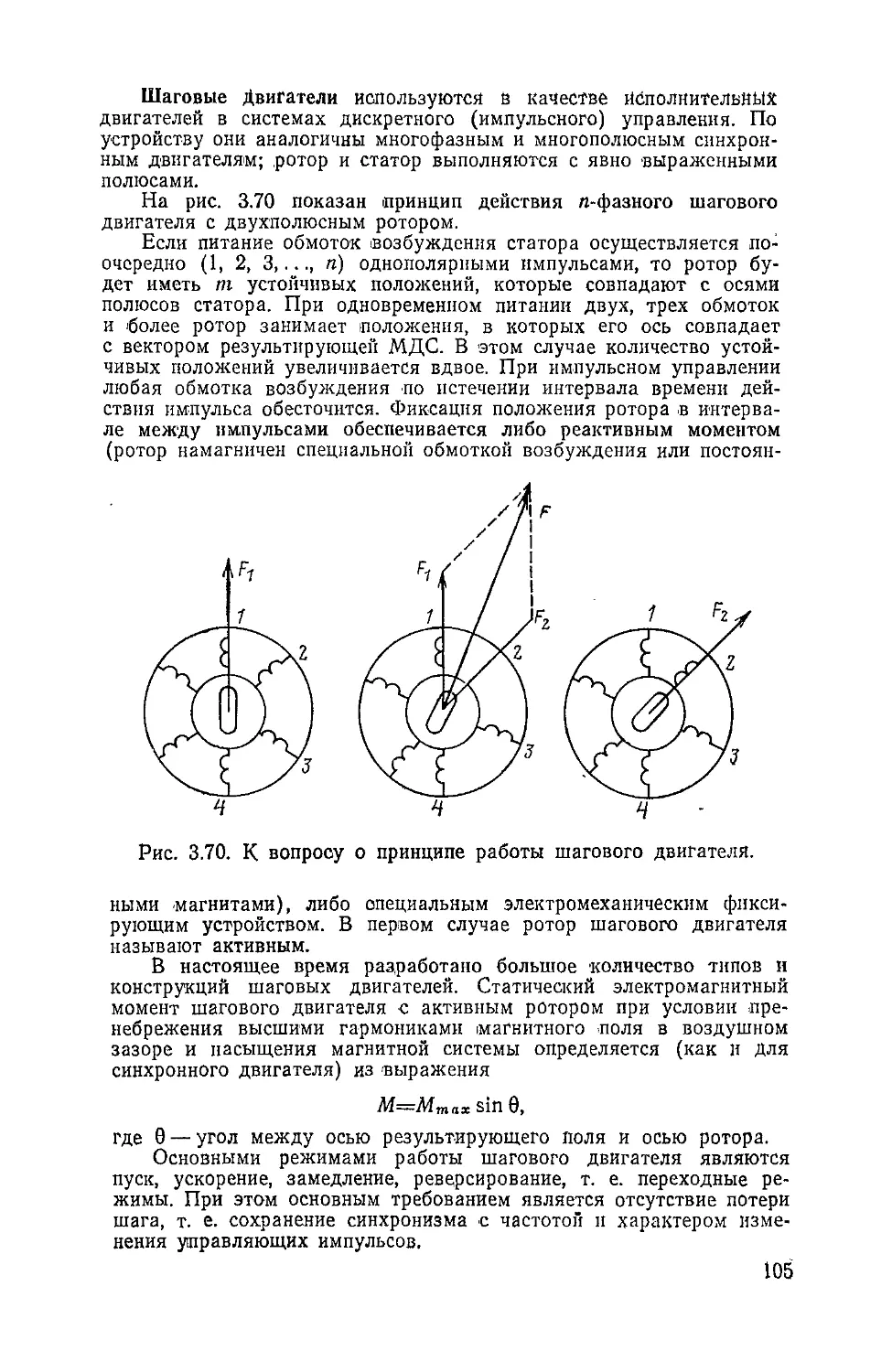
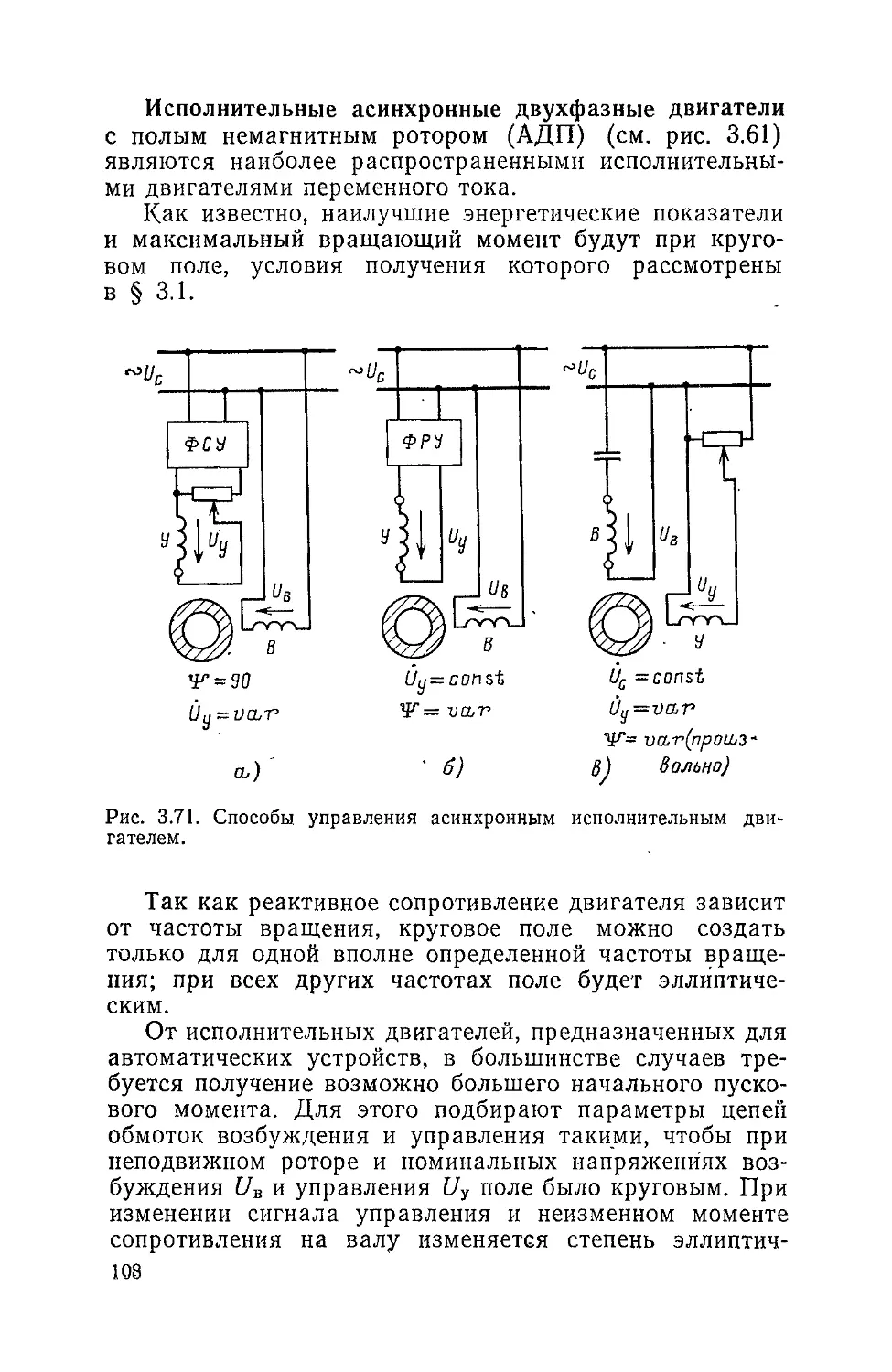
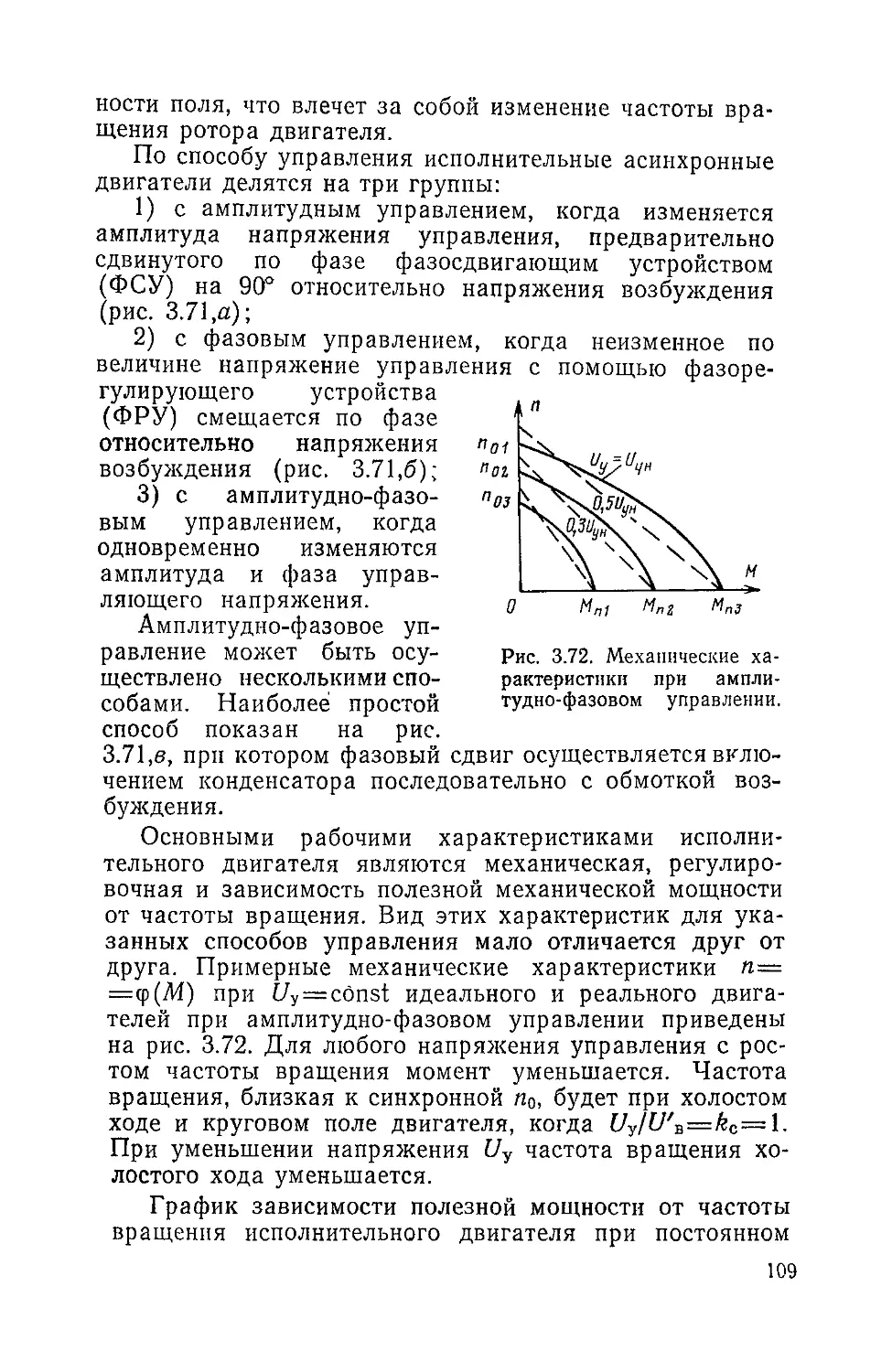
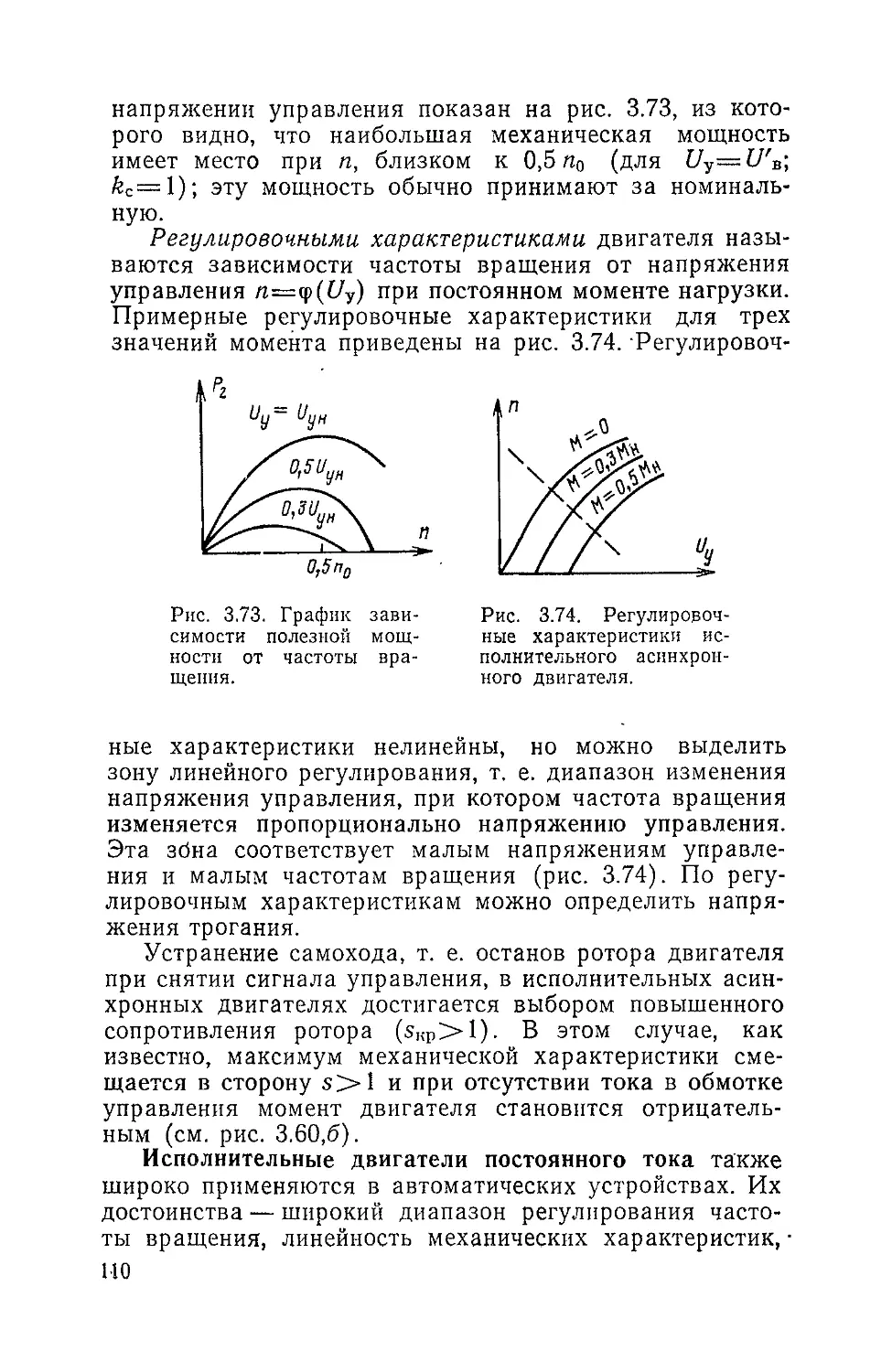
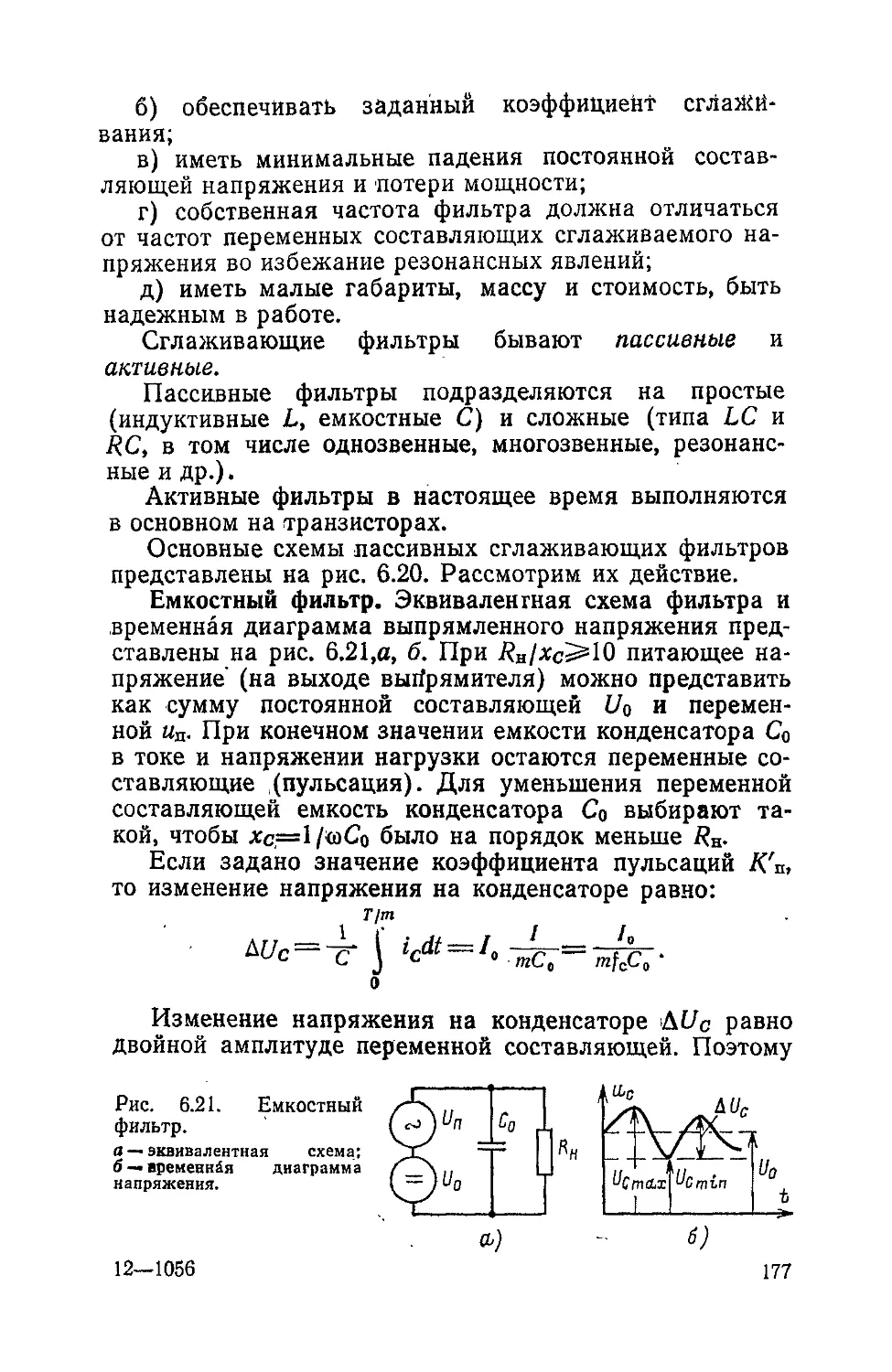
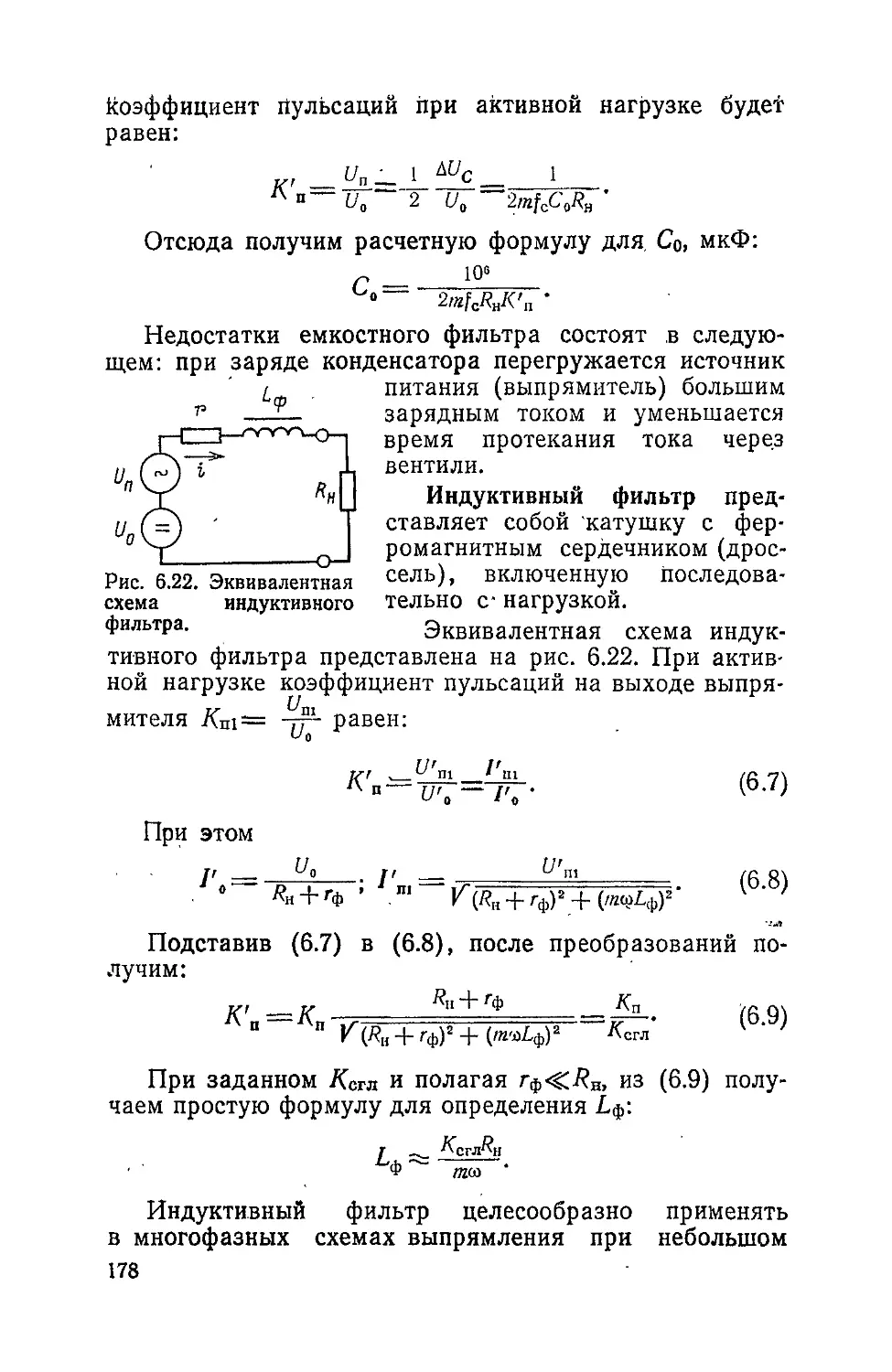
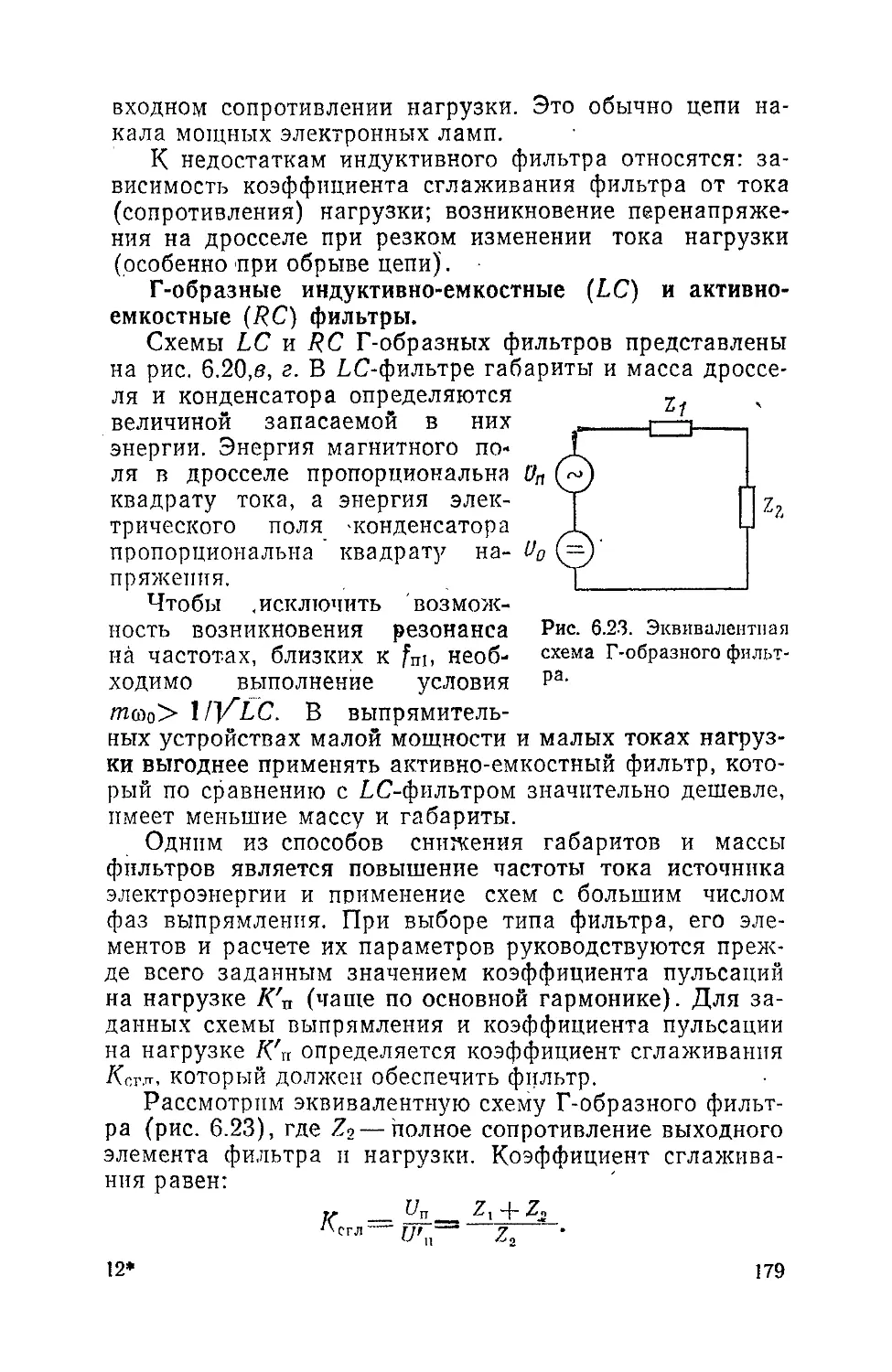
/






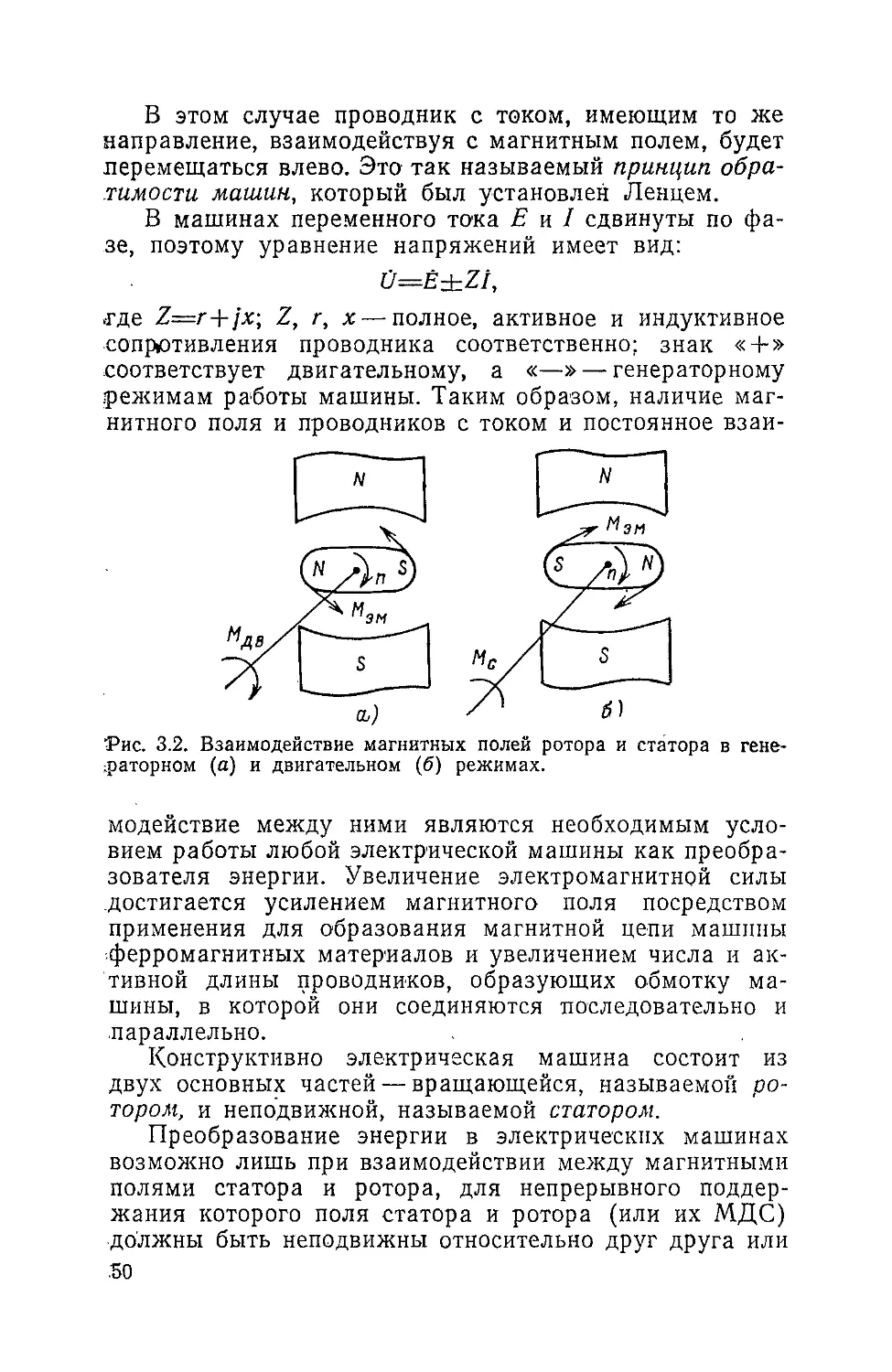
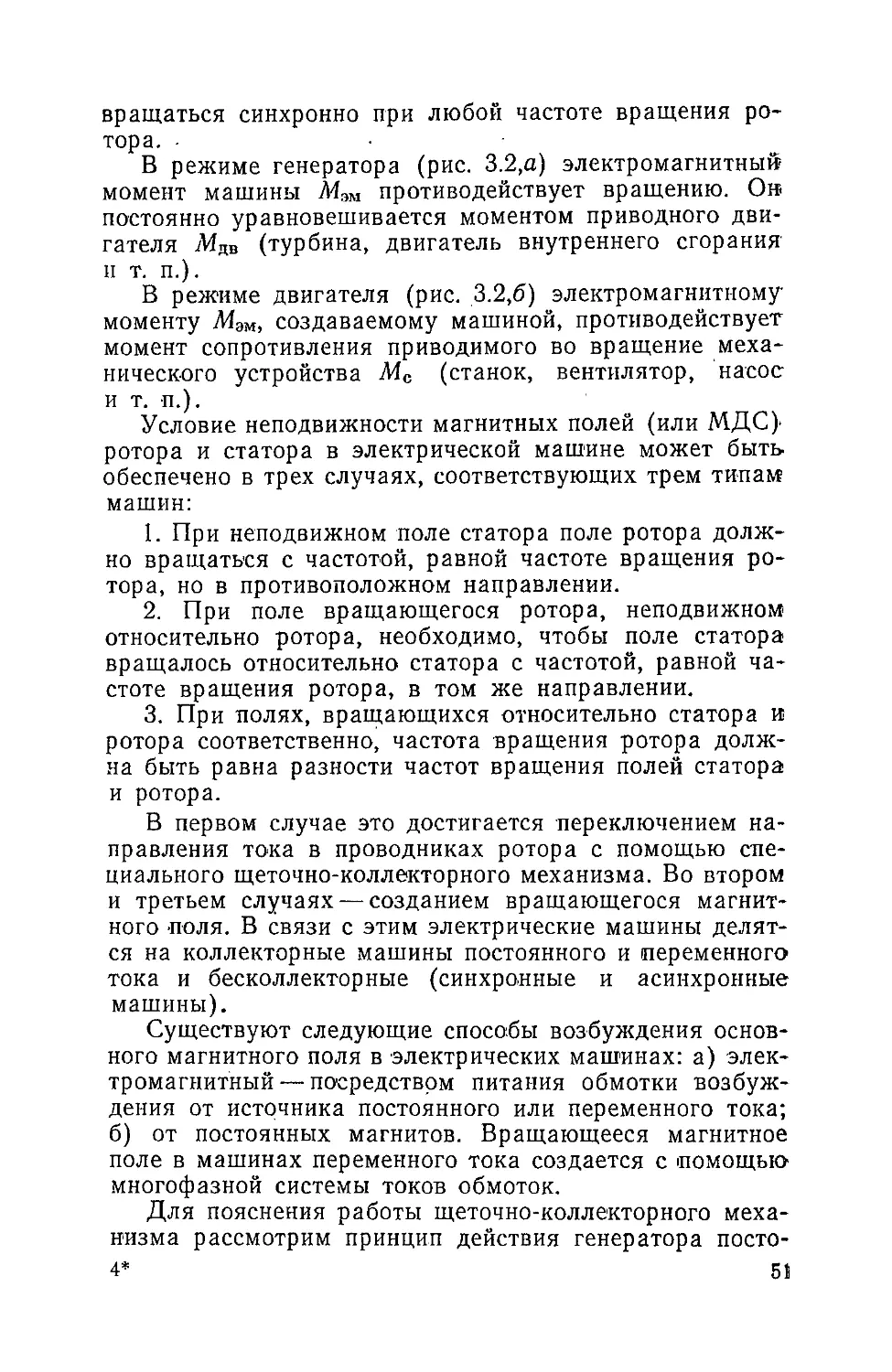
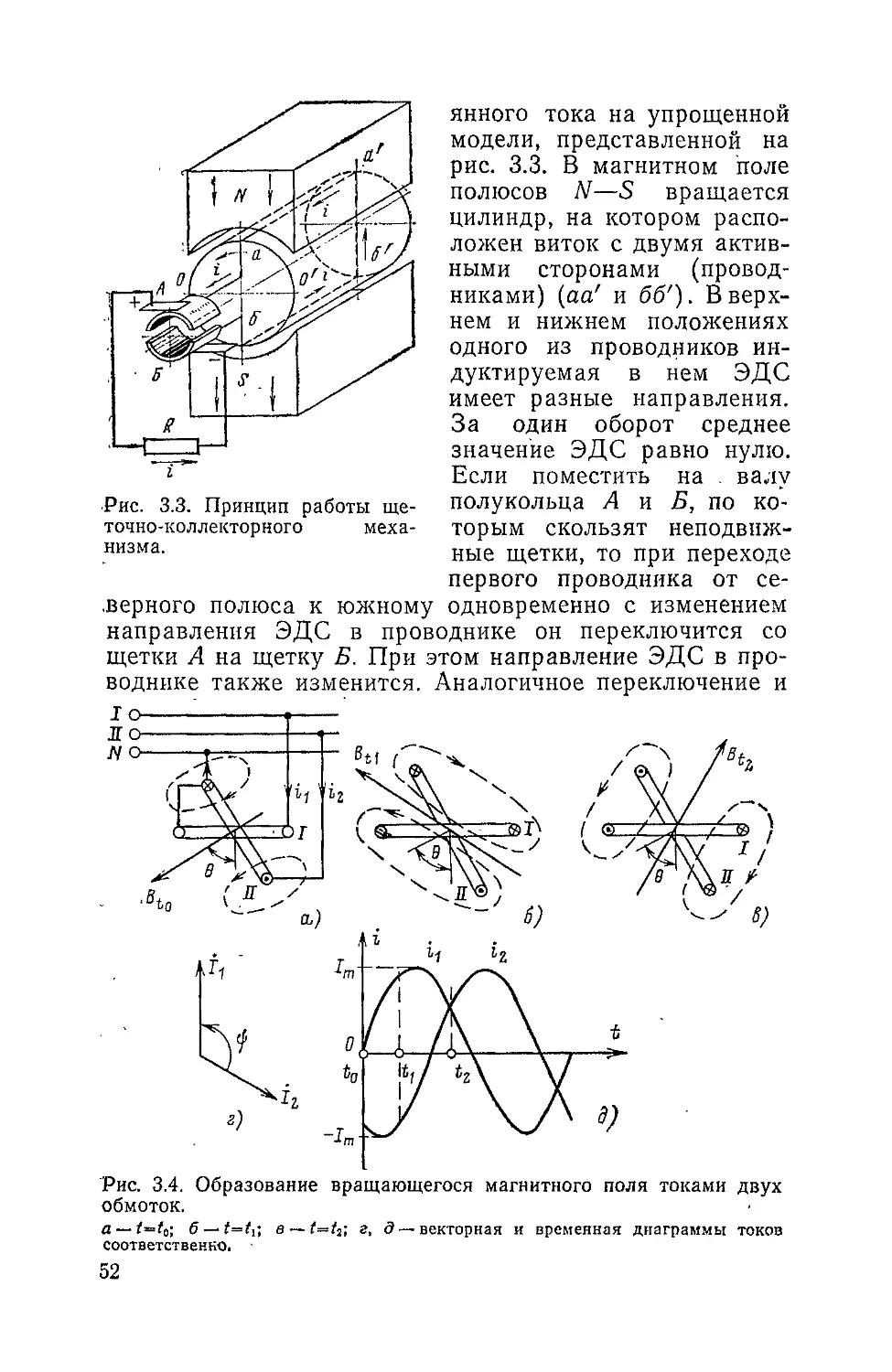
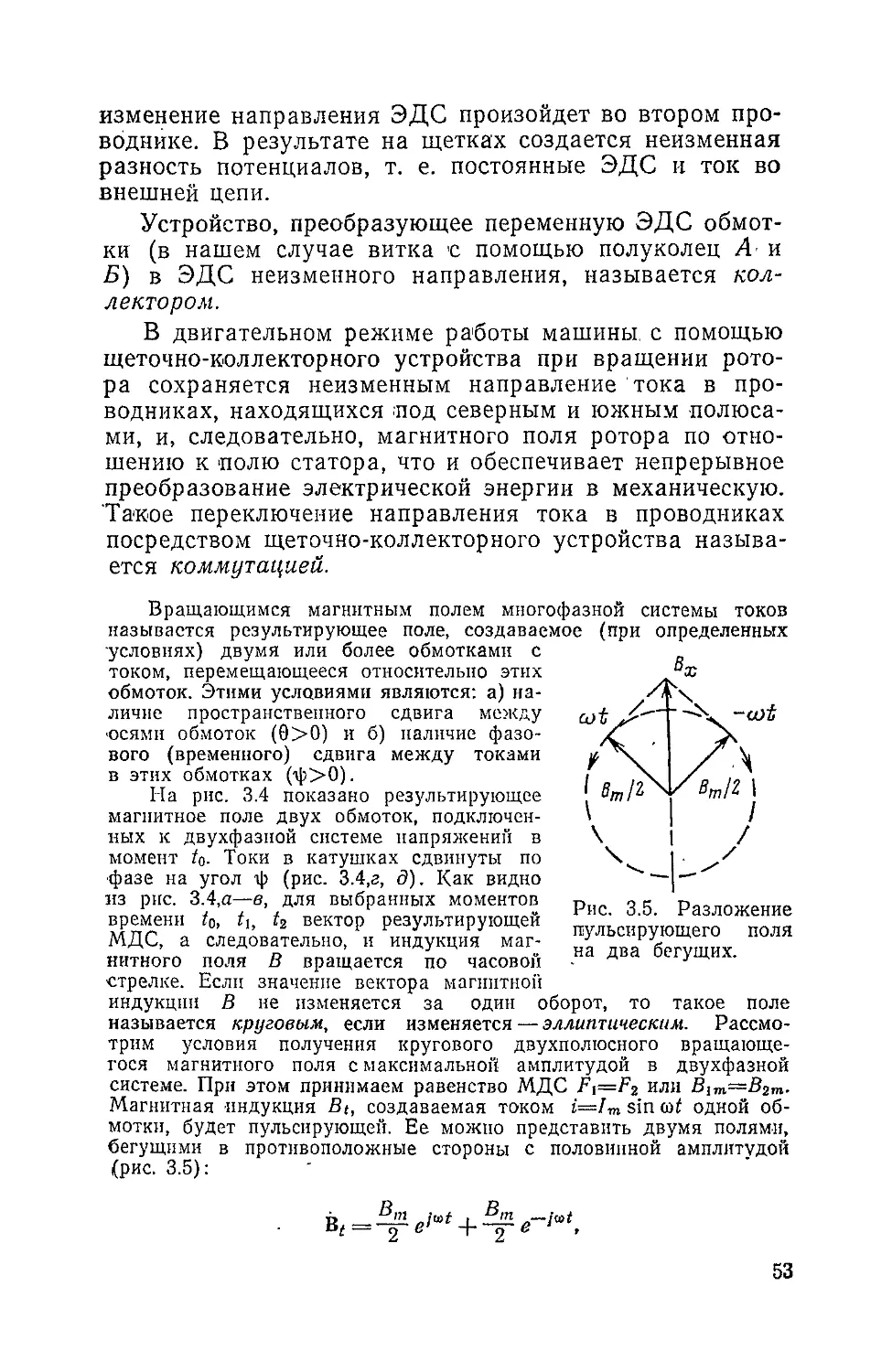






















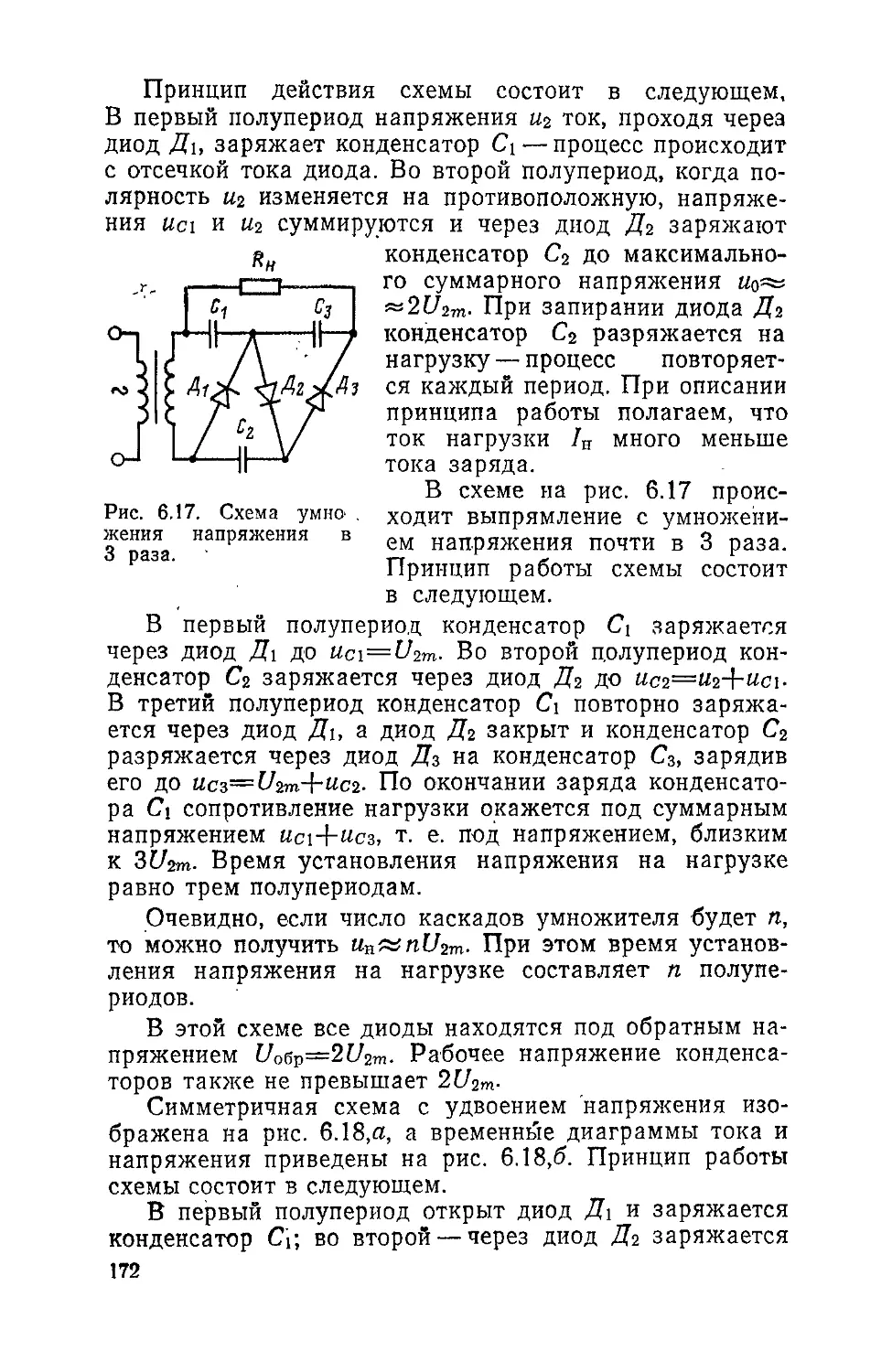
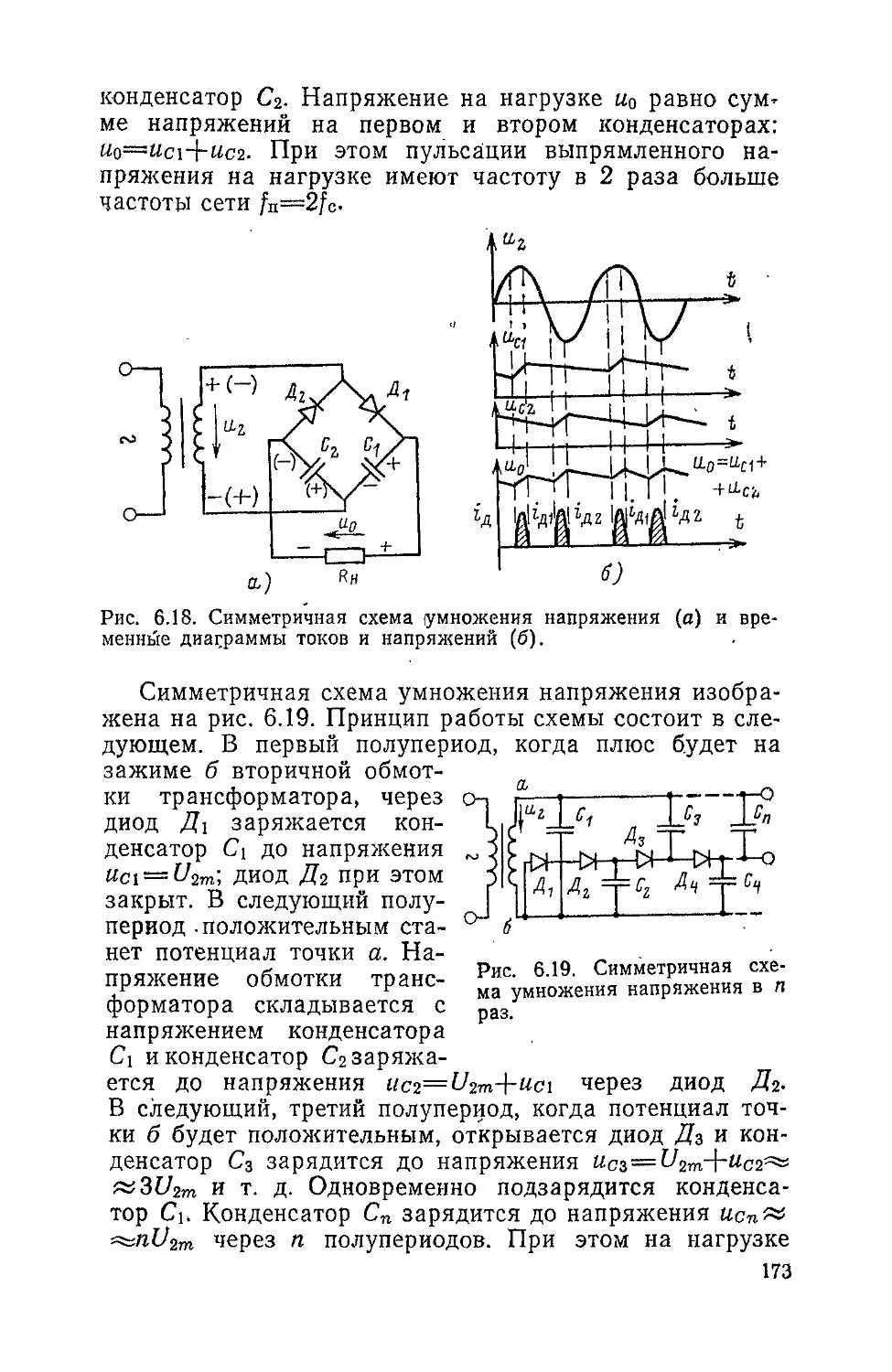
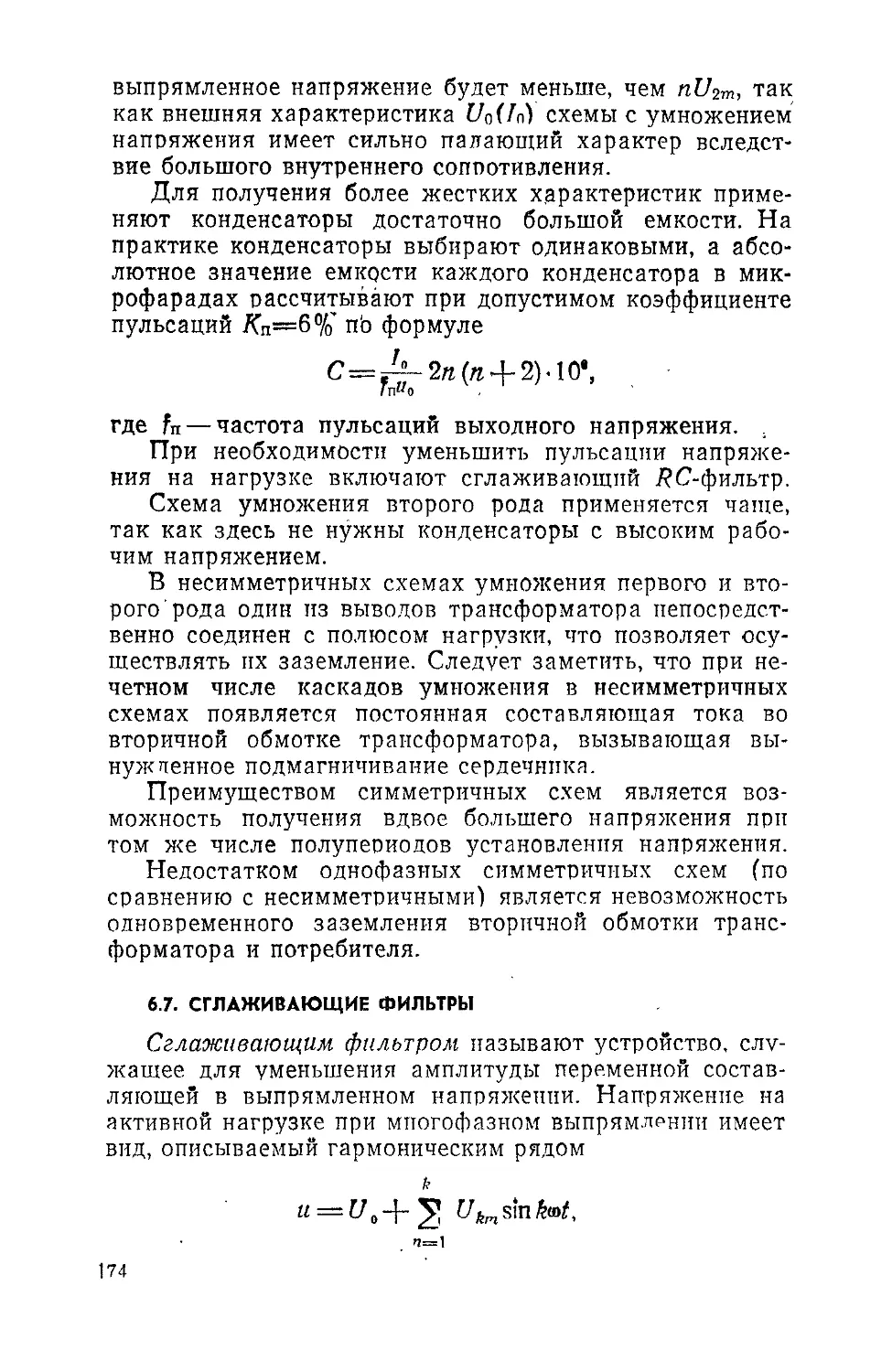





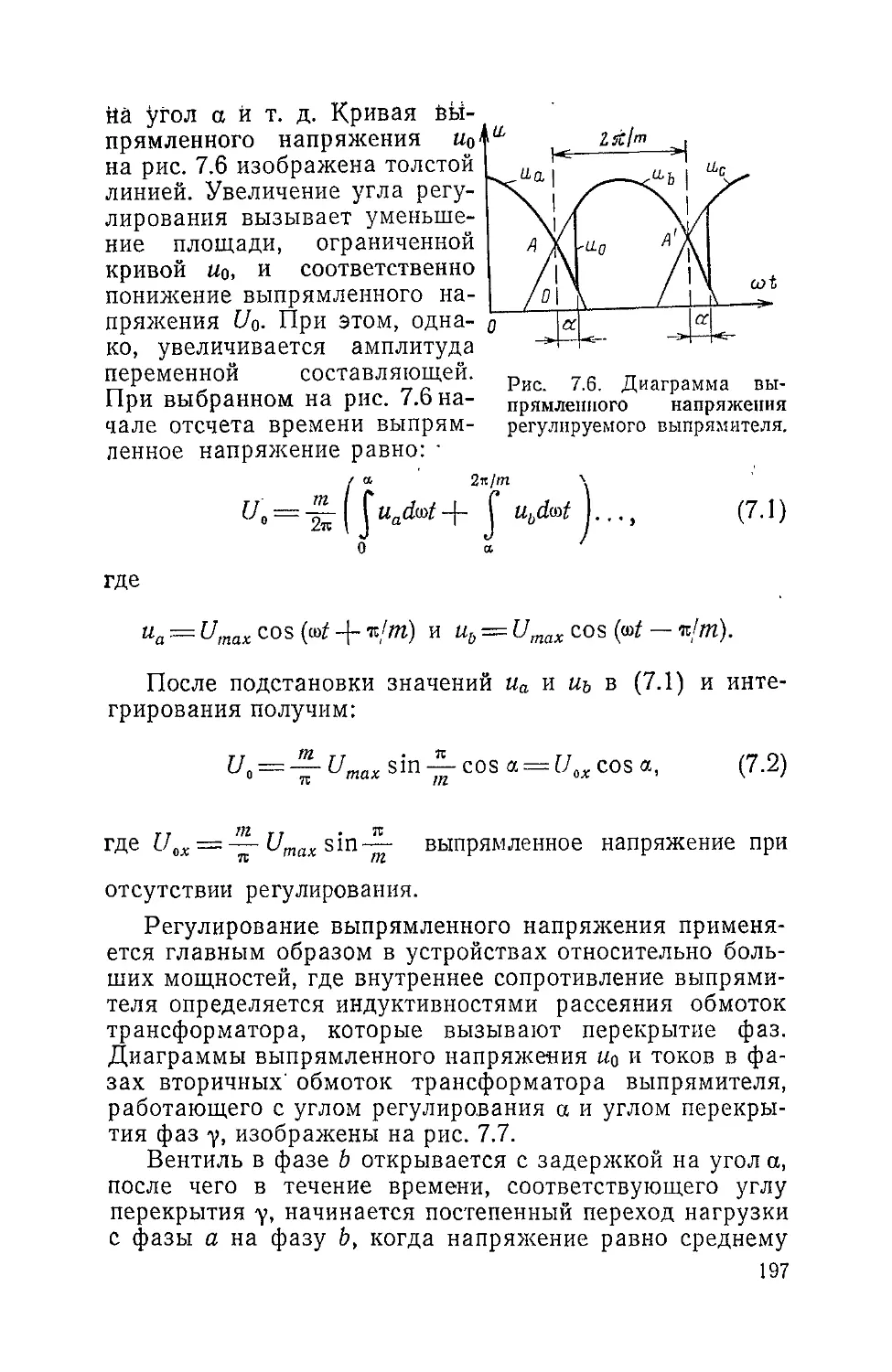

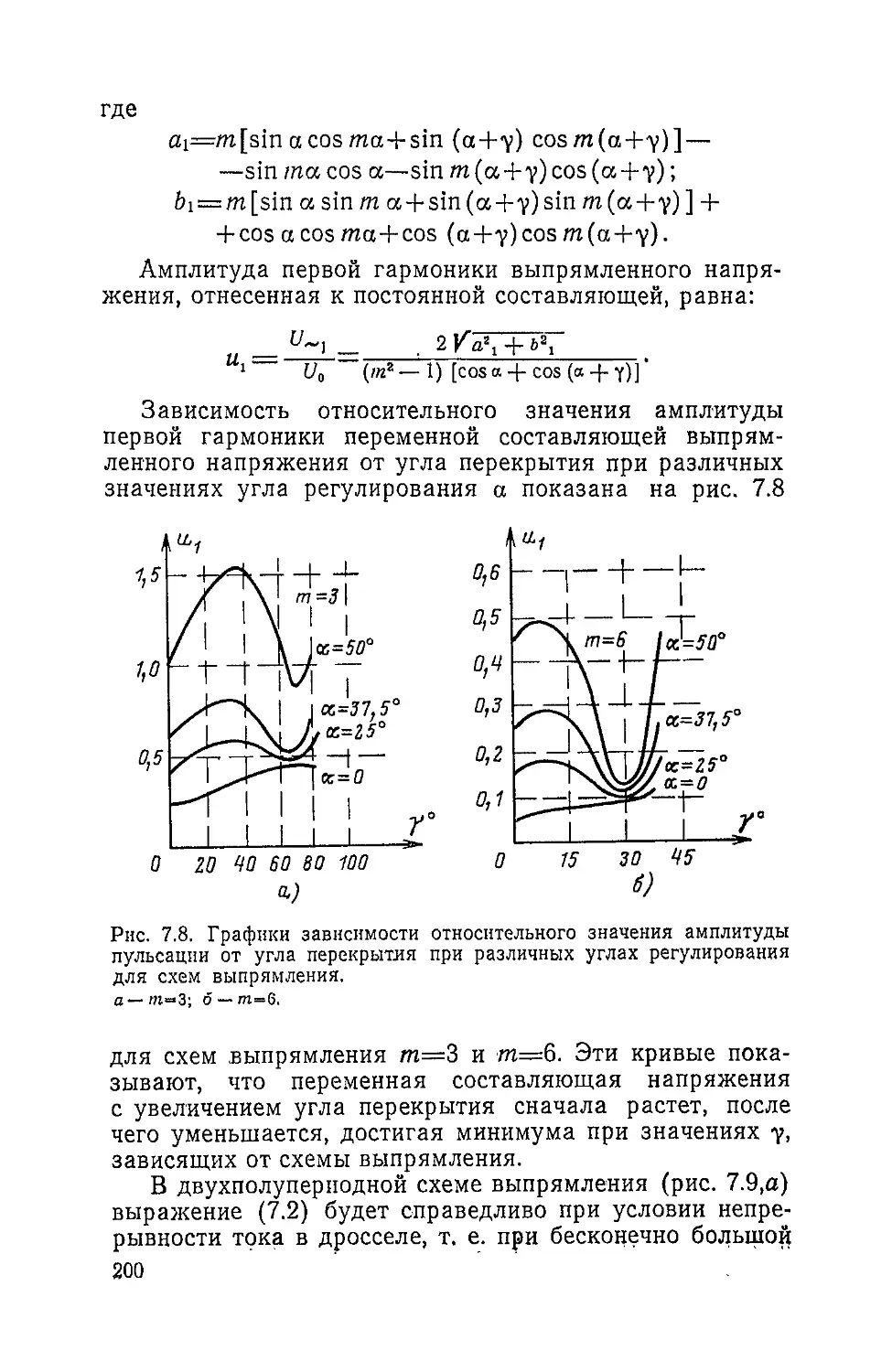
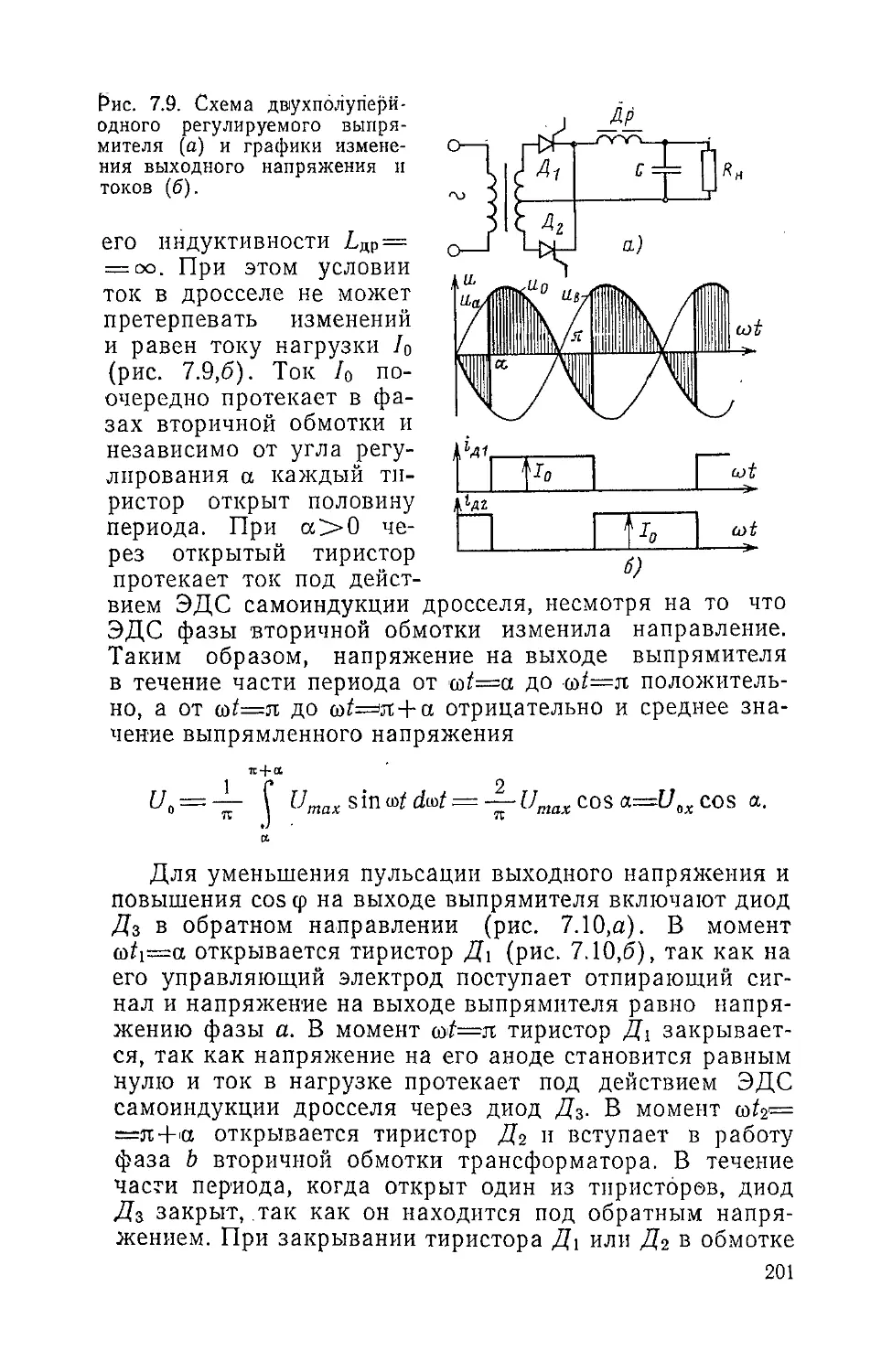












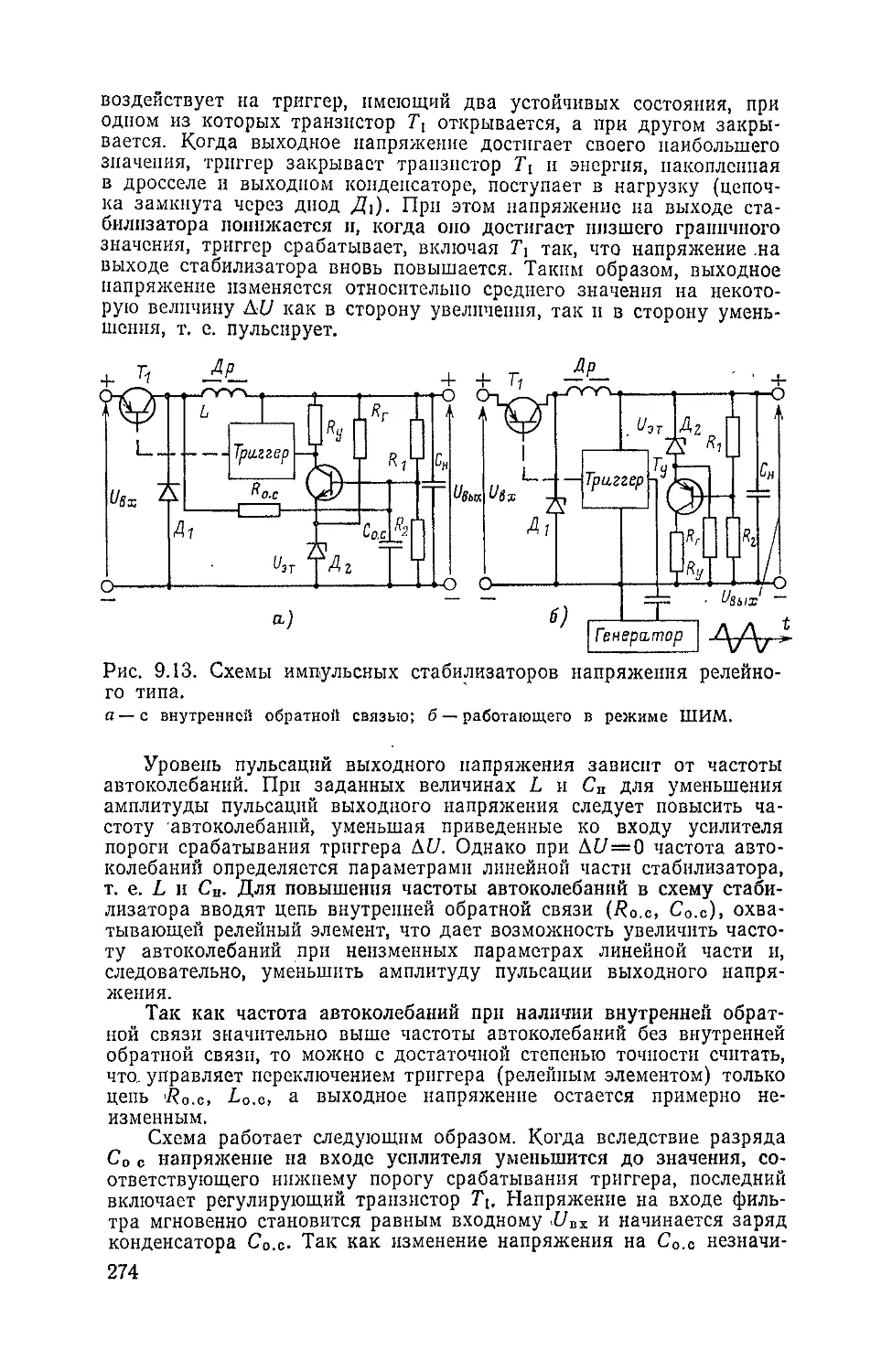


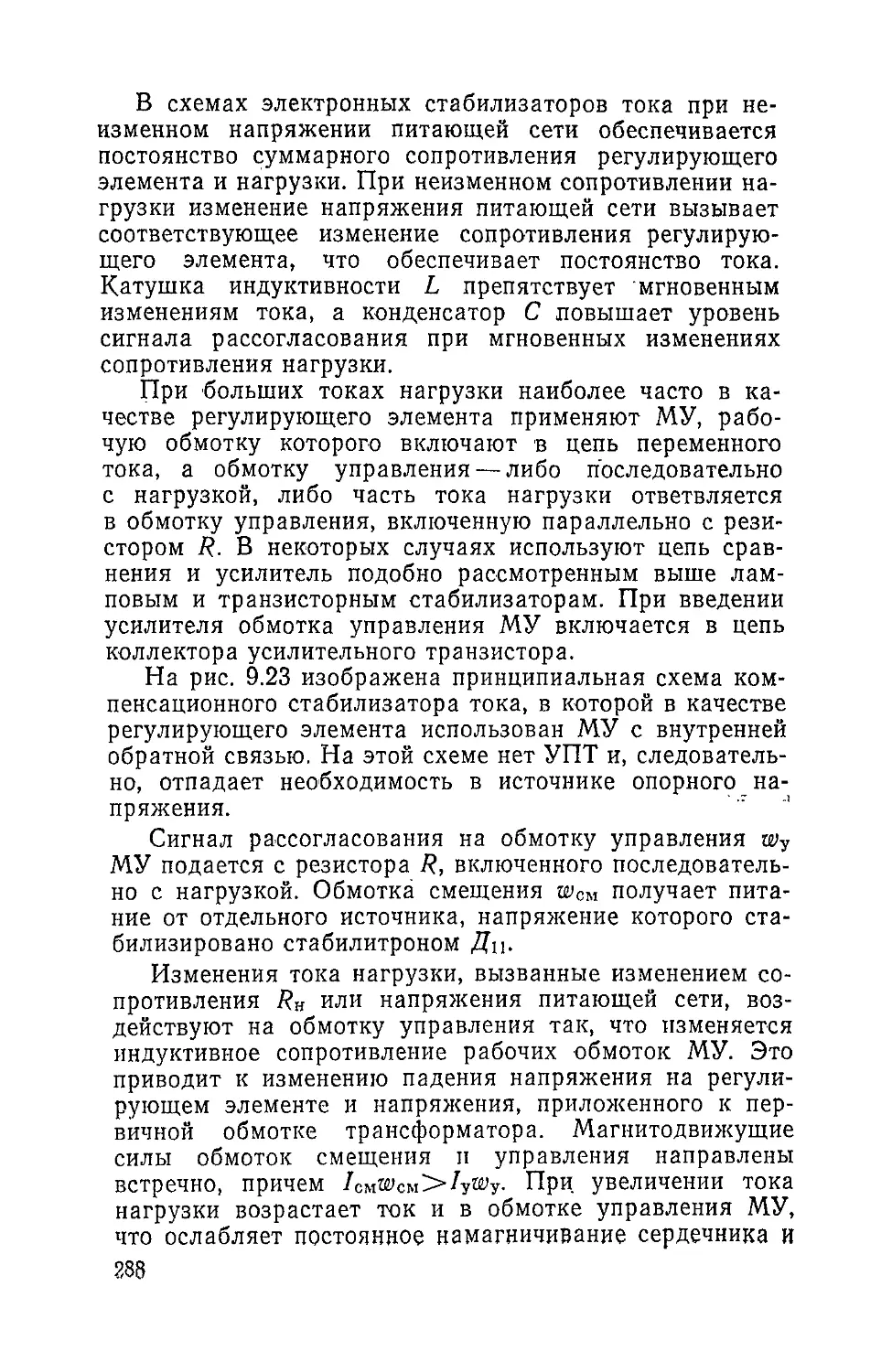












Text
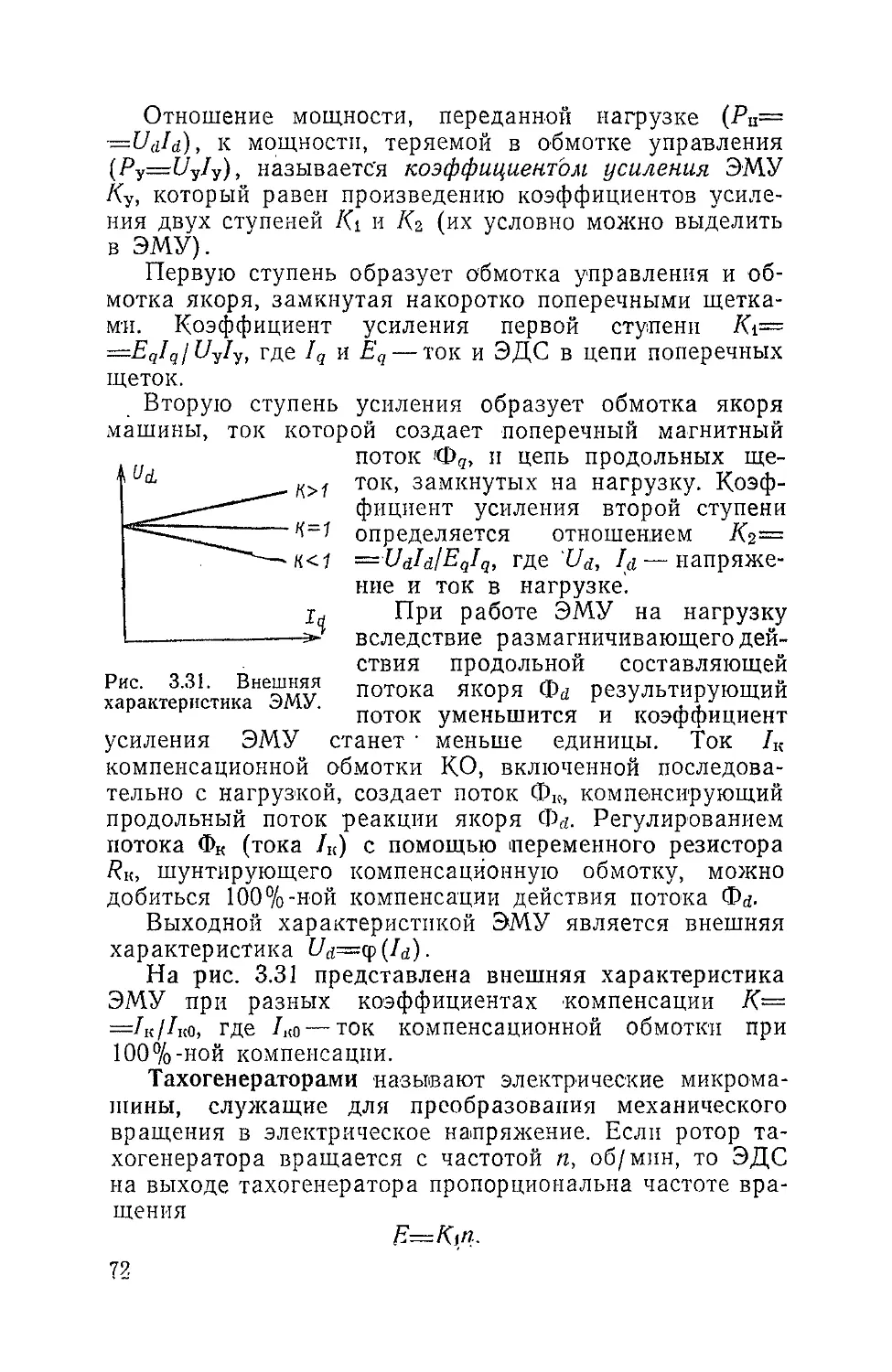
О. В. Алексеев
В. Е. Китаев
А. Я. Шихин
ЭЛЕКТРО-
ТЕХНИЧЕСКИЕ
УСТРОЙСТВА
Под общей редакцией проф. А. Я. Шихина
Допущено Министерством высшего и среднего специального образования СССР в качестве учебника для студентов вузов, обучающихся по специальности «Радиотехника»
МОСКВА ЭНЕРГОИЗДАТ 1981
ББК 32.844
А 47
УДК /621.311.6:621.396.6/(075.8)
Рецензенты: Кафедра систем автоматического управления МАИ, кафедра электропитания устройств связи МЭИС
Алексеев О. В. и др.
А47 Электротехнические устройства: Учебн. для вузов/ О. В. Алексеев, В. Е. Китаев, А. Я. Шихин; Под общ. ред. А. Я. Шихина. — М.: Энергоиздат, 1981.— 336 с., ил.
В пер.: 95 к.
Излагаются общие принципы работы и дано описание технических свойств электротехнических устройств радиосистем. Рассматриваются принципы построения и свойства современных источников электропитания радиоэлектронной аппаратуры, возможности миниатюризации их элементов.
Заключительная часть книги посвящена вопросам проектирования и защиты устройств электропитания. Особое внимание уделено вопросам надежности и электромагнитной совместимости. Для студентов вузов радиотехнических специальностей.
_ 30404-416
Ab5iioi)-81 ,87-81,Э|- 2402020000
ББК 32.844
6Ф2.13
scan: The Stainless Steel Cat
© Энергоиздат, 1981
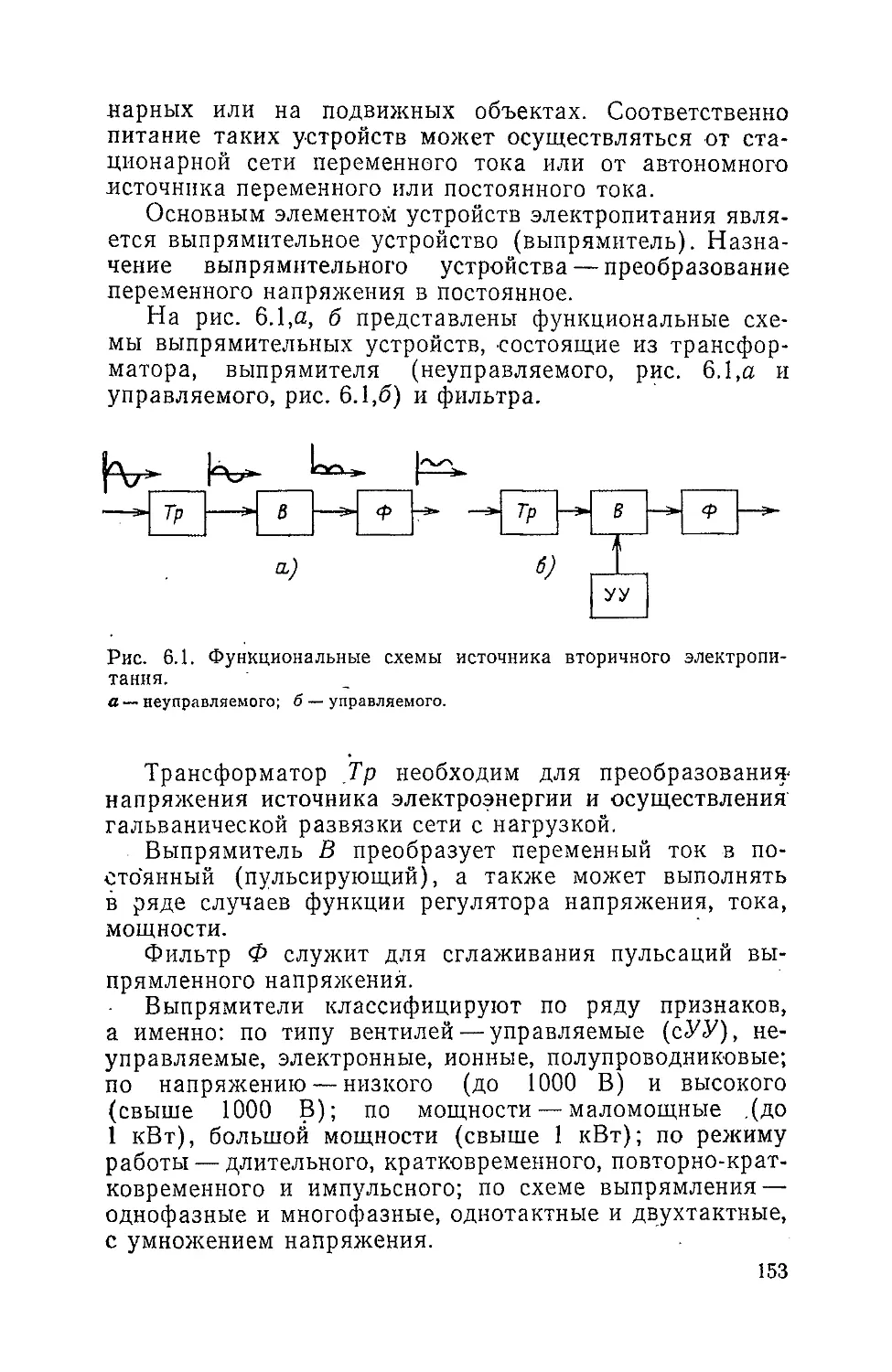
ПРЕДИСЛОВИЕ
Одним из основных результатов современного научно-технического прогресса является ускорение темпов обновления технических средств и технологических процессов. Особенно ускоряются темпы обновления радиотехнических систем, в которых значительное место занимают электротехнические устройства.
К электротехническим устройствам радиосистем относятся различные типы электрических машин, аппаратов, приборов, преобразователей и других устройств. Они применяются как элементы и узлы систем управления, регулирования и источников электропитания радиоаппаратуры.
В общем случае электротехнические устройства можно разделить на несколько групп:
а) устройства, непосредственно входящие в радиотехническую систему (системы электроприводов, переключающая и логическая аппаратура, системы синхронной связи, устройства автоподстройки частоты, датчики положения и др.);
б) устройства электропитания, обеспечивающие работоспособность радиоаппаратуры (электромашинные генераторы и преобразователи, электрохимические источники электроэнергии, трансформаторы, стабилизаторы, выпрямители, фильтры и др.);
в) устройства управления радиотехническими системами, защиты аппаратуры и источников электропитания от перегрузок и коротких замыканий, сигнализации и обеспечения надежности работы.
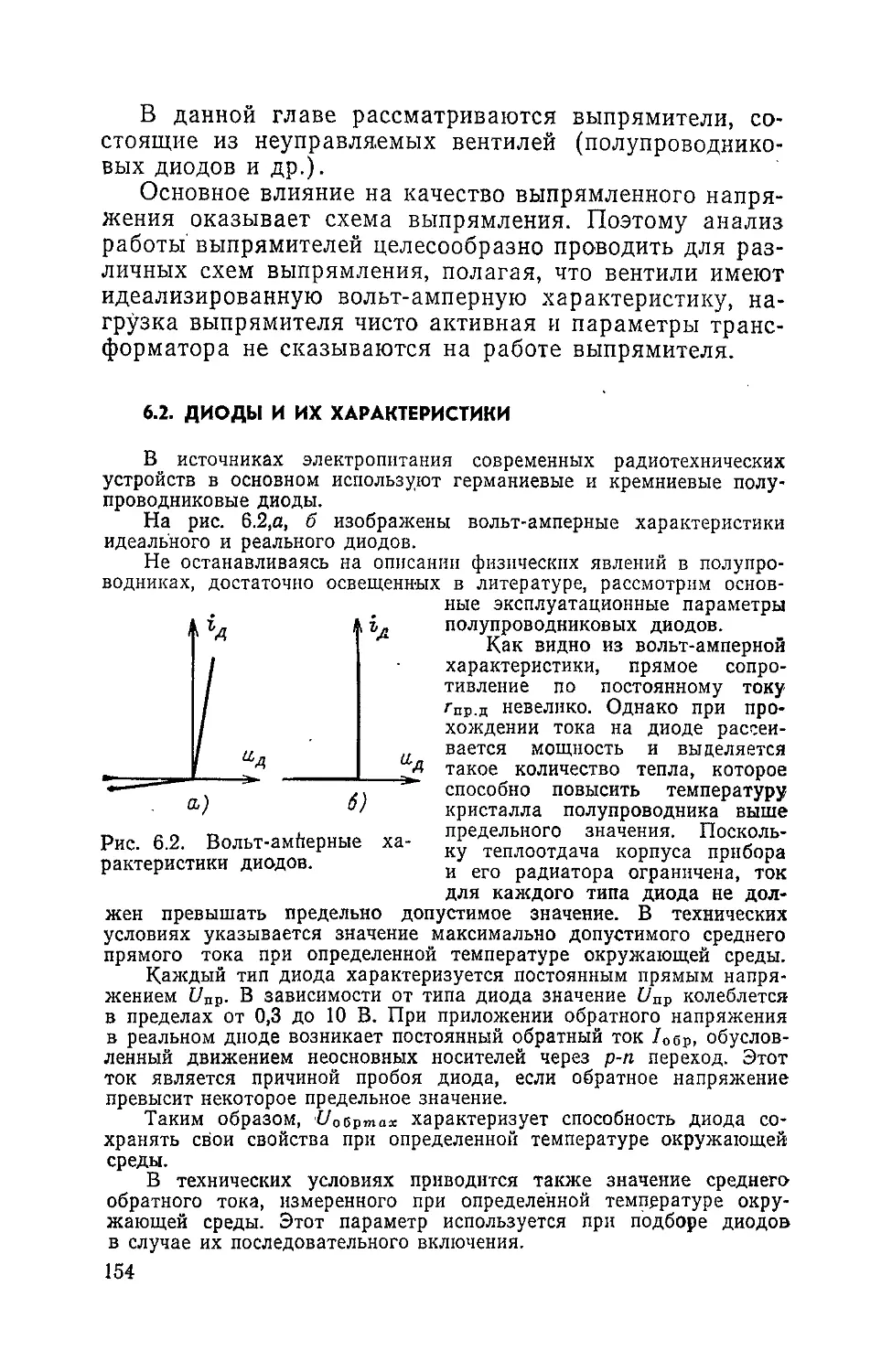
В настоящее время в нашей стране действует более 100 млн. радиоприемников, телевизоров и других приборов. Потребляемая мощность каждым из них составляет от единиц ватт до нескольких киловатт. Суммарная мощность, потребляемая только радиовещательными и телевизионными устройствами, составит более 10 млн. кВт. Поэтому снижение потерь мощности, габаритов и массы источников электропитания и
з
других электротехнических устройств в настоящее время является одной из наиболее важных проблем.
Микроминиатюризация радиотехнических устройств выдвигает задачу комплексной миниатюризации электромагнитных устройств, источников электроэнергии и источников вторичного электропитания (ИВП), поскольку их доля в общем объеме и массе радиотехнических систем становится все более ощутимой (в отдельных случаях до 80%). Поэтому комплексная миниатюризация стала одним из главных направлений развития электротехнических устройств. В этой связи весьма перспективными представляются ИВП в виде высокочастотных ключевых преобразователей, бесконтактная' коммутационная и защитная аппаратура, выполненная на основе транзисторных и тиристорных силовых ключей. Важным направлением в развитии электротехнических устройств является создание универсальных и специализированных интегральных микросхем ИВП, цепей управления и защиты с высокой степенью интеграции.
При проектировании радиотехнических систем радиоинженеру необходимо знать о технических характеристиках и свойствах электротехнических устройств, уметь правильно их выбирать, учитывать уровень и степень их влияния на качество работы всей радиосистемы и ее элементов.
В данной книге не приводятся подробные методики расчета отдельных устройств, но даются рекомендации по их выбору, приводятся сравнительные характеристики, что позволит принимать правильные решения и при необходимости пользоваться специальными литературными источниками по их проектированию. Книга рассчитана на студентов, специализирующихся в области радиотехники. Ее основная цель—способствовать активному усвоению основ построения электротехнических устройств радиосистем.
Авторы признательны рецензентам, а также канд. техн, наук А. А. Бокуняеву за ценные замечания, способствовавшие улучшению рукописи.
Все замечания и пожелания по содержанию книги просим направлять по адресу: 113114, Москва, М-114, Шлюзовая наб., 10, Энергоиздат.
А вторы
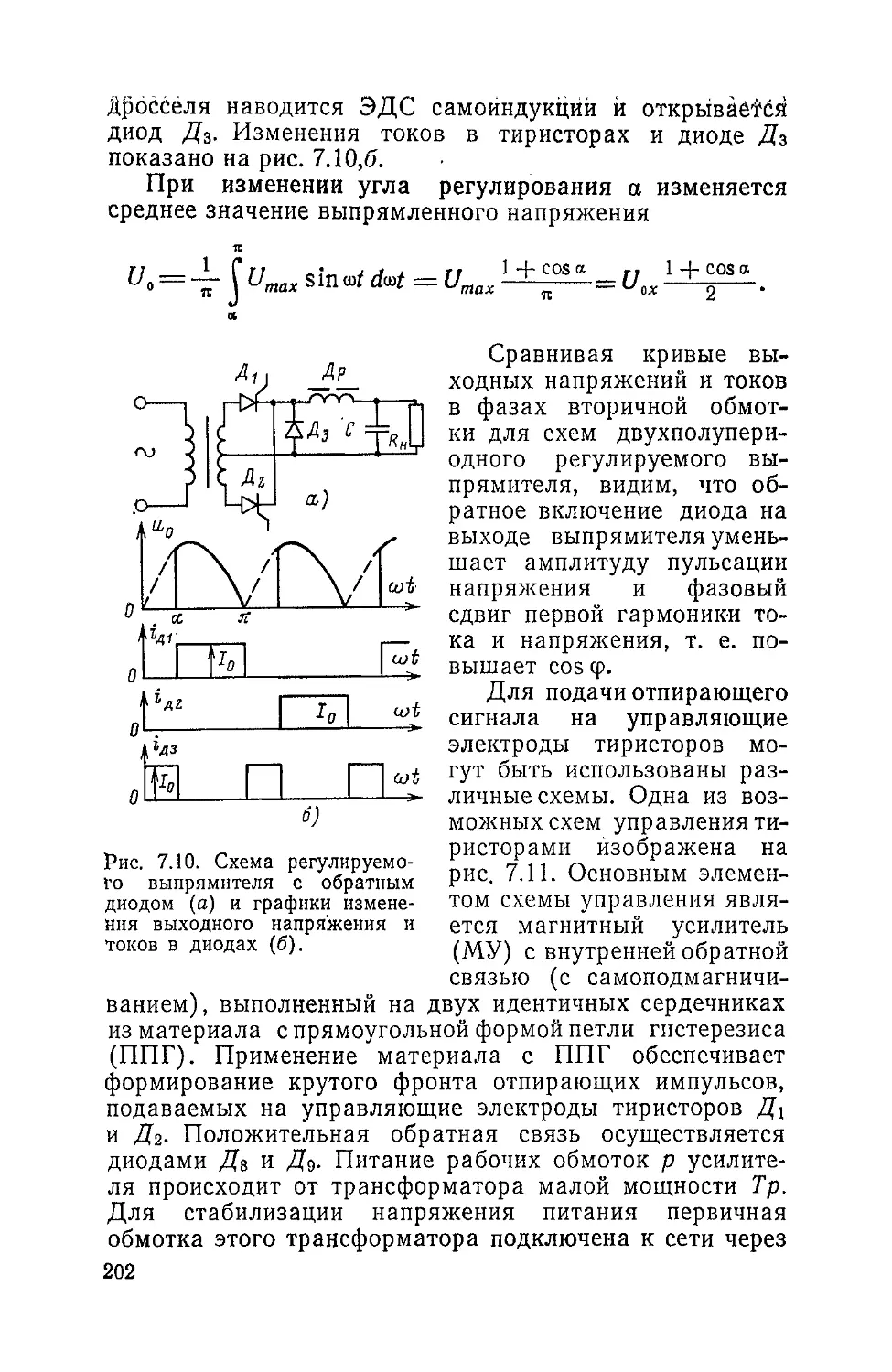
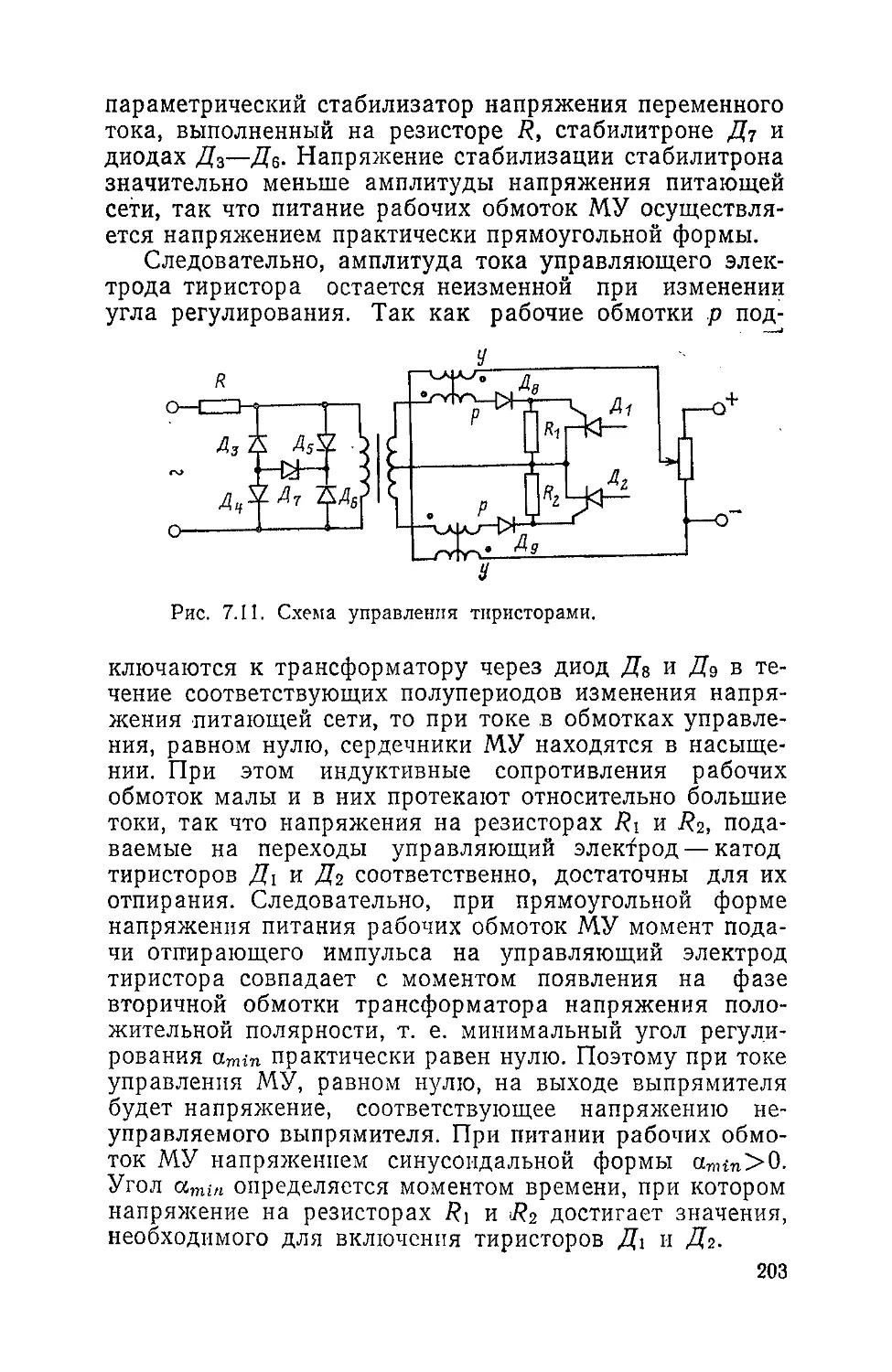
Глава первая
ДРОССЕЛИ И МАГНИТНЫЕ УСИЛИТЕЛИ
1.1. НАЗНАЧЕНИЕ, ПРИНЦИП ДЕЙСТВИЯ И УСТРОЙСТВО ДРОССЕЛЕЙ
Дросселем называется электротехническое устройство, реализующее индуктивность и содержащее катушку с ферромагнитным сердечником.
Дроссель как индуктивный элемент электрической цепи широко используется в радиотехнических устройствах (сглаживающих фильтрах, магнитных усилителях, электромагнитных регуляторах, стабилизаторах напря-
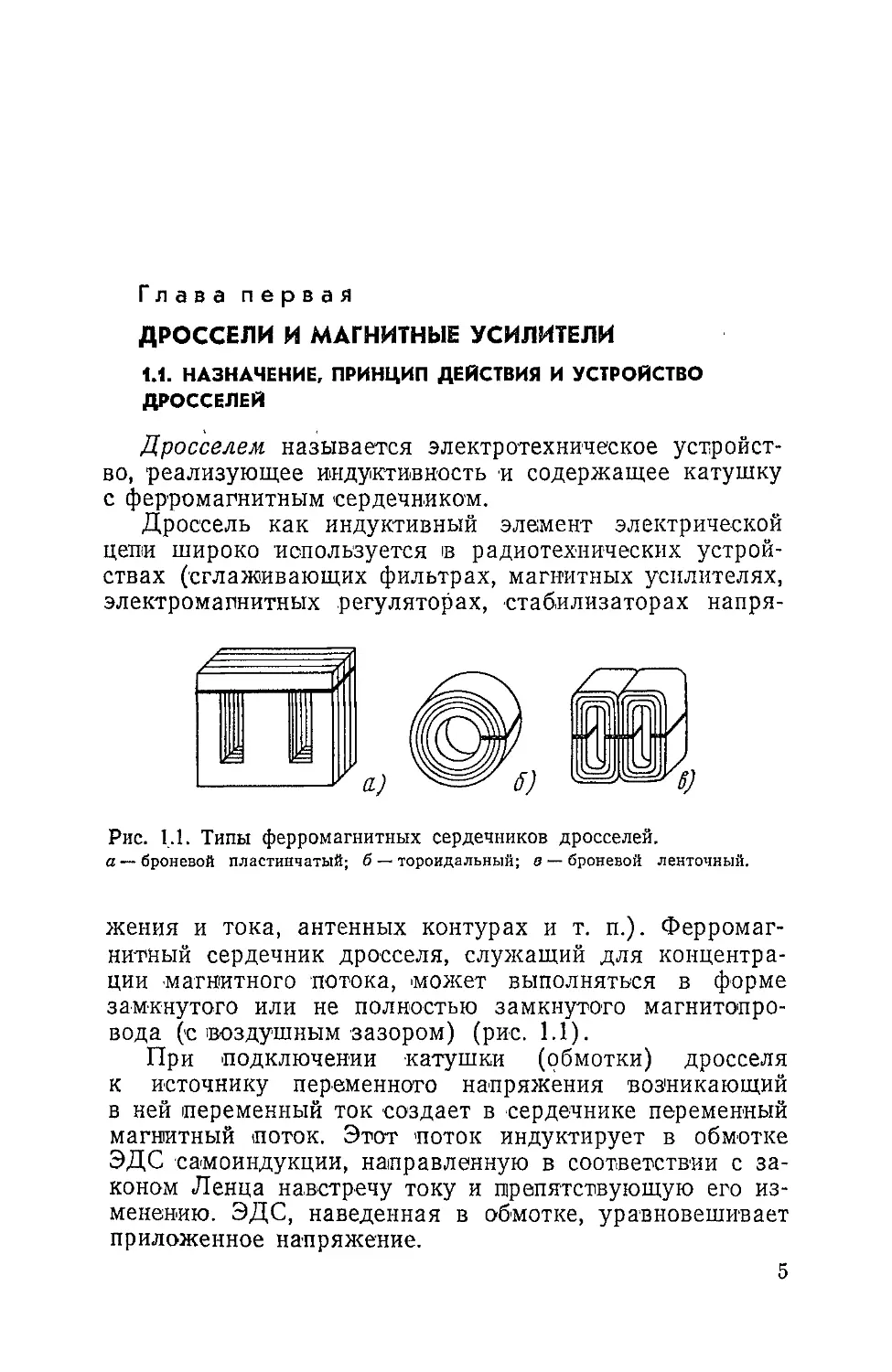
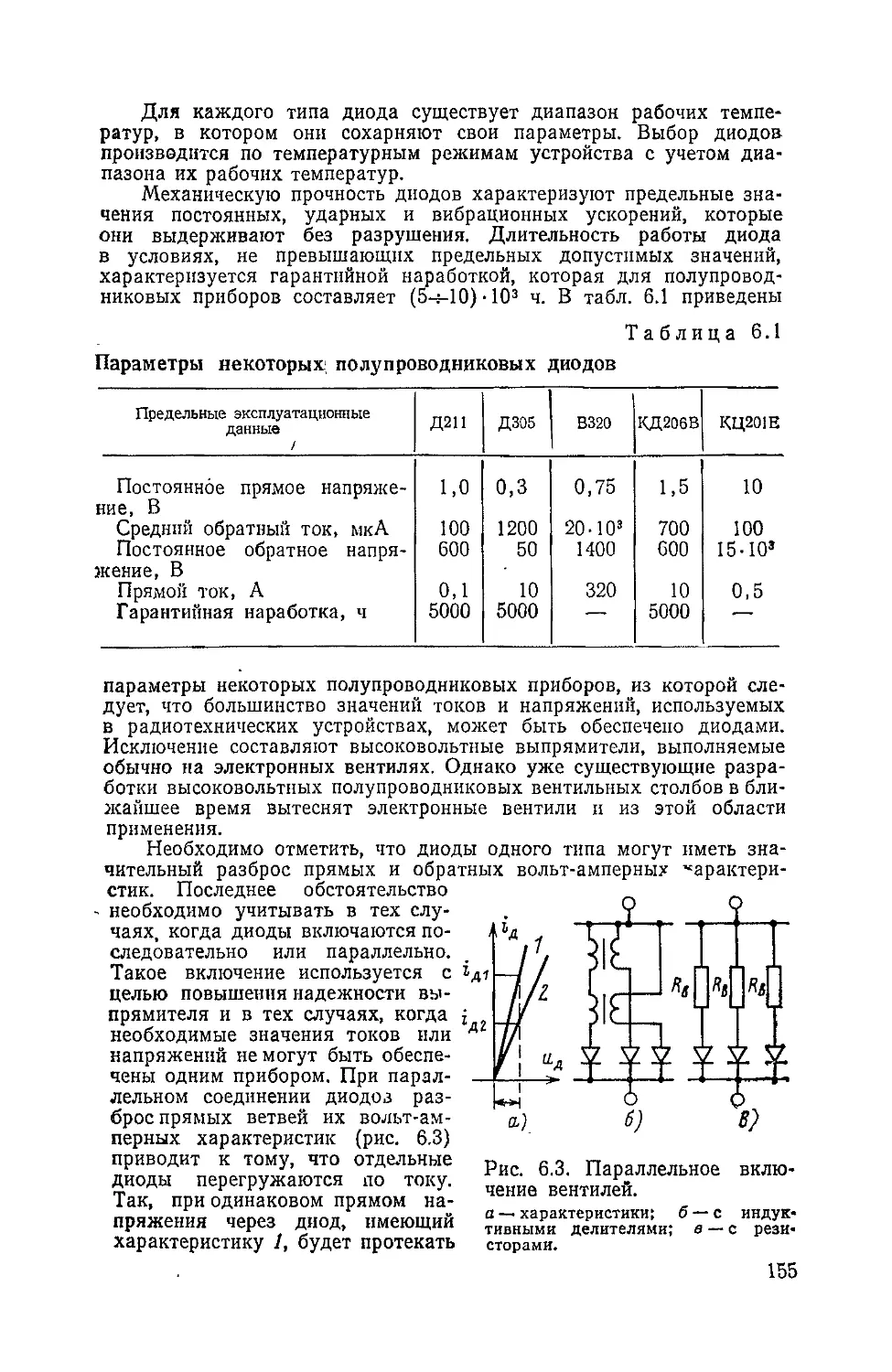
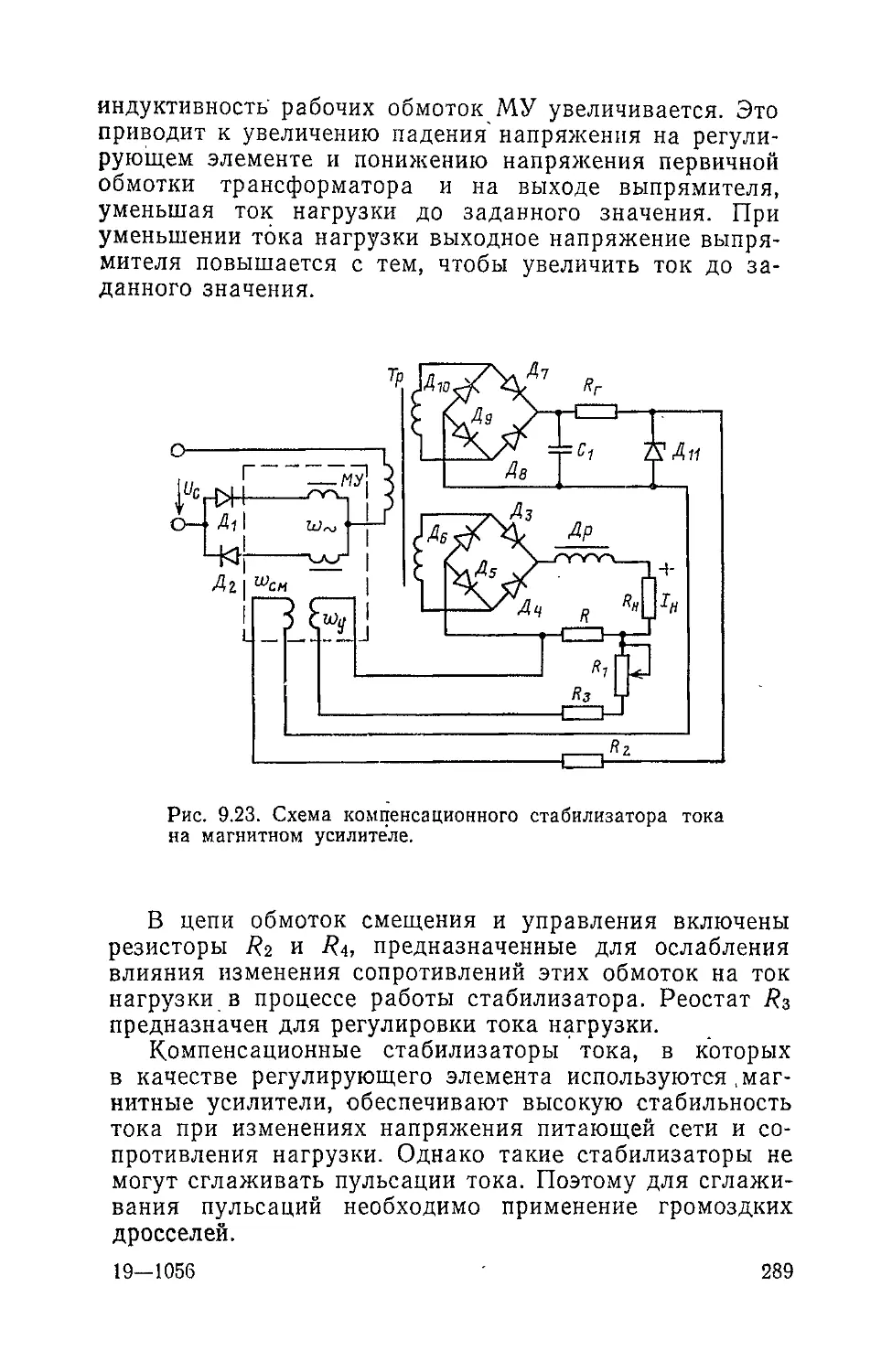
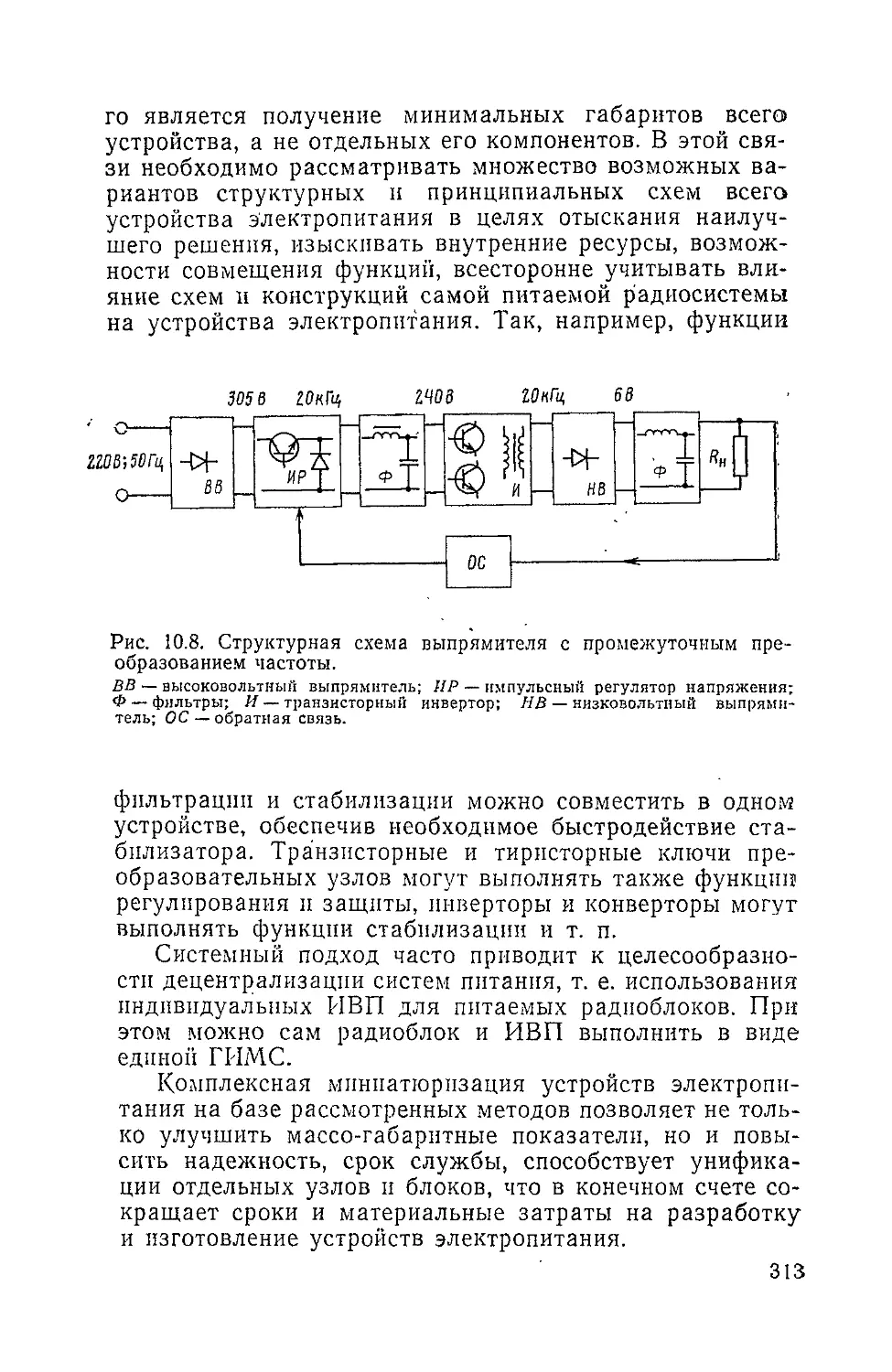
Рис. 1.1. Типы ферромагнитных сердечников дросселей.
а — броневой пластинчатый; б — тороидальный; в — броневой ленточный.
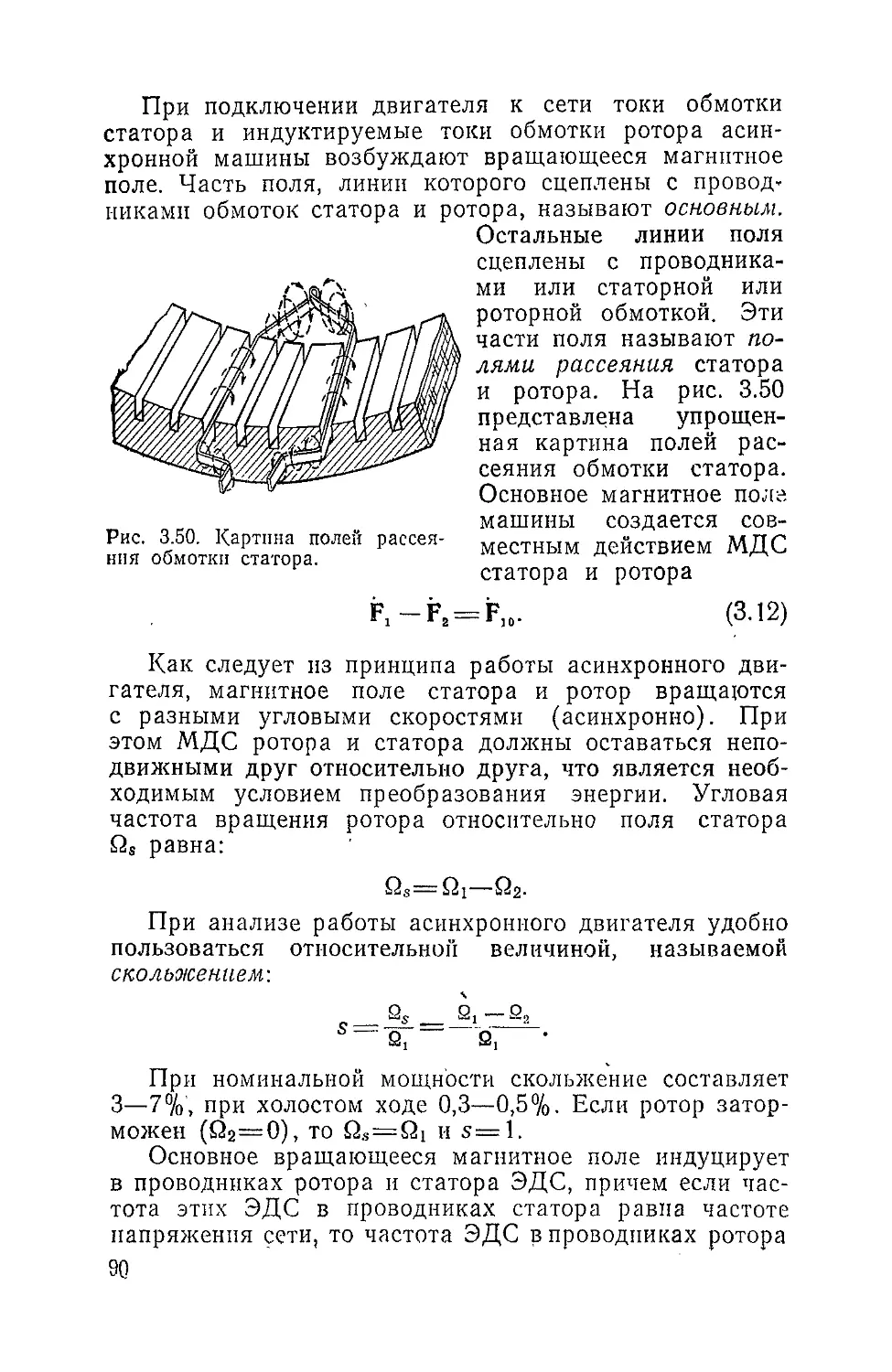
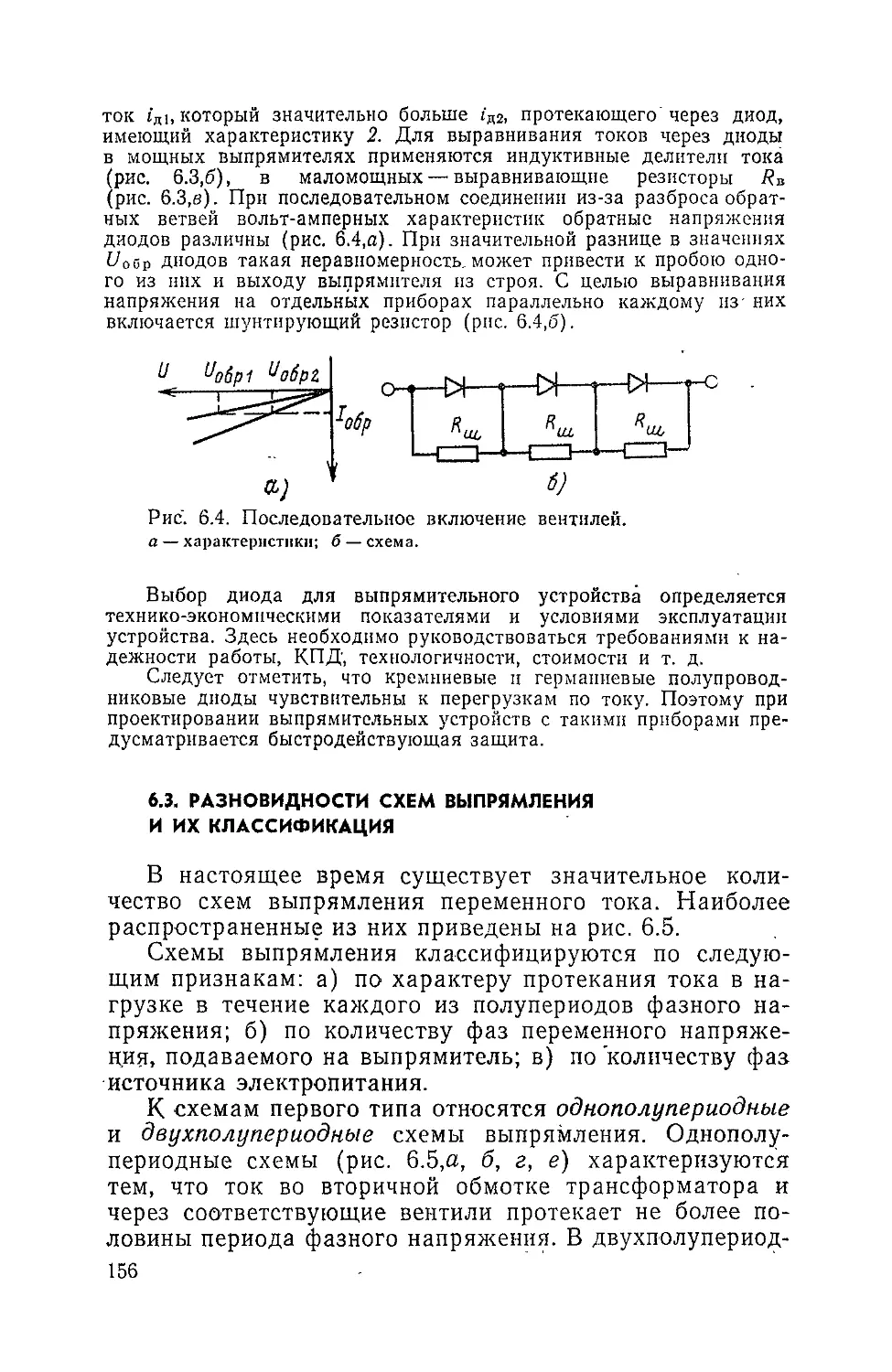
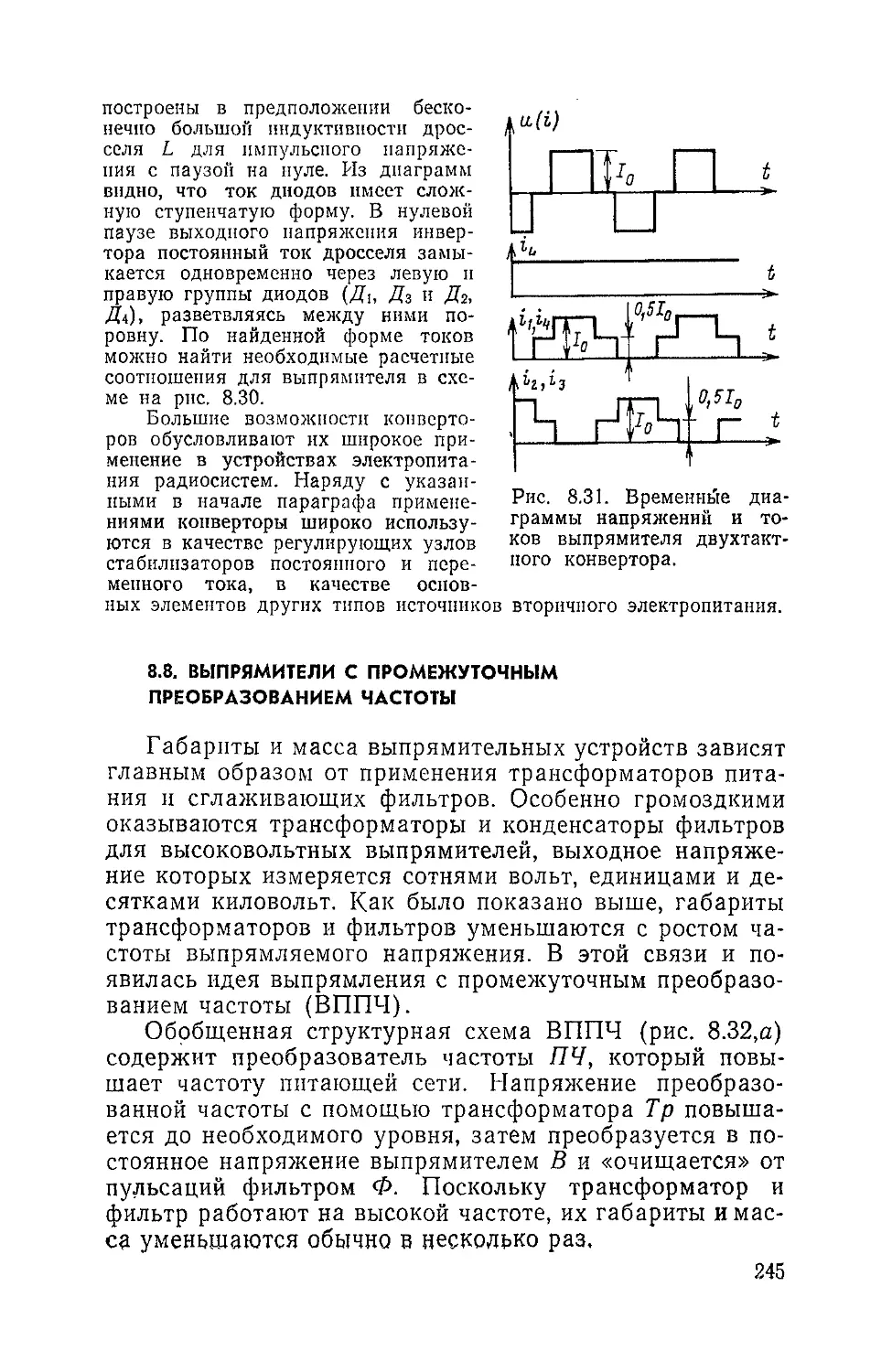
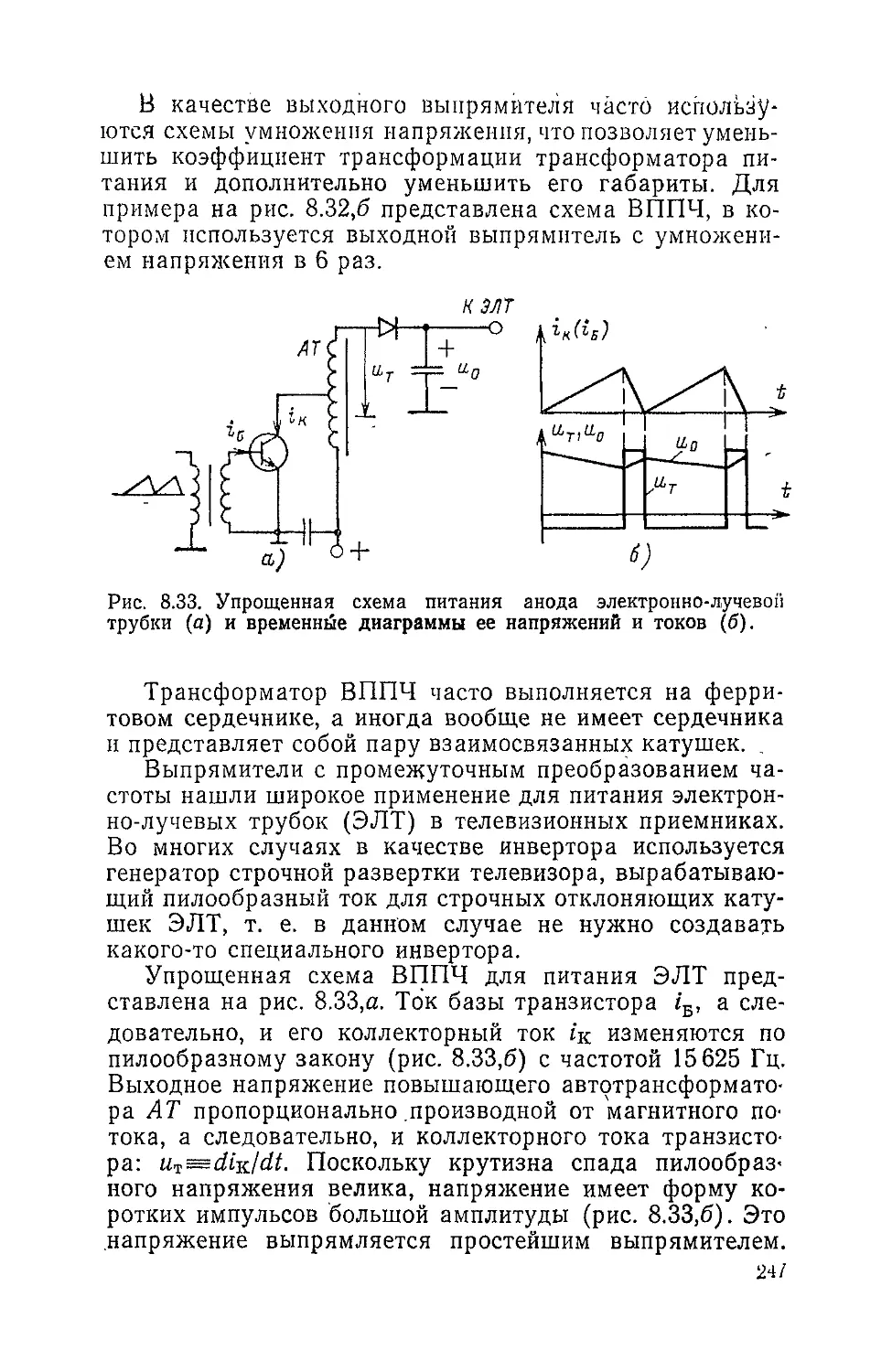
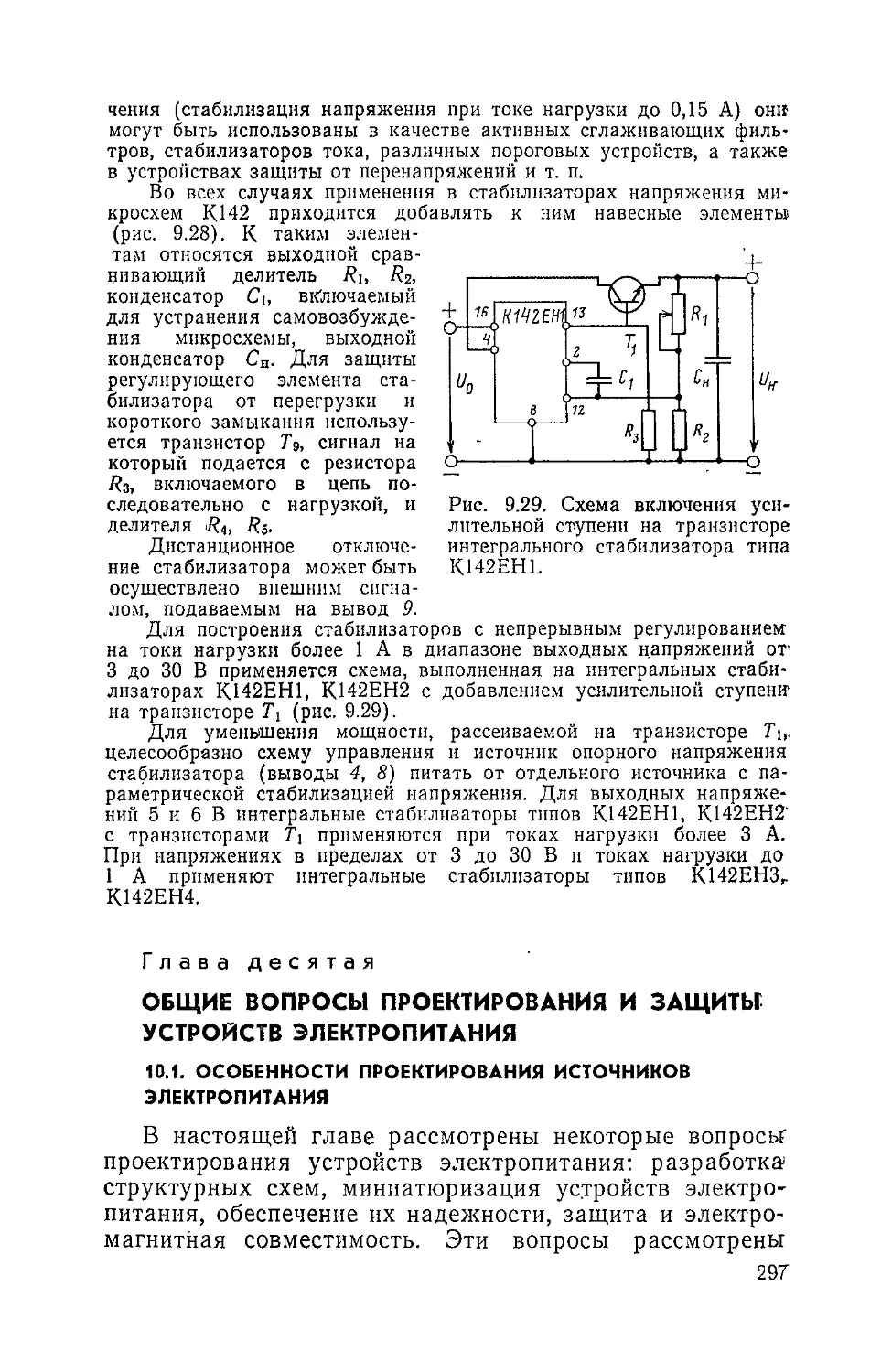
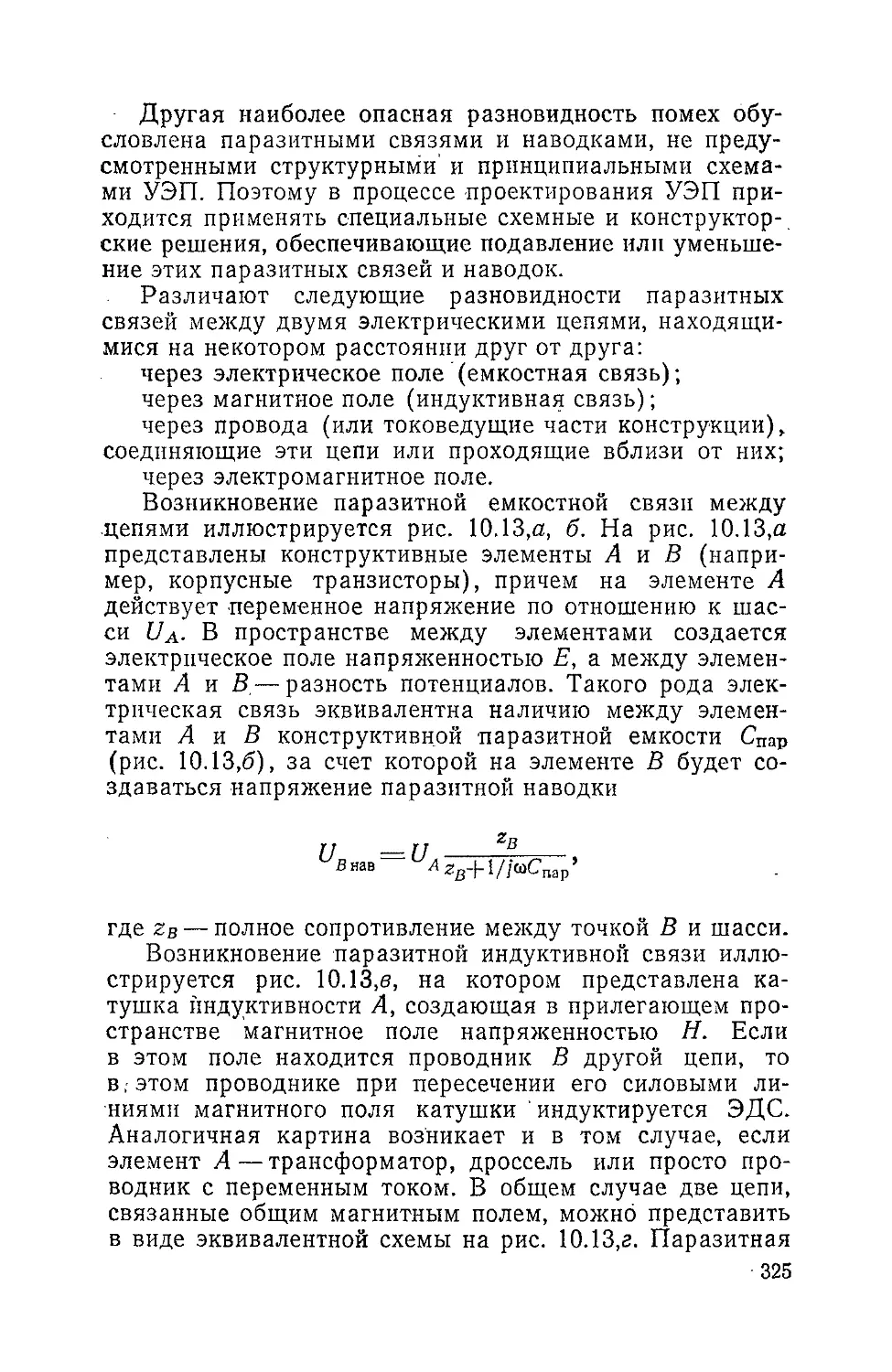
жения и тока, антенных контурах и т. п.). Ферромагнитный сердечник дросселя, служащий для концентрации магнитного потока, может выполняться в форме замкнутого или не полностью замкнутого магнитопровода (с воздушным зазором) (рис. 1.1).
При подключении катушки (обмотки) дросселя к источнику переменного напряжения возникающий в ней переменный ток создает в сердечнике переменный магнитный поток. Этот поток индуктирует в обмотке ЭДС самоиндукции, направленную в соответствии с законом Ленца навстречу току и препятствующую его изменению. ЭДС, наведенная в обмотке, уравновешивает приложенное напряжение.
5
Свойство дросселя Накапливать энергию магнитного поля характеризуется индуктивностью. Для дросселя с ферромагнитным сердечником из-за нелинейной зависимости потока Ф от тока I связь между индуктивностью и током L=<p(/) также имеет нелинейный ха
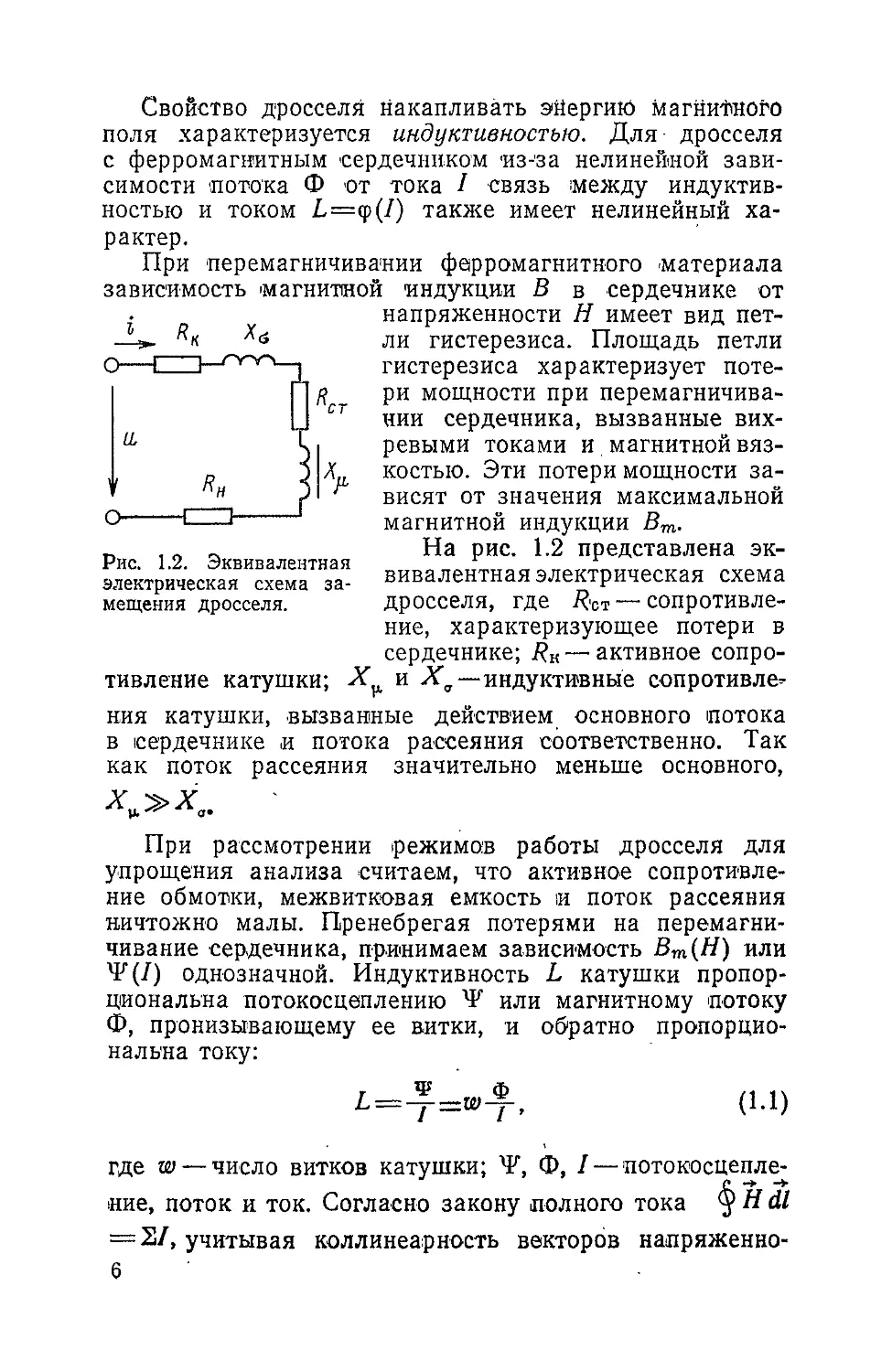
Рис. 1.2. Эквивалентная электрическая схема замещения дросселя.
рактер.
При перемагничивании ферромагнитного материала зависимость магнитной индукции В в сердечнике от напряженности Н имеет вид петли гистерезиса. Площадь петли гистерезиса характеризует потери мощности при перемагничивании сердечника, вызванные вихревыми токами и магнитной вязкостью. Эти потери мощности зависят от значения максимальной магнитной индукции Вт.
На рис. 1.2 представлена эквивалентная электрическая схема дросселя, где /?Ст— сопротивление, характеризующее потери в сердечнике; — активное сопротивление катушки; Х^ и Хя — индуктивные сопротивления катушки, вызванные действием основного потока в сердечнике и потока рассеяния соответственно. Так как поток рассеяния значительно меньше основного,
При рассмотрении режимов работы дросселя для упрощения анализа считаем, что активное сопротивление обмотки, межвитковая емкость и поток рассеяния ничтожно малы. Пренебрегая потерями на перемагничивание сердечника, принимаем зависимость Вт(Н) или ЧД/) однозначной. Индуктивность L катушки пропорциональна потокосцеплению Чг или магнитному потоку Ф, пронизывающему ее витки, и обратно пропорциональна току:
г Ф Ф
L==^=w_r
(1-1)
где w — число витков катушки; Чг, Ф, I — потокосцепление, поток и ток. Согласно закону полного тока § Н dl = 21, учитывая коллинеарность векторов напряженно-6
сти магнитного поля Н и пути интегрирования /=/Ст + ~Нв, получаем:
J Т^ст^ст ~Ь 7Д/в (12)
где ZCT — средняя длина магнитной линии сердечника; ZB— длина воздушного зазора.
Полагая, что магнитный поток равномерно распределен по сечению сердечника Ф=ВЗ и при небольших воздушных зазорах Zb<CZCt, принимаем: Вот=Вв=В и SCT=SB=S. После подстановки (1.2) в (1.1) получим:
J ____________________________ (1 Q\
/ст/^ + 4/fx. ’ U ’
где iia.=iir^o—BIН — абсолютная магнитная проницаемость ферромагнитного материала сердечника; ц0— магнитная постоянная; — относительная магнитная проницаемость ферромагнитного материала сердечника.
При отсутствии зазора (Z=ZCT)
Из этого выражения следует, что для получения значительных индуктивностей при минимальных габаритах дросселя необходимо выбирать материал сердечника с большим значением магнитной проницаемости, а его конфигурацию —с минимальным I. Однако для получения не менее важных показателей дросселя, [линейность зависимости индуктивности от тока Д=ср(/), малые потери в сердечнике, помехозащищенность] необходимо принимать компромиссные решения, такие как введение воздушного зазора, использование в качестве сердечников ферритов и магнитодиэлектриков, экранирование и др. Все это сказывается на конструктивных особенностях исполнения катушек и сердечников дросселей.
Дроссели, используемые в. радиотехнических устройствах, можно разделить на три группы. К первой группе относятся дроссели с фиксированной индуктивностью, предназначенные для колебательных контуров и сглаживающих фильтров. Ко второй группе относятся дроссели с индуктивностью, регулируемой посредством изменения зазора; они используются в настраиваемых колебательных контурах, а также для регулирования TQK3 в электрических цепях. Третья групп? включает
7
дроссели, индуктивность которых изменяется посредством подмагничивания сердечника постоянной магнитодвижущей силой (МДС). Это так называемые дроссели с подмагничиванием. Они используются в качестве основных элементов в магнитных усилителях.
1.2. ХАРАКТЕРИСТИКИ ДРОССЕЛЕЙ
К дросселям, используемым в колебательных контурах и сглаживающих фильтрах, предъявляются следующие требования:
1) обеспечение A(/)=const', что означает независимость абсолютной магнитной проницаемости ца от тока в катушке дросселя;
2) малые потери энергии;
3) малые габариты и масса.
Если третье требование удовлетворяется выбором рациональной конструкции дросселя и использованием качественных ферромагнитных материалов, то для удовлетворения первых двух требований необходимо, чтобы материал сердечника имел линейную зависимость магнитной индукции от МДС (тока катушки) и малые удельные потери, а обмотка дросселя — малое активное сопротивление.
В связи с тем, что у большинства ферромагнитных материалов ца зависит от тока катушки, то введение воздушного зазора в магнитопровод и выбор режима перемагничивания сердечника в ненасыщенной области позволяют устранить этот недостаток.
Из выражения (1.3) следует, что при /в/ц.о>^ст/ра (ца>1):
т. е. все параметры, а следовательно, и индуктивность не зависят от тока (или МДС) (L = const).
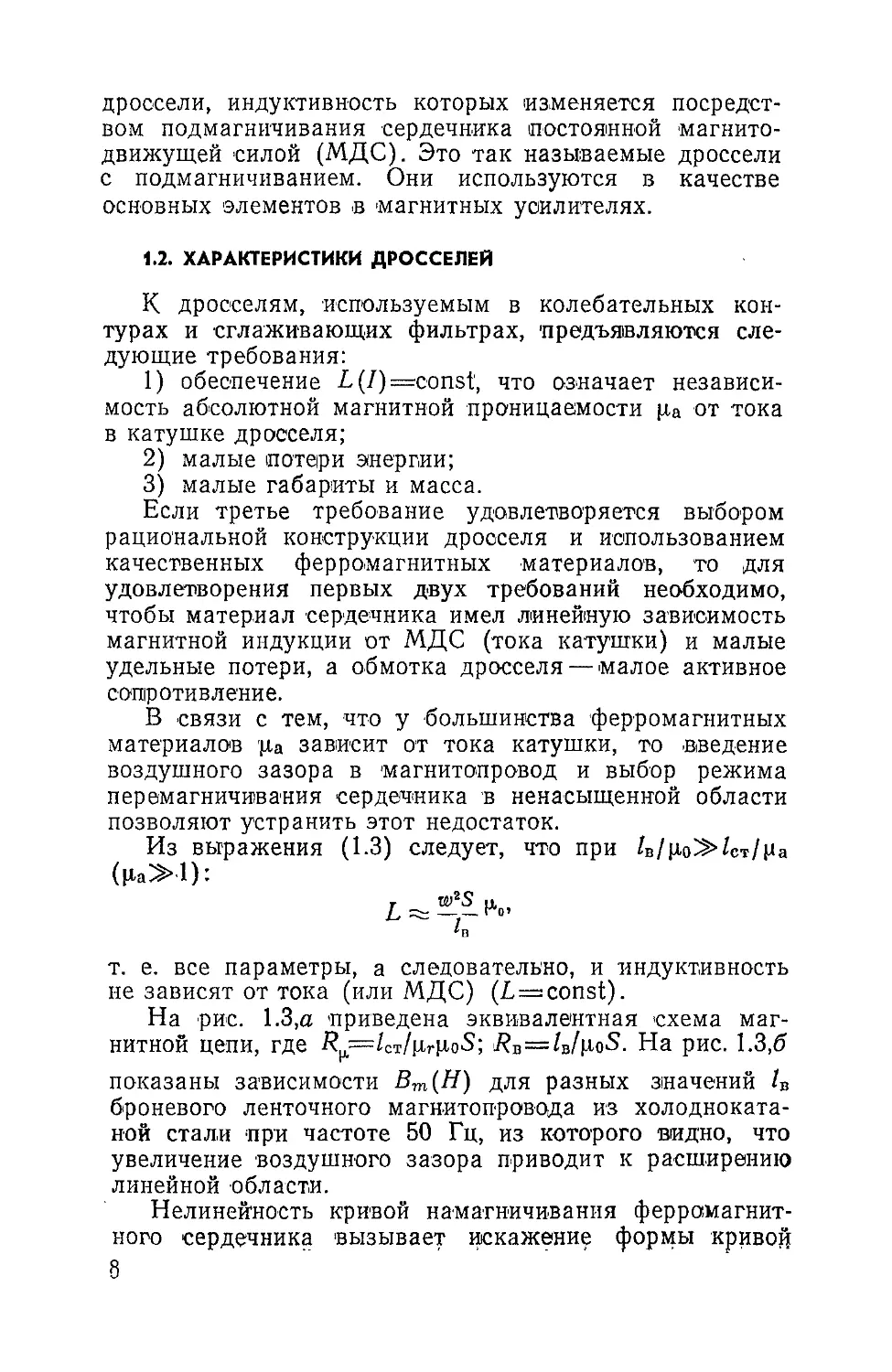
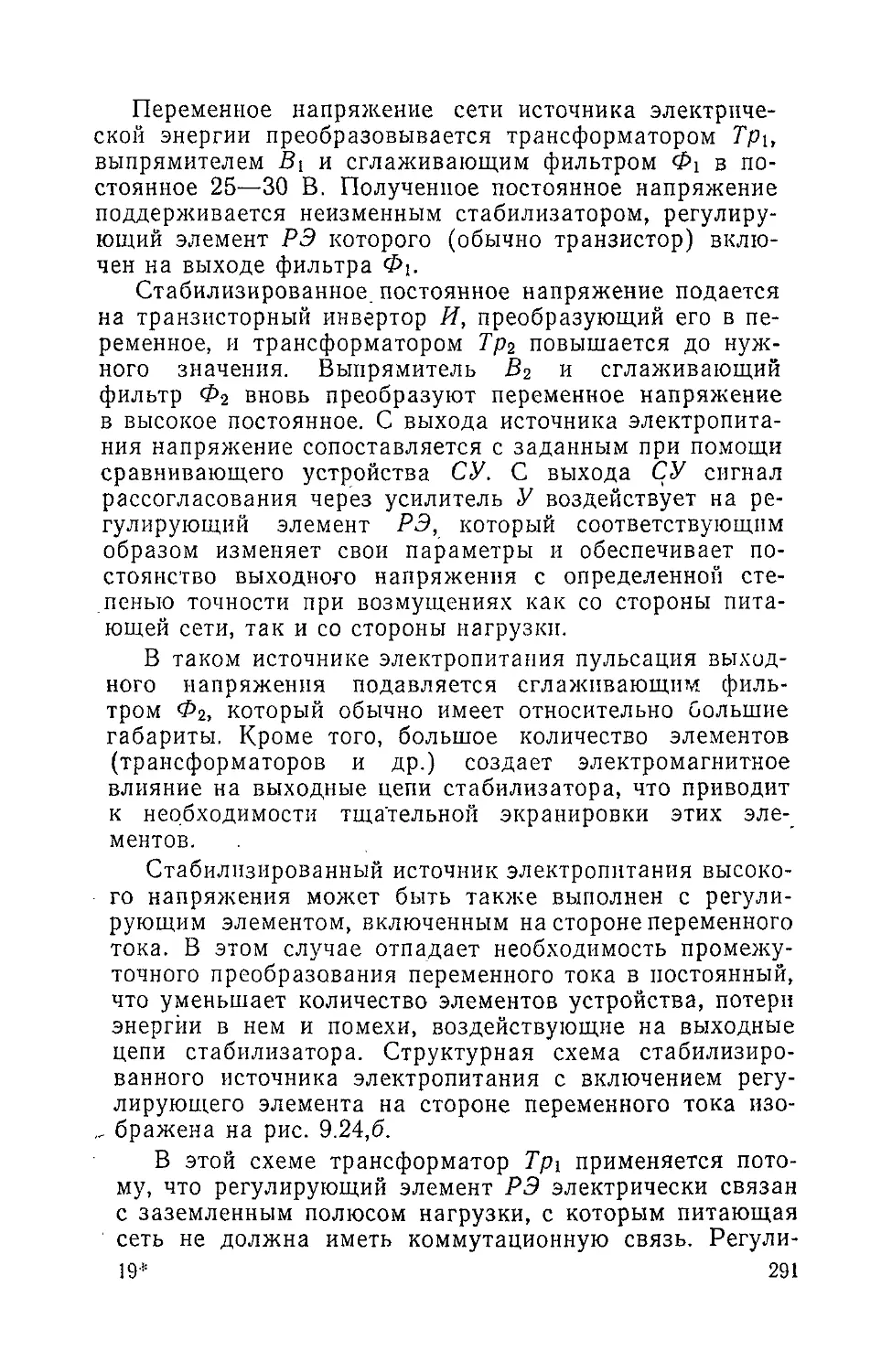
На рис. 1.3,а приведена эквивалентная схема магнитной цепи, где Я^/ст/цгЦоЗ; i/?B=ZB/poS. На рис. 1.3,5 показаны зависимости Вт(Н) для разных значений /в броневого ленточного магнитопровода из холоднокатаной стали при частоте 50 Гц, из которого видно, что увеличение воздушного зазора приводит к расширению линейной области.
Нелинейность кривой намагничивания ферромагнитного сердечника вызывает искажение формы кривой 8
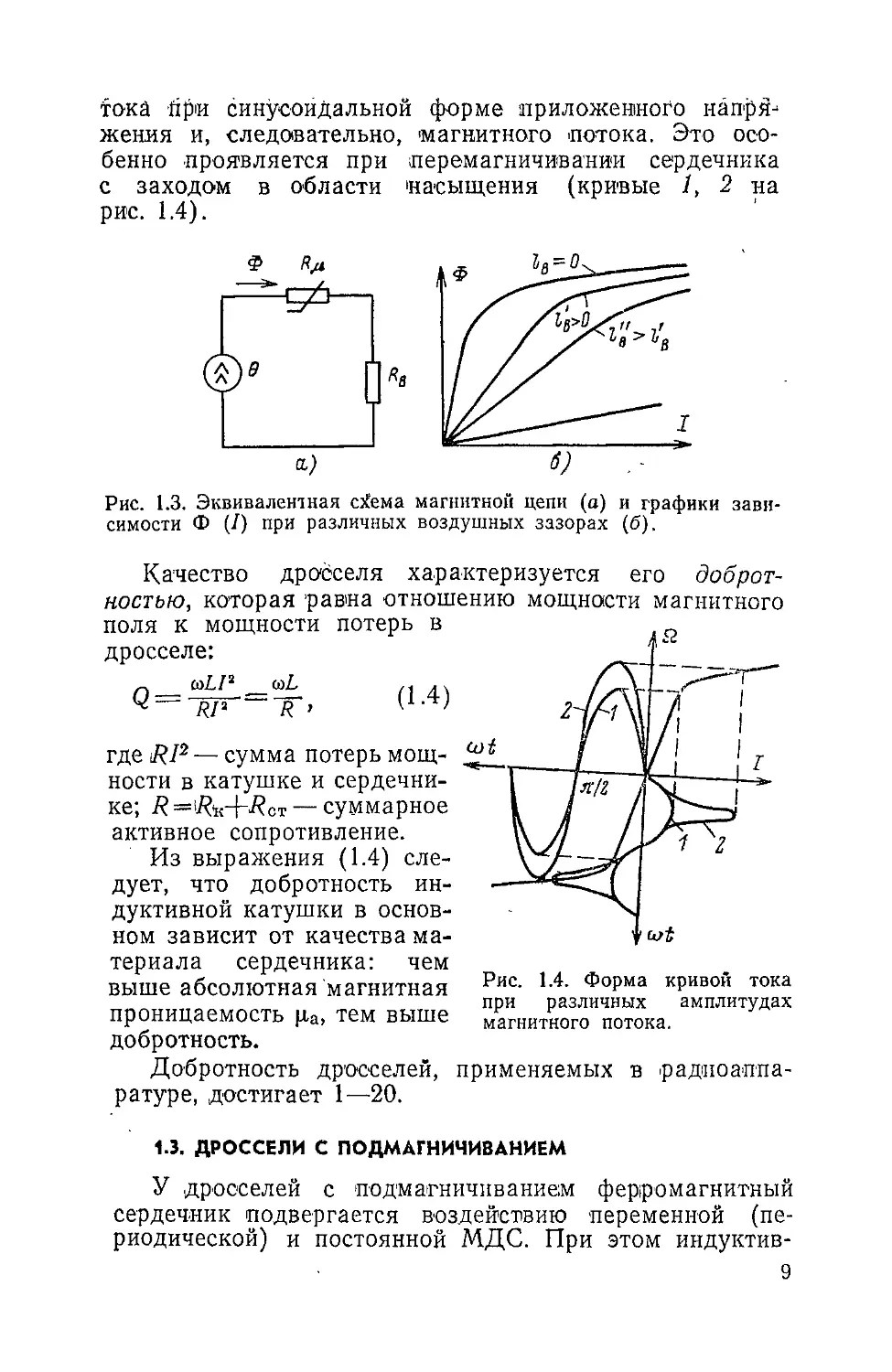
тока йри синусоидальной форме приложенного напря^ жения и, следовательно, магнитного потока. Это особенно проявляется при перемагничивании сердечника с заходом в области насыщения (кривые 1, 2 на рис. 1.4).
Рис. 1.3. Эквивалентная сХема магнитной цепи (а) и графики зависимости Ф (/) при различных воздушных зазорах (б).
Качество дросселя характеризуется его добротностью, которая равна отношению мощности магнитного
поля к мощности потерь в дросселе:
где 1R12 — сумма потерь мощности в катушке и сердечнике; — суммарное
активное сопротивление.
Из выражения (1.4) следует, что добротность индуктивной катушки в основном зависит от качества материала сердечника: чем выше абсолютная магнитная проницаемость |га, тем выше добротность.
Рис. 1.4. Форма кривой тока при различных амплитудах магнитного потока.
Добротность дросселей, применяемых в радиоаппаратуре, достигает 1—20.
1.3. ДРОССЕЛИ С ПОДМАГНИЧИВАНИЕМ
У дросселей с подмагничиванием ферромагнитный сердечник подвергается воздействию переменной (периодической) и постоянной МДС. При этом индуктив-
9
ность катушки зависит от режима перемагничивания ферромагнитного сердечника. Режим перемагничивания, в свою очередь, определяется значением постоянной МДС.
Если пренебречь потоками рассеяния и потерями в сердечнике, то для схемы на рис. 1.2 уравнение электрического состояния имеет вид:
u = Ri^-u^iR^-wSu-B-,
(1-5)
Рис. 1.5. Влияние наличия воздушного зазора на величину ДВ.
где Идр — падение напряжения на индуктивном сопротивлении катушки; 7?=/?к+^н — суммарное сопротивление катушки и нагрузки; ш—число витков катушки.
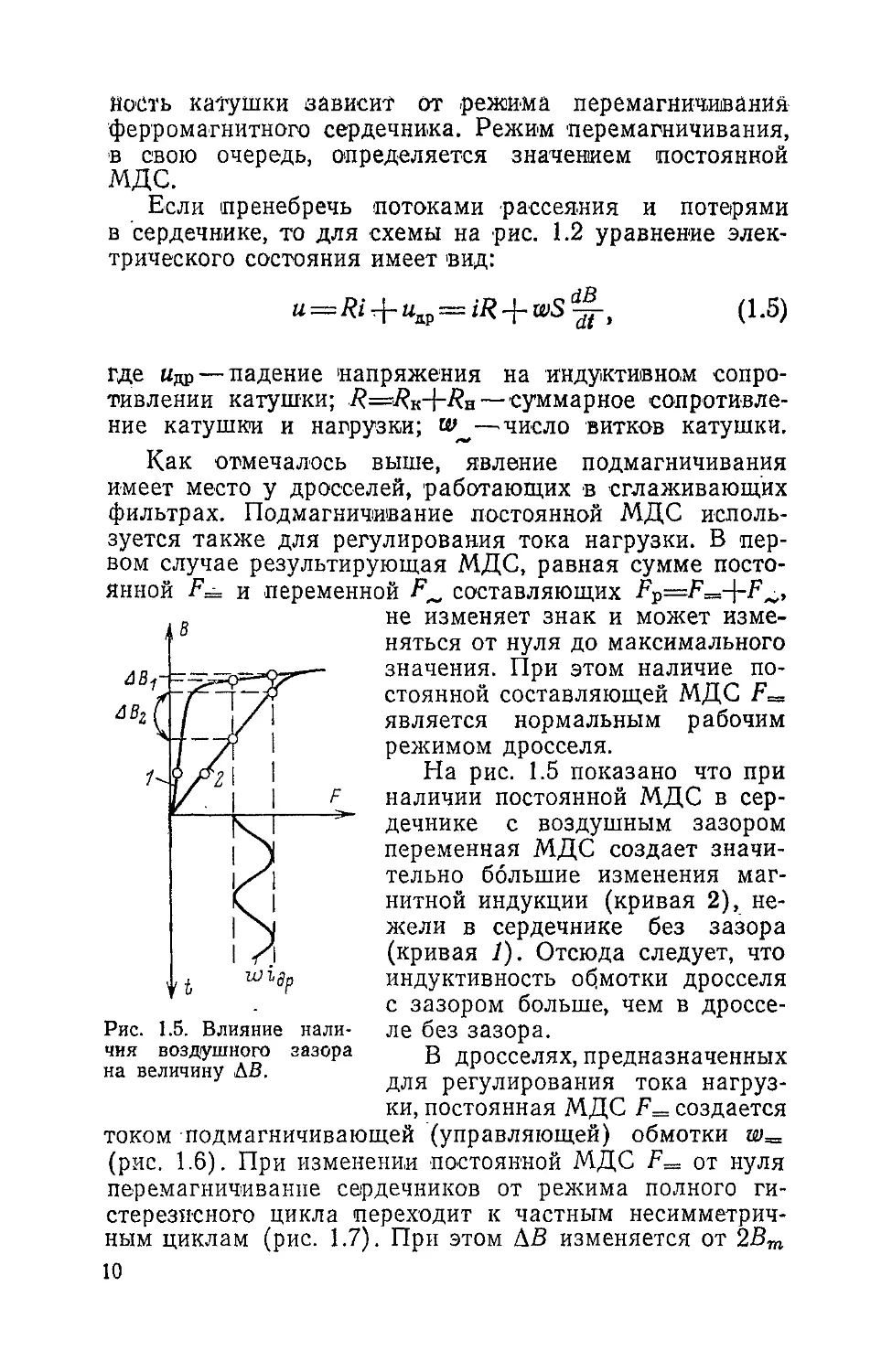
Как отмечалось выше, явление подмагничивания имеет место у дросселей, работающих в сглаживающих фильтрах. Подмагничивание постоянной МДС используется также для регулирования тока нагрузки. В первом случае результирующая МДС, равная сумме постоянной F= и переменной F~ составляющих FP=F=-|-F~, не изменяет знак и может изменяться от нуля до максимального значения. При этом наличие постоянной составляющей МДС F= является нормальным рабочим режимом дросселя.
На рис. 1.5 показано что при наличии постоянной МДС в сердечнике с воздушным зазором переменная МДС создает значительно большие изменения магнитной индукции (кривая 2), нежели в сердечнике без зазора (кривая Г). Отсюда следует, что индуктивность обмотки дросселя с зазором больше, чем в дросселе без зазора.
В дросселях, предназначенных для регулирования тока нагрузки, постоянная МДС F= создается
током подмагничивающей (управляющей) обмотки гу_ (рис. 1.6). При изменении постоянной МДС F= от нуля перемагничивание сердечников от режима полного гистерезисного цикла переходит к частным несимметричным циклам (рис. 1.7). При этом ДВ изменяется от 2Вт
10
Рис. 1.6. Дроссель с подмагничиванием.
Рис. 1.7. Частные циклы перемагничивания сердечника при различных Дт. ;_ру„0; ДВ~2Вт; 2-4-Гу>0; ДВ'<2Вт; ДВ"<ДВ'; ДВ"'<ДВ''.
(при 7г==0) до минимального значения (при F^— =Fm~), что соответствует изменению тока в цепи нагрузки согласно (1.5) от Imin ДО /щах— U/7?н (при ЛВ=0).
1.4. ПРИНЦИП ДЕЙСТВИЯ И УСТРОЙСТВО МАГНИТНЫХ УСИЛИТЕЛЕЙ
Магнитным усилителем (МУ) называют электротехническое устройство, служащее для изменения тока в цепи нагрузки посредством подмагничивания ферромагнитного сердечника постоянной МДС.'
Основными элементами магнитного усилителя являются два замкнутых ферромагнитных сердечника с несколькими обмотками. В качестве сердечников в МУ малой и средней мощности, как правило, используются ленточные кольцевые или прямоугольные сердечники одинакового сечения из магнитомягкого материала. Сердечники МУ работают в условиях одновременного намагничивания переменным и постоянным магнитными полями. Для создания этих полей на каждом из сердечников расположены обмотка переменного тока, которая является рабочей с числом витков и обмотки постоянного тока. Рабочие обмотки и обмотки управления обоими сердечниками имеют одинаковое число витков. В некоторых случаях МУ имеет общую обмотку управления, которая наматывается одновременно на оба сердечника.
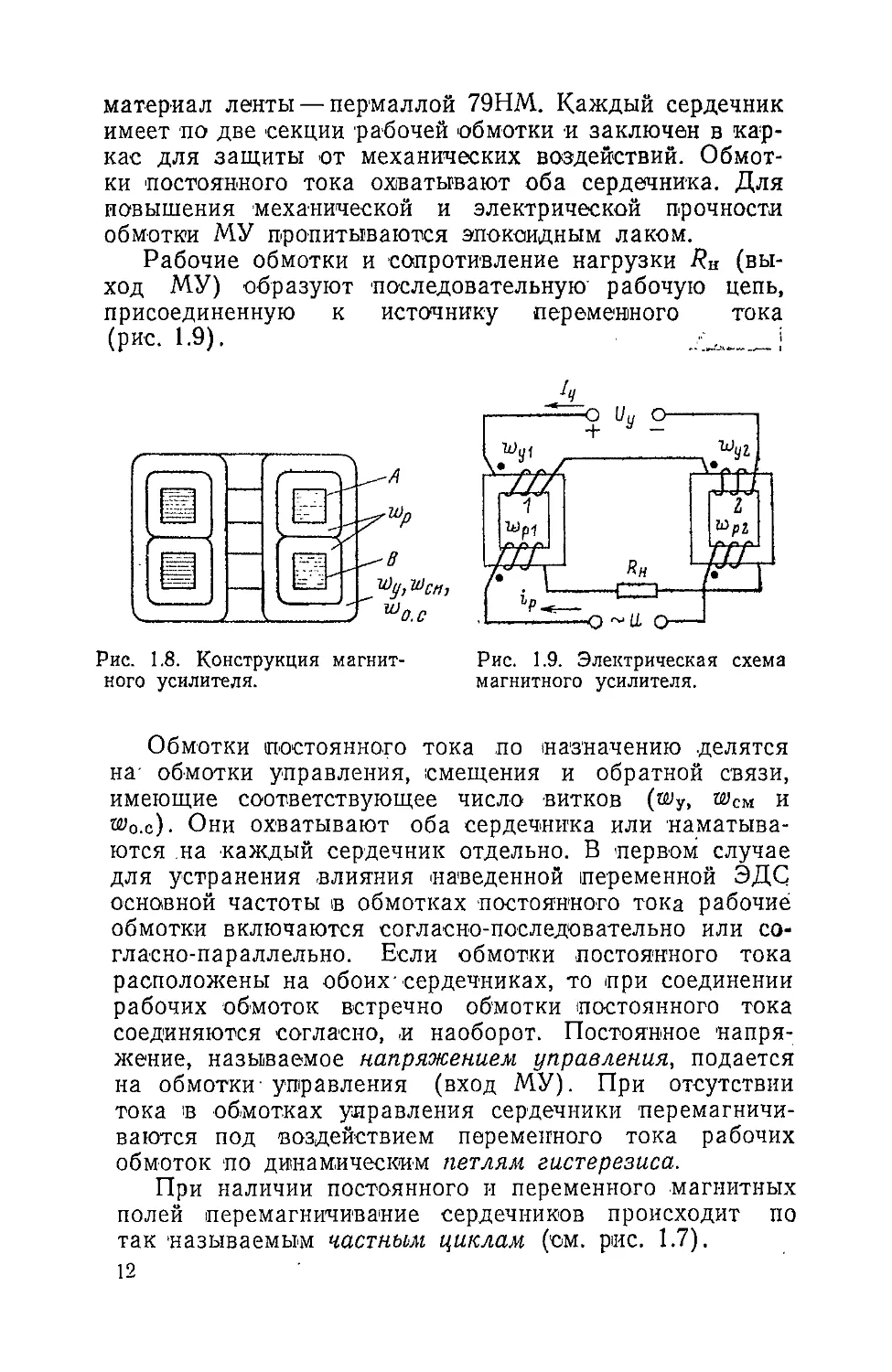
В качестве примера на рис. 1.8 показан разрез МУ типа ТУМ-А. Магнитный усилитель состоит изГ сердечников А и В, выполненных из ленты толщиной 0,05 мм;
11
материал ленты — пермаллой 79НМ. Каждый сердечник имеет по две секции рабочей обмотки и заключен в каркас для защиты от механических воздействий. Обмотки постоянного тока охватывают оба сердечника. Для повышения механической и электрической прочности обмотки МУ пропитываются эпоксидным лаком.
Рабочие обмотки и сопротивление нагрузки (выход МУ) образуют последовательную рабочую цепь, присоединенную к источнику переменного тока (рис. 1.9). j
Рис. 1.8. Конструкция магнитного усилителя.
Рис. 1.9. Электрическая схема магнитного усилителя.
Обмотки постоянного тока по назначению делятся на- обмотки управления, смещения и обратной связи, имеющие соответствующее число витков (Wy, wCJil и Wc). Они охватывают оба сердечника или наматываются на каждый сердечник отдельно. В первом случае для устранения влияния 'наведенной переменной ЭДС основной частоты в обмотках постоянного тока рабочие обмотки включаются согласно-последовательно или согласно-параллельно. Если обмотки постоянного тока расположены на обоих-сердечниках, то при соединении рабочих обмоток встречно обмотки постоянного тока соединяются согласно, ,и наоборот. Постоянное напряжение, называемое напряжением управления, подается на обмотки-управления (вход МУ). При отсутствии тока в обмотках управления сердечники перемагничиваются под воздействием переменного тока рабочих обмоток по динамическим петлям гистерезиса.
При наличии постоянного и переменного магнитных полей перемагничивание сердечников происходит по так называемым частным циклам (см. рис. 1.7).
12
, Уравнение электрического состояния рабочей цепи магнитного усилителя (рис. 1.9) для мгновенных значений при активной нагрузке имеет вид:
(1-6)
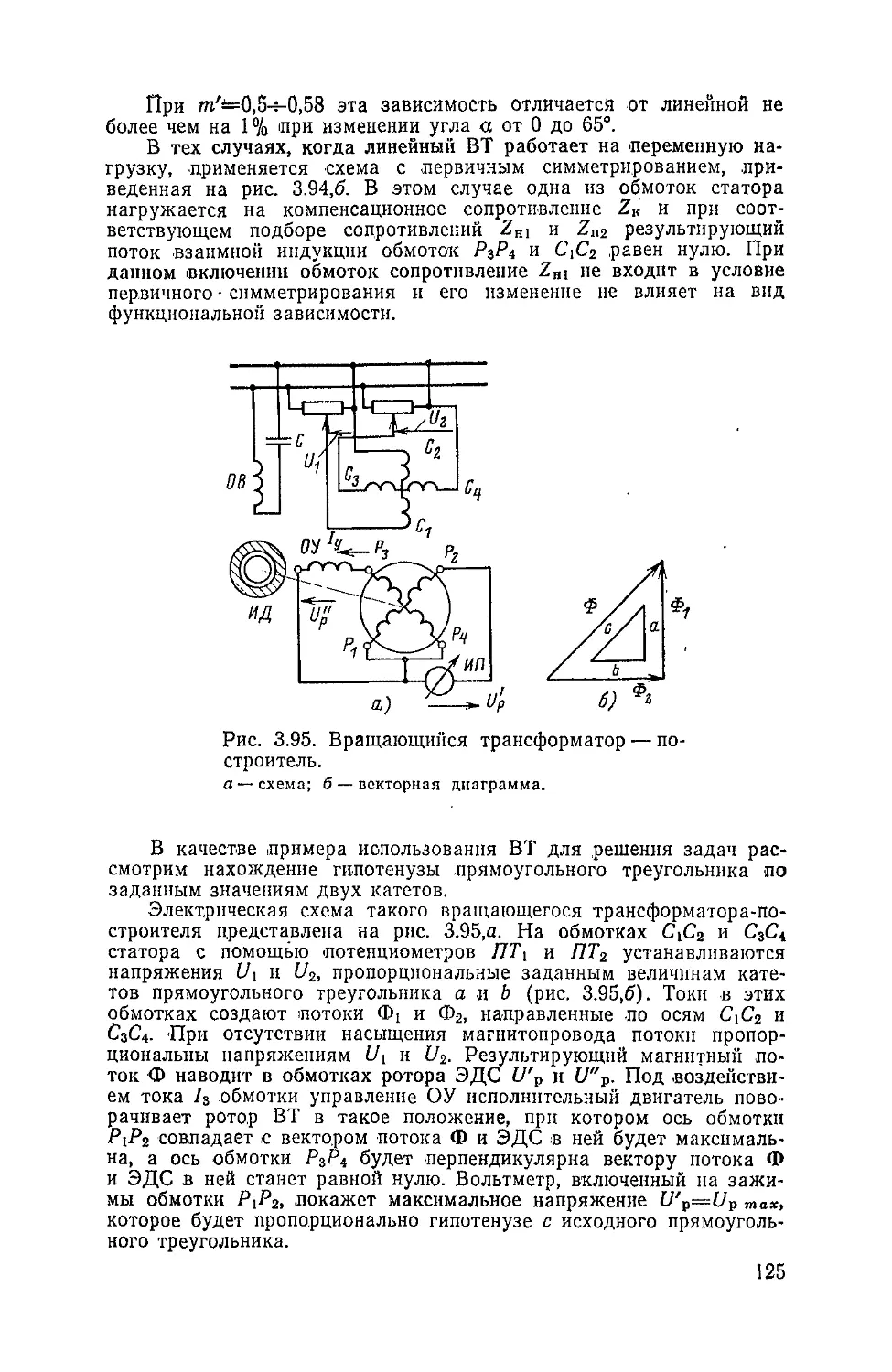
где Вг и В2 — индукция в сердечниках 1 и 2; L° — индуктивность рассеяния; S — сечение сердечников; ip— рабочий ток; и — напряжение источника питания; R — активное сопротивление, равное сумме сопротивлений нагрузки Дн и рабочих обмоток £р.
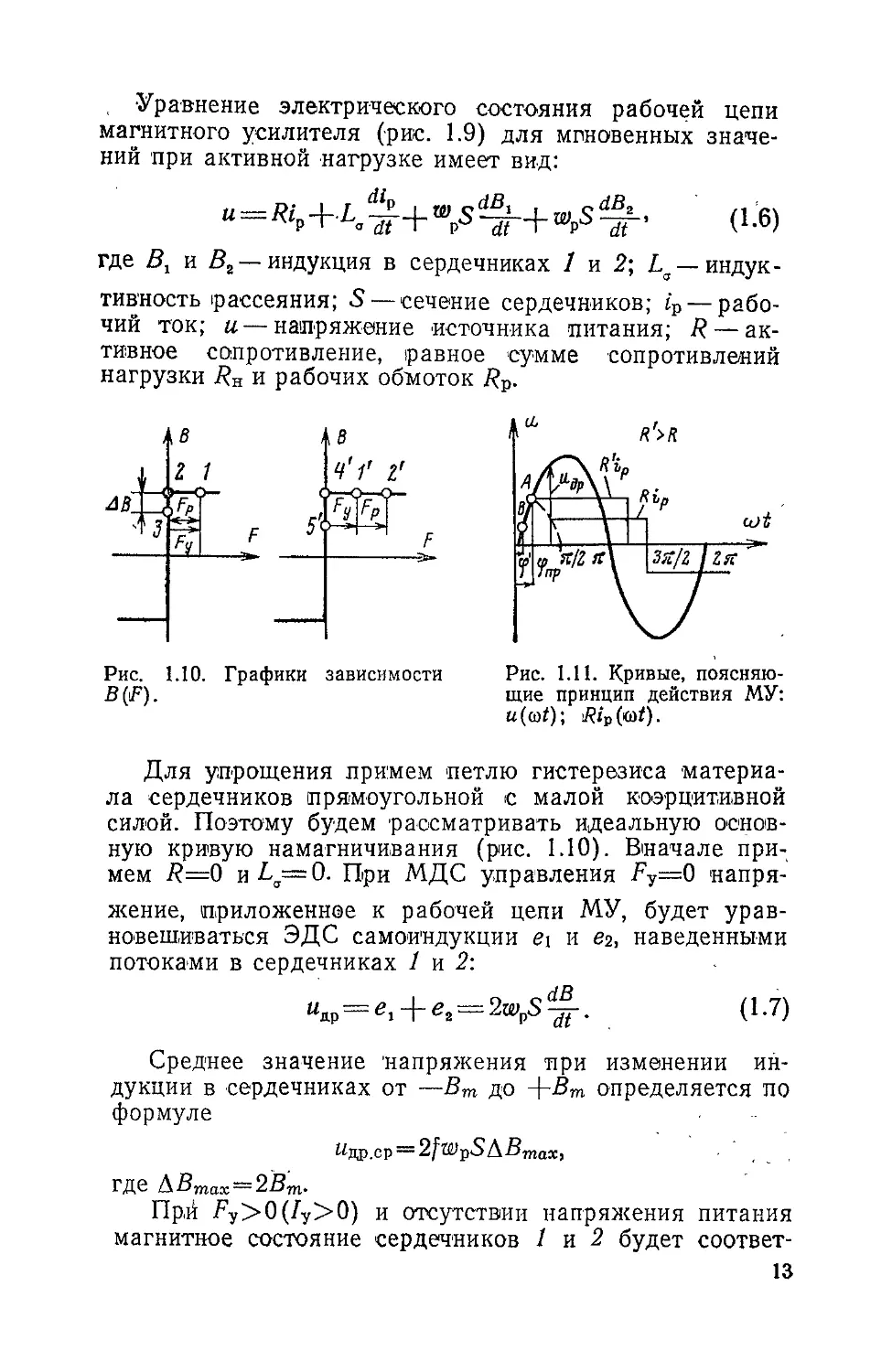
Рис. 1.10. Графики зависимости B(f).
Рис. 1.11. Кривые, поясняющие принцип действия МУ: «(со/); i/?jp(<of).
Для упрощения примем петлю гистерезиса материала сердечников прямоугольной с малой коэрцитивной силой. Поэтому будем рассматривать идеальную основную кривую намагничивания (рис. 1.10). Вначале примем /?=0 иАа=0. При МДС управления 7у=0 напряжение, приложенное к рабочей цепи МУ, будет уравновешиваться ЭДС самоиндукции е\ и ег, наведенными потоками в сердечниках 1 и 2:
u^e^e^2wpSd-^. (1.7)
Среднее значение напряжения при изменении индукции в сердечниках от —Вт до +Вт определяется по формуле
^др.ср — 2^йур5 А-Втаж,
где &Втах=2Вт.
Прй Fy>0(Zy>0) и отсутствии напряжения питания магнитное состояние сердечников / и 2 будет соответ-
13
спвавать точкам 1 и Г на рис. 1.10. Предположим, что-источник переменного напряжения включается в момент, когда u=Um (переходный процесс отсутствует). При этом ток в рабочих обмотках изменится скачком, й магнитное состояние материала сердечника 7 будет характеризоваться точкой 2, а сердечника 2— точкой 2'.
В сердечнике 1 индукция начнет изменяться, например, до точки 3, т. е. ABi>0, что вызовет появление ЭДС в1 в рабочей обмотке, которая уравновешивает приложенное напряжение. Магнитная индукция сердечника 2 не изменяется, следовательно, ег=0.
Таким образом, в первый полупериод все напряжение сети приложено к рабочей обмотке первого сердечника. Во второй полупериод картина изменится — на-пряжение сети будет уравновешиваться ЭДС, создавае-мой в рабочей обмотке второго сердечника вследствие изменения магнитного состояния от точки 2' к точке 4? и затем до точки 5'.
Из рассмотренного следует, что для изменения индукции в сердечниках (рис. 1.10) при Fy>0 необходимо, чтобы ток рабочей обмотки !гр изменился скачкой до значения £р= —7у, что соответствует:
Fp=a'Fy или ®р7р=ауу7у, (1.8))
где 7Р — среднее значение тока в рабочей обмотке.
Из выражения (1.8) и рис. 1.11 видно, что рабочий ток изменяется во времени по прямоугольному закону.
При Д>0 увеличение тока рабочих обмоток вызывает увеличение активной составляющей падения напряжения в рабочей цепи
^Zp.cp=^cp cos ср. (1.9)
При определенном значении Л> с увеличением R фазовый сдвиг ф между напряжением питания и и током гр уменьшается (рис. 1.11). Точка А соответствует моменту времени <рПр, когда u=R'iv, а «1=0. При этом значение ip достаточно, чтобы магнитное состояние сердечника довести до точки 2 (см. рис. 1.10), т. е. обеспечить выполнение равенства (1.8). Если теперь увеличить R, то в момент скачка рабочего тока ср' будет меньше <рПр, а значение ограничивается напряжением питания u=4Jm sin <р (точка В на рис. 1.11). В этот момент гур(р будет меньше пуу/у. Через промежуток времени «Рпр'—<рЛ наступит равенство tt>pfp=a>yfy, но вследствие того, что фовма .кривой МО отличается от прямоугольной, закон равенства МДС (1.8) нарушается.
Для предельного режима (точка А на рис. 1.11) <Рпр определяется из равенства
- - « 2 tgfnp = ит
14
Отсюда <pnp = arctg(2/n) =32’30', cos <рПр=0,844. Подставляя полученное значение cos<pnp в (1.9), получаем:
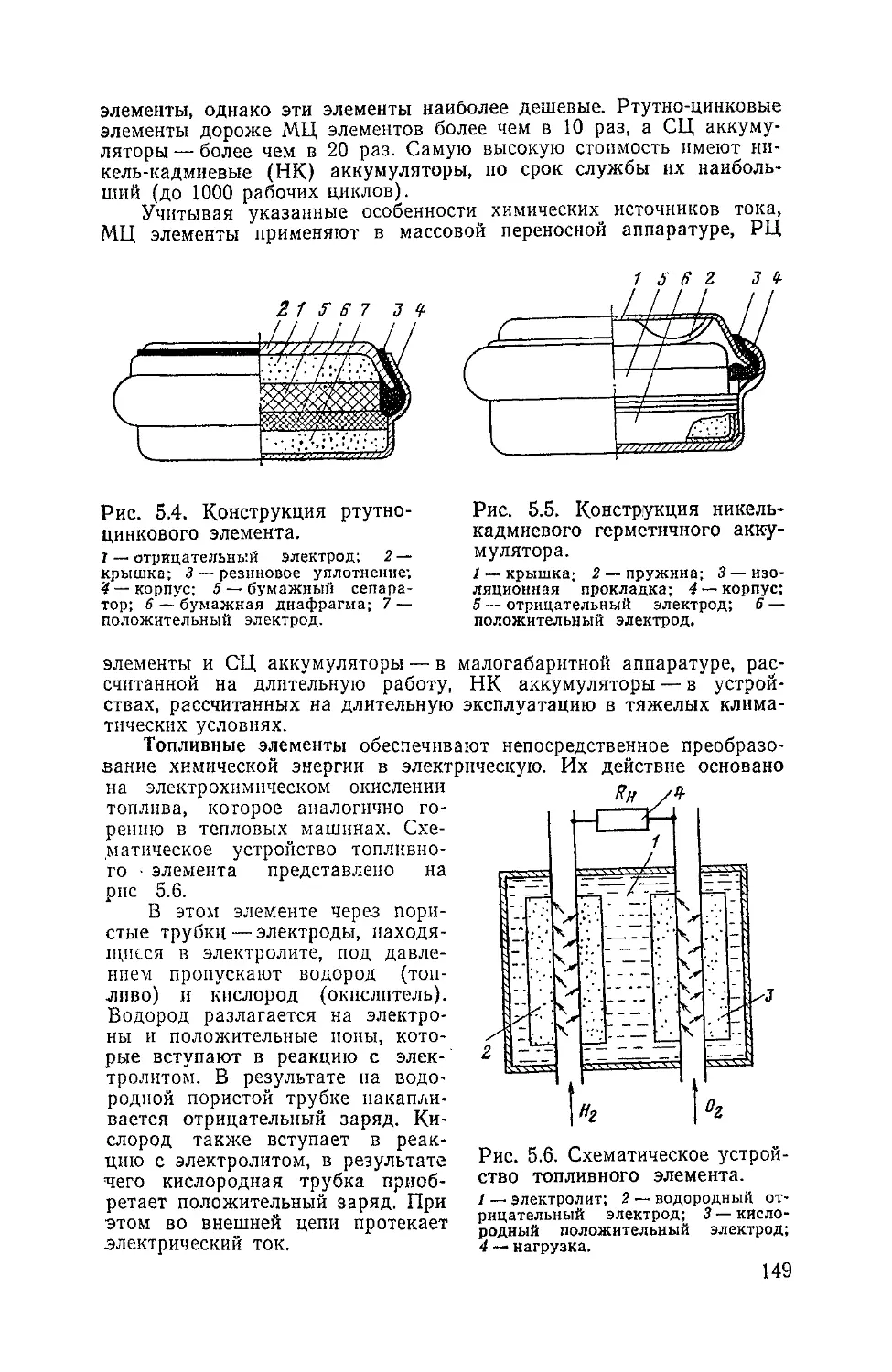
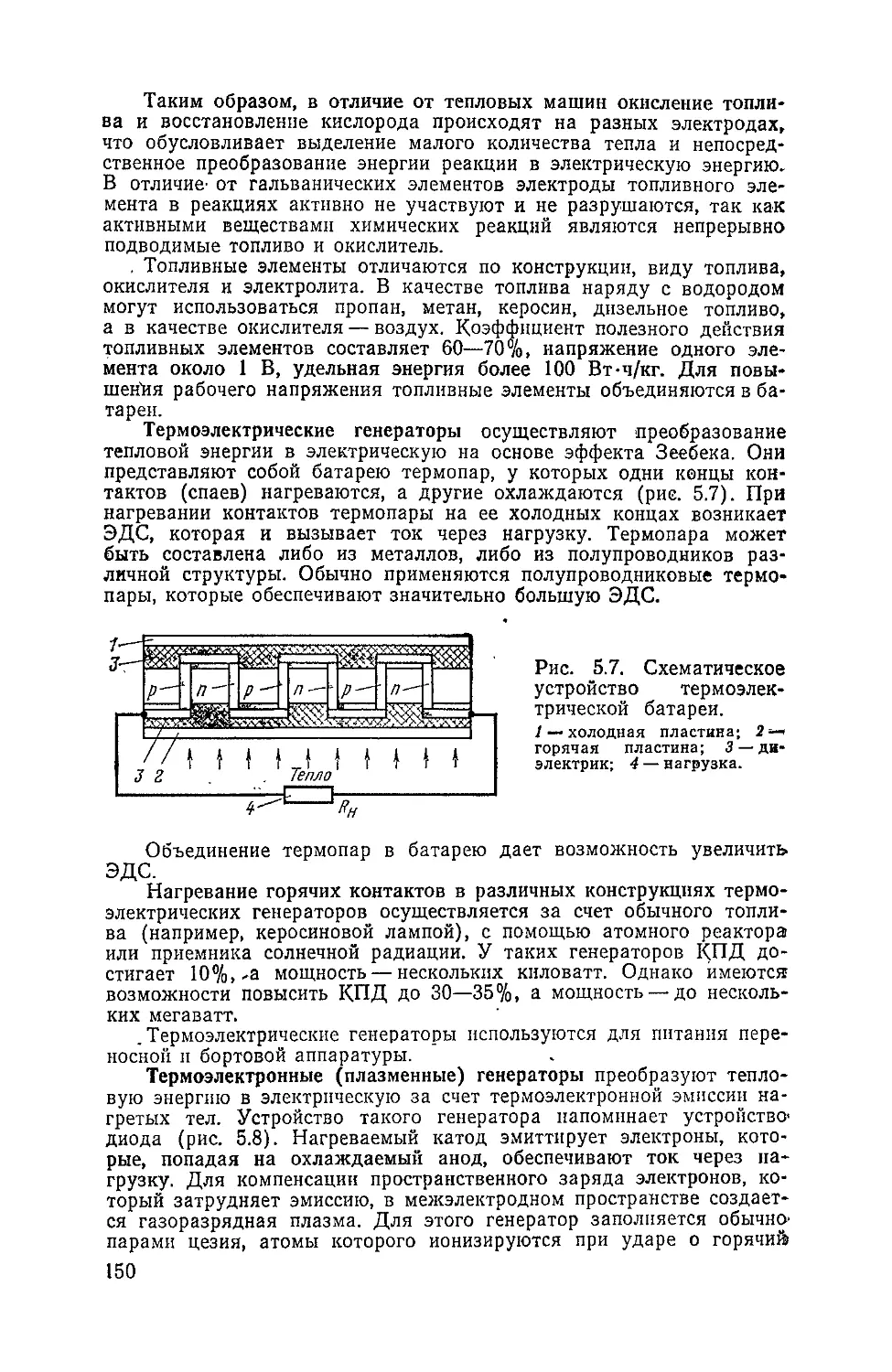
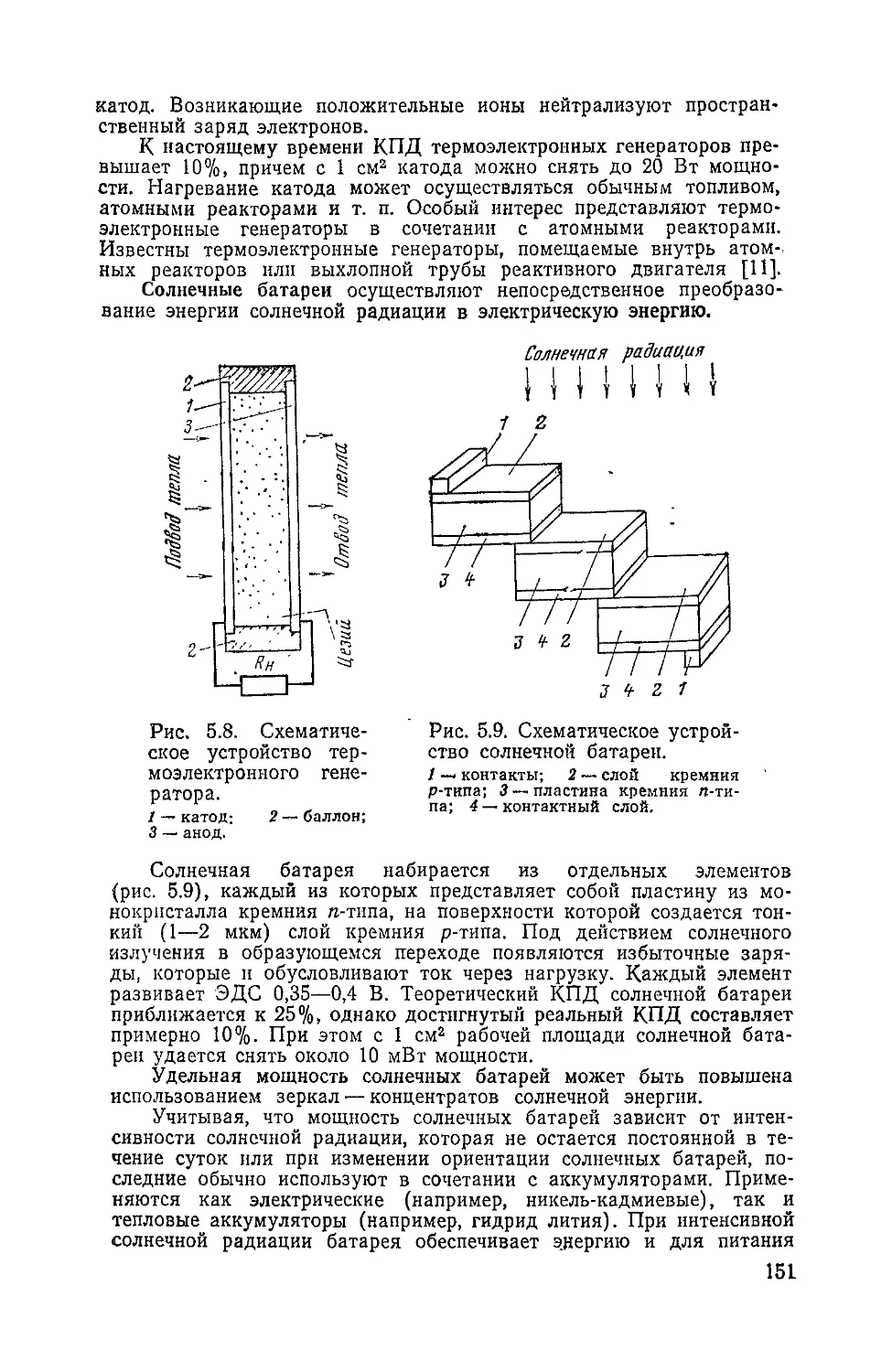
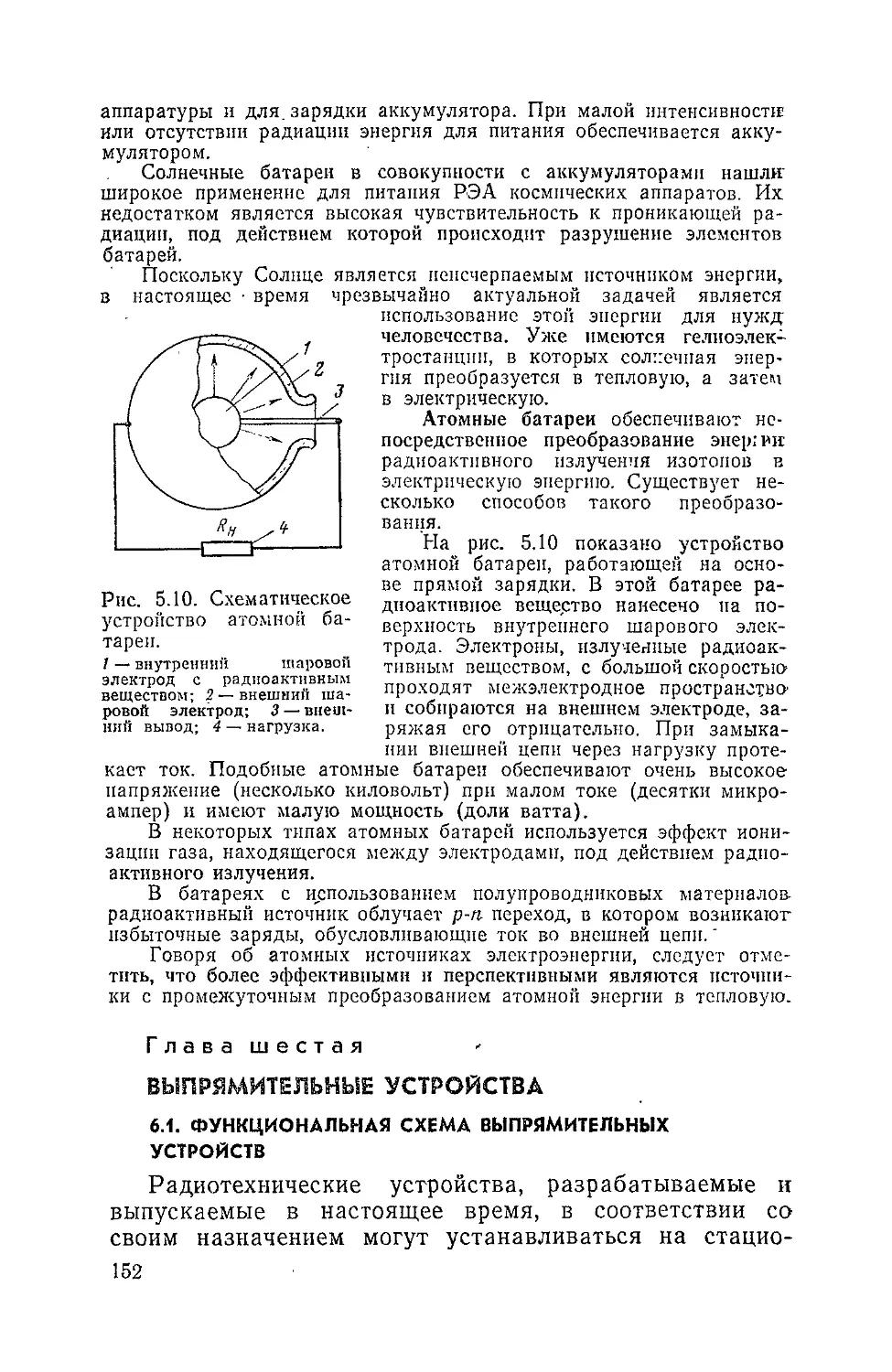
0,844Уср Л>.пр < ft
(1-10)
Из (1.10) следует, что при заданных Uep и R равенство МДС рабочей обмотки и обмотки управления нарушается при /р>/р.пр и характеристика управления МУ, пройдя область АБ на рис. 1.12, вырождается в горизонтальную прямую.
При изменении R (или напряжения питания) предельное значение ZP также будет изменяться. Если изменить полярность напряжения управления, то характеристика управления МУ, сохраняя тот же характер зависимости /p(wy7y), переместится во второй квадрант.
Вследствие отличия реальной кривой перемагничивания сердечников от прямоугольной, а также из-за
рассеяния энергии в рабочих ной формы напряжения питания кривая тока tp отличается от прямоугольной. Кроме того, при изменении результирующей МДС магнитная индукция будет изменяться одновременно в обоих сердечниках. Поэтому в уравнении (1.7) необходимо учитывать одновременное действие ei и Й2-С учетом указанных факторов зависимость /р = ф(/у) рассчитывается по формуле
обмотках и синусоидаль-
А ШрТр
Рис. 1.12. Характеристики управления МУ.
1 —• простейшего; 2 — с внешней положительной обратной связью; 3 — со смещением.
Wxr
(1-11)
где | — коэффициент, учитывающий реальную форму кривой намагничивания сердечника.
Для реальных сердечников, выполненных из качественных 'электротехнических сплавов, не превосходит 0,02—0,04. Кроме того, в реальных МУ вследствие наличия коэрцитивной силы петли магнитного гистерезиса материала при /у=0 /ртт>0 (см. рис. 1.12), так как для перемагничивания сердечников затрачивается электрическая энергия, пропорциональная площади динамической петли гистерезиса.
15
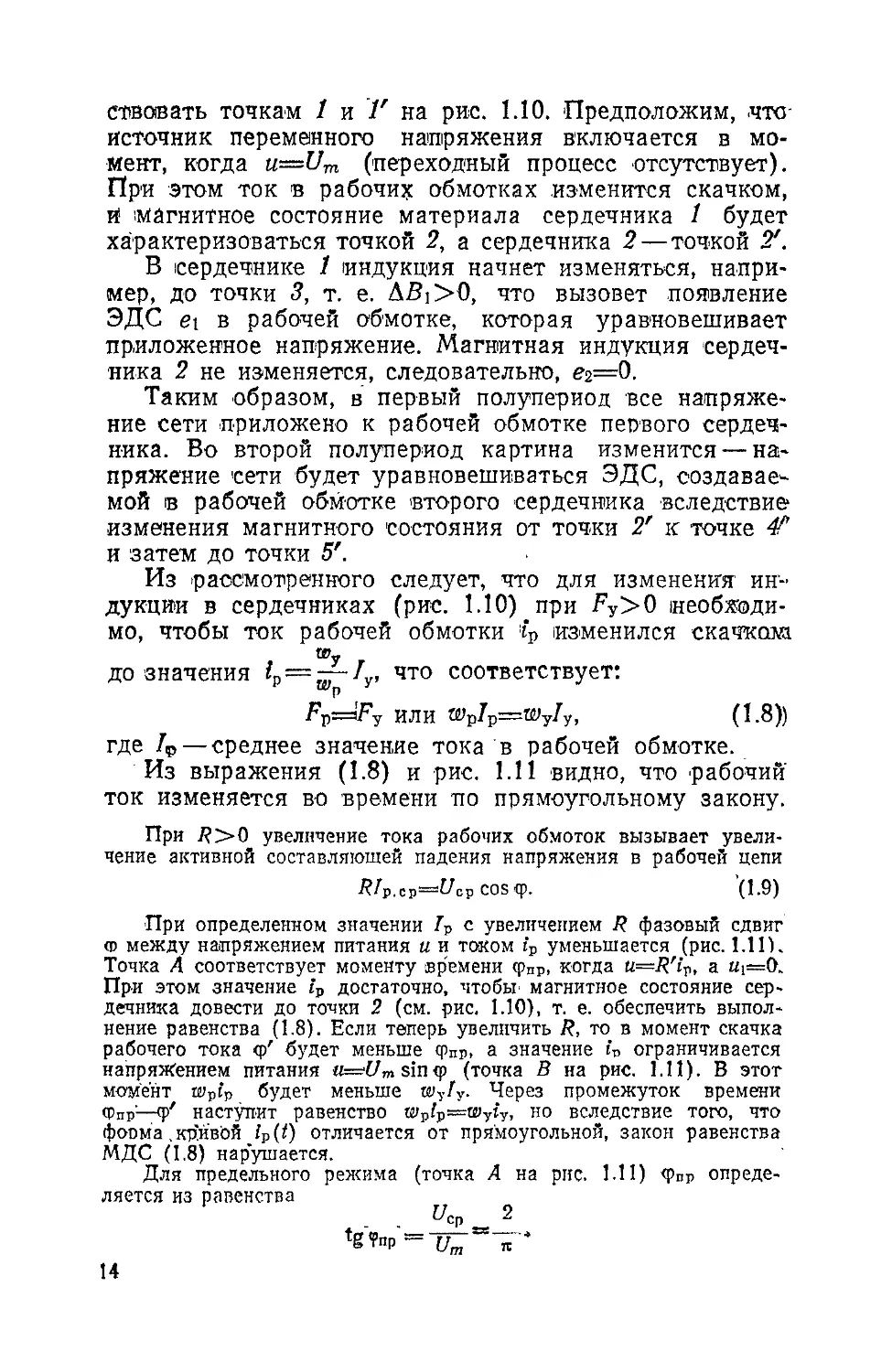
1.5. МАГНИТНЫЙ УСИЛИТЕЛЬ С ОБРАТНОЙ СВЯЗЬЮ
При введении внешней обратной связи (рис. 1.13) Подмагничивание постоянным полем будет осуществляться двумя обмотками постоянного тока: управления дау и обратной связи w0.c. Последняя питается выпрямленным током рабочей цепи (или его частью). При /см—/р из (1.8) имеем:
Т т | к’см т
р Wp у wp Р-
В этом случае уравнение характеристик управления МУ имеет вид:
I — Wy I
р“ Wp(l-Ko,c)
(1-12)
где /Со.с=^о.с/®р — коэффициент обратной связи.
Рис. 1.13. Схема МУ с внешней обратной связью.
Рис. 1.14. Схема МУ с внутренней обратной связью.
Из выражения (1.12) следует, что. в МУ с положительной обратной связью по сравнению с МУ без обратной связи для получения одной и той же величины /р необходима меньшая МДС управления Fy (мощность управления). При этом минимум тока /р сместится во второй квадрант (кривая 2 на рис. 1.12).
Недостатком МУ с внешней обратной связью является увеличение сопротивления рабочей цепи или уменьшение максимального тока нагрузки, что уменьшает выходную мощность МУ.
Магнитные усилители с внутренней обратной связью с самоподмагничиванием свободны от этого недостатка. 16
Кроме того, ойи йе требуют специальной обмоткй обратной связи, роль которой выполняет рабочая обмотка. Поэтому МУ с внутренней обратной связью в настоящее время получили широкое применение в технике.
На рис. 1.14 изображена схема МУ с внутренней обратной связью и активной нагрузкой на постоянном токе. Для' упрощения будем считать, что выпрямители и сердечники имеют идеальные характеристики. Если пренебречь обратными токами вентилей обратной связи (Д1 и Дг), то работу МУ (процесс размагничивания и намагничивания) можно рассматривать для каждого сердечника отдельно. Процессы перемагничивания первого и второго сердечников будут аналогичны, но смещены на полупериод питающего напряжения. Уравнение электрического состояния рабочей цепи в первый полупериод для средних значений имеет вид:
Яср = /?/р+ Яср1,
где Д — суммарное сопротивление рабочей цепи (R— =Дн+Др+Дв; Дв —прямое сопротивление вентилей).
При отсутствии тока управления (/у=0) магнитное состояние сердечника в интервале рабочего полупериода (вентиль Д1 открыт) изменяется от точки 1 до точки 2 (рис. 1.15). В этом случае АВ = 0 (ЯСР1 = О), /р определяется по формуле
т _ 4J
Р““~7Г‘
Этот полупериод работы называют интервалом насыщения.
При работе МУ с положительной обратной связью большое значение приобретает ширина статической петли гистерезиса сердечников, оцениваемая коэрцитивной силой Нс (рис. 1.15).
При увеличении тока управления в отрицательном направлении до тех пор, пока w7Iy^Hcl&t, индукция не будет изменяться, так как внешнее поле меньше поля реакции сердечника (Яс). С момента, когда шу/у>Яс/ст, начнет изменяться индукция в сердечнике, при этом значение АВ зависит от -величины и длительности действия разности (Яу—Нс), называемой действующим полем АН. Перемагничивание сердечника будет происходить по частным циклам (рис. 1.15).
2—1056 17
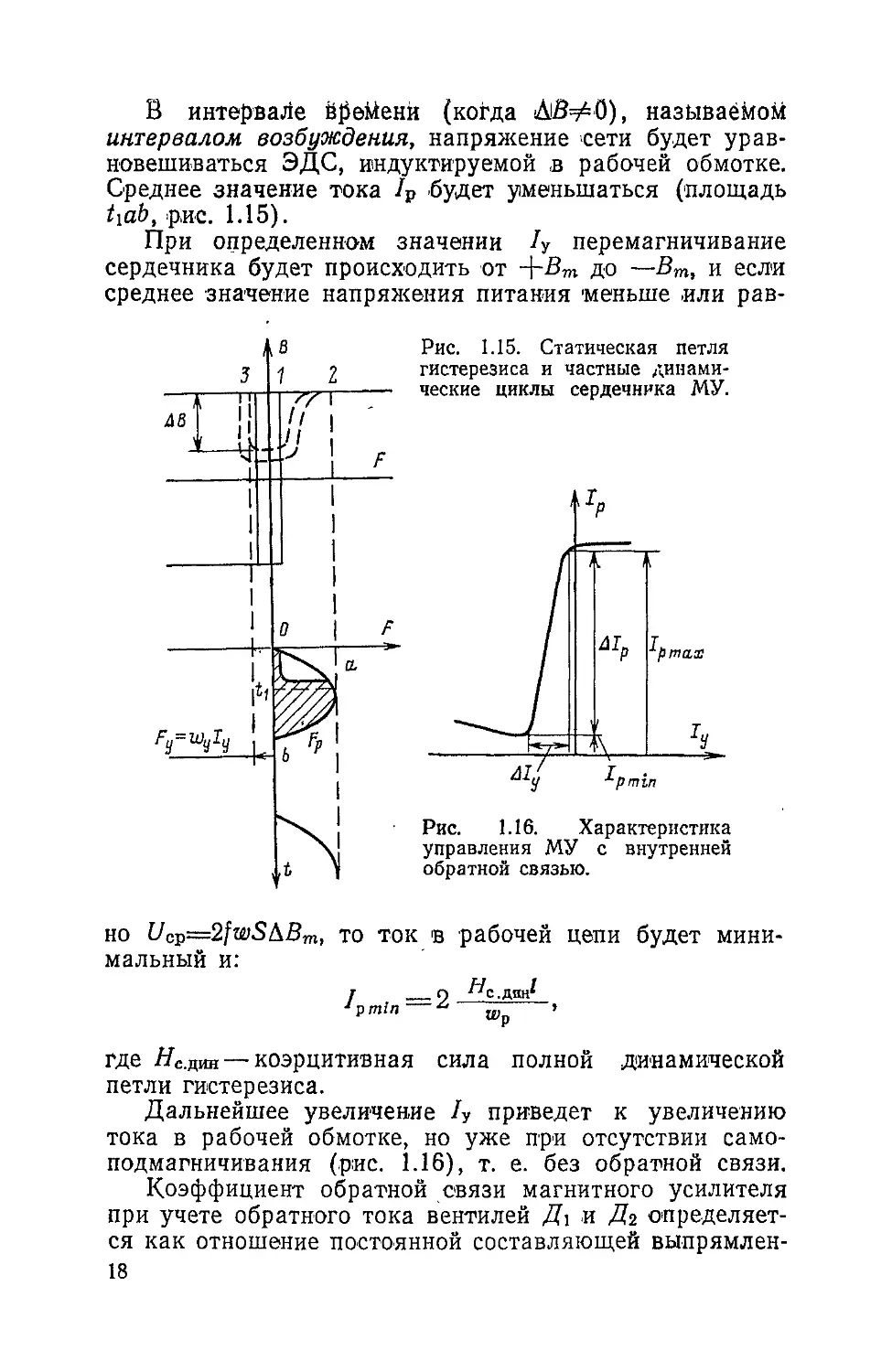
В интервале йрейенй (когда Aj8=#0), называё^ой интервалом возбуждения, напряжение сети будет уравновешиваться ЭДС, индуктируемой в рабочей обмотке. Среднее значение тока /Р будет уменьшаться (площадь t\ab, рис. 1.15).
При определенном значении /у перемагничивание сердечника будет происходить от +Вт до —Вт, и если среднее значение напряжения питания 'меньше или рав-
Рис. 1.15. Статическая петля гистерезиса и частные динамические циклы сердечника МУ.
Рис. 1.16. Характеристика управления МУ с внутренней обратной связью.
но Ucp—2fwSkBm, то ток в рабочей цепи будет минимальный и:
Г ____ п
Jpmin Wp »
где Нс.цш — коэрцитивная сила полной динамической петли гистерезиса.
Дальнейшее увеличение /у приведет к увеличению тока в рабочей обмотке, но уже при отсутствии само-подмагничивания (рис. 1.16), т. е. без обратной связи.
Коэффициент обратной связи магнитного усилителя при учете обратного тока вентилей Д\ и Дч определяется как отношение постоянной составляющей выпрямлен-18
яого тока Io к среднему значению переменного тока /р.ср'
j. ___ Jn гобр,д — ГПр,д °’С /р.ср Пзбр.д + Ли +/?р
где гпр.д и гОбр.д—прямое и обратное сопротивления вентилей.
При использовании германиевых или кремниевых приборов Гпр,д<Г0бр.д И Гобр.дЗ>Лр, ПОЭТО'Му 7(0.с= —0,9-4-0,95.
Регулирование коэффициента обратной связи можно осуществлять введением добавочного переменного сопротивления Rm, шунтирующего вентили обратной связи (см. рис. 1.14), что равноценно изменению обратного сопротивления вентилей Bi и Bj. Изменением Rm можно изменять К0.с в широких пределах.
Для получения релейного режима (Д0.е>1) обычно используется комбинированная обратная связь: внутренняя и внешняя. При Ло.с>1 рабочий ток скачком переходит от одного стабильного значения к другому. При увеличении отрицательного сигнала в точке а (рис. 1.17) происходит скачок в точку Ь, при уменьшении сигнала в точке с происходит скачок в точку d.
Предельный случай, когда /(0.0=1, называется кри-
тическим.
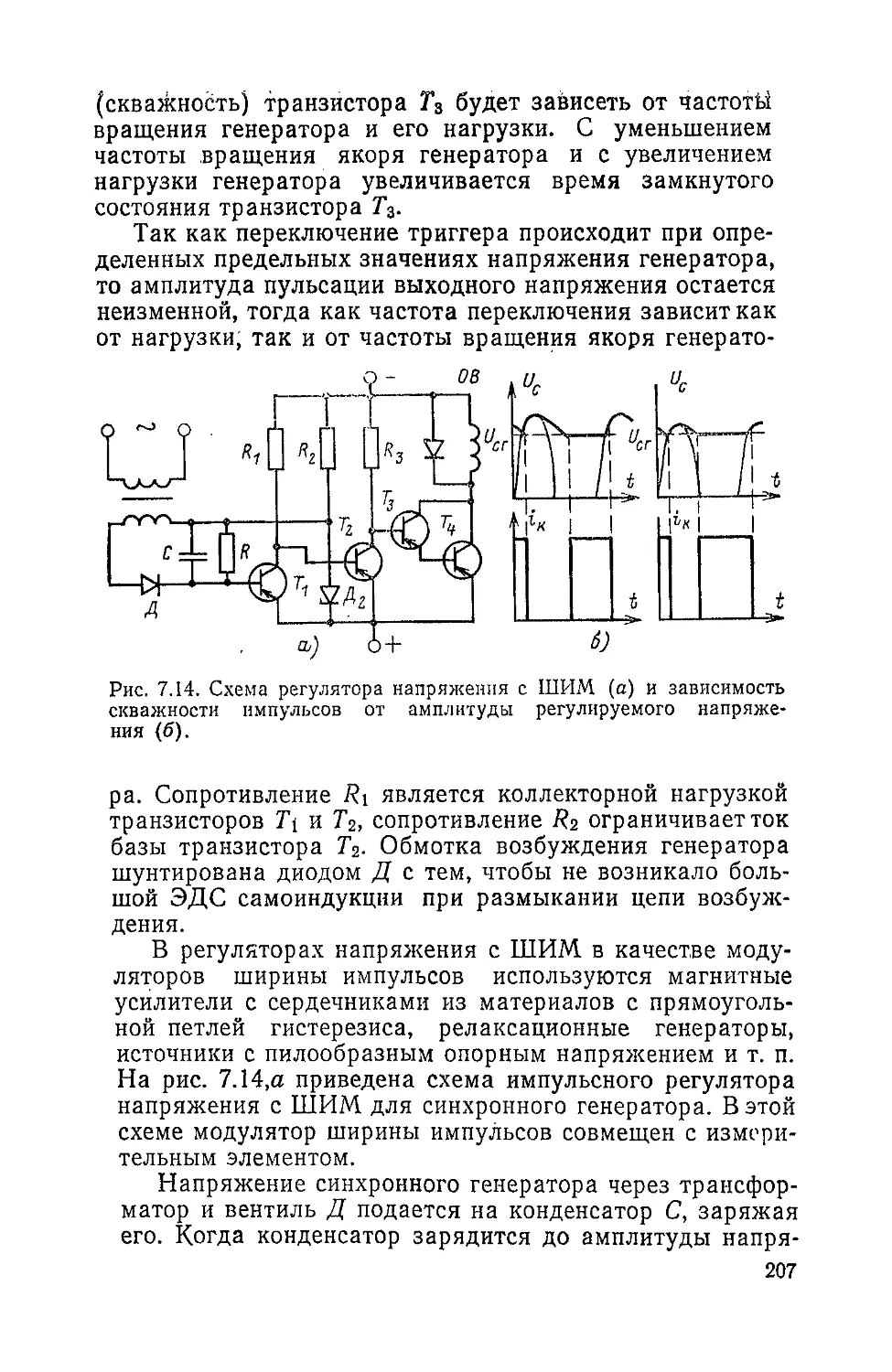
Для получения характеристик управления, сдвинутых по оси абсцисс вправо или влево, в МУ применяют
начальное подмагничивание, осуществляемое с помощью обмоток смещения, питаемых от независимого источника постоянного тока.
Если магнитный поток, создаваемый током обмотки смещения, смещает характеристику МУ вправо, то такое смещение называется положительным (см. рис. 1.12), в противоположном направлении'— отрицательным. Смещение ха-
Рис. 1.17. Характеристика управления Му в релейном режиме.
рактеристики управления МУ применяют для выбора начального тока в нагрузке, относительно которого происходит изменение /р при изменении тока управления /у.
Основными величинами, характеризующими свойства МУ, являются коэффициенты усиления:
тока и МДС
2*
к __Д/Р. „ __
Лг“~Д7у’ Wybfy
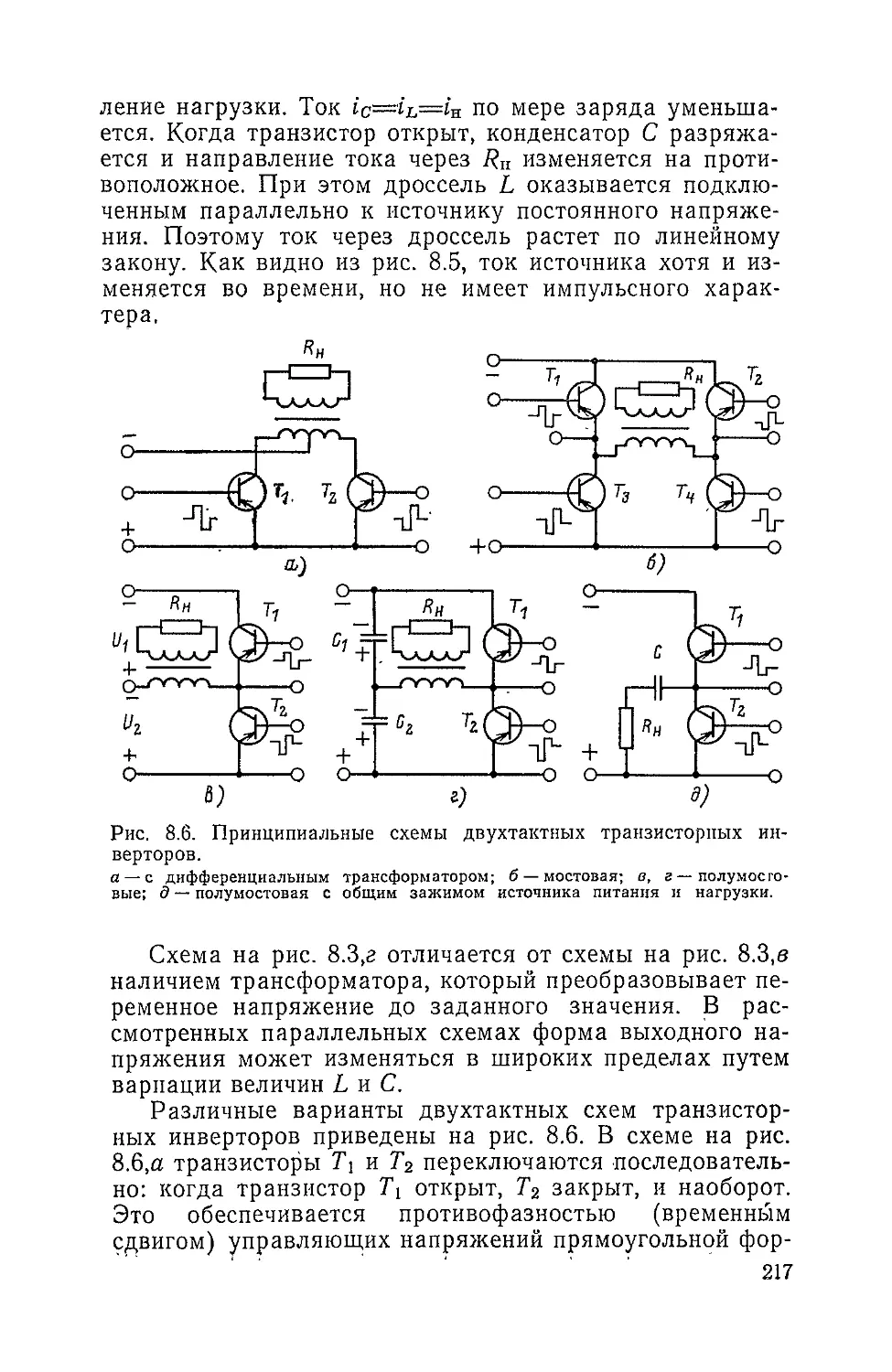
19
напряжения
К
_ ДЦ, u~~LUy ’
мощности
^p—t^Py RyM\‘
Динамические свойства МУ оцениваются постоянной времени тэ/ Считают, что переход от одного установившегося режима к другому характеризуется кривой переходного процесса. За время Зт8 переходный процесс практически заканчивается.
Постоянная времени тэ зависит от обмоточных данных МУ, от коэффициента усиления и определяется по формуле
л ,
Lwy‘
~dF~’ i-l
где п — число обмоток управления; ДУ1— сопротивление i-й обмотки управления; Fyt — МДС i-й обмотки управления; UB—RBIP — напряжение на нагрузке.
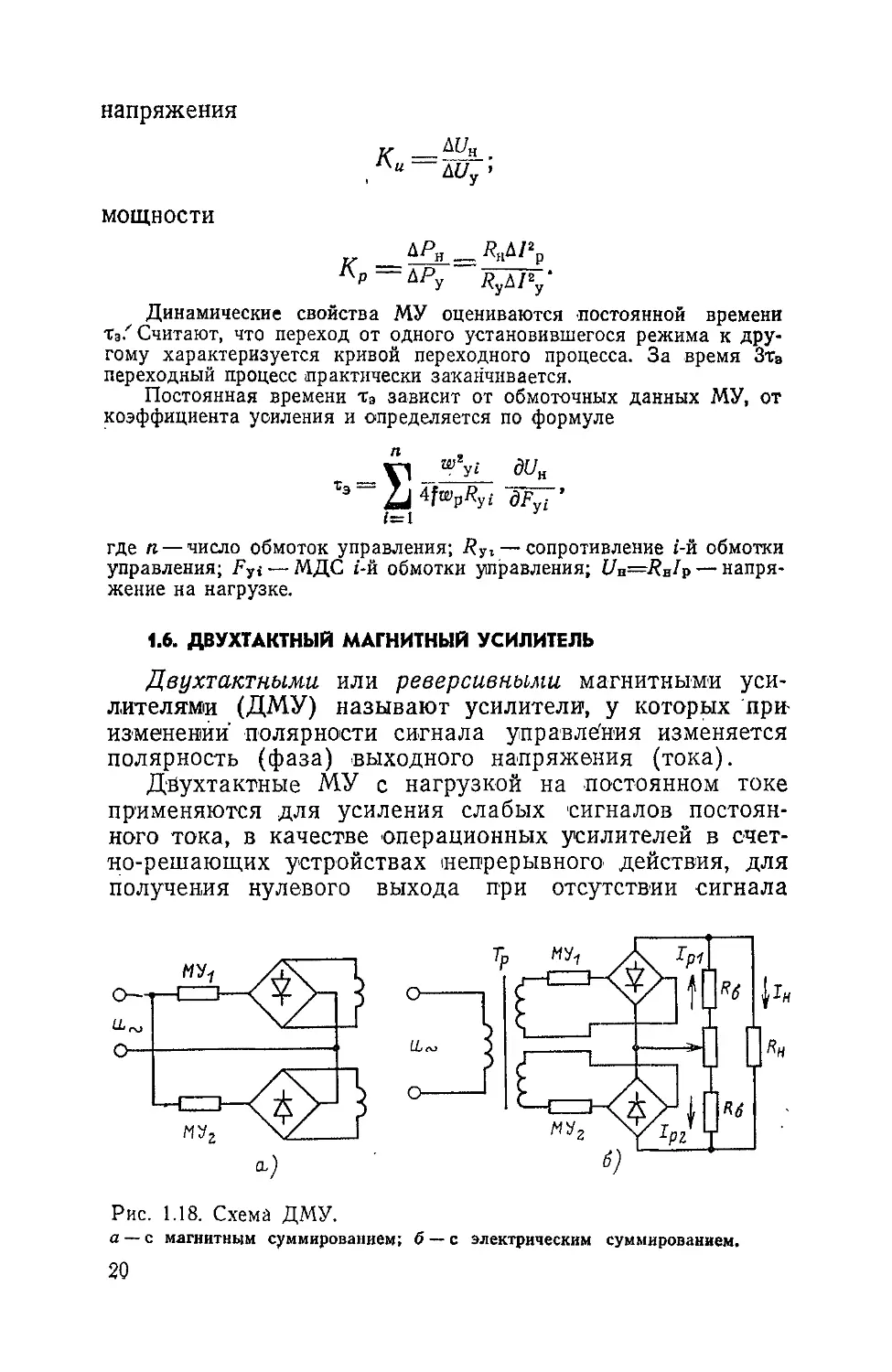
1.6. ДВУХТАКТНЫЙ МАГНИТНЫЙ УСИЛИТЕЛЬ
Двухтактными или реверсивными магнитными усилителями (ДМУ) называют усилители, у которых при-изменении полярности сигнала управления изменяется полярность (фаза) выходного напряжения (тока).
Двухтактные МУ с нагрузкой на постоянном токе применяются для усиления слабых сигналов постоянного тока, в качестве операционных усилителей в счетно-решающих устройствах «епрерывного действия, для получения нулевого выхода при отсутствии сигнала
Рис. 1.18. Схема ДМУ.
а — с магнитным суммированием; б — с электрическим суммированием.
20
и т. п. Двухтактные МУ находят также широкое применение в различных системах управления.
Двухтактные МУ обычно выполняются путем соединения двух однотактных МУ по мостовой или дифференциальной схеме. По схеме включения нагрузки ДМУ выполняются с магнитным и электрическим суммированием выходных сигналов.
Схема ДМУ с магнитным сум
мированием сигналов приведена
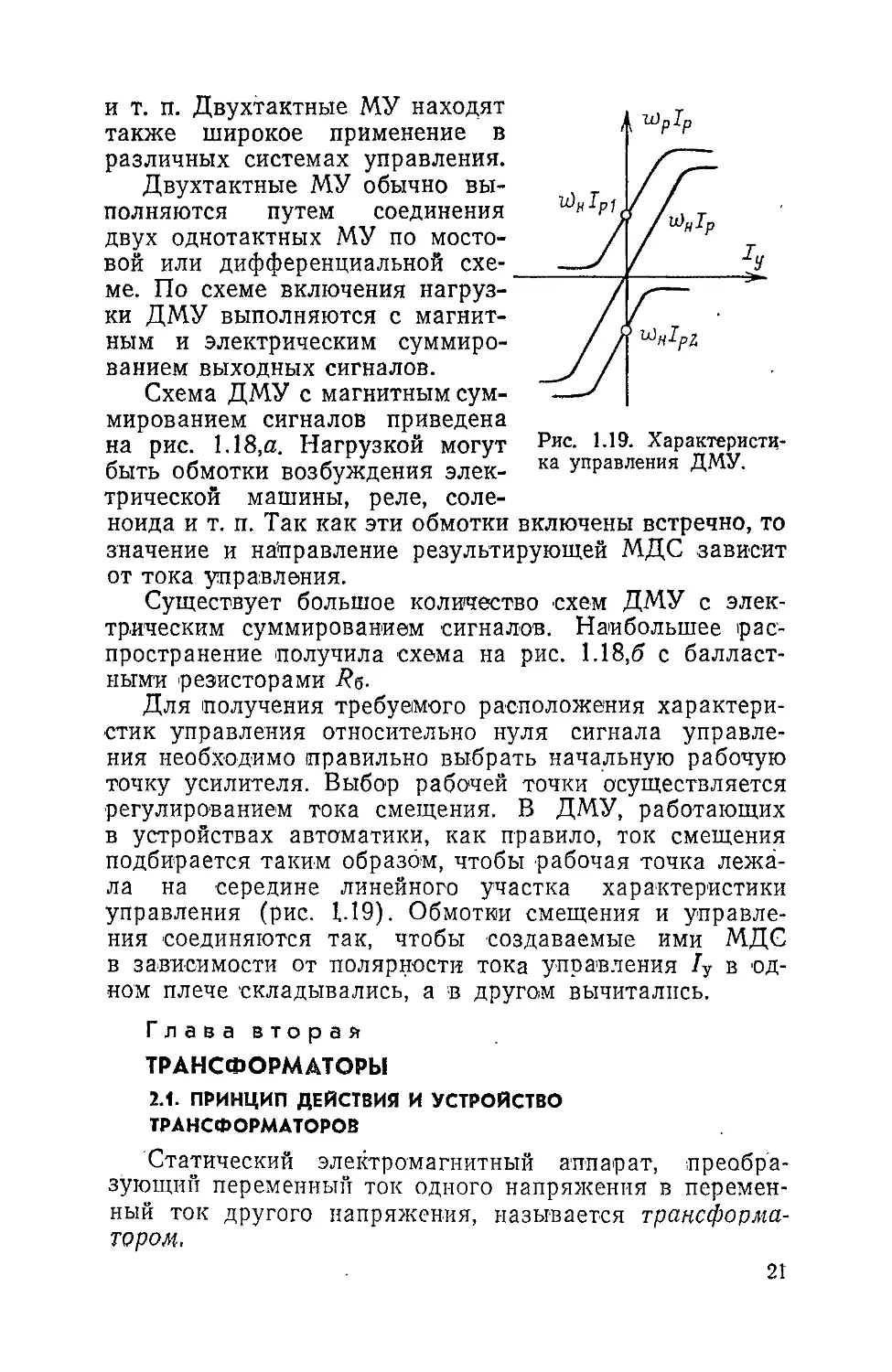
на рис. 1.18,62. Нагрузкой могут Рис- L19- Характеристц-быть обмотки возбуждения элек- ка УпРавления ДМУ. трической машины, реле, соле-
ноида и т. п. Так как эти обмотки включены встречно, то значение и направление результирующей МДС зависит
от тока управления.
Существует большое количество схем ДМУ с электрическим суммированием сигналов. Наибольшее распространение получила схема на рис. 1.18,5 с балластными резисторами 7?б-
Для получения требуемого расположения характеристик управления относительно нуля сигнала управления необходимо правильно выбрать начальную рабочую точку усилителя. Выбор рабочей точки осуществляется регулированием тока смещения. В ДМУ, работающих в устройствах автоматики, как правило, ток смещения подбирается таким образом, чтобы рабочая точка лежала на середине линейного участка характеристики управления (рис. L.19). Обмотки смещения и управления соединяются так, чтобы создаваемые ими МДС в зависимости от полярности тока управления 7У в одном плече складывались, а в другом вычитались.
Глававторая
ТРАНСФОРМАТОРЫ
2.1. ПРИНЦИП ДЕЙСТВИЯ И УСТРОЙСТВО
ТРАНСФОРМАТОРОВ
Статический электромагнитный аппарат, преобразующий переменный ток одного напряжения в переменный ток другого напряжения, называется трансформатором.
21
Трансформаторы нашли очень широкое применение в системах передачи и распределения электрической энергии, в устройствах регулирования напряжений, пуска в ход двигателей переменного тока и т. д. В радиотехнических системах различного назначения трансформаторы являются важнейшими элементами блоков питания, преобразователей и согласующих устройств.
Работа трансформатора основана на электромагнитном взаимодействии двух или >в общем случае нескольких электрически несвязанных между собой контуров (обмоток). Если одну из таких обмоток включить в сеть переменного тока, то под действием переменного магнитного поля, создаваемого этой обмоткой, в другой обмотке, магнитно связанной с первой, будет наводиться (индуктироваться) ЭДС. При подключении нагрузки к зажимам второй обмотки по цепи этой обмотки будет протекать переменный ток, т. е. энергия из одной цепи будет передаваться во вторую без электрической (гальванической) связи между ними.
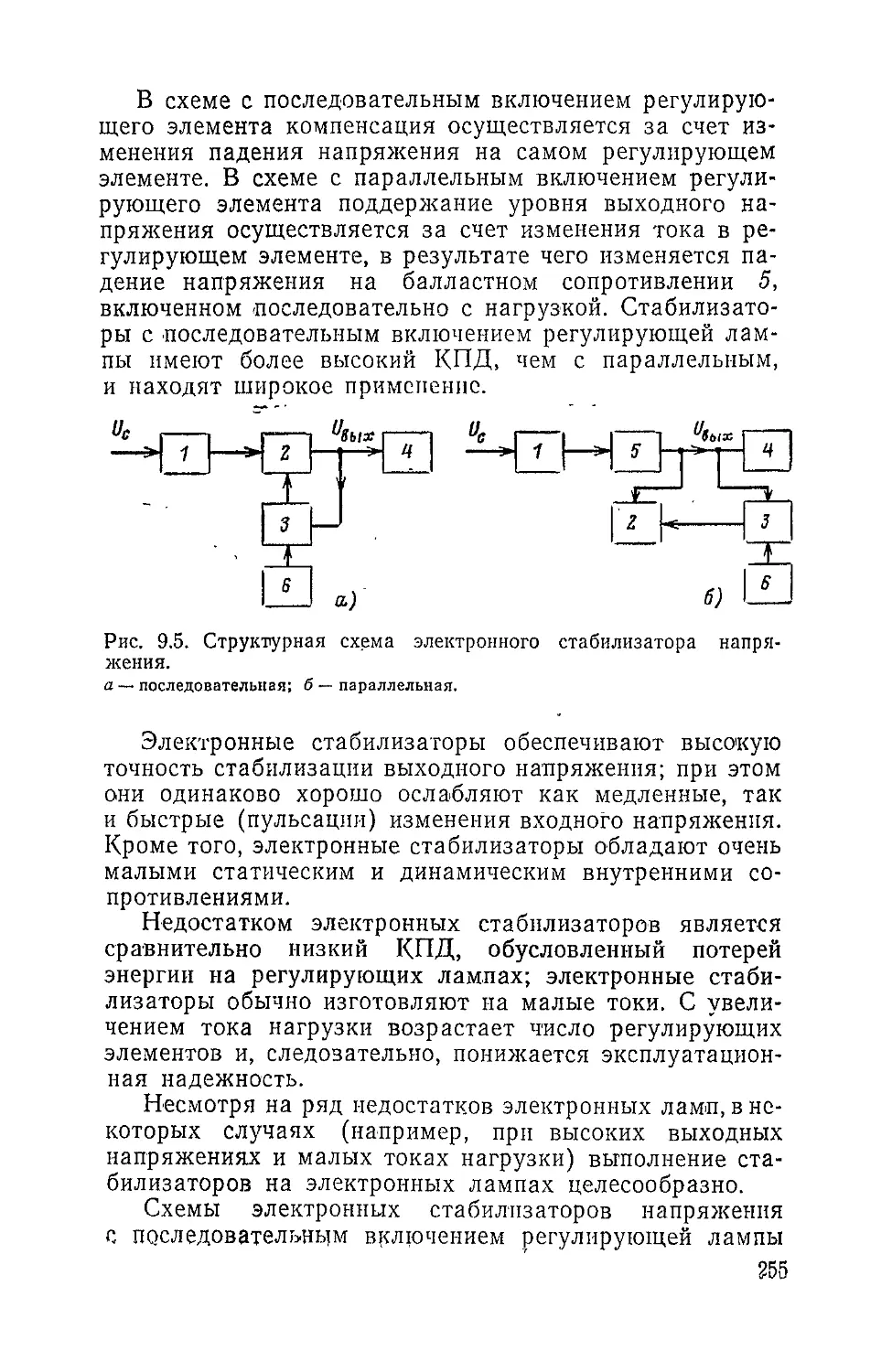
Для улучшения магнитной связи обмотки располагают на стальном сердечнике (магнитопроводе).
Трансформатор выполняется из двух или в общем случае нескольких обмоток (многообмоточные трансформаторы), размещенных на стальном сердечнике. Обмотки трансформатора могут иметь различное число витков. Обмотка с большим числом витков называется обмоткой высшего напряжения, а обмотка с меньшим числом витков — обмоткой низшего напряжения.
Обмотку, включенную в сеть источника электрической энергии, считают первичной; обмотку же, к которой подключается нагрузка, —- вторичной. Различают понижающие и повышающие трансформаторы. У понижающих трансформаторов первичной обмоткой является обмотка высшего напряжения, а вторичной —обмотка низшего напряжения. В повышающем трансформаторе в качестве первичной обмотки используются обмотки низшего напряжения, а вторичной — обмотка высшего напряжения.
Для изготовления магнитопроводов трансформаторов используются высоколегированные горячекатаные стали и повышеннолегированные холоднокатаные стали. При использовании горячекатаной стали магнитопроводы собираются (шихтуются)-из отдельных пластин, изолированных друг от друга слоем лака, окалины пли бумаги для уменьшения потерь на вихревые токи. Из холоднокатаной стали магнитопроводы выполняются ленточными (спиральными). Та-22
Ййе сердёчнйки' Наматываются ЙЗ стальной ленты на специальных приспособлениях.
Потери в стали магнитопровода складываются из потерь на гистерезис (перемагничивание стали) и потерь на вихревые токи.
Для уменьшения потерь на вихревые токи магнитопроводы собирают из пластин специальной электротехнической стали (с при-’ садкой кремния до 4,8%). Эти стали имеют повышенное удельное электрическое сопротивление.
Магнитопроводы трансформаторов для работы в сети с частотой тока 50 Гц изготавливают из сталей следующих марок: горячекатаных 1511 (Э41), 1512 (Э42), 1513 (Э43), 1514 (Э43А) и холоднокатаных текстурованных анизотропных 3411—3416 с толщиной
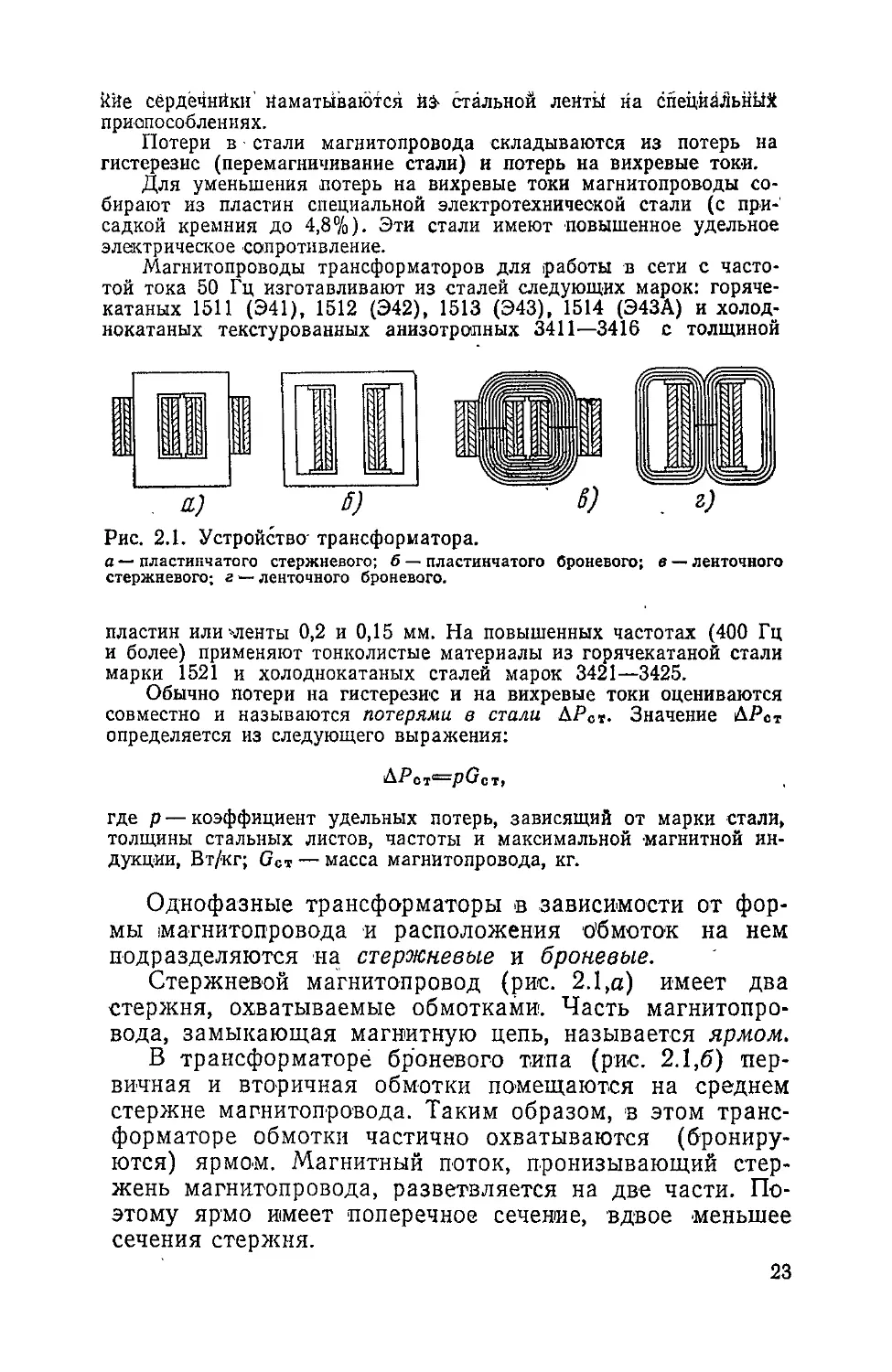
Рис. 2.1. Устройство трансформатора.
а — пластинчатого стержневого; б — пластинчатого броневого; в — ленточного стержневого; г ленточного броневого.
пластин иличленты 0,2 и 0,15 мм. На повышенных частотах (400 Гц и более) применяют тонколистые материалы из горячекатаной стали марки 1521 и холоднокатаных сталей марок 3421—3425.
Обычно потери на гистерезис и на вихревые токи оцениваются совместно и называются потерями в стали Д-Рст. Значение ДРст определяется из следующего выражения:
ДРст==рОст,
где р—коэффициент удельных потерь, зависящий от марки стали, толщины стальных листов, частоты и максимальной магнитной индукции, Вт/кг; Ост — масса магнитопровода, кг.
Однофазные трансформаторы в зависимости от формы магнитопровода и расположения Обмоток на нем подразделяются на стержневые и броневые.
Стержневой магнитопровод (рис. 2.1,а) имеет два стержня, охватываемые обмотками. Часть магнитопровода, замыкающая магнитную цепь, называется ярмом.
В трансформаторе броневого типа (рис. 2.1,6) первичная и вторичная обмотки помещаются на среднем стержне магнитопровода. Таким образом, в этом трансформаторе обмотки частично охватываются (бронируются) ярмом. Магнитный поток, пронизывающий стержень магнитопровода, разветвляется на две части. Поэтому ярмо имеет поперечное сечение, вдвое меньшее сечения стержня.
23
Ленточные разрезные Магнитапроводь! йз колбдйбкй-Таной стали подобны стержневым (рис. 2.1,в) или броневым (рис. 2.1,г).
Трансформаторы больших и средних мощностей выполняют стержневыми, так как в броневых трансформаторах изоляция обмоток высшего напряжения от сердечника представляет большие трудности. Трансформаторы малой мощности часто выполняют с броневым ’магнито-проводом.
Броневой магнитопровод обладает рядом конструктивных преимуществ: необходимость только одного каркаса с обмотками вместо двух при стержневом магнитопроводе; более высоким коэффициентом заполнения окна магнитопровода обмоточным проводом; частичной защитой обмотки ярмом от механических повреждений.
Для измерительных и лабораторных трансформаторов, а также трансформаторов, работающих на повышенной частоте, применяются тороидальные магнитопроводы. Преимуществом трансформатора с тороидальным магнитопроводом является относительно малое магнитное сопротивление, почти полное отсутствие внешнего потока рассеяния и нечувствительность к внешним магнитным полям (независимо от их направления) при условии равномерного распределения обмоток трансформатора по окружности тороида. Обмотки таких трансформаторов наматываются на специальных станках челночного типа.
МагниТопроводы трансформаторов собираются встык или внахлест. При сборке встык все пластины магнитопровода составляют вместе,, располагая одинаково. Такой магнитопровод состоит из двух частей. После размещения обмоток на магнитопроводе обе части его скрепляют между собой.
При сборке встык монтаж и демонтаж трансформатора осуществляется просто, но в месте стыка необходимо поместить немагнитную прокладку, представляющую собой большое магнитное сопротивление. При установке ярма его пластины не будут точно совпадать с пластинами стержня, так что пластины стержня и ярма окажутся замкнутыми. Такое замыкание пластин вызовет увеличение вихревых токов, которые, в свою очередь, могут вызвать недопустимо высокий нагрев стали в месте стыка.
24
Сборка внахлест позволяет уменьшить магнитное сопротивление магнитопровода (пластины могут плотно прилегать друг к другу в месте стыка), но усложняет монтаж и демонтаж трансформатора. При сборке вна7 хлест пластины чередуются так, чтобы у лежащих друг на друге листах разрезы были с разных сторон магнитопровода.
После сборки магнитопровода его Стягивают болтами или шпильками. Стяжные планки и болты изолиру-
ют от тела магнитопровода электроизоляционным картоном или бумагой для того, чтобы предотвратить возможность образования короткозамкнутых витков вокруг магнитопровода или его части.
Обмоткам трансформатора придают преимущественно цилиндрическую или прямоугольную форму, выполняя их при малых токах из круглого
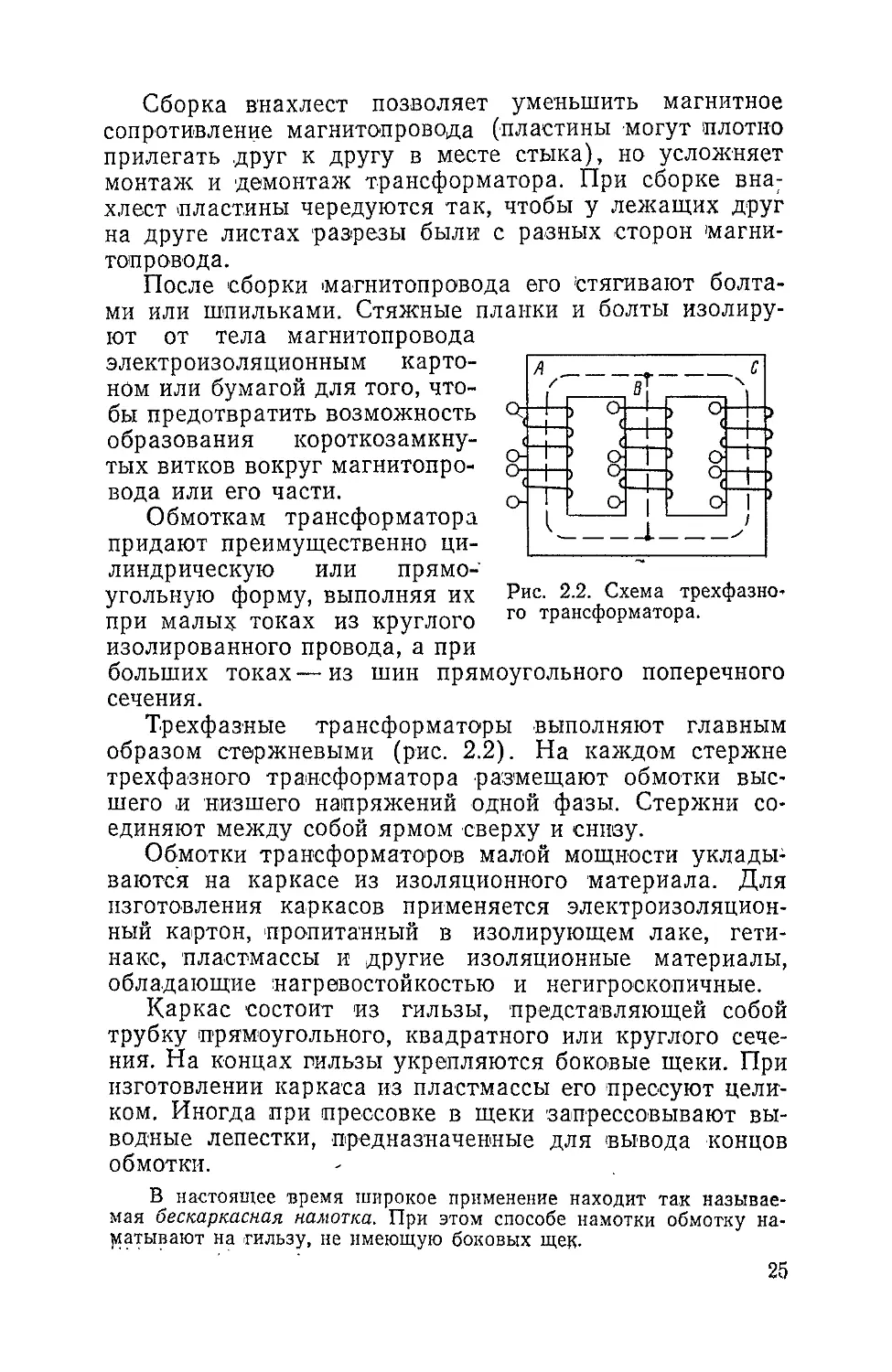
Рис. 2.2. Схема трехфазного трансформатора.
изолированного провода, а при
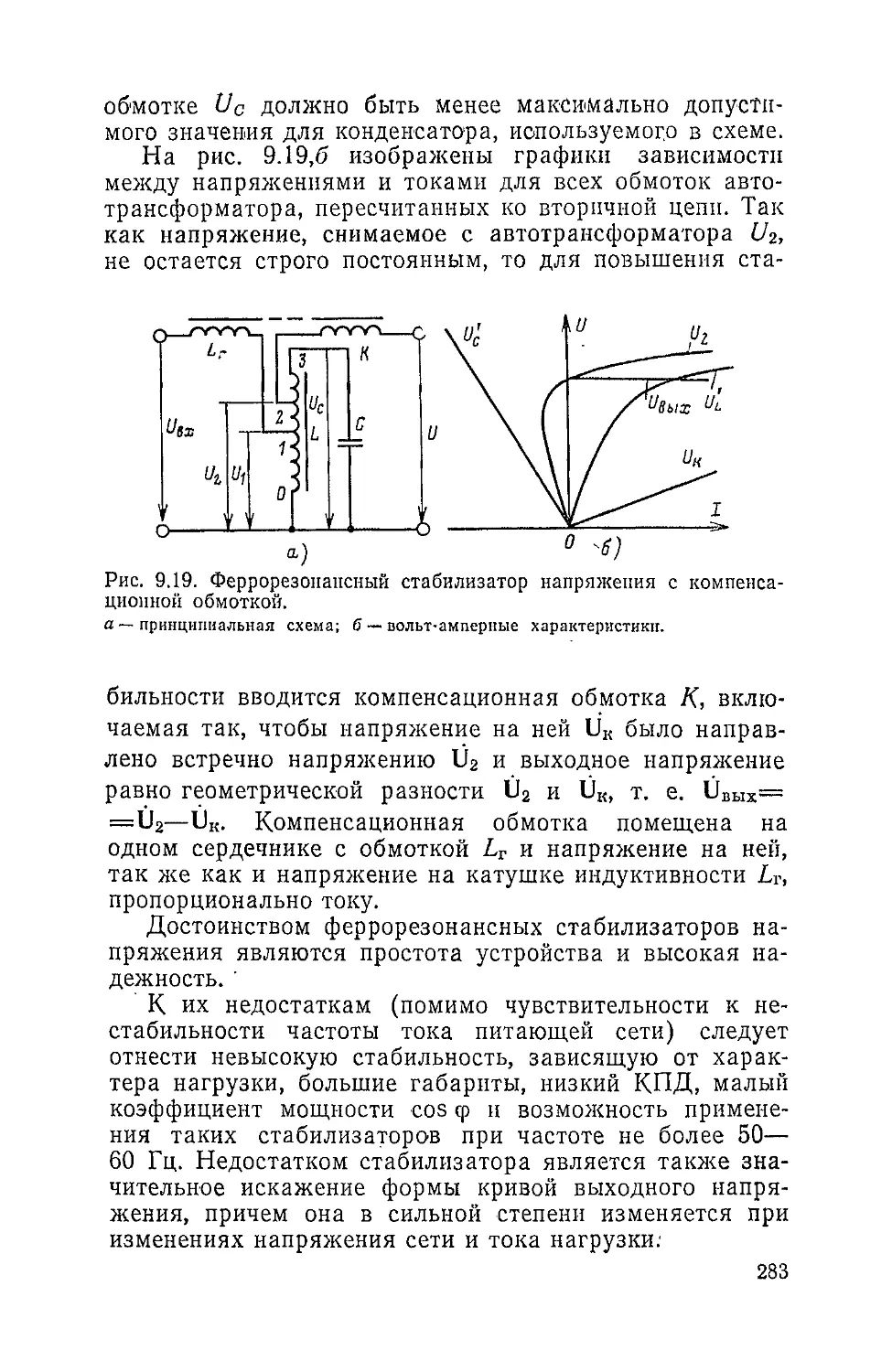
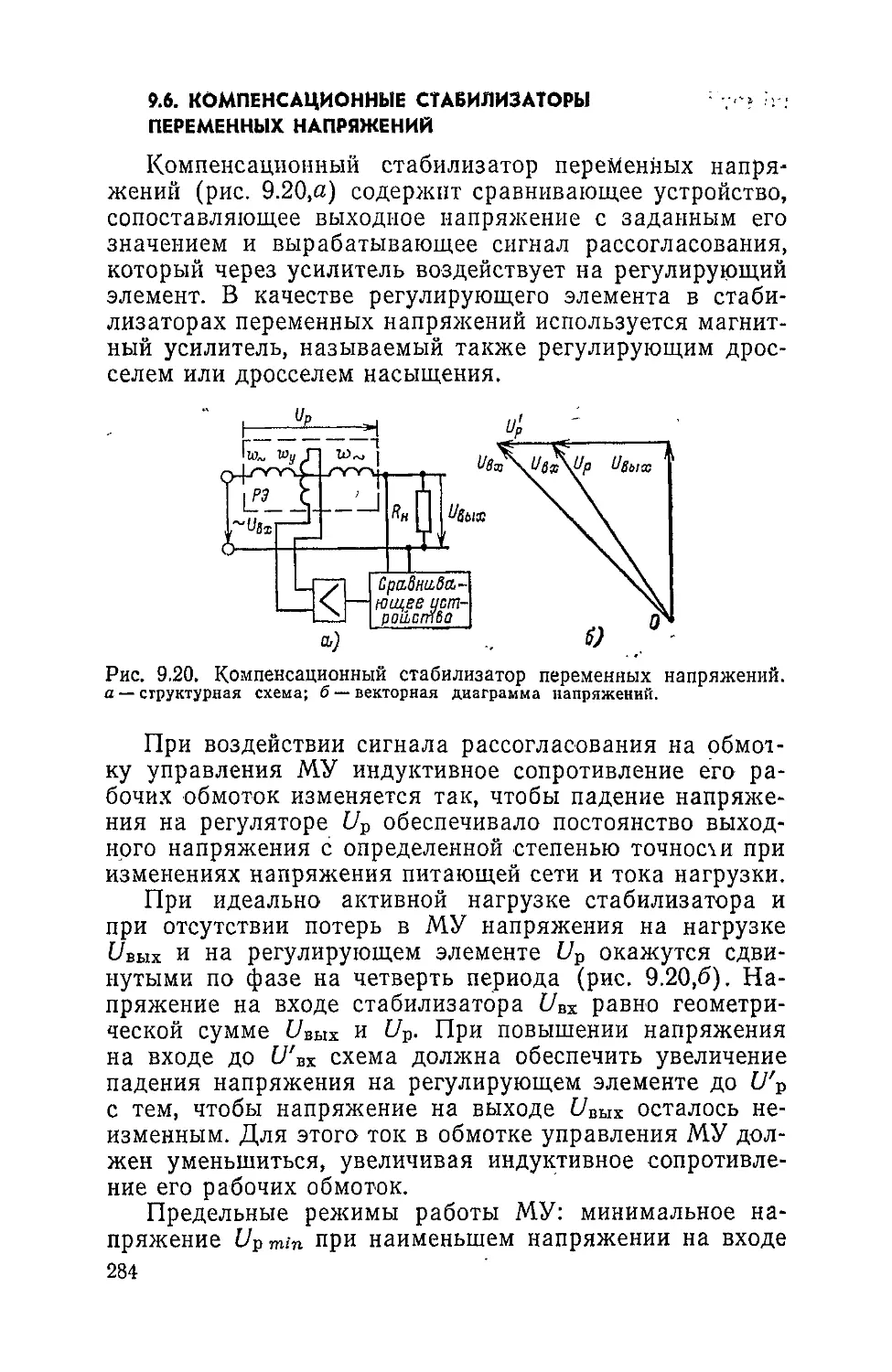
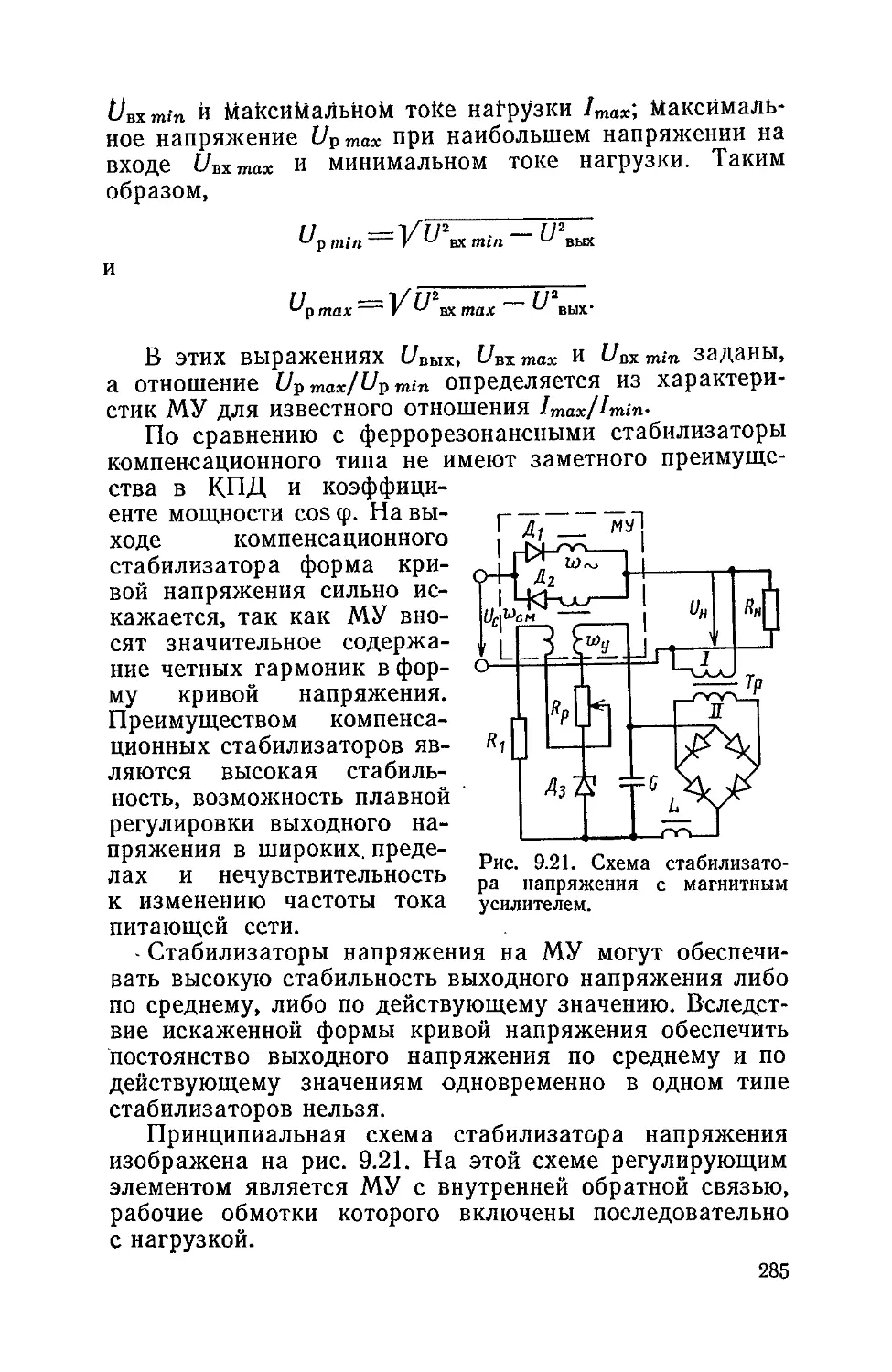
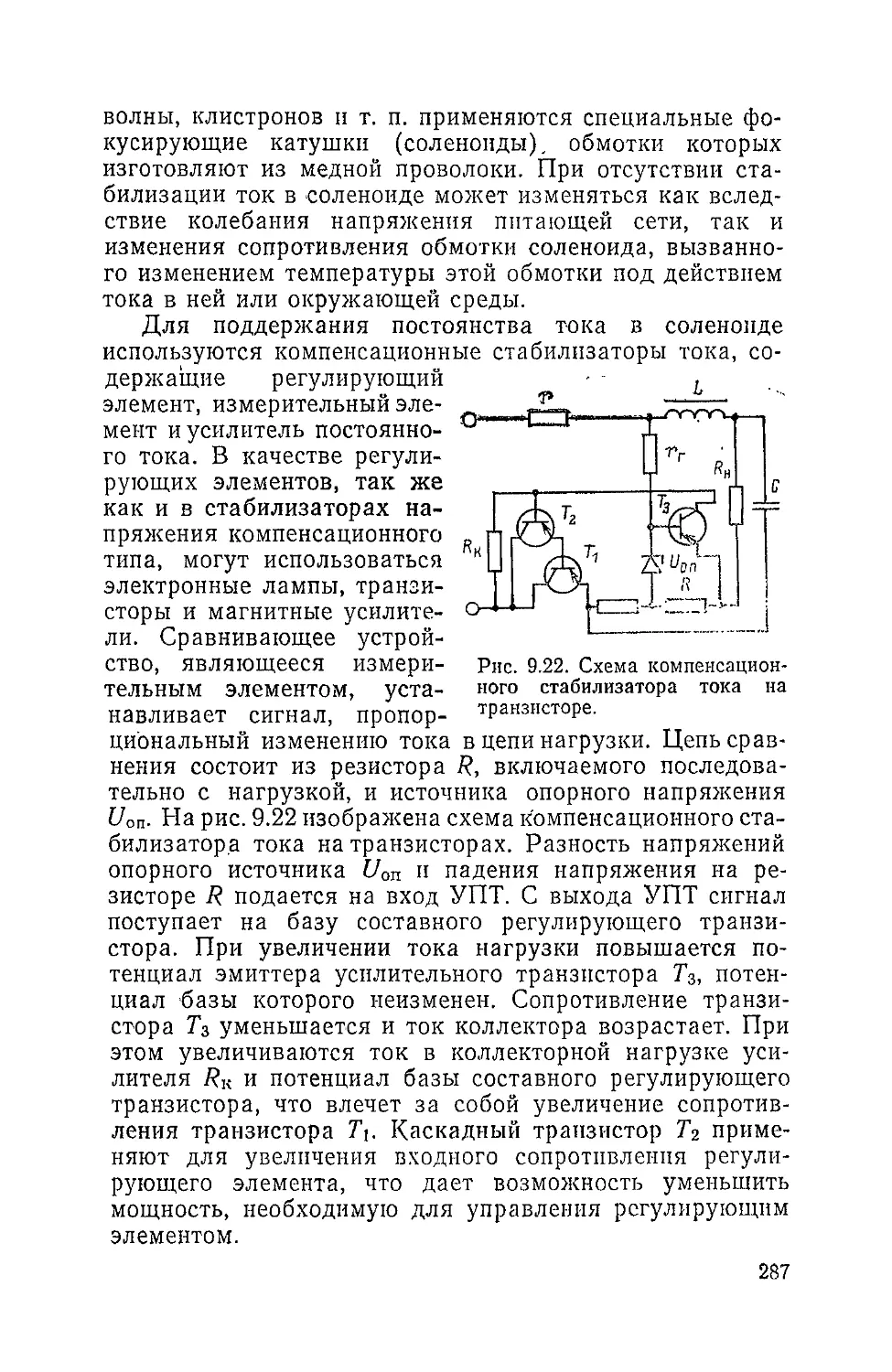
больших токах—из шин прямоугольного поперечного
сечения.
Трехфазные трансформаторы выполняют главным образом стержневыми (рис. 2.2). На каждом стержне трехфазного трансформатора размещают обмотки высшего и низшего напряжений одной фазы. Стержни соединяют между собой ярмом сверху и снизу.
Обмотки трансформаторов малой мощности укладываются на каркасе из изоляционного материала. Для изготовления каркасов применяется электроизоляционный картон, пропитанный в изолирующем лаке, гети-накс, пластмассы и другие изоляционные материалы, обладающие нагревостойкостью и негигроскопичные.
Каркас состоит из гильзы, представляющей собой трубку прямоугольного, квадратного или круглого сечения. На концах гильзы укрепляются боковые щеки. При изготовлении каркаса из пластмассы его прессуют целиком. Иногда при прессовке в щеки запрессовывают выводные лепестки, предназначенные для вывода концов обмотки.
В настоящее время широкое применение находит так называемая бескаркасная намотка. При этом способе намотки обмотку наматывают на гильзу, не имеющую боковых щек.
25
Витки обмотки на каркасе укладывают рядом плотно друг к другу; первый ряд наматывают в одну сторону, следующий ряд в другую. Поэтому при четном числе рядов выводы "начала и конца обмотки будут с одной стороны, а при нечетном — с противоположных. При малых диаметрах провода может происходить «западание» витков из последующих рядов в нижележащие, в результате чего напряжение между отдельными (запавшими) витками может оказаться настолько большим, что вызовет пробой изоляции и выход трансформатора из строя. Для предотвращения западания после, намотки каждого ряда укладывают прокладку из конденсаторной телефонной или кабельной бумаги.
В трансформаторе питания ’ радиотехнического устройства с электронными лампами обычно ближе к стержню помещают первичную (сетевую) обмотку. Затем укладывают анодную и сверху накальную обмотки. Если трансформатор имеет экранную обмотку, то ее помещают между сетевой и анодной обмотками.
2.2. РАБОЧИЙ РЕЖИМ ТРАНСФОРМАТОРА
Если первичная обмотка’трансформатора с числом витков wi присоединена к сети переменного тока, а вторичная обмотка с числом витков ш2 замкнута на внешнюю нагрузку, то по обмоткам будут протекать токи Ц и 12. Магнитодвижущие силы первичной и вторичной обмоток будут создавать магнитный поток,
большая часть магнитных линий которого замкнется по магнитопроводу, образуя основной магнитный поток Фо. Этот магнитный поток сцеплен со всеми витками первичной и вторичной обмоток и индуктирует в них ЭДС Ei и Е2.
Небольшая часть магнитных линий замыкается вне магнитопровода, образуя поток рассеяния, который сцеплен с частью витков той-обмотки, током которой он создается. Потоки рассеяния первичной и вторичной обмоток Фо] и Фо2 индуцируют в этих обмотках ЭДС
е е =
1 dt и dt
Первичная и вторичная обмотки обладают активным сопротивлением и и г2, а падения напряжения в них равны fill и г212.
Уравнения электрического состояния для цепей первичной и вторичной обмоток могут быть записаны в следующем виде:
(71——4-пЛ и (72=Ё2-\-Ё§2—r
26
Если представить ЭДС рассеянйЯ каждой обмотки в виде падений напряжений в индуктивном сопротивле-1 нии Xi и Х2 первичной и вторичной обмотки, обусловлен^ ных потоками рассеяния Фа1 и Фо2, т. е.
— £sl = +jXi/i и Es2~—ix2^2t то уравнения электрического состояния для обмоток примут вид:
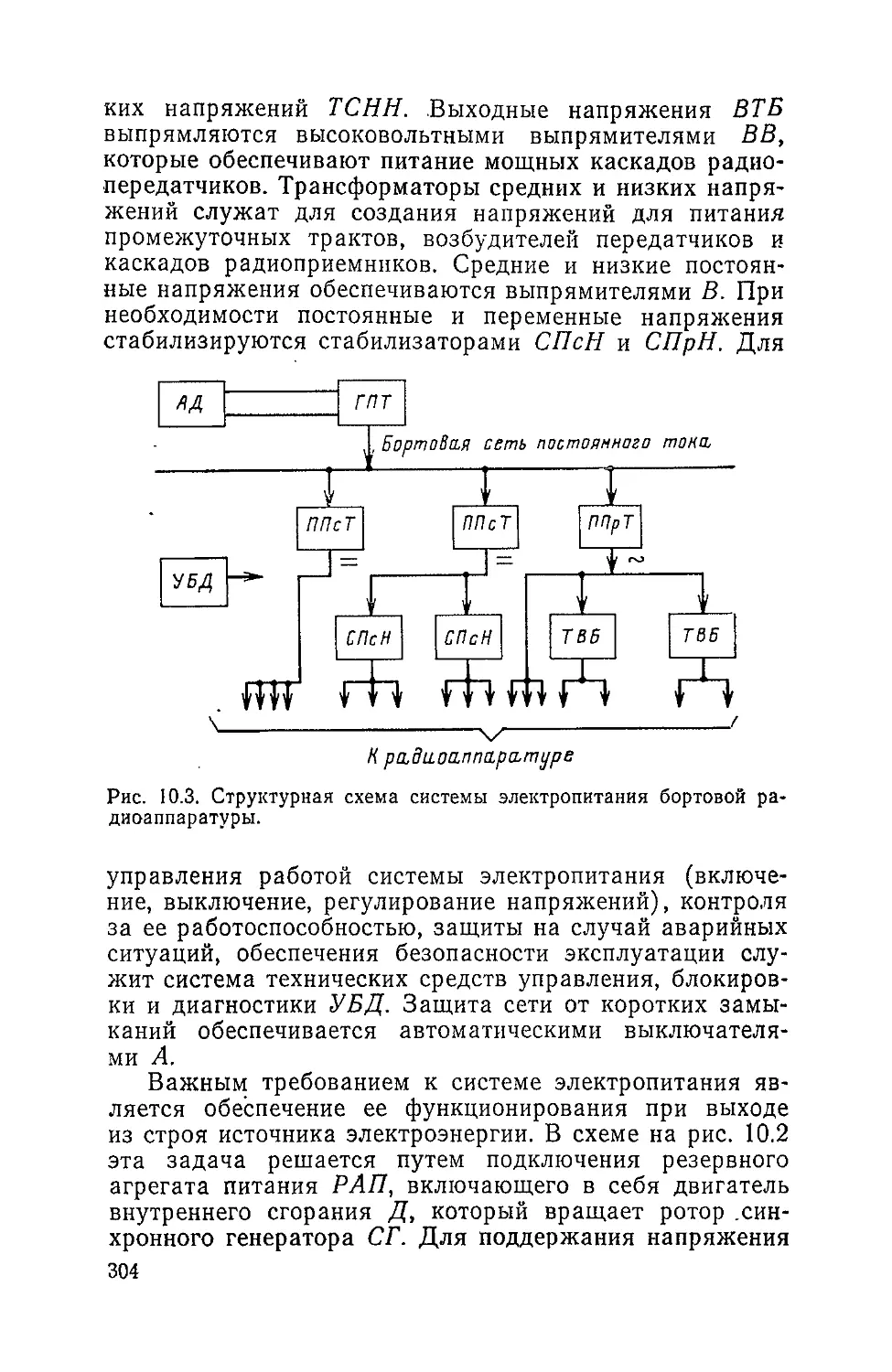
Ui = — Ё1 rjl -f- jxj1 = — ^14" (2- О
и
U2 = Ёг - rj2 - jxj2 = Ё, - Zjt, (2.1a)
где Zi^r^ixi и г2=г2+х2— полные сопротивления первичной и вторичной обмоток соответственно. Так как падение напряжения в полном сопротивлении первичной обмотки много меньше ее ЭДС (Zi/i<C£i), то можно'считать, что приложенное напряжение практически уравновешивается ЭДС первичной обмотки, т. е. При неизменном
напряжении сети будет практически неизменна ЭДС £1, а следовательно, и магнитный поток Фт при любой нагрузке (Фт=const).
При отсутствии нагрузки
(при холостом ходе) во вторичной обмотке тока нет (/2=0), а в первичной обмотке протекает ток холостого хода /х.х, который значительно меньше номинального тока первичной обмотки при полной нагрузке.
Магнитодвижущая сила Wilx.x возбуждает основной магнитный поток трансформатора Фт, который индуцирует в первичной и во вторичной обмотках ЭДС £1 и Ё2.
Если вторичную обмотку трансформатора замкнуть на какой-либо приемник энергии (нагрузку), то в этой обмотке возникнет ток /2. Магнитодвижущая сила вторичной обмотки w2I2 направлена встречно создающему ее потоку, т. е. МДС вторичной обмотки стремится уменьшить магнитный поток Фт. Но при уменьшении потока уменьшится и Ei, что ведет к увеличению тока первичной обмотки Ц согласно уравнению (2.1). Ток Ц
27
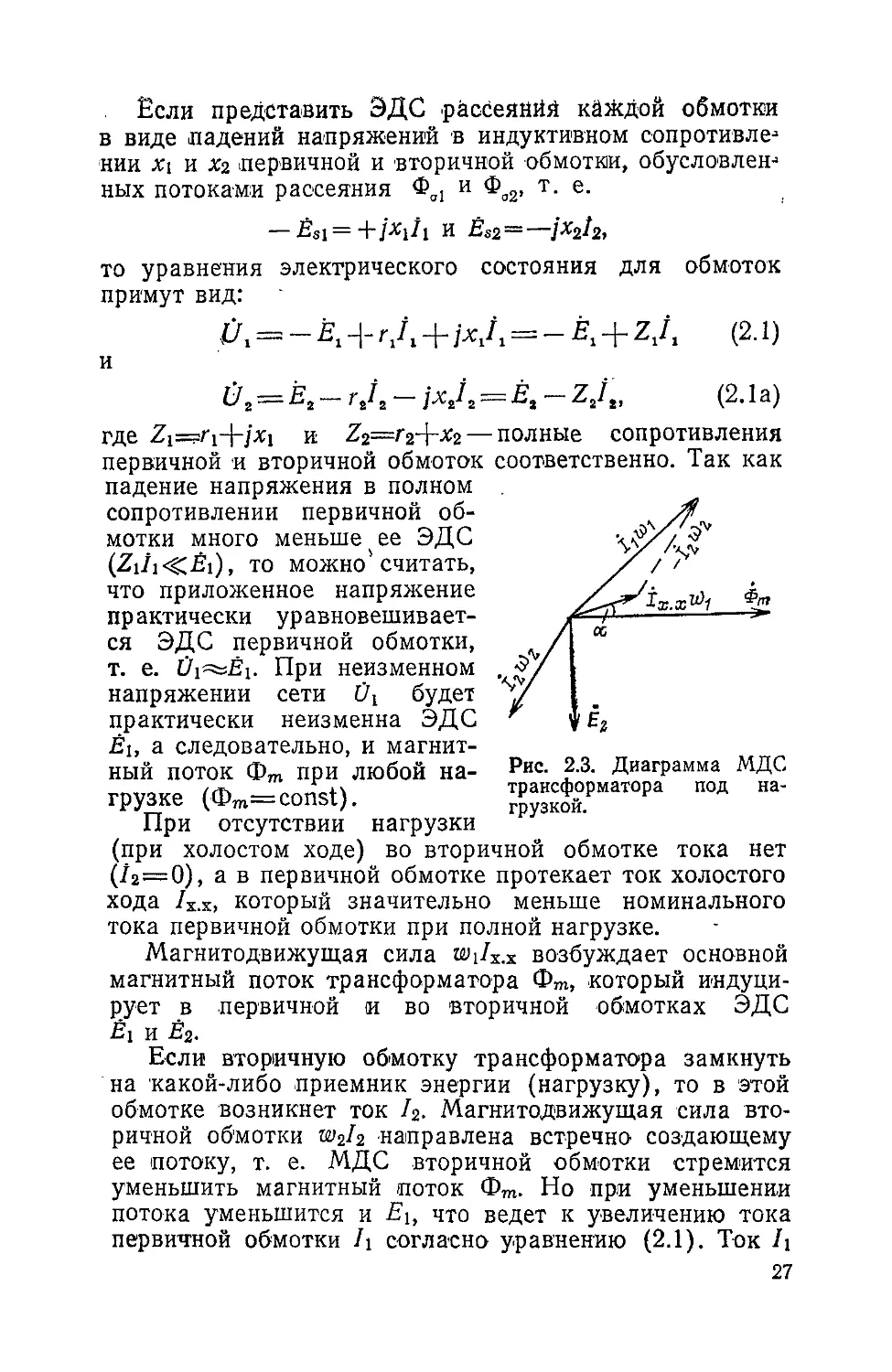
Рис. 2.3. Диаграмма МДС трансформатора под нагрузкой.
будет увеличиваться до значения, при котором МДС первичной обмотки скомпенсирует размагничивающее действие МДС вторичной обмотки. Таким образом, МДС первичной обмотки создает неизменный, практически не зависящий от нагрузки магнитный поток Фт и компенсирует размагничивающее действие МДС вторичной обмотки трансформатора, что показано на векторной диаграмме (рис. 2.3). Следовательно, можно записать уравнение МДС в следующем виде:
или
Л = 4.х + (-Л). (2.2)
где Гг = /2—ток вторичной обмотки трансформатора, приведенный к первичной.
На векторной диаграмме (рис. 2.3) вектор МДС wповернут относительно вектора магнитного потока Фт на угол а в сторону опережения. В трансформаторах, имеющих стальной магнитопровод, возникают потери в стали, которые вызываются гистерезисом и вихревыми токами. .Поэтому намагничивающий ток помимо реактивной составляющей совпадающей по фазе с магнитным потоком, содержит активную составляющую /0, т. е./х.х = ]Л72с + /2р/
Если основной магнитный поток изменяется во времени по синусоидальному закону, т. е.
Фх.х-—Фт sin (at,
то ЭДС первичной обмотки будет равна:
ег = — cos со/ = к^соФ^ s in ^со/ —;
Таким образом, ЭДС первичной обмотки е\ изменяется во времени синусоидально, причем ei отстает по фазе от Фх.х на четверть периода (зт/2).
Действующее значение ЭДС первичной обмотки
Е. = pf^Фт = 4,44^Фт (2.3)
и вторичной обмотки
2?2—4,44йУ2/Фт.
(2.3а)
28
Напряжения обмоток трансформатора при холостом ходе практически равны их ЭДС, и отношение этих напряжений UilU2=E\lE2—wiIW2=Ki называется коэффициентом трансформации.
Для удобства построения векторных диаграмм и возможности построения эквивалентных схем вторичную обмотку трансформатора приводят к виткам первичной, т. е. условно полагают, что вместо вторичной обмотки с числом витков w2 имеется обмотка с числом витков a»i, равным числу витков первичной обмотки, но при
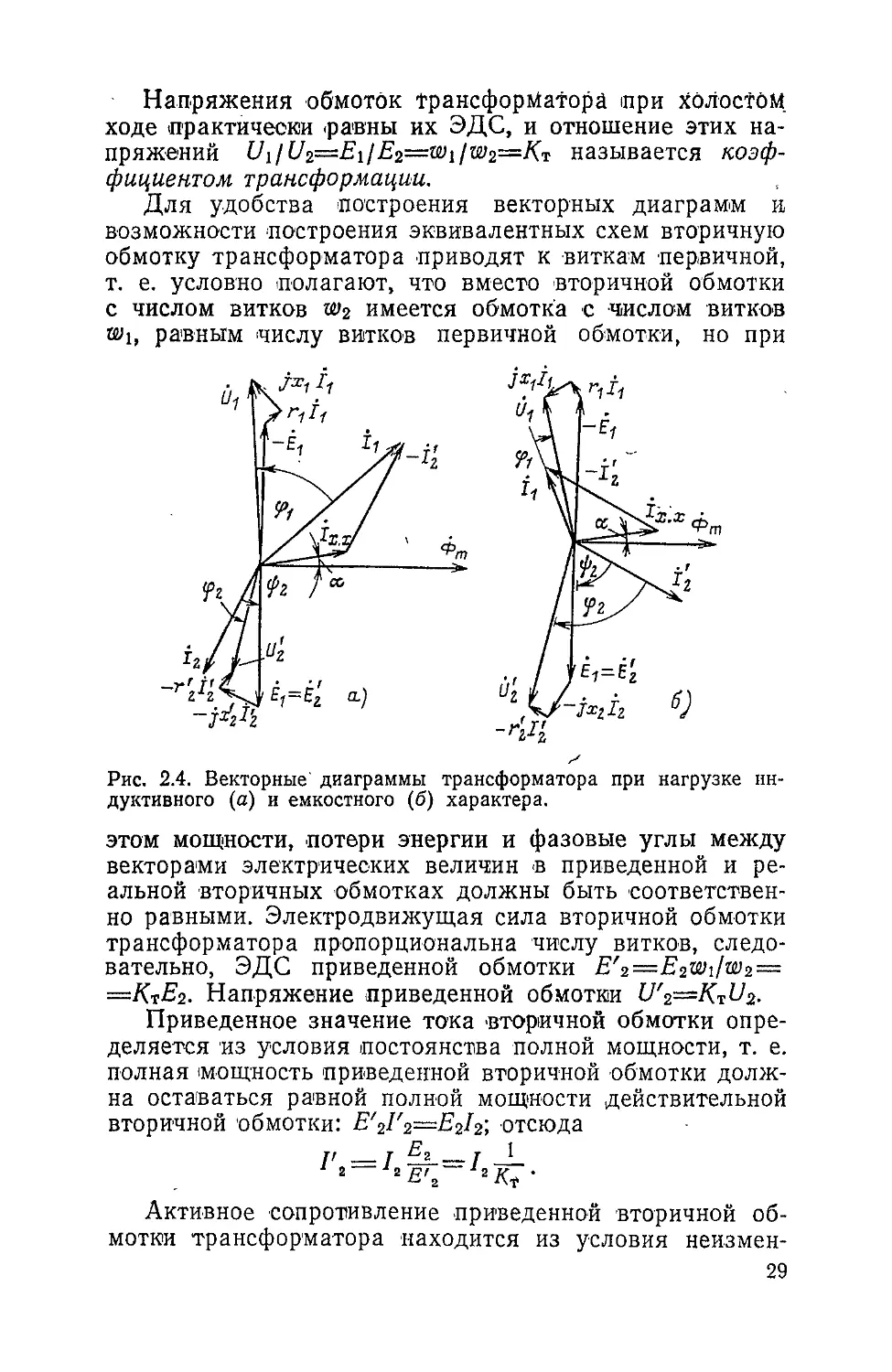
Рис. 2.4. Векторные диаграммы трансформатора при нагрузке индуктивного (а) и емкостного (б) характера.
этом мощности, потери энергии и фазовые углы между векторами электрических величин в приведенной и реальной вторичных обмотках должны быть соответственно равными. Электродвижущая сила вторичной обмотки трансформатора пропорциональна числу витков, следовательно, ЭДС приведенной обмотки E'2—E2Wilw2 = =K.tE2. Напряжение приведенной обмотки
Приведенное значение тока вторичной обмотки определяется из условия постоянства полной мощности, т. е. полная мощность приведенной вторичной обмотки должна оставаться равной полной мощности действительной вторичной обмотки: отсюда
у —I Ё1. — 1 J_
2 J2£,2 •
Активное сопротивление приведенной вторичной обмотки трансформатора находится из условия неизмен-
29
йостй потерь в этой обмотке, т. ё. г'2(Л>)отсюда rf2=r2 (h/i'z) 2=ЛтГ2-
Индуктивное сопротивление (так же как и индуктивность катушки) пропорционально квадрату числа витков. Следовательно, индуктивное сопротивление приведенной вторичной обмотки х'2 = Кл:Х2.
На рис. 2.4,а, б показаны векторные диаграммы для: нагрузки индуктивного и емкостного характера. В положительном направлении горизонтальной оси изображен вектор амплитуды основного, потока трансформатора Фто. В сторону опережения относительно вектора Фт повернут на угол а вектор тока холостого хода 1х.х и в сторону отставания относительно вектора Фт на угол л/2 — векторы ЭДС первичной и приведенной вторичной обмоток Ei=E'2.
Вектор приведенного вторичного тока 1'2 отстает от вектора Е'2 на угол ф2 при индуктивном и опережает при емкостном характере нагрузки.
После приведения вторичной обмотки к виткам первичной уравнение электрического состояния запишется в следующем виде:
й'2=Ё'2—jx'st'z—r'zi'2- (2.4)
Для определения вектора напряжения на зажимах вторичной обмотки трансформатора при нагрузке необходимо из конца вектора ЭДС Ё'2 построить вектор —/х'2Г2, отстающий от вектора тока 1'2 на угол л/2, и затем вектор—г'21'2, параллельный и противоположно направленный вектору тока 1'2. Геометрическая сумма трех построенных векторов согласно уравнению (2.4) определит собой приведенное вторичное напряжение трансформатора.
Для определения тока первичной обмотки нужно согласно уравнению магнитного состояния (2.2) построить геометрическую сумму векторов тока холостого хода 1х.х и приведенного тока вторичной обмотки с обратным знаком —1'2.
Для определения первичного напряжения воспользуемся уравнением (2.1). Строим вектор —Ej, равный и противоположно направленный вектору Еь Далее из конца вектора Ei проводим вектор rili, параллельный 30
вектору тока первичной обмотки 11, и затем вектор +/X1I1, опережающий вектор h на угол л/2. Геометрическая сумма трех построенных векторов является вектором приложенного напряжения th.
Из векторных диаграмм на рис. 2.4 следует, что значение вторичного напряжения зависит как от силы тока нагрузки трансформатора /2, так и от характера нагрузки, т. е. от угла <рг. При индуктивном характере нагрузки вторичное напряжение по абсолютной величине меньше ЭДС (Uf2<E'2). Следовательно, при индуктивной нагрузке происходит понижение выходного напряжения. При емкостном характере нагрузки вторичное напряжение может быть по абсолютной величине больше ЭДС (U'2>E'2), т. е. выходное напряжение трансформатора повышается.
Трансформатор, работающий под нагрузкой, может быть представлен эквивалентной схемой, для определения которой запишем уравнения равновесия электрического и магнитного состояний в следующем виде:
(2.5)
О,2=Ё'2--Z'2I'2', (2-6)
Л=/х.х-/'2. (2.7)
Введем следующие обозначения:
= = (2.8)
(2.9)
где Z'H=№TZH — сопротивление нагрузки трансформатора, приведенное к первичной обмотке.
Из (2.6) — (2.9) получим:
хх~ ’Zx.x + Zh + ZV
(2.Ю)
Из (2.5), (2.8) и (2.10) получим:
(2.П)
(Z',+Z'„)ZX,X
Zx.x + г + Z'K
Таким образом, трансформатор под нагрузкой может быть представлен эквивалентным сопротивлением, рав-
ным 7 7 Zx.x + ZfH) .0. ^.x + 2'a + Z'K (Л12)
31
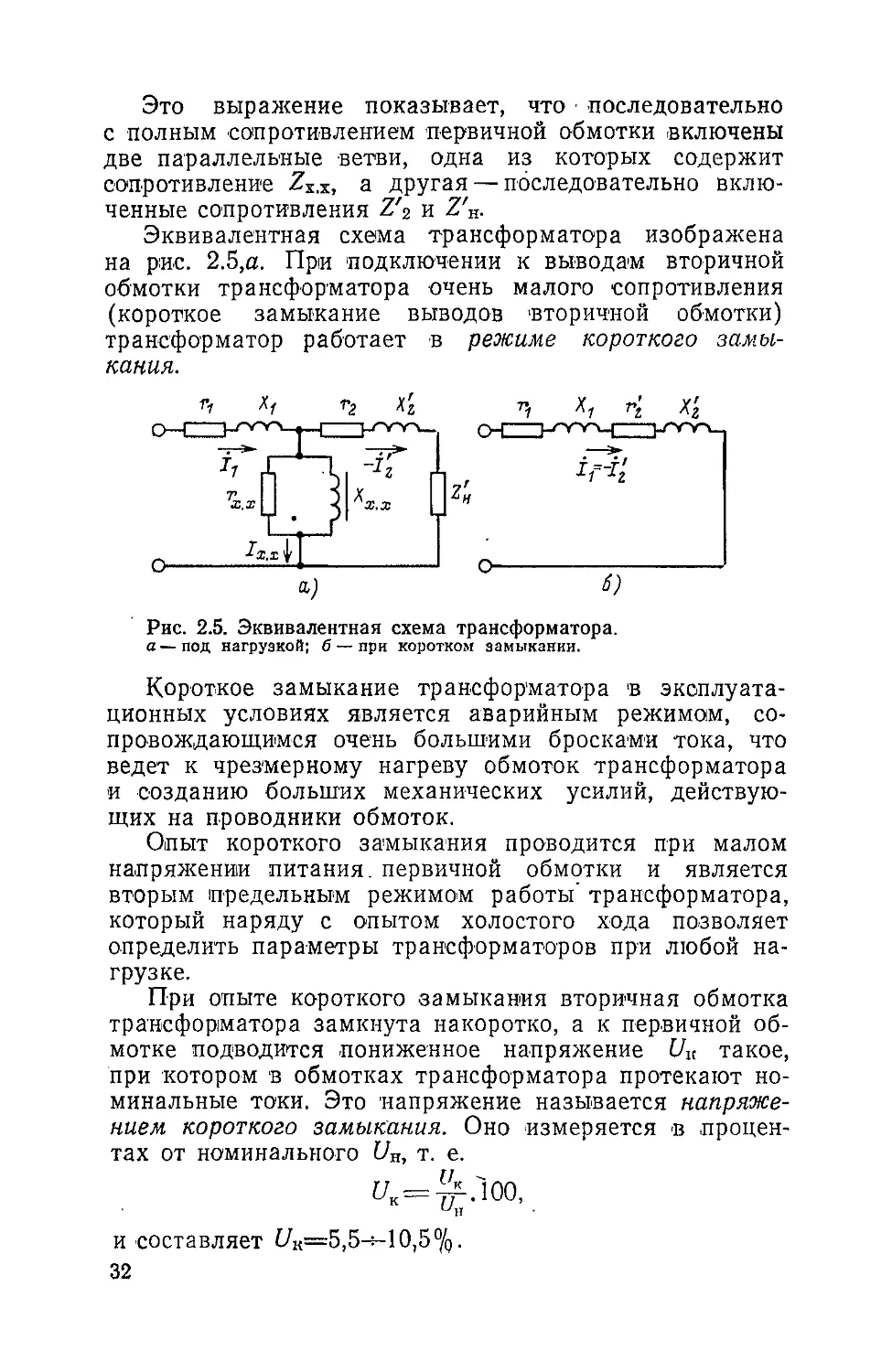
Это выражение показывает, что последовательно с полным сопротивлением первичной обмотки включены две параллельные ветви, одна из которых содержит сопротивление а другая — последовательно включенные сопротивления и Z'h-
Эквивалентная схема трансформатора изображена на рис. 2.5,а. При подключении к выводам вторичной обмотки трансформатора очень малого сопротивления (короткое замыкание выводов вторичной обмотки) трансформатор работает в режиме короткого замыкания.
Г1 X; Г2’
а) о)
Рис. 2.5. Эквивалентная схема трансформатора. а — под нагрузкой; б — при коротком замыкании.
Короткое замыкание трансформатора в эксплуатационных условиях является аварийным режимом, сопровождающимся очень большими бросками тока, что ведет к чрезмерному нагреву обмоток трансформатора и созданию больших механических усилий, действующих на проводники обмоток.
Опыт короткого замыкания проводится при малом напряжении питания, первичной обмотки и является вторым предельным режимом работы’ трансформатора, который наряду с опытом холостого хода позволяет определить параметры трансформаторов при любой нагрузке.
При опыте короткого замыкания вторичная обмотка трансформатора замкнута накоротко, а к первичной обмотке подводится пониженное напряжение (7К такое, при котором в обмотках трансформатора протекают номинальные токи. Это напряжение называется напряжением короткого замыкания. Оно измеряется в процентах от номинального Нн, т. е.
пк=£поо, ин
и составляет (7k=5,5-j-10,50/q.
32
При столь малом 'напряжении магнитный поток будет незначителен, следовательно, мал и намагничивающий ток, т. е. Л.х=^0. Поэтому можно считать, что МДС первичной обмотки трансформатора идет лишь на компенсацию МДС вторичной обмотки. Таким образом, пренебрегая намагничивающим током, уравнение магнитного состояния можно записать в следующем виде:
Wvli-}-W2i2—0.
Отсюда Л=—Г2.
При опыте короткого замыкания (ZH=0 и Д.х=0) эквивалентная схема трансформатора примет вид, изображенный на рис. 2.5,6. Из этой схемы видно, что полное сопротивление короткого замыкания трансформатора
ZK=ri+jxi+r'2+!x'2=rK+ixK,
где гк=г1-|-гЛ2 — активное сопротивление; xK=Xi-f-x/2 — индуктивное сопротивление короткого замыкания трансформатора.
Опыт короткого замыкания трансформатора позволяет определить напряжение короткого замыкания, потери в обмотках и входное сопротивление трансформатора в режиме короткого замыкания.
Полное, активное и индуктивное сопротивления короткого замыкания определяются соответственно из следующих выражений:
2к=Дк/Л; rK=\PK/I21- хк= yz\-r\.
Напряжение короткого замыкания, его активная и реактивная составляющие в процентах определяются из следующих выражений:
t7K = ^100; = 100; 100.
Фазовый сдвиг между напряжением и током при коротком замыкании <pK==arctg(xK/rK)==arctg (^/1/с) называется углом, короткого замыкания трансформатора.
Для трехфазных трансформаторов эквивалентная схема и векторная диаграмма изображаются для одной фазы и имеют такой же вид, как и для однофазных. При определении параметров трехфазного трансформатора следует использовать фазные значения токов и напряжений, а также мощность в одной фазе.
3-1056 33
Обмотки трехфазных трансформаторов обычно соединяются звездой или треугольником. Помимо этих двух основных схем соединения обмоток трансформа
торов существует схема «зигзаг», которая хотя и неэкономична, но в некоторых случаях (например, для устранения вынужденного намагничивания магнитопровода в трехфазной схеме выпрямления) оказывается
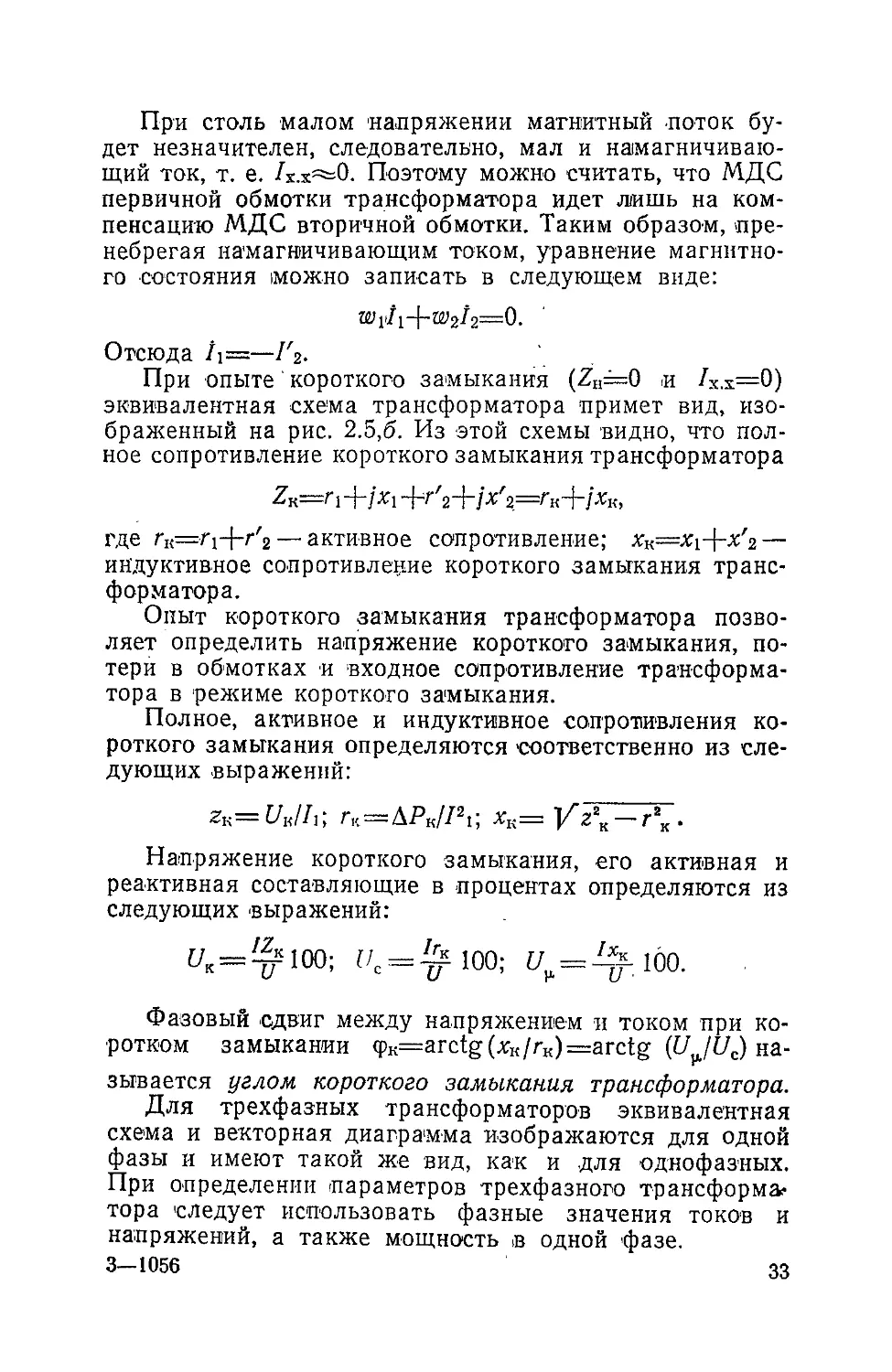
Рис. 2.6. Эквивалентная схема многообмоточного трансформатора.
целесообразной.
В многообмоточных трансформаторах параметры всех обмоток приводятся к первичной цепи через коэффициенты транс-
формации между первичной и соответствующей вторичной обмотками, т. е.
^12=^1/102; /Ст13=^1/^з; ... Лтт=да1/К'п.
Уравнения электрического и магнитного состояний для многообмоточного трансформатора имеют следующий вид:
t7i==_E1 + /xz1; t7'2 = E'2-Z'27'2;...;
i =i — г — —i'
Эквивалентная схема многообмоточного трансформатора изображена на рис. 2.6. Следует иметь в виду, что изменение нагрузки в одной из вторичных обмоток вызывает изменение напряжения как в этой обмотке, так и во всех остальных вторичных обмотках, несмотря на то что нагрузка в них не изменяется. При определении параметров короткого замыкания трансформатора опыт проводится между первичной и каждой вторичной обмотками в отдельности при разомкнутых остальных вторичных обмотках.
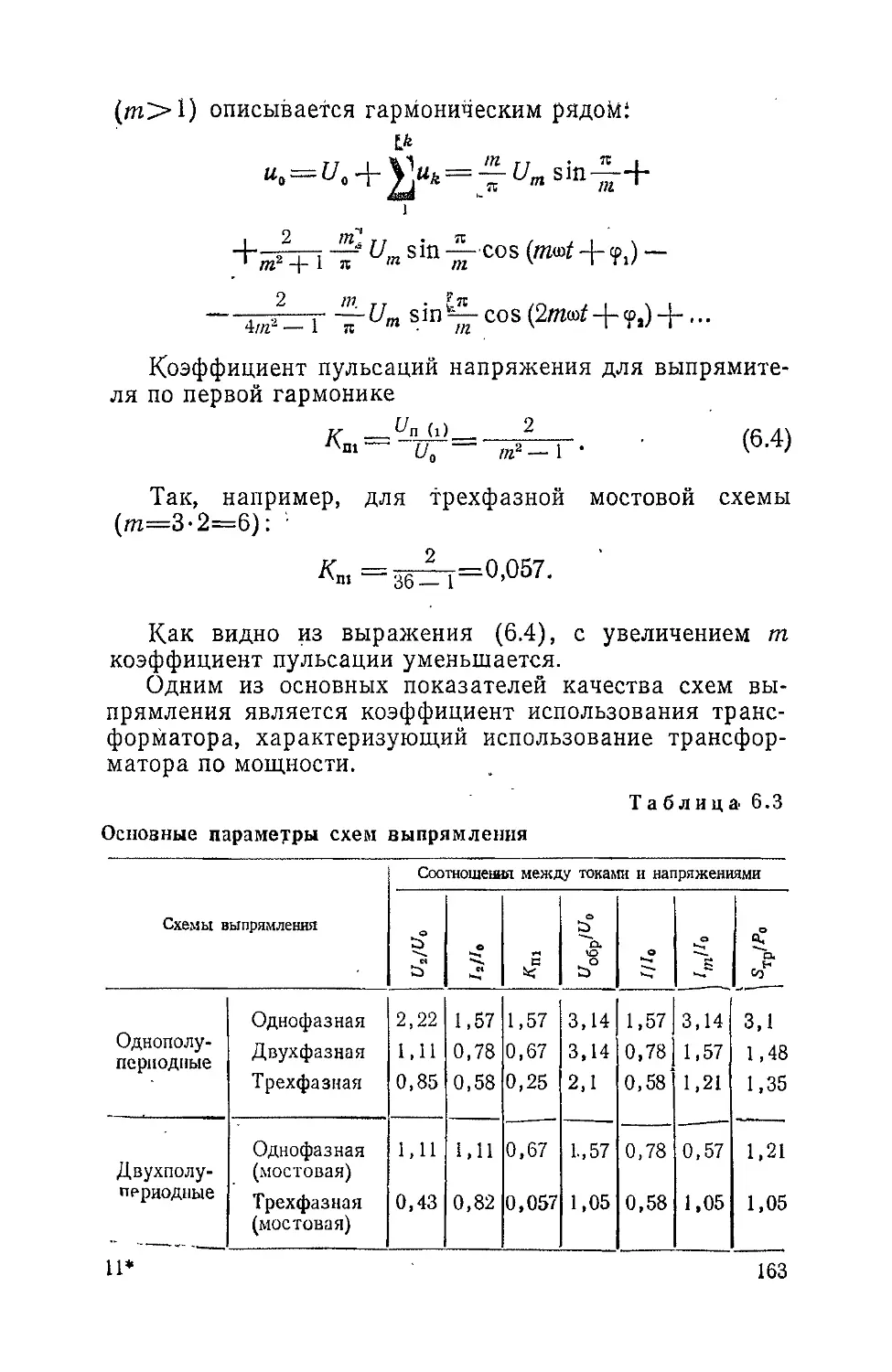
2.3. ВНЕШНЯЯ ХАРАКТЕРИСТИКА И КПД ТРАНСФОРМАТОРА
Свойства трансформатора при его работе под нагрузкой могут быть определены непосредственным его испытанием. Если включить трансформатор на некоторую нагрузку и изменять ее, то по показаниям прибб-34
ров можно определить, как будет изменяться напряжение на зажимах вторичной обмотки и КПД трансформатора. Однако при 'испытании трансформатора под
нагрузкой расходуется мног Этот расход увеличивается < испытуемого трансформатора ния активной, индуктивной и емкостной нагрузок необходимо громоздкое оборудование (реостаты, катушки индуктивности и конденсаторы).
Технические параметры трансформатора могут быть
электрической энергии, возрастанием мощности Кроме того, для созда-
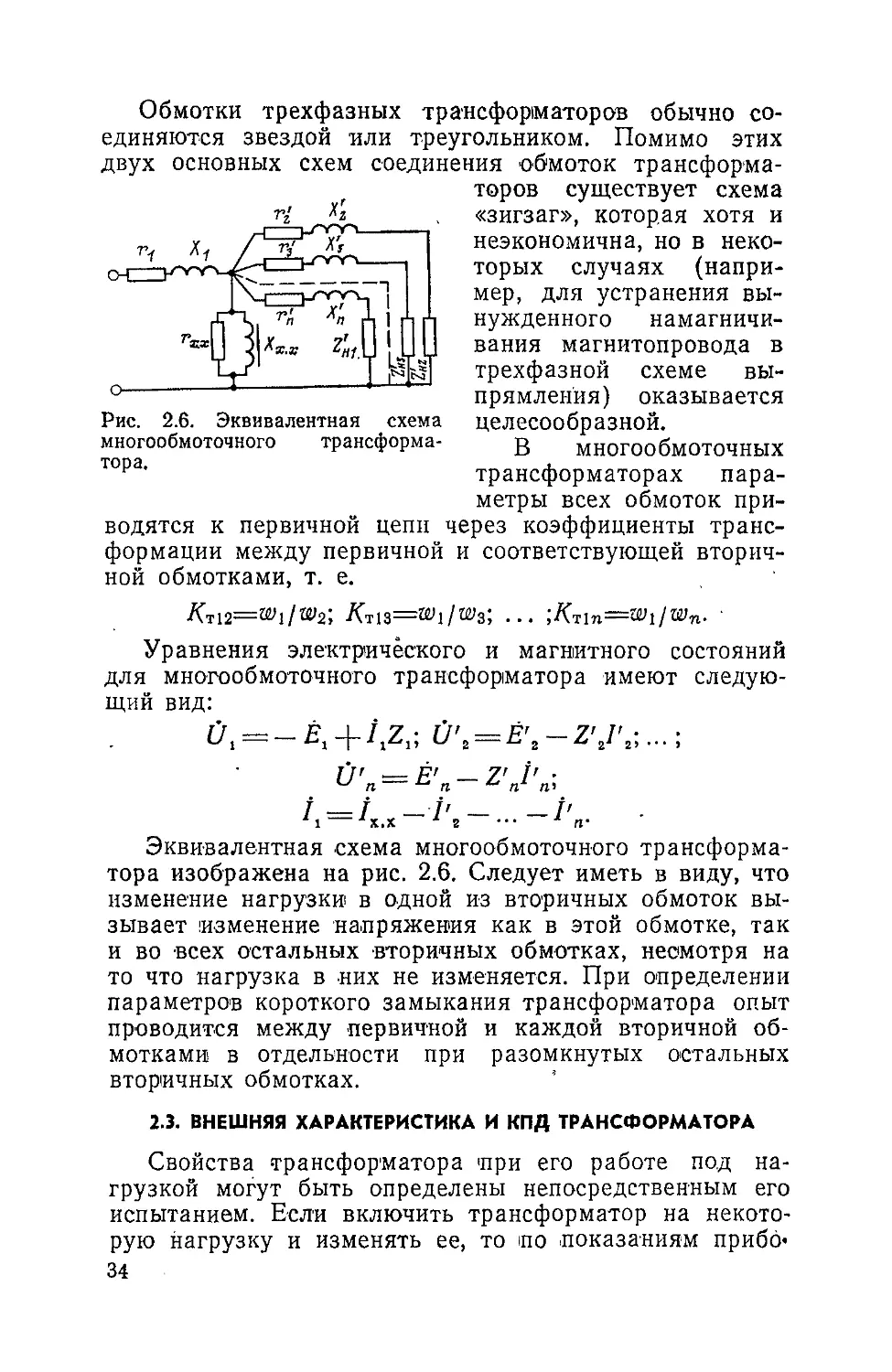
Рис. 2.7. Внешняя характеристика трансформатора при индуктивной (1) и емкостной (2) нагрузках.
определены по данным опытов холостого хода и короткого замыкания. Для проведения этих опытов требует-
ся сравнительно малая затрата энергии и отпадает надобность в громоздком оборудовании.
При опыте холостого хода измеряются напряжение первичной и вторичной обмоток Ui и U2, ток холостого хода Ix.x и потребляемая при холостом ходе мощность ДРХ.Х. По данным опыта холостого хода определяют коэффициент трансформации Кт, потери в стали ДРСт и сопротивления (полное, активное и реактивное) трансформатора при холостом ходе Zx.x, гх.х и хх.х.
При опыте короткого замыкания измеряют напряжение короткого замыкания UK, ток в первичной обмотке, который устанавливается равным номинальному /s, и мощность |Д'РК, потребляемая трансформатором. По данным опыта определяют потери в проводах- обмоток ДРп.н при номинальном токе, сопротивления (полное, активное и реактивное) трансформатора -при коротком замыкании ZK, гк й хк, а также напряжение короткого замыкания UK и его составляющие—'активная Uc и реактивная и
I*
Как было показано на векторных диаграммах трансформатора (см. рис. 2.4), напряжение вторичной обмотки не остается постоянным при изменении тока нагрузки. Изменение вторичного напряжения происходит вследствие того, что обмотки трансформатора обладают как активным, так и индуктивным сопротивлениями. При этом напряжение вторичной обмотки зависит не 3* 35
только от значения тока, но й от характера нагрузки. На рис. 2.7 показаны внешние характеристики трансформатора, из которых следует, что при индуктивном характере нагрузки вторичное напряжение понижается с увеличением нагрузки, а при емкостном характере нагрузки (при достаточно больших фазовых сдвигах ф2) с ростом нагрузки вторичное напряжение повышается.
При изменении нагрузки от холостого хода до номинальной напряжение вторичной обмотки трансформатора изменяется на величину:
At/H==[/Ccos <р24-£7^ sin<p2, (2ЛЗ)
где Uc и U — соответственно активная и реактивная составляющие напряжения короткого замыкания трансформатора, выраженные в процентах; ф2 — фазовый сдвиг между напряжением и током вторичной обмотки. Если ввести коэффициент нагрузки трансформатора ₽, равный отношению тока при любой нагрузке к номинальному току вторичной обмотки, т. е. р=/2//н, то понижение вторичного напряжения при любой нагрузке трансформатора равно:
At/ = p(J7ccos + sin<p2). (2.14)
Напряжение вторичной обмотки трансформатора под нагрузкой
^2=1/2Х.х(1—AI/),
где [Угх.х —напряжение вторичной обмотки при холостом ходе.
Коэффициент полезного действия трансформатора
Ъ = PJP. = ^4-др^ + д^’
где Pi и Р2—потребляемая и полезная мощности соответственно; ДРст — потери в стали магнитопровода; ДРоб—потери в обмотках.
Полезная мощность трансформатора при любой нагрузке равна:
Р2 = U2I2 COS ф2 = Р £Vh COS ф2 = PSh COS ф2, где Sn=U2sI2B—полная номинальная мощность трансформатора, В-А. 36
Потери в стали не зависят от нагрузки и равны потерям холостого хода (ДРСт—ЛРх.х) . Потери в обмотках при любой нагрузке
APo6=7VK=p272HrK=₽2APIt,
где АРК— потери короткого замыкания.
Таким образом, КПД трансформатора определяется из следующего выражения:
________РЛг cos у,________
?РН cos у2 + ДРХ.Х + 32ДРХ
(2.15)
В этом выражении АРх.х и АРК определяются из опьг
тов холостого хода и короткого значениями р и cos ф2, можно определить КПД трансформатора при любой нагрузке.
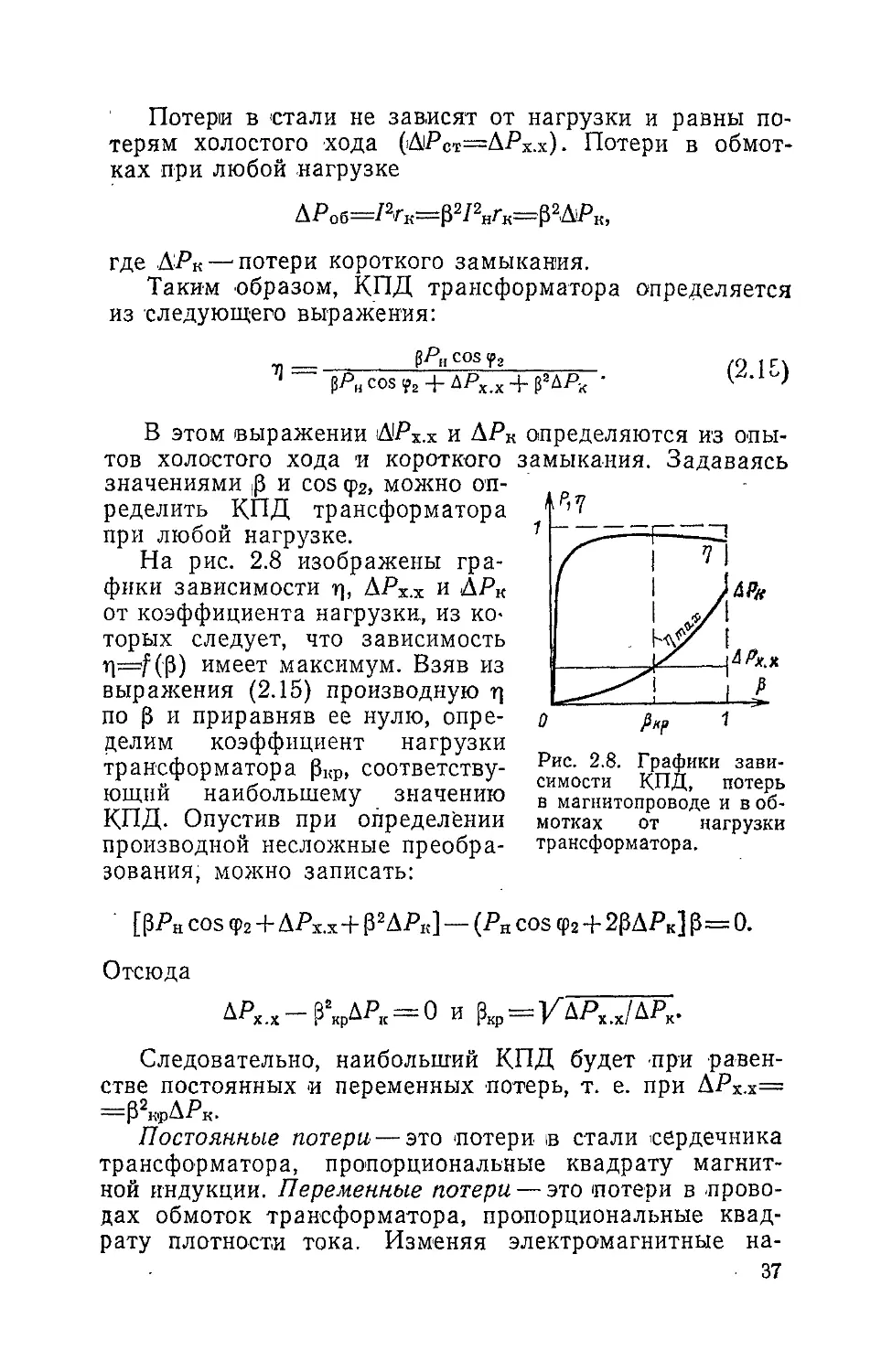
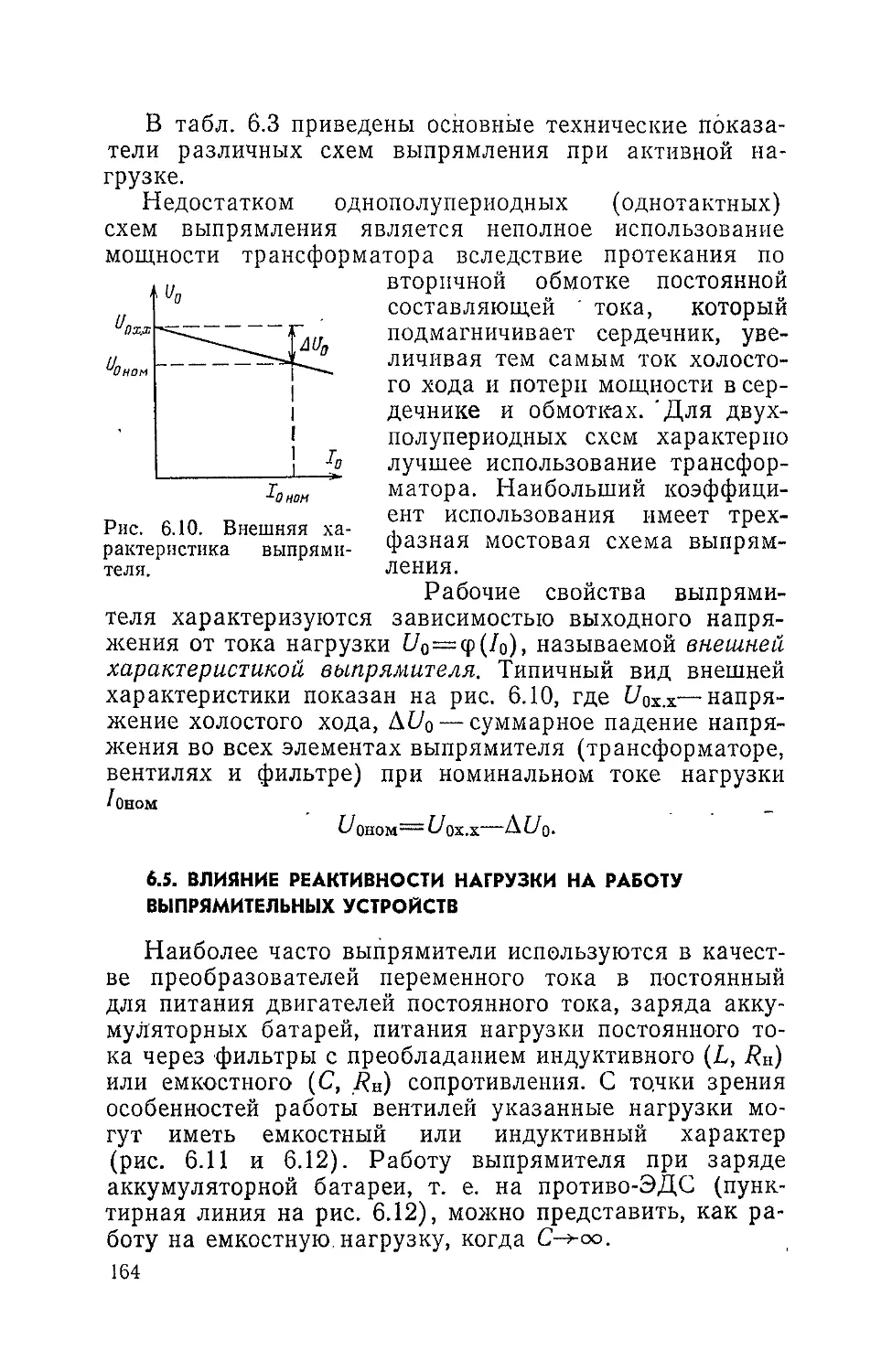
На рис. 2.8 изображены графики зависимости т], АРх.х и АРК от коэффициента нагрузки, из которых следует, что зависимость T|=f(P) имеет максимум. Взяв из выражения (2.15) производную г] по |3 и приравняв ее нулю, определим коэффициент нагрузки трансформатора ркр, соответствующий наибольшему значению КПД. Опустив при определении производной несложные преобра-
замыкания. Задаваясь
Рис. 2.8. Графики зависимости КПД, потерь в магнитопроводе и в обмотках от нагрузки трансформатора.
зования, можно записать:
[₽Рн cos ф2 + АРх.х+₽2 А Рк] — (Рн COS ф2 + 2₽дрк] р=0.
Отсюда
ДРХ х — — 0 И BKD = УДРХ Х/ДРК.
Л-л г кр 11 гкр » л»л/ Л
Следовательно, наибольший КПД будет при равенстве постоянных и переменных потерь, т. е. при АРх.х= —Р2крАРк-
Постоянные потери — это потери в стали сердечника трансформатора, пропорциональные квадрату магнитной индукции. Переменные потери — это потери в проводах обмоток трансформатора, пропорциональные квадрату плотности тока. Изменяя электромагнитные на-
37
грузки трансформатора, можно варьировать соотношением постоянных и переменных потерь и тем самым изменять коэффициент загрузки, доводя его до максимального значения, соответствующего наибольшему значению КПД.
Если трансформатор постоянно работает на номинальную нагрузку, то стремятся получить наибольший КПД- при номинальном токе, т. е. при ркр—1, что является обычным в трансформаторах малой мощности. Если же трансформатор работает в режиме частых и значительных недогрузок (силовые, осветительные трансформаторы), то желательно получить наибольший КПД при нагрузках, меньших номинальных, т. е. при Ркр<С 1.
Габариты трансформатора зависят от его мощности, частоты тока и выбранных электромагнитных нагрузок (плотности тока и магнитной индукции). Мощность трансформатора
P2=E2I2=4№w2f®mI2=4A4W2fBSajS2, откуда се Рг-Ю’ 2,22fBjkokc ’
где S2 — поперечное сечение провода вторичной обмотки, м2; Sc—-поперечное сечение стержня, м2; So — площадь окна магнитопровода, м2; В — магнитная индукция, Тл; /— плотность тока, А/мм2; f—-частота тока, Гц; kc — коэффициент заполнения сталью сечения магнитопровода, равный 0,8—0,95; k0 — коэффициент заполнения медью окна сердечника, равный 0,2—0,35 в зависимости от мощности трансформатора.
’Задаваясь электромагнитными нагрузками (В и /)*, определяют произведение S0S0 и выбирают стандартный магнитопровод для трансформатора. Зная Sc, определяют число витков обмоток трансформатора:
£r10* _ jE2.104
Ю>— 4,44fB,nSc > 4,44fBmSc
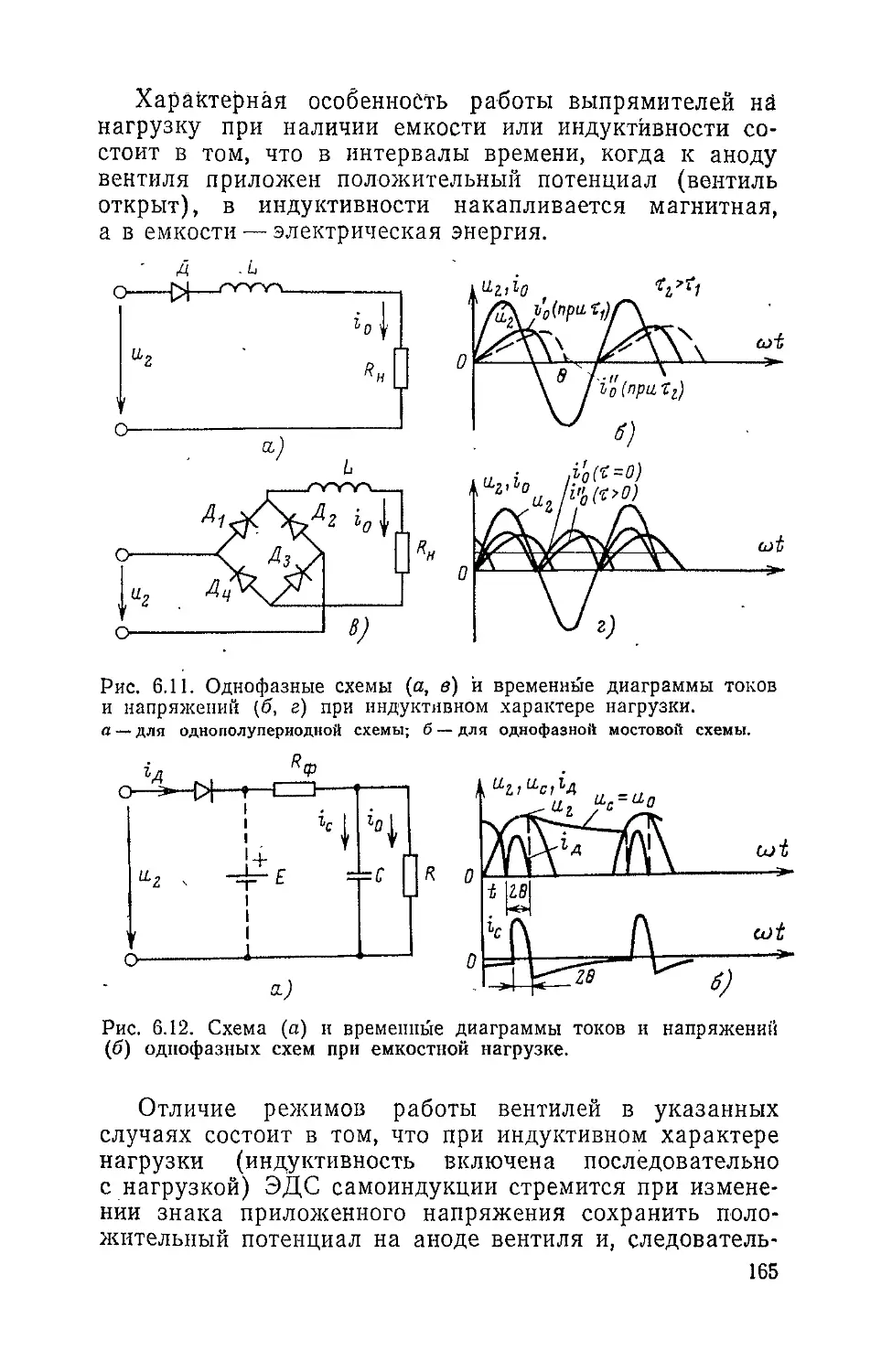
2.4. АВТОТРАНСФОРМАТОРЫ
В конструктивном отношении автотрансформатор подобен трансформатору: на стальном магнитопроводе размещаются две обмотки, выполненные из проводников 38
различного поперечного сечения. Конец одной обмотки электрически соединен с началом другой так, что две последовательно соединенные обмотки образуют общую
обмотку высшего напряжения. Обмоткой низшего напряжения служит часть обмотки высшего напряжения автотрансформатора. Таким образом, между обмотками выс
шего и низшего напряжении автотрансформатора имеется не только магнитная, но и электическая связь.
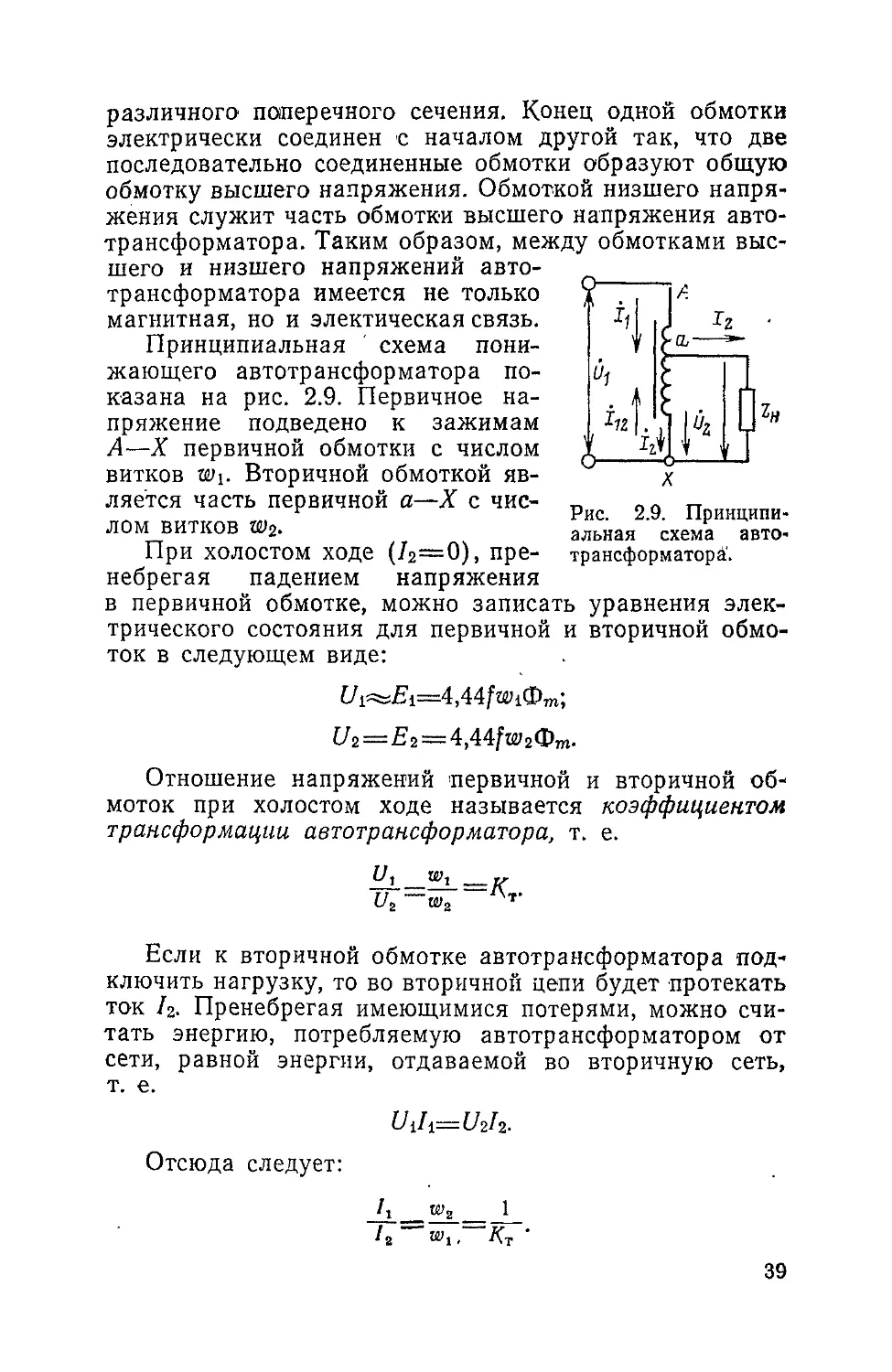
Принципиальная ' схема понижающего автотрансформатора показана на рис. 2.9. Первичное напряжение подведено к зажимам А—X первичной обмотки с числом витков Вторичной обмоткой яв
Рис. 2.9. Принципиальная схема автотрансформатора'.
ляется часть первичной а—X с числом ВИТКОВ W2-
При холостом ходе (/2=0), пренебрегая падением напряжения
в первичной обмотке, можно записать уравнения электрического состояния для первичной и вторичной обмо
ток в следующем виде:
[/1«к£'1=4,44/да1Фт;
U 2=Е2 — 4,44fw 2 Фт-
Отношение напряжений первичной и вторичной обмоток при холостом ходе называется коэффициентом трансформации автотрансформатора, т. е.
U-t ,__Wi
Если к вторичной обмотке автотрансформатора подключить нагрузку, то во вторичной цепи будет протекать ток 12. Пренебрегая имеющимися потерями, можно считать энергию, потребляемую автотрансформатором от сети, равной энергии, отдаваемой во вторичную сеть, т. е.
ад=[72/2.
Отсюда следует:
Л___w2______1_
/2 W1, Кт '
39
Таким образом, основные соотношения трансформатора остаются без изменения и для автотрансформатора.
Для автотрансформатора может быть построена векторная диаграмма и эквивалентная схема, подобные диаграмме и схеме двухобмоточного трансформатора.
Из условия постоянства магнитного потока при неизменном напряжении сети Ui можно записать уравнение магнитного состояния автотрансформатора:
По части обмотки а—X с числом витков w2 протекает ток Аг, равный геометрической сумме токов первичной’ и вторичной цепи:
1к==11 + 12.
Если пренебречь током холостого хода, то можно считать, что токи Л и /2 сдвинуты по фазе на 180° и их геометрическая сумма равна арифметической разности, т. е.
/12=/г—Л=/2(1—1/Кт).
В понижающем автотрансформаторе ток /12 совпадает по направлению с током /2, в повышающем направлен противоположно току /2.
Преимуществом .автотрансформатора перед трансформатором -одинаковой полезной мощности является меньший расход активных материалов — обмоточного провода и стали, меньшие потери энергии, более высокий КПД, меньшее изменение напряжения при изменениях нагрузки.
Масса провода обмоток автотрансформатора меньше массы обмоток трансформатора при одинаковых плотностях тока. Это объясняется тем, что у трансформатора имеются две обмотки —- первичная с числом витков Wi, поперечное сечение провода которой рассчитано на ток /1, и вторичная с числом витков и>2, поперечное сечение провода которой рассчитано на ток 12. У автотрансформатора также две обмотки, но одна из них (часть А—а) имеет число витков Wi—w2 из провода, поперечное сечение которого рассчитано на ток /1, а другая (часть а—X) с числом витков w2 из провода, поперечное сечение которого рассчитано на разность токов /2—Л=/12.
Поперечное сечение и масса магнитопровода автотрансформатора также меньше сечения и массы магнитопровода трансформатора. Это объясняется тем, что 40
в трансформаторе энергия из первичной сети во вторичную передается за счет электромагнитной связи между обмотками. В автотрансформаторе энергия из первичной сети во вторичную частично "передается за счет электрического соединения первичной и вторичной сетей. Так как в процессе передачи этой части энергии магнитный поток не участвует, у автотрансформатора электромагнитная мощность меньше, чем у трансформатора.
Полезная мощность автотрансформатора при активной нагрузке Pz—Uzh.
Имея в виду, что /2—Л + Лг, получаем:
Pi = U2I1 + ^2^12 = Рэ + Рм,
где Рэ — мощность, передаваемая электрическим соединением нагрузки и сети; Рх— электромагнитная мощность автотрансформатора, определяющая необходимый магнитный поток, поперечное сечение и массу магнитопровода, которая является расчетной или габаритной мощностью автотрансформатора.
Расчет автотрансформатора аналогичен расчету обычного трансформатора, но за расчетную принимают электромагнитную мощность и автотрансформатор заменяют эквивалентным трансформатором, в котором первичной обмоткой является обмотка Аа с числом витков Wi—W2, первичное напряжение U1—U2, ток Л; вторичной обмоткой является обмотка аХ с числом витков w2, вторичное напряжение U2, ток /i2=/2—Л (рис. 2.9).
Наряду с преимуществами автотрансформаторов перед трансформаторами (наличие одной обмотки и др.) они имеют и существенные недостатки. Автотрансформатор имеет малое сопротивление короткого замыкания, что обусловливает большую кратность тока короткого замыкания, а также возможность попадания высшего напряжения в цепь низшего напряжения за счет электрической связи между этими цепями, связи между сетью источника и приемника энергии, что, в свою очередь, не позволяет применять автотрансформаторы в случае, когда приемник .энергии имеет заземленный полюс (например, в выпрямительных устройствах).
Преимущества автотрансформаторов будут выражены тем сильнее, чем меньше коэффициент трансформации. Поэтому автотрансформаторы применяются при небольших коэффициентах трансформации (7(т=1-^-2).
41
2.5. ТРАНСФОРМАТОРЫ СПЕЦИАЛЬНЫХ ТИПОВ
Пиктрансформатор, Широкое практическое применение в различных радиоэлектронных устройствах нашли пиктрансформаторы, преобразующие напряжение синусоидальной формы в импульсное напряжение пикообразной формы.
Форма импульсов вторичного напряжения зависит от кривой изменения магнитного потока во времени. Для получения на зажимах вторичной обмотки трансформа-
тора импульсов пикообразной формы кривая изменения магнитного потока, с которым сцеплена вторичная обмотка, должна иметь трапецеидальную форму.
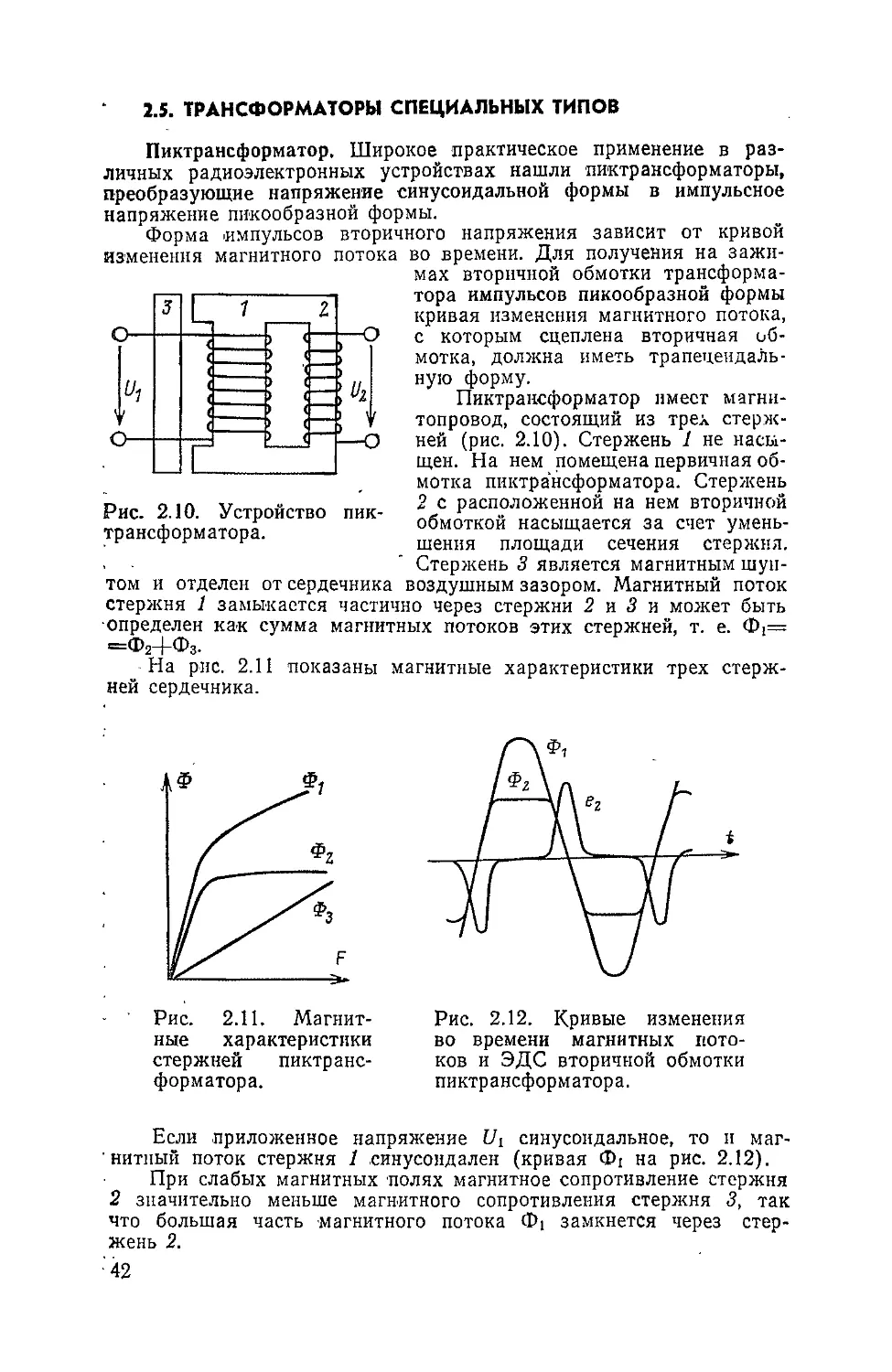
Пиктрансформатор имеет магнитопровод, состоящий из трех стержней (рис. 2.10). Стержень 1 не насыщен. На нем помещена первичная обмотка пиктрансформатора. Стержень 2 с расположенной на нем вторичной обмоткой насыщается за счет уменьшения площади сечения стержня.
Рис. 2.10. Устройство пик-трансформатора.
Стержень 3 является магнитным шунтом и отделен от сердечника воздушным зазором. Магнитный поток стержня 1 замыкается частично через стержни 2 и 3 и может быть определен как сумма магнитных потоков этих стержней, т. е. <!>!= =Ф2-|-Фз.
На рис. 2.11 показаны ней сердечника.
магнитные характеристики трех стерж-
Рис. 2.11. Магнитные характеристики стержней пиктрансформатора.
Рис. 2.12. Кривые изменения во времени магнитных потоков и ЭДС вторичной обмотки пиктрансформатора.
Если приложенное напряжение синусоидальное, то и магнитный поток стержня 1 синусоидален (кривая Ф1 на рис. 2.12).
При слабых магнитных полях магнитное сопротивление стержня 2 значительно меньше магнитного сопротивления стержня 3, так что большая часть магнитного потока Ф1 замкнется через стержень 2. ;42
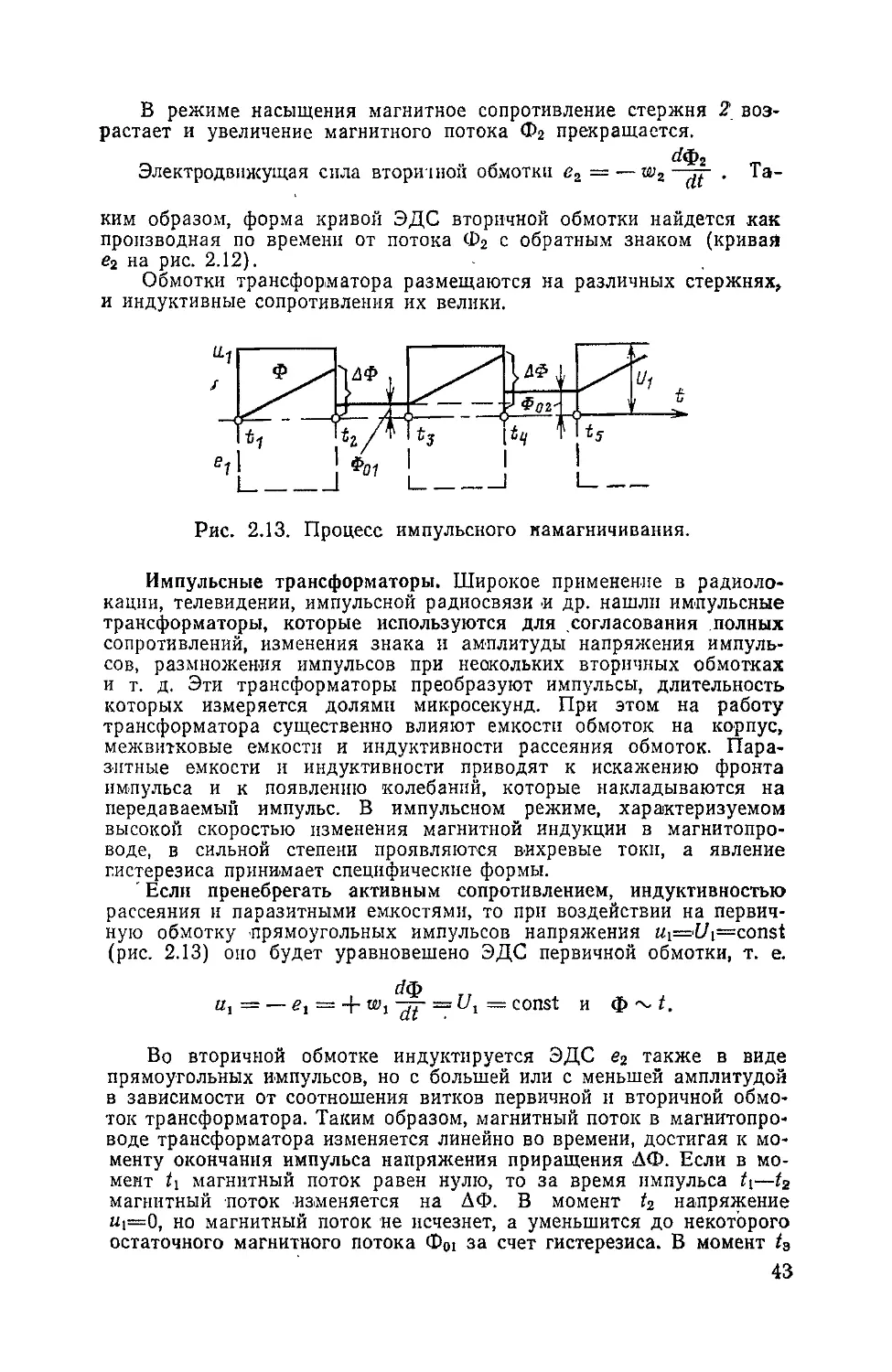
В режиме насыщения магнитное сопротивление стержня 2' возрастает и увеличение магнитного потока Ф2 прекращается.
£^Ф2 m
Электродвижущая сила вторичной обмотки е2 — — w2-^- . Таким образом, форма кривой ЭДС вторичной обмотки найдется как производная по времени от потока Ф2 с обратным знаком (кривая е2 на рис. 2.12).
Обмотки трансформатора размещаются на различных стержнях, и индуктивные сопротивления их велики.
Рис. 2.13. Процесс импульсного намагничивания.
Импульсные трансформаторы. Широкое применение в радиолокации, телевидении, импульсной радиосвязи и др. нашли импульсные трансформаторы, которые используются для согласования полных сопротивлений, изменения знака и амплитуды напряжения импульсов, размножения импульсов при нескольких вторичных обмотках и т. д. Эти трансформаторы преобразуют импульсы, длительность которых измеряется долями микросекунд. При этом на работу трансформатора существенно влияют емкости обмоток на корпус, межвитковые емкости и индуктивности рассеяния обмоток. Паразитные емкости и индуктивности приводят к искажению фронта импульса и к появлению колебаний, которые накладываются на передаваемый импульс. В импульсном режиме, характеризуемом высокой скоростью изменения магнитной индукции в магнитопроводе, в сильной степени проявляются вихревые токи, а явление гистерезиса принимает специфические формы.
' Если пренебрегать активным сопротивлением, индуктивностью рассеяния и паразитными емкостями, то при воздействии на первичную обмотку прямоугольных импульсов напряжения Ui=(A=const (рис. 2.13) оно будет уравновешено ЭДС первичной обмотки, т. е.
г/ф
и, =— et — + w, -ц- = и1 = const и ф t.
Во вторичной обмотке индуктируется ЭДС е2 также в виде прямоугольных импульсов, но с большей или с меньшей амплитудой в зависимости от соотношения витков первичной и вторичной обмоток трансформатора. Таким образом, магнитный поток в магнитопроводе трансформатора изменяется линейно во времени, достигая к моменту окончания импульса напряжения приращения ДФ. Если в момент ii магнитный поток равен нулю, то за время импульса —12 магнитный поток изменяется на ДФ. В момент t2 напряжение «1==0, но магнитный поток не исчезнет, а уменьшится до некоторого остаточного магнитного потока Ф01 за счет гистерезиса. В момент t3
43
А
Во
Вон В,ог> вог
ДВ
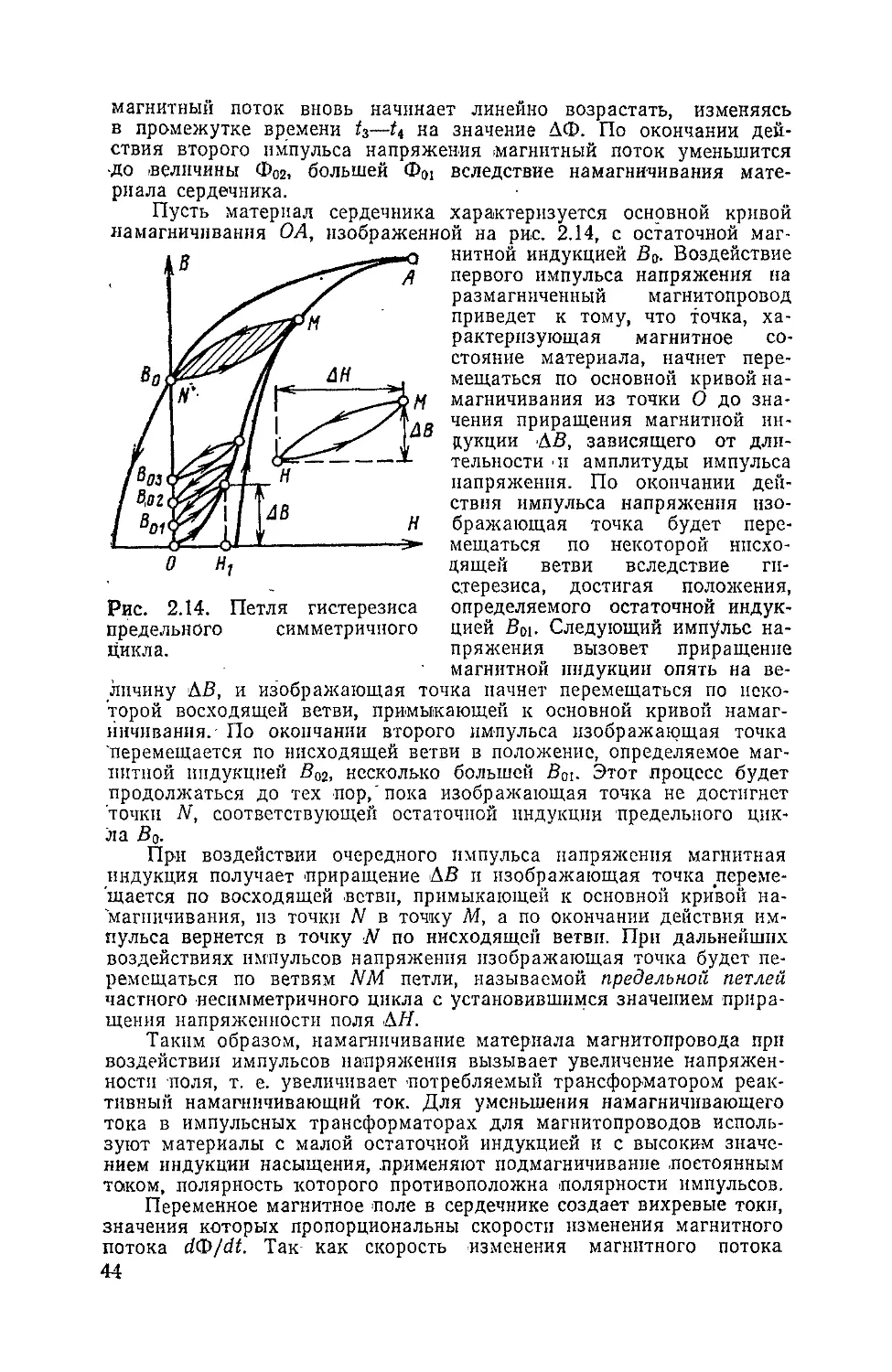
Рис. 2.14. Петля гистерезиса предельного симметричного цикла.
Н
магнитный поток вновь начинает линейно возрастать, изменяясь в промежутке времени /3—h на значение ДФ. По окончании действия второго импульса напряжения магнитный поток уменьшится до величины Фог. большей Ф01 вследствие намагничивания материала сердечника.
Пусть материал сердечника характеризуется основной кривой намагничивания ОА, изображенной на рис. 2.14, с остаточной магнитной индукцией Во. Воздействие первого импульса напряжения на размагниченный магнитопровод приведет к тому, что точка, характеризующая магнитное состояние материала, начнет перемещаться по основной кривой намагничивания из точки О до значения приращения магнитной индукции ДВ, зависящего от длительности 'И амплитуды импульса напряжения. По окончании действия импульса напряжения изображающая точка будет перемещаться по некоторой нисходящей ветви вследствие гистерезиса, достигая положения, определяемого остаточной индукцией Вт. Следующий импульс напряжения вызовет приращение магнитной индукции опять на ве
личину ДВ, и изображающая точка начнет перемещаться по некоторой восходящей ветви, примыкающей к основной кривой намагничивания.' По окончании второго импульса изображающая точка 'перемещается по нисходящей ветви в положение, определяемое магнитной индукцией В02, несколько большей ВОь Этот процесс будет продолжаться до тех пор,'пока изображающая точка не достигнет точки N, соответствующей остаточной индукции предельного цикла Во.
При воздействии очередного импульса напряжения магнитная индукция получает приращение ДВ и изображающая точка перемещается по восходящей ветви, примыкающей к основной кривой намагничивания, пз точки N в точку М, а по окончании действия импульса вернется в точку N по нисходящей ветви. При дальнейших воздействиях импульсов напряжения изображающая точка будет перемещаться по ветвям NM петли, называемой предельной петлей частного несимметричного цикла с установившимся значением приращения напряженности поля &Н.
Таким образом, намагничивание материала магнитопровода при воздействии импульсов напряжения вызывает увеличение напряженности поля, т. е. увеличивает потребляемый трансформатором реактивный намагничивающий ток. Для уменьшения намагничивающего тока в импульсных трансформаторах для магнитопроводов используют материалы с малой остаточной индукцией и с высоким значением индукции насыщения, применяют подмагничивание постоянным током, полярность которого противоположна полярности импульсов.
Переменное магнитное поле в сердечнике создает вихревые токи, значения которых пропорциональны скорости изменения магнитного потока d<£>/dt. Так как скорость изменения магнитного потока 44
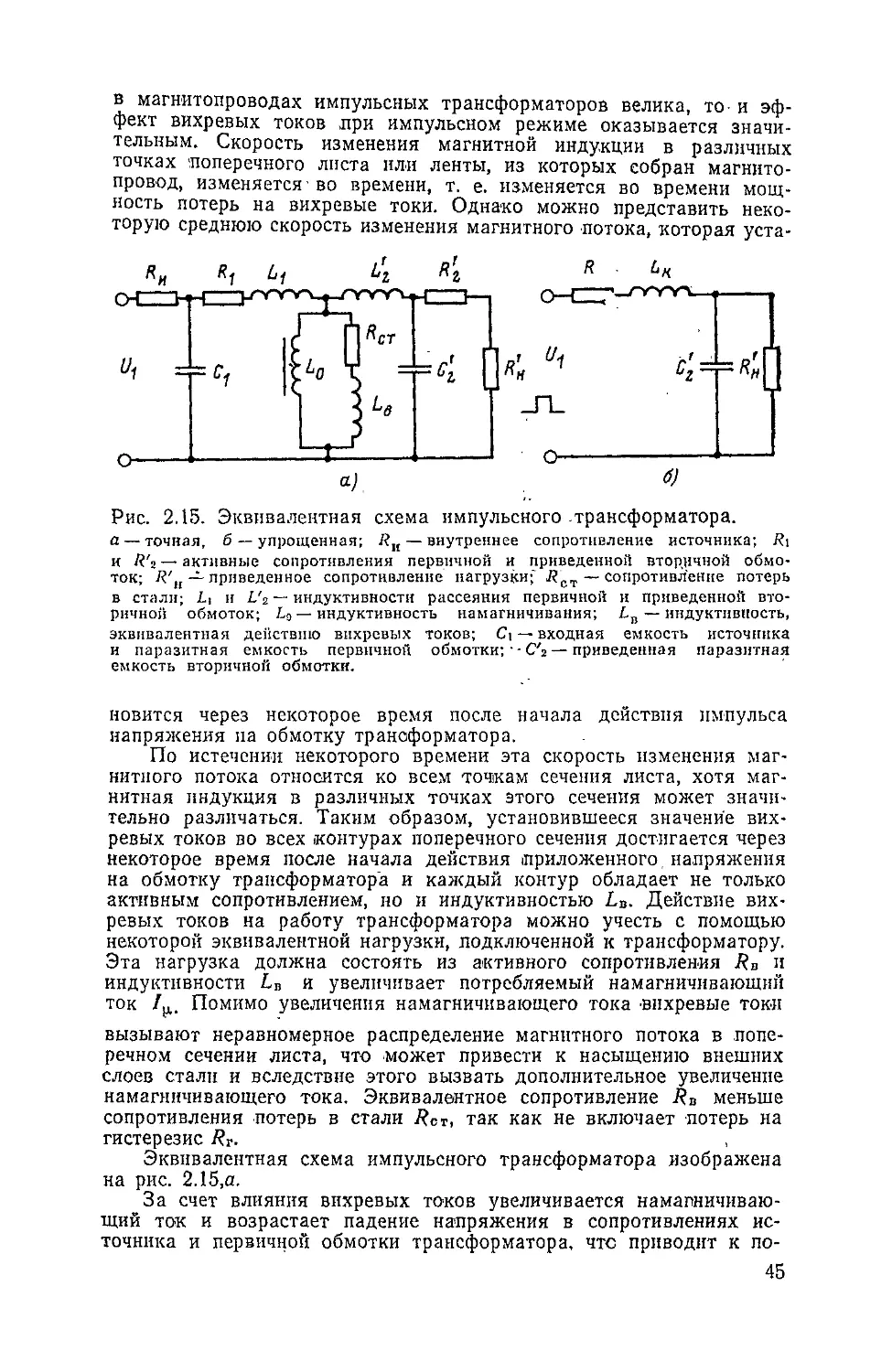
в магнитопроводах импульсных трансформаторов велика, то - и эффект вихревых токов .при импульсном режиме оказывается значительным. Скорость изменения магнитной индукции в различных точках поперечного листа или ленты, из которых собран магнитопровод, изменяется -во времени, т. е. изменяется во времени мощность потерь на вихревые токи. Однако можно представить некоторую среднюю скорость изменения магнитного потока, которая уста-
Рис. 2.15. Эквивалентная схема импульсного-трансформатора.
а— точная, б — упрощенная; — внутреннее сопротивление источника; R\ и /?'2 — активные сопротивления первичной и приведенной вторичной обмоток; — приведенное сопротивление нагрузки*' — сопротивление потерь в стали; Ц и L'z — индуктивности рассеяния первичной и приведенной вторичной обмоток; 1о — индуктивность намагничивания; LB — индуктивность, эквивалентная действию вихревых токов; Ci — входная емкость источника и паразитная емкость первичной обмотки; •- С*ч — приведенная паразитная емкость вторичной обмотки.
ловится через некоторое время после начала действия импульса напряжения па обмотку трансформатора.
По истечении некоторого времени эта скорость изменения магнитного потока относится ко всем точкам сечения листа, хотя магнитная индукция в различных точках этого сечения может значительно различаться. Таким образом, установившееся значение вихревых токов во всех контурах поперечного сечения достигается через некоторое время после начала действия приложенного, напряжения на обмотку трансформатора и каждый контур обладает не только активным сопротивлением, но и индуктивностью Ав. Действие вихревых токов на работу трансформатора можно учесть с помощью некоторой эквивалентной нагрузки, подключенной к трансформатору. Эта нагрузка должна состоять из активного сопротивления 7?в и индуктивности £в и увеличивает потребляемый намагничивающий ток /у,. Помимо увеличения намагничивающего тока -вихревые ток-и вызывают неравномерное распределение магнитного потока в поперечном сечении листа, что -может привести к насыщению внешних слоев стали и вследствие этого вызвать дополнительное увеличение намагничивающего тока. Эквивалентное сопротивление Лв меньше сопротивления потерь в стали 2?Ст, так как не включает -потерь на гистерезис /?г.
Эквивалентная схема импульсного трансформатора изображена на рис. 2.15,а.
За счет влияния вихревых токов увеличивается намапничиваю-щий ток и возрастает падение напряжения в сопротивлениях источника и первичной обмотки трансформатора, что приводит к по
45
нижению плоской части импульса выходного напряжения. Искажение фронта трансформируемого импульса напряжения можно определить на основании анализа эквивалентной схемы, что требует решения дифференциального уравнения пятой степени. Поэтому целесообразно упростить схему. Так как для момента времени, меньшего, чем время установления фронта импульса /$, намагничивающий ток ничтожно мал, то допустимо принять £0=оо. Также можно пренебрегать еще меньшим током в контуре Рот—La. Обычно С'2> >С, так как емкость С'2 учитывает довольно большую межвитко-вую емкость обмотки трансформатора и нагрузки, а С — сравнительно небольшую емкость источника питания.
Упрощенная эквивалентная схема импульсного трансформатора изображена на рис. 2.15,6, где |-/fi-|—R'a; £k=£i-|-£,2. При
этих условиях переходные процессы в цепи описываются операторными уравнениями:
I1 (p)==ZP2(p)//?'H-|-pC/2t//2(p).
При составлении этих уравнений приняты начальные условия У2(0)=0 и Zi(0)==0. Исключив из написанной системы Ц, получим:
U, (р)
(Р) = p.Lkc2 + p(RC'2 + £«//?'„) + (1 +R/R’uy (2J6)
Разделив числитель и знаменатель этого выражения на 1+RIR's и введя следующие обозначения:
1/ Z.KC f2 I/ Z-K s
Zi~V i+Wh; C'J 6-
__.............fA.jq
2 Kl + \P
полу! им:
У, (p)/(1 + RIR\} _ l/'2oo (P)
(рг1р + 2в(рЧ)+ 1 У(р) ’ (2Д7>
так как установившееся значение выходного сигнала (/=оо)
(р) = (Р) -R + VH = (р)/(‘ + R/R,«y
Корни уравнения (2.17):
^(p) = (pTi)2+26(prt)+l=0.
Отсюда
РЛ = — 8 ± ! — 82= — 5 ± 1Y-
Введя относительную величину времени и применяя
формулу разложения, находим решение уравнения (2.17):
, ( Г е^' е~^' В ,9 ,йч
н'2 —и 2оо V + 2/Y [— О-Нт — 8— JY Р ’
46
Выполнив преобразования, решению можно придать вид: Г e~lx' 1
“2 = ^200 [1 — “7“ (Y cos f-* + 8 Sin ft*) J —
= U2X [! —-7-<?-Sx*sin(YI*+¥)]•••» (2.19)
где <p = arctg (8/y) = arctg (S/V^l — 62).
Таким образом, относительная величина напряжения представляет собой функцию относительного времени т*:
t/2/[/2oo = F(T*) = l--Y-^_b,*sin(YT* + ?). (2.20)
При 6<1 эта функция имеет колебательный характер. При б> >1 процесс становится апериодическим и решение принимает вид:
U2/U2ao = 1 + Ле-”1'1* — Ве~*^, (2,21)
где
1
1/8 \
А~ 2 ~9:
а, = 8 —/82 — 1;
/8 \
аг=8 + К82 — 1.
Соотношение (2.21) содержит только один параметр S, который называется колебательной характеристикой трансформаторной цепи.
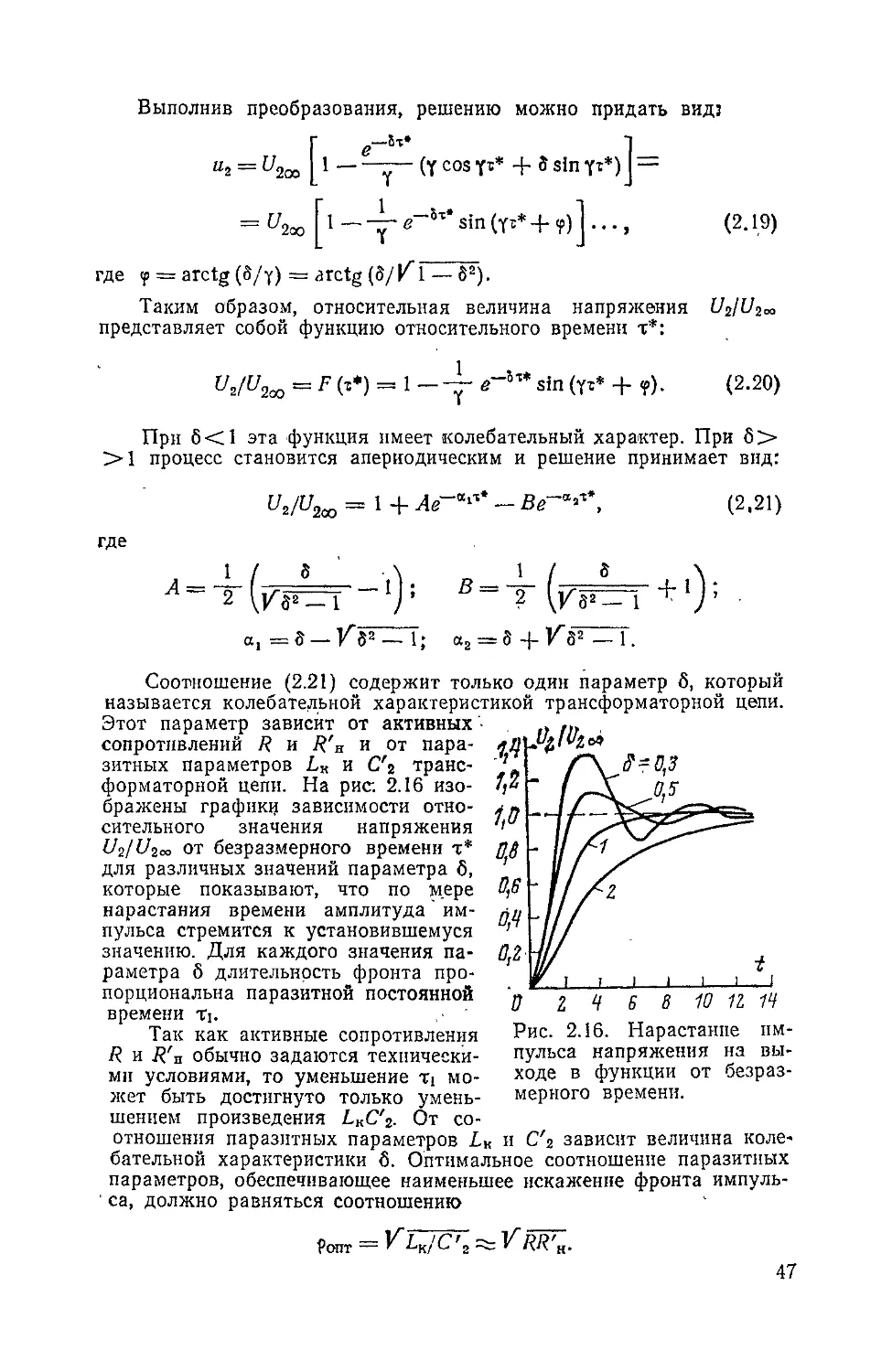
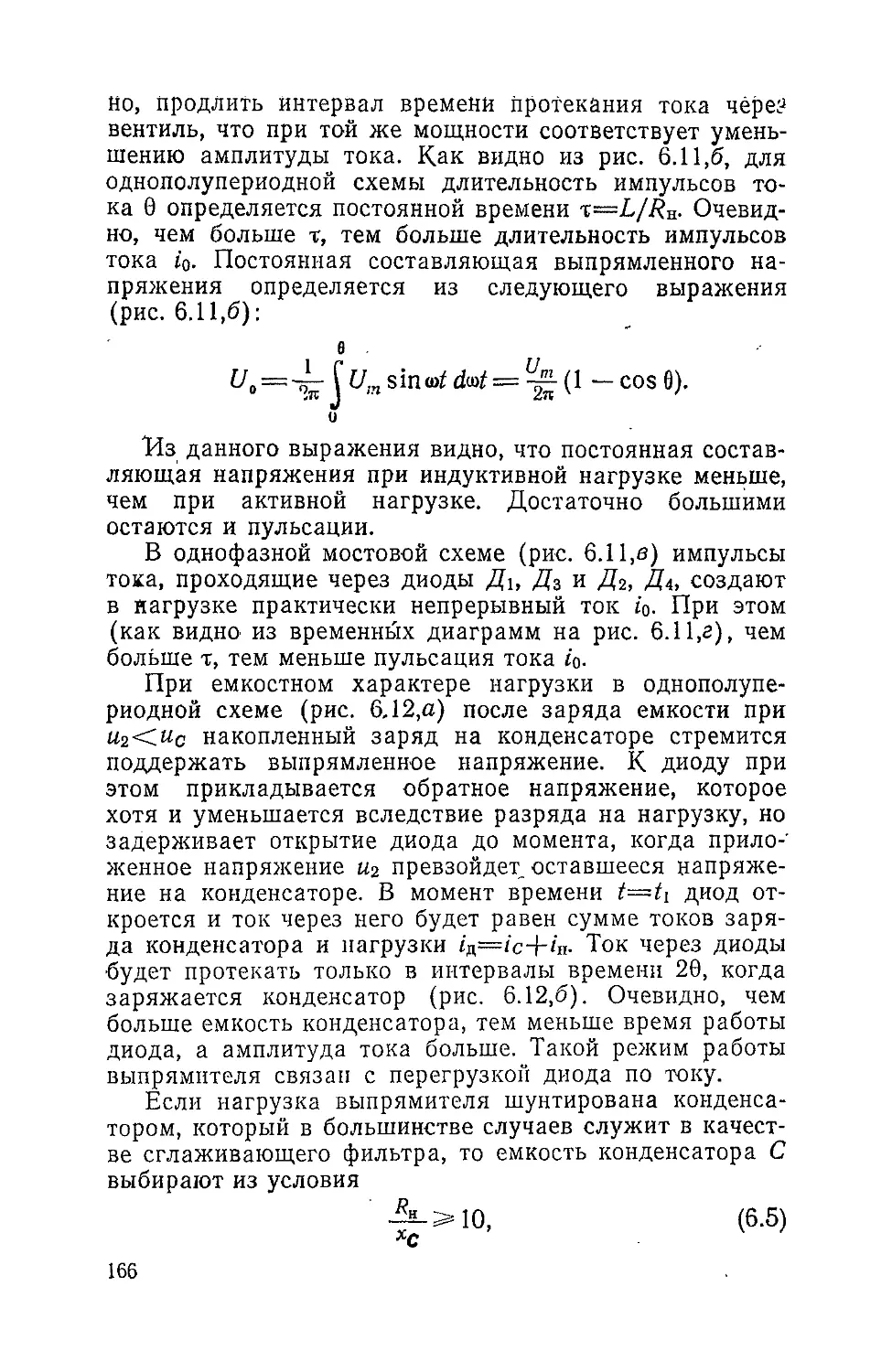
Этот параметр зависит от активных-сопротивлений R и Д'н и от паразитных параметров LK и С'г трансформаторной цепи. На рие. 2.16 изображены графики зависимости относительного значения напряжения от безразмерного времени т* для различных значений параметра 6, которые показывают, что по мере нарастания времени амплитуда импульса стремится к установившемуся значению. Для каждого значения параметра 6 длительность фронта пропорциональна паразитной постоянной времени Т]. ‘
Так как активные сопротивления R и Д'н обычно задаются техническими условиями, то уменьшение Xi может быть достигнуто только уменьшением произведения LKC'z. От со-
ff 2 4 8 8 10 12 14
Рис. 2.16. Нарастание импульса напряжения на выходе в функции от безразмерного времени.
отношения паразитных параметров LK и С’г зависит величина колебательной характеристики 6. Оптимальное соотношение паразитных
параметров, обеспечивающее наименьшее искажение фронта импуль-
' са, должно равняться соотношению
Ропт — Вк/С ’z
47
Глава третья
ЭЛЕКТРИЧЕСКИЕ МАШИНЫ
3.1. ПРИНЦИП ДЕЙСТВИЯ И УСТРОЙСТВО
ЭЛЕКТРИЧЕСКИХ МАШИН
Электрические машины в основном 'предназначены для преобразования механической энергии в электрическую и обратно. В первом случае электрические машины называют генераторами, во втором — двигателями.
Электрические машины используются также для преобразования рода тока — переменного в постоянный, ча-тоты и числа фаз переменного тока, значения напряжения постоянного тока и т. п. Такие машины называются электромашинными преобразователями.
Принцип действия электрических машин основан на законах электромагнитной индукции и электромагнитных сил. Согласно этим законам, а также законам Ома и Джоуля — Ленца можно получить основные соотношения между величинами, характеризующими работу
Рис. 3.1. Принцип наведения ЭДС в проводнике, перемещающемся в магнитном поле.
а — правило правой руки; б — правило левой руки.
48
электрических машин. Так, из закона элекромагнитной индукции следует, что если проводник, помещенный в магнитное поле, перемещать перпендикулярно магнитным линиям, то по правилу правой руки в нем будет наводиться ЭДС в направлении, указанном на рис. 3.1, а ее значение определяется как
E=Blv, (3.1)
где В — магнитная индукция, В-с/м2; I, v— длина и скорость перемещения проводника, м, м/с.
Если подключить к концам проводника резистор, то ток пойдет в направлении, совпадающем с направлением ЭДС. В результате взаимодействия проводника с током и магнитного поля возникнет электромагнитная сила F3M, значение которой определяется как
FayL=BIl,
а направление — по правилу левой руки (рис. 3.1,6).
При равномерном движении проводника E3M уравновешивается противодействующей силой
Дзм—-Емех- (3.2)
Если умножим в (3.2) левую и правую части на скорость v, то с учетом (3.1) получим уравнение мощностей
FahlV:=Fjlie^V=EI.
Отсюда следует, что механическая мощность преобразуется в электрическую. Это элементарный идеальный генератор. Электрическая мощность реального генератора, отдаваемая во внешнюю сеть, будет отличаться на величину электрических потерь мощности в проводнике rl2
UI=EI^rP. (3.3)
Разделив выражение (3.3) на I, получим уравнение электрического состояния
U—E—rl.
В двигательном режиме электрическая мощность,, подведенная к проводнику, преобразуется в электромагнитную мощность РЭМ=Е7 и частично в тепловую мощность потерь в проводнике
UI—EI-\-rI2.
Уравнение электрического состояния имеет вид:
U=E+rI. (3.4)
4-1056 49-
В этом случае проводник с током, имеющим то же направление, взаимодействуя с магнитным полем, будет перемещаться влево. Это так называемый принцип обратимости машин, который был установлен Ленцем.
В машинах переменного тока Е и / сдвинуты по фазе, поэтому уравнение напряжений имеет вид:
O—E±ZI,
«где Z=r+jx; Z, г, х — полное, активное и индуктивное сопротивления проводника соответственно: знак « + » соответствует двигательному, а «—» — генераторному режимам работы машины. Таким образом, наличие магнитного поля и проводников с током и постоянное взаи-
•рис. 3.2. Взаимодействие магнитных полей ротора и статора в генераторном (а) и двигательном (б) режимах.
модействие между ними являются необходимым условием работы любой электрической машины как преобразователя энергии. Увеличение электромагнитной силы достигается усилением магнитного поля посредством применения для образования магнитной цепи машины ферромагнитных материалов и увеличением числа и активной длины проводников, образующих обмотку машины, в которой они соединяются последовательно и параллельно.
Конструктивно электрическая машина состоит из двух основных частей — вращающейся, называемой ротором, и неподвижной, называемой статором.
Преобразование энергии в электрических машинах возможно лишь при взаимодействии между магнитными полями статора и ротора, для непрерывного поддержания которого поля статора и ротора (или их МДС) должны быть неподвижны относительно друг друга или .50
вращаться синхронно при любой частоте вращения ротора. •
В режиме генератора (рис. 3.2,а) электромагнитный момент машины Л4ЭМ противодействует вращению. Он постоянно уравновешивается моментом приводного двигателя Л4дв (турбина, двигатель внутреннего сгорания и т. п.).
В режиме двигателя (рис. 3.2,6) электромагнитному моменту Л4эм, создаваемому машиной, противодействует момент сопротивления приводимого во вращение механического устройства Мс (станок, вентилятор, насос и т. п.).
Условие неподвижности магнитных полей (или МДС)-ротора и статора в электрической машине может быть обеспечено в трех случаях, соответствующих трем типам машин:
1. При неподвижном поле статора поле ротора должно вращаться с частотой, равной частоте вращения ротора, но в противоположном направлении.
2. При поле вращающегося ротора, неподвижном относительно ротора, необходимо, чтобы поле статора вращалось относительно статора с частотой, равной частоте вращения ротора, в том же направлении.
3. При полях, вращающихся относительно статора и ротора соответственно, частота вращения ротора должна быть равна разности частот вращения полей статора и ротора.
В первом случае это достигается переключением направления тока в проводниках ротора с помощью специального щеточно-коллекторного механизма. Во втором и третьем случаях — созданием вращающегося магнитного поля. В связи с этим электрические машины делятся на коллекторные машины постоянного и переменного тока и бесколлекторные (синхронные и асинхронные машины).
Существуют следующие способы возбуждения основного магнитного поля в электрических машинах: а) электромагнитный— посредством питания обмотки возбуждения от источника постоянного или переменного тока; б) от постоянных магнитов. Вращающееся магнитное поле в машинах переменного тока создается с помощью многофазной системы токов обмоток.
Для пояснения работы щеточно-коллекторного механизма рассмотрим принцип действия генератора посто-4* 51
Рис. 3.3. Принцип работы щеточно-коллекторного механизма.
.верного полюса к южному
янного тока на упрощенной модели, представленной на рис. 3.3. В магнитном поле полюсов N—S вращается цилиндр, на котором расположен виток с двумя активными сторонами (проводниками) (аа' и бб'~). В верхнем и нижнем положениях одного из проводников индуктируемая в нем ЭДС имеет разные направления. За один оборот среднее значение ЭДС равно нулю. Если поместить на . валу полукольца А и Б, по которым скользят неподвижные щетки, то при переходе первого проводника от се-одновременно с изменением
направления ЭДС в проводнике он переключится со щетки А на щетку Б. При этом направление ЭДС в проводнике также изменится. Аналогичное переключение и
Io-
Рис. 3.4. Образование вращающегося магнитного поля токами двух обмоток.
a — Z=f0; б — в — t~t2; г, б —векторная и временная диаграммы токов соответственно.
52
изменение направления ЭДС произойдет во втором проводнике. В результате на щетках создается неизменная разность потенциалов, т. е. постоянные ЭДС и ток во внешней цепи.
Устройство, преобразующее переменную ЭДС обмотки (в нашем случае витка с помощью полуколец А и Б) в ЭДС неизменного направления, называется коллектором.
В двигательном режиме работы машины, с помощью щеточно-коллекторного устройства при вращении ротора сохраняется неизменным направление тока в проводниках, находящихся под северным и южным полюсами, и, следовательно, магнитного поля ротора по отношению к полю статора, что и обеспечивает непрерывное преобразование электрической энергии в механическую. Такое переключение направления тока в проводниках посредством щеточно-коллекторного устройства называется коммутацией.
Вращающимся магнитным полем многофазной системы токов называется результирующее поле, создаваемое (при определенных условиях) двумя или более обмотками с током, перемещающееся относительно этих обмоток. Этими условиями являются: а) наличие пространственного сдвига между осями обмоток (9>0) и б) наличие фазового (временного) сдвига между токами в этих обмотках (ф>0).
На рис. 3.4 показано результирующее магнитное поле двух обмоток, подключенных к двухфазной системе напряжений в момент to. Токи в катушках сдвинуты по фазе на угол ф (рис. 3.4,а, д). Как видно из рис. 3.4,а—в, для выбранных моментов времени tB, Ц, t2 вектор результирующей МДС, а следовательно, и индукция магнитного поля В вращается по часовой стрелке. Если значение вектора магнитной
индукции В не изменяется за один оборот, то такое поле называется круговым, если изменяется — эллиптическим. Рассмотрим условия получения кругового двухполюсного вращающегося магнитного поля с максимальной амплитудой в двухфазной системе. При этом принимаем равенство МДС В1=Вг или Blm=B2m. Магнитная индукция Bt, создаваемая током i=Im sin at одной обмотки, будет пульсирующей. Ее можно представить двумя полями, бегущими в противоположные стороны с половинной амплитудой (рис. 3.5):
Рис. 3.5. Разложение пульсирующего поля на два бегущих.
53
imt , _fmf z
где -g-e1 —обратное поле; е 1 \—прямое поле (по часовой стрелке).
Полагая для первой катушки 9 = Ф = 0, получаем:
Ви = (е/ш/ + e~iat); Ва< = ~ [е' (ш/+ф) + е~! <шг+Ф)]е/в.
Результирующий вектор индукции магнитного поля равенз
В, = 61Z+ В2, = ~ {[1 + е‘ (0+ф)] eiat + [1 4- е' (0-«] e~ia>i}.
Очевидно, поле будет круговым, т. е. вектор магнитной индукции поля В( за оборот не изменяется по величине, когда отсутствует обратное поле (при 0—j—гр=дс). Тогда индукция результирующего поля будет равна:
Bt = [1 + е>' (0-«J
Это поле будет максимальным, если 0—ф=0; при этом
В; = Bme-‘at , т. е. равна амплитуде магнитной индукции, создаваемой одной катушкой.
Двухполюсные двигатели, предназначенные для работы от однофазной или двухфазной сети, изготовляются с двумя обмотками, оси которых сдвинуты в пространстве на угол 0=л/2.
Пользуясь приемом разложения пульсирующего поля на прямое и обратное, для многофазной системы будем иметь:
п—т
В; = yj {[1 — е' Фп> ] е/ш/ + [1 + е' (8'~Ф,1) ] e~’mt} = 1
= \eiuit + Ве~Iat,
где m — число фаз; А — вектор обратного поля; Б — вектор прямого поля.
Для любой m-фазной симметричной системы при ф=0=2л/т и 0^02=03=.-... =0т А=0, вектор Bt будет вращаться по часовой стрелке, так как 5>0. Так, для трехфазной симметричной системы при ф=0=2л/3 обратное поле будет отсутствовать, а индукция результирующего поля равна:
3 Др = g
Угловая частота Я вращения магнитного поля равна:
„ со 2лл
2 == —= ,.л -
р 60
54
и частота вращения, об/мин,
60 f
где р— число пар полюсов.
При однофазном источнике питания и наличии двух обмоток на статоре вращающееся магнитное поле можно получить двумя способами: а) включением в цепь одной из обмоток фазосдвигающего элемента (Л, L или С), что позволяет сдвинуть по фазе ток этой обмотки'; б) расщеплением (экранированием) полюсов.
В качестве примера реализации первого способа на рис. 3.6 представлена схема включения электрического двигателя, в котором в качестве фазосдвигающего элемента используется конденсатор и резистор.
Рис. 3.6. Схема включения конденсаторно-'го двигателя.
Рис. 3.7. Схема экранировки полюсов.
Экранирование полюсов осуществляется охватом части полюса короткозамкнутым витком (рис. 3.7). При этом основная обмотка подключается к источнику переменного тока. Ток этой обмотки создает пульсирующий магнитный поток, который можно разделить на две части: Ф' и Ф". Результирующий магнитный поток Фэ под экранированной частью полюса (рис. 3.8,а) равен Фэ= =Ф"-|-Фк. Как видно из векторной диаграммы на рис. 3.8,6, потоки под неэкранированной частью полюса Ф' и экранированной частью Фа сдвинуты по фазе на угол ф. Наличие пространственного сдвига между осями обмоток 0>О (см. рис: 3.7) и фазового сдвига между потоками <р>0 является достаточным условием получения вращающегося магнитного поля.
Принцип работы электрических машин переменного тока (синхронных и асинхронных) основан на использовании вращающегося магнитного поля. В синхронном двигателе при подключении к сети переменного тока трехфазная обмотка статора создает вращающееся магнитное поле. На роторе размещается обмотка возбуж-55
дения, подключаемая к источнику постоянного тока1 (рис. 3.9). При неподвижном роторе в силу его инерции вращающееся магнитное поле статора не успевает увлечь, ротор за собой. В результате за один оборот поля вращающий момент, действующий на ротор, изменяет на-
Рис. 3.8. Магнитные потоки (а) и векторная диаграмма магнитных потоков в машине с экранированными полюсами (б).
правление и среднее значение момента за период будет равно нулю. В этом случае ротор остается неподвижным (колеблется). Следовательно, синхронный двигатель не
9
s
Рис. 3.9. К пояснению принципа работы синхронного двигателя.
Рис: 3.10. К пояснению принципа работы асинхронного двига-
теля.
имеет пускового момента. Если же ротор предварительно разогнать до угловой скорости, равной угловой скорости вращающегося магнитного поля статора, то поля ротора и статора будут неподвижны относительно друг друга и вращающий момент за один оборот сохраняет одно и то же направление, а его ротор при этом вращается синхронно с полем статора.
56
На статоре асинхронного двигателя размещается трех- или двухфазная обмотка, создающая вращающееся магнитное поле (Л/—S на рис. 3.10). На роторе размещена короткозамкнутая обмотка (проводники с торцов замкнуты кольцами). Если магнитное поле пересекает проводники, то в них индуктируется ЭДС, направление которой определяется по правилу правой руки. При этом токи в проводниках обмотки ротора, •отстающие от ЭДС по фазе, образуют собственное вращающееся магнитное поле относительно ротора, но синхронно вращающееся с полем статора в пространстве, постоянно взаимодействуя с ним и создавая вращающий электромагнитный момент, действующий на ротор в направлении, совпадающем с вращающимся магнитным полем статора. Если частота вращения ротора /г2 меньше частоты вращения поля статора nlt то будет возникать вращающий электромагнитный момент. Если частоты вращения равны, то ЭДС и токи в проводниках ротора будут отсутствовать и момент равен нулю. Следовательно, чтобы существовал вращающий момент, необходимо проскальзывание ротора относительно поля статора, т; е. nz<«i.
3.2. ГЕНЕРАТОРЫ ПОСТОЯННОГО И ПЕРЕМЕННОГО ТОКА
Одним из основных способов получения электрической энергии является преобразование механической энергии в электрическую. Производство электрической энергии в основном осуществляется электрическими генераторами переменного (в основном синхронными) и постоянного тока. Обмотка, в которой индуктируется ЭДС при пересечении ее проводниками магнитного поля, называется якорной обмоткой, а часть магнитной системы машины, на которую она наматывается, — якорем (рис. 3.11).
При равномерном вращении якоря изменение во времени ЭДС,- индуктируемых в проводниках обмотки, определяется характером кривой изменения магнитной индукции в воздушном зазоре машины (E—Blv). Заменим реальную кривую распределения индукции ее первой гармоникой. Замена сложной картины поля более простой облегчает анализ явлений в машине и вывод основных соотношений, описывающих эти явления. В таком поле ЭДС проводников изменяются по синусоидальному закону.
57
При равномерном распределении проводников по поверхности якоря ЭДС в них сдвинуты по фазе на равные углы, которые определяются конструкцией машины. В двухполюсной машине (2р=2) (рис. 3.11,а) угол сдвига фаз ЭДС р равен пространственному углу между соседними проводниками 0п.
На рис. 3.11,6, в показана многолучевая звезда векторов ЭДС, наводимых в проводниках обмотки машины,
Рис. 3.11. Получение, трехфазной системы ЭДС.
и топографическая векторная диаграмма. Частота ЭДС, индуктируемой в проводниках, равна f=pn/60.
Для получения трехфазной системы ЭДС общее число проводников делят на три равные части: А—X, В—Y, С—Z, называемые фазами (А, В и С) обмотки якоря, которые могут быть соединены в звезду или в треугольник. Такая машина называется синхронным генератором. Векторы ее фазных ЭДС ЕАВ, Евс и ЕСА смещены относительно друг друга по фазе на угол 2л/3. При этом величина фазной ЭДС равна геометрической сумме ЭДС проводников, которая меньше их арифметической суммы. Это обстоятельство учитывается обмоточным коэффициентом Коб-
Для получения постоянной по направлению ЭДС (в генераторе постоянного тока) обмотку якоря необходимо присоединить к коллектору (рис. 3.12,а), который представляет собой ряд изолированных относительно друг друга медных пластин, образующих цилиндр. Витки (секции) обмотки присоединяются к коллектор-58
ным пластинам посредством отпаек. Число пластин равно числу витков. При вращении якоря и жестко связанного с ним коллектора между щетками все время остается включенным почти постоянное число проводников, одинаково расположенных по отношению к полюсам N—S. Проводники, заключенные между щетками и находящиеся в зоне одного полюса, образуют параллельные ветви обмотки (рис. 3.12,6).
Рис. 3.12. Схема получения постоянной ЭДС.
а “-обмотка с коллектором; б — топографическая диаграмма.
Генератор постоянного тока имеет конструкцию, представленную на рис. 3.13. Магнитная система машины образуется из станины 6, сердечников главных полюсов 4 и якоря 3. Катушки главных полюсов 5 электрически соединены и образуют обмотцу возбуждения. Обмотка якоря 9 состоит из секций, выполненных из медного провода. Коллектор 1 так же, как и сердечник якоря, жестко закрепляется на валу. Щетки 2 располагаются в щеткодержателях, укрепленных на подшипниковых щитах. Вентилятор 7 служит для охлаждения машины.
При вращении якоря отдельные витки обмотки якоря все время переходят из одной параллельной ветви в другую, причем изменяется направление их ЭДС. При хо-59
лостом ходе ЭДС машины Ео определяется суммой мгновенных значений ЭДС проводников, образующих параллельные ветви. Мгновенные значения ЭДС проводников верхней и нижней параллельных ветвей обмотки
Рис. 3.13. Конструкция машины постоянного тока.
имеют одинаковое по отношению к щеткам и внешней цепи направление (см. рис. 3.1'2). Таким образом, ветви обмотки являются источниками постоянной ЭДС, вклю-
Рис. 3.14. Устройство якоря барабанного типа.
ценными параллельно во внешнюю цепь, хотя в каждом проводнике за один оборот ротора наводится переменная ЭДС.
В современных электрических машинах используется якорь барабанного типа 1, в котором обе стороны секций обмотки находятся на внешней части якоря под смежными полюсами различной полярности (рис. 3.14). Благодаря этому обе стороны витка 2 активны, ЭДС, наводимые в них, согласны. С целью уменьшения магнитного сопротивления (получения большого магнитного
60
потока при той же МДС) и надежного крепления проводников якорная обмотка укладывается в пазы. В каждой паре пазов укладывается несколько проводников,, образующих секцию (катушку) обмотки. Расстояние между сторонами катушки называют шириной катушки или шагом обмотки у. Все катушки имеют одинаковую' форму и одной своей стороной помещаются внизу одного паза, а другой — вверху другого паза, отстоящего на-расстоянии полюсного деления т=л£>/2р, где D — диаметр якоря. Такие обмотки называют двухслойными. Катушки могут соединяться между собой двумя способами: по волнообразной схеме (рис. 3.15,а) и по петлевой схеме (рис. 3.15,6).
Рис. 3.16. Характеристика холостого хода генератора.
Рис. 3.15. Волновая (а) и петлевая (б) обмотки электрических машин.
Магнитный поток одного полюса Ф=В0р5п=Всрт/я-
В режиме холостого хода генератора постоянного тока напряжение на его щетках равно ЭДС, индуктируемой в параллельной ветви якорной обмотки.
Если общее число проводников якоря N, а число параллельных ветвей 2а, то ЭДС одной параллельной ветви
- <3-5>
Подставив значения Ф и и=^5^- в (3.5), получим:
Е==^ПФ==СЕПФ^ (3-6>
pN Л
где сЕ—-^— конструктивная постоянная обмотки.
61
Рис. 3.17. Магнитное поле ма-
При холостом ходе генератора поток полюса Фо и «соответствующая ему ЭДС Ео зависят только от тока возбуждения. Поэтому зависимость Е(13), называемая характеристикой холостого хода генератора, аналогична характеристике магнитной цепи машины Ф(/в). Эти характеристики получают либо в результате расчета магнитной цепи, либо из опыта холостого хода генератора. Опытная характеристика холостого хода, снятая при плавном изменении тока возбуждения от нуля до максимума и обратно, представляет собой петлю гистерезиса. В расчетах ее представляют средней кривой, изображенной прерывистой линией на рис. 3.16. При отсутствии тока возбуждения в якоре наводится ЭДС Еост вследствие наличия остаточной намагниченности машины (2—3% номинального напряжения).
При включении обмотки якоря на внешнее сопротивление (нагрузку) в проводниках обмотки появится ток. Направление тока в генераторе постоянного тока совпадает с направлением ЭДС проводников.
Ток обмотки якоря создает собственное магнитное поле, которое воздей-
шины постоянного тока. ствует на основное поле
возбуждения машины. Это явление называют реакцией якоря. На рис. 3.17 показаны магнитные линии результирующего поля генератора постоянного тока, из которого видно, что. поле ослабляется под одним краем полюсов и усиливается под другим. Такая реакция якоря называется .поперечной. При этом среднее значение магнитного потока остается практически неизменным. Только при больших значениях тока якоря вследствие насыщения полюсов поток несколько уменьшается.
Напряжение на зажимах генератора при работе в режиме нагрузки равно разности ЭДС якоря Е и падения напряжения в обмотке якоря гя1 и щетках |ДС/Щ
U=E—гя1—\ищ.
62
При работе на нагрузку генератор создает на валу первичного двигателя тормозной электромагнитный момент, среднее значение которого определяется как сумма моментов, создаваемых электромагнитными силами' взаимодействия поля возбуждения с полем токов в проводниках обмотки якоря. Учитывая, что в поле одного-полюса находится N/2а проводников с током 1а=112а,. имеем:
N.
т— 2 —zP°cp 2а я а 2 ~ 2ла а
1
или
М=смФ/а,
где
г — -
М 2лл
Полная электромагнитная мощность генератора постоянного тока
Рдм=Е1=UI+гя/2=Мй,
где Й —угловая частота вращения ротора.
Основными рабочими характеристиками генераторов^ являются зависимости выходного напряжения от тока-нагрузки, называемые внешними характеристиками. Они снимаются при постоянной угловой^ частоте вращения-ротора. Аналитически эти характеристики описываются-уравнением электрического состояния (3.6). Характер' этих зависимостей определяется способом возбуждения7 основного поля.
9 9
Рис. 3.18. Схемы возбуждения генератора постоянного тока.
а — с независимым; б— с параллельным; в — с последовательным; г — со* смещенным возбуждением.
/
63
Различают независимое возбуждение (питание обмотки возбуждения от независимого источника питания) (рис. 3.18,а) и самовозбуждение (питание обмотки возбуждения от генератора).
Самовозбуждение в генераторах постоянного тока может быть осуществлено по трем схемам соединения •обмоток возбуждения: параллельной (рис. 3.18,6), по-.ледовательной (рис. 3.18,в) и смешанной (согласное или встречное возбуждение) (рис. 3.18,г).
Рис. 3.19. Внешние характеристики генератора постоянного тока.
1 — независимое возбуждение; 2 — параллельное; 3 — последовательное; 4 — смешанное встречное; 5 — смешанное согласное возбуждение.
'Рис. 3.20. Самовозбуждение генератора постоянного тока.
Внешние характеристики генератора постоянного тока при различных схемах возбуждения представлены на рис. 3.19.
Для осуществления смешанного возбуждения на полюсах машины имеются две катушки: одна намотана проводом меньшего сечения — для параллельного подключения, другая намотана проводом большого сечения —для последовательного включения с нагрузкой и обмоткой якоря.
Для осуществления самовозбуждения генератора необходимо обеспечить три условия:
1) наличие остаточного магнитного потока, создающего £ост (рис. 3.20);
2) совпадение направления МДС обмотки возбуждения с направлением остаточного магнитного потока;
3) сопротивление обмотки возбуждения (при параллельном возбуждении) должно быть меньше критического, т. е. когда ток возбуждения способен достигнуть значения, обеспечивающего на характеристике холостого 64
хода заданное значение ЭДС £он. Последнее вытекает из равенства гв1в—Е—тя1в, которое на рис. 3.20 соответствует точке А пересечения графиков зависимостей Е(1В) и гв7в(/в).
При увеличении сопротивления гв точка А будет перемещаться по кривой Ео вниз и при гв=^кр самовозбуждение невозможно.
Рис. 3.21. Электромагнитная схема синхронного генератора.
Синхронные генераторы как источники переменного напряжения классифицируются по числу фаз, частоте и напряжению. Наибольшее распространение получили трехфазные генераторы промышленной частоты 50 Гц на повышенное напряжение (до 24 кВ). Из-за трудностей выполнения изоляции на роторе обмотка якоря таких генераторов располагается на статоре, а на роторе располагается обмотка возбуждения. Частота Д ЭДС переменного тока, вырабатываемая синхронным генератором, зависит от частоты вращения ротора гц и числа пар полюсов: fi—pn.i/60.
Роторы синхронных генераторов бывают с явно выраженными и неявно выраженными полюсами. На рис. 3.21 представлена электромагнитная схема синхронного генератора. Трехфазная обмотка якоря состоит из трех однофазных катушек, сдвинутых в пространстве на угол 120° относительно друг друга. При вращении ротора созданное в нем постоянным током /п магнитное поле 5—1056 65
пересекает проводники обмотки якоря (статора), наводит в ее фазах ЭДС Ел, Ед и Ес одинакового значения и частоты, смещенные по фазе относительно друг друга на угол 120°.
В синхронных генераторах стремятся получить синусоидальную форму выходного напряжения. Для этой цели в явнополюсных системах применяют неравномер-
Рис. 3.22. Способы получения синусоидального распределения индукции магнитного поля вдоль воздушного зазора.
ный воздушный зазор, а в неявнополюсных системах— распределение обмотки возбуждения (рис. 3.22). Кроме того, обмотку якоря выполняют распределенной с укороченным шагом.
Действующее значение ЭДС фазы якорной обмотки синхронного генератора при синусоидальной форме ЭДС, индуктируемой в проводниках, равна
£'=4,44):1Ш/(обФо, где w — число последовательно соединенных витков фазы якорной обмотки.
Характеристика холостого хода синхронного генератора Е'=ср(7в) имеет такой же вид, как и у генератора постоянного тока, но здесь меньше проявляется магнитный гистерезис. В режиме нагрузки синхронного генератора токи обмотки якоря создают магнитное поле, вращающееся относительно якоря синхронно с ротором. Совпадение токов в проводниках по фазе с ЭДС будет только при активной нагрузке; при индуктивной нагрузке ток отстает по фазе на я/2, при емкостной — опережает на л/2.
При активной нагрузке поле статора направлено перпендикулярно полю ротора (рис. 3.23,а), т. е. создается поперечное поле реакции якоря.
66
При индуктивной (рис. 3.23,6) и емкостной (рис. 3.23,s) нагрузках магнитные линии поля ротора и статора'коллинеарны. При этом в случае индуктивной нагрузки реакция якоря будет размагничивающая, т. е. магнитное поле машины ослабляется, а в случае емкостной нагрузки — подмагничивающее магнитное поле машины усиливается.
Рис. 3.23. Магнитное поле машины при активной (а), индуктивной (б) и емкостной (в) нагрузках.
Уравнение электрического состояния одной фазы синхронного генератора имеет вид:
Ё„ + Ёа + Ё =П + гя1,
где Ёо —ЭДС холостого хода; Ёа, Ёо —ЭДС самоиндукции поля якоря и поля рассеяния соответственно. Представляя Ёа и Ёз через индуктивные сопротивления Ёо = = — jxat и Ёа= — jxi и полагая хс — ха + хо и хс»гя, получаем упрощенное . уравнение электрического состояния фазы якоря синхронного генератора
й = Ё0-./хс1.
Этому уравнению соответствует электрическая схема замещения, представленная на рис. 3.24,а. Векторная диаграмма при индуктивно-активной нагрузке представлена на рис. 3.24,6, где 0 — угол между векторами магнитного поля полюсов и результирующего поля статора.
В синхронных генераторах используется независимое возбуждение и самовозбуждение. В последнем случае обмотка возбуждения питается от генератора через выпрямитель. Вид внешней характеристики определяется характером нагрузки. На рис. 3.25 представлены внеш-5* 67
ние характеристики синхронного генератора при актива ной (кривая /), активно-индуктивной (кривая 2) и активно-емкостной (кривая 3) нагрузках.
Возрастающая зависимость U(Г) при емкостной нагрузке объясняется подмагничивающим действием реакции якоря, а падающая характеристика при индуктивной нагрузке — размагничивающим действием.
Рис. 3.24. Электрическая схема замещения синхронного генератора (а) и векторная диаграмма (б).
Рис. 3.25. Внешняя характеристика синхронного генератора..
Электромагнитная мощность генератора
Рам—тЕ01 cos ф, (3.7)
где т — число фаз генератора.
Из векторной диаграммы на рис. 3.24,6
Электромагнитная мощность для трехфазного генератора в функции 0 определяется из следующего выражения:
P3M = J-E0sin9. (3.8)
Электромагнитный момент равен:
^=>=4Tw!''sinl)'
где — угловая частота вращения результирую-Р
щего поля статора.
68
На рис. 3.26 представлены зависимости Р и М синхронного генератора от 'Q и разных токов возбуждения.
Как источники электроэнергии переменного тока в мощных энергосистемах, включающих электрические станции и разнообразную нагрузку, синхронные генераторы соединены параллельно на распределительную сеть. В таких системах с помощью различных регуляторов поддерживаются строго постоянные частота тока и на-
Рис. 3.26. Угловая характеристика синхронного генератора.
Рис. 3.27. Схема замещения синхронного генератора, работающего на сеть большой мощности.
---О
i—-
пряжение. Поэтому работу отдельного генератора можно рассматривать как генератор, включенный на зажимы активного двухполюсника с очень малым входным сопротивлением, неизменными частотой и напряжением, замещающего всю остальную часть энергосистемы (рис. 3.27).
В режиме параллельной работы генератора с системой большой мощности частота тока и напряжение генератора, а следовательно, угловая частота вращения и амплитуда результирующего магнитного потока должны оставаться неизменными при любых изменениях нагрузки, тока возбуждения и момента первичного двигателя.
Регулирование активной мощности, отдаваемой генератором в сеть, можно осуществлять только изменением момента первичного двигателя, т. е. воздействуя на органы, регулирующие по
дачу топлива или энергоносителя (воды, пара и т. п.).
Регулирование реактивной мощности, отдаваемой генератором в сеть, осуществляется изменением тока возбуждения. При этом если активная мощность генератора остается неизменной, то из выражений (3.7), (3.8) и векторной диаграммы на рис. 3.24,6 следует, что при изменении тока возбуждения остаются неизменными I cos <р и Ео sin 0, т. е. соответственно активная составляющая тока и проекция вектора £0 на ось мнимых величин.
На рис. 3.28 представлены графики зависимости тока якоря от тока возбуждения при разных мощностях генератора, называемые U-'образными «характеристиками, а на рис. 3.29 — векторные
69
Рис. 3.28. U-образные характеристики синхронного генератора.
диаграммы синхронного генератора, работающего на сеть большой мощности при трех значениях тока возбуждения и Р—const. Последние иллюстрируют характер зависимостей /(/п) па рис. 3.28. Линия, соединяющая минимальные значения токов, соответствует чисто активной нагрузке, т. е. coscp=l. При уменьшении тока воз-
Рис. 3.29.. Векторная диаграмма синхронного генератора.
буждения уменьшается амплитуда момента М угловой характеристики М (0). При МЯв=Мг наступает граница устойчивости. Дальнейшее уменьшение 1В приведет к выпадению генератора из синхронизма (см. рис. 3.26).
3.3. ЭЛЕКТРОМАШИННЫЕ УСИЛИТЕЛИ Й ТАХОГЕНЕРАТОРЫ
К специальным электрическим машинам, используемым в генераторном режиме работы, относятся: элек-тромашинные усилители, тахогенераторы, электрома-шинные преобразователи частоты, напряжения и рода тока (постоянный в переменный и наоборот), регуляторы фазы и напряжения и т. д.
Р1аиболее распространены преобразователи частоты 50 Гц и нестандартной частоты 400, 800 Гц, используемые для питания специального электропривода и вычислительных машин. Преобразователь частоты — это двухмашинный агрегат, состоящий из двигателя и синхронного генератора, выполненных в одном корпусе. Преобразователи рода тока и частоты в настоящее время в основном заменены статическими ламповыми и полупроводниковыми преобразователями.
Электромашинные усилители (ЭМУ) бывают продольного и поперечного поля. Имея ряд преимуществ перед магнитными и электронными усилителями, они достаточно широко используются, особенно ЭМУ попе-70
речного поля. Основными их преимуществами являются: возможность получения большой мощности, высокий коэффициент усиления, сравнительно малые габариты, а по сравнению с магнитными усилителями — более высокое быстродействие.
Электромашинный усилитель поперечного .поля представляет собой специальный двухполюсный генератор постоянного тока, в котором поперечный поток якоря используется как главный поток возбуждения. Принци-
пиальная электрическая схема ЭМУ приведена на рис. 3.30.
В отличие от обычных двухполюсных машин постоянного тока ЭМУ имеет четыре щетки: две поперечные (qi—q2) и две продольные (Д—d2). Ось продольных щеток расположена по оси полюсов; ось поперечных щеток перпендикулярна оси полюсов. Поперечные щетки закорочены.
Магнитная система ЭМУ не-
Рис. 3.30. Схема ЭМУ поперечного поля.
явнополюсная: статор набирается из штампованных колец электротехнической стали с пазами для обмоток. В пазах статора уложены компенсационная обмотка (КО), обмотка дополнительных полюсов и обмотки управления (ОУ). Компенсационная обмотка и обмотка дополнительных полюсов (ОДП) включены последовательно в цепь продольных щеток. К выходным зажимам этой цепи подключается нагрузка Дн.
Принцип работы ЭМУ состоит в следующем. Небольшой ток в обмотке управления возбуждает относительно небольшой магнитный моток, направленный по оси полюсов. На поперечных щетках ЭМУ при вращении якоря наводится небольшая ЭДС, а при замыкании накоротко цепи поперечных щеток создается сравнительно большой ток Iq. Этот ток в короткозамкнутом якоре возбуждает достаточно большой поперечный магнитный поток Фд, ось которого перпендикулярна оси главных полюсов. Под действием сильного поперечного поля якоря (неподвижного в пространстве) в секциях обмотки якоря индуктируются значительные ЭДС, в результате чего на продольных щетках возникает напряжение Url.
71
Отношение мощности, переданной нагрузке (Ра— —Uah), к мощности, теряемой в обмотке управления (Py—Uyly), называется коэффициентом усиления ЭМУ Ку, который равен произведению коэффициентов усиления двух ступеней Ki и Кг (их условно можно выделить в ЭМУ).
Первую ступень образует обмотка управления и обмотка якоря, замкнутая накоротко поперечными щетками. Коэффициент усиления первой ступени Кл= =EqIqlUyIy, где Iq и Eq — ток и ЭДС в цепи поперечных щеток.
Вторую ступень усиления образует обмотка якоря машины, ток которой создает поперечный магнитный поток Ф7, и цепь продольных щеток, замкнутых на нагрузку. Коэффициент усиления второй ступени определяется отношением Кг= — UJdlEqlq, где 'Ud, I<i — напряжение и ток в нагрузке.
При работе ЭМУ на нагрузку вследствие размагничивающего действия продольной составляющей потока якоря Фй результирующий поток уменьшится и коэффициент
усиления ЭМУ станет • меньше единицы. Ток /к компенсационной обмотки КО, включенной последовательно с нагрузкой, создает поток Фк, компенсирующий продольный поток реакции якоря Фй. Регулированием потока Фк (тока /к) с помощью переменного резистора /?к, шунтирующего компенсацйонную обмотку, можно добиться 100%-ной компенсации действия потока Ф^.
Выходной характеристикой ЭМУ является внешняя характеристика СД=ср(Д).
На рис. 3.31 представлена внешняя характеристика ЭМУ при разных коэффициентах компенсации К= =/к/До, где До — ток компенсационной обмотки при 100%-ной компенсации.
Тахогенераторами называют электрические микромашины, служащие для преобразования механического вращения в электрическое напряжение. Если ротор тахогенератора вращается с частотой п, об/мин, то ЭДС на выходе тахогенератора пропорциональна частоте вращения
Рис. 3.31. Внешняя характеристика ЭМУ.
E—Kin.
73
Вольтметр, измеряющий эту ЭДС, может быть отградуирован непосредственно в оборотах в минуту. Электродвижущая сила на выходе тахогенератора пропорциональна первой производной от угла поворота а по времени:
р — К —
Приведенное выражение показывает способность та4 хогенераторов решать задачу дифференцирования функ-ций.
Тахогенераторы применяются:
для контроля частоты вращения различных машин и механизмов;
для получения демпфирующих и форсирующих сигналов в функции частоты вращения в системах автоматического регулирования;
при вычислительных операциях в счетно-решающих устройствах автоматизированного привода;
для исследования процессов разбега двигателей различных типов.
Тахогенераторы по роду тока делятся на тахогенераторы постоянного тока и тахогенераторы переменного тока (асинхронные и синхронные). По своему назначению в автоматических устройствах тахогенераторы подразделяются на две группы: 1) демпфирующие или форсирующие для обратных связей; 2) точные (измерительные) .
В зависимости от назначения требования к выходным характеристикам тахогенераторов указанных групп различны. Так, например, от тахогенераторов, предназначенных для работы в качестве элементов обратной связи, не требуется высокая точность, но необходима большая крутизна выходной характеристики. От тахогенераторов второй группы требуется главным образом высокая точность и линейность выходной характеристики.
Тахогенераторы постоянного тока (ТГП) конструктивно представляют собой обычные генераторы постоянного тока с независимым электромагнитным возбуждением или с возбуждением от постоянных магнитов.
На рис. 3.32 показана конструкция ТГП с постоянными магнитами. В корпусе 6 из алюминиевого сплава залиты полюсы 5 с постоянными магнитами 7. Подшипниковые щиты 4 закреплены стопорным кольцом 3. Якорь 2 вращается в подшипниках 1. Напряжение тахо-
73
Генератора снимается с коллектора с помощью щеток 8.
Качество работы ТГП оценивается следующими техническими показателями: линейностью, асимметрией, крутизной выходной характеристики и зоной нечувствительности.
Рис. 3.32. Конструкция ТГП.
Если магнитный поток ТГП постоянен и сопротивление нагрузки /?н=0°, то выходное напряжение равно:
U—E=сЕФп=К\П.
Выходная характеристика £/=ф(н) будет линейной. При работе на нагрузку напряжение ’на зажимах ТГП равно:
U=Е—гя/—Д U щ, где гя — сопротивление обмотки якоря; ДС^щ —падение напряжения на щеточном контакте.
Выходная характеристика тахогенератора отклоняется от характеристики при холостом ходе (7?н=оо) (рис. 3.33) вследствие падения напряжения в сопротивлении обмотки якоря и на переходном сопротивлении между щетками и коллектором ДНЩ, а также из-за влияния реакции якоря.
В выходной характеристике ТГП U=tf(n) в области малых частот вращения обычно имеет место зона нечувствительности из-за наличия сопротивления переходных контактов щеток (рис. 3.33,6). Для уменьшения указанного недостатка щетки тахогенератора выполняют из сплавов серебра и других металлов. При одной и 74
той же частоте вращения, но при разных направлениях вращения выходные напряжения тахогенератора различны вследствие технологических факторов и неточности установки щеток на нейтрали.
Рис. 3.33. Характеристики ТГП при Д£/щ=0 (я), реальная характв' ристика ТГП (б).
Максимальные частоты вращения тахогенераторов постоянного тока лежат в пределах 1000—7000 об/мин. Крутизна выходной характеристики составляет 10— 100 мВ/(об/мин). Отклонение от линейности при максимальной частоте вращения лежит в пределах 0,5—3%.
На точность работы ТГП большое влияние оказывает температура, наличие якорных, зубцовых и коллекторных пульсаций напряжения и потока.
К недостаткам тахогенераторов постоянного тока также относятся наличие скользящих контактов между коллектором и щетками, необходимость устройства фильтров для подавления радиопомех и сложность конструкции.
Несмотря на эти, казалось бы, существенные недостатки, ТГП постоянного тока широко применяется вследствие большой выходной мощности.
Асинхронные тахогенераторы (АТГ) выполнены в виде асинхронных двигателей с полым ротором (рис. 3.34).
В воздушном зазоре между внешним 1 и внутренним 2 статорами помещается полый ротор — стакан 3 Из немагнитного материала (сплавы алюминия, фосфористой бронзы и др.). В пазах статора уложены две однофазные обмотки, оси которых сдвинуты в пространстве на электрический угол 90° (рис. 3.35). Одна из обмоток является обмоткой возбуждения 4, а другая — генераторной обмоткой 5 (рис. 3.34), Часто генераторную обмотку располагают на внутреннем статоре.
75
о
Рис. 3.34. Конструкция АТГ.
Обмотку возбуждения включают в сеть, а генераторную— подключают к измерительному прибору или усилителю с большим входным сопротивлением. При неподвижном роторе обмотка В создает пульсирующий
Рис. 3.35. Схема АТГ.
Рис. 3.36. Эквивалентные схемы АТГ.
поток Фв, не сцепленный с обмоткой Г (рис. 3.35). Полый ротор можно представить как равномерно распределенную короткозамкнутую обмотку. В этой обмотке поток возбуждения наводит ЭДС трансформации Е?. Максимальная ЭДС трансформации будет наводиться в витках ротора, плоскость которых перпендикулярна оси обмотки В (рис. 3.36,а).
Электродвижущая сила Дт создает ток, МДС которого вызывает появление потока реакции ротора Фрй. Общий магнитный поток при неподвижном роторе
Ф^Ф.^Ф^.
Так как практически невозможно достигнуть точной магнитной симметрии, т. е. перпендикулярного расположения обмоток статора, часть потока Фв оказывается магнитно-связанной с обмоткой Г, наводя в ней остаточную ЭДС. Во время вращения ротора в его частях, пересекающих поток Ф</ (условный короткозамкнутый виток Wd), возникает ЭДС вращения Eq. Ее действие приводит к появлению тока в верхних и нижних слоях ротора (рис. 3.36,6) и созданию магнитного потока по поперечной оси Ф7. Мгновенное значение ЭДС вращения eq определяется частотой вращения п и значением потока Ф<г, т. е. еч — сФатп.
Таким образом, значение ЭДС вращения Eq зависит от частоты вращения п, а ее частота равна частоте по-77
тока Фв и определяется частотой поля возбуждения, т. е. частотой тока сети.
Поперечный поток Ф7 (рис. 3.36,6), созданный МДС обмотки ротора, пропорционален частоте вращения.
Под действием поперечного магнитного потока Фд в генераторной обмотке Г индуктируется ЭДС Ег с частотой питающей сети fc: •Ег=4,44Дги’г/сФ<г==Д2«. Если замкнуть обмотку Г на внешнее нагрузочное сопротивление ZH, то в ней возникнет ток I и поток Фд будет создаваться геометрической суммой МДС поперечной обмотки ротора и обмотки Г, вследствие чего ЭДС будет нелинейной функцией нагрузки ZH.
Основным техническим показателем работы асинхронного тахогенератора с полым ротором является линейность выходной характеристики [7=ф(п). Отклонение от линейной зависимости обусловлено следующими факторами:
изменением сопротивлений обмоток под влиянием температуры и насыщения магнитопровода;
падением напряжения на сопротивлении генераторной обмотки при включении на нагрузку;
технологическими неточностями при изготовлении тахогенераторов;
изменением параметров ТГ при вращении (сопротивления полого ротора и др.);
реакцией ротора.
В асинхронных, тахогенераторах погрешность АС выходной характеристики — величина комплексная, состоящая из амплитудной А£/ и фазовой 8^ погрешностей. Наименьшая амплитудная погрешность имеет место при вполне определенной активно-емкостной нагрузке, а наименьшая фазовая—-при чисто индуктивной нагрузке.
В современных тахогенераторах амплитудная погрешность при максимальной частоте вращения составляет 0,1—2,5%, а фазовая 5'—15'.
Важным показателем качества работы АТГ является крутизна выходной характеристики тахогенератора и значение остаточной ЭДС Ео. Значения крутизны лежат в пределах от 1 до 10 мВ/(об/мин), Ео — 7—8 мВ.
Для уменьшения остаточной ЭДС, особенно в точных тахогенераторах, генераторную обмотку размещают на внутреннем статоре, который может поворачиваться; 78
применяют также специальные схемы в цепи выходной обмотки.
Асинхронные тахогенераторы отличаются простотой конструкции. Достоинством АТГ является возможность применения промежуточных трансформаторов, что позволяет получить любое выходное напряжение и при необходимости иметь несколько потенциально не связанных выходных напряжений. Частота выходного напряжения постоянна и не зависит от частоты вращения.
Недостатком АТГ является малая мощность выхода (до 2—3 Вт). Поэтому они часто работают с усилителями мощности.
3.4. ЭЛЕКТРИЧЕСКИЕ ДВИГАТЕЛИ
Электрическими двигателями называют электрические машины, служащие для преобразования электрической энергии в механическую. Это преобразование осуществляется обычно с целью привода различных механизмов, которые в силу своих производственных функций предъявляют к электрическим двигателям определенные требования. Эти требования в основном сводятся к следующим:
обеспечение пускового момента и возможность его регулирования;
устойчивость работы в рабочем режиме; возможность регулирования частоты вращения; высокий КПД и cos<p;
надежность в работе.
Электрические двигатели, так же как и генераторы, в зависимости от вида источника питания делятся на двигатели постоянного и переменного тока. Последние в зависимости от способа возбуждения основного магнитного поля подразделяются на синхронные и асинхронные.
Устройство электрических двигателей принципиально не отличается от устройства генераторов. Основное отличие состоит в конструктивном исполнении, учитывающем особенности условий эксплуатации, взрывобезопасность, пылевлагонепроницаемость приводимых механизмов (глубинные насосы) и т. д.
Основной рабочей характеристикой электрических двигателей является механическая характеристика — зависимость частоты вращения п или угловой скорости Q от вращающего момента М или обратная зависимость.
79
Анализ пуска и остановка двигателя, устойчивость в работе производят по уравнению механического состояния _ . r-v ,
Мдв- (3.9)
где уИдв — вращающий момент электрического двигателя; Мт — тормозной момент приводимого во вращение механизма; 7 — момент инерции вращающихся (подвижных) частей электрического двигателя и приводимого механизма.
Рис. 3.37. К анализу устойчивости работы двигателя.
а — механическая характеристика приводимого механизма; б — механическая характеристика двигателя.
Из выражения (3.29) следует, что при Мдв>Мг, dQ/d/>0 двигатель ускоряется, при МДВ<МТ— замедляется. При МДВ=Л1Т ротор двигателя или стоит, или вращается с постоянной частотой, т. е. система двигатель— механизм находится в равновесном состоянии.
Способность двигателя при кратковременных или длительных возмущениях (изменения Л4Т, Пит. п.) обеспечивать новое равновесное состояние или возвращение системы в исходное состояние после снятия возмущения называют устойчивостью в работе двигателя.
Рассмотрим способность системы двигатель — нагрузка сохранять устойчивое состояние на примере двигателя, имеющего механическую характеристику Мдв(га), представленную на рис. 3.37,а, где Мт(п)—механическая характеристика приводимого механизма.
Равновесным состоянием системы Л4ДВ=Л1Т является точка А, которая соответствует частоте вращения пА. Если AfT увеличится, характеристика Мт(/г) сместится (штриховая линия). В соответствии с уравнением (3.9) при МТ>МДВ ротор электрического двигателя будет замедляться. Это вызовет увеличение Мдв и система придет в новое равновесное состояние в точку А', которой соответствует частота вращения пА,. Можно показать способность к устойчивой работе данной системы и при 80
других возмущениях, приводящих в конечном итоге к такому смещению механических характеристик Л4дв(п) и Л1т(/г), при котором сохраняется условие устойчивости
дМдв д/Мг /д IQ,
дп да’ ' ’ '
Механическая характеристика двигателя, представленная на рис. 3.37,6, имеет две области. Первая — между точками аб— устойчивая, так как здесь сохраняется условие (3.10). Вторая область бв— область неустойчивой работы. Действительно, если точка равновесного состояния А находится в области бв, то при возмущении, например, со стороны нагрузки (штриховая линия) (ИТ>Л1ДВ ротор двигателя замедляется, частота вращения уменьшается. Это приведет к увеличению их разности и еще большему замедлению, и двигатель остановится. Если механическая характеристика механизма имеет вид М"т(п), то при МДВ>МТ ротор разгоняется, и чем больше п, тем больше разность Мдв—Мт — точка рабочего режима переходит в область аб (область устойчивой работы) и в точке А" наступает равновесное состояние.
Номинальные технические параметры двигателей (7Н, Ль Ль т]н, cos фн (для двигателей переменного тока) рассчитываются из условия допустимой температуры нагрева двигателя и электрической прочности, ограничиваемых главным образом стойкостью изоляции проводников обмоток.
Причиной нагревания двигателя являются потери мощности ДРЕ— в основном электрические, магнитные и механические.
Паспортные поминальные данные двигателя устанавливаются при температуре внешней среды +20°С. Чем меньше ДЛ,тем большую полезную мощность может обеспечить двигатель. Поэтому при проектировании двигателей вопросам охлаждения (отвода тепла) уделяется большое внимание. По способу охлаждения двигатели делятся на двигатели с естественным охлаждением, самовентиля-цией, принудительным обдувом и др. По условиям эксплуатации различают длительный и -повторно-кратковременный режимы работы.
Повторно-кратковременным (ПВ) режимом работы двигателя называют режим, когда интервал между пуском, остановом и повторным пуском не превышает 4 мин. При этом различают режим по -продолжительности включения ПВ двигателя, которым называют интервал времени работы двигателя, выраженный в процентах интервала времени между двумя включениями. Чем меньше ПВ, тем большую мощность может обеспечить двигатель. ГОСТ 183-66 предусмотрены следующие ПВ: 15, 25, 40 и 60%.
6—1056 81
Энергетическая Диаграмма двигателей представЛейа на рис. 3.38, где Pi — мощность, потребляемая из сети, Р2 — полезная мощность на валу двигателя. Потери мощности включают: ДР;)Л — электрические, ДРМ — магнитные, ДРмех — механические, ДРДОб — добавочные (потери в изоляции и др.).
Коэффициент полезного действия
/"2 ^2
В зависимости от мощности двигателя каждый вид потерь может достигать следующих значений: ДРЭЛ = = 0,54-7%, ДРМ=14-3%, ДРмех= l-j-2%.
Рис. 3.38. Энергетическая диаграмма двигателя.
Рис. 3.39. Электрическая схема замещения двигателя постоянного тока.
Для сравнения рабочих свойств двигателей постоянного и переменного тока рассмотрим их пусковые и рабочие характеристики.
Двигатели постоянного тока. Для них уравнение электрического состояния цепи якоря без учета падения напряжения на щетках имеет вид (3.4), которому соответствует расчетная электрическая схема замещения, представленная на рис. 3.39.
Возбуждение основного поля двигателя может быть параллельным, последовательным, смешанным (встречным и согласным) и независимым (от постороннего источника тока или постоянного магнита).
Уравнение механической характеристики получим из уравнения электрического состояния (3.4), которое с учетом равенств Е—сеФп и М—смФ1 после преобразований примет вид:
п
==-^- = —____г-^—М
сйф сЕф СЕС^
(3.11)
82
В уравнении механической характеристики (3.11) неизменными параметрами являются гя, сЕ и см. Напряжение питания U и поток возбуждения Ф могут изменяться произвольно или в целях управления. Кроме того, для управления в цепь якоря включают добавочное сопротивление 7?д. Механическую характеристику, полученную при номинальных значениях напряжения питания и отсутствии добавочного сопротивления в цепи возбуждения, называют естественной.
Рис. 3.40. Естественные механические характеристики двигателя постоянного тока.
1 — при последовательном возбуждении; 2 —при параллельном (независимом) возбуждении; 3, 4 — при смешанном возбуждении (согласном, встречном).
Механические характеристики л(Л4) при отличии от номинальных значений U, потока возбуждения Ф или наличии добавочного сопротивления в цепи якоря называют искусственными. Характер зависимостей п(М) описывается уравнением (3.11).
На рис. 3.40 представлены естественные механические характеристики двигателей постоянного тока при постоянных U—U-b. и |/?в-
Искусственные механические характеристики двигателя параллельного возбуждения при изменении сопротивления в цепи якоря магнитного потока представлены на рис. 3.41,а—в.
Искусственные механические характеристики двигателя последовательного возбуждения (рис. 3.42,а) при изменении добавочного сопротивления в цепи якоря (7?д) и ослаблении поля возбуждения (/?ш<со) представлены на рис. 3.42,6, в. Следует заметить, что при отсутствии нагрузки на валу (Л1т=0) двигатель последовательного возбуждения идет в разнос (л->оо), так Как Ф->0. Поэтому двигатели последовательного возбуждения всегда работают под нагрузкой.
В двигателях смешанного возбуждения в основном Используется согласное включение последовательной и Параллельной обмоток. Основной обмоткой считается та, которая создает до 70%' МДС возбуждения. Для такого двигателя не опасно снятие нагрузки, так как при 6* 83
I—О поток возбуждения создается параллельной обмоткой.
Пусковые и регулировочные свойства двигателей постоянного тока состоят в возможности обеспечить необходимый пусковой момент, разгон двигателя с допустимым ускорением до заданной частоты вращения и регулирование частоты вращения.
Рис. 3.41. Искусственные механические характеристики двигателя параллельного возбуждения.
Рис. 3.42. Схема двигателя последовательного возбуждения (а) и искусственные механические характеристики двигателя последовательного возбуждения (б), (в).
В момент пуска ЭДС якоря равна нулю, все напряжение приложено к обмотке якоря и ток якоря I,L~Ulrn в 10—30 раз превосходит номинальное значение, создавая на валу двигателя большой пусковой момент. Наиболее простой способ ограничения пускового тока до допустимого значения /п.доп= (24-2,5)/н состоит во включении в цепь якоря добавочного резистора /?д, называемого пусковым.
84
По мере увеличения частоты вращения ЭДС якоря растет, а ток якоря уменьшается. Для поддержания необходимого ускорения пусковой реостат плавно выводят. На рис. 3.43 показан переход от искусственных (кривые 1—4 обозначены стрелками) к естественной (кривая 5) механической характеристике двигателя параллельного возбуждения в процессе пуска двигателя при заданной механической характеристике приводимого
во вращение механизма п(Мт). При ступенчатом уменьшении RK в процессе пуска двигателя поддерживается Л4Дв>Л1т и двигатель разгоняется до установив шегося режима в точке а.
Для изменения направления вращения двигателя необходимо изменить поляр-
Рис. 3.43. Диаграмма пуска двигателя.
ность напряжения питания якоря или обмотки возбуждения. Наиболее просто час-
тоту вращения регулируют также изменением добавоч-
ного резистора 7?д, называемого в этом случае регули-
ровочным сопротивлением. Действительно, если двигатель работал в точке а (рис. 3.43) при п=«ь то при введении первой ступени RK установившийся режим двигателя перейдет в точку 4 при лг2<^1-
Если пусковой реостат рассчитывается на кратковременный режим работы, то регулировочный реостат должен выбираться из расчета длительной работы, т. е. большей мощности. Использование пускорегулирующего реостата связано с лотерей мощности в цепи якоря. Поэтому реостатные пуск и регулирование частоты вращения применяются для двигателей малой и средней «мощности.
Регулирование частоты вращения двигателя изменением поля возбуждения используется только в небольшом диапазоне, так как даже при небольшом уменьшении потока возбуждения ток якоря резко возрастает.
Наиболее экономичным способом регулирования пускового момента и частоты вращения является изменение напряжения питания. Однако для реализации его необходим отдельный регулируемый источник питания, в качестве которого может быть использован генератор постоянного тока или управляемый выпрямитель, питаемый от сети переменного тока.
На рис. 3.44,а представлена схема системы генератор — двигатель, в которой генератор Г, приводимый во
85
вращение первичным двигателем (тепловым или электрическим) ПД, подключен к якорной обмотке двигателя с независимым возбуждением Д. Питание обмотки возбуждения генератора В Г осуществляется по схеме, позволяющей изменять силу и направление тока возбуждения.
Механические характеристики двигателя в системе Г—Д и приводимого механизма л(Л4т) представлены на рис. 3.44,5, из которых видно, что пуск двигателя осуществляется при пониженном напряжении, а регули-
Рис. 3.44. Схема системы генератор — двигатель (а) и механические характеристики (б).
рование частоты вращения и реверсирование двигателя— изменением тока возбуждения генератора, т. е. изменением значения полярности напряжения на зажимах двигателя.
Ряд преимуществ двигателей постоянного тока, состоящих в возможности достаточно просто осуществлять реверсирование и регулирование в широком диапазоне пускового момента и частоты вращения, несмотря на пониженную надежность и сложность в эксплуатации, позволяет применять их во многих областях техники.
Так, двигатели параллельного возбуждения применяются для привода металлорежущих станков и других механизмов. Система Г—Д с двигателями независимого возбуждения и ЭМУ широко применяется в системах автоматического управления (антенных системах). Двигатели последовательного и смешанного согласного возбуждения — в подъемных и транспортных средствах. В последнем случае применение двигателей с последовательным возбуждением имеет то преимущество, что при широком диапазоне изменения частоты вращения и 86
произвольном изменении момента на валу двигателя (при и—const) мощность генератора, потребляемого от первичного двигателя (дизеля, турбины и т. п.), практически остается неизменной, что позволяет обеспечить его режим работы при максимальном КПД.
Как уже отмечалось, основным недостатком синхронного двигателя является отсутствие пускового момента. Поэтому для запуска синхронного двигателя необходимо его разогнать до скорости, близкой к синхронной (около 0,95й[).
Рис. 3.45. Механическая характеристика синхронного двигателя при пуске.
Рис. 3.46. Схема замещения синхронного двигателя (а) и векторная диаграмма синхронного двигателя (б).
Наиболее распространенным способом запуска синхронного двигателя является асинхронный запуск, для осуществления которого полюсы синхронного двигателя снабжены специальной короткозамкнутой обмоткой.
Пуск трехфазного синхронного двигателя производится прямым подключением обмотки статора па трехфазную сеть переменного тока. Возникающее при этом вращающееся магнитное поле индуктирует в короткозамкнутой обмотке ЭДС и токи, в результате чего создается электромагнитный момент Л4а (как у асинхронного двигателя). При пуске синхронного двигателя его обмотка возбуждения отключена от источника постоянного тока и замкнута на активное сопротивление с целью уменьшения напряжения, возникающего на ее зажимах. При достижении частоты вращения, близкой к синхронной (S^0,05), обмотка возбуждения подключается к источнику постоянного тока и двигатель втягивается в синхронный режим работы (рис. 3.45).
Схема замещения синхронного двигателя, соответствующая упрощенному уравнению электрического состояния фазы якорной обмотки,
87
Йредстайлена на рис. 3.46,а. Этой схеме замещенйя соответствует векторная диаграмма, представленная на рис. 3.46,6.
Подобно показанному ранее для синхронного генератора мощность и электромагнитный момент синхронного двигателя в функции угла 0 имеют вид:
3U Е» • Л Л/Г Р Р -^-£„81110; /И=д-.
Максимальный момент
М — — Е irimax — J—*o’
Зависимость 44(0), называемая угловой характеристикой, представлена на рис. 3.47,а. Здесь областью
Рис. 3.47. Угловая характеристика синхронного двигателя (а); (7-образные характеристики синхронного двигателя (б) и векторные диаграммы синхронного двигателя (s).
1 — при недовозбуждении; 2 — при перевозбуждении.
устойчивой работы двигателя является участок 0— — О-Нл/2, где выполняется условие dM/dQZ>Q. С целью получения запаса устойчивости за расчетный номинальный. момент синхронного двигателя принимают 44и— — 0,5 Мтах, которому соответствует 0 = 30°.
Важным преимуществом синхронного двигателя является способность регулировать потребляемую из сети реактивную мощность посредством изменения тока возбуждения. Зависимость тока якоря от тока возбуждения, представленная на рис. 3.47,6, практически не отличается от U-образной характеристики генератора.
Как видно из векторных диаграмм на рис. 3.47,в, построенных для точек 1 и 2 U-образной характеристики (рис. 3.47,6), при перевозбужденном состоянии ток 88
якоря имеет емкостный характер, а при недовозбужде-нии — индуктивный.
Несмотря на необходимость наличия дополнительного источника постоянного тока для возбуждения, синхронные двигатели средней и большой мощности широко используются в промышленности благодаря возможности регулирования активно-емкостной нагрузки, что позволяет повысить общий cos ср' системы.
Асинхронные машины в основном используются в двигательном режиме. Их преимущества перед другими типами двигателей состоят в высокой надежности,
Рис. 3.48. Конструкция короткозамкнутого ротора асинхронного двигателя.
Рис. 3.49. Конструкция фазного ротора.
простоте в эксплуатации и низкой стоимости. Благодаря этим качествам асинхронные двигатели (АД) получили широкое применение в качестве электропривода различных механизмов. В настоящее время только в СССР ежегодно производится несколько миллионов (80% всех двигателей) асинхронных двигателей мощностью от нескольких ватт до нескольких сотен киловатт.
По числу фаз обмотки статора асинхронные двигатели делятся на трехфазные, двухфазные и однофазные.
Трехфазные асинхронные машины впервые были разработаны русским инженером М. О. Доливо-Доброволь-ским в 1880—1882 гг.
Асинхронные двигатели различаются по типу обмотки ротора (с короткозамкнутой обмоткой и фазной обмоткой). Конструкция ротора с короткозамкнутой обмоткой представлена на рис. 3.48. Такую обмотку называют беличьей клеткой. Конструкция ротора с трехфазной обмоткой представлена на рис. 3.49. Концы фаз этой обмотки, соединенной в звезду, присоединяются к контактным кольцам.
89
При подключении двигателя к сети токи обмотки статора и индуктируемые токи обмотки ротора асинхронной машины возбуждают вращающееся магнитное поле. Часть поля, линии которого сцеплены с проводниками обмоток статора и ротора, называют основным.
Рис. 3.50. Картина полей рассеяния обмотки статора.
Остальные линии поля сцеплены с проводниками или статорной или роторной обмоткой. Эти части поля называют полями рассеяния статора и ротора. На рис. 3.50 представлена упрощенная картина полей рассеяния обмотки статора. Основное магнитное поле, машины создается совместным действием МДС статора и ротора
K-F^F.o- (3-12)
Как следует из принципа работы асинхронного двигателя, магнитное поле статора и ротор вращаются с разными угловыми скоростями (асинхронно). При этом МДС ротора и статора должны оставаться неподвижными друг относительно друга, что является необходимым условием преобразования энергии. Угловая частота вращения ротора относительно поля статора Qs равна:
Оз— Oj Оз-
При анализе работы асинхронного двигателя удобно пользоваться относительной величиной, называемой скольжением-.
а. а, — а2
5-”аГ~ а,
При номинальной мощности скольжение составляет 3—7%’, при холостом ходе 0,3—0,5%. Если ротор заторможен (Q2—0), то Qs=Qi и s=l.
Основное вращающееся магнитное поле индуцирует в проводниках ротора и статора ЭДС, причем если частота этих ЭДС в проводниках статора равна частоте напряжения сети, то частота ЭДС в проводниках ротора 90
зависит от скольжения
f __P^s _ Р (^1 ' ^s) _„£
— 2к ~ 2к — '1‘
Действующие значения ЭДС в фазах обмоток статора и вращающегося ротора равны:
£1 = 4,44 ЛаУ1/гОб1Фо;
E2s=4,44 /г^обгФо,
где £Об1 и k062 — обмоточные коэффициенты; £2s=s£2; £2 — действующее значение ЭДС в фазе неподвижного ротора (при s—1).
Рис. 3.51. Схема замещения фазы обмотки ротора (а) и зависимость E2s, x2s, cos ф2з и I2s от скольжения (б).
Индуктивные сопротивления фаз обмоток статора и ротора равны:
Е. E.is
xt = -^=Lia4>t-, x2S = sxt = j^-L2m2.
Уравнение электрического состояния фазы обмотки статора имеет вид:
U1 = -E1+/x1i1 + r1i1. . (3.13)
Схема замещения фазы обмотки ротора представлена на рис. 3.51,а, которой соответствуют уравнения электрического состояния
Ё2$ = j-^2s\s (3- 14)
ИЛИ
E2 = /xj2S+~s-U
Действующее значение тока в фазе ротора и cos i|)2s равны:
/2S = -S.EJ ; COS <p2S — r. г-..
M + (sx2)2 ’ Y2 +
91
Зависимости x2s, E2s, cosip2s и l2s от скольжения представлены на рис. 3.51,6.
Уравнения асинхронного двигателя (3.12) —(3.14) аналогичны уравнениям трансформатора. Отличие состоит в том, что частота ЭДС и тока в роторной цепи АД отличается от частоты ЭДС и токов статорной цепи и полезная мощность не электрическая, а механическая. Поэтому для определения параметров схемы замещения
Рис. 3.52. Схема замещения асинхронного двигателя.
и приведения вторичной (роторной) цепи к статорной необходимо кроме приведения по частоте и числу витков представить механическую мощность на роторе двигателя в виде электрической. Такое преобразование достигается, если в цепь ротора включить дополнительный резистор, сопротивление которого RK определяется из уравнения (3.14), где
-^=Яд+г2 или Яд=г2-Ц=Л
В этом случае электрическая цепь ротора имеет индуктивное сопротивление х2 и ЭДС Е2, соответствующие заторможенному ротору. Для уравнивания амплитуд ЭДС, индуктируемых в обмотках статора и ротора, обмотку ротора заменяют фиктивной обмоткой, имеющей такое же число фаз и витков, что и у статора. При этом параметры фазы ротора будут равны: r'2=r2№T; x'2=x2R2t.> где AT=te>ifeO6i/®2^o62 — коэффициент приведения.
Полная и упрощенная схемы замещения фазы асинхронного двигателя приведены на рис. 3.52.
Вращающий электромагнитный момент АД в соответствии с законом электромагнитных сил равен:
Л4 = /^ЛГ}
92
где F=Bil— мгновенное значение электромагнитной силы, вызванной взаимодействием проводника с током и вращающимся магнитным полем; N — число проводников; D — диаметр ротора.
При синусоидальном законе распределения индукции вращающегося магнитного поля вдоль зазора В = =Bmsina, перемещающегося во времени относительно проводников ротора с угловой частотой со2, в них индук-
Рис. 3.54. Механическая характеристика асинхронного двигателя.
Рис. 3.53. Временная диаграмма электромагнитной силы проводника.
тируются синусоидальные токи, смещенные по фазе на угол ф28 относительно индукции магнитного поля. Синусоиды тока и магнитной индукции представлены на рис. 3.53. На этом же рисунке представлена кривая мгновенного значения, электромагнитной силы одного проводника.
Среднее значение вращающего момента, действующего на ротор, определяется из выражения
М = i j 4 s in sin К + Ю d<ot = 1 о
= смФ/25 cos <p2S. (3.15)
Электромагнитная мощность АД РЭм, передаваемая от статора к ротору, меньше активной мощности, потребляемой двигателем из сети, на величину магнитных и электрических потерь в статоре и больше механической мощности ротора РМех=П2А1 на величину' магнитных и электрических потерь в роторе:
Р =Р 1 (ДРЭ[ + ДР Ml) =
==-Рмех4_ (ДРЭ2 + ДРМ2). (3.16)
93
В рабочем режиме ДРа2^ДРм2, поэтому (3.16) можно записать в виде
ДР э2==Ром—Р мех = QjAl—Q2A4 = sP эм. (3.17)
Таким образом, мощность электрических потерь в роторе АД пропорциональна скольжению.
Полезная мощность на валу двигателя Р2 меньше механической на величину мощности механических потерь.
Коэффициент полезного действия равен отношению т|—Р2/Р1. Номинальный КПД современных асинхронных двигателей равен 0,75—0,95.
Механическая характеристика M(s) асинхронного двигателя, построенная по формуле (3.15) с учетом зависимостей 72s(s) и cos i|)2s ($), представлена на рис. 3.54, где Мп — пусковой момент при й2=0 (s=l); Мтах — максимальный момент, которому соответствует критическое скольжение sKp- У синхронных двигателей обычно Мн/Л1п= (0,64-1,5), Мтах/Мн—1,54-2. Механическая характеристика может быть представлена и через электрические параметры схемы замещения (см. рис. 3.52). С учетом (3.17) получим:
М — Рзм 4Рэг ^ЗР242 ЗС/\г'г________
21 $2, s2t 521 [(ri + r'2/s)2 + (x1 + x'2)2]
(3.18)
Можно определить s=sKp, при котором асинхронный двигатель развивает максимальный момент Мтах, если в выражении (3.18) взять первую производную dM/ds и приравнять ее нулю. В результате получим:
Skp % ^+х'2 • (3‘19)
Подставив полученное значение sKp в (3.18),получим значение Мтах:
^тах— 2а . 4-Х' Р] ” (3.20)
Lrl Т ' ’ 1 Т V*1 г * 2J J
Из (3.20) следует, что Мmax не зависит от значения г'2) а из (3.19) —sKp зависит от значения г'2.
На рис. 3.55 представлены механические характеристики асинхронного двигателя Й(М) при разных значе-94
ниях г'г (или введении добавочного сопротивления в цепь обмотки ротора), из которых видно, что при определенном значении активного сопротивления фазы ротора r'2=Xi + х'2 можно получить Мп=Мтах. В тех случаях, когда не требуется большой точности для приближенного построения механической характеристики асинхронного двигателя, пользуются упрощенной формулой:
— 2Мпах 5/5кр + 5кр/5
(3.21)
Асинхронный двигатель, электропривода различных
используемый в качестве механизмов, должен обла-
Рис. 3 55. Механические характеристики асинхронного двигателя при разных значениях сопротивления обмотки ротора.
Рис. 3.56. Семейство механических характеристик асинхронного двигателя при частотном регулировании.
дать возможностями регулирования пускового момента и частоты вращения. При пуске cos ср двигателя очень мал и пусковой ток АД может превосходить номинальный ток 7П в обмотке статора в 5—7 раз, а при частых пусках привести к сильному перегреву обмоток и выходу из строя двигателя. Регулирование пускового момента осуществляют двумя способами: изменением частоты питающего напряжения или изменением активного сопротивления цепи обмотки ротора в период пуска двигателя. Эти же способы применяются для регулирования частоты вращения ротора двигателя. В первом случае для управления двигателем необходим источник регулируемой частоты, обеспечивающий 77//» const.
95
В качестве такого источника используют синхронные генераторы с приводом от двигателя постоянного тока.
В настоящее время для частотного регулирования широко применяются статические источники питания на транзисторах и тиристорах.
Семейство механических характеристик асинхронного двигателя при частотном регулировании представлено на рис. 3.56.
При частотном регулировании уменьшение частоты вызывает некоторое уменьшение максимального и пускового моментов.
Рис. 3.57. Конструкция глу-бокопазного ротора (а) и ротора с двойной беличьей клеткой (б).
Реализация второго способа пуска в двигателях е короткозамкнутым ротором осуществляется посредством выполнения глубокопазной обмотки (рис. 3.57,а) и обмотки в виде двойной беличьей клетки (рис. 3.57,6).
Принцип действия двигателя с глубокопазным ротором состоит в следующем. При пуске, когда частота токов обмотки ротора равна частоте токов обмотки статора, индуктивное сопротивление элементарных проводников в глубине паза (рис. 3.57,а) оказывается столь значительным, что токи в них практически не возникают. При этом в верхних слоях стержней, где полное сопротивление проводниковых нитей определяется главным образом их активным сопротивлением, плотность тока будет больше, чем в нижних. Происходит эффект вытеснения тока к поверхностным слоям беличьей клетки. При этом площадь активного (используемого) сечения стержней будет меньше их геометрической площади, что эквивалентно увеличению активного сопротивления фазы обмотки ротора. Таким образом, начальный пусковой момент оказывается увеличенным.
По мере возрастания частоты вращения ротора частота токов в его обмотке уменьшается, одновременно уменьшается и ее индуктивное сопротивление. При 96
частоте вращения, близкой к номинальной, частота тока обмотки ротора мала, ток ротора в этом случае распределяется практически равномерно по всему сечению стержня. Это приводит к тому, что общее активное сопротивление беличьей клетки автоматически уменьшается по мере возрастания частоты вращения ротора двигателя.
Рис. 3.58. Схема включения добавочных сопротивлений в цепь ротора.
Рис. 3.59, Однофазный' асинхронный двигатель.
а —схема; б —пояснение принципа действия.
Несколько лучшие пусковые характеристики имеют асинхронные машины, роторная обмотка которых выполнена в виде двойной беличьей клетки. Здесь при пуске вытеснение тока происходит во внешнюю беличью клетку (рис. 3.57,6), имеющую повышенное активное сопротивление. При номинальной нагрузке ток ротора устанавливается главным образом в стержнях нижней беличьей клетки, имеющей малое сопротивление и называемой рабочей.
В двигателях с фазным ротором в цепь роторной обмотки через кольца включается добавочное переменное сопротивление (рис. 3.58).
Регулирование частоты вращения'ротора й2 асинхронного двигателя при заданном противодействующем моменте в соответствии с (3.18)
Q2 = Q1(1-s) = ^-(1-S)
может быть осуществлено тремя способами: изменением частоты питающего напряжения, переключением числа пар полюсов и изменением активного сопротивления роторной цепи,
7-1056 97
Частотный способ регулирования частоты вращения асинхронных двигателей является наиболее перспективным, так как он принципиально обеспечивает глубокое, плавное и экономичное изменение частоты вращения машины. Однако для его реализации требуется специальный источник питания с регулируемой частотой и напряжением. Регулирование частоты вращения асинхронного двигателя изменением числа пар полюсов осуществляется наиболее просто, но производится лишь ступенями. Регулирование частоты вращения при помощи регулировочного реостата, включенного в цепь обмотки ротора, наиболее просто, ио неэкономично из-за увеличения электрических потерь в роторной цепи.
Однофазный асинхронный двигатель отличается от трехфазного тем, что при работе он подключается к однофазному источнику питания. Роторная обмотка однофазного двигателя выполняется короткозамкнутой. В таких двигателях, как .правило, на статоре размещаются две обмотки, оси которых смещены в пространстве относительно друг друга обычно на электрический угол 90°. Одна из этих обмоток называется основной (рабочей), а другая — вспомогательной (пусковой) (рис. 3.59,а).
Часто обе обмотки (фазы) выполняют одинаковые функции. Они питаются токами, смещенными относительно друг друга во времени (по фазе). Такне двигатели по своему устройству являются двухфазными, хотя и питаются от однофазной сети. При подключении одной фазы обмотки статора к сети по ней протекает ток, создающий пульсирующее .магнитное поле (как в трансформаторе). В роторной обмотке индуктируется ЭДС. Возникающий при этом ток ротора создает пульсирующую МДС, направленную навстречу МДС статора. Электромагнитные силы, действующие на неподвижный ротор (его проводники), компенсируют друг друга. Суммарный вращающий момент, действующий на неподвижный ротор, равен нулю (рис. 3.59,6). Двигатель не развивает начального (пускового) момента. Если ротор раскрутить внешней силой, то при определенных условиях (малом сопротивлении обмотки ротора) он будет вращаться, развивая вращающий момент в направлении, в котором получил внешнее воздействие.
Принцип работы однофазного двигателя можно .пояснить, используя принцип разложения пульсирующего магнитного поля обмотки статора па два вращающихся в разные стороны (прямое и обратное) с амплитудами МДС F, равными половине амплитуды пульсирующего поля
_ F
Fpp = Д>бр —• 2 '
Работу однофазного асинхронного двигателя можно представить как совместную работу двух одинаковых трехфазных двигателей, имеющих общий вал, статорные обмотки которых создают вращающиеся в противоположные стороны магнитные поля. При неподвижном роторе оба поля создают одинаковые, направленные встречно вращающие моменты. Если ротор под действием внешней силы нача/j 98
враЩатьея в прямом направлении (по часовой стрелке), то его скольжение snp (рис. 3.60,а) будет уменьшаться и Мпр возрастать, a s06p увеличиваться и Л10бр уменьшаться так, что суммарный момент М=МПр—
Л4обр>0.
Механическая характеристика М (Й) однофазного асинхронного двигателя может быть получе
Рис. 3.60. Механическая характеристика однофазного асинхронного двигателя. а — при малом сопротивлении обмотки ротора; б — при большом сопротивлении обмотки ротора.
на путем сложения двух механических характеристик: МПр(й) и Л40бр(й) с учетом того, что при $пр.= 0 s06P=2.
Если сопротивление обмотки ротора велико и исходные характеристики Л4Пр(й) и Мобр(Й) имеют вид показанных
на рис. 3.60,6, то ротор однофазного асин-
хронного двигателя при получении внешнего воздействия вращаться не будет, так как результирующий момент, действующий на ротор, будет направлен навстречу действующей внешней силе.
3.5. ЭЛЕКТРИЧЕСКИЕ ДВИГАТЕЛИ МАЛОЙ МОЩНОСТИ
Электрическими двигателями малой мощности (микродвигателями) обычно называют двигатели мощностью до 600 Вт. Кроме обычных трехфазных асинхронных и синхронных двигателей, двигателей постоянного тока с электромагнитным возбуждением и возбуждением от постоянных магнитов, двигатели малой мощности изготовляются также с учетом ограничений энергетических возможностей источников питания (однофазная сеть, аккумуляторные батареи и т. п.). При этом часто ставится цель получения малых габаритов, высокой надежности, достаточно высоких КПД и cos ср, быстродействия, заданных рабочих характеристик и т. п. Во многих случаях возникает необходимость обеспечения универсальности двигателей, т. е. способности их работы от разных источников питания, например при питании от трехфазного и однофазного тока, от постоянного и переменного тока и т. п.
По конструкции и рабочим характеристикам трехфазные асинхронные и синхронные микродвигатели (так же как и микродвигатели постоянного тока) мало отличаются от обычных двигателей средней и большой мощности.
По способу получения вращающегося магнитного поля при питании от однофазной сети асинхронные и син-7* 99
хройные микродвигатели Делятся йа Две ГруйпЫ. В Двщ гателях первой группы на статоре располагаются две обмотки, оси которых смещены на электрический угол 90°. В двигателях второй группы на статоре имеется одна обмотка возбуждения. Вторую обмотку создают короткозамкнутые витки, охватывающие часть полюсов (см. рис. 3.7).
Асинхронные микродвигатели по устройству отливаются от обычных двигателей схемой обмотки и конструкцией ротора. Они имеют короткозамкнутые роторы с обмоткой в виде беличьей клетки. Реже их роторы выполняются массивными или полыми из стали или алюминия с целью получения «мягких» механических характеристик за счет повышенного сопротивления обмотки ротора и др.
Устройство асинхронного микродвигателя с полым ротором показано на рис. 3.61. Статор машины, набранный из листов электротехнической стали, состоит из наружной 1 и внутренней 2 частей. В пазы наружного статора укладываются две обмотки 4, оси которых сдвинуты относительно друг друга на угол 90°.
В цилиндрическом выступе подшипниковых щитов
помещаются подшипники 5, в которых вращается вал 6. В воздушном зазоре между внутренним и наружным статорами помещается полый ротор 3, жестко скрепленный с валом. Полый ротор обычно выполняется из сплава алюминия в виде стакана с толщиной стенок 0,3—0,8 мм и толщиной дна 1—2 мм. Немагнитный промежуток между внутренним и наружным статорами составляет 0,6—1,2 мм. Увеличенный более чем вдвое по сравнению с обычным асинхронным двигателем, немагнитный промежуток вызывает увеличение намагничивающего тока — тока холостого хода до I*.*— = (0,84-0,9)/н. Назначение внутреннего статора состоит в уменьшении магнитного сопротивления для поля, замыкающегося через воздушный зазор и внутренний статор. В двигателях с полым ротором мощностью менее
Рис. 3.61. Конструкция асинхронного двигателя с полым ротором.
100
1,5 Вт часто обмотки размещают на внутреннем Статоре. Габариты двигателя значительно уменьшаются при повышении частоты питающего напряжения.
Основным недостатком двигателей с полым ротором по сравнению с другими типами исполнительных двигателей являются большой немагнитный промежуток, низкий КПД (меньше 50%), сравнительно большие масса и габариты.
Рис. 3.62. Конструкция (а) п схемы включения универсального асинхронного двигателя (б).
Асинхронные двигатели малой мощности часто используются для работы при питании как от трехфазной, так и однофазной сети. Такие двигатели, называемые универсальными, специально рассчитаны для работы от трехфазной и однофазной сети переменного тока (рис. 3.62,а). Асинхронные универсальные двигатели серии УАД имеют трехфазную обмотку с шестью выводами. Схемы включения обмоток при однофазном питании представлены на рис. 3.62,6. Они обеспечивают круговое вращающееся магнитное поле (при правильном выборе емкости конденсатора) при нагрузке, близкой к номинальной. За номинальную мощность однофазного двигателя принимается мощность, равная 70—75% номинальной мощности трехфазного двигателя.
Синхронные микродвигатели в зависимости от конструкции ротора разделяются на двигатели с постоян-101
иыми магнитами, реактивные и гистерезисные (рис. 3.63). Кроме обычных синхронных микродвигателей применяются тихоходные двигатели. Это двигатели с электромагнитной редукцией, с катящимся и волновым роторами, а также шаговые двигатели. Последние широко применяются в системах автоматического дискретного управления.
Рис. 3.63. Конструкции ротора синхронных микродвигателей, а —с постоянными магнитами; б — реактивны?; в — гистерезисные.
Рис. 3.64. Образование реактивного вращающего момента.
Принцип работы реактивного синхронного микродвигателя состоит в следующем. При подключении к сети переменного тока токи обмотки статора создают вращающееся 'магнитное поле, которое при 0</г<нс, возбуждая в роторе вихревые токи, создает вращающий момент Л4а аналогично моменту асинхронного двигателя. Одновременно действует реактивный момент Л1р, обусловленный неравенством магнитных проводимостей машины .по продольной и поперечной осям (рис. 3.64).
Вращающееся магнитное поле здесь представлено в виде двух вращающихся полюсов магнита. Сначала ротор разгоняется до подсинхронной частоты вращения за счет асинхронного момента, а за-102
гем втягивается в синхронизм за счет синхронизирующего реактивного момента.
Механическая характеристика реактивного синхронного микродвигателя представлена на рис. 3.65.
Гистерезисные двигатели. Ротор двигателя представляет собой цилиндр 1 из магнитотвердого материала, расположенный на втулке 2 (рис. 3.66). Принцип работы гистерезисного двигателя состоит в следующем. Вращающееся магнитное поле, создаваемое то-
Рпс. 3.65. Механическая характеристика реактивного двигателя.
Рис; 3.66. Конструкция ротора гистерезисного двигателя.
ками обмотки статора, индуцирует в роторе вихревые токи — намагничивает цилиндр из магнитотвердого материала. В результате вращающий момент такого двигателя можно представить как сумму двух моментов: гистерезисного Мт, обусловленного наличием остаточного магнетизма ротора, и асинхронного, возникающего от взаимодействия вращающегося магнитного поля статора с вихревыми токами ротора Мя. Механическая характеристика гистерезисного двигателя приведена на рис. 3.67.
Рис. 3.67. Механическая характеристика гистерезисного двигателя. '
Рис. 3.68. Петли магнитного гистерезиса викал-лоя (7) и альни (2).
В режиме асинхронной частоты вращения потери в роторе будут от вихревых токов и магнитного гистерезиса. Эти потери пропорциональны площади динамической петли гистерезиса. В режиме синхронной частоты вращения гистерезисный момент будет тем больше, чем больше площадь статической петли гистерезиса В (И).
В настоящее время для ротора наибольшее применение находит магнитотвердый материал — викаллой (Fe — Со—V), имеющий до-
103
статочпо широкую и прямоугольную петлю гистерезиса (рис. 3.68). При применении более дешевого магнитотвердого материала, например Альни (А1 — N1 — Fe), имеющего более узкую петлю гистерезиса, для повышения рабочего вращающего момента ротор делают с явно выраженными полюсами. Такой двигатель называют реактивно-гистерезисным. Его вращающий момент в режиме пуска равен сумме трех моментов: гистерезисного, реактивного и асинхронного:
М=Мг4-ЛГр4-Ма,
а в режиме синхронного вращения ротора
M=Afr-|-Afp.
Коллекторные, микродвигатели (обычно двухполюсные) в конструктивном отношении мало отличаются от двигателей средней и большой мощности. Корпуса их выполняются из сплавов алюминия. Если двигатель используется па постоянном токе, то его полюсы выполняются литыми. В этих двигателях применяется независимое и
последовательное возбуждение и возбуждение от постоянных магнитов. Если коллекторный микродвигатель используется на переменном токе, то его полюсы набираются из листов электротехнической стали.
В настоящее время широкое распространение получили универсальные коллекторные двигатели, предназначенные для работы как от сети постоянного тока, так и от сети однофазного переменного тока. Эта двигатели имеют только последовательную обмотку возбуждения с дополнительными выводами (рис. 3.69,о).
Необходимость дополнительных выводов вызвана тем, что при работе на переменном
Рис. 3.69. Схема универсального коллекторного двигателя (УКД) (а) и его механические характеристики (б).
токе из-за влияния индуктивности обмоток якоря и возбуждения поток ослабляется (штриховая линия на рис. 3.69,6). Искрение под щитами, радиопомехи, шум, потери мощности при работе на переменном токе значительно больше, чем на постоянном, вследствие ухудшения условий коммутации. При работе на переменном токе включается лишь часть обмотки возбуждения, что позволяет сблизить механические характеристики двигателя при работе на постоянном и переменном токе (рис. 3.69,6), но при этом увеличивается ток, потребляемый от сети.
Преимущество коллекторного двигателя переменного тока по сравнению с асинхронным и синхронным состоит в том, что он позволяет получить практически любые частоты вращения и путем простых средств обеспечить широкое и экономичное регулирование пускового момента и частоты вращения. Например, при частоте питания 50 Гц диапазон регулирования частоты вращения достигает 3000—20 000 об/мин.
104
Шаговые Двигатели используются й качестве Исполнительных двигателей в системах дискретного (импульсного) управления. По устройству они аналогичны многофазным и многополюсным синхронным двигателям; ротор и статор выполняются с явно выраженными полюсами.
На рис. 3.70 показан принцип действия n-фазного шагового двигателя с двухполюсным ротором.
Если питание обмоток возбуждения статора осуществляется поочередно (1, 2, 3.. п) однополярными импульсами, то ротор бу-
дет иметь т устойчивых положений, которые совпадают с осями полюсов статора. При одновременном питании двух, трех обмоток и более ротор занимает положения, в которых его ось совпадает с вектором результирующей МДС. В этом случае количество устойчивых положений увеличивается вдвое. При импульсном управлении любая обмотка возбуждения по истечении интервала времени действия импульса обесточится. Фиксация положения ротора в интервале между импульсами обеспечивается либо реактивным моментом (ротор намагничен специальной обмоткой возбуждения или постоян-
Ч Ч ч -
Рис. 3.70. К вопросу о принципе работы шагового двигателя.
ными магнитами), либо специальным электромеханическим фиксирующим устройством. В первом случае ротор шагового двигателя называют активным.
В настоящее время разработано большое количество типов и конструкций шаговых двигателей. Статический электромагнитный момент шагового двигателя с активным ротором при условии пренебрежения высшими гармониками магнитного поля в воздушном зазоре и насыщения магнитной системы определяется (как и Для синхронного двигателя) из выражения
Л1===Л'1п1ах SIH 0,
где 0 — угол между осью результирующего поля и осью ротора.
Основными режимами работы шагового двигателя являются пуск, ускорение, замедление, реверсирование, т. е. переходные режимы. При этом основным требованием является отсутствие потери шага, т. е. сохранение синхронизма с частотой и характером изменения управляющих импульсов.
105
При синхронном вращении ротора определяющим работоспособность двигателя является максимальный динамический электромагнитный момент, который уменьшается по сравнению со статическим нз-за снижения среднего значения тока в управляющих обмотках. В зависимости от частоты вращения динамический момент шагового' двигателя может достигать 20% значения статического электромагнитного момента при неподвижном роторе. Поэтому одним из важных показателей рабочих свойств шагового двигателя является предельная механическая характеристика, представляющая собой зависимость частоты управляющих импульсов от величины момента сопротивления. При увеличении момента сопротивления ротор двигателя выпадает из синхронизма.
3.6. ИСПОЛНИТЕЛЬНЫЕ (УПРАВЛЯЕМЫЕ) ДВИГАТЕЛИ
В современных автоматических системах регулирования, управления и контроля, в счетно-решающих устройствах, в следящем электроприводе в качестве силового органа широко применяются исполнительные (управляемые) электрические двигатели. Исполнительный двигатель как элемент автоматического устройства служит для преобразования подводимого электрического сигнала (напряжения управления или его фазы) в механическое вращение вала. В связи с этим к исполнительным двигателям предъявляются определенные требования, основными из которых являются:
широкий диапазон регулирования частоты вращения; большой пусковой момент;
линейность и параллельность механических и регулировочных характеристик;
малая мощность управления;
надежность в работе;
устойчивость работы во всем диапазоне регулирования;
отсутствие самохода;
быстродействие;
малые массы и габариты.
Кроме указанных основных требований исполнительный двигатель как звено системы автоматического управления должен иметь ряд специфических показателей, таких как коэффициенты управления по моменту, частоте вращения, ускорению, электромеханическая постоянная времени, передаточная функция и др. Коэффициенты управления по моменту, частоте вращения и ускорению определяются как отношение соответствующей величины к напряжению управления
у „ Qx _____dQ/ dt
иу ; ля— Uy’ Uy ’
106
где Мп — пусковой момент; Qx — угловая частота вращения при уИс=О.
При работе в автоматических устройствах важным свойством двигателя является его быстродействие, т. е. быстрота нарастания или снижения частоты вращения после подачи сигнала. Быстродействие двигателя характеризуется его электромеханической постоянной времени тм, которой называют время разгона двигателя после включения до частоты вращения Q = 0,63Q.v. Разгон двигателя вхолостую до номинальной частоты вращения совершается примерно за время, равное (Зч-4)тм. Электромеханическая постоянная времени определяется из уравнения движения (3.9):
где / — момент инерции.
Передаточной функцией исполнительного двигателя называют отношение выходной величины — углового перемещения вала а к входной — напряжению управления. Обычно при этом принимается Л4с=0.
Приближенное выражение передаточной функции (без учета переходного процесса в электрической цепи обмотки управления) может быть найдено из выражения (3.9), после подстановки Q = da]dt и M„ — K^Uy с учетом (3.22) получим:
d2a . 1 da „ __р
dt2 “г тм dt Лм J
Переходя к операторной форме, получаем:
Учитывая, что Км^г = Ks, получаем:
а _ Ks
Uy~~ Р + 1)
Необходимость выполнения тех или иных требований определяется условиями работы исполнительного двигателя в конкретной системе управления.
В качестве исполнительных двигателей используются двухфазные асинхронные двигатели, двигатели постоянного тока с независимым возбуждением и синхронные шаговые двигатели.
107
Исполнительные асинхронные двухфазные двигатели с полым немагнитным ротором (АДП) (см. рис. 3.61) являются наиболее распространенными исполнительными двигателями переменного тока.
Как известно, наилучшие энергетические показатели и максимальный вращающий момент будут при круговом поле, условия получения которого рассмотрены в § 3.1.
Рис. 3.71. Способы управления асинхронным
Uy=va,r>
V= var(npoiL3-' g) вольно)
гателем.
исполнительным дви-
Так как реактивное сопротивление двигателя зависит от частоты вращения, круговое поле можно создать только для одной вполне определенной частоты вращения; при всех других частотах поле будет эллиптическим.
От исполнительных двигателей, предназначенных для автоматических устройств, в большинстве случаев требуется получение возможно большего начального пускового момента. Для этого подбирают параметры цепей обмоток возбуждения и управления такими, чтобы при неподвижном роторе и номинальных напряжениях возбуждения UB и управления Uy поле было круговым. При изменении сигнала управления и неизменном моменте сопротивления на валу изменяется степень эллиптич-108
ности поля, что влечет за собой изменение частоты вращения ротора двигателя.
По способу управления исполнительные асинхронные двигатели делятся на три группы:
1) с амплитудным управлением, когда изменяется амплитуда напряжения управления, предварительно сдвинутого по фазе фазосдвигающим устройством (ФСУ) на 90° относительно напряжения возбуждения (рис. 3.71,а);
2) с фазовым управлением, когда неизменное по
величине напряжение управления с
помощью фазоре-
Рис. 3.72. Механические характеристики при амплитудно-фазовом управлении.
гулирующего устройства (ФРУ) смещается по фазе относительно напряжения возбуждения (рис. 3.71,6);
3) с амплитудно-фазовым управлением, когда одновременно изменяются амплитуда и фаза управляющего напряжения.
Амплитудно-фазовое управление может быть осуществлено несколькими способами. Наиболее простой способ показан на рис. 3.71,в, при котором фазовый сдвиг осуществляется включением конденсатора последовательно с обмоткой возбуждения.
Основными рабочими характеристиками исполнительного двигателя являются механическая, регулировочная и зависимость полезной механической мощности от частоты вращения. Вид этих характеристик для указанных способов управления мало отличается друг от друга. Примерные механические характеристики п= =ср(Л1) при 17y = const идеального и реального двигателей при амплитудно-фазовом управлении приведены на рис. 3.72. Для любого напряжения управления с ростом частоты вращения момент уменьшается. Частота вращения, близкая к синхронной п0, будет при холостом ходе и круговом поле двигателя, когда UyIU'^=kc—\. При уменьшении напряжения Uy частота вращения холостого хода уменьшается.
График зависимости полезной мощности от частоты вращения исполнительного двигателя при постоянном
109
напряжении управления показан на рис. 3.73, из которого видно, что наибольшая механическая мощность имеет место при п, близком к 0,5 п0 (для Uy—U'3\ &с=1); эту мощность обычно принимают за номинальную.
Регулировочными характеристиками двигателя называются зависимости частоты вращения от напряжения управления /г=ф({7у) при постоянном моменте нагрузки. Примерные регулировочные характеристики для трех значений момента приведены на рис. 3.74. Регулировоч
Рис. 3.73. График зависимости полезной мощности от частоты вращения.
Рис. 3.74. Регулировочные характеристики исполнительного асинхронного двигателя.
ные характеристики нелинейны, но можно выделить зону линейного регулирования, т. е. диапазон изменения напряжения управления, при котором частота вращения изменяется пропорционально напряжению управления. Эта збна соответствует малым напряжениям управления и малым частотам вращения (рис. 3.74). По регулировочным характеристикам можно определить напряжения трогания.
Устранение самохода, т. е. останов ротора двигателя при снятии сигнала управления, в исполнительных асинхронных двигателях достигается выбором повышенного сопротивления ротора (sKP>l). В этом случае, как известно, максимум механической характеристики смещается в сторону s>l и при отсутствии тока в обмотке управления момент двигателя становится отрицательным (см. рис. 3.60,6).
Исполнительные двигатели постоянного тока также широко применяются в автоматических устройствах. Их достоинства — широкий диапазон регулирования частоты вращения, линейность механических характеристик, • ПО
отсутствие самохода, достаточно большой пусковой момент.
Основным недостатком исполнительных двигателей постоянного тока является наличие коллектора и щеток, что часто приводит к нестабильности параметров и характеристик, искрению, а также необходимости использования устройств для подавления радиопомех.
Наиболее широкое распространение в автоматических системах получили двигатели типов МИ, СЛ, ДПМ и др. мощностью от долей ватта до нескольких киловатт. Они выполняются реверсивными с независимым возбуждением на номинальные напряжения от 4 до 220 В. Возможны случаи, когда обмотка якоря выполнена на одно напряжение, а обмотка возбуждения — на другое. Электродвигатели автоматических устройств имеют закрытое или защищенное исполнение.
В исполнительных двигателях постоянного тока корпус не только служит для механического крепления частей,- но и является элементом магнитной цепи. Он выполняется в виде цилиндрической трубы из стали. К корпусу прикрепляются полюсы с обмоткой возбуждения. У исполнительных микродвигателей полюсы и ярмо штампуются как одно целое из листов электротехнической стали. При мощностях до 200 Вт магнитная система выполняется двухполюсной, при больших мощностях — четырехполюсной.
Различают два способа управления исполнительными двигателями: якорное и полюсное.
Схема включения двигателя с якорным управлением показана на рис. 3.75. Обмотка полюсов постоянно присоединена к напряжению сети и является обмоткой возбуждения. Магнитодвижущая сила этой обмотки да/в создает магнитный поток Фв, сцепленный с обмоткой якоря. При подаче напряжения управления (сигнала) на обмотку якоря (называемую здесь обмоткой управления) в • якоре появится ток /у, создающий совместно с потоком возбуждения Фв вращающий момент М, под действием которого якорь приходит во вращение.. При отключении обмотки управления или уменьшении тока до нуля якорь быстро останавливается.
Схема включения двигателя с полюсным управлением показана на рис. 3.76. В этом случае обмоткой воз^ буждения служит обмотка якоря, подключенная по-
111
сгоянно (непосредственно или через балластное сопротивление) к напряжению возбуждения UB. Напряжение управления подается на обмотку полюсов, являющуюся обмоткой управления. Магнитодвижущая сила этой обмотки при £7у>0 создает поток Фу, который, взаимодействуя с полем обмотки якоря, образует вращающий момент М.
Рис. 3.75. Исполнительный двигатель постоян него тока с якорным управлением.
Рис. 3.76. Схема включения исполнительного двигателя с полюсным управлением.
где
Основными характеристиками исполнительного двигателя являются механические н=ф(Л4) и регулировочные n=<p(t/y).
При якорном управлении поток возбуждения пропорционален току возбуждения или напряжению возбуждения (сети) Фв=сфЕ/в, а вращающий момент
двигателя равен: , •/
Л4 = см/уФв = смсф7/7в,
и — Е,, ток якоря /у равен /у==—------» а ЭДС якоря
Еч = сЕпФв = сЕсфп.ив,
гу — сопротивление цепи якоря; п — частота враще-якоря; см, сЕ, ф —постоянные коэффициенты.
где ния
Коэффициентом сигнала kc называют отношение напряжения управления к напряжению возбуждения k^-UylUn.
112
Зависимость частоты вращения от коэффициента сигнала определяется из уравнения
1 / rvM \
/1=-?— kc--------~~пг~Г (3.23)
СЕСФ СМСФ^2В J V 7
При йс= 1 (U7=>UB) и при отсутствии нагрузки (Л4—0) частота вращения якоря равна частоте вращения при холостом ходе: п0=1/сЕсф, а уравнение (3.23) имеет вид:
п — п„ (kc — cxM),
(3.24)
Из выражения (3.24) видно, что механические характеристики двигателя с якорным управлением линейны и могут быть построены по двум точкам: короткого замыкания (п=0) и холостого хода (Л4=0).
На рис. 3.77 показано семейство механических характеристик для ka= 1; 0,5; 0,3.
Рис. 3.78. Семейство регулировочных характеристик исполнительного двигателя при якорном управлении.
Рис. 3.77. Семейство механических характеристик при якорном управлении.
Выражение (3.23) при постоянном моменте является уравнением регулировочной характеристики n~f{kc). Эти характеристики линейны, и их можно также строить по двум точкам.
На рис. 3.78 показано семейство регулировочных характеристик для Af=O; 0,25; 0,5; 0,75 Ма (ЛТП — пусковой момент, развиваемый двигателем при kc~ 1).
8—1056 113
Механические характеристики при полюсном управлении определяются из уравнения
п - ( К - - Ml = ^(kc-c2M), (3.25)
к с \ в ] li с
где Uo — напряжение питания.
Выражение (3.25) дает линейную зависимость частоты вращения от момента, которая может быть построена по двум точкам: короткого замыкания (п=0) и холостого хода (Л4 = 0). На рис. 3.79 показано семей
Рис. 3.79. Семейство механических характеристик исполнительного двигателя при полюсном управлении.
п
О 0,2 Ofi О,В 0,8 1
Рис. 3.80. Семейство регулировочных характеристик исполнительного двигателя при полюсном управлении.
ство механических характеристик для £с=1; 0,8; 0,5. При постоянном значении М выражение (3.25) является уравнением регулировочной характеристики. Здесь частота вращения не является линейной функцией kc. На рис. 3.80 показано семейство регулировочных характеристик, построенных для различных М.
Из сравнения механических и регулировочных характеристик исполнительного двигателя при двух рассмотренных способах управления можно определить следующие преимущества якорного управления:
линейность и параллельность механических и регулировочных характеристик;
большая крутизна механической характеристики, способствующая быстрому разгону якоря;
меньшие потери при неподвижном якоре, так как обмотка его при этом отключена, а потери в обмотке полюсов невелики;
114
Рис. 3.81. Устройство двигателя с полым якорем.
меньшая индуктивность цепи управления и, следовательно, более быстрое протекание переходных электромагнитных процессов.
При полюсном управлении преимуществами являются:
меньшая мощность управления;
лучшее использование машин при малых напряжениях управления, так как максимальная полезная мощность при полюсном управлении не зависит от коэффициента сигнала.
Повышение быстродействия исполнительных двигателей постоянного тока (уменьшение электромеханической постоянной времени) достигается использованием малоинерционного якоря. Известны два типа малоинерционных якорей: а) дисковый или полый цилиндрический якорь с печатной обмоткой; б) полый ци
линдрический якорь с обычной обмоткой и возбуждением от постоянного магнита, расположенного внутри якоря. В малоинерционном двигателе с полым якорем (рис. 3.81) обмотка якоря 1, залитая пластмассой в виде полого цилиндра, вращается в зазоре- между полюсами возбуждения 2 и неподвижного ферромагнитного цилиндрического сердечника 3 (внутренний статор), укрепленного на одном из подшипниковых щитов.
3.7. ИНФОРМАЦИОННЫЕ ЭЛЕКТРИЧЕСКИЕ МИКРОМАШИНЫ
Информационные электрические микромашппы предназначены для выполнения функций первичных преобразователей, передачи информации, вычислительных операций в схемах автоматики, телемеханики и вычислительной техники. В качестве первичных преобразователей они служат для преобразования различных механических величин (угла поворота, частоты вращения, скорости перемещения, ускорения, момента и т. п.) в электрические величины или обратного преобразования; в вычислительной технике выполняют решение тригонометрических задач, преобразование координат, дифференцирование, интегрирование; в телемеханических системах обеспечивают работу систем синхронной связи.
В настоящее время разработано и создано большое количество различных типов специальных электрических микромашин, предна-8* . 115
злаченных для выполнения указанных функции. В данном параграфе рассматриваются сельсины и вращающиеся трансформаторы, используемые в системах синхронной связи и выполняющие функции первичных преобразователей.
В общем случае системой синхронной связи называют совокупность устройств, служащих для измерения и ‘передачи на расстояние сигнала (непрерывно или дискретно), являющегося функцией рассогласования .положения двух или нескольких механизмов.
Рис. 3.82. Индикаторная система синхронной связи.
Под рассогласованным положением понимается наличие разных углов поворота валов этих механизмов (или частот вращения) от ис-
Рис. 3.83. Трансформаторная система синхронной связи.
(рис. 3.82). Этот момент дейст
согласования.
ходного положения или относительно друг друга. В основном система синхронной связи состоит из управляющего устройства (датчика Д), линии передачи и принимающего устройства (приемника П). Датчик, получая внешнее воздействие, перемещается (поворачивается), вырабатывая сигнал и передавая его приемнику. На выходе приемника появляется сигнал в функции угла рассогласования О (или частоты вращения). Если выходным сигналом является вращающий’ момент, то такая система называется индикаторной ет в направлении устранения рас-
В трансформаторной системе синхронной связи (рис. 3.83) выходным сигналом является ЭДС, а устранение рассогласования между датчиком и приемником осуществляется исполнительным двигателем ИД, управляющая обмотка которого питается от приемника через усилитель мощности.
В системах малой мощности в качестве датчика и приемника используются специальные электрические машины (сельсины), способные самосинхронизироваться.
Сельсины — это небольшие электрические машины переменного тока, предназначенные для синхронной передачи на расстояние угловых перемещений валов, различных устройств, механически не связанных между собой.
По конструкции сельсины делятся на контактные и бесконтактные. Конструктивно контактные сельсины подобны синхронным или асинхронным машинам. Контактные сельсины выполняются в двух вариантах. В одном варианте обмотка возбуждения 1 располагается на роторе, а трехфазная обмотка 2, называемая обмоткой синхронизации,— в ‘пазах статора (рис. 3.84,я). В другом варианте обмотка возбуждения расположена на статоре, а трехфазная обмотка— в пазах ротора (рис. 3.84,6). Начала фаз этой обмотки выведены к трем контактным кольцам, по которым скользят три щетки. Пакеты статора и ротора (3, 4 на рис. 3.84) набраны из листов электротехнической стали. Контактные кольца для уменьшения переходного сопротивления скользящих контактов выполняются нз сплавов серебра, 116
В отличие от синхронной машины обмотка возбуждения сельсина включается на переменное однофазное напряжение. Щеточноконтактный узел является наиболее ненадежным местом контактных сельсинов. Вследствие окисления или подгорания щеточного контакта, слабого нажатия щеток па кольца бывают случаи нарушения контакта между щетками и кольцами. Сильное нажатие щеток увеличивает момент трения па валу ротора и приводит к снижению точности синхронной передачи. Эти недостатки устранены в бескон-
Рис. 3.84. Конструкция контактного сельсина.
тактном сельсине (рис. 3.85). Обмотки возбуждения 1 и синхронизации 2 в бесконтактном сельсине неподвижны. Трехфазная обмотка синхронизации расположена в пазах статора. Обмотка возбуждения состоит из двух кольцевых катушек, оси которых совпадают с осью ротора.
Для связи потока возбуждения с обмоткой синхронизации применен специальной формы ротор 3, полюса которого разделены немагнитной прокладкой 4. Вследствие такой конструкции ротора поток возбуждения изменяет свое направление и через небольшой за-
Рис. 3.85. Конструкция бесконтактного сельсина.
зо.р из одного полюса ротора проходит в пакет статора 5, а далее по ярму статора до диаметрально противоположной точки, затем снова через зазор входит во второй полюс ротора. Далее поток опять через два зазора, тороиды 6 и магнитопровод 7 попадает в .первую часть ротора. При повороте ротора положение оси потока возбуждения относительно обмотки синхронизации изменяется так же, как и в контактных сельсинах. Между работой контактных и бесконтактных сельсинов в схемах синхронной связи различия нет.
В бесконтактном сельсине поток возбуждения проходит более длинный путь, в том числе четыре воздушных зазора вместо двух в обычных машинах. Поэтому намагничивающий ток здесь больше,
117
a cos <p меньше, чем у контактных сельсинов. Отсутствие скользящих контактов позволяет значительно увеличить надежность работы и стабильность характеристик бесконтактного сельсина. На рис. 3.86 схематически показано положение осей обмоток сельсина. Обмотка синхронизации представлена тремя катушками, оси которых смещены на 120°. При включении обмотки возбуждения сельсина на однофазное напряжение ее ток создает пульсирующее магнитное поле, которое индуктирует в каждой фазе обмотки синхронизации переменную ЭДС. Действующее значение ЭДС каждой фазы зависит от пространственного расположения осей этих фаз относительно оси потока возбуждения:
Ei=E cos ад;
Е2=Е cos (ад—120°);
Е3=Е cos (ад4-120°),
где Е — наибольшее действующее значение ЭДС фазы обмотки, когда ее ось совпадает с осью потока возбуждения; ад — угол поворота ротора.
Рис. 3.86. Схема обмоток синхронизации сельсинов.
Рис. 3.87. Схема индикаторного режима работы системы синхронной связи (ССС).
В простейшем случае схема дистанционной передачи угловых перемещений состоит из двух одинаковых сельсинов, у которых одноименные зажимы обмоток синхронизации соединены проводами линии связи, а на обмотки возбуждения подается напряжение сети (рис. 3.87). В такой схеме сельсины работают в индикаторном режиме. Один из сельсинов называют сельсином-датчиком СД, а другой — сельсином-приемником СП. Если оси одноименных обмоток синхронизации сельсинов 1—3 расположены одинаково относительно осей обмоток возбуждения, то в фазах обмоток синхронизации приемника и датчика индуктируются одинаковые ЭДС, уравновешивающие друг друга. Тока в обмотках и в линиях связи нет. Такое положение сельсинов называется согласованным.
При рассогласовании роторов сельсинов, например, вследствие поворота ротора СД равновесие ЭДС обмоток синхронизации нарушится, между одноименными зажимами обмоток будут действо-118
вать ЭДС, равные разностям ЭДС соответствующих фаз СД и СП:
Е\=Е^\—£щ; Ег=Сд2—Е^', Е$=Епз—Еаз,
где индекс «д» относится к сельсину-датчику, а индекс «и» — к сельсину-приемнику. Углом рассогласования 0 сельсинов называют разность
0=ад—ап.
Если полное сопротивление каждой фазы СД и СП равно ZH= =Zn=Z и сопротивление линии Zл, то сила тока в фазах обмотки синхронизации определяется из выражении:
Е, Е2 Е3
= 2Z+Z,; /а = 2Z+z; ; Z3 = 2Z + z?
момент практически пропорциона-
В результате взаимодействия проводников с током обмотки синхронизации с полем обмотки возбуждения в каждом сельсине возникает вращающий (синхронизирующий) момент, который стремится привести систему в согласованное положение, при котором токи фаз / 1=/2=/3=0. Синхронизирующий лен синусу угла рассогласования Afc=7WTOax sin 0. Так как задаваемое положение ротора СД фиксировано, то синхронизирующий момент в СП, преодолевая сопротивление трения на валу, поворачивает его ротор до согласования с ротором СД. Так осуществляется дистанционная передача угла в индикаторном режиме.
Работа сельсинов в индикаторном режиме используется для передачи показаний о повороте какого-либо органа пли механизма из труднодоступного или удаленного от наблю-
дателя пункта. Во всех случа-3™?110- 3.88. Схема трансформатор-ях индикаторной работы же- ного режима ССС. лательна максимальная точ-
ность показаний сельсинов-приемников. Она определяется видом характеристики Л4С (0), моментом сопротивления на валу СП и другими факторами. Если требуется повышенная точность, то применяется трансформаторная система синхронной связи. Схема соединений двух одинаковых сельсинов-датчиков и сельсинов-приемников, работающих в трансформаторном режиме, представлена на рис. 3.88.
Одноименные зажимы обмоток синхронизации СД и СП соединены проводами линии связи. Обмотка возбуждения СД подключена к источнику питания, а обмотка возбуждения СП является выходной и подключается к усилителю. При включении питания на обмотку возбуждения СД в обмотках синхронизации появятся токи, определяемые действием ЭДС Ед1, Ед2 и Едз:
-g*1. . [______, £ДЗ
2г+гл- /a~2z+z.a’ /?-=2z+z -
115
Каждый иЗ этйх Юков бозДает В Фрехфазной обмотке еельййна-приемника МДС фаз, которые, суммируясь, создают пульсирующий магнитный поток сельсина-приемника, направленный в общем случае под углом 0=ад—ап к оси выходной обмотки. Значение наводимой этим потоком ЭДС Ет в выходной обмотке зависит от угла 0:
ЕТ=Е? т cos 0,
где ЕТ т — наибольшее действующее значение ЭДС выходной обмотки СП, когда 0=0.
Таким образом, сельсин-приемник выполняет в этой схеме роль трансформатора, напряжение на однофазной обмотке которого изменяется пропорционально косинусу угла 0.
Для практического использования трансформаторного режима работы сельсинов удобнее, чтобы зависимость £'т=<р(0) была синусоидальной, т. el чтобы при согласовании сельсинов £т=0. Это достигается тем, что ротор сельсина-приемника смещают на постоянный угол 90° и такое положение роторов принимают за начальное.
С помощью сельсинов, работающих в трансформаторном режиме, осуществляется дистанционное непрерывное управление электроприводом. Для этого выходное напряжение однофазной обмотки СП усиливается усилителем (электронным, электромашинным или магнитным) и подается на двигатель, .поворачивающий (вращающий) управляемый объект, которым может быть платформа с укрепленной на ней направленной антенной и т. п. Ротор СП жестко связывают механической передачей с поворачиваемым объектом. Поворот вала двигателя объекта вслед за поворотом ротора СД начинается уже при незначительном угле рассогласования (5—:10°). Двигатель, поворачивая объект, одновременно поворачивает и ротор СП в таком направлении, чтобы рассогласование сельсинов уменьшилось до нуля (0=0). При исчезновении рассогласования вся система, повернувшись на заданный угол, останавливается. На точность следования ротора СП (объекта) за ротором СД существенно влияет вид характеристики £=<р(0).
Дифференциальный сельсин по конструкции подобен трехфазному асинхронному двигателю с контактными кольцами. Обмотки ста-
Рис. 3.89. Схема включения дифференциального сельсина в индикаторном режиме.
120
как вторые датчики.
а) 6)
Рис. 3.90. Диаграммы суммы и разности углов поворота СД\ и СД2.
а — при повороте ротора по часовой стрелке; б ~ при повороте ротора против часовой стрелки.
тора и ротора имеют одинаковое число фаз, пазов и витков катушек.
Дифференциальные сельсины применяются в схемах следящего привода, где индикаторная схема должна отрабатывать угол, равный сумме или разности двух задаваемых углов. В системах синхронной передачи угла дифференциальные сельсины могут быть использованы либо как приемник Из рис. 3.89 приведена схема включения дифференциального сельсина (ДС) для работы в индикаторном режиме. В этой схеме дифференциальный сельсин может работать \ датчиком или приемником. При включении ДС в качестве приемника от датчиков СД\ и СДг работа происходит следующим образом. При повороте ротора сельсинов СДХ и СД2 в их обмотках и обмотках сельсина ДС возникают токи, пропорциональные действующим ЭДС. Эти токи создают в сельсине ДС два результирующих магнитных потока: поток ротора и поток статора, векторы которых поворачиваются на углы, равные углам поворота ротора сельсинов СД\ и СДг. При повороте ротора сельсина СД-t на угол аг (рис. 3.90,а) по часовой стрелке результирующий поток Ф2 ротора сельсина ДС повернется в противоположном направлении на угол а2, при повороте ротора СДг на угол а2 по часовой стрелке Ф1 ротора ДС повернется в противоположном направлении на угол а2.
Магнитные потоки статора и ротора сельсина ДС, взаимодействуя между собой, создают синхронизирующий момент, который стремится вращать ротор дифференциального сельсина до тех пор, пока оба потока не совпадут по направлению. В рассматриваемом случае для совпадения потоков необходимо, чтобы ротор сельсина ДС повернулся на угол 0=(Xi—а2. Если ротор сельсина СДг повернуть против часовой стрелки, то для совпадения магнитных потоков статора и ротора сельсина ДС его ротор должен повернуться на угол 0=a]-|-ci2 (рис. 3.90,6). Если в рассматриваемой схеме поменять местами две фазы обмотки синхронизации сельсинов СД\ и СДг, то при повороте их роторов по часовой стрелке ротор ДС повернется на угол 0=а|-|-а2, .а при повороте в противоположном направлении— на угол 0=ai—а2.
Вращающиеся трансформаторы — это микромашины переменного тока, служащие для получения на выходе напряжения, амплитуда которого пропорциональна углу поворота ротора (линейный ВТ) или тригонометрическим функциям угла поворота (синусно-косинусный ВТ).
Вращающийся трансформатор ВТ выполнен по типу двухфазной асинхронной машины малой мощности с контактными кольцами. На статоре и роторе ВТ уложены по две обмотки, оси которых сдвинута в пространстве на электрический угол 90°. Одна из первичных 121
обмоток трансформатора включается в однофазную сеть, а другая выполняет роль компенсационной и замыкается накоротко или на сопротивление, равное внутреннему сопротивлению источника питания. К одной из обмоток ротора подключается нагрузка, к другой — симметрирующее сопротивление.
Вращающиеся трансформаторы применяются в электрических счетно-решающих устройствах, маломощных следящих системах, в системах разверток радиолокационных станций, в системах синхронной связи и в других устройствах. Они работают как в режиме ограниченного угла поворота, так и при вращении.
Рис. 3.91. Конструкция вращающегося трансформатора.
/ — корпус; 2 — сердечник статора; 3 — обмотки статора; -/ — сердечник ротора; 5 — обмотки ротора; б — контактные кольца.
Конструкция ВТ показана па рис. 3.91, а электрическая схема — на рис. 3.92. Он имеет по две обмотки (3, 4), располагаемые на статоре 1 и роторе 2. Оси обмоток смещены относительно друг друга на 90 эл. град. Концы обмоток ротора выведены через кольца 5 на щетки 6.
Рассмотрим принцип действия синусно-косинусного вращающегося трансформатора (СКВТ).
Пульсирующий магнитный поток Фц создаваемый статорной обмоткой С;С2, сцепляется с обмотками ротора и наводит в них ЭДС. Если ось роторной обмотки Р\Рг перпендикулярна оси обмотки статора С|С2, то ЭДС в обмотке Р;Р2 наводиться не будет 122
Рис. 3.92. Электрическая схема вращающегося трансформатора.
а в обмотке ротора Р3Р4, ось которой совпадает с осью обмотки статора CiC0 ЭДС будет максимальной. При повороте ротора на угол а величина потока, сцепленного с роторной обмоткой, изменится: для обмотки Р-.Р2 величина потока будет пропорциональна синусу угла поворота, и ЭДС, наводимая этим потоком, равна: £/2=£'2m sin а. Для обмотки Р3Р4 величина потока будет пропорциональна косинусу угла поворота, а ЭДС равна: Е"2—Е2т cos а. При непрерывном вращении ротора выходные напряжения па зажимах его обмоток изменяются во времени и зависят обмотки Р1Р2
от частоты вращения. . Для
U'2 = К 2 U2 sin <at sin а = V~2 KrUt sin at sin Qt.
ДЛЯ ОбмОТКП P3P4
П"2 = K2 sin <о/cos Sf,
где й — угловая частота вращения ротора; — коэффициент трансформации.
При включении нагрузки Znl в цепи обмотки PiP2 появится ток /2, который создаст свой магнитный поток Ф2. Этот поток можно представить разложенным по двум осям: одна ось совпадает с осью обмотки CiC2, а другая перпендикулярна ей (рис. 3.92).
Продольная составляющая потока ротора O2sina будет направлена встречно потоку Ф[. Поперечная составляющая потока ротора Ф2 cos а индуктирует в обмотке PiP2 составляющую ЭДС самоиндукции, которая складывается с ЭДС взаимной индукции. При этом результирующая ЭДС обмотки Р{Р2 ротора будет отличаться от синусоиды. В этом случае выражение для Е2(а) имеет вид:
КТЕ sin а
2 1 + т cos2 а ‘
Для уменьшения искажения синусоидальной зависимости выходного напряжения обмотки Р\Р2 поперечная составляющая потока ротора Ф2 компенсируется с помощью второй обмотки статора. С этой целью обмотка С3С4 замыкается накоротко или на определенное сопротивление. Под влиянием потока ротора Ф2 cos а в ней наводятся ЭДС и ток, который создает магнитный поток, компенсирующий поперечную составляющую потока ротора. Такая компенсация называется первичным симметрированием.
Для первичного симметрирования необходимо, чтобы полное сопротивление Z'K цепи компенсационной обмотки C3Ct было равно
123
Полному сопротивлению 2!а цепи обмотки Возбуждения Под полным сопротивлением Z'c понимается сумма сопротивления обмотки возбуждения, сопротивления линии и сопротивления источника питания ZBI, под Z'k — сумма компенсационного сопротивления ZK и сопротивления компенсационной обмотки ZC34-
Если ВТ работает от сети бесконечно большой мощности, то ZDX=0 и следует замкнуть компенсационную обмотку С3С4 накоротко.
Если обе вторичные обмотки включены на нагрузку, то каждая из них является компенсационной для другой и точность работы ВТ повышается. Такая взаимная компенсация поперечных магнитных потоков называется вторичным симметрированием (рис. 3.93).
Рис. 3.94. Схема линейного вращающегося трансформатора.
а —со вторичным симметрированием; б — с первичным симметрированием.
Рис. 3.93. Схема вторичного симметрирования . вращающегося трансформатора.
Для достижения вторичного симметрирования необходимо, чтобы полные сопротивления цепей роторных обмоток были равны
ZP34-4-Zb2, где Zb;, Zn2 — сопротивления, включаемые в цепи обмоток ротора. При ZPi2=Zp34 и ZHi=ZH2 достигается полное вторичное симметрирование.
Вращающийся трансформатор может также работать в режиме линейного ВТ, когда вторичное напряжение пропорционально углу поворота а. Для этой цели используется СКВТ, статорные и роторные обмотки которого включаются, например, по схеме на рис. 3.94,а с вторичным симметрированием. Зависимость выходного напряжения ВТ от угла поворота а при таком соединении определяется соотношением
и ____
2 2ffi 1 cos а >
где т' — параметр, зависящий от числа витков статорных и роторных обмоток, свойств магнитопровода и сопротивлений ZH] И ZB2-
124
При m'M),5ч-0,58 эта зависимость отличается от линейной не более чем на 1% при изменении угла а от 0 до 65°.
В тех случаях, когда линейный ВТ работает на 'Переменную нагрузку, применяется схема с первичным симметрированием, приведенная на рис. 3.94,5. В этом случае одна из обмоток статора нагружается на компенсационное сопротивление ZK и при соответствующем подборе сопротивлений ZHi и Zn2 результирующий поток взаимной индукции обмоток Р$Р* и С,С2 равен нулю. При данном включении обмоток сопротивление ZHI не входит в условие первичного - симметрирования и его изменение не влияет на вид функциональной зависимости.
Рис. 3.95. Вращающийся трансформатор — построитель.
а —схема; б — векторная диаграмма.
В качестве примера использования ВТ для .решения задач рассмотрим нахождение гипотенузы прямоугольного треугольника по заданным значениям двух катетов.
Электрическая схема такого вращающегося трансформатора-построителя представлена на рис. 3.95,а. На обмотках СуС2 и С3С4 статора с помощью потенциометров ПТ{ и ПТ2 устанавливаются напряжения U\ и U2, пропорциональные заданным величинам катетов прямоугольного треугольника а и b (рис. 3.95,5). Токи в этих обмотках создают потоки Ф| и Ф2, направленные по осям С\С2 и С3С4. При отсутствии насыщения магнитопровода потоки пропорциональны напряжениям Ui и U2. Результирующий магнитный поток Ф наводит в обмотках ротора ЭДС U'p и U"p. Под .воздействием тока /3 обмотки управление ОУ исполнительный двигатель поворачивает ротор ВТ в такое положение, при котором ось обмотки PiP2 совпадает с вектором потока Ф и ЭДС в ней будет максимальна, а ось обмотки Р3Р4 будет перпендикулярна вектору потока Ф и ЭДС в ней станет равной нулю. Вольтметр, включенный па зажимы обмотки PtP2, покажет максимальное напряжение U'v—Up тах, которое будет пропорционально гипотенузе с исходного прямоугольного треугольника.
125
Глава четвертая
ЭЛЕКТРИЧЕСКИЕ АППАРАТЫ И РЕЛЕ
4.1. НАЗНАЧЕНИЕ И КЛАССИФИКАЦИЯ ЭЛЕКТРИЧЕСКИХ АППАРАТОВ
Электрическим аппаратом называется электротехническое устройство, предназначенное для коммутации электрических, механических или других цепей путем замыкания или размыкания соответствующих связей. Иногда в понятие «электрический аппарат» включают также электротехнические устройства, предназначенные для стабилизации и регулирования электрических и механических нагрузок.
Примером электрического аппарата, коммутирующего механические цепи, является электромагнитная муфта, которая соединяет или разъединяет ведомый и ведущий валы в механическом приводе.
В радиотехнических системах наиболее широкое применение находят аппараты, коммутирующие электрические цепи: реле, контакторы, автоматические выключатели, пускатели, командные аппараты, рубильники, пакетные выключатели, предохранители и др.
Электрический аппарат замыкает или размыкает электрическую цепь при подаче на его вход управляющего воздействия. Различают контактные и бесконтактные электрические аппараты.
В контактном аппарате имеется одна или несколько пар контактов, один из которых подвижный. Замыкание или размыкание контактов осуществляется за счет воздействия магнитного поля, теплового расширения, механической силы и др.
В бесконтактном аппарате такие контакты отсутствуют и коммутацию осуществляет нелинейный элемент, сопротивление которого может резко изменяться от очень малого до очень большого значения. Достоинством бесконтактных аппаратов является отсутствие подвижных частей.
Рассмотрим основные разновидности электрических коммутирующих аппаратов.
Реле — это слаботочные аппараты, коммутирующие цепи, ток в которых обычно не превышает 5 А и редко доходит до нескольких десятков ампер. Они применяются в устройствах управления, защиты и сигнализации 126
радиотехнических схем и устройств. Замыкание или размыкание контактов происходит за счет энергии управляющего воздействия. По характеру этого воздействия различаются реле:
электрические, реагирующие на силу электрического тока (или напряжения) в управляющей цепи;
тепловые, реагирующие на температуру (или количество тепла);
механические, реагирующие на давление или перемещение;
оптические, реагирующие на силу света; акустические, реагирующие на силу звука и др. Контакторы — это сильноточные аппараты, предназначенные для частых оперативных коммутаций силовых цепей, в которых ток может достигать нескольких сотен ампер. Замыкание контактов этого аппарата обычно осуществляется за счет электромагнита, а размыкание— за счет возвратной пружины при обесточивании электромагнита. Контакторы применяются для включения и .выключения мощных источников питания, электродвигателей и других силовых установок.
Автоматические выключатели (автоматы) предназначены для оперативного включения, а также отключения поврежденного участка силовой цепи при возникновении в нем аварийного режима (перегрузки, короткого замыкания, пониженного или повышенного напряжения и т. п.). Автомат отличается от контактора тем, что он содержит специальный чувствительный элемент, обнаруживающий аварийный режим и приводящий к срабатыванию автомата. Автоматы, предназначенные для защиты, в отличие от контакторов рассчитаны на сравнительно редкие отключения.
Пускатели — это специальные коммутирующие аппараты, предназначенные для пуска, остановки и защиты электродвигателей без введения в их цепи резистивных сопротивлений.
Командоаппараты — это кнопки управления, конечные выключатели и т. п.
Комбинации реле, контакторов и других аппаратов могут образовывать довольно сложные системы управления, выполняющие определенные логические операции, состоящие из совокупности элементарных логических операций: И, ИЛИ, НЕ и др.
127
4.2. ПРИНЦИП ДЕЙСТВИЯ И УСТРОЙСТВО КОММУТИРУЮЩИХ АППАРАТОВ
Широкое применение находят электромагнитные электрические аппараты, основным элементом которых является электромагнит. Электромагнит — наиболее простой преобразователь электрического сигнала в механическое усилие или перемещение. Электромагнит содержит обмотку, по которой протекает ток, и магнитную систему. Магнитная система состоит обычно из трех
Рис. 4.1. Устройство электромагнитов реле.
а — клапанного типа; б —с втяжным якорем; в —с поворотным якорем; 1 — обмотка; 2 — сердечник; 3 — ярмо; 4 — якорь.
элементов: сердечника, на котором расположен каркас с обмоткой; ярма, обеспечивающего замыкание магнитного потока; и якоря, являющегося подвижной частью магнитной системы. Все три элемента магнитной системы выполняются из ферромагнитных материалов.
Якорь может находиться в одном из двух положений. В одном из этих положений магнитная система является замкнутой, а в другом — разомкнутой. В разомкнутом положении якорь обычно удерживается специальной пружиной, называемой рабочей.
По конструктивному исполнению различают электромагниты с якорем клапанного типа, с втяжным и поворотным якорем (рис. 4.1,а—в). Для любой из этих конструкций при обесточенной обмотке якорь с помощью пружины удерживается в таком положении, что магнитная цепь разомкнута и между якорем и сердечником (или ярмом) имеется воздушный зазор длиной б. При включении обмотки возникает магнитное поле, силовые линии которого замыкаются через магнитную систем му и воздушный зазор. При этом на якорь действует механическая сила, притягивающая его к сердечнику. Эта 128
сила стремится перевести якорь в такое положение, при котором магнитная система оказывается практически замкнутой. Перемещение якоря и замыкание магнитной цепи может прризойти лишь при таких токах и магнитных полях, при которых сила притяжения способна преодолеть силу сопротивления рабочей пружины.
Якорь механически связан с контактами аппарата,, являющимися исполнительными органами, так что при переходе якоря из одного положения в другое эти контакты замыкаются или размыкаются.
Рис. 4.2. Реле клапанного типа.
/ — каркас с обмоткой; 2--< ЯрМО; 3—выводы обмотки; 4 — эбонитовый штифт; 5— контактные пружины; 6 “ замыкающий контакт; 7 — подвижные контакты; 8 —- размыкающий контакт; 9 — рабочая пружина; 10—якорь; 11— штифт отлипания; 12 — сердечник.
Примером конструкции электрического аппарата является реле клапанного типа, изображенное на рис. 4.2. Конструкции других аппаратов отличаются конфигурацией магнитной системы, типом обмотки, конструкцией исполнительных контактов и механического привода, связывающего якорь с контактами. Существует большое многообразие подобных конструкций.
Основным элементом электрических аппаратов являются исполнительные контакты. Различают точечные, линейные, плоскостные и ртутные контакты (рис. 4.3). При отсутствии тока в обмотке электромагнита контакты могут быть либо замкнутыми, либо разомкнутыми. Их называют соответственно размыкающими или замыкающими.
К контактам предъявляются требования высокой надежности электрического соединения, долговечности, стойкости к влиянию внешней среды.
В процессе работы контакты могут находиться в замкнутом, разомкнутом состояниях или состояниях замыкания и размыкания.
9—1056 129
Поверхность контактов имеет малые неровности и бугорки, которые в замкнутом состоянии сминаются контактным усилием Рк. В состоянии равновесия механическое усилие Р в точках соприкосновения равно напряжению смятия о:
P = PK/Ss = a, где Ss — суммарная площадь соприкосновения. Механическое усилие Р должно быть достаточным для продавливания окисной или сульфидной пленки, образующейся на поверхности контактов. При протекании тока замкну-
Рис. 4.3. Разновидности контактов реле.
а —< точечные; б — линейные; в — плоскостные; г — ртутные.
Рис. 4.4. Схема искрогашения контактов.
тые контакты нагреваются, что приводит к изменению их сопротивления. При больших токах может произойти сплавление контактов.
Наиболее тяжелым режимом работы контактов является процесс размыкания. При уменьшении контактного' усилия сопротивление контакта растет, увеличивается температура точек соприкосновения, в результате чего материал контактов в этих точках может расплавиться. При дальнейшем движении контактов «мостик» из расплавленного металла разрывается и напряженность поля в образующемся малом зазоре резко возрастает. Этому способствует ЭДС самоиндукции, возникающая в размыкаемой цепи, которая обусловлена индуктивностью этой цепи и может быть существенно больше рабочего напряжения на разомкнутых контактах. Напряженность 130
поля может быть настолько большой, что возникает газовый разряд — дуга, которая сильно разрушает контакты.
Для гашения дуги и уменьшения искрения контактов в качестве материала контактов используют тугоплавкие металлы и сплавы, увеличивают расстояние между контактами в разомкнутом состоянии, располагают контакты в масле, используют специальные дуго- и искрогасящие цепочки. Например, для реле малой мощности используют ДС-цепи, которые включают параллельно контактам, или катушке индуктивности в коммутируемой цепи (рис. 4.4). Такие цепи уменьшают ток контактов в момент разрыва за счет зарядного тока емкости.
Рассмотренные особенности работы контактов определяют выбор материалов для их использования. Так, для маломощных контактов наиболее часто применяются серебро, золото, сплавы золота с никелем, платины с иридием и сложные многокомпонентные сплавы. Для мощных контактов обычно используется медь.
Электромагниты электрических аппаратов конструируются исходя из условия получения необходимой электромеханической силы при заданных значениях тока, напряжения и мощности источника питания. Электромагниты могут иметь одну или несколько обмоток. По активному сопротивлению обмотки подразделяются на низкоомные (до 1 кОм) и высокоомные (свыше 1 кОм). При включении и выключении в обмотке наводится значительная ЭДС самоиндукции, которая должна быть учтена при выборе изоляционных материалов обмотки.
Магнитные цепи электрических аппаратов конструируются таким образом, чтобы обеспечить минимальные ' потоки рассеяния и заданные электромеханические характеристики. После выключения тока в обмотке якорь может остаться притянутым из-за остаточного магнетизма или, как часто говорят, якорь может «залипнуть». Для предотвращения этого обычно ограничивают минимальный зазор между якорем и сердечником (ярмом) •с помощью специальных штифтов отлипания (см. рис. 4.2).
4.3. ХАРАКТЕРИСТИКИ ЭЛЕКТРОМАГНИТНЫХ РЕЛЕ
Реле позволяют коммутировать электрические цепи, мощность которых значительно превышает, мощность, потребляемую приводным электромагнитом. Это свойст-9* ' 131
во реле характеризуется коэффициентом управления по мощности
Ку^=Р ком/Р у,
где Рком — мощность в коммутируемой цепи; Ру — мощность, потребляемая электромагнитом. /(у может достигать значений 105—106.
Сила электромагнитного притяжения якоря зависит от величины зазора в магнитной цепи б. Зависимость электромагнитной силы Fa от величины зазора б называется тяговой или электромеханической характеристикой реле. Анализ показывает, что тяговая характеристика хорошо описывается соотношением
F3 = 4тс-10-7 (M2Sj/2S2,
нию якоря, обусловлена
Рис. 4.5. Тяговая (/%) и механическая ('Рм) характеристики реле.
деляемой минимальной током, необходимыми
где Iw— ампер-витки обмотки электромагнита; S5—площадь поперечного сечения воздушного зазора.
Механическая сила FM, противодействующая движе-жесткостью рабочей пружины и другими механическими факторами. Она также зависит от величины зазора б. Зависимость FM от б называется механической характеристикой реле.
Для надежного срабатывания реле необходимо, чтобы тяговая характеристика в рабочей части лежала выше механической характеристики (рис. 4.5).
Реле также характеризуются чувствительностью, опре-мощностыо, напряжением или для срабатывания реле. По
скольку мощность и напряжение нестабильны, чаще всего чувствительность оценивается током срабатывания, т. е. минимальным током обмотки, при котором происходит переключение контактов. Ток срабатывания может быть найден по приведенному выше выражению для тяговой характеристики и заданной механической характеристике из условия F^Fk для любых возможных б.
К параметрам реле также относится:
132
время срабатывания tCp — интервал времени с момента подачи управляющего сигнала срабатывания реле до полного замыкания (или размыкания) контактов. Оно складывается из двух составляющих: ^Ср=^тр+^дв, где /тр — время трогания, т. е. промежуток времени, в течение которого ток нарастает от нуля до тока срабатывания; /дВ — время движения якоря из нормального состояния в притянутое;
время отпускания ^отп, которое также состоит из двух аналогичных составляющих.
Отметим, что при отсутствии специальных тормозящих устройств /тр^/дв- Время трогания определяется в основном постоянной времени x=L]r (L — индуктивность обмотки электромагнита, г — активное сопротивление обмотки и внешней цепи).
По времени срабатывания реле подразделяют на безынерционные (^Ср<1 мс), быстродействующие (^Ср= =5-4-50 мс), нормальные (ZCp=50-4-150 мс), замедленные (/Ср=0,15-4-1 с) и реле времени (?ср>1 с). Время срабатывания и отпускания можно изменять как конструктивными, так и схемными методами. К конструктивным методам относятся снижение массы подвижных частей, уменьшение вихревых токов в магнитной системе, для чего она набирается из пластин, использование специальных ускоряющих обмоток и т. п. Схемные методы направлены на ускорение переходного процесса в обмотке, например последовательно с ней включается резистор, уменьшающий постоянную времени;
коммутируемая мощность РКом и диапазон коммутируемых напряжений и токов в пределах этой мощности, которые являются важными энергетическими параметрами реле. По этому параметру реле подразделяются на маломощные (РКом<1 Вт), средней мощности (PKmi— = 1-4-10 Вт) и мощные (Рком>10 Вт).
Максимальное значение коммутируемого тока ограничивается дугообразованием и температурой нагрева, при которой наступает уменьшение прочности материала контактов. Максимальное значение коммутируемого напряжения определяется электрической прочностью изоляции и межконтактного промежутка. Минимальное значение коммутируемых токов и напряжений ограничивается требованиями к стабильности переходного сопро,-тивления контактов;
133
максимальная частота срабатывания реле, определяемая минимальным временем срабатывания и отпускания;
износоустойчивость реле, определяемая допустимым количеством срабатываний до наступления систематических отказов. Износоустойчивость зависит от конструкции реле, силы коммутируемого тока, характера нагрузки и лежит в пределах 104—109,
Реле клапанного типа (см. рис. 4.2) работает при любом направлении тока через обмотку электромагнита. Такие реле называются нейтральными. Во многих случаях необходимо, чтобы реле реагировало не только на
силу, но и на направление управляющего тока. Эту задачу решают реле, называемые поляризованными. В поляризованных реле магнитный поток создается не только обмоткой, но и постоянным магнитом, встроенным в магнитную систему реле.
На рис. 4.6,а приведена конструкция одного из вариантов поляризованного реле, называемого дифференциальным поляризованным. При отсутствии тока через обмотку постоянный магнит создает поляризующий магнитный поток Фп, который делится поровну между симметричными половинами магнитной цепи. Поскольку магнитные потоки в каждой половине магнитопровода направлены в противоположные стороны, электромагнитные силы при строго вертикальном положении якоря действуют в разные стороны и взаимно уравновешиваются. При прохождении тока через обмотку создается поток управления Фу, который, складываясь с поляри-134
зующим потоком, уменьшает общий магнитный поток в одной из половин магнитопровода и увеличивает его в другой. В результате электромагнитные силы, действующие на якорь, не будут уравновешиваться, и он переместится вправо или влево в зависимости от направления тока через обмотку.
Состояние равновесия якоря, соответствующее его вертикальному положению при отсутствии управляющего потока, является неустойчивым. Малейшее случайное отклонение его вправо или влево приведет к появлению электромагнитной силы, которая выведет якорь из состояния равновесия, и он окажется либо в правом, либо в левом положении соответственно. Реле рассмотренной конструкции называется двухпозиционным-. якорь в зависимости от направления тока находится либо в правом, либо в левом положении- и остается там после прекращения тока в обмотке.
Если один из контактных винтов выдвинуть за нейтраль 1—1 (рис. 4.6,6), то в обесточенном состоянии якорь будет всегда прижат к противоположному контакту. Такие поляризованные реле называются двухпозиционными с преобладанием (к одному из контактов).
Вводя в конструкцию удерживающие пружины, обеспечивающие устойчивость вертикального положения якоря (рис. 4.6,в), получают реле, у которого при отсутствии тока через обмотку якорь находится в среднем положении. Такое поляризованное реле называется трехпозиционным.
Существуют другие конструкции поляризованных реле, например мостовые. Однако принцип их действия аналогичен принципу действия рассмотренной конструкции. Достоинствами поляризованных реле является их высокая чувствительность и малое время срабатывания.
Если питать обмотку поляризованных реле переменным током, то якорь будет периодически перемещаться из одного положения в другое. В таком режиме" поляризованное реле работает как вибропреобразователь. С его помощью можно преобразовать постоянный ток некоторого источника в переменный.
Наряду с реле постоянного тока применяются также реле переменного тока. Их конструкция аналогична конструкции нейтрального реле постоянного тока (см. рис. 4.2). Однако они имеют некоторые особенности, обусловленные тем, что через обмотку электромагнита протекает иеременный ток.
135
4.4. МАГНИТОУПРАВЛЯЕМЫЕ КОНТАКТЫ
Наиболее ненадежным элементом реле являются контакты, которые подвергаются коррозии и разрушаются газовым разрядом. Важным недостатком обычных реле является также сравнительно большое время срабатывания, обусловленное большой массой якоря и сравнительно длительным процессом нарастания тока в обмотке до тока срабатывания.
Указанные недостатки в значительно меньшей мере свойственны так называемым магнитоуправляемым контактам (МК). Эти контакты впаяны в стеклянную колбу, заполненную азотом или инертным газом, т. е. изоли-
Рис. 4.7. Конструкции герконов.
а — замыкающих; б — переключающих; в — плунжерных; г— многоконтактных.
рованы от внешней среды (герметизированы). Поэтому МК называют часто герконами, т. е. герметизированными контактами.
Некоторые варианты конструкций герконов представлены на рис. 4.7. Основными элементами конструкции герконов (рис. 4.7,а) являются пермаллоевые пластинки 1, концы которых покрыты золотом, серебром или родием.
Принципиальным отличием герконов от обычных реле является отсутствие якоря. Пермаллоевые пластинки выполняют одновременно роль магнитопровода и контактных пружин, а их концы 2— контактов. На стеклян-136
ной колбе 3 размещена обмотка управления 4. При протекании тока через обмотку возникает магнитное поле, которое, замыкаясь через пермаллоевые пластинки, создает электромагнитное усилие, притягивающее контакты друг к другу. Если это усилие превосходит механическую силу упругости пластинок, контакты замыкаются.
Геркон, изображенный на рис. 4.7,6 является переключающим. реле. При подаче управляющего тока в левую обмотку средняя пластина замыкается с левой, а при протекании тока через правую обмотку средняя пластина замыкается с правой.
Конструкция геркона, представленная на рис. 4.7,в, называется плунжерной. В ней под действием магнитного поля плунжер 1 смещается влево и замыкает пластины 2 и 3. Плунжер двигается в цилиндре 4, заполненном
ртутью.
Реле может иметь при одной обмотке несколько магнитоуправляемых контактов (рис. 4.7,г). Известны конструкции поляризованных герконов, в которых в колбоч-
ках помещаются тонкие пластинчатые постоянные магниты.
Достоинством герконов является высокое быстродействие и малая износоустойчивость (до 109 срабатываний), малые габариты, невысокая стоимость.
Разновидностью магнитоуправ-ляемых контактов являются фер-риды. В ферриде (рис. 4.8) магнитоуправляемые контакты 1 и 2 дополнены магнитопроводом 3, за-
Рис. 4.8. Устройство феррида.
мыкающим магнитную цепь. В качестве материала для магнитопровода выбирается ферромагнетик с прямоугольной петлей гистерезиса. В отличие от герконов для замыкания контактов феррида в обмотку управления 4 достаточно подать короткий импульс тока. После
прекращения тока контакты остаются замкнутыми за счет остаточного потока магнитопровода. Для размыкания контактов необходимо подать в обмотку импульс тока противоположного направления, который размагничивает сердечник. Таким образом, феррпды являются элементами с «памятью». Достоинством ферридов является малая энергия, потребляемая обмоткой управления,
137
по сравнению с герконами, у которых ток протекает через обмотку управления в течение всего периода замкнутых контактов.
Материал магнитопровода (феррит) должен обладать высоким электрическим сопротивлением, чтобы обеспечить разрыв цепи при разомкнутых контактах. Для этих целей используются ферриты специальных типов, имеющих прямоугольную петлю намагничивания и высокое удельное сопротивление.
4.5. БЕСКОНТАКТНЫЕ РЕЛЕ
Бесконтактные реле (БК), основанные на использовании нелинейных управляемых сопротивлений, имеют перед обычным реле ряд существенных преимуществ: повышенные надежность и срок службы,' более высокое
Рис. 4.9. К пояснению принципа действия бесконтактных реле.
д —общая схема; б —схема с питанием нагрузки постоянным током от источника переменного тока.
быстродействие, отсутствие дуги и искрообразо-вания и т. д.
Принцип действия бесконтактных реле состоит в следующем (рис. 4.9,а). Выходная исполнительная цепь БК имеет сопротивление Zk, которое с помощью некоторого управляющего воздействия может изменяться от
•очень малого до очень большого значения. При малых
значениях по модулю гк нагрузка zn оказывается подключенной к источнику, а при больших—практически отключенной от источника, если [zK[^> [zH|. Сопротивление zK может иметь как резистивный, так и реактивный характер. В последнем случае должен быть использован источник переменного тока. Если в этом случае необходимо в нагрузке получить постоянный ток, то используется выпрямитель (рис. 4.9,6).
Наиболее широкое применение нашли следующие бесконтактные реле.
Электронные и полупроводниковые реле используют свойства электронных и полупроводниковых приборов. Они находятся в одном из двух состояний: проводящем (открытом) и непроводящем (закрытом).
Электронное реле (рис. 4.10,а) имеет очень высокое сопротивление (соизмеримое с сопротивлением разомк
138
нутых контактов обычных реле) . при отсутствии управляющего положительного сигнала на сетке за счет отрицательного напряжения смещения, закрывающего лампу. При подаче достаточно большого положительного сеточного напряжения лампа открывается и обеспечивает необходимый ток через нагрузку. При этом, однако, сопротивление открытой лампы оказывается значительным, что является недостатком электронных реле.
Рис. 4.10. Упрощенные схемы электронных реле, в —лампового; б — транзисторного; в — тиристорного.
Транзисторные реле (рис. 4.10,6) работают аналогично рассмотренному выше. Их достоинство — малое сопротивление в открытом состоянии; недостаток — значительно меньшее, чем у ламп, сопротивление в закрытом состоянии.
Весьма перспективны тиристорные реле (рис. 4.10,в) . Они имеют ту особенность, что после открывания тиристор остается в открытом состоянии и после снятия управляющего сигнала. Для закрывания тиристора требуется снимать анодное напряжение.
Магнитные реле. Их действие основано на изменении магнитной проницаемости ферромагнетиков при насыщении. Когда сердечник не насыщен, индуктивное сопротивление обмотки велико. При подаче в управляющую обмотку тока сердечник насыщается и индуктивное сопротивление исполнительной обмотки резко уменьшается, обеспечивая необходимый ток через нагрузку. Практические схемы и конструкции таких реле выполняются в виде магнитных усилителей с внешней положительной обратной связью или с самонасыщением, работающих в релейном режиме (см. гл. 1).
Феррорезонансные реле используют особый вид вольт-амперных характеристик резонансных контуров,
139
построенных на обычных линейных конденсаторах и нелинейных дросселях с ферромагнитными сердечниками.
Следует иметь в виду, что бесконтактные реле имеют ряд недостатков: сравнительно небольшие коммутируемые мощности, меньшее, чем у контактных реле, отношение сопротивлений в разомкнутом и замкнутом состояниях. Габариты, масса и стоимость магнитных и феррорезонансных. реле обычно выше, чем контактных реле. Полупроводниковые реле более чувствительны к перегрузкам, чем обычные реле. Поэтому вопрос о выборе типа реле во многих случаях не может быть решен однозначно в пользу бесконтактных; он решается исходя из конкретных технико-экономических и эксплуатационных условий.
Главапятая
ПРИНЦИПЫ ПОСТРОЕНИЯ УСТРОЙСТВ ЭЛЕКТРОПИТАНИЯ РЭА. ИСТОЧНИКИ ЭЛЕКТРИЧЕСКОЙ ЭНЕРГИИ
5.1. ПРИНЦИПЫ ПОСТРОЕНИЯ УСТРОЙСТВ И СИСТЕМ ЭЛЕКТРОПИТАНИЯ
Устройства электропитания служат для обеспечения электрической энергией радиоэлектронной аппаратуры (РЭА).
Электрическая энергия вырабатывается путем преобразования механической, тепловой, атомной, химической, солнечной или другой энергии с помощью специальных устройств, называемых источниками электропитания. К их числу относятся автономные электромашинные генераторы постоянного и переменного тока, гальванические батареи, аккумуляторы, солнечные и атомные батареи, электростанции и т. д.
Надежность и ряд других показателей РЭА во многом зависят от правильного выбора и параметров источника электропитания. В связи с этим к источникам электропитания предъявляют ряд вполне определенных и довольно жестких требований.
К наиболее важным из них относятся:
обеспечение РЭА заданными значениями напряжений и мощности постоянного и переменного тока. 140
В большинстве случаев для питания РЭА требуется постоянный ток;
’ обеспечение требуемой стабильности, т. е. точности поддержания выходного напряжения или тока, при воздействии дестабилизирующих, (возмущающих) факторов: изменении температуры, влажности, давления, механических воздействий (вибрации, ударов), изменении сопротивления нагрузки, напряжения первичного источника питания и др.;
Рис. 5.1. Структурная схема источника электропитания.
ИЭ — первичный источник; ИВП — источник вторичного питания; П — потребитель.
' Возмущающие воздействия
^возможность регулирования в заданных пределах выходного напряжения или тона;
источники постоянного тока должны иметь минимальную пульсацию, т. е. минимальную амплитуду переменной составляющей выходного напряжения;
уровень помех, создаваемых источником электропитания, должен удовлетворять требованиям электромагнитной совместимости РЭА;
источник электропитания должен обладать минимальными массой и габаритами, высокой надежностью.
Параметры источников электроэнергии не всегда удовлетворяют изложенным выше требованиям. Поэтому между источником электроэнергии и потребителем включается специальное преобразующее устройство, называемое источником вторичного электропитания (рис. 5.1). Назначение источника вторичного электропитания (ИВП) состоит в передаче электрической энергии от источника электроэнергии к потребителю (РЭА) с минимальными потерями и необходимым преобразованием количественных и качественных характеристик в условиях возмущающих воздействий.
Таким образом, функции, выполняемые источниками вторичного электропитания, состоят в однократном или многократном преобразовании рода тока (переменный в постоянный или наоборот), изменении напряжения ^трансформации), стабилизации и регулировании напря-
141
жения или тока, подавлении пульсаций и шумов выходного напряжения или тока (фильтрации). Источники вторичного электропитания содержат также устройства защиты, блокировки и диагностики (сигнализации), что повышает их надежность и позволяет обнаруживать и устранять неисправности, возникающие в процессе эксплуатации.
г- ]
Рис. 5.2. Структурные схемы источников вторичного электропитания. а — с двойной стабилизацией напряжения; б •— с промежуточным преобразованием частоты; в — с регулируемым конвертором.
Источники вторичного электропитания могут выполнять либо одну из указанных выше функций, либо их произвольную комбинацию.
На рис. 5.2 представлены различные варианты структурных схем источников электропитания, получивших в настоящее время наиболее широкое распространение. В схеме на рис. 5.2,а в качестве источника электроэнергии используется, например, синхронный генератор или промышленная сеть. Источник вторичного электропитания выполняет функции преобразования перемен-142
кого напряжения в постоянное необходимой величины, стабилизации и регулирования выходного напряжения.
. Для стабилизации выходного напряжения при изменении напряжения источника электроэнергии используется специальное устройство — стабилизатор переменного напряжения СПрН, включенный на входе ИВП. Выходное напряжение стабилизатора с помощью трансформатора Тр преобразуется по величине и выпрямляется выпрямителем В.
Для сглаживания пульсации на выходе выпрямителя включен фильтр Ф. Для стабилизации выходного постоянного напряжения при изменении сопротивления нагрузки и воздействии других возмущений служит стабилизатор постоянного напряжения СПсН.
Функцию регулирования величины выходного напряжения, защиты источника электропитания (блокировки), диагностики (сигнализации, о неисправностях) выполняет блок УВД.
Источник электропитания, схема которого изображена на рис. 5.2,а, называется стабилизированным выпрямителем.
Наиболее громоздкими и дорогостоящими элементами стабилизированных выпрямителей являются трансформатор и фильтр. Несмотря на простоту выполняемых ими функций, они в основном определяют габариты, массу и стоимость ИВП. Габариты, масса и стоимость трансформаторов и фильтров уменьшаются с ростом частоты переменного тока.
Повышение частоты тока источника электроэнергии не всегда возможно и целесообразно. Поэтому в ряде случаев применяют схемы ИВП с промежуточным преобразованием частоты. Структурная схема такого ИВП приведена на рис. 5.2,6. В этой схеме напряжение источника электроэнергии с 'частотой fi предварительно выпрямляется выпрямителем Вь а затем вновь преобразуется в переменное напряжение повышенной частоты
Это преобразование осуществляется специальным устройством И, называемым инвертором. Переменное напряжение повышенной частоты трасформируется, выпрямляется и фильтруется с помощью элементов Тр, В2 и Ф.
Несмотря на усложнение функциональной схемы {введение дополнительного выпрямителя и инвертора), масса и габариты всего устройства уменьшаются за счет
143
уменьшения массы и габаритов трансформатора и фильтра, работающих на повышенной частоте.
Совокупность блоков выпрямитель Bi — инвертор И называется преобразователем частоты ПЧ.
Для стабилизации напряжения в функциональную схему на рис. 5.2,6 возможно введение стабилизатора переменного или постоянного напряжения в виде самостоятельных функциональных узлов подобно схеме на рис. 5.2,а.
В схеме на рис. 5.2,в в качестве первичного источника электроэнергии используется источник постоянного тока, например генератор постоянного тока или аккумулятор. Источник вторичного электропитания в данной схеме включает в себя предварительный фильтр Ф\, конвертор и выходной фильтр Ф^. Фильтр Ф\ подавляет пульсации источника электроэнергии. Конвертор изменяет постоянное напряжение до требуемой величины. Выходные пульсации конвертора подавляются фильтром Ф2. Стабилизация напряжения осуществляется за счет регулирования напряжения конвертора, управляемого от устройства УВД.
Функциональные схемы на рис. 5.2 не охватывают всего многообразия вариантов источников вторичного электропитания. Однако они содержат.практически все функциональные узлы, на основе которых строятся современные ИВП.
Таким образом, по выполняемым функциям эти узлы классифицируются на выпрямители, стабилизаторы, регуляторы, конверторы, инверторы, преобразователи частоты. По возможности регулирования выходных напряжений и токов они подразделяются на неуправляемые и управляемые.
По величине выходной мощности ИВП и его узлы подразделяются на маломощные (до 100 Вт), средней мощности (до 1 кВт) и большой мощности (свыше 1 кВт).
По значениям рабочих напряжений различают ИВП низковольтные (до 100 В), средних напряжений (от 100 до 1000 В) и высоковольтные (свыше 1000 В).
Кроме того, ИВП классифицируются по принципу действия и характеру схем, по функционально-структурным признакам. Такая классификация проводится обычно для отдельных функциональных узлов ИВП (выпрямителей, стабилизаторов, инверторов и др.). Она по 144
мере необходимости будет рассмотрена в последующих главах.
Важную роль играет классификация ИВП по условиям эксплуатации. В этой связи различают ИВП для наземных и бортовых радиосистем. К последним обычно предъявляются более жесткие требования по габаритам и массе, надежности, экономичности, диапазону изменения климатических условий, механическим нагрузкам и т. п. По виду объекта, на которых устанавливаются радиосистемы, различают судовые, самолетные,, космические ИВП и др.
Специфические требования, особенности проектирования и конструктивной реализации ИВП различных классов будут рассмотрены в последующих главах.
Свойства источников вторичного электропитания задаются некоторым множеством их параметров и характеристик. Совокупность требуемых параметров и характеристик ИВП составляет важную часть технического задания на их проектирование.
Параметры источников электропитания подразделяются на выходные, качественные и энергетические.
К выходным параметрам относятся: выходное напряжение, ток .нагрузки, пределы регулирования выходного напряжения (тока) и др.
К качественным параметрам следует отнести: абсолютную и относительную нестабильности выходного напряжения (тока), коэффициент стабилизации, внутреннее сопротивление, коэффициент сглаживания пульсаций (для источников постоянного тока) и др.
Энергетическими параметрами источника электропитания являются КПД, полная, активная и реактивная мощности, потребляемые от источника электроэнергии, коэффициент мощности cos ср, выходная мощность и др._
5.2. ИСТОЧНИКИ ЭЛЕКТРОЭНЕРГИИ
Как указывалось выше, источники электроэнергии обеспечивают-электроэнергией РЭА. Они являются преобразователями одного из неэлектрических видов энергии: механической, тепловой, химической, атомной, лучистой энергии солнца — в электрическую. Источники электроэнергии могут преобразовывать исходную энергию в электрическую не только непосредственно, но и с использованием некоторого промежуточного вида энергии. Так, например, солнечная энергия может преобразовываться в тепловую, а затем в электрическую.
На рис. 5.3 приведена диаграмма различных способов преобразования неэлектрических видов энергии в электрическую. На этом рисунке связи, показанные пунктцрйой линией, отражают проме-10—1056 145
.акуточные преобразования энергии, которые осуществляются преобразователями неэлектрического характера. Например, тепловая энергия ТЭ преобразуется в механическую МЭ тепловыми двигателями; атомная энергия АЭ в тепловую — атомными реакторами и т. п.
Электромашинные генераторы, преобразующие механическую энергию в электрическую, широко применяются в качестве источников электроэнергии для питания РЭА. Они устанавливаются /на’ судах, самолетах, используются для питания наземных радиосистем. Основные свойства и принцип действия электромашинных генераторов рассмотрены в гл. 3.
Рис. 5.3. Способы преобразования различных видов энергии в электрическую.
МЭ — механическая энергия; ТЭ — тепловая энергия; ХЭ — химическая энергия; СЭ — солнечная энергия; АЭ — атомная энергия; ЭЭ — электрическая энергия.
Недостатками электромашинных генераторов являются сравнительная низкая надежность и повышенные акустические шумы, обусловленные наличием движущихся частей.
Магнитогидродинамические генераторы (МГД-генераторы). Электрический ток в МГД-генераторе возникает за счет энергии движущейся газовой плазмы, нагретой до высокой температуры, которая при своем движении пересекает силовые линии магнитного поля. Этот процесс аналогичен возбуждению ЭДС в проводнике, движущемся в магнитном поЛе. Поскольку роль проводника выполняет газовая плазма, движущиеся части в МГД-генераторе отсутствуют, что определяет его повышенную надежность. В настоящее время ведутся большие работы по созданию и усовершенствованию МГД-генераторов.
Химические источники широко используются для питания портативной РЭА, аппаратуры подвижных автономных объектов, в качестве резервных и аварийных источников и в других случаях.
Возникновение тока в замкнутой цепи химического источника происходит за счет электрохимического процесса, обусловленного переходом валентных электронов от вещества одного электрода к веществу другого вследствие различия концентрации валентных 146
электронов в веществах разных электродов. Для выравнивания концентраций валентных электронов вещества электродов в химических источниках используется электролит.
Химические источники являются источниками постоянного тока-и подразделяются на гальванические элементы (батареи), аккумуляторы и топливные элементы.
Гальванические элементы представляют собой источники разового действия. Они отдают электрическую энергию в нагрузку беэ предварительной зарядки от другого источника.
Аккумуляторы обеспечивают электроэнергией после их предварительного заряда от постороннего источника. В процессе отдача энергии происходит разряд аккумулятора. Циклы заряд — разряд, могут многократно повторяться.
При практическом использовании гальванических аккумуляторов важно знать их следующие параметры:
ЭДС Е, которая представляет собой напряжение источника при отсутствии нагрузки;
начальное и конечное напряжения £/Нач и UK0B
элементов »
на зажимах
на зажимах источника в начале и конце разряда соответственно для определенного сопротивления нагрузки /?в;
внутреннее сопротивление источника
£ —Цвч Ri = —TT^-^’ итч
емкость Q, которая определяется количеством электричества (зарядом), отдаваемым источником в процессе разряда:
Q == J (0-^ = 4ьср^р> о
где iH(f)—ток нагрузки; 7Н.СР — средний ток нагрузки; /р —время разряда.
Емкость зависит от среднего тока нагрузки, температуры, срока работы (хранения) источника и других величин. Энергия, отдаваемая источником в процессе разряда, определяется из соотношения
*9
W = J dt,
о
где «в(0 —напряжение на нагрузке.
Мощность источника за время разряда
W
*
Р =
Важную роль играет удельный энергетический показатель—-удельная энергия, представляющая собой отношение энергии источника к его массе или объему. Этот показатель является определяющим для аппаратуры, устанавливаемой на подвижных объектах.
Для гальванических элементов и аккумуляторных батарей обычно задается гарантийный срок хранения, который зависит от степей» их саморазряда.
Срок службы аккумуляторов определяется числом рабочих циклов заряд — разряд. При выборе химических источников основы-10* 147
ваются на их разрядных характеристиках, представляющих собой зависимость напряжения источника от времени при заданном токе разряда.
Для эксплуатации аккумуляторов представляют интерес также зарядные характеристики, показывающие, как изменяется напряжение на зажимах аккумулятора в процессе его заряда.
При выборе химических источников не менее важными параметрами являются их стоимость и механическая прочность.
В табл. 5.1. приведены параметры химических источников тока, .нашедшие наиболее широкое применение.
Таблица 5.1
Параметры гальванических элементов и аккумуляторных батарей
Тип источника Начальное напряжение, В Сохранность, мес Число рабочих циклов Емкость, А-ч Удельная энергия
ВТ’Ч/кг Вт-ч/дм3
Сухие марганцево-цинковые элементы с солевым электролитом 1,4— 1,55 3—13 — — 50 75
Сухие марганцево-цинковые и воздушно-цинковые элементы со щелочным электролитом 0,9— 0,75 9 60 100
Сухие ртутно-цинковые элементы 1,22— 1,25 12—30 — — 90 300
Герметичные никель-кадмиевые аккумуляторы (со щелочным электролитом) 1,25— 12 — 500— 1000 0,03— 10 20 70
Серебряно-цинковые аккумуляторы со щелочйым электролитом 1,5— 22,5 — 50— 100 2—4 130 260
Кислотные (свинцовые) аккумуляторы ,— — 60—70 — 35 60
На рис. 5.4 изображена конструкция ртутно-цинкового (РЦ) элемента, а на рис. 5.5 — конструкция герметичного никель-кадмиевого (НК) аккумулятора.
Гальванические элементы могут набираться в батареи с последовательным, параллельным или последовательно-параллельным соединение^ элементов, что обеспечивает увеличение емкости и напряжения.
Как видно из табл. 5.1, наибольшие значения удельной энергии имеют серебряно-цинковые (СЦ) аккумуляторы и РЦ элементы. Поэтому они широко применяются в аппаратуре, где масса и габариты имеют первостепенное значение. Эти же источники обладают наиболее стабильным напряжением при длительных режимах разряда. Наименее стабильное напряжение имеют марганцево-цинковые (МЦ)
Я48 ' _
элементы, однако эти элементы наиболее дешевые. Ртутно-цинковые элементы дороже МЦ элементов более чем в 10 раз, а СЦ аккумуляторы— более чем в 20 раз. Самую высокую стоимость имеют никель-кадмиевые (НК) аккумуляторы, но срок службы их наибольший (до 1000 рабочих циклов).
Учитывая указанные особенности химических источников тока, МЦ элементы применяют в массовой переносной аппаратуре, РЦ
1 5 6 2 3 £
Рис. 5.5. Конструкция никелькадмиевого герметичного аккумулятора.
1 — крышка; 2 — пружина; 3—изоляционная прокладка; 4 — корпус;
5 — отрицательный электрод; 6 — положительный электрод.
Рис. 5.4. Конструкция ртутно-цинкового элемента.
i — отрицательный электрод; 2 — крышка; 3 — резиновое уплотнение;
4 — корпус; 5 — бумажный сепаратор; 6 — бумажная диафрагма; 7 — положительный электрод.
элементы, и СЦ аккумуляторы — в малогабаритной аппаратуре, рассчитанной на длительную работу, НК аккумуляторы — в устройствах, рассчитанных на длительную эксплуатацию в тяжелых климатических условиях.
Топливные элементы обеспечивают непосредственное преобразование химической энергии в электрическую. Их действие основано
на электрохимическом окислении топлива, которое аналогично горению в тепловых машинах. Схематическое устройство топливного элемента представлено на рис 5.6.
В этом элементе через пористые трубки — электроды, находящиеся в электролите, под давлением пропускают водород (топливо) и кислород (окислитель). Водород разлагается на электроны и положительные попы, которые вступают в реакцию с электролитом. В результате па водородной пористой трубке накапливается отрицательный заряд. Кислород также вступает в реакцию с электролитом, в результате чего кислородная трубка приобретает положительный заряд. При этом во внешней цепи протекает электрический ток.
Рис. 5.6. Схематическое устройство топливного элемента.
1 — электролит; 2 — водородный отрицательный электрод; 3 — кислородный положительный электрод; 4 —• нагрузка.
149
Таким образом, в отличие от тепловых машин окисление топлива и восстановление кислорода происходят на разных электродах, что обусловливает выделение малого количества тепла и непосредственное преобразование энергии реакции в электрическую энергию. В отличив' от гальванических элементов электроды топливного элемента в реакциях активно не участвуют и не разрушаются, так как активными веществами химических реакций являются непрерывно подводимые топливо и окислитель.
. Топливные элементы отличаются по конструкции, виду топлива, окислителя и электролита. В качестве топлива наряду с водородом могут использоваться пропан, метан, керосин, дизельное топливо, а в качестве окислителя — воздух. Коэффициент полезного действия топливных элементов составляет 60—70%, напряжение одного элемента около 1 В, удельная энергия более 100 Вт-ч/кг. Для повышения рабочего напряжения топливные элементы объединяются в батареи.
Термоэлектрические генераторы осуществляют преобразование тепловой энергии в электрическую на основе эффекта Зеебека. Они представляют собой батарею термопар, у которых одни концы контактов (спаев) нагреваются, а другие охлаждаются (рие. 5.7). При нагревании контактов термопары на ее холодных концах возникает ЭДС, которая и вызывает ток через нагрузку. Термопара может быть составлена либо из металлов, либо из полупроводников различной структуры. Обычно применяются полупроводниковые термопары, которые обеспечивают значительно большую ЭДС.
Рис. 5.7. Схематическое устройство термоэлектрической батареи.
/—холодная пластина; 2 — горячая пластина; 3 — диэлектрик; 4 — нагрузка.
Объединение термопар в батарею дает возможность увеличить ЭДС.
Нагревание горячих контактов в различных конструкциях термоэлектрических генераторов осуществляется за счет обычного топлива (например, керосиновой лампой), с помощью атомного реактора! или приемника солнечной радиации. У таких генераторов КПД достигает 10%,-а мощность — нескольких киловатт. Однако имеются возможности повысить КПД до 30—35%, а мощность —до нескольких мегаватт.
.Термоэлектрические генераторы используются для питания переносной и бортовой аппаратуры.
Термоэлектронные (плазменные) генераторы преобразуют тепловую энергию в электрическую за счет термоэлектронной эмиссии нагретых тел. Устройство такого генератора напоминает устройство' диода (рис. 5.8). Нагреваемый катод эмиттирует электроны, которые, попадая на охлаждаемый анод, обеспечивают ток через нагрузку. Для компенсации пространственного заряда электронов, который затрудняет эмиссию, в межэлектродном пространстве создается газоразрядная плазма. Для этого генератор заполняется обычно’ парами цезия, атомы которого ионизируются при ударе о горячий 150
катод. Возникающие положительные ионы нейтрализуют пространственный заряд электронов.
К настоящему времени КПД термоэлектронных генераторов превышает 10%, причем с 1 см2 катода можно снять до 20 Вт мощности. Нагревание катода может осуществляться обычным топливом, атомными реакторами и т. п. Особый интерес представляют термоэлектронные генераторы в сочетании с атомными реакторами. Известны термоэлектронные генераторы, помещаемые внутрь атом-, ных реакторов или выхлопной трубы реактивного двигателя [И].
Солнечные батареи осуществляют непосредственное преобразование энергии солнечной радиации в электрическую энергию.
Рис. 5.8. Схематическое устройство термоэлектронного генератора.
1 — катод; 2 — баллон: 3 — анод.
Солнечная радиация
Рис. 5.9. Схематическое устройство солнечной батареи.
1 — контакты; 2 — слой кремния р-типа; 3 — пластина кремния п-ти-па; 4 — контактный слой.
Солнечная батарея набирается из отдельных элементов (рис. 5.9), каждый из которых представляет собой пластину из монокристалла кремния n-типа, на поверхности которой создается тонкий (1—2 мкм) слой кремния p-типа. Под действием солнечного излучения в образующемся переходе появляются избыточные заряды, которые и обусловливают ток через нагрузку. Каждый элемент развивает ЭДС 0,35—0,4 В. Теоретический КПД солнечной батареи приближается к 25%, однако достигнутый реальный КПД составляет примерно 10%. При этом с 1 см2 рабочей площади солнечной батареи удается снять около 10 мВт мощности.
Удельная мощность солнечных батарей может быть повышена использованием зеркал — концентратов солнечной энергии.
Учитывая, что мощность солнечных батарей зависит от интенсивности солнечной радиации, которая не остается постоянной в течение суток или при изменении ориентации солнечных батарей, последние обычно используют в сочетании с аккумуляторами. Применяются как электрические (например, никель-кадмиевые), так и тепловые аккумуляторы (например, гидрид лития). При интенсивной солнечной радиации батарея обеспечивает энергию и для питания
151
аппаратуры и для. зарядки аккумулятора. При малой интенсивности: или отсутствии радиации энергия для питания обеспечивается акку-
мулятором.
Солнечные батареи в совокупности с аккумуляторами нашли широкое применение для питания РЭА космических аппаратов. Их
недостатком является высокая чувствительность к проникающей радиации, под действием которой происходит разрушение элементов
батарей.
Поскольку Солнце является неисчерпаемым источником энергии, в настоящее • время чрезвычайно актуальной задачей является
Рис. 5.10. Схематическое устройство атомной батареи.
1 — внутренний шаровой электрод с радиоактивным веществом; 2 —внешний шаровой электрод; 3 — внешний вывод; 4 — нагрузка.
использование этой энергии для нужд человечества. Уже имеются гелиоэлектростанции, в которых солнечная энергия преобразуется в тепловую, а затем в электрическую.
Атомные батареи обеспечивают непосредственное преобразование энер: ин радиоактивного излучения изотопов в электрическую энергию. Существует несколько способов такого преобразования.
На рис. 5.10 показано устройство атомной батареи, работающей на основе прямой зарядки. В этой батарее радиоактивное вещество нанесено па поверхность внутреннего шарового электрода. Электроны, излученные радиоактивным веществом, с большой скоростью проходят межэлектродное пространство1 п собираются на внешнем электроде, заряжая его отрицательно. При замыка-
нии внешней цепи через нагрузку протекает ток. Подобные атомные батареи обеспечивают очень высокое напряжение (несколько киловольт) при малом токе (десятки микроампер) и имеют малую мощность (доли ватта).
В некоторых типах атомных батарей используется эффект ионизации газа, находящегося между электродами, под действием радио-
активного излучения.
В батареях с использованием полупроводниковых материалов-радиоактивный источник облучает р-п переход, в котором возникают избыточные заряды, обусловливающие ток во внешней цепи.'
Говоря об атомных источниках электроэнергии, следует отметить, что более эффективными и перспективными являются источники с промежуточным преобразованием атомной энергии в тепловую.
Глав а шестая
ВЫПРЯМИТЕЛЬНЫЕ УСТРОЙСТВА
6.1. ФУНКЦИОНАЛЬНАЯ СХЕМА ВЫПРЯМИТЕЛЬНЫХ
УСТРОЙСТВ
Радиотехнические устройства, разрабатываемые и выпускаемые в настоящее время, в соответствии со своим назначением могут устанавливаться на стацио-152
парных или на подвижных объектах. Соответственно питание таких устройств может осуществляться от стационарной сети переменного тока или от автономного источника переменного или постоянного тока.
Основным элементом устройств электропитания является выпрямительное устройство (выпрямитель). Назначение выпрямительного устройства — преобразование переменного напряжения в постоянное.
На рис. 6.1,а, б представлены функциональные схемы выпрямительных устройств, состоящие из трансформатора, выпрямителя (неуправляемого, рис. 6.1,а и управляемого, рис. 6.1,6) и фильтра.
Рис. 6.1. Функциональные схемы источника вторичного электропитания.
а — неуправляемого; б — управляемого.
Трансформатор _Тр необходим для преобразования' напряжения источника электроэнергии и осуществления гальванической развязки сети с нагрузкой.
Выпрямитель В преобразует переменный ток в постоянный (пульсирующий), а также может выполнять в ряде случаев функции регулятора напряжения, тока, мощности.
Фильтр Ф служит для сглаживания пульсаций выпрямленного напряжения.
Выпрямители классифицируют по ряду признаков, а именно: по типу вентилей — управляемые (сУУ), неуправляемые, электронные, ионные, полупроводниковые; по напряжению — низкого (до 1000 В) и высокого (свыше 1000 В); по мощности — маломощные .(до 1 кВт), большой мощности (свыше 1 кВт); по режиму работы — длительного, кратковременного, повторно-кратковременного и импульсного; по схеме выпрямления — однофазные и многофазные, однотактные и двухтактные, с умножением напряжения.
153
а) 6)
Рис. 6.2. Вольт-амйерные рактеристики диодов.
В данной главе рассматриваются выпрямители, состоящие из неуправляемых вентилей (полупроводниковых диодов и др.).
Основное влияние на качество выпрямленного напряжения оказывает схема выпрямления. Поэтому анализ работы выпрямителей целесообразно проводить для различных схем выпрямления, полагая, что вентили имеют идеализированную вольт-амперную характеристику, нагрузка выпрямителя чисто активная и параметры трансформатора не сказываются на работе выпрямителя.
6.2. ДИОДЫ И ИХ ХАРАКТЕРИСТИКИ
В источниках электропитания современных радиотехнических устройств в основном используют германиевые и кремниевые полупроводниковые диоды.
На рис. 6.2,а, б изображены вольт-амперные характеристики идеального и реального диодов.
Не останавливаясь на описании физических явлений в полупроводниках, достаточно освещенных в литературе, рассмотрим основные эксплуатационные параметры полупроводниковых диодов.
Как видно из вольт-амперной характеристики, прямое сопротивление по постоянному току Гпр.д невелико. Однако при прохождении тока на диоде рассеивается мощность и выделяется такое количество тепла, которое способно повысить температуру кристалла полупроводника выше предельного значения. Поскольку теплоотдача корпуса прибора и его радиатора ограничена, ток для каждого типа диода не дол
жен превышать предельно допустимое значение. В технических условиях указывается значение максимально допустимого среднего прямого тока при определенной температуре окружающей среды.
Каждый тип диода характеризуется постоянным прямым напряжением С/Пр- В зависимости от типа диода значение Unp колеблется в пределах от 0,3 до 10 В. При приложении обратного напряжения в реальном диоде возникает постоянный обратный ток 70бр, обусловленный движением неосновных носителей через р-п переход. Этот ток является причиной пробоя диода, если обратное напряжение превысит некоторое предельное значение.
Таким образом, С/Обртах характеризует способность диода сохранять свои свойства при определенной температуре окружающей среды.
В технических условиях приводится также значение среднего обратного тока, измеренного при определенной температуре окружающей среды. Этот параметр используется при подборе диодов в случае их последовательного включения.
154
ха-
Для каждого типа диода существует диапазон рабочих температур, в котором они сохарняют свои параметры. Выбор диодов производится по температурным режимам устройства с учетом диапазона их рабочих температур.
Механическую прочность диодов характеризуют предельные значения постоянных, ударных и вибрационных ускорений, которые они выдерживают без разрушения. Длительность работы диода в условиях, не превышающих предельных допустимых значений, характеризуется гарантийной наработкой, которая для полупроводниковых приборов составляет (5-=-10) 103 ч. В табл. 6.1 приведены
Таблица 6.1
Параметры некоторых полупроводниковых диодов
Предельные эксплуатационные данные / Д211 Д305 В320 КД206В КЦ201Е
Постоянное прямое напряже- 1,0 0,3 0,75 1,5 10
ние, В Средний обратный ток, мкА Постоянное обратное напря- 100 1200 20-Ю3 700 100
600 50 1400 600 15-10’
жение, В Прямой ток, А Гарантийная наработка, ч 0,1 10 320 10 0,5
5000 5000 — 5000 —
параметры некоторых полупроводниковых приборов, из которой следует, что большинство значений токов и напряжений, используемых в радиотехнических устройствах, может быть обеспечено диодами. Исключение составляют высоковольтные выпрямители, выполняемые обычно на электронных вентилях. Однако уже существующие разработки высоковольтных полупроводниковых вентильных столбов в ближайшее время вытеснят электронные вентили и из этой области
применения.
Необходимо отметить, что диоды одного типа могут иметь зна-
чительный разброс прямых и обратных вольт-амперных характери-
стик. Последнее обстоятельство необходимо учитывать в тех случаях, когда диоды включаются последовательно или параллельно. Такое включение используется с целью повышения надежности выпрямителя и в тех случаях, когда необходимые значения токов или напряжений не могут быть обеспечены одним прибором. При параллельном соединении диодов разброс прямых ветвей их вольт-амперных характеристик (рис. 6.3)
Рис. 6.3. Параллельное включение вентилей.
а — характеристики; б — с индуктивными делителями; в — с резисторами.
приводит к тому, что отдельные диоды перегружаются по току. Так, при одинаковом прямом напряжения через диод, имеющий характеристику 1, будет протекать
155
ток (дь который значительно больше 1д2, протекающего' через диод, имеющий характеристику 2. Для выравнивания токов через диоды в мощных выпрямителях применяются индуктивные делители тока (рис. 6.3,6), в маломощных —выравнивающие резисторы RB (рис. 6.3,8). При последовательном соединении из-за разброса обратных ветвей вольт-амперных характеристик обратные напряжения диодов различны (рис. 6.4,а). При значительной разнице в значениях Побр диодов такая неравномерность, может привести к пробою одного из них и выходу выпрямителя из строя. С целью выравнивания напряжения на отдельных приборах параллельно каждому из- них включается шунтирующий резистор (рис. 6.4,6).
Рис. 6.4. Последовательное включение вентилей. а — характеристики; б — схема.
Выбор диода для выпрямительного устройства определяется технико-экономическими показателями и условиями эксплуатации устройства. Здесь необходимо руководствоваться требованиями к надежности работы, КПД, технологичности, стоимости и т. д.
Следует отметить, что кремниевые и германиевые полупроводниковые диоды чувствительны к перегрузкам по току. Поэтому при проектировании выпрямительных устройств с такими приборами предусматривается быстродействующая защита.
6.3. РАЗНОВИДНОСТИ СХЕМ ВЫПРЯМЛЕНИЯ
И ИХ КЛАССИФИКАЦИЯ
В настоящее время существует значительное количество схем выпрямления переменного тока. Наиболее распространенные из них приведены на рис. 6.5.
Схемы выпрямления классифицируются по следующим признакам: а) по характеру протекания тока в нагрузке в течение каждого из полупериодов фазного напряжения; б) по количеству фаз переменного напряжения, подаваемого на выпрямитель; в) по количеству фаз источника электропитания.
К схемам первого типа относятся однополупериодные и двухполупериодные схемы выпрямления. Однополупериодные схемы (рис. 6.5,а, б, г, е) характеризуются тем, что ток во вторичной обмотке трансформатора и через соответствующие вентили протекает не более половины периода фазного напряжения. В двухполупериод-156
ных схемах выпрямления ток во вторичной обмотке-трансформатора протекает в течение обоих полупериодов или их частей (рис. 6.5,в, д).
В зависимости от вида питающей сети выпрямители делятся на однофазные (рис. 6.5,а—в), питающиеся от однофазного источника, и трехфазные, питающиеся от трехфазного источника (рис.6.5,а—е). В мощных выпря-' мителях (десятки и сотни киловатт) искусственно,.
Рис. 6.5. Схемы выпрямителей.
а — однополупериодная; б — двухполупериодная; е — мостовая однофазная;-г — трехфазная; д — мостовая трехфазная; е — шестифазная.
например созданием дополнительных обмоток в трехфазном трансформаторе питания, создают шестифазную систему напряжений (рис. 6.5,е). Возможно создание и большего количества фаз. Эта группа схем относится к многофазным схемам выпрямления.
Для сравнения различных схем выпрямления, а также для математического описания токов и напряжений,, действующих в выпрямителях, вводят понятие фаз выпрямления т. Параметр т связывает количество фаз-выпрямленного переменного- напряжения р с количест
157
вом полупериодов q этого напряжения, в которых работают вентили
m=pq.
Так, например, для схемы на рис. 6.5,6 р=2; 7=1; /п=2-1=2; для схемы на рис. 6.5,6 р=3; 7=2; т= =3-2=6.
Выпрямительное устройство характеризуется выходными параметрами, параметрами вентилей в схеме выпрямления и параметрами трансформатора. Основным энергетическим параметром является КПД.
К выходным параметрам относятся:
среднее значение выпрямленного напряжения Uq',
среднее значение выпрямленного тока /0;
мощность в цепи выпрямленного тока Po=UoIo;
частота 1-й гармонической составляющей выпрямленного напряжения;
коэффициент пульсации Дп, равный отношению действующего значения переменной составляющей выпрямленного напряжения к напряжению Uo или отношению амплитуды А-й гармоники Umk к напряжению Uq (.Knk==^Jmk/Uo) •
К параметрам диодов относятся:
среднее, действующее и амплитудное значения тока вентиля (7ср, I, 1т) ;
максимальное обратное напряжение t/обршах-
К параметрам трансформатора относятся:
действующие значения токов и напряжений первичной и вторичной обмоток трансформатора (Л, /2, Ui, ^2);
мощность первичных обмоток Si=mi/iI7r,
мощность вторичных обмоток S2=m2/2^2;
мощность трансформатора STP= (S1+S2) /2;
коэффициент использования вторичной обмотки ’Кг = Ро/‘52;
коэффициент использования первичной обмотки Л1 = Ро/51;
коэффициент использования трансформатора Ктр— =Ро/5Тр (mi и т2— число фаз первичной и вторичной обмоток соответственно).
6.4. АНАЛИЗ СХЕМ ВЫПРЯМЛЕНИЯ ПРИ АКТИВНОЙ НАГРУЗКЕ
При анализе схем выпрямления предполагаем, что вольт-амперные характеристики диодов идеальные.
158
Рассмотрим принцип действия однофазной однополу-периодной схемы, имеющей /п = р.^=1 (р=1, 9=1). Схема приведена на рис. 6.5,а, временнйе диаграммы тока и напряжения — на рис. 6.6. Принцип действия схемы состоит в том, что в положительный полупериод, когда на аноде диода положительный потенциал, он открывается (гпр.д==0), все напряжение вторичной обмотки трансформатора прикладывается к нагрузке 7?s. В отрицательный полупериод- диод закрыт (л>бр.д=оо), ток через него равен нулю, а все напряжение вторичной обмотки трансфор
Рис. 6.6. Диаграммы напряжений и токов для одно-полупериодной схемы выпрямления.
матора прикладывается к диоду.
Постоянная составляющая выпрямленного тока в нагрузке за период
4 = i f4sin dwt= 4"7-=°>3187«= °’457’-о
Отсюда /2//о=2,22.
Постоянная составляющая выпрямленного напряжения
U0=RJ0=0,318 C/m=0,45 U 2.
Амплитуда тока через вторичную обмотку трансформатора
7т== 0,318= 3,14/0.
Соответственно действующие значения напряжения и> тока вторичной обмотки трансформатора
/* 2л
Us = |/ i J sin2ш/ (Ы =0,707^ = 2,2217,;
/г = 0,57т= W,
159
Обратное напряжение на диоде (рис. 6.3,6) U06v= = [/2m—3,14С/0.
Многофазная однополупериодная схема выпрямителя (m2=s2, р>1, 7=1) приведена на рис. 6,7,а, а временные диаграммы тока и напряжения — на рис. 6.7,5. Вторичные обмотки (фазы) питающего трансформатора
Рис. 6.7. Схема (а) и временные диаграммы напряжений (б) многофазного выпрямителя.
а)
обычно соединены в звезду. В данной схеме ток через диод и фазу будет протекать тогда, когда потенциал этой фазы будет наибольшим относительно общей точки. Поскольку потенциалы на аноде диодов изменяются во времени, то они открываются поочередно в моменты времени Л, /г, h и т. д., т. е. через интервалы at=2n/m (рис. 6.7,6). В результате кривая тока в нагрузке будет иметь форму огибающей, фазных напряжений (рис. 6.7,6).
Постоянная составляющая напряжения и тока на нагрузке определяется из выражения
2 т
— f Um sinotf dwt — — U sin — =.
° 2n I m ~ m m
2~ m
(6.1)
Uo V 2 mU2 . n
. =-=2- =-----=- Sin
0 PH " Ph «
(6-2)
360
Амплитуда тока диода
sin^
Из выражения (6.1) следует, что при одном и том же напряжении переменного тока U2 можно получить различные значения выпрямленного напряжения. При этом с увеличением числа фаз выпрямления т отношение Uo/U2 растет (табл. 6.2).
Таблица 6.2
Значения U<JU2 при различных т
т 2 3 4 6 12
0,9 1,17 1,27 1,35 1,39
Особенностью мостовых схем является то, что ток через вторичную обмотку трансформатора проходит в положительный и отрицательный полупериоды. На рис. 6.5,в, д представлены одно- и трехфазные мостовые схемы выпрямления.
Мостовые схемы выпрямления имеют удвоенное число вентилей по сравнению с однополупериодными. Исключением является однофазная мостовая схема выпрямления, где необходимо иметь четыре вентиля.
Рассмотрим однофазную мостовую схему на рис. 6.5,в. Здесь число фаз выпрямления т=1*2=2. Временные диаграммы тока и напряжения на вентилях выпрямителя показаны на рис. 6.8. Принцип работы выпрямителя состоит в следующем. В положительный полупериод, когда точка а имеет положительный потенциал, диоды Д1 и Д3 открыты и ток протекает через нагрузку 7?н и диоды Д\ и Д3. Диоды Д2 и Д4 в этот полупериод закрыты и к ним прикладывается обратное напряжение. В следующий полупериод точка б имеет положительный потенциал, открыты диоды Д2 и Д4 и ток протекает от точки б через диоды Д2, Д4 и нагрузку в том же направлении, что и в первый полупериод. Диоды Д1 и Д3 в этот полупериод закрыты.
Как видно из временнйх диаграмм на рис. 6.8, средние значения тока и напряжения на выходе выпрямите-11-1056 161
ля в 2 раза больше, чем в однополупериодной однофазной схеме.
Принцип работы многофазных мостовых схем выпрямления рассмотрим на примере трехфазной мостовой схемы (схема Ларионова), представленной на рис. 6.5,5. Временные диаграммы токов и напряжений приведены на рис. 6.9. Здесь m=pq—3-2—6. В любой момент времени открыты те пары диодов, аноды которых имеют, наибольший положительный потенциал. При этом ком
Рис. 6.8. Временные диаграммы напряжения и тока однофазного мостового выпрямителя.
Рис. 6.9. Временные диаграммы напряжений и токов трехфазного двух-, тактного выпрямителя.
бинации пар открытых диодов меняются через интервал, равный 2л/т=л/3. Например, в интервал времени h—tz открыты диоды Д\ и Дь. В момент времени /2 открывается диод Де, а Д5 закрывается. В момент времени tz диод Д1 закрывается, а Д2 открывается и т. д. В течение периода через каждый диод протекают два импульса тока.
Используя расчетные выражения (6.1) — (6.3), получаем: (7o=2,34t/2; /о=2,341/о/£?п и /т=1,О51о, действующее значение тока вентилей /=О,58/о. Обратное напряжение на каждом диоде равно [70бр=1,05/7о-
Оценку схем выпрямителей с точки зрения пульсаций выпрямленного напряжения можно произвести по коэффициентам пульсаций. Пульсирующий характер выпрямленного напряжения при m-фазном выпрямлениц 16?
(т>1) описывается гармоническим рядом!
«.=y.+£«.=£t/„stai+
1
U'n sin cos ~
—4„Л1Т sin^-cos(2znarf+?1) + „.
Коэффициент пульсаций напряжения для выпрямителя по первой гармонике
Km=-V12=-^rr- • <6-4)
С/ Q III. 1
Так, например, для трехфазной мостовой схемы (т=3-2=6):
^=36^1=0,057.
Как видно из выражения (6.4), с увеличением т коэффициент пульсации уменьшается.
Одним из основных показателей качества схем выпрямления является коэффициент использования трансформатора, характеризующий использование трансформатора по мощности.
Таблица 6.3
Основные параметры схем выпрямления
Схемы в ыпрямлення Соотнощещы между токами и напряжениями
о сГ е О ь ю" ь>° О °г/ш/1 Оч
Однополу-периодпые Однофазная 2,22 1,57 1,57 3,14 1,57 3,14 3,1
Двухфазная Трехфазная 1,11 0,85 0,78 0,58 0,67 0,25 3,14 2,1 0,78 0,58 1,57 1,21 1,48 1,35
Двухполу- Однофазная (мостовая) 1,11 1,11 0,67 1..57 0,78 0,57 1,21
периодные Трехфазная (мостовая) 0,43 0,82 0,057 1,05 0,58 1,05 1,05
и* 163
Рис. 6.10. Внешняя характеристика выпрямителя.
теля характеризуются
В табл. 6.3 приведены основные технические показатели различных схем выпрямления при активной нагрузке.
Недостатком однополупериодных (однотактных) схем выпрямления является неполное использование мощности трансформатора вследствие протекания по вторичной обмотке постоянной составляющей ' тока, который подмагничивает сердечник, увеличивая тем самым ток холостого хода и потери мощности в сердечнике и обмотках. ‘Для двух-полупериодных схем характерно лучшее использование трансформатора. Наибольший коэффициент использования имеет трехфазная мостовая схема выпрямления.
Рабочие свойства выпрями-зависимостыо выходного напря
жения от тока нагрузки U0=q>(J0), называемой внешней характеристикой выпрямителя. Типичный вид внешней характеристики показан на рис. 6.10, где £70х.х— напряжение холостого хода, Д1/о — суммарное падение напряжения во всех элементах выпрямителя (трансформаторе, вентилях и фильтре) при номинальном токе нагрузки Л)ном
U оном= U ох.х—-A U о-
6.5. ВЛИЯНИЕ РЕАКТИВНОСТИ НАГРУЗКИ НА РАБОТУ ВЫПРЯМИТЕЛЬНЫХ УСТРОЙСТВ
Наиболее часто выпрямители используются в качестве преобразователей переменного тока в постоянный для питания двигателей постоянного тока, заряда аккумуляторных батарей, питания нагрузки постоянного тока через фильтры с преобладанием индуктивного (L, 7?н) или емкостного (С, /?н) сопротивления. С точки зрения особенностей работы вентилей указанные нагрузки могут иметь емкостный или индуктивный характер (рис. 6.11 и 6.12). Работу выпрямителя при заряде аккумуляторной батареи, т. е. на противо-ЭДС (пунктирная линия на рис. 6.12), можно представить, как работу на емкостную, нагрузку, когда С->оо. 164
Характерная особенность работы выпрямителей нй нагрузку при наличии емкости или индуктивности состоит в том, что в интервалы времени, когда к аноду вентиля приложен положительный потенциал (вентиль открыт), в индуктивности накапливается магнитная, а в емкости — электрическая энергия.
Рис. 6.11. Однофазные схемы (а, в) й временные диаграммы токов и напряжений (б, г) при индуктивном характере нагрузки.
а — для однополупериодной схемы; б — для однофазной мостовой схемы.
Рис. 6.12. Схема (а) и временные диаграммы токов и напряжений (б) однофазных схем при емкостной нагрузке.
Отличие режимов работы вентилей в указанных случаях состоит в том, что при индуктивном характере нагрузки (индуктивность включена последовательно с нагрузкой) ЭДС самоиндукции стремится при изменении знака приложенного напряжения сохранить положительный потенциал на аноде вентиля и, следователь
165
Но, продлить интервал времени протекания тока через вентиль, что при той же мощности соответствует уменьшению амплитуды тока. Как видно из рис. 6.11,6, для однополупериодной схемы длительность импульсов тока 0 определяется постоянной времени т=Л//?н- Очевидно, чем больше т, тем больше длительность импульсов тока io- Постоянная составляющая выпрямленного напряжения определяется из следующего выражения (рис. 6.11,6):
0
t/0=§ U.n sin wt dwt = —£ (1 — cos 0). О
Из данного выражения видно, что постоянная составляющая напряжения при индуктивной нагрузке меньше, чем при активной нагрузке. Достаточно большими остаются и пульсации.
В однофазной мостовой схеме (рис. 6.11,в) импульсы тока, проходящие через диоды Дь Д3 и Д2, Дь создают в нагрузке практически непрерывный ток io. При этом (как видно из временных диаграмм на рис. 6.11,г), чем больше т, тем меньше пульсация тока io.
При емкостном характере нагрузки в однополупериодной схеме (рис. 6.12,а) после заряда емкости при «2<мс накопленный заряд на конденсаторе стремится поддержать выпрямленное напряжение. К диоду при этом прикладывается обратное напряжение, которое хотя и уменьшается вследствие разряда на нагрузку, но задерживает открытие диода до момента, когда приложенное напряжение «2 превзойдет оставшееся напряжение на конденсаторе. В момент времени t—ti диод откроется и ток через него будет равен сумме токов заряда конденсатора и нагрузки in=ic+in. Ток через диоды будет протекать только в интервалы времени 20, когда заряжается конденсатор (рис. 6.12,5). Очевидно, чем больше емкость конденсатора, тем меньше время работы диода, а амплитуда тока больше. Такой режим работы выпрямителя связан с перегрузкой диода по току.
Если нагрузка выпрямителя шунтирована конденсатором, который в большинстве случаев служит в качестве сглаживающего фильтра, то емкость конденсатора С выбирают из условия
-^->10, (6.5)
166
где хс~^с—емкостное сопротивление конденсатора для основной гармоники. При этом хс»гпр,д.
Поэтому с момента времени, когда открывается диод и начинается заряд конденсатора, ток через диод в основном определяется скоростью изменения приложенного напряжения u=Um sin at и емкостью конденсатора С
. . daC Ц cos a>t
д с dt хс
При (ot—si/2 напряжение на конденсаторе будет равно Um. Ток 1Д достигнет максимального значения при со/<л/2, которое может в 10 и более раз превосходить номинальный ток нагрузки.
Рис. 6.13. Г-образный (а) и П-образный (б) сглаживающие фильтры.
Таким образом, при работе выпрямителя на емкостную нагрузку диод открыт только в течение части полупериода, характеризуемого углом отсечки тока. 0. Для m-фазной схемы выпрямления 20<2л/т каждая фаза работает аналогично однофазной схеме, а количество циклов заряда и разряда конденсатора за период равно т.
С целью ограничения максимального значения тока вентилей между выпрямителем и конденсатором включают добавочный резистор Дф. Включение /?ф несколько снижает КПД выпрямительного устройства и напряжение на нагрузке, но одновременно позволяет в несколько раз снизить максимальный ток через вентиль.
Часто для снижения пульсаций напряжения на нагрузке включают индуктивно-емкостные Г- и П-образные сглаживающие фильтры (рис. 6.13). В этом случае выпрямитель работает на смешанную нагрузку. Для фильтров применяются дроссели с большой индуктивностью и конденсаторы Cj, С2 большой емкости. При этом должно выполняться условие
Кц<^т(й(?С (6.6)
167
Рис. 6.14. Кривые тока при активной (/?), индуктивной (L) и емкостной (С) нагрузках.
и неравенство (6.5). В этом случае выпрямитель с Г-образным фильтром работает на нагрузку с преобладающей индуктивной реакцией (xc<^Rh), а с П-образ-ным фильтром — с преобладающей емкостной, реакцией (XL>XC).
При рассмотрении работы выпрямителя трансформатор и вентили принимались идеальными. В реальном выпрямителе имеются-потери напряжения на сопротивлении диода Гяр.д, индуктивности рассеяния Ls и сопротивлении обмоток гТр трансформатора. Относительное значение потерь напряжения, 'вызванных падением напряжения \Ur на сопротивлении г — и Д17х на индуктивности Ls зависит от мощности выпрямителя.
В полупроводниковых выпрямителях малой и большой МОЩНОСТИ обычно Гир.д<Гтр. Поэтому в расчетах принимают г— = гтр. Влияние Ls в маломощных
выпрямителях учитывается в основном при повышенной частоте напряжения сети (/о>400 Гц).
В выпрямителях большой мощности (Ро>2 кВт) вследствие малых значений гПр.д и гтр влияние Ls сказывается значительно сильнее. Поэтому при расчетах учитывают в основном \UX.
В расчетах выпрямителей средней мощности потерн напряжения суммируют
Д(7=ЛПГ+Д[Л.
В выпрямителях малой мощности, как правило, применяются фильтры, начинающиеся с емкости. При использовании таких фильтров через вентили протекает большой зарядный ток. Внешняя характеристика выпрямителя Uo(Io) в этом случае будет менее жесткой, чем при работе на активно-индуктивную нагрузку.
При работе на индуктивность внешняя характеристика более стабильна и вентиль не подвергается перегрузке по току. Поэтому в выпрямителях большой и средней мощности применяют фильтры с преобладающей индуктивной реакцией, 168
На рис. 6.14 представлены кривые тока прй активной, индуктивной и емкостной нагрузках выпрямителя. Если принять, что средняя мощность в нагрузке в рассмотренных случаях одинакова при одном и том же RB, то интегралы от функций тока в интервале работы вентиля должны быть одинаковы и равны произведению среднего значения тока на интервал времени работы вентиля.
Расчет полупроводникового выпрямителя малой и средней мощности производится графоаналитическим методом. Примем допущения, не вносящие заметных погрешностей в результаты расчета выпрямителей:
1) прямое сопротивление диода гПр.д не зависит от силы тока, а обратное сопротивление г0бр.-д->-оо;
2) напряжение питающей сети синусоидально и в случае многофазной системы симметрично;
3) выпрямители малой мощности, как правило, работают на емкостный фильтр.
При емкостном характере нагрузки предполагается, что напряжение на выходе выпрямителя (J0=^2mcos 0= — Uc и неизменно во времени.
В m-фазных схемах выпрямления ток нагрузки /о зависит от угла отсечки 0 (рис. 6.15,а)
к/т 0
m (* m (‘
Ia = тг— I i0 cl'ot — p— 1 —-(cos wf — cos 9) du>t —
J J 'пр.Д J
—it/m —0
m n
m U.
-- (sin 9 — 9Jcos 9) = — --(tg 9 —• 9)‘= гпр.д--------------------------------• ' п гпр.д 4 s '
m
EM---
Л (9).
Коэффициент 4(0)— tg0—0 используется в расчете как параметр, связывающий угол отсечки с параметрами выпрямителя и нагрузки:
. ... яГпр.дЛ)_ гпр.д
А = mU„ V ~R^~'
График зависимости 0 от коэффициентов А(0) приведен на рис. 6.15,а.
Через параметр 4(0) выражаются коэффициенты Д D, ц. Графики зависимости В, D, 1/р. от параметра А представлены на рис. 6.15,в.
Через указанные коэффициенты определяются соответственно:
169
действующее значение фазной ЭДС £’2—BUo\
действующее и максимальное значения тока вентиля /пр=-^-£);
/ — —
J пр max— ♦
р* •
Через коэффициенты В, D определяются также действующие значения токов в обмотках трансформатора и его габаритная мощность;
Рис. 6.15. К работе выпрямителя на емкость.
а — зависимость угла отсечки S от коэффициента Я(0); б — зависимости е2(ш<). в — зависимости коэффициентов В, D, 1/р. от А.
4) выпрямители средней мощности, как правило, работают на индуктивный фильтр.
При индуктивном характере нагрузки в многофазных схемах выпрямления углом перекрытия фаз (у = 3-4-5°) можно пренебречь и уравнение внешней характеристики выпрямителя примет вид:
Uo =иох — ^г+^- Л»
где £е—суммарная индуктивность рассеяния трансформатора и дросселя.
Методика инженерного расчета подробно изложена в [10].
170
6.6. ВЫПРЯМИТЕЛЬНЫЕ СХЕМЫ С УМНОЖЕНИЕМ НАПРЯЖЕНИЯ
Схемы умножения напряжения применяются в тех случаях, когда необходимо иметь высокое напряжение (более 1 кВ)’ на нагрузке при заданном входном напряжении (постоянного или переменного тока)'. Их целесообразно применять при высоком напряжении и малых токах нагрузки.
Рис. 6.16 Несимметричная схема (а) и временные диаграммы тока и напряжения (б) однофазной схемы с удвоением напряжения.
Принцип действия таких умножителей состоит в том, что на нагрузку разряжается один выходной конденсатор, заряженный до необходимого напряжения, или несколько последовательно включенных по постоянному току конденсаторов, каждый из которых в отдельности заряжен от источника постоянного тока. В первом случае— это умножитель напряжения первого рода, во втором— второгорода.
Все схемы умножения напряжения подразделяются •на симметричные и несимметричные. Кратность умножения может быть сколь угодно большой, но практически ограничиваются умножением в 2—10 раз. В некоторых случаях при малых токах нагрузки (/=0,54-2 мкА, t/o=10-F100 кВ) кратность умножения достигает 100.
Рассмотрим несколько схем умножения напряжения. Несимметричная схема умножения напряжения (схема удвоения) изображена на рис. 6.16,а, временные диаграммы тока и напряжений — на рис. 6.16,6.
171
н
Рис. 6.17. Схема умно . жения напряжения в 3 раза.
Принцип действия схемы состоит в следующем, В первый полупериод напряжения «2 ток, проходя через диод Д1, заряжает конденсатор Ci — процесс происходит с отсечкой тока диода. Во второй полупериод, когда полярность U2 изменяется на противоположную, напряжения «ci и «2 суммируются и через диод Д2 заряжают конденсатор С2 до максимального суммарного напряжения и^ ~2U2m. При запирании диода Д2 конденсатор С2 разряжается на нагрузку — процесс повторяет-
ся каждый период. При описании принципа работы полагаем, что ток нагрузки 7Н много меньше тока заряда.
В схеме на рис. 6.17 происходит выпрямление с умножением напряжения почти в 3 раза. Принцип работы схемы состоит в следующем.
В первый полупериод конденсатор С( заряжается через диод Д\ до uci=U2m. Во второй п.олупериод конденсатор С2 заряжается через диод Д2 до «c2=«2+wci. В третий полупериод конденсатор Ci повторно заряжается через диод Д1, а диод Д2 закрыт и конденсатор С2 разряжается через диод Д3 на конденсатор С3, зарядив его до uc3—U2m-]-Uc2- По окончании заряда конденсатора Ci сопротивление нагрузки окажется под суммарным напряжением «ci+wcs, т. е. под напряжением, близким к 3t/2m. Время установления напряжения на нагрузке равно трем полупериодам.
Очевидно, если число каскадов умножителя будет п, то можно получить ин«п[72т. При этом время установления напряжения на нагрузке составляет п полупериодов.
В этой схеме все диоды находятся под обратным напряжением J7o6P=2[72m. Рабочее напряжение конденсаторов также не превышает 2t72m.
Симметричная схема с удвоением напряжения изображена на рис. 6.18,а, а временные диаграммы тока и напряжения приведены на рис. 6.18,6. Принцип работы схемы состоит в следующем.
В первый полупериод открыт диод Д\ и заряжается конденсатор Ci; во второй — через диод Д2 заряжается 172
конденсатор С2. Напряжение на нагрузке и0 равно сумме напряжений на первом и втором конденсаторах: Ио=«С1+ис2. При этом пульсации выпрямленного напряжения на нагрузке имеют частоту в 2 раза больше частоты сети fn—2f0-
Рис. 6.18. Симметричная схема умножения напряжения (а) и временные диаграммы токов и напряжений (б).
Симметричная схема умножения напряжения изобра-
жена на рис. 6.19. Принцип работы схемы состоит в сле-
дующем. В первый полупериод, когда плюс будет на
зажиме б вторичной обмотки трансформатора, через диод Д] заряжается конденсатор С\ до напряжения Uci — Uim, ДИОД Д2 ПрИ ЭТОМ закрыт. В следующий полупериод -положительным ста-
Рис. 6.19. Симметричная схема умножения напряжения в п раз.
нет потенциал точки а. Напряжение обмотки трансформатора складывается с напряжением конденсатора Ci и конденсатор С2 заряжается до напряжения «С2=
Utm+uci через диод Д2.
В следующий, третий полупериод, когда потенциал точки б будет положительным, открывается диод Дз и конденсатор С3 зарядится ДО напряжения исз=^2т-\-ис2^а яз3112т и т. д. Одновременно подзарядится конденсатор Сь Конденсатор Сп зарядится до напряжения исп~ ^nU2m через п полупериодов. При этом на нагрузке
173
выпрямленное напряжение будет меньше, чем nU^m, так как внешняя характеристика схемы с умножением напряжения имеет сильно падающий характер вследствие большого внутреннего сопротивления.
Для получения более жестких характеристик применяют конденсаторы достаточно большой емкости. На практике конденсаторы выбирают одинаковыми, а абсолютное значение емкости каждого конденсатора в микрофарадах рассчитывают при допустимом коэффициенте пульсаций Кп=6°/о nb формуле
С = /^2/г(п + 2).1О*,
/п^о
где fn — частота пульсаций выходного напряжения. ;
При необходимости уменьшить пульсации напряжения на нагрузке включают сглаживающий /?С-фильтр.
Схема умножения второго рода применяется чаще, так как здесь не нужны конденсаторы с высоким рабочим напряжением.
В несимметричных схемах умножения первого и второго рода один из выводов трансформатора непосредственно соединен с полюсом нагрузки, что позволяет осуществлять их заземление. Следует заметить, что при нечетном числе каскадов умножения в несимметричных схемах появляется постоянная составляющая тока во вторичной обмотке трансформатора, вызывающая вынужденное подмагничивание сердечника.
Преимуществом симметричных схем является возможность получения вдвое большего напряжения при том же числе полупериодов установления напряжения.
Недостатком однофазных симметричных схем (по сравнению с несимметричными) является невозможность одновременного заземления вторичной обмотки трансформатора и потребителя.
6.7. СГЛАЖИВАЮЩИЕ ФИЛЬТРЫ
Сглаживающим фильтром называют устройство, служащее для уменьшения амплитуды переменной составляющей в выпрямленном напряжении. Напряжение на активной нагрузке при многофазном выпрямлении имеет вид, описываемый гармоническим рядом
k
«=^o+S
. П=1
174
в котором помимо постоянной составляющей Uo имеетсй ряд переменных составляющих, основная из которых с частотой fal—mfc имеет наибольшую амплитуду. Переменная составляющая характеризуется коэффициентом пульсаций k-й гармоники
2Z .._№nk
~и • ио
В большинстве применяемых фильтров основная гармоническая составляющая выпрямленного напряжения ослабляется хуже высших гармонических. Поэтому при анализе и расчете фильтров используют коэффициент пульсации по первой гармонике
К —U™.
Vni Ua > или в процентах
кП1=-^-юо.
Переменная составляющая выпрямленного напряжения ухудшает качественные показатели радиотехнических устройств при слуховом и визуальном восприятии, а в системах автоматического регулирования приводит к ошибкам. Допустимая величина фона, создаваемого питающим напряжением, зависит от отношения сигнал/фон, при котором радиотехническое устройство работает нормально. Поэтому при большом уровне сигнала допускаются относительно большие пульсации. Так, например, для некоторых устройств значения Кт не должны превышать для микрофонных цепей 0,00001%, для задающих генераторов передатчиков 0,0001—0,001%, для ступени усиления высокой и низкой частоты 0,01— 0,1%, для промежуточных ступеней радиотелеграфных передатчиков 0,01—0,1%, для анодных цепей электронно-лучевых трубок 0,1—0,5%.
Фильтры наряду с ослаблением переменной составляющей несколько снижают постоянное напряжение на нагрузке. Это ослабление характеризуют коэффициентом передачи ^=UqIU'o, где U'o и (70 — постоянные составляющие напряжения на входе и выходе фильтра соответственно.
175
За показатель качества фильтра принимают коэффициент затухания
л3 к _ .
Чем меньше К3 или больше Л, тем качественней фильтр. Для реальных маломощных фильтров
^з=1 + 7^=1>05-1,1,
где Гф — активное сопротивление фильтра.
Для фильтров мощных выпрямителей 1,005^-1,01.
Сглаживающие качества фильтра оцениваются значением коэффициента сглаживания
fC ___
/'сгл ®К'п’
где /Сп, К!а — коэффициенты пульсации на входе и выходе фильтра соответственно.
Сглаживающие фильтры должны отвечать следующим требованиям:
а) не нарушать нормальной работы источника;
-------о
а)
Рис. 6.20. Схемы пассивных фильтров.
а — индуктивного; б — емкостного; в — Г-образного £С-фнльтра; а — Г-образ-ного ЯС-фильтра; д — П-образного LC-фильтра; е — П-образного ДС-фильт-ра; 'ж — двухзвенного LC-фильтра; з — резонансного фильтра с параллельным контуром; и — резонансного фильтра с последовательным контуром.
176
б) обеспечивать заданный коэффициент сглаживания;
в) иметь минимальные падения постоянной составляющей напряжения и потери мощности;
г) собственная частота фильтра должна отличаться от частот переменных составляющих сглаживаемого напряжения во избежание резонансных явлений;
д) иметь малые габариты, массу и стоимость, быть надежным в работе.
Сглаживающие фильтры бывают пассивные и активные.
Пассивные фильтры подразделяются на простые (индуктивные L, емкостные С) и сложные (типа LC и RC, в том числе однозвенные, многозвенные, резонансные и др.).
Активные фильтры в настоящее время выполняются в основном на транзисторах.
Основные схемы пассивных сглаживающих фильтров представлены на рис. 6.20. Рассмотрим их действие.
Емкостный фильтр. Эквиваленгная схема фильтра и временная диаграмма выпрямленного напряжения представлены на рис. 6.21,а, б. При 7?н/Хс^Ю питающее напряжение (на выходе выИрямителя) можно представить как сумму постоянной составляющей Uq и переменной ип- При конечном значении емкости конденсатора Со в токе и напряжении нагрузки остаются переменные составляющие (пульсация). Для уменьшения переменной составляющей емкость конденсатора Со выбирают такой, чтобы хс,=1/соСо было на порядок меньше Rn.
Если задано значение коэффициента пульсаций К'а, то изменение напряжения на конденсаторе равно:
Т/т
( г’сЛ = Л —7^= —•
с С J с 0 тС„ mfcC0
о
Изменение напряжения на конденсаторе AUC равно двойной амплитуде переменной составляющей. Поэтому
Рис. 6.21. Емкостный фильтр. а—эквивалентная схема; б — временная диаграмма напряжения.
6)
12—1056
177
коэффициент Цульсаций при активной нагрузке будет равен:
к, — L &Uc —. 1
Л п~ и„ "2 U. 2mfcCaR3 •
Отсюда получим расчетную формулу для Со, мкФ:
с _ 10G
2mfcRaK'a •
индуктивного
Недостатки емкостного фильтра состоят в следующем: при заряде конденсатора перегружается источник питания (выпрямитель) большим зарядным током и уменьшается время протекания тока через вентили.
Индуктивный фильтр представляет собой катушку с ферромагнитным сердечником (дроссель), включенную последовательно с-нагрузкой.
Эквивалентная схема индук-
схема фильтра.
тивного фильтра представлена на рис. 6.22. При активной нагрузке коэффициент пульсаций на выходе выпря-
мителя /Сп1 =
ит' '
-г— равен:
<7о
При этом
= <6-8)
«н + 'ф V (RH + Гф)2 + (исоДф)2
Подставив (6.7) в (6.8), после преобразований получим:
VI + ГФ _ .
° п К № + гф)2 + (и'лД]1)2 -^сгл
При заданном КСгл и полагая Гф<С#н, из (6.9) получаем простую формулу для определения £ф-.
г Кеглей Ф ты ‘
Индуктивный фильтр целесообразно применять в многофазных схемах выпрямления при небольшом 178
Рис. 6.23. Эквивалентная схема Г-образного фильтра.
входном сопротивлении нагрузки. Это обычно цепи накала мощных электронных ламп.
К недостаткам индуктивного фильтра относятся: зависимость коэффициента сглаживания фильтра от тока (сопротивления) нагрузки; возникновение перенапряжения на дросселе при резком изменении тока нагрузки (особеннопри обрыве цепи)'.
Г-образные индуктивно-емкостные (LC) и активноемкостные (RC) фильтры.
Схемы LC и RC Г-образных фильтров представлены на рис. 6.20,в, г. В LC-фильтре габариты и масса дросселя и конденсатора определяются величиной запасаемой в них энергии. Энергия магнитного поля в дросселе пропорциональна квадрату тока, а энергия электрического поля -конденсатора пропорциональна ’ квадрату напряжения.
Чтобы .исключить возможность возникновения резонанса на частотах, близких к fni, необходимо выполнение условия /Ийо> VVLC. В выпрямитель
ных устройствах малой мощности и малых токах нагрузки выгоднее применять активно-емкостный фильтр, который по сравнению с LC-фильтром значительно дешевле, имеет меньшие массу и габариты.
Одним из способов снижения габаритов и массы фильтров является повышение частоты тока источника электроэнергии и применение схем с большим числом фаз выпрямления. При выборе типа фильтра, его элементов и расчете их параметров руководствуются прежде всего заданным значением коэффициента пульсаций на нагрузке К'п (чаще по основной гармонике). Для заданных схемы выпрямления и коэффициента пульсации на нагрузке К'и определяется коэффициент сглаживания Ке.т.п, который должен обеспечить фильтр.
Рассмотрим эквивалентную схему Г-образного фильтра (рис. 6.23), где Z2— полное сопротивление выходного элемента фильтра и нагрузки. Коэффициент сглаживания равен:
>z __ Un __Z, -f- Zj
^'сгл Tjf —• 7
и 11 ^2
12*
179
Обычно Zi/Z2^>l, поэтому можно считать, что Кстп ^&Z\/Z2. Для LC-фильтра (рис. 6.20,в) имеем:
Z.=:rap + /'W(',Ln
R„
1 + ш(лРпС, ’
Учитывая, что ГдР<т(о£1 и RH> 1 / (таС\), получаем:
Z =jmwL ; Z8 = — j—1—.
‘ i 2 1 mutC.
Тогда коэффициент сглаживания равен:
КСгл = - 1 (6.10)
или
LC. = Ксгл2+^ . (6.11)
1 1 т«>г v '
Если известна схема выпрямления, частота питающего напряжения и задано значение /Ссгл, то из (6.11) можно рассчитать значения Ъ\ и Cj. Значения L\ и выбирают с учетом отмеченных выше требований, выполнение которых позволит исключить резонанс и обеспечить индуктивный характер нагрузки. Для этого должны выполняться условия
Т . 1 1
1 mwC, Vl.c.
Для 7?С-фильтра (рис. 6.20,г) коэффициент сглаживания можно определить из выражения
7 I ти>С.
----r^=l+ /*/>»•
1 тыС,
При переходе к модулям и учете /?п получим:
Ксгл = ГМ7СЗФ rn^R.C. (6.12)
Из этого выражения при заданном значении' /Ссгл можно определить произведение
п £ -Ксгл Rl 4" Rh
1 1 nvo R„
(6.13)
180
При определении параметров /?С-фильтра важно учитывать потери в фильтре, т. е. его КПД:
_РН
р„ + Рф=Х+лГ’
где Рф — потери мощности в фильтре.
Принимая т]—0,8, из выражения (6.13) с учетом (6.14) получаем: 1
Q ^СГЛ 1 5КсгЛ /С 1
7)— ГС<о/?я» к ’
где
П-образный фильтр (рис. 6.24) можно представить как двухзвенный, состоящий из емкостного фильтра и Г-образного LC-фильтра. Коэффициент сглаживания такого фильтра равен произведению коэффициентов сглаживания составляющих звеньев
= (6.15)
Погрешность определения Кп по (6.15) невелика и зависит от активного сопротивления дросселя, а также от выполнения условия xL^>xc.
При расчете параметров и выборе элементов П-образного фильтра следует исходить из необходимости получения наименьших габаритов, массы и стоимости. Обычно выбирают С0 = С>1. Вместе с этим необходимо обосновать целесообразность использования П-
образного фильтра вместо Г-образного, у которого С= — Cj-j-Q. Для оценки рассмотрим отношение Кп//<г, принимая С1 = Сг.
Кп Jc/?H 1
Кг~ z«WL1-2C1 2m<oRnC0 ' ’ '
Из выражения (6.16) видно, что при больших сопротивлениях нагрузки выгоднее использовать П-образные фильтры, при малых нагрузках (несколько ом) лучше Г-образные, так как Кп мало отличается от Кг.
Многозвенные фильтры используются в тех случаях, когда необходимо получить большие значения коэффи-
181
. -
О-------O-O-''VYVX-f—О
~ - С0 С< ~~
О-------0-0--------—о
Рис. 6.24. Схема П-образного фильтра.
циента сглаживания. Из [12] известно, что с точки зрения минимума произведения LC двухзвенный и трехзвенный фильтры целесообразно использовать при 7<сгл>70. Общий коэффициент сглаживания многозвенного Г-образного фильтра
^сгл = ^LcJ^LC,,
где K.LCt — tn*<s?LxCx, KLCi = m<ssLtC2.
Рекомендуется выбирать L\—Lz— ... —Ln и Cj=C2= = ... —Сп, т. е. звенья фильтра должны иметь одинаковые коэффициенты сглаживания.
Резонансные фильтры применяются обычно в однофазных цепях в тех случаях, когда основная гармоника имеет преобладающее значение и частота сети стабильна.
Схемы резонансных фильтров представлены на рис. 6.20,з, и. Для тока резонансной частоты контур из элементов LK и Ск на рис. 6.20,5 (резонанс токов) имеет большое сопротивление, а в схеме на рис. 6.20,и (резонанс напряжений) — малое.
К недостаткам резонансных фильтров следует отнести чувствительность к колебаниям частоты питающего напряжения и зависимость индуктивности дросселя LK от тока нагрузки. Необходимо отметить также, что Дсгл для высших гармоник в таких фильтрах, меньше, чем для основной гармоники.
Активные фильтры построены по типу ламповых или транзисторных стабилизаторов напряжения, реагирующих на быстрое изменение входного напряжения. По своему действию они подобны LC- и ДС-фильтрам, но обладают рядом преимуществ перед последними. В схемах активных фильтров роль дросселей (или сопротивлений) выполняет ламповый пентод или транзистор.
Наибольшее, распространение получили активные Фильтры, выполненные на транзисторах. Активные фильтры обеспечивают независимость коэффициента сглаживания от тока нагрузки и имеют меньшие габариты по сравнению с LC-фильтрами.
К недостаткам активных транзисторных фильтров следует отнести прежде всего значительное влияние изменения температуры на режим работы транзистора.
Принцип работы транзисторного фильтра основан на том, что сопротивление транзистора по переменному 182
Рис. 6.25. Коллекторная характеристика транзистора.
току при определенных режимах его работы может бы!ъ во много раз больше, чем по постоянному току. Действительно, если на коллекторной характеристике транзистора (рис. 6.25) выбрана рабочая область а—б (1Ъ—. =const), то сопротивление транзистора для переменной составляющей тока нагрузки г# стоянкой составляющей гСт= ^»tg аг — мало.
Транзисторные фильтры в зависимости от способа включения нагрузки подразделяются на фильтры с последовательно включенной нагрузкой в цепь коллектора (КФ) или эмиттера (ЭФ) транзистора и с нагрузкой, включенной параллельно транзистору (ПФ). При последовательном включении нагрузки и транзистора с целью уменьшения пульсаций выпрямленного напряжения (особенно при использовании однофазных выпрямителей) включается предварительный пассивный емкостный фильтр. Это необходимо для
того, чтобы мгновенные значения напряжения не достигали С/кпнлдоп (рис. 6.25).
В зависимости от способа смещения различают фильтры с фиксированным и автоматическим смещением.
На рис. 6.26 приведены схемы последовательных транзисторных фильтров КФ с фиксированным и автоматическим смещениями.
Ток коллектора /к транзистора, равный току нагрузки /0, почти не зависит от потенциала коллектора £7КЭ и в основном определяется током эмиттера 1Э. Для рабочей точки А (рис. 6.25) сопротивление транзистора постоянному току 1О = 1К равно гст == {7КЭ//О и ’Составляет несколько десятков ом. Если /э = const, то любое изменение напряжения на коллектове ведет к перемещению точки А по характеристике. При этом сопротивление коллектора переменной составляющей тока равно /?к=
183
— Д£7КЭ/Д/к, что составляет несколько килоом. Для Поддержания /э = const в схеме предусмотрена цепочка ДД, имеющая большую постоянную времени. В этом случае ток /э = ис1/^ за время одного периода почти не изменяется. Однако наличие в схеме уменьшает его КПД примерно на 20%.
В схеме фильтра с фиксированным смещением (рис. 6.26,а) выходное напряжение UH будет изменяться с изменением температуры и тока нагрузки. Фильтр
гь) 6)
Рис. 6.26. Схемы последовательных транзисторных фильтров типа КФ.
а — с фиксированным; б — с автоматическим смещением.
с автоматическим смещением (рис. 6.26,6) обеспечивает компенсации этих возмущений, но имеет значительно меньший коэффициент сглаживания Ксгл.
Конденсатор С2 в схемах на рис. 6.26 служит дополнительным фильтром пульсаций, получаемых на выходе транзисторного фильтра.
Рис. 6.27. Схемы последовательных транзисторных фильтров типа ЭФ. а — с однозвенным /?С-фНЛЬТрОМ; б — с двухзвенным R.C-фильтром.
Транзисторные фильтры типа ЭФ (рис. 6.27) по сравнению с фильтрами типа КФ имеют ряд преимуществ: малое входное сопротивление (менее 1 Ом); при введении автоматического смещения на базу уменьшается влияние изменения температуры. В этом фильтре отсут-184
ствует конденсатор С%, так как он не дает заметного увеличения /Ссгл- Отсутствие резистора Ri приводит к значительному увеличению КПД.
Транзисторные фильтры, типа ПФ применяются при малых напряжениях и больших токах (малых 7?п). В этих фильтрах транзистор аналогичен емкости в ак-
Рис. 6.28. Схема параллельного транзисторного фильтра типа ПФ.
тивно-емкостном фильтре.
Наиболее широко применяется фильтр типа ПФ, управляемый с выхода, так как он не требует подстройки; его характеристики менее чувствительны к колеба-
ниям температуры.
Схема фильтра приведена на рис. 6.28.
6.8. ПЕРЕХОДНЫЕ ПРОЦЕССЫ В ВЫПРЯМИТЕЛЕ С ФИЛЬТРОМ
При подключении и отключении выпрямителя с фильтром со стороны источника электроэнергии, а также отключении нагрузки (полном пли частичном) в фильтре возникают переходные процессы, которые могут сопровождаться значительными превышениями тока и напряжения вентилей и отдельных элементов ИВП.
Рис. 6.29. Эквивалентная схема Г-образного индуктивно-емкостного фильтра.
Характер переходных процессов зависит от параметров выпрямителя, фильтра и потребителя. При этом основное влияние на переходный ток оказывает постоянная составляющая пульсирующего тока выпрямителя 1о.
Правильный подбор параметров элементов выпрямительного устройства позволяет существенно ограничить амплитуды переходных тока и напряжения.
Рассмотрим переходные процессы при подключении Г-образного индуктивно-емкостного фильтра, эквивалентная схема которого представлена на рис. 6.29,а. Здесь гв — полное внутреннее сопротив-
185
ление выпрямителя. Переходные процессы в такой цепи описываются следующей системой уравнений:
г и I I 11
L dt2 + dt +UC==U1>
k = + } (6.17)
11 c = с" J ‘cf/z = г'н^»’ I
Имея в виду, что на практике обычно rB<d?n, собственная час-сота фильтра равна:
. / 1 Л , М (гп , L V 1
“° ~ У LC +??н J (2L ' 2С7?П/ •
При этом параметры фильтра подбираются такими, чтобы
Г / D ГВ , 1 Гв
®oL < Ян . И а — L + 2^ =S 2L ®о-
Решение системы уравнений (6.17) с учетом принятых соотношений имеет вид:
ис = Ua (1 — ё~ai cos со0/);
, (6.18)
k = Л + “ е “'sin со,/,
где р = V L/C —волновое сопротивление фильтра.
Временнйе графики переходных ia и ис приведены на рис. 6.29,5.
Из выражений (6.18) следует, что при cos co0i=l, т. е. при ®(/=л:, напряжение на конденсаторе может достигать значения 2(7Н, а при sin ®с/=1, т. е. при O)t/=n/2, ток :0 может превзойти в несколько раз /н.
На практике для защиты элементов выпрямительного устройства от перенапряжений и сверхтоков в переходном процессе (при пуске) в мощных выпрямительных устройствах последовательно с первичной обмоткой трансформатора включают так называемые пусковые резисторы или используют автотрансформаторы.
В выпрямительных устройствах малой мощности сопротивление гв относительно велико, вследствие чего переходные процессы протекают при незначительных превышениях напряжения и тока. В активных транзисторных фильтрах типов КФ и ЭФ в момент включения выпрямителя напряжение на входе фильтра мгновенно достигает установившегося значения. В этот момент Ua практически прикладывается полностью к участкам коллектор — эмиттер (в фильтре КФ) И коллектор — база (в фильтре ЭФ). По мере заряда конденсаторов перенапряжение постепенно снимается.
При коротком замыкании на выходе фильтров в транзисторе возникают значительный переходный ток и перенапряжение, которы? вызывают увеличение выделяемой мощности на транзисторе, 186
Защита от перенапряжений и перегрузок по току транЗисгорбй в фильтрах типов ЭФ н КФ осуществляется с помощью стабилитронов, ограничивающих резисторов и транзисторных схем защиты.
Для фильтров типа ШФ опасен режим холостого хода, так как в этом режиме увеличиваются /I-., и
Главаседьмая
РЕГУЛЯТОРЫ НАПРЯЖЕНИЯ И УПРАВЛЯЕМЫЕ
ВЫПРЯМИТЕЛИ
7.1. НАЗНАЧЕНИЕ И КЛАССИФИКАЦИЯ РЕГУЛИРУЮЩИХ УСТРОЙСТВ
При включении мощных электроустановок (электродвигателей, накала генераторных ламп и т. п.) необходимо понижать напряжение для ограничения бросков тока. Регулирование напряжения иногда требуется в процессе работы устройств: при исследовании режимов работы аппаратуры, при изменении частоты вращения электродвигателей и т. п. Регулирование выпрямленного напряжения можно осуществить на стороне переменного тока, на стороне, постоянного тока и изменением параметров вентилей. Может быть также использовано комбинированное регулирование напряжения-.
В зависимости от требований, предъявляемых потребителем энергии к питающему напряжению, возможно регулирование этого напряжения от нуля до номинального значения или в некоторых пределах независимо от значений входного напряжения и сопротивления нагрузки. Регуляторы напряжения могут быть неавтоматическими или автоматическими. В неавтоматических регуляторах изменение в регулируемом элементе осуществляется оператором, в автоматических регуляторах — по заранее .выработанной программе.
Возмущающим воздействием на регулятор обычно является выходное напряжение или ток нагрузки. В качестве регуляторов напряжения на стороне переменного тока применяются следующие электромагнитные устройства: регулируемые трансформаторы, регулирующие дроссели (магнитные усилители), индукционные регуляторы. Недостатком таких регуляторов являются большие масса, габарит и значительная потребляемая реактивная мощность, что снижает cos<p установки. Кроме того, все электромагнитные устройства инерционны и время их срабатывания велико.
187
В качестве регуляторов на стороне постоянного тока применяются переменные резисторы, включаемые как делители напряжения или реостаты. Исполнительными органами могут быть проволочные реостаты, угольные столбики из дисков, электронные лампы, трансформаторы. Общим недостатком таких регуляторов является значительное снижение КПД, так как в них выделяется часть преобразуемой энергии.
Регулирование выпрямленного напряжения изменением параметров вентилей не требует дополнительных регулирующих устройств, обладает высоким быстродействием и не вносит потерь энергии, т. е. экономично. Недостатком такого способа регулирования напряжения является значительное увеличение переменной составляющей в выпрямленном напряжении и понижение cos <р. Эти недостатки проявляются тем сильнее, чем больше пределы регулирования выходного напряжения.
7.2. РЕГУЛИРОВАНИЕ НАПРЯЖЕНИЯ НА СТОРОНЕ ПЕРЕМЕННОГО ТОКА
Трансформаторы с регулируемым напряжением. Наиболее простым способом регулирования выходного напряжения трансформатора или автотрансформатора является изменение числа витков обмотки, для чего обмотка (первичная или вторичная) выполняется с несколькими отводами. С помощью переключателя изменяется число витков обмотки и, следовательно, выходное напряжение трансформатора или автотрансформатора.
Недостатком такого способа регулирования напряжения является необходимость отключения трансформатора от сети. Если производить регулирование напряжения без отключения от сети, то при коммутации обмоток трансформатора часть витков может оказаться замкнутой накоротко, что приведет к созданию в замкнутых витках чрезмерно больших токов и к выходу трансформатора из строя. Для ограничения токов короткого замыкания на время переключения витков в цепь короткозамкнутых витков вводится активное или реактивное сопротивление. Существует ряд схем, позволяющих ограничить токи короткозамкнутых витков. Однако такие регуляторы очень громоздки и находят применение только в трансформаторах большой мощности.
Ограничение токов короткозамкнутых витков при регулировании напряжения используется в ЛАТР (лабора-188
торном автотрансформаторе регулируемом), который представляет собой автотрансформатор, выполненный на тороидальном магнитопроводе, часть витков обмотки которого оголена и по оголенным проводникам перемещается угольная щетка. Угольная щетка выполняется в виде ролика так, чтобы она могла перекрывать не более двух проводников, т. е. чтобы не более одного витка замыкалось щеткой накоротко. Большое переходное сопротивление между проводниками обмотки ЛАТР и
угольной щеткой ограничивает ток короткозамкнутого витка. Такие автотрансформаторы широко используются в лабораториях.
Для регулирования напряжения под нагрузкой используется трансформатор с подвижной короткозамкнутой катушкой (трансформатор Норриса,), который позволяет равномерно изменять напряжение на выходе в широких пределах.
Трансформатор с короткозамкнутой катушкой имеет удлиненный стальной сер
Рис. 7.1. Принципиальная схема устройства трансформатора с подвижной короткозамкнутой катушкой (а) и схема соединения его обмоток (б).
дечник с узким окном
(рис. 7.1,а). Чаще трансформатор выполняется по схеме автотрансформатора (рис. 7.1,6). На сердечнике размещена обмотка трансформатора, состоящая из катушек 1 и 2 с одинаковым числом витков. Катушка 1 является вторичной обмоткой трансформатора. Обе катушки намотаны встречно так, что магнитные потоки Ф1 и Ф2, создаваемые МДС этих катушек, в любой момент времени равны и направлены встречно. Поэтому по сердечни-
ку замкнуться они не могут и вынуждены замыкаться через воздушное пространство в средней части окна сердечника. Поверх обмоток 1 и 2 намотана короткозамкнутая катушка К, которая может перемещаться по высоте стержня от крайнего нижнего до крайнего верхнего положения.
Если катушка 7< находится в средней части между катушками 1 и 2, то она не сцеплена с магнитными линиями потоков Ф1 и Ф2 и не оказывает никакого влияния
189
йа эти катушки. Следовательно, приложенное напряжение уравновешивается противо-ЭДС катушек 1 и 2 (если пренебрегать падением напряжения в сопротивлениях этих катушек), т. е.
l71==—Et—Ё2.
Катушки 1 и 2 находятся в одинаковых магнитных условиях, следовательно, их ЭДС равны, т. е.
£i=£2; U^E^U ij2.
Вторичное напряжение, примерно равное ЭДС катушки 1, в рассматриваемом случае вдвое меньше приложенного напряжения, т. е.
U2~E2=Ui/2.
Если переместить короткозамкнутую катушку в крайнее нижнее положение, то витки этой обмотки будут сцеплены со всем потоком Ф2, что приведет к значительному его уменьшению; ЭДС катушки 2 также уменьшится до минимума. Для упрощения примем, что ЭДС катушки 2 при крайнем нижнем положении короткозамкнутой катушки уменьшится до нуля, т. е. Е2=0. Тогда Oi=—Ei, т. е. вторичное напряжение равно первичному: U2—Ei—Ui.
При положении короткозамкнутой катушки в некоторой промежуточной точке между серединой стержня и крайним нижним положением не происходит полной компенсации потока Ф2 и ЭДС катушки 2 не будет равна нулю, так что вторичное напряжение будет меньше напряжения сети. Изменяя положение короткозамкнутой катушки от среднего по .высоте стержня до крайнего нижнего положения, можно получить на выходе регулятора любое напряжение — от 0,5t/i до U\.
Если короткозамкнутая катушка находится в крайнем верхнем положении и сцеплена со всем потоком Фь то ЭДС катушки 1 уменьшается примерно до нуля, так что вторичное напряжение примерно равно нулю, т. е. [72=Е1=О.
При положении короткозамкнутой катушки в какой-либо промежуточной точке между средним и крайним верхним положениями по высоте стержня полной компенсации потока Ф1 не будет и выходное напряжение не равно нулю. Таким образом, перемещая короткозамкнутую катушку от середины до крайнего верхнего цоложе-190
ния по высоте стержня, на выходе регулятора можем получить любое напряжение от О,5СЛ до 0.
Следовательно, в зависимости от положения короткозамкнутой катушки вторичное напряжение трансформатора может быть плавно изменено в пределах от 0 до Ui.
Перемещение короткозамкнутой катушки по сердечнику осуществляется с помощью червячной передачи.
Достоинством регулятора является равномерное изменение выходного напряжения. Такие трансформаторы нашли широкое применение в электропитающих устройствах радиосвязи для регулирования напряжения накала ламп и анодного напряжения "выпрямительных устройств. Они применяются также в ряде специальных электроустановок.
Недостатком такого трансформатора является большой намагничивающий ток (так как магнитный поток замыкается через значительный воздушный^ промежуток), большие индуктивные сопротивления обмоток (из-за больших потоков рассеяния) и низкий cos <р.
Рис. 7.2. Схема включения регулирующего дросселя (а) и векторная диаграмма напряжений (б).
Регулирующие дроссели (или дроссели с подмагничиванием) представляют собой магнитные усилители (см. гл. 1). Если обмотки переменного тока дросселя включить последовательно с нагрузкой и изменять ток в обмотке управления (рис. 7.2,а), то будет изменяться индуктивное сопротивление обмоток дросселя и падение напряжения на этих обмотках. Следовательно, при неизменном напряжении на входе £/вх напряжение на нагрузке Uu будет изменяться. Считая нагрузку чисто активной, а сопротивление обмотки переменного тока дросселя чисто индуктивным (пренебрегая активным сопротивлением обмотки), можем записать:
y,=/n'»-n'w-
1Э1
При увеличении тока в обмотке управления магнитная проницаемость материала сердечника дросселя уменьшится, следовательно, уменьшатся индуктивность обмотки переменного тока и падение напряжения на ней (7'др, а напряжение на нагрузке U'H повысится (рис. 7.2,6). Зная пределы регулировки выходного напряжения, можно определить необходимое напряжение на входе регулятора (JBX, а также наибольшее и наименьшее падения напряжений на регулирующем дросселе Идр тах И Ujsjjmin-
Чем больше пределы изменения напряжения и тока нагрузки, тем больше габариты регулирующего дросселя. Так как обмотки переменного тока регулирующего дросселя обладают в основном индуктивным сопротивлением, то его применение приводит к снижению cos <р электроустановки. Недостатком регулирующего дросселя являются также инерционность и высокие массо-габаритные показатели.
Индукционный регулятор, являющийся асинхронной машиной с заторможенным ротором, позволяет равномерно регулировать напряжение в широких пределах.
При неподвижном роторе асинхронная машина подобна трансформатору, коэффициент трансформации которой определяется отношением фазных ЭДС, обмоток статора и ротора.
В роторе регулятора (так же как на статоре) помещается трехфазная обмотка. Регулирование напряжения осуществляется поворотом ротора относительно статора, вызывающим изменение сдвига фаз между ЭДС, индуктированной вращающимся магнитным полем в обмотках статора и ротора. Для поворота ротора и его фиксации служит червячная передача с самоторможением. Схема трехфазного индукционного регулятора изображена на рис. 7.3.
Конец каждой фазы обмотки статора включен в трехфазную сеть с напряжением U\. К этой же сети через скользящие контакты щеток и колец подключена трехфазная обмотка ротора, соединенная в звезду. Другие концы фаз обмоток статора соединены с сетью приемника энергии, напряжение которой U2 регулируется в широких пределах.
Действие регулятора поясняет векторная диаграмма на рис. 7.4, построенная для одной фазы регулятора. При включении регулятопа в сеть трехфазная система 192
токов обмотки ротора создает вращающееся магнитное поле, которое индуктирует ЭДС в фазах обмоток статора £i и ротора Ei.
Если пренебречь падением напряжения в активном и индуктивном сопротивлениях обмотки ротора, то для приложенного напряжения Ux и ЭДС ротора можно записать следующее приближенное равенство, справедливое для любого положения ротора: Ui=—Е2.
Для удобства построения диаграммы будем считать, что ЭДС фазы статора меньше ЭДС фазы ротора (Ei<’ <е2).
Рис. 7.3. Схема трехфазного индукционного регулятора.
Рис. 7.4. Векторная диаграмма ЭДС индукционного регулятора для одной фазы.
Если ротор занимает такое положение, при котором оси катушек статора и ротора совпадают, то и ЭДС, индуктируемые вращающимся магнитным полем в обмотках статора и ротора, также совпадают по фазе, т. е. вектор Ej совпадает с вектором Ё2 и направлен противоположно вектору Ui.
Если повернуть ротор на какой-либо угол +ai по направлению вращения магнитного поля, то магнитные линии вращающегося поля будут пересекать витки катушек статора раньше, чем витки катушек ротора, и ЭДС статора будет опережать по фазе ЭДС ротора, т. е. вектор Ё'1, неизменный по величине, повернется на угол +'«1 относительно неизменного вектора Ё2, равного вектору Ui с обратным знаком. При повороте ротора против поля (—ai) ЭДС статора будет отставать по фазе от ЭДС ротора и на диаграмме вектор Ё"1 изобразится 13—1056 193
повернутым на угол —в сторону отставания относительно вектора Е2.
При повороте ротора будет изменяться угол между векторами фазных ЭДС статора и ротора. Если непрерывно поворачивать ротор, то вектор ЭДС статора будет изменять свое положение так, что конец этого вектора опишет окружность радиусом Ei из точки А, являющейся концом вектора Uj.
Напряжение U2 зависит не только от приложенного напряжения th, но и от ЭДС статора Ei и определяется как геометрическая сумма Ui и Еь т. е.
й^Ц + Ё,.
Поэтому окружность, описанная концом вектора Ё] при вращении ротора, представляет собой геометрическое место точек концов вектора U2.
При повороте ротора на электрический угол от 0 до 180° может быть получено любое напряжение на выходе ОТ U2m,-n до и2тах, причем
Ei (при а=0); U2max—;Ui-l-Ei (при сс= =180°).
Если выполнить регулятор с коэффициентом трансформации 1, т. е. Е\— Е2 (E2=Ui), то U2min=0 и U2max= =2Ui и, следовательно, такой регулятор дает возможность регулировать напряжение на выходе в пределах от 0 до двойного напряжения сети.
Возможность равномерного изменения напряжения в широких пределах является очень важным свойством, благодаря которому этот регулятор нашел широкое при-мение. Однако регулятор обладает рядом недостатков, которые заключаются в следующем: регулируемое напряжение U2 изменяется не только по величине, и по фазе, что делает недоступным включение этого регулятора параллельно с каким-либо другим регулятором; на валу регулятора создаются большие вращающие моменты, что вызывает необходимость громоздкого устройства механической передачи с самоторможением; обмотки регулятора имеют большие индуктивные сопротивления, что приводит к значительному падению напряжения; воздушный зазор между статором и ротором увеличивает реактивный намагничивающий ток и регулятор имеет низкий cos а.
194
Первые два неДбстаРка — изменение фазы напряжения и механические силы на валу регулятора — в устройствах большой мощности устраняются выполнением сдвоенных регуляторов, векторы ЭДС статорных обмоток которых поворачиваются в противоположных направлениях при повороте ротора.
Так как регулятор используется при автотрансформаторной схеме и, следовательно, его регулируемая (выходная) мощность РВЬ1Х не равна номинальной (габаритной) мощности Рн,
Рис. 7.5. Схема однофазного индукционного регулятора.
;на которую рассчитана машина, то между этими мощностями, так же как в автотрансформаторе, имеет месте
следующее соотношение:
р — р II_________Z2— । или р —р ГТ
*н—~ вых I 1 'вых 2 н ev
В однофазном индукционном регуляторе на статоре и роторе помещены однофазные обмотки (рис. 7.5). Обмотка статора включается в сеть источника энергии с напряжением Ui, а обмотка ротора соединяется с ней последовательно.
Так как однофазная обмотка статора создает пульсирующее магнитное поле, то при повороте изменяется магнитный поток, сцепленный с витком обмотки ротора, т .е. Ф2=Ф1 cos а, где Ф1 — магнитный поток, созданный обмоткой статора; ф2 — магнитный поток, сцепленный с обмоткой ротора; а — угол поворота ротора.
Следовательно, ЭДС, индуктированная в роторе, равна:
Е2—Е2тах COS Ct, где Егтах — максимальная ЭДС в роторе, получающаяся при совпадении осей катушек ротора и статора (а=0 или 180°).
На выходе регулятора напряжение не изменяется по фазе и равно
^2=^1+Д2таж COS а.
При нагрузке в обмотке ротора возникает ток, создающий свое магнитное поле Рр. Магнитодвижущая сила ротора может быть представлена в виде двух со-13* 195
Сбавляющих: продольной Fd=Fv cos а и поперечной Fg— =FP sin а.
Продольная составляющая МДС ротора Fd взаимодействует с МДС статора, как и ,в трасформаторе, так что в результате взаимодействия МДС статора F\ и продольной МДС ротора Fd устанавливается всегда практически неизменный магнитный поток из условия
—El. Поперечная составляющая МДС ротора Fq не компенсируется МДС статора. Это поперечное поле ротора создает ЭДС самоиндукции, вызывающую значительное изменение напряжения при изменении нагрузки и снижает cos ср регулятора.
Для компенсации поперечного поля ротора на статоре помещают короткозамкнутую компенсационную обмотку К, ось которой повернута относительно оси основной обмотки статора на электрический угол 90°.
7.3. ВЫПРЯМИТЕЛЬ С УПРАВЛЯЕМЫМИ ВЕНТИЛЯМИ
Выпрямитель с управляемыми вентилями может обеспечить регулировку выпрямленного напряжения при высоком КПД, имеет меньшие габариты и стоимость, чем- выпрямители со специальными регуляторами переменного или постоянного напряжения. Кроме того, в выпрямителе с управляемыми вентилями может быть обеспечена высокая скорость регулирования, что позволяет стабилизировать выпрямленное напряжение и осуществить быстродействующую защиту выпрямителя от перегрузок и коротких замыканий.
Управляемые вентили (тиристоры, тиратроны и др.) могут находиться в двух состояниях: открытом, когда падение напряжения на них почти не зависит от тока, и закрытом, когда тока в вентиле нет.
Регулирование выходного напряжения вентиля посредством управляемого выпрямителя основано на изменении момента открывания очередного вентиля. На рис. 7.6 изображена диаграмма выпрямленного напряжения для случая, когда очередная фаза .вступает в работу с опозданием на угол а, называемый углом регулирования.
Так, например, фаза b вступает в работу не в момент, соответствующий точке А, где пересекаются кривые ЭДС фаз а и Ь, а со сдвигом на угол а. Также и фаза с начинает работать не в точке А, а с опозданием 196
йй угол а й т. д. Кривая выпрямленного напряжения и0 на рис. 7.6 изображена толстой линией. Увеличение угла регулирования вызывает уменьшение площади, ограниченной кривой но, и соответственно понижение выпрямленного напряжения Uo. При этом, однако, увеличивается амплитуда переменной составляющей. При выбранном на рис. 7.6 начале отсчета времени выпрям
Рис. 7.6. Диаграмма выпрямленного напряжения регулируемого выпрямителя.
ленное напряжение равно:
/а 2n/tn
и0 = ( J Uadwt + j ubdwt
О а
(7-1)
где
иа = Umax cos (а>/ 4- Tt/m) и иь = Umax cos (со/ - nlm).
После подстановки значений иа и в (7.1) и интегрирования получим:
U. = — Umax sin — cos a = U0X cos а, (7.2) и ffiii л v л- * х •
ГТ >п ТТ . П
где иох = — Umax sm— выпрямленное напряжение при отсутствии регулирования.
Регулирование выпрямленного напряжения применяется главным образом в устройствах относительно больших мощностей, где внутреннее сопротивление выпрямителя определяется индуктивностями рассеяния обмоток трансформатора, которые вызывают перекрытие фаз. Диаграммы выпрямленного напряжения Uq и токов в фазах вторичных' обмоток трансформатора выпрямителя, работающего с углом регулирования а и углом перекрытия фаз у, изображены на рис. 7.7.
Вентиль в фазе b открывается с задержкой на угол а, после чего в течение времени, соответствующего углу перекрытия у, начинается постепенный переход нагрузки с фазы а на фазу Ь, когда напряжение равно среднему 197
значению:
Рис. 7.7. Диаграммы выпрямленного напряжения и токов в' фазах вторичных обмоток трансформатора регулируемого выпрямителя с учетом перекрытия фаз.
Z2„ 4- МЛ rr « l
ucn=- =xUmnx COS —- COS tot.
Ср ТПиХ
Выпрямленное напряжение равно: (a a-f-f
J uadwt + j ucpdwt 4- J ubdwt 0 a a+7
,_ m TT n cos a + cos (a + y) _ TT cos a + cos (a + Y)
ГUmali S ln~m 2 —uOX 2 '•
(7-3)
Для регулирования выходного напряжения необходимо изменение угла регулирования а, причем этот угол должен быть строго одинаковым для всех вентилей, так как неравенство'углов а для различных вентилей приведет к возникновению дополнительной пульсации более низкой частоты. Так, например, в шестифазной схеме выпрямления первая гармоника переменной составляющей выпрямленного напряжения имеет частоту 6/с (fc — частота тока питающей сети). Если один из шести вентилей вступает в работу с опозданием на угол, больший, чем остальные пять вентилей, то в кривой выпрямленного
напряжения появится дополнительный провал один раз за период, т. е. возникнет переменная составляющая с частотой тока питающей сети fc-
Схемы управления вентилями должны обеспечивать подачу такого потенциала на управляющий электрод, который обеспечивает надежное отпирание вентиля при положительном потенциале на аноде, не превышающем определенного значения. С увеличением угла регулирования первая гармоника тока вентиля смещается в сторону отставания относительно кривой напряжения, т. е. увеличивается сдвиг фаз между напряжением и током, вследствие чего cos ср уменьшается.
198
Существенным недостатком регулирования напряжения выпрямителя изменением параметров вентилей является значительное увеличение амплитуды переменной составляющей в кривой выпрямленного напряжения (пульсации), что требует увеличения индуктивностей и емкостей сглаживающего фильтра.
Кривая выпрямленного напряжения регулируемого выпрямителя может быть представлена гармоническим рядом:
и0 = Uo -|- U~{ sin (mmt-(-<р,) -j- U~2 sin(2mwf-|-cp2) ...
... Sin (&77Za>f-|-<pft)-j- ... ,
где , U~2 ,..., U~k — амплитуды соответственно первой, второй, £-й гармоник и т. д., причем U~k
и <pft==arctg(5*/AA) для k-й гармоники напряжения;
А — т IJ — — итах
a
COS sintozarf бЫ-|-
L6
a+T
4-cos-^- J cos wt sin km<»t a
2тс/т
+ J COS -----------sin knuibt dwt I;
a+7
«+Т
_|_COS2L cos cos kmwt d^t 4~ a
2tc/zm
J cos (arf —cos kmmt dwt .
a+T J
Амплитуда первой гармоники кривой выпрямленного напряжения
=/A\ + 5\==^-sin +
щ2 — 1 у 11 1 ’
199
где
a^/nfsin a cos ma+sin (a+y) cos m(a+y)]—
—sin ma cos a—sin m (a+7) cos (a+7);
&i = m[sin a sin m a + sin(a+y)sin m(a+y) ] + + cos a cos ma + cos (a+y)cos m(a+y).
Амплитуда первой гармоники выпрямленного напряжения, отнесенная к постоянной составляющей, равна:
1 Ua (тг—1) [cos a + cos (a -f- у)]'
Зависимость относительного значения амплитуды первой гармоники переменной составляющей выпрямленного напряжения от угла перекрытия при различных значениях угла регулирования а показана на рис. 7.8
Рис. 7.8. Графики зависимости относительного значения амплитуды пульсации от угла перекрытия при различных углах регулирования для схем выпрямления.
а — гп=3; б — т=6.
для схем .выпрямления т=3 и т=6. Эти кривые показывают, что переменная составляющая напряжения с увеличением угла перекрытия сначала растет, после чего уменьшается, достигая минимума при значениях у, зависящих от схемы выпрямления.
В двухполупериодной схеме выпрямления (рис. 7.9,а) выражение (7.2) будет справедливо при условии непрерывности тока в дросселе, т. е. при бесконечно большой 200
Рис. 7.9. Схема двухполуперй-одного регулируемого выпрямителя (а) и графики изменения выходного напряжения и токов (б).
его индуктивности Лдр = = оо. При этом условии ток в дросселе не может претерпевать изменений и равен току нагрузки /о (рис. 7.9,6). Ток /о поочередно протекает в фазах вторичной обмотки и независимо от угла регулирования а каждый тиристор открыт половину периода. При а>0 через открытый тиристор протекает ток под дейст
вием ЭДС самоиндукции дросселя, несмотря на то что ЭДС фазы вторичной обмотки изменила направление. Таким образом, напряжение на выходе выпрямителя в течение части периода от до at—л положительно, а от at—л до со^л + а отрицательно и среднее значение выпрямленного напряжения
к-f-a
1 f 2
U„ — — \ U—х s in at dwt = — (7„1ЛЛ. cos а=[7.х cos а.
и 7Т I IIIUA ШИЛ UA
к
Для уменьшения пульсации выходного напряжения и повышения cos ф на выходе выпрямителя включают диод Дз в обратном направлении (рис. 7.10,а). В момент открывается тиристор Д\ (рис. 7.10,6), так как на его управляющий электрод поступает отпирающий сигнал и напряжение на выходе выпрямителя равно напряжению фазы а. В момент at—л тиристор Д\ закрывается, так как напряжение на его аноде становится равным нулю и ток в нагрузке протекает под действием ЭДС самоиндукции дросселя через диод Д3. В момент at%= —л + а открывается тиристор Д2 и вступает в работу фаза b вторичной обмотки трансформатора. В течение части периода, когда открыт один из тиристоров, диод Дз закрыт, так как он находится под обратным напряжением. При закрывании тиристора Д] или Д2 в обмотке 201
Дросселя наводится ЭДС самоиндукций й открываемся диод Дз. Изменения токов в тиристорах и диоде Дз показано на рис. 7.10,6.
При изменении угла регулирования а изменяется среднее значение выпрямленного напряжения
и.=4 jsin.1 d.l _IZ„ 1+^1. a
Рис. 7.10. Схема регулируемого выпрямителя с обратным диодом (а) и графики изменения выходного напряжения и токов в диодах (б).
, выполненный на
Сравнивая кривые выходных напряжений и токов в фазах вторичной обмотки для схем двухполупери-одного регулируемого выпрямителя, видим, что обратное включение диода на выходе выпрямителя уменьшает амплитуду пульсации напряжения и фазовый сдвиг первой гармоники тока и напряжения, т. е. повышает cos ср.
Для подачи отпирающего сигнала на управляющие электроды тиристоров могут быть использованы различные схемы. Одна из возможных схем управления тиристорами изображена на рис. 7.11. Основным элементом схемы управления является магнитный усилитель (МУ) с внутренней обратной связью (с самоподмагничи-зух идентичных сердечниках
из материала с прямоугольной формой петли гистерезиса (ППГ). Применение материала с ППГ обеспечивает формирование крутого фронта отпирающих импульсов, подаваемых на управляющие электроды тиристоров Д\ и Дз. Положительная обратная связь осуществляется диодами Дз и Дз. Питание рабочих обмоток р усилителя происходит от трансформатора малой мощности Тр. Для стабилизации напряжения питания первичная обмотка этого трансформатора подключена к сети через 202
параметрический стабилизатор напряжения переменного тока, выполненный на резисторе R, стабилитроне Д7 и диодах Дз—Д6. Напряжение стабилизации стабилитрона значительно меньше амплитуды напряжения питающей сети, так что питание рабочих обмоток МУ осуществляется напряжением практически прямоугольной формы.
Следовательно, амплитуда тока управляющего электрода тиристора остается неизменной при изменении угла регулирования. Так как рабочие обмотки р под-
Рис. 7.11. Схема управления тиристорами.
ключаются к трансформатору через диод Д8 и Дэ в течение соответствующих полупериодов изменения напряжения питающей сети, то при токе в обмотках управления, равном нулю, сердечники МУ находятся в насыщении. При этом индуктивные сопротивления рабочих обмоток малы и в них протекают относительно большие токи, так что напряжения на резисторах Ri и /?2, подаваемые на переходы управляющий электрод — катод тиристоров Д1 и Дз соответственно, достаточны для их отпирания. Следовательно, при прямоугольной форме напряжения питания рабочих обмоток МУ момент подачи отпирающего импульса на управляющий электрод тиристора совпадает с моментом появления на фазе вторичной обмотки трансформатора напряжения положительной полярности, т. е. минимальный угол регулирования amin практически равен нулю. Поэтому при токе управления МУ, равном нулю, на выходе выпрямителя будет напряжение, соответствующее напряжению неуправляемого выпрямителя. При питании рабочих обмоток МУ напряжением синусоидальной формы amin>0. Угол cimin определяется моментом времени, при котором напряжение на резисторах R\ и Rz достигает значения, необходимого для включения тиристоров Д1 и Дз.
203
Так как обмотки управления у включены встречно рабочим обмоткам р, то при токе управления, не равном нулю, материал сердечников МУ окажется ненасыщенным и индуктивное сопротивление рабочих обмоток МУ будет большим, т. е. ток в резисторах Ri и Дг мал и падение напряжения на них для отпирания тиристоров Д\ и Дг недостаточно. Насыщение материала сердечников и отпирание тиристоров происходят в момент, соответствующий углу регулирования а и зависящий от тока в обмотках управления; с увеличением тока управления увеличивается угол регулирования.
Недостатком такой схемы управления является необходимость тщательного подбора сердечников МУ. При сердечниках с различными магнитными характеристиками нарушается равенство углов регулирования тиристоров Д\ и Д2, что вызывает появление пульсации с частотой, равной частоте тока питающей сети, а также приводит к подмагничиванию сердечника трансформатора.
7.4. РЕГУЛИРОВАНИЕ НАПРЯЖЕНИЯ НА СТОРОНЕ ПОСТОЯННОГО ТОКА
Регулирование напряжения на стороне постоянного тока осуществляется переменным сопротивлением (угольный столбик, переменный резистор и др.) или включением на выходе вольтодобавочных регулируемых источ
ников энергии.
Угольный регулятор применяется в устройствах элек-
тропитания аппаратуры связи, в схемах автоматического регулирования и др. Угольный регулятор (рис. 7.12) представляет собой столбик, собранный из угольных
ра напряжения.
дисков, сопротивление которого ДР зависит от силы сжатия дисков. Пружина П стремится сжать диски столбика, уменьшая сопротивление Др. Ток в катушке электромагнита Э создает силу, под действием которой якорь регулятора Я стремится притянуться к сердечнику электромагнита, разжимая диски угольного столбика и увеличивая сопротивление Др. Регулируемое напряжение £7Р меньше приложенного напряжения U за счет падения напряжения на сопро
204
тивлении угольного столбика, т. е. Др={/—/Др.
Если по какой-либо причине повысится регулируемое напряжение Uv, то увеличится ток в обмотке электромагнита Э и увеличится сила, разжимающая диски столбика. При этом увеличится сопротивление 7?р и падение напряжения на нем и выходное напряжение уменьшится до заданного значения С/р с определенной степенью точности. При использовании угольного регулятора в качестве регулятора тока обмотка электромагнита должна быть включена последовательно с нагрузкой с тем, чтобы сопротивление регулятора Др зависело от регулируемого тока.
Недостатком регулятора является инерционность, так как его сопротивление зависит от силы сжатия дисков, которая не может претерпевать быстрых изменений. Поэтому в устройствах с резкими изменениями нагрузки такие регуляторы не могут быть использованы. Недостатком угольных регуляторов являются также низкие массо-габаритные показатели и низкая точность регулирования.
Полупроводниковые регуляторы, напряжения в настоящее время нашли широкое применение. В них автоматически изменяется сопротивление транзистора или другого элемента. Для уменьшения потерь энергии в регулирующем элементе и для повышения КПД наиболее часто используется импульсный (ключевой) режим работы регулирующего элемента. При импульсном режиме работы разброс параметров полупроводниковых приборов и их зависимость от температуры окружающей среды не оказывают влияния на работу регулятора.
Импульсные регуляторы напряжения подразделяются на релейные (или двухпозиционные) и с широтноимпульсной модуляцией (ШИМ). В регуляторах напряжения релейного типа частота переключения регулирующего элемента (транзистора или тиристора) зависит от нагрузки и напряжения на входе регулятора, в то время как в регуляторах с ШИМ она остается строго постоянной. В релейных регуляторах переключение регулирующего элемента происходит под воздействием релейного элемента, реагирующего на величину регулируемого напряжения.
На рис. 7.13 показана схема регулятора напряжения генератора постоянного тока. Транзистор Тз работает
205
Рис. 7.13. Схема транзисторного регулятора напряжения релейного типа.
в ключевом режиме и регулирует среднее значение тока возбуждения генератора постоянного тока. Релейным элементом является триггер, имеющий два устойчивых со.-стояния и выполненный на транзисторах Т2 и Т3. Измерительным элементом регулятора напряжения генератора служит мост на резисторах R3, Ra, R5 и стабилитроне Д2.
На базы транзисторов Л и подается сигнал, пропорциональный отклонению напряжения генератора от заданного значения. В зависимости от знака этого сигнала открывается транзистор Т2 или Т3. Если напряжение на зажимах генератора станет меньше заданного значения, то падение напряжения на резисторе R3 уменьшится и потенциал точки а станет меньше потенциала точки б, определяемого напряжением стабилитрона Д2. На вход транзистора Т\ (эмиттер — база) подается отпирающее напряжение и ток в обмотке возбуждения начинает увеличиваться. Открытый транзистор Т\ шунтирует переход эмиттер — база транзистора Т2, запирая его. При этом открывается транзистор Т3, так как на его базу подается отрицательный относительно эмиттера потенциал. С увеличением тока возбуждения генератора напряжение на зажимах его якоря начинает расти и изменяется полярность сигнала, снимаемого с измерительного элемента.
Если напряжение генератора достигнет наибольшего значения, то падение напряжения на резисторе R3 окажется больше напряжения стабилитрона и потенциал точки б станет меньше потенциала точки а, т. е. на вход транзистора Л будет подан открывающий сигнал. Открытый транзистор Т} шунтирует переход эмиттер — база транзистора Т3, закрывая его. Ток в обмотке возбуждения генератора начнет уменьшаться до тех пор„ пока не изменится полярность управляющего сигнала на выходе измерительного устройства.
Далее процесс будет повторяться и соотношение между временами замкнутого п разомкнутого состояния 206
(скважность) транзистора Г3 будет зависеть от частоты вращения генератора и его нагрузки. С уменьшением частоты вращения якоря генератора и с увеличением нагрузки генератора увеличивается время замкнутого состояния транзистора Т2.
Так как переключение триггера происходит при определенных предельных значениях напряжения генератора, то амплитуда пульсации выходного напряжения остается неизменной, тогда как частота переключения зависит как от нагрузки, так и от частоты вращения якоря генерато-
Рис. 7.14. Схема регулятора напряжения с ШИМ (а) и зависимость скважности импульсов от амплитуды регулируемого напряжения (б).
ра. Сопротивление Ri является коллекторной нагрузкой транзисторов Т\ и Т2, сопротивление R2 ограничивает ток базы транзистора Т2. Обмотка возбуждения генератора шунтирована диодом Д с тем, чтобы не возникало большой ЭДС самоиндукции при размыкании цепи возбуждения.
В регуляторах напряжения с ШИМ в качестве модуляторов ширины импульсов используются магнитные усилители с сердечниками из материалов с прямоугольной петлей гистерезиса, релаксационные генераторы, источники с пилообразным опорным напряжением и т. п. На рис. 7.14,а приведена схема импульсного регулятора напряжения с ШИМ для синхронного генератора. В этой схеме модулятор ширины импульсов совмещен с измерительным элементом.
Напряжение синхронного генератора через трансформатор и вентиль Д подается на конденсатор С, заряжая его. Когда конденсатор зарядится до амплитуды напря
207
Жен и я вторичной обмотки трансформатора, вентиль Д закроется и начнется разряд конденсатора С на резистор R и напряжение на конденсаторе начнет уменьшаться по экспоненциальному закону (рис. 7.14,6). Ко входу транзистора 1\ (эмиттер — база) приложена разность постоянного по величине напряжения стабилитрона ид2 и напряжения на конденсаторе Uc- При Uc > U Д2 на базе транзистора Т\ будет положительный потенциал относительно эмиттера и транзистор будет закрыт.
Когда напряжение на конденсаторе, уменьшаясь при его разряде, станет меньше напряжения стабилитрона (ис<^ид2), на базе транзистора Л появится отрицательный потенциал относительно эмиттера и транзистор откроется. При этом разряд конденсатора прекращается и напряжение на нем остается неизменным. Когда напряжение вторичной обмотки трансформатора и на конденсаторе вновь станет больше напряжения стабилитрона, транзистор Ti закроется и т. д. При закрытом транзисторе 71 ток его коллектора равен нулю, при открытом— ограничивается резистором Ri.
При уменьшении амплитуды напряжения генератора напряжение на конденсаторе Uc достигнет напряжения стабилитрона ид2 быстрее и откроет транзистор раньше, т. е. длительность импульса увеличится. Повышение напряжения генератора вызовет уменьшение времени открытого состояния транзистора 7\ и ширина импульса уменьшится. При закрытом транзисторе 7\ открывается транзистор Т2 (усилитель), так как на его базе будет отрицательный потенциал, а при открытом транзисторе Л закрывается транзистор Т2.
Составные транзисторы Т3 и Г4 являются регулирующим элементом, изменяющим ток в обмотке возбуждения генератора. При закрытом транзисторе Т2 на базе составного транзистора будет отрицательный потенциал и транзисторы Т3 и Т4 будут открыты. Если открывается транзистор Т2, то транзисторы Т3 и Т4 закрываются. При постоянной частоте тока генератора частота следования импульсов также постоянна.
На рис. 7.15 показана структурная схема регулятора напряжения с вольтодобавкой. Добавочный источник включается последовательно с источником энергии, так что напряжение на выходе равно сумме напряжений основного и добавочного источников [/ВЬ1Х=ДВХ + Дд. 208
Вольтодобавочный источник состоит из генератора Г, преобразующего постоянное напряжение источника в переменное напряжение прямоугольной формы, трансформатора Тр, повышающего или понижающего напряжение, выпрямителя В и регулятора напряжения Р, который может работать как в непрерывном, так и в импульсном режиме.
Рис. 7.15. Структурная схема регулятора напряжения с вольтодобавкой.
Достоинством регуляторов с добавочным источником является высокий КПД, так как регулируется не вся мощность, поступающая в нагрузку, а только часть ее, которая обеспечивается добавочным источником.
Глава восьмая
ПРЕОБРАЗОВАТЕЛИ ПЕРЕМЕННОГО
И ПОСТОЯННОГО ТОКА
8.1. ПРИНЦИПЫ ПРЕОБРАЗОВАНИЯ, КЛАССИФИКАЦИЯ И ОСНОВНЫЕ ХАРАКТЕРИСТИКИ ПРЕОБРАЗОВАТЕЛЕЙ
При построении устройств и систем электропитания часто возникает задача преобразования переменного тока одной частоты в переменный ток другой частоты при минимальных потерях энергии. Выпрямление переменного тока может рассматриваться как частный случай этой задачи, когда частота преобразованного тока равняется нулю. Другой частный случай — это преобразование постоянного тока в переменный, т. е. процесс, обратный выпрямлению. Исключая из рассмотрения выпрямление переменного тока, которому посвящены гл. 6, 7, обратимся к другим возможным вариантам преобразования.
Процесс преобразования постоянного тока в переменный называется инвертированием, а устройство, осуществляющее это преобразование, — инвертором. Отметим, однако, что в радиотехнике аналогичный процесс принято называть генерированием, когда речь идет о получении токов высоких или сверхвысоких частот. Само устройство преобразования называют генератором высо-14—1056 209
кбй (сверхвысокой) частоты. С энергетической точйй зрения принципиальной разницы между инвертированием и генерированием нет. Отличия заключаются главным.. образом в рабочей частоте, форме колебаний, а также в различных требованиях, которые предъявляются к инверторам и генераторам.
Если преобразуемый и преобразованный ток имеют разные, но отличные от нуля частоты, то говорят о преобразовании частоты, а соответствующие устройства называют преобразователями частоты. В устройствах электропитания преобразователи обычно повышают частоту переменного тока.
Часто требуется преобразовывать постоянный ток одного напряжения в постоянный ток другого (обычно более высокого) напряжения при минимальных потерях энергии. Такой процесс называют конвертированием, а само устройство преобразования — конвертором. Таким образом, конвертирование можно рассматривать как трансформацию постоянных (т. е. имеющих нулевую частоту) токов.
Важное требование ко всем типам преобразователей — минимальные потери энергии, которые в любом устройстве неизбежны. Это требование находит отражение как в самих принципах построения преобразователей, так н в выборе элементной базы и проектирования этих устройств.
По принципу действия различают электромеханические (например, вибрационные, электромашинные) и статические преобразователи. Статические преобразователи не имеют механически движущихся узлов, а строятся на электронных приборах —транзисторах, тиристорах, электронных и газоразрядных лампах, что определяет повышенную надежность и срок службы преобразователей.
Структурные схемы статических преобразователей, поясняющие принцип их работы, приведены на рис. 8.1,а—в. На рис. 8.1,а изображена структурная схема инвертора. В преобразователе частоты (рис. 8.1,6) напряжение первичного источника переменного тока ИПрТ частотой fi предварительно выпрямляется, а затем подается на инвертор И, который инвертирует постоянный ток в переменный требуемой частоты fi¥=f2- Преобразователь частоты, построенный по схеме на рис. 8.1,6, называют преобразователем с явным звеном постоянного тока, поскольку выпрямитель можно выделить в качестве 210
самостоятельного элемента схемы. Существуют также .преобразователи, в схемах которых в явном виде выпрямитель отсутствует. Такие устройства называют преобразователями со скрытым звеном постоянного тока.
В конверторе (рис. 8.1, в) постоянное напряжение Un первичного источника постоянного тока ИПсТ предварительно преобразуется в переменное напряжение ,
Рис. 8.1. Структурные схемы преобразователей.
а — инвертора; б — преобразователя частоты; в—конвертора.
ИПсТ — источник постоянного тока; ИПрТ — источник переменного тока.
Напряжение^] изменяется трансформатором Тр до необходимого значения и выпрямляется выпрямителем В. После подавления пульсаций выпрямленного напряжения с помощью фильтра Ф получается требуемое постоянное напряжение Uoz^Uqi.
Заметим, что все структурные схемы на рис. 8.1 содержат в качестве элемента инвертор, что определяет тесную связь между различными видами преобразователей.
Основными электрическими характеристиками преобразователей, определяющими их энергетическую эффективность и качественные показатели, являются:
КПД, представляющий собой отношение мощности преобразованного тока к мощности, отдаваемой источником преобразуемого тока;
стабильность выходного напряжения и частоты при воздействии различных возмущающих факторов: неста-14* 211
бильности напряжения источника преобразуемого тока, температуры, сопротивления нагрузки и др.;
пульсация выходного напряжения;
форма выходного напряжения;
нагрузочная характеристика, представляющая собой зависимость выходного напряжения от тока (или сопротивления) нагрузки.
Стремление повысить КПД преобразователей приводит к необходимости выбора эффективных схем преобразователей.
Для обеспечения высоких качественных показателей (стабильности напряжений и частоты, малых пульсаций, требуемой формы выходного напряжения) применяются более сложные специальные схемы и дополнительные устройства стабилизации.
8.2. ПРЕОБРАЗОВАТЕЛИ ПОСТОЯННОГО ТОКА В ПЕРЕМЕННЫЙ (ИНВЕРТОРЫ)
Принцип действия инверторов основывается на периодическом подключении нагрузки к источнику постоянного напряжения, в результате чего через нагрузку протекает переменный ток. В статических преобразователях коммутация тока осуществляется с помощью электронных приборов, работающих в ключевом режиме. При работе в этом режиме электронный прибор может находиться в одном из двух состояний: закрытом, когда анодный (коллекторный) ток близок к нулю, или открытом, когда ток имеет максимальное значение, а напряжение на аноде (коллекторе) близко к нулю. В первом и втором состояниях мощность, рассеиваемая на аноде (коллекторе), мала. Переход электронного прибора из закрытого состояния в открытое и обратно (коммутация) происходит очень быстро, так что коммутационные потери на аноде (коллекторе) малы. Малость потерь мощности на электронном приборе в ключевом режиме обусловливает высокий КПД инверторов, который обычно составляет 80—90% и более.
Структурная схема инвертора представлена на рис. 8.2. Ее основнььм элементом является преобразователь П, выполненный на электронных приборах, работающих в ключевом режиме. Преобразователь П преобразует постоянное напряжение в переменное. На его выходе включена нагрузка Н. Управление блоком П осуществляется от схемы управления СУ, которая вырабатывает 212
сигналы, периодически открывающие и закрывающие электронные приборы.
Необходимая регулировка выходного напряжения инвертора осуществляется блоком РВН. Этот блок управляется либо сигналом с пульта управления, либо воздействием, подаваемым от устройства сравнения выходного напряжения УСЭН с некоторым эталонным напряжением. Выходной управляющий сигнал этого устройства будет воздействовать в том случае, если выходное напряжение отлично от номинального. Таким образом, обеспечивается автоматическая стабилизация выходного наряжения инвертора.
Для изменения частоты переменного напряжения необходимо воздействовать на систему управления, изменяя частоту управляющих сигналов. При необходимости стабилизации частоты используется блок У&ЭЧ — устройство сравнения частоты инвертора с частотой эталонного генератора, входящего в состав УСЭЧ.
Инверторы классифицируются по целому ряду признаков. В зависимости от типа применяемого электронного прибора различают ламповые, транзисторные, ти-ратронные и тиристорные инверторы.
По характеру взаимодействия преобразовательного блока и системы управления различают инверторы с внешним возбуждением и самовозбуждением. В инверторах с внешним возбуждением в состав системы управления входит автономный генератор импульсов (или гармонических колебаний), создающий управляющие сигналы. В инверторах с самовозбуждением такой генератор в системе управления отсутствует, а коммутация электронных приборов осуществляется за счет положительной обратной связи, осуществляемой в самом преобразователе П.
Часто инверторы работают параллельно с другими автономными источниками переменного напряжения (АИПрТ на рис. 8.2) на общую сеть переменного тока, питающую обычно несколько нагрузок Н. При этом имеет место взаимодействие между инвертором и другими источниками переменного тока. По характеру этого взаимодействия различают автономные и неавтономные инверторы. Автономный инвертор способен работать и в том случае, если все другие источники отключены от сети. Неавтономный инвертор при отсутствии в сети других автономных источников работать не может. Таким об-
213
В озВействае,управляющее напряжением
Рис. 8.2. Структурная схема инвертора.
П — преобразовательный блок; РВИ — регулятор выходного напряжения; УСЭН — устройство сравнения с- эталонным напряжением; УСЭЧ — устройство сравнения с эталонной частотой; СУ — схема управления; АИПрТ — автономный источник переменного тока; И — нагрузка.
разом, неавтономные инверторы, называемые часто инверторами, ведомыми сетью, увеличивают мощность сети переменного тока.
Инверторы классифицируются также по количеству фаз выходного переменного напряжения (однофазные, трехфазные и т. д.); по форме этого напряжения (с синусоидальной, прямоугольной и другой формой); по типу схемы преобразователя; системе управления; по наличию стабилизации и управления выходным напряжением и частотой, а также по ряду других признаков.
8.3. ТРАНЗИСТОРНЫЕ ИНВЕРТОРЫ
Различают однотактные и двухтактные схемы инверторов. Некоторые варианты простейших однотактных транзисторных инверторов с внешним возбуждением представлены на рис. 8.3. Транзисторы инверторов работают в ключевом режиме. Напряжение управления имеет форму прямоугольных импульсов.
В дросселе L (рис. 8.3,а) во время открытого состояния транзистора запасается энергия, которая отдается в нагрузку при запирании транзистора.
214
Рис. 8.3. Принципиальные схемы однотактных транзисторных инверторов.
а, б —с последовательным включением транзистора; в, г—с параллельным включением транзистора»
На рис. 8.4 представлены временные диаграммы токов и напряжений для схемы на рис. 8.3,а в предположении, что сопротивление участка эмиттер — коллектор транзистора в открытом состоянии пренебрежимо мало. При отрицательной полярности управляющего напряжения транзистор Т открыт и все напряжение источника постоянного тока приложено к нагрузке. При этом ток дросселя iL будет нарастать по линейному закону. После запирания транзистора ток дросселя замкнется через сопротивление нагрузки, создавая отрицательную полуволну напряжения. Этот ток уменьшается по экспоненциальному закону, вызывая уменьшение напряжения на нагрузке. Поскольку постоянная составляющая напряжения на нагрузке равна нулю, площади, ограниченные положительными и отрицательными полупериодами выходного напряжения, должны быть одинаковыми. Отсюда следует, что пиковое значение отрицательной полуволны превышает напряжение источника питания на величину At/: unmax=U0-i-&U.
Ток 1И, отдаваемый источником постоянного напряжения, будет равняться сумме токов нагрузки 1В и индуктивности iL при открытом транзисторе и нулю — при закрытом транзисторе (рис. 8.4).
215
Напряжение на транзисторе будет' ра'внб нулю пр'Й отрицательной полуволне управляющего напряжения. В закрытом состоянии максимальное напряжение коллектор-эмиттер транзистора более чем в 2 раза превышает напряжение источника постоянного тока. На выходе рассмотренной схемы переменное напряжение имеет форму, близкую к прямоугольной. Чем больше индуктивность L, тем ближе форма напряжения к прямоугольной.
Рис. 8.4. Временные диаграммы токов и напряжений однотактного инвертора с последовательным включением транзистора.
Рис. 8.5. Временные диаграммы токов и напряжений однотактного инвертора с параллельным включением транзистора.
Схема на рис. 8.3,6 содержит трансформатор, который повышает или понижает переменное напряжение на нагрузке до требуемого значения.
Недостаток схемы на рис. 8.3,а, б, заключается в неравномерной во времени загрузке источника постоянного тока, т. е. ток, отдаваемый источником, носит импульсный характер. Этот недостаток устранен в схеме на рис. 8.3,в, в Которой источник постоянного тока, транзистор и нагрузка включены параллельно.
Диаграммы токов и напряжений для этой схемы приведены на рис. 8.5. При закрытом транзисторе происходит заряд конденсатора С через дроссель L и сопротив-216
ление нагрузки. Ток ic=ijr,=iH по мере заряда уменьшается. Когда транзистор открыт, конденсатор С разряжается и направление тока через изменяется на противоположное. При этом дроссель L оказывается подключенным параллельно к источнику постоянного напряжения. Поэтому ток через дроссель растет по линейному закону. Как видно из рис. 8.5, ток источника хотя и изменяется во времени, но не имеет импульсного характера.
Рис. 8.6. Принципиальные схемы двухтактных транзисторных инверторов.
а — с дифференциальным трансформатором; б —мостовая; в, г—полумосго-вые; д — полумостовая с общим зажимом источника питания и нагрузки.
Схема на рис. 8.3,г отличается от схемы на рис. 8.3,в наличием трансформатора, который преобразовывает переменное напряжение до заданного значения. В рассмотренных параллельных схемах форма выходного напряжения может изменяться в широких пределах путем вариации величин L и С.
Различные варианты двухтактных схем транзисторных инверторов приведены на рис. 8.6. В схеме на рис. 8.6,а транзисторы Ту и Т2 переключаются последовательно: когда транзистор Ту открыт, Т2 закрыт, и наоборот. Это обеспечивается противофазностью (временным сдвигом) управляющих напряжений прямоугольной фор-
217
мы. При этом постоянное напряжение источника питания попеременно прикладывается то к одной, то к другой половине первичной обмотки трансформатора, создавая на нагрузке переменное напряжение прямоугольной формы.
В схеме на рис. 8.6,6, называемой мостовой, одновременно открыта пара транзисторов: Т\ и Т4 либо Т2 и Т3. При переключении пар транзисторов (например, Ti и Т4 закрываются, а Т2 и Т3 открываются) происходит изменение полярности напряжения на первичной обмотке трансформатора. Следовательно, напряжение на нагрузке будет иметь прямоугольную форму.
Достоинство мостовой схемы заключается в лучшем использовании трансформатора по мощности и меньшем напряжении на закрытом транзисторе.
Схемы на рис. 8.6,в, г называют полумостовыми двухтактными. Как и в мостовой схеме, полярность напряжения на первичной обмотке трансформатора изменяется за счет последовательного переключения транзисторов Л и Т2. Недостаток схемы на рис. 8.6,в заключается в необходимости использования двух одинаковых источников постоянного напряжения (£Д и U2) или вывода средней точки постоянного напряжения при одном источнике. Этот недостаток устраняется введением конденсаторов Ci и С2 в схеме на рис. 8.6,а. При открытом транзисторе Ti конденсатор Cj разряжается, а С2 заряжается. При закрывании транзистора Ti и открывании Т2, наоборот, происходит разряд конденсатора С2 и заряд Сь
Достоинством схемы на рис. 8.6,6 является отсутствие трансформатора и наличие общего зажима у источника питания и нагрузки. В этой схеме при открытом транзисторе Т] происходит заряд конденсатора С. При открывании транзистора Т2 конденсатор разряжается через нагрузку, причем направление нагрузочного тока изменяется на противоположное. За счет периодического перезаряда конденсаторов в схемах на рис. 8.6,а, д напряжение на нагрузке в каждый из полупериодов будет спадать по экспоненциальному закону.
В рассмотренных схемах сигналы, управляющие транзисторами, создаются самостоятельными устройствами — генераторами прямоугольных импульсов, т. е. эти преобразователи являются инверторами с внешним возбуждением.
Инверторы с самовозбуждением, которые также могут быть построены по однотактным и двухтактным cxg-218
Мам, вырабатывают управляющие сйгйалы самостоятельно за счет положительной обратной связи.
Рассмотрим схему двухтактного инвертора с самовозбуждением (рис. 8.7,а). В этом инверторе положительная обратная связь осуществляется с помощью дополнительных обмоток, находящихся на одном сердечнике с коллекторной и нагрузочной обмотками и соединенных с базами транзисторов.
Ян
Тр
б)
Рис. 8.7. Принципиальные схемы двухтактных транзисторных инверторов с самовозбуждением.
а — с насыщающимся силовым трансформатором; б — с насыщающимся дросселем; в— с насыщающимся коммутирующим трансформатором.
работе инвертора (рис.
Принципиальную роль в
8.7,а) играет нелинейный характер кривой намагничивания сердечника силового трансформатора. Не принимая во внимание явление гистерезиса, аппроксимируем характеристику намагничивания материала сердечника кривой, изображенной на рис. 8.8,а. При включении питающего напряжения Ек падение напряжения на резисторе /?1 обеспечивает открывание транзисторов Ту и Т2. Допустим, что первоначально коллекторные токи обоих транзисторов одинаковые. Однако из-за различного рода возмущений один из токов обязательно получит хотя бы малое приращение. Пусть появился избыточный (разностный) ток коллектора транзистора Этот избыточный ток обусловливает появление на кол-
219
Рис. 8.8. Характеристика намагничивания сердечника трансформатора (а) и временные диаграммы токов и напряжений двухтактного инвертора с самовозбуждением (б).
Лекторной и базовой обмотках трансформатора напряжений, полярность которых указана на рис. 8.7,а. Эти напряжения на базах приведут к дальнейшему увеличению тока Iki и уменьшению тока г'кг- В свою очередь, увеличение тока tKi приведет к дальнейшему увеличению напряжения на базовых обмотках и к еще большему увеличению тока i’ki и уменьшению i’k2 и т. д. Таким образом, происходит лавинообразный процесс, в результате которого изменится состояние схемы (транзистор Т% закрывается, a 1\ оказывается в состоянии насыщения). При этом напряжение «кэ1 на коллекторе Т[ уменьшается до инас (рис. 8.8,6). В режиме насыщения напряжение на базе транзистора практически не влияет на ток г'кь что обеспечивает возможность длительного сохранения этого режима.
Дальнейшие процессы в инверторе определяются намагничиванием сердечника трансформатора.
Перепад напряжения Дм на половине коллекторной обмотки
трансформатора, имеющей число витков wK, приведет к изменению индукции В в сердечнике. В соответствии с законом электромагнитной индукции
' (8Л)
где Ф — магнитный поток в сердечнике; Sc — сечение сердечника; kc — коэффициент заполнения сердечника сталью.
Согласно (8.1) индукция изменяется по линейному закону и рабочая точка на характеристике намагничивания (рис. 8.8,а) будет перемещаться, например, вверх. Пока рабочая точка находится на линейном участке ха-220
рактеристики намагничивания, напряженность поля Н и ток намагничивания трансформатора i растут по линейному закону. Ток коллектора открытого транзистора Ti равен:
Щ. ^Н + "4“ 7.
К1 н 1 Б1 1
где Г н и ГБ1 — токи нагрузки и базы, приведенные к коллекторной обмотке.
Вначале из-за малости «„ его изменения почти не влияют на изменения тока г’К1. В окрестности точки / (рис. 8.8, а) сердечник насыщается, что приводит к резкому возрастанию тока г . Это, в свою очередь, вызывает значительный рост тока гК1, транзистор выходит из насыщения и напряжение иКЭ| увеличивается. Возрастание иКЭ1 приводит к появлению на базовой обмотке транзистора Т2 напряжения полярности, которая противоположна указанной на рис. 8.7,а. Это в конечном итоге приводит к открыванию транзистора Т2 и увеличению тока i’k2- Увеличение тока 1’кг вызывает дальнейший рост «КЭ1 и появление в цепи базы транзистора 1\ напряжения запирающей полярности. Вновь возникает лавинообразный процесс, который изменяет состояние схемы: транзистор Ti закрывается, а Т2 оказывается в состоянии насыщения.
Рассмотренные процессы в инверторе периодически повторяются. При этом транзисторы работают в ключевом режиме, а выходное напряжение имеет форму, близкую к прямоугольной. Конденсатор С обеспечивает увеличение токов баз транзисторов в момент включения схемы и при переключении транзисторов. Это повышает надежность самовозбуждения.
Частоту f выходного напряжения можно найти из (8.1), определив время изменения индукции в сердечнике от —Втах до +ВИ1«х (рис. 8.8,а). Это время равно половине периода Т выходного напряжения (рис. 8.8,6). Интегрируя (8.1), получаем:
w^kcSc § dB = w^cSc 2Bmax = J Дц dt = 0,5ТДи. ~~Bmax tl
221
Отсюда
.__ 1 __ Ди ________ — цнас
7 ^W^rkoS^Bniax ^^^с.^с.^тах
В последнем выражении учтено, что Е&= «нас4-0,5Аи (рис. 8.8,6).
Рассмотренная схема называется схемой с насыщающимся силовым трансформатором. В целях получения относительно стабильной частоты сердечник силового трансформатора должен быть выполнен из материала с прямоугольной петлей гистерезиса.
Недостатком схемы на рис. 8.7,а является всплеск, коллекторного тока одного из транзисторов во время переключения и увеличение потерь за счет насыщения, сердечника. Для устранения этих недостатков используются схемы с коммутирующими дросселем (рис. 8.7,6); или трансформатором (рис. 8.7,е). В этих схемах силовой трансформатор Тр не насыщается, и его сердечники рабочая индукция выбираются из соображений оптимизации самого трансформатора.
В схеме на рис. 8.7,6 пе-обусловлено насыщением не
сердечника трансформатора, а коммутирующего дросселя Др, который выполняется на сердечнике с прямоугольной петлей гистерезиса. В схеме на рис. 8.7,в применен специальный маломощный насыщающийся коммутирующий трансформатор Тр2. Его сердечник выполнен из материала с прямоугольной петлей гистерезиса. Работают схемы на рис. 8'.7,б, в аналогично схеме на рис ’8.7,6!.
В режиме с самовозбуждением могут работать мостовые и полумостовые инверторы. В качестве примера на рис. 8.9 приведена схема мостового инвертора с самовозбуждением и с насыщающимся силовым трансформатором. Очередность работы транзисторов обеспечивается определенным подключением концов обмоток обратной связи в цепи баз транзисторов. Как и в обычной двухтактной схеме, в мостовом инверторе можно исполь-222
т.
К,
транзисторного
самовозбужде-
Рис. 8.9. Принципиальная схема мостового инвертора с нием.
транзисторов
зовать ненасыщающийся силовой трансформатор, возложив функцию коммутации на специальный насыщающийся дроссель или дополнительный трансформатор.
8.4. ТИРИСТОРНЫЕ ИНВЕРТОРЫ
В качестве управляемых электронных элементов в схемах инверторов широко применяются управляемые вентили: тиристоры и тиратроны. Эти приборы имеют ряд важных особенностей по сравнению с транзисторами, которые существенно сказываются на принципах работы схем инверторов.
Рис. 8.10. Принципиальная схема параллельного тиристорного инвертора.
Рис. 8.11. Временные диаграммы токов и напряжений параллельного тиристорного инвертора.
Тиристоры и тиратроны открываются при подаче в цепь управляющего электрода тока или напряжения. Однако у открытого прибора управляющие электроды теряют свои управляющие свойства, так что закрывание тиристора или тиратрона практически может быть достигнуто лишь снижением анодного напряжения до нуля или подачей отрицательного напряжения на анод.
Рассмотрим принцип действия широко распространенной схемы тиристорного инвертора, представленной
223
на рис. 8.10. Тиристоры Д\ и Д2 последовательно открываются положительными импульсами тока, создаваемыми схемой управления. Важную роль в работе схемы играет коммутирующий конденсатор Ск, который при открывании одного из тиристоров обеспечивает закрывание другого путем создания на его аноде напряжения отрицательной полярности. Дроссель L обеспечивает непрерывность тока источника питания при коммутации тиристора. При больших индуктивностях дросселя можно считать ток iL практически постояцным.
Допустим, что в момент времени (рис. 8.11) тиристор Д1 открывается подачей на его управляющий электрод положительного импульса тока. Анодный ток открытого тиристора Д1, протекая через левую половину первичной обмотки трансформатора Тр, индуктирует на правой половине обмотки ЭДС (полярность указана на рис. 8.10). Конденсатор Ск перезаряжается, причем ток ic будет уменьшаться (рис. 8.11). Напряжение tzai на открытом тиристоре Д\ мало, а его ток iai—Д при достаточно большой индуктивности дросселя L остается практически постоянным.
В момент времени /2 на управляющий электрод тиристора Д2 подается открывающий импульс тока. В этот момент времени напряжение на коммутирующем конденсаторе Ск имеет полярность, указанную на рис. 8.10. Это напряжение оказывается приложенным через малое внутреннее сопротивление открытого тиристора Д2 к тиристору Д{. Тиристор Д1 оказывается под обратным напряжением, в результате чего он закрывается. При этом ток коммутирующего конденсатора изменяет свое направление и конденсатор вновь начинает перезаряжаться. К моменту времени, когда вновь будет происходить коммутация тиристоров, полярность напряжения на конденсаторе будет противоположна указанной на рис. 8.10.
Таким образом, процесс коммутации тиристоров периодически повторяется и на нагрузке действует переменное напряжение, форма которого отличается от синусоидальной и прямоугольной.
Необходимо отметить, что после закрывания тиристора Д\ (в момент f2) напряжение на его аноде сохраняет отрицательное значение в течение времени (рис. 8.11). Обязательным условием нормальной работы инвертора является ?5>6)ыкл, где /Выкл — время выключения тиристора, 224
Если последнее неравенство не выполняется, то в момент времени /2+ тиристор Д1 вновь откроется, что приведет к короткому замыканию источника постоянного напряжения.
Рассмотренную схему называют параллельным инвертором, так как в ней коммутирующий конденсатор Ск подключен параллельно нагрузке (через трансформатор Тр).
ДругИхМ примером параллельного инвертора является мостовая схема, изображенная на рис. 8.12. В этой схеме (как и в мостовой схеме транзисторного инвертора) тиристоры работают попарно.
В один из полупериодов, когда тиристоры Д2 и Д3 открыты, коммутирующий конденсатор Ск заряжается их анодным током. В начале следующего полупериода ти-
Рис. 8.12. Принципиальная схема мостового параллельного тиристорного инвертора.
Га/
Рис. 8.13. Принципиальные схемы последовательных тиристорных инверторов.
а — однотактная; б — двухтактная.
Рис. 8.14. Временные диаграммы токов и напряжений последовательного тиристорного инвертора.
15—1056
225
ристоры Д1 и Д4 одновременно открываются и напряжение коммутирующего конденсатора (полярность указана на рис. 8.12) оказывается приложенным через малые сопротивления открытых тиристоров Д'] и Д4 к анодам тиристоров Д2 и Д3. В результате этого тиристоры Д2 и Д$ закрываются и конденсатор Ск перезаряжается током тиристоров Дх и Д4. К концу полупериода полярность напряжения на конденсаторе Ск изменяется на противоположную.
Достоинством мостовой схемы является простота конструкции трансформатора (нет средней точки в первичной обмотке) и лучшее по сравнению со схемой на рис. 8.10 использование трансформатора по мощности.
Принципиально в схеме на рис. 8.12 трансформатор может отсутствовать. Нагрузка в этом -случае подключается непосредственно к коммутирующему .конденсатору Ск.
В схемах последовательных инверторов конденсатор Ск и нагрузка включены последовательно.
В однотактной схеме последовательного инвертора (рис. 8.13,а) имеется коммутирующий дроссель Др с выводом средней точки.
Поскольку обе половины обмотки дросселя намотаны на одном сердечнике, дроссель может рассматриваться как автотрансформатор, для которого справедливо соотношение: Иц—«1,2-
Рассмотрим работу схемы на рис. 8.13,а. Временные диаграммы напряжений и токов приведены на рис. 8.14. В момент времени С на управляющий электрод тиристора Д1 подается импульс тока. Тиристор Д\ открывается, и его ток протекает через нагрузку Rw, заряжая конденсатор Ск- Процесс заряда описывается следующим уравнением:
Решение этого уравнения имеет вид:
i ai = _£z^£Le-“'sinu)of, (8.2)
где E — напряжение источника постоянного тока; иС\ — напряжение на конденсаторе в момент открывания ти» ристора Дг, а—Д,/2Д — aS
226
В последовательном инверторе используется колебательный режим заряда конденсатора Ск, для которого д=г>а2. Ток заряда в этом (режиме согласно (8.2) изменяется по закону затухающей синусоиды с периодом 7’=2л/соо.
Напряжение на конденсаторе иС\ в момент открывания тиристора Д1 обусловлено процессами, происходящими при открытом тиристоре Д2. Через половину периода колебательного процесса (в момент f2) ток заряда конденсатора станет равным нулю, а напряжение на конденсаторе достигнет максимального значения ис2. В момент t2 происходит закрывание тиристора. Д1г поскольку ток через него в обратном направлении протекать не может. При этом напряжение на коммутирующем дросселе также достигнет максимального значения.
Полагаем, что в момент t2 появляется импульс на управляющем электроде тиристора Д2, что обеспечивается выбором периода Т коммутирующих импульсов, равного периоду колебательного процесса заряда конденсатора Т=Т0.
После открывания тиристора Д2 конденсатор Ск начинает разряжаться через этот тиристор, нижнюю половину коммутирующего дросселя и нагрузку. Разряд конденсатора также носит колебательный характер и ток разряда определяется из соотношения
"С2 -*t- .
В момент открывания тиристора Д2 напряжение на коммутирующем дросселе скачком изменяет свою полярность (рис. 8.14). Это напряжение через открытый тиристор Д2 обеспечивает надежное закрывание тиристора Дь В процессе разряда конденсатора Ск напряжение на его обкладках изменяет свою полярность и к моменту равно значению иС1. Ток разряда в этот момент времени обращается в нуль. В момент t3 тиристор Д2 закрывается, а приходящий в это время коммутирующий импульс тока открывает тиристор Дь Изменяющееся скачком напряжение на дросселе обеспечивает надежное закрывание тиристора Д2. Далее описанные процессы периодически повторяются.
Как видно из временных диаграмм на рис. 8.14, после закрывания каждого из тиристоров напряжение на их 15* 227
анодах за счет коммутирующего дросселя удерживается отрицательным в течение времени tb, которое должно быть больше времени выключения тиристора (^s£> >^выкл)- В противном случае может произойти одновременное открывание обоих тиристоров, что приведет к короткому замыканию источника питания.
Рассмотренный режим работы последовательного инвертора, называемый граничным, предполагал равенство периода коммутирующих импульсов и периода собственных колебаний цепи заряда и разряда конденсатора. В этом режиме форма выходного напряжения близка к синусоидальной. Возможны два других режима.
Если тиристор Д2 открывается не сразу после закрывания тиристора Дь то между импульсами тока в нагрузке имеется временная пауза (рис. 8.15,а, б). Такой прерывистый режим работы последовательного инвертора называется режимом с естественной коммутацией. Он может быть обеспечен выбором периода коммутирующих импульсов, большего периода собственных колебаний цепи заряда конденсатора Ск:Т>Тй.
Если выполняется неравенство Т<7'о, то тиристор Д2 открывается до того, как закрывается тиристор Д\, и в течение некоторого времени оба тиристора проводят ток. Такой режим называется режимом с вынужденной коммутацией. Форма выходного тока в этом режиме приближается к прямоугольной (рис. 8.15,в). Нормальная работа инвертора в режиме с вынужденной коммутацией возможна только в случае, если напряжение на дросселе в момент коммутации будет больше напряжения источника питания. :
Недостаток рассмотренной
схемы последовательного инвертора заключается в том, что ток источника носит прерывистый
Рис. 8.15. Временные диаграммы токов нагрузки последовательного инвертора, а —в граничном режиме; б —в режиме с естественной коммутацией; в —в режиме с вынужденной коммутацией.
228
характер и энергия источника поступает в цепь нагрузки только в то время, когда открыт тиристор Др Этот недостаток в значительной мере устранен в схеме на рис. 8.13,6, которая называется двухтактной или с разделенным конденсатором. Работа этой схемы аналогична схеме на рис. 8.13,а с той разницей, что при разряде конденсатора С2 при открытом тиристоре Д2 конденсатор Cj будет заряжаться от источника, создавая через нагрузку ток того же направления. Заряд этого конденсатора обеспечивает непрерывность тока, отдаваемого источником.
8.5. ПРЕОБРАЗОВАТЕЛИ ЧАСТОТЫ
Преобразователи частоты с явным звеном постоянного тока строятся в соответствии со структурной схемой, изображенной на рис. 8.1,6. Напряжение сети переменного тока исходной частоты /1 выпрямляется с помощью обычного выпрямителя. Выпрямленное постоянное напряжение питает инвертор (транзисторный или тиристорный), который вырабатывает переменное напряжение требуемой частоты При необходимости выходное напряжение выпрямителя фильтруется и стабилизируется. Для регулирования выходного напряжения преобразователя можно использовать управляемые выпрямители, а для регулирования частоты применяются схемы управления' (коммутации) инвертора с изменяющейся частотой следования коммутирующих импульсов.
Таким образом, преобразователи частоты с явным звеном постоянного тока представляют собой совокупность обычных выпрямителей п инверторов.
В преобразователях частоты со скрытым звеном постоянного тока одни и тс же вентили используются как для выпрямления, так и для инвертирования тока. Рассмотрим некоторые схемы таких преобразова гелей.
На рис. 8.16,а приведена схема однофазного преобразователя, которая представляет собой параллельный инвертор со встречно
Рис. 8.16. Схема однофазного преобразователя частоты со скрытым звеном постоянного тока (я) и временная диаграмма его выходного напряжения (б).
229
параллельным включением тиристоров для обеспечения работЬт Тиристоров как в положительный, так и в отрицательный полупериод питающего напряжения Uj. Как и в обычном параллельном инверторе, здесь открывание тиристоров происходит за счет подачи на их управляющие электроды импульсов тока, а закрывание тиристоров обеспечивается коммутирующим конденсатором Ск. При положительном питающем напряжении работают тиристоры Д2 и Д3, а при отрицательном — тиристоры Д\ и Д4. Частота определяется часто-
Рис. 8.17. Схема трех-фазно-однофазного преобразователя частоты со скрытым звеном постоянного тока (а) и временные диаграммы его напряжений (б).
той следования коммутирующих импульсов, создаваемых специальной схемой управления. Как видно из рис. 8.16,6, выходное напряжение преобразователя промодулировано синусоидальным напряжением с частотой питающей сети fi.
Другим примером преобразователя частоты со скрытым звеном постоянного тока является трехфазно-однофазная схема (рис.8.17,а). Этот преобразователь содержит три параллельных однофазных инвертора, анодные обмотки силовых трансформаторов которых намотаны на общем сердечнике. Преобразователь питается от трехфазной сети переменного тока с нулевым проводом. Каждая пара тиристоров Д1—Д2, Дз—Дь Дз—Дь поочередно работает лишь третью часть периода питающего напряжения с частотой fi, пока напряжение ее фазы больше, чем двух других фаз. При этом выходное напряжение преобразователя с частотой f2 промодулировано огибающей трехфазного напряжения. Можно увеличить число инверторов до шести и, питая шестифазным напряжением, существенно уменьшить пульсации амплитуды выходного напряжения.
230
В рассмотренных схемах преобразователей со скрытым звеном постоянного тока Известны схемы преобразователей с вну-
тренней выпрямляющей цепью, имеющие частоту выходного напряжения ниже частоты питающего напряжения.
8.6. РЕГУЛИРОВАНИЕ И СПОСОБЫ УЛУЧШЕНИЯ КАЧЕСТВА ВЫХОДНОГО НАПРЯЖЕНИЯ ИНВЕРТОРОВ
Во многих практических задачах возникает необходимость регулирования выходного напряжения инвертора. Схемы регулируемых инверторов можно разделить
Рис. 8.18. Структурные схемы регулируемых инверторов.
а — с регулируемым конвертором; б, в— с управляемыми выпрямителями; г — со сложением напряжения нерегулируемого и регулируемого инверторов; РК— регулируемый конвертор; И — нерегулируемый инвертор; УВ— управляемые выпрямители; РИ — регулируемый инвертор.
на два класса: 1) обеспечивающие регулирование без изменения формы выходного напряжения; 2) в которых регулирование действующего значения или амплитуды первой гармоники напряжения осуществляется за счет изменения формы выходного напряжения.
На рис. 8.18 представлены варианты функциональных схем регулируемых инверторов.
Простейшим способом регулирования выходного на- пряжения инвертора является изменение напряжения источника постоянного тока. Если напряжение источника постоянного тока не может изменяться, то между источником и инвертором включают регулируемый преобразователь постоянного тока РК (конвертор). Функциональная схема регулируемого инвертора изображена на рис. 8.18,а.
Й31
В схеме на рис. 8.18,5 содержится управляемый выпрямитель УВ, на вход которого подается переменное напряжение инвертора, снимаемое с дополнительной обмотки силового трансформатора. Выходное напряжение управляемого выпрямителя складывается с напряжением основного источника питания и подается па вход инвертора.. При минимальном выходном напряжении управляемого выпрямителя общее напряжение питания инвертора также будет минимальным. Следовательно, минимальное выходное напряжение инвертора будет соответствовать нижнему пределу регулирования управляемого выпрямителя. При максимальном выходном напряжении управляемого выпрямителя выходное напряжение инвертора также будет максимальным. Таким образом, в схеме на рис. 8.18,6 часть выходной мощности инвертора через управляемый выпрямитель возвращается в цепь источника питания инвертора.
Другая схема регулируемого инвертора с возвратом мощности в цепь питания представлена на рис. 8.18.в. Здесь первичная обмотка трансформатора питания Try управляемого выпрямителя включена последовательно с нагрузкой инвертора. При состоянии управляемого выпрямителя, соответствующем нижнему пределу регулирования. мощность, возвращаемая в цепь источника питания, будет минимальной. В этом случае переменный ток, протекающий через первичную обмотку трансформатора, а следовательно, ток и напряжение на нагрузке инвертора будут минимальными. Верхний предел регулирования управляемого выпрямителя соответствует максимальному напряжению на нагрузке инвертора.
В схеме на рис. 8.18.а регулирование напряжения на нагрузке инвертора осуществляется за счет дополнительного регулируемого инвертора РИ, который обеспечивает добавочный ввод энергии в цепь нагрузки. Дополнительный инвертор РИ может быть осуществлен, например, по схеме на рис. 8.18,я.
В схеме на рис. 8.18,я—я осуществляется так называемое амплитудное регулирование с сохранением неизменной формы выходного напряжения. В схеме на рис. 8.18,а регулиоование может быть как амплитудным, так и фазовым. Если дополнительный инвертор имеет точно такую же форму выходного напряжения, как и основной инвертор, и если эти напряжения синхронны (пе сдвинуты во времени), то регулирование будет амплитудным, 232
i‘. e. напряжение на нагрузке инвертора будет регулирб2 ваться за счет изменения уровня напряжения дополнительного инвертора.
В схеме на рис. 8.18,г можно изменять напряжение на нагрузке также за счет изменения сдвига фаз Дер между напряжением дополнительного инвертора и напряжением основного инвертора. Такое регулирование называется фазовым. Векторная диаграмма напряжений при синусоидальных выходных напряжениях обоих инверторов для этого случая показана на рис. 8.19.
Рис. 8.19. Векторная диаграмма напряжений инвертора при фазовом регулировании.
Если форма выходных напряжений инверторов И и РИ отлична от синусоидальной, то фазовое регулирование напряжения на нагрузке будет сопровождаться изменением формы этого напряжения.
Рис: 8.20. Принципиальная схема регулируемого инвертора с управляемым выпрямителем.
В качестве примера на рис. 8.20 приведена принципиальная схема регулируемого инвертора с возвратом мощности в цепь питания (рис. 8.18,5). Инвертор собран по двухтактной схеме на транзисторах и Т2. Управляемый выпрямитель У В выполнен по двухполупериод-
233
граммы токов и напряжений регулируемого инвертора с управляемым выпрямителем.
ной схеме на диодах Д1 и Дг и содержит регулирующий транзистор Т3. Последний может работать либо в непрерывном, либо в импульсном (ключевом) режиме.
Рассмотрим работу схемы на рис. 8.20 в установившемся режиме. Регулирующий транзистор Т3 работает в ключевом режиме. Полагаем, что в открытом состоянии диод Дз и транзистор Т3 имеют нулевое сопротивление. Временнйе диаграммы напряжений и токов изображены на рис. 8.21.
На базу транзистора Т3 подаются импульсы (рис. 8.21,6) с периодом Тув, открываю-
щпе этот транзистор на время Гу, которое может изменяться. Частота работы регулирующего транзистора обычно меньше рабочей частоты инвертора.
Индуктивность дросселя L выбирается обычно большой, так что ток через дроссель можно считать постоянным (рис. 8.21,а). На интервале времени Гу, когда регулирующий транзистор Г3 открыт, управляемый выпрямитель УВ преобразует переменное напряжение инвертора, снимаемое с добавочной обмотки трансформатора питания Гр, в постоянное напряжение. Это напряжение оказывается приложенным к диоду Д3 (полярность показана на рис. 8.20). Следовательно, диод Д3 на интервале времени Гу закрыт и ток дросселя iL замыкается через цепь
управляемого выпрямителя (ib=jyB). При закрытом
транзисторе Г3 ток 1ув =0 и ток дросселя замыкается через диод Д3 (1ь=1д на рис. 8.21,а, в). При этом напряжение Ид на диоде Д3 равно нулю (рис. 8.21,г).
Результирующее напряжение на диоде Д3 (рис. 8.21,г) имеет постоянную составляющую Г7д0, которая вместе с напряжением источника питания UQ образует напряжение питания инвертора Uc—£Дт^до- Поскольку емкость конденсатора С достаточно велика, перемен-234
ная составляющая напряжения на нем пренебрежимо мала. Таким образом, дроссель L и конденсатор С по существу обеспечивают фильтрацию выходного напряжения управляемого выпрямителя. Изменяя с помощью
Рис. 8.22. Схема мостового инвертора с широтно-импульсным регулированием.
ГПИ — генератор прямоугольных импульсов; ЛЗ — линия задержки.
специальной схемы управления длительность Т7 открытого состояния транзистора Т3, можно изменять постоянную составляющую напряжения на диоде Д3 и, следовательно, напряжение Uc питания инвертора и в конечном итоге переменное напряжение на нагрузке инвертора 7?н.
Рассмотренные структурные схемы регулирования на рис. 8.18 могут использоваться как для транзисторных, так и для тиристорных инверторов.
Находят также широкое применение инверторы с регулированием за счет изменения формы выходного напряжения. Наибольшее распространение получил широтно-импульсный метод регулирования, сущность которого заключается в изменении длительности открытого состояния транзисторов (тиристоров) инвертора при постоянном периоде коммутации.
В двухтактных схемах инверторов при таком способе регулирования выходное напряжение имеет форму разнополярных прямоугольных импульсов с паузой на нуле (см. рис. 8.23,5). При постоянной амплитуде импульсов
235
действующее значение (и первую гармонику) такого напряжения можно регулировать, изменяя длительность импульсов Ту при постоянном периоде коммутации Тк. Изменение Ту осуществляется специальной схемой уп
равления.
Весьма просто решается вопрос о широтно-импульс
ном регулировании для транзисторных инверторов, выполненных по мостовой схеме. Регулируемый мостовой
транзисторный инвертор (рис. 8.22) управляется генератором прямоугольных импульсов ГПИ, имеющих форму, изображенную на рис. 8.23,а.
Генератор ГПИ через трансформатор Тр{ обеспечивает противофазную коммутацию транзисторов Тг и Тг-Импульсы генератора подаются на базы второй пары транзисторов Т-> и Т4 через' линию
Рис. 8.23. Временные диаграммы токов и напряжений инвертора с широтно-импульсным регулированием.
задержки ЛЗ, обеспечивающую сдвиг управляющих импульсов на время Гзад, которое можно регулировать (рис. 8.23). Ток через первичную обмотку нагрузочного трансформатора Тр будет протекать только в том случае, если одновременно открыты транзисторы 1\, Л или Т2, Т3. Нетрудно убедиться, что форма тока через нагрузку будет иметь паузу на нуле длительностью Тзад (рис. 8.23,3). Изменяя Тзад, можно при постоянном периоде коммутации Тк изменять длительность протекания тока через транзисторы и нагрузку (пунктирная линия на рис. 8.23), а следовательно, действующее значение и первую гармонику выходного напряжения инвертора.
Качество инверторов оценивается стабильностью выходного напряжения, стабильностью частоты и показателями, характеризующими форму напряжения.
К инверторам, используемым в комплексе радиосредств, обычно предъявляется требование близости формы напряжения к синусоидаль-
236
ной. Это обусловлено тем, что при больших мощностях и высоких частотах коммутации инверторы создают интенсивные радиопомехи. Если форма выходного напряжения отлична от синусоидальной, то спектр содержит компоненты высших гармоник частоты коммутации транзисторов или тиристоров, которые представляют особую опасность. Для этой цели применяют специальные меры:
1) на выходе инверторов устанавливают фильтры. Обычно применяют LC-фильтры, так как они имеют наименьшие потери;
2) используют широтно-импульсную модуляцию (ШИМ) исходного прямоугольного напряжения;
3) формируют ступенчатую кривую выходного напряжения, близкую к синусоиде.
Отличие периодического напряжения сложной формы от синусоидального удобно оценивать коэффициентом искажений:
K = pr[/’/[72I- 1, где U — действующее значение полного напряжения; /71 — действующее значение первой гармоники напряжения.
Для напряжения прямоугольной формы (рис. 8.24,а) К=0,484. Для напряжения прямоугольной формы в схеме с ШИМ с паузой на нуле (рис. 8.24,6) при Ту/7'к=0,37 достигается минимальный коэффициент искажений.К= —0,27. Следовательно, обеспечив в схеме на рис. 8.22 соответствующее значение Ту, можно существенно снизить содержание гармоник. Однако при использовании широтно-импульсного метода в сочетании с фильтром гармоник целесообразно выбирать 7^=0,33 Тк. Для такого Ту коэффициент искажений /С=0,312. Он незначительно отличается от оптимального, но зато в спектре напряжения полностью отсутствует третья и ослаблены пятая и седьмая гармоники. Четные гармоники для всех напряжений, изображенных на рис. 8.24, равны нулю, поскольку эти напряжения удовлетворяют условию м(^-|-0,57,к)=—u(t). Фильтр для подавления высших гармоник имеет малые значения индуктивностей и емкостей, т. е. малые массу и габариты.
Для подавления третьей и пятой гармоник можно использовать дополнительную коммутацию в течение полупериода выходного напряжения. Так, для формы кривой выходного напряжения, изображенной на рис. 8.24,в, 237
при Ti/TK—0,0656 и Т2/7к=0.0925 коэффициент искажений К=0,865, т. е. превышает коэффициент искажений для обычного напряжения прямоугольной формы (рис. 8.24). Однако третья и пятая гармоники здесь отсутствуют. В этом случае фильтр высших гармоник упрощается.
Особенно эффективно снижаются высшие гармоники, близкие к основной частоте, при модуляции ширины импульсов в пределах периода Тк по синусоидальному или близкому к синусоидальному, закону (рис. 8.24,г). Пре
Рис. 8.24. Временные диаграммы выходных напряжений инвертора с широтно-импульсной модуляцией.
а — напряжение прямоугольной формы; б — то же с паузой на нуле; в — то же с модуляцией ширины импульсов; г — то же с модуляцией ширины импульсов по синусоидальному закону.
образователи, имеющие такую форму выходного напряжения, обеспечивают не только подавление высших гармоник, но и дают возможность регулировать амплитуду выходного напряжения путем пропорционального изменения ширины импульсов.
Недостатком инверторов с дополнительной коммутацией являются сложные схемы управления и повышенные потери за счет высокой скорости коммутации.
Один из возможных способов формирования ступенчатого выходного напряжения инверторов, близкого к синусоидальному, основан на суммировании напряже-238
ний прямоугольной формы различных частот. Общая схема инвертора со ступенчатым напряжением (рис. 8.25,а) содержит в общем случае п инверторов, вырабатывающих напряжения прямоугольной формы частот, кратных основной частоте, которые суммируются с помощью трансформаторов в общей нагрузке. Подбирая определенные амплитуды напряжений отдельных инверторов, можно получить напряжение на нагрузке, близкое по форме синусоидальному. Это иллюстрируется временными диаграммами (рис. 8.25,6) для п=3. Чем боль-
Рис. 8.25. Структурная схема формирования ступенчатого напряжения (а) и временные диаграммы напряжений в этой схеме (б).
ше число инверторов, тем ближе выходное напряжение по форме к синусоидальному. Для дальнейшего улучшения качества выходного напряжения можно использовать фильтры.
Амплитуда (действующее значение) и частота выходного напряжения инвертора могут существенно изменяться во времени за счет нестабильности напряжения источника питания, непостоянства нагрузки, изменения окружающей температуры, вибраций и т. п. Поскольку во многих случаях требования к стабильности напряжения и частоты весьма жесткие, появляется необходимость стабилизации этих параметров инвертора.
Схема простого и широко используемого стабилизированного инвертора представлена на рис. 8.26,а. Здесь стабильность выходного напряжения инвертора обеспечивается за счет стабилизатора Ст постоянного напря
239
жения, включенного в цепь питания инвертора. Однако такая схема может не обеспечивать нужной стабильности, если изменение выходного напряжения обусловлено не нестабильностью питающего напряжения, а какой-то другой причиной, например непостоянством нагрузки.
Более совершенной является схема на рис. 8.26,6, работающая на принципе компенсации. В этой схеме используется регулируемый инвертор по схеме на рис. 8.18,6, управляемый цепью обратной связи ЦОС. Выходное напряжение инвертора сравнивается с некоторым
Рис. 8.26. Структурные схемы стабилизации напряжения инверторов. а — со стабилизатором постоянного напряжения, б — компенсационного типа; Ст — стабилизатор постоянного напряжения; И — инверторы; ЦОС — цепь обратной связи; УСЭН — устройство сравнения с эталонным напряжением; В •— выпрямитель; УВ — управляемый выпрямитель; РО — регулирующий орган; Ян— нагрузка.
эталонным напряжением в устройстве сравнения- УСЭН. Обычно сравнение происходит на уровне постоянных напряжений, для чего выходное напряжение инвертора предварительно преобразуется в постоянное напряжение выпрямителем В. Если эталонное напряжение и напряжение инвертора не одинаковы, то на выходе устройства сравнения появляется сигнал, который подается на регулирующий орган РО управляемого выпрямителя УВ. Это приводит к изменению выходного напряжения инвертора до тех пор, пока выходное напряжение инвертора не сравняется с эталонным.
Если, например, регулируемый инвертор выполнен по схеме на рис. 8.20, то на выходе устройств сравнения УСЭН используется генератор прямоугольных импульсов, длительность которых изменяется в зависимости от разности эталонного напряжения и напряжения инвертора. Таким образом, в Данном случае регулирующим воздействием является длительность импульсов, открывающих регулирующий транзистор Т3 в схеме на рис. 8.20.
240
Стабильность частоты инверторов, применяемых в радиосистемах, является важным качественным показателем даже в том случае, когда с точки зрения задач электропитания допустимо изменение частоты в широких пределах. Дело в том, что инвертор при высокой рабочей частоте даже при синусоидальной форме напряжения создает радиопомехи на основной частоте коммутации. Для борьбы с ними в радиоэлектронных устройствах используются защитные резонансные фильтры. При изменении частоты инвертора происходит расстройка фильтра и его эффективность снижается.
Стабилизация частоты обеспечивается использованием в схемах управления высокостабильных автогенераторов, в частности кварцевых. Используются также компенсационные методы стабилизации частоты. Автогенератор в схемах компенсационных стабилизаторов частоты управляется сигналом, вырабатываемым устройством сравнения частоты инвертора с некоторой эталонной частотой (УСЭЧ на рис. 8.2).
8.7. ПРЕОБРАЗОВАТЕЛИ ПОСТОЯННОГО ТОКА
(КОНВЕРТОРЫ)
Конверторы применяются не только для повышения или понижения постоянного напряжения. С их помощью можно регулировать напряжение, а также реверсировать постоянное напряжение, т. е. изменять его полярность.
Конвертор включает в себя инвертор и выпрямитель с фильтром.
Рассмотрим работу схем однотактпых конверторов, представленных на рис. 8.27.
Рис. 8.27. Принципиальные схемы однотактных транзисторных конверторов. а — с понижением напряжения; б — с повышением напряжения; в — реверсирующая схема.
16—1056
241
Во всех схемах на рис. 6.27 транзисторы работают в клйчёйоМ режиме. В схеме па рис. 8.27,а при открытом транзисторе происходит передача энергии источника питания в нагрузку и одновременно накопление энергии в дросселе L и конденсаторе С. При закрытого транзисторе нагрузка питается за счет энергии, накопленной дросселем и конденсатором. При этом ток дросселя и нагрузки замыкается через диод.
В схеме на рис. 8.27,6 при открытом транзисторе дроссель L накапливает энергию от источника питания, а при закрытом трап-
Рис. 8.28. Временные диаграммы токов и напряжений однотактных конверторов.
зисторе энергия источника питания и дросселя передается в нагрузку и па конденсатор С. Последний отдает частично энергию в нагрузку при открытом транзисторе.
Дроссель L в схеме на рис. 8.27,в накапливает энергию при открытом транзисторе, а при закрытом транзисторе отдает эту энергию в нагрузку и на конденсатор. При открытом транзисторе ток нагрузки обеспечивается за счет конденсатора, который отдает нагрузке часть накопленной энергии.
На рис. 8.28 представлены временные диаграммы токов и напряжения на дросселе для схем на рис. 8.27. При построении диаграмм принято, что L и С достаточно велики. Это позволяет считать токи через дроссель и нагрузку не зависящими от времени. Формы токов и напряжений, изображенных на рис. 8.27, одинаковы для всех трех схем.
Если предположить, что потери в коммутирующем транзисторе, диоде, дросселе и конденсаторе равны нулю, то для всех рассмотренных схем справедливо соотношение
где Uo, /0, — напряжение и постоянная составляющая тока источника электроэнергии; Uv, Is — постоянные напряжение и ток нагрузки. Из последнего соотношения находим коэффициент передачи конвертора:
ип
А.
7„ •
77q/o — 77 п7ц,
Поскольку постоянная составляющая напряжения на дросселе UL равна нулю (рис. 8.28), справедливо следующее соотношение:
ПьиГу = 7/1.р(7’к-7'у), (8.3)
где ULa и Ul-p — соответственно напряжения на дросселе на интервале Ту накопления энергии и на интервале (7’к—Ту) расходования энергии; Ту. и Тк — интервал скрытого состояния транзистора и период коммутации соответственно.
242
Напряжения Urn и ULJ> для каждой из схем на рис. 8,27,а—в равны:
Ulh — U0—Ub, Ulp — Uh — для схемы на рис. 8.27,а;
Ulb—'Uq, Ulp — Ub—Uо — для схемы на рис. 8.27,6;
Ulu — Uo, U^p — U-a — для схемы на рис. 8.27,в.
Подставляя последние соотношения в (8.3), нетрудно получить коэффициенты передачи напряжения для схем на рис. 8.27,а—в:
Ku = q — Для схемы на рис. 8.27,а;
Ktr = l/(1—q) —для схемы на рис. 8.27,6;
Ku—q/(l—q) — для схемы на рис. 8.27,в,
где отношение q=Ty/TK называется скважностью коммутирующих импульсов.
Учитывая, что q<l, приходим к выводу, чго конверторы, выполненные по схеме на рис. 8.27,а, б, понижают напряжение, а конвертор на рис. 8.27,0 может как понижать (при zy<0,5), так и повышать напряжение (при 0,5<<?< 1).
Коэффициент передачи и выходное напряжение можно регулировать, изменяя q, т. е. длительность открытого состояния транзистора Ту при заданном периоде коммутации Тк. Заметим, что схема на рис. 8.27,в изменяет полярность выходного напряжения на противоположную.
Конденсатор С в схемах на рис. 8.27,6, в является необходимым фильтрующим элементом. При его отсутствии и открытом транзисторе ток через нагрузку равнялся бы нулю. Для схемы на рис. 8.27,а конденсатор С не является обязательным, так как необходимую фильтрацию может обеспечить дроссель L при достаточно большой индуктивности.
В схемах на рис. 8.27,а, в входной ток конвертора i имеет импульсный характер. Для обеспечения непрерывности тока, отдаваемого источником, в этих схемах используется конденсатор Со, который заряжается током источника при нулевом токе i. В схеме на рис. 8.27,6 конденсатор Со не является обязательным, так как непрерывность тока источника может быть обеспечена выбором большой индуктивности дросселя L.
Рассмотренные однотактные схемы конверторов могут быть построены и на основе тиристоров. Учитывая, что тиристоры могут закрываться лишь по анодной
цепи, в схему приходится вводить дополнительные цепи коммутации.
В качестве примера на рис. 8.29 представлена тиристорная схема конвертора по схеме на рис. 8.27,а. Тиристор Дз, конденсатор Ск и резистор Лк образуют дополнительную коммутирующую цепь. При открытом основном тиристоре Д\ происходит передача энергии от источника в нагрузку /?п. В дросселе L и конденсаторе С также запасается энергия. Одновременно происходит заряд коммутирующего конденсатора Ск через тиристор Д\ и резистор Дк, в результате чего напряжение па конденсаторе имеет полярность, показанную на рис. 8.29, После открывания вспомогательного тиристора Д2 16* 243
Рис. 8.29. Принципиальная схема однотактного тиристорного инвертора.
напряжение на конденсаторе Ск оказывается приложенным к тиристору Дь Тиристор Д1 закрывается под воздействием обратного напряжения, а конденсатор Ск начинает перезаряжаться. Емкость конденсатора Ск должна быть такой, чтобы к моменту следующего включения тиристора Д\ полярность напряжения на конденсаторе за счет перезаряда изменилась на противоположную. Это обеспечивает закрывание тиристора Д2 после открывания тиристора Д\. Таким образом, интервал открытого состояния тиристора Д\ лежит между импульсами запуска тиристоров Д[ и Д2.
Рис. 8.30. Принципиальная схема двухтактного конвертора.
На рис. 8.30 представлена схема-преобразователя постоянного тока с двухтактным инвертором, мостовым выпрямителем и Г-образ-ным LC-фильтром. В схемах конверторов могут использоваться другие типы выпрямителей (например, двухполупериодные, с умножением напряжения и т. п.) и фильтров.
Особенности работы и проектирования выпрямительных узлов конвертора обусловлены относительно высокой частотой выходного напряжения инверторов и отличием формы этого напряжения от синусоидальной. Повышенная частота иногда приводит к необходимости учета инерционных явлений в диодах, паразитных параметров трансформатора и дросселей, реактивности нагрузки.
Обычно в преобразователях постоянного тока применяются инверторы с прямоугольной формой напряжения. Если требуется регулирование выходного напряжения конвертора, то очень часто используется широтно-импульсный метод регулирования, при котором напряжение прямоугольной формы имеет паузу на нуле (рис. 8.31). Для напряжения прямоугольной формы токи различных цепей выпрямителя могут иметь сложную форму. При этом соотношения между действующими значениями токов и их постоянными составляющими будут отличны от соотношений, полученных выше для синусоидального напряжения сети. Поэтому для расчета выпрямителей необходимо определить форму напряжений и токов в различных цепях и на основе этого найти требуемые расчетные соотношения.
На рис. 8.31 приведены временные диаграммы некоторых токов выпрямительного узла конвертора по схеме рис, 8.30. Диаграммы 244
построены в предположении бесконечно большой индуктивности дросселя L для импульсного напряжения с паузой на нуле. Из диаграмм видно, что ток диодов имеет сложную ступенчатую форму. В нулевой паузе выходного напряжения инвертора постоянный ток дросселя замыкается одновременно через левую и правую группы диодов (Дь Д3 и Д2, Д4), разветвляясь между ними поровну. По найденной форме токов можно найти необходимые расчетные соотношения для выпрямителя в схеме на рис. 8.30.
Большие возможности конверторов обусловливают их широкое применение в устройствах электропитания радиосистем. Наряду с указанными в начале параграфа применениями конверторы широко используются в качестве регулирующих узлов стабилизаторов постоянного и переменного тока, в качестве основ-
Рис. 8.31. Временнйе диаграммы напряжений и токов выпрямителя двухтактного конвертора.
ных элементов других типов источников вторичного электропитания.
8.8. ВЫПРЯМИТЕЛИ С ПРОМЕЖУТОЧНЫМ
ПРЕОБРАЗОВАНИЕМ ЧАСТОТЫ
Габариты и масса выпрямительных устройств зависят главным образом от применения трансформаторов питания и сглаживающих фильтров. Особенно громоздкими оказываются трансформаторы и конденсаторы фильтров для высоковольтных выпрямителей, выходное напряжение которых измеряется сотнями вольт, единицами и десятками киловольт. Как было показано выше, габариты трансформаторов и фильтров уменьшаются с ростом частоты выпрямляемого напряжения. В этой связи и появилась идея выпрямления с промежуточным преобразованием частоты (ВППЧ).
Обобщенная структурная схема ВППЧ (рис. 8.32,а) содержит преобразователь частоты ПЧ, который повышает частоту питающей сети. Напряжение преобразованной частоты с помощью трансформатора Тр повышается до необходимого уровня, затем преобразуется в постоянное напряжение выпрямителем В и «очищается» от пульсаций фильтром Ф. Поскольку трансформатор и фильтр работают на высокой частоте, их габариты и масса уменьшаются обычно в несколько раз.
245
Несмотря на то что в функциональной схеме имеется преобразователь частоты ПЧ, в целом построенное по схеме рис. 8.32,а выпрямительное устройство оказывается по массо-габаритным параметрам существенно лучше обычных выпрямителей, работающих при напряжении и частоте сети переменного тока. Особенно существенным выигрыш оказывается для выпрямителей, работающих с очень высокими напряжениями и малыми токами на-
Рис. 8.32. Структурные схемы выпрямителей с промежуточным преобразованием частоты.
а — обобщенная; б — с преобразователем частоты с явным звеном постоянного тока и выпрямителем с умножением напряжения; ПЧ — преобразователь частоты; Тр — трансформатор; В — выпрямитель; Ф — фильтр; И — инвертор; ПН — нагрузка.
грузки. Характерным примером применения ВППЧ является питание ускоряющего анода электронно-лучевой трубки, для чего обычно требуется напряжение в несколько киловольт при токах нагрузки, составляющих доли миллиампера.
Преобразователь частоты ВППЧ может быть в принципе выполнен либо со скрытым звеном постоянного тока (рис. 8.16, 8.17), либо с явным звеном постоянного тока (см. рис. 8.1,6). Как было показано в § 8.5, преобразователи со скрытым звеном постоянного тока вырабатывают напряжение, модулированное по амплитуде, с частотой, равной или кратной частоте сети переменного тока. Это приводит к тому, что в выходном напряжении выпрямителя будут пульсации с низкой частотой, следовательно, должны быть увеличены габариты фильтра. Поэтому обычно отдают предпочтение преобразователям частоты с явным звеном постоянного тока, т. е. содержащим входной (обычно низковольтный) выпрямитель. 246
В качестве выходного выпрямителя часто используются схемы умножения напряжения, что позволяет уменьшить коэффициент трансформации трансформатора питания и дополнительно уменьшить его габариты. Для примера на рис. 8.32,6 представлена схема ВППЧ, в котором используется выходной выпрямитель с умножением напряжения в 6 раз.
Рис. 8.33. Упрощенная схема питания анода электронно-лучевой трубки (а) и временные диаграммы ее напряжений и токов (б).
Трансформатор ВППЧ часто выполняется на ферритовом сердечнике, а иногда вообще не имеет сердечника и представляет собой пару взаимосвязанных катушек. .
Выпрямители с промежуточным преобразованием частоты нашли широкое применение для питания электронно-лучевых трубок (ЭЛТ) в телевизионных приемниках. Во многих случаях в качестве инвертора используется генератор строчной развертки телевизора, вырабатывающий пилообразный ток для строчных отклоняющих катушек ЭЛТ, т. е. в данном случае не нужно создавать какого-то специального инвертора.
Упрощенная схема ВППЧ для питания ЭЛТ представлена на рис. 8.33,а. Ток базы транзистора гБ, а следовательно, и его коллекторный ток г’к изменяются по пилообразному закону (рис. 8.33,6) с частотой 15625 Гц. Выходное напряжение повышающего автотрансформатора АТ пропорционально .производной от магнитного потока, а следовательно, и коллекторного тока транзистора: u^^di-K_ldt. Поскольку крутизна спада пилообразного напряжения велика, напряжение имеет форму коротких импульсов большой амплитуды (рис. 8.33,6). Это напряжение выпрямляется простейшим выпрямителем.
24/
Поскольку частота пилообразного напряжения высо кая, автотрансформатор и конденсатор выпрямителя имеют обычно малые габариты даже при напряжениях в несколько киловольт. Вместо, автотрансформатора можно использовать трансформатор и схемы выпрямителей с умножением напряжения.
Глава девятая
СТАБИЛИЗАТОРЫ НАПРЯЖЕНИЯ И ТОКА
9.1. НАЗНАЧЕНИЕ И КЛАССИФИКАЦИЯ СТАБИЛИЗАТОРОВ НАПРЯЖЕНИЯ И ТОКА
Нормальная работа большинства радиоустройств невозможна без обеспечения постоянства напряжения питания с определенной степенью точности. Например, радиовещательные и связные радиостанции допускают нестабильность питающего напряжения не хуже 2—3%. Напряжение питания клистронных генераторов должно поддерживаться с точностью 0,1%. Чем чувствительнее прибор, чем точнее измерительное устройство, тем выше должна быть стабильность источников питания. Так, для электронного микроскопа нестабильность питающих напряжений не должна превышать 0,005%, усилители постоянного тока и некоторые измерительные приборы высокого класса точности допускают нестабильность напряжений не более 0,0001%. Низкой стабильностью (ГОСТ 19157-73) считают такую, при которой пределы изменения питающего напряжения (или тока) составляют более 5%, средней соответственно 1—5%, высокой 0,1—1 % и прецизионной — менее 0,1 %.
Напряжение сети или ток нагрузки могут изменяться не только медленно (в течение нескольких часов), но и очень быстро (скачком). Поэтому устройство, поддерживающее питающее напряжение в заданных пределах, должно действовать непрерывно и автоматически. В качестве таких устройств применяются стабилизаторы напряжения.
Дестабилизирующими факторами могут быть: изменения окружающей температуры, влажности, частоты тока питающей сети и др. Однако основными причинами нестабильности являются колебания входного напряжения и изменения тока нагрузки.
В зависимости от рода тока сети, в которой включено устройство, обеспечивающее постоянство напряжения 248
или тока, эти устройства подразделяются на стабилизаторы постоянных и стабилизаторы переменных напряжений и токов.
Стабилизаторы- подразделяются на параметрические и компенсационные. В качестве параметрических стабилизаторов используются нелинейные элементы. Такие стабилизаторы применяются в качестве эталонных источников и для питания устройств с малыми токами потребления. Их основные недостатки — невозможность плавной регулировки выходного напряжения, малый КПД, большое внутреннее сопротивление и малая выходная мощность, зависимость выходного напряжения от температуры окружающей среды и частоты тока питающей сети.
Компенсационные стабилизаторы напряжения и тока представляют собой замкнутую систему автоматического регулирования с отрицательной обратной связью. В современной радиотехнической аппаратуре наиболее широкое применение получили стабилизаторы постоянных напряжений (ламповые и полупроводниковые), которые подразделяются: по способу включения регулирующего элемента относительно нагрузки на последова-вательные и параллельные и по режиму работы регулирующего элемента на линейные и импульсные (ключевые).
Применение того или иного типа компенсационного стабилизатора в значительной степени определяется его нагрузкой и требованиями, предъявляемыми к стабильности питающего напряжения.
Основными характеристиками стабилизаторов напряжения являются следующие:
1) коэффициент стабилизации по входному напряжению
1Z __ ^Ццх/UbK___^вых
Л'Т— ДСУПЬ1ХД1ЫХ ДЦ.ЫХ (7ВХ >
где At/Bx и А^вых — соответственно приращения входного и выходного напряжений стабилизатора при неизменном токе нагрузки (7n=const); [/вх и Unix — номинальные значения входного и выходного напряжений стабилизатора.
Вместо КгТ может быть задана статическая ошибка стабилизации по сети би=ДС/Вых/^Вых при /н=const и изменяющемся напряжении питающей сети;
249
2) внутреннее сопротивление Ri стабилизатора (стабильность по нагрузке), равное отношению приращения выходного напряжения стабилизатора Д(7ВЬ1Х к приращению тока нагрузки Д/н (с обратным знаком) при неизменном входном напряжении (t/BX==const), т. е. Ri— =Д Двых/ДАх-
Вместо внутреннего сопротивления Ri может быть задана статическая ошибка стабилизатора по нагрузке б(—Д^вых/^вых при Двх—const и изменяющемся токе нагрузки;
3) если инерционность стабилизатора не проявляется на частоте пульсации входного напряжения, то стабилизатор будет являться сглаживающим фильтром. Коэффициент сглаживания пульсации К~— (^~ВХ/А~ВЫХ) (£/Вых/^вх)> где U~BX и П~вых — амплитуды пульсации напряжений на входе и выходе стабилизатора.
Иногда вместо может быть задано относительное значение допустимой амплитуды пульсации выходного напряжения 8_ = Д^ВЫХ/ПВЬ1Х;
4) температурный коэффициент стабилизации, равный отношению приращения выходного напряжения Д^вых к приращению температуры окружающей среды ДАокр (у—Д^вых/ДАокр) при неизменных входном напряжении и токе нагрузки (t/BX=const и /H=const).
Помимо параметров, характеризующих качество стабилизации, стабилизаторы оцениваются по энергетическим (КПД) и массо-габаритным показателям.
9.2. ПАРАМЕТРИЧЕСКИЕ СТАБИЛИЗАТОРЫ
ПОСТОЯННОГО НАПРЯЖЕНИЯ
В качестве параметрических стгбилизаторов постоянных напряжений используются нелинейные сопротивления, в которых ток является нелинейной функцией напряжения, т. е. динамическое сопротивление Ад не равно статическому Rc. К таким нелинейным сопротивлениям относятся газовые и кремниевые стабилизаторы, бареттеры и др.
Кремниевый стабилитрон — это плоскостной диод, изготовленный по особой технологии и включаемый в обратном (непроводящем) направлении, 250
ВоЛьт-амперная характеристика кремниевого стабилитрона (рис. 9.1,а) имеет обратную ветвь с протяженным участком а—б, на котором относительно большим приращениям тока соответствуют малые приращения напряжения. Обычно рабочий участок (обратная ветвь) вольт-амперной характеристики кремниевого стабилитрона изображают при ином расположении координатных осей (рис. 9.1,6).
6)
Рис. 9.1. Вольт-амперная характеристика и условное’ обозначение кремниевого стабилитрона (а); (б)—та же характеристика в других координатах.
Динамическое сопротивление кремниевых стабилитронов мало и составляет от единиц до несколько десятков ом. Стабилизирующее свойство их основано на том, что падение напряжения на р-п переходе мало зависит от тока на рабочем участке вольт-амперной характеристики. Если ток стабилитрона окажется больше максимально допустимого тока для него, то мощность, рассеиваемая в стабилитроне, превысит предельную, температура р-п перехода станет выше допустимой и произойдет необратимый тепловой пробой, разрушающий р-п переход.
Схема включения кремниевого стабилитрона приведена на рис. 9.2,а. Резистор Rr (балластный), включенный последовательно с цепью источника постоянного напряжения, ограничивает ток стабилитрона. Точность поддержания напряжения на выходе стабилизаторов тем выше, чем меньше изменение тока через стабилитрон. Изменение напряжения на входе стабилизатора вызывает изменение тока в стабилитроне и в балластном сопротивлении, падение напряжения на котором изменяется и обеспечивает постоянство выходного напряже-
251
Рис. 9.2. Схемы параметрических стабилизаторов напряжения с кремниевыми стабилитронами. а — однокаскадная; б — двухкаскадная.
ния с определенной сте-пенью точности. Для получения более высокого выходного напряжения стабилитроны соединяют последовательно. Параллельное включение стабилитронов не имеет смысла, так как их напряжение стабилизации не может быть строго одинаковым.
Расчет параметрических стабилизаторов напряжения сводится к определению номинального значения входного напряжения £7Вх и балластного сопротивления Дг, при которых обеспечивается требуемая стабильность.
Стабилизаторы на стабилитронах не обеспечивают высокой стабильности выходного напряжения и коэффициент стабилизации их не превышает нескольких десятков. Максимальный коэффициент стабилизации равен:
Д' _________ Д|ЫХ (1 а
max (г { I \ Р \* и max н ^ctJ '\д
(9.1)
где Пвых — номинальное выходное напряжение; а — относительное изменение входного напряжения в сторону уменьшения; — относительное значение амплитуды пульсации входного напряжения; /итЯх —максимальный ток нагрузки; /от — наименьший ток стабилитрона, который должен быть выбран большим его минимального тока; 7?д— динамическое сопротивление стабилитрона.
Для увеличения коэффициента стабилизации используют каскадное (последовательное) соединение стабилизаторов (рис. 9.2,6), при котором коэффициент стабилизации равен произведению коэффициентов стабилизации первой и второй ступеней стабилизатора. Недостатком такого стабилизатора является значительное увеличение входного напряжения и низкий КПД.
Высокой стабильности выходного напряжения при незначительном увеличении напряжения на входе можно достигнуть применением вместо балластного резистора токостабилизирующего двухполюсника (рис. 9.3,а, б). При изменении напряжения входа изменяется падение напряжения на транзисторе Т, компенсируя изменения напряжения на входе и обеспечивая постоянство выход-252
ного напряжения с высокой степенью точности. Если, например, на входе напряжение повысится, то в результате увеличения тока в цепи увеличится падение напряжения на балластном резисторе и на входе транзистора эмиттер — база напряжение уменьшится, что вызовет увеличение сопротивления транзистора и падение напряжения на нем.
Рис. 9.3. Схемы параметрических стабилизаторов напряжения с токостабилизирующим двухполюсником в качестве балластного сопротивления с транзисторами типа р-п-р (а) и п-р-п (б).
В стабилизаторах на кремниевых стабилитронах выходное напряжение в значительной мере зависит от температуры окружающей среды и при ее изменении необходимо вводить термокомпенсацию. В качестве термокомпенсирующих элементов можно использовать диоды или стабилитроны, включенные в прямом направлении последовательно с основным стабилитроном. Однако
при такой термокомпенсации динамическое сопротивление
значительно увеличивается цепи стабилитрона.
Рис. 9.4. Схемы параметрического стабилизатора переменных напряжений на двух стабилитронах («) и на одном (б) стабилитроне.
Кремниевые стабилитроны могут быть использованы для стабилизации переменных напряжений (рис. 9.4,а). В этом случае включаются два стабилитрона так,, что при полуволне входного переменного напряжения одной полярности стабилизирующее действие обеспечивалось бы одним стабилитроном, а при полуволне другой полярности— другим. Такой стабилизатор сильно искажает форму кривой переменного напряжения и кривая вы-
253
ЯбдйоГо йапряжения близка к прямоугольной. Кроме того, за счет различия параметров стабилитронов прямоугольные импульсы выходного напряжения различной полярности будут иметь различные амплитуды, вследствие чего в кривой выходного напряжения появится постоянная составляющая. Этот недостаток устраняет схема с одним стабилитроном, включаемым через выпрямительный мост (рис. 9.4,6). При одной полярности входного напряжения стабилитрон включен через диоды Д1 и Д4, а при другой полярности — через диоды Д2 иДз.
9.3. ЭЛЕКТРОННЫЕ СТАБИЛИЗАТОРЫ НАПРЯЖЕНИЯ
НЕПРЕРЫВНОГО ДЕЙСТВИЯ
Электронные стабилизаторы, в которых в качестве регулирующего элемента используется электронная лампа или транзистор, являются стабилизаторами компенсационного типа.
В зависимости от регулирующего элемента стабилизаторы компенсационного типа подразделяются на непрерывные (линейные), импульсные (ключевые) и непрерывно-импульсные (гибридные). Компенсационные стабилизаторы с замкнутой цепью воздействий (с отрицательной обратной связью) обеспечивают постоянство выходного напряжения с высокой степенью точности при изменении напряжения сети и тока нагрузки, а также и при иных возмущениях извне (изменении частоты тока питающей сети, характера нагрузки, состояния внешней среды — температуры, влажности и т. п.).
Компенсационные стабилизаторы напряжения могут быть выполнены как с последовательным, так и с параллельным включением регулирующего элемента относительно нагрузки. Структурные схемы стабилизаторов непрерывного действия показаны на рис. 9.5,а, б. На этих схемах введены следующие обозначения: i— выпрямитель, преобразующий переменное напряжение питающей сети Uc в постоянное; 2— регулирующий элемент (электронная лампа), который автоматически изменяет свои параметры, обеспечивая постоянство выходного напряжения £7Вых; 3 — управляющий элемент, который измеряет отклонение выходного напряжения от заданного, усиливает это отклонение и передает его на регулирующий элемент; 4 — нагрузка; 5 — балластное или гасящее сопротивление; 6 — источник опорного (эталонного) напряжения, с которым сравнивается выходное.
254
В схеме с последовательным включением регулирующего элемента компенсация осуществляется за счет изменения падения напряжения на самом регулирующем элементе. В схеме с параллельным включением регулирующего элемента поддержание уровня выходного напряжения осуществляется за счет изменения тока в регулирующем элементе, в результате чего изменяется падение напряжения на балластном сопротивлении 5, включенном последовательно с нагрузкой. Стабилизаторы с последовательным включением регулирующей лампы имеют более высокий КПД, чем с параллельным,
Рис. 9.5. Структурная схема электронного стабилизатора напряжения.
а •— последовательная; б — параллельная.
Электронные стабилизаторы обеспечивают высокую точность стабилизации выходного напряжения; при этом они одинаково хорошо ослабляют как медленные, так и быстрые (пульсации) изменения входного напряжения. Кроме того, электронные стабилизаторы обладают очень малыми статическим и динамическим внутренними сопротивлениями.
Недостатком электронных стабилизаторов является сравнительно низкий КПД, обусловленный потерей энергии на регулирующих лампах; электронные стабилизаторы обычно изготовляют на малые токи. С увеличением тока нагрузки возрастает число регулирующих элементов и, следовательно, понижается эксплуатационная надежность.
Несмотря на ряд недостатков электронных ламп, в некоторых случаях (например, при высоких выходных напряжениях и малых токах нагрузки) выполнение стабилизаторов на электронных лампах целесообразно.
Схемы электронных стабилизаторов напряжения с последовательным включением регулирующей лампы
255
(рис. 9.6) отличаются одна от другой, способом включения анодной нагрузки управляющей лампы Лу. В одной схеме сопротивления R3 включено на выход стабилизатора, в другой —на его вход.
Рис. 9.6. Схемы электронных стабилизаторов напряжения с последовательным включением регулирующей лампы, с включением усилительной лампы на' входе (б) и на выходе (а) стабилизатора.
Регулирующим элементом здесь служит электронная лампа Лр. Резисторы Ri и /?2 образуют выходной сравнивающий делитель. Полное внутреннее сопротивление источника питания электронного стабилизатора обозначено на схеме через 7?в; Пот— эталонное напряжение (в большинстве схем создается стабилитроном).
При изменении входного напряжения автоматически изменяется сопротивление регулирующей лампы и падение напряжения на ней, которое компенсирует изменение напряжения на входе, обеспечивая постоянство выходного напряжения. Например, если повысится напряжение на входе или уменьшится ток нагрузки, то в первый момент увеличится напряжение на выходе. Одновременно увеличится падение напряжения на резисторе 7?1 нижнего плеча сравнивающего делителя. Напряжение на сетке усилительной лампы относительно катода по абсолютной величине равно разности напряжений U,n—URi. При увеличении URl разность t/0T— уменьшается и потенциал сетки относительно катода усилительной лампы станет менее отрицательным, вследствие чего анодный ток лампы увеличится и 'возрастет падение напряжения на анодной нагрузке R3. Напряжение на резисторе R3 будет приложено между сет-256
кой и катодом регулирующей лампы и повышение напряжения UR3 увеличит отрицательное смещение на сетке регулирующей лампы, увеличив ее сопротивление и падение напряжения на ней. Таким образом, напряжение на выходе стабилизатора уменьшится до первоначального значения с определенной степенью точности. При понижении входного напряжения и увеличении тока нагрузки стабилизатора схема работает аналогично описанной выше.
Параметры (/?,• — внутреннее сопротивление, S— крутизна характеристики, ц — статический коэффициент усиления) регулирующей и управляющей ламп будем в дальнейшем различать соответственно индексами «р» и «у».
Составим уравнения, связывающие конечные приращения входных и выходных величин для схемы на рис. 9.6,а при изменении тока нагрузки на А/н. Приращение напряжения на резисторе Ri сравнивающего делителя
. ЛПд1—аАС/Вых, (9-2)
где u=Ri/ (Ri + Rz) —коэффициент передачи сравнивающего делителя.
Приращение напряжения на анодной нагрузке управляющей лампы
Д1/Лз=КуАС7Л1, (9.3)
где Ку— коэффициент усиления управляющей лампы.
Приращение тока регулирующей лампы
д/р==д/н = ^з+5а.Р>' (94)
где А£7а.р — изменение анодного напряжения регулирующей лампы.
Из выражений (9.2) — (9.4) получаем связь между .изменениями тока нагрузки и выходного напряжения в замкнутой системе регулирования напряжения
17—1056
257
Внутреннее сопротивление источника стабильного напряжения или, иначе, стабильность по нагрузке
q А[/вых + Ra
(9-5)
Статическая ошибка регулирования по нагрузке .
- А^ВЫХ Кф+Яв ,Q д.
г ивык ивъ1Х р.р/Суа ’ '
При определении стабильности по нагрузке мы полагали, что характеристика регулирующей лампы во всем диапазоне изменения тока нагрузки линейна и изменение выходного стабильного напряжения очень мало, так что его непосредственным влиянием на анодное напряжение регулирующей лампы можно прнебречь.
Произведя аналогичные вычисления для схемы на рис. 9.6,6, получим следующее выражение для внутреннего сопротивления и ошибки регулирования по нагрузке:
г, _ ^ip + (1 + р.р?) .
1 ~~ ’ ,о ~
о ^‘У
ГАе
Если параллельно соединено п регулирующих ламп, то в выражениях для внутреннего сопротивления стабилизатора вместо Rip надо подставить Rip/п.
Таким образом, стабильность напряжения по нагрузке тем выше, чем меньше Rip, Ra и чем больше р,Р1 /<у и а. Если внутреннее сопротивление выпрямителя RB очень мало, так что для схемы на рис. 9.6,а выполняется условие Rip^Rp, а для схемы на рис. 9.6,6 Rip^
Rb (1 + (Лр₽) > то р ______________________ 1
“ SpKya '
При включении анодной нагрузки управляющей лампы на входе стабильность по нагрузке получается более высокая, чем при включении ее на выходе, так как в этом случае коэффициент усиления будет больше.
258
(9.8)
Уравнения, связывающие входные и выходные величины при изменении напряжения сети, те же, что и при изменении тока нагрузки, т. е. At/а.р=At/BX и
л г л + Д^вх
д/р^0=-----------
Стабильность выходного напряжения при изменении напряжения сети для схемы на рис. 9.6,а у .___________________. Д6ВЬ1Х _ 1
и Д6ВХ р-рКу®
Статическая ошибка регулирования по сети
<> Д^вых ДСВХ °и '— п —п !«•
ивых и вых
(9.9)
Коэффициент стабилизации
V ___ ^вх Свых _ ь,- Свых
Яст = д[7— ТГ' —^уа-гг-аивых ивх J ивх
Здесь, как и в предыдущем случае, мы пренебрегаем изменением анодного напряжения регулирующей лампы, вызванным изменением выходного стабильного напряжения.
Аналогичные выражения для стабильности и ошибки регулирования по сети для схемы на рис. 9.6,6 будут иметь вид:
1 + Щ>?. § _ДСвх у .
Y =------7?—, ии — Г/ 1и>
“ (9.10.
„ ____ Р-рКуа Свьис
Лет— 1+[Ар? 6ВХ •
Эти формулы справедливы при постоянстве напряжения накала управляющей лампы.
Стабильность по сети в схеме на рис. 9.6,а может быть более высокой, чем в схеме на рис. 9.6,6, только при больших значениях цу или цР.
В большинстве практических случаев стабилизировать напряжение накала не удается, вследствие чего стабильность выходного напряжения по сети получается ниже, чем рассчитанная по приведенным выше формулам.
Электронный стабилизатор напряжения уменьшает как переменную составляющую выпрямленного напряжения (пульсацию), так и постоянную составляющую 17* 259
Вкодйбго йап£я>кенйя. Одйако в общек! случае стабильность по сети для конечного изменения входного напряжения уи и для пульсации не одинакова.
Следует иметь в виду, что емкость на выходе электронного стабилизатора практически не оказывает никакого влияния на ослабление пульсации, поэтому при расчете учитывать ее не будем. Это упрощение становится очевидным, если учесть, что внутреннее сопротивление выпрямителя с электронным стабилизатором составляет единицы ом.
На ослабление пульсации существенное влияние оказывает сравнивающий делитель, верхнее плечо которого (резистор R2) заблокировано конденсатором Сг.
Ослабление переменной составляющей (пульсации) на выходе стабилизатора в 1/а раз может быть достигнуто подключением конденсатора С2 соответствующей емкости параллельно резистору R2. При этом емкость конденсатора С2 должна быть такой, чтобы ее сопротивление было меньше хотя бы на порядок сопротивления верхнего плеча делителя для низшей частоты пульсации, т. е.
та>С2 ’ 2 2 [мш7?г у
где пг — число фаз выпрямления; со — угловая частота тока питающей сети.
Следует иметь в виду, что уменьшение емкости конденсатора С2 за счет увеличения сопротивления резистора R2 не рекомендуется, так как при увеличении' R2 увеличивается также и сопротивление резистора Ri, в результате чего увеличивается постоянная времени нижнего плеча сравнивающего делителя ti==/?iC', где С' — межэлектродная емкость сетка — катод управляющей лампы и емкости монтажных проводов, шунтирующие резистор Ri. Увеличение постоянной времени тц уменьшает ослабление пульсации, что вызывает необходимость дополнительного увеличения емкости конденсатора С2.
В качестве регулирующей лампы электронного стабилизатора напряжения могут быть использованы любые триоды, тетроды или пентоды, которые могут допускать требуемый ток нагрузки с учетом потребления тока схемой регулирования. При необходимости получить в нагрузке больший ток, чем допускает одна регу-260
лнрующая лампа, включают несколько ламп парад-* лельно.
Для получения высокой стабильности по сети желательно в качестве регулирующей лампы использовать тетрод.
Анодное напряжение регулирующей лампы в тетрод-ном режиме примерно вдвое меньше, чем в триодном, и соответственно во столько же раз выше КПД самого стабилизатора. Мощность, потребляемая экранной сеткой, не превышает 10% мощности, рассеиваемой анодом.
Регулирующая лампа, поставленная в тетродный режим, работает при токе, примерно в 1,5 раза большем, чем та же лампа в триодном режиме.
Структурные схемы транзисторных стабилизаторов напряжения изображены на рис. 9.5.
Регулирующий транзистор в стабилизаторе используется в качестве регулируемого сопротивления. Он управляется усилителем постоянного тока, который повышает уровень сигнала рассогласования, поступающего от схемы сравнения. Схемой сравнения можно назвать ту часть стабилизатора, в которой происходит сравнение выходного напряжения с опорным. Сигнал со схемы сравнения, усиленный усилителем постоянного тока, воздействует на регулирующий транзистор, изменяя его сопротивление и поддерживая этим постоянство выходного напряжения.
На рис. 9.7 изображены наиболее распространенные схемы стабилизаторов с последовательным включением регулирующего триода. Если, например, выходное напряжение стабилизатора <7ВЫХ по какой-либо причине возрастет (за счет повышения напряжения питающей сети или уменьшения тока нагрузки), то увеличится падение напряжения на резисторе 7?i; это приведет к увеличению напряжения на входе транзистора Ту. Следовательно, ток базы транзистора Ту возрастет, что приведет к увеличению его коллекторного тока. Ток базы регулирующего составного транзистора уменьшится и, следовательно, падение напряжения на нем возрастет, так что напряжение на выходе с определенной степенью точности останется постоянным. При понижении выходного напряжения все изменения в схеме происходят в противоположном направлении.
Схемы стабилизаторов, изображенные на рис. 9.7, отличаются одна от другой лишь схемами сравнения. Схе-
261
му рис. 9.7,а применяют в случаях, когда выходное напряжение t/вых больше опорного Uar, а схему на рис. 9.7,6, когда напряжение t/вых меньше Uar. Необходимо отметить, что- стабилизирующие свойства схемы в значительной степени зависят от стабильности напряжений U2 и U3.
Рис. 9.7. Схемы стабилизаторов напряжения с последовательным включением регулирующего транзистора.
«-при УВЬ11>НЭТ; б -- при <7ВЫХ<ПЭТ.
В схемах стабилизаторов в качестве регулирующего элемента применяется составной транзистор, состоящий из нескольких транзисторов, причем каждый последующий является эмиттерным повторителем, нагрузкой которого служит входное сопротивление предыдущего. Применение составного транзистора обусловлено необходимостью увеличения входного сопротивления регули-2G2
рующего транзистора. При расчете удобно рассматривать составной транзистор как один транзистор с эквивалентными параметрами.
Применение составного транзистора позволяет согласовать мощный регулирующий транзистор с маломощным усилительным транзистором Ту.
Рис. 9.8. Способы соединения регулирующих транзисторов. а — параллельное; б — последовательное.
При больших токах нагрузки регулирующий элемент стабилизатора состоит из нескольких параллельно соединенных транзисторов. Для равномерного распределения нагрузки между параллельно включенными транзисторами в цепи эмиттеров их включают балластные резисторы 7?б (рис. 9.8,а), падение напряжения на которых составляет 0,5—1 В. Выравнивание нагрузки между транзисторами происходит следующим образом. Если в одном из транзисторов (например, Tj) ток оказался больше, чем во втором (УД, то увеличится падение напряжения в балластном резисторе и понизится потенциал эмиттера транзистора Л, увеличивая его сопротивление и уменьшая ток через этот транзистор. При больших напряжениях стабилизаторов регулирующие транзисторы соединяют последовательно и для равномерного распределения напряжения на транзисторах они шунтируются сопротивлениями (рис. 9.8,6).
Если напряжение на одном из транзисторов (например, Л) окажется больше, чем на втором (Т2), то потенциал эмиттера транзистора Т2 понизится, что вызовет увеличение его сопротивления и падение напряжения на нем.
С повышением температуры коллекторного перехода транзистора Т\ (рис. 9.7) возрастает обратный (тепловой) ток коллектора /ко, направленный от базы к коллектору. Ток базы транзистора Tv зависит Ът тока нагрузки и при уменьшении нагрузки суммарный ток базы транзистора Т\ уменьшается и, следовательно, уменьшается ток эмиттера Т2. При некотором значении тока нагрузки ток базы 1\ и ток эмиттера Т2 в сумме станут равными нулю и нормальная работа схемы нарушится.
263
Чтобы обеспечить нормальную работу схемы при максимальной температуре и минимальном токе нагрузки, в схему вводят резистор /?з, ток через который должен быть больше разности наибольшего значения /ко и наименьшего значения /Б транзистора Тг.
В качестве источника опорного напряжения в транзисторных стабилизаторах обычно используются параметрические стабилизаторы на кремниевых стабилитронах Дг. Нестабильность опорного напряжения С/Эт будет вызывать изменения напряжения на выходе. Например, если в схеме на рис. 9.7,а увеличится напряже-. ние (79Т, то потенциал эмиттера транзистора Т7 понизится и ток коллектора его уменьшится. При этом уменьшится падение напряжения в резисторе R? и потенциал базы составного регулирующего транзистора понизится, уменьшая его сопротивление и падение напряжения на нем, так что напряжение на выходе стабилизатора увеличится.
Сравнивающий делитель состоит из резисторов Ri, R2 и переменного резистора Rn, предназначенного для регулировки выходного напряжения. При перемещении движка резистора Rn вверх (по схеме) на базу усилительного транзистора Ту подается более отрицательный потенциал и ток коллектора Т7 увеличивается, вследствие чего увеличивается падение напряжения в коллекторной нагрузке Ry усилителя и потенциал базы составного регулирующего транзистора повышается. При этом увеличивается сопротивление регулирующего транзистора Л и падение напряжения на нем, так что напряжение на выходе стабилизатора уменьшается.
При перемещении движка резистора Rn вниз (по схеме) выходное напряжение стабилизатора увеличивается. Для увеличения коэффициента передачи сравнивающего делителя по переменной составляющей (для уменьшения пульсации) сопротивление его верхнего плеча R2 может быть шунтировано емкостью, как это делается в ламповых стабилизаторах. В схеме на рис. 9.7,6 для низких выходных напряжений делитель находится под напряжением //вых+^/эт. Включение термокомпенсирующих диодов в цепь опорного стабилитрона Д1 нецелесообразно, так как это вызовет значительное увеличение динамического сопротивления цепи стабилитрона и ухудшит стабильность (7Эт. Поэтому обыч-264
но термокомпенсирующие диоды включают в верхнёё. плечо делителя /?2-
Напряжение питания усилителя постоянного тока (УПТ) оказывает значительное влияние на стабильность выходного напряжения. При питании УПТ непосредственно от входного напряжения стабилизатора (рис. 9.9,а) изменения напряжения UBX вызывают значительные изменения тока коллектора усилительного транзистора Ту, что приводит к изменениям выходного напряжения, т.е. ухудшает стабильность. В связи с этим
Рис. 9.9. Схемы питания усилителя постоянного тока.
а —со входа стабилизатора; б —от дополнительного источника; в—со входа стабилизатора через эмиттерный повторитель; г — схема дифференциального усилителя. ...
УПТ обычно питают от дополнительного стабилизированного источника. В качестве такого источника приме’ няют параметрические стабилизаторы на кремниевых стабилитронах (Да на рис. 9.9,6).
Нестабильность напряжениия U2 дополнительного источника будет вызывать изменения напряжения на выходе стабилизатора. Если, например, U2 увеличится, то потенциал базы составного регулирующего транзистора понизится, уменьшив сопротивление транзистора Л и падение напряжения на нем, так что напряжение на выходе увеличится. Поэтому коэффициент стабилизации дополнительного источника должен быть значительно больше коэффициента стабилизации стабилизатора.
265
Если применение дополнительного источника питания УПТ невозможно или нецелесообразно, например при питании стабилизатора от аккумуляторной батареи, может быть использована схема питания УПТ со входа стабилизатора через эмиттерный повторитель (рис. 9.9,в), состоящий из транзистора Тз и резистора Лб и являющийся стабилизатором тока. Так как выходное напряжение эмиттерного повторителя равно напряжению стабилитрона Дз и мало зависит от изменения входного напряжения t/BX, то ток эмиттера Т3, а следовательно, и ток коллектора Тз также мало зависит от изменения входного напряжения стабилизатора.
Таким образом, изменения напряжения на входе стабилизатора практически не вызывают изменения тока коллектора усилительного транзистора Ту и не приводят к изменениям напряжения на выходе стабилизатора.
В стабилизаторах с дифференциальным усилителем (рис. 9.9,г) компенсируется температурный дрейф напряжений база—эмиттер транзисторов Ту и Т'у, для чего транзисторы должны быть одинаковы и токи коллекторов их равны. Применение в качестве опорного источника стабилитронов с малым температурным дрейфом позволяет не вводить в схему элементы термокомпенсации. Кроме того, источник опорного напряжения включен в цепь базы транзистора Т'у, что позволяет уменьшать нестабильность из-за влияния динамического сопротивления опорного источника.
При питании УПТ от дополнительного источника (рис. 9.9) коэффициент стабилизации по напряжению и внутреннее сопротивление стабилизатора определяются из следующих выражений:
Кст:=ИрКуадПОс^;
^ВХ
tfz = l/(SPKya/znap),
(9.П)
где Цр — коэффициент усиления составного- регулирующего транзистора по напряжению (р,р = Д£7КЭ/Д17БЭ при /K=const); Ку — коэффициент усиления УПТ; та— коэффициент передачи сравнивающего делителя [та= =ПЗТ/t/вых для схемы на рис. 9.7,а и а=<7Эт/(1/Эт+ +Пвых) для схемы на рис. 9.7,6]; пПОс и «пар —число последовательно и параллельно соединенных регули-266
рующих транзисторов; крутизна регулирующего транзистора 5Р=Д/К/Д[7БЭ при t/K = const [Sp = Si/(I-L-Ч-З^б), где — крутизна транзистора Л; 7?б — сопротивление балластного резистора в цепи эмиттера при параллельном включении регулирующих транзисторов].
Коэффициент усиления по напряжению цР составного регулирующего транзистора >в зависимости от числа транзисторов, входящих в составной, равен:
(*р = р.1—при одном транзисторе;
р =-Ь.Ь------при двух транзисторах;
И 1*1 Т 1*2
1*11*21*3
1*„ =----i— ,— — при трех транзисторах,
Р 1*11*2 + 1*11*3 + 1*21*3 г 1 ‘
где ць Ц2, Цз— коэффициенты усиления по напряжению первого, второго и третьего транзисторов соответственно.
Коэффициент усиления УПТ Ky=Sy7?K/ (1-Н>у/?д1) для схемы на рис. 9.7,а и Ky=Sy/?K для схемы на рис. 9.7,6, где Sy — крутизна усилительного транзистора Ту, Rm—динамическое сопротивление стабилитрона Дг, RK — коллекторная нагрузка усилительного транзистора Ту, состоящая из параллельного соединения резистора Ry .и входного сопротивления 7?Вх.р составного регулирующего транзистора, т. е..
П __ ЯуЯвх.р
к — /?у+ Яах.р'
В зависимости от числа транзисторов, образующих составной регулирующий транзистор, входное сопротивление равно:
Двх.р=(/?вх1+^б₽ИП1п)’1/Ппар —при ОДНОМ траНЗИ-сторе;
Двх.р == ^?вх2~Ь (^?вхГ Ч~ ДбРьш’п) P2min/Ипар При Двух транзисторах;
Rbx.p == НвхЗ “Ь ДвхгРзпНта + (^?вх1 + -^бР 1ml п) Р21ПЙ1 X ХРзт/п/Нпар —при трех транзисторах, где Rsxi, Rbx2, ₽вхз — входные сопротивления транзисторов, образующих составной регулирующий транзистор; pimin, РгпНп, Рзпнп — минимальные коэффициенты усиления по току этих транзисторов, включенных по схеме С общим эмиттером,
26?
и и
Коэффициент сглаживания пульсации К~ = ~вх -77s равен коэффициенту стабилизации (К~ = КСТ). Если
верхнее плечо сравнивающего делителя шунтировано конденсатором, то коэффициент передачи сравнивающего делителя для переменной составляющей примерно равен единице (а~=1) и коэффициент сглаживания пульсации будет больше коэффициента стабилизации, т. е. К~ — Кст/а.
На рис. 9.10 изображена схема стабилизатора напряжения с параллельным включением регулирующего транзистора. При возрастании выходного напряжения
Пвых увеличивается падение напряжения на резисторе Rlt вследствие чего ток базы и ток коллектора транзистора Т2 также увеличиваются, что приводит к увеличению тока базы, а следовательно, и тока коллектора регулирующего составного транзистора Т\. Это вызывает
Рис. 9.10. Схема стабилизатора на- повышение напряже-пряжения с' параллельным включе- НИЯ на резисторе И нием регулирующего транзистора. выходное напряжение Пвых с определенной степенью точности остается неизменным.
С точки зрения КПД, размеров, количества выделяемого тепла, а также параметров стабилизации целесообразнее применять схему с последовательным включением регулирующего транзистора.
Достоинством стабилизатора с параллельным включением является его лучшая работа на импульсную нагрузку и нечувствительность его к перегрузкам и коротким замыканиям на выходе. При импульсной нагрузке в стабилизаторах с параллельным включением регулирующего транзистора индуктивность фильтра выпрямителя не будет сказываться на работе стабилизатора. Поэтому в стабилизаторах с параллельным включением регулирующего транзистора при импульсной нагрузке возможно применение индуктивного фильтра, 268
В стабилизаторах с последовательным включением регулирующего транзистора при скачкообразном возрастании тока нагрузки в индуктивности фильтра будет иметь место переходный процесс, характеризуемый резким изменением напряжения на входе стабилизатора.
Недостатком линейных стабилизаторов напряжения является сравнительно низкий КПД, так как в регулирующем элементе выделяются значительные потери энергии. Использование регулирующего транзистора в ключевом (импульсном) режиме дает возможность значительно уменьшить потери энергии и повысить КПД стабилизатора.
9.4. ИМПУЛЬСНЫЕ СТАБИЛИЗАТОРЫ ПОСТОЯННЫХ НАПРЯЖЕНИЙ
Отличием ключевых (импульсных) стабилизаторов напряжения от линейных является работа регулирующего транзистора в режиме переключения, характеризующаяся быстрым переходом рабочей точки из области отсечки в область насыщения. При этом мощность, рассеиваемая на регулирующем транзисторе, много меньше, чем при его работе в линейном режиме. Таким образом, работа транзистора в режиме переключения позволяет повысить КПД стабилизатора и уменьшить его габариты.
Ufa
О—
+
О—
О—
3'"
Рис. 9.11. Простейший ключ (а), график напряжения на входе и выходе ключа (в) и структурная схема ключевого стабилизатора (б).
Принцип действия ключевого стабилизатора основан на периодическом подключении нагрузки к источнику нестабилизированного напряжения 1/вх и последующем отключении его от нагрузки. На рис. 9.11,а изображена простейшая электрическая цепь с периодически замыкающимся и размыкающимся ключом К.. Если на входе такой цепи приложено напряжение то на ее выходе образуются
269
прямоугольные импульсы напряжения, среднее значение которых будет равно (рис. 9.1 l,e): V
ДвхУ»
где Т — период коммутации; ta — длительность импульса или замкнутого состояния ключа /<; у — скважность работы ключа.
Если для управления ключом ввести цепь обратной связи, реагирующую на отклонение среднего значения выходного напряжения от заданного и воздействующую на скважность работы ключа у, то среднее значение напряжения на выходе можно поддержив'ать постоянным, несмотря на изменение UBI.
Структурная схема ключевого стабилизатора (рис. 9.11,в) содержит силовую часть (ключ К, сглаживающий фильтр, рекуперативный диод Д), схему сравнения (сравнивающий делитель RiR?, источник опорного напряжения UOu, усилитель постоянного тока) и импульсный элемент ИЭ.
Наиболее широкое применение нашли два типа импульсных стабилизаторов: стабилизаторы с широтно-импульсной модуляцией и релейные стабилизаторы или стабилизаторы с двухпозионным регулированием.
В стабилизаторах с широтно-импульсной модуляцией {ШИМ) в качестве импульсного элемента используется генератор, время импульса или паузы которого изменяются в зависимости от постоянного сигнала, поступающего на вход импульсного элемента с выхода схемы сравнения.
Принцип работы стабилизатора с ШИМ заключается в следующем. Выпрямленное напряжение через фильтр или непосредственно с выпрямителя подается на регулирующий транзистор, а затем через фильтр на выход стабилизатора. Выходное напряжение стабилизатора приводится к опорному напряжению, сравнивается с ним, а затем сигнал разности подается на вход УПТ, усиливается и поступает на вход устройства, преобразующего сигнал постоянного тока в импульсы с определенной длительностью. Длительность импульсов изменяется пропорционально сигналу разности опорного и измеряемого напряжений. С устройства, преобразующего постоянный ток в импульсы, сигнал поступает на регулирующий транзистор.
Регулирующий транзистор периодически переключается, и среднее значение напряжения на выходе фильтра зависит от отношения времен нахождения транзистора в открытом и закрытом состояниях. При изменении напряжения на выходе стабилизатора изменяется сигнал постоянного тока, а следовательно, и соотношение между паузой и импульсом и среднее значение выходного напряжения остается неизменным.
На рис. 9.12 изображены принципиальные схемы импульсных стабилизаторов напряжения с ШИМ. Их основное отличие заключается в том, что в схеме на рис. 9.12,а в качестве импульсного элемента применен мультивибратор, а в схеме на рис. 9.12,6—магнитный модулятор. Мультивибратор выполнен на транзисторах Т5 и Tt. Эти транзисторы попеременно переключаются и создают на своих коллекторных нагрузках (резисторы R9 и /?&) импульсы напряжений. Открывание одного из транзисторов, например Т4, вызывает падение напряжения на резисторе Rs, и на базу транзистора Т5 через конденсатор С4 подается положительный потенциал, который и закрывает транзистор Т$.
При закрывании транзистора Т5 увеличивается отрицательный потенциал его коллектора, который через конденсатор С3 передается 270
па базу транзистора Tt и открывает его еще больше. После насыщения транзистора Tt временно наступает устойчивое состояние и конденсатор Ct разряжается, а конденсатор С3 заряжается, причем ток заряда конденсатора С3 регулируется транзистором Т7, а ток разряда конденсатора С4— транзистором Тв. Если конденсатор С3 зарядится настолько, что напряжение на базе транзистора Л станет равным
Рис. 9.12. Схемы импульсных стабилизаторов напряжения с ШИМ. а — с мультивибратором; б — с магнитным модулятором.
нулю, то этот транзистор закроется и на базу транзистора Т3 через конденсатор С4 будет подан отпирающий отрицательный потенциал. При переходе транзистора Т5 в режим насыщения конденсатор С4 заряжается, а С3 — разряжается. Когда конденсатор С4 зарядится почти до входного напряжения, закроется транзистор Т3 и т. д. Ток заряда конденсатора С4 регулируется транзистором Т3.
271
Импульсы напряжения, Снимаемые с резистора /?5, включают транзисторы силовой цепи стабилизатора. Длительность отрицательных импульсов напряжения, снимаемых с резистора Rs, определяется скоростью заряда конденсатора С3, т. е. током транзистора Гт. Ток транзистора То определяет длительность.паузы между импульсами.
При равенстве напряжений Uou и Ui токи базы транзисторов Ге и Г? равны, причем относительная длительность импульсов мультивибратора равна 0,5.
При изменении выходного напряжения изменится соотношение между токами базы транзисторов Гв и Гт. Скорость разряда конденсаторов С3 и Ctk также изменится, а следовательно, изменится и относительная длительность импульсов мультивибратора.
Магнитный модулятор (рис. 9.12,6) состоит из магнитного усилителя с внутренней обратной связью, питаемого от источника прямоугольных импульсов, на выход которого подключается регулирующий транзистор стабилизатора напряжения.
Сердечник магнитного усилителя выполнен из материала, магнитная характеристика которого имеет резкий излом, т. е. четко выраженную границу насыщения (прямоугольную .петлю гистерезиса). Если сердечник магнитного усилителя не насыщен, то сопротивление его обмоток переменного тока бесконечно велико и тока в них нет. При насыщении сердечника магнитного усилителя сопротивление его обмоток переменного тока становится равным нулю и ток в этих обмотках определяется сопротивлением нагрузки усилителя /?5. При ненасыщенном сердечнике усилителя ток в его обмотках переменного тока равен нулю и падение напряжения на нагрузке Rs также равно нулю. Поэтому регулирующий транзистор Ti будет включен смещением на базе, созданным диодом Дз, и напряжение со входа поступает на нагрузку. При насыщении сердечника усилителя в его нагрузке R$ протекает ток и падение напряжения на Rs закрывает транзистор Ti, отключая нагрузку от входного напряжения Ubx-
Транзисторы Т2 и Т3 образуют усилитель постоянного тока, питающий обмотки управления магнитного усилителя. При отклонении выходного напряжения от заданного значения изменяется ток в обмотке управления магнитного усилителя, в результате чего изменяется время прохождения тока в нагрузке усилителя Rs и закрытого состояния регулирующего транзистора 7\.
В качестве источника прямоугольного напряжения обычно используется автогенератор с насыщающимся трансформатором. Магнитный усилитель обеспечивает изменение относительной длительности импульсов выходного тока от 1 до 0.
Включение индуктивности последовательно с регулирующим транзистором позволяет свести к минимуму мощность, рассеиваемую в стабилизаторе. Когда регулирующий транзистор открыт, в дросселе запасается магнитная энергия, которая после закрывания транзистора расходуется через рекуперативный диод Д1 на поддержание тока в цепи нагрузки. Схемы построены таким образом, что при увеличении выходного напряжения уменьшается время открытого состояния регулирующего транзистора и выходное напряжение остается неизменным.
В релейных стабилизаторах в качестве импульсного элемента применяется триггер, который, в свою очередь, управляет регулирующим транзистором. При подаче постоянного напряжения на вход 272
стабилизатора в первый момент регулирующий транзистор открыт и напряжение на выходе стабилизатора увеличивается. Соответственно растет сигнал на выходе схемы сравнения.
При определенном уровне выходного напряжения уровень сигнала на выходе схемы сравнения станет достаточным для срабатывания и закрывает регулирующий транзистор. Напряжение па выходе стабилизатора начинает уменьшаться, что вызывает уменьшение сигнала на выходе схемы сравнения. При определенном уровне сигнала на выходе схемы сравнения триггер вновь срабатывает и открывает регулирующий транзистор. Напряжение на выходе стабилизатора начинает увеличиваться. Выходное напряжение будет увеличиваться до тех пор, пока триггер вновь не закроет регулирующий транзистор. Таким образом, процесс будет повторяться. Изменение входного напряжения или тока нагрузки стабилизатора приведет к изменению открытого состояния регулирующего транзистора и его частоты переключения, а среднее значение выходного напряжения будет поддерживаться неизменным с определенной степенью точности.
Отличие стабилизаторов первого и второго типов заключается в следующем:
в стабилизаторах первого типа частота переключения регулирующего транзистора постоянна, в стабилизаторах второго типа частота зависит от изменения тока нагрузки и входного напряжения;
пульсация выходного напряжения в .стабилизаторах первого типа принципиально может быть равна нулю, так как импульсный элемент управляется постоянной составляющей сигнала схемы сравнения;
пульсация на выходе стабилизаторов второго типа принципиально не может быть равной нулю, так как периодическое переключение триггера возможно только при периодическом изменении выходного напряжения.
Одним из основных недостатков стабилизаторов первого типа является их малое быстродействие. При питании таких стабилизаторов от выпрямителя входная пульсация напряжения отрабатывается стабилизатором незначительно, и поэтому его фильтр приходится рассчитывать на низкочастотную составляющую пульсации.
Недостатком стабилизаторов второго типа является зависимость частоты переключения от изменения напряжения сети и тока нагрузки. '
Необходимо отметить, что в релейных стабилизаторах можно устранить указанный недостаток. Для этого от внешнего генератора на вход усилителя или непосредственно триггера подается переменный сигнал. Если амплитуда переменного сигнала превышает пороги срабатывания триггера, то при определенных условиях внешний сигнал навязывает стабилизатору свою частоту и он работает в режиме ШИМ. В этом случае при изменении входного напряжения или тока нагрузки частота остается неизменной, а изменяется скважность импульсов регулирующего транзистора.
На рис. 9.13,а изображена принципиальная схема импульсного стабилизатора релейного типа с внутренней обратной связью. Стабилизатор состоит из регулирующего транзистора Г], работающего в ключевом режиме, сглаживающего фильтра (индуктивность дросселя Др, Си, ДО, схемы сравнения и усилителя постоянного тока (Л1, /?2, Дг> Rг, Ту, Ry). Сигнал со схемы сравнения через усилитель 18—1056 273
воздействует на триггер, имеющий два устойчивых состояния, при одном из которых транзистор 1\ открывается, а при другом закрывается. Когда выходное напряжение достигает своего наибольшего значения, триггер закрывает транзистор 1\ и энергия, накопленная в дросселе и выходном конденсаторе, поступает в нагрузку (цепочка замкнута через диод Д|). При этом напряжение на выходе стабилизатора понижается и, когда оио достигает низшего граничного значения, триггер срабатывает, включая Ti так, что напряжение .на выходе стабилизатора вновь повышается. Таким образом, выходное напряжение изменяется относительно среднего значения на некоторую величину ДУ как в сторону увеличения, так и в сторону уменьшения, т. е. пульсирует.
Рис. 9.13. Схемы импульсных стабилизаторов напряжения релейного типа.
а —с внутренней обратной связью; б — работающего в режиме ШИМ.
Уровень пульсаций выходного напряжения зависит от частоты автоколебаний. При заданных величинах L и Сп для уменьшения амплитуды пульсаций выходного напряжения следует повысить частоту автоколебаний, уменьшая приведенные ко входу усилителя пороги срабатывания триггера ДУ. Однако при ДУ=0 частота автоколебаний определяется параметрами линейной части стабилизатора, т. е. L и Сп. Для повышения частоты автоколебаний в схему стабилизатора вводят цепь внутренней обратной связи (Д0.с, Со.с), охватывающей релейный элемент, что дает возможность увеличить частоту автоколебаний при неизменных параметрах линейной части и, следовательно, уменьшить амплитуду пульсации выходного напряжения.
Так как частота автоколебаний при наличии внутренней обратной связи значительно выше частоты автоколебаний без внутренней обратной связи, то можно с достаточной степенью точности считать, что. управляет переключением триггера (релейным элементом) только цепь До.с, Со.с, а выходное напряжение остается примерно неизменным.
Схема работает следующим образом. Когда вследствие разряда Со с напряжение на входе усилителя уменьшится до значения, соответствующего нижнему порогу срабатывания триггера, последний включает регулирующий транзистор Tt. Напряжение на входе фильтра мгновенно становится равным входному .УВх и начинается заряд конденсатора С0.с. Так как изменение напряжения на Со.о незначи-274
тельно по сравнению со средним значением, то ток, протекающий через резистор Ro с, можно считать неизменным, т. е. заряд конденсатора Со.с осуществляется неизменным током и напряжение на нем увеличивается по линейному закону. Когда напряжение на входе усилителя, равное разности напряжений на конденсаторе С0.с и опорного источника Сэт, увеличится до значения, соответствующего верхнему порогу срабатывания триггера, транзистор 1\ закроется и откроется рекуперативный диод Д\, через который происходит разряд дросселя и конденсатора Сп- При этом начинается разряд конденсатора С0.с через R0,a и открытый диод Д1.
Таким образом, ток через /?0 с при открытом и закрытом транзисторе Ti протекает в различных направлениях, т. е. содержит как постоянную, так и переменную составляющую. Постоянная составляющая тока резистора R0.c замкнется через резистор R2 сравнивающего делителя, а переменная составляющая — через конденсатор Со с-
При наличии внутренней обратной связи ошибка регулирования на выходе стабилизатора обусловлена нелинейным зарядом конденсатора Со.с- Введение внутренней обратной связи в релейном стабилизаторе не позволяет уменьшить пределы изменения частоты автоколебаний при изменениях входного напряжения и тока и нагрузки.
Если на вход релейного элемента или па вход УПТ подать внешнее периодическое воздействие, то при выполнении определенных условий внешнее периодическое воздействие навязывает стабилизатору свою частоту и подавляет возможные автоколебания. Чем выше частота' вынужденных колебаний при одних и тех же параметрах фильтра, тем меньше амплитуда пульсации выходного напряжения, и чем выше частота вынужденных колебаний, тем меньшие индуктивности и емкости выходного фильтра требуются для получения заданной амплитуды пульсации выходного напряжения, а следовательно, меньшие габариты и масса стабилизатора. Верхняя граница частоты определяется частотными свойствами регулирующего транзистора 1\ коммутирующего диода Д) и конденсатора Сп.
При введении вынужденных колебаний релейный стабилизатор работает в режиме шпротно-импульсной модуляции. На вход релейного элемента (пли на вход усилителя) через разделительный конденсатор от внешнего источника подается переменный сигнал (рис. 9.13,6). Форма сигнала может быть пилообразной или синусоидальной. На вход триггера подаются внешний сигнал, например пилообразной формы, и постоянное смещение, поступающее с выхода усилителя постоянного тока. Когда напряжение на входе триггера достигает порога его срабатывания, триггер закрывает регулирующий транзистор Ti. Напряжение пилообразной формы уменьшается, и в некоторый момент времени напряжение на входе триггера станет равным значению отпускания. Триггер срабатывает и регулирующий транзистор открывается. Таким образом, триггер и соответственно регулирующий транзистор непрерывно переключаются за счет внешнего переменного сигнала.
Изменение напряжения на входе стабилизатора или тока нагрузки приводит к изменению смещения, поступающего с усилителя постоянного тока, что приводит к измененным моментам переключения триггера и регулирующего транзистора, т. е. изменяет длительность открытого и закрытого состояния регулирующего транзистора при постоянной частоте его переключения,
18’ 275
По ряду качественных показателей: коэффициенту пульсации и стабилизации, динамической точности и быстродействию — стабилизаторы непрерывного действия превосходят ключевые, однако уступают им по КПД.
Улучшение качественных показателей ключевых стабилизаторов при сохранении присущего им высокого КПД достигается в непрерывно-ключевых стабилизаторах напряжения. Отличительной особенностью непрерывно-ключевых стабилизаторов напряжения является наличие двух РЭ, один из которых — основной силовой — работает в режиме переключений, а другой — меньшей мощности — в линейном режиме
Рис., 9.14. Структурная схема непрерывно-ключевого стабилизатора напряжения с последовательным включением регулирующих элементов (а) и графики изменения выходного напряжения и токов непрерывной и ключевой части стабилизатора (б).
На рис. 9.14,а показана структурная схема непрерывно-ключевого стабилизатора с последовательным включением регулирующих элементов (РЭ и К). Ток Д стабилизатора непрерывного действия Ст поддерживается минимально возможным и постоянным при изменении сопротивления нагрузки Дн и напряжения t/вх. Ток нагрузки /н=Л+Д, где /1 — среднее значение тока непрерывного стабилизатора; 12— среднее значение тока дросселя.
Чтобы напряжение на нагрузке оставалось постоянным при ее изменении, необходимо изменить ток /п на некоторую величину Д/Н=Д(Д+Д). Если задаться /1 = const, то т. е. для под-
держания постоянными выходного напряжения и тока Д непрерывного стабилизатора Ст при изменении Ра необходимо автоматическое выполнение равенства приращений токов нагрузки и дросселя, что обеспечивается двухпозиционной схемой регулирования. Она содержит датчик тока стабилизатора непрерывного действия Ст, выполненный на резисторе R, двухпозиционное устройство в виде триггера Т с одним устойчивым положением равновесия, регулирующим элемент в виде ключа К и дроссель Др.
Стабилизатор работает следующим образом. На холостом ходу и при минимальных токах в нагрузке ключ Д разомкнут и стабилизация выходного напряжения обеспечивается непрерывным стабилизатором Ст. С увеличением тока в нагрузке возрастает напряжение 276
Рис. 9.15. Структурная схема непрерывно-ключевого стабилизатора напряжения с параллельнопоследовательным включением регулирующих элементов (а) и графики изменения выходного напряжения и токов непрерывной и ключевой частей стабилизатора (б).
на резисторе R и соответственно на входе триггера с эмиттерной связью Т. При токе ii=Ii триггер Т срабатывает и ключ К замыкается. Через нагрузку Ra и дроссель Др проходит ток ia, нарастающий во времени. Toki’i начинает уменьшаться и при й=1отп триггер Т отпускает, а ключ К размыкается. Дроссель начинает разряжаться через диод Д на нагрузку, ток i2 уменьшается. Ток ii нарастает, пока вновь не сработает триггер Т. Далее цикл повторяется и в стабилизаторе устанавливаются устойчивые автоколебания.
При колебаниях напряжения Пих и тока нагрузки /н изменяются скорости изменения токов 1ги t’i, а значит, и длительность замкнутого состояния ключа К. Среднее значение тока h остается при этом неизменным и незначительным. Поэтому и потери в стабилизаторе Ст малы, а КПД близок к КПД ключевого стабилизатора.
6)
Пульсация выходного напряжения, обусловленная пилообразными увеличениями тока й стабилизатора непрерывного действия Ст,
ввиду малости его внутреннего сопротивления незначительна.
На рис. 9.14,6 представлены графики токов й и й и выходного напряжения непрерывно-ключевого стабилизатора.
Рассмотренная структурная схема непрерывно-ключевого стабилизатора не является единственной и всегда наилучшей. Последнее объясняется характерной для последовательных структур чувствительностью к токовым перегрузкам и коротким замыканиям в на-
грузке.
На рис. 9.15,а показана структурная схема непрерывно-ключевого стабилизатора напряжения с параллельно-последовательным включением РЭ. Ток Ц регулирующего элемента непрерывного действия поддерживается минимально возможным и постоянным при изменении нагрузки и входного напряжения (Rr и (7ВХ). Ток нагрузки /п = /г—Л, где 1\ — среднее значение тока в цепи РЭ непрерывного действия; /2 — среднее значение тока дросселя.
Для постоянства напряжения на нагрузке в этой схеме при изменении или C/BS и при /( = const необходимо также автома-277
тическое выполнение равенства приращения токов нагрузки и дросселя, т. е. Д/п=Д/2-
Стабилизатор работает следующим образом. При подаче входного напряжения ключ К замкнут и напряжение на нагрузке увеличивается до заданного делителем и опорным напряжением (70П значения. Регулирующий транзистор РЭ в течение времени нарастания выходного напряжения до заданного значения закрыт. Дальнейший
Рис. 9.16. Схемы непрерывно-ключевых стабилизаторов напряжения. а —с последовательным включением регулирующих элементов; б —с параллельно-последовательным включением РЭ.
рост выходного напряжения вызывает появление и нарастание тока й в цепи регулирующего транзистора РЭ. Ток й увеличивается до значения й==Л. при котором происходит срабатывание триггера с одним устойчивым положением равновесия Т. Ключ К размыкает, и дроссель Др начинает разряжаться через коммутирующий диод Д па нагрузку. Ток /2 и выходное напряжение уменьшаются. Ток й также начинает уменьшаться, и при й = й>тп триггер Т переходит в исходное состояние. Ключ /< замыкает, ток й и выходное напряжение возрастают. Цикл повторяется, и в стабилизаторе устанавливаются устойчивые автоколебания.
278
Изменения тока нагрузки и входного напряжения отрабатываются изменением длительности замкнутого состояния и частоты коммутации ключа К. Ток /1 остается практически постоянным па уровне, заданном порогами срабатывания и отпускания триггера Т. Графики токов и выходного напряжения показаны на рис. 9.15,6.
На рис. 9.16,«, б изображены схемы непрерывно-ключевых стабилизаторов напряжения, реализующие рассмотренные выше структурные схемы.
Ключ К в обеих схемах выполнен на транзисторах Тц, Tt2 и наряду с элементами Т2, Т2, Rs—Re, /?зап, Сзап, Дг подробно рассмотрен в ключевых стабилизаторах напряжения. Триггер Т выполнен на транзисторах Tit Г5 и резисторах —Ri2. Регулирующий элемент непрерывного действия собран на транзисторах Те, Тт по составной схеме. Датчиком тока ц в его цепи служит резистор R, напряжение на котором управляет триггером Т. Усилитель отклонения выходного напряжения от заданного эталонного значения Uoa выполнен на транзисторе ,ГУ и резисторе Ry. Опорное напряжение £/оц вырабатывается параметрическим стабилизатором на стабилитроне Д] и резисторе R?.
Принцип работы обеих схем непрерывно-ключевых стабилизаторов напряжения описан выше по их функциональным схемам.
Если в рассмотренных схемах непрерывно-ключевых стабилизаторов вместо двухпозиционного устройства (триггера Т) применить широтно-импульсный модулятор, вход которого через усилитель и сглаживающий фильтр подключить к датчику тока (резистору R), то получим непрерывно-ключевой стабилизатор с широтно-импульсной модуляцией. Принцип работы таких стабилизаторов мало чем отличается от рассмотренного выше.
Достоинством непрерывно-ключевых ' стабилизаторов с ШИМ. являются постоянство частоты переключения ключевого РЭ и несколько меньшая индуктивность дросселя Др. Однако схема управления ключевым РЭ в таких стабилизаторах сложнее, чем в непрерывно-ключевых стабилизаторах с двухпозицпонным регулированием.
9.5. ПАРАМЕТРИЧЕСКИЕ СТАБИЛИЗАТОРЫ ПЕРЕМЕННЫХ НАПРЯЖЕНИЙ
В качестве параметрического стабилизатора переменных напряжений может быть использован нелинейный элемент, обладающий малым динамическим сопротивлением. Таким элементом является дроссель с насыщенным стальным сердечником, вольт-амперная характеристика которого изображена на рис. 9.17,а. В ином масштабе эта характеристика является магнитной характеристикой материала сердечника В области
насыщения (на пологом участке кривой) относительно большим приращениям тока А/ в дросселе соответствуют незначительные изменения напряжения MJ. Поэтому при параллельном соединении нагрузки с дросселем и включении между ними и питающей сетью балластного резистора Вг (рис. 9.17,6) напряжение на нагруз-
279
ке будет изменяться в Значительно Мейьшей сЧёпёйй, чем изменяются напряжение питающей сети и ток нагрузки. Напряжение на выходе такого стабилизатора равно геометрической разности входного напряжения сети и падения напряжения на балластном резисторе Яг, т. е.
йи=ис—йг=йс-1Л-
Ток балластного резистора равен геометрической сумме токов нагрузки и дросселя, т. е. 1г=1н-]-1х.. При изменении напряжения сети, например при его повыше-
ние. 9.17. Параметрический электромагнитный стабилизатор напряжения.
а — вольт-амперная характеристика; б — принципиальная схема.
нии, несколько увеличивается напряжение на выходе, что вызывает увеличение тока как в обмотке дросселя II, так и в балластном резисторе 1Г, вследствие чего увеличивается падение напряжения на балластном резисторе. Таким образом, при повышении напряжения сети падение напряжения на балластном резисторе увеличивается, а при понижении напряжения сети оно уменьшается и напряжение на выходе остается примерно неизменным.
Электромагнитный стабилизатор, схема которого изображена на рис. 9.17,6, практического применения не имеет. Он не обеспечивает высокой стабильности, имеет низкий КПД и малый коэффициент мощности cos ср, так как на балластном резисторе Яг выделяются значительные потери энергии, а для насыщения сердечника дросселя L стабилизатор потребляет от сети большой реактивный ток. Для устранения этих недостатков вместо балластного резистора устанавливают балластную катушку индуктивности Lv, что уменьшает потери энергии, 280
а для уменьшения реактивной мощности, потребляемой от сети, параллельно дросселю с насыщенным сердечником включают конденсатор (рис. 9.18,а).
Такой стабилизатор называется феррорезонансным. Индуктивность катушки LT должна быть неизменной, чтобы падение напряжения на ней было пропорционально току. Поэтому дроссель LT выполняется с ненасыщенным сердечником.
На рис. 9.18,6 изображены графики зависимости между напряжением и током для трех параллельных
Рис. 9.18. Феррорезонансный стабилизатор напряжения. а — принципиальная схема; б — вольт-амперная характеристика.
ветвей — индуктивности L, емкости С и нагрузки Ru-При повышении напряжения на дросселе ток в его обмотке Il увеличивается сначала пропорционально напряжению, а при насыщении стали сердечника начинает расти быстрее. Ток конденсатора пропорционален напряжению (Ic=UсоС). Результирующий ток 7Р резонансного контура равен геометрической сумме токов индуктивности и емкости, т. е. 1р=1ь+1с.
Если потерь в дросселе и конденсаторе нет, то токи L и !с находятся в противофазе и результирующий ток равен арифметической разности этих токов, т. е. 7Р= =1ь—1с-
При 'малых напряжениях индуктивность дросселя велика, ток 'в дросселе мал и результирующий ток имеет емкостный характер. В точке А, соответствующей резонансу токов, результирующий ток равен нулю и при дальнейшем повышении напряжения результирующий ток имеет индуктивный характер. При этом результирующий ток резко увеличивается с повышением напряжения, что соответствует резкому уменьшению эквива-
281
лентной индуктивности LC. Из сравнения рабочих (пологих) участков кривых Un и UL видно, что при одинаковых изменениях тока напряжение на резонансном контуре (кривая t/H) изменяется меньше, чем при одном дросселе (кривая UL), т. е. резонансный контур улучшает стабилизирующую способность устройства.
Устойчивая работа стабилизатора возможна лишь за точкой резонанса (от точки А вправо), так как на этом участке повышение напряжения вызывает увеличение тока как в резонансном контуре, так и в балластной катушке индуктивности, падение напряжения на которой компенсирует приращение напряжения на входе. Слева от точки А (участок А—В) устойчивая работа стабилизатора невозможна (срыв стабилизации), так как положительным приращениям напряжения соответствуют отрицательные приращения тока резонансного контура и балластной катушки 'индуктивности, вследствие чего падение напряжения на дросселе LT уменьшается, повышая выходное напряжение в большей степени.
Феррорезонансный стабилизатор очень чувствителен к изменению частоты тока питающей сети. Изменение частоты на 1—2% вызывает изменение выходного напряжения на 2—3,5%. При увеличении частоты тока (пунктирные кривые на рис. 9.18,6) индуктивное сопротивление увеличивается, а емкостное уменьшается. Поэтому кривая UL пройдет выше, a Uc — ниже и кривая выходного напряжения Ua сместится вверх, т. е. напряжение на выходе стабилизатора повысится. Уменьшение частоты тока вызывает понижение напряжения на выходе.
Практическая схема феррорезонансного стабилизатора изображена на рис. 9.19,а. Дроссель с насыщенным сердечником L представляет собой повышающий автотрансформатор, первичное напряжение LL которого из сети через дроссель Аг прикладывается к обмотке О—1. Напряжение t/2 обмотки 0—2 больше приложенного с тем, чтобы было обеспечено стабильное номинальное напряжение при понижении! напряжения сети. Резонансная обмотка 0—3 имеет еще большее число витков для увеличения индуктивности, что дает возможность уменьшить емкость конденсатора, так как необходимая резонансная частота обеспечивается определенной величиной LC. Однако напряжение на резонансной 282
обмотке Uc должно быть менее максимально допустимого значения для конденсатора, используемого в схеме.
На рис. 9.19,6 изображены графики зависимости между напряжениями и токами для всех обмоток автотрансформатора, пересчитанных ко вторичной цепи. Так как напряжение, снимаемое с автотрансформатора t/2, не остается строго постоянным, то для повышения ста-
Рис. 9.19. Феррорезонапсный стабилизатор напряжения с компенсационной обмоткой.
а — принципиальная схема; б — вольт-амперные характеристики.
бильности вводится компенсационная обмотка К, включаемая так, чтобы напряжение на ней UK было направлено встречно напряжению U2 и выходное напряжение равно геометрической разности U2 и UK, т. е. СВыХ= =U2—UK. Компенсационная обмотка помещена на одном сердечнике с обмоткой Аг и напряжение на ней, так же как и напряжение на катушке индуктивности Lr, пропорционально току.
Достоинством феррорезонансных стабилизаторов напряжения являются простота устройства и высокая надежность. '
К их недостаткам (помимо чувствительности к нестабильности частоты тока питающей сети) следует отнести невысокую стабильность, зависящую от характера нагрузки, большие габариты, низкий КПД, малый коэффициент мощности cos ср и возможность применения таких стабилизаторов при частоте не более 50— 60 Гц. Недостатком стабилизатора является также значительное искажение формы кривой выходного напряжения, причем она в сильной степени изменяется при изменениях напряжения сети и тока нагрузки;
283
9.6. КОМПЕНСАЦИОННЫЕ СТАБИЛИЗАТОРЫ ПЕРЕМЕННЫХ НАПРЯЖЕНИЙ
Компенсационный стабилизатор переменных напряжений (рис. 9.20,а) содержит сравнивающее устройство, сопоставляющее выходное напряжение с заданным его значением и вырабатывающее сигнал рассогласования, который через усилитель воздействует на регулирующий элемент. В качестве регулирующего элемента в стабилизаторах переменных напряжений используется магнитный усилитель, называемый также регулирующим дросселем или дросселем насыщения.
Рис. 9.20. Компенсационный стабилизатор переменных напряжений. а — структурная схема; б — векторная диаграмма напряжений.
При воздействии сигнала рассогласования на обмотку управления МУ индуктивное сопротивление его рабочих обмоток изменяется так, чтобы падение напряжения на регуляторе Up обеспечивало постоянство выходного напряжения с определенной степенью точности при изменениях напряжения питающей сети и тока нагрузки.
При идеально активной нагрузке стабилизатора и при отсутствии потерь в МУ напряжения на нагрузке t/вых и на регулирующем элементе Up окажутся сдвинутыми по фазе на четверть периода (рис. 9.20,6). Напряжение на входе стабилизатора UBX равно геометрической сумме [Дых и Up. При повышении напряжения на входе до U'BX схема должна обеспечить увеличение падения напряжения на регулирующем элементе до U'p с тем, чтобы напряжение на выходе t/вых осталось неизменным. Для этого- ток в обмотке управления МУ должен уменьшиться, увеличивая индуктивное сопротивление его рабочих обмоток.
Предельные режимы работы МУ: минимальное напряжение Up min при наименьшем напряжении на входе 284
UB*min й Максимальном токе накрузки 1тах; Максимальное напряжение Upmax при наибольшем напряжении на входе UBXmax и минимальном токе нагрузки. Таким образом,
U ==\/ТР ____U2
^рпип—V вхтш вых
И
[J —у/гр. Тр
max— V и вхтах вых1
Рис. 9.21. Схема стабилизатора напряжения с магнитным усилителем.
В этих выражениях UBHx, и Usxmtn заданы,
а отношение U9max/U9min определяется из характеристик МУ для известного отношения 1таХ/linin'
По сравнению с феррорезонансными стабилизаторы компенсационного типа не имеют заметного преимущества в КПД и коэффициенте мощности cos <р. На выходе компенсационного стабилизатора форма кривой напряжения сильно искажается, так как МУ вносят значительное содержание четных гармоник в форму кривой напряжения. Преимуществом компенсационных стабилизаторов являются высокая стабильность, возможность плавной регулировки выходного напряжения в широких, пределах и нечувствительность к изменению частоты тока питающей сети.
- Стабилизаторы напряжения на МУ могут обеспечивать высокую стабильность выходного напряжения либо по среднему, либо по действующему значению. Вследствие искаженной формы кривой напряжения обеспечить постоянство выходного напряжения по среднему и по действующему значениям одновременно в одном типе стабилизаторов нельзя.
Принципиальная схема стабилизатора напряжения изображена на рис. 9.21. На этой схеме регулирующим элементом является МУ с внутренней обратной связью, рабочие обмотки которого включены последовательно с нагрузкой.
285
Для управления магнитным усилителем используются две обмотки постоянного тока: управления wy и смещения аУсм- Магнитодвижущие силы этих обмоток направлены встречно, причем МДС обмотки смещения постоянна п больше, чем МДС обмотки управления (/СмИ'см> >/yWy). Поэтому увеличение тока в обмотке управления приводит к уменьшению постоянного намагничивания сердечника МУ и увеличивает индуктивное сопротивление его рабочих обмоток. Сопротивление обмотки смещения изменяется при изменении температуры, что приводит к перемещению рабочей точки на характеристики вход — выход МУ.
Чтобы уменьшить влияние температуры на ток в обмотке смещения, последовательно с ней включают резистор /?ь сопротивление которого значительно превышает сопротивление самой обмотки. Резистор предназначен для регулировки выходного напряжения.
При стабилизации напряжения по среднему значению (рис. 9.21) выходное напряжение через трансформатор и выпрямительный мост воздействует на обмотку управления МУ. При повышении напряжения (7Н увеличится напряжение на выходе выпрямителя, вследствие чего увеличится также и ток в обмотке управления. При этом незначительные изменения напряжения на выходе выпрямителя вызывают существенные изменения тока через стабилитрон Дз, который играет роль усилителя тока.
Так как в этой схеме сигнал на обмотку управления МУ подается через выпрямитель, т. е. пропорционален среднему значению напряжения (7Н, то такой стабилизатор обеспечивает стабильность выходного напряжения по среднему значению. На выходе такого стабилизатора могут быть включены выпрямители с фильтрами, аналогичными фильтру выпрямителя в цепи управления стабилизатора. Если же на выходе стабилизатора включить выпрямитель, работающий на емкостный фильтр, то стабильность значительно ухудшится.
9.7. КОМПЕНСАЦИОННЫЕ СТАБИЛИЗАТОРЫ ТОКА
Стабилизаторы тока компенсационного типа находят преимущественное применение в устройствах, предназначенных для стабилизации магнитного поля. Для нормальной работы ламп бегущей волны, ламп обратной 28G
волны, клистронов и т. п. применяются специальные фокусирующие катушки (соленоиды), обмотки которых изготовляют из медной проволоки. При отсутствии стабилизации ток в соленоиде может изменяться как вследствие колебания напряжения питающей сети, так и изменения сопротивления обмотки соленоида, вызванного изменением температуры этой обмотки под действием тока в ней или окружающей среды.
Для поддержания постоянства тока в соленоиде используются компенсационные стабилизаторы тока, со-
держащие регулирующий элемент, измерительный элемент и усилитель постоянного тока. В качестве регулирующих элементов, так же как и в стабилизаторах напряжения компенсационного типа, могут использоваться электронные лампы, транзисторы и магнитные усилители. Сравнивающее устрой-
ство, являющееся измери- Рис. 9.22. Схема компеисацион-тельным элементом, уста- ного стабилизатора тока на навливает сигнал, пропор- транзисторе.
циональный изменению тока в цепи нагрузки. Цепь сравнения состоит из резистора 7?, включаемого последовательно с нагрузкой, и источника опорного напряжения Uon. На рис. 9.22 изображена схема компенсационного стабилизатора тока на транзисторах. Разность напряжений
опорного источника Uoa и падения напряжения на резисторе R подается на вход УПТ. С выхода УПТ сигнал поступает на базу составного регулирующего транзистора. При увеличении тока нагрузки повышается потенциал эмиттера усилительного транзистора Т3, потенциал базы которого неизменен. Сопротивление транзистора Тз уменьшается и ток коллектора возрастает. При этом увеличиваются ток в коллекторной нагрузке усилителя RK и потенциал базы составного регулирующего транзистора, что влечет за собой увеличение сопротивления транзистора Каскадный транзистор Л приме-
няют для увеличения входного сопротивления регулирующего элемента, что дает возможность уменьшить мощность, необходимую для управления регулирующим элементом.
287
В схемах электронных стабилизаторов тока при неизменном напряжении питающей сети обеспечивается постоянство суммарного сопротивления регулирующего элемента и нагрузки. При неизменном сопротивлении нагрузки изменение напряжения питающей сети вызывает соответствующее изменение сопротивления регулирующего элемента, что обеспечивает постоянство тока. Катушка индуктивности L препятствует мгновенным изменениям тока, а конденсатор С повышает уровень сигнала рассогласования при мгновенных изменениях сопротивления нагрузки.
При больших токах нагрузки наиболее часто в качестве регулирующего элемента применяют МУ, рабочую обмотку которого включают в цепь переменного тока, а обмотку управления — либо последовательно с нагрузкой, либо часть тока нагрузки ответвляется в обмотку управления, включенную параллельно с резистором R. В некоторых случаях используют цепь сравнения и усилитель подобно рассмотренным выше ламповым и транзисторным стабилизаторам. При введении усилителя обмотка управления МУ включается в цепь коллектора усилительного транзистора.
На рис. 9.23 изображена принципиальная схема компенсационного стабилизатора тока, в которой в качестве регулирующего элемента использован МУ с внутренней обратной связью. На этой схеме нет УПТ и, следовательно, отпадает необходимость в источнике опорного напряжения.
Сигнал рассогласования на обмотку управления wy М.У подается с резистора R, включенного последовательно с нагрузкой. Обмотка смещения шСм получает питание от отдельного источника, напряжение которого стабилизировано стабилитроном Дц.
Изменения тока нагрузки, вызванные изменением сопротивления RH или напряжения питающей сети, воздействуют на обмотку управления так, что изменяется индуктивное сопротивление рабочих обмоток МУ. Это приводит к изменению падения напряжения на регулирующем элементе и напряжения, приложенного к первичной обмотке трансформатора. Магнитодвижущие силы обмоток смещения и управления направлены встречно, причем /смИ>см>/уИ’у. При увеличении тока нагрузки возрастает ток и в обмотке управления МУ, что ослабляет постоянное намагничивание сердечника и 288
индуктивность рабочих обмоток МУ увеличивается. Это приводит к увеличению падения напряжения на регулирующем элементе и понижению напряжения первичной обмотки трансформатора и на выходе выпрямителя, уменьшая ток нагрузки до заданного значения. При уменьшении тока нагрузки выходное напряжение выпрямителя повышается с тем, чтобы увеличить ток до заданного значения.
Рис. 9.23. Схема компенсационного стабилизатора тока на магнитном усилителе.
В цепи обмоток смещения и управления включены резисторы /?2 и Т?4, предназначенные для ослабления влияния изменения сопротивлений этих обмоток на ток нагрузки в процессе работы стабилизатора. Реостат R3 предназначен для регулировки тока нагрузки.
Компенсационные стабилизаторы тока, в которых в качестве регулирующего элемента используются .магнитные усилители, обеспечивают высокую стабильность тока при изменениях напряжения питающей сети и сопротивления нагрузки. Однако такие стабилизаторы не могут сглаживать пульсации тока. Поэтому для сглаживания пульсаций необходимо применение громоздких дросселей.
19—1056 ' 289
9.8. СХЕМЫ СТАБИЛИЗИРОВАННЫХ ИСТОЧНИКОВ
ЭЛЕКТРОПИТАНИЯ ВЫСОКИХ И ОЧЕНЬ НИЗКИХ НАПРЯЖЕНИЙ
Для электропитания клистронов, ЛБВ, электроннолучевых трубок и т. п. необходимы высокие напряжения (2—20 кВ) и мощности (до 200 Вт) при высокой стабильности и малой пульсации выпрямленного напряжения.
Так как стабилизаторы высокого напряжения на электронных лампах неэкономичны и недостаточно надежны, то в настоящее время их применение крайне
Рис. 9 24. Структурные схемы стабилизированного источника электропитания высокого напряжения.
а — с промежуточным преобразованием переменного тока в постоянный; б — с включением регулирующего элемента на стороне переменного тока.
ограничено. Транзисторные стабилизаторы не могут быть использованы при высоких напряжениях ввиду ограниченной электрической прочности транзисторов. Поэтому приведенные выше схемы стабилизаторов напряжения непригодны для обеспечения высоких выходных напряжений, так как последовательное соединение большого числа транзисторов усложняет схему и конструкцию стабилизатора и снижает его надежность.
Стабилизированный источник электропитания высокого напряжения может быть изготовлен с промежуточным преобразованием переменного тока в постоянный. При этом стабилизация выходного высокого напряжения осуществляется на стороне постоянного тока низкого напряжения. Структурная схема такого источника электропитания изображена на рис. 9.24,а.
290
Переменное напряжение сети источника электрической энергии преобразовывается трансформатором Tpi, выпрямителем В\ и сглаживающим фильтром Ф\ в постоянное 25—30 В. Полученное постоянное напряжение поддерживается неизменным стабилизатором, регулирующий элемент РЭ которого (обычно транзистор) включен на выходе фильтра Ф\.
Стабилизированное постоянное напряжение подается на транзисторный инвертор И, преобразующий его в переменное, и трансформатором Тр% повышается до нужного значения. Выпрямитель В2 и сглаживающий фильтр Фг вновь преобразуют переменное напряжение в высокое постоянное. С выхода источника электропитания напряжение сопоставляется с заданным при помощи сравнивающего устройства СУ. С выхода СУ сигнал рассогласования через усилитель У воздействует на регулирующий элемент РЭ, который соответствующим образом изменяет свои параметры и обеспечивает постоянство выходного напряжения с определенной степенью точности при возмущениях как со стороны питающей сети, так и со стороны нагрузки.
В таком источнике электропитания пульсация выходного напряжения подавляется сглаживающим фильтром 02, который обычно имеет относительно большие габариты. Кроме того, большое количество элементов (трансформаторов и др.) создает электромагнитное влияние на выходные цепи стабилизатора, что приводит к необходимости тщательной экранировки этих элементов.
Стабилизированный источник электропитания высокого напряжения может быть также выполнен с регулирующим элементом, включенным на стороне переменного тока. В этом случае отпадает необходимость промежуточного преобразования переменного тока в постоянный, что уменьшает количество элементов устройства, потерн энергии в нем и помехи, воздействующие на выходные цепи стабилизатора. Структурная схема стабилизированного источника электропитания с включением регулирующего элемента на стороне переменного тока изо-бражена на рис. 9.24,6.
В этой схеме трансформатор Tpi применяется потому, что регулирующий элемент РЭ электрически связан с заземленным полюсом нагрузки, с которым питающая сеть не должна иметь коммутационную связь. Регули-19* 291
рующий элемент РЭ стабилизатора изменяет первичное напряжение трансформатора Тр2 и, следовательно, выходное напряжение на нагрузке.
При отклонении выходного напряжения от заданного значения сравнивающее устройство СУ вырабатывает сигнал рассогласования, который через усилитель У воздействует на регулирующий элемент РЭ, обеспечивающий с определенной степенью точности постоянство выходного напряжения.
Рис. 9.25. Схема стабилизированного источника электропитания высокого напряжения с регулированием на стороне переменного тока.
Одна из возможных схем стабилизированного источника электропитания высокого напряжения изображена на рис. 9.25. Напряжение со вторичной обмотки трансформатора Tpi через регулирующий элемент подается на первичную обмотку повышающего трансформатора Тр2. Высокое напряжение выпрямляется выпрямителем (Bb Cj, В2, С2, Вз, Сз, В4, С4), собранным по схеме умножения (увеличения в 4 раза) напряжения и через сглаживающий фильтр Рф, Сф подается на нагрузку.
Регулирующим элементом в схеме является составной транзистор (Ti—Тз), включенный в цепь между трансформаторами Tpi и Тр2 через выпрямитель В, со-292
стоящий из диодов, собранных по мостовой схеме выпрямления.
Источником опорного напряжения является двухкаскадный параметрический стабилизатор на кремниевых стабилитронах: первый каскад — резистор и диод Дь второй каскад — резистор и диоды Д2 и Д3. Питание источника опорного напряжения осуществляется от третьей обмотки трансформатора Tpi и выпрямителя В' с емкостным фильтром С'.
В качестве УПТ использован дифференциальный усилитель на транзисторах 1\ и 7V
На выходе схемы стабилизатора включен сравнивающий делитель R\, Rn, Rz. Стабилизатор работает следующим образом. При повышении напряжения на выходе за счет повышения напряжения питающей сети или тока нагрузки увеличивается напряжение на резисторе Ri нижнего плеча делителя и на базе транзистора Те, вследствие чего увеличивается сопротивление этого транзистора, а ток его коллектора уменьшается. Это приводит к уменьшению как тока в резисторе Re, так и падения напряжения на нем, т. е. потенциал эмиттера транзистора Т4 повышается и ток его коллектора возрастает, увеличивая падение напряжения на резисторе Ri. При этом повышается потенциал базы составного регулирующего транзистора и его сопротивление увеличивается, что приводит к уменьшению первичного напряжения трансформатора Тр2 и выходного напряжения.
Аналогично понижение выходного напряжения вызывает уменьшение сопротивления эмиттер — коллектор транзистора и увеличивает как первичное напряжение трансформатора Тр2, так и выходное напряжение источника электропитания.
Для питания схем на туннельных диодах, твердотельных схем, микромодулей и в некоторых других случаях требуются весьма низкие напряжения (менее 1 В) с достаточно высокой стабильностью и малой пульсацией выпрямленного напряжения. В этих случаях схемы транзисторных стабилизаторов, описанные выше, окажутся крайне неэкономичными, так как потери в регулирующем элементе и источнике опорного напряжения окажутся во много раз превосходящими полезную мощность, отдаваемую стабилизатором в нагрузку.
К неэкономичности стабилизаторов, выполненных по обычным наиболее распространенным схемам, следует 293
Рис. 9.26. Схема стабилизатора очень низких напряжений.
ного уровня, то генератор
также добавить плохие показатели в отношении стабильности выходного напряжения, так как транзисторные усилители измерительных элементов при напряжениях 0,2 В и ниже утрачивают работоспособность, а температурная нестабильность источников опорного напряжения (кремниевых стабилитронов) оказывается значительно больше допустимой нестабильности выходного напряжения. Поэтому для стабилизации низких напряжений используются специальные схемы.
На рис. 9.26 изображена схема стабилизатора сверхнизких напряжений, обеспечивающая высокую стабильность выпрямленного напряжения. В этой схеме в качестве измерительного элемента используется релаксационный генератор, состоящий из туннельного диода Д, дросселя Др и резистора R7. Этот генератор весьма чувствителен к уровню напряжения питания. Если это напряжение ниже некоторого определение работает, а если оно пре
вышает этот уровень, то генератор начинает создавать напряжение в виде прямоугольных импульсов весьма высокой частоты (около 50 кГц).
В качестве регулирующего элемента использован составной транзистор (Ti—Т3), а в качестве усилителя — транзистор
Стабилизатор работает следующим образом. При включении стабилизатора в сеть входное напряжение (7ВХ окажется приложенным к цепи, состоящей из последовательно соединенных резистора /?2, перехода эмиттер — база транзистора Т3 и резистора Д3. Под действием приложенного напряжения в этой цепи возникает ток, являющийся входным сигналом составного регулирующего транзистора. Этот ток, предварительно усиленный транзисторами Т3 и Д, протекает через переход эмиттер — база транзистора Т\ и уменьшает сопротивление его коллекторного перехода, в результате чего напряжение на выходе стабилизатора начинает возрастать.
294
При достижении определенного значения выходного напряжения начинает работать релаксационный генератор. Импульсы напряжения, создаваемые генератором, подаются на вход транзисторного усилителя Л. Амплитуда генерируемых импульсов вполне достаточна для того, чтобы через переход коллектор — эмиттер транзистора протекал относительно большой ток, что приведет к увеличению как тока в резисторе /?з, так и падения напряжения на нем.
При этом потенциал базы транзистора 73 повышается, что вызывает увеличение сопротивления коллекторного перехода транзистора Т\ и понижение выходного напряжения стабилизатора. При снижении выходного напряжения до некоторого минимального значения происходит срыв генерации релаксационного генератора и сопротивление коллекторного перехода транзистора Тх вновь резко уменьшается, повышая выходное напряжение стабилизатора.
Таким образом, в процессе работы стабилизатора напряжение на его выходе непрерывно изменяется от наибольшего напряжения, соответствующего запуску релаксационного генератора, до наименьшего значения, при котором происходит срыв генерации. Колебания выходного напряжения происходят при неизменном среднем значении, которое устанавливается с помощью регулируемого резистора R--
9.9. ПРИМЕНЕНИЕ ИНТЕГРАЛЬНЫХ МИКРОСХЕМ
В СТАБИЛИЗАТОРАХ
Миниатюризация и повышение надежности источников вторичного электропитания достигается широким применением интегральных микросхем, которые изготовляются как в виде отдельных элементов схемы (усилители, модуляторы, триггеры и т. п.), так и в виде закопченных стабилизаторов напряжения. Для питания аппаратуры, выполненной на микросхемах, часто применяют однокорпусные составные транзисторы, которые позволяют получить (помимо высокой надежности и качественных показателей) сравнительно высокий КПД.
Микросхемы, используемые в стабилизаторах напряжения, относятся к классу линейных интегральных микросхем. Первыми интегральными приборами (т. е. с несколькими элементами в одном корпусе, выполняющими определенные функции), применяемыми в стабилизаторах напряжения, были термокомпенсированные стабилитроны типа Д818, в которых последовательно соединены обратно-смещенный и два прямосмещенных р-п перехода. Были также разработаны парные транзисторы (например, К1НТ291), изготовленные по планарной технологии единым процессом и помещенные в одном корпусе. Оба транзистора такой пары имеют практически одинаковые 295
параметры. Использование дифференциальной схемы сравнения на транзисторах К1НТ291 совместно со стабилитронами Д818Д-Е позволяет получить высокостабильные транзисторные стабилизаторы.
Разработаны также многофункциональные интегральные элементы, которые могут использоваться в различных устройствах, в том числе и в стабилизаторах напряжения и тока.
Рис. 9.27. Схема интегрального стабилизатора серии К142.
Рис. 9.28. Схема включения интегрального стабилизатора типа К142ЕН1.
Промышленностью освоено производство и серийный выпуск, интегральных стабилизаторов с непрерывным регулированием (серия К142). Эта серия содержит стабилизаторы с регулируемым выходным напряжением от 3 до 30 В [К142ЕН1 (А,Б), К142ЕН2 (А,Б),. К142ЕНЗ, К142ЕН4], с фиксированными выходными напряжениями-5 и 6 (К142ЕН5А,Б) и с двухполярными входными и регулируемыми от ±5 В до ±25 В выходными напряжениями (-К142ЕН6). ’
Из перечисленных типов интегральных стабилизаторов наиболее широкое применение нашли стабилизаторы типов К142ЕН1 (А,Б), К142ЕН2 (А,Б) (рис. 9 27). Помимо своего основного казна* 296
чения (стабилизация напряжения при токе нагрузки до 0,15 А) они могут быть использованы в качестве активных сглаживающих фильтров, стабилизаторов тока, различных пороговых устройств, а также в устройствах защиты от перенапряжений и т. п.
Во всех случаях применения в стабилизаторах напряжения микросхем К142 приходится добавлять к ним навесные элементы (рис. 9.28). К таким элемен
там относятся выходной сравнивающий делитель 7?i, R?, конденсатор Ci, включаемый для устранения самовозбуждения микросхемы, выходной конденсатор Сп. Для защиты регулирующего элемента стабилизатора от перегрузки и короткого замыкания используется транзистор Tg, сигнал на который подается с резистора 7?з, включаемого в цепь последовательно с нагрузкой, и делителя R4, R$.
Дистанционное отключение стабилизатора может быть
Рис. 9.29. Схема включения усилительной ступени на транзисторе интегрального стабилизатора типа К142ЕН1.
осуществлено внешним сигналом, подаваемым на вывод 9.
Для построения стабилизаторов с непрерывным регулированием на токи нагрузки более 1 А в диапазоне выходных напряжений от' 3 до 30 В применяется схема, выполненная на интегральных стабилизаторах К.142ЕН1, К142ЕН2 с добавлением усилительной ступени на транзисторе Т1 (рис. 9.29).
Для уменьшения мощности, рассеиваемой на транзисторе Ti,. целесообразно схему управления и источник опорного напряжения стабилизатора (выводы 4, 8) питать от отдельного источника с параметрической стабилизацией напряжения. Для выходных напряжений 5 и 6 В интегральные стабилизаторы типов К142ЕН1, К142ЕН2' с транзисторами 7\ применяются при токах нагрузки более 3 А. При напряжениях в пределах от 3 до 30 В и токах нагрузки до 1 А применяют интегральные стабилизаторы типов К142ЕНЗГ К142ЕН4.
Гл ав а десятая
ОБЩИЕ ВОПРОСЫ ПРОЕКТИРОВАНИЯ И ЗАЩИТЫ
УСТРОЙСТВ ЭЛЕКТРОПИТАНИЯ
10.1. ОСОБЕННОСТИ ПРОЕКТИРОВАНИЯ ИСТОЧНИКОВ ЭЛЕКТРОПИТАНИЯ
В настоящей главе рассмотрены некоторые вопросы проектирования устройств электропитания: разработка структурных схем, миниатюризация устройств электропитания, обеспечение их надежности, защита и электромагнитная совместимость. Эти вопросы рассмотрены
297
главным образом применительно к источникам вторичного электропитания.
Проектирование устройств электропитания радиосистем включает в себя следующие основные этапы: составление и обоснование технического задания; разработку тактико-технических требований;
разработку структурной и принципиальной схем, включая их расчет;
разработку конструкции;
изготовление и испытание опытных образцов;
разработку и корректировку технической документации.
Документация является основой для разработки технологических процессов изготовления устройств электропитания в условиях индивидуального, серийного или массового производства.
Особенностью современного процесса проектирования любых устройств, в том числе устройств электропитания, является системный подход к проектированию.
Системный подход к проектированию устройств электропитания подразумевает максимальный учет взаимосвязи отдельных элементов и узлов, взаимодействия устройства электропитания с другими устройствами радиосистемы, влияния большого числа внешних воздействий, технико-экономических, конструкторско-технологических и эксплуатационных факторов. Системный подход требует исследования возможно большего числа решений и выбор на основе некоторого интегрального критерия оптимального решения. При этом может оказаться, что для оптимального в целом решении по некоторому интегральному критерию, в той или иной мере учитывающему большинство факторов, решения для отдельных узлов устройства электропитания не являются оптимальными.
В качестве интегрального критерия для оценки выбора оптимального решения в последние годы широко применяется критерий эффективности. Под эффективностью понимается обычно некоторая совокупность показателей, которые позволяют количественно оценить степень приспособленности системы к выполнению поставленных перед нею требований.
Все множество показателей устройств электропитания можно разбить на следующие основные группы: 298
функциональные, эксплуатационные, конструктивные и экономические.
К функциональным показателям относятся количественные и качественные характеристики источника электропитания, энергетические показатели, показатели электромагнитной совместимости, характеризующие помехи, создаваемые устройством электропитания, и др.
К эксплуатационным показателям относятся показатели, характеризующие надежность, удобство эксплуатации и ремонта, безопасность обслуживания.
Конструктивные показатели включают массу, габариты, вибро- и ударостойкость, влагозащищенность, степень использования стандартизованных и унифицированных блоков, узлов и деталей, технологичность конструкций п др.
Экономические показатели учитывают материальные затраты на разработку, производство и эксплуатацию.
Интегральный критерий! эффективности Э обычно формируется из совокупности рассмотренных, показателей, например, в виде суммы
1=1
где —некоторая функция от i-ro показателя pit — весовой коэффициент, учитывающий степень важности показателя. -5,
Техническое задание на проектирование устройств электропитания содержит назначение и обобщенную структурную схему питаемой радиотехнической системы, характеристики источников электроэнергии, условия эксплуатации, климатические условия, конструктивные, технологические и экономические ограничения.
На основе анализа заданных условий и ограничений вырабатываются тактико-технические требования на разработку устройства электропитания. Эти требования являются технической основой для всего процесса проектирования и обычно включают следующие элементы:
1) характеристики нагрузок, подключаемых к выходным зажимам устройства электропитания, например, вольт-амперная характеристика, показывающая, как изменяется'ток нагрузки при изменении питающего напряжения;
2) количественные и качественные характеристики требуемых напряжений и токов:
а) предельно допустимые токи и напряжения нагрузки;
299
б) допустимые абсолютные и относительные нестабильности питающих напряжений или токов;
в) пределы регулирования питающих напряжений и токов;
г) коэффициент пульсаций и уровень шумов питающих напряжений;
3) первичные источники энергии и их характеристики;
4) ограничения на уровень помех, создаваемых устройством электропитания;
5) требования к устройству электропитания на случай аварийных ситуаций;
6) требования к надежности;
7) требования к защите, системе управления, сигнализации;
8) ограничения на массу и габариты устройства электропитания или его отдельных узлов;
9) пределы изменения климатических условий (температуры, влажности, давления);
10) требования к КПД;
11) требования к механической устойчивости (виброустойчивости, удароустойчивости);
12) специальные требования, которые связаны с конкретными условиями разработки, производства и эксплуатации устройств электропитания.
На начальном этапе проектирования некоторые требования не удается сформулировать однозначно и точно. Поэтому ими приходится задаваться, а в дальнейшем при необходимости вносить коррективы в принятые решения.
Сформулированные тактико-технические требования играют решающую роль на всех этапах проектирования,, являются основой для принятия решений и оптимизации разрабатываемого устройства.
10.2. СТРУКТУРНЫЕ СХЕМЫ УСТРОЙСТВ ЭЛЕКТРОПИТАНИЯ
РАДИОСИСТЕМ
Структурная схема устройства электропитания отображает характер и последовательность преобразований источника электроэнергии для получения требуемых напряжений и токов, питающих блок и устройства радиосистемы.
Структурная схема предусматривает меры по обеспечению работоспособности радиосистемы при аварийных ситуациях, повышению надежности, защиты самого устройства электропитания и радиоблоков, а также обеспечивает управление и контроль. При составлении структурной схемы необходимо выбирать такие варианты, которые могут обеспечить лучшие массо-габаритные показатели, технологичность конструкции и наилучшие экономические показатели.
390
Если учесть, что радиосистемы состоят из большого числа блоков, устройство электропитания должно иметь весьма большое число выходных напряжений, отличающихся по характеру, значению и качественным показателям, причем отдельные радиоустройства и блоки могут быть сильно разнесены в пространстве. В этой связи могут использоваться централизованные, децентрализованные и комбинированные системы электропитания, структурные схемы которых показаны на рис. 10.1.
Рис. 10.1. Структурные схемы электропитания радиоблоков. а — централизованная; б — децентрализованная; в — комбинированная.
301
При централизованном питании (рис. 10.1,а) все необходимые питающие напряжения вырабатываются в центральном источнике вторичного электропитания ЦИВП, который связан с отдельными радиоблоками РБ системой распределения (проводниками, шинами и т.п.).
При децентрализованном (индивидуальном) питании (рис. 10.1,6) каждый радиоблок имеет свой источник вторичного электропитания ИВП, причем источники электроэнергии (в общем случае их несколько) связаны с ИВП через центральное распределительное устройство ЦРУ.
В комбинированной системе часть радиоблоков может питаться от центрального источника ЦИВП, а остальная часть имеет индивидуальные источники вторичного электропитания. Возможен вариант, когда в комбинированной системе электропитания часть функций источника вторичного электропитания выполняет ЦИВП одновременно для всех радиоблоков, а остальные функции выполняются индивидуальными для каждого радиоблока ИВП. Структурная схема такой системы изображена на рис. 10.1,s. Здесь трансформация переменных напряжений и их выпрямление осуществляются центральным трансформаторно-выпрямительным блоком ЦТВБ, а стабилизация напряжения обеспечивается индивидуальными стабилизаторами С.
Централизованная система электропитания обычно более экономична, чем индивидуальная. Однако при централизованном электропитании возрастают потери в системе распределения, которые особенно велики при малых питающих напряжениях и больших токах нагрузки. Кроме того, при централизованном электропитании могут возникнуть паразитные связи между радиоблоками через общий источник. Учитывая, что при индивидуальном электропитании мощность ИВП сравнительно невелика, имеется возможность их интегрального или гибридно-интегрального исполнения и широкого использования унифицированных узлов. Вы0ор той или иной системы электропитания определяется конкретными условиями с учетом отмеченных выше их достоинств и недостатков.
Рассмотрим на ряде примеров особенности структурных схем устройств электропитания для различных .типов радиосистем. ........ j
302
На рис. 10.2 представлена структурная схема системы электропитания стационарного радиоцентра связи РЦ, включающего несколько передатчиков РП и приемников РПУ. Источником электроэнергии является промышленная сеть трехфазного переменного тока высокого напряжения (в несколько десятков киловольт). Высокое напряжение сети обеспечивает малые потери энергии при передаче, ее на большие расстояния. Обычно
Промышленная сеть переменного тона,
Рис. 10.2. Структурная схема системы электропитания стационарного радиоцентра связи.
это напряжение снижается до 380/220 В с помощью трансформаторной подстанции ТП. Напряжения с вы? хода ТП подаются на систему электропитания через центральный распределительный щит ЦРЩ. Входная часть системы электропитания включает несколько трансформаторов, а именно: высоковольтные трансформаторные блоки ВТБ и трансформаторы средних и низ-
303
ких напряжений ТОНН. Выходные напряжения ВТБ выпрямляются высоковольтными выпрямителями ВВ, которые обеспечивают питание мощных каскадов радиопередатчиков. Трансформаторы средних и низких напряжений служат для создания напряжений для питания промежуточных трактов, возбудителей передатчиков и каскадов радиоприемников. Средние и низкие постоянные напряжения обеспечиваются выпрямителями В. При необходимости постоянные и переменные напряжения стабилизируются стабилизаторами СПсН и СПрН. Для
К раЛи.оа.ппа.ра,туре
Рис. 10.3. Структурная схема системы электропитания бортовой радиоаппаратуры.
управления работой системы электропитания (включение, выключение, регулирование напряжений), контроля за ее работоспособностью, защиты на случай аварийных ситуаций, обеспечения безопасности эксплуатации служит система технических средств управления, блокировки и диагностики УВД. Защита сети от коротких замыканий обеспечивается автоматическими выключателями А.
Важным требованием к системе электропитания является обеспечение ее функционирования при выходе из строя источника электроэнергии. В схеме на рис. 10.2 эта задача решается путем подключения резервного агрегата питания РАП, включающего в себя двигатель внутреннего сгорания Д, который вращает ротор .синхронного генератора СГ. Для поддержания напряжения 304
в требуемых пределах служит система стабилизации, состоящая из регулятора напряжения PH и устройства сравнения УС выходного напряжения с некоторым эталоном. Ввод в действие РАН обычно происходит автоматически при прекращении внешнего энергоснабжения. Рассмотренная система электропитания обычно является комбинированной, т. е. включает как централизованные, так и индивидуальные источники вторичного электропитания.
Структурная схема системы электропитания бортовой радиоаппаратуры представлена на рис. 10.3. Источником электроэнергии является генератор постоянного тока ГПТ, якорь которого приводится во вращение авиационным двигателем АД. В бортовой сети постоянного тока используется сравнительно низкое напряжение, которое весьма нестабильно. Для обеспечения электропитания бортовой радиоаппаратуры приходится использовать преобразователи постоянного тока ППсТ (конверторы) с последующей стабилизацией, которую осуществляют стабилизаторы постоянного напряжения СПсН. Однако некоторые устройства питаются переменным током. Поэтому в состав источников вторичного электропитания входит обычно преобразователь постоянного тока в переменный ППрТ (инвертор); он служит также для питания трансформаторно-выпрямительных блоков ТВБ, обеспечивающих высокие постоянные напряжения (несколько сотен вольт, киловольты). В большинстве случаев в состав систем входят аккумуляторы, обеспечивающие электропитание аппаратуры при аварийном отключении генератора.
На рис. 10.4 представлена схема системы электропитания радиоаппаратуры, в которой источником электроэнергии служит солнечная батарея СБ. Для обеспечения электропитания радиоаппаратуры при отсутствии солнечного освещения элементов солнечной батареи служит аккумуляторная батарея АБ. При солнечном освещении солнечные батареи СБ обеспечивают питание радиоаппаратуры и зарядку аккумулятора через диоды Д1 и Д2. Ограничитель тока заряда ОТЗ служит для защиты аккумулятора при больших напряжениях на выходе СБ.
При снижении напряжения СБ до определенного уровня срабатывает пороговое устройство ПУ, которое замыкает контакт К, и система переходит в режим пи-20—1056 305
тания от аккумулятора. При этом диод Д\ препятствует разряду аккумулятора на солнечные батареи, диод Д% исключает протекание разрядного тока аккумулятора через ограничитель тока заряда ОТЗ.
Поскольку выходное напряжение СБ изменяется в очень широких пределах, система электропитания содержит стабилизатор постоянного напряжения СПсН.
Рис. 10.4. Структурная схема системы электропитания радиоаппаратуры с солнечной батареей.
Сравнительно низкое напряжение стабилизатора может быть использовано лишь для некоторых радиоблоков. Для получения переменных питающих напряжений и высоких постоянных напряжений используется инвертор И. При этом высокие постоянные напряжения вырабатываются трансформаторно-выпрямительными блоками ТВБ.
На базе структурной схемы разрабатываются принципиальные схемы, осуществляется выбор ее отдельных компонентов и узлов, рассчитываются электрические принципиальные схемы. Расчет осуществляется по заданным в техническом задании показателям с помощью соотношений, приведенных в предыдущих главах.
10.3. ОСНОВНЫЕ НАПРАВЛЕНИЯ И МЕТОДЫ КОМПЛЕКСНОЙ МИНИАТЮРИЗАЦИИ УСТРОЙСТВ ЭЛЕКТРОПИТАНИЯ
Миниатюризация аппаратуры, первичная цель которой состоит в уменьшении габаритов и массы радиоустройств, является одним из главных направлений развития современной радиоэлектроники. В этом направлении достигнуты большие успехи, особенно применительно к аппаратуре, предназначенной для обработки слабых сигналов. Здесь эффективность миниатю-306
ризации оценивается обычно плотностью компоновки, т. е. количеством элементов в единице объема, которая в настоящее время достигает 105 элементов/см3.
Устройства электропитания относятся к классу энергетической аппаратуры, предназначенной для преобразования энергии. Поэтому для оценки эффективности миниатюризации в качестве критерия используется удельная мощность Руд, Вт/дм3, т. е. отношение выходной мощности устройства к его объему, или относительный объем V, т. е. отношение объема устройств электропитания к суммарному объему всей радиосистемы.
Трудности и особенности миниатюризации устройств электропитания связаны с большими значениями токов и напряжений, действующих в цепях этих устройств, большим уровнем активных и реактивных мощностей и большими тепловыми нагрузками на отдельные конструктивные элементы и конструкции устройств электропитания в целом. Для обеспечения нормального теплового режима элементов и устройств возникает проблема охлаждения, т. е. отвода во внешнюю среду, теплоты, выделяемой в конструкции. Это часто является одним из ограничений в уменьшении габаритов источников электропитания.
Миниатюризация устройства электропитания — это проблема комплексная, требующая для ее решения использования энергетических, структурных, конструктивно-технологических и системных методов.
Энергетический метод миниатюризации в конечном итоге сводится к повышению КПД всех функциональных блоков и конструктивных компонентов, выбору частоты преобразования, оптимальных удельных электрических и магнитных нагрузок элементов.
Основными конструктивными элементами, определяющими габариты и массу источников электропитания, являются трансформаторы, дроссели и конденсаторы. Полупроводниковые приборы сами по себе могут иметь малые габариты при больших рабочих токах. Однако значительная мощность, рассеиваемая на них, приводит к необходимости увеличения поверхности теплоотвода для обеспечения нормальной температуры р-п перехода. Необходимость увеличения поверхности теплоотвода приводит к значительному увеличению габаритов. В частности, мощные диоды, транзисторы и тиристоры устанавливаются на радиаторы, размеры которых обыч-20* 307
но в несколько раз превышают размеры самого полупроводникового прибора.
Исследования и опыт разработки показывает, что габариты устройств электропитания определяются либо требуемой поверхностью теплоотвода, либо конструктивным объемом, необходимым для размещения элементов схемы.
Габариты таких конструктивных элементов, как трансформаторы и дроссели, определяются удельными нагрузками: плотностью тока в проводниках j и индукцией магнитного поля в сердечниках В. С ростом удельных нагрузок уменьшаются габариты элементов. Например, при увеличении j для того же тока можно уменьшить сечение проводников, т. е. уменьшить габариты дросселей и трансформаторов. Однако при этом неизбежно уменьшается КПД элементов, увеличивается рассеиваемая в них мощность, что приводит к необходимости увеличения поверхности теплоотвода, т. е. габаритов устройства электропитания.
В результате оказывается, что существуют оптимальные удельные нагрузки, при которых при необходимой поверхности теплоотвода обеспечивается максимальная плотность компоновки элементов в конструкции. В процессе проектирования устройства электропитания необходимо найти эти оптимальные удельные нагрузки, обеспечивающие минимальные габариты конструкции.
Повышение КПД устройства электропитания может быть обеспечено как выбором соответствующих элементов и материалов, так и выбором режимов работы узлов источника электропитания. Так, для уменьшения потерь в низковольтных сильноточных выпрямителях вместо обычных диодов может оказаться целесообразным применение диодов Шоттки, биполярных и полевых транзисторов в диодном включении. Весьма перспективными являются ключевые режимы работы преобразователей и стабилизаторов, обеспечивающие весьма высокие КПД.
Как было показано в предшествующих главах, габариты трансформаторов, дросселей и конденсаторов существенно уменьшаются с ростом рабочей частоты. Поэтому одним из эффективных средств снижения габаритов устройств электропитания является повышение рабочей частоты выпрямительных и преобразовательных блоков. Следовательно, более предпочтительными являются источники переменного тока повышенной частоты.
308-
Для снижения габаритов можно искусственно повышать рабочую частоту выпрямительных устройств с помощью преобразователей частоты. Примером подобного решения являются весьма перспективные с точки зрения уменьшения массы и габаритов выпрямители с промежуточным преобразованием частоты (см. гл. 8).
Следует, однако, иметь в виду, что при слишком высокой частоте увеличивается влияние паразитных конструктивных индуктивностей и емкостей на работу устройства, уменьшается КПД полупроводниковых преобразователей за счет инерционности транзисторов и тиристоров и увеличиваются создаваемые ими помехи. На современном этапе развития элементной базы оптимальное значение частоты преобразующих устройств лежит в пределах 10—50 кГц.
Рассмотренные энергетические аспекты проблемы миниатюризации приходится учитывать не только на этапе конструкторской разработки, но и при построении структурной и принципиальной схем устройств электропитания.
Структурный метод миниатюризации базируется на исключении или уменьшении количества, номиналов и рабочей мощности реактивных компонентов схем устройств электропитания: трансформаторов, дросселей и конденсаторов большой емкости. Он используется главным образом на этапах разработки структурных и принципиальных схем. В соответствии со структурным методом, например, вместо обычных LC- или ЛС-фильт-ров для подавления пульсаций целесообразно использовать электронные (транзисторные) фильтры, которые не только позволяют устранить дроссели, но и уменьшить емкость конденсаторов фильтров.
Для замены трансформаторов целесообразно использовать выпрямители с умножением напряжения, снижая его на стороне переменного тока с помощью емкостных делителей или осуществляя требуемую трансформацию напряжения в цепях постоянного тока с помощью ключевых конверторов, описанных в гл. 8. При разработке структурной схемы следует иметь в виду, что повышение рабочей частоты всегда приводит к уменьшению габаритов трансформаторов, дросселей и конденсаторов. Поэтому в функциональные схемы целесообразно вводить преобразователи, повышающие рабочую частоту переменного тока, даже если для принципиального решения задачи инверторы не являются необходимыми.
309
Для всей системы питания в целом, включая электрические аппараты управления, защиты и блокировки, важным средством миниатюризации является замена электромагнитных реле, контакторов, автоматов электронными (транзисторными, тиристорными)’ устройствами, выполняющими аналогичные функции.
Конструктивно-технологические методы миниатюризации основаны на интеграции конструктивных элементов в единые функциональные блоки, на использовании
Рис. 10.5. Принципиальные схемы бескорпусных сборок.
а — силовой части преобразователя напряжения; б—мостового выпрямителя с фильтром; в — двухфазного выпрямителя с фильтром.
интегральной технологии, на применении бескорпусных полупроводниковых приборов, микросхем и специальных материалов, а также на специальных методах конструирования, обеспечивающих плотную компоновку и благоприятные условия для отвода тепла.
Интеграция конструктивных элементов подразумевает создание функционально законченных гибридных интегральных микросхем (ГИМС) на основе бескорпусных полупроводниковых приборов и микросхем или бескорпусных малогабаритных сборок, включающих силовые транзисторы и диоды в сочетаниях с другими элементами.
На рис. 10.5 приведены принципиальные схемы таких сборок. Гибридные интегральные микросхемы и малогабаритные сборки выполняются обычно на пластинах из окиси бериллия. Эти пластины обладают высокой теплопроводностью и герметизируются эпоксидным компаундом. Маломощные транзисторы, резисторы и микросхемы, входящие в цепи стабилизации управления и защиты, обычно выполняются в виде самостоятельных ГИМС, хотя могут быть конструктивно объединены с силовыми приборами и цепями. В качестве примера на рис. 10.6 приведена конструкция интегрального стабилизатора, схема которого изображена на рис. 9.27.
310
Рис. 10.6. Топологическая схема интегрального стабилизатора напряжения К142ЕН (размер кристалла 1,7X1,7 мм).
процессе работы устройства
Крупные функциональные блоки или все устройство электропитания в большинстве слу-чаев строятся путем объединения ГИМС, малогабаритных сборок, трансформаторов, дросселей и других элементов в общем герметичном корпусе с плотной компоновкой элементов. Для обеспечения хорошего теплового контакта элементов с корпусом полость последнего часто заливается жидким диэлектриком с низкой температурой кипения. Эта кипящая в жидкость обеспечивает отвод тепла от элементов через корпус во внешнюю среду.
Конструкция другого варианта крупного блока представляет собой металлическую пластинку с отсеками, пазами и полостями, в которых размещаются все компоненты и соединения между ними. Полупроводниковые элементы или сборки помещаются в герметизированных отсеках. Трансформаторы, дроссели и конденсаторы крепятся в полостях с помощью эпоксидного компаунда. Пример подобного рода гибридно-интегральной конструкции приведен на рис. 10.7. Она представляет собой реализацию выпрямителя с промежуточным преобразованием частоты для обеспечения весьма низкого напряжения, построенного по схеме на рис. 10.8.
Рассмотренные конструкции позволяют избежать применения шасси, кожухов, расшивочных панелей, обеспечивают высокую плотность упаковки, отсутствие крепежных деталей, хорошие условия теплоотвода и механическую прочность. Конструкция может быть моноблочной или состоять из нескольких пластин.
Системные методы миниатюризации основаны, с одной стороны, на комплексном использовании трех предшествующих методов с учетом их взаимосвязи и, с другой стороны, на оптимизации структурной и принципиальной схем всего устройства электропитания с учетом взаимодействия отдельных блоков и элементов.
311
Часто оказывается, что рассмотренные энергетический, структурный и конструкторско-технологический методы приводят к противоречивым решениям и требуют поиска оптимального решения. В подобных противоречивых случаях необходимо рассмотреть множество конструктивных реализаций и выбрать наилучшую с точки зрения габаритов.
Рис. 10.7. Интегрально-гибридная конструкция выпрямителя с промежуточным преобразованием частоты.
Однако детальная разработка множества вариантов требует большого времени и больших материальных затрат на проектирование. В этой связи огромный интерес представляют методы автоматизированного проектирования с помощью ЭВМ. Разработчик строит математические модели, т. е. совокупности уравнений, описывающих разрабатываемые конструкции, рассчитывает с помощью ЭВМ все интересущие параметры и характеристики разных вариантов конструкций и выбирает оптимальный вариант. Современные цифровые ЭВМ позволяют даже для весьма сложных конструкций, недоступных для «ручных» расчетов, быстро рассмотреть интересующую совокупность вариантов и принять оптимальное ре-щение.
Системный метод миниатюризации требует комплексного подхода к проектированию всех составляющих блоков узлов и элементов по единому плану, целью которо-312
го является получение минимальных габаритов всего устройства, а не отдельных его компонентов. В этой связи необходимо рассматривать множество возможных вариантов структурных и принципиальных схем всего устройства электропитания в целях отыскания наилучшего решения, изыскивать внутренние ресурсы, возможности совмещения функций, всесторонне учитывать влияние схем и конструкций самой питаемой радиосистемы на устройства электропитания. Так, например, функции
Рис. 10.8. Структурная схема выпрямителя с промежуточным преобразованием частоты.
ВВ— высоковольтный выпрямитель; ИР — импульсный регулятор напряжения; Ф — фильтры; И — транзисторный инвертор; НВ — низковольтный выпрямитель; ОС —обратная связь.
фильтрации и стабилизации можно совместить в одном устройстве, обеспечив необходимое быстродействие стабилизатора. Транзисторные и тиристорные ключи преобразовательных узлов могут выполнять также функции регулирования и защиты, инверторы и конверторы могут выполнять функции стабилизации и т. п.
Системный подход часто приводит к целесообразности децентрализации систем питания, т. е. использования индивидуальных ИВП для питаемых радиоблоков. При этом можно сам радиоблок и ИВП выполнить в виде единой ГИМС.
Комплексная миниатюризация устройств электропитания на базе рассмотренных методов позволяет не только улучшить массо-габаритные показатели, но и повысить надежность, срок службы, способствует унификации отдельных узлов и блоков, что в конечном счете сокращает сроки и материальные затраты на разработку и изготовление устройств электропитания.
313
10.4. НАДЕЖНОСТЬ, РЕЗЕРВИРОВАНИЕ И ДИАГНОСТИКА УСТРОЙСТВ электропитания
Надежность устройств электропитания является одним из важнейших эксплуатационных показателей.
Под надежностью понимается способность устройств выполнять определенные функции и сохранять заданные характеристики в течение заданного времени в определенных условиях эксплуатации. Утрата этой способности называется отказом устройства.
Различают внезапные (или полные) и постепенные (или допусковые) отказы. При внезапном отказе устройство электропитания утрачивает свою способность выполнять заданные функции. При постепенном отказе происходит сравнительно медленное изменение характеристик и показателей устройства, в результате чего один или несколько показателей выходят за допустимые границы, хотя устройство и продолжает функционировать. Таким образом, одно из основных свойств надежности— это безотказность в работе, т. е. сохранение работоспособности в течение некоторой наработки без вынужденных перерывов.
Отказ —это событие случайное, т. е. нельзя точно предсказать появление отказа в любой интересующий нас момент времени. Можно лишь говорить о вероятности появления отказа. Поэтому количественные характеристики надежности носят вероятностный характер. Рассмотрим некоторые из таких характеристик.
Вероятность безотказной работы p(t) определяется из соотношения
где N — общее число одинаковых устройств, находящихся в эксплуатации; п(1)—число устройств, отказавших за время t.
Строгое определение p(t) требует, чтобы N было не-ограничено большим.
Применительно к одному устройству физический смысл p(t) сводится к тому, что имеется р(£)ХЮ0 случаев из 100 возможных, что за время t устройство не откажет.
Интенсивность отказов X определяется как dp(t)/dt __________________ Дл
я _ __ >
314
где Дга — число отказавших устройств на временном интервале ДЛ
Во многих случаях можно считать, что X не зависит от времени. Поэтому интенсивность отказов является удобной характеристикой надежности, поскольку в отличие от p(t) она является не функцией, а некоторым числом. В то же время, как вытекает из последнего соотношения, Л, однозначно определяет вероятность безотказной работы:
p(t) = e~u.
Устройство электропитания состоит из связанных компонентов (функциональных узлов, блоков, отдельных конструктивных элементов), каждый из которых имеет свои характеристики надежности pi(t) и Ль В большинстве случаев у так называемых нерезервированных устройств полные отказы отдельных узлов, блоков и элементов приводят к отказу устройства электропитания в целом. При этом оказывается, что вероятность безотказной работы всего устройства
k
k
/’(0=Цй(0=в .
1=1
С помощью последней формулы простыми расчетами можно показать, что с ростом числа компонентов p(t) весьма быстро, уменьшается. Поэтому сложные многокомпонентные устройства электропитания могут иметь весьма низкую надежность несмотря на высокую надежность отдельных компонентов.
Таким образом, для обеспечения высокой надежности устройства электропитания в целом необходимо использовать при его проектировании высоконадежные компоненты, т. е. диоды, транзисторы, тиристоры, резисторьц дроссели, трансформаторы или функциональные узлы в виде сборок и микросхем.
Весьма важно отметить, что надежность отдельных компонентов сильно зависит от электрических режимов и условий эксплуатации. Интенсивность отказов растет с увеличением электрической и тепловой нагрузки, повышением или снижением окружающей температуры по сравнению с нормальной, повышением влажности, механических нагрузок и т. п. Поэтому одним из средств пб-
315
вышения надежности является выбор таких режимов работы элементов, при которых интенсивности отказов минимальны или не превышают заданных значений. В частности, с точки зрения повышения надежности целесообразно использовать активные и пассивные компоненты в недогруженных режимах, т. е. устанавливать рабочие токи й напряжения ниже номинальных значений.
Следует отметить, что количественные характеристики надежности компонентов часто не известны проектировщику, поскольку для их оценки необходима длительная массовая эксплуатация. Это, в частности, относится к. новым компонентам, опыт эксплуатации которых недостаточен для оценки надежности. Поэтому в процессе разработки устройств электропитания часто приходится проводить специальные испытания компонентов на надежность.
Эффективным средством повышения надежности является резервирование, сущность которого сводится к использованию вместо одного компонента двух или нескольких. Резервные компоненты не являются необходимыми для функционирования устройств питания и служат лишь для сохранения работоспособности при отказе основного компонента. Резервированию могут подлежать как отдельные элементы (резисторы, конденсаторы, диоды, транзисторы и т. п.), так и целые функциональные блоки (выпрямители, стабилизаторы и др.).
Различают горячее (нагруженное) и холодное (непогруженное) резервирование. При горячем резервировании основные и резервные компоненты находятся в одинаковых условиях, т. е. через них протекают одинаковые •токи, действуют одинаковые напряжения и т. д. При выходе из строя основного компонента его функции продолжает выполнять резервный.. В большинстве случаев горячее резервирование сводится к параллельному и по-
Рис. 10.9. Схемы резервирования.
а—в — нагруженного (горячего); г — ненагруженного (холодного).
316
следовательному соединению отдельных компонентов. При холодном резервировании резервный компонент обесточен и-исключен из функциональной схемы устройства электропитания. Он начинает функционировать только лишь при отказе основного компонента.
Примеры горячего резервирования представлены на рис. 10.9,а—в. Простейший пример (рис. 10.9,а) представляет собой последовательное соединение двух диодов. При отказе одного диода функцию выпрямления обеспечивает резервный. Однако надежность такого компонента будет повышаться лишь по отношению к таким отказам диодов, когда при пробое сопротивление их в прямом и обратном направлениях будет равно нулю. Если при отказе сопротивление диода в обоих направлениях станет равным бесконечности (разрыв), то надежность не повышается. Резервирование диодов по схеме на рис. 10.9,6 обеспечивает повышение надежности как при коротких замыканиях, так и разрывах диодов. Примером горячего резервирования функциональных блоков является схема на рис. 10.9,в, которая содержит два выпрямителя В, работающих параллельно на общую нагрузку 7?н- При отказе одного из выпрямителей продолжает работу резервный. При этом диоды предотвращают протекание тока резервного выпрямителя через выходную цепь отказавшего.
Рисунок 10.9,г иллюстрирует холодное резервирование выпрямителей. Резервный выпрямитель при исправном основном обесточен и исключен из 4УнкЦиональной схемы. При отказе основного выпрямителя устройство переключения УП получает соответствующий сигнал и, воздействуя на переключатели П\ и П2, отключает из схемы отказавший выпрямитель и включает резервный.
Следует иметь в виду, что резервирование является весьма дорогим средством повышения надежности, приводящим к усложнению устройства электропитания, увеличению его габаритов и массы. Поэтому обычно резервируют лишь наиболее слабые в отношении надежности звенья и элементы.
Если говорить о постепенных отказах компонентов устройств электропитания, то здесь широкое применение нашли так называемые схемные методы повышения надежности. Сущность их сводится к такому построению структурной и принципиальной схем, при котором изменение характеристик отдельных компонентов мало влия-317
ет на результирующие характеристики и показатели .всего устройства электропитания.
Таким образом, основными путями повышения надежности в процессе проектирования устройств электропитания являются:
применение надежных компонентов; оптимизация режимов работы компонентов; поэлементное и поузловое резервирование; оптимизация схем к постепенным отказам компонентов.
Безотказность — не единственное свойство устройств электропитания, характеризующее его надежность. Надежность определяется также такими свойствами, как сохраняемость, ремонтопригодность и долговечность.
Сохраняемостью называется свойство изделия сохранять работоспособность в течение и после срока хранения и транспортировки.
Ремонтопригодность есть свойство, заключающееся в приспособленности изделия к предупреждению, обнаружению и устранению отказов.
Долговечность характеризует сохранение работоспособности до наступления предельного состояния с необходимыми перерывами для обслуживания и ремонта.
Наиболее важным свойством из названных для проектирования устройств электропитания является ремонтопригодность. Одной из количественных характеристик ремонтопригодности является среднее время пребывания устройств в нерабочем состоянии, которое необходимо для выявления и устранения неисправностей, т. е. причин отказов. Следует отметить, что в сложных устройствах электропитания, содержащих большое число элементов и узлов, выявление причины отказа всего устройства представляет собой весьма трудную задачу. Для ее решения в настоящее время широко используются специальные технические средства, называемые средствами диагностики, которые позволяют ускорить процесс отыскания неисправности и частично или полностью автоматизировать этот процесс.
Технические средства диагностики устройств электропитания включают в себя измерительные приборы или датчики, контролирующие значения токов и напряжений отдельных элементов и цепей, устройства сигнализации, регистрирующие нарушение нормальных режимов работы отдельных элементов и узлов. Устройства сигнализа-318
ции дают информацию оператору о характере и месте неисправности или вырабатывают сигналы, необходимые для автоматического устранения неисправности.
10.5. ЗАЩИТА УСТРОЙСТВ ЭЛЕКТРОПИТАНИЯ ОТ ПЕРЕГРУЗОК
И КОРОТКОГО ЗАМЫКАНИЯ
Одним из средств повышения надежности, ремонтопригодности и долговечности является защита устройств электропитания от перегрузок и короткого замыкания.
В процессе работы устройства электропитания часто возникают аварийные ситуации, не предусмотренные нормальным режимом эксплуатации. Внешние аварийные ситуации возникают при коротком замыкании в цепи нагрузки, при нарушениях в работе первичных источников, например сети переменного тока. При этом элементы устройства электропитания могут подвергаться значительным электрическим и тепловым перегрузкам, которые могут привести к выходу их из строя.
Значительные перегрузки узлов и элементов могут возникнуть также при включении и выключении устройств электропитания, при отказах других узлов и элементов (внутренние аварийные ситуации).
Защита узлов и элементов устройства электропитания имеет своей целью сохранение их работоспособности после устранения аварий и перегрузок и восстановления нормального режима эксплуатации. Защита предотвращает развитие внутренней аварии и упрощает ремонт устройства электропитания после отказа.
Различают общую и индивидуальную защиту.
Общая защита, как правило, полностью отключает устройство электропитания от источника электроэнергии при появлении перегрузки.
Индивидуальная защита обеспечивает отключение или устранение перегрузки отдельных узлов и элементов устройства.
По принципу реакции на перегрузку методы защиты подразделяются на схемные, пассивные и активные.
Схемные методы защиты основаны на построении специальных схем, которые при возникновении перегрузки автоматически переходят в состояние, при котором нормальное функционирование нарушается, но это неопасно для отдельных элементов схемы.
Пассивные методы защиты основаны на введение в схемы специальных устройств, которые при появлении 319
перегрузки либо ограничивают ток или напряжение в месте перегрузки, либо вообще отключают устройство, или элемент, причем срабатывание пассивных устройств защиты происходит непосредственно за счет самой перегрузки, т. е. за счет энергии, возникшего возмущения. Примерами пассивных защитных устройств являются предохранители, автоматические выключатели, стабилитроны, резисторы, катушки индуктивности.
Активные методы защиты отличаются от пассивных тем, что возникшее возмущение воздействует на исполнительный элемент защиты не непосредственно, а через некоторое управляющее устройство. Последнее обеспечивает усиление возникшего возмущения, что обеспечивает высокую чувствительность активных схем защиты.
Устройства защиты должны обладать достаточным быстродействием и чувствительностью, т. е. должны срабатывать быстрее, чем защищаемые элементы и устройства выходят из строя под действием перегрузки.
Наиболее чувствительными даже к кратковременным перегрузкам являются полупроводниковые приборы, применяемые в устройствах электропитания. Если ток и напряжение полупроводникового прибора превышают предельно допустимые значения, то происходит тепловой или электрический пробой, который разрушает р-п переход. Поэтому полупроводниковые приборы, как правило, обеспечиваются индивидуальной защитой. На рис. 10.10 приведены различные варианты защиты диодов, тиристоров и транзисторов.
Для защиты полупроводниковых диодов последовательно с ними часто включают катушки индуктивности (рис. 10.10,а), которые ограничивают скачки токов за счет ЭДС самоиндукции, быстродействующие предохранители (рис. 10.10,6), разрывающие цепь при превышении током некоторого значения, либо резисторы. Эти же способы защиты могут применяться для тиристоров и транзисторов.
Для защиты тиристоров от перенапряжений, возникающих в процессе коммутации, их часто шунтируют 2?С-цепями (рис. 10.10,в). Для снижения пиков обратного напряжения могут использоваться последовательно включенные диоды (рис. 10.10,г).
Весьма большую опасность для управляющего электрода тиристоров представляют отрицательные напряжения и обратные токи, которые могут привести к пробою. 320
Для ограничения обратных напряжений и токов параллельно управляющему электроду (рис. 10.10Д) или последовательно с ним (рис. 10.10,е) включают диоды.
Для защиты транзисторов от перенапряжений между коллектором и эмиттером можно включить стабилитрон (рис. 10.10,ж). Стабилитрон ограничивает коллекторное напряжение, при этом резко возрастает его ток, что приводит к увеличению падения напряжения на внешней нагрузке транзистора.
Рис. 10.10. Схемы индивидуальной защиты полупроводниковых приборов.
а, б — диодов; в, г — выходных цепей тиристоров; д, е — входных цепей тиристоров; ж — коллекторной цепи транзистора.
Пассивные элементы устройств электропитания (резисторы, дроссели, трансформаторы и др.) более устойчивы к перегрузкам. Поэтому они обычно не снабжаются индивидуальной защитой.
Как правило, устройства электропитания обеспечиваются несколькими защитными устройствами на случай различных аварийных ситуаций. Рассмотрим несколько конкретных примеров устройств электропитания с защитой.
В управляемом трехфазном выпрямителе (рис. 10.11) каждый из тиристоров снабжен индивидуальной защитой, состоящей из предохранителя Пр, /?С-цепочки и двух диодов в цепи управляющего электрода. Для защиты выпрямителя от скачков напряжения сети используют ДС-цепочки, подключенные треугольником к выходным обмоткам трехфазного трансформатора. При коротком замыкании в самом трансформаторе или его вторичной цепи автоматический выключатель А отключает выпрямитель от сети переменного тока.
21—Ю56 321:
Вис. 10.11. Принципиальная схема защиты трехфазного управляемого выпрямителя.
На рис. 10.12 представлены два варианта схемы защиты линейных (непрерывных) стабилизаторов от перегрузок и коротких замыканий. Устройства защиты на этих схемах обведены пунктирной линией. В схеме на рис. 10.12,а при возникновении короткого замыкания в цепи нагрузки, а также при значительном увеличении тока через регулирующий транзистор стабилизатора напряжение на резисторе 7?i возрастает настолько, что тиристор Д переходит в открытое состояние. При этом резко возрастает напряжение на резисторах Rz и Rn, что приведет к открыванию транзистора Т. Резкое возрастание тока коллектора Т вызывает уменьшение тока базы и закрывание составного регулирующего транзистора стабилизатора. После устранения короткого замыкания или перегрузки выходное напряжение стабилизатора восстанавливается повторным включением питающего напряжения.
В схеме на рис. 10.12,5 для защиты используется реле Р\, управляемое транзистором Т. При нормальном режиме работы линейного стабилизатора напряжение на диоде Д превышает напряжение на резисторе R%, а ток базы транзистора Т таков, что транзистор находится в состоянии насыщения. Ток коллектора транзистора, протекая через обмотку реле Р\, удерживает его контак-322
+
Рис. 10.12. Принципиальные схемы защиты стабилизаторов от перегрузок и короткого замыкания.
а —с запиранием регулирующего транзистора; б—с отключением от сети.
ты 1 и 2 в замкнутом состоянии. При возникновении перегрузки или короткого замыкания напряжение на резисторе Т?2 возрастает. Как только напряжение на резисторе Rz превысит напряжение на диоде, транзистор Т закрывается. При этом контакты реле Pi размыкаются, отключая, выпрямитель и стабилизатор от сети. После устранения перегрузки для включения источника электропитания необходимо нажать и отпустить кнопку К.
Обычно устройства защиты снабжаются индикаторами (лампами накаливания, неоновыми лампами или светоизлучающими диодами), сигнализирующими о перегрузке и месте ее возникновения. Так, на рис. 10.12,а при срабатывании схемы защиты загорается сигнальная лампа Л.
Комплекс защитных мер с системой сигнализации является весьма эффективным средством повышения надежности устройств электропитания. Поэтому они широ-21* 323
ко применяются как в сравнительно простых, так и в весьма сложных устройствах, содержащих большое число функциональных узлов.
10.6. ЗАЩИТА ОТ ПОМЕХ, СОЗДАВАЕМЫХ УСТРОЙСТВАМИ ЭЛЕКТРОПИТАНИЯ
Устройства электропитания (УЭП), выполняя свои основные функции, являются одновременно и источниками помех для других радиотехнических устройств и си-
ИН
л
Шасси, _
ф Сплр1
пн
Ф Сплег
Посторонний. npoSod Q д
в
Рис. 10.13. Разновидности паразитных связей между цепями.
.а — емкостная .связь; б — эквивалентная схема емкостной связи; в ~ индуктивная связь; г — эквивалентная схема индуктивной связи; д — емкостная связь через посторонний провод.
стем. В конечном счете помехи обусловлены переменными напряжениями и токами, действующими в цепях УЭП. Важной задачей проектирования УЭП является борьба с этими помехами, т. е. обеспечение возможности совместной, одновременной и независимой работы УЭП с другими устройствами и системами или, как принято говорить, обеспечение электромагнитной совместимости.
Одна из разновидностей помех связана с самим .принципом работы УЭП. Примером таких помех являются пульсации выпрямленного напряжения, которые, попадая вместе с питающим напряжением на радиоустройство, приводят к искажениям основного сигнала этого устройства, в частности паразитной модуляции, фону переменного тока и т. п. Для борьбы с такого рода помехами предусматриваются специальные сглаживающие фильтры, которые сводят помехи к необходимому мини-.муму.
.324
Другая наиболее опасная разновидность помех обусловлена паразитными связями и наводками, не предусмотренными структурными' и принципиальными схемами УЭП. Поэтому в процессе проектирования УЭП приходится применять специальные схемные и конструкторские решения, обеспечивающие подавление или уменьшение этих паразитных связей и наводок.
Различают следующие разновидности паразитных связей между двумя электрическими цепями, находящимися на некотором расстоянии друг от друга:
через электрическое поле (емкостная связь);
через магнитное поле (индуктивная связь);
через провода (или токоведущие части конструкции), соединяющие эти цепи или проходящие вблизи от них;
через электромагнитное поле.
Возникновение паразитной емкостной связи между цепями иллюстрируется рис. 10.13,а, б. На рис. 10.13,а представлены конструктивные элементы А и В (например, корпусные транзисторы), причем на элементе А действует переменное напряжение по отношению к шасси На- В пространстве между элементами создается электрическое поле напряженностью Е, а между элементами А и В,— разность потенциалов. Такого рода электрическая связь эквивалентна наличию между элементами А и В конструктивной паразитной емкости Спар (рис. 10.13,6), за счет которой на элементе В будет создаваться напряжение паразитной наводки
I] — и Zb
Внав U^ZB+l//<oCnap’
где zB — полное сопротивление между точкой В и шасси.
Возникновение паразитной индуктивной связи иллюстрируется рис. 10.13,в, на котором представлена катушка индуктивности А, создающая в прилегающем пространстве магнитное поле напряженностью Н. Если в этом поле находится проводник В другой цепи, то в,-этом проводнике при пересечении его силовыми линиями магнитного поля катушки ' индуктируется ЭДС. Аналогичная картина возникает и в том случае, если элемент А—трансформатор, дроссель или просто проводник с переменным током. В общем случае две цепи, связанные общим магнитным полем, можно представить в виде эквивалентной схемы на рис. 10.13,г. Паразитная 325
ЭДС, наводимая в контуре В, определяется из соотношения
Ев—ЩаМ,
где /п — ток наводящей цепи; М — коэффициент взаимной индуктивности.
Паразитные наводки могут возникать не только путем непосредственной связи через поля, но и с участием посторонних проводов, проходящих вблизи источника наводки (ИН) и приемника наводки (ПН). Такая ситуация иллюстрируется на рис. 10.13,д. Здесь ИН за счет паразитной емкости связи с проводником, соединяющим цепи А и В, не связанные непосредственно с источником наводки, создает наводки в ПН, который также связан с этим проводником паразитной емкостью. Паразитная связь между проводником и ИН и ПН может быть не только емкостной, но и индуктивной.
С паразитной связью, обусловленной электрическим или магнитным полем, приходится иметь дело в том случае, когда расстояние между источником и приемником наводки не превышает длины волны колебаний. Если же это расстояние существенно превышает длину волны, то паразитная связь может возникать за счет электромагнитного поля излучения. При этом УЭП является как бы антенной, излучающей помехи.
Рассмотренные механизмы возникновения паразитных наводок позволяют наметить пути борьбы с помехами, создаваемыми УЭП.
Как видно из приведенных выше формул, напряжение и ЭДС, возникающие за счет паразитных емкостной и индуктивной связей, увеличиваются с ростом частоты. Поэтому для высокочастотных УЭП задача подавления помех стоит более остро, чем для низкочастотных. Таким образом, задача миниатюризации, одним из направлений решения которой является повышение частоты переменных токов УЭП, в известной мере вступает в противоречие с борьбой с помехами.
При работе преобразователей, стабилизаторов и выпрямителей в ключевых режимах токи и напряжения имеют импульсный характер с весьма крутыми фронтами. Такие импульсы наряду с основной частотой содержат весьма интенсивные высшие гармоники, которые создают большие напряжения наводок из-за их высокой частоты. Поэтому из соображений электромагнитной совместимости иногда целесообразно уменьшать крутиз-326
ну фронта импульсов тока и напряжения УЭП, работающих в ключевых режимах. Однако при этом увеличиваются коммутационные потери в тиристорах и транзисторах. Таким образом, возникает противоречие между требованиями высокого КПД и электромагнитной совместимости.
В этой связи в процессе проектирования УЭП приходится находить компромиссные решения, выбирая некоторые оптимальные значения рабочей частоты преобразовательных устройств и форму импульсов тока.
Наряду с этим имеются весьма эффективные конструктивные меры по борьбе с помехами УЭП. Их сущность сводится к уменьшению паразитных емкостей и взаимных индуктивностей между цепями УЭП и защищаемыми устройствами. Одна из таких мер — экранирование.
Сущность экранирования заключается в локализации электрических и магнитных полей УЭП или их отдельных узлов и компонентов в некотором пространстве, достигаемой путем создания препятствий для проникновения полей вне этого пространства. Практически это осуществляется размещением элемента или устройства внутри замкнутого кожуха (экрана) той или иной формы из металла с высокой электропроводностью. Этот кожух должен быть соединен с общим металлическим основанием УЭП. Эффект экранирования электрического поля обусловлен тем, что напряженность электрического поля в массе металла с высокой электропроводностью очень мала. Эффект магнитного экранирования обеспечивается вихревыми токами, возникающими на внутренней поверхности экрана. Чем выше частота этих токов, тем меньше глубина их проникновения в толщину экрана, тем тоньше может быть сам экран.
Имеется большое количество разнообразных конструкций экранов. В частности, наряду с замкнутыми экранами находят применение экранирующие перегородки. Для экранирования магнитных полей можно использовать экраны из ферромагнитных материалов с большой магнитной проницаемостью. Экранированию могут подлежать не только элементы и узлы УЭП, но и соединительные провода. Однако следует иметь в виду, что экраны удорожают конструкцию, увеличивают габариты и массу УЭП.
Весьма эффективными являются другие конструктивные меры по борьбе с паразитными наводками от УЭП. К их числу можно отнести следующие:
327
использование тороидальных сердечников трансформаторов и дросселей, обеспечивающих минимальные потоки рассеяния;
сокращение длин соединительных проводов;
минимизация площади петель, образуемых соединительными проводами;
размещение проводов высокого и низкого напряжения в отдельных кабелях;
рациональное размещение отдельных элементов, узлов и соединительных проводников УЭП, обеспечивающее минимальные паразитные емкости и взаимные индуктивности с защищаемыми цепями;
использование подавляющих фильтров не только в выходных цепях УЭП, но и в других цепях (межблочных соединениях, в сетевых кабелях).
Источниками интенсивных помех, создаваемых УЭП, являются электромеханические устройства с размыкающимися контактами: коллекторные машины, реле, вибропреобразователи и т. п. Поэтому эти устройства обычно снабжаются специальными искрогасящими цепями. С точки зрения электромагнитной совместимости необходимо стремиться заменить электромеханические устройства электронными, создающими меньшие помехи.
Таким образом, требования электромагнитной совместимости оказывают существенное влияние на выбор того или иного варианта схем, режимов, элементной базы, конструкций УЭП.
ЛИТЕРАТУРА
Основная
1. Китаев В. Е. Электротехнические устройства радиосистем. — М.: Энергия, 1971.
2. Иванов-Цыганов А. И. Электротехнические устройства радиосистем.— М.: Высшая школа, 1979.
Дополнительная
3. Миловзоров В. П. Электромагнитные устройства автоматики.— М.: Высшая школа, 1974.
4. Таев И. С. Электрические аппараты автоматики и управления. — М.: Высшая школа-, 1975.
5. Расчет трансформаторов и дросселей малой мощности/ И. И. Белопольский, Е. Н. Каретникова, Л. Г. Пикалова и др.— М.: Энергия, 1973.
6. Юферов Ф. М. Электрические машины автоматических устройств. — М.: Высшая школа, 1976.
7. Чиженко И. М,, Руденко В. С., Сенько В. И. Основы преобразовательной техники. — М.: Высшая школа, 1974.
8. Домеников В. И., Казанский Л. Н. Стабилизированные источники электропитания судовой радиоэлектронной аппаратуры. — Л.: Судостроение, 1971.
9. Основы проектирования микроэлектронной аппаратуры/ Под ред. Б. Ф. Высоцкого. — М.: Советское радио, 1977.
10. Электронная техника, в автоматике/ Сборник статей под ред. 10. И. Конева. Вып. 3, 5, 6, 9, 10. — М.: Советское радио, 1972—1978.
11. Петрович Н. Т., Камнев Е. Ф. Вопросы космической радиосвязи.— М.: Советское радио, 1965.
12. Векслер Г. С. Расчет электропитающих устройств. — Киев: Техника, 1978.
ТЗ. Максимов Ю. И. Новые источники и преобразователи электрической энергии на судах. — М.: Судостроение, 1980.
14. Справочник по полупроводниковым диодам, транзисторам и интегральным схемам/ Под общ. ред. Н. IT. Горюнова.—М.: Энергия, 1979.
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
А
Автоматический выключатель 127
Автотрансформатор 38
Аккумулятор 147
Аппарат электрический 126
Б
Батарея атомная 152
— солнечная 15'1
Броневой магнптопровод 23
Быстродействие 71, 106
В
Векторная диаграмма 27, 29, 68, 70, 87, 88
Вентиль 155
Возбуждение 63
— независимое 64
— параллельное 64, 82
— последовательное 64, 82
— смешанное 64, 82
Вращающееся магнитное поле 53
Вращающийся трансформатор 116, 120
Выпрямитель 153
Г
Генератор 57
— магнитогидродинамический 146
— постоянного тока 59
— синхронный 58
— термоэлектрический 150
— термоэлектронный 150
— электромашинный 146
Геркон 136
330
Д >
Действующее поле 17
Диод 154
— германиевый 154
— кремниевый 154
Дро'ссель 5
— с подмагничиванием 9
Е
Емкостная нагрузка 165
Емкостный фильтр 177
Емкость 165
3
Защита устройств электропитания 318
И
Инвертор автономный 214
— ведомый сетью 214
— двухтактный 217
— мостовой 218
— параллельный 223
— последовательный 226
— регулируемый 231
— самовозбуждением 214, 219
— с внешним возбуждением 214
— тиристорный 223
— транзисторный 214
Индуктивность 6
Интервал возбуждения 18
— насыщения 17
Интегральные схемы 295
Информационные машины 115
Источник атомный 152
— вторичного электропитания 14'1
— электрохимический 3, 147
Источник электроэнергии 3, 57, .140, 141
К
Коллектор 53
Коммутация 53
Конвертор 210, 241
Короткое замыкание 32
Коэффициент обратной связи 16, 18
— полезного действия 36, 82
— пульсации 176
сглаживания 175
— трансформации 29
— усиления 19, 72
М
Магнитный усилитель 11
---двухтактный 20
— — релейный режим 19
---с внешней обратной связью 16
------- внутренней обратной связью 16
Магнитодвижущая сила 8
Магнитопровод 5, 22
Микродвигатель 90
— асинхронный 101
— гистерезисный 103
— коллекторный '104
— реактивный 102
— синхронный 101
— шаговый 105
Микросборка 210, 241
Микросхема 311
Н
Надежность 3'13
— схемные методы повышения 317
О
Обмотка 61
— возбуждения 116
— волновая 61
— вторичная 22
— генераторная 76
— двухслойная 61
— компенсационная 71
— короткозамкнутая 55
— первичная 22
— петлевая 61
Обмотка рабочая 11
—синхронизации 116
— смещения ,12
— управления 12
— якоря 57
Обратная связь 16
— — внутренняя 17
— — положительная 17
П
Паразитные связи и паводки . 325, 327
Петля гистерезиса 12
---частный цикл 12
Пиктрансформатор 42
Потери в обмотках 33
--- стали 23
Преобразователи 70, 241
— переменного тока 209
— постоянного тока 210, 241
— статические 210
— частоты 144, 210, 211, 229
— электромашинные 70
— электромеханические 210
Пускатель 127
Р
Реакция якоря 62
Регулятор напряжения 187
---импульсный 205
--- индукционный 195
—-------однофазный 195
—------- ------ трехфазный 192
— — полупроводниковый 205
----с вольтодобавкой 208
--------широтно-импульсной
'модуляцией 235
---угольный 204
Резервирование 3'16
Резистор пусковой 156
— соединение параллельное 186
— — последовательное 263
Реле 126
— бесконтактное 131 контактное 138
— магнитное 139
— нейтральное 431
— поляризованное 134
— транзисторное 139
— феррорезонансное 139
Ремонтопригодность 318
Ротор 50
— массивный 100
— полый 100
331
с
Самовозбуждение параллельное и последовательное 64
Сельсин 116
— бесконтактный 1'16
— датчик Г18
— дифференциальный 120
— контактный 116
— приемник 118
Сердечник броневой 23
— кольцевой '11
— прямоугольный 11
— тороидальный 23
— ферромагнитный 8
Система децентрализованная
302
— комбинированная 302
— синхронной связи 116
-------режим индикаторный
116
----------согласованный 118
------------- трансформаторный
119
— централизованная 302
— электропитания 301
Скольжение 90
Стабилизатор напряжения 248
------ импульсный 269
----компенсационный 249
— — непрерывно-импульсный
276
----непрерывный 254
---- параметрический 250
----транзисторный 260
----феррорезонансный 281
— — электронный 254
— тока 286
Стабилитрон 250
Статор 50
Схема выпрямления 156 .
•---двухполупериодная 156
---- однополупериодная 156
----однофазная 157
----трехфазная 157
— замещения генератора 68, 69
— — двигатели 82, 87, 91
----дросселя 6
----трансформатора 32, 34
Т
Тахогенератор асинхронный 75
— постоянного тока 73
Трансформатор 23
33 2
Трансформатор однофазный 23
— с короткозамкнутой катушкой 189
— специальных типов 42
— с регулируемым напряжением 188
— трехфазный 25
У
Угол отсечки 170
— пространственного сдвига 53
— фазового сдвига 53
Умножение напряжения 171
----схемы несимметричные
172
-------симметричные 173
Управление амплитудное 109
— амплитудно-фазовое 109
— полюсное 112
— фазовое 109
— якорное .112
Усилитель магнитный ,11
— электромашинный 70
Устойчивость 48
Ф
Фазовыпрямление 157
Феррид ,137
Фильтр .сглаживающий 174
----активный 177, 182
----Г-образный 179
—, — емкостный ,177
---- индуктивный 178
----многозвенный 181
----пассивный 177
----П-образнып 181
----резонансный 182
Характеристика внешняя генератора 64, 68
----выпрямителя 164
----трансформатора 35
— двигателя механическая 83, 90, 93, ,109
---- — естественная 83
------- искусственная 83
— регулировочная ПО
— тяговая 132
— холостого хода 61 .
Ч
Частота вращения 51, 55
щ
Щетки 59
Э
Электрический двигатель 79
---- асинхронный 89
-------однофазный 98
— -----трехфазный 89
----бесколлекторный 51
----'исполнительный 80
Электрический двигатель коллекторный 51
— — постоянного тока 82
— — синхронный 88
универсальный 101, 104
Электромагнитная совмести1-
мость 324
Элемент гальванический 147
— солнечный 151
— топливный 149
Я
Якорь 57, 128 ’
ОГЛАВЛЕНИЕ
Предисловие.............................................. 3
Глава первая. Дроссели и магнитные усилители . . 5
1.1. Назначение, принцип действия и устройство дросселей 5
1.2. Характеристики дросселей............................. 8
1.3. Дроссели с подмагничиванием.......................... 9
1.4. Принцип действия и устройство магнитных усилителей 11
1.5. Магнитный усилитель с обратной связью .... 16
4.6. Двухтактный магнитный усилитель....................20
Глава вторая. Трансформаторы................................21
2.1. Принцип действия и устройство трансформаторов . 21
2.2. Рабочий режим трансформатора ...... 26
2.3. Внешняя характеристика и КПД трансформатора . 34
2.4. Автотрансформаторы...................................38
2.5. Трансформаторы специальных типов.....................42
Глава третья. Электрические машины............................48
3.1. Принцип действия и устройство электрических машин 48
3.2. Генераторы постоянного и переменного тока ... 57
3.3. Электромашинные усилители и тахогенераторы . . 70
3.4. Электрические двигатели..............................79
3.5. Электрические двигатели малой мощности ... 99
3.6. Исполнительные (управляемые) двигатели .... 106
3.7. Информационные электрические микромашины . . 115
Глава четвертая. Электрические аппараты и реле . . 126
4.1. Назначение и классификация электрических аппаратов 126
4.2. Принцип действия и устройство коммутирующих аппаратов............................................128
4.3. Характеристики электромагнитных реле .... 131
4.4. Магнитоуправляемые контакты.........................136
4.5. Бесконтактные реле..................................138
'Глава пятая. Принципы построения устройств электропитания РЭА. Источники электрической энергии . . . 140
5.1. Принципы построения устройств и систем электропитания .........................................140
5.2. Источники электроэнергии............................145
(Глава шестая. Выпрямительные устройства .... 152
6.1. Функциональная схема выпрямительных устройств 152
6.2. Диоды и их характеристики...........................154
6.3. . Разновидности схем выпрямления и их классификация 156
6.4. Анализ схем выпрямления при активной нагрузке 158
:334
6.5. Влияние реактивности нагрузки на работу выпрямительных устройств...............................164’-
6.6. Выпрямительные схемы с умножением напряжения . 171
6.7. Сглаживающие фильтры........................174'
6.8. Переходные процессы в выпрямителе с фильтром . 185'
Глава седьмая. Регуляторы напряжения и управляемые выпрямители..........................................187'
7.1. Назначение и классификация регулирующих устройств 187
7.2. Регулирование напряжения на стороне переменного тока.............................................188-
7.3. Выпрямитель с управляемыми вентилями .... 196
7.4. Регулирование напряжения на стороне постоянного тока.......................•.........................204
Глава восьмая. Преобразователи переменного и постоянного тока...........................................209
8.1. Принципы преобразования, классификация и основные характеристики преобразователей .... 209'
8.2. Преобразователи постоянного тока в переменный
(инверторы)...............................212'
8.3. Транзисторные инверторы..................214
8.4. Тиристорные инверторы................... 223'
8.5. Преобразователи частоты..................229
8.6. Регулирование и способы улучшения качества выходного напряжения инверторов....................231
8.7. Преобразователи постоянного тока (конверторы) 241
8.8. Выпрямители с промежуточным преобразованием частоты ...................................'. . . . 245-
V
Глава девятая. Стабилизаторы напряжения и тока . . 248
9.1. Назначение и классификация стабилизаторов напряжения и тока.......................................... 248-
9.2. Параметрические стабилизаторы постоянного напряжения ................................................250
9.3. Электронные стабилизаторы напряжения непрерывного действия......................................... 254'
9.4. Импульсные стабилизаторы постоянных напряжений 269-
9.5. Параметрические стабилизаторы переменных напряжений ................................................ 279'
9.6. Компенсационные стабилизаторы переменных напряжений .................................................284
9.7. Компенсационные стабилизаторы тока................ 286-
9.8. Схемы стабилизированных источников электропитания высоких и очень низких напряжений..................... 290'
9.9. Применение интегральных микросхем в стабилизаторах 295-
Глава десятая. Общие вопросы проектирования и защиты устройств электропитания ....................... 297
10.1. Особенности проектирования источников электропитания ................................................297
10.2. Структурные схемы устройств электропитания радиосистем ...............................................300
10.3. Основные направления и методы комплексной миниатюризации устройств электропитания . . . 306
10.4. Надежность, резервирование и диагностика устройств электропитания ........................................ 314
10.5. Защита устройств электропитания от перегрузок и короткого замыкания.....................................319
10.6. Защита от помех, создаваемых устройствами электропитания ................................................324
Литература.................................................329
'Предметный указатель......................................330
«ОЛЕГ ВАСИЛЬЕВИЧ АЛЕКСЕЕВ ВАЛЕНТИН ЕВГЕНЬЕВИЧ КИТАЕВ АНАТОЛИЙ ЯКОВЛЕВИЧ ШИХИН
ЭЛЕКТРОТЕХНИЧЕСКИЕ УСТРОЙСТВА
Редактор А. А. Боку н я ев
Редактор издательства Г. Н. Астафуров
Технический редактор Н. П. Собакина
Корректор М. Г. Гулина
ИБ № 2392 («Энергия»)
Сдано в набор 10.02.81 Подписано в печать 23.04.81 Т-07502
Формат 84><108i/3a Бумага типографская № 2 Гарн. шрифта литературная Печать высокая Усл. печ. л. 17,64 Уч.-изд. л. 18,47 Тираж 40 000 вкз. Заказ 1056 Цена 95 к.
Энергоиздат, 113114, Москва, М-114, Шлюзовая наб., 10
Московская типография Н9 10 Союэполиграфпрома при Государственном комитете СССР по делам издательств, полиграфии и книжной торговли. .113114, Москве, М-114, Шлюзовая наб,, 10