/























































































































































































































































































































































































































Text
СИГНАЛ
СИГНАЛ
Ж II О НЕКОТОРЫХ || \Х/ понятиях ||<¥> || КИБЕРНЕТИКИ |/Т\
№:Exlibris Андрея И. Полетаева
Послесловие Я.И. Фета к сетевому изданию 2004 г.
ИЗДАТЕЛЬСТВО „СОВЕТСКОЕ РАДИО
М О С К В А — 1958
ПРЕДИСЛОВИЕ ИЗДАТЕЛЯ
Полетаевский «Сигнал» - особенная книга... Ее появление в 1958 году стало вехой на тернистом пути отечественной кибернетики. Странным образом, XX век ознаменовался не только великими научными достижениями, но и позорными преследованиями Знания и ученых. «Обезьяний» процесс в США, аризация наук в Германии, гонения на биологию, теорию относительности и кибернетику в СССР... Иррациональность этих явлений в нашей стране оттенялась тем, что «крамольные» направления - от радиобиологии до системотехники - все равно интенсивно развивались ради обеспечения обороноспособности. В результате, от ретроградов наиболее пострадало самое легальное и открытое для нападок звено, а именно - образование. «Оттепель» в образовании началась с публикации новых учебных пособий, написанных активно работающими учеными. Одним из таких пособий и стал «Сигнал». Характерно, что книга Игоря Андреевича Полетаева вышла в «Советском радио» - ведь аудитория именно этого издательства - огромная армия радиолюбителей - была особенно восприимчива к новым идеям.
Если бы эта книга имела только исторический интерес, вряд ли стоило ее переиздавать. Она безусловна сохранилась, по крайней мере, в крупных библиотеках, и доступна специалистам. Однако «Сигнал» является шедевром научно-популярной литературы, да и массовая потребность в нем сегодня вряд ли меньше, чем полвека назад. Дело в том, что теория информации и теория управления оказались в беспризорниках, и их основы выпали из школьных программ по физике и по естествознанию. Что же касается информатики, то этот курс ориентирован почти исключительно либо на обучение популярным алгоритмическим языкам и элементам программирования, либо на освоение текущих версий операционных систем и прикладных программ. Блестяще написанная книга И.А. Полетаева безусловно способна заполнить образовавшуюся лакуну и помочь молодежи получить из первых рук добротные знания о наиболее общих проблемах обращения с информацией н управления сложными системами.
Это издание подготовлено учениками московской гимназии № 1543 Алексеем Алексеевым, Владимиром Марченко, Русланом Саркисяном и Михаилом Степановым при любезном содействии Андрея Игоревича Полетаева.
VIVOS VOCO
ОГЛАВЛЕНИЕ
Предисловие .............................................
Глава 1. Энергетика и кибернетика........................
Управление потоками энергии..........................
Информация...........................................
Глава 2. Сигнал..........................................
ИзоморфиЗхМ..........................................
Возникновение сигнала и реакция .....................
Сигналы порождают сигналы............................
Полнота описания ....................................
Дискретные и непрерывные сигналы.....................
Глава. 3. Случай........................................
Случайные события ...................................
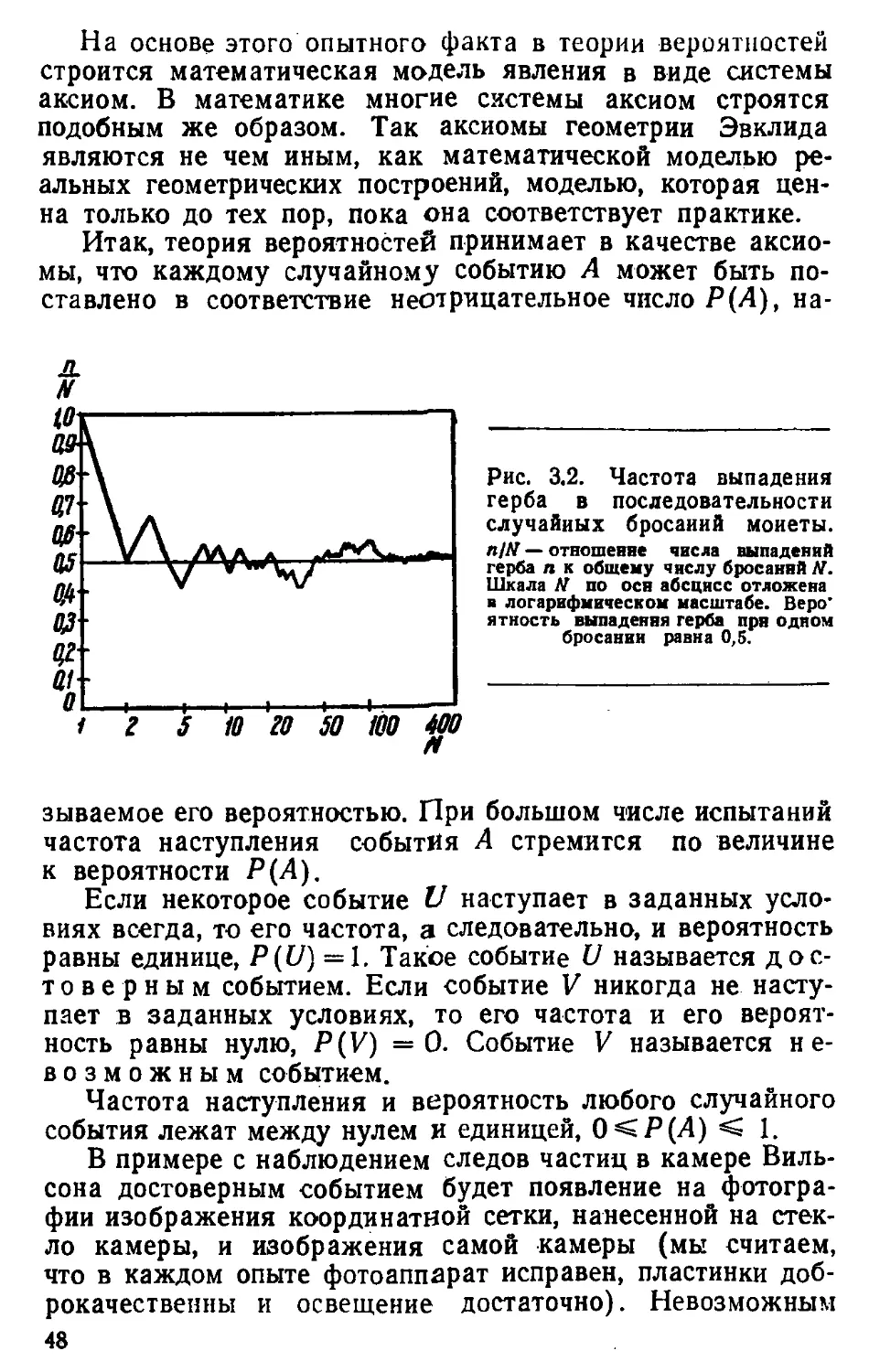
Вероятность .........................................
Распределение вероятностей. Математическое ожидание и дисперсия ..........................................
Шум.................................................
Вероятность в физике. Энтропия .....................
Глава 4. Количество информации..........................
Информационная едкость...............................
Мера количества информации ..........................
Код..................................................
Скорость передачи ...................................
Самокорректирующиеся коды ...........................
Теорема Шэннона......................................
Информационная и физическая энтропия. Организация . . .
9 11 22 25 28 34 36 37 40 44 44 47
53 58 62
70
80
84
89
92
94
Глава 5. Передача сигнала...........................102
Модуляция............................................103
Искажения............................................110
Спектр и полоса пропускания ........................ 113
Селекция.............................................116
Пример канала связи..................................119
Работа нервного волокна..............................124
Глава 6. Обратная связь. Регулирование...................128
Работа систем регулирования ........................ 137
Обратная связь в живых организмах....................141
Рефлексы.............................................150
Глава 7. Сигнал в машине.................................162
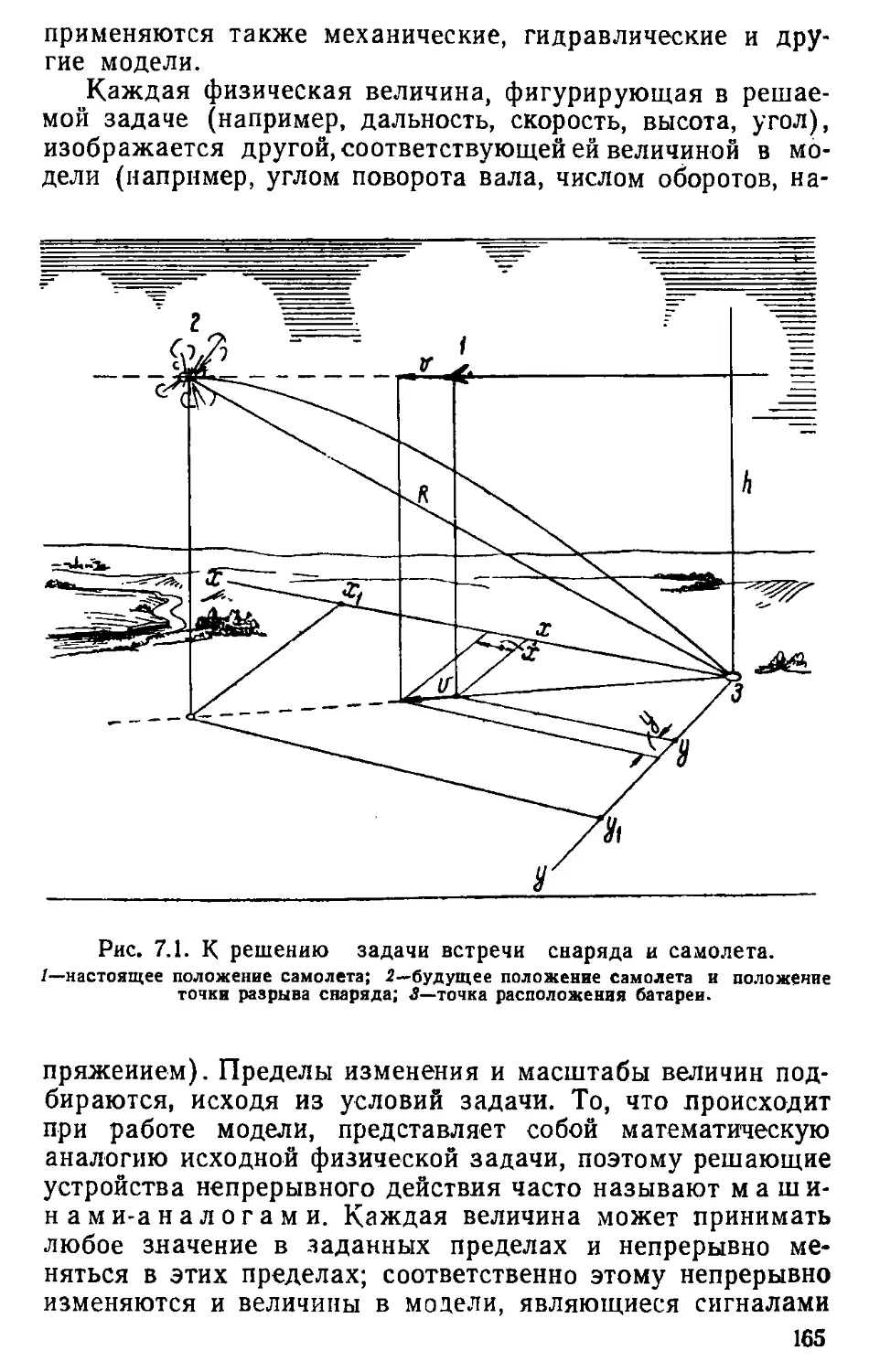
Вычислительные устройства непрерывного действия .... 164
Дискретный счет......................................169
Вычислительные устройства дискретного счета..........172
Счетно-аналитические машины..........................176
Быстродействующие электронные вычислительные машины 180
Управление и память ................................ 193
Особенности электронных машин........................203
Теоретическая логика и алгебра релейных схем ....... 206
Релейные схемы....................................... 212
Машины и мышление....................................218
Глава 8. Робот..........................................221
Кибернетические игрушки..............................233
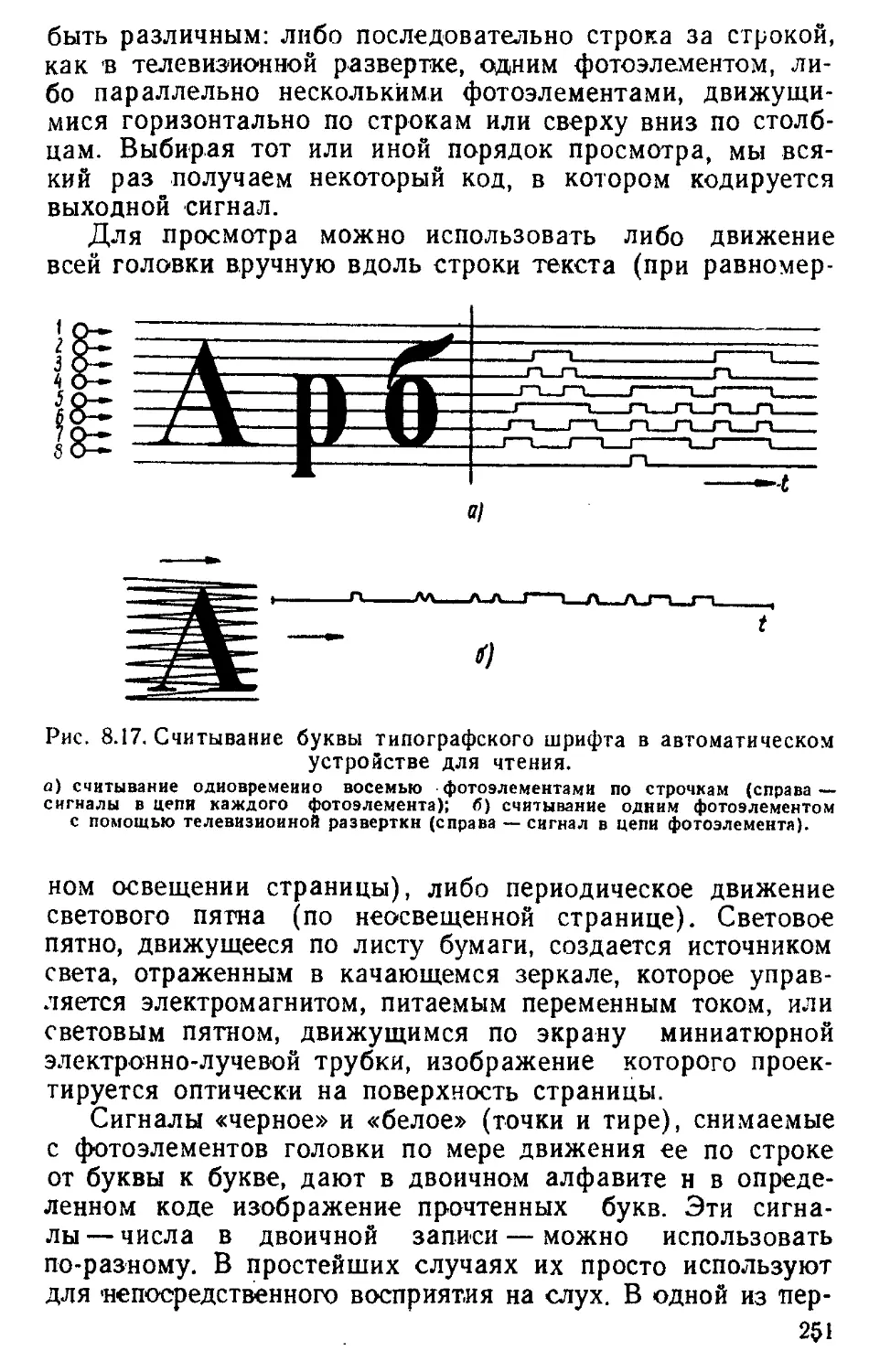
Роботы и язык........................................245
Автоматический перевод ............................. 258
Другие роботы........................................267
Глава 9. Мысль..........................................275
Человек у машины.....................................277
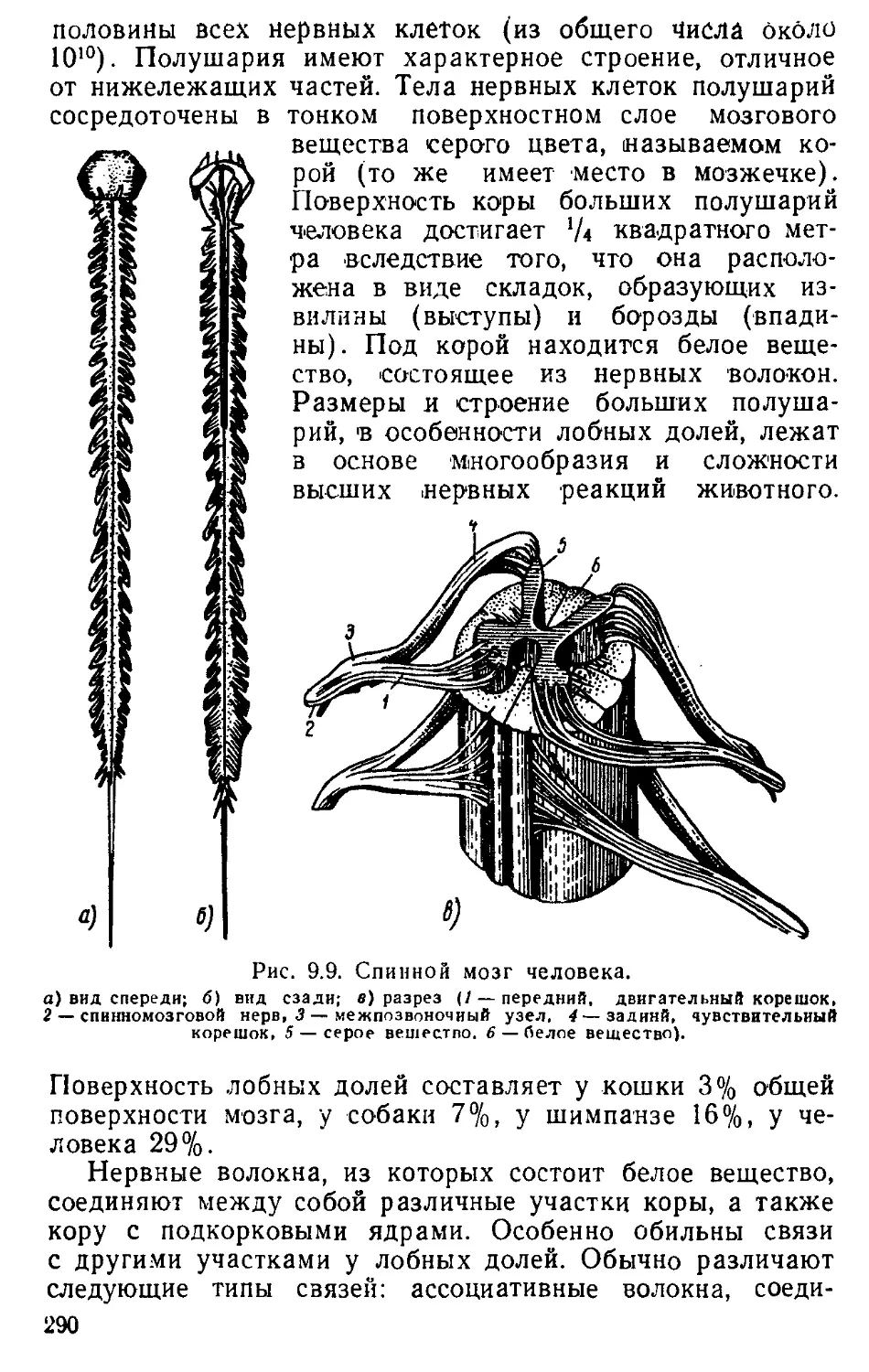
Строение нервной системы.............................283
Работа мозга.........................................293
Эмоции...............................................307
Сигнальные процессы в мозге..........................309
Чем не обладает машина?..............................315
Глава 10. Игра..........................................331
Понятия теории игр...................................333
Стратегия............................*...............334
Функция пользы...................................... 336
Смешанное расширение игры........................... 342
Случайные ходы.......................................347
Машины, играющие в стратегические игры...............350
Еще раз о неопределенных играх ......................354
Глава 11. Робот, который мог бы быть умнее своего конструктора .........................................360
Самоорганизующиеся системы...........................362
Осуществление самоорганизующихся систем..............367
Избыточность организации.............................376
Глава 12. Большой робот.................................380
Что же дальше?.......................................380
Возможности кибернетических систехМ..................385
Заключение..............................................395
Краткая библиография................................ 401
Узнать, понять и охватить гармонию научного здания с его недостроенными частями — значит получить такое наслаждение, какое даёт только высшая красота и правда.
Д. И. МЕНДЕЛЕЕВ.
ПРЕДИСЛОВИЕ
Кибернетика* есть наука о процессах управления и передачи сигналов в машинах и живых организмах, использующая математические методы.
Сигнал, т. е. физический процесс, несущий информацию, является центральным понятием кибернетики, отсюда—название этой книги.
Возникновение, передача и использование сигнала для управления представляет собой явление весьма общее для самых, на первый взгляд, различных объектов. Закономерности использования сигнала в системах управления и связи обширны, многообразны и отличны от законов преобразования энергии. Эта специфика нуждается в отдельном изучении и отдельной трактовке, достаточно общей и строгой.
Задача данной книги не в том, чтобы дать исчерпывающие, точные и окончательные определения понятий
* От греческого корня хореручх1& означающего «искусство рулевого».
кибернетики и изложить решения всех проблем. Такая задача сегодня вряд ли выполнима. Цель этой книги заключается лишь в том, чтобы дать читателю предварительное, по возможности понятное изложение общих идей, на которых строится учение об информации и управлении. Большой интерес к вопросам кибернетики, по-видимому, оправдывает такую попытку. Общее знакомство со всем кругом идей кибернетики в целом обычно вызывает большой интерес и помогает углубленному изучению какого-либо одного ее раздела.
Широкое поле применений кибернетики—от теории связи до рефлексологии—создает большие трудности для тех, кто пытается охватить материал в целом. Однако большая часть ценности понятий кибернетики в том и состоит, что они позволяют усматривать общее в самых разнообразных явлениях и взаимно обогащать самые, казалось бы, отдаленные друг от друга области знаний. Поэтому ограничиваться рассмотрением каких-либо отдельных применений кибернетики означает наносить вред изложению. Признав нежелательным такое обеднение содержания и будучи убежденным в том, что опасность совершить мелкие ошибки в деталях является меньшим злом, чем выбрасывание из рассмотрения целых областей применения кибернетики, автор был вынужден, естественно, входить в те области знаний, которые далеки от его привычной узкой специальности. Разумеется, добиться исчерпывающей полноты изложения было затруднительно по многим причинам. К содержанию книги можно и, быть может, нужно многое добавить.
Изложение понятий кибернетики в этой книге, в основном, преследует цель возбудить интерес к конкретным проблемам и привлечь к ним внимание. Нам представляется, что биолог и врач по-новому увидят тот живой материал, с которым они работают, получив общее представление об информации, связи и управлении в их технических применениях, а инженер сумеет увидеть новые перспективы, сравнив системы, им создаваемые, с естественными системами аналогичного назначения.
Изложение понятий кибернетики в общедоступной форме и без больших упрощений представляется делом нелегким. Берясь за его выполнение, часто приходится жертвовать развлекательной стороной изложения, надеясь, что содержание самих понятий кибернетики не позволит читателю скучать.
Кибернетике еще не исполнилось десяти лет со дня ее
если не рождения, то «крещения»*. Количество проблем как принципиально-познавательного, так и утилитарноприкладного характера в области кибернетики поистине огромно, и большинство из них ожидает скорейшего разрешения. Поэтому задача направить силы ученых и техников на решение этих насущных проблем, создать единое понимание общих законов управляющих систем и систем связи, установить общую систему понятий и терминов для различных отраслей знаний представляется задачей чрезвычайно актуальной. Если настоящая книга хоть в незначительной степени послужит привлечению внимания различных специалистов к их общим интересам, задачу ее можно считать выполненной.
Мы являемся свидетелями первых шагов кибернетики. Возможности, которые она сулит в перспективе, настолько велики, что самая смелая фантазия может оказаться бессильной их представить.
Изложение в настоящей книге не копирует какой-либо источник или серию источников, хотя общие идеи почерпнуты из многих работ.
Кибернетика сложилась впервые в США, Франции и Англии. Первые шаги кибернетики в СССР были омрачены возникшим по недоразумению предвзятым отношением к ней. К счастью, недоразумение сейчас рассеяно, и кибернетика заслуженно завоевывает все большее внимание советской интеллигенции. Сегодня уже невозможно огульное охаивание кибернетики; остались только споры принципиального характера, закономерные и необходимые на всех этапах развития науки.
Спорных и нерешенных вопросов в кибернетике много. Это делает ее особенно интересной. В настоящей книге намеренно не обходятся спорные вопросы. Относительно будущих, не созданных еще устройств, нерешенных еще вопросов невозможно делать бесспорные утверждения. Широкое и свободное обсуждение проблем в научных спорах полезно для развития науки и поучительно для участников этих споров. Поэтому автор заранее благодарен всем, кто возьмет на себя труд добросовестной и аргументированной критики. Речь идет, разумеется, о науч-
* Слово «кибернетика» вошло в обиход с 1948 года после выхода в свет книги Н. Винера под этим названием. Впервые слово «кибернетика» употребил французский физик Андре Мари Ампер для обозначения науки о государственном управлении.
ном обсуждении вопроса, а не о декларациях с предвзятых позиций, которыми изобиловали первые сообщения о кибернетике у нас.
Из числа отрицательных суждений о кибернетике хочется отметить одно. Иногда работники узких прикладных специальностей, примыкающих к кибернетике, задают вопрос: «Зачем нужно называть «кибернетикой» то, что существует много лет без этого названия и чем мы с успехом занимаемся ежедневно? Нам это ни в чем не поможет!» Не хотелось бы резко возражать против подобных суждений. Можно много лет работать кочегаром и не иметь понятия об энергетике в целом. Можно всю жизнь говорить прозой и не подозревать об этом, без малейшего вреда для себя. Совершенно так же можно изо дня вдень занимаясь, например, следящими системами, не задумываться над связями понятий техники и биологии. И никто не будет вправе сказать, что такая деятельность в пределах одной узкой специальности не полезна. Но если бы мы занимались только деятельностью в пределах «узких специальностей», не выходя за их рамки, то мы не имели бы ни реактивных самолетов, ни меченых атомов, ни, быть может, атомной энергии, словом, ничего, что создано смелой мыслью, ломающей рамки «узких специальностей». Порой смелое объединение разнородных явлений общими понятиями приносит неизмеримо больше общественной пользы, чем движение по проторенным путям.
Автор считает своим приятным долгом выразить глубокую благодарность всем, оказавшим ему помощь в написании этой книги советами, указаниями и обсуждением грудных вопросов, и в первую очередь академику А. И. Бергу, без инициативы которого эта книга не увидела бы света, а также т.т. А. А. Ляпунову, А. И. Китову, Л. В. Крушинскому, М. О. Герцбергу и многим другим.
Москва, 1956 г.
ГЛАВА
ЭНЕРГЕТИКА И КИБЕРНЕТИКА
Нельзя представить себе современной культуры без использования огромных количеств энергии из естественных источников. Никакая отрасль современной индустрии не обходится без энергетических устройств значительной мощности. Огромные количества энергии расходуем мы при плавке чугуна в домнах или стали в мартеновских печах, обжимая многотонные болванки на прокатных станах, снимая стружку с миллионов металлических деталей на металлообрабатывающих станках, поднимая н перенося стройматериалы на стройплощадках, перемещая миллионы тонн грунта на строительствах гидросооружений, перевозя грузы и пассажиров из одного конца страны в другой по земле, воде и по воздуху, выполняя сельскохозяйственные работы. Энергия, дробясь на мелкие порции, проникает в наши жилища, освещает, согревает их, позволяет без затраты физического труда выполнять мелкие домашние работы. Энергия, преобразуемая машинами из одного вида в другой, послушно служит не только нашим материальным потребностям, но и помогает удовлетворять потребности
духовные. Современная полиграфическая промышленность, телефон, телеграф, радио, телевидение, кино не могли бы существовать без умелого использования больших количеств энергии. Попытайтесь представить себе, как изменилась бы жизнь современного города, если бы были выключены все источники энергии и нам пришлось бы обходиться только силой собственных мышц, и вам станет ясно, как тесно и прочно связана жизнь современного общества с использованием энергии.
Разнообразные и многочисленные применения энергии на пользу человека суть результат многолетнего развития различных отраслей науки и техники, которые объединяются общим названием энергетика. Электротехника, гидро- и аэродинамика, термодинамика, ядерная физика и многие другие отрасли науки и техники являются составными частями энергетики.
Основные знания в области энергетики были заложены уже в девятнадцатом веке. Открытие основных законов преобразования энергии — первого и второго законов термодинамики—позволило подходить строго, с числом и мерой, к конструированию энергетических машин.
Первый закон, закон сохранения энергии гласит: невозможно возникновение или уничтожение энергии. Этот закон устанавливает эквивалентность различных видов энергии при ее преобразованиях. Один киловаттчас электроэнергии может превратиться в 367 100 килограммометров механической работы, не больше и не меньше. Однако обычно не удается целиком использовать все количество энергии, участвующей в преобразовании. При работе машины часть энергии расходуется попусту, но она не исчезает, а переходит в такие виды энергии (чаще всего в тепло), которые уже нельзя полностью «собрать» и использовать. Использовать удается лишь часть энергии, участвующей в преобразовании. Эта часть (обычно выражаемая в процентах), называется коэффициентом полезного действия машины, преобразующей энергию. Одним из следствий закона сохранения энергии является следующее утверждение: «Коэффициент полезного действия (к. п. д.) машины не может быть больше 100%». Практически он всегда меньше 100%.
Конкретные отрасли энергетики, занимающиеся преобразованием энергии, в качестве одной из основных задач имеют повышение к. п. д. В этом отношении остается еще многое сделать. Так, например, к. п. д. паровоза обычно не превышает нескольких процентов, и из всей энергии, 10
полученной от сжигания угля в топке, лишь менее одной десятой расходуется на перемещение поезда, а остальные девять десятых бесполезно тратятся на нагревание окружающего воздуха.
Энергию, израсходованную на нагревание воздуха, обычно уже невозможно использовать снова или же, если и возможно, то лишь частично. Если два резервуара тепла имеют одинаковую температуру, то, хотя в них запасено большое количество энергии, использовать ее невозможно, не привлекая на помощь резервуар с более высокой или более низкой температурой. Это утверждение является одним из следствий второго закона термодинамики. Второй закон может быть сформулирован так: невозможен процесс, единственным результатом которого явилось бы превращение тепла в работу.
Первый и второй законы дают возможность ставить разумные требования к энергетическим системам и показывают, что от них можно требовать и чего нельзя.
Правда, и до наших дней еще встречаются горе-нзо-бретатели вечных двигателей, пытающиеся обойти либо первый, либо второй закон и получить энергию из таких источников, из которых ее невозможно извлечь. Попытки «изобретения» вечных двигателей не приносят пользы.
Энергетика еще не сказала своего последнего слова и продолжает неуклонно и быстро развиваться. Достаточно напомнить, что сейчас начата новая глава энергетики—использование атомной энергии. По этому пути сделаны только первые шаги, и в настоящее время еше трудно предсказать, насколько сильно использование энергии атома изменит облик энергетики. Ясно только, что эти изменения будут значительными и что в результате их «мышцы» человечества станут еще более могучими, чем в наши дни.
Управление потоками энергии
Всякое применение или использование энергии требует управления её потоком. Любую энергетическую машину нужно пускать в ход и останавливать, регулировать ее работу. Любой технологический процесс требует изменения количества подводимой энергии во времени.
Самым существенным в процессе управления потоком энергии является то, что для осуществления управления необходимо всегда меньшее количество энергии, чем то, которым управляют, Если бы это было не так, то управ-
to
ПЛАТ-*’
O-*-Y ТЛ Электрическое UW напряжение r^Y~ *”
веское wue 1Лг 9)
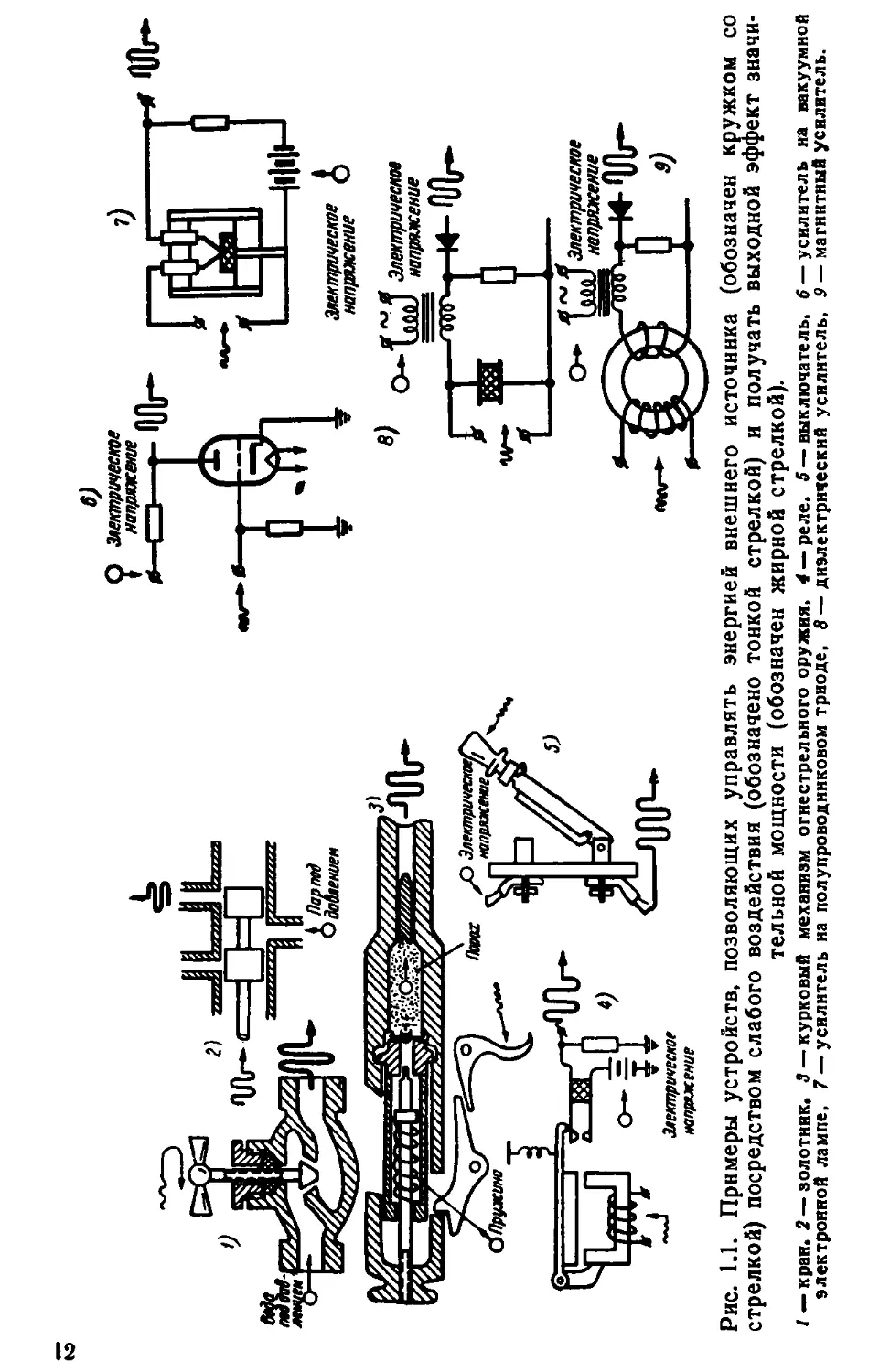
Рис. 1-1. Примеры устройств, позволяющих управлять энергией внешнего источника (обозначен кружком со стрелкой) посредством слабого воздействия (обозначено тонкой стрелкой) и получать выходной эффект значительной мощности (обозначен жирной стрелкой).
/—кран, 2 — золотник, 5 —курковый механизм огнестрельного оружия, 4 —реле, 5 — выключатель. 6 — усилитель на вакуумной электронной лампе, 7 —усилитель на полупроводниковом триоде, 8 — диэлектрический усилитель, 9 — магнитный усилитель.
ление было бы невозможно. Любое управляющее устройство имеет в своем составе «клапан», который открывает или закрывает путь большому количеству энергии и который требует для своего «срабатывания» сравнительно малого усилия. Такого рода «клапанами» являются электронные лампы, реле, контакторы, выключатели, дроссельные заслонки двигателей внутреннего сгорания, золотники паровой машины, водопроводные краны и т. д. Все устройства подобного рода можно рассматривать как усилители, которые получают на «вход» слабое воздействие и дают на «выходе» соответствующее действие большой силы, для которого энергия черпается из постороннего источника. Усилие, которое прикладывается к рукояткам управления паровой машины локомотива, соизмеримо с силой мышц человека, и человек, стоящий у машины, движением своих рук управляет энергией, во много раз превышающей его собственные энергетические ресурсы.
Первоначально, на заре энергетики, только человек-машинист стоял у рукояток управления машиной. В «атмосферической машине» Ньюкомена даже управление золотником для впуска пара в цилиндр при каждом ходе поршня осуществлялось машинистом, и скорость хода машины зависела, таким образом, от его расторопности. По преданию, мальчик-машинист Гемфри Поттер заставил машину самое дергать ручку золотника в нужный момент, привязав ручку веревочкой к шатуну машины. Это было одним из первых применений обратной связи в машине, которое сохранилось в принципе до наших дней и которое будет, вероятно, существовать еще долго. Изобретательный и ленивый мальчик передал свои обязанности по регулированию впуска пара самой машине, причем он разгрузил этим не только свои руки, но—что принципиально гораздо важнее— и свое внимание.
Регулятор Джемса Уатта, часто приводимый как классический пример автомата регулирования, относится к тому же классу устройств, заменяющих деятельность человека при выполнении им одной операции. В данном случае эта операция заключается в поддержании скорости хода машины постоянной посредством регулировки подачи пара при изменениях нагрузки. Регулятор отводит небольшую часть энергии машины и направляет ее на приведение в действие регулирующего клапана—заслонки. Этого небольшого количества энергии достаточно для управления машиной потому, что заслонка, подобно другим устрой
ствам «клапанного» типа, обладает свойством «усиления». Энергия, отводимая для регулирования, несет «сведения» об изменениях хода машины. Эти сведения регулятор использует для того, чтобы воздействием на заслонку регулировать ход. В сущности то же делал и человек, передавший свои функции регулятору.
И сейчас еще человек продолжает управлять машиной непосредственно, находясь в будке крановщика или экскаваторщика, сидя за рулем автомашины или трактора, держа в руках штурвал корабля или ручку контроллера электропоезда. Однако со времен Уатта и Ньюкомена машины настолько «поумнели», что некоторые из них могут
Рис. 1.2. Центробежный регулятор.
Паровая машина 1 работает на нагрузку 2, одновременно вращая регулятор Вместе с валом 3 вращаются грузы 4 и обойма 5. Если нагруака на валу машины уменьшится, вал начнет вращаться быстрее, грузы под действием центробежной силы разойдутся в стороны и поднимут обойму. Скользящий в пазу обоймы конец рычага 6 также поднимется. Другой конец рычага опустится и опустит заслонку 7, перекрывая трубу 8 н уменьшая доступ пара в машину. В результате работы регулятора машина лишь немного увеличит обороты, несмотря на уменьшение нагрузки.
обходиться вовсе без помощи человека. Человек же в тех случаях, когда он присутствует, выполняет лишь операции, которые почему-либо еще не автоматизированы. Машина «сама» принимает меры предупреждения против вредных последствий невнимательности и ошибок человека.
Решающую роль в развитии техники автоматического управления энергетическими устройствами сыграло появле-14
ние электроники—техники применения приборов, использующих свойства электронных и ионных токов в вакууме и полупроводниках, а также достижения техники связи. Создание быстродействующих, надежных в эксплуатации усилителей и реле создало огромные возможности для автоматического управления и управления на расстоянии.
Когда мы набираем с помощью диска номер телефона, мы получаем соединение с нужным абонентом—одним из нескольких десятков или сотен тысяч, причем ни один человек не участвует непосредственно в осуществлении соединения. Вращение наборного диска под нашими пальцами быстро и надежно управляет работающими телефонными искателями на АТС, расположенной за несколько километров от нашей квартиры.
Стоящий у вас в комнате холодильник сам следит за постоянством температуры своего шкафа, не допуская ни нагрева, ни переохлаждения его содержимого. Он управляется автоматически.
Сложные сообщения, приказы, распоряжения передаются по телефону, телеграфу, радио. Эти приказы управляют действиями людей—исполнителей. Рисунки, чертежи, фотографии передаются по фототелеграфу. Еще более сложные сообщения передаются по системе телевидения, доводя до зрителя движущееся изображение, серое или цветное, одновременно со звуковым сопровождением.
Передача сообщений на расстояние, управление на расстоянии, автоматическое управление—все эти отрасли техники выросли в недрах энергетики, на основе ее технических достижений и для обслуживания ее нужд. Однако совершенно ясно, что управление не сводится к одним только преобразованиям энергии, у него есть специфические особенности, которые заслуживают отдельного изучения.
Нужда в автоматах и управлении на расстоянии особенно возросла и стала насущной потребностью, когда родилась новая отрасль энергетики—использование ядер-ной энергии. Известно, что непосредственное соприкосновение человека с радиоактивными препаратами вызывает ожоги, лучевую болезнь и смерть. Только очень небольшие порции лучистой энергии переносятся живыми организмами без вреда. Поэтому управление ядерными реакциями, процессами изготовления и исследования радиоактивных препаратов не может производиться руками человека и под его непосредственным наблюдением.
К счастью, к моменту появления ядерной энергетики руки у человека были уже достаточно «длинными» и глаза достаточно «дальнозоркими», чтобы справиться с новыми задачами. Техника автоматического и дистанционного управления появилась раньше ядерных реакторов. Большие и малые электросиловые станции, управляемые полностью автоматически, работали уже более двух десятков лет тому назад. На таких станциях все операции по регулированию напряжения в сети при изменениях нагрузки, аварийная защита, переключения агрегатов, регулирование их режима работы, словом, все текущие операции обслуживания производятся автоматически. Только в случае глубокого повреждения дежурный инженер вызывается автоматически действующей аварийной сигнализацией. Такая же станция, но с ручным управлением, требует для своего обслуживания непрерывного внимания и усилий более десятка работников.
Автоматические метеорадиостанции сбрасываются с самолета на парашюте, сами (с помощью автомата) устанавливаются в рабочее вертикальное положение, включаются в работу и в течение долгого времени регулярно передают по радио результаты метеонаблюдений.
Очевидно, что некоторый и притом не слишком узкий круг обязанностей человека, связанных с применением не мускульной силы, а внимания и сообразительности, полноценно выполняется без его присутствия устройствами автоматического управления. На наших глазах машины «отнимают» у человека все больше обязанностей по управлению энергией. Собственно, само понятие «машина» раздвоилось. Машиной мы называем и двигатель внутреннего сгорания и электронную счетную машину. Мы, во избежание путаницы, будем называть «энергетическими машинами» машины типа двигателя внутреннего сгорания или паровой, преобразующие один вид энергии в другой. Что же касается счетных машин и систем управления, то мы дадим им несколько позже другое название.
Появление быстродействующих электронных цифровых машин, или —как их еще называют —машин дискретного счета, резко усилило «наступление» машин на область интеллектуальной человеческой деятельности или, проще говоря, позволило резко усложнить поручаемые машинам операции управления. Достаточно сказать, что автоматические устройства такого типа доказали на деле свою способность не только заменить труд многих десятков и 16
сотен техников—вычислителей, но даже выполнять удивительным образом такие, казалось бы, неотъемлемо человеческие обязанности, как перевод текста с одного языка на другой, например, с английского на русский. Несколько лет назад предположение о возможности поручить перевод машине многим показалось бы плодом больной фантазии.
Если машина и человек станут соревноваться в выполнении одной какой-либо операции, представляющей собой более или менее сложную реакцию на изменение внешней обстановки, то первое место, безусловно, останется за машиной. Машина работает во много раз быстрее и надежнее, чем человек, она не подвержена усталости, не отвлекается, ей не свойственны и другие человеческие слабости.
Человек, призванный выполнять одну единственную операцию, например, вести по ровной, свободной от препятствий дороге автомашину, работает как автомат. Его работа тем лучше, чем точнее, своевременнее и автоматичнее его реакции. Всякое отвлечение внимания, всякий «выход из режима автомата», чреват для него и пассажиров неприятными последствиями. Его работа может быть точно описана в тех же терминах, что и работа автомата.
Но слабость человека, призванного все внимание отдавать выполнению роли автомата, слабость, заключающаяся в том, что он может переключить свое внимание на нечто другое—отвлечься, она же является его главной силой, которой никакая машина ие может похвастаться. Человек может выполнять функции любого автомата, перестраиваясь с одной задачи на другую и обучаясь делать каждое дело наилучшим образом: вести любой экипаж в любых условиях, следить за ходом производственного процесса, вычислять, изобретать и т. д. Кроме того, он может выбрать, какую из задач ему нужно решать в настоящий момент, сформулировать эту задачу и найти методы ее решения, И хотя уже существует много автоматов, каждый из которых решает одну из задач, обычно решаемых человеком, и число типов таких автоматов непрерывно растет, до настоящего времени еще нет такого, который решал бы их в с е. Впрочем, мы не можем привести убедительных доводов, которые опровергали бы возможность существования и такого автомата.
В теле животных, в том числе и человека, непрерывно протекает большое число процессов, которые вполне по
добны работе технических автоматов, хотя они и протекают в совершенно иной физической среде и включают в себя работу живых тканей и клеток, которые по своей природе совершенно отличны от реле, радиолампы, рычага, потока пара. И тем не менее регулировка энергетического процесса нагрева и охлаждения и поддержание постоянства температуры тела теплокровных животных в принципе вполне подобны регулировке температуры в термостате. Это сходство можно проследить даже в деталях.
Уместно, однако, спросить, не является ли грубой ошибкой проведение сравнений между живыми организмами и механизмами? Не впадаем ли мы при этом в «вульгарный механицизм»? По-видимому, подобные сравнения проводить можно, тем более что они проводились и проводятся уже давно. Мы давно изучаем химические превращения веществ в тканях живых организмов и многие реакции повторяем в пробирке. Мы изучаем обмен энергии в организме, подсчитываем теплотворную способность пищи, поглощаемой организмом, изучаем механизмы рычагов, образуемых костями скелета и скелетными мышцами, мало того, мы вмешиваемся и в механику н в химию организма, исправляя его недостатки на основе знаний механики, физики и химии, предпринимаем хирургическое и медикаментозное лечение и прн этом не задаемся никакими вопросами о «вульгарном механицизме» или «вульгарном химизме». Если и другие законы природы, законы управления посредством сигналов, оказываются применимыми равно как для живой, так и для мертвой материи, то вряд ли что-либо, кроме, разве, предрассудков, может запретить рассматривать и использовать и эти законы. Было время, когда из-за тех же предрассудков строжайше запрещалось вскрытие трупов. Правда, это было очень давно. Сегодня мы можем и должны рассматривать факты без предубеждений, четко устанавливая как сходство, так и различия в явлениях природы.
Автоматизмы наблюдаются не только в деятельности внутренних органов, но и в поведении животных. Это так называемые «отраженные движения», нли рефлексы, которые появляются с «машинной» регулярностью и всегда одинаково при одинаковых раздражениях. По их изменениям судят об отклонениях от нормы в работе организма. Значит, не только деятельность внутренних органов тела животного, но и его поведение, можно поставить, конечно, 18
с должной осторожностью, в один ряд с работой технических автоматических устройств, рассматривать их, хотя бы отчасти, с единой точки зрения, применяя общую методику, одинаковые критерии оценки и т. д.
Несомненно, что обобщение сведений и методов как технических, так и биологических наук на основе строгого математического подхода приведет к взаимному обогащению естественных наук. Поэтому объединение точек зрения следует считать весьма желательным.
Но возможно ли это в действительности? Не является ли все же живая природа глубоко качественно отличной от неживой? Не стоит ли меж ними непроходимая стена, которая не позволит установить единые взгляды и методы? И можно ли свести все поведение животных, их приспособление к условиям среды к автоматизмам, пусть даже очень сложным?
И. М. Сеченов отвечал на этот вопрос утвердительно. Он писал в своей работе «Рефлексы головного мозга»: «... вопрос о полнейшей зависимости наипроизвольнейших из произвольных поступков от внешних условий человека решен утвердительно. Отсюда же роковым образом следует, что при одних и тех же внутренних и внешних условиях человека деятельность его должна быть одна и та же. Выбор между многими концами одного и того же психического рефлекса, следовательно, положительно невозможен, а кажущаяся возможность есть лишь обман сознания...»
И, П. Павлов разделял это мнение. Он писал: «... Человек есть, конечно, система (грубее говоря—машина), как и всякая другая в природе, подчиняющаяся неизбежным и единым для всей природы законам, но система, в горизонте нашего современного научного видения, единственная по высочайшему саморегулированию. Разнообразно саморегулирующиеся машины мы уже достаточно знаем между изделиями человеческих рук. С этой точки зрения метод изучения системы—человека тот же, как и всякой другой системы: разложение на части, изучение значения каждой части, изучение связи частей, изучение соотношений с окружающей средой и в конце концов понимание, на основании всего «-этого, ее общей работы и управление ею, если это в средствах человека...».
Что касается различия и сходства живой и неживой природы вообще и возможности «объяснения» всех явле-
19
ний с единой точки зрения, то по этому поводу можно высказать некоторые общие соображения, хотя многие стороны процессов, протекающих в живых организмах, нам еще не совсем ясны.
Всякое физическое тело больших размеров (или, как говорят, макроскопическое тело) состоит нз молекул (или микроскопических частиц), безразлично, принадлежит ли это тело живой или мертвой природе. Все свойства макроскопических тел определяются в конечном итоге свойствами микрочастиц и характером их взаимодействия. Однако для живых организмов эта зависимость проявляется, по-види-мому, иначе, чем для тел мертвой природы.
Всякая молекула представляет собой устойчивое образование. Она не изменяет своей структуры или состояния до тех пор, пока на нее не будет оказано воздействие извне, обладающее достаточно большой энергией (тепловое соударение с другой молекулой, соударение с элементарной частицей, воздействие поля).
Молекулы, собранные в большом количестве, образуют физическое тело, обладающее новыми свойствами, которых не было у единичной молекулы. Молекулы, входящие в состав тела, постоянно обмениваются энергией, обмениваются количеством движения, взаимно перемещаются, В теле непрерывно происходят изменения, даже при полном отсутствии внешних воздействий: выравнивается температура его частей, выравнивается концентрация различных веществ в объеме тела и т. д. В результате тело приходит в некоторое состояние равновесия. Физики говорят: «Трение, диффузия, теплопроводность приводят микроскопическую систему посредством термодинамически необратимых процессов в состояние с наибольшей энтропией в соответствии со вторым законом термодинамики». В этом состоянии равновесия микрочастицы—молекулы, из которых состоит тело, движутся, обмениваются местами, переносят энергию, но при этом в любом направлении происходят в среднем одинаковые перемещения. Поэтому макроскопически, т. е. в масштабе всего тела, не происходит ни переноса энергии, ни изменения концентраций. В этом и заключается сущность равновесного состояния или состояния с «наибольшей энтропией».
Живые организмы, в отличие от тел неживой природы, будучи предоставлены самим себе, не приходят в состояние равновесия. В них непрерывно продолжаются многочисленные и разнообразные физико-химические процессы. 20
Процесс «повышения энтропии», т. е. выравнивания температуры с окружающими телами и распадения устойчивых структур начинается только после смерти организма. Это не означает, впрочем, что второй закон термодинамики недействителен для живых организмов. Они поддерживают постоянство своей структуры за счет поглощения и разложения пищи и за счет поглощения энергии извне. Если рассматривать, в соответствии со вторым законом термодинамики, «замкнутую систему», т. е. систему, полностью разобщенную с остальным миром, состоящую из организма, пищи и отбросов, то в этой системе будет наблюдаться повышение энтропии. Однако энтропия самого живого тела остается приблизительно неизменной до момента смерти.
Различие в свойствах живых и неживых тел, отмеченное нами выше, определяется тем, что в живом организме в целом и в каждой живой клетке протекают физико-химические процессы, направление и ход которых в конечном! итоге определяются молекулярными структурами ядра клетки. В живой клетке непрерывно происходит управление макроскопическими процессами со стороны микроскопических объектов. При этом устойчивость, неизменность, характерная для молекул как объектов микромира, проявляется в виде неизменности структур и постоянства процессов организма в макроскопических масштабах. Посредником являются процессы управления в живой клетке.
Постепенно выясняется все больше деталей этих процессов управления. Возможно, что ближайшие годы принесут нам знание новых интересных подробностей, а может быть и разгадку «тайны жизни», разгадку, полученную путем изучения процессов управления и передачи информации в живой клетке. Ведь именно эти процессы и делают клетку живой, устойчивой, устойчиво и однообразно функционирующей в окружающей среде до момента смерти.
Независимо от решения вопроса о том, существует ли непроходимая стена между живым и неживым миром и можно ли свести все поведение живых существ к сложным автоматизмам, мы можем утверждать, что сегодня иам известно большое число примеров, когда машина успешно выполняет сложные операции интеллектуального характера, заменяя человека в операциях управления энергетическими устройствами. Это обстоятельство породило общую систему взглядов на процессы связи и управления, которая включает в себя понятие информации.
Информация
Для всех систем, в которых протекают процессы управления, будь то устройства регулирования или живые организмы, характерна одна весьма общая черта: отдельные части этих систем связаны друг с другом таким образом, что они передают друг другу некоторые сообщения о процессах, в них происходящих, с помощью сигналов. Именно по этому признаку можно проследить глубокое сходство и единство процессов управления. Энергетические процессы, сопровождающие сигнализацию, играют второстепенную и непринципиальную роль. Важна не энергия, а сигнал. Чтобы показать на примере справедливость последнего замечания, зададим себе вопрос: чему равен коэффициент полезного действия телевизора или радиолокатора? Ответить на этот вопрос невозможно (как, впрочем, и на всякий неправильно поставленный вопрос) уже потому, что на выходе телевизора, радиолокатора и им подобных систем энергия как таковая не представляет никакого интереса. Назначение радиолокатора состоит не в отдаче энергии в той или иной форме, как это свойственно энергетической машине, а в решении совершенно иной задачи. И радиолокатор и телевизор потребляют энергию, и даже в значительных количествах, но отдают они не энергию, а информацию, сведения в виде сигналов.
Понятие информации очень широкое. Информацию переносят телеграф, телефон и радио. Информация записана на граммофонных пластинках, магнитных лентах, на фотоснимках и литографских оттисках. Информация передается с помощью человеческого языка устно или письменно, ее пересылают по почте, издают в виде книг, газет н журналов, хранят в библиотеках. Информация заключена в отсчете измерительного прибора, в результатах контроля продукции, в числовых подсчетах, в математических формулах и таблицах. Наше зрение, слух, осязание приносят нам информацию о внешних событиях, внутренние органы обмениваются информацией, координируя свою совместную работу. Ничтожные количества химических веществ доставляют нам посредством обоняния и вкуса информацию о качестве пищи. Изменения физических величин (электрического напряжения и тока, электромагнитного поля, давления), механические перемещения вводят информацию в автоматические устройства и позволяют получить из них новую информацию.
Информация — это то, что несет на себе след какого-то факта или события, события, которое уже произошло или должно произойти, все то, что доставляет нам об этом факте сведения или сообщения. Создание, передача, хранение, использование и главным образом преобразование информации происходит и в машинах и в живых организмах по определенным строгим законам. Правила, по которым происходит преобразование информации, называют алгоритмами преобразования *. Законы существования и преобразования информации объективны и доступны изучению. Они интенсивно изучаются. Собственно, определение этих законов, их точное описание, использование алгоритмов преобразования информации, в особенности алгоритмов управления, и составляет содержание кибернетики.
Здесь уместно заметить, что точное определение содержания и границ таких наук, как кибернетика, затруднительно, и поэтому вокруг них до сих пор не затихает дискуссия. Точное определение границ любой науки обычно можно дать только после того, как эта наука вполне оформится. Этого пока нельзя сказать о совсем еще молодой кибернетике.
Кибернетика выросла на основе изучения конкретных процессов передачи сигналов, процессов управления и обобщения законов, по которым протекают эти процессы. По мере накопления и обобщения фактов, естественно, расширяется область применения уже изученных законов. Обилие приложений кибернетики иногда заставляет задавать вопрос: а что же не относится к кибернетике? Подобные вопросы вызваны, конечно, только новизной ситуации, так как аналогичный вопрос в отношении, например, математики никому не пришло бы в голову задать, хотя математика имеет не меньше областей применения, чем кибернетика.
Специалисты отдельных прикладных наук иногда отождествляют кибернетику со своей специальностью. Так, например, часто приходится слышать, что кибернетика—это теория автоматического регулирования (разумеется, сильно расширенная). Некоторые, увлекаясь наиболее эффектными перспективами, утверждают, что кибернетика — это наука о моделировании функций человеческого мозга. Подобные определения оказываются очень ограниченными.
Вряд ли попытки дать точное и строгое определение ки-
• Примером алгоритма может служить любая математическая формула.
бернетикн, которое оказалось бы верным раз и навсегда, могут сейчас оказаться плодотворными. Однако водораздел между кибернетикой и «не кибернетикой» всегда нетрудно провести, если помнить, что интересы кибернетики лежат в области общих законов передачи информации, ее преобразования и использования для управления.
Можно сказать, что одной из основных задач кибернетики являются поиски строго формализованных алгоритмов преобразования информации и реализация этих алгоритмов.
Системы нли устройства, имеющие дело с сигналами, воспринимающие, преобразующие, передающие, принимающие, хранящие, обрабатывающие или использующие информацию и работающие в соответствии с определенным алгоритмом, мы будем называть кибернетическими системами или устройствами.
Таким о»бразом, электронная счетная машина является кибернетической машиной в отличие от паровой машины—машины энергетической.
Энергетические и кибернетические системы чаще всего существуют н работают совместно. Автоматическая энергоподстанция, беспилотный самолет, авторегулируемый производственный процесс могут служить тому примерами. В живом организме также сочетаются энергетическая и кибернетическая системы.
Энергетика и кибернетика идут рука об руку. И как энергия не может использоваться без управления ею, так и управление не может осуществляться помимо материального, физического процесса, без энергии, пусть даже и самых малых количествах.
Однако специфика и закономерности этих двух областей явлений природы различны, и это различие нужно очень четко видеть. Понятие информации сложилось позже, чем понятие энергии. И законы работы кибернетических систем познаны еще далеко недостаточно. В наши дни только закладываются основы их понимания.
Широкое поле уже существующих применений и поистине необъятные перспективы развития кибернетики требуют быстрого движения вперед в познании законов кибернетики и их использовании.
Одним из основных понятий кибернетики является понятие сигнала. К разбору этого понятия мы и перейдем.
ГЛАВА 2 SSSSSSSSSSSSSSSSSSSS^^^SS
СИГНАЛ
Мы можем знать о событиях, в которых не принимали участия, свидетелями которых не были, отделенных от нас большими пространствами и промежутками времени. Мы можем знать об этих событиях полно и подробно, подчас подробнее, чем участники или свидетели этих событий.
Подобные знания мы получаем ежедневно, когда читаем газеты и журналы, изучаем историю, слушаем радиопередачи или смотрим телевизионную программу. Иной раз телевизионный экран позволяет нам заметить такие подробности футбольного матча, о которых не сумеют рассказать зрители, присутствовавшие на стадионе.
Попытаемся вдуматься в этот простой и привычный факт.
Если наши знания о каком-нибудь событии приходят к нам уже после того, как само событие закончилось, скажем, исход футбольного матча становится нам известным на другой день после матча, то это значит, что какие-то следы события продолжают существовать и тогда, когда само событие закончилось. Сохраняются не только ре
зультаты и следствия данного события, но и незначительные подробности—забавный эпизод у ворот одной из команд, ошибка судьи, реакция публики и т. д. Все это может сохраниться в точном соответствии с тем, как оно происходило.
Событие может сохраняться в памяти очевидцев, в описаниях, в фотоснимках, в зарисовках, в кинофильмах, в звукозаписи самого события или репортажа о нем или в какой-либо иной форме. В большинстве случаев описание события соответствует самому событию более или менее полно. Смысл слова «соответствует» нам интуитивно ясен. Попросту говоря, описание события правдиво: на фотоснимке изображены фигуры игроков в тех позах, в каких они находились в тот момент, когда мяч летел в ворота; в рассказе очевидца сохранен порядок и характер действий игроков, который может быть лишь немного окрашен эмоциями рассказчика, и т. д.
Однако постараемся понять точнее, что значит «соответствовать», а главное, что чему соответствует. Прежде всего, фотография момента игры у ворот есть прямоугольный кусок плотной белой бумаги размером 9X12 см, покрытый слоем желатина, в который вкраплены мельчайшие зерна серебра. Все это никакого отношения к футболу не имеет. Не имеет к нему также отношения и то, что частицы серебра поглощают падающий на них свет, а белая бумага этот свет отражает. О футболе на фотоснимке говорит только распределение зерен серебра по поверхности бумаги. Оно определяет, в свою очередь, распределение потоков света, идущего от фотоснимка к глазу наблюдателя, и это распределение оказывается близким к тому, которое существовало в момент, когда был сделан снимок, в том месте, где стоял фотокорреспондент. При этом соответствие существует лишь приблизительное: не передан цвет, неточно передано распределение интенсивности, отсутствует стереоэффект (снимок получился плоский, а не объемный) и т. д.
Отметим следующее: фотоснимок (заметка в газете, лента звукозаписи, кинолента, устный рассказ и т. д.) как физическое явление не имеет ничего общего с изображаемым событием. Он имеет самостоятельную физическую природу и самостоятельное существование в пространстве и времени. Упомянутое выше «соответствие» фотоснимка изображенному на нем событию заключается в том, что снимок прн осуществлении некоторых условий, 26
производит на наблюдателя приблизительно такое же воздействие, как и само событие.
В сказанном заключается нечто общее для характеристики всех видов сигнала. Сигнал порождается некоторым событием, фактом, действием. Сигнал имеет самостоятельную физическую природу и самостоятельное существование в пределах некоторой организованной системы; он всегда воплощен в некотором материальном объекте или процессе. В этом виде сигнал может быть зафиксирован и существовать долгое время. Сигнал может быть передан на большие расстояния. Сигнал в конце своего существования может превратиться в действие или в событие. Он может воздействовать на живого наблюдателя или на мертвую физическую систему и породить некоторую реакцию этого наблюдателя или системы. Иногда, например, сигнал может вызвать ту же реакцию, какую произвело бы породившее этот сигнал событие при непосредственном воздействии. Так, узнав об удаче любимой футбольной команды из газет, мы обрадуемся почти так же, как обрадовались бы на стадионе при окончании матча.
Существование сигнала после окончания события позволяет ему не только пассивно «ждать» того момента, когда он вызовет действие, но и вести «полноценную жизнь», в том смысле, что, комбинируясь с другими сигналами, он может порождать новые сигналы, обладающие новыми свойствами, новой формой и несущие новое действие, новый смысл. Например, в результате вычислений из исходных данных задачи получается ее решение, возникает новый сигнал, соответствующий новому факту.
Разумеется, такое «самостоятельное» существование сигналы ведут отнюдь не самостоятельно, а только в пределах некоторой организованной системы, по законам, свойственным этой системе. Самостоятельность заключается лишь в независимости от породившего сигнал события, после того, как сигнал возник.
Если мы имеем событие и его подробное, правдивое описание, то по описанию мы можем восстановить событие. Это происходит, например, при изготовлении машины по чертежу, постройке дома по проекту, выполнении военной операции по плану и т. д.
Итак, между событием и сигналом при некоторых условиях существует однозначная связь, взаимное соответствие, в пределах, задаваемых степенью подробности описания.
Изоморфизм
Взаимное соответствие физически разнородных явлений часто встречается и используется.
Возьмем в качестве примера геометрические объекты— линии, поверхности, тела—в эвклидовом пространстве, в котором мы сами существуем. Можно построить модели этих объектов, изобразить их на чертеже, представить себе их мысленно. Мысленно или реально эти объекты можно перемещать, видоизменять, сопоставлять и т. д., т. е. производить с ними некоторые операции. Мы можем, например, нарисовать на плоскости окружность определенного размера и пересечь ее прямой линией, определенным образом расположенной. Затем мы можем найти точки пересечения окружности и прямой.
Рис. 2.1. Геометрический образ на плоскости (окружность н пересекающая ее прямая) н изоморфная аналитическая запись в виде уравнений в прямоугольных коордниатах.
Теперь сопоставим каждую точку плоскости с парой чисел х и у—координатами точки, например, в прямоугольной декартовой системе координат. Каждое число представляет собой расстояние этой точки от одной из осей.
Числа, удовлетворяющие уравнению
(x-ay + ty-b^R*, (2.1)
соответствуют точкам окружности, имеющей радиус R и центр в точке Хо = о; Уо = Ь.
Числа, удовлетворяющие уравнению
Ях + /у + Л = 0, (2.2)
соответствуют точкам, лежащим на прямой, проходящей через точки:
х' = 0; у' =— у и х" =— —; у" = 0. / о
Если уравнения (2.1) и (2.2) имеют общие решения (их может быть в действительных числах либо два, либо одно), то эти решения соответствуют точкам, лежащим одновре-28
менйо и на окружности, и на прямой, т. е. точкам пересечения прямой с окружностью. Если мы решим оба уравнения совместно, то точки пересечения будут найдены нами аналитически.
Производя вычисления с числами х и yt мы могли бы вовсе не думать о геометрических образах (и наоборот). Однако ясно, что любой геометрический образ и любая операция с ним имеют соответствующие образы в виде пар чисел и операции над ними. Мы ставим некоторую геометрическую задачу, затем переводим ее на аналитический «язык» и решаем эту задачу в числах, не вспоминая о геометрии. Дойдя до результата и снова переведя его на язык геометрии, мы получим тот же ответ, который получили бы, решая задачу геометрически—построением фигур. Мы получили правильный результат.
В математике существует понятие нзофор м и зма двух множеств X и Y элементов х S.X и у 6 К.
Множества X и Y называются изоморфными, если выполняются следующие условия:
1) каждый элемент х$Х может быть взаимно однозначно сопоставлен с элементом ygF, т. е. х—>у и у->х;
2) каждая операция f (из некоторого класса операций), преобразующая элемент Xj$X в х2$Х во множестве Xt f(Xi) — x2t может быть взаимно однозначно сопоставлена с операцией F, преобразующей элемент у^К в y2gK, ^(У1)=у2.т-е- F~*f;
3) если AqgX соответствует у]gУ и х2$Х соответствует у2$У, если f(xj)=x2 и f-*F> то для всех х, у, f F(y1)=y2.
Два множества называются изоморфными, если их элементы попарно взаимно однозначно соответствуют друг другу и преобразования элементов одного множества соответствуют преобразованиям соответствующих элементов второго множества.
Если считать, что геометрические образы получаются непосредственно из практики как результаты измерений и операций производства, то аналитические операции—вычисления с числами на бумаге—являются изоморфным изображением реальных явлений. Каждое событие—операция с реальными объектами (из определенного класса объектов и операций)—может быть сопоставлено с записью и вычислением. И, наоборот, каждая разумная запись может быть сопоставлена с событием, которое можно воспроизвести. Длинный ряд вычислений, проведенных по определенным правилам, воспроизводящим реальные операции,
Приводит к результату, который точно соответствует результату изоморфной этим вычислениям практической операции. Мы можем сопоставить оба результата и проверить правильность вычислений.
Можно назвать записи инженера, производившего расчет, сигналами реальных событий—операций производства. Система этих записей и вычислений изоморфна реальным объектам и операциям с ними. Можно говорить об изоморфизме теории и практики вообще, не только для геометрических построений, но и для других отраслей знаний.
Рис. 2,2. Деталь и ее изображение в виде чертежа, находящиеся в изоморфном соответствии друг с другом.
Совокупность сигналов в кибернетической системе является изоморфным отображением некоторых сторон реального события. Мы говорим «некоторых сторон» потому, что никакое самое подробное описание события с помощью совокупности сигналов не исчерпает всех характеристик реального события. Описание с помощью сигналов отражает лишь некоторые стороны события, существенно важные для кибернетической системы, в пределах которой существует сигнал.
Характерным примером изоморфизма систем может служить часто упоминаемая аналогия различных видов колебаний. Физически колебания могут протекать в виде механического движения тел (механические колебания), изменений плотности и давления газообразной, жидкой или твердой среды (акустические колебания), изменений токов и напряжений в электрических цепях (электромагнитные колебания), изменений напряженности электромагнит-30
ного поля (радиоволны, оптические процессы), изменений физиологического состояния живых тканей и т. д. Во всех этих физически конкретных ситуациях ход колебательного процесса имеет общие черты, которые могут быть прослежены очень далеко. Именно поэтому возможно существование общей теории колебаний, в формальном построении которой можно отвлечься от размерностей величин и выводы которой в значительной части одинаково справедливы для всех конкретных случаев. Все виды колебаний объективно изоморфны друг другу, а теория колебаний с ее формальным математическим аппаратом изоморфна им всем.
Изоморфизм различных физических явлений позволяе г осуществлять модели промышленных и технических устройств и протекающих в них процессов. Речь идет не моделях судов, самолетов и т. п., т. е. о моделях с масштабным уменьшением размеров. Понятие моделирования несравненно шире и включает воспроизведение реального явления на изоморфной модели, которая отлична от воспроизводимого явления по своей физической природе. Само изучаемое явление может быть недоступно для изучения либо вследствие своих энергетических масштабов или масштабов времени (просачивание грунтовых вод, полет управляемого снаряда), либо вследствие недоступности для непосредственного наблюдения (работа сердца в живом организме). Изоморфная модель—механическая, электронная, гидравлическая — воспроизводит законы протекания реального процесса и делает доступной оценку его течения в широких пределах изменения условий.
Существенным в природе сигнала является не сам физический объект, в котором сигнал воплощен, а лишь тот факт, что сигнал представляет собой множество различных состояний физического объекта или процесса. Множества состояний для различных физических объектов или их подмножества могут быть изоморфно сопоставлены друг с другом и реально переведены одно в другое соответствующим физическим преобразованием. Так, из одной физической формы сигнала может быть получена другая форма. Именно таким образом множество значений звукового давления, упорядоченное во времени, переводится с помощью микрофона во множество значений электрического тока, а затем — во множество положений иглы звукозаписывающего аппарата и множество точек звуковой дорожки, упорядоченные в пространстве. Одно-
значное соответствие позволяет применить обратное преобразование и вернуться к прежнему множеству в прежнем, звуковом, воплощении сигнала.
При записи звуков с помощью нотных знаков или речи с помощью букв сопоставляются не мгновенные значения давления и символы записи, а комбинации значений давления (тон, фонема) и символы. При этом некоторые характеристики звука в записи теряются (тембр, интонация), отсутствует полное соответствие звуков нотам и тексту. Воспроизведение нотной записи и текста оказывается, та-
Рнс. 2.3. Электрические преобразования при записи звука на диск, /—запись звука в виде нот. 2 — воспроизведение нот в виде звука на музыкальном инструменте, 3 — микрофон преобразует авук в электрические колебания (4), 5 — усилитель, 6 — записывающая головка преобразует электрические колебания в механические и наносит .звуковую дорожку* иа вращающийся диск, 7 — звуковая дорожка иа диске, 8 — воспроизводящая головка (игла скользит по дорожке и преобразует ее рисунок в механические колебания, пьезоэлемент преобразует механические колебания в электрические), 9 —'усилитель, 10 — усиленные электри* ческие колебания, 11 — репродуктор преобрзаует электрические колебания в звуковые (12).
ким образом, оставленным в некоторой степени на произвол исполнителя. Различные национальные языки могут быть поставлены в соответствие друг другу так, как это делается при переводе. Каждому языку соответствует примерно одинаковое множество понятий, отражающих события индивидуального и общественного бытия. Все, что можно выразить на французском языке, можно сказать по-русски и наоборот.
Итак, сигнал есть изоморфное отображение некоторых сторон физического факта или события. Сигнал всегда существует в некотором физическом воплощении. Сигнал существует в пределах организованной кибернетической системы. Сигнал порождается в пределах этой системы под воздействием внешнего события или других сигналов. Сигнал существует самостоятельно, независимо от поро-32
дившего его события, передается, фиксируется (запоминается), воспроизводится и в конечном итоге воздействует на кибернетическую систему, вызывая некоторое действие—реакцию. Ни физическая форма, ни количество энергии не имеют -решающего значения. Значение, смысл сигнала заключается в том, что имеется соответствие сигнала и события или реакции.
Таким образом, смысловое или семантическое содержание понятия информации, по-видимому, исчерпывается изоморфным соответствием внешнего события и сигнала.
Имея, с одной стороны, некоторое событие или явление и множество возможных «состояний» этого явления и, с другой стороны, сигнал и множество его состояний или символов и установив соответствие элементов этих двух множеств, мы тем самым припишем каждому сигнальному символу его «смысл», т. е. соответствующее ему конкретное состояние описываемого события.
Посылка определенного сигнала представляет собой выбор одного символа или элемента из всего множества возможных символов. Этот выбор производится тем внешним событием, с которым сигнал находится в соответствии.
Особенно нужно отметить тот факт, что сигнал как физический процесс, несущий на себе информацию, т. е. сохраняющий соответствие с тем или иным событием, всегда существует только в пределах некоторой организованной системы. Эта система, в силу своих свойств, позволяет реализовать все свойства сигнала, из которых главным является то, что сигнал используется для управления, т. е. для создания реакции или ответа на изменение внешней обстановки. Вне организованной системы сигнал может существовать и сохранять свои физические свойства, но теряет все свойства сигнала, утрачивается информация, связь с событием и реакцией, утрачивается возможность «понять» сигнал, использовать его для выработки реакции.
Кибернетическая система, в пределах которой существует данный сигнал и которая, таким образом, обеспечивает условия его существования, должна быть заранее организована, т. е. построена по некоторому плану и иметь определенную степень сложности. Иначе говоря, структура системы уже заключает в себе некоторую информацию, которую мы назовем «предварительной» по отношению к «текущей» информации, которую несет на себе сигнал, существующий в данной системе.
3 И. А. Полетаев 33
Возникновение сигнала и реакция
Внутренность шкафа термостата стала нагреваться вследствие теплопроводности стенок. Поток тепла грозит нарушить постоянство температуры, которое должно тщательно поддерживаться. Небольшая часть этого тепла нагрела чувствительный элемент термореле. Реле замкнуло контакты, в цепи возник ток—сигнал опасного перегрева. Этот сигнал вызовет включение охлаждающего устройства, и равновесие будет восстановлено.
При возникновении пожара ничтожная часть выделяемого тепла воздействует на термочувствительный прибор
Рис. 2.4. Сторожевое фотореле.
/ — осветитель, 2 —линза, 3 - луч света, пересекающий охраняемое пространство, 4 — фотоэлемент, 5 — ламповый усилитель, 6 — рале, 7 — световой сигнал, 8 — звуковой сигнал (звонок), 0 —контактор мощного исполнительного устройства, 10 — провод к исполнительному устройству.
и преобразуется в нем в сигнал тревоги или в сигнал, включающий систему спринклеров, разбрызгивающих воду на очаг пожара.
Бывают случаи, когда сигнал по своей энергии не только не меньше, а гораздо больше того события, появление которого он отмечает. Так, счетчик Гейгера—Мюллера отмечает импульсом электрического тока пролет через его объем частицы космического или радиоактивного излучения. В этом случае сигнал по своей энергии во много раз превышает само событие.
Свет, падающий на сетчатку глаза животного, вызывает появление возбуждения нервных окончаний, которое соответствует характеристикам падающего света и является сигналом внешнего события для организма. Нервное возбуждение передается в мозг, где в результате вырабатывается реакция на внешнее раздражение.
Любая рефлекторная деятельность организма начинается с ощущения, т. е. с появления сигнала нервного возбуждения, возникающего под действием внешнего или внутреннего события. Все впечатления от внешнего мира суть сигналы совершающихся вокруг событий.
Внутренние процессы в живом организме также сопровождаются тюявлением сигналов, даже в тех случаях, когда ощущения отсутствуют. Работа мышц вызывает расширение кровеносных сосудов, вследствие чего падает кровяное давление. Падение кровяного давления отмечается раздражением чувствительных нервных окончаний, расположенных в большом числе в стенках периферических сосудов, и в виде сигнала нервного возбуждения передается по так называемым прессорным нервам к нервным центрам продолговатого мозга. Эта сигнализация не сопровождается субъективным ощущением.
Можно привести еще много примеров, показывающих, как в некотором элементе организованной системы (реле, фотоэлемент, нервное окончание) внешнее событие возбуждает сигнал.
Не менее богата примерами и область явлений, в которых сигнал превращается в действие и вызывает течение энергетических процессов большой мощности.
Простейшим примером из этой области является пуск, остановка и регулирование хода мощных моторов, обслуживающих электровоз, подъемный кран или прокатный стан, с помощью вспомогательных маломощных цепей управления. Нажатие кнопки или поворот рукоятки управления является сигналом, который по своей мощности не способен привести в движение мощный мотор, но который достаточен для того, чтобы включить реле или контактор, и замыкание контактов силовой цепи произведет желаемое действие. Мотор будет вращаться за счет энергии источника питание Сигнал же способен только направить энергию источника в желаемое русло. В данном случае основным элементом системы, позволяющим сигналу превратиться в действие, является контактор, который можно рассматривать как нелинейный усилитель мощности сигнала.
Любое дистанционное управление, осуществляемое передачей сигналов по радио или по проводам, относится к тому же кругу явлений. В московском Политехническом музее одно время демонстрировалось включение моторного привода от фотоэлемента. Исходный сигнал включения создавался посетителем, пересекавшим луч света, падаю-3* 35
щий на фотоэлемент. В этом случае сигнал представлял собой не поступление порции энергии, а прекращение подачи ее на фотоэлемент. Этот пример убеждает нас в том, что для сигнала существенным является не наличие энергии, а изменение ее поступления, т. е. различие состояний.
Аналогичные явления наблюдаются и в работе нервной системы. Нервное возбуждение может возникать не только при увеличении энергии воздействия (появление света, звука, давления), но и при ее уменьшении или исчезновении.
Все движения живого организма, произвольные или непроизвольные, являются результатом сокращения мышц или групп мышц, а эти последние происходят только под воздействием очень слабых сигналов нервного возбуждения, приходящих по нервным волокнам. Сами сокращения происходят за счет энергии, накопленной в мышечных волокнах.
Сигналы порождают сигналы
Появление первоначального сигнала и реакция системы суть начальный и конечный этапы существования сигнала. Между своим «рождением» и «смертью» сигнал может вести долгую жизнь, полную событий. Далеко не всегда сигнал сейчас же вслед за появлением вызывает реакцию. Часто он существует долго вместе с другими сигналами, с которыми он может взаимодействовать по определенным законам, порождая новые сигналы. Бесчисленные примеры такого рода можно привести из работы решающих устройств. Еще более богата подобными примерами работа нервной системы живого организма. Нервные процессы сопровождаются таким тесным переплетением воздействий многих сигналов, что поистине приходится потрудиться, чтобы выделить отдельный акт возбуждения.
Рассмотрим самый простой пример. Тяговый мотор электропоезда при разгоне, на малых оборотах, потребляет повышенный ток. Чтобы его ограничить последовательно включают пусковой реостат. По мере разгона растет противоэлектродвижущая сила, ток падаег, реостат выводят, замыкая накоротко его секции с помощью контакторов. В системе управления имеется так называемое реле ускорения, которое регулирует режим пуска. Оно получает один сигнал от контроллера машиниста, а другой — от мотора. Первый сигнал несет команду: «увеличить ско-36
рость» или «замкнуть очередную секцию реостата». Второй сигнал несет информацию: «ток мотора достиг нормы и может быть увеличен». Отсутствие сигналов имеет зна-
чение, противоположное указанным. Под воздействием комбинации двух сигналов — «нужно» и «можно» — реле срабатывает и включает контактор, замыкающий секцию реостата. Если хотя бы один из сигналов отсутствует (либо «не нужно», либо «нельзя», либо и то и другое), реле не
срабатывает и поезд не увеличивает скорости.
В коммутаторе АТС при наборе занятого номера два сигнала—набор номера и снятая трубка—порождают но-
вый сигнал—короткие гудки «занято».
Если неожиданно уколоть человека в плечо, он непроизвольным движением отдернет руку. Нервное раздражение прошло по нервным волокнам в спинной мозг и обрат
Рис. 2.5. Схема реле ускорения электропоезда.
1 — тяговый мотор, 2 — обмотка возбуждения мотора, 3 — секция пускового реостата, 4 — контактор, замыкающий реостат накоротко при разгоне поезда, 5—обмотка реле, соединенная последовательно с мотором, и контакты, работающие на размыкание, б — обмотка реле, возбуждаемая от контроллера машиниста, н контакт, работающий на замыкание, 7—контакт коитроллера машиниста. '
но к мышцам, замкнув рефлекторную дугу, и вызвало сокращение мышц. Теперь предположим, что человеку назначена врачом подкожная инъекция. Ясно, что в этом случае
при уколе пациент не
отдернет (или почти не отдернет) руки. «Акт воли», выраженный в нервном сигнале, пришедшем от головного мозга, в комбинации с болью укола — другим нервным сигналом, вызвал новый сигнал и новое действие — торможение реф
лекторного движения.
Подобные примеры можно без труда умножить и усложнить.
Полнота описания
Итак, сигнал есть физический процесс, существующий в кибернетической системе, имеющий множество состояний, которые он принимает в соответствии с внешними событиями, воздействующими на систему. Основным свойством сигнала является то, что он несет информацию о со-
37
бытии, т. е. находится в соответствии с ним. Одна и та же информация может заключаться в различных формах и, наоборот, один и тот же сигнал может нести иа себе различную информацию.
Очень часто в теории информации различают понятия «сообщения» и «сигнала». Нам представляется весьма существенным тот факт, что сообщение никогда не сущест
Рис. 2.6. Квантование непрерывного сигнала.
а) квантование по уровню, б) квантование по времени: У — непрерывный сигнал, 2—квантованный сигнал.
вует иначе, как в виде сигнала события, т. е. в виде материального объекта.
Никакое сигнальное описание события ие может быть полным. Ставя задачу описания, мы всегда должны знать границы подробности этого описания. Любое событие можно описать короче или полнее. Упоминавшийся выше футбольный матч можно описать выбором из двух соо бщений: «выиграли», «не выиграли». Можно использовать
более обширное множество сообщений (около ста), сообщив счет. Можно наращивать подробности в любом количестве. Таким образом, многообразие реальных событий ставится в соответствие или отображается на меньшее по объему многообразие сообщений в виде сигналов. Одиноч-
ное описание неполно, и, только продолжая описание как угодно долго, мы можем приблизиться к полному соответствию описания реальному событию.
Поскольку сигнал существует в кибернетической системе, свойства которой полностью определяют и возможные свойства сигнала, постольку полнота описания события с помощью сигнала зависит от свойств системы. Система воспринимает только те стороны события, которые оиа способна прямо или косвенно «ощутить». Простейшие системы с ограниченной сложностью структуры способны только к примитивному и неполному восприятию н воспроизведению («описанию») события. Так, например, работа термостата связана только с одной единственной величи
ной—температурой; другие физические величины—давление, масса, ускорение и т. п.— не имеют смысла для этой системы в том отношении, что сигнал их не отображает (хотя они косвенно или прямо влияют на работу термостата). Другие, более сложные системы, обладают большими возможностями в смысле описания событий.
Кроме качественной стороны—способности систем воспринимать различные физические свойства и стороны явлений,— полноту описания события с помощью сигналов можно рассматривать также и с количественной стороны, оценивая числом «количество информации» о данном событии, заключенное в сигнале. Этот вопрос составляет содержание теории информации, которой мы коснемся в гл. 4.
Иногда говорят, что сигнал, описывающий внешнее воздействие, несет «осведомительную информацию», а сигнал определяющий реакцию системы—информацию «исполнительную». Однако этими двумя типами не исчерпываются все возможные сигналы. Существуют сигналы, порождаемые осведомительной информацией и порождающие в свою очередь сигналы исполнительные.
Бывают случаи, когда вообще затруднительно сопоставить некоторые сигналы с определенными событиями или реакциями. Например, инструментальная музыка, которая заполняет эфир в радиопередачах и которая, несомненно, имеет все признаки сигнала, не позволяет сразу и просто указать, какому именно событию или реакции она соответствует. Затруднение это, однако, не принципиальное, а скорее «техническое». Музыка, рассматриваемая как сигнал, несомненно, несет информацию и ей соответствуют эстетические переживания слушателей. Действие музыки можно наблюдать, рассматривая нервные механизмы, управляющие эмоциями человека. Эти механизмы работают закономерно, но мы сравнительно мало знаем об этих закономерностях. Тем не менее мы можем, хотя бы качественно, проследить связь между эмоциями и физиологическим состоянием нервной системы. Слезы восторга являются лишь крайним проявлением объективного действия, которое оказывает музыка как сигнал на человека как кибернетическую систему. Мы не можем проследить точно детали и оттенки этого действия, так как еще не все знаем о работе нервной системы. Современная эстетика весьма далека от того, чтобы изучать произведения искусства как звено цепи «событие—сигнал—реакция», и подобное предположение большинству искусствоведов показалось бы, с непривычки, совершенно неприемлемым. Однако,
л г»
идя цо этому пути, можно постепенно поставить эстетику в ряд точных наук, оперирующих количественной мерой и точными критериями. В настоящее время мы весьма далеки от этого, чему ие приходится удивляться, так как трудности на этом пути необычайно велики.
Итак, сигнальное сообщение о событии всегда беднее, чем само событие. Сигнал описывает только некоторые стороны события, существенные для кибернетической системы. При возникновении сигнала происходит примерно то же, что случается с толстым романом, когда его излагают на иностранном языке для легкого чтения.
Дискретные и непрерывные сигналы
Событие или одна из его сторон, описываемая сигналом, может иметь характер либо непрерывно изменяющейся величины, либо состоять из резко различающихся ступеней или градаций, т. е. иметь дискретный характер. Число посетителей’ выставки может быть только целым числом. Количество жидкости может принимать любые, не только целочисленные значения. Различие в характере событий отражается и на структуре сигналов. Сигналы могут быть дискретными или непрерывными. В первом случае они состоят из отдельных, резко различных символов, во втором— два сигнала могут отличаться друг от друга сколь угодно мало. Речь, записанная в виде текста, или число, записанное цифрами, представляют собой примеры дискретного сигнала. Отсчет по шкале амперметра или число, отложенное на шкале счетной линейки, являются сигналами непрерывной структуры.
Дискретный сигнал может быть без труда выражен с помощью сигнала непрерывного, так как среди возможных значений непрерывных величин содержатся и все дискретные. Обратный переход может быть совершен только приближенно, с округлением до ближайшего дискретного значения. Во всех реальных случаях, однако, можно с достаточной точностью сопоставить непрерывные и дискретные сигналы, если использовать достаточное число дискретных символов.
Непрерывный процесс, например телефонный разговор, может быть представлен при определенных условиях в виде набора дискретных величин. Это утверждение впервые было использовано В. А. Котельниковым для анализа передачи сигналов по каналам связи.
Пусть сигнал представляет собой некоторую величину у (f)> не прерывно меняющуюся во временя от момента t s= 0 до t = Г. Ее можно представить в виде разложения в ряд Фурье на интервале от 0 до Т
оо
У(0 = Ц)+ cos 2я&-уг + 6ftsin 2яй (2.3)
А-1
где Оо* &k— коэффициенты Фурье, определяемые выражениями:
г
о
т
2 Г t
ak = -у ly (t) cos 2я& -у dft
о т 2 Г t
bk = —jr \y (/) sin 2r,k dt.
0
Формулу (2.3) можно переписать в виде
Оо
У (0 = *о + ck cos ^2хЛ -у — 9*) • (2-4)
А-1
............................... k где cu = а0, ck=y a2k + bl , 6ft = arctg — .
Множество величин с0, с2, с3,., ck называется амплитудным
спектром функции у (t). Каждая из величин ck представляет собой k
амплитуду колебаний с частотой Сложение колебаний дает
первоначальную периодическую функцию у (t) с периодом Г.
Если функция в виде физической величины передается через реальный канал связи, в составе которого всегда имеются резонансные элементы, то амплитуды некоторых составляющих колебанцй измеиятси. Колебания очень высоких частот полностью подавятся, и амплитуды их окажутся равными нулю. Обычно об этом факте в технике свиэи говорят, как об „ограниченной частотной полосе пропускании* канала связи. Ширина полосы пропускаемых частот Д/ определяется как разность между самой высокой и самой низкой нз пропускаемых частот. В простейшем случае
= f макс f мин’
Если Uh = °> т0 Д/ = /макс-
Реальный сигнал всегда имеет ограниченный спектр, т. е. содержит в спектре лишь те частоты, которые лежат в полосе пропу-
скания канала. Таким образом, сигнал с ограниченным спектром Af на ограниченном интервале времени Т может быть полностью описан перечислением величин всех амплитуд ck и фаз 0Л или же всех коэффициентов ak и где й—0, 1,2,..., n, а п конечное целое число. Поскольку самая низкая частота (кроме постоянной составляющей f0 = 0) равна а самая высокая
fп = nfl~ (макс “ г »
то число гармоник, необходимое для характеристики данной функции, равно
^2n-2fMaKCT==2AfT,
где Af —ширина спектра функции (полоса пропускания канала).
Можно описать непрерывный процесс с помощью дискретных величин иначе, указав мгновенные значения функции у (/) в определенные моменты времени. Можно показать, что для полного определения функции достаточно задать ее значения в моменты, отстоящие друг от друга по времени на величину Число таких „вы-
Т
борочных значений“ равно, очевидно, W —— = 2AfT. Если, таким образом, заданы дискретные значения функции у (t) с ограниченным спектром н на ограниченном интервале времени Т:
У (0), У у (2т)....у (fex),..., у - 1) х],
то любое значение функции, в том числе и промежуточное, может быть получено по формуле
sin —М
У (П = 2J ~т у (fex)-----«------• (2 5)
*-о sinN — (t—kr)
И в этом случае набор Af==2AfT дискретных величин у (kt) полностью описывает непрерывный процесс y(t).
Представление непрерывного сигнала в виде дискретного часто называют «квантованием» сигнала. Практически это производится таким образом, что непрерывная физическая величина заменяется конечным множеством ее значений («квантовых уровней»). Различают два случая: «квантование по уровню» и «квантование по времени». При квантовании по уровню дискретный сигнал остается неизменным до момента, когда значение непрерывного сигнала достигнет некоторой заданной величины; это может произойти в любой момент времени. В случае квантования по времени фиксируются те величины непрерыв-42
ного сигнала, которые существуют в заданные мгновения времени. При квантовании по времени можно «округлять» дискретную величину до ближайшего квантового уровня.
Итак, в большинстве случаев можно подобрать достаточно близкое выражение непрерывного сигнала посредством сигнала дискретного. Это верно в той же степени, в какой любое число, например иррациональное, может быть выражено с достаточно малой ошибкой десятичной дробью с конечным числом разрядов.
Допустимые искажения сигнала при квантовании определяются, с одной стороны, допустимой неточностью воздействия на систему управления, а с другой стороны,— еще одним очень серьезным обстоятельством — наличием шума. Шумом называются случайные воздействия и искажения, которые испытывает сигнал при передаче, возникновении или хранении. В присутствии шума тонкие различия сигналов стираются и сигналы становятся неразличимыми. Уровень шума кладёт, таким образом, предел различимости отдельных символов сигнала.
Поскольку шум всегда сопутствует сигналу, можно сказать, что дискретный сигнал практически всегда может быть сделан равноценным заменителем непрерывного.
О природе и характеристиках шума мы скажем несколько слов в следующей главе.
СЛУЧАЙ
Случайные события
В тексте бывают опечатки. В речи встречаются оговорки, неточности, заминки. На фотографиях, иа кинокадрах заметны пятнышки, которых не было на объекте съемки. В наушниках радиоприемника, в телефонной трубке слышен шорох. На экране телевизора мелькают посторонние полосы... Все перечисленное представляет собой искажение сигнала случайными воздействиями—шумами или помехами.
При наложении помехи на сигнал мы получаем вместо информации о событии нечто такое, что не имеет отношения к событию. Информация разрушается. Выражаясь вольно, помеха есть враг сигнала. Но одновременно она связана с сигналом и «родством». И помеху, и сигнал можно рассматривать как случайный процесс. Познакомимся с понятием «случая».
Если много раз повторять какое-либо измерение, наблюдение, испытание, всякий раз пытаясь точно воспроизвести одни и те же условия, то, вообще говоря, вместо того, что-44
бы получать один и тот же результат, при каждом отдельном измерении будет получаться результат, отличный от прочих. На результат каждого испытания оказывают воздействие не только те условия, которые мы воспроизвели, но и те, которые мы воспроизвести не в состоянии. Они лежат либо вне нашего внимания, либо находятся не в нашей власти. Воспроизводя условия испытания, мы ие можем вернуть весь мир в первоначальное состояние. Воспроизведению поддаются лишь некоторые из большого числа причин, влияющих на результат.
Событие, подверженное такому разбросу, мы называем случайным событием. Случайный характер явления или события порождается причинами, лежащими вне наблюдаемого события или явления. Чаще всего наличие большого числа посторонних причин приводит к тому, что явление приобретает характер случайности. Так, при измерении малых токов весьма чувствительным гальванометром отклонение легкой измерительной катушки будет зависеть не только от величины тока, ради которой и предпринято измерение, но и от броуновского движения катушки, которое вызвано ударами о катушку большого'числа молекул окружающего газа.
Иногда явление приобретает случайный характер от того, что результат сильно зависит от начальных условий, и достаточно лишь очень немного, случайным образом, изменить эти условия, чтобы результат приобрел большой разброс. Это имеет место при запускании рулетки или при бросании игральной кости. Бросание кости, монеты, сдача игральных карт из перетасованной колоды, пуск рулетки — типичные случайные события, которые используются в играх.
Если случайное событие представляет собой появление одной из нескольких возможных величин (выпадение числа очков игральной кости, падение снаряда на некотором расстоянии от цели), то говорят о случайной величине или о величине, принимающей случайные значения.
Имея дело со случайными событиями или величинами, никогда нельзя быть уверенным в получении определенного результата в данном испытании. Однако в серии одинаковых опытов выявляются специфические закономерности, и, следовательно, случайные явления не представляют собой полного сумбура и хаоса, о котором невозможно сказать что-либо убедительно и достоверно. Каждому случайному явлению можно приписать определенные чис
ловые характеристики, которые позволяют отличать случайные явления друг от друга, предсказывать характеристики сложных событий по характеристикам простых и решать большое количество задач, полезных для практики. Изучением закономерностей случайных событий занимаются теория вероятностей н математическая статистика — разделы математики, тесно связанные с естествознанием.
Теория вероятностей формулирует законы массовых явлений. Этн законы тем более точны, чем к большему числу однородных явлений они относятся. О случайных величинах, взятых в большом числе, возможно точное знание
Рис. 3.1. Пример случайной величины—дальность D точки падения артиллерийского снаряда.
Так, законы газового состояния (например, закон Бойля — Мариотта) являются законами статистическими и в то же время точными, если речь идет о достаточно больших числах молекул. Если же переходить ко все более малым объемам, содержащим все более малые числа молекул, то в конце концов закон Бойля—Мариотта для мгновенных значений давления газа перестанет выполняться. С манометром, позволяющим измерить давление, производимое газом на площадку очень малых размеров, произойдет примерно то же, что и с гальванометром: он будет испытывать случайные воздействия небольших групп молекул— флюктуации давления, которые будут выражены тем сильнее, чем меньше будут размеры чувствительного элемента манометра.
Сигнал всегда испытывает более или менее сильные случайные искажения, вызываемые помехами и шумами. Искаженный помехой сигнал на приемном конце канала 46
связи перестанет быть однозначно связанным с переданным сигналом и с событием, о котором он несет информацию. Это является одной из причин того, что теория информации строится, в основном, на базе статистики и теории вероятностей. Вторая причина заключается в том, что для системы, воспринимающей сигнал, появление того или другого сигнала является также случайным. К последнему утверждению мы вернемся в гл. 4.
Вероятность
Основным понятием теории вероятностей является понятие вероятности случайного события. При реализации некоторых условий случайное событие может либо произойти, либо не произойти. Так, например, если мы, с некоторой экспозицией т, сделаем фотографический снимок объема камеры Вильсона*, то, проявив пластинку, мы либо обнаружим фотографию следа ионизирующей частицы, пролетевшей через объем камеры (событие наступило), либо не обнаружим ее (событие не наступило).
Повторяя опыт много раз в одинаковых условиях, мы будем получать случайные результаты. Подсчитаем, какая часть опытов дала нам фотографии следов. Для этого разделим число полученных фотографий следов на общее число истраченных пластинок, т. е. возьмем отношение числа наступлений события п к полному числу испытаний N. По-fl
лученное отношение называется частотой появления события.
Наблюдая многократные повторные опыты (или серии опытов, проводимые в большом числе одновременно), иначе говоря, наблюдая массовые явления, нередко приходится отмечать, что частота наступления события от одной серии опытов к другой остается приблизительно постоянной, мало отличаясь от некоторого среднего значения. Отклонения от среднего оказываются обычно тем меньше, чем больше число испытаний. Очевидно, что для таких явлений объективно существует некоторая средняя частота, которая может быть с большей или меньмпей точностью определена в серии опытов.
* Камера Вильсона представляет собой прибор для наблюдения траекторий ионизирующих частиц (космического излучения, продуктов атомного распада). В камере создается атмосфера пересыщенных паров, которые конденсируютси на ионах, созданных пролетевшей частицей вдоль ее пути. Следы частиц мы наблюдаем в виде белых нитей тумана, которые могут быть сфотографированы.
На основе этого опытного факта в теории вероятностей строится математическая модель явления в виде системы аксиом. В математике многие системы аксиом строятся подобным же образом. Так аксиомы геометрии Эвклида являются не чем иным, как математической моделью реальных геометрических построений, моделью, которая ценна только до тех пор, пока она соответствует практике.
Итак, теория вероятностей принимает в качестве аксиомы, что каждому случайному событию А может быть поставлено в соответствие неотрицательное число Р(4), на-
Рис. 3.2. Частота выпадения герба в последовательности случайных бросаний монеты. п/М — отношение числа выпадений герба л к общему числу бросаний Шкала по осн абсцисс отложена логарифмическом масштабе. Веро’ ятность выпадения герба при одном бросания равна 0,5.
зываемое его вероятностью. При большом числе испытаний частота наступления события А стремится по величине к вероятности Р(А),
Если некоторое событие V наступает в заданных условиях всегда, то его частота, а следовательно, и вероятность равны единице, Р (£7) = 1. Такое событие U называется достоверным событием. Если событие V никогда не наступает в заданных условиях, то его частота и его вероятность равны нулю, P(V) =0. Событие V называется невозможным событием.
Частота наступления и вероятность любого случайного события лежат между нулем и единицей, 0<Р(Д) < 1.
В примере с наблюдением следов частиц в камере Вильсона достоверным событием будет появление на фотографии изображения координатной сетки, нанесенной на стекло камеры, и изображения самой камеры (мы считаем, что в каждом опыте фотоаппарат исправен, пластинки доброкачественны и освещение достаточно). Невозможным 48
событием явилось бы непоявление изображения камеры. Вероятность появления следа частицы мы приблизительно определим, сделав много снимков и подсчитав частоту появления изображения следа на снимке. При этом мы предполагаем, что источник частиц остается постоянным и находится на неизменном расстоянии от камеры.
Теория вероятностей делает возможным, зная вероятности простых или элементарных случайных событий, определять вероятность сложных событий. Что такое сложное событие?
Пусть, например, мы имеем не одно, а два устройства, фиксирующих пролет ионизирующих частиц. Это могут быть не камеры Вильсона, а счетчики Гейгера—Мюллера, которые дают при пролете частицы через их объемы импульс тока, фиксируемый автоматическим регистратором. Назовем событием А срабатывание первого, а событием А2—срабатывание второго счетчика в течение времени т. Расположим счетчики так, чтобы одна и та же частица не могла последовательно пролететь оба счетчика. Кроме того, введем несколько искусственное предположение, что одновременный вылет двух частиц не случается и за короткое время наблюдения т две различные частицы наблюдаться не могут. Таким образом, всегда дело идет о регистрации одной частицы первым 41 или вторым А2 счетчиком.
Зададим теперь вопрос: какова вероятность того, что в течение времени наблюдения т сработает любой из двух счетчиков? Иначе говоря, какова вероятность сложного события, состоящего в пролете частицы через первый или второй счетчик?
Два события Л1 и А2 такие, что появление одного из них исключает возможность появления другого, называются несовместимыми. В нашем случае несовместимыми являются пролеты частицы через оба счетчика одновременно. Сложное событие, состоящее в наступлении хотя бы одного из событий А и A2i называется суммой событий Aj и А2 (обозначается Д1Ч-Л2).
Вероятность суммы несовместимых событий равна сумме вероятностей каждого
P = (Al^A2) = P(Ai)^P(A2) (3.1)
(аксиома сложения вероятностей).
Это соотношение понятно без пояснений, если вместо вероятностей подставить частоты событий.
Событие, состоящее в ненаступлении события А (обозначается А), называется дополнительным к событию А и, очевидно, является с ним несовместимым. Поскольку в каждом испытании событие А либо наступает, либо не наступает, т. е. наступает событие Л, то на основании (3.1) будем иметь
Р (Л + Л) = Р (Л) + Р (Л) = 1 (3.2)
как вероятность достоверного события. Отсюда, вероятность дополнительного события (непоявления следа на фотографии) равна
Р(А)=1-Р(Д). (3.3)
В систему аксиом теории вероятностей входят следующие: Аксиома 1. Каждому случайному событию А поставлено в соответствие неотрицательное число Р (А), называемое его вероятностью.
Аксиома 2. Вероятность достоверного события равна единице
?((/)=!.
Аксиома 3 (аксиома сложения). Если события А2 и А2 несовместимы, то
Р(А1+А2) = Р(А1) + Р(А2).
Пусть теперь два счетчика находятся на большом расстоянии друг от друга и каждый фиксирует пролет частиц от отдельного источника. Пролет частицы через счетчики № 1 и 2 в течение интервала времени т снова имеет некоторые вероятности Р(А}) и Р(Л2). На этот раз пролет частицы через первый счетчик не исключает возможности одновременного пролета другой частицы через второй счетчик и наоборот. Более того, пролет частицы через один из счетчиков не изменяет вероятности пролета через ДРУГОЙ.
Если наступление или ненаступление одного из событий не меняет вероятности другого, то такие события называются независимыми. Сложное событие, состоящее в одновременном наступлении событий Aj и A2t называется произведением событий 4 j и А2 (обозначается 4р42). Вероятность произведения независимых событий равна произведению вероятностей каждого из них.
P(A}A2) = P(Ai)P(A2). (3.4)
Этим соотношением определяется вероятность одновременного пролета частиц в течение т секунд через первый и второй счетчики.
Можно обобщить эти результаты иа любое число элементарных событий. Если события Лр Л2.....ЛА попарно несовместимы, т. е.
никакие два из них не могут появиться одновременно, то
РЦ^Лг + .-. + Л^^РСЛ^ + РИ^ + .-. + РСЛ^. (3.5) Если события At, Л2,.., независимы, т. е. наступление яли не-наступление любой системы этих событий ие меняет вероятностей наступления остальных, то
P^t42... ЛЛ) = Р(Л1)Р(Л2)...Р(ЛА). (3.6)
В задачах теории вероятностей приходится иметь дело с* системами событий, которые наступают илн ие наступают при реализации определенных условий. Обычно принимаются следующие допущения относительно системы событий:
а) если система содержит события А и В, то она содержит также и события ЛВ, Л + В, Л — В;
б) система содержит достоверное и невозможное события.
Система событий, удовлетворяющая этим допущениям, называется полем событий.
Мы все время пользовались в качестве примера случайного события пролетом ионизирующей частицы через заданный объем. Те же рассуждения и заключения справедливы и для других случайных событий: для бросания игральной кости или монеты, вытаскивания карты из колоды или тиража лотереи, появления бракованного изделия в продукции завода или появления ценного вещества в образце породы и т. д.
Вернемся снова к подсчету ионизирующих частиц, чтобы ввести еще одно понятие—условную вероятность. Будем с помощью счетчиков исследовать образцы минералов, содержащих радиоактивное вещество. Пусть в нашем распоряжении имеются одинаковые образцы двух сортов с различным содержанием радиоактивного вещества, причем мы не знаем, какие именно из образцов принадлежат первому и какие—второму сорту. Если мы наугад берем один из образцов, то существует вероятность Р(В{), что он окажется первого сорта (с низкой радиоактивностью), и вероятность Р(В2)—второго (с высокой радноактивносгью). Вероятность зафиксировать пролет частицы Р(А) зависит от того, к какому сорту принадлежит взятый нами наугад образец, который подвергается исследованию. Иначе говоря, мы наблюдаем случайное событие А—пролет частицы—при условии, что наступило другое случайное собы
Тие В—случайно выбран образец первого (или второго) сорта. Вероятность такого события называется условной вероятностью и обозначается Р(А/В).
Вероятность сложного события, состоящего в совместном появлении событий А и В\ — выбор образца первого сорта и пролет частицы за время т,— будет равна произведению вероятности первого события на условную вероятность второго при условии, что первое событие наступило
P(AB,) = P(JB1)P(A|JBI). (3.7)
Условная вероятность, так же как и безусловная, имеет величину, лежащую в пределах от нуля до единицы. Для нее остаются справедливыми правила сложения и умножения вероятностей, о которых мы говорили выше. Это естественно, так как, в сущности, любую безусловную вероятность можно рассматривать как условную, ибо она существует только при условии осуществления определенной обстановки, в которой наблюдается данное случайное событие. Говоря об условной вероятности, мы подчеркиваем тот факт, что к однажды оговоренным условиям испытания мы добавляем некоторые дополнительные условия (выбор определенного сорта образца в нашем примере), которые осуществляются не при всяком испытании, являются случайным событием и имеют определенную вероятность.
Вероятность совместного наступления двух событий—выбор образца первого сорта и появление следа на фотоснимке или срабатывание счетчика в заданном интервале времени — можно записать иначе, чем мы это сделали в (3. 7), а именно:
Р(АВХ) = Р{А)Р(ВХ\А). (3.8)
Здесь Р (BJA) есть условная вероятность того, что мы выбрали образец первого сорта при условии, что после опыта мы обнаружили на фотографии след частицы.
Взяв образец наугад, мы не знаем, к какому именно сорту он принадлежит, и можем по этому поводу делать лишь предположения или высказывать гипотезы. Проведя ряд экспериментов и получив их результаты (обнаружив следы частиц), мы можем на основании этих результатов сделать заключение о вероятности того, что наша гипотеза справедлива.
Вопрос о статистической проверке гипотез является обширным и важным разделом теории вероятностей.
В практике, разумеется, задачи несравненно сложнее, чем в нашем примере. Вопрос о проверке гипотез особенно важен в технике передачи сигнала в помехах. Сигнал, посланный передатчиком, оказывается на приемном конце искаженным помехой. Приняв искаженный сигнал, мы можем определить условные вероятности передачи того или иного сигнала и на основании этих условных вероятностей вынести суждение об истинном сообщении, которое было послано.
Если условная вероятность Р(В|Д) равна безусловной вероятности Р(В), то события А и В являются независимыми. Если Р(В) не равна Р(В1А), то события А и В оказываются статистически связанными, между ними существует корреляция. Наступление одного из них меняет вероятность другого. В пределе наступление одного события делает наступление другого достоверным или невозможным. В этом случае мы имеем обычную функциональную связь двух событий.
Распределение вероятностей. Математическое ожидание и дисперсия
Если случайным событием является выбор определенного числа или величины из некоторого множества чисел или величин, то мы имеем дело со случайной величиной. Число пассажиров трамвая, число зафиксированных ионизирующих частиц, ошибка измерения, отклонение размера обработанной детали от заданного, вес початка кукурузы, число выигрышей, выпавших на ваши лотерейные билеты, число козырей, доставшееся игроку при сдаче карт, число родившихся сегодня в Москве мальчиков, возраст умершего—все это суть случайные величины. Они могут принимать как дискретные, так и. непрерывные множества значений.
Задавшись одним определенным значением случайной величины или областью ее значений, мы можем подсчитать вероятность события, состоящего в том, что случайная величина в очередном испытании примет это значение или окажется в заданной области значений. При массовых испытаниях эта вероятность будет равна частоте появления данного значения случайной величины. Так можно найти, например, вероятность того, что все ваши лотерейные билеты выиграют или что не выиграет ни один. Можно определить вероятность того, что размер детали выйдет из допусков, и т. д.
Определив вероятность каждого значения случайной величины, мы можем построить диаграмму зависимости вероятности от значения случайной величины. Обычно строится кривая распределения вероятностей, на которой по горизонтальной оси откладывается значение величины а по вертикальной оси — вероятность того, что эта величина g окажется меньше некоторого заданного значения х, P(g<x) =Р(х). По мере роста х кривая распределения монотонно возрастает от нуля до единицы. Если случайная величина g может принимать только отдельные дискретные значения (число выигравших билетов, например, может быть только целым), то кривая распределения оказывается ступенчатой. Если же величина g изменяется непрерывно (отклонение размера детали), то кривая распределения оказывается плавной. С помощью кривой распределения можно ответить на вопрос, чему равна вероятность того, что случайная величина окажется лежащей в пределах от Xi до х2, P(xi^? Сх2). Эта вероятность равна разности ординат, соответствующих абсциссам х{ и х2.
Иногда пользуются кривой плотности вероятности, на которой откладывается производная (скорость роста) распределения вероятности по х. Для дискретных величин эта кривая имеет вид отдельных точек, для которых абсциссы равны дискретным значениям а ординаты— их вероятностям P(g). Для непрерывных распределений кривая плотности вероятности непрерывна. Для того чтобы по кривой плотности определить вероятность попадания g в интервал Xi х2, необходимо определить площадь, заключенную между кривой и осью абсцисс на участке Xi, х2, т. е. интеграл плотности вероятности. Вся площадь под кривой плотности равна, очевидно, вероятности достоверного события, т. е. единице,
В качестве характеристик кривой распределения вероятности пользуются величинами математического ожидания и дисперсии. Математическое ожидание случайной величины [обозначается Af(g)] представляет собой сумму произведений значений случайной величины на соответствующие вероятности
В случае непрерывной величины Е сумма заменяется интегралом
+ оо
M(E) = f Zp®dlt (3.10)
—00
где р (Е) — плотность вероятности.
Дисперсией [обозначается D(E)] называется математическое ожидание квадрата отклонения случайной величины Е от М (Е) п
D (Е) = М [Е - М (Е)]2 = J] [Ef - М (Е;)]’Р (Е.),
где P(Et) — вероятность появления Ег Для непрерывных величин
+оо
D(E)= j ['-M(E)]’p(E)dE,
— 00
где р(Е)— плотность вероятности.
Чем больше дисперсия, тем чаще в среднем встречаются большие отклонения от среднего значения. Величина дисперсии ошибок измерения характеризует качество измерения, с точки зрения точности. Чем меньше дисперсия, тем точнее измерение.
Приведем некоторые типичные законы распределения вероятностей.
Пусть существует N лотерейных билетов, каждый из которых имеет вероятность выиграть независимо от остальных, равную pt одинаковую для всех билетов (и, следовательно, вероятность не выиграть, равную, как вероятность дополнительного события, q =1—р). Какова вероятность того, что в тираже нз # билетов выиграют ровно п (и, следовательно, ие выиграют m «= ЛГ — п) билетов? Если мы заранее укажем определенные билеты, которые должны выиграть, то вероятность того, что именно указанные билеты выиграют, а остальные — нет, равна, как вероятность произведения независимых событий, pnqm. Однако мы могли бы выбрать не только те билеты, которые указали, ио и любые другие из числа V, имеющихся в нашем распоряжении. Из общего числа N можно выбрать п билетов С„ =—I /жг —способами. Искомая вероятность того, что л ю-п п\ (/V — п)\
бые п билетов выиграют (для несовместимых событий — отдельных выборов) равна
п /и\ _______($1______
PN “ п! (М — л)! р q
(З.Н)
Рис. 3.3. Биномиальное распределение. Вероятность получить данный результат в серии испытаний [см. формулу (3.11)].
Нетрудно заметить, что в (3.11) равно л-му члену разложения бинома (p+q)N> По этому признаку распределение вероятностей, соответствующее формуле(3.11),называется биномиальным распределением. Функция распределения вероятностей FN (п) равна вероятности того, что случайная переменная £ меньше величины л или равна ей.
Рис. 3.4. Биномиальное распределение. Вероятность получить результат ие меньше данного в серии испытаний [см. формулу (3.12)].
р^<ч)
п
не < п) = fn (/.) = -щ/1 k)\ • <3-12)
ы
Величины PN (л) и FN (л) заранее вычислены и для них составлены специальные таблицы. Для биномиального распределения ма-тематическое ожидание равно М (л) = Мр, дисперсия D(n)—Npq.
Рис. 3.5. Нормальное распределение.
а) плотность вероятности, б) распределение вероятности [см. формулы (3.13) и (3.14)].
Если мы будем в формуле (3.11) увеличивать ЛГ и л, оставив постоянными р и q, то в пределе придем к непрерывному распределению х <х~аР
P(S<x)=F(x) = -^ Je 2” dx (3.13)
—00 с плотностью вероятности (Н-аР 1 2а»
называемому нормальным распределением или законом Муавра— Ла пл аса—Гаусс а.
Нормальное распределение встречается в практических задачах весьма часто. Этому закону следуют случайные величины, являющиеся суммой очень большого числа взаимно-независимых случайных величин, таких, что каждая из них мала по сравнению со всей суммой. Математическое ожидание для нормального распределения равно М (5) — а, дисперсия D (£) = <&.
Если теперь мы будем увеличивать V в формуле (3.11), положив величину вероятности р очень малой, р 1, то в пределе получим так называемый закон распределения Пуассона
п
PN(^n) = FN(n)=YP^~e~NP- (3J5) 1=0
В этом случае вероятность для данной величины п равна
л! е л! е , (3.16)
М (п) = tfp=lt D (п) =Ыр = \
Закону Пуассона следует, например, распределение вероятностей числа вызовов телефонной станции, число излученных ионизирующих частиц, число посетителей выставки за данный отрезок времени и другие дискретные случайные величины. Для нормального закона и закона Пуассона также имеются таблицы.
В практике встречаются задачи, когда экспериментально изучается случайная величина, вероятность которой распределена по известному закону. Из результатов измерения бывает необходимо определить только параметры закона: М (g) и D(g). Другие задачи состоят в определении типа закона распределения по результатам наблюдений или в определении влияния на этот закон условий опыта.
Шум
На выходе усилителя приемника сигналов при большом усилении всегда имеется напряжение шумов, которое представляет собой случайную величину и принимает в различные моменты времени случайные значения. Эти шумы происходят от флюктуаций тока во входных цепях усилителя, обязанных тепловому хаотическому движению электронов. Если измерить значения шумового напряжения в различные моменты времени и подсчитать частоту появления тех или иных значений, то закон распределения окажется близким к нормальному. Тепловые шумы называются поэтому нормальными или гауссовыми.
Если на вход усилителя поступает сигнал и притом настолько слабый, что он оказывается мал по сравнению с шумами, то распределение вероятностей напряжения на 58
выходе изменится. Наблюдая напряжение на выходе однократно или в течение короткого промежутка времени, мы не сможем с достоверностью установить присутствие или отсутствие сигнала и, только продолжая наблюдения достаточно долго, по изменению вида распределения сможем надежно решить этот вопрос.
Подобная ситуация представляется довольно общей для современного естествознания. В любом эксперименте результаты наблюдений подвержены случайным отклонениям, и единичное наблюдение может дать результат, вооб-
Рис. 3.6. Импульсный сигнал и шумы на выходе радиоприемника.
ще говоря, сколь угодно сильно отличающийся от среднего. Поэтому результаты эксперимента должны быть после обработки представлены в виде кривых распределения вероятностей этих величин. Избежать ошибок можно только посредством корректной статистической обработки результатов.
Когда на выходе приемника одновременно присутствуют и сигнал, и шум, мы имеем дело с вероятностью сложного события—напряжения, зависящего от двух случайных причин. Для подобных ситуаций следует пользоваться понятиями вероятности сложного события и условной вероятности.
Получив на приемном конце канала связи некоторый сигнал, искаженный шумами, мы оказываемся не в состоянии точно указать, какой именно сигнал был передан. Мы
можем только строить предположения или гипотезы на этот счет, каждая из которых после получения искаженного сигнала приобретает некоторую апостериорную или «послеопытную» вероятность. По-видимому, наблюдая однократно переданный сигнал, большего мы и не в состоянии определить.
Проблема приема сигнала в шумах или помехах является одной из центральных проблем не только теории и техники связи, но и техники автоматического регулирования и других областей применения кибернетики. Величина шумов илн помех по сравнению с сигналом определяет скорость, с которой возможно передавать сигналы без ошибок. Статистические характеристики помех заставляют применять особые методы передачи и приема.
Минимальный по мощности сигнал, различимый при заданном числе наблюдений на фоне существующих шумов, носит название порогового сигнала. Чем ниже его мощность, тем выше чувствительность приемника. Чувствительность приемника является одним из самых важных его качеств. Интересно отметить, что, как правило, технические устройства для приема сигналов далеко уступают в чувствительности естественным приемникам, которые существуют у живых организмов в виде так называемых рецепторов или органов чувств. С этой точки зрения изучение процессов восприятия сигналов у живых организмов может принести огромную пользу технике.
Не только шумы, накладывающиеся на сигнал в канале связи, являются примером случайных воздействий на кибернетические системы. Иногда случайные воздействия поступают другими путями. При работе автопилота или автоматического рулевого система в целом испытывает случайные воздействия в <виде порывов ветра, ударов волн, течений, которые хаотически изменяют курс корабля. Возникает задача противодействия этим случайным влияниям и их «отработки», т. е. внесения поправок в управление с таким расчетом, чтобы курс корабля не отклонялся случайным образом от желаемого. Иначе говоря, оказывается необходимым стабилизировать курс, сделать его независимым от случайных воздействий.
Подобные же задачи стабилизации решают многие искусственные и естественные кибернетические системы, например органы тела животного, обеспечивающие постоянство температуры тела, давления и состава крови при случайных изменениях внешних и внутренних условий (температуры среды, питания, нагрузки).
Случайные воздействия, неизвестные и непредсказуемые изменения обстановки—вот нормальные условия существования как живых организмов, так и созданных человеком кибернетических систем.
Имея дело с шумами, помехами или приемом заранее неизвестного сигнала, приходится рассматривать последовательность случайных событий во времени. В этом случае мы имеем дело уже не со случайной величиной, а со случайной функцией времени. Если множество случайных функций может быть охарактеризовано с помощью распределения вероятностей, то процесс, включающий в себя это множество, есть случайный процесс.
Для характеристики случайного процесса обычно задаются вероятности сложных событий, состоящих в совместном появлении определенных величин в различные моменты времени:
1) вероятность того, что величина х в момент Ц окажется в интервале xrt Xi+dxb
(3.17)
2) вероятность того, что величина х в момент окажется в интервале хк Xi+dxi и затем в момент /2,—в интервале х2; x2+dx2,
/?2(хь fp х2, t2)dxldx2t (3.18)
и т. д.
Если для некоторого случайного процесса замена всех значений /2... в (3.17), (3.18) и т. д. на 6+т; /2+т... не изменяет величин вероятностей pi, р2,..., то такой случайный процесс называется стационарным. Смещение по времени т может быть выбрано произвольным. Характеристики стационарного процесса не зависят от времени; их можно изучить, наблюдая процесс достаточно долго. В случае нестационарного процесса мы должны были бы для той же цели наблюдать большое число одновременно протекающих процессов или воспроизводить процесс с начала до конца много раз. Шумы приемника являются стационарным процессом.
Случайный процесс может давать как непрерывное изменение случайной величины, так и дискретные значения через определенные интервалы времени. В общем случае вероятность получить определенную величину в данный момент зависит от всей предыдущей истории случайной величины. В простейшем случае все значения величины не 61
Зависят друг от друга. В том случае, когда значение случайной величины в данный момент времени /0 полностью определяет распределение вероятностей величины х для следующего момента времени и если это распределение не зависит от значений х в предыдущие моменты времени /</0, случайный процесс является процессом без последействия и называется процессом типа Маркова.
Вероятность в физике. Энтропия
Мы упоминали выше о термодинамике. Эта область физики дает нам настолько интересную иллюстрацию плодотворного применения математического понятия вероятности, что уместно сказать об этом подробнее.
Как известно, энергия существует в различных видах: механическая энергия, электрическая, магнитная, химическая, тепловая и т. д. Многочисленные физические процессы сопровождаются превращениями энергии из одного вида в другой, причем, согласно первому началу термодинамики, энергия не возникает и не исчезает. Однако, хотя количество энергии всегда сохраняется, в некоторых процессах происходит, как говорят, «обесценение» энергии. Это значит, что уменьшаются возможности дальнейшего преобразования энергии в другие виды. В этом отношении особую роль играет тепловая энергия.
Тепловая энергия представляет собой кинетическую энергию движения молекул вещества или же элементарных частиц. Собственно, о тепловой энергии можно говорить только в тех случаях, когда мы имеем дело с макроскопическим телом, состоящим из очень большого числа движущихся молекул, скорости которых распределены по некоторому закону. Для малого числа молекул, и тем более для одной молекулы, следует говорить не о тепловой, а о кинетической энергии.
Особая роль тепловой энергии в процессах преобразования энергии из одного вида в другой заключается в том, что тепловая энергия тела не может быть целиком превращена в механическую работу или в другой вид энергии без того, чтобы этому процессу не сопутствовали какие-то другие процессы, приводящие в конечном итоге к превращению в тепло некоторых количеств других видов энергии. Второе начало термодинамики, сформулированное на основании практики и результатов эксперимента, утверждает именно это: «Невозможен процесс, единственным результатом которого явилось бы превраще-62
ние тепла в работу». Однако возможны процессы, единственным результатом которых является переход в тепло других видов энергии (трение, нагревание провода электрическим током и т. д.).
Преобразование тепла в работу возможно, например, при использовании изменений состояний газа. Нагревая газ, заключенный в цилиндре машины, мы заставляем его расширяться, перемещать поршень и поднимать груз. Тепло при этом отбирается у некоторого нагретого тела (котла). Чтобы продолжить этот процесс, необходимо вернуть поршень в исходное положение, т. е. охладить газ, а это значит, что часть тепловой энергии газа должна быть передана холодильнику. Таким образом, завершив цикл, мы отняли у горячего источника тепла некоторое количество тепловой энергии Qi, часть ее превратили в работу 4, а другую часть Q2 отдали холодильнику в виде тепловой энергии. При этом Qi—Д + <?2 (все величины измерены в калориях). Коэффициент полезного действия машины q оказывается меньше единицы, так как часть энергии не перешла в работу,
(3J9)
Последнее, однако, не означает, что в данном случае тепло Q2 безвозвратно потеряно. Можно осуществить обратный процесс, сообщив тепловой машине механическую энергию, т. е. совершив за счет посторонних источников работу А и заставив машину работать как холодильник. При этом не только работа А полностью превратится в тепло и будет передана горячему котлу, но, кроме этого, количество тепла Q2 будет отнято у холодильника, который при этом еще сильнее охладится, и передано также котлу, который еще более нагреется. Цикл работы холодильной машины полностью восстанавливает исходное состояние, с которого начала свой цикл тепловая машина. Таким образом, превращение тепла в работу тепловой машиной является процессом обратимым. Это значит, что с помощью процесса, обратного данному, можно вернуть систему в первоначальное состояние, не внося при этом никаких изменений в окружающие тела.
Однако обратимый процесс является лишь теоретической идеализацией реальных процессов. Для того чтобы приблизиться к осуществлению обратимого процесса, нужно исключить трение, теплопроводность и производить все изменения в газе чрезвычайно медленно, не нарушая его 63
равновесного состояния. В действительности при превращении тепла в работу, кроме тепла Q2, бесполезно рассеивается еще некоторое количество тепла за счет трения и теплопроводности. Это рассеяние не сопровождается превращением в работу соответствующей части тепла, и, следовательно, для того чтобы вернуть систему в исходное состояние, необходимо почерпнуть дополнительную работу откуда-то извне. Процесс с участием трения оказывается необратимым.
Принципиально важно то, что коэффициент полезного действия (к. п. д.) идеальной тепловой машины, осуществляющей обратимый процесс превращения тепла в работу, не зависит от свойств газа («рабочего тела») и определяется только температурами котла Л и холодильника Т2
(3.20)
Если котел и холодильник имеют одинаковую температуру, то к. п. д. равен нулю, т. е. невозможно никакую часть тепла превратить в работу. Всякое выравнивание температур котла и холодильника ведет к понижению к. п. д. машины, т. е. к уменьшению той части тепла котла, которая может быть превращена в работу. Отсюда ясен смысл утверждения, что теплопроводность «обесценивает» тепловую энергию.
Приведенные выше утверждения справедливы не только для тепловой машины с рабочим телом в виде газа. То же самое справедливо, например, и для процессов непосредственного превращения тепла в энергию электрического тока. Можно практически осуществить приближение к идеальному обратимому процессу, используя термоэлектрический эффект (явление Зеебека) и явление Пельтье.
Явление Зеебека заключается в появлении электрического тока в замкнутой цепи, состоящей из двух последовательно включенных проводов различного материала, когда один спай нагревается, а другой охлаждается извне. При этом часть тепла, получаемая нагретым спаем, превращается в электрическую энергию и часть передается холодильнику.
Явление Пельтье заключается в самопроизвольном нагреве одного из спаев в цепи, подобной только что описанной, и в охлаждении другого спая при пропускании через цепь электрического тока от постороннего источника. Энергия электрического тока превращается при этом в 64
тепло, выделяющееся в нагретом спае, и, кроме того, некоторое количество тепла переносится от холодного спая к горячему. Последний факт часто вызывает утверждение, будто бы термоэлектрический холодильник «имеет коэффициент полезного действия больше единицы». Такое же утверждение можно было бы сделать, как мы видели, и относительно газовой холодильной машины. Однако, если мы попытаемся осуществить замкнутый обратимый процесс превращения электрической энергии в тепло (явление Пельтье), а затем обратное превращение полученного тепла в электрическую энергию (явление Зеебека), то даже в идеальном случае «выигрыш» оказался бы равным нулю, а к. п. д. — равным единице.
В реальном же эксперименте нагревание проводов за счет джоулева тепла вызовет понижение к. п. д. В этом случае, как и в любом другом, реализовать вполне обратимый процесс не удается.
Внутреннюю энергию тела можно разделить на две части: ту, которая может быть превращена в работу (свободная энергия), и ту, которая при этом неизбежно будет передана более холодному телу в виде тепла (связанная энергия). Физическая энтропия тела характеризует долю этой «бесполезной» энергии, которая не может быть превращена в работу. Энтропия является реальной величиной, которая может быть определена расчетом или измерением. При физических изменениях тела энтропия его меняется. Энтропия аддитивна: энтропия суммы нескольких тел равна сумме их энтропий. Размерность энтропии— калории!градус.
Приращение энтропии тела .при изменениях его физического состояния определяется суммой «приведенных теп-лот» dQIT:
2
S,-S2 = j4$-. (3.21)
1
Самым существенным свойством энтропии является то, что в замкнутой системе, для которой невозможен обмен энергией с внешним миром, энтропия никогда не уменьшается. Она остается постоянной при обратимых процессах и повышается при необратимых.
Связанная энергия тела пропорциональна его энтропии. Таким образом, трение, теплопроводность, увеличивая долю связанной энергии, повышают энтропию системы.
Изменение энтропии является мерой «необратимости»
данного процесса или мерой «неполноценности» внутренней энергии данного тела. Второе начало термодинамики в формулировке Клаузиуса звучит так; «С течением времени энтропия всякой изолированной системы стремится к максимуму». Достигнув максимума энтропии, изолированная система пребывает в состоянии теплового равновесия.
Как мы уже упоминали, некоторыми особенностями в этом отношении обладают тела живой природы. Они самопроизвольно поддерживают свою энтропию неизменной за счет увеличения энтропии перевариваемых питательных веществ или за счет поглощения энергии извне (главным образом, солнечной радиации). Однако живые тела сами по себе не представляют собой изолированной системы, так как не могут существовать без взаимодействия со средой. Поэтому утверждение, будто бы «живые организмы не подчиняются второму началу термодинамики», является неверным. Поддержание энтропии некоторого тела постоянной за счет соответствующего увеличения энтропии окружающих тел вовсе не представляет собой чего-то исключительного и может быть воспроизведено. Особенностью живых тел является собственно лишь тот способ, которым они достигают этого непрерывно и «автоматически».
Свойство изолированных систем изменять свою энтропию только в одном направлении—в сторону увеличения— было блестяще объяснено Больтцманом на основе теории вероятностей. Сущность этого объяснения вкратце сводится к следующему: «Физические тела переходят от состояний менее вероятных к более вероятным».
Энтропия, так же как и температура, свойственна только телам макроскопическим, т. е. состоящим из очень большого числа молекул. Для одной молекулы энтропии не существует. Расположение и движение молекул газа в объеме могут быть самыми разнообразными. Большое число соударений с другими молекулами делает координаты и скорости молекул случайными величинами, которые имеют некоторые распределения вероятностей. Число молекул чрезвычайно велико: в кубике с ребром 4 микрона при атмосферном давлении содержится больше молекул, чем имеется людей на земном шаре. Понятие «массовое явление» как нельзя более подходит к газовому состоянию.
Мы можем представить себе различные распределения молекул газа в объеме. Каждое такое распределение является сложным событием и будет иметь определенную 66
вероятность, котарую можно подсчитать по известным правилам теории вероятностей.
Пусть в сосуде с объемом V находится Л/ молекул таза. Разобьем объем сосуда на большое число v одинаковых элементарных объемов или ячеек. Будем считать, что все
молекулы размещаются независимо друг от друга и что вероятность того, что молекула находится в определенной ячейке, равна отношению объема ячейки к полному объему:
_ДГ_ДУ _2 Р~ V — уДИ V *
(3.22)
Теперь подсчитаем вероятность сложного события, заключающегося в том, что в первой ячейке окажется пх молекул, во второй /г2, . . .,в последней /zv. При этом, разумеется,
i=l
где N — общее число молекул в сосуде. Эта задача аналогична подсчету вероятности выигрыша п билетов из общего числа N. Обобщая формулу (3,11), напишем:
PN («1- «2.....«,) (v) • (3-23)
Меняя числа мы будем, очевидно, менять и величину вероятности PN. По-видимому, одно из возможных распределений будет иметь наибольшую вероятность. Определив максимум величины PN, убедимся, что наибольшей вероятностью обладает равномерное распределение молекул в объеме сосуда. При этом
nf=¥-=Np.. (3.24)
Именно к такому распределению плотности приходит газ при отсутствии внешних возмущений в любом реальном эксперименте. В частности, явление диффузии приводит именно к такому наиболее вероятному распределению плотностей в смеси газов.
Аналогичным образом можно определить наиболее вероятное состояние газа с учетом влияния поля тяготения и с учетом распределения скоростей. В этом случае получается закон распределения Максвелла — Больтцмана, который наблюдается и на опыте. При этом физические вели
чины, свойственные всей массе газа, оказываются параметрами распределения вероятностей. Так, например, температура газа пропорциональна математическому ожиданию кинетической энергии молекул.
Состояние газа, отличное от равновесного, обладает меньшей вероятностью, причем вероятность падает тем быстрее, чем больше число молекул. М. Смолуховский подсчитал, что вероятность самопроизвольного отклонения мгновенного значения давления газа от среднего на 1% такова, что в объеме газа, соответствующем кубу с ребром 0,2 микрона, такое отклонение происходит в среднем каждые 10-9 секунды; в объеме, равном одному кубическому сантиметру, то же самое случается лишь каждые Ю10* секунд, т. е. практически никогда не случается.
Можно доказать методами теории вероятностей, что система молекул газа, находящаяся в состоянии, отличном от наиболее вероятного, устойчивого, вскоре самостоятельно придет к устойчивому состоянию и останется в нем. Если мы, например, приведем в соприкосновение через теплопроводную стенку две порции газа с различными средними энергиями молекул (т. е. с различными температурами), то обе порции газа вскоре окажутся при одинаковой температуре. Если мы уберем перегородку, то газ будет самопроизвольно перемещаться и распределится по объему равномерно. Таким образом, теплопроводность и диффузия являются «макроскопическим» выражением статистической закономерности перехода от маловероятного состояния к более вероятному.
Можно вычислить энтропию S равновесного состояния газа, выразив ее через функцию распределения молекул по скоростям, или вероятность состояния. Это выражение имеет вид
5 = А11пР+СЛ (3.25)
где Р—вероятность состояния,
С — некоторая постоянная.
Энтропия равновесного состояния газа пропорциональна логарифму вероятности состояния газа. Самопроизвольное увеличение энтропии получает, таким образом, наглядное толкование как увеличение вероятности состояния.
* Энтропия, выраженная через числа молекул в ячейках объема и вероятности пребывания в них, принимает вид:
s = k 2 nt log ni — — k 2 Pi log Pi + C. (3-26)
Второе начало термодинамики является законом статистического типа, справедливым только для массовых явлений. Для малых количеств молекул энтропия может иногда испытывать случайные самопроизвольные уменьшения и второе начало будет справеливым только в среднем по времени. Законы газового состояния являются законами статистического типа.
Другим примером плодотворного применения статистических методов, на этот раз к вопросам передачи сигнала, является теория информации, некоторые положения которой мы рассмотрим в следующей главе.
ГЛАВА 4 I
КОЛИЧЕСТВО ИНФОРМАЦИИ
При проектировании и создании систем, работающих с сигналами, в частности каналов связи, недостаточно подходить к решению задачи только с точки зрения физики или энергетики. Правда, физические процессы, происходящие в канале, весьма существенны и их характеристиками нельзя пренебрегать, так как сигнал есть физический процесс. Однако ограничиваться только рассмотрением физических процессов как таковых — значит упускать из виду самое главное, ради чего создается канал связи. Этим главным является количество информации, передаваемой без искажений в единицу времени. Таким образом, мы приходим к необходимости иметь численную меру количества информации.
Информационная емкость
С установления оценки количества информации посредством числа начинается новая отрасль теории связи— теория информации, которая рассматривает вопро-70
сы о пропускной способности каналов связи, о наилучшем кодировании информации и выводит предельные соотношения для количества информации, которое может быть передано по каналу в единицу времени. Эти соотношения в теории связи по их значению можно сравнить с законом сохранения энергии в энергетике. Подобно тому как в энергетике, количество энергии, отдаваемое энергетической машиной, не может быть больше количества потребляемой ею энергии, в теории информации количество информации, передаваемое без ошибок в единицу времени, не может быть больше пропускной способности канала.
Как же оценить количество информации? Как это ни странно с первого взгляда, но для численной оценки количества информации, т. е. количества содержания, смысла сигнала, необходимо прежде всего отвлечься от этого содержания, от смысла, от семантики. Впрочем странность этого только кажущаяся. При любых количественных расчетах все единицы теряют свою индивидуальность и становятся качественно одинаковыми. Чтобы воспользоваться, например, арифметикой или алгеброй для какого-либо конкретного расчета, мы должны прежде всего отбросить эту конкретность и перейти к числу вообще. То же справедливо относительно формальной логики и других теоретических дисциплин.
Если мы перестанем интересоваться семантикой сообщений, т. е. отвлечемся от конкретного содержания того события, о котором передаются или записываются сообщения, то у нас останется только множество отличных друг от друга состояний. Какое бы реальное событие мы ни описывали: строительство дома или производство автомобилей, ход спортивного соревнования или военной операции, состояние физической системы или ход химической реакции, судьбу отдельного человека или историю народа—любое событие в каждый момент времени может находиться в одном из большого числа возможных состояний. Описание события есть не что иное, как указание на то, в каком из возможных состояний находится описываемый объект.
Протекание события во времени есть смена этих состояний, выбранных из числа возможных. Различные конкретные события отличаются друг от друга числом возможных состояний и особенностями выбора. Множество возможных состояний может быть дискретным или непрерывным, представлять собой одну величину или совокупность многих величин.
Таким образом, информация в отвлеченном виде, без конкретного смысла сообщения, есть просто выбор некоторого определенного элемента из множества возможных. Каждому состоянию события может быть приведено в соответствие определенное состояние физического процесса, представляющего собой сигнал. Посылка сообщения о событии есть, таким образом, выбор определенного символа сигнала из множества возможных символов. Элементы множества сигнальных символов, подобно состояниям описываемого события, могут быть либо дискретными символами (буквы печатного текста, точки и тире телеграфной азбуки, цифры), либо непрерывными (высота звукового тона, амплитуда колебания).
Будем называть множество возможных состояний или символов сигнала алфавитом сигнала, а состояние физического объекта или процесса, реализующее этот алфавит, физическим алфавитом. Отдельный символ можно называть буквой алфавита, а серию или комбинацию символов—словом в алфавите. Простейшим примером дискретного алфавита является алфавит, состоящий из двух символов: 0 и 1, или + н —, или да и нет и так далее.
Чтобы подойти к определению числовой меры количества информации, необходимо прежде всего составить представление об объеме множества возможных сообщений, из которого производится выбор, а затем уточнить характер самого выбора.
Для дискретных алфавитов подсчет числа возможных сообщений, состоящих из заданного числа символов, не составляет труда. Если в алфавите N букв, то число возможных слов, состоящих из п букв каждое, равно Nn (одну букву можно выбрать N способами, две буквы — Л/2 способами,... ,п букв—Nn способами).
Для непрерывных алфавитов число возможных сообщений бесконечно велико. Однако непрерывная величина, являющаяся сигналом, всегда известна с некоторой ошибкой, обязанной шуму. Поэтому с точностью до допустимой ошибки эта величина может быть представлена в виде дискретных значений (или, как говорят, «квантована»). Наличие шума не позволяет реализовать и использовать бесконечно большое множество сообщений в непрерывном алфавите. Мы уже видели, каким образом можно непрерывную функцию времени с ограниченным спектром и с ограниченной амплитудой в ограниченном интервале времени представить в виде конечной последовательности конеч-72
ных дискретных величин. Квантованием этих величин можно представить любую такую функцию в виде конечного множества чисел с конечным числом разрядов. Таким образом, можно свести непрерывный алфавит к дискретному и пересчитать все возможные непрерывные сообщения и в этом случае.
Пересчитав подобным образом все возможные трехминутные телефонные разговоры при полосе частот 4000 герц и разбиении амплитуды квантованием на 32 значения, мы получим число ю2000000 (единицу с двумя миллионами нулей). Разумеется, среди пересчитанных таким образом разговоров подавляющая часть окажется вопиющей бессмыслицей или просто набором звуков.
Для телеграммы из 10 слов по 5 букв каждое количество всех возможных (в том числе и бессмысленных) телеграмм равно Nn = 3250^1075. Для передачи одного сообщения, состоящего в выборе одного из двух символов, число возможных сообщений равно 2.
Итак, зная алфавит и длительность передачи, можно подсчитать число возможных сообщений, из которых производится выбор при каждой передаче. Мы подошли к определению информационной емкости системы, передающей или запасающей информацию. В 1928 г. Хартли предложил оценивать информационную емкость системы логарифмом числа возможных состояний системы. Так, если система может находиться в N возможных состояниях и все ее состояния взаимно независимы, то ее емкость равна
C1=logJV. (4.1)
Две такие системы вместе будут, очевидно, иметь № состояний (каждому состоянию первой соответствует # возможных состояний второй). Следовательно, емкость двух систем составит
С2 = log № = 2 log Л/ = 2Ci, (4.2)
т. е. она будет вдвое больше, чем емкость одной системы. Очевидно, что емкость трех систем в таком определении будет втрое больше, а емкость k систем — в k раз больше; другими словами, емкость аддитивна.
С помощью меры, предложенной Хартли, работа системы, состоящая в прохождении тактов, может быть описана таким образом, что емкость будет возрастать линейно
с увеличением числа тактов, т. е. пропорционально времени работы. Эти линейные соотношения делают удобными расчеты и оправдывают применение логарифмической меры емкости. Поскольку в качестве систем, запасающих информацию, применяются реле или другие устройства, имеющие только два устойчивых состояния, основание логарифма удобно взять равным двум. Тогда присоединение к схеме дополнительного реле увеличит емкость схемы на единицу.
Чтобы подойти к определению понятия количества информации, необходимо представить себе, как заполняется информационная емкость канала и какая часть ее действительно используется при передаче. Мы уже видели, что часть пересчитанных нами разговоров и телеграмм бессмысленны, т. е. никогда не встретятся в реальной передаче. Стало быть, при использовании канала некоторые состояния или сообщения никогда не встречаются, другие встречаются редко, третьи—часто. По-видимому, для передачи только «разумных», т. е. реально встречающихся сообщений, в принципе можно было бы обойтись каналом с меньшей емкостью.
Представим себя в роли адресата, находящегося на приемном конце канала связи. Мы получаем различные сообщения, которые исполняем или запоминаем. Интуитивно ясно, что не все серии сообщений встречают с нашей стороны одинаковое субъективное отношение. Случается, что сообщения оказываются «интересными», «новыми», «неожиданными». Случается и так, что мы не получаем «ничего нового», «все без перемен» «все и так было ясно заранее», и т. д. Если все получаемые сообщения одинаковы или заранее известны или если из предыдущих можно однозначно вывести последующие, то, естественно, мы не узнаем ничего нового, т. е. будем получать количество информации, равное нулю.
Помните, как один из героев Жюля Верна—журналист Гедеон Спиллет—передавал по телефону главу из библии только для того, чтобы не дать возможности конкурирующим репортерам воспользоваться линией. Вся острота ситуации заключается в том, что Спиллет использует линию нелепым образом, т. е. передает общеизвестный текст.
Сообщения «интересны», мы узнаем из них новости и получаем информацию только тогда, когда они «неожиданны» или, лучше сказать, случайны. Этот термин объективен и точен и, кроме того, позволяет перейти от ин-74
туитивного и психологического определения ситуации «новизны» или «неожиданности» к объективному статистическому описанию явлений, из которого полностью исключается какая бы то ни была произвольность оценок.
Разумеется, случайность, которая входит, таким образом, в выбор сообщения из множества возможных, имеет источником случайный характер описываемого события. В поисках меры количества информации мы должны обратиться к методам теории вероятностей.
Мера количества информации
Всякое сообщение, передаваемое по каналу или фиксируемое в запоминающем устройстве, соответствует некоторому определенному состоянию внешнего явления, о котором передаются сообщения. Внешнее явление или событие представляет собой источник сообщения или источник информации. Те или иные состояния внешнего явления наступают часто или редко в зависимости от характера тех законов природы, по которым это явление протекает. Поскольку течение описываемого явления в будущем неизвестно (иначе о нем не было бы смысла передавать сообщения), можно говорить только о частотах или о вероятностях наступления тех или иных состояний. В связи с этим различные сообщения, каждое из которых соответствует определенному состоянию описываемого явления, также приобретают определенные вероятности.
Расположим все возможные сообщения At в некотором порядке и припишем каждому из них вероятность равную вероятности появления этого сообщения в реальной передаче. Мы будем иметь конечную схему, состоящую из полной системы попарно несовместимых событий (сообщений) А., заданных вместе с их вероятностями.
Конечная схема может быть записана так:
А| Д2 А3... А....Ап \
р2 p3...p(...pj-
(4.3)
При каждой передаче производится выбор одного из элементов Д. схемы в соответствии с распределением вероятностей. Для каждой передачи какое-то сообщение будет 75
обязательно выбрано, поэтому сумма всех вероятностей должна быть равна единице
(4.4)
1-1
Некоторые из Pt могут быть равны нулю.
Всякая конечная схема представляет неко орую неопределенность выбора ее элементов, которая снимается после того, как выбор произведен. Степень этой неопределенности различна в различных схемах. Неопределенность, по-видимому, возрастает, если возрастает число элементов схемы при равномерном распределении вероятностей. При одинаковом числе элементов схемы неопределенность возрастает по мере приближения распределения вероятностей к равно-
Л2\
z имеет боль-2/
$2 ). Неопре-0,99 J н
мерному. Так, по-вндимому, схема I
\/2 шую неопределенность, чем схема / деленность исчезает вовсе, если одна из вероятностей становится равной единице.
Мера неопределенности выбора в данной конечной схеме и является мерой количества информации на один выбор, так как выбор снимает неопределенность. Мера неопределенности выбора или количества информации на один выбор должна быть функцией всех вероятностей Pi9 изменяться непрерывно при непрерывном изменении и, кроме того, принимать максимальное значение в том случае, когда все вероятности равны друг другу.
К. Шэннон, которому принадлежит заслуга постановки этого вопроса, показал, что этим и некоторым дополнительным требованиям удовлетворяет функция
п
H=-k^p.\0g ph
(4.5)
где k — постоянная, определяющая единицу измерения.
Вид этой функции совпадает с выражением для энтропии в статистической физике, причем это совпадение существенно, а не только формально. Поэтому величина Н носит название энтропии совокупности вероятностейР. .
В тех случаях, когда будет возникать опасность путаницы, мы будем называть соответствующие величины физической и информационной энтропиями.
В качестве единицы измерения количества информации или энтропии принимается единичный выбор из двух равновероятных возможностей. Для этого случая /7=1; логарифм, как и в случае меры Хартли, берется при основании 2. Этим определяется постоянная k—\.
H(i'
Аналогично мере Хартли энтропия возрастает пропорционально числу последовательных выборов. Для однократного выбора из двух возможностей с неравными вероятностями р н q (p+q=\) энтропия принимает различ-
Н
Рис. 4.1. Зависимость энтропии от вероятности в случае выбора из двух возможностей с вероятностями р и 1 — р.
ные значения в пределах между нулем и единицей (рис. 4.1). Когда р стремится к нулю или единице, т. е. когда выбор оказывается заранее предопределенным, энтропия равна нулю в полном соответствии с нашими интуитивными представлениями. Максимум энтропии соответствует наибольшей неопределенности выбора, т. е. равным вероятностям. В этом случае энтропия равна информационной емкости множества возможных сообщений. Для любого множества выравнивание вероятностей ведет к увеличению энтропии. Эн
тропия одиночного выбора из множества W сообщений или символов, приведенная в формуле (4.5), представляет собой энтропию на символ передаваемого сообщения. Иногда эту величину называют также «содержательностью одиночного сообщения».
Интересно отметить, что Хартли, предложив меру емкости системы для запасания информации при равновероятном использовании элементов, остановился перед дальнейшими трудностями. Он считал, что характер реального вы
бора сообщения из множества представляет Собой проблему психологическую, а не математическую и не инженерную, Заслугой Шэннона является то, что он вместо психологических использовал статистические данные. В результате статистической постановки задачи мера Хартли
С — iogN = ~ logA- = — log Р (4.7)
заменена энтропией п н==^рл-i —1
которая является не чем иным, как математическим ожиданием (или средним по вероятности) отрицательного логарифма вероятности, т. е. меры Хартли.
Следует отметить, что величина энтропии относится не к единичному сообщению, которое фактически выбрано, а к единичному выбору из данного множества с заданным распределением вероятностей. Следовательно, энтропия характеризует не то, что в данный момент передано, а то, что могло бы быть передано. Иногда называют энтропию «мерой свободы выбора» или «мерой априорного незнания».
Выбор сообщения при передаче производится иа входе канала связи источником сообщений, т. е. случайным процессом, обладающим соответствующими статистическими характеристиками. Следует, таким образом, говорить об «энтропии источника сообщений». Реальным источником сообщений для канала связи может быть и репортер, передающий сообщения в газету, и клиенты, подающие телеграммы, и измерительные приборы автоматической метеостанции: барометр, гигрометр, термометр и другие, выдающие результаты измерения для передачи по радио, и т. д. Важно, что в любом случае существует множество возможных сообщений и определенные частоты или вероятности отдельных сообщений. Делом нашего произвола будет выбор того, что считать «сообщением»: целую телеграмму, слово, букву или, наконец, точку, тире и паузу телеграфной азбуки Морзе.
Энтропию источника сообщений можно измерять или на символ, т. е. на один выбор, или в единицу времени. Энтропия на символ, умноженная на число символов, выдаваемых в единицу времени, равна энтропии в единицу времени.
Емкость русского алфавита, включая знаки препинания и пропуски, при 32 возможных символах равна
32
— V'^l°g32~log32 = 5 единиц/символ. (4.8) 1
Если источник выдает текст на русском языке, то его энтропия на букву в два—три раза меньше емкости алфавита, т. е. составляет около 2 единиц на букву, поскольку в реальном «осмысленном» тексте символы не равновероятны (например, мягкий знак встречается реже, чем буква «а»).
Энтропия телеграммы из 10 слов (50 знаков) равна приблизительно 100 единицам. Страница книги содержит около 5000 единиц, книга в 200 страниц —около 1 000 000 единиц, библиотека в 100 000 томов—1011 единиц.
Реальные события, о которых передаются сообщения, не всегда могут описываться простой конечной схемой. Различные стороны события могут потребовать введения нескольких конечных схем («погода» описывается температурой, давлением, влажностью, облачностью и т. д.). Таким образом, встает задача об определении количества информации сложного события.
Пусть мы имеем два взаимно-независимых события А и В и для каждого из них задана конечная схема, т. е. множества возможных исходов или состояний At и Bk и их вероятности. Совместное появление состояний Лг и Bk представляет собой сложное событие и будет иметь определенную вероятность
Р(Л/вА)=Р(Л,.)Р(вд
Совокупность таких сложных событий образует новую конечную схему, более обширную, чем первоначальные. Выбору из этой новой схемы соответствует новое количество информации сложного события Н(А, В).
Для независимых событий энтропия схемы сложного события равна сумме энтропий простых событий
Н(А, В) = Н(А) 4- Н (5). (4.9)
Для любого числа независимых событий Л, В, С...
/7(Л, В, С.. ,) = Я(Л)4-В(В)4-Н(С)4-... (4.10) Для независимых событий энтропия аддитивна.
Код
На пути от источника информации к адресату сигнал может проходить несколько различных участков канала, каждый в отличном от других физическом алфавите. Так, при передаче по радио сигнал представляет собой то звуковые колебания, то колебания электрического тока, то колебания электромагнитного поля и т. д. На границах участков сигнал испытывает преобразование из одного физического алфавита в другой, причем содержание (информация), т. е. соответствие первоначальной форме сообщения или описываемому событию, сохраняется.
Преобразуя сигнал из одного алфавита в другой, мы сопоставляем символы первого алфавита с символами второго. Такое сопоставление алфавитов называется кодированием сигнала, а правило, по которому оно производится,— кодом*. В частности, всякое измерение представляет собой кодирование измеряемой величины в «выходном алфавите» измерительного прибора. Выходным алфавитом чаще всего служит механическое смещение стрелки — индикатора, поскольку оно лучше всего воспринимается человеком.
При кодировании дело, однако, не сводится только к тому, чтобы заменить одну физическую величину другой. При кодировании может измениться множество символов и распределение вероятностей. При кодировании мы можем сопоставить один символ первого алфавита с комбинацией или группой символов второго, и «наоборот, или же сопоставить группу с группой. Так, при кодировании буквенного текста азбукой Морзе буква русского алфавита сопоставляется с двумя—семью (считая пропуски) символами телеграфного алфавита. Таким образом могут быть сопоставлены различные по информационной емкости алфавиты. Поскольку при кодировании меняется множество символов и распределение вероятностей, постольку меняется, вообще говоря, и энтропия на символ сообщения. Отсюда следует, что, выбирая один из возможных кодов, мы можем найти такой код, который имеет наибольшую энтропию на символ, или, иначе, наименьшее число символов на данное количество информации. Этот код будет «наибо
* Часто называют «кодовой группой» или просто «кодом» группу символов — слово в некотором алфавите. Говорят, например, что «устройство памяти хранит 1024 кода». Мы будем применять слово «код» только в смысле правила кодирования, но не в смысле слова в алфавите.
лее экономным» для передачи сообщения, так как потребует наименьшего числа символов и наименьшего времени передачи.
Рассмотрим пример, приведенный Шэнноном. Пусть источник выдает четыре взаимно-независимых символа А, В, С, D с вероятностями, соответственно, ’/2, У4, !/в, 7в-Иначе говоря, источник изображается конечной схемой
Энтропия источника, очевидно, равна
[2 2 ^4 4 + 8 8 ] 8 ’ (4.12)
Рассмотрим два кода, которые переводят эти символы в двоичный алфавит— (0,1).
Код № 1:
Л-00, В —01, С—10, £>—11.
Код № 2:
/1-0, В — 10, С—110, £>—111.
Подсчитаем вероятности появлении символов нового алфавита для обоих кодов. Для этого выпишем все символы исходного алфавита в соответствии с их вероятностями или частотой их появления и соответствующие комбинации символов нового алфавита для обоих кодов, а затем подсчитаем частоты появления последних.
Исходный алфавит:
AAAABB CD
Код № 1:
00 00 00 00 .01 01 10 11
Код № 2:
0 0 0 0 10 10 НО 111
Подсчитаем частоты появления (вероятности) символов. Исходный алфавит:
Р(Л) = 4/8=1/21 p(B) = 2/g = I/4) P(C) = ‘/s. =
Код Ко 1;
Код № 2:
B2(0) = 7/u=‘/2, p2(1)=7/u=72.
В результате кодирования мы получили две новые конечные схемы.
Код № 1:
/ ° 1 \
1п/ 51 Г
\ /16 /16/
Код № 2:
( 0 1 (4.13)
v/2 */2/
Подсчитаем теперь энтропии на символ.
Для исходного алфавита [по формуле (4.12)]:
Нц — 7/4 единиц^символ.
Для кода № 1:
= - (11/1б1оё11/1б + 5/1б1оё5/1б) = 0,875.
Для кода № 2:
^2 = -(7Jog72 + 72iog'/2) = i.
Очевидно, что код № 2 является более экономичным, чем код № 1, так как каждый символ кода № 2 несет большее количество информации.
Закодировав сообщения кодом № 2 в алфавит (0,1), можно снова вернуться к исходному алфавиту (Л, В, С, В), воспользовавшись кодом № 1 в обратном порядке: 00 — Л, 01—В, 10 — С, 11 — В. После такого двойного перекодирования мы получим в исходном алфавите новую конечную схему с новыми вероятностями. Чтобы подсчитать эти вероятности, снова прибегнем к тому же приему и в результате получим:
Р'И) = ’/4. /’'(В)=74. Р'(С) = 74. P'(D)=^.
Таким образом, новая конечная схема, полученная после двойного перекодирования, будет
А В С D\
74 74 74 4J'
(4.14)
Как нетрудно видеть, энтропия на символ в новой схеме Н3 равна 2, т. е. информационной емкости применяемого алфавита.
Максимальная энтропия данного алфавита равна его информационной емкости и достигается при равенстве вероятностей всех символов. Всякий конкретный код с определенной энтропией можно -оценить с точки зрения его экономичности, т. е. близости его к оптимальному коду, обладающему максимальной энтропией. Для этого достаточно взять отношение значения энтропии данного кода к максимальному ее значению в том же алфавите. Это отношение носит название относительной энтропии h
h = (4-15)
макс
Наибольшее значение относительной энтропии равно единице.
В вышеприведенном примере относительная энтропия сообщений в исходном алфавите по схеме (4.11) равна 7Д: 2=7/8; после двойного перекодирования относительная энтропия стала равна 1. Таким образом, двойное перекодирование дало «сжатие» сообщений в 7/8 раза, т. е. для передачи той же информации по новому коду потребуется число символов на */8 меньше, чем по исходному.
Вычитая величину относительной энтропии из ее -максимального значения, мы получим число, называемое избыточностью кода г и служащее мерой числа излишних символов в передаче
r = \-h==H*aKC~H . (4.16)
“ макс
В приведенном выше примере: для исходных сообщений го=1—7/8 = 1/8, для кода № 1 /*1 = 1—0,875=0,125, для кода № 2 /*2=0, для окончательно полученной схемы (4.14) /з=0.
Избыточность равна нулю только при оптимальном коде, когда появление всех символов независимо и равновероятно, как в схеме (4.14). Неравномерность распределения вероятностей, как в схеме (4.11), или же наличие внутренних вероятностных связей (корреляции между появлениями букв) уменьшает относительную энтропию и увеличивает избыточность.
При составлении текста мы делаем по нашему произволу гораздо меньше выборов, чем число букв текста. В среднем лишь ’А—Уз общего числа букв появляется случайно вследствие выбора нами смысла фразы, подбора выражений и т. д., а остальные приходят вынужденно, благодаря 6* 83
наличию грамматических законов словообразования и составления фраз.
Избыточность русского и европейского языков превышает половину и составляет, по некоторым подсчетам, от 0,68 до 0,75. Мы могли бы выражаться в 3—4 раза лаконичнее, умен мы пользоваться в качестве языка оптимальным кодом. В этом случае любая комбинация букв составляла бы слово, имеющее смысл, любая таблица, состоящая из букв, представляла бы собой кроссворд, все буквы и все их комбинации применялись бы одинаково часто.
В действительности, конечно, в реальном языке вероятности появления букв и их сочетаний далеко не одинаковы. Если подсчитать частоты появлещя слов, например в телеграммах, то окажется, что такие слова, как задерживаюсь, целую, деньги будут иметь большие частоты, а такие, как пахта или верея очень малые. Примерно то же самое имеет место и в разговорной речи, и в газетно-журнальных текстах, инаучно-технической литературе. Все реальные сообщения, закодированные в символы национальных языков, имеют значительную избыточность.
Этот факт, конечно, не случаен и не является недостатком принятого способа выражать человеческие мысли. Избыточность полезна, и польза ее состоит в том, что «излишние» символы позволяют без труда исправлять ошибки, опечатки, которые всегда появляются при передаче. или воспроизведении информации.
Конечно, никакой аптекарь не рискнул бы выполнить рецепт, написанный типичным врачебным почерком, если бы ошибка в одной букве меняла слово аспирин на слово стрихнин.
Скорость передачи
Всякое устройство, осуществляющее передачу сигналов на расстояние, называется каналом связи. Примером могут служить телеграф, телефон, телеметрическая система, нерв животного и т. д. Канал связи на входном передающем конце получает информацию в виде сигналов от некоторого источника. Далее эти сигналы проходят по каналу до другого его конца — выходного или приемного, где выдаются адресату. Алфавит выходного сигнала не обязательно совпадает с алфавитом сигнала на входе; иначе говоря, в состав канала связи могуг входить кодирующие устройства. Так, канал телеизмерения может получать на вход от датчика-измерителя электриче-84
ское напряжение, а на приемном конце выдавать кривую, записанную на бумажную ленту.
При передаче сигнала по каналу связи на сигнал тем или иным путем воздействуют шумы или помехи. В результате на приемном конце канала адресат получает нечто отличное от посланного сообщения—сигнал, искаженный помехой. Если рассматривать выход канала как источник сообщений и подсчитать его энтропию, то окажется, что энтропия на выходе больше, чем энтропия на входе. Количество информации возросло, однако ее содержание отнюдь не обогатилось, так как содержанием дополнительной информации является помеха, которая не соответствует описываемому событию.
Если помехи велики, то на выходе канала они преобладают над полезным сигналом и большая часть выходных сигналов канала становится не относящейся к исходному сообщению. Возникает вопрос: какое же количество полезной информации передается при этом от входа к выходу канала?
Сигнал на выходе канала при наличии помех перестает быть однозначно функционально связанным с сигналом на входе, между ними сохраняется только статистическая связь.
Рассмотрим два случайных события: появление на входе канала сигнала X и появление на выходе сигнала Y. Каждое из этих событий имеет определенную вероятность Р(Х) и P(Y). X и Y не являются независимыми, поэтому вероятность сложного события — одновременного и совместного появления обоих сигналов, Р(Х, У), можно выразить с помощью условной вероятности:
Р(Х, Y) = P(X)P(Y\X) = P(Y)P(X\Y), (4.17)
Р(Х|У)—вероятность появления X, если появился У, P(YfX)—вероятность появления У, если появился X. Для всех возможных сигналов X и У, образующих две взаимно-зависимые конечные схемы, можно подсчитать энтропию на символ или в единицу времени. То же можно сделать и для объединения схем X и У в одну общую конечную схему сложного события (X, У).
= rjlogP(X;, Yk) =
i k
= У V P I [log P (^) + log P (X,. | rfc)] =
i k
+Sр S p <*< । r«>log p <x- । K*>- (4J8)
а так как ^Р(Х.|КД)=1 для любого Уд, как сумма веро
ятностей полной группы событий, то
Н(Х, Г) = Я(Г) + 5Р(Ка) SP(XjrA)logР(Х.|Кй) I (4.19)
Величина Р (ЛХ-|Кд) log Р (X.\Yk) есть энтропия послан
ного сигнала (схемы Л) при заданном значении принятого сигнала Уд. Поскольку Yk — случайная величина, эта энтропия также является случайной величиной. В формулу (4.19) входит ее математическое ожидание по всем возможным сигналам на выходе К. Эта величина
Н (Х|Г) = S Р (Ук) х Р (XJK А) log Р (Х,.|ГЙ) k i
носит название условной энтропии. Оиа дает меру количества информации на один выбор (или меру неопределенности до выбора) из множества возможных X, если известен К, в среднем по всем Y. Итак,
Н{Х, Г) = /7(Г) + Я(Я|Г);
(4.20)
аналогично получаем
Н(Х, Y) = H(X) + H(Y\X}.
(4.21)
Условная энтропия H(X\Y) не может быть больше безусловной Н (X), т. е. всегда 0 < Н (Я|К) Н (X). Иначе говоря, знание выходного сигнала Y никогда не увеличивает энтропию X. Из (4.20) и (4.21) следует
Н(Х, Г)^Я(Х) + Я(Г),
(4.22)
причем равенство имеет место только в том случае, если X и Y независимы. В случае взаимозависимости X и Y энтропия перестает быть аддитивной.
Итак, мы имеем перед собой две ситуации. Во-первых, до передачи сигнала нам известна конечная схема X, т. е. возможные сообщения Xi и их вероятности, а следовательно, и энтропия источника Н(Х), которая характеризует степень неопределенности выбора X из множества возможных. Во-вторых, после получения искаженного сигнала Y мы все еще остаемся перед некоторой, хотя и меньшей, неопределенностью относительно того, какое же из возможных сообщений Хг было в действительности послано. Эта «остаточная» неопределенность характеризуется условной энтропией Н (X | Y), которую называют также ненадежностью.
Поскольку Н(Х |У) не может быть больше Н(Х), неопределенность выбора X никогда не может возрасти, а может только уменьшиться в результате получения искаженного сигнала У. Уменьшение неопределенности происходит потому, что, несмотря на помехи, некоторое количество информации все же было передано по каналу. Это количество информации при исчислении энтропии в единицу времени называется действительной скоростью передачи /?. Она равна разности безусловной и условной энтропий
R = H(X)^ Н (X)Y) = H (X)-\-H(Y) — Н (Х,У). (4.23) Иначе говоря, R есть уменьшение неопределенности выбора X после приема сигнала. Это уменьшение неопределенности за счет приема сигнала относительно неопределенности исходной схемы называют иногда отрицательной или «негативной» энтропией или же сокращенно негэн-т р о п и е й.
Если шум в канале отсутствует, то, как мы видели, H(X/Y) равно нулю и скорость передачи равна энтропии источника; иначе говоря, все количество информации, выдаваемое источником в единицу времени, доходит до адресата. Если шум настолько велик, что условная энтропия равна энтропии источника, то по каналу информация не проходит вовсе и /?=0. Это, между прочим, не означает, что все сигналы обязательно искажаются. Так, например, если при передаче сигнала в алфавите (0,1) только половина знаков проходит без искажений, а другая половина меняется на противоположные случайным образом, то скорость передачи оказывается равной нулю. Это очевидно хотя бы потому, что в этом случае можно было бы не пользоваться каналом связи, а просто восстанавливать каждый символ с помощью жребия; результат был бы такой же,
как и при использовании канала связи. В самом деле, пусть Р(0) = Р(1) =1/г. Тогда Н(Х) = 1 единиц/символ. После принятия любого символа условные вероятности равны:
Р(0| 1)==Р(0|0) = Р(1 |0) = Р(111)= >
Следовательно,
Я(Л|Г) = Р(0)[P(0|0)logP(0|0)4-P(l |0)logP(l |0)] + + Р(1)[Р (0| l)logP(011) + Р(1 |l)10gP(l 11)]= т]+у|т1о£ т+т1о&т]=1>
т. е.
R = H(X) — Я(Х|У)=1 — 1=0.
Скорость передачи зависит от распределения вероятностей как сообщений, так и шумов. При данных шумах в канале и различных множествах сообщений с различными распределениями вероятностей скорости передачи будут также различны. Если мы будем поочередно испытывать различные источники на входе канала, то для одного из них скорость передачи окажется максимальной и будет равна пропускной способности к а н а-л а С.
Пропускная способность канала, следовательно, равна
С = max [// (X) — Ну (X) ], (4.24)
где максимум отыскивается по всем возможным источникам.
Величина С является характеристикой канала связи. Она имеет тот смысл, что при наличии любых шумов, но при правильном кодировании, т. е. при статистическом согласовании источника и канала, по каналу можно передавать в единицу времени количество информации, равное С ед/сек, со сколь угодно малой вероятностью ошибки. Если величина С будет превзойдена, т. е. мы захотим передать по каналу количество информации, превышающее С (например, использовав более экономичные коды), то вероятность ошибок должна остаться конечной и не сможет быть сведена к нулю. В результате при приеме сигнала появится ненадежность (см. рис. 4.2).
Таким образом, проблема передачи информации по каналу связи приобретает вполне законченную, по крайней ме-88
ре в принципе, количественную трактовку. Информацию можно рассматривать как физическую величину, которая
может быть точно измерена, и вопрос о ее передаче становится аналогичным, скажем, перевозке грузов. Шэннон
сравнивает передачу информации с перевозкой леса на конвейере. Если вес и кубатура леса не превышает грузоподъемности и емкости конвейера, лес может быть транспортирован полностью. Нужно только, чтобы форма бревен соответ ствовала конструкции конвейера. Для правильной упаковки леса и полной загрузки конвейера придется, быть может, некоторые бревна распилить
Рис. 4.2. Ненадежность принятого сигнала в зависимости от энтропии на входе канала.
на бруски или даже измельчить до опилок. В случае канала связи это изменение формы соответствует перекодировке сообщений для статистического согласования источника и
канала *
Самокорректирующиеся коды
Понижение вероятности ошибок при передаче достигается разумным использованием избыточности при кодировании сообщений. Чем выше уровень шумов в канале, тем больше вероятность ошибки при передаче и тем больше лишних символов нужно применить для того, чтобы устранить ошибки. Именно этим ценна высокая избыточность человеческого языка. Отдельные опечатки в тексте делают слова бессмысленными, т. е. такими, которые ничему не соответствуют и не применяются. Это позволяет без труда обнаружить их и исправить.
То же свойство используется при составлении помехоустойчивых или, как их еще называют, самокорректирующихся кодов. Простейшим способом защиты от помех является многократное повторение передачи. При достаточном числе повторений правильный вариант сигнала будет приниматься несколько чаще, чем любой из искаженных. Есть,
* Мы опускаем рассмотрение вопроса о количестве информации, содержащейся в сообщении, которое закодировано в непрерывном алфавите. Исчерпывающее изложение вопроса питатель найдет у А. Н. Колмогорова [5].
однако, и более тонкие методы составления самокорректирующихся кодов. Рассмотрим примеры.
Пусть мы передаем сигнал в-алфавите (0,1), причем символы следуют группами, по JV символов в группе. Вероятность появления в группе более одной ошибки достаточно мала и ею можно пренебречь. Иначе говоря, в группе может появиться только одна ошибка (0 вместо 1 или 1 вместо 0), но почти никогда не появится две или больше таких ошибок.
Припишем к каждой группе из AZ символов еще один, который не несет информации, а служит контрольным. Будем выбирать его для каждой группы так, чтобы вся группа из#+1 символов при суммировании нулей и единиц, в нее входящих, давала бы, скажем, четное число. На приемном конце канала все группы проверяются на четность суммы и та группа, в которой ошибочно изменен один символ, немедленно будет опознана как ошибочная. Мы получили код, обнаруживающий одиночную ошибку. Его недостаточно для того, чтобы указать место ошибки в группе >и, следовательно, исправить ее.
Можно составить код и для исправления ошибки, только для этого придется увеличить избыточность и приписать дополнительные символы. Пусть в предыдущем примере Л; = 4; припишем к каждой группе из 4 символов еще 3 контрольных. Пусть символы, стоящие на 3, 5, 6 и 7-м местах, используются для передачи информации, а символы, стоящие на 1, 2 и 4-м местах — для контроля. Их мы выбираем по следующим правилам: составляем три вспомогательные суммы, в каждую из которых входит один контрольный символ, выбранный так, чтобы сделать её четной:
выбор Хр X3-|-X5-|-X7 + ^i = Y четное;
выбор Х2: Х3 + Х6“F %7~F%2 — Р четное; (4.25) выбор Х3: Х5-|-Х6-|-А'7-|-Х4 = а четное.
Группы из 7 символов передаются по каналу с искажением. На приемном конце канала вычисляются суммы а, р и у. Четные обозначаются нулем, нечетные—единицей. Двоичное число а р у дает номер неверно переданного символа в данной группе.
Пусть, например, Хз=0, Xs=l, Х6 = 1, Х7=0. Тогда Х] = 1, Х2=1, Х4=0. Передается группа 1100110. Пусть в третьем символе произошла ошибка и группа принята в следующем виде: 1110110. Вычислив по принятой груп-90
пе величины контрольных сумм а=0, 0=1, у=1, получим число ОН *, которое в двоичном начертании равно трем. Это индекс ошибочно принятого символа. Ошибка в любом другом символе была бы исправлена подобным же образом.
В самокорректирующемся коде не все слова «имеют смысл», т. е. являются допущенными к употреблению. Проверка принятого сигнала на наличие ошибок сводится к опознаванию недопущенных слов и к определению, из какого допущенного слова вероятнее всего получилось в результате искажения данное недопущенное. Это, по-види-мому, тем легче сделать, чем большим числом символов отличаются друг от друга допущенные слова.
Пример кода, который мы приводили выше, носит название кода типа Голей — Хемминга. Коды этого типа применимы, когда вероятность ошибки невелика. При больших вероятностях ошибки, когда в слове из N символов достаточно часто появляется более одной ошибки, код Хемминга оставляет без изменений слова, в которых нет ошибок, корректирует одиночные ошибки, не исправляет слова с четным числом ошибок и может внести одну дополнительную ошибку, если число ошибок больше одной и нечетное.
В таких случаях можно применять более сложные коды, например с повторным применением кодирования. Так, например, после исправления одиночных ошибок избыточные контрольные символы отбрасываются и из оставшихся символов составляются новые группы, состоящие из информационных и контрольных символов, и т.д. В результате достигается возможность передать некоторую информацию почти без ошибок, несмотря на значительную вероятность ошибок в отдельном символе, правда ценой значительной задержки во времени. Задержка при кодировании—общее явление для всех сложных кодов.
Передача телеграмм с последовательным исправлением ошибок повторным кодированием дает результат только спустя некоторое время. Вот как примерно выглядит подобная передача по мнению одного из изобретателей кодов.
Телеграмма, принятая с возможными искажениями, вручается адресату с припиской: «Вероятность ошибки на букву равна 0,1; исправления—завтра». Назавтра, после того как приняты следующие телеграммы с дополнитель-
* О двоичных числах см. гл. 7.
ними контрольными символами и найдены поправки, адресату вручается извещение: «Вместо гетры читайте метры, вместо мыло читайте мило; вероятность ошибки на букву теперь равна 0,01; дополнительные исправления—на следующей неделе». Через неделю адресату вручается новое извещение: «Вместо кости читайте гости, вероятность ошибки на букву—0,001; ждите следующего месяца». Это продолжается до тех пор, пока адресат не попросит больше не беспокоить его извещениями.
Теорема Шэннона
Самокорректирующиеся коды позволяют в ряде случаев с успехом пользоваться каналом связи даже тогда, когда уровень шумов в нем относительно высок. Вопрос о построении помехоустойчивых кодов для всех возможных случаев и в любом алфавите еще не решен до конца. Использование самокорректирующихся или других рациональных кодов требует, разумеется, разработки соответствующих автоматических кодирующих и декодирующих устройств.
Каково же то предельное количество информации, которое может быть передано без ошибок по каналу с шумами? Иначе говоря, чему равна пропускная способность канала? Ответ на этот вопрос, по крайней мере для одного весьма часто встречающегося случая, дает теорема Шэннона для канала с шумами. Пропускная способность канала вычислена точно только для случая гауссовых шумов, мощность которых равномерно распределена по частоте в пределах полосы пропускания канала при ограниченной средней мощности шумов и сигнала и их статистической независимости. Для этого случая пропускная способность канала равна
C = ед/сек, (4.26)
где Р — средняя мощность сигнала,
N— средняя мощность шумов,
W— полоса пропускания канала.
Не заботясь о строгости доказательства, можно вкратце пояснить вывод этой формулы следующим образом. Любая случайная функция с ограниченной полосой частот W может быть полностью описана 2WT ее значениями за время Т. Значения амплитуды сигнала, смешанного с шумом, 92
имеют в среднем величину ^P-j-N (складываются мощности, которые пропорциональны квадратам амплитуд). Из-за наличия шумов различение амплитуд выходной функции происходит с точностью до величины средней амплитуды шума — YN. Стало быть число различаемых значений амплитуды на выходе в среднем равно | А так
так в единицу времени проходит 2IF дискретных значений функции, то пропускная способность равна
С = 2U7log2 /= Wlog2 . (4.27)
Для очень малых отношений сигнал/шум можно написать приближенно
C = U71og2(l + T^U7^1og2e = l,443r^ . (4.28)
Действительная скорость передачи может как угодно мало отличаться от пропускной способности канала, если применить правильный код. Передавать информацию без ошибок с большей скоростью невозможно.
В формулу Шэннона входит как полоса пропускания так и мощность сигнала Р. Можно сохранить пропускную способность канала, уменьшив мощность передатчика и соответственно увеличив полосу пропускания или наоборот. При этом, разумеется, кодирование должно также измениться. Такая возможность действительно используется в системах связи. Например, различные типы так называемой импульсно-кодовой модуляции позволяют это осуществить.
Исследования показывают, что существующие системы связи далеки от достижимого предела в смысле использования их пропускной способности. Для подтверждения этого мы можем привести результат простого расчета, приводимого Шэнноном. Если телефонный канал будет работать оптимальным кодом для передачи нормальной речи со скоростью 100 слов в минуту при наличии шумов, меньших в 10 раз по амплитуде, чем сигнал, то при передаче с точностью до смысла (т. е. не передавая интонаций) потребуется полоса пропускания всего 2,3 герца, вместо обычно используемых при тех же условиях 1,5—5 тысяч герц. Очевидно, разработка кодов, кодирующих устройств и их использование могут принести немалую экономию.
Информационная и физическая Энтропия. Организация
Понятие количества информации в теории информации тесно связано с понятием физической энтропии. Этому не приходится удивляться, так как сигнал есть отражение явлений физического мира и информация в семантическом значении этого слова есть соответствие сигналов и событий. Следовательно, случайный характер явления, распределение вероятностей и физическая энтропия просто переносятся на сигнал, когда физическое явление представляет собой источник сообщений, которые перекодируются в алфавит сигнала. Если бы мы задались целью описать такое явление в газе, которое переводит его в новое состояние, связанное с изменением физической энтропии на величину Яф, то минимальное количество информации, содержащееся в таком сообщении, или его информационная энтропия Ян* были бы численно равны изменению физической энтропии Яф.
Физическая энтропия определяется обычно только для физических явлений, связанных с молекулярными процессами (тепловые явления, диффузия, химические реакции). Но не только такие явления могут служить источниками информации. Можно, по-видимому, воспользовавшись понятием информационной энтропии, обобщить понятие физической энтропии на более широкий круг явлений—всех явлений, могущих быть источником сообщений, или же ввести некоторое новое понятие, служащее для той же цели.
Именно таким путем было введено появившееся недавно понятие организации, которое применимо к широкому кругу объектов или систем и которое дает числовую меру статистических связей отдельных элементов, входящих в систему.
Интуитивно мы отождествляем отсутствие организации с хаосом. Пусть мы имеем некоторую систему, состоящую из отдельных частей или элементов, не обязательно однородных. Такой системой может быть не только совокупность молекул физического тела, но и собрание клеток в ткани живого организма, механизм, состоящий из связанных между собою • твердых тел, производственное предприятие, состоящее из отдельных цехов, коллектив людей, воинское соединение, состоящее из подразделений, и т. д.
Каждый из элементов в процессе существования или деятельности системы может принимать некоторое множество состояний, над которым задано распределение вероятностей. Если все элементы системы разобщены и состояние одного никак не влияет на состояния других, словом, если элементы независимы, то очевидно, что система является предельно неорганизованной. Другим предельным случаем является такой, когда состояние одного элемента однозначно определяет состояния всех остальных.
Подсчитаем обычным образом энтропию множества состояний каждого элемента системы Хг
п
А=1
где &=1, 2,..., п — число возможных состояний элемента Xt и P.k — вероятность элементу X. оказаться в состоянии k.
Подсчитаем теперь энтропию системы в целом. В случае независимости элементов в предельно неорганизованной системе общая энтропия будет максимальна и равна сумме энтропий отдельных элементов. Так, для системы, состоящей из двух элементов
Я0(Х,Л2) = Я(Х1) + Я(Х2).
Если в системе устанавливаются связи элементов и взаимные влияния, т. е. если система организуется, то общая энтропия становится меньше суммы энтропий элементов. В соответствии с (4.20), (4.21)
Нх (ХМ = Н (X,) + Н (Х21 Х0 = Н (Х2) +
+ Я(Х1|Х2)<Я(Х1)+Я(Х2).
В результате организации системы ее энтропия понизилась по сравнению с максимальной энтропией Это уменьшение энтропии может служить числовой мерой степени организованности системы Д.
д = Но - Нх = Н (Хх) + Н (Х2) - Н. (ХМ (4.29) или, согласно (4.23),
Д = Я(Х1)-Я(Х1|Х2) = Я(Х2)-Я(Х2|Х1) =
= Щ (ХМ ~Н(Х2\ X,) - И (X. | Х2). (4.30)
95
Мы снова пришли к негэнтропии, как и в случае передачи информации по каналу связи. Передача информации является, таким образом, частным случаем организации.
Рассмотрим простой пример. Пусть мы имеем систему, состоящую из двух элементов. Множество возможных состояний каждого есть отрезок прямой, над которым задано распределение вероятностей (или плотность вероятности) . Распределение вероятностей состояний системы будет задано над прямоугольником, стороны которого суть отрезки, соответствующие множествам состояний элементов.
Для неорганизованной системы распределение плотности вероятности над прямоугольником есть просто произведение плотностей вероятности на отрезках. При максимальной организации совместное распределение стягивается в линию. Промежуточный случай соответствует преимущественному группированию вероятности в области вокруг линии (рис. 4.3).
Максимальная организация системы соответствует, таким образом, соотношениям функционального типа между состояниями элементов и системы в целом. Уменьшение организации ведет к тому, что выбор определенного состояния одного элемента еще не определяет однозначно состояний остальных. Каждый элемент имеет еще некоторую «свободу», т. е. состояние его остается случайным и лишь статистически связанным с состояниями остальных. При полной дезорганизации все элементы становятся независимыми.
Для физических систем уменьшение организации соответствует повышению физической энтропии (уменьшению негэнтропии).
Механизм с разболтанными шарнирами обладает меньшей организацией по сравнению с механизмом, у которого шарниры пригнаны точно. На заводе, обладающем высокой организацией, цехи работают строго согласованно по времени, номенклатуре и качеству изделий. Разброс качества изделий определяется только разбросом качества сырья. Цехи завода, обладающего низкой организацией, работают вразброд (то недодавая другим цехам полуфабрикаты, то забивая ими промежуточные склады), несогласованно во времени, с большим количеством брака. Из хорошего сырья такой завод производит много некондиционных и бракованных изделий.
Подразделения высокоорганизованной воинской части ведут бой взаимосогласованно, строго по плану операции и не совершают никаких произвольных маневров. По мере снижения организации часть постепенно превращается
*/
г)
Рис. 4.3. Пример систем, обладающих различной степенью организации.
а) распределение плотности вероятности иад отрезками X и И б) распределение плотности вероятности иад прямоугольником'со сторонами X и У (плотность вероят* ности пропорциональна плотности точек иа рисунке), случай организации, равной нулю; •) то же. организация отлична от нуля; г) то.же,^ организация максимальная — между X и Y установлена ^функциональная зависимость.
в независимо действующие подразделения, а затем в толпу вооруженных людей.
Живой организм, пораженный раковой опухолью, име-
ет меньшую организацию по сравнению со здоровым. Функции больного организма, его реакции на внешние воздействия также дезорганизуются, т. е. приобретают характер неоднозначности, случайности.
В любам конкретном случае статистическое описание системы и ее деятельности позволяет определить числовую меру степени ее организации. Разумеется, конкретные задачи такого типа могут оказаться очень сложными и потребовать для своего решения затраты большого труда.
Повышение организации системы является следствием усиления связей между ее элементами, в частности, введения управления с помощью сигналов. Именно поэтому кибернетические системы являются системами организованными. Введение числовой меры организации придает этому интуитивному понятию строгий смысл.
Можно было бы связать понятие организации и количества информации теснее, поставив, например, вопрос о количестве информации, необходимом для организации определенной системы. Такая постановка вопроса законна в тех случаях, когда приходящая извне информация не только запоминается системой, но и влияет на ее организацию. Так дело обстоит в так называемых самоорганизующихся системах (см. гл. 11). Можно было бы рассматривать любую организованную систему как систему, накопившую «предварительную» информацию, которая и позволяет ей выполнять свои функции.
Эти построения затрудняются при наличии нескольких «этажей» управления, когда одна часть системы непосредственно осуществляет обработку информации по определенному алгоритму, другая определяет этот алгоритм по какому-либо иному правилу, третья изменяет это последнее правило и т. д. Возможно, что для таких случаев потребовались бы своеобразные разделения оценок организации по «этажам».
Пока что количественная оценка организации еще не нашла широкого применения на практике.
Подведем некоторые итоги. События, внешние по отношению к кибернетической системе, воздействуют на систему таким образом, что заставляют ее изменять свое состояние. При этом одни состояния системы втречают-ся чаще, другие — реже. Каждое состояние соответствует определенному внешнему событию. Это соответствие представляет собой информацию о событии. Тот физический объект или процесс, который в пределах кибернетической системы испытывает измене-98
МИЯ состояния и, следовательно, является Носителем информации, есть сигнал. Чем больше разнообразие состояний системы,- чем обширнее множество и чем длительнее отрезок времени, тем подробнее может быть описано внешнее событие. Количество информации, передаваемое или запасаемое системой в виде сигнала, зависит не только от множества состояний, но и от распределения вероятностей этих состояний. Содержание сообщений (или конкретная информация), физический алфавит сигнала и энтропия (или количество информации) являются независимыми явлениями и каждое может изменяться независимо от других.
Сигнал как физический процесс связан с внешним событием энергетически. Хотя сигнал существует в системе за счет энергии, которая черпается из источников, принадлежащих системе, а не за счет энергии, связанной с событием, породившим сигнал, тем не менее возникновение сигнала, первичное изменение состояния системы под воздействием изменений во внешней среде происходят с поглощением энергии. Иногда энергия, идущая на создание сигнала, ничтожно мала по сравнению со всей энергией, которая связана с событием. Иногда же, когда само событие заключает в себе ничтожно мало энергии, создание сигнала требует затраты значительной доли или даже всей этой энергии. Это имеет место, например, при измерениях параметров элементарных частиц — электронов, протонов и т. д. По-видимому, с этим связаны трудности полного описания микросостояний вещества, выраженные в физическом принципе неопределенности.
Если крупное событие большого энергетического масштаба, например производственную операцию по обработке крупной детали на станке, спортивное соревнование и т. п., мы можем наблюдать со многих точек зрения, пользоваться измерительными и записывающими приборами, «снимать» с этого события многие сигнальные процессы, увеличивая объем информации и подробность описания события, и при этом никак не влиять на ход самого события, то наблюдение положения движущейся частицы мы сможем произвести только в том случае, если эта частица оставит след или, иначе говоря, если произойдет взаимодействие ее с другими частицами, что потребует затраты заметной доли энергии частицы и изменит ее состояние.
То обстоятельство, что информация в виде сигнала не может существовать вие физических объектов, позволяет, между прочим, подойти к решению очень интересного па-
радокса о так называемом энтропийном «демоне» Максвелла— воображаемом существе, которое, находясь в равновесной физической системе, достигшей состояния с максимальной физической энтропией, «сортирует» молекулы газа, пропуская их через отверстие с заслонкой в отдельный сосуд, если они обладают высокой скоростью, и не пропуская, если скорость мала. Такая сортировка привела бы в конце концов к понижению энтропии в изолированной системе, вопреки второму закону термодинамики, так как в одном сосуде самопроизвольно сосредоточились бы молекулы с высокой энергией, а в другом — с низкой. В результате, можно было бы использовать образовавшуюся разность температур для получения полезной работы без затраты энергии извне. Если мыслить максвелловского демона не как фантастическое существо, способное творить чудеса, а как реальный прибор, то вопрос о его работе приобретает большую принципиальную и практическую остроту. Второй закон термодинамики издавна подвергается произвольным толкованиям, и в наши дни то и дело появляются варианты «вечных двигателей второго рода», в которых делаются попытки более или менее замысловато обойти этот закон природы.
Демон Максвелла, находясь внутри равновесной системы, не может различить молекул друг от друга, так как на него со всех сторон падает одинаковое количество излучения одинакового спектрального состава. Это обстоятельство есть одно из свойств равновесного состояния. Для того чтобы иметь возможность сортировать молекулы по скоростям, демон должен получать информацию о положениях и скоростях молекул. Однако такая информация может быть получена только с помощью сигнала, т. е. процесса, связанного с энергией.
Внутри равновесной системы демон может получить информацию только при условии, если он будет применять некоторое дополнительное информационное устройство, сигнализирующее ему о состояниях молекул. Так, например, он может освещать каждую молекулу светом от отдельного источника с достаточной яркостью для того, чтобы молекула была надежно видна на фоне равновесного излучения, или же со спектральным составом, отличным от равновесного излучения (светом более короткой волны). Если провести подсчет энергии, необходимой для создания такой информации даже исходя из минимальных заниженных требований, предположив, например, что достаточно одного кванта света на молекулу, то окажется, что выиг-100
рыш свободной энергии, даваемый демоном, не окупит затрат энергии на получение информации. Замкнутая система «газ—демон—информационное устройство» будет постепенно повышать свою физическую энтропию, делая это лишь несколько медленнее, чем делал бы неуравновешенный газ без демона. Максвеллов демон лишь немного замедляет естественный процесс повышения энтропии, но не приостанавливает его и уж во всяком случае не заставляет энтропию понижаться.
ПЕРЕДАЧА СИГНАЛА
Сигнал может быть передан от одного кибернетического устройства к другому. Это одно из самых существенных свойств сигнала. Именно это свойство позволяет пространственно разделенным частям системы или различным системам действовать согласованно. Иногда передача сигнала производится на очень большие расстояния (в системах телеуправления, в сетях связи и так далее), иногда же — на малые расстояния в пределах одного устройства (передача числа из блока памяти в арифметическое устройство в электронной вычислительной машине, передача возбуждения по нерву).
Техника передачи сигнала имеет дело с физическими процессами, которые переносят сигнал, с анализом протекания этих процессов во времени и пространстве, с физическими свойствами систем, в которых эти процессы протекают. Естественно, что для передачи сигналов используются те физические процессы, свойством которых является распространение, перемещение в пространстве. К их числу относятся волновые процессы различного" рода (звуковые 102
волны, радиоволны, свет) или механические перемещения предметов (почта).
Поскольку всякий сигнал для того, чтобы переносить информацию, должен иметь возможность принимать различные значения или состояния, то же требование предъявляется и к физическому процессу, используемому для передачи сигнала. В упрощенном виде дело можно было бы представить так, как будто бы от передатчика к приемнику непрерывно движется нечто, на чем передатчик может делать пометки в виде символов некоторого алфавита. Эти пометки, распространяясь вместе с их носителем, доходят до приемника, где пометки снимаются с носителя
Рис. 5.1. Схема канала связи.
/ — источник сообщений — внешнее событие, 2 — кодирующее устройство — измеритель-датчик, корреспондент, 3 — модулятор-передатчик, 4— генератор несущих колебаний, 5 —среда передачи, 6— источник шумов, 7—приемник, 8 — демодулятор, 9 — декодирующее устройство, 10—исполнительное устройство — адресат.
и переносятся или преобразуются в иную форму. Так, например, в случае радиотелефона «нечто», которое перемещается от передатчика к приемнику, представляет собой электромагнитное излучение, а «пометки» — модуляцию.
Модуляция
Модуляцией называется изменение во времени одного из параметров (характеристик или свойств) физического процесса, несущего информацию. Чаще всего используется изменение мощности колебаний. Автомобильный гудок, звонок, сирена либо молчат, либо включаются на полную громкость. Их включение и выключение есть модуляция звуковых колебаний. Мигание светового сигнала — пример модуляции света. Вибрация звука при пении или игре на скрипке — пример модуляции звуковых колебаний по частоте.
Чаще всего понятие модуляции применяется к волновому процессу, т. е. к процессу распространения колебаний. Волновой процесс описывается зависимостью от времени и расстояния некоторой физической величины: давления 103
газа в случае звука, напряженности электрического или магнитного поля в случае радиоволны. В простейшем случае эта зависимость представляет собой синусоидальную функцию
и — A sin (со/ -|- <р0). (5.1)
Эта функция является решением линейного дифференциального уравнения, которое описывает подавляющее большинство реально встречающихся процессов колебаний.
Рис. 5.2. Временная диаграмма синусоидального колебания (4 — амплитуда колебания, Г—период колебания, —начальная фаза колебания, /= 1/Г — частота колебаний).
/ — колебание с измененной амплитудой, 2 — колебание с измененной начальной фазой. — колебание с измененным периодом (частотой).
Точнее, решением является не синусоидальная, а экспоненциальная функция вида:
u = Ce*,I
где С и а — комплексные числа.
Синусоидальная функция представляет собой частный случай экспоненциальной для чисто мнимого аргумента а.
Всякую более сложную периодическую функцию можно представить как сумму синусоидальных.
Параметр А в (5.1) (наибольшее значение и) называется амплитудой синусоиды. Значения синусоидальной функции повторяются через равные промежутки времени Т. Если заметить какое-либо значение, например и = 0, на восходящем участке кривой, то то же самое значение и тоже на вое ходящем участке снова появится через промежуток 7, 27 104
ЗГ н т. д. Т называется периодом колебания, число периодов в секунду 1/7 = f — частотой колебания, а частота, умноженная на 2ir(2irf=o>)— круговой частотой. Величина ю/-|-<р0 — 2-nft-|-<р0 называется фазой или текущей фазой колебания, а <р0— начальной фазой.
Для волнового процесса аргументом синусоидальной функ-
ции является величина Ф = (t — которая дает зависи-
мость и от расстояния, и от времени. Для некоторой точки пространства, положив х равным постоянной величине (координате точки наблюдения), мы получим синусоидальную зависимость от времени (синусоидальное колебание); для некоторого фиксированного момента времени, положив t равным постоянной величине, получим синусоидальную зависимость от расстояния. Зафиксировав текущую фазу вол-
IAA/W \/WW [VWW
ф
Рис. 5.3. Бегущая волна в пространстве в последовательные моменты времени (Ф — положение отмеченной фазы колебания).
ны ф = мы заметим, что координата этой
фазы меняется со временем; она перемещается со скоростью и. Волна ябежит“, сохраняя по пути свою форму. Функция и = sina>( t — “)+?о описывает немодулированную
волну, распространяющуюся вдоль оси х со скоростью v. В качестве модуляции можно использовать изменение любой из величин, параметров, в выражении для и (5.1) 4, ш или ф0. Можно, например, изменять по синусоидальному или другому закону амплитуду волны. Мы получим амп
литудную модуляцию
и = [40 4* Ло m cos £1Ф] sin (шФ 4- ?0)- (5-2)
Изменяя синусоидально начальную фазу, будем иметь фазовую модуляцию
и = До sin (шФ + фоcos (5-3)
Изменяя частоту, получим частотную модуляцию
ц=408т[(в)04-ш । соз2Ф)Ф4-<РоЬ (5-^)
105
Иногда частотную и фазовую модуляции ввиду их сходства объединяют под общим названием угловой модуляции (так как при обоих видах модуляции происходит изменение фазы или фазового угла, но по разным законам).
Функция, описывающая параметра волны, называется
закономерность изменения модулирующей функцией.
Только модулирующая функция несет информацию. Это может быть колебание, повторяющее речь или музыку, или же условные знаки — символы телеграфной передачи. Основное колебание с ча-стотои f=2^ представляет собой лишь средство перенесения информации. Оно называется несущим колебанием. Его роль в передаче сообщения подобна роли бумаги, на которой написано письмо.
На приемном конце канала связи выделяется модулирующая функция, которая в том или ином виде доводится до адресата — человека или си-выделения модулирующей
Рнс. 5.4. Модуляция.
1 — несущее колебание. 2 — модулирующая функция, «? — амплитудно-модулнрованное колебание, 4 — частотно-модулированное колебание.
Процесс демодуляцией или детекти-детектирования зависит от вида мо-
стемы управления, функции называется рованием. Способ дуляции.
Рассмотрим несколько примеров. Свет представляет собой, как известно, электромагнитные колебания весьма высоких частот (порядка 1015 герц). При передаче сообщений с помощью световых волн источником колебаний несущей частоты является либо сам источник информации, либо посторонний источник света. Приемником является либо глаз животного, либо фотоэлемент. При сигнализации гелиографом используется амплитудная модуляция. Модулирующей функцией чаще всего являются точки и тире 106
азбуки Морзе. Модуляция в этом случае имеет вид «прямоугольных импульсов»: интенсивность света очень быстро возрастает от нуля до максимума и через некоторый промежуток времени снова быстро падает до нуля.
Сигнализация цветными фонарями типа светофора или железнодорожная сигнализация использует частотную модуляцию, так как свет горит непрерывно с постоянной интенсивностью, но меняет цвет, т. е. частоту несущих колебаний.
Зрение представляет собой связь многоканальную. Глаз вопринимает одновременно очень много отдельных сигналов, которые, будучи связаны друг с другом, дают в комбинации сложный сигнал — образ.
Звук также является переносчиком информации. Сигнализация звуком использует амплитудную модуляцию (включение гудка). Устройство типа эхолота, измеряющие глубину водоемов по времени прихода отраженного звукового сигнала, используют амплитудную импульсную модуляцию или же частотную.
Общение людей посредством разговора использует как амплитудную, так и частотную звуковую модуляцию. То же относится и к музыке, но в музыке модуляция заметна отчетливее, так как звуки разной высоты и силы в музыке выявлены рельефнее, чем в речи. Особенностью речи (как, впрочем, и оркестровой музыки) является то, что в звучании присутствуют одновременно колебания различных частот с различными амплитудами. Этот набор колебаний меняется во времени. Отдельные звуки речи — фонемы, звучания отдельных инструментов оркестра, отличаются друг от друга своими спектрами, т. е. различным содержанием колебаний с различными частотами. Тембры голосов позволяющие узнавать знакомых при разговоре по телефону, также определяются содержанием различных частотных составляющих, т. е. спектром. К фазовым соотношениям звуковых колебаний ухо человека нечувствительно.
Процессом, служащим для передачи сигнала, не обязательно должны быть колебания. Передача сигнала без использования колебаний может осуществляться, например, с помощью электростатического или магнитостатического поля. Электрическое поле распространяется вдоль провода и вызывает в проводе изменение электрического тока. Это используется при телеграфировании постоянным током или при телефонной передаче. Модуляция при этом наложена на постоянный ток в проводе.
Иногда используется и постоянное магнитное поле. Не-
поля в звук, удалось сделать
Рис. 5.5. Импульсы.
/ —импульсы прямого (.постоянного") тока (видеоимпульсы), 2 — импульсы колебаний (радиоимпульсы).
давно в печати сообщалось об использовании мощного электромагнита для передачи команд режиссера актерам в киностудии при съемках звуковых фильмов. Посторонние звуки в студии недопустимы, световые сигналы неудобны и недостаточны. Передача с помощью магнитного поля оказалась очень удобной в этом случае. Режессер наблюдает за съемкой из звукоизолированной кабины и дает указания актерам в микрофон. Токи звуковой частоты модулируют магнитостатическое поле, которое пронизывает студию. Приемник, превращающий изменения магнитного настолько малым, что он может быть незаметно размещен возле уха актера и замаскирован прической и костюмом. Телефонная трубка размещается в ушной раковине.
Носителям и инфор м а-ции могут быть и такие процессы, как теплопроводность, диффузия, течение жидкости или газа и т. д. Так, сигнал, упра-
вляющий термостатом, достигает чувствительного элемента посредством теплопроводности. Запах дыма, предупреждающий пожарную охрану об опасности, передается диффузией или током воздуха. Возбуждение некоторых нервных центров происходит в том случае, когда током крови к ним приносится измененное по сравнению с нормальным количество химического вещества — гормона. Так происходит, например, возбуждение дыхательного центра головного мозга при увеличении концентрации углекислого газа в крови, омывающей мозг. Вкус—сигнал, несущий информацию о качестве пищи, также передается с помощью химических воздействий при изменениях концентрации вещества.
Из всех процессов, несущих информацию, наибольшее значение в технике связи в настоящее время имеет, пожалуй, распространение электромагнитных колебаний — радиоволны. В радиосвязи применяется и амплитудная, и частотная модуляции. При этом частоты несущих колебаний могут лежать в очень широких пределах (104— 1010 герц).
В последнее время в радиотехнике получила распространение так называемая импульсная модуляция, которая 108
* JLWULXJULUJUL,
Рис. 5.6. Импульсно-кодовая модуляция.
/—модулирующая функция, 2 — несущие импульсы, 3 — модуляция по амплитуде, 4 — модуляция по частоте, 5 — модуляция по положению, £ —модуляция по ширине.
заслуживает особого упоминания. Импульсы представляют собой протекание тока большой силы в течение очень коротких промежутков времени, разделенных продолжительными паузами. Если рассматривать серию импульсов как процесс, протекающий во времени, то становится ясно, что импульсы можно промодулировать. Модуляцию при этом
Рис. 57. Одновременное наложение модуляции различных типов на один процесс.
/—несущие импульсы, 2 — модулирующая функция и амплитудная модуляция, 3 — вторая модулирующая функция и модуляция по ширине, 4 —третья модулирующая функция и частотная модуляция, 5 — совмещение амплитудном, частотной и широтной модуляций с различными модулирующими функциями в одном процессе.
можно осуществить различными способами, например, по амплитуде импульсов, по частоте их повторения, по положению каждого импульса в пределах периода повторения, по длительности. Можно при этом одновременно применять два или три вида модуляции к одной и той же последовательности импульсов независимо друг от друга и для передачи двух или трех различных сообщений одновременно. Число одновременно передаваемых сообщений можно еще увеличить, если в промежутки между импульсами поместить новые серии импульсов, модулированные независимо от первых.
Одновременная передача двух независимых сообщений на одной общей несущей может осуществляться не только при импульсно-кодовой модуляции, но и при использовании непрерывных колебаний. В этом случае используются одновременно как амплитудная, так и фазовая модуляция. Передаваемое колебание складывается из двух независимых колебаний
«1=Л0 [1 + Wj f{ (/)] sin
u2 — BQ [ 1 ^2/2(0 1cos (5-5)
Суммарное колебание tz = tzj + u2 оказывается модулированным и по амплитуде и по фазе, причем на приемном конце из него оказывается возможным выделить первоначальные составляющие и их модулирующие функции fi ('/) и МО-
Искажения
По пути от входа передатчика до выхода приемника сигнал претерпевает двоякого рода искажения: во-первых, на него воздействуют шумы, т. е. случайные изменения в среде распространения и в аппаратуре, и, во-вторых, он подвергается искажениям закономерного характера, которые вносятся самой аппаратурой и определяются ее характеристиками. С шумами мы уже знакомы, рассмотрим здесь вкратце закономерные искажения.
Если мы имеем какую-либо систему, обладающую инерцией, и воздействуем на нее некоторой внешней силой, то смещение системы из положения равновесия произойдет не мгновенно, а лишь постепенно.
Так, если мы попытаемся двигать массивное тело по шероховатой поверхности с помощью эластичного шнура или пружины, то, перемещая свободный конец шнура равномерно со скоростью мы заставим тело двигаться по
С ускорением, и оно достигнет скорости и0 лишь спустя некоторый (теоретически — бесконечно большой) промежуток времени.
Такое же явление произойдет, если к электрической цепи, состоящей из емкости, индуктивности и сопротивления, приложить электродвижущую силу. Ток в цепи в этом
1
-—v
Рнс. 5.8. Системны, обладающие инерцией.
/ — тяжелое тело, приводимое в движение по шероховатой поверхности с помощью эластичного шнура, 2 — электрическая цепь, состоящая нз сопротивления, индуктивности и емкости.
случае будет нарастать постепенно и приближаться к предельному значению асимптотически. В зависимости от соотношения параметров т, р, 8 (массы, сопротивления трения, эластичности) или L, 2?, С (индуктивности, сопротивления, емкости) могут возникать различные переходные
процессы. Колебательный переходный процесс происходит при малом трении (сопротивлении) по сравнению с инерцией и упругостью (индуктивностью и емкостью). Апериодический процесс (без колебаний) происходит при большом сопротивлении.
Запаздывание реакции физической системы на приложенное извне воздействие представляет собой явление весьма общего характера. Оно
Рис. 5.9. Движение системы, обладающей инерцией, под действием внешней силы.
/ — внешнее воздействие; 2, 3 — различные типы движения.
имеет место и для механи-
ческих, и для электрических, и для акустических систем. Реакции всех этих систем протекают по сходным законам и могут быть строго сопоставлены друг с другом. При формальном описании различных систем уравнения, описывающие изменения их состояния, совпадают, и только коэффициенты в уравнениях отличаются размерностью. Так, массе тела в механической системе (или моменту инерции в случае вращательного движения) соответствует индуктивность электрической системы и инертность акустической. Эл астичности
механической системы (т. е. свойству деформироваться под действием внешней силы) соответствует емкость электрической системы и акустическая емкость. Силе трения соответствует электрическое и акустическое сопротивление.
Аналогия между механическими, электрическими и акустическими явлениями может быть прослежена очень далеко. Многие сложные механические системы можно повторить или «моделировать» электрически и наоборот. Явле-
Рис. 5.10. Линейные искажения сигнала. а) входной сигнал; б, в) искаженный сигнал на выходе.
ния инерционности проявляются при передаче сигналов принципиально одинаково в любой системе связи, независимо от ее природы, и поэтому могут рассматриваться с единой точки зрения.
Наличие инерционности ведет к тому, что сигнал, приложенный ко входу системы, оказывается искаженным на ее выходе. Прямоугольный импульс растягивается и изменяет форму. При этом характер искажений однозначно и закономерно определяется устройством и характеристиками системы. Один и тот же сигнал всегда искажается одинаково. Эти искажения в корне отличны от тех, которые вносятся шумами.
Таким образом, если знать устройство системы или ее характеристики, то в принципе возможно по искаженному сигналу восстановить точный вид сигнала, поступившего 112
на вход. Практически же для такого «восстановления» нужно измерять сигнал с очень большой точностью, что бывает невозможно из-за присутствия шумов.
Спектр и полоса пропускания
Можно подойти к изучению свойств физических систем с иной точки зрения, рассматривая ие реакцию системы на изменения входного сигнала, а установившееся
3/
Рис. 5.11. Резонансные кривые.
л) ревояаяеяая кривея (отмечена полоса пропускания), б) резонансные кривы* вря различных добротностях контура, в} последовательные контур, а) резонансные кривые сложных систем.
состояние — величину сигнала на выходе по прошествии достаточно долгого времени после изменения сигнала на входе.
Подавая на вход электрической цепи, изображенной на рис. 5.11,а, синусоидальное напряжение, мы получим иа выходе, спустя некоторое время, достаточное для затухания переходных процессов, также синусоидальное напряжение некоторой амплитуды Лвых. Изменяя частоту входного напряжения и сохраняя постоянной его амплитуду, 8 И. Л. Полетаев ИЗ
мы заметим, что амплитуда установившегося выходного напряжения изменяется в зависимости от частоты. В некоторых случаях напряжение на выходе может превышать напряжение на входе, в иных же — будет меньше него. Зависимость амплитуды выходного напряжения от частоты, изображенная графически, представляет собой кривую с максимумом и называется «резонансной кривой» или частотной характеристикой цепи. Максимум резонансной кривой может быть выше или ниже в зависимости от соотношения индуктивности, емкости и сопротивления контура (добротности контура Q*). Добротность контура, а с нею и величина максимума на резонансной кривой, тем выше, чем меньше потери в контуре, т. е. чем меньше сопротивление, включенное последовательно с индуктивностью и емкостью (или проводимость, включенная параллельно им).
Если на резонансной кривой отметить точки, лежащие справа и слева от максимума, для которых амплитуда выходного напряжения меньше максимальной в 1/К2 раза (т. е. мощность колебаний вдвое меньше, чем в максимуме кривой, так как мощность пропорциональна квадрату амплитуды), и отметить соответствующие этим точкам частоты fa и /2, то разность этих частот /2—Л — Af, называемая полосой пропускания цепи, окажется также зависящей от добротности: чем выше добротность, тем меньше полоса пропускания. Система с высокой добротностью резко различает частоты, она дает сильную реакцию на колебания с частотой, близкой к резонансу, и слабую — на другие частоты. Такую систему называют «узкополосной». В противоположность этому широкополосные системы имеют размытую резонансную кривую, характерную для низкой добротности, и реагируют на колебания с заметно отличающимися частотами почти одинаково.
Реакция системы на изменение входного напряжения, т. е. переходный процесс в системе, полностью определяется формой резонансной кривой и полосой пропускания. Узкополосные системы обладают большой инерционностью и реагируют медленно, широкополосные — обладают малой инерционностью и реагируют быстро. Если подать на вход цепи напряжение, которое изменяется скачком, то выходное напряжение будет возрастать лишь постепенно.
* Добротностью контура Q=(dL/R называется величина, обратная затуханию a; Q=1/a. Чем меньше добротность, тем большая доля энергии, запасенной в контуре, рассеивается за один период колебаиня.
Время, в течение которого выходное напряжение достигает 63% от установившегося значения (0,63 & 1—1/е), называется постоянной времени цепи. Величина постоянной времени обратно пропорциональна ширине полосы пропускания.
Увеличивая полосу пропускания цепи, мы можем понизить инерционность системы и ускорить ее реакцию; однако этого можно достичь лишь ценой понижения амплитуды выходного напряжения. Создание весьма узкополосных и весьма широкополосных цепей представляет значительные трудности, как это часто бывает в технике при решении задач, связанных с приближением к пределу возможностей. В реальных системах всегда приходится считаться с наличием ограниченной полосы пропускания и связанной с этим инерционностью системы.
Искажения формы сигнала при прохождении им реальных физических систем можно рассматривать с двух различных точек зрения: во-первых, во времени и, во-вторых, в области частот. Имея сигнал в виде функции времени u(t)t мы можем пользоваться для описания свойств системы понятием .отклика на единичный импульс* w(t) и получать значение выходного сигнала либо с помощью интегральной свёртки (интеграла Дюамеля)
“вых W = J “вх (0 w (х - 0dt’ (5-6)
—00
либо с помощью спектральной функции сигнала, применив к сигналу преобразование Фурье
4-оо
гвх(“)= j elatu(t)dt. (5.7)
—00
Умножая в последнем случае спектральную функцию F (<о) на частотную характеристику системы Y (<*>), получим спектральную функцию выходного сигнала
^вых(") = ^вх(“)^(")- <5-8>
Производя затем обратное преобразование Фурье, получим выходной сигнал как функцию времени
4-00
“вых Ю = рвых (5.9)
—00
Интегрирование в последнем случае производится в комплексной плоскости. По результатам оба способа вычислений вполне равноценны. 8* 115
Преобразование Фурье интегральной свертки двух функций вре.мени равно произведению преобразований Фурье обоих этих функций. Преобразование Фурье отклика системы иа единичный импульс равно частотной характеристике системы.
Операции в области спектров имеют некоторое преимущество благодаря своей наглядности. В сигнале содержатся колебания с различными частотами. При прохождении через систему с конечной полосой пропускания часть колебаний, частоты которых лежат вне полосы пропускания, сильно подавляется, и в спектре выходного сигнала остаются главным образом колебания с частотами, лежащими в полосе пропускания. Искажения сигнала соответствуют исчезновению из спектра некоторых частотных составляющих. Обычно исчезают высокочастотные составляющие, что соответствует сглаживанию формы кривой.
Искажения сигнала, обусловленные конечной шириной полосы пропускания системы, кладут предел возможности передачи большого количества информации через систему. Так, например, при импульсной модуляции посылка все более коротких и частых импульсов приводит к тому, что амплитуда импульсов на выходе канала уменьшается, так как за время очень короткого импульса его величина не успевает достаточно нарастать, импульсы становятся малоотличимыми от пауз, и увеличивается вероятность появления ошибок из-за наличия шумов, т. е. падает надежность передачи.
Полоса пропускания частот, время передачи и мощность сигнала по отношению к шумам — вот те три величины, которые определяют пропускную способность канала.
Селекция
Если нам нужно передать две телеграммы или провести два телефонных разговора, мы можем сделать это либо по очереди (за счет увеличения времени), либо одновременно по двум линиям связи, либо, наконец, одновременно по одной и той же линии, но на двух различных несущих частотах. В обоих последних случаях необходимо увеличение суммарной полосы частот, используемой при передаче. Каждый разговор в последнем случае используется как модулирующая функция для одного из двух колебаний с различными несущими частотами. Затем оба модулированных колебания передаются по общему проводу (или по радио) одновременно. На приемном конце установлены фильтры — резонансные системы, которые про-116
пускают разные полосы частот. На выходе фильтра первой несущей вторая несущая отсутствует, так как она лежит вне полосы пропускания фильтра. В результате из выходного напряжения может быть получено напряжение, соответствующее модулирующей функции, т. е. принят только первый разговор. То же происходит во втором фильтре со второй несущей и со вторым разговором. На входном конце канала два разговора сводятся в общий канал, но не смешиваются в нем, на выходном — они разделяются с ис-
Рис. 5.12. Схема многоканальной связи с частотной селекцией. Mt.............Мп — модуляторы, Фь ..., Фп — фильтры.
пользованием разницы несущих частот. Такое разделение сигналов по частоте называется частотной селекцией.
Таким способом можно по одному каналу одновременно передавать и более двух разговоров. Если на передачу каждого разговора требуется полоса частот 3—5 килогерц, то для общего канала эта полоса будет равна сумме всех полос или несколько больше.
При импульсной передаче можно «вписывать» одну последовательность коротких импульсов в паузы другой последовательности и таким образом совмещать две и более передачи одновременно в общем проводе или радиоканале. Затем на приемном конце пропускать каждый первый импульс в первый выходной канал, второй — во второй и т. д., каждый раз начиная с некоторого «нулевого
синхронизирующего импульса, который отличается от всех других каким-либо признаком, например амплитудой. Такой способ разделения сигналов, идущих по общему каналу, называется селекцией по времени или временной селекцией.
Системы связи, позволяющие передавать по одному проводу несколько различных сообщений одновременно, называются многоканальными. Говоря о многоканальных системах, нельзя не упомянуть и о системах, которые яв-
Рис. 5.13. Схема многоканальной связи с времеинбй селекцией.
Г —генератор, Mi....Мл — модуляторы. О — опорный сигнал, С —селектор
Л......, Дп - детекторы.
ляются в буквальном смысле многоканальными, т. е. состоящими из многих раздельных проводов — каналов связи. С такими системами мы встречаемся, например, в электронных счетных машинах параллельного типа, где каждый разряд числа передается по отдельной шине. С помощью одного из видов селекции можно осуществить переход от многопроводной системы связи к однопроводной многоканальной и обратно.
Во всяком реальном канале связи происходит рассеяние энергии сигнала и поэтому энергия (амплитуда) сигнала на выходе канала должна быть меньше, чем на входе. Для того чтобы компенсировать потери энергии в канале, часто используют усиление сигнала по пути его следования с помощью усилителей, которые черпают энергию из собственных источников. Расход этой энергии никак не окупается энергетически, т. е. эта энергия почти целиком теряется в цепях канала, однако в результате на выходе 118
канала сигнал оказывается достаточно большим по величине по сравнению с шумами. Иногда общее усиление в канале достигает очень больших величин.
Пример канала связи
Рассмотрим подробно работу одного вида связи, чрезвычайно важного для существования живых организмов — передачу возбуждения или раздражения по нерву. Нерв, проводящий раздражение, представляет собой типичный канал связи и может сравниваться по своим характеристикам с техническими каналами. Эта далеко идущая аналогия так же несомненна, как несомненна, например, аналогия костей и суставов скелета позвоночных животных с рычагами механизмов.
Нервная система животного (в том числе и человека) состоит из очень большого числа живых клеток особого вида (нейронов), связанных в определенном порядке друг с другом и с органами тела животного. В нервной системе существует много нейронов различных типов, но всем им присущи общие черты, несмотря на различия в деталях строения. Каждый нейтрон состоит из клеточного тела размером около 0,1 мм и отходящих от тела отростков. Большинство этих отростков (дендритов) ветвится, образуя как бы дерево длиной несколько миллиметров. Кроме того, от клеточного тела отходит один осевой отросток (аксон) большой длины (от нескольких сантиметров до метров). От аксона отходит небольшое число боковых волокон — коллатералей; на конце аксон делится на несколько ветвей.
Таким образом, нервная клетка представляет собой как бы длинный провод, оканчивающийся на одном конце телом клетки. Эти провода — нервные волокна — обычно объединены в пучки, называемые нервами. Нерв, таким образом, больше напоминает многожильный телефонный кабель, чем одиночный провод. Как и в многожильном кабеле, в нерве каждое волокно живет своей собственной жизнью и выполняет свое собственное назначение
Основным назначением нервного волокна и нервной клетки в теле животного является передача сообщения (возбуждения, раздражения) от одного органа к другому. По каналам связи, для которых нервные волокна служат проводами, передаются сообщения, которые оцениваются человеком как субъективные ощущения: сообщения о механическом давлении (осязание), об изменениях температуры (ощущение тепла, холода), о биологически опасных 119
Рис. 5.14. Схема строения нейрона. а) общее строение: 1 — тело клетки, 2 — дендриты, 3 — аксон, 4 — коллатерали. 5— оболочка аксона, 6 — перехват Ранвье, 7 — концевое разветвление; б) разрез аксона: / — перехват Ранвье, 2 — невоилемма, 3— ядро шванновской клетки. 4—нейроплазма, 5 — миэлиновая оболочка, 6 — внешняя оболочка.
воздействиях (боль), об акустических, световых, химических явлениях, происходящих на границе живого организма и внешней среды. По тем же каналам передается команда о включении в работу мышечных волокон или клеток желёз. В случае ощущения сигнал идет от рецепторов («органов чувств»), непосредственно воспринимающих внешние воздействия, к нервным узлам центральной нервной системы. Эти нервные связи называются восходящими, центростремительными или афферентными. В случае действия сигнал идет от нервных центров к периферии и соответствующие нервы называются нисходящими, центробежными или эфферентными.
К афферентным относятся также и иервы так называемой внутренней чувствительности, передающие информацию о положении членов тела, т. е. о состоянии сокращения или расслабления отдельных мышц и натяжении сухожилий (так называемые кинэстетические ощущения). Кроме того, большое число нервов обслуживает связи между внутренними органами, необходимые для их совместной целесообразной деятельности. Работа этой группы нервов (так называемой вегетативной или автономной нервной системы) не дает субъективных ощущений непосредственно, и мы «не замечаем» ее работы, во всяком случае до тех пор, пока она работает нормально.
Итак, нервная система представляет собой сложную, разветвленную систему связи, которая обеспечивает обмен сигналами между органами тела животного и согласованную их работу.
Как и в технических каналах связи, в нервной системе все сообщения передаются с помощью одного и того же процесса. Передача 'раздражения по одному нерву качественно не отличается от передачи по любому другому. Особенностью нервной системы как системы связи является то, что по каждому нервному волокну передаются сообщения, как правило, лишь в одном направлении и лишь об одном типе внешних или внутренних событий. Так, например, нервное волокно, соединяющее чувствительное болевое окончание, расположенное в коже ладони, со спинным мозгом, будет работать только при сильных механических давлениях на этот участок кожи (укол) и не будет реагировать на слабые раздражения ии теплом, ни холодом, ни прикосновением. В этом отношении нервные каналы связи напоминают скорее устройства аварийного предупреждения типа пожарной тревоги, чем телефонную или телеграфную связь. Правда, нерв позволяет передавать сигналы о раз-
ных степенях воздействия и этим отличается от пожарной сигнализации. Таким образом, каждый нерв работает только в одной «службе связи» со строгой специализацией: в «болевой», «слуховой», «вкусовой», «моторной» и т. д.
Провод нервного канала связи — нервное волокно или аксон — представляет собой ниточку клеточного вещества— протоплазмы, покрытую оболочками. Толщина аксона для разных нервных клеток различна. Самые толстые из них имеют диаметр от 0,02 до 0,001 миллиметра. Клеточное вещество аксона, как и клеточного тела, покрыто оболочкой или мембраной, отделяющей его от окружающей среды. Поверх мембраны аксон одет, как чехлом, оболочкой особого жирового вещества — миэлина. Толщина миэлиновой оболочки неодинакова для различных волокон. У волокон вегетативной нервной системы миэлиновая оболочка очень тонка; иногда ее даже не удается обнаружить. Самой толстой оболочкой обладают нервные волокна, проводящие раздражение от чувствительных окончаний к мозгу и от мозга к мышцам. Поверх миэлиновой оболочки аксон одет еще одной оболочкой —неврилеммой. Миэлинизированные волокна отличаются серебристо-белой окраской от клеточных тел, имеющих серый цвет.
Со времен Гальвани известно, что деятельность нерва связана с электрическими явлениями. Эта связь выражается в том, что, во-первых, приложение к нерву электрического потенциала вызывает его раздражение и, во-вторых, в том, что раздражение нерва любым способом вызывает в нем появление изменений электрического потенциала. Однако нервное раздражение совсем не то же самое, что электрический ток в проводе.
С помощью современных электроизмерительных приборов, позволяющих отмечать и записывать очень слабые и быстро протекающие изменения электрических напряжений и токов, снимая потенциалы с поверхности нерва, можно установить, что изменения этих потенциалов представляют собой короткие толчки или импульсы, длящиеся около 0,001 секунды. Эти импульсы распространяются вдоль нерва и, достигая его конца, вызывают, например, сокращение мышечных волокон. При этом передача раздражения мышечным волокнам и распространение электрических импульсов по нерву всегда присутствуют совместно. Более того, скорость распространения электрических импульсов и скорость передачи физиологического раздражения совпадают, что позволяет считать электрические импульсы не побочным явлением, а составной частью процесса передачи 122
раздражения. Скорость передачи раздражения по нервному волокну тем больше, чем больше диаметр волокна и чем толще его миэлиновая оболочка. Эта скорость вообще невелика; для разных ‘волокон она колеблется в пределах от 2 до 160 метров в секунду, что несравненно меньше скорости распространения электрического поля (и тока) вдоль провода (108 метров в секунду).
Передача раздражения по нервному волокну есть электрохимический процесс, протекающий за счет энергии, накопленной в самом волокне. Начальное возбуждение, нано-
симое на окончание нервного волокна, вызывает только начало, «поджиг», процесса распространения раздражения, который затем уже продолжается самостоятельно, подобно искре, бегущей по бикфордову шнуру. Каждая такая «искра», импульс, пробегает самостоятельно.
0
0 io 20 30 io 30 60 70 80 90 t Миллисекунды
Рис. 5.15. Одиночный электрический импульс нервного возбуждения.
и независимо от величины энергии приложенного из!вне воздействия, если только это воздействие (превышает минимальное, пороговое, значение. Энергия, израсходованная нервом на проведение импульса, возмещается впоследствии процессами питания нерва.
Эта ситуация типична для сигнальных устройств или систем связи, которые по^ти всегда питаются энергией от внутренних источников, не связанных с поступлением на вход сигнала.
После каждого прохождения импульса по нервному волокну последнее в течение некоторого времени должно «отдохнуть» и подготовиться к проведению следующего импульса, который пройдет или не пройдет в зависимости от наличия сигнала на входе. Эта пауза, или рефрактерный период, длится от 0,02 до 0,1 секунды. Таким образом, нервное волокно может находиться лишь в одном из двух возможных состояний: состоянии полного покоя или полного возбуждения. Все сообщения, передаваемые по нерву, ко-
дируются с помощью двоичного алфавита, состоящего из двух символов: «покой», «возбуждение».
Однако, несмотря на то, что нервное волокно работает в двоичном алфавите, по нерву могут передаваться сообщения о различной степени возбуждения, причем передаваемая величина может изменяться непрерывно. Различные степени возбуждения, передаваемые по нервному волокну, изменяют частоту следования импульсов. Таким образом, в нерве мы имеем дело с частотн о-и м п у л ь с-ной модуляцией, получившей в последнее время широкое применение в технике связи. С увеличением степени раздражения увеличивается и число волокон нерва, передающих раздражение.
Работа нервного волокна
Распространение импульса возбуждения по нервному волокну протекает примерно следующим образом. Внутренняя часть волокна, как мы уже говорили, отделена оболочкой от наружной. Эта оболочка в нормальном состоянии покоя является электрическим изолятором и находится в состоянии электрической поляризации. Она разделяет области высокой концентрации ионов отрицательного знака (внутри оболочки) и области положительных ионов (снаружи оболочки). Таким образом, нервное волокно в состоянии покоя представляет собой длинный и тонкий заряженный цилиндрический конденсатор. Емкость перегородки равна приблизительно одной микрофараде на квадратный сантиметр ее поверхности.
Если в любой точке оболочки каким-либо путем нарушить ее изоляционные свойства, электрически «повредить» оболочку, возникнет местный электрический ионный ток («пробой» конденсатора). Ток замыкается через соседние участки оболочки и тем самым- нарушает их равновесное состояние, изоляционные свойства и поляризацию. В результате участок проводимости оболочки перемещается вдоль волокна в обе стороны от места первоначального нарушения. Вместе с тем перемещается и место протекания ионного тока и вся картина распределения потенциалов, с ним связанная. Это перемещение распределения потенциала и воспринимается измерительным прибором в точке, где наложен электрод, как проходящий импульс напряжения. Амплитуда импульса напряжения равна разности потенциалов между внутренней частью (аксоплазмой) и внешней оболочкой нервного волокна и составляет 124
30—60 милливольт. Для данного волокна величина импульса остается всегда постоянной, если только нерв нормально питается и не поврежден.
Процесс восстановления активности нервного волокна еще не полностью изучен. Чтобы избежать излишних подробностей, мы не будем обсуждать здесь этот вопрос.
Итак, одиночное нервное волокно представляет собой канал связи для передачи сообщений об одной единственной величине. На входном конце канала находится чувствительный элемент (рецептор), который воспринимает внешнее событие и кодирует сообщение в алфавите канала в виде периодического импульсного возбуждения конца нервного волокна, примыкающего к рецептору. Увеличение раздражения соответствует возрастанию частоты периодических возбуждений. Каждый отдельный акт возбуждения — нервный импульс — распространяется по волокну и достигает выходного конца, в случае афферентных нервов — тела нервной клетки. Импульс может пройти сквозь клетку дальше, на другие ее отростки, и перейти через соединения (синапсы), существующие между телами клеток, дендритами и аксонами клеток, на одно из волокон следующей по цепи клетки или нескольких клеток сразу. Распространяясь по волокнам и переходя с одной нервной клетки на другую, сигнал достигает места своего окончательного назначения — стоящего на выходе канала исполнительного элемента (мышечного волокна или клетки железы), который под воздействием пришедшего сигнала включается в работу. Происходит декодирование сигнала и его исполнение.
Передача сигнала раздражения с рецептора на волокно, с одной клетки на другую и с волокна на исполнительный элемент (эффектор) происходит обычно с участием промежуточных химических веществ (нейрогуморов), которые выделяются в синапсах и нервных окончаниях с приходом нервного импульса и воздействуют на последующее звено канала. Характер воздействия нейрогуморов может быть различным. Так, например, возбуждение некоторых нервов ведет к торможению работы органа (остановке сокращений изолированного сердца при раздражении блуждающего нерва), возбуждение других нервов — к усилению их работы (ускорение биений сердца при раздражении симпатических нервов).
Прохождение импульсов нервного возбуждения через тела клеток определяется состоянием этих клеток. Клетки могут пропускать или не пропускать импульсы в зависи-125
мости от того состояния, я котором они находятся. Это состояние определяется питанием клетки, наличием химических стимуляторов в окружающей клетку среде и приходящими стимулирующими или тормозящими нервными раздражениями со стороны других клеток. Здесь мы подходим к сложному вопросу о коммутации нервных раздражений — их переключению с одной линии связи на другую. Сейчас мы не будем вдаваться в подробности и вернемся к этому вопросу позже.
Рис. 5.16. Импульсы возбуждения чувствительного нервного волокна нервного узла сердца (каротидного синуса) при различных уровнях давления крови.
Давление повышается от 1 к 4; 5—ритмические группы импульсов в одиночном волокне двигательного нерва наружных межреберных мышц кошки (группы следуют в ритме дыхания). Отметки времени—0,2 сек (по Броику).
На всем протяжении нервных связей распространение возбуждения происходит за счет энергии нервной системы, а не за счет энергии поступающего извне сигнала раздражения. Нервная система имеет, таким образом, внутреннее усиление сигнала, обеспечивающее его передачу без затухания. Нервный канал связи обладает ограниченной полосой частот. Изменения входного сигнала более быстрые, чем, скажем, самый короткий рефрактерный период нервного волокна не могут быть переданы по нерву. «Высокочастотный» сигнал при передаче подвергается искажению.
Можно подсчитать пропускную способность нервного волокна тем же методом, который применяется для техни-126
ческих каналов связи. При этом, разумеется, необходимо учитывать тот факт, что передача по нерву является связью многопроводной. Так, например, зрительное ощущение передается от сетчатки глаза к зрительным центрам мозга по зрительному нерву, содержащему несколько десятков тысяч волокон.
Можно также оценить пропускную способность не отдельных нервов, а всей их совокупности, обслуживающей данное «внешнее чувство» — слух, зрение, осязание, вкус и т.д. Затем можно сравнить отдельные каналы по их пропускной способности. В результате сравнения оказывается, что на первом месте стоит зрение, имеющее самую большую информационную пропускную способность, далее идет осязание и еще далее —слух. Именно поэтому протезирование (в информационном смысле) утерянного зрения легче осуществить с помощью осязания, чем с помощью слуха. Этот вывод может оказаться полезным для конструкторов машин, предназначенных для «чтения» печатного шрифта слепыми.
Все сказанное выше о нервных связях позволяет рассматривать передачу возбуждения по нерву, как типичный случай передачи сообщений по каналу связи. И этот канал связи может полноценно и полноправно рассматриваться в одном ряду с техническими каналами, тоже передающими сигнал от корреспондента адресату. Особенностью нервного канала связи является только своеобразие физиологических процессов, являющихся носителем информации, которое в сущности одно только и отличает этот канал связи от многих других.
ОБРАТНАЯ СВЯЗЬ. РЕГУЛИРОВАНИЕ
Предположим, что нам необходимо во время нашего отсутствия поддерживать постоянной температуру в комнате. Для этой цели мы хотим изготовить автомат, который регулировал бы комнатную температуру. Допустим, что для поддержания постоянной температуры воздух в комнате необходимо все время подогревать и мы можем регулировать нагрев, изменяя подачу топлива в печь или силу тока в электронагревателе.
Самое простое решение поставленной задачи — это установить такой регулятор (например, часовой механизм), который с течением времени менял бы нагрев в соответствии с ожидаемой потребностью в тепле. Обычно к утру становится холоднее, и подачу топлива в утренние часы следует увеличить. Такое «регулирование по программе» предполагает знание статистических сведений об изменении внешней температуры в течение суток. Регулятор, работающий по программе, не способен справиться со своей задачей, если внешние условия сильно отклонятся от своего среднего значения, например, если к угру произойдет неожиданное похолодание или потепление.
Для того чтобы улучшить работу регулятора, необходимо вводить в него информацию о внешней температуре и заставить его реагировать на ее изменения. Тогда случайное понижение внешней температуры вызовет не только охлаждение комнаты, но и через воздействие на регулятор—увеличение нагрева. Такая система называется системой «прямого регулирования». Ценой больших усилий при налаживании автомата можно подобрать его характе-
Рис. 6.1. Термостат.
Повышение температуры внутри шкафа вызывает реакцию чувствительного элемента—подъем ртути в трубке термометра 2 и замыкание электрического контакта, который включает питание 4, подаваемое на обмотку реле 3. Реле, сработав, размыкает контакты и выключает питание 5 нагревателя 1, тем самым прекращая повышение температуры.
ристики так, чтобы степень нагрева соответствовала степени охлаждения воздуха при изменении внешней температуры. Однако открытая дверь или форточка сделают и эту систему неэффективной, ибо охлаждение комнаты через форточку увеличится, а нагрев, зависящий только от внешней температуры,— нет, и равновесие будет нарушено.
Радикальное решение задачи достигается системой с обратной связью, или «системой регулирования замкнутого цикла». Такая система отличается от предыдущих тем, что подача топлива определяется не заранее установленной программой и не внеш-129
ними условиями, а разностью между действительным значением температуры в самой комнате и желаемым ее значением. Если температура в комнате равна заданной величине, топливо подается с некоторой нормальной скоростью. Если температура становится ниже (выше) заданного уровня, подача топлива увеличивается (уменьшается) пропорционально образовавшейся разности. Таким образом, регулятор не только воздействует на температуру комнаты, но и «ощущает» результат этого воздействия и автоматически изменяет воздействие так, чтобы результат как можно меньше отличался, от желаемого.
Рис. 6.2. Автоматический рулевой.
Изменение курса судна 1 в сторону 2 вызывает прецессию волчка а в направлении 3 и замыкание контактов г, которое заставляет мотор б вращаться в направ ленни 4 н поворачивать руль в в направлении 5, выравнивая судно иа прежнем курсе.
Теперь можно открывать форточки и двери и не бояться капризов погоды. Наш автомат «привязан» непосредственно к температуре воздуха в комнате и будет ее поддерживать автоматически, независимо от любых внешних влияний.
Другим типичным примером применения обратной связи является автоматический рулевой, или автопилот. Выходное устройство воздействует на руль корабля или рули самолета. Входное устройство работает совместно с компасом, отмечая отклонения фактического курса от заданного. При отклонениях от заданного курса входное устройство выдает сигнал, который после усиления вызывает поворот рулей и выравнивание курса. 130
Системы с обратной связью чрезвычайно широко распространены. Можно перечислить многие и многие примеры их применения в технике. Более того, регулирование с обратной связью характерно для многих биологических процессов. Можно без преувеличения сказать, что обратная связь является некоторым универсальным общим принципом кибернетических систем.
Простая система регулирования замкнутого цикла состоит из нескольких узлов, соединенных в общую, харак-
Рис. 6.3. Схема системы с обратной связью.
терную для всех таких систем схему. Эта схема приведена на рис. 6. 3.
Система регулирования замкнутого цикла, как правило, включает в себя некоторое энергетическое устройство, приводимое в действие от внутреннего источника энергии и управляемое с выхода усилителя сигнала. Это выходное исполнительное устройство может, например, производить нагрев или охлаждение, перемещать тяжелые тела, производя механическую работу, открывать и закрывать клапаны, заслонки, краны, вращать рули и т. д. Результатом работы выходного устройства всегда является действие, подчас заключающее в себе очень большие количества энергии и направленное на некоторый внешний, по отношению к системе регулирования, объект.
Как мы уже сказали, управление выходным устройством, скажем печью в нашем примере, осуществляется сигналом с выхода усилителя. Сигнал только управляет выходным устройством, но не снабжает его энергией. Мощность входного сигнала, подаваемого на усилитель, может быть очень мала.
9* 131
Существенной частью системы регулирования с обратной связью является сама цепь обратной связи. Действие, производимое выходным устройством, улавливается некоторым чувствительным элементом, в котором оно преобразуется в сигнал, и этот сигнал подается с выхода системы обратно на ее вход (отсюда термин «обратная связь»). На входе системы стоит элемент схемы, который служит для сравнения двух сигналов: сигнала обратной связи, несущего информацию о результате работы выходного устройства, и входного сигнала системы, поступающего извне и несущего информацию о желаемом результате действия выходного устройства. В результате сравнения получается разность обоих сигналов, которая и подается на вход усилителя. Если желаемый и действительный результаты совпадают, сигнал на входе усилителя равен нулю и выходное устройство бездействует.
Если же, вследствие любых воздействий, желаемый и действительный результаты не совпадают, разностный сигнал на входе усилителя не равен нулю, что заставляет работать выходное устройство до тех пор, пока действительный результат не станет равен желаемому.
Входной узел системы представляет собой вычитающее устройство. Из выходного сигнала системы, дающего сведения о желаемом результате, вычитается величина, определяемая сигналом обратной связи. Поэтому такой вид обратной связи называется «отрицательной» обратной связью. Существуют и системы с «положительной» обратной связью, которые мы рассмотрим несколько позже.
Система с обратной связью испытывает, очевидно, воздействия двоякого рода. Во-первых, влияние случайных изменений внешних условий; в случае термостата — это изменения условий теплообмена (изменения внешней температуры и теплопроводности стенок), в случае автопилота— это влияние ветра и т. д. Во-вторых, воздействие внешнего сигнала управления, который дает, так сказать, опорный уровень желаемого результата, исходя из которого система «отрабатывает» внешние воздействия. Пользуясь сигналом управления, мы можем установить терморегулятор на новое значение температуры, и автомат будет поддерживать это новое значение.
Входной сигнал можно непрерывно менять. В этом случае выходное устройство будет работать так, что на выходе его величина, характеризующая результат его действия, например положение тяжелого груза, будет послушно следовать за входным сигналом, который может задавать-132
ся, например, поворотом небольшой ручки или легкого диска или ничтожным световым потоком, падающим на фотоэлемент.
Как бы при этом ни был слаб входной сигнал и как бы ни была велика мощность выходных устройств, выходное устройство будет не только послушно следовать за изменениями входного сигнала, но и стабилизировать выходную величину при случайном изменении внешних условий.
Естественно назвать систему с отрицательной обратной связью устройством, и с п о л н я ю щ и м сигнал, т. е. превращающим сигнал в действие значительного энергетического масштаба.
К
Рис. 6.4. Решение трансцендентного уравнения с помощью системы с обратной связью (К—коэффициент усиления).
Впрочем, не следует думать, что система с обратной связью непременно обладает большой мощностью выходного устройства. Существует много применений таких систем, где этого не требуется, хотя и в этих применениях имеется усилитель сигнала. К числу таких применений относится использование обратной связи в решающих устройствах непрерывного действия. Для решения сложного уравнения (например, трансцендентного) используются устройства, функционально преобразующие сигнал, изображающий независимую переменную. Решаемое уравнение приводится к виду /(х)=0; сначала в качестве аргумента х вводится произвольная величина. На выходе функциональных преобразователей получается некоторая величина, отличная от нуля f(x)=y=^=0. Эта величина подается в качестве входного сигнала на цепь обратной связи, с выхода которой снимается величина аргумента х, вводимого в функциональное решающее устройство. Система изменяет входную и выходную величины до тех пор, пока не будет удовлетворено уравнение и на выходе функционального устройства не появится нулевое значение (точнее, значение, близкое к нулю). Решающее устройство с обратной связью как
бы ищет подходящее значение корня, решая задачу методом последовательных приближений.
Разнообразные приборы такого типа, и подчас очень сложного устройства, широко применяются в технике.
Системы с обратной связью по своим свойствам резко отличаются от систем прямого регулирования. Отличия эти можно проследить с различных точек зрения. Они характерны и имеют большое принципиальное значение.
В системе прямого регулирования, как мы уже видели выше, некоторый сигнал, подаваемый на вход системы, проходит усиление и преобразование в системе. В результате, на выходе системы имеет место некоторое энергетическое действие, одназначно определяемое входным сигналом, например выделение тепла или поворот руля. В этом отношении система прямого регулирования, казалось бы, подобна системе с обратной связью. Однако это справедливо только при том условии, что все внешние влияния и внутреннее состояние системы остаются строго неизменными и не оказывают воздействий на результат работы системы. В практике такие условия чаще всего не выполняются, поэтому любое изменение внешних условий или изменение характеристик узлов самой системы влечет за собой изменение результата работы системы регулирования разомкнутого цикла (по сравнению с желаемым результатом). Так, например, порыв ветра сбивает корабль с курса или же уменьшение коэффициента усиления усилителя сигнала влечет за собой уменьшение выходного эффекта при неизменном сигнале на входе.
Замыкание петли обратной связи создает качественно новую систему, обладающую новыми свойствами, которых не имели ее составные части. Характеристики системы с обратной связью в широких пределах не зависят от характеристик ее узлов или эта зависимость оказывается очень малой. Так, изменение коэффициента усиления усилителя оказывается практически незаметным, если только коэффициент усиления остается еще достаточно большим. Кроме того, система с обратной связью работает, учитывая внешние влияния на результат работы и р е а г и-руя на них таким образом, чтобы устранить эти влияния. Система с обратной связью как бы «приспосабливается» к внешним условиям. Автоматический рулевой восстановит нужный курс, по какой бы причине ни произошло отклонение.
Различие систем прямого регулирования от систем регулирования с обратной связью хорошо знают любители 134
строить парусные и моторные модели судов. Пуская модель в открытом бассейне, они всегда сталкиваются с трудностями, когда пытаются обеспечить ход модели по заданному курсу.
Если это удается сделать при равномерном ветре и отсутствии течения, то при порывистом ветре или волне, т. е. при наличии случайных влияний извне, модель сбивается с курса и далеко отклоняется от желаемой траектории. Никакая предварительная установка руля и снастей не обеспечивает стабилизации курса.
В этом случае задача решается двояким путем: либо вводится автомат стабилизации, либо управление по радио. Простой автомат передает воздействие при изменении силы ветра с паруса через натяжение шкота на румпель руля и доворачивает руль на некоторый угол, что компенсирует изменение курса при порыве ветра. Такое устройство, строго говоря, хотя и отрабатывает изменения ветра, все же не является системой с обратной связью, так как оно не ощущает и не отрабатывает изменений курса судна.
Более сложный автомат для механических моделей конструируется так же, как автоматический рулевой для настоящих судов. Изменение курса (по каким бы причинам оно ни происходило) относительно курса, заданного по компасу (или маяку), т. е. ошибка в курсе, вызывает в конечном итоге поворот руля, доворачивающего судно до нужного направления. Это — типичная система с обратной связью.
При использовании управления моделями по радио петля обратной связи замыкается через оператора, наблюдающего с берега за отклонениями модели от курса и воздействующего на рули с помощью управления по радио. Для полноты следует упомянуть, что на парусном судне (не модели) рулевой, наблюдающий отклонения от курса и исправляющий их поворотом руля, является живым звеном петли обратной связи, стабилизирующей судно на курсе.
При конструировании станков-автоматов различие в программном регулировании и регулировании с обратной связью приобретает уже серьезное технико-экономическое значение. Станок-автомат выполняет операцию по обработке сырья, превращая его в изделие. Операция может представлять собой изменение формы и размеров, обточку, шлифовку, окраску (печатание обоев, рисунка на ткани), химическую обработку, тепловую обработку и т. Д. В каждом случае сырье, орудие, характер обработки и
результат различны. Общим для всех случаев является то, что производится некоторое воздействие на сырье, которое подвергает сырье обработке и превращает его в продукт.
Работа станка-автомата может регулироваться по программе. В этом случае подача суппорта и резца токарного станка, например, определяется формой шаблона или установкой предельного упора, задающего нужный размер детали, который должен быть получен в результате обработки; температура печи и время пребывания в печи
Рис. 6.5. Рулевой, управляющий курсом судна.
Изменение курса судна 1 в сторону 2 воспринимается зрением рулевого (по береговым ориентирам, звездам или компасу). Рулевой перекладывает штурвал в сторону 3, что вызывает поворот руля 4 в сторону 5 и выравнивание судна на прежнем курсе.
изделий хлебопекарни устанавливается заранее и однажды; совпадение рисунков различных цветов определяется положением валиков печатного станка и точностью протяжки материала и т. д.
Точность результата зависит во всех этих случаях от постоянства структуры и режима работы станка-автомата. Достаточно измениться одному размеру (например, в случае износа) или сбиться установке — и результат обработки выйдет из допусков; станок начнет делать брак. За таким «автоматом» необходим неослабный надзор, проверка и регулировка.
Надзор за автоматом резко сокращается, если автомат
работает по системе регулировки с обратной связью. Так, например, при печатанья цветных обоев на выходе напечатанной ленты можно поставить устройство с фотоэлементами и светофильтрами, которое будет фиксировать момент прохождения рисунка каждого цвета. В случае расхождения рисунков (брак) несовпадение будет отмечаться в виде появления тока «сигнала ошибки» в цепях фотоэлементов, который используется после усиления для регулировки относительного расположения валиков, печатающих рисунки разных цветов, с целью устранения расхождения.
Случайные проскальзывания или растягивание бумажной ленты, износ механизмов и другие случайные и систематические влияния будут автоматически компенсироваться следящим устройством. Станок сам контролирует качество своей работы и исправляет ошибки.
Подобные же системы с наблюдением результата работы и соответственной автоматической регулировкой установки могут быть применены и применяются во многих производствах. И в этих случаях обратная связь, осуществляемая техническими устройствами, заменяет труд человека, наблюдающего за работой станка-автомата и регулирующего его работу.
Работа систем регулирования
Работа следящих систем или систем с обратной связью поддается точному описанию и расчету. Математической формулировкой таких описаний занимается теория автоматического регулирования. Подробная теория сформулирована, в частности, для широкого класса так называемых «линейных» систем, т. е. систем, описываемых линейными дифференциальными уравнениями. Математический аппарат теории линейных следящих систем является общим для теории автоматического регулирования и теории линейных цепей в электро- и радиотехнике, а также теории линейных систем в механике упругих тел и акустике.
Мы не будем уделять много внимания математическому описанию и исследованию свойств систем. Нас больше будет интересовать качественная сторона явлений. Поэтому мы рассмотрим характерные типы реакций системы на некоторые типичные входные сигналы — единичный скачок и единичный импульс. Оба эти сигнала являются математической идеализацией, и в практике мы можем создавать их только приближенно, но они удобны для описания систем и ими поэтому широко пользуются.
На рис. 6.6 представлены типичные реакции на единичный скачок (функцию Хевисайда):
«вх = 0 АЛЯ *<°; ивх = 1 АЛЯ
и на единичный импульс (функцию Дирака):
« = 0 для /^0; и =оо для / = 0; од • од
+ оо
j «вх (0 dt = 1
— 00
Реакция следует не мгновенно, а с некоторым запозданием и достигает установившегося значения, лишь спустя значительное (теоретически бесконечно большое) время.
Рис. 6.6. Стандартные входные сигналы н их отработка системами с обратной связью, обладающими различными характеристиками.
а) единичный скачок (функция Хевисайда), б) единичный им* пульс (функция Дирака).
Отрезок времени, за который система достигает некоторой доли установившегося значения (63%), называется постоянной времени системы. Чем меньше постоянная времени, тем быстрее система реагирует. Система может достигать установившегося состояния, либо подходя к установившемуся значению с одной стороны (апериодическая реакция), либо колеблясь вокруг установившегося значения. Колебания должны затухать со временем. Наличие колебательного процесса в реакции системы и скорость 138
затухания этих колебаний определяются структурой системы.
Реакции следящей системы на входные сигналы подобны реакциям электрических (механических, акустических) фильтров с тою лишь разницей, что следящая система обладает внутренним источником энергии, и потому, в принципе, может расходовать эту энергию на поддержание самостоятельных колебаний. Вопрос о возможности возникновения самостоятельных колебаний или вопрос устойчивости системы, не возникавший для пассивных
Рис. 6.7. Примеры реакций технических систем с обратной связью на единичный импульс (/ — время в секундах).
фильтров, становится одним из главных вопросов при изучении активных следящих систем.
Можно непрерывным изменением параметров системы изменять реакцию системы от медленной апериодической до колебательной, которая в пределе может привести к неустойчивости системы.
Для определения степени устойчивости системы разработаны, по крайней мере для достаточно простых случаев, точные критерии.
Явления, приводящие к неустойчивости и возникновению колебаний от внешнего толчка, в простейшем описании могут быть изложены следующим образом.
Сигнал, приложенный на вход системы, проходит петлю обратной связи за некоторый отрезок времени (с некоторой 139
задержкой) и с некоторым искажением формы: Если амплитуда сигнала обратной связи не мала,то входной сигнал усилителя может изменить за счет сигнала обратной связи свою величину и знак. Сигнал обратной связи, приложенный ко входу системы, снова усиливается и задерживается и снова поступает на вход системы с обратным знаком. На входе усилителя сигнал возрастает по абсолютной величине и периодически меняет знак. Система «раскачивается», т. е. возникают колебания с нарастающей амплитудой.
Если в цепи обратной связи высокочастотные компоненты сигнала имеют коэффициент усиления больше единицы и сдвиг фазы больше 90°, то обратная связь из отрицательной превращается в положительную, так как на входе системы происходит вычитание противофазных компонент, т. е. сложение синфазных, что и дает постепенное нарастание амплитуды.
Рассмотрим на примере автоматического управления рулем судна, что происходит в инерционных системах, т. е. системах, обладающих большой задержкой реакции. Случайное отклонение от курса вызывает реакцию системы и поворот руля. Это ведет к постепенному довороту судна до направления заданного курса; входной сигнал исчезает, однако вследствие инерции системы сигнал на выходе, т. е. поворот руля, еще некоторое время сохраняется. Судно продолжает поворачивать и отклоняться от курса в противоположную сторону. Оно успеет отклониться тем больше, чем дольше не сработает (запоздает) система управления. Затем отклонение вызовет реакцию, руль будет переложен в противоположном направлении и все повторится в том же порядке, но в противоположную сторону. Судно будет «рыскать» на курсе и может совсем потерять управление. Дело можно исправить различными способами, например введя регулирование с учетом производной входного сигнала, т. е. так, чтобы поворот руля вызывался не только величиной отклонения от курса, но и скоростью изменения этого отклонения, а главное, зависел бы от знака этой скорости. Тогда нарастание угла ошибки вызовет более сильный поворот руля, а уменьшение ее уменьшит поворот руля или даже заставит руль слегка перейти за нулевое положение, чтобы притормозить вращение судна по инерции. Вводя это изменение, мы меняем частотную характеристику системы так, чтобы фаза сигнала обратной связи для всех усиливаемых частот обеспечивала отрицательную обратную связь,
Системы с положительной обратной связью могут использоваться и используются как генераторы незатухающих колебаний. Эти системы более сложны в описании, чем системы с отрицательной обратной связью, так как они нелинейны. Положительная обратная связь в линейной системе вызывает неограниченное нарастание амплитуды колебаний, а так как всякая реальная система линейна лишь в некоторых пределах, то эти пределы и задают наибольшую, предельную амплитуду нарастающих колебаний. Математический аппарат линейных систем способен лишь указать на наличие положительной обратной связи и на возможность возникновения колебаний. Для описания подробностей развития и установления процесса требуется другой, более сильный математический аппарат.
Технические следящие системы встречаются в большом разнообразии типов и воплощений. По применению их можно разделить на следующие классы: усилители мощности, системы дистанционного управления, преобразователи, измерительные устройства, счетно-решающие устройства. По характеру физических процессов, которые используются в сигнальной и в силовой частях системы, они делятся на электромашинные (сервосистемы) постоянного и переменного тока, электронные (вакуумные и тиратронные), механические, гидравлические, пневматические и т. д. По структуре систем их можно разделить на системы непрерывного, прерывистого (импульсного) и релейного действия. В системах непрерывного действия выходной эффект пропорционален «ошибке», выделенной во входном устройстве, ее производным и интегралам. В системах импульсного действия выходной эффект постоянен в течение некоторого периода времени, и его изменение происходит только в момент короткого импульса регулирования. В релейных системах выходной эффект достигает максимального значения всякий раз, как «ошибка», выделенная во входном устройстве, превышает некоторую минимальную, пороговую величину. Все перечисленные типы следящих систем широко применяются на практике.
Обратная связь в живых организмах
Существование систем регулирования с обратной связью далеко не ограничивается техникой. Гораздо более широко, чем в технике, такие системы представлены в биологии, в живых организмах.
Любой, даже самый простой живой организм (живая клетка), представляя собой нечто единое и цельное, всегда заключает в себе различные составные части, отличающиеся структурно и функционально. Эти составные части взаимодействуют друг с другом и с внешней средой сложным образом, в результате чего некоторые жизненно важные для организма величины поддерживаются строго постоянными, несмотря на изменения, происходящие во внешней среде. Процесс биологической приспособляемости организмов к изменениям внешней среды весьма многообразен и сложен. Мы сумеем упомянуть лишь некоторые процессы, участвующие в этом взаимодействии.
Переходя от технических устройств к живым организмам, нельзя не отметить целого ряда особенностей предмета изучения, которые должны наложить отпечаток на подход к вопросу и на методы исследования.
Наблюдая поведение, реакции живых организмов, в особенности высших животных, на внешние раздражения и сравнивая эти реакции с работой машин, даже самых сложных, мы невольно отмечаем огромную разницу, заметную уже при самом поверхностном наблюдении. Разница эта настолько велика, что часто мы вовсе не решаемся проводить никаких аналогий или же, если и делаем это, то сопровождаем многочисленными оговорками и «извинениями».
Реакция простой машины на любое внешнее воздействие всегда однозначна. Зная устройство машины, зная внешнее воздействие, мы всегда заранее можем предсказать ее реакцию. Даже если машина среагирует неожиданно, то и тогда мы уверены, что это произошло из-за ее поломки, которая, собственно, и оказалась неожиданной и однозначно определила неожиданную реакцию.
Иное дело — живые существа. С ними никогда нельзя, казалось бы, быть уверенным, как именно они поступят в следующий момент. Любое неучтенное воздействие со стороны меняет их реакцию, их поведение. Чтобы добиться постоянства условий эксперимента, биологи отгораживают лаборатории звуконепроницаемыми стенками, возводят «башни молчания», но даже стены не ограждают от случайного воспоминания, уловить влияние которого на поведение практически невозможно. И чем выше стоит животное на лестнице развития, тем сложнее и многообразнее, неожиданнее и, казалось бы, «беспричиннее» с виду его реакция. Даже два близнеца, выросших вместе, по разному ответят на одинаковые события.
Как же можно и можно ли подходить с одной меркой к животным и машинам? Не пытаемся ли мы сравнивать несравнимое и не является ли мир живых существ качественно новым и несравнимым с миром неживым?
Несомненно, живые существа составляют особый мир. Несомненно, что их существование качественно отлично от неживой природы. И тем не менее эти качественные отличия не могут заслонить несомненных черт сходства между работой машины и поведением живых существ.
Если мы будем помнить о различиях физической природы процессов и если мы всегда будем иметь в виду, что мы говорим о сходстве общего характера, касающемся передачи информации с помощью сигналов в пределах организованной системы, то мы, во-первых, избежим грубой ошибки, заключающейся в ложном утверждении, что «животное подобно техническому автомату», и, во-вторых, сумеем внести много нового в наше понимание процессов жизни.
Не все реакции живых органимов «неожиданны» или «произвольны» даже с первого взгляда. Произвольных в строгом смысле слова, т. е. беспричинных реакций, вообще не существует, есть только очень сложные реакции, вызываемые незаметными и неизвестными нам причинами, в частности прошлой историей существования живого организма, т. е. реакции, имеющие для нас характер случайности. Но многие жизненные проявления имеют вполне устойчивый, закономерный характер, напоминающий строго закономерные реакции машин-автоматов и получившие за это названия «автоматизмов». Вот об этих автоматизмах мы, в первую очередь, и поведем разговор.
Для нормального существования живого организма необходимо строгое поддержание постоянства некоторых физико-химических величин. Регулирование этих величин производится автоматически и протекает помимо ощущений, сознания и воли. Человек обычно не может прямым волевым актом повысить или понизить температуру своего тела, кровяное давление, содержание сахара в крови и т. д. Сознание и воля могут оказывать влияние на эти величины, но не так непосредственно, как, скажем, на работу скелетных мышц.
Функции организма, не подчиненные непосредственно центральной нервной системе и обеспечивающие постоянство внутренней среды организма, так называемые вегетативные функции, протекают под управлением сложного механизма автономной (висцеральной, или вегетативной) нервной системы.
Интересным и очень важным свойством этих процессов является их постоянство и закономерность. Для данного нормального индивидуума любой из вегетативных процессов при повторных экспериментах будет давать одну и ту же зависимость от времени. Те же эксперименты для другого индивидуума дадут другую, но тоже постоянную зависимость. Отклонение зависимости от обычной для данного индивидуума всегда свидетельствует об отклонениях функций от нормы и может быть использовано для диагностики заболевания. Именно поэтому врачи часто больше внимания уделяют изучению объективных лабораторных анализов, чем жалоб пациента.
Автоматические реакции по поддержанию постоянства внутренней среды организма — гомеостазис — осуществляются в связи с энергетическими процессами усвоения питательных веществ и их использования в организме. Получение питательных веществ, воды, кислорода, химиче-ское расщепление и синтез новых веществ, доставка нужных продуктов к внутренним органам, использование запасов энергии и физической энтропии, заключенных в этих продуктах и получаемых организмом извне для нужд организма, удаление продуктов распада — вот основные энергетические процессы, протекающие в различных органах и тканях.
Все эти процессы протекают одновременно в различных органах и должны быть точно согласованы друг с другом во времени и пространстве. В любую минуту включение в работу той или иной группы мышц или других «потребителей» энергетической системы должно быть удовлетворено соответствующим «обслуживанием» во всех отношениях. Эта внутренняя «интеграция функций» различных органов не может иметь места без обмена информацией между сотрудничающими органами, без каналов связи и автоматов регулирования. Можно предположить, что если бы все вегетативные регулировки человеческого тела зависели от внимания человека, то человеку не только некогда было бы подумать ни о чем другом, кроме этих внутренних регулировок, но, попросту, не хватило бы внимания и времени обо всех о них подумать во-время.
Итак, кроме взаимодействий энергетических, связанных со снабжением тканей питательными веществами и кислородом, необходима сигнальная связь между органами и взаимное согласование их работы. Такая связь, как мы уже знаем, осуществляется, в первую очередь, по нервным волокнам вегетативной нервной системы. Кроме того, 144
информация о химических реакциях переносится химическими же веществами — гормонами, которые разносятся током крови и оказывают воздейсгвие на соответствующие органы, даже в ничтожно малой концентрации. Оба типа каналов связи, нервный и химический, тесно взаимодействуют: под действием нервных раздражений возникают химические вещества (нейро-гуморы), воздействие гормонов на нервные узлы вызывает передачу раздражений по нервам. Управление функциями с помощью этих двух типов связи называется нейро-гуморальной регуляцией.
Работа мышечных волокон сопровождается усиленным потреблением кислорода и выделением углекислого газа. Снабжение клеток происходит через посредство крови. Если бы при работе мышцы ток крови не усиливался, мышца не могла бы долго усиленно работать. Однако то возможно, так как при включении в работу мышцы одновременно увеличивается приток крови к работающей мышце. Как это происходит? Выделяемый при работе мышечной клетки в кровь углекислый газ является переносчиком информации о работе мышцы. Повышение концентрации СО2 в крови служит сигналом, на который сосуды прилежащие к работающей мышце, реагируют расширением. В результате, ток крови усиливается и обмен веществ обеспечивает возросшую потребность. Местный регулирующий механизм представляет собой автомат с обратной связью, причем внешним сигналом является иннервация мышцы, а его исполнением — увеличение притока крови. Передача сигнала происходит с помощью физико-химического процесса изменения содержания СО2 в крови.
Если в работу включаются большие группы мышц, регулировка такого типа окажется недостаточной в масштабе всего организма, вследствие понижения кровяного давления. Должен быть увеличен доступ кислорода извне, т. е. усилены дыхание и кровообращение. Это действительно происходит под действием регулирующих механизмов более крупного масштаба. Увеличение концентрации СО2 в крови воздействует, во-первых, на хеморецепторы, т. е .чувствительные к изменениям химизма нервные окончания вегетативной нервной системы, расположенные в аорте и сонных артериях («каротидные синусы»), и, во-вторых, на группу нервных клеток, расположенных в продолговатом мозге. Первое воздействие ведет через нервные раздражения, передаваемые сердцу, к учащению его сокращений и усилению тока крови, второе — к усилению дыхания (и 10 И. А. Полетаев 145
появлению субъективного ощущения «удушья»). И здесь, уже в больших масштабах, возникшая вследствие включения в работу мышц потребность в кислороде вызывает передачу сигналов по замкнутой петле обратной связи, что приводит к восстановлению равновесия между потребностью и ее удовлетворением.
Содержание сахара (глюкозы) в крови регулируется многими механизмами. Сахар обратимо усваивается печенью, где он превращается в гликоген, сахар усваивается тканями и т. д. Взаимодействие всех процессов этого рода организуется с помощью автоматических регулировок типа регуляторов с обратной связью. Так, увеличение содержания сахара в крови (гипергликемия) воздействует на гипоталамическую область мозга и далее в виде нервного возбуждения передается поджелудочной железе, где под действием нервных сигналов в островковой ткани выделяется в кровь гормон— инсулин, что приводит к увеличению усвоения сахара тканями тела, частичному превращению сахара в гликоген и, в результате, к устранению избытка сахара. Увеличение концентрации глюкозы воздействует и непосредственно на поджелудочную железу, стимулируя секрецию инсулина, но в меньшей степени. Гипогликемия, т. е. понижение концентрации глюкозы, вызывает реакцию другой группы нервных узлов, также в гипоталамической области мозга; нервное возбуждение передается печени и надпочечникам. Надпочечники выделяют гормон — адреналин, который воздействует на печень вместе с непосредственным нервным возбуждением и вызывает усиленное расщепление гликогена (гликогенолиз) и превращение его в глюкозу, которая выводится в кровь, восполняя недостаток.
Можно перечислить очень много примеров подобных автоматических регулировок. Содержание в организме воды, кислорода, солей металлов, температура тела, давление крови ит. д. — все эти величины поддерживаются постоянными с помощью аналогичных автоматических механизмов, использующих передачу информации посредством химических раздражителей и нервных возбуждений, а также регулировки замкнутого цикла. Во всех этих процессах мы ясно видим характерные черты управления с помощью сигналов, когда энергетические процессы организма вызываются очень слабыми нервными или химическими воздействиями, являющимися только первым толчком к развитию процесса, энергия которого во много раз превышает энергию управляющего сигнала.
В каждом из этих процессов можно проследить возникновение сигнала регулирования, его передачу, усиление, превращение его в энергетическое (механическое, химическое) действие, которое снова вызывает появление уже нового сигнала регулирования. Можно вызывать искусственно (в эксперименте) повреждение механизма регулирования и наблюдать отклонение от нормы в его работе. Именно такими методами (экстрипация желез, перерезание нервных связей, инъекции гормонов) и изучаются механизмы регулирования в живых организмах.
В эксперименте выявляются также характерные черты сходства работы технических и биологических систем регулирования. Так, при искусственном нарушении состояния покоя какой-либо системы регулирования, например при увеличении содержания сахара путем инъекции глюкозы или приема внутрь некоторого количества сахара, можно наблюдать ответную реакцию системы регулирования, снимая зависимость от времени регулируемой величины (концентрация сахара в крови — «сахарная кривая»). Ход кривой напоминает реакцию технической системы регулирования на единичный импульс. Протекание реакции может быть как апериодическим, так и периодическим с затухающими колебаниями.
Автоматические регулировки можно наблюдать и у растений и низших животных (тропизмы). Примером может служить цветок подсолнечника, поворачивающийся к свету, или бактерия, -перемещающаяся в область более благоприятных условий среды.
Сравнивая регулирование при помощи обратной связи в живых организмах и в технических автоматах, можно заметить ряд интересных различий. Так, например, в живых организмах характеристики отдельных звеньев цепи регулирования не обладают линейными свойствами. Величина нервного возбуждения чаще всего бывает пропорциональна не силе раздражения (как в линейных цепях), а ее логарифму. При этом изменения внешних воздействий в весьма широких пределах (в тысячи и десятки тысяч раз) дают изменения величины сигналов, существующих внутри организмов, в более узких пределах (всего на несколько единиц). Эти свойства цепей с логарифмическими амплитудными характеристиками в последнее время все чаще находят применение и в технике.
В живых организмах регулировки чаще всего осуществляются по двум противоположно действующим, как бы «борющимся», каналам. Так, например, к сердцу подходят 10* 147
Рис. 6.8. Примеры реакций органических систем с обратной связью на внешнее возбуждение типа единичного импульса.
а) возбудимость сетчатки глаза в зависимости от времени после однократного раздражения электрическим током (по Мотокава), б) изменение скорости роста растения после переноса его из темноты иа свет (по Блаув), в) изменение водородного показателя (pH) крови собаки после вдыхания углекислоты (по Гольвят-церу). Момент вдыхания отмечен черточками на оси времени.
два регулирующих нервных ствола — блуждающий нерв и ветвь симпатического нерва. Периодические сокращения сердца могут протекать независимо от воздействия обоих этих нервов. Однако оба нерва оказывают воздействие на работу сердца. Возбуждение ветви симпатического нерва вызывает ускорение и усиление сердцебиения, возбуждение блуждающего — замедляет сердцебиение и даже прекращает его вовсе. Воздействия обоих нервов на сердце передаются с помощью нейтрогуморов — ацетилхолина и
Рис. 6.9. Примеры реакций органических систем с обратной связью на внешнее возбуждение типа единичного импульса и единичного скачка.
а) изменение содержания сахара а крови после приема внутрь 25 и 100 граммов глюкозы (по Францу), б) выделение азота с мочой,, после резкого увеличения содержания белков в пище (по Йошимура).
О 5 10 15 20 25 30 36 40 45 врем, су тки
симпатина, соответственно. Ритм работы сердца определяется, таким образом, уровнем возбуждения обоих нервов, действующих в противоположных направлениях: уменьшение возбуждения одного действует примерно так же, как усиление возбуждения другого.
Не только сердце регулируется подобным образом. Вся автономная или симпатическая нервная система делится на два раздела: ортосимпатическую и парасимпатическую системы. Клетки первой располагаются главным образом вдоль позвоночного столба (вне спинного мозга), клетки второй образуют узлы (ганглии)
в различных участках тела, располагаясь рядом с 'Внутренними органами. Функционально каждый внутренний орган испытывает противоположные воздействия от обеих систем; если одна тормозит его функции, другая — возбуждает их. Чувствительность обеих систем к воздействию химических веществ совершенно различна.
Пользуясь техническими терминами, можно сказать, что мы имеем некоторое подобие балансной системы, когда положительные воздействия передаются отдельно от отрицательных, по отдельным цепям. Такая система раздельной передачи положительных и отрицательных воздействий по разным каналам в живом организме неизбежна, так как по нервам могут передаваться возбуждения лишь одного знака, от состояния покоя и до максимума.
Рефлексы
Не только вегетативные функции внутренних органов регулируются механизмами с обратной связью. Такие же механизмы в ряде случаев действуют и в управлении скелетной мускулатурой. К их числу относятся антигравитационные механизмы, обеспечивающие устойчивость тела в поле тяжести, регулировки, создающие наилучшие условия работы рецепторов, а также многие другие безусловные рефлексы.
Скелетные мышцы, обеспечивающие устойчивое положение нашего тела в поле тяжести, например мышцы ног и опины, всегда несколько напряжены. Состояние напряжения мышц вызывает раздражение особых чувствительных окончаний афферентных нервов, расположенных в мышцах и суставах. (Благодаря этим проприоцептивным или интрорецептивным нервам внутренней чувствительности мы знаем о положении наших членов тела, не глядя на них). Если мышца ноги окажется дополнительно растянутой или сокращенной за счет внешнего воздействия (как это случается, например, когда мы спускаемся на лыжах с горы по неровному склону), вследствие автоматической реакции произойдет удлинение или сокращение мышцы таким образом, что нога не потеряет контакта с почвой и не передаст нашему телу опрокидывающего толчка; мышца автоматически приспособится к изменению внешней нагрузки. Регулирующий механизм безусловного рефлекса состоит из афферентных нервов, поднимающихся от чувствительных окончаний к спинному мозгу, промежуточных нервных связей в тканях спинного мозга, эфферентных 150
волокон, спускающихся от спинного мозга к мышцам, нервных окончаний в мышцах и самих мышц. Реакцию этого нервно-мышечного автомата проверяют невропатологи, постукивая молоточком по сухожилию коленного сустава и наблюдая сокращение мышц (искусственное, механическое растяжение мышцы при ударе по сухожилию вызывает ее физиологическое сокращение).
Рис. 6.10. Схема рефлекторной дуги.
/—белое вещество спинного мозга; 2—двигательные нейроны; 3—спинномозговой канал; 4— вставочный нейрон (включенный между чувствительными н двигательными нейронами); 5—аксон чувствительного нейрона; 6—нервный узел; 7—чувствительный нейрон; S—отросток чувствительного нейрона; 9—задний корешок спинного мозга; 10—чувствительные окончания в коже; 11—двигательные окончания в мышечных волокнах; /2-передний корешок спинного мозга; 13—аксон двигательного нейрона; 14—дендриты двигательного нейрона; /5—волокно проприоцептивного нейрона.
Антигравитационные автоматизмы позволяют нам «не думать» о своем равновесии.
Сказанное выше есть лишь крайне упрощённое описание рефлекторной дуги. В действительности в осуществлении даже элементарных рефлекторных актов участвует более сложная нервная структура. К изложенной выше простейшей схеме следует добавить, в первую очередь, обратную связь, идущую от исполнительных органов (мышц) к спинному мозгу. Эта связь осуществляется нервными окончаниями и клетками-рецепторами внутренней чувствительности (интро- или проприоцепторами). Чувст-
вительные проприоцептивные окончания расположены между мышечными волокнами, в связках и сухожилиях суставов. Раздражения, идущие от проприоцепторов, сигнализируют о положении костей, суставов и состоянии мускулатуры. Таким образом, даже простые движения происходят не как однократный акт «включения в работу» той или иной группы мышц, а скорее как процесс работы системы с обратной связью, в котором сравнивается «желаемый» и «достигнутый» результаты.
К этому нужно еще добавить, что чувствительность проприоцепторов, по крайней мере некоторых из них, может дополнительно регулироваться (натяжением промежуточных мышечных волокон, в толще которых непосредственно расположен рецептор) с помощью отдельных особого типа нервных волокон. Вероятно, нервная структура, осуществляющая простейший рефлекс, не исчерпывается полностью приведённым описанием и имеет дополнительные усложнения.
Безусловные рефлексы в большинстве случаев имеют сложную структуру, причем нервная дуга замыкается через несколько промежуточных нейронов спинного мозга и реакция включает работу не одной мышцы, а целой группы мышц. Если обезглавленной лягушке нанести на кожу живота каплю кислоты, лягушка стирает каплю ближайшей к месту повреждения лапкой. Если эту лаПку придержать или же отсечь, то лягушка стирает кислоту другой лапкой или даже лапками другой стороны тела.
Безусловные рефлексы не протекают изолированно. Нервные возбуждения ответвляются от рефлекторной дуги и по нервным связам спинного мозга передаются в кору головного мозга , который в ряде случаев посылает соответственные эфферентные импульсы и меняет, таким образом, реакцию — усиливает или тормозит ее. Пациент может затормозить коленный рефлекс, напрягая мышцы ноги. Врачу приходится отвлекать внимание больного, заставляя напрягать произвольно другие группы мышц (растягивать руки), чтобы растормозить коленный рефлекс для исследования. Безусловные рефлексы могут быть связаны в цепь и вызывать последовательность стереотипных движений, каждое из которых выполняется с автоматическим приспособлением к требованиям обстановки. Такие цепи непроизвольных движений — рефлексов — представляют собой ходьба и бег, лазание по лестнице и т. д. Реакции на интенсивные раздражения — кашель, чихание, глотание представляют собой цепь движений, которые вызывают 152
друг ДрУга последовательно и образуют вместе целесообразное автоматическое действие, как бы выполнение одной общей программы.
Работа рецепторов (органов внешних чувств), например глаз, протекает по той же схеме автоматических регулировок. При взгляде на светлое пятно глаза совершают целый ряд движении. Во-первых, оси обоих глаз поворачиваются вместе в направлении пятна; во-вторых, оси глаз взаимно смещаются на такой угол, чтобы точка их пересечения пришлась на пятно (конвергенция); хрусталики глаз изменяют форму* и фокусируют изображение на сетчатке (аккомодация); зрачки сокращаются или расширяются в соответствии с яркостью пятна (адаптация) и, наконец, кровеносные сосуды, снабжающие сетчатку, меняют диаметр в соответствии с потребностями в кровоснабжении. Все эти регулировки протекают с помощью нервных возбуждений, идущих в мозг и возвращающихся к мышцам глаз. И здесь имеются противоположно направленные воздействия, только они осуществляются не двумя системами нервных регулировок, а двумя группами мышц, работающих в противоположных направлениях и возбуждаемых, конечно, раздельно. И в этом случае отдельные петли обратной связи работают совместно в едином комплексе и взаимосвязанно. И работа каждой из них зависит от управления со стороны высших отделов центральной нервной системы.
При выполнении сложных движений, требующих точности, обратная связь осуществляется с помощью зрения. Вдевание нитки в иголку протекает как типичный процесс сведения к нулю разности между достигнутым и желаемым результатами, причем эта разность координат ушка иголки и конца нитки воспринимается зрением. С закрытыми глазами вдеть нитку в иголку можно только случайно. Кинестетического чувства, т. е. обратной связи через проприоцепторы, или рецепторы внутренней чувствительности, оказывается недостаточно. Даже свести концы указательных пальцев с закрытыми глазами удается далеко не всегда. При некоторых расстройствах проприоцептивной чувствительности оказывается затруднительным даже коснуться пальцем носа с закрытыми глазами.
* У некоторых животных, например у рыб, фокусировка производится не деформацией неподвижного хрусталика, а перемещением хрусталика, имеющего неизменную форму, относительно сетчатки вперед и назад.
Письмо и рисование протекают под неослабным контролем зрения. Существует забавный способ убедиться в этом наглядно. Предлагается с закрытыми глазами нарисовать на листе бумаги, не отрывая карандаша, очертание поросенка или собаки. В завершение рисунка -следует пририсовать глаз. При этом запрещается прикасаться к бумаге свободной рукой. Обычно на рисунке глаз оказывается на совершенно неподходящем месте, часто даже вне очертаний животного.
Слепые пишут обычно, пользуясь трафаретом, который позволяет им избежать ошибок.
В живом организме существует большое число примеров систем с положительной обратной связью. К их числу, в первую очередь, следует отнести замкнутые цепи нейронов в нервной системе, которые могут постоянно поддерживать свою активность за счёт самовозбуждения. В настоящее время имеются гистологические данные, доказывающие существование таких цепей. Первоначальный импульс, подаваемый на такую систему, может вызвать очень длительное возбуждение системы, которое облегчает прохождение всех последующих импульсов. Активность в процессе циркуляции импульсов возбуждения по замкнутым цепям поддерживается за счёт метаболизма (обмена веществ, связанного с питанием) нейронов, составляющих цепь.
Самовозбуждающиеся нейронные цепи с положительной обратной связью могут играть определенную роль в процессе образования и закрепления навыков животного, т. е. образовывать материальный субстрат памяти живого существа. Это утверждение подтверждается некоторыми экспериментами. Так, перерезание специфических замкнутых нервных путей приводит к исчезновению процессов образования навыков (опыт производился на голово-ногих моллюсках).
Различного рода циклические процессы, протекающие в живом организме, являются следствием работы систем с положительной обратной связью. К числу нормальных циклических процессов относится, в первую очередь, работа сердца, которое периодически сокращается, даже если все подходящие к нему нервы перерезаны. Начало сокращения сердца — сокращение предсердий — наступает при раздражении нервных узлов стенки предсердия, которое по коротким выростам клеток проводящей системы распространяется к мышечным волокнам предсердия. Мышечные волокна желудочков возбуждаются другим чувствительным узлом (атриовентрикулярный узел), расположенным в сердечной стенке, который возбуждается от узлов 154
предсердия, но с некоторой задержкой. Таким образом, приток крови в предсердия вызывает сокращение сердца (систолу), а последнее прогоняет кровь сквозь сердце в сосудистую систему и, в свою очередь, вызывает новый приток крови, замыкающий цикл.
Интересно отметить, что в нормальном состоянии члены тела не находятся в покое, а совершают хаотические колебания малой амплитуды с частотами порядка десятка герц. Такие колебания регистрируются, например, при изучении антигравитационных рефлексов. Положение членов тела определяется тонусом (степенью напряжения) мышц, который регулируется по схеме рефлекса. Однако прохождение сигнала нервного возбуждения по рефлекторной дуге происходит с задержкой. Основная доля задержки происходит в соединениях нейронов—синапсах. Время задержки и определяет средний период колебаний. Дело обстоит здесь совершенно так же, как в технических системах с обратной связью, при наличии задержек, о чём мы говорили выше. Механическая инерция членов тела препятствует появлению колебаний большой амплитуды при частоте порядка 10—15 герц. При физическом или умственном утомлении или при заболевании синаптическая задержка прохождения нервного возбуждения возрастает. Это ведёт к понижению частоты собственных колебаний, что, в свою очередь, влечёт за собой увеличение амплитуды. Становится заметным дрожание пальцев, рук, головы.
К циклическим процессам относятся такие патологические явления, как дрожь от переохлаждения тела, заикание, икота и т. п.
Смена сна и бодрствования представляет собой нормальный цикл.
Весьма поучительными, с точки зрения демонстрации действия обратной связи в организме, являются опыты венгерских физиологов Секей и Сентагота. Производилась пересадка ткани образующегося глаза от одного зародыша тритона другому. Пересадка производилась антисимметрично; правый глаз донора пересаживался на место левого глаза реципиента и наоборот, причем нижний край глаза оставался внизу. Таким образом, бывший задний сектор глаза донора оказывался на новом месте, расположенном спереди. После пересадки ткань приживалась и глаз развивался нормально. В процессе развития зародыша нервные связи сетчатки глаза и мозга устанавливались в соответствии с первоначальным расположением глаза у донора (задний сектор сетчатки донора, расположенный 155
после пересадки спереди, соединялся нервным пучком с передним разделом зрительного анализатора, с которым нормально соединяется задний сектор сетчатки). Развившееся животное имело извращенные безусловные рефлексы. Видя червяка, расположенного сзади, передним сектором глаза (расположенным сзади) животное воспринимало его расположение ложным образом, спереди, и реагировало прыжком вперед.
Рис. 6.11. Схема опытов по пересадке глаза у тритона.
/-эмбрион-донор; 2—эмбрион-рецнпиент; а—передний сектор сетчатки донора, который становится задним сектором у реципиента; 3—прорастание нервных пучков при развитии нормального зародыша (пучок от переднего сектора сетчатки в про* растает в задний участок зрительного отдела мозга д. пучок от заднего сектора б прорастает в передний участок г); 4 прорастание нераных пучков при развитии зародыша с пересаженным глазом (пучок от бывшего заднего сектора сетчатки б, который теперь расположен спереди, прорастает в передний участок г, пучок от бывшего переднего сектора прорастает в задний участок д); 5—нормальное животное совершает движение в направлении движения бумаги е, помещенной снаружи ак-варнума яс; 6—животное, подвергшееся двусторонней пересадке глаз с переменой мест переднего и заднего секторов при неподвижной бумаге з совершает колебательные движения вправо и влево.
Особенно поучительным является сравнение поведения нормального н оперированного животного в следующих условиях: снаружи стенки аквариума помещался лист белой бумаги с нарисованными на нем вертикальными полосами. Если двигать лист вправо и влево, то нормальное животное в ответ начинает перемещаться вслед за движением бумаги. Оно стремится сохранить свое положение относительно окружающих предметов, как в том случае, когда его в естественной обстановке сносит течением. При неподвижной бумаге тритон сохраняет неподвижность. В тех же условиях, при неподвижной бумаге, тритон, у которого оба глаза пересажены так, что передний сектор оказывается сзади и наоборот, не остается неподвижным. Он совершает периодические движения, как маятник, вправо и влево, которые изредка прерываются судорожными хаотическими перемещениями.
И у нормального, и у оперированного животных в описанных случаях имеют место проявления врожденного безусловного рефлекса, определяемого свойствами нервной структуры. У нормального животного рефлекс протекает по схеме с отрицательной обратной связью, у оперированного— с положительной обратной связью, превращающей животное в «генератор колебаний». У нормального животного перемещение бумажной ленты вызывает зрительное раздражение( перемещение образа на сетчатке) и рефлекторное движение «вдогонку» бумажной ленты. В результате перемещения тела животного движение образа на сетчатке прекращается, происходит, по терминологии физиологов, «уравновешивание воздействия среды», типичное для отрицательной обратной связи. У оперированного животного случайное движение или поворот его вызывают движение образа на сетчатке, но в обратную сторону (вследствие извращённого положения секторов глаза). Рефлекторная реакция животного (попытка двигаться за кажущимся движением ленты) также происходит в неверном направлении, животное усиливает первоначальное относительное движение, что ускоряет кажущееся движение ленты и ещё более усиливает реакцию (положительная обратная связь).
Поскольку скорость движения животного не может нарастать неограниченно (нелинейность системы), это движение в какой-то момент времени должно замедлиться. Замедление может .произойти, например, из-за ^тормозящего воздействия проприоцептивных раздражений. Замедление движения животного влечёт за собой замедление
157
перемещения образа на сетчатке, которое стимулирует дальнейшее замедление движения, и так далее. В результате ложные восприятия направления движения стимулируют ускорение начатого движения и заставляют тритона совершать ритмические движения, как это случается с любой другой системой с положительной обратной связью. Неподвижное положение тритона становится неустойчивым.
Превращение отрицательной, стабилизирующей, обратной связи в положительную, вызывающую появление колебаний, происходит в описанном эксперименте из-за изменения знака возбуждения в одном звене петли обратной связи—перемены мест переднего и заднего секторов сетчатки обоих глаз. Все остальные звенья природной нервной структуры безусловного рефлекса остаются без изменений и не поддаются исправлению путём «переучивания».
Некоторые болезненные состояния вызывают типичные явления нарушения обратной связи. Так, заболевание, называемое локомоторной атаксией и представляющее собой нарушение проприоцептивной чувствительности конечностей, лишает больного возможности чувствовать, например, положение своих ног. Этим разрушаются многие автоматизмы ходьбы. Больной может двигаться, только наблюдая за положением собственных ног. Походка его неуверенна и неловка. В темноте или с завязанными глазами он не может ходить и теряет равновесие.
Рост и развитие организма, размножение клеток, входящих в состав его тканей, также протекает под воздействием многих перекрещивающихся и взаимодействующих регулировок. Жизнедеятельность одних тканей тормозит или стимулирует рост других в различные периоды развития организма, и только те организмы оказываются жизнеспособными и выживают, у которых процессы взаимных влияний тканей друг на друга приводят к образованию биологически целесообразных структур.
Если, например, некоторая ткань а стимулирует развитие ткани б, а ткань б задерживает развитие ткани а, то взаимодействие между ними, протекающее по схеме замкнутой петли отрицательной обратной связи, приведет к некоторому равновесному состоянию, которое может быть нарушено внешними влияниями. Так, например, взаимодействуют друг с другом в теле петуха половые железы и ткань петушиного гребня. Рост гребня тормозит развитие тканей желез, функция желез стимулирует рост гребня. 158
Если хирургически удалить гребень — усилится рост желез; если удалить железы — уменьшится гребень.
Примеров подобного «противоречивого взаимодействия» между органами тела животного можно привести очень много.
В условиях патологических внешних воздействий, в особенности длительных, регулировки подобного типа могут быть перегружены или даже вовсе нарушены. За нарушением регулировок специфического синтеза веществ в организме следует патологический рост органов или тканей или всего организма. Так, чрезмерная активность одной из долей гипофиза вызывает гигантизм — ненормальное увеличение размеров тела. Недоразвитие щитовидной железы приводит к недоразвитию тела и кретинизму. Многократное повторное местное разрушение тканей ведет к усиленному течению восстановительных процессов, что в некоторых случаях стимулирует рак — заболевание, связанное с патологическим, неумеренным размножением клеток. Размножение клетки определяется как внутренними процессами в самой клетке, так и внешними условиями. Нарушение нормальных регулировок роста и размножения клеток в организме, разрыв петли обратной связи, приводит к вредным, а иногда и гибельным для организма последствиям.
Системы с обратной связью и в технике, и в живой природе существуют не только в том простом виде одиночной замкнутой петли регулирования, о котором мы вели речь. Взаимная попарная связь различных органов, осуществляемая как через посредство нервной системы, так и с помощью гуморальных воздействий, позволяет проследить длинные цепи регулировок функций в организме, образующие сложные системы регулирования. Наличие таких систем подтверждается на обширном экспериментальном материале.
Схемы подобных систем и их функционирование весьма сложны. Однако в принципе возможно точное описание их поведения с помощью того же формального аппарата, что и для простых систем. Примером многопетлевой системы могут служить, во-первых, сложные решающие устройства технического назначения и, во-вторых, взаимосвязанные гомеостатические регулировки в живом организме. Можно сказать, что принцип «взаимно противоречивого» взаимодействия органов, или принцип отрицательной обратной связи, в процессе развития организма связывает части организма в единое целое.
По-видимому, дальнейшее изучение взаимодействия органов, проводимое не только качественно, но и количественно, с привлечением аппарата теории автоматического регулирования, может принести большую пользу не только для изучения функций организма, но и для улучшения методов распознавания причин заболеваний и лечения последних.
Изучение организации систем с обратной связью в живых организмах даёт много полезных конструктивных идей
Рис. 6.12. Предполагаемая схема замкнутой цепи нейронов (по Рэнсону).
для создания технических систем. В живых организмах простейшие системы с обратными связями типа безусловных рефлексов, как мы видели, управляются и «настраиваются» более высоко расположенными нервными структурами. В числе технических систем регулирования в последнее время всё чаще встречаются так называемые «само^ настраивающиеся» системы.
Обычная система с обратной связью, собранная из звеньев, обладающих некоторыми фиксированными характеристиками, может выполнять свою задачу регулирования наилучшим образом лишь в определённых внешних условиях. При изменении внешних условий качество работы может ухудшиться и для его улучшения могут потребоваться новые регулировки (изменение характеристик системы и её звеньев). Так, автопилот при изменении высоты полёта и плотности воздуха может потребовать таких ре-160
гулировок. Регулировку или подстройку обычно осуществляет оператор, наблюдающий за работой системы и оценивающий по тем или иным признакам качество её работы. Функция текущей подстройки системы может быть передана автоматическому устройству. Для этого над основной системой настраивается ещё одна система регулирования, для которой входной информацией является качество работы основной системы, оцениваемое по объективным признакам, а выходной реакцией — регулировка основной системы для оптимальной работы в соответствии с заданным критерием качества. Все устройство, включающее в себя и основную систему и надстройку, называют обычно самонастраивающейся системой.
Естественно, что «второй этаж» управления может сам нуждаться в подстройке при изменении внешних условий в более широких пределах. Для его регулировки может быть надстроен «третий этаж» и так далее. Каждый следующий «этаж» управления использует всё более общие критерии качества, всё более сложную информацию и должен требовать для своей работы всё больше времени, так как определение качества работы нижерас-положенной системы предусматривает проведение «проб» или испытаний работы этой системы в различных режимах.
Любая самонастраивающаяся система требует предварительной принципиальной организации, т. е. воплощения некоторого принципа, некоторого общего критерия качества работы.
В принципе можно, при достаточном усложнении системы, сделать единственным критерием качества естественный критерий: способность системы устойчиво существовать не разрушаясь в данных условиях. При наличии некоторых исходных качеств система может сама, без участия конструктора, перестроиться и дойти до устойчивого состояния посредством изменения своей внутренней структуры. К системам такого типа удобно применить название «самоорганизующиеся». (Часто в просторечии-термины «самонастраивающаяся» и «самоорганизующаяся» система употребляют без различия.) Самоорганизующиеся системы в отличие от самонастраивающихся, не несут в себе никакого конструктивного критерия качества работы, кроме естественного критерия — способности «выжить» в данных условиях.
К вопросам реализации самоорганизующихся систем мы вернёмся в гл. 11.
11 И. А. Полетаев 161
ГЛАВА 71ИИ!
СИГНАЛ В МАШИНЕ
В системах с отрицательной обратной связью, рассмотренных нами вкратце в предыдущей главе, на входе устройства автоматического регулирования взаимодействовали два сигнала: сигнал, соответствующий «желаемому» или заданному действию автомата, и сигнал, соответствующий уже достигнутому в результате работы автомата действию. Оба сигнала выражаются в простейших случаях в одном и том же физическом алфавите (обычно в виде непрерывно изменяющейся физической величины: электрического напряжения, поворота или скорости вращения вала, концентрации или скорости изменения концентрации химического вещества и т. д.) и в одинаковых масштабах. Взаимодействие двух сигналов сводилось к сравнению двух физических величин с выделением нового сигнала (их разности или некоторой эквивалентной функции), который управлял работой исполнительного устройства. Из двух сравниваемых сигналов внешним был только один.
Можно представить себе ситуацию, когда иа вход или входы системы подходят одновременно или последователь-162
но во времени несколько сигналов, причем система должна автоматически реагировать не на каждый сигнал, а только на их комбинации.
Примером простейших устройств такого рода является дешифратор, реагирующий лишь на одну единственную комбинацию символов. На кораблях союзников во время Второй мировой войны были установлены автоматические дешифраторы сигналов бедствия. Спасательные лодки и плоты снабжались полуавтоматическими радиопередатчиками, которые после завода часового механизма автоматически в течение нескольких минут передавали на специально отведенной для этого волне сигналы бедствия — серию тире и пауз стандартной длительности. Сторожевые приемники на судах не выключались круглые сутки. На выходе каждого приемника стоял дешифратор. Однажды принятое тире включало программный механизм, который работал только в том случае, когда принимаемые сигналы совпадали с его программой. В конце программы (по окончании последнего тире) включался сигнал, дававший знать вахтенному о приеме сигналов'бедствия. Любое отклонение от программы (отсутствие нужного тире или наличие лишних, не выдерживание пауз и т. д.) прекращало работу дешифратора и возвращало его в исходное положение.
Аналогично, но более сложно работает селектор автоматической телефонной станции. На любую (из числа возможных) серию электрических импульсов, получаемых им от наборного диска абонента, он отвечает включением одной из линий — той, которая соответствует набираемому номеру. Селектор реагирует уже не на единственную комбинацию, а на любую. Сопоставление всех элементарных символов сигнала (импульсов) ставит в соответствие определенной комбинации символов одну единственную реакцию.
Закон сопоставления заложен в структуре селектора. Для того чтобы его изменить, необходимо вводить изменения в его схему.
Всякое устройство подобного рода, которое, получив серию или комбинацию входных сигналов, вырабатывает новый сигнал на выходе, в основе своей структуры и работы имеет некоторый закон обработки, сопоставления, взаимодействия входных сигналов, или, как говорят, алгоритм преобразования.
При конструировании автоматических устройств для преобразования сигналов ставится задача реализации заданного алгоритма, т. е. создание схемы машины, ее струк-Н* 163
туры, которая обеспечивала бы необходимое преобразование. С этим кругом вопросов встречаются конструкторы вычислительных устройств, релейных коммутаторов и, в особенности, автоматических цифровых вычислительных машин. Обычным назначением таких устройств является решение математических, или для цифровых машин, лучше сказать, арифметических, и логических задач. Структурные схемы решающих устройств связаны со свойствами переработки сигналов алгоритмами их преобразований.
В настоящее время существует и широко применяется много типов решающих устройств, отличающихся друг от друга характером и сложностью решаемых задач, использованием тех или иных физических процессов и, главное, характером сигналов, с которыми они работают. По этому последнему признаку вычислительные устройства распадаются на два обширных класса — устройства непрерывного действия и устройства дискретного счета. Первые работают с сигналами, имеющими непрерывную структуру, вторые — с дискретными сигналами. Из этого принципиального различия вытекает много различий технического характера и в устройстве, и в областях применения. Различия эти настолько существенны, что описание устройств непрерывного действия и устройств дискретного счета должно проводиться отдельно.
Вычислительные устройства непрерывного действия
Вычислительные устройства непрерывного действия применяются исключительно для решения задач, связанных с физическими величинами, поддающимися измерению, т. е. математических задач, решаемых средствами арифметики, алгебры, интегрального и дифференциального исчислений. Логических задач такие устройства не решают.
Физическая задача, вернее, ее математическая идеализация, изображается в виде дифференциального уравнения или системы дифференциальных уравнений. Затем строится некоторая физическая модель, работа которой описывается тем же дифференциальным уравнением или той же системой уравнений. Эта модель и служит вычислительным устройством. Такие устройства часто поэтому называют моделирующими. Обычно физические процессы, протекающие в модели, совершенно иные, чем в решаемой задаче. Чаще всего строятся электрические модели; однако широко 164
применяются также механические, гидравлические и другие модели.
Каждая физическая величина, фигурирующая в решаемой задаче (например, дальность, скорость, высота, угол), изображается другой, соответствующей ей величиной в модели (например, углом поворота вала, числом оборотов, на-
Рис. 7.1. К решению задачи встречи снаряда и самолета.
/—настоящее положение самолета; 2—будущее положение самолета и положение точки разрыва снаряда; 3—точка расположения батареи.
пряжением). Пределы изменения и масштабы величин подбираются, исходя из условий задачи. То, что происходит при работе модели, представляет собой математическую аналогию исходной физической задачи, поэтому решающие устройства непрерывного действия часто называют машинами-аналогами. Каждая величина может принимать любое значение в заданных пределах и непрерывно меняться в этих пределах; соответственно этому непрерывно изменяются и величины в модели, являющиеся сигналами
величин задачи. Процесс решения задачи также протекает во времени непрерывно.
Одной из наиболее популярных задач, решаемых на машинах-аналогах, является «задача встречи», решение которой необходимо для наведения орудия на движущуюся цель и наведения истребителя на самолет противника. Допустим, что нас интересует только величина полетного времени снаряда Г, которое сложным образом зависит от наклонной дальности 7? до точки встречи снаряда и цели. Если цель находится в точке с координатами х, у, h
Рис. 7.2. Упрощенная схема вычислительного устройства прибора управления артиллерийским огнем.
(в декартовой системе координат) и имеет составляющие скорости х, у. то, спустя время Г, она будет находиться в точке
xi = л4" Тх; ух =у4-Гу; h{ = h.
Для определения координат точки встречи xI? yY и времени Т необходимо решить систему уравнений
R=/(х + хТ)2 4- (у+уГ)2 4- Л2,
T — F(R),
где F(R) задается баллистическими таблицами.
Возможная схема вычислительного устройства прибора управления артогнем приведена на рис. 7.2. Текущие координаты цели х, у, h (А остается постоянной) вводятся 166
непрерывно в виде условных сигнальных величин от измерительных устройств (радиолокатора, дальномера), Координаты х и у дифференцируются и умножаются на Г, которое задается следящей системой. Далее к произведениям хТ, уТ прибавляются текущие координаты х и у, и затем три полученные координаты «упрежденной» точки геометрически складываются (определяется диагональ параллелепипеда /?); по величине R определяется Т\ которое подается на вход следящей системы; величина Т с выхода следящей системы, как мы уже говорили, подается в вычислительное устройство. Поскольку следящая система непрерывно поддерживает равенство входного и выходного сигналов Т—Т' (по окончании начального переходного процесса), выходные величины y\t Г, являющиеся результатом решения задачи, также непрерывно выдаются, если только на вход подаются текущие координаты цели.
Для реализации приведенной в этом грубом описании схемы нам нужны устройства, способные производить указанные в квадратах схемы преобразования: дифференцирование, умножение, алгебраическое и геометрическое суммирование, функциональное преобразование, интегрирование и т. д. Весь арсенал средств, служащих для такого рода преобразований, в настоящее время хорошо разработан для вычислительных устройств различных типов: механических, электрических и др.
Каждое вычислительное устройство типа модели-аналога приспособлено для решения только одной задачи. Изменение задачи влечет за собой изменение конструкции модели, что практически выполнить нелегко, особенно в механических моделях. Точность получаемых в результате решения величин обычно невелика, ошибка составляет не менее 0,1 %,в лучших случаях. Все узлы и детали машины должны выполняться с высокой точностью и потому они дороги и трудно выполнимы.
Удобством в работе с аналогами является то, что входные данные на них можно подавать прямо с измерительных устройств, согласовав масштабы, без сложных промежуточных преобразований, а выходные — непосредственно использовать для управления объектами (например, орудиями) в качестве входного сигнала силовой передачи. Поэтому чаще всего вычислительные устройства непрерывного действия применяются в системах автоматического управления, где приходится решать на данной модели только одну задачу.
Рис. 7.3. Примеры функциональных узлов счетно-решающих устройств. 1 - суммирование механических перемещений; 2—дифференциал (суммирование углов поворота); 3—суммирование электрических напряжений на сопротивлениях; 4—сум» мироваиие электрических напряжений в ламповой схеме; 5—множительный меха» низм; 5—перемножение с помощью потенциометров; 7— эксцентриковый механизм (задание функции от одного аргумента); 8—функциональный потенциометр; 9—дифференцирующая ячейка; /0—интегрирующая ячейка.
Функциональная схема модели не определяется однозначно системой уравнений задачи. Одну и ту же задачу можно решать различными - путями на конструктивно различных моделях, построенных по различным функциональным схемам. Машины с различными структурами могут, таким образом, выполнять одинаковую функцию. Обратное для машин-аналогов неверно: определенная схема может решать только одну математическую задачу, т. е. выполнять только одну функцию.
Во время решения задачи машина-модель непрерывно отображает текущее состояние процесса, относительно ко-того сформулирована задача. Внутри модели как бы воспроизводятся в виде сигналов все существенные для решения задачи стороны процесса, вся полезная для решения информация. При этом физическая структура и состояние модели могут не иметь ничего общего с отображаемым процессом (кроме изоморфной связи события и сигнала). Если модель сконструирована и запущена правильно, то она даст правильный ответ в том смысле, что снаряд, выпущенный в соответствии с рассчитанными величинами установок орудия, точно или почти точно попадает в цель. На этом мы убеждаемся в правильности утверждения об изоморфизме сигналов и событий в данном случае.
Термины «правильность» и «точность» не равнозначны. Точность (или обратная ей величина—ошибка) характеризует допуск в определении искомой величины (вместе с вероятностью этого допуска). Правильность состоит в том, что истинная (реальная) величина и величина, полученная с преобразованиями сигнала, совпадут в пределах допуска.
Дискретный счет
Физическая величина может быть сопоставлена не только с другой физической величиной, но и выражена числом, записанным в определенной системе счисления в виде ряда условных символов. Для этого измеряемая величина сравнивается с некоторой единицей измерения и в результате сравнения получается число, умноженное на единицу, имеющую размерность физической величины. Число записывается в виде ряда символов—цифр, расположенных на определенных местах—позициях. Каждая позиция соответствует разряду и придает стоящей в этом разряде цифре определенный вес. В повсеместно приме-
няемой десятичной системе счисления числа, выражаемые цифрами, стоящими в соседних разрядах, отличаются по величине в 10 раз.
Так число 325 равно 3 • 102 + 2 • 1О’ + 5 • 10°. Число десять является основанием десятичной системы счисления. В этой системе в каждом разряде может стоять один из десяти возможных символов 1,2,3,4,5,6,7,8,9 и 0. При
о о
7 .......
ООО
Рис. 7.4. Изображение чисел у
о
о о
ООО о о о о
о
о о
ООО о о о о
племени Майя.
о о о о
перечислении последовательно возрастающих чисел символы меняются в указанном порядке, и по завершении цикла, при переходе от 9 к 0, меняется символ в соседнем слева разряде.
Эти общеизвестные правила мы напомнили для того, чтобы воспользоваться ими для других систем счисления, отличающихся тем, что в качестве основания в них используется не 10, а другое число: 2, 3, 12, 20 и т. д. Некоторые из таких систем счисления получили за последнее время большое распространение. Все эти системы одинаково пригодны для практического использования, и применение 170
той или иной из них определяется, во-первых, привычкой и, во-вторых, некоторыми техническими удобствами. Так, например, общепринятая десятичная система имеет или, вернее, имела в далеком прошлом то преимущество, что пальцы двух рук представляли собой удобную «счетную машину», всегда находящуюся в распоряжении вычислителя, который мог данные любой простой задачи «по пальцам перечесть».
Отчасти сохранились до настоящего времени и другие системы счисления: счет дюжинами и гроссами (дуодеци-мальная система, основание—12), счет шестью десятками — минуты, секунды при исчислении времени, углы в градусной мере (гексагезимальная система).
У древнего южноамериканского племени индейцев Майя, не знавших обуви, счет велся при основании 20 по очевидным причинам. Символы, употреблявшиеся для записи разряда, прямо указывают на их происхождение (например, число 7 — рука и два пальца). Мудрые лошади «Гуинь-яньямы», в государстве которых гостил герой Дж. Свифта Гулливер, наверное, должны были бы пользоваться двоичным счетом, так как вместо человеческих десяти пальцев в их распоряжении было только два копыта.
В любой системе счисления позиционная запись числа имеет вид
что означает
а3с3 + а2с2 + а1сЧ-аосО>
где с—основание счисления, aQj alt а2, а3...—один из воз-возможных в разряде символов 0<az<c, означающий целое число единиц.
В табл. 7.1 приводятся для сравнения записи одних и тех же чисел в различных системах счисления.
Вводя разряды справа от запятой, представляющие доли единицы, мы можем записать любую величину с любой заданной погрешностью в виде ряда дискретных символов, т. е. в виде разрядного представления числа. Таким образом, непрерывная физическая величина можег быть изображена в виде сигнала дискретной природы. Реальные преобразования физических величин получают изоморфное отображение в действиях над символами записи числа, производимых по определенным правилам.
Таблица 71
Таблица сравнения записи чисел в различных системах счисления
Десятичная или децимальная (основание Ю) Восьмирич* ная или октальная (основание 8) Троичная или тринар-иая (основание 3) Двоичная или бинарная (основание 2) Двудесятнчиая (разряды десятичные, числа в разрядах двоичные)
0 0 0 0 0000
1 1 1 1 0001
2 2 2 10 0010
3 3 10 11 ООН
4 4 11 100 0100
5 5 12 101 0101
6 6 20 но оно
7 7 21 111 0111
8 10 22 1000 1000
9 11 100 1001 1001
10 12 101 1010 0001 0000
11 13 102 1011 0001 0001
12 14 ПО 1100 0001 0010
13 15 111 1101 0001 ООН
14 16 112 1110 0001 0100
15 17 120 1111 0001 0101
16 20 121 10000 0001 оно
17 21 122 10001 0001 0111
18 22 200 10010 0001 1000
19 23 201 10011 0001 1001
20 24 202 10100 0010 0000
21 25 210 10101 0010 0001
30 36 1010 НПО ООН 0000
50 62 1212 110010 0101 0000
100 144 10201 1100100 0001 0000 0000
1000 1750 1101001 1111101000 0001 0000 0000 0000
Вычислительные устройства дискретного счета
Символы, применяемые для записи числа, не обязательно должны иметь вид знаков, написанных на бумаге. Каждому из знаков может быть поставлено в соответствие некоторое состояние физической системы с соответствующим числом степеней свободы. Так, каждому символу-цифре может соответствовать число отложенных на конторских счетах косточек, нажатие одного из клавиш счетной машины, поворот валика с фиксатором на несколько ступеней — «щелчков» и т. д. Счетные устройства имеют при этом структуру, соответствующую применяемой систе-172
ме счисления; они имеют разряды и в каждом разряде число состояний, равное основанию счисления. Все это совершенно ясно видно на конструкции конторских счет. Тот же принцип лежит в основе механических счетных машин.
Вводя число в арифмометр или откладывая его на счетах, мы делаем, по существу, то же, что и при записи
Рис, 7.5. Конторские счеты.
числа цифрами на бумаге. Только те же действия мы выражаем другими символами в другом физическом алфавите.
Вычисляя на бумаге, производя, например, сложение, мы по двум записанным столбиком цифрам, пользуясь «таблицей сложения», выученной наизусть в школе, определяем третью и записываем ее в столбик под слагаемыми. Если нужно, мы переносим единицу в разряд слева. Буквально то же самое делается и в арифмометре с той лишь разницей, что «таблица сложения» уже содержится в конструкции колес арифмометра вместе с правилом переноса единицы в старший разряд. Алгоритм сложения мы не должны держать в голове и применять его по очереди к каждому разряду; он автоматически выполняется арифмометром при повороте ручки, так как он заложен в конструкцию арифмометра. Это возможно потому, что арифмометр имеет дискретный ряд состояний, изменения которых связаны друг с другом так же, как связаны символы в разрядах складываемых чисел.
Хотя принципиально здесь все представляется предельно простым, изобретение механического сумматора явилось в свое время выдающимся достижением человеческой мыс-173
Ли и сослужило неоценимую службу развитию техники и науки.
Инженерные задачи создания счетных машин сводятся в настоящее время не к поискам принципов осуществления алгоритмов арифметических действий, а к наилучшему воплощению этих принципов и созданию наилучших (простых, удобных, дешевых) конструкций.
Рис. 7.6. Суммирующий механизм арифмометра (.колесо Однера*). /—выдвижные вубцы: 2—спица для установки числа; 5—прорезь, выводящая зубцы/ вверх при повороте спицы 2; 4—вал; 5—ручка; d—счетчик (при повороте ручки 5 счетчик 6 поворачивается иа такое число зубцов, которое соответствует числу выведенных вверх зубцов / колеса: при миогократно.м повороте в счетчике откладывается сумма); 7—рукоятка сброса (установка счетчика иа нуль); 5—дополнительный зубец для передачи единицы в соседний слева разряд при переполнении счетчика.
В настоящее время механические счетные машины автоматически суммируют и вычитают, множат, делят и печатают на ленте результаты вычислений. Вычислитель, работающий на машине, не обязан больше помнить таблицы сложения и умножения; их однажды заложил разработчик в конструкцию машины. В обязанности вычислителя входит теперь только вводить в машину исходные данные, включать нужные операции, фиксировать результаты вычислений и вводить их снова, соблюдая общую программу решения задачи.
Рис. 7.7. Клавишные вычислительные машины. а) арифмометр; б) автоматическая вычислительная машина.
Счетно-аналитические машины
Ввод данных в машину и передача их из одной машины в другую могут быть также автоматизированы. Чаще всего это делается с помощью перфорированных карточек или лент. Перфокарта представляет собой кусок тонкого картона стандартной формы, на котором пробиты одинаковые, но различно расположенные отверстия. Отверстия пробиваются только в определенных точках карточки, расположенных в виде правильной прямоугольной сетки по строкам и столбцам. Наличие или отсутствие пробивки на данном месте карты может условно обозначать ту или иную цифру, букву или другой символ. Пробивки на карточках представляют собой, таким образом, сигнал, несущий ту или иную информацию в соответствии с принятым кодом, а сама перфокарта со всеми возможными пробивками представляет собой дискретный алфавит.
Вычислительные устройства, работающие с перфокартами, носят общее название «счетно-аналитических машин». В число их входят машины различного назначения:
«перфоратор» — для нанесения вручную перфораций на карты,
«сортировка» (сортировочная машина) — раскладывающая группу карт по различным карманам в зависимости от наличия пробивок в тех или иных местах карты,
«контрольник»— для проверки пробивок, «интерпретер» — расшифровщик, печатающий текст с перфокарты,
«табулятор» — осуществляющий подсчет карт, сложение и вычитание данных, пробитых на картах, и пробивку результатов,
множительный и вычислительный перфораторы — выполняющие сложение, умножение, вычитание и деление данных, пробитых на картах, и пробивающие результаты и т. д.
Существует много типов таких машин с различными особенностями конструкции, различной скоростью и для различных операций. Во многих машинах изменением внутренних соединений — переключением на коммутационной доске — изменяется их схема и функции, которые они выполняют.
Работа машин основана на том, что пробивки на введенной в машину карте оказывают на механизмы машины такое же действие, как нажатие клавиша или включение контакта. При прохождении карточки в машине сквозь 176
to X >
Рис. 7.8. Перфокарта с нанесением пробивок для записи буквенного текста.
a)
б)
Рис. 7.9. Счетно-аналитические машины.
в) перфоратор САМ; б) контрольная САМ; в) перфоратор ПД-45-1.
в)
в)
б)
Рис. 7.10. Счетио-аналитические машины а) сортировка САМ; б) табулятор Т«2.
пробивку либо проваливается щуп, либо замыкается электрический контакт. Таким образом, автоматическая подача карты равносильна вводу данных на клавиатуру.
Счетно-аналитические машины освобождают оператора еще от нескольких обязанностей. Они способны автоматически регистрировать информацию и сами ее считывать, хранить информацию, вести подсчет, сортировать карты по данному признаку или ряду признаков и т. д. Передавая карты из одной машины в другую, можно, не вмешиваясь в ход решения, получить полное решение сложной задачи с большим числом исходных данных.
Возможности счетно-аналитических машин не ограничиваются, таким образом, только арифметическими действиями. Сравнение, выбор по признакам, сортировка являются уже на арифметическими, а логическими операциями.
Особенно широко используются счетно аналитические машины в операциях бухгалтерского учета. Однако они находят применение и в решении научно-технических задач.
Счетно-аналитические машины могут производить вычисления со скоростью порядка тысячи умножений шестизначных чисел в час; сортиро-вальные машины пропускают около 500 карт в минуту. Все операции, производимые с помощью перфокарт, можно вести и с перфолентой, что в ряде случаев удобнее, так как ленту проще подавать в машину.
Перфоленты и перфокарты служат для обработки и хранения не только чисел, но и других видов информации, например текста, условных обозначений и т. п. Это сильно расширяет область их применения.
В конструкции карточки отражается позиционная система записи. Число пробивается на ней поразрядно. В каждом разряде позиция пробивки соответствует цифре. Перфокарта, изображенная на рис. 7.8, использует десятичную систему счисления. Можно пользоваться и другими системами, например двоичной.
Быстродействующие электронные вычислительные машины
Совершенно новый этап в обработке дискретных сигналов на машине наступил с появлением электронных вычислительных машин. В этих машинах сигнал имеет форму электронных импульсов весьма малой продолжительности (порядка 1 микросекунды, т. е. IO"6 секунды). Таково же 180
09
Рис. 7.11. Цифровая электронная вычислительная машина БЭСМ. Внешний вид.
Рис. 7.12. Цифровая электронная вычислительная машина „Вихрь" (Whirlwind). Внешний вид.
и время реакции схемы. Это в десятки и сотни тысяч раз короче, чем время работы механических рычагов или электромеханических реле. Соответственно выше и скорость вычислений. Современные электронные машины способны производить вычисления со средней скоростью 5—7 тысяч, а некоторые и до 20 тысяч операций в секунду с девятиразрядными десятичными числами. Использование чрезвычайно гибкой и богатой электронной техники открыло новые пути и настолько широкие перспективы применения вычислительных устройств дискретного счета, что об этом типе машин следует сказать несколько подробнее.
f 325
,_ил,_
! » 12*51
Рис. 7.13. Запись чисел с помощью электрических импульсов.
/—обычная запись числа в десятичном счислении: 2—запись в виде электрических импульсов в двоичной системе счисления (наличие импульса означает „1“, отсутствие его—.0*); 3—запись числа в виде электрических импульсов в двоично-десятичной системе счисления (четыре двоичных разряда образуют один десятичный разряд, в котором десятичное число записано в двоичной системе).
Основным носителем сигнала в электронной машине является электрическое напряжение, основным элементом, фиксирующим символ алфавита, — электронный триггер.
Схема триггера представляет собой соединение двух электронных усилительных ламп. Обе лампы должны быть включены, как усилители напряжения с положительной обратной связью: входы усилителей, сетки ламп, соединены с выходами, анодами, крест-накрест, т. е. сетка первой — с анодом второй и наоборот. Схема имеет два состояния устойчивого равновесия:
1) первая лампа проводит, вторая заперта отрицательным потенциалом на сетке,
2) симметричное относительно первого состояния.
Состояние схемы, при котором через обе лампы текут одинаковые токи, неустойчиво. Достаточно току через одну 182
Рис. 7.14. Элементы схемы машниы. Диод—двухэлектродный прибор, проводящий ток только в одном направлении.
а) селеновый диод; б) кремниевый диод в металлической капсюле; в) германиевый диод в стеклянной оболочке; г) обозначение кристаллического диода в схемах; д )вакуумный диод; е) изображение вакуумного диода в схемах (/—анод. 2—катод, 3—нить накала); ж) характеристика диода—зависимость тока через диод от напряжения на его аноде.
Рис. 7.15. Элементы схемы машины. Вакуумный триод—трехэлектродный прибор, осуществляющий усиление сигнала за счет энергии внешнего источника.
а) конструкция триода: б) обозначение триода в схемах (/—анод; 2—сетка, 5—ка« тод, 4—нить накала); в—характеристика триода—зависимость тока анода от напряжения на сетке.
Рис. 7.16. Элементы схемы машины. Вакуумный пентод — электронная лампа с тремя сетками. Лампа используется как усилитель сигнала и как прибор, позволяющий осуществлять управление от двух сигналов одновременно.
а) конструкция пентода; б) обозначение пентода в схемах (/ '-анод, 2— третья сетка (используется для управления или для защиты от вредного действия вторичной эмиссии электронов с анода). 5—втооая сетка (используется для экранировки первой сетки от анода), 4 —первая управляющая сетка, 5 —катод]; а) характеристики пентода — зависимость анодного тока от напряжения на аноде при различных напряжениях на управляющей сетке.
из ламп случайно измениться, например уменьшиться, как сейчас же возникнет процесс, который переведет схему в устойчивое состояние: уменьшение тока через лампу 1 (см. рис. 7.18) вызовет увеличение напряжения на ее аноде и соответственно на сетке лампы 2; это вызовет увеличение тока через вторую лампу, понижение напряжения на ее аноде и соответственно на сетке лампы /; последнее в свою оче-
Рис. 7.17. Элементы схемы машины. Полупроводниковый триод (транзистор)— трехэлектродный прибор, осуществляющий усиление сигнала за счет энергии внешнего источника.
о) точечный триод; б) расположение электродов (протекание токя между металлическим эмиттером в и полупроводниковым основанием о увеличивает концентрацию носителей заряда в объеме полупроводника и уменьшает сопротивление между коллектором к н основанием о); е) плоскостной триод; г) обозначение транзистора в схемах; д) характеристики-триода—зависимость напряжения иа коллекторе от тока эмиттера.
редь, вызовет новое уменьшение тока в лампе /, т. е. поддержит первоначальное изменение (положительная обратная связь). Ток в лампе 1 быстро упадет до нуля, а в лампе 2 возрастет до максимума.
При подаче короткого импульса напряжения (отрицательного) на сетки обеих ламп запертая лампа не изменит своего состояния (ток через нее не изменится, он был и останется равным нулю), отпертая лампа с приходом на 186
сетку отрицательного импульса среагирует уменьшением тока, что вызовет повышение напряжения на ее аноде и далее — всю последовательность описанных выше явлений в цепи положительной обратной связи, которая приведет к переходу триггера в новое состояние равновесия. Лампы поменяются ролями. Та, которая проводила ток, окажется
Рис. 7.18. Схе.ма триггерной ячейки, а) обозначение триггерной ячейки из схемах; б) временная диаграмма напряжений на входе триггера, на его аноде а и на выходе (после прохождения дифференцирующей ячейки).
Два усилителя на триодах / и 2 работают совместно. Выход первого а соединен со входом второго б и, наоборот, выход второго в соединен со входом первого г. запертой, а запертая будет проводить ток. Следующий импульс снова возвратит схему в прежнее состояние и т. д.
Два устойчивых состояния триггера дают возможность сопоставить их с двумя символами двоичного алфавита, которые могут находиться в разряде числа, записанного в двоичной системе счисления, 0 и 1. Состоянию «О» соответствует отсутствие тока в первой лампе, «1» — отсутствие тока во второй лампе.
Если подавать на сетки ламп триггера серию импуль-
сов напряжения, то каждый нечетный импульс будет переводить триггер в состояние «1», а каждый четный —в состояние «О». Снимая напряжение с анода лампы 1 через дифференцирующую цепочку, мы получим на выходе отрицательный импульс всякий раз, когда триггер будет переходить из положения «1» в положение «О». Этот импульс можно использовать как единицу для переноса в соседний слева (старший) двоичный разряд и подать его на вход (сетки ламп) еще одного триггера.
Объединив в одну схему несколько триггеров, мы можем на этой схеме «записать» число, представленное символами двоичного счисления. Каждый триггер будет соответствовать разряду, состояние этого триггера «О» или «1» будет соответствовать 0 или 1 в этом разряде «записанного» числа. Цепочка триггеров, на которой таким способом фиксируется число, называется регистром. Цепочка триггеров, способная пересчитывать поступающие на ее вход импульсы, называется счетчиком. В сущности, счетчик и регистр работают так же, как конторские счеты или, вернее, арифмометр с передачей единиц в старшие разряды, только с несравненно большей скоростью и в двоичной, а не в десятичной системе счисления.
Другим важным элементом электронной машины является «схема совпадения». Это устройство пропускает на выход импульс в том и только в том случае, если на оба его входа одновременно поступают импульсы. Один из этих импульсов может быть символом числа, а второй — управляющим сигналом, отпирающим схему совпадений и пропускающим импульс в нужную цепь. Схема совпадений выполняется либо на много сеточной электронной лампе, либо на диодах.
Схема совпадений может управляться выходным напряжением триггера и пропускать импульсы в линию, если триггер находится в состоянии «1», или не пропускать, если триггер находится в состоянии «О».
В нашу задачу не входит разбирать детали устройства и работы узлов машины. Однако мы должны сказать немного о некоторых из них, чтобы сделать хотя бы отчасти понятной структуру и работу машины в целом.
Если на регистре уже записано число и на него подается еще одно, то в результате в нем будет отложена сумма этих двух чисел. Так можно осуществлять сложение в устройстве, именуемом сумматором. Числа в сумматор подаются поразрядно, т. е. в каждый разряд приходит только 0 (нет импульса) или 1 (есть импульс). Таб-188
лица сложения для двоичного счисления до предела проста:
0-]-0 = 0; 04-1 = 1; i-j-o=i; 14-1 = ю.
Если в триггере регистра был 0, то приходящее число не опрокинет триггера, если оно 0, и опрокинет, если оно
Рис. 7.19. Схема совпадений или вентильный каскад.
с) схема на пентоде (входные положительные импульсы поступают на первую и третью сетки лампы, выходной отрицательный импульс снимается с анода лампы); б) схема с использованием диода; в) обозначение каскада совпадений в схемах. Сигнал иа выходе появляется только тогда, когда на обоих входах одновременно присутствуют входные сигналы.
1, и т. д. Самый сложный случай, когда складываются 1 + 1. В этом случае в триггере оказывается 0, а 1 с выхода пере-
чуля
Рис. 7.20. Счетчик импульсов, состоящий из нескольких триггеров, включенных последовательно.
Выход каждого предыдущего триггера соединен со входом следующего. Наличие напряжения на выходах .0* или ,1е каждого триггера дает в двоичной записи число поступивших на вход импульсов. Подачей импульса на шину УСТАНОВКА НУЛЯ все триггеры переводятся в нулевое положение.
дается в старший разряд (где она в свою очередь может сложиться с 1 и дать перенос в следующий разряд).
Умножение осуществляется последовательным сложением и сдвигом. Умножать при этом приходится только на О и 1. Двоичная таблица умножения такова:
0X0 = 0; 1X0 = 0;
0X1=0; 1X1 = 1.
Умножение многоразрядных чисел, например, выглядит так:
У 25 Л 10 [11001 = 1.164-1.84-0.44- 4-0.24-1.1 = = 16 4-8-4-1=25; 1010=1.84-0.4 4-1-24-0.1 = = 8-|-2 = 10]; v 11001 Л 1010
00 25 250 , 00000 г 11001 00000 11001
11111010
Множимое откладывается или не откладывается в регистр в зависимости от того, стоит в разряде единиц множителя 1 или 0; затем множимое сдвигается на разряд вправо и тем же путем умножается на следующий разряд множителя и т. д. В регистре-сумматоре происходит при этом сложение как обычно.
Вычитание производится в электронных машинах чаще всего как сложение с числом, дополнительным до самого большого, причем единица самого старшего разряда отбрасывается.
В десятичной системе
45 — 22 = 23
_45 22 23
или
45-|_(Ю0 — 22) — 100 = 454-78— 100 = 23; .45 123
"г 78 100
"123 23" •
В двоичной системе:
0101101 —0010110 = 0010111; [45 — 22 = 23];
_ 0101101 0010110 0010111
или
0101101+(1000000 — 0010110) — 1000000 = =0101101 +0101010— 1000000 = 0010111;
(45 + (64 — 22) — 64 = 45 + 42 — 64 = 23J;
, 0101101 _ 1010111
’ 0101010 1000000
1010111 0010111 •
Деление может производиться как повторное вычитание со сдвигом разрядов.
Могут быть применены и другие приемы вычислений, но в них не будем сейчас вникать.
Числа, передаваемые в виде электрических импульсов по проводам от одного узла машины к другому, могут быть, представлены различным образом. Во-первых, они могут посылаться последовательно во времени разряд за разрядом по одно-му проводу; так делается в так называемых машинах последовательного действия. Во-вторых, они могут посылаться одновременно всеми разрядами, но каждый разряд по своему собственному проводу; так делается в машинах параллельного действия. Первые содержат меньше шин, но требуют больше времени для передачи чисел и потому медленнее работают. Вторые работают быстрее, но имеют более сложную схему коммутации.
Все импульсы, идущие по разным шинам и приходящие в различные узлы машины, должны точно совпадать по времени. Работа машины протекает в строгом ритме, задаваемом генератором тактовых или синхронизирующих импульсов. Из гребенки этих импульсов и «нарезается» число пропусканием или непропусканием очередного импульса на соответствующую шину.
Следует упомянуть о том, что числа в машине могут быть представлены различными способами. В регистре, имеющем, например, 40 двоичных разрядов, можно каждый разряд регистра закрепить за определенным разрядом числа. В этом случае, скажем, разряд единиц будет всегда 191
фиксироваться на одном и том же триггере. Такой способ записи называется записью с фиксированной запятой. Его преимуществом является простота выполнения элементарных операций сложения и вычитания чисел, которые производятся так, как описано выше. Недостатком этого способа записи является то, что он ограничивает число значащих разрядов и вынуждает прибегать к округлениям. Другим способом записи является запись с пла-
Рис. 7.21. Схема преобразователя.
Преобразователь выдает напряжение на выходной шине с номером, равным числу, поданному иа входы в виде двоичной поразрядной записи. Например, перевод всех входных переключателей в верхнее положение (положение /) вызывает появление напряжения только на выходной шине 7. Схема может служить для преобразования двоичных чисел в восьмеричные.
вающей запятой. При этом записывается максимальное число разрядов независимо от порядка числа, причем первая значащая цифра ставится сразу после запятой, а порядок числа записывается отдельно. В этом случае перед сложением двух чисел требуется дополнительная операция «выравнивания порядков», что является недостатком этого способа. Его достоинство — в большой точности записи.
Следующая таблица дает представление об этих двух формах записи различных чисел. Для простоты число разрядов взято равным 6 и числа записаны в десятичной системе счисления.
Число Запись с фиксирован* ной запятой Запись с плавающей запятой
3571,25 3571,25 0,357125.10*
357,125 0357,18 0,357125* 103
35,7125 0035,71 0,357125-102
3,57125 0003,57 0,357125-101
0,357125 0000,36 0,357125-10®
0,00357125 0000,00 0,357125-10-2
Рис. 7.22. Схема преобразователя, обратного приведенному на рис. 7.21.
Устаиовка входного переключателя в одно на восьми положений вызывает поив* леиие иа выходных шинах напряжений, изображающих в двоичной записи иомер положения переключателя.
Управление и память
Электронные машины позволяют вести расчеты с огромной быстротой не только потому, что скорость вычислений в них высока, но еще и потому, что в них все промежуточные операции, необходимые при решении задачи, производятся автоматически с большой скоростью. К числу таких операций относятся: запись промежуточных резуль--13 И. А. Полетаев 193
татов вычислений, подача исходных данных и промежуточных результатов для последующих вычислений, установка порядка операций, выбор необходимых данных и т. д. Все решение задачи от начала до конца идет самостоятельно, без участия человека, и с большой скоростью.
Такая полностью автоматическая работа достигается в результате того, что схема машины с каждым тактом ее работы изменяется, в ней производятся переключения с помощью устройств типа схемы совпадений, которые заставляют машину переключаться с одного действия па другое. Переключения производятся специальным управляющим устройством, встроенным в машину и работающим по заданной ему оператором программе. Управляющее устройство командует всеми узлами рабочей части машины, заставляя их посредством переключений в очень короткое время перестраиваться для выполнения новой операции.
Наличие управляющего устройства, которое воздействует на вентили в различных узлах машины, приводит к тому, что машина оказывается способной выполнять различные операции. Для каждой операции управляющее устройство меняет схему машины, отпирая одни и запирая другие шины. Оно, таким образом, воздействует на структуру машины, изменяя ее для каждой операции. При этом установленная данной командой управляющего устройства схема операции однозначно соответствует этой операции и только ей. Команда управляющего устройства представляет собой такие же импульсы напряжения, как и те, которые представляют числовые данные; поэтому команды могут быть также записаны условно в виде числа в двоичной системе счисления. Команды передаются по особым шинам, но хранятся в записанном виде в таких же устройствах памяти, в каких хранятся и числовые данные задачи.
Кроме арифметического устройства и устройства управления, в машине обязательно имеются устройства «памяти» или запоминающие устройства, а также устройства ввода и вывода данных.
Запоминающее устройство обычно бывает двух видов: оперативное (или внутреннее) и внешнее. Первое обладает небольшой емкостью, но является быстродействующим; записать число и снять число можно за короткое время. Второе обладает большой емкостью, но требует большего времени для считывания. Требования быстродействия и большой емкости технически противоречивы, и потому приходится идти на такое разделение устройств памяти.
Для того чтобы записать число в двоичной системе, т. е. серию разрядов, в каждом из которых либо присутствует, либо отсутствует импульс напряжения, можно использовать различные физические процессы. Это можно сделать на ламповых схемах-регистрах, состоящих из цепи триггеров (по одному на разряд числа). Ламповые регистры можно заменить катушками и сердечниками из магнитного
Рис 7.23. Устройство памяти машины — запись двоичных чисел и а магнитную леиту.
а) схема записи на ленту, б) схема записи на барабан, в) характеристика намагничивания, г) импульсы записи, считывания и выходные импульсы после прохождения формирующего каскада.
Головка записи / — электромагнит с узкой щелью, перед ней движется магнитная лента или барабан 4\ изменения тока в обмотке головки перемагничивают участки ленты. Намагничивание участков ленты сохраняется и после прекращения воздействия магнитного поля головки вследствие большой коэрцитивной силы материала ленты (прямоугольная характеристика намагничивания). Головка считывания 2 подобна по устройству головке записи; при прохождении магнитной ленты с намагниченными участками мимо щели в обмотке возникает ток, служащий выходным сигналом считывания.
материала; после пропускания через катушку тока сердечник остается намагниченным и фиксирует импульс. Намагничение можно использовать в форме записи на ленту типа магнитофонной или на барабан, покрытый намагничивающейся пленкой. Наконец, импульсы можно фиксировать в виде зарядов на диэлектрике, на который в вакууме падает узкий электронный пучок. Последнее можно делать в обычной электронно-лучевой трубке, подобной кинескопу, стоящему в телевизорах, записывая точки вместо единиц на экране, где они сохраняются достаточно дол-13* 195
го. Можно, наконец, регистры выполнять на электромеханических реле.
Для запоминания сигналов применяются ультразвуковые устройства — линии задержки. Это — трубки, наполненные жидкостью (например, ртутью), или металлические стержни, на концах которых в контакте с ними расположены пластинки пьезоэлектрического материала (например, кварца). Прикладывая к пьезоэлектрическому материалу электрическое напряжение — импульс, мы получим
Рис. 7.24. Общий вид устройства памяти электронной вычислительной машины—магнитного барабана. (Видны ряды магнитных головок записи и воспроизведения сигнала.)
механический толчок, который передастся жидкости или стержню и будет распространяться в нем в виде звуковой волны. (Обычно используется не импульс постоянного тока, а импульс колебаний высокой — ультразвуковой — частоты). Поскольку звук имеет относительно небольшую скорость, волна доходит до конца линии задержки через заметный промежуток времени (доли миллисекунды). На конце линии волна падает на приемный пьезоэлектрический преобразователь, где снова превращается в электрический импульс. Выходной импульс попадает снова на вход той же линии, предварительно пройдя узел, восстанавливающий его форму. В результате импульс, вернее серия импульсов, будет как угодно долго циркулировать по линии задержки, периодически появляясь на ее выходе, 196
откуда число может быть снято и послано в регистр арифметического устройства.
Каждая запись в запоминающем устройстве должна быть сделана в определенном месте так, чтобы она не мешала предыдущим и последующим записям и чтобы записанное
Рис. 7.25. Устройство памяти машины на магнитных сердечниках (ферритовых торах).
а) ячейка для запоминания одного двоичного разряда: б) матрица для запоминания чисел (1,2— входные обмотки. 3— выходная обмотка).
При подаче напряжений на одну пару входных проводов 1 и 2 и протекании в них тока тор. стоящий на пересечении этих проводов, намагничивается. При вторичном „опросе* этого элемента импульс тока в выходном проводе 3 появляется только в том случае, если соответствующий тор был предварительно намагничен.
можно было отыскать. Говорят, что записанное число имеет адрес, условный номер того места, где оно записано.
Адрес — это номер строки и столбца на квадратной таблице точек, записанных на экране электронно-лучевой трубки, а также номер трубки, если их несколько, номер лампового, магнитного или релейного регистра, номер отрезка магнитной ленты и номер дорожки при записи с помощью магнитофона и магнитного барабана, номер линии
задержки и номер серии импульсов («слова») из числа циркулирующих в этой линии и т. д.
Очевидно, что необходимы коммутирующие устройства, которые, получая на вход команду (адрес числа), под действием этой команды производили бы нужные переключения для выдачи числа из указанного командой адреса в арифметическое устройство. Такие коммутаторы устроены не очень сложно. В машине параллельного действия,
Рис. 7.26. Устройство памяти — ртутная ультразвуковая линия задержки.
а} общий вид, б) схема (/—металлическая труба, 2—ртуть, 3—кварцевые пьезоэлек-трические преобразователи, 4~— входные электроды).
Электрические импульсы ультразвуковой частоты прикладываются ко входному электроду. Кварцевая пластина преобразует электрические колебания в механические. которые перелаются ртути и проходят по линии в виде ультразвуковых волн. Дойдя до приемного кварца, акустические волны снова преобразуются приемным кварцем в электрические колебания, которые снимаются с выходного электрода на усилитель. Время распространения звуковых колебаний в ртути является временем задержки.
где каждый разряд числа передается по отдельной шине, можно свести командные шины на диодный переключатель. При подаче на входные шины «слова», изображающего число, на выходной шине, имеющей номер, обозначенный этим числом, появляется напряжение. Выходная шина соединяется с регистром соответствующего номера и открывает его выходные вентили на кодовые шины арифметического устройства. Посылая по одним и тем же входным шинам разные числа, мы будем получать один и тот же выходной сигнал на разных выходных шинах, открывающих разные регистры.
Можно использовать этот диодный переключатель «наоборот», если выходные шины сделать входными. Подавая напряжение на одну из входных шин, мы получаем на выходных шинах комбинацию сигналов, дающую номер возбужденной шины.
Рис. 7.27. Схема циркуляционной памяти машины с ультразвуковой линией задержки.
Числа или .слова*, записанные в памяти, непрерывно циркулируют в замкнутом кольце; появившись на выходе линии, импульс претерпевает регенерацию (исправление формы, которая несколько ухудшается при прохождении линии) и снова подается на вход линии. Прохождение каждого импульса и каждого слова, состоящего из определенного количества разрядов, отмечается и фикси* руется счетчиком импульсов. Для записи или считывания слова в регистр подается адрес (номер по порядку записи) того места, с которого должно производиться считывание или на которое должна быть произведена запись. Кроме того, подается команда записи или считывания»—импульс на соответствующий вход. При совпадении чисел в счетчике и в регистре адреса устройство совпадений выдает на выход импульс, который пропускает команду через входные каскады команды. При записи числа каскад не* *— совпадений не пропускает на вход линии число, записанное на том месте, на котором должно быть записано новое число, н таким § образом старое число «забывается* машиной.
Подобные же устройства могут использоваться для перекодирования чисел из двоичной записи, например, в восьмеричную и обратно.
В тех случаях, когда в устройствах памяти слова изо-
бражаются последовательным
расположением символов во времени и сами слова расположены во временной последовательности, как в линии задержки или на ленте магнитофона, прихо-
Рис. 7.28. Устройство памяти машины
на электронно-лучевых труб-
ках.
л) запись импульсов из экране кинескопа, б) запись с помощью потенциалоскопз, а) вид экрана контрольной трубки с воспроизведением записанных импульсов. 1— электронная пушка, создающая узкий пучок электронов, 2— отклоняющая система, направляющая пучок электронов в определенную точку экрана трубки. 3—коллектор— электрод, собирающий рассеянные электроны, 4— стеклянная колба, 5—электронный луч, 6—входной электрод, 7—диэлектрик, на котором сохраняются электрические заряды, нанесенные при записи.
Электронный луч, падающий на диэлектрик, выбивает из него вторичные электроны, которые уходят на коллектор или возвращаются на поверхность диэлектрика в зависимости от потенциала диэлектрика. Подавая различные потенциалы на входную пластину 6, можно полу-чить различную величину заряда и потенциала в точке падения пучка. Заряд в этой точке сохраняется продолжительное время. При считывании пучок направляется в ту же точку; на входную пластину подается постоянный потенциал; ток коллектора меняется в зависимости от заряда, который сохранился в данный точке диэлектрика. Запись можно периодически восстанавливать, чтобы воспрепятствовать ее стиранию с течением времени.
дится ожидать, когда подойдет нужное слово, чтобы вывести его на шины из запоминающего устройства. В этих случаях на магнитной ленте имеется отдельная дорожка с записью синхронизирующих импульсов, которые пересчитываются счетчиком. Адрес искомого числа по-200
дается в специальный регистр адреса и сравнивается на каскадах совпадения с очередным номером в счетчике. При совпадении число выдается, так как по сигналу совпадения отпираются вентили и сигнал выдается на шины.
Время ожидания подхода нужного числа не очень велико на линиях задержки, несколько больше — на магнитном барабане и довольно велико—при записи на ленту. Самое короткое время выборки — у запоминающего устрой
Рис. 7.29. Ввод данных в машину с помощью перфорированной ленты.
а) лента с записью в двоичной системе входных данных (чисел илн команд) б) ввод данных в машину.
ства на электронно-лучевых трубках; оно равно времени установки электронного луча на нужную точку экрана, что достигается подачей напряжений определенной величины на отклоняющие электроды трубки. В машинах параллельного действия на каждый разряд имеется своя трубка. Поэтому адрес числа одинаков для всех трубок и выдается на них одновременно. Для быстродействующей оперативной памяти часто используют этот способ запоминания.
Оперативное и внешнее запоминающие устройства обмениваются зафиксированными в них данными. Готовые результаты вычислений передаются на магнитную ленту с трубок, а с ленты на трубки переписываются новые входные данные.
Ряд мест записи, или, как говорят, ячеек памяти, используется для записи команд управления машиной. Команды расположены в порядке номеров; очередная команда передается в регистр команд, отсюда в управляющее устройство для исполнения.
В различных типах машин используются различные виды команд. Стандартная команда определяет одно действие машины и вызывает все необходимые для этого дей-
Рнс. 7.30. Общая схема электронной вычислительной машины.
ствия переключения (отпирание и запирание коммутирующих узлов — вентилей). Под одним действием можно подразумевать более или менее сложный процесс. Так, если считать одним действием, например, передачу числа из Запоминающего устройства в арифметическое, то команда для выполнения этого действия должна содержать указание (или номер) операции и адрес числа. Такие команды* и машины, работающие с ними, называются одноадресными. Для того чтобы сложить два числа и записать результат, нужно три команды, но сами команды короткие.
Если под одним действием понимать весь процесс сложения и записи, то команда должна содержать номер операции и три адреса: первые два — откуда взяты слагаемые и третий — куда записать сумму. Эта система применяется в трехадресных машинах.
Все команды в последовательности их выполнения составляют программу работы машины над данной задачей. Программа составляется математиком-программистом и записывается в виде слов в алфавите машины, т. е. в виде чисел двоичного счисления на перфоленте или перфокартах. Затем программа вводится во внешнее запоминающее устройство машины (уже автоматически) и выполняется в порядке следования команд после запуска машины. Последней командой машины будет «остановка».
Таким же путем вводятся и исходные данные для вычислений. Результаты вычислений выводятся из машины печатающей автоматической машиной (телетайпом) или же с помощью быстродействующего фотопечатающего устройства.
Особенности электронных машин
Электронная вычислительная машина выполняет более широкий круг операций по сравнению с арифмометром и даже со счетно-аналитическими машинами. Она работает как расчетное бюро, выполняя не только все вычисления, но и все операции записи, сортировки и считывания промежуточных результатов, которые на клавишных машинах еще делает оператор.
Подобно тому, как оператору-расчетчику дается программа обработки исходных данных задачи и таблица для записи результатов, электронной машине также задается программа действий, которую она строго выполняет. Эта программа составляется несколько детальнее, чем для вычислителей. Машина выполняет программу несравненно быстрее. За несколько часов работы она сделает больше, чем вычислитель за всю свою жизнь. Машина, пока она исправна, не допускает ошибок. Ошибки появляются только при поломках машины или при наличии ошибок в программе. Для снижения частоты поломок принимается ряд эффективных мер: предварительный отбор деталей, работа в ослабленных режимах, периодические проверки точности с помощью специальных «испытательных» задач — тестов и т. д.
Машины сверхвысокой производительности не просто заменяют труд многих вычислителей. Несомненно, что
использование машин дает качественно новые возможности, которые заключаются в том, что с помощью машин могут ставиться и решаться задачи такого объема и сложности, решение которых при ручном счете было бы практически невозможно, хотя бы из-за трудностей кооперирования большого числа вычислителей, обмена информации между ними и согласования их действий при совместной работе над одной задачей.
Решающее значение в расширении функций электронных машин сыграло введение в их состав быстродействующей памяти и операций автоматической записи и отыскания слов в ней. В процессе обработки информации машина, использующая запоминающие устройства, т. е. обладающая памятью, реагирует не только на приходящие в данный момент сигналы, но и на те, которые приходили в прошлом. Такая машина способна накапливать сведения и использовать их по мере надобности. Эта способность не только чрезвычайно сильно расширяет возможности машин, но придает машинам совершенно новое качество по сравнению с автоматами, реагирующими стереотипно всякий раз на существующее в данный момент воздействие. Наличие памяти в принципе дает возможность менять реакцию по мере накопления информации. Такой способностью простейшие автоматы обладают лишь в зачаточном состоянии в том случае, если управление производится с интегрированием сигнала.
Введение в машины долговременной памяти, даже с той примитивной ее организацией, какая используется в машинах сейчас, позволяет имитировать на машинах, например процесс обучения, бывший характерным до сего времени только для живых организмов.
Одним из наиболее важных свойств электронных машин является также их способность до некоторой степени самостоятельно изменять собственную программу действий. Дело в том, что расписывать подробно ход за ходом длинную программу решения сложной задачи представляется очень долгой и трудоемкой работой. Поэтому программисты стремились сократить этот труд и добились в этом отношении заметных успехов. Для большинства математических задач ход вычислений разбивается на повторяющиеся серии одинаковых операций — циклы. Очевидно, нет смысла выписывать цикл за циклом одни и те же команды. Можно поручить эти обязанности той же машине, дав ей для этого соответствующую программу. Поскольку команды записываются так же, как числа, с ними можно произ-204
водить преобразования как с числами, например после выполнения команды преобразовать ее, прибавляя по единице к адресам для того, чтобы по очереди перемножить столбики чисел, размещенных в ячейках памяти в порядке номеров.
Особенно интересный и принципиально очень важный результат в этом отношении дает применение команды условного перехода. Эта команда не однозначна, она имеет два значения: Д — Перейти к выполнению команды № А и В — Перейти к выполнению команды № В. Выбор варианта А или В зависит от исхода специальной логической операции сравнения двух чисел х и у. Если х>У, выбирается вариант Д, если у — вариант В. Сравнение проводится машиной в конце цикла вычислений, и результат сравнения уже однозначно определяет выбор А или В.
Так, если при вычислении очередного члена ряда в итоге цикла вычислений получается величина больше заданной минимальной, машина возвращается к началу цикла (команда Д) и вычисляет следующий член. Если очередной член ряда оказывается меньше заданной минимальной величины, машина, не вычисляя следующего члена, переходит к новой операции, определяемой командой В. Условный переход представляет собой отклонение от принципа программного управления и переход к управлению с обратной связью. В самом деле, при условном переходе действия машины (следующая операция) зависят не только от внешнего влияния — программы, но и от результатов работы машины. Правда, способ введения обратной связи в этом случае сложнее, чем в случае следящих систем, и отличается от линейной связи в последних. Однако в принципе— это обратная связь (зависимость действия от результата предыдущего действия).
Используя в программе условный переход, программист может заранее не знать и не интересоваться тем, сколько повторных циклов (итераций) проделает машина до получения результата нужной точности. Машина без участия оператора и без предварительного плана сама решит по заложенному в нее правилу и исходя из обстановки, когда ей перейти к новому циклу операций. Не исключен и такой случай, когда сама же машина может составить себе это правило перехода на основании других, более общих указаний. Таким образом, с использованием в программе условных переходов машина приобретает некоторую самостоятельность в выполнении простых 205
операций, подчиняясь указаниям программы лишь более общего характера.
Введение операции выбора на основе сравнения представляет собой, как мы уже сказали, не арифметическую, а логическую операцию. Выбор — не единственная операция логики, которую выполняют машины. Выполнение логических операций наряду с математическими—это еще одно очень интересное и важное свойство счетных машин. Операцию выбора проделывает и счетно-аналитическая сортировальная машина.
Преобразование команд и условные переходы являются очень важными принципиальными особенностями электронных цифровых машин, которые открывают много совершенно новых возможностей их использования.
Какие же операции логики и как выполняют машины? Для ответа на этот вопрос следует сказать несколько слов о теоретической логике и алгебре релейных схем.
Теоретическая логика и алгебра релейных схем
Теоретическая логика представляет собой ветвь математических наук, объектом изучения которой уже не являются числа. Теоретическая логика разбивается на несколько разделов: исчисление высказываний, исчисление предикатов, исчисление классов и т. д. Предметом изучения теоретической логики являются средства, с помощью которых из заданных логических предложений, выражающих связь между объектами, можно получить новые предложения. Теоретическая логика строится как математическая дисциплина, т . е. с точной формулировкой основных положений и правил и введением формально-математических выражений для их записи.
Один из простейших разделов теоретической логики — исчисление высказываний — находит весьма полную аналогию в соотношениях, существующих для схем, состоящих из электрических контактов и соединяющих их проводов (релейно-контактных схем). Эта аналогия используется двояко: во-первых, математические формализмы теоретической логики используются для исследования свойств релейных схем, как рабочий аппарат для анализа и синтеза схем для технических применений; во-вторых, релейные схемы, построенные по логическим формулам, позволяют автоматически решать логические задачи.
Несомненно, что область аналогий между положениями теоретической логики и решающими схемами не ограничит-206
ся исчислением высказываний. Усложнение вычислительных схем приводит и приведет в дальнейшем к расширению соответствующего логического аппарата, подлежащего использованию в машинной логике.
В исчислении высказываний изучаются простейшие утверждения или высказывания, каждое из которых может быть либо ложным, либо истинным. Например, такими высказываниями могут быть:
Х=Дверь в лифт закрыта,
У=Пассажир находится в лифте,
Z=Мотор вращается,
V=Ha фотоэлемент падает свет,
W=Кнопка электрического контакта нажата и т. д.
Из этих простых высказываний посредством сопоставления их друг с другом в различных связях могут быть построены новые высказывания, которые также могут быть либо истинными, либо ложными.
Принимаются следующие связи между высказываниями:
1) Конъюнкция X&Y (читается: икс и игрек). Например, Дверь в лифт закрыта, и пассажир находится в лифте. Сложное высказывание X&Y истинно в том и только в том случае, если истинны X и У.
2) Дизъюнкция X\/K (читается: икс или игрек). Например, Кнопка контакта нажата или на фотоэлемент падает свет. Высказывание X\JY истинно тогда, когда истинно по крайней мере одно из высказываний X, Y (или оба вместе). Слово или, применяемое для обозначения дизъюнкции, не следует понимать в смысле исключения — либо-ли-бо («либо пан, либо пропал»), а только в смысле или X, или У, или оба вместе. Для исключающего или в смысле либо-либо можно составить особое выражение, более сложного вида. __
3) Отрицание X (читается: не икс). Не икс истинно, когда икс ложно, и наоборот. Например, Х=Мотор вращается— ложно; тогда X—Мотор не вращается — истинно.
4) Импликация X—► У (читается: если икс, то игрек.) Например: Если кнопка нажата, то мотор вращается. Однако это соотношение не следует понимать в смысле причины и следствия, т. е. в смысле: Если кнопка нажата, то тогда и только тогда мотор вращается. Высказывание X -* Y истинно всегда, когда X ложно или когда У истинно. Оно ложно только тогда, когда X истинно, а У ложно.
Можно ввести еще и другие элементарные связи между высказываниями.
Применяя основные связи несколько раз, можно образовать из данных высказываний все более сложные, например:
[(V V &Х & У] -> Z или (Х&Г V^j и т. д. (7.1)
Каждое такое сложное высказывание — логическая функция — может быть либо истинным, либо ложным в зависимости от комбинаций истинности и ложности входящих в него логических аргументов—независимых переменных Хг У, Z, V, W. Можно перечислить все комбинации значений аргументов и для каждого вычислить значение функции (в приведенном примере их всего 25 = 32).
Значения сложного логического высказывания ф(Х, У) — логической функции от двух аргументов — можно наглядно представить в виде квадратной таблицы. Два столбца этой таблицы соответствуют значениям независимого переменного X, а две строки — значениям У. На пересечениях строк и столбцов помещено соответствующее значение функции ф(Х, Y).
Обычно истинное высказывание обозначается единицей, а ложное нулем в двоичном алфавите, поскольку значения каждого высказывания укладываются в этот алфавит.
Для конъюнкции, дизъюнкции и импликации таблицы значений выглядят следующим образом:
Любую четырехзначную таблицу такого вида можно представить с помощью некоторого логического высказывания. Так, например, таблица сложения в двоичной системе счисления, которая записывается
0 1
0 1
1 о
совпадает с
таблицей для логического выражения
Двоичная таблица умножения совпадает с таблицей конъюнкций.
Вообще, любую функцию от k аргументов 117 (Хь
если сама функция и каждый из её аргументов может принимать только два значения, обозначаемые 0 и 1 соответственно, можно задать в виде таблицы:
X, *2 W (Х„ х2,
0 0 0 №(0,0, • • , 0)
0 0 1 W (0,0, . . 1)
1 i 'Г №(1, 1,’.. , 1).
Число значений данной функции от k аргументов
(число строк в таблице) равно 2А. Общее число всех возможных функций от k аргументов равно 22*.
Любую функцию, заданную таблицей, можно выразить с помощью формулы, используя элементарные логические функции: конъюнкцию, дизъюнкцию и отрицание и, наоборот, любую формулу можно записать в виде таблицы.
Таблица, состоящая только из единиц или только из нулей задается так называемыми всегда истинными и всегда ложными высказываниями, примерами которых могут служить
А'&Х = 0; Х&Л и т- Д- (7-2)
Можно показать, что для составления всех сложных высказываний, которые получаются с применением отрицания, конъюнкции, дизъюнкции и импликации, достаточно только двух операций — отрицания и конъюнкции. Тогда, например, импликация выразится так:
= Х Vr> (7-3)
а дизъюнкция
= Ж (7-4)
что нетрудно проверить по таблицам. Здесь знак равенства означает эквивалентность обоих выражений в смысле ложности и истинности. Обычно, однако, применяют дизъюнкцию для упрощения записи.
В других разделах логики—исчислении предикатов и исчислении классов—применяются формально те же соотношения между логическими переменными, но в них вкладывается иной смысл. Интерпретация логических
14 И, А, Полетаев 209
связей в исчислении классов в ряде случаев помогает освоиться с формализмами теоретической логики.
В исчислении классов под переменной X понимают уже не высказывание, а класс или множество элементов или предметов, для которого истинно данное утверждение (предикат). При этом в рассмотрение вводятся также пустой класс, не содержащий элементов, и класс всех предметов, включающий все возможные элементы. Можно изобразить класс всех предметов в виде площади прямоугольника и класс X как часть этой площади, ограниченную, например, окружностью. Тогда выражение X &Y будет пересечением классов X и У, т. е. площадью, принадлежащей обоим классам одновременно. Подобные истолкования получают и другие логические выражения.
Иногда для обозначения конъюнкции принимают алгебраический знак умножения (•), для дизъюнкции—сложения ( + ), и вводят алгебраический знак равенства ( = )
= хуу=х4-г. (7.5)
Применяя эти обозначения, мы приходим к привычным и потому легко запоминающимся соотношениям:
Х&Г Х\/¥ 0Ц-Х = Х
0-0 = 0 04-0 = 0 0-Х = 0
о.1=о 04-1 = 1
ьо = о 14-0=1 х4-к=У4-х
1-1 = 1 14-1 = 1 Х-¥=У-Х (7-6)
%4-(r+z)=(%4-r)4-z %(rz)=(xr)z x(r4-z)=xr4-xz
Однако соотношение 1 + 1 = 1 уже выходит за пределы привычных. Кроме того, в этих обозначениях верны также и следующие соотношения:
Х4-Х + Х4-Х = Х; = Х4-1 = 1;
X4-KZ==(X4-r)-(A'4-Z) и т. д. (7.7)
Эти соотношения не верны для обычной алгебры. Поэтому, во избежание недоразумений, логические связи лучше записывать без помощи алгебраических знаков, оставив только знак равенства.
Любое сложное логическое высказывание можно привести к так называемой «нормальной форме», представ-210
ляющей собой конъюнкцию членов, содержащих только дизъюнкции переменных и их отрицаний или же дизъюнкцию конъюнкций членов. Приведение к нормальной форме производится последовательным применением эквивалентных преобразований вида:
Х&К = К&Х; = (коммутативность); (7.8) Х& (Y\/Z) =X&Y\/X&Z't X V P&Z) =
= X\/Y&X\/Z (дистрибутивность); (7.9) (X&r)&Z = X& (K&Z);
Рис. 7.31. Символическое изображение логических операций в исчислении классов.
X\/(K\/Z)=(X\/F) \JZ (ассоциативность); (7.10)
lt = X; f=X; X&F= Jv*7; X\/Y = X&Y. (7.11)
Обозначая сложное выражение W (в виде функции f) от аргументов ^2, Х3,.. . , Хп,
W=f (Xlt Х2, Х3,...,ХД
можно показать, что функция f (X[t Х2, Х3, . . . ,Хп) равна ее разложению по одному или более переменным:
f (Xi, х2, Х3....Хп) = [X.&f (1, Х2, Х3, . . . , Х„)] V
VIX.&HO, Х21 Х3,...,ХЯ)],(7.12)
J4* 211
j(Xt, X3......X;i) = [X1&X2&)'(l, 1, X3, .. . , X„)l v
V[W/(|,O. X3..........x„)]V
Vix^&no, i,x3.........*„)]V
\/Й1&ЗД(О, O, X3, ...,X„)](7.13) и т. д. или же
f (Xb X2, X3, . . . , Xn) = [X, V f (0, X2, X3, . . . , X„)] &
xb x2, x3,...,x„)] =
= HiV*2W.°>
&[X^X2\jf(l,0, x3, ...,X„)]&
& 1, X3t. . . ,X„)] (7.14)
и т. д.
Продолжая разложение и проводя его по всем переменным, получим выражение W в одной из нормальных форм.
Отметим еще логическую операцию, обозначаемую так называемым знаком Шеффера. Эта операция интересна тем, что все логические связи можно представить с помощью одной этой операции. Связь двух переменных X и У с помощью знака Шеффера обозначается Х/У и записывается словами: X и Y несовместны. Эта связь эквивалентна отрицанию конъюнкции или дезъюнкции отрицаний
Х/У = Х&У = X V У. (7.15)
В этой записи
Х]Х = Х\ (XIX)I(YIY) = xiy=1x\/Y и т. д.
Очевидно, если дизъюнкция и отрицание могут быть выражены с помощью только знака Шеффера, то то же можно сделать и со всеми остальными связями.
Релейные схемы
Реле с двумя контактирующими электродами может иметь лишь два состояния: включено и выключено, подобно высказыванию логики, которое может быть либо истинным, либо ложным. Логические связи между высказыва-212
ниями могут быть успешно сопоставлены со схемами взаимных соединений между реле.
Сопоставление состояний реле с истинностью высказываний может быть двояким:
либо
1 = истина = включено (контакт)
О = ложь—выключено (разрыв), либо
истина=выключено (разрыв) 0 = ложь—включено (контакт).
—— ---
У
Рис. 7.32. Релейные схемы, изображающие логические операции.
Оба типа сопоставлений равноценны и равноправны. Они образуют так называемые взаимные схемы соединений, о чем мы скажем несколько слов позже.
Воспользовавшись, например, сопоставлением первого типа, мы приписываем каждому реле одно определенное высказывание (X, У, Z...) и, соединяя реле друг с другом, получим схемы, эквивалентные сложным высказываниям (двухполюсники). Вся схема в целом от входа до выхода будет давать соединение или разрыв в соответствии с ложностью или истинностью сложного высказывания, которое она изображает, и в зависимости от включения (истинности) или выключения (ложности) реле — «аргументов».
В такой системе сопоставления конъюнкция изображается последовательным включением двух реле (см. рис. 7.32). Конъюнкция истинна тогда и только тогда, когда истинны оба высказывания. Последовательная цепь проводит тогда и только тогда, когда включены оба реле. Дизъюнкция изобразится параллельным включением кон
тактов. Отрицание изображается контактом, работающим при включении реле (истина) не на замыкание, а на размыкание (на схемах изображается черным контактом).
Сформулировав и записав логические высказывания, можно перейти от них к релейной схеме.
Примем, например, следующие обозначения логических высказываний (и соответствующих им контактов):
Di, D2— двери лифта на первом и втором этажах закрыты,
— дверь кабины лифта закрыта,
77— пассажир находится в кабине,
7<i — кнопка спуска в лифте нажата,
К2 — кнопка вызова на первом этаже нажата.
Рис. 7.33. Схема управления лифтом.
Сформулируем сложное высказывание, эквивалентное условию включения мотора лифта— Вниз:
(дверь на первом этаже закрыта и дверь на втором эта же закрыта и дверь кабины закрыта и пассажир в кабине и нажата кнопка спуска) или [дверь на первом этаже закрыта и дверь на втором этаже закрыта и пассажира нет в кабине и кнопка вызова нажата и (дверь в лифте закрыта или не закрыта)]:
М = (Di&D2&7)ji&//&/(1) V
\J[Dx&D2&n&K2&{Dn\JD^\. (7.16)
Преобразуем
М = (D!&D2) & 1(Ол&/7&/(1) V (/Ж2)].
Схема, реализующая эту логическую формулу приведена на рис. 7.33.
214
Другой пример. Необходимо тремя контакторами Klt К2, К3 включать три исполнительных механизма Л12’ М3 в комбинациях, задаваемых таблицей
Л2 К3 Л4, М2 М3
ООО 010
0 0 1 0 0 1
0 10 0 10
0 11 0 11
10 0 10 0
10 1 10 1
110 110
111 0 10
Для этих механизмов составляем по таблице выражений таким способом, чтобы для каждого состояния, когда ме ханизм включен, получить конъюнкцию выражений коммутаторов, и затем выражения этого вида объединим знаками дизъюнкции.
М, = #2&^з) V (WW (7-18)
М2 = (KfiK2&K3) \J (Я,&К2&Кз) V (К1&К2&Кз) V
V ^,&к2ад v (К^МКз); (7.19)
Л43 = (МК2&Кз) V (КМ&Кз) V (ТС1&^2&/Сз). (7.20)
Упрощая, получим:
м^к.&^х/Лз);
м2=к2\жМ); (7.21)
м3^к3&(к^к2). По этим формулам составляем схему, приведенную на рис. 7.34.
Если учесть, что число возможных сложных выражений с ростом числа логических аргументов п возрастает как 22" и уже для п=6 составляет 2,5- 1019, то станет ясно, что наличие строгого формального метода для проектирования сложных схем является весьма полезным.
Правда, аппарат исчисления высказываний не дает возможности проектировать наилучшие схемы, например, в смысле наименьшего числа элементов, и для реше-215
ния этой важной для техники задачи приходится прибегать к дополнительным приемам. В этой очень трудной области сделано уже много, но в ней еще имеется много нерешенных проблем.
Ясно, что в качестве коммутирующих элементов могут применяться электронные лампы. Приведем некоторые схемы с их применением в качестве примера. Уже знаков мый нам вентиль или каскад совпадений реализует логическую операцию конъюнкции. Собирательный каскад выполняет многократную дизъюнкцию. Реле ускорения, упомп-
Рис. 7.34. Схема управления тремя механизмами Aflt M2t М3 с помощью трех контакторов К3, К2, К3.
навшееся нами в гл. 2, выполняет операцию конъюнкции сигнала (нужно) от контроллера и отрицания сигнала (нельзя) от мотора.
Как мы уже говорили выше, можно вместо применявшегося нами до сих пор обозначения (1) для истинности применять не соединение, а разрыв контактов, для ложности (0) — не разрыв, а соединение. В этом случае конъюнкция изобразится параллельным, а дизъюнкция последовательным соединением контактов.
Две схемы, приведенные на рис. 7.36, эквивалентны. На левой схеме инстина изображается замыканием контактов, на правой — размыканием
X&V\/yyu = l^\/Ti\/v. (7.22)
Узловые точки схемы / становятся контурами схемы II и наоборот (включая внешний контур, показанный пунктиром). Замкнутые контакты схемы I (истина) превращаются в разомкнутые контакты схемы II (истина) и наоборот. Такие схемы называются «взаимно-обратными» или «взаимными».
Рис. 7.35. Электронные схемы, изображающие логические операции.
Логические выражения исчисления высказываний позволяют описать в алгебраической форме любые релейноконтактные схемы. Одновременно на релейных схемах можно построить аналог любого выражения исчисления высказываний.
Рис. 7.36. Взаимно-обратные схемы.
Машины и мышление
Современные электронные вычислительные машины уже начали новую эпоху в кибернетике несмотря на то, что им от роду всего 12 лет. Быстрота обработки ими информации, гибкость, с какой они могут переключаться с одной операции и с одной задачи на другую, разнообразие выполняемых операций и, наконец, наличие собственной памяти и некоторая самостоятельность машин, работающих продолжительное время без вмешательства оператора,— все эти черты создают качественно новое явление. Машины получают все новые и все более удивительные применения, они вырывают у человека одну за другой его, казалось бы, неотъемлемые человеческие обязанности, заменяют его труд во все большем количестве операций, которые всегда считались областью умственной работы.
В самом деле, если бы мы услышали заявление о том, что можно не думая переводить текст с английского языка на русский, выбирать нужные книги или библиографические карточки из каталога, вести бухгалтерский учет, 218
продавать железнодорожные билеты, давать справки о расписании поездов, управлять движением самолетов над аэродромом и выводить машины в нужном порядке на посадку и все это делать без ошибок и с невероятной скоростью, мы не согласились бы с такой возможностью и запротестовали. Однако современные электронные вычислительные машины делают все это и многое другое, и, конечно, вслед за этими операциями будут появляться все новые. Значит ли это, что машины думают, выполняя человеческую работу, думают так, как думает человек, делающий то же самое?
Это — вопрос, на который нелегко ответить, даже стоя перед лицом фактов. Ясно, что результаты работы живого и машинного переводчиков с английского языка на русский совпадают. Ясно, что физические процессы в работе человека и машины не имеют ничего или почти ничего общего. И в том и в другом случае речь идет об обработке информации, которая заключена в сигналах, воплощенных в определенном физическом процессе, закодированных некоторым кодом в определенном алфавите и преобразуемых в соответствии с некоторым алгоритмом. Все эти черты кибернетического процесса перевода различны для живого и машинного переводчиков, кроме, быть может, алгоритма преобразования, который, по-видимому, имеет много общего для обоих переводчиков. Оба переводчика перекодируют информацию с кода, называемого английским языком, в код, именуемый русским языком.
Если же мы согласимся считать, что эквивалентность результатов влечет за собой эквивалентность терминов, то, будучи последовательными, мы обязаны будем признать, что простейшие сигнальные устройства, например пожарная сигнализация или железнодорожная автоблокировка, также обладают способностью думать. Это явно противоречит интуитивным представлениям о процессе мышления и потому с этим нельзя согласиться. По-видимому, самое понятие «думать» требует четкого и однозначного определения. Однако такое определение дать нелегко.
То, что делает человек, происходит посредством физиологического процесса мышления. Мышление более обширно, чем те функции, которые оно выполняет при переводе с английского на русский. То, что делает машина, она производит с помощью электронных процессов. И физиологический процесс мышления, и электронные процессы вычислений в случае перевода имеют одинаковое информацион
ное содержание. По своим возможностям мышление шире, чем возможности современной вычислительной машины. По своей физической природе мышление не имеет ничего общего с работой машины.
Однако поскольку оба процесса ведут от одинаковых исходных данных к одинаковым результатам, и поскольку оба процесса являются кибернетическими, т. е. связанными с информацией, нельзя не признать, что они родственны.
Кибернетическое, информационное содержание мышления и содержание электронных вычислений пересекаются в узких областях, но не совпадают полностью. Физические процессы в обоих случаях различны.
Может ли машина, хотя бы в принципе, охватить все области человеческого интеллекта и можно ли расширить ее возможности за пределы человеческого мышления? Этот новый вопрос пока не имеет решения. Сегодня у нас нет достаточных оснований ответить на него твердо да или нет, но его можно и нужно обсуждать. Для того же, чтобы подойти к обсуждению этого вопроса, необходимо знать, что представляют собой процессы, протекающие в человеческом мозге. К работе мозга мы подойдем в гл. 9.
ГЛАВА 8 —мм—
РОБОТ
Слово «робот» принадлежит чешскому писателю-сатирику и публицисту Карелу Чапеку *. Это слово прочно вошло в языки многих народов. У Чапека роботы (изобретенные инженером Россумом живые автоматы) идеально приспособлены для работы на станках вместо рабочих. Они не обладают человеческими чувствами и лишены человеческих запросов. По мере усовершенствования роботов они из автоматов перерастают в нечто иное и в финале драмы уничтожают своих хозяев, но вынуждены погибнуть и сами, так как только люди владеют секретом изготовления роботов. Последний из оставшихся людей вкладывает в роботов свойство желать и размножаться.
Художники-карикатуристы любят изображать роботов в виде нелепых фигур, скрепленных огромными шарнирами и опутанных свитыми в спиральки проводами.
Немало досужих изобретателей потрудилось над изготовлением игрушек в рост человека, нарочито причудливо
* Karel Capek. <R. U. R.» Hry. Ceskoslovensky Spisovatel. Praha.
221
го вида, умеющих вставать, садиться, ЦоворачИваДь голову, произносить фразы и т. д.
Все эти выдумки, рассчитанные на то, чтобы поразить воображение, а подчас и на самом деле производящие сильное впечатление, совсем не так удивительны, как действительно полезные роботы, которые не имеют вида ка-
Рис. 8.1. Робот „Сабор IVе изобретателя Августа Губера (1938).
рикатуры на человека, не подражают внешне манерам и поведению человека, но зато точно и безошибочно, неутомимо и быстро выполняют обязанности, которые всего несколько лет назад мог выполнять только человек и никто другой. То и дело появляются сообщения о новых достижениях информационной кибернетической техники, и поток этих новостей нарастает. Мы ведь делаем только первые робкие шаги по пути создания и эксплуатации роботов, и трудно еще предвидеть, сколько открытий, удивительных изобретений лежит на этом пути, какие новые факты принесет нам завтрашний день.
Мы буДем Называть «роботами», пользуясь терминологией Чапека, автоматические устройства, в которых реализуются следующие возможности:
1) автоматические измерения, непрерывные или дискретные, некоторого множества физических величин и
Рис. 8.2. Роботы (в изображении карикатуриста).
автоматический непрерывный ввод, по мере получения, результатов измерения (сигналов) в решающее устройство в схеме робота;
2) передача входных сигналов внутри схемы робота и запоминание информации;
3) обработка входной информации в соответствии с некоторым алгоритмом. Алгоритм может быть не единствеи-
ным, он может быть выбран Из множества Позмо/Кных алгоритмов по определенному правилу в соответствий с поступающей извне или накопленной ранее информацией. В результате обработки входной информации образуется выходная, исполнительная информация — решение;
4) исполнение решения, реализуемое в виде действий орудий с использованием, быть может, значительных количеств энергии;
5) автоматическое измерение результатов действия (контроль исполнения) и введение полученной информации во входные устройства в виде сигнала (обратная связь).
Сложный машинный автомат-робот способен автоматически и самостоятельно выполнять сложные операции, приспосабливаясь к меняющимся внешним условиям и производя на всякое изменение внешних воздействий некоторое ответное действие— реакцию, рациональную в смысле решаемой им задачи.
Робот воздействует на некоторый объект, наблюдает за состоянием объекта и результатом его обработки, вычисляет на основании наблюдений, какие действия необходимо предпринять для дальнейшей обработки наилучшим (в смысле некоторого определенного критерия) образом. Результаты вычислений выдаются управляющему устройству (состояние которого также «известно» вычислительной машине) и используются для дальнейшего воздействия на объект.
По такой схеме работает автоматический прокатный стан, автоматический фрезерный -станок, артиллерийский комплекс противовоздушной обороны. По такой схеме может работать огромное количество автоматов-роботов, выполняющих каждый только одну задачу,— «одноцелевых роботов».
В общем случае в схеме робота может использоваться многократная самонастройка с большим числом «этажей» иерархии регулирования.
Робот этого типа должен воспринимать информацию, понимать ее, запоминать, обрабатывать и производить действия на основании результатов вычислений. Все эти операции по отдельности и вместе машина способна выполнить.
Машины могут воспринимать информацию о внешних событиях и переводить ее на свой язык, ъ е. кодировать рабочим кодом вычислительного устройства, 224
Огромное количество разнообразных по размерностям физических величин может автоматически, непрерывно или периодически, измеряться и превращаться в сигнал. Только перечисление этих величин займет много места, а описанию методов измерений пришлось бы посвятить не одну книгу. Устройства, превращающие отсчет физической величины в сигнал, называются в телемеханике и телеметрии датчиками величины. Каждый датчик характеризует-
Рис. 8.3. Примеры датчиков — преобразователей механического перемещения в электрическое напряжение или ток.
/ — емкостный датчик (смещение пластины электрического конденсатора вызывает изменение его емкости и изменение резонансной частоты электрического контура); 2 — пьезоэлектрический датчик (деформация пьезокристалла вызывает появление электрического потенциала на его поверхности); 3 — индукционный датчик (смещение магнитного сердечника вызывает изменение индуктивности катушки п изменение резонансной частоты электрического контура); 4 — потенциометрический датчик (смещение движка потенциометра вызывает изменение тока, текущего через потенциометр); 5—тензометрический датчик (деформация металлической проволоки изменяет внутренние механические напряжения и электрическое сопротивление проволоки, а также и текущий через проволоку ток); 6—угольный тензометр-датчик (деформация угольного столбика меняет его электрическое сопротивление и текущий через него ток).
ся, во-первых, той входной физической величиной, которую он измеряет и, во-вторых, тем типом сигнала, который он выдает на выходе — физическим алфавитом и кодом.
Входной величиной может быть: геометрический размер (длина), скорость — первая производная длины по времени, ускорение — вторая производная, угол (отклонение от заданного направления), угловая скорость, сила, давление жидкости или газа, концентрация водородных ионов, сила света различных длин волн, звуковое давление и высота тона, электрический ток и напряжение, напряженность электрического или магнитного поля, число ионизирующих 15 И. А. Полетаев 225
частиц, количество (уровень) жидкости, масса, вес, поток (газа, жидкости), протекающий через поперечное сечение канала, частота, амплитуда, фаза колебаний (механических, электрических, акустических), твердость, упругость, прозрачность, электропроводность, диэлектрическая и магнитная проницаемости, вязкость, концентрация ионов и т. д. и т п. При этом каждая величина может измеряться не в одной только точке, а во многих и, следовательно, измеряться будет не местное значение, а распределение величины по контуру, поверхности или объему и изменение этого распределения во времени. Измерения каждой из величин могут, в случае необходимости, произво-
Рис. 8.4. Мостовая схема измерений.
О] — а2 — место подключения питания, — Z?2 — место подключения измерительного прибора, х — чувствительное сопротивление.
диться в различных пределах, с различной точностью, в различных масштабах, непрерывно или периодически, с различным темпом. Измерения могут быть как абсолютные, так и относительные или разностные.
Выходным сигналом датчика чаще всего является сигнал, представляющий собой непрерывную электрическую величину, например величину прямого тока, с последующей перекодировкой в любой алфавит.
Техника автоматических измерений весьма богата. Одну и ту же физическую величину часто представляется возможным измерить различными методами, используя различные эффекты. Так, например, перемещение или изменение геометрического размера можно превратить в величину электрического напряжения, связав перемещаемый элемент с движком потенциометра (металлического, полупроводникового, жидкостного), или с перемещающейся пластиной переменного конденсатора, или с подвижной катушкой переменной индуктивности (вариометра), или 226
с пьезоэлектрической пластиной и т. д. В зависимости от требований точности, пределов измерения, постоянной времени выбирают тот или иной метод измерения.
В измерениях большой популярностью пользуются так называемые компенсационные методы, сущность которых сводится к тому, что измеряемая величина непосредственно в приборе сравнивается с некоторой стандартной величиной той же размерности. Чаще всего такое сравнение производится в электрической схеме моста. Компенсационные схемы особенно полезны в тех случаях, когда чувствительный элемент реагирует не только на изменение измеряемой («полезной») величины, но и на другие внешние условия.Так, например, при измерении деформаций и усилий с помощью проволочных электрических тензометров проволока, меняющая электрическое сопротивление под воздействием натяжения, меняет сопротивление также *и под воздействием изменений температуры; или при измерении влажности чувствительный элемент, кроме влажности, оказывается также чувствительным к температуре, давлению и т. д. В этих случаях в схему моста полезно включать два одинаковых чувствительных сопротивления, причем одно из них используется^для измерений (тензометр, гигрометр), а другое — для компенсации паразитных влияний (нагрев и пр.), которые оказываются одинаковыми для обоих сопротивлений. При этом, разумеется, компенсирующее сопротивление не подвергается воздействию измеряемой величины. Меняя компенсирующее сопротивление, можно заранее «настроить» мост на желаемое значение измеряемой величины (сместить нулевую точку).
В схемах измерения часто применяют следящие системы. При этом узлом сравнения может являться мостовая схема. Выходной сигнал моста усиливается и приводит в действие исполнительное устройство, которое воздействует на компенсирующий элемент (например, мотор перемещает движок реостата). При этом измеряемая величина «отрабатывается» исполнительным устройством значительной мощности, и, таким образом, при измерении очень малых энергий на выходе активного измерительного устройства такого рода в качестве сигнала получается довольно значительная энергия. Кроме того, указанный метод измерения позволяет получать сигнал в виде угла поворота вала, что иногда оказывается удобным.
Полученный в результате измерения сигнал, отображающий измеренную величину, распределение величины 15* 227
или распределение нескольких величин, должен -быть закодирован в алфавите вычислительного устройства, которое использует этот сигнал. В результате кодирования сигнал может быть представлен либо в виде непрерывно меняющейся величины, либо в дискретной форме. При кодировании могут меняться и физический алфавит сигнала и масштабы, а также производиться функциональные преобразования шкал.
Рис. 8.5. Общая схема автомата-робота, воздействующего на некоторый объект.
Так, например, измерение размера, взятое с выхода датчика в виде электрического напряжения, может быть преобразовано в поворот вала и затем переведено в алфавит дискретной бинарной записи и пробито на перфокарте. Величина электромагнитного поля и звуковое давление, изменяющиеся в таких широких пределах, что максимальный отсчет отличается от минимального в тысячи раз, могут быть изображены сигналами, пропорциональными логарифмам этих величин, и представлены на шкале длиною в несколько единиц.
Распределение освещенности по участку экрана, измеренное с помощью фотоэмиссии электронов или с помощью фотосопротивлений и превращенное, таким образом, в распределение тока или сопротивления, перекодируется во 228
временную последовательность величин электрического напряжения посредством последовательного просмотра точек экрана электронным пучком и затем превращается в амплитудную модуляцию метровых радиоволн для передачи изображения на расстояние по радио. Одновременно передавая три распределения -освещенности различных цветов, мы кодируем цветное плоское изображение. В принципе можно закодировать и передать шесть -распределений, соответствующих цветному стереокадру.
Распределение черных и белых пятен в кадре, например рисунок буквы печатного текста, может быть превращено фотоэлементом с разверткой телевизионного типа в последовательность во времени электрических импульсов (последовательный двоичный код) или в сигнал наличия и отсутствия напряжения в ряде шин — по числу точек измерения (параллельный двоичный код). Каждой букве данного шрифта будет соответствовать одно двоичное число, букве, записанной любым шрифтом, — некоторый набор двоичных чисел. Таким способом в машину можно вводить печатный текст, предназначенный для обычного чтения.
Можно сказать, что любое множество значений измеряемой физической величины или множество распределений этой величины может быть сопоставлено посредством измерения и кодирования -с любым, равны-м по объему, множеством значений сигнала. Разнообразие измеряемых величин, технических приемов измерений и сигналов составляет богатую и пеструю картину техники автоматических измерений.
Сигнал, полученный в результате кодирования измеренной величины, может быть передан по каналу связи (телеметрический канал) и на приемном конце записан с помощью регистрирующего устройства. Часто уже такая фиксация результата дистанционного измерения оказывает огромную услугу. Эта техника дает возможность пользоваться результатами измерений (например, космического излучения), проведенных в стратосфере измерительными приборами — датчиками, установленными на борту ракеты, или изучать режим работы двигателя беспилотного самолета в полете.
Передача сигнала от измерительных устройств к вычислительному устройству может осуществляться и не на многие километры, а всего лишь на расстояние нескольких метров, по кабелю. В вычислительном устройстве сигнал, 229
несущий информацию об измеренных величинах, подвергается обработке для определения наилучшего действия — реакции в данной ситуации.
Прежде всего, каждая из измеренных величин, являясь объектом обработки, дает материал для определения производных по времени различных порядков и интегралов, спектрального состава, функций корреляции и т. д. Затем различные величины могут быть сопоставлены друг с другом и вычислены функции от нескольких переменных. Так, по трем текущим координатам могут быть вычислены векторы скорости и ускорения и определена экстраполяцией будущая траектория движущейся точки. По данной температуре можно определить скорость нагрева или остывания и будущую температуру и т. д.
Интересным примером обработки измеренных величин является определение текущих спектров звуковых колебаний. Звуки, издаваемые человеческим речевым аппаратом, сложны по своему спектральному составу. Каждый звук, или фонема, представляет собой сложный процесс во времени, который может быть представлен суммой гармонических составляющих. Эти составляющие, спектр фонемы, зависят не только от произносимой буквы, но и от места в слове, характера произношения этой буквы в слове (например, буква «о» в словах слон и отец), от тембра голоса, интонации, ударения и т. д. Однако для одной и той же фонемы, произносимой различными голосами и с различной интонацией, сохраняются некоторые особенности, которые и позволяют на слух различать одну фонему от другой. Эти особенности заключаются в различном относительном расположении отдельных спектральных составляющих.
Подвергая электрическое напряжение, снятое в качестве сигнала с выхода акустического датчика — микрофона, спектральному анализу и обрабатывая полученный спектр с целью опознавания характерных особенностей фонем, можно в некотором алфавите получить сигналы, соответствующие определенным фонемам, и заставить исполнительное устройство—автоматическую пишущую машинку типа телетайпа печатать в виде текста речь, произносимую перед микрофоном. Так может быть устроен простейший автоматический стенограф. Правда, этот автомат не будет знать грамматики и будет записывать слова так, как он их слышит. Вместо слова отец он запишет, наверное, атец, а слово слон, весьма возможно, запишет как шлон, если 230
говорящий шепелявит или если в канале записи имеются искажения.
Можно заставить автоматического стенографа учитывать и грамматику; это задача более сложная, но она разрешима. К ней мы еще вернемся.
По мере поступления сигналов в вычислительное устройство и по мере их обработки может производиться и автоматическая регистрация, или запоминание, как самих сигналов, так и их функций. Это может оказаться необходимым либо для того, чтобы контролировать впоследствии работу робота, либо для самого решения задачи, если в процессе решения приходится прибегать к использованию прошлых значений сигнала.
Далее производится решение задачи о выборе реакции, необходимой для достижения нужного результата в данных условиях. Вычисления, связанные с нахождением этого решения, могут быть простыми или сложными в зависимости от характера задачи. Они могут производиться с помощью устройств дискретного счета или непрерывного действия и определяться программой решения или структурой вычислительного устройства, предусмотренными заранее для данной задачи. Вычисления могут включать в себя логические операции сравнения и выбора, обращение к памяти и сравнение с прошлыми входными или промежуточными данными или результатами.
Существенным моментом в решении задачи является то, что для определения оптимального или наилучшего решения некоторая переменная величина должна в результате принимать экстремальное (наибольшее или наименьшее) значение. Такой величиной может быть, например, время, потребное для всего цикла обработки, которое нужно свести к минимуму, или же количество выданной продукции из данного количества сырья, которое должно быть наибольшим, и т. п. Важно то, что такая величина — критерий качества работы автомата — всегда существует, будучи заложенной конструктором в структуру машины или в программу ее работы, и на основании этого критерия машина может самостоятельно выбирать именно то действие из всех возможных, которое соответствует наилучшему, или оптимальному, значению критической величины.
Полученное вычислительным устройством решение подается в виде сигналов к управляющим элементам робота, которые воздействуют на исполнительные механизмы. Передача сигнала к управляющим устройствам произво-231
дится по каналу связи и может осуществляться как на ближние, так и на дальние расстояния.
Вычислительное устройство контролирует исполнение команды, получая информацию от управляющего устройства о положении исполнительных элементов (обратная связь).
Само управляющее устройство может представлять собой систему с обратными связями, исполняющую сигнал — команду, которая приходит от вычислительной машины. Команда превращается в действие—реакцию робота на обстановку. Действие исполнительных органов робота вызывает появление изменений в объекте обработки. Эти изменения регистрируются измерительными приборами — датчиками и снова вводятся в автомат в качестве новой информации. Процесс обработки продолжается без перерыва до его окончания.
Итак, наш робот не только ощущает и принимает решения, но и действует. Он действует решительно, эффективно, правильно, но, кроме управления своим объектом, он ни на что не отвлекается. Он работает, как очень сосредоточенный, пожалуй даже, как фанатически настроенный труженик: он не способен ни размышлять, ни отвлекаться, ни заниматься чем-либо другим, кроме своей задачи. Он работает, как чапековский робот.
Система автоматизации прокатного стана требует устройства именно такого типа. Прокатываемая болванка проходит между валами с определенной скоростью, причем скорость выхода после валов зависит как от скорости вращения валов, так и от степени обжимки. Если несколько пар валов расположены последовательно друг за другом, то режим работы последующих (зазор, число оборотов, вращающий момент) зависит от скорости подачи прокатываемого материала, т. е. от режима работы предыдущей пары валов. Кроме того, режим зависит еще и от температуры, механических свойств материала и формы его сечения. В связи с тем, что все эти величины меняются и зависят от режима прокатки, ясно, во-первых, что задача о последовательном пропускании болванки через несколько пар валов весьма сложна, и, во-вторых, поскольку это так, что точное ее решение позволит значительно ускорить производство и удешевить его, так как стан будет использоваться на полную мощность.
Нужно сказать, что роботы, подобные тому, который мы выше описали в общих чертах, являются чрезвычайно 232
полезными устройствами. Они чувствительнее, безынерционнее, неутомимее, чем любой работник. Для управления сложной производственной операцией, например плавкой или прокаткой стали, необходим большой производственный опыт. В чем он заключается? В том, что старый мастер знает наперед, как пойдет процесс, если произойдут какие-либо отклонения от нормы. По первым признакам отклонения он, долго не раздумывая, примет нужные меры, не дожидаясь, пока станет очевидным появление брака.
Вот такого опытного мастера и может заменить робот. Он тоже может предвидеть ход процесса и принять во-вре-мя нужные меры не только для предотвращения брака, но и для предотвращения замедления процесса. Опыт показывает, что введение автоматического управления производственным процессом всегда ведет к значительному ускорению производства и повышению качества продукции. Роботу не нужно учиться и приобретать опыт. Он всегда работает очень хорошо.
Но хотя для производства и хорошо, что робот не требует обучения, тем не менее в принципе невозможность обучения и самосовершенствования есть несомненно н е-способность робота, т. е. его несовершенство.
Работающие сегодня роботы-мастера, роботы-производственники не учатся. Но их экспериментальные братья-роботы способны обучаться. Для того чтобы придать роботу эту способность, достаточно снабдить его дополнительными «органами» — устройствами, которые меняли бы программу вычислений в зависимости от качества выполнения задачи роботом.
Достаточно простые устройства такого рода осуществлялись с демонстрационной целью. Они были способны менять свою программу действий по мере производства последовательных проб. Это изменение поведения в некоторой мере имитирует процесс обучения на основе опыта (методом проб и ошибок). В результате накопления опыта закрепляется некоторое «наилучшее» в определенном смысле поведение. Смысл понятия «наилучшее» определяется критерием оценки качества работы, заложенным конструктором.
Кибернетические игрушки
Автоматы-роботы, имеющие практическое значение, по необходимости весьма сложны и не только конструктивно, ио и принципиально. Задачи автоматизации произ-233
водства в основном еще не решены до конца. Решаются только отдельные части, частные задачи большой проблемы полной автоматизации производственных операций и производства в целом. Пока еще только создается теория больших автоматов, намечаются принципы их создания и разрабатываются необходимые частные вопросы, весьма поучительным оказывается конструирование простых кибернетических роботов, которые демонстрируют возможности, превышающие обычные способности автоматов.
Рис. 8.6. Черепашка Эльси Гред Уолтера со снятым внешним щитом.
Можно создать робот-игрушку, состоящую всего из нескольких деталей: чувствительных, исполнительных и коммутирующих устройств. Такие игрушки создавались и создаются в значительном числе как кибернетиками-любителями для развлечения, так и учеными для решения серьезных задач. Многие из них описаны в литературе и имеют большое принципиальное значение.
Мы не станем перечислять многочисленные варианты автоматов с часовыми механизмами, подчас довольно замысловатых и сложных, ведущих свою историю еще с XVII века. Гораздо интереснее появившиеся недавно роботы с обратной связью.
Одними из первых описанных в литературе игрушек-роботов были «черепашки» англичанина Грея Уолтера. Они представляют собой миниатюрные тележки на колесиках, снабженные двумя электромоторчиками. Один — 234
вращает колеса, другой — поворачивает руль. На тележке, кроме источников питания, установлены фотоэлемент, усик, замыкающий электрический контакт при соприкосновении с препятствием, несколько реле и электрическая лампочка. Несмотря на такое предельно примитивное устройство, черепашки демонстрируют свойства не только забавные,
Рккумулятор
выводы для зарядки аккумулятора
контакт, срабатываю-
щим
Фотоэлемент
5
щии пру столкновении
Реле 2
о
колесо
Реле путания
Мотор движения
Рис. 8.7. Схема соединений элементов черепашки Эльси.
ОНИ
Усилитель Усилитель
Лампа о
Реле1
но и поучительные. В темноте или при слабом свете они беспорядочно ползают, как будто чего-то ищут. Натыкаясь на препятствия, они сворачивают и пытаются их обойти. Если имеется достаточно сильный источник света, они его скоро замечают и решительно направляются в его сторону, обнаруживая «положительный тропизм». Однако подойдя к свету слишком близко, они от него отворачиваются («отрицательный тропизм»), двигаются вокруг источника света, находя для себя «оптимальные условия» и непрерывно поддерживая их («гомеостазис»). Между двумя источниками света черепашка совершает путешествие от 235
одного к другому наподобие буриданова осла, который, как известно, умер от голода, находясь между двумя одинаковыми копнами сена, не будучи в состоянии выбрать, в какой из них сено вкуснее.
Рис. 8.8. Две минуты из жизни черепашки Эльсн, запечатленные на фотопластинке.
На щитке черепашки была прикреплена свеча /. вторая свеча 2 установлена на некотором расстоянии. Между свечой и черепашкой установлено препятствие 3, Затем был открыт затвор фотоаппарата и черепашка предоставлена сама себе. Ее путь записан на фотоснимке. 4 — исходная позиция черепашки (она начинает движение в направлении источника света), 5 —удар о препятствие. 6 — обход препятствия и возобновление движения в сторону источника света. 7 —черепашка случайно подошла очень близко к свече, свет слишком силен, черепашка вынуждена отступить, она двинулась в обход свечн.
Две черепашки «видят» и «узнают» друг друга (по зажженной лампочке) и ползут друг другу навстречу. Черепашка видит и узнает себя в зеркале и т. д.
Более сложна и интересна игрушка Эдмунда Беркли, которую он построил руками двух помощников — школьников. Это тоже тележка с моторным приводом и моторным управлением, но у нее больше чувствительных, коммутирующих и исполнительных элементов и она «специали-236
Рис. 8.9. Внешний вид игрушечного робота — черепашки Эйхлера, обладающей „условными рефлексами-.
Рис. 8.10, Советская черепашка с «условными рефлексами* (без щитка).
зирована» на определенную работу— собирание с пола разбросанных в беспорядке белых шариков (мячей для игры в гольф) и складывание их в определенном месте. Авторы назвали своего игрушечного робота «белка», так как живая белка тоже собирает орехи на зиму и складывает их в свое гнездо. «Белка» Беркли имеет два фотоэлемента, две лапки, которые могут раздвигаться или сдвигаться на уровне пола, образуя чашечку, язычок внутри чашечки и металлический хвостик, волочащийся по полу.
Кроме того, в «организме» белки, т. е. в ее схеме, имеется, помимо коммутирующих реле, еще фильтр, позволяющий различать постоянный и переменный токи.
Обстановка, в которой работает белка, такова. Большая пустая комната освещена лампами накаливания. По полу в беспорядке разбросаны белые шарики. В одном из углов комнаты положен металлический лист, освещенный газосветной люминесцентной лампой (лампой дневного света) и обозначающий «гнездо» белки. Белка совершает наугад поиск, пока в поле зрения фотоэлементов, служащих ей «глазами», не попадает белый шарик. Тогда белка направляется прямо к нему, раздвигает лапки, останавливается, сдвигает лапки, захватывая в них шарик. Язычком, помещенным между лапками, белка чувствует, что шарик у нее «в лапках». Затем белка поворачивается и ищет гнездо. Поскольку гнездо освещено мигающим светом газосветной лампы, в отличие от непрерывного света ламп накаливания, электрический фильтр позволяет ей распознать направление на гнездо. Белка направляется к гнезду, заползает на металлический лист и останавливается на нем, так как замыкание контакта между листом и ее металлическим хвостиком дает ей знать, что она «дома». Белка раздвигает лапки, выбрасывая шарик, и снова направляется на поиски следующего шарика.
Схема коммутации между чувствительными и исполнительными элементами может быть очень быстро и без труда составлена с помощью релейной логической алгебры, как только сформулированы все операции, которые должна выполнять белка.
Еще более интересной и поучительной, а кстати, принципиально и гораздо более серьезной является машина Клода Шэннона, имитирующая поведение мыши в лабиринте.- «Мышь» Шэннона, которую автор назвал именем древнегреческого героя Тезея, представляет собой всего лишь намагниченный кусочек стали размером в несколько сантиметров, на колесиках, с декоративными глазками, ушками и хвостиком. Мышь Тезей ползает по квадратной доске, разбитой на 25 одинаковых квадратов, под действием магнита, помещенного под доской и направляемого ведущим механизмом, моторы которого управляются решающим устройством, состоящим из 50 телефонных реле.
По границам квадратов устанавливаются перегородки в произвольном порядке, которые образуют лабиринт. В одном из квадратов помещают «сыр» — электрод, замы-238
иание которого представляет собой цель путешествия мыши. Сыр — мышиное лакомство — может быть заменен выходом из лабиринта или, если хотите, другой целью хождения по лабиринту, например Минотавром — чудовищем с головой быка и телом человека, которого древнегреческий легендарный герой Тезей — тезка мыши Клода Шэннона — отыскивал в лабиринте Миноса, царя Крита. Независимо от литературного оформления цели путешествия такая цель существует, находится в определенном квадра-
Рис. 8.i I. Внешний вид искусственной обучающейся мыши Тезея Клода Шэннона. Видны колесики, магнитная пластинка, усик, ощущающий препятствие, и нижний контакт, ощущающий приход к цели.
те, и мышь отправляется на поиски ее, начиная с того квадрата, куда ее пустили.
Механизм ведет мышь наугад, переводя ее в соседний квадрат во «горизонтали» или по «вертикали». Решение о направлении движения дается некоторым механизмом, «бросающим жребий», т. е. имитирующим случайный процесс. Если мышь встречает на своем пути из квадрата в квадрат перегородку и не может пройти, специальное устройство сигнализирует об этом в решающее устройство, где замыкается соответствующее этой границе квадрата реле и, таким образом, «запоминается» частичка плана лабиринта. Мышь поворачивается под прямым углом вправо или влево (случайно) и продолжает свой путь, испытывая успехи и неудачи, наугад продвигаясь все дальше и запоминая по пути все больше сведений о расположении перегородок лабиринта. Наконец, совершенно случайно мышь добирается до цели своего странствования (Тезей убивает Минотавра или мышь съедает сыр,— как Вам
угодно). При этом все замкнутые реле остаются замкнутыми и исследованная мышью часть лабиринта зафиксированной в памяти решающего устройства.
Если мышь снова вернуть в исходное положение, она будет вести себя совершенно иначе, чем в первый раз. Она уже не движется наугад, не ищет, не ошибается. Она движется к цели кратчайшим путем по той части лабиринта, которая ею уже исследована.
Рис. 8.12. Клод Шэннон пускает искусственную мышь Тезея в лабиринт.
Если теперь мышь поместить в один из квадратов, в котором она еще ни разу не побывала и который она, следовательно, «не знает», мышь снова начнет бродить наугад, запоминая путь, как и в первый раз, пока случайно не попадет в один из знакомых квадратов, откуда она уже сразу находит кратчайший путь к цели.
«Мышь» Клода Шэннона демонстрирует нам, так сказать, «машинный вариант» способности к запоминанию предыдущего опыта и к рациональному его использованию в дальнейшем. Это не что иное, как «обучение», понимаемое в самом широком смысле. Недаром внешнее оформление машины Шэннона нарочито пародирует «лабиринтовые эксперименты» Лешли и других зоопсихологов и физиологов, проводившиеся в очень больших количествах и заключавшиеся в наблюдениях главным образом над 240
крысами и определении времени, в течение которого животное находит выход из лабиринта при последовательно проводимых попытках. Это время обычно закономерно уменьшается, образуя так называемую «кривую научения». «Мышь» Шэннона, в отличие от живых мышей или крыс, идеально «обучается» за один эксперимент, без повторных попыток.
Правда, искусственная мышь ничему, кроме выхода из лабиринта, не может больше научиться, но это и не суще-
Рис. 8.13. Путь мыши Тезея в лабиринте.
а) при первом запуске (мышь бродит наугад), б) прн втором запуске (мышь сразу находит кратчайший путь к цели).
ственно. Дело в том, что эксперимент Шэннона преследовал не столько цель имитировать некоторую отдельно взятую черту поведения животного, сколько совсем другую и гораздо более существенную для технических приложений цель, а именно: создать такую систему коммутации телефонных линий, которая автоматически избирала бы для соединений (например, междугородных) кратчайшие пути с наименьшим числом обходных петель в зависимости от наличной загрузки кабелей.
В последнее время экспериментальные модели типа черепахи и мыши построены в Советском Союзе в ходе экспериментальных работ по кибернетике.
Кроме мыши Шэннона, было сделано много других более или менее простых роботов, имитирующих отдельные черты поведения животных. Так, например, неоднократно демонстрировался условный рефлекс как на машине 16 И. А. Полетаев 241
Дискретного счета, так и на простых электрических игрушках. В этих случаях, как и всегда при сравнениях поведения животных и роботов, следует помнить, что робот обычно имеет в своем распоряжении лишь ничтожное количество возможных «раздражений» или входных сигналов, в то время как животное может воспринимать необозримое разнообразие внешних воздействий.
Условным рефлексом называется выработанная в результате тренировки реакция животного на безразличный
Рис. 8.14. Возможные схемы для имитации условных рефлексов в игрушечных роботах.
5 —контакт, замыкаемый при появлении безусловного раздражителя, У — контакт. замыкаемый при появлении условного раздражителя. Pj — исполнительное реле, включающее реакцию иа безусловное раздражение.
После многократного одновременного включения контактов Б и У в схеме а) заряжается емкость С, в схеме б) нагревается сопротивление R, в результате замыкается контакт К и после этого реле Pi возбуждается только замыканием контакта У.
(условный) раздражитель. Основным условием образования условного рефлекса является многократное совпадение во времени действия безразличного раздражителя и агента, вызывающего безусловный рефлекс, который имеет непосредственное биологическое значение. Обычная схема опыта такова: у животного (например, у собаки) многократно вызывают биологически целесообразную реакцию на внешний раздражитель (например, выделение слюны при приёме пищи, оборонительные движения при уколе в лапу и т. д.), причём действию внешнего раздражителя (пища, укол), вызывающего автоматическую или безусловную реакцию, каждый раз предшествует действие безразличного раздражителя (например, звонка, зажигания лампы и т. п.). После некоторой тренировки у животного выраба-242
тывается автоматический ответ выделения слюны только на включение звонка, без подкрепления пищей, или отдёргивания лапы только на зажигание лампы, без укола. Если много раз повторять демонстрацию условного рефлекса, не «подкрепляя» его, т. е. не проводя время от времени совместного применения безразличного и безусловного раздражителей, то условный рефлекс затухает и в конце концов исчезает вовсе.
Можно выработать условный рефлекс на сложное восприятие, например аккорд, форму светового пятна и т. д.; можно выработать условный рефлекс, совмещая безразличный раздражитель не с -безусловным, а с другим условным, на который предварительно уже был выработан условный рефлекс.
Если отвлечься от всего разнообразия возможных сочетаний простых и сложных раздражений и ограничиться схемой с одним условным и одним безусловным раздражителями, то для процесса выработки и затухания условного рефлекса нетрудно осуществить машинную модель. В любой такой схеме необходим узел, который бы позволял запоминать совпадение двух раздражителей — безусловного и условного.
На схеме рис. 8.14,а этим элементом является емкость С, которая через сопротивление R и одновременно включенные контакты Б и У заряжается до положительного потенциала и заставляет радиолампу Л проводить ток. В результате срабатывает реле Р2, замыкая контакт /С, и после этого реле Р\ может быть включено только контактом У без замыкания контакта Б, Пока конденсатор С не разрядится через сопротивление R (на что потребуется некоторое время, тем большее, чем больше величины емкости С, сопротивления R и заряда на емкости С), исполнительное реле Pi может включаться либо контактами У, либо контактами Б, либо обоими вместе. После разряда емкости С лампа Л перестает проводить, контакт К размыкается и исполнительное реле Pi может включаться только контактом Б, «Условный рефлекс» оказывается затухшим.
На схеме рис. 8.14,6 в качестве запоминающего элемента использовано нагревание биметаллического контакта К электронагревателем R. Это нагревание происходит только в момент одновременного замыкания контактов Б и У. После нагрева контакт К замыкается и до остывания позволяет включать исполнительное реле Pi замыканием контактов У при незамкнутых контактах Б.
16* 243
Использовав в качестве модели «черепашку», подобную описанным выше, можно включить реле Pj в одной из приведенных схем как исполнительное реле, вызывающее остановку черепашки (выключение ведущего мотора) или ее поворот (включение управляющего магнита или мотора). В качестве контакта К в схеме можно использовать контакт усика, замыкающийся при соприкосновении с препятствием, а в качестве контакта У — контакт реле, срабатывающего от микрофона на свисток. В результате мы получим «черепашку с условным рефлексом». Наш робот будет всегда останавливаться или поворачивать, столкнувшись с препятствием («безусловный рефлекс»). При этом он никак не будет реагировать на свисток (безразличный раздражитель). После достаточно продолжительного или повторного совпадения условного раздражителя с безусловным, т. е. если мы несколько раз будем давать свисток в тот момент, когда черепашка натыкается на препятствие, робот начнет останавливаться по свистку, без соприкосновения с препятствием. Если долго не «подкреплять» рефлекс, т. е. не давать свистка одновременно с остановкой на препятствии, то робот «забудет» тренировку и вернется к прежнему состоянию. Такие черепашки с условным рефлексом изготовлялись и испытывались.
Нет нужды, по-видимому, напоминать здесь, что физические процессы в животном и роботе не только различны, но могут не иметь вообще ничего общего. Но с точки зрения кибернетической, т. е. с точки зрения использования информации о внешней обстановке для выработки реакции, условный рефлекс животного и «условный рефлекс» робота несомненно имеют больше сходства, чем различий. Схема внешних проявлений в обоих случаях в общих чертах, попросту, одинакова. Различия заключаются лишь в том, что у животного имеется способность к выработке одновременно или последовательно многих различных рефлексов, а наши черепашки способны лишь к немногим сочетаниям. Никто, впрочем, не может запретить, пожертвовав простотой устройства игрушки, сделать ее способной к выработке достаточно большого числа различных рефлексов. Говоря о различиях, необходимо сказать еще и о том, что в силу многообразия восприятий животного и обилия образов, запасенных в памяти, выработка условного рефлекса всегда протекает под перекрестным огнем посторонних внешних и внутренних влияний и потому включает в себя элементы случайности. Случайность отсутствует в простей-244
шем роботе. Ее, впрочем, можно искусственно внести в модель. По-видимому, при достаточно развитой схеме и обилии восприятий и реакций у модели эта случайность неизбежно появится сама, и робот, как и подопытная собака, будет «отвлекаться» посторонними шумами, вибрациями, светом и даже «воспоминаниями по ассоциации», и для опытов с ним придется, как и для животных, строить «башню молчания».
Теперь мы оставим поучительные игрушки, имитирующие животных, и обратимся к роботам, имитирующим деятельность человека.
Роботы и язык
Рассматривая самые простые модели, мы видели, что их возможности лимитируются ограниченностью доступных им 'Восприятий и реакций. Для того чтобы оказаться на высоте положения в тех случаях, когда робот перестает быть игрушкой и претендует на оказание серьезной помощи человеку в его труде, он, робот, должен быть способен к некоторым сложным операциям обработки информации, которые уже не укладываются в простые схемы. Помогая человеку, робот имеет дело с тем материалом, над которым работает человек. Если оставить в стороне производственные операции, то останется еще широкое поле деятельности, связанное с человеческим языком, записанной и напечатанной человеком и для человека информацией.
В истории человеческих знаний было два выдающихся события, которые, каждый по-своему, открыли новые пути и перспективы сохранения полезных сведений. Это—изобретение письменности, позволившее передавать знания потомкам в виде документов, свободных от искажающих воздействий устной передачи и превратностей человеческой памяти, и изобретение книгопечатания, сделавшее возможным распространение знаний в широкие массы человеческого общества.
Однако в последнее время ощущается настоятельная необходимость еще в одном, новом шаге в вопросе хранения и распространения информации. Дело в том, что количество полезных сведений, накопленных за годы существования точных наук и изложенных в печатных трудах, стало настолько большим, что, хотя любые из этих сведений в принципе и доступны для изучения, вся их масса вряд ли может быть обозрима одним человеком в разумные
сроки. Книги по всем специальностям лежат в библиотеках, и для того, чтобы отыскать нужные сведения, приходится тратить недели и месяцы нелегкого труда. Для исправления положения составляются справочники, каталоги, обзорные труды, на что уходит также немало времени, средств и усилий, но что, однако, далеко не исправляет печального положения вещей.
Обилие накопленных знаний начинает вступать в конфликт с возможностями человека, с его «пропускной способностью» и требует для дальнейшего развития наук применения новых, более сильных и гибких методов обращения с информацией с тем, чтобы в минимальное время сделать возможным доступ к любой информации, не только по ее адресу, т. е. названию труда и имени автора, но и по содержанию. Иначе говоря, необходимы средства для быстрого просмотра большого массива книг и журналов и выбора из них нужных сведений. Эта задача является развитием и обобщением работы по составлению обзоров, реферативных справочников, аннотаций и каталогов. В решении этой задачи машины могут и должны оказать человечеству не меньшую услугу, чем печатный станок. Именно быстродействующие машины с достаточно большой памятью способны и обязаны хранить, сортировать, пополнять запас информации в библиотеках и совершать все необходимые информационные поиски, выдавая по требованию читателей любые сколь угодно подробные справки о всех уже накопленных сведениях.
По-видимому, мы находимся на грани нового переворота в этой области. Этот переворот еще не совершен, так как не решены основные проблемы передачи машине человеческих знаний и хранения информации. Многое в этом направлении уже сделано, еще больше делается и, несомненно, уже в ближайшие годы мы будем освобождены от обязанности просматривать массу книг и журналов в поисках необходимых нам сведений.
Основной проблемой механизации хранения и поисков информации является, пожалуй, создание не самих информационных машин, а удобного алфавита и кода, которыми экономно, полно и точно можно было бы записать в «понятной» для машины форме все необходимые для передачи содержания подлежащих розыску предметов признаки и их комбинации. Дело идет о создании информационного машинного языка, такого, что, задав на этом языке вопрос машине-библиотекарю, мы получили бы в ответ либо спи-246
сок литературы по заданному вопросу (в простейшем случае), либо микроотпечатки всей этой литературы или ее аннотации.
Чтобы представить себе всю сложность этой задачи, следует вспомнить, что при поисках литературы нам приходится призывать на помощь нашу эрудицию и знания предмета, помнить большое число синонимов и равнозначных выражений. Очевидно, что недостаточно снабдить каждую отрасль науки и техники четким однозначным индексом, чтобы решить эту задачу. Необходимо еще предусмотреть большое количество разнообразных связей между различными отраслями знания. Как правило, любая техническая проблема охватывает сразу несколько областей. Если, например, нас интересует вопрос о допустимой скорости резания при обработке металла резцом из твердого сплава, то полезные сведения по этому вопросу нам удастся обнаружить в разделах: технология холодной обработки металлов, станкостроение, химия сплавов, термодинамика, кристаллография. Большее или меньшее знание предмета определит успех поисков.
Если машина будет в состоянии запомнить все связи между отраслями знаний в достаточно компактной форме, то она будет в состоянии по одной характеристике или совокупности характеристик предмета или книги отыскивать и указывать все другие характеристики или совокупности характеристик этого предмета или печатного труда.
По-видимому, машинный информационный язык, удовлетворяющий самым широким требованиям, будет обладать некоторым грамматическим строем, подобным грамматическому строю человеческого языка, но более строгим, рациональным и компактным. Он будет позволять записывать сложные высказывания при достаточно малом количестве символов.
Потребуется осуществлять перевод с языка машин на национальные языки и дублирование аннотаций на печатные труды или самих трудов, т. е. параллельную запись на национальном и машинном языках. В наилучшем случае машинный язык должен быть интернациональным. По-видимому, машинный язык следует строить «в коде, близком к оптимальному, с разумным использованием избыточности кода для снижения вероятности искажений.
Современные машинные системы индексов, которые применяются в уже существующих информационных машинах, далеки от совершенства, и, таким образом, проб-
Рис. 8.15. Автоматический библиограф — машина, выбирающая из каталога аннотации книг и статей на заданную тему.
лема разработки машинного языка стоит во весь рост. Конструирование самих информационных машин представляет собой проблему более легкую, которая при наличии алфавита и кода может быть решена без принципиальных затруднений. Подобные машины находят применение пока только в узких специализированных областях с уже разработанной системой индексов, в которой обычно почти отсутствуют внутренние связи и, таким образом, весь язык описывает только перечень некоторого множества элементов.
Одна из нескольких действующих информационных машин представляет собой автоматический каталог — справочник. На киноленте двумя рядами отпечатаны: с одной стороны краткие аннотации статей в виде обычного текста, на другой — указатель содержания аннотированной статьи,
Рис. 8.16. Каталог на киноленте автоматического библиографа. Слева аннотации, записанные обычным текстом, справа — библиографический ив-дек с, записанный двоичным Алфавитом в виде белых и черных пятен и читаемый фотоэлементом.
записанный условным кодом в двоичном алфавите в виде белых и черных точек.
Кинолента, содержащая около 70 000 библиотечных карточек такого вида, просматривается автоматическим устройством с фотоэлементами за 6—7 мииут. Перед просмотром вводятся шифры, соответствующие содержанию 249
отбираемых статей. При просмотре шифров фотоэлементы улавливают нужные комбинации в указателе, лента автоматически притормаживается и производится фотографическая печать соответствующих аннотаций, записанных обычным текстом. Таким образом, через 6—7 минут автоматический библиотекарь выдает библиографические справки по любому вопросу из имеющихся в его распоряжении материалов.
Целый ряд проблем возникает и в связи с тем способом фиксировать и запоминать информацию, которым мы пользуемся,— человеческим национальным языком, устным или письменным (рукописным и печатным). Машина способна работать с человеческим языком и выполнять полезные операции. Наиболее важной и сложной из них является автоматический перевод с одного национального языка на другой. Более простыми и, быть может, менее нужными являются машины, читающие печатный текст, стенографирующие устную речь и т. д.
Машина для чтения печатного текста была создана у нас и за границей во многих вариантах. Первая машина такого назначения — «Оптофон» Ф. д’Альба — была разработана еще в 1904 году. В настоящее время такие машины могут применяться не только для чтения текста слепыми, но и для ввода буквенного или цифрового текста в счетную машину.
Для чтения буквы печатного текста участок поверхности листа, на котором изображена буква, разбивают на элементы — прямоугольники. Каждый из элементов может быть белым или черным. Просматривая поочередно или одновременно все элементы изображения буквы, мы получаем двоичное число с числом разрядов, равным числу элементов, и с двумя возможными символами в каждом разряде: 0 (белое) и 1 (черное). Различные начертания (шрифты) одной и той же буквы дадут, вообще говоря, различные числа, но так как число вариантов начертания букв ограничено и ни один вариант начертания одной из букв не совпадает ни с одним из вариантов начертания никакой другой буквы, то каждая буква может быть однозначно опознана.
Элементы изображения буквы просматриваются с помощью миниатюрного устройства, имеющего в своем составе один или несколько фотоэлементов. Черное соответствует отсутствию тока в фотоэлементе, белое — наличию тока. Порядок просмотра элементов изображения может 250
быть различным: либо последовательно строка за строкой, как в телевизионной развертке, одним фотоэлементом, либо параллельно несколькими фотоэлементами, движущимися горизонтально по строкам или сверху вниз по столбцам. Выбирая тот или иной порядок просмотра, мы всякий раз получаем некоторый код, в котором кодируется выходной сигнал.
Для просмотра можно использовать либо движение всей головки вручную вдоль строки текста (при равномер-
Рис. 8.17. Считывание буквы типографского шрифта в автоматическом устройстве для чтения.
а) считывание одновременно восемью фотоэлементами по строчкам (справа — сигналы в цепи каждого фотоэлемента); б) считывание одним фотоэлементом с помощью телевизионной развертки (справа — сигнал в цепи фотоэлемента).
ном освещении страницы), либо периодическое движение светового пятна (по неосвещенной странице). Световое пятно, движущееся по листу бумаги, создается источником света, отраженным в качающемся зеркале, которое управляется электромагнитом, питаемым переменным током, или световым пятном, движущимся по экрану миниатюрной электронно-лучевой трубки, изображение которого проектируется оптически на поверхность страницы.
Сигналы «черное» и «белое» (точки и тире), снимаемые с фотоэлементов головки по мере движения ее по строке от буквы к букве, дают в двоичном алфавите н в определенном коде изображение прочтенных букв. Эти сигналы — числа в двоичной записи — можно использовать по-разному. В простейших случаях их просто используют для 'непосредственного восприятия на слух. В одной из пер-
из
1
Рис. 8.18. Одна нз первых машин для чтения (машииа Г. Таучека) и схема ее работы.
Буква текста / проектируется на фотоэлемент 4 с помощью линзы 2 сквозь маску 3, кз которой вырезаны отверстия в форме стандартных букв. Маска вращается^ пробегая полный оборот за время экспозиции одной литеры. При совпадении формы вырева в маске и проектируемого изображения буквы фотоэлемент полностью затемняется, что дает сигнал совпадения с полученным положением маски.
Рис. 8.19. Слепой за чтением текста с помощью современной> машины для чтения.
Рис. 8.20. Внешний вид одного из типов воспринимающей головки для чтения текста.
вых читающих машин буква просматривалась периодическим движением сверху вниз светового пятна от вибрирующего зеркальца при одновременном перемещении головки вправо по строке от руки. Синхронно с вертикальным движением пятна изменялся звуковой тон в телефоне, причем 253
звук появлялся только тогда, когда пятно проходило черный элемент. Каждая буква при чтении получала своеобразное звучание, состоящее из звуков разной высоты и длительности, комбинации которых нетрудно было различать на слух. Средняя высота тона позволяла скорректировать положение головки по вертикали.
Можно использовать точки и тире несколько более сложным способом и в результате вторичной перекодировки каждой букве поставить в соответствие замыкание оп-
Рис. 8.21. Схема устройства воспринимающей головки для чтения текста.
/ ~ миниатюрная электронно-лучевая трубка, 2 — светоаое пятно на экране трубки, движущееся по экрану как в системах телевидения. 5 — зеркало, расположенное наклонно, 4— линза, фокусирующая изображение светового пятна на поверхность листа бумаги 5 с читаемым текстом, 6 — линза, отбрасывающая изображение освещенной части литеры на катод фотоумножителя, 7 — фотоумножитель (фотоэлемент с усилителем), 6 —кожух.
ределенного быстродействующего реле, которое включает считывание с магнитной ленты или барабана заранее записанного звука, соответствующего прочитанной букве. Такой вариант читающей машины тоже был осуществлен.
Можно, наконец, превращать сигналы букв не в звуки, а в конфигурации выпуклостей, применяемые при печатании книг для слепых по системе Брайля.
Для осуществления двух последних способов приходится преодолевать некоторые трудности. Произношение слов или начертание их в системе Брайля неоднозначно определяется начертанием слова в печатном тексте. При вторичной перекодировке желательно читать и воспроизводить не буквы, а их сочетания — по две или три буквы — или даже целые слова, что не может не усложнить машину.
При проектировании машин для чтения приходится сталкиваться с тем фактом, что пропускная способность 254
различных каналов внешних восприятий человека (органов чувств) неодинакова. Наибольшей пропускной способностью обладает зрение, далее следует осязание, затем — слух. Перекодировка текста в алфавит Брайля для восприятия осязанием, оказывается, дает лучшие результаты в смысле скорости чтения, малой утомляемости, чем перекодировка в звуки, воспринимаемые на слух.
Как уже говорилось, можно использовать сигналы букв для ввода текста в машину, для чего, разумеется, необходима предварительная кодировка букв кодом машины.
Значительную трудность при чтении машиной представляет проблема различия размеров шрифта и точной установки головки на букву. Эти трудности обычно преодолеваются путем однократной регулировки машины под шрифт данной книги, например с помощью переключателя или посредством изменений размеров головки и с помощью вспомогательного трафарета для вождения головки по строкам. Это — решение простое и достаточно хорошее.
Можно было бы для регулирования положения головки в соответствии с расположением и размерами буквы применить автоматическое устройство с обратной связью, которое при развертывании световым пятном участка страницы реагировало бы на наличие белого пространства по краям буквы и автоматически совмещало головку с буквой так, чтобы белые поля с каждой стороны были одинаковы, а размер этих полей был приведен (регулировкой размера растра) к некоторой стандартной величине. Однако такое устройство было бы сложным и дорогим.
Еще сложнее техническое решение проблемы чтения рукописи. В принципе она решается так же, как и чтение печатного текста, однако разнообразие начертаний букв, даже в -пределах одного почерка, делает решение трудным.
Различение машиной рисунка буквы является частным случаем более общей проблемы различения формы вообще— на плоскости или в пространстве. Как машина может отличить, например, круг от квадрата? Речь идет о различении не двух конкретных фигур, а двух классов этих фигур. Как круги, так и квадраты могут быть любого размера, как угодно расположены и даже слегка деформированы. Машина должна рассортировать эти образы на два класса — «круги» и «квадраты» — так же четко и безошибочно, как это делает глаз человека. Для того чтобы достичь этого, геометрические образы должны быть приведены в совпадение с некоторым стандартом, для чего каж-
дый конкретный образ, или его запись в виде сигнала, необходимо подвергнуть ряду преобразований, состоящих в перемещениях, поворотах и растяжениях или сжатиях. Если набор этих преобразований будет достаточно полным, то при одной из их комбинаций любой круг или эллипс будет превращен в стандартный круг, т. е. круг, центрально расположенный, со стандартным размером; когда он совпадет со стандартным изображением и даст сигнал совпадения, он будет, таким образом, опознан как круг.
Проблема различения формы, кроме чтения текста, имеет и другие практические приложения. Одно из них состоит в автоматизации дешифровки аэрофотоснимков при составлении карт местности, для ускорения и удешевления трудоемкой операции определения рельефа местности по ее стереоскопическому фотоснимку. Для этого отдельные элементы обоих изображений стереоскопического снимка должны быть сопоставлены с точки зрения расхождения формы и размеров отдельных пятен. Это расхождение, поскольку оно однозначно связано с рельефом, используется для вычисления высоты каждой точки изображения. Каждая точка местности будет изображена на обоих снимках, но с некоторым смещением, из-за параллакса. Это смещение будет тем больше, чем ближе к фотоаппарату расположена данная точка местности. Если ось объектива при съемке была вертикальна, то смещение зависит от высоты точки. Таким образом, высота точки может быть определена по относительному смещению двух ее изображений на стереофотоснимке.
Для механизации этой операции оба снимка считываются по строкам точка за точкой с помощью фотоэлемента подобно тому, как читающая текст машина считывала букву, и записываются на магнитных лентах. При многократном воспроизведении записей с лент они могут сдвигаться друг относительно друга и, таким образом, приводить к совпадению отдельные элементы записи, т. е. пятиа, изображающие отдельные участки местности. По степени сдвига автоматически вычисляется высота этого элемента. На выходе машины вычерчивается или вырезается из целлулоида рельеф, соответствующий данной строчке снимка. Складывая строка за строкой все вырезанные рельефы строк, получают рельефный макет сфотографированной местности.
Другим примером проблемы различения является различение звуков разговорного языка — фонем. Решение 256
этой проблемы, как и предыдущей, имеет непосредственное прикладное значение при создании протезов — аппаратов для понимания устной речи (например, принимаемой по радио или телефону) глухими. В дальнейшем автоматы, регистрирующие и различающие слова разговорной речи, вероятно, найдут много применений в качестве входных устройств роботов, которые, таким образом, окажутся способными выполнять устные команды.
Простейший протез для глухих представляет собой устройство, которое непосредственно записывает осциллограмму звуковых колебаний на флюоресцирующем экране. По виду осциллограммы не очень трудно научиться на глаз различать фонемы и целые слова. В этом случае восприятие формы кривой, записанной на экране, с помощью зрения заменяет работу слухового аппарата по различению звуков и слов.
Можно переложить эту обязанность на автомат другого устройства. Для этого звуки, воспринимаемые микрофоном, превращенные в электрические колебания и усиленные, поступают на ряд параллельно включенных узкополосных фильтров, настроенных на разные частоты. Каждая фонема речи имеет характерный для неё спектр и сопровождается появлением на выходных шинах узкополосных фильтров некоторой комбинации напряжений: на выходе одних фильтров (тех, которые настроены в резонанс со спектральными составляющими фонемы) напряжение присутствует, на выходе других — отсутствует. Эта комбинация возбуждаемых и невозбуждаемых шин соответствует фонеме.
Если меняется высота голоса, говорящего перед, микрофоном, то та же комбинация появится выше илп ниже на шинах фильтров подобно тому, как мажорное трезвучие может быть взято на фортепиано в разных тональностях. Решающее устройство реагирует на комбинацию выходов, а не на среднюю высоту тона. Поэтому одна и та же фонема, произнесенная различными голосами, будет одинаково зарегистрирована и превращена на выходе решающего устройства в сигнал данной фонемы, который может быть использован для приведения в действие исполнительного печатающего аппарата или же записан в устройстве памяти для дальнейшего различения слов и фраз. В практически осуществленном варианте такого устройства использовалось 20 фильтров с полосой пропускания около 7з октавы каждый в диапазоне от 125 герц до 8 килогерц. Это 17 Й. А. Полетаев 257
устройство хорошо различало звуки «т, к, м, н, с, ш, и, а, у» и не могло различать звуки «п, ф и р».
Однако такой метод различения фонем обладает по крайней мере двумя недостатками: во-первых, фонемы не всегда соответствуют правописанию, а во-вторых, некоторые фонемы в живой речи могут оказаться неразборчивыми и не будут зафиксированы. К исправлению этих недостатков есть пути. Грамматически правильное написание слова может быть восстановлено сравнением с образцами или выполнением некоторого набора стандартных правил. Для записи неразборчиво произнесенных фонем в одной из конструкций автомата этого назначения было предусмотрено специальное устройство. Оно состояло из набора потенциометров, которые заранее устанавливались в такие положения, которые соответствуют условным вероятностям появления различных фонем после данной. Таким образом, напряжение, соответствующее сигналу следующей фонемы, взвешивается по вероятности, и, если неразборчивая фонема плохо выявлена, оценка по вероятности в большинстве случаев позволяет избежать ошибки.
Проблемы грамматической коррекции записываемого текста принадлежат к кругу тех вопросов, которые решаются при автоматическом переводе текста с языка на язык. Успехи в этой области, достигнутые в последнее время, имеют большое принципиальное и прикладное значение. Правда, проблема литературного перевода любого текста еще не решена, но достигнутые успехи позволяют надеяться на разрешимость и этой проблемы.
Автоматический перевод
Перевод делается на электронной быстродействующей цифровой машине, управляемой специальной программой. Составление программы перевода производится один раз, и любая фраза переводится по одной и той же программе. Собственно, вся проблема автоматического перевода и сводится к составлению этой программы и словаря.
Прежде всего, текст должен быть введен в машину. Для этого он кодируется буква за буквой в двоичном алфавите, причем каждая буква изображается двухзначным десятичным числом (табл. 1), закодированным в двоичном алфавите.
Буквы, изображенные в двоичном алфавите, и слова, изображаемые этими буквами, пробиваются в виде перфо-258
Таблица 1
Кодирование букв латинского алфавита с помощью чисел (числа записаны в десятичной системе)
а 16 i 12 Q 23 у 04
b 06 J 18 r 07 z 25
с 22 k 19 s 05 • 31
d 30 I 27 t 21 , 03
е 08 m 11 u 20
f 14 n 15 V 29 пробел 00
g 10 0 28 w 13
и 26 P 24 X 09
раций на ленте, которую «читает» машина. Разумеется, пробивка производится специальным входным устройством с клавиатурой, на которой, как на пишущей машинке, оператор, могущий не знать языка, печатает, например, английскую фразу. Можно, по-видимому, использовать для этой цели й машину, читающую печатный текст.
Чтобы перевести фразу, прежде всего необходимо перевести слова. Для этой цели в устройство памяти электронной цифровой машины предварительно вводится специальный словарь. Словарь размещается в запоминающем устройстве машины и разбивается на английскую и русскую части. В ячейках памяти английской части словаря для каждого слова записываются следующие сведения (разумеется, кодом в двоичном алфавите): само слово (иногда только неизменяемая часть слова без флексии); грамматические сведения о слове, необходимые при переводе; адрес соответствующего русского слова. В русской части словаря в ячейках памяти, адрес которых указан в английской части словаря, записывается русский перевод
Таблица 2
Кодирование букв русского алфавита с помощью чисел (числа записаны в десятичной системе)
a 16 к 19 У 20 Ю 01
6 06 Л 27 Ф 14 я 03
в 13 M 11 X 26 й 18
г 10 H 15 Ц 22 ъ 00
д 30 0 28 4 23 b 09
e 08 n 24 III 09
29 p 07 2
3 25 c 05 Э 17
u 12 m 21 bl 04
17*
259
слова тоже кодом в двоичном алфавите, но для (5укр русского алфавита (табл. 2).
Слово, введенное в машину, после того как машина «прочла» это слово с перфоленты и записала его в регистре, сравнивается поочередно со всеми словами словаря. Быстрота вычислений электронной машины позволяет проделать это за короткий срок. Слово текста, записанное кодом в двоичном алфавите, попросту вычитается поочереди из слов, записанных в словаре. Машиной управляет при этом специальная часть программы — пользование словарем. Как только разность равна нулю, т. е. слова совпали, из словаря считывается адрес русского слова, которое и может использоваться для перевода.
Однако описанная схема работы реально осуществляется лишь в редких случаях. Чаще дело обстоит гораздо сложнее. Многие английские слова не находятся в словаре сразу, и их нужно отыскивать по корням, отбрасывая окончания. Многие слова имеют не один, а несколько переводов, в зависимости от контекста, т. е. от места в предложении и от окружающих слов. Для таких слов в словаре вместо адреса русского слова стоит адрес дополнения к словарю, которое содержит необходимые данные для решения вопроса в этих случаях.
Решение возможно потому, что язык и его грамматика построены закономерно, по определенным правилам. Ведь язык представляет собой систему сигналов, отражающую в определенном алфавите и с помощью определенного кода внешние события, наши действия, идеи и понятия.
Сигнальное отображение (кодирование) возможно потому, что оно закономерно. И хотя эти закономерности многочисленны, разнообразны и сложны, тем не менее они существуют и потому могут быть выявлены и четко сформулированы.
Число грамматических правил, необходимых для перевода фраз, определяется характером текста. Чем обширнее круг понятий, заключенных в данном тексте, тем больше требуется грамматических правил. Технический текст обладает более строгой, «сухой» структурой, и для его перевода требуется меньше грамматических правил, чем для перевода художественных литературных произведений. Кстати, и словарь технической литературы меньше по объему. Из нескольких сотен тысяч слов языка в технических специализированных текстах используется обычно немного более тысячи «общих» слов и примерно столько же техниче-260
ских терминов. Именно по этим причинам перевод технических текстов значительно проще. Первые переводы на машине выполнялись со словарем, состоявшим всего из 250 слов, и с шестью грамматическими правилами.
Если машина не находит в словаре искомого слова, то по окончании поиска (с помощью команды условного перехода) включается код программы отбрасывания окончаний. Слово проверяется на возможные окончания (ing, ed, er, est, s, ’s и т. д.). После каждой проверки получается ответ да или нет, в зависимости от чего машина либо переходит к следующей проверке, либо производит отбрасывание найденного окончания и начинает новый поиск в словаре. Если и он не увенчается успехом и надежды найти слово в словаре не остается, машина просто впечатывает в перевод непереведенное слово латинскими буквами.
Если перевод слова неоднозначен, т. е. слово в переводе имеет несколько значений, машина выбирает нужное значение, соответственно тексту. Для этой цели по указанию словаря дается команда перехода к подпрограмме проверки слов, окружающих данное слово. Делается перевод уже не одного слова, а кусочка фразы, например слова и предлога; переводится не слово instance (инстанция, требование, пример), a for instance (например). И в этих случаях проверки окружающих слов построены таким образом, что они производятся по очереди и каждый раз в результате получается ответ: да или нет.
Когда слово полностью определено, оно запоминается со всеми грамматическими характеристиками, необходимыми для перевода. После перевода всех слов английской фразы производится синтез русской фразы. Каждому русскому слову системой последовательных проверок грамматических признаков придается необходимая грамматическая форма. Специальная часть программы определяет порядок слов, другая — расстановку знаков препинания.
В опытах автоматического перевода машина порой совершает грамматические ошибки. Они происходят по вине программистов, забывших предусмотреть какую-либо грамматическую деталь в программе. Так, один из первых переводов с английского на русский, выполненный с помощью машины, содержал, по сообщению Д. Ю. Панова, следующую фразу: «...Это верно безусловно для обширной
категории задач связатых с силой и движением, так что хочем ли мы знать будущий путь Юпитера в небе
сах или путь электрона.....» и т. д. Другая машина, переводя с французского, напечатала: «...Мы мог ем сделать...» Ошибки очень напоминают человеческие, каковыми они, в сущности, и являются.
В конце концов английское предложение, «впечатанное» в машину с помощью клавиатуры, отпечатывается машиной на ленте русским шрифтом в грамматически правильном русском переводе.
Особенно удобно и быстро печатный текст можно выводить из машины, используя специальные электроннолучевые трубки: тайпотроны или характроны. В этих трубках, в общем подобных телевизионным кинескопам, электронный луч испытывает последовательно два отклонения, независимых друг от друга. Первое отклонение выводит луч на участок металлического экрана, в котором пробиты миниатюрные отверстия в форме знаков, цифр или букв. При этом луч как бы «продавливается» сквозь трафарет, и его поперечное сечение принимает форму отверстия. Второе отклонение выводит луч на желаемое место экрана. Луч дает светящееся изображение знака, пробитого на трафарете. Если последовательно проводить луч по строкам экрана и каждый раз пропускать его через нужный участок трафарета, мы получим на экране текст. Печать на экране тайпотрона производится практически мгновенно, причем изображение текста можно повторять и задерживать на экране произвольно долго, столько, сколько нужно, чтобы его прочесть или сфотографировать. Первое и второе отклонения независимы, и поэтому на любом месте экрана может быть изображен любой знак трафарета.
Задача машинного перевода с языка на язык сегодня еще не решена до конца. Грамматика человеческого языка слишком сложна для того, чтобы можно было ее формализовать для машины небольшим числом приемов. Одиако сегодня уже доказана принципиальная возможность вложить в машину необходимые правила. Дальнейшая работа по усовершенствованию машинного перевода продолжается. Несомненно, что «правила машинной грамматики» могут быть и будут сформулированы для всех языков. Возможно, некоторые языки окажутся особенно «удобными», с точки зрения формализации грамматики, и они приобретут особое значение. Возможно также, что будет выработан некоторый международный «машинный язык», т. е. код, кодировка с которого иа национальные 262
Рис. 8.22. Схема характрона.
а) подогреватель катода; б) катод; в, г) ускоряющие электроды электронной пушки; д, е) первая система отклоняющих пластин для выбора знака; ж) матрица с пробитыми отверстиями в виде знаков алфавита; з) катушка магнитной фокусировки; и) траектории электронов луча; к, л) вторая система пластин, компенсирующая отклонение луча, вызванное первой системой; м, к) третья система отклоняющих пластин для выбора места экрана, на котором появляется изображение выбранного знака; о) светящийся экран;
п) колба; р) изображение знака на экране.
языки будет максимально простой, и, таким образом, международный обмен информацией будет значительно облегчен.
Весьма возможно, что проблема машинного перевода находится в настоящее время приблизительно в таком же состоянии, в каком находилась проблема механического воспроизведения речи до изобретения фонографа. Подобно тому, как тогда применялись громоздкие и малоэффективные артикуляционные машины, которые стали ненужными после замены принципа воспроизведения, так и в проблеме перевода, возможно, наступит переломный момент, когда окажется возможным непосредственно фиксировать смысл предложения универсальным лаконичным кодом в удобном алфавите, переходя от него к национальным языкам по стандартным правилам.
Если машина может переводить, то не может ли она сочинять? Это — законный и совсем не праздный вопрос. Пытаясь на него ответить, мы можем уяснить ряд интересных и не простых понятий.
Машина, работающая над переводом по той схеме, которая описана выше, конечно, не «понимает» ничего из того текста, который она переводит. Иначе- говоря, в машину не заложено ничего, что давало бы ей возможность сопоставлять информацию, содержащуюся в тексте, с информацией, полученной ранее из каких-либо других источников. И переводя с французского фразу «va fenh>, машина напечатает «уходи», но никак не свяжет то, что она напечатала, ни с движением, ни с повелением, хотя в машине глагол записан, если не черным по белому, то «намагниченным по ненамагничеииому» в повелительной форме, ни, наконец, с переживаниями действующих лиц, одно из которых хочет, чтобы другое удалилось, а второе вынуждено уйти. Словом, машина не «читает» текст так, как читает его разумный читатель, и она не ассоциирует слово ни с каким действием, предметом, событием. Она не могла бы поэтому, скажем, сыграть на сцене переводимую ею пьесу. Машина-переводчик не имеет необходимых для этого возможностей.
Однако в некотором смысле такая машина может, если не «сочинять», то «излагать» человеческим языком нечто, что ей задается в качестве «смысла». Если подойти к тексту, как к простому набору букв и слов, то, анализируя его статистически, можно установить наличие внутренних связей, которые вытекают, во-первых, из грамматики и, во-вторых, 264
из того, насколько часто используются в речи применяемые обороты, т. е. комбинации слов. Можно перекодировать любой текст так, что в результате он будет лишен всех или почти всех внутренних связей. Текст укоротится, энтропия его повысится, он будет содержать только эссенцию смысла. С точки зрения статистики, текст по своим свойствам приблизится к «белому шуму». Если теперь взять любую случайную последовательность символов, обладающих теми же статистическими свойствами, и произвести с ней перекодировку, обратную той, которую мы производили с исходным текстом, внося в код избыточность в соответствии со свойствами человеческого языка, то исходный «белый шум» приобретет структуру и качества фраз. Однако в качестве смысла этих фраз окажется нечто случайное, то, что мы взяли за исходный процесс. Такие фразы машина может «сочинять» или лучше сказать «излагать». Примерно так же работала машина Лапутян-ской академии у Свифта. В этом, в сущности, нет ничего обескураживающего. Мы вложили в машину случайную последовательность и получили текст со случайным смыслом. Если бы на вход машины было подано что-либо иное, представляющее собой соответствующим образом закодированную рациональную реакцию на внешнее воздействие, смысл полученной фразы был бы в соответствии с обстановкой и фраза не была бы бессмысленной. Машина могла бы реагировать на обстановку грамотными русскими высказываниями.
Сейчас уже ле представляют редкости демонстрации сочиненной подобным образом музыки, например, в стиле Баха и Вивальди. Утверждается, что мелодии ковбойских песен хорошо имитируются с помощью случайного процесса марковского типа, т. е. процесса, у которого выбор следующей ноты зависит по вероятности только от непосредственно предшествующей.
И, наконец, последнее, о чем нам хотелось бы упомянуть, говоря о машинах, работающих с текстом,— это об автоматических шифровальщиках и дешифровальщиках секретных передач. Задача автоматической кодировки любым сложным (однократным или многократным), но известным кодом и раскодирования шифрограмм не содержит принципиальных трудностей, и сложность ее определяется лишь сложностью заданного кода.
Гораздо интереснее задача расшифровки секретных сообщений, закодированных неизвестным кодом. Задача
эта имеет интересную особенность по сравнению с другими видами обработки информации. Обычно любая система сигналов бывает заранее установлена или предварительно организована. В случае искусственных кибернетических систем эта организация (алфавит, код) предусматривается конструкцией системы. Естественные системы организуются в процессе существования (язык вырабатывается в связи с действиями, трудовыми процессами и т. д.). Отсутствие всякой предварительной организации, по-видимому, исключает возможность существования сигнальной связи двух систем. Мы могли бы понять сигналы, посланные с Марса, только в той мере, в какой жизнь на Марсе имела бы общие черты с нашей.
Расшифровка секретных сообщений с неизвестными кодами является задачей с минимальными предварительными сведениями о множестве возможных сообщений, алфавите и коде. При сравнительно простых кодах эту задачу решают обычно, опираясь на статистические свойства текста (частоту появления символов и их комбинаций). Расшифровка в этом случае не слишком трудна. В сложных кодах для того, чтобы изменить статистическую структуру, применяют кодировку по таблицам случайного набора символов. В этом случае задача расшифровки усложняется, однако не становится полностью неразрешимой. Расшифровка ведется, грубо говоря, пробами на разных кодах. По мере хода проб отсеиваются неверно выбранные коды и из всех возможных вариантов неизвестного текста постепенно оказываются более вероятными лишь некоторые. Успех расшифровки зависит от размеров текста (чем длиннее текст, тем легче его расшифровать) и, конечно, от количества проб. Расшифровка с неизвестным кодом напоминает поиски неизвестно где спрятанного предмета. Спрятавший может его отыскать сразу, но тот, от кого спрятан предмет, должен обыскать все возможные тайники и только тогда найдет искомое.
Работы по поиску неизвестного кода чрезвычайно трудоемки. На этом, собственно, и основывается «секретность» передачи.
Ясно, что механизация поисков неизвестного кода с помощью быстродействующей машины повышает производительность в десятки тысяч раз. Соответственно снижается и секретность кодов.
Интересен тот факт, что техника дешифровки шифрограмм имеет много общего с «расшифровыванием» надпи-266
сей на древних, ныне забытых языках. И здесь один из основных методов состоит в выявлении частот комбинаций символов, их связей и статистической структуры. И в этом случае большая часть долгой и утомительной работы может быть поручена аккуратным, неутомимым быстродействующим машинам.
Несколько лет назад была сделана попытка поручить машине набор и размещение текста на газетной полосе, т. е. работу метранпажа. Отредактированный текст вводился в машину, куда подавалась также информация о размерах газетной полосы, отведенной под текст. Машина «сама» определяла тип шрифта, размеры и расположение заголовков и делала все необходимые для этого расчеты. Результаты работы машины автоматически реализовывались специальным станком, и газетный текст оказывался не только набранным, но и сверстанным в готовом для печати виде.
Другие роботы
Оставим машины, работающие с текстом, и обратимся к другим, которые также успешно выполняют некоторые «человеческие» обязанности. Сейчас появляются все новые роботы; возможности их создания весьма широки. Мы сможем упомянуть только некоторые из них.
Не так давно сообщалось о машине, заменяющей кассира железной дороги. Автоматический кассир не только получает деньги и выдает билеты и сдачу, но и исполняет все, что требуется от кассира: дает справки о расписании поездов и необходимых в пути пересадках, об опозданиях поездов, если такие случаются, дает справки о наличии мест в разных типах вагонов и, выдав билеты, «вычеркивает» номера проданных мест из списка, дабы не продать их дважды.
Человек в работе этой машины не принимает участия. Тем не менее все обязанности живого кассира машина выполняет и притом предельно четко, безошибочно, быстро, без промедлений и лишних разговоров.
В некоторых городах США на перекрестках больших улиц установлены автоматические регулировщики уличного движения. На подходах к перекрестку располагаются маломощные радиолокационные установки, которые отмечают каждую автомашину, направляющуюся к перекрестку, и одновременно регистрируют ее скорость (по эффек-
ту Допплера). Информация, собранная локационными установками, направляется по каналам Связи в решающее устройство, которое по определенным правилам (алгоритму) определяет необходимый сигнал светофора в данной ситуации, исходя из того, чтобы свести к минимуму задержку машин на перекрестке. Применение автоматического регулировщика увеличило пропускную способность перекрестков примерно на 30% и освободило от необходимости держать на перекрестке полицейский пост. Очень важным, по-видимому, является тот факт, что автоматический регулировщик получает сведения о прибывающих на перекресток машинах до того, как машины скопятся у перекрестка в ожидании сигнала. Важно, конечно, и то, что в авторегулировщике заложен хороший алгоритм управления, полученный на основе намного решения задачи о сведении к минимуму времени ожидания машин.
Более серьезной обязанностью является диспетчерская служба, сопряженная с большой ответственностью и требующая постоянного напряжения внимания и подчас немалой находчивости и опыта. Посмотрим, как работает автоматический диспетчер аэропорта.
Приближающиеся к аэропорту самолеты обнаруживаются аэродромными радиолокаторами. Каждый новый самолет, появившийся в районе аэродрома, отмечается и «берется на учет». Координаты самолета, определяемые радиолокаторами, автоматически вводятся в счетно-решающую машину, которая, собственно, и является диспетчером. Машина с помощью радиолокаторов успевает следить за всеми самолетами от момента их появления в зоне наблюдения до посадки. Каждый самолет снабжается номером и записывается «в очередь на посадку». Поскольку для совершения посадки самолет должен оказаться в нужное время в нужной точке, подход его обеспечивается строгими указаниями. Исходя из его настоящего местоположения, высоты, скорости, для него вычисляется траектория подхода, которая ему и передается в виде команды с проверкой исполнения и корректировкой. Траектория подхода должна обеспечивать не только заход на посадку в соответствии с расчетом, но и безопасность подхода, поэтому она выбирается так, чтобы не было опасности излишнего сближения с другими самолетами на подходе или в зоне ожидания. Наконец, оставляются резервные «места» в очереди на случай, если один из прибывающих 268
Рис. 8.23. Перекресток, обслуживаемый автоматическим регулировщиком движения.
/- радиолокационные установки, 2 -светофоры, 3- решающее устр ойство.
самолетов потребует срочной посадки из-за недостатка горючего или из-за аварии. Если «внеочередных» посадок не оказывается, в резервный момент может быть посажен один из ожидающих самолетов, для чего соответственно меняется его маршрут.
Ведение «текущей работы» по выводу на посадку многих десятков самолетов одновременно легко укладывается в производительность электронной машины, которая заменяет при этом работу многих диспетчеров аэропорта, ускоряет оборот порта и повышает надежность работы. Связь с самолетами поддерживается по радио либо командами пилоту и штурману, либо непосредственным управлением автопилотом. Посадка также может осуществляться автоматами вслепую, без участия пилота.
Рис. 8.24. Аппаратура, обеспечивавшая автоматическое пилотирование самолета от взлета до посадки (в процессе наладки).
Не только посадка самолетов в аэропорту, но и полет по трассе может быть полностью автоматизирован. Задача автоматического выдерживания заданного курса самолета с помощью автопилота решена давно. Однако это не решает полностью всех задач полета, так как автопилот сам требует управления (введения курса, который определяется штурманом по данным пеленга радиомаяков, наблюдению- ориентиров, наблюдениям небесных светил и с помощью радионавигационных систем, дающих возмож-270
ность сразу определять координаты самолета). Необходимые расчеты по данным измерений производит штурман. Расчеты эти сложны, но они производятся по строгим правилам и потому могут быть поручены машине.
Принципиально задача полностью автоматического пилотирования самолета от взлета до посадки не представляет особых трудностей; трудности сосредоточены в технической стороне, дела: в создании устройств, сопрягающих выход навигационных приборов со входом вычислительной машины, в создании достаточно легкой бортовой машины, программировании ее работы и обеспечении высокой надежности работы всей системы. Первый полностью автоматический полет пассажирского самолета на дальнее расстояние был осуществлен в 1947 г. в США.
Транспортный самолет с пассажирами совершил десятичасовой перелет через Атлантический океан из Ньюфаундленда в окрестности Лондона. Полет начался единственным действием человека — нажатием стартовой кнопки, после этого, вплоть до приземления самолета и вывода его к месту выгрузки, «человеческое» управление полностью отсутствовало. В течение всего полета самолет управлялся роботом. На отдельных этапах полета менялась программа управления, менялись маяки и ориентиры, и эта смена управления, так же как и посадка, производилась автоматически.
С тех пор проблема вождения самолета без человека-пилота разрабатывалась и продолжает весьма активно разрабатываться, и в этом направлении достигнуты новые успехи.
Пилотирование самолетов не является, конечно, единственной областью, где необходимо производить замену человека роботом. Но это та область, где очень ярко выступает необходимость такой замены, где человеческие слабости явно тормозят использование возможностей техники. Человек на борту скоростного высотного самолета слишком медленно реагирует, слишком быстро утомляется, требует слишком много забот о себе (аппаратуры для обеспечения его работы в условиях пониженного давления, недостатка кислорода, чрезмерных нагрузок при ускорениях, низкой температуры и т. д.). Человек «не согласован по техническим характеристикам» с современным самолетом, и для «согласования» требуется ряд дополнительных тяжелых, сложных и дорогих устройств. И даже эти устройства (скафандры, герметизированные
кабины, отопление и т. п.) не могут решить задачу до конца. Для грузовых перевозок, для боевых самолетов пора заменить человека на борту более выносливым, менее медлительным, неутомимым роботом. Это и происходит на наших глазах.
Не менее насущные потребности того же рода имеются и в промышленности радиоактивных веществ и в ядерной энергетике. Здесь также роботы, нечувствительные к биологически вредным излучениям, должны стать иа место человека.
Говоря о роботах «высшей квалификации», выполняющих очень сложную и ответственную работу по координации действий большого коллектива людей и механизмов, таких, например, как диспетчер аэропорта, нельзя не упомянуть о некоторых социальных аспектах этой проблемы. Диспетчер аэропорта или промышленного предприятия или офицер противовоздушной обороны (его обязанности по своему характеру мало отличаются от обязанностей диспетчера аэропорта, который обеспечивает «обслуживание» приходящих самолетов) является лицом ответственным, в юридическом смысле этого слова, и эта особенность не только входит органически в техническую сторону организации его работы, но и составляет социальную сторону вопроса. На месте диспетчера аэропорта немыслим работник, не несущий ответственности за свои действия. Это исключило бы возможность пользоваться аэропортом.
И если роботы по мере их «роста», по мере развития теории автоматов, электроники и других отраслей знаний будут все более и более полноценно заменять человека на самых сложных операциях, то это не значит, что человек сможет полностью устраниться и оставить робота в одиночестве выполнять свои функции. Вопрос об «ответственности» робота за качество выполняемой им работы лежит вне сферы технических наук, а в области социального использования техники, и даже сама постановка этого вопроса, по-видимому, представляет нелегкую задачу.
Именно как ответственное лицо человек является необходимым звеном в работе робота, и это место, по-видимому, не может быть занято никем другим. Робот может очень быстро, точно и безошибочно думать за человека, подсказывать ему самые сложные, точные и безошибочные решения, но принимать ответственные решения или, иначе, одобрять или отвергать решения ро-272
бота, может только человек — юридически ответственное лицо, командир производства или офицер армии *.
Это обстоятельство первостепенной важности накладывает некоторые требования на деятельность, а следовательно, и на устройство робота. Прежде чем действовать, робот обязан предъявить свое решение человеку-контролеру для одобрения и критики. В некоторых случаях это будет не одно решение, а несколько возможных решений, из которых человек выберет одно, исходя из соображений, учет которых по тем или иным причинам не заложен в машину.
Следовательно, робот обязан предъявлять человеку некоторую информацию о своей работе. Естественно, что эта информация не может быть полной, ибо информационная пропускная способность, или, говоря проще, скорость работы робота, в тысячи раз превышает соответствующую способность человека. Человек просто не успеет ничего «прочесть» или увидеть и понять. Информация, которую робот обязан предъявить, должна быть очень краткой и представленной максимально наглядно и понятно для человека. Обратное воздействие человека на работу робота также должно быть максимально простым, например, сведено к иажатию сигнальной кнопки.
Необходимость общения человека и робота в ходе работы ставит целый ряд проблем по отбору нужной информации, ее перекодированию в «человеческий» алфавит
• В настоящее время, когда кибернетическая техника еще только выходит из своей «колыбели», контроль за работой машин особенно необходим. Это иллюстрируется забавным, хотя и не очень приятным, происшествием иа открытии Всемирной выставки в Брюсселе 18 апреля 1958 года (Паэээ Сэра, 19 — 20/4 1958).
Приезжие обращались за -направлением в гостиницу в посреднические бюро, расположенные в большом числе возле вокзалов и аэропорта. Бюро сносилось по телефону с центральной конторой^ которая обслуживалась электронной счетной машиной. Машина, получив запрос, отыскивала в памяти адрес ближайшей к месту, откуда -поступил запрос, гостин-ницы, где* имелись свободные номера требуемого типа (с ванной или без ванны, одиночные, парные и т. п.) и выдавала адрес. Адреса гостиниц и загрузка хранились в памяти машины и непрерывно корректировались по мере прибытия новых постояльцев. Все было хорошо кроме... надёжности машины. Случилось так, что машина из-за неисправности, которую нельзя было сразу заметить, стала выдавать адреса занятых номеров, вместо свободных. К вечеру город оказался в смятении из-за скопления около 50 000 вновь прибывших, которые не могли найти себе пристанища по вине безответственной машины. Неисправность была устранена только к утру следующего дня. (Примечание при корректуре).
18 И. А. Полетаев 273
из алфавита машины, очищению информации от шумов, а вместе с этим и вопросы о скорости восприятия человеком различных типов представления информации. С новой остротой возникают старые вопросы о работе оператора с индикаторами и о реакции оператора на различные внешние раздражения. Только теперь оператор работает не с элементарными сведениями, получаемыми, например, от радиолокатора или по телеграфу, телефону и т. д., а с сообщениями о результатах решения очень сложных, запутанных задач, которые «подсказывает» ему робот и на проверку которых у человека ушло бы, быть может, несколько суток драгоценного времени.
Мы снова сталкиваемся с проблемой «перевода» с языка машины на «язык» восприятий человека, и на этот раз проблема по своему значению оказывается выросшей на две головы выше. В данном случае речь идет не только о переводе информации, т.е. перекодировании ее в широком смысле слова, но и о селекции только строго необходимых сведений, о согласовании пропускной способности человека и робота, об устранении всякой избыточности сведений.
Это — проблемы сегодняшнего дня. Пока наши роботы делают первые шаги и мы только учим их разговаривать с нами толково, лаконично и корректно, а вместе с ними многому учимся и сами.
ГЛАВА 9 1SBBBSBSSSSSSSSSB^SSEBBSSSSSSSB
мысль
В работе кибернетических систем управления и связи почти всегда так или иначе принимает участие человек. До появления автоматов и технических средств связи человек был единственным агентом управления, своими руками направлявшим и силу животных, и тепло, идущее от огня, и воду рек на поля. С тех пор уже многие операции управления переданы человеком в руки автоматов, и человек теперь направляет свою деятельность не только непосредственно на управление используемой им энергией, но и на создание управляющих систем и их регулировку.
Если посмотреть на деятельность человека с самой общей точки зрения, то можно увидеть, что по существу всякая производственная деятельность человека представляет собой управление силами природы в его собственных биологических и социальных интересах. Обработка почвы, раз-ведение скота, строительство плотин, электрических станций, добыча полезных ископаемых, обработка сырья и т. п.— все это есть не что иное, как направление естественных природных процессов по некоторому желательному 18* 275
руслу, то есть, в конечном итоге, управление йМй с целый извлечения пользы.
Мы уже говорили, что характерным свойством всякого процесса управления является то, что энергия управляющего сигнала может быть ничтожно мала по сравнению с энергией, подчиняющейся управлению. Именно это свойство управляющих систем влечет за собой тот факт, что производственная деятельность человека всегда дает «энергетический выигрыш», приносит энергии больше, чем затрачивает, или, если не ограничиваться только рассмотрением энергии, извлекает из природы больше «материальных благ», необходимых для существования человеческого рода, чем затрачивается тех же «благ» человеком, производящим работу. Именно об этом свойстве человека по существу говорил К. Маркс, когда он писал о рабочей силе, которая в условиях капитализма является товаром: «...решающее значение имела специфическая потребительная стоимость этого товара, его свойство быть источником стоимости, притом большей стоимости, чем имеет он сам». (К. Маркс. «Капитал», т. 1).
С этой точки зрения введение автоматизации и механизации производственных процессов не только в смысле замены мускульной силы людей при транспортировке грузов, на строительстве и в других физических работах, но и в смысле замены индивидуальной человеческой сообразительности, опыта и т. п. обобщенным научным опытом, вложенным в машину, замена человека роботом в процессах управления, естественно, приводит к тому, что ту же работу может сделать меньшее число людей или те же люди в то же время сделают гораздо больше, т. е. повысится производительность труда человека.
С этой общей точки зрения научно-исследовательская деятельность человека представляет собой не непосредственно производственную деятельность, а процесс собирания и обработки информации, которая затем (может быть очень не скоро, но с тем большим эффектом) будет использована в управлении природой для достижения большей пользы при меньших затратах. Конечной целью науки является познание, т. е. описание наблюдаемых фактов, их систематизация, выявление их связей и путей к полезному промышленному использованию накопленных сведений.
Итак, люди, энергетические машины и кибернетические машины-роботы работают совместно на пользу человеку. 276
Человек в этом коллективе играет особую, руководящую роль, он может делать многое такое, чего не могут (если угодно, «еще не могут») делать работы. В частности, человек должен исполнять те обязанности, которые нельзя поручать роботам и за которые он сам обязан нести ответственность.
Огромное количество операций в равной степени может выполнять и робот, и человек, и по характеру выполнения этих операций, по качеству результатов работу человека-оператора и робота можно сравнивать. Иногда мы бываем вынуждены проводить такие сравнения. Как же выглядит работа человека рядом с работой автомата?
Человек у машины
Пусть, например, человек сидит на вышке деррик-крана, который поднимает грузы со строительной площадки на стены строящегося здания. Под его руками три рукоятки; каждая из них включает один из трех моторов и имеет три положения: среднее — «выключено», правое — «вперед» и левое — «назад». Один из моторов вращает лебедку, поднимающую груз вверх или опускающую его вниз, второй вращает стрелу крана вправо или влево, третий движет весь кран по рельсам вдоль строящейся стены вперед или назад. Крановщик получает от своего помощника, сигнализирующего взмахами флажка, команду, показывающую, откуда и куда нужно перенести груз, и выполняет этот сигнал-команду. Он нажимает рукоятки, делая это подчас почти не задумываясь. Кран движется, крюк, на который цепляют груз, подходит к нужному месту площадки и останавливается. Помощник закрепляет груз и дает новую команду. Снова кран приходит в движение и перемещает груз.
Крановщик не может работать с закрытыми глазами, не глядя на груз. По мере движения груза, наблюдая за его положением, крановщик включает и выключает моторы в зависимости от положения и скорости груза так, чтобы в конце концов действительное положение груза совпало с желаемым. Обратная связь осуществляется с помощью зрения крановщика и его рук, воздействующих на ручки пуска моторов.
Мы уже знаем, что буквально то же самое может делать автомат с обратной связью. Неловкий, неопытный или невнимательный крановщик, остановив или пустив не во-время мотор может вызвать раскачивание груза, не 2?7
безопасное для окружающих. Чтобы избежать этого, он должен научиться гасить возникающие колебания, рассчитывая моменты включения и выключения моторов, исходя из скорости груза, его ускорения, длины троса, величины груза и т. д. Этому нужно научиться, и научиться этому не очень легко.
Правильно сконструированная сервосистема с достаточным числом обратных связей будет делать то же самое без ошибок. Для этого ее структура должна быть подобрана соответствующим образом, исходя из заданной допустимой величины колебаний груза. Если мы создадим такую следящую систему, которая перемещает груз по программе, определяемой сигналом-командой, и обеспечивает отсутствие опасной раскачки груза, и будем рассматривать ее отдельно от крана и груза, то мы сможем измерить ее характеристики и, если нужно, изменить их и отрегулировать систему.
Теперь обратимся к крановщику. Он должен делать и делает то же, что наш автомат. Он получает внешние воздействия — информацию о судьбе груза — и сам воздействует на кран. Мы можем описать действия крановщика в терминах и символах теории автоматического регулирования и, подвергнув его работу объективным измерениям, определить его «функцию передачи» совершенно так же, как если бы на его месте был автомат. Это не абстрактная возможность, это технический прием, которым широко пользуются инженеры при расчете полуавтоматических систем регулирования, в работе которых участвует человек. Ведь для того, чтобы разумно и грамотно построить систему, необходимо знать характеристики всех звеньев, в нее входящих, в том числе и характеристики человека.
Какими же особенностями обладают функции передачи «человеческого звена» следящей системы по сравнению с характеристиками мертвых звеньев, выполняющих ту же работу?
Во-первых, характеристики человека и автомата оказываются близкими друг другу. Иного, собственно говоря, и ожидать нельзя, поскольку практически совпадают выполняемые функции. Во-вторых, характеристики человека не являются строго постоянными. От раза к разу человек несколько изменяет свою реакцию, сам того не замечая. Таким образом, функция передачи человека подвержена случайным изменениям и потому о ней приходится делать 278
утверждения лишь в статистическом смысле, как о средней величине с некоторым разбросом.
Кроме случайных отклонений от среднего, функция передачи человека подвержена также и систематическим изменениям. Она меняется по мере обучения, сначала медленно, затем быстрее, после этого снова замедляет изменение и приближается к некоторому стационарному значению. Об этом установившемся значении мы и говорили выше. Процесс же изменения функции передачи, скорость изменения и пределы изменения часто используются как характеристики скорости обучения или способности субъекта к обучению. Для автомата эта кривая бывает «пройдена» еще до его рождения; мышь Шэннона проходит обучение за один урок; человеку нужен для этого длительный «производственный стаж».
Далее, функция передачи меняется от субъекта к субъекту. Она меняется также для одного и того же оператора в зависимости от настроения, состояния здоровья, утомления и других внешних и внутренних факторов. Однако эти изменения не меняют вида функции передачи, а дают лишь количественные отклонения от среднего.
Самым интересным свойством «человеческого звена» являются не эти сравнительно мелкие особенности, а другое свойство, имеющее весьма важное значение. Человек-оператор может посредством обучения достичь того, что его функция передачи может приблизиться к любому (разумеется, в некоторых пределах) наперед заданному виду. Иначе говоря, человек не обладает одной определенной функцией передачи, он может «настроиться» или научиться работать в соответствии с любой функцией из некоторого класса. Таким образом, человек, хотя и требует времени на обучение, но зато оказывается «универсальным» звеном.
В зависимости от поставленной перед ним задачи человек может работать как звено с линейной или нелинейной характеристикой, как дифференцирующее или интегрирующее звено и т. д. Разумеется, он при этом не может выйти за некоторые естественные пределы, например, повысить скорость реакции сверх свойственной ему максимальной скорости или давать меньшую ошибку считывания, чем та, которая соответствует остроте его зрения и т. д. Оставаясь в количественном отношении ограниченным, человек обладает чрезвычайно гибкими характеристиками ц потому легко приспособляется к любой машине
н любой операции. Правда, различные операции требуют от него различного напряжения сил: физических и интеллектуальных (внимание), и потому вызывают большее или меньшее утомление. Поэтому, несмотря на наличие ценных универсальных возможностей оператора к приспособлению, при проектировании систем необходимо «согласовывать» характеристики машины с параметрами человеческого интеллекта так же, как согласуют геометрические размеры частей машины и необходимые для управления ею усилия с размерами человеческого тела и его энергетическими возможностями.
Если задача оператора, например, состоит в том, чтобы подобно крановщику приводить к совпадению некоторый наблюдаемый им предмет (не обязательно груз, висящий на крюке, это может быть подвижная метка на индикаторе или перекрестье прицела орудия) с желаемым его положением (местом опускания груза, стрелкой индикатора или с целью) и при этом оператор воздействует на штурвал, то будет справляться со своей задачей как в случае, когда положение штурвала будет определять положение управляемого им объекта, так и в случае, когда положение штурвала соответствует скорости или ускорению или комбинации положения, скорости и ускорения объекта. В каждом случае оператор должен «научиться», «привыкнуть», «приобрести опыт», т. е. довести свое умение до такой степени, чтобы ему не нужно было размышлять над тем, какое действие предпринять, чтобы реакция возникала «автоматически», без размышлений, раньше, чем сам он успеет «сообразить», что он делает.
Задача шофера, сидящего за рулем — вести машину по отведенной ему части дороги. Случайные отклонения от желаемого пути из-за поворотов дороги, ее неровностей, ошибок самого шофера он ликвидирует поворотом баранки в нужном направлении. При этом угол поворота пропорционален кривизне траектории машины, т. е. приблизительно второй производной функции, определяющей положение машины на полосе дороги. Таким образом, шофер воздействует непосредственно на вторую производную регулируемой величины. Поэтому для того, чтобы, например, сохранив направление движения, «принять» на метр влево, шофер должен повернуть руль четыре раза (второе и третье движение обычно сливаются, так как производятся в одном направлении). Стрелок же для 230
того, чтобы переместить точку прицеливания должен сделать всего одно движение, если его штурвал воздействует на положение ствола, илн два движения, если штурвал определяет скорость поворота.
Стрелок, крановщик, водитель транспорта и любой другой оператор, будучи «живым звеном» в системе с обратной связью, выполняет свою задачу тем лучше, чем меньше он проявляет свои разнообразные человеческие способности, чем больше его работа напоминает работу автомата, чем меньше он рассуждает и отвлекается. Ошибки в работе оператора порождаются как внешними, случайными, так и внутренними причинами. Шофер может совершить ошибку ие только потому, что он вынужден был отвлечься, чтобы посмотреть на что-то, происходящее на краю дороги, или потому, что его отвлекли вопросом, или в глаз ему залетела мошка, но и просто потому, что он поддался посторонним мыслям или воспоминаниям, переключил внимание на заботы, не связанные с выполняемыми им обязанностями.
Действительно, хорошо работает в качестве шофера или вообще оператора у машины только тот человек, который работает, как автомат. Есть очень эффективный, хотя и рискованный, способ продемонстрировать автоматизм реакций при управлении велосипедом. Попробуйте, если вы хорошо ездите на велосипеде, на ходу переместить правую руку иа левую ручку руля, а левую — на правую ручку и, перекрестив таким образом руки, управлять рулем велосипеда. Обычно вначале дело идет хорошо две или три секунды, пока велосипед может двигаться без управления. Но как только произойдет первое вынужденное движение рулем, оно окажется направленным в сторону, противоположную той, в которую следовало его сделать. Автоматические реакции «перепутанных» рук осуществляют не отрицательную, стабилизирующую, а положительную обратную связь, и велосипед неизбежно опрокидывается. Разумеется такой эксперимент может предпринять только закаленный спортсмен, способный перенести небольшую аварию. Проделывать такой опыт всякому не рекомендуется.
Итак, в полном смысле слова сознательное, рассудительное мышление действует только в период обучения. При выполнении привычных операций действуют автоматические, быстрые реакции, за которыми детальный анализ рассудка попросту не успевает. При этом автомати-?8|
ческие реакции совсем не обязательно являются элементарно простыми: шофер, ведя машину в потоке транспорта, не только учитывает положение соседних машин в данный момент, но и экстраполирует их положение на последующие моменты времени, осуществляя предсказание будущей ситуации и предпринимая те или иные действия (тормозит, ускоряет, поворачивает) в зависимости от того, что «должно» случиться спустя несколько секунд. Такое же предсказание будущего осуществляет подсознательно пешеход, переходящий улицу в потоке транспорта (в нарушение правил движения). То же делает охотник, стреляющий в летящую птицу и выносящий точку прицеливания вперед, «упреждая» цель. Ту же задачу решает прибор управления артиллерийским огнем.
Все эти и подобные им естественные или, чаще, приобретенные обучением и опытом автоматизмы, т. е. определенные реакции на определенные раздражения, которые регулярно повторяются от опыта к опыту и потому имеют характер устойчивости, осуществляются только потому, что в организме протекают определенные, закономерные и стабильные процессы, начинающиеся восприятием и кончающиеся реакцией. Функционирование, работа организма человека как хорошо построенного автомата протекает на базе материальной структуры, в которой происходят материальные физико-химические, физиологические процессы. Функции человека, его реакции связаны со структурой его нервной системы. Со строением нервной системы связаны, конечно, не только автоматические реакции, но и процессы обучения и все психические явления, как бы сложны они ни были. Вряд ли это нужно доказывать, так как всякому известно, что нормальная сознательная активность человека или животного возможна только при нормальном здоровом состоянии его нервной системы. Любое повреждение, заболевание, отравление системы нервных клеток обязательно влечет за собой расстройство функций нервной системы с соответствующими внешними проявлениями. Точно так же ведет себя машина: она не может нормально функционировать, если ее структура нарушена.
Мы уже говорили в гл. 5 о работе нервных волокон и клеток при передаче сигналов — нервных возбуждений. В гл. 6 мы упоминали о нервных структурах, ответственных за простейшие врожденные автоматизмы — безусловные рефлексы. Теперь мы вкратце остановимся на неко торых чертах строения нервной системы в целом.
Строение нервной системы
Мы уже говорили, что нервная система, как и любой другой орган живого тела, состоит из отдельных клеток.
Нервная клетка — нейрон, как и всякая другая клетка, имеет ядро, окруженное протоплазмой. Размеры тела клет-
Рис. 9.1. Нейроны различных отделов нервной системы позвоночных. /— нейрон спинального ганглия, 2 —нейрон с коротким аксоном. 3 — моторный нейрин передних рогов спинн-'го мозга, 4 — нейрон мозжечка, 5 — периферический афферентный нейрон об ияния, d — нейрон ганглия ав ономнпй нервной системы, 7—клетка Пуркинье мозжечка, 8 — пнрчмндный нейрон коры полушарий головного мозга.
ки порядка 0,1 мм. От тела клетки отходят один или несколько отростков, имеющих диаметр порядка 0,01 мм и длину от долей миллиметра до метра и больше. Обычно только один отросток (аксон) имеет большую длину и осуществляет связь данного нейрона с удаленными клетками. Аксон имеет короткие ответвления (коллатерали), рстальные отростки данной клетки (кроме аксона), на-
Я83
зываемые древовидными отростками (дендритами), имеют небольшую длину и сильно ветвятся. Они обеспечивают контакты с аксонами других нейронов.
Нервные волокна — аксоны, собираясь в пучки, образуют более или менее толстые нити жемчужно-белого цве-
Рис. 9.2. Нейроны различных отделов нервной системы позвоночных.
/ — тело клетки, 2 — дендриты, 3 — аксон.
та — нервы. Нервы пронизывают ткани тела животного и соединяют между собой скопления нервных клеток, а также нервные клетки с чувствительными окончаниями (рецепторами) разного рода и с исполнительными клетками (эффекторами). Таким образом, составными частями или простейшими элементами нервной системы являются: чувствительные окончания — рецепторы (осязательные 294
иди ТакТиЛЬные, болевые, химические, световые и т. д.), расположенные как на поверхности тела, так и вблизи нее, нервные клетки и волокна — нейроны, места соединений нервных волокон различных клеток между собой (синапсы) и нервные окончания в клетках мышц и желез.
Число типов нейронов довольно велико. В разных частях нервной системы преобладает тот или иной тип нейронов, имеющих, очевидно, некоторую специализацию.
Рис. 9.3. Различные виды синапсов в нервной системе рыбы.
Клетки нервной ткани и их волокна образуют некоторые структуры, различимые как по их обособленному расположению, так и по совместному функционированию. Эти структурные образования чрезвычайно многообразны и весьма различны у различных животных. Чем сложнее организм, тем более сложную структуру представляет собой его нервная система и тем разнообразнее реакции организма на внешние воздействия.
У гидроидных полипов, например, нервная система состоит из двух типов клеток и представляет собой единую рассеянную сеть без отдельных, выделяющихся структур. У кольчатых червей нервные клетки образуют скопления
В каждом сегменте Тела, называемые Ганглиями, связанными в единую цепочку. От каждого ганглия отходят волокна к мышцам своего сегмента тела. В головной части имеется более крупное скопление клеток — надглоточный ганглий, являющийся органом, координирующим в какой-то мере работу всей системы в целом.
Все позвоночные имеют примерно такую же общую схему строения нервной системы. Она распадается на сегменты, связанные в единое целое по продольной оси тела животного и имеющие на головном конце наиболее обширное скопление клеток — головной мозг. Начиная от кости-
стых рыб и кончая человеком, у всех позвоночных нервная система имеет одни и те же составные части. Правда, эти части у разных животных выполняют не совсем одинаковые функции.
Среди органов тела животного нервная система занимает особое место. Только нервная система в своей центральной части целиком ващищена сплошным ко-
Рис. 9.4. Нервная система медузы.
стным чехлом (череп, позвоночник). При голодании организма нервные ткани в последнюю очередь начинают терять в весе. Дело обстоит так, будто нервная система больше других органов оберегается от вредных влияний. Несомненно, что повреждение нервной системы наносит больший вред организму
в целом, чем повреждение многих других органов.
Нервная система млекопитающих делится на два раздела: низший и высший. Иногда первый называют автономной или вегетативной системой, подчеркивая тот факт, что этот раздел нервной системы обеспечивает согласованную работу внутренних органов животного, работающих независимо от сознания. Одиако эта независимость весьма
относительна, так как низший раздел тесно связан и структурно и функционально с высшим разделом — центральной нервной системой. Автономная нервная система состоит из скоплений нервных клеток — узлов или ганглиев,
расположенных в различных частях тела, рядом с другими органами, и сети волокон, пронизывающих внутренние органы и проникающих, в частности, в спинной мозг. Центральная нервная система состоит из головного мозга, спинного мозга и сети волокон, идущих от рецепторов к мозгу и от него к эффекторам, так называемая периферическая нервная система.
Рис. 9.5. Нервная система червя (/) и насекомого (2).
Спинной мозг представляет собой круглый тяж, лежащий внутри позвоночника. В разрезе ясно видно серое вещество, представляющее собой скопление нейронов и лежащее в средней части мозга в виде буквы Н. Внешняя часть состоит из белого вещества — нервных волокон, идущих отчасти в радиальном направлении, но главным образом в продольном, в виде так называемых столбов. Спинной мозг имеет периодическую структуру. На уровне каждого позвонка в него входят нервы, всего 31 пара. Нервы подходят симметрично справа и слева, причем сзади входят задние корешки нервов периферической чувствительности (в задние рога—отростки серого вещества), а спе-
Рис. 9.6. Развитие мозга рыбы (/), ящерицы (2), кролика (3) и человека (4).
реди выходят передние корешки — двигательные (из передних рогов). Передние и задние корешки сливаются в общие узлы, от которых идут к периферии нервы, имеющие в своем составе и чувствительные и двигательные волокна.
Рис. 9.7. Лобные доли головного мозга кошки (/), лемура (2), макаки (3) и человека (4).
В передней части спинной мозг переходит в продолговатый мозг, представляющий собой часть головного мозга.
Головной мозг состоит из продолговатого мозга, являющегося непосредственным продолжением спинного, сред-263
него мозга со зрительным бугром, промежуточного мозга и переднего мозга. Головной мозг в целом представляет очень сложное образование, изобилующее скоплениями клеток, вкрапленных в виде ядер в белое вещество, и пучков волокон, проходящих в толще белого вещества в различных направлениях. В нашу задачу не входит подробно описывать структуру мозга.
Наибольшим сходством строения и функций у различных видов животных обладают более древние, появившие-
Рис. 9.8. Схема автономной нервной системы.
С правой стероны тела показаны парасимпатические нервы, с левой — орто-симпатические. Оргосимпатнческяе нервы образуют сплетения (ганглии) вблизи позвоночного столба, парасимпатические — возле тканей тех органов, на которые они воздействуют. Орто- и парасимпатические нервы обычно оказывают противоположное воздействие на внутренние органы: если одни стимулируют, то другие тормозят функцию (или наоборот). Окончания ортоснмпа-тическнх волокон выделяют химическое вещество (нейрогумор)— симпатии, окончания парасимпатических волокон — ацетилхолин.
ся ранее в процессе эволюции части мозга, которые ближе примыкают к спинному мозгу: продолговатый, задний, средний и промежуточный. Все они сходны у различных видов животных, и функции их более или менее одинаковы.
Эволюционно наиболее молодая часть мозга — передний или конечный мозг—и в особенности часть его, называемая плащем, по размерам и строению резко различается у различных животных. Эта часть мозга образует так называемые большие полушария. У человека полушария занимают большую часть черепа и содержат около 19 И. А. Полетаев 289
половины всех нервных клеток (из общего числа около 1010). Полушария имеют характерное строение, отличное от нижележащих частей. Тела нервных клеток полушарий сосредоточены в тонком поверхностном слое мозгового
вещества серого цвета, называемом корой (то же имеет место в мозжечке). Поверхность коры больших полушарий человека достигает 7ч квадратного метра вследствие того, что она расположена в виде складок, образующих извилины (выступы) и борозды (впадины). Под корой находится белое вещество, состоящее из нервных волокон. Размеры и строение больших полушарий, в особенности лобных долей, лежат в основе многообразия и сложности высших нервных реакций животного.
Рис. 9.9. Спинной мозг человека.
а) вид спереди; б) вид сзади; в) разрез (/ — передний, двигательный корешок, 2 — спинномозговой нерв, 3—межпозвоночный узел, 4—задний, чувствительный корешок, 5 — серое вешестпо. 6 — белое вещество).
Поверхность лобных долей составляет у кошки 3% общей поверхности мозга, у собаки 7%, у шимпанзе 16%, у человека 29%.
Нервные волокна, из которых состоит белое вещество, соединяют между собой различные участки коры, а также кору с подкорковыми ядрами. Особенно обильны связи с другими участками у лобных долей. Обычно различают следующие типы связей: ассоциативные волокна, соеди-290
ИЯЮЩИё различные области одного и того же полушария; комиссуральные волокна, связывающие между собой участки двух различных полушарий; проекционные волокна, связывающие участки коры с подкорковыми ядрами и нижележащими отделами нервной системы.
Кора полушарий не представляет собой однородного образования. Микроскопические срезы коры обнаруживают характерное слоистое строение. В различных слоях
Рис. 9.10. Отделы головного мозга человека.
/ — промежуточный мозг, 2 — средний мозг, 3 — продолговатый мозг, 4—мозжечок, 5 —передний мозг.
обнаруживаются различные типы клеток и волокон. Особенно интересно то, что в различных участках коры микроскопическое строение оказывается различным. Из восьми характерных слоев некоторые могут отсутствовать, быть слабо или сильно развитыми. В соответствии с особенностями клеточного строения всю кору делят на 11 цито-архитектонических областей и 52 поля. По мере изучения коры число известных, полей постепенно увеличивается, так как внутри, казалось бы, однородных структур при детальном исследовании обнаруживаются новые.
Цитоархитектоническая и миэлоархитектоническая структуры мозга, т. е. структуры клеточных скоплений и расположения пучков волокон, изучены довольно подробно. Изучение нервных структур производится параллельно и в связи с изучением функций. И хотя изучение мозга еще чрезвычайно далеко от завершения, уже в настоя-19* 291
Рис. 9.11. Послойное строение коры головного мозга человека.
/ — нервные клетки, окрашенные по методу Гольджи. 2— нервные клетки* окрашенные по НисслЮ» а — миелиновые волокна ио Кульчицкому.
щее время известны интересные сведения, позволяющие утверждать, что между работой мозга и его структурой имеется определенная связь. Физиологи называют сопоставление работы мозга и его структуры «локализацией функций». Вопрос о «локализации функций», т. е. зависимость функции от работы определенных участков мозга имеет длинную и богатую историю. Для нас он интересен прежде всего тем, что подход к работе мозга с точки зрения связи структуры и функции, подход более чем знакомый конструкторам вычислительных устройств, позво-
Рис. 9.12. Цитоархитектонические поля коры больших полушарий головного мозга человека (участки коры, отличающиеся друг от друга клеточным строением).
ляет' четко сопоставить особенности живой и неживой машин, провести между ними параллели, а главное, определить, где кончается сходство, где начинается различие между ними и в чем же состоит это различие. В частности, весьма интересен вопрос о том, существуют ли такие функции живого организма, для которых не имеется соответствующих физико-химических, физиологических процессов, протекающих в пределах определенных органических структур. Весь опыт изучения деятельности нервной системы говорит однозначно о том, что ответ на последний вопрос отрицателен.
Работа мозга
Прежде чем ставить вопрос о характере работы мозга, следует посмотреть, какими методами изучаются структура и функции мозга. Таких методов несколько. Прежде
всего это микроскопия. Ткань мертвого мозга разрезается на очень тонкие слои (срезы), которые -подвергаются окраске различными красителями, избирательно окрашивающими либо клеточные тела, либо волокна, либо промежуточную ткань и т. д. Цитоархитектоника мозга установлена именно таким способом. Однако на срезе можно проследить нервное волокно лишь на очень коротком участке; установить же топографию взаимосвязей в белом веществе мозга не представляется возможным, потому что пучки волокон тянутся подчас на несколько сантиметров. Для этой цели пользуются методом перерезки волокон (на живых животных).
Небольшой участок белого вещества рассекается на операционном столе и затем оперированное животное сохраняют живым в течение нескольких дней. Нервные волокна, отделенные ножом хирурга от нейронов, перерождаются и гибнут (подвергаются некрозу). Если после этого рассматривать под микроскопом окружающие ткани при соответствующей окраске, то перерезанные, переродившиеся волокна оказываются ясно видными. Длиннрй серией таких опытов можно детально проследить нервные связи в белом веществе.
Трудоемкость и трудность этой работы очевидны. Если бы сложное техническое устройство, например телевизионный центр, уменьшить до размеров спичечной коробки, залить в парафин и затем изучать под микроскопом на тонких срезах, вряд ли бы мы могли рассчитывать на скорый успех в изучении схемы и работы неизвестного нам устройства. Мы наблюдали бы в различных срезах то или иное количество деталей, провода, идущие в различных направлениях, но от этих сведений до схемы в том понимании, которое известно радиотехникам, было бы еще очень далеко. Примерно так же обстоит дело и с изучением мозга, сложность строения которого несравненно выше, чем сложность любой существующей сегодня радиосхемы.
К счастью, в распоряжении физиологов имеются и другие методы изучения мозга, еще в живом нормальном функционирующем состоянии.
Если на операционном столе под наркозом вскрыть череп животного и снять мозговые оболочки, то можно непосредственно воздействовать на поверхность мозга, раздражая ее механическим, химическим или электрическим способом. Можно получить доступ и к внутренним 294
частям мозга, вводя тонкие изолированные электроды в толщу мозга и раздражая ткань мозга электрически. Мозговая ткань не обладает чувствительностью ни тактильной, ни болевой, так как в ткани мозга не имеется соответствующих рецепторов. Подопытное животное или
Рис. 9.13. Диаграмма Пенфильда — представительство двигательных функций тела в передней центральной извилине коры головного мозга человека. (Функции символически для наглядности изображены в виде частей тела человека.)
/ —пальцы ноги, 2 —лодыжка, 3 —колено, 4 — бедро. 5 — туловище. 6—плечо, 7 — локоть, запястье, р—кисть, 10 — мизинец. 11— безымянный палец, 12 — средний палец, 13 — указательный палец, 14 — большой палец, 15 — шея, 16 — бровь, 17 — веко и глазное яблоко, 18 — лицо, 10 — губы. 20 — челюсть, 21 — язык,
22 — глотка.
человек, подвергающиеся такому воздействию, могут быть в полном сознании, без воздействия наркоза и не испытывать страданий при умеренном раздражении мозговых тканей. Таким образом, производя раздражения и наблюдая реакцию или узнавая субъективные ощущения пациента, можно многое узнать о работе нервной системы.
Что же известно из результатов подобного рода исследований?
Если раздражать электрическим током мозговую извилину, лежащую впереди от так называемой роландовой борозды, то всегда при раздражении одной и той же точки будет происходить одно и то же непроизвольное автоматическое сокращение определенной группы мышц на противоположной стороне тела. Переходя от одной точки поверхности мозга к другой, мы будем, таким образом, поочередно «включать» мышцы ног, спины, руки, лица и т. д. Можно построить отображение мышц тела на поверхность извилины, сохраняя наблюдающееся соответствие. Тогда мы получим проекцию мышц скелетной мускулатуры на переднюю извилину — «моторную зону» коры. От нервных клеток моторной зоны (так называемых «больших пирамид» или клеток Бетца) отходят нервные волокна, образующие большой пучок (пирамидный путь). Волокна пирамидного пути проходят через различные отделы мозга, частично перекрещиваются на границе продолговатого и спинного мозга (переходят с правой стороны тела на левую и наоборот) и входят в число проводящих путей спинного мозга. В пределах серого вещества спинного мозга волокна пирамидального пути образуют соединения (синапсы) с клетками серого вещества, соединяясь через них с эффекторными окончаниями на скелетных мышцах.
Если раздражать током заднюю извилину, лежащую позади роландовой борозды, пациент будет ощущать прикосновение (фактически отсутствующее) в различных участках кожи. И снова каждой точке поверхности мозга однозначно соответствует участок кожи, от которого можно проследить проекционные чувствительные связи в коре. В задней извилине мы имеем чувствительную или «сен-зорную» зону кожной чувствительности.
Подобным образом можно хотя бы отчасти «распутать» схему нервных взаимодействий в теле животного. Искусственно раздражая участок мозга, мы получаем не только видимую реакцию, но и субъективное ощущение. При этом мы как бы обходим нормальные пути прохождения сигнала нервного возбуждения и подаем его где-то посредине пути. Сигнальный характер процессов в мозге виден при этом весьма рельефно.
Опыты с раздражением коры позволяют обнаруживать устойчивые структуры, несущие некоторые определенные функции. Подобно тому, как в сегменте спинного мозга можно проследить дугу простейшего безусловного рефлекса от кожного рецептора к задним корешкам и рогам 296
спинного мозга, через серое вещество к передним рогам и корешкам и далее до мышечных эффекторов, можно установить также и более сложные и разветвленные связи.
Существуют связи между различными сегментами спинного мозга; благодаря этим связям в реакцию включаются большие группы различных мышц. Существуют побочные
Рис. 9.14. Диаграмма Пеифильда— представительство чувствитель* ных функций тела в задней центральной извилине коры головного мозга человека.
/—внутренние органы, 2 —глотка, «? — язык, 4 и 5 —челюсти, 6 — нижняя губа, 7 — верхняя губа. 8— щека, 9— нос, 10—глаз, //—большой палец. /2—указатель» иый палец, 13 — средний палец, 14 — безымянный палец, 15 — мизинец, 16 — кисть, 17 — запястье» 18 — предплечье, 19 — локоть, 20 — плечо, 2/ —лопатка, 22 —голова, 23 — шея, 24 — туловище, 25 — бедро, 26— голень, 27 —ступня, 28 — пальцы, 29 — половые органы.
связи с ганглиями симпатической нервной системы, расположенными вне позвоночного столба, вдоль него по сторонам. Эти связи оказывают воздействие на регулировки внутренних органов, включая их в работу при интенсивных реакциях. Существуют, наконец, многочисленные связи с головным мозгом по восходящим и нисходящим
нервным путям спинного мозга. Эти связи, во-первых, дают возможность осуществлять, кроме чисто автоматических рефлекторных движений, движения сознательные, субъективно определяемые волей и объективно исходящие из коры головного мозга и идущие по пирамидальным путям через спинной мозг к эффекторам. Эти связи, во-вторых, регулируют протекание простейших рефлексов, задерживая их или включая. Именно поэтому акт ходьбы проходит часто незаметно для сознания, автоматически,
Рис. 9.15. Кошка, подвергающаяся непосредственному воздействию электрического тока на нервные клетки головного мозга через введенные в мозг электроды.
а) до включения тока, бив) после включения тока, г) способ крепления электро* дов на черепе. Электроды введены в область подбугорья (по А. Б. Когану).
или рефлекторно. Сознательно ходьба может регулироваться лишь «в общем», а в деталях протекает автоматически.
Разбирая элементарный акт передачи сигнала по нервному волокну, мы уже говорили о том, что нервное возбуждение, представляющее собой физиологический процесс, имеющий электрохимическую природу, протекает в нервном волокне периодически, распространяясь по нерву со скоростью от 2 до 160 метров в секунду и повторяясь с большей или меньшей частотой в зависимости от силы возбуждения рецептора.
Прохождение возбуждения через нервную клетку подчиняется определенным законам и зависит от состояния клетки, которое, в свою очередь, определяется питанием, предыдущей историей клетки и падающими на нее раздражениями. Клетка под влиянием этих условий может 293
проводить или не проводить нервный импульс. Ряд приходящих со стороны раздражений может повысить ее порог возбудимости и «запереть» ее, как запирается для прохождения сигнала вентиль в схеме электронной цифровой машины. Недаром нейрон так любят последнее
Рис. 9.16. Запись электрических потенциалов внутренних частей мозга кошки с помощью введенных в мозг электродов.
а) подопытная кошка в состоянии покоя, 6) кошка, пробужденная зовом ,кис—кис*, в) способ крепления электродов, г) осциллографическая запись потенциала под* бугорья. Отметка соотиетствует моменту возбуждения зовом „кис—кис "
(по А. Б. Когаиу).
время сравнивать с радиолампой. К тому же результату могут привести химические (гуморальные) влияния на клетку через омывающую ее жидкость.
Пока организм живет, на вход нервной системы непрерывно поступают различные раздражения, которые распро-299
страняются по нервным структурам, вызывают реакции, которые, в свою очередь, дают начало новым сигналам и т. д. В результате, нервная сеть постоянно находится в активном состоянии и проводит возбуждение. Это состояние активности не исчезает даже во время сна или коматозного состояния. Таким образом, каждое внешнее воздействие падает не на ожидающие его прихода безжизненные реле, а на непрерывно движущуюся и самостоятельно работающую
систему. Внешние воздействия вносят изменения в уже существующее динамическое функционирование нервной системы. Часто эту динамику называют «спонтанной», т. е. самостоятельной деятельностью нервной системы. Термин этот неудачен, ибо эта деятельность является в конечном итоге отзвукам внешних воздействий, и, таким образом, она ® некотором смысле рефлекторна.
Эта пестрая картина непрерывной работы мозга проявляется в разнообразии картин электрической активности. Электрохимические процессы проведения нервных импульсов вызывают появление изменяющихся электрических потенциалов в окружающих тканях и могут быть наблюдаемы и даже с поверхности кожи головы при усилении. Такого рода записи — энцефа-
Рис. 9.17. Крепление электродов иа коже головы человека при записи тенциалов
электрических по-(энцефалограмм).
записаны должном
л ограм мы — похожи на записи случайных процессов, однако в них можно выделить систематические составляющие, так называемые ритмы мозга. Систематические колебания потенциала отражают некоторые периодические процессы, протекающие в мозге. Можно классифицировать характерные колебательные процессы по их частоте. Удается уловить колебания с частотами порядка 8— 10 герц («альфа-ритм»), 18—32 герца («бета-ритм»), 35— 55 герц («гамма-ритм»), 1—6 герц («дельта-ритм»).
Период и амплитуда систематических составляющих и характер непериодических процессов сильно меняются 300
в зависимости от того, с какой части черепа снимается потенциал и в каком состоянии находится подопытный. При засыпании пациента амплитуда медленных дельтаколебаний увеличивается, при открывании глаз — уменьшается или исчезает. Состояния нормального и гипнотического сна дают отличные друг от друга записи. Некоторые душевные болезни, например эпилепсия, вызывают
\юомк&
1 j SOmkS
IZOhk!)
\100ик8
tee*
Рис. 9.18. Энцефалограммы—осциллографическая запись электрических потенциалов с кожи головы.
а} человек, слуховое раздражение во сне (отмечено стрелкой), б) кошка, открыва-ние глаз (отмечено стрелкой), в) человек, открывание глаз (отмечено стрелкой), г) человек в бодром состоянии, д) человек в состоянии легкой дремоты, в) человек
в состоянии глубокого сна.
характерные изменения вида энцефалограммы: в ней появляются «высоковольтные> пики.
В последнее время появился новый метод наблюдения электрических потенциалов, снимаемых с кожи головы. На голове пациента в шахматном порядке укрепляют несколько одинаковых электродов. Потенциал каждого электрода подается на усилитель и далее через коммутатор на вход электронного осциллографа. Световое пятно, образуемое лучом осциллографа, перемещается по экрану, воспроизводя геометрическое расположение электродов, укрепленных на голове пациента. Яркость пятеи на экране
изменяется при этом в соответствии с потенциалами, снимаемыми с соответствующих точек кожи. На экране осциллографа получается светящаяся картина распределения электрических потенциалов на коже головы, которая изменяется во времени в зависимости от состояния пациента и его психической деятельности.
Еще один метод исследования деятельности мозга дается клиническими наблюдениями над нервнобольными, а также экспериментами над животными с удалением частей мозга. Животное и человек
могут существовать при значительных повреждениях отдельных частей мозга. При этом их поведение заметно отклоняется от нормы. Изучение таких отклонений и позволяет выяснить роль отдельных частей мозга, поврежденных болезнью или операцией.
Если перерезать спинной мозг, то полностью нарушается чувствительность и произвольные движения в той части тела,которая управляется (иннервируется) частью спин-
1сек
Рис. 9.19. Энцефалограммы различных животных.
а) морская свинка, б) кошка, в) обезьяна, г) человек.
ного мозга, отделенной от головного. Однако в отделенной части остаются простейшие рефлекторные движения, так как нервные пути рефлекторных дуг не нарушены. Более того, простейшие рефлексы оказываются повышенными. То же самое'наблюдается не только в том случае, если полностью перерезать спинной мозг, но и при заболеваниях, нарушающих в большей или меньшей степени проводимость пирамидного пути, ведущего, как мы уже знаем, от коры больших полушарий к эффекторам и передающего сигналы произвольных движений. Усиление рефлекторных движений и появление нормально невыяв-ленных рефлексов служит в медицинской практике признаком (симптомом) заболевания пирамидного пути (сдавливание опухолью и т.п.). Одним из таких симптомов является симптом Бабинского. Если провести тупым 302
предметом по подошве йбгй от пятки к пальцам, то в результате происходит непроизвольное тыльное разгибание большого пальца и расхождение веером остальных так, как эго происходит при ходьбе. Это явление происходит только при нарушении управления со стороны коры. Рефлексы проявляются «самостоятельно», без команды вышележащих центров, и поведение становится автоматичным. Подобных явлений можно наблюдать много.
Рис. 9.20. Энцефалограмма с различных участков черепа больного эпилепсией, снятая во время припадка, длившегося три секунды.
Разрушение продолговатого мозга ведет к смерти животного. Исследования раздражением показывают, что в продолговатом мозге находятся участки, возбуждение которых дает сложные автоматические движения глотания, рвоты, слюноотделения, дыхания, сердцебиения, расширения и сужения сосудов и т. д.
Если разрезать мозг выше промежуточного, то появятся судорожные напряжения мышц (так называемая децеребрационная ригидность) за счет усиления рефлексов, обеспечивающих противодействие силе тяжести (антигравитационных рефлексов).
Удаление коры головного мозга превращает животное в своего рода автомат. Оно ходит, совершает координированные движения, но неспособно ничему научиться, не узнает даже знакомых предметов, неспособно добывать пищу и, будучи голодным, пробегает мимо кормушки с пи
щей, которую тем ие меиее исправно ест, если пищу вкладывают ему в рот.
Удаление или поражение болезнью отдельных участков коры головного мозга дает очень пеструю картину нервных расстройств, которая в общем согласуется с теми сведениями о функциональных особенностях различных струк
тур, которые получены из опытов с раздражением электрическим током.
Участки мозговой ткани, которые тесно связаны с данной функцией, например, с сокращением определенной группы мышц, обычно называют «центром» данной функ-
Рис. 9.21. Децеребрационная ригидность кошки.
Перерезание ствола мозга вызывает напряжение мышц-разгибателей за счет снятия торможения антигравитационных рефлексов со стороны головного мозга.
ци.и и говорят о «локализации данной функции» в этом центре. Постепенно было открыто много таких «центров». Особенно интересен тот факт, что границы многих функциональных «центров» совпадают с границами цито-архитектонических полей. Очевидно, что структурные особенности соответствуют функциональному назначению участков. Имеются рецепторные, или
сензорные поля, имеются эффекторные, или моторные поля, но, кроме тех и других,
существуют также участки коры, не связанные непосредственно с простыми ощущениями и движениями. Некоторые физиологи называют их «ассоциативными полями», отмечая роль этих полей в связывании ощущений и реакций. Многие из таких полей имеются только у определенных видов животных, например, у человека. Разрушение или повреждение нервных структур или функциональных систем коры влечет за собой расстройство интеллектуальных способностей. Симптомы таких заболеваний чрезвычайно разнообразны. Так, например, повреждение задней части третьей лобной извилины слева вызывает особое расстройство речи — так называемую «афазию Брока»; пациент не способен выражать свои мысли словами. Он понимает то, что ему говорят, но не в состоянии сформулировать свои мысли в виде фразы. Поражение некоторых частей нижней теменной доли сопровождается выпа
дением из памяти отдельных слов (амнестическая афазия). Больной способен произносить эти слова, если их подскажут и он понимает их смысл.
Повреждение отдельных участков коры вызывает потерю способности писать (аграфия), читать (алексия), считать (акалькулия), распознавать ритм и мелодию музыки (амузия), невозможность совершать произвольные движения при отсутствии параличей (апраксия) и т. д. Описаны случаи, когда специалист лингвист с повреждением некоторого участка мозга оказывается в состоянии грамматически правильно выполнять перевод текста с одного языка на другой и при этом не понимает ни слова из переведенного им текста.
Все эти и многие другие- подобные им факты, казалось, позволяют достоверно утверждать о существовании геометрически ограниченных «центров» речи, письма, чтения и т. д. Однако это утверждение может быть подвергнуто критике. Оказывается, одни и те же симптомы можно получить с различных участков коры. Иногда вместо изолированного движения получаются координированные движения различных мышц, например, поворот глаз и головы в одну и ту же сторону и т. п. Можно было бы попытаться назвать новую точку «центром координированного движения глаз и головы», но это не дало бы ничего для понимания работы мозга, как, собственно, ничего не объясняет и введение понятия «центра».
Некоторые сложные рефлексы при повреждении коры вскоре восстанавливаются. Очевидно, что работу поврежденной части стала выполнять какая-то другая — неповрежденная. При этом, чем сложнее нарушенная функция и чем она «моложе» филогенетически, т. е. чем позже она появилась в процессе эволюции, тем чаще и быстрее она восстанавливается. Филогенетически «старые» функции, относящиеся к подкорковым структурам, восстанавливаются хуже или вовсе не восстанавливаются.
По-видимому, различные функции различным образом связаны с нервными структурами. Некоторые функции — типа простых рефлексов — связаны со структурой однозначно, другие — сложные, вырабатывающиеся по мере роста организма в виде приобретенных навыков,— могут протекать различными путями и использовать как одни, так и другие структуры. Следует говорить не о «локализации функций» в мозге, а о локализации нервных структур, одни из которых выполняют лишь небольшое разнообра-20 И. А. Полетаев 305
зие функций, другие же, подобно счетной машине, выполняющей на одной и той же конструкции различные действия, способны реагировать очень сложно и разнообразно на разнообразные внешние воздействия и, в частности, выполнять некоторую функцию различными путями, используя различные каналы связи или обходные пути. К структурам последнего типа относится вся кора головного мозга. Удаление ее целиком лишает животное всех приобретенных навыков и возможности их приобретения, т. е. всех интеллектуальных функций.
Попытки «локализации функций», т. е. разыскания нервных структур, работающих при реализации тех или иных психических функций и их взаимодействий, очень напоминает задачу, которая стоит перед инженером, когда он пытается локализовать причину неправильного функционирования сложной системы автоматического управления. Правда, есть и разница: инженер всегда имеет в своем распоряжении полную схему устройства, в случае же анализа нервных структур такой схемы нет, а если бы она и была, то оказалась бы в огромное число раз сложнее схемы самых сложных технических устройств. Но в существенных чертах обе задачи близки друг другу. В системе управления одно и то же нарушение или изменение функции может быть вызвано различными изменениями в структуре, вносимыми в различных точках цепи прохождения сигнала. Бывает и так, что некоторое нарушение функции однозначно связано с неисправностью одного определенного узла системы. При анализе схемы машин в связи с ее функционированием становится ясным, что любая функция реализуется посредством сложной схемы, включающей в себя большое число узлов машины и их связей. И если неисправность в определенном узле всегда вызывает нарушение определенной функции, то это совсем не дает права утверждать, что данная функция «локализована» в данном «центре».
Одна и та же задача может решаться животным по-разному в зависимости от наличных ресурсов нервной системы. Об этом говорят, например, результаты опытов с обучением крыс в лабиринте (те самые, которым подражал Шэннон своей искусственной мышью). Понижение способности крыс ориентироваться в лабиринте зависит не столько от того, какие части мозга у них удалены или повреждены, сколько от того, какая часть общего количества мозгового вещества выключена. Это говорит прежде всего 306
о том, что зрение, слух, обоняние, осязание могут дополнять и заменять друг друга при ориентировке в лабиринте. Эти наблюдения оказали влияние на установившиеся в свое время взгляды относительно существования строго фиксированных «центров» любой функции. В настоящее время установлено, что, помимо «основных» центров, существуют разбросанные по всей коре участки, которые в не-которой степени могут заменить собой основной центр.
Отдельные индивидуумы могут отличаться друг от друга особенностями строения и развития отдельных частей мозга. Эти различия могут сказываться на способностях индивидуума, характере его восприятий, памяти, склонностях и т. д. Поскольку общее число клеток мозга более или менее постоянно, чрезмерное развитие какой-либо одной способности часто предполагает некоторое снижение других.
Эмоции
Эмоции связаны с работой определенных нервных структур мозга, т. е. клеточных образований, возбуждение которых вызывает реакцию вегетативной нервной системы и внутренних органов, дающую внешнюю картину проявления эмоции и одновременно субъективное ощущение перемены настроения. Некоторая часть нервных структур, ответственных за возникновение эмоций, расположена в отделе мозга, называемом «гипоталамус», по соседству с некоторыми центрами телесных гомеостатических регулировок.
Эмоция и ее проявления имеют определенную биологическую целесоо»бразность, определяя общий характер реакции организма на обстановку в целом. Так, появление чувства страха объективно сопровождается возбуждением автономной нервной системы, выделением активирующего вещества, симпатина, в эффекторах ортосимпатической системы, выделением адреналина надпочечными железами, усилением расщепления гликогена в глюкозу в печени и усиленным поступлением глюкозы в кровь, сокращением селезенки, выбрасывающей добавочную резервную кровь в кровеносное русло, усилением работы сердца (и задержкой работы пищеварительного тракта), сужением кровеносных сосудов, усилением дыхания, расширением зрачков, уменьшением охлаждения тела (ослабление притока крови к коже и поднятие волос для сохранения тепла), общим усилением обмена веществ и т. д. Все телесные проявле-20* 307
ния страха способствуют мобилизации организма на то, чтобы обеспечить максимальную отдачу усилий ради самосохранения. Работоспособность организма в состоянии страха (или гнева), как известно, заметно повышается. Телесные проявления эмоции охватывают весь организм.
Деятельность «центров» эмоций может быть подавлена воздействием коры головного мозга по соответствующим нервным связям. Заболевание таламической области или связанной с ней лобной доли коры мозга ведет, к стойким нарушениям 'настроения. Воздействие алкоголя на кору ведет к ослаблению воздействия коры на таламус и к его «расторможению», чем и объясняются неразумные и разнузданные поступки людей, подвергающих себя такого рода «алкогольной децеребрации».
Связь эмоциональных «центров» с корой явствует также и из того, какими путями возбуждаются эмоции. Кроме прямых воздействий (испуг от слишком громкого, неожиданного шума и т. п.), тот же страх может возникнуть в результате восприятия смысла какого-либо устрашающего рассказа, новости и т. л,
Существует особый вид общения людей, призванный апеллировать непосредственно к эмоциям. Это — музыка, поэзия, живопись, театр и другие виды искусства. Некоторые произведения искусства (инструментальная, симфоническая музыка) очень мало связаны с разумным восприятием (если оставить в стороне профессиональную, ремесленную сторону музыки). Другие же (жанровая живопись, эпическая поэзия, проза) пользуются средствами рассудка для достижения той же цели—возбуждения эмоций; чувство радости или гнева возникает у читателя лишь тогда, когда он подробно узнает историю героев или рассмотрит во всех подробностях полотно жанровой живописи.
Некоторые химические вещества избирательно воздействуют на отдельные области мозга, вызывая возбуждение или торможение их деятельности и давая характерную картину изменения поведения человека и его реакций на изменения внешней обстановки. Так, например, одно из таких веществ («Обливион») вызывает подавление эмоций страха, не вызывая при этом снижения способности правильно оценивать обстановку и принимать решения. Другое вещество (мескалин) вызывает временное состояние, весьма напоминающее душевное заболевание — шизофрению, 308
Сигнальные процессы в мозге
Если подытожить те не слишком обширные и далеко не исчерпывающие сведения, которые имеются у нас о работе нервной системы в целом и мозга в частности, то в результате складывается убеждение, что нервная система, рассматриваемая как физический объект, представляет собой типичную кибернетическую систему, работающую с сигналами. Непосредственное и детальное сравнение мозга и счетной машины вряд ли имеет смырл, и название «электронный мозг», которое часто в последнее время применяют к машине, имеет, разумеется, только иносказательный, пожалуй даже иронический, смысл. Но в самом общем плане такое сравнение вполне законно, ибо и мозг, и машина работают с информацией, используют сигналы, выполняют преобразования сигналов и управляют исполнительными органами.
При таком сравнении нельзя игнорировать тот факт, что самая сложная машина имеет всего несколько тысяч элементов, что в миллионы раз меньше числа нервных клеток мозга. Правда, машина совершает элементарные такты работы в сотни тысяч и миллионы раз быстрее мозга. Кроме того, деятельность машины и деятельность мозга специализированы на решение различных классов задач с различными алгоритмами и в различных алфавитах.
Все, что мы знаем о мозге, не противоречит утверждению, что известные нам мозговые процессы суть процессы сигнальные. И у нас нет никаких оснований утверждать, что сигнальные процессы не исчерпывают всей деятельности мозга.
Внешние события воздействуют на рецепторы, и возбуждение передается в соответствующие отделы мозга, так называемые анализаторы, где происходит предварительная обработка информации. О механизмах этой обработки, об алгоритме ее и о коде нам известно очень мало главным образом потому, что наблюдать работу соответствующих структур в живом мозге очень трудно. Если раздражать током различные участки, например, зрительного анализатора, то при раздражении частей, расположенных близко к рецептору (сетчатке глаза), пациент сообщает об ощущении зрительного образа, ясно различимого, как бы реального и зафиксированного в пространстве; при раздражении более высокорасположенных разделов пациент
сообщает о том, что видимый им фиктивный образ имеет характер не реальности, а скорее яркого представления, не связанного с пространством и окружающей обстановкой.
По мере продвижения от рецептора к коре число нервных волокон не увеличивается, а уменьшается. Очевидно, объем доводимой до сознания информации меньше, чем объем информации, получаемой на входе. Это сжатие информации, отсев ненужной и сохранение лишь необходимой представляет чрезвычайно большой интерес с принципиальной стороны.
Представим себе, что не слишком крепко спящий человек испытывает внешнее воздействие: он слышит сильный звук или ощущает прикосновение. Обычно в этой ситуации воздействие не осознается спящим непосредственно, а вызывает сновидение, которое он по пробуждении хорошо помнит и может воспроизвести рассказом во всех деталях. Можно зафиксировать объективно время от начала воздействия до пробуждения, т. е. время, пока длилось сновидение. Обычно оно невелико. Воспользовавшись аналогией с телевизионной передачей изображения, можно оценить, сколько кадров и сколько элементов в кадре потребовалось бы, чтобы воспроизвести сновидение с теми деталями, которые может рассказать проснувшийся, а затем подсчитать, исходя из времени сна, какую полосу частот должна была бы занимать подобная «телепередача». Подобные приблизительные подсчеты дают астрономическую цифру порядка 1020—1023 герц, т. е. частоты жесткого гамма-излучения. Поскольку физиологические процессы в мозге имеют верхнюю границу полосы порядка не выше 100 герц, а число возможных параллельно работающих каналов не превышает 109—1010, остается заключить, что способ кодирования информации в мозге в огромное число раз экономнее, чем в современном телевидении. Не приходится говорить, какое значение для технических отраслей кибернетики имела бы разгадка этой тайны физиологии.
Аналогичные примеры можно было бы привести и относительно «синтеза» реакций на основе обработки информации.
К сожалению, «синтез и анализ» раздражений—понятие, введенное в физиологию еще Павловым, — с тех пор не получило никакого развития и конкретизации, и мы сегодня так же мало знаем о деталях обработки входной осведомительной информации и переработки ее в выход-310
ную исполнительную, как и во времена Павлова. Термин «синтез и анализ» применяется только вообще.
Мы уже обсуждали вкратце проблему различения формы, когда говорили о 'машинах для чтения. Эта проблема решена природой в мозговых структурах, но мы о ней не знаем почти ничего и должны отнести ее к очередным задачам кибернетики.
Еще более интересен и актуален вопрос о механизме памяти мозга. «Анализ» раздражений и «синтез» реакций тесно связаны с памятью. Объем памяти мозга чрезвычайно велик. Механизм, ответственный за сохранение сигналов нервных раздражений, до сих пор не установлен и не локализован. По-видимому, каждый анализатор имеет свою собственную память (может быть даже несколько видов ее), тесно переплетающуюся с механизмом обработки информации. Существует память зрительная, слуховая, моторная и т. д. При этом «вызов» информации из памяти происходит не по ее «адресу», как в счетной машине, а по ассоциации данного сигнала с другими, поступившими одновременно с данным, на основе ранее выработанных условных рефлексов. Однако детали этого процесса, его схема, порядок протекания его в нервных структурах мозга нам еще неизвестны.
Каким образом, различные раздражения, поступившие одновременно в различные отделы мозга, фиксируются памятью совместно и впоследствии появление одного их них вызывает представление о другом и притом достаточно сильное для того, чтобы вызвать реакцию? Ответ на этот вопрос затруднителен потому, что количество сочетаний различных элементарных раздражений необозримо велико. И на любое сочетание с безусловным раздражением может быть выработан условный рефлекс. Кроме того, условный рефлекс, т. е. совместная фиксация в активной памяти комбинации раздражителей, непрерывно изменяется. С течением времени он укрепляется, ослабевает, сочетается с новыми раздражителями и рождает новые рефлексы, тормозится и т. д. Время реакции уменьшается при обучении, т. е. выработке рефлекса, и увеличивается при его торможении. По-видимому, все это сопровождается динамической перестройкой функционирования нервных структур, изменением путей прохождения сигналов в мозге. При огромном количестве активных элементов (клеток в мозге) картина таких динамических изменений должна
быть чрезвычайно сложной. Энцефалограмма дает о ней лишь очень слабое представление.
Существуют гипотезы относительно элементарных процессов, которые обеспечивают запоминание нервных сигналов. Согласно одной из них память осуществляется циркуляцией нервного возбуждения по замкнутому пути, состоящему из нервных волокон и клеток, подобно тому, как «слова», закодированные в бинарном алфавите, циркулируют в устройстве памяти с линией задержки вычислительной машины (см. гл. 7). Некоторыми исследователями были обнаружены замкнутые петлеобразные нейтронные структуры в нервных тканях рецепторов, однако решительного подтверждения этой гипотезы памяти у нас нет. Другая гипотеза приписывает память свойствам протеиновых молекул, находящихся внутри клеток. Изомерные перестройки этих весьма сложных агрегатов (т. е. перестройки, не изменяющие числа атомов, а лишь порядок расположения атомов в молекуле) дают набор дискретных состояний, отличающихся, вообще говоря, химическими свойствами и могущих проявиться в физиологических функциях клетки. Эта гипотеза, также впрочем еще не проверенная основательно, весьма заманчива, так как она объясняет многие факты, необъяснимые гипотезой циклических нейронных структур, и, в частности, наличие памяти у простейших одноклеточных организмов, которое отмечалось многими естествоиспытателями *.
Если гипотеза о внутриклеточной молекулярной памяти верна, то необходимо допустить, что молекулярные квантово-механические процессы в клетке оказывают влияние на функционирование целых органических структур и всего макроскопического организма. Происходит обмен информацией между квантово-механическими, молекуляр-
* Парамеция, посаженная в узкую, закрытую с одного конца капиллярную трубку, доплыв до тупика, совершает 30—50 неудачных попыток повернуться, затем находит способ это сделать. Во второй раз в той же ситуации парамеция делает только 10—15 неудачных попыток перед правильным движением. При последующих повторениях опыта она все быстрее находит выход из затруднения, явно приобретая опыт, т. е. запоминая предыдущие действия и их результаты.
Инфузория-трубач (стентор) при раздражении ее струей воды вначале пытается уклониться от раздражения, совершая движения в стороны. Затем прячется в слизистую оболочку, вылезая из нее по временам, и прячется снова, если раздражение продолжается. Наконец, она покидает свое убежище и уплывает прочь, ища более благоприятной среды. Поведение изменяется по мере накопления опыта, что не может происходить без запоминания предыдущих ситуаций.
ними структурами и «классическими» макроскопическими структурами, а также взаимное управление (запоминание и вспоминание). Следует заметить, что эта ситуация — управление макроскопической системой со стороны квантово-механических процессов — не является единственной. То же имеет место при взаимодействии молекулярных структур хромосомы и плазмы клетки. Процесс обмена веществ в плазме, расщепление пищевых веществ и синтез клеточного вещества, синтез энзимов — органических катализаторов, определяющих направление и характер химических реакций,— определяются в конечном итоге актив-
Рис. 9.22. Замкнутые нервные цепи в ретикулярном веществе глазодвигательного нерва (предполагаемая схема по Лоренте де Но).
ным воздействием сложнейших молекул, которые входят в состав хромосом.
Таким образом, жизнедеятельность клетки складывается из направляющего воздействия молекулярных структур хромосомы и воздействий внешней среды (поступление пищи того или другого состава и создание условий хода реакций, температуры, давления и т. п.).
Обширная и гибкая память по ассоциациям есть то свойство мозга, которое создает громадное качественное отличие поведения животного от поведения механических автоматов.
Выработка условных рефлексов создает тот тип рационального поведения, которым характеризуются животные. Условный рефлекс всегда создается только на основе биологически целесообразной безусловной реакции, например реакции на пищу. Вид и запах пищи не являются безусловными раздражителями. Щенки, воспитанные на вегетарианском питании, не реагируют на вид и запах мяса. Лишь после того, как они узнают вкус мяса, вид и запах его будут прочно ассоциироваться с поглощением пищи и вызы-
вать обильное выделение слюны; вырабатывается «натуральный» условный рефлекс, который будет поддерживаться и существовать в течение всей жизни собаки. Впоследствии, после первой поимки дичи, подобные же натуральные рефлексы вырабатываются на вид дичи, ее поведение (убегание) и т. д.
Затем будут вырабатываться условные рефлексы на условные рефлексы (продолженные рефлексы), и если сочетания условных раздражителей во внешней обстановке устойчивы, эти рефлексы также будут непрерывно поддерживаться, создавая в своей совокупности общий облик поведения животного. Условные рефлексы вырабатываются не только в виде реакции активного действия, но и в виде торможения действия. Рефлексы могут вырабатываться с задержкой реакции по времени (до получаса), т. е. реакция будет происходить не на раздражение, а на след раздражения, зафиксированный в памяти. Рефлекторной реакцией может быть действие внутренних органов, не воспринимаемое сознанием, в частности изменение эмоций. Следует заметить, что «сознательная» часть работы мозга составляет лишь малую долю общего объема его работы.
Все эти хорошо изученные факты позволяют строить гипотезы о внутренних процессах, определяющих поведение животного или человека.
Информация о внешних событиях в обработанном виде, с отсевом несущественной части, зафиксированная в памяти в виде сигналов — физиологических состояний и процессов нервной системы, либо может превратиться в действие-реакцию немедленно или с задержкой, либо реакция может быть заторможена. Процесс сопоставления сигналов различных событий, вызов из памяти ассоциированных сигналов других событий (например, причин и следствий), выбор на основании эмоциональных оценок наиболее целесообразной реакции и представляет собой физиологическую основу того процесса, который в субъективной терминологии называется «размышлением». Мысль представляется, таким образом, объективно как сигнальный процесс обработки информации, запасенной в памяти за все время жизни человека, на основе свойственных индивидууму природных инстинктов, эмоциональных оценок, темперамента. Мысль, по Сеченову и Бехтереву, есть задержанный исполнением условный рефлекс «... очевидно, что мысль и вообще субъективные переживания должны быть понимаемы как задержанные рефлексы, которые рано или поздно, освободившись от торможения, перейдут в объективный мир в форме 314
ли пересказа или в форме действий и других реакций». (В. Бехтерев. «Общие основы рефлексологии», гл. II). При эмоциональном возбуждении торможение ослабевает и реакция прорывается наружу. Интенсивно и возбужденно мыслящий человек шепчет, жестикулирует, гримасничает.
Объективная психология, или рефлексология, имеющая дело не с анализом субъективных внутренних ощущений и переживаний, а с наблюдаемыми реакциями, рефлексами и подобными им явлениями, может быть в значительном объеме, а скорее всего целиком, построена, на сигнале как основном понятии. Субъективные ощущения представляют собой информацию, несомую сигналом — физиологическими процессами нервной деятельности. В этом факте отражается общее свойство сигнала—соответствие, изоморфизм сигнала и внешних событий или реакций.
«Объяснить» субъективное сознание индивидуума, сознание как ощущение личности, собственного «я», как ощущение различия между внутренними и внешними явлениями в жизни индивидуума вряд ли возможно, ибо для каждого индивидуума оно единственно и ни с чем не сравнимо. Сознание же других людей, наблюдаемое не как явление внутри моего «я», а в окружающем меня коллективе людей (индивидуальное сознание каждого члена этого коллектива), может быть понято по сопоставлению с богатым миром кибернетических систем и процессов, существующих помимо живых существ. Правда, сегодня ни одна самая сложная машина не подошла еще к той грани, за которой начинается сознание, и мы не знаем, перейдет ли она когда-нибудь эту грань. Но ничто, кроме предубеждения и предрассудков, не позволяет сегодня уверенно отрицать подобную возможность. Здесь уместно вспомнить слова академика И. П. Павлова о человеке как машине, единственной по высочайшему саморегулированию, которые мы цитировали в первой главе.
В последующих главах мы еще вернемся к этому вопросу.
Чем не обладает машина?
Когда обсуждается вопрос о сравнении потенциальных возможностей счетных машин со способностями человеческого интеллекта, обычно в качестве недоступных машине качеств называют чисто человеческие свойства: фантазию, способность к творчеству, «свободу воли». Сюда можно добавить еще свойства, которые не всегда упоминаются: эгоизм, эмоции и, наконец, способность размножаться.
Если говорить только о существующих и эксплуатируемых сегодня машинах, то этот перечень свойств значительно расширится. Но мы будем обсуждать не только свойства современных утилитарных устройств, но и более широкого класса возможных конструкций машин, игнорируя их утилитарную ценность и экономическую целесообразность их эксплуатации.
Попытаемся оценить, в какой степени фантазия и способность к творчеству являются для машины «запретной
Рис. 9.23. Обезьяна наливает в кружку воду из бака.
областью». Для этого прежде всего следует дать определение этих понятий.
Если человек фантазирует, он создает нечто (рассказ, рисунок и т. п.), не соответствующее непосредственно наблюдаемой реальности. Плод фантазии — это, например, чудовище с телом быка, крыльями орла и головой человека, 'стоящее на страже ворот ассирийского храма; это — существо с человеческим телом и козлиными рогами, играющее в роще на свирели, или существо с двойным телом коня и человека; это — история войны с титанами, история божеств и их взаимоотношений со смертными и т. д.
Ничего подобного ни один фантазер никогда не наблюдал, и у нас нет оснований утверждать, что подобные вещи могли быть почерпнуты им из окружающей реальности, заимствованы, скопированы. Несомненно, он их 316
создал сам, но создал из материала, полученного все тем же путем—путем наблюдения реальности.
Способность любого организма реагировать одинаково на различные раздражения определенного класса лежит в основе различения не конкретных предметов, а классов предметов, т. е. абстракций. Одним из первых абстрактных образов, существовавших еще на заре жизни, был образ, или зародыш понятия, реакция — «пища». Однородные
Рис. 9.24. Обезьяна заливает водой огонь, горящий вокруг апельсина.
признаки различных предметов (признаки, имеющие одинаковое биологическое значение) в процессе выработки условных рефлексов непроизвольно группируются и закрепляется в виде однородной группы. Впоследствии с появлением речи эти группы признаков ассоциируются со словом. Возможно, первыми - двумя различными абстрактными классами предметов еще задолго до того, как на земле было произнесено первое слово, были классы «съедобные» и «несъедобные» или подобные им категории. Сама необходимость различать предметы и отбирать из большого числа конкретных объектов полезные и вредные рождает способность к классификации. Животные не могли бы существовать, если бы не обладали этой способностью в большей или меньшей степени.
Таким путем высшие животные могут различать огромное количество не только конкретных предметов, но и классов предметов, и понятия «голова» и «нога» любого животного различаются теперь уже не по степени их съедобности, а в результате длинной цепи натуральных и продолженных условных рефлексов, прочно закрепленных в памяти и связанных с эмоциональными оценками. То же относится, разумеется, не только к предметам, но и к действиям. В результате рождаются оторванные от конкретной обстановки образы: «разделить», «соединить», а первоначально, вероятно, «съесть», «поймать» и т. п.
Если сигналы классов предметов и действий существуют в нервной системе, точнее, в памяти мозга животного, то, естественно, они могут случайно сочетаться друг с другом в фантастических образах и при этом «нравиться» или «не нравиться», привлекать или пугать вследствие эмоциональной окраски.
Посмотрим внимательнее на произведения человеческой фантазии и попытаемся найти в них то, чего мы никогда не знали. К продуктам фантазии относятся только сочетания элементарных образов или понятий, но не сами образы. Нельзя придумать ничего такого, что не было бы ни в чем (ни в деталях, ни в общем) похоже на действительность. Лучшее, что известно в этом жанре, это китайский «белый дракон», изображаемый пустым фоном без рисунка.
Фантазия есть просто активная переработка информации о реальных предметах, применяющая случайный выбор сочетаний при синтезе образов, понятий, сюжета и т. п., или же намеренное извращение привычных сочетаний. Как известно, основными признаками «смешного» являются неожиданность, нелепость (несоответствие привычному и полезному) при отсутствии угрозы.
Необходимость опираться на реальные образы или хотя бы на их «осколки», даже при самой смелой фантазии, часто приводит к серьезным затруднениям при формировании понятий. Известно, например, с каким трудом студенты и учащиеся привыкают к понятиям корпускулярно-волновой природы элементарных частиц. Свойства частицы каждый знает хорошо на основании опыта. Свойства волн несколько хуже, но тоже знает. Но никто никогда не наблюдал непосредственно ничего, что обладало бы одновременно и теми и другими свойствами, как это имеет место для электрона, который как частица остав-318
ляет индивидуальный след на фотоэмульсии и образует на ней же интерференционный рисунок, да ко всему остальному еще и не обладает индивидуальностью! *
Свойства элементарных частиц мы не можем «понять» в обычном смысле слова, т. е. сопоставить известными операциями с уже известными явлениями. Мы можем только привыкнуть к новым понятиям и научиться ими правильно пользоваться, несмотря на их «неочевидность», просто потому, что они являются для нас элементарными, изначальными понятиями, информацией о физической реальности. И при ответе на вопрос: «Как Вы себе представляете электрон или квант?»— мы вынуждены воздержаться от описания формы, цвета, шероховатости и ограничиться только разъяснением свойств уравнений Шредингера — де Бройля как наиболее точного описания событий внешнего мира.
Итак, фантазия сводится, очевидно, к особым методам обработки информации, поступающей из внешнего мира. Зная признаки этих методов, можно вложить их в машину и заставить ее фантазировать. На этом пути, вероятно, могут получиться забавные результаты. Музыка, сочиняемая с помощью случайных процессов с заданными распределениями вероятностей, представляет собой один из первых примеров творчества без человека в области искусства.
Человек сам иногда страдает отсутствием достаточно богатой фантазии и оказывается слишком сильно привязанным к информации, получаемой им непосредственно из внешнего мира.
Обратимся к процессу творчества и постараемся представить, как протекает этот процесс у человека. Творчество есть создание чего-то (предмета или идеи), что является новым, т. е. не существовавшим до сих пор. Это может быть энергетическая машина или метод управления ею, использование огня или силы животного, статуя или мелодия, орудие труда или теория и т. д.
В основе творчества, конечно, лежит фантазия. Творчество, помимо фантазии, заключает в себе, во-первых, отбор по некоторым признакам «нужных» или «хороших»
* Как известно из опыта, распределение энергий электронов подчиняется статистике Бозе — Эйштейна, которая в отличие от статистики Больцмана, применимой для молекул и атомов, не учитывает перестановки индивидуальных электронов в ячейках фазового пространства.
Co to о
Рнс 9 25- Обезьяна переправляется с плота на плот.
продуктов фантазии, а во-вторых, создание реальных предметов в соответствии с выбранной «фантастической» идеей.
Академик И. П. Павлов ставил много опытов с человекообразными обезьянами для проверки их способности к решению творческих задач. Эти опыты весьма поучительны для выяснения самого понятия творчества.
Обезьяна получала на тарелке лакомство—апельсин, брала его с тарелки и с удовольствием съедала. После
Рис. 9.26. Фантастический образ— страж Ассирийского дворца.
Рис. 9.27. Фантастический образ— Кентавр.
этого апельсин окружали кольцевым сосудом со спиртом, спирт горел, и обезьяна при попытке достать апельсин обжигала лапу. Она искала способа избежать ожога. Обезьяна научилась заливать огонь водой; для этого ей пришлось научиться последовательно, в порядке постепенного усложнения задачи, пользоваться кружкой и бачком, из которого она черпала воду, ходить к бачку за водой, пользоваться краном бачка, когда крышка его была закрыта, добираться до бачка, стоящего на плоту, по дощечке, перекинутой через пруд *. Наконец, был поставлен
* Фотографии любезно предоставлены Н. Н. Ладыгиной-Котс.
21 И. А. Полетаев 321
последний опыт. На пруду плавали два плота, соединенные узким мостиком. На одном плоту находилась обезьяна, апельсин, окруженный горящим спиртом, и кружка в руках у обезьяны. На другом — бачок без воды. Все привычные способы добычи воды не давали успеха, несмотря на затрату усилий и преодоление мостика (обезьяны— не любители купаться). Кругом был целый пруд воды, но это была не та вода, которую знала обезьяна, видевшая ее в кружке. Вода в пруду не была связана с кружкой, огнем и апельсином, была неизвестна и потому бесполезна. Отсутствовала ассоциация — реальная связь в мозге обезьяны. Налицо была ситуация для творческого открытия воды в пруду. Долго обезьяна повторяла привычные безуспешные попытки, затем оставила их, по-видимому, вместе с надеждой получить апельсин. И стала развлекаться, чем могла. И вот тогда, хотя далеко не сразу, обезьяна совершила «научное открытие». Оно, как все гениальные открытия, было по 'смешного простым и пришло, как это часто бывает, случайно. Играя, обезьяна случайно зачерпнула в кружку воды из пруда и узнала ее. Ассоциация вызвала из памяти стереотипную последовательность действий... Апельсин был съеден.
Что же мешало обезьяне отождествить воду в пруду и воду в кружке? Отсутствие прямого опыта и вытекающих из него ассоциаций. Случай восполнил этот пробел, а нужда в воде (в кружке), т.е. условно-рефлекторная связь образа воды (в кружке) с цепью реакций, имеющих результатом апельсин и удовольствие от этого лакомства, заставила обезьяну обратить внимание на воду (в кружке), когда она зачерпнула ее (из пруда). Будь обезьяна сыта, она могла бы не заметить своего открытия и «обезьянья наука» на этот раз не совершила бы прогресса.
Человеческие изобретения и открытия совершаются двумя путями: путем подражания и путем находок. Один из первых автомобилей имел четыре ноги и переставлял их, как четвероногое животное. Один из первых паровозов имел привод на кулисный механизм, упиравшийся одним концом в землю, как веслом в воду или шестом в дно. Это — изобретения по подражанию, напоминающие действия обезьяны, бегавшей через пруд за водой из бака, по привычке. Известно много изобретений — находок, когда ошибка в задуманном процессе приводила к неожиданным хорошим результатам. Однако изобретения и открытия делаются не столько путем экспериментальных по-322
исков, сколько «выдумыванием» при наличии настоятельной необходимости.
Если у человека болит зуб и не дает ему покоя, больной мечется от боли, он совершает массу движений, не имеющих ни плана, ни смысла. Если животное хочет вырваться из клетки, оно совершает такой же беспорядочный и настойчивый поиск выхода. Одно из хаотических движений, или их комбинация, может привести к желаемому результату.
Если изобретатель или ученый горят желанием решить некоторую задачу, то это неотвязное желание часто не
Рис. 9.28. Паровоз системы Брумтона использует в качестве движителя кулисный механизм, упирающийся концами в почву наподобие ног животного.
дает покоя не меньше, чем зубная боль. Человек, размышляя, перебирает в уме без определенных методов и плана всю информацию относительно интересующего его предмета. Рано или поздно он натыкается на решение, отбросив предварительно много вариантов. Эмоциональная установка-* желание найти решение — заставляет его отметить благоприятную находку, обратить на нее внимание и остановиться на ней. Впоследствии путь к решению аналогичной задачи уже не будет столь извилистым. Память позволит восстановить кратчайший путь к цели.
Этот метод, называемый методом проб и ошибок, в общем, одинаков и для животного, пытающегося выйти из клетки, и для ученого, отыскивающего, например, новый математический аппарат для решения абстрактной задачи. Разным является только материал.
Творчество есть решение новой задачи, поставленной 21* 323
внешней обстановкой, методом поисков и находок. При этом важную роль играет внимание. Когда экспериментирование с реальными объектами заменяется в процессе творческого размышления упорядоченным или беспорядочным перебиранием запасенных в памяти образов, понятий— точнее их изоформных изображений в виде сигналов нервных возбуждений — внимание автоматически и бессознательно останавливается на тех сигнальных описаниях событий, на тех идеях, которые дают решение задачи или ее части. Эта невольная фиксация внимания является непременным условием успеха.
Однако тот же самый факт—невольное фиксирование внимания на самом важном — может порой сослужить дурную службу. Достаточно сказать, что техника циркового искусства фокусников (иллюзионистов) основана именно на этом явлении — невольном для зрителя сосредоточении внимания на том, что представляется самым важным в происходящем на арене и что в действительности является приемом артиста, направленным на отвлечение внимания от действительно важных для результата фокуса действий.
Такие же «фокусы» проделывает инстинктивное сосредоточение внимания на «самом важном» и без помощи фокусника. Многие предрассудки и суеверия имеют именно такое происхождение. Совпадения «примет» или снов с важными событиями, особенно с несчастьями, привлекают к себе внимание (часто болезненно возбужденное) и надолго остаются в памяти. Несовпадение как факт, не имеющий значения, не привлекает внимания и забывается или просто не замечается. Объективная регистрация примет и событий позволяет обойти фокусы внимания и строго устанавливает отсутствие взаимосвязи между приметами, предчувствиями и событиями, ими «предсказываемыми». Естествоиспытатели должны осторожно применять объективные статистические методы, дабы избежать серьезных ошибок и заблуждений, обязанных объективному несовершенству человеческой психики, которое, однако, в других случаях является необходимым.
Несомненно, что поиск и нахождение наилучшего решения, метод проб и ошибок, может быть заложен в машину, и в этом смысле акт творчества в принципе машине не чужд.
Способность к размножению или самовоспроизведению резко отличает существующие сегодня машины от живых 324
организмов. Однако в принципе возможно создание машины, которая сама создавала бы себе подобную. Для этого, прежде всего, необходимо предоставить машине сырье или -полуфабрикаты, которые она должна будет использовать для построения новой машины, подобно тому, как животные используют сложные органические вещества, входящие в состав пищи, для синтеза тканей будущего организма. При условии, если машине будет поставляться в нужном количестве «пища» в виде радиоламп, проводов, моторов, фотоэлементов и так далее, и при условии, что сама машина будет обладать достаточной сложностью структуры и богатством функций, машина сможет самостоятельно построить новую машину, которая, в свою очередь, если она не «умрет от голода», построит следующую и так далее.
Строгое доказательство этой возможности было проведено математиком Джоном фон Нейманом, который построил математическую модель устройства саморазмно-жающейся машины. В описании фон Неймана каждая деталь машины занимает элементарную ячейку пространства, что позволяет свести задачу к геометрии. Используются три вида элементов машины: логические или комбинирующие элементы, проводящие элементы и исполнительные элементы. Первые имитируют нейроны животных, вторые — нервные проводящие пути, последние — мышцы и железы.
Логический элемент модели имеет возможность пребывать в различных состояниях, которые могут меняться во времени. Время, как и пространство, квантовано, т. е. разбито на дискретные участки — «циклы». Состояние элемента в данном цикле зависит от состояний его самого и состояний соседних элементов в предыдущие циклы. Состояние логических элементов может передаваться по цепям проводящих элементов к исполнительным элементам. Исполнительные элементы воздействуют на окружающие детали (сырье), выбирая нужные и соединяя их в схемы в соответствии с получаемыми сигналами.
Исходную информацию машина получает от ’программы, записанной на серии элементов машины и занимающей часть общего объема машины. В программе могут быть записаны любые возможные операции над деталями, окружающими машину (над сырьем). Согласно программе машина может собрать, любую возможную схему. Для того чтобы машина воспроизводила сама себя, достаточно
записать в программе оборку такой же машины, как исходная, копирование программы, передачу копии программы новой машине и запуск ее в работу по программе. В результате, процесс самовоспроизведения будет повторяться и продолжаться до тех пор, пока хватит сырья или пока размножившиеся машины не войдут в конфликт друг с другом, начав мешать друг другу синтезировать новые машины.
По подсчетам фон Неймана минимальное число элементов, необходимое для построения самовоспроизводя-щейся машины, составляет около 200 000 (около 50 000 элементов самой машины и около 150 000 элементов для записи программы.. Модель самовоспроизводящейся машины фон Неймана по своей схеме во многом сходна с воспроизведением живой клетки при ее делении. Программа машины, которая копируется и в копии передается новой машине, напоминает набор хромосом клетки, определяющих, в общем, строение и развитие самой клетки.
Итак, свойство самовоспроизведения или размножения не чуждо машине, хотя бы в принципе. До сего времени самовоспроизводящиеся машины не были реализованы. В этом не было необходимости, так как практического применения такие машины сейчас, по-видимому, не нашли бы, а принципиальная сторона вопроса достаточно ясна и в математической формулировке, без реализации. Однако некоторые практические работы прикладного характера по автоматизации производства непосредственно примыкают к кругу вопросов, связанных с самовоспроизводящимися системами. К числу таких работ относится, например, создание полностью автоматизированного цеха для производства радиоаппаратуры.
Цех-автомат снабжен автоматическими станками, автоматическими измерительными устройствами, осуществляющими операции контроля и браковки, и транспортными устройствами. Станки и контрольные устройства связаны друг с другом цепями управления и обратной связи. Это позволяет автоматически поддерживать режим работы автоматов, соответствующий минимальному браку изделий.
Каждый станок-автомат может управляться программой, записанной на ленте, выдавая, в зависимости от содержания программы, тот или иной вид продукции (из числа возможных). Часть станков производит полуфабрикаты, другая часть осуществляет автоматическую сборку 326
узлов и блоков. В процесс сборки входят также операции промежуточного контроля и управления с помощью обратной связи.
Работа всего цеха координируется общим вычислительным устройством, работающим по некоторой генеральной программе. Цех выдает продукцию типа радиоприемников, телевизоров или других электронных устройств без всякого участия в его работе человека при условии питания энергией и доброкачественным сырьем.
Преимуществом такой системы автоматизации является ее большая гибкость. Можно за короткий срок перестроить цех на выпуск нового изделия, изменив программу управляющего устройства. Одно время в печати публиковались результаты экспериментальных работ по эксплуатации подобного цеха. Эти работы дают некоторое представление о возможности реализовать модель фон Неймана, если бы по каким-либо причинам это оказалось желательным.
К сказанному выше о размножении машин можно добавить еще несколько слов. Можно заметить различия между моделью самовоспроизводящейся машины и живыми организмами. Эти различия идут по двум направлениям. Во-первых, организм не является фиксированной структурой. Его строение и функции непрерывно меняются по мере роста, развития организма и накопления им опыта. Машина же не заменяет своих составных частей, не увеличивает их числа, в ней отсутствует «обмен веществ», хотя структура ее в процессе работы несомненно претерпевает изменения (коммутация элементов управляющим устройством). Во-вторых, машина, в отличие от живых существ, сама себе не добывает «пищи», т. е. сырья, и, таким образом, не может существовать самостоятельно, без помощи человека.
Оба упомянутых различия имеют относительный характер и могут быть, по крайней мере в принципе, сведены к нулю. Вспомнив автоматический цех радиодеталей и блоков, легко представить себе, как такой цех производит запасные узлы и блоки для собственного управляющего устройства и заменяет ими вышедшие из строя или подключает, в случае необходимости, дополнительные блоки (например, увеличивая объем памяти). По-видимому, машина с помощью автоматического цеха, становится способной к регенерации и росту.
Что касается самостоятельного добывания машиной сырья, то, даже не обсуждая этой возможности (которая, 327
однако, не представляется заранее исключенной), следует сразу же заметить, что не только машины, но и животные не способны самостоятельно обеспечивать себе все необходимые для жизни вещества. Обязательным условием жизни животных является наличие растений, которые служат им пищей. Только растения, как известно, способны синтезировать органические вещества из неорганических, используя энергию солнечного света (фотосинтез). Животные не способны этого сделать и потому должны получать готовые органические вещества, поедая растения или других животных. Можно, таким образом, утверждать, что животные могут существовать только за счет жизнедеятельности растений подобно тому, как машины могут получать сырье для развития и «размножения» только при условии существования и деятельности человека.
По-видимому, отмеченные выше отличия машин от животных не являются коренными.
Обладает ли человек «свободой воли»? Иначе говоря, свойственно ли человеку хотя бы иногда, в отличие от автомата, выбирать такой образ действий, который не определяется однозначно и фатально сложившейся внешней ситуацией? Несомненно, человек способен действовать, и не слишком редко, вопреки узко понимаемым эгоистическим интересам. Голодный он способен делиться с товарищем, способен погибнуть ради спасения других и т. д.
Является ли, однако, такое поведение действительно ^свободным», т. е. независимым от цепи причин и следствий? Если мы дополним наш вопрос и спросим, может ли человек действовать независимо от сложившейся внешней и внутренней обстановки, понимая под внутренней обстановкой весь опыт, накопленный в его памяти, и природные качества, го ответ, несомненно, будет отрицательным. Природные качества индивидуума причинно обусловлены. Приобретенные им понятия, знания, склонности являются конечным звеном причин и следствий в истории его существования. И если он может принимать решения о своих поступках в соответствии со своими желаниями, в желаниях своих он не властен, они с неумолимостью закона причинности диктуются суммой внутренних и внешних причин. Если же читатель захочет доказать противное, нарочно совершить «свободный», беспричинный поступок, то он это сделает потому, что ему это навеяно желанием возразить.
«Идея детерминизма, устанавливая необходимость че
ловеческих поступков, отвергая вздорную побасенку о свободе воли, нимало ни уничтожает ни разума, ни совести человека, ни оценки его действий» *.
Так называемая «свобода воли» есть иллюзия, порожденная, с одной стороны, необозримым разнообразием причин, настоящих и прошлых, которые определяют поведение человека, а с другой,— ограниченностью объема внимания, не позволяющего учесть все эти причины одновременно. Подсознательная деятельность мозга несравненно богаче, чем сознательная * **. Чтобы «понять это, достаточно представить себе, как много мы могли бы вспомнить фактов, о которых редко вспоминаем и которые постоянно хранятся в памяти вне сферы внимания.
Машина не испытывает эмоций, и действия машины не связаны *с ее собственной пользой. Впечатления и реакции человека всегда эмоционально окрашены и имеют в виду собственные интересы, эгоистические в широком смысле этого слова. (Если человек правильно воспитан и морально здоров, его собственные интересы окажутся социально обусловленными и его «эгоизм», в нашем понимании, состоит в соблюдении интересов коллектива.)
Эмоциональная окраска тесно связана с «эгоистическими» интересами индивидуума и является непосредственным критерием (очень часто неосознанным) для выбора реакции. Эмоции, представляющие, таким образом, некоторый руководящий принцип поведения, являются тем не менее продуктом деятельности филогенетически древних мозговых центров, т. е. образований, имеющихся у всех животных. Подавление эмоций, по крайней мере исключение влияния их на поступки, является чертой чисто человеческой, обязанной коре головного мозга. У человека
♦ В. И. Ленин. Соч. Т. 1, стр. 142.
** Подтверждением тому служат случаи, когда различные люди в сходной обстановке, действуя «свободно», поступают одинаково. Люди сходных темпераментов, долго живущие или работающие вместе, иногда, ие сговариваясь, одновременно начинают одну и ту же фразу.
Большой класс людей одинаково решает следующую задачу. Испытуемому для отвлечения -внимания предлагают вести счет, называя только четные числа, в порядке их возрастания, или числа, кратные трем. Одновременно, не прекращая счета, ему предлагают быстро назвать домашнюю птицу, часть лица, фрукт, русского поэта. В качестве ответа в подавляющем большинстве случаев оказываются следующие: курица, нос, яблоко, Пушкин. Испытуемый бывает неизменно искренне удивлен, когда ему показывают бумажку, на которой заранее написаны его ответы (бумажу эту ради эффекта кладут под его ладонь до начала опыта).
сильные эмоции проявляются иногда в виде непроизвольных действий, не имеющих очевидного характера биологической целесообразности (смех, плач). Однако в целом направление поступков, руководимых эмоцией, хотя и нуждается в серьезных поправках со стороны разума, все же имеет тенденцию к обеспечению благополучия индивидуума. И если машину, снабженную исполнительными механизмами, можно запрограммировать так, чтобы она сама себя разрушала, то человек с нормальной психикой охраняется от подобного поведения отрицательными эмоциями страдания. Случаи самобичевания и самоистязания на почве религиозного фанатизма относятся к числу патологических, но даже в подобных случаях человек испытывает добровольно причиняемое страдание только ради ложно понятого «высшего блага».
Несомненно, было бы очень интересно наблюдать работу машины, которой свойственны внешние проявления эмоций, машины, которая работала бы то с лихорадочным подъемом, то с меланхолической медлительностью в зависимости от успеха собственной деятельности и предлагаемых задач. Вряд ли, впрочем, это улучшило бы эксплуатационные качества машины как полезного орудия. Пути реализации такого эксперимента еще не вполне ясны. С утилитарной точки зрения в ряде задач от машины требуются некоторые свойства, подобные животному эгоизму, однако более широкие. В ряде задач (некоторые из них описаны в следующей главе) машине необходимо выбрать решение, являющееся оптимальным в смысле выполнения некоторого критерия. Этот критерий не обязательно «эгоистичен», т. е. устанавливается не исходя из «интересов» самой машины. Установление критерия может быть поручено самой машине, но опять-таки принцип выбора должен быть в нее заложен извне. Может ли такой принцип появиться у машины самостоятельно?
Живые организмы, от простейших до высших, обладают таким принципом установления критериев целесообразности. Этот принцип можно, по-видимому, сформулировать различным образом, но общий смысл его сводится к сохранению биологического вида.
Наличие такого рода «видового эгоизма» у животных и отсутствие его у машин представляется нам естественным различием между ними. К возможности появления «эгоизма» у технических систем мы еще вернемся в гл. 11.
ИГРА
В процессе работы машины могут решать и решают разнообразные по характеру математические и логические задачи. Человеческие существа в процессе существования, индивидуального или коллективного, рационально реагируют на внешнюю обстановку, приспосабливаясь к ее изменению и извлекая из внешнего окружения необходимые для существования вещества, энергию и информацию. Реакция на внешнюю обстановку также требует решения задач различных типов. Часть этих задач, как мы уже видели, может быть переложена на плечи машины.
Из всего разнообразия решаемых человеком задач мы остановимся подробнее на одном типе, отличном от прочих, требующем принципиально отличного подхода и к тому же чрезвычайно распространенном и важном.
Мы хорошо знаем задачи, в которых результат решения однозначно вытекает из исходных данных. Задачи этого типа характерны тем, что в их постановке учтены все условия, влияющие на результат. Ответ функционально связан с исходными данными.
Задачи другого типа возникают в тех случаях, когда на результат оказывают влияние некоторые случайные факторы, не могущие, по тем или иным причинам, быть точно учтенными в условиях задачи. При заданных точно условиях задачи результат получается неоднозначным. В сущности результатом решения задач такого рода является не число и не функция, а распределение вероятностей, заданное над возможными значениями результата. Естественно, что в исходных данных задачи неучитываемые точно факторы случайного характера также должны задаваться распределением вероятностей.
В таких задачах стохастического типа наличие неконтролируемых факторов не препятствует получению практически ценных результатов, только формулировка этих результатов оказывается отличной от формулировки результатов задач функционального типа: результат формулируется не для одного частного случая, а для большого числа аналогичных случаев. В каждом отдельном случае или при отдельном испытании результат может больше или меньше отклоняться от среднего значения в ту или другую сторону.
Существует также ситуация иного характера, когда не находящиеся под контролем факторы почти всегда дают наименее благоприятный результат. Это происходит в тех случаях, когда неконтролируемая часть условий задачи управляется не случаем, а разумным существом — оппонентом, противником, интересы которого противоположны нашим. Эта ситуация соревнования, борьбы, весьма характерна для существования отдельных биологических индивидуумов и коллективов. К этому необходимо еще добавить, что от успеха или неуспеха в этой ситуации часто зависит дальнейшее существование индивидуума.
Учитывая жизненную важность ситуации соревнования, следует попытаться ответить на вопрос: является ли возможность выбора правильного поведения в ситуации соревнования присущей только живому существу или и в этом случае, как и во многих других, на помощь человеку могут прийти машины и решать за него задачи лучше, чем он сам. Вопрос этот возникает потому, что обычные логико-математические и статистические методы подхода к решению задачи, которыми могут оперировать машины, как правило, оказываются непригодными для выбора поведения в ситуации соревнования с разумным оппонентом. Поставив задачу обычным методом, приняв некото-332
рые предположения о действиях противника и сделав из них выводы, мы решим задачу о нашем поведении, но результат будет зависеть не только от наших действий, но и от действий противника, который, поступая разумно и вопреки нашим предположениям, может достичь того, что мы получим результат, противоположный тому, на который рассчитывали.
Очевидно, что для ситуации соревнования должен быть выработан особый подход и методика решения задачи. Без этого невозможно ни научное доказательное знание, ни использование машии. Такой формально-математический аппарат в основах своих заложен довольно давно (в 1928 г.) работами Вальда, Неймана и др. в виде математической теории игр, имеющей большое принципиальное значение и ряд ценных практических применений в экономике, военном деле и других областях. Формализация соотношений, имеющих место в соревнованиях или <играх», позволяет надеяться на то, что мощная поддержка человеческому интеллекту со стороны машин может быть оказана и в этой области.
Понятия теории игр
Рассмотрим цкратце основные понятия, вводимые в математической теории игр. Игрой в смысле этой теории именуется не только игра в обычном житейском смысле, т. е. шахматы, шашки, домино и карты, но и многие другие виды соревнований, гораздо менее безобидные. Именно поэтому теория игр и имеет практическое значение, так как вряд ли стоило бы прилагать большие усилия ради создания теории только развлекательных игр.
В игре участвуют два или более игрока или команды. Каждая игра протекает согласно правилам. Каждый игрок (или команда) в соответствии с правилами по очереди или одновременно совершает некоторые действия или ходы, выбирая каждый раз один какой-нибудь ход из некоторого множества различных возможных ходов, допущенных правилами. После каждого хода игрокам становятся известны некоторые сведения о ходе игры. Сумма этих сведений представляет собой очередную ситуацию, в которой оказывается игрок и на основании знания которой игрок должен выбирать очередной ход. Правила игры определяют, когда игра кончается и каков результат данной партии этой игры, т. е. кто и что выиграл.
Выбор хода игроком на основании знания ситуации является его реакцией на внешнюю обстановку, в состав которой входит и реакция его противника. Эта последняя зависит, в свою очередь, от действий первого игрока.
Оставим пока в стороне усложнения этих определений, вносимые случаем. В развлекательных играх, например в шашках или шахматах, понятия правил игры, определяющих очередность, порядок ходов и выигрыш, не требуют пояснений, так как являются общеизвестными и строго формализованными. Для игр, представляющих собой реальную борьбу, «правилами» игры являются условия физической реализуемости тех или иных действий, а проигрышем — физическая невозможность продолжать борьбу. В ходе борьбы наличные силы могут использоваться тем или иным способом, причем в каждый данный момент всегда существует выбор из нескольких возможностей для использования этих сил. Таким образом, каждая из борющихся сторон (игроков) выбирает свое действие (ход) из числа физически возможных и в результате в конце игры одерживает победу или терпит поражение.
Стратегия
Представим себе, что игрок до начала игры составляет исчерпывающий план игры, т. е., во-первых, перечисляет все возможные ситуации, в которых он должен делать ход, и, во-вторых, каждой такой ситуации приписывает определенное решение, т. е. заранее решает, какой ход он сделал бы из числа возможных в данной ситуации. Вместо полного перечисления всех ситуаций он может дать правило или систему правил, которые однозначно позволяют получить тот же результат и провести игру. Будем называть такое перечисление ходов или правило, определяющее игру нашего игрока, обобщенным ходом или стратегией игрока. Определение стратегии — задача несравненно более трудоемкая, чем проведение реальной партии данной игры. В реальной партии игрок должен принимать решения только для тех ситуаций, которые фактически встречаются, в то время как для определения стратегии, кроме упомянутых, он должен принять решения еще и для всех прочих возможных ситуаций, которые в реальной партии могут и не встретиться. Так, например, играя в шахматы черными фигурами и делая первый ход, игрок в реальной партии имеет дело с одной 334
единственной ситуацией (после первого хода белых) и должен принять одно решение. Составляя же стратегию игры, тот же игрок для первого хода должен иметь дело с двадцатью ситуациями (после каждого из двадцати возможных первых ходов белых).
Составление стратегии, например, для шахмат,— дело невыполнимое по своей трудоемкости, даже если этот труд механизировать в доступной сегодня степени. Нас, однако, это обстоятельство, имеющее место для многих игр, не будет смущать, и мы удовлетворимся тем, что стратегии принципиально могут быть определены; они существуют, и этого для наших целей достаточно.
Различных стратегий в данной игре может быть очень много, и перечисление их или подсчет их числа представляет собой задачу не менее трудоемкую, чем определение-одной стратегии. В некоторых играх стратегии могут попарно отличаться друг от друга бесконечно мало, образуя континуум—'пространство непрерывно меняющихся величин.
Однако для любой игры можно указать, опять-таки хотя бы принципиально, все стратегии данного игрока. Одновременно таким же образом можно перечислить и все стратегии другого игрока.
Если до начала партии оба игрока (или все игроки, если их больше двух) совершили «обобщенные ходы», т. е. выбрали каждый из всех возможных стратегий одну, то дальше их участие в игре оказывается необязательным и партия может быть проведена в их отсутствие посредником (судьей), так как все ходы, которые делали бы игроки, заранее определены стратегией и судье известны. Таким образом, выбор стратегии всеми игроками однозначно определяет ход игры и ее результат. Заметим попутно, что один и тот же результат игры может быть достигнут применением различных стратегий. Однако, вообще говоря, меняя стратегию, игрок может достигнуть изменения результата.
Результат игры ие всегда представляет собой выигрыш или проигрыш, иногда результатом игры может явиться некоторая ситуация, например, обладание некоторыми предметами, территорией, уничтожение некоторых объектов и т. д. В таких случаях вопрос о выигрыше и проигрыше в игре решается ие просто, даже при знании результата игры.
Функция пользы
Для того чтобы решить вопрос о том, выиграл данный игрок или проиграл, необходимо знать, чего добивался он в игре, т. е. узнать предпочтительный для него результат. Лучше всего достигнутый результат оценить некоторой числовой функцией, такой, что игрок предпочитает всегда тот результат, который дает большую по величине функцию. Такую функцию часто называют функциейполь-зы данного игрока. Для того чтобы в реальных случаях получить такую функцию, приходится расположить все результаты на шкале, отражающей степень предпочтения.
Существует специальный прием для количественной оценки степени предпочтения различных объектов. Расположить в порядке предпочтения несколько объектов обычно не представляет труда. Для этого достаточно сравнить их попарно и в каждом случае решить, какой из. них предпочтительнее. Если такого решения для какой-либо пары объектов вынести нельзя, оба объекта имеют одинаковую степень предпочтительности, т. е. выбор между ними безразличен.
Допустим, из упорядоченной по предпочтению последовательности объектов мы выделим три объекта: А, В и С, причем
и(Л)>а(В)>а(С), где и (х) — функция пользы.
Последнее неравенство говорит о том, что объект А предпочтительнее объекта В и В предпочтительнее С.
Теперь попытаемся решить, иа каком .расстоянии" по предпочтительности расположен объект В от объектов Л и С. Считая интервал и (Л)— u (С) равным единице, составим выбор из следующей пары объектов: объекта В и комбинации объектов Л и С, взятых каждый с некоторой вероятностью.
Можно этот выбор сформулировать иначе. Пусть в течение 100 промежутков времени мы будем ..получать либо 100 раз объект В, либо 35 раз объект Л и 65 раз объект С (или в общем виде: 100р раз объект Л и 100? раз объект С; р + ?=1). Что мы предпочтем? Меняя р и qf мы найдем такое р0, для которого нельзя вынести решения о предпочтении, т. е. выбор будет безразличен. Тогда объект В разместится по шкале предпочтения иа расстоянии />[а(Л) — u (С)] от объекта С и иа расстоянии q [а (Л) — u (С)] от объекта Л, т. е. будет иметь координату
а (С) + (1 — р) [а (Л) — u (С)] = а (Л) — р [а (Л) — u (С)].
Итак, построив функцию пользы для всех результатов данной игры, мы получим суждение о том, к какому именно результату стремится в игре данный игрок. Очевидно, 336
что в игре игрок будет стремиться применить ту стратегию, которая обеспечит ему наибольший выигрыш в установленном выше смысле, т. е. даст максимальное значение функции пользы.
Особенный интерес представляют так называемые парные игры с нулевой суммой, в которых принимают участие две стороны (два игрока или две команды) и где сумма выигрышей обоих игроков в результате игры равна нулю. Иначе говоря, один выигрывает только за счет второго и сколько выиграл первый, столько проиграл второй. В играх этого типа нам достаточно рассматривать только выигрыш одной стороны, так как выигрыш другой имеет ту же величину, но обратный знак (мы считаем проигрыш отрицательным выигрышем). При этом, разумеется, мы предполагаем, что оба игрока совершенно одинаково выражают свое предпочтение относительно исходов игры, и поэтому мы просто говорим об одной и той же функции пользы для обоих как о «выигрыше», который выражается числом.
В некоторых парных играх множество возможных стратегий является конечным и стратегии каждого игрока можно просто перенумеровать. Выбор игроком А некоторой стратегии номер i и игроком В некоторой стратегии номер / полностью определяет исход партии и величину выигрыша а.. (т- функции пользы), скажем, игрока А. Перебирая по очереди все пары стратегий (/, /), мы перечислим все возможные варианты партий и их исходов. Далее можно построить таблицу — матрицу, каждая строка которой будет соответствовать стратегии i игрока А, каждый столбец — стратегии / игрока В, а на пересечении f-той строки и /-того столбца будет записан aif— выигрыш игрока А (т. е. проигрыш игрока В). Матрица конечной игры, полученная нами, перечисляет, таким образом, все возможные варианты партий данной игры.
Рассмотрим стратегию с номером i игрока А. Его выигрыш будет меняться в зависимости от действий противника, т. е. от стратегии игрока В. Применяя стратегию номер /, игрок А не может быть уверенным, что он получит выигрыш больше, чем наименьшее значение по строке иомер /, ибо его противник всегда может выбором своей стратегии добиться этого результата. Минимум по / от величины а.( является гарантированной величиной, хуже которой результат для игрока А не может быть, если 22 И. А. Полетаев 337
он применит стратегию номер I. Находя этот минимум для всех строк матрицы, т. е. для всех стратегий игрока А, мы можем найти его максимальную величину по I. Обозначим ее через ал.
Стратегия номер i=i{ игрока А, для которой получен этот максимум (по I) от минимума (по /), или „максимин", дает, очевидно, наилучший результат из гарантированных наихудших результатов.
Теперь проведем те же рассуждения для игрока 5, учтя, что для него желательным является минимальный выигрыш игрока А, который соответствует максимальному выигрышу игрока В. Для каждого столбца, соответствующего стратегии игрока В с номером /, найдем максимум по / величины ац, т. е. наихудший результат для игрока В при его стратегии номер /. Проделаем это для всех столбцов и найдем минимум по / этой величины. Обозначим найденный минимум (по /) от максимума (по /), или „минимакс", через ав для соответствующей стратегии / = /2.
Теперь сравним величины ад и ав и обе пары стратегий (Ч, Л) и 0*2» /2)- Могут быть два случая:
1) обе величины равны друг другу и обе пары стратегий совпадают
G'[i~^AZ==0'i
2) те же величины не совпадают
аВ>аА>
Игры первого типа мы будем называть определенными играми или играми с оценкой, игры второго типа— неопределенными или играми без оценки. Величины аА и ав называются соответственно нижней и верхней оценками игры; величина а — собственной оценкой.
В первом случае, т. е. для определенных игр, матрица игры имеет седловую точку, т. е. а максимально на протяжении столбца и минимально на протяжении строки. Во втором случае, т. е. для неопределенных игр, такая точка отсутствует. В седловой точке, в первом случае, пересекаются стратегии, которые называются иаилучшими или оптимальными. Игрок, придерживающийся оптимальной стратегии, не рискует получить результат хуже а. Если один из игроков, например А, отклонится от 338
оптимальной стратегии, он только ухудшит свой результат, если только при этом В играет разумно, так как а пред ставляет собой максимум по стратегиям игрока А. То же произойдет с игроком В, если он отойдет от своей оптимальной стратегии, так как а минимально по стратегиям игрока В, если игрок А играет разумно. (Напомним, что для игрока В выгодны меньшие величины az/.)
Наличие седловой точки матрицы игры и оптимальных стратегий имеет большое принципиальное значение. Игрок, знающий оптимальные стратегии, имеет преимущество перед своим противником, не знающим их. Построение стратегий и матрицы игры (так называемое решение игры), определение оптимальных стратегий является задачей игрока, желающего вести игру действительно разумно.
Решение игры определенного типа в общем случае может быть получено поочередным вычеркиванием строк и столбцов в матрице игры и исключением соответствующих стратегий обоих игроков, которые являются «не лучшими» по сравнению с другими стратегиями. Вычеркивается та стратегия, у которой некоторые элементы матрицы такие же, а другие—хуже, чем у другой стратегии (с точки зрения данного игрока). Последовательное вычеркивание «не лучших» стратегий в матрице определенной игры поочередно у каждого из двух игроков приводит к тому, что в результате у каждого игрока остается всего по одной стратегии, которые и являются оптимальными.
К числу игр определенного типа, т. е. игр, обладающих «собственной оценкой», относятся все так называемые игры с полной информацией, т. е. игры, в которых игрок перед очередным ходом знает все предыдущие ходы, свои и своего противника.
Рассмотрим для иллюстрации предельно упрощенный пример парной конечной игры с нулевой суммой и полной информацией.
На доске нарисовано в ряд шесть клеток, пронумерованных по порядку. Правила игры формулируются следующим образом. В исходном положении в первой клетке расположена белая шашка (игрока Д), в шестой клетке — черная (игрока В). Игрок А двигает белую шашку от первой клетки к шестой, игрок В двигает черную шашку от шестой клетки к первой. Игроки делают ходы по очереди, начиная с игрока А, передвигая каждый свою шашку на одну клетку, в своем направлении. Если следующая (по пути шашки) клетка занята шашкой другого цвета, то оче-22* 339
редкой ход совершается, минуя занятую клетку (перепрыгивая через шашку противника). Первый ход каждый игрок может сделать по своему выбору, передвигая шашку либо на одну, либо сразу на две клетки. Выигрывает в партии тот игрок, шашка которого первой
белые Выиграли /
Черные Выиграли1
Mwm' Ы)
~1 I I |о|— —
kvxod \ белых
р~|о| _черных белые Выиграли
3 й ход
черных
Зу ход
белых
ал- га
Ш-1 1.ЖО - И
ход
черне 1
ГПоПёГ
2йход белых
жз
0
*U*od
----ШТЕ®------------1 | |о| ЕВ—
1й ход белых
/ 2 3 4 5 6
Исходная позиция
Рис. 10.1. .Дерево игры".
достигнет конечной клетки, если только шашка противника не достигнет того же следующим ходом, то есть если шашка противника отстанет больше, чем на один ход. В противном случае, т. е. если шашка противника достигнет последней клетки следующим же ходом, имеет место ничья (см. рис. 10.1).
Легко показать, что исход игры определяется выбором обоими противниками первого хода (одна или две клетки). После первого хода белых и первого хода черных игра 340
протекает однозначно, т. е. каждый игрок может делать только один ход, без выбора.
У белых, таким образом, есть две стратегии, совпадающие с их первым ходом. Стратегии белых:
1А) первый ход на одну клетку (1);
2А) первый ход на две клетки (2).
На каждый ход белых у черных имеется два ответа, т. е. черные имеют четыре стратегии. Стратегии черных:
1В) если белая ш-ашка первым ходом продвинулась на одну клетку, продвинуть черную шашку иа одну клетку; если белая шашка продвинулась на две, продвинуть черную-на одну (1—1; 2—1);
2В) если белая шашка продвинулась первым ходом на одну клетку, продвинуть черную на одну; если белая шашка продвинулась на две, то продвинуть черную на две клетки (1—1; 2—2);
ЗВ) если белая шашка продвинулась первым ходом на одну клетку, продвинуть черную на две; если белая шашка продвинулась на две, продвинуть черную на одну (1—2; 2—1);
4В) если белая шашка продвинулась первым ходом на одну клетку, продвинуть черную на две; если белая шашка продвинулась на две, продвинуть черную на две (1—2; 2—2).
Составим матрицу игры. Обозначим выигрыш белых через +1, их проигрыш — 1, ничью через 0. Строки матрицы, как мы условились, будут соответствовать стратегиям игрока А (белым), столбцы — стратегиям игрока В (черным) .
IB 2В ЗВ 4В
1 А аи== + 1 °12 = + 1 а13 = — 1 ам=-1
2 А а21 = 0 а22 = + 1 а23 = 0 а24 = + 1
1А игрока А
(первая строка матрицы)
стратегии
Для
наихудшими для игрока А по стратегиям игрока В (т. е. наименьшими) являются результаты ai3 и а^; для стратегии 2А (вторая строка матрицы) наихудшими для А будут а2\ и йзз. Из числа этих наихудших по стратегиям В результатов наилучшими для игрока А (т. е. наибольшими) по стратегиям игрока А будут результаты а2\ и Оаз-341
Они представляют собой верхнюю оценку игры, или максимин.
Для стратегии 1В игрока В (первый столбец матрицы) наихудшим для игрока В (т. е. наибольшим) по стратегиям игрока А явится результат ац; соответственно, для стратегии 2В — «12 и а22, для ЗВ — а23, для 4В — я24. Из числа этих наихудших по стратегиям А результатов наилучшим для игрока В (т. е. наименьшим) по стратегиям В явится результат а23. Он представляет собой нижнюю оценку игры, или минимакс.
Результат я23 является одновременно верхней и нижней оценкой игры. Иначе говоря, нижняя и верхняя оценки игры совпадают и являются собственной оценкой игры. Этого следовало, ожидать, так как разбираемая игра принадлежит к играм с полной информацией, т. е. к играм определенного типа.
Стратегии 2А белых и ЗВ черных являются оптимальными стратегиями, а собственной оценкой игры будет ничья. Результат а2з представляет собой седловую точку матрицы игры. Для любого игрока отход от оптимальной стратегии может только ухудшить его результат по сравнению с собственной оценкой игры (ничьей).
Другими примерами игр с полной информацией могут служить шашки, шахматы, крестики и нолики, игра в Ним и т. п. Для простейших из этих игр известно, что в них выигрывает всегда один игрок, если оба играют правильно; либо тот, кто делает первый ход, либо его противник. Этот результат и представляет собой седловую точку матрицы игры, результаты которой имеют только два значения выиграл ( + 1) и проиграл (—1). Шашки и шахматы тоже имеют предрешенный исход игры при правильной игре обоих противников, однако огромное число стратегий не позволяет провести до конца решение игры и определить оптимальные стратегии и собственное значение. Таким образом, в шахматы и шашки мы играем только потому, что «не умеем» играть в эти игры правильно, так как неизвестны решения этих игр. И хотя такое утверждение звучит парадоксально, оно тем не менее вполне обоснованно.
Смешанное расширение игры
Кроме игр определенного типа, имеющих седловую точку. матрицы, есть еще, как мы знаем, игры неопределенного типа, лишенные этого свойства. Игроки не имеют опти-342
мальных стратегий в одной партии. Любая стратегия игрока может быть «битой» противником путем выбора им соответствующей стратегии.
Примером такой игры может быть следующая: два игрока одновременно выбирают целое число и записывают каждый на бумаге, не сообщая другому. Затем выбор обоих объявляется, выбранные числа складываются. Если результат четный — первый игрок выигрывает очко, если нечетный — очко выигрывает второй*.
Стратегией игрока в каждой партии этой игры может быть либо выбор четного числа, либо выбор нечетного. Для любой из этих стратегий найдется стратегия противника, которая приводит к проигрышу. Матрица игры имеет вид
м,7
(10.1)
Седловой точки в ней нет. Верхняя и нижняя оценки не совпадают. У игроков нет оптимальных стратегий в одной партии игры, и, ведя игру, ни один из игроков не может быть уверен в том, что его противник выберет какую-то определенную оптимальную, т. е. наилучшую, стратегию.
Аналогичную ситуацию (эквивалентную игру) мы имеем в том случае, если два противника, например на поле боя или на спортивной арене, имеют каждый по два приема или по два вида оружия: первый—1А и 2А, второй— 1В и 2В. При этом прием 1А дает преимущество игроку А, если противник В применяет прием 1В, или ведет к проигрышу, если противник применяет прием 2В; прием 2А дает выигрыш или преимущество против приема 2В и проигрыш против приема 1В. Примеров такой ситуации очень много.
Еще чаще встречаются примеры, когда приемов, родов оружия, или стратегий существует не две, а больше. Простой пример—игра «Камень, бумага и ножницы» **. Играть
* Ту же игру можно вести с монетами. Игроки кладут на стол каждый свою монету, накрыв ладонью, затем показывают мо>неты и сравнивают. Если обе монеты лежат вверх гербом или решеткой, выиграл первый, если одна гербом, другая решеткой, выиграл второй. Аналогичную игру можно вести, показывая один или два пальца («Морра»), Игры, одинаковые по способу их ведения, называются эквивалентными.
** Напомним игру. Каждый из двух игроков имеет три карта: «камень», «бумага», «ножницы». Оба одновременно кладут по одной карте на стол. При одинаковых картах — ничья. При разных картах «ножницы» выигрывают у «бумаги», «бумага» — у «камня» и «камень»— у «НОЖНИЦ».
в такую игру было бы нетрудно, если бы мы имели основание 'предположить, что наш противник выберет какой-либо определенный образ действий, т. е. приписать его поведению некоторую априорную вероятность. Однако величина этой вероятности зависит от решения противника, а это решение нам неизвестно.
Неопределенный тип игры приводится к результатам, практически совпадающим с результатами для определенного типа, введением понятия смешанного расширения игр ы.
Будем рассматривать не одну партию данной игры, а длинный ряд партий и оценим выигрыш и проигрыш в среднем за большое число партий. Такой подход не удаляет нас от реальности, так как реальные игры, независимо от того, развлекательные они или нет, почти всегда имеют характер повторяемости. Если в последовательности партий игрок применяет все время одну п ту же стратегию (например, «герб» или «четное» в неопределенной игре с двойным выбором, описанной выше), то будем называть такую стратегию чистой стратегией. Очевидно, что упрямо придерживаясь чистой стратегии в неопределенной игре, игрок как бы раскрывает свои карты, т. е. делает для противника ясным.ход своих действий на будущее. Поэтому противник уже не строит предположений о его действиях в будущем, а получает уверенность в них, просто экстраполируя его поведение. При этом противник выбирает свою стратегию, чтобы все время выигрывать. Чистая стратегия оказывается, таким образом, непригодной. Следует затруднить или сделать невозможным для противника предугадывание действий игрока. Для этого, очевидно, необходимо, во-первых, от партии к партии менять стратегию, а во-вторых, добиться того, чтобы эти изменения не носили никаких следов закономерности, т. е. были бы абсолютно случайными. Всякая закономерность изменений стратегии (например, цикличность) и даже корреляция (в тех случаях, когда изменения стратегии случайны) дает возможность противнику хотя бы иногда правильно «угадывать» действия игрока и «ловить» его на этом. Ведение игры со случайной сменой чистых стратегий от партии к партии называют смешанной стратегией в игре, состоящей из длинной серии партий и называемой смешанным расширением данной игры.
Комбинирование чистых стратегий в смешанной стратегии можно, очевидно, производить по-разному. Одна из 344
чистых стратегий, чередуясь случайно с другими, может повторяться чаще или реже других, имея ту или иную частоту или вероятность появления. Таким образом, беспорядочное чередование, скажем, двух чистых стратегий с вероятностями р и q (р+^=1) дает некоторую смешанную стратегию. Изменяя р и q, мы получим бесконечное множество смешанных стратегий.
Применение смешанных стратегий в смешанном расширении игры сводит игру, неопределенного типа к игре определенной, в которой имеются оптимальные стратегии у обоих игроков и оценка игры. Задача правильного ведения смешанного расширения данной неопределенной игры сводится, таким образом, к определению оптимальных вероятностей, с которыми чистые стратегии входят в смешанную. Кроме того, необходимо каким-то образом имитировать случайный процесс с заданными вероятностями чистых стратегий. В случае игры в «чет и нечет», описанной выше, в которой оптимальные вероятности «чета» и «нечета» (или герба и решетки) равны 0,5, случайный процесс может быть имитирован бросанием монеты или игральной кости.
Попытаемся определить оптимальные стратегии смешанного продолжения конечной неопределенной игры, матрица которой имеет вид
ан я12
Я21 ^22
9 —6
-21-4-4
(10.2)
Игрок Л, чистые стратегии которого соответствуют строкам матрицы, имеет в своем распоряжении две чистые стратегии 1А и 2А, которые он применяет с вероятностями Pi (для первой строки матрицы) и q\ (для второй); Pi + ?i = l.
Игрок В, чьи чистые стратегии соответствуют столбцам матрицы, также имеет две стратегии 1В и 2В, которые он применяет с вероятностями р2 и ^2, соответственно; p2~}~q2 = 1-
Если игрок А применяет чистую стратегию (верхняя строка), а игрок В—смешанную, результат равен
аю = аиА-|-а12<72- (10-3)
То же для стратегии 2А игрока А (нижняя строка)
^20~a2iP2 + a2^2- (10-4)
345
Если оба игрока применяют смешанные стратегии aW — aloP\ -4*а2О<71 —
= ^PlP2+al2P^2 + a2\P2(l\+a22(l^ (10-5)
Для седловой точки максимум по р( совпадает с минимумом по р2\ это соответствует
Q (10 61 dpi dpi \ )
Учитывая, ЧТО dq _ . dp
получим Д22 — «21 (Ю J) Ао = . (Ю.8) °11 + а22 — ° 12 — а21
Подставляя рю в (10.7), мы обнаруживаем, что для этого (оптимального) значения р\ в смешанной стратегии значение выигрыша aoo(Pi) не зависит о т р%. Иначе говоря, что бы ни делал игрок В, результат не изменится, если игрок А применяет оптимальную стратегию. То же справедливо для второго игрока.
Для данной матрицы выигрыш для оптимальных смешанных стратегий равен нулю (ничья). Оптимальные стратегии: р\ = 0,70 р2=0,4. Иначе говоря, в 100 партиях игрок А применяет чистую стратегию 1А (верхняя строка) 70 раз, стратегию 2А (нижняя строка) 30 раз; игрок В применяет стратегию 1В (левый столбец) 40 раз, стратегию 2В (правый столбец) 60 раз (в случайном чередовании).
Если один из игроков в игре счет и нечет», описанной выше, случайным образом (на основании бросания монеты) ходит «с чета» и «нечета» с вероятностью 0,5, то игра в среднем идет вничью, независимо от того, что делает противник (если только действия противника не имеют корреляции с ходами игрока, т. е. противник не «шпионит»). Безразлично в этом случае, ходит ли противник все время «с чета», или все время «с нечета», или же случайно меняет «чет» и «нечет».
Если игрок изменит свою смешанную стратегию, отойдя от оптимальной, и станет применять «чет» (или «нечет») чаще, чем в половине случае®, то противник может на этом выиграть, перейдя на соответствующую чистую стратегию и добившись, таким образом, некоторого выигрыша.
В общем случае решение игры неопределенного типа можно получить путем совместного решения системы уравнений;
2j Р W М (xt. У/) = V, (10.9,а)
I
J] Р (*,)=!, (Ю.9,6)
I
^'?СУ/)^(х/, yt) = v, (10.9,в)
/
(Ю.9,г)
/
где р (xt) и <7 (jy) — вероятности появления чистых стратегий xt и соответственно, в оптимальной смешанной стратегии.
Уравнения (10.9,а) и (10.9,в) записываются для всех и всех х., входящих в оптимальную стратегию противника; v — собственное значение игры.
Для простых игр выводы представляются тривиальными. Однако для более сложных игр, где одного здравого смысла недостаточно, математический аппарат оказывается ценным. Правда, задачи о решении конкретных игр, имеющие практическое значение, чаще всего бывают чрезвычайно сложны. Многие весьма серьезные и важные практические задачи в настоящее время ждут своего решения.
Случайные ходы
До сих пор мы говорили об играх, в которых встречались только личные ходы, т. е. ходы, сделанные игроком по собственному произволу. В общем случае, кроме личных ходов, в игре встречаются, согласно правилам игры, также ходы случайные, примером которых может служить сдача карт в карточной игре.
Когда правила игры требуют совершения случайного хода, включается некоторый случайный процесс, который определяет исход случайного хода в соответствии с некоторым заданным распределением вероятностей. В этом случае результат игры не определяется однозначно выборами личных ходов на протяжении партии, т. е. личной стратегией игрока. Одна и та же пара стратегий, применяемая обоими игроками, будет давать различные результаты игры в зависимости от исходов серин случайных хо
дов в данной партии («стратегии случая»). Зная распределение вероятностей при отдельных случайных ходах, можно найти распределение вероятностей всех комбинаций исходов всех случайных ходов партии. Это распределение при известных личных стратегиях игроков дает возможность определить распределение вероятностей результатов игры. Таким образом, в игре со случайными ходами применение игроками определенных личных стратегий дает не определенный результат, а некоторое определенное распределение вероятностей л над возможными результатами х. Выбирая личную стратегию, игрок должен отдать предпочтение одному из этих распределений вероятностей результатов, а не самим результатам игры. При числовой оценке результатов с помощью функции пользы и(х) можно воспользоваться математическим ожиданием этой функции, вычисленным для распределения вероятностей результатов л.
Полученное число
и(тг) = ^ 7г(х)и(х) (10.10)
Х = 0
представляет собой функционал, т. е. число, зависящее от некоторой функции, в данном случае от функции л(х) распределения вероятностей результатов игры, и (л) есть функция пользы для игры со случайными ходами. Таким образом, решение игр со случайными ходами производится аналогично играм без случайных ходов, с привлечением теории вероятностей. Некоторые игры (например, лото, рулетка) целиком сводятся только к случайным ходам; личные ходы и стратегии в них отсутствуют.
В ряде конкретных игр случайные ходы совершаются одновременно с личными. Так, например, посылка мяча в спортивных играх (теннис, баскетбол) совершается игроком в определенную точку площадки, и выбор этой точки есть результат личного хода. Однако мяч всегда попадает в выбранную точку с некоторой ошибкой, являющейся результатом неточностей движений игрока и имеющей случайный характер. Разброс мячей не зависит от воли игрока (хотя зависит, конечно, от уровня его спортивной техники) и является случайным ходом в игре, который совершается одновременно с личным ходом. Уменьшение ошибок отражает рост спортивной техники игрока, а правильный выбор направлений ударов — его спортивную тактику, или «стратегию» в смысле теории игр.
Почти все спортивные игры (а также игры типа военных действий) предъявляют к игрокам смешанные требования: с одной стороны, требования высокого качества спортивной техники, точности удара, силы, выносливости, а с другой,— умения применять эту технику правильно, т. е. выбирать стратегии, близкие к оптимальным, или же, если
Рис. 10.2. Ход игры машины с человеком в „чет и нечет*.
а) последовательные процессы выработки стратегии при применении противником машины одной определенной комбинации ходов, б) ход игры при изменении, комбинаций, применяемых противником машины.
стратегия, выбранная противником, уклоняется от оптимальной, то стратегию, дающую преимущество.
Существуют спортивные соревнования такие, как стрельба, городки, соревнования в прыжках, метаниях и т. д., в которых «стратегическая часть» игры отсутствует и игра сводится к соревнованию в точности, силе или выносливости. Эти соревнования по сути дела не являются «стратегическими играми». Однако такое, казалось бы, далекое от стратегии соревнование, как перетягивание каната, позволяет улучшить результат за счет маневра величиной усилия, т. е. допускает применение стратегии.
Бокс, фехтование, борьба являются, несомненно, стратегическими играми. Соотношение сил и владение приема-349
ми ведения боя создают те исходные предпосылки, на которых должна строиться смешанная стратегия применения приемов и контрприемов на протяжении боя. И нередко применение «с умом» ограниченного арсенала не очень сильных приемов оказывается равноценным большой силе, быстроте и точности движений.
Мы не можем входить здесь в подробности спортивной или военной техники и тактики. Несомненно, что ведение любой игры на основе знания ее решения всегда дает преимущество игроку над его противником, не знающим этого решения.
Машины; играющие в стратегические игры
Мы уже говорили, что решение большинства конкретных игр, представляющих практический интерес, требует очень большого труда. Однако практический интерес к нахождению решения некоторых игр, как нетрудно понять, весьма велик. Отсюда, естественно, следует стремление использовать для получения решения игр и для ведения сложных игр, решение которых почему-либо не найдено, современные счетные машины и автоматы.
В настоящее время работа по созданию специализированных машин, играющих в игры, или программ игры для универсальных машин развернута довольно широко. О результатах этой работы мы знаем по большому числу сообщений о машинах, играющих в Ним, «крестики и нолики» и т. п. Эти, казалось бы, ничтожные по практическому значению результаты не должны, однако, казаться нам не имеющими никакого значения. Напротив, следует отдавать себе отчет в том, что серьезные применения машинной техники в этом направлении невозможны без предварительного решения элементарных и даже тривиальных задач. Без этого первого шага невозможны последующие. И сегодня сделан уже не только первый шаг на этом пути.
Машины, «умеющие» играть в игры, делятся на три типа. Первый — это машины, способные вести конечную игру с полной информацией с оптимальной стратегией (типа крестиков и ноликов). Второй — машины, играющие в «нерешенные» игры типа шашек или шахмат, т. е. игры, для которых оптимальная стратегия не определена. Третий— машины, рассчитанные на ведение игр неопределенного типа, для которых оптимальная стратегия существует только в смешанном расширении игры.
Ним — игра, состоящая в том, что два игрока берут по очереди со стола некоторое число фишек. Фишки в Ниме разбиваются на несколько групп. Каждый игрок берет за один ход любое число фишек, но только из одной группы, и не менее одной фишки (можно взять сразу всю группу). Игрок, вынужденный взять последнюю фишку, проиграл.
Ячейки памяти
Рис. 10.3. Упрощенная схема машины, играющей в „чет и нечет".
В ячейках памяти записаны последовательности из двух ходов. Например: „выиграла* (В), «сделала прежний ход* (/7), «выиграла* (В) или «проиграла" (77) „изменила ход* (И) и «снова проиграла* (/7).
Ним — конечная парная игра с нулевой суммой и полной информацией. Она принадлежит к играм определенного типа с собственной оценкой и чистыми оптимальными стратегиями. В этой игре при заданных начальных условиях всегда выигрывает один из игроков, если игра ведется без просчетов*.
* Рассмотрим вариант Нима с группами из трех, четырех и пяти фишек. Выигрывает всегда тот, кто делает первый ход, если этот ход правильный (взять две фишки из группы, состоящей из трех). Положение (1, 4, 5) после первого хода не дает противнику возможности выиграть. После любого его хода первый игрок может привести игру к одному из следующих положений: (0, 4, 4), (0. О, 1), (1, 1, 1)» (1, 2, 3), из которых проигрыш второго игрока очевиден. Любой первый ход, кроме указанного, ведет к проигрышу игрока, его сделавшего.
Игры такого типа могут быть решены, и механизм для осуществления ходов оптимальной стратегии реализован в виде электронной схемы. Составление такого рода схем не менее интересно, чем решение шахматных этюдов, и в настоящее время существует много любителей, посвящающих часы досуга этому занятию. Некоторые схемы оказываются предельно простыми *.
Обычно машины такого типа имеют индикаторные лампочки, зажигание или гашение которых производится кнопками и системой реле. После очередного хода живого игрока, погасившего те лампы, которые соответствуют взятым им фишкам, нажимается кнопка ХОД МАШИНЫ. На это воздействие релейная схема машины реагирует очередным ходом в пределах оптимальной стратегии.
Аналогично ведется игра в крестики и нолики и остальные игры с полной информацией. Можно сделать универсальную схему, которая коммутируется для ведения одной из нескольких игр такого типа. При составлении схем этих машнн-игроков удобно пользоваться релейной алгеброй логики.
Подобным же образом в принципе можно было бы построить машину и для игры в шашки и шахматы. Однако большое число ходов в этих играх и огромное число стратегий делают решение этих игр чрезмерно трудоемким. Для решения шахматной игры (определения оптимальных стратегий и собственной оценки), даже с помощью современных быстродействующих электронных вычислительных машин, потребовалось бы много миллионов лет вычислительной работы. Однако задача ведения игры в шахматы или шашки машиной вызывает большой интерес, так как многие практически интересные игры еще более сложны, чем шахматы или шашки. В качестве подхода к решению задачи о ведении машиной сложных игр задача о ведении
* Для примера рассмотрим Ним с одной группой из девяти, тринадцати, семнадцати и, вообще 4л+1 фишек (п=1, 2, 3...), причем брать за один ход можно не меньше одной и не больше трех фишек; вынужденный взять последнюю фишку — проиграл. Проигрывает в игре без (просчетов всегда игрок, делающий первый ход. На любой ход первого игрока второй отвечает так, чтобы общее число фишек взятых за оба первых (оба вторых) и т. д. хода, было равно четырем. Машина для ведения этой игры при очередном ходе просто выключает очередную группу нз четырех индикаторных дамп, в том числе и те, которые уже потушены ходом первого игрока. Несмотря на предельную простоту игры, для новичка иоход ее не очевиден, и машина, обыгрывающая его подряд много рав и с неизменным успехом, производит большое впечатление.
игр в шашки и шахматы весьма заманчива, поскольку правила этих игр четко установлены и игры носят наглядный обозримый характер.
Ведение игры в шахматы без живого игрока решается на универсальной электронной вычислительной машине с помощью специальной программы. Обстановка на доске вводится в машину с помощью цифрового кода, в котором машина работает. Допустимые правилами ходы для каждой фигуры превращаются в операции над числами, изображающими позиции фигур на доске. Машина может поочередно перебирать все возможные в данной позиции ходы, как свои, так и противника. Каждая новая позиция получает числовую оценку тем выше, чем лучше эта позиция с точки зрения тактики шахмат. В системе этих оценок в сущности заключаются все тактические принципы ведения игры, которые сообщает машине составитель программы. Перебирая возможные позиции на два-три хода вперед, машина вычисляет и запоминает все оценки этих позиций и в результате выбирает тот ход, который ведет к позиции с наилучшей оценкой. Вычисленный и выбранный машиной ход декодируется в обычные обозначения и печатается автоматически на бумажной ленте. Оценивается не только взятие фигур и пешек в соответствии с их достоинством (король имеет оценку, значительно превосходящую все другие фигуры), но и такие особенности расположения фигур и пешек, как сдвоенные пешки, проходная пешка, продвижение пешки вперед и т. д. Каждая из этих особенностей имеет свою «цену», отрицательную или положительную, отдельно для своих фигур и отдельно для фигур противника. Общая оценка позиции равна сумме частных оценок.
Оценки можно, разумеется, делать различными способами, и эти способы неравноценны.
Машина, играющая по такой программе, выполняет некоторые операции из числа тех, которые выполняет и человек-шахматист; при этом она фантазирует при выдумывании ходов в меру отведенных ей на то творческих возможностей. Увеличение этих возможностей требует расширения памяти машины с тем, чтобы анализ позиций мог распространяться на большее число ходов вперед. Потребность в емкости памяти с ростом числа анализируемых ходов возрастает чрезвычайно быстро.
Программы этого типа для игры в шахматы и шашки страдают отсутствием тактического замысла, общего плана 23 И. А. Полетаев. 353
Ведения игры, рассчитанного на большое число ходов. Этот недостаток не является неустранимым, и, возможно, существуют другие типы программ, не обладающие этим недостатком.
Машина, работающая по описанной программе, играет в шахматы 'вполне корректно, соблюдая правила игры, не делая грубых промахов и используя ошибки противника. Однако сильный шахматист может выиграть партию у такой машины, поскольку машина играет в силу спортсмена-шахматиста четвертой-третьей категории.
Особенно заметны недостатки программ такого типа в партиях «позиционных», в которых отсутствует возможность заметного изменения обстановки на протяжении нескольких ходов. Это иллюстрируется забавным эпизодом с одним из первых составителей программы для игры в шашки, о котором рассказывает К. Шэннон. После составления программы ее проверку было решено провести посредством игры машины с машиной. Программа игры и исходная позиция были введены в машину, и была нажата пусковая кнопка для первого хода. Машина работала в течение нескольких секунд и затем бодро напечатала: «Я сдаюсь!».
Шахматные задачи двух- и трехходовки очень хорошо решаются машиной, работающей по программе с оценками.
В области ведения машинами «нерешенных» игр, несомненно, еще многое будет сделано в ближайшее время.
Весьма сложные задачи выбора стратегии в военных операциях, в вопросах оптимального планирования промышленной, хозяйственной и административной деятельности в различных масштабах являются как раз тем типом задач, которые практически неразрешимы точно при решении их «вручную», без помощи машин. Применение машинного решения конкретных игр в этих областях позволит заменить приближенные «интуитивные» решения (которые иногда могут быть попросту неверными) точными, оптимальными решениями, что, учитывая масштабы, должно принести гораздо больше пользы, чем автоматизация любых отдельно взятых процессов производства.
Еще раз о неопределенных играх
Несколько иной характер имеет задача ведения машиной неопределенных игр типа описанной выше игры в «чет и нечет», т. е. игр, в которых отсутствуют оптимальные 354
чистые стратегии. Оказывается, в играх этого типа машина имеет более высокие способности, чем человек. Дело в том, что человек в силу врожденной и воспитанной опытом привычки действовать рационально, т. е. в соответствии с некоторым намеченным планом, почти не способен вести игру наугад, имитируя своим поведением чисто случайный процесс. А именно такой чисто случайный выбор ходов в игре «чет и нечет» и составляет оптимальную смешанную стратегию.
Одна из первых машин такого рода играла именно в «чет и нечет». Эта машина была рассчитана на игру против противника, применяющего определеннные закономерные стратегии — последовательности ходов, и не применяла оптимальной смешанной стратегии. В состав машины входило около сотни реле. Человек, игравший против машины, делал выбор из двух возможностей («чет» или «нечет», «да» или «нет», «красное» или «зеленое») и сообщал вслух о своем выборе, но не вводил его в машину. Далее нажималась пусковая кнопка машины, машина самостоятельно (наугад) делала выбор из тех же двух возможностей и объявляла о своем выборе зажиганием одной из двух сигнальных ламп. Если выбор машины совпадал с выбором человека, машина выигрывала, в противном случае — проигрывала. Результат «партии» вводился -в машину нажатием одной из двух предназначенных для этого кнопок. Далее игра продолжалась тем же порядком. Машина запоминала свои ходы и результаты каждой партии, а затем обнаруживала в серии запомненных данных закономерности, единственным источником которых была тенденция человека играть «разумно» и перехитрить машину. На основе обнаруженных закономерностей машина производила экстраполяцию и предугадывала ходы человека. Разумеется, это удавалось ей не всегда, но в некотором числе случаев удавалось.
Сначала игра протекала с переменным успехом, но затем машина постепенно начинала выигрывать все чаще и чаще, а проигрыш человека систематически возрастал.
Из общего числа 9795 партий, сыгранных машиной со многими партнерами, машина выиграла 5218 и проиграла 4577 партий. Правда, соотношение это не очень показательно, поскольку игры были большей частью короткими и продолжались лишь до тех пор, пока машина «училась» играть с данным партнером, прекращаясь, когда машина начинала выигрывать. Если для оценки предположить, что 23* 355
полученное соотношение выигранных и проигранных пар* тий явилось результатом случая, а не было обязано качествам машины, и подсчитать вероятность такого результата в предположении, что выигрыш и проигрыш машины в каждой партии равновероятны, то вероятность окажется ничтожно малой — порядка 10-10. Таким образом, машина на практике доказала свою способность использовать отклонения от оптимальной смешанной стратегии, свойственные человеку. Здесь снова уместно напомнить, что невинное оформление этого эксперимента в виде детской игры «чет и нечет» не должно никого обманывать, ибо в принципе применение смешанных стратегий свойственно большому числу игр, ничего общего не имеющих с детскими развлечениями.
Интересно, что вокруг машины для игры в «чет и нечет», о которой мы говорили выше, возник спор о наилучших методах экстраполяции случайных процессов и об оптимальном числе партий, по которому должна производиться экстраполяция. В результате спора была построена вторая машина, работавшая по меньшему числу партий. Для их сравнения было сконструировано устройство, связывавшее обе машины и вводившее ходы одной в другую и наоборот. Обе машины были запущены в игру друг против друга. Необычный матч машин вызвал бурный интерес сотрудников лаборатории, где производился эксперимент, и заключение большого числа пари.
В результате соревнования выявилось заметное преимущество машины, работавшей по малому числу партий и, таким образом, имевшей более быструю реакцию (ее автором был все тот же Клод Шэннон).
Описанные машины не применяют оптимальной стратегии; ее применение всегда приводило бы игру к ничьей. Поэтому существует стратегия противника, играющего против машины, которая обеспечивает ему выигрыш у машины. Однако эта стратегия не очевидна, что и приводит к проигрышу неподготовленного оппонента.
Итак, человек в соревновании с машиной в случае неопределенных игр оказывается более слабым. Это, однако, не является непоправимым. Мы уже говорили, что человек имеет свойство менять свои реакции в результате накопления опыта. В данном случае машина «от рождения» имеет способность вести неопределенные игры наилучшнм образом, и человек, вступивший с ней в соревнование без предварительной тренировки, оказывается попросту иелод-356
готовленным. Он может улучшить свои результаты в игре с машиной, если сумеет с помощью тренировки развить в себе соответствующие способности. Правда, в данном случае задача довольно сложна, поскольку она состоит в выработке чисто случайного поведения, что противоречит устойчивым привычкам. Целый ряд фактов убеждает нас в том, что такое обучение, как и всякое другое, возможно. Об этом говорит опыт игры в покер—типичную игру неопределенного типа. Кроме того, некоторые эксперименты с обучением дают возможность подтвердить этот вывод.
Представим себе, что человеку (испытуемому) много раз повторно предлагают испытание одного и того же типа, например, ему предлагается на фоне хаотически расположенных пятен обнаружить рисунок или узор, который может присутствовать в предъявляемой картинке или же отсутствовать и быть либо ясно, либо неясно выраженным. Просматривая серию картинок, в которой четкость рисунка на скрывающем его фоне распределена в соответствии с некоторым вероятностным законом, испытуемый по своему усмотрению сортирует картинки на две группы: 1) группа, в которой есть рисунок, 2) группа, в которой нет рисунка. При этом он может совершать ошибки двух типов: а) относить картинку с рисунком во вторую группу и б) относить картинку без рисунка в первую группу. Итак, все его реакции (сортировка картинок) состоят из четырех действий: двух правильных и двух ошибочных. Обозначим их следующим образом:
I (++) и II (--) —правильные действия; III (д--) и IV (_+)—неправильные (первый знак в скобках соответствует наличию рисунка, второй—характеризует отнесение к соответствующей группе).
Представим себе, что действия испытуемого являются ходами в некоторой игре против неизвестного противника. Каждый правильный ход I или II приносит ему некоторый выигрыш О], аг, а ошибочный III и IV—проигрыш Оз, а4 (аь а2 > 0; аз, а4<0). Установим величины аь а2, а,\,
сообщим их испытуемому и будем его поощрять и штрафовать в соответствии с установленными оценками. Это можно делать, либо выплачивая ему денежные суммы и делая вычеты из выплат в качестве штрафов, либо применяя иные меры воздействия типа армейских взысканий и поощрений и т. п.
Ясно, что величины ai, a2i а4 должны быть подобраны в соответствии с распределением вероятностей появ-
ления рисунков в картинках так, чтобы испытуемый при хорошей работе получал от нее некоторый выигрыш, т. е. работал с положительной заинтересованностью. Не будем входить в детали подбора величин штрафов и поощрений, ибо это отвлекло бы нас от главного.
Теперь дадим испытуемому поработать некоторое время, чтобы он прошел период «обучения», а затем подсчитаем и зафиксируем число его правильных и ошибочных действий.
Затем повторим тот же эксперимент с тем же испытуемым (или лучше с той же группой испытуемых), но с другими оценками, и снова подсчитаем число правильных и ошибочных реакций.
Как показывают проведенные эксперименты такого типа, реакции испытуемого меняются при изменении оценок. Эксперимент производился с операторами, обнаруживавшими сигнал определенной формы, но произвольной величины и расположения, на фоне шумов на экране электронно-лучевой трубки индикатора.
Увеличение штрафа а4 за «ложную тревогу», т. е. за отнесение случая нет по ошибке в категорию есть (-+), ведет за собой уменьшение ошибок этого типа и увеличение ошибок типа (+-), т. е. отнесение случая есть ошибочно в категорию нет. Это означает понижение порога чувствительности оператора к сигналу. Понижение платы а\ за правильное обнаружение сигнала (++) ведет к тому же результату.
Можно сформулировать результат эксперимента следующим образом. Оператор в результате обучения начинает работать так, чтобы обеспечить себе максимальный выигрыш в игре, вырабатывая для этого те реакции, которые ведут к этому результату, исходя из действующих оценок.
Самое интересное в этой серии экспериментов, пожалуй, то, что, вообще говоря, возможно решение обратной задачи. Статистически изучая реакции оператора, мы можем установить те оценки возможных результатов его работы, в соответствии с которыми он работает. В ряде случаев решение такой задачи представляет интерес. Мотивы, которые руководят деятельностью человека, решающего ту или иную задачу, иначе говоря, ведущего ту или иную игру, часто бывают многообразны и скрыты от непосредственного наблюдения. Изучая реакции человека в ходе решения задачи, т. е. в процессе ведения игры, можно сде-358
лать определенные выводы о том, каковы же истинные цели, которые он преследует, и каковы те оценки, которые он придает тем или иным результатам.
Таким образом, статистика реакций дает ключ к скрытым психологическим мотивам человеческой деятельности. Такого рода анализ может быть произведен количественно и вполне строго на основании математической теории игр. Подобный анализ может количественно установить изменения критериев оценок при эмоциональных сдвигах в психике. Этими методами можно вести строго количественное изучение особенностей психологии человека, в частности, подсознательных мотивов, ускользающих от самонаблюдения испытуемого.
РОБОТ, КОТОРЫЙ МОГ БЫ БЫТЬ УМНЕЕ СВОЕГО КОНСТРУКТОРА
В предыдущих главах мы обсуждали явления и понятия, связанные с управлением энергетическими системами посредством сигналов. Эти явления и эти понятия общи как для управляющих кибернетических систем, созданных человеком искусственно ради тех или иных применений в технике, так и для кибернетических систем естественного происхождения — живых организмов. Поскольку такая общность явлений для живой и неживой природы существует, необходимо проследить, насколько далеко эта общность простирается. Мы уже делали такую -попытку в главе о работе мозга и сейчас продолжим ее, сделав несколько замечаний относительно возможностей изменять свою структуру в соответствии с внешними условиями и воздействиями внешней среды, которые имеют живые организмы, с одной стороны, и неживые механизмы, с другой.
Здесь еще раз уместно повторить следующее: мы далеки от того, чтобы непосредственно сравнивать ма-зво
шины и организмы и делать какие бы то ни было утверждения, хотя бы отдаленно приближающиеся к утверждению о том, что «мозг человека — это счетная машина» и т.п. Живой организм и любая современная машина представляют собой в целом совершенно различные вещи. И по составу, и по структуре, и по функциям, и по характеру протекающих в них физических процессов, и по условиям существования, и, наконец, по истории их возникновения и развития они совершенно несходны между собой. И тем не менее в принципе они представляют собой явления одного и того же порядка, так как и те и другие суть кибернетические системы. И именно поэтому допустимо и нужно сравнивать их свойства и возможности.
Машина всегда, идейно и материально, создается ее конструктором — человеком. Человек— это животное, умеющее создавать орудия и инструменты, в том числе и такие сложные, как кибернетические машины, помогающие ему выполнять не только физическую, но и интеллектуальную работу. Создавая машину, конструктор всегда имеет перед собой задачу, решение которой диктуется необходимостью, вызывающей внутренний эмоциональный стимул, именуемый желанием.
Решение стоящей перед конструктором задачи может быть достигнуто, как и решение всякой другой задачи, разными неравноценными путями и методами. Конструктор из известных ему методов выбирает тот, который он считает наилучшим. Этот выбор оптимального варианта, будь он правилен или ошибочен, предопределяет структуру машины и связанные с ней особенности функционирования. Другие, отвергнутые конструктором варианты со всеми их частичными достоинствами остаются в стороне, в замыслах, в голове конструктора. Реализуемый вариант воплощает в себе лишь часть знаний конструктора, он всегда беднее по своему содержанию, чем то, что мог бы создать конструктор в идеале, без учета материальных ограничений. В этом смысле духовное дитя конструктора — машина, вопреки известному правилу, не идет дальше своих родителей.
Создание устройства, выполняющего данную функцию, есть задача всегда более обширная, чем само выполнение этой функции.
Имея в виду именно такой подход к созданию машин-роботов, имеющих утилитарную ценность, нетрудно убедиться, что все операции, которые способны выполнять
роботы, заложены в них конструктором. Даже в тех случаях, когда робот по роду своей деятельности делает выборы и самостоятельно принимает решения, изменяет реакцию и производит самонастройку, эти решения принимаются им на основании критериев и правил, сообщенных ему конструктором и реализованных либо в виде структурных особенностей машины, либо в виде сигналов или команд, зафиксированных в памяти робота.
Конструктор всегда знает больше, чем робот. И хотя конструктор не успевает следить за работой робота во всех деталях, хотя некоторые элементарные или сложные операции робот выполняет, не сообщая об этом человеку, и «услужливые» роботы выполняют все больше чисто человеческих операций, беря все более и более сложные задачи из рук человека в свои,— все же человек выдумал робота и создал его, а не робот выдумал и создал человека.
Может быть, в завершение следовало бы добавить, как это делают многие: «....и никогда не создаст!» Но мы воздержимся от такого утверждения, несмотря на казалось бы крайнюю фантастичность противоположной возможности. Воздержимся для того, чтобы обсудить, действительно ли человек, конструктор кибернетической системы, является единственно возможным источником и причиной эволюции роботов и нет ли путей к созданию роботов, которые сами, без вложенного в них «идейного содержания», были бы способны под воздействием внешних влияний менять свою структуру и функции, развиваясь и эволюционируя «по пути к совершенству», как это свойственно живому миру. Факт саморазвития, эволюция без вмешательства творца, под действием законов природы не представляет собой для естествоиспытателя чего-то нового и невиданного.
Возможность саморазвития, «самоорганизации» кибернетических систем реально существует; в наши дни ведутся экспериментальные работы, в которых исследуется эта возможность. Идеи самоорганизующихся систем связаны с именем англичанина В. Р. Ашби, который одним из первых их высказал.
Самоорганизующиеся системы
Мы будем называть самоорганизующимися кибернетические системы, обладающие некоторыми описанными ниже свойствами. Их первоначальная структура представ-362
ляет собой случайный набор элементов, связанных друг с другом случайным образом. Предоставленная самой себе система пребывает в 'первоначальном состоянии, и ее организация, т. е. связь между элементами, может меняться лишь случайным образом под воздействием внешних или внутренних случайных событий (шумов). Если на «вход» системы подаются некоторые сигналы, система реагирует, т. е. на ее выходе появляются новые сигналы, представляющие собой преобразование входных (в том числе и с использованием памяти); сигналы с выхода передаются во внешнюю среду и воздействуют на нее. Если в процессе такого взаимодействия с внешней средой, и только при наличии такого взаимодействия, структура кибернетической системы и ее функции меняются, приближаясь к некоторому устойчивому состоянию, то такую систему мы будем называть самоорганизующейся.
Из определения непосредственно следует, что возможность самоорганизации зависит не только от свойств самой системы, но и от характера воздействий внешней среды и вообще от характера взаимодействия системы со средой.
Представим себе, что некоторая кибернетическая система, робот, некоторым образом произвольно организованная, находится в постоянном взаимодействии с внешним миром. Пусть во внешнем мире произошло что-то, что изменило условия существования системы и оказало на нее воздействие, скажем, уменьшило поступление энергии, питающей систему, или внесло некоторые другие изменения (например, ослабление или усиление связен между всеми или некоторыми элементами системы), повлиявшие как на функционирование системы, так и на ее структуру. Система испытывает это влияние двояким образом: во-первых, уменьшение поступления энергии заставляет ее работать более вяло, если только она не обладает собственным запасом, накопленным в каком-либо аккумулирующем устройстве, во-вторых, это событие, воздействуя на чувствительные элементы системы, превращается в сигнал и, пройдя после преобразования в системе на выход, вызывает некоторое ответное действие — реакцию. Эта реакция окажет, в свою очередь, воздействие на внешнюю среду, которое может быть произвольным, так как внутренняя организация кибернетической системы произвольна или случайна. В некоторых случаях реакция может быть «нейтральной» в том смысле, что она ничего не 363
изменит в дальнейшем ходе событий. В других случаях реакция системы может повлечь за собой изменение воздействия внешней среды на систему, н первоначальное воздействие либо усилится, либо ослабится, либо, наконец, появится некоторое новое воздействие на систему.
Если реакция системы такова, что она ослабляет первоначальное внешнее воздействие или полностью его снимает, то можно сказать, выражаясь языком физиологов, что эта система «уравновешивает воздействие среды» или «целесообразно реагирует», по крайней мере, в отношении данного воздействия. Во взаимодействии системы и среды мы имеем отрицательную обратную связь, которая стабилизирует существующее состояние. Повторные воздействия того же типа снова будут отрабатываться системой, которая, таким образом, будет «уходить» от воздействий внешней среды. Слово «уходить» можно понимать и буквально, т. е. в смысле пространственного перемещения в более благоприятную область.
Другой вид реакции (типа положительной обратной связи) окажет на внешнюю среду такое воздействие, которое усилит первоначальное воздействие со стороны среды на систему. В примере с уменьшением поступления энергии реакция системы приведет к еше большему снижению питания, а затем, по мере «самовозбуждения» этого процесса,— к полному выключению системы в энергетическом смысле. Реакция системы на внешнее воздействие в этом случае не стабилизирует положение, а «подхлестывает», ускоряет его изменение и ведет к непрерывному развитию процесса взаимодействия в одну сторону. Если первоначальное воздействие наносит повреждение системе, то в дальнейшем может наступить полное ее разрушение. Повторное воздействие застанет систему уже не в том виде, в каком оно заставало ее в первый раз. После первого воздействия система «выключилась», или разрушилась, или приобрела совсем иную, отличную от первоначальной структуру.
Какую именно реакцию имеет система—типа отрицательной обратной связи, положительной обратной связи или нейтральную — зависит в конечном итоге от первоначальной организации системы, т. е. от случая, поскольку исходная организация системы по предположению случайна.
Системы, случайно оказавшиеся обладателями реакции типа отрицательной обратной связи, могут, приспосабли-364
ваясь к воздействиям среды, долгое время существовать без изменений. Системы с реакцией типа положительной обратной связи «выходят из игры» при первом же вредном воздействии. Таким образом, ври прочих равных условиях время существования тех и других неодинаково.
Представим себе, что некоторый естественный случайный процесс создает одну за другой различные случайно организованные системы, т. е. некоторые собрания взаимосвязанных активных элементов. Допустим, что известны вероятности pi и р% появления систем первого и второго типов с реакциями типа отрицательной и положительной обратной связи, соответственно. Иначе говоря, в единицу времени создается всего W систем, из них в среднем n\=piN первого и n2=pzN второго типа. Каждая из систем дачного типа существует в среднем в течение времени 1\ и Г2, соответственно. Начиная с некоторого момента будем наблюдать только те системы, которые появляются после начала наблюдения, игнорируя остальные. Их число будет нарастать со временем для каждого типа до тех пор, пока по истечении времени Т\ и не начнется их исчезновение. После этого количество их будет постоянным и равным пхТх и л2Г2. Поскольку срок существования систем первого типа гораздо больше того же срока для систем второго типа (Tj >Т2), количество одновременно наблюдаемых систем с отрицательной обратной связью намного превысит количество систем с положительной связью, даже если вероятность появления систем второго типа (р2) несколько больше, чем р\. И даже если вероятности р\ и /?2 равны, т. е. системы обоих типов рождаются приблизительно в одинаковых количествах, все же долго существовать и потому преимущественно наблюдаться будут только устойчивые системы.
Это простое рассуждение приходит на помощь тогда, когда у естествоиспытателя появляется чувство удивления, вызванное «рациональным устройством» живых организмов. Действительно, все наблюдаемые живые существа обладают многочисленными и совершенными реакциями типа отрицательной обратной связи на вредные воздействия (и положительной на полезные). Для различных проявлений таких реакций существуют названия: тропизмы, рефлексы и т.д., о чем мы говорили ранее. Реакции эти часто бывают совершеннее реакций, придуманных человеком и реализованных им в роботах. Недаром много
веков существовала идея о «творце» всего живого, кото-рый создал все «разумно». Однако этим «творцом» является тот факт, о котором мы только что упоминали: на свет появляются и «рационально», и «нерационально» устроенные существа; выживают же и существуют только те, которые устроены действительно рационально; остальные очень скоро, порой почти мгновенно, исчезают.
Но вернемся от живой природы, от уже сформировавшихся и отобранных биологических видов, закрепленных наследственностью и лишь иногда подвергающихся случайным «экспериментальным» изменениям, к искусственным, случайно организованным системам со случайными реакциями. Как мы установили, одни из них, «ощутив» опасное воздействие, от него «уходят», а другие, «почувствовав ожог, лезут в огонь» и в нем сгорают. Вот эти последние нас и должны заинтересовать.
Несомненно, что не все «нерационально» реагирующие системы должны обязательно подвергнуться полному физическому разрушению и уничтожению. По мере «развития» процесса взаимодействия системы и среды в одном направлении и усиления внешнего воздействия это воздействие, поскольку оно усиливается, может вызвать частичную перестройку структуры системы и тем самым изменить ее реакцию. В некоторых случаях реакция может измениться в сторону «рационального» поведения, т.е. в сторону реакции типа отрицательной обратной связи. Разумеется, перестройка, или, лучше сказать, ломка системы под нарастающим внешним воздействием, происходит не обязательно в этом направлении, она происходит случайно. Однако, подобно песчинке в сите, которая рано или поздно проваливается через сетку, если только этому не препятствуют ее размеры, система, подвергаясь хаотическим реконструкциям, в конце концов может обрести устойчивое состояние, т. е. приобрести реакцию, выводящую ее из-под опасного, травмирующего воздействия. Таким образом, система может приобрести «рациональную» реакцию без какого-либо руководящего влияния разумного существа, под воздействием чисто случайных причин. Может быть, очень немногие из случайно организованных систем дойдут до конечного устойчивого состояния, но те из них, которым это удастся, останутся в устойчивом состоянии надолго.
Можно сказать, что система, прошедшая путь случайных преобразований под внешними воздействиями и по-366
лучившая структуру, обеспечивающую реакцию «самозащиты», является самоорганизующейся системой.
Путь, по которому идет преобразование системы, имеет много общего, с одной стороны, с методом «проб и ошибок», т.е. с приобретением опыта живыми организмами без их намеренного обучения или дрессировки со стороны, а с другой стороны, несомненно, представляет собой пример обратной связи, в очень широком понимании этого явления, направленной на реорганизацию структуры системы.
Поскольку процесс протекает без вмешательства разумного существа и, быть может, без всякой связи с его существованием, самоорганизующаяся система не заимствует сгруктурной организации и информации ниоткуда, кроме внешней среды. Структурные изменения системы под воздействием внешней среды, несомненно, представляют собой некоторый род памяти. Использование информации, запасенной в структурной памяти, требует определенного уровня сложности системы, т. е. достаточного количества активных чувствительных элементов и их связей. Перешагнув некоторый порог сложности, система приобретает способность самостоятельно накапливать поступающую в нее информацию и так или иначе ее использовать.
Заметим попутно, что из числа случайно организованных кибернетических систем, подвергающихся хаотическим изменениям и естественному отбору, выживают только те, которые случайно научились употреблять внешние влияния в свою пользу, т. е. приобрели положительные тропизмы к воздействиям, поддерживающим их существование, и отрицательные — к воздействиям, которые угрожают им разрушением. Таким образом, естественно, зарождается то свойство, которое мы в гл. 9 назвали «эгоизмом» в широком понимании и которое были вынуждены признать несвойственным современным роботам.
Если допустить, что рациональная организация, сложившаяся в процессе самоорганизации, закрепляется передачей ее по наследству, то мы получим грубую модель биологических видов.
Осуществление самоорганизующихся систем
Следует сказать несколько слов о первых попытках экспериментальной проверки идей, связанных с самоорганизующимися системами.
Самым первым экспериментом было создание д-ром Ашби устройства, названного им гомеостатом. Гомеостат состоял из четырех электромагнитов, сердечники которых, перемещаясь, передвигали ползунки реостатов. Питание электромагнитов включалось через эти реостаты. Отклонение сердечника в крайнее положение вызывало в схеме
Рис. 11.1. Внешний вид одного из четырех блоков гомеостата Ашби.
случайное переключение соединений реостатов и обмоток электромагнитов. Положения всех четырех сердечников были, таким образом, взаимосвязанными, так как ток в каждом соленоиде зависел от положений всех четырех реостатов, а положение каждого реостата зависело от тока в соответствующем соленоиде.
Включение питания на схему гомеостата Ашби вызывало движение всех сердечников и перемещение ползунков всех реостатов. При этом могло быть два случая: либо 368
после некоторого переходного процесса все сердечники останавливались в некотором промежуточном устойчивом состоянии и движение прекращалось, либо система не находила устойчивого состояния и один из сердечников выходил за пределы нормального отклонения, доходя до упора. В последнем случае в схеме происходило случайное переключение, и поиски равновесия возобновлялись.
Рис. 11.2. Д-р В. Р. Ашби со своим гомеостатом.
В конце концов, после нескольких переключений, осуществляющих случайные изменения схемы соединений гомео-сгата, система самостоятельно доходила до такого состояния, при котором оказывалось возможным равновесие, и затем находила это равновесие.
Различные манипуляции с гомеостатом: перестановка упоров, изменение связей, даже частичные поломки — не нарушали этого свойства гомеостата.
Еще более поучительным является другой эксперимент. Исходным материалом в этом эксперименте являлся набор из «некоторого количества (от 8 до 64) нелинейных элементов. Каждый элемент мог приходить в состояние 24 И. А. Полетаев 369
возбуждения или быть в покое. Находясь в состоянии возбуждения, элемент мог передавать это состояние или его долю другим элементам, с ним связанным. Каждый элемент мог также воспринимать возбуждение от одного или нескольких элементов. Состояние возбуждения каждого элемента затухало по экспоненциальному закону, возник-
Рис. 1L3. Схема одного из четырех блоков гомеостата Ашби.
А, В, Ct D — обмотки соленоида, каждая из которых питается от одного из четырех блоков гомеостата. ГЦ, П2, I7S, ГЦ; Xlt Х2, Х3, Xt — потенциометры и переключатели, устанавливаемые вручную. У — автоматический переключатель, дающий случайное изменение параметров схемы при каждом переключении и срабатывающий ври включении уела Н от реле Pt в случае Увеличения тока в цепи солеиоидов выше порога. 2', 3', 4'; 2", провода, соединяющие блок с остальными тремя
блоками гомеостата. Остальные блоки имеют такие же схемы.
нув одновременно с импульсом, подаваемым извне. Для того чтобы элемент, находящийся в покое, мог быть возбужден, уровень подаваемого на него извне или от соседей возбуждения должен был превышать некоторый порог. Величина порога весьма велика в момент возбуждения (только что возбужденный элемент не может быть еще раз возбужден) и спадает с течением времени, стремясь 870
к некоторому, вообще говоря, переменному или регулируемому минимальному значению.
Все элементы связаны друг с другом. Эти связи в начале эксперимента устанавливались по жребию с помощью таблицы случайных чисел, имитировавшей случайный процесс, который определял первоначальную органи-
Рис. 11.4. Упрощенная схема модели самоорганизующейся системы (по Фарли и Кларку).
а} общая схема: 1а, 2а — две входные группы элементов, 1в, 2в— две выходные группы элементов. Л! — модификатор — устройство, вносящее изменения в структуру системы; б) два элемента системы и их связи.
зацию системы. Во-первых, устанавливалось наличие связи между каждой парой элементов. Для этого бросался жребий — бралось наугад число, расположенное между нулем и единицей; если оно превышало некоторую величину fe<l, связь для данной пары не устанавливалась, если не превышало, то устанавливалась (величина k называлась постоянной связи системы; чем больше k, тем больше связей устанавливалось). Для каждой установ-25 И. А. Полетаев 371
ленной связи между элементами с номерами i и / выбирался также по жребию свес» этой связи, имевший 16 различных значений и определявший, какая доля уровня возбуждения по этой связи передается.
Все связанные таким образом по жребию элементы разбивались на четыре группы: две «входные» (1а и 2а) и две «выходные» {lb и 2Ь). На элементы входных групп в определенном порядке подавалось периодическое возбуждение. Со всех выходных элементов снималось их возбуждение на выход системы. Возбуждение извне на входные элементы подавалось периодически, причем за каждую серию циклов возбуждение подавалось на все элементы только одной входной группы, а на элементы другой не подавалось. Затем две входные группы менялись ролями. Таким образом, хаотически организованная система подвергалась систематическому воздействию извне.
.Задачей" системы было проводить возбуждение от первой входной группы только к первой выходной (1а—>16) и от второй входной только ко второй выходной (2а—*26). Качество выполнения этой задачи оценивалось числом Nt . После каждого такта работы системы подсчитывалось число возбужденных элементов выходных групп 16 и 26 и п2) и их разность (т. е. превышение числа .правильно" возбужденных над числом .неправильно" возбужденных элементов в группе, куда сигналы не должны проходить). Эта величина, накапливаясь от такта к такту, образует число Nv Это число в начале решения задачи может быть установлено произвольным по желанию экспериментатора. Когда число Nt в процессе работы системы меняет знак, пара входных групп меняется местами, т. е. возбуждение начинает подаваться не на группу 1а, а на группу 2а.
Если бы система работала идеально, то при подаче возбуждения на группу 1а все элементы группы 16 были бы возбуждены, а все элементы группы 26 не возбуждены. Разность пх — п2 имела бы максимальное значение, число быстро изменяясь, достигло бы нулевого значения и изменило знак. Входные группы попарно поменялись бы местами, число N, снова изменило знак и т. д. Затем число Nt поддерживалось бы непрерывно вблизи нуля. Если бы при этом искусственно изменить число Nt от нуля в любую сторону, то оно с максимальной скоростью снова вернулось бы к нулю.
Система первоначально весьма далека от идеала и, работая описанным способом, она будет медленно менять число Nt, вообще говоря, в произвольную сторону.
Теперь в систему вводится дополнительное усложнение. Специальное устройство вносит изменение во внутреннюю организацию системы. Его влияние на систему определяется направлением изменения числа Nt. Если Nt меняется в правильном направлении, т. е. уменьшается по абсолютной величине, то в системе подкрепляются все фактически действующие связи. Если Nt меняется в неправильном направлении, действующие связи ослабляются. Усиление и ослаб-
Рис. 11.5. График работы самоорганизующейся системы при последовательных циклах работы (по Фарли и Кларку).
Число оценивает качество работы в зависимости от времени. В начале каждой пробы AZ искусственно отводится от нулевого значения. Скорость, с которой N стремится к нулю. возрастает по мере хода опыта и самооргзиизации системы.
Звездочкой отмечен момент включения модификатора М.
ление связей производится изменением „веса" этих связей. Кроме того, в систему вводится некоторый пшум“ — случайные хаотические изменения структуры, независимые от результата работы системы, а также регулировка уровня максимального значения порога возбуждения.
Введение в действие механизма, изменяющего структуру, придает системе новые свойства. По мере хода работы в процессе повторного решения задачи показатель качества работы изменяется в лучшую сторону. Число Nt на первых порах слегка удаляется от нуля, но затем почти неизменно стремится к нулю. Скорость возвращения к нулю возрастает по мере организации системы под дейстием „тренировки"
На рис. 11.5 приведены графики изменения Nt во времени. После сведения Nt к нулю в ходе работы системы оно
25* 373
искусственно скачком йзмейяется в ту или другую сторону. Улучшение качества функционирования системы, выражающееся в нарастании скорости, с которой стремится к нулю, достигается за счет изменения связей в системе. Таблица весов связей между элементами от начала эксперимента к концу существенно меняется.
Повторное проведение эксперимента с различными случайно выбранными начальными связями внутри системы давало одинаковые результаты: каждый раз по мере использования поступающей извне информации система самостоятельно изменяла свою внутреннюю структуру так, что качество ее функционирования улучшалось. Из 64 опытов лишь 3 или 4 не привели к «самоорганизации» вследствие того, что в исходной системе случайно оказались отсутствующими важные связи.
Эксперимент проводился посредством моделирования описанной системы на быстродействующей электронной вычислительной машине со специальной программой. Выходная величина Nt автоматически записывалась с помощью осциллографа.
Интересно также то, что по прошествии периода «самоорганизации» система оказывалась довольно устойчивой по отношению к повреждениям. Искусственное удаление до 10% всех связей не наносило еще заметного ущерба функционированию системы.
Описанный эксперимент с «самоорганизующейся» системой весьма элементарен по характеру решаемой системой задачи. Результаты эксперимента, несомненно положительные, не позволяют еще усмотреть непосредственно какие-либо полезные технические применения продемонстрированных принципов *. Тем не менее уже эти простые эксперименты позволяют сделать важные принципиальные обобщения.
Продолжение исследований в этой области, несомненно, должно дать не только результаты большой принципиальной важности, но и ценные утилитарные возможности. Эти работы ведутся, и результаты их, возможно, явятся основой целого раздела кибернетики — изучение свойств «самоорганизующихся» систем,— быть может, самого интересного ее раздела.
♦ Однако, несомненно, что эта работа имела в виду практические применения. Об этом говорит хотя бы то, что финансирование работы производилось военным министерствам США.
Интересным является тот факт, что явление «самоорганизации» воспроизводится при малом числе элементов (восемь—в описанном выше эксперименте). По-видимому, уже такое малое число элементов позволяет создать достаточную избыточность структуры. Избыточные элементы являются принципиально необходимыми в самоорганизующихся системах, которые обязательно отклоняются от оптимальных, наиболее экономно построенных структур, выполняющих ту же функцию.
Трудно предсказать, в каком именно воплощении могут быть и будут практически использованы возможности, представляемые самоорганизующимися системами. Скорее всего, это будут наиболее гибкие, электронные элементы. Однако не исключена возможность, что, кроме средств электроники, могут оказаться применимыми и другие, физико-химические, а быть может, и биологические средства.
Понятие самоорганизации случайно сложившейся структуры представляет собой не только принцип, обещающий ценные применения, но и средство понять многие процессы, происходящие в живой природе. Модель самоорганизующейся системы, о которой мы говорили выше, создавалась в явном расчете на имитацию некоторых черт механизма нервной деятельности (образование нервных структурных связей, ответственных за возникающую в процессе .обучения новую функцию).
Возможно, что структуры, содержащиеся в органических ’пищевых веществах и поглощаемые в процессе питания живыми тканями, являются источником информации для процессов самоорганизации вещества живых тканей в какой-то мере подобно тому, как информация, подаваемая на вход самоорганизующейся системы, служит исходным звеном в процессе организации структуры. Известно, что живые существа при питании нуждаются не только в энергии, скрытой в пище, но и в физической энтропии (точнее, в отрицательной энтропии, т. е. в структурной организации поглощаемых питательных веществ) *.
Нам представляется чрезвычайно плодотворным применение понятий информации и самоорганизации к элементарным жизненным актам живой материи.
Даже столь краткое упоминание о самоорганизующихся системах, которое мы сделали в этой главе, дает возмож-
♦ См. Э. Шредингер «Что такое жизнь с точки зрения физики?». Изд. нностраниой литературы, 1946.
ность ясно себе представить, какое огромное поле для приложения совместных усилий ученых различных специальностей представляет изучение процессов управления в живых организмах.
Жизнедеятельность живых организмов от простейших до высших и 'процессы управления, непрерывно протекающие в ходе этой-жизнедеятельности и составляющие сущность «уравновешивания со средой», включают в себя не только непосредственное использование информации, поступающей извне, и ее автоматическую отработку, но и гораздо более сложные, не однозначные и не прямые пути использования информации, одним из которых является самоорганизация типа «проб и ошибок».
Избыточность организации
При анализе живых структур, выполняющих ту или иную функцию, всегда обращает на себя внимание избыточность состава их по сравнению с соответствующими оптимальными, наиболее экономичными системами технического характера.
Такая избыточность живых структур возникла, по-видимому, не случайно. Во-первых, системы, возникающие в порядке индивидуального или видового развития, если только они возникают путем «самоорганизации» за счет поступающей извне информации в описанном выше смысле, всегда по необходимости избыточны. Во-вторых, избыточность конструкции — это то свойство, которое в конечном итоге обеспечивает долговечность системы при бесперебойном функционировании.
Здесь уместно было бы вспомнить об известном факте «двойного обеспечения» функций в живых организмах. Передача информации в живом организме почти всегда «дублируется» различными каналами. Именно поэтому нарушение связи и управления в каком-либо звене чаще всего ведет только к временному нарушению функции, которая затем восстанавливается посредством включения в работу обходных путей и «запасных» регулировок. Примером тому могут служить результаты опытов Лешли с ориентировкой крыс в лабиринте, о которых мы упоминали выше. Удаление у крыс значительной части мозгового вещества не приводило к полному нарушению способности животного к ориентировке.
В современной технике весьма остро стоит вопрос о долговечности кибернетических систем. Сложные систе-376
мы, построенные из малонадежных элементов, имеющих небольшой срок службы, оказываются все менее и менее надежными по мере того, как с их усложнением возрастает число составляющих их элементов. Это происходит потому, что системы технической кибернетики создаются с максимальной экономией деталей и выход из строя хотя бы одной детали выводит обычно из строя всю систему. Таким образом, срок службы до ремонта системы равен сроку службы наименее надежного элемента системы. Повышение средней надежности деталей еще не решает вопроса, так как разброс по сроку службы может свести на нет достижения. Проблема обеспечения высокой надежности сложной системы, построенной из большого числа ненадежных элементов, стоит весьма остро и представляет большой прикладной интерес.
Ответ на этот вопрос дается нам живыми кибернетическими системами. И этот ответ — избыточность конструкции. В живых организмах иногда удаление некоторой части живого вещества, даже в условиях отсутствия регенерации,— как это имеет место, например, для нервных структур—дает лишь временное ухудшение функции, которая затем восстанавливается, вырабатываясь заново в остатках тканей. Конечно, дело обстоит не так, если удалена полностью некоторая структура, без которой данная функция не может быть осуществлена.
Увеличение избыточности конструкции в некотором, ие слишком изящном варианте уже используется в технике. В особенно ответственных случаях, например при работе автоматического оборудования без оператора и без возможности ремонта (автоматические радиометеостанции), приходится, попросту, дублировать целиком весь радиопередатчик. Один из двух передатчиков непрерывно эксплуатируется, другой — находится наготове. Выход из строя первого автоматически включает в работу второй.
Более выгодным явилось 'бы дублирование отдельных блоков и узлов передатчика. В случае дублирования передатчика целиком выход из строя второго передатчика (после того, как первый уже вышел, т. е. случай безнадежного отказа системы) может произойти вследствие поломки совсем другой детали в другом блоке, чем при аварии первого. Чаще всего так и бывает, если выход из строя деталей случаен. Но в этом случае в системе с подменой не всего передатчика, а блоков или узлов, работа не была бы нарушена» так как оба поврежденных узла
были бы заменены полноценными. Таким образом, чем «мельче» блоки и узлы, для которых имеются запасные, тем надежнее работает система, состоящая из данного числа комплектов аппаратуры. Правда, в этом случае аппаратура дополнительно усложняется за счет возрастания числа коммутирующих аварийных устройств.
Вероятно, подробное знакомство с путями использования избыточности в живой природе могло бы дать много поучительных и полезных идей для конструкторов систем технической кибернетики.
Еще одним интересным вопросом, касающимся «самостоятельного» существования роботов без идейной помощи со стороны конструктора, является вопрос о приспособленности данной структуры, достаточно сложной и избыточной, к выполнению не одной, а нескольких различных функций. Всякая структура с избыточностью имеет возможность использовать избыточные элементы для формирования своего поведения. Поэтому часто искусственная кибернетическая система, построенная для выполнения одной функции, оказывается способной производить’ и другие (например, логические операции наряду с арифметическими и т. д,). Некоторые конструкторы высказывают «жалобы» на то, что не успеет новая конструкция вступить в строй для выполнения своей задачи, как уже оказывается, что она может и должна использоваться для совершенно иных применений, на которые она не рассчитывалась.
Проблема приспособляемости кибернетических систем к новым условиям в известной мере аналогична проблемам самоорганизации и выживания. Несомненно, что система, способная в известных внешних условиях к самоорганизации, способна также и к реорганизации. Проводя последовательно приспособление системы к различным условиям, можно усложнять и «наращивать» функции системы в пределах, определяемых количеством элементов. Идя по этому пути, мы могли бы получить некоторую модель эволюции организованных систем, их усложнения как структурного, так и функционального.
Сейчас очень трудно предсказать конкретные перспективы таких исследований, однако несомненно, что последовательное повторение процесса самоорганизации в отношении все более и более сложных систем может привести к системе, как угодно сложной с как угодно слож-378
ными функциями, если только не ставить ограничений со стороны количества элементов, входящих в систему.
Учитывая, что процесс самоорганизации происходит без участия разумного творца, приходится признать, что на вопрос: «Может ли робот стать умнее своего конструктора?»— мы не можем с полным основанием ответить отрицательно. Такая возможность, хотя бы в принципе, существует, но пути ее реализации еще ждут дальнейших исследований *.
♦ Пока печаталась эта книга, появились работы, продолжающие исследования самоорганизующихся систем. Интересные результаты получены в Гарвардском университете. На машине ИБМ-704 моделировался творческий процесс поискав методов решения новой задачи. В машину вводилось много различных программ, в том числе и бессмысленных, и ставилась задача. Машина решала задачу наугад, чаще веет® неправильно. Результат решения оценивался и на основе оценки изменялся метод решения. Вначале правильные результаты получались лишь случайно, приблизительно один раз из 400 попыток. После йё-скольких сотен тысяч попыток у машины «вдруг» появлялось самостоятельное суждение о правильном методе решения, и далее она придерживалась всегда этого метода, несколько изменяя его самостоятельно, если изменялась задача.
Общая схема этого эксперимента напоминает описанные выше опыты Фарли и Кларка, но в данном случае условия опыта ближе к практически интересным явлениям. Задача, ставившаяся машине, состояла в обработке 14-значного числа посредством 63 математических операций. Авторы работы считают, что легче построить машину, способную выработать собственное суждение по сложному вопросу, чем точно формализовать алгоритм решения этого вопроса. (Нью-Йорк Таймс, 4/1, 1958). (Примечание при корректуре).
ГЛАВА 12
БОЛЬШОЙ робот
Что же дальше?
Человек приобрел отличный от прочих животных облик и образ жизни с тех пор, как стал способен применять орудия и инструменты. По. мере накопления человеком опыта использования различных орудий производства, передвижения и т. д., эти орудия совершенствовались, усложнялись, приносили все больше пользы и давали, при правильном их использовании, все большую производительность труда. В наше время человек, которому предстоит, скажем, проложить дорогу в какой-либо местности, уже не приступает к этой работе сразу, хватаясь за топор и лопату. Сначала он изготовляет машины-орудия и машины-двигатели, с помощью которых затем выполняет работу по устройству дороги с несравненно меньшими затратами времени и усилий, чем если бы он прокладывал дорогу голыми руками или с помощью простейших орудий. В наш век механизации трудоемких работ иное и представить себе невозможно. Все больше машин приходит в промышленность, сельское хозяйство, транспорт — всюду, где работает человек.
Очень редко человеческая рука непосредственно прикасается к сырью для его обработки. Руки мастера всегда либо держат инструмент, либо, чаще всего, лежат на рукоятках управления машиной. Однако работает в процессе производства не инструмент и не машина, а человек с помощью инструмента и машины. Машина «удлиняет» его руки, делает возможными миллионы различных операций обработки, которые никогда нельзя было бы совершить ии пальцами, ни ногтями, ни зубами, делает руки человека настолько сильными, что ему не приходится прилагать собственной физической силы. Те производственные операции, которые сегодня еще требуют физической силы рабочего, мы называем «отсталыми», немеханизированными, имея в виду их скорое исчезновение.
Работа человека в процессе производства все больше и больше становится работой управления армией орудий, и руки человека становятся из непосредственных исполнителей лишь проводниками сигиалов-команд, передаваемых от человека к исполнительным механизмам.
Физический труд человека стал непроизводительным, «отсталым», рядом с механическими машинами огромной мощности и сверхтвердыми «когтями» и «зубами» машии, рядом с тончайшей технологией сложных производств, немыслимой при выполнении голыми руками человека. Человек в производстве ценится сегодня не как силач-грузчик или молотобоец, способный работать «за двоих», а как умный мастер, вдумчивый администратор, имеющий в запасе много знаний и опыта и способный вести армию машин к победе кратчайшим путем и с наименьшими потерями. Труд управления производством велик и сложен. И труд этот становится все сложнее и обширнее, а главное, ответственнее, по мере роста общественного производства, роста тех мощностей и разнообразия средств, которые принимают участие в процессе производства. Встает вопрос о механизации управления производством.
И как в те времена, когда человек впервые привязал камень к палке, изготовив первый инструмент, чтобы выполнять физическую работу, в наши дни человек тоже изготовил и применил орудия, облегчающие его труд управления производством. На наших глазах все чаще в области интеллектуального труда происходит то же самое, что имеет место для труда физического. Вместо того, чтобы своими руками (лучше сказать теперь «своей головой») решать задачу, переписывая множество цифр и про-
изводя в уме тысячи вычислений, человек изготовляет ма-шину, которая быстрее, надежнее и лучше его выполняет эту работу. Все больше так называемых чисто человеческих задач решают информационные кибернетические машины, и решаемые ими задачи становятся все объемистее и сложнее. Недаром Н. Винер говорит о «второй промышленной революции», совершающейся в наши дни и состоящей в механизации интеллектуальной работы наравне с работой физической.
Если бы пещерного человека, изготовлявшего каменные топоры, спросили, какие топоры человек будет применять в будущем и как он будет ими пользоваться, вряд ли бы даже самый искусный мастер топорных дел того времени сумел рассказать о паровом молоте, гидравлическом прессе и других машинах-орудиях нашего времени. И это не его вина. В его распоряжении было недостаточно информации для того, чтобы сделать эти столь далеко идущие выводы.
Мы в наши дни тоже можем спросить себя: «Что дадут нам и нашим потомкам кибернетические машины?» И надо признаться, что ответить иа этот вопрос мы сможем вряд ли лучше, чем пещерный мастер. Мы еще слишком мало знаем возможности машин, мы еще мало их применяли. По мере накопления опыта и знаний придут догадки и находки науки, и подобно тому, как человек шел от камня и бронзы к стали и сплавам, от огня к электричеству и атомной энергии, он пройдет новый путь от современных громоздких и дорогих кибернетических машин к чему-то новому, на фоне чего сегодняшние машины будут заслуженно казаться пещерной техникой.
Какие элементы придут на смену современным радиолампам, транзисторам, магнитным и диэлектрическим ячейкам, проводам и контактам? Об этом можно только мечтать и фантазировать.
Быть может, это будут волноводные устройства, работающие с волнами длиной в сантиметр, миллиметр, доли миллиметра или со световыми волнами. Быть может, это будут живые клетки, которые биологи-кибернетики научатся выращивать в питательной среде по заданной схеме со специализированными функциями. Может быть, это будут замороженные в криостате почти до абсолютного нуля квантово-вырожденные сложные кристаллы с непериодической структурой (сложные и сложнейшие молекулы), способные претерпевать изомерные переходы в соот-382
ветствии с поступающими сигналами. Может быть, это будет что-то еще, чему мы не знаем названия, подобно тому, как пещерный человек не знал названий марок легированных сталей...
У нас есть только один путь поскорее узнать все это, и этот путь — неустанно и упорно трудиться над решением сегодняшних проблем кибернетики для того, чтобы быстрее передать машинам сначала свои будничные и простые задачи, а затем и более сложные, чтобы полнее использовать помощь машин для сбора и обработки информации, чтобы поскорее научить машины человеческим делам и научиться у машин всему, что необходимо человеку для дальнейшего движения вперед.
Человек, несомненно, многому учится у машин и не только потому, что он использует результаты расчетов, напечатанные на выходной ленте автоматического решающего устройства. Оператор-программист, формулирующий задачу для машины, не только обладает специальными знаниями. Выражаясь образно, машина воспитывает его мыслить иначе, строже, не допускать произвольных толкований и необоснованных решений. Передавая машине ту или иную задачу, человек обязан строго сформулировать, что должно быть сделано, как сделано, как сделать это наилучшим образом, а стало быть, каким критерием надо пользоваться для определения «на и лучшего» и почему именно этим критерием, а не другим. Невозможно записать в программу машины действия, ход которых непонятен программисту или которые нечетко сформулированы. Говоря коротко, работа с машиной воспитывает в человеке точность и строгость мышления и умение критически оценивать свои собственные решения и действия. Против такого воспитания вряд ли можно что-либо возразить.
Отдав себе отчет в своих действиях с достаточной полнотой и четкостью, поняв, как именно человек производит ту или иную работу, сформулировав правила, по которым эта работа производится, можно эту работу запрограммировать, т. е. записать кодом команд машины или реализовать в решающем устройстве непрерывного действия и передать полностью машине. Это особенно выгодно в тех случаях, когда аналогичная задача решается повторно, много раз.
Вполне разумно ставить задачи механизации с помощью кибернетических машин информационных поисков (автоматический библиотекарь и библиограф); диспет-
Ззз
черизации; административно-хозяйственного управления промышленными предприятиями и планирования производства в разных масштабах; постановки диагноза заболевания по данным объективного обследования, анамнеза и жалоб больного; инженерно-технического руководства производством; ведения сложных технологических процессов; оптимальной дозировки лекарственных веществ и распределения доз во времени при медикаментозном лечении; применения исправительных мер в отношении преступников на основании данных следствия и объективных характеристик подсудимого, а также ведения следствия по уголовным делам.
Все эти задачи требуют знания критериев оптимизации, правил, по которым вырабатывается решение, и объективного взвешивания по вероятности различных гипотез в случае неполной информации. Польза от попыток механизации решения этих задач заключается не только в разгрузке государственного и технического аппарата и повышении производительности его труда, но еще и в том, что попытка сформулировать точные правила и критерии качества работы инженера, врача, судьи, администратора принесет огромную пользу соответствующим отраслям-деятельности, позволит четко поставить вопросы, устранить произвольные решения и выявить существующие неясности. Машина не терпит даже тени неясности и произвола.
Большое число задач связано с военным делом. Их решение должно механизироваться, ибо скорость реакции в играх типа военных действий почти всегда имеет решающее значение, а объем задачи, как правило, не позволяет человеку в ограниченное время решить ее строго, без произвола. Задачи о решении игр и выборе оптимальной стратегии характерны не только для военного дела, но и для ряда мирных применений.
Многие из задач, упомянутых выше, не только не решены, но еще и не поставлены достаточно точно и строго. Производится лишь разведка путей подхода к их постановке и решению.
Для решения этих задач, несомненно, потребуется расширение математического аппарата. Машины вызовут к жизни новые разделы математической науки не только потому, что они позволяют производить вычисления, недоступные ранее по трудоемкости, и исследовать вопросы, недоступные для исследования сегодня из-за огромного 384
количества необходимой вычислительной работы, но еще и потому, что в ходе применения машин выявится много неожиданных возможностей, для использования которых будет необходим новый формальный аппарат.
Возможности кибернетических систем
Пытаясь заглянуть в будущее, мы должны, хотя бы на основе наших ограниченных знаний, оценить возможности произвольно сложной машины — большого робота, отвлекаясь от его конструктивных и экономических характеристик. Мы не будем учитывать экономические характеристики не потому, что этот вопрос не важен, а лишь на том основании, что возможности реализации могут нас интересовать только в том случае, когда мы знаем, что в принципе конструируемая машина будет в состоянии выполнять желаемую функцию. Естественно, что при этом большая часть высказываний явится плодом фантазии.
Человек, занимаясь судопроизводством или администрацией, планированием хозяйственных или военных операций, разработкой конструкций или технологии, или же научным исследованием, кроме практической или экспериментальной деятельности, непременно должен мыслить или, лучше сказать, размышлять. Для того чтобы решать те же задачи, робот, по-видимому, должен быть способен производить некоторые операции, равноценные размышлению, если не по характеру, то по результату. Можно ли допустить существование такой возможности? Чего не хватает машине для того, чтобы полноценно заменить размышляющего человека?
Представим себе большого робота — машину, имеющую произвольно большое число чувствительных и исполнительных элементов, достаточный запас энергии и как угодно много запоминающих и комбинирующих элементов. Пусть мы можем каким-то образом собрать все Э1И элементы воедино и обеспечить их нормальное функционирование в течение некоторого промежутка времени. Пусть, кроме чувствительных элементов (рецепторов) и исполнительных (эффекторов), имеются элементы, возбуждение которых соответствует возбуждению комбинаций рецепторов и эффекторов. Поскольку число всех возможных сочетаний элементов гораздо больше, чем число самих элементов, естественно, что число таких «центральных» элементов будет значительно превышать число рецепторов и эффекторов.
Допустим для простоты, что каждый элемент может находиться только в одном из двух возможных состояний: «возбуждение» и «покой». Возбуждение может передаваться от элемента к элементу непосредственно, при наличии соединения, прямого или через усилитель. Каждый элемент может получать возбуждение от любого числа других элементов и передавать его также любому числу элементов.
Любое внешнее событие, доступное восприятию робота, окажет воздействие на его чувствительные элементы и превратится, таким образом, в сигнал возбуждения в его системе управления. Если чувствительных элементов много и они разнообразны, то различные события будут возбуждать различные комбинации чувствительных элементов, т. е. будут различаться роботом.
Каждая комбинация возбужденных чувствительных элементов будет давать возбуждение одного внутреннего центрального элемента, соответствующего этой комбинации рецепторов и представляющего, таким образом, соответствующий чувствительный «центр». Для того чтобы данный «центр» возбуждался тогда и только тогда, когда возбуждена только данная комбинация рецепторов (нн одного лишнего и ни одного недостающего), достаточно включить необходимые чувствительные элементы по схеме, изображающей логическое, высказывание
Gj & а2 & а3... & & b2 & 63... & Ьь
где ak — элементы избранной комбинации, bt — прочие элементы.
Далее, исполнительные элементы могут быть также включены группами, возбуждаемыми каждая от своего моторного «центрального» элемента. В результате мы получаем робота, способного различать сложные воздействия извне и совершать сложные реакции.
Остается только соединить чувствительные и моторные «центры», сопоставив внешние раздражения и реакции робота с некоторой стратегией, и мы получим робота с мгновенной реакцией (т. е. без памяти) с заданным поведением в данной обстановке. Если при этом исполнительные элементы — эффекторы робота — соединены с энергетическими выходными устройствами, реакции робота будут воздействовать на внешнюю среду. Можно, однако, оставить эти реакции в виде сигналов возбуждения эф-386
фекторных элементов робота, не доводя их до энергетических устройств.
Создадим много различных роботов подобного типа с различными стратегиями (правилами поведения) и предусмотрим возможность «включать» их в работу отдельно, по очереди. Мы можем конструктивно совместить этих роботов таким образом, чтобы один и тот же элемент или группа элементов поочередно работали в различных схемах. Поручим управление комбинированной группой роботов новому роботу «старшего» типа и снабдим его некоторыми дополнительными возможностями, например возможностью запоминать внешние воздействия и реакции «младших» роботов, а также включать или выключать любого младшего робота в соответствии с некоторой собственной внутренней программой, ну скажем, случайным образом или в некотором порядке, по очереди. Пусть также старший робот обладает некоторым особым родом чувствительности к воздействиям внешней среды, состоящим в том, что он не только регистрирует эти воздействия в виде сигналов, но и различает их таким образом, что различные классы внешних влияний оказывают на него «стимулирующие» воздействия, изменяя тем или иным способом программу его работы. Для достижения последней цели, возможно, придется создать отдельную схему или самостоятельного робота, связанного со старшим роботом и управляющего его действиями. Это будет уже «старший» робот второго класса.
Пусть теперь под перекрестным огнем внешних влияний наши совместно работающие роботы оказываются включенными в работу, пока без робота второго класса. Старший робот, работая по программе, включает одного из младших роботов, который автоматически выполняет свойственные ему реакции на внешнюю обстановку. Старший робот запоминает и воздействия, и реакции. Затем включается поочередно второй, третий и остальные младшие роботы. Когда методом проб использованы все роботы, включается старший робот второго класса, который обследует память первого старшего робота и оценивает или классифицирует работу младших роботов. В результате его работы некоторые из младших роботов, получившие высокие оценки по различным критериям, отбираются в особую группу пригодных для дальнейшей работы, а остальные, получившие «неуд» по всем предметам, либо попросту уничтожаются и никогда больше не включа
ются в работу, либо структурно изменяются и испыты-ваются повторно.
Отобранные младшие роботы остаются в работе и включаются старшим роботом в соответствии с измененной программой. Дальнейшая работа приносит но-вый опыт применения отдельных младших роботов, уточнение оценок, дополнительный отбор. Все меньше становится случайных неудачных реакций, все рациональнее — в смысле удовлетворения заложенным критериям — будет поведение системы, все больше знаний накапливается в памяти старшего робота.
Мы могли бы еще и еще усложнять систему, наращивая верхние этажи управления, например, с целью испытания и подбора критериев оценки работы младших роботов, введения оценок старших роботов и т. д. Можно также воспользоваться принципами самоорганизации, т. е. сделать общим и всеобъемлющим критерием работы всей системы естественное условие длительного устойчивого существования системы в целом в окружающей среде. Естественно, что для процесса организации или обучения системы потребовался бы некоторый период времени.
По прошествии времени обучения система реагирует на внешние воздействия оптимальным или почти оптимальным образом, пока она находится в «привычных» условиях.
Любое сложное воздействие может быть сначала зафиксировано в памяти, затем память обследована в поисках аналогичных предыдущих воздействий и по этим воспоминаниям восстановлены все возможные реакции, и^ результаты и оценки результатов. Из воспоминаний о результатах может быть выбран один с наивысшей оценкой в соответствии с действующим критерием оценки («настроением» или «расположением духа» системы, если позволить себе вольные сравнения) и осуществлена та реакция на действующее раздражение, которая согласно прошлому опыту давала этот результат.
Но вот, допустим, во внешней обстановке произошло некоторое отступление от привычных условий, например, появился какой-то неизвестный объект, оказывающий на систему непривычные возбуждения. Эти возбуждения обычным образом воспринимаются машиной, запоминаются и сравниваются с памятью. Но непосредственного совпадения не 'получается. Новое воздействие не может быть опознано, и оказывается невозможным выбрать реакцию
непосредственно на основе предыдущего опыта. Человек в подобных условиях вынужден бывает задуматься и поразмыслить. Он должен что-то придумать.
В нашем сложном роботе возникает состояние неустойчивости («неудовлетворенности», «волнения»), вызываемое отсутствием сигнала совпадения после полного обследования памяти. Это состояние можно назвать состоянием «наличия вопроса» или «необходимости решить проблему».
Это состояние системы, поскольку оно выражено в конкретном сигнале, может включить программу действий, направленную на решение задачи о наилучшей реакции на известное воздействие. Для этого производится анализ воздействия, оно расчленяется иа элементы или группы элементов, которые сопоставляются с памятью, выделяется то, что уже знакомо, и то, что представляет новизну, и таким образом задача формулируется. Далее, совместно группируется все известное и делаются попытки дополнить недостающие сведения сведениями, взятыми наугад, или по ассоциациям из памяти, до получения некоторого комплекса сведений, который совпадает с одним из имеющихся в памяти. Иначе говоря, строятся гипотезы или предположения. Каждая гипотеза проверяется, т.е. ней сопоставляется реакция, вероятный результат реакции, и этот результат сопоставляется с комплексом уже имеющихся сведений о новом объекте. При наличии противоречий испытывается новая гипотеза, которая «выдумывается» тем же путем дополнения неполных сведений. Все это происходит без исполнения реакций, на основе анализа содержимого памяти, где зафиксирован обширный материал о воздействиях, реакциях, их результатах. Обсуждение гипотез без принятия решения и без реакции представляет собой характерную особенность размышления. Система уже не пробует реакции наугад с риском ошибиться и прийти к плохим последствиям, а перебирает в памяти все возможные последствия реакций и сопоставляет их со сведениями о новом объекте. Если одна из гипотез приведет к согласию с предыдущим опытом, состояние «вопроса» снимается, решение найдено, оно исполняется.
Если же гипотезы иссякают, вопросительное состояние приводит либо к энергичной хаотической реакции, действиям наугад (панической реакции), в случае если воздействие приносит большой вред, либо к осторожному экс-26 И. А. Полетаев 389
перименгу— выжидательной реакции на получение дополнительных сведений для анализа.
То обстоятельство, что испытание гипотез может производиться без действительных реакций, на основе запасов памяти в сигнальном алфавите и коде системы, описывающем внешние события и их взаимосвязь с реакциями, имеет большое значение. Это не пробы наугад, не эмпиризм, а некоторое подобие творческих теоретических построений — размышление.
Решенная задача запоминается и входит в актив памяти для дальнейшего использования, как используется однажды доказанная математическая теорема, т. е. сразу от формулировки к результату без промежуточных рассуждений.
То, что мы сказали о гипотетической системе сложного робота, способного размышлять, представляет собой просто фантазию, быть может, слабо обоснованную. Если бы мы вздумали приступить к осуществлению подобной системы на современных машинах, мы бы встретились с целым рядом неудобств, трудностей и нерешенных вопросов. Мы были бы вынуждены совмещать в одной системе свойства различных существующих систем, а кроме того, проделать большую работу по конкретному программированию этапов работы системы. Возможно, что такая задача оказалась бы сложнее, чем, например, задача машинного перевода текста или создания информационного справочника.
Для того чтобы система выполняла описанные функции, она должна работать непрерывно, в отличие от существующих счетных машин, запускаемых старт-сигналом после ввода данных. Кроме того, система должна обладать рецепторами — чувствительными элементами, которые выдают в машину сигналы в алфавите машины в соответствии с внешними событиями. Большой робот должен работать, в общем, так, как работает автомат, непрерывно ощущающий обстановку и непрерывно реагирующий на нее, только, разумеется, гораздо более замысловато.
Обследование памяти, выбор в соответствии с критерием, группировка по признакам и другие подобные операции не новы, так как они широко применяются в действующих сегодня машинах. Однако следует отметить, что в современных машинах «вспоминание» сводится к перебиранию всего содержимого памяти (как поиски слова 390
в машинном словаре). «Вспоминание» по ассоциации современной машине чуждо.
«Вопросительное состояние», о котором мы говорили выше, как об исходном моменте размышления, насколько нам известно, до сего времени в машинах не реализовано *.
Принципиально было бы очень интересно подробнее исследовать это состояние, порождающее поиски, изменения программы поведения и т. д. Ощущение наличия проблемы является очень важным моментом мыслительной работы, который до сих пор чужд современному «машинному разуму». Возможно, что введение в машину способности «ощущать вопрос» приведет к появлению у нее некоторого подобия различных «эмоциональных» или «аффективных» состояний или потребует их введения наряду с соответствующими центральными структурами, регулирующими состояния «нормальной реакции», «вопросительного возбуждения» (или «неудовлетворенности»), «ускоренного поиска реакции» (или «паники») и т. д.
Сложный робот должен быть непосредственно связан с эффекторами — исполнительными органами, причем их включение для осуществления реакции должно производиться отдельно от «принятия решения», т. е. достижения окончательного состояния выходных сигнальных элементов робота. Таким образом, и ощущения, и реакции должны быть зафиксированы в памяти и существовать в виде сигналов, соответствующих реальным воздействиям и реакциям. Несомненно, что содержание памяти при этом должно оказаться богаче, чем реальное поведение, так как на выход системы подаются только некоторые реакции, отобранные из большого числа возможных.
Сложные роботы, подобные описанному выше, будут неизбежно обладать собственными «темпераментами». Смещая критерии оценок и изменяя программы поиска при решении задач и выборе реакции, можно было бы при необходимости построить робота «задумчивого»— испытывающего много гипотез до выбора реакции, робота «решительного»— быстро осуществляющего первую же найденную более или менее подходящую реакцию, робота «пугливого»— склонного к резким «необдуманным» реакциям, робота «изобретательного»— способного к выполнению
• Ближайшим подобием этого состояния является переход к подпрограмме отбрасывания окончаний при отсутствии искомого слова в словаре в случае машинного перевода.
26* 391
большого числа разнообразных операций с имеющейся в его распоряжении информацией и к образованию разнообразных гипотез и предположений, и т. д.
Машина, способная не только решать, но и ставить задачи, ощущая необходимость этого, явится новым шагом в освобождении человека от повседневной умственной работы. Машина не станет уклоняться от трудных вопросов, как это часто склонен делать человек, или заменять собственные выводы, полученные на основе анализа фактов и опыта, предубеждениями, предрассудками или подражаниями; во всяком случае, ей можно запретить это делать.
На основе изучения таких машин, несомненно, был бы приобретен ценнейший материал о мыслительной работе человека и о протекающих при этом сигнальных процессах. Интересен вопрос о взаимоотношениях двух подобных роботов, созданных и «воспитанных» независимо друг от друга. Будут ли такие роботы понимать друг друга и в какой степени? По-видимому, если при их создании не предусмотрен общий алфавит и общий код для связи (общий язык), как это всегда предусматривается при создании каналов связи и других единых кибернетических систем, то понимание будет очень ограниченным или будет полностью отсутствовать, по крайней мере, в начале «знакомства». Согласованность действий обоих «незнакомых» или «чужих» роботов и обмен информацией между ними могут возникнуть самостоятельно, но только на основе их действий, на основе активного общения. Характер этого общения будет зависеть от устройства обоих роботов.
«Коллектив», состоящий из многих роботов, представляет собой еще более сложный и интересный объект для изучения. Каким образом характеристики членов коллектива повлияют на их взаимодействие и на самоорганизацию коллектива? Какие сведения, полезные для общества людей, можно извлечь из изучения коллектива роботов?
Исследования подобного рода моделей творческих личностей и коллективов представляются чрезвычайно интересными и плодотворными. Следует проводить такие исследования, не пугаясь трудностей и не считаясь с предрассудками.
Хочется сказать здесь, что в этой, еще очень мало исследованной области должны быть приложены совместные усилия ученых, инженеров и изобретателей самых различных специальностей. Даже сравнительно простые модели 392
с небольшим числом элементов могут оказаться очень поучительными и обладающими удивительным разнообразием поведения. Ведь число комбинаций работающих элементов растет несравненно быстрее, чем само число элементов. Может быть, именно этим <в значительной степени и объясняется сложность поведения животных и человека, кажущаяся нам порой «бесконечной» и «неисчерпаемой». Поле деятельности для изучения свойств кибернетических систем и их полезного использования поистине огромно и необозримо. И это поле уже давно должно было стать ареной организованной, планомерной деятельности и специалистов, действующих по единому государственному плану, и энтузиастов-любителей, организованных в добровольные общества и кружки.
Быть может, скоро мы станем свидетелями спортивных соревнований роботов-моделей, созданных кибернетиками-любителями и выполняющих ’некоторую стандартную интеллектуальную задачу данного спортивного класса, например, играющих в какую-либо игру друг против друга.
Трудно перечислить все задачи и все области кибернетики, требующие активной исследовательской деятельности. Попытаемся назвать лишь некоторые из них.
Во-первых,— это изучение способов кодирования информации, т. е. выражения необходимых сведений в различных физических алфавитах и перевода из одного алфавита в другой. Сюда относятся вопросы построения наиболее экономных и сжатых оптимальных кодов, а также кодов с использованием избыточности и обладающих возможностями заметить и поправить ошибки, возникающие от шумов (самокорректирующиеся коды). Сюда же относятся вопросы оптимизации каналов связи и полного использования их пропускной способности. К тому же кругу проблем принадлежат вопросы создания чувствительных устройств, регистрирующих события и описывающих их в некотором алфавите, т. е. по существу выполняющих задачу кодирования информации.
Во-вторых,— это множество проблем, связанных с переработкой информации: классификация информации по признакам, выявление связей между элементами информации, опознавание классов или комплексов этих элементов, различение образов, сочетаний, образование операций преобразования или алгоритмов 'переработки информации, оценка результатов переработки в соответствии с заданными критериями, выработка частных критериев из общих, 393
образование оптимальных реакций, выработка оптимальной стратегии поведения, запоминание информации и обследование памяти по заданным признакам (ассоциациям).
Еще один круг проблем — анализ структуры с целью выявления ее функции, исходя из свойств элементов структуры и их взаимосвязей.
Далее следует более сложный комплекс проблем — создание структур, выполняющих заданную функцию, проблема моделирования кибернетических систем, создание экономичных систем из малого числа элементов, создание надежно работающих систем из малонадежных элементов, физическая реализация алгоритмов из заданных структурных элементов.
И, наконец,— изучение собственного поведения систем, снабженных обратными связями того или иного вида, обучение, самоорганизация, самостоятельные структурные изменения системы по мере накопления внешней информации.
Несомненно, что изучение упомянутых здесь проблем, равно как и многих других, должно и будет протекать в процессе создания полезных устройств.
Развитие техники синтеза кибернетических систем на основе мобилизации сведений всех наук под общим организующим влиянием математики даст человечеству мощный и точный разум, свободный от человеческих слабостей, даст понимание свойств личности и коллектива, позволит выявить и использовать резервы человеческих способностей и в итоге поднимет человека еще на одну ступень культуры.
ЗАКЛЮЧЕНИЕ
Одним из наиболее интересных и привлекательных аспектов кибернетики является, по нашему мнению, возможность приблизиться к объяснению сущности человеческого сознания и мышления. До сих пор было очень трудно подойти к этому объяснению, и вокруг сущности сознания не смолкали бурные и обширные споры. Нам нет нужды, да у нас и нет возможности напоминать здесь многовековую историю борьбы философских воззрений по поводу природы сознания. Сама длительность этих споров говорит о том, что в этом вопросе существуют реальные трудности. В чем же они заключаются?
Всякое объяснение есть в конечном итоге сведение неизвестного к известному путем известных операций, например путем сравнения. Однако до настоящего времени не существовало ничего, подобного сознанию, ничего такого, что позволило бы проводить сравнения, что давало бы необходимые понятия, термины, образы для установления сходства и различия, словом, для определения и, следовательно, для объяснения сознания. Поэтому сознание
являлось единственным в своем роде фактом, не поддающимся сравнению и объяснению. Немудрено, что единственность этого явления приводила многих к ошибочной мысли о его первичности и несводимое™ к другим, аналогичным явлениям.
Последнее время ситуация постепенно, но решительно меняется. Сделаны первые шаги по созданию систем, которые моделируют отдельные процессы ‘восприятия и обработки информации, выработки реакций. Выработаны основы системы понятий, позволяющей поставить в один ряд некоторые проявления человеческого интеллекта и работу искусственно созданных систем. Моделирование «чисто человеческой» деятельности пока что идет успешно. Человеческое сознание, возможно, потеряет в будущем свое исключительное положение и станет одним из многих явлений, свойственных различным видам естественно или искусственно организованной материи. Появится большое число разнообразных сигнальных или кибернетических процессов в различных физических реализациях, результаты которых, а быть может, и самый ход, будут эквивалентны результатам мышления, а возможно, и превзойдут их.
Ведь и процессы в сложной машине, и процессы в мозге суть лишь различные физические, сигнальные процессы, несущие информацию либо осведомительного, либо управляющего характера. И подобно тому, как физиологические процессы в мозге не исчерпывают сущности мышления, электрический ток в машине не объясняет процесса перевода машиной иностранного текста на русский язык. Оба процесса являются сигнальными, они несут информацию и способны производить действия. Именно в этом сущность и мысли, и работы управляющей системы, в этом их единство, в этом их общность.
Мы идем к освобождению от фетишизации человеческого «духа», «души», идем к тому, чтобы полностью или пока хотя бы отчасти понять сущность тех материальных кибернетических явлений, которые собирательно обозначены этими терминами. И когда человек своими руками построит машину, к творческим идеям которой он сам должен будет отнестись с уважением, он не сможет больше пользоваться ни ложным понятием, ни термином «душа» или «дух» как чем-то, что существует вне и помимо физического тела. От них придется отказаться всем и окончательно. Так будут, возможно, прекращены споры о «душе» 396
Часто говорят по этому поводу, что кибернетика не только «развенчивает» человеческий разум, но и «принижает» его достоинство. Такое мнение противоречиво, и с ним мы не можем согласиться. Человеческий разум представляет собой огромную силу, одержавшую немало побед в познании явлений и законов природы. И самой замечательной его победой, несомненно, явится познание собственной его сущности и силы. В результате, не только мышцы человечества будут иметь силу атомного взрыва, но и его разум приобретет мудрость такого же масштаба. Вряд ли можно называть это «принижением достоинства» разума. Ведь экскаватор не принижает достоинства человека; он ему помогает, заменяет его и позволяет ему заниматься другим, более важным, увлекательным, трудным человеческим делом, чем копание земли.
Однако объяснение сущности человеческого сознания пока является делом будущего, будущими плодами тех трудов, которые мы должны совершить на поле научной деятельности. Сегодня мы говорили об этом, как о перспективе. И многие сегодня с нами не согласны. Почему? Когда ведешь беседу с людьми разных складов ума, разных темпераментов, различного воспитания и специальностей по поводу перспектив и возможностей кибернетики, то приходится выслушивать не только много положительных, но и некоторое количество отрицательных суждений. Подавляющая часть возражений, которые иногда приходится слышать, сводится к одному утверждению, которое всегда высказывается с крайней убежденностью и решительностью и без каких-либо попыток аргументации. Это утверждение сводится к тому, что «машина не сможет заменить человека потому, что она машина» или же «потому, что человек — не машина!» Подобно отставному Войска Донского поручику Семи-Булатову из села Блины-Съедены (А. П. Чехов «Письмо ученому соседу»), некоторые готовы утверждать, что «этого не может быть потому, что этого не может быть н и к о г д а», а иногда и действительно произносят нечто подобное и при том с неменьшей убежденностью, чем чеховский герой. Эта убежденность, по-видимому, не случайна и имеет свои причины, которые важно знать, так как порой они приводят к плачевным последствиям. Достаточно вспомнить содержание критических статей, которые в 1951—1952 гг. писались против кибернетики. Все они разделяют мнение и пользуются «аргументацией» Семи-Булатова. Но в ре-
зультате такой «критики» мы начали заниматься кибер-нетикой с опозданием и несем от этого сегодня заметный урон.
Чем же объясняется (хоть и не оправдывается) глубокое убеждение многих в том, что «машина не может делать всего, что делает человек»? Почему некоторым людям одиозна сама идея объективности и закономерности явлений, связанных с человеческим мышлением, сознанием, волей?
Прежде всего, этому способствует то, что подсознательная деятельность мозга несравненно обширнее сознательной. Человек, если можно так сказать, знает о себе только ту часть, которую сознает, а это очень мало. В его памяти, вне сознания, хранится гораздо больше. Поэтому многие мыслительные акты представляются ему суверенными, изначальными, ничем не обусловленными. Отсюда иллюзия свободы воли и фетишизация этой свободы.
Кроме того, признанию «машинности», причинной обусловленности мысли мешают инстинкты и, в первую очередь, один из самых сильных — инстинкт самосохранения, которому мы обязаны в значительной мере выживанием биологического вида. Подсознательный страх смерти, присутствующий в живом организме, иногда не позволяет некоторым людям охотно признать факты, которые приводят к заключению о неизбежности гибели любого индивидуума наряду с разрушением всякой существующей машины. Признание хотя бы отдаленного родства между «живым» и «мертвым» разрушает подсознательную веру в исключительность человеческого существования, надежду на то, что человек обладает особыми свойствами и особыми правами на бессмертие в той или иной фантастической форме. Вера в бессмертную душу, коренящаяся в инстинкте самосохранения, иногда бывает запрятана глубоко в подсознании, но и тогда она является судьей и законодателем суждений, заставляя не принимать суждений, неприятных с этой точки зрения. Иногда эта вера проявляется в осознанных религиозных воззрениях, вступая в конфликт с фактами и существуя, несмотря на явные противоречия с ними. Чем меньше человек знает научных фактов и чем сильнее в нем инстинкты, тем более подвержен он подсознательным инстинктивным предрассудкам.
Признание фактов, принятие к руководству основанных на фактах научных сведений, требует от человека некоторого внутреннего самоотречения, победы над собственны-398
ми древними животными инстинктами, замены подсознательных критериев оценки суждений разумными — чисто человеческими. Не всякому это удается в одинаковой степени.
Когда слышишь утверждения без научной, т. е. основанной на фактах и логике аргументации, убеждения без их разумного подтверждения, невольно приходишь к выводу о том, что ведешь беседу с догматиком, руководствующимся в своих суждениях предубеждениями и предпочитающим интуитивную уверенность разумным, научным доказательствам.
Нечто подобное имело место в те времена, когда Чарльз Дарвин показал несомненное биологическое родство человека и низших животных. Идея родства человека с приматами вошла тогда у многих современников Дарвина в конфликт с той же инстинктивной верой в исключительность человека как вида и как индивидуума. И хотя сегодня уже никто не может усомниться в сходстве различных биологических видов, Дарвину в свое время пришлось выслушать немало суждений того же характера, какие можно услышать порой в наши дни по поводу идеи об аналогиях между мыслительной сигнальной деятельностью живого мозга и сигнальными процессами в машине.
Действительную исключительность человек сумеет сохранить за собой всегда, даже и в те времена, когда машины будут не только работать физически, но и думать за человека. Эта исключительность выразится в том, что человек сумеет остаться на вершине руководства всеми управляющими системами, как природными, которые он изучит и которыми овладеет, так и искусственно созданными им самим. Единственным общим критерием качества работы системы умных роботов будет правильно понятая польза, приносимая человеческому обществу. И роботы придут нам на помощь тем скорее, чем раньше мы сумеем освободиться от господства предрассудков, чем скорее мы признаем узы нашего «родства» с роботами.
Не исключена возможность, что это родство может оказаться более близким, чем мы сегодня в состоянии признать. Изучение самоорганизующихся систем, едва только начатое сегодня, может привести к результатам совершенно неожиданным, предвидеть которые попросту невозможно.
КРАТКАЯ БИБЛИОГРАФИЯ
1) Н. В ни ер. Кибернетика. Перевод с англ. Изд. «Советское радио», 1958.
2) С. Л. Соболев, А. И. Китов, А. А. Ляпунов. Основные черты кибернетики. «Вопр. философии», № 4, 1955.
3) Э. Кольман. Что такое кибернетика. Там же.
4) А. И. Китов. Техническая кибернетика. «Радио», № 11, 1955.
5) Колмогоров А. Н. Теория передачи информации. Сессия АН СССР по научным проблемам автоматизации производства, октябрь, 1956, пленарное заседание. Изд. АН СССР, 1957.
6) Б. В. Гнеденко и А. Я- Хин чин. Элементарное введение в теорию вероятностей. Гос. издательство технико-теоретической литературы, 1952.
7) А. Я. Хинчии. Об основных теоремах теории информации. «Успехи матем. наук», т. II, вып. 1(67), январь 1956.
8) Теория передачи электрических сигналов при наличии помех. Сборник статей. Изд. иностранной литературы, 19Й.
9) И. А. Кощеев. Основы теории электрической связи. Изд. литература по вопросам связи и радио, 1954.
10) Л. Маккол. Основы теории сервомеханизмов. Изд. иностранной литературы, 1947.
11) X. Джеймс, Н. Николь с, Р. Филипс. Теория следящих систем. Изд. иностранной литературы, 1951.
12) А. И. Китов. Электронные цифровые машины. Изд. «Со ветское радио», 1956.
13) Д. Гильберт и В. Аккерман. Основы теоретической логики. Изд. иностранной литературы, 1947.
14) Автоматы. Сборник статей под ред. Шэннона и Маккарти, Перевод с англ, под ред. А. А. Ляпунова. Изд. иностранной литературы, 1956.
15) Д. Ю. Панов. Автоматический перевод. Изд. АН СССР, 1956.
16) Цзянь Сюэ Сэнь. Техническая кибернетика. Изд. иностранной литературы, 1956.
17) М. Брейзье. Электрическая активность нервной системы. Изд. иностранной литературы, 1955.
18) Р. Джерард. Функции человеческого тела. Изд. иностранной литературы, 1947.
19) М. М. Завадовский. Противоречивые взаимодействия в живом организме. Изд. МГУ, 1941.
20) Блэквелл к Г и р ш и к. Теория игр и статистических решений. Изд. иностранной литературы, 1958.
21) Л. Бриллюэн. Демон Максвелла не может работать. J. Appl. Phys., 1951, v. 22, № 3.
22) В. Г. Уолтер. Имитация жизни. Sclent. Amer., 1950, v. 182, Xs 5.
23) E. С. Беркли. Зрячий электронный зверек. Radio-Electronics, 1951, v. 23, № 3.
24) Е. Эйхлер. Искусственная черепаха. Radiotechnik (Radioamateur), 1955, v. 31, № 5/6.
25) К. Ш э н н о н. Программирование машин для игры в шахматы. Bell Labs. Record, 1948, v. 8.
26) К. Шэннон Машины, играющие в игры. J. Franklin Inst., 1955, v. 260, № 6.
27) Н. В и н е р, Машина умнее своего создателя. Electronics, 1953, V. 26, № 6.
28) Д. В. X а ге л ь б ер ге р. Робот с последовательной экстраполяцией. Trans. I.R.E., ЕС-5, 1956, Х° 1.
29) Б. Е. Фарли и В. А. Кларк. Воспроизведение самоорганизующихся систем на машине дискретного счета. Trans. I.R.E. PGIT-4, Sept. 1954.
30) Г. Г а м о в. Передача информации в живой клетке. Sclent Amer., 1955, № 4.
31) Е. Л. Гр юн е б ер г. Размышление в машине. Computers and Automat., 1954, v. 3, № 2.
Я. И. Фел
ИГОРЬ АНДРЕЕВИЧ ПОЛЕТАЕВ И ЕГО КНИГА “СИГНАЛ”
(Вместо послесловия)
Книга “С игнал” - первая в нашей стране монография о кибернетике, а ее автор, Игорь Андреевич Полетаев - один из пионеров отечественной кибернетики. Эта замечательная книга представляет собой достаточно серьезное, но, в то же время, доступное для широкого круга читателей изложение основных идей новой науки, провозглашенной в 1948 году Норбертом Винером.
Кибернетике в Советском Союзе досталось “почетное” место, рядом с генетикой. Невежественные функционеры, управлявшие страной и наукой, систематически подавляли любые новые взгляды, которые не соответствовали их пониманию “чистоты” официальной советской идеологии.
Конечно, кибернетика была в этом смысле “опасной”. Норберт Винер был уверен, что модели управления в обществе и в экономике могут изучаться теми же средствами, которые разрабатываются для технических управ шющих устройств. Проникшие через железный занавес экземпляры его книги “Кибернетика или управление и связь в живоi ном и машине” были заперты в “спецхранах” iieMiioinx библиотек, а против его идей была развернута обычная для тех времен истерическая кампания разноса.
В 1953 году в официальном идеологическом журнале “Вопросы философии” появилась статья “Кому служит кибернетика. Автор этой статьи, скрывшийся за выразительным псевдонимом Материалист, писал:
“Теория кибернетики, пытающаяся распространить принципы действия вычислительных машин новейшей
конструкции на самые различные природные и общественные явления без учета их качественного своеобразия, является механицизмом, превращающимся в идеализм. Это пустоцвет на древе познания, возникший в результате одностороннего и чрезмерного раздувания одной из черт познания ”.
И да iee:
“Империалисты бессильны разрешить те противоречия, которые раздирают капиталистический мир. Они не в состоянии предотвратить надвигающийся на них экономический кризис. Они ищут спасения не только в бешеной гонке вооружений, но также в идеологическом оружии. В отчаянии они прибегают к лженаукам, которые дают им хотя бы тень надежды на продление существования ”.
В чегверюм издании “Краткого фи юсофского словаря” (1954 г.) в статье “Кибернетика” эта наука была определена как
“реакционная лженаука, возникшая в США после второй мировой войны, и получившая широкое распространение в других капиталистических странах; форма современного механицизма”.
Похоже на ю, что ioiовилось нечю подобное разгрому генетики. У всех еще в памяти была трагическая сессия ВАСХНИЛ 1948 года.
Однако удар против кибернетики оказался не столь разрушительным. Случилось так, что этот удар приняли на себя, в основном, военные. Борьбу за признание кибернетики возглавил профессор кафедры математики Артиллерийской академии имени Дзержинского Алексей Андреевич Ляпунов.
В первых рядах защитников кибернетики были его ученики, слушатели этой Академии Н.П. Бусленко, С.Я. Виленкин, А.И. К’нюв, Н.А. Крииицкий, И.Б. Поюжев, И.А. Полетаев и другие.
Почему - военные? Во-иервых, в отличие от многих штатских, они имели некоторую возможность - по особому разрешению! - познакомил ься с киш ой Винера в “спецхране”. Во-вторых, они прекрасно понимали, что идеи и методы кибернетики имеют серьезные применения, в частности, при проектировании эффективных средств для обороны страны. (Уместно напомнить, что сам Норберз Винер при создании кибернетики использовал свой оиыз работы с приборами противовоздушной обороны во время второй мировой войны). Наконец, немаловажную роль сыграло то, что эти офицеры, в том числе, и А.А. Ляпунов, недавно вернулись с фронта. Они прошли через огневые удары О гечествепной войны. Они и здесь бы ш готовы принять иа себя и отразить идеологические удары служителей культа “единственно верной теории”.
К этому времени относятся некоторые воспоминания, рассказанные участниками чех событий спустя ЗОлет, в 19841оду, иа семинаре по истории кибернетики, коюрый проводи ш в Политехническом музее энтузиасты кибернетики (и истории кибернетики!) Д.А. Поспелов и М.Г. Гаазе-Рапопорт.
Обратимся к фонограмме одного из заседаний. Говорит Виктор Семёнович Гурфинкель:
“Я контактирова i с Игорем Андреевичем очень недолго и эпизодически, тем не менее, эти контакты у меня остались в памяти очень яркими, и я бы хотел только об этом, по существу, рассказать. Я помню, как первый раз попал на семинар к А.А. Ляпунову. Он сам расхаживал вдо п> доски, очень похожий на капитана Немо. В это время реферировались статьи из сборника
«Автоматы». И я вдруг услышал (совсем еще новичок): «роботы с полной памятно, роботы с неполной памятью». Все это, в сочетании с внешним видом аудитории, произвело на меня очень сильное впечатление. Я не понимал, как это так, в пределах Москвы, можно вдруг оказаться в таком месте! И вот, контрастом к таким общим и во многом непонятным для меня разговорам прозвучало выступление И.А. С конкретными вопросами и своими репликами. Вот это послужило поводом для нашего знакомства, потому что в этих репликах и вопросах были проблемы, которые меня интересовали. После семинара я познакомился с И.А. На предмет, связанный с применением теории автоматического регулирования для биологических систем...
Я помню И.А. как человека, умевшего очень четко ставить вопросы. Он ставил их так, что имел на них ответы. Это особенно проявлялось тогда, когда мы собирались у Алексея Андреевича дома. Был такой период, когда одну неделю семинар проводился в Университете, а на следующей педеле семинар в полном составе собирался у А.А. дома. Тогда обычно, всегда приезжал И.А. ...
Книга «Сигнал» вышла позже, в 58-м году. Но еще до появления этой книги с изжилось очень яркое впечатление такого порядка: И.А. говори! очень четко о вещах, которые для новичка казались малопостижимыми. Потом, познакомившись с этой книгой, я понял, что все это не экспромты, что эти вещи хорошо выношены и продуманы. Книга производила большое впечатление не тозько на тех, кто интересовался кибернетикой, но и на всех сотрудников лаборатории, которые впервые увидели в таком четком и ясном изложении вопросы, казавшиеся до этого совершенно далекими. Эта книга и сейчас сохраняет свое значение для тех, кто хотел бы приобщиться...--.
Игорь Андреевич Полетаев. Конец 50-х годов.
Модест Георгиевич Гаазе-Рапопорт:
“Я довольно давно был знаком с Игорем Андреевичем. Познакомился я с ним в 49-м году, после того, как перешел на работу в НИИ-5. Однако, примерно до 53-го года это знакомство было отдаленным: я больше слышал об И.А. разговоров в институте, чем знал его. Потому что он пользовался большим успехом, считался очень талантливым и, в то же время, очень резким и ехидным человеком. Игорь, действительно, не терпел дилетантизма и всегда своими вопросами умел ставить человека на место.
Более или менее прилично мы познакомились в 1954 году, во время этого знаменитого семинара по философским проблемам кибернетики, когда мы решили выступить с докладами о том, что же позитивное содержится в кибернетике. До этого кибернетика именовалась «лженаукой», но ею, в общем-то занимались. Игорь в это время был уже знаком с книгой Винера, которую ему дал почитать на английском Исаак Семенович Брук. На этом семинаре должно было быть три сообщения. Одно, довольно сухое, - мое, посвященное кибернетике как развитию теории автоматического регулирования и ее расширению. Второе было -блестящее выступление Игоря, содержавшее примерно те идеи, которые потом были изложены в «Сигнале». Причем, мне запомнилось (это редкость, вообще-то, когда на заседаниях такого семинара какое-нибудь из выступлений закан чивается аплодисментами), выступление Игоря вызвало аплодисменты. Третье выступление не состоялось, потому что Китов не смог прийти. У него была написана некая статья о кибернетике. Вскоре Китов опубликовал эту статью, вместе с дополнениями Ляпунова и подписью Соболева, в
«Вопросах философии»...
Примерно в это же время И.А., узнав от Китова, что вопросами программирования и кибернетики занимается Ляпунов, попросил Китова и меня свести его с Ляпуновым. После этого начались очень тесные контакты По зетаева и Ляпунова...
Мне хотеюсь бы отметить очень большую роль Полетаева в деле устной пропаганды кибернетических идей. В этот период, с 54-го до 61-62-го годов Ляпунов, Полетаев, я и еще два-три энтузиаста прочитали, наверное, несколько сотен докладов о том, что такое кибернетика. Кроме этих докладов Игорь чрезвычайно активно и очень зло откликался на всякие «лженаучные» выступления в печати...
По поводу возникновения книги «Сигнал». Я как-то, когда мы решили заниматься историей кибернетики, Игоря спросил. Неохотно, но все-таки несколько слов о том, как он начал писать «Сигнал», он мне сообщил. Дело было вот в чем. После выхода знаменитой статьи Соболева, Ляпунова и Китова при Берге состоялось какое-то совещание, на котором был И.А. (кстати, Аксель Иванович Берг очень хорошо относился к Игорю и весьма ценил его). Обсуждалась эта статья. И вот теш Игорь выступил с небочьшим предложением. У него уже было что-то вроде план-проспекта. Берг настоял на том, чтобы эту книгу включить в план издательства «Советское радио», которое было под эгидой Министерства обороны. В резу штате книга была издана...
Игорь очень активно участвова i и в работе Московского дома ученых, когда он был в Москве. Я помню его выступэение о кибернетике на секции Юрия Петровича Фролова. Любопытное, очень интересное выступление. Насколько мне известно, он и в Новосибирске активно участвовал в работе Дома
ученых, клуба «Под интегралом». Он очень любил собирать вокруг себя способную молодежь и работать с нею не только в плане, скажем, чисто научной работы. Всюду, где можно было общаться с молодежью и до какой-то степени воспитывать ее...
Нельзя не напомнить о широкой эрудиции Полетаева. Он прекрасно знал искусство, играл на рояле и на других инструментах. Он занимался керамикой. Я помню, когда мы с Николаем Андреевичем Криницким были в Академгородке во время 2-й Всесоюзной конференции по программированию, Полетаев показал нам свои трубки. Он делал трубки, подарил одну Криницкому, одну - мне. Квартира у него была очень интересная. У меня такое впечатление, что книжные полки и почти все, что там было, было сделано им самим и сделано очень неплохо и достаточно интересно ”.
Анатолий Иванович Кшов:
“Вспоминается ряд горячих и глубоко аргументированных выступлений И.А. По принципам кибернетики. Он был твердым принципиальным борцом за внедрение ЭВМ в сферу управления экономикой и вооруженными силами. В период 59-60 годов, когда впервые в нашей стране был предложен план создания единой государственной сети ВЦ для двойного испо 1ьзования - управления народным хозяйством и управ 1ения вооруженными силами, И.А. решительно выступил с поддержкой этого плана, совместно с такими учеными как Ляпунов, Люстерник и другие. Этот план встретил резкую оппозицию со стороны ряда высокопоставленных деятелей, и Полетаеву, как военнослужащему, такое выступление грозило серьезными неприятностями. Но это не поколебало его решимости, и он отстаивал идею компзексной автоматизации управления в своих выступзениях на
самых различных совещаниях, подписывал соответствующие документы...
И.А. очень много сделал для популяризации идей кибернетики, для ее развития и применения в сфере автоматизации процессов управления и исследования сложных систем...
Нельзя не сказать несколько слов об И.А. как о человеке. Он был надежный товарищ, остроумный, обаятельный собеседник, человек, нетерпимый к фальши и беспринципности. Я сохранил о нем самые светлые воспоминания ”.
Алексей Андреевич Ляпунов горячо поддерживал подготовку и издание киш и “Сигнал”. В октябре 1955 года Ляпунов направляет в издательство следующее письмо:
“В издательство «Радио».
Я познакомился с проспектом научно-популярной монографии «Сигнал», предложенной подполковником И.А. Полетаевым издательству „Радио**.
Замысел автора чрезвычайно интересен. Автор раскрывает содержание кибернетики и ее связи с техникой, физикой, математикой и биологией. Точки зрения автора в ряде случаев отличаются от тех, которые имеются в иностранной литературе, в частности, по вопросу о взаимоотношении машины и организма. На мои взгшд, точка зрения автора заслуживает предпочтение.
Материал проспекта очень содержателен и интересен. Появление такой книги было бы очень ценно. Я согласен с автором в том, что в процессе написания книги было бы целесообразно ее детальное обсуждение. Думаю, что к этому обсуждению целесообразно привлечь представителей разных специальностей: инженеров,
биологов, физиков, психологов, лингвистов и др.
Я охотно предоставлю ряд заседаний руководимых мною семинаров для обсуждения этой монографии. Я всецело рекомендую Издательству оказать тов. Полетаеву поддержку в работе над монографией «Сигнал».
Доктор физ.-мат. наук, Профессор А. А. Ляпунов
31 октября 1955 г.”
В 1956-1957 гг. Игорь Андреевич несколько раз высзупал на заседаниях Большого ляпуновского семинара, где обсуждались материалы будущей книги.
А.А. Ляпунов и его соратники придавали большое значение изданию научной и популярной литературы по кибернетике. В этой деятельности защитников и пропагандистов кибернетики И.А. Полетаев играл одну из главных ролей. В 1956 году в издательстве “Советское радио” вышла книга Ф.М. Морза и Д.Е. Кимболла “Методы исследования операций” (Перевод с английского И.А. Полетаева и К.Н. Трофимова). В 1960 году - книга Дж.Д. Вильямса “Совершенный стратег, или Букварь ио зеории стратегических игр” (Перевод с английского под редакцией И.А. Полез аева) *.
* Факсимильное воспроизведение пой книги еечь в сетевой библиотеке VIVOS VOCO (http://vivovoco.nns.ru).
Одновременно Ляпунов и ею единомышленники ведуз большую разъяснительную рабозу в форме докладов на научных семинарах в академических институтах, высших учебных заведениях и в организациях, где методы кибернетики moi ли бы принести практическую пользу. В ходе подготовки одного из заких докладов, в конце 1954 года, Анатолий Иванович Китов написал текст, который лег в
основу статьи трех авторов (С.Л. Соболев, А.А. Ляпунов, А.И. Китов) “Основные черты кибернетики”.
Эта знаменитая работа вошла в историю советской науки как первая в СССР позитивная ста>ья о кибернетике. Она была опубликована в № 4 журнала “Вопросы философии” за 1955 год. Ситуация изменилась. Благодаря усилиям и бескомпромиссной борьбе выдающихся российских ученых кибернетика заняла в СССР подобающее место.
Наступил начальный период свободного и ускоренного развития советской кибернетики. Важнейшим событием стало создание в АН СССР в январе 1959 года Научного совета по комплексной проблеме “Кибернетика”, который возглавил инженер-адмирал и академик Аксель Иванович Берг. В течение 20 лет, до последних дней своей жизни, он возг швлял этот Совет, который стал ценiром исследований по кибернетике в масштабах всей страны. В создании и всей да шнейшей работе этого Совета бо шшую роль сыграло участие А.А. Ляпунова, И.А. Полетаева и других ученых - их сора i ников.
В январе 1962 года А.А. Ляпунов переезжает в Новосибирский научный центр, в Академгородок. Не будет преувеличением сказать, что вместе с ним постепенно туда перемещается центр кибернетических исс юдовании в нашей стране. Июрь Андреевич Полетаев переехал гуда немкою раньше, в 1961 юду.
В то время Академгородок был особым местом на Земле. Многие знают, что в первые годы существования этою Городка здесь возникла совершенно необычная для Советского Союза атмосфера. Это был некий остров, в каком-то смысле - Остров свободы... Чем это объяснить? Может быть, тем, что все это происходило на фоне “оттепели”. Может быть, тем, что масса необычных, талантливых, непокорных людей в этом Городке превышала критическую. Во всяком случае, в то время здесь (ие без оснований) имела хождение поговорка: “в Советском районе
нет советской власти” (согласно административному делению Академгородок находится в Советском районе города Новосибирска).
В “Литературной газет е” писали: “Раньше мальчишки убегали в Америку к индейцам, теперь они убегают в Академгородок к Ляпунову”. Эго - не просто юмор с 16-й страницы. Это можно бы ю обсуждать и на других страницах. Олимпиады и летние математические школы всколыхнули самых талантливых мальчишек всей Сибири и Дальнего Востока. Один из них, приехавший из дальнего района Якутии и победивший во всех турах Олимпиады, во время первой лекции сказал о Ляпунове: “я никогда не видел настоящего профессора”.
И не только Сибирь. В начале 60-х годов сюда, в Академгородок, приезжали мальчишки из Западных областей СССР, с Украины, из Молдавии - талантливые мальчишки, блестящие победители математических олимпиад, которых ие принимали в местные университеты но причинам, от мальчишек ие зависящим. Здесь, в НГУ, в то время из всех документов больше всего ценился талаиг... Многие из этих ребят стали потом выдающимися учеными.
Физматшко ia... Защита фаитас1ических проектов... Фантастические доклады С.Л. Соболева и А.Н. Ко imoio-рова... Клуб “Под инт егралом”... Кофейный Кибернетический Клуб - ККК... Киноклуб “Сигма”... Встречи с людьми легендарной судьбы...
Ясно, что в то время Академгородок был самым подходящим местом в СССР для яростных и непохожих.
Игорь Андреевич Полетаев должен был оказаться именно здесь...
Новосибирск, Июнь 2004 г.
ЗА СТРАНИЦАМИ УЧЕБНИКА SHEBA.SPBPU/ZA
Хочу всё знать (теория) ЮНЫЙ ТЕХНИК (ПРАКТИКА) ДОМОВОДСТВО (УСЛОВИЯ)