/






























































































































Author: Александров М.П.




Text
§ 28. Определение сопротивления передвижению механизмов
с приводными колесами
При передвижении тележки или крана по рельсам двигатель
механизма передвижения преодолевает сопротивление сил трения,
инерции, ветровой нагрузки, а также сопротивления, которые мо-
гут появиться при движении вверх по наклонному пути. Однако
ветровая нагрузка появляется только при работе на открытом воз-
духе, а составляющую силу тяжести
при движении по наклонному пути учи-
тывают только в тех случаях, когда
заранее известно, что подкрановый
путь имеет уклон на значительном
протяжении.
В данном параграфе подробно рас-
смотрено определение сопротивления
передвижению, вызываемое трением.
Передвижение крана сопровождается
трением в опорах колес, а при исполь-
зовании подшипников скольжения так-
же трением торцов ступиц колес о при-
лежащие детали. При качении по рель-
су колес, нагруженных силой Grp+G, в
в опорах колеса возникает момент тре-
ния, равный f (Grp+G)t//2, где Grp— вес
транспортируемого груза; G — собст-
венный вес тележки или крана; d —
диаметр цапфы; /— приведенный коэф-
фициент трения, имеющий для различ-
ных подшипников следующие значения:
Рис. 150. Схема определения
момента сопротивления пере-
движению
Подшипники скольжения
О1крыюго типа....................... 0 1
б>кса с жидкой смазкой.............. 0,0$
Подшипники качения
шариковые и роликовые.................. 0,0'5
конические.......................... 0.02
Материал колес по своим физическим свойствам не является
идеально упругим, поэтому при его движении по жесткому осно-
ванию оказывается, что сумма нормальных давлений в точках,
выходящих из-под контакта, меньше, чем в точках, входящих в
контакт, так как восстановление первоначального объема проис-
ходит с некоторым запаздыванием по отношению к снятию нагруз-
ки. По этой причине нормальная равнодействующая реакции
GIp+G смещается от линии, проходящей вертикально через ось
колеса на размер ц (рис. 150), называемый коэффициентом
трения качения колеса по рельсу. Его значения указаны в
табл. 25.
9*
259
Т а б л и л а 25. Коэффициент трения качения ц, см,
для стальных ходовых колес
Рельс Ди а -.и । г л> u i'< G колеса /Д ,{. М‘.1
2С0-320 ют—дл Ю0—1009
С плоской головкой 0,03 0,05 0,06 0,065 0,07
С выпуклой головкой 0,01 0,06 0,08 0 1 0,12
При этом возникает момент сопротивления от качения колеса
по рельсу, равный (Gip -i-(7) ц.
Общий момент сопротивления передвижению
/;ij = (G^ — G) и 4- f (Grt, Gt//2.
Сопротивление передвижению, приведенное к окружности ка-
чения колеса диаметром 7)х.к (рис. 150), разно
\V' = JolL = _?.|P_T(i(2<x4- fd). (41)
£>,.к £>.<.к
Как уже указывалось, при движении кранов мостового типа
по рельсовому пути вследствие различных причин, в том числе из-за
неточностей укладки подкранового пути и также из-за различия
в характеристиках электродвигателей при раздельном приводе,
происходит отставание или забегание одной стороны крана относи-
тельно другой и может образоваться перекос моста. При движении
крана с перекосом плоскости качения ходовых колес не совпадают
с направлениями движения и происходит поперечное скольжение
ободов ходовых колес по рельсу. Перекос вызывает появление
по;:'?у?'Ю! г: др'пзж'г гз т пых нагрузок, которые воспринимаются
или ребордами ходовых колес, или направляющими роликами
(ппи безребирдиых ходовых колесах). Перекос крана с двух-
ребордными колесами может ограничиваться обычно ребордами
колес, расположенных по диагонали моста, а иногда ребордами
колес на одной стороне моста ил si ребордами одного колеса.
Для первого случая максимальные боковые нагрузки 5П на
колесо крана в горизонтальной плоскости перпендикулярно рель-
совому п}ти определяются:
1) максимальными силами перекоса крана действующими
вдоль оси рельса,
где L и В — соответственно пролет и база крапа: для крана с дву-
мя приводными колесами максимальная сила перекоса 5тах =
= 2/\n.Vin.;.. где Л7-,-;: — минимальное давление на приводное колесо
конкежж б :ки кр: и? при тележке, расположенной около проти-
воположной концевой балки; /7ц = 0,15 — коэффициент сцепления
приводного колеса с рельсом;
2) силами поперечного скольжения колес по рельсу
•^П = /ск(^гр4~^)»
260
где /о. ="-0.1 — коэффициент скольжения колеса по рельсу.
Расчет концевых балок крановых мостов, элементов баланси-
ров и направляющих роликов ведется по большему из этих двух
значений Si:.
Сопротивление трения реборд ходовых колес о рельсы теорети-
чески оценить трудно, так как оно определяется большим количе-
ством разнообразных факторов (конструкцией опор и видом по-
верхности каыния колеса к рельса, отношением пролета к базе,
скоростью движения, сосюянием подкранового кути, положением
тонки контакта реборды с рельсом и т. в.). Поэтому сопротивление
реборд в общепринятой практике расчетов учитывают коэффици-
ентом называемым ьо5ффициентом трения реборд, но фактиче-
ски учитывающим дополнительные сопротивления, например
трение торцов ступиц колес при их установке па подшипниках
скольжения, трение от поперечного скольженья колее по рельсу,
трение при движении токосъемников по питающим проводам и пр
Эти дополнительные сопротивления условно принимают пропор-
циональными сопротивлениям трения в опорах колеса в трения ка-
чения колеса по рельсу. Значение коэффициента /:р, установленного
на основе обобщения результатов экспериментальных исследова-
ний, можно принять но рекомендациям ВНИИПТМАШ:
Вид обода \одо- 'ил о колеса Привод Mei: 1! |Ч,Т Значение А’р
Для кранового .госта опорного типа
К лшческi< ;i Д( и рал! и.1 1,2
Г'.1 <де. ил । ы и 1.1
Цилиндричес \ий v жбеюдами I !•••! гральныи 1,5
Дилина; Ж-, юбордный с г . । р. !>• и 'ini:ii 1 нками Ра л.ы : и..и цен р.ьь .:ый Для кра ioi',o:\ теле.чки 1,1
I1иличдричес\ий Ц(.!! . ШИШНЫЙ С /ИДСТ КИМ токоподводом 2,5
' Шоордами Центральный с кабельным токоподподом Для подвесных КПП iOR 2,0
КоИПЧССКИЙ од- Односторонний на подшипниках качения 2.5
1' . (ООрДНЫЙ Односторонний на подшипниках скольже- ния
Двусторонний на потшипника.х качения 2,0
Двусторонний шт полтинниках скольже- ния 1,8
С учетом коэффициента трения реборд момент сопротивления
г силу сопротивления, действующие на ходовом колесе, можно
" . 'с.юлить по следующим bi [ражениям:
Л/1—^C?rp-|-G) , £р,
Gr<> 4- G
-----^ + ЛГ/гР. (42)
^Х.к
261
Момент сопротивления, приведенный к валу двигателя,
Л/с=
где «м и т]м — соответственно передаточное число и кпд механизма
между валом двигателя и валом ходовых колес.
Для кранов с безребордными ходовыми колесами сила сопро-
тивления, приведенная к оси ходового колеса, равна
Ч"=
где Dp, dv — соответственно диаметры поверхности катания на-
Рис. 151. Cxcva определения нагру-
зок в опорах колес консольно! о
к ра на
правляющего ролика и цапфы
оси ролика; цр— коэффициент
трения качения; fp — коэффици-
ент трения в подшипнике ро-
лика.
В отличив от механизмов
передвижения мостовых кра-
нов у консольных кранов кро-
ме ходовых колес, восприни-
мающих вертикальные нагруз-
ки, имеются еще ролики с вер-
тикальной осью вращения,
воспринимающие горизонталь-
ные нагрузки (рис. 151). При
расчете сопротивления пере-
движению этих кранов необ-
ходимо определить макси-
мальные нагрузки на ходовые
колеса и поддерживающие ро-
лики. Так, наибольшая верти-
кальная нагрузка па ходовые
колеса V= Gip+ G' + Gr, где GT — вес тележки; наибольшая гори-
зонтальная нагрузка на поддерживающие ролики
+ 61)£, +6я]//z, те а — расстояние от центра тяжести крана до
центра рельса, по которому перемещаются ходовые колеса
Тогда общее сопротивление передвижению крана с грузом, при-
веденное к окружности качения приводного ходовою колеса, равно
Wz = -Т-Ю + -ДН («)
где £\.к, d, [ и ц— соответственно диаметры поверхности катания
и цапфы, коэффициент трения в подшипнике и коэффициент трения
качения ходового колеса; Du, dih и ри — то же, для нижнего
поддерживающего ролика; /9В, dB, fB и р,в— то же, для верхнего
поддерживающего ролика.
В однорельсовых тележках, перемещающихся по подвесному
пути, дополнительная сила сопротивления передвижению переко-
262
шенной тележки различна для тележек, имеющих жесткую базу
и шарнирное соединение колесных пар. Эта сила от трения реборд,
трения и-оперечного проскальзывания и трения в операх ко чеса
учитывается введением коэффициента реборд /г/, на который нуж-
но умножить сумму всех сопротивлений передвижению тележки на
прямолинейном участке без перекоса. Коэффициент трепня реборд
&р' для однорельсовых тележек принимаю! по следующим реко-
мендациям:
Т е.’Сжы о-. t кольжеяич
С. жестко.! б;вой 1,4 1,6
С шарнирным соединени- t
ем колесных пар . . . 2,5 —
На криволинейных участках сопротивление передвижению су-
щественно повышается. Так, для тележек с жесткой базой и одно-
сторонним приводом значение коэффициента трения реборд прини-
мается равным 2/гг/; для тележек с жесткой базой и двусторонним
приводом оно равно (1,2-е1,5) kp'. Большое влияние на значение
сил сопротивления оказывает радиус закругления пути. При
малых радиусах они существенно выше. Допустимое значение
радиуса закругления зависит от конструкции тележки и от скоро-
сти ее передвижения. Для шарнирных тележек со скоростью пере-
движения до 60 м/мин радиус закругления не превышает 1,2 м.
Для ручных тележек, работающих в стесненных условиях, он мо-
жет быть уменьшен до 0,9 м. При скорости передвижения выше
90 м/мин с целью ограничения центробежной силы радиус закруг-
лений увеличивают до 3—6 м. Для тележек с жесткой базой грузо-
подъемностью 3 т н более радиус закругления принимается не
менее 14/, где I — база тележки, а для быстроходных тележек —
не менее (20н-30)/.
При применении фрикционных тягачей для подвесных кранов
коэффициент, учитывающий различные дополнительные сопротив-
ления движению катков крана по двутавровому пути, в том числе
от перекосов и трения реборд, принимают равным kp= 1,3л-2,5.
Расчетная суммарная сила сопротивления движению подвесного
крана или тали в этом случае
^еум . = + IV1..
Здесь первый член уравнения И7фР^р — сила сопротивления
передвижению колес тележки по двутавровому горизонтальному
подвесному пути от веса крана GK, веса грузовых тележек 6’т, веса
груза О'гр и силы zF прижатия тягачей к рельсу (сопротивление
от трения реборд учитывается коэффициентом kp)\
1ГФР= + + + (2|Л + fd}t
где z— число тягачей; ц, d, DXA< — те же величины, что и в урав-
нении (41). Теоретически необходимую силу прижатия тягача к
263
подвесному пути определяют по формуле- /д = П"с ,-при коэффи-
циенте сцепления (для монолитного резинового обода с рельсом
ср = 0,35 ж 0,45 при сулой поверхности трения и ср = 0,25 при влажной
поверхности трения; при применении пневмошии соответственно
ср = 0,6 ж 0,7 и ср = 0,45). Расчетная сила прижатия тягача к поверх-
ности рельса F — kF\, где /? = 1,5—коэффициент запаса, обеспечи-
вающий надежное сцепление тягача с рельсом при разгоне и тор-
можении крапа.
Второй член уравнения 1Гг — сила сопротивления движению
от перекатывания катков тягачей:
чу,= 4г- <:-Д+/л,
где /)т — диаметр поверхности ка-!тн,’я тягачей; [ и л — соответст-
венно коэффициент трения в подшипниках и диаметр папфы вала
катка; рг — коэффициент трения к-чечип, м. при плоском рельсе
и резиновом ободе катка тягача:
дг = 0,17• 10-31 k
где В—ширина поверхности катания обода тягача, м; Е— модуль
упругости резины, МПа, зависящий от сорта резины (для предва-
рительных расчетов принимают н; = (3-дб) • 10~'3 м).
Третий член уравнения — сопротивление от уклона выра-
жается формулой
irv кл =. 6?,.Р GK. -и (?т; а,
где а — } клон пути.
При работе на открытом воздухе кроме сил сопротивления от
трения должно быть учтено дополнительное сопротивление пере-
движению от встречной ветровой нагрузки рабочего состояния
Fb(cm. §3).
Необходимо отмети!ь, что сила сопротивления W7 и момент ста-
тического сопротивления ЛИ обычно рассматриваются как величи-
ны постоянные, хотя на самом деле в процессе передвижения кра-
на или тележки эти величины могут изменяться в значительных
пределах.
/Мощность двигателя (в киловаттах), необходимую для обеспе-
чения движения со скоростью v. м/.мин, подсчитывают по формуле
Р----
ст lUUU-6'JCr ’ k '
где ц — кпд механизма передвижения; с — количество двигателей
в механизме передвижения.
264
§ 29. Нагрузки в механизмах передвижения
при пуске и торможении
= +
:.,.'К.к ^х.к
2 ’
Процесс пуска. Уравнение моментов при пуске имеет вид
'4iycK = 'Mc 4“ ^'ин = '^с "4 -^ин1 + 'Ч н2- (45)
Момент сил инерции Мш| при пуске состоит из момента сил
инерции вращающихся масс механизма Л6Ш i и момента сил инер-
ции поступательно движущихся масс груза и крана (тележки) Л1и112.
Момент /М1Ш । определяется, как в механизме подъема, по зависи-
мости (37). Момент АГ1П|?, II -м, действующий на валу ходовых
колес при тех же допущениях, какие были приняты для механизма
подъема (в § 23), равен
М'
Ин2 к ! X 1 2
= W + W—60Л.
где Q-rQi — масса крана или тележки и груза при движении кра-
на с грузом; Q — масса поступательно
Qi — собственная масса тележки или крана, кг; а --- у скореиие при
пуске, м/с2; v-—установившаяся скорость движения крана, м/с;
— период неустановпвшегося движения, с. Частоту вращения
ходового колеса можно выразить через частоту вращения вала п}
двигателя по соотношению пх.к=И1/цм, где wM— передаточное число
механизма.
Тогда момент силы инерции, действующей на валу ходового
колеса, выражается формулой
у, __ (Q ь Qi)
нн2— 38,
движущегося груза, кг;
и этот же момент, приведенный к валу двигателя,
(Q + Qi)
38,2/„и’ Лт(11
(16)
Подставив в уравнение (45)
формул (37) и (46) получим
А1,^к = /Ис-Ь(1,1 I/-7)
выражения моментов инеркии, ih
7 ПО
9.55Л,
r(Q + Qi)/\.K/o
38,2А,д
(47)
В этом уравнении имеются две величины, связанные между со-
бой: время пуска /п и пусковой момент Л1(1у1!;. Минимально допус-
каемое время пуска можно определить из условия надежного сцеп-
ления ходовых колес с рельсами, т. е. отсутствия пробуксовки. На-
де/кпос1ь сцепления зависит от соотношения между силой сцепле-
ния и движущей силой. Так как сила сцепления имеет меныпее
значение при отсутствии груза, то наибольшая опасность буксова-
ния возникает именно в этом случае. Следовательно, он и является
265
расчетным. Тогда сила сцепления F = AGcp, где AG— часть общего
зоеа крапа без груза, приходящаяся на приводные ходовые колеса
(сцепной вес при работе без груза); q< — коэффициент сцепления
колеса с рельсом: для кранов, работающих на открытом воздухе,
q •--- 0,12; для кранов, работающих в закрытых помещениях, ф = 0,2;
при работе на открытом воздухе с применением песочниц ср = 0,25.
/1,ля кранов мостового тина и крановых тележек снспной вес
AG с достаточной степенью точности определяется по формуле
\G = Gtnln,
где G — общий вес крана без груза; т — число приводных ходовых
колес; п — общее число ходовых колес.
Чтобы не было пробуксовывания ходовых колес по рельсу в пе-
рил пуска, сила сцепления должна быть не меньше суммы сил
coilротньтекия движению. Для периода пуска в эту сумму входят
следующие величины:
1) сила инерции пост упательно движущихся масс крала
2) сила (• противления перемещению IV3 * * * 7—и7пр от сил трения в
цапфах колее, трения качения колеса по рельсу и трения реборд
[см. уравнение (42)] без учета трения в цапфах приводных колес,
которое при пробуксовывании ходовых колес по рельсу является
внутренним сопротивлением и не оказывает влияния на надеж-
ность сцепления колес с рельсами: здесь сила трения в цапфах
приводных колес
3) сила сопротивления ветра рабочего состояния МД при ди-
намическом давлении вегра, принимаемом ио рекомендациям
ГОСТ 1451 - 77.
Отсюда условие, определяющее отсутствие буксования, имеет
вид
AG?>F„H-J-(Vr-W7lip) + U/B.
Для обеспечения надежного сцепления устанавливают коэффи-
циент запаса сцепления &(1!: при нормальной работе без ветровой
нагрузки /.’.р--- 1,2 и при нормальной работе с ветровой нагрузкой
/?(.1=1,1. Тогда
AG? — + '3 ’ —- U/ ир).
Подставив в это уравнение значения сил /Д,, АД, W7 и МДр после
преобразований, получаем максимально допустимое значение уско-
рения при пуске, при котором обеспечивается заданный запас
сцепления:
Г т /
L п \ Дц
/У \
И
1
jg.
Следует отметить, что при работе в закрытом помещении, когда
исключаемся влияние ветровой нагрузки, максимально допустимое
ускорение при пуске не зависит от наличия или отсутствия груза,
мак как сила сопротивления передвижению находится в прямой за-
висимости с силой сцепления.
По найденному значению максимально допустимого ускорения
при пуске можно определить минимальное время пуска, при кото-
ром обеспечивается заданный запас сцепления:
С Д;о 1- Д !•
Так как для разгона механизма передвижения при работе крана
без груза требуется меньшая мощность, го максимально допусти-
мое значение пускового момента следует определять при отсутст-
вии груза. Для этого случая уравнение (47) принимает вид
'ИП)„ = М + (1,1 + 1,2)-Д1-+—, (48)
38,2г,д;/1М
где Л4С'— момент сопротивления передвижению крапа (или тележ-
ки) без груза:
Л/L = G, '2',+,d kr
При подстановке в уравнение (48) вычисленного значения вре-
мени пуска можно определить пусковой момент, необходимый для
создания рекомендуемого ускорения. Оценка пускового момента
по уравнению (48), необходимая для подбора электродвигателя,
возможна только при известном значении момента инерции Д, по-
этому вычисление требуемой мощности двигателя приходится про-
изводить с помощью уравнения (44) путем последовательных при-
ближений, задаваясь вначале параметрами двигателя, подобран-
ного по статической мощности и силе сопротивления VF при рабо-
те механизма с номинальным грузом. По этой мощности подбирают
двигатель, номинальная мощность которого при соответствующем
значении относительной продолжительности включения равна или
несколько превышает расчетную статическую мощность.
Для предотвращения буксования ведущих ходовых колес по
рельсам в процессе пуска следует провести проверку выбранного
двигателя по создаваемому им ускорению. С этой целью с помощью
уравнения (47) определяют фактическое время пуска Д и по урав-
нению равномерно ускоренного движения — фактическое ускоре-
ние a = vUOM/tn.
Меньшие ускорения при пуске требуют .меньшего момента дви-
гателя и соответственного снижения динамических нагрузок меха-
низма передвижения и металлоконструкций. С уменьшением уско-
рений уменьшается также и амплитуда раскачивания груза на гиб-
ком грузовом элементе (канате), что приводит к упрощению тех-
нологических операций.
Для нормальной работы механизма передвижения фактическое
ускорение не должно превышать допускаемого значения ускоре-
267
ния [а] В противном случае оказывается необеспеченным рекомен-
дуемы!: запас сцсилсппя /%ц и возможно пробуксовывание ходовых
колес.
(Фактический запас сцепления при пуске можно определить по
уравнению
Если он оказываемся меньше рекомендуемого (см. с. 266), то
необходимо взять меньший по мощности электродвигатель или уве-
личить число приводных колес. При эюм вновь выбранный двига-
тель надо проверить на на!рев по среднеквадратичной мощности,
значение которой при нормальной работе двигателя без перегрева
должно быть меньше пли равно номинальной мощности выбран-
ного по статической мощное! и двигателя при соответствующем
значении oiносительной продолжительноеiи включения ПВ. Если
необходимо получить большие ускорения, следует повысить коэф-
фициент сцепления применением песочниц, блаюдаря чему для
рельсовых механизмов передвижения максимально допустимое
ускорение |а| -^1 — 1,2 м/с2. Для еще больших ускорений следует
nepeii i и на другие виды приводов механизма передвижения, на-
при; мер с канатной тягой.
Для кранов, имеющих пролет более 20 м, рекомендуется значе-
ние максимально допустимого ускорения принимать на 25—30%
меньше, чем определенное расчетным путем.
Ограничение ускорения при пуске и замедления при торможе-
нии вызвано не только требованием отсутствия юза или пробук-
совки, но и особенностями технологического процесса, для кото-
рого предназначен данный кран. В этом случае средние ускорения
(замедления) без учета влияния ветровой нагрузки и уклона пути
могут быт!> выбраны для кранов с гибкой подвеской груза по дан-
ным ВПИИПТМАШ (табл. 26). Для кранов с жестким подвесом
груза эги значения ускорений можно увеличить на 50%.
В механизмах передвижения с раздельным приводом двигате-
ли устанавливаются на каждом приводе. Мощность каждого элек-
тродвигателя принимается равной 0,5 общей мощности для обеспе-
чения пускового момента, определенного по формуле (47). При
этом принимается, что нагрузка на оба двигателя распределена по-
ровну. Некоторое различие в фактической нагрузке двигателей,
если тележка находится вблизи одной из опор, компенсируется
перегрузочной способностью двигателя. Для кранов с раздельным
приводом запас сцепления должен быть проверен для возможного
случая работы одною привода при расположении тележки без гру-
за со стороны работающего привода. При этом влияние сил инер-
ции при пуске не учитывается и запас сцепления при работе без
ветровой нагрузки должен быть не менее 1.1, а при наличии ветро-
вой нагрузки — не менее 1,05.
2НЯ
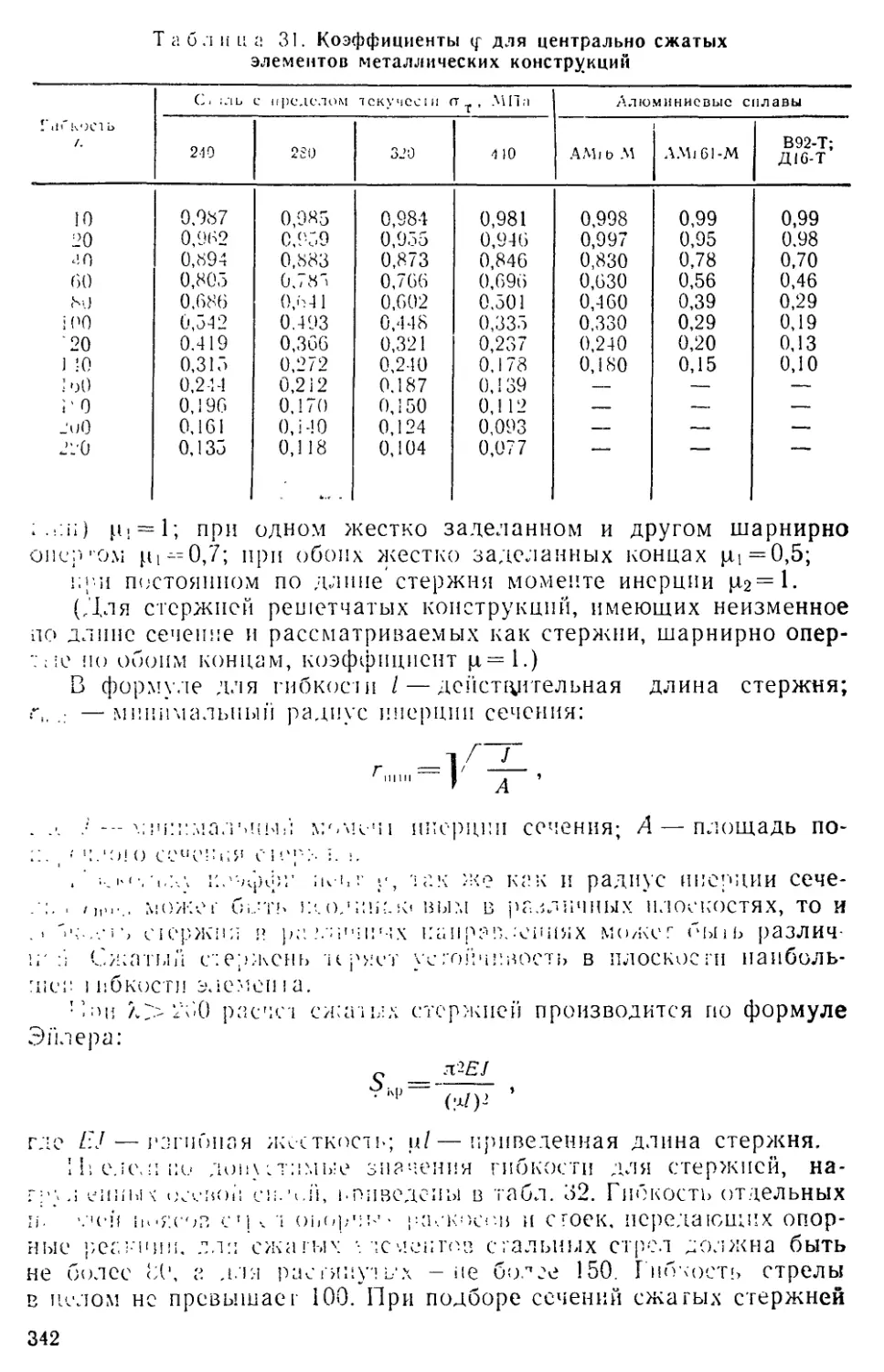
Таблииа 26. Предельные допускаемые средние ускорения
и замедления а, м/с-, для механизмов передвижения
На jh.i чс и не крана Гр;, .с.нодъемность крана, i
до 3,2 3.2—!2.5 свыше 12.5
Перегрузка насыпных грузов с по- 0,25 0,25 0,25
мощью Iре,".фора Перегрузка штучных грузов с помощью 0,1 0,1 0,1
приводного захвата Перегрузка штучных грузов при руч- 0,2 0,15 0,1
нои строповке Обслуживание монтажных работ 0,1 0,07 0,05
Транспортировка жидкого металла 0,1 0,1 0,1
При необходимости увеличения силы сцепления приводных ко-
лес с рельсами в процессе разгона моста крана иногда все четыре
ходовых коюса снабжают индивидуальным приводом. период
разгона работают все четыре электродвигателя, а при установив-
шемся движении — только два передних электродвигателя (считая
по ходу крана).
Для механизмов передвижения с фрикционным тягачом необ-
ходимую силу F прижатия катков тягача к поверхности рельса на-
ходят из условия отсутствия пробуксовки:
Л? > W 4- W',
где /др — тяговая сила, создаваемая катком одного тягача; <р — ко-
эффициент сцепления резинового обода катка тягача с рельсом
(см. с. 264); М7фр7гр/г — часть общего сопротивления передви-
жению от веса крана, тележек, груза и от прижатия катка тягача
к пути, приходящаяся на один тягач (см. с. 263); W" = F——
чополнительное сопротивление от прижатия катка тягача диамет-
ром /)т к пути силой F.
Момент, развиваемый электродвигателем при буксовании тяга-
чей, равен
где ц.м и т|м — соответственно передаточное число и кпд механизма
между колесом тягача и электродвигателем. Этот момент являет-
ся максимальной нагрузкой для расчета элементов передачи.
Процесс торможения. Процессу торможения свойственны те же
юления, что и процессу пуска. Однако в процессе пуска вредные
сопротивления уменьшают ускорение, требуя увеличения мощности
привода, а при торможении сопротивления способствуют остановке
механизма, увеличивая замедление и уменьшая необходимую ра-
боту, совершаемую тормозом. На механизмах передвижения крапов
и крановых тележек с механическим приводом, перемещающихся
по рельсовым путям, устанавливают тормоза нормально замкпуто-
269
го или комбинированного типа. Комбинированный тормоз при ра-
боте машины удерживается в разомкнутом состоянии приводом
тормоза, рассчитанным на длительное включение, и используется
в этом случае как тормоз, управляемый педалью или рукояткой.
При срабатывании конечных выключателей привод тормоза авто-
матически выключается и тормоз замыкается, производя остановку
механизма.
Механизмы передвижения тележек поворотных кранов без са-
мостоятельного двигателя, механизмы передвижения тележек,
мостовых кранов с ручным приводом и элсктроталей с управлением
снизу могут не иметь тормозов, если исключено их самопроизволь-
ное передвижение под действием ветровой нагрузки, сил инерции
или силы тяжести на уклоне, а также механизмы передвижения
грузоподъемных машин с машинным приводом и их тележек при
скорости передвижения менее 32 м/мин. Механизмы передвижения
машин, работающих на открытом воздухе или передвигающихся по
пути, уложенному на полу цеха, снабжаются тормозами независи-
мо от скорости передвижения. В механизмах передвижения допус-
кается установка тормозных шкивов непосредственно на валу дви-
гателя.
При определении как пускового момента двигателя, так и мо-
мента, развиваемого тормозом, за основу расчета берут обеспече-
ние соответствующего запаса сцепления приводных ходовых колес
с рельсами и весь расчет ведут для наиболее опасного случая ра-
боты крана без груза. Тогда максимально допустимое значение
замедления при торможении крана или тележки при движении их
в сторону действия ветровой нагрузки, при котором обеспечивает-
ся заданный запас сцепления, равен
Запас сцепления при торможении
k______________________________'i____
**'Т _г* м ’ __
|^Сц]. (51)
I V \VB 1 1 л
----— +— --- ---- 4- f —
L---1 m D.
Так как при торможении может не происходить трения реборд
о рельсы, то при выводе уравнения (50) принято &р=1. Определив
по значениям замедления и скорости движения время торможе-
ния /т, по уравнению моментов можно определить необходимый
тормозной момент. При торможении крана без груза
4" Мс = 7Иин1 + ^Ин2 + + ^укл
или в развернутом виде
М -1- ^рх.к_ = (1 1 _ j
2ам^м 9,55fT * 1 38,2^Tu2M
1^укл^х.к7|М
2uM ’
GD1.Kn^
W В^Х.К^М
2им
(52)
270
где WT — сила сопротивления при торможении, определяемая по
формуле (42), при работе крана без груза и коэффициенте &р=1.
Тормоза, рассчитанные на случаи остановки крана при попут-
ном ветре, могут вызвать излишне резкое юрможение при отсутст-
вии ветровой нагрузки. Поэтому в ряде случаев находит приме-
нение двухступенчатое торможение, при котором обеспечивается
плавное торможение и в случае отсутствия ветровой нагрузки. При
этом общий тормозной момент Мт, определяемый по уравнению
(52) с учетом ветровой нагрузки рабочего состояния и уклона пути,
развивается последовательно двумя ступенями тормоза. Тормозной
момент первой ступени Л/т| определяется по уравнению (52) при
отсу!ствии ветра и при движении по горизонтальному пути. Тор-
мозной момент второй ступени Мт2 = Л4т—Л1И развивается тормозом
с задержкой 2—3 с после начала действия момента Л1Т1.
Максимальный тормозной момент механизма передвижения
крана или тележки, если не заданы дополнительные требования к
значению замедления, может быть при практических ра< четах
определен по уравнению (52) при допускаемых величина , замед-
ления а (см. табл. 26). Краны, работающие на открытом воздухе
ат перемещающиеся по рельсовым путям, кроме тормоза механиз-
ма передвижения имеют противоугонные устройства с ручным или
машинным приводом, автоматического или принудительного дей-
ствия, предотвращающие возможность движения крана под дейст-
вием ветровой нагрузки нерабочего состояния. Мостовые краны,
работающие на открытом воздухе, могут не снабжаться противо-
угонными устройствами, если имеющийся тормоз механизма пере-
движения обеспечивает удержание крана (без груза) в неподвиж-
ном состоянии при коэффициенте запаса Ар = 1,2 при действии на
кран ветровой нагрузки нерабочего состояния. В этом случае тор-
мозной момент
ЛТ,= kl „.„-IVт), (53)
где №в.н — ветровая нагрузка нерабочего состояния; IFT — сила
сопротивления передвижению крана без груза (при /?Р = 1);
№уьл = аС — дополнительная сила, возникающая при движении
крана без груза вниз по уклону подкранового пути; с — количество
тормозов на механизме.
При работе крана на открытом воздухе тормоза должны удер-
живать кран без груза от угона ветром рабочего состояния. В этом
случае тормозной момент определяется по уравнению (53) при
k} —1,15 и ветровой нагрузке рабочего состояния М7п.р. В зависи-
мое! и от типа кранов рекомендуется брать следующие значения
расчетного уклона пути а:
Мостовые крзны...................... 0.0015
Тележки мостовых кранов............ 0,002
Портальные краны на постоянных пут^'х . 0.002
Портальные краны па временных nyifix . 0,01
271
Тп.ш и b.'Jiibi на подвесных путях..... 0,001
Козловые краны и перегрузочные мосты на
постоянных путях...................... 0,002
Башенные краны......................... 0,01
Определенный по уравнению (53) тормозной момент Л1Т не
должен превышать момента юза, возникающего при скольжении
неподвижных колес крана по рельсам:
/11 ‘
J ‘ юз
Выведенные формулы не учитывают влияния возможного рас-
качивания груза при торможении и являются полностью справед-
ливыми для таких кранов и тележек, с которыми груз жестко свя-
зан (например, для клетевых кранов и штабелеров). Как пока-
зывают исследования, влияние раскачивания груза на движение
крана или тележки зависит главным образом от соотношения вре-
мени их разгона и периода качания груза на полиспастной под-
веске и от соотношения между массой груза и массой крана или
тележки. За время торможения большинства механизмов передви-
жения груз не успевает совершить полного колебания около поло-
жения равновесия. Поэтому для подавляющего большинства кон-
струкций механизмов передвижения определение значения замед-
ления и длины пути торможения по приведенным выше формулам
обеспечивает моста точную точность расчета. Уточненное определе-
ние юрмозного пути с учетом раскачивания груза приведено в ли-
тературе [15].
В механизмах передвижения кранов мостового типа с раздель-
ным приводом тормоз устанавливают на каждом приводе. Момент
каждого тормоза для этих конструкций принимается равным 0,5
от общего юрмозного момента, определенною по уравнению (52).
§ 30. Трансмиссионные валы
Быстроходные трансмиссионные валы необходимо проверять на
возможность возникновения резонанса. При этом амплитуда коле-
баний может достигнуть больших значений и напряжения в вале
превысят допустимые.
Резонанс наступает при критической частоте вращения, когда
частота, с которой изменяется значение внешних сил, совпадает
или становится кратной частоте собственных колебаний системы,
состоящей из вала и деталей, соединенных с ним. Если вал общей
массой Q имеет начальный эксцентриситет в и вращается с угло-
вой скоростью (о. то под действием возникающей центробежной
силы С образуется дополнительный прогиб у:
C = Q^(y + ^-
Прото вала длиной / от этой центробежной силы y = Clz! (48EJ)t
от куда
48Е/ ,
с = —-— у = ky.
272
Коэффициент k здесь численно равен! силе, вызывающей ьрклиб
вала, равный единице.
Так как Q<o2(г/те) •=/?//, то
е
При <йкр =Vrk/Q прогиб у стремится к бесконечности, следова-
тельно, это значение <л)(.р является критической угловой скоростью
и тогда критическая частота вращения вала в оборотах в минуту
равна
30 1/ k п -- 1 ' k
/гкр__—-(/ _-_9,оо ( — .
Но величина i^^Qg/k является статическим прогибом вала
пол действием собственного веса G = Q^, тогда
«кР=300 У
1
Аг
12Ю-А- ,
Z2
где cl — диаметр вала, см; /—расстояние между опорами вала, м.
Чтобы вал не работал при частоте вращения п, близкой! к кри-
тической, необходимо соблюдать условие п А 0,8 zzi;J).
Явление резонанса в механизмах передвижения возникает не
только при чаенле вращения, равной /г„р, но и при удвоенной кри-
! ической часюич Тогда, чтобы избежать возникновения резонанса,
следует ввести дополнительное условие: 1,2 rziq)s^rz^ 1,6
Расчет быстроходного вала по критической частоте вращения
является определяющим и позволяет установить необходимый диа-
Meip вала, так как при расчете на прочность и сопротивленис уста-
лости запасы по этим критериям обычно значительно превышают
рекоменд)емые значения (см. гл. II).
Для тихоходного трансмиссионного вала основным является
расчет на совместное действие кручения и изгиба от собственного
веса вала. Чтобы уменьшить вес трансмиссионных валов (как i ис-
ходных, так и быстроходных), их нужно делать трубчатыми. Кри-
тическая частота вращения трубчатого вала в 4,5—5,5 раза выше
частоты сплошного вала, а суммарный угол закручивания и напря-
жения кручения соогвстственно в 2 3 раза меньше.
Динамические нагрузки, учитываемые при расчете валов и дру-
гих элементов механизма передвижения, должны определяться по
номинальному моменту тормоза Мт и номинальному моменту элек-
троды!! ателя .Ч.в. При эюм расчетый динамический момент, от-
несенный к быстроходному валу, определяется для случая тор-
можения по зависимости Af;ilII! г = Л1ТА’Г, где Ад ^=2,0 при нор-
мально замкнуiom юрмозе; Ад =-1,5 при управляемом (ормозе, при
двухступенчатом тормозе или при применении какой-либо системы
плавного торможения, а для случая пуска но зависимости
273
лЕ,..,-п = Л1,иЛь где k (— 4 при двигателе с короткозамкнутым рото-
ром: //и = 3 при двигателе с фазным ротором при реостатном пуске
иди при двигателе с короткозамкнутым ротором с регулирующим
устройством: /г,, — 2 при приводе с системой плавного пуска.
В расчете следует принимать наибольшее из этих двух значе-
ни'”: динамического момента. Динамические крутящие моменты на
любом из валов механизма не должны превосходить предельного
значения, определяемого сцеплением ведущих колес с рельсами.
§ 31. Механизмы передвижения с гибкой тягой
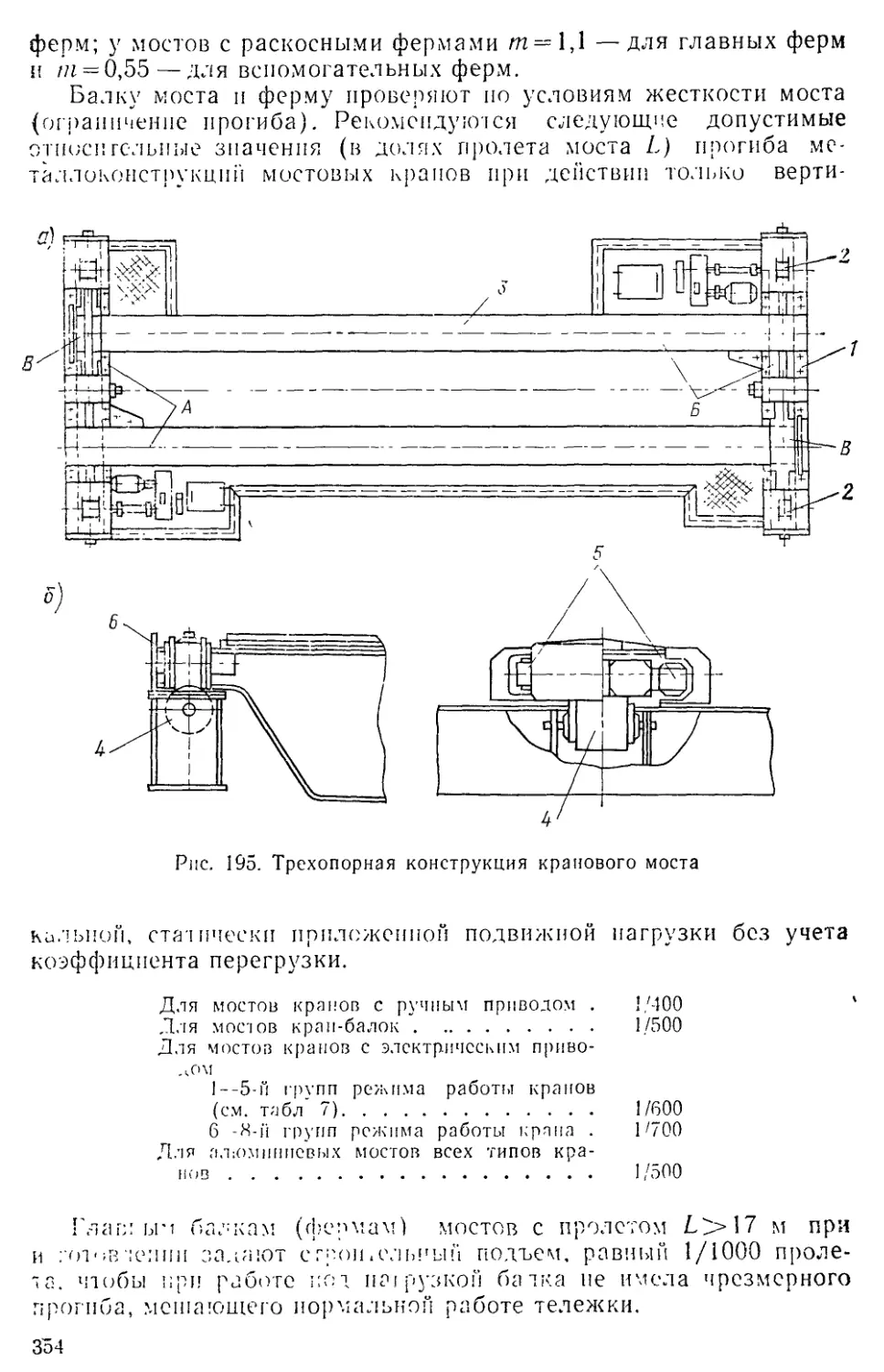
Барабан (или звездочку) 1 механизма передвижения с гибкой
.ягой устанавливают на выходном валу привода и соединяют с те-
лежкой 2 гибким элементом 3 (канатом или цепью). С другой сто-
ронт тележки гибкий элемент огибает обводной блок 4. На тележ-
ке имеются блоки 5 подъемного механизма, которые огибает канат
Рис. 152. Схема механизма передвижения с гибкой тягой
механизма подъема 6. При вращении барабана / тележка передви-
ган ея. При этом одна ветвь типового каната 3 сматывается с ба-
рабана, а другая наматывается--тележка перемещается в ту или
иную сторону в зависимости от направления вращения барабана.
Показанное на рис. 152 направление вращения барабана 1 соответ-
ствует передвижению тележки вправо. При перемещении тележки
кашм 6 механизма подъема перекатывается по блокам 5, а под-
вешенный груз перемещается вместе с тележкой, оставаясь на од-
ш и и той же высоте.
Сила сопротивления передвижению тележки в период устано-
вившегося движения состоит из силы трения U7, ветровой нагруз-
ки Н7В, разности сил в подъемных канатах AS, силы Н от провиса-
ния тягового каната или цепи, составляющей силы тяжести и7укл
на \ клоне.
Разность натяжений подъемных канатов, перекатывающихся
при передвижении тележки по блокам, определяют следующим об-
разом. Если груз весом Сор подвешен на двух ветвях каната, то
справедливо равенство (7li, = S2 + S3. По при движении тележки
вправо справедливо равенство S2=-S3i], где i] — коэффициент со-
274
(1 + О<,
Grp . 9
противления блока, принимаемый при некотором допущении неза-
висимым от угла обхвата блока канатом.
Из двух последних уравнений получаем Sb = Gip/(l -Н]). Отсюда
54= ------
И
•^1 — ^2 Л
1 + Ti
Тогда
д S = S4 - Si - Grv-LzZl_
P (1+<H
В общем случае при подвесе груза не на двух, а на а ветвях
каната (в этих механизмах число а всегда четное)
•.О-ч")
Натяжение левой нерабочей ветви тягового элемента, прило-
женное к тележке, требует увеличения силы F на величину Н,
но, с другой стороны, эта же сила Н через барабан 1, нижнюю
ветвь тягового элемента 3 и блок 4 прикладывается к тележке,
уменьшая необходимую силу F на величину 7/t|iT|4 (натяжения Т
от веса тягового элемента 3 между барабаном 1 и блоком 4 при
действии на тележку взаимно уравновешиваются и при расчете
сопротивления не учитываются).
Натяжение Н определяют по допускаемому провисанию тяго-
вого элемента, принимаемому в пределах h= (0,034-0,02) I (обычно
/г = 0,1 -т-0,15 м), откуда H = ql2/%h, где q — погонный вес тягового
элемента, I — максимальная длина свободно висящего тягового
элемента.
Таким образом, для преодоления всех сопротивлений движе-
нию тележки без учета инерционной нагрузки к ней надо при-
ложить силу
F=W №/„ -j- AS -{- Н (1 —'П1Л4)_Ь ^Лукл-
Тогда окружная сила тягового элемента на барабане T = F/r\t,
а момент на оси барабана
. . F-Г Wц + Н (1 — СГ'М) + укл ^бар
/И J •—— “ - )
2тц/4 7, Р]4 2
где т]4 — коэффициент сопротивления блока 4; £>бар— диаметр ба-
рабана механизма передвижения; r|i— коэффициент, учитываю-
щий потери на барабане.
Момент сопротивления, приведенный к приводному валу ме-
ханизма,
мс=-^- ,
276
где г]м и wM — соответственно кпд и передаточное число механиз-
ма. По этому моменту производят определение потребной мощ-
ности электродвигателя или размеров тяговой звездочки при руч-
но?л приводе.
Тяговый канат рассчитывается по разрывной силе [см. урав-
нение (8)] при запасе прочности, равной 4. Наибольшее натяже-
ние нижней ветви тягового каната Snias = Т-\-Н. В этой зависи-
мости величина Н является дополнительной силой от провисания
нижней ветви каната. При определении крутящего момента Л1|
на оси барабана эта сила не учитывалась, так как при крайнем
положении тележки она уравновешивается провисанием верхней
ветви каната.
Иногда вместо барабана 1 применяют приводные канатоведу-
щие блоки, на которых конец каната не закреплен и связь блока
с канатом осуществляется за счет силы трения между канатом
и ручьем блока. Применение канатоведущих шкивов допускается,
только если они оснащены устройствами, автоматически поддер-
живающими заданное натяжение тягового каната. В этом случае
при натяжении верхней ветви каната Н, а нижней Т-\-Н окруж-
ная сила равна Т. При угле обхвата блока канатом а и коэффици-
енте трения между блоком и канатом f буксование каната на блоке,
согласно зависимости Эйлера, начнется, когда Т = Не^п, т. е. когда
сила сцепления будет использована полностью.
Благодаря размещению механизмов подъема и передвижения
вне тележки ее масса и габариты резко уменьшаются. В отли-
чие от схемы механизма передвижения с приводными ходовыми
колесами с помощью механизма передвижения с гибкой тягой
проще осуществить передвижение тележки по наклонному пути.
Недостатком этого типа механизмов является высокий износ
грузовых и тяговых гибких элементов, поэтому его применение
ограничивается тележками на стрелах поворотных кранов, бал-
ках козловых кранов и перегружателей с горизонтальным или
наклонным рельсовым путем и кабельными кранами. Для данной
схемы проверки по запасу сцепления не требуется.
При подъеме или опускании груза на тележку действует сила
Fr, стремящаяся сдвинуть тележку. Это усилие
Дт = АЗ" 4" й \ пЛ U7K -f- FI (1 — ЛхЛх) — йут,
где IVT — сила сопротивления передвижению тележки, определяе-
мая по уравнению (42) при А’р=1.
Чтобы удержать тележку в неподвижном состоянии, меха-
низм передвижения в ряде случаев необходимо снабжать тор-
мозным устройством. Сила натяжения нижней ветви тягового
элемента механизма передвижения при удержании тележки в
непочвижном состоянии равна
276
Крутящий момент, возникающий на барабане (звездочке) ме-
ханизма передвижения при подъеме иди опускании груза,
Л1баР = (Л ~ Н) т]бзр = [(Д5 — Г/т) л - И (1 — 31) ] -^-Лбзр.
Тормозной момент механизма передвижения определяется с
учетом коэффициента запаса торможения Мт = 1,2 Л4с,.1р, где мо-
мент Мбар приведен к валу, на котором установлен тормоз.
Рис. 153. Грузовая тележка башенного крана
В случае передвижения тележки по наклонному рельсовому
пути при определении силы FT необходимо учитывать влияние
составляющей от силы тяжести тележки и груза:
W \ кл — ( О гр -ф GT) и.,
где а — уклон пути.
Чтобы обеспечить плавное передвижение тележки, особенно
при изменении направления ее движения, канатные механизмы
передвижения тележек должны быть оборудованы устройством
для выборки слабины тягового каната с ходом не менее 2% пол-
ной длины каната. Для этого ось блока устанавливают так, что-
бы она имела возможность горизонтально перемещаться под дей-
ствием пружинно-винтового механизма.
В башенных кранах с помощью тележки, перемещающейся
по нижнему поясу двутавра, подвешенного к стреле, можно из-
менять вылет. Тележка (рис. 153) состоит из рамы 7, внутри
277
которой установлены ходовые колеса 4, перемещающиеся по дву-
тавровой балке 5, и направляющие блоки 8 механизма подъема
груза. Через эти блоки и крюковую обойму 11 проходит подъем-
ный канат 9. Тележка снабжена рычагом 10 ограничителя вы-
соты подъема крюка. При подъеме до предельного верхнего по-
ложения крюковая обойма приподнимает рычаг 10, второе плечо
которого, воздействуя на тросик 2, вызывает срабатывание ко-
нечного выключателя, останавливающего механизм подъема. Тя-
говый канат 6 соединяется с рамой тележки зажимами 1. Тележ-
ка снабжена специальной линейкой 3, которая при соприкосно-
вении с рычагами конечных выключателей, установленными на
стреле, разрывает цепь управления двигателем лебедки передви-
жения тележки и тем самым фиксирует крайние положения те-
лежки.
§ 32. Расчет ходовых колес
При работе кранов и тележек их ходовые колеса нагружены
весом крана и груза, силами инерции массы груза и крана, вет-
о)
Рис. 154. Виды контакта ходового
колеса с рельсом
ровыми нагрузками и силами,
возникающими при перекосе
крана. Эги нагрузки действу-
ют в радиальном, окружном и
поперечном направлениях в
вызывают контактные напря-
жения и плас!ические дефор-
мации, усталостные разруше-
ния, износ колес и рельсов.
Значение нагрузки на колесо
в процессе работы может из-
меняться в весьма широких
пределах, поэтому кроме рас-
чета на смятие при максималь-
ной нагрузке в интенсивно ра-
ботающих кранах ходовые ко-
леса должны быть рассчитаны
на долговечность при дейст-
вии постоянной нагрузки, эк-
вивалентной по заданному сро-
ку службы реальной перемен-
но й на грузке.
В зависимости от типа по-
верхности катания (рис. 154)
колеса и рельса различают ли-
нейный (а, б) и точечный
(в—е) контакты. У цилиндри-
ческого колеса радиусом R, ка-
тящегося по рельсу, имею-
щему радиус головки г. или у
278
котеса co скругленной поверхностью катания, катящегося по плос-
кому рельсу, площадка контакта представляет собой эллипс, боль-
шая ось которого ориентирована вдоль рельса, если /?>>/•, или по-
перек рельса, если R<r.
Эффективные напряжения смятия (в мегапаскалях) при то-
чечном контакте определяют по методу, предложенному проф.
'5. С. Ковальским:
= (/ (54)
Здесь [(т.э]—допускаемые эффективные напряжения смятия;
--коэффициент, зависящий от отношения #2//?1<1, причем
:од 7?ь м, подразумевается больший из радиусов R и г, а под R%,
— меньший; его значение определяется по следующей зависи-
мо, ги:
Л ^0,09 I .
* \ rJ
Коэффициент kj, учитывающий влияние тангенциальной на-
у,<ки (силы трения) на работу ведущего и ведомого ходовых
солес, принимается в зависимости от группы режима работы
•шханизма (см. § 1); для 1, 2 и 3-й групп режима работы /?/=1;
длч 4-й группы kf= 1,044-1,06; для 5-й группы k,= 1,064-1,1;
£----2Ei£2/(£i + £,2) —приведенный модуль упругости, где £j и £2—
сули упругости, МПа, материалов колеса и рельса.
При линейном контакте цилиндрического колеса с пло-
?К!:М рельсом
Ь = 1Л7-Ю-’/г, | -<|’,1, (55)
•'др b — рабочая ширина, м, головки рельса без учета закруг-
лений.
3 формулах (54) и (55) F—приведенная расчетная нагруз-
ка, Н:
Здесь Fc — максимальная нагрузка на ходовое колесо при номи-
нал иных нагрузках рабочего состояния (номинальный груз, вет-
',о,''1я нагрузка рабочего состояния); /гн — коэффициент неравно-
яс пости распределения нагрузки по ширине рельса: для рельсов
выпуклой головкой Х?п=1,1; для плоских рельсов значения
коэффициента /гп зависят от перекоса колеса относительно рель-
са, обусловленного состоянием подкрановых путей, погрешностя-
ми в установке колес и т. п., но его среднее значение можно при-
нимать равным двум; kT — коэффициент толчков, учитывающий
влияние вертикальной динамической нагрузки, возникающей при
перемещении крана из-за погрешностей укладки рельсового пути
279
и влияния стыков: в зависимости от скорости передвижения мож-
но принять следующие его значения:
с, м/мин...................... до 60 60- 120 бо.юс 120
/ст........................... 1,1 1,2 1,3
(При заваренных стыках или при их отсутствии дробную часть
коэффициента можно уменьшить в два раза).
Базовые допускаемые значения эффективных напряжений
(в мегапаскалях) можно принять
]зэ0} = (2,5 - 3,0) НВ, (56)
где НВ — число твердости (по Бринеллю) материала колес. При
этом полагают, что это предельное значение сохранится неиз-
менным, если число оборотов ходового колеса за период срока
его службы составляет ;V<:104. При большем числе оборотов
предельные значения уменьшаются согласно аналитическому
выражению кривой усталости:
В этой формуле N — приведенное за срок службы число обо-
ротов ходового колеса, делающего ЛЗ оборотов под поминальной
нагрузкой Л,; л72 оборотов — под нагрузкой F2 и т. д.:
.v=.v, + n2 -Г лЦДДуШ....
Число оборотов АЗ колеса диаметром DX.K, м, под номиналь-
ной нагрузкой F\
N 60----------//р
•т/'Л.к
где /?| — число часов передвижения крана со скоростью и, м/мин.
Если известно число циклов Z\ работы крана в час и путь пе-
ремещения S], м, за цикл, то за число h\ часов работы количество
оборотов /Vi можно определить также по зависимости
Аналогично определяют числа оборотов при работе с други-
ми нагрузками. Наиболее точное приведенное число оборотов У
при заданном сроке службы определяется ио нагрузочной диа-
грамме колес, устанавливающей, сколько времени, с какой на-
грузкой работает колесо. При отсутствии нагрузочной диаграм-
мы можно использовать усредненный график нагрузки (см.
рис. 46).
Необходимо отметить, что твердость колес не определяет од-
нозначно их контактную прочность. Существенное влияние ока-
зывает также структура металла. Но для практических расчетов
с достаточно высокой степенью точности можно рассматривать
280
твердость как вполне устойчивую характеристику и пользоваться
зависимостью (56). Для более точных расчетов значения эффек-
тивных напряжений смятия для числа оборотов .V = 104 пользу-
ются следующими рекомендациями:
Колеса кованые Jo >]. МПа
Сталь 35, нормализованная.................... 430
(Даль 45, нормализованная.................... 510
(Даль 50, завалка, отпуск I IB 2-10.......... 650
Сгаль 75 н 65Г, закалка, oniyci; НВ 260 . . 690
То же, закалка, ош\ск НВ 290 ................. 750
То же, закалка, опоек НВ 330 ................. 860
То же, обод прокаiан, закалка, отпуск НВ 350 920
Л и ’ ые
(Даль 35/1, О1ЖПГ............................ 4 10
(Даль 55/1, отжиг............................. 190
(Даль 404 Г, (лжив............................. 5 10
(Да п. 50/1Г2, нормали..опаивая..............
Твердость поверхности катания ходовых котес с г>nii:;ee::i- л
>бодом не должна быть меньше НВ 300. Для увеличения >) i-
овечности ходовых колес и катков рекомендуется пр-ш.ию.ш и,
термическую обработку с целью повысить твердоеiь до
НВ 340—360 с глубиной закаленного слоя не менее 15 мм и с
плавным изменением твердости по глубине при сохпаненн.и вят-
кой сердцевины. Наиболее высокое качество характерна для
колес из стали 65Г с сорбитной микроструктурой закаленного
слоя. Колеса изготовляют штамповкой с прокаткой беговой до-
рожки. Для экономии дефицитных легированных сталей реко-
мендуется применять бандажирование ходовых колес с толщиной
бандажа, равной примерно 0,1 диаметра колеса, по не менее
60 мм.
Согласно правилам Госгортехнадзора ходовые колеса из не-
суна (не ниже марки СЧ15) могут применяться только для гру-
зоподъемных машин с ручным приводом.
Формулы (54) и (55) позволяют одновременно определить
напряжения в ходовом колесе и в рельсе. Но число нагружений
колеса и рельса различно. Поэтому и требования к их мате-
нгалам не одинаковы. При качении z колес диаметром Dx.t, но
гути длиной L соотношение чисел нагружения рельса ,\р и ко-
леса А7к равно
При этом соотношение требуемой твердости поверхностей
рельса и колеса при числах циклов нагружения Лф>» 104 и ,V;,> 104:
нв„=нвк ]/ .
Если же 7VK<104 и A/pd0’, то степень радикала в формуле
ледует принять равной 25, а если Лгк>>104, а Лф<Д04, то
281
Колеса фрикционных тягачей с резиновыми, тканевыми и
пластмассовыми обидами проверяют на напряжения смятия:
где п — частота вращения колеса, об/мин; Dr— диаметр пов-шх-
ности катания колеса, м; b — рабочая ширина обода, м; Г—нор-
мальная нагрузка на колесо, Н;
ние смятия для материала обода
Рис. 155. Определение максима.!!.рой
нагрузки на ходовое колесо мостово-
го кра:а
[о<м'] — допускаемое напря ке-
колеса: для резины [(!<.,.] =
— 0,4-4-0,5 МПа; для прессо-
ванных тканей [сг'см] = 0,6“
-4—1.0 МПа; для полиамидных
материалов [o,(v]sC2 МПа.
Нагрузка Г<- на ходовое ко-
лесо определяется для наихуд-
ших условий работы крана с
поминальным грузом, когда
поло/кепие тележки мостового-
крана пли стрелы таково, что
на ходовом колесе возникает
максимальное значение nai р.уз-
ки, например, как показано на
рис. 155, для мостового крана
весом (7м с тележкой весом G?
с грузом весом GrP, расположенной у рассматриваемой опоры.
В этом случае максимальная нагрузка па концевую балку, опре-
деляемая с некоторым упрощением, без учета влияния жесткости
моста,
Если число ходовых колес на концевой балке равно г, нагруз-
ка на ходовое колесо
^гпах/^*
Для кранов с поворотной стрелой (рис. 156), подвешенной к
раме грузовой тележки с помощью центральной направляющей
колонны с роликами на опорном круге, а также для поворотных
кранов на колонне, установленных на тележке, давление на хо-
довые колеса тележки зависит от положения стрелы. Кроме того,
на значение нагрузки влияют состояние пути, но которому пере-
мещается кран или тележка, и упругость как путей, так и метал-
локонструкции ходовой части. В большинстве случаев мосты
кранов и тележек являются четырехопорными, статически неопре-
делимыми системами, требующими при определении реакций
опор проведения весьма сложных расчетов, учитывающих де-
формации металлоконструкции и опорных точек.
282
При расчетах условно считают, что все опоры лежат в одной
плоскости, и сводят исследуемую систему к статически опреде-
лимой, рассматривая металлоконструкцию ходовой части 1) как
абсолютно жесткую или 2) как полностью шарнирную.
В первом случае рама
GT считается абсолютно жест-
кой (рис. 156, а). Центр тяже-
ти рамы (точка Л) обычно
.•□впадает с центром симмет-
>. i и.
Центр тяжести вращающей-
ся части G вместо с грузом Grp
расположен на оси стрелы на
расстоянии а от осп вращения
О. Этот вес создает момент
Vl=(Grp + G) а, а силу Grp + G
считают действующей в точ-
:е О.
Реакции RI; па опорах те-
сежки от собственного веса ее
'истовой части Gy можно счи-
тать равными
Реакции /?п от веса враща-
ющейся части и груза опреде-
ляются с учетом того, что ось
вращения расположена на про-
юл ьной (или в других случа-
ях—на поперечной) оси те-
1ежки:
ходовой части тележки весом
\
\
Рис. 156. Определение максимальной
VM=/<4 = (Gr;J4-G)
0,56— d
Ть ’
нагрузки на ходовое колесо поворот-
но| о крана
2Ь
Момент Al = (Grp-|-G)a может быть разложен на две состаз-
хпощи.х: момент Л/Л Д1 cos а, действующий в плоскости х—х, я
момент MLI = M sin а, действующий в плоскости у—у. Реакции
.•пор от момента Мх:
Реакции опор от момента Му:
V,.
^.„ = AX;= Rm,3=^=
283
Суммарная реакция опоры равна алгебраической сумме от-
дельных реакций, действующих на эту опору. Анализ получен-
ныл при этом уравнений показывает, что наиболее нагруженной
опорой является опора 2, а наименее нагруженной — опора 4.
Максимальная реакция R? возникает, если \гол а-«о; значение
угла се,, определяется из условия равенства нулю первой произ-
водной:
d /?2
d а
ао4
---- Cos (Гц । = О,
2 с-!
о: куда tgccn = b/c’, т. е. нагрузка па опору 2 имеет максимальное
значение при расположении оси стрелы перпендикулярно диаго-
нали 1—3 опорного контура (это положение стрелы показано на
рис. 156, а штриховой линией). При наличии iоризонтально дей-
ствующих сил (ветровая нагрузка, силы инерции) следует еще
дополнительно счесть нагрузки па опоры, создаваемые эти-
ми силами.
При некотором сочетании нагрузок, а также при значитель-
ных неровностях пути и погрешностях при изготовлении крана
реакппя на наименее нагруженную опору может стать равной
нулю, т. е. эта опора не будет нагружена и колесо может при-
подниматься над рельсом, что иногда и случается в реальных
условиях эксплуатации. Тогда четырехопорная конструкция ста-
новится статически определимой трехопорной системой с более
высокими нагрузками на опоры, определяемыми по уравнениям
моментов относительно осей 1—2; 2—3 и 1—3 (рис. 156, б). Если
тележка со стрелой установлена на мосту крана, давление на
ходовые колеса моста также зависит от угла поворота стрелы
и определяются с учетом неравномерной нагрузки ходовых колес
тележки.
Во втором случае, когда рама ходовой части рассмат-
ривается как полностью шарнирная, опоры имеют возможность
перемещаться в вертикальной плоскости независимо друг от дру-
га, после нагружения рама может не сохранить плоскую форму.
В этом случае неточности конструкции и различная степень по-
датливости ее у отдельных опор нс влияют на распределение на-
грузки между опорами в пределах возможности их вертикаль-
ного перемещения, и определение опорных реакций является
статически определенной задачей.
Если на шарнирной раме тележки весом Gv установлена по-
воротная часть крана на колонне, то па раму (рис. 156, в) в точ-
ке О (ось колонны), как и в нервом случае, действе ют силы
Grp-pG и момент Af=(Grp +G)a, который можно разложить на
моменты Л1Х и Му. Реакции от сил GT) Grp+G и от момента Л1Х
такие же, как и для жесткой рамы, а момент Му вызывает в
точках А и В фиктивной балки АВ вертикальные силы Рл =
^—Вв=Му/с.
284
Эти силы можно распределить между опорами рамы:
0.56 — d
Л1
0,56 + d
~~b
b
Суммируя вес составляющие реакций опор, 'л'Ж!то определить
искомые реакции. Как и в случае жесткой рамы, максимальная
нагрузка воспринимается опорой 2, а минимальна,ч— опорой 4.
При с/ = 0 значения реакции для жесткой и шарнирной рам оди-
наковы. Максимальное значение /?- для шарнирной рамы имеет
место при угле а — осо; тангенс угла а0 определяется апалогичш
случаю жесткой рамы:
1. е. реакция R> имеет максимальное значение, когда стрела рас-
положена перпендикулярно линии, соединяющей! опору 1 с осью О
вращения колонны. Fla рис. 156, в положение стрелы при макси-
мальном значении R* показано штриховой линией. Значение дав-
ления на опору 2 при шарнирной раме несколько больше, чем
при жесткой.
Выбор того или иного метода расчета зависит от конструк-
ции (упругих свойств) рамы, ходовых опор и пути. Передвиж-
ные поворотные краны на колонне обычно рассчитываются по
схеме жесткой рамы.
§ 33. Устройства, обеспечивающие безопасность работ!.!
Для ограничения хода крановых тележек и мостов креков
применяются упоры, устанавливаемые на концах пути тележек
и мостов, а сами тележки и мосты снабжаются буферами — уст-
ройствами, смягчающими удары при наездах на упоры. В самых
простых случаях их можно изготовлять из дерева или ре,ины.
На рис. 157, а показана конструкция пружинного буфера, уста-
навливаемого на тяжелых кранах. Этот буфер имеет четыре п('у-
жины — две внутренние и две наружные. Направление навивки
каждой пары пружин — встречное, чтобы устранить влияние за-
кручивания торцов пружин при их нагружении. В пружинных
буферах большая часть кинетической энергии удара переходит
з потенциальную энергию сжатия пружины, поэтому работа пру-
жинного буфера сопровождается отдачей, что является нежела-
тельным явлением. Кроме того, пружинные буферы човольнс
громоздки. Способность пружки.-гого б\ р:,;-а ггогллща г:> шгерг ию
можно существенно увеличить, применяя предварительно поджа-
тые пружины. При этом снижается ход буфера и, следовательно,
его габариты. Применение пружинных буферов целесообразно
при скорости крана или тележки, не превышающей 70 м/мин.
285
При более высокой скорости движения соответствующей уста-
новкой конечных выключателей достигается своевременное за-
мыкание тормоза, снижающего скорость движения при подходе
к упору до 70 м/мин.
Рис. 157. Буферы
а — пружинный, б — гидравлический
Более рациональны гидравлические буферы, поглощающие
значительно большую энергию удара и не имеющие отдачи. Энер-
гия удара в этих буферах расходуется на продавливание рабо-
чей жидкости через кольцевой зазор между отверстием в дне
поршня и штоком (рис. 157, б) и почти целиком переходит в
теплоту. Буфер состоит из корпуса 3, поршня 4, штока 5, воз-
вратной пружины 6, наконечника 1 и ускорительной пружины 2.
Рабочая жидкость заполняет внутреннюю часть поршня и при
осадке буфера протекает через отверстие в дне поршня. Так как
шток 5 имеет переменное сечение, то площадь кольцевого зазора
между дном поршня и штоком изменяется, вследствие чего из-
меняется и сопротивление передвижению поршня. Соответствую-
щим подбором сечения можно получить различные закономерно-
сти замедления движения крана при остановке его буфером.
Пружина 2 используется для создания плавного нарастания ско-
286
рости движения поршня. В качестве рабочей жидкости применяют
веретенное масло, если кран работает при нормальной темпера-
туре окружающей среды, и смесь спирта с глицерином — при
работе в условиях пониженных температур.
Конструкции гидравлических буферов значительно компакт-
нее пружинных. Их применение экономически оправдано при ско-
рости движения, не превышающей 160 м/мин. При более высоких
скоростях должны быть предусмотрены устройства, снижающие
скорость движения до 160 м/мин при подходе крана к упору.
Буфер считают полностью работоспособным, если он погло-
щает кинетическую энергию крана или тележки (при гибкой
подвеске — при работе без груза; при жесткой — с грузом), дви-
гающимися со скоростью, составляющей 0,7 номинальной. За-
медление при этом не должно превышать 4 м/с2. Детали крепле-
ния буфера должны быть рассчитаны на нагрузку, возникающую
при поглощении энергии удара крана или тележки, двигающихся
с номинальной скоростью. Запас прочности деталей крепления
должен быть не менее 1,15. При упрощенном расчете пружин-
ных буферов считают, что вся 'кинетическая энергия тележки или
крана переходит в потенциальную энергию упругой деформации
пружины. Энергия пружины U = Fa/2, где F — максимальная си-
ла сжатия пружины; а — осадка пружины.
Кинетическая энергия движущегося крана (или тележки)
массой QKp с грузом массой Qrp без учета влияния гибкого под-
веса груза (груз рассматривается находящимся в крайнем верх-
нем положении, когда влияние гибкости подвеса минимально)
равна
. (QkP + Qi о) и2
А=--------------,
2
где v — скорость движения крана (или тележки) в момент на-
езда на упор.
Для максимальной силы сжатия пружины буфера получаем
выражение из условия равенства энергий движущегося крана
и сжатой пружины:
г-, (QkP "Ь Qrp)
г =-------------,
az
где z—число буферов, воспринимающих удар.
Отсюда максимально допустимая скорость движения моста
крана (или тележки) при наезде на упор
f zFc1
Расчетная динамическая нагрузка при наезде крана (или те-
лежки) на упор определяется по формуле
F д^т (Qxp r'Qrp)’
287
'ги;1=1,3 — коэффициент перегрузки; ат — замедление крана (те-
лежки); р — коэффициент, имеющий в зависимости от вида под-
веса груза следующие значения:
Гибгий, с vki’ioi'' по 1зсса. м |>
1,5—3.................... 0,5
3—5...................... 0 35
5 7...................... 0,2
/Кинли....................... 1,0
В последнее время вместо буферов все чаще используют спе-
циальные тупиковые устройства, у которых в конце пути рельс
имеет плавный подъем и кинетическая энергия движущегося
крана преобразуется в работу перемещения центра тяжести кра-
на (или тележки) на некоторую высоту.
Если скорость передвижения тележки или моста превышает
32 м/мин то требуется установка конечных выключателей, обес-
печивающих автоматическое замыкание тормоза на необходимом
расстоянии от конца пути, что предупреждает наезд крана или
тележки с большой скоростью на упоры. Механизмы передвиже-
ния башенных, портальных и козловых кранов, а также перегру-
зочных мостов должны иметь конечные выключатели независимо
от скорости передвижения крана. Взаимосогласованные конечные
выключатели должны применяться для предупреждения столкно-
вения мостовых или консольных кранов, работающих на одном
подкрановом пути. Отключение механизмов передвижения этих
кранов должно производиться на расстоянии между ними не ме-
нее 0,5 м. После срабатывания концевых выключателей движение
кранов может осуществляться только в обратную сторону. Такие
выключатели разрешается не устанавливать при работе на одном
пути нескольких башенных, козловых или портальных кранов.
При больших скоростях передвижения моста (более 80 м/мин)
рычажные концевые выключатели недостаточно надежны и для
таких кранов разработаны конструкции фотоэлектрических оста-
новов.
Концевой выключатель механизма передвижения устанавли-
вают таким образом, чтобы он срабатывая, когда расстояние от
упора составляло бы не менее половины пути торможения (а это
обеспечивает движение в момент приближения к упору со ско-
ростью, равной половине номинальной), а у башенных, порталь-
ных. козловых кранов и перегрузочных мостов—не менее пол-
ного пути торможения.
Для механизмов передвижения мостовых кранов допускается
исключение из этого правила, если кран подходит к посадочной
плота яке с наименьшей скоростью, допускаемой электросхемой
крана. В этом случае рекомендуется установка двух тормозов в
приводе механизма передвижения: один — стопорный, включае-
мый только тля удержания крана против угона его ветровой на-
грузкой нерабочего состояния, а второй — рабочий.
288
Путь торможения определяется из предположения, что дви-
жение крана равнозамедленное:
$ __ VHOM^f
~ 2
где время торможения /т = ЦНом/[а].
Если нет точных данных о процессе торможения, приблизи-
тельный тормозной путь крана или тележки без груза можно
определить, используя данные табл. 28.
Таблица 28. Тормозной путь, s, м, при скорости и, м/мин
Условия работы крана Все колеса приводные Почовпна ко .юс приводная Четверть ко- лес приводная
На открытом воздухе (ср = 0,12) v2 V2 V2
G500 3250 1650
В помещении (<р = 0,15) v2 V2 V 2
8400 4200 2100
Примечание Коэффициент <г сцепления колеса и рельса (см с. 266).
Противоугонные устройства, устанавливаемые на кранах для
предотвращения угона их ветровой нагрузкой нерабочего состоя-
ния, можно разделить на три группы по принципу их действия]
стопорные устройства или фиксаторы, действие которых основано
на том, что кран фиксируется закладными пальцами, крюками
или выдвижными упорами, связывающими кран с неподвижной
опорой; противоугонные устройства нажимного типа (остановы),
действие которых основано на создании трения между рельсом
и специальным башмаком, подводимым под ходовое колесо и вос-
принимающим часть собственного веса крана; клещевые рельсо-
вые захваты, действие которых основано на принципе непосред-
ственного зажатия головки подкранового рельса рабочими по-
верхностями захвата.
Захваты бывают ручные и механические (автоматические и
полуавтоматические). По правилам Госгортехнадзора противо-
угонные устройства с механическим приводом должны быть обо-
рудованы дополнительным устройством для приведения их в дей-
ствие вручную. Для мостовых кранов рекомендуется применять
ручные захваты клещевого типа, устанавливаемые с обеих сто-
рон моста крана. В перегрузочных мостах применяют клещевые
противоугонные устройства с грузовым клином или винтовые,
имеющие механический привод управления клещами из кабины
крановщика, или автоматического действия. Эти устройства
должны быть сблокированы с механизмом передвижения так,
чтобы захваты открывались перед началом движения и замыка-
лись после остановки крана.
10—1628 289
Для оповещения крановщика о достижении ветром опасной
скорости башенные, портальные, кабельные краны и мостовые
перегружатели снабжаются анемометрами, имеющими звуковую
или световую сигнализацию.
Рис. 158
Противоугонный клещевой захват
с электромеханическим приводом
ГДсле получения сигнала крановщик должен прекратить ра-
боту, обесточить кран и закрепить его противоугонными захва-
тами.
На рис. 158 показана конструкция клещевого захвата козло-
вых и портальных кранов, состоящая из рамы 4, закрепленной
990
между балансирами тележки, клещей захвата 10 и электромеха-
нического привода. При включении электродвигателя 1 враще-
ние передастся через червячный редуктор 2 на вертикальный
винт 5. Гайка 6 совершает поступательное движение вместе с
корпусом 7, на который она нажимает через пружину 9. Корпус
перемещается в направляющих 15, прикрепленных к раме 4.
В пазах корпуса 7 двшаются ролики 8, оси которых закреплены
на длинных плечах клещей 10, поворачивающихся вокруг осей 11.
При движении корпуса вниз короткие плечи рычагов, сближаясь,
зажимают головку рельса, после чего при дальнейшем вращении
винта пружина 9 сжимается, а закрепленный на корпусе регу-
лируемый упор 13 нажимает на рычаг конечного выключателя 12
и отключает питание двигателя
При вращении вала двигателя в другую сторону корпус 7
подпимас.ся и ротики 8, перемещаясь по прорезям корпуса, рас-
крывают клещевой захват, а затем поднимают клещи на 20 мм
выше \ розня головки рельса. Верхнее положение корпуса фикси-
руется с помощью конечного выключателя 14 при достижении им
упора 16 Дтя установки крана на захваты вручную при ава-
рийном отключении электроэнергии вал червяка заканчивается
рукояткой 3. Благодаря тому что в выключенном состоянии i у бки
члещей нахо тятся выше уровня головки рельса, исключается воз-
можность случайного захвата рельса при передвижении крапа.
Привод клещевых захватов может быть также и гидравлическим
и пневматическим.
В противоугонных устройствах грузовой клин весом Сьл при
опускании его с помощью лебедки или гидравлического при-
вода воздействует на длинные плечи клещей (рис. 159), а корот-
кие плечи зажимают головку рельса. При подъеме клипа клещи
под действием вспомогательной пружины освобождают рельс.
Механизм клещевых захватов перегрузочных мостов так сбло-
кирован с механизмом передвижения крана, что до тех пор, пока
че освобождены рельсы, кран не можег начать движение. После
ютановки крана захваты автоматически зажимают рельс Дви-
гатель клещевых захватов сблокирован также с анемометром и
чри скоростном напоре ветра больше нагрузки рабочего сосюя
П1Я подъем клина и освобождение рельсов исключены
Коэффициент запаса, равный отношению удерживающей силы,
развиваемой противоугонными устройствами крана, к сумме
зетровой нагрузки нерабочего состояния и составляющей силы
чжести крана от уклона пути, должен быть не менее 1,2. Сила
у гона
р =iv/B.H-n/ + \vVK1,
де W'n п — ветровая на1рузка нерабочего состояния по ГОСТ
1451—77; W— сила сопротивления передвижению при работе кра-
на без груза, определяемая при коэффициенте трения реборд
'р=1; = — сила, возникающая от уклона подкрановых
291
путей; а — уклон подкрановых путей, принимаемый по рекомен-
дациям на с. 271.
При равномерном распределении нагрузки между захватами
сила нажатия плоских рабочих поверхностей клещевых захватов
на
должна быть равна N = Fyk/ (2г/) (см.
рис. 155), где г— число захватов на
головку рельса
Рис. 159 Схема противо-
угонного клещевого захвата
кране; Fy— сила угона крана; f—коэф-
фициент трения рабочей поверхности за-
хватов о головку рельса (табл. 29).
Необходимый вес клина Gin опреде-
ляется из условия равновесия эычагов
при замкнутом захвате (рис. 159):
S = (Na-\-Fupc)/b,
GK=2(Stg?+W),
где Лпр — усилие пружины, стягивающей
рычаги, принимаемое равным
Л,Р = (1,5 - 2) Мр/с,
Mp=Gpe— момент от веса рычага G?
относительно оси шарнира при зажатом
рельсе; [3^6°— угол наклона плоскости
клина к вертикали; W — вертикальная
составляющая силы сопротивления от пе-
рекатывания роликов верхних концов ры-
чагов по плоскости клина, определяемая
по зависимости (42) при коэффициенте
&р=1; а, Ь, с — размеры по рис. 159.
Необходимый вес клина
о., = -2- (Na + /V) (tg ? + ^4-^-) ’
О \ /
где d — диаметр цапфы ролика; Dp — диаметр поверхности ката-
ния ролика.
Ход клина h назначается, исходя из необходимого размера
отхода 8 = 64-8 мм рабочих поверхностей клещей от головки
рельса и упругого прогиба ф рычагов клещей;
tg?
где /2=1,5—коэффициент запаса хода клина, компенсирующий
износ рабочих поверхностей, неточность изготовления и монтажа
и упругие деформации деталей; и = Ь/а—передаточное отношение
рычагов клещей; ^ = Sb3/(3EJ)—упругий прогиб конца рычага
292
Таблица 29. Значения коэффициента трения f
Материал губок Вид поверхности губок I
Стали 65Г, 60С2 1 С острой насечкой 0,3
У8А, У10А (HRC>56) J С притупленной насечкой 0,18
СтЗ, Ст5, сталь 45 (НВ^ЗбО) Без насечки 0,15
от силы S; Е—модуль упругости; J — момент инерции сечения
рычага в опасном месте.
Устройство для подъема клина имеет тормоз с коэффициентом
запаса не менее двух для удержания клина на весу в верхнем
положении. Канат механизма подъема клина рассчитывается па
прочность с запасом прочности, равным восьми. Механизм лебед-
ки рассматривается как обычный подъемный механизм легкого
режима работы.
Рис. 160. Ограничитель перекоса
Перегрузочные мосты и козловые краны с раздельным при-
водом при пролете более 40 м, имеющие одну гибкую (плоскую)
и одну жесткую опору, снабжаются автоматическим ограничите-
лем перекоса. Эти устройства должны предотвращать опасные
перекосы кранов, которые могут возникнуть при нарушении нор-
мальной работы механизма передвижения. Они или останавли-
вают кран, или выравнивают скорость движения опор. Принцип
действия ограничителей перекоса основан или на измерении раз-
ности пути, пройденного приводными колесами обеих опор кра-
на, или на измерении деформации металлоконструкции крана
при забегании вперед одной из опор. Разность путей, пройденных
опорами, определяется сопоставлением числа оборотов ходовых
колес. При этом валы колес соединяются с сельсинами-датчика-
ми, сигналы от которых подаются на дифференциальный сельсин,
управляющий механизмами передвижения.
В соответствии с другим способом измерения вдоль путей пе-
ремещения обеих опор с равными интервалами устанавливают
устройства, например постоянные магниты, воздействующие на
датчики, установленные на опорах крана. Дискретные сигналы
293
от датчиков поступают в счетное устройство и если различие в
их числе достигнет продельного заданного значения, то устрой-
ство выдает соответствующую команду в цепь управления
краном.
Широко распространены ограничители перекоса, реагирующие
на деформации металлической конструкции крана. На рис. 160
представлена одна из схем такого ограничителя. На некотором
расстоянии от жесткой опоры установлен валик 2, соединенный
с рычагом 1, имеющим прорезь, в которой расположен болт 11,
закрепленный на металлоконструкции 10 жесткой опоры. При
повороте пролетного строения вследствие забегания опоры ры-
чаг 1 поворачивает валик 2 с надетой па него конической ше-
стерней 3, что приводит к повороту валика 6 с зубчатым коле-
сом. Валик 6, в свою очередь, вызывает поворот валиков путевых
выключите 1ей 4 и рычаи 7. к которому прикреплен канатик 5;
этот канатик, проходя по системе блоков, поворачивает грузик
(зубчатый сектор) 9 и через, нею указатель перекоса 8. При до-
стижении допустимого угла перекоса поворот валиков путевых
выключателей 4 позволяет включением соответствующих двига-
телей автоматически выравнивать положение ног. При угле пе-
рекоса более допустимого устройство автоматически останавли-
вает мост и опускает клин противоугонного захвата.
Краны и тележки должны быть снабжены сбрасывающими
щитками 1 (см. рис. 143), предотвращающими попадание по-
сторонних предметов под ходовые колеса. Зазор между щитком
и поверхностью рельса не превышает 10 мм.
Глава IX
МЕХАНИЗМЫ ПОВОРОТА
§ 34. Схемы механизмов поворота
Поворотные краны можно подразделить на две группы.
К первой группе относятся краны, грузоподъемность которых не
зависит от вылета стрелы (см. рис. 31—33); ко второй группе
относятся стреловые краны (см. рис. 34—38), грузоподъемность
которых изменяется с изменением вылета стрелы.
Механизмы поворота у поворотных кранов служат для вра-
щения металлоконструкции крана и 1руза. Принципиальное от-
личие работы Э1их механизмов от рассмотренных выше механиз-
мов подъема и передвижения заключается в том, что при по-
вороте отсутствуют поступательно движущиеся массы — имеются
только вращающиеся массы.
Механизмы поворота могут у панавливаться либо на непо-
движной части крана и тогда повэритая nacio движется относи-
тельно механизма, либо на поворотной части и тогда механизм
при повороте перемещается вместе с поворотной частью крана.
Мехапиз.м поворота, изображенный на рис. 161, расположен на
294
Рис. 161. Схема механизма поворота
Рис 162 Редукторы механизма поворота:
а —зубчатый б — планетарный
поворотной части металлоконструкции. Он состоит из двигателя
(на рисунке не показан), соединенного муфтой 1 с червячным
редуктором 4, имеющим iоризоитальиое расположение червячно-
го колеса. На валу червячного колеса закреплена шестерня 3,
передающая крутящий момент на вертикальный вал. Шестер-
ня 2 вертикального вала входит в зацепление с зубчатым коле-
сом, укрепленным на неподвижной части металлоконструкции.
При работе двигателя шестерня 2 обкатывается вокруг колеса,
приводя во вращение поворотную часть крана.
Рис. 162 Продолжение
297
Большинство механизмов поворота имеет червячную передачу,
что объясняется необходимостью обеспечить большое передаточ-
ное отношение. Это требование проще всего реализуется именно
применением червячной передачи. Действительно, обычно частота
вращения стрелы составляет пс= 14-3,5 об/мин, а частота вра-
щения вала двигателя /21=7504-1000 об/мин. Тогда передаточное
число ме.хани ;ма шли,-рота z/v =--/г ц'щ =-200-4-1000, и оно разби-
вается следующим образом: червячная передача пч = 304-40 и
зубчатая пара н3=10л-25.
Иногда отказываются от использования червячной передачи,
а неподвижное колесо изготовляют большого диаметра в виде
согнутого в кольцо швеллера (рис. 162, а). Вместо зубчатого вен-
ца в колесо через равные промежутки вставлены валики (цев-
ки) 2. В этом случае число зубьев шестерни / принимается рав-
ным 9—12. Преимуществом цевочного зацепления является мень-
шая стоимость при реализации больших передаточных чисел.
Согласно правилам Госгортехнадзора механизмы поворота
вновь изготовляемых портальных кранов должны быть оборудо-
ваны муфтой предельного момента.
В механизме на рис. 162, б такой муфтой является дисковая
муфта 1, соединяющая вал вертикально установленного фланце-
вого двигателя с валом редуктора. В другом редукторе
(рис. 162, а) применена коническая предохранительная муфта 3.
Эти муфты предохраняют механизмы от перегрузок при резком
пуске и торможении, при задевании стрелой за посторонние пре-
пятствия и т. п. Если угол поворота стрелы должен быть мень-
ше 360°, используются рычажные концевые выключатели. В кра-
нах с бескольцевым токоподводом для предотвращения перекру-
чивания или обрыва питающего кабеля автоматическое выклю-
чение двигателя механизма после совершения заданного числа
оборотов стрелы в одну сторону производится с помощью шпин-
дельного конечного выключателя.
Все большее распространение в конструкциях механизмов по-
ворота находят планетарные редукторы (рис. 162, б), дающие
возможность получения весьма компактных устройств с бо !ьшим
передаточным отношением и высоким кпд. Широкое применение
находит гидравлический привод механизма поворота (рис. 163),
дающий возможность регулировать скорость поворота в широких
пределах. Здесь жидкость под давлением, создаваемым насо-
сом 4, приводимым от электродвигателя 5, подастся по трубо-
проводу 3 в низкомоментный гидродвигатель 2, вращение которо-
го через редуктор 1 передается к шестерне 6, обкатывающей зуб-
чатое колесо.
Поворотная часть кранов и крановых тележек может опирать-
ся на неподвижную или вращающуюся колонну или на поворот-
ный круг на катках, шарах и роликах. В соответствии с этим
различают опорно-поворотные устройства крапов на колонне и
кранов на поворотном круге. Краны на колонне подразделяются
на краны на неподвижной и на вращающейся колонне.
293
Рис. 163 Механизм поворот портального крана с гидравлическим при-
водом
При неподвижной колонне (рис. 164) поворотная часть крана
опирается на пяту, расположенную в верхней части колонны, а
опрокидывающий момент от веса груза Огр и элементов поворот-
Рис. 164. Поворотный кран на неподвижной колонне.
а — схема крана, б — схема опорно поворотного устройства
ной части G крана уравновешивается горизонтальными реакция-
ми Н, воспринимаемыми верхней и нижней опорами крана.
При вращающейся колонне, составляющей одно целое с по-
воротной частью крана (рис. 165), цапфы колонны вращаются в
Рис. 165. Поворотный кран на вращающей-
ся колонне
а — схема крана, б — схема опорно поворотного
устройства подвесной тележки
Большое распространение имеют
ства на поворотном круге (рис. 166)
неподвижно установленных
опорах, причем нижняя опо-
ра, установленная на фунда-
менте, обычно воспринимает
вертикальную V и горизон-
тальную Н силы, а верхняя
опора, установленная на не-
подвижной части здания
(потолочном перекрытии,
кронштейне и т. п ), воспри-
нимает только горизонталь-
ную силу Н. При примене-
нии тележек с подвесной по-
воротной стрелой (рис. 165,
б) упорный подшипник рас-
полагается в верхней опоре,
опорно-поворотные устрой-
В этом случае поворотная
часть крана опирается на колеса, катки, шары или ролики, ка-
300
Рис 166 Опорно поворотные устройства на поворотном круге
— колесная опора: б — варианты катковой опоры (слева — с конически-
ми элементам» качения справа — с цилиндрическими элементами качения)
Рис 167 Механизм поворота ко тонны крана штабелера
301
тящиеся по круговому рельсу. Колесное опорное устройство
(рис. 166, а) представляет собой обычно четырехопорную систему
с одним или с двумя колесами на балансире в каждой точке
опоры. Колеса могут выполняться коническими, катящимися без
скольжения по коническому рельсу, или цилиндрическими, катя-
щимися по рельсу со скольжением. Опорно-поворотные устройст-
ва на катках (рис. 166, б) состоят из ряда конических или ци-
линдрических катков, причем конические катки для восприятия
осевой нагрузки, действующей на катки, соединены тягами с
Рис 168. Реечный механизм поворота автокрана 4903
центральной цапфой, а цилиндрические катки снабжены сепара-
торными кольцами, обеспечивающими сохранение постоянного
расстояния между катками. Центрирование хода опорно-поворот-
ного устройства на поворотном круге обеспечивается централь-
ной цапфой, воспринимающей также все горизонтальные нагруз-
ки, действующие на поворотную часть крана.
В кранах-штабелерах подвесного или опорного типа с пово-
ротной колонной механизм поворота размещается на кольцевой
поворотной платформе 5 (рис. 167, а), к которой болтами при-
крепляются зубчатый венец 1 и двухрядное шариковое опорно-по-
воротное устройство, состоящее из двух наружных колен 2 и 4,
соединенных с платформой 5, и внутреннего кольца 3, соединен-
ного с поворотной колонной. Механизм поворота (рис. 167, б)
состоит из фланцевого электродвигателя 6, соосного двухступен-
302
чатого редуктора 9 и тормозного устройства 8 с тормозным шки-
вом 7, укрепленным на выходящем из редуктора конце промежу-
точного вада.
В ряде конструкций автомобильных кранов, особенно предна-
значенных для самопогрузки, находят применение механизмы по-
ворота винтового или реечного типа. Так механизм поворота
(рис. 168) автокрана 4903 (см. рис. 36, а) выполнен в виде по-
воротной колонны 3, на которой укреплена шестерня 4, находя-
щаяся в зацеплении с зубчатой рейкой 2. Эта рейка выполняет
роль штока гидроцилиндра с двумя поршнями 1 и 5, обеспечи-
вающими перемещение рейки, а следовательно, и поворот колон-
ны крана в двух направлениях при подаче жидкости под давле-
нием в рабочие полости 6 гидроцилиндра. В винтовых механиз-
мах вместо пары рейка — шестерня используется пара винт —
"айка.
§ 35. Определение моментов сопротивления
в опорах крана
Кран на неподвижной колонне. Вертикальная сила V (см.
пне. 164), действующая на верхнюю опору, равна сумме весов
поворачивающихся частей крана; V= С?Grp-f-б7пр, где 6'1Т--вес
груза; G— суммарный вес элементов поворотной части метал-
локонструкции, включающей вес стрелы, растяжек и т. п.; <7пр —
вес противовеса (если на кране установлен противовес). Гори-
зонтальную силу И, действующую в верхней и нижней опорах,
определяют из уравнения моментов: H=(GrpL-\-Ga—Gnpb)/h,
где L, a, b, h — размеры по рис. 164, а.
При работе крана на открытом воздухе должно быть учтено
влияние ветровой нагрузки 1ГВ рабочего состояния. При этом
Grp£ + (Ja. — (iltpb + W Я<1
n =-------------------------,
h
'•де d—плечо действия ветровой нагрузки.
Момент сопротивления в опорах относительно оси колонны
Л4с = 7WH// ’
де Л1и г— момент трения в верхней опоре от силы Vr; Мпц — мо-
мент трения в верхней опоре от силы Н\ МпП — момент трепня
з нижней опоре от силы Н.
Траверсу верхней опоры крана с неподвижной колонной вы-
полняют либо цельнокованой (рис. 169), либо со вставными ши-
1ами. Момент трения в верхней опоре от силы И равен
М„„ = Н Xj-f,
те <7.—диаметр цапфы, воспринимающей горизонтальную си-
’у Н\ [--коэффициент трения, значение которого принимается
по данным на с. 259.
303
Момент трения в верхней опоре от силы V при использовании
в пяте упорного шарикового подшипника с диаметром цапфы de
равен
Нижнюю опору обычно выполняют в виде обоймы ДЛЯ рО“
ликов или катков, катящихся по колонне (рис. 170). Количество
Рис. 169. Цельнокованая траверса верхней опоры крана с подшип-
никами качения
к4атков мюжет быть равно двум (рис. 170, а), если сила Н на-
правлена в одну сторону при работе с грузом и без груза, и че-
тырем (рис. 170, б), если она изменяет свое направление Неза-
висимо от конструкции обоймы в каждый данный момент рабо-
тают только два катка.
Каждый из катков передает на колонну силу
2 cos а/2
где а — угол между направлениями сил N (рис. 170, а), обычно
принимаемый в пределах 50—80°. При установке роликов на
неподвижной части конструкции крана их располагают на рав-
ных расстояниях друг от друга Чтобы регулировать положение
роликов относительно колонны и компенсировать неточности из-
готовления рамы, ось ролика может выполняться с эксцентриси-
тетом. При определении момента сопротивления в нижней опоре
304
качение катков по неподвижной колонне рассматривается как
качение по плоскости и, следовательно, остаются справедливыми
зависимости, выведенные для качения колеса по рельсу (см.
Рис. 170 Конструкция нижней опоры крана на котонне
гл. VIII). Тогда сила сопротивления движению катка, нагружен-
ного силой N (рис. 171, а), равна
1Г=-^-(2р+</,/),
а
где d— диаметр поверхности катания катка; dx—диаметр оси
катка; ц и f — коэффициенты трения, принимаемые соответствен-
но по данным па с 259 и в табл 25
Выразив N через Н, получим
\V =
И
d cos а/2
(2р.
305
Момент сопротивления движению катков относительно оси ко-
лонны с учетом того, что сила Л', приложенная к колонне с экс-
центриситетом относительно линии, соединяющей центр колонны
с центром ролика, создает момент Л;ц, равен
M„n = \V D+l‘‘- + 2N^
После подстановки в эту формулу зн
м„,, = г-О— | (2ц+ /,/,)(-С
2ls u/2 L \ d
В этой формуле знак «+» соответств;
Рис. 171. Схема расчета сил сопротивления
где D — диаметр колонны, по которому катятся катки.,
чений W и N получим
+ 1)-2ф
ет неподвижной колон-
не (внешняя опора), а
знак «—» вращающей-
ся колонне (внутрен-
няя роликовая опора).
В катковом опорно-по-
воротном устройстве, в
котором сила передает-
ся не через ось катка, а
через сам каток, появ-
ляется трение качения
по двум опорным повер-
хностям (рис. 171,6),
что приводит к удвое-
нию значения силы
греипя. При этом дви-
жущая сила прикладывается к ободу катка при мгновенном цент-
ре вращения, расположенном на неноворотной части устройства
в точке О. Тогда W’Z) = 2iu,V, и с учетом дополнительных потерь на
трение торцов (при конических катках) и на проскальзывание (при
цилиндрических катках) получаем W~=2N$u/D, где р= 1,34-1,5.
В ряде конструкций кранов большой грузоподъемности вме-
сто двух- или четырехкатковых опор устанавливают многороли-
ковые опоры (рис. 172). Для уменьшения потерь на трение в них
иногда применяется сепаратор. Принимая распределение нагру-
зок на ролики соответствующим распределению давлений по ок-
ружности цилиндра, определяем силу, действующую па ролик:
ЛЛ. = ./V1 cos (х — 1)а,
где а — угловой шаг расположения роликов; (х—1)сс — угол
между силами A/’i и Ух.
Сила Н равна сумме проекций всех сил Лг на направление
линий действия этой силы, т. е.
// = ^-^•2 У Nх cos (х — 1) а.
306
Отсюда максимальное значение силы, прижимающей ролик
к колонне,
1 1+2 VC(;S2(X_ ])а
Так как в процессе работы возможен перенос роликов, то зна-
чение силы /Vi увеличивают и расчет ведут на условную силу:
1,25//
1 1 + 2 cos2 (v — 1) а
Обычно многороликовые опоры сложнее изготовить и они полу-
чаются больших габаритов, чем
опоры с катками. Однако в много-
роликовы.х опорах момент сопротив-
ления несколько меньше, так как в
них отсутствует трение об оси кат-
ков и остается только сопротивле-
ние от трения качения роликов по
колонне. Эта сила сопротивления
равна сумме сил сопротивления ка- -
чения всех нагруженных роликов в
[юликовой обойме:
V7 = Мщ +2 (\V2-j- Г3 4- • • • + ^) =
Рис. 172. Схема многороликовой
опоры крана на колонне
= А\^-+2 —
Х(А7г4~ МгХ ... 4~ А\),
ИЛИ
1Г=ДЩ^, + 2(М> + ЛЧ+... + ЛГ,)].
dp
В этом случае момент сопротивления вращению
— V/ —-—F p-A^i 4- (^4-^3 4- • • • 4- ;Vr)-
Катки нижней опоры выполняют цилиндрическими или боч-
кообразными. Последние более предпочтительны, так как на ха-
рактер соприкосновения бочкообразного катка с колонной не
влияют возникающие при изготовлении металлоконструкции пе-
рекосы. Катки рассчитывают по контактным напряжениям
(см. § 32). Обычно ориентировочный диаметр поверхности ката-
ния ролика с/,, выбирают из соотношения с/р~ (2,5м-3)с/], где
— диаметр оси ролика (см. рис. 170, б). Ось ролика изготовляют
из стали 45 или стали 50, а ее диаметр определяют по результатам
расчета на изгиб при условии [оп] = ат/4.
307
Рабочую поверхность оси ролика проверяют по давлению, при-
нимаемому вследствие малых скоростей ско чьжения равным
10—13 МПа. Для приближенных расчетов роликов можно при-
менять расчет по среднему условному давлению между роликом
и колонной по формуле р=-------} р\, где b — высота рабочей
поверхности ролика. Допустимое давление в этом расчете [р] =
= 7,5ч-13,0 МПа при твердости
контактных поверхностей не ме-
нее I IB 200
Кран с внешней верхней опо-
рой. Вертикальная сила V (см.
рис. 165), действующая на ниж-
нюю опору, равна, так же как и
для крана на колонне, сумме всех
весов поворотной части крана.
Горизонтальная сила И, дейст-
вующая в верхней и нижней опо-
рах,
Схема верхней опоры крана
подшипниках качения
Рис 173
на
Здесь
и для
Н = (GrpL-\-Ga)/h.
обозначения такие же, как
кранов на колонне.
Обе опоры крана этого типа
выполняют на подшипниках ка-
чения (рис. 173 и 174). Момент
сопротивления в опорах определяют так же, как и для крана на
неподвижной колонне Общий момент сопротивления от трения в
опорах крапа равен сумме моментов сопротивления от силы Н в
верхней и нижней опорах и от силы V в нижней опоре.
Л/с — Л/н // -f- Mitfi Л1ц у.
Цапфы опор крана работают на изгиб, а нижняя цапфа еще
и на сжатие от силы V. Максимальное напряжение в нижней
цапфе в опасном ссчснии (у заделки цапфы)
IT 1 л1 1
Допускаемое напряжение [о] = От/2,5. Изготовляют цапфы
обычно из стали Ст5 или стали 40. Общий момент сопротивления
повороту, приведенный к валу двигателя,
Л/с = .
Тот же момент при торможении механизма
/И. .,=JL2—.
308
При учете ветровой нагрузки суммарный момент сопротивле-
ния повороту, приведенный к валу двигателя,
-Мсуми — < -j- Л1в,
Рис. 174 Схема нижней опоры крана'
а — с упорным подшипником на сферической
шайбе б — с упорным подшипником на свин-
цовой подкладке
где Л1в — момент от ветровой нагрузки на кран в рабочем со-
стоянии.
При расчете предпола-
гается, что ветровая на-
грузка действует перпен-
дикулярно плоскости
стрелы, препятствуя ее
движению:
f. м
•где а — расстояние от
точки приложения равно-
действующей ветровой на-
грузки до оси вращения
стрелы.
Краны с поворотным
кругом. В некоторых ав-
томобильных кранах
опорно-поворотное уст-
ройство, соединяющее по-
воротную часть крана с
неподвижной частью
(рис 175), состоит из за-
крепленного на непод-
вижной раме круга ката-
ния 3, имеющего с внеш-
ней стороны замкнутую
круговую дорожку для
эпорных роликов 2 пово-
ротной рамы, а в центре — полую ступицу для размещения вала
привода. На круге катания закреплен зубчатый венец 1, вокруг
которого обкатывается шестерня механизма поворота, установлен-
ного на поворотной части. Нагрузки от веса поворотной части
крана и от грузового момента передаются с поворотной части на
неподвижную раму через конические опорные ролики 2, оси кото-
рых соединены с поворотной рамой. Момент о г веса стрелы и груза
прижимает ролики, расположенные со стороны стрелы, к нижней
рабочей поверхности круга катания, а ролики с противоположной
стороны—к верхней поверхности. Центральная цапфа круга ката-
ния разгружена от передачи момента.
Нормальная работа опорно-поворотного устройства во многом
зависит от размера зазора между роликами и опорными дорож-
ками круга катания Увеличение зазоров приводит к росту удар-
ных нагррок и увеличению износа дорожек и тел качения. Поэ-
309
tomv при конструировании необходимо предусматривать возмож-
ность регулирования зазора
В последнее время в поворотных кранах все большее приме-
нение находят одно или двухрядные шариковые и роликовые
спорно поворотные устройства (рис 176) Однорядные устройства
Рис 175 Опорно поворотное yciponciво автомобильного крана
(рис 176, а, в) применяют для кранов относительно малой гру-
зоподъемности Двухрядное опорно поворотное устройство (рис
176, б, г) имеет внутреннюю (неподвижную) опору /, состоящую
из двух полуопор, соединенных болтами, и подвижную опору 2
с зубчатым венцом, прикрепленным к подвижной опоре или изго-
товленным как одно целое с ней Двухрядные устройства воспри-
нимают как горизонтальные нагрузки, так и нагрузки от опро-
кидывающего момента и не требуют дополнительных центрирую-
щих или удерживающих элементов Между беговыми дорожками
опорных колец размещаются стальные шарики 3, разделенные
сепаратором Во всех этих устройствах используются стандарт-
ные шарики и ролики, выпускаемые промышленностью При весь-
ма малых значениях частоты вращения шарики укладываются и
без сепараторов вплотную друг к другу Применение шариковых
или роликовых опорно поворотных устройств позволяет уменьшить
потери на трение Кольца кругов изготовляют из стали а беговые
дорожки закаливают и полируют, что обеспечивает снижение
износа элементов устройства Роликовые опорно поворотные уст-
310
ройства могут выдерживать большие нагрузки, чем шариковые
тех же размеров Однако шариковые кощтоужцнн нмеот мень
шие потери на трение и менее чувствительны к неточности i из
готовления и деформациям сопрягаемых рам
Рис 176 Поперечные сечения опорно поворотных ьрхгов
а б — шариковых в г — рои i о ь \
При определении нагрузки на тело качения опорно поворот
чого устройства такого типа следует учесть что в общем с )\чае
система является статически неопределимой и распре те ченье на
грузки между отдельными телами зависит от жесткости ci стомы
и точности изготовления ее элементов При проектировании стре
мятся создать по возможности более жесткие конструкции
Момент трения при вращении поворотной платформы на ша-
риковом круге определяют с учетом давления на шары от вер
гикальной нагрузки Л-Кр и момента Мьр, воспринимаемых опор
ным устройством (рис 176) Принимая закон распредечсния де
формаций линейным и считая вертикачьную нагрузке равномсп
но распределенной между всеми шарами рята, ориентировочное
суммарное значение наибольшей нагрузки на тело качения
/ о \ 1
ДГ = Д7 , Д- 2,25---- ----1---,
' rk„ / ns ч а
311
где п — число тел качения водном ряду; г1р — радиус беговой
дорожки; а — угол наклона опорной реакции к горизонтали.
Момент сопротивления вращению опорного круга определяется
по следующим формулам:
Мтр ---------— [ NK[1r,кр -ф 5кр рикр------------——
н s;n v L \ 2
Мкр гкр
при ----->------- ,
jVKp 2
где Л1кр—момент от нормативных составляющих нагрузок, дей-
ствующий на опорный круг относительно оси, проходящей через
центр круга нормально к плоскости подвеса (см. ГОСТ
13994—81); f—приведенный коэффициент сопротивления: / = 0,01
для шариковых и / = 0,012 для роликовых кругов; Л\{р—суммар-
ная вертикальная нагрузка на опорный круг; гьр— средний радиус
опорного круга по дорожке катания; v — угол наклона к горизон-
тали сил, действующих на шарики или ролики опорного круга;
6кр= (1,34-3) 10-WKp, где Л/кр выражена в кН.
Учитывая неизбежную неравномерность распределения на-
грузки между телами качения, сила N не должна превышать по-
ловины допустимой статической нагрузки на тело качения выб-
ранного размера, принимаемой при расчете подшипников ка-
чения.
§ 36. Пуск и торможение механизма поворота
Процесс пуска. Уравнение моментов при пуске механизма
имеет вид
_Г^^ии14"^ин2 4"/^инЗТ-1, В’ (57)
где Мпуск — средний пусковой момент двигателя, определяемый
по формуле (27) или (28); — момент от сил инерции вра-
щающихся элементов привода, определяемый по формуле (37);
А/Ин2 — момент от силы инерции груза, вращающегося относи-
тельно оси поворота, при максимальном вылете; МИПз—момент
от сил инерции поворачивающихся частей металлоконструкции;
Afc — суммарный момент сопротивления движению в опорах кра-
на; Мв— момент сопротивления ветровой нагрузки, учитываемый
при работе крана на открытом воздухе.
Все моменты в уравнении (57) приведены к валу двигателя.
Значение момента силы инерции груза определяют следующим
образом: чтобы сообщить грузу массой Q, расположенному на
вылете L, угловое ускорение е = dco/dZ, необходимо к стреле прило
312
жить момент
M2=Jb = QL2
do)
77
Как и прежде, принимаем ускорение в течение процесса пуска
d (о и ,
постоянным. Тогда------=-------, где /п — продолжительность перио-
d
да пуска, с. Подставляя в это выражение значение угловой ско-
рости о) = лПс/ЗО и выражая частоту вращения стрелы пс, об/мин,
через частоту вращения двигателя пс = П\/им, получаем момент
силы инерции груза, действующий относительно оси стрелы, в
следующем виде:
3'Jz„u4l
Приведем этот момент, выраженный в ньютонах на метр, к
залу двигателя:
/Мин? —
9,55<,u‘2f/1M
где п.м и т)м — соответственно общее передаточное число и кпд
механизма поворота от оси стрелы до вала двигателя.
Момент сил инерции поворачивающихся частей металлокон-
струкции, действующий на оси поворота стрелы, представляется
как сумма моментов, которые
элементам металлоконструкции,
рение e = w//n-
HI
J2—---Г
‘и
надо приложить к отдельным
чтобы сообщить им угловое уско-
т
т JTZZj , Ji
<о (t) j i 1
i 1
где J2, Jm—моменты инерции отдельных элементов поворот-
ной части металлоконструкции (стрелы, противовеса, растяжек,
подкосов и т. п.).
Момент инерции поворачивающихся элементов металлоконст-
рукции (в ньютонах на метр), приведенный к валу двигателя,
равен
т
m2 л-
Ч",3= 9.7,’
Учитывая эти выражения, уравнение (57) представляется в
следующем виде:
/И„„к = .'Ис-|-(1,1-:- 1,2)—
11 у У U. I ' ’ ' * г— —*
9,оо^
QZ.2/Z]
9,5o/uzzM
m
। 1
"1-----o' -- ,
9,DO
(58)
313
Время пуска для механизмов поворота кранов первой группы
определяют в зависимости от режима работы по формуле
(59)
лпс
где 0 — рекомендуемый угол поворота стрелы за время пуска:
для первых трех групп режима работы кранов [3 = л/12, для 4-й
и 5-й групп р = л/9, для остальных групп |3 = л/6; пс—номиналь-
ная частота вращения стрелы, об/мин.
Для второй группы кранов время пуска, а также и время тор-
можения во избежание сильного раскачивания груза принимается
обычно [24] равным 3—5 с при отсутствии ветра и 4—10 с —
при наличии ветровой нагрузки.
Момент сопротивления повороту от сил трения в механизмах
поворота с машинным приводом обычно в 3—10 раз меньше мо-
ментов от сил инерции. Предварительный выбор двигателя мож-
но производить по моменту [24]:
л/ = .11с+(1,1 i.SH.vu+AM/K,,,
где Ки — кратность пускового момента, принимаемая по паспорту
электродвигателя. Выбранный двигатель необходимо проверять
по пусковому моменту, который должен быть близок по значе-
нию к величине, определяемой по уравнению (58), при времени
пуска, найденном по зависимости (59). Если пусковой момент
двигателя значительно меньше пускового момента, определяемого
по уравнению (58), то время пуска увеличится и соответственно
снизится производительность. Установка двигателя со слишком
большим пусковым моментом приводит к появлению повышенных
динамических нагрузок, отрицательно влияющих на работу
элементов механизма поворота и металлоконструкции. В меха-
низмах поворота, имеющих несколько скоростей, для переклю-
чения скоростей правила Госгортехнадзора разрешают применять
фрикционные или кулачковые муфты включения.
Процесс торможения. Механизмы поворота грузоподъемных
машин с машинным приводом имеют тормоза, обеспечивающие
прекращение движения на определенной длине тормозного пути.
Тормозной путь не должен превышать допустимого значения при
действии ветра в направлении поворота при допустимом уклоне
пути для рабочего состояния крана; тормоз должен обеспечивать
плавное торможение при отсутствии ветра. На механизмах по-
ворота с ручным приводом устанавливать тормоза не обязатель-
но, если исключена возможность самопроизвольного поворота под
действием ветровой или какой-либо иной нагрузки.
Тормоза механизмов поворота грузоподъемных машин долж-
ны быть нормально закрытого типа. Но на механизмах поворота
башенных и портальных кранов допускается установка управляе-
мых тормозов нормально открытого типа. В этом случае тормоз-
314
ной момент, создаваемый усилием крановщика, может изменять-
ся в широких пределах и обеспечивать плавное торможение ме-
ханизма. Кроме того, если электрическая схема включения меха-
низма предусматривает возможность торможения электродвигате-
лем, то при отключении электродвигателя тормоза могу! не за-
мыкаться, и в этом случае может быть предусмотрено замыжмше
(размыкание) тормоза добавочной кнопкой при центратьном
положении контроллера.
Для механизма поворота уравнение моментов при торможе-
нии имеет вид
Л4т4-^г..-Л/г.И1Л + Л/г,11124-Л?г.из-г-^/^ (60)
Момент сил инерции вращающихся маем механизма Д ,Ш1
определяется ио уравнению (37), как и для махани люз и \зела
и передвижения.
Момент сил инерции поворачивающс! ося груза (в ш>ю! л ж
на метр) вычисляют по формуле
. QZ,2/Z1/M
где Q — масса груза, кг; L — максимальный вылет, м; П\— часто-
та вращения вала электродвигателя, об/мин; tT—время торможе-
ния, с; т]м и «м — соответственно кпд и передато inoe число меха-
низма. Момент сил инерции поворачивающейся части металло-
конструкции
т
момент ветровой нагрузки при торможении
где а—плечо действия равнодсйствующей ветровой нагрхзки -м-
носительно оси поворота крана; остальные обозначения в дь} х
последних зависимостях соответствуют обозначениям в формулах
для расчета моментов при пуске.
Угол поворота стрелы, соответствующий рекомендуемому тор-
мозному пути, такой же, как при пуске. Тогда время торможе-
ния равняется времени пуска, т. е. При этом замедления
при торможении по абсолютной величине равны ускорениям при
пуске, а следовательно, моменты инерции и напряжения в элемен-
тах крана при пуске и торможении также одинаковы.
Подставив время торможения в уравнение (60), можно опре-
делить номинальное значение тормозного момента, производяще-
го остановку крана на рекомендуемом пути торможения. Для
315
портальных кранов при применении управляемых тормозов вре-
мя торможения при номинальной силе нажатия на педаль управ-
ления тормозами, принимаемой в пределах 80—120 Н, и при от-
сутствии ветровой нагрузки и уклона крана составляет не менее
3—5 с. Предохранительные устройства в виде фрикционной муфты
предельного момента (см. рис. 162) или срезающихся штифтов
ограничивают значения напряжений, возникающих в элементах
механизма в периоды неустановившегося движения, а также
предупреждают поломку стрелы и элементов механизма или оп-
рокидывание крана, если поворачивающиеся части металлоконст-
рукции задевают внешние препятствия. Предохранительную муф-
ту рассчитывают на передачу в период разгона момента:
^предохр =---— (-^с 4“ ЛТз-фТИ,,),
«Гл
где «1 и гр — соответственно передаточное число и кпд механизма
между осью вращения крана и валом, на котором установлена
предохранительная муфта; k=l 15 — коэффициент запаса; Мс',
М2, М3, Л4/— соответственно моменты сопротивления, сил инерции
и ветровой нагрузки, действующие относительно оси поворота.
Во избежание появления в элементах механизма чрезмерно боль-
ших динамических нагрузок в механизмах поворота нельзя при-
менять самотормозящие червячные передачи.
§ 37. Элементы поворотных кранов
Колонны, на которых расположена поворачивающаяся часть
металлоконструкции кранов, обычно изготовляют из сталей СтЗ,
Ст4 и Ст5. Размер поперечного сечения колонн определяют из
расчета на изгиб от силы Н (см. рис. 164). Максимальный мо-
мент, изгибающий колонну без учета ветровой нагрузки и воз-
можного уклона, равен
Мип1ах = Hh = GrpL 4- Ga — Gt pb.
Диаметр колонны в расчетном сечении
J -j [ Ми ,11Я<
> 0,1 Ы ’
где [сг„] =сгт/2,5
Колонну, имеющую большую высоту, необходимо проверять
на устойчивость от сжатия силой V. Обычно высоту колонны при-
нимают не более половины высоты крана и не более 3 м. Прогиб
верхнего конца колонны приводит к появлению уклона фермы
крана, поэтому его необходимо учитывать при назначении раз-
меров колонны. Допускаемое отношение максимального прогиба
колонны к вылету крана принимается в пределах 1/400—1/300.
Нижний конец колонны имеет форму цилиндра или усеченного
конуса. Конический конец колонны устанавливают в коническом
же гнезде фундаментной плиты (рис. 177, а), причем уклон
316
образующей конуса принимают в пределах 1/15—1/20. Хвостовик
колонны работает на смятие от силы V и от момента М = Н/г
(см. рис. 164). Длину хвостовика выбирают таким образом, что-
бы максимальное напряжение смятия не превышало допускаемых
значений. Эпюры напряжений от момента М по длине образую-
щей конуса имеют вид треугольника при максимальных значе-
ниях напряжений он и сгв (рис. 177, а). На верхнем участке хво-
Рис. 177. Схема расчета хвостовика колонны с конической (а)
и с цилиндрической (б) поверхностью
стовика напряжение смятия равно и' = хап/Ь и на нижнем
и" = Х(ун/Ь. Момент сил, создаваемый этими напряжениями, урав-
новешивает внешний момент М. Тогда, принимая для упрощения
вывода, что на верхнем участке хвостовика диаметр его равен dB,
а на нижнем dn и что на полоске шириной dt давление по дуге
контакта хвостовика с плитой распределено равномерно (хотя в
действительности давление распределено по косинусоидальному
закону), получаем
& ь
Нh = f a'xd* d x ( 3''xd" d x.
a a
Подставляя сюда значения о' и о", имеем
. ь ь
Hh=- [x2dx+-^- (x2dx. (61)
а а
Силы, действующие на верхнюю и нижнюю части хвостовика,
равны между собой:
ъ ь
Ja,/7BdJC= |* а'7/н d X,
а а
317
откуда = Пц(/п, т. е. максимальное напряжение смятия
Gh от момента Hh. возникает на нижнем конце хвостовика, имею-
щем меньший диаметр. После интегрирования уравнения (61)
получаем
____3///z6
При а = 0 (гнездо плиты не имеет центральной проточки)
_ 3Hh
2</нг»-»
Вертикальная сила V распределена равномерно по горизон-
тальной проекции площади тнезда плиты:
j г .r d в — d н х b а
V = Jl/Л ------ -А ---- ,
2 b
где Д= (<7В — с/н) /2.
Отсюда напряжение
__________Wb________ .
Л (''в- ' “)
при а = О
4Г
Суммарное напряжение в нижней точке хвостовика
^[осм]. Допускаемые напряжения принимаются равными: для
чугунной плиты [сем] — 25 л-30 МПа; для стальной плиты
[осм] — 50л-60 МПа. Исходя из этих данных, определяют необхо-
димую длину хвостовика колонны. При проектировании обычно
задаются размерами хвостовика колонны, принимая его длину
в пределах 2 б= (0,94-1,5)Д;р, где dcp~ (du4-dn)/2 — средний диа-
метр хвостовика колонны.
Цилиндрический хвостовик (рис. 177, б) вставляют обычно в
сварную раму. Вертикальную силу V в этом случае воспринимает
кольцевой выступ. Хвостовик рассчитывают на смятие по силе N,
возникающей между хвостовиком и рамой от момента, изгибаю-
щего колонну: Hh = Nh0, откуда N = Hh/hQ. Напряжение смятия
N _ Hh
Id ~ bdhd
где [Осм] — 120-к-140 МПа для рамы, изготовленной из стали СтЗ.
Верхняя траверса крана (см. рис. 169) представляет собой
гнездо для подшипников и ее обычно изготовляют ковкой из ста-
ли Ст4 или Ст5. Для соединения с металлоконструкцией крана
траверсу снабжают шипами или отверстиями для вставных ши-
поз. Траверса работает на изгиб от сил И и V с максимальными
изгибающими моментами в среднем сечении, вызывающими на-
318
пряжения:
°и//—
где Миц и Л1иу—расчетные значения изгибающих моментов, деи
ствующих в среднем сечении траверсы; Wx и Wy— моменты со
противления среднего сечения траверсы относительно горизон
тальной и вертикальной осей.
Максимальное напряжение от
изгиба определяют как сумму на-
пряжений от изгибов в горизонталь-
ной и вертикальной плоскостях:
Зтах аиО~[~ 3иТ 13и1,
где [ои]=От/2,2.
Шипы траверс проверяют на из-
гиб и на смятие их поверхностей
соприкосновения с элементами ме-
таллоконструкции, на которые они
опираются. Расчетной силой в этом
случае является равнодействующая
сил Н/2 и V/2.
Фундаментные плиты необходи-
мы для укрепления колонн кранов
на фундаменте (рис. 178). Их обыч-
но прикрепляют к фундаменту бол-
тами. Плиту изготовляют литьем из
стали или чугуна или сваркой из
стали. Она состоит из нескольких
радиальных лап, по копнам которых
располагаются фундаментные бол-
Рис. 178. Схема фундаментной
плиты крана с неподви/кнои ко-
лонной
ты, а в центре находится гнездо, в которое входит хвостовик ко-
лонны. Расчет опорной площади фундаментной плиты производят
из условий сохранения прочности фундамента в стыке с пл hi ой и
обеспечения псраскрытия стыка под влиянием действия на плиту
опрокидывающего момента M = Hh и вертикальной силы I7], со-
стоящей из максимальной вертикальной нагрузки V на колонну от
веса крана, веса колонны и веса плиты. При работе крана на от-
крытом воздухе к опрокидывающему моменту M = Hh от веса гру-
за и конструкции крана необходимо добавить момент от ветровой
нагрузки.
Если принять, что основание плиты остается плоским во все
периоды нагружения крана, можно считать, что нагрузки в бол-
тах от опрокидывающего момента AI пропорциональны расстоя-
нию I (рис. 178) от оси болта до оси у — у поворот фундамент-
ной плиты, т. е.
Л Z] . Л /1
lk
319
Опрокидывающий момент М уравновешивается суммой момен-
тов сил в болтах относительно оси опрокидывания у — у:
M = F2^2*24" ••• 4“ F
где z’i, t2, .... in — число болтов, нагруженных соответственно си-
лами Fb F2, ...» Fn и расположенных на расстоянии /1, 12, ...» /п от
оси у —у.
В болтах возникают наибольшие напряжения, когда стрела
находится в плоскости х — х, проходящей через центр фундамент-
ной плиты. Это положение является расчетным. Все другие
положения дают более благоприятное распределение нагрузки
между болтами. Решая совместно приведенную систему уравне-
ний, определяют максимальную внешнюю нагрузку на болт от
опрокидывающего момента:
„ Mli .Mli
F । ~ — •
Zpl + /^2 + • • . + fyn V1 / 2 •
1
Так как плита имеет достаточно высокую жесткость, можно
считать, что сила V’i распределяется равномерно по всей поверх-
ности стыка между плитой и фундаментом. При общем числе
болтов п нагрузка на каждый болт от силы V] равна Fv=V\/n,
Внешняя нагрузка на наиболее нагруженный болт FBH =
= F\ — FV.
Внешняя нагрузка от опрокидывающего момента вызывает
увеличение растягивающей нагрузки болтов, расположенных с
одной стороны от оси опрокидывания, и уменьшение — с другой.
При действии отрывающей внешней нагрузки FBn на затянутое
болтовое соединение только часть этой нагрузки, равная ipFBH,
где ф < 1, идет на увеличение силы, растягивающей бол-
ты, а остальная часть, равная (1—ф) Fm, разгружает стык. По
условию совместимости перемещений под действием внешней на-
грузки болт удлинится настолько, насколько уменьшится сжатие
деталей, т. е.
5 = ф^ВнХб = (1— Ф)^вЛ<
Здесь Хб = //(£'б^б) — податливость болта, численно равная де-
формации болта под действием силы 1 Н; Хп—податливость сое-
динения плиты и фундамента; I — расчетная длина болта, сло-
женная из расстояния между опорными поверхностями болта и
половины высоты гайки; Еб и Aq — модуль упругости материала
и площадь сечения болта. Тогда коэффициент ф = /.п/(Хп4-Хб)-
При большой податливости болта Хб и малой податливости
плиты и фундамента ?-.п коэффициент ф мал и почти вся внешняя
сила идет на разгрузку стыка, и наоборот, при большой подат-
ливости плиты и фундамента ?vn и малой податливости болта
большая часть внешней нагрузки передается на болты. В боль-
320
шинстве случаев гр =<Z0,2н-0,3. Это значение обычно и принимается
в приближенных расчетах при отсутствии в стыке мягких про-
кладок.
Болты, крепящие плиту к фундаменту, должны быть предва-
рительно затянуты так, чтобы при работе крана с поминальной
нагрузкой не произошло раскрытие стыка. Силы предварительной
затяжки
Гзат = £(1 — tp)/7™,
где ^ = 1,8-7-2 — коэффициент запаса затяжки с учетом перемен-
ности внешней нагрузки. Расчет болта производится на растяже-
ние по максимальной осевой силе, действующей на затянутый
болт после приложения внешней нагрузки /?Ш1, с учетом влияния
крутящего момента от затяжки болтов:
Л>асч = 1 >3/?зат + Ф^вн-
При наличии горизонтальной силы Н соединение до'лжпо пре-
пятствовать сдвигу плиты по фундаменту. Это условие выпол-
няется при соблюдении следующего неравенства:
/ nd? \
n —L- [ар] +,
\ 4 ь /
где f = 0,35-j-0,5 — коэффициент трения между фундаментом и
плитой; [<ур]—допускаемое напряжение растяжения для болтов;
di — внутренний диаметр резьбы болта.
Обычно для крепления фундаментных плит берут болты диа-
?:етром не меньше 24 мм. Головки болтов следует закладывать
по возможности ближе к подошве фундамента, чтобы при затяж-
ке болта и приложении внешней нагрузки использовать большую
массу фундамента.
Каждая из лап фундаментной плиты нагружена вертикальной
силой Vi и нагрузкой от опрокидывающего момента М. Макси-
мальная нагрузка на лапу
Лпах = ^ + ^-
Лапу рассчитывают на изгиб в расчетном сечении примыка-
ния ее к центральной части плиты:
<3H==^’'inax^/M''Z,
где W—момент сопротивления расчетного сечения лапы; b —
плечо действия силы Fmax относительно расчетного сечения.
Давление между лапой плиты и фундаментом проверяется по
той же максимальной внешней нагрузке Fmax с учетом силы пред-
варительной затяжки болта, т. е.
Jtdj*
F щах + ~ [стр]
р=——-
11 — 1628
321
где Лоц — опорная поверхность лапы; [р]—допускаемое напря-
жение смятия фундамента: для кирпичной кладки на известковом
растворе [р] =0,74-1,0 МПа; для кладки на цементном растворе
[р] = 1,5-4-2,0 МПа; для бетонного фундамента [р] =2,04-2,5 МПа.
Фундаменты. Для восприятия нагрузок, действующих на кран,
передачи этих нагрузок на грунт и обеспечения необходимой
устойчивости крана применяют фундаменты из бетона, бутобето-
M=Hh
Рис. 179. Фундамент для крана на колонне:
а — прямоу! ольпый, б — расширяющийся книзу; в — уступчатый; г — схема расчета
фундамента
на или кирпичной кладки. Устойчивость фундамента против дей-
ствия опрокидывающего момента обеспечивается правильным вы-
бором собственной массы фундамента и его размеров. Влияние
грунта, подпирающего фундамент по его боковым поверхностям
и увеличивающего устойчивость фундамента и крана, обычно при
расчетах не учитывается, что приводит к некоторому повышению
фактического запаса устойчивости. Верхнее основание фундамен-
та во избежание выкрошивания его краев на 200—400 мм с каж-
дой стороны превышает размер фундаментной плиты, т. е.
а = 2004-400 мм (рис. 179) . Глубина заложения фундамента
обычно составляет 1,2—2 м, и она должна быть на 0,2 м больше
глубины промерзания грунта. Обычно фундамент выполняют с
квадратной или многоугольной формой подошвы. Для повыше-
ния устойчивости фундамент иногда делают расширяющимся
книзу — наклонным или уступчатым (рис. 179, б, в). Подошва
фундамента должна иметь такие размеры, чтобы в месте стыка
фундамента с грунтом не происходило деформации грунта или
раскрытия стыка и, как следствие этого, перекоса крана.
Действие вертикальной силы Vi и веса фундамента (7Ф вызы-
вает появление между фундаментом и грунтом равномерно рас-
322
пределенных напряжений смятия (рис. 179, а):
1де Ап — площадь подошвы фундамента. Момент M = Hh создав
напряжения, изменяющиеся по закону треугольника:
। ie U7n — момент сопротивления площади подошвы фундамента
и 1 посительно оси, перпендикулярной плоскости действия момен-
ia М. Максимальные значения ом соответствуют положению стре-
лы, при котором №п минимален. При квадратной подошве фун-
(амента момент сопротивления имеет наименьшее значение, когда
( грела крана расположена по направлению диагонали подошвы.
11ри этом >л=Д2д3/12, где b—-длина стороны квадрата.
Во избежание раскрытия стыка необходимо, чтобы ог^еом,
। де е — коэффициент запаса, принимаемый равным 1,25.
Чтобы не происходило разрушения грунта под фундаментом,
голжно быть соблюдено условие
асумм — 1 “Н е) =2,25зд! [°см].
в 11 Допускаемые напряжения < смятия грунта [(Jcm'L следующие значения: Гравелистый песок . . Песок средне,.'! круп- МПа, имеют 0,35—0,45
зависимости от анит, базальт, диа- баз вида грунта 3,0
11 шестняк, песчаник 1-1,5 пости 0,25—0,35
111гбепч^тый (галеч- никовый) грунт . . . 11 1относлежавшийся ।равий 1 ..ЛИНКИ, глины, мелкий песок .... 0,6 0,3-0,5 0,2- 0,3 Влажный песок . . . . Мокрая глина . . . . Болотистый грунт торф 0,1—0,2 • 0,05 -0,2 0,025—0,05
Противовесы применяют для уменьшения момента, изгибаю-
щего колонну поворотного крана, и уменьшения горизонтальной
• л ня, определяющей нагрузку на опорные элементы. Их уста-
н 'вливают на поворачивающейся части металлоконструкции.
Противовесы уравновешивают вес металлоконструкции и часть
щ«мента от веса груза. Для стационарных кранов противовес вы-
ирают так, чтобы момент, изгибающий колонну при работе кра-
i с грузом и направленный в сторону груза, равнялся изгибаю-
щему моменту при отсутствии груза, направленному в сторону
щотивовеса.
Изгибающий момент для крана с неизменяемым вылетом стре-
11 (рис. 180):
при наличии груза
= OrpL + GMa - б7лр£;
11
323
при отсутствии груза
М'И=О„рЬ — Ояа,
где Grp— вес номинального груза; GM— вес металлоконструкции
поворачивающейся части крана (без противовеса); Gnp— вес про-
тивовеса.
Противовес выбирают из
условия М11=ЛГ11.
При этом момент, созда-
ваемый противовесом,
Grh
G,ipb =—-— L-]-OMa.
Задавая плечо b из конст-
руктивных соображений, опре-
деляют необходимый вес про-
тивовеса GIip. Так как кран мо-
жет работать с различными
Рис.- 180 Схема определения веса
противовеса
грузами, то во избежание по-
стоянного изгиба колонны большим моментом от' противовеса
можно при расчете принять М'п ~ cpM„, где <р = 0,7-4-0,85 — коэффи-
циент, учитывающий использование крана по грузоподъемности.
Тогда момент, создаваемый противовесом,
Glip^=Grp£ —-----
1 + <р
Противовес поворотных кранов для уменьшения габаритов
можно выполнять в виде набора чугунных плит. Для поворотных
передвижных кранов размеры и место расположения противовеса
выбирают таким образом, чтобы обеспечить необходимую устой-
чивость крана в рабочем и нерабочем состояниях.
Глава X
УСТОЙЧИВОСТЬ кранов
Безопасность работы всех передвижных и поворотных кранов
должна обеспечиваться достаточной устойчивостью против опроки-
дывания крана. Коэффициент запаса устойчивости и методика его'
определения регламентированы правилами Госгортехнадзора [20]д
а для башенных кранов— ГОСТ 13994—81. *
Условия равновесия крапов определяются соотношением значе-i
ний удерживающего и опрокидывающею моментов,'действующих
относительно оси (ребра) опрокидывания крана Проверку кранов
на устойчивое in производят как для рабочего положения крана с.
грузом (срузовая устойчивость), так и для крана без груза (соб-
ственная устойчивость) в условиях, когда сочетание действующих
на кран нагрузок наиболее неблагоприятно с точки зрения возмож-
ности опрокидывания крана. Башенные строительные краны^
324 !
узовои устойчивости —
Рис. 181. Схема определения грузовой (а)
и собственной (б) устойчивости крапа
кроме того, должны быть проверены на устойчивость при виезап-
ном снятии нап'А'Зки с крюка и в процессе монтажа и демонтажа
(<-м ГОСТ 13994—81).
Устойчивость крана характеризуется соедующими величинами:
коэффициентом г
шепнем момента относи-
тельно ребра опрокиды-
вания, создаваемого си-
лой тяжести всех частей
крана с учетом всех до
волнительных нагрузок
(ветровой нагрузки, инер-
ционных сил, возникаю-
щих при пуске или тормо-
жении механизмов подъе-
ма груза, поворота и пе-
редвижения крапа), а
1акже возникающей со-
ставляющей силы тяжести
при наибольшем допусти-
мом при работе крана
\ хлопе к моменту, созда-
ваемому силой тяжести
। пуза относительно того
же ребра опрокидывания;
коэффициентом
i о б с т в е н н о й устой-
чивости крана — отно-
шением момента, созда-
ваемого силой тяжести
всех частей крана с уче-
юм уклона пути в сторо-
в} опрокидывания отно-
ительно ребра опроки-
дывания, к моменту, соз-
даваемому ветровой на-
11" зкой нерабочего состояния машины относительно того же ребра
"прокидывания.
Согласно правилам Госгортехнадзора значения коэффициентов
। рутовой и собственной устойчивости должны быть не менее 1,15.
Определение числовых значений этих коэффициентов произво-
дится без учета действия рельсовых захватов, повышающих устой-
швоеть крана. Устойчивость крана необходимо обеспечить при
ipene, расположенной как вдоль, так и поперек подкранового
". in. Так как в большинстве случаев у передвижных кранов колея
•.’••'ьше базы, то обычно более опасным, а следовательно, и расчет-
; • ।м случаем является положение стрелы поперек пути. Кроме
грузовую устойчивость крана, согласно правилам Госгортех-
1 ; : юра, проверяют при направлении стрелы под углом 45° к на-
1628 325
правлению движения с учетом дополнительных касательных сил
инерции. Поворжныс велосипедные и кмгщъпые коаны проверяют
на \с।oii'H.вости ня;,' положении е.рслы в io ib ищи. Оноеделе:;ие
грузокон и (.о.'е I вшивой уСТОЬ'ШВОЮ И ДОЛЖНО вр '! 2-13 ' нться ;я
5'1.. । ш:к юна краьа не менее •'/ —длч стреловых кранов (.за исклю-
чением железнодорожных,) и Г — д.ш портальных краш-г.. У же-
лезнодорожных кранов, предназначенных для рабпы бе? дополни-
тельных опор, должно учитываться превышение одною рельса над
др\гпм на криволинейных участках пути.
При проверке грузовой устойчивости рассматривают положение,
когда груз находится на максимальном вылете. При этом уклон
и ветровую нагрузку 1ЕП принимают такими, чтобы они способст-
вовали опрокидыванию крана (рис. 181, а). Для определения укло-
на рабочей площадки и проверки точности установки крана на вы-
носных опорах стреловые, самоходные и прицепные краны (за
исключением работающих на рельсовых путях) снабжаются ука-
зателями — креномерами.
Коэффициент грузовой устойчивости
УД
где Л11Р= Огра — момент, создаваемый весом номинального груза
относительно ребра опрокидывания; Mg = (jc— момент, созда-
ваемый силой тяжести частей крана п противовеса относительно
того же ребра опрокидывания с учетом возможного угла наклона а
пути; ,b'i; - Wttd — момент, создаваемый ветровой нагрюжой рабо-
чего состояния, действующей на наветренную площадь крана и
груза перпендикулярно ребру опрокидывания и парад дльно плос-
кости, на которой установлен кран; £/WIlu--с\ ммарный момент сил
инерции элементов крапа и груза, возникающих г> процессе куска
и торможения механизмов крана, и цензробежной силы при вра-
щении крана.
При определении суммарного молена сил инерции следует учи-
тывать возможность совмещения oiici пд'й подъема или опускания
груза с поворотом крана. Если кран перемещается с грузотл на
крюке и если при этом возможно совмещение операций подъема
груза, поворота и передвижения крана, то производят проверку
грузовой устойчивости крапа в направлении его движения. При
этом учитывают опрокидывающий момент сил инерция, возникаю-
щих в периоды разгона и торможения механизма передвижения
крана.
Во время поворота крапа возникает горизонтально направлен-
ная и лежащая в плоскости стрелы центробежная сила F^=Qw2p
(рис. 182), создающая опрокидывающий момент (Q —
масса груза, кг; со—угловая скорость стрелы, рал/с; остальные
обозначения понятны из рисунка). Под действием центробежной
силы груз сдклопяется на \ гол р и ртщус вращения грюа превы-
шает вылет L стрелы на размер х = //tg д, где tg ;> -- /•’/ (Од): g—
ускорение свободного падения. Принимая м/с2; р--Д-В
326
-I HF/(QgY. си = л/?/30, где п—частота вращения стрелы, об/мин,
получаем для силы F выражение (в ньютонах)
р— 111^п2Л
~ 9l)0 — /гДУ
Опрокидывающих момент ог юой силы
Ч —
Сила инерции посг\ на;елы.о движущегося (при разгоне под-
таощиося, при 1 (;р.М>;ЖСПИИ (лЛ СК.'.ЮЩСЬА'Я) 1 р\за I ’и,. ,])-= Qv/t
•овпадаег ио направлению с силон тя-
1.ч\-''л i р\за л при расчете хстойчп- ;х_____________
> юности; b-- половина колеи рсльсо-
>.>го пути (см. рис. 181). Если стрела
щрпендикулярна ребру опрокидыва-
щя, то a = L.
В процессе пуска пли торможения
Рис. 182. Схема к определению
центробежной сил о
механизма
передвижения
;>а!,а, имеющего номинальную скорость щ, силы инерции, возни-
. "Л.нис от массы гр\’за Q и массы крана Q> соответственно рав-
>' Qvi/F и Qi.pt’i/'i- Они действуют i оризонта тьио и направлены
юл:> п\тт; перемещения крапа. Опрокидывающие моменты от этих
•'Л (см. рис. 181, а}
Qv\ fr. СЕрЩ
Z1 Zi
Б этих формулах Е — длительность нсуставовивщихся процес-
ю движения крана
Следует иметь в виду, что для опрокидывания крана кратко-
, i мсиио действующими силами инерции, возникающими при раз-
1 ? и торможении, при раскачивании груза и т. и., необходимо
. ернуть кран оiносптслыю ребра опрокидывания па некоюрый
. а. е. заранпь определенную работу. При весьма кратком
литвин инерционных сич кран не опрокинется, даже если при
> I запас ус.лнчи! до (кал-лося иедоста ючным. Лакам образом,
а . сюй’швость крапа при действии кратковременных сил инерции
называет основное влияние не значение опрокидывающего
327
момента or инерционных сил, а развиваемая за время дейст-
вия этих сил работа опрокидывания.
Влияние крена и сил инерции на устойчивость крана увеличи-
вается с увеличением высоты центров тяжести крана и противовеса
и с уменьшением размера колеи. Поэтому если, например, баки
для горючего расположены так, что их .заполнение уменьшает
устойчивость крана, то при расчете их принимают полностью на-
полненными. В обратном случае их считают пустыми. При опреде-
лении высоты центра тяжести массу нижних ветвей гусеничных
лент и других элементов, не влияющих па устойчивость, при рас-
чете не учитывают.
Для увеличения устойчивости и уменьшения необходимой мас-
сы противовеса краны с переменным вылетом стрелы иногда снаб-
жают подвижным стреловым противовесом, автоматически изме-
няющим свое положение при изменении вылета стрелы. Такое кон-
структивное решение уменьшает нагрузку на механизм изменения
вылета и способствует уравновешиванию поворотной части крана.
По правилам Госгортехнадзора необходимо также определять
значения коэффициента грузовой устойчивости без учета дополни-
тельных нагрузок и уклона пути, т. е. отношение момента ЛГс,
создаваемого массой элементов крана и противовеса относительно
ребра опрокидывания, определенного без учета уклона пути, к мо-
менту .Мгр:
При проверке собственной устойчивости (см. рис. 181, б) кран
рассмагривают при минимальном вылете стрелы и снятом грузе, с
креном в сторону противовеса, при ветровой нагрузке 1ГВ нерабо-
чего состояния, действующей в сторону опрокидывания. Определе-
ние коэффициента собственной устойчивости производят по фор-
му ле
ЛД
К,=—— > 1,15,
.4',
где M'n^Wud — момент ветровой нагрузки нерабочего состояния,
действующей на наветренную площадь перпендикулярно ребру
опрокидывания и параллельно плоскости, на которой установлен
кран.
Для кранов, у которых изменение вылета стрелы осуществляет-
ся с помощью лебедки с машинным приводом, значение коэффи-
циента собственной устойчивости определяют при стреле в нижнем
рабочем положении. Однако в этом случае необходимо проверить
на устойчивость кран без груза при наименьшем вылете стрелы
и действии ветра рабочего состояния. При проверке собственной
устойчивости Крана влияние дополнительных опор и стабилизато-
ров не учитывается.
Для кранов, у которых по условиям эксплуатации требуется
328
он) ехать стрелу без груза в горизонтальное положение, необходи-
мо проверить их устойчивость в этом состоянии.
При испытаниях самоходных стреловых, башенных и порталь-
ных крапов их устойчивость проверяют при подъеме груза массой,
равной 1,-1 расчетной грузоподъемности, в положении, соответст-
вующем наименьшей устойчивости крана, а таг же при выполнении
! разовых операций с грузом, соответствующим 1,25 расчетной гру-
Рис. 183. Схема к определению грузовой устойчивости
козловых кранов вдоль (а) и поперек (б) подкранового
пути
,дъемнос'ги. Такие испытания производят для каждой грузовой
.-.V.ракгсрис!ыкп при вылете стрелы, соответствующем наименьшей
с ц.'йчивос. i н крана.
Проверка устойчивости козловых, полу козловых кранов и пе-
с-ру зонных мостов правилами Госгортехнадзора не рсгламенти-
, шана, однако и эти крапы должны обладать достаточным запа-
•>м устойчивости, так как они обычно имеют большую подветрсн-
! \ ю площадь и высокорасположенные центр тяжести и точку при-
о/кения равнодействующей ветровой нагрузки. Поэтому динамиче-
кие нагрузки при нсустановившихся процессах работы мс шиизма
►-редвижения кранов в сочетании с ветровыми нагрузками могут
‘ .давать значительные опрокидывающие моменты. Устойчивоегь
ранов данного типа в рабочем состоянии характеризуется коэф-
рицпентом усIойчивостп, определяемым как отношение момента
ыюсителыю ребра опрокидывания, создаваемого силой тяи ести
•.рана и груза, к моменту от действия инерционных сил и ветровой
। .грузки на металлическую констру кцию крана и на груз. Проверку
к тойчивости следует проводить на опрокидывание крапа вдоль
.юперск подкранового пути.
Коэффициент запаса грузовой устойчивости в направлении
>доль подкранового nyiи (рис. 183, д) равен
д,__ (^кР + ^гр + GT) В/2 1 15
Лр^кр “Ь (^т "Г Л-р) "Г 1ГВАВ
329
где Gip, Girp, GT — соответственно силы тяжести номинального гру-
за, крана и крановой тележки: FiV, F4h FT — соответственно силы
инериии груза, крана и тележки при экстренном торможении крана;
№р — ешммариая ветровая налрузка; В — база крана; /р.р. //г, /гп—
сое I гл шт водно плечи действия сил пнернип крана, тележки с грузом
к не:; or.)!i нанеси огпжи ;елыю плоскости, проходящей через
HCBOpxii!-г, шн.-' реЛЬСОВ.
Проверку гру.к.-в-»н устойчивости против опрокидывания киана
поперек node;;; нопое:~> /’ути производят для кранов, имеющих кон-
про.ic: ж.-го < грот идя (рис. 183,6). Коэффнниен j запаса устой-
чивости в этом случае
GV2-(F;-t 6I;)ftr- W\,h\
/<.=-----------------------------> 1.4,
(Cr 4-
где F'!t. и /-'т— с'-отвегсiвешю силы кнерппи тележке и i руза при
к :?! о.енном теум(>ж-'’*.|;н те :сж! и; U”z(,-- ветровая па: рузка на кран,
дою ' в;- юшал в наира гл: лип, исриеклику.щршш оси рельсов- L —
прол, ; край;:; <>'и / и.'ено ней..-; спя ветров ?й иагрхэки, сил тя-
ж< и п и ; че.дкя оптчт.телвпэ ребра оррежп няв.анпя.
•дл.й'П'.'г.-;;, к::,.';'., nix кражш в нерабочем с 'ст< яппи характе-
Г»и.;о л I . Прин!г;--,. л.: .'<<„•гпнлй устойчивости, < :iроде,"чемы.м
ка:/ • . !’ "! чше v , с -здав'1- и,с о ж; ноев; едино ре”->а опро-
ьет-.'жост” p.'-cx частей коана, к Мому относи-
те;:'.;• •• !<,го же щ-бна. аж ем ж и ветрозол нагрузкой нсрабоче-
го v о; тояння (см. ПЧ/Г ; 161 - -77). Коэффиппсят собственкой устой-
чивости не должен б:.л1. меж.-ч0 1.15.
Прпведснн'.’о выше пасчс гы устойчивости сделаны в предполо-
жен!.;!, что крап я’|5.1яс1сл жестким телом и пип опрокидывании
поворачивается вокруг нспо'вижного ребра. В действительности
как метал.'OKoiicTpyKHnH крана, так и пути, по которым он пере-
межается, деформируются, что хсложнгет механику явлений, про-
исходящих при опрокидывании крана. Полное решение этой задачи
с учетом I’.cex факторов, влияющих на опрокидывание крана, еще
не получено. Для некоторых частных случаев решение этой задачи
приводится в литературе [16].
Глава. XI
МЕТАЛЛИЧЕСКИЕ КОНСТРУКЦИИ
Г Р УЗ О И ОДЪ Е М НИХ МАШИН
§ 38. Основные требования к металлоконструкции
На мот а.'.'".’К'ллс гш кш!п грузошщъемшш машины, являющейся
ее остовом, чон: :o>yio' тыс •.жханпамы, приводы и системы управ-
лен!''’. II.! шло л ж шине ye i а аж •к-шетрукннй рас шдуетс^ значи-
те.жлос ; л м; :с!.!з От свойств ме••ял.-ц-конструкции за-
висит до. ; ('ве-ш-о-. < ь и паде>.<1': ь работы .мсханг.з.мов к грузо-
330
подъемной машины в целом, поэтому при проектировании особое
внимание необходимо обращать на совершенсняжание •••.. к-
гивных форм и .методов расчета ?.ко лгдюжтр\ьа ми.о
.металла при <» шовремешюм обе., печен ш на дежшэс) и, то и <-веч-
ности, удо'• т •;<! обс.'р. жилмнли! и ремонт a. Mei а.; м.Ч”. :пе конст-
рукции должны обладай, надлежащ*, а прочностью, с.шрогив..син-
ем усталости, устойчивостью и жесткой н.:о элементов с у'-сюм
условий изготовления, транспортирования, монтажа и экс;!.лата-
нии. Металлоконструкции должны быть транспортабельны при пе-
ревозке железнодорожным, водным или автомобильным гранс-
портом.
Металлические конструкции грузоподъемных машин выполняют
сварными и клепаными, но изготовление сварных конструкций бо-
лее производительно и дешево.
§ 39. Материалы
Черные металлы. Металлоконструкции грузоподъемных машин
изготовляют из стальных листов, фасонного проката, труб, гнутых
и штампованных профилей. Уголковые профили и трубы широко
используют в качестве элементов, работающих на раст яженпесжа-
тие, швеллеры и двутавры применяют в качестве элементов, вос-
принимающих преимущественно изгибные нагрузки.
Для сварных конструкций чаще всею применяют углеродистую
сталь обыкновенного качества группы В, имеющую гарантии как
по механическим свойствам, так н по химическому составу. Основ-
ной маркой стали является BCi3, обладающая достаточно высоки-
ми механическими (прочность, ударная вязкость) и технологиче-
скими (свариваемое’!ь) свойствами.
В зависимое! и от те.хно.ъч ии плавки различают сталь спокой-
ную (ВСтЗсп),, иолуспокочную (ВСтЗпс) и кипящую (ВСтЗкн).
Спокойная сталь остывает в изложницах без бурного выделения
газов, что обеспечиваемся полным раскислением металла с по-
мощью присадок кремния, марганца, алюминия, святы.юющш; ia-
зы. Сталь в этом случае обладает более высокими мс\анячеекми
свойствами. Кипящая сталь раскисляется нс полностью, и в ;лнг-
ках остаются га., вые пузыри, опа имеет большую склипш.сть к
хрупким разрушениям, у псе ниже ударная вязкость при понижен-
ных температурах, н-.> опа дешев.те, чем спокойная сталь. Несущие
элементы металлоконструкций следует изготовлять из сш.чяишой
или полуспокойной стали, а для вспомогательных элемент--в (ле-
стниц, перил, настилов, кожухов и т. л.) можно исш; шзовать ки-
пящую пли иолуснокойную сталь.
Кроме yiпородистых сталей для и потопления ответс• венных
деталей находят применение также ич n<onei nao^aniinie лт ма-
рок 09Г2, 09Г2С, 10ХСИД, 15ХСНД, 14Г2АФ, 1 чГ2АФД. ж . .ти-
рованных сталей шжыш.шшш прочности ..л;; ку-.шв прям;. ..лот
также стали 16Г2АФ, 181 2АФ, 16i 2АФД и ]<б';'2АФД. А, л .. мне-
нии со сталью С13 ле; ированные cia.in имеют большее введшие
331
продела текучести, v.euec склонны к хрупкому разрушению при
пониженных температурах, обладают повышенной стойкостью
против корр )зии. Но от 11 стали более дороги и более чувствительны
к концентрации напряжений при действии переменных нагрузок.
При пело шзованпи вместо углеродистых низколегированных ста-
лей значительно снижается масса деталей, размеры которых опре-
деляются статической прочностью. Когда же размеры деталей
определяются сопротивлением усталости или жесткостью, эконо-
мия металла при пере? оде па легированные стали менее значитель-
на, поскольку пределы выносливости таких сталей близки к пре-
делу выносливости обычных сталей, а модули упругости одинаковы,
следоваюлыю, критические нагрузки при расчете па устойчивость
не завися г от марки стали.
Учитывая их бо юс высокую стоимость, низколегированные
стали марок 10Г2СД и 09Г2ДТ целесообразно применять, если
снижение массы составляет не менее чем 10%, а стали 15ХСНД
даже нс менее чем 17% по сравнению с конструкциями из стали
СтЗ. Для тех районов страны, где температура в течение длитель-
ного времени может бьыь ниже минус 30°С к металлу, применяе-
мому для изготовления металлоконструкций, предъявляются по-
вышенные требования в отношении хладостойкости стали, так как
в этих условиям отмечаются случаи хрупкого разрушения.
Алюминиевые сплавы. Для уменьшения массы металлоконст-
рукций все большее применение находят легкие сплавы на основе
алюминия и магния. Наряду с малой плотностью (в 2,8—3 раза
меньше, чем у стали), что дает возможность облегчать поддержи-
вающие конструкции (подкрановые пути, эстакады и т. п.), они
обладают высокой механической прочностью, близкой к прочности
стали СтЗ, высокой коррозионностойкостью, сохраняют высокие
механические свойства при низких температурах.
Наиболее целесообразно использовать алюминиевые сплавы в
металлоконструкциях мостовых кранов, в которых масса металло-
конструкций составляет 55—80% общей массы крапа. Особенно
эффективно применение легких сплавов для кранов малой грузо-
подъемности (5—10 т), а также при больших пролетах моста
(рис. 184), что объясняется значительным влиянием собственной
массы металлоконструкции на возникающие в ней нагрузки. Умень-
шение массы однотипных крановых мостов среднего режима рабо-
ты при замене стали СтЗ алюминиевыми сплавами Д16Т (штрихо-
вые линии) и А.\\г6 (сплошные линии) достигает 53—70%. Исполь-
зование легких сплавов в металлоконструкциях стреловых кранов
позволяет при том же вылете снизить массу стрел до 50% по срав-
нению со стальными стрелами и соответственно уменьшить массу
противовесов, а при равной массе стрел и одинаковом коэффи-
циенте устойчивости передвижного крана — увеличить вылет стрел
на 15—20% или повысить грузоподъемность крана на 20—25%.
Снижение массы металлоконструкций означает не только эко-
номию мета зла, необходимого для изготовления. Оно приводит
также к уменьшению давлений на ходовые колеса, снижению мощ-
332
ности .механизма передвижения или при той же мощности— к уве-
личению производительности крана благодаря меньшему времени
разгона и торможения.
По зарубежным данным, снижение массы механизма передви-
жения и электрооборудования в результате применения алюминие-
вых сплавов в кране i рузоиодъемностыо 50 т с пролетом 32 м
достигает около 30%, а увеличение
производительности таких кранов
при сохранении механизмов пере-
движения и электрооборудования,
как в кранах со стальными .металло-
конструкциями, составляет 16—25%.
К сожалению, алюминиевые
рядом недостат-
малы.м модулем
МПа), что сни-
элементов конст-
и высоким коэф-
расширеиия,
темпе-
массы мс-
м остовых
стали СтЗ
Рис. 184. Снижение
таллоконструкцип
кранов при замене
алюминиевыми сплавами в за-
ВПСИМОС1И от грузоподвечно-
сти Q и длины пролша L
сожалению,
сплавы обладают
ков, в том числе
упругости ( — 7-104
жает устойчивость
рукции на сжатие,
финиентом линейного
что приводит к увеличению
ратурных деформаций, а также не-
высоким сопротивлением усталости.
Кроме того, стоимость алюминие-
вых сплавов примерно в 10 раз пре-
вышает стоимость стали СтЗ той же
хГассы.
Для компенсации уменьшенного
модуля упругости алюминиевые
стержни, работающие на сжатие,
следует конструировать возможно
'слое жесткими (коробчатого или трубчатого сечения). Темпера-
турные напряжения, возникающие в элементах конструкции, из-за
низкого модуля упругости остаются примерно в тех же пределах,
чго и в стальных конструкциях.
Возможность применения более дорогих материалов, в.члег-
ж.сти алюминиевых сплавов, в каждом отдельным случае ..о. 1жпа
быть обоснована техническими или экономическими соображешы-
мл. Выпуск конструкционных алюминиевых сплавов непрерывно
растет, стоимость их в связи с этим снижается, и применение их
тля металлоконструкций подъемно-транспортных машин имеет
широкую перспективу. Поэтому вопрос о возможности применения
алюминиевых сплавов не должен основываться только на абсолют-
ной стоимости материалов, а требует внимательного анализа тех-
нических особенностей алюминиевых сплавов и их влияния на ве-
совую и экономическую эффективность конструкции.
Алюминиевые ептавы делятся на литейные н деформируемые.
Более расиространены деформируемые сплавы. Их обрабатывают
давлением (протяжкой, штамповкой, прессованием), чн> шнводяет
получить удобную для использования в металлоконструкции форме
элементов. Эти сплавы в зависимости от легирующих присадок
де тятек на шесть групп.
Г ру.ппы
Ксчпоцрнты сплава
Марки сплавов
и ;ч .ueia inoконструкций
I Л.1 w'.iiiiiin'i + марганец
II A.iH.Miiiiiin магнии (магна-
.1ИП)
III .X.jk мюп:й -j- магний -У кремний
(аниз.н: •
IV Алюминии д- меть т л::.:
' дг ра. пом и i:i.:)
V Аги'-'.;л;:л.1 Д маги;!!!
\ I Алюминий -j- iiiiiiK ; ма.-зи:; -}-
— медь
ЛМц
ЛМг. АМгЗ, АМ15, АМгб, АМг61
АЛ31, АДЗЗ, АД35, АВ
Л1, ДШ, Д18, Д65
Са-|(>за; а.’шв;)!О1НиГ|Ся сплав 1392
Вьи окопро'.ныс сплавы Б94, В95, В96
Сплавы 1 nil групп термически неупрочнясмы. Они имеют отно-
сительно невысокую прочность, большую пластичность, хорошо
свариваю гея. обладают высокий коррозионной стойкостью. Сплавы
111- VI групп термически упрочняемы, их прочность существенно
повышается в результате закалки и последующего старения.
Мета.тлохонс(рукции из алюминиевых сплавов изготовляют
сваркой в а-.-до-фере шн-ргпых га юв или клепкой, способ соедине-
нья э. имен дю ,e,iii I рукции определяется маркой сплава. Так, при-
менение сварки целесообразно для термически неупрочняемых
сплавов. Для расчетам?; несущих элементов рекомендуется приме-
нение сплава марки A'ijG, для вспомогательных элементов —
сплавы марок АД31, АДЗЗ, АВ.
§ 40. Расчет металлических конструкций
Нюд.; раю:?га -ю;зллогюнструкипп является предотвращение
В 'ЗМ< ЛЬ'--; I! 1ИИ!ВЛ( ’!; В ней !!С. С ГИМЫХ ИЛ!! НСЖ?Л 3 ГСЛЬН Н X
р;: ;..уи:с!м ч; с , • г.н,.- ;,р >гцб ,ь ч • ; ьнбраний, препятствуют.!:'
с; 1. •, । i я ।! ч! ,!? а Ра.-ч., де : ячеек их г инструкций
!! r.v и л,? .'••>' г о. iiiic и, двух । < .я: расчет по методу
i-де ! ел ; се» то- ни : базису.! • на статическом изуче
ПС : К? . i’\ .Mi Г !.' ! Л ' НИИ ?. УСЛОВИЯХ ЭКСПЛу-
< !3!1,-и ! .'-..к'. :,. -л.ди ;-гтв при.меняемых мате
1 ।. д: . ';; -ю-. ,.и i’шны:, ..ля т .• или иных типов кранов
Г.’-.-.'Т > ’И.,. !('.’ ! :!!С1 у\bi, ЯП В'/Т! Но С Т С> Т у Д О К у С К а С М Ь! X
е: к ; ос; • •. ' !!н > 'у на уст чеов. пшных иракт ...юй коэф
( М'-гептах .с.ваеа прочя-я «в.
Метод прел ел ьн Ы?; < ос год: он. 1ли дезьпыми называются
состояния, ррг ко'м.-л .’•< кы\н\г'!ч; не*'*. - ыдл выполнять установ-
ленные для нее футин. п > о. ;•< с.ится непригодной к .тайнейшей
эк('•.••y-iTai’nif. '|'я '"у ,. д-? гр\кнай подъемно-гранс-
юлнх мд.;.: : у .л . :ь ,'де ; ;'уь;;’>' "[/сдельны:-: состоя-
огни; . !..•• \ >с;и. к которой’относят
m.-j -.t, \•_;з.ьI?гн>•• раз!>? шснис, потеря устойчи-
ва а формы, 1 Г/'.ч.пие ;.змс.-елне конфигурации; вторая — по
334
непригодности к нормальной эксплуатации по общим деформациям
или колебаниям.
Первая группа предельных состояний включает возможность по-
тери несущей способности элементов крапа по прочности или по-
тере устойчивости от однократного действия предельных нагрузок
в рабочем или нерабочем состоянии. Для этой группы проводят
расчет на прочность и устойчивость формы элементов крана или
устойчивость крана против опрокидывания (см. § 2: второй и тре-
тий случаи сочетания расчетных нагрузок). За начало разрушения
при расчете по предельному состоянию принимают превышение
предела текучести в каком-либо волокне сечения. Все нагрузки
при этом расчете считаются действующими статически. В этой же
группе рассматривается возможность потерн несущей способности
элементов крана при многократном действии нагрузок различного
значения за расчетный! срок службы. В этом случае производятся
расчеты на сопротивление усталости, износ и нагрев ио эквивалент-
ным нагрузкам (первый случай сочетания расчетных нагрузок).
Это состояние наступает к концу заданного срока службы конст-
рукции или части ее в результате суммарного действия всех нагру-
жений за этот срок.
До<тижепие вюрого предельного сос: пиния, в принципе не
шч,.1ючае1 возможное ти далын Г.шей экон.i\агацни и является тре-
б она ином, ел раин кивающим использование метал, юкоист руки и и
крана в условиях нормальной эксплуатации, так как ггзт больщ щ
упругих деформаций или вибраций иногда при сохранении проч
ности и устойчивости теряется работоспособность конструкции или
оказывает^я вредное фи як>.:'И пческое возлсйетШ'С на обслуживаю-
щий персо-пал и снижается безопасность ведения работ. Д-лью
расчета но второму предельному сосгоянкю является ограничение-
деформаций или перемещений из условий обеспечения необходи-
мой точности работы, устранение неблагоприятных физиологиче-
ских воздействий на обслуживающая персонал. При проверке по
второму предельному состоянию определяют расчетный прогиб и
сравнивают его с допускаемым.
Наибольшее значение имеют расчеты на прочность ио первому
предельному состоянию. Основное положение расчета заключайся
ь предпосылке, чю расчетная (наибольшая) сила (момент, напря-
жение) в элементе по должна превышать предельно.": силы, о,-.д-
вс:с 1 вуюшей несущ-.1 шиобнисin элемента и выража< 1 ся ф ip-
мул ой
Qi'h <Д'ГМ3, (С-2)
z-ая
г.с Левая ‘Зсц. : щ./кзег сил >в-с ж .и-. ..ж г .-с ». ; к^.рф..-
1 :' io!:: т’-. р-е. ।\ р а я - - .' г нс । г.;: ’ -? я я i -. ’; ж-- щу ю б •
ность конструкции. В этой формуле:
- ' . : . । .-.. . - . "и "г к и;;-. \< л • ;Д с-меН . . л Д:
честве которых нршшмаюгс л жлщ-мальшж- щирхзки । аб< ж-,
состояния пли аварийные нагрузки в со л аетствнп с расчетным
случаем и возможной их комбинацией;
335
tit — коэффициенты перегрузки, учитывающие возможное пре-
вышение действительными нагрузкам!! их нормативных значений.
Значения этих коэффициентов устанавливаются на основе практи-
ческого опыта с учетом назначения кранов и условий их эксплуата-
ции: для собственной массы металлоконструкции /21 = 1,054-1,1; для
расположенного на конструкциях оборудования /22 = 1,14-1,3; для
груза /23= 1,05-4-1,5 (большие значения принимаются для малых
грузов и для тяжелого режима работы); /г4^ 1,5 — коэффициент пе-
регрузки горизонтальных сил инерции, зависит от ускорений при
пусках и торможениях; п5= 1,24-2,0 — коэффициент, учитывающий
раскачивание груза; для ветровой нагрузки п6= 1,1 (в соответствии
с указаниями ГОСТ 1451—77 учитывается только для нерабочего
состояния крана); для монтажных нагрузок принимают коэффици-
енты перегрузки /2М = 1,2; для транспортных нагрузок при транспор-
тировании по железной дороге и водным путям /2тр= 1,1, а при
транспортировании автотранспортом /2ТР= 1,3 (при расчете на сопро-
тивление усталости, где в качестве нормативных нагрузок прини-
маются эквивалентные нагрузки, коэффициенты перегрузки nt= 1);
А — геометрический фактор рассчитываемого элемента (пло-
щадь, оптический момент инерции, момент сопротивления);
R — расчетное сопротивление рассчитываемого элемента: при
расчетах на сопротивление усталости /? = 0,9(Ja>, где он—предел
вынос швости элемента с учетом числа циклов изменения нагрузки
и коэффициентов концентрации напряжений и асимметрии цикла;
при расчета.'; па прочность (растяжение, сжатие, изгиб) R = G-v/kyit
где о,- — минимальное значение предела текучести, зависящее от
марки материала и вида проката; /гм — коэффициент надежности
по материалу, принимаемый по данным табл. 30; при расчетах на
устойчивость расчетное сопротивление на прочность умножают на
коэффициент уменьшения ср несущей способности сжимаемых или
изгибаемых элементов;
Таблиц а 30. Коэффициенты надежности по материалу /гм
Гос>дарственный стандарт или технические условия па сталь
ТУ 14-1-3023—80 1,025
ГОСТ 380—71; ГОСТ 10705—80; ГОСТ 10706—76; ГОСТ 1,05
19281—73 ц ГОСТ 19282—73 (с пределом текучести до 380 МПа); ТУ-14-1-389—72; ТУ 14-1-1217—75
ГОСТ 1928!—73 и ГОСТ 19282—73 (с пределом текучести свыше 380 МПа); ГОСТ 8731—74 1,1
/?<с— коэффициент, зависящий от тех условий работы элемента,
которые не учитываются расчетом и показателями качества мате-
риала. Его принимают равным
I =
где /771 = 0,754-1 —коэффициент, учитывающий степень ответствен-
33-5
пости рассчитываемого элемента и возможные последствия при
его разрушении (в особых случаях, при возможности хрупкого
разрушения, /zzi = 0,6); m2 = 0,84-1— коэффициент, учитывающий
возможные повреждения элементов конструкции в процессе эксплу-
атации, транспортировки, монтажа (этот коэффициент зависит от
типа крана); т3— коэффициент, учитывающий несовершенство
расчета, связанное с неточным определением внешних нагрузок или
расчетных схем.
Рассчитываемая система
т3
Плоская, статически определимая........... 0,9
Плоская, статически неопределимая......... I
Пространственная.......................... 1,1
Для проведения расчета на сопротивление усталости необходи-
мо знать спектр напряжений для рассматриваемого элемента в те-
чение срока его эксплуатации. Такие данные можно получить, если
известны соответствующие нагрузки, число и характер операций,
выполняемых краном. В этом случае можно определить число цик-
лов с различными максимальными напряжениями и использовать
принцип суммирования повреждений, полагая, что каждое пере-
менное напряжение влияет на сокращение срока службы элемента
вследствие постепенного накопления повреждений материала, об-
разования трещин и разрушений. Однако в большинстве случаев
такие исчерпывающие данные отсутствуют и при расчете исполь-
зуют некоторые усредненные значения, полученные для одного
цикла.
Для второй группы предельных состояний приняты следующие
основные условия:
: де и —расчетное и допускаемое значения относитель-
ного прогиба: f — прогиб; L — длина рассматриваемого элемента;
• р п [/р] — расчетное и допускаемое значения времени затухания ко-
лебаний конструкции.
Расчет по второму предельному состоянию ведут при номиналь-
ном транспортируемом грузе и коэффициенте перегрузки, равном
единице.
Метод допускаемых напряжений. Расчет по этому методу про-
изводят, если отсутствуют числовые значения коэффициентов пере-
-рузки необходимые для расчета по методу предельных состоя-
ний. Этот метод основан на сравнении напряжений п, возникающих
в элементе конструкции от действия максимальных нагрузок (И
и III расчетные случаи), с допускаемыми напряжениями. Основ-
ная расчетная зависимость имеет вид
о^[ст].
337
Зись [а]=с>т/«, где От — предел 1екучести, п — запас проч-
ности (см табл 10)
Для одностороннее прикрепляемых элементов конструкции зна-
чение запаса прочности увеличивается на 25% Для сп чая особых
нагру зок----транспортных при перевозке изделия, монтажных при
ударах о буферы, сейсмических и т п —запас прочности п$ при-
нимается равным 1,2
Расчет на сопротивление усталости производится при действии
на кран нормальных нагрузок рабочего состояния (I случай соче
таиия расчетных нагрузок) по эквивалентным значениям этих на-
грузок, определяемым при наиболее вероятном их сочетании в за-
висимости от наиболее часто встречающегося положения тележки
на мост\, положения стрелы но вылету и т и Расчет ведется по
форме ле
где Ощах — наибольшее по абсолютной величине напряжение в
цик ie, [o/J —допускаемое напряжение, ар— предел вынос ливости
элемента конструкции, п—запас прочности по I расчетному слу-
чаю
Р с> о-'- по меюд} щпескасмых напряжены! может быть пред
t rai Hi ъ частный с 1 чаи расчета по методу предо о ны\ состоя
i и 1 ci'p( и I; ины при ouiiiaxOB.ix д 1я веч \ видов нагрузки
зн< "О . \ кю(; ipiiiHCii а псрх! резки Ь \ et го одно! о (ЮхЦсч-о за! а<.а
пряности принимаем но при 'течете ио методе допускаемых на
пряжени, в мето те по предельным состояниям используются три
коэфф1 циеита безопасности—но терна iy 4’м по перегруз \0 /7„
и по условиям работы устанавливаемые на основе статистиче-
ского е чета действ! тельных условий работы конструкции, поэтому
метол расчета ио предельным состояниям позволяет лучше учесть
дсис1вп'етьпые условия работы элементов moi аллоконстрекции и
степень воздействия каждой из дейс’ву ющпх нагрузок, а та же
лучше учитываются механические свойства материи та
При расисте металлоконструкции необходимо учесть все деист
вующие на них нагрузки, а именно весовые постоянные, весовые
подвижные, действие которых возможно в любом сечении вдоль
продела крана динамш'сск е, возникающие при пуске и торможе
шт крановых механизмов, а также при прохождении колесами
ст’ ков рельсов— эли нагрузки делствх от кш в вертикальной, таг:
и в гор! зон га i ьн ы х в Ю( кости , HaipvM'’, во шикающие при вы-
ш шеви'! > еа1 uv Ш1 1 (ьпч' м т< \ь н гв icckiix операций, дина
• иче-ч к > ’ 1г \ > и 'ж ли '’ЮПИ e noil пае < о кпана j in тележки на
\ 11 н Hi и а ’> 1 Но ’ ни и1 <. с а ц нь х требовании
ы u i„\/i ’> i с 5 : ; п - 1 I '’/лк транспортные,
( i с v е г-н 1 1 и , < 1 н ! <- о < с 1 1 । с
1\ , (। / I ,t' с ч /н! / у., а I >•' с с ’ ся собственный вес
металле! лютрж! ,ii и вес чаще! крана, жестко связанных с ме-
таллоконструкцией (механизмов, кабины управления, троллеев
338
и v п) Для хпрощспчя расчета вес металлоконструкции прини-
ма от равномерно распределенным по ее длине Вес механизмов,
Кабины или уз лов считают сосредоточенной натру шоп, при ю
женной в соответствующем сечении или узле металлоконструкции
Дли стрел )вы\ и поворотных кранов, нс имеющих передвигающих
ся тележек, к постоянным нагрузкам следует отнесли также вес
1 ранспортируемого 1р\за и грузозахватного приспособления Эта
нагрузка рассматривается как сосредоточенная и приложенная в
месте крепления юловньг- блоков на стреле Так как при подъеме
I спускании груза в элементах металлоконструкции появляются
си 1Ы инерции, то их влияние учитывают коэффициентом перегруз
К И /2з
1\ подвижным вековым нагрузкам относятся силы давления от
ходовых колес 1рузовых тележек, перемещающихся по метал то
конструкции Эти пагрхзки определяются сиюи тяжести лранено')
тируемого груза и тележки
,*е Рт — сила давления колеса на рельс от веса грузов ni лележчи
(/’т = 1,05 Р(, гл,е До—сила давления ходовою колею, вычш icn
тая по спецификации), Р Q—сила давления ходового колеса от
полезной нагрузки, включая вес грузозахватною приспособления
Всртика 'ьные динамические нагрузки, возникающие при рабо-
те механизма подьема груза, определяют при положении тележки
посередине пролета для случаев подъема iруза «с подхватом» и
кс веса» В распет юодпт большая из указанных нагрузок Дина
ншеская нагрхзка при прохождении краном стыков рельсов учи
гь’ваелся умножение = нормативных весовых патрубок на коДф1
ииент толчков /гт, принимаемый в зависимости от скорости пере-
движения крана (см с 280)
Тина ю !j/>ck I м!< (mi и ни ые ni г] iui в звякающие при ну<
<с и к рм( ксиия \ , и; перс ли же i inn ,>(,ре а, \ чт тываюг
ш р они мела в р\ ни1 icpai ов с i\ ап.чпиын при. >до
.3 чо.теюых Kpri 1 д 11 а м! ।1 > с с 1 < । I 1кд ру жа щи термо1 е ш >\рача_
1 жрав л.) । он га и н и | ic < ie 'ч . им > ж я ; н ; 0 1
СЧ ! ! О ЦП 11'1 Ю \ 4 I < • О е I i I !, Я ) 1 I (’ •' ) i i
с! F:с ь 1 i I > । а Д о i :р с г; \ юн ; i и
- U.I ЧЫХ 1! II Р И» I j С ' с ЫХ I 3 у 1 а : >( л Hi с 1 > > I О
резки Динамич'ч ч 1ы вуз ш от с л i ш л метал локол< л о к
in [ ранима ч рзвн ) цщ ,, рас.чрс,.°л'чл.ы я i но длине мо га а от
тав сипя юсовых кокс г ру вой i< i '/Ki и — сосредоточенны ми
В стрс’1 ’ыл к > i.ia I инь н али:\10 тыи пчсскую на руз^у от
сил инерции npi пи аюг и ibiioh 0 1 с” сп ы тл ессти мсюлпокон
сд'-кцая Кр > ' з"7 ш nai )\ <кп нс< > vo'4 мо хчитьдш гь I о ' 'з нгаль
ДЮ С - I [I 1 < 13 Я'З. Ч С. Г Я Д'О Д( ТО О’ ; II Н II и
чо 1 ? I ; В 1. ' 'Я ’ 1ОЫ! \ б К ч В На t 'ВС !с
к ’ н? 1 ! । ’ р 1 и ' м О | ( 1 < । ты ы ста 1 р\ за и гр то-
ла ) > 1 : '..I Э ( с. <н ’ ’ 1 ж- с ч откл' не-
нию гр^за ; , мрмг кзлп примерно на б
339
Ветровую нагрузку рабочего и нерабочего-состояний кранов,
работающих на открытом воздухе, определяют в соответствии с ука-
заниями, приведенными в § 2. Эту нагрузку считают приложенной
в узлах связей или равномерно распределенной ко длине конструк-
ции. При расчете металлоконструкций мостовых кранов на сопро-
тнн.чнпс усталости ветровую нагрузку можно не учитывать.
Нагрузка от перекоса крановых мостов в виде сосредоточенной
силы приложена к горизонтальной плоскости касания ведущих
колес с рельсом и направлена параллельно оси концевой балки
моста крана. Определение максимальной силы перекоса приведено
в § 28.
В стреловых кранах при расчете металлоконструкции стрелы
кроме перечисленных нагрузок следует также учитывать нагрузку
от натяжения тросов грузового полиспаста и полиспаста измене-
ния вылета стрелы.
Для оптически неопределимых металлических конструкций при
колебаниях температур ж40°С необходимо учитывать температур-
ные нагрузки. За начальную температуру обычно принимается тем-
пература 1()°С. Кроме того, при расчете следует определять рас-
пределенные и сосредоточенные монтажные и iранснортные весо-
вые нагрузки с учетом условий производства монтажных работ и
транспортирования.
Площадки, предназначенные для установки механизмов пере-
движения, рассчитывают на нормативную нагрузку от собственно-
го веса площадки (коэффициент перегрузки равен 1,1) и механиз-
ма (коэффициент перегрузки равен 1,2), а также на действие пус-
кового (тормозного) момента, действующего на выходном валу
редуктора. Перила рассчитывают на подвижную горизонтальную
нагрузку 300 Н, приложенную к поручню. Лестницы рассчитывают
на сосредоточенную нагрузку 1200 Н.
§ 41. Основные положения расчета
и конструирования крановых металлоконструкций
Статический расчет краповых металлических конструкций про-
изводят с помощью методов строительно!! механики. В расчете
используют принцип независимости действия сил. Расчетные на-
грузки в элементах металлоконструкций определяю'! как для про-
странственных систем. Однако можно применять упрощенный рас-
чет, расчленяя пространственную конструкцию на отдельные плос-
кие системы (главная балка или главная ферма, вспомогательные
фермы, концевые балки и т. п.) и каждую из этих систем рассмат-
ривать нагруженной силами, действующими в соответствующих
плоскостях. Силы в стержнях определяют либо графическим спо-
собом (построением диаграммы Максвелла -- Кремоны), либо ана-
литическим я способами, рассматривая сварные и клепаные соеди-
нения как жарииры, передающие силы только по осям стержней
без ж/щикповения изгибающих моментов.
340 ’
При наличии перемещающейся по крановому мосту грузовой
тележки необходимо проанализировать каждое ее положение и
определить расчетные значения нагрузки в стержнях конструкции.
Для определения наибольшей нагрузки в рассматриваемом стерж-
не удобно пользоваться построением линий влияния [7].
Основным критерием подбора сечения растянутых стержней яв-
ляется удовлетворение условиям прочности. Кроме того, стержни
должны обладать также определенной устойчивостью при продоль-
ном изгибе.
Расчетная сила для стержней решетчатых ферм крановых мос-
тов выражается формулой
где П], пз, п* — коэффициенты перегрузки; Зп— статическая сила
в стержне от постоянной нагрузки; S<? — статическая сила в стерж-
не от подвижной нагрузки; Si и S2—инерционные силы в стержне
от постоянной и подвижной нагрузок (при их определении коэф-
фициенты перегрузки не вводятся); SB — сила в стержне от ветро-
вой нагрузки.
Условие прочности растянутых стержней имеет вид
Sp
3 = — (63)
Проверка устойчивости центрально сжатых стержней произво
тится по условному напряжению
(6-0
। де Sp — расчетная (растягивающая или сжимающая) сила в
стержне; А—площадь поперечного сечения рассчитываемого
стержня (для клепаных конструкций при определении площади се-
чения растянутых стержней учитывают ослабление сечения отвер-
стиями под заклепки); [о] —допускаемое нормальное напряжение;
ц — коэффициент уменьшения допускаемого напряжения при про-
дольном изгибе, определяемый по табл. 31 в зависимости 01 1 иб-
кости X и материала стержня.
Гибкость 7., определяемая по формуле
Л=-Ц_,
/"mi 11
является основной характеристикой стержня при продольном изги-
бе. Здесь ц=-р1Ц2—коэффициент приведения длины стержня (щ
считывает способ заделки концов стержня; рг считывает изменение
формы стержня ио длине):
при одном жестко заделанном конце и другом с’юб’'дном р;^2:
при шарнирно опертых концах (к таким стержням относится боль-
шинство стержней ферменных конструкций грузоподъемных ма-
341
Т а 6.1 к на 31. Коэффициенты для центрально сжатых
элементов металлических конструкций
Гибкость /. C. ;ль с пределом текучесш <т т , МП,| Алюминиевые сплавы
2-10 2S0 320 1 ю AMib М A.MiCl-M B92-T; Д16-Т
10 0.937 0,985 0,984 0,981 0,998 0,99 0,99
20 0,962 0,959 0,955 0,946 0,997 0,95 0.98
4 0 0,894 0,883 0,873 0,846 0,830 0,78 0,70
60 0,305 0,785 0,766 0,696 0,630 0,56 0,46
ко 0.686 0,641 0,602 0.501 0,460 0,39 0,29
100 0,542 0.493 0,448 0,335 0,330 0,29 0,19
20 0.419 0,366 0,321 0,237 0,240 0,20 0,13
1 1-0 0,315 0,272 0,240 0,178 0,180 0,15 0,10
1о0 0,2 44 0,212 0,187 0,139 — — —
? 0 0,196 0,170 0,150 0,112 — — —
_'и0 0,161 0,140 0,124 0,093 — -— —
220 0,135 0,118 0,104 0,077 — — —-
i.kh) В1 = 1; при одном жестко заделанном и другом шарнирно
one:'--ом pi ^=0,7; при обоих жестко заделанных концах рн =0,5;
при постоянном по длине стержня моменте инерции |Л2=1-
(Для стержней решетчатых конструкций, имеющих неизменное
по длине сечение и рассматриваемых как стержни, шарнирно опер-
; ;е по обоим концам, коэффициент |Л= 1.)
В формуле для гибкост / — дсйстщтгельная длина стержня;
г,. — минимальный радиус инерции сечения:
. а /---мшшмал'шьи; момеч! инерции сечения; А— площадь no-
к. , • ч.'э! о селенья с!ер-•.
. ’ м.-..гл коэффн :к-|.г о, тк же как и радиус инерции сече-
. может бить ю.олпш.ю вым в различных плоскостях, то и
. > i •, сюржпи в ра. .’личных направлениях может ebiib различ-
пж; Сжатый стержень it ряст устойчввость в плоскости наиболь-
шей I ибкости элемси i а.
Сои УД) расчс'1 сжатх стержней производится по формуле
Эйлера:
•кР“”(Д)2 ’
где Z.7— нагибная жжткост; и/—приведенная длина стержня.
И1 еле.и ко доп_\;тимые значения гибкости для стержней, на-
гл;.; еииых отвой сн.п.й, приведены в табл. 32. Гибкость отдельных
и. •.'ей нттов c'i •. т oil(»];';ь1 • раскосо.в и стоек, передающих опор-
ные регл-нии. для сжатых : ••.сленгов стальных стрел должна быть
не более г для рас типу’ы.х - не более 150. Гибкость стрелы
в шелом но превышает 100. При подборе сечений сжагых стержней
342
желательно, чтобы моменты инерции относительно осей х и у были
приблизительно равны.
Табл и ц а 32. Предельные гибкости л элементов
Элементы конструкций Сж-пые элементы PaciHiiyibie элемен.ы
сталь алюминиевые сплавы сталь алюминиевые сплавы
Пояса главных ферм 120 100 150 120
Одностержневые конст- 120—150 100—120 150—180 120—150
рукции стрел, колонн, мачт Остальные стержни глав- 150 120 200—250 180—200
ны\ ферм и пояса вспомо- laieowiwx ферм Все прочие стержни 200—250 150 250-350 250
Примечание. Значения 2. даны для элементов с сечениями, симметричными о.нь
сительно направления действия сил. При несимметричных сечениях предельнее гибкоеп! ре-
комендуется уменьшить на 30%
За расчетную длину /0 элементов ферм принимают: для поясов —
расстояние между смежными узлами или местами крепления связей’
..ля элементов решетки--расстояние, равное полной геомстри'.с
< кой длине элемента (из плоскости фермы), пли расстояние, раз
! 'С 0,8 полной геометрической дтины стержня (в плоскости фор,мы)?,
ля опорных стоек и раскосов--раестояпне, равное пощой длин".
При работе .элемента .металлоконструкции на изгиб условш
прочности имеет вид:
Л1
Зи— U7
;де М— изгибающий момент; IV — момент сопротивления (для
клепаных конструкций принимают момент сопротивления с учетом
ослабления сечения отверстиями под заклепки).
При работе стержня одновременно на сжатие и изгиб сн' необ
ходимо проверить на прочность по формуле
При действии в расчетном сечении поперечной силы элсмен:г.
металлоконструкции проверяют на каеа:сльиое напряжение ирt
изгибе:
I.1'- Т — рр -чстнзя 'кнгрщщ’.: < ,’.'щ в дщщ еоею-нн 6'."K:i: 5
с гичс/кин .’’оменг по lyccnen.. < о-ддо я jck’.ho нее j ра.в.: й б -
доя ослабления ссчщ.щ; щю уст ня?::: иод заклепки; — меч-.лт
инерции сссния без учета ослабления сечения; б —толщина
стенки.
343
При расчете сжатых стержней необходимо учитывать их гиб-
кость, расчет ведут в такой последовательности:
1) по табл. 32 определяют предельно допустимое значение гиб-
кости стержней К-ц.ед;
2) по зависимости г=//Хпред определяют минимальное значение
радиуса инерции сечения;
3) выбрав форму сечения по ГОСТам на сортамент, выбирают
соответствующий размер сечения так, чтобы действительный радиус
инерции сечения был нс меньше найденного минимального радиуса
инерции;
4) определяют действительную гибкость стержня:
5) по табл. 31 находят значение коэффициента <р уменьшения
допускаемых напряжений при продольном изгибе центрально сжа-
тых стержней;
6) по силе Sp, сжимающей стержень, проверяют по уравне-
нию (64) правильность подбора площади сечения по устойчивости.
При конструировании металлоконструкций в первую очередь
необходимо соблюдать следующие условия:
продольные оси стержней, подходящих к узлу, должны пересе-
каться в одной точке;
прочность сварных и заклепочных соединений необходимо про-
верять расчетом;
для растянутых стержней рекомендуется применять элементы
максимальной длины с целью уменьшения количества стыков;
стержни и узлы следует проектировать без резких изменений
сечений, чтобы избежать концентрации напряжений;
у составных стержней число используемых профилей должно
быть минимальным.
В сечении, состоящем из двух не сваренных друг с другом эле-
ментов, они должны быть соединены планками. Расстояние между
планками выбирают таким, чтобы гибкость растянутой ветви
стержня нс превышала 100, а сжатой—50. Гибкость отдельных
вегвей составных стержней из алюминиевых сплавов на участках
между планками или узлами решеток не должна превышать 30 —
для сжатых стержней и 80 — для растянутых.
Обычно поперечные сечения элементов, работающих на сжатие
или растяжение, выполняют симметричными и нагрузку приклады-
вают по центру тяжести сечения. Формы наиболее распространен-
ных сечений с ограничениями на ширину сжатых поясов из условия
обеспечения их устойчивости (при полном использовании допускае-
мых напряжений) и технологии приварки внутренних диафрагм
показаны па рис. 185. Для более полного удовлетворения потребно-
стей краностроения освоено производство облегченных профи-
лей — тонкостенных двутавров, тавров с короткой или удлиненной
стенкой.
344
Для основных рабочих элементов во избежание разрушения от
коррозии не рекомендуется брать листы тоньше 4 мм, уголки менее
45X45X5 мм в сварпых соединениях и менее 50X50X5 мм в кле-
паных соединениях. Все большее применение находят гнутые и
дггампованные профили незамкнутого и замкнутого типов и труб-
чатые профили.
Рис. 185. Составные сечения балок и стержней ферм
Гнутые профили (рис. 186) изготовляют профилированием по-
лосового, листового и ленточного проката на гибочных станках.
При этом получаются профили с наиболее рациональными с точки
>рения прочности и жесткости формами сечения, что позволяет
экономить до 25% массы металла. При одинаковой высоте площадь
юперечного сечения гнутых швеллеров меньше, а моменты инерции
ечения больше, чем у горячекатаных. При профилировании ме-
!алла в холодном состоянии благодаря наклону прочность гнутых
.рофилей получается значительно выше прочности горячекатаных
юофилей. Однако из-за меньшего сопротивления усталости и по-
ниженной местной устойчивости применение гнутых профилей в
крановых металлоконструкциях ограничено.
В решетчатых конструкциях из труб (рис. 187) можно сокра-
тив расход металла благодаря отсутствию дополнительных связей,
что особенно важно для стержней, сечения которых определяются
условиями предельной гибкости. При равной площади поперечного
сечения труба имеет больший радиус инерции, чем уголок, и поэто-
му может воспринимать большие продольные сжимающие нагруз-
ки. Преимуществом труб является возможность применения стерж-
ней с малой толщиной стенок. 'Гак, если толщина полок уголков
составляет обычно не менее 0,05—0,1 ширины полки, то для труб
345
эта величина уменьшается до 0,02—0,05 диаметра. Замкнутые про-
фили при одной и roii же площади сечения имеют меньшую внеш-
нюю поверхшсть, подверженную коррозии, а блаюдаря уменьше-
нию проекции боковой поверхности и лучшей обюкас.мосги >. ьи-
жае!ся ветровая нагрузка, чю также ведет к уменьшению обшей
массы металлоконструкции. Хотя стоимость труб примерно на 30%
Рис. 186 Гнутые профили и сечения балок из них
выше стоимости уголкового проката, но конструкции, сваренные
из труб, вследствие снижения количества вспомогатетьных элемен-
тов и массы металла, а также уменьшения стоимости окраски
обычно оказываются дешевле конструкций из уголков. Если же
учесть, что уменьшение массы, достигаемое при применении труб-
чатых конструкций, влияет и на размеры остальных элементов
крана (ходовых колес, механизма передвижения, противовеса,
подг.рашч ы' 'ivu н ц т р то замена уы.дков трубами становится;
эффскI’iBiioi’i даже при снижении ма<сы с его на 8%.
В мс’ат’ь тук. иже i < а ;юмиппеллх сплавов келссообоаз-
но ч ! । нот с ь’"'.е ,лсм-м -> у i ойчивос гь которых по
вы'.; ! ' • и 11 ' . п •» , ж>.\ м ж то>:к'>сте1..,ыс эшменты
. л . . , । • .и од ’’.пс |*<Hf П о вменен ие
' '' ы /<’/ '' 1 .г''.; б> - < по ;, жн:’ни . к< сыЛ'.к и
< < „ \ is, на- г> е э' ’[''ич
ньв' ^еиеьня я ч .. Так. дю > рех. уьиы \ пг.шет пых ('алок
С ри с 1 о д, (/. ;> к' v - '; $с е' ।1 *Ь' н i о л. i с н м онорс 1ЬС( >noii т ел ? жки
используется двутавровый профиль (рис. 188, в), к утолщенным
346
юлкам которого болтами прикреплены сменные рельсы, также
! 1' I'TOBv'Chhые из легкою сплава Верхние полки двутавра выпол-
чаы наклонными для удобств,а стыкования со стенками балки. Для
решетчатых тре\гранных пролетных балок (рис. 188, б) применя-
д глю ’ ”ч, (рнс. 18^. с'), \о’>( ни) работающий ihci ropnj ина дня
>.!гр\’3'ои и возвеляюшпп ссылать весьма технотогичнхю конст
<_ киш ) и к. по'.еа ба '-м; (рис 188, б), а так,кс профиль, ’.к
к.'ч.’ны;"' па рис 188, О
Металл.юесьпе конструкции мостовых кранов. Мосты краю в
с гут быть двухба тспыми или одиоба точными В двухбалочных
о,- .чах, .мета ктоконстрхмшю обычно выполняют либо в виде двух
ообчатых пространственно жестких балок 6 (вис. 189, а, в),
- одиночны-. го копнам пролета с корневыми балками 5. в котс-
>:\ размешают ' н'зые i ) ’о а крана, либо в вн ;е пространствен
' сисгс,,ы (р-д ’8°, б), шип-пион т, двух вертикальных 2,3
1 -пух юрч 'чр? и ы\ / 4 ре.пс!-.а п>!х ферм В последнем случае
л-рии'р'л! д-i 3 nei.oci, ••д-тво.'по воспринимающая через
рельсы, уложенные на ее верхнем поясе, вес тележки с грузом, яв-
347
'И.ется главной фермой. Параллельно главной ферме располагают
вспомогательную вертикальную ферму 2, соединяющуюся с главной
фермой двумя вспомогательными горизонтальными фермами / и 4,
воспринимающими горизонтальные нагрузки, возникающие при
торможении крана. Главные и вспомогательные фермы крепятся к
концевым балкам 5.
Рис. 188. Сечения пролетных балок (а, б), изготов-
ленных из прессованных профилей (в—д)
Механизм передвижения моста такого крана обычно распола-
гается на верхней горизонтальной вспомогательной ферме. Крутя-
щие моменты, возникающие при нагружении главных балок, вос-
принимаются пространственной системой, сосюящсй из главных
балок, вспомогательных ферм, iоризонтальиых и поперечных свя-
зей. Вследствие этого главные балки че: ырехфермепных мостов
мснут иметь меньшую горизонтальную патовую н крутильную же-
сткость, чем коробчатые балки однобалочпых и двухбалочных
стоп. Часто главные балки чегырехфермеппых мостов выполняют
c.:H0l генчагымп.
В настоящее время при производстве кранов все шире приме-
няют сплошные листовые металлоконструкции, так как они де-
шевле и "сисе трудоемки в изютовленип бт.'нодаря автоматизации
п| опсссов сварил; и использованию листа вместо прокатных профи-
лей В листовых конструкциях по сравнению с решетчатыми более
равномерно расвределяен’я сиговой поток и в связи с эгпм наблю-
дается меньшая концентрация напряжений в стыках. Такие кон-
318
сгрукции обеспечивают более высокую надежность при перемен-
ных нагрузках.
Необходимо иметь в виду, что при малых грузоподъемностях
вся площадь сечения сплошных листов полностью не используется
поэтому применять листовые конструкции в этих условиях нерацио-
нально. Перспективными для мостов кранов грузоподъемностью до
Рис. 189. Металлические конструкции крановых мостов:
Вт — колея тележки, L — пролет моста; Вк — база крана
' 5 т оказались конструкции балок «оболочкового» типа из гнутых
• ючентов (рис. 190). Благодаря рациональной форме сечения
алии устойчивы, несмотря на то, что у них тонкие стенки и нет
шеречных диафрагм.
Вспомо!ательная стенка коробчатой балки иногда выполняется
ви те безраскосной фермы (рис. 191, а); основная несущая стенка
1 :я обеспечения устойчивости снабжается продольными зигами
' 'и'с. 191,6), а отверстия в стенке балки — отбортовкой.
Крановая тележка перемещается по рельсам, уложенным на
•; днях поясах основных балок. Механизм передвижения крана и
роллеи тележки располагаются на консольных площадках, что
349
•бе< псч;-ваег ле: кий доступ к выкатным буксам ходовых колес,
'•ищ.олежешлых внутри концевых балок.
Наиболее расиуссчраненным типом кринок.ио мое.а чв...е!\я
лнухбалочный мечт с перемешенном течежки по верхнем) поясу.
Ьдяако он имеет сравни'сльно большую высочу, болы.дю \щчсу и
трудоемок в изготовлении. Поэтому в мостовом кращ-стрсешн: все
шире применяют однобалочные мосты с бо1\овь;?»1 расположением
Рис. НО. Сечения балок «оболочкового» типа (о)
и конструкции балок моста (б)
подъемного механизма (см. рис. 28 и 29). Для однобалочных мос-
тов характерны мскьшая масса благодаря лучшему использованию
свойств материала вертикальных стенок, меныпее число вспомо-
гательных элементов и статическая определенность, что облегчает
расчет. В ряде случаев снижение массы достигает 40%, что позво-
ляет увеличить гр\зоподъсмпость крана без усиления существу-
ющих подкрановых путей. Для сокращения объема сварочных ра-
бот в однобалочных мостах применяются также оболочковые про-
летные балки (см. рис. 190). К их торцам приваривают пипы е хо-
довыми колесами, а механизм передвижения моста может быть
даже встроен внхтрь балки. Для ходовых колес тележки на трубе
устанавливаются продольные швеллеры, используемые в качестве
рельса.
Коробчатые бачки могут изготовляться также из гнутых про-
филей (рис. 192, а) Основные профили 4 и 6 имеют в нижней части
отбортовки 5 для сварного шва. В верхней части профили соеди-
нены швами 9, причем оюгнутые тючки 8 скреплены со стенками
пробочным соединением (электрозаклепками о) и выполняют роль
•оризонгальных ребер жесткости, поддерживая стенки в сжатых
верхних зонах. 1Дш шкальные участки 7 иочдержшшют но.ыеле-
жечный рельс / Поперечные ребра 2, обсспечш'.аюшыс \с..йчи-
••теть стешж н p-ъ'-рг.дл.-’.щчие Haipy.>K\ от рол;.-'?. на стенки бал-
ка, гак е пр; :.р< косны к ! •.ионному профилю j TCK’pi -за1, юлка-
ми 3. В -той коне\ укипи ум-.лишено количеыво ирод юьных сиар-
350
Р"'~- 1Я'- Л1оет,,, с г
фер„ачи
б)
₽ЯС-'9*-Коробчагь,
Г"уты’! эЛех!г.„гов
35»
вых швов (по сравнению с обычными конструкциями, сваренными
из двух вертикальных и двух горизонтальных листов) и использо-
вано минимальное количество горизонтальных ребер жесткости.
/Аналогичная конструкция коробчатой балки из гнутых элемен-
тов (рис. 192,6) образована из одного листа 3 и нижнего пояса 4.
Пидтележечный рельс поддерживается дополнительным гнутым
листом 1, распорные
Рис 193. Одлосюичатые пролетные балки с
коробками жесткости
нагрузки в котором
воспринимаются гори-
зонтальным листом 2.
Предварительно свари-
вается коробка из ли-
стов 1 и 2 и заводится
в полость гнутого лис-
та 3 главной балки.
Элементы балки, вклю-
чая отбортованный
нижний пояс 4, скреп-
ляются между собой
точечной сваркой.
Так как изготовле-
ние коробчатых балок
трудоемко, то разрабо-
таны и выпускаются
одностенчатые пролет-
ные балки с коробками жесткости, расположенными обыйно вдоль
сжатой зоны стенки (рис. 193). В таких балках функции элементов
сечения четко распределены: стенки вместе с поясами восприни-
мают вертикальные нагрузки, боковой настил и верхний пояс—
I оризонтальные нагрузки, а коробка жесткости обеспечивает не-
обходимую крутильную жесткость сечения. Коробка жесткости
(рис. 193, а) образована наклонными ребрами 2 и 4, приваренны-
ми к стенке 3, что устраняет сосредоточение сварных швов в месте,
где верхний пояс 5 примыкает к стенке. Кроме того, верхняя сжа-
тая зона стенки подкреплена двумя разнесенными по высоте про-
дольными ребрами, благодаря чему стенка приобретает большую
устойчивость. Лист 5 горизонтального настила поддерживается
ребрами 6. В сечении предусмотрены также вертикальные ребра /,
обеспечивающие общую жесткость стопки. В другой конструкции
(рис. 193, б) верхний пояс 1 представляет собой треугольную ко-
робку жесткости, приваренную к стенке 5. Верхний сжатый пояс-
ной лист подкреплен наклонными стенками коробки. Горизонталь-
ная жесткость сечения обеспечивается отбортованным листом 3 на-
стила, поддерживаемым гнутыми кронштейнами 4 и 2, связанны-
ми со стенкой и с коробкой жесткости.
В козловых кранах с подвесными тележками, перемещающими-
ся по монорельсу, используются различные сечения однобалочного
пролетного строения (рис. 194) в зависимости от грузоподъемности
и пролета крана и конструкции тележки.
352
Металлоконструкция мостовых кранов, состоящая из двух глав-
ных и двух концевых балок, жестко соединенных между собой,
г.вляется статически неон; с дел и.мой четырехопорной системой, чю
диктует требование повышенной точности изготовления и монта-
жа, поскольку определить
леса в этих конструкциях
нагрузки, действующие в
металлоконструкции, то
появится возможность
снизить ее массу, умень-
шить потребную мощ-
ность механизма пере-
движения и т. д. С этой
фактические
трудно. Если
нагрузки на ходовые по-
более точно определить
Рис. 194. Поперечные сечения пролетных
строений однобалочных козловых кранов с
подвесными тележками
целью предложена стати-
чески определимая трех-
оиорная система (рис.
195, а). В этой конструк-
ции мост крана собирает-
ся из двух жестких Г-об-
разных полумостов А и Б,
связанных между собой
шарнирно. Каждый полу
мост'состоит из концевой
балки 1, опирающейся хо-
довыми колесами 2 на
подкрановые рельсы.
С концевой балкой жестко
соединена главная балка 3. Таким об-
разом, каждый полумост опирается на три точки — на два ходо-
вых колоса и на свободный конец В главной балки, лежащий на
горизонтальном ролике 4, установленном на концевой бальо сопря-
женного полумоста (рис. 195,6). Ролики 5 предназначены для на-
правления главной балки, а торцевой .чист 6 oi рани шваст взаим-
ное перемещение полумостов.
При расчете металлических силошностенчатых конструкций
кранов следует рассмотреть нагрузки, которые возникают, когда
тележка расположена а) посередине пролета и б) около наиболее
нагруженной концевой балки. Для ферменных конструкций расчет-
ные положения тележки устанавливаются из условия получения в
расчетных элементах максимальных нагрузок. Наиболее точно эти
нагрузки можно определить при расчете мостов как пространст-
венных систем. Однако часто расчет ведут по упрощенной схеме,
расчленяя пространственную конструкцию моста на отдельные
плоские элементы Главную балку или ферму, вспомогательные
фермы, концевые балки). В эюм случае надо ввести коэффициент
условии работы ///, принимаемый т — 0,8 — для главных балок ко-
робчатых мостов без вспомогательных форм и z?z=l,2, если есть
вспомогательные фермы; т — 0,5 — для концевой балки и /и = 0,45—
для вспомогательной фермы. У одностопных балок мостов т =
= 1,1—для главных балок и z?i = 0,55—для вспомогательных
353
ферм; у мостов с раскосными фермами т—\,\ —для главных ферм
и til = 0,55 — для вспомогательных ферм.
Балку моста и ферм}7 проверяют по условиям жесткости моста
(ограничение прогиба). Рекомендуются следующие допустимые
отпоенгсльпые значения (в долях пролета моста L) прогиба ме-
таллоконструкций мостовых крапов при действии только верти-
кальной, статически приложенной подвижной нагрузки без учета
коэффициента перегрузки.
Для мостов кранов с ручным приводом . 1/400
Для мостов кран-балок................... 1/500
Для мостов кранов с электрическим приво-
дом
1--5-Й групп режима работы кранов
(см. табл 7)....................... 1/600
6 -К-й групп режима работы крана . Р700
Для алюминиевых мостов всех типов кра-
нов .................................... 1/500
Глав: Ы'1 балкам (фермам) мостов с пролетом £/>17 м при
и :отыв :e;inn задают сгрои.ельпый подъем, равный 1/1000 проле-
та. чтобы при работе поз пшрузкой батка не имела чрезмерного
прогиба, мешающего нормальной работе тележки.
354
В кранах малой грузоподъемности и кран-балках часто огра-
ничиваются применением одной балки, являющейся отионным
гущим элементом. Обычно это прокатная ву i аврог.ая балка, от-
бор размера коюрой производят по условиям обеспечен! 51 щ б-
ходимои жесткости и возможности прохода тележки или элсктро-
1али по ее нижнему поясу. Avin увеличения высоты балки и ее -..о-
меита сопротивления без увеличения массы иногда прокатные
двутавровые балки разрезают но длине, как показано па рис. 196, а.
Рис. 196. Составная двутавровая балка
Рис 197. Кран балка с элемента-
ми горизон I а ль юн жесткости
Затем разрг-’апные половинки раздвигают, смещают на нолнина
вырезов и сваривают (рис 196,6). Выступают >•? ио концам балки
консольные части (показанные на рис. 196, б пунктиром) отре-
зают.
У кранов большой грузоподъемноеiи с болыним пролетом дву-
тавровую балку прикрепляют к фермам, причем балке либо под-
вешивают к ферме моста снизу, либо ферму устанавлпваюг г
плоскости основной балки (см. рис. 27) Для обеспечения необхо-
димой горизонгальной жесткости и общей устойчивости главш й
балки коиструкиип моста применяют горизонтальные формы
(рис. 197, а) пли дополнительные раскосы (рис. 197, б), используе-
мые для размещения механизма передвижения моста. При приме-
нении горизонтальных ферм жесткости (при пролсте крана
Р>10 м) элементы горизонтальной фермы выбирают так, чтобы их
гибкость X не превышала 250.
От жесткости металлоконструкции моста крапа в значительной
степени зависит правильность eio движения по рельсам. При не-
достаточно жестких конструкциях наб iio.iaioicn повышенные пере-
косы моста.
При определении прогиба рсчпстчшых ферм применяют форме-
лу Мора, которая, если все стержни работают юлоко на пр? соль-
ные нагрузки, имеет вид
355
У___
к = 1
где S\,' —сида от внешней нагрузки Q, от действия которой опре-
деляется прогни в /г-м стержне; Sik— сила в /г-м стержне от еди-
ничной силы, приложенной в точке определения прогиба; 1к, Ак,
Ек— соответственно длина, площадь сечения и модуль упругости
материала /г-го стержня.
При проектировании крановых мостов с балками коробчатого
сечения в ряде случаев целесообразно проверять металлоконструк-
цию на время 'затухания собственных колебаний, вызывающих
вибрацию, отрицательно влияющую на самочувствие крановщи-
ка [7J:
S f
где — период собственных колебаний моста с тележкой без
груза, расположенной в середине пролета, с; 6 — логарифмический
декремент затухания колебаний, равный разности логарифмов
двух последовательных амплитуд; /1Пах— амплитуда колебаний в
начальный момент (иногда принимается равной статическому про-
гибу от веса номинального груза); /—амплитуда, при которой
процесс затухания колебаний считается законченным: обычно при-
нимают /—0,05/тах- Декремент затухания б с точностью, достаточ-
ной для практических расчетов, можно считать в процессе колеба-
ний постоянной величиной, равной
_ 5,5-10--3
о =---------- .
‘I
Допустимое время затухания колебаний I зависит от типа крана
и условий его эксплуатации.. Обычно его принимают равным 15 с.
Период собственных колебаний крановых мостов общего назначе-
ния при их работе без груза /е<с0,25 с.
У алюминиевых сплавов внутренние неупругие сопротивления
больше, чем у сталей. Эти сопротивления являются одной из при-
чин затухания колебаний, поэтому и логарифмический декремент
затухания колебаний конструкций из алюминиевых сплавов почти
вдвое больше: 10-2//,2.
Высоту главных решетчатых ферм в середине пролета из усло-
вий необходимой жесткоеги принимают в пределах
Лф = (1/12 1/16)2,.
Высоту балки коробчатого сечения принимают в пределах
h^ — (1/16-у 1/20) L, а высоту балки двутаврового сечения
/;6 = (1/14 - 1/16)2.
Ваза крана В (см. рис. 189), т. е. расстояние между осями-хо-
довых колес в концевой балке или между осями крайних балан-
356
сирных тележек у многоколесных кранов, принимается равной
(1/7-1/5) L.
При предварительных расчетах ориентировочную массу поло-
вины моста крана 4-й группы режима работы (без учета массы
а)
Рис. 198. Графики для определения маГсы половины кра-
новых мостов:
а—с главными фермами; б—с балками коробчатого сечения
концевой балки, настила и рельсов) можно определить по графи-
кам (рис. 198) в зависимости от принятой конструкции моста,
грузоподъемности и пролета [24].'Для кранов 1, 2 и 3-й групп ре-
жима работы массу, полу-
ченную по данным графика,
следует уменьшить на 10%,
а для кранов 5-й и 6-й групп
режима работы — увеличить
на 10%. Для мостов, изго-
товленных из низколегиро-
ванных сталей, значения
массы следует уменьшить на
10—20%. Масса решетча-
тых мостов малых пролетов
практически та же, что и ко-
робчатых, -а при больших
пролетах решетчатые мосты
легче коробчатых на 10—
40%, причем более сущест-
венное снижение массы на-
°%5 7,5 10,5 13,5 16,5 19,5 21,5 25,5 28,‘
Пролет, м
Рис. 199. Масса мостовых однобалочных
крюковых кранов опорного типа
блюдается у кранов малой
грузоподъемности.
Массу однобалочных крюковых кранов с управлением из каби-
ны определяют с помощью графиков на рис. 199 и 200. Для кранов,
управляемых с пола, масса оказывается ниже на 10—25%.
Ширину В горизонтального листа балки (см. рис. 189, в) из
условий обеспечения горизонтальной жесткости принимают в пре-
357
делах В= (1/24-1/3) /гб, и она должна быть В(1 /404-1 /50) L.
Толщину вертикальных листов балок принимают обычно не менее
5 мм. При отношении высоты листа к его толщине /г/б = 804-160
вертикальною стенку с целью повышения устойчивости укрепляют
поперечными вертикальными ребрами жесткости. Очень тонкие
стенки (Л/6^160) укрепляют вертикальными и горизонтальными
Pirc. 200. Масса подвесных однобалочных кранов:
а — однопролетных; б — двухпролетных; в — трехпролетных
ребрами жесткости. Наибольшее расстояние между поперечными
ребрами жесткости не превышает двойной высоты стенки (и не
более 3 м).
Рамы тележек мостовых кранов в большинстве случаев свари-
вают из листовой стали (см. рис. 19). К верхнему листу рамы при-
варивают специальные платики для последующей обработки или,
делают набор подставок для компенсации неточностей при сборке
устанавливаемых на них элементов механизмов. При проектирова-
нии рамы тележки особое внимание обращают на обеспечение до-
статочной ее жесткости, обеспечивающей нормальную работу ме-
ханизмов^ Так как рама тележки состоит из ряда жестко соеди-
ненных балок, установленных на четыре опоры, то она является
многократно статически неопределимой системой. Точный расчет
рамы методами строительной механики весьма трудоемок. Поэто-
му используют приближенные методы расчета, расчленяя конструк-
цию рамы на отдельные двухопорные, свободнолежащие продоль-
ные и поперечные балки. Так как действительные деформации и на-
пряжения отличаются от расчетных, то для компенсации допущен-
ных погрешностей и повышения жесткости принимают запас проч-
ности, равный 2.
358
Для обеспечения безопасности обслуживания тележка имеет
перила, проходящие с двух сторон, перпендикулярных направлению
движения, а при подводе тока по гибкому кабелю и отсутствии
галереи для обслуживания перила устанавливаются и со стороны
токоподвода. Для продольных и поперечных балок рам тележек
рекомендуется применять гнутые и штампованные профили. Балки
следует располагать по возможности непосредственно под опорами
валов, блоков, редукторов, дви-
гателей механизма. Рама тележ-
ки должна быть полностью за-
крыта настилом из листовой ста-
ли, за исключением отверстий,
через которые проходят грузовые
канаты и кабели для грузового
электромагнита. При предвари-
тельных расчетах металлоконст-
рукции моста и механизмов ори-
ентировочную массу Шу тележек Рис. 201. Масса крановых тележек
мостовых кранов общего назна- грузоподъемностью 5—50 т
чения можно принять по данным
рис. 201.
Металлические конструкции поворотных кранов. При работе
поворотных кранов груз может находиться постоянно на конце
стрелы или перемещаться по стреле. В зависимости от выбранной
схемы крана расчет стрелы производят различными способами.
При неподвижной нагрузке (см. рис. 164, а) подкос АВ стрелы рас-
считывают на сжатие, а растяжку БВ — на растяжение от сосре-
доточенной нагрузки, приложенной к оголовку стрелы. При нагруз-
ке, перемещающейся вдоль стрелы, определение расчетной нагрузки
для подкоса производят при положении груза на максимальном
вылете. Расчет стрелы (рис. 202) производят в этом случае для
двух положений груза: на конце стрелы (положение /) и посере-
дине пролета (положение 11). Максимальный изгибающий момент
стрелы в точке В, когда тележка находится в положении 1,
М\ = О гр(£ — с).
Для определения максимального изгибающего момента при по-
ложении тележки в пролете балки между точками Б и В тележка
должна быть установлена в пролете так, чтобы точка середины
пролета (рис. 203,а) делила пополам расстояние щ между равно-
действующей 7? от сил Р\ и Р% давления ходовых колес на балку
и наибольшей из этих двух сил. Сечение с наибольшим изгибаю-
щим моментом окажется расположенным не в середине пролета,
а под большей нагрузкой. При этом наибольший момент для слу-
чая неравных нагрузок, т. е. при Р\>Ръ (рис. 203, а), определяют
по формуле
4с
359
где /? = Pi + P2, а для случйя равных нагрузок, т. е. при Р{ = Р2 = Р
(рис. 203, б), — по формуле
М
max
-Д-6--?.
Ac \ 2 Г
где Р = 2Р.
Для наиболее рационального использования сечения стрелы
необходимо, чтобы макси-
мальные изгибающие мо-
менты при нахождении
груза как в положении /,
так и в положении II были
одинаковы, т. е. А41и = А4пи.
Отсюда можно найти
размер с. Так как в пово-
ротных кранах база те-
лежки весьма невелика,
то, заменяя силы, дейст-
вующие на ходовые коле-
са, одной силой Gip, при-
ложенной в центре тележ-
ки, находим, что в поло-
жении II тележки Л1цц=
= Grpc/4. Из условия
равенства моментов полу-
Рис 202 Расчетная схема металлоконструк- чаем С = 4Т/5.
ции крана с верхней внешнее опорой Колонну крана с внеш-
ней верхней опорой (см.
рис 202) рассчитывают на изгиб по наибольшему изгибающему
моменту М и, возникающему либо в точке опоры подкоса А на ко-
лонну, либо в точке Б соединения стрелы с колонной.
Рис. 203 Схема определения изгибающих моментов
При работе поворотного крана с постоянным вылетом (когда
нагрузка не перемещается по стреле) прогиб металлоконструкции
не имеет решающего значения. Если же нагрузка перемещается по
стреле, то прогиб стрелы от веса тележки и наибольшего рабочего
груза должен быть таким, чтобы уклон пути, по которому передви-
гается тележка при наиболее невыгодном положении тележки, не
3G0
превышал 0,003. Это'условие не распространяется на краны/у ко-
торых механизм передвижения тележки оборудован автоматиче-
ским тормозом замкнутого типа, и на краны, у которых тележка
перемещается канатной тягой
В поворотных кранах, у которых изменение вылета создается
качанием стрелы в вертикальной плоскости, стрела представляет
собой стержень, имеющий прямолинейную, ломаную или криволи-
нейную продольную ось Нижнии конец стрелы крепится к пово-
ротной части металлоконструкции, а верхний конец поддерживает-
ся полиспастом изменения вы-
лета Благодаря этому стрелу
можно рассматривать в плос-
кости подвеса груза как стер-
жень с двумя шарнирно опер-
тыми концами В поперечном
сечении стрела обычно пред-
ставляет собой четырехуголь-
ник или треугольник. Пояса
стрелы обычно изготовляют из
проката—уголков или труб.
Из этих же видов проката вы-
Рис 204 Схема расчета полки одно-
рельсового пути
полняют и элементы решеток
стрел Для снижения материа-
лоемкости стрелу изготовляют
в виде стержня переменной
жесткости по длине. В этом случае продольную устойчивость стре-
лы проверяют на расчетной длине |лПр/, где I — длина стержня и
piirp — коэффициент длины, зависящий от закона изменения момен-
та инерции сечения стержня и от отношения минимального момен-
та инерции сечения стрелы к максимальному. Зная коэффициент
цПр и минимальный радиус инерции сечения, в котором момент
инерции достигает максимального значения /щах, определяют гиб-
кость стержня переменного сечения:
^miii
По этому значению X для стержня сплошного сечения по
табл 31 определяю! коэффициент ср.
Проверку общей устойчивости стрел следует производить по
обоим главным направлениям- в плоскости подвеса стрелы и в пер-
пендикулярной ей плоскости Расчетную длину стрелы принимают
в зависимости от схемы закрепления ее концов (рекомендуемые
значения коэффициента приведения длины ц даны на с. 341).
Па участках между соединительными планками каждая ветвь
сечения стрелы представляет собой сжатый стержень, закреплен-
ный по концам, проверяемый на устойчивость по гибкости X.
В нпжнеи полке балки однорельсового пути (рис. 204), по ко-
торой перемещаются ходовые колеса тележек талей, возникают на-
пряжения от изгиба под действием собственной силы тяжести бал-
12—1628
361
ки и на[Iряжсния С5Т местною шииба, Bb'3i>'3dC?j'.>с щ-доюченяср
нагрузкой г’- си.юи давления катка тележки Для определения
местных напряжении полку балки рассматривают хак нашу бес-
конечной длины, жестко закрепленную по одному продольному
краю в месте примыкания его к стенке балки при остающемся сво-
бодным другом крае. Напряжение на нижней границе сеченая (в
точке В) от изгиба силой тяжести балки, подвешиваемой на тягах
или кронштейнах,
Рис. 205. Расчетные
коэффициенты /(,, Л2.
К3
где МЦуг=-'£Р1/4 + ql2/8— изгибающий мо-
мент в сечении, расположенном на полови-
не расстояния I между точками подвеса
рельса, от всех действующих сил (сосредо-
точенных внешних сил и* равномерно рас-
пределенной нагрузки q от силы тяжести
рельса); VV\/{ — момент сопротивления изги-
бу поперечного сечения балки, проходящего
через точку В.
Напряжения от местного изгиба в кор-
невом сечении в плоскости ху
КгР
С
в плоскости yz
- - .
J“- /2
Знак «- » относится к точке А; знак «—,> относится к точке €
корневого сечения на его нижней границе.
Напряжения от местного изгиба по свободному краю полки
(параллельному плоскости yz):
Др
Знак «4~» относится к точке В на нижней границе сечения, 8
знак «—» к точке, расположенной па верхней границ? сечения
полки.
В этих формулах К\, Кг, Кз — коэффициенты, зависящие од
соотношения с/а (рис. 204) и принимаемые по графикам, изобра-
женным на рис. 205; /к— толщина сечения полки в корневом сече
нии; Ztp— толщина полки в среднем сечении.
В зависимости от положения нагрузки Р на полке наибольшие
напряжения могут возникнуть либо в точке А, либо в точке В.
Приведенные напряжения для точки В равны а в ~ ta 4-
а приведенные напряжения для точки А, определенные по
362
энергетической теории прочности, равны
Эд = I Эл- 4- ( Д/ + и)2 - 3Л- (Зг/ + Д/ и) 11/2 < [3 Д
Если балка изготовлена, например, из стали СтЗ, то [ов] =
180 МПа, [о_4] =200 МПа. Различие в значениях объясняется
образованием наклепа металла балки от действия хо :.овы\ колес.
Расстояние межд) i очками крепления пути опрсде 1яют расче-
юм прочности рельса на изгиб и на жесткость (прошб). Уклон пути
при положении .тележки посередине между креплениями не должен
превышать 0,003. Предельный прогиб монорельсового пути не дол-
жен превышать 1/400 длины пролета ме/кду точками крепления.
Часть вторая
Транспортирующие машины
Глава XII
ТРАНСПОРТИРУЮЩИЕ МАШИНЫ
С ТЯГОВЫМ ЭЛЕМЕНТОМ
§ 42. Виды грузов.
Характеристики транспортирующих машин
,В отличие от грузоподъемных машин, которые перемещают
грузы определенными порциями и обратным движением без груза
возвращаются за новой порцией груза, транспортирующие маши-
ны-конвейеры предназначаются для перемещения грузов не-
прерывным потоком без остановок для их загрузки и разгрузки.
Конвейеры предназначены для работы с массовыми груза-
м и, т. е. грузами, состоящими из большого числа однородных
частиц или кусков, или штучными грузами, перемещаемыми в
большом количестве. v
Все машины непрерывного транспорта можно подразделить на
две группы: транспортирующие машины с тяговым элементом
(лента, цепь, канат), в которых груз перемещается вместе с тяго-
вым элементом, и транспортирующие машины без- тягового эле-
мента.
В зависимости от характера груза грузовой поток может быть
осуществлен в виде сплошной струи сыпучих или кусковых грузов,
а также в виде отдельных порций сыпучих или кусковых грузов и
отдельных штучных грузов. Транспортирующие машины обычно
используются для перемещения, как правило, груза одного вида.
Транспортные операции в этом случае отличаются однотипностью
и значительно легче поддаются автоматизации. На предприятиях,
производящих однородные массовые грузы транспортные и пере-
грузочные процессы доведены с помощью конвейеров до высокой
степени автоматизации.
Основной характеристикой конвейеров является их произво-
дительность— объемная V, м3/ч, массовая (в дальнейшем
просто производительность) Q, т/ч, или штучная Z (для штучных
грузов), шт/ч. Объемная и массовая производительности связаны
между собой зависимостью
364
где р — насыпная плотность груза, т/м3, численно равная массе
единицы объема груза при свободной насыпке.
Насыпная плотность зависит от физико-механических свойств
транспортируемого груза, его влажности, а также размеров частиц.
С увеличением размеров частиц увеличивается насыпная плот-
ность, так как при этом происходит относительное уменьшение
объема воздушных промежутков между частицами груза. По чис-
ловому значению насыпной плотности грузы подразделяют на че-
тыре группы: легкие с р<0,6 т/м3 (древесные опилки, фрезерный
торф, кокс и т. п.); средние с р = 0,64-1,6 т/м3 (зерно, шлак, камен-
ный уголь и т. п.); тяжелые с р = 1,64-2,0 т/м3 (песок, гравий и т. и.);
весьма тяжелые с р>>2 т/м3 (руда, булыжник, камень и т. и.).
Значения насыпных масс некоторых грузов приведены в табл. 33.
Таблица 33. Характеристики некоторых насыпных грузов
Грузы Насыпная плотность р, т/м3 Угол а есте- ственного откоса в по- кое, град Коэффициент трения в состоянии ПОКОЯ /л
по стали по ренте
Опилки древесные сухие 0,2—0,3 40 0,8 0,65
Торф кусковой сухой 0,3—0,5 32—45 0,6 —
Овес 0,4-0,5 28-35 0,58 0,5
Кокс среднекусковой 0,4-0,5 30-50 1 0,65 —
Мука пшеничная 0,45—0,6 50-55 0,85
Зола сухая 0,6-0,9 40-50 0,84 —
Шлак каменноугольный Уголь каменный кусковой 0,6—0,9 35—40 1 0,66 ,
(рядовой) 0,65-0,8 30—45 0,45—0,8 0,6
Пшеница 0,65—0,83 22—25 0,6 0,5
Цемент сухой 1,0—1,5 30—40 0,65 0,64
Земля грунтовая сухая 1,1 —1.6 30—40 0,8 —
Гипс порошкообразный 1,2—1,4 40 0,78 0,82
Земля формовочная выбитая 1,25—1,3 30—45 0,71 0,61
Песок сухой 1,4—1,65 35—40 0,8 0,56
Известняк мелкокусковой 1,4—1,7 35—40 0,56 —
Щебень сухой 1,5—1,8 35—45 0,74 0,6
Гравий рядовой округлый 1,5—1,8 30—45 0,8 —
Глина сухая, мелкокусковая 1,6—1,8 40 0,75 —
Агломерат железной руды 1,6—2 45 ’ 0,8—1 —
Руда железная, мелко- и среднекусковая 2-3,5 30-50 1,2 —
Важными эксплуатационными характеристиками насыпных гру-
зов являются также их абразивные свойства, гранулометрический
состав, степень подвижности и однородность.
По абразивным свойствам грузы подразделяются на
категории: неабразивные — продукты сельского хозяйства, зерно,
опилки, щепа, штучные пакетированные грузы; малоабразивные —
бурый уголь, каменный уголь, формовочная земля, мягкие вскрыш-
ные породы, комовая сера, глина, шамот, динас, песок, гравий, це-
мент; абразивные — железная руда, антрацит, горные породы сред-
365
ней твердости, кокс, рудный концентрат, известняк, магнезит, руд-
ный агломерат, щебень: высокоабразивные— полиметаллические
руды, руды цветных метал юв, твердые юрные породы, железные
руды с включеньем кварцита
Г р а и \ л о ". с т р и ч е с к и и состав грузов, т е. распределе-
ние по крупнощч составл'М’Ощих н\ кхсков, определяется размером
наибольших ч.'цы'ц, которых содержится в пробе как минимум
г>
—
Рис 20G Схема определения производительности конвейера:
а—при сплошном поюкс насыпного груза, б, в — ери порционных и шинных грузах
10%. По этом}' параметру грузы делят па категории: пылевидные
(<0,05 мм); порошкообразные (0,05—0,5 мм); зернистые (0,5—•
6 мм); мелкокусковые (6—80 мм); среднькусковые (80—350 мм);
крупнокусковые (350—500 мм); осйбокрупнокусковые (>-500 мм).
По однородности различают рядовые и сортированные
грузы. В основу этого критерия принимается наибольший из линей-
ных размеров частицы (куска). Рядовым считается груз, у которо-
го am<ix/«mm>2,5, где атах и йтт — наибольший и наименьший ли-
нейные размеры типичных кусков груза. Сортированным считает-
ся груз, у которого amax/tfmin<2,5. Сортированный груз характери-
зуется средним размером:
^ср (^max ~F ^mlii)/
По степени подвижности частиц насыпные грузы под-
разделяются на грузы легкой, средней и малой подвижности.
Форма и площадь сечения груза, свободно насыпанного на не-
подвижную горизонтальную плоскость, определяется углом а есте-
ственного откоса в покое. Значение этого угла зависит от сил сцеп-
ления между отдельными частицами, определяемых, в частности,
влажностью груза, и от сил трения, возникающих при относитель-
ного перемещении частиц (см. табл. 33).
Если плоскость, на которой лежит груз, движется, испытывая
сотрясения (рис. 206, а), то груз рассыпается и угол ср естествен-
ного откоса в движении меньше угла а: обычно ср — 0,35 а.
366
При гр.шенортирсвании сы.нч^-о ip}.;a вспрерл во ым iii r< ком
вр^изво^чтельность конвейера выражш. о.я форм.}.к ч
() = 3600Дгл
где А — площадь поперечного сечения поюка i руза (рис. 266, а),
м2; v — скорость перемещения груза, м/с.
При транспортировании штучных грузов (рис. 206, 6) штуч-
ная производительность зависит от расстояния t, м, между единич-
ными грузами:
у ЗбЭОи
" t
\
Если обозначить массу каждого груза т, кг, то распределенная
погонная масса, кг/м, q = nilI и производительность, т/ч,
„ mZ ЗбОО/иг/ о /г-\
Q =------=----------= 3,bqv. (6о)
1003 1003/ ’
§ 43. Ленточные конвейеры
Ленточные конейеры яляются наиболее распространенным ти-
пом транспортирующих машин непрерывного действия во всех
отраслях промышленности. Из более чем полумиллиона конвейерных
установок, эксплуатирующихся в нашей стране, 90% составляют
ленточные конвейеры. Они используются в горнодобывающей про-
мышленности—для транспортирования руд полезных ископаемых
и угля при открытой разработке, в металлургии — для подачи зем-
ли и топлива, на предприятиях с поточным производством—для
транспортирования заготовок между рабочими местами и т. д.
Обычно ленточные конвейеры имеют тяговый элемент 7
(рис. 207) в виде бесконечной ленты, являющейся и несущим эле-
ментом конвейера, привод 13, приводящий в движение барабан 14,
натяжное устройство 2 с барабаном 3, груз 1, роликовые опоры 6
на рабочей ветви ленты и 5 на холостой ветви ленты, отклоняющий
барабан 8, загрузочное устройство 4 и разгрузочные устройства 9
и 10, разгрузочный желоб И и устройство 12 для очистки ленты.
Все элементы конвейера смонтированы па раме.
С помощью установок, оснащенных ленточными конвейерами,
можно транспортировать сыпучие грузы на весьма большие рассто-
яния, превышающие 100 км.
В Советском Союзе работает несколько конвейерных линий
большой протяженности. Для транспортировки руды на шахте Кри-
ворожского бассейна разработана конвейерная линия, состоящая
из 9 горизонтальных и наклонных конвейеров общей длиной 9 км,
обеспечивающая при скорости ленты 3 м/с производительность
600 т/ч. Суммарная мощность приводных электродвигателей состав-
ляет 31 200 кВт.
367
Однако чаще всего длина одиночных конвейеров не превышает
1—2 км.
Ленточные конвейеры отличаются высокой производительно-
стью (до 30—40 тыс. т/ч), простотой конструкции, малой материа-
лоемкостью, надежностью в работе и удобством в эксплуатации,
Рис. 207. Принципиальная схема стационарного наклонно-горизонтального
ленточного конвейера
относительно небольшим расходом энергии. Они могут иметь кри-
волинейную трассу с поворотами в горизонтальной плоскости и с
подъемами и спусками в вертикальной плоскости в зависимости от
рельефа местности. Однако создание криволинейной трассы сопря-
жено с трудностями обеспечения надежного и стабильного положе-
ния ленты на криволинейном участке Радиусы поворота ленты в
горизонтальной плоскости завися^ от конструкции конвейера, типа
ленты и ее ширины и имеют широкий диапазон значений, до 600—
800 м. 'г •
Схемы ленточных конвейеров весьма разнообразны и опреде-
ляю’гся назначением конвейера (рис. 208). Сравнительные технико-
экономические исследования и опыт проектирования и эксплуата-
ции ленточных конвейеров показывают, что для транспортирования
массовые грузов с грузооборотом 5—25 млн. т/год на расстояние
до 100 км применять ленточные конвейеры экономичнее, чем ис-
пользовать железнодорожный или автомобильный транспорт. До-
стоинствами конвейерных лент являются их относительно малая
масса, отсутствие быстроизнашивающихся шарниров, возможность
перемещения грузов с большими скоростями. Срок службы конвей-
368
конвейеров ограничено диапазоном темпе-
К недостаткам ленточных конвейеров сле-
Рис 208 Схемы ленточных конвейеров
а — горизонтальный с концевой раярузкой, б — гс
риюнтальный с передвижным барабанным разгру
жителем в — наклонный г - комбинированный с
двумя перегибами д — конвейерная линия из гори-
зоп ильного и наклонно! о конвейеров
роизводительности- ленточного конвейера
ерных резинотканевых лент в зависимости от условий эксплуатации,
характеристики транспортируемого груза, типа тканевого каркаса
и времени одного оборота пробега ленты составляет 15—48 мес.
Применение ленточных
ратур от —60 до 200° С.
дует также отнести пы-
ление при транспорти-
ровании легких сыпу-
чих грузов.
Площадь сечения
груза на ленте конвей-
ера (см. рис. 206, а)
определяется шириной
лепты В и углом есте-
ственного откоса <р на
движущейся ленте.
Для увеличения произ-
водительности конвей-
ера при той же скоро-
ст и ширине ленты
опоры ленты конвейера
конструируют так, что-
бы под действием мас-
сы ленты и массы гру-
за, лежащего на ней,
лента принимала фор-
му желоба, что увели-
чивает площадь А по-
перечного сечения гру-
за Во всех случаях
площадь сечения про-
порциональна Ь2 где
Ь = 0,9В—0,05 м. В
зависимости от типа
роликовых опор фор-
мулы для определения г
приведены в табл. 34.
При заданной производительности Q по этим We формулам
можно определить размер b и по нему в соответствии с ГОСТ 20—76
подбирают ленту со стандартной шириной В. Минимально допу-
стимую ширину ленты В проверяют- по однородности груза
(см. § 42) и для рядового груза #min = 2 flmax + 200 м, а для сортиро-
ванного груза Bmn = 3,3 «тах + 200 мм. Чт-
При перемещении штучных грузов ширину ленты выбирают так,
чтобы на ленте остались с обеих сторон свободные ноля шириной
50—100 мм.
Чтобы груз не сползал вниз вдоль ленты, необходимо угол нак-
лона конвейера принимать на 10° меньше угла т|рения груза о по-
лотно конвейера, потому, что из-за провисания полотна угол его
369
Таблица 34. Расчетные формулы для определения производительности
конвейера
Поперечное сечение ленты
с 1pyjov
Угол Р накло-
на боковые
роликов,
град
Производительность
конвейера Q, т/ч
900 bzk[>v tg qp
20
30
45
60
ЬЧ'рс (245+840 tg ф)
ЬЧщи (345 + 770 tg ф)
ЬЧгри (470+610 tgф)
b4’{w (505 + 430 tg ф)
18—54 (410+710 tg ф)
ЬЧ'ри (360+650 tg ф)
В
h
Примечание Коэффициент k для грузов с различной степенью псдвижнасти част
в о.зисимости от у1ла наклона конвейера к горизонтали имеет следующие значение]
370
Продолжение табл. 34
Г РУ llilcl подвижное! Ji часиш, насыпного i ру ia ’* : сд наклона конвенира
1—3° 6—10° 11-15° 10—20' . 21—24’
Легкая 0,95 0,90 0,85 0,80
Средняя 1,0 0.97 0,95 0,90 0,85
Малая 1,0 0,^8 0,97 0,95 0,90
подъема у опор больше, чем угол наклона оси конвейера, и, кроме
того, на опорах полотно встряхивается, что способствует сползанию
груза. Это встряхивание тем больше, чем больше скорость движе-
ния полотна и чем большее биение имеют опорные ролики.
Приведенные значения /г даны для конвейера с резиновой лен-
той, имеющей гладкую рабочую поверхность. Эти значения справед-
ливы только в пределах допустимых углов наклона конвейера,
Omax^&ia, где a — угол естественного откоса груза в покое (см.
табл. 33), /?1 — коэффициент, зависящий от подвижности: для грузов
легкой подвижности /?1 = 0,35; при средней подвижности k\ = 0,4 и
при малой подвижности /г, =0,55. При превышении угла Отах произ-
водительность конвейера резко снижается. Рекомендуемые для не-
которых грузов предельные значения угла наклона конвейера 0»
град, следующие:
Апатит......................... 16
Глина кусковая, влажная ... 24
Земля влажная.................. 22
Известняк..................... 18
Кокс рядовой.................. 15
Руда железная............. 15
Соль каменная кусковая .... 18
Уголь каменный рядовой ... 18
Уголь б\рый, сухой........ 1G
Цемент сухой ................. 20
Надо отметить, что значения предельного угла наклона зависят
от состояния груза, т. е. от его влажности, размеров кусков, от угла
наклона боковых (роликов при желобчатой ленте и т. п.
Скорость движения ленты конвейера при транспортировании
сыпучих друзов назначают в зависимости от свойств груза. Для
легких пылевидных грузов скорость ограничивается возможностью
сдувания груза с полотна. Для крупнокусковых, тяжелых грузов
скорость движения ограничена возможностью повреждения ленты
вследствие ударов груза по лепте при набегании на (ролики и бара-
баны. Для кусковых грузов, ценность которых уменьшается из-за
разрушения при встряхивании ленты, таких, например, как кокс,
скорость движения также снижают. Кроме того, скорость транспор-
тирования зависит от ширины ленты: ее можно увеличить при боль-
шей ширине, так как па более широких ..ентах гр\д рашпшагается
более равномерно и лепта лучше центрируется на опорах. Рекомен-
дуемые скорости движения ленты конвейера для разных грузов при
разгрузке через головной барабан приведены в табл. 35.
При разгрузке с помощью барабанного (разгружателя (сбрасы-
вающей тележки) скорость ленты обычно не превышает 2 м/с, а при
разгрузке с помощью плужковых разгружателей и = 14-1,6 м/с, при-
371
Таблица 35. Рекомендуемые скорости у, м/с, ленты при транспортировании
насыпных грузов
Характеристика груза Ширина ленты, мм
400— 500 650 800 1000 1200 1400 1000 2000
Пылевидные и порош- кообразные, сухие, пыля- щие 1 1 1 1 1 1 1 1
Хрупкие, кусковые, крошение которых сни- жает их качество 1,25 1,6 1,6 1,6 2,0 2,0 2,0 2,0
Зернистые, в том числе рыхлые вскрышные поро- ды на открытых разра- ботках Кусковые: 1,6 2,5 3,15 4,0 4,0 4,0 5,0 5,0
аср=С80 мм 1,6 2,0 2,5 3,15 4,0 4,0 5,0 5,0
йср^ 160 мм 1,6 1,6 2,0 2,5 2,5 3,15 4,0 4,0
йср= 161—350 мм — — 1,6 1,6 2,0 2,5 3,15 3,15
йср^500 мм — — — — 2,0 2,0 2,5 3,15
Зерно 1,6 2,5 3,15 4,0 — — — —
Овощи, фрукты, корне- плоды 0,8 0,8 1-.0 1,0
Примечание Известны ленточные конвейеры, работающие
ботках угля со скоростью движения ленты, доходящей до 8 м/с.
на открытых разрв-
чем меньшие значения скорости принимаются для кусковых тяже-
лых грузов.
При транспортировании штучных грузов принимают следующие
значения скорости движения ленты:
Г руз
V, м/с
Мешки с мукой, зерном, цементом, мелом .... 0,5—1
Почтовые посылки в мягкой упаковке............ 0,8—1
Рулоны бумаги массой до 200 кг................ 0,3—0,5
Ящики, бочки, чемоданы массой до 50 кг........ 0,3—0,5
Если транспортирующая машина входит в состав технологиче-
ской линии, скорость ленты назначают в зависимости от ритма тех-
нологического процесса, а также от способа загрузки и разгрузки
конвейера.
В конвейерах применяют резинотканевые и металлические лен-
ты. Они используются в качестве грузонесущего элемента, осущест-
вляя одновременно и тяговую связь между барабанами конвейера.
Поэтому лента должна обладать прочностью и гибкостью в про-
дольном (па барабанах) и поперечном (на желобчатых опорах)
направлениях, высокой влагостойкостью и износостойкостью рабо-
чих поверхностей, не должна расслаиваться при многократных пе-
регибах, должна иметь небольшое упругое и остаточное удлинение,
малую гигроскопичность.
372
Ленточные конвейеры с резинотканевой лентой
ленты общего назначения,
а) 1 2
Рис 209. Резинотканевая (а) и рези-
нотросовая (б) конвейерные ленты:
/—тканая прокладка, 2 — резиновая об"
Наиболее широко распространены резинотканевые ленты
рис 209; ГОСТ 20—76), состоящие из резинотканевого послойного
«ям-вого каркаса 1 и наружных резиновых обкладок 2, предохра-
няющих каркас от механических повреждений и от воздействия на
но влаги, газов, агрессивных сред. В зависимости от условий экс-
11\атации и назначения изготовл
морозостойкие, теплостойкие, пи-
щевые и негорючие. В зависимо-
in от типа ленты установлены
шапазоны температур окружаю-
щей среды. Ленты общего назна-
1СНПЯ работают при температуре
ог —45 до +60°С; морозостой-
кие— от—6(Г до +60°, тепло-
<. loi’fKiie — до 100° и ленты повы-
иенной теплостойкости — до
20СГС. В ленте бывает от 1 до 8
ляговых тканых прокладок, а ши-
рина выпускаемых промышленно-
гтью лент колеблется от 100 до 2000 мм.
Увеличение числа прокладок, уменьшая напряжения растяже-
ния ленты, в то же время снижает ее гибкость, что затрудняет
огибание барабана небольшого диаметра и образование желоба
ленты на роликоопорах, расположенных под углом. При примене-
нии более широких лент трудно обеспечить равномерное (распреде-
ление натяжения ленты по ширине. Неравномерное натяжение при-
водит к существенному снижению допускаемого натяжения.
Толщина наружных резиновых обкладок в зависимости от типа
ленты и вида транспортируемого груза для нерабочей стороны ко-
леблется от 1 до 3,5 мм, а для рабочей стороны от 1 до 10 мм. Тол-
щина тканевых прокладок каркаса составляет 1,15—2 мм.
Изготовляют тканевые прокладки из полиамидных или поли-
эфирных нитей, либо из комбинированных (полиэфирных и хлоп-
чатобумажных) нитей. В зависимости от типа ткани каркаса номи-
шльная прочность тяговой прокладки имеет различное значение
(табл. 36).
Наружные обкладки пищевых лент должны быть изготовлены
из резиновых смесей, соответствующих санитарно-гигиеническим
требованиям (отсутствие вредных примесей), установленным техни-
ческой документацией, утвержденной Министерством здравоохра-
нения СССР.
Учитывая сложность точного определения действительного на-
пряжения в слоях резинотканевой конвейерной ленты при совмест-
ном действии растяжения и изгиба, расчет ленты ведут только на
растяжение по максимально допустимой (расчетной) рабочей на-
грузке [К], кН/м, по ширине одной прокладки:
[ЛГ]=АГпр//г,
373
Таблица 36. Прочность тканевых прокладок конвейерных лент
Тип ткани
Марка
Номинальная
прочность тка-
ни Кпр по шири-
не однов про-
кладки, кН/м
Ткань с нитями основы и ут- TA-400; ТК-400; МК-400/120; 400
ка из полиамидных волокон TA-300; ТК-300; А-10-2-ЗТ
К-10-2-ЗТ; МК-300/100 ' 300
ТК-200-2 200
TA-150; ТК-150 150
ТА-100; ТК-ЮО 100
Ткань с нитями основы из МЛ К-4 00/120 400
полиэфирных волокон и нитя- ТЛК-ЗОи, х-300/100 300
ми утка из полиамидных воло- ТЛ К-200 200
кон
Ткань с нитями основы и ут- БКНЛ-150 150
ка из комбинированных (поли- БКНЛ-100 100
эфирных с .хлопком) волокон ВКНЛ-65; БКНЛ-65-2 65
где п — расчетное значение коэффициента запаса прочности ленты:
/? — /?о/ (А2нр^ст^т^р) •
Здесь /70 — номинальный запас прочности, принимаемый /г0=5 —
при проверочных расчетах по максимальным пусковым нагрузкам
и /?о = 7 — при расчете по нагрузкам установившегося движения;
«нр—коэффициент неравномерности нагружения прокладок, зави-
сящий от количества прокладок:
Количество прокладок
Коэффициент zzHp . . . .
3 4 5 6 7
0,95 0,9 0,88 0,85 0,82
8
0,8
пСт — коэффициент прочности стыкового соединения концов ленты,
принимаемый в зависимости от типа соединения:
Тип стыка.......
Коэффициент Лет
Вулканизиро-
ванный
0,9—0,85
Скобами
и шарнирами
0,5
Заклепками
0,3—0,4
пт — коэффициент, учитывающий влияние конфигурации трассы
конвейера:
Профиль трассы
Коэффициент пт
Горизонталь- Наклонный Наклонно-
ный горизонталь-
ный
1 0,9 0,85
пр—коэффициент, учитывающий влияние режима по времени ра-
боты конвейера в течение суток и по производительности:
Режим работы Весьма Легкий Средний Тяже- Весьма
легкий лый тяже-
лый
Коэффициент
лР........... 1,2 1,1 1 0,95 0,85
374
Максимально допустимую расчетную силу растяжения резино-
тканевой ленты определяют по формуле
Т,.ак=й1^|г,
где В — ширина ленты; z— число тканевых прокладок.
Высокие запасы прочности, устанавливаемые при расчете кон-
вейерной ленты, объясняются необходимостью учета ослабления
ленты в месте соединения ее концов и наличием динамических на-
грузок, испытываемых лентой в процессе эксплуатации. Такие ди-
намические нагрузки возникают в местах загрузки конвейеров и в
пунктах передачи груза между сопряженными конвейерами под
действием ударов кусков груза, падающих с некоторой высоты.
Ударные нагрузки зависят от вида транспортируемого груза, раз-
меров кусков, высоты падения, скорости транспортирования, силы
натяжения ленты, конструкции опор ленты в местах загрузки. Зна-
чительные динамические нагрузки наблюдаются также три пуске
и торможении конвейеров.
При выборе типа ленты, толщин обкладок рабочей и нерабочей
сторон следует учитывать свойства транспортируемого груза (на-
пример, категорию абразивности) и условия эксплуатации конвей-
ерных лент, которые устанавливаются по методике ГОСТ 20—76
суммированием баллов, учитывающих различные данные контрет-
чого конвейера.
Производственные условия характеризуются типом помещения,
з котором установлен и работает конвейер, климатом района, где
jh установлен, температурой и влажностью окружающего воздуха,
степенью насыщения воздуха абразивной пылью и парами (газами),
вредно воздействующими на элементы конвейера. Эти условия со-
ставляют четыре группы (табл. 37).
Для увеличения производительности конвейеров применяют
,'зикотканевую ленту с резиновыми борта,ми высотой 60—300 мм.
1ля того чтобы борта при огибании барабанов не повреждались,
выполняют гофрированными (рис. 210, а, б). Наличие бортов
.'сличивает площадь сечения груза, насыпанного на ленту, и по-
'ляет увеличить скорость транспортирования и угол наклона кон-
. йера. Допускаемый угол наклона конвейера в этом случае (бла-
_,чря боковому сжатию груза) на 2—3° больше, чем у конвейера
обычной желобчатой лентой. Берта к гонге приклеивают или
.' и в у л ка и и з и р у ю т.
Чтобы еще более увеличить угол наклона конвейера, применяют
,’фленую ленту (рис. 210, и), в которой па верхнюю рабочую сто-
>иу методом горячей вулканизации прикрепляют шевронные ре-
йвовые выступы высотой 5—40 мм. Для конвейеров с рифлеными
еь’тами используют такое жй оборудование, как и для конвейеров
гладкими лентами. Применение рифленых лент позволяет увели-
игь угол наклона конвейера до 35—10°. В ряде случаев для увелп-
и’ия возможного угла наклона конвейера лен гы снабжаются по-
чечными выстхламп в!, сотой 5 -40 мм (рис. 210.6) ичи поперсч-
дш? перегоро/\д он из плотной резины высотой! 50—300 мм
w
о
Таблица 37. Характеристика производственных условий
эксплуатации конвейера
Покиза(ели Группа прошподс!венных условий
Л {лei кис) С (средние) Т (тяжелые) ОТ (очень тяжелые)
1. Место уста- новки конпс. ера (характеристика производствен- ного помещения) Чистые, закры- тые, отапливаемые или охлаждаемые и вентилируемые помещения (кате- гория 4 по ГОСТ 15150-69) Закрытые, отапливае- мые производственные помещения капитального сооружения без регла- ментированного контро- ля температуры и влаж- ности (категория 4 по ГОСТ 15150-69) - На открытом воздухе с венным воздействием атмос( ловим в период всего года п ветра и абразивной пыли (к по ГОСТ 15150-69) Навесы или легкие, времен! ливаемые помещения, в кот бания температуры и влажн< ха несущественно отличаютс вин на открытом воздухе (к по ГОСТ 15150—69) Неотапливаемые и невент помещения, в которых возх тельное нахождение воды и конденсация влаги на стенах (категория 5 по ГОСТ 1515С Закрытые, каменные, бетонные, дере- вянные неотапливаемые помещения с естественной вентиляцией без искусст- венно ре!улируемых климатических ус- ловий (категория З'по ГОСТ 15150—69) Закрытые, отапливаемые помещения с высокой концентрацией абразивной пы- ли и повышенной влажностью 1епосредст- * верных ус- ти наличии атегории 1 !ые неотап- орых коле- зсти возду- я от усло- атегория 2 илируемые ожно дли- ли частая и потолке -69)
2. Климатиче ское исполнение по ГОСТ 15150— 69 Исполнение У для районов с умеренным климатом Исполнение ХЛ для районов Q хо- лодным климатом
Продолжение табл 37
Показатели Группа производственных условий
Л (легкие) С (средние) Т (тяжелые) ОТ (очень тяжел не)
3 Температура окружающего воз- духа 10-35’С 10-35°С * —45-т-40°С (для категорий 1, 2, 3) —5-т-35°С (для категории 5)< —60ч-40°С (для категорий 1, 2, 3) — 104-35°С (для категории 5)
4. Относитель- ная влажность воздуха <40% <65% <80% <90%
5. Наличие в ок- ружающем воз- духе абразивной пыли, агрессивных паров и газов Содержание аб- разивной пыли не более 5 мг/м3; от- сутствие вредных паров и газов Содержание абразив- ной пыли не более 10 мг/м3, вредных паров и газов не более 1 мг/м3 Содержание абразивной пыли более 10 мг/м3, наличие вредных паров и газов — в верхних пределах санитарных норм i
Примечание Л — предприяiия но производству приборов, радио и телевизионной аппаратуры, цехи пег изготовлению одежды,
почтовые эк1педиции. типо1рафии, книгохранилища: гИ*8 — тепловые электростанции, формовочные отделения литейных цехов; заводы резино-
технических изделий, предприятия Пищевой промышленности, закрытые зернохранилища, Т — карьеры открытых разработок полезных ископае-
мых в районах умеренного климата, неотапливаемые галереи, обогатительные фабрики металлургической, коксохимической и угольной промыш-
ленности, ОТ — карьеры открытых разработок полезных ископаемых в районах с .холодным климатом, лесоразработки на открытых площад-
ках в районах с холодным климатом.
(рис. 210, г). Для придания ленте желобчатой формы перегородки
должны состоять из двух или более частей (рис. 210, в). Перего-
родки несколько смещены одна относительно другой вдоль ленты,
что позволяет избежать защемления кусков перемещаемого груза.
При достаточно широких перегородках угол наклона конвейерного
полотна может доходить до 50—60°. Недостатком таких лент яв-
ляется сложность их очистки, и поэтом)' они малопригодны для
транспортирования влажных и липких грузов.
Угол наклона конвейера существенным образом влияет на его
длину. С увеличением этого угла длина конвейера уменьшается,
что приводит к снижению эксплуатационных расходов, уменьшению
производственной площади, снижению объема капитальных работ.
Так, при высоте подъема 30 м длина ленточного конвейера с глад-
кой лентой п,ри угле наклона 20° равна 82 м, длина конвейера с
078
рифленой лентой при угле наклона 30° равна 52 м, а конвейер.,
имеющий ленту с перегородками, расположенную под углом 50°,
составляет по длине всего 25 м.
Кроме указанных выше способов удержания груза на ленте кон-
вейера с целью обеспечения больших углов наклона находят при-
менение крутопаклонные двухленточные конвейеры с прижимной
Рис. 211. Транспортирование сыпучего груза при большом
угле наклона:
а — конвейер с прижимной лен iой; б — скребково-ленточный кон-
вейер
или с трубчатой лентой и скребково-ленточные конвейеры. В двух-
ленточных конвейерах с прижимной лептой (рис. 211, а) транспор-
тируемый груз подается на загрузочный участок конвейера и при-
жимается к основной ленте 1 конвейера силой тяжести прижимной
ленты 2, что препятствует скольжению груза вниз по основной лен-
те. Прижимную ленту изготовляют из обычной резинотканевой
ленты или из соединенных между собой звеньев сварной цени.
В последнем случае она обладает высокой гибкостью в продольном
и поперечном направлениях, что позволяет ей плотно.охватывать
груз как в общей массЬ, так и его отдельные большие куски. При-
жимная лента приводится в движение лентой дополнительного
конвейера 3, установленного параллельно основному и имеющего
ту же скорость. Применение прижимной ленты позволяет осущест-
вить подъем сыпучего груза при углах наклона 48—60°.
В конструкции скребково-ленточного конвейера (рис. 211,6) к
тяговой ленте 2 прикреплены скребки 7, захватывающие груз из за-
грузочной воронки 6 и удерживающие его от соскальзывания с ра-
бочей ленты 5 конвейера, перемещающейся со скоростью, равной
скорости тяговой ленты. Тяговая лента 2 и рабочая лента 5 удер-
живаются от прогиба под действием веса груза направляющими ро-
ликами 3 и 4.
В некоторых конструкциях двухленточных конвейеров ленты на
рабочей ветви образуют закрытую камеру, заполняемую грузом.
379
В конструкции па рис. 212, б ленты основного и вспомогательного
конвейеров на нерабочей поверхности имеют продольный выступ
посередине ленты, а роликоопоры 2, 10 холостых ветвей 1, 11 и ро-
ликоопоры о, 8 грузовых ветвей 4, 7 ленты имеют соответствующие
канавки, в которые попадают выступы лент. Края грузовых ветвей
-4 и 7 основного и вспомогательного конвейеров прижимаются друг
к другу прижимными роликоопорамп 5 и 6, прикрепленными к ра-
Рис. 212. Двухленточный конвейер:
а—схема горизонтально-вертикального конвейера; б—сечение полотна с плоской
лен гой
ме 9 конвейера. Груз попадает на ленту 1 (рис. 212, а) на гори-
зонтальном участке. Скорости движения обеих лент 1 и 2 одина-
ковы.
Основные преимущества рассмотренных конвейеров следующие:
простота и унификация конструкции, простота очистки ленты от
прилипших частиц груза, возможность создания комбинированной
трассы с горизонтальными и крутопаклонными участками различной
длины, высокая экономичность. Недостатки этих конвейеров —
•просыпание груза на продольных стыках кромок двух лент, необхо-
димость создать поперечные нагрузки на ленты для обеспечения
стабильного положения столба сыпучего груза на вертикальном
участке трассы, повышенный износ ленты, увеличение расхода
энергии. Двухленточные конвейеры могут обеспечить работы с вы-
сокими скоростями (до 6 м/с) при угле наклона до 90°, причем их
производительность не зависит от угла наклона.
Для транспортирования ядовитых, пылящих или портящихся от
воздействия атмосферных условий материалов находит применение
трубчатая лента (рис. 213, а), которая в развернутом виде пред-
ставляет собой полосу, состоящую из С|редней утолщенной части,
снабженной несколькими тканевыми прокладками, и более гибких
боковых частей с зубцами на кромках. Зубцы при свертывании лен-
ты соединяют ее кромки с помощью замка типа застежки «молния».
На участке загрузки лента открыта и образует желоб, который пос-
ле заполнения ленты грузом застегивается с помощью двух пар ро-
ликов, образуя плотно закрытую трубу. В зоне разгрузки лента
раскрывается и движется в плоском состоянии, что позволяет осу-
ществить ее очистку. Такая трубчатая лента дает возможность
380
чуществить транспортирование материала как по горизонтали, так
। по сильно наклоненным и вертикальным участкам трассы.
В некоторых случаях такие трубчатые ленты используют на
навесных конвейерах (рис. 213, б), где лента не является тяговым
> (сментом, роль которого выполняет специальный тяговый элемент
(канат или цепь), завулканизированный в края ленты. Это позво-
!яст использовать более тонкие лепты. Замок может находиться
чак сверху, так и сбоку лен-
। ы. Скорость движения под-
носных ленточных конвейе-
ров обычно находится в пре-
;слах 0,5—1 м/с. При расче-
iax их производительности
принимается, что заполнено
Ччоло 0,6 площади попереч-
ного сечения трубы.
Для транспортирования
изделий через сушильные и
нагревательные камеры при
температуре до 200°С при-
меняют специальные ленты
из стекловолокна, покрыто-
о кремнийорганическим ка-
S чуком толщиной до 6 мм,
<7) S)
Рис. 213. Трубчатая лента:
а — ленточного конвейера; б — подвесного кон-
вейера с боковой застежкой
а также ленты из прорези-
ненной ткани с покрытием из стекловолокна.
Все более широко применяют резинотросовые ленты со сталь-
ными канатами, завулканизированными между слоями ткани вдоль
продольной оси ленты (см. рис. 209,6). Преимуществом этих лент
является их высокая гибкость в поперечном направлении, что по-
зволяет легко придавать им желобчатую форму, высокая прочность,
малое удлинение в продольном нащравлении при рабочих нагруз-
ках, повышенная долговечность-. Недостатком их является слож-
ность соединения концов ленты. В Советском Союзе освоен выпуск
резинотросовых лент шириной от 900 до 2000 мм при прочности по
ширине до 5 МН/м. Продолжаются работы по освоению выпуска
ленты шириной до 2000 мм при прочности по ширине до 6 МН/м.
Дальнейшее увеличение прочности конвейерных лент нецелесооб-
разно, так как приводит к увеличению толщины ленты и ее массы,
стоимости, диаметров барабанов, усложнению соединения концов
ленты. Максимально допустимая ((расчетная) сила растяжения тя-
гового каркаса резинотросовой лепты равна
тт^=в 1КД
где В — ширина ленты; [КРт] = Крт/п'— допустимая расчетная на-
грузка, численно равная силе на единицу ширины ленты; Крт— но-
минальная прочность на разрыв; п'=п0/(пСгПрпг)—расчетный за-
пас прочности (значения коэффициентов п0, пт и пр принимают та-
кими же, как и для резинотканевой ленты (см. с. 374); так как для
381
резинотросовой ленты допускается только вулканизированный стык,
то коэффициент /1ст = 0,9).
Для транспортирования на большие расстояния находят приме-
нение ленточно-канагные конвейеры (рис. 214), в которых тяговая
сила воспринимается двумя стальными канатами 1, а резиноткане-
вая специальная лента 2 является только.элементом, несущим груз.
Лента ложится на канаты утолщениями, отформованными вдоль
Рис. 214. Ленточно-канатный конвейер:
а — ленга* б — поперечное сечение конвейера
обеих кромок ленты. Тяговый капа г 1 опирается на ролики 4, рас-
положенные с шагом 5—8 м. Чтобы лента нс теряла поперечной ус-
тойчивости под влиянием веса груза, ее армируют поперечными
стальными пластинами 3. Благодаря им лента хорошо пружинит и
сопротивляется ударам. Кромки ленты не изнашиваются, и износ
самой лепты также значительно меньше, поэтому срок ее службы
больше, чем обычной резинотканевой лепты. Однако такая лента
очень трудоемка в изготовлении, а большие размеры приводных
блоков существенно увеличивают габариты привода. Срок службы
канатов относительно мал и замена их сложна. Скорость движе-
ния ленты ленточно-канатных конвейеров обычно не превышает
2,5 м/с, а производительность 1000 т/ч.
Аналогичную конструкцию имеют ленточно-цепные конвейеры.,
в которых тяговым элементом является цепь. Тяговые цепи этих
конвейеров обычно опираются на каретки, снабженные ходовыми
катками. Эти конвейеры имеют еще меньшую скорость движения
вследствие возникновения динамических нагрузок в цепном приводе
и соответственно меньшую производительность.
Надежность и долговечность конвейерных лепт определяются в
значительной степени качеством соединения их концов. Чаще всего
понеоечные разрывы ленты и усталостное их разрушение происхо-
дят именно в месте соединения, поэтому соединения конвейерных
лент должны обладать прочностью, достаточной, чтобы восприни-
мать максимальную тяговую силу и удары от падения крупных
кусков груза; долговечностью, сравнимой со сроком службы ленты;
гибкостью в продольном и поперечном направлениях, необходимой
382
Рис. 215. Подготовка концов резинотка-
невой ленты для соединения вулкани-
зацией
:.:я придания ленте желобчатой формы и возможности огибания
шрабанов возможно меньшего диаметра; простотой и быстротой
исполнения соединения; они должны исключать возможность вы-
1яжки ленты и саморазъединения стыка, а также не выступать из
плоскости ленты. Соединения бывают разъемными и неразъемными.
К неразъемным относятся соединения, выполняемые с помощью го-
>ячей или холодной вулканизации, а также заклепочные соедине-
ния. К разъемным относятся
соединения на- петлях, крюч-
ках и соединения, выполняемые
с помощью пластин и болтов.
Разъемные соединения приме-
няются на передвижных и
1среносных конвейерах, а так-
же при необходимости часто
менять длину конвейера. Сое-
динение методом вулканизации
)беспечивает наиболее высо-
кую прочность и отсутствие
утолщений в месте стыка, что
благоприятно влияет на рабо-
ту барабанов, поддерживаю-
цих роликов и очистных уст-
ройств.
Резинотканевую ленту сле-
тует стыковать методом вулка-
низации с использованием
клеев холодного или горячего
ггверждсния. При соединении
вулканизацией концы лент срезают ступенчато по одной прокладке
:од углом к продольной осп лепты (рис. 215). Затем прокладки
жищают и промазывают специальным клеем, после чего концы
:ент накладывают один на другой и выдерживают под давлением
. нагревом до температуры 150~С. Резинотросовые ленты стыкуют
•алько горячей вулканизацией. При этом растягивающая сила
.омпспсирустся прочностью связи тросов с резиной.
Ленты из тканой типа БКНЛ-55, БК.ПЛ-100, ТА-100, ТК-ЮО,
31\НЛ-150 и ТА-150 шириной до 1200 мм допускается стыковать
механическими способами.
Барабаны. В ленточных конвейерах различают приводные, кон-
гевые, натяжные и отклоняющие, служащие для изменения направ-
ления движения ленты, барабаны. Чем больше диаметр барабана,
:ем меньше напряжение от изгиба ленты и тем больше срок ее
•лужбы. При эксплуатации лент установлено, что |рсзинотканевую
ленту обычно приходится заменять из-за ее расслаивания, которое
происходит от многократных изгибов ленты на барабанах. Диа-
•летр барабана (в метрах) при резинотканевой ленте определяется
до формуле
^бар — K\K2Z’>
383
где z — число тканевых прокладок в ленте; Л] — коэффициент, за-
висящий от прочности ленты:
Прочность про-
кладки по ши-
рине, кН/м ... 65 100 150 200 300 400
Коэффициент^ . 125—140 141 — 160 161 — 170 171 — 180 181 — 190 191-200
/^2 — коэффициент, учитывающий назначение барабана, а также
натяжение ленты и угол обхвата ею барабана (табл. 38).
Таблица 38. Значение коэффициента К2
Барабаны Угол об\ва та барабана лентой, град Отношение натяжения деты, набегающей на барабан, к допускаемому натяжению
76-100% 51-75% 25-50% 25 70
Приводные 180—240 1 0,8 0,63
Концевые и натяжные 180—200 1 0,8 0,63 0,5
Оборотные 70—100 — 0,63 0,5 0,4
Отклоняющие 20—30 — — 0,4 0,32
В
унифицированы.
качестве
Барабаны Ленточных конвейеров
основной характеристики, используемой при выборе барабанов из
установленного ряда типоразмеров, принята нагрузочная способ-
ность барабана. Для неприводных барабанов нагрузочная способ-
ность определяется как нагрузка от натяжения ветвей ленты, оги-
бающей барабан, а для приводных барабанов, кроме того, следует
учесть еще и максимальный передаваемый крутящий момент. Вы-
бор барабанов любого назначения при проектировании производят-
следующим образом: при проведении тягового расчета конвейера
находят максимальную нагрузку в ленте и по ее значению подби-
рают ленту (тип, число прокладок); затем определяют необходи-
мее, ‘минимально возмож^йе диаметры барабанов q учетом значе-
ний коэффициентов Л) и пос^^этого для каждого из барабанов
находят радиальную силу 5бар, действующую на барабан, как гео-
метрическую сумму натяжений ветвей ленты; при тяговом расчете
определяют также крутящий момент Л1Кр и окружную силу F, дей-
ствующие на приводном барабане. В заключение по полученным
параметрам из унифицированного ряда подбирают барабан по его
нагрузочной способности, определенной по результатам расчета
осей и валов на прочность и сопротивление усталости и расчета под-
шипников на долговечность.
Для выбранного барабана определяет допустимое давление
ленты на его поверхность по условию
360S6ap
.. .. =
Л Ud
где Soap — результирующая радиальная .сила от натяжения ветвей
ленты; D — диаметр барабана; В — ширйна ленты; а — угол обхва-
384
(66)
лентой барабана, град. Для резинотканевых лент допускаемое
явление [р] = 0,2-40,3 МПа. Для резинотросовых лент [р] =
0,35-40,55 МПа. Меньшие значения допускаемого давления при-
нимаются для лент меньшей прочности, а также при работе кон-
вейера в тяжелых режимах.
Чтобы лента не сбегала с барабанов в сторону, приводные и на-
ыжные барабаны (рис. 216; а, б) прежде выполняли бочкообраз-
ными со стрелой выпуклости А/200, но не менее 4 мм. Но надо
1меть в виду, что применение выпуклого барабана приводит к по-
.ышению натяжения (до 40%) в сравнительно неширокой цент-
шной части ленты, что часто вызывает порчу соединения концов.
1! этому в последнее время стараются не применять выпуклых ба-
’•’'днов, обеспечивая центровку ленты с помощью центрирующих
' Дикоопор.
Отклоняющие барабаны выполняют цилиндрическими. Длину
барабана принимают равной L = B+ (150—200) мм. В случае необ-
шмости повышения коэффициента трения поверхность прнвод-
. : э барабана футеруют различными высокофрикционными мате-
щлами и чаще всего эластичной резиной (рис. 216, в), обеспечи-
• нощей большой запас трения благодаря передаче части тяговой
илы на дуге относительного покоя. Деформация сдвига футеровки,
возникающая при этом, несколько снижает упругое скольжение
тенты по поверхности барабана: в результате снижается износ фу-
теровки и конвейерной ленты. Футеровка резиной обеспечивает ста-
бильный коэффициент трения: f= 0,3-40,45.
Крепление футеровки к барабану должно быть прочным, чтобы
шотивостоять сдвигающим нагрузкам, возникающим при передаче
'шэабаном тяговой силы. Лучше всего приклеивать или привулка-
нтзировать футеровку к поверхности обечайки барабана или к ме-
'аллическим листам, которые, в свою очередь, крепят к обечайке
•о.ттами (рис. 216, г). Футеровку, прикрепленную последним спо-
ибом, в случае необходимости легко заменить.
На конвейерах небольшой длины иногда устанавливают 'элек-
1 робарабаны, J3 которых двигатель Н‘рёдуктбр находится в полости
шрабана, что позволяет создать ^е^ьм а компактную и легкую кон-
грукцию. Однако из-за худшего охлаждения условия работы элек-
:родвигателя в этих конструкциях значительно более тяжелые.
Поддерживающие роликоопоры. Чтобы лента под влиянием соб-
1 венной силы тяжести и веса груза не провисала, на раме конвей-
р'а устанавливают поддерживающие роликоопоры. Ролики явля-
огся самыми многочисленными элементами конвейеров. Их еже-
одно выпускают миллионы штук. От надежной и долговечной ра-
иты роликоопор зависят ^большой степени надежность и долго-
вечность всей машины, а также потребляемая ею энергия, эксплуа-
тационные затраты и т. п.
В зависимости от назначения существуют два основных тип^
.инструкций роликов. В роликах легкого uiiia. (рис. 217, а) п*риме-
ichli шариковые подшипники .со встроенными манжетными уплот-
нениями. Смазка подшипниковзакладная, долгодействующая.
385
f’i> UKU T 14 с i t! 217 у< 1 ЛК В iC'I’l Ш. 1< ШЧС^ЧИ''
роЛИКОРСДШИПЧИ и. \ il 1О'СЮ1 Kitxc ’ 1C I'HI -J [TH 3?MP il (.MfUi
На базе (чрор’оЧ типов ротилоз нредуех о1 йены j аз н1 'ные в'
исполнения
Обрезиненные ро гики применяют при транспортировке высоко
абразивных грузов Слой резины, пак тееннь и на внешнюю металла
Рис 216 Барабаны для конвейера с резинотканевой тенюй
« — приводно о—\bocioh и 0ТКЛ0ИЯЮЩ1Н в — СараСан q 5 . j о"а ;i
крипе 1ие фу еронкп к 6j >aojtiv
38b
>. о поверхность ротика, предохраняет ею от истиоания, особен-
> нт хо юстой ветви, так как там дейта идет по ротикам своей
о >401 стороной, загрязненной остатками манерна та
Амортизирующие ролики (рис 217, в) применяют в роликоопо-
ах, зстанавтиваемых под загрузочным узлом конвейера с целью
федохранения ленты и подшипников от ударов падающего груза.
>та разновидность отличается наличием резиновых дисков или шин,
гадеваемых с натягом на корпус ролика и поглощающих при своей
реформации энергию удара
Дисковые ролики предназначены для предохранения роликоопсф
т налипания на них транспортируемого груза и для очистки от не-
э холостой ветви ленты Этот тип роликов применяется тотько ,гя
элостой ветви конвейера и конструктивно представши г собой ро-
ик с насаженными на него высокими резиновыми дискам"
387
В настоящее время разработана новая конструкция безвкла-
дышного ролика (рис. 217, г), отличающаяся высокой технологич-
ностью изготовления. Для роликов этой конструкции не требуется
дополнительной механообработки и сборки и расход металла сни-
жается на 10 —15%. Особенностью ролика является то, что его
корпус вместе с полуосями выполнен из одной трубчатой заготовки
методом обкатки.
Ролики обычно изготовляют из стальных труб. Находят приме
нение также ролики из полиэфирной смолы, армированной стекло-
волокном, и гибкие ролики из неопрена, имеющие большую износо-
стойкость.
Диаметр ролика выбирают в зависимости от ширины ленты, ско-
рости ее движения, вида груза и особенно от размеров кусков.
В соответствии с ГОСТ 22646—77 установлен ряд диаметров роли-
ков: 89, 108, 133, 159, 194 мм. При этом ролики диаметром от 89
до 133 мм применяют в конвейерах легких и средних типов, а ро-
лики больших размеров — в конвейерах тяжелого типа и быстро-
ходных (с’^4 м/с) конвейерах. Шаг установки роликов в конвейе-
рах с резинотканевой лентой на средней части рабочей ветви при
транспортировании насыпных грузов принимается в пределах =
= 14-1,5 м. В зоне загрузки ленты шаг роликов вдвое меньше. На
холостой ветви ленты шаг роликов во всех зонах вдвое больше ша-
га на рабочей ветви, т. е. /х = 2/р. При транспортировании мелких
штучных грузов массой до 20 кг расстояние между опорами на
средней части рабочей ветви конвейера fp = 1-41,4 м; для штучных
грузов массой более 20 кг расстояние между роликоопорами ра-
бочей ветви принимается равным половине наибольшего размера
груза по направлению движения конвейера. <
На концах оси ролика фрезеруются лыски и ось вставляется в
пазы, вырезанные в раме конвейера или в кронштейне. Для уве-
личения площади поперечного сечения насыпного груза ленте при-
дается желобчатая форма, для чего ролики роликоопоры на ра-
бочей ветви конвейера располагают наклонно (см. табл. 34).
Увеличение угла наклона боковых роликов способствует центриро-
ванию ленты, уменьшая ее поперечное смещение. Основным типом
желобчатой роликоопоры является роликоопора с углом наклона
30°, обеспечивающая более высокую производительность, лучшее
центрирование ленты, уменьшение просыпания груза. Опоры холо-
стой ветви чаще всего выполняют однороликовыми.
Для конвейеров с резинотканевой лентой применяют также гиб-
кие роликоопоры (рис. 218, а, б), состоящие из стального троса /
с резиновыми роликами 2 и трубками 3, закрепленными на ролике
вулканизацией. Концы троса заделаны во втулках 4 и вращаются
в подшипниках 5, установленных в неподвижных опорах на раме
конвейера. С помощью такой опоры ленте также придают ферму
желоба, причем его глубина пропорциональна весу груза, но лента
имеет несколько больший коэффициент сопротивления движению.
Разработаны и так называемые гирляндные роликоопоры
(рис. 218, в), в которых оси роликов шарнирно соединены между
388
ленты, уменьшают металлосм-
собой. Гирляндные опоры, подвешиваемые с помощью резинового
амортизатора 6 па несущие элементы 7 рамы, имеют повышенную
податливость, смягчающую динамические нагрузки, обеспечи-
вают лучшее центрирован!
кость рамы конвейера. Од-
нако их применение ухудша-
< । условия формирования
потока груза вследствие бо-
ковой податливости гирлянд
в пунктах загрузки и созда-
ст раскачивание гирлянд в
направлении движения
ЛИ'! Ы.
Надежность и долговеч-
ность конвейерной ленты в
шачптельной мере опреде-
ляются центровкой ленты
относительно продольной
оси конвейера. Лента сдви-
1ается в сторону при работе
конвейера из-за некачест-
венного его монтажа, серпо-
впдности ленты, несиммет-
ричной загрузки и т. п., по-
лому конвейеры оснащают-
ся специальными устройст-
вами — центрирующими,
роликоопорами для центри-
рования ленты. В такой ро-
ликоопоре (рис. 219) узел ро-
ликов монтируется на рамке
1 с цапфой 2, обеспечиваю-
щей возможность поворота
роликоопоры относительно
вертикальной оси. Сбегая в
сторону, лента своей кром-
кой нажимает на центриру-
ющий ролик 3, что приводит
к повороту рамки 1. При
этом возникает сила, возвращающая ленту в нужное положение.
Для предупреждения чрезмерного смешения ленты в сторону
в ряде случаев применяют специальное электроблокцровочное уст-
ройство, обеспечивающее автоматическое выключение электродви-
гателя привода при смещении лепты от продольной оси сверх до-
пускаемого предела. В этом случае .пента при сходе с опор нажи-
мает кромкой на ролик, соединенный тягой с выключателем.
Для увеличения- центрирующей способности роликоопоры могут
устанавливаться группой из 2—3 шт. и иметь принудительную сис-
тему управления со следящей системой.
Рис. 218. Гибкие роликоопоры для резино-
тканевой ленты:
а — опора с роликами, набранными из дисков:
й — поперечное сечение резинового ролика иг
тросе, в—।ирлянлпая родикоопора
389
Рис. 219. Центрирующая роликоопора