается на передающем конце
непосредственно в кабельном усилителе. Параметры корректирую-
щих цепей изменяются в зависимости от длины применяемых
кабелей. При большой длине соединительных кабельных линий
приходится использовать промежуточные кабельные усилители.
Для уменьшения числа дорогостоящих широкополосных кана-
лов связи радиолокационный сигнал подвергается предваритель-
ному уплотнению. Вместе с сигналами, несущими информацию
о координатах целей, передаются вспомогательные сигналы: запус-
кающие импульсы, масштабные метки дальности и азимута. Селек-
ция вспомогательных сигналов на приемном конце производится по
амплитудным признакам, полярности и длительности передавае-
мых импульсов. В некоторых случаях различные виды сигналов
передаются на разных несущих частотах и селектируются на прием-
ном конце с помощью частотно-избирательных фильтров. В некото-
100
рых случаях для трансляции радиолокационных сигналов на боль-
шие расстояния используются широкополосные радиорелейные ли-
нии. Передача сигналов в них производится также аналоговым
способом.
При трансляции радиолокационных сигналов на большие рас-
стояния используются узкополосные кабельные каналы связи или
радиорелейные линии. Для этого широкополосный радиолокацион-
ный сигнал преобразуется в узкополосный. Сжатие спектра осу-
ществляется путем устранения избыточности информации, содержа-
щейся в радиолокационном сигнале. Устранение избыточное™
производится в аппаратуре первичной обработки радиолокацион-
ной информации.
Аппаратура передачи данных автоматизированной системы УВД
«Теркас» может служить примером устройства трансляции радио-
локационных сигналов на большие расстояния по узкополосным
кабельным каналам связи. В этой системе на радиолокационных
позициях и в Центре АС УВД располагаются модемы GH-2054,
предназначенные для преобразования дискретной информации с
целью ее трансляции по узкополосным каналам связи как от
радиолокационных позиций в направлении Центра АС УВД, так и
от Центра АС УВД в направлении периферийных устройств систе-
мы. Модем может обеспечивать передачу и прием дискретной
информации по коммутируемым и некоммутируемым четырех-
проводным и двухпроводным радиорелейным и кабельным ка-
налам тональной частоты, а также по абонентским сетям передачи
данных общего пользования.
В модеме предусмотрены следующие процедуры связи:
попеременная передача-прием по двухпроводным каналам свя-
зи со скоростью 1200/2400 бит/с (полудуплекс);
попеременная передача-прием по двухпроводным каналам свя-
зи со скоростью 1200/2400 бит/с с организацией обратного канала
со скоростью 75 бит/с;
одновременная передача-прием по четырехпроводному каналу
связи со скоростью 1200/2400 бит/с с организацией обратного кана-
ла со скоростью 75 бит/с (полный дуплекс);
полудуплексная передача данных в многоточечных двухпровод-
ных или четырехпроводных сетях связи.
Номенклатура цепей и параметры сигналов обмена модема
с АПОИ соответствуют рекомендациям Международного консуль-
тативного Комитета по телеграфии и телефонии (МККТТ) и
ГОСТ 18145-81.
При скороста работы 1200 бит/с в модеме используется метод
однократной относительной фазовой модуляции (ОФМ). По этому
методу информация о Передаваемом сигнале заложена не в абсо-
лютном значении фазы передаваемого сигнала, а в разности фаз
двух соседних посылок. Логическому нулю в первоначальном дво-
ичном сигнале соответствует передача одинаковых значений фазы
101
данного и предшествующего символов, а логической единице-пере-
дача различных значений. После относительного кодирования пер-
вичного сигнала логической единице будет соответствовать фаза
+ 270°, а логическому нулю +90°.
При скорости работы 2400 бит/с используется метод двукратной
относительной фазовой модуляции (ДОФМ). В этом случае двум
символам первичного двоичного сигнала (дибиту) соответствует
определенное изменение фазы несущей частоты передаваемого сиг-
нала. Возможны два варианта изменения фазы передаваемого
сигнала. Для первого варианта дибитам 00, 01, 11 и 10 соответст-
вуют фазы 0, +90, +180 и +270°; для второго варианта-соответ-
ственно фазы +45, +135, +225 и +315°. Как и при двухфазной
относительной модуляции, четырехфазная фазовая модуляция бази-
руется на изменении фазы для каждого дибита, а не на абсолютном
значении фазы. Повышение скорости в данном случае достигается
путем увеличения числа двоичных информационных символов (ди-
битов), передаваемых одним элементом сообщения (изменением
фазы). В обратном канале со скоростью передачи 75 бит/с исполь-
зуется частотный метод модуляции: символу 1 соответствует часто-
та 390 Гц, символу 0-450 Гц.
Модем обеспечивает устойчивую передачу информации с коэф-
фициентом битовой ошибки не хуже 5-10“5 при 12 переприемных
участках на скорости 1200 бит/с и шести переприемных участках на
скорости 2400 бит/с. При этом предполагается, что общая протя-
женность магистрали равна 12 тыс. км. Модем оснащен средствами
локального и удаленного функционального контроля с выводом
информации о состоянии аппаратуры на индикаторные световые
элементы.
Для передачи информации с радиолокационной позиции в Центр
УВД должны использоваться прямые, некоммутируемые стандарт-
ные каналы тональной частоты общегосударственной сети связи
страны, а также сети связи МГА или других ведомств. При этом
необходимо иметь два канала-основной и резервный, организован-
ные по независимым, географически разнесенным трассам с привяз-
кой их к различным пунктам общегосударственной сети Министер-
ства связи СССР. Если отсутствует возможность организации
каналов связи в географически разнесенных магистралях, то в виде
исключения допускается использовать каналы одной магистрали,
но в независимых друг от друга системах уплотнения и с самостоя-
тельными фидерами электропитания. В нормальных условиях ра-
диолокационная информация передается по обоим каналам, но если
один из них оказывается неисправным, то вся информация переда-
ется цо другому каналу. В АПОИ предусмотрено переключение
модемов на соответствующий канал в зависимости от принятого по
обратному каналу сигнала о состоянии линии связи.
Формат блоков информации, передаваемых от радиолокацион-
ной позиции в Центр УВД, зависит от типа передаваемого сообще-
102
ния. Начальный код, состоящий из 11 единиц и разделяющего нуля,
передается после каждых 16 блоков информации. Каждый блок
информации содержит 3-6 восьмибитовых байта, один бит чет-
ности и один разделяющий нуль. Первые четыре бита в каждом
блоке информации содержат код, специфичный для каждого блока
информации.
Передача основной информации производится по симплексному
методу. В случае появления свободного интервала в одном из
каналов связи устройство выдачи информации АПОИ посылает
блоки информации по этому каналу. При отсутствии информации
передатчик данных посылает только синхронизирующие сигналы.
Вместе с радиолокационной информацией по тем же каналам
связи могут передаваться сигналы АРП. В качестве формата для
передачи данных АРП в этом случае выбирается один из форматов,
принятых для передачи данных РЛС.
Аппаратура передачи дискретной радиолокационной информации
АС УВД «Стрела» построена аналогичным образом. В состав
аппаратуры входят передающая и приемная стойки АИ-010, пред-
назначенные для дуплексного и симплексного обмена дискретной
информацией в реальном масштабе времени между радиолокацион-
ной позицией и аппаратурой обработки информации Центра УВД.
Стойка обеспечивает передачу информации на скоростях 1200 и
2400 бйт/с по двум независимым четырехпроводным каналам то-
нальной частоты или по одному каналу с использованием второго
в качестве резервного. Информация передается методом двойной
относительной фазовой модуляции на скорости 2400 бит/с и мето-
дом однократной относительной фазовой модуляции на скорости
1200 бит/с. Обмен информацией производится последовательным
способом блоками, состоящими из 117 двоичных символов. Вероят-
ность искажения передаваемой информации не хуже 10“6 на вось-
миэлементный знак при частоте ошибки в канале связи не более
1СГ3. Максимальная длина линии связи равна 13 900 км при 12
переприемных участках на скорости передачи 1200 бит/с и восьми
участках при скорости 2400 бит/с. Допустимое время обрыва канала
связи или отсутствия изменения полярности в принимаемом сигна-
ле, не приводящее к расфазировке по тактовой частоте, не превыша-
ет 10 с. Номенклатура цепей и параметры сигналов обмена модема
с АПОИ соответствуют рекомендациям МККТТ и ГОСТ 18145-81.
В состав оборудования стойки АИ-010 входят (рис. 2.10) два
устройства защиты от ошибок (УЗО), два устройства преобразова-
ния сигналов (УПС) с блоками частотных корректоров (БЧК),
устройство резервирования (схемы переключений СП) с резервными
частотными корректорами и устройство питания.
Информация с АПОИ-1 или АПОИ-2 по целям стыка С2
поблочно поступает в УЗО, где осуществляется избыточное кодиро-
вание, необходимое для обеспечения заданной достоверности и цик-
лового фазирования при двустороннем обмене информацией. Из
юз
Рис. 2.10. Структурная схема аппаратуры передачи радиолокационных данных трас-
совой автоматизированной системы УВД
УЗО информация поступает в УПС, предназначенное для преобра-
зования дискретных сигналов информации в вид, пригодный для
передачи по стандартным каналам тональной частоты. Далее сигна-
лы корректируются по частоте в блоках БЧК и поступают в канал
связи. Из капала связи информация через БЧК поступает в УПС,
где происходит обратное преобразование модулированного сигнала
в дискретный. В УЗО информация декодируется, анализируется на
наличие ошибки и при отсутствии последней выводится в аппарату-
ру обработки сигнала Центра УВД.
Частотно-кодовая аппаратура передачи данных (ЧК АПД),
входящая в состав АПОИ «Вуокса», предназначена для организации
симплексной передачи дискретной информации от радиолокацион-
ных позиций, где располагается аппаратура «Вуокса», на командно-
диспетчерские пункты по выделенным проводным, радиорелейным
и кабельным линиям связи по одному, двум или трем направлени-
ям. Скорость передачи информации равна 2400 бит/с (218 одиннад-
цатиразрядных байтов в секунду). В каждом байте передается
восемь информационных разрядов, остальные три разряда обеспе-
чивают обнаружение ошибок в принимаемых байтах и передачу
служебной информации. Вероятность необнаруженной ошибки в
данных, выдаваемых потребителю, не более 10 6 на восьмиэле-
ментный байт при частоте ошибок в канале связи не более 10 ~4 на
единичный элемент. Вероятность ошибки принимаемой информа-
ции не более 10“ 5 при воздействии флуктуационной помехи с уров-
нем — 22 дБ по отношению к уровню сигнала. Допустимое время
обрыва канала связи, при котором не происходит расфазировка по
тактовой частоте, не более 10 с. Время вхождения в синхронизм при
первоначальном включении аппаратуры или при перерывах связи
более 10 с составляет не более 40 с.
В состав оборудования ЧК АПД входят блок передатчика ВП-01
и блок приемника ВП-02 (рис. 2.11). Вход и выход ЧК АПД
в сторону канала связи симметричны и соответствуют требованиям
104
стыка Cl (ГОСТ 25007 81). Об-
мен информацией с АПОИ и око-
нечным оборудованием данных
(ООД) производится последова-
тельным способом блоками по 96
бит. Номенклатура, наименова-
ние цепей и параметры сигналов
в сторону АПОИ и ООД соответ-
ствуют требованиям стыка С2.
В канале связи применяется
параллельный способ передачи
группы двоичных знаков. Для
этого восемь информационных
Рис. 2.11. Структурная схема частот-
но-кодовой аппаратуры передачи дан-
ных
разрядов собираются в один двоичный кодовый блок и преобра-
зуются затем в одиннадцатиразрядный блок постоянного веса,
содержащий всегда семь нулей и четыре единицы на разных инфор-
мационных позициях. Для передачи единиц в каждом блоке по-
стоянного веса используют четыре различных поднесущих из числа
11 частот, расположенных в диапазоне от 4,5 до 7 кГц. Интервал
между соседними поднесущими частотами равен 250,16 Гц. Сигнал
в полосе частот 4,5 ... 7 кГц непосредственно передается в кабель-
ную линию связи или в радиорелейный канал звуковой частоты.
Для работы в канале тональной частоты сигнал с помощью
балансного модулятора и соответствующих фильтров переносится
в полосу частот 0,5 ... 3 кГц.
Длина каждого сообщения составляется из 96 информационных
разрядов (12 байт). Перед посылкой каждого сообщения в канал
передается служебный байт, предназначенный для фазирования
системы по сообщениям. При отсутствии информации у отправите-
ля в канал связи посылается комбинация «молчания», состоящая из
служебного байта и трех тестовых байтов, обеспечивающих как
поддержание синхронизма, так и тестовый контроль тракта переда-
чи данных.
2.3. Средства отображения радиолокационной информации
Средства отображения информации являются связующим зве-
ном между источниками радиолокационной информации и ее потре-
бителями-диспетчерами службы управления воздушным движени-
ем. В связи с этим при разработке требований к средствам отобра-
жения информации приходится учитывать не только параметры
поступающих на индикаторы сигналов, но и эргономические реко-
мендации по оптимизации условий восприятия и переработки ин-
формации диспетчером.
Существует большое число различных видов и топов радиоло-
кационных индикаторов. Исторически сложилось так, что вначале
105
индикаторы разрабатывались как неотъемлемая часть каждого типа
РЛС и на командных пунктах аэропортов часто сосредоточивалось
несколько видов выносных индикаторов различных по назначению
РЛС, обслуживающих какой-либо диспетчерский пункт. Это были
так называемые темновые индикаторы, выполненные на электрон-
но-лучевых трубках с большим послесвечением и предназначенные
для отображения информации, поступающей на них в виде аналого-
вых сигналов. Темп обновления информации у этих индикаторов
полностью соответствует периоду обзора пространства РЛС,
поскольку их развертка синхронна и синфазна с вращением антенн
РЛС.
Темновые индикаторы являются наиболее распространенным
средством отображения радиолокационной информации. Это объ-
ясняется их сравнительно малой стоимостью и простотой выполне-
ния. Однако их недостатки-малая яркость, мелькающее изображе-
ние, отсутствие универсальности, малая информативность - заста-
вили искать и использовать другие средства отображения информа-
ции о воздушной обстановке.
Аппаратура «Знак». Она частично устраняет один из недостатков
обычных темновых индикаторов, заключающийся в их малой ин-
формативности, совмещая отображение знаковой и координатной
информации. Эта аппаратура выполняет также функции очистки
и обработки информации ВРЛ, автоматического сопровождения
шести радиолокационных отметок от самолетов, оборудованных
ответчиками УВД, совмещенного отображения на экране индика-
тора информации ПРЛ и ВРЛ. На экранах индикаторов аппаратуры
«Знак» отображаются азимутально-дальномерная сетка, аналоговая
координатная информация от ПРЛ и ВРЛ, дополнительная полет-
ная информация (бортовой номер самолета, высота, остаток топ-
лива, признак высоты) в виде знаково-цифровых формуляров,
схемы трасс или маршрутов, состоящие из 12 линий, генерируемых
электронным способом, и линии радиопеленга и вектора измери-
теля дальности с цифровым отображением результата измерения.
Число одновременно отображаемых формуляров равно 6. Пол-
ный формуляр содержит И знаков, расположенных в две строки.
Размер знаков в формулярах оперативно регулируется в пределах
от 2 х 3 до 4 х 6 мм. Ввод в сопровождение производится либо
автоматически, либо вручную набором бортового номера или
использованием шарового датчика координат. При получении ин-
формации о потере связи, бедствии, а также сигналов опознавания
аппаратура «Знак» маркирует соответствующие координатные от-
метки целей. Кроме того, на пульте управления аппаратурой
обработки сигналов загораются предупреждающие световые сигна-
лы. К групповому оборудованию аппаратуры «Знак» можно под-
ключить пять комплектов индивидуального оборудования «Знак-И»
с темновыми индикаторами радиолокационного типа.
106
Экран индикаторов имеет диа-
метр 40 см. Индикаторы могут
работать в круговом и секторном
режимах. В последнем случае
возможно смещение центра раз-
вертки в любую точку экрана ин-
дикатора. При сопряжении с аэро-
дромными РЛ класса В1 масшта-
бы рабочих индикаторов выби-
раются равными 45, 100 и 200 км;
с аэродромными РЛ класса В2-ЗО,
90 и 200 км; прй сопряжении с
трассовыми РЛ класса Б -100, 200
и 375 км. Яркость изображения
аналоговой информации на экра-
не индикатора равна 0,5 ... 1 кд/м2,
яркость изображения знаковой
информации - 60 кд/м2. У ровень •
внешней освещенности, при кото-
ром возможна нормальная работа
диспетчера, составляет 5 ... 15 лк.
Аппаратура «Знак» состоит из
групповой аппаратуры обработки
вторичной радиолокационной ин-
формации (рис. 2.12) и индивиду-
альной аппаратуры «Знак-И»
(рис. 2.13). В состав индивидуаль-
ной аппаратуры входит оборудо-
вание обработки вторичной ин-
формации и оборудование со-
вмещенного отображения первич-
ной и вторичной информации.
Групповая аппаратура обеспечи-
вает череспериодный автомати-
Рис. 2.12. Групповое оборудование
аппаратуры отображения информации
«Знак»
ческий запрос информации о номере борта и высоте ВС, а также
производит очистку и дешифрацию получаемой от самолетных
ответчиков информации. Индивидуальная аппаратура обеспечивает
ввод в сопровождение самолетов по бортовому номеру и высоте,
выдачу дополнительной информации на аппаратуру отображения
и совмещенное отображение координатной и дополнительной ин-
формации на диспетчерских индикаторах. ,
Упрощенная структурная схема аппаратуры «Знак» показана на
рис. 2.14. Сигналы ПРЛ поступают на распределительное устрой-
ство, предназначенное для согласования сигналов по уровням и
нагрузкам, а также для подключения дополнительных комплектов
аппаратуры «Знак-И». С распределительного устройства аналого-
вые координатные сигналы ПРЛ подаются на индикатор кругового
107
обзора, расположенный вместе с аппаратурой оперативного управ-
ления отображением на диспетчерском пульте.
Сигналы вторичного канала РЛ поступают в блок дешифрато-
ров групповой аппаратуры обработки информации. В блоке де-
шифраторов производится декодирование интервально-временных
координатных, ключевых и сорокаразрядных цифровых кодов, а
также кодов опознавания и бедствия. На выходе дешифратора
формируются сигналы специального последовательного кода, кото-
рые передаются на индивидуальную аппаратуру обработки вторич-
ной информации. Там же формируется сигнал переключения за-
просного кода (ПЗК), который посылается на шифраторы запрос-
ных сигналов вторичных каналов РЛ.
С блоками дешифраторов взаимодействует блок очистки от
несинхронных помех. Этот блок получает от дешифраторов нор-
мализованные по амплитуде и длительности декодированные коор-
динатные импульсы и вырабатывает такие же импульсы, но очи-
щенные от несинхронных помех.
Индивидуальная аппаратура обработки вторичной информации
выполняет функции дешифрации последовательного кода, автома-
тического сопровождения целей и сопряжения с аппаратурой
Рис. 2.13. Индивидуальное оборудование аппаратуры отображения информации
«Знак»
108
Видеосигнал ВРЛ j
Сигнал пзк
оуппобое
мрудование
Блон
очистки
а, ----х--
1 _ Дешшр-
ратор
Запуск
Видеосигнал ПРЛ
^eln,cos________[
Метки азимута |
сигнал опознавания
Знак-и''
-J Лндикатоо • Аппаратура
" пноикатор p-j уПрарле//ия
Аппаратура
одрадотки
сигналов
Распреде-
лительное
устройство
Последователь-
ный код
Запуск
Видеосигнал ПРЛ
i—'
j иsin, cos
Метки азимута
Сигнал опознавания
Рис. 2.14. Упрощенная структурная схема аппаратуры отображения информации
«Знак»
отображения информации. Аппаратура оперативного управления
взаимодействует с устройствами обработки и отображения инфор-
мации. В ее состав входят пульт управления аппаратурой обработ-
ки, панель управления формулярами, панель управления измери-
телем «Азимут-дальность», шаровой датчик координат.
Индикатор построен по принципу совмещенного отображения
на экране электронно-лучевой трубки аналоговой координатной
и дополнительной знаково-цифровой информации за счет разделе-
ния времени отображения.
Первичная и вторичная аналоговая координатная информация
о самолетах отображается на индикаторе в виде обычных яркост-
ных отметок при радиально-круговой или секторной развертке.
Знаково-цифровая информация отображается методом знакогенера-
ции в виде формуляров во время нерабочей части периода разверт-
ки. Роспись формуляров производится путем последовательного
опроса регистров дополнительной информации, расположенных
в шести каналах автосопровождения индивидуальной аппаратуры
обработки сигналов. За время нерабочей части периода развертки
производится роспись одного двухстрочного формуляра. Время
отображения каждого знака равно 25 мкс. На экране индикатора
формуляры располагаются слева от соответствующих координат-
ных целей и перемещаются вместе с координатными отметками.
Привязку формуляров к координатным отметкам осуществляет
аппаратура управления отображением по единым координатным
сигналам, которые поступают от индивидуальной аппаратуры об-
работки. Для этого в аппаратуре управления отображением произ-
водится запоминание вертикальной и горизонтальной составляю-
щих развертки, соответствующих координатному сигналу цели,
109
которые затем используются в качестве координат формуляров по
ортогональным осям х и у.
Формуляры содержат в первой строке информацию о бортовом
номере ВС (5 знаков) и номере канала сопровождения (1 знак), а во
второй-значение текущей барометрической высоты в десятках
метров (4 знака) с признаком начального давления (1 знак). Вместо
высоты по вызову диспетчера может отображаться информация об
остатке топлива (3 знака). Признак начального давления отобража-
ется буквой А, если самолетный ответчик сообщает барометричес-
кую высоту, отсчитываемую по давлению аэродрома. Буква А появ-
ляется под первой цифрой бортового номера. При передаче отрица-
тельной высоты на этом месте отображается знак «минус».
При вводе самолетов в сопровождение по бортовому номеру
бортовой номер предварительно отображается на микротабло,
которое состоит из однострочных формуляров и может быть
установлено в любом свободном от информации месте на экране
индикатора. После начала автосопровождения соответствующие
формуляры из микротабло перемещаются к координатным отмет-
кам сопровождаемых самолетов и в них появляется вторая строка
с информацией о текущей высоте или остатке топлива.
Для измерения азимута и дальности между двумя любыми
точками на экране индикатора используется измеритель «Азимут -
дальность», который формирует на экране индикатора светящуюся
линию. Положение начальной точки линии определяется маркером,
управляемым шаровым датчиком координат. Положение конца
линии устанавливается с помощью органов управления измерителя
«Азимут-дальность». Направление линии определяется по шкале
на панели измерителя, а длина отображается в цифровом виде на
экране индикатора в конце линии.
Аппаратура «Знак» сопрягается с аэродромными радиолокато-
рами ДРЛ-7СМ, «Нарва», «Иртыш» и через специальный блок
сопряжения с трассовыми РЛ варианта Б и автоматическими
радиолокаторами АРП-7, АРП-75. При сопряжении с ВРЛ «Ко-
рень» групповая аппаратура обработки информации не исполь-
зуется.
Принципы совмещенного отображения аналоговой координат-
ной и буквенно-цифровой дополнительной информации получили
дальнейшее развитие в аппаратуре отображения воздушной обста-
новки «Символ».
Аппаратура «Символ». Предназначена для объединения и совме-
щенного отображения первичной и вторичной аналоговой информа-
ции в виде координатных отметок и дополнительной полетной
информации в виде буквенно-цифровых формуляров сопровож-
дения.
Источниками первичной радиолокационной информации могут
быть РЛ кругового обзора с частотой повторения запускающих
импульсов 310 ... 550 Гц, имеющие на выходе сигналы пассивного,
НО
активного и когерентного каналов, синусные и косинусные развер-
тывающие напряжения, импульсы десяти- и тридцатиградусных
азимутальных меток дальности, малые азимутальные импульсы
(4096 за период обзора пространства) и импульс «Север» (один за
полный оборот антенны). Источниками пеленгационной информа-
ции могут быть АРП, выходные сигналы которых содержат синус-
ные и косинусные развертывающие напряжения, положительные
и отрицательные сигналы вызова пеленга и сигналы включения
пеленга. Источником вторичной аналоговой и полезной информа-
ции является аппаратура первичной обработки сигналов «Вуокса».
Функции, выполняемые аппаратурой «Символ», в основном
соответствуют задачам, решаемым аппаратурой «Знак». Сущест-
венным отличием является возможность одновременного сопряже-
ния с двумя радиолокационными станциями, увеличение количества
формуляров до 14 и увеличение количества знакомест в формуляре
до 15. В состав формуляра входят бортовой номер, высота полета (в
десятках метров), остаток топлива в процентах, сигналы «Бедст-
вие», «Нападение на экипаж», «Потеря радиосвязи», радиотелефон-
ный позывной, условный номер высотного слоя, аэропорт назна-
чения.
Время отображения самого сложного символа не более 20 мкс,
время перемещения луча на диаметр экрана электронно-лучевой
трубки менее 50 мкс. Число отображаемых символов русского
и латинского алфавитов равно по 27, арабских цифр-10, специаль-
ных символов-7. Существенное увеличение объема выводимой на
экран индикатора цифровой информации достигнуто за счет приме-
нения принципа динамического временного сжатия отображаемой
аналоговой информации.
Функционально изделие «Символ» построено таким образом,
что один комплект аппаратуры обеспечивает информацией два
рабочих места диспетчера, на каждом из которых устанавливают по
два блока индикаторов и по одному комплекту панелей управления.
При этом один индикатор-основной, а другой-дополнительный.
На дополнительный индикатор выносится информация с любого
другого канала или комплекта изделия «Символ». Рабочий диаметр
экрана индикатора равен 400 мм. Масштабы изображения в зависи-
мости от типа РЛ, с которыми сопрягается изделие «Символ»,
соответствуют 50, 100, 200 и 400 км. Смена масштабов оперативная.
Допустимый уровень внешней освещенности в плоскости экрана
индикатора не более 10 лк. Яркость изображения аналоговой
и знаковой информации такая же, как у изделия «Знак», т. е.
0,5 ... 1 кд/м2 и 60 кд/м2 соответственно.
Конструктивно вся аппаратура изделия «Символ» разделяется
на две части (рис. 2.15): оборудование, устанавливаемое в диспет-
черском зале, и оборудование аппаратаой. В диспетчерском зале на
унифицированных пультах устанавливают два индикатора БИ-45
с панелями управления (ПУ) и блоками питания (БП). В аппарат-
111
Рис. 2.15. Состав оборудования аппаратуры отображения информации «Символ»
ном зале располагаются стойка сопряжения аналоговых сигналов
(ССА), две стойки управления отображением (СУО), две стойки
памяти и сопровождения (СПС), две стойки питания (СП-10),
стойка с запасным имуществом и приборами (ЗИП) и контрольный
индикатор. Длина линии передачи сигналов между аппаратным
залом и пультами диспетчеров должна быть не более 150 м.
Предусмотрена возможность наращивания оборудования аппарат-
ного зала, что позволяет при том же числе источников радиолока-
ционной информации увеличить число рабочих мест диспет-
черов.
Блок индикатора БИ-45 предназначен для преобразования пер-
вичной и вторичной аналоговой координатной информации, а так-
же вторичной знаково-цифровой информации, поступающих на
вход индикатора в виде импульсных сигналов, в визуально наблю-
даемую информацию на экране электронно-лучевой трубки.
Аппаратура стойки сопряжения аналоговых сигналов (ССА)
предназначена для сопряжения с двумя РЛ и АРП, размножения
информации от двух РЛ и обработки первичной радиолокационной
информации для отображения ее на индикаторах. Стойка содержит
два идентичных независимых канала, каждый из которых обеспечи-
вает сопряжение с двумя РЛ и одним АРП.
Аппаратура стойки управления отображением (СУО) выполняет
следующие функции: формирование управляющих сигналов для
стойки СПС, генератора символов, измерителя интервалов даль-
ности, генератора электронной карты, формирователя навигацион-
ных пунктов, устройства тестового контроля; преобразование вто-
ричной цифровой координатной информации в аналоговый вид
и объединение ее с первичной информацией; формирование сигна-
лов подсвета и отклоняющих напряжений, обеспечивающих отобра-
жение на экранах индикаторов символов целей, формуляров, векто-
ров электронной карты, навигационных пунктов, маркеров; измере-
ние интервалов дальности между объектами; трансляция информа-
ции на рабочие места диспетчеров.
112
Аппаратура стойки памяти и сопровождения (СПС) обеспечива-
ет выполнение следующих операций: прием координатной и допол-
нительной информации, поступающей через АПОИ «Вуокса», а так-
же управляющих сигналов, поступающих с пультов диспетчеров;
выделение и первоначальную привязку полетной информации воз-
душных судов к их координатным отметкам, т.е. ввод целей
в сопровождение; группирование привязанной цифровой информа-
ции в формуляры сопровождения и перемещение их на экране
индикатора в соответствии с перемещениями координатной отмет-
ки; формирование зон автоввода ВС в сопровождение; выделение
информации о ВС, терпящих бедствие; выделение находящихся
в сопровождении ВС, информация о которых не возобновляется
в течение 3 и более периодов обзора пространства; автоматический
сброс формуляров, информация которых не обновляется за время
12... 14 оборотов антенны (кроме формуляров сопровождения
с аварийными сигналами); формирование, регенерация и управление
регенерацией дополнительных символов цифровых координат воз-
душных судов, не оборудованных ответчиками или не введенных
в сопровождение; формирование сигналов управления в соответст-
вии с командами, набираемыми на диспетчерском пульте; выдача
сформированной и регенерируемой цифровой информации в стойку
СУО для последующего отображения информации на экранах
индикаторов.
Для удобства обслуживания в состав оборудования изделия
«Символ» включены имитаторы первичной и вторичной информа-
ции, позволяющие выполнить полную проверку и регулировку
аппаратуры при выключенных источниках информации. Для повы-
шения надежности предусмотрен 100%-ный функциональный ре-
1ерв.
Один из возможных методов увеличения яркости радиолокаци-
онных индикаторов заключается в использовании промежуточной
памяти и увеличении частоты вывода преобразованных сигналов на
жраны электронно-лучевых трубок. Этот метод реализован в аппа-
ратуре «Строка-Б».
Аппаратура «Строка-Б». Ее назначение-преобразование радио-
локационных сигналов в телевизионные и отображения их на
индикаторах телевизионного типа. В качестве масштабно-времен-
ных преобразователей сигналов в этой аппаратуре используются
запоминающие электронно-лучевые трубки типа графекон, на ми-
шень которых записываются радиолокационные сигналы в соответ-
ствии с закономерностями медленных радиолокационных развер-
ток, а считывание записанного потенциального рельефа произво-
дится по закону быстрых телевизионных разверток с периодом
возобновления информации 25 полных кадров в секунду-
Аппаратура такого типа под названием «Строка-Б» (рис. 2.16)
была разработана в Советском Союзе в 1968 г. и в настоящее время
успешно эксплуатируется во многих подразделениях гражданской
113
Рис. 2.16. Оборудование индивидуальных каналов аппаратуры преобразования
и отображения радиолокационных сигналов «Строка-Б»
авиации. Кроме повышения яркости изображений и устранения
мельканий, аппаратура «Строка-Б» позволила отображать различ-
ного рода графическую и текстовую информацию. Благодаря приме-
нению стандартной телевизионной развертки во всех индикаторах
независимо от характера отображаемой информации аппаратура
«Строка-Б» обладает высокой степенью универсальности, позволя-
ющей коммутировать на экран диспетчерского индикатора радио-
локационную информацию от любой первичной РЛС, обеспечивая
тем самым гибкое резервирование различных радиолокационных
средств, расположенных в одном аэропорту. Эта аппаратура со-
прягается практически со всеми источниками радиолокационной
информации, имеющимися в гражданской авиации. В зависимости
от требований заказчика аппаратура «Строка-Б» может постав-
ляться в различной комплектации.
Число каналов графеконного преобразования в одном комплек-
те аппаратуры может достигать 26 с одновременным подключением
к каждому каналу преобразования до 12 диспетчерских телевизион-
ных индикаторов. По характеру преобразуемой информации аппа-
ратура графеконного преобразования подразделяется на каналы
кругового обзора, посадки и «азимут-дальность». Число каналов
дополнительной информации и оперативной видеосвязи может
достигать 16. Аппаратура позволяет передавать графическую ин-
формацию следующего содержания: метеосводки, контурные карты
диспетчерского района, схемы движения ВС, машинописные и ру-
кописные тексты. При вводе на экран диспетчерских индикаторов
графической или текстовой информации можно по желанию диспет-
чера изменять полярность вводимых сигналов, т. е. воспроизводить
негативные или позитивные изображения.
Размеры экранов диспетчерских телевизионных индикаторов
равны 450 и 310 мм, телевизионный стандарт разложения - 625
строк, 50 полей, 25 кадров при чересстрочной развертке.
Аппаратура «Строка-Б» обеспечивает:
работу диспетчерского состава в незатемненных помещениях
с освещенностью до 350 лк в плоскости экранов индикаторов;
определение направления движения ВС по светящимся траекто-
риям на экранах индикаторов, вызываемых памятью графеконов;
совмещение графической и радиолокационной информации на
одном экране диспетчерских индикаторов;
опознавание ВС путем их пеленгования;
стирание информации с экрана индикатора;
регулирование памяти графеконных преобразователей непосред-
ственно с рабочих мест диспетчеров;
переключение масштабов радиолокационного изображения.
В состав аппаратуры «Строка-Б» (рис. 2.17) входят:
групповое оборудование, состоящее из аппаратуры синхрониза-
ции, сопряжения и встроенного контроля, объединенной в шкафу
группового оборудования (ШГО);
115
Управление РЛС
видео рлс
Контрольный к-
осциллограф
Стойка
Угловая распределе-
' ния сигналов информация
информа-
ция —
БГС
БГС
резервный
~ШКО
ТИ-ЧП
БРИТС
Угловая
- Тестовый сигнал
~| Синхросигналы
Блок
сопряжения
_♦ » ♦
6J10XU
литания
_♦ I ♦
Силовое
оборудование
Запуск
Видео
БГП
БПиВП
ШГИ
Управляющие сигналы
Дти
БПиВП
ШГИ
ШКО
ТИ-Ы1
БРИТС
БГП
ДТИ |
ПУ РЛС
ПУТИ
Шкаф
документи-
рования
Рис. 2.17. Структурная схема аппаратуры «Строка-Б»
каналы графеконного преобразования радиолокационных сигна-
лов в телевизионное изображение, сгруппированные по два в шка-
фах канального оборудования (ШКО);
каналы дополнительной информации, выполненные в виде шка-
фов графической информации (ШГИ);
силовое оборудование, включающее распределительные щиты,
выпрямители и стабилизаторы;
выносное оборудование, состоящее из диспетчерских телевизи-
онных индикаторов (ДТИ), панелей коммутации телевизионных
индикаторов (ПК ТИ), панелей управления телевизионными инди-
каторами (ПУ ТИ) и РЛС (ПУ РЛС).
Радиолокационные видеосигналы и сигналы углового положе-
ния антенн РЛС поступают на стойку распределения сигналов,
с выхода которой радиолокационные сигналы поступают в блок
сопряжения, а сигналы угловой информации-непосредственно в
блоки радиолокационных и телевизионных сигналов (БРИТС) и
графеконных преобразователей (БГП), расположенных в ШКО.
В блоке сопряжения от видеосигналов отделяются запускающие
импульсы, а сами видеосигналы подвергаются дополнительному
преобразованию, которое заключается в их нормализации и форми-
ровании масштабных меток азимута и дальности. С блока сопряже-
ния все эти сигналы также подаются в блоки БРИТС и БГП шкафа
ШКО. Контроль за качеством преобразования осуществляется с по-
мощью телевизионного индикатора ТИ-411, расположенного в
верхней части шкафа ШКО. Питание блоков осуществляется от
выпрямителей ВП и блоков питания БП, расположенных в нижней
части шкафа. Синхронизация телевизионных разверток графекон-
ных преобразователей и телевизионных индикаторов производится
с помощью сигналов, вырабатываемых блоком генерации синхро-
116
сигналов (БГС). Этот же блок формирует тестовый сигнал сетчато-
го поля, предназначенный для контроля и настройки телевизионной
части аппаратуры преобразования и отображения радиолокацион-
ной информации. Контроль синхронизирующих сигналов выполня-
ется с помощью осциллографа, расположенного в шкафу группово-
го оборудования.
После преобразования телевизионные сигналы через панель
коммутации телевизионных сигналов, усилители-распределители
и делители подаются на диспетчерские телевизионные индикаторы
ТИ-412.
Сигналы дополнительной графической информации формиру-
ются в шкафах графической информации ШГИ. Для этого использу-
ется телевизионный метод формирования вспомогательных изобра-
жений, основанный на синхронном преобразовании основного ра-
диолокационного и вспомогательного графического или знакового
изображения в телевизионный эквивалент с одинаковым стандар-
том разложения. Полученные таким образом видеосигналы пода-
ются на ДТИ, где образуется комбинированное изображение, содер-
жащее все исходные компоненты радиолокационной и графической
информации. Телевизионный эквивалент вспомогательного изобра-
жения получают при считывании его с экрана кинескопа или
бумажного носителя, которое осуществляется передающей телеви-
зионной трубкой типа видикон. На диспетчерских пультах, кроме
индикаторов ТИ-412, на которые подаются комбинированные сиг-
налы, устанавливаются также индикаторы ТИ-4ц, предназначен-
ные для отображения только дополнительной информации. Управ-
ление информацией, подаваемой на телевизионные индикаторы,
производится с помощью панелей управления ПУ ти. Управление
аппаратурой ШГИ, ШКО и радиолокационных станций произво-
дится с помощью панелей управления ГТУ РЛС.
При сопряжении аппаратуры «Строка-Б» с посадочными РЛ
предусмотрено оснащение диспетчерских залов дополнительными
шкафами документирования. Регистрация процесса захода ВС на
посадку осуществляется методом фотографирования телевизионно-
го изображения на один фотокадр, т. е. в режиме открытого затвора
фотоаппарата на все время посадки ВС. ФотографИрОвание ведется
с экранов двух индикаторов ТИ-411, установленных в шкафу фото-
документирования и подключенных к тем же каналам телевизион-
ного преобразования, которыми в этот момент Пользуется диспет-
чер посадки.
Для настройки и проверки качества работы блоков графеконно-
го преобразования используют моноскоп, представляющий собой
графекон с нанесенной на мишень стандартной телевизионной испы-
тательной таблицей. С помощью сигналов моноскопа проверяется
линейность считывающих телевизионных разверток, четкость изоб-
ражений, качество передачи полутонов. Размеры и линейность
записывающих разверток проверяются с помощью кадроскопа,
117
представляющего собой записывающую секцию графекона, на сиг-
нальную пластину которого нанесен люминофор.
Опыт эксплуатации аппаратуры «Строка-Б» показал значитель-
ные преимущества телевизионного представления радиолокацион-
ной информации перед обычными методами отображения инфор-
мации на темновых радиолокационных индикаторах. Преимущест-
ва заключаются прежде всего в улучшении условий работы диспет-
черского состава, связанного с возможностью наблюдения воздуш-
ной обстановки в незатемненном помещении. Кроме того, примене-
ние одного и того же стандарта разложения в различных каналах
графеконного преобразования позволило использовать одни и те же
унифицированные индикаторы для отображения информации, по-
лучаемой от различных типов радиолокационных станций.
Основные недостатки аппаратуры «Строка-Б» заключаются в
относительной сложности ее эксплуатации, большой стоимости
и недостаточно высокой разрешающей способности преобразовате-
лей и индикаторов, связанной с применением стандарта разложения
изображений на 625 строк, принятого в бытовом телевидении.
Существенным недостатком являются также малые информацион-
ные возможности аппаратуры, так как она не приспособлена для
отображения оперативной цифровой информации, поступающей по
вторичным каналам радиолокационных комплексов. Последний из
указанных недостатков устраняется путем дополнительного приме-
нения аппаратуры «Страница» (рис. 2.18), предназначенной для
совместной работы с изделием «Строка-Б» и позволяющей отобра-
жать на телевизионных индикаторах динамическую буквенно-циф-
ровую информацию, поступающую от вторичных радиолокацион-
ных станций или вводимую вручную.
Аппаратура «Страница». Она может входить в состав аэродром-
ных или трассовых комплексов УВД (рис. 2.19). Аналоговая коор-
динатная информация поступает на аппаратуру «Строка-Б» не-
посредственно от трассовых или аэродромных ПРЛ. Информация,
получаемая от ВРЛ, обрабатывается вначале АПОИ «Вуокса»,
а затем подается на аппаратуру «Страница». Обмен информацией
между АПОИ «Вуокса» и аппаратурой «Страница» осуществляется
на основе стыка С2. Сигналы 101 и 102 являются защитным
и рабочим заземлением. Сигнал 104 представляет собой обрабо-
танные данные, содержащие информацию, поступающую от ВРЛ.
Выдача данных осуществляется последовательным кодом в виде
трехсловного сообщения блоками по 96 бит. Цепь 115 обеспечивает
в аппаратуре «Страница» синхронизацию элементов блока данных.
Сигналы цепи 134 служат для отделения информационного сообще-
ния от контрольного.
После преобразования поступающих на аппаратуру «Страница»
информационных сообщений и формирования из них буквенно-циф-
ровых формуляров видеосигналы подаются на аппаратуру «Стро-
ка-Б» для непосредственного отображения на диспетчерских телеви-
118
WHWIDP О
о
а ё
Шан
•л*
IBWMlW ° 1
Рис. 2.18. Унифицированная аппаратура совмещенного отображения координатной
и буквенно-цифровой информации «Страница»
Рис. 2.19. Структурная схема включе-
ния аппаратуры «Страница» в комп-
лексе средств УВД
знойных индикаторах. Вместе с
видеосигналами на аппаратуру
«Строка-Б» поступают строчные
синхроимпульсы (СС), кадровые
синхроимпульсы (КС), гасящий
импульс (ГИ), сложный синхро-
сигнал приемника (ССП) и в слу-
чае необходимости контрольный
сигнал «сетчатое поле» (СП). Все
эти сигналы вырабатываются в
синхрогенераторе, расположен-
ном в аппаратуре «Страница».
Динамическая полетная ин-
формация, передаваемая самолет-
ными ответчиками, отображается
на телевизионных индикаторах
в виде двухстрочных формуляров, содержащих в каждой строке по
8 знакомест. Предусмотрена возможность сокращения всех форму-
ляров до первой смысловой строки либо до условного номера ВС.
В формулярах может отображаться следующая информация:
индивидуальный номер ВС, его позывной, условный номер форму-
ляра, текущая высота, признак передаваемой высоты, заданный
эшелон, остаток топлива, сигналы «Бедствие», «Нападение», «Поте-
ря связи», служебная информация. Часть из этой информации
поступает автоматически от самолетных ответчиков, часть вводится
вручную с пульта ввода данных, расположенного на рабочем месте
диспетчера. Всего может быть введен 21 формуляр.
Знаки на экране индикатора формируются телевизионно-растро-
вым методом. Матрица символа содержит 4x6 элементов разло-
жения. Размеры ее на экране диспетчерского индикатора составля-
ют 3x4 мм.
Ввод информации на каждом рабочем месте может произво-
диться автоматически или вручную. В первом случае предусмотрена
возможность ввода информации от ВС, находящихся в определен-
ном объеме пространства, или для всех ВС, находящихся в
пространстве, отображаемом на экране индикатора в соответству-
ющих границах по высоте. Во втором случае ввод информации
осуществляется набором номера ВС на панели управления или
с помощью маркера, положение которого на экране индикатора
определяется кнюппелем - шаровым датчиком координат.
Состав оборудования изделия «Страница» изменяется в зависи-
мости от варианта поставки. При любом варианте изделие «Стра-
ница» содержит шкаф группового оборудования (ШГО), шкаф
коммутации и синхронизации (ШКС), шкаф цифровой информации
(ШЦИ), аппаратуру рабочего места диспетчера (телевизионный
индикатор, панель ввода данных, датчик прямоугольных коорди-
нат, смеситель видеосигналов), блоки питания и вспомогательную
120
аппаратуру. Каждый шкаф группового оборудования обеспечивает
работу восьми шкафов цифровой информации и соответственно
восьми рабочих мест диспетчеров. При необходимости увеличения
числа рабочих мест в состав оборудования может быть введен еще
один дополнительный шкаф группового оборудования. Общее чис-
ло ШЦИ и рабочих мест диспетчеров в этом случае может быть
доведено до шестнадцати.
Структурная схема изделия «Страница» приведена на рис. 2.20.
Аналоговая координатная и графическая информация с аппаратуры
«Строка-Б» через смеситель видеосигналов поступает непосредст-
венно на телевизионный индикатор рабочего места диспетчера.
Дополнительная полетная информация о ВС, обработанная в
АПОИ «Вуокса», подается по цепям стыка С2 на вход шкафа
группового оборудования. В имитаторе сигналов ВРЛ формируют-
ся сигналы контрольных сообщений, которые передаются по тем же
цепям, что и сообщения, поступающие из АПОИ. Образованные
таким образом сигналы распределяются по восьми стойкам ШЦИ.
Кроме того, в ШГО формируются вспомогательные сигналы, соот-
ветствующие наличию ВС в зоне автоввода в плане и по высоте:
«Цель в зоне», «Цель в слое», «Цель в слое II». Эти сигналы также
распределяются по стойкам ШЦИ.
В шкафах ШЦИ на основе информации, поступающей с АПОИ
«Вуокса» или с пультов ввода данных рабочих мест диспетчеров,
формируются сигналы, необходимые для отображения на экранах
телевизионных индикаторов буквенно-цифровых формуляров.
Шкаф ШКС осуществляет коммутацию и резервирование канально-
Рис. 2.20. Структурная схема аппаратуры «Страница»
121
го оборудования. Кроме того, в этом шкафу вырабатываются
синхронизирующие импульсы, обеспечивающие совместную работу
изделия «Страница» с аппаратурой «Строка-Б». Все команды с
пульта ввода данных и датчика координат поступают в шкафы
ШЦИ через шкаф ШКС. Сигналы ШЦИ, содержащие цифровую
дополнительную информацию, поступают на индикаторы рабочих
мест диспетчеров также через шкаф ШКС.
Дальнейшей модернизацией аппаратуры телевизионного ото-
бражения радиолокационной информации является выпускаемое
в настоящее время изделие «Строка-2». Оно представляет собой
органическое объединение изделий «Строка-Б» и «Страница», но
в отличие от них его аппаратура более долговечна и надежна, так
как выполнена с более широким использованием новой элементной
базы. Для удобства эксплуатации предусмотрены автоматизирован-
ный встроенный контроль работоспособности аппаратуры и фо-
тодокументирование диспетчерской и метеорологической инфор-
мации.
Принцип действия изделия «Строка-2» практически не отличает-
ся от принципа действия «Строки-Б» и «Страницы». Преобразова-
ние координатных радиолокационных сигналов в телевизионные
производится с помощью графеконов. Стандарт разложения теле-
визионных изображений соответствует стандарту телевизионного
вещания, принятому в Советском Союзе, т. е. 625 строк, 50 полей
и 25 кадров в секунду при чересстрочной развертке. Каналы графе-
конного преобразования и сопряженные с ними каналы формирова-
ния цифровой информации обеспечивают совмещенное отображе-
ние аналоговой координатной и знаковой дополнительной инфор-
мации о ВС, а также графической информации, вводимой по тракту
записи радиолокационных сигналов. Информация отображается
в виде позитивного или негативного изображения при внешней
освещенности до 350 лк. Аппаратура сопрягается практически со
всеми источниками радиолокационной информации.
Индикаторы «Комета-МД». Предназначены для устранения од-
ного из главных недостатков темновых радиолокационных индика-
торов-малой яркости изображения. Они выполнены на запомина-
ющих электронно-лучевых трубках, представляющих собой потен-
циалоскопы с видимым изображением. Принцип работы этих при-
боров основан на записи радиолокационных сигналов на специаль-
ной мишени, расположенной внутри электронно-лучевой трубки
перед экраном, запоминании сигналов и постоянном воспроизведе-
нии их с помощью мощного расфокусированного пучка электронов,
пронизывающего мишень и попадающего на люминофор экрана.
На экране индикатора образуется яркое немелькающее изображе-
ние, обеспечивающее нормальную работу диспетчерского состава
в условиях, когда уровень внешней освещенности в плоскости
экрана достигает 1000 лк.
122
Индикаторы «Комета-МД» специализированные. Они предна-
значены для отображения аналоговой координатной информации
аэродромных радиолокаторов ДРЛ-7СК. Широкого распростране-
ния в гражданской авиации они не получили, поскольку так же, как
и темновые радиолокационные индикаторы, не являются универ-
сальными, т.е. не могут быть подключены к источникам радио-
локационной информации различного типа. Кроме того, индикато-
ры «Комета-МД» не приспособлены для воспроизведения знаковой
информации.
В последние годы в связи с разработкой и внедрением новых
эффективных устройств первичной обработки радиолокационной
информации, широким использованием высокоэффективных специ-
ализированных ЭВМ, созданием быстродействующих устройств
управления электронно-лучевыми трубками появилась возмож-
ность создания индикаторов, изображение воздушной обстановки
у которых образуется в результате использования не аналоговых,
а синтезированных с помощью ЭВМ сигналов. Информация ПРЛ
и ВРЛ обрабатывается, преобразуется в цифровую форму, объеди-
няется, запоминается и после этого по определенной программе
выводится в синтезированном виде на экраны универсальных инди-
каторов. Собственно индикаторы в этом случае представляют
собой электронно-лучевые трубки радиолокационного типа с уст-
ройствами управления интенсивностью и отклонением электронно-
го луча. Такого типа индикаторы обладают высокой разрешающей
способностью, яркостью, они универсальны, позволяют выводить
на экран объединенную координатную и буквенно-цифровую ин-
формацию, плавно изменять масштабы, смещать центр зоны в лю-
бую точку экрана индикатора, объединять на экране одного индика-
тора информацию, получаемую от нескольких радиолокационных
станций.
В настоящее время такого типа индикаторы используются во
всех новых системах АС УВД. Для увеличения их функциональных
возможностей они могут работать в двух режимах: в аналоговом,
как обычные темновые радиолокационные индикаторы, и в режиме
воспроизведения синтезированного радиолокационного изображе-
ния. Условием возможности использования такого типа индикато-
ров является наличие аппаратуры первичной обработки информа-
ции и специализированных ЭВМ, синтезирующих сигналы и управ-
ляющих отклонением электронного луча.
Глава 3. ОСНОВНЫЕ ХАРАКТЕРИСТИКИ
РАДИОЛОКАТОРОВ
3.1. Общий подход к выбору характеристик радиолокаторов
Современный РЛ состоит из совокупности ряда устройств,
объединенных общей целью-определением с помощью электро-
магнитных волн местоположения объектов, характеристик их дви-
жения и в некоторых случаях физических свойств объектов наблю-
дения. С этой точки зрения РЛ можно рассматривать как сложную
радиотехническую или метрическую информационную систему и,
следовательно, при анализе ее характеристик и оптимизации пара-
метров можно использовать методы и математический аппарат
общей теории системотехники. В качестве критерия оптимальности
параметров вновь разрабатываемый РЛ может выбираться в соот-
ветствии с требованиями заказчика минимизация стоимости, мини-
мизация времени разработки, максимизация вероятности успеха
или какой-либо другой критерий.
Процесс проектирования новой РЛ можно условно разделить на
шесть этапов. Первый этап заключается в уточнении задачи и уясне-
нии требований, выдвинутых заказчиком. Важная роль на этом
этапе принадлежит инженеру-системотехнику, который должен
охватывать задачу в целом, а не отдельные частные ее стороны
с узкоспециальной точки зрения. Инженер-системотехник должен
понимать запросы заказчика и в то же время хорошо знать
возможности техники, чтобы правильно решить поставленную за-
дачу. Если какое-либо требование оказывается практически не-
целесообразным, он предлагает заказчику пересмотреть требова-
ния, чтобы найти компромиссное решение при имеющихся в настоя-
щее время технических средствах.
В качестве исходных данных при расчете РЛ берутся их тактичес-
кие показатели, т. е. совокупность параметров, характеризующих
РЛ как источник информации, необходимой диспетчерам УВД для
решения их оперативных задач. К тактическим показателям РЛС
относятся назначение, зона обнаружения, период обзора или ско-
рость обзора, число и характер измеряемых координат, точность
измерения координат, разрешающая способность, помехоустойчи-
вость, объем и качество получаемой дополнительной информации,
способ отображения информации.
Перед началом расчета характеристик РЛС уточняются условия,
в которых она должна работать, и учитываются некоторые ограни-
чения. К ним относятся:
124
вероятность правильного обнаружения и ложной тревоги;
характеристики целей;
сведения о наиболее вероятных помехах;
сведения о климатических и атмосферных условиях, в которых
будет работать РЛ;
ограничения в выборе размеров антенны, излучаемой мощности,
массы, габаритных размеров, стоимости, номенклатуры используе-
мых электронных приборов и деталей и т. д.
Для обслуживающего персонала, осуществляющего техничес-
кую эксплуатацию РЛ, важное значение имеют эксплуатационные
параметры. К ним относятся показатели надежности, климатичес-
кие характеристики, габаритные размеры и масса. Представляют
интерес также эргономические показатели (напряженность магнит-
ного и электрического полей, уровень акустического шума), конст-
руктивные показатели (коэффициенты блочности, стандартизации,
показатели унификации), показатели ремонтопригодности.
В некоторых случаях при сравнении альтернативных вариантов
РЛС предпринимаются попытки использовать показатели эффек-
тивности функционирования РЛС путем отнесения значений показа-
телей качества к затратам ресурсов на их реализацию и функциони-
рование. Для интегральной оценки эффективности вариантов воз-
можно применение сверток показателей качества различного типа
с последующим отнесением их к сопутствующим затратам.
После того как задание сформулировано, переходят ко второму
этапу проектирования РЛС, который состоит в анализе всех воз-
можных путей решения этой проблемы. Каждая возможность все-
сторонне изучается на основе использования известных методов
и применения уже имеющихся решений или же на основе совершен-
но новых подходов, требующих дополнительных разработок.
Третий этап состоит в выборе оптимизированной системы, т. е.
системы, максимально приближающейся к идеальной с учетом
физических, экономических и технических ограничений, определен-
ных на первом этапе проектирования станции. Важную часть этого
этапа проектирования составляет расчет технических характеристик
и уточнение тактических показателей РЛС. Технические характерис-
тики РЛС показывают, какими техническими средствами и инже-
нерными решениями обеспечиваются ее тактические характери-
стики.
К важнейшим техническим параметрам РЛС относятся:
длина волны излучаемых колебаний;
длительность и частота повторения импульсов;
средняя и импульсная мощности излучения;
форма и ширина диаграммы направленности антенны;
эффективная площадь и коэффициент усиления антенны;
чувствительность приемного устройства, полоса частот прием-
ника;
коэффициент потерь отдельных узлов РЛС.
1'25
За основу расчета технических параметров обычно берут одну из
модификаций уравнения максимальной дальности действия РЛС.
Многие параметры, входящие в это уравнение, выбираются на
основе сложившихся рекомендаций, некоторые из них взаимозави-
симы. К взаимозависимым параметрам часто относят рабочую
частоту, среднюю мощность передатчика и размеры антенны.
Выбор одного из этих параметров, как правило, предрешает выбор
остальных двух.
При рассмотрении нескольких вариантов совокупностей харак-
теристик системы появляются контуры общей схемы будущей РЛС.
Когда выбрано оптимальное решение, проводится более детальная
разработка структурной и функциональной схем РЛС. В этом
заключается четвертый этап разработки системы. Пятый этап
состоит в разработке реальной аппаратуры. Он обычно бывает
наиболее трудоемким и требует больших материальных затрат.
Шестой этап включает в себя заводские и эксплуатационные испы-
тания системы и сдачу ее заказчику.
3.2. Тактические и эксплуатационные
характеристики радиолокаторов
Зона обнаружения. Пространство, в пределах которого РЛ обна-
руживает цели с вероятностными характеристиками, не хуже задан-
ных, называется зоной обнаружения. Обычно эту зону представля-
ют в виде вертикальных DB и горизонтальных DT сечений трехмер-
ной фигуры зоны обнаружения. В общем случае она описывается
соотношениями:
DB = ROmaxF(Ф, 0)<р=Со„«- 10-°-о5₽вв; (3.1)
DT = AOmaxF(<p, 0)H=const- 10-°о5₽2Ч (3.2)
где F(<р, 0)-нормированная диаграмма направленности антенны; ср- ази-
мутальный угол; 0-угол места; Н высота расположения цели; р-удель-
ный коэффициент затухания радиоволн; 7?Отах-максимальная дальность
действия РЛС без учета затухания радиоволн в атмосфере.
Зона обнаружения в вертикальной плоскости для РЛС кругового
обзора (рис. 3.1) строится в координатах «наклонная дальность-
приведенная высота», причем под термином приведенная высота
понимают высоту расположения воздушного судна относительно
касательной к поверхности земли, проведенной из точки размеще-
ния антенны РЛС (рис. 3.2). Приведенная высота Нпр связана
с истинной высотой Яист приближенным выражением:
Япр«Нист-^, (3.3)
где гнакл-наклонная дальность до цели; Аэхв-эквивалентный радиус земли,
принятый с учетом стандартной рефракции равным 8500 км.
126
Рис. 3.1. Зона обнаружения радиолокатора кругового обзора в вертикальной
плоскости:
заданная зона:-реальная зона
Кроме наклонной дальности и приведенных высот, на диаграм-
ме вертикальной зоны обнаружения обычно указывают пинии
равных истинных высот и линии равных углов места. В качестве
дополнительных обязательных параметров указывают эффектив-
ную отражающую площадь цели 5цэф, вероятность правильного
обнаружения Рпо, вероятность ложной тревоги Рл т, высоту подвеса
антенн Ла и погодные условия. Реальная конфигурация зоны
обнаружения сильно отличается от идеальной зоны, приведенной на
рис. 3.1. На зону обнаружения существенное влияние оказывает
рельеф местности, характер подстилающей поверхности, поляриза-
ция используемых радиоволн. В связи с этим зона обнаружения
каждой радиолокационной станции уточняется экспериментальным
путем при вводе станции в эксплуатацию и проверяется ежегодно
в период подготовки к весенне-летней навигации путем облетов
специальными и рейсовыми воздушными судами.
При формировании требований на зону обнаружения радио-
локационной станции обычно задают максимальную и минималь-
ную дальность действия (7?тах и 7?min), минимальный и максималь-
ный угол зоны обнаружения в вертикальной плоскости (®min и 0тах),
максимальную истинную высоту обнаружения воздушных судов
(Яист
.max/’
127
Максимальная дальность действия радиолокационной станции
может быть приближенно определена расчетным путем по ее
техническим характеристикам. Для этого может быть использована
одна из модификаций уравнения дальности радиолокации, справед-
ливая для импульсных РЛС, работающих в пассивном режиме,
„4 = •Ю-°-2^ах
(4я)2/сТ0Д/КштиРп91£п ’ ( )
где Рср-средняя излучаемая мощность; D- коэффициент направленного
действия антенны; 5аэф-эффективная поверхность приемной антенны;
т)а-КПД антенны; £цэф-эффективная площадь рассеяния цели; п-число
интегрируемых импульсов; Et(я)-коэффициент, характеризующий эффек-
тивность интегрирования; р- коэффициент затухания радиоволн в атмосфе-
ре, дБ/км; /с-постоянная Больцмана, равная 1,38-10~23 Вт-с/град;
То- абсолютная температура по Кельвину; Д/-ширина полосы частот
приемника; Кш-коэффициент шума; ти-длительность излучаемых импуль-
сов; FB-частота повторения импульсов; qt-отношение сигнал/шум по
мощности, требуемое для обнаружения единичного импульса; Ln-потери
в системе, не учтенные другими параметрами.
При использовании этого уравнения необходимо помнить, что
оно справедливо только для случая прямой видимости между
антенной РЛС и ВС. Максимально возможная дальность действия
РЛС
^тахвозм ~ 4,1 (х//^ + yjНист).
(3-5)
Величина /?тахвозм получается в километрах, если высота подвеса
антенны ha и высота цели Нист берутся в метрах.
Для активного режима работы РЛС максимальная дальность
действия по запросу и ответу определяется следующей системой
приближенных уравнений:
Рис. 3.2. Определение приведенной вы-
соты расположения ВС
О
/хтахз
о
''тахо
fH.3 Сз ^а.зф.о.
^Лгр.гтпо
/Л..о°<А.Эф.з
V 4^^пр.т!пз
(3.6)
где Ртахз-максимальная дальность
действия активной системы по запро-
су; ЯП1ахо-максимальная дальность
действия активной системы по отве-
ту; Р„3- импульсная мощность пере-
датчика запросчика; Рио-импульсная
мощность передатчика бортового от-
ветчика; G3-коэффициент усиления
запросной антенны; Go-коэффициент
128
усиления передающей антенны ответчика; Хаэф0-эффективная площадь
приемной антенны ответчика; 5аэфз-эффективная площадь приемной ан-
тенны запросчика; Pnpmino-реальная чувствительность приемника ответ-
чика; Pnpmin3-реальная чувствительность приемника запросчика.
Оптимизация параметров системы запроса и системы ответа по
энергетическим показателям соответствуют условию
п ____ Т)
/Хтахз J'max о ‘
Минимальная дальность действия РЛС, работающей в пассив-
ном режиме, теоретически определяется длительностью импульса
ти, временем восстановления антенного переключателя тв и разре-
шающей способностью индикаторного устройства по дальности
Я
°ГИНД •
Knn = | (т„ + М + 5Г инд. (3.7)
На самом деле в большинстве случаев основными обстоятельст-
вами, определяющими минимальную дальность действия РЛС,
являются засветки экрана индикатора РЛС сигналами, отраженны-
ми от местных предметов, и форма ДНА системы в плоскости,
перпендикулярной плоскости сканирования.
Значения максимальной и минимальной дальности действия
РЛС, предельные углы места и максимальная высота обнаружения
целей для многих классов РЛС регламентированы различными
международными нормами и отечественными стандартами. Нормы
и рекомендации на зоны обнаружения РЛС будут приведены
ниже.
Период обзора пространства. Выбор периода обзора пространст-
ва РЛС зависит от многих факторов, в том числе от ширины ДН
антенны РЛС (<ра), сектора обзора (А<р), необходимого числа им-
пульсов и, отраженных от цели за время одного обзора, и макси-
мальной дальности действия Ртах.
Для станций кругового обзора период полного обзора простран-
ства 7^6з может быть определен следующим образом:
где ?ф-время, необходимое для того, чтобы антенна повернулась на угол,
равный ширине диаграммы направленности антенны.
Это время может быть представлено в виде
= пТп, (3.9)
где Тп -период повторения импульсов; и-число импульсов в пачке отра-
женных сигналов.
5 Зак. 1375
129
Учитывая уравнения (3.8), (3.9), а также условие однозначного
отсчета дальности
2R к
rri -^ тах Лзап
(3.10)
где с-скорость света; кмп - коэффициент запаса,
получаем
г ^2Хап«Лтах-360°
(3.11)
фас
Для РЛС с секторным обзором пространства период одного
обзора включает в себя время прохождения рабочего сектора 71аб
и время, необходимое на остановку антенны и возвращение ее назад
в рабочий сектор 7^ераб:
Т — Т -к т
обз лраб ' нераб*
Полагая, что
2нераб/2раб = Рп’
где Рп- коэффициент, характеризующий относительную величину потери
времени обзора при движении антенны в нерабочем секторе,
получаем
Тра6 = То6з(1 - рп).
Предполагая, что в рабочем секторе угловая скорость перемещения
антенны остается постоянной, получаем
, _ т Фа _ Го6з(1 - р„)фа
ф ра6А<р Дф
Отсюда, учитывая условие однозначности отсчета дальности,
„ 2kwnnRm, уДф
• у' зап шах
063 " (1 - рп)фас •
Для посадочных радиолокаторов рп = 0,5. Поэтому
4^ап«Дпах АФ
. (3.12)
т
обз.п
(3.13)
ФаС
Кроме указанных выше основных требований, при выборе пери-
ода обзора пространства необходимо учитывать также следующие
обстоятельства:
при уменьшении скорости вращения или качания антенн снижа-
ются аэродинамические и механические нагрузки на антенну и ан-
тенный привод;
при уменьшении скорости вращения антенн улучшается работа
системы СДЦ вследствие уменьшения флуктуаций отраженных от
целей сигналов;
130
при увеличении скорости вращения антенн улучшаются условия
восприятия информации с экранов индикаторов, увеличиваются
яркость изображения и слитность перемещения отметок движущих-
ся целей;
в некоторых случаях при быстрых перемещениях отметок целей
на экранах индикаторов, как это имеет место, например, у посадоч-
ных РЛ, период вращения или качания антенн определяется в основ-
ном тактическими соображениями. Минимально допустимая ско-
рость возобновления информации регламентируется в этих случаях
специальными нормами.
Разрешающая способность. Различают разрешающую способ-
ность РЛ по дальности и угловым координатам.
В общем случае реальная разрешающая способность РЛС по
дальности
= 8*П01 + Е 8Kj = YK8Kn0T> (3-14)
i — 1
где 8R -потенциальная разрешающая способность, определяемая формой
сигнал и отношением энергии сигнала к энергии шума; 8К.-ухудшение
разрешающей способности в i-м узле устройства обработки сигнала;
yR- коэффициент ухудшения потенциальной разрешающей способности по
дальности.
Для наиболее распространенного случая импульсов прямоуголь-
ной формы и применения индикаторных выходных устройств с ли-
нейной разверткой
где £>масшт-дальность, соответствующая при выбранном масштабе рабоче-
му диаметру экрана индикатора £)внд; da- диаметр светового пятна на
экране индикатора.
Как показывает формула (3.15), разрешающая способность стан-
ции зависит от многих параметров, в том числе и от таких, которые
могут оперативно изменяться в процессе эксплуатации РЛС. Поэто-
му при количественной оценке разрешающей способности обычно
оговариваются условия, при которых работает станция.
Реальная разрешающая способность радиолокационной станции
по угловым координатам может быть выражена в виде уравнения,
аналогичного (3.14),
4=и
5<р = 8ФПОТ 4“ 5L 8Ф, = ^Ф^Фпот = ’УфФа» (3.16)
i= 1
где 5Ф,-ухудшение разрешающей способности в г-м узле радиолокационной
станции; уф-коэффициент ухудшения потенциальной разрешающей способ-
ности по угловым координатам; (ра-ширина ДНА в плоскости скани-
рования.
5* 131
В случае использования индикаторов с радиально-круговой
разверткой
„ 1>НШ1'360
5Ф = Фа + Фиид = Фа + Xl- ’ <ЗЛ7>
где (р^-угловая разрешающая способность индикатора; г-расстояние от
центра развертки до отметки цели на экране индикатора; k = Dmn/dn.
Как видно из приведенной формулы, угловая разрешающая
способность. РЛС зависит от местоположения цели. Поэтому при
количественной оценке угловой разрешающей способности РЛС
необходимо указывать относительное расположение цели r/DmR на
экране индикатора.
В случае применения специальных индикаторов с нелинейными
развертками, растяжкой шкалы, селективным выбором зоны обзора
приведенные выше формулы должны быть соответствующим обра-
зом скорректированы.
Точность определения координат. Точность РЛС зависит от
многих факторов, в том числе от параметров излучаемых импуль-
сов, отношения сигнал/шум, полосы пропускания приемного трак-
та, способа обработки сигналов, длины излучаемых волн, парамет-
ров индикатора, качества сельсино-следящих систем, передающих
информацию о положении антенн, способа считывания информации
И т.д.
Общая погрешность измерения разделяется на потенциальную,
определяющую предельную точность РЛС при заданных парамет-
рах зондирующих импульсов, ширине ДН и отношения сигнал/шум,
и погрешность, вызываемую всеми остальными факторами.
Результирующая погрешность измерения дальности
СТ
Ок = ^к°кпот = (3.18)
пот
где средняя квадратическая погрешность измерения дальности; ^-ко-
эффициент ухудшения потенциальной точности измерения дальности;
-средняя квадратическая потенциальная погрешность измерения
даЖности; с-скорость света; ти-длительность импульса гауссовой формы;
q-отношение сигнал/шум по мощности.
Коэффициент Z,R может принимать значение от 1 до 15 в зависи-
мости от конкретного выполнения отдельных узлов РЛС.
Для практических целей более удобно пользоваться другим
выражением, определяющим общую погрешность измерения даль-
ности:
стк = Jсг1ПО1 + Ё + Ё Ч’ (3.19)
* 7=1 i=l
где oR у-погрешности, обусловленные изменением скорости распростране-
ния радиоволн и искривлением их траекторий; aR.- погрешность, вызван-
ная ухудшением точности в i-м узле РЛС. ‘
132
Погрешность измерения угловой координаты
стч> - £ф°фпот
у яд
(3.20)
где коэффициент ухудшения потенциальной угловой точности оф ;
сра- ширина ДНА в плоскости сканирования.
Для практических целей удобней пользоваться следующей фор-
мулой:
I j=m i-n
СТФ = + Z стф + Z стф ’ (3-21)
V пот j=i р i=i i
смысл составляющих которой такой же, как в формуле (3.19).
Объем получаемой дополнительной информации. Некоторые типы
РЛС позволяют, кроме координатной информации, получать раз-
личного рода дополнительную информацию. К таким РЛС относят
в первую очередь ВРЛ, а также МРЛ. Вторичные РЛ позволяют
принимать на земле дополнительную попутную информацию о но-
мере ВС, высоте полета, остатке топлива, векторе скорости, специ-
альные сообщения об аварии, потере радиосвязи, незаконном вме-
шательстве в действие экипажа. Метеорологические РЛ могут
получать информацию о физическом состоянии гидрометеоров.
Объем получаемой информации принято характеризовать прос-
тым перечислением видов информации и максимальным количест-
вом передаваемых информационных сообщений. Качество передачи
дополнительной полетной информации характеризуют вероятность
получения достоверной дополнительной информации Рдост. Качест-
во дополнительной информации, получаемой с помощью МРЛ,
определяется вероятностью правильной локализации зон опасной
турбулентности Рзот.
Помехоустойчивость. Способность РЛ сохранять свои тактичес-
кие показатели при воздействии различного рода помех называется
помехоустойчивостью. Для оценки помехоустойчивости РЛ не вы-
работано единого критерия. Обычно для этих целей пользуются
частными показателями. Так, например, степень защищенности РЛ
от воздействия мешающих сигналов местных предметов принято
характеризовать коэффициентом подпомеховой видимости. Под
коэффициентом подпомеховой видимости Кп п в понимается такое
максимальное отношение мощности сигнала помехи Рп вх к мощ-
ности полезного сигнала Рс вх на входе высокочастотной части РЛ,
при котором на выходе РЛ обеспечиваются заданные статистичес-
кие параметры обнаружения полезных сигналов. Коэффициент под-
помеховой видимости
= Wig при заданных Рп о и Р,
*с.вх
(3.22)
133
Для различного рода помех других типов существуют частные
показатели, характеризующие помехоустойчивость РЛ по отноше-
нию к этим помехам: коэффициент подавления несинхронных по-
мех, коэффициент подавления сигналов, отраженных от гидро-
метеоров. В общем случае РЛ считается более помехозащищенным,
если при прочих равных условиях воздействие помехи вызывает
меньшее ухудшение тактических показателей.
Надежность функционирования РЛ. Под надежностью РЛ, как
и любого другого технического объекта, понимают свойство выпол-
нять заданные функции, сохраняя во времени значения установлен-
ных тактических показателей в заданных пределах, соответствую-
щих заданным режимам и условиям использования, технического
обслуживания, ремонтов, хранения и транспортирования. Надеж-
ность является комплексным свойством, характеризующимся пока-
зателями безотказности, долговечности, ремонтопригодности и
сохраняемости.
Для характеристики безотказности работы РЛ чаще всего ис-
пользуют такие показатели, как вероятность безотказной работы
и наработка на отказ. Первый показатель представляет собой
вероятность того, что в пределах заданной наработки отказа РЛ не
произойдет. Статистическая вероятность безотказной работы опре-
деляется отношением числа объектов, безотказно проработавших
до момента времени г, к числу объектов, работоспособных в началь-
ный момент времени t = 0.
Наработкой на отказ называется отношение наработки восста-
навливаемого объекта к математическому ожиданию числа его
отказов в течение этой наработки. Статистически наработка на
отказ определяется отношением суммарной наработки восстанав-
ливаемых объектов к суммарному числу отказов этих объектов.
При экспоненциальном распределении наработки между отказами
оценка для наработки на отказ определяется как
То = 1/А, (3.23)
где X,-интенсивность отказов.
При двухкомплектном режиме работы РЛ, когда один из равно-
ценных комплектов находится в нагруженном резерве и переход
с одного комплекта на другой при отказе рабочего комплекта
происходит практически мгновенно (без фиксации отказа), наработ-
ка на отказ РЛ будет определяться приближенным выражением
Ъ = То2/Тв, (3.24)
где То-наработка на отказ одного комплекта РЛ; Тв-среднее время
восстановления РЛ.
При трехкомплектном построении РЛ, характерном для трассо-
вых радиолокационных комплексов АС УВД, когда два равноцен-
ных в смысле надежности комплекта находятся в рабочем состоя-
134
нии, а третий комплект является резервным для любого из рабочих
комплектов, результирующая наработка на отказ
= ТО2/4ТВ. (3.25)
При этом предполагается, что отказом считается выход из строя
любого из двух работающих комплектов и замена отказавшего
комплекта на резервный происходит за короткое время, не приво-
дящее к фиксации отказа.
Среднее время восстановления используется как один из показа-
телей ремонтопригодности. Время восстановления включает в себя
время, затрачиваемое на обнаружение, поиск причин отказа и устра-
нение последствий отказа. Для новых РЛ, имеющих разветвленную
аппаратуру встроенного контроля и отыскания неисправностей,
среднее время восстановления составляет 20 ... 40 мин.
Ремонтопригодность характеризуется’ группой экономических
показателей: стоимостью ремонта, средней стоимостью ремонтов
и коэффициентом стоимости ремонтов. В качестве показателей
долговечности радиолокационной аппаратуры обычно используют
такие понятия, как технический ресурс Тр и срок службы Тс.
Технический ресурс определяется наработкой объекта от начала
эксплуатации до наступления предельного состояния, когда даль-
нейшая эксплуатация объекта должна быть прекращена из-за не-
устранимого ухода заданных параметров за установленные преде-
лы. Срок службы РЛ определяется календарной продолжитель-
ностью эксплуатации РЛ от ее начала до наступления предельного
состояния. Технический ресурс РЛ гражданской авиации обычно
равен 40 ... 60 тыс. ч. Для РЛ нового поколения устанавливают
ресурс примерно 100 тыс. ч.
В качестве показателя сохраняемости РЛ обычно используют
средний срок сохраняемости, т. е. математическое ожидание кален-
дарной продолжительности хранения и транспортирования объекта
в заданных условиях, в течение и после которой сохраняются
значения заданных показателей качества в установленных пределах.
Срок сохраняемости устанавливается заводом-изготовителем в за-
висимости от условий хранения и транспортирования аппаратуры.
Кроме единичных показателей надежности, иногда используют
комплексные показатели, относящиеся к нескольким свойствам,
составляющим надежность объекта. К комплексным показателям
относятся коэффициент готовности, коэффициент технического ис-
пользования, средняя суммарная трудоемкость технического обслу-
живания и др. Эти показатели для определения тактических харак-
теристик РЛ используются редко.
Климатические и механические требования. По условиям эксплу-
атации аппаратура наземных РЛС может быть разделена на три
группы: смонтированную и установленную в стационарных отапли-
ваемых помещениях (группа А), смонтированную и установленную
в отапливаемых кузовах или контейнерах и не работающую на ходу
135
(группа Б), смонтированную и установленную на открытом воздухе
(группа В).
Для радиолокационной аппаратуры, смонтированной на откры-
том воздухе, устанавливается диапазон температур внешней среды,
при котором РЛС должна сохранять свою работоспособность. Этот
диапазон обычно лежит в пределах —40 ... +50°C с возможным
изменением нижней границы до — 50 °C. Для аппаратуры, размещен-
ной в отапливаемых помещениях, диапазон рабочих температур
устанавливается в пределах 5 ... 40 °C с возможностью увеличения
верхней границы до 50 °C. Относительная влажность воздуха для
внешнего оборудования устанавливается до 98% при t = 40°С, для
внутреннего оборудования - 80 ... 93% при t = 30°С. Кроме того,
заказчиком устанавливаются требования на допустимую скорость
ветра, минимальное атмосферное давление, работу в условиях
морского тумана, устойчивость к порывам ветра и т. д.
Выполнение климатических и механических требований к радио-
локационной аппаратуре проверяется в заводских условиях при
испытаниях на теплоустойчивость, холодоустойчивость, устойчи-
вость к циклическим изменениям температур, влагоустойчивость,
атмосферное давление, пылеустойчивость, отсутствие резонанса
конструктивных элементов, ветроустойчивость, прочность при
транспортировании, вибропрочность. Условия проведения испыта-
ний дифференцируются в зависимости от принадлежности аппара-
туры к одной из перечисленных выше эксплуатационных групп.
По отношению к габаритным размерам и массе стационарной
наземной радиолокационной аппаратуры жестких требований не
выдвигается. Исключением являются требование уменьшения высо-
ты подвеса антенны аэродромных РЛС, представляющих собой
опасность для низколетящих ВС. В этом случае следует руководст-
воваться требованиями по ограничению высоты препятствий
согласно техническим условиям и нормам на проектирование аэ-
родромов гражданской авиации.
3.3. Технические характеристики радиолокаторов
Длина волны. Оптимизация параметров радиолокационной сис-
темы чаще всего начинается с выбора длины волны, на которой
должна работать РЛС. Длина волны не входит в явном виде
в уравнение дальности (3.4), но от ее выбора зависит значение всех
параметров, входящих в это уравнение. Одни параметры получают
значения, приближающиеся к оптимальным при уменьшении длины
волны, другие, напротив, требуют ее увеличения. Предпочти-
тельная длина волны, выбирается на основе компромисса между
противоречивыми требованиями.
Зависимость эффективной отражающей площади целей от длины
волны. Эту зависимость лучше всего проследить по графику измене-
136
ния эффективной поверхности ша-
ра от его относительных разме-
ров (рис. 3.3).
В рэлеевской области, когда
размеры цели малы по сравнению
с длиной волны (г « X), эффектив-
ная площадь цели изменяется об-
ратно пропорционально длине
волны в четвертой степени
(Хэф — ак~4). В резонансной об-
ласти, где размеры цели соизме-
римы с длиной волны, эффектив-
ная отражающая площадь зави-
сит от конкретного их соотноше-
ния и изменяется по затухающему
Рис. 3.3. Зависимость эффективной от-
ражающей площади шара от длины
волны:
1 рэлеевская область; 2-резонансная об-
ласть; 3 -оптическая область
периодическому закону при умень-
шении X. В оптической области, где размеры цели намного пре-
восходят длину волны (г » X), эффективная отражающая площадь
цели не зависит от длины волны [5эф
Указанные зависимости позволяют сделать некоторые выводы
относительно диапазона волн, в котором должна работать проекти-
руемая РЛС. Если речь идет о РЛС обнаружения ВС, необходимо
так подбирать длину волны, чтобы для этого типа целей имело
место резонансное или оптическое отражение, но вместе с тем при
работе по гидрометеорам характер отражения сигналов должен
соответствовать процессам, имеющим место в рэлеевской области.
Для МРЛ, когда нужно иметь достаточно интенсивные отраже-
ния от дождевых капель и водяных частиц, необходимо переходить
на более высокие частоты. Для этих же МРЛ, используя зависи-
мость 5эф = ак~4, справедливую для рэлеевской области, можно
рекомендовать двухчастртную работу РЛС для получения дополни-
тельной информации о характере метеообразований (крушюкапель-
ные, мелкокапельные и т. д.).
Особые трудности в выборе длины волны возникают при проек-
тировании трассовых РЛС, когда наряду с требованием высокой
вероятности обнаружения ВС при плохих метеоусловиях и на
больших расстояниях ставится дополнительная задача обнаружения
метеообразований, опасных для полетов.
Влияние выбора длины волны на геометрические размеры антен-
ны. Для параболических зеркальных антенн, которые чаще приме-
няют в РЛС, справедливо следующее приближенное уравнение:
Sa = DX.2/4nks. (3.26)
где D - коэффициент направленного действия антенны; Sa-геометрическая
поверхность антенны; ^-коэффициент использования раскрыва антенны,
устанавливающий связь между геометрической и эффективной поверх-
ностью антенны (Sa эф = ksSa), обычно ks = 0,4 ... 0.7.
137
Если заданы максимально допустимые размеры антенны Samax,
угловая разрешающая способность и зона обзора в плоскости,
перпендикулярной плоскости сканирования, т. е. задан коэффициент
направленного действия антенны Dr, то максимальная длина вол-
ны, на которой может работать такая РЛС, в соответствии с
уравнением (3.26) определяется выражением
(3-27)
Влияние выбора длины волны на угловую разрешающую способ-
ность РЛС можно определить так:
Фр = 7<р^<рпот ~ 7<рфа> (3.28)
где 5^- реальная разрешающая способность РЛС по угловой координате <р;
уф- коэффициент ухудшения разрешающей способности, равный приблизи-
тельно 1,5; Зф потенциальная разрешающая способность станции по
угловой координате; фа-ширина ДНА в. плоскости сканирования.
Принимая во внимание, что для зеркальных антенн справедливо
соотношение
Фа = 60 у, (3.29)
«а
где -размер раскрыва антенны в соответствующей плоскости,
получаем:
X = Зф<4/60уф. (3.30)
Таким образом, для улучшения разрешающей способности РЛС
по угловым координатам желательно при заданных размерах ан-
тенны уменьшать длину волны.
Влияние выбора длины волны на точность РЛС по угловым
координатам. Точность РЛС по угловым координатам
Оф = фрОф , (3.31)
v жпот
где -среднее квадратическое значение погрешности измерения угловой
координаты; коэффициент ухудшения потенциальной точности, равный
1,1 ... 15; Оф -среднее квадратическое значение потенциальной погреш-
ности измерёййя угловой координаты.
Принимая во внимание уравнение (3.20), а также учитывая
выражение (3.29), получим
Таким образом, для повышения точности измерения угловых
координат при заданных размерах антенны необходимо также
уменьшать длину волны.
Влияние длины волны на положение нижнего лепестка ДНА в
вертикальной плоскости. При работе РЛС по низколетящим целям,
138
т. е. по объектам, расположенным под малыми углами места, ДНА
в вертикальной плоскости претерпевает значительные искажения.
Это явление обусловлено интерференцией прямых и отраженных от
поверхности земли волн. Диаграмма направленности антенны в
вертикальной плоскости при этом будет иметь многолепестковый
характер.
Угол места максимума нижнего лепестка ДНА
0„«14,3р (3.33)
где X и Ла выражаются в одинаковых линейных единицах, а ®н-в градусах.
Уравнение (3.33) показывает, что для того чтобы «прижать»
нижний лепесток ДНА к земле, необходимо или увеличивать высоту
подвеса антенны, или уменьшать X. При э^рм, правда, увеличивает-
ся число лепестков и сужаются их размеры в вертикальной плос-
кости.
Влияние выбора длины волны на слепые скорости при работе РЛС
в режиме СДЦ. При наиболее распространенном в настоящее время
когерентно-импульсном методе селекции движущихся целей «сле-
пые» скорости
гслв = nXFn/2, (3.34)
где гсл „-«-я слепая скорость; «-коэффициент, равный порядковому номеру
слепой скорости (и = 1, 2, 3, ...); Fn-частота повторения зондирующих
импульсов.
Если не принимать специальных мер по устранению слепых
скоростей, они для большинства видов РЛС попадают в диапазон
реальных скоростей ВС гражданской авиации и вызывают значи-
тельные трудности в осуществлении непрерывного контроля за
воздушной обстановкой. При разработке методов устранения сле-
пых скоростей и выборе рабочей длины волны РЛС необходимо
ориентироваться на выражение (3.34).
Влияние длины волны на обнаружение гидрометеоров. Одна из
задач радиолокационного обеспечения полетов заключается в опре-
делении координат метеорологических зон, опасных для полетов.
Эти зоны обнаруживаются или с помощью специальных МРЛ, или
с помощью радиолокаторов УВД, на экранах индикаторов которых
наряду с отметками целей могут отображаться области грозовых
облаков, дождя, снега и т.д. Представляет интерес вопрос об
интенсивности отражений сигналов от различных метеообразова-
ний в зависимости от длины волны, на которой работает станция.
Количественная характеристика этой зависимости может быть по-
лучена путем определения эффективной отражающей поверхности
гидрометеоров.
Эффективная отражающая поверхность гидрометеоров зависит
от многих факторов, в том числе от температуры, водности,
размера капель, скорости выпадения осадков, параметров самой
139
радиолокационной станции. Для гидрометеоров в виде дождя
различной интенсивности эта зависимость может быть определена с
помощью следующего приближенного выражения:
Хэф м = 21,5 КГ ^фЛ*1’6^4, (3.35)
где 5эфм-эффективная отражающая поверхность гидрометеора, м2; тн-
длительность зондирующих импульсов, с; г дальность до гидрометеора,
м; фа-ширина ДНА в горизонтальной плоскости, град; ®а-ширина
диаграммы направленности антенны в вертикальной плоскости, град;
к интенсивность дождя, мм/ч; А.-длина волны, м.
Выражение (3.35) получено путем статистической обработки
экспериментальных данных для диапазона волн, в котором работа-
ют радиолокационные станции гражданской авиации. Из выраже-
ния (3.35) видно, что уменьшение длины волны резко улучшает
способность РЛС обнаруживать гидрометеоры. Вместе с тем ухуд-
шаются условия обнаружения полезных целей, находящихся в зоне
расположения гидрометеоров.
Влияние длины волны на мощность сигналов, отраженных от
местных предметов. Эффективную отражающую площадь местных
предметов 5эф м п можно представить в виде эффективной отража-
ющей площади фона подстилающей поверхности земли 5эфф и
эффективной отражающей площади точечных объектов 5эф т, распо-
ложенных на этой поверхности:
^эф.м.п ’^эф.ф 3” ^эф.т*
Составляющая 5)фт может изменяться от 0 до 10000 м2 в
зависимости, от характера местных предметов. Фоновая составляю-
щая может быть описана приближенным равенством
5Эф.ф = 840ЛтнфагА-1, (3.36)
которое получено из выражения
^эф.ф ^м.п^о’
где омп = 0,00032/1А.-1 -удельная эффективная отражающая площадь по-
верхности земли; So = 0,5стифаг-площадь ячейки разрешения РЛС.
В уравнении (3.36) длительность импульсов ти выражается в
секундах, ширина ДНА <ра-в градусах, а длина волны X и дальность
г-в метрах. Коэффициент А в этих выражениях характеризует
физическое состояние подстилающей поверхности. Для плоской
поверхности без леса А = 0,1, для лесистой местности А = 1, для
сильно пересеченной местности А = 10. Уравнение (3.36) показыва-
ет, что, как и для случая переотражения волн от гидрометеоров,
мощность принимаемых сигналов от поверхности земли будет
уменьшаться с увеличением длины волны.
Влияние выбора длины волны на необходимые энергетические
показатели РЛС. Максимальная дальность действия РЛС может
быть приближенно определена с помощью одной из модификаций
140
щадях антенны Хаэф И цели 5ц эф, at мощности излучаемых импульсов от
также чувствительности приемки- длины волны
ка Pnp.min, связь между необхо-
димой мощностью Pv и длиной *
волны X будет выражаться следующей зависимостью:
Ри = Ь72, (3.38)
где b-постоянный коэффициент, не зависящий от X.
Если учесть поглощение радиоволн в атмосфере, то реальная
максимальная дальность действия РЛС
Лпахр = 10-°-05₽№™х₽, (3.39)
где Ятахо-максимальная дальность действия РЛС без учета затухания
радиоволн; 0(л)-коэффициент затухания волн в атмосфере.
Коэффициент Р (л) зависит от многих факторов, в частности, от
длины волны, температуры и состояния атмосферы. Если принять
температуру t = 18 °C, а в качестве среды, в которой распространя-
ются радиоволны, дождь с различной интенсивностью осадков к, то
Р(Х) = 1,65- 10“6kV2’26. (3.40)
Уравнения (3.39) и (3.40) показывают, что при увеличении к
затухание радиоволн в атмосфере уменьшается. Для обеспечения
заданной реальной дальности действия РЛС в этом случае требует-
ся меньшая мощность передатчика, чем при небольших X.
По формулам (3.37) и (3.39) можно построить кривые (рис. 3.4),
иллюстрирующие зависимость мощности передатчика, необходи-
мой для обеспечения заданной дальности действия РЛС, от длины
волны. При построении кривых мощность излучения на волне 25 см
(Р25) принималась за единицу. Графики строились для определен-
ных метеоусловий (дождь с интенсивностью 4 мм/ч на всей даль-
ности действия). Расчет проводился для пяти значений реальной
максимальной дальности РЛС: 100, 250, 500, 750 и 1000 км. Резуль-
таты расчета показывают, что для каждой дальности действия
может быть определено оптимальное значение длины волны, при
которой необходимая мощность будет иметь минимальное зна-
чение.
141
Если длину волны брать больше оптимальной, то необходимая
мощность излучения увеличивается относительно медленно, так как
преобладает тенденция, определяемая выражением (3.38). При
уменьшении волны по сравнению с оптимальной преобладает
тенденция, определяемая выражением (3.39), и необходимая мощ-
ность передатчика резко увеличивается. По графикам, аналогичным
представленным на рис. 3.4, для РЛС различного назначения и
различных метеоусловий находят оптимальные значения длин волн,
уточняют их по другим приведенным выше критериям и берут
полученное значение в качестве основы для последующих расчетов.
Немаловажное значение для выбора длины волны РЛС имеют
также практические соображения по возможности изготовления
необходимых СВЧ-приборов, элементов фидерного тракта, а также
такие факторы, как электронная совместимость радиосредств, нали-
чие готовых дорогостоящих СВЧ-приборов, международные согла-
шения по распределению частот и т. д.
Диапазон частот, на которых могут работать РЛС, регламенти-
руется соглашениями, вырабатываемыми заинтересованными стра-
нами. Международный союз электросвязи (МСЭ) и Международ-
ный консультативный комитет по радиосвязи (МККР) определили
границы специальных диапазонов частот (табл. 3.1), которые могут
использоваться в радиолокации странами, расположенными в пре-
делах Района I (Африка, Европа, СССР), Района II (Северная и
Южная Америка) и Района III (Азия). Диапазоны частот, выделен-
ные для других районов, несколько отличаются от приведенных в
таблице, но отличия эти несущественны.
Международная организация гражданской авиации (ИКАО) раз-
решила использовать для трассовых РЛ волны одного из трех
диапазонов 10, 23 или 50 см. При этом окончательный выбор длины
волны зависит от ряда требований, предьявляемых к той или иной
радиолокационной станции. К числу таких требований относятся:
обеспечение заданной зоны видимости с наименьшими энергети-
ческими затратами;
Таблица 3.1. Диапазоны частот, выделенные для применения в радиолокационных
системах Района II
Обозначение диапазона Границы диапазона, ГГц Частоты, ГГц Обозначение диапазона Границы диапазона, ГГц Частоты, ГГц
ввч 0,03-0,3 0,137-0,144 0,216-0,225 с 4-8 5,255-5,925
УВЧ 0,3-1 0,42-0,45 0,89-0,94 X 8 12,5 8,5-10,7
1-2 1,215-1,4 к„ 12,5-18 13,4-14,4
2 4 2,3-2,55 к 18- 26,5 23-24,25
2.7-3,7 Ка 26,5 40 33,4-36
142
обеспечение заданной угловой разрешающей способности при
экономически и конструктивно целесообразных размерах антенн;
устойчивость зоны видимости при аномальном распространении
радиоволн, особенно при малых углах места;
устойчивость получения информации при внешних помехах от
метеообразований;
отсутствие «провалов» в зоне видимости под малыми углами
места.
На основе компромисса между противоречивыми требованиями
шестая сессия ИКАО в 1957 г. рекомендовала для трассовых РЛ
использовать волну 23 см как оптимальную для такого рода РЛ, а
международная конференция по частотам радиосвязи, проходившая
в 1961 г. в Женеве, уточнила частотный диапазон трассовых РЛ,
выделив для них полосу частот 1215 ... 1400 МГц.
Аэродромные РЛ работают на волнах 35, 23 и 10 см. Следует
отметить, что выбор длины волны X =*35 см для этих РЛ не
является оптимальным. При такой длине волны размеры антенн
оказываются неоправданно большими, а разрешающая способ-
ность и точность по азимуту-недостаточно высокими. Для аэ-
родромных РЛ классов В2 и ВЗ более выгодным значением длины
волны следует признать 23 и 10 см. Для аэродромных РЛ класса В1
оптимальное значение длины волны будет приближаться к 23 см.
Все посадочные РЛ гражданской авиации работают на волне
приблизительно 3,2 см, которую следует считать в настоящее время
оптимальной для ПРЛС. На этой, же волне работают ОПРЛ,
предназначенные для аэропортов местных воздушных линий.
Радиолокаторы обзора летного поля работают на волне 8 мм.
Для такого рода РЛ могут быть использованы также волны
трехсантиметрового диапазона. Уменьшение длины волны приво-
дит к резкому сокращению дальности действия РЛ и снижению
вероятности обнаружения при плохих метеоусловиях. Увеличение
длины волны отрицательно сказывается на разрешающей способ-
ности по азимуту.
Метеорологические РЛ работают на волнах 8 мм, 3,2 см и 10 см.
Одновременная работа РЛ на двух частотах позволяет получить
дополнительную информацию о физическом состоянии метеообъ-
ектов.
Диапазон волн, в котором работают ВРЛ, жестко регламентиру-
ется международными и отечественными нормами. Это объясняет-
ся тем, что ВРЛ составляет лишь часть активной радиолокационной
системы, в которую входят также самолетные ответчики, рабо-
тающие на определенных частотах запроса и ответа. Международ-
ными нормами предусматривается передача запроса на волне
«29 см и ответа на волне «27,5 см.
Диаграммы направленности антенн. Выбор ширины ДНА являет-
ся ответственным этапом проектирования РЛС. Как и большинство
других параметров РЛС, ширина ДН выбирается на основе компро-
143
мисса между противоречивыми требованиями. Рассмотрим вначале
требования, определяющие выбор ширины ДН в плоскости скани-
рования.
Угловая разрешающая способность и угловая точность РЛ
связаны с шириной ДН. Чем уже ДН, тем выше разрешающая
способность и точность РЛ.
При сужении ДН увеличивается дальность действия РЛС. Дейст-
вительно, в соответствии с выражением (3.4) максимальная даль-
ность действия РЛС увеличивается с ростом коэффициента направ-
ленного действия антенны, который в свою очередь увеличивается
при уменьшении ширины ДН в горизонтальной (сра) и вертикальной
©а плоскостях:
D = 4125О/<ра0а, (3.41)
где <ра и ©а выражаются в градусах.
Более точные результаты дает формула, пригодная для практи-
ческих расчетов:
D = 32ООО/<ра0а. (3.42)
Сужение ДН приводит при определенной частоте вращения
антенны к сокращению числа импульсов, отраженных от цели, и,
следовательно, к уменьшению вероятности обнаружения цели и
дальности действия РЛС.
При чрезмерном сужении ДН увеличивается вероятность про-
пуска целей. Кроме того, уменьшение числа импульсов в пачке
отраженных сигналов неблагоприятно сказывается на коэффициенте
улучшения, характеризующем качество работы системы СДЦ.
Минимальная ширина ДН, необходимая для получения п им-
пульсов в пачке, для РЛС кругового обзора согласно выражению
(З.П)
Фа min = 2«Лтах • З60/сэап/то63с. (3.43)
Для РЛС с секторным обзором пространства аналогичное выра-
жение согласно формуле (3.12) примет вид
зап
Го63(1 - ₽П)С •
(3.44)
При выборе ширины ДН следует также иметь в виду, что
стремление уменьшить ее ширину приводит к увеличению геометри-
ческих размеров антенны (см. (3.29)) со всеми вытекающими отсюда
последствиями: увеличением аэродинамических нагрузок на антен-
ну, повышением расхода энергии антенного привода, увеличением
стоимости, массы и т. д. Неблагоприятной в этом отношении
является также и другая тенденция: чем уже ширина ДН зеркальных
антенн, тем больше, как правило, оказывается уровень боковых
лепестков.
144
При выборе ширины ДН антенны в плоскости, перпендикуляр-
ной плоскости сканирования, решающее значение имеют в основ-
ном три фактора:
увеличение коэффициента усиления антенны и, следовательно,
дальности действия РЛС при уменьшении ширины диаграммы
направленности;
уменьшение влияния сигналов, отраженных от гидрометеоров,
вследствие уменьшения эквивалентной отражающей площади ме-
теообразования при сужении ДНА;
необходимость обзора всего заданного воздушного пространст-
ва без дополнительного наклона или-доворота антенн.
Характерной особенностью ДНА в плоскости, перпендикуляр-
ной плоскости сканирования, является их сложная конфигурация.
Как правило, это диаграмма типа cosec2 0 или другой какой-либо
сложной зависимости.
Выбор той или иной формы ДН обусловлен стремлением охва-
тить только ту часть воздушного пространства, где могут нахо-
диться контролируемые ВС с тем, чтобы рациональней использо-
вать энергетический потенциал радиолокатора.
Еще большее влияние на выбор конфигурации ДНА оказывает
стремление к уменьшению помех от местных предметов с одновре-
менным обеспечением большой дальности действия РЛС по целям,
находящимся на нижних эшелонах воздушного пространства. Ком-
промиссное решение этой проблемы привело к появлению сложных
антенно-волноводных устройств, имеющих несколько парциальных
ДН в вертикальной плоскости. В некоторых современных РЛС
предусматриваются специальные адаптивные переключатели, изме-
няющие конфигурацию результирующей ДНА в зависимости от
характера и мощности отражений от местных предметов. У некото-
рых РЛС переключение ДН производится по жесткой программе в
зависимости от расстояния до цели.
Характерными значениями ширины ДН в плоскости сканирова-
ния для антенн РЛ различного назначения являются: для трассо-
вых-1 °, для аэродромных 2 ... 4°, для посадочных-0,6°, для РЛ
обзора летного поля-0,2°, для ВРЛ-около 4°. Метеорадиолокато-
ры имеют симметричные ДН, ширина которых в зависимости от
частотного канала и режима работы может иметь значения «0,2°
(миллиметровый канал), «1° (сантиметровый канал), «1,5° (деци-
метровый канал).
Приводить значения ширины ДНА в плоскости, перпендику-
лярной плоскости сканирования, нецелесообразно, поскольку диа-
граммы в этой плоскости имеют сложную конфигурацию и такой
параметр, как ширина ДН, недостаточно полно характеризует в
этом случае свойства антенны.
Мощность передатчика. Мощность передатчика Ри вместе с
чувствительностью приемника Рпр min и коэффициентом усиления
антенны G определяет так называемый энергетический потенциал
145
РЛС, от которого при прочих заданных параметрах А зависит
максимальная дальность действия РЛС:
= (3.45)
Для увеличения дальности действия РЛ принципиально безраз-
лично, повышать ли мощность передатчика или улучшать чувстви-
тельность приемника. На практике при разработке новых РЛ
используют обе эти возможности. При этом принимаются во
внимание следующие обстоятельства.
Импульсная мощность может увеличиваться до известных пре-
делов. Ограничивающими факторами здесь являются: электричес-
кая прочность фидерного тракта, стоимость передающих устройств
и эксплуатационные расходы, уровень допустимых по технике
безопасности сверхвысокочастотных и рентгеновских излучений,
наличие соответствующих мощных генераторных или усилительных
СВЧ-приборов.
Для того чтобы преодолеть эти ограничения, во многих мощных
РЛС используют несколько передатчиков, работающих на одну
антенну. Чтобы не перегружать волноводный тракт, передатчики
часто работают с небольшим временным сдвигом между зондирую-
щими импульсами и с разносом несущих частот. В некоторых
случаях приходится использовать зондирующие сигналы большой
длительности с внутриимпульсной частотной модуляцией и сужать
их на приемном конце для восстановления удовлетворительной
разрешающей способности по дальности.
Поскольку во всех наземных РЛ гражданской авиации использу-
ется импульсный метод определения координат целей, обычно для
характеристики излучаемой мощности вводят понятие импульсной
мощности, под которой понимают среднюю в течение импульса
мощность, отдаваемую передатчиком в волноводную систему. Ори-
ентировочные значения импульсной мощности передатчиков сле-
дующие: для трассовых РЛ-единицы мегаватт, для аэродром-
ных-сотни киловатт, для посадочных и обзорно-посадочных-
приблизительно 150 кВт, для РЛ обзора летного поля-десятки
киловатт, для МРЛ-от десятков киловатт до 1 МВт в зависимости
от частотного канала, для ВРЛ, работающих в соответствии с
нормами ИКАО, «20 кВт.
Трассовые РЛ имеют при этом, как правило, многокомплектную
структуру построения, предусматривающую одновременную рабо-
ту нескольких передатчиков на одну антенну.
Чувствительность приемника. Под чувствительностью приемни-
ка подразумевают его способность усиливать и выделять слабые
отраженные сигналы на фоне шумов. Различают два понятия
чувствительности-предельную и реальную.
Предельная чувствительность характеризуется той минималь-
ной мощностью сигнала на входе приемника Рпред, при которой на,
146
выходе его линейной части обеспечивается равенство мощностей
сигнала и шума. Под реальной чувствительностью понимается
такая минимальная мощность сигнала на входе приемника Рпр т1п,
при которой на выходе создается необходимое для нормальной
работы РЛ превышение уровня сигнала над шумом, т. е. заданные
вероятности правильного обнаружения и ложной тревоги.
Обычно в качестве технического показателя РЛС приводят
значение не предельной, а реальной чувствительности, причем часто
в относительных единицах (децибелах):
В = 101g—(3.46)
'пр. min
где Ро-уровень отсчета мощности, выбираемый равным 1 Вт или 1 мВт.
Кроме перечисленных выше параметров, для характеристики
чувствительности приемников часто используют такие понятия, как
коэффициент шума и эффективная шумовая температура. Коэффи-
циент шума Кш показывает, во сколько раз отношение сигнал/шум
на входе приемника больше этого же отношения на его выходе.
Понятие эффективной шумовой температуры основывается на пред-
положении, что приемник, якобы, является идеальным, а возникаю-
щие в нем дополнительные шумы относят ко входу приемника и
считают, что их появление обязано дополнительному повышению
температуры входных цепей.
Для получения высокой чувствительности приемников в боль-
шинстве РЛ применяют малошумящие входные усилители сверх-
высоких частот, выполненные на лампах бегущей волны (ЛЕВ),
специальных транзисторах или параметрических электронно-луче-
вых приборах. Ориентировочные значения коэффициента шу-
ма приемников РЛС большого радиуса действия составляют
2,5 ... 3 дБ. У аэродромных РЛ с предварительными усилителями,
выполненными на ЛЕВ, коэффициент шума равен 4 ... 6 дБ. У
посадочных РЛ, работающих без малошумящих входных усилите-
лей, коэффициент шума ухудшается до 15 дБ.
Частота повторения и длительность излучаемых импульсов. На
выбор частоты повторения зондирующих импульсов влияют следу-
ющие факторы.
Для однозначного определения местоположения ВС необходи-
мо, чтобы радиоволны, отраженные от целей, находящихся на
максимальном удалении от РЛ, успевали прийти на вход приемника
до начала излучения нового зондирующего импульса. Это условие
может быть представлено в следующем виде:
Fn < c/2R^k3an, (3.47)
где /сзап-коэффициент запаса, равный для большинства РЛС 1,5 ... 2,5.
Чем выше частота повторения импульсов, тем больше импуль-
сов будет получено от цели за время одного обзора. Следовательно,
увеличится реальная чувствительность приемника, улучшатся точ-
147
ность определения угловых координат и компенсации сигналов
местных предметов в режиме селекции движущихся целей.
В результате компромиссных решений определились следующие
характерные значения частоты повторения импульсов: для трассо-
вых РЛ 250 ... 400 Гц, для аэродромных 500 ... 1000 Гц, для поса-
дочных 2 ... 3 кГц, для РЛ обзора летного поля 6,5 ... 10 кГц, для
МРЛ в зависимости от канала и принятых масштабов
250 ... 6500 Гц. Частота повторения импульсов ВРЛ обычно соот-
ветствует частоте повторения импульсов ПРЛ, с которыми ВРЛ
сопрягаются.
На выбор длительности импульсов оказывают влияние два
основных фактора:
при увеличении длительности зондирующего импульса ти при
постоянной импульсной мощности Ри увеличивается энергия им-
пульса WK — Рити, что приводит к повышению реальной чувстви-
тельности приемника и в конечном итоге к увеличению максималь-
ной дальности действия РЛС;
при увеличении длительности импульса ухудшается разрешаю-
щая способность станции по дальности.
Характерными значениями длительности зондирующих импуль-
сов являются: для трассовых РЛ-2 ... 3,5 мкс, для аэродромных
1 ... 2 мкс, для посадочных-0,4 ... 0,5 мкс, для РЛ обзора летного
поля-0,02 ... 0,05 мкс, для МРЛ в зависимости от используемого
канала 0,45 ... 2 мкс.
Вторичные РЛ излучают двухимпульсные и трехимпульсные
запросные посылки с длительностью импульсов 0,8 мкс. Кодовые
интервалы между импульсами определяются нормами ИКАО или
требованиями стандарта СЭВ. Некоторые аэродромные РЛ работа-
ют с импульсами длительностью та 24 мкс с внутриимпульсной
линейной частотной модуляцией. В приемнике длительность этих
импульсов сокращается до 1 мкс.
3.4. Нормы ИКАО на тактические
и технические характеристики радиолокаторов
Нормы ИКАО для посадочных РЛ. ИКАО установила нормы и
рекомендации относительно выбора тактических параметров поса-
дочных радиолокаторов PAR (Precision Approach Radar). Предпола-
гается, что эти РЛ могут вместе с аэродромным радиолокатором
SRE (Surveillance Radar Equipment) входить в состав системы управ-
ления посадкой по командам с земли GCA (Ground Command
Approach) или использоваться автономно.
В соответствии с нормами ИКАО зона обнаружения посадочно-
го РЛ определяется следующим образом: посадочный РЛ должен
быть способен обнаруживать и указывать местоположение ВС с
отражающей площадью 15 м2 или более, которое находится в
148 . !
пространстве, ограниченном сектором по азимуту в 20° и по углу
места в 7° на расстоянии не менее 17 км от антенны радиолокатора.
Точность РЛ в азимутальной плоскости определяется нормами в
виде зависимости максимально допустимой погрешности от рассто-
яния до цели и отклонения цели от линии курса: максимальная
допустимая погрешность в определении отклонения ВС от линии
курса должна быть либо 0,6% расстояния от антенны посадочного
РЛ до цели плюс 10% отклонения его от линии курса, либо 9 м в
зависимости от того, какая из этих величин больше.
Аналитически это условие можно представить следующей зави-
симостью:
< (0,006г + 0,1 |As|);
(3-48)
^maxs > 9 М,
х
где <rmaxs-допустима я максимальная погрешность определения отклонения
воздушного судна от линии курса в азимутальной плоскости; г-расстояние
от антенны РЛ до ВС; As-отклонение ВС от линии курса в азимутальной
плоскости.
Необходимая точность посадочного РЛ по углу места определя-
ется следующим образом: максимальная допустимая погрешность в
определении отклонения ВС от заданной траектории посадки в
вертикальной плоскости не должна превосходить 0,4% расстояния
от антенны РЛ до цели плюс 10% фактического линейного отклоне-
ния по вертикали от траектории посадки либо 6 м в зависимости от
того, какая из этих величин больше, т. е.
птах* < (0,004г + 0,1 |АЛ|);
(3-49)
amaxh 6 М,
где АЛ-отклонение ВС от линии глиссады в угломестной плоскости.
Точность по дальности посадочного РЛ определяется согласно
нормам ИКАО погрешностью в указании расстояния от точки
приземления до ВС. Максимальная погрешность не должна превы-
шать 30 м плюс 3% расстояния гх от расчетной точки приземления
до цели, т. е.
отакг< 30 м + 0,03^. (3.50)
К разрешающей способности ПРЛС предъявляются довольно
мягкие требования. Согласно нормам ИКАО разрешающая способ-
ность по азимуту должна быть не хуже 1,2°, по углу места-0,6° и по
дальности -120 м.
Определенные требования предъявляются также к форме ото-
бражения информации, получаемой с помощью посадочных РЛ.
Информация по азимуту и углу места должна отображаться таким
образом, чтобы можно было легко следить за отклонениями
149
Рис. 3.5. Требования ИКАО к зоне об-
наружения аэродромного радиолока-
тора
ВС влево и вправо, вверх и вниз
от заданной траектории сниже-
ния. Информация должна быть
достаточной для того, чтобы оп-
ределить место управляемого ВС
по отношению к другим ВС и
препятствиям. Система индика-
ции должна допускать возмож-
ность определения путевой ско-
рости и скорости удаления от за-
данной траектории полета или
приближения к ней. Информация
должна полностью обновляться,
по крайней мере, ежесекундно.
Нормы ИКАО для аэродром-
ных РЛ. Аэродромный радиолока-
тор SRE, входящий вместе с посадочным радиолокатором PAR в
радиолокационную систему управления посадкой по командам с
земли GCA, должен удовлетворять следующим нормам, рекомендо-
ванным ИКАО.
Зона обнаружения. Аэродромный РЛ должен обнаруживать ВС с
отражающей площадью 15 м2 более, находящиеся в зоне прямой
видимости (из точки расположения антенны) в пределах простран-
ства, охватывающего вращением на 360° вокруг вертикальной оси
антенны плоской фигуры, представленной на рис. 3.5 сплошной
линией. В то же время нормами ИКАО рекомендуется увеличить
зону обнаружения до размеров, указанных на этом же рисунке
штриховой линией.
Точность. Погрешность в определении положения отметки цели
по азимуту не должна быть больше +2°.
Погрешность индикации дальности не должна превышать 5% от
действительного расстояния до цели или 150 м в зависимости от
того, какая из этих величин больше, т. е.
^maxr
< 0,05т;
(3-51)
<^пахг> 150 м,
где г -наклонная дальность до цели.
Для новых РЛС, спроектированных после принятых норм
ИКАО, погрешность индикации дальности не должна превышать
3% от действительного расстояния до цели или 150 м в зависимости
от того, какая из этих величин больше.
Разрешающая способность станции по азимуту должна быть не
хуже 4°.
Разрешающая способность по дальности должна быть не хуже
1 % расстояния от антенны РЛ до цели либо 230 м в зависимости от
того, какая из этих величин больше, т. е.
8Г «= 0,01г; 8, > 230 м. (3.52)
150
Скорость возобновления информации. Информация о дальности и
азимуте любого ВС, находящегося в пределах зоны обнаружения
радиолокатора, должна возобновляться не реже, чем каждые 4 с.
Кроме указанных выше норм, в документах ИКАО содержится
также пожелание странам-участницам международного соглаше-
ния приложить усилия к тому, чтобы по возможности уменьшить
помехи, вызываемые отражениями от земли, облаков и осадков.
Количественные требования при этом не оговариваются.
Нормы ИКАО для ВРЛ. ИКАО установила нормы и выработала
ряд рекомендаций на тактические и некоторые технические характе-
ристики вторичных радиолокаторов SSR (Secondary Surveillance
Radar).
Для радиолокационных систем с активным ответом устанавли-
вается зона обнаружения, определяемая следующими параметрами:
максимальная дальность действия 370 км, минимальная дальность
действия 1,85 км, максимальный угол места-45°, минимальный угол
места 0,5°, максимальная высота 30480 м. Зона должна быть обес-
печена при любых метеорологических условиях и на всех азимутах.
Запросные сигналы должны посылаться на частоте (1030 +
+ 0,2) МГц, ответные-на частоте (1090 + 3) МГц. Поляризация
запросных и ответных сигналов должна быть вертикальной.
Сигнал запроса должен состо-
ять из двух импульсов (рис. 3.6),
обозначаемых Рг и Р3. Дополни-
тельный импульс управления Р2,
предназначенный для подавления
сигналов боковых лепестков, мо-
жет передаваться в случае необ-
ходимости за первым импульсом
запроса Pt. Интервал между им-
пульсами Pt и Р3 определяет код
запроса. Могут использоваться че-
тыре запросных кода: А, В, С и D
с кодовыми интервалами 8, 17, 21
и 25 мкс соответственно. Допуски
на кодовые интервалы равны
+ 0,2 мкс, длительность всех за-
просных импульсов (0,8 + 0,1) мкс.
Когда используется импульс Р2,
интервал между импульсами Рг и
Р2 должен составлять (2 + 0,15) мкс.
Коды А и В предназначены
для опознавания ВС. В ответ на
запросы этими кодами бортовой
ответчик должен сообщить на
?! Ъ
Рис. 3.6. Структура запросных кодов
ИКАО
землю рейсовый номер ВС. Вве-
дение двух различных кодов, име-
151
ющих одно и то же смысловое значение, обусловлено исторически
сложившимися обстоятельствами: к тому времени, когда ИКАО
устанавливала нормы на активный канал трассовых РЛ, на между-
народных воздушных линиях уже использовались английские ВРЛ с
двухимпульсными системами подавления (код В) и американские
трехимпульсные (код Л). Поэтому, для того чтобы использовать
уже имеющуюся аппаратуру, было принято решение включить в
международные нормы оба кода на равных правах.
Запросный код С используется для получения данных о высоте,
на которой находится ВС. При запросе этим кодом ответчик
передает на землю показания барометрического высотомера,
отрегулированного на стандартное давление 760 мм рт. ст.
(1,013 -10* Па).
Код С имеет две модификации. При двухимпульсной системе
подавления излучаются два импульса Рх и Рэ с кодовым интерва-
лом между ними тк — 21 мкс. При трехимпульсной системе подавле-
ния кодовый интервал между импульсами Ру и Р3 сохраняется
таким же, но за первым импульсом через (2 + 0,15) мкс излучается
дополнительный импульс подавления Р2. Код D зарезервирован
для использования в перспективных радиолокационных системах
УВД.
Смысловое содержание этого кода международными нормами
пока не установлено.
Запросный код наземной части активной радиолокационной
системы устанавливается диспетчером или переключается автома-
тически по определенной программе. Одна из возможных программ
предусматривает поочередное переключение запросных кодов А, В,
С в смежных периодах повторения зондирующих сигналов. При
необходимости программа переключения кодов может быть из-
менена.
Нормы ИКАО предполагают применение двухимпульсных и
трехимпульсных систем подавления сигналов боковых лепестков по
запросу. При двухимпульсной системе подавления, когда использу-
ется сравнение амплитуд импульсов и Р3, амплитуда Рх в
антенне приемника бортового ответчика должна превышать ампли-
туду Р3 по крайней мере на' 11 дБ для всех азимутальных углов,
кроме тех, которые охватываются основным лепестком запросной
антенны.
Для трехимпульсной системы подавления, когда используется
сравнение амплитуд импульсов 7\ и Р2, амплитуда импульса Р2 в
антенне приемника бортового ответчика должна быть равна или
больше амплитуды импульса для всех направлений, кроме
направления главного лепестка запросной антенны. Амплитуда
этого же импульса должна иметь уровень на 9 дБ ниже амплитуды
импульса в пределах желаемого сектора запроса.
Девятая аэронавигационная конференция ИКАО, состоявшаяся
в 1976 г., приняла решение об отказе от применения двухимпульсно-
152
го запросного кода В. Таким образом, для всех новых вторичных
радиолокационных систем в настоящее время является обязатель-
ным применение трехимпульсного запросного кода А, а также
трехимпульсного запросного кода С.
Поскольку нормальное функционирование вторичного канала
РЛС зависит не только от наземной аппаратуры, но и от бортовой,
необходимо, чтобы параметры запросчика и ответчика были взаим-
но согласованы. Поэтому нормы ИКАО устанавливаются не только
на тактические, но также и на технические характеристики радио-
локаторов, работающих в активном режиме. Для уменьшения
излишних запусков ответчиков рекомендуется, чтобы частота
повторения запросов была минимально возможной. Максимальная
частота повторения запросов не должна быть больше 450 Гц.
При определении максимально допустимой мощности излуче-
ния ВРЛ принимают во внимание возможность срабатывания
ответчиков ВС, находящихся на очень большом удалении от места
установки РЛ. Для предотвращения ненужных срабатываний ответ-
чиков, находящихся вне установленной зоны управления, эффектив-
ная излучаемая пиковая мощность импульсов запроса Pt и Р3
(произведение импульсной мощности на коэффициент усиления
антенны) не должна превышать 52,5 дБ по отношению к 1 Вт
(180 кВт).
Уровень боковых лепестков направленной запросной антенны
должен быть на 24 дБ ниже уровня главного лепестка. Синхрониза-
ция антенн ПРЛ и ВРЛ должна осуществляться таким образом,
чтобы максимальная погрешность рассовмещения отметок целей по
азимуту на экране индикатора не превышала Г. Желательно, чтобы
эффективная ширина ДН запросной антенны по показаниям на
индикаторе не превышала 3°. Чувствительность приемника запрос-
чика, измеренная при соотношении (С + Ш)/Ш = 2, должна быть не
хуже 120 дБ/Вт.
Нормы ИКАО устанавливают требования на структуру ответ-
ных кодов, объем и характер передаваемой информации.
Информацию, получаемую с помощью активных РЛС, можно
условно разделить на две основные части: координатную и допол-
нительную. Координатная информация (наклонная дальность, ази-
мут) является важнейшей для диспетчеров службы движения. Эта
информация может быть получена и с помощью первичных каналов
РЛС, однако применение ВРЛ способствует тому, что эта информа-
ция предъявляется диспетчеру в наиболее достоверном и надежном
виде.
В первый период использования активных РЛС от них требова-
лось только получение координатной информации. По мере увели-
чения плотности воздушного движения значение дополнительной
информации о режиме полетов ВС (номер рейса, высота и т.д.)
возросло. Анализ работы диспетчерского состава службы движения
показал, что 50 ... 60% своего времени диспетчер тратит на сбор
153
информации от ВС, 30 ... 40% времени уходит на выработку
решения и 10 ... 20% времени затрачивается на передачу команд.
Особенно много времени требуется диспетчеру на сбор инфор-
мации о высоте полетов. С помощью ПРЛ эта информация не
может быть получена с достаточной для практики точностью
и поэтому диспетчер получает ее от экипажей ВС с помощью
средств радиосвязи. Для облегчения труда диспетчера ИКАО в 1962
г. приняла решение о передаче по вторичному каналу дополнитель
ной информации об абсолютной барометрической высоте полета.
Очень большое значение имеет информация о номере рейса или
номере ВС, так как его опознавание с помощью пеленгаторов не
всегда осуществимо, особенно, когда несколько целей находятся на
одном азимуте. Кроме того, постоянное наличие информации
о номере рейса чрезвычайно важно в автоматизированных системах
УВД, так как по этим сигналам можно осуществлять привязку всей
остальной дополнительной информации при обработке ответных
сигналов в счетно-решающих комплексах.
В некоторых случаях имеет определенное значение информация
о запасе топлива на ВС. В обычных условиях эта информация мало
интересует диспетчера, но при некоторых ситуациях, например при
плохих метеоусловиях и при большом скоплении ВС, ожидающих
своей очереди на посадку, информация об остатке топлива стано-
вится важной.
Нормами ИКАО передача информации о запасе топлива в на-
стоящее время не предусмотрена.
Оперативная информация об изменениях скорости движения ВС
и их курса имеет определенное значение для автоматизированных
систем УВД, но поскольку эта информация может быть получена на
земле с помощью других средств, ИКАО также в настоящее время
не требует передачи этой информации.
К особо важной информации относятся сообщения об аварий-
ном состоянии воздушного судна, нарушении радиосвязи и незакон-
ном вмешательстве в действия экипажа. ИКАО установила необхо-
димость передачи этих сообщений по вторичному радиолокацион-
ному каналу. Передача перечисленной выше информации осуществ-
ляется ответными сигналами, структура которых показана на
рис. 3.7.
Ответный сигнал состоит из двух крайних опорных импульсов
и F2, временной интервал между которыми составляет
(20,3 ±0,1) мкс. Между ними расположены 13 кодовых позиций.
Центральная позиция зарезервирована для использования в перс-
пективных системах УВД. После импульса F2 предусмотрена еще
одна дополнительная позиция, предназначенная для передачи спе-
циального импульса опознавания SPI (Special Position Indication) по
требованию с земли. Эта позиция следует за импульсом F2 через
(4,35 ±0,1) мкс. Длительность всех импульсов ответа равна
(0,45 ± 0,1) мкс.
154
a) Ff /7/ 0% flz Ci/ flii Bf Bi 8^ Oz Bi/ Uy Fz
m m г~r~—1 r~i r—1 r-*T i—1 1 1—1 1—1 1— пл
5PI
1,05 мкс
20,3 мкс
0,3 5мкс
Рис. 3.7. Структура ответных кодов ИКАО:
а-полный вариант; б-сокращенный вариант
Все информационные позиции разбиты на группы А, В, С и D.
Каждая из этих групп содержит по три позиции At, А2, Л4; В1, В2,
В4 и т. д.
На первом этапе внедрения активных радиолокационных систем
использовались только две группы информационных позиций-Л
и В. Структура ответного сигнала имела тогда вид, представленный
на рис. 3.7,6. С помощью шести импульсов групп А и В можно
было передать 64 различных элементарных сообщения. В дальней-
шем для расширения информационных возможностей вторичного
канала РЛС к двум группам А и В были добавлены группы С и D.
Импульсы этих групп удалось разместить между импульсами А и В,
чем и объясняется странное, на первый взгляд, размещение инфор-
мационных импульсов в ответном сигнале. Общее число передавае-
мых элементарных сообщений при использовании всех 12 информа-
ционных позиций увеличилось до 4096. Рассмотрим более подробно
структуру международного кода при различных режимах работы
наземного запросчика.
Если в наземном запросчике установлены коды А или В, т. е.
кодовый интервал между запросными импульсами и Р2 равен
8 или 17 мкс, то независимо от принятой системы подавления
сигналов боковых лепестков бортовой ответчик должен передать на
землю номер рейса. Передача номера рейса в соответствии со
структурой ответного сигнала (рис. 3.7, а) производится натураль-
ным двоично-десятичным четырехдекадным трехзарядным кодом
на общей базе 20,3 мкс. При этом декада А, имеющая три разряда
А2 и Л4, будет передавать тысячи, декада В-сотни, декада
С-десятки и декада D-единицы номера рейса. Импульсы переда-
ются только для символа «1» младшими разрядами вперед, при
нулевом символе импульс отсутствует.
Так при передаче номера рейса 3461 декада А передает деся-
тичное число 3. В двоичной системе оно будет записано в виде
011, т. е. на кодовой позиции At будет записана 1, на позиции А2-1
155
и на Л4-0. Для остальных декад получаем аналогичным образом:
Вх-0; В2-0; Я4-1;
Q-0; С2-1; С4-1;
Dt-1; D2-0; D4-0.
Максимальное число, которое может быть записано таким
образом, будет 7777. Поскольку в каждой декаде для передачи
десятичных чисел используются только три разряда, передача
десятичных цифр 8 и 9 при выбранной системе кодирования вообще
невозможна.
Импульс индивидуального опознавания SPI выдается по заявке
диспетчера. Команда на выдачу этого импульса поступает со
специальной кнопки «Знак» бортового ответчика, которую нажима-
ет пилот по запросу с земли. Импульс должен передаваться в тече-
ние 15 ... 50 с.
На запрос двухимпульсным или трехимпульсным кодом С с
бортового ответчика на землю передается информация о высоте.
Показания высотомера могут непрерывно меняться во времени.
Двоично-десятичный трехразрядный код для передачи такого рода
информации не подходит, так как он не обеспечивает непрерыв-
ность передачи данных о текущей высоте и, кроме того, возникает
опасность больших ошибок при переходе от одного значения
высоты к другому. Для передачи непрерывно изменяющейся во
времени информации лучше подходят циклические коды, которые
при смене соседних цифровых значений не приводят к существен-
ным ошибкам.
Согласно международным нормам ИКАО передача данных о
высоте производится кодом Гиллхэма, представляющим собой
совокупность рефлексного трехдекадного трехразрядного кода Грея
и специального трехразрядного рефлексного кода, имеющего циф-
ровую емкость в 5 единиц с градациями по 100 футов. Рефлексный
код Грея является в свою очередь сочетанием натурального кода.
Грея с зеркальным. Принцип построения натурального и зеркально-
го кода Грея показан в табл. 3.2.
Основной особенностью кода Грея является то, что в отличие от
натурального двоичного кода два соседних числа отличаются друг
от друга всегда только в одном разряде. Это приводит к тому, что
при использовании кода Грея для передачи информации о непре-
рывно меняющейся высоте возникают гораздо меньшие ошибки,
чем при использовании двоично-десятичного кода. Объясняется это
следующим. Для преобразования непрерывной информации о высо-
те, получаемой на ВС с помощью барометрического датчика,
используется преобразователь типа вал-код. Этот преобразователь
представляет собой комбинацию нескольких кодирующих дисков с
прорезями и выступами, конфигурация которых определяется при-
меняемым кодом. Кодирующие диски своими краями входят в
156
Таблица 3.2. Перевод цифровых значений десятичных чисел в натуральный и
зеркальный код Грея
Десятичное число— Код Грея Десятичное число Код Грея
натуральный зеркальный натуральный зеркальный
0 000 100 4 НО 010
1 001 101 5 111 он
2 ОН 111 6 101 001
3 010 i но 7 100 000
зазоры магнитных головок. Диски закреплены на валу, угловое
положение которого пропорционально высоте полета ВС. Если
магнитная головка совмещена с прорезью какого-либо диска, то с
выхода преобразователя снимается «1» в соответствующем разряде
определенной декады. Если же магнитная головка совмещается с
выступом, то снимается «О». При изменении высоты возможно
возникновение ошибок за счет того, что опрос магнитных головок
может произойти в тот момент времени, когда магнитная головка
попадает на грань между выступом и зазором. В этом случае
равновероятно возникновение как символа «1», так и символа «О».
При этом наибольшие ошибки возникают при использовании нату-
рального двоично-десятичного кода. Так, например, при переходе
от числа 3 (011) к числу 4 (100) неопределенность может возникнуть
в любом из трех разрядов, т.е. могут возникнуть любые из
следующих комбинаций: 111 (7), 001 (1), 010 (2) и т.д. При
использовании кода Грея любые соседние числа различаются между
собой только в одном разряде и поэтому при переходе от одного
числа к другому состояние неопределенности возникает только в
одном разряде, что приведет к тому, что сохранится предыдущее
число или будет сформирована комбинация, соответствующая со-
седнему новому числу. Для предыдущего примера сохранится число
3 (010) или будет сформировано число 4 (НО).
Порядок построения рефлексного кода зависит от того, какие
числа передаются в соседних декадах-четные или нечетные. Если в
соседней декаде высшего порядка записано четное число, то в
предыдущей декаде низшего порядка число записывается натураль-
ным кодом Грея. Если в декаде высшего порядка записано нечетное
число, то в декаде низшего порядка число записывается зеркальным
кодом Грея.
Для передачи рефлексного кода Грея используются трехразряд-
ные декады D, А и В, для передачи специального трехразрядного
кода-декада С. Цены градаций в каждой из декад установлены
следующие: декада D-32000, декада Л-4000, декада В-500, декада
С-100 футов. Нумерация разрядов в декадах принята обратная, т. е.
£>4-первый разряд, £>2-второй разряд, -третий разряд и т.д.
157
Отсчет высоты ведется от так на-
зываемой остаточной высоты -
1200 футов. Разряд 1)г в настоя-
щее время не используется, так
как в соответствии с нормами
ИКАО передача значений высот
более 30480 м не предусматри-
вается. Принцип построения спе-
циального трехразрядного реф-
лексного кода, передаваемого де-
кадой С, такой же, как и кода
Грея (табл. 3.3).
код используется при отсутствии
Таблица 3.3. Специальный трехразряд-
ный рефлексный код
Высота, футы Натуральный код Зеркальный код
0 .. . 100 001 100
100 . ..200 он по
200 . .. 300 010 010
300 . ..400 по 011
400 . .. 500 100 001
’ В этой таблице натуральный
записи в соседней старшей декаде или при записи в этой декаде
четного числа. Если необходимо передать значения высоты больше
500 футов, начинается запись в ближайшую старшую декаду,
имеющую цену градаций 500 футов, и продолжается запись в
низшую декаду натуральным или зеркальным кодом в зависимости
от того, четное или нечетное число записывается в ближайшую
старшую декаду.
Для примера рассмотрим структуру ответного сигнала ВС,
летящего на высоте 98650 футов. С учетом остаточной высоты 1200
футов передаваемое на землю значение высоты будет равно 99 850.
Число градаций старшей декады D определяют делением высоты на
цену градации декады D: 99 850:32000 = 3 (остаток 3850). Число 3
записывается в виде натурального кода Грея: 010, т. е. = 0,
D2 = 1, D4 = 0.
Число градаций декады А определяют делением полученного
остатка на цену градации: 3850:4000 = 0 (остаток 3850). Поскольку
в предыдущей декаде было записано нечетное число, запись нуля
проводится зеркальным кодом Грея: = 1, А2 = 0 и А4 = 0.
Декаду В определяют следующим образом: 3850:500 = 7 (оста-
ток 350). Число 7 записывается натуральным кодом Грея: = 1,
В2 = 0, В4 = 0.
Декада С записывается специальным рефлексным кодом в зер-
кальном отображении в соответствии с табл. 3.3: Сг =0, С2 = 1,
С3 = 1.
Методика пересчета десятичной формы представления числа в
форму, соответствующую коду Гиллхэма, и наоборот представляет
определенные трудности. Поэтому ИКАО рекомендует использо-
вать для этих целей специальные таблицы. В таблице указывают
значения барометрических высот с градациями через 100 футов и
соответствующие им комбинации нулей и единиц на информацион-
ных позициях А, В, С и D. Отсчет высоты производится от —1000 до
127650 футов.
Предполагается, что в скором времени будет осуществлен пере-
ход на метрическую систему измерения высоты.
158
Кроме номера рейса, высоты и сигнала идентификации SPI
нормы ИКАО предусматривают передачу некоторых специальных
сообщений. При запросах в режимах А или В ответный код 7700
обозначает, что ВС находится в аварийном состоянии. При запро-
сах в тех же режимах ответный код 7600 обозначает нарушение
радиосвязи, а код 7500 обеспечивает идентификацию ВС, экипаж
которого подвергается незаконному вмешательству. До 1976 г.
вместо кода 7500 использовался код 3100. Коды 0000 и 2000
зарезервированы для использования в соответствии с региональ-
ными соглашениями.
3.5. Нормы СЭВ на характеристики радиолокаторов
Нормы СЭВ на параметры посадочных РЛ. Требования к поса-
дочным РЛ, предназначенным для использования в СССР и стра-
нах-членах СЭВ, устанавливаются соответствующими отраслевы-
ми стандартами, стандартами Совета Экономической Взаимопомо-
щи, правилами технической эксплуатации наземных средств радиотех-
нического обеспечения полетов ВС гражданской авиации и техничес-
кой документацией на конкретные образцы посадочных РЛ.
С 1982 г. в Советском Союзе начал применяться стандарт СЭВ
(СТ СЭВ 1824-79), действие которого распространяется на вновь
разрабатываемые наземные посадочные РЛ систем УВД. Стандарт
устанавливает требования к основным тактическим, эксплуатацион-
ным и техническим характеристикам посадочных РЛ. Требования
стандарта в основном соответствуют международным рекоменда-
циям, но для некоторых параметров вводятся существенные уточне-
ния или устанавливаются новые количественные соотношения.
Согласно стандарту СЭВ зона обнаружения посадочного РЛ по
самолетам с эффективной отражающей поверхностью 10 м2 харак-
теризуется следующими параметрами: максимальная дальность
действия 25 км, сектор по азимуту 30°, сектор по углу места
— 1... 8°. При включенной системе СДЦ дальность обнаружения ВС
может быть уменьшена до 17 км. Перечисленные выше значения
параметров должны выполняться при метеоосадках с интенсив-
ностью 4 мм/ч. Вероятность обнаружения целей установлена рав-
ной 0,9 при вероятности ложных тревог 10~3.
Максимальная допустимая погрешность (по уровню Зо) опре-
деления положения ВС при визуальном съеме информации уста-
новлена такой же, как и в нормах ИКАО. При инструментальном
съеме координат ВС средняя квадратическая ошибка не должна
превосходить по дальности 20 м, по азимуту 8', по углу места 6'.
Разрешающая способность по ВС с эффективной отражающей
поверхностью 10 м2 на дальности до 17 км устанавливается такой
же, как и в требованиях ИКАО. Это же относится и к периоду
обновления информации.
159
Стандарт СЭВ в отличие от рекомендаций ИКАО устанавливает
нормы на параметры помехозащищенности посадочного РЛ: коэф-
фициент подавления отражений от местных предметов > 25 дБ,
коэффициент подавления отражений от метеообразований > 18 дБ,
коэффициент подпомеховой видимости >17 дБ. Минимальная
дальность сопровождения ВС, находящегося на глиссаде, не более
1 км. При смене направления посадки ВС должна быть предусмот-
рена возможность изменения ориентации антенн курса и глиссады
на 180°. Время изменения ориентации не должно превосходить 3 с.
Установлены нормы на показатели надежности: среднее время
наработки на отказ не должно быть менее 500 ч, время перехода на
резервный комплект оборудования менее 5 с, время перехода на
резервное электропитание менее 10 с. Технический ресурс посадоч-
ного РЛ должен составлять не менее 80000 ч в течение 10 лет
эксплуатации и хранения на складах.
Кроме тактических и эксплуатационных параметров, стандарт
СЭВ регламентирует некоторые технические характеристики поса-
дочных РЛ. Длина волны, на которой работает РЛ, должна выби-
раться в диапазоне 3 см. Указывается на необходимость введения
двух режимов работы - первичной радиолокации с СДЦ и без СДЦ.
Регламентируются встроенные и выносные средства контроля,
устройства сопряжения с аппаратурой КДП, устройства трансляции
радиолокационной информации и т. д. Указываются климатические
условия и параметры внешней среды, при которых должно быть
обеспечено нормальное функционирование посадочных РЛ.
Нормы СЭВ на параметры обзорных РЛ и РЛК. В соответствии
со стандартами СЭВ СТ СЭВ 2772-80 и СТ СЭВ 3414-81 обзорные
РЛ и РЛК систем УВД в зависимости от их максимальной даль-
ности действия подразделяются на следующие типы:
трассовые РЛ и РЛК варианта А с дальностью действия свыше
400 км;
трассовые РЛ и РЛК варианта Б с дальностью действия
250... 400 км;
аэродромные РЛ и РЛК варианта В1 с дальностью действия
160...250 км;
аэродромные РЛ и РЛК варианта В2 с дальностью действия
100... 160 км.
Радиолокационный комплекс в отличие от обзорного РЛ со-
стоит из ПРЛ, ВРЛ, АПОИ и аппаратуры передачи радиолокацион-
ных данных (АПРД).
Основные характеристики обзорных РЛ и РЛК должны соответ-
ствовать параметрам, указанным в табл. 3.4.
Нормы на параметры зоны обнаружения ПРЛ установлены при
вероятности обнаружения не менее 0,9 для аэродромных РЛС и не
менее 0,8 для трассовых. Вероятность ложных тревог при этом
должна быть не хуже 10“б. Эффективная отражающая поверхность
целей принимается равной 5 м2. Разрешающая способность по
160
Таблица 3.4. Нормы СЭВ на параметры обзорных РЛ н РЛК, предназначенных для
автономной работы н в составе АС УВД
Параметр РЛ и РЛК
аэродромные трассовые
Вариант
В2 В1 Б А
Дальность действия, км:
максимальная '' 100 160 250 400
минимальная 1,5 1,5 5 5
Максимальная высота обнаружения, км 7 12 20 20
Максимальный угол обзора в вертикальной плоскости, 45 45 45 45
градус
Максимальная дальность действия, км, на высоте полета 70 90 НО 120
1000 м
Максимальная дальность действия, км. на высоте поле- 100 160 200 240
та 4500 м
Период обновления информации по первичному каналу, с 4 6 12 12
Разрешающая способность по дальности для первичного 350 500 1000 1000
канала, м Разрешающая способность по азимуту для первичного
2 2 1,5 1,5
канала, градус Средняя квадратическая погрешность измерения даль-
350 500 1000 1000
ности по индикатору для первичного канала, м
Средняя квадратическая погрешность измерения азиму- 1 1 1 I
та по индикатору для первичного канала, градус
Средняя квадратическая погрешность измерения даль-
ности РЛК на выходе АПОИ, м:
для первичного канала 150 200 300 300
» вторичного » Средняя квадратическая погрешность измерения азиму- 250 250 250 250
та РЛК на выходе АПОИ, градус:
для первичного канала 0,2 0,2 0,25 0,25
» вторичного » 0,25 0,25 0,25 0.25
Диапазон рабочих волн ПРЛ, см 23 или 10 23 или 10 23 23
азимуту измеряется на дальности, соответствующей интервалу
0,4...0,6 максимальной дальности действия РЛ.
Вероятность получения координатной и дополнительной инфор-
мации вторичного канала радиолокационных комплексов устанав-
ливается равной 0,95. При этом число ложных тревог за один обзор
при любых метеоусловиях не должно превышать 10.
Помехозащищенность первичных каналов обзорных РЛ всех
типов регламентируется стандартами СЭВ путем введения ограни-
чений на подпомеховую видимость и конфигурацию амплитудно-
скоростной характеристики системы СДЦ. Коэффициент подпоме-
6 Зак. 1375 161
ховой видимости должен быть не хуже 24 дБ. Неравномерность
амплитудно-скоростной характеристики в диапазоне скоростей
50... 3000 км/ч должна быть не более 10 дБ, за исключением перво-
го провала скоростной характеристики, в котором допускается
уменьшение полезного сигнала на 14 дБ.
Требования к эксплуатационным характеристикам обзорных РЛ
формируются следующим образом: РЛ должен обеспечивать время
наработки на отказ не менее 500 ч при времени восстановления
30 мин; технический ресурс обзорных РЛ должен составлять не
менее 80000 ч в течение 10 лет эксплуатации и хранения на
складах.
Стандартом СТ СЭВ 3414-81 устанавливается ряд дополнитель-
ных требований к первичному и вторичному каналам радиолока-
ционных комплексов. Вероятность искажения дополнительной
информации ВРЛ должна быть не более 10“3, вероятность дробле-
ния пакетов для ПРЛ не более 0,04, для вторичного канала не более-
0,05. Вероятность объединения координатной и дополнительной
информации от одного воздушного судна должна быть не менее 0,9.
Кроме норм на тактические и эксплуатационные параметры, в
стандартах СЭВ содержатся также требования на технические,
климатические, эргономические и конструкторские характеристи-
ки РЛ.
Нормы СЭВ на параметры РЛ обзора летного поля. Радиолока-
торы обзора летного поля (РЛ ОЛП) предназначены для обнаруже-
ния движущихся и неподвижных ВС, спецавтотранспорта и других
объектов, находящихся на ВПП, рулежных дорожках с твердым
покрытием, с целью обеспечения безопасности передвижения ВС во
время старта, руления и посадки в условиях горизонтальной ви-
димости не менее 50 м. Основные параметры РЛ ОЛП регламенти-
руются стандартом СТ СЭВ 4760-84, срок начала применения
которого в Советстком Союзе установлен с 1986 г. В соответствии
со стандартом параметры РЛ ОЛП определяются следующими
предельными значениями:
минимальная дальность действия у поверхности земли по цели с
эффективной отражающей поверхностью 2 м2 должна быть не
более 100 м при вероятности правильного обнаружения не менее
0,9;
максимальная дальность действия у поверхности земли по той
же цели и с той же вероятностью обнаружения при интенсивности
осадков до 10 мм/ч должна быть не менее 4 км;
разрешающая способность по дальности при использовании
ИКО кругового обзора с масштабом 2 км должна быть не более
15 м на краю экрана;
разрешающая способность по азимуту при использовании
такого же индикатора и при тех же условиях наблюдения не должна
превосходить 16 м;
период обновления информации не более 1 с.
162
Требования к эксплуатационным характеристикам:
наработка на отказ не менее 1000 ч;
технический ресурс не менее 80 000 ч;
средний срок сохраняемости не менее 3650 ч;
среднее время восстановления без учета времени, необходимого
для прибытия обслуживающего персонала на объект, и без учета
времени доставки комплектующих изделий не более 0,5 ч.
В стандарте сформулированы также технические требования к
РЛ ОЛП. Указывается, что высота подвеса антенны над уровнем
земли должна быть не менее 30 м. Поляризация излучаемых сигна-
лов должна плавно регулироваться от линейной через эллиптичес-
кую до круговой. Выключение сверхвысокочастотного излучения
должно производиться не менее чем в трех произвольных заранее
выбранных секторах обзора с угловой дискретностью не более 6°.
Информация должна транслироваться по кабельной линии на
удаления до 3 км и по радиолинии на удаления до 5 км. Индика -
торы КДП должны обеспечивать работу при круговом обзоре и
обзоре со смещенным центром развертки до 2/3 радиуса рабочего
поля индикатора. Приводятся также требования к климатическим,
эргономическим и конструкторским параметрам РЛ.
Нормы СЭВ на параметры МРЛ. В соответствии со стандартом
СТ СЭВ 3202-81 наземные некогерентные МРЛ в зависимости от
выполняемых функций подразделяют на следующие типы:
для обнаружения зон облаков и осадков с целью оповещения об
опасных явлениях, связанных с ними (тип 1);
для измерения количества и интенсивности атмосферных осад-
ков и контроля за результатами активных воздействий на градовые,
грозовые и дождевые облака (тип 2);
для наблюдения за недождевой облачностью и измерения ее
границ, а также для контроля за результатами активных воздейст-
вий на недождевые облака (тип 3).
Основные параметры каждого типа МРЛ должны соответство-
вать данным, приведенным в табл. 3.5.
В приведенной таблице все значения параметров, характеризую-
щих точность МРЛ, даны для 99,7% числа измерений. Эффектив-
ный радиус обнаружения метеорологических целей представляет
собой расстояние, на котором метеоцель обнаруживается МРЛ с
вероятностью не менее 0,95 при отсутствии ослабления радиоволн в
атмосфере между МРЛ и метеоцелью. Под метеорологическим
потенциалом (ПМ) понимается параметр, характеризующий эффек-
тивность МРЛ при обнаружении метеорологических целей:
ПМ = я3
45lg2 Pnp.minV 2’
где ПМ имеет размерность м-1, если ДНА антенны ® и <р по
половинной мощности выражается в градусах; длина волны Х-в
6* 163
(3.53)
точкам
метрах;
Таблица 3.5. Нормы СЭВ на параметры МРЛ
Параметр Значение параметра для МРЛ . типов
1 2 3
Эффективный радиус обнаружения, км 150 ...250 70... 120 30 ...70
Минимальное значение метеорологического потен- 270 264 280
циала, дБ/м
Диапазон длин волн, см 3...11 3...11 0,8 ...2 (исклю- чая X = = 1,35 см)
Предельное отклонение линии развертки, градус:
индикаторов МРЛ от оси ДНА 3 3 2
выносных индикаторов от оси ДНА 3,5 3,5 2,5
Предельная относительная погрешность измерения 1 1 0,5
наклонной дальности, % от масштаба дальности
Зона обзора по азимуту, градус 360 360 360
Скорость обзора по азимуту, с-1 0,5 ...36 0,5 ...60 0,5 ...36
Зона обзора по углу места, градус -1...+93 -1... + 93 -1...+93
Длительность одного цикла обзора по углу места (подъем и опускание антенны), с 18...80 18 ...80 18... 80
Предельная погрешность измерения мощности отра- ±3 ±3 ±3
женных сигналов, дБ
Диапазон измерения мощности отраженных сигна- 100 100 70
лов, дБ Ширина ДНА, градус
0,5 ...2 0,5... 1,5 0,2 ...0,5
Уровень боковых лепестков, дБ -23 -23 -23
Длительность зондирующего импульса, мкс 1...5 1...4 0,1... 1
Динамический диапазон приемного устройства, дБ 70 70 70
коэффициент усиления антенны G0-b относительных единицах; мощность
Ри и Pnp.min-B ваттах; скорость света с-в метрах в секунду; длительность
импульсов ти- в секундах.
При регламентации диапазона волн, в котором могут работать
МРЛ третьего типа, была исключена волна X = 1,35 см. Объясняет-
ся это тем, что волна 1,35 см является резонансной для водяного
пара.
В общих технических нормах на МРЛ указывается, что наработ-
ка на отказ аппаратуры МРЛ должна быть не менее 300 ч. Средний
ресурс до первого капитального ремонта должен составлять
20 000 ч в течение 5 лет с учетом времени хранения на складе
и транспортирования. Продолжительность непрерывной работы
МРЛ типов 1 и 3 должна быть не менее 24 ч при продолжитель-
ности годовой работы не менее 3500 ч. Для МРЛ типа 2 время
непрерывной работы должно быть не менее 72 ч при продолжитель-
ности годовой работы не менее 2000 ч.
В общих технических требованиях указывается также на не-
обходимость введения допускового контроля метеорологического
164
потенциала, измерения мощности отраженных сигналов, фотореги-
страции изображений с экранов индикаторов.
Нормы СЭВ на параметры ВРЛ. Принятый в 1979 г. стандарт СТ
СЭВ 1823-79 распространяется на системы вторичной радиолока-
ции, предназначенные для УВД и посадкой ВС, стран-членов СЭВ.
Согласно этому стандарту системы вторичной радиолокации долж-
ны обеспечивать:
определение координат ВС, оборудованных ответчиками;
определение местоположения ВС относительно посадочного РЛ
при наличии в нем вторичного канала;
получение информации о высоте полета, бортовом номере,
запасе топлива, об аварийной ситуации, выпуске шасси и о векторе
скорости.
Поскольку встроенные вторичные каналы посадочных РЛ не
получили широкого распространения в гражданской авиации, ниже
будет рассматриваться материал, относящийся только к автоном-
ным или встроенным вторичным каналам обзорных РЛ.
Вторичные обзорные РЛ подразделяются на аэродромные, аэро-
узловые и трассовые. Аэродромный ВРЛ должен иметь дальность
действия до 120 км и обеспечивать работу системы вторичной
радиолокации в зоне одного аэродрома. Аэроузловой ВРЛ должен
иметь дальность действия до 200 км и обеспечивать работу системы
вторичной радиолокации в зоне нескольких аэродромов. Трассовые
ВРЛ должны иметь дальность действия до 400 км и обеспечивать
работу систем вторичной радиолокации при полетах ВС вне зон
ответственности аэродромов и аэроузлов.
Зона обзора по углу места всех типов обзорных ВРЛ должна
лежать в пределах 0,5...45°.’ Минимальная дальность действия не
более 2 км. Указанные параметры зоны обзора соответствуют
вероятности получения достоверной дополнительной информации,
равной 0,9 для всех случаев, когда два ВС находятся на одном
азимуте с расстоянием между ними 4...50 км и интенсивность
потока сигналов запроса не более 150 в секунду. Та же вероятность
0,9 должна сохраняться для случая, когда между ВС, находящимися
на одном азимуте, расстояние будет больше 50 км, а интенсивность
потока запросных сигналов не будет превосходить 450 в секунду.
Точность определения координат целей по дальности и азимуту
стандартом не устанавливается. Исключением является требова-
ние обеспечения допустимого рассовмещения угловых положений
электрических осей антенн ВРЛ и ПРЛ в горизонтальной плоскости.
Максимальная ошибка рассовмещения не должна быть более 8' при
встроенном и 30' при автономном варианте. При этом предполага-
ется, что координаты целей будут определяться в основном с
помощью ПРЛ.
Разрешающая способность обзорного ВРЛ должна быть не хуже
1 км по дальности и 1,2 ширины ДНА по азимуту. Ширина ДН
запросной антенны в горизонтальной плоскости должна быть равна
. 165
2,5° по уровню половинной мощности; ее боковые лепестки должны
быть, по крайней мере, на 22 дБ ниже максимума основного
лепестка. Сигналы боковых лепестков должны подавляться как по
запросу, так и по ответу. Подавление по ответу должно произво-
диться в динамическом диапазоне не менее 70 дБ. Чувствительность
приемного устройства РЛ при отношении сигнал/шум, равном
нулю, должна быть не хуже 122 дБ/Вт.
Несущая частота сигналов запроса и сигналов подавления бо-
ковых лепестков должна быть равна (1030 + 0,2) МГц с исполь-
зованием вертикальной поляризации излучаемых радиоволн. Пре-
дусматривается также применение частот (835 + 0,3) МГц, (837,5 ±
+ 0,3) МГц и (840 + 0,3) МГц с горизонтальной поляризацией.
Несущая частота сигналов ответа должна быть равна (1090 +
+ 3) МГц с вертикальной поляризацией. Предусматривается воз-
можность использования одной из следующих несущих частот:
(730 ± 1,8) МГц, (740 ± 1,8) МГц, (750 ± 1,8) МГц с горизонталь-
ной поляризацией. Для предотвращения излишних запусков ответ-
чиков и уменьшения числа несинхронных ответов эффективная
излучаемая импульсная мощность запросных импульсов не должна
превышать 50 дБ по отношению к 1 Вт на частоте 1030 МГц и
72 дБ по отношению к 1 Вт на частотах 835, 840 и 837,5 МГц. У
вторичных РЛ, дальность действия которых по техническим усло-
виям меньше 400 км, эффективная излучаемая максимальная мощ-
ность должна быть соответственно уменьшена. Под эффективной
излучаемой мощностью понимается произведение импульсной
мощности передатчика на коэффициент усиления антенны за выче-
том потерь в высокочастотном тракте.
Максимальная частота повторения запросных сигналов должна
составлять 500 Гц. Для предотвращения излишних запусков ответ-
чиков необходимо устанавливать минимально возможную частоту
повторения запросов, обеспечивающую заданную вероятность
получения достоверной дополнительной информации с учетом ско-
рости вращения и ширины диаграммы направленности антенны.
В зависимости от конкретного назначения и использования в
системах УВД у обзорных ВРЛ предусматриваются режимы работы
УВД и режимы RBS (Radar Beacon System). Для любого режима
сигнал запроса обзорного ВРЛ должен состоять из двух запросных
импульсов и Р3 и импульса подавления Р2, отстоящего от
импульса Р1 на (2 + 0,15) мкс. Длительность всех импульсов долж-
на быть равна (0,8 + 0,1) мкс. Интервалы между импульсами Р3 и
Р3 определяют коды запросов, характеристики которых приведены
в табл. 3.6. Для ВС гражданской авиации на запросы кодами ЗКЗ
допускается в некоторых специализированных системах УВД отсут-
ствие ответных сигналов.
Для подавления сигналов боковых лепестков по запросу ампли-
туда импульса Р2 должна быть не менее чем на 9 дБ меньше
амплитуды импульса Р3 в пределах основного луча ДН запросной
166
Координатная част
Информационная часть
Координатный иод Ключедой код Информационная посылка Поffторная информационная посылка
PKj...PK3 РКЦ... РКП3 РИГ..РИго РИГ..РИго
Рис. 3.8. Структура ответного сигнала на запросы в режимах УВД
антенны и не менее амплитуды импульса вне пределов основного
луча. Амплитуда импульса Р3 не должна отличаться от амплитуды
импульса более чем на 1 дБ.
Временная структура й параметры ответных сигналов при рабо-
те станции в режимах RBS соответствуют нормам ИКАО. При
работе РЛ в режимах УВД структура ответных сигналов содержит
координатный код, ключевой код, информационную посылку и
повторную информационную посылку (рис. 3.8). Координатные
сигналы состоят из двух импульсов PKj и РК3 длительностью
(0,8 + 0,2) мкс с кодовыми интервалами 14, 11, 18 и 23 мкс для
ответов на запросы ЗК1, ЗК2, ЗКЗ и ЗК4 соответственно. При
передаче сигналов «Бедствие» между импульсами PKj и РК3
передается дополнительный импульс РК2. Он отстоит от импульса
РК3 на (6 ± 0,2) мкс. *
Стандартом предусмотрена возможность передачи специаль-
ного сигнала опознавания местоположения ВС (по аналогии с
импульсом SPI в режиме RBS). Для этого на пульте управления
ответчика на 15...30 с включается режим опознавания и на землю
при любом из четырех запросов УВД посылается координатный
код ОК6. Интервал между импульсами РКХ и РК3 в этом случае
Координатный, код
Ключ номера
Информационные импульсы
\РК] ПРК2 П^з
I J&H/y
~\РКИ, ПРЩ РКИ3Г
I декада
к
tp 2р Зр
PH/
РИ2 РИ3
/Умнс
8,5мн с
8мнс
12МКС
Умке Умнс Умнс У мне
Координатный код
Ключ Высоты
nwi ПРРг
1
I \DMKC
Рк3
pkhj г\Ркн2
Информационные импульсы
х ._________л____________
РКИз I декада
' Тр 7 2р Зр
РИ2 РИ3
Имнс
1У-МКС
8мнс
вмкс Умнс Умнс Умнс Умке
t
t
Рис. 3.9. Взаимное расположение импульсов координатных и информационных
сигналов:
а, б-ответы на запрос 3K1 и 3K2
167
Таблица 3.6. Параметры запросных кодов (СТ СЭВ 1823 79)
Режим Код -запроса Кодовый интервал, мкс Информационное содержание ответных сигналов
ЗК1 9,4 ± 0,2 Индивидуальный номер ВС (инфор- мационное слово № 1)
ЗК2 14 ± 0,2 Высота полета и запас топлива (ин- формационное слово № 2)
УВД ЗКЗ 23 ± 0,2 Вектор скорости (информационное слово № 3)
ЗК4 19 ± 0,2 Только сигналы координатной от- метки
RBS А 8 + 0,2 Код опознавания ВС
С 21 + 0,2 Высота полета
D 25 ± 0,2 Резервный режим
равен 6 мкс. Никакая дополнительная информация на землю при
этом не передается.
Информационные сигналы состоят из трех ключевых и 20
информационных импульсов, обозначаемых соответственно РКИ и
РИ. Интервалы между координатными и ключевыми импульсами,
между самими ключевыми импульсами и между ключевыми им-
пульсами и первыми позициями информационных импульсов
(рис. 3.9) указаны в табл. 3.7.
По содержанию ответной информации запросный режим ЗК1
иногда обозначают индексом БН (бортовой номер), а режим ЗК2-
ТИ (текущая информация).
С помощью информационных импульсов РИ при работе в
режимах БН и ТИ бортовые ответчики передают пятизначный
бортовой номер, абсолютную или относительную барометричес-
кую высоту полета до 30000 или 15000 м с градациями через 10 м,
отрицательные значения абсолютной барометрической высоты от 0
до 300 м, данные о запасе топлива (15 градаций), сигнал бедствия и
признак высоты. Если в бортовом ответчике предусмотрен режим
работы ЗКЗ, то передается информационное слово № 3, содержа-
щее значения аргумента вектора скорости в пределах 0...3600 с
градациями 1° и значения модуля вектора скорости в интервале от 0
Таблица 3.7. Интервалы между импульсами информационных сигналов, мкс
Режим запроса РК3 и РКИ, РКИ, и РКИ2 РКИ2 и РКИ3 РКИ3 и РИ,
ЗК1 ЗК2 ЗКЗ 8,5 + 0,5 . 8 ± 0,2 12 + 0,2 4 ± 0,2 14 + 0,2 8 + 0,2 8 ± 0,2 4 ± 0,2 10 ±0,2 12 + 0,2 4 ±0,2 4 ± 0,2
168
1-й разряд 2~й разряд
9мкс 9 мкс
1-й разряд
*-
9мкс"\ 9 мкс
2-й разряд
*------
//мкс
------¥------
‘/мкс 9мкс
Символы
/п
о'
Сим Воли „О”
9мкс
Рис. 3.10. Фрагмент структуры кода
с активной паузой
t
t
до 3500 км/ч с градациями 10 км/ч.
Для повышения достоверности ин-
формации каждое сообщение пе-
редается дважды в ответ на один
запрос.
Структура ответной информа-
ционной посылки предусматрива-
ет использование режима актив-
ной паузы: импульсы передаются
не только на символ «1», но и на
символ «0». При этом временные
позиции символа «0» сдвинуты
относительно временных позиций
«1» на 4 мкс. Временной интер-
вал, отведенный на передачу каж-
дого разряда двоично-десятичного кода, равен 8 мкс (рис. 3.10).
Излучение сигналов производится младшими разрядами вперед.
Очередность передачи декад аналогичная: сначала передается
младшая первая декада, затем вторая и т.д.
На рис. 3.11,а показан формат информационного слова № 1,
передаваемого в ответ на запрос кодом ЗК1. Передается пятизнач-
ный бортовой номер ВС. Для этого используется натуральный
двоично-десятичный пятидекадный четырехразрядный код. В каж-
дом разряде передается импульс, располагающийся на единичной
или нулевой информационной позиции. Всего в пяти декадах
используется 40 информационных позиций. Поскольку информа-
ционное слово для повышения достоверности передаваемых со-
общений повторяется дважды, вся информационная посылка будет
Декады I II Ш V
Разряды 1 2 а 9 5 В 9 10 11 12 13 19 15 18 17 18 1S 2D
бес разрядов 1 2 9 в 1 2 b 8 1 2 9 8 1 г 9 8 1 2 9 8
вес декад Единицы Десятки Сотни Тысячи Десятки тысяч
Содержание информации Бортовой номер
Декады I И Ш П Г
Разряды 1 2 3 9 5 6 7 8 9 10 11 12 13 19 15 18 17 18 19 2D
Вес разрядов 1 2 9 8 1 2 9 8 1 2 9 8 1 2 1 2 9 8
Вес декад 1есятки четров Сотни метров Единицы километро Десятки 0
Содержание информации • Барометрическая высота н 14 1 Л Залас топлива
Рис. 3.11. Формат информационного слова
169
соответствующие типы АПОИ подразделяют на трассовые вариан-
тов А и Б и аэродромные вариантов В1 и В2. По функциональным
возможностям различают: АПОИ-ПРЛ, АПОИ-ВРЛ и АПОИ-
РЛК для обработки соответственно радиолокационной информа-
ции ПРЛ, ВРЛ и радиолокационной и полетной информации РЛК,
содержащих первичные и вторичные каналы.
Требования к параметрам АПОИ трассовых и аэродромных РЛ
и РЛК мало отличаются друг от друга (табл. 3.9). Исключением
являются минимальная дальность действия (1,5 км для аэродром-
ных и 5 км для трассовых типов АПОИ) и число целей, обрабаты-
ваемых на одном азимуте (30 для аэродромных и 100 для трассовых
типов АПОИ).
Приведенные в табл. 3.9 характеристики обнаружения и точно-
сти справедливы для случая, когда отношение сигнал/шум по
напряжению принято равным 3 для центрального импульса не-
флуктуирующего пакета, состоящего из 12 импульсов на уровне
— 3 дБ. Огибающая пакета при этом аппроксимируется функцией
sin4 х/х4.
Вероятность обнаружения сигналов при заданном отношении
сигнал/шум и заданном числе импульсов в пачке зависит от значе-
Таблица 3.9. Требования к параметрам АПОИ
Параметр Значение параметра
Вероятность обнаружения цели Вероятность ложных тревог по собственным шумам при- емника Вероятность дробления пакетов: для первичного канала » вторичного » Средняя квадратическая погрешность определения координат целей по дальности: для первичного канала в длительностях импульсов » вторичного », м Средняя квадратическая погрешность определения координат целей по азимуту в угловых дискретностях: для первичного канала » вторичного » V Разрешающая способность по дальности: для первичного канала в длительностях импульсов » вторичного » по координатным сигналам, км Разрешающая способность по азимуту в угловых дискрет- ностях: для первичного канала » вторичного » Вероятность потерь правильной полетной информации » искажения полетной информации » объединения координатной и полетной информации Среднее время наработки на отказ, ч » » восстановления, мин Технический ресурс, ч 0.9 10“6 0.04 0,05 0,5 250 1,2 2 1,5 1 6 8 0,03 10“3 0,95 20000 30 80000
172
ний первого и второго пороговых напряжений обнаружителя. По-
этому при измерении вероятности обнаружения сигналов пороги
устанавливаются таким образом, чтобы в соответствии с критерием
Неймана-Пирсона было обеспечено постоянство вероятности лож-
ных тревог 10“ б.
При оценке вероятности дробления пакетов отношение сигнал/
шум устанавливают таким же, как при определении вероятности
обнаружения целей. Дробление пакетов может происходить по
азимуту и по дальности. При выбранном критерии обнаружения к
из т дробление пакета по азимуту происходит при отсутствии более
чем к импульсов на т позициях в пакете. В этом случае возможно
либо раздвоение цели, либо раздвоения цели не происходит, но
погрешность в определении азимута цели составит более Зег, где
о-допустимая средняя квадратическая погрешность определения
азимута цели. Дробление пакета по дальности происходит в том
случае, если пакет импульсов от одной и той же цели обнаруживает-
ся в двух или более дискретах дальности.
При испытаниях вероятность дробления пакета
Рар = («2 + «За)/Иобщ,
где п2 - число отсчетов, в которых от одной цели отмечалось наличие двух
отметок; пза- число отсчетов, в которых координатная информация вы-
давалась с погрешностью более За; ио6щ-общее число отсчетов.
Требования к погрешности определения координат целей регла-
ментируются в предположении, что систематические составляющие
погрешностей учитываются и компенсируются в соответствующих
функциональных узлах РЛК. Средняя квадратическая погрешность
определения координат целей в АПОИ находится эксперименталь-
ным путем.
Число каналов обработки информации в АПОИ зависит от
характера обрабатываемых сигналов. Для ПРЛ должны обрабаты-
ваться сигналы амплитудных каналов и системы СДЦ. Число
одновременно обрабатываемых сигналов не должно быть менее
четырех. Сигналы ВРЛ должны обрабатываться в пяти каналах: два
для ответов по международным нормам, два-для ответов по
стандарту СЭВ и один канал для обработки сигналов SPI.
Кроме указанных выше требований, в стандарте СЭВ приводят-
ся необходимые сведения о характеристиках принимаемых и пере-
даваемых сигналов и методиках измерения их параметров.
Нормы СЭВ иа параметры индикаторов. Параметры индикато-
ров, предназначенных для отображения радиолокационной инфор-
мации, определяются стандартами СТ СЭВ 1820-79 и СТ СЭВ
1821-79. Первый из указанных стандартов распространяется на
индикаторы кругового обзора (ИКО) наземных РЛ. Эти индика-
торы работают в режиме радиально-круговой развертки. Они пре-
образуют аналоговые сигналы РЛ в видимое изображение в поляр-
ных координатах.
173
В зависимости от функционального назначения различают: ИКО
I - индикатор, отображающий только радиолокационную информа-
цию (эхо-сигналы РЛС, координатная сетка меток дальности и
азимуту); ИКО II-индикатор, обеспечивающий наряду с радио-
локационной информацией отображение дополнительной информа-
ции (линий пеленга, курса, маркера, видеокарты). По уровню
допустимой освещенности в плоскости экрана индикатора разли-
чают темновые индикаторы (ИКО-Т), допускающие освещенность
не более 5 лк; яркостные индикаторы (ИКО-Я), допускающие осве-
щенность более 100 лк. Любой из названных индикаторов может
быть монохроматическим или цветным (ИКО-Ц).
В зависимости от принятого метода отображения информации
выделяют;
индикаторы, выполненные на электронно-лучевых трубках с
большим послесвечением (ИКО-Т), обеспечивающие нормальную
работу только в затемненных помещениях;
яркостные запоминающие индикаторы (ИКО-ЯЗ), выполненные
на запоминающих электронно-лучевых трубках с ярким видимым
изображением;
яркостные телевизионные индикаторы (ИКО-ЯТ), выполненные
на кинескопах с предварительным преобразованием радиолока-
ционных сигналов в телевизионные с помощью запоминающих
электронно-лучевых трубок;
яркостные проекционные индикаторы (ИКО-ЯП), выполненные
на проекционных устройствах и проекционных электронно-лучевых
трубках;
темновые матричные (ИКО-ТМ) и яркостные матричные (ИКО-
ЯМ) индикаторы, выполненные на матричных экранах и панелях.
Независимо от типа индикатора к ним предъявляются следую-
щие требования:
рабочий диаметр экрана ИКО должен быть не менее 250 мм;
ИКО должны иметь не менее двух масштабов, отношение
одного масштаба к другому должно быть кратно двум;
должно быть предусмотрено смещение центра развертки в
любую точку экрана на любом масштабе индикатора;
геометрические искажения формы окружности не должны пре-
вышать 3%;
нелинейность развертки на начальном участке, составляющем
5% шкалы дальности, не должна превышать 20%;
нелинейность развертки на всех остальных участках дальности
не должна превышать 3%;
должно обеспечиваться отображение основных и опорных мас-
штабных меток с возможностью выделения опорных меток по
яркости;
разрешающая способность ИКО должна обеспечивать возмож-
ность отображения информации с толщиной линий, не превышаю-
щей 0,4% диаметра экрана индикатора.
174
Геометрические искажения формы окружности
К ^тах------Лшп) jqq
Лпах + ^min
где Rm.M и Amin-максимальные и минимальные значения радиусов окруж-
ности развертки ИКО, измеренные по последней масштабной метке даль-
ности.
Нелинейность развертки N определяется в процентах по фор-
муле:
Ч₽
100,
где Л/;- длина отрезка развертки между двумя основными масштабными
метками, взятая в начале и конце развертки (без учета первой масштабной
метки); А/Ср-длина отрезка развертки между, двумя основными масштаб-
ными метками, взятая в середине развертки.
Величина N вычисляется для А/;, взятых в начале и конце
развертки. За N берется большая из двух вычисленных величин.
Аналогичным образом измеряется нелинейность на начальном
участке развертки. Отличие заключается лишь в том, что метки
дальности здесь формируются искусственным путем с помощью
генераторов стандартных сигналов, генерирующих синусоидальные
колебания частотой 150 или 300 кГц в зависимости от шкалы
дальности и диаметра экрана индикатора.
Разрешающая способность индикатора определяется путем
измерения диаметра пятна на заданной шкале дальности. Диаметр
пятна определяется с помощью микроскопа при нормальной ярко-
сти отметок целей и нормальном уровне внешней освещенности.
Стандарт СТ СЭВ 1821 79 распространяется на индикаторы
воздушной обстановки (ИВО) автоматизированных систем управле-
ния воздушным движением.
Основные характеристики ИВО и их номинальные значения
должны соответствовать следующим данным:
рабочий диаметр экрана не менее 370 мм;
число масштабов дальности не менее 3;
плавное или скачкообразное смещение центра развертки на
радиус экрана с величиной скачков не более 5 мм;
масштабные метки дальности с интервалами 10 и 50 км и метки
азимута через 10 и 30° с раздельной регулировкой яркости;
геометрические искажения окружностей не более 3%;
число видов знаков не менее 60;
максимальное число одновременно отображаемых знаков не
менее 900;
высота знаков 3...6 мм;
погрешность совпадения изображений аналоговой, знаковой и
графической информации не более 2 мм;
средняя наработка на отказ не менее 800 ч.
175
Глава 4. ФУНКЦИОНАЛЬНЫЕ СХЕМЫ РАДИОЛОКАТОРОВ
И РАДИОЛОКАЦИОННЫХ КОМПЛЕКСОВ
А
4.1. Типовая функциональная схема
аэродромного радиолокатора
Функциональную схему аэродромного РЛ целесообразно рас-
смотреть на примере радиолокатора ДРЛ-7СМ, который в настоя-
щее время является самым распространенным в Советском Союзе.
По своим тактико-техническим характеристикам он согласно клас-
сификации СЭВ ближе всего подходит к аэродромным РЛ варианта
В2.
Основное отличие радиолокатора ДРЛ-7СМ от предшествую-
щих модификаций заключается в наличии дополнительного вто-
ричного канала, удовлетворяющего требованиям стандарта СЭВ. С
помощью этого канала диспетчерам предоставляется возможность
получить дополнительную полетную информацию о ВС-номер,
высоту и остаток топлива. Сигналы дополнительной информации
декодируются и отображаются в групповой и индивидуальной
аппаратуре типа «Знак». Для повышения помехозащищенности РЛ
во вторичном канале введена система подавления сигналов боковых
лепестков ДНА по запросу, а в первичном канале-блоки памяти и
очистки от несинхронных помех.
Несмотря на устаревшую элементарную базу, ДРЛ-7СМ обла-
дает хорошими эксплуатационными характеристиками, высокой
надежностью и малой стоимостью. Построение функциональной
схемы этого РЛ и компоновка его узлов являются традиционными
для такого типа РЛ и поэтому представляют интерес как класси-
ческий пример построения РЛ средней мощности.
Основные характеристики, структурная схема и состав оборудо-
вания станции были приведены ранее в гл. 1. Взаимодействие
основных узлов станции можно проследить по функциональной
схеме одного комплекта радиолокатора (рис. 4. L).
При работе РЛ в пассивном режиме импульсы запуска, выра-
батываемые блоком трансляции и запуска, синхронизируют работу
передатчика первичного канала, индикатора кругового обзора,
передатчика вторичного канала (УПАК) и аппаратуры КДП.
Импульс запуска передатчика первичного канала с частотой
повторения 550 Гц поступает на блок подмодулятора, где происхо-
дит его нормирование по длительности и амплитуде. Длительность
импульсов устанавливается равной приблизительно 2 мкс. С выхо-
да подмодулятора импульсы подаются на модулятор, где выраба-
тываются мощные импульсы с напряжением около 20 кВ. Эти
импульсы подаются на магнетронный генератор, который генери-
рует СВЧ-импульсы мощностью 230 кВт. СВЧ-импульсы через
176
антенный переключатель (АП) подаются в антенную систему и
излучаются в эфир.
Для подстройки частоты магнетрона часть мощности СВЧ-им-
пульсов с помощью ненаправленного ответвителя, расположенного
между магнетроном и антенным переключателем, отводится на
систему АПЧ приемника первичного канала. В системе АПЧ
вырабатывается сигнал ошибки, который подается на механизм
подстройки частоты магнетрона.
Отраженные от целей сигналы, принятые антенной системой,
через антенный переключатель подаются в приемный фидерный
тракт. Приемный фидерный тракт включает в себя частотно-разде-
лительное устройство, состоящее из фильтров верхней (ФВЧ) и
нижней (ФНЧ) частот. Фильтры предназначены для селекции сигна-
лов первичного и вторичного каналов, отличающихся по частоте.
Фильтр верхних частот направляет принятые отраженные сигналы
на фидерный переключатель и далее на малошумящий транзи-
сторный усилитель сверхвысоких частот (УСВЧ). Фидерный пере-
ключатель предназначен для защиты приемного устройства от
больших уровней мощности в момент включения передатчика и при
неисправности системы АПЧ.
С выхода УСВЧ усиленные сигналы поступают в приемник
первичного канала. Там они преобразуются в промежуточную
частоту, усиливаются, детектируются амплитудным детектором и
подаются на блок трансляции и запуска, а затем на индикатор и
Рис. 4.1. Функциональная схема одного комплекта радиолокатора ДРЛ-7СМ
177
далее через распределительный щит в составе сигнала трансля-
ции-на КДП. Одновременно пассивные сигналы с выхода прием-
ника поступают в блок памяти и очистки. В режиме очистки этот
блок выполняет функции подавителя несинхронных помех.
Для получения радиально-круговой развертки на экране ИКО и
на выносных индикаторах в приводе вращения антенны устанавлива-
* ются сельсины-датчики угловой информации. Сигналы угловой
информации транслируются на ИКО и КДП. Масштабные метки
дальности генерируются непосредственно в индикаторе. Для созда-
ния азимутальных масштабных меток в приводе антенны с помощью
фотомодуляторов вырабатываются сигналы азимутальных меток 10°
и 30°. Эти сигналы подаются на ИКО. Выработанный индикатором
импульс «Запуск 10°» подается на КДП в составе общего сигнала
трансляции. Сигнал «Метки 30°» также транслируется на КДП.
Работа первичного канала в активном режиме аналогична работе
РЛС в пассивном режиме. Отличие заключается в том, что передат-
чик первичного канала генерирует не одиночный импульс, а кодовую
посылку, представляющую собой два импульса длительностью 1 мкс
с интервалом между импульсами 14 мкс. В приемнике первичного
канала парные отраженные от цели импульсы дешифруются, преоб-
разуются в одиночные импульсы и через блок памяти и очистки и
блок трансляции и запуска подаются, как обычные пассивные сигна-
лы, на ИКО. Для совпадения полученных таким образом отметок
целей первичного канала с отметками целей, получаемых в то же
самое время от наземного приемника ответных сигналов (НПО),
видеосигналы первичного канала в индикаторе подвергаются допол-
нительной задержке.
При работе первичного канала РЛ в активном режиме со входа
передающего устройства вторичного канала снимаются запускаю-
щие импульсы и передатчик вторичного канала не работает.
Работа передатчика первичного канала в активном режиме не
обеспечивает получение дополнительной информации, необходимой
для выносной аппаратуры отображения знаковой информации, и не
имеет подавления сигналов боковых лепестков ДНА по запросу.
Отсутствие системы подавления по запросу отрицательно сказы-
вается на вероятности получения достоверной дополнительной
информации при работе нескольких радиолокаторов в одном
районе ввиду перегрузки бортовых ответчиков. Зона приема сигна-
лов боковыми лепестками в этом случае расширяется до 25 км.
При работе радиолокатора в режиме СДЦ первичным источни-
ком синхронизирующих импульсов является генератор пусковых
импульсов (ГПИ), расположенный в компенсаторе. ГПИ в за-
висимости от режима работы (СДЦ-1, СДЦ-2 или СДЦ-Автомат)
вырабатывает пусковые импульсы с частотой повторения 800,
1075 Гц или череспериодно 800 и 1075 Гц. Эти импульсы подаются
на блок памяти и очистки (БПО) и одновременно на блок трансля-
ции и запуска (БТЗ). В БТЗ из пусковых импульсов компенсатора
178
вырабатываются несколько различных видов синхронизирующих
сигналов. В режиме СДЦ-1 на передатчик первичного канала
подаются запускающие импульсы с частотой 800 Гц, а на индика-
тор, УПАК и ВАРУ НПО-400 Гц. В режиме СДЦ-2-1075 и
537,5 Гц соответственно. В режиме СДЦ-Автомат на передатчик
первичного канала подаются запускающие импульсы с череспериод-
ным изменением частоты 800 и 1075 Гц, а на все остальные
устройства—с частотой 458,7 Гц, т. е. ИКО, УПАК и ВАРУ, а также
выносная аппаратура запускаются один раз за два периода запуска
передатчика первичного канала. Необходимость введения режима
редкого запуска вызвана тем обстоятельством, что в соответствии
со стандартом СЭВ частота запросов вторичного канала РЛ круго-
вого обзора не должна превышать 500 Гц.
Работа передающего устройства первичного канала в режиме
СДЦ аналогична пассивному режиму. Отличие заключается лишь в
изменении частоты повторения и длительности модулирующих и
зондирующих импульсов. Длительность импульсов устанавлива-
ется равной 1 мкс.
Более существенные изменения имеют место в приемном тракте
первичного канала РЛ. Для выделения движущихся целей в
ДРЛ-7СМ используется когерентно-импульсный метод с внутрен-
ней псевдокогерентностью. Реализуется этот метод с помощью двух
дополнительных блоков - фазового и компенсатора. В фазовом
блоке с помощью фазового детектора производится оценка измене-
ния фазы принимаемых сигналов от периода к периоду повторения
импульсов. В качестве опорного напряжения, несущего информа-
цию о фазе зондирующих импульсов, используются колебания
когерентного гетеродина, расположенного в фазовом блоке. Под-
стройка фазы когерентного гетеродина осуществляется с помощью
фазирующего импульса, снимаемого с усилителя промежуточной
частоты системы АПЧ. На систему АПЧ этот импульс поступает с
ненаправленного ответвителя, расположенного в высокочастотном
тракте передатчика первичного канала между магнетронным гене-
ратором и антенным переключателем.
После фазового блока видеоимпульсы, соответствующие не-
подвижным целям, в каждом новом периоде повторения импульсов
будут иметь постоянную амплитуду. Для движущихся целей, сигна-
лы которых в каждом периоде имеют новое значение фазы, видео-
импульсы на выходе фазового блока будут изменяться по ампли-
туде. В компенсаторе, осуществляющем череспериодное вычитание
сигналов, все сигналы, не меняющие свою амплитуду от периода к
периоду, будут уничтожены. Останутся лишь сигналы с переменной
амплитудой, т. е. сигналы движущихся целей.
После компенсатора сигналы движущихся целей поступают на
БПО. Блок памяти и очистки работает синхронно с блоком ком-
пенсатора и представляет собой устройство, выполняющее функции
накопителя сигналов (режим накопления) или компенсации не-
179
синхронных помех (режим подавления). Основной режим работы
БПО-режим накопления. Необходимость этого режима обусловле-
на тем обстоятельством, что запуск индикатора РЛ производится в
два раза реже запуска передатчика. Поэтому-для сохранения инфор-
мации того периода, отображение сигналов которого непосредст-
венно на экране индикатора не производится, приходящие сигналы
запоминаются на время одного периода частого запуска и вос-
производятся затем одновременно с сигналами другого периода
частого запуска.
В тех случаях, когда уровень несинхронных помех превышает
допустимое значение, БПО переключают в режим подавления.
Отличие этого режима от режима накопления заключается в том,
что сигналы после запоминания подаются не на схему сложения, а
на схему совпадения. Несинхронные помехи при этом будут по-
давляться, но эффективность работы системы СДЦ при этом
снижается вследствие ухудшения отношения сигнал/шум и увеличе-
ния вероятности пропуска целей, движущихся со слепыми ско-
ростями.
Кроме накопления и очистки сигналов, БПО выполняет также
функцию объединения пассивного сигнала и сигнала, прошедшего
обработку в фазовом блоке и компенсаторе. Объединение сигналов
производится по последовательному принципу. В первую часть
каждого периода (25 ... 40 км) пропускаются сигналы когерентного
канала, в которых значительно подавлены отражения от местных
предметов. В остальную часть периода частого запуска, когда
отражений от местных предметов практически нет, пропускаются
сигналы амплитудного канала (пассивные сигналы, не прошедшие
обработку в системе СДЦ). Таким образом, режим работы ДРЛ-
7СМ смешанный, реализующий преимущества и когерентного, и
амплитудного методов обработки сигналов.
С выхода БПО сигналы «СДЦ + Пас» подаются на блок
трансляции и запуска, где происходит бланкирование видеосигна-
лов того периода, который не отображается непосредственно на
экране индикатора. Дальнейшее прохождение сигналов аналогично
пассивному режиму РЛ.
Передатчики второго канала РЛ запускаются в том случае, если
первичный канал работает в пассивном режиме или режиме СДЦ. В
состав передающего устройства вторичного канала входят передат-
чик запроса и передатчик подавления сигналов боковых лепестков,
установленные в УПАК. Передатчик запроса генерирует СВЧ-им-
пульсы Рх и Р3 с кодовыми интервалами, соответствующими
запросу бортового номера (БН) или текущей информации (ТИ).
Передатчик подавления генерирует СВЧ-импульсы Р2. Запуск пере-
датчиков УПАК производится с помощью синхронизирующих
импульсов, вырабатываемых в блоке трансляции и запуска. Чередова-
ние кодов БН и ТИ производится сигналами переключения запросных
кодов (ПЗК), поступающими с КДП от аппаратуры «Знак».
180
Рис. 4.2. Упрощенная функциональная схема антенно-фидерной системы радиоло-
катора ДРЛ-7СМ
СВЧ-сигналы передатчиков запроса и подавления с импульсной
мощностью 800 Вт через фидерный тракт вторичного канала по-
даются на облучатели основной антенны (рис. 4.2). Несущая часто-
та запросных сигналов соответствует международным требова-
ниям, т.е. равна 1030 МГц. Импульсы Pt и Р3 поступают на
основной облучатель, но в отличие от СВЧ-импульсов первичного
передатчика (Прд) возбуждают в облучателе волну с вертикальной
поляризацией. Импульс Р2 подается на два дополнительных облу-
чателя, формирующих вместе с параболическим отражателем ДНА
подавления сигналов боковых лепестков по запросу.
Ответные сигналы принимаются по двум каналам: основному и
дополнительному. Ответные сигналы самолетных ответчиков пере-
даются на несущих частотах, регламентированных стандартами
СЭВ для внутрисоюзных полетов. В основном канале сигналы,
принятые остронаправленной антенной, через вращающийся пере-
ход, антенный переключатель, фильтр нижних частот и аттенюатор
поступают на основной канал НПО. В дополнительном канале
(канале подавления) сигналы принимаются щелевой антенной и
через вращающийся переход (ВП) подаются непосредственно на
вход канала подавления НПО.
В приемнике (Прм) происходит усиление, преобразование, де-
тектирование и сравнение амплитуд сигналов обоих каналов с
181
целью подавления сигналов, принятых боковыми лепестками ДН
основной антенны. Усиленные видеосигналы подаются на блок БТЗ,
в котором сигналы усиливаются' до уровня, необходимого для
трансляции их на КДП по кабелю. Кроме того, в блоке БТЗ
происходит декодирование координатного кода ответных сигналов
для воспроизведения отметок активных целей непосредственно на
ИКО. Эти же декодированные сигналы, несущие информацию о
координатах целей, оборудованных ответчиками, подаются на сме-
ситель распределительного щита, где могут быть по команде с
КДП включены в состав сигнала трансляции на выносное оборудо-
вание отображения информации.
4.2. Типовая функциональная схема
трассового радиолокатора
Существует несколько вариантов построения структурных и
функциональных схем трассовых РЛ. Наиболее характерными осо-
бенностями этих схем является двухкомплектное двухканальное
построение схемы с одновременной работой двух комплектов на
разных несущих частотах.
Двухкомплектное построение РЛ предполагает, что имеются два
идентичных комплекта аппаратуры, включающие в себя отдельные
передающие и приемные устройства и работающие на общую
антенную систему. Выход из строя одного из комплектов не
вызывает отказ в работе всего РЛ, а лишь несколько уменьшает его
максимальную дальность. В некоторых случаях предусматривается
нормальная работа с одним комплектом. Второй комплект в это
время находится в нагруженном резерве. У некоторых радиоло-
каторов предусматривается третий резервный комплект аппара-
туры, который в случае необходимости в так называемом фор-
сированном режиме может работать одновременно с первым и
вторым комплектами.
Для устранения перегрузки волноводных трактов, обеспечения
возможности введения особых режимов работы каждого из комп-
лектов и для уменьшения флуктуаций результирующих сигна-
лов каждый комплект РЛ работает на своей несущей частоте
wmfz-
Разнос частот между комплектами обычно составляет 40... 60 МГц.
Объединение и разделение сигналов отдельных комплектов про-
изводятся с помощью волноводных мостов или избирательных
фильтров.
Для устранения нежелательных взаимных влияний сигналов,
излучаемых и принимаемых на разных несущих частотах, в радио-
локаторах предусмотрен небольшой временной сдвиг зондирующих
импульсов одного комплекта относительно импульсов другого
комплекта. Этот сдвиг обычно равен 4...8 мкс. В приемном тракте
182
при суммировании сигналов разных комплектов осуществляется
соответствующая компенсация временного сдвига.
Двухканальный принцип построения РЛ означает, что ДН та-
кого РЛ в вертикальной плоскости имеет два лепестка. Нижний
лепесток формируется облучателем основного канала, а верхний-
дополнительным каналом, предназначенным для индикации вы-
сотных целей. Такое построение РЛ позволяет гибко изменять его
зону обзора в зависимости от помеховой ситуации и в какой-то
мере оптимизировать конфигурацию зоны обзора, добиваясь не-
обходимой вероятности обнаружения целей, расположенных на
нижних и верхних эшелонах, при достаточно низких энергетических
затратах.
Основной канал работает, как правило, на передачу и на прием
излучаемых сигналов. Дополнительный канал работает только на
прием. В этом случае принимается та часть энергии, которая
излучается основным каналом в секторе “угла места дополнитель-
ного канала.
Комбинируя сигналы, принимаемые основным и дополнитель-
ным каналами, по жесткой или гибкой программе, можно оптими-
зировать конфигурацию зоны обнаружения РЛ.
У некоторых РЛ переключение каналов производится автома-
тически по адаптивной программе в зависимости от помеховой
ситуации. При этом вся зона разбивается на большое число более
мелких участков и для каждого участка автоматически выбирается
определенное соотношение сигналов верхнего и нижнего каналов.
Такой принцип формирования зоны обнаружения используется в
радиолокаторах ATCR-22, ATCR-44, «Скала-МПР», «Скала-МПА».
Важным преимуществом работы РЛ в двухкомплектном режиме
с разносом частот является увеличение дальности действия вслед-
ствие уменьшения влияния флуктуаций эффективной отражающей
площади целей.
Действительно, отношение сигнал/шум, необходимое для обес-
печения заданного значения вероятности правильного обнаружения,
различно для флуктуирующих и нефлуктуирующих целей. В общем
случае большинство радиолокационных целей являются флуктуи-
рующими, поскольку их размеры намного превосходят длину вол-
ны, на которой работает РЛ. При этом необходимо иметь в виду,
что для флуктуирующих целей влияние отношения сигнал/шум на
вероятность обнаружения зависит от характера флуктуаций. При
анализе флуктуаций радиолокационных целей обычно рассматрива-
ют четыре наиболее характерных случая.
Случай 1. Распределение амплитуд отраженных сигналов под-
чиняется закону Рэлея:
U ( С2 \
w{V) = — expl - — ,
<у \ 2сг/
где о2-дисперсия амплитуды сигнала.
183
Рис. 4.3. Зависимость вероятности об-
наружения целей от отношения сиг-
нал/шум для различных характеристик
флуктуаций отраженных сигналов
Отраженные сигналы в пачке
полностью коррелированы, от-
сутствует корреляция между сиг-
налами в пачках, принадлежащих
различным периодам обзора про-
странства.
Случай 2. Распределение амп-
литуд отраженных сигналов под-
чиняется закону Рэлея. Отражен-
ные сигналы являются некоррели-
рованными от импульса к им-
пульсу в одной и той же пачке, а
не от обзора к обзору цели.
Случай 3. Корреляция сигна-
лов соответствует первому из рас-
смотренных случаев, но распреде-
ление амплитуд отраженных сиг-
налов соответствует обобщенно-
му закону Рэлея, скорректирован-
ному модифицированной функци-
ей Бесселя первого рода нулевого
порядка.
Случай 4. Корреляция сигна-
лов соответствует второму из рассмотренных случаев, но с распре-
делением амплитуд, соответствующим третьему случаю.
Случай 5. Сигналы, отраженные от целей, не флуктуируют.
Влияние характера флуктуаций отраженных сигналов на от-
ношение сигнал/шум, обеспечивающее определенное значение ве-
роятности правильного обнаружения цели, можно оценить по кри-
вым рис. 4.3. Кривые относятся к пяти указанным случаям флук-
туаций сигналов при интеграции десяти импульсов в пачке и
вероятности ложных тревог КС6. Из рисунка видно, что для
обеспечения одного и того же значения вероятности правильного
обнаружения необходимые значения отношения сигнал/шум будут
иметь наибольшие значения для 1-й и 3-й моделей Сверлинга.
Изменение несущей частоты от импульса к импульсу приводит к
декорреляции флуктуаций импульсов внутри пачки отраженных
сигналов, т. е. к переходу от моделей 1 и 3 к моделям 2 и 4
Сверлинга. Такая декорреляция будет возможна только в том
случае, если разнос между несущими частотами и /2 будет
достаточно большим, чтобы флуктуации отраженных сигналов на
этих частотах были некоррелированы. Условие декорреляции мо-
жет быть записано в виде
fz -f, > c/L.
где с-скорость света; Lфизический размер ВС в линейных единицах.
184
Введение двух комплектов, работающих на разных несущих
частотах, и последующего объединения сигналов обоих комплектов
приводит к эффекту, аналогичному изменению несущей частоты РЛ
от импульса к импульсу. При этом можно считать, что повышение
вероятности правильного обнаружения целей эквивалентно уве-
личению дальности действия РЛ при постоянном значении ве-
роятности обнаружения целей. Дальность действия РЛ при работе
•его в двухкомплектном режиме с разносом частот по сравнению с
работой в однокомплектном режиме увеличивается.
Рпо 0,3 0,4 0,5 0,6 0,7 0,8 0,9
1.И Мб 1,21 1,26 1,3 1,36 1,41
Следовательно, относительное изменение дальности действия
РЛ зависит от вероятности обнаружения целей. При малых вероят-
ностях правильного обнаружения эффект от включения второго
комплекта соответствует случаю простого удвоения излучаемой
мощности. При больших значениях вероятности правильного обна-
ружения целей на эффект увеличения дальности действия РЛ зна-
чительное влияние оказывает декорреляция флуктуаций отражен-
ных сигналов.
Использование двухкомплектного двухканального принципа с
одновременной работой двух комплектов на разных несущих час-
тотах характерно для трассовых РЛ третьего поколения, эксплуата-
ция которых началась в Советском Союзе с 1979 г. Для РЛ третьего
поколения характерно также применение адаптивных устройств
управления параметрами РЛ в зависимости от помеховой ситуации,
цифровая обработка сигналов и широкое использование интеграль-
ной микроэлектронной техники.
Типичным представителем трассовых РЛ третьего поколения
является РЛ ATCR-22, структурная схема и состав оборудования
которого были рассмотрены в п. 1.2. Функциональная схема радио-
локатора будет рассмотрена по частям в соответствии со структур-
ным подразделением оборудования радиолокатора.
Функциональная схема антенно-волноводного тракта. В радио-
локаторе ATCR-22 используется антенна типа G14. Она состоит из
отражателя двойной кривизны и двух рупорных облучателей, фор-
мирующих основной и дополнительный лучи. Между облучателями
и опорно-поворотным устройством (рис. 4.4) размещаются поляри-
заторы волноводного типа в основном канале и волноводно-коак-
сиального типа в дополнительном канале. С помощью поляризато-
ров осуществляется дистанционное изменение поляризации излучае-
мых волн от линейной горизонтальной при хорошей погоде до
круговой при наличии сильных отражений от гидрометеоров. Для
перехода от вращающейся части антенны к неподвижной при-
меняется тройной вращающийся переход, в котором задействованы
два канала-волноводный для основного тракта, работающего на
185
Рис. 4.4. Схема построения антенной
части радиолокатора ATCR-22
прием и передачу сигналов, и
коаксиальный, работающий толь-
ко на прием отраженных сигна-
лов.
Опорно-поворотное устрой-
ство антенны РЛ имеет несколько
датчиков, вырабатывающих син-
хронизирующие сигналы азиму-
тального вращения антенны. Один
из этих сигналов используется
для синхронизации вращения ан-
тенны автономного ВРЛ. Второй
сигнал, содержащий импульсы
азимутальной угловой информа-
ции, используется в приемном
устройстве РЛ. Третий сигнал,
содержащий коды секторов ази-
мута, подается в цифровую часть
приемника для выполнения неко-
торых вспомогательных операций
обработки принимаемых сигна-
лов.
Антенна РЛ размещается на
специальной металлической выш-
ке высотой 15... 25 м. Для защиты
от внешних метеорологических
воздействий она встраивается в
радиопрозрачное укрытие, вы-
полненное в виде каркаса сотовой металлической конструкции,
сегменты которого обтянуты слоистым пластиком.
Вначале сигналы, принимаемые антенной на частотах и f2,
поступают по основному тракту через устройство ввода шума на
диплексор (разделитель) основного канала (рис. 4.5). Устройство
ввода шума позволяет по командам, поступающим с блока контро-
ля параметров РЛ, вводить в волноводный тракт калиброванный по
мощности шум и тем самым оперативно измерять чувствитель-
ность приемника.
Диплексор основного канала обладает селективными свойства-
ми. Это позволяет разделить принимаемые сигналы по частотам/!
и /2 на два полностью идентичных волноводных тракта, входящих в
состав аппаратуры комплектов А и В. За диплексером следуют
направленные ответвители, предназначенные для контроля пара-
метров излучаемых сигналов: несущей частоты, спектра частот,
проходящей мощности, формы излучаемого импульса, коэффициен-
та бегущей волны в волноводном тракте. Для этого ответвленные
сигналы подвергаются некоторым преобразованиям в высокочас-
тотных головках направленных ответвителей и подаются затем в
186
блок контроля параметров РЛ. С помощью специальных направ-
ленных ответвителей часть излучаемой мощности передается на
систему автоматической подстройки частоты магнетронов передат-
чиков комплектов А и В и устройства фазирования колебаний
когерентных гетеродинов.
Разделение трактов приема и передачи сигналов осуществляется
с помощью управляемых антенных переключателей, выполненных
на волноводных циркуляторах с коммутирующими элементами на
p-z-и-диодах. Поскольку передающие устройства комплектов А и
В запускаются со сдвигом по времени около 8 мкс, запирание
приемных трактов в антенных переключателях производится управ-
ляющими сигналами, поступающими как из комплекта А, так и из
комплекта В. Таким образом устраняется возможность проникно-
вения в приемные тракты части излучаемой мощности в момент
срабатывания передатчиков обоих комплектов.
После антенных переключателей принимаемые сигналы через
двойной коаксиальный ограничитель и малошумящие усилители
сверхвысоких частот поступают на входы приемников комплектов
А и В.
Коаксиальные ограничители предохраняют входные цепи тран-
зисторных усилителей от очень больших сигналов, способных
вывести из строя усилители. Транзисторные усилители представ-
ляют собой монолитную конструкцию. Она обеспечивает коэф-
фициент шума не более 2,5 дБ при коэффициенте усиления 25 дБ и
полосе пропускания 100 МГц.
Структурная схема дополнительного канала антенно-волновод-
ной системы в основном содержит те же элементы, что и схема
основного тракта. Отличия заключаются в том, что этот канал
Рис. 4.5. Функциональная схема волноводного тракта радиолокатора ATCR-22
187
работает только на прием сигналов и поэтому у него вместо
антенного переключателя используется антенный выключатель, уп-
равляемый стробирующими импульсами, поступающими из обоих
комплектов радиолокатора. Кроме того, в этом канале отсутствуют
направленные ответвители, введенные в основной тракт для из-
мерения параметров излучаемых сигналов.
Функциональная схема передающего устройства. Передающие
устройства радиолокатора ATCR-22 выполнены на магнетронах
М5О51. Функциональные схемы передающих устройств обоих комп-
лектов РЛ одинаковы (рис. 4.6), единственное отличие заключается
в том, что передатчик одного комплекта является ведущим, а
другого-ведомым. Модуляторы передатчиков выполнены на ли-
ниях задержки, коммутирующим элементом является тиратрон.
Для стабилизации амплитуды модулирующих импульсов приме-
няется специальное устройство, прерывающее процесс заряда кон-
денсаторов формирующей линии каждый раз, когда напряжение на
них достигает номинального значения. Модулятор питается от
высоковольтного выпрямителя, выполненного по трехфазной двух-
полупериодной схеме.
Для фиксирования момента формирования СВЧ-импульса в
магнетроне между модулятором и магнетроном включается транс-
форматор тока, с вторичной обмотки которого снимается импульс,
запускающий схему синхрогенератора. Через время, соответствую-
щее периоду повторения импульсов, с синхронизатора поступает
очередной синхронизирующий импульс, запускающий модулятор.
Стабилизация несущей частоты излучаемых сигналов произ-
водится с помощью механизма подстройки частоты магнетрона.
Управляющие сигналы на механизм подстройки поступают с блока
АПЧ, расположенного в стойке приемника. Для контроля токов и
напряжений в различных точках схемы передающего устройства, а
также для защиты передатчика от перенапряжений и недопустимо
больших токов в состав оборудования РЛ введены соответствую-
щие контролирующие приборы и защитные устройства.
Функциональная схема аналоговой части приемника. Она состоит
из трех частей: высокочастотной (ВЧ), промежуточной частоты
Запускающие импульсы генеРаТ7гоР От системы АПЧ
Рис. 4.6. Функциональная схема передающего устройства радиолокатора ATCR-22
188
Рис. 4.7. Функциональная схема аналоговой части приемного устройства радио-
локатора ATCR-22 •
(ПЧ) и видеосигналов (рис. 4.7). В отличие от традиционных схем
радиолокационных приемников в состав аппаратуры приемного
устройства РЛ введены дополнительные блоки, обеспечивающие
приспосабливаемость характеристик РЛС к помеховой ситуации. К
таким блокам относятся адаптивный сумматор сигналов основного
и дополнительного каналов на входе высокочастотной части при-
емника, а также адаптивный аттенюатор помех (ААП), распо-
ложенный перед фазовыми детекторами. Адаптивный сумматор
смешивает сигналы основного и дополнительного каналов по адап-
тивной программе в зависимости от уровня помех для каждого
участка зоны видимости РЛ. Программа выбора весовых коэф-
фициентов слагаемых выбирается следующим образом-. Вся область
контролируемого пространства разбивается на две зоны: ближнюю
и дальнюю. Ближняя зона, простирающаяся до половины мак-
симальной дальности действия РЛ, разбивается на 1024 участка
(64-по азимуту и 16-по дальности). Каждому из этих участков в
аппаратуре адаптивного сумматора соответствует своя ячейка па-
мяти, которая может находиться в четырех состояниях: 00, 01, 10,
11. Перед началом работы РЛ за время трех полных оборотов
антенны ячейки памяти заполняются информацией об уровне помех
от местных предметов для каждого участка зоны видимости. Для
этого первый обзор пространства производится только нижним
лучом антенны, второй обзор-смешанным лучом, причем соот-
ношение весовых коэффициентов между сигналами двух лучей
выбирается таким, чтобы нижняя кромка эквивалентного объе-
диненного луча могла занимать угловое положение 0,5°, и, наконец,
третий обзор пространства производится эквивалентным смешан-
ным лучом, нижняя кромка которого может подниматься до угла
места, равного 1°.
Последовательное увеличение угла места нижней кромки экви-
валентной ДНА позволяет классифицировать отражения от мест-
189
ных предметов по критерию их влияния на обнаружение полезных
сигналов на четыре типа: отсутствие помех от местных предметов
(00), слабые помехи (01), средние помехи (10) и сильные помехи (11).
Информация об уровне помех при каждом предварительном обзоре
пространства выбирается из сигнала, прошедшего обработку и
сравнение с заданными порогами в цифровой части приемника.
Информация об уровне помех записывается в ячейках памяти и
затем, когда РЛ переходит из режима записи помеховой ситуации в
режим нормальной работы, используется для формирования ве-
совых коэффициентов, определяющих долю сигналов основного и
дополнительного каналов в обобщенном сигнале для каждого из
1024 участков, на которые была разбита вся зона обзора РЛ. Таким
образом осуществляется адаптация конфигурации эквивалентной
ДНА к помеховой ситуации во всей зоне обзора. На тех участках
пространства, где помехи от местных предметов велики, экви-
валентный луч ДН как бы приподнимается над землей и помехи
уменьшаются.
Вторым элементом функциональной схемы аналоговой части
приемника, который определяет степень адаптивности РЛ по от-
ношению к помехам, является адаптивный аттенюатор помех.
Адаптивный аттенюатор помех уменьшает коэффициент усиления
приемника в тех случаях, когда уровень сигналов выходит за
пределы динамического диапазона сигналов, обрабатываемых без
потерь в системе СДЦ.
Цифровая система СДЦ РЛ ATCR-22 обрабатывает сигналы,
динамический диапазон амплитуд которых не превосходит 40 дБ.
Динамический же диапазон входных сигналов РЛ может превос-
ходить 90 дБ. С помощью адаптивного сумматора удается снизить
динамический диапазон сигналов приблизительно на 30 дБ. Ос-
тавшиеся 20...30 дБ устраняются адаптивным аттенюатором по-
мех, принцип действия которого заключается в предварительном
анализе амплитуд входных сигналов и последующем ступенчатом
изменении коэффициента усиления приемника на 10, 20 или 30 дБ
для тех сигналов, амплитуда которых выходит за пределы дина-
мического диапазона 40 дБ.
Одновременно с изменением коэффициента усиления приемника
в ААП формируются бланкирующие импульсы для блокировки
системы СДЦ на два периода повторения импульсов, непосред-
ственно примыкающих к тому периоду, в котором произошло
изменение усиления. В противном случае система СДЦ расценит
изменение усиления приемника как наличие подвижной цели. По-
скольку большие амплитуды сигналов характерны для местных
предметов, протяженность которых по дальности и азимуту на-
много превосходит размеры полезных целей, процесс уменьшения
коэффициента усиления приемного тракта будет захватывать не-
сколько периодов. Для того чтобы переключения не происходили
слишком часто, т. е. чтобы система СДЦ не слишком часто бло-
190
Рис. 4.8. Функциональная схема цифровой части приемного устройства радиолока-
тора ATCR-22
кировалась, в схеме ААП предусмотрено устройство, которое не
позволяет изменять коэффициент усиления приемника чаще, чем
через 7...20 периодов повторения импульсов. Оптимальное число
периодов, через которое разрешается следующее переключение,
подбирается экспериментальным путем.
Для стабилизации опорного коэффициента усиления приемника
на входе ААП помещается исполнительное устройство системы
шумовой автоматической регулировки усиления (ШАРУ). Управ-
ляющие сигналы для ШАРУ формируются в цифровой части
приемника, при этом коэффициент усиления оценивается путем
подсчета числа шумовых выбросов, превосходящих заданный порог
за время полного оборота антенны.
Еще одной особенностью аналоговой части приемника является
применение двух фазовых детекторов в системе СДЦ. В качестве
опорных колебаний, несущих информацию о фазе зондирующих
импульсов, в фазовых детекторах используется сигнал когерентного
гетеродина, но на один из детекторов этот сигнал поступает через
цепочку, сдвигающую фазу опорных колебаний на 90°. Образую-
щиеся на выходах фазовых детекторов видеосигналы преобразуют-
ся с помощью аналого-цифровых преобразователей АЦП-I и
АЦП-П в цифровую форму и под условными названиями «синусный
сигнал» и «косинусный сигнал» поступают в цифровую часть
приемника для дальнейшей обработки. Образованная таким об-
разом квадратурная система СДЦ позволяет устранить слепые
фазы сигналов, возникающие вследствие доплеровской модуляции
амплитуды импульсов в пачке принимаемых сигналов.
Остальные элементы структурной схемы аналоговой части при-
емника не нуждаются в пояснениях.
191
Функциональная схема цифровой части приемника. Цифровая
часть приемника содержит три основных канала (рис. 4.8): СДЦ,
нормального сигнала и комбинированных сигналов «СДЦ/Нор-
мальный».
Канал СДЦ включает в себя цифровую часть системы СДЦ,
цепи логарифмирования, дифференцирования и антилогарифмиро-
вания сигналов (Лог-МП В-Антилог), сумматор сигналов веду-
щего А и ведомого В комплектов и цифроаналоговый преобра-
зователь (ЦАП).
Цифровая часть системы СДЦ имеет два канала-«синусный» и
«косинусный». В каждом канале осуществляется двойное вычитание
сигналов, содержащихся в трех смежных периодах повторения
импульсов (X, Y. Z). В схеме двойного вычитания из сигналов
первого периода Uх вычитаются сигналы второго периода UY, из
сигналов третьего периода Uz снова вычитаются сигналы второго
периода UY и полученные разности сигналов затем суммируются.
Таким образом, каждый из каналов схемы двойного вычитания
сигналов производит операцию
U = Ux - 2Uy + Uz. (4.1)
Для того чтобы операция (4.1) стала возможной, необходимо,
чтобы сигналы Ux, UY, Uz существовали одновременно, т. е. сиг-
налы Ux необходимо задержать на два периода повторения зон-
дирующих импульсов, а сигналы 17у-на один период. Задержка
сигналов в схеме двойного вычитания производится с помощью
цифровых линий задержки, выполненных на регистрах сдвига,
управляемых тактирующими импульсами.
Результаты двойного вычитания сигналов в «синусном» и «ко-
синусном» каналах необходимо просуммировать в соответствии с
квадратичным законом:
Uz = (Uin + U2a>s)112. (4.2)
Эта операция производится в блоке «Экстрактор модуля».
Поскольку выполнение операции (4.2) простейшими цифровыми
элементами вызывает определенные технические трудности, то ее
заменяют на более простую, включающую в себя несколько логи-
ческих и алгебраических операций:
,г IC^einl + l^cosl +max{|l/sin| или |GCOS|}
oz — ’ v'-’J
t. e. операции возведения в квадрат, суммирования и последующего
извлечения квадратного корня заменяют на операции определения
абсолютных значений чисел, нахождения большего из двух чисел,
суммирования и деления на 2.
При двойном вычитании амплитуда полезных сигналов, отра-
женных от движущихся целей, будет определяться амплитудно-
192
скоростными характеристиками системы СДЦ, а уровень собствен-
ных шумов в соответствии с уравнением (4.1)
= [C'ix + (-21/шГ)2 + C^z)]1'2.
Предполагая, что уровень флуктуационных шумов в соседних
периодах повторения зондирующих импульсов остается неизмен-
ным, получаем
= (4.4)
т. е. после двойного вычитания сигналов уровень собственных
флуктуационных шумов увеличивается в ^/б раз. Поэтому после
экстрактора модуля в цифровой части системы СДЦ устанавливают
нормализатор шума, выполняющий операцию уменьшения коэф-
фициента усиления канала в ^/б раз. •
После аппаратуры цифровой системы СДЦ сигнал разделяется
на три части. Одна часть поступает на селектор нормального
сигнала и сигнала СДЦ, расположенный в канале комбинированных
сигналов, вторая часть поступает в цифровую схему шумовой
автоматической регулировки усиления (ШАРУ), а третья часть -
на цепочку Лог-МПВ-Антилог для дальнейшей обработки.
Принцип действия цифровой схемы ШАРУ основан на подсчете
числа шумовых выбросов в определенном интервале времени,
соответствующем кольцу дальности в конце активной части перио-
да повторения импульсов, и сравнении результата подсчета с
порогом, определяющим заданное значение вероятности ложных
тревог. Результат сравнения в виде изменяющегося по значению
напряжения поступает в аналоговую часть ШАРУ, расположенную
перед адаптивным аттенюатором помех, для управления коэф-
фициентом передачи делителя, образованного резисторами и полу-
проводниковыми диодами.
Цепь Лог-МПВ-Антилог служит для уменьшения помех, вы-
зываемых отражениями от гидрометеоров. Сигналы, отраженные
от дождевых капель, снега, облаков, сильно флуктуируют и поэтому
плохо подавляются системой СДЦ. Эффективным средством их
подавления являются цепи, которые вначале логарифмируют сигна-
лы, затем дифференцируют и после этого антилогарифмируют для
восстановления распределения градаций полезных сигналов по все-
му динамическому диапазону их амплитуд. В том случае, если
помех от гидрометеоров нет, сигналы не должны подвергаться
логарифмированию, дифференцированию и антилогарифмирова-
нию, поскольку проведение этих операций сопровождается некото-
рым ухудшением отношения сигнал/шум.
Команда на включение или выключение цепочек Лог-МПВ -
Антилог подается с помощью специальных управляющих напря-
жений, поступающих с устройства, называемого идентификатором
метеосигналов. Принцип действия этого устройства основан на
7 Зак. 1375 1 93
оценке длительности принимаемых сигналов, причем в качестве
оцениваемых сигналов берутся сигналы, свободные от помех, выз-
ванных отражениями от местных предметов. Все помехи, дли-
тельность которых в несколько раз превышает длительность сигна-
лов, отраженных от ВС, принимаются в этом случае в качестве
сигналов, отраженных от гидрометеоров, и устройство вырабаты-
вает управляющее напряжение, включающее цепочки Лог-МПВ -
Антилог. После цепочки Лог-МПВ-Антилог сигналы поступают в
сумматор, где к ним добавляются аналогичные сигналы, обра-
ботанные в комплекте В. Далее после цифроаналогового преобра-
зования сигналы подаются на АПОИ.
Канал нормального сигнала построен в основном аналогичным
образом. Отличия заключаются лишь в том, что в этом канале нет
схемы двойного вычитания и соответственно линейки нормали-
зации шума после экстрактора модуля. Выход этого канала также
подключается к аппаратуре первичной обработки информации.
Канал комбинированных сигналов начинается с селектора, вы-
бирающего для последующей обработки сигнал СДЦ или нор-
мальный сигнал. Селектор управляется напряжениями, поступаю-
щими из картографа помех.
Картограф помех представляет собой блок памяти, состоящий
из 2048 ячеек. Каждая ячейка имеет азимутальный адрес и адрес
дальности. Вся зона обзора РЛ разбита на 64 азимутальных сектора
и 32 сектора по дальности. В образованные таким образом 2048
ячеек памяти записываются сигналы непрерывно обновляющейся
помеховой ситуации. Источником информации о помехах является
нормальный сигнал, поступающий в цепи обработки картографа
помех с экстрактора модуля нормального канала. Для тех участков
контролируемого пространства, где помехи от местных предметов
отсутствуют, управляющий сигнал, получаемый с помощью кар-
тографа помех, включает нормальный канал. Если на каком-либо
участке пространства отмечаются сильные помехи от местных
предметов, автоматически с помощью селектора на вход канала
комбинированных сигналов подаются сигналы канала СДЦ. Не-
обходимость таких переключений обусловлена тем обстоятельст-
вом, что при отсутствии помех от местных предметов нормальный
сигнал обеспечивает более высокие характеристики обнаружения
полезных целей.
После селектора комбинированный сигнал СДЦ/Нормальный
поступает на цепочку Лог - МПВ, а затем на сумматор, где к нему
добавляется аналогичный сигнал, поступающий из комплекта В.
Дальнейшая обработка комбинированного сигнала производится
интегратором, в состав которого может входить также коррелятор
сигналов. Необходимость такой дополнительной обработки объяс-
няется тем, что комбинированные сигналы в отличие от рассмот-
ренных ранее сигналов СДЦ и нормальных сигналов используются
непосредственно для подачи на контрольные индикаторы или для
194
трансляций их по широкополосным линиям связи в центр УВД,
минуя АПОИ.
Интегратор позволяет бороться с несинхронными помехами,
создаваемыми близко расположенными РЛ, работающими при-
близительно на тех же несущих частотах повторения импульсов, что
и рассматриваемый РЛ. Кроме того, интегратор значительно
уменьшает уровень нескомпенсированного остатка помех от мест-
ных предметов и теплового шума приемника, поддерживая их в
пределах заданного значения вероятности ложных тревог.
Принцип действия интегратора основан на суммировании сигна-
лов каждого элемента дальности в нескольких смежных развертках
и сравнении результата суммирования с заранее установленным
порогом, обеспечивающим максимальное отношение сигнал/поме-
ха при заданной вероятности ложных тревог. Число суммируемых
разверток обычно выбирается равным среднему числу импульсов в
пачке сигналов, отраженных от точечной цели. Интегратор такого
типа в радиолокационной технике получил название интегратора
движущегося окна.
Выбор числа интегрируемых периодов повторения импульсов и
порог определяются критерием Неймана-Пирсона, согласно ко-
торому наилучшими будут считаться такие параметры интегратора,
которые обеспечивают максимум вероятности правильного обнару-
жения целей при условии, что вероятность ложной тревоги имеет
заданное фиксированное значение:
Рп о = max при РЛ1 = Рд.^зад,
где Рл.т.зад для рассматриваемых РЛС выбирается равным 10-6.
В интеграторе движущегося окна предусмотрены два порога:
первый и второй. Для получения максимального отношения сиг-
нал/помеха на выходе интегратора при заданной вероятности лож-
ных тревог необходимо поддерживать постоянным значение ве-
роятности ложных тревог на его входе. Для этого первый порог
интегратора делают переменным, а управляющее напряжение для
изменения первого порога вырабатывают с помощью устройства-
нормализатора ложных тревог (НЛТ). Принцип действия НЛТ
сводится к интегрированию сигналов каждого элемента дальности в
пределах некоторого числа разверток с помощью вспомогательного
движущегося окна, имеющего постоянный порог, и затем второго
интегрирования полученного результата за определенный период
времени с целью выделения ложных тревог из совокупности ложных
тревог и правильных обнаружений движущихся целей, время пре-
бывания которых на каждом элементе контролируемого простран-
ства незначительно. Результат второго интегрирования в виде
управляющего напряжения подается на адаптивный сумматор,
расположенный на входе аналоговой части приемника, а также на
устройство оперативного изменения первого порога интегратора.
По сигналам НЛТ в адаптивном сумматоре выбирается такое
7* 195
соотношение сигналов основного и дополнительного каналов, при
котором прием отраженных сигналов становится возможным прак-
тически только за счет верхнего луча ДНА радиолокатора.
Функциональная связь между нормализатором ложных тревог и
адаптивным сумматором обеспечивает подавление помех от так
называемых «ангелов», обусловленных отражениями от скопления
птиц, насекомых, неоднородностей атмосферы. Сигналы, отражен-
ные от перечисленных выше объектов, сильно флуктуируют и
медленно перемещаются и поэтому не могут быть скомпенсирова-
ны обычными системами СДЦ, принцип действия которых основан
на сравнении фаз отраженных сигналов в смежные периоды повто-
рения зондирующих импульсов.
Еще одним важным источником помех, затрудняющим работу
РЛ в автоматизированных системах УВД, являются отражения от
объектов с большой эффективной площадью рассеяния, располо-
женных за пределами максимальной дальности действия РЛ, обус-
ловленной его периодом повторения импульсов Ти, т. е. когда
расстояние до объекта
г>сТп/2.
Сигналы, отраженные от этих объектов, могут воспроизводить-
ся во время второго или даже третьего периода повторения им-
пульсов, создавая на экране индикаторов изображения ложных
целей.
Отраженные от таких объектов сигналы обычно имеют боль-
шую протяженность по дальности и по азимуту и поэтому будут
плохо компенсироваться интегратором.
Для подавления этих сигналов используют видеокорреляторы,
включаемые между устройствами первого порога и «движущегося
окна» интегратора.
Принцип действия видеокоррелятора аналогичен принципу дей-
ствия схемы движущегося окна. Отличие заключается в том, что
число разверток, в пределах которых производится интегрирование
сигналов в каждом элементе дальности, выбирается равным числу
вобуляций периода повторения импульсов (равным шести для
рассматриваемой станции). Поскольку все шесть смежных периодов
повторения импульсов имеют разную длительность, то сигналы,
отраженные от очень далеких объектов, будут попадать на разные
элементы дальности каждого нового периода развертки. Таким
образом, при суммировании сигналов элементов одинаковой даль-
ности в корреляторе они не будут создавать достаточно большого
сигнала, который мог бы превзойти заданный порог и пройти далее
на интегратор. Сигналы, отраженные от целей, расположенных в
пределах дальности радиолокатора и имеющих достаточную про-
тяженность по азимуту, будут попадать на одни и те же элементы
дальности во всех смежных периодах развертки и поэтому ре-
зультат их интегрирования за шесть периодов развертки будет
196
больше установленного порога. Эти сигналы беспрепятственно
пройдут на интегратор и далее на выход приемника.
Для уменьшения потерь, неизбежно вносимых видеокорреля-
тором в полезные сигналы, он включается лишь на тех азиму-
тальных участках, где наблюдаются отражения, вызванные сверх-
дальним приемом.
С этой целью вся зона обзора разбита по азимуту на восемь
секторов и на пульте управления приемника предусмотрена возмож-
ность включения видеокоррелятора для любого из этих восьми
азимутальных участков.
После интегратора комбинированный сигнал поступает на сум-
матор, где к нему добавляются сигналы координатных отметок от
ВРЛ, а также сигналы контуров метеобразований, генерируемых
идентификаторов метеосигналов. Принцип его действия основан на
выделении тех сигналов, протяженность которых по времени (по
дальности) превосходит протяженность полезных целей. Достигает-
ся это суммированием сигналов в соседних 16 элементах дальности
и сравнением результата суммирования с определенным порогом.
Для большей вероятности обнаружения метеообъектов результат
сравнения с порогом проверяется в соседней развертке. В случае
совпадения результатов с выхода датчика метео выдаются сигналы
на включение цепей Лог-МПВ-Антилог и после дополнительной
обработки формируются сигналы контуров метеообъектов для
введения их в комбинированный сигнал.
Принцип отождествления сигналов, имеющих большую про-
тяженность по дальности и повторяющихся в соседних развертках, с
сигналами от метеообъектов основан на том, что в канале ком-
бинированных сигналов после селектора «СДЦ/Нормальный» сиг-
налами большой длительности могут быть только те сигналы,
которые отражаются от метеообъектов. При этом предполагается,
что нормальный канал включается только тогда, когда в кар-
тографе помех нет информации о наличии в данный момент
сигналов местных предметов. Сигналы большой длительности мо-
гут пройти через селектор только через канал СДЦ, и это будут
сигналы, отраженные от метеообъектов, поскольку они сильно
флуктуируют и не могут быть подавлены в цепях СДЦ. Качество
подавления системой СДЦ сигналов, отраженных от местных пред-
метов, считается вполне достаточным, чтобы идентификатор на них
не реагировал.
Кроме указанных выше операций, в канале комбинированных
сигналов проводится дополнительная операция девобулирования
периода повторения импульсов, т. е. приведение всех шести периодов
повторения сигналов к некоторому их среднему значению. Необ-
ходимость девобуляции этих сигналов связана с тем, что они в
отличие от нормальных сигналов и сигналов СДЦ передаются
непосредственно на контрольные индикаторы и в центр АС УВД,
минуя АПОИ.
197
4.3. Особенности построения функциональных схем
посадочных радиолокаторов
С помощью посадочного РЛ диспетчер посадки получает ин-
формацию о положении ВС М в координатах «наклонная дальность
гв-курсовой угол <р относительно оси ВПП» и «наклонная даль-
ность гв-угол места ® относительно поверхности земли» (рис. 4.9).
По этим координатам диспетчер может судить о расстоянии от
ВС до расчетной точки приземления 0t на ВПП и линейных
отклонениях ВС от заданной траектории посадки в горизонтальной
Ад и вертикальной Ай плоскостях.
Таким образом, посадочный РЛ должен обеспечивать инфор-
мацию о трех координатах цели. В простейшем случае такую
информацию можно получить с помощью двух независимых двух-
координатных РЛ, антенны которых сканируют соответственно в
вертикальной и горизонтальной плоскостях (рис. 4.10, а). Однако
для более эффективного использования аппаратуры, удобства ком-
поновки и по экономическим соображениям все посадочные РЛ
строят в настоящее время по последовательно-параллельному
принципу (рис. 4.10,6). В соответствии с этим принципом два
отдельных параллельных канала-курсовой и глиссадный-имеют
много общих объединенных элементов (передатчик, приемник, ап-
паратура обработки сигналов и т.д.), которые последовательно
работают то на курсовой, то на глиссадный каналы. Поочередное
переключение производится с помощью коммутаторов П1 и П2. На
экраны курсового и глиссадного индикаторов информация вы-
водится последовательно с периодом переключения приблизитель-
но 0,5 с. Непрерывность наблюдения за целью обеспечивается за
счет большого послесвечения люминофоров экранов индикаторов.
Коммутатор П1 технически реализуется электронным способом
путем использования стробирующих подсветных импульсов. Пе-
реключатель П2 чаще всего представляет собой волноводный ком-
мутатор электромеханического типа.
Курсовой и глиссадный индикаторы обычно выполняются на
одной электронно-лучевой трубке. На верхнюю часть экрана ин-
198
Рис. 4.10. Варианты схем посадочных радиолокаторов
Mr
дикатора выводится изображение зоны глиссады, на нижнюю -
зоны курса. С помощью курсового канала диспетчер получает
информацию о координатах: «дальность от цели до расчетной
точки посадки rt»-«отклонение от линии курса As»; с помощью
глиссадного канала: «дальность от цели до расчетной точки посадки
гр>- «отклонение от линии глиссады АЛ». Пересчет из одной ко-
ординатной системы в другую осуществляется диспетчером не-
посредственно по экрану индикатора, на котором, кроме отметок
целей и некоторых масштабных линий, отображаются линии за-
данной траектории посадки, формируемые с помощью специализи-
рованных вычислительных устройств.
Структурные схемы и состав оборудования посадочных PJI
различных типов рассмотрены в гл. 1. Функциональные схемы
отдельных устройств посадочных РЛ рассмотрим на примере
РП-ЗГ, поскольку этот РЛ в настоящее время является самым
распространенным посадочным РЛ.
Функциональная схема антенно-волноводной системы. Антенно-
волноводная система предназначена для передачи высокочастотной
энергии от передатчика к курсовой и глиссадной антеннам,’ из-
лучения энергии в пространство, приема отраженных сигналов и
передачи принимаемой энергии от антенны к приемному устрой-
ству. Особенностью РП-ЗГ является то, что в нем используется
сдвоенный комплект антенно-волноводных систем, обеспечиваю-
щий контроль за посадкой ВС в одном из двух желаемых направ-
лений с возможностью переключения основного комплекта при-
емопередающей аппаратуры на резервный. Другой характерной
особенностью антенно-волноводной системы является то, что в ней
предусмотрен встроенный контроль параметров передающего и
приемного устройств, позволяющий оперативно измерять чувстви-
тельность приемника, мощность передатчика и контролировать
работу системы СДЦ.
199
Антенна ну pea
Рис. 4.11 Функциональная схема антенно-волноводной системы посадочного ра-
диолокатора РП-ЗГ
I Антенна глиссады
Для маркировки характерных точек на местности в комплект РЛ
входят угловые отражатели, имитирующие неподвижные цели.
Антенно-фидерная система посадочного РЛ включает в себя
волноводный тракт, элементы встроенного контроля, курсовые и
глиссадные антенны, антенные механизмы, имитаторы целей, си-
стему избыточного давления (рис. 4.11).
Магнетрон подсоединяется к волноводному тракту через фа-
зовращатель, предназначенный для оптимальной установки фазо-
вого угла коэффициента стоячей волны в фидерном тракте. Пра-
вильный подбор параметров фазовращателя обеспечивает макси-
мальную отдачу полезной мощности магнетрона при минимальной
нестабильности высокочастотных колебаний. К угловой секции
волновода фазовращателя подключается система избыточного дав-
ления, обеспечивающая циркуляцию сухого воздуха в герметизиро-
ванном волноводном тракте. Избыточное давление составляет при-
близительно 0,35 • 105 Па.
После фазовращателя в волноводный тракт включается секция
направленных и ненаправленных ответвителей. С помощью не-
направленного ответвителя часть СВЧ-энергии передается на сме-
ситель системы автоматической подстройки частоты магнетрона. С
помощью калиброванного направленного ответвителя часть энер-
гии падающей волны СВЧ-колебаний магнетрона может переда-
ваться на измеритель мощности передатчика. Волны, отраженные
от неоднородностей высокочастотного тракта, благодаря высокой
направленности ответвителя не попадают на измерительный при-
бор и не оказывают непосредственного влияния на результаты
измерения мощности.
После ненаправленного ответвителя СВЧ-энергия поступает в
циркулятор, предназначенный для стабилизации нагрузки магне-
трона. Кроме того, вместе с разрядником циркулятор выполняет
роль антенного переключателя. Отраженная от целей СВЧ-энергия,
проходя через антенны и часть волноводного тракта, направляется
циркулятором на вход приемника, разделяя тем самым цепи переда-
чи и приема. При излучении зондирующих импульсов СВЧ-энергия
после циркулятора поступает на второй направленный ответвитель,
к которому подсоединяется специальный эхо-бокс. Он предназначен
для контроля и настройки приемника в режиме СДЦ.
После второго направленного ответвителя высокочастотная
энергия поступает на четырехполюсные переключатели. Первый
четырехполюсный переключатель предназначен для подключения к
резервному комплекту приемопередатчика эквивалента нагрузки
или генератора шума. Генератор шума подключается в том случае,
когда необходимо проконтролировать чувствительность резервного
приемника. Во всех остальных случаях резервный комплект приемо-
передатчика подключен к эквиваленту нагрузки, что позволяет
провести контроль параметров резервного передающего устройства
и держать его в состоянии постоянной готовности к работе.
201
Второй четырехполюсный переключатель предназначен для под-
ключения к антеннам основного или резервного комплекта приемо-
передатчиков. В то время, когда основной комплект приемопере-
дающей аппаратуры подключен к антеннам, резервный комплект
подключается к эквиваленту нагрузки или шумовому генератору.
Третий четырехполюсный переключатель предназначен для выбора
необходимого комплекта антенн. С помощью этого переключателя
к волноводному тракту подсоединяется первый или второй комп-
лект курсовых и глиссадных антенн.
После четырехпблюсных переключателей СВЧ-энергия посту-
пает на антенный коммутатор, подключающий попеременно к
волноводному тракту антенну курса или антенну глиссады. Пере-
ключение производится приблизительно один раз за 0,5 с.
Связь между подвижными и неподвижными элементами волно-
водного тракта осуществляется с помощью качающихся сочленений
отдельно для антенны курса и антенны глиссады. После качающих-
ся сочленений СВЧ-энергия через поляризаторы поступает на об-
лучатели антенн, затем на отражатели и узконаправленным лучом
излучается в пространство. Поляризаторы преобразуют линейно
поляризованные волны в эллиптические. Управление поляризато-
рами осуществляется дистанционно.
Для обзора пространства в заданном секторе применяется ме-
ханическое сканирование антенн курса и глиссады в двух взаимно
перпендикулярных плоскостях. Качание антенн обеспечивают два
антенных привода-по одному на комплект антенн одного направ-
ления.
Для юстировки антенн и получения опорных отметок на экране
индикатора в комплект антенно-волноводной системы включены
специальные оптические приборы, фотоэлектрические датчики и
угловые отражатели, имитирующие неподвижные цели.
Функциональная схема передающего устройства (рис. 4.12). Пере-
дающее устройство радиолокатора РП-ЗГ вырабатывает СВЧ-им-
пульсы с пиковой мощностью 120... 160 кВт длительностью
0,45 мкс и частотой заполнения 9250...9450 МГц. Частота повторе-
ния импульсов меняется в зависимости от режима работы РЛС. В
пассивном режиме она составляет 2 кГц, в режиме СДЦ частота
повторения импульсов попеременно переключается с 2 на 2,4 кГц.
Модулятор передатчика собран по схеме полного разряда на-
копителя, выполненного на формирующей линии задержки. Заряд
линии производится от высоковольтного выпрямителя через за-
рядный дроссель и зарядный диод. Индуктивность зарядного дрос-
селя и суммарная емкость накопительной линии образуют последо-
вательный резонансный контур, благодаря чему на накопительной
линии образуется напряжение, равное удвоенному значению вы-
ходного напряжения высоковольтного выпрямителя. Зарядный ди-
од предотвращает разряд накопительной линии через выходные
цепи выпрямителя.
202
Рис. 4.12. Функциональная схема передающего устройства радиолокатора РП-ЗГ
Разряд формирующей линии производится через тиратрон и
первичную обмотку импульсного трансформатора. При этом на
магнетроне образуются короткие прямоугольные импульсы, дли-
тельность которых определяется удвоенным значением времени
задержки формирующей линии. Поджиг тиратрона осуществляется
импульсами, вырабатываемыми схемой запуска. Источником
синхроимпульсов в пассивном режиме является сама схема запуска,
в режиме СДЦ синхронизация передатчика осуществляется пуско-
выми импульсами Спсдц, вырабатываемыми в системе СДЦ.
Устройство запуска вырабатывает, кроме того, импульс U , синхро-
низирующий работу модулятора резервного передатчика11 станции,
системы ВАРУ и контрольного индикатора. Синхронизация вы-
носной аппаратуры осуществляется синхроимпульсом Un в, форми-
руемым в трансформаторе тока, включенном непосредственно в
катодную цепь магнетрона. Сформированный таким образом
синхроимпульс по времени точно совпадает с моментом формиро-
вания зондирующего импульса, что приводит к уменьшению по-
грешности определения дальности до цели.
В передающем устройстве предусмотрена защита по току и
защита от высокочастотных пробоев в магнетроне. При коротких
замыканиях в модуляторе подается команда на отключение высоко-
вольтного выпрямителя. Если короткое замыкание окажется крат-
ковременным, то панель повторения команд через некоторое время
вновь автоматически включит выпрямитель. рсли после трех-че-
тырех попыток включения выпрямителя окажется, что пробои в
модуляторе не исчезли, то панель повторения Команд подаст сигнал
на включение резервного комплекта передатчика. Аналогичным
образом работает защита от коротких замыканий в магнетроне.
При СВЧ-пробоях в магнетроне на входе формирующей пинии
накапливается отрицательное напряжение, которое открывает шун-
тирующий диод и увеличивает среднюю составляющую тока этого
203
диода. Сигнал об увеличении тока поступает на панель повторения
команд, которая вырабатывает сигналы выключения и включения
выпрямителя. Если причина аварии не исчезла, то после нескольких
автоматических попыток включения выпрямителя подается коман-
да перехода на резерв. Перечисленные вьппе команды сопровожда-
ются световой сигнализацией о состоянии аппаратуры передатчика.
Режим работы магнетрона устанавливается регулировкой сете-
вого напряжения высоковольтного выпрямителя. Контроль за ре-
жимом работы магнетрона осуществляется измерителем тока,
включенным в катодную цепь магнетрона.
Функциональная схема приемного устройства (рис. 4.13). При-
емное устройство радиолокатора РП-ЗГ состоит из смесителя
сигналов, местного гетеродина, усилителя промежуточной частоты
(с системой временной автоматической регулировки усиления, амп-
литудным детектором и видеоусилителем), объединителя сигналов
и кабельного усилителя. С приемным устройством связана система
автоматической подстройки частоты (АПЧ) магнетрона и система
СДЦ, включающая в себя когерентный гетеродин и фазовый де-
тектор. Объединитель сигналов в зависимости от того, в каком
режиме работает станция, пропускает на выход сигналы ампли-
тудного канала или канала СДЦ. В последнем случае на короткое
время, соответствующее моменту поступления сигналов от угол-
ковых отражателей, расположенных на траверзе торца ВПП, на
выход объединителя пропускаются сигналы амплитудного канала.
В противном случае при хорошо работающей системе СДЦ отметки
от уголковых отражателей были бы не видны на экранах инди-
каторов. Для того чтобы сигналы, отраженные от уголковых
отражателей, имели большую амплитуду, управляющие сигналы
системы ВАРУ на экспоненциальном спаде имеют резко очер-
ченный положительный выброс. В тот момент, когда предпола-
гается появление сигналов уголковых отражателей, коэффициент
передачи усилителя промежуточной частоты резко увеличивается, и
Рис. 4.13. Функциональная схема приемного устройства радиолокатора РП-ЗГ
204
слабые сигналы уголковых отражателей увеличиваются по ампли-
туде.
В объединителе к видеосигналам амплитудного и когерентного
каналов подмешивается синхроимпульс, поступающий с трансфор-
матора тока магнетронного генератора. В выносной аппаратуре,
расположенной в аппаратном зале КДП, этот импульс селекти-
руется по амплитудному признаку, усиливается и в качестве синхро-
низирующего направляется в блоки принадлежностей индикаторов
и вычислитель, формирующий специальные линии на экранах дис-
петчерских индикаторов.
Система СДЦ работает по когерентно-импульсному методу с
компенсатором, выполненным на ультразвуковых линиях задержки.
Для улучшения фазировки колебаний когерентного гетеродина пе-
ред приходом фазирующего импульса с УПЧ-АПЧ генератор гете-
родина блокируется бланкирующими импульсами, вырабатывае-
мыми компенсатором системы СДЦ.
Кабельный усилитель, расположенный на выходе приемного
устройства, предназначен для компенсации искажений, возникаю-
щих в видеосигнале при прохождении его через кабельную линию
связи. В усилителе предусмотрена возможность переключения кор-
ректирующих цепей в зависимости от длины кабеля.
Остальные элементы приемного устройства являются традици-
онными для приемников импульсных РЛС.
4.4. Функциональная схема вторичного радиолокатора
Функциональную схему ВРЛ рассмотрим на примере самого
распространенного в Советском Союзе автономного ВРЛ «Ко-
рень-АС» (рис. 4.14).
Оборудование ВРЛ состоит из аппаратуры, размещенной в
кузове прицепа, и выносной аппаратуры. Кузов и антенную вышку
устанавливают на небольшом расстоянии от ПРЛ, с которым
сопрягается ВРЛ. Синхронное вращение антенн ПРЛ и ВРЛ обес-
печивается сервоприводом, получающим сигналы угловой инфор-
мации от ПРЛ. Запрос самолетного запросчика выполняется на
частоте 1030 МГц трехимпульсными посылками. Импульсы Рг и Р3
формируются основным передатчиком, импульс Р2-передатчиком
подавления.
Основные запросные импульсы и импульсы подавления через
антенные переключатели, фидерный тракт, делители мощности и
систему кольцевых мостов поступают на двухдиапазонную антенну.
Антенна представляет собой рупорную решетку, состоящую из 42
отдельных излучателей, соединенных с системой кольцевых мостов.
Результирующая ДНА зависит от распределения амплитуд и фаз,
питающих излучатели напряжений. Система кольцевых мостов
построена таким образом, что при подаче на ее входы сигналов
205
Рис. 4.14. Укрупненная функциональная схема автономного вторичного радиолока-
тора «Корень-АС»
основного канала на излучателях создается симметричное отно-
сительно центра раскрыва антенны синфазное распределение токов,
благодаря чему суммарная ДНА будет иметь в горизонтальной
плоскости остронаправленный характер. Сигналы канала подавле-
ния снимаются с «разностных» выходов кольцевых мостов и созда-
ют на излучателях антенной решетки противофазное распределение
токов, формирующее разностную ДН канала подавления. Эта
диаграмма охватывает боковые лепестки основной диаграммы, а в
направлении главного лепестка у нее наблюдается «провал»
(рис. 4.15). С помощью высокочастотного аттенюатора, включен-
ного в фидерный тракт основного канала, подбирается необходимое
соотношение амплитуд импульсов основного канала и канала по-
давления, обеспечивающее устранение запросов самолетных от-
ветчиков на всех направлениях, кроме направления главного ле-
пестка.
206
Рис. 4.15. Диаграммы направленности
антенны ВРЛ в горизонтальной плос-
кости:
/-основной канал; 2-канал подавления
Z7; Р2 Р3 Pl,
" 17мкс 9ДмЩ
Кой RBS,, В” КоЙУВД„ЗК1”
21 мкс 1Ьмкс
Кой RBS,, В” Кой УВД„ЗК2"
Рис. 4Г16. Временная расстановка им-
пульсов запросных сигналов при рабо-
те ВРЛ в совмещенном режиме
Передающее устройство основного канала и канала подавления
выполнено на усилительных пролетных клистронах. Модулятор
основного канала вырабатывает импульсы Рг и Р3 с определенным
кодовым интервалом между ними. Запросный код определяется
шифратором RBS, управляемым генератором режимов.
Генератор режимов синхронизируется запускающими импульса-
ми ПРЛ. В его функции входят формирование импульсов запуска
ВРЛ и генерация сигналов, управляющих чередованием запросных
кодов А, В. С и D в любой выбранной последовательности. При
работе радиолокатора в совмещенном режиме, кроме импульсов Р,
и Р3, в основном канале генерируется также импульс Р4, рас-
полагающийся после импульса Р3 (рис. 4.16). Интервал между
импульсами Р3 и Р4 определяется запросными кодами УВД оте-
чественного стандарта. При работе в совмещенном режиме произ-
водится одновременный запрос отечественных и иностранных ВС.
При этом отечественный запросный код ЗК1 (индивидуальный
номер ВС) совмещается обычно с международными запросными
кодами А или В (номер рейса), а запросный код ЗК2 (высота полета
и запас топлива)-с международным кодом С (высота полета).
Импульс подавления Р2 является в этом случае общим и для
отечественного, и для международного запросного кода.
Ответные сигналы принимаются на частотах международного и
отечественного стандартов. Поскольку поляризация принимаемых
радиоволн в этом случае будет вертикальной на частоте 1090 МГц и
горизонтальной на частоте 740 МГц, антенна РЛ должна быть
рассчитана на прием волн и с вертикальной, и с горизонтальной
поляризацией. Достигается это установкой в рупорных излучателях
207
двух взаимно ортогональных возбудителей, рассчитанных на прием
волн с соответствующей поляризацией.
В приемниках как международного, так и отечественного диа-
пазонов применены системы подавления сигналов боковых ле-
пестков по ответу фазового типа. Реализуются такие системы путем
преобразования амплитудных соотношений сигналов, принимае-
мых основным каналом и каналом подавления, в фазовые соот-
ношения, которые затем после усиления разностных и суммарных
сигналов вновь преобразуются в амплитудные соотношения.
После приемников усиленные и продетектированные ответные
сигналы поступают на групповую аппаратуру декодирования и
преобразования информации. Эта аппаратура производит коррек-
цию видеосигналов после их трансляции по кабелю, декодирование
сигналов, преобразование информации о высоте полета из англий-
ских футов, передаваемых в международном канале кодом Гил-
лхэма, в двоично-десятичный код метрической системы счисления,
защиту координатной информации от несинхронных помех и выда-
чу информации на аппаратуру дальнейшей обработки сигналов в
двоично-десятичном коде.
После группового оборудования сигналы ВРЛ в зависимости от
структуры построения системы УВД подаются или на входы ап-
паратуры первичной обработки информации автоматизированных
центров УВД, или на индивидуальную аппаратуру диспетчера для
отображения информации на цифровых табло и индикаторах кру-
гового обзора, размещенных на пультах автономного командно-
диспетчерского пункта.
Аппаратура радиолокатора может работать без постоянного
присутствия обслуживающего персонала в режиме дистанционного
управления. Для удобства эксплуатации в состав оборудования РЛ
введены контрольный ответчик с антенной и аппаратура регла-
ментного контроля. Встроенный допусковый и тестовый контроль
обеспечивает при нарушении нормальной работы радиолокатора
автоматическое переключение аппаратуры на резерв и выдачу
соответствующей сигнализации на КПД. Резервированием охва-
чены все основные узлы радиолокатора, за исключением антенны с
антенным приводом.
Встроенные активные каналы ПРЛ пр построению аналогичны
автономным РЛ. В них не используются специальный привод
антенны активных сигналов и сервопривод, отпадает также не-
обходимость в дополнительных устройствах, формирующих сиг-
налы углового положения активных антенн.
Глава 5. СИСТЕМЫ ПОДАВЛЕНИЯ СИГНАЛОВ
БОКОВЫХ ЛЕПЕСТКОВ ДИАГРАММ НАПРАВЛЕННОСТИ
АНТЕНН
5.1. Классификация систем подавления сигналов
боковых лепестков
Боковые лепестки ДНА оказывают существенное влияние на
технические и тактические характеристики РЛ. Это влияние про-
является в снижении помехозащищенности станции, увеличении
потерь излучаемой энергии, уменьшении коэффициента направлен-
ного действия антенны, ухудшении угловой разрешающей спо-
собности, увеличении взаимных помех от соседних радиотехниче-
ских устройств, возникновении ложных отметок целей и увеличении
вероятности ложных срабатываний самолетных ответчиков при
работе станции в активном режиме.
При работе РЛ в активном режиме мешающее действие боковых
лепестков особенно значительно. Действительно, для обеспечения
высокой вероятности обнаружения целей мощность передатчика
наземного запросчика выбирается с большим запасом. При этом
мощность, излучаемая боковыми лепестками, оказывается доста-
точной для запроса самолетных ответчиков, находящихся на зна-
чительных удалениях от станции. Самолетные ответчики сраба-
тывают и посылают на землю ответные сигналы, вызывающие
появление ложных отметок целей.
Влияние боковых излучений антенны проявляется также в сни-
жении эффективности всей активной радиолокационной системы в
целом. Снижение эффективности объясняется перегрузкой ответ-
чиков ложными запросами, посылаемыми несколькими одновре-
менно работающими станциями. Обычно в системах УВД одна и та
же зона управления контролируется несколькими радиолокаторами
различного назначения. При работе РЛ в активном режиме даль-
ность действия их значительно увеличивается, что приводит к
увеличению перекрытия радиолокационных зон контроля. Таким
образом, самолетный ответчик будет запрашиваться не только
радиолокационными средствами своей контролируемой зоны, но и
радиолокаторами соседних участков системы УВД. Если РЛ не
оборудованы аппаратурой, устраняющей ложные запросы боко-
выми лепестками, то ответчики оказываются перегруженными,
вероятность передачи достоверной информации уменьшается, резко
возрастают несинхронные помехи, вызванные приемом ответных
сигналов на запросы соседних радиолокаторов.
209
В настоящее время разработано несколько методов компенсации
сигналов, излучаемых или принимаемых боковыми лепестками
диаграмм направленности радиолокационных антенн. Сущность
этих методов заключается в использовании каких-либо отличий
сигналов, принимаемых с основного или бокового направления:
амплитудных, фазовых, частотных, поляризационных или струк-
турных.
В активных радиолокационных системах наиболее широкое
применение нашли методы энергетического вычитания помеховых
сигналов, a также методы, предполагающие применение управляе-
мых вентилей, реагирующих на соотношение амплитуд основных
сигналов и сигналов подавления.
Существует несколько вариантов построения систем подавления,
основанных на этих методах. Почти все они предполагают ис-
пользование дополнительного приемного или передающего канала,
содержащего специальную антенну с ДН, охватывающей боко-
вые лепестки и не охватывающей главный лепесток основной
антенны.
Системы подавления сигналов боковых лепестков можно раз-
делить на три класса: системы подавления по запросу, системы
подавления по ответу и смешанные системы.
Первый класс предполагает, что ложные запросы подавляются в
самом самолетном ответчике, т. е. ответчик не запускается от
запросов боковыми лепестками ДНА наземных РЛ. Подавление
сигналов боковых лепестков в этих системах обычно основано на
использовании инерционных автоматических регулировок усиления
в ответчике или на сравнении сигналов, излучаемых основной
антенной запросчика и антенной подавления.
Метод, основанный на использовании инерционной АРУ в
ответчике, достаточно просто реализуется, но не обеспечивает
работу в поле произвольно расположенных радиолокаторов. Этот
метод наиболее пригоден для посадочных РЛ, наблюдающих за
движением ВС по строго определенной траектории в направлении
радиолокатора. Метод, основанный на сравнении сигналов в ответ-
чике, требует значительного усложнения наземной аппаратуры за
счет введения дополнительного канала, включающего в себя пере-
датчик, фидерную систему и антенны подавления. Несмотря на этот
недостаток, рассматриваемый метод благодаря своей эффектив-
ности нашел широкое применение в активных радиолокационных
системах гражданской авиации Советского Союза и зарубежных
стран.
Подавление по линии ответа осуществляется обычно одним из
следующих методов:
временной регулировкой усиления приемника запросчика (метод
ВАРУ);
вычитанием ответных сигналов, принятых направленной и не-
направленной антеннами (метод вычитания);
210
селекцией ответных сигналов отраженными от объекта пас-
сивными сигналами (метод клапанирования);
сравнением фаз сумм и разностей ответных сигналов, принятых
основной антенной и антенной подавления (фазовый метод).
Метод временной автоматической регулировки усиления не тре-
бует значительного усложнения аппаратуры, он прост в реализации,
однако эффективность его невелика. Особенно плохо работает эта
система по целям, расположенным под разными углами места,
поскольку они облучаются неодинаковыми потоками мощности.
Амплитуда отраженного сигнала при этом будет зависеть от
большого числа факторов. Связь между амплитудой отраженного
сигнала и расстоянием до цели не будет однозначной.
Метод вычитания, наиболее широко распространенный в ак-
тивных системах, также несвободен от недостатков. Его эффек-
тивность зависит от динамического диапазона амплитуд сигналов в
основном канале и канале подавления. Кроме того, при вычитании
сигналов ухудшается отношение сигнал/шум ..что приводит к умень-
шению дальности действия РЛ.
При использовании метода клапанирования также не удается
обеспечить высокое качество подавления ложных сигналов из-за
значительных отражений от местных предметов и гидрометеоров.
Управляющий пассивный сигнал не будет однозначно определять
принадлежность ответного сигнала к главному или боковому ле-
пестку ДНА. Кроме того, отраженные пассивные сигналы, играю-
щие в этих системах роль управляющих, сильно подвержены раз-
ного рода флуктуациям, особенно в режиме селекции движущихся
целей.
Фазовый метод подавления сигналов боковых лепестков яв-
ляется усовершенствованным методом вычитания сигналов. В от-
личие от обычных способов вычитания в этом методе исключается
влияние амплитудных характеристик каналов на качество подав-
ления сигналов боковых лепестков. Недостаток метода заключается
в сравнительно большой сложности его реализации.
Всем системам подавления сигналов боковых лепестков по
ответу присущ принципиальный недостаток: подавление по линии
ответа не устраняет ложные запросы ответчиков. Поэтому при
нахождении ВС в зоне действия нескольких активных РЛ наступает
перегрузка ответчиков и качество работы всей активной радио-
локационной системы ухудшается. С другой стороны, применение
систем подавления только по запросу полностью себя не оправды-
вает. Действительно, при большом парке ВС вероятность того, что
у некоторого числа ответчиков будет плохо работать система
подавления, достаточно велика. В случае появления в зоне действия
активного РЛ одного или двух таких ответчиков создаваемые ими
помехи настолько возрастают, что получаемая с помощью активно-
го радиолокатора информация оказывается непригодной к исполь-
зованию в системе УВД. Поэтому наилучшим вариантом для
211
обеспечения эффективной работы системы УВД являются ВРЛ с
подавлением сигналов боковых лепестков одновременно по запросу
и ответу.
Радикальным решением проблемы уменьшения влияния сигна-
лов боковых лепестков на эффективность работы вторичных систем
является использование дискретно-адресных принципов построения
ВРЛ.
Рассмотренные ранее системы вторичной радиолокации типа
RBS или УВД основаны на пространственной селекции запра-
шиваемых ВС диаграммами направленности антенн наземных за-
просчиков. Поскольку ДН имеют боковые лепестки, то адрес
запроса является неоднозначным и при большой интенсивности
воздушного движения уровень внутрисистемных помех резко увели-
чивается. Вторичная система становится неэффективной.
Основное отличие дискретно-адресной системы вторичной ра-
диолокации (ДАС ВРЛ) от систем RBS или УВД заключается в
способе обращения к самолетным ответчикам, т. е. в выборе того
ВС, которое должно ответить на запрос. В ДАС ВРЛ каждый
самолетный ответчик имеет свой индивидуальный код адреса и
отвечает на запрос, который включает в себя только такой адрес-
ный код. Таким образом, дискретный индивидуальный адрес стано-
вится основной формой селекции и определяет, какой из самолет-
ных ответчиков будет отвечать на запрос. Если учесть, что у
запросчиков ДАС ВРЛ также применяются направленные антенны,
выполняющие задачу пространственной развязки между соседними
запросчиками, то станет ясным, что количество ложных сраба-
тываний и ложных ответов в системе ДАС ВРЛ будет очень
незначительным.
Дискретно-адресные системы ВРЛ принципиально способны
обеспечить высококачественный сбор данных о воздушной обста-
новке, однако широкое внедрение этих систем сдерживается боль-
шими экономическими затратами, необходимыми для их реали-
зации.
5,2. Системы подавления сигналов боковых лепестков
по запросу
Системы подавления сигналов боковых лепестков по запросу
можно разделить на два вида: двухимпульсные и трехимпульсные.
При двухимпульсном подавлении наземный запросчик излучает
импульсы Рг и Р3 (см. рис. 3.6). При трехимпульсном подавлении,
кроме запросных импульсов Рг и Р3, излучается также контрольный
импульс Р2, отстающий от импульса Р3 на 2 мкс. Импульсы
излучаются двумя антеннами: основной, имеющей узкую ДН, и
антенной подавления, имеющей широкую ДН, охватывающую
боковые лепестки основной антенны и не охватывающую главный
лепесток основной антенны.
212
Рис. 5.1. Нормы на основные и конт-
рольные излучения:
/-контрольное излучение 2-основное
излучение Р3; 5-основное излучение Рг и
Рз> контренное излучение Р2
При двухимпульсном методе
основная антенна излучает за-
просный импульс Р3, а антенна
подавления-запросный импульс
Pt, который одновременно явля-
ется контрольным (рис. 5.1, а).
Соотношение излучаемых мощнос-
тей между основным и контроль-
ным импульсами установлено сле-
дующее: в направлении главного
лепестка ДН основной антенны
Р3 Pt — 1 дБ; для всех осталь-
ных направлений Р3 < Р, — 11 дБ.
При трехимпульсном методе
подавления основная антенна из-
лучает запросные импульсы Pt и
Р3, а антенна подавления -
контрольный импульс Р2 (рис. 5.1,6). Соотношение излучаемых
мощностей установлено следующее: в направлении главного ле-
пестка диаграммы направленности основной антенны Рх и Р3 >
> Р2 + 9 дБ; для всех остальных направлений Р2 > Pt и Р3.
Трехимпульсная система подавления имеет преимущество перед
двухимпульсной, заключающееся в том, что для ее реализации не
требуется мощный передатчик, формирующий контрольный им-
пульс. При двухимпульсной системе подавления контрольный им-
пульс одновременно выполняет роль запросного и поэтому он
должен быть на входе приемника ответчика соизмерим по величине
с импульсом Р3. Поскольку антенна подавления в отличие от
основной антенны, имеет слабонаправленную диаграмму излуче-
ния, мощность передатчика подавления для выполнения этого
условия должна быть намного больше мощности основного пере-
датчика. Кроме того, трехимпульсная система подавления ока-
залась более помехоустойчивой.
В связи с этим организация ИКАО отдает предпочтение трех-
импульсной системе, но в то же время допускает применение и
двухимпульсных систем.
Двухимпульсная система подавления сигналов боковых лепестков.
При двухимпульсном запросе соотношение уровней излучаемых
мощностей между импульсами будет определяться следующими
величинами (рис. 5.2):
для основного направления (цель 1): Р3/1\ = АО/ВО',
для направления боковых лепестков (цель 2): Р3/Рх = CO/DO.
Запросные сигналы принимаются антенной самолетного ответ-
чика и через антенный переключатель поступают на приемник
ответчика. Здесь они преобразуются в сигналы промежуточной
частоты, усиливаются, детектируются и направляются для даль-
нейшей обработки на входной формирователь, схему формирова-
213
Цель1
Цель 2
Рис. 5.2. Диаграммы направленности излучаемых мощностей (а) и эпюры запрос-
ных сигналов (б) при двухимпульсной работе:
1- основной канал; 2- контрольный канал; 3-сигналы на входе приемников ответчиков
ния строба и далее в дешифратор запроса (рис. 5.3). Входной
формирователь нормализует поступающие на него сигналы по
амплитуде и длительности. После формирователя сигналы и Р3
для целей 1 и 2 будут иметь одинаковые амплитуды и длительности
(2). Нормализованные сигналы поступают на дешифратор запроса.
Основными декодирующими элементами дешифратора являют-
ся многозвенная линия задержки, рассчитанная на максимальное
время задержки 25 мкс, и логические ячейки И типа диодных
матриц совпадений, на выходах которых появляется сигнал только
в том случае, когда все диоды матрицы закрыты. Для рассматри-
ваемого нами случая декодирование сигналов запроса осуществля-
ется по каналу запроса номера рейса через схему совпадения И1 и
по каналу запроса высоты полета через схему совпадения И2.
Схемы совпадения содержат несколько диодов. Для того чтобы
диоды закрылись, на них необходимо одновременно подать сле-
дующие сигналы: второй импульс запросного кода Р3 с выхода
нормализатора (2); первый импульс запросного кода с одного из
отводов линии задержки (3); стробирующий импульс со схемы его
формирования (6).
Стробирующий импульс формируется следующим образом. Не-
нормированные импульсы Pi и Р3, сохраняющие соотношение
амплитуд, установленное при их излучении основной и контрольной
антеннами (/), поступают на схему амплитудного сравнения фор-
мирователя строба. Эта схема содержит накопитель, состоящий из
214
a)
Ждущий
мультивиб-
ратор
•—& Приемник
Накопитель
В)
Цель!
ключ
Я I
бланк
Рис. 5.3. Упрощенная
Схема
сравнения
ключ
I
| Схема формирования стробирующего импульса
цель?.
" '~ ’ ж i функциональная
схема цепей подавления сигналов боковых
лепестков при работе ответчика в режиме
двухимпульсного запроса (а) и соответст-
вующие эпюры напряжений (б)
параллельно включенных конденсаторов и резистора. Постоянная
времени разряда накопителя выбирается намного больше кодового
расстояния между импульсами. В случае приема запросных сигна-
лов целью 1 первый импульс заряжает конденсатор накопителя
до максимальной величины, что обеспечивает запирание схемы
сравнения на время около 700 мкс после прохождения первого
импульса (4). Через 17 или 21 мкс на схему сравнения поступает
второй запросный импульс Р3, амплитуда которого превосходит
напряжение, накопленное конденсатором. Схема сравнения вновь
открывается, в результате чего на ее выходе после первого за-
просного импульса появляется и второй импульс (5). Эти импульсы
запускают ждущий мультивибратор, который формирует строби-
рующие импульсы длительностью приблизительно 8 мкс (б). Вто-
рой стробирующий импульс будет совпадать по времени на схемах
И с незадержанным импульсом Р3 и задержанным импульсом и
поэтому на выходе соответствующей схемы И появится сигнал,
запускающий шифратор высоты или номера рейса (7).
При приеме сигналов целью 2 импульс Р3 оказывается меньше
накопленного на конденсаторе потенциала (4) и схема сравнения
амплитуд не пропустит этот импульс на ждущий мультивибратор.
Второй стробирующий импульс сформирован не будет и схемы И
не сработают. Таким образом, ответчик ВС, расположенный в
направлении бокового лепестка запросной антенны, отвечать на
ложные запросы не будет.
Накопленный на конденсаторе заряд определяет порог сраба-
тывания схемы формирования строба. После прихода первого
импульса чувствительность схемы к приему сигналов резко умень-
шается. Это полезное свойство схемы становится вредным после
того, как произойдет выделение полезных запросов и подавление
ложных. Для восстановления чувствительности, схемы с выхода
линии задержки через 25 мкс после прихода первого сигнала на
ключ I накопителя подается коммутирующий импульс (<У). Ключ
замыкается и заряд с накопителя стекает на землю. Чувстви-
тельность схемы восстанавливается.
Накопление заряда на конденсаторе возможно также от на-
веденных сигналов передающего устройства ответчика. Для вос-
становления чувствительности схемы в этом случае применяется
ключ II, управляемый бланкирующим импульсом передатчика.
Трехимпульсная система подавления сигналов боковых лепестков.
Принцип действия трехимпульсной системы подавления сигналов
боковых лепестков во многом похож на принцип действия двух-
импульсной системы, но имеются и существенные отличия.
Как уже указывалось выше, при трехимпульсной системе по-
давления основная антенна излучает сигналы Р{ и Р3, а дополни-
тельная антенна-контрольный сигнал Р2 (рис. 5.4). Особенность
этих сигналов заключается в том, что амплитуда контрольного
импульса Р рсегля меньше амплитуды запросных импульсов Рг и
216
Цель 1
Цель 2
Pi Ре
fl------В~7
Рис. 5.4. Диаграммы направленности антенны (а) и эпюры запросных сигналов (б)
при трехимпульсной работе: “
/-основной канал; 2- контрольный канал; 5-сигналы на выходе приемников ответчиков
Р3 в направлении главного лепестка основной антенны. Во всех
остальных направлениях имеет место обратное соотношение.
Упрощенная функциональная схема цепей подавления сигналов
боковых лепестков в ответчике при трехимпульсном запросе пред-
ставлена на рис. 5.5. На рис. 5.6 показаны формы напряжений в
соответствующих точках схемы.
После приемника видеосигналы (7) поступают на схему ампли-
тудного сравнения. Эта схема содержит пиковый детектор, диф-
ференцирующую цепь и накопитель, состоящий из параллельно
включенных конденсатора и резистора. Принцип действия ее ничем
не отличается от работы схемы сравнения формирователя стробов,
используемой для дешифровки двухимпульсных запросов.
На конденсаторе накопителя образуется напряжение (2), из-
менение которого во времени подчиняется экспоненциальному зако-
Рис. 5.5. Упрощенная функциональная схема цепей подавления сигналов боковых
лепестков при работе ответчика в трехимпульсном режиме (режимы ИКАО А и Q
217
ну. Постоянная времени разряда
накопителя выбирается таким об-
разом, чтобы за 2 мкс напряже-
Т ние на конденсаторе упало бы
меньше чем на 9 дБ.
Так же, как и в рассмотренной
t ранее схеме, в результате сравне-
ния приходящих импульсов с по-
_ тенциалом накопителя (2), диф-
* ференцирования полученного на-
- пряжения и последующего вырав-
, нивания импульсов по амплитуде
f и длительности в нормализаторе
образуются сигналы (3), форма
— которых зависит от направления
t на цель. Для целей, расположен-
ных в направлении главного ле-
— пестка запросной антенны, сигна-
f лы будут образованы только им-
пульсами Рг и Р3, а для всех
— остальных целей-импульсами
# Рг, Р2 и Р3. Совокупность этих
сигналов поступает на дешифра-
-* тор запроса. Дешифратор запроса
состоит из секционированной ли-
Рис. 5.6. Эпюры напряжений в схеме нии задержки ЛЗ, двух логических
подавления сигналов боковых лепест- ячеек И1 И И2 И схемы формиро-
икасГд ра5?те ответчика (режимы ва11ия импульсов запрета, состоя-
и щей из логической ячейки ИЗ и
ждущего мультивибратора.
Если цель находится в направлении главного лепестка основной
антенны, то процесс декодирования запросного кода происходит
следующим образом. На ячейки И1 и И2 поступают одновременно
незадержанные (3) и задержанные (4) сигналы. В зависимости от
кодового интервала между запросными импульсами срабатывает
ячейка И1 или И2 и на шифратор ответчика будет подана команда
передачи номера рейса или высоты (5). Если же цель находится в
направлении любого бокового лепестка, то сначала сработает
ячейка ИЗ, на которую подается незадержанный сигнал (3) и тот же
сигнал, но задержанный на 2 мкс (6). На выходе ячейки появляется
импульс (7), обусловленный совпадением сигналов (6) и Р2 (3).
Этот импульс запускает ждущий мультивибратор и тот в свою
очередь формирует импульс запрета (S) длительностью 25 мкс,
который запирает ячейки И1 и И2. Таким образом, несмотря на
совпадение задержанного импульса Рг (4) с незадержанным им-
пульсом Р3 (3), ячейки не срабатывают и не запускают передатчик
ответчика. Ответа на ложный запрос не последует.
218
Для повышения эффективности подавления сигналов боковых
лепестков по запросу в некоторых случаях применяют более слож-
ные схемы, предусматривающие формирование нескоЛьких запрет-
ных импульсов, однако работа их в конечном итоге основывается на
тех же принципах, что и у описанных выше устройств.
5.3. Системы подавления сигналов боковых Лепестков
по ответу
Большинство систем подавления сигналов боковых лепестков по
ответу основано на использовании двух независимых каналов прие-
ма сигналов ответчика с последующим сравнением этих сигналов по
какому-нибудь признаку. Во всех применяемых в настоящее время в
гражданской авиации активных радиолокаторах в Качестве такого
признака принято соотношение амплитуд сигналов, поступающих
по основному и дополнительному каналам. Система подавления
независимо от особенностей ее технической реализации оценивает
это соотношение и автоматически принимает решение о принадлеж-
ности приходящих сигналов к ответчикам, расположенным в на-
правлении главного или боковых лепестков диаграммы направ-
ленности запросной антенны.
Система подавления сигналов боковых лепестков, основанная на
принципе вычитания сигналов. Упрощенная функциональная схема
такой системы представлена на рис. 5.7. На рис. 5.8 показаны ДНА
и эпюры напряжений сигналов в различных точках схемы наземного
приемника ответных сигналов.
Сигналы самолетного ответчика одновременно принимаются
двумя каналами-основным и контрольным. После преобразова-
ния, усиления и детектирования сигналы обоих каналов поступают
на схему вычитания, где из сигналов основного канала вычитаются
сигналы канала подавления.
Поскольку относительная ДНА подавления (с учетом коэф-
фициента усиления приемника) «охватывает»^ боковые лепестки и
«не охватывает» главный лепесток основной антенны, то после
Основной канал
Канал подавления
Рис. 5.7. Упрощенная функциональная схема системы подавления сигналов боковых
лепестков, основанная на принципе вычитания сигналов
Цель 1
Цель I
Рис. 5.8. Диаграммы направленности антенн и условные эпюры напряжений в раз-
личных точках схемы приемника ответных сигналов:
/ основная антенна; II- антенна подавления
3)
схемы вычитания разностный сигнал всегда будет положительным
для целей, расположенных в направлении главного лепестка, и
отрицательным для целей, расположенных в направлении боковых
лепестков. Включенный после схемы вычитания ограничитель
уничтожит отрицательные сигналы и пропустит на дешифратор
только сигналы ответчиков, расположенных в направлении глав-
ного лепестка запросной антенны.
Рассмотренная схема относительно проста, но имеет ряд су-
щественных недостатков. Главный из них, как и у всех систем
подавления по ответу,-перегрузка ответчиков ложными запросами.
Кроме того, схема имеет следующие недостатки:
используемый в рассматриваемой станции принцип энергети-
ческого вычитания сигналов приводит к ухудшению отношения
сигнал/шум и, как следствие этого, к уменьшению дальности
действия РЛС в активном режиме;
поскольку динамический диапазон входных сигналов приемника
очень велик (% 45 дБ), то рассматриваемый принцип сравнения
сигналов накладывает жесткие требования на амплитудные ха-
рактеристики основного и контрольного трактов;
ДНА подавления является секторной и поэтому схема неэф-
фективна по отношению к сигналам, принимаемым задними ле-
220
пестками основной антенны. Эти сигналы вызывают появление
ложных отметок целей на дальностях до 20 км.
Для улучшения отношения сигнал/шум и повышения эффек-
тивности подавления сигналов боковых лепестков по всем направ-
лениям необходимо оптимизировать форму ДНА подавления.
Идеальной для этого случая следует считать такую ДН, которая
удовлетворяет следующему условию:
Gn(<p)Kn « Go(<p)Kj при | <р | < Фа.о/2;
Сл(ф)К* = Go((p)K* при | ф | > фа.„/2,
где Go и Gn-дифференциальные коэффициенты усиления антенн основного
канала и канала подавления; Ко и Кп- коэффициенты усиления приемников
основного канала и канала подавления по напряжению; фа о-ширина ДН
основной антенны на нулевом уровне.
ДН для этого условия показана на рис. 5Т9 штриховой линией.
Другой недостаток метода, подавления сигналов боковых ле-
пестков, связанный с предъявлением жестких требований к ампли-
тудным характеристикам приемных трактов радиолокатора, может
быть устранен преобразованием амплитудных различий сигналов в
фазовые, которые в меньшей степени зависят от изменения коэф-
фициентов передачи усилительных трактов приемников.
Фазовая система подавления сигналов боковых лепестков. В
некоторых современных аэродромных и вторичных РЛ, предназ-
наченных для управления воздушным движением, принят метод
подавления сигналов боковых лепестков, основанный на создании
фазовых различий сигналов, принимаемых основным и контроль-
ным каналами. Как и в ранее рассмотренной схеме, в качестве
критерия принадлежности цели к направлению главного или бо-
кового лепестка запросной антенны используется соотношение
амплитуд сигналов, принимаемых основной и контрольной ан-
теннами, но для исключения влияния изменений коэффициентов
передачи основного тракта и тракта подавления это соотношение
амплитуд преобразуется в соот-
ветствующее соотношение фаз.
Принцип работы схемы заклю-
чается в следующем. Сигналы,
принятые основной антенной и
антенной подавления, одновре-
менно складываются и вычита-
ются. Образующиеся суммарный
и разностный сигналы получают
друг относительно друга опреде-
ленные фазовые различия, кото-
рые в зависимости от направле-
ния приема будут иметь одно из
двух возможных значений:
Рис. 5.9. Диаграммы направленности,
удовлетворяющие условию оптималь-
ного подавления сигналов боковых ле-
пестков
221
Рис. 5.10. Векторные диаграммы сложения и вычитания сигналов при приеме
в направлении главного (а) и бокового (б) лепестков
при приеме сигналов в направлении главного лепестка основной
антенны угол между векторами суммарного и разностного сигналов
будет острым;
при приеме сигналов в направлении боковых лепестков угол
между векторами суммарного и разностного сигналов будет тупым.
Действительно, при приеме в направлении главного лепестка
сигнал, поступающий от основной антенны По.г, превышает сигнал,
поступающий от антенны подавления 17пг. Из диаграммы, при-
веденной на рис. 5.10, а, видно, что при любом произвольном
значении угла у между векторами Go.r и Пп.г_сдвиг фаз 0Г между
векторами суммарного UcyM.r и разностного 17ра3н.г сигналов будет
меньше 90°:
0 с ©г < 90е.
При приеме в направлении боковых лепестков сигнал, посту-
пающий от основной антенны С'о.б, будет всегда меньше сигналов,
поступающих от антенны подавления Un,6. В этом случае
(рис. 5.10,0 угол между векторами суммарного UcyM.6 и разност-
ного Празн.б сигналов будет тупым: 90° < 0б 180°.
Суммарные и разностные сигналы, получившие фазовые раз-
личия в зависимости от направления приема, усиливаются в от-
дельных каналах промежуточной частоты до необходимого зна-
чения. После этого фазовые соотношения сигналов вновь пре-
образуются в амплитудные. Производится это следующим об-
раз
222
Рис. 5.11. Векторные диаграммы напряжений в фазовом детекторе при прцеме
сигналов в направлении главного (а) и бокового (б) лепестков
Суммарные и разностные сигналы сравниваются по фазе с
помощью фазового детектора. При этом суммарные сигналы про-
межуточной частоты используются в качестве опорных и подаю-ГСя
на оба плеча детектора в фазе. Разностные сигналы промежуточной
частоты поступают на плечи фазового детектора в противофазе
Поскольку при приеме сигналов в направлении главного лепестка
угол между векторами суммарного и разностного сигналов будет
всегда острым, то, как видно из рис. 5.11, а, про детектированное
напряжение во втором плече нагрузки фазового детектора I72r gy.
дет всегда больше продетект ированного напряжения первого пдеча
171Г.
При приеме в направлении боковых лепестков из-за того, Что
фазовый угол 06 тупой, Ui6 > Ь'2б (рис. 5.11,6).
Рис. 5.12. Схема подавления ложных ответов способом фазовых различий сиг.
налов
223
Если теперь после фазового детектора включить схему ампли-
тудного сравнения сигналов первого и второго плеч нагрузки, то на
выходе ее останутся сигналы только тех целей, которые находятся в
зоне действия главного лепестка запросной антенны.
Функциональная схема приемника, осуществляющего подавле-
ние сигналов боковых лепестков по вышеописанному методу, пред-
ставлена на рис. 5.12. Недостатком этой схемы является неэф-
фективное подавление сигналов задних лепестков основной ан-
тенны. Это объясняется тем, что по энергетическим соображениям
создавать с помощью одной антенны подавления единую ДН,
перекрывающую все без исключения боковые лепестки, нецелесо-
образно. Поэтому в некоторых РЛ для обеспечения кругового
подавления применяют не одну, а две или несколько вспомога-
тельных антенн.
Часто встречаются ВРЛ, у которых одна и та же антенная
система формирует две ДН-узкую и широкую. Антенна в этом
случае представляет собой фазированную антенную решетку с
синфазным и противофазным возбуждением.
Глава6. ПЕРЕДАЮЩИЕ УСТРОЙСТВА
РАДИОЛОКАТОРОВ
6.1. Общая характеристика
Принципы построения. Передающее устройство - одна из Важ-
нейших частей РЛ, в значительной степени влияющая на его
эксплуатационные параметры, первоначальную стоимость и сто-
имость эксплуатации.
Первые отечественные и зарубежные РЛ работали в диапазоне
метровых волн. Для генерации и усиления высокочастотных ко-
лебаний в этих РЛ использовались передающие устройства, вы-
полненные на обычных триодах и тетродах. В дальнейшем в связи с
переходом на более короткие волны, изобретением резонансных
электронных приборов со скрещенными полями и освоением их
промышленного выпуска в радиолокационных передатчиках цаи.
более широкое распространение получили магнетроны.
В послевоенные годы были выявлены потенциальные возможно-
сти использования в РЛ передающих устройств, оконечные каскады
которых выполнены на мощных генераторах с внешним возбужде-
нием. В отличие от магнетронных передатчиков такого рода Пере-
дающие устройства обладают повышенной стабильностью излу-
чаемых частот, что позволяет существенно улучшить качество
работы систем когерентной обработки сигналов.
Среди генераторов с внешним возбуждением особенно широкое
распространение получили клистронные и амплитронные передат-
чики большой мощности. Определенный интерес представляют
также передающие устройства, промежуточные каскады которых
выполнены на ЛЕВ.
В некоторых случаях, особенно в радиолокационных системах
работающих на частотах менее 1000 МГц, нашли применение спе-
циальные триоды и тетроды. Прежде всего это относится к Пере-
датчикам, излучающим сложные сигналы, а также к запросчикам и
ответчикам активных РЛС.
В зависимости от построения генераторной части передатчики
разделяются на однокаскадные и многокаскадные. В первых из цИх
роль оконечного каскада и одновременно возбудителя чаще всего
выполняет магнетрон. Многокаскадные передатчики строятся по
классической схеме: задающий генератор (возбудитель)-умножи-
тели частоты-усилители мощности. В качестве усилителей Мощ-
ности используются пролетные клистроны, амплитроны, ЛЕВ или
электронные лампы с сеточным управлением.
8 Зак. 1375 225
Передатчики, у которых выходной каскад генератора выполнен
на магнетроне, обычно имеют небольшие относительные размеры,
малую относительную массу, большой промышленный коэффици-
ент полезного действия. Вместе с тем этому классу передающих
устройств свойствен существенный недостаток-плохая стабиль-
ность частоты генерируемых колебаний, в частности, зависимость
частоты от режима работы магнетрона и параметров его нагрузки.
Вследствие этого магнетронные передатчики более целесообразно
применять в тех случаях, когда не предъявляются жесткие тре-
бования к качеству системы когерентной обработки радиолокацион-
ных сигналов и сама РЛС должна быть мобильной и достаточно
дешевой.
Для передатчиков, собранных по классической схеме, состоящей
из возбудителя, умножителей и усилителей, характерны большие
относительная масса, габаритные размеры, малый промышленный
коэффициент полезного действия и высокая стабильность частоты.
Наиболее целесообразная область применения таких передатчи-
ков-РЛС с высококачественными системами СДЦ, сложными зон-
дирующими сигналами и сжатием импульсов.
Передающие устройства с однокаскадной генераторной частью
строятся обычно по схеме, представленной на рис. 6.1. Запуск
передатчика осуществляется синхронизирующими импульсами,
формируемыми в специальном блоке. Подмодулятор вырабатывает
импульсы, необходимые для запуска модуляторов. При работе РЛ в
активном режиме в подмодуляторе обычно формируется запросный
код. В некоторых случаях, например при использовании модуля-
торов с неполным разрядом емкостных накопителей, специальные
цепи под модулятора определяют длительность излучаемых им-
пульсов. Модулятор предназначен для формирования мощных
импульсов, запускающих автогенератор сверхвысокочастотных ко-
лебаний.
Автогенератор преобразует модулирующие видеоимпульсы в
мощные радиоимпульсы. Для перестройки передатчика и стаби-
лизации частоты заполнения радиоимпульсов применяются спе-
| Цепи УБС
Синхронизи-
рующий
импульс
Подмоду-
лятор
Модулятор
Автогенера-
тор
Импульс СВЧ
Источники
питания
ВысокоВольт-
С > ) ный источ-
ник
Механизм
подстройки £
частоты
Управляющий
сигнал
Рис. 6.1
тором
226
поющего устройства с однокаскадным генера-
Рис. 6.2. Структурная схема передающего устройства с многокаскадным генера-
тором
циальные устройства перестройки и подстройки частоты, управляе-
мые сигналами системы АПЧ. Цепи управления, блокировки и
сигнализации (УБС) охватывают все основные каскады передатчи-
ка, включая высоковольтный выпрямитель и источники питания.
Передающие устройства с многокаскадной генераторной частью
строятся обычно по схеме, представленной на рис. 6.2. Задающий
генератор вырабатывает колебания высокой частоты, стабилизи-
рованные кварцами. В умножителях и усилителях происходит повы-
шение частоты колебаний и увеличение их мощности. Оконеч-
ный усилитель работает в режиме генератора с внешним возбуж-
дением.
Модуляция высокочастотных колебаний осуществляется в око-
нечном каскаде или в нескольких каскадах, включая предвари-
тельные усилители мощности. Как правило, применяются анодная
модуляция или различные комбинированные виды модуляции. В
генераторах, оконечные каскады которых выполнены на триодах и
тетродах, иногда применяется сеточная модуляция.
В РЛС с многокаскадными передающими устройствами задаю-
щий генератор с умножителями частоты часто используется для
формирования вспомогательных сигналов: опорной промежуточ-
ной частоты для когерентной. обработки сигналов /пч и гетеро-
динной частоты fT, предназначенной для преобразования прини-
маемых сигналов в промежуточную частоту. В блоках умножителей
частоты передатчика для этих целей предусмотрены специальные
выходы промежуточных и гетеродинных частот.
Основные параметры. Качество функционирования передающих
устройств характеризуется большим числом параметров. Эти па-
раметры классифицируются по различным признакам: энергети-
ческим, электрическим, климатическим, эксплуатационным и т. д.
Из всего многообразия параметров передатчиков рассмотрим лишь
те из них, которые непосредствешю определяют эксплуатационные
и технические характеристики РЛС.
8* 227
Излучаемая мощность. В радиолокационных передатчиках раз-
личают импульсную мощность Ри и среднюю мощность за период
повторения импульсов:
f p(t)dt
р = —-------
•* ср — ,
гдер(г)-изменение излучаемой мощности по времени; Тп-период повторе-
ния импульсов.
Для случая периодического излучения одиночных прямоуголь-
ных импульсов с длительностью ти:
где Fn-частота повторения импульсов.
Передающие устройства современных РЛС излучают сигналы с
импульсной мощностью от десятков киловатт до единиц мегаватт.
Значения средних мощностей при этом лежат в пределах от де-
сятков ватт до единиц киловатт.
Длительность излучаемых передающим устройством зондирую-
щих импульсов определяется интервалом между фронтом и задним
срезом импульса на каком-либо определенном отсчетном уровне. В
качестве отсчетного уровня чаще всего используется уровень
0,5Ртах.
Характерные значения длительностей излучаемых импульсов
передатчиков лежат в пределах 0,4...3,5 мкс. В радиолокаторах с
внутриимпульсной частотной модуляцией и последующим сжатием
импульсов длительность излучаемых зондирующих сигналов имеет
порядок десятков микросекунд. Длительность импульсов передат-
чиков РЛ обзора летного поля составляет десятки наносекунд.
Частота повторения импульсов передатчиков лежит в пределах
от 250 Гц для трассовых РЛ до 10 000 Гц для РЛ обзора летного
поля. Важным параметром, непосредственно влияющим на каче-
ство работы РЛ, особенно для случая использования системы СДЦ
с череспериодным вычитанием сигналов, является нестабильность
частоты повторения импульсов. Нестабильность характеризуют
обычно в абсолютных или в относительных величинах изменения
периода следования импульсов. Характерные значения нестабиль-
ности периода следования импульсов лежат в пределах десятков
наносекунд.
Форма излучаемых импульсов характеризуется длительностью
фронта и заднего среза, средней и максимальной крутизной, ампли-
тудой первого выброса и максимальной неравномерностью плоской
части импульса.
Форма импульса определяет спектр частот излучаемого сигнала,
необходимую полосу пропускания приемника, а также вместе с
другими ......... "'^петляющую способность и точность РЛ.
228
Относительный диапазон перестройки несущей ит ВСЕ J^ar’
чика характеризуют отношением A/7fCD. Обычно о Пяпя\л₽?еде'
лах 1 .„10%. Скорость перестройки определяемараметром
д//д^пер, где А/пер-время, необходимое для 03*£ те рЛ
генерируемых колебаний на величину А/. ПРИ Ра сйрОванных
сированных частотах указывают общее число фи* с одной час-
тот, число оперативных частот и время пеРехода ППЯРТ е™, ра’
тивной частоты на другую. Это время обычно составляет едццИцы
Стабильность частоты генерируемых к9деба”Хперэтур1 °*
многих дестабилизирующих факторов: изменения и т.д ЯГ°
режима А/, питающих напряжений АСа, нагрузк вастоты ,
ответственно вводятся температурный коэффиние = Аг/л'гТ
= А//А/ коэффициент электронного смещения даСтери3ующий
и коэффициент затягивания частоты Ц^*ара*нТа отражен^ £
менение частоты генерации при модуле коэффицис» «я от
нагрузки р = 0,2 (КСВ = 1,5) и изменении аргумента коэффицИента
отражения в пределах 2л. два разли
Для характеристики передатчиков использую преобразо
понятия коэффициента полезного действия • как отнощ"^
Т|11р и общий к.п.д. Т]общ. Первый из них ог[РеДеляГ гпЧ.ПрибопОх
выходной колебательной мощности, отдаваемой с Характеп К
входной мощности постоянного тока Hup = рсвч/ каскадов па Ые
значения т)пр различных типов генераторных Р вны
30 ...80%. С ЭКСПП,
Более исчерпывающей мерой к.п.д. передатч Уата-
ционной точки зрения является общий к.п.д., оД1^бщей вхо ка*
отношение выходной колебательной мощности * ето мощн °И
мощности, включающей в себя, кроме всего пр аВЛения: п Осуь
подогрева, охлаждения, цепей сигнализации, упр ПИО1П ’ *“6<ц ~
= Рсвч/^щ. Общий к.п.д: современных радиолокадионных Пере-
датчиков составляет 5 ...25%. „.м неппепкт». -
Передатчики РЛ характеризуются также Д аМИ Возмо^1ОИ
работы, параметрами надежности, массой, габарит , Юно-
стью работы в определенных климатических усД „;1ЪНЬ1е услг?чае
необходимости оговаривают некоторые дополни ехода на Вия:
допустимые вибрации, ударные нагрузки, BPefaa"BP системы оЛ/®’
необходимое для прогрева аппаратуры, параметр» лаж-
дения и т.д.
6.2. Модуляторы
Для управления*1 ВЧ-^^кЛЯТОрЬ1 в передатчиках РЛ предназнач_
с внешним возбужприии. адиями автогенераторов или генератп^11Ь1
зуется импульсная^одуляцД п°ЛЬШИНСТВе наземНЫХ РЛ
ДУ яция. В настоящее время получили
229
распространение РЛ с двухступенчатой модуляцией генераторов,
когда дополнительно к амплитудной модуляции используют
внутриимпульсное изменение частоты ВЧ-колебаний по определен-
ному закону.
Сущность работы импульсного модулятора заключается в
трансформации мощности источника питания в мощность питания
генератора. Производится это с помощью накопителя, который
относительно медленно заряжается от источника питания и быстро
разряжается на нагрузку. Коммутация накопителя осуществляется
ключом, роль которого могут выполнять электронные лампы,
ионные приборы или нелинейные магнитные элементы. Управление
ключом осуществляется импульсами, вырабатываемыми подмо-
дулятором.
Существует несколько систем классификации модуляторов: по
виду накопителя, типу коммутирующего прибора, по режиму рабо-
ты накопителя и т. д. Импульсные модуляторы удобней всего
классифицировать по виду накопителя и режиму его работы. В
некоторых случаях наиболее полно свойства модулятора характе-
ризуются типом используемых в нем коммутирующих элементов. В
дальнейшем при описании модуляторов, применяемых в современ-
ных РЛ, будем пользоваться терминологией, наиболее часто встре-
чающейся в технической литературе.
Модуляторы с частичным разрядом емкостного накопителя.
Принцип действия модулятора с частичным разрядом емкостного
накопителя (рис. 6.3) заключается в медленном накоплении энергии
конденсатором в интервале времени между пусковыми импульсами
и быстром частичном разряде конденсатора через магнетрон V3 во
время действия пускового импульса, открывающего модуляторную
лампу VI. Зарядный ток конденсатора протекает от положитель-
ного полюса источника питания Еа через ограничивающий резистор
R1, конденсатор С1, зарядный дроссель Др1, предохранительный
Рис. 6.3. Упрощенная принципиальная схема модулятора с частичным разрядом
емкостного накопителя ‘
дроссель Др2 и миллиамперметр (mA) на отрицательный полюс
источника. Постоянная времени цепи заряда рассчитана таким
образом, чтобы за период повторения импульсов конденсатор С1
зарядился полностью до напряжения источника питания £а. При
подаче на модуляторную лампу VI положительных импульсов
лампа открывается, и все напряжение конденсатора С1 приклады-
вается к магнетрону V3. Накопительный конденсатор начинает
разряжаться по цепи, состоящей из малого внутреннего сопротивле-
ния модуляторной лампы (десятки ом) и внутреннего сопротивле-
ния магнетрона (сотни ом в рабочем состоянии). Постоянная
времени разряда
^разр ^*1 (R; мод + R( маги)
выбирается таким образом, чтобы за время действия модулирую-
щего импульса напряжение на конденсаторе изменялось незначи-
тельно, т.е. выполнялось условие
1 (£> мод + Ri маги) In (1 — 8) ’
где 8 = Д£а/£а-относительное допустимое изменение напряжения на за-
рядном конденсаторе в конце действия модулирующего импульса.
Допустимые изменения напряжения определяются требования-
ми к форме зондирующих импульсов и к стабильности частоты
СВЧ-колебаний. Обычно эти значения лежат в пределах нескольких
процентов.
Модуляторная лампа VI используется в рассматриваемой схеме
в качестве электронного ключа, управляемого импульсами, по-
ступающими с подмодулятора. В промежутке между импульсами
лампа должна выдерживать полное напряжение источника питания,
а во время действия импульсов-пропускать полный ток генера-
тора. При этом падение напряжения на лампе должно быть мини-
мальным, так как при разряде накопительного конденсатора лампа
оказывается включенной последовательно с генератором.
Ограничивающий резистор R1 входит в состав зарядной цепи
накопительного конденсатора. Он предназначен для ограничения
тока выпрямителя при пробое модуляторной лампы и уменьшения
дополнительного тока, протекающего через лампу и выпрямитель в
течение импульса. Защитные резисторы R2, R3, R4 служат для
ограничения токов при пробоях в лампе и для подавления па-
разитной генерации. Эффективность действия этих цепей тем выше,
чем больше сопротивление резисторов. Однако необходимость
сохранения достаточно высокого к.п.д. модулятора вынуждает
выбирать защитные сопротивления такого значения, чтобы на них
падало 5... 20% напряжения во время действия импульса.
Значение емкости накопительного конденсатора С1 выбирается
из условий обеспечения допустимых искажений плоской части
импульса. Чем больше емкость конденсатора, тем меньше будет
231
искажаться импульс. С другой стороны, при случайных пробоях
опасность выхода лампы из строя будет тем меньше, чем меньше
емкость конденсатора, так как в этом случае энергия разряда будет
незначительной.
Дроссель Др1 -зарядный. Через него, а также дроссель Др2 и
миллиамперметр замыкается цепь зарядного тока. Часто вместо
дросселя Др1 в модуляторах используют резисторы, но при этом
происходит затягивание заднего среза импульса, обусловленное
сравнительно медленным зарядом паразитных емкостей через этот
резистор после запирания модуляторной лампы.
В случае использования зарядного дросселя его индуктивность и
паразитная емкость, составленная из емкостей магнетрона, мо-
дуляторной лампы и монтажа, образуют параллельный колеба-
тельный контур, в котором после запирания модуляторных ламп
возбуждаются колебания. Чем выше частота колебаний, тем круче
получается задний срез импульса. Однако возникающие при этом
положительные выбросы напряжения, складываясь с напряжением
накопительного конденсатора, создают на аноде модуляторной
лампы слишком высокий потенциал, который может стать при-
чиной выхода ее из строя. Отрицательные всплески напряжения
могут привести к повторному запуску магнетрона. Для устранения
этих нежелательных явлений в схему модулятора включают демп-
фирующий диод V2, который гасит возникающие колебания, так
как при изменении полярности напряжения на магнетроне диод V2
становится проводящим, шунтирует контур и колебания в нем
быстро затухают.
Для измерения среднего тока магнетрона в цепи заряда на-
копительного конденсатора последовательно с зарядным дросселем
включен миллиамперметр. В действительности он показывает ток
заряда конденсатора, но вследствие того, что при разряде кон-
денсатора через магнетрон расходуется столько же энергии, что и
при заряде, миллиамперметр может быть отградуирован по сред-
нему или импульсному току магнетрона.
Дроссель Др2 и разрядник Ppi предназначены для предотвра-
щения выхода из строя миллиамперметра при случайных пробоях
модуляторной лампы или магнетрона.
На нормальную работу модулятора эти элементы практически
не влияют.
Резистор R6 служит для создания пути току заряда накопи-
тельного конденсатора в случае обрыва цепи измерения тока
магнетрона. Если бы не было этого сопротивления, то при потере
контакта в измерительной цепи многие элементы схемы оказались
бы под высоким напряжением и были бы выведены из строя.
Дроссель ДрЗ и параллельно включенный ему резистор R7
образуют так называемую притупляющую схему, уменьшающую
крутизну переднего фронта модулирующего импульса. При очень
большой скорости нарастания напряжения в магнетроне возможно
232
появление нерабочих видов колебаний и высокочастотных пробоев.
Параметры этой цепочки подбираются опытным путем.
Модуляторы с частичным разрядом емкостного накойителя
нашли широкое применение в аэродромных РЛС. Их осно0нымИ
достоинствами являются:
возможность получения модулирующих импульсов, длитель-
ность и частота повторения которых могут оперативно измеНяться
без переключения в высоковольтных цепях;
возможность формирования двухимпульсных и трехимпуз1ЬСНЬ1х
кодовых посылок, что особенно важно при работе РЛС в активном
режиме;
высокая стабильность моментов начала и окончания импульсов;
слабая зависимость формы импульсов от внутреннего сопро-
тивления СВЧ-генератора.
Недостатки модуляторов с частичным разрядом емкоСтного
накопителя следующие: -
большие габаритные размеры и масса, связанные с необхо-
димостью применять накопительные конденсаторы большей ве-
личины, громоздкие модуляторные лампы и высоковольтное вы-
прямители;
недостаточно высокий к.п.д. (40 ... 70%), обусловленный сравни-
тельно большим внутренним сопротивлением применяемых в ка-
честве ключа электронных ламп; использование газоразрядных
приборов с малым внутренним сопротивлением в таких модуля-
торах исключено, так как их нельзя запереть после зажигайия’ не
сняв предварительно с открытой лампы анодное напряжений-
Модуляторы с полным разрядом накопителя, выполненной на
линии задержки. Упрощенная принципиальная схема модуляД°Ра с
накопителем в виде одной линии задержки (рис. 6.4) состОит из
источника постоянного напряжения Ел, зарядного дросселе Др1,
водородного тиратрона V2, зарядного и демпфирующего диоДов ^1
и V3, формирующей линии задержки Л3-1, импульсного ?ранс-
Рис. 6.4. Упрощенная принципиальная схема модулятора с накопителем в в и'
де линии задержки
233
Рис. 6.5. Эквивалентная схема цепи
заряда накопительной линии
форматора 77, согласующей RC-
цепочки (R1C1) и демпфирующей
цепочки R2. К вторичной обмотке
импульсного трансформатора под-
ключается магнетрон.
В интервале времени между
поджигающими импульсами, по-
ступающими на сетку тиратрона,
происходит сравнительно медлен-
ный заряд конденсаторов формирующей линии. После прихода с
подмодулятора поджигающих импульсов тиратрон резко уменьша-
ет свое внутреннее сопротивление и линия задержки разряжается на
нагрузку, формируя на ней прямоугольный импульс. Линия задерж-
ки полностью разряжается через время, равное 2тзад, после чего
газовый разряд в тиратроне прекращается и внутреннее сопротив-
ление тиратрона становится снова большим.
Эквивалентная схема цепи заряда накопителя модулятора пред-
ставлена на рис. 6.5. На этой схеме L3ap-индуктивность зарядного
дросселя, VI-зарядный диод; 7?„-сопротивление потерь; ЕСЛ-сум-
марная емкость конденсаторов линии. Индуктивным сопротивле-
нием импульсного трансформатора, включенного в зарядную цепь
накопителя, пренебрегаем, так как процесс заряда происходит
достаточно медленно.
* Эквивалентная схема зарядной цепи представляет собой по-
следовательный резонансный контур с периодом собственных ко-
лебаний
70 = 2л(£зар£Сл71/2
Напряжение на конденсаторах линии в такой цепи, если не
Рис. 6.6. Изменение напряжения (а) и
тока (6) конденсаторов накопительной
линии в режиме заряда
учитывать влияние зарядного дио-
да VI, будет изменяться по за-
кону:
ц. *= £а (1 — е "cos соог),
со0 1 „
где а = —; <в0 = -----=; £>-доб-
2G x/L3apLCn
ротность контура.
Характер изменения этого на-
пряжения показан на рис. 6.6, о
штриховой линией. Сплошной
линией представлено изменение
этого же напряжения, но с учетом
вентильных свойств зарядного
диода. На рис. 6.6, б показано со-
ответствующее изменение заряд-
234
ного тока конденсаторов. Как
видно из рисунков и приведенной
формулы, напряжение на конден-
саторах через время
Тэар = = 77 \/Езар£Сл
достигает значения
[/л,гаах « 2£а(1 - 71/40,
Рис. 6.7. Упрощенная эквивалентная
схема цепи разряда накопительной ли-
нии
\
которое обычно равно приблизительно 1,8Еа, т. е. почти удвоен-
ному значению напряжения источника питания. Зарядный диод
позволит сохранить это напряжение на конденсаторах линии до
прихода очередного импульса, поджигающего тиратрон.
После зажигания тиратрона начинается процесс формирования
модулирующего импульса. Эквивалентная схема цепи разряда ли-
нии (рис. 6.7) состоит из формирующей линии ЛЗ-1, ключа S1, роль
которого выполняет тиратрон V2, и сопротивления нагрузки 7?н.
Если сопротивление нагрузки 7?н выбирается равным волновому
сопротивлению линии рл, то в момент замыкания ключа в разряд-
ной цепи появляется ток:
7И 6^л<тах/(/?н + Рл) ,
создающий на нагрузке напряжение
гт __ 6^л>тах/?н _ Unmta
*н + Рл 2 '
Напряжение на левом конце ли-
нии скачком уменьшается до зна-
чения Пл.тах/2, и по линии слева
направо начинает распространять-
ся волна — С7л.тах/2 (рис. 6.8). Че-
рез время t = тзад эта волна дой-
дет до правого разомкнутого кон-
ца линии, отразится от него и
начнет двигаться в обратном на-
правлении, продолжая разряжать
конденсаторы Сл. Через время
t = 2тзад эта волна снова дойдет
до левого конца линии. На этом
процесс формирования импульса
закончится, поскольку левый ко-
нец линии согласован нагрузоч-
ным сопротивлением 7?н = рл, и
напряжение на всех конденсато-
рах линии к этому моменту ста-
нет равным нулю.
Рис. 6.8. Распределение напряжения
вдоль линии в процессе ее разряда:
а-до замыкания ключа t < 0; б-в момент
времени 0 < t < тзад; в-в момент времени
7эаа ** 7 < 2Т1ИД
235
Рис. 6.9. Формы импульсов при раз-
личных соотношениях сопротивлений
нагрузки и волнового сопротивления
линии:
В течение всего времени, пока
по линии распространяется раз-
рядная волна, через нагрузку про-
текает ток
’« = + Рл) >
и на ней выделяется напряжение
(рис. 6.9, а) амплитудой
^нмп = ^л.тах/2 « Ел
и длительностью тимп = 2тзад.
Если сопротивление нагрузки
не равно волновому сопротивле-
нию линии, то процесс разряда
линии не заканчивается через вре-
мя 2тзад и форма импульсов на
нагрузке будет отличаться от иде-
альной (рис. 6.9,6, в).
На практике добиться полного
й-к,. = р„;бля>рл;в-л„<р„ согласования линии трудно, по-
этому форма модулирующего им-
пульса обычно отличается от иде-
альной. С точки зрения обеспечения передачи максимальной мощ-
ности от накопителя к нагрузке лучше выбирать RH > рл по сравне-
нию с вариантом, когда RK < рл, так как при одном и том же
рассогласовании передаваемая мощность в первом случае умень-
шается в процентном отношении меньше, чем во втором. Задний
срез модулирующего импульса при этом будет затянут.
В реальных модуляторах чаще используется вариант, когда
сопротивление нагрузки несколько меньше волнового сопротивле-
ния линии. В этом случае на линии в результате перезаряда
образуется отрицательное напряжение, которое способствует сокра-
щению времени восстановления (деионизации) тиратронов. Для
того чтобы отрицательное напряжение постепенно не накапли-
валось от периода к периоду, параллельно тиратрону включают
демпфирующий диод V3 (рис. 6.4), который шунтирует линию и
прекращает в ней колебательный процесс.
Магнетроны обладают нелинейной амплитудной характеристи-
кой. Генерация ВЧ-колебаний начинается у них приблизительно при
60% номинального анодного напряжения. Поэтому входное сопро-
тивление магнетрона в момент прихода модулирующего импульса
имеет большое значение, а затем начинает уменьшаться и через
время, равное приблизительно длительности фронта модулирующе-
го импульса, становится равным номинальному рабочему зна-
чению. В результате рассогласования линии (RH » рл) в начальный
момент формирования импульса его форма искажается, появляется
резкий всплеск напряжения, достигающий почти удвоенного зна-
236
чения амплитуды импульса. Чтобы устранить эти всплески, па-
раллельно магнетрону или первичной обмотке импульсного транс-
форматора подключают ЛС-звено, состоящее из набора после-
довательно включенных резисторов и конденсаторов (звено R1C1
на рис. 6.4). Входное сопротивление такой цепи в каждый момент
времени будет определяться мгновенными значениями параллельно
включенных пересчитанного в первичную обмотку трансформатора
сопротивления магнетрона и АС-звена. При соответствующем под-
боре параметров АС-звена можно добиться достаточно хорошего
согласования нагрузки с линией во всем временном интервале
формирования импульса, т. е. выполнить условие RH = рл.
Кроме согласующего АС-звена, параллельно нагрузке в мо-
дуляторах на линиях задержки часто включают демпфирующую
цепочку (звено R2 на рис. 6.4). Эта цепочка предназначена для
устранения возникающих после импульса колебаний, которые мо-
гут явиться причиной возникновения в приемнике дополнительных
помех. Параметры этой цепочки подбирают обычно эксперимен-
тальным путем.
Модуляторы на линиях задержки нашли широкое применение в
трассовых и посадочных РЛ. Основными достоинствами этих моду-
ляторов являются:
возможность применения в качестве ключа водородных ти-
ратронов, обладающих малым внутренним сопротивлением и, как
следствие этого, высоким коэффициентом полезного действия;
хорошая форма импульса, определяемая в основном параметра-
ми линии задержки;
низкие требования к форме и амплитуде поджигающего им-
пульса, формируемого в подмодуляторе;
высокая стабильность длительности сформированных импуль-
сов.
Недостатки модуляторов на линиях задержки:
трудности в формировании запросных кодовых посылок;
плохая стабильность моментов начала импульсов;
невозможность изменять длительность импульсов без коммута-
ции элементов модулятора, находящихся под высоким напряже-
нием;
большие масса и габаритные размеры, связанные с применением
искусственных линий задержки и импульсных трансформаторов,
находящихся под высоким потенциалом.
Модуляторы с полным разрядом накопителя, выполненного на
двух линиях задержки. В последние годы в передающих устройствах
мощных РЛ нашли применение модуляторы, у которых накопители
выполнены в виде двух линий задержки. Использование двойных
формирующих линий в качестве накопителя было вызвано стремле-
нием получить большие амплитуды модулирующих импульсов, что
особенно важно для передающих устройств, оконечные каскады
которых выполнены на мощных усилительных клистронах.
237
Рис. 6.10. Упрощенная принципиальная схема модулятора на двух линиях задержки
Принципиальная схема модулятора на двух линиях задержки
(рис. 6.10) мало чем отличается от схемы модулятора на одной
линии. Она содержит зарядный дроссель ДР1, зарядный диод VI,
водородный тиратрон V2, две одинаковые линии задержки ЛЗ-1,
ЛЗ-2 и импульсный трансформатор ИТр1.
Эквивалентная схема зарядной цепи такого модулятора анало-
гична схеме, показанной на рис. 6.5. Отличие будет состоять лишь
в том, что эквивалентная емкость конденсатора будет составлена из
сумм отдельных емкостей обеих линий. Разрядная цепь модулятора
состоит из водородного тиратрона, первой формирующей линии
ЛЗ-1, импульсного трансформатора ИТр1 и второй формирующей
линии ЛЗ-2. Упрощенная принципиальная схема этой цепи показана
на рис. 6.11.
В отличие от модулятора с одной линией задержки в этой схеме
параметры нагрузки выбирают из условия
Ян = 2рл,
где рл-волновые сопротивления линий.
Первая и вторая линии оказываются несогласованными и по
входу, и по выходу. Левый конец первой линии в момент замыкания
ключа оказывается короткозамкнутым. Правый конец этой же
линии нагружен на последовательно соединенные входное сопро-
тивление второй линии (рл) и сопротивление нагрузки /?н = 2рл, т. е.
238
^Н.ЛИН Рл + ЗРл •
На такое же сопротивление нагружен вход второй линии, а нагруз-
кой выхода этой линии является бесконечно большое сопротив-
ление.
В момент замыкания ключа К1 (зажигания тиратрона) в си-
стеме, состоящей из двух несогласованных линий, возникают вол-
ны, которые могут распространяться в обоих направлениях. Волны,
распространяющиеся в представленной на рис. 6.11 схеме слева
направо, будем называть падающими, а распространяющиеся спра-
ва налево-обратными. Возможно многократное отражение волн,
эти случаи будут оговариваться особо.
Коэффициент отражения в линии по напряжению в общем
случае определяется выражением
(^Н.ЛНН Рл)/(^Н.ЛНН “Ь Рл) • п
Тогда для обратной волны на входе первой линии коэффициент
тв.л.,-1 '= (0 - рл)/(0 + рл) = - 1.
Для падающей волны в конце первой линии коэффициент отра-
жения
тК.Л.З-1 = (ЗРл - Рл)/(3рл + Рл) = 1/2 -
Аналогичным образом получаем коэффициент отражения для
обратной волны в начале второй линии тн л.з-2 = 0,5 и коэффициент
отражения для падающей волны в конце второй линии тк.л.3-2 = 1.
Учитывая полученные здесь соотношения, рассмотрим более
подробно процессы, происходящие в представленной на рис. 6Л1
схеме после замыкания ключа К1. Это удобнее всего сделать
с помощью эпюр распределения напряжений вдоль обеих линий
в отдельные моменты времени. В качестве исходного состояния
условно выбираем момент времени t < 0, когда все конденсаторы
линий зарядились до напряжения, приблизительно равного удвоен-
ному напряжению источника питания (рис. 6.12, а).
После замыкания ключа в первой линии образуется падающая
волна с амплитудой 2Еа. Эта волна, двигаясь слева направо,
поочередно снимает заряд с конденсаторов линии ЛЗ-1 (интервал
времени 0 < t < тзад на рис. 6.12,6). Во второй линии в этот про-
межуток времени заряд конденсаторов остается неизменным. В
момент времени t = тзад падающая волна достигнет конца первой
линии. Поскольку коэффициент отражения в конце этой линии
равен 1/2, то волна разделится на две части, одна из которых,
отразившись, пойдет в обратном направлении, а другая начнет
разряжать линию ЛЗ-2 (рис. 6.12, в). В момент времени t = 2тзад
отраженная волна достигнет короткозамкнутого начала первой
линии, изменит свою полярность и пойдет в обратном направлении,
239
Рис. 6.12. Распределение напряжений
вдоль линий в различные моменты
времени
Рис. 6.13. Эпюры напряжений в раз-
рядной цепи модулятора на двух ли-
ниях задержки
снимая отрицательный потенциал, накопленный линией в проме-
жуток времени тзад < t < 2тзад (рис. 6.12, г).
Во второй линии падающая волна (£а) снимает половину заряда
с конденсаторов формирующей линии и в момент времени t — 2тзад
полностью без изменения полярности отразится от ее разомкнутого
конца. Двигаясь в обратном направлении, она к моменту времени
t = Зтзад дойдет до начала линии. К этому же моменту времени
волна +Еа в первой линии подойдет к ее концу. Разделившись на
две части, обе волны компенсируют друг друга (рис. 6.12, д) и
поскольку к этому моменту времени на обеих линиях напряжения
уже не будет, процесс разряда накопителя на этом полностью
закончится.
Таким образом, в интервале времени от момента замыкания
ключа до момента Зтзад в схеме модулятора происходит сложный
процесс разряда накопителя и формирования импульса. Для того
чтобы определить что при этом происходит на нагрузке, необ-
ходимо рассмотреть, как во времени изменяется напряжение на
конце первой линии (wi>2) и в начале второй (1/3,4)- Напряжение на
нагрузке г/2,4 будет найдено из соотношения
W2,4 — ^3,4 — •
240
Эпюры изменения во времени указанных напряжений показаны на
рис. 6.13.
Сформированный модулирующий импульс будет иметь ампли-
туду 1ЕЛ и длительность ^имп — 2тэад.
Таким образом, применение двойной формирующей линии по-
зволило вдвое уменьшить необходимое напряжение высоковольтно-
го источника питания и снизить требования к электрической проч-
ности элементов схем модулятора.
Недостатком модулятора на двух линиях задержки по срав-
нению с модулятором на одной линии является некоторое услож-
нение его схемы и увеличение габаритных размеров.
6.3. Магнетронные генераторы
Основные параметры. Эксплуатационное свойства магнетронов
оцениваются определенной совокупностью параметров и характе-
ристик. К числу обязательных параметров, контролируемых в
процессе работы магнетрона в составе аппаратуры передающего
устройства РЛ, относятся: импульсная мощность, отдаваемая в
нагрузку; рабочее анодное напряжение; анодный ток; длина волны
или частота генерируемых колебаний. Кроме перечисленных пара-
метров, имеется еще большая группа величин, с помощью которых
можно оценить пригодность магнетронов для использования в
различных видах РЛ: критические и пороговые анодные напря-
жения, нагрузочный к.п.д., статическое и динамическое внутреннее
сопротивление магнетронов, коэффициент электронного смещения
частоты, коэффициент затягивания частоты, температурный коэф-
фициент частоты, максимально допустимая температура анодного
блока, время разогрева магнетрона, относительный диапазон пере-
стройки частоты, крутизна перестройки частоты, допустимое число
полных циклов перестройки частоты.
Особым параметром магнетрона, определяющим характеристи-
ки модулятора, является номинальная крутизна переднего фронт
модулирующего импульса. К модулирующим импульсам предъяв-
ляются определенные требования, причем эти требования различны
для разных типов магнетронов. На рис. 6.14 в утрированном виде
показаны отдельные участки модулирующего напряжения, а также
форма высокочастотного импульса, вырабатываемого магнетро-
ном в результате воздействия на него напряжения указанной фор-
мы.
Начальное нарастание напряжения модулирующего импульса
(участок Г) может происходить по произвольному закону, так как
генерация СВЧ-колебаний в магнетроне возникает в промежу1ке
0,6...0,8 номинального рабочего напряжения. Затягивать процесс
нарастания напряжения на первом участке нежелательно, так как
при этом бесполезно тратится мощность модулятора, падает па-
241
Рис. 6.14. Модулирующий импульс (я)
и соответствующая ему огибающая
высокочастотного импульса в магне-
троне (б)
грузочный коэффициент полезно-
го действия магне трона и проис-
ходит излишнее выделение тепла.
Крутизна нарастания напряжения
на участке II должна иметь со-
вершенно определенное значение
для того, чтобы в магнетроне
возникли основные колебания
л-вида. После того как в магнет-
роне установятся колебания, на-
пряжение на нем необходимо как
можно быстрее довести до номи-
нального (участок Ш). Чем боль-
ше крутизна модулирующего им-
пульса на этом участке, тем коро-
че будет фронт зондирующего
импульса.
Участок IV модулирующего
напряжения определяет конфигу-
рацию вершины высокочастотно-
го импульса. Кроме того, измене-
ния модулирующего напряжения
на этом участке приводят также
к паразитной внутриимпульсной частотной модуляции, так как
частота генерируемых колебаний в магнетроне зависит от его
анодного напряжения. Обычно допускают отклонение анодного
напряжения магнетрона от его номинального значения на этом
участке не более 5%.
На участке V напряжение магнетрона должно быть резко умень-
шено с максимально возможной скоростью до величины порядка
0,617а.раб. Это необходимо для получения крутого заднего среза
высокочастотного импульса.
На участке VI после срыва генерации напряжение может умень-
шаться с наиболее удобной скоростью, но не настолько быстро,
чтобы возник чрезмерно большой обратный выброс (VII), и не
настолько медленно, чтобы на магнетроне выделялась значитель-
ная бесполезно теряемая мощность. Возможный последующий
положительный выброс напряжения (VIII) нежелателен, так как он
может вызвать новую генерацию высокочастотных колебаний в
магнетроне. Это увеличит уровень межимпульсного шума в прием-
нике, минимальную дальность действия РЛ или вызовет появление
ложных целей в начале просматриваемой дистанции.
Методы перестройки и стабилизации частоты магнетронных пере-
датчиков. К передающим устройствам предъявляются жесткие тре-
бования в отношении кратковременной и долговременной ста-
бильности частоты генерируемых колебаний. Особенно высоки эти
требования для РЛС, работающих в режимах СДЦ с когерентной
242
обработкой сигналов. С другой стороны, в силу ряда причин,
например при изменении помеховой ситуации в аэропорту, где
установлен РЛ, появляется необходимость в переходе с одной из
генерируемых частот на другую. У магнетронных передатчиков
процесс подстройки и перестройки частоты затруднен, поскольку
резонансные системы, определяющие частоту генерируемых колеба-
ний, являются неотъемлемой частью самого магнетрона.
Управление частотой генерируемых колебаний в магнетронах
может осуществляться путем непосредственного изменения пара-
метров его резонансной системы, рабочего режима (использование
явления электронного смещения частоты) или параметров его
нагрузки (использование явления затягивания частоты).
Воздействие на параметры резонансной системы магнетрона
может осуществляться механическим или электронным путем. В
магнетронах с механической перестройкой* частоты производится
перемещение какого-либо элемента в резонансной системе. При
введении настроечного штыря в отверстие резонатора уменьшается
его эквивалентная индуктивность. Введение в щель резонатора
настроечной пластины увеличивает его эквивалентную емкость.
В магнетронах с двойными кольцевыми связками собственная
частота резонансной системы может быть изменена введением
между связками кольца, увеличивающего эквивалентную емкость
связок.
В каждом из перечисленных выше механических методов пе-
рестройки можно получить изменение частоты на 5... 10%. Для
получения большего диапазона перестройки (10... 15%) следует
реализовать несколько методов одновременно. При этом необхо-
димо иметь в виду, что параметры магнетронов при больших
изменениях частоты резко ухудшаются.
Метод изменения настройки магнетронов, основанный на яв-
лении электронного смещения частоты, предполагает управление
анодным током или напряжением. Достоинства этого метода за-
ключаются в простоте исполнения системы управления частотой,
большом быстродействии и возможности перестройки по произ-
вольному закону. Недостаток метода состоит в том, что для
получения значительного отклонения частоты необходимо сильно
изменять рабочий режим магнетрона. Это приводит к падению
отдаваемой мощности и ухудшению к.п.д.
Для импульсных магнетронов обычных конструкций, применяе-
мых в РЛ гражданской авиации, пределы перестройки частоты за
счет изменения рабочего режима незначительны. В этих РЛ способ
управления частотой изменением анодного напряжения исполь-
зуется иногда для автоматической подстройки частоты при из-
менении параметров излучаемых сигналов.
Метод изменения настройки магнетрона, основанный на явле-
нии затягивания частоты, предполагает включение во внешнюю
фидерную линию перестраиваемого согласующего устройства, вы-
243
полненного в виде объемного резонатора или коаксиального шлей-
фа. Диапазон изменения частот в устройствах, использующих этот
метод, составляет приблизительно 1 % номинального значения. При
перестройке магнетрона одновременно изменяются его выходная
мощность и к.п.д. Метод, основанный на явлении затягивания
частоты, используется только для первоначальной настройки маг-
нетронных передатчиков.
6.4. Особенности построения передатчиков,
выполненных на генераторах с внешним возбуждением
Передатчики, выполненные на лампах с сеточным управлением.
На первом этапе развития радиолокации лампы с сеточным управ-
лением широко использовались для построения передающих
устройств. В дальнейшем они были вытеснены более совершенными
приборами, способными работать в дециметровом, сантиметровом
и миллиметровом диапазонах волн. Основная причина потери
интереса к лампам с сеточным управлением со стороны конструк-
торов радиолокационных передатчиков заключается в принципи-
альных ограничениях по частоте, свойственных этим электронным
приборам. К факторам, ограничивающим получение хороших ха-
рактеристик мощных ламп при увеличении частоты, относятся:
увеличение реактивных сопротивлений вводов и выводов;
увеличение высокочастотных потерь в диэлектриках;
увеличение относительного времени пролета электронов между
электродами;
уменьшение возможности отвода тепла в связи с малыми раз-
мерами элементов конструкции лампы;
увеличение вероятности электрических пробоев при уменьшении
размеров элементов конструкции лампы.
В последние годы в связи с развитием радиолокационных систем
с когерентной обработкой сигналов и применением сложных за-
просных кодов разработчики радиолокационной аппаратуры стали
вновь проявлять интерес к усилителям мощности, выполненным на
лампах с сеточным управлением. Были созданы новые лучевые
триоды и тетроды с характеристиками, вполне удовлетворяющими
требованиям, предъявляемым к некоторым типам радиолокацион-
ных передатчиков.
Передатчики, выполненные на лампах с сеточным управлением,
применяются во вторичных каналах аэродромных РЛ и самолетных
ответчиках. Принцип построения таких передатчиков рассмотрим
на примере передающего устройства активного канала (УПАК)
радиолокатора ДРЛ-7СМ.
В состав аппаратуры УПАК входят два передатчика - запросных
сигналов и сигналов подавления. Несущая частота сигналов равна
1030 МГц, выходная импульсная мощность-800 Вт. Передатчик
244
Рис. 6.15. Функциональная схема передающего устройства вторичного канала ра-
диолокатора ДРЛ-7СМ
запросных сигналов формирует импульсы и Р3, передатчик
сигналов подавления-импульсы Р2.
Схемы обоих передатчиков (рис. 6.15) совершенно идентичны.
Возбудитель состоит из автогенератора Tl, ТЗ, стабилизирован-
ного сменными кварцами; усилителей Т5, Т7, работающих в непре-
рывном режиме; группы усилителей T9, Тб, Т8, Т10 и умножителей
Т2, Т4, Д1, Д2, работающих в импульсном режиме. Импульсный
режим обеспечивается модулирующим напряжением +27 В, по-
ступающим с первого выхода модулятора. Длительность моду-
лирующих импульсов равна 5,5 мкс. Модуляция транзисторных
каскадов возбудителя производится по коллекторным цепям путем
отключения от них питающего напряжения. Таким образом, пред-
варительная модуляция высокочастотных колебаний в возбудителе
обеспечивает значительную экономию потребляемой энергии и
уменьшение паразитных излучений во время приема ответных
сигналов.
Частота в умножителях Т2 и Т4 удваивается за счет выбора
рабочей точки транзисторных каскадов на нелинейном участке
вольт-амперной характеристики с последующей фильтрацией вто-
рой гармоники выходных сигналов. В умножителе Д1, Д2 произ-
водится параметрическое утроение частоты. Утроитель собран на
варакторах. Для получения третьей гармоники используется не-
линейная зависимость барьерной емкости диодов Д1 и Д2 от
обратного напряжения, приложенного к д-и-переходам диодов.
Уровень выходного сигнала при этом достигает 35... 40% входного
сигнала. Выделение третьей гармоники осуществляется трехзвен-
ным фильтром с распределенными параметрами.
245
После возбуждения сигналы частоты 1030 МГц поступают на
вентиль, предназначенный для развязки оконечных каскадов пе-
редатчика возбудителя. Вентиль состоит из ферритового циркуля-
тора ФЦ, согласующей нагрузки R, трех согласующих элементов
СЭ и трех отрезков ВЧ-кабеля. Согласующие элементы предназна-
чены для частотной коррекции ферритового циркулятора в рабочем
диапазоне частот передатчика. Выполнены они в виде двух па-
раллельных шлейфов (замкнутого и разомкнутого) на полосковых
линиях с использованием печатного монтажа. Длина отрезков
ВЧ-кабеля подбирается при настройке из условия получения мини-
мального значения потерь в тракте высокочастотного сигнала.
Оконечные каскады передатчиков выполнены на титано-кера-
мических триодах Л1 и Л2. Каскады собраны по схеме с общей
сеткой и имеют входной катодно-сеточный контур и выходной
анодно-сеточный коаксимальный резонатор. Модуляция каскадов
осуществляется по катодной цепи путем подачи на нее со второго
выхода модулятора отрицательных прямоугольных импульсов дли-
тельностью 0,8 мкс.
Передающие устройства вторичных каналов аэродромных ра-
диолокаторов «Экран-85» выполняются аналогичным образом.
Единственное отличие заключается в том, что для увеличения
излучаемой мощности на выход передатчика включается допол-
нительный усилительный каскад, собранный на более мощной
лампе. Модуляция этого каскада производится по экранной сетке
импульсами амплитудой 750 В.
Передатчики, выполненные на пролетных клистронах. При кон-
струировании мощных передатчиков трассовых РЛ многие разра-
ботчики отдают предпочтение усилителям, выполненным на про-
летных многорезонаторных клистронах. Основным преимуществом
клистронных усилителей является их способность генерировать
мощные стабильные СВЧ-колебания при высоком к.п.д. и большом
усилении. Высокие значения указанных параметров клистронов
объясняются прежде всего удачным распределением функций между
отдельными узлами их конструкции: элементы, находящиеся под
напряжением постоянного тока, и высокочастотные элементы в
пролетном клистроне разделены между собой. Кроме того, высоко-
частотный вход клистрона хорошо развязан с высокочастотным
выходом, что позволяет получать большие значения коэффициента
усиления, не опасаясь самовозбуждения усилительных каскадов
передатчика.
Принцип построения передающих устройств, оконечные каскады
которых выполнены на мощных пролетных клистронах, рассмот-
рим на примере первичного канала трассового РЛК «Скала-М»
(рис. 6.16). Передатчик состоит из генератора задающих частот,
возбудителя, усилителя мощности и модулятора. Построение пе-
редатчика по такому принципу является типовым для истинно
когерентных РЛС и позволяет получить высокую фазовую ста-
246
Рис. 6.16. Функциональная схема передающего устройства первичного канала РЛК
«Скала-М»
бильность, необходимую для обеспечения заданного подавления
сигналов местных предметов.
Генератор задающих частот формирует сигналы гетеродинной и
промежуточной частот. Гетеродинный сигнал получается путем
умножения в 12 раз частоты кварцевого генератора. Промежу-
точная частота /пр вырабатывается кварцевым генератором. Фор-
мирование сигнала несущей частоты/. происходит в смесительно-
усилительном устройстве возбудителя путем смешения гетеродин-
ной /. и промежуточной /пр частот. Сигнал суммарной частоты
f.=fT+ /Пр» выделяемой входным резонатором второго каскада
возбудителя, усиливается и поступает в усилитель мощности-
клистронный генератор, являющийся оконечным каскадом пере-
датчика. В клистронном генераторе происходит усиление СВЧ-ко-
лебаний до необходимого уровня мощности.
Для канализации и распределения ВЧ-энергии, регулировки
режима работы возбудителя и клистронного генератора, а также
для контроля работы возбудителя служит коаксиальный ВЧ-тракт,
состоящий из блоков распределения энергии гетеродина и устрой-
ства регулирования и контроля мощности возбуждения.
Возбудитель представляет собой смесительно-усилительное
устройство, состоящее из усилителя сигнала гетеродинной частоты,
диодного смесителя, усилителя сигнала несущей частоты и двух
импульсных модуляторов (рис. 6.17). Оба усилителя выполнены на
клистронах, работающих в импульсном режиме. На катод первого
клистрона подается импульсное напряжение отрицательной поляр-
ности с амплитудой 1 кВ, а на катод второго клистрона-минус
4,5 кВ. Модулирующие импульсы формируются с помощью двух
различных импульсных модуляторов. Модулятор первого клистро-
на выполнен в виде схемы формирования прямоугольных им-
пульсов на транзисторах. Модулятор второго клистрона пред-
ставляет собой импульсный модулятор с полным разрядом на-
копительной линии.
247
Рис. 6.17. Функциональная схема воз-
будителя оконечного клистрона усили-
теля
На диодный смеситель пода-
ются два сигнала: сигнал гетеро-
динной частоты/,., усиленный пер-
вым клистроном, и импульсно-
модулированный сигнал промежу-
точной частоты /пр. Нагрузкой
смесителя является входной резо-
натор второго клистрона. На этой
нагрузке будет выделяться сигнал
суммарной частоты /.=/.+ /пр.
Оконечный усилитель мощно-
сти передатчика состоит из пролетного четырехрезонаторного
клистрона, фокусирующей катушки и импульсного трансформатора.
Клистрон имеет жидкостное охлаждение коллектора и резонаторно-
го блока. Поддержание необходимого вакуума в баллоне клистрона
обеспечивается электроразрядным насосом. Модулирующие им-
пульсы отрицательной полярности амплитудой 140 кВ подаются на
катод клистрона через импульсный трансформатор от модулятора.
Модулятор оконечного каскада выполнен по схеме с полным
разрядом накопительной линии. При этом вместо одной форми-
рующей линии в модуляторе используются пять линий вместе со
своими зарядными диодами и тиратронами. Каждая линия, за-
рядный диод и тиратрон образуют самостоятельный модуль. Вхо-
ды всех модулей подключаются к зарядному дросселю модулятора,
а все выходы-параллельно первичной обмотке импульсного транс-
форматора. Выход из строя любого из модулей не приводит к
отказу всего модулятора, а лишь уменьшает его выходную мощ-
ность. Кроме того, модульное построение модулятора позволяет
оперативно изменять выходную мощность передатчика путем от-
ключения одного или двух формирующих модулей. Согласование
волнового сопротивления параллельно включенных линий с на-
грузкой при этом не нарушается, так как при отключении модулей
одновременно изменяется внутреннее сопротавление клистрона.
В зарядной цепи модулятора применяется схема стабилизации
амплитуды модулирующих импульсов. Достигается это путем из-
менения добротности зарядного дросселя, входящего в цепь ре-
зонансного заряда линий. Если напряжение заряда по какой-либо
причине превзойдет номинальное значение, то срабатывает по-
роговая схема и добротность индуктивности зарядного дросселя
резко упадет. Благодаря этому накопленный потенциал формирую-
щей линии после зарядного диода всегда будет равен номинальному
значению.
Стабилизатор заряда линий позволяет снизить пульсации мо-
дулирующих импульсов до 0,08%. Благодаря этому удается умень-
шить фазовую нестабильность излучаемых сигналов до 0,42°. Такая
248
высокая стабильность позволяет получить в системе СДЦ коэф-
фициент подавления помех от местных предметов более 40 дБ.
Передатчики, выполненные на амплитронах и ЛБВ. Амплитро-
ны—сравнительно новый класс электронных приборов со скрещен-
ными полями. Первые эксперименты по их исследованию были
проведены в начале 50-х годов, а в начале 60-х они стали исполь-
зоваться в радиолокационной аппаратуре.
Быстрый прогресс в разработке и совершенствовании амплитро-
нов объясняется тем, что параметры этих приборов очень хорошо
соответствуют требованиям, предъявляемым к передающим
устройствам радиолокационных станций. К таким параметрам
относятся высокий к.п.д. (55...80%) сравнительно низкие рабочие
напряжения (при Ри = 1 МВт U % 25 ...40 кВ), высокая фазовая
стабильность (менее 3... 5° на 1% изменения рабочего напряжения),
широкополосность (7... 10% относительно средней частоты), воз-
можность получения больших выходных мощностей (2... 5 МВт),
большой срок службы (более 1000 ч), относительно небольшие
габаритные размеры и масса. К сожалению, амплитроны не лишены
недостатков. Они обладают очень малым коэффициентом усиления
(7... 15 дБ) и склонны к возбуждению при малых уровнях входной
мощности. Для амплитронов характерно так называемое явление
«прозрачности», которое заключается в том, что энергия с выхода
амплитрона может беспрепятственно проникать на вход без су-
щесз венного затухания. С другой стороны, входная мощность
может поступать на выход амплитрона даже при выключенном
источнике питания. Поэтому в многокаскадных передатчиках, вы-
полненных на амплитронах, приходится применять ферритовые
развязки на входе и выходе приборов. Эту же цель преследует
применение в многокаскадных амплитронных передатчиках в ка-
честве промежуточных каскадов усилителей, выполненных на лам-
пах бегущей волны.
Лампы бегущей волны относятся к типу электронных приборов,
у которых усиление высокочастотной мощности достигается за счет
длительного взаимодействия электронов с электромагнитным по-
лем. Принцип действия ЛБВ, предназначенных для работы в пере-
дающих устройствах радиолокационных станций, ничем не отли-
чается от принципа действия обычных малошумящих ЛБВ радио-
локационных приемников. Они так же, как малошумящие ЛБВ,
содержат электронную пушку, коллектор, высокочастотные вход и
выход, замедляющую систему и арматуру, включающую в себя
входные и выходные цепи, элементы подстройки, фокусирующую
систему, центрирующее устройство и систему охлаждения.
ЛБВ характеризуются большим числом параметров. При ис-
пользовании ЛБВ в качестве усилителей мощности наиболее важ-
ными параметрами являются коэффициент усиления, максимальная
выходная мощность, диапазон рабочих частот, к.п.д., срок службы,
габаритные размеры и масса.
249
Коэффициент усиления ЛЕВ зависит от входной мощности,
частоты сигнала, электрического режима и некоторых других фак-
торов. При работе в режиме линейного усиления отношение вы-
ходной мощности ЛЕВ к мощности возбуждения лежит в пределах
20...40 дБ.
В принципе ЛЕВ могут развивать такую же большую выходную
мощность, что и клистроны, так как функции катодного узла,
области взаимодействия и коллектора у них достаточно хорошо
разделены между собой. Однако имеются и причины, ограничиваю-
щие возможность получения больших выходных мощностей. Одна
из таких причин связана с необходимостью введения в ЛБВ со-
средоточенных поглотителей, способных рассеивать требуемые
мощности в небольшом объеме при малых значениях коэффициента
отражения. Другое существенное ограничение обусловлено необ-
ходимостью применения специальных периодических структур, ко-
торые способны хорошо отводить выделяющееся на них тепло.
Такие структуры обладают малой широкополосностью, т. е. ЛБВ,
рассчитанные на большие выходные мощности, не могут усиливать
сигналы в очень широком спектре частот.
Под рабочим диапазоном частот ЛБВ понимается диапазон, в
котором лампа обеспечивает усиление не менее некоторого зна-
чения, гарантируемого заводом-изготовителем. Характерным зна-
чением относительной полосы частот для современных мощных
ЛБВ является 10% при коэффициенте усиления 30 дБ. В ЛБВ
средней мощности при том же коэффициенте усиления удалось
получить относительные полосы частот около 20%. Коэффициент
полезного действия ЛБВ сравнительно низок-около 20%. Основ-
ная причина, обусловливающая низкий к.п.д. ламп бегущей волны,
заключается в трудностях согласования волноводных трактов с
замедляющими системами. У ЛБВ средней мощности к.п.д. полу-
чается несколько выше.
Срок службы ЛБВ может быть относительно велик по срав-
нению с долговечностью других мощных ламп. При правильной
эксплуатации срок службы ЛБВ составляет 5... 10 тыс.ч.
Габаритные размеры и масса каскадов передатчиков, выпол-
ненных на ЛБВ, определяются в основном фокусирующей и охлаж-
дающей системами, а также защитными устройствами, предохра-
няющими обслуживающий персонал от рентгеновского излучения.
Масса и габариты каскадов на ЛБВ соизмеримы с массой и
габаритами клистронных каскадов такой же мощности.
Наибольшее распространение в радиолокационной технике ЛБВ
находят в тех случаях, когда спектр излучаемых сигналов должен
занимать большой диапазон частот, как, например, в РЛС с
внутриимпульсной частотной модуляцией, необходимой для обес-
печения высокой разрешающей способности при работе импуль-
сами большой длительности. В некоторых случаях в связи с
250
изменением помеховой ситуации
требуется оперативный переход
на новую рабочую волну. Если
диапазон изменения частот велик,
Рис. 6.18. Дисперсионная ультразву-
то передающие устройства таких ковая линия задержки
станций целесообразно выпол-
нять на генераторах, использующих ЛБВ или амплитроны.
Большой интерес представляет комбинация включения ЛБВ и
амплитронов, устраняющая недостатки, связанные с малым коэф-
фициентом усиления амплитронов, их «прозрачностью», малым
к.п.д. ламп бегущей волны, их большими габаритами и массой.
Эффект от применения усилительных цепочек, состоящих из по-
следовательного соединения ЛБВ и амплитронов, проявляется в
увеличении к.п.д., снижении необходимого анодного напряжения,
уменьшении массы и габаритных размеров передатчика. Примером
передающего устройства, выполненного на ЛБВ и амплитронах,
может служить передатчик первичного канала аэродромного радио-
локатора «Экран-85».
Радиолокатор «Экран-85» излучает импульсы длительностью
25 мкс с линейной частотной внутриимпульсной модуляцией
(ЛЧМ). Формирование импульсов ЛЧМ производится в гетеро-
дине-возбудителе, входящем в состав устройства преобразования и
фильтрации (УПФ) передатчика. В гетеродине-возбудителе принят
пассивный способ формирования ЛЧМ сигнала на промежуточной
частоте. В качестве пассивного формирователя выбрана диспер-
сионная ультразвуковая линия задержки, которая представляет
собой звукопровод из монокристалла кварца с нанесенными на его
рабочую поверхность тонкими металлическими полосками, пре-
образующими электрические сигналы в поверхностные ультразву-
ковые волны (рис. 6.18). Выходной преобразователь осуществляет
обратную операцию-ультразвуковые волны преобразуются в
электрические сигналы.
Рис. 6.19. Упрощенная функциональная схема устройства преобразования и фильтра-
ции сигналов
251
нение частоты в схеме гетеродина-воз-
будителя
Распределение металлических
полосок во входном преобразова-
теле носит эквидистантный ха-
рактер. Расстояние между сосед-
ними полосками выбирается из
условия настройки на среднюю
частоту девиации f0 = 20 МГц.
Число полосок определяет полосу
пропускания преобразователя.
Выходной преобразователь со-
держит ряд металлических поло-
сок с неравномерным шагом. Бла-
годаря этому при распростране-
нии ультразвуковой волны вдоль
звукопровода на выходных зажи-
мах преобразователя образуются
электрические сигналы перемен-
ной частоты, а сам сигнал «растягивается» во времени. Закон
размещения полосок на звуконосителе подобран таким образом,
чтобы выходной сигнал имел девиацию частоты 1 МГц. Упро-
щенная схема устройства преобразования и фильтрации сигналов
передатчика показана на рис. 6.19.
Генератор, стабилизированный кварцем, вырабатывает сигналы
частотой 20 МГц, которые в модуляторе преобразуются в радио-
импульсы длительностью 0,4 мкс (рис. 6.20, а). После дисперсион-
ной ультразвуковой линии задержки (УЛЗ) эти импульсы расши-
ряются до 29 мкс и модулируются по частоте +0,5 МГц
(рис. 6.20,6, в). После усилителя, необходимого для компенсации
затухания сигналов в УЛЗ, частотно-модулированный импульсный
сигнал поступает на выход гетеродина-возбудителя для дальнейше-
го преобразования его в схеме УПФ.
Кроме импульсного сигнала, ЛЧМ гетеродин-возбудитель гене-
рирует также непрерывные сигналы стабильной частоты 20 МГц,
которые используются в качестве опорных в АПОИ и фазовых
детекторах системы СДЦ. Для контроля качества работы системы
Запуск
Рис. 6.21. Функциональная схема передающего устройства первичного канала ра-
диолокатора «Экран-85»
252
СДЦ в схеме предусмотрена возможность генерации некогерентных
сигналов, которые вырабатываются нестабилизированным генера-
тором 20 МГц и переключаются в случае необходимости на выход
гетеродина-возбудителя специальным коммутатором.
Дальнейшее преобразование ЛЧМ сигнала производится путем
переноса его в область более высоких частот. Для этого исполь-
зуется гетеродинная частота fr, вырабатываемая в гетеродине при-
емного устройства станции. Непосредственное смешение частот fT и
/0 затруднено, так как эти частоты несоизмеримы по величине и
фильтрация продуктов смешения частот вследствие этого оказы-
вается неэффективной. Поэтому для формирования выходного сиг-
нала /с применяется двойное преобразование частоты. Сначала
сигнал ЛЧМ смешивается в первом преобразователе с сигналом
частотой 167 МГц и первый фильтр выделяет разностную частоту
(167 — /0) МГц. Во втором преобразователе гетеродинная частота fT
смешивается с частотой 167 МГц и второй фильтр выделяет раз-
ностную частоту (fT-167) МГц. Третий преобразователь смешивает
частоты (167 ~У0) МГц и (/г-167) МГц, а третий фильтр выделяет
суммарную частоту (fr-167) МГц + (167-/0) МГц = (fT~f0) МГц.
Таким образом, нестабильность генератора частоты 167 МГц не
оказывает влияния на стабильность результирующей частоты
(4 -f0) МГц.
После устройства преобразования и фильтрации СВЧ-сигнал/с в
виде импульса длительностью 29 мкс с линейной частотной внутри-
импульсной модуляцией через распределитель и транзисторный
усилитель поступает на ЛЕВ (рис. 6.21). Распределитель предназна-
чен для коммутации сигналов УПФ первого и второго комплектов
передающих устройств. Такая коммутация может потребоваться в
случае неисправности одного из комплектов.
В ЛЕВ производятся дальнейшее усиление сигнала и его моду-
ляция импульсами длительностью 27 мкс. Начало и конец импульса
определяются сигналами «Запуск 1» и «Запуск 2», поступающими из
синхронизирующего устройства. Модулятор рассчитан на неболь-
шую мощность, поскольку в ЛЕВ используется сеточная модуля-
ция.
Оконечный каскад передатчика выполнен на амплитроне. Мо-
дуляция амплитрона производится мощными импульсами длитель-
ностью 25 мкс и напряжением 5... 13 кВ. Длительность модулирую-
щего импульса и его положение выбираются таким образом, чтобы
начало и конец возбуждения амплитрона происходили соответ-
ственно раньше и позже, чем на амплитрон будет подан моду-
лирующий импульс. В противном случае в амплитроне могут
возникнуть колебания паразитных частот.
Глава 7. АНТЕННО-ФИДЕРНЫЕ УСТРОЙСТВА
7.1. Классификация радиолокационных антенн
и их основные параметры
Основные типы антенн. В радиолокаторах применяются в ос-
новном два вида антенн: зеркальные и антенные решетки. Зер-
кальная антенна состоит из слабонаправленного облучателя и
металлического отражателя (зеркала). В качестве зеркала чаще
всего используются параболические отражатели различных типов.
Для формирования симметричных ДН обычно выбирают отра-
жатели в виде параболоидов вращения, преобразующих сфери-
ческие волны, излучаемые облучателем, в волны с плоским фрон-
том, распространяющиеся только в одном направлении.
Направленность антенны с зеркалом в виде параболоида вра-
щения зависит от относительных размеров радиуса-раскрыва ан-
тенны /?/Х и амплитудного распределения поля на раскрыве. Наи-
большая направленность получается при равномерном распреде-
лении.
Ширина ДН параболических антенн на уровне половинной
мощности <ра0>5, выраженная в градусах, может быть ориентиро-
вочно определена по формуле
r\
<Ра0,5 = 30-1 1 + а—I, (7.1)
Л \ ZJ /
где а = 0,5 для плоскости Е, совпадающей с плоскостью поляризации
излучаемой волны, и а = 0,2 для плоскости Н, перпендикулярной к плос-
кости Е.
Антенна с зеркалом в виде параболоида вращения формирует
приблизительно симметричный луч игольчатого вида. Среди на-
земного радиолокационного оборудования широкое распростра-
нение такие антенны получили в метеорологических радиолока-
торах.
Для формирования несимметричных в горизонтальной и верти-
кальной плоскостях ДН применяются зеркала в виде усеченных
параболоидов вращения (рис. 7.1). Изменяя раскрыв антенны, мож-
но регулировать ширину ДН в различных направлениях, добиваясь
удовлетворения заданных требований отдельно для горизонтальной
и вертикальной плоскости. Усеченные параболоиды вращения ис-
пользуют при построении антенных систем трассовых, аэроузловых
и аэродромных радиолокаторов.
254
Частным случаем усеченного параболоида вращения является
его несимметричная вырезка (рис. 7.2). Фазовый центр облучателя у
таких антенн помещен в фокусе параболы, но облучатель наклонен
относительно ее оси. Облучатель в этом случае оказывается рас-
положенным вне пути распространения отраженной энергии, бла-
годаря чему отсутствует эффект затенения раскрыва антенны. Отра-
жатели в виде несимметричной вырезки из параболоида вращения
нашли широкое применение в радиолокаторах сантиметрового
диапазона, у которых из-за больших относительных размеров
облучателей эффект затенения проявляется наиболее сильно. С
такими антеннами работают радиолокаторы; посадочные, обзора
летного поля и обзорно-посадочные местных воздушных линий.
Для получения косекансных ДН или ДН более сложной формы
применяются специальные профили отражателей и системы об-
лучателей, состоящие из нескольких излучающих элементов. Осо-
бенно остро проблема получения нужной конфигурации ДН стоит
при конструировании антенн трассовых и аэроузловых радиоло-
каторов. Желание приблизить нижнюю кромку вертикальной ДН к
земле, уменьшить влияние отражений от поверхности земли и
направить излучаемую энергию в те участки контролируемого
пространства, где могут находиться ВС, приводит к использованию
нескольких облучателей и применению рефлекторов с профилями
двойной кривизны. Такого типа антенны в настоящее время ис-
пользуются практически во всех трассовых и аэроузловых радио-
локаторах и некоторых аэродромных и посадочных РЛ.
Кроме зеркальных антенн, в РЛ используются антенные ре-
шетки. Антенная решетка состоит из ряда отдельных излучающих
элементов, расположенных друг относительно друга определенным
образом. Результирующая ДН антенной решетки определяется
совместным действием всех элементов антенны. Относительные
амплигуды и фазы сигналов, подаваемых на эти элементы, подби-
раются таким образом, чтобы получить заданную диаграмму на-
правленности.
Рис. 7.1. Усеченный параболоид вра-
щения
Рис. 7.2. Несимметричная вырезка из
параболоида вращения
255
В радиолокационной технике применение антенных решеток
наиболее целесообразно в двух случаях:
в устройствах метрового диапазона волн, когда использование
зеркальных антенн для формирования узких диаграмм направлен-
ности становится невозможным из-за чрезвычайно больших раз-
меров отражателей;
в устройствах с электрическим сканированием пространства или
электрическим управлением конфигурацией диаграммы направлен-
ности.
Антенные решетки в зависимости от расположения излучателей
разделяются на линейные, поверхностные и объемные. Примером
линейного расположения облучателей могут служить антенны авто-
номных ВРЛ, ДН которых изменяют свою конфигурацию в зави-
симости от условий возбуждения излучающих элементов (рис. 7.3).
Антенна ВРЛ предназначена для излучения сигналов запроса на
частоте 1030 МГц, сигналов приема на частотах 1090 и 740 МГц, а
также для подавления сигналов боковых лепестков как по линии
запроса, так и по линии ответа. Поляризация излучаемых и при-
нимаемых сигналов для международного диапазона частот-верти-
кальная, для отечественного диапазона частот-горизонтальная.
Диаграммы направленности, формируемые антенной в горизон-
тальной плоскости для основного канала и канала подавления,
были показаны ранее на рис. 4.15.
Антенна сотоит из 42 идентичных двухдиапазонных излучателей
8, сорок из которых объединены в 10 излучающих устройств 1. В
Рис. 7.3. Функциональная схема антенны автономного вторичного радиолока-
тора
256
состав каждого устройства входят четыре рупора, делитель мощно-
сти международного диапазона и делитель мощности отечественно-
го диапазона (на рисунке не показан). В каждом рупоре установлены
два взаимно ортогональных возбудителя соответственно для меж-
дународного и отечественного диапазонов.
Сигнал основного канала международного диапазона через де-
литель мощности 3 поступает на «суммирующие» входы кольцевых
мостов 4. С кольцевых мостов сигналы поступают на делители
мощности излучающих устройств 2 для распределения их по ру-
порным излучателям 8. Образующиеся при этом на излучателях
синфазные токи будут распределены симметрично относительно
центра раскрыва антенны. Сформированная таким образом ре-
зультирующая ДН будет иметь один узкий в горизонтальной
плоскости лепесток и незначительные по уровню боковые лепестки.
Сигнал канала подавления поступает на вход делителя мощно-
сти 6, с выхода которого меньшая часть сигнала подается на
специальную антенну 7, предназначенную для подавления сигналов
заднего полупространства зоны обзора. Большая часть мощности
сигнала через делитель 5 подается на «вычитающие» входы коль-
цевых мостов 4. С выходов кольцевых мостов сигналы через
делители мощности 2 поступают на рупорные излучатели. На
излучателях антенной решетки формируется противофазное распре-
деление токов, создающее диаграмму направленности канала по-
давления с «провалом» в области главного лепестка основной
диаграммы направленности.
Формирование узкой ДН и ДН канала подавления для сигналов
диапазона УВД осуществляется аналогичным образом.
Другим примером антенной решетки с линейным расположе-
нием излучателей может служить щелевая антенна подавления
сигналов боковых лепестков, широко используемая в аэродромных
РЛ со встроенными активными каналами отечественного диапазо-
на. В этих РЛ щелевые антенны предназначены для приема от-
ветных сигналов на частоте 740 МГц с горизонтальной поляриза-
цией. Антенна представляет собой отрезок прямоугольного волно-
вода, в широкой стенке которого вырезаны семь вертикальных
щелей (рис. 7.4). Для уменьшения аэродинамического сопротивле-
ния стенки волновода выполнены в виде металлической сетки с
ячейками 20 х 20 мм. Отбор энергии из волновода в фидерную
линию осуществляется штырем, введенным в центр симметрии
широкой стенки волновода.
Согласно принципу двойственности, сформулированному
А. А. Пистолькорсом, можно провести аналогию между рассматри-
ваемой щелевой антенной и синфазной антенной, состоящей из семи
вибраторов, расположенных друг над другом в плоскости, перпен-
дикулярной поверхности земли. Для получения необходимой на-
правленности такой антенны в вертикальной плоскости расстояние
между щелями должно быть равно Х/2 и все щели должны питаться
9 Зак. 1375 257
синфазно. Для обеспечения синфазности питания щелей они рас-
положены в шахматном порядке симметрично средней линии широ-
кой стенки волновода. Принципиально тот же эффект можно было
бы получить и при линейном размещении щелей, но тогда для
обеспечения синфазности их питания пришлось бы вырезать щели
на расстоянии X друг от друга, что вдвое увеличило бы размеры
антенны в вертикальном направлении.
Поверхностные антенные решетки позволяют формировать ДН,
управляемые в двух взаимно ортогональных плоскостях. Направ-
ленность такой антенны определяется числом излучающих эле-
ментов, расстояниями между ними и законом их возбуждения. Для
эквидистантной прямоугольной решетки с равномерным амплитуд-
ным возбуждением излучателей ширина ДН в горизонтальной <ра и
вертикальной 0а плоскостях, выраженная в градусах:
уа да 180°X/kNA; 6а ~ 180°X/kNX, (7.2)
где Nx и Л у число излучающих эле-
ментов соответственно в горизонталь-
ной и вертикальной плоскостях; dx и
dy -расстояние между излучающими
элементами в этих плоскостях.
Максимальный коэффициент
направленного действия такой ан-
тенны
Отахда^Л,- (7.3)
Плоскостные антенные решет-
ки используются в некоторых за-
рубежных и отечественных об-
разцах посадочных систем с элект-
ронным сканированием контроли-
руемого пространства.
Объемные антенные решетки
позволяют более гибко управлять
положением, а также конфигура-
цией ДН.
Их использование предполага-
ется в перспективных радиолока-
ционных устройствах.
Параметры радиолокационных
антенн. Они в значительной степе-
ни влияют на тактические харак-
теристики радиолокационных стан-
ций. От них зависят зона обзора,
угловая разрешающая способ-
ность, угловая точность, помехе-
258
защищенность, темп обновления информации и многие технические
характеристики РЛС.
Диаграмма направленности антенны. Основной характеристикой
радиолокационной антенны является ее ДН. Ширина и конфигура-
ция ДНА в плоскости сканирования (в горизонтальной плоскости
для станций кругового обзора) определяют угловую разрешающую
способность и точность определения координат целей, дальность
действия РЛ, помехозащищенность по отношению к сигналам,
отраженным от гидрометеоров и местных предметов, электро-
магнитную совместимость. От ширины ДН зависит число им-
пульсов в пачке отраженных сигналов, что в свою очередь влияет на
качество функционирования системы СДЦ и АПОИ.
В качестве параметров, характеризующих ДНА в плоскости
сканирования, обычно принимают ширину ДН фао,5, измеренную в
угловых единицах на уровне половинной мощности, и уровень
боковых лепестков по отношению к главному лепестку, выра-
женный в децибелах. Ширина и конфигурация ДНА в плоскости,
перпендикулярной плоскости сканирования (вертикальной для стан-
ций кругового обзора), определяют зону обзора, дальность дей-
ствия РЛ, помехозащищенность по отношению к сигналам, отра-
женным от гидрометеоров и поверхности земли.
К конфигурации ДН антенны РЛ кругового обзора в верти-
кальной плоскости предъявляются следующие требования.
Для того чтобы уменьшить влияние помех от местных пред-
метов и в то же время обеспечить нормальную работу станции по
низколетящим целям, крутизна нижней кромки ДНА должна выби-
раться максимально возможной. При определении требований к
конфигурации верхней кромки ДНА обычно исходят из условия
получения постоянного уровня сигналов, принимаемых от целей,
находящихся на определенной высоте Н и на любом расстоянии R в
пределах зоны видимости РЛ.
Согласно основному уравнению радиолокации мощность при-
нимаемого сигнала Рпр при пассивном режиме работы радиолокато-
ра связана с дифференциальным коэффициентом направленного
действия антенны Ь(0) соотношением:
где г-наклонная дальность до цели; к -коэффициент пропорциональности;
0-угол места цели.
Предполагая, что для постоянной высоты Н принимаемая от
цели мощность должна быть постоянной независимо от угла места,
под которым наблюдается цель (рис. 7.5), и учитывая, что
г — Н cosec 0, получаем
D (0) = Н2 cosec2 0. (7.4)
9*
259
Выражение (7.4) получено в предположении, что земная по-
верхность плоская. На самом деле для РЛ с большой дальностью
действия земная поверхность должна рассматриваться как круглая
и тогда, учитывая рис. 3.2 и уравнения (3.3) и (7.4), можно записать:
D(0)
Мир (х/Кэп, + 2Аэк„77Ист cosec2 6 - Рэхв)2
V к cosec2 0
(7-5)
Диаграмма направленности, конфигурация верхней кромки ко-
торой описывается выражением (7.5), обеспечивает постоянство
вероятности правильного обнаружения полезных сигналов вдоль
всей дистанции заданной зоны видимости при постоянном уровне
флуктуационных шумов приемника. Однако в ближней зоне основ-
ными помехами, затрудняющими обнаружение полезных сигналов,
являются обычно не флуктуационные шумы приемника, а отра-
жения от местных предметов. Способность РЛ выделять полезные
сигналы из помех, обусловленных отражениями от местных пред-
метов, принято характеризовать коэффициентом подпомеховой ви-
димости Кп.в, т. е. отношением мощности помехи на входе при-
емника Рп.вх к такой мощности полезного сигнала на входе прием-
ника Рс.т, при котором на выходе РЛ обеспечивается заданная
вероятность правильного обнаружения полезных сигналов при
определенной вероятности ложных тревог. Для рассматриваемой
задачи во всех случаях, когда
Рд.ВХ > ^П.вРс.ВХ S
вероятность правильного обнаружения целей становится хуже за-
данной. Таким образом, если ставить задачу оптимизации конфи-
гурации верхней кромки ДНА по критерию получения постоянных
значений вероятности правильного обнаружения целей при задан-
ной вероятности ложных тревог, то в уравнение (7.5) вместо
постоянного значения Рпр необходимо подставить выражение:
рпр = + Pm.BxVm, (7.6)
где Р„р-уровень полезного принимаемого сигнала, обеспечивающий за-
данные вероятностные характеристики обнаружения цели при условии
одновременного воздействия помех от местных предметов Рп.вх(г) и соб-
ственных флуктуационных шумов приемника Рш.вх (рис. 7.6); vm-коэф-
фициент различимости полезных сигналов на фоне шумов.
Распределение мощности помех от местных предметов Рп.Вх(О
вдоль дистанции г зависит от рельефа местности, характера под-
стилающей поверхности, конфигурации нижней кромки диаграммы
направленности антенны, наклона самой антенны относительно
линии горизонта, однако общая тенденция всегда сохраняется
одной и той же-наблюдается резкое увеличение мощности сигна-
260
лов, отраженных от местных пред-
метов, в зоне, непосредственно
примыкающей к месту установки
РЛ. Для сохранения заданной ве-
роятности обнаружения целей не-
обходимо согласно уравнению
(7.5) с учетом выражения (7.6)
резко увеличить уровень прини-
маемой мощности полезных сиг-
налов при малых значениях на-
клонной дальности г, т. е. увели-
чить дифференциальный коэффи-
циент направленности антенны в
области больших углов места
(рис. 7.7).
Для сохранения заданных ве-
роятностных характеристик обна-
ружения и сужения динамическо-
го диапазона амплитуд принима-
емых сигналов независимо от ха-
рактера рельефа и физических
свойств подстилающей поверх-
ности окружающей РЛ местности
целесообразно использовать ан-
тенные устройства, формирую-
щие два луча-верхний и нижний.
Сигналы, принимаемые верхним
и нижним лучами, должны авто-
матически смешиваться по жест-
кой или адаптивной программе в
зависимости от помеховой ситуа-
ции.
Коэффициенты направленного
действия и усиления антенны. Для
интегральной характеристики на-
правленных свойств радиолока-
ционных антенн используются
такие параметры, как коэффици-
ент направленного действия D и
коэффициент усиления G антенны.
Коэффициент направленного
действия показывает, насколько
мощность радиосигнала, излучае-
мого направленной антенной,
больше мощности радиосигнала,
излучаемого ненаправленной ан-
тенной, при условии, что к обеим
Рис. 7.5. Геометрические соотноше-
ния, определяющие требования к ДНА
в вертикальной плоскости
Рис. 7.6. Распределение помех и тре-
буемого уровня полезных сигналов в
функции наклонной дальности
Рис. 7.7. Требования к конфигурации
ДНА в вертикальной плоскости:
/-косекансквадратная диаграмма; 2- моди-
фицированная косекансквадратная диаграм-
ма, учитывающая кривизну Земли; 3- диа-
грамма, учитывающая влияние помех
261
антеннам подводится одинаковая мощность и что измерение сигна-
ла производится в одной и той же точке пространства, расположен-
ной в направлении максимума излучения антенны.
Для параболических антенн коэффициент направленного дей-
ствия связан с геометрической поверхностью антенны Sa.r соот-
ношением
D = 4л$а.ЛА2,
(7.7)
где ks = 5аэф/5аг-коэффициент использования раскрыва антенны, равный
отношению эффективной поверхности антенны к геометрической:
Обычно для радиолокационных зеркальных антенн коэффициент
использования раскрыва антенны равен 0,4...0,7.
Если известна ширина ДНА в горизонтальной <ра и вертикальной
0а плоскостях, то теоретически коэффициент направленного дей-
ствия
D = 4л/<ра0а или D = 4125О/<ра0а. (7.8)
В первое выражение значения <ра и 0а подставляются в радианах,
а во второе-в градусах.
Более близкие к реальным результатам получаются значения
коэффициента направленного действия в том случае, если поль-
зоваться выражением
D = 32ООО/<ра0а.
(7.9)
Коэффициент направленного действия характеризует направлен-
ные свойства идеальной антенны без потерь. Для характеристики
направленных свойств реальной антенны вводится понятие коэф-
фициента усиления антенны
<7 = ц£>,
где г|-к.п.д., учитывающий потери, обусловленные омическим нагревом,
нагревом токами высокой частоты или несогласованностью элементов
антенны.
Для зеркальных антенн G к D, так как их коэффициент по-
лезного действия обычно равен 0,95 ...0,98.
Поляризационные характеристики антенны. Одной из характе-
ристик радиолокационных антенн является их способность излучать
или принимать волны различной поляризации. Поляризация волны
определяется законом изменения во времени направления вектора
напряженности электрического поля в плоскости, перпендикулярной
направлению распространения волны. Вид поляризации зависит от
типа антенны и ее ориентации в пространстве.
Радиолокационные антенны излучают волны с линейной, кру-
говой или эллиптической поляризацией. Волна любой поляризации
может быть представлена в виде двух когерентных ортогональных
262
линейно поляризованных волн Ех
и Еу, сдвинутых друг относитель-
но друга по фазе на определенный
угол. При равенстве амплитуд
обеих ортогональных составляю-
щих и фазовом сдвиге между ни-
ми 90° получается волна с круго-
вой поляризацией, являющаяся
частным случаем волны с эллип-
I ической поляризацией.
В общем случае годограф век-
гора напряженности электрическо-
го поля Е в плоскости, перпенди-
кулярной направлению распро-
с 1 ранения волны, имеет форму
шлипса (рис. 7.8).
Для характеристики поляриза-
ционных свойств антенны чаще
Рис. 7.8. Параметры эллипса поляри-
зации
всего пользуются двумя параметрами этого эллипса: коэффициен-
том эллиптичности р и углом наклона большой оси эллипса
относительно горизонтальной плоскости а. Коэффициент эллиптич-
ности оценивается отношением малой оси эллипса к его большой
оси р = Ь/а.
Величине р приписывается положительный или отрицательный
знак в зависимости от направления вращения вектора Е. Если при
наблюдении вдоль направления распространения волны вектор
вращается по часовой стрелке, то волна в этом случае называется
правополяризованной и величине р приписывается положительный
знак. При вращении вектора поля против часовой стрелки волна
будет левополяризованной, а коэффициент эллиптичности р будет
отрицательной величиной.
В радиолокации чаще всего используются антенны с линейной
вертикальной или линейной горизонтальной поляризацией. Пред-
почтение одному виду поляризации перед другим отдать трудно.
Часто выбор того или другого вида поляризации определяется
конструктивными соображениями и требованиями обеспечения
электромагнитной совместимости различных радиотехнических
устройств. Во всех случаях, когда отражения от гидрометеоров
создают существенные помехи приему полезных сигналов, при-
меняют специальные устройства, преобразующие линейно поляри-
зованные волны в волны с круговой или эллиптической поляри-
зацией.
Предельная пропускаемая мощность. Для радиолокационных
передающих антенн важным параметром является предельная про-
пускаемая мощность Дпред- Обычно, учитывая реальные климати-
ческие условия, возможность рассогласования волноводных трак-
263
тов и т.д., при определении допустимой пропускаемой мощности
вводят коэффициент запаса у:
Рдоп У^пред ?
где у = 0,2...0,4.
Допустимая пропускаемая мощность антенн чаще всего опреде-
ляется электрической прочностью облучателей и волноводного или
фидерного тракта.
Электрическая прочность линии передачи СВЧ-энергии оценива-
ется предельной мощностью пропускания, при которой градиент
электрического поля в линии при режиме бегущей волны достигает
пробивного напряжения. Для воздуха при нормальном атмосфер-
ном давлении, нормальной ионизации и температуре предельная
напряженность поля составляет х 3 кВ/мм. Для повышения
электрической прочности волноводов в них предусматривается
избыточное атмосферное давление осушенного воздуха. В некото-
рых случаях волноводы заполняются специальным газом (элегазом)
с электрической прочностью до 9 кВ/мм.
Полоса пропускания антенны. Под полосой пропускания антенны
понимают полосу частот, в которой электрические параметры
антенны отвечают предъявляемым к ним требованиям. При работе
РЛ простыми сигналами спектр частот излучаемых и принимаемых
сигналов обычно намного уже полосы пропускания используемых
антенн. Проблема обеспечения необходимой широкополосности
антенн возникает обычно лишь в тех случаях, когда РЛ излучает
сложные сигналы, применяется многочастотный метод обзора про-
странства или производится оперативное изменение несущих час-
тот.
У зеркальных антенн элементом, ограничивающим полосу про-
пускания, обычно являются облучатель и узлы волноводного трак-
та. Параметры отражателя, как правило, мало сказываются на
широкополосности антенны. В некоторых РЛ применяются двух-
диапазонные антенны. Примером такого РЛ может служить авто-
номный ВРЛ «Корень-АС», работающий в диапазоне частот
1030... 1090 и 740 МГц. Для обеспечения двухдиапазонной работы
рупорные излучатели антенной решетки этого РЛ возбуждаются в
двух взаимно ортогональных плоскостях. При этом горизонталь-
ный и вертикальный раскрывы рупора согласуются с соответствую-
щими длинами излучаемых волн.
7.2. Поляризационные устройства
При работе РЛ в сложных метеорологических условиях сигналы,
отраженные от гидрометеоров, могу г во много раз превосходить
полезные сигналы. Для подавления сигналов, отраженных от гидро-
264
метеоров, используются поляризаторы различных типов. Принцип
подавления сигналов от гидрометеоров с помощью поляризаторов
заключается в том, что излучаемые РЛ линейно поляризованные
волны преобразуются поляризующими устройствами в волны с
круговой поляризацией. При отражении таких волн от симметрич-
ных целей их поляризация не изменяется, изменяется лишь направ-
ление вращения вектора электрической составляющей поля. При
повторном прохождении волн через поляризующее устройство
вновь образуется волна с линейной поляризацией, но ее плоскость
поляризации при этом поворачивается на угол 90° по отношению к
плоскости поляризации исходной волны. Полученная таким обра-
зом волна не возбуждает излучающий элемент, и сигналы, от-
раженные от симметричных целей, не поступают на вход при-
емника.
Если же цель не имеет осевой симметрии, то при отражении от
нее волн с круговой поляризацией образуются волны с эллипти-
ческой поляризацией, которые при повторном прохождении через
поляризатор образуют линейно поляризованную волну с плос-
костью поляризапии, повернутой относительно исходного положе-
ния на угол, не равный 90°, что приводит к возбуждению антенн, и
следовательно, к прохождению отраженных сигналов на вход при-
емника.
В качестве поляризаторов в радиолокационной технике могут
использоваться поляризационные решетки, волноводные скрутки с
фазовращателями, ферритовые, диэлектрические поляризаторы и
другие элементы с механическим или электрическим управлением
поляризацией излучаемых радиоволн. В радиолокаторах санти-
метрового и миллиметрового диапазонов, в частности в радио-
локаторах посадочных и обзора летного поля, широкое распро-
странение получили поляризационные решетки.
Поляризационные решетки. Поляризационные решетки представ-
ляют собой набор металлических или диэлектрических пластин,
расположенных перед рупорным облучателем антенны.
Принцип действия поляризационной решетки основан на раз-
ложении линейно поляризованной волны на две ортогональные
составляющие и сдвиге одной из составляющих по фазе на 90е.
11 случающаяся при этом результирующая волна будет иметь круго-
вую или эллиптическую поляризацию в зависимости от угла пово-
рота решетки относительно облучателя.
Пусть облучатель РЛ (рис. 7.9) рассчитан на излучение и прием
волн с вертикальной поляризацией. Вектор электрической состав-
ляющей поля облучателя будет при этом изменяться по закону
с, = Е3 sin со?. В идеальном случае, когда элементарные отража-
ющие поверхности гидрометеора могут быть представлены в виде
абсолютно симметричных целей, лопасти решетки поворачивают на
угол 45° относительно плоскости поляризации облучателя.
265
Рис. 7.9. Схема преобразования ли-
нейно-поляризованной волны в волну
с круговой поляризацией
Пользуясь тем, что среда, в
которой распространяются вол-
ны, имеет изотропный характер,
вертикально поляризованную вол-
ну е3 можно представить в виде
двух линейно поляризованных вза-
имно ортогональных составляю-
щих е2 и е2, причем
Е3 . Е3 .
et = —=. sin со? и е2 = ~р sin со?.
V2 v2
При прохождении волны через
решетку условия распространения
для составляющих и е2 оказы-
ваются неодинаковыми. Действи-
тельно, решетка может быть пред-
ставлена в виде набора прилега-
ющих друг к другу коротких от-
резков волноводов с расстояния-
ми между стенками а и Ъ. Фазовая скорость волны в волноводе:
Соотношение размеров а и Ь, а также ширина каждой лопасти в
решетке выбираются таким образом, чтобы после прохождения
решетки волна ех обогнала волну е2 по фазе точно на 90е. Тогда
после решетки результирующая волна е3, являющаяся совокупно-
стью двух новых ортогональных составляющих е1р и <?2р, будет
иметь круговую поляризацию: значение результирующего вектора
Е3р напряженности электрического поля е3р получается постоян-
ным:
Е3 Т Г Е3
—— sin (со? -I- 90е) + —= sin со?
1 У2 J LV2
а угловое положение вектора <?3р будет зависеть от времени:
= arctg —Е = arctg
eiP
—-= sin со?
V2_____
Е3
—-= cos со?
V2
= со?.
266
Рис. 7.10. Векторные диаграммы излучаемых и отраженных волн
На рис. 7.10 условно в виде векторных диаграмм, учитывающих
фазовый сдвиг между составляющими ех и е2, показано преобра-
зование и прохождение волны от облучателя через решетку, отра-
жение от симметричной цели и вторичное прохождение через
решетку.
Обе ортогональные составляющие Ег и Е2 в пространстве между
излучателем и решеткой (рис. 7.10, а) будут находиться в одина-
ковой фазе. После решетки (рис. 7.10,6) составляющая Ег обгонит
по фазе Е2 на 90°. При отражении от симметричной цели
(рис. 7.10, в) соотношение между амплитудами обеих составляющих
не изменится (£i = Е'2) и фазовый сдвиг останется прежним (90°).
После того, как отраженная волна на обратном пути вновь пройдет
через поляризационную решетку (рис. 7.10, г), составляющая Е)
обгонит волну Е'2 дополнительно еще на 90°. Таким образом,
разница в фазах между Е\ и Е'2 составит 180°, что может быть
представлено просто как изменение полярности составляющей Е'2
без какого-либо сдвига по фазе (по времени). На рис. 7.10, г вектор
Е'2 при такой интерпретации составляющей е'2 показан штриховой
линией. В случае отражения от несимметричной цели векторное
представление волны будет иметь аналогичный характер, за исклю-
чением того, что после отражения волны от несимметричной
поверхности соотношение величин Е'[ и Е2 изменится. В зави-
симости от условий отражения Е'[ станет больше или меньше Е2.
Волны, отраженные от симметричных поверхностей и прошед-
шие через поляризационную решетку, не будут возбуждать облу-
чатель. Действительно, как видно из рис. 7.11, а, вектор результи-
рующего поля Е'3 принимаемой волны, полученный в результате
геометрического сложения составляющих Е\ и Е’2, оказывается
сдвинутым в пространстве относительно исходного вектора Е3 на
угол 90°. Но так как облучатель и волноводный тракт антенной
системы рассчитаны в рассматриваемом случае на работу с волна-
ми, имеющими вертикальную поляризацию, горизонтально поля-
ризованная волна Е'3 не возбудит облучатель и сигнал не попадет на
вход приемника.
В случае отражения сигналов от несимметричных поверхностей
(рис. 7.11,6), когда Е2 / Е'[, вектор результирующего поля Е3 ока-
зывается повернутым в пространстве относительно исходного век-
267
Рис. 7.11. Векторные диаграммы волн, возбуждающих облучатель антенны:
а при отражении от симметричной цели; б при отражении от несимметричной цели
тора Е3 на угол а, не равный 90е. Следовательно, результирующая
волна может быть разложена на две взаимно ортогональные
поляризованные составляющие, одна из которых (£4) имеет верти-
кальную поляризацию, а другая (£5)-горизонтальную. Составляю-
щая £4 возбуждает излучатель, и сигнал, хотя и сильно ослаблен-
ный, проходит на вход приемника. Так производится селекция
принимаемых сигналов по признаку, характеризующему поляриза-
ционные свойства отражающих поверхностей целей.
В реальных условиях элементарные отражающие поверхности
гидрометеоров (капли дождя, тумана, градины) нс являются абсо-
лютно симметричными. Поэтому для получения максимального
подавления сигналов, отраженных от этих целей, используют волны
не с круговой, а с эллиптической поляризацией. Для этого поляри-
зационная решетка дистанционно с помощью электродвигателей
поворачивается на определенный угол, обеспечивающий макси-
мальное соотношение между полезными сигналами, отраженными
от интересующих диспетчера объектов, и мешающими сигналами,
отраженными от гидрометеоров. Полезные сигналы при этом
ослабляются поляризационной решеткой приблизительно па
6...8 дБ, а мешающие-на 20...25 дБ. Общий выигрыш в соот-
ношении полезных и мешающих сигналов достигает 12... 19 дБ.
Поляризаторы, выполненные на волноводных скрутках. У радио-
локаторов, работающих в дециметровом диапазоне, выполнение
поляризатора в виде решетки, расположенной перед облучателем,
сопряжено с большими трудностями. Поэтому в этих случаях
применяются более компактные конструкции, обеспечивающие до-
статочно эффективное преобразование линейно поляризованных
волн’ в волны с круговой и эллиптической поляризацией. В пср-
268
поляризацией
Рис. 7.12. Упрощенная структурная схема поляризатора, выполненного на волно-
водных скрутках
вичных каналах таких РЛ для этих целей используется конструкция,
состоящая из управляемого делителя мощности, фазовращателя,
волноводных скруток, Т-образного разветвителя и симметричного
рупорного облучателя (рис. 7.12).
Вначале с помощью делителя мощности, расположенного в
высокочастотном тракте, волны разделяются йа две одинаковые
или неодинаковые части в зависимости от того, какой вид поля-
ризации необходимо получить. Управление делителем дистанцион-
ное. После этого волна в одном из каналов сдвигается по фазе
относительно волны в другом канале на 90°. Затем" обе волны
поступают в блок волноводных скруток, каждая из которых раз-
ворачивает плоскость поляризации волн на 45е. Разворот в обеих
скрутках производится в противоположных друг относительно
друга направлениях. С помощью Т-образного разветвителя волны
обоих волноводных каналов возбуждают в симметричном рупор-
ном облучателе две взаимно ортогональные линейно поляризован-
ные волны с фазовым сдвигом между ними 90°. Перераспределяя с
помощью делителя мощности энергию между одним и другим
каналами, можно изменять поляризацию излучаемой волны от
линейной горизонтальной до линейной вертикальной через эллип-
тическую и круговую.
Поляризаторы, выполненные на вращающихся сочленениях прямо-
угольных и квадратных волноводов. Такого типа поляризаторы
применяются в обзорно-посадочных радиолокаторах ОПРЛ-4, трас-
совых ATCR-22 и аэроузловых ATCR-44 (рис. 7.13 и 7.14).
Сигнал
управления
Рис. 7.13. Структурная скрутка поляризатора, выполненного на качающемся сочле-
нении прямоугольного и квадратного волноводов
269
Электромагнитная волна по
волноводу с прямоугольным се-
чением поступает на качающееся
сочленение также прямоугольно-
го сечения, которое в свою оче-
редь возбуждает волновод с квад-
ратным сечением. При повороте
качающегося сочленения на 45°
относительно плоскости поляри-
зации прямоугольного волновода
в квадратном волноводе возбуж-
даются две взаимно ортогональ-
ные одинаковые по величине вол-
ны. Из квадратного волновода
волны поступают в фазовраща-
тель, представляющий собой вол-
новод прямоугольного сечения,
возбуждаемый обеими ортого-
Рис. 7.14. Возбуждение взаимно орто-
гональных волн в волноводе с квадрат-
ным сечением:
7, 2-квадратный и прямоугольный волно-
воды соответственно
нальными составляющими. Соотношение размеров сечения волно-
вода, а также его длина выбираются так, чтобы одна из составляю-
щих в волноводе обогнала другую по фазе на 90°. В некоторых
случаях в волновод вставляются специальные диэлектрические
пластины, увеличивающие различия в фазовых скоростях обеих
составляющих. Облучатель выбирается в виде симметричного ру-
пора, способного возбудиться как вертикальной, так и горизон-
тальной составляющими. В зависимости от угла поворота качаю-
щегося сочленения соотношение значений горизонтальной и верти-
кальной составляющих может изменяться, что приводит в конечном
итоге к возможности изменения поляризации излучаемых волн от
линейной через эллиптическую до круговой.
7.3. Элементы антенно-фидерных систем
Антенные переключатели и ферритовые вентили. Они предназна-
чены для коммутации приемных и передающих трактов импульс-
ных РЛ, использующих одну и ту же антенну для излучения и
приема сигналов. Они подключают передатчики к антенне в момент
посылки зондирующих импульсов и приемник к антенне на время
прихода отраженных или ответных сигналов.
Антенные переключатели можно разделить на две большие
группы: коммутационные переключатели и переключатели, по-
строенные на базе необратимых элементов.
Принцип действия коммутационных антенных переключателей
основан на использовании эффекта резкого изменения сопротивле-
ния резонансных газоразрядных приборов под действием мощных
СВЧ-сигналов и трансформации этих сопротивлений в различные
270
участки высокочастотного тракта с помощью настроенных отрез-
ков длинных линий.
Входные сопротивления полуволновых и четвертьволновых от-
резков длинных линий определяются следующими выражениями:
2
ZBx[^j = ZH’ Zbx[(2„+1)^- — ’
где zH-нагрузка линии; рл-волновое сопротивление линии; п-любое целое
число.
Комбинируя отрезки длинных линий и изменяя их сопротивле-
ния нагрузки, можно построить схему переключателя, который бы в
зависимости от уровня проходящей через высокочастотный канал
мощности блокировал передающий или приемный тракт антенно-
фидерной системы.
Для изменения нагрузочных сопротивлений отрезков длинных
линий используются резонансные газовые разрядники, представ-
ляющие собой герметичные баллоны различной конфигурации,
заполненные инертными газами при давлении 103... 104 Па. При
подаче на такой разрядник высокочастотной энергии происходит
ионизация газа и сопротивление разрядника резко падает. После
окончания импульса происходит деионизация газа и разрядник
восстанавливает свои первоначальные свойства.
Возможны два способа включения разрядников в фидерный
тракт РЛ - параллельное и последовательное. На рис. 7.15, а пока-
зан антенный переключатель коаксиального типа с параллельным
включением разрядников. В момент передачи зондирующего им-
пульса разрядники закорачивают отрезки линий в точках 1-1 и 4-4.
Входные сопротивления этих отрезков в точках 2-2 и 3-3 станут
равными бесконечности и вся мощность передатчика будет на-
правлена в антенну. Во время приема отраженных сигналов после
деионизации разрядников их сопротивление становится близким к
бесконечности. Бесконечное сопротивление точек 1-1 пересчитыва-
Рис. 7.15. Параллельное (а) и последовательное (б) включение разрядников
271
ется через полуволновой отрезок линии также в бесконечное сопро-
тивление в точках 3—3. Таким образом, тракт передатчика оказы-
вается блокированным и вся принимаемая мощность направляется
в приемник.
Последовательное включение разрядника показано на рис.
7.15, б. Такое включение более характерно для волноводных высоко-
частотных линий. В этой схеме при излучении зондирующих им-
пульсов разрядник РР1 пробивается и позволяет передаваемой
мощности беспрепятственно пройти в антенну. Разрядник бло-
кировки приемника РР2 в этот момент закорачивает линию в
точках 3-3, создавая таким образом бесконечно большое входное
сопротивление приемного тракта в точках 2-2. Во время приема
отраженных сигналов оба разрядника восстанавливают свое перво-
начальное сопротивление. Образующееся при этом в точках 2-2
бесконечно большое входное сопротивление блокирует высокочас-
тотный тракт передатчика и вся мощность из антенны поступает на
вход приемника.
Рассмотренные антенные переключатели обладают избиратель-
ными свойствами, поскольку в их состав входят настроенные
резонансные отрезки длинных линий. При работе антенно-фидерной
системы одновременно на нескольких частотах приходится исполь-
зовать многоконтурные антенные переключатели (рис. 7.16).
Переключатель представляет собой отрезок коаксиальной линии
с тремя ответвлениями, включающими в себя резонансные разряд-
ники. Такого рода схемы используются во всех модификациях
аэродромного радиолокатора ДРЛ-7. Станция излучает сигналы на
волне Xj, а принимает отраженные сигналы на той же длине волны
и сигналы самолетных ответчиков на волне Х2. При излучении
зондирующих импульсов все три разрядника пробиваются, образуя
в точках а-а, б-б и в-в бесконечные сопротивления для всех
ответвлений. Сигналы передатчика проходят в сторону антенны.
Рис. 7.16. Схема антенного переклю-
чателя аэродромного радиолокатора
ДРЛ-7
При приеме отраженных сиг-
налов на волне короткозам-
кнутое ответвление II создает в
точках б-б короткое замыкание,
которое через четвертьволновый
отрезок линии б-а трансформи-
руется в бесконечно большое вход-
ное сопротивление в точках а-а в
сторону передатчика. Тракт пере-
датчика оказывается блокирован-
ным и вся принимаемая мощ-
ность из антенны будет поступать
в приемник. Во время приема от-
ветных сигналов на волне Х2 бло-
кировка передающего тракта бу-
дет происходить за счет ответв-
272
ления I. В реальной аппаратуре, учитывая, что отрезки линий I и II
одновременно воздействуют и на сигналы с длинной волной 11, и на
сигналы, приходящие на волне Х2, размеры ответвлений и их
взаимное расположение несколько отличаются от приведенных на
рис. 7.16.
Антенные переключатели, построенные на базе необратимых
элементов, нашли широкое применение в РЛ сантиметрового диапа-
зона и коротковолновой части дециметрового диапазона. Досто-
инством такого рода переключателей является их высокая на-
дежность, большой срок службы и важное дополнительное свой-
ство, заключающееся в стабилизации нагрузки передатчиков. Ис-
пользуемые в антенных переключателях необратимые элементы
обладают вентильными свойствами, благодаря чему на участке
волноводного тракта от передатчика до антенного переключателя
устанавливается режим бегущей волны независимо от качества
согласования антенны.
Имеется несколько видов антенных переключателей, построен-
ных на базе необратимых элементов. Чаще всего в качестве таких
переключателей используются ферритовые фазовые циркуляторы,
принцип действия которых основан на явлении необратимого фазо-
вого сдвига волн, проходящих в прямоугольном волноводе, со-
держащем поперечно намагниченные ферритовые пластины.
В зависимости от направления движения волны магнитная
проницаемость феррита будет иметь различные значения, т. е.
фазовая скорость волны в волноводе зависит от направления, в
котором движется волна. При сильных постоянных магнитных
полях может возникнуть ферромагнитный резонанс. Вся проходя-
щая в волноводе СВЧ-энергия в этом случае будет поглощаться
ферритом. Условие возникновения резонанса может быть опре-
делено с помощью приближенного соотношения fpe3 « 0,03577, где
частота f выражается в мегагерцах, а напряженность постоянного
магнитного поля Н-в амперах на метр.
Ферромагнитный резонанс является невзаимным процессом. Он
наступает при движении волны только в одном направлении. Это
свойство ферритов широко используется в радиолокационной тех-
нике для построения высокочастотных вентилей.
Высокочастотный резонансный ферритовый вентиль представ-
ляет собой отрезок прямоугольного волновода с тонкой феррито-
вой вставкой, приклеенной к узкой или широкой стенке волно-
вода.
К ферриту прикладывается постоянное поперечное магнитное
поле.
Такого рода вентили обладают широкой полосой частот, имеют
достаточно большую рабочую мощность и обладают хорошими
вентильными свойствами.
В ферритовых антенных переключателях напряженность по-
стоянного магнитного поля выбирается меньше напряженности
273
Рис. 7.17. Схема ферритового антенного переключателя
поля, необходимого для резонанса, т. е. принцип действия ферри-
товых переключателей основан не на явлении ферромагнитного
резонанса, а на использовании невзаимных фазовых сдвигов волн в
волноводах.
Рассмотрим более подробно принцип построения ферритового
антенного переключателя (рис. 7.17). Переключатель состоит из
двойного Т-образного разветвителя, сдвоенного волновода с ферри-
товыми вставками, щелевого моста, поглотителя и постоянного
магнита, поле которого пронизывает ферритовые вставки в по-
перечном направлении. В плечо Е разветвителя обычно включается
управляемый разрядник или диодная схема, блокирующая вход
приемника в момент излучения зондирующего импульса. Блоки-
ровка необходима для устранения части мощности, просачиваю-
щейся в плечо Е из-за неидеальности развязки между входами
разветвителя.
Двойной Т-образный разветвитель обладает следующими свой-
ствами:
мощность, подаваемая в плечо Н, разделяется на две одина-
ковые по величине части и в одинаковой фазе проходит на выходы 1
и 2;
мощность, подаваемая в плечо Е, также разделяется на две
равные части и проходит на выходы 7 и 2, но в противофазе;
два одинаковых по мощности и фазе сигнала, подаваемые на
входы / и 2, складываются и поступают на выход Н;
два одинаковых по мощности, но противоположных по фазе
сигнала, подаваемые на входы 7 и 2, также складываются, но
поступают на выход Е;
развязка между плечамиHwE равна приблизительно 20 ... 30 дБ.
274
Сдвоенный волновод с ферритовыми вставками сконструирован
таким образом, чтобы волна, идущая в одном волноводе, обгоняла
по фазе волну, идущую в другом волноводе, на 90е. При обратном
движении волн благодаря невзаимным свойствам ферритов от-
стававшая ранее волна обгонит другую волну на 90е. Достигается
это выбором длины ферритовых вставок, их расположением и
величиной постоянного магнитного поля.
Щелевой мост в общей стенке волноводов имеет отверстие связи,
обладающее направленными свойствами. Размеры и конфигурация
отверстия выбираются таким образом, что любая волна, про-
ходящая в одном из волноводов мимо отверстия, разделяется на
две равные части, причем та часть, которая проходит через от-
верстие связи, получает дополнительный фазовый сдвиг —90е.
Поглотитель выполняется в виде прямоугольного волновода с
клинообразной вставкой из графитокерамического материала. Для
отвода тепла на наружных стенках волновода устанавливаются
металлические радиаторы.
Принцип действия ферритового антенного переключателя мож-
но пояснить с помощью рис. 7.18, на котором показан процесс
прохождения волн через переключатель для четырех случаев:
излучения зондирующих импульсов (рис. 7.18, а);
прохождения волн, отразившихся от зажженного разрядника,
расположенного в плече Е сдвоенного Т-образного ответвителя
(рис. 7.18,6);
приема сигналов, отраженных от целей (рис. 7.18, в);
прохождения волн, отразившихся от неоднородностей волновод-
ного тракта в момент излучения зондирующих импульсов
(рис. 7.18, в, б).
На рисунке показаны относительные фазы волн нижнего и
верхнего волноводов. При излучении зондирующих импульсов
(рис. 7.18, д) почти вся мощность направляется в сторону антейны.
Незначительная часть мощности просачивается в плечо Е сдвоен-
ного Т-образного ответвителя. Разрядник, включенный в это плечо,
во время излучения зондирующего импульса находится в зажжен-
ном состоянии и поэтому попавшая в плечо Е мощность полностью
отражается и вновь поступает на выходы разветвителя, но уже в
противофазе. Дальнейший путь этих волн показан на рис. 7.18,6.
Вся мощность попадает в нижнее плечо щелевого моста и по-
глощается нагрузкой.
Путь прохождения сигналов, отраженных от целей, показан на
рис. 7.18,в. К этому времени в разряднике уже произойдет деиони-
зация газа и сигналы беспрепятственно проходят в сторону при-
емника.
Во время излучения зондирующих импульсов часть мощности
отражается от неоднородностей волноводного тракта и возвраща-
ется назад, образуя стоячие волны. Проходя через антенный пе-
реключатель, они вначале попадают в плечо Е разветвителя (см.
275
рис. 7.18, в), но поскольку деионизация разрядника в этот момент
времени еще не закончилась, волны отражаются от разрядника,
проходят сдвоенный волновод и через щелевой мост поступают на
нагрузку циркулятора (см. рис. 7.18,6). В этом проявляется свой-
ство ферритового антенного переключателя стабилизировать на-
грузку передающего устройства.
Имеется несколько вариантов построения ферритовых антенных
переключателей, однако принцип их действия мало чем отличается
от описанного выше.
Высокочастотные фильтры. Они применяются для селекции сиг-
налов по частоте.
В фидерных линиях коаксиального типа частотная селекция
сигналов производится обычно с помощью фильтров, выполненных
в виде комбинации отрезков длинных линий. Принцип действия
таких фильтров рассмотрим на примере построения высокочастот-
ного тракта аэродромного радиолокатора ДРЛ-7 (рис. 7.19). В
Рис. 7.18. Схема прохождения волн через ферритовый антенный переключатель
276
этом РЛ основная антенна при-
нимает отраженные от целей сиг-
налы на волне А^ас ss 35 см и сиг-
налы самолетных ответчиков на
волне Хакт л 40 см. С помощью
фильтров отраженные сигналы
должны быть направлены на ос-
новной приемник, а сигналы са-
молетных ответчиков-на назем-
ный приемник ответных сигналов
НПО.
Для того чтобы не пропустить
сигналы ответчиков на основной
приемник, в точке 1 на расстоя-
нии 3/4Аакх от разветвления О ус-
танавливается короткозамкнутый
отрезок линии длиной Хак1/2. Этот
отрезок создает в точке О вход-
Рис. 7.19. Схема высокочастотных
фильтров аэродромного радиолока-
тора
ное сопротивление в сторону основного приемника для волны Хакт,
равное бесконечности.
Аналогичным образом включают короткозамкнутый отрезок
линии в тракт приемника ответных сигналов, только его длина и
расположение выбираются из расчета запирания этого тракта для
сигналов, передаваемых на волне Апас = 35 см.
Отрезки 1-2 и 5-6 обеспечивают хорошую развязку для пас-
сивных и активных сигналов, однако они являются источником
рассогласования фидерных линий для полезных сигналов, про-
ходящих мимо этих отрезков на входы своих приемников.
Действительно, для волны ^пас — 35 см короткозамкнутый отре-
зок 1—2 создает в точке 1 индуктивное сопротивление, т. е. в
фидерном тракте появится неоднородность, которая значительно
ухудшит КСВ линии. Для компенсации неоднородности на уда-
лении Апас/4 от точки 1 устанавливается аналогичный отрезок 3-4,
который создает в точке 3 также индуктивное сопротивление. Это
сопротивление через четвертьволновой отрезок 1-3 пересчитывает-
ся в емкостное сопротивление, которое вместе с индуктивным
входным сопротивлением отрезка 2-1 создает параллельный кон-
тур, резонирующий на волне А.пас. Образованное таким образом
активное сопротивление в точке / (ив точке 3 соответственно) не
будет представлять собой столь существенной неоднородности, как
это имеет место при включении лишь одного короткозамкнутого
отрезка 1-2.
Аналогичная компенсация неоднородностей производится в
тракте приемника НПО с той лишь разницей, что компенсации
подлежит не индуктивное, а емкостное сопротивление отрезка 5-6.
Модель поведения схемы, представленной на рис. 7.19, носит
условный характер, поскольку при объяснении процессов, про-
277
текающих в пассивном и активном фидерных трактах, не учи-
тывалось влияние дополнительных компенсирующих отрезков на
отфильтрованные сигналы. В реальных схемах размеры отрезков и
их расположение несколько отличаются от приведенных на рисунке.
В случае использования волноводной техники высокочастотные
фильтры обычно выполняются в виде настроенных щелевых мостов
с удлинительными вставками, размеры которых выбираются из
условия получения синфазных и противофазных возбуждений щелей
соответственно для одной и другой волны. Такого типа фильтры
используются в трассовых РЛ «Скала-М», «Скала-МПР», ATCR-22
и аэроузловых РЛ «Скала-МПА», ATCR-44 для разделения и
сложения мощностей передатчиков различных комплектов аппара-
туры. Эти устройства получили название диплексоров.
Принцип действия диплексора может быть пояснен с помощью
условных схем (рис. 7.20). Диплексор имеет два плеча, электри-
ческая длина которых неодинакова. Между плечами имеются от-
верстия связи, обладающие направленными свойствами. При про-
хождении волны мимо отверстия она разделяется на две одина-
ковые части, причем та часть, которая проходит через отверстие,
получает дополнительный фазовый сдвиг минус 90°. Разница в
длине плеч между отверстиями связи подбирается таким образом,
чтобы для частоты она составляла (2п + 1) (Х./2), а для частоты
f2 — nik2, где п и т- любые целые положительные числа. Тогда для
волны (рис. 7.20, а) после второго отверстия связи образуется
такое соотношение фаз обеих составляющих волн, прошедших через
верхнее и нижнее плечи диплексора, что вся энергия поступит в
верхнее плечо. Для частоты f2 соотношение фаз будет таково
(рис. 7.20,6), что вся энергия будет поступать в нижнее плечо.
Поскольку РЛ могут работать на разных несущих частотах, то в
диплексоре предусмотрена возможность механической подстройки
электрической длины его плеч.
Датчики системы контроля параметров РЛ. В современных РЛ
предусматривается возможность непрерывного контроля их основ-
ных параметров: проходящей средней или пиковой мощности,
чувствительности приемника, огибающей излучаемых импульсов,
несущей частоты и ряда других величин.
Для измерения средней мощности в волноводном тракте уста-
навливаются полупроводниковые термоэлементы. Они представля-
ют собой цилиндры, торцовая плоскость которых нагревается за
счет проходящей по волноводному тракту мощности. Второй конец
цилиндра имеет температуру окружающей среды. Для того чтобы
результаты измерения не зависели от фазы, коэффициента отра-
жения и длины волны в волноводе, вместо одного термоэлемента
устанавливают два последовательно включенных элемента на рас-
стоянии Х/4 между ними. Для устранения погрешностей, возникаю-
щих при изменении частоты сигнала, в волноводе устанавливают
несколько пар термоэлементов.
278
a)
Рис. 7.20. Условная схема прохождения волн в диплексоре:
«-выделение сигналов по частоте б-выделение сигналов по частоте f2
Пиковая мощность и форма огибающей излучаемых импульсов
измеряются с помощью диодных датчиков, установленных в вы-
сокочастотных головках, сопрягаемых с направленными ответвите-
лями. После детектирования сигналов в диодных головках полу-
ченные видеоимпульсы поступают на преобразователь импульсных
сигналов в постоянное напряжение для измерения пиковой мощ-
ности или на осциллографы для измерения параметров огибающей
излучаемых сигналов. Относительная погрешность измерения мощ-
ности с помощью описанных выше датчиков равна 5... 15%.
Для контроля чувствительности приемных устройств РЛ в высо-
кочастотный тракт встраивается волноводный генератор шума v
отрезок волновода, в широкую стенку которого под углом 7 ... 8°
вставляется газоразрядная трубка. Трубка обеспечивает большой
уровень шума на частотах до 75 ГГц. Наклонное положение трубки
в волноводе позволяет получить хорошее согласование ее с волно-
водным трактом в широком диапазоне частот, а на волнах длиннее
10... 12 см лучшее согласование получается при использовании ко-
аксиальных или полосковых конструкций генераторов шума.
279
Глава 8. ПРИЕМНЫЕ УСТРОЙСТВА
8.1. Основные характеристики
Приемные устройства РЛ предназначены для выполнения функ-
ций, связанных с выделением полезных высокочастотных сигналов,
их усилением и преобразованием в форму, необходимую для нор-
мальной работы оконечных устройств. Особенности радиолока-
ционных приемников заключаются в использовании СВЧ-диапазо-
на, обработке импульсных сигналов малой длительности, необхо-
димости приема сигналов очень малой мощности, большом дина-
мическом диапазоне входных сигналов. Качество радиолокацион-
ных приемников определяется рядом характеристик, важнейшими
из которых являются способность принимать слабые сигналы,
полоса пропускания, коэффициент усиления, динамический диапа-
зон воспроизводимых без искажения сигналов.
Способность радиолокационного приемника принимать слабые
сигналы характеризуется его чувствительностью, коэффициентом
шума или эффективной шумовой температурой. Различают пре-
дельную и реальную чувствительность приемника. Предельной
чувствительностью Рпр называют такую минимальную мощность
сигнала в антенне, которая при согласовании антенны со входом
приемника обеспечивает на выходе линейной части приемника
отношение мощности полезного сигнала к мощности шума, равное
единице. Реальной чувствительностью Pnpmin приемника в отличие
от предельной чувствительности называют такую минимальную
мощность, которая обеспечивает заданные для каждого конкрет-
ного РЛ значения вероятности правильного обнаружения и ложных
тревог. Реальная и предельная чувствительности связаны между
собой через коэффициент различимости vm:
Р = V Р
л пр 1ШП *ш Пр •
Часто чувствительность приемника (в децибелах) представляют
в виде отношения
101g—,
пр min
где Ро-мощность отсчетного уровня, принимаемая обычно равной 1 Вт
или 1 мВт.
Реальная чувствительность современных радиолокационных
приемников лежит в пределах 10-12.. 10“14 Вт (120... 140 дБ/Вт).
280
(8.1)
Шумовые свойства приемников часто характеризуют коэффи-
циентом шума Кш, который показывает, во сколько раз реальный
приемник ухудшает отношение сигнала к шумам по мощности по
сравнению с идеальным нешумящим приемником, т.е. во сколько
раз ухудшается отношение сигнал/шум на выходе приемника по
сравнению с этим отношением на его входе:
„ _ ^с.вх/^ш.вх
” р Тр
л с.вых/ л ш.вых
Коэффициент шума измеряется в относительных единицах или
децибелах. Реальные значения коэффициента шума современных
радиолокационных приемников лежат в пределах 2... 10 дБ. Чем
больше коэффициент шума приемника, тем хуже его чувствитель-
ность. У идеального нешумящего приемника Кш = 1.
В некоторых случаях, особенно при расчете и проектировании
входных цепей радиолокационных приемников, для характеристики
их шумовых свойств удобно пользоваться понятием эффективной
шумовой температуры. Уровень шума на входе приемника может
быть определен выражением
Рш.вх = кТ0ДУ, (8.2)
где к-постоянная Больцмана; То - абсолютная температура по Кельвину;
А/-полоса частот, в которой определяется мощность шумов.
На выходе идеального приемника уровень шума
Рш.вых.ид = fcT0A/G,
а на выходе реального приемника
Ли.вых.р = kTobfG + ЛРШ.ВЫХ 9
(8-3)
где G- коэффициент усиления приемника по мощности; АРШ ВЫХ-добавка
шума на выходе реального приемника, обусловленная шумом его от-
дельных каскадов.
Когда вводят понятие эффективной шумовой температуры,
предполагают, что приемник идеальный, а появляющаяся на его
выходе добавка шума возникает якобы за счет увеличения тем-
пературы его входных элементов, т. е. полагают, что
ДЛ^х = kT^bfG, (8.4)
где 7^, эффективная шумовая температура приемника.
Учитывая уравнения (8.1)... (8.4), а также соотношение Рс.ъъп =
= (тРс.вх, получаем связь между коэффициентом шума Кш и эф-
фективной шумовой температурой T3$:
Т3ф = (Кш — 1) То.
Для идеального приемника Т,ф = 0. Значения Тэф современных
реальных радиолокационных приемников равны 300...2700°C.
281
Полоса пропускания приемника определяет его избирательные
свойства, качество воспроизведения огибающей принимаемых сиг-
налов и чувствительность. Основой для выбора полосы пропуска-
ния служит выражение и
А/= Д/опт + А/доп,
где А/опт-оптимальная полоса частот; А/доп-дополнительное расширение
полосы частот, необходимое для компенсации возможной частотной рас-
стройки основных элементов приемника.
Если в качестве критерия оптимальности выбирается макси-
мизация отношения сигнал/шум, то оптимальная полоса частот для
импульсной РЛС
А/,пт И/Ти »
где ^-длительность зондирующих импульсов; a-коэффициент, равный 1
для колоколообразных и 1,37 для прямоугольных импульсов.
Если в качестве критерия оптимальности принимается не мак-
симальное отношение сигнал/шум, а требование правильного вос-
произведения формы огибающей принимаемых сигналов, то опти-
мальная полоса частот
А/опт = 0,35/Тф,
где Тф-длительность фронта импульсов принимаемых сигналов.
Дополнительное расширение полосы частот приемника, необ-
ходимое для компенсации ухода частоты передающего устройства
Ayiiep, местного гетеродина А/г и расстройки УПЧ А/уцч, ориенти-
ровочно определяется по формуле
А/доп = -^(2А/гаг + 2А/Г + 2А/УПЧ),
Л-АПЧ
где Капч“ коэффициент автоподстройки частоты системы АПЧ; р-коэф-
фициент, учитывающий вероятность одновременного ухода частоты от-
дельных устройств РЛС в одну сторону.
Коэффициент усиления характеризует усилительные свойства
приемников. Различают коэффициент усиления по мощности G —
= Рвых/Рвх и по напряжению К = Usbsx/Usx. Наибольшее усиление
сигналов в приемном тракте приходится на долю усилителя про-
межуточной частоты.
Коэффициент усиления является комплексной величиной, т. е.
характеризуется амплитудной и фазовой характеристиками. Для
РЛС, работающих в режиме СДЦ с когерентно-импульсной обра-
боткой сигналов, важное значение имеют параметры, характери-
зующие кратковременную нестабильность модуля коэффициента
усиления и его фазы. В качестве таких параметров принимаются
относительное изменение амплитуды и абсолютное изменение фазы
сигналов за период повторения между импульсами.
282
Динамический диапазон Д определяет способность приемника
работать без ухудшения его показателей качества при воздействии
сильных сигналов и помех. Количественно динамический диапазон
определяется как отношение максимальной входной мощности
сигнала Рпртах, при которой не наступает существенного ухудшения
качества приема, к мощности сигнала, соответствующей предель-
ной чувствительности приемника:
Д = Рпртах/Лр-
Под максимальной входной мощностью сигнала понимается
такой уровень сигнала, который вызывает некоторое заданное
отклонение показателей качества РЛС от номинальных значений.
Для линейных приемников обычно за допустимое отклонение при-
нимается уменьшение дифференциального коэффициента усиления
на 1 дБ. В приемниках с ограничением или логарифмической
характеристикой допустимое отклонение выходного напряжения
оговаривается особо.
Динамический диапазон сигналов на входе радиолокационных
приемников обычно очень велик, он может достигать 100 дБ.
Благодаря применению различного рода адаптивных устройств и
программируемых регулировок усиления в современных РЛС уда-
ется сократить динамический диапазон сигналов до 40 дБ без
существенного ухудшения качества обрабатываемой информации.
8.2. Аналоговые и цифровые узлы
радиолокационных приемников
Структурные и функциональные схемы приемных устройств
РЛС различного назначения достаточно подробно рассмотрены в
гл. 1 и 3 учебника. В состав аппаратуры приемных устройств наряду
с элементами и узлами, специфичными для радиолокационной
техники, входиз аппаратура, являющаяся традиционной для при-
емников широкого назначения. В последующих разделах учебника
будут рассмотрены только те устройства, которые являются специ-
фичными для приемников, предназначенных для работы в составе
аппаратуры радиолокационных станций.
Малошумящие предварительные СВЧ-усилители. Предваритель-
ные СВЧ-усилители предназначены для увеличения уровня сигналов
перед подачей их на смесители. Предварительные усилители позво-
ляют существенно уменьшить коэффициент шума приемника. К
ним предъявляются следующие требования:
малая эквивалентная шумовая температура;
достаточный коэффициент усиления, чтобы последующие каска-
ды не оказывали существенного влияния на общий коэффициент
шума приемника;
283
высокая мощность насыщения, позволяющая воспроизводить
без искажений динамический диапазон входных сигналов;
малое время восстановления после воздействия сильных помех;
достаточная широкополосность, обеспечивающая возможность
работы приемников без дополнительной перестройки по частоте
при смене фиксированных волн;
высокая кратковременная стабильность фазовых и амплитудных
характеристик для когерентных РЛС.
В приемных устройствах РЛС в качестве предварительных уси-
лителей наиболее часто используются лампы бегущей волны (ЛБВ),
электронно-лучевые параметрические усилители, транзисторные
усилители и каскады, выполненные на триодах СВЧ по схеме с
общей сеткой.
Приемники посадочных РЛС производства фирмы «Тесла»
ЧССР работают без предварительных усилителей. Сигналы СВЧ у
этих приемников из волноводной системы поступают непосред-
ственно на кристаллические смесители, выполненные по балансной
схеме. Коэффициент шума таких смесителей равен 6... 10 дБ при
полосе частот »20МГц, коэффициенте передачи 0,2 ...0,3 и ди-
намическом диапазоне сигналов ~ 90 дБ. Недостатком такого типа
приемников, кроме большого коэффициента шума и малого коэф-
фициента передачи, является также пониженная электрическая проч-
ность входных цепей и связанная с этим необходимость принятия
дополнительных мер по защите от воздействия импульсов пе-
редатчика и сигналов мощных помех.
Предварительные усилители, выполненные на ЛБВ, не имеют
резонансных систем и поэтому обладают большой широкополос-
ност ью (до 25% от средней частоты). Коэффициент шума у них
лежит в пределах 4...6 дБ при коэффициенте усиления 25...35 дБ и
динамическом диапазоне сигналов 70... 80 дБ. Достоинства ЛБВ-
высокая электрическая прочность, большое обратное затухание
(> 60 дБ), высокая температурная стабильность характеристик и
способность выдерживать большие входные мощности при малом
времени восстановления после воздействия сильного сигнала. К
недостаткам ЛБВ относятся значительное потребление энергии,
высокие требования к стабильности источников питания из-за
сильной зависимости фазового сдвига от питающих напряжений,
большие габаритные размеры и масса, особенно фокусирующей
системы. В настоящее время ЛБВ используются в старых модифи-
кациях аэродромных радиолокаторов ДРЛ-7.
Электронно-лучевые параметрические усилители (ЭЛПУ) име-
ют малые значения коэффициента шума (1,3... 3 дБ), большой
коэффициент усиления (20...25 дБ), достаточно большую полосу
частот («10%), обладают способностью выдерживать большие
перегрузки. Наиболее высокие параметры удалось получить в
ЭЛПУ с быстрой циклотронной волной, однако для таких усили-
телей требуется переменное поперечное поле накачки, частота
284
которого в два раза выше частоты сигнала. В электростатических
электронно-лучевых усилителях используется накачка постоянным
полем, но характеристики их при этом несколько уступают ЭЛПУ с
переменной накачкой. <
В настоящее время электростатические ЭЛПУ используются в
первичных каналах РЛК «Скала-М», «Скала-МПР» и «Скала-
МПА».
Транзисторные малошумящие усилители имеют коэффициент
шума 2...5 дБ, относительную полосу частот »5%, коэффициент
усиления 15...25 дБ, динамический диапазон сигналов ~80 дБ.
Усилители потребляют мало энергии, обладаю! небольшими габа-
ритами и массой. Недостатками транзисторных усилителей являют-
ся их повышенная чувствительность к нагрузкам и пониженная
электрическая прочность. Для увеличения надежности усилителей
во входных цепях предусматриваются дополнительные устройства
защиты от воздействия импульсов передатчика и сигналов мощных
помех. Малошумящие транзисторные усилители применяются в
аэродромных радиолокаторах ДРЛ-7СМ, ATCR-44 и трассовых
ATCR-22.
Усилители, выполненные на триодах СВЧ по схеме с общей
сеткой. Их целесообразно использовать на частотах не выше
800 МГц. В этом диапазоне коэффициент шума таких усилителей
равен 6...8 дБ при коэффициенте усиления ~10 дБ, полосе частот
~ 10 МГц и динамическом диапазоне % 90 дБ. Усилители на трио-
дах не боятся перегрузок и обладаю! большой электрической
прочностью по входу. При использовании таких усилителей на
частотах выше 800 МГц их параметры резко ухудшаются.
Усилители на триодах СВЧ используются в наземных прием-
никах вторичных каналов, рассчитанных на прием сигналов на
частотах 730, 740 и 750 МГц.
Система автоматической регулировки усиления. В радиолока-
ционных приемниках используются системы автоматической ре-
гулировки усиления, основным назначением которых являются
уменьшение динамического диапазона входных сигналов и стаби-
лизация среднего уровня усиления приемника.
Шумовая автоматическая регулировка усиления (ШАРУ). В
радиолокационных приемниках для стабилизации опорного значе-
ния коэффициента усиления радиочастотного тракта используются
системы автоматической регулировки усиления, принцип действия
которых основан на оценке уровня шумов, содержащихся в видео-
сигнале. При этом предполагается, что чем больше уровень шума
на выходе приемника, тем больше его коэффициент усиления и
наоборот. Использовать в качестве информации о коэффициенте
усиления какой-либо другой параметр принимаемого сигнала не
представляется возможным, так как амплитуда и характер отражен-
ных сигналов быстро изменяются и в каждый момент времени
зависят от положения сканирующей антенны, воздушной обста-
285
новки и конкретной помеховой ситуации в отдельных дискретах
контролируемого пространства.
Для того чтобы из совокупности шума, помех и сигналов
полезных целей выделить только те составляющие, которые соот-
ветствуют стационарному шуму, в системах ШАРУ используются
методы стробирования и нелинейного интегрирования сигналов,
снимаемых после детектора.
В качестве примера рассмотрим принцип действия устройств
формирования управляющих напряжений систем ШАРУ трассовых
радиолокаторов «Скала-М» и ATCR-22.
Устройство формирования управляющего сигнала системы
ШАРУ приемника первичного канала РЛС «Скала-М» состоит из
входного дифференциального усилителя постоянного тока (УПТ),
ключа, нелинейной интегрирующей цепочки, выходного дифферен-
циального УПТ и формирователя запирающих импульсов (рис. 8.1).
На вход устройства поступают сигналы, снимаемые с полной
нагрузки амплитудного детектора приемника. Для предотвращения
выхода из строя входных цепей дифференциального УПТ сигналы
на него поступают через диодный ограничитель. На второй вход
УПТ подается опорное напряжение (7О1, относительно которого
производится отсчет уровня шума. Выходное напряжение диф-
ференциального УПТ через диод Д1 поступает на ключ, выполнен-
ный на полевом транзисторе. Ключ управляется запирающими
импульсами, поступающими в цепь его затвора с выхода управляю-
щего каскада. На управляющий каскад подаются сигналы «Бланк
1», «Бланк 2», а также прямоугольные импульсы длительностью
650 мкс, сформированные ждущим мультивибратором, синхронизи-
руемым импульсом запуска ВАРУ. Запирание ключа сигналами
ждущего мультивибратора, а также импульсами Бланк необходимо
для того, чтобы система ШАРУ не реагировала на резкие изменения
выходных сигналов амплитудного детектора, которые неизбежно
возникают во время действия перечисленных выше импульсов. При
выключенной системе ВАРУ ждущий мультивибратор продолжает
генерировать запирающие импульсы, предупреждая гем самым
реагирование системы ШАРУ на мощные помеховые сигналы,
Рис. 8.1. Функциональная схема системы ШАРУ
286
которые неизбежно присутствуют в начале каждого периода повто-
рения зондирующих импульсов.
В момент окончания запирающих импульсов ключ открывается
и напряжение с выхода УПТ поступает на нелинейную интегрирую-
щую цепь, включающую в себя, кроме RC-звена, также диод Д1. В
зависимости от уровня и знака выходного напряжения УПТ про-
исходит заряд или разряд конденсатора интегрирующей цепочки.
Нелинейная интегрирующая цепочка имеет большую постоянную
времени для положительных изменений входного напряжения и
меньшую инерционность для отрицательных изменений. Благодаря
этому схема ШАРУ оказывается малочувствительной к коротким
импульсным сигналам, превышающим средний уровень шума. В
момент времени, когда ключ закрывается, напряжение на кон-
денсаторе остается практически постоянным, так как утечка энергии
конденсатора через закрытый ключ и бодыпое входное сопро-
тивление выходного УПТ мала.
Выходной УПТ выполнен на полевых транзисторах по диф-
ференциальной схеме. Это позволяет значительно понизить зави-
симость параметров ШАРУ от изменений температуры и напря-
жений источников питания. С выходного усилителя регулирующее
напряжение ШАРУ С7рег через эмиттерные повторители подается на
регулируемые каскады УПЧ.
В радилокаторах ATCR-22 и ATCR-44 управляющие сигналы
ШАРУ формируются в цифровой части приемника, при этом
коэффициент усиления оценивается путем подсчета числа шумовых
выбросов, превосходящих заданный порог, за время полного оборо-
та антенны в кольце дальности, вероятность появления сигналов
местных помех в котором очень незначительна. Расположение
кольца дальности выбирается в самом конце активной части перио-
да повторения импульсов. Длительность стробирующего сигнала, с
помощью которого осуществляется выборка шумового напряже-
ния, составляет приблизительно двадцатую часть от активной части
периода повторения импульсов. Для исключения влияния на ре-
зультат подсчета шумовых выбросов сигналов местных предметов
отбор образцов сигнала производится из канала СДЦ. Кроме того,
для подсчета выбросов используются только те сигналы, в которых
отсутствуют помехи, зарегистрированные в картографе помех.
После интегрирования, сравнения с нормированным значением и
преобразования в аналоговую форму управляющий сигнал ШАРУ
подастся на диодный делитель, изменяющий коэффициент передачи
усилителя промежуточной частоты.
Временная автоматическая регулировка усиления. В приемных
устройствах РЛС применяются различные устройства сжатия дина-
мического диапазона входных сигналов. К таким устройствам
относятся системы ВАРУ. Они предназначены для автоматического
именения коэффициента усиления приемника во времени в зави-
симости от расстояния до целей, от которых приходят отраженные
287
сигналы. Для того чтобы амплитуда принимаемых сигналов была
постоянной во всем диапазоне дальности действия РЛС, в идеаль-
ном случае необходимо изменять коэффициент усиления приемника
пропорционально четвертой степени расстояния до целей. Однако,
учитывая ряд дополнительных факторов, определяющих амплитуду
принимаемых сигналов, как, например, изменение дифференциаль-
ного коэффициента усиления антенны в функции от угла места,
зависимость эффективной площади отражения местных предметов
от угла падения радиоволн, влияние кривизны земной поверхности
и т. д., коэффициент усиления приемника необходимо изменять по
более сложному закону, причем этот закон должен варьироваться в
зависимости от условий, в которых работает РЛС.
В состав аппаратуры систем ВАРУ обычно входят устройства
формирования управляющих напряжений и электронные узлы уси-
лителей промежуточной частоты,' изменяющие под воздействием
управляющих напряжений коэффициент передачу сигналов. В ка-
честве таких узлов используются управляемые усилительные каска-
ды или диодные аттенюаторы, изменяющие свои параметры под
воздействием приложенных к ним управляющих напряжений. В
качестве примера рассмотрим принцип построения схемы ВАРУ
трассового РЛ «Скала-М».
Формирователь управляющего напряжения ВАРУ состоит из
ключевого каскада, составного эмиттерного повторителя, нако-
пительного конденсатора, ограничителя разрядного напряжения,
управляемого разрядного каскада и управляющего усилительного
каскада (рис. 8.2). Запускающий импульс открывает ключ и накопи-
тельный конденсатор быстро заряжается от источника отрицатель-
ного напряжения до максимального отрицательного потенциала.
После того как ключ закроется, конденсатор начинает медленно
разряжаться через управляемый разрядный каскад, выполненный на
транзисторе. Максимальное напряжение, до которого может раз-
рядиться конденсатор, определяется опорным напряжением Uo,
подпитывающим диодный ограничитель. Сформированное таким
образом отрицательное экспоненциальное напряжение Срег через
составной эмиттерный повторитель и цепь регулировки уровня
Рис. 8.2. Функциональная схема системы ВАРУ трассового радиолокатора
288
Рис. 8.3. Упрощенная функциональная схема двухканальной системы ВАРУ поса-
дочного радиолокатора
поступает на управляющие входы регулируемых усилителей про-
межуточной частоты. Для изменения формы управляющего напря-
жения в устройстве предусмотрена возможность регулировки коэф-
фициента передачи петли обратной положительной связи, органи-
зованной с помощью управляющего усилительного каскада. Для
этого часть напряжения, снимаемого с эмиттерного повторителя,
через потенциометр «Форма ВАРУ» и усилитель подается на базу
транзистора управляемого разрядного каскада. В этом же каскаде
предусмотрена возможность регулировки опорного напряжения,
подаваемого на базу. Регулируя это напряжение потенциометром
«Длительность ВАРУ», можно изменять внутреннее сопротивление
транзистора разрядного каскада и тем самым увеличивать или
уменьшать постоянную времени разряда накопительного конден-
сатора.
В некоторых случаях применяются более сложные схемы ВАРУ.
Так, например, у посадочных РЛ типов РП-ЗФ и РП-ЗГ исполь-
зуются двухканальные системы ВАРУ (рис. 8.3), формирующие
управляющее напряжение сложной формы (рис. 8.4, з). Такая форма
обусловлена необходимостью получения достаточно большого
коэффициента усиления приемника в те моменты времени (точка А
на рис. 8.4, з), когда на вход приемного тракта приходят сигналы,
отраженные от уголковых отражателей, расположенных на траверзе
торца ВПП. Сигналы этих отражателей должны быть отчетливо
видны на экране индикатора, несмотря на их малую эффективную
площадь рассеяния.
Указанную на рис. 8.4, з форму напряжения получают с по-
мощью двухканальной схемы (см. рис. 8.3), один из каналов кото-
рой запускается с задержкой, соответствующей расстоянию от
точки установки радиолокатора до уголковых отражателей. За-
держка осуществляется с помощью импульсов (рис. 8.4, в), фор-
мируемых мультивибратором, синхронизируемым импульсами за-
пуска ВАРУ (рис. 8.4, а). Задний фронт импульса (рис. 8.4, г) ис-
пользуется для запуска второго канала ВАРУ (рис. 8.4, Э). Сами же
схемы формирования экспоненциальных управляющих напряжений
представляют собой зарядно-разрядные цепи, состоящие из диодов
10 Зак. 1375 ' 289
и RC-цепочек. Постоянная време-
ни заряда таких цепей выбирается
малой, а разряда - большой. На-
пряжение, снимаемое с RC-цепи
второго канала (рис. 8.4, е), ин-
тегрируется (рис. 8.4, ж) и после
суммирования с экспоненциаль-
ным напряжением первого канала
(рис. 8.4,6) в отрицательной по-
лярности подается на управляе-
мые каскады УПЧ (рис. 8.4, з).
Для согласования формы уп-
равляющего напряжения с харак-
теристиками принимаемого сигна-
ла в системе предусмотрены регу-
лировки амплитуды выходного
напряжения, времени задержки
запуска второго ждущего муль-
тивибратора, постоянной време-
ни интегратора, уровня ограниче-
ния заряда накопителя первого
канала и постоянной времени
разряда накопителя второго ка-
нала. Регулировки производятся
раздельно для курса и глиссады и
для двух направлений посадки.
Системы автоматической нод-
Рис. 8.4. Эпюры напряжений двухка- стройки частоты. АПЧ, предна-
нальной системы вару значенные для поддержания по-
стоянства промежуточной часто-
ты приемников, разделяются на электронные и электромехани-
ческие. В электронных системах управляющее напряжение подается
на отражательный электрод клистрона, входящего в состав местно-
го гетеродина, т. е. частота местного гетеродина подстраивается
под частоту магнетрона. В электромеханических системах управ-
ляющие сигналы изменяют напряжение ЭД переменного тока,
воздействующего через редуктор на механический орган управления
частотой магнетрона. В этих системах частота магнетрона под-
страивается под частоту местного кварцованного гетеродина.
Электромеханические системы АПЧ являются астатическими.
Остаточная расстройка у них не зависит от начальной расстройки, а
определяется только напряжением трогания двигателя и коэффи-
циентом передачи разомкнутой цепи АПЧ. Примером электро-
механической системы может служить система АПЧ аэродромного
РЛ типа ДРЛ-7СМ (рис. 8.5). Принцип действия ее заключается в
следующем. Часть энергии импульсов СВЧ, генерируемых магне-
троном, через ненаправленный ответвитель и избирательный кон-
290 '
На механизм подстройки частоты 400 Гц
Рис. 8.5. Функциональная схема электромеханической системы АПЧ
тур АПЧ поступает на смеситель, куда одновременно подаются
непрерывные колебания кварцованного гетеродина. Добротность
контура АПЧ выбирается такой, чтобы он обеспечивал передачу
высокочастотной энергии от ненаправленного ответвителя к сме-
сителю во всем рабочем диапазоне частот магнетрона без до-
полнительной перестройки.
Полученные после смесителя импульсы промежуточной частоты
усиливаются трехкаскадным полосовым УПЧ и подаются на диск-
риминатор. С этого же усилителя снимаются импульсы проме-
жуточной частоты, предназначенные для фазировки когерентного
гетеродина псевдокогерентной системы СДЦ.
Дискриминатор настраивается на промежуточную частоту
30 МГц. На выходах дискриминатора вырабатываются видеоим-
пульсы, амплитуда которых зависит от значения и знака расстройки
сигнала в соответствии с амплитудно-частотными характеристи-
ками дискриминатора по его выходам 7 и 2 (рис. 8.6). При уходе
частоты от номинальной в сторону увеличения амплитуда им-
пульсов второго выхода будет преобладать над амплитудой им-
пульсов первого выхода и наоборот. Если частота заполнения
импульсов точно соответствует номинальной частоте 30 МГц, то
амплитуда видеоимпульсов на обоих выходах будет одинаковой.
При очень больших расстройках частоты амплитуда видеоимпуль-
сов на выходах дискриминатора стремится к нулю.
После дискриминатора видеоимпульсы подаются на расшири-
тели, представляющие собой пиковые детекторы с большой раз-
ницей постоянных времени заряда и разряда накопительных кон-
денсаторов. На конденсаторах образуются постоянные отрицатель-
ные напряжения, значение которых будет являться функцией рас-
стройки частоты магнетрона. Эти напряжения через балансные
катодные повторители подаются на управляющие входы диффе-
ренциального магнитного усилителя. В зависимости от соотно-
шения входных токов усилителя на его выходе появляется пе-
ременное напряжение различной величины и фазы. Переменное
напряжение Ш через переключатель «Поиск-подстройка» подает-
ся на двигатель механизма подстройки частоты магнетрона, кото-
Ю* , 291
Рис. 8.6. Амплитудно-частотные ха-
рактеристики дискриминатора
нитного усилителя и подаст на
рый механическим путем приво-
дит значение частоты магнетрона
к номинальной. Если частота
магнетрона очень сильно отлича-
ется от номинальной, то на выхо-
де дискриминатора видеоимпуль-
сы будут отсутствовать, после
расширителя отрицательное на-
пряжение исчезнет и управляю-
щий каскад с помощью переклю-
чателя «Поиск-подстройка» от-
ключит двигатель от выхода маг-
хвигатель переменное напряжение
CL от сети 400 Гц. Двигатель начнет вращаться и будет пере-
страивать частоту магнетрона до тех пор, пока эта частота не
станет равной номинальной или цока не сработают концевые
выключатели механизма перестройки частоты магнетрона. Если
сработают концевые выключатели, то на двигатель будет подано
напряжение сети с противоположной фазой. Это приведет к тому,
что двигатель начнет вращаться в другую сторону. Так будет
продолжаться до тех пор, пока частота магнетрона не станет
равной номинальной, т. е. когда на выходе дискриминатора не
появятся видеоимпульсы и управляющий каскад не переключит
систему АПЧ из режима поиска в режим подстройки.
Рассмотренная схема АПЧ обладает большой инерционностью.
Объясняется это тем, что скорость вращения двигателя по мере
уменьшения расстройки также уменьшается, поскольку выходное
напряжение дискриминатора после его преобразования в постоян-
ный ток непосредственно используется для управления магнитным
усилителем. Для уменьшения инерционности часто применяются
системы АПЧ с релейным преобразованием управляющих сигна-
лов. В этих системах рабочее напряжение различной фазы подается
на двигатель через контакты двух одинаковых реле. Одно из них
срабатывает при положительном знаке расстройки, другое-при
отрицательном. Поскольку в этом случае величина рабочего на-
пряжения, подаваемого на двигатель, не зависит от величины
расстройки, а только от ее знака, скорость вращения двигателя
будет оставаться постоянной. Инерционность системы будет не-
большой, однако точность подстройки будет хуже по сравнению с
устройствами непосредственного управления двигателем из-за
большой величины «выбега» двигателя при вхождении в зону
остаточной расстройки.
Схемы АПЧ релейного типа используются в радиолокаторах
посадочных и типа ATCR-22/44.
Устройства логарифмирования, малой постоянной времени и анти-
логарифмирования. Устройства Лог-МП В-Антилог используются в
радиолокационных приемниках для подавления сигналов, отражен-
292
ных от гидрометеоров. Сигналы
метеообъектов сильно флуктуиру-
ют, причем случайная составля-
ющая отраженного сигнала свя-
зана линейной зависимостью со
средним значением сигнала Сфл =
уСср. Чем больше средняя со-
ставляющая сигнала, отраженно-
го от гидрометеора, тем больше и
его флуктуирующая часть. Эф-
фект от воздействия цепи Лог-
МПВ-Антилог на сигналы гидро-
метеоров заключается в подавле-
нии средней составляющей сигна-
ла и перераспределении флуктуи-
рующей составляющей: большие
по величине флуктуации уменьша-
ются, а малые-увеличиваются.
Поскольку к устройствам обра-
ботки сигналов предъявляется тре-
бование постоянства ложных тре-
вог и максимизации вероятности
правильного обнаружения, то эф-
фект от применения цепей Лог-
МПВ-Антилог будет проявляться
в том, что пороговые устройства
обнаружителей будут настраи-
Рис. 8.7. Преобразование сигналов в
устройстве Лог-МПВ-Антилог
ваться на стабильный средний, а не на максимальный уровень
флуктуаций, что автоматически приведет к повышению вероятности
обнаружения полезных целей.
Сказанное выше иллюстрирует рис. В.7, где условно показано
прохождение больших и малых по амплитуде сигналов гидрометео-
ров (ГМ) и ВС через цепи логарифмирования (а), малой постоянной
времени (б) и антилогарифмирования (в). Действительно, если связь
между входным и выходным сигналами логарифмирующего
устройства представить в виде приближенной зависимости
СВЫх ~ 'к ,
то дифференциальный коэффициент передачи такого устройства
будет определен из следующего соотношения:
^диф — (fc l°ga[/cp,BX) = — ——- .
ср.вх dU ср.вх U ср.вх
Учитывая, что для сигналов метеообразований флуктуирующая
составляющая связана со средней составляющей соотношением
Юв Зак. 1375
293
получаем
Тфл.ВЫХ --------- (^диф(^фл.
t.BX
б^фл.вх Y^ep.BX >
^У^ср.вх
ку
СТср.вх In a In а ’
т. е. уровень флуктуаций на выходе логарифмирующего устройства
не зависит от средней составляющей входного сигнала.
Цепь МПВ не пропускает постоянную составляющую сигналов
большой длительности (рис. 8.7,6), поэтому в устройстве анти-
логарифмирования флуктуирующая составляющая сигналов метео-
образований попадает на участки амплитудной характеристики с
малым дифференциальным коэффициентом усиления и на выходе
устройства будет иметь соответственно малый размах (рис. 8.7, в).
Цепи Лог-МПВ-Антилог в радиолокационных приемниках вы-
полняются на базе аналоговой или цифровой техники. Аналоговые
логарифмирующие устройства представляют собой диодно-резис-
тивные аттенюаторы, коэффициент передачи которых зависит от
амплитуды входных сигналов. В качестве цепей МПВ используются
дифференцирующие цепочки. Цифровые устройства Лог-МПВ-Ан-
тилог имеют более сложную структуру построения, но зато их
характеристики не зависят от внешних воздействий окружающей
среды и стабильны во времени.
Процесс цифрового логарифмирования можно выполнить путем
раздельного формирования целой части и мантиссы логарифма
входного двоичного сигнала с последующим представлением ре-
зультатов в виде объединенного двоичного кода логарифма ис-
ходного слова (рис. 8.8). Действительно, входное слово Е при
двоичной системе счисления может быть записано в виде:
, 6„~1 bt \
" + 2 ~ ~ " “ 2"-1/ ’
£= 2"-1
где и-номер разряда, находящегося в состоянии «1», левее которого все
старшие разряды находятся в состоянии «О»; состояние (и — z)-ro
разряда.
Тогда
(8-5)
Поскольку в этих уравнениях Ь„ всегда равно «1» и
( 1=п~1Ь •'
+ I
выражение (8.5) может быть записано как
log2 Е к (и - 1) + X "у2-
=П-1Ь •
2‘
(8.6)
294
В этом выражении (и — 1) пред-
ставляет собой целую часть лога-
рифма, а второе слагаемое яв-
ляется мантиссой логарифма.
Подставляя значение (и — 1) в ви-
Рис. 8.8. Структурная схема устройст-
ва двоичного логарифмирования
де двоичного кода, после млад-
шего разряда которого следует
выборка состояний соответствую-
щих разрядов исходного слова Е,
получаем логарифм слова Е по основанию 2 в двоичной системе
счисления.
Число разрядов, описывающих целую часть логарифма, зависит
от числа разрядов исходного слова. Так, например, при десяти-
разрядном исходном слове оно равно 4, поскольку максимальное
значение (п — 1) равно 9, для воспроизведения которого в двоичном
коде (1001) требуется 4 разряда. Число разрядов мантиссы в общем
случае на единицу меньше числа разрядов исходного слова, но если
согласиться с погрешностью + 3%, то можно ограничиться че-
тырьмя разрядами.
Принципиальная схема устройства, выполняющего логические
операции, соответствующие уравнению (8.6) и рис. 8.8, может быть
построена на базе двоичных приоритетных кодирующих устройств
и селекторов данных. Более перспективным направлением создания
цифровых логарифмирующих схем следует признать схемы, вы-
полненные на программируемых постоянных запоминающих
устройствах, в которых каждому входному числу Е поставлено в
соответствие выходное число к log2 (1 + Е). По этому же принципу
могут быть построены и антилогарифмирующие устройства.
Цепи МПВ в цифровом исполнении достаточно сложны по
сравнению с аналоговыми дифференцирующими цепочками, при-
чем их сложность возрастает при увеличении разрядности диф-
ференцируемых слов. Основными элементами цифровой схемы
МПВ (рис. 8.9) являются сдвиговый регистр, сумматоры, схема
деления, схема вычитания, стробирующий триггер L и ограничитель
отрицательных чисел G. Для синхронизации ячеек сдвигового ре-
гистра и стробирующего триггера используются тактирующие им-
пульсы ТИ, период следования которых зависит от числа эле-
ментов, на которое разбит весь диапазон дальности РЛС. На схеме
показан сдвиговый регистр на 16 ячеек с отводами через каждые две
ячейки. Отвод с восьмой ячейки подсоединяется непосредственно к
схеме вычитания. Деление на 8 (по числу отводов со сдвигового
регистра) производится простым сдвигом разрядов на 3 в сторону
младших разрядов при вводе их в схему вычитания.
Схема вычитания выполнена на сумматоре, при этом исполь-
зуется принцип двоичного дополнения вычитаемого числа до двух.
Для этого число инвертируется и в его младший разряд вводится
дополнительная логическая единица. Стробирующий триггер L
10в* 295
Рис. 8.9. Функциональная схема цепи малой постоянной времени
(триггер-защелка) фиксирует с помощью тактирующих импульсов
временное положение сигналов. Ограничитель отрицательных чисел
G работает как управляемый вентиль, обнуляющий выходной сиг-
нал, когда на его управляющий вход поступает со знакового
разряда сумматора логическая единица, свидетельствующая о том,
что в результате вычитания на сумматоре образовалось отрица-
тельное число.
На рис. 8.10 показана аналоговая интерпретация условных эпюр
напряжений, поясняющих процесс прохождения через цепи МПВ
сигналов малой (А) и большой (Б) длительностей.
х Эпюры относятся к точкам, обозначенным на рис. 8.9 буквами,
а, б, в, г и д.
Рис. 8.10. Аналоговая интерпретация сигналов в схеме малой постоянной
времени —
296
8.3. Адаптивные устройства
радиолокационных приемников
Адаптивный сумматор сигналов основного и дополнительного
каналов. В трассовых и аэродромных РЛ третьего поколения
антенно-волнОводные системы строятся по двухканальному прин-
ципу, позволяющему производить обзор пространства верхним
(дополнительным) и нижним (основным) лучами ДНА. Переклю-
чение лучей производится по жесткой или адаптивной программе в
зависимости от помеховой ситуации. Это позволяет значительно
уменьшить динамический диапазон амплитуд сигналов на входе
приемника за счет уменьшения сигналов, принимаемых нижним
лучом, для тех участков контролируемого пространства, где ме-
шающее действие помех особенно сильно.
Принцип действия адаптивного сумматора заключается в за-
поминании помеховой ситуации на отдельных участках контроли-
руемого пространства и последующем использовании записанной
информации для управления аттенюаторами, суммирующими сиг-
налы, получаемые с помощью верхнего и нижнего лучей. Эффект от
оперативного изменения коэффициентов аттенюации эквивалентен
изменению суммарной диаграммы направленности антенны, т. е.
при больших отражениях от местных предметов эквивалентная ДН
как бы приподнимается над поверхностью земли и сигнал, отра-
женный от местного предмета, уменьшается по амплитуде.
Упрощенную функциональную схему (рис. 8.11), поясняющую
принцип действия адаптивного сумматора сигналов, рассмотрим на
примере радиолокаторов ATCR-22 и ATCR-44.
Сигналы основного и дополнительного каналов поступают на
сумматор. При этом сигналы основного канала проходят через
аттенюатор и фазовращатель, параметры которых оперативно из-
меняются в зависимости от помеховой ситуации, записанной в
памяти фиксатора помех. Поскольку сложение сигналов происходит
на высокой частоте, то перед сложением сигналы основного и
дополнительного каналов выравниваются по фазе с помощью
специального устройства, размещенного в дополнительном канале.
На дальних дистанциях работа всегда производится нижним лучом,
поэтому во второй половине дистанции переключатель выбора
каналов с помощью цепи управления (Пуп) постоянно включает
основной канал.
Запоминающее устройство выполнено следующим образом.
Число ячеек памяти определяется числом дискретных участков, на
которое разбивается все контролируемое пространство. При опре-
делении азимутальной протяженности дискретных участков учиты-
вают то обстоятельство, что при слишком мелком делении про-
странства возможны частые переключения каналов и вследствие
этого-частые изменения амплитуд принимаемых сигналов, что
отрицательно скажется на работе системы селекции движущихся
297
Азимутальные Адреса
адреса дальности
Рис. 8.11. Упрощенная функциональная схема адаптивного сумматора сигналов
целей. Хорошим решением считается выбор азимутального размера
сектора таким, чтобы он по крайней мере в 3-4 раза превосходил
ширину диаграммы направленности антенны. У радиолокаторов
ATCR-22 и ATCR-44 число азимутальных секторов фиксатора
помех выбирается равным 64, т. е. каждый сектор имеет азиму-
тальную протяженность приблизительно 5,63° и захватывает при-
близительно 60 периодов повторения импульсов.
При дискретизации контролируемого пространства по даль-
ности необходимо исходигь из того, что число выборок сигналов в
каждом секторе, на которые разбивается все пространство, должно
быть приблизительно более 2 тыс. Это требование обусловлено
тем, что сигналы местных предметов, используемые для заполнения
ячеек памяти фиксатора помех, формируются в цифровой части
приемного устройства путем подсчета числа импульсов принимае-
мых сигналов в каждом секторе пространства и сравнения ре-
зультата подсчета с заранее установленным порогом. При этом для
уверенного разделения сигналов, отраженных от местных предме-
тов и полезных целей, число выборок сигналов должно быть
больше указанного значения. В противном случае сигналы по-
лезных целей могут быть приняты за помехи и записаны в память
фиксатора помех.
Учитывая, что на дальних расстояниях, начиная приблизительно
с /?тах/2, местные помехи проявляются слабо, разбивка контро-
лируемого пространства на отдельные секторы производится толь-
ко для первой половины дистанции. Число дискретных участков
дальности для этой дистанции выбирается равным 16, и общее
число ячеек памяти, таким образом, будет равно 16 х 64 = 1024.
Адреса ячеек памяти образуются шестью разрядами азимутальной
информации и четырьмя разрядами информации о дальности. В
дальней зоне на участке от Rmax/2 до Rmax работа ведется нижним
лучом, на участке от 0 до Rmax/2-комбинированным лучом по
адаптивной программе в зависимости от содержания информации,
записанной в памяти фиксатора помех. Для небольшого числа
дискретов дальности в самом начале дистанции, где мешающее
298
воздействие местных предметов особенно сильно, работа ведется
комбинированным лучом, параметры которого определяются за-
ранее записанной жесткой программой.
Каждая ячейка памяти фиксатора помех рассчитана на запись
четырех разновидностей сигналов: 00-отсутствие помехи, 01-сла-
бая помеха, 10-средняя помеха, 11-сильная помеха. Заполнение
памяти фиксатора помех (карты помех) осуществляется за время
трех первых полных оборотов антенны РЛ при каждом новом ее
включении или при подаче специальной команды, посылаемой с
панели управления приемника. Процесс заполнения карты произ-
водится следующим образом.
При первом обороте антенны цепь управления адаптивного
сумматора автоматически устанавливает переключатель выбора
каналов в положение «Основной канал», х- е. работа РЛ при первом
обороте антенны ведется только нижним лучом. Сигналы, при-
нимаемые нижним лучом, обрабатываются в аналоговой и цифро-
вой частях приемного устройства, интегрируются в пределах каждо-
го из секторов, на которые разбита вся контролируемая зона, и в
виде 12-разрядного кода поступают на вход цифровой части фикса-
тора помех. Здесь эти сигналы сравниваются с заранее установлен-
ным порогом, равным приблизительно 40 дБ по отношению к
минимальному принимаемому сигналу, и результат сравнения в
виде логической единицы (01) или логического нуля (00) записы-
вается в ячейки памяти фиксатора помех в соответствии с их
адресами. Конфигурация 01 записывается в том случае, если сигнал
превосходит установленный порог, конфигурация 00-если сигнал
оказывается меньше порога.
При втором обороте антенны для тех участков, где была
записана конфигурация помехового сигнала 01, аттенюатор и фа-
зовращатель адаптивного сумматора фиксатора помех автомати-
чески устанавливаются в такое состояние, что нижняя кромка
эквивалентной ДНА несколько поднимается над поверхностью
земли и занимает угловое положение +0,1° относительно гори-
зонта. Принимаемые сигналы обрабатываются в приемном устрой-
стве и вновь сравниваются с тем же порогом в фиксаторе помех.
Если сигнал и в этом случае превосходит порог, то на выходе
сравнивающего устройства вырабатывается логическая единица,
которая посылается на запись в устройство памяти фиксатора
помех для коррекции ранее записанной информации. Таким обра-
зом, после двух оборотов антенны в ячейках памяти фиксатора
помех будет записана следующая информация: 00-отсутствие по-
мех, 01-слабая помеха, 10-средняя или сильная помеха.
Неопределенность комбинации 10 уточняется за время третьего
оборота антенны. Во время третьего оборота антенны аттенюатор
и фазовращатель адаптивного сумматора для всех участков, где
была записана конфигурация 10, автоматически переходят в такое
299
12 13 14 15 16
Ячейки памяти
Irjfolj/I
|Z?7 |Z77 |Z7Z7|<?Z/,|ZV |
12 К П 15 16
Ячейки памяти
U/юр ~i’
12 13 14 >5 №
Сектора дальности
состояние, что нижняя кромка эк-
вивалентной ДН поднимается над
горизонтом еще выше и занимает
положение 4-0,5°. Уровень помех
от местных предметов для этих
участков становится еще меньше.
Если и в этом случае сигнал, при-
ходящий с цифровой части при-
емника, превзойдет установлен-
ный порог, то это значит, что на
данном дискретном участке про-
странства имеет место «сильная»
IHofcop
У лор —
|zzpz|g/z|w|zg|
12 13 14 15 16 12 13 14 15 16
Ячейки памяти Сектора дальности
Рис. 8.12. Динамика процесса регист-
рации помеховой ситуации в памяти
фиксатора помех
помеха от местного предмета.
Сравнивающее устройство выра-
батывает логическую единицу,
которая поступает на запоминаю-
щее устройство фиксатора помех
и заменяет все комбинации 10 на
11 на тех дискретных участках, у
которых уровень помех оказы-
вается выше порогового значения.
Остальные комбинации (00,01)
коррекции не подвергаются, поскольку при третьем обороте антен-
ны для всех дискретных участков пространства, где ранее была
произведена запись этих значений уровня помех, на выходе сравни-
вающего устройства будет вырабатываться логический нуль. При
добавлении логического нуля к ранее записанным комбинациям 00
и 01 последние не изменятся.
Процесс регистрации помеховой ситуации в памяти фиксатора
помех за время первых трех оборотов антенны иллюстрируется
рис. 8.12.
В левой части рисунка показано изменение содержания памяти
фиксатора помех за три полных оборота антенны. Из всей сово-
купности ячеек памяти показана лишь часть, соответствующая
одному азимутальному сектору и секторам дальности с 12 до 16. В
правой части рисунка показано изменение амплитуды сигналов,
обработанных в цифровой части приемника для этих секторов
дальности. Уровни сигналов в каждом секторе сравниваются с
пороговым напряжением 1/пор и результат сравнения в виде ло-
гических единицы или нуля изменяет содержание соответствующих
ячеек памяти, зафиксированное при предыдущем периоде обзора
пространства.
После трех полных оборотов антенны процесс заполнения памя-
ти фиксатора помех заканчивается и начинается нормальная работа
адаптивного сумматора входных сигналов. Записанная в памяти
фиксатора помех информация используется для выработки сигна-
лов, управляющих состоянием аттенюатора и фазовращателя, т. е.
300
для изменения эквивалентной ДНА. Информация, заложенная в
память фиксатора помех, при нормальной работе РЛ не стирается.
Информация обновляется путем подачи специальной команды с
пульта управления РЛ. Возможна ручная коррекция содержания
информации, записанной в отдельных ячейках памяти. Коррекция
производится путем набора адреса ячейки и кода, соответствующе-
го определенному уровню помех.
Адаптивный сумматор (рис. 8.13) содержит аналоговые и цифро-
вые цепи. Аналоговая часть сумматора включает в себя устройство
подстройки фазы сигналов дополнительного канала, высокочастот-
ную часть и устройство распределения управляющих сигналов.
Подстройка фазы сигналов дополнительного канала Производится
раздельно для случаев работы РЛ с линейной и круговой поля-
ризацией излучаемых радиоволн, поскольку фазовые соотношения
между сигналами основного и дополнительного каналов оказы-
ваются различными при различных режимах работы антенно-
волноводной системы. При изменении поляризации излучаемых
волн специальные управляющие сигналы Uynp ,л и Uyap к переклю-
чают элементы подстройки фазы сигналов дополнительного ка-
нала.
Высокочастотная часть блока фиксатора помех содержит ряд
аттенюаторов и фазовращателей, управляемых сигналами, при-
ходящими с цифровой части фиксатора помех через распределитель
управляющих сигналов.
Цифровая часть фиксатора помех содержит блок памяти, управ-
ляемый адресными сигналами дальности и азимута Ua д и 1/аа. Для
заполнения ячеек блока памяти используется информация^^полу-
чаемая в цифровой части приемного устройства при обработке
сигналов, отраженных от местных предметов Пм.п. В случае очень
сильных помех, когда вероятность ложных тревог становится не-
допустимо большой, на фиксатор помех поступают специальные
сигналы нормализатора ложных тревог (17н.л.т), которые опреде-
ляют новое положение нижней кромки эквивалентной’ ДНА и
уменьшают таким образом помехи.
Кроме перечисленных выше сигналов, на цифровую часть фикса-
Рис. 8.13. Состав оборудования адаптивного сумматора сигналов
ЗОГ
тора помех подаются управляющие сигналы Uynp, обеспечивающие
взаимодействие всех элементов схемы фиксатора помех между
собой.
Адаптивный аттенюатор помех. ААП предназначен для умень-
шения динамического диапазона помех, уровень которых выходит
за пределы допустимого динамического диапазона амплитуд сигна-
лов в системе СДЦ. Принцип действия ААП можно пояснить с
помощью схемы, приведенной на рис. 8.14.
Сигналы промежуточной частоты анализируются по амплитуде
с помощью измерителя уровней, выполненного па компараторах с
заданным порогом срабатывания Ппор. Для этого на компараторы
подаются сигналы, усиленные в линейке УПЧ до уровней, отли-
чающихся друг от друга на 10 дБ. Если динамический диапазон
входных сигналов лежит в пределах 0... 40 дБ, то логика управления
ААП вырабатывает команду на выбор селектором выхода того
каскада УПЧ, в котором сигналы усилены до первоначального
максимального уровня. Эти сигналы после селектора поступают
непосредственно на фазовые детекторы квадратурной системы СДЦ
и далее через аналого-цифровые преобразователи подаются на
цифровой процессор для последующей обработки. Если же дина-
мический диапазон сигналов лежит в пределах 40 ...50 дБ, то сра-
батывает другой компаратор измерителя уровней, и на селектор
поступит команда выбора выхода того каскада УПЧ, в котором
сигналы усилились на 10 дБ меньше первоначально установленного
максимального уровня. При диапазоне амплитуд сигналов
50...60 дБ в усилительный тракт вводится затухание 20 дБ и,
наконец, при диапазоне амплитуд сигналов более 60 дБ - затухание
30 дБ. Поскольку в радиолокационном сигнале большим амплиту-
дам соответствуют, как правило, отражения от местных предметов,
то устройство регулировки усиления, работающее по указанному
выше принципу, получило название адаптивного аттенюатора по-
мех. В отличие от неадаптивных устройств оно уменьшает коэф-
фициент усиления приемника лишь в те моменты времени, когда
помехи превосходят уровень сигналов, обрабатываемый в системе
СДЦ без ограничения.
Рис. 8.14. Упрощенная структурная схема адаптивного аттенюатора помех
302
Структурная схема ААП, показанная на рис, 8,14, является
упрощенной. На самом деле, она значительно сложнее, особенно в
части построения логики управления селектором. Объясняется это
особенностями сопряжения ААП с системой СДЦ. При каждом
переключении усиления в УПЧ система СДЦ из-за резкого изме-
нения амплитуды сигнала будет генерировать импульс, соответ-
ствующей движущейся цели, якобы появившейся в момент пере-
ключения каскадов усиления. Для подавления ложных сигналов с
ААП на блок СДЦ при каждом скачкообразном изменении усиле-
ния необходимо посылать бланкирующие сигналы. Если переклю-
чения будут производиться слишком часто, то число бланкирующих
сигналов сильно увеличится и вероятность пропуска целей резко
возрастет. Для уменьшения вероятности пропуска целей в устрой-
ство управления селектором включается память, не позволяющая
слишком часто коммутировать усилительные каскады УПЧ. Спе-
циальным переключателем устанавливается определенное число
зондирований, через которое разрешается повторное переключение
усиления УПЧ для каждого элементарного участка дальности
контролируемого пространства. Количество периодов выбирается
как компромисс между необходимой точностью слежения за из-
менением динамического диапазона амплитуд сигнала и допусти-
мой вероятности пропуска целей.
Рассмотрим более подробно принцип работы схемы управления
селектором. На вход схемы (рис. 8.15) по трем линиям а, б и в
поступают сигналы с измерителя уровней. Сигналы имеют значения
ООО, 001, 010 или 100 в зависимости от того, в каком диапазоне
амплитуд находится в каждый момент времени.сигнал АЧ. На
входе схемы управления эти сигналы сначала квантуются по вре-
мени, преобразуются в соответствующий специальный двухразряд-
ный код 01, 00, 11 или 10 и затем через единичный вход пере-
ключателя МРХ-1 и нулевой вход переключателя МРХ-2 подаются
на устройство преобразования двухразрядного кода в четырехраз-
рядный. На выходной шине перекодирующего устройства появ-
ляются двоичные слова конфигурации 0001, 0010, 0100 или 1000,
которые вновь поступают на линейку УПЧ ААП для управления
вентилями селектора, выбирающими один из выходов УПЧ с
соответствующими ослаблениями 0, 10, 20 или 30 дБ. Одновремен-
но сигналы с выхода МРХ-1 подаются' в память и устройство
управления переключателем. Память представляет собой цифровую
линию задержки, рассчитанную на запоминание сигналов одного
периода развертки РЛ. С выхода цифровой линии задержки сигналы
подаются на нулевой вход переключателя МРХ-1 и на устройство
управления переключателем. Если сигналы помех во всех элементах
дальности какого-либо периода развертки точно соответствуют
сигналам помех последующего периода развертки, то устройство
управления переключателем вырабатывает управляющий сигнал,
выбирающий единичный вход МРХ-1. Если же в каком-либо эле-
303
Рис. 8.15. Структурная схема устройства управления селектором ААП
менте дальности произойдет изменение помеховой ситуации, то
появится новая конфигурация управляющих сигналов селектора и
одновременно устройство управления переключателем вырабаты-
вает сигнал, выбирающий нулевой вход переключателя МРХ-1.
Таким образом, для того элемента дальности, где произошло
изменение помеховой ситуации, конфигурация сигналов селектора
будет определяться не реальным содержанием помех в каждой
последующей развертке, а теми сигналами, которые вызвали пе-
реключение МРХ-1 и которые оказались зафиксированными в
памяти. Такое состояние будет продолжаться до тех пор, пока
выходной сигнал устройства управления переключением снова не
выберет единичный вход переключателя МРХ-1. Продолжитель-
ность этого процесса определяется счетчиком и компаратором,
расположенными в устройстве управления переключателем. Из-
меняя порог срабатывания компаратора, можно задержать об-
ратное переключение входов МРХ-1 на время от одного до 32
периодов повторения импульсов РЛС.
Каждый раз при переключении входов МРХ-1 схема управления
формирует бланкирующие сигналы для системы СДЦ. Контроль за
работой схемы управления производится с помощью осциллографа
или ИКО.
Возможен и другой вариант работы распределителя ААП. Этот
вариант предполагает включение с помощью переключателя S7
единичного входа МРХ-2. При таком состоянии МРХ-2 конфигу-
рация управляющих сигналов селектора будет определяться не
реальной помеховой ситуацией, а кодами, заранее записанными в
ППЗУ и извлекаемыми из него по командам адресных сигналов.
Возможен также смешанный режим работы распределителя ААП.
При таком режиме в ППЗУ записана не только программа управ-
ления сигналами селектора, но и команды на переключение нуле-
304
вого и единичного входов МРХ-2. Формирование управляющих
сигналов селектора в этом случае будет производиться частично по
жесгкой, а частично по адаптивной программе.
Устройство идентификации сигналов метеообразований. Для по-
давления сигналов метеообразований в радиолокационных прием-
никах используются цепи Лог-МПВ-Антилог. Применение таких
цепей позволяет уменьшить сигналы, отраженные от дождевых
образований, до 10 дБ. В то же время потери, вносимые этими
цепями для полезных сигналов, могут достигать 2 дБ. Поэтому во
многих РЛС предусматривается возможность выключения цепей
Лог-МПВ-Антилог из тракта обработки сигнала. Ручное вклю-
чение-выключение этих цепей неэффективно, поскольку в контро-
лируемом пространстве одновременно присутствуют участки с хо-
рошими и плохими метеоусловиями. Поэтому в некоторых РЛС
предусматривается адаптивное переключение цепей Лог-МПВ-Ан-
тилог в реальном масштабе времени. Информация о наличии или
отсутствии метеообразований для различных азимутов и даль-
ностей в этом , случае вырабатывается специальным устройством-
«датчиком дождя», или идентификатором сигналов метеообразо-
ваний. Идентификатор анализирует отраженные сигналы по ряду
параметров и в случае выявления сигналов метеообразований авто-
матически выдает команду на включение цепей Лог-МПВ-Антилог.
Характерными особенностями сигналов, отраженных от метео-
объектов, являются большая амплитуда, значительная протяжен-
ность по дальности и азимуту, сильные флуктуации уровня. Поэто-
му в качестве критериев, по которым анализируются сигналы,
принимаются амплитуда сигнала, длительность, азимутальная про-
тяженность и непрерывность в течение определенного количества
квантов дальности. Для того чтобы отличить метеообразования от
местных предметов, на идентификатор подаются сигналы, про-
шедшие обработку в когерентном канале, т. е. свободные от помех,
вызванных отражениями от поверхности земли.
Схема идентификатора (рис. 8.16) содержит селекторы по амп-
литуде, длительности, азимутальной протяженности и непрерыв-
Рис. 8.16. Функциональная схема устройства идентификации сигналов метеообра-
зований
305
ности. Амплитудный селектор выполнен на цифровом компараторе,
который выдает логическую единицу, если входной сигнал А будет
больше порога В. Порог В устанавливается переключателем S1.
Амплитудный селектор исключает срабатывание идентификатора
от собственных шумов приемника и других случайных сигналов
малого уровня.
Для того чтобы идентификатор не реагировал на сигналы малой
длительности (импульсные помехи, отражения от ВС и т. д.), в
состав идентификатора введены интегратор и второй компаратор с
порогом S2. Интегратор выполнен на сдвиговом регистре и сум-
маторе. Сдвиговый регистр управляется тактирующими импуль-
сами ТИ. Он состоит из 16 ячеек с выводами после каждой четной
ячейки. Для сигналов, длительность которых не превосходит удво-
енной длительности импульса ТИ (длительности двух дискретов
дальности), на выходе сумматора амплитуда сигнала будет равна 1.
Для сигналов с длительностью более 16 ТИ, на выходе сумматора
амплитуда сигнала будет равна 8. Устанавливая значения порога в
пределах 1 ...8, можно выделять сигналы с длительностью 1 ... 16 и
более квантов дальности.
Для того чтобы идентификатор не реагировал на сигналы,
отображаемые на экране индикатора только вдоль одной раз-
вертки, предусмотрены запоминание сигналов на период повторе-
ния импульсов и проверка повторяемости сигналов в двух смежных
периодах развертки. Память выполняется в виде цифровой линии
задержки на регистре сдвига, управляемом тактирующими им-
пульсами. Схема совпадения выполнена на логическом элементе
И-НЕ.
Последняя проверка, которой подвергается сигнал, осуществ-
ляется сдвиговым регистром, содержащим 8 ячеек, и схемой сов-
падений, выполненной на многовходовом элементе И-НЕ. Через эту
схему пройдут только те сигналы, которые существуют во всех
восьми смежных квантах дальности.
В результате проверки по всем перечисленным выше критериям
из всей совокупности отраженных сигналов, соответствующих ме-
теообъектам, местным предметам, ВС, импульсным помехам раз-
личной длительности, регулярным наводкам, шумам и «ангелам»,
останутся только те сигналы, которые соответствуют метеообъек-
там.
Глава 9. СИСТЕМЫ СЕЛЕКЦИИ ДВИЖУЩИХСЯ ЦЕЛЕЙ
9.1. Основные характеристики систем СДЦ
Коэффициент подавления пассивной помехи. Для характеристики
эффективности различных систем СДЦ используются несколько
параметров. Одним из таких параметров является коэффициент
подавления пассивной помехи Кп, который определяется как от-
ношение мощности пассивной нефлуктуирующей помехи на входе
системы СДЦ к ее мощности на выходе системы при равенстве
входной и выходной мощностей полезного сигнала:
А. = Рп вх/Р„ вых при Р = Р .
Коэффициент подавления удобен тем, что его легко измерить
при испытаниях РЛС. Недостаток этого параметра заключается в
том, что он не дает полной характеристики эффективности по-
давления пассивных помех, поскольку не учитывает особенностей
прохождения полезного сигнала через систему СДЦ и не учитывает
разнообразие параметров самой пассивной помехи.
При измерении коэффициента подавления в качестве объекта
наблюдения выбирается нефлуктуирующий или слабофлуктуирую-
щий местный предмет. Эффект подавления помехи оценивают по
соотношению квадратов амплитуд сигналов на выходе амплитудно-
го и когерентного каналов при условии, что коэффициенты усиления
этих каналов были предварительно выравнены по сигналам, имити-
рующим подвижную цель. Имитация подвижной цели производится
с помощью импульсного СВЧ-генератора, синхронизированного по
частоте повторения с зондирующими импульсами РЛС. Коррекция
по фазе между частотой заполнения импульсов СВЧ-генератора и
РЛС отсутствует.
Для посадочных РЛС, в состав волноводной системы которых
входит эхо-камера, генерирующая сигналы, имитирующие отра-
жения от неподвижных целей, возможен другой способ измерения
коэффициента подавления. Коэффициент подавления измеряется по
соотношению квадратов амплитуд сигналов эхо-камеры на выходе
системы СДЦ при расфазированном U2 и сфазированном и2
когерентном гетеродине, что эквивалентно измерению соотношения
квадратов амплитуд сигналов от подвижной и неподвижной целей:
K„=V2/U22.
Коэффициент улучшения. Наиболее полную характеристику эф-
фективности различных систем СДЦ дает коэффициент улучшения
307
I, который определяется как отношение мощностей сигналов цели и
помехи на выходе системы СДЦ, разделенное на отношение мощ-
ностей сигналов цели и помехи на входе системы СДЦ, при условии,
что мощность сигнала цели на выходе системы СДЦ берется
усредненной по врем скоростям:
j ^с.вых/^п.вых
Рс вх -^п.вх
Коэффициент улучшения более объективно характеризует ка-
чество систем СДЦ по сравнению с коэффициентом подавления
помех от неподвижных отражателей, поскольку он является пока-
зателем отклика системы СДЦ на сигналы пассивных помех по
отношению к усредненному отклику системы СДЦ на сигналы
движущихся целей. Чем больше коэффициент улучшения, тем луч-
ше будут выделяться полезные цели на фоне неподвижных объ-
ектов.
Максимально достижимое значение коэффициента улучшения
ограничивается различными факторами, основными из которых
являются:
амплитудная и фазовая модуляция отраженных сигналов, воз-
никающая из-за вращения ДНА при сканировании пространства;
флуктуация отражающей поверхности местных предметов;
флуктуация амплитуды, фазы и временного расположения сигна-
лов из-за нестабильности внутренних параметров радиолока-
торов;
ограниченный динамический диапазон приемного тракта и си-
стемы СДЦ;
вобуляция периода повторения зондирующих импульсов;
ограниченное число дискретных значений амплитуд и длитель-
ностей сигналов при квантовании их в цифровых системах СДЦ.
Общий коэффициент улучшения с учетом ограничивающих фак-
торов
i -Гу-Г
* общ ' • Ь г / ’
\(=1 -Ч'
где Д-частные предельные значения коэффициента улучшения, вычислен-
ные с учетом ряда ограничений.
Предельное значение коэффициента улучшения, определяемое
амплитудной и фазовой модуляцией отраженных сигналов при
обзоре пространства вращающейся узкой ДНА Ц1), может быть
найдено из следующих соображений:
чем уже ДН и чем быстрее она перемещается относительно
неподвижных целей, тем шире будет спектр дополнительных частот,
возникающих при амплитудной и фазовой модуляции импульсов в
пачке отраженных сигналов, обусловленный эффектом перемещения
диаграммы направленности;
308
чем меньше импульсов в пачке, тем сильнее они будут от-
личаться друг от друга по амплитуде и фазе и тем больше будет
спектр дополнительных частот при уменьшении частоты повторе-
ния импульсов.
Исследования показали, что при гауссовой форме ДНА в гори-
зонтальной плоскости и при однократном вычитании сигналов
смежных периодов в компенсирующем устройстве когерентно-им-
пульсной системы СДЦ частное значение I'i, обусловленное ука-
занными выше ограничениями, может быть определено как
Л = и2/1,39,
<P,W„
360°
где
п =
-число импульсов в пачке отраженных сигналов; <ра-
ширина ДНА; ТоЪз- время полного обзора пространства; Fn-частота повто-
рения импульсов.
Для двукратного и трехкратного выиитаний соответственно
получаем I'i = л4/3,84; Г{' — «б/16.
Приведенные формулы справедливы для случая отсутствия огра-
ничения амплитуд сигналов в приемном тракте. При ограничении
сигналов коэффициент улучшения существенно уменьшается.
Уменьшение коэффициента улучшения при ограничениях сигна-
лов объясняется расширением спектра частот помехи. Общая тен-
денция изменения коэффициента улучшения Д в этом случае за-
ключается в следующем:
чем сильнее ограничение сигналов, отраженных от местных
предметов, тем шире частотный спектр помех и тем меньше
коэффициент улучшения системы СДЦ;
чем выше кратность вычитания сигналов в компенсаторе, тем
сильнее влияет эффект ограничения на величину коэффициента
улучшения.
Влияние ограничения сигналов на коэффициент улучшения в
зависимости от числа импульсов в пачке для случаев однократного
(Л/'i), двукратного (АГ/) и трехкратного (АГ/') вычитаний сигналов
показано на рис. 9.1. Приведенные данные получены расчетным
путем и подтверждены экспериментально для гауссовой формы
ДНА и ограничения сигнала на уровне 20 дБ.
Предельные значения коэффициента улучшения, вызываемые
флуктуациями отражающей поверхности местных предметов Ц2),
могут быть найдены по следующим формулам, справедливым
соответственно для однократного, двукратного и трехкратного
вычитаний сигналов:
где с,.-средний квадратический разброс скоростей элементарных отра-
жателей поверхности местных предметов.
309
Характерные значения av да-
ны в табл. 9.1.
Ограничения на предельное
значение коэффициента улучше-
ния, обусловленные внутренней
нестабильностью параметров РЛ,
зависят прежде всего от флуктуа-
ций амплитуд, фаз и временного
положения сигналов в передаю-
щем и приемном трактах радио-
локатора. Амплитудная неста-
бильность может возникать при
Рис. 9.1. Зависимость снижения коэф-
фициента улучшения от числа импуль-
сов в пачке
генерации зондирующих импуль-
сов в передатчиках, при плохой
стабилизации выпрямителей и
т. д. Источниками фазовой неста-
бильности могут служить магнетрон, местный гетеродин, коге-
рентный гетеродин, элементы приемного тракта, фазовая характе-
ристика которых зависит или от питающего напряжения, или от
величины приходящих сигналов. Временная нестабильность сигна-
лов определяется параметрами генераторов синхронизирующих
импульсов, передатчиков, задерживающими цепями компенсаторов
и т.д.
Ориентировочные значения предельных коэффициентов улучше-
ния /3, обусловленных нестабильностью внутренних параметров РЛ
от импульса к импульсу, получают с помощью выражений:
(лД/т)-2 (частота передатчика);
-2
(частота местного или когерентного гетеродина);
Дф-2 (сдвиг фазы передатчика);
Дф-2 (фазирование когерентного гетеродина);
т2/2Дг2 (временное положение импульса);
ЛДЛ-2 (амплитуда импульса),
где т—длительность импульса; Д/-изменение частоты от импульса к
импульсу; К-расстояние до цели; Дф-изменение фазы от импульса к
импульсу; Д/ -временное смещение импульсов; Л-амплитуда импульса;
ЛА-изменение амплитуды от импульса к импульсу.
с
4лД/7?,
Таблица 9.1. Средний квадратический разброс скоростей характерных отражателей
Источник пассивных помех Скорость ветра, м/с о,,, см/с
Редкий лес Лесистые холмы То же » Морская поверхность Дождевые тучи Безветрие 1,7 5 4 10 15 20 30 4... 10 46... 110 180 ... 400
310
Для получения коэффициента улучшения /3 более 40 дБ (> 104)
флуктуации напряжения импульсов не должны превосходить 0,01 их
максимального размаха, а флуктуации фазы-0,01 рад, что соот-
ветствует изменению амплитуды сигнала на 1% в точке макси-
мальной крутизны характеристики фазового детектора.
Указанные выше численные значения нестабильности амплиту-
ды и фазы сигналов берутся обычно в качестве исходных при
определении требований к стабилизации частоты внутри зондирую-
щего импульса, кратковременной стабильности частоты местного и
когерентного гетеродинов, качества фазировки опорного напря-
жения фазовых детекторов, допустимой величины пульсаций ис-
точников питания.
На коэффициент улучшения оказывает влияние вобуляция пе-
риода повторения импульсов, применяемая в РЛС для устранения
слепых скоростей. Влияние вобуляции проявляется в дополнитель-
ном расширении спектра помех, имеющем место при сканировании
пространства антенной с узкой ДН и при случайных перемещениях
элементарных отражателей местных предметов под действием ве-
тра или других каких-либо внешних возмущений. Предельное зна-
чение коэффициента улучшения, когда в качестве ограничивающего
фактора выступает дополнительное расширение спектра помех за
счет вобуляции периода повторения импульсов при сканировании
пространства антенной с ДН гауссовой конфигурации, может быть
оценено так:
2
I п2,
ц
где у-соотношение вобулируемых периодов.
Предельное значение коэффициента улучшения, когда в качестве
ограничивающего фактора выступает дополнительное расширение
спектра помех за счет вобуляции периода повторения импульсов
при перемещении элементарных отражателей местных предметов,
оценивают по формуле
где средний квадратический раз-
брос скоростей элементарных отра-
жателей.
Ограничение коэффициента
улучшения при аналого-цифро-
вом преобразовании сигналов
происходит за счет потерь, вно-
симых амплитудными квантизато-
рами и за счет конечного коли-
чества выборок при квантовании
сигналов по времени.
Рис. 9.2. Зависимость потерь L от чис- .
ла выборок т при аналого-цифровом
преобразовании сигналов
311
Предельное значение коэффициента улучшения, ограниченное
числом двоичных разрядов N аналого-цифрового преобразователя,
может быть определено с помощью выражения
76 = 0,75(2N — I)2.
Полученный коэффициент улучшения, на самом деле, будет не-
сколько меньше из-за потерь L в отношении сигнал/помеха при
недостаточно большом числе выборок сигнала по времени. Эти
потери можно получить из рис. 9.2. На графике по оси абсцисс
отложено число выборок т, приходящихся на время, соответствую-
щее длительности одного зондирующего импульса. При этом пред-
полагается, что перед аналого-цифровым преобразователем в трак-
те приемника имеется оптимальный фильтр.
Амплитудно-скоростная характеристика. Важной характеристи-
кой РЛС, работающих в режиме СДЦ, является зависимость ампли-
туды выходных сигналов компенсирующего устройства от скорости
воздушного судна. Эта зависимость, получившая название ампли-
тудно-скоростной характеристики (АСХ) системы СДЦ, связывает
относительную амплитуду выходного сигнала системы СДЦ Uom с
радиальной по отношению к РЛС составляющей скорости ВС Ц,ад,
частотой повторения импульсов Fn и длиной волны излучаемых
колебаний X. Для когерентно-импульсных систем СДЦ с постоян-
ной частотой повторения импульсов и однократным вычитанием
сигналов в компенсаторе выражение для АСХ имеет вид
Сэтн(1)= sin (175^) .
\ FnX/
В этом выражении значение аргумента синуса получается в ра-
дианах, если скорость берется в километрах в час, частота повто-
рения импульсов-в герцах и длина волны-в сантиметрах.
Амплитудно-скоростные характеристики РЛС, работающих с
постоянной частотой повторения импульсов, при некоторых зна-
чениях радиальной скорости обращаются в нуль. Эти скорости
получили название слепых. Слепые скорости Кл.рад определяются
формулой
Kn.pafl = fc’0,018FnX,
где /с-порядковый номер слепой скорости.
Значение величины Кл.рад в этой формуле получается в ки-
лометрах в час, если Fn берется в герцах, а Х-в сантиметрах.
Для устранения слепых скоростей применяется вобуляция часто-
ты повторения импульсов.
В случае «-кратного изменения частоты повторения импульсов и
m-кратного вычитания сигналов в компенсаторе выражение для
АСХ примет вид
312
Рис. 9.3. Амплитудно-скоростная характеристика радиолокатора
1 »-
Готн (т) = £
П 1= 1
В качестве примера на рис. 9.3 приводится рассчитанная по
приведенной выше формуле АСХ для РЛС с параметрами п = 3,
Fnl = 323 Гц, Fn2 = 346 Гц, Fn3 = 302 Гц, X = 24,1 см. В компенса-
торе использовалось двукратное вычитание сигналов (т = 2). При
уменьшении кратности вычитания сигналов глубина провалов в
амплитудно-скоростной характеристике уменьшается.
9.2. Устройства СДЦ, выполненные
на базе аналоговых элементов
Для систем СДЦ, выполненных на базе аналоговых элементов,
характерно использование в качестве запоминающих устройств
ультразвуковых линий задержки. Имеются несколько вариантов
построения аналоговых систем СДЦ. В качестве типового примера
рассмотрим систему СДЦ радиолокатора ДРЛ-7СМ. В нем при-
меняется псевдокогерентная система СДЦ высокой скважности с
внутренней когерентностью. В состав атшаратуры СДЦ входят два
блока: фазовый блок и компенсатор. В фазовом блоке осуществля-
ется запоминание фазы излучаемых сигналов и сравнение ее с фазой
принимаемых сигналов. Запоминание фазы осуществляется с по-
мощью когерентного гетеродина, а сравнение фаз излучаемых и
принимаемых сигналов-с помощью фазового детектора. На вы-
ходе фазового детектора появляются видеоимпульсы, амплитуда и
полярность которых зависят от разности фаз излучаемых и прини-
маемых сигналов. Если цель неподвижна, то разность фаз излу-
313
чаемых и принимаемых сигналов от периода к периоду не меняется
и, следовательно, амплитуда сигналов на выходе фазового де-
тектора в смежных периодах повторения импульсов будет по-
стоянной. Для целей, перемещающихся относительно РЛ, в каждом
новом периоде на выходе фазового детектора будут появляться
сигналы с изменяющейся амплитудой.
В компенсаторе осуществляется череспериодное вычитание сиг-
налов. Сигналы неподвижных целей, не изменяющиеся по амплиту-
де, будут полностью компенсированы. Останутся только те сигна-
лы, которые от периода к периоду изменяют свою амплитуду, т. е.
останутся сигналы только движущихся целей. Функциональная
схема фазового блока показана на рис. 9.4.
При нормальной работе на фазовый детектор поступают сигна-
лы с предварительного усилителя промежуточной частоты (ПУПЧ)
и когерентного гетеродина. Сигналы ПЧ предварительно проходят
систему АРУ, предназначенную для выравнивания динамического
диапазона входных сигналов. Когерентный гетеродин в начале
каждого периода фазируется импульсами промежуточной частоты,
поступающими на фазовый блок с линейки АПЧ, куда они в свою
очередь поступают с направленного ответвителя антенно-фидерной
системы РЛ в момент излучения зондирующих импульсов. Для
обеспечения процесса фазировки когерентного гетеродина в неко-
торых типах станций перед приходом каждого нового фазирующего
импульса колебания генератора когерентного гетеродина срывают-
ся специальными бланкирующими импульсами, вырабатываемыми
в компенсаторе.
Для контроля работоспособности и настройки фазового блока в
состав его аппаратуры введена линейка проверки фазирования.
Линейка генерирует серию импульсов промежуточной частоты,
имитирующих неподвижные цели. Для этого используется ультра-
звуковая линия задержки на 20 мкс, рассогласованная по входу и
выходу. При подаче на линию фазирующего импульса на ее выходе
Рис. 9.4. Функциональная схема фазового блока
314
Возбудитель
! Генератор
ММГц
С разового блока
ЛЗ-2 | т-з
I Электронный
коммутатор
Модуля-\
тор |
УЛЗ-2 НН
вычитания
Делитель (
| Накопитель |*
Усилитель
Блокинг-
генератор
Униполяри-
затор
Амплитуд-
ный
селектор
Схема
управления
Запускаю-
щий
каскад
ЛЗ-1
ZE
Генератор
бланкируюцих ♦
импульсов
Генератор пусковых импульсов
выход
I
&
Рис. 9.5. Функциональная схема компенсатора с амплитудной модуляцией
сигналов
образуется серия импульсов промежуточной частоты, фаза которых
оказывается жестко связанной с фазой колебаний когерентного
гетеродина.
Функциональная схема компенсатора (рис. 9.5) в простейшем
виде должна была бы состоять из трех элементов: входного уси-
лителя, линии задержки и схемы вычитания задержанных и не-
задержанных сигналов. Однако реальная схема оказалась значи-
тельно сложнее. Прежде всего появилась необходимость вместо
одной ультразвуковой линии задержки ввести две линии УЛ3-1 и
УЛЗ-2, рассчитанные на время задержки 930 и 1250 мкс.
Введение двух линий позволило перейти на работу РЛС с
автоматическим переключением частот повторения импульсов, не-
обходимым для подавления слепых скоростей (режим «СДЦ-
Автомат»). Работа в режиме «СДЦ-Автомат» потребовала в свою
очередь введение в схему компенсатора электронного коммутатора,
поочередно включающего в канал задержанного сигнала У Л 3-1 или
УЛЗ-2. Применение вместо обычных электрических линий задержки
ультразвуковых вызвано необходимостью задержки широкополос-
ных сигналов на время периода повторения импульсов прибли-
зительно 1000 мкс. Такое время задержки при большой полосе
частот и сравнительно малом затухании можно обеспечить на
ультразвуковых волнах, распространяющихся в плавленом кварце.
Однако применение таких волн потребовало предваризельного
преобразования видеосигналов в радиосигналы с последующим
превращением их с помощью пьезокварцев в ультразвуковые коле-
бания. Для преобразования видеосигналов потребовалось ввести в
схему генератор на 14 МГц и амплитудный модулятор, в котором
315
входные видеоимпульсы преобразуются в радиоимпульсы. После
УЛЗ механические колебания снова с помощью пьезокварцев пре-
образуются в электрические сигналы, проходят через коммутируе-
мые каскады КК-1, КК-2 электронного коммутатора, усиливаются
и детектируются в усилителе задержанного канала (УЗК) и через
дополнительную линию задержки ЛЗ-l поступают на схему вы-
читания. Туда же поступают незадержанные сигналы, усиленные и
продетбктированные в усилителе незадержанного канала (УНЗК).
После схемы вычитания могут образоваться сигналы как поло-
жительной, так и отрицательной полярности. Для приведения их к
одной полярности используется каскад, получивший название уни-
поляризатор.
Нескомпенсированный остаток сигналов местных предметов
после схемы вычитания зависит от стабильности коэффициентов
усиления задержанного и незадержанного каналов и стабильности
задержки сигнала в УЛЗ. Первая проблема решается путем ис-
пользования одинаковых схем УЗК и УНЗК, что приводит к
одинаковым изменениям уровней сигналов в задержанном и не-
задержанном каналах при появлении таких дестабилизирующих
факторов, как изменения температуры и питающих напряжений.
Вторая проблема решается путем использования одних и тех же
нестабильных во времени элементов, какими являются УЛЗ, одно-
временно для задержки сигналов в задержанном канале и форми-
рования пусковых импульсов, определяющих период повторения
зондирующих сигналов. Для этого организуется кольцо синхрони-
зации, содержащее генератор пусковых импульсов (ГПИ) и за-
держанный канал, включающий в себя УЛЗ-1 или УЛЗ-2. Пусковые
импульсы, вырабатываемые блокинг-генератором, через подстроеч-
ную линию задержки ЛЗ-2 подаются на возбудитель и объеди-
няются там с сигналом, поступающим с фазового блока. С до-
полнительного выхода УЗК смесь сигналов подается на ампли-
тудный селектор ГПИ, выделяющий из смеси только пусковой
импульс. Амплитудная селекция пускового импульса возможна
благодаря тому, что его амплитуда по крайней мере в 3 раза
превосходит максимально возможный уровень- сигналов фазового
блока. Для того чтобы работа амплитудного селектора не зависела
от регулировки усиления задержанного канала, в качестве по-
рогового напряжения селектора используется не фиксированное
напряжение, а средняя составляющая приходящих сигналов, вы-
деляемая накопителем.
Выделенный селектором импульс подается на блокинг-гепера-
тор. Время прохождения пускового импульса по кольцу синхро-
низации, зависящее в основном от времени задержки сигнала в УЛЗ,
будет, таким образом, определять период повторения пусковых
импульсов передатчика. Для того чтобы период повторения им-
пульсов Тп был точно равен задержке сигналов в задержанном
канале Т3, в тракте задержанного сигнала перед схемой вычитания
316
устанавливается небольшая электрическая линия задержки ЛЗ-1,
компенсирующая дополнительную задержку в ГПИ, необходимую
для запуска блокинг-генератора. Точная подгонка соотношения
Тп = Т3 производится с помощью переменной линии ЛЗ-2.
Кроме пусковых импульсов, в ГПИ формируются также бланки-
рующие импульсы, длительность которых несколько меньше перио-
да повторения пусковых импульсов. Бланкирующие импульсы по-
ступают на запускающий каскад блокинг-генератора, предотвращая
его случайное срабатывание между пусковыми импульсами. Задним
фронтом бланкирующего импульса запускается электронный ком-
мутатор, переключающий коммутируемые каскады КК-1 и КК-2
незадолго до начала следующего периода повторения импульсов.
Дополнительным элементом компенсатора является линия за-
держки ЛЗ-З с тзад = 88 мкс, предназначенная для формирования
сигнала, имитирующего неподвижную цель.
Компенсаторы посадочных радиолокаторов РП-ЗФ, РП-ЗГ стро-
ятся по аналогичному принципу. Основные отличия заключаются
лишь в введении системы АРУ, балансирующей коэффициенты
усиления задержанных и незадержанных каналов, формирователя
бланкирующих сигналов когерентного гетеродина и имитатора
сигналов подвижных целей. Принцип действия последнего основан
на делении частоты повторения импульсов, имитирующих непод-
вижную цель, на 2. Это приводит к тому, что в смежных периодах
повторения амплитуды сигналов, имитирующих цель, принимают
различные значения (максимальное и нулевое), т. е. после черес-
периодного вычитания амплитуда сигналов будет максимальной.
В некоторых РЛ, как, например, в аэродромном «Экран-85», в
компенсаторе вместо УЛЗ используют дискретно-аналоговые
устройства, выполненные на приборах с зарядовой связью. До-
стоинством таких устройств являются высокая стабильность за-
держки и возможность ее регулировки путем изменения тактовой
частоты. Кроме того, такие устройства обладают малыми габа-
ритными размерами, массой и стоимостью. По своему принципу
действия устройства, выполненные на приборах с зарядовой связью,
напоминают цифровые сдвиговые регистры, управляемые тактовы-
ми импульсами, но в отличие от последних информация об ампли-
туде у них представляется в аналоговом виде. Для них не требуются
аналого-цифровые и цифро-аналоговые преобразователи.
Стремление к повышению стабильности характеристик
устройств СДЦ привело к созданию компенсаторов, у которых
амплитудная модуляция сигналов УЛЗ заменена на частотную.
Такого рода компенсирующие устройства используются в коге-
рентных каналах обзорно-посадочного радиолокатора ОПР Л-4 и
посадочной станции РП-4Г. Применение частотной модуляции сиг-
налов позволило отказаться от периодической балансировки кана-
лов задержанного и незадержанного каналов и использования
систем АРУ в этих каналах.
317
Функциональная схема компенсатора с частотной модуляцией
сигналов показана на рис. 9.6. Биполярные видеосигналы с выхода
фазового детектора поступают на частотный модулятор, выпол-
ненный на вариконде и генераторе 30 МГц. Девиация частоты
выбрана равной +1 МГц. Эти сигналы передаются непосредствен-
но в возбудитель УЛЗ и через преобразователь частоты 47 +
+ (30 + АД) МГц без задержки подаются на балансный смеситель.
В возбудителе сигналы (30 + АД) МГц усиливаются до уровня,
необходимого для возбуждения УЛЗ. УЛЗ имеет два выхода с
задержками 500 и 416 мкс, что соответствует частотам повторения
импульсов 2 и 2,4 кГц. Череспериодная коммутация выходов осу-
ществляется с помощью переключающих сигналов р и р, вы-
рабатываемых в генераторе синхроимпульсов. С выходов УЛЗ
сигналы предыдущего периода (30 + АД) МГц поступают на ба-
лансный смеситель, куда одновременно подаются сигналы
(77 + АД) МГц незадержанного канала. Разностный сигнал
47 ± (АД — АД) МГц после смесителя поступает на резонансный
усилитель и частотный детектор. Если обрабатываемые сигналы
соответствуют неподвижной цели, то отклонение частоты от но-
минальной в смежных периодах будет одинаковым (АД = АД) и на
частотный детектор поступят сигналы с частотой 47 МГц. Если же
сигналы соответствовали подвижной цели, то отклонение частоты
от номинальной в смежных периодах повторения импульсов будет
неодинаковым (АД АД) и на частотный детектор поступят сигна-
лы с частотой 47 + (АД — АД) МГц. Поскольку частотный детектор
настроен на 47 МГц, то в первом случае на выходе детектора
видеоимпульсы будут отсутствовать, а во втором случае появятся
видеоимпульсы, амплитуда и полярность которых будут опреде-
ляться величиной и знаком расстройки (АД — АД) МГц. Выделен-
ные частотным детектором биполярные сигналы движущихся целей
преобразуются с помощью униполяризатора в однополярные и
направляются далее на индикатор.
Для обеспечения равенства времени задержки сигналов периоду
повторения импульсов в блоке синхронизации применяется элект-
дапускаипцие импульсы 2/2,Ь кГц
Рис. 9.6. Функциональная схема компенсатора с частотной модуляцией сигналов
318
ронное слежение по частоте. Производится это следующим обра-
зом. Управляемый генератор импульсов основного такта выра-
батывает прямоугольные импульсы частотой ® 1,005 МГц. В плате
управления синхроимпульсами производится деление этой частоты
на 4, а в генераторе синхроимпульсов полученная таким образом
частота (« 250 кГц) делится еще на 105 и 126. В результате деления
образуются запускающие импульсы частотой 2,4 и 2 кГц, которые
синхронизируют работу всей станции. Одновременно с запускаю-
щими импульсами в генераторе синхроимпульсов вырабатываются
контрольные сигналы К1. Они поступают на модулятор ком-
пенсатора и проходят тот же путь, что и все остальные сигналы,
поступающие на компенсатор с фазового детектора. При равенстве
периода повторения синхроимпульсов времени задержки УЛЗ конт-
рольные сигналы полностью подавляются в селективном усилителе.
Если период повторения не равен времени задержки УЛЗ, то на
выходе селективного усилителя появляютсяцвидеосигналы ошибки,
полярность которых свидетельствует об увеличении или умень-
шении периода синхронизации по сравнению с временем задержки
УЛЗ. Видеосигналы ошибки выделяются из всей совокупности
сигналов с помощью стробирующих импульсов В1, которые так же,
как и контрольный сигнал, вырабатываются в генераторе синхро-
импульсов. Выделенные сигналы ошибки поступаю! на управляе-
мый генератор импульсов основного такта. Этим сигналом управ-
ляются вариконды, изменение емкости которых приводит к со-
ответствующему увеличению или уменьшению частоты генератора
1,005 МГц. Изменение частоты происходит в сторону уменьшения
разности между временем задержки УЛЗ и периодом импульсов
синхронизации.
9.3. Устройства СДЦ, выполненные
на базе цифровых элементов
Принцип действия систем СДЦ, выполненных на цифровой
элементной базе, аналогичен принципу действия систем, описанных
выше. Отличие заключается в том, что в цифровых системах все
операции обработки проводятся не с аналоговыми сигналами, а с их
числовым безразмерным эквивалентом. Преимуществами такой
обработки является высокая стабильность параметров сигналов во
времени при изменении питающих напряжений и температуры,
программная гибкость алгоритмов обработки, уменьшение массы,
габаритов, потребляемой энергии и в некоторых случаях стоимости
аппаратуры.
Примером построения цифровых систем СДЦ могут служить
системы СДЦ радиолокаторов ATCR-22, ATCR-44 и ТРЛК-10.
Принцип действия системы СДЦ радиолокаторов ATCR-22 и
ATCR-44 достаточно подробно описан в гл. 4 учебника. Ниже будут
319
рассмотрены особенности построения лишь отдельных устройств
аппаратуры СДЦ этих станций.
Аналого-цифровой преобразователь (рис. 9.7). В приемниках РЛС
ATCR-22 и ATCR-44 применяются АЦП, использующие принцип
двоично-взвешенного приближения. Этот принцип заключается в
следующем. В начале каждого элемента дальности за время
0,05 мкс отбирается и запоминается образец аналогового сигнала.
Затем специальный генератор последовательно генерирует 10 деся-
тиразрядных двоичных слов для очередного элемента дальности.
Начинается генерация со старшего разряда. Первое слово, со-
держащее один старший разряд, преобразуется в аналоговую форму
и сравнивается с преобразуемым аналоговым сигналом. Если пре-
образованное десятиразрядное слово не превосходит аналоговый
сигнал, то в старшем разряде запоминается 1 и формируется 0 в
следующем разряде. Полученное таким образом новое слово опять
преобразуется в аналоговую форму и вновь сравнивается в ком-
параторе с преобразуемым сигналом и т. д. Если же преобразован-
ное десятиразрядное слово превосходит или равно преобразован-
ному сигналу, то в нем запоминается 0, а в следующем разряде
формируется 1 и т. д. После перебора всех десяти разрядов образо-
ванное таким способом двоичное десятиразрядное слово выводится
в параллельном коде из АЦП и подается на цифровую часть
приемника.
Аппаратура АЦП радиолокатора ATCR-22 состоит из двух
полукомплектов, каждый из которых обрабатывает сигнал одного
из фазовых детекторов квадратурной системы СДЦ. Эти сигналы
условно названы синусным и косинусным. Принцип работы обоих
полукомплектов одинаковый.
Управляющие сигналы, поступающие с синхрогенератора, пре-
образуются в формирователе в последовательность импульсных
Рис. 9.7. Упрощенная функциональная схема АЦП
320
сигналов, синхронизирующих ра-
боту всех элементов АЦП, Схема
выбора образца представляет со-
бой ключ, который в начале каж-
дого дискрета дальности подклю-
чает на время 0,05 мкс вход АЦП
к запоминающему элементу. На
запоминающем элементе образу-
Рис. 9.8. Процесс квантования анало-
гового сигнала по времени и ампли-
ется потенциал, пропорциональ- тУДе
ный входному сигналу (рис. 9.8).
Этот потенциал сохраняется в течение длительности одного дис-
крета дальности (тд). Таким образом, на выходе схемы запоминания
образца аналоговый сигнал (штриховая линия на рис. 9.8) преоб-
разуется в сигнал ступенчатой формы (сплошная линия), кванто-
ванный по времени и амплитуде.
Время от конца импульса выбора образцу до начала следующего
дискрета дальности отводится на преобразование записанной амп-
литуды сигнала в двоичную форму. Для этого одновременно с
началом очередного дискрета дальности запускается генератор
синусоидальных колебаний с частотой 10 МГц. Этот генератор
синхронизирует работу генератора двоичных десятиразрядных
слов. Для генерации каждого десятиразрядного слова отводится
0,1 мкс. После генерации первого слова, которое всегда имеет одну
и ту же конфигурацию 1 000 000 000, оно преобразуется в цифро-
аналоговом преобразователе (ЦАП) в аналоговую форму и по-
дается на компаратор для сравнения с амплитудой входного сиг-
нала. Если преобразованное десятиразрядное слово не превосходит
исходный сигнал, то на выходе компаратора появляется логическая
единица, которая с помощью схемы коррекции закрепляет единицу
в старшем разряде первого десятиразрядного пробного слова, и
гецератор двоичных слов формирует следующее пробное слово с
конфигурацией 1 100 000 000.
Если же при сравнении на компараторе входной сигнал окажется
меньше первого преобразованного десятиразрядного слова, то на
выходе компаратора появляется логический нуль, который через
корректирующую цепь выдает запрет на закрепление единицы в
старшем разряде первого пробного слова, и генератор двоичных
слов формирует второе слово с конфигурацией 0 100 000000. Так
будет продолжаться до тех пор, пока не сформируется десятое
двоичное слово, т. е. пока не будут определены все 10 разрядов
двоичного слова, представляющего собой цифровой эквивалент
входного сигнала, зафиксированного схемой запоминания образца
для каждого дискрета дальности. После формирования десятого
слова дается разрешение на его выдачу во внешнюю часть схемы
АЦП и команда на прекращение работы генератора 10 МГц.
Поскольку вся длительность каждого дискрета дальности исполь-
зовалась на выбор образца и подбор соответствующего цифрового
321
слова, то выдача этого слова производится в тот период времени,
когда в схеме АЦП обрабатывается сигнал следующего дискрета
дальности.
Особенностью выходных цепей АЦП является то, что они
работают в режиме разделения сигналов во времени, т. е. выход
данных синусного сигнала производится за первую половину диск-
рета дальности, а за вторую половину выводятся данные ко-
синусного сигнала. Для этого на выходе АЦП устанавливается
быстродействующий переключатель МРХ, управляемый сигналами,
поступающими с формирователя. В первую половину периода
дискрета дальности на выход 1 будут поступать данные 1...5
разрядов синусного сигнала, а 6... 10 разряды будут переданы на
выход 2. Во вторую половину периода дискрета дальности на выход
1 из полукомплекта 2 будут поступать данные 1... 5 разрядов
косинусного сигнала, а на выход 2-данные 6... 10 разрядов этого же
сигнала.
В радиолокаторе ATCR-44 продолжительность одного дискрета
дальности в два раза меньше, чем в ATCR-22. В этих станциях
приходится использовать два комплекта АЦП, так как их быстро-
действие не обеспечивает полное преобразование сигнала за время
одного дискрета дальности. В этом случае на оба входа одного
комплекта АЦП подается только синусный сигнал, а на оба входа
другого-только косинусный сигнал. Для получения такой же по-
следовательности синусных и косинусных сигналов, как в ATCR-22,
после АЦП устанавливается дополнительное устройство сопря-
жения, в котором производится поочередная выборка синусных и
косинусных сигналов.
Схема двойного вычитания. Перед тем как произвести вычитание
задержанных и незадержанных сигналов, необходимо провести
дополнительную операцию, которая заключается в том, что каж-
дый раз, когда в десятиразрядном слове появляется конфигурация
ООО 000 000 0, ее надо заменить на близкую по значению кон-
фигурацию ООО 000 000 1, так как вычитание сигналов производится
по методу двоичного дополнения, непригодному для сигналов типа
000 000 000 0. Замена указанного числа производится с помощью
двух компараторов, которые анализируют все 10 разрядов входного
слова и, если конфигурация 000 000 000 0 подтверждается, то в
самый младший разряд с помощью элементов И-НЕ и ИСКЛЮ-
ЧАЮЩЕЕ ИЛИ-HE искусственно заводится единица.
Устройство двойного вычитания (рис. 9.9) выполняет операцию,
описываемую выражением
U =UX-2UV+ Uz,
где индексы х, у, z обозначают принадлежность сигнала соответст-
венно к первому, второму и третьему смежным периодам повторе-
ния импульсов. Необходимое для этой операции совмещение сигна-
322
Рис. 9.9. Функциональная схема устройства двойного вычитания сигналов
лов разных периодов производится с помощью запоминающих
устройств ЗУ1... ЗУ4. Каждое из этих устройств представляет собой
цифровую линию задержки, выполненную на сдвиговых регистрах,
содержащих 1280 или 1440 последовательно включенных триггеров.
Управление сдвиговыми регистрами производится тактирующими
импульсами (ТИ), число которых в каждом периоде совпадает с
числом ячеек памяти цифровой линии задержки, а начало каждой
серии совпадает с началом каждой развертки независимо от ее
длительности. Это позволяет обеспечить равенство времени за-
держки сигналов в линии периоду повторения зондирующих им-
пульсов при любых законах их вобуляции. _____
Поскольку тактирующие сигналы ТИ и ТИ имеют противо-
положную полярность, устройства памяти 1 и 2 будут задерживать
только синусную, а 3 и 4-только косинусную составляющие вход-
ного сигнала. Объединение этих составляющих после задержки на
один или два периода в последовательный сигнал Usin/cos про-
изводится переключателями МРХ, управляемыми также тактирую-
щими импульсами.
Операции сложения и вычитания сигналов различных периодов
выполняются последовательно по частям. Вначале суммируются
сигналы первого (Uxsin/cos) и третьего (Uz sin/cos) периодов, а затем из
них вычитается удвоенный сигнал второго периода (2L\sin/cos).
Умножение сигнала на два производится путем простого сдвига
всех разрядов исходного слова на один разряд в сторону старших
разрядов. Вычитание сигналов осуществляется методом двоичного
дополнения. В соответствии с этим методом операция вычитания
заменяется на операцию сложения, но вычитаемый сигнал пред-
варительно инвертируется и в его младший разряд принудительно
вводится единица. Поскольку в рассматриваемом случае произ-
водится вычитание удвоенного сигнала, то в младший разряд
323
вводятся две единицы. На рис. 9.9 это осуществляется подачей
высокого потенциала на вход переноса и вход В1 сумматора
сигналов (Uxsin/Cos + t^zsin/cos) и предварительно инвертированного
удвоенного объединенного сигнала Uysin/cog. Если полученное таким
образом число будет положительным, то в дополнительном (один-
надцатом) разряде появится единица, а если отрицательным,
то-нуль. Отрицательное число при этом будет представлено в
дополнительном коде. Для последующей обработки сигналов удоб-
но вынести знаковый разряд числа за пределы его значащих
разрядов. Для этого в рассматриваемой схеме в самый старший
разряд вводится еще одна единица (высокий потенциал на вход В4
сумматора). Появление единицы в двенадцатом разряде будет
означать в этом случае, что полученное число отрицательное и его
обратный код следует заменить на прямой.
После устройства двойного вычитания сигналы подаются на
схему разделения синусных и косинусных составляющих и сов-
мещения их во времени. Составляющие сигнала выделяются с
помощью регистров типа D, управляемых тактирующими импуль-
сами, поступающими на регистры синусного и косинусного каналов
в противоположной полярности. Эти же импульсы синхронизируют
работу дополнительного регистра, включенного в синусный канал
для сдвига по времени синусного сигнала на половину периода
тактирующего импульса. Дополнительный сдвиг необходим для
точного совмещения синусного и косинусного сигналов во времени.
Экстрактор модуля. В квадратурной системе СДЦ после опера-
ции вычитания синусных и косинусных составляющих сигналов в
смежных периодах повторения импульсов необходимо произвести
объединение этих составляющих по закону
и£=(^+ад/2- (9.1)
Эту операцию выполняет устройство, получившее название
экстрактор модуля.
Поскольку выполнение операции (9.1) простейшими цифровыми
элементами вызывает технические трудности, то ее заменяют на
более простые, приводящие тс тому же результату, но с опре-
деленными погрешностями. В качестве эквивалентных операций
могут быть приняты следующие логические и арифметические
действия:
сложение абсолютных значений чисел Usin и Ucos, т. е.
|Esin| + |Ucos|;
выбор большего из абсолютных значений чисел Usin и Ucos, т. е.
I Usin |, еСЛИ | USin | > | Ucos | И | Ucos I, еСЛИ I Ucos | > | Usin I j
сложение большего по абсолютному значению числа с поло-
виной меньшего по абсолютному значению, т. е.
324
| Usin | + 0,51 Ucos I, если | Usjn | > | Ucos |
или
I uc№| + 0,51 Usin |, или I Ucos I > I UsinI.
(9.2)
Последнее выражение дает наименьшую погрешность (а; 12%) и
поэтому положено в основу принципа построения экстрактора
модуля. При этом алгоритм работы экстрактора модуля опре-
деляется уравнением
I ^in I + I t^cos I + max {| Usin I или | Ucos |}
(9.3)
которое полностью эквивалентно выражению (9.2). Согласно урав-
нению (9.3) операции возведения в квадрат, суммирования и извле-
чения квадратного корня заменяются на более простые операции
определения абсолютных значений чисел, нахождения большего йз
двух чисел, суммирования и деления на два.
Функциональная схема экстрактора модуля показана на
рис. 9.10. Поскольку разрядность сигналов после операции (9.3)
увеличивается, на выходе экстрактора модуля устанавливается
ограничитель максимального количества разрядов, который также
показан на рис. 9.10.
На вход экстрактора модуля подаются 12-разрядные сигналы
USin и Ucos, самый старший разряд (ССР) которых является зна-
ковым. Для выделения абсолютных значений двоичных чисел,
соответствующих сигналам USm и Ucos, используются элементы
ИСКЛЮЧАЮЩЕЕ ИЛИ и сумматоры. Схема анализирует состоя-
ния двенадцатого разряда входного слова и если там окажется нуль,
то все элементы ИСКЛЮЧАЮЩЕЕ ИЛИ пропустят сигналы без
изменения на сумматоры и те в свою очередь без изменения
передадут эти сигналы на свои выходы. Если же в двенадцатом
Знаковый разряд
Пр
Ucos
Usin
Знаковый разряд
выделитель
абсолютного
значения
числа
выделитель
абсолютного
значения
числа
Определитель
большего ио чисел
выделитель
большего
ио двух чисел
Пр
ССР
Рис. 9.10. Функциональная схема экстрактора модуля с ограничителем
325
разряде окажется единица, т. е. входной сигнал представляет собой
отрицательное число, передаваемое в обратном коде, то согласно
логике работы элемента ИСКЛЮЧАЮЩЕЕ ИЛИ входные сигна-
лы буду! инвертированы и в младший разряд выходного слова
через вход переноса сумматора будет введена дополнительная
единица. И в том, и в другом случаях знаковый разряд отбра-
сывается.
Определение большего из двух чисел производится цифровыми
компараторами, а выделение большего числа-селекторами данных,
управляемыми сигналами, поступающими с выходов компарато-
ров. Ограничитель также выполнен на селекторах данных. На одну
шину селектора подается 13-разрядное слово, которое необходимо
ограничить до 12 разрядов, а на другую шину - 12-разрядное слово,
в каждом разряде которого содержится единица. В выходном слове
отсекается 13-й разряд, но если в нем содержалась единица, то
селектор данных переключается и все 12 разрядов выходного слова
заполняются единицами, т. е. воспроизводится максимальное число,
которое может быть воспроизведено 12 разрядами.
Устройство череспериодного вычитания системы СДЦ радиоло-
катора «Скала-М». Система СДЦ первичного канала РЛК «Ска-
ла-М» построена по истинно когерентному принципу и включает в
себя два квадратурных канала и вычислитель модуля, объединяю-
щий сигналы квадратурных каналов. Функциональная схема цифро-
вой части системы СДЦ этой станции показана на рис. 9.11. В
отличие от рассмотренной ранее системы СДЦ радиолокаторов
ATCR-22 и ATCR-44 в этой схеме предусмотрена возможность
трехкратного вычитания сигналов четырех смежных периодов по-
Рис. 9.11 Функциональная схема цифровой части системы СДЦ РЛК «Скала-М»
326
вторения импульсов, что в некоторых случаях позволяет получить
более высокое качество подавления сигналов местных предметов.
Результат тройного вычитания описывается уравнением U =
= U4 — 3U3 + 3U2 — Uj, где индексы 1, 2, 3 и 4 указывают на
принадлежность сигнала U соответственно к первому, второму,
третьему и четвертому периодам повторения импульсов. Выбор
кратности вычитания осуществляется с помощью специального
коммутатора.
Вторым существенным отличием схемы СДЦ РЛК «Скала-М»
от рассмотренной ранее является использование в качестве памяти
адресных оперативных запоминающих устройств (ОЗУ) с произ-
вольным доступом. Базовым элементом ОЗУ является интеграль-
ная микросхема 527РУ1, представляющая собой ОЗУ статического
типа, рассчитанное на 64 одноразрядных слова. В качестве за-
поминающего элемента микросхемы используется управляемый
триггер, находящийся в одном из двух устойчивых состояний. В
состав микросхемы входит также дешифратор адресного кода.
Информация записывается при подаче на общий вход «Запись-
считывание» напряжения высокого уровня, а считывание-при пода-
че напряжения низкого уровня. Управление микросхемами орга-
низовано таким образом, что сначала из ячейки памяти про-
изводится считывание информации предыдущего периода, а затем
запись в ту же ячейку информации текущего периода.
Каждому элементу памяти поставлен в соответствие один из
дискретов дальности радиолокационной развертки. Вся дальность
разбита на 960 дискретов, следовательно, для записи одного раз-
ряда цифрового слова требуются 15 микросхем типа 527РУ1, а для
записи 8-разрядных слов, используемых в схемах вычитания, 120
микросхем. Генерация адресных сигналов, сигналов записи-считы-
вания и выбора корпусов микросхем (сигналы ВК) производится в
устройстве управления ОЗУ. Там же формируются бланкируюгцие
сигналы, позволяющие выбрать группы микросхем, обеспечиваю-
щих запоминание сигналов на участках дальности 0... 130, 130... 260
и 260...390 км.
Устройство череспериодного вычитания системы СДЦ радиоло-
катора «Скала-МПР». Система СДЦ радиолокационного комплек-
са «Скала-М» эффективна по отношению к местным предметам,
спектр флуктуаций отраженных сигналов которых достаточно узок
и расположен в области частот, кратных частоте повторения им-
пульсов Fn. Для подавления сигналов с более широким или сме-
щенным спектром применяются системы череспериодной компен-
сации (ЧПК) с более сложным структурным построением. Так,
например, в первичном канале РЛК «Скала-МПР» в качестве
системы ЧПК используется цифровой нерекурсивный фильтр вто-
рого порядка (рис. 9.12, а) с разносом нулей на z плоскости.
Выходной сигнал такого фильтра (С) образуется путем сум-
мирования входного сигнала (173) и сигнала, задержанного на два
327
периода повторения импульсов а также вычитания сигнала,
задержанного на один период и умноженного на коэффициент at:
U= Ut — alU2 + U3.
При otj = 2 нерекурсивный фильтр второго порядка преобразуется в
обычную схему ЧПК с двукратным вычитанием сигналов.
Амплитудно-частотная характеристика нерекурсивного фильтра
второго порядка (рис. 9.12,6) описывается выражением
С(/) =
«1
— 2 cos
где СЦ < 2.
Необходимые значения коэффициента eq могут быть найдены из
выражения:
СЦ ='2 cos
где/0/Гп определяется как относительное значение частоты/0, при котором
амплитудно-частотная характеристика фильтра обращается в нуль. Для
получения значений f0/F„ = 5% коэффициент at надо выбирать равным 1,9.
Функциональная схема системы ЧПК первичного канала ТРЛК
«Скала-МПР» показана на рис. 9.13. Система СДЦ этого РЛК
выполнена по истинно когерентному квадратурному принципу.
Сигналы квадратурных каналов Usin и Ссо5 после фазовых де-
текторов преобразуются аналого-цифровыми преобразователями
(АЦП) в 9-разрядный двоичный код (8 разрядов модуля и один
знаковый разряд) с интервалом временного квантования 1,2 мкс.
Для увеличения диапазона различимых градаций амплитуд сигна-
лов в АЦП предусмотрен стохастический режим работы. В этом
Рис. 9.12. Структурная схема нерекур-
сивного фильтра второго порядка (о)
и его амплитудно-частотная характе-
ристика (б)
328
режиме в АЦП с генератора пос-
ледовательности случайных чисел
(ПСЧ) вводятся аналоговые зна-
чения двоичных трехразрядных
случайных чисел. Наибольшее зна-
чение этого числа устанавливает-
ся равным младшему разряду
цифрового эквивалента входного
сигнала АЦП. Сигналы генера-
тора ПСЧ используются также
для управления запоминающим
устройством с постоянной памя-
тью (ПЗУ), которое может изме-
нять знак коэффициентов ctj ум-
ножителей цифровых перестраива-
емых режекторных фильтров.
Рис. 9.13. Функциональная схема цифровой части системы СДЦ РЛК «Скала-МПР»
Режекторные фильтры обрабатывают отдельно синусную и ко-
синусную составляющую сигналов.
Каждый из них представляет собой двукратный компенсатор, со-
стоящий из двух оперативных запоминающих устройств (ОЗУ),
умножителя а15 алгебраического сумматора и умножителя С. В
сумматоре происходит алгебраическое сложение входного незадер-
жанного сигнала, входного сигнала, задержанного на два периода
зондирования, и входного сигнала, задержанного на один период и
умноженного на коэффициент — ах. Далее сигнал подается на
второй умножитель, в котором производится его умножение на
коэффициент С, записанный в ПЗУ. Умножением на коэффициент С
обеспечивается постоянный уровень шума на выходе фильтра.
Параметры фильтра могут изменяться путем уменьшения или
увеличения коэффициента cq. При этом происходит смещение нулей
амплитудно-частотной характеристики фильтра и тем самым изме-
нение полосы режекции. Возможен режим работы, когда знак
коэффициента аг может принимать по случайному закону как.
положительные, так и отрицательные значения. Вследствие этого
Рис. 9.14. Функциональная схема вычислителя модуля
11 Зак. 1376
329
получается более высокая равномерность АЧХ в зоне режекции
фильтра.
После умножителей С синусная и косинусная составляющие
сигналов подаются на цифровой когерентный накопитель, выпол-
ненный на основе дискретного преобразователя Фурье по четырех-
точечной схеме. Кроме того, в режекторном фильтре имеются еще
два дополнительных выхода: для нормального (некогерентного)
сигнала и сигнала СДЦ. Нормальный сигнал образуется путем
квадратурного сложения сигналов I7sin и Ucos, задержанных на два
периода повторения импульсов. Сигнал СДЦ образуется квадра-
турным сложением этих же сигналов, но прошедших обработку в
режекторном фильтре. Квадратурное сложение производится вы-
числителем модуля, осуществляющим операцию
U^ = (Ql + Q22)112, (9.4)
где Q± и Q2-входные сигналы вычислителя модуля.
Как и в рассматриваемой ранее схеме экстрактора модуля (см.
рис. 9.10), операции возведения в квадрате, сложения и извлечения
квадратного корня в вычислителе модуля системы СДЦ радио-
локатора «Скала-МПР» заменены на более простые
U = А + В/4 + Д/8 - Л/32, (9.5)
где А = Qt, В = Q2, если Qt > Q2, и А = Q2, В = Qt, если Qt < Q2.
При этом максимальная погрешность от замены алгоритма (9.4) на
(9.5) не превосходит 5%.
Функциональная схема вычислителя модуля, реализующего ал-
горитм (9.5), показана на рис. 9.14. Сравнение 8-разрядных входных
двоичных чисел Q1 и Q2 производится с помощью компаратора
Qi > Qi- Если > Q2, то компаратор вырабатывает логическую
единицу, которая подается на управляющие входы переключателей
МРХ-1 и МРХ-2. Поскольку в переключателе МРХ-1 на единичный
вход подается сигнал Qt, а в переключателе МРХ-2-сигнал Q2, то
на выходе переключателя МРХ-1 в этом случае окажется сигнал Qlt
а на выходе МРХ-2-Q2. Если Qt < Q2, то компаратор выраба-
тывает логический ноль, и на выходе МРХ-1 оказывается сигнал Q2,
а на выходе МРХ-2-Qt, т.е. в любом случае на выходе пере-
ключателя МРХ-1 всегда будет больший из двух сигналов (А), а на
выходе МРХ-2-соответственно меньший (В).
Деление сигналов на 2; 4 и 32 производится простым переносом
разрядов двоичного слова соответственно на 1, 2 и 5 разрядов в
сторону младших разрядов. Вычитание числа А/У2. в последнем
сумматоре осуществляется путем преобразования его в дополни-
тельный код и сложения результата преобразования с числом
А + В/4 + 5/8.
Глава 10. АППАРАТУРА ДЕКОДИРОВАНИЯ
И ОБРАБОТКИ ИНФОРМАЦИИ ВТОРИЧНОГО
РАДИОЛОКАТОРА
10.1. Структурная схема
Аппаратура декодирования и обработки информации ВРЛ пред-
назначена для декодирования информации самолетных ответчиков
по стандартам СЭВ и ИКАО, преобразования информации о
высоте полета, передаваемой согласно кодам ИКАО в футах, в
двоично-десятичный код метрической системы счисления, очистки
координатной информации от несинхронных помех, преобразова-
ния ответной информации в двоично-десятичный параллельный код
и выдачи ее на аппаратуру обработки. Типовую структурную схему
и состав аппаратуры обработки информации рассмотрим на при-
мере ВРЛ «Корень-АС» (рис. 10.1).
Входная информация, включающая в себя запросные коды и
ответные видеосигналы режимов УВД и RBS, с выходов соот-
ветствующих корректирующих видеоусилителей поступает на вхо-
ды трех дешифраторов.
Состав обрабатываемой информации определяется структурой
запросных кодов. Импульсы запросных кодов Рг и Р3 (см. рис. 3.6)
поступают на дешифратор режимов, где происходит их деко-
дирование и формирование соответствующих стробов режимов
А, В, С, D.
Эти стробы являются служебными для селектирования опре-
деленной ответной информации. Они поступают через плату со-
пряжения на выходные устройства.
В плате сопряжения осуществляется нормирование служебных
сигналов ВРЛ и распределение их на устройства аппаратуры.
Дешифраторы УВД и RBS включают в себя дешифраторы
координатных, ключевых кодов, кодов «Бедствие», «Знак», а также
дешифраторы информации, поступающей из приемных устройств
ВРЛ.
Для обработки информации от ВС, находящихся на незначи-
тельном удалении друг от друга, дешифраторы выполнены как
двухканальные, что позволяет производить декодирование сигналов
при наложении ответных кодов.
Декодированная координатная информация очищается в фильт-
ре от несинхронных помех. Декодированная информационная по-
сылка ИКАО о высоте полета, передаваемая в футах, преобразуется
11* 331
сВРЛ
Рис. 10.1. Структурная схема аппаратуры декодирования и обработки
в метры и поступает так же, как и информационная посылка УВД,
на выходные устройства. В режиме А информационная посылка
проходит на выходные устройства через преобразователь футы-
метры без изменения.
10.2. Принцип действия дешифратора УВД
Дешифратор УВД (рис. 10.2) осуществляет декодирование ко-
ординатного кода, кода «бедствие», ключевого кода, кода «Знак» и
информационного слова, выдаваемых ответчиком при запросе ко-
дами ЗК1 и ЗК2.
Дешифратор декодирует одиночные и переплетенные ответные
коды, образованные в результате наложения двух ответов для
близко летящих ВС, исправляет в ответной посылке одиночные и
обнаруживает двойные ошибки. Поскольку каждый разряд ин-
формационного слова передается на двух позициях (см. рйс. 3.10),
то возможно преобразование одиночных и двойных ошибок. Оди-
ночной ошибкой считается стирание или возникновение одного из
символов в разряде информационного слова. Двойной ошибкой
считаются следующие искажения: стирание одного и возникновение
другого символа в разряде, образование двух ошибочных символов,
стирание двух символов. Так как ответчик при работе кодами УВД
на каждый запрос дважды выдает информационное слово, то для
обнаружения и исправления ошибок в дешифраторе УВД осу-
ществляется запоминание первого 20-разрядного слова и его по-
разрядное сравнение с одноименными позициями второго слова.
332
Дешифратор УВД осуществляет декодирование ключевого кода
при одиночных ответах по логике «2 из 3», а при переплетенных
ответных кодах-по логике «3 из 3», т. е. совпадением любых двух
из трех или трех из трех импульсов ключевого кода.
Входной ответный сигнал поступает на дешифратор кодов ДК1,
в котором осуществляются его нормализация по амплитуде и
селекция по длительности. Информационное слово без задержки
поступает в дешифратор информации. Импульсы стирания запре-
щают прохождение информационных импульсов на выход платы
ДК1. После задержки на 6 мкс в ДК1 все импульсы, предшествую-
щие информационному слову, поступают на дешифратор кодов
ДК2, где происходит их дополнительная задержка на 22 мкс,
которая позволяет осуществлять декодирование координатного ко-
да, кода «бедствие» и ключевого кода по логике «3 из 3». В
дешифраторе кодов ДКЗ декодированная координатная отметка
задерживается еще на 16 мкс для совмещения с последним им-
пульсом ключевого кода. В случае одиночных ответов в плате ДКЗ
осуществляется также декодирование ключевого кода по логике «2
из 3», что позволяет увеличить вероятность декодирования клю-
чевого кода при подавлении одного из трех импульсов ключевого
кода.
Для декодирования информационного слова служат кварцевый
калибратор КК и дешифратор информации ДИ. Декодированный
импульс ключевого кода с выхода дешифратора ДКЗ запускает
кварцевый калибратор, вырабатывающий опорные импульсы час-
тотой 4 МГц. Из импульсов кварцевого калибратора формируются
импульсы сдвига, позволяющие выделить и записать в дешифрато-
ре информации только информационное слово длительностью
1'60 мкс. В устройстве контроля один раз в 10 с формируется
контрольный текст, который обрабатывается дешифратором. Пос-
ле анализа выносится решение о состоянии дешифратора.
Стров-импульсы режимов
БН rtf'
Тест .
Импульс
Декодированный импульс„ Бедствие”
I Декодированная координатная
ДКЗ | отметка ,
2ZZZZZZ Декодированный клип
Устройство
контроля
Запускающие импульсы
Сигнал аварии
стирания
\ хк I-----------
ДН ТИ ,
Стров-имлульсы режимов
Информация
Импульс сдвига । “ди---------1
III ШТ
20р 1р
Разряды выходной информации
Рис. 10.2. Упрощенная структурная схема дешифратора УВД
333
10.3. Функциональная схема дешифратора УВД
Входной ответный сигнал через пороговое устройство (рис. 10.3)
поступает на селектор длительности, который отфильтровывает
слишком короткие импульсы (менее 0,25 мкс). Затем входной сиг-
нал через схему ИЛИ1 поступает на линию задержки 28 мкс,
имеющую несколько отводов для задержки кодовой посылки на
различное время, и на схему декодирования координат. С их
помощью осуществляется декодирование координатного кода при
наличии стробов соответствующих режимов ЗК1 (БН) и ЗК2 (ТИ).
Информационные импульсы с четырехмикросекундного вывода
линии задержки 28 мкс подаются в регистр «1», где осуществляется
запись единиц информационного кода. На регистр «0» подается
незадержанное информационное слово, обеспечивая в нем тем
самым запись нулей. Отделение информационного слова от осталь-
ных кодов (координатного, ключевого, кода «Бедствие») обеспе-
чивает стробирующий импульс, временное положение которого
соответствует началу информационного слова. Поэтому через схе-
мы совпадения И1 и И2 на входы соответствующих регистров
поступают только символы «0» и «1» разрядов информационного
слова.
Импульс «Стирание» запрещает прохождение информационного
слова на выход 28-микросекундной линии задержки.
Незадержанная входная информационная посылка поступает
также на две схемы декодирования ключевых кодов по логике «2 из
3» и «3 из 3», с выходов которых декодированный импульс клю-
чевого кода через схему ИЛИ2 отпирает ключевую схему. Ключевая
схема в свою очередь открывает схему совпадения ИЗ, через
которую на 11 -разрядный счетчик поступают импульсы кварцевого
генератора. Счетчик запускается последним импульсом ключевого
кода. Кварцевый генератор вырабатывает импульсы с периодом
повторения 0,25 мкс (F = 4 МГц). Импульс, фиксирующий конец
информационного слова, снимается с выхода схемы совпадения И4
при наличии на ее входе импульсов с 5,8,10-го разрядов счетчика
(01010010000), что соответствует 656 импульсам кварцевого гене-
ратора. Таким образом, импульс фиксации конца информационного
слова, необходимый для анализа информации, записанной в ре-
гистре «1», появляется через 0,25 мкс х 656 = 164 мкс после декоди-
рованного импульса ключевого кода, т. е. в момент окончания
первого информационного слова. На выходе схемы И5 в результате
совпадения импульсов с 6,9, 11-го разрядов счетчика, что соот-
ветствует 1312 импульсам кварцевого генератора, появляется им-
пульс, задержанный относительно декодированного ключа на вре-
мя, равное 328 мкс. Этот импульс, соответствующий моменту
окончания повторного информационного слова, закрывает клю-
чевую схему, а следовательно, и схему ИЗ, останавливая тем самым
счетчик.
335
С 5-го разряда счетчика снимается импульс, задержанный отно-
сительно декодированного ключа на 4 мкс и совпадающий с на-
чалом информационного слова, т. е. с импульсом РИ, (см. рис. 3.9).
Этот импульс, расширенный в формирователе до 4 мкс, служит для
выделения разрядов информационного слова и записи символов «1»
и «О» в сдвигающие регистры дешифратора информации. Сдвиг
информации осуществляется, таким образом, последовательностью
импульсов, период повторения которых равен периоду следования
разрядов в информационном сообщении.
Кварцевый калибратор работает синхронно с декодирующими
ключами, обеспечивая тем самым однозначное совпадение номера
декодируемого разряда информационного слова с номером ячейки
сдвигающего регистра. Запись разрядов информационного слова,
т. е. символов «О» и «1» в регистры сдвига, происходит на интервале
первого 20-разрядного слова, а считывание-на интервале второго.
Считываемые из регистров сигналы поступают в анализатор ин-
формации, который сопоставляет одноименные позиции двух смеж-
ных информационных слов, делает вывод об истинности или лож-
ности каждого разряда декодированной информации, исправляет
одиночные и обнаруживает двойные ошибки.
Декодирование кода «Бедствие» (рис. 10.4). В режиме БН через
схему совпадения И1 поступает ответная кодовая посылка, за-
держанная относительно первого импульса координатного кода на
20 мкс (эпюра 7). В режиме ТИ на схему И2 поступает посылка,
задержанная на 23 мкс. Декодирование кода «Бедствие» в обоих
режимах происходит аналогичным образом. На схему ИЗ подается
декодированный импульс координатного кода, задержанный на
28 мкс (эпюра 2). С выхода ИЗ снимается декодированный сигнал
«Бедствие» (эпюра 3), который задерживается на 12 мкс и расши-
ряется с помощью мультивибратора для его совмещений с послед-
ним импульсом ключевого кода (эпюра 4). Импульс мультивибра-
тора поступает на схему И4, на второй вход которой подается
задержанный на 42,5 мкс импульс декодированного кода (эпю-
ра 5).
На выходе схемы И4 образуется, таким образом, импульс
декодированного кода «Бедствие» (эпюра б).
При наличии двух ВС на одном азимуте возможно образование
ложных кодов «Бедствие» из совокупности координатных кодов
(эпюра 3), например, если интервал между третьим импульсом
первого кода и первым импульсом второго кода равен 8 мкс (эпю-
ра 7).
Для стирания ложных кодов бедствия служат схемы совпадения
И5, И6, И7, на входы которых подаются задержанные на 20, 6,
12 мкс (в режиме ТИ) и 34 мкс импульсы координатного кода
(эпюры 7 и 9). Снимаемый со схемы НЕ импульс запрета (эпюра 8)
запирает схему ИЗ, запрещая тем самым прохождение ложного
кода «Бедствие».
336
ч) ЗК-1
ZJmxc
20 мкс
ЗК-2
Координатный код
28MXC\®^-
ИЗ Н*-
Ж
НЕ
вибратор
ИВ
©Декодированный
---------1 код „Бедствие"
г— Ив (-Х2--
- “1®
Декодированные
координаты
№1,Н°2
и
1
2
3
в
5
6
7
В
9
SK-2 12мкс (Г) звмкс
2Вмкс
К мкс
Декодированный
РК^ РК^
важный код „ бедствие”
2Вмкс
бвмкс
Декодированная
в2,5мкс
"П координата V~\ Декодированная
№1 | | координата №2
“I Декодированный
код „бедствие”
ЯГ; РКг РК3
PH] pel р^з
Импульс запрета
Зв мкс
PKj Рв} PKj
ю
6^
Рис. 10.4. Схема декодирования кода «бедствие» (с) и ее временные диаграммы (б)
Декодирование координатного кода (рис. 10.5). Декодирование
осуществляется с помощью схемы совпадения ИЗ, на входы ко-
торой подаются задержанные на 14 и 28 мкс координатные коды
(эпюры 2 и 3) и строб режима БН. На выходе схемы ИЗ образуется
так называемая нормализованная декодированная координата (4),
которая путем последующей задержки совмещается с последним
импульсом ключевого кода.
При наличии на одном азимуте двух близко расположенных
целей возможно образование ложных координатных отметок, на-
пример, когда кодовый интервал между вторым импульсом ко-
ординаты первой цели и первым импульсом координаты второй
337
a)
0"<J-
ftU
Шмксо*-
СтроЯ-импулъс 6H o-
Рис. 10.5. Схема декодирования координатного кода (а) и ее временные диаграм-
мы (б)
I hi нМ к
в
цели равен 14 мкс (эпюра 1). В этом случае на выходе схемы ИЗ
образуется ложная декодированная координата (4). Для ее стирания
служат схемы совпадения И1 и И2, на входы которых подается
незадержанная координата (7), задержанная на 14 мкс (2) и 42 мкс
(6). На вход схемы И2 подается задержанная последовательность со
схемы И1 (5) и задержанный на 42 мкс координатный код.
Снимаемый со схемы И2 (7) импульс расширяется мульти-
вибратором и подается на ключевую схему в качестве импульса
запрета, предотвращающего прохождение через эту схему ложной
координатной отметки (5). При наличии кода «Бедствие» (эпюра 1,
импульс 2) на выходе схемы ИЗ также образуется ложная коор-
динатная отметка в результате совпадения импульса второго кода
«Бедствие» и первого импульса ключевого кода РКИ1 (2, 3 и 4). Эта
ложная отметка стирается специальной схемой в плате ДК-3.
Декодирование ключевого кода. Оно осуществляется либо по
принципу совпадения двух из трех импульсов ключевого кода, либо
трех из трех (рис. 10.6). В первом случае, когда обрабатывается
одиночный ответный сигнал, для декодирования используется сов-
падение любых двух импульсов ключевого кода (рис. 10.6, в). Для
этой цели на входы трех схем совпадения И1, И2, ИЗ подаются в
338
различных комбинациях незадержанная и задержанная на 12 или
20 мкс кодовые последовательности (режим БН) (рис. 10.6, а). Де-
кодированный импульс ключа через схему ИЛИ1 подается на
ключевую схему, которая может запираться импульсом «Признак»
в случае необходимости декодирования по логике «3 из 3». Через
схему ИЛИ2 на вход схемы совпадения И4 подается декодиро-
ванный по логике «2 из 3» или «3 из 3» импульс ключевого кода. На
второй вход схемы И4 подается задержанный на 42,5 мкс (режим
БН) координатный импульс. Импульс, снимаемый со схемы И4,
запускает двоичный счетчик кварцевого калибратора.
Аналогичным образом осуществляется декодирование ключе-
вого кода по логике «3 из 3» (рис. 10.6,6).
Анализатор и дешифратор информации. В анализаторе инфор-
мации происходит поразрядное сравнение двух информационных
сообщений с целью выявления двойных и исправления одиночных
ошибок.
В режиме БН (бортовой номер) анализируются все 20 разрядов и
при наличии двойной ошибки в любом разряде вырабатывается
сигнал «Сбой», запрещающий выдачу информации. В режиме ТИ
(текущая информация) два младших разряда анализируются только
на наличие одиночной ошибки и сигнал «Сбой» не вырабатывается.
При обнаружении двойной ошибки в последней декаде информа-
ционного слова, передающей информацию об остатке топлива,
вырабатывается сигнал запрета считывания топлива, в то время как
считывание информации о высоте продолжается.
Рассмотрим функциональную схему анализатора информации
(рис. 10.7). В режиме БН импульс конца слова («164 мкс») через
схему И2 и ИЛИ1 отпирает ключевую схему 1, разрешая формиро-
Рис. 10.6. Схема декодирования ключевого кода по логике «2 из 3» (а), по логике «3
из 3» (б) и временные диаграммы (в)
339
Комбинации
Рис. 10.7. Функциональная схема анализатора информации
вание импульсов «Анализ 2» для анализа информации на наличие
двойных ошибок. Одновременно этим же импульсом («164 мкс»)
отпирается ключевая схема 2 для формирования импульсов «Ана-
лиз I» на выявление в информации одиночных ошибок. Обе ключе-
вые схемы запираются импульсом «328», а ключевая схема 7, кроме
того, может запираться сигналом «Сбой», снимаемым со схемы
ИЛИ2.
Импульсом конца слова «164 мкс» отпирается также ключевая
схема 3, с выхода которой подается разрешающий потенциал для
прохождения импульса «Сбой» со схемы ИЛИ4 через схему И4
и ИЛИЗ на выход схемы анализатора в режиме ТИ. В режиме БН
импульс «Сбой» поступает на схему ИЛИЗ со схемы ИЗ. Через
схему ИЛИ2 импульс «Сбой» запирает ключевую схему 7. Посколь-
ку в режиме ТИ ключевая схема 1 открывается импульсом
«180 мкс», то двух первых импульсов из серии «Анализ 2» не будет,
т. е. два младших разряда высоты не анализируются. Таким обра-
зом, при наличии искажений в двух младших разрядах первой
декады максимальная погрешность не превысит 30 м. Импульсом
«276 мкс» ключевая схема 3 закрывается, тем самым запрещая
прохождение сигналов «Сбой» после анализа информации о высоте,
т. е. разряды 15 (признак высоты), 16 (бедствие) и 16.. .20 (остаток
топлива) информационного .слова не анализируются. Одновременно
340
с этим на выходе схемы И5 появится импульс, закрывающий
ключевую схему 4, на выходе которой будет нулевой потенциал,
запрещающий в режиме ТИ считывание информации о топливе.
Анализ двойных и одиночных ошибок осуществляется импуль-
сами «Анализ 1» и «Анализ 2» при совмещении во времени
символов 1 и 0 одноименных разрядов первого и второго сооб-
щений.
Поскольку информация каждого разряда с учетом повторения
информационного слова передается на четырех позициях (см. рис.
3.10), то возможны следующие комбинации, возникающие при
правильном или неправильном декодировании одного разряда
(табл. 10.1).
В табл. 10.1 al, в1-символы «1» на первой (а) и второй (в)
информационных позициях одного разряда первого сообщения; а2,
в2-символы «1» на первой (а) и второй (в) информационных
позициях того же разряда повторного сообщения; al, в1, а2, в2-
символы «0» на тех же позициях для первого и повторного сообще-
ний соответственно.
Из табл. 10.1 видно, что из 16 комбинаций только две не имеют
ошибок-шестая, которая соответствует передаче символа «0», и
одиннадцатая, соответствующая передаче символа «1».
Дешифратор информации построен на сдвигающих регистрах,
причем на регистр «0» проходит незадержанная информация, а на
регистр «1»-задержанная на 4мкс (см. рис. 10.3). Это делается для
того, чтобы избежать потерь информации. Сдвиг информации
осуществляется 4-микросекундной последовательностью импуль-
сов, период следования которых равен периоду следования разря-
дов информационного слова.
Поскольку регистр «1» закольцован, т. е. его выход соединен со
входом (рис. 10.8), то к моменту считывания в регистре оказывается
Таблица 10.1. Возможные комбинации импульсон при декодировании одного
разряда
Номер комби- нации Вид сооб- щения Крат- ность ошиб- ки Условное обозначение Номер комби- нации Вид сооб- щения Крат- ность ошиб- ки Условное обозначение
1 0000 2 al, в1, а2, в2 9 1000 1 al, в1, а2, в2
2 0001 1 al, в1, а2, в2 10 1001 2 al, в1, а2, в2
3 0010 1 al, в1, а2, в2 11 1010 0 al, в1, а2, в2
4 ООН 2 al, в1, а2, в2 12 1011 1 al, в1, а2, в2
5 0100 1 al, в1, а2, в2 13 1100 2 al, в1, а2, в2
6 0101 0 al, в1, а2, в2 14 1101 1 al, в1, а2, в2
7 0110 2 al, в1, а2, в2 15 11 10 1 al, в1, а2, в2
8 01 11 1 al, в1, а2, в2 16 11 11 2 al, в1, а2, в2
341
Рис. 10.8. Функциональная схема дешифратора информации УВД
записанной алгебраическая сумма символов «1» первого и второго
повторений (схема ИЛИ).
Таким образом, происходит исправление одиночных ошибок.
Для примера рассмотрим комбинацию № 3 (0010). При поступле-
нии рассматриваемого разряда первого слова (00) на выходе соот-
ветствующего разряда дешифратора информации запишется «0»
(рис. 10.9,а). При поступлении рассматриваемого разряда 10 повтор-
ного сообщения на выходе соответствующего разряда регистра «1»
запишется правильный символ «1». Аналогичным образом осуще-
6) и
а) и
в регистр „О”
t
------х-------х—-
Ьмкс J В регистр „I"
t
Ui
5=
и
В регистр,,!
t
На выходе соответствую-
щего разрядарегистра„!”
В регистр „О"
t
U'
В регистр^"
Врегистр „1”
Невыходе
t соответст-
•вующего
разряда
t регистра „1”
Врегистр„О”
На выходе соответствую-
щегоразрядарегистра„ 1”
Врегистр „Г
Невыходе
t соответст-
— дующего
t разряда
U~ регистра „1”
Имтмъс исправления
ошибки на выходе ИЛИ 5
1В
§
I
t
5s
5?
U
U\
UK
Рис. 10.9. Временные диаграммы исправления ошибки комбинации
№ 3 (о) и № 8 (б)
342
ствляется исправление комбинаций № 2, 5, 9, 12 и 15. Исключение
составляют комбинации № 8 и 14, в которых первая ложная
единица одного разряда 11 не исправляется путем поразрядного
сравнения (рис. 10.9,6). При этом на выходе соответствующего
разряда регистра «1» записывается ложная единица, тогда как на
самом деле в комбинациях № 8 и № 14 необходимо записать символ
«0». Эти комбинации обнаруживаются схемами И12 и И13, соответ-
ственно и через схему ИЛИ5 импульс исправления ошибки поступа-
ет в дешифратор информации и устанавливает триггер Т1 в нулевое
состояние. При этом происходит стирание ложной единицы.
Схемами совпадений И6-И11 выявляются двойные ошибки,
содержащиеся в 1,4, 7, 10, 13 и 16-й комбинациях. При обнаружении
двойной ошибки в этих комбинациях со схемы ИЛИ4 снимается
сигнал «Сбой», запрещающий считывание информации из дешиф-
ратора информации. При отсутствии двойных ошибок в обрабаты-
ваемом информационном слое сигнал «Сбой» не вырабатывается,
а вырабатывается сигнал «Готовность».
Считывание информации из дешифратора информации возмож-
но как в последовательном, так и в параллельном кодах.
10.4. Дешифратор RBS
Дешифратор международного канала, работающий по стандар-
ту ИКАО, служит для декодирования координатных и аварийных
кодов, информационного слова и импульса опознавания SPI. В де-
шифраторе осуществляется также декодирование запросных кодов
с целью формирования соответствующих стробов режимов. Де-
шифратор имеет раздельные входы для запросных и ответных
кодов.
Дешифратор международного канала состоит из следующих
основных узлов (рис. 10.10): дешифратора режимов, устройства
задержки, дешифратора координатных отметок, дешифратора ин-
формации.
Рассмотрим принцип работы дешифратора. На вход дешифрато-
ра поступают запросные коды, ответная информация и импульс
конца дистанции. Пороговое устройство, входящее в состав платы
дешифратора режимов, позволяет осуществить селекцию входного
сигнала по длительности. При одиночных ответах длительность
импульсов ответного кода составляет приблизительно 1,2 мкс, при
обработке переплетенных кодов длительность импульсов равна
0,3.. .0,7 мкс. С выхода порогового устройства ответная информа-
ция поступает на распределитель и схему совпадения И1.
Распределитель по каналам задержки преобразует входной сиг-
нал к виду, удобному для задержки на узкополосных линиях.
Задержанные на 20,3 мкс в каналах задержки сигналы подаются на
устройство восстановления длительности, благодаря чему дости-
343
гается равенство длительностей входных и задержанных импульсов.
Задержанная на 20,3 мкс ответная информация поступает на сдви-
гающие регистры и схему совпадения Й1. На второй вход схемы И1
поступает незадержанная информация. В результате совпадений
опорных импульсов Fl и F2 (см рис. 3.7) выделяется координатная
отметка, поступающая на схему управления включением счетчиков
дешифратора координатных отметок.
В плату дешифратора режимов входит также схема формирова-
ния стробов режимов А, В, С, D. На вход схемы поступают
запросные коды (без импульса подавления) и импульс конца ди-
станции. Формирование стробов осуществляется по принципу
совпадения импульсов Pt и Р3 запросных кодов соответствующих
режимов.
Дешифратор координатных отметок предназначен для логи-
ческой обработки поступающих из дешифратора режимов коорди-
натных отметок с целью выделения истинных отметок.
Рис. 10.10. Функциональная схема дешифратора RBS
344
Дешифратор координатных отметок и дешифратор информации
выполнены как двухканальные с целью возможности обработки
наложенных ответных кодов.
При приеме ответных сигналов возможны следующие случаи.
1. Одиночный ответ.
2. Переплетенный ответ. В этом случае дешифратор декодирует
две координатные пары и информацию первого и второго ответов.
При этом первый счетчик обрабатывает первый ответ, а второй-
второй ответ.
3. Пересеченные ответы, при которых интервал между кодовы-
ми импульсами кратен 1,45 мкс. В этом случае возможно обра-
зование ложных координатных отметок, а также искажение ин-
формации.
Дешифратор при обнаружении ситуации пересечения ответных
кодов выдает только координатные отметки, ответная информация
в этом случае не обрабатывается. Схема анализа в этом случае
выдает сигнал «искажение информации».
4. Сближенные ответные коды, когда интервал между двумя
ответами больше времени работы первого счетчика. В этом случае
дешифратор обрабатывает оба ответа как одиночные.
Декодированная координатная отметка, поступающая из де-
шифратора режимов, запускает первый счетчик, формирующий
последовательности стробирующих и сдвигающих импульсов, не-
обходимых для управления работой сдвигающего регистра де-
шифратора и информации.
На сдвигающие регистры с устройства задержки подается за-
держанная ответная информация, которая продвигается по разря-
дам регистров с помощью импульсов сдвига. Стробирующие им-
пульсы привязаны по времени к координатной отметке, запустив-
шей счетчик, и определяют промежуток времени, необходимый для
записи ответной информации в сдвигающем регистре. Поэтому
запись в регистр информации возможна только в моменты времени,
соответствующие позициям ответного кода. Через 24,65 мкс (это
время складывается из длительности базы ответного кода ИКАО,
равного 20,3 мкс, и интервала следования импульса SPI-4,35 мкс)
после запуска счетчик формирует импульс «Перезапись», разре-
шающий перезапись информации из сдвигающего регистра в ре-
гистр памяти дешифратора информации. С регистров памяти ин-
формация поступает на выход дешифратора и на дешифратор
аварийных кодов. Дешифратор аварийных кодов осуществляет
декодирование кодов 7700, 7600 и 7500 при наличии строба «Режим
А + В» и импульса «Считывание аварии», поступающего из де-
шифратора УВД.
Схема управления включением счетчиков обеспечивает запуск
первого счетчика первой координатной отметкой, а второго счет-
чика-всеми последующими, кроме первой. Выходная координатная
отметка второго счетчика формируется последней отметкой из
345
приходящей на вход дешифратора серии сигналов на базе 24,65 мкс.
Благодаря этому возможно выделение координат-ных отметок при
наложении ответов.
Выходная координатная отметка первого ответа формируется
счетчиком через 37,7 мкс. В качестве сигналов SP1 в счетчиках
используются координатные отметки, задержанные на 4,35 мкс.
Поскольку интервал между импульсами С2 и SPI в ответах ИКАО
составляет 20,3 мкс, то при декодировании они образуют ложные
координатные отметки. Стирание ложных отметок происходит
в схеме управления включением счетчиков при наличии «строба
диспетчера» в режимах А и В. Сигналом ИКД (импульс конца
дистанции) спусковые схемы дешифратора устанавливаются в ис-
ходное состояние.
Декодированные координатные отметки из дешифратора ИКАО
поступают на фильтр несинхронных помех, а обработанная ин-
формация в параллельном виде поступает на преобразователь
«футы-метры».
Глава 11. АППАРАТУРА ПЕРВИЧНОЙ ОБРАБОТКИ
РАДИОЛОКАЦИОННОЙ ИНФОРМАЦИИ
11. 1. Общие сведения
Важнейшей составной частью РЛК, входящих в состав АС УВД,
является аппаратура первичной обработки информации, выполня-
ющая следующие основные операции: обнаружение полезных сиг-
налов с помощью логического обнаружителя и формирование
радиолокационных отметок; определение 11 рост ранет венных коор-
динат целей по результатам одного обзора РЛС. Крдме того,
в процесс первичной обработки выполняются дополнительные опе-
рации: декодирование информации, поступающей по вторичному
каналу, и привязка этой информации к координатам целей; форми-
рование стандартных сообщений для передачи их через узкопо-
лосную линию связи.
В цифровых системах обработки перечисленным операциям
предшествуют вспомогательные операции двоичного квантования
по амплитуде на два уровня (0 или 1) и временной дискретизации
сигналов, подаваемых на АПОИ с аналогового выхода приемного
устройства РЛС.
В АПОИ логика работы обнаружителя сводится к возможности
получения ответа на вопрос: имеются ли на входе приемного
устройства РЛС, сопрягаемой с АПОИ, полезный сигнал и помеха
или только помеха. В зависимости от алгоритма работы обнаружи-
телей в современных образцах АПОИ реализуется весовой или
критерийный метод обнаружения пачки двоично-квантованных
сигналов.
Обработка двоично-квантованных сигналов в АПОИ осу-
ществляется на отдельных элементарных участках дальности.
С этой целью вся просматриваемая дальность обнаружения кван-
туется на дискреты дальности. Длительность каждого кванта даль-
ности должна быть согласована с полосой пропускания приемного
устройства РЛС и длительностью зондирующих импульсов.
Весовой метод обнаружения сигнала основан на задержке им-
пульсов пачки на время, кратное периоду повторения, и последую-
щем сложении их в соответствии с весовыми коэффициентами qt,
отражающими форму диаграммы направленности.
Алгоритм обнаружения пачки двоично-квантованных сигналов,
реализующий весовое накопление, заключается в суммировании
значений весовых коэффициентов qi на тех позициях i = 1,2,..., m,
347
на которых имеются «1», и сравнении полученной суммы с порого-
вым числом С:
fxrfi^C, (11.1)
i = i
где -весовой коэффициент, соответствующий i-му импульсу пачки;
X; = 0; 1(1 = 1, 2, ...., ш); т- число зондирований, выбранных для обнару-
жения сигнала.
Функция х может принимать значения:
[1с вероятностью Р,
х = (
(0 с вероятностью 1 — Р,
СО
где Р = Рс п = J Жс п(и)«/и-при наличии сигнала с шумом; Р = Р„ =
и
со °
[ W„(u) Jw-при наличии одного шума; wcn(w) и w„(w)-плотности распреде-
и
ления вероятности смеси сигнала с шумом и шума; Р- вероятность превы-
шения порога квантования.
Алгоритм (11.1), реализующий весовой метод обнаружения,
достаточно сложен в реализации.
Если принять = 1 (в случае прямоугольности пачки отражен-
ных сигналов), то
т
(11.2)
1=1
Отсюда следует, что обнаружение пачки двоично-квантованных
сигналов сводится к подсчету числа «1», поступивших с выхода
устройства квантования на т смежных позициях и сравнению этой
суммы с пороговым числом С. Алгоритм (11.2) положен в основу
безвесовой или критерийной обработки двоично-квантованных сиг-
налов, получившей широкое распространение на практике. Таким
образом, особенностью обнаружения пачки сигналов РЛС является
необходимость реализации двухпороговой процедуры обнаруже-
ния. Первый входной порог Uo устанавливается в устройстве
квантования и является порогом обнаружения отдельных импуль-
сов пачки. Второй порог С-порог обнаружения пачки сигна-
лов РЛС.
Весовой метод обнаружения не получил широкого распростра-
нения. Алгоритм (11.1) реализован в АПОИ «Анис» (используется
в АС УВД «Старт»), которая характеризуется отсутствием со-
пряжения с различными РЛС, высокой стоимостью и сложно-
стью.
Безвесовой (критерийный) метод обнаружения реализован в оте-
чественных образцах АПОИ-1, АПОИ-2, входящих в состав РЛК
«Скала-М», «Скала-МПР», «Скала-МПА», а также АПОИ
348
«СХ-1100» (Швеция), используемой в составе РЛК АС УВД «Тер-
кас». Эти образцы АПОИ харктерйзуются универсальностью, при-
менением межобзорной обработки.
В качестве основного алгоритма междупериодной обработки
сигналов используется алгоритм безвесовой обработки, реализуе-
мый путем поэтапной обработки сигнала с применением нескольких
критериев.
Для разделения сигнала и помехи в АПОИ используются их
различия по амплитуде, длительности и протяженности по азимуту.
АПОИ производит проверку входной радиолокационной информа-
ции по этим критериям, отфильтровывая сначала все сигналы,
амплитуда которых меньше определенного порогового уровня Uo,
затем все оставшиеся сигналы, которые не удовлетворяют крите-
рию длительности импульсов, и, наконец, из оставшихся от-
фильтровывают сигналы, которые не имеют приемлемой протя-
женности по азимуту. Оптимальный выбор критериев обработки
производится с учетом длительности и частоты повторения им-
пульсов РЛС, ширины диаграммы направленности антенн и пе-
риода обзора, а также временного соотношения между импульсами
в ответной посылке ВРЛ.
Критерий обнаружения по амплитуде. Пороговое значение видео-
сигнала задается в соответствии с определенным правилом измене-
ния некоторого среднего уровня сигнала РЛС. Этот усредненный
сигнал формируется путем интегрирования во времени сигнала
с выхода приемного устройства РЛС. В АПОИ обычно устанавли-
ваются пороговые уровни помех и пороговые уровни шумов,
которые используются для обработки видеосигналов на различных
дальностях РЛС, причем уровень помех изменяется быстрее, чем
уровень шума. Уровень шумов измеряется в конце радиолокацион-
ной развертки, где пассивные помехи малы. Установка порогового
уровня шума, выполняемая схемой управления уровнем шума
(УУШ), сводится к определению в конце каждой развертки числа
сигналов, амплитуда которых выше текущего уровня шумов.
Поскольку на этих дальностях амплитуда большинства сигналов
соизмерима с уровнем шумов, то измеренные схемой УУШ сигналы
представляют собой сигналы ложных тревог. Схема УУШ, под-
страивая пороговый уровень, поддерживает постоянной частоту
ложных тревог.
Критерий обнаружения по длительности. Эхо-сигнал цели должен
иметь длительность, соизмеримую с длительностью зондирующих
импульсов РЛС. В АПОИ имеется специальное устройство-ди-
скриминатор длительности импульсов, который отфильтровывает
импульсы, длительность которых не укладывается в допустимые
пределы. В качестве критерия длительности выбирается условие
Т . < Т < Т
vmin и max'
Критерий обнаружения по азимутальной протяженности. Для про-
верки на протяженность по азимуту в АПОИ просматривается
349
последовательность эхо-сигналов, относящихся к одной дальности.
При этом, если выполняется критерий обнаружения начала пачки,
например по логике “т из и”, то схема обнаружения фиксирует
начальный азимут 6Н. Здесь “т из л” означает, что начало пачки
фиксируется в том случае, если на и смежных зондированиях на
фиксированном кванте дальности обнаружены т единиц. Критерии
типа “ш”,из л” часто называют программами или логиками фикса-
ции начала пачки.
При выполнении критерия обнаружения конца пачки (например,
наличие серии из нескольких нулей подряд) фиксируется конечный
азимут 0К и одновременно определяется угловая протяженность
отметки ДО = 0К — 0Н. Если A0min < Д0 < Д0тах, то цель считается
обнаруженной. Значения A0min и Д0тах могут быть изменены в зави-
симости от характеристик и условий работы РЛС.
11.2. Логика работы обнаружителей
В состав аппаратуры АПОИ в качестве одного из основных
узлов входит логический обнаружитель (рис. 11.1). Задачей логи-
ческого обнаружителя является установление наличия полезных
сигналов на выходе приемного устройства РЛС. Как правило,
обнаружению полезного сигнала сопутствует и измерение коорди-
нат целей т. е. некоторые элементы логического обнаружителя
и вычислителей координат целей могут быть общими. Однако для
повышения точности измерения способы обработки сигналов в этих
устройствах могут быть различными.
При наличии цели в зоне видимости РЛС на выходе ее приемно-
го устройства появляется пачка импульсов, огибающая которой
с достаточной степенью точности соответствует форме диаграммы
направленности антенны РЛС, а число импульсов определяется
периодом повторения зондирующих импульсов, скоростью враще-
ния антенны и шириной диаграммы направленности. По угловому
положению пачки отраженных импульсов при известной форме
ДНА можно получить оценку азимута цели
во = (ви + в«)/2, (11.3)
где 0О- оценка азимута цели; 0Н- азимут начального импульса пачки;
0,.-азимут конечного импульса пачки.
При обнаружении цели схема логического обнаружителя генери-
рует специальный импульс, который подается на вычислитель
дальности цели. При большом отношении сигнал/шум на выходе
приемного устройства за такой импульс может быть принят первый
импульс пачки. Поскольку в общем случае на выходе приемника
РЛС действует не только полезный сигнал, но и помеха, то для
обнаружения цели и измерения ее координат используется более
сложная логика, например “л из и” и “т из л”. В первом случае за-
350
начало пачки принимается п под-
ряд следующих импульсов с по-
стоянным периодом повторения
на п последовательных разверт-
ках, во втором случае -т любых
импульсов (не обязательно смеж-
ных) на п смежных развертках.
Эти критерии называются крите-
риями фиксации начала пачки и
Рис. 11.1. Упрощенная схема АПОИ
являются одновременно критерия-
ми ее обнаружения. Установление
наличия т импульсов на п раз-
вертках обычно сводится к суммированию сигнала на одних и тех
же участках дальности за п смежных периодов повторения импуль-
сов РЛС. w
В качестве критерия конца пачки обычно принимается отсут-
ствие одного или нескольких импульсов пачки подряд, например,
наличие 1,2,3,...,к нулей подряд на I смежных позициях. Обычно
критерий обнаружения выбирается исходя из заданной вероятности
обнаружения и точности определения центра пачки при фиксиро-
ванном значении вероятности ложной тревоги. При выборе величи-
ны к следует учитывать, что при малых значениях к возрастает ве-
роятность «дробления» пачки, а при больших значениях к ухуд-
шается разрешающая способность по азимуту и точность его
измерения.
Сигналы начала и конца пачки, выдаваемые обнаружителем,
а также число позиций между началом и концом пачки (ширина
пачки) используются в схеме измерения координат для оценки
азимута цели, т. е. определения положения середины пачки им-
пульсов.
Азимут цели
0 = 0К-Д0/2,
(11.4)
где АО = 0К — 0Н- угловая протяженность отметки по азимуту.
Вычисленные значения азимута и дальности хранятся в за-
поминающем устройстве (ЗУ) (рис. 11.1) и подаются в виде двоич-
ного кода на аппаратуру вторичной обработки.
Более эффективной является обработка сигнала на отдельных
элементарных участках дальности. Простейшая схема квантования
участков дальности представлена на рис. 11.2.
Генератор масштабных меток вырабатывает импульсы, период
следования которых соответствует длительности одного кванта
дальности. В регистр сдвига вначале записывается единица в млад-
ший разряд, цена которого характеризует дискретность отсчета
дальности. Масштабные метки сдвигают записанную единицу по
разрядам регистра. Выходы каждого разряда управляют схемами
351
совпадения И1, И2,..., Ия, на второй вход которых подаются
квантовые видеосигналы (КВС) с выхода пороговой схемы. При
совпадении сигнала в каком-либо разряде регистра и проквантован-
ного видеосигнала РЛС отпирается соответствующая схема И,
номер которой однозначно определяет дальности цели. Каждая
схема совпадения открывается только на время, соответствующее
длительности одного кванта дальности.
Таким образом, за период повторения импульсов РЛС просмат-
риваются все кванты дальности. За п периодов повторения в обна-
ружителе накапливается определенная информация, которая при
дальнейшей обработке позволяет сделать вывод о наличии цели
в данном кванте дальности.
Принятый в течение длительности некоторого кванта дальности
видеосигнал с помощью входного регистра вводится в определен-
ную ячейку памяти ЗУ с произвольной выборкой (ЗУПВ). Адрес
меняется один раз для каждого кванта дальности, так что ЗУПВ
работает, как регистр сдвига, причем информация об отметках из
предыдущей развертки присутствует на выходе в такой момент
времени, когда она может сравниваться в течение текущей разверт-
ки с данными об отметках с такой же дальностью. С перемещением
ДНА по азимуту необходимо обновлять хранимую в ЗУПВ.ин-
формацию для всех дальностей об п последних зондированиях. Это
осуществляется сдвигом в ЗУПВ с помощью масштабных меток
всех записанных сигналов в одну сторону в каждом зондировании
и введнии принятого сигнала очередного периода в освободившиеся
ячейки памяти. При этом записанный сигнал для самого раннего
зондирования стирается.
352
Эта операция выполняется для
всех квантов дальности, пока не
произойдет обновление всей ин-
формации по результатам послед-
него зондирования. Затем с по-
ступлением очередного импульса
запуска РЛС данный процесс по-
вторяется. Таким образом, ЗУ,
в котором хранится вся информа-
ция, принято рассматривать
как «движущееся окно», переме-
щающееся по азимуту синхрон-
но с вращением антенны. Анали-
зируя информацию, содержащую-
ся в «движущемся окне», в соот-
ветствии с принятой логикой ра-
боты обнаружителя можно сде-
лать вывод о наличии цели в дан-
ном кванте дальности. На рис.
11.3 показана последовательность
Рис. 11.3. Обновление информации в
обновления информации В «ДВИ- «движущемся окне»
жущемся окне» для обнаружите-
ля, работающего по логике «5 из 7». В нижней части рисунка
показан момент «обнаружения» сигнала, т. е. выполнения условия
«5 импульсов на 7 развертках».
При каждом очередном зондировании повторяется логика обна-
ружения цели. В случае выполнения заданной логики дальность
цели однозначно определяется адресом ячейки памяти ЗУПВ, в ко-
торую были записаны данные принятой отметки. Поэтому рас-
смотренная схема позволяет наряду с обнаружением вычислять
и дальность принятой отметки.
После выделения отметки данные о ней передаются в буферное
ЗУ (БЗУ). Передача происходит тогда, когда информация об отмет-
ке находится во входном регистре. После передачи данных об
отметке в БЗУ ячейки ЗУПВ, для которых логика обнаружения не
выполняется или выполняется критерий обнаружения конца пачки,
возвращаются в исходное состояние.
Если цель находится на границе двух смежных квантов даль-
ности, то из-за нестабильности следования импульсов запуска РЛС
эхо-сигналы от одной цели в течение различных разверток могут
фиксироваться в одном из двух соседних квантов дальности, вслед-
ствие чего возможен пропуск цели. Для устранения этого недостат-
ка на границе каждого кванта дальности имеется так называемая
зона перекрытия. Если в зоне перекрытия появляется эхо-сигнал
с приемлемой амплитудой и длительностью, он условно фикси-
руется в обоих смежных квантах дальности в виде «1».
353
Таким образом, два смежных кванта дальности будут иметь
совместную область, ширина которой определяется временной
нестабильностью и неопределенностью обнаружения переднего
фронта импульса.
11.3 Структурная схема АПОИ
Рассмотрим упрощенную структурную схему АПОИ на примере
трассовых РЛК АС УВД «Стрела» (рис. 11.4).
Основными функциями данной АПОИ являются автомати-
ческий выбор канала ПРЛ; выделение сигналов ПРЛ и ВРЛ на фоне
различных помех, в том числе от метеообразований (МО); измене-
ние критериев обработки в зависимости от помеховой обстановки;
кодирование координат целей; сокращение избыточности дополни-
тельной информации ВРЛ, обусловленной повторами ответов, и
повышение достоверности этой информации; отождествление ин-
формации ВРЛ и ПРЛ; фильтрация обнаруженных целей по ско-
рости для подавления сигналов местных предметов и других мало-
подвижных объектов; бланкирование целей в заданных зонах про-
странства; преобразование полярных координат целей в прямо-
угольные; формирование стандартных сообщений и выдача их
в аппаратуру передачи данных (АПД).
При обработке информации метеоприемника ПРЛ также про-
изводится статическая обработка сигналов метеоканала для по-
вышения достоверности информации, кодирование выборочных
координат границ (штриховки), прореживание информации во
времени.
Рис. 11.4. Структурная схема АПОИ
354
На вход АПОИ поступают видеосигналы ПРЛ и ВРЛ, метеоин-
формация, кодированные сигналы АРП, а также ряд вспомогатель-
ных сигналов, необходимых для работы АПОИ.
Обработка сигналов ПРЛ. Она осуществляется поэтапно. На
первом этапе осуществляется амплитудное квантование видеосиг-
налов, затем проверка по длительности, привязка их к соответ-
ствующим квантам дальности и стандартизация их длительности
целым числом дискретов.
На втором этапе происходит выбор канала ПРЛ, если в данной
зоне дальности поступают одновременно сигналы нескольких кана-
лов. Для этой цели вся развертка РЛС разбивается на кольцевые
сегменты, размерами 32 кванта по дальности и 128 угловых дискре-
тов по азимуту. Если в течение одного обзора для каждого из
каналов РЛС (например, каналов 1 и 2) подсчитывается число «1»
в данном секторе пространства меньше заданного числа, то на
следующем обзоре в данном секторе пространства используется
информация канала 1, в противном случае - канала 2. Каналом
1 может быть, например, амплитудный канал, а каналом 2-коге-
рентный, поэтому в секторах пространства, где амплитудный канал
поражен отражениями от местных предметов или метеообразова-
ний, будет использован сигнал когерентного канала, но только
в том случае, если соответствующая помеха в этом канале суще-
ственно подавлена.
На третьем этапе обработки происходит обнаружение пачек
сигналов, определение 6Н и 6К пачки с помощью «движущегося
окна», деление одного кванта дальности на четыре элемента точной
дальности и формирование маркера перекрытия (МП), Необходи-
мого для исключения потери цели, находящейся на границе двух
смежных квантов дальности.
На следующем этапе обработки происходят формирование и
выдача сообщений о выделенных отметках в спецвычислитель,
который относится к клссу миниЭВМ и предназначен для решения
задач обработки информации в реальном масштабе времени.
Сообщение включает в себя два слова. Первое является общей
частью для информации ПРЛ и ВРЛ. Индивидуальная информация
ПРЛ и ВРЛ передается соответственно в первом и втором полусло-
вах второго слова. В выходном сообщении реализуется алгоритм
объединения координатной информации ПРЛ и ВРЛ. Признак
объединения содержится в старшем разряде кода вида информации
для пакета ПРЛ. Объединение информации осуществляется в ре-
альном масштабе времени с учетом задержек на обработку ин-
формации ПРЛ и ВРЛ.
При отсутствии признака объединения дальнейшая обработка
происходит следующим образом. На первом этапе осуществляется
межобзорная обработка с целью селекции целей по скорости.
В результате этой обработки оценивается вектор скорости переме-
щения цели путем суммирования векторов за восемь последова-
355
тельных обзоров. Программа обработки предусматривает форми-
рование в ОЗУ спецвычислителя списка «ловушек», в котором
хранится информация о координатах «ловушек», и о значении
суммы векторов перемещений обнаруженных целей. Работа этой
программы основана на статистической обработке информации,
поступающей на смежных обзорах. Если на обработку поступает
новая цель, координаты которой не попадают ни в одну из
существующих «ловушек», формируется новая «ловушка» с коор-
динатами поступившей цели. Векторы перемещения суммируются
после выполнения заданного критерия начала введения цели, опре-
деляемого с помощью «движущегося окна». На дальнейшую обра-
ботку поступает информация о целях, скорость которых превышает
некоторую заданную.
Для селекции по скорости формируется специальный строб
объединения координат «ловушек» с координатами целей. Он пред-
ставляет собой сектор, и объединение ведется по двум независимым
координатам-дальности и азимуту. Цели, координаты которых
объединились с «ловушкой», в случае выполнения критерия начала
пакета поступают на дальнейшую обработку только при условии,
что их скорость больше заданной. Если объединение не произошло,
то в текущий разряд «движущегося окна» записывается нуль. Когда
число нулей больше заданного, «ловушка» сбрасывается вместе со
всей информацией.
На втором этапе пакеты, прошедшие межобзорную обработку,
проверяются по азимутальной протяженности, т. е. A0min < АО <
А0тах. Если выполняется это условие, а также условие АО < A0min, то
информация о цели идет на дальнейшую обработку. Если же
АО > А0тах, го информация о такой цели не обрабатывается.
Последующая обработка заключается в проверке попадания
цели в границы специальных бланков либо контрольных стробов.
В случае выполнения первого условия информация о цели сбрасы-
вается, во втором случае-поступает на дальнейшую обработку
и сопровождается специальным признаком. На последнем этапе
полярные координаты цели преобразуются в прямоугольные, фор-
мируется сообщение о цели и обеспечивается вывод информации
через устройство сопряжения в АПД.
Обработка информации ВРЛ. На первом этапе происходит при-
вязка координатной и дополнительной информации ВРЛ к соответ-
стствующим квантам дальности. Дополнительным критерием обра-
ботки является критерий полноты пачки, определяемый минималь-
ным числом единиц в пачке. Дальнейшая обработка координатной
информации ВРЛ аналогична обработке информации ПРЛ.
При обработке дополнительной информации ВРЛ осуществля-
ются статистическая обработка для повышения ее достоверности
и передача достоверной информации на дальнейшую обработку.
После коррекции информации ВРЛ с учетом временных задер-
жек в аппаратуре обработки ВРЛ и АПОИ координатная и допол-
356
нительная информация запоминается в ОЗУ специального вычис-
лителя.
Обработка сигналов метеоприемника. На вход устройства обра-
ботки сигналов метеоприемника поступают сигнал превышения
нижнего порога (сигнал метеообразований (МО) низкой плотности)
и сигнал превышения верхнего порога (сигнал МО высокой плот-
ности). Каждый из этих сигналов обрабатывается одинаковым
образом, в результате чего повышается достоверность и уменьша-
ется избыточность информации о МО.
Для передачи координат МО используется метод оконтурива-
ния, принцип которого заключается в определении на ряде последо-
вательных азимутов начала и конца МО. Поскольку отраженный
сигнал от МО носит хаотический шумоподобный характер, то
сигнал от метеоприемника в зоне МО может неоднократно преры-
ваться по дальности, хотя само МО явлается сплошным. В этом
случае, если не принять специальных мер, на одном азимуте может
появиться несколько начальных и конечных координат МО, что
приведет к появлению нескольких ложных границ контура МО. Для
исключения ложных контуров в АПОИ применяется интегрирова-
ние сигнала за несколько зондирований, поскольку угловая
дискретность зондирований ПРЛ (~ 6) значительно меньше необхо-
димой для передачи контуров МО (несколько градусов).
Для этой цели осуществляется квантование входного сигнала по
дальности, все пространство разбивается на азимутальные секторы
равной ширины. В каждом секторе для каждого кванта дальности
подсчитывается число зондирований, на которых сигнал в заданном
кванте имеет единичное значение. В конце каждого сектора анали-
зируются подсчитанные числа последовательно в порядке нараста-
ния дальности. Если число N единиц оказалось не менее заданного
числа «начало МО», то фиксируется начало МО. Если при дальней-
шем просмотре квантов N окажется меньше или равно числу «конец
МО», фиксируется конец МО по дальности.
Координаты границ МО на каждом азимуте передаются затем
в ОЗУ спецвычислителя.
Обработка информации от АРП. Сообщение АРП последова-
тельным кодом поступает в устройство обработки, где оно прове-
ряется на правильность контрольных разрядов и выдается в ОЗУ
спецвычислителя. Далее проверяется, была ли затребована комму-
тация данного канала АРП и, если запрос подтверждается, то
формируется сообщение о пеленге, которое выдается через
устройство сопряжения на АПД.
СПИСОК РЕКОМЕНДУЕМОЙ ЛИТЕРАТУРЫ
Авиационная электросвязь. Приложение к конвенции о Международной граж-
данской авиации. Т.1, ч.1. Аппаратура и системы. ИКАО, изд. IV. 1985. 413 с.
Автоматизация обработки, передачи и отображения радиолокационной инфор-
мации/Под рсд. В. Г. Корякова. М.: Сов. радио, 1975, 304 с.
Автоматизированные системы управления воздушным движением: Справоч-
ник/В. И. Савицкий, В. А. Василенко, Ю. А. Владимиров, В. В. Точилов; Под ред.
В. И. Савицкого. М.: Транспорт, 1986. 192 с.
Васин В. В., Степанов Б. М. Справочник-задачник по радиолокации. М.:
Сов. радио, 1977. 320 с.
Диспетчерский радиолокатор ДРЛ-7СМ/В. Н. Огарков, Л. Т. Перевезенцсв,
С. П. Петренко и др. Киев: КНИГА, 1988. 108 с.
Качан В. К., Перевезенцев Л.Т., Сокол В. В. Радиооборудование автома-
тизированных систем управления воздушным движением. Киев: Вища школа. Го-
ловное издательство, 1984. 312 с.
Радиолокационное оборудование автоматизированных систем УВД/А.А. Куз-
нецов, А. И. Козлов, В. В. Криницин и др. М.: Транспорт, 1985. 344 с.
Лобанов М.М. Развитие советской радиолокационной техники. М.: Воениз-
дат, 1982. 239 с.
Перевезенцев Л. Т., Зеленков А. В., Огарков В. Н. Радиолокационные
системы аэропортов/Под ред. Л.Т. Перевезенцева. М.: Транспорт, 1981. 378 с.
Справочник по радиолокации: В 4 т./Под ред. М. Сколника. Том 3. Радиолока-
ционные устройства и системы. М.: Сов. радио, 1978. 528 с.
Финкельштейн М.И. Основы радиолокации. 2-е изд., перераб. и доп. М.:
Радио и связь, 1983. 536 с.
ОГЛАВЛЕНИЕ
Предисловие ............ 3
Введение...................... - .......... 4
Глава 1. Общие сведения о наземных радиолокационных системах 16
1.1. Назначение и классификация радиолокаторов........................ 16
1.2. Основные виды современных радиолокаторов и их краткая характе-
ристика , . .......... ................................. 23
Глава 2. Устройства обработки, трансляции и отображения радиолокационной
информации........................................................... 84
2.1. Аппаратура первичной обработки информации....................... 84
2.2. Аппаратура трансляции радиолокационной информации . . 100
2.3. Средства отображения радиолокационной информации................105
Глава 3. Основные характеристики радиолокаторов . .............124
3.1. Общий подход к выбору характеристик радиолокаторов...............124
3.2. Тактические и эксплуатационные характеристики радиолокаторов . 126
3.3. Технические характеристики радиолокаторов....................... 136
3.4. Нормы ИКАО на тактические и технические характеристики радио-
локаторов .................. .................... .... 148
3.5. Нормы СЭВ на характеристики радиолокаторов .... 159
Глава 4. Функциональные схемы радиолокаторов и радиолокационных ком-
плексов ..............................................................176
4.1. Типовая функциональная схема аэродромного радиолокатора . 176
4.2. Типовая функциональная схема трассового радиолокатора.......... 182
4.3. Особенности построения функциональных схем посадочных радиолока-
торов ...............................................................198
4.4. Функциональная схема вторичного радиолокатора ... ..... 205
Глава 5. Системы подавления сигналов боковых лепестков диаграмм на-
правленности антенн ................................................. 209
5.1. Классификация систем подавления сигналов боковых лепестков . 20*)
5.2. Системы подавления сигналов боковых лепестков по запросу........212
5.3. Системы подавления сигналов боковых лепестков по ответу ... 219
Глава 6. Передающие устройства радиолокаторов 225
6.1. Общая характеристика . . . ... 225
6.2. Модуляторы............ .... . . 229
6.3. Магнетронные генераторы......................................... 241
6.4. Особенности построения передатчиков, выполненных на генераторах
с внешним возбуждением . ............ ... 244
Глава 7. Антенно-фидерные устройства.................................. 254
7.1. Классификация радиолокационных антенн и их основные параметры 254
7.2. Поляризационные устройства ..................................... ’64
7.3. Элементы антенно-фидерных систем ... 270
359
Глава 8. Приемные устройства....................................... 280
8.1. Основные характеристики.........................................280
8.2. Аналоговые и цифровые узлы радиолокационных приемников .... 283
8.3. Адаптивные устройства радиолокационных приемников...............297
Глава 9. Системы селекции движущихся целей...........................307
9.1. Основные характеристики систем СДЦ..............................307
9.2. Устройства СДЦ, выполненные на базе аналоговых элементов .... 313
9.3. Устройства СДЦ, выполненные на базе цифровых элементов..........319
Глава 10. Аппаратура декодирования и обработки информации вторичного
радиолокатора ...................................................... 331
10.1. Структурная схема..............................................331
10.2. Принцип действия дешифратора УВД..............................332
10.3. Функциональная схема дешифратора УВД...........................335
10.4. Дешифратор RBS . ..............................................343
Глава 11. Аппаратура первичной обработки радиолокационной информации 347
11.1. Общие сведения............................................... 347
11.2. Логика работы обнаружителей.................................. 350
11.3. Структурная схема АПОИ........................................ 354
Список рекомендуемой литературы ................................... 358
Учебвик
Перевезенцев Лев Тимофеевич
Огарков Виталий Николаевич
РАДИОЛОКАЦИОННЫЕ СИСТЕМЫ АЭРОПОРТОВ
Технический редактор Р. А. Иванова
Корректор-вычитчик Е. А. Котляр
Корректор С. А. Сержант
ИБ № 4277
Сдано в набор 20.06.90. Подписано в печать 30.07.91. Формат 60X88‘/ie.
Бум. офс. № 2. Гарнитура литературная. Офсетная печать. Усл. печ. л. 22,05.
Усл. кр.-отт. 22,05. Уч.-изд. л. 25,19. Тираж 2000 эк-з. Заказ 856. Цена 4 руб.
Изд. № 1-1-1/17-7 № 5032.
Ордена «Знак Почета»
издательство «ТРАНСПОРТ», 103064. Москва, Басманный туп., 6а
Набрано в Можайском полиграфкомбинате В/О «Совэкспорткнига» Госком-
печати СССР г. Можайск, ул. Мира, 93.
Отпечатано с готовых диапозитивов в Московской типографии № 4
Государственной ассоциации предприятий, организаций и объединений
полиграфической промышленности «АСПОЛ».
129041. Москва, Б. Переяславская, 46. зак. 1375.