/
























































































































































































































































































Text
В.А.Махин, Н.П. Миленка,
Л.В.Пртя
Теоретические
основы
экспериментальной
отработки
ЖРД
В. А. МАХИН. Н. П. МИЛЕНКО,
Л. В. ПРОНЬ
ТЕОРЕТИЧЕСКИЕ ОСНОВЫ
ЭКСПЕРИМЕНТАЛЬНОЙ
ОТРАБОТКИ
ЖРД
Под редакцией
д-ра техн, наук, профессора В. А. Махина
Москва
«МАШИНОСТРОЕНИЕ»
1 973
6МЗ
УДК 629.7.036.54.063.6
Махин В. А., Миленко Н. П., Пронь Л. В. Теоретические
основы экспериментальной отработки ЖРД. М., «Машиностро-
ение», 1973, стр. 284.
В книге рассматриваются теоретические вопросы экспери-
ментальной отработки жидкостных ракетных двигателей
(ЖРД). Излагаются общие соображения по экспериментальной
отработке, этапы и виды испытаний, их планирование и анализ
результатов, разработка программ экспериментальных работ
и прикладные методы теории надежности. Дан анализ аварий-
ных ситуаций ц описаны модели отказов с использованием
уравнений динамики рабочих процессов в агрегатах ЖРД-
Кратко освещен вопрос моделирования физических процессов
при отработке элементов и систем ЖРД.
Книга предназначена для инженеров и научных работников
соответствующих областей техники. Она может быть также
полезна преподавателям, аспирантам и студентам старших кур-
сов вузов.
Табл. 31. Илл. 77. Список лит. 104 назв.
Рецензент д-р техн, наук, проф. С. Д. Гришин
3186-206
038(01)-73
206-73
ВВЕДЕНИЕ
Особенностью -современной эпохи является (научно-техничес-
кий прогресс, охвативший практически все сферы народного хо-
зяйства. Наиболее значительно он проявился (в области ракетно-
космической техники. Чтобы представить высокий уровень
совершенства ракет-носителей и космических аппаратов, доста-
точно указать на достижения последних лет (доставку на Луну
автомата-исследователя «Луноход-П», полеты пилотируемых кос-
мических кораблей вокруг Земли и на Луну, длительные полеты
автоматических станций на Венеру и Марс и т. п.). Эти достиже-
ния в значительной мере предопределены созданием мощных на-
дежно действующих жидкостных ракетных двигателей (ЖРД) и
двигательных установок (ДУ). Вместе с тем, возникли новые
проблемы, прежде всего — проблема надежности функционирова-
ния ЖРД, обусловленная соображениями обеспечения надежнос-
ти ракетно-космических комплексов, обеспечением безопасности
полетов и т. д.
Несомненно, вопросы надежности в той или иной форме всег-
да стояли перед создателями двигателей ракет. Но если в ран-
ний период развития техники ограничивались качественной ин-
формацией, то в настоящее время требуется количественная
оценка уровня надежности.
Особенно остро эта потребность возникает на этапах экспери-
ментальной отработки ЖРД, поскольку целенаправленность про-
граммы и объемы различных видов испытаний, момент заверше-
ния отработки определяются достигнутым уровнем надежности,
который должен соответствовать требованиям технического зада-
ния на разработку ЖРД.
Несмотря на то, что теория надежности оформилась в'само-
стоятельную науку совсем недавно (в последние два десятиле-
тия), в ее развитии четко определились два направления.
Первое — вероятностно-статистическое направление, основан-
ное на статистическом представлении массовых явлений или со-
бытий, предполагает поступление, систематизацию и обработку
информации по результатам испытаний. При этом применяемые
методы теории вероятностей и математической статистики не-
посредственно не учитывают физические особенности исследуемых
процессов.
3
Второе направление основывается на физическом подходе к
проблеме надежности. Оно предполагает обнаружение отказов,
исследование причин их проявления и устранения путем соответ-
ствующих доработок.
Первое , направление развивалось в основном математиками,
второе — специалистами, инженерами и конструкторами — не-
посредственными создателями ЖРД. Оба направления, дополняя
одно другое, служат одним и тем же целям, однако до недавнего
времени они являлись предметом бурных дискуссий [5, 11, 21,
37, 54, 76, 81, 87, 103].
Чтобы пояснить сущность происходящего, заметим, что вероят-
ностно-статистические методы оценки надежности, базирующиеся
на использовании только качественной информации (классифи-
цированной по признаку «успех — отказ»), не могут удовлетво-
рять требованиям, предъявляемым к оценке надежности сложных
технических устройств, какими являются современные ЖРД.
(Методы, основанные на фиксировании времени наработки, для
ЖРД в большинстве случаев не применяются).
Это положение объясняется тем, что несмотря на сравнитель-
но высокую информативность испытаний, при которых средства-
ми телеизмерений записываются десятки и сотни динамических
характеристик, для расчета надежности используется лишь одна
оценка — «успех» или «отказ». Поэтому подтверждение высоких
уровней надежности требует большого объема испытаний. Мож-
но выделить три основные причины, которые делают неприемле-
мыми классические методы оценки надежности ЖРД, основанные
на качественной информации:
1) высокий уровень надежности ЖРД;
2) сложность конструкции, -высокая стоимость изготовления
и испытания;
3) ограниченность сроков отработки и производства.
По этим причинам для испытаний на надежность выделяется
малое количество изделий, в результате чего не удается выявить
все отказы, «слабые» места конструкции и технологии.
Проявление же конструктивно-технологических отказов и по-
следующая их доработка на этапе эксплуатации по многим при-
чинам крайне нежелательны. Вот почему принятие обоснованных
решений особенно важно на заключительных этапах отработки.
Тем не менее, приходится принимать решение на основании испы-
таний ограниченного количества изделий. Значит, информатив-
ность испытаний должна быть высокой.
При вероятностных методах оценки надежности, основанных
на качественной информации, исход единичного испытания рас-
сматривается как простое событие, оценка вероятности которого
основана на допущении о стабильности частоты результатов
испытаний. Это допущение обусловливает непременное выполне-
4
ние требований идентичности испытываемых экземпляров изде-
лий и постоянства условий проведения испытаний. Однако эти
требования противоречат исследовательскому характеру отработ-
ки ЖРД, так как исключают возможность использования для
оценок надежности значительной части информации.
Следовательно, вероятностно-статистические методы, основан-
ные на качественной информации, не могут быть (без грубых на-
рушений) согласованы с программами экспериментальной отра-
ботки ЖРД, а требования технического задания по надежности
не увязываются с реальными возможностями их подтверждения.
Рассматриваемые методы исключают возможность определения
конкретного /вида отказов, поэтому в процессе отработки нельзя
изучить свойства конструкции.
Исход испытаний в процессе конструкторской отработки не
единственный и не всегда главный показатель качества испыты-
ваемого двигателя. Чем больше на данном этапе будет выявле-
но отказов и чем эффективнее будет проведена доработка, тем
надежнее окажется двигатель в процессе эксплуатации. Рассмат-
ривая вопрос- о работоспособности двигателя, исследователь не
должен ограничиваться фиксированием исходов испытаний, но
должны приниматься во внимание результаты измерений пара-
метров, характеризующих физические процессы, режимы и ус-
ловия испытаний, при которых зафиксированы дефекты и отка-
зы, состояние материальной части и т. п.
Только такой подход к оценке работоспособности ЖРД в со-
четании со статистическими методами, учитывающими полный
объем информации, представляет убедительную характеристику
его надежности.
В последние годы теория надежности начала развиваться на
стыке двух рассмотренных направлений — физического и статис-
тического. Задача состоит в том, чтобы физические основы инже-
нерного анализа облечь в математическую форму и получить ко-
личественную оценку результатов испытаний. При этом -ставятся
вопросы о повышении 'информативности испытаний, -сокращении
количества изделий, о раннем выявлении «слабых» мест и отка-
зов, об оценке показателей надежности и их прогнозировании на
длительные сроки эксплуатации. Во всех случаях эти оценки
должны совпадать со статистическими оценками, полученными на
этапе эксплуатации по результатам большого числа натурных
испытаний.
Для обеспечения надежности ЖРД необходимо следующее.
1. Проверить работоспособность двигателя при любых воз-
можных сочетаниях внешних и внутренних факторов, определяю-
щих режимы его функционирования.
2. Определить соответствие эксплуатационных характеристик
и параметров двигателя заданным требованиям.
При решении этой задачи на всех этапах отработки важное
место отводится раннему обнаружению и прогнозированию отка-
5
зов. До недавнего времени это делалось методами эмпирического
поиска. Однако современные требования, предъявляемые к отра-
ботке ЖРД, требуют разработки -научно обоснованных программ
с обоснованием различных планов опытных работ и объемов ис-
пытаний.
Теоретические основы для этого в основном уже разработа-
ны— это теория эксперимента, математическое моделирование,
теорий подобия и размерностей и т. д. К сожалению, описание
приложения этих методов, за редким исключением, разобщего в
литературе по различным областям знаний.
Тан как ЖРД — комплекс сложных агрегатов и систем, раз-
личающихся природой и механизмом физических процессов, т^
методологически было бы неверно ограничиться при планирова-
нии его отработки каким-либо одним из методов. Этой же цели и
отвечает внедрение технической диагностики в практику исследо-
вания и отыскания аварийных ситуаций ЖРД.
Теория испытаний тесно связана с теориями математического,
физического и -структурного моделирования.
Комплексное применение основных положений этих теорий и
методов должно стать основой теории экспериментальной отра-
ботки сложных технических систем. Применительно к ЖРД такая
теория отвечала бы современным требованиям обеспечения за-
данного уровня надежности.
Глава I
ОБЩИЕ СООБРАЖЕНИЯ ПО ОБЕСПЕЧЕНИЮ
НАДЕЖНОСТИ ЖРД
§ 1. ТЕХНИЧЕСКОЕ ЗАДАНИЕ НА РАЗРАБОТКУ ДВИГАТЕЛЯ
Техническое задание со стороны заказчика—первоначальный
основной документ, определяющий комплекс тактико-техничес-
ких требований, конструктивных характеристик и эксплуатацион-
ных показателей, которым должен удовлетворять разрабатывае-
мый двигатель. В техническом задании излагаются сведения,
определяющие целевое назначение двигателя, его применение и
эксплуатацию, перечень основных параметров, в том числе вид
топлива, некоторые конструктивные особенности, наконец, срок
и 'стоимость разработки [62].
К основным относятся энергетические и массовые параметры:
удельная и суммарная тяги двигателя, давление в камере сгора-
ния и газогенераторе, коэффициенты соотношения компонентов
топлива, секундные расходы, характеристики турбонасосного
агрегата, диапазоны регулирования, суммарное время работы,
циклограммы запуска и выключения, ’габариты, масса, стыковоч-
ные размеры и т. п.
Условия применения определяются целевым назначением
(двигатель баллистической ракеты, носителя космических аппа-
ратов и т. д.).
Под конструктивными особенностями понимают некоторые за-
даваемые (или предлагаемые заказчиком) проектные решения,
учитывающие современные достижения науки или развитие дан-
ной области техники. С учетом этого ib техническом задании мо-
жет указываться, каким должен быть двигатель (с «открытой»
или «замкнутой» схемой), тип подвески камеры сгорания, нали-
чие турбонасосного агрегата (ТНА) или вытеснительной системы
подачи компонентов топлива, вид охлаждения камеры сгорания,
способы воспламенения топлива, диапазоны регулирования ос-
новных параметров и некоторые другие характеристики, напри-
мер, возможность повторного использования, взаимосвязь с дру-
гими системами комплекса и т. д.
Эксплуатационные свойства ЖРД определяют следующие
факторы: z
7
— удобство монтажа;
— возможность периодических проверок технического состоя-
ния;
— условия хранения и транспортировки;
— температурно-влажностный режим по эксплуатации;
— температура и давление 'рабочих компонентов при хране-
нии, заправке и в предпусковой период;
— максимальная допустимая разность температур компонен-
тов;
— максимальное .время контакта с компонентами или с их
парами;
— ресурс для различных условий эксплуатации;
— уровни вибраций,’избыточного давления и кратковременно-
го повышения температур;
— ударные нагрузки;
— осевые и радиальные перегрузки и т. п.
Для ЖРД ракет-носителей космических аппаратов к эксплуа-
тационным требованиям следует отнести уровни солнечной и
космической радиации; влияние условий невесомости; циклич-
ность смены режимов работы, активного и пассивного участков
полета; коррекцию траектории полета и т. п.
На заключительных этапах отработки и при поставках гото-
вых изделий техническое задание является одним из основных
документов для решения вопроса о качестве выполнения заказа
и о степени его соответствия установленным требованиям. При
этом техническое задание кладется в основу разрабатываемой
технической и эксплуатационной документации. В ряде случаев
оно может дополняться отдельными частными заданиями на
комплектующие элементы и системы, агрегаты автоматики, при-
боры, датчики и т. п.
§ 2. ТЕХНИЧЕСКИЙ ПРОЕКТ
Технический проект разрабатывается на основе технического
задания, предварительных проектных данных в виде аванпроекта,
теоретических и экспериментальных исследований НИИ, конст-
рукторских бюро и априорной информации об изделиях-прото-
типах.
Технический проект должен содержать:
— перечень технических характеристик;
— обоснования принятых конструктивно-технологических и
схемных решений;
— приложения с гидравлическими и термогазодинамическими
расчетами рабочих процессов, расчетами на прочность основных
узлов и агрегатов;
— выбор оптимального профиля сопла;
— рабочие чертежи;
8
— технологическую и эксплуатационно-техническую докумен-
тацию, включающую описание конструкции изделия, инструкции
на испытания и практическое использование.
Основными 'показателями качества реализованного техничес-
кого проекта на двигатель можно считать следующие характе-
ристики:
— уровень эксплуатационной надежности;
— величину удельной тяги;
— удельную массу двигателя (как отношение массы ЖРД,
залитого компонентами топлива, к тяге в пустоте);
— стоимость разработки.
Все они в достаточной степени зависят одна от другой. Так,
например, попытки увеличить полноту сгорания топлива или дав-
ление в камере сгорания с целью повышения удельной тяги в
какой-то мере могут привести к снижению надежности. Стремле-
ние обеспечить надежность путем повышения прочности агрега-
тов ухудшает массовые характеристики. В свою очередь, дости-
жение этой цели путем применения -более совершенных конструк-
ционных материалов приведет к повышению стоимости. В не
меньшей мере оказываются взаимосвязанными надежность и
стоимость [53]. Вполне очевидно, что продолжение эксперимен-
тальной отработки двигателя с целью повышения достигнутого
уровня надежности непосредственно приводит к увеличению его
стоимости. Наоборот, уменьшение стоимости за счет объема ис-
пытаний связано с понижением уровня надежности.
При всем этом указанные требования зависят непосредствен-
но от целевого назначения двигателя. Требования минимальной
стоимости, максимальной удельной тяги и малой массы в какой-
то мере являются общими. Величина удельной тяги и масса
двигателя определяют максимальную дальность полета (или по-
лезную нагрузку). Однако сами значения их производных по
дальности зависят от технических характеристик и особенно наз-
начения ракетной ступени. Так, например, для межконтиненталь-
ной баллистической ракеты снижение на один процент удельной
тяги или увеличение на несколько процентов массы двигателя
первой (нижней) ступени с целью повышения надежности не при-
ведет к сколько-нибудь существенному сокращению дальности
полета.
В то же время изменение таким образом характеристик двига-
телей верхних -ступеней играет уже -существенную роль. Чем выше
ступень, тем больше значение частных производных.
В каждом конкретном случае выбор рассматриваемых харак-
теристик двигателя в техническом проекте должен обосновывать-
ся решением частных задач по оптимизации.
Оптимизация и нормирование надежности двигателей ниж-
них и верхних ступеней должны учитывать особенности стартово-
го сооружения, эксплуатационные характеристики изделия, в том
9
числе безопасность его 'использования. Так, например, надеж-
ность нижней ступени но этим соображениям может быть более
высокой, чем надежность верхних ступеней.
§ 3. КЛАССИФИКАЦИЯ СИСТЕМ И ЭЛЕМЕНТОВ ДВИГАТЕЛЬНЫХ
УСТАНОВОК
Программы и виды испытаний должны максимально учиты-
вать физические и конструктивные особенности систем и эле-
ментов.
Под системой понимается комплекс взаимодействующих эле-
ментов, которые находятся ;в функциональной взаимосвязи и
рассматриваются как простейшие звенья в структурной схеме
надежности изделия. Некоторые системы могут быть смонтиро-
ваны из типовых, стандартных блоков (элементов), которые, в
свою очередь, могут быть независимыми или коррелированы
один с другим. Для вновь разрабатываемых механических систем
тцкие возможности, как правило, ограничены. Однако не исклю-
чается применение в пневмогидравлических системах ДУ отдель-
ных стандартных элементов типа реле давления, электропневмо-
клапанов и т. п. Специфической особенностью рассматриваемых
ракетных систем является практически всегда взаимная корреля-
ция между элементами, что создает определенные трудности при
их автономной отработке.
Испытания считаются автономными, если испытываются от-
дельные элементы системы. Но в ряде случаев, когда сложная
комплексная система состоит из менее сложных систем, тогда
испытания последних также будут автономными. Так, например,
двигательную установку, состоящую из нескольких независимых
ЖРД, можно рассматривать как комплексную систему, а от-
дельные ЖРД — как ее автономные блоки. При этом испытания
ЖРД автономны по отношению к ДУ. Сами же испытания ДУ
по отношению к ЖРД будут комплексными. Это не исключает
возможности проведения комплексных испытаний ДУ в составе
других более сложных систем, как, например, ракета.
С такой точки зрения простейшим условием деления систем
на элементы следует рассматривать структурную схему надеж-
ности или конструктивную схему изделия. Обе они взаимосвя-
заны.
Как системы, так и элементы в целом, могут быть подразделе-
ны на системы и элементы однократного и многократного дейст-
вия.
Технические устройства однократного действия не могут быть
включены в работу -дважды, так как процессы, происходящие в
них, необратимы. К числу таких устройств можно отнести раз-
личные ’пиротехнические средства, разрывные мембраны, срезае-
мые стопорные элементы, разрывные болты и т. п. Применитель-
но к ДУ элементами однократного действия являются некоторые
10
агрегаты автоматики, средства управления запуском, разделени-
ем ступеней и т.п.
Основные агрегаты (камеры сгорания, турбонасосные агрега-
ты, газогенераторы’ и другие, в том числе такие элементы авто-
матики, как электропневмоклапаны, (регуляторы, дроссели и т. п.)
являются устройствами многократного действия.
Существуют также механические устройства комбинированно-
го типа, которые сочетают -в себе функции однократного и много-
кратного действия.
Испытания элементов однократного действия хотя и характе-
ризуются как испытания
с разрушением, тем не ме-
нее многие детали остаются
пригодными для дальнейше-
го использования и могут
быть применены при испы-
таниях на надежность, испы-
таниях до отказа и т. п.
Примером систем одно-
кратного действия может
служить конструкция топ-
ливного бака с вытеснитель-
ной системой подачи компо-
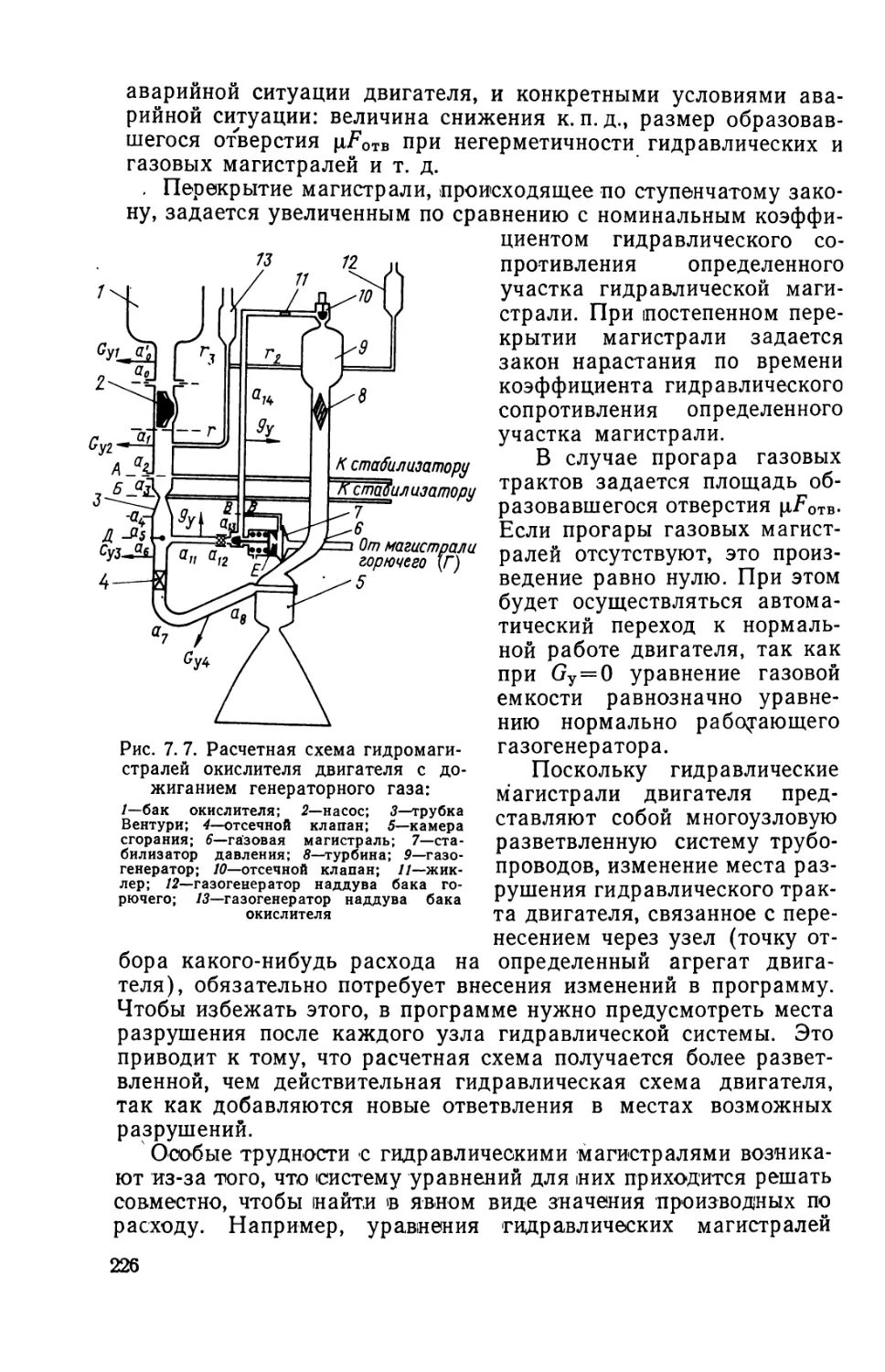
нентов топлива (рис. 1.1).
Внутренний объем бака раз-
делен эластичной мем бра-
Рис. 1. 1. Бак 1с эластичной (разделитель-
ной мембраной:
Г—сжатый газ; К—жидкий компонент топ-
лива;
О, /, 2, 3, 4—последовательные положения
разделительной мембраны при опорожнении
бака; 5, 6—сварные швы
ной на две герметичные полости, из которых правая заполнена
жидким компонентом, а в левую подают сжатый газ. Принцип
работы следующий.
По мере вытеснения компонента топлива из «правой полости
бака мембрана деформируется и последовательно занимает по-
ложения 0, 1, 2, 3, 4. В конечном итоге она ложится на внутрен-
нюю поверхность правой полусферы.
Таким образом, в данной системе эластичная мембрана —
элемент однократного действия. Полусферы бака могут быть
использованы несколько раз, так как в пределах изменения рабо-
чего давления они сохраняют свою 'работоспособность. Однако в
ряде случаев они могут быть подвергнуты (испытаниям до разру-
шения.
С этой целью после полного вытеснения компонента топ-
лива из бака в газовой полости необходимо продолжать повы-
шать давление. При достижении предела прочности -стенки бака
разрушаются.
При конструировании расчет мембраны ведется таким обра-
зом, чтобы в процессе ее работы до -момента полного вытеснения
жидкости из бака эластичность ее сохранялась благодаря дефор-
мации и текучести материала.
11
В структурной -схеме надежности бака слабейшим звеном, по
всей -вероятности, будет мембрана. Испытания на надежность
мембраны будут рассмотрены ниже.
§ 4. ОБЩИЕ ТРЕБОВАНИЯ К ИСПЫТАНИЯМ И ПРОГРАММАМ
ОТРАБОТКИ
В программах обеспечения надежности -сложных технических
систем (к ним относится и ЖРД) испытания являются наиболее
важной частью, требующей максимального вклада экономичес-
ких, материальных и физических затрат.
Испытания следует считать естественным продолжением
проектных и исследовательских работ, которые заканчиваются
созданием опытных образцов. В настоящее время уровень точ-
ности проектных работ и теоретических расчетов с точки зрения
оценки физического функционирования ЖРД не позволяет ис-
ключить испытания из общего плана работ по обеспечению на-
дежности. Работоспособность ЖРД оценивается только на осно-
вании результатов испытаний.
Первым этапом испытаний является конструкторская отработ-
ка опытных образцов, имеющая целью уточнение проектных
данных и выбор штатного варианта конструкции. Затем следует
доводка штатного 'варианта изделия и оценка его эксплуатацион-
но-технических характеристик. Отработка сложных технических
систем завершается государственными испытаниями [57, 53].
В задачу планирования экспериментальных работ и разработ-
ки программ испытаний входит максимально полное выявление
потенциальных возможностей проекта и устранение его «слабых»
мест. При этом все усилия экспериментаторов и конструкторов
должны быть направлены на возможность раннего прогнозирова-
ния отказов отрабатываемых изделий.
Испытания являются единственным основанием для внесения
конструктивных доработок по выявленным дефектам и неисправ-
ностям. При этом чем раньше они будут обнаружены, тем в более
выгодном положении окажется проект. Совершенно недопустимо
по многим очевидным соображениям введение конструктивных
доработок в процессе эксплуатации. По этой причине самая ран-
няя диагностика отказав и оценка 'надежности до завершения
конструкторской отработки ЖРД становится задачей первосте-
пенной важности. В свете этого становится очевидной вся важ-
ность разработки и принятия рациональных программ, соответ-
ствующих предъявляемым требованиям. Эту задачу специалисты
считают практически самой важной [62], и, следовательно, для ее
решения должны привлекаться наиболее квалифицированные
сотрудники КБ, НИИ, эксперты и испытатели, а также конструк-
торы — разработчики конкретных систем.
Экспериментальная программа должна содержать следующие
основные сведения:
12
— цель испытания, объект и место проведения испытания;
— вид 'стендового оборудования, состав измерительной и ре-
гистрирующей аппаратуры;
— факторы ((параметры), определяющие условия испытаний;
— законы изменения и уровни варьирования факторов;
— тип и место установки контрольных датчиков на изделии,
способы их крепления;
— периоды измерения параметров в (процессе испытания;
— методы дешифровки записей параметров и обработки экс-
периментальных данных;
— методы дефектации материальной части после испытаний
и т. п. .
В процессе испытаний решается большой комплекс техничес-
ких и организационных вопросов по обеспечению высокого ка-
чества отработки. В ряде отраслей промышленности конструктор-
скую отработку технических систем проводят не только при спе-
циальных экспериментальных бюро, но, главным образом, на
серийных заводах при условии достаточного их укомплектования
инженерно-техническими - кадрами и самом активном участий
опытно-конструкторских бюро [57].
Иногда испытания начинаются еще на ранних стадиях проек-
тирования, когда конструктор эмпирическим путем восполняет
отсутствие необходимых для расчета теоретических данных или
проверяет их достоверность.
С точки зрения планирования отработки испытания подразде-
ляются на несколько этапов [62]. Начальные этапы характеризу-
ются лабораторными и опытно-конструкторскими проработками,
заключительные этапы—демонстрацией надежности в заданных
условиях эксплуатации с обязательным подтверждением соответ-
ствия эксплуатационно-технических характеристик изделия тех-
ническому заданию на разработку. Юридическим завершением
отработки -следует считать подтверждение заданных уровней на-
дежности и выходных характеристик ЖРД по. результатам всех
видов испытаний.
Поскольку количество испытаний изделий в натурных усло-
виях эксплуатации весьма ограничено вследствие их высокой сто-
имости, к тому же неудачные 'пуски и аварийные исходы приво-
дят к дополнительному увеличению затрат, поэтому необходимо
добиваться предельной эффективности наземной отработки.
Последняя обеспечивается имитацией условий натурных испыта-
ний и учетом влияния (всех эксплуатационных факторов, обуслов-
ливающих достоверность характеристик надежности при стендо-
вой отработке отдельных элементов и систем.
Решение задачи достигается разработкой экспериментальных
программ наземных испытаний, основная цель которых — выяв-
ление всех (возможных видов неисправностей и отказов, устране-
ние их путем доработки конструкции и совершенствования техно-
13
логических процессов. При разработке авиационных двигателей
это -составляет основную (цель доводочных испытаний [1].
Менее Обоснована постановка задачи, -ставящая целью только
подтверждение работоспособности принятого варианта конструк-
ции, так как она исходит из условия демонстрации надежности
ЖРД, а не с точки зрения выявления его «слабых» мест. Стрем-
ление к достижению успеха может создать тенденциозный, -субъ-
ективный подход к оценке результатов испытаний. При этом
иногда серьезные неисправности и отказы могут объясняться при-
чинами, не свойственными данной конструкции.
При наземной отработке стремление к выявлению- отказов
элементов и систем путем ужесточения возможных режимов ра-
боты, условий испытаний с учетом многократного использования
материальной части способствует созданию высоконадежных дви-
гательных установок, в ряде -случаев даже в более короткие сро-
ки при меньшем количестве затрат.
В настоящее время за рубежом все большее внимание уделя-
ется проектированию и разработке ЖРД многоразового исполь-
зования для возвращаемых на землю ступеней ракет космических
носителей и аппаратов. Гарантийный ресурс таких двигателей уже
не ограничивается единичными запусками и несколькими минута-
ми работы. Так, например, кислородно-во дородный ЖРД фирмы
Аэроджет—Дженерал с тягой; равной 230 тонн (0,225-107 Н),
рассчитывается на (многократное использование при числе вклю-
чений не менее 500 и суммарной продолжительности работы на
маршевом режиме порядка 10 ч [92]. При этом предусматривается
возможность многократных повторных заправок ступени компо-
нентами топлива.
Это налагает -свои -особенности на -методы отработки и -сами
виды испытаний. К числу таких особенностей относятся цикличес-
кий режим работы двигателя в земных условиях и условиях не-
весомости; положительные и отрицательные осевые перегрузки
(связанные с разгоном и торможением ступеней при возвращении
на Землю); допустимость ударных нагрузок, возникающих в мо-
мент посадки; цикличность изменения температурных режимов
для некоторых элементов конструкции в весьма широких преде-
лах (от высоких температур рабочего процесса до температур
исходных компонентов) и т. д.
Не -менее важным и сложным в данном -случае следует счи-
тать обеспечение заданного ресурса, в том числе и времени рабо-
ты на маршевом режиме. Если для ЖРД баллистических ракет
эти требования не вызывают особых трудностей, то для двигате-
лей многоразового использования они являются уже основопола-
гающими. Учитывая заметное влияние режима запуска и перио-
дичности включений на общий технический ресурс, программы
ресурсных испытаний должны предусматривать такие условия
работы двигателя, при которых -количество запусков и циклич-
ность смены режимов были бы максимальными.
14
Требования ужесточения режимов работы являются общими
для стендовых и летных испытаний. Однако если стендовые ис-
пытания могут проводиться при различных предельных и гранич-
ных условиях и режимах, превышающих заданные, то летные ис-
пытания, как правило, ограничивают предельными уровнями
основных параметров, допускаемых в технической документации.
Ужесточение режимов работы двигателя при летных испытаниях
более целесообразно достигать в результате сочетания предель-
ных значений различных факторов.
В процессе наземной отработки путем реализации различно-
го вида программ из материальной части опытных образцов по
каждому агрегату, узлу и ЖРД в целом должен извлекаться мак-
симум информации о надежности.
В рациональной программе ни один элемент конструкции, со-
хранивший работоспособность, не должен попадать в число изде-
лий, не пригодных для дальнейшего использования.
В итоге могут быть сформулированы основные требования к
оптимальной программе проведения огневых испытаний двигате-
ля на заключительных этапах отработки. ,
1. Условия и режимы работы, включая стендовое оборудова-
ние, должны быть максимально приближены к натурным услови-
ям эксплуатации.
2. Программа испытаний должна предусматривать режимы,
учитывающие не только номинальные, но и предельные уровни
варьирования внешних и внутренних факторов, а также наиболее
неблагоприятные их сочетания.
3. В процессе испытаний должно производиться варьирование
температуры компонентов топлива и конструкции, входных дав-
лений, некоторых внутренних факторов, программных перекла-
док регулирующих элементов и рулевых приводов камер сгора-
ния, включая допустимые отклонения в химическом и массовом
составе компонентов топлива.
4. Система измерения должна обеспечивать контроль и запись
практически (всех основных параметров и уровней значимых фак-
торов с необходимой точностью.
5. Программа не должна допускать проведения очередного
испытания без дешифровки и анализа результатов предыдущих
экспериментов.
6. Объем испытаний должен быть достаточным для однознач-
ной оценки результатов испытаний и подтверждения заданного
уровня надежности.
7. Программа должна предусматривать максимальное исполь-
зование материальной части.
8. Планирование испытаний, программа работ и обработка
экспериментальных данных должны основываться на методах ма-
тематической статистики, факторном анализе и теории надеж-
ности.
15
9. Программа должна предусматривать пути дальнейшего
повышения информативности испытаний.
Опытно-конструкторские испытания не являются .каким-то
обособленным этапом создания технической системы; они прохо-
дят как постоянный источник достоверной информации че}5ез все
периоды разработки, производства и эксплуатации.
§ 5. ТРЕБОВАНИЯ К СТЕНДОВОМУ ОБОРУДОВАНИЮ
Реализация сложной экспериментальной программы требует
сложного стендового оборудования, наличия совершенной систе-
мы телеметрического контроля, включая измерительную аппара-
туру. Отработка запуска :и выключения ЖРД высотных ступеней
требует создания таких стендовых систем, как барокамеры с
вышибными заглушками, вакуумных установок в виде эжекторов
и т. п. Для двигателей большой тяги эти установки должны обла-
дать большими габаритами при достаточно большой мощности
или производительности энергетических систем. Для этих целен
в США (в центре Арнольда) создана подземная барокамера глу-
биной 76,2 м и диаметром 30 м, Обеспечивающая разрежение,
соответствующее условиям при высоте 38 км [95]. Барокамера
использовалась для отработки двигателя J-2 («Рокетдайн»), пред-
назначенного для второй ступени ракеты-носителя «Сатурн-5»
Наряду с этим фирмой «Боинг» создан вибростенд для испытания
полностью собранных ракет и ступеней [82], а на базе Эдварса
(США) имеется стенд для огневых испытаний ступеней S-1C ра-
кеты-носителя «Сатурн-5» [91] с тягой ДУ, равной 3400 тонн
(0,333-108 Н), в течение полетного времени работы около 150 с.
Цель наземной отработки можно сформулировать как обеспе-
чение требуемых уровней надежности ЖРД наиболее экономи-
чески доступными средствами, что достигается частичной заменой
натурных, летных испытаний стендовыми. Практически это зна-
чит, что результаты стендовых испытаний могут быть достовер-
ными только при их полном соответствии летным условиям. Для
этого должно быть соблюдено статическое и динамическое подо-
бие или имитация условий летных испытаний изделий на стенде.
Эта задача и определяет основное требование, предъявляемое к
стендовому оборудованию.
Рассматривая динамику ЖРД в предпусковой период, при за-
пуске, старте, в полете на маршевом режиме и при выключении
можно прийти к выводу, что каждый из этих режимов характера
зуется комплексом определенных факторов. Так, например, пред-
пусковой период и запуск двигателя характеризуются температур-
но-влажностным режимом и давлением окружающей среды, ко-
торые определяются, в основном, атмосферными условиями или.
микроклиматом стартового сооружения.
Эти факторы имеют максимальные и минимальные уровни,
заданные в технической документации. Подобным образом уста-
16
навливаются температуры компонентов топлива и конструкции.
В свою очередь, давление- на входе в двигатель в предпусковой
период измененяется в соответствии с давлением наддува баков.
Порядок прохождения команд и срабатывания элементов авто-
матики происходят в зависимости от циклограммы запуска.
После открытия главных клапанов происходит движение ком-
понентов топлива по внутридвигательным коммуникациям, обус-
ловленное перепадами давлений, которые определяются, главным
образом, характеристиками подводящих магистралей {их длиной,
поперечным сечением, местными потерями на гидросопротивле-
ния, вибрациями) и давлением поднаддува баков. После старта
изделия появляются осевые перегрузки. Последние, в свою оче-
редь, оказывают воздействие на рост входных давлений перед на-
сосами.
Стенд для проведения огневых испытаний ЖРД должен иметь
станок с тяпоизмерительным устройством, централизованную сис-
тему подачи компонентов топлива с арматурой и измерителями
секундных расходов и пульт управления с контрольно-измери-
тельными приборами и регистрирующей аппаратурой.
Основными требованиями, предъявляемыми к стендовому обо-
рудованию, можно назвать:
— обеспечение идентичности, или динамического подобия ха-
рактеристик систем питания двигателя компонентами топлива,
включая соответствие инерционных, волновых и гидравлических
характеристик питающих магистралей;
— обеспечение соответствия законов изменения входных дав-
лений в двигатель, давлений в камере сгорания и газогенераторе,
времени подхода или поступления компонентов топлива к основ-
ным агрегатам;
— обеспечение изменения в широких пределах температуры
компонентов топлива и конструкции, входных давлений, регули-
рования секундных расходов и тяги;
— для двигателей верхних ступеней достижение степени соот-
ветствия высотных условий (разрежения окружающей среды, от-
сутствия конвективного обмена между элементами конструкции
и средой, влияния солнечной радиации);
— обеспечение идентичности прохождения команд по времени;
— применение конструкции узлов крепления двигателя и его
агрегатов, соответствующей штатной;
— удобство и возможность проведения испытаний в возмож-
но короткие сроки;
— экономичность испытаний;
— максимальная автоматизация и упрощение программы ис-
пытаний;
— наличие систем шумоглушения, нейтрализации и промыш-
ленных стоков;
— наличие однотипной измерительной и записывающей аппа-
ратуры.
17
Последнее требование имеет целью исключение возможности
появления ошибок при сравнении и определении контролируемых
параметров ЖРД за счет разнотипности аппаратуры, различия
характеристик датчиков и методик их пересчета.
В целом стенды для проведения огневых испытаний должны
обеспечивать возможность отработки ЖРД различной конструк-
ции, близких по тяге и работающих на одноименных компонен-
тах топлива. Стендовые баки для хранения компонентов должны
обеспечивать проведение испытаний ЖРД в течение нескольких
заданных ресурсов работы без дозаправки.
Арматура стендов должна допускать аварийное выключение
двигателя и прекращение подачи компонентов топлива с несколь-
ких автономных пультов, дублированных между собой и находя-
щихся в различных помещениях, соединенных средствами связи.
Наряду с этим необходимо иметь автоматическую систему ава-
рийного выключения, реагирующую на резкое повышение темпе-
ратуры в испытательных боксах, на падение давления в подводя-
щих магистралях и т. п.
В целом испытательный стенд должен удовлетворять всем
требованиям техники безопасности, иметь средства пожаротуше-
ния, санитарные службы, средства дегазации и т. п.
Стенды, применяемые для отработки ЖРД, являются универ-
сальными, а стенды для контроля надежности товарных изде-
лий— специальными. В данном -случае они настроены на опреде-
ленные динамические характеристики конкретного двигателя.
Обилие программ при экспериментальной отработке требует
различного технического оборудования и создания специальных
стендов. Некоторые из них могут использоваться, скажем, только
для проливок систем и различного рода гидроиспытаний; дру-
гие— для автономных испытаний камер сгорания; третьи — для
автономных испытаний ЖРД в земных условиях; четвертые — для
тех же испытаний, но уже в условиях глубокого вакуума или не-
весомости; пятые — для испытания двигательных установок, со-
стоящих из связок автономных блоков ЖРД; шестые — для испы-
тания ступеней ракет и т. д.
В результате один и тот же двигатель может одновременно
проходить испытания на нескольких стендах. Так, например, от-
работка двигателя F-1 ракеты-носителя «Сатурн-5» велась прак-
тически одновременно примерно на 10 стендах, из которых 3
использовались для испытания ДУ в составе ступеней.
В зависимости от угла наклона вектора тяги к горизонту стен-
ды могут быть вертикальными, наклонными и горизонтальными.
Степень совершенства стендов характеризуется технической
оснащенностью, тяговооруженностью, защищенностью от возмож-
ных взрывов двигателей и компонентов топлива, -составом конт-
рольно-измерительной аппаратуры, временем подготовки.и прове-
дения огневых испытаний, включая повторные запуски. Чем выше
18
техническая оснащенность стендов, тем информативнее результа-
ты испытаний и тем эффективнее наземная отработка.
§ 6. ИНФОРМАТИВНОСТЬ ИСПЫТАНИЙ
Информация, получаемая в процессе испытаний, может быть
двух видов.
1. Количественная параметрическая информация о физичес-
ких характеристиках изделия и техническом -состоянии его эле-
ментов. Первичным источником этой информации являются изме-
рительные приборы для фиксирования установившихся или быст-
роменяющихся процессов. К ним относятся различного рода дат-
чики замера давления, секундных расходов, температуры, числа
оборотов (частоты вращения), уровней жидкостей, всевозможные
датчики контроля прохождения различных команд. Данная ин-
формация со стенда или борта изделия передается к наземным
устройствам памяти по проводной или радиоканальной системе
телеизмерений. По общему объему параметрическая информация
является самой значительной. Достаточно привести пример [80],
когда при летном испытании ракеты-носителя «Сатурн-5» только
с первой -ступени S-1C снимается и передается на землю телемет-
рическая информация по 89-0 параметрам с помощью 12 каналов
с частотой опроса от 12 до 120 Гц. Это позволяет вести практичес-
ки непрерывную запись всех основных параметров ДУ, исключая
быстропеременные процессы и высокочастотные колебания. В слу-
чае необходимости их запись может вестить при стендовых испы-
таниях.
Такой объем информации дает практически полное представ-
ление о физических процессах и техническом состоянии изделия
при его функционировании в любой момент времени, в том числе
в момент проявления отказа, включая предысторию и последей-
ствие. Это очень важно при анализе причины отказа и всей ава-
рийной ситуации. Исключением, разумеется, являются случаи,
когда в месте проявления отказа отсутствовал контрольный замер
или его достоверность низка.
Однако при количественной оценке надежности использовать
указанный объем информации трудно.
2. Качественные и количественные характери-стики в виде
частоты безотказной работы, времени наработки на отказ и т. п.
Вполне очевидно, что параметрические, количественные харак-
теристики обладают значительно большей точностью, чем качест-
венные. Последние достоверны только при большом числе испы-
таний. Зная же точность приборов измерения, -можно достаточно
точно оценить параметры буквально по единичным испытаниям.
Таким образом, если численное значение количественного фак-
тора позволяет довольно точно установить его уровень, то качест-
венный фактор характеризуется лишь оценкой «да—нет»,
19
«успех — отказ» и т. п. Тем не менее, для большинства систем и
элементов, не имеющих телеизмерений, (качественная информация
является основным видом при статистической оценке показате-
лей надежности. Рассмотрим этот вопрос несколько подробнее.
Показатели надежности могут определяться только по резуль-
татам испытаний. Некоторые из них могут оцениваться по ре-
зультатам краткоресурсных, контрольных, типовых, приемо-сда-
точных и других видов испытаний. Но существуют характеристи-
ки, связанные с оценкой гарантийных ресурсов и долговечности,
которые требуют проведения длительных, дорогостоящих испы-
таний, например, до отказа. Фактический же уровень надежности
изделий, учитывающий влияние всех эксплуатационных факторов,
может 'быть 'Оценен по результатам эксплуатации в натурных ус-
ловиях. Это позволяет определить состав неисправностей и отка-
зов, гарантийный ресурс, конструктивные недоработки, недостат-
ки технологии изготовления и эксплуатации. Все это требует дли-
тельных сроков эксплуатации, испытаний и больших материаль-
ных затрат. Чтобы определить указанные характеристики забла-
говременно, еще на стадии экспериментальной отработки, необхо-
димо проведение испытаний, имитирующих условия натурной
эксплуатации.
Большое значение имеет также хорошо налаженная система
организации и учета статистических данных. С ее помощью опре-
деляются виды дефектов и отказов, количественные показатели
по характеристикам надежности, разрабатываются технические
мероприятия, планы экспериментальных работ и программы ис-
пытаний по обеспечению надежности. Немаловажную роль в этом
играют сами методы оценки надежности, так как они определяют
состав и объем информации. В ее задачу входит сбор, классифи-
кация, обобщение и обработка статистических данных. Информа-
ция должна поступать по мере проявления отказов или через
строго определенные промежутки времени. Информация должна
объективно и полно отражать все обстоятельства проявления от-
каза.
Трудность в разработке системы информации о надежности
изделий заключается в многообразии сведений о характере, усло-
виях, причине возникновения отказа, наработке на отказ на дан-
ный момент времени и т. п. Наработка для различных элементов
определяется характером их функционирования. Для элементов,
работающих в ресурсном режиме, наработка определяется вре-
менем безотказной работы. Для элементов, функционирующих в
режиме переключающих устройств, она характеризуется коли-
чеством циклов до отказа. Для изделий, работающих в режимах
многократного включения, суммарная наработка определяется
числом циклов и временем работы на установившемся режиме.
Характеристика наработки—весьма важный критерий, опре-
деляющий физический процесс работы изделия, при котором про-
явился отказ. Неправильный выбор этого критерия, как правило,
20
приводит -к принятию ошибочных решений. Величина наработки,
как и надежность изделий, определяется конструктивным совер-
шенством изделий, технологией изготовления и условиями испы-
таний. Этому последнему фактору иногда при оценке надежности
не придают должного внимания, что неизбежно приводит к про-
счетам и ошибкам. Иногда, суммируя отказы, их не дифференци-
руют в зависимости от условий испытаний. Например, можно
просуммировать отказы, проявившиеся при испытаниях изделий,
проведенных, казалось бы, практически в одинаковых условиях,
за исключением температуры окружающей среды. Впоследствии
после длительной эксплуатации оказалось, что именно температу-
ра является решающим фактором, определяющим пределы рабо-
тоспособности системы.
Следовательно, при обработке статистических данных недо-
пустимо обобщение информации об отказах, вызванных разными
условиями. Это возможно только в тех случаях, когда результа-
тами самих испытаний доказано, что. факторы, определившие
различие условий, не приводят к 'изменению интенсивности от-
казов.
Для качественной оценки результатов испытаний обычно ис-
пользуются различные статистические методы, основанные на
фиксировании параметров изделия, количества отказов и т. п.
Некоторый интерес в этом отношении представляет статисти-
ческий метод, основанный на суммировании отказов в процессе
отработки изделия без учета конструктивных различий отдельных
его модификаций. На рис. 1.2 по оси ординат систематически по
мере накопления экспериментальных данных отмечают количест-
во отказов т$, а по оси абсцисс — число испытаний N. В результа-
те получается дискретная функция распределения отказов в зави-
симости от объема испытаний.и степени ввода в изделие конст-
руктивных изменений. В целом эта зависимость отражает
эффективность отработки и может быть разделена на несколько
этапов, каждый из которых характеризует изменение надежности
изделия по мере его доводки при достаточном числе эксперимен-
тов, подтверждающих эффективность принятых мер. На рис. 1.2
таких этапов два — I и II. Этапу I соответствует отрезок (Afi—
О), этапу II—-(Л^п—М)- Каждый из них имеет уровень интенсив-
ности отказов, определяемый тангенсом соответствующего угла
наклона (aj или ац):
tga' = X: tga"
^011
Ml-М
В момент, соответствующий месту пересечения прямых I и /Л
в конструкцию или технологию изготовления изделия были вне-
сены изменения, которые с точки зрения инженерного решения
можно оценить как эффективные. Дальнейший анализ этих реше-
ний позволяет обеспечить рост надежности. Если ац^аь то это
21
может считаться симптомом неэффективности 'произведенных до
работок или ошибок и просчетов, в результате которых конструк-
тор и экспериментатор оказались на ложном пути.
Такой метод обработки статистических данных сам по себе
не нов, но его применение имеет практический смысл как для
оценки эффективности доработок, так и для систематизации и
обобщения экспериментальных данных. При оценке эффектив-
ности доработок он исходит из качественной информации, не учи-
тывает количественную, параметрическую информацию, поэтому
Рис. 1. 2. Зависимость количества отказов от числа
испытаний б процессе отработки
данный метод не оперативный. Его точность зависит от большого
объема испытаний. При использовании количественной информа-
ции задача оценки эффективности доработок может быть решена
при меньшем количестве затрат и в 'более короткий срок. Одним
из возможных путей решения задачи с использованием количест-
венной, параметрической информации является метод построения
математических моделей исследуемых процессов, который будет
рассмотрен ниже.
Возвращаясь теперь вновь к рис. 1.2, обратим внимание на
то, что полученная экспериментальная зависимость фактически
символизирует «рост» надежности двигателя в процессе его от-
работки. При этом имеется в виду четкая взаимосвязь, которая
существует между качеством отработки и количеством проведен-
ных испытаний. Так, например, характеристика III является в
некотором роде теоретической зависимостью, устанавливающей
функциональную взаимосвязь числа отказов и количества испы-
таний конкретного образца двигателя без учета знания общего
вида закона распределения.
Зная оба эти показателя, не составляет труда построить зави-
симость вероятности безотказной работы Р от числа испытаний
N, используя связь
р _ 1 _
N ’
22
Данная зависимость внешне не будет отличаться от характе-
ристик рис. 1. 2.
Практически в течение всего периода отработки уровень на-
дежности меняется и характеризуется постепенным ростом пока-
зателя надежности. Поэтому в ряде работ [53, 70] ломаную линию
дискретного вида заменяют экспоненциальной кривой
где а и b—коэффициенты, характеризующие исходы иопытаний.
Вся сложность этих решений состоит в том, что коэффициенты
а и Ь, как правило, неизвестны, а точно их определить по ограни-
ченному количеству испытаний практически невозможно [70]. Бо-
лее того, известные методы их расчета, основанные на регрессион-
ном анализе и методе наименьших квадратов, предполагают сто-
хастическую независимость наблюдений, а так как в нашем слу-
чае наблюдения (или результаты испытаний) зависимы один от
другого, то невыполнение известных допущений ведет к дополни-
тельным ошибкам. Частичное решение вопроса можно найти в
работе [53], где предлагается весь процесс опытной отработки
разбить на несколько интервалов, каждый из которых характе-
ризуется относительно стабильной программой испытаний. По
результатам этих испытаний для каждого интервала определяет-
ся точечная оценка надежности и соответствующий ей доверитель-
ный интервал.
Информативность испытаний и интервальные оценки надеж-
ности теснейшим образом связаны между собой. Чем больше
объем информации при любом количестве испытаний или чем
выше их информативность, тем уже доверительный интервал и
точнее оценки.
Количественный показатель надежности — наиболее всеобщий
и объективный критерий оценки результатов испытаний. Поэтому
его использование для определения степени завершенности отра-
ботки двигателя на различных этапах экспериментальных работ
весьма желательно. В то же время, если время проведения испы-
таний ограничено и принимаются малые выборки, то при
реализации отдельно взятой программы такие оценки вести не
всегда удается. Поэтому на практике при реализации каждой
программы надо стремиться к расширению объема испытаний,
не увеличивая при этом объем выборки экспериментальных об-
разцов. Это позволяет значительно повысить информативность
испытаний вследствие увеличения их продолжительности, циклич-
ности режимов и расширения диапазонов варьирования факторов,
определяющих условия испытаний.
Исходя из анализа результатов испытаний по выходным пара-
метрам, характеризующим физический процесс, информативность
испытаний может быть увеличена повышением точности контроль-
ных замеров и их достоверности, а также увеличением числа
контролируемых точек.
23
§ 7. ПЛАНИРОВАНИЕ ОТРАБОТКИ
План экспериментальных работ составляется с учетом этап-
ности отработки, масштабов опытного производства, производи-
тельности стендового оборудования, заданных сроков отработки,
стоимости испытаний и прочих материальных затрат. Основным
ядром такого плана является совокупность экспериментальных
частных программ, а выходным (критерием качества плана следу-
ет считать достигнутый уровень надежности отрабатываемого
двигателя.
С учетом названных (выше факторов план экспериментальных
работ (в конечном итоге определяется объемом всех видов испыта-
ний в соответствии с установленными этапами отработки. Разра-
ботка оптимального плана является довольно сложной задачей,
так как многие факторы не всегда удается не только оценить ко-
личественно, но и определить их качественно. Задача усугубляет-
ся еще и тем, что основной элемент плана — программа отличает-
ся большим разнообразием по количеству, видам испытаний, про-
должительности, объему работ и по затратам.
С точки зрения анализа программ завершающих доводочных
испытаний и испытаний на надежность следует указать, что этот
этап наиболее трудоемкий и обходится значительно дороже, чем
проверка качества при серийном производстве. Однако он необхо-
дим, так как последствия ошибочных решений, допускаемых при
выборе штатной конструкции, как правило, оказываются очень
тяжелыми. По этой причине выходной контроль качества не мо-
жет заменить предшествующий этап доводочных испытаний, все-
сторонне определяющий качество конструкции и принятой техно-
логии производства.
Фактически план экспериментальных работ координирует
этапность отработки двигателя в зависимости от перечисленных
выше факторов и определяет сроки реализации частных прог-
рамм. Как известно, цель этих программ применительно к приня-
тому варианту конструкции — определение тактико-технических
характеристик изделия и выявление «слабых» мест конструкции,
а также технологии производства.
Для каждого образца большинство тактико-технических ха-
рактеристик определяется однозначно в процессе испытаний, а их
разброс для данного типа двигателя уточняется по мере обработ-
ки статистических данных.
Выявление «слабых» мест связано со случайными проявлени-
ями отказов. Это означает качественное или количественное оп-
ределение надежности конструкции по результатам испытаний
ограниченной выборки изделий в пределах конкретной программы.
Допустим, программа определяет некоторый (комплекс усло-
вий испытаний. Требуется на основании экспериментальных дан-
ных определить, работоспособен ли двигатель при заданных ус-
ловиях.
24
Вполне очевидно, что ответить на этот (вопрос (возможно одно-
значно, оценив количественно надежность. Но если уровни на-
дежности заданы высокими, то объем испытаний соответственно
должен быть велик. А так как существует Обилие программ и кон-
кретных задач параллельно рассматриваемой программе, то об-
щий объем испытаний возрастает пропорционально их числу.
В целом реализация десятков программ по конкретному дви-
гателю выливается в сотни и даже тысячи стендовых испытаний,
Пропорционально этому растут затраты, к сокращению которых
мы должны стремиться, а следовательно, стремиться и к сокраще-
нию объема всех работ.
С учетом изложенного выше определение объема эксперимен-
тальных работ и составляет основную цель разрабатываемого
плана.
Рассматривая этот вопрос, укажем, что в абсолютном боль-
шинстве случаев после успешного проведения испытаний мате-
риальная часть опытного образца сохраняет свою работоспособ-
ность (исключением, разумеется, надо считать испытания агрега-
тов до разрушения и т. п.).
Этим объясняется одно весьма важное требование плана: мно-
гократное использование материальной части в процессе реализа-
ции одной программы. Практически это означает последователь-
ное проведение испытаний до отказа, в результате чего в процессе
реализации одной программы могут быть определены характерис-
тики наработки на отказ. В свою очередь, для их эффективного
использования нужны объективные законы распределения с уче-
том статистических и физических особенностей конкретной конст-
рукции.
Точность -статистических оценок результатов испытаний зави-
сит от того, насколько принятый закон соответствует истинному
распределению отказов. Вопрос о свойствах и преимуществах тех
или иных законов подробно будет рассмотрен нами позже в
гл. V. В настоящем разделе укажем, что использование экспо-
ненциального распределения имеет ограниченное применение для
механических систем -и что наиболее достоверной моделью, по
мнению специалистов, является распределение Вейбулла [62].
Итак, разработка плана экспериментальных работ должна
слагаться из следующих этапов.
1. Изучения и анализа тактико-технического задания на раз-
работку проектной и технической документации.
2. Сбора и обобщения данных о масштабах производства, ха-
рактеристиках имеющегося испытательного оборудования (стен-
дов и лабораторий), степени их соответствия намечаемой про-
грамме работ, -степени модернизации или разработке новых видов
оборудования и т. п.
3. Оценки и анализа экономических показателей стоимости
испытаний, затрат'на модернизацию и разработку новых видов
стендового оборудования.
25
4. Определения целей и задач экспериментальных исследова-
ний по каждой частной программе.
5. Разработки и согласования программ по воем видам испы-
таний элементов и систем, включая автономную отработку агре-
гатов, оценочные, доводочные и квалификационные испытания
применительно к существующему стендовому оборудованию [62].
6. Определения объема испытаний для каждой из программ и
количества расходуемой материальной части элементов и сис-
тем с учетом оптимизации всех характеристик разрабатываемого
плана.
Частные программы разрабатываются на основе факторных
планов с учетом конкретных условий. При этом планом экспери-
ментальных работ должно предусматриваться «гибкое» реагиро-
вание на результаты испытаний, позволяющее своевременно со-
кращать или расширять объем и программу. Сокращение объема
испытаний может быть вызвано преждевременным достижением
цели, а расширение, — например, вводом в программу новых
факторов и т. п.
В целом план экспериментальных работ должен служить цели
обеспечения заданного уровня надежности оптимальными средст-
вами и в заданные сроки.
Глава II
ЭКСПЕРИМЕНТАЛЬНАЯ ОТРАБОТКА ЖРД.
ЭТАПЫ И ЬИДЫ ИСПЫТАНИЙ
§ 1. ОБЩИЕ ХАРАКТЕРИСТИКИ ИСПЫТАНИЙ
Программы обеспечения надежности ЖРД отличаются боль-
шим разнообразием. Реализациями таких программ следует счи-
тать испытания, которые с точки зрения объекта их проведения
делятся на два основных вида: стендовые и летные испытания.
Однако с точки зрения объема оба эти вида нельзя считать рав-
ноценными.
Стендовые испытания ЖРД и их агрегатов включают в себя
весь круг вопросов, связанных с наземной отработкой, обеспече-
нием надежности и выходным контролем качества товарных из-
делий.
Летные испытания — это прежде всего комплексная проверка
работоспособности всех ракетных систем. Соответственно стои-
мость одного комплексного летного испытания во много раз выше
стоимости стендового испытания отдельно взятой автономной сис-
темы ЖРД. Поэтому общее количество летных испытаний состав-
ляет всего лишь часть или несколько (процентов от общего числа
стендовых испытаний [83, 86]. 9
Поскольку стендовые испытания представляют собой реали-
зацию большого перечня программ, их делят на несколько этапов,
придавая каждому этапу определенное целевое назначение.
Содержание каждого из этапов наземной отработки будет рас-
смотрено нами в § 2, 3, 4.
ЖРД должен обладать достаточно высокой надежностью, да-
же при наличии систем резервирования, так как его надежность
определяет надежность ракет, носителей и космических аппара-
тов, живучесть стартовых сооружений.
В ходе стендовых испытаний практически полностью решают-
ся вопросы обеспечения надежности проектируемых и отрабаты-
ваемых систем в условиях полета и эксплуатации, которые, как
известно, представляют собой совокупность сочетаний различного
рода факторов, обусловливающих конструктивные, технологичес-
кие и эксплуатационные характеристики изделий. Их большое
число и разнообразие создают необходимость разработки комп-
27
лекса программ для -наземной, 'Стендовой отработки, требующих
имитации^всех натурных условий эксплуатации, включая полет-
ные. Поэтому необходимо создание уникального оборудования
для проведения стендовых испытаний, большого количества изме-
рительных и регистрирующих устройств, систем для заправки и
хранения компонентов топлива, сжатых газов, средств защиты
обслуживающего персонала и техники (см. гл. I).
Степень отработки ЖРД, его эксплуатационная надежность
определяются прежде всего полнотой имитации натурных условий
эксплуатации и полета ракеты. Это связано с необходимостью
тщательной разработки программ, длительной подготовки испы-
таний, четкого их проведения, обработки и анализа полученной
информации.
Стендовые испытания обычно начинаются с автономной отра-
ботки агрегатов. При этом проверяется работоспособность эле-
ментов и систем, определяются /их рабочие характеристики без
учета влияния смежных систем технического проекта. После за-
вершения автономной отработки следуют комплексные испытания,
при которых проверяются работоспособность и параметры двига-
теля при взаимодействии агрегатов и систем. В данном случае
оценивается степень значимости корреляции и взаимного влияния
агрегатов ЖРД. Если она мала или не приводит к нарушению
рабочих режимов, эффективность автономной отработки будет
высокой. Если же корреляция приводит к нарушению условий
нормального функционирования агрегатов, эффективность авто-
номной отработки низка. В ряде случаев для весьма динамичных
систем она равна нулю. Это, в свою очередь, требует проведения
большого количества более сложных и дорогостоящих комплекс-
ных испытаний. С этой точки зрения оптимальным будет конст-
руктивное решение, обеспечивающее высокую эффективность
автономных испытаний при отработке отдельных элементов
систем.
Развитых корреляционных связей между элементами системы
практически нельзя достичь имитацией при автономных испыта-
ниях.
С учетом имитации влияния условий окружающей среды и
внешних факторов программы экспериментальных работ могут
отличиться разнообразием технических решений, продолжитель-
ностью испытаний, уровнями варьирования факторов, цикличес-
кой скоростью смены режимов и х п. В отдельных случаях может
реализовываться ряд специальных программ: испытания на на-
дежность; проверки влияния на работоспособность разного рода
технологических дефектов и т. д.
Планирование отработки требует проведения таких видов ис-
пытаний, /которые для конкретного задания, являясь наиболее
информативными, с учетом всех затрат были бы, по возможности,
оптимальными/ С учетом этого программа испытаний должна
включать анализ различных видов испытаний с указанием их пре-
28
имуществ и ожидаемых результатов, оценку оптимальных сроков
завершения работ и материальных затрат. Существующие про-
граммы чаще всего учитывают рабочий задел и опыт предприя-
тия, а не его реальные возможности.
Стендовые испытания могут быть разбиты на следующие эта-
пы [62]:
I — опытно-конструкторские, оценочные испытания;-
II — испытания на воздействие окружающей среды с учетом
влияния внешних и внутренних факторов;
III —квалификационные испытания.
§ 2. ОПЫТНО-КОНСТРУКТОРСКИЕ, ОЦЕНОЧНЫЕ ИСПЫТАНИЯ
При этих испытаниях оценивается работоспособность одного
или нескольких проектных вариантов конструкции основных агре-
гатов и ЖРД в целом. Определяются возможности функциониро-
вания, динамического взаимодействия, а также ведется предвари-
тельная оценка основных характеристик. На самом начальном
этапе оценочных испытаний проверяется, насколько данная про-
ектная схема или конструкция реализуема в заданных условиях
эксплуатации. В дальнейшем развиваются заложенные в проект
возможности — происходит совершенствование с точки зрения эф-
фективности, надежности, стоимости, удобства управления,
повышения гарантийных сроков эксплуатации и всех остальных
свойств и характеристик качества. Это развитие ведется в направ-
лении обеспечения заданных эксплуатационных показателей. Но
обычно конструктор и заказчик этим не ограничиваются и прово-
дят испытания при более жестких условиях, определяются пре-
дельные возможности штатного варианта изделия [62]. Испытания
подразделяются на:
— гидравлические проливки и испытания на прочность;
— продувки «холодными» и «горячими» газами;
— кратковременные повторные и типовые испытания элемен-
тов и систем в лабораторных условиях;
— статические, динамические и вибрационные испытания от-
дельных агрегатов, узлов и изделий в целом;
— контрольные и типовые испытания систем на натурных
стендах;
— коррозионные, климатические и другие виды испытаний
[62, 57].
Испытания этого этапа включают автономную отработку прак-
тически (всех проектируемых узлов и агрегатов. В отдельных 'Слу-
чаях исключением могут быть комплектующие элементы и уни-
фицированные изделия, когда заданные режимы работы и усло-
вия испытаний не превышают допустимых. К ним относятся под-
шипники, сальники, уплотнительные элементы любых типов, не-
которые агрегаты автоматики, датчики, реле давлений и т. п.
29
Особым разнообразием отличаются -программы испытаний
основных агрегатов: камеры сгорания, турбины, топливных насо-
сов и газогенератора. Цель этих испытаний также направлена
на выбор оптимальных характеристик и раннюю диагностику от-
казов. Так, например, автономные испытания газовых турбин
имеют целью выбор конструкции с максимальным к. п. д. при
расчетной пропускной способности соплового аппарата. Для этого
проводятся аэрогазодинамические испытания проточной части
[102], при которых выбирается оптимальный профиль лопаток ро-
тора турбины и направляющего аппарата статора.
Практически все элементы конструкции агрегатов должны
подвергаться автономным испытаниям на прочность. Для замкну-
тых объемов (корпусы насосов и турбин) эти испытания являют-
ся статическими и осуществляются методом гидроопрессовок. В
ряде случаев для определенных выборок такие испытания прово-
дятся до разрушения. Крыльчатки насосов и диски турбин про-
ходят динамические испытания на специальных стендах при по-
вышенных оборотах. В данном случае определенная выборка из-
делий испытывается до разрушения с помощью центробежных
сил методом постепенного увеличения числа оборотов ротора.
Важным моментом разработки программ автономной отработ-
ки следует считать обеспечение имитации нагрузок и достижение
их соответствия натурным испытаниям агрегатов в условиях экс-
плуатации. В процессе испытаний на прочность проверяются
«слабые» места конструкции. По их результатам сравниваются
расчетные значения прочностных характеристик с фактическими,
устанавливаются разбросы характеристик прочности и принима-
ются решения о доработках конструкции или об изменении техно-
логии производства.
В целом испытания завершаются дефектацией материальной
части и анализом результатов.
При автономной отработке турбин, так же как и топливопода-
ющих насосов, весьма важную роль играют методы физического
моделирования. Для этих целей в ряде случаев создают модели
уменьшенных размеров, которые иногда выполняются с прозрач-
ными стенками. В этих случаях испытания можно вести на воз-
духе (для турбин) или на модельной жидкости (для насосов) с
добавлением особых химических красителей.
Автономной отработке практически каждой новой конструк-
ции предшествуют модельные испытания. Цель этих испытаний —
выбор оптимальной конструкции и уточнение проектных характе-
ристик.
Автономные испытания камеры сгорания и газогенератора на-
правлены на выбор работоспособной конструкции, как можно
более полное изучение устойчивой зоны горения, диапазонов воз-
никновения низких и высоких частот, замера амплитуд колеба-
ний, определение мер по их ликвидации. При этом производится
оценка области устойчивого горения в зависимости от изменения
30
различных факторов, таких как давление в камере сгорания,
коэффициент соотношения компонентов топлива и другие [16].
Не менее важна оценка режимов охлаждения камеры сгора-
ния при различных 'сочетаниях внешних и внутренних факторов.
В этом случае наиболее неблагоприятным сочетанием для каме-
ры 'Следует считать минимально допустимый расход охлаждаю-
щего компонента, форсирование по давлению и коэффициенту
соотношения при минимальном перепаде давления в зарубашеч-
ной полости.
В процессе автономных испытаний уточняются основные энер-
гетические характеристики и их зависимости от регулируемых
параметров, 'внешних факторов (входных давлений и температур)
и некоторых внутренних факторов, определяемых разбросом тех-
нологических характеристик, например, перепадами давлений на
форсуночной головке.
Наряду с огневыми испытаниями камера сгорания и ее эле-
менты подвергаются гидроиспытаниям с целью определения пере-
падов давлений на линиях -горючего и окислителя, оценки равно-
мерности ' зон распыла, секундных расходов через отдельные
форсунки горючего и окислителя, углов и качества распыла, рас-
пределения коэффициента соотношения компонентов топлива по
поперечному сечению камеры и т. д.
Завершается автономная отработка агрегатов их испытания-
ми на прочность. Цель испытаний — проверка запасов прочности
после многократного статического и динамического нагружения
давлением жидкости или газа. При этом одновременно решается
вопрос о проверке герметичности полостей и соединений, свар-
ных швов, паяных соединений.
При проведении автономной отработки агрегатов весьма важ-
ной задачей следует считать максимальное приближение экспе-
риментальной программы к натурным условиям испытания в сос-
таве изделия. Поскольку при автономной отработке агрегатов
достичь этого в полной мере не всегда удается, то выбор про-
граммы должен предусматривать наиболее критические условия
ее проведения для каждого конкретного агрегата. Так, например,
автономная обработка камеры сгорания двигателя F-1 ракеты-
носителя «Сатурн-5» велась с вытеснительной системой подачи
компонентов топлива.
Добиться идентичности условий и характеристик запуска, от-
вечающих штатным, сложно, тем более, что штатные условия на
данной стадии отработки в полной мере еще неизвестны. В таких
случаях целесообразно выводить крайние режимы работы, кото-
рые отвечали бы, с одной стороны, весьма «жестким» градиентам
нарастания давления и температур в камере и, с другой — усло-
виям обеспечения затяжного запуска. При этом конструкция дол-
жна удовлетворять не только требованиям по обеспечению проч-
ности, но и стабильности внутрикамерных процессов, устойчи-
вости горения и т. д.
31
Динамические и вибрационные испытания ведутся на специ-
альных стендах, позволяющих длительно нагружать агрегаты и
изменять характер 'нагрузки. Так, например, топливоподающие
магистрали, корпусы арматуры, насосов ;и полости форсуночных
головок могут проверяться на (воздействие гидравлических уда-
ров. При этом фиксируется состояние материальной части, напря-
жения и величины давления при «пиковых» нагрузках. Сами на-
грузки могут быть однократными, -цикличными, знакопеременны-
ми, с затухающей или генерируемой частотой и амплитудой.
Вибрационные испытания ведутся на вибростендах и имеют
целью определение частоты и формы собственных колебаний ме-
тодом установления резонансных частот. Для этого в плоскости
колебаний и нормальной к ней устанавливаются вибродатчики.
Путем плавного изменения частоты колебаний находится пер-
вая резонансная частота. Таким же методом могут быть опреде-
лены и все остальные. Так как частота собственных колебаний
зависит от упругости конструкции, то анализ резонансных частот
и форм дает возможность установить их физическую природу.
В соответствии с результатами испытаний могут быть проведены
конструктивные доработки.
Для определения декремента затухания колебаний конструк-
ция.-вводится в (резонанс соответствующего тона, после чего гене-
ратор колебаний мгновенно выключается. При этом период зату-
хания колебаний должен быть минимальным.
Опытно-конструкторские, оценочные испытания чаще всего
проводятся в условиях окружающей среды. По их результатам
уточняются теоретические зависимости и расчетные данные, от-
носящиеся к системе в целом. В зависимости от этого могут
корректироваться некоторые параметры, конструктивные решения
отдельных элементов и узлов, а в ряде «случаев и принципиальная
схема ЖРД. Характер опытно-конструкторских испытаний явля-
ется поисковым. В ходе их проведения постоянно сравниваются
количественные и качественные характеристики для различных-
схем и конструктивных решений. Методика испытаний, как пра-
вило, основывается на эмпирическом, шаговом поиске. Разумно
построенный план предусматривает практически параллельное
ведение испытаний для нескольких вариантов одного и того же
узла, агрегата. На основе анализа результатов испытаний выби-
рается вариант, близкий к оптимальному. Немалую роль в этом
играют заключения ведущих специалистов, учитывающих опыт
предприятия, НИИ и других организаций. При этом неправильно
стремиться к -сокращению числа исходных вариантов и к умень-
шению объема испытаний.
При завершении этапа опытно-конструкторских, оценочных
работ уточняются отдельные технические решения по элементам
и системе в целом. Выбираются циклограммы запуска и выклю-
чения, определяются основные параметры, рабочие характеристи-
32
ки элементов, технология их изготовления, техническая докумен-
тация, методы приемочного и входного контроля и т. п.
Проводятся мероприятия технического и организационного
плана. На заданном этапе в соответствии со сложившейся прак-
тикой, например, в США заказчик, как правило, <в испытаниях не
участвует. Это объясняется тем, что на данном этапе произво-
дится выбор оптимальных конструктивных решений, а не оценка
технического состояния изделия и технологических процессов
при серийном производстве.
Это положение сохраняется и в тех случаях, когда программа
финансируется полностью заказчиком. После завершения этапа
опытно-конструктивных работ заказчик может участвовать при
анализе достигнутых результатов, так как на их основании при-
нимается решение о штатном варианте конструкции [62].
§ 3. ИСПЫТАНИЯ НА ВОЗДЕЙСТВИЕ ОКРУЖАЮЩЕЙ СРЕДЫ
С УЧЕТОМ ВЛИЯНИЯ ВНЕШНИХ,!! ВНУТРЕННИХ ФАКТОРОВ
На этом этапе испытывается конструктивная модификация,
близкая к штатной.
Испытания на воздействие (внешней среды в общем плане
экспериментальных работ отличаются разнообразием программ,
видов и условий испытаний. Целью испытания являются:
1) определение штатной конструкции ЖРД, его отдельных
узлбв и агрегатов;
2) подтверждение работоспособности штатной конструкции в
соответствии с заданной технической документацией и определе-
ние функциональных связей между входными и выходными ха-
рактеристиками ЖРД как системы, так и ее элементов;
3) установление рабочих пределов изменения основных пара-
метров для всех узлов и агрегатов;
4) оценка технологического процесса изготовления двигателей
при серийном производстве.
Указанный перечень охватывает основные этапы эксперимен-
тальных работ и практически находится в полном соответствии
с общими требованиями к программам испытаний на воздействие
внешней среды и различного рода факторов [62]. В соответствии
с этим методика испытаний в каждом конкретном случае опре-
деляется техническим заданием, разрабатывается конструктор-
ской группой и согласовывается с заказчиком. Объем испытаний
определяется отделами конструктора или подразделением на-
дежности. В ряде зарубежных работ [37, 62] ставится вопрос об
определении объема испытаний как функции подразделения на-
дежности — подразделения прямого подчинения руководителю
проекта. Объем испытаний должен находиться в соответствии с
техническими условиями на разработку проекта и требованиями
программ испытаний на надежность.
2 1874 ' 33
По своей природе испытания данного этапа отработки могут
быть самыми разнообразными—от простейших (коррозионных
испытаний, проводимых в атмосферных условиях, до сложных
программ, когда проверяется запуск ЖРД в условиях невесомос-
ти или разреженной среды.
Говоря об испытаниях на воздействие (внешних факторов,
имеют в виду оценку работоспособности ЖРД (в зависимости от
температуры (компонентов топлива и элементов конструкции,
входных давлений на линиях горючего и окислителя, барометри-
ческого давления, влажности и т. п.
Испытания на влияние внешних и внутренних факторов по
своему объему являются наиболее обширной частью программы
обеспечения надежности. Включение в эксперимент тех или иных
факторов и их сочетаний обусловливается степенью готовности
к испытаниям данного этапа разрабатываемой конструкции. В
зависимости от целевого назначения программы эксперименталь-
ных работ условия испытаний могут быть натурными или имити-
рованными. Испытания в натурных условиях экономически всегда
более целесообразны, чем при имитации условий окружающей
среды и внешних факторов. Программы испытаний, как правило,
предусматривают проверку работоспособности конструкции изде-
лия при низких и высоких температурах. Руководствуясь эконо-
мическими соображениями, легко прийти к выводу, что испыта-
ния при низких и высоких значениях температур топлива и кон-
струкции целесообразно проводить в соответствующие времена
года и по возможности в соответствующих географических или
климатических зонах.
В ряде случаев проведение таких испытаний в арктических
или субтропических широтах с точки зрения экономических зат-
рат может оказаться более выгоднее, чем испытания в условиях
имитации заданного диапазона температур на стенде. Это отно-
сится прежде всего к испытаниям крупногабаритных, масштаб-
ных изделий. Решающим критерием в этом случае должна быть
экономическая оценка стоимости программ экспериментальных
работ. Уместно отметить, что путем проведения испытания в на-
турных условиях нельзя обеспечить требуемые значения всех
факторов, особенно когда речь идет о взаимодействиях несколь-
ких факторов одновременно в одной программе.
Таким образом, имитация влияния внешних факторов при от-
работке сложных технических систем — явление неизбежное.
Имитация условий испытаний, как правило, требует уникального
оборудования: вибростендов, термостатов, холодильных устано-
вок, барокамер, пульсаторов давлений, ресиверов, быстродейст-
вующих переключателей, вибраторов и т. д. Естественно, что сто-
имость этого оборудования определяется не только его назначе-
нием, но также производительностью, полезным объемом и харак-
теристиками, которые находятся в прямой зависимости от мас-
штаба и массы отрабатываемых изделий и систем.
34
При отработке двигателей особое место отводится также ис-
пытаниям их на прочность и герметичность. Выше уже отмеча-
лось, что таким испытаниям подвергаются отдельные элементы
конструкции при автономной отработке. Однако с точки зрения
системы автономных испытаний может оказаться недостаточно,
так‘как в этом случае не будут -проверены места соединения эле-
ментов, сварные швы, узлы крепле-
ния и т. п.
Испытания на прочность замк-
нутых объемов, как правило, про-
водятся методом гидравлических
опрессовок, однако для проверки
прочности незамкнутых полостей,
наружных подвесов, узлов крепле-
ния агрегатов, средств монтажа не-
обходимы испытания системы в це-
лом на 'влияние различного вида
перегрузок. В зависимости от спе-
цифики программы, особенностей
конструкции изделия могут быть
подвергнуты испытаниям на влия-
ние осевых перегрузок, а в ряде слу-
чаев и радиальных. При этом пол-
Вис. 2. 1. Испытание двигателя
на центрифуге
ностью собранный двигатель как
объект испытания в штатном
подвесе крепится на центри-
фуге [93]. В соответствии с программой замкнутые полости могут
находиться в нагруженном или разгруженном состоянии, иначе
говоря, эти испытания могут включать в себя и испытания на
прочность.
Наиболее ответственные места конструкции оснащаются теле-
метрическими датчиками, -измеряющими местные напряжения,
вибрации и друпие параметры. Такого вида испытания ЖРД
могут проводиться на специальных установках (рис. 2. 1). Эти ис-
пытания дают ценную информацию о прочности и жесткости креп-
ления магистралей, командных приборов и датчиков, сопла, соп-
ловых насадков, автоматики и т. п. Подобные испытания
проводились в США на маршевом двигателе корабля «Аполлон»
(Риальто, штат Калифорния) [93].
Достаточно сложным при имитации условий испытаний являет-
ся обеспечение невесомости, определяемой также (внешними и
внутренними факторами. Включение этих факторов в программу
экспериментальной отработки второго этапа необходимо для дви-
гателей космических кораблей и аппаратов, а также двигателей
верхних ступеней ракет, 1вступающих в работу в условиях невесо-
мости или близких к нулю осевых -перегрузок. Достаточно ска-
зать, что запуск ЖРД в обычных условиях отличается динамич-
ностью, сложностью протекающих процессов. Условия невесомое-
2*
35
ти тем более оказывают на него заметное влияние, которым
пренебрегать нельзя.
Отсутствие сил гравитации изменяет физическое состояние
покоящейся или движущейся жидкости. В этих условиях капли
как бы отрываются от основной массы жидкого компонента, мо-
гут хаотично перемещаться по газовой полости бака и перемеши-
ваться с газами системы наддува. Те, в свою очередь, свободно
проникают в жидкую фазу, образуя газовые включения, газо-
жидкостную эмульсию. Эмульсии характеризуются прежде всего
нестабильностью процессов и, следовательно, не -могут обеспе-
чить стабильный режим запуска. В данном случае этот .режим
определяется не только конструктивными особенностями и ха-
рактеристиками ЖРД, а также параметрами и характеристика-
ми питающих магистралей, включая баки.
Следовательно, экспериментальные программы отработки
запуска двигателя в стедовых условиях должны предусматри-
вать не только имитацию условий невесомости (прежде всего
отсутствие осевых перегрузок), но и имитацию натурной системы
питания. Учитывая 'сложность этого вопроса, в ряде -случаев ока-
зывается целесообразным такие испытания ЖРД проводить в
составе ДУ.
Одновременно отметим, что основным требованием обеспече-
ния нормального запуска ЖРД в этих условиях является по-
ступление в топливоподающие магистрали «чистых» компонен-
тов, т. е. в жидких фазах без газовых пузырей. Это требование
обеспечивается с помощью ряда конструктивных решений. Од-
ним из них можно назвать отделение жидких компонентов от
газа в баках с эластичными мембранами (см. рис. 1.1). Сооб-
разно этому требованию при стендовой отработке должен обес-
печиваться и контроль его выполнения.
Реально воссоздать физическую картину -подобия поведения
компонентов топлива при наличии невесомости в земных усло-
виях— задача весьма сложная. Поэтому ее можно решать, ими-
тируя полет ДУ на данном участке траектории. Для этого можно
использовать так называемые «'башни невесомости», 'которые
внешне представляют полые, вертикально расположенные высот-
ные сооружения.
Внутри такой башни имеются направляющие, обеспечивающие
свободное или принудительное перемещение платформы (подоб-
но кабине лифта высотного дома). На платформе устанавливает-
ся ДУ так, чтобы вектор тяги от работающего двигателя был на-
правлен вертикально вверх. Подготовленная для испытания ДУ
устанавливается на верхнем ярусе башни и затем в нужный мо-
мент вместе с платформой может совершать «свободное» падение
вниз вдоль направляющих под действием силы тяжести. Спустя
некоторое время, по команде с 'пульта управления включается
двигатель. Возникающая при этом тяга прекращает «свободное»
падение платформы.
36
Под действием возрастающей силы тяги двигателя ее движе-
ние вниз как бы тормозится и, наконец, прекращается совсем.
Последнее возможно, если величина тяги двигателя превышает
массу платформы с ДУ. В момент 'остановки платформа автома-
тически с помощью специальных захватов фиксируется относи-
тельно направляющих, после чего двигатель выключается.
Как следует :из описания, запуск двигателя практически пол-
ностью происходит в условиях невесомости, т. е. «свободного» па-
дения ДУ.
«Башни невесомости» являются дорогостоящими и уникаль-
ными сооружениями. Поэтому в ряде случаев их заменяют пило-
тируемыми установками. Например, контейнер с ДУ может сбра-
сываться с самолета, а после запуска и выключения двигателя
спускается на землю с помощью парашютных систем.
В обоих случаях, как платформа с ДУ, так и контейнер, обес-
печиваются системами телеконтроля в виде автономных записы-
вающих устройств и радиоканальных передатчиков. Кроме пара-
метров ДУ, фиксируются также осевые перегрузки в течение все-
го периода испытаний, начиная с момента «свободного» падения
до выключения двигателя.
Цикл испытаний на воздействие внешних и внутренних факто-
ров заканчивается испытаниями двигателя и его агрегатов на
надежность и долговечность (см. гл. IV).
Наиболее трудоемки различного рода испытания на долговеч-
ность, требующие имитации внешних факторов в течение длитель-
ного времени, намного превышающего рабочий цикл предприятия.
Здесь возникают перерывы в ведении эксперимента, которые мо-
гут влиять в большей или меньшей мере на конечный результат.
Допустим, программой предусмотрены испытания ЖРД на
полный ресурс. Естественно, что для двигателей с большим га-
рантийным ресурсом по времени работы запас топлива в стендо-
вых емкостях может оказаться недостаточным. Периодическая
дозаправка баков связана с временным прекращением испытаний.
А это может привести к следующему.
Во-первых, прекращение испытаний вызовет резкое охлажде-
ние элементов конструкции и агрегатов, подверженных топливно-
му (воздействию (камеры сгорания, сопла, газогенератора,.турби-
ны), вследствие испарения ‘остатков топлива в рабочих полостях.
Повторный запуск, наоборот, вызовет их интенсивный нагрев.
Вполне очевидно, что резкое охлаждение, так же как и последую-
щий (интенсивный нагрев сложных сварных или паяных конст-
рукций, состоящих из деталей разных толщин и выполненных из
различных металлов, ведет в конечном итоге к концентрации
внутренних напряжений, к деформации элементов, появлению и
развитию микротрещин и дефектов, т. е. к изменению качества
конструкции в целом.
Во-вторых, при повторном запуске, весьма динамичном по ре-
жиму и короткому по времени, возможны внезапные отказы
37
вследствие разброса нагрузок и понижения механических харак-
теристик из-за влияния ударных нагрузок. Исследования, 'прове-
денные рядом авторов [54], указывают на то, что при запуске
большинства ЖРД интенсивность проявления отказов значитель-
но возрастает по сравнению с установившимся режимом работы.
Особенно это проявляется на этапах конструкторской отработки
ЖРД.
Итак, при ресурсных испытаниях двигателей, проводимых в
несколько этапов, при одном из повторных запусков, допустим,
произошел отказ. Но этот отказ по той же причине мог проявить-
ся и несколько позже на маршевом режиме. И тогда он может
объясняться совершенно другими причинами, что приведет к по-
явлению дополнительных гипотез, подлежащих проверке.
В-третьих, агрессивные компоненты топлива могут коррозион-
но воздействовать на разогретые элементы конструкции в про-
цессе прекращения испытаний. Это влияет на общее состояние
характеристик двигателя, а в итоге и на результаты всей про-
граммы.
Этот пример подтверждает, что нарушение объективных усло-
вий выполнения программы (временное прекращение испытаний)
влияет на конечный результат: один и тот же вид отказа может
быть отнесен к переходным или установившимся режимам рабо-
ты или объясняется целым комплексом причин.
Эффективность испытаний с точки зрения качества и досто-
верности определения выходных характеристик прежде всего за-
висит от «чистоты» проведения эксперимента. Временное прекра-
щение испытаний не всегда заметно сказывается на выходных
характеристиках, например, при испытаниях на герметичность,
тряску и т. п.
Не менее важным вопросом при разработке программы испы-
таний на воздействие различного рода факторов является выбор
значений предельных уровней.
Допустим, реализуется программа с предельными значениями
факторов, принятыми в соответствии с техническим заданием.
При качественном анализе результатов испытаний не всегда мож-
но отличить влияние внешних факторов от случайных отклонений
отдельных параметров. Поэтому предельные значения исследуе-
мых факторов должны несколько превышать заданные. Это пре-
вышение может составлять не менее lO-e-15% от номинального
уровня [62]. Необходимость этого «запаса» по основным пара-
метрам, определяющим условия испытаний, становится тем за-
метнее, чем ближе заданные уровни к граничным условиям рабо-
ты ЖРД.
Расширение диапазонов изменения параметров двигателя при
отработке производится, главным образом, с целью повышения
информативности испытаний. Это можно показать на следующем
примере.
38
Допустим, исследуется рабочий «квадрат» — ркХ&— измене-
ния давления в камере сгорания рк и коэффициента соотношения
компонентов топлива k (рис. 2.2). Точки, обозначенные звездоч-
ками, свидетельствуют об испытаниях, проведенных в заданных
пределах изменения настроечных параметров рк и k. Одновремен-
но нас интересуют испытания при предельных уровнях этих па-
раметров, соответствующих точкам, отмеченным кружками
Однако ошибки настройки, усиленные влиянием неконтролируе
мых случайных факторов, не все-
гда позволяют достичь намечен-
ной цели. Вместо ожидаемых ре-
зультатов могут быть получены
другие. К тому же ошибки изме-
рений создают дополнительный
разброс. В результате этого
практически всегда имеется веро-
ятность получить реализации, не
отвечающие в полной мере наме-
ченной программе. Допустим, на
рис. 2.2 они обозначены круж-
ками. В итоге по этим данным
Рис. 2.2. Рабочий «квадрат»
изменения параметров рк и k
с учетом предыдущих реализа-
ций мы должны судить о работоспособности двигателя при пре-
дельных значениях параметров рк и k, что нежелательно. По-
этому чтобы иметь достоверные данные, испытания предыдущей
программы должны повторяться, но это, в свою очередь, нельзя
признать рациональным.
В результате, чтобы исключить случайные ошибки и необходи-
мость проведения повторных испытаний, особенно в тех случаях,
когда варьируется не один-два фактора, а несколько, исследова-
тели идут по пути расширения диапазонов изменения параметров,
расширяя их за заданные пределы (треугольники на рис. 2.2).
Такие диапазоны варьирования факторов могут достигаться пу-
тем соответствующей настройки параметров ДУ с некоторым
«гарантийным» запасом на предельно допустимые, граничные и
прочие условия, а также вследствие расширения диапазонов варь-
ирования входных факторов (давлений, температур и т. п.).
Проведение испытаний на неноминальных, крайних режимах
и их сочетаниях значительно расширяет объем информации да-
же при одном и том же объеме экспериментов. Следовательно,
повышается не только информативность испытаний, но и досто-
верность производимых оценок.
§ 4. КВАЛИФИКАЦИОННЫЕ ИСПЫТАНИЯ
Квалификационные испытания отличаются от предыдущих
этапностью их.проведения, а не содержанием программ. В соот-
ветствии со сложившейся практикой в США такие^испытания
39
характеризуются как зачетные [62]. По -сути дела — это испытания
определенной выборки штатных изделий, изготовленных в соот-
ветствии с технической документацией и принятых для участия
в летных испытаниях. Программа квалификационных испытаний
соответствует испытаниям II этапа с учетом всех изменений, вне-
сенных в проект в ходе опытно-конструкторских работ и этапа
испытаний на воздействие различного рода факторов.
Конструкция ЖРД к началу квалификационных испытаний,
может претерпеть существенные изменения. Поэтому статистика
испытаний штатной конструкции, как правило, бывает мала и не
может удовлетворить требованиям, предъявляемым к подтвержде-
нию надежности. Естественно, 'возникает необходимость повторе-
ния некоторой части программ испытаний предыдущего этапа,
что в свою очередь должно привести к удлинению общих сроков
отработки ЖРД. Такое удлинение сроков легко предупредить и
поэтому целесообразно заранее включать его в план эксперимен-
тальных работ. Так, например, в США при разработке ракет и
космических объектов на реализацию программ квалификацион-
ных испытаний предусматривается 5н-6 месяцев, а в ряде случаев
и более [62].
Заключительной программой квалификационных испытаний,
в том числе и наземной отработки, следует -считать стендовые
испытания ЖРД в составе двигательных установок и ступеней
ракеты. Так, например, в США все вновь разрабатываемые ЖРД
проходят огневые испытания в составе ДУ с технологическими
баками, полностью воспроизводящими натурные, включая авто-
матику и топливоподающие магистрали, затем испытания в соста-
ве натурных ракетных ступеней [83, 86]. В количественном отно-
шении объем этих испытаний достаточно велик. Достаточно при-
вести примеры:
— ДУ первой ступени носителя «Сатурн-5» (фирмы «Боинг»),
состоящая из пяти автономных ЖРД F-1, прошла не менее 25
огневых испытаний;
— ДУ второй ступени «Сатурн-5» (фирмы «Норт-Америкен»),
состоящая из пяти ЖРД J-2,—около 60 испытаний [83, 86].
То же можно сказать и о других проектах. Количество огне-
вых испытаний ДУ с технологическими баками соответствует
примерно названному порядку.
Такие эксперименты позволяют получить весьма ценную ин-
формацию о работоспособности ЖРД в составе двигательных
установок, а также в комплексе с другими бортовыми системами,
выявить и оценить взаимное влияние двигателей и -систем при
относительно малых материальных затратах в сравнении с лет-
ными испытаниями.
Решение о начале летных испытаний ракеты должно прини-
маться после полного завершения программы квалификационных
испытаний.
40
§ 5. ЛЕТНЫЕ ИСПЫТАНИЯ
В ходе опытно-конструкторских работ, испытаний на влияние
комплекса факторов и квалификационных испытаний проверяет-
ся работоспособность всех систем ДУ при воздействии окружаю-
щей среды и различных сочетаниях внешних и внутренних фак-
торов. Однако достаточно полной имитации условий полета при
стендовых испытаниях достичь не удается.
Для полномасштабных объектов в наземных условиях трудно
обеспечить имитацию вибрации, невесомости, осевых перегрузок,
глубокого вакуума и т. п. Не менее «сложной и зачастую нерешен-
ной задачей является обеспечение сочетаний комплекса динами-
ческих факторов. Все это ставит вопрос о необходимости про-
ведения летных испытаний в условиях эксплуатации. Наряду с
этим летные испытания следует рассматривать как своего рода
зачетные комплексные испытания совокупности отрабатываемых
наземных и бортовых систем. По их результатам уточняется сте-
пень соответствия стендовых и летных испытаний, в результате
чего некоторые программы стендовых испытаний могут быть со-
ответствующим образом скорректированы. На данном этапе речь
может идти о корректировке программ приемо-сдаточных испы-
таний, типовых и т. п.
Однако летные испытания имеют недостатки. Основным из
них является высокая стоимость, а также несколько меньшая их
информативность из-за ограниченного количества измерительных
средств и телеметрических каналов, ограниченная возможность
регулирования физических процессов в сравнении с лаборатор-
ными и стендовыми испытаниями.
Летные испытания ЖРД можно проводить совместно с изде-
лием данного разрабатываемого .проекта или в составе серийных
аналогичных изделий более ранних разработок, которые бы пол-
ностью или частично удовлетворяли требованиям технического
задания. Такие испытания, по всей вероятности, имеет смысл
проводить на этапах конструкторской отработки с целью сокра-
щения общих материальных затрат. Такая практика нашла ши-
рокое применение, например, в США при разработке ракетных
комплексов и космических объектов [86].
Несмотря на попытку имитировать условия испытаний двига-
телей верхних ступеней в земных условиях, стендовые испытания
не позволяют полностью воспроизводить динамику запуска ЖРД.
Поэтому в ряде случаев в США двигатели верхних ступеней
проходят начальный этап летных испытаний на менее дорогих
носителях. С целью иллюстрации данного положения можно при-
вести примеры, когда двигатель J-2 до постановки его на ракету-
носитель «Сатурн-5» первые летные испытания проходил в соста-
ве второй ступени носителя «Сатурн-1»; двигатель RL-10 до
постановки его на вторую ступень носителя «Сатурн-1» первые
летные испытания проходил в составе носителя «Атлас-Кентавр»;
41
двигатели ступени «Аджена»'до постановки на «Атлас» подверга-
лись летным испытаниям в составе носителя «Тор».
Следовательно, менее дорогие или выработавшие гарантий-
ный «ресурс носители и стратегические ракеты могут быть исполь-
зованы 'как своеобразные «летающие стенды». Цель таких испы-
таний — проверка работоспособности ЖРД практически при пол-
ной имитации условий натурного, объектового использования.
Данные испытания позволяют получить достоверную информацию
о полетных характеристиках ЖРД, сравнить их со стендовыми и,
наконец, доработать последние с целью достижения как можно
более полного соответствия основных параметров при стендовых
и летных испытаниях. Все это может рассматриваться как мера,
направленная на снижение общих материальных затрат.
Вопрос б «летающих стендах» заслуживает особого внимания.
С их помощью даже на ранних стадиях отработки может осу-
ществляться проверка запуска двигателя в условиях невесомости
или при малых значениях осевых перегрузок, в разреженной сре-
де и т. п. Практически такие испытания имеют смысл во всех слу-
чаях, когда имитация на стенде натурных условий испытаний эко-
номически более дорога, требует специального оборудования,
модернизации стенда, создания новых сооружений и т. п. Даже
при равных затратах испытания некоторой выборки двигателей
в данных летных условиях могут оказаться целесообразными,
так как с точки зрения достоверности результатов имитации на
стенде условий протекания сложных физических процессов прак-
тически всегда будет менее точной, чем при натурных испытаниях.
В то же время испытания на «летающих стендах» не могут
полностью заменить обычные стендовые испытания, хотя бы с
точки зрения организации контроля при серийном производстве.
Поэтому любые летные испытания следует сочетать со стендовы-
ми, добиваясь при этом их полного взаимного соответствия.
Имеется в виду, что. динамические характеристики по основным
параметрам в стендовых и летных условиях должны быть иден-
тичными, что легко проверить обычным совмещением однотипных
осциллограмм.
При выходе на летные испытания ракет на первом этапе мо-
жет допускаться замена верхних ступеней макетами, эквивалент-
ными натурным ступеням в геометрическом, массовом и аэроди-
намическом отношениях. Данное обстоятельство учитывает тот
факт, что при выходе на летные испытания вероятность получить
отказ по первой ступени достаточно велика. Следовательно, вели-
ка и вероятность при аварийном полете первой ступени потерять
материальную часть верхних ступеней без какой-либо полезной
информации о их качестве. В случае одинаковой технической ос-
нащенности нижних и верхних ступеней при выходе на летные
испытания возможен большой риск. Поэтому, например, в США
летные испытания первых ступеней проводятся, как правило, с
макетами последующих и только после подтверждения некоторого
42
приемлемого уровня надежности 'переходят к испытаниям верх-
них ступеней ,в штатном наполнении.
Программы летных испытаний изделий могут существенно от-
личаться один от другого полетным заданием. При этом приме-
нительно к ЖРД от испытания к испытанию меняются програм-
мы обеспечения импульса тяги за счет варьирования временем
работы и режима регулирования основных параметров. Осталь-
ные факторы определяются условиями окружающей среды, точ-
ностью настройки отдельных систем и элементов, поэтому они
соответственно могут изменяться случайным образом. Если ко-
личество программ ограничено, то обработка результатов может
вестись методами «пассивного» эксперимента. Однако с целью
охвата экстремальных условий испытаний целесообразно преде-
лы варьирования некоторых факторов расширить до заданных
уровней и тем самым приблизить летные испытания к условиям
ведения «активного» эксперимента. Последнее обстоятельство
может оказаться весьма важным с точки зрения повышения ка-
чества отработки.
Кроме того, важным этапом, предшествующим летным испы-
таниям, должно явиться прогнозирование результатов испытаний
с помощью методов математического моделирования [80], анали-
за предшествующей .информации, диагностики отказов, анализа
возможных аварийных ситуаций.
Не менее важным следует считать и 'последующее моделиро-
вание физических процессов с помощью полученных результатов
для прогнозирования условий нормального функционирования
ДУ при всех возможных сочетаниях факторов, не охваченных
данной программой.
Летные испытания являются одним из этапов полигонных
испытаний [53], в процессе которых проверяется взаимодействие
всех элементов ракетного комплекса. Полигонные испытания
включают транспортировочные и климатические испытания, ис-
пытания при крайних температурно-влажностных режимах после
длительного хранения и т. п.
Как правило, изделия, прошедшие весь комплекс наземных
полигонных испытаний, подвергаются летным испытаниям. Полу-
чаемая при этом информация используется при проверке соот-
ветствия тактико-технических характеристик комплекса и его
систем требованиям технического задания.
§ 6. ВИДЫ ИСПЫТАНИЙ ПРИ СЕРИЙНОМ ПРОИЗВОДСТВЕ.
КОНТРОЛЬ КАЧЕСТВА И НАДЕЖНОСТИ
Серийное производство ЖРД — сложный процесс, в котором
наряду с производственно-технологическими действуют морально-
психологические и другие факторы. Технико-экономический про-
гресс и культура производства — основные показатели качества
товарной продукции. С учетом этого бесспорным является факт,
что качество и надежность изделий зависят не только от степени
43
их -конструктиваото совершенства, завершенности стендовой от-
работки, но не в меньшей мере от качества и стабильности техно-
логических процессов изготовления, внедрения передовых методов
производства, управления, текущего, поэтапного, предупр(еди-
тельного и 1приемо-сдаточного контроля.
Каждый этап серийного производства характеризуется прове-
дением соответствующих испытаний на основе физических и ста-
тистических методов выборочного и сплошного видов контроля.
Статистические исследования {17] показали, что при стендовых
и летных испытаниях ЖРД в целом ряде случаев отказы объяс-
няются технологическими факторами. Их удельный вес составля-
ет около 30% от общего числа неблагоприятных исходов. Причем
названную цифру в некотором роде следует считать условной,
так как при анализе причин аварийного состояния не всегда мож-
но четко разделить отказы на конструктивные, производственные
и эксплуатационные. Особенно это относится к случаям, когда
причины однозначно не установлены или объясняются как следст-
вие нескольких гипотез.
Если отказ объясняется только производственными причинами
и произошел в пределах допусков, установленных технической
документацией, он может объясняться лишь ее несовершенством.
Такие отказы считают обусловленными технологическими факто-
рами первого рода. В отличие от них существуют технологические
факторы второго рода, обусловленные отступлениями от произ-
водственных процессов, в ряде -случаев они объясняются грубыми
его нарушениями. Технологические факторы второго рода зависят
от случайных причин. Процесс их появления хаотический.
Технологические факторы первого рода практически неотде-
лимы от конструкции. Поэтому связанные с ними вопросы обеспе-
чения высоких уровней надежности зависят от степени завершен-
ности конструкторской отработки изделия и технической докумен-
тации, от степени отлаженное™ производства. Если технологи-
ческие факторы первого рода присущи конструкции и документа-
ции, то факторы второго рода характеризуют лишь конкретное
производство. Естественно, в этих условиях могут быть опреде
лены конкретные меры, не допускающие или 'Снижающие вероят-
ность появления брака и тем самым обеспечивающие высокий
уровень качества. В целом это может быть достигнуто отсутст-
вием брака среди товарных изделий, с одной стороны, и благода-
ря стабильности основных параметров, с другой. Последнее чаще
всего объясняется технологическими факторами первого рода.
В промышленности применяется целый ряд физических и ста-
тистических методов контроля качества изготовления деталей,
контроля герметичности полостей и 'Соединений (50]. К физичес-
ким методам относятся ферромагнитный, люминесцентный, цвет-
ная дефектоскопия, просвечивание рентгеновскими и гамма-луча-
ми, ультразвуковой и, наконец, визуальный осмотр деталей спе-
циальными оптическими и осветительными приборами. Указанные
44
методы позволяют проверять качество изготовления деталей без
их разрушения и способствуют выявлению скрытых дефектов, свя-
занных с нарушением «поверхностей и внутренней сплошности
металлов. Каждый -метод имеет свои особенности, определяющие
область его применения. Так, например, «ферромагнитный метод
может применяться только для контроля качества деталей, изго-
товленных из ферромагнитных сплавов. Наиболее универсальным
в этом отношении может быть назван метод рентгеновского
контроля, с помощью которого проверяется качество сварных
швов, оболочек, сплошность литых корпусов и т. п.
Контроль герметичности замкнутых объемов может осуществ-
ляться методами погружения емкостей, находящихся под давле-
нием, в ванну с водой; обмыливанием стыков; газовыми течеиска-
телями и т. п.
В процессе серийного производства «физические методы нераз-
рушающих видов контроля позволяют получать основной объем
информации о качестве товарных изделий. Этим методам подвер-
гаются не только отдельные элементы, но и системы. Так, напри-
мер, в США тщательному рентгенографическому обследованию,
ультразвуковому контролю и испытаниям с применением других
физических методов проверки герметичности полостей, сварных
швов, целостности корпусов агрегатов -подвергаются полностью
собранные двигатели [62].
Несмотря на всю их действенность, методы физического конт-
роля все же являются косвенными. Они не исключают и не могут
заменить типовые испытания по проверке работоспособности и
оценке стабильности основных параметров. Как показывает опыт,
наиболее действенным был и остается сплошной контроль, осталь-
ные виды по эффективности лишь в разной мере могут к нему
приближаться. Как следует из статистического анализа, для мел-
косерийного изготовления, которое существует в ракетной и кос-
мической технике, методы выборочного контроля не всегда дей-
ственны. В случае малых партий отсутствуют статистически обос-
нованные планы и объемы выборки. По этой причине в ряде аме-
риканских проектов надежность товарных поставок ЖРД прове-
ряется -методами сплошного «контроля [80]. Так, например, прие-
мочные испытания двигателя F-1 «фирмы «Ракетдайн» строятся на
основе многократных огневых испытаний как разновидности
сплошного контроля всех товарных изделий.
Вновь изготовленные двигатели проходят полноресурсные
испытания (160 с) в соответствии столетней программой, затем
огневые испытания по специальной программе с несколькими
включениями общей продолжительностью от 100 до 300 с. Заклю-
чительным этапом приемо-сдаточных испытаний являются стен-
довые испытания связок ЖРД 1в ДУ в составе ступени (5 авто-
номных блоков) продолжительностью 100-4-150 с. После этого
вида типовых испытаний ДУ идет на товарную сборку без после-
дующей переборки.
45
Такой В1ид сплошного приемо-сдаточного контроля налагает
обязанности на конструкцию и, безусловно, должен быть учтен
еще на стадиях проектирования и отработки ЖРД. В свою оче-
редь, это привело к пересмотру точек зрения на ЖРД как на сис-
тему одноразового использования, а в отдельных случаях и на
ракетную ступень. Если раньше ЖРД рассматривался только как
система однократного действия и одноразового использования, то
в настоящее время в свете новых идей и требований он становит-
ся системой многократного включения. ЖРД по своим эксплуа-
тационным возможностям значительно приближен к турбореак-
тивным авиационным двигателям.
Современный ЖРД допускает'большой технический и гаран-
тийный ресурс, многократные запуски и остановы без дополни-
тельных монтажных работ (80]. Поэтому возникает вопрос об от-
казе от автоматики однократного действия. Разумеется, что ска-
занное не носит общего характера и не относится ко всем ЖРД
в целом, а должно в каждом конкретном случае соответствовать
назначению двигателя. Но сегодня эго уже бесспорно для ЖРД
ракет-носителей космических аппаратов.
Наряду со сплошными видами контроля качества изделий,
свойственными мелкосерийному производству, в настоящее время
нашли широкое применение и статистические выборочные методы
контроля. В ряде случаев применяются планы с переменными
объемами выборки [62]. Согласно такому плану объем выборки
.от первой партии может быть 1 : 1, т. е. испытываются все 100%
изделий. 'Для последующей партии используется план 1:4, т. е.
испытываются 25% изделий, затем 1 : 10 и т. д.
Объем выборки изменяется в зависимости от результатов ис-
пытаний и статистических данных, подтверждающих качество
товарной продукции. Если оно ухудшается, план должен предус-
матривать немедленное ужесточение контроля и переход на уве-
личенный объем выборки изделий для типовых испытаний. Такие
выборочные планы должны «гибко реагировать» на отказы изде-
лий при сдаточных испытаниях и в процессе их эксплуатации.
Статистические методы строятся на основе однократной и мно-
гократной выборки. В настоящее время статистические методы
контроля качества и надежности товарной продукции в основном
стандартизованы [63, 68] и находят широкое применение в круп-
носерийном и массовом производстве. Данные методы контроля
строятся на основе типовых испытаний, которые применительно
к ЖРД соответствуют по продолжительности и режиму работы
полетной программе.
Типовые испытания проходят не только системы, но и их эле-
менты. Наряду с этим при серийном производстве проводятся
всевозможные специальные и технологические испытания с целью
контроля стабильности производства по программам широких
технологических исследований.
Глава III
ПЛАНИРОВАНИЕ ОТРАБОТКИ
И АНАЛИЗ РЕЗУЛЬТАТОВ ИСПЫТАНИЙ
§ 1. ОСОБЕННОСТИ ПЛАНИРОВАНИЯ ИСПЫТАНИЙ СЛОЖНЫХ
ТЕХНИЧЕСКИХ СИСТЕМ
Планированию предшествует анализ информации, экспери-
мент (проводится с целью проверки одной из возможных гипотез.
Однако на ранних стадиях поисковых работ не всегда удается
предвидеть конечный результат. Если планирование испытаний
ведется на этапе проектирования, оно должно учитывать наличие
априорной информации в виде систем — аналогов. Планирование
испытаний должно базироваться на достоверной информации.
Если информация малодостоверна или отсутствует, планировать
испытания невозможно. Трудно планировать первый экспери-
мент, желательно планировать второй и уже совершенно необхо-
димо — третий.
При ведении первой серии испытаний чаще используется проб-
ный поиск, благодаря которому конструктор как бы «нащупыва-
ет» порог работоспособности системы. Для сложных технических
систем проводятся автономные испытания агрегатов и узлов,
только после их завершения приступают к автономным испыта-
ниям системы в целом. Автономная проверка позволяет устано-
вить взаимосвязь и функционирование элементов данного узла.
При этом она совершенно не учитывает взаимную корреляцию,
которая в условиях функционирования сложных динамических
систем может быть значительной. Известны случаи, когда силь-
ное влияние корреляционных связей между элементами отдель-
ных систем сводило на нет результаты автономной отработки.
В подобных случаях отработка практически заключалась в про-
ведении дорогостоящих комплексных испытаний. Экономически
это нельзя признать целесообразным. Ввиду этого для сложной
системы рациональным следует назвать проектирование, которое
в какой-то мере исключает взаимное влияние элементов системы
друг на друга.
Планирование экспериментов целесообразно проводить на
всех этапах, но его эффективность особенно очевидна для слож-
ных технических систем, когда существует комплекс значимых
47
факторов. При планировании последующий этап должен учиты-
вать результаты предыдущего, поэтому важна своевременная об-
работка первичных данных.
Эксперимент дает 'информацию, подтверждающую расчет и
исправляет погрешности проектирования. По результатам испы-
таний судят о правильности принятых решений. Эксперимент
подтверждает одну гипотезу, отвергает другую или рождает но-
вые. Однако интуитивный подход к разработке эксперименталь-
ных программ может приводить к ошибкам. Из практики извест-
ны примеры, когда по первому неудачному испытанию отвергался
приемлемый вариант конструкции и принимался, как .впоследст-
вии оказывалось, несовершенный.
Экспериментальная отработка ЖРД и связанное с нею плани-
рование испытаний ставят своей целью поиск оптимальных кон-
структивных решений, удовлетворяющих требованиям техничес-
кого задания. Поиск ведется в направлении сокращения общих
сроков отработки, обеспечения качества и надежности и миними-
зации экономических затрат. Каждый двигатель должен удовлет-
ворять требованиям, определяющим его конструктивные, техноло-
гические и эксплуатационные характеристики. По этой причине
отработка связана с проверкой работоспособности изделий при
различных сочетаниях внешних .и внутренних факторов.
К внешним факторам относятся температуры компонентов
топлива и элементов конструкции, входные давления, динамичес-
кие импульсы, изменяемые в соответствии с программой испыта-
ний и т. п.
Внутренние факторы — это (параметры, обусловленные кон-
структивными и технологическими характеристиками, особеннос-
тями производства, точностью настройки и т. п. Их можно изме-
нять путем ввода специальных конструктивных мероприятий или
технологических сборок.
Заключительным этапом отработки «следует считать переход
к серийному производству, при котором надежность товарных
поставок обеспечивается завершенностью конструктивной отра-
ботки, степенью совершенства технологических процессов и тех-
нологического оборудования, текущим пооперационным и выход-
ным контролем.
Таким образом, научное решение проблемы должно вестись
в направлениях обеспечения надежности изделий в процессе от-
работки, с одной -стороны, и контроля товарных поставок — с дру-
гой. Это прежде всего выбор работоспособной конструкции дви-
гателя, удовлетворяющей заданным требованиям по обеспечению
эксплуатационных показателей и надежности. Последнее должно
достигаться путем оптимального планирования отработки с целью
всесторонней проверки работоспособности всех элементов при
различных сочетаниях внешних и внутренних факторов. При этом
важными вопросами являются: сокращение количества испыта-
ний, общих сроков отработки и экономических затрат при условии
48
выполнения требований технического задания. Помимо техничес-
ких проблем, связанных с проектированием и отработкой, возни-
кает <ряд трудностей, вызванных большим объемом эксперимен-
тальных .работ, при которых учитывается полнота охвата большо-
го количества факторов, влияющих на работоспособность дви-
гателя.
В процессе отработки, когда решается задача обеспечения
конструктивно-технологической надежности, конструктивные ха-
рактеристики двигателя могут изменяться. На этой стадии значи-
мыми факторами могут быть различные технические параметры,
которыми вынужден варьировать* разработчик при выборе рабо-
тоспособной конструкции. ЖРД относятся к числу тех сложных
систем, которые не всегда допускают поочередного изменения
абсолютно всех факторов. Они динамичны и в ряде 'случаев кор-
релированы между собой, в результате чего варьирование одного
фактора может сказываться на уровнях других. Это является
основной трудностью при применении факторных планов к отра-
ботке 'подобных технических систем.
В целом испытания ЖРД — это факторный эксперимент, ко-
торый может быть простым или сложным. Поэтому необходима
простейшая классификация, которая делила бы испытания на
стационарные, однофакторные и многофакторные. Под фактор-
ным экспериментом понимается такой вид испытаний, при кото-
ром все уровни одного фактора находятся в комбинациях с уров-
нями варьирования других. К 'Стационарным относятся испыта-
ния, которые проводятся в условиях нормальной эксплуатации
при фиксированных уровнях нагрузок. Данные испытания могут
непосредственно использоваться при оценке надежности. Они
являются наиболее распространенным видом испытаний при се-
рийном производстве.
К однофакторным испытаниям относятся те, при которых ,про-
извольно или в соответствии с намеченной программой изменяют-
ся определенные факторы, однако соблюдается условие: в пре-
делах одной программы или группы испытаний варьируется один
фактор. Примером служат контрольные испытания с настройкой
двигателей на различное давление в камере сгорания. При этом
в отличие от других характеристик давление рассматривается
как варьируемый фактор. Цель испытаний — оценка влияния дан-
ного фактора на работоспособность системы. Варьирование
может осуществляться как в пределах заданных границ для нор-
мальной эксплуатации, так и за ними. Последний случай являет-
ся примером так называемых «ускоренных» испытаний.
Для сложных систем, суммирующих влияние нескольких фак-
торов, однофакторных экспериментов недостаточно, так как они
не всегда соответствуют условиям нормальной эксплуатации. В
качестве примера можно привести описание работы регулируемого
ЖРД при взаимодействии систем подачи топлива, изменении тяги
и коэффициента соотношения компонентов топлива. Здесь назва-
49
ны три фактора. На самом деле их значительно больше: к ним от-
носятся колебания входных давлений вследствие нестабильности
характеристик систем наддува, уменьшения гидростатических
столбов жидкости в баках, роста осевых перегрузок и температур
компонентов топлива при наличии систем «горячего» наддува
и т. п. При данных условиях решение задачи возможно только
путем внедрения многофакторного эксперимента, при котором
часть факторов или большинство из них изменяются одновремен-
но. Такого рода испытания называются многофакторными. Мето-
ды их постановки и планирования — актуальные задачи совре-
менности.
Преимущества многофакторных экспериментов над одноф ак-
торными можно сформулировать следующим образом.
1. У многофакторных экспериментов значительно большая
информативность, а следовательно, более высокая эффективность,
при которой одна и та же цель достигается при меньших за-
тратах.
2. При многофакторных экспериментах оценка влияния каж-
дого варьируемого фактора производится путем обобщения всех
результатов, а не части, как при анализе данных, полученных при
однофакторных экспериментах.
3. Они позволяют судить о влиянии и взаимодействиях линей-
ных эффектов на конечные результаты.
4. В отличие от однофакторных экспериментов многофактор-
ные наиболее полно соответствуют реальным физическим про-
цессам.
Поскольку существуют погрешности в настройке двигателей
на основные параметры и различного рода ошибки, то с доста-
точной степенью точности можно утверждать, что для сложных
систем стационарные и однофакторные эксперименты практичес-
ки не существуют. При многофакторных экспериментах, когда
варьируется некоторое количество факторов на заранее извест-
ных уровнях, иногда важным является выполнение условия ран-
домизации, повышающего точность расчетов за счет исключения
влияния ряда случайных причин. При данном условии, как пра-
вило, должен обеспечиваться случайный порядок проведения
испытаний. Рандомизация позволяет получить более однородны^
и достоверные результаты. Условие рандомизации может сущест-
венно влиять на (конечный вывод, что легко показать на следую-
щем примере.
Допустим, поставлена задача сравнить фактические данные по
проливкам двух вариантов конструкции камер сгорания в стен-
довых условиях. Для этого выделено несколько экземпляров из-
делий для каждого варианта конструкции. В процессе гидрав-
лических испытаний по независящим от экспериментатора при-
чинам произошел некоторый дрейф секундного расхода проли-
ваемой жидкости. Если проливки велись подряд (сначала изде-
лий одной конструкции, затем—другой), то могло оказаться, что
50
одни изделия проливались при пониженном расходе, другие —
при повышенном. Соответственно будут получены неточные за-
меры и сделаны неправильные выводы. Если же при проливках
случайным образом чередовались камеры обоих вариантов,
ошибки измерений будут осреднены и средние значения резуль-
татов будут ближе к истинным.
Таким образом, даже неполная рандомизация испытаний
позволяет некоторым образом избежать увеличения ошибок. При
соблюдении объективного условия рандомизации очередность в
проведении испытаний может быть установлена в соответствии
с таблицей случайных чисел ’или путем бросания монеты
(«герб» — «решетка»).
Информативность испытаний ЖРД велика, достаточно боль-
шой должна быть и область ее применения при объективной
оценке полученных результатов. Чаще такая оценка является
качественной, так как существуют определенные трудности в вы-
боре критериев (параметров), характеризующих выходное ка-
чество процесса. На этапе конструкторской отработки наиболее
информативная оценка результатов — это прежде всего выясне-
ние (возможных причин отказов.
Для конструктора и экспериментатора сложными вопросами
являются поиск оптимальных решений, схем, характеристик и
условий работы. Важную роль в этом играет эмпирический, шаго-
вый поиск. Но он сам по себе экономически не выгоден и потому
необходимо использовать математическую статистику, позволя-
ющую решать те же задачи, но с меньшими средствами.
Известно, что не всякое физическое явление можно описать
с помощью аналитических выражений, отражающих в полной
мере физическую суть процессов, и не всегда это требуется. Иног-
да достаточно увязать «вход» системы с ее «выходом». Подобные
решения известны в математической статистике и все чаще на-
ходят применение на практике. Задачу, не рассматривающую
промежуточных физических процессов, а только «вход» и «выход»
системы, символично называют «черным ящиком». Для сложной
технической системы он может быть представлен в виде схемы
на рис. 3. 1, где х2, х3,..., хп — входные параметры или факто-
ры, включающие переменные («вход» системы); у — выходной
параметр («выход» системы).
В общем смысле слова, «вход» может быть детерминистиче-
ским, случайным, динамическим, независимым с точки зрения
взаимного влияния факторов, наконец, коррелированным. «Вы-
ход» может быть, в свою очередь, один или их может быть не-
сколько. При решении задач наиболее универсальными могут
оказаться методы кибернетической диагностики, основанные на
идентификации динамических процессов. В теоретическом плане
некоторые задачи решены [47, 59, 85, 89], но с точки зрения прак-
тики их использование вызывает определенные трудности, о ко-
торых речь будет идти позже.
51
Доводочные 'работы для практически любой технической сис-
темы представляют серию последовательных экспериментов, про-
водимых с целью обеспечения основных характеристик в зависи-
мости ют комплекса внешних и внутренних факторов. С учетом
этого вся отработка должна строиться на основе оптимального
планирования экспериментальных работ. Этим целям отвечают
полные факторные планы, при которых число испытаний охваты-
вает влияние всех факторов и их взаимодействий. Если принять
количество факторов, равным п, а уровней варьирования d9 то
Рис. 3. 1. Схема «черного ящика» для де-
терминированных процессов
число испытаний N в (полном факторном эксперименте будет рав-
но dn. Уже из этой зависимости видно, что применимость таких
планов очень ограничена, так как для их реализации требуется
большой объем экспериментальных работ. Даже при наличии
двух уровней варьирования и количестве факторов более пяти
объем испытаний составляет:
при n=6, М=64;
при /?=8, М=256 и т. д.
Отсюда вывод: в зависимости от сложности и стоимости экс-
перимента полный факторный план может быть применен при
количестве независимых переменных п^5. При большем числе
факторов возникает вопрос о сокращении испытаний. С этой
целью будут рассмотрены дробные планы, крутое восхождение
по поверхности отклика и т. д. Определенный интерес представ-
ляют Д-оптимальные планы, ортогональное планирование и т.п.
В настоящее время по теоретическим вопросам планирования
экспериментов имеется большое количество литературы [2, 47, 67,
68, 72J.
Цель планирования эксперимента—определение состава зна-
чимых факторов, их возможные сочетания и влияние на выходное
качество исследуемого процесса. Методы планирования многооб-
разны и для различных физических задач не могут быть стан-
дартными. Общим непременным свойством всех планов является
построение математической модели на основе обработки экспе-
риментальных данных. Сам по себе эксперимент — это физичес-
кая реализация намеченной программы с точки зрения обеспече-
ния входных факторов. Выходное качество процесса определяется
свойствами самой системы реагировать на «вход».
52
В заключение следует отметить, что планирование экспери-
ментов и математическое моделирование'не 'исключают эмпири-
ческий поиск, а дополняют его.
§ 2. ПРИМЕНЕНИЕ ФАКТОРНЫХ ПЛАНОВ К ИСПЫТАНИЯМ
СЛОЖНЫХ ТЕХНИЧЕСКИХ СИСТЕМ
Основная цель испытаний — получение необходимой инфор-
мации. Однако один и тот же результат достигается различными
средствами. .Потребный объем информации может быть получен
при значительно меньшем количестве испытаний, чем это следует
из условия проведенного полного факторного эксперимента. Эф-
фект достигается: а) рациональным выбором числа и интервала
варьирования факторов; б) уменьшением количества неразличи-
мых, совместных эффектов; в) исключением повторения резуль-
татов при ведении экспериментов; г) определением экстремаль-
ных условий испытаний и д) прогнозированием результатов.
Оптимальность факторных планов состоит в извлечении из
эксперимента максимума информации об исследуемых процессах,
с одной стороны, и минимизации числа испытаний —с другой. В
такой постановке решению задачи могут служить дробные фак-
торные планы, т. е. дробные реплики. Их смысл заключается в
замене взаимодействий линейных эффектов новой фиктивной пе-
ременной с порядковым номером (п+1). В физическом смысле
происходит дробление полного факторного плана на блоки.
Так, например, если имеется план типа 2П, то он может быть раз-
делен на четное число блоков г, из (которых на начальном этапе
реализуется один. Соответственно количество реализуемых
испытаний уменьшается и в данном случае составит N=—2n,
г
Дробный факторный эксперимент—это математический инстру-
мент, используемый при планировании испытаний.
Рассмотрим некоторые его свойства. Предположим, рассмат-
ривается эксперимент типа 24 при различных вариациях факторов
хь х2, х3, х4. Матрица испытаний определяется:
— строкой линейных членов
Хо, JC49
где х0 — фиктивная переменная, равная единице;
— двойными взаимодействиями
(Х1Х2), (Х1Х3), (XjX^), (х2х3), (х2х4), (х3х4),
— тройными взаимодействиями
(х^дХз); (х1х2х4); (x^xj; (х2х3х4)
— и взаимодействием (Х1Х2Х3Х4).
В соответствии с выражением Д/ = 24 количество испытаний
для полного факторного плана будет равно 16. Для сокращения
53
объема работ разделим полный план на два блока, или полуреп-
лики. Тогда каждый из них опишется соответствующей строкой:
— блок № 1
*^3» «^4» ('^2’^3"^4)*
— блок № 2
•^0’ (*Л)> С^З^з) > (•^2^4)» (•^3*^4)»
В целом оба блока с точки зрения суммарного эффекта рав-
ноценны полному факторному плану. Простейшим 'принципом
определения полуреплик является запись в виде строк, где фактор
xQ и все четные взаимодействия относятся к одному блоку, а все
остальные — ко второму. В первый блок входят факторы с опреде-
ляющим контрастом ( + 1), а во второй (—1).
Вполне очевидно, что разбиение полного факторного плана
на блоки не ограничивается пюлурепликами. Дробление может
продолжаться делением на четверть реплики и далее. В пределе
могут быть созданы планы, которые по количеству испытаний
равны числу варьируемых факторов плюс единица (W—и+1).
Особенность дробных факторных планов состоит в том, что при-
нятые блоки могут быть дополнены до полного плана путем реа-
лизации остальных реплик. В ходе испытаний дробные планы
могут быть легко перестроены из реплик большей кратности в
меньшую и наоборот. Это свойство позволяет оперативно менять
планы даже в ходе самих испытаний.
Планы могут перестраиваться, расширяться .или своевременно
могут быть прекращены.
Сокращение экспериментов при дробных факторных планах
достигается благодаря введению в матрицу испытаний совме-
щенных оценок. При этом эффекты взаимодействия заменяются
новыми факторами, участвуют в реальном процессе и оценивают-
ся наравне с остальными. Под эффектом фактора условимся по-
нимать реакцию отклика системы на изменение уровня варьиро-
вания «входа». Наличие матрицы испытаний позволяет заблаго-
временно проанализировать влияния каждого из линейных чле-
нов на выходное качество. Так, например, для факторного плана
типа 23 (табл. 3. 1) могут быть получены суммы по каждому из
столбцов, определяющие эффекты линейных членов и их взаимо-
действий. Таковыми являются:
— для линейных факторов
— для взаимодействий
54
Аналогично могут быть оценены эффекты линейных факторов
и их взаимодействий для любого плана типа 2П. Следствием оце-
нок эффектов является дисперсионный анализ результатов испы-
таний, показывающий, какие из факторов и взаимодействий ока-
зывают решающее влияние на исследуемый процесс.
Анализ суммарных эффектов показал, что разбиение на блоки
полного факторного плана не имеет смысла при малом количест-
ве линейных членов, так как суммарные эффекты при рассмотре-
нии результатов испытаний становятся неразличимыми, т. е.
совместными. С целью исследования неразличимых эффектов
вновь обратимся к плану 23 (см. табл. 3. 1) .
Таблица 3.1
№ по пор. Хо *i Х2 *3 *1*2 *1*3 *2*3 *1*2*3 Вариант испы- таний Y
1 Рк k <Рк Ркк Рк ?к НК PKk ?к
1 + + __ + + Х1 Л
2 + — + — — + — + X, г2
3 + — — + + — — + Х3 Y3
4 + + + + + + + + Х1Х2Х3 Y.
Пусть исследуются параметры рк, k, <рк—давление в камере,
коэффициент соотношения компонентов топлива и коэффициент,
характеризующий полноту сгорания топлива. Разобьем полный
факторный план на два блока, из которых реализуем реплику
•Хр **3, *1*2*^з*
В этом случае матрица испытаний примет такой вид, при ко-
тором взаимодействие (*1*2*3) рассматривается как новая неза-
висимая переменная.
Оценим далее суммарные эффекты, соответствующие вариан-
там испытаний:
— для линейных факторов
[рк] = X - X - Х3 + Х^Х,; [Л] = - X, + х - Х3 + Х.Х.Х,,
[?к] = - X, - Х3 + Х3 + Х3Х3Х3;
— для взаимодействий
М = - Х3 - х3 4- х3 + XXX; [рк ?к] = - х, + х3 - х3 +
+
\k Тк] = Х1-Х3-Х3 + Х,Х3Х3, [pKk ?к]=х+Х+Х+ХХХ
55
Проведанный анализ линейных эффектов и их -взаимодействий
показал, что эффекты [6] и [ркфк]; [£<Рк] и [рк], а также [<рк] и
[рк£] неразличимы. Эффекты считаются неразличимыми, если их
модули равны, т. е. их оценки не зависят от знака.
Вполне очевидно, что такого рода планирование для данного
количества факторов будет малоэффективным, так как из восьми
эффектов повторяются три.
Рассмотренный путь анализа и определения неразличимых
эффектов является громоздким. Более того, степень его сложнос-
ти возрастает по мере увеличения числа факторов. Но сама по
себе оценка неразличимых эффектов важна до проведения ис-
пытаний с целью исключения из программы малоэффективных
экспериментов. С такой оценки должен начинаться выбор любо-
го плана.
При выборе кратности реплики дробного плана важным мо-
ментом является установление генерирующих соотношений и
определяющих контрастов, без которых не могут быть оценены
наиболее важные эффекты взаимодействий для рассматриваемого
числа факторов. В том случае, если рассматривается полуреплика
типа 2П-1, определяющий контраст равен произведению линей-
ных эффектов
J — х1х2х3,..., хл.
Соответственно могут быть получены равноценные эффекты
Хр/= Х^ Х2Х3, . .. ,хл,
или хг = Х2Х3,..., хп
и аналогично
х2 = х1х3,...,хл;х3 = х1х2х4,...,хл и т. д.
Наряду с линейными эффектами подобным образом определя-
ются и их взаимодействия:
Х*Х2 — Х3Х4,. • . , Хл, XjX3 — Х2Х4,.. . , Хл, Х2Х3 — XjX^, . . . , Хл и т. д.
В случае более высокой кратности дробной реплики необхо-
димо решить, какие линейные эффекты приравнять к эффектам
взаимодействий. Как уже отмечалось, это дань методу Д. Финни
[68, 69], позволяющему сократить объем испытаний по сравне-
нию с полным факторным планом. Вопрос о приравнивании эф-
фектов желательно решать исходя из анализа экспериментальных
данных, физической сути исследуемого процесса или путем ис-
пользования имеющейся априорной информации.
Количество генерирующих соотношений равно кратности дроб-
ной реплики. Так, например, если принять дробный план 2n~h, то
количество генерирующих -соотношений принимается равным k.
Соответствующим этому количеству будет и число определяю-
щих контрастов. Последние всегда легко найти в каждом конкрет-
ном случае путем умножения левой и правой частей генерирую-
56
щих соотношений на соответствующий линейный эффект. Допус-
тим, в некотором плане типа 27-3 принято одно из генерирующих
соотношений х6=Х1Х2Х4Х5, тогда определяющий контраст для
данного соотношения можно найти следующим путем:
х| = Хб (Х^Х^) ИЛИ J = XiX3X4X6X6.
Аналогично решается (вопрос и для других генерирующих соотно-
шений и их определяющих контрастов. В итоге, получив k значений
для контрастов, необходимо оценить все неразличимые эффекты
первого и второго порядков, пользуясь изложенным выше прави-
лом. Эффектами взаимодействий третьего и более высоких по-
рядков можно пренебречь.
На основании изложенного легко проанализировать полуреп-
лики, учитывающие влияние 3, 5 и более факторов. При этом
становится очевидным, что с увеличением числа факторов доля
неразличимых эффектов и их парных взаимодействий уменьша-
ется. С этой точки зрения можно прийти к весьма важному для
практики выводу, что преимущества дробных планов становятся
очевидными только при большом числе факторов, когда и^5.
Смысл и ценность проведенного анализа заключаются в том,
что для реализации должен быть принят блок, в котором коли-
чество неразличимых линейных факторов и их парных взаимо-
действий равно- нулю. Такого рода подход несколько нарушает
принцип рандомизации, но повышает эффективность самих ис-
пытаний, что в данном 'случае более важно. Точнее, приняв для
реализации блок, вводят оценку его качества, так как сам по себе
выбор плана еще ничего не значит.
Оценка качества — это определение разрешающей способнос-
ти реплики. В дробном факторном эксперименте невозможно раз-
личить коэффициенты регрессии между линейными членами и
некоторыми их взаимодействиями. Чем выше дробность реплики,
тем больше неразличимость эффектов и наоборот. Полные фак-
торные планы неразличимых эффектов не имеют. Число неразли-
чимых эффектов является разрешающей способностью дробной
реплики.
Далее для конкретного дробного плана решается вопрос об
оценке коэффициентов регрессии с учетом принятых генерирую-
щих соотношений, так как именно он в конечном итоге интересу-
ет экспериментатора. С целью определения зависимостей для
коэффициентов регрессии неразличимых, совместных эффектов
рассмотрим пример для полуреплики плана 24 с определяющим
контрастом
J —
Неразличимыми эффектами для парных взаимодействий явля-
ются
хгх2 = х3х4; xtx3 = х3х4; xtx4 = х3х3<
57
Для указанных взаимодействий выборочные оценки коэффициен-
тов регрессии будут -соответственно равны.
С целью практического использования можно предложить
более простой способ выбора дробного факторного плана, явля-
ющегося, как правило, оптимальным. Способ заключается в сле-
дующем.
Для дробного факторного плана количество испытаний долж-
но удовлетворять условию
Допустим, в эксперименте участвуют четыре линейных факто-
ра (п=4), тогда при k=\ количество испытаний JV=8. Таким
образом, при наличии четырех факторов целесообразно исполь-
зовать полуреплику плана 24-1.
Если количество факторов равно восьми (п=8), то рекомен-
дуемым дробным планом является 1/16 — реплика типа 28-4 и т. д.
Следующим этапом после выбора и анализа дробного фактор-
ного плана является составление матрицы исходных данных X
и программы испытаний. Практически удобный способ составле-
ния программы покажем на примере.
Допустим, в плане типа 23 для реализации принята полуреп-
лика— xQt Х\Х2, Х1Х3, х2х3. Тогда количество испытаний будет рав-
но четырем. Однако нам неизвестна программа. Принцип ее по-
строения может быть предложен следующий.
К матрице исходных данных приписывается столбец «вариант
испытаний» согласно табл. 3. 2.
Таблица 3.2
№ по пор. X Вариант испытаний
*1 *2 *3
1 + — — — х0 -
2 + + + — Х1Х2
3 + + — + ад
4 + — + + ад.з
Для столбца х0 принимается условный уровень со знаком
(-+). Первая строка реальных факторов записывается при уров-
нях, характеризуемых знаком «—». Далее для «вариантов испы-
таний» и «эффектов» знак « + »-ставится в месте пересечения стро-
ки и столбца, имеющих одинаковые обозначения (xi—Xi); (Х2—
—Х2); (*з—Хз). Во всех остальных случаях программа испытаний
характеризуется знаком«—». На этом первый этап планирования
заканчивается и далее следуют эксперименты.
58
В дальнейшем реализуемый план корректируется с учетом
результатов 'испытаний. Для более эффективного использования
экспериментальных данных целесообразно построение математи-
ческих моделей исследуемых процессов, оптимизация которых
позволит теоретически решать задачи обработки и в дальнейшем
лишь уточнять полученные результаты путем проведения конт-
рольных испытаний.
§ 3. ИССЛЕДОВАНИЕ МАТЕМАТИЧЕСКИХ МОДЕЛЕЙ СЛОЖНЫХ
ФИЗИЧЕСКИХ ПРОЦЕССОВ
На начальных этапах отработки сложных технических систем,
как правило, причины отказов неизвестны и невозможно их прог-
нозировать. Поиск оптимальных условий ведется эмпирически
путем обобщения опыта отработки аналоговых систем, не исклю-
чая интуиции разработчика. Как известно, это ведет к большому
объему экспериментальных работ, сокращение которых возможно
на основе применения статистических методов моделирования
физических процессов. В (соответствии с этим может быть рас-
смотрен метод, основанный на описании поверхности отклика «вы-
хода» системы на «вход» в некотором векторном пространстве.
Каждый из векторов Хг характеризуется свойствами данного фак-
тора, а поверхность отклика в целом — свойствами вектора вы-
ходного качества У. В общем виде функцию отклика для некото-
рого числа п учтенных факторов можно записать
У ==f (.Xtf • • • > == f
Для сложных физических моделей аналитический вид функции
заранее неизвестен. Неизвестны также уравнения, описывающие
полную динамику исследуемых процессов, вследствие их чрезвы-
чайной сложности. В ряде случаев (могут быть известны отдель-
ные частные зависимости для промежуточных процессов, напри-
мер, влияние суммарных секундных расходов и коэффициентов
соотношения компонентов топлива на давление в камере сгора-
ния ЖРД и т. п. Исследование ведется практически при полном
(или частичном) незнании внутреннего механизма явлений. Это
позволяет нам ограничиться разложением функции в ряд:
П П п
у = s biXi+2 bi} xiX] + 2 Ьц x? +..., (3.1)
/=0 i<j i=l
где bit b.\ и Ьц — коэффициенты регрессии, определяющие сте-
пень влияния фактора и их взаимодействий на выходную харак-
теристику у.
Функциональная зависимость y=f(x) представляет систему
нормальных уравнений, которая в отдельных случаях может быть
дополнена зависимостями, описывающими промежуточные про-
цессы или функциональные связи отдельных параметров, с «вы-
ходом» системы. При этом исходная модель «черного ящика»
59
дополнится новыми характерными признаками, которые делают
ее качественно более совершенной, так как повышается точность.
Определение коэффициентов регрессии—основная трудность при
построении модели. Путем обработки экспериментальных данных
может воспроизводиться физическая суть модели, на основании
которой выявляются доминирующие факторы, их взаимодействия,
находятся оптимальные решения и намечается программа даль-
нейших исследований. Как правило, математические модели
сложных технических -систем характеризуют определенные режи-
мы .работы.
С целью проверки достоверности модели проводятся конт-
рольные испытания, при которых теоретические и расчетные дан-
ные по оценке ожидаемого выходного качества сравниваются с
экспериментальными. Если ожидаемый эффект не достигнут, ана-
лизируется перечень учтенных факторов и делаются последова-
тельные приближения. Таких приближений может быть несколь-
ко. Тем не менее, это не приводит к существенному увеличению
объема испытаний. Суммарный эффект, как правило, значителен
и становится тем заметнее, чем сложнее сам процесс. Метод рег-
рессии применяется для решения различных задач, но, к сожале-
нию, его нельзя считать совершенным. Существует ряд ограниче-
ний математического и физического плана, сужающих область
его применения. Основные из них можно сформулировать следу-
ющим образом.
1. Входные факторы и результаты наблюдений должны быть
независимыми один от другого.
2. Результаты измерений должны следовать закону нормаль-
ной плотности распределения.
3. Дисперсии оценок должны быть постоянными, выборочные
оценки — однородными.
4. Ошибки измерения входных факторов малы по сравнению
с ошибками определения выходного качества.
Система измерения, датчики и подводящие каналы должны
обеспечивать достоверность информации об исследуемых процес-
сах, не искажая физической сути. Для абсолютного большинства
систем первые три условия, как правило, выполняются. Послед-
нее условие не всегда позволяет применять статистические мето-
ды моделирования для изучения, например, быстро меняющихся
процессов и их параметров. Нередко получаемые результаты во
многом зависят от измерительной техники. При этом степень их
точности и достоверности определяется не только погрешностями
измерения, но иногда и местом расположения подводящих кана-
лов, точностью их изготовления. Важность этого обстоятельства
можно 'показать на примере.
Допустим, измеряется статическое давление по контуру вы-
ходной части сопла ЖРД. Фактическая величина этого парамет-
ра на конкретном двигателе помимо параметров рабочего тела
зависит от площади поперечного сечения сопла. Измеренная же
60
величина давления, помимо прочего, будет определяться перпен-
дикулярностью оси канала к касательной (контура сопла в задан-
ной точке. Это ограничение справедливо для большинства моде-
лей -и в каждом конкретном случае должно учитываться с точки
зрения оценки точности полученных результатов.
Говоря о статистических методах планирования экспериментов,
следует отметить, что в настоящее время экспериментатору нельзя
рекомендовать оптимальные планы, свойственные конкретной
модели. В различных областях техники они могут быть различны-
ми и преимущества одних перед
другими не очевидны. Общими
для всех программ являются:
1) определение числа факто-
ров и уровней варьирования;
2) выбор интервалов варьиро-
вания;
3) выбор оптимального пла-
на ведения экспериментов;
4) составление матрицы испы-
таний и ее реализация;
5) обработка эксперименталь-
ных данных и определение мате-
Рк min
п Рк
Рк max
*mtn
К max *
Pine. 3. 2. Геометрическое представ-
ление плана эксперимента (ркХ&)
матической модели.
В простейших случаях коэффициенты регрессии могут опре-
деляться методам наименьших квадратов, в более -сложных — с
помощью ЭЦВМ.
Рассмотрим >в качестве примера план, соответствующий задаче
по определению максимального значения удельной тяги двига-
теля при варьировании одновременно двух факторов — давления
в камере сгорания рк 'и коэффициента соотношения компонентов
топлива k. При расчетных оптимальных значениях параметров
их можно условно считать независимыми. Варьирование произво-
дится на двух уровнях по «квадрату» ркХ& (рис. 3.2).
Такая программа испытаний характеризуется как план типа
22. При полном факторном ’эксперименте количество испытаний
будет равно четырем (^=4). Порядок записи вариантов испыта-
ний показан в табл. 3. 3.
Таблица 3.3
№ по пор. X Y
Рк k Рк*
1 + — — + У\
2 + + — — У2
3 + — + — Уз
4 + + + + У 4
61
Для данного эксперимента математическая модель будет
иметь вид
у = brjxQ + btpK + b2k + b3pKk + e,
где e — ошибка эксперимента.
При появлении третьего независимого переменного, 'например,
фактора фк, характеризующего полноту сгорания топлива, матри-
ца X соответственно дополнится новыми членами:
?к» Рк ?к> ?к> Рк
В итоге мы перейдем к полному факторному эксперименту ти-
па 23. С вводом третьего фактора количество испытаний увели-
чится в два раза и соответственно составит N=8. Полный фак-
торный эксперимент геометрически может быть представлен вер-
шинами куба.
Эксперимент такого типа удовлетворяет условиям матрицы
планирования (табл. 3. 4).
Таблица 3.4
пор. । X Вариант Y
о с *о 1 х *1 Рк *2 k *з <Рк Х1Х2 м *1*3 РкЧк Х2х3 Х1Х2Х3 РккЧк испытаний
1 4- — — — 4- 4- 4- — *0 У\
2 4- 4- — — — — 4- 4- У 2
3 + — 4- — — 4- — 4- *2 Уз
4 4- — — 4- 4- — — 4- *3 У4
5 4- 4- 4- — 4- — — — У5
6 4- — 4- — 4- — — ад3 Уб
7 4- — 4- 4- — — 4- — ад У7
8 + 4- 4- 4- 4- 4- 4- 4- %1ад УЗ
Математическая модель для данного эксперимента будет
иметь вид
У — Мо Ч- Ч~ b^x^ —Р Ьгх3 b4x2xY 4“
Ч” Ч" 4“ ^7 4“
С вводом четвертого фактора количество испытаний увеличит-
ся до 16, а геометрическая модель может быть представлена вер-
шинами восьмигранной призмы.
Из сказанного выше следует, что полный факторный экспе-
римент не исключает необходимости в постановке большого чис-
ла испытаний. Однако существуют методы их сокращения. Пос-
ледние будут рассмотрены ниже.
62
Определяющим -моментом в постановке факторного экспери-
мента, как мы уже убедились, является определение -количества
независимых переменных. Тем не менее на ранних стадиях отра-
ботки количество учтенных факторов может быть неполным.
С вводом новых независимых 'переменных коэффициенты регрес-
сии в линейных уравнениях изменяются (за исключением ортого-
нального планирования). Поэтому -при обработке результатов
испытаний (особенно первой серии) направленность и значи-
мость отдельных факторов следует принимать ориентировочно,
избегая преждевременных выводов. После проведения контроль-
ной серии экспериментов, когда расчетные данные совпадут с
фактическими, состав варьируемых факторов может быть приз-
нан полным, а анализ их влияния достоверным.
Опыт решения отдельных задач, связанных с отработкой
сложных технических систем, показал практическую ценность
статистических методов моделирования процессов. Однако дос-
товерные решения возможны не всегда, особенно в тех «случаях,
когда функция отклика в исследуемой области имеет разрыв.
Возможности регрессивного анализа ограничены условиями его
применимости.
Более универсальны, несмотря на кажущуюся сложность,
методы идентификации, основанные на корреляционном анализе.
Функция отклика в этом случае является уравнением динамики
П оо
У (0 =2 У (3.2)
1=1 о
где Ri — импульсная переходная функция аргумента 0, являюще-
гося интервалом варьирования фактора времени t.
Эта модель имеет вид, показанный на рис. 3. 1, где все факто-
ры «выхода» и «входа» являются динамическими функциями,
учитывающими не только конечные результаты или значения фак-
торов, но и их предысторию на данном отрезке времени.
Методы описания данной математической модели в принципе
известны [59] и мы укажем лишь некоторые из них с целью сис-
тематизации материала. Если «входы» некоррелированы, функ-
цию отклика можно записать в виде системы интегральных урав-
нений:
К,„ = J*,.('-«)«. («)<'»:
к,„=~! W
о
(3.3)
(х — 6)(6) 4/О,
лп
63
при этом Кх.—корреляционная функция /-го «входа», а КХ1у —
функция корреляции между Z-м «входом» и «выходом» соответ-
ственно.
В математической статистике «в частном случае при -наличии
ограничений это решение известно как задача Винера и Пелёгре-
на. При наличии постоянных значений входных факторов
функция отклика примет вид
У (О = 2/4 (9) d 9. (3.4)
Исследование сложных технических систем — часто встречаю-
щийся случай, для -которого входные факторы есть условия испы-
таний или конструктивные характеристики, которые практически
стабильны в пределах одного эксперимента. Определение мате-
матической модели процесса по экспериментальным данным, по
сути дела, сводится к корреляционному анализу.
При обработке статистических данных иногда удобно говорить
о дискретных значениях входных и выходных факторов в зависи-
мости от количества испытаний:
•MW);
При этом, если речь идет о параметрах, то каждый из факто-
ров является линейной характеристикой, следующей закону нор-
мальной плотности распределения. Аналогично выражается и
реализация характеристики «выхода» — y(N). Если в ходе иссле-
дования возникает необходимость характеризовать процесс нес-
колькими выходными факторами при том же «входе», расчет
повторяется несколько раз пропорционально числу «входов».
Решение может оказаться громоздким, но принципиальных труд-
ностей не вызывает. Задача решается на ЭВМ или на специаль-
ной вычислительной машине — синтезаторе, применяемой для
решения интегральных уравнений. С некоторым приближением
математическая модель данного процесса как поверхность от-
клика может быть описана интегральным уравнением вида
п ОО
y(2V) = 2 f
1=1 b
где Д — интервал изменения количества испытаний.
Если входные факторы независимы, корреляционные функции
связи «выхода» и «входа» определяются как
^(A9=J^,(2V-A)/?3(A)rfA;
64
«х , W = I КХ (N - Д)ЯЛ (A)rf Д.
лпу лп
При наличии экспериментальных данных исходное выраже-
ние для поиска корреляционной функции будет .иметь вид
Кх (/и) ~ х (т)х (т + &) ^т-
о
При вычислениях корреляционной функции рассматриваемое ко-
личество испытаний N подразделяется на k малых групп А:
АГ=Д£;
N > (т + 5) > т > 0; 5 = Др,
где ц=0, 1, 2, 3...
Заменяя интеграл знаком суммы, при сделанных допущениях
получим
v=0
Расчет взаимной корреляционной функции может произво-
диться аналогично с достаточной степенью точности
1 к
Кху (р) ~ , 2
“Г V=O
В общем случае, когда входные факторы взаимно коррелиро-
ваны, уравнения для определения корреляционных и импульсной
переходной функций могут быть представлены с помощью спект-
ральных плотностей S(cd), которые определяются как преобразо-
вание Фурье от корреляционной функции /((#):
= *1 и “) SX, (“) + •••+ Хп (J ш) (со);
\у — ' Sx,n (ш) + • • • + Хп (J ш) SXn (<*>)»
где (у ш) = А У (- S (ш) dkh
а л/гу
/г=1
a dhi — соответствующий минор детерминанта d\
Sxty (®)
iyn п
3 1874
65
В целом представленный математический аппарат позволяет
использовать экспериментальные данные в виде входных и вы-
ходных характеристик для построения моделей сложных физи-
ческих процессов, включая модели прогнозирования. Как и в слу-
чае регрессивной модели, функция y(N) должна быть адекватна.
Математическая модель вида (3. 1) может характеризовать,
строго говоря, только установившийся процесс, например, рабо-
ту двигателя на маршевом режиме. При динамических процессах
помимо модели (3. 2) не исключено применение полинома вида
(3.1), для которого каждая матрица X и вектор У строго соот-
ветствует определенному аргументу времени t. В этом смысле
матрицы исходных данных и векторы представляются в виде
набора отдельных последовательных дискретных значений фак-
торов х и характеристики у. Если условно принять количество
измеряемых параметров x(t), равным числу факторов, тогда
матрицу иопытаний можно представить в виде табл. 3. 5.
Таблица 3.5
№
по
пор.
Время
п
1
2
3
4
*11 Х]2 Х13
*21 *22 *23
*31 *32 *33
*41 *42 *43
*2л
*3п
*4л
У\
У2
Уз
У4
XN1 XN2 XN3
Nn
yN
N
Характерно для данной формы записи то, что в процессе об-
работки результатов испытаний с каждого эксперимента снимает-
ся несколько замеров текущего значения данного фактора x(t),
равное числу дискретных точек t. Заранее следует сказать,
что такая форма матрицы X не является оптимальной. Вполне
очевидно, что количество интервалов измерения текущих зна-
чений факторов х и характеристики у должно быть по возмож-
ности большим.
Чем'динамичнее исследуемый процесс и чем выше градиенты
изменения его характеристик, тем точнее должны определяться
исходные данные для определения математической модели. За
дание исходных данных для динамической модели в виде дискрет-
ных значений факторов — вопрос очень сложный. Но его решение
66
актуально, так как для большинства механических систем функ-
циональные зависимости изменения текущих значений факторов
Xi(/); -МО; — как правило, неизвестны. Однако может
быть известен 'вид телеметрической записи этих факторов. Для это-
го рассмотрим рис. 3. 3. Из анализа телеметрических записей сле-
дует, что на точность моделирования в данном случае будут
влиять число экспериментов и количество интервалов Ы времени
1 2 3 4 5 6 t
Рис. 3. 3. Запись динамических характеристик параметров
Xi и х2 и их модел/и:
/—осциллографическая запись процесса; 2—модельная кривая
измерения текущих значений параметров x(t), —tj при
i>j. Для этого, если говорить о точности моделирования устано-
вившихся процессов, объем испытаний устанавливался в соответ-
ствии с разрешающей способностью дробной реплики. Это усло-
вие остается справедливым и в дйнно-м случае, когда исследуется
динамический процесс. Но, к сожалению, не только это условие
определяет точность нашей модели. Не менее важным следует
считать выбор интервала измерения Д/^. Его влияние можно по-
казать на следующем примере.
На рис. 3. 3 при построении динамической модели взято шесть
интервалов измерения ^параметров %i(/) и x2(t). При этом момен-
ты фиксации параметров Xi и х2 не совпадают с их экстремаль-
ными уровнями. Тем не менее модельная характеристика на пер-
вом графике (пунктирная линия) в какой-то мере характеризует
исследуемый процесс. На втором же графике модельная харак-
теристика реальному процессу практически полностью не соот-
3* 67
ветствует. Для обеспечения наиболее полного их соответствия
физическому процессу, очевидно, интервалы времени Atfi2, Л/45,
Д/5б необходимо дополнительно разделить на более мелкие участ-
ки. Для этого при обработке первичной информации, полученной
в виде телеметрических данных, все значимые факторы следует
привязать к одной шкале 'времени. Затем произвольно назначить
интервалы времени измерения, которые бы наиболее полно учи-
тывали физические особенности поведения рассматриваемых па-
раметров. Причем с точки зрения выбора количества интервалов
измерения существуют ограничения только емкости памяти
ЭЦВМ и времени ее работы.
Далее в каждый установленный 'момент времени по всем
параметрам с телеметрических графиков снимаются замеры, со-
ответствующие конкретному эксперименту, и помещаются в таб-
лицу типа табл. 3. 6.
Таблица 3.6
Время
Результаты эксперимента
/1 *11 Х]2............................
Z2 Х21 Х22............................
*3 *31 *32............................
УЛ
У j2
УЛ
Таким образом, количество таблиц соответствует объему экс-
периментов. Их данные обобщаются и помещаются в матрицы
исходных данных (табл. 3. 7).
Таблица 3.7
№ по пор.
*1 *2 *3
1 *11 *12 *13 . . . . *1л
2 *21 *22 *23 • • • • *2л
3 *31 *32 *33 . . • . *3n
xNt XNt XN3 • • • xNn У/V^i)
Расчет коэффициентов модели процесса производится для
каждого момента времени /г-, т. е. количество вычислений про-
порционально числу интервалов времени. Далее, суммируя ре-
68
зультаты проведенных расчетов, можно получить математическую
модель динамического процесса y(t).
До настоящего времени рассматривались детерминированные
и случайные процессы, учитывающие только количественную ин-
формацию. При этом мы совершенно не касались информации
качественной. При 'исследовании математических моделей посто-
янно соблюдалось условие: независимо от уровней варьирования
и числа вводимых факторов наблюдался строго аддитивный эф-
фект, при котором равенство левой и правой частей линейных
уравнений Цри точечных значениях всех переменных являлось
обязательным. Наряду с этим существует обширный круг задач,
требующих учета не только количественной, но и качественной
информации, классифицированной по признаку «да — нет» или
«успех — отказ». Это условие часто встречается при решении за-
дач теории игр и анализа моделей надежности. С вводом качест-
венных данных аддитивность уравнений регрессии нарушается,
что делает методы подбора постоянных коэффициентов неприем-
лемыми. Так как качественные факторы -случайным образом
могут изменяться от нуля до единицы, достигнуть равенства ле-
вых и правых частей линейных уравнений во всех случаях не
удается.
Тем не менее, существуют математические приемы, позволя-
ющие конечные эффекты таких моделей сделать близкими к адди-^
тивным за счет изменения масштаба измерения доли качественно-
го фактора с помощью какого-либо преобразования. При этом
важно, чтобы преобразованная величина изменялась в очень ши-
роких пределах, например, от бесконечности до нуля, при из-
менении самой доли качественного фактора от нуля до единицы.
Для подобных целей в математической статистике обычно приме-
няются преобразования в логиты и пробиты. В некоторых рабо-
тах Д. Финни и Ф. Йейтса [26] используются преобразования в
логиты с помощью выражения
где Р — вероятность, а Д— характеризует интервал ее измерения.
Вид этого выражения для логита не ограничивается'приведен-
ным выше примером. Он может зависеть от условия решаемой
задачи. Так, например, при анализе моделей надежности преобра-
зование в логиты удобно вести с помощью равенства
у= —1п(Р Д).
При этом под Р понимается частость в виде вероятности без-
отказной работы, оцененная по группе испытаний Ni.
( Р = — , где т. — количество успешных испытаний). Текущее
\ А//
значение Д; в данном случае равно отношению Ni/N. Если за z
69
АГ/
принять количество групп в данной программе, то должно обес
z
печиваться равенство N = 2
/=1
Уместно заметить, что логит Д. Финни имеет -смысл при нали-
чии примерно одинаковых интервалов или долей выборки Дг-.
Если они изменяются во (всем интервале от нуля до единицы, то
выражение для логита не определяет частость. Поэтому при
анализе моделей надежности более примлемым является выра-
жение
У/ = — In (Р Д;) ИЛИ У/ = — In
При значениях вероятности Р=1 уравнение логита у = —1пРД
1 Р
полностью соответствует выражению д/ = In—, отвечающему ло-
д
гиту Д. Финни.
При составлении матрицы исходных данных обработка ре-
зультатов испытаний несколько отличается от обычных методов.
С этой целью все испытания разбиваются на группы с осреднен-
ными (или примерно одинаковыми) значениями параметров. Для
каждой группы выходное качество оценивается эксперименталь-
ной частостью, аппроксимированной выражением для преобра-
зования в логиты.
При классификации результатов испытаний по каждой группе
(строке матрицы) успешным считается то испытание, при кото-
ром материальная часть осталась неповрежденной. Одновремен-
но, если возникает необходимость учесть некоторое изменение в
конструкции, его можно характеризовать вводом нового фактора
как объективной количественной характеристики. Например, от-
личия в конструкции форсуночных головок камер сгорания мож-
но выражать изменением коэффициента полноты -сгорания топли-
ва; размеры камеры — значением приведенной длины и т. д.
Рассмотрим теперь вопро-с об оценке точности (моделирования.
Естественно, что суммарная ошибка зависит от погрешностей са-
мого метода, состава факторов, объема и качества информации.
При использовании указанных моделей дисперсия погрешности в
описании поверхности отклика может быть оценена корреляцион-
ной матрицей или методом линеаризации полученной функции
где —дисперсия оценок независимых переменных х.
При использовании (методов корреляционных функций точ-
ность зависит прежде всего от таких факторов, как интервал
интегрирования по количеству испытаний N, шаг интегрирования
и число подлежащих определению ординат корреляционной функ-
ции в рассматриваемом интервале 0^AA2^mmax.
70
С точки зрения математической статистики в настоящей гла-
ве рассматриваются стационарные случайные процессы, -для ко-
торых известен закон распределения параметров и его характе-
ристики в виде математического ожидания и дисперсии, которые
в процессе испытания нестабильны. Об этом однозначно можно
утверждать, рассматривая входные факторы, для которых закон
распределения при штатных условиях является нормальным. То
же можно сказать и о выходном качестве у. А поскольку случай-
ный процесс изменения характеристики является стационарным,
его достаточно точно можно аппроксимировать линейной комби-
нацией гармонических колебаний со случайной амплитудой и
фазой
у (7V) = A sin (о); N + срД
Аналитическое исследование этой функции, данное в работе [59],
позволяет сделать вывод о том, что для вычисления корреляцион-
ной функции с погрешностью не -более 2% необходимо иметь со-
отношения И1тах^0,1 JV 'и Цтах^ОДД.
Таким образом, точность расчета корреляционной функции
определяется объемом статистических данных (или интер-
валом наблюдения, величиной текущего значения аргумента т,
изменяющегося в пределе от 0 до mmax и от масштабного факто-
ра А).
Методика определения корреляционных функций на универ-
сальных цифровых машинах и точность их оценок рассмотрены
в специальной литературе по вычислительной технике в примене-
нии к статистическим исследованиям [59].
При анализе математических моделей следует иметь в виду,
что связь между «выходом» и «входом» может быть функцио-
нальной, если любому определенному значению у соответствуют
определенные значения уровней значимых факторов х. Эта связь
может быть и стохастической, когда при определенных значениях
входных факторов «выход» случайным образом с определенными
вероятностями может принимать различные значения. Таким об-
разом, вероятностная модель надежности является частным слу-
чаем модели стохастической.
Использование вероятностных моделей при исследовании фи-
зических процессов базируется на общих принципах их приведения
к определенному типу математических зависимостей. В ряде слу-
чаев эти модели не могут абсолютно точно отражать реальные
процессы. По этой причине их формализация связана с некото-
рыми упрощениями. Заодно следует отметить, что точное отра-
жение физических явлений не всегда и требуется. Тем не менее,
всякая формализация не исключает оценки точности, что дости-
гается вводом суммарной ошибки моделирования е. Практика
показывает, что преимущества от формализации процессов при
планировании испытаний, прогнозировании результатов и вооб-
ще моделировании значительно превышают те отрицательные
71
последствия, которые могут наблюдаться вследствие неточности
самих методов.
При физических исследованиях и анализе (качественных пока-
зателей необходимо учитывать, что не все факторы, вводимые и
эксперимент, являются значимыми. Поэтому их эффективность
может быть различной направленности. Второстепенные факто-
ры следует исключать, а их влияние учитывать путем осреднения
результатов 'при оценке ошибки моделирования.
Частным 'случаем стохастической формы связи является -кор-
реляция между «выходом» и «входом». Случайные величины х и
у являются коррелированными, если математическое ожидание
z/o зависит от математического ожидания уровней значимых фак-
торов Xq.
Наиболее важным моментом построения математической мо-
дели, безусловно, является выбор формы связи между «выходом»
и «входом». Эти связи могут быть'самыми различными. Кроме
рассмотренных выше, могут быть предложены *и другие:
а) линейная модель
У = bQ + blx1 + b2x2 +... + bnxn, (3.5) ч
являющаяся частным случаем полинома (3. 1);
б) степенная модель
у = аох“'х“*....х“п-, (3.6)
в) экспоненциальная модель
у = aQa*' • af... а*п. (3.7)
Выбор модели диктуется особенностями физического процес-
са. Тем не менее, подбор формы связи может 'быть автоматизи-
рован на основе перебора различных аналитических функций с
помощью ЭЦВМ. Такой подбор включает расчет параметров кор-
реляции при различных вариантах математической интерпрета-
ции процесса, аналитическое сравнение результатов и вь^бор на-
илучшего варианта. В качестве объективного критерия выбора
оптимальной формы связи может быть использован коэффициент
множественной корреляции при условии адекватности и удовлет-
ворительной физической интерпретации самой модели процесса.
Оптимальной принимается модель, для которой коэффициент
множественной корреляции имеет максимальное значение.
Для этого необходимо разработать алгоритм перебора, кото-
рый бы позволил в кратчайший срок находить оптимальную фор-
му связи. Вычислительная программа должна предусматривать
возможность воспроизведения модели и моделирования процессов
при всех известных формах связи «входа» с «выходом».
В процессе отработки сложных технических систем практичес-
ки воссоздать картину четкого планирования экспериментов не
72
всегда удается. Появляется масса частных задач и программ, ко-
торые вынуждают нас отступать от первоначально разработан-
ных планов, подвергать их корректировке, вносить новые идеи
и т. п. Помимо этого появляются в силу тех или иных 'причин
эксперименты, проведенные на «неплановых» уровнях варьирова-
ния. Допустимо, что при этом могут быть не предельные, а 'про-
межуточные значения некоторых параметров.
Таким образом, в процессе отработки технических систем по-
является комплекс статистических данных, свойственных как
активному, так и пассивному экспериментам. Тогда возникает
вопрос, в какой мере полученные экспериментальные данные мо-
гут «быть использованы при разработке или уточнении математи-
ческих моделей физических процессов.
Исследования показывают, что при построении моделей раз-
личия исходных экспериментальных программ особого значения
не имеют. Важно обеспечить условие учета влияния всех значи-
мых факторов с точки зрения полноты их охвата и идентичность
рабочих процессов. Имеется в виду, что совокупность статисти-
ческих данных, характеризующих установившиеся режимы рабо-
ты, -может быть дополнена результатами пассивного эксперимен-
та, проведенного также на установившемся режиме. Недопусти-
мо результаты испытаний, относящиеся к переходным режимам,
обобщать с данными для установившихся режимов и наоборот.
При .выполнении этих условий практически любые эксперимен-
тальные данные в произвольном порядке могут быть включены
в матрицу испытаний X и вектор-столбец Y для последующей об-
работки. При этом чем больше исходных данных используется
для этих целей, чем большую область они охватывают и чем
меньше шаг варьирования факторов, тем точнее модель.
§ 4. РАНЖИРОВКА ЗНАЧИМЫХ ФАКТОРОВ И ВЫБОР ИХ ЧИСЛА.
АДЕКВАТНОСТЬ МОДЕЛИ
Увеличение числа факторов приводит к усложнению модели
и решения задачи планирования экспериментов в целом. Поэтому
включение дополнительных факторов требует их анализа с точки
зрения оценки значимости, которая в свою очередь определяется
физической структурой (исследуемого процесса. При определении
исходных данных для любого плана в виде .количества и ранга
значимых факторов можно принять объективное решение, что не
исключает учета и субъективного мнения исследователей.
В первом случае используются методы математической ста-
тистики, учитывающие состав исходных данных, во втором слу-
чае— субъективные оценки отдельных специалистов, которые
вносят дополнительную информацию и поэтому заслуживают вни-
мания. Оба метода строятся независимо один от другого, но они
не должны взаимно исключать один другого.
73
Рассмотрим метод ранжировки факторов путем опроса. Это
значит, что до планирования экспериментов каждый из специа
листов должен высказать мнение о 'Степени значимости рассмат-
риваемых факторов или о влиянии их на выходное качество про-
цесса. Естественно, что это мнение должно базироваться не на
интуиции и предположениях опрашиваемого лица, а на его лич-
ном опыте и на извест-
Рис. 3. 4. Диаграмма !ра1ижиранюи значимых
факторов
ной ему априорной ин-
формации. Может пока-
заться, что такого рода
опрос ничего не вносит
в расчет, кроме субъек-
тивных оценок. Однако
обобщение нескольких,
даже субъективных оце-
нок специалистов данной
области знаний порой го-
раздо ближе к истине,
чем методика, лишенная
физической сути. При этом целесообразно использовать ранго-
вый метод формализации при отборе факторов. Суть его можно
показать на примере.
Допустим, инженер, планирующий эксперимент, подготовил
исходные данные и программу в виде матрицы испытаний. При
этом факторы были расположены в порядке их предполагаемой
значимости, которая определяется степенью влияния каждого из
факторов на исследуемый процесс. В итоге получена строка ис-
ходных данных, характеризующих «вход»:
*1, %2, *3, *4, *5, Хб, *7- I
Однако для объективности был произведен опрос, при кото-
ром четыре специалиста независимо друг от друга представили
свои данные. Результаты опроса сведены в табл. 3. 8.
Таблица 3.8
ному анализу.
Оценку однородности или противоречивости во мнениях спе-
циалистов можно провести с помощью F-критерия.
74
Если полученное значение критерия не входит в зону F-pac-
пределения, то это значит, что мнения специалистов о рангах
разноречивы.
Степень согласованности результатов опроса может быть так-
же проверена с помощью коэффициента конкордации [2], вычис-
ляемого по формуле
т2 (л3 — л)
где S — сумма квадратов отклонений суммы рангов от среднего
значения;
т — количество опрошенных специалистов.
В математической статистике существует много способов опре-
деления критериев значимости, но не всегда они удовлетворяют
экспериментаторов, так как некоторые из них не имеют четкой
связи с физической интерпретацией задачи. В этом отношении
более приемлемыми следует считать методы дисперсионного ана-
лиза.
Если получен вывод о несогласованности во мнениях специа-
листов, то можно продолжить исследование о рангах. С этой
целью построим диаграмму, которая, собственно, и дает ответ
на поставленный вопрос. Для такой цели можно использовать
обычную балльную систему, при которой за «первое» место дает-
ся количество баллов, равное числу факторов \п. За «второе» мес-
то— количество баллов, равное (п—1), и т. д. При построении
диаграммы по оси ординат откладывается сумма полученных бал-
лов, деленная на число специалистов. Тогда на оси абсцисс по-
лучаем собственно порядок значимости факторов. В нашем слу-
чае (табл. 3. 8) это
Хь х2, Х3, Х5, х4, х7, х6.
Диаграмма ранжировки показана на рис. 3. 4.
Иногда специалисты, участвующие в опросе, дополняют пред-
ставленный перечень факторов или исключают некоторые из них.
В этом случае задача решается аналогичным образом. При этом
обработка и анализ результатов опроса могут вестись с учетом
условия рандомизации или без него. Уместно заметить, что ран-
домизация порядка представления результатов снижает ошибку
и безусловно дает более точный результат.
После этих сравнительно простых операций может быть приня-
то решение о составе значимых факторов, что является важным
условием для обоснования плана испытаний.
При машинных методах обработки результатов испытаний
для ранжировки факторов могут использоваться частные мно-
жественные соотношения, характеризующие корреляционную
связь между каждым входным фактором и выходным качеством.
Такого рода автоматизированная ранжировка факторов х по сте-
75
пени «очищенной» тесноты связи с характеристикой у может 'про-
изводиться следующим образом.
1. Определяется матрица для множественных корреляционных
отношений вада табл. 3. 9.
ул1 Л1л]
Таблица 3.9
Xi Х2 Хз Xn У
*1 1 Т)г г 'Х.Х2 ^XiX3 Vy
*2 ^2*1 1 ^х2х3 ^xn ^y
Хз ^XzXi 1 ^8y
Хп 4х» 1 Чу
У ^ух2 1
2. На основании этой матрицы находят аналитические выра-
жения для yi и у:
У{= Л1 + • • • +
У = bo + + • • *• + bkXk +... + bnxn,
где х. —факторы, от .которых зависят yi,
3. Определяются частные корреляционные отношения по фор-
муле
b\ + • • • + bkbkaxk
у ......... /- •
4. Ранжировка факторов проводится по степени распределе-
ния корреляционного отношения в интервале от нуля до единицы:
0<^ <1.
'yL у
Недостатком этого метода «следует считать его сложность и
чувствительность к объему информации.
Оба описанных метода строятся практически независимо один
от другого. Однако только метод экспертных оценок, базирую-
щийся на знании физики процессов, опыте экспертов и априорной
информации, может объективно вводить в планы конкретные фак-
торы. Метод 'статистических оценок, в свою очередь, позволяет
исключать из них малозначимые. Следовательно, оба метода не
только не исключают, а взаимно дополняют друг друга. Практи-
чески оба метода устанавливают, при каком составе факторов
модель точнее соответствует экспериментальным данным.
76
Поэтому при выборе состава и ранга значимых факторов це-
лесообразно использование о(боих методов с тем лишь различием,
что метод опроса применяется при выборе состава и ранга зна-
чимых факторов, а метод корреляционных отношений — для их
последующей ранжировки машинными методами при обработке
результатов испытаний.
Наряду с этим необходима проверка значимости коэффициен-
тов модели. В некоторых случаях она имеет, прямое отношение
к оценке значимости самих факторов, их линейных эффектов.
Это наблюдается в тех случаях, когда при проверке значимости
коэффициентов модели некоторые из них оказались незначимы-
ми. Причиной этому мог оказаться малозначимый эффект от
фактора, который по ошибке был включен в эксперимент. В ко-
нечном итоге,, если установленная модель достоверна, незначимые
факторы должны иметь коэффициенты, 'близкие к нулю.
Произведения коэффициентов модели на независимые пере-
менные и их взаимодействия не всегда позволяют установить ко-
личественное влияние и направленность каждого из факторов на
исследуемый процесс. В некотором смысле точное решение этой
задачи дает ортогональное планирование. В таком случае коэф-
фициенты регрессии рассчитываются по формулам
1 1 *
Ортогональные планы обеспечивают независимость коэффи-
циентов и их оценок, что весьма важно для практики. Особенно
это желательно при вводе новых выявленных факторов или при
исключении из эксперимента малозначимых. Условие ортогональ-
ности имеет вид
w
Sxwx^=° ПРИ
N
2xw = 0 ПРИ i=j-
1
При выполнении указанных условий дисперсии оценок мини-
мальны и равны между собой.
Определение значимости коэффициентов модели имеет смысл
до проведения испытаний, так как отсеивание хотя бы одного из
них приводит к значительному упрощению экспериментальной
программы. В тех случаях, когда проводится несколько серий
испытаний, полезным может оказаться метод, по которому о пред-
полагаемой значимости факторов судят до эксперимента и про-
веряют величину и направленность эффекта после обработки
первичных данных. Если совпадения нет даже в направленности
эффекта, то этот фактор из дальнейшей программы исключается,
как не соответствующий физической сути исследуемого процесса.
77
Новая математическая модель строится исходя из этой предпо-
сылки. Испытания продолжаются. Если окажется, что на сходи-
мости экспериментальных «и теоретических данных решение об
отсеивании факторов не отразилось, принятое решение остается
в силе. Если же это привело к нежелательным последствиям, тог-
да исключенный из программы фактор вновь включается в экспе-
римент. Операции по -контролю значимости факторов в конечном
итоге могут быть автоматизированы.
Методы проверки значимости коэффициентов регрессии обще-
известны [2] и их проведение не представляет особой сложности.
Для оценки адекватности модели обычно пользуются диспер-
сионным отношением в виде критерия Фишера
где
лг w
2 у»)3 2(*- у»)3
.
у ЛГ— 1 и (N— п) — 1
При этом под характеристикой г/о понимается 'математическое
ожидание, а под yi — расчетные значения переменной у.
Оценка адекватности модели необходима для проверки соот-
ветствия результатов испытаний полученной математической
модели. Если модель адекватна, может проводиться дальнейшее
исследование поверхности отклика к оптимизация ее параметров.
Причины неадекватности модели могут заключаться также в не-
удачном выборе интервалов варьирования факторов в сторону их
уменьшения. Модель может быть неадекватна, если при нулевом
значении параметра оптимизации сразу оказалась достигнутой
экстремальная область.
Итак, в случае неадекватности модели требуется повторить
эксперименты с измененными интервалами варьирования. Для
сложных технических систем это нежелательно. Единственным в
настоящее время выходом, исключающим ошибки подобного ро-
да, является, на наш взгляд, фиктивная реализация разработан-
ного плана на ЭЦВМ с помощью результатов испытаний систем—
аналогов. Такая «гарантия» адекватности модели, строго говоря,
является условной, но практически такая мера всегда будет
оправданной.
Физически сходимость оценок адекватности разрабатываемой
и аналоговой моделей можно объяснить тем, что разработка но-
вых систем, как правило, ведется в направлении модернизации
и совершенствования «старых» проектов. Вследствие этого интер-
валы варьирования основных физических параметров, определя-
ющих сам процесс, могут быть очень близкими, хотя основные их
уровни различны.
78
§ 5. ПАССИВНЫЙ И АКТИВНЫЙ ЭКСПЕРИМЕНТ ПРИ ОТРАБОТКЕ
СИСТЕМ И ЭЛЕМЕНТОВ
В ряде случаев, когда экспериментальная отработка какой-
либо системы ведется методами эмпирического поиска, отдел
надежности может находиться в положении «пассивного» наблю-
дателя, обрабатывающего результаты испытаний, но не вмешива-
ющегося активно в эксперимент, в частности, в разборку прог-
рамм испытаний. Так бывает, например, при выборе номинальных
значений некоторых конструктивных и технологических характе-
ристик агрегатов, при оценке предельных значений основных па-
раметров, их допусков и разбросов. Примером пассивного экспе-
римента можно назвать гидравлические проливки камер сгора-
ния с целью определения перепадов давлений по охлаждающему
тракту, форсуночной головке и т. д.
Пассивный эксперимент проводится при отсутствии достаточ-
но точных данных о функциональных связях между элементами
системы, когда экспериментатор фактически «ощупью» находит
один из возможных путей обеспечения работоспособности проект-
ного варианта системы. При этом невозможно оценить, какой из
путей обеспечения заданных эксплуатационных показателей явля-
ется оптимальным. Для решения этой задачи методами эмпири-
ческого поиска необходимо выполнить большой объем экспери-
ментальных работ. Сократить их количество можно, если извест-
ны функциональные связи динамических характеристик системы
или математическая модель исследуемого процесса. В данном
случае экспериментатор может использовать методы математи-
ческой статистики и вычислительной техники, включая математи-
ческое программирование. Однако при пассивном эксперименте
невозможно заранее предвидеть результат.
При осуществлении активного эксперимента появляются воз-
можности для управления им. При этом проверяется, насколько
точно результаты испытаний подтверждают теоретические дан-
ные, полученные путем оптимизации математической модели ре-
ального физического процесса. В этом собственно и заключается
принципиальное отличие методов ведения пассивного и активного
экспериментов.
Однако принципиальная их оценка требует критического под-
хода к статистическим методам планирования экспериментов во-
обще. До обработки экспериментальных данных физический про-
цесс практически не учитывается. Один и тот же план полного
факторного эксперимента, например, с четырьмя независимыми
переменными х2, *з, *4 и двумя уровнями варьирования (план
типа 24) можно применить в равной мере как к ЖРД, так и к ра-
диоэлектронному устройству. Некоторая физическая особенность
процесса может учитываться только при выборе генерирующих
соотношений дробного факторного плана. Однако этот выбор в
большей мере процесс субъективный, чем объективный, а потому
79
и здесь не исключаются ошибки. То же можно сказать и о боль-
шинстве других статистических методов планирования экспери-
ментов.
Если отсутствует или не учитывается априорная информация,
нельзя создать достоверные планы, отражающие физическую
суть процессов. Об объективности методов можно говорить толь-
ко при наличии экспериментальных данных, с помощью которых
описывают предварительно математическую модель процесса.
Объективные планы могут строиться только на основании ее ана-
лиза. В итоге можно ставить вопрос о .разработке метода плани-
рования испытаний с целью исследования сложных физических
процессов, учитывающего на начальном этапе априорную, а за-
тем апостериорную информацию. Суть метода заключается в том,
что при разработке конкретного плана применяется информация
не только о составе и рангах значимых факторов (результаты
экспертных оценок), а главное, априорная модель процесса
ув=Лр).
Значения уа устанавливаются по результатам испытаний дви-
гателя -пр ототи п а.
Отличительная особенность и достоинство этого метода—ис-
пользование при разработке нового плана математической моде-
ли предшествующего проекта. Это привносит в математическую
структуру плана физические особенности исследуемого процесса
по конкретной системе и дополняет объем используемой инфор-
мации, которая на начальных этапах экспериментальных работ
может быть заимствована у аналоговых систем. Планирование
активного эксперимента символизирует переход от априорной ин-
формации к апостериорной при условии моделирования и после-
дующей оптимизации физических процессов.
В сооответствии с этим предлагается поэтапный метод плани-
рования, основанный на исследовании математических моделей
процессов. На первом этапе планирования модель принимается
априорной и может задаваться в виде соответствующих коэффи-
циентов (частных производных характеристик системы) для не-
которого состава значимых факторов, определяющих работоспо-
собность существующей аналоговой модели. Планирование мо-
жет вестись методом крутого восхождения по поверхности откли-
ка. Достаточно полно этот метод изложен в работах (2, 47]. Дос-
тоинства этого метода — малый объем экспериментов для реали-
зации оптимальных планов, а также -его преемственность при
разработке программ испытаний сложных технических систем с
точки зрения удобства интервального варьирования независимых
переменных.
Количество испытаний первого этапа принимается исходя из
условия
Па “Ь 1»
где па — количество значимых факторов априорной модели. .
80
Исходя из математического анализа моделей можно заклю-
чить, что достаточно точное описание ряда физических процессов
может быть основано на объеме информации, соответствующем
зависимости
N > 6л.
На данном этапе реальный интервал >и шаг варьирования сле-
дует задавать в относительных величинах, количественно соот-
ветствующих уровням варьирования факторов априорной модели.
Второму, апостериорному этапу планирования предшествует
реализация плана .первого этапа, обработка результатов испы-
таний, уточнение апостериорной модели в виде коэффициентов
репрессии и состава значимых факторов. При этом необходимо
помнить, что объем априорной информации на первом этапе зна-
чительно превышает апостериорную, в .результате чего может
происходить как бы «поглощение» информацией результатов ис-
пытаний первого этапа. Если окажется, что результаты двух ви-
дов информации несовместимы между собой или -существенно
отличается состав значимых факторов, то априорные данные
исключаются вообще как малодостоверные.
При реализации планов каждого этапа порядок проведения
испытаний устанавливается с учетом ограничений на рандомиза-
цию. Испытания ведутся в последовательности, определяемой с
помощью таблицы случайных чисел или путем -бросания монеты
(«герб» — «решетка»).
В принципе предложенное поэтапное планирование отработки
сложных технических систем может вестись и на основе дробных
факторных планов, D-оптимального планирования и других ста-
тистических методов.
Подобного рода план для некоторого числа факторов п может
быть схематично представлен в виде табл. 3. 10. Вполне очевид-
но, что разработка такого плана может не ограничиваться двумя
этапами, но дальнейшее планирование принципиальных труднос-
тей не вызывает, так как ведется обычными методами.
§ 6. МЕТОДЫ РЕШЕНИЯ МАТЕМАТИЧЕСКИХ МОДЕЛЕЙ СЛОЖНЫХ
ПРОЦЕССОВ
Этапы планирования испытаний завершаются реализацией
разрабатываемых программ, в результате чего накапливается
экспериментальный материал для построения математических мо-
делей исследуемых процессов. Исходные данные для расчета
удобно представлять в виде матриц исходных данных X и векто-
ров У:
•^11-^21^31 • • •
•^12-^22-^32 * * * *^Л2
X1N X2N X3N • • • XnN
; у = У;2
У1
yN
81
Априорная модель *1
Коэффициент модели B'i
Основной уровень
Верхний уровень 4-
Нижний уровень —
Интервал варьирования Д1
Шаг варьирования д,в;
Планируемые испытания I этапа: 4 1 7 #1 +AjBi
Таблица 3.10
Состав значимых факторов Выходное качество
Х2 х3 .... x'i .... x'n
в2 В'3 .... B'i B'n к
U2 *3 .... at an
+ + .... + .... 4-
— — — .... —
А2 Az .... дл
д2я2 Аз^з .... д(в; ^nB'n
.... у\
00
N1
Коэффициент уточненной модели В1
Уточненный состав факторов *1
Уточнение шага Д1В1
Планирование испытаний II этапа:
3
8
5 fl-|-3AiZ?i
1 a4-4AiBi
6 4 д4~5А15]
N a4-^AlB]
Ял+^]АЛВЛ - Уых
в2 Вз .... Bi .... Bn
x<i хг xi .... Хп
А2^2 А3В3 .... Wh .... ЬпВп
Уз Уз У5 Ул Уб yN
где каждая строка характеризует эксперимент или группу испы-
таний, провидимых практически в стабильных условиях.
В конечном итоге все .виды моделей (3. 1), (3. 5), (3. 6) и (3. 7)
могут быть приведены к линейному виду путем соответствующе-
го преобразования исходной информации:
1) линейная модель
У = bo + + 62х2 + • • • + Ьпхп + е;
2) нелинейная модель '
у = ьо + ьгхг +... + bnxn + bnx2 + d13x*+ binx2n +Ь21х1х2+... + е
3) степенная модель
In у == In aQ + aY In xt + a2 In x2 + ... + an In xn + e;
4) экспоненциальная модель
In у = In aQ + Xi In aL + x2 In a2 + ... + xn In an + e.
Решение для каждого вида моделей может быть получено в
том случае, когда число членов линейной модели 7? удовлетворяет
в крайнем случае хотя бы условию обеспечения квадратной мат-
рицы X, т. е.
N>R + -\.
Для линейной, степенной и экспоненциальной моделей R = n.
Самым сложным с точки зрения реализации является решение
для нелинейной модели, так как в этом случае требуется наи-
большее количество испытаний при одном и том же составе зна-
чимых факторов. Это объясняется наличием не только линейных
членов, но их взаимодействий и степенных показателей. Причем,
чем выше степень полинома, описывающего процесс, тем больше
объем реализаций N. Однако исследования показывают, что при
моделировании сложных физических процессов достаточным бы-
вает использование полинома второй степени 1[47]. Если же речь
идет о локальной зоне поверхности отклика или об исследовании
ее экстремума, как правило, можно ограничиться плоскостью.
Количество членов для полинома второй степени показано
в табл. 3. 11.
Из практики следует, что количество испытаний, необходи-
мое для решения нелинейной модели, удовлетворяет условию
Л>(5н-6)п.
Во всех остальных рассмотренных выше случаях справедли-
во условие
Af>(n+1).
Исходя из этого может быть установлен некоторый нижний
предел для объема испытаний, необходимый для описания мате-
матической модели исследуемого процесса.
84
Таблица 3,11
п ^0 bi til Ьц Е
5 1 5 5 10 21
6 1 6 6 15 28
7 1 7 7 21 36
8 1 8 8 28 45
9 1 9 9 36 57
10 1 10 10 45 66
Здесь bi — количество линейных членов; Ьц — количество
квадратичных членов; Ьц— количество членов взаимодействий;
/’о — количество фиктивных переменных; п — количество фак- •
торов.
Обработка результатов испытаний ведется, как правило, ме-
тодом наименьших квадратов. При числе факторов, большем 4ч-
5, расчет коэффициентов следует вести на машине.. В матричной
записи решение можно представить в следующем порядке.
1. Трансформируется матрица исходных данных — X*.
2. Производится перемножение матриц — XX*.
3. Обращается матрица 2— (XX*)-1.
4. Перемножается трансформируемая матрица X* на вектор
Г-Х*Г.
5. Перемножаются матрицы 3 и 4— (XX*)-1 (Х*У).
Конечное выражение и представляет вектор-столбец коэффи-
циентов линейных уравнений.
Статистический анализ зависимостей 4 и 5 /показал; что при ре-
шении задач на ЭЦВМ могут встречаться некоторые трудности,
например, при обращении матриц определитель может оказаться
близким к нулю или при перемножении матриц получаются
большие числа, которые не могут быть записаны в ячейке маши-
ны. Поэтому при разработке вычислительной программы целесо-
образно предусмотреть также машинный способ выбора масшта-
ба исходной информации.
В итоге алгоритм вычислительной программы может быть
представлен следующим образом.
1. Определение состава значимых факторов, ввод исходных
данных и ранжировка независимых переменных.
2. Решение моделей: линейной, нелинейной, степенной и экс-
поненциальной. Определение коэффициентов линейных урав-
нений.
3. Выбор масштаба исходной информации и проверка ее при-
надлежности к одной генеральной совокупности (исключение экс-
периментальных данных, вышедших за пределы ±2о).
85
4. Проверка значимости коэффициентов регрессии и адекват-
ности моделей.
Для дальнейших исследований принимается тот вид модели,
который в лучшей мере удовлетворяет F-критерию значимости
или имеет минимальную ошибку линейной аппроксимации.
§ 7. ПРОГНОЗИРОВАНИЕ РЕЗУЛЬТАТОВ ИСПЫТАНИЙ
Прогнозирование — это элемент динамического .программиро-
вания. Оно используется для оценки возможного технического
состояния систем при наиболее ответственных испытаниях, на-
пример, накануне вывода космического корабля на орбиту или
при стендовых испытаниях ступеней и т. п. Основным средством
прогнозирования результатов испытаний в настоящее время сле-
дует считать методы, основанные на описании математических
моделей сложных физических процессов путем обобщения и об-
работки экспериментальных данных. Математический образ мо-
дели в этом случае имеет вид
у = 2 biXi + ...+z,
i=Q
где коэффициенты &г- рассматриваются как частные производные
отдельных характеристик ДУ.
Если модель с известной степенью точности (1—е) соответст-
вует исследуемому процессу, то накануне очередного ответствен-
ного испытания в нее могут быть введены исходные данные прог-
раммы планируемых экспериментальных работ. Соответственно
с заданной точностью может быть получен ответ — прогноз. Это
дает возможность конструктору и экспериментатору запрограм-
мировать модель на ЭЦВМ и в случае необходимости проводить
«эксперименты» на вычислительной машине до их натурной реали-
зации и таким образом предвидеть ожидаемый результат. В за-
висимости от вычислительной программы прогноз может вестись
по выходным динамическим характеристикам системы или путем
оценки вероятности обеспечения ее исправного состояния. Рас-
смотренные выше методы построения математических моделей
процессов путем обработки априорной информации служат прак-
тически в равной мере как задачам планирования, так и прогно-
зирования результатов испытаний.
Одним из реальных примеров прогнозирования может слу-
жить модель «Марк-7А» [80], используемая для прогнозирования
результатов планируемых летных испытаний ДУ первой ступени
ракеты-носителя «Сатурн-5». Описание этой модели проводилось
по результатам стендовых и летных испытаний ДУ в составе сту-
пеней S-1C, приемочных испытаний двигателей F-1 в составе связ-
ки на технологической ступени и т. п. Схема модели «Марк-7А»
предусматривает учет влияния входных факторов и их предель-
ных отклонений на реальный физический процесс. В целом вы-
86
числительная программа включает модель ДУ, модель изменения
полетной массы ступени ракеты по мере расходования компонентов
топлива из баков и модель внешнетраекторных измерений. Резуль-
Рис. 3.5. Блок-схема вычислительной
программы та основе математической
модели лвделдя
таты расчета в конечном итоге используются для определения
предельных отклонений параметров траектории полета на конеч-
ном участке. По мере поступления апостериорных данных коэф-
фициенты ’влияния характеристик ДУ могут уточняться. Кроме
того, с помощью 'программы модели «Марк-7А» для различных
полетных ситуаций могут вы-
числяться около 250 парамет-
ров ДУ.
Вычислительная программа
учитывает влияние и неста-
бильность тяги, удельной тяги,
коэффициентов соотношения
компонентов топлива, давле-
ния наддува, массы заправ-
ленных баков, температуры и
удельной массы компонентов
топлива и т. п. Многие из ука-
занных параметров устанав-
ливаются с учетом конкретной
даты планируемого испытания,
реальных настроечных и весо-
вых характеристик. С этой
целью в полной мере исполь-
зуются телеизмерения при кон-
трольно-технических, приемочных испытаниях ДУ.
С точки зрения технологических возможностей одни и те же
вычислительные-программы и математические модели можно ис-
пользовать как для 'прогнозирования результатов испытаний, мо-
делирования функционирования ДУ, так и для последующего
анализа результатов реализованного эксперимента.
В итоге может быть рассмотрена скелетная схема универсаль-
ной математической модели изделия, (представленная на рис. 3. 5.
Как видно из схемы, модель имеет два «входа» (для параметров
ДУ и весовых характеристик ступени). Модель не ограничивает-
ся функциональным «выходом» ДУ, а позволяет определять сте-
пень влияния входных параметров ДУ, весовых характеристик
и программы полета изделия на внешнетраекторные отклонения.
В случае необходимости задача может ограничиваться только
определением выходных характеристик ДУ. Такая модель содер-
жит элементы, характерные практически для любой ракетной
системы. Однако в каждом конкретном случае вычислительная
программа должна обладать элементами и свойствами, харак-
терными только данному проекту. Представленный метод прогно-
зирования имеет важное практическое значение, так как позволяет
сочетать математическую модель «прогноза» с методами фактор-
87
него анализу. Это значительно расширяет методологическую пос-
тановку задач по прогнозированию, рассмотренных в некоторых
работах А. Г. Ивахненко [25].
Немаловажно решение задач прогнозирования и .при отработ-
ке сложных технических систем. Специфика этих задач состоит
в том, что модель процесса постоянно совершенствуется от одной
экспериментальной программы к другой. А это значит, что тща-
тельное моделирование промежуточных вариантов проекта, их
исследование позволяет «экспериментировать» с помощью вычис-
лительных программ на ЭЦВМ, а не проведением натурных
испытаний. Прежде чем отказаться от какого-либо конструктив-
ного решения в ’пользу другого, оба они должны быть исследо-
ваны путем моделирования. При отработке планирование и реа-
лизация экспериментов должны проводиться в количествах, необ-
ходимых для описания математической модели физического про-
цесса и для проведения контрольных испытаний, желательно, при
экстремальных сочетаниях значимых факторов. Во всех осталь-
ных случаях исследовать процесс и определять характеристики
системы следует путем прогнозирования и математического мо-
делирования. Только такие планы позволяют оптимально сокра-
тить количество испытаний.
Как следует из анализа метода крутого восхождения на по-
верхности отклика и других статистических методов планирова-
ния испытаний, объем экспериментальных работ, необходимый
для описания математических моделей процессов, вполне реалис-
тичен. Обычно он не превышает нескольких десятков испытаний,
а в ряде случаев при числе факторов 7 или 8 решение задачи
может быть сведено к 15-е—20 испытаниям. На начальных этапах
отработки сложных технических систем прогнозирование может
быть сведено к построению приближенной модели. Это, в свою
очередь, также снижает требования к объему натурных испы-
таний.
§ 8. О ФАКТОРНЫХ ПЛАНАХ С КОЛИЧЕСТВОМ УРОВНЕЙ
ВАРЬИРОВАНИЯ БОЛЬШЕ ДВУХ
В существующей литературе по математической статистике
достаточно полно рассмотрены планы типа 2П. Однако имеется
широкий круг задач, связанных с испытаниями и отработкой
сложных технических систем, для которых 'количество уровней
варьирования d может быть больше двух. Такие планы носят
условное обозначение rfn, где d может быть любым целым числом.
В нашем конкретном случае d>2.
Наибольший практический интерес представляют планы типа
Зп. Эти планы не являются каким-либо исключением в теории
испытаний, так как составляют неотъемлемую часть программ
отработки для большинства технических систем.
Практическая обусловленность рассматриваемых планов объ-
ясняется сложностью самих систем, заданным диапазоном варь-
88
ирования и физическими особенностями исследуемых процессов.
Так, например, для регулируемых ЖРД существуют, как прави-
ло, три основных режима работы — номинальный, форсированный
и дросселированный. Естественно, что эти режимы для реальных
изделий являются фактически заданными уровнями варьирова-
ния основных параметров. Некоторые из них отличаются особой
широтой. В их числе применительно к ЖРД следует назвать тем-
пературы элементов конструкции и компонентов топлива. Для
них диапазон варьирования может составлять десятки и даже
сотни градусов. Это ведет к тому, что при исследовании всего ди-
апазона изменения факторов иногда изменяется сам физический
процесс. Последнее легко показать на примере.
При низких значениях температур топлива и элементов кон-
струкции запуск двигателя, как правило, происходит в условиях
нормального течения жидкости по 'магистральным каналам, че-
рез форсунки камеры сгорания и газогенератора. При высоких
температурах картина иногда резко изменяется. Естественно, что
характеристики протекания процессов запуска в обоих случаях
отличаются одна от другой. Этим явлением характеризуются пре-
дельные уровни варьирования факторов. Внутри рассматривае-
мого температурного диапазона следует ожидать протекание про-
межуточных процессов.
Следовательно, если для сложной технической системы, имею-
щей широкий диапазон варьирования факторов, ограничиться
только двумя предельными уровнями, то их смена может сопро-
вождаться изменением физических процессов. В таком случае
последние не всегда удается моделировать. Если это и возможно,
то только путем ввода новых факторов, характеризующих смены
физических констант. Более целесообразно ввести дополнитель-
ные уровни варьирования.
Таким образом, использование факторных планов типа dn при
исследовании сложных физических процессов является практичес-
кой необходимостью.
В некоторой мере планы типа Зп уже исследованы [72]. Раз-
работан метод их дробления на блоки. Планы 4П исследованы
очень мало, особенно с‘точки зрения практического использо-
вания.
Следует отметить, что принятые в математической статистике
методы обоснования факторных планов типа dn с числом уровней
варьирования 'больше двух при реализации встречают значитель-
ные трудности, особенно когда речь идет об испытаниях сложных
технических систем, в том числе и ЖРД. Опыт показывает, что
дробление планов типа Зп на блоки при числе факторов п>5 тре-
бует также чрезмерного объема экспериментальных работ, а до-
полнительное дробление планов на блоки резко снижает досто-
верность полученных результатов.
Сравнение по числу экспериментов планов типа Зп и их дроб-
ных реплик.с планами типа 2П представлено в табл. 3. 12.
89
Таблица 3.12
п 1 2 3 4 5 6 7
2п 2 4 8 16 32 64 128
3" 3 9 27 81 143 729 2187
З"-1 1 3 9 27 81 243 729
3п-2 1 9 27 81 243
2” + 2Л 4 8 16 32 64 128 256
2п+2п+2п 6 12 24 48 96 192 384
Из таблицы видно, что в сравнении с планами типа 2П для
полного факторного эксперимента Зп количество испытаний на
порядок больше. Матрица испытаний для плана Зп показана в
табл. 3. 13. При этом три уровня варьирования: верхний, нижний
и номинальный обозначены соответственно через ( + ), (—) и (0).
условий испытаний данного плана. Несмотря на сравнительно
малое число варьируемых факторов, она отражает всю его слож-
ность с точки зрения реализации. Поэтому экспериментаторы и
инженеры вынуждены искать более приемлемые для практики
пути решения подобных задач.
Хотя имеется различие в уровнях варьирования факторов пла-
ны типа Зп в принципе можно сравнить с планами 2П. Для этой
цели применимы следующие три схемы: а, б и а (рис. 3.6).
Схема а представляет факторный эксперимент типа Зп.
Схема б символизирует тот же факторный эксперимент Зп, но
при этом делается попытка три уровня варьирования охватить
с помощью планов типа 2П. Последний назовем комбинирован-
ным с обозначением (2П + 2П), в отличие от плана 2Х271, являю-
щегося двойной реализацией плана типа 2П.
Наряду с этим может быть рассмотрена схема в комбиниро-
ванного плана типа (2П + 2П + 2П).
Матрицы испытаний планов схем б и в представлены в виде
таблиц. Табл. 3.14 характеризуют план 2П с уровнями варьирова-
90
ния ( + ) и (—); табл. 3. 15 — матрицу того же плана с уровнями
(0) и (—); табл. 3. 16 — матрицу плана с уровнями ( + ) и (0).
Рис. 3. 6. Схемы планов факгго|р1НЫ1х экспериментов типа Зп
Сравнивая комбинированные (планы типов (2П + 2П) и (2П +
+ 2П + 2П) с планом Зп (см. табл. 3>. 12), а также планы (23 + 23)
и (23 + 23 + 23) с планом З3, можно отметить следующую особен-
ность. По (количеству испытаний 'комбинированные планы значи-
тельно экономичнее планов Зп, но они не учитывают сочетания
всех предельных уровней для заданного числа факторов (экспе-
рименты № 6, 8, 12, 16, 20 и 22 в табл. 3. 13).
Рассмотрим, насколько необходимо учитывать данные соче-
тания уровней варьирования. Очевидно, это зависит от условия
задачи. С этой целью целесообразно рассмотреть новую перемен-
ную— условную вероятность одновременного наблюдения соче-
таний всех предельных уровней варьирования.
Анализируя различные варианты решения частной задачи,
легко заметить следующее. Если распределения уровней факто-
ров равновероятные, то программа испытаний должна учитывать
все предельные сочетания, предусмотренные планом Зп. Но сам
по себе такой случай — явление редкое. Чаще предельные уровни
следуют нормальному закону. Тогда сочетания всех предельных
уровней для п факторов — события маловероятные, что дает нам
основание рекомендовать комбинированные планы (2П + 2П) и
(2П + 2П + 2П) вместо планов с количеством уровней варьирования
больше двух.
91
Уместиб также заметить, что решение практических задач,
охватывающее п факторов, не ставит условием варьирования
всех переменных при одинаковом количестве уровней. Так, на-
пример, если требуется оценить запуск двигателя в довольно ши-
роком температурном диапазоне, например при четырех уровнях
варьирования, то вовсе нет необходимости назначать четыре
уровня и для других значимых факторов: входного давления, вре-
мени вступления в работу элементов автоматики и других. Более
того, дробление полного диапазона варьирования этих факторов
на четыре уровня (три зоны) может привести к тому, что коэф-
фициенты регрессии в линейных уравнениях окажутся незначи-
мыми, а модель — неадекватна.
Итак, возникает новая задача — построение комбинированных
планов с переменным числом уровней варьирования. Если п\ фак-
торов имеет три уровня, а П2 — всего два, тогда полный фактор-
ный эксперимент такого плана будет характеризоваться числом
испытаний М=3Л1«2Л2, где И14-И2=п. О количестве 'испытаний
для планов типа 3Л1 • 2Л2 можно судить по табл. 3. 17.
Таблица 3.17
П2 721
1 2 3 4 5 6 7
0 3 9 27 81 243 729 2187
1 6 18 54 162 486 1458 4374
2 12 . 36 108 324 972 2916
3 24 72 216 648 1944
4 48 144 432 1296
5 96 288 864
6 192 576 *
Ломаная линия по диагонали отсекает планы с одинаковым
числом факторов (п,1 + п2=7).
Из рассмотрения табл. 3. 12 и 3. 17 -следует, что план типа
ЗЛ1 . значительно экономичнее планов Зп. При этом количество
испытаний тем меньше, чем меньше факторов -с тремя уровнями
варьирования.
В пределе при п2—*0 -планы типа 3Л1 • 2Л* приближаются к
планам Зп и, наоборот, при п\—^0 они -стремятся к ‘планам 2П.
При наличии всех трех факторов план типа З1 • 22, в отличие
от плана З3, характеризуется 12 экспериментами вместо 27. Мат-
92
рица этого плана приведена в табл. 3. 18 (сравните ее с матрицей
плана типа З3 в табл. 3. 13).
Таблица 3J8
ЛГ=31'Х22 1 2 3 4 5 6 7 8 9 10 11 12
0 0 0 0 + + + + — — — —
*2 + + — — + + — — + + — —
*3 + — — — + — + — + —
Определяющий контраст такого плана будет
У = X3 (Х3Х3).
Разбиение -плана 31Х22 на 'блоки приводит к тому, что даже
для полуреплики линейные эффекты являются неразличимыми.
Поэтому такого рода планирование в целом неудовлетворительно.
Следовательно, -план 3*Х22 требует «реализации всех эксперимен-
тов (N = 12). Аналогичным образом можно проанализировать
планы (31Х23); (З1 Х24) и т. п.
С точки зрения практического 'использования планов типа
3Я1 X 2я’ в ряде случаев целесообразными также могут оказаться
комбинированные планы. Схемы их реализации показаны на
рис. 3. 7.
Однако следует признать, что комбинированные планы обла-
дают недостатком, вследствие которого исключаются предельные
сочетания уровней варьирования всех значимых факторов. В ряде
случаев это недопустимо, например, при реализации программ
испытаний, согласно которым проверяется работоспособность
ЖРД при предельных значениях внешних и внутренних факторов.
Реализация планов типа 3я* X 2я’ может происходить и по
иному пути, который представляется наиболее перспективным.
При этом каждая группа факторов п\ и п2, являясь независимой
одна от другой, определяется программой, требующей для своей
реализации условное количество экспериментов и Af2. Соот-
ветственно = 3я* и N2 = 2п\ а общее количество испытаний
М=Л^2.
По аналогии с планами типа 2П и Зп, могут быть предложены
дробные планы с кратностью реплик k\ и k2:
N= 3n'~kl X 2ni~ki.
С целью их иллюстрации рассмотрим некоторый план типа
З1^3-1 (с одной полурепликой), учитывающий влияние четырех
значимых факторов: Xi, х2, х3, х4, из которых один (х2) варьиру-
ется на трех уровнях («1 = 1) и три (хь х3, х4)—на двух (п2 = 3).
При этом от условного плана 23-1 реализуется блок
*1, *3, Х4, Х1Х3Х4.
93
В итоге, используя идеи построения матриц исходных данных,
изложенные ;в § 3 данной главы, мы можем перейти к составле-
нию программы испытаний комбинированного плана типа
М=31Х23~1.
Как следует из приведенной зависимости, суммарный объем
испытаний для реализации данного плана состоит из выборки
А=12. При этом условное количество экспериментов для факто-
ров с тремя и двумя уровнями варьирования соответственно со-
ставит
#1=3 и А2 = 4.
Таблица 3.19
№ по пор. № испыта- ния X Варианты испытаний подплана 2Л Y
*0 *1 *2 х4
1 7 + + — — — X, Ут.
2 11 + — — + — *3 Уи
3 9 + — — — + х< У9
4 4 + + — + + Х,Х3Х4 У4
5 12 +‘ + 0 — — Хг У12
б 3 + —— 0 + — х3 Уз
7 6 + — 0 — + Х4 Уб
8 8 ' + т 0 + + XiX3X4 Уб
9 5 + + + — — Хг У5
10 1 + — + + — х3 У1
11 10 + — + — + Х4 У10
12 2 + + + + + Х1Х3Х4 У2
Порядок проведения испытаний устанавливается с учетом
ограничения на рандомизацию в соответствии с таблицей слу-
чайных чисел.
Аналогичным образом
Рис. 3. 7. Схемы (комбинированных планов
факторных экспериментов
могут решаться задачи
и для большого количе-
ства факторов. При этом
программа соответствен-
но усложняется, но исход-
ные предпосылки остают-
ся прежними.
Если количество фак-
торов с тремя уровнями
варьирования возраста-
94
ет более трех, рекомендуется в табл. 3.19 дополнительно ввести
столбец «варианты испытаний подплана Зп». Такая формализа-
ция позволит несколько упростить способ построения программы
испытаний для данного комбинированного плана. При числе
факторов П1>2 программа испытаний может основываться на
дробных репликах подплана типа Зп*. Однако при решении прак-
тических задач рекомендуется даже самые сложные планы огра-
ничивать по числу факторов с тремя и более уровнями варьиро-
вания. В противном случае реализация такого плана за-
трудняется не только из-за чрезмерного увеличения объема
испытаний, но и с точки зрения оценки его эффективности.
Эффективность предложенных .планов, как было показано
выше, состоит в том, что решение одной и той же задачи дости-
гается при меньшем количестве затрат в сравнении с планами
типа Зп.
Все факторные планы в некотором смысле следует считать
дискретными, так как они учитывают строго фиксированные уров-
ни варьирования, при которых переход с одного уровня на дру-
гой осуществляется ступенями.
В регулируемых системах это условие неприемлемо. Экспери-
ментатора практически интересует весь рабочий диапазон изме-
нения фактора от верхнего до нижнего предела.
Используя для исследования физических процессов фактор-
ные планы типа dn, мы заранее применяем гипотезу, согласно
которой, если система работоспособна при предельных уровнях
варьирования а и б, то она работоспособна и внутри диапазона
аб. Составив модель рассматриваемого процесса, мы можем про-
вести математическое моделирование. Результаты проверяются
с помощью контрольных испытаний, которые проводятся при
промежуточных значениях диапазонов варьирования ряда основ-
ных факторов.
Количество контрольных испытаний должно выбираться в со-
ответствии с решением конкретной задачи и анализом получен-
ных данных. В ряде случаев при исследовании физических про-
цессов объем контрольных испытаний может составлять 15—е—20%
от общего количества экспериментов, принятых для определения
математической модели. Практически это означает, что если ис-
следуется модель, которая учитывает влияние семи значимых
факторов и описывается полиномом второй степени, то в соответ-
ствии с изложенным в § 6 количество испытаний Л^42. Тогда
объем контрольных испытаний будет равен примерно восьми.
Общее количество испытаний ^42 + 8=50.
Такое решение является достаточным для исследования пол-
ного диапазона изменения факторов, определяющих работоспо-
собность рассматриваемых систем. К тому же оно не требует
деления заданного диапазона варьирования факторов на беско-
нечно большое число уровней. Как правило, оно может быть огра-
ничено тремя, в очень редких случаях четырьмя уровнями.
95
§ 9. Д)БЩИЕ МЕТОДЫ ДИСПЕРСИОННОГО АНАЛИЗА,
ПРИМЕНЯЕМЫЕ ПРИ ОБРАБОТКЕ ЭКСПЕРИМЕНТАЛЬНЫХ ДАННЫХ
В процессе обработки результатов наблюдений, принадлежа-
щих к одной или разным генеральным -совокупностям, могут быть
получены несколько .выборочных -средних, характеризующихся
большим разбросом. Вопрос о том, какие выборочные средние
соответствуют действительному отклонению, решается посредст-
вом дисперсионного анализа. Математическая ‘модель, использу-
емая при этом, принимается линейной.
Рассмотрим два случая дисперсионного анализа: однофак-
торный и двухфакторный.
О дн о ф а кто р н ы й дисперсионный анализ. В ус-
ловиях проведения однофакторного эксперимента варьируется
один фактор с фиксированными уровнями. Математическая мо-
дель процесса с учетом возможных ошибок в этом случае описы-
вается уравнением вида
где уц— точечное значение выходного качества при /-м условии
и Z-м испытании;
— истинное среднее;
Xi — текущее значение фактора;
eij — возможная ошибка эксперимента.
Пределы изменения значений 1 = 1, 2, 3,... п и /=1, 2, 3,... т.
Достоверность этой модели обеспечивается в пределах выпол-
нения условий применимости регрессивного анализа.
В настоящее время математический аппарат для проведения
дисперсионного анализа разработан достаточно полно. В качест-
ве одного из удобных приемов могут быть рекомендованы схемы,
рассмотренные в работе [72]. Для проверки соответствия резуль-
татов испытаний принятой гипотезе используется F-распределе-
ние с (т—1) и (п—т) степенями свободы. В том случае,
если значение F-критерия меньше значений F(1_a);(m_1);(/I_m)>
рассматриваемая гипотеза принимается, в противном случае —
отвергается.
Значения критерия (п-т) характеризуют
собою границу критической зоны F-распределения с (т—1) и
(п—т) степенями свободы.
За границу критической зоны принимается фактически дове-
рительный предел F-раапределения при доверительной вероят-
ности а. Данное распределение не исключает и другие методы
проверок.
Исходные данные для проведения дисперсионного анализа
результатов однофакторного эксперимента удобно представить
в виде табл. 3. 20.
96
Таблица 3.20
Условия испытаний
1 2 ........................ т
*11 *21
*12 *22
*1л *2л
*/п1
*т2
хтп
Сумма
£>1 £>2
Число наблю-
дений
пт
Сам же дисперсионный анализ для рандомизированных одно-
факторных планов удобно проводить в соответствии со схемой,
представленной в табл. 3. 21.
Таблица 3.21
Источ- ник варьиро- вания Число степеней свободы Сумма квадратов отклонений Сред- ний квад- рат F-критерий
Между
услови-
ями ис-
пытаний
e=y£L_^ S" Sn(N~m)
П ni т—1 (т—1) *$£
i —1
Ошибка
экспери-
мента
_£е_<
N—т
Сумма
т— 1
— — - D2
N
4 1874
97
Под суммой (квадратов отклонений следует понимать несме-
щенные оценки дисперсий, а под средними квадратами — их от-
ношение к числу степеней свободы. При этом разность суммы
квадратов отклонений (Ss—Sn) равна несмещенной оценке дис-
персии ошибки, допускаемой при эксперименте:
S' = SB-Sa.
Если планирование однофакторного эксперимента является
блочным, математическая модель несколько видоизменяется. По-
является дополнительная переменная, учитывающая межблоч-
ный эффект. При условии осуществления полной рандомизации
испытаний внутри блоков дисперсионный анализ этой модели
аналогичен анализу двухфакторного эксперимента без учета вли-
яния взаимодействия независимых переменных. Основным урав-
нением дисперсионного анализа является выражение для суммы
квадратов отклонений, которое применительно к двухфакторному
эксперименту будет иметь вид
^2 = 4~ Sn + 5в,
где Ss —сумма квадратов отклонений между блоками.
Таблица 3.22
Источник варьирова- ния Число сте- пеней сво- боды Сумма квадратов отклонения Средний квадрат F-критерий
Между блоками п — 1 Со От II 3 1^ 1 S8 <т- 1)
л— 1 5.
Между ус- ловиями испытаний т— 1 s Sn $„(»-!)
т — 1
Ошибка экспери- мента (л— l)(m— 1) 1 э |!Lbda ~+’ 1 1 1 Л? Ю 1
(л—1)(/л—1)
Сумма N—1 N = тп 22 1=1 /=1
98
Дисперсионный анализ для рандомизированных блочных пла-
нов однофакторных экспериментов удобно проводить в соответ-
ствии с табл. 3. 22.
Д в у х фа кто р н ы й дисперсионный анализ. При
двухфакторном эксперименте варьируются два фактора на неко-
торых фиксированных уровнях. Математическая модель процесса
с учетом возможных ошибок описывается уравнением вида
У/j = Хо 4" 4“ ^a^'i‘^'2 “Н
где произведения независимых переменных на соответствующие
коэффициенты регрессии характеризуют эффекты от влияния
обоих факторов и их взаимодействие. Достоверность данной мо-
дели обеспечивается в пределах применимости регрессивного
анализа.
Однако наряду с эффектами взаимодействия не учитыва-
ются суммы от квадратов независимых переменных как малозна-
чимые члены. Схема дисперсионного двухфакторного анализа для
независимых переменных а и b показана в табл. 3. 23. При этом
количество уровней фактора а равно р, а фактора b равно d
(i='l, 2, 3,...,d; /=1, 2, 3,.., р\ m=l, 2, 3, ..., п).
Однофакторный и двухфакторный дисперсионный анализы
основаны на методе проверки гипотез и могут 'быть использованы
для качественной оценки характеристик систем с точки зрения
их соответствия заданным требованиям.
Аналогичным образом может быть предложено исследование
для трехфакторного и более эксперимента. Однако, как правило,
это практического значения не имеет. При анализе влияния на
систему значительного числа факторов целесообразно количест-
венно оценивать их влияние на выходную характеристику систе-
мы. Методика дана выше. Исследование ведется * построением
математической модели процесса.
§ 10. ПРИМЕНЕНИЕ ДИСПЕРСИОННОГО АНАЛИЗА ДЛЯ РЕШЕНИЯ
ЧАСТНЫХ ЗАДАЧ
Предположим, что из четырех вариантов корректирующих дви-
гателей космического корабля необходимо выбрать один с опти-
мальной характеристикой, определяющей летно-технические ка-
чества. Такой характеристикой может являться теплостойкость
неохлаждаемой выходной части сопла, определяющей стабиль-
ность удельного импульса, или сам импульс. Подобная задача
может решаться и в стендовых условиях, но в этом случае возни-
кает необходимость моделирования ряда внешних факторов,
таких как высокая степень разрежения окружающей среды, теп-
ловая радиация и т. п.
При известных исходных данных планируемые испытания мо-
гут характеризоваться как факторный эксперимент, при котором
от испытания к испытанию изменяется и фиксируется удельный
4*
99
о
о
Таблица 3.23
Источник варьирова- ния Число степеней свободы Сумма квадратов отклонений Средний квадрат F-критерий
Фактор а р—1 1 -I’f II co Чз 1 Sg (n — 1) pd (P-VSt
Фактор b d — 1 о =J_y/,2 Sb d— 1 Sb (n — 1) pd (d-l)St
Взаимодей- ствие ab (p-l)(d-l) у d P t П \2 П2 Sab=t22(2>,/j -~^-Sa-s» i=l j=l \m=l / §ab (p-l)(d-l) sab(n—l)pd (p-l)(d-l)S,
Ошибка pd (п — 1) d p n d p I n \ 2 i=l /=1 m=l /=1 j=l \m=}. / - pd (n— 1)
Сумма N — 1 N = pdn d p n «.-222^-w x^i;=lm=l
импульс Yij и тип двигателя Dj, где i и /=’1, 2, 3... Каждый дви-
гатель проходит 4 испытания. В итоге мы имеем факторный экс-
перимент типа 4X4 (N= 16). Решая 'вопрос об установке коррек-.
тирующих двигателей на натурном объекте, можно рассмотреть
два варианта:
1) на каждом космическом аппарате устанавливаются двига-
тели одного типа;
2) на одном аппарате по разным каналам коррекции траек-
тории полета устанавливаются двигатели различных типов.
Вполне очевидно, что при использовании первого варианта
не будут учтены особенности конкретной программы полета каж-
дого корабля, психологические особенности поведения космонав-
тов, возможный случайный маневр, предельные возмущения
и т. п. План этого варианта можно представить в виде табл. 3. 24.
Таблица 3.24 Таблица 3.25
Номер аппарата 1 2 3 4 Номер аппарата 1 2 3 4
Распределение I I I I Распределение III I IV I
типов двигателей II II II II типов двигателей II IV II IV
III III III III IV II III I
IV IV IV IV III II I III
Такой план является неэффективным, так как он не позволяет
определить результирующее влияние варьируемого фактора на
выходное качество. При этом погрешность оценки 'будет макси-
мальной.
План второго варианта размещения двигателей (составлен-
ный с учетом условия рандомизации) можно представить в виде
табл. 3. 25. При этом выполнялось условие; один тип двигателя
на одном изделии встречается только один раз.
Так как во втором случае план полностью рандомизированный,
усредняются ошибки, определяемые конструктивными особеннос-
тями носителей, аппаратов и отличием полетных программ.
Математическая модель данного плана выражается записи*
мостью
Y i ;=Хо + bDj + 8i j.
Однако уже краткий анализ обнаруживает ошибки этого ме-
тода планирования. В частности, как и при смешанном плане
(вариант 1), рандомизированный план (вариант 2) не учитыва-
ет особенностей полета всех аппаратов. Так, например, из
табл. 3.25 видно, что двигатель типа III не учтет особенностей
испытаний изделия № 2, тип I — изделия № 1, а тип II — особен-
ности изделия № 4.
Испытания изделий № 1, 2 и 4 имеют общий недостаток, за-
ключающийся в том, что типы двигателей III, П и I испытывают-
101
ся в каждом случае дважды, в то время как двигатели I, III и
II на данных изделиях не были установлены и не испытывались
совсем. И только при летных испытаниях ’изделия № 3 испытыва-
ются двигатели всех типов. Со всех точек зрения это испытание
является наиболее информативным. План испытаний, составлен-
ный пр подобию изделия № 3, является блочным, а порядок раз-
мещения двигателей всех типов на изделиях полностью рандоми-
зированным. Такой тип называется полностью рандомизирован-
ным блочным планированием. Математическая модель данного
типа выражается зависимостью для двух факторов эксперимента
Y=Xq+bjPt + bjDj + ег- j,
где — фактор, определяющий конструктивные особенности
изделий и отличие их полетных программ;
Dj — фактор, оценивающий влияние характеристик типов
двигателей;
bif bj — соответствующие коэффициенты регрессии;
ец — суммарная ошибка испытаний.
Несмотря на то, что мы назвали данный эксперимент двух-
факторным, по сути дела он является однофакторным: варьиру-
ется всего лишь один фактор—тип- двигателя.
По.этой причине взаимодействие факторов Diy Dj не рассмат-
ривается.
Допустим, были проведены испытания в соответствии с пред-
ложенным планом и получены результаты, которые в кодирован-
ном виде сведены в табл. 3. 26.
Таблица 3.26
Номер аппарата Тип двигателя Сумма
I II III IV
1 0 —1 3 4 6
2 5 —1 0 2 б
3 1 2 0 1 4
4 —2 4 —2 0 0
Сумма D( 4 4 1 7 16
4 / i
Сумма У И/ 30 22 13 21
/-1 1 1
Для вариантов типов двигателей сумма квадратов результа-
тов планирования определяется как
ST = 5^-4-22-16 = 6,
tS п "
102
а для вариантов испытаний двигателей
л=4 г\2 _
5В= У 4--4 =20,5-16 = 4,5.
ft k N
Общая сумма квадратов составит
п=4Л=4 п,
5==22 ^5—^==86 —16 = 70.
7=1 i=i
Сумма квадратов для оценки ошибки эксперимента опреде-
лится как разность
5а = 5д — 5в — 5т = 70 —6 —4,5 = 59,5.
В заключение найдем средние квадраты:
S 59,5
1С₽ („ — !)(*;—1) (4-1) (4-1)
Результаты расчета сведем в табл. 3. 27.
Таблица 3.27
Варьируемый фактор Число степеней свободы Сумма квадратов Средний квадрат
Номер аппарата 3 6,0 2,0
Тип двигателя 3 4,5 1,5
Ошибка дисперсии . 9 59,5 6,6
Сумма 15 70
На основании проведенного дисперсионного анализа могут
быть проверены возможные гипотезы, например, о равенстве сред-
них характеристик всех типов двигателей.
С этой целью используем критерий F-раопределения при уров-
не риска 5%:
F,o = -^-= 0,303 <3,86.
3>9 6,6
При условии выполнения данного неравенства мы можем
утверждать, что средние значения характеристик указанных ти-
пов двигателей примерно одинаковы, а потому ни одному из них
мы не можем оказать предпочтение.
103
В результате (проведенного дисперсионного анализа может
быть сделан следующий вывод: средние характеристики выход-
ного качества для всех типов двигателей примерно одинаковы.
Если бы наряду с блочным рандомизированным планировани-
ем был проведен анализ обычного рандомизированного плана,
то был бы получен тот же вывод. Однако в случае блочного пла-
нирования ошибки в оценке дисперсии оказались бы несколько
меньше. Это еще раз указывает на более высокую эффективность
блочного рандомизированного планирования по сравнению с
остальными.
Рис. 3. 8. Зависимости между параметрами рк, k и Pi
С целью изучения влияния и взаимодействия факторов на ко-
нечный эффект рассмотрим такой пример.
Предположим, что мы хотим оценить влияние давления в ка-
мере сгорания рк и коэффициента соотношения компонентов топ-
лива k на удельную тягу двигателя Рь Принимая условие, что
рассматриваемый ЖРД работает при оптимальном (или близком
к этому) значении k, будем считать, что оба параметра практи-
чески независимы. С целью исключения влияния других факто-
ров испытания проводятся при прочих стабильных условиях.
Факторный эксперимент был осуществлен для уровней варь-
ирования 1 и 2 при количестве испытаний М=22 (рис. 3.8). Из
рисунка видно, что при варьировании параметра k в пределах
уровней 1—2 и постоянном давлении рк удельная тяга возрастает;
при постоянном значении k и увеличении параметра рк эффект
повторяется. Графики показывают, что степень этого влияния
определяется углом наклона отрезка прямой к оси абсцисс. При-
чем угол наклона прямой в сильной мере зависит от уровней
варьирования (/—2) (см. рис. 3.8,6). Вполне очевидно, что в
конкретном случае мы не можем сказать, какова 'Степень этого
влияния, так как на графике изменение Pi определяется масштаб-
ным фактором. Анализ зависимостей говорит и о наличии взаи-
модействия между факторами. Так, например, на рис. 3.8,6 и в
линии, соответствующие разным давлениям рк и коэффициентам
104
k, строго говоря, не параллельны, что может объясниться только
наличием взаимодействия варьируемых факторов.
Оценить большую или меньшую степень влияния параметров
рк или k однозначно нельзя вследствие указанных выше причин.
Когда это сделать необходимо, приводится статистическая про-
верка значимости взаимодействия. Но оно может выполняться
при условии, что количество
наблюдений цри каждом со-
четании больше одного.
Для оценки взаимодейст-
вия факторов несколько рас-
ширим эксперимент. С этой
целью введем дополнительный
уровень варьирования пара-
метра рк—его номинальное
значение, кроме двух предель-
ных уровней (форсирования и
дросселирования). Точнее,
планируется факторный экспе-
римент типа 2X3 с фиксиро-
ванными уровнями варьирова-
ния параметров рк и k. При
разработке программы решено
Таблица 3.28
каждое сочетание проверять
дважды. В итоге полное количество испытаний составит 2W.
Каждому из экспериментов присвоен порядковый номер. Все
испытания проводятся при условии соблюдения объективного
метода рандомизации.
Математическая модель выглядит следующим образом:
У = 6о*о + bipK + bjk + Ьцркк + Ei j.
При этом коэффициенты регрессии bi, bj и ощибка соответст-
вуют уровням варьирования факторов: рк—*=1, 2, 3; k — /=1, 2.
При наличии трех уровней варьирования по параметру рк и
двух по параметру k данная программа имеет 3-2 = 6 экспери-
ментальных условий или существует 6—1=5 степеней свободы
между вариантами испытаний и (2—1)6 = 6 степеней свободы
внутри вариантов. Полное число степеней свободы для 12 ис-
пытаний будет 12—1 = 11.
В соответствии с рассматриваемым планом получены резуль-
таты испытаний, которые в кодированном виде помещены в
табл. 3.28. Данные для дисперсионного анализах представлены в
табл. 3. 29. *
Используя результаты испытаний, получим суммы квадратов,
соответствующие влиянию фактора рк. Далее оценим влияние
главного эффекта для параметра рк через сумму квадратов:
_j42 + 62 + о 202 _5
рк 6 12 ~ '
105
Таблица 3.29
Вариант испы-
таний
Рк max
^max
Рк max
^mln
Рк nom
^max
Рк nom
^mln
Рк mln Рк mln
^max ^mln
Di
Уровни фак- 6
торов 4
б о
2 —2
Сумма 10
Сумма квад- 52
ратов
4 8
10 40
9 —9
65 41
19
1
20=2 D‘
1
212=2 5 Уи
Сумма квадратов главного эффекта k будет
27> + (-7)>.201 = 967.
к 6 12 .
Сумма квадратов взаимодействия .параметров ркХ& опреде-
лится как разность сумм квадратов между вариантами 'испыта-
ний и суммой:
($,« + $«)= 102,1.
Полученные данные позволяют завершить дисперсионный
анализ, проводимый с целью изучения влияния факторов рк и k
на исследуемый процесс.
Результаты расчета сведены в табл. 3. 30.
Таблица 3.30
Источник варьиро- вания Число степеней свободы Сумма квадратов Средний квадрат
Рк 2 5,4 2,7
k 1 96,7 96,7
Рк X k 2 37,6 18,8
Ошибки дисперсии 6 39,0 6,5
Сумма 11 178,7
В заключение, используя F-критерий, проверим гипотезу о
влиянии параметра рк на удельную тягу. Суть гипотезы: пара-
метр рк влияет на Л- Для доверительной вероятности 0,95
2 7
F2,6 = —<4,76. Так как критерий Рг.б значительно меньше кри-
6,5
106
тического значения 4,76, то выдвинутая гипотеза правомочна в за-
данных пределах изменения параметра рк.
Рассмотрим вторую гипотезу о влиянии параметра k на Р\.
Тогда
Гипотеза отвергнута как несостоятельная.
Аналогично может быть рассмотрена гипотеза о влиянии вза-
имодействия ркХАна выходной параметр Р\.
Рассмотренные примеры носят несколько иллюстративный ха-
рактер. В частности, нами была решена задача, в которой сте-
пень значимости факторов рк 'и k оценивалась с помощью диспер-
сионного анализа. Этот анализ может применяться для решения
частных задач по выбору тех или иных конструктивных вариан-
тов отрабатываемых систем и элементов, когда вследствие влия-
ния комплекса факторов выбор оптимального варианта затрудни-
телен. Однако в целом возможности дисперсионного анализа
значительно шире.
Глава IV
ИСПЫТАНИЯ НА НАДЕЖНОСТЬ
§ 1. ОБЩИЕ ПОЛОЖЕНИЯ. ЦЕЛЬ И НАЗНАЧЕНИЕ
В ходе опытно-конструкторских работ накапливается значи-
тельный объем статистических данных, который может быть ис-
пользован для качественной и -количественной оценки надежнос-
ти. Однако их тщательный анализ показывает, что для большин-
ства систем и агрегатов эти данные нельзя принять в полном
объеме. Причина заключается в том, что они относятся к раз-
личным видам испытаний и программ, различным конструктив-
ным модификациям одного и того же типа узла, агрегата или
элемента. А главное, практически все испытания, проводимые на
этапах конструкторской отработки ЖРД, характеризуются боль-
шим разнообразием программ, которые далеко не всегда соответ-
ствуют реальным условиям эксплуатации. Почти каждое после-
дующее испытание не повторяет предыдущего и отличается одно*
от другого рядом конструктивных модификаций. Иногда их мож-
но рассматривать как испытания различных вариантов двигате-
лей с близкими значениями основных параметров.
Следовательно, с точки зрения математической статистики,
результаты этих испытаний не могут быть признаны принадле-
жащими к одной генеральной совокупности, так как относятся к
различным объектам испытаний. Поэтому на заключительном
этапе отработки из полного объема статистических данных для
оценки надежности может быть использована лишь часть его.
Значение оставшейся части экспериментальных данных состоит в
формировании правильных путей эмпирического поиска штат-
ного варианта конструкции, в определении границ работоспособ-
ности, запасов прочности, устойчивости процессов и т. п.
В будущем следует ожидать появления оптимальных методов
оценки надежности, позволяющих учитывать весь объем инфор-
мации независимо от программ Испытаний, уровней варьирования
количественных и качественных факторов.
В настоящее время задача состоит в том, чтобы оптимальным
образом расширить объем информации и соответственно статис-
тических данных, принятых для оценки надежности штатного
варианта конструкции. В значительной мере эта задача может
108
решаться специальными испытаниями ограниченных выборок из-
делий и их элементов, которые называют испытаниями на надеж-
ность. Их оптимальность основывается на -свойстве эргодичности
систем и элементов, благодаря чему на ограниченном числе из-
делий проводится большое количество испытаний, чем и дости-
гается минимум материальных и экономических затрат. В прин-
ципе качественная информация, классифицированная по
признаку «успех — отказ», дополняется количественной (време-
нем наработки на отказ, распределением статистических характе-
ристик, их математическим ожиданием и дисперсией оценок).
Целесообразность испытаний на надежность состоит в том, что
при их проведении с помощью телеметрических данных учитыва-
ется практически весь ход изменения основных характеристик
изделий в процессе функционирования, а не единственный факт
наступления отказа, как при оценке надежности систем дискрет-
ными методами. Такой путь решения задачи обеспечивает сокра-
щение потребного количества изделий благодаря расширению
объема информации [21, 87].
При анализе результатов испытаний на надежность отказы,
обусловленные грубым нарушением технологических процессов
производства, учитываться не могут.
В зависимости от’назначения испытания на надежность отли-
чаются большим разнообразием программ. Широко известны
программы -с целью проверки запасов прочности, оценки гаран-
тийного ресурса, количества циклов до отказа, сроков службы
и хранения, определения «слабейшего» звена, возможного вида
отказов и т. п.
Испытания на надежность опытных образцов в некоторой
мере позволяют определить их «слабые» места, но в целом они
не могут характеризовать действительные уровни надежности
штатных изделий. Это объясняется, во-первых, возможными кон-
структивными доработками, которые неизбежно приходится вво-
дить в изделия по мере их совершенствования в процессе испыта-
ний; во-вторых, отличием опытного производства от серийного.
Поэтому испытаниям на надежность должны подвергаться так-
же штатные изделия, изготовленные в условиях серийного произ-
водства по штатной технологии. Вследствие этого испытания на
надежность, с точки зрения оценки достоверности показателей,
могут быть наиболее информативными на заключительных эта-
пах отработки.
Наиболее целесообразными оказываются планы доводочных
испытаний, построенные на основе испытаний на надежность.
С этой целью квалификационные испытания изделий (III этап от-
работки) можно план.иров1ать по типовым программам с той раз-
ницей, что время их проведения не ограничивается гарантийным
ресурсом. Испытания продолжаются до обнаружения первичного
отказа или на время и количество включений, во много раз пре-
вышающие штатные условия [83, 86]. Это в ряде случаев не явля-
109
ется исключением также и для изделии однократного действия.
Так, например, двигатель F-1 (фирма «Рокет-Дайн») после за-
вершения автономной отработки агрегатов и узлов испытывался
по программам, сочетающим элементы квалификационных ис-
пытаний и испытаний на надежность.
К моменту завершения испытаний на проверку соответствия
двигателя техническим условиям прошло порядка 800 огневых
испытаний общей продолжительностью около 82000 с [83, 86].
Точнее, при выполнении данной программы каждый двигатель
испытывался в среднем около 35 раз (задано одно включение).
При этом средняя наработка на каждый экземпляр двигателя
составила 35 700 с (полетное время работы ~ 160 с).
Программы испытаний для изделий однократного и много-
кратного действия различны. В частности, последние наиболее
часто подвергаются циклическим и ресурсным испытаниям [37,
62, 104].
Циклические испытания определяются условиями работы сис-
темы или элемента при переходных режимах. Следовательно, при
данных испытаниях могут быть выявлены отказы, свойственные
этим режимам. При этом среднестатистическая вероятность про-
явления отказов для широкого класса изделий является довольно
большой. В частности, для ЖРД доля отказов, проявившихся на
режимах запуска и выключения, составляет значительную часть
от общего числа аварийных исходов [37].
Ресурсные испытания определяются условиями работы систе-
мы или элемента на установившихся режимах работы. Этому
виду испытаний свойственны в большинстве случаев износовые
и постепенные отказы.
Как правило, испытания на надежность одной выборки изде-
лий проводятся в фиксированных условиях, соответствующих на-
турным условиям эксплуатации или экстремальным сочетаниям,
значимых факторов, выявленным в процессе отработки или экс-
плуатации системы.
§ 2. ОРГАНИЗАЦИЯ ИСПЫТАНИЙ И МЕТОДИКА ИХ ПРОВЕДЕНИЯ
Особенностью программ испытания на надежность является
широкое использование материальной части, прошедшей другие
виды испытаний (типовые, контрольные и т. п.). При этом сум-
марная наработка учитывается при обработке статистических
данных. В процессе испытаний ведется постоянный контроль за
техническим состоянием изделий. При этом за отказы принима-
ются разрушения материальной части или выходы контрольных
параметров за допустимые пределы. Последние могут сопровож-
даться плавным изменением характеристик для постепенных от-
казов или скачкообразным — для .внезапных отказов (рис. 4. 1 и
4.2).
110
На рис. 4. 1 отчетливо видны моменты начала отклонений
контрольного параметра от некоторого рабочего уровня (та) и его
уход за допустимый предел (Т2).С точки зрения работоспособнос-
ти системы временем проявления отказа следует считать момент
Т2, но с точки зрения технического состояния в ряде объективных
программ за время проявления отказа принимается момент вре-
мени Ti, так *как изменение характеристики параметра, ее пере-
лом свидетельствует о возникновении неисправности, а дальней-
ший период — это развитие отказа.
Отметка времени {0file}
Верхний предел
Контрольный параметр
нижний предел
V_________________________________________________
Рис. 4. 1. Осциллограмма, записи контрольного параметра в период
проявления постепенного 'Отказа
Момент наступления внезапного отказа (см. рис. 4. 2) харак-
теризуется резким изменением характера поведения параметра
и скачкообразным выходом за допустимый предел. Время на-
ступления внезапного скачка исчисляется, как правило, миллион-
ными долями секунды.
Выше речь шла о параметрах, за которыми в течение всего
процесса испытаний осуществляется постоянный контроль. К со-
жалению, не на всех изделиях удается его организовать.
Допустим, ведутся испытания на надежность электропневмо-
клапана, для которого контрольным параметром является рабо-
чий ход'разгрузочного клапана. В процессе повторно-переменных
включений (циклические испытания) замерить ход клапана до-
вольно сложно. Для осуществления этой цели все изделия выбор-
ки пришлось бы дорабатывать, вводить конструктивные измене-
ния, что нежелательно. В обычных условиях для замера хода
клапана испытания необходимо приостановить, что также неже-
лательно, так как нарушается рабочий процесс, удлиняются сроки
испытаний, понижается точность результатов исследования и т. п.
На это иногда приходится идти. В таких случаях необходимо
принять меры к тому, чтобы ошибка эксперимента была мини-
мальной, а сроки реализации программы не очень удлинялись.
111
Положим; 'принято условие: контрольные замеры осуществ-
лять через каждые 1000 циклов. Тогда может оказаться, что в
интервале между 8000 и 9000 циклами произошел отказ. За фак-
тическое число циклов, при котором произошел отказ, можно
принять среднее значение наработки (8500 циклов) или при от-
ветственной программе — 8000. Но и то и другое, безусловно,
неточно.
В ряде программ, чтобы уменьшить возможные ошибки, пред-
лагается переменный план испытаний. Для этого сначала испы-
тывают одно изделие и определяют ориентировочно ожидаемые
Отметка времени (0,01с)
т2
Рис. 4. 2. Осциллограмма записи конт-
рольного параметра в период прояв-
ления внезапного отказа
границы, в которых может
произойти отказ. Допустим,
что он произошел при коли-
честве циклов 8000. Тогда
с учетом приработок и воз-
можного разброса контроль
хода разгрузочного клапана
ведется по следующему пла-
ну: 0, 100, 500, 3000, 6000,
7000, 7500 и далее через
каждые 500 циклов. С це-
лью сокращения сроков про-
граммы испытания всей вы-
борки (или половины) ве-
дутся параллельно на одном стенде.
Методика испытания примерно такова. До начала испытаний
все изделия установленной выборки проходят входной контроль
в соответствии с техническими условиями для товарных поста-
вок. В порядке исключения некоторые, особенно ответственные
изделия могут подвергаться дополнительным проверкам сверх
установленной программы: например, проверка на виброустойчи-
вость по трем взаимно перпендикулярным осям; определение ре-
зонансных частот; допусков на срабатывание при резонансных
частотах и т. п.
В качестве примера рассмотрим методику испытаний элемен-
тов автоматики, в частности, реле давления, в функции которого
входит выдача электрической команды после достижения некото-
рого уровня давления в рабочей полости. Испытания на надеж-
ность ведутся циклами до отказа. При этом вследствие имитации
натурных условий эксплуатации в течение времени каждого цик-
ла определяются: а) влияние действия резонансных частот;
б) циклопрочность давлением, изменяющимся от нуля до верхне-
го предела и затем до нуля; в) устойчивость контактней пары с
максимальной токовой нагрузкой.
Через каждые 500 циклов изделия подвергаются испытаниям
на вибропрочность при заданных уровнях виброперегрузок и
частот в течение времени, предусмотренного программой при
максимальном давлении в рабочей полости. Периодически после
112
каждого цикла испытаний фиксируются точки срабатывания
контактной пары при максимальной температуре среды.
Регистрация случаев замыкания и . размыкания при прямом
и обратном ходе штока может производиться с помощью шлей-
фового осциллографа. Результаты испытаний обрабатываются и
представляются в виде таблиц и графиков. Наряду с этим дается
краткйй анализ экспериментальных данных, при котором устанав-
ливается диапазон частот виброперегрузок, при которых изделия
виброустойчивы, погрешность срабатывания изделий на резонанс-
ных частотах и т. п. За отказ принимается разрушение матери-
альной части или выход контрольного параметра (в рассмотрен-
ном выше случае —давление срабатывания контактной пары)
.за установленные пределы.
По экспериментальным данным можно определить границы
поля рассеивания отказов как отношение максимального значе-
ния наработки хтах к минимальному хтщ. Для ряда механичес-
ких систем оно может оказаться достаточно большим xmax/*min =
=Зн-8, особенно в тех 'случаях, когда речь идет о предельных зна-
чениях поля рассеивания, определяемых для генеральной сово-
купности изделий [57]. Указанное рассеивание определяется,
главным образом, не особенностями физических процессов, а в
большей мере стабильностью свойств материалов, технологией
изготовления и т. п. По этой причине для широкого класса изде-
лий указанный предел в основном сохраняется. Наличие большо-
го рассеивания отказов не может не отразиться на методике ис-
пытаний, особенно при испытании изделий многократного дейст-
вия с большим гарантийным сроком эксплуатации. В данном
случае испытания до отказа всей выборки провести не всегда
удается из-за малых сроков реализации программы по экономи-
ческим соображениям. В связи с этим ряд программ испытаний
на надежность имеют ограничение, которое характеризуется
условием: испытания проводятся до наработки не более ха. Прак-
тически это значит, что по отношению к фактическим границам
рассеивания отказов заданная величина наработки ха может
быть распределена следующим образом:
1- < ХтЛ
min и шах’
2. < Л* < Ха\
mln max и
3. ха < я:т|„ < xm,„.
В первом случае, при испытании до наработки ха, получено не-
которое количество отказов (в предельном случае хотя бы один).
Оставшиеся изделия сохранили работоспособность. В математи-
ческой статистике такого рода исход принято называть испытани-
ями усеченной выборки. При определенных условиях результаты
испытаний могут характеризовать рассеивание отказов.
Во втором случае вся выборка изделий прошла испытания
до отказа, программа оказалась полностью выполненной. По по-
113
нятным причинам оценка характеристик рассеивания в этом слу-
чае является более точной, чем в первом.
Третий случай характеризуется тем, что отказы не обнаруже-
ны. С точки зрения поставленной цели данные испытания следует
считать менее результативными, так как неизвестны характерис-
тики рассеивания и сам вид отказов. В ряде случаев после контг
рольной проверки изделий данной выборки на соответствие тех-
ническим условиям испытания целесообразно продолжить. В тех
случаях, когда поставлена цель — подтвердить некоторый уро-
вень надежности Р(х, а) с доверительной вероятностью а — уро-
вень ха может быть определен -следующим образом.
Для безотказных испытаний нижняя граница вероятности без-
отказной работы может быть описана с помощью экспоненциаль-
ного распределения [76]:
т“> / \ ЛС In (1 — а)
Рн(х,а) = ехр ----------- ,
L хо J
где математическое ожидание х0 соответствует суммарной нара-
ботке изделий выборки N, тогда
XQ = Nxa.
После преобразования получим
х _ xln(l-g)
а TV In Рн (х, а) *
За текущее значение параметра х в данном случае следует
принимать заданное время работы или гарантийный , ресурс.
Обычно имеет смысл уровень ха задавать в относительных вели-
f Ха\ 1
чинах —- ; тогда х=1.
\ х /
С учетом этого
х _ 1п(1-а)
а AUnPH(l,a)’
Графическая зависимость параметров ха и АГот характеристи-
ки Рн (1, а) показана на рис. 4.3.
Уровень, который устанавливается для параметра ха для раз-
личных систем и элементов, как следует из рис. 4. 3, может быть
самым различным. Практически это зависит не только от задан-
ного уровня надежности и объема выборки, но и от сложности
изделия, степени автоматизации и стоимости испытаний, наличия
стендового оборудования, методов контроля и т. п. В США при
испытаниях полноразмерных ЖРД средняя наработка двигателя
превышает заданное полетное время работы в десятки и сотни
раз. Тот же порядок относится и к количеству включений — цик-
лов. Так, например, для двигателя F-1 на одном из.этапов квали-
фикационных испытаний средняя наработка по времени соста-
« / 35 700 с \
вила около 220 гарантийных ресурсов f ——-\ [83, 86].
114
После завершения программ испытаний на надежность экспе-
риментальные данные обрабатываются и все изделия дефекти-
руются. Разрушенные детали подвергаются металл огр афическо-
Рис. 4. 3. Зависимость парамет-
ра ха для безотказных
испытаний
му анализу. Тщательно анализируются причины отказов с целью
проведения дальнейших доработок конструкции для повышения
достигнутого уровня надежности.
Методика обработки экспериментальных данных будет рас-
смотрена ниже.
§ 3. УСКОРЕННЫЕ ИСПЫТАНИЯ
В зависимости от программы в ряде случаев испытания на
надежность могут рассматриваться как ускоренные. Это объясня-
ется тем, что для некоторых изделий заданное гарантийное время
работы является довольно большим. Так, например, для коррек-
тирующих систем космических кораблей и аппаратов, предназна-
ченных для полетов к Марсу, гарантийное время работы в усло-
виях нормальной эксплуатации должно составлять годы. Естест-
венно, возникает вопрос, как же вести полноресурсные испытания
подобных систем, если даже испытание на полетное время работы
вызывает почти непреодолимые трудности. Разумное решение это-
го вопроса —применение методик ускоренных испытаний [51, 104],
при которых происходит ужесточение условий работы изделия,
благодаря чему и достигается сокращение общих сроков реализа-
ции программ.
Допустим, некоторая система работает в заданном цикличес-
ком режиме (рис. 4. 4). Соответственно полный рабочий цикл ха-
рактеризуется временем выхода на режим Л, работой на марше-
вом режиме t2 и выключением t3. В ряде случаев удобно говорить
о сумме времен (Л + ^з) как о времени работы на переходных ре-
жимах. Вполне очевидно, что градиенты изменения рабочего про-
цесса при запуске и выключении зависят от циклограммы управ-
ления и .физики процесса и в сильной мере изменяться не могут.
В отличие от них, время работы на маршевом режиме практичес-
ки может изменяться от нуля до полной наработки на отказ.
115
Если tn-ринэть t2 = 0, то в этом предельном случае осциллограмма
рабочего процесса примет вид б или в (см. рис. 4.4).
Обе осциллограммы отличаются тем, что в случае б между
отдельными включениями имеется интервал «отдыха» ^4. В случае
в он отсутствует. Уже с этой точки зрения режим в намного на-
пряженнее режима б и тем более режима а. Испытания, прово-
димые по осциллограмме в, являются ускоренными по отношению
к испытаниям в условиях нормальной эксплуатации.
Рис. 4. 4. Циклические 'режимы работы
Обе осциллограммы бив характеризуются выходом конт-
рольного параметра на заданный режим и затем резким его спа-
дом (выключением). Осциллограмма в отражает так называемый
«пулеметный» режим работы. Однако такие виды испытаний воз-
можны только для систем и элементов многократного действия,,
к тому же и их круг ограничен. Если такого рода программы
можно использовать при ускоренных испытаниях, например, эле-
ментов автоматики типа ЭПК, то их не всегда удается реализо-
вать для тепловых систем и элементов, требующих некоторой вы-
держки ta на установившемся режиме с целью стабилизации теп-
ловых и динамических процессов. Так, например, для полнораз-
мерных ЖРД, по данным фирмы «Аэроджет-Дженерал Корпо-
рейшен» [54], это время составляет не менее 10 с. С учетом ска-
занного кривая распределения интенсивности отказов Х(0 нес-
колько «запаздывает» по отношению к динамической характерис-
тике нарастания контрольного параметра. В итоге для данного
класса систем может быть использована программа ускоренных
испытаний, характеризующаяся осциллограммой г.
Чтобы количественно характеризовать отличие программ ти-
па б и в, г, введем характеристику Сг — циклическую скорость
смены режимов [104] как число циклов (включений) в единицу
времени:
где х— число циклов, которое наработала система за время
В определенных условиях для определенного класса систем мно-
116
гократного действия циклические 'испытания могут быть рас-
смотрены как ускоренные по отношению к ресурсным.
Сокращение общих сроков испытаний до наступления отказов
достигается путем «утяжеления» режимов работы. Степень тако-
го «утяжеления» характеризуется коэффициентом т] — отношени-
ем интенсивностей отказов двух видов испытаний:
Стабильность коэффициента -q, как будет показано ниже, мо-
жет быть обеспечена экспоненциальным распределением отказов,
когда характеристики М и Х2 постоянны. Во всех остальных слу-
чаях обеспечить стабильность коэффициентов ц весьма трудно.
Объясняется это тем, что любой механической системе в некото-
ром диапазоне изменения параметров свойственно сохранять вид
закона распределения отказов при условии, что в данном диапа-
зоне физическая картина процесса не изменяется. Следовательно,
приняв условие постоянства закона распределения отказов, легко
убедиться в следующем.
Допустим, что исследуемая нами система подчиняется распре-
делению Вейбулла с интенсивностью отказов
Х(х) = -£-х₽-1,
где Xq — математическое ожидание;
Р — постоянный коэффициент, показатель распределения.
На рис. 4. 5 показана функциональная зависимость характе-
ристики Х(х) от числа циклов х и показателя р. Если при штат-
ных испытаниях интенсивность отказов близка к показателю рас-
пределения р = 4, то за счет изменения режима и условий испыта-
ний интенсивность отказов изменится и будет близка показателю
Р=2.
Рассмотрим интересующий нас характер изменения режима
работы. Легко установить, что коэффициент «утяжеления» — не-
стабильная величина и изменяется в процессе испытаний в соот-
ветствии с зависимостью, показанной на рис. 4. 6.
Отсюда -следует важный вывод, что. коэффициент «утяжеле-
ния» т] может быть принят в качестве характеристики ускоренных
испытаний только при условии экспоненциального распределения
отказов. В большинстве других случаев он дает неоднозначные
решения, и попытка оценить интенсивность отказов для нового
вида испытаний с помощью этого коэффициента может привести
к серьезным ошибкам. Это объясняется тем, что отношение ин-
тенсивностей отказов представляет собой некоторую функцио-
нальную зависимость, которая не может быть выражена постоян-
ным коэффициентом, так как представляет собой некоторую
функцию с новыми независимыми переменными. Последние ха-
117
растеризуют параметры применяемых видов ускоренных испы-
таний.
Одним из основных недостатков метода ускоренных испытаний
является необходимость экспериментального исследования как
средства оценки достоверности результатов.' Практически всегда
для всех систем требуется проводить наряду с натурными уско-
ренные испытания. Но и это может быть оправданным, если, на-
пример, необходимо ускоренными испытаниями подтвердить на-
дежность товарных изделий с очень большим гарантийным вре-
менем работы.
Pine. 4.5. Интенеивность отказов
для распределения Вейбулла
(х0=5)
Рис. 4.6. Зависимость коэф-
фициента «утяжеления» ре-
жима т) от числа циклов х и
от показателя распределения
Р
Тогда на этапе опытно-конструкторских работ проводят оба
вида испытаний, устанавливают экспериментальные зависимости
между ними, а в дальнейшем ведут только ускоренные испытания
и делают пересчет на натурные условия их проведения.
Соответствующие экспериментальные исследования проводят
у нас и за рубежом. Так, например, по результатам работ фирмы
«Аринк Рисерч» (США) [104], полученным путем обработки ста-
тистических данных по испытаниям ракетных систем, интенсив-
ность отказов при ускоренных испытаниях увеличивается соглас-
но зависимости
^-=1+Сг/е,
где Xi и Л,2 — интенсивности отказов при ускоренных цикличес-
ких и штатных ресурсных испытаниях соответствен-
но;
/с — коэффициент, определяющий время проведения ре-
сурсных испытаний, эквивалентное одному циклу
работы.
118
По данным фирмы «Аринк Рисерч», для обширного класса
ракетных систем одноразового использования коэффициент fc
является постоянной величиной /с=8[104]. В данном случае закон
распределения отказов был не экспоненциальный, а нормальный.
В случае нормального распределения коэффициент «утяжеления»
эмпирически оказался равен некоторой функции с переменным
параметром Сг:
г) = 1 + Crfc.
По всей вероятности, для других распределений и других ви-
дов испытаний может существовать иной вид этой функции с
новыми независимыми переменными, характеризующими пара-
метры данного вида испытаний. Если Имеются экспериментальные
значения характеристик и Х2 для одного вида испытаний и
различных систем одного класса, то определить вид функции,
характеризующей коэффициент «утяжеления», не представляет
труда с помощью методов математической статистики, в частно-
сти, метода наименьших квадратов.
Итак, мы рассмотрели кратко один из видов ускоренных ис-
пытаний, который характеризуется убыстрением темпа прове-
дения испытаний, т. е. циклической скоростью смены режимов.
Наряду с этим могут быть представлены виды ускоренных
испытаний, при которых «утяжеление» режима работы осуществ-
ляется увеличением уровней основных параметров. Трудности
этих испытаний состоят не в определении вида отказов, а в уста-
новлении величины корреляции полученных данных с ожидаемы-
ми характеристиками в реальных условиях эксплуатации, так как
увеличение уровня параметра, вызывающего отказ, может сопро-
вождаться частичным или полным изменением физических про-
цессов. В таких 'случаях выявленные отказы могут быть совер-
шенно не характерны для изделий при их испытаниях в натурных
условиях.
Примером этому служит чрезмерное форсирование камеры
сгорания ЖРД по давлению и температуре. Последнее, как из-
вестно, может привести к появлению пара в каналах охлаждаю-
щего тракта, разложению компонентов топлива, к его «коксованию,,
т. е. к явлениям, которые не характерны для нормальных условий
эксплуатации ЖРД. В данном случае трудности в проведении
ускоренных испытаний состоят также в ограниченных возмож-
ностях самих систем. Так, например, форсирование камеры сгора-
ния может чаще ограничиваться не проявлением ее отказов, а
возможностями других агрегатов: газогенератором, ТНА, насоса-
ми, регулирующими элементами и особенно их гидрогазодинами-
Ч£скими характеристиками. Даже при наличии времени и средств
установить степень корреляции режимов оказывается достаточно
трудно. Проведение испытаний с чрезмерным форсированием ос-
новных параметров (до уровней, при которых не происходит из-
менения физических процессов) полезно для определения рабо-
119
тоспособности основных агрегатов ЖРД при граничных условиях
испытаний. Практически же целесообразно, испытания с некото-
рым гарантийным форсированием основных параметров сочетать
с циклическими и ресурсными программами.
Проблема ускоренных испытаний механических систем и их
элементов как самостоятельная область довольно сложна и мало
исследована. Вероятно ее решение должно базироваться как на
эксперименте, так и на математической статистике. В этом отно-
шении полезным может оказаться опыт работ по радиоэлектрон-
ным элементам [51].
Для планирования ускоренных испытаний, учета влияния от-
дельных факторов, а также методов построения математических
моделей в практическом плане могут бытыиспользованы материа-
лы гл. III.
§4. ОСОБЕННОСТИ ИСПЫТАНИЙ НА НАДЕЖНОСТЬ ЭЛЕМЕНТОВ
ОДНОКРАТНОГО ДЕЙСТВИЯ
Рис. 4.7. Зависимость соотношений
плотностей 'распределения «нагруз-
ки» и «прочности»:
тл, th—параметры «прочности»; т2, аз-
параметры «нагрузки»
теристцк. Следовательно, они
ментов, для которых рабочий
В период функционирования элементы однократного дей-
ствия характеризуются необратимостью физических процессов.
По этой причине при их испытаниях на надежность не могут
быть использованы циклические
или другие виды испытаний, ха-
рактеризующиеся такими уров-
нями параметров, как циклич-
ность или смена режимов. Испы-
тания на надежность должны
в полной мере соответствовать
физическим явлениям, протекаю-
щим в условиях нормальной экс-
плуатации. Анализ этих условий
показывает, что в абсолютном
большинстве случаев физические
процессы, определяющие работо-
способность элементов однократ-
ного действия, сопровождаются
изменением прочностных харак-
могут быть отнесены к типу эле-
режим определяется отношением
таких параметров, как «нагрузка» и «прочность». Оба пара-
метра следуют закону нормального распределения с плотно-
стями fi(x) и ?2(х), соответственно математическими ожиданиями
xQ' и xq" и среднеквадратическими отклонениями ел и а2. Приме-
нительно к вероятности безотказной работы можно установить
зависимость Р(х) через функцию Лапласа Fo:
\ а /
(4Л)
где
а
квантиль нормального распределения.
120
С практической точки зрения справедливым является усло-
вие, когда математические ожидания xQ' и xQ" достаточно велики
в сравнении с соответствующими среднеквадратическими откло-
нениями ел и а2- На рис. 4.7 площадка q характеризует нена-
дежность системы н количественно равна (1—Р). При этом сум-
марное отклонение математического ожидания для данного рас-
пределения составит
х0-х= (x;-x)-(x;-x)=x;-<.
Суммарное среднеквадратическое отклонение о будет равно
С = К + •
Тогда вероятность безотказной работы системы, определяемая
соотношением «нагрузки» и «прочности», будет равна
(4-2)
Эта зависимость, собственно, и определяет программу испы-
таний на надежность элементов однократного действия, со-
гласно которой по испытаниям некоторой выборки однотипных
изделий оцениваются математические ожидания xQ и а так-
же их дисперсии и <^. Для нахождения оценок прочности,
по всей вероятности, потребуется проводить испытания до раз-
рушения.
С целью иллюстрации данного метода рассмотрим два при-
мера.
Пример 1. Предлагается с помощью специальных испытаний оценить кон-
структивно-технологическую надежность шарового баллона с рабочим давле-
нием р2:
(р3 —Др)<р3<(р3 + Др),
где Др — отклонение от рабочего давления.
Соответственно среднеквадратический разброс «нагрузки» можно опреде-
АР
лить как ®2 = 7~’ где *а— квантиль для нормального распределения при
заданной доверительной вероятности а.
Для оценки прочности обычно проводятся гидравлические испытания до
разрушения некоторой выборки одного (вида изделий, прошедших все виды
текущего и выходного контроля, предусмотренного технической документаци-
ей. В процессе испытаний фиксируются максимальные давления, при которых
происходит потеря прочности. По данным результатам оцениваются парамет-
ры xQ и Оь Далее^по формуле (4.2) определяется среднестатистическое значе-
ние вероятности Р.
Пример 2. Предлагается провести испытания на надежность бака (см.
рис. 1. 1). Испытания на надежность наружной оболочки бака при необходи-
мости могут быть проведены подобно тому, как это было изложено в приме-
ре 1. Испытания на надежность эластичной мембраны можно организовать
следующим образом.
121
Испытаниям подвергается некоторая выборка однотипных .изделий. Испы-
тания на всех изделиях проводятся поочередно в два этапа. В ходе первого
этапа из топливной полости максимальным рабочим давлением производится
полное вытеснение жидкости до посадки эластичной мембраны на внутреннюю
поверхность полусферы бака. Затем давление сбрасывается и испытание прек-
ращается. После испытания первого этапа вся выборка баков направляется
в цех, где опорные полусферы срезаются фрезой по периметру сварного шва 6.
В ходе испытаний второго этапа проводятся гидравлические испытания
топливной полости бака до разрушения мембраны, лишенной твердой опоры.
При испытаниях происходит дальнейшее выпучивание и утонение мембраны,
которое заканчивается ее разрывом. Конечный объем топливной полости опре-
деляется линейной деформацией мембраны и может быть принят для оценки
запаса ее прочности, который, как известно, определяет надежность данного
элемента.
Особенностью программ испытаний на надежность для неко-
торых изделий может явиться ограничение по времени срабаты-
вания. Оно заключается в том, что рабочий элемент системы
должен не только нормально функционировать, но и срабаты-
вать не позднее некоторого заданного времени. В процессе
испытаний в данном случае измеряются не только нагрузка
и прочность, но и время срабатывания рабочего элемента. Этот
параметр также характеризуется математическим ожиданием
и среднеквадратическим разбросом. Если использовать для
оценки надежности данного типа элементов ранее установленные
зависимости, то решение может быть найдено с помощью дву-
мерного нормального распределения [8].
Испытания на надежность элементов и систем однократного
действия, так же как и. систем и элементов многократного дей-
ствия, имеют следующие аспекты. Первоначально ставится
цель — определить заданные характеристики надежности, затем
вид отказа или слабейшее звено. На этом анализ результатов
испытаний не заканчивается, а рассматриваются перспективные
программы, например, возможность совершенствования конст-
рукции с точки зрения повышения достигнутого уровня надеж-
ности и экономическая целесообразность продолжения работ
и т. п. Рационально составленные программы должны, как ми-
нимум, исходить из условия оптимизации достижимых уровней
надежности, сроков отработки и экономических затрат.
Главной задачей испытаний на надежность является оценка
предельных возможностей изделия, его конструктивных решений
при самых неблагоприятных сочетаниях внешних и внутренних
факторов в натурных условиях эксплуатации, а также оценки
запасов, гарантирующих работоспособность изделия в этих
условиях. Последние целесообразно назначать иногда более
жесткими, чем это предусмотрено штатной программой.
§ 5. ИСПЫТАНИЯ НА НАДЕЖНОСТЬ ПРИ НЕСТАБИЛЬНЫХ
УСЛОВИЯХ. ПЛАНИРОВАНИЕ ИСПЫТАНИЙ НА НАДЕЖНОСТЬ
До сих пор, говоря об условиях испытаний, мы считали их
строго фиксированными. При этом регистрировались: для си-
122
стем и элементов однократного действия контрольные пара-
метры: нагрузка и прочность, а для систем и элементов много-
кратного действия, как правило, — наработка в виде времени
безотказной работы или количества циклов. В ряде эксперимен-
тальных программ условия проведения испытаний принимаются
•довольно жесткими, соответствующими предельным маловероят-
ным сочетаниям внешних и внутренних факторов. Такой подход
к оценке надежности может вызывать иногда обоснованные
возражения. Возникает вопрос, какими же должны быть уровни
параметров, определяющих условия испытаний для оптималь-
ных программ? Это приводит (К мысли, что желательно иметь
несколько программ испытаний на надежность, которые бы учи-
тывали не только предельные сочетания значимых факторов,,
но и их номинальные значения. Более того, для сочетаний пре-
дельных уровней существуют максимальные и минимальные
значения. Их учет сам по себе уже требует реализации по край-
ней мере двух программ. Все это в конечном итоге существенно
отразится на общих сроках отработки систем и материальных
затратах. Посмотрим, нельзя ли разработать одну общую про-
грамму, которая учитывала бы оптимальным образом варьи-
рование значимых факторов на нескольких уровнях.
При планировании таких испытаний их программа прибли-
жается к условиям реализации факторного плана. Возможное
отличие состоит в том, что к началу испытаний на надежность
существует довольно большой объем статистических данных по
отработке и есть возможность достаточно полно определить
состав и ранг значимых факторов. Наряду с этим известна
математическая модель процесса или можно ее определить. За
выходное качество процесса в этом случае принимается иссле-
дуемая характеристика надежности (контрольный параметр,
время наработки до отказа, число циклов, «нагрузки», «проч-
ность») .
Указанная характеристика и является аргументом функции
распределения отказов, которой следует испытываемая си-
стема или элемент. Допустим, что распределение отказов
соответствует закону Вейбулла, тогда с учетом знания реальной
модели наработки выражение для вероятности безотказной
работы можно представить как
Р (х,) = ехр Г — ^-1,
L у° J
/(гЧ
В данном случае математическое ожидание уСр является
масштабной характеристикой для параметров распределения
123
Таблица 41.
Варьируемый фактор *1 *2 *3 х4 *5 *6 Выгодное качество
опыт расчет
Основной уровень #2 ^3 а4 ^5 а6
Верхний уровень + + + + + +
Нижний уровень — — — — — ’—
Интервал варьиро- Д1 Д2 дз д4 Д5 д6
вания
Последовательность
испытаний:
4 — — — — — — У4
8 + — — + + — Уз У»
2 — + — + *— + У2 у\
1 + + — — + + У1 У1
6 — — + — + + Уб у'б
3 + — + + . — + Уз Уз
7 — + + + + — У7 у\
5 + — + — — — У5 Уз
Коэффициент ре- Ь2 *4 #5 ^6
грессии
Шаг варьирования Mi ^2^2 Аз^з Д4*4 Д5*5 Дб^б
Планируемые и конт-
рольные испытания
9 — — а/4-д/Д/ — — ► У9 Уз
10 — — #/4-2Д/^/— — -+ У\0 Ую
11 — — <2/4~ЗД/^ [ — — ^/11 «/И
12 — — — — «/12 #12
124
у0 и р. Аналогично может решаться вопрос и для других видов
распределений, отличных от закона Вейбулла. В ряде случаев
вид закона может быть заранее введен в вычислительную про-
грамму. Аналитическая взаимосвязь результатов испытаний на
надежность с параметрами закона распределения отказов мо-
жет быть установлена с помощью функции правдоподобия [76].
Для иллюстрации этого метода рассмотрим план испытаний
на надежность, при котором учитывается варьирование шести
количественных факторов: х2, х3, х4, *5, х6. Порядок проведе-
ния испытаний устанавливается с учетом ограничений на ран-
домизацию. Испытания проводятся в последовательности, опре-
деленной с помощью таблицы случайных чисел.
В основу предложенного плана положен метод крутого вос-
хождения по поверхности отклика, при котором в качестве
исходной формы модели физического процесса принимается
полином первой степени
У = ^0*^0 4“ 2 bi%i*
Исходя из этого условия первоначально проводится
2V^(n+l) экспериментов по программе, представленной
в плане испытания на надежность (табл. 4. 1).
В нашем случае 8 экспериментов. Варьирование факторов
ведется на двух уровнях: верхнем и нижнем. Путем обработки
результатов методом наименьших квадратов определены коэф-
фициенты регрессии математической модели.
Затем проводится следующий этап планирования с целью
движения по поверхности отклика в направлении градиента
линейного приближения. С целью проверки достоверности мо-
дели осуществляется серия контрольных испытаний. Их резуль-
таты сравниваются с расчетными. При значительном расхожде-
нии коэффициенты регрессии уточняются методом последова-
тельного приближения, выбирается новое направление гради-
ента для движения по поверхности отклика.
Объем выборки, как правило, ограничивается количеством
изделий не более двадцати.
При анализе результатов испытаний с точки зрения оценки
точности немаловажной является проверка сходимости экспе-
риментальных и теоретических данных. При этом основная
погрешность при оценке надежности определяется объемом вы-
борки, представленной для испытаний. Метод крутого восхож-
дения по поверхности отклика обычно формулируется как задача
определения экстремальных условий. В нашем случае это реше-
ние используется для отыскания и описания некоторой локаль-
ной зоны модели с помощью линейной аппроксимации. Знание
модели и состава значимых факторов позволяет установить сте-
пень влияния каждого из них на надежность испытываемого
изделия.
125
§ 6. МЕТОДЫ УТЯЖЕЛЕННЫХ ИСПЫТАНИЙ
При отработке сложных технических систем с очень боль-
шим числом элементов, когда в короткие сроки необходимо
обеспечить высокие требования по надежности и долговечности,
методы ускоренных испытаний становятся практически единст-
венно возможными. В данном случае речь может идти о сокра-
щении времени испытаний за счет увеличения интенсивности
отказов.
Особой разновидностью ускоренных испытаний являются
испытания утяжеленные, которые отличаются повышенным уров-
нем нагрузки рабочих параметров. Применительно к ЖРД та-
кими параметрами могут быть давление в камере сгорания
и коэффициент соотношения компонентов топлива. Соответст-
венно повышенный уровень нагрузки для ЖРД означает форси-
рование по режиму и тяге до граничных условий. Последние
определяют те предельные уровни основных параметров, выше
которых двигатель неработоспособен. Характер нагружения
может быть достаточно разнообразным и изменяться в соответ-
ствии с программой испытаний по различным законам. Про-
грамма утяжеленных испытаний может характеризоваться вы-
ходом двигателя на номинальный режим с последующим фор-
сированием до граничных условий или выходом на форсирован-
ный режим, минуя номинальные значения параметров. В первом
случае выход на заданный режим достигается настройкой дви-
гателя на номинальные условия, а дальнейшее его форсирова-
ние происходит в результате включения системы регулирования.
Во втором случае конечный режим обеспечивается только
настройкой двигателя на предельные значения параметров,
которые затем поддерживаются постоянными в течение всего
времени испытаний.
Данная программа, предусматривая испытания на гранич-
ные условия, может быть реализована в том случае, если они
заранее известны.
Помимо этого некоторые виды возможных программ утяже-
ленных испытаний могут быть представлены кривыми, каждая
из которых определяет экспоненциальный, линейный и ступен-
чатый законы нагружения соответственно. Следует отметить, что
предельный уровень форсирования не обязательно должен опре-
деляться граничными условиями: он может быть ниже, но, как
правило, превышает верхний предел регулирования %тах, задан-
ный в техническом задании на разработку.
Изменение параметра х в соответствии с программой мо-
жет предусматривать одновременное варьирование и других
факторов. Однако их число не должно быть большим, так как
это усложняет анализ результатов испытаний. Как правило,
в пределах одной программы утяжеленных испытаний число
варьируемых факторов не превышает двух. Допустим, что
126
имеется некоторая система, работоспособность которой опреде-
ляется пределами регулирования двух переменных и %ц. Каж-
дая из них имеет три заданных уровня варьирования — мини-
мальный (min), номинальный (пот) и максимальный (max).
Перенося их на график (рис. 4.8), можно получить рабочий
квадрат с вершинами aif bi, а[, b'v Точка А определяет номи-
нальный режим. По всей вероятности, в зависимости от конст-
руктивных особенностей выход системы на этот режим может
характеризоваться кривой аА или а'А. Объяснить в частном
случае это явление легко.
Рис. 4. 8. Режимы (работы динамической сис-
темы при граничных условиях
Положим, что фактор Xi характеризует давление в камере
сгорания, а фактор Хц — коэффициент соотношения компонен-
тов топлива, тогда кривая аА—есть характеристика выхода
на режим двигателя с опережением горючего в камере сгора-
ния, а кривая а'А — с опережением окислителя. В первом слу-
чае пределы изменения параметра хц от нуля до Хитах
(0<хц<хцmax), а во втором — параметр Хц изменяется в диа-
пазоне ОТ бесконечности ДО Хцтщ (оо>Хц>'Хп min) •
После выхода системы на номинальный режим в соответст-
вии с программой испытаний происходит дальнейшее форсиро-
вание параметров.
Как известно, оно происходит в направлении характери-
стики Аах. Но в ряде случаев граничные условия могут ока-
заться ближе при движении в направлении Ла/. В данном слу-
чае вершины квадрата ах и а/ означают заданные предельные
сочетания факторов Xi max • *п шах и Xi max • min соответственно.
Далее из каждой вершины квадрата форсирование до гра-
ничных условий может производиться в трех направлениях. На
рис. 4.8 они соответственно обозначены цифрами 1,2,3 и 1', 2',3'.
В параметрическом виде это можно характеризовать сле-
дующим образом:
режим 1 определяется сочетанием факторов Xin-*nmax;
127
к max
Рис. 4.9. Качественная картина рас-
пределения границ работоспособности
ЖРД
режим^ 2 — сочетанием Xi п • (хц п) max;
режим'з — сочетанием Ximax- (Xlln)max;
режим Г — сочетанием Xin-xiimin;
режим 2'— сочетанием Xin- (хпп)тт;
режим 3' — сочетанием Ximax(xIIn)min,
где индекс «п>>- означает предельно допустимый уровень варьи-
рования для параметра Хц в сторону форсирования (хцп)тах
И В сторону Дросселирования (Хцп)т1п; для Xj— только в сто-
рону форсирования Xin. Режимы 2 и 2' соответственно характе-
ризуются одновременным изменением обоих параметров до гра-
ничных условий. В отличие
от них режимы /, 3 и Зг
характеризуются фиксиро-
ванным уровнем одного из
факторов при переменном
втором параметре.
В итоге за пределами ра-
бочего квадрата может быть
получен другой внешний
квадрат, характеризующий
предельные уровни факто-
ров, при которых ведется
отработка двигателя, или
пределы его работоспособ-
ности.
Рассматриваемый квадрат на рис. 4.8 условно отмечен
пунктиром. Однако на практике внешний «квадрат», определяе-
мый граничными условиями, не имеет столь правильной гео-
метрической формы. Параметрическая область работоспособ-
ности может принимать самые различные очертания. В качестве
примера укажем на рис. 4.9, где зоны неустойчивой работы
заштрихованы.
Вполне очевидно, что значение области работоспособности
позволяет конструктору вести уверенный выбор рабочих пара-
метров и характеристик двигателя, обеспечивающих высокий
уровень качества отработки.
Практическая реализация экспериментальной программы
зависит от широкого диапазона регулирования основных пара-
метров и возможности обеспечения повторных включений дви-
гателя. Во всех остальных случаях, когда нельзя многократно
испытывать двигатель, необходимо испытывать большое количе-
ство штатных изделий, что увеличивает общие сроки отработки
и материальные затраты.
Отмеченные на рис. 4.9 зоны неработоспособности двигателя
характеризуются повышенной интенсивностью отказов. Это сле-
дует понимать так, что вероятность безотказной работы на гра-
нице этой зоны низка, но не всегда равна нулю. Чаще всего она
128
определяется видом отказов, вероятности появления которых
в данном случае обозначим через qx и qt.
С удалением в глубь зоны вероятность отказов нарастает.
В итоге практически возможно определить границу равной
вероятности отказов:
?Е < и q'x < q'x.
В целом такое представление зоны неработоспособности
напоминает геодезическое изображение пересеченной местности
и может быть описано математически как поверхность отклика.
Подобные границы равной вероятности существуют и в области
между рабочим «квадратом» и обозначенной зоной. Но только
в этом случае вероятность отказов ниже допустимой и в целом
удовлетворяет заданным требованиям по надежности. Однако
область работоспособности, как правило, бывает определена
по ограниченному количеству испытаний, поэтому во всех слу-
чаях целесообразно при ее определении вводить доверительные
границы, а не довольствоваться случайными результатами.
При экспериментальной отработке эмпирический поиск гра-
ниц работоспособности очень сложен в техническом отношении
и вызывает массу трудностей, которые, прежде всего, заклю-
чаются в индивидуальной настройке двигателя на основные
параметры при граничных условиях, что иногда требует спе-
циальной сборки, подбора агрегатов с предельными характери-
стиками и т. п. Поэтому использование здесь математических
методов, позволяющих формализовать процесс в виде поверхно-
сти отклика, заслуживает самого серьезного внимания. С их по-
мощью по малому числу испытаний возможно определить мате-
матическую модель исследуемого процесса и границы равной
вероятности отказов, наконец, осуществить прогнозирование
ожидаемых результатов.
5 1874
Глава V
ПРИКЛАДНЫЕ МЕТОДЫ ТЕОРИИ НАДЕЖНОСТИ
В СИСТЕМАХ ОДНОРАЗОВОГО ИСПОЛЬЗОВАНИЯ
§ 1. ОСНОВНЫЕ КРИТЕРИИ И СТАТИСТИЧЕСКИЕ МОДЕЛИ
НАДЕЖНОСТИ
Краткое изложение прикладных методов теории надежности
в системах одноразового использования требует уточнения неко-
торых положений для постановки задачи и определения основ-
ных показателей. Это необходимо для использования основных
теорем и законов при планировании испытаний, обработке
результатов и оценке технического состояния изделий на раз-
личных этапах отработки.
Под системами и элементами одноразового использования
условимся понимать невосстанавливаемые системы и их эле-
менты в виде узлов, агрегатов и изделий различного вида тех-
нического оборудования, в том числе ракетной и космической
техники. В отличие от них системы многоразового использова-
ния являются восстанавливаемыми, так как допускают ремонт,
замену вышедших из строя узлов, блоков и т. п. Так, например,
электропневмоклапан (ЭПК) —типичный элемент многократ-
ного действия. В то же время он может применяться на систе-
мах одноразового использования типа ракет. Характер работы
ЭПК сохраняется независимо от объекта применения, но прин-
цип его эксплуатации на каждой из этих систем совершенно
различный. Если на теплоэлектростанциях ЭПК восстанавли-
ваемый элемент системы, то на ракетах это осуществить в про-
цессе применения невозможно (это допустимо при хранении
в арсеналах, на учебных изделиях). То же самое относится и
к элементам однократного действия типа разрывных мембран.
Попутно следует отметить, что их применение на системах мно-
горазового использования весьма ограничено.
Надежность как комплексная характеристика определяет
свойство изделия сохранять работоспособность в заданных усло-
виях. При этом под количественной мерой надежности следует
понимать вероятность безотказной работы на протяжении всего
периода функционирования в заданных условиях эксплуатации,
130
при любых возможных сочетаниях внешних и внутренних
факторов.
Оценка надежности характеризуется прежде всего определе-
нием вероятности наступления интересующего нас события.
Контроль надежности — это проверка выполнения требова-
ний по надежности со стороны заказчика на основе утвержден-
ных методов определения количественных показателей.
Обеспечение надежности — реализация проекта на основе
планов проведения экспериментальных работ, методик отра-
ботки, различного рода программ и других документов, способ-
ствующих выполнению в установленные сроки технического
задания на систему в целом.
Допустим, при испытаниях большого числа изделий в неко-
торых фиксированных условиях проявились отказы. В теории
надежности это явление характеризуется как поток отказов.
Последние подчиняются определенным закономерностям, зави-
сящим от конструктивных и технологических особенностей изде-
лия, физических свойств процессов, а также режимов работы
или условий испытаний. Эти закономерности, выраженные мате-
матическими символами, принято называть моделями отказов.
В теории надежности и математической статистике они известны
как законы распределения.
Количественные показатели надежности могут быть полу-
чены только на основе знания законов распределения отказов.
Последние устанавливаются путем обработки статистических
данных. Если говорят о количественных показателях надеж-
ности элементов и систем и не говорят, для каких условий они
пригодны, тогда эти условия подразумевают. Если условия испы-
таний не определены, количественные показатели надежности
не имеют практического смысла. Они справедливы только для
того вида информации и тех условий, при которых получены.
Исключением следует считать «ускоренные» или «утяжеленные»
виды испытаний, о которых речь шла выше.
Прогнозирование надежности на основе статистических оце-
нок может вестись в направлении их уточнения вследствие изме-
нения объема информации, но не ее вида или условий испыта-
ний. Точнее, если по испытаниям некоторой выборки или сово-
купности изделий получена оценка надежности Р, то
с определенной достоверностью можно утверждать, что в сред-
нем она сохранится и для будущих испытаний штатных изделий,
проведенных в тех же условиях. Если же условия изменились
или не являются стабильными, о точности прогноза говорить
не приходится.
Тем не менее существует обширный класс систем и элемен-
тов, работоспособность которых обеспечивается в довольно
широких пределах изменения внешних факторов, т. е. колебание
в известных границах условий испытаний не влечет к сущест-
венному изменению показателей надежности. В конкретном
5*
131
случае этдт вывод требует экспериментального подтверждения.
Если это так, то делается соответствующее заключение о нечув-
ствительности изделий к изменению условий испытаний и на-
дежность их может оцениваться по всей совокупности статисти-
ческих данных.
В качестве основного критерия, применяемого для оценки
надежности механических систем одноразового использования,
следует считать вероятность безотказной работы
Р (х) = J /(х) rfx,
х
где f(x) —плотность распределения параметра х, или частота
отказов.
В отличие от двух названных критериев Р(х) и f(x), интен-
сивность отказов Х(х) имеет весьма ограниченное применение
для стационарных потоков отказов, при которых
Х(х) = const.
Интенсивность отказов» является характеристикой надеж-
ности и количественно равна отношению плотности распределе-
ния f(x) к вероятности безотказной работы Р(х):
Х(х) = 2^.
V 7 Р(х)
В любом случае вероятность безотказной работы может
быть определена как функция интенсивности отказов:
Р (х) = ехр
— J k(x)rfx
о
(5.1)
Из уравнения (5.1) легко получить выражение для част-
ного случая, когда X(x)=const:
Р (х) = exp (— X х).
Соответственно для плотности распределения
f(x) = X • exp (— X х).
Этот частный случай и является экспоненциальным законом для
стационарных потоков отказов.
Если поток характеризуется условием X(x)=#const и имеет
плотность распределения вида
f (х) =---!---ехр Г - 1,
L 20 J
тогда он следует нормальному распределению, при этом х0 и о—
параметры распределения (х0— математическое ожидание; о —
132
среднеквадратическое отклонение). Случайная величина х изме-
няется в пределах
— ОО < X < + оо.
Вероятность безотказной работы будет равна
P(x) = Fof
\ а /
где Fo — функция Лапласа.
Если величина х характеризует время нормального функ-
ционирования или другой параметр наработки, то, естественно,
нижний предел ее изменения ограничивается нулем:
О < х < + оо.
С учетом этого несколько видоизменяется и сам закон, который
в данном случае следует считать усеченным на величину коэф-
фициента
1
ГО I -)
\ а /
Тогда выражение для Р(х) примет вид
Точность таких оценок, как будет показано ниже, в сильной
мере зависит от объема испытаний. В том случае, если они
малы, может использоваться распределение Стьюдента [76]. Па-
раметры этого распределения хорошо согласуются с нормаль-
ным при количестве испытаний более тридцати (/?^30). Харак-
/Хо------------X \ , / Xq \
теристики —----- и — являются квантилями нормального
\ ° / \ ° /
распределения. Для них имеются таблицы [76], позволяющие
оперативно оценивать вероятность безотказной работы.
Итак, мы рассмотрели весьма кратко два вида распределе-
ний — экспоненциальный и усеченный нормальный. Эмпириче-
ское их исследование подсказало еще два очень важных свой-
ства: экспоненциальный закон описывает только внезапные,
а усеченный нормальный — постепенные отказы.
Однако на практике в большинстве случаев при испытаниях
элементов и систем одной выборки встречаются оба вида отка-
зов вместе, а доли их проявления различны. Тогда решение
принимается следующее. Результаты испытаний строго разгра-
ничиваются, классифицируются по видам отказов и отдельно
оцениваются характеристики надежности по отношению к вне-
133
запным R(x)BH и постепенным Р(х)ПОс отказам. Суммарная
вероятность безотказной работы равна произведению:
Р (х) = Р (х)вн Р (х)пос,
а доли их проявления сх и с2 в сумме равны единице. Если же
известны распределения отказов и доли их проявления С\ и с2у
тогда для оценки вероятности безотказной работы могут быть
использованы суперпозиции двух законов, при этом соблюдается
условие
C1 + с2 = 1.
Рис. 5. 1. Распределение вероятности безот-
казной работы для закона В ей булл а
В нашем случае
Р (х) = exp (— X х) + с2 —-—-——.
Fo
Однако для практики отработки элементов сложных техниче-
ских систем доли распределения отказов заранее неизвестны.
Поэтому использование такого вида суперпозиции законов не
всегда представляется возможным.
С точки зрения эмпирического исследования распределения
отказов для ряда механических систем серьезного внимания
заслуживает закон Вейбулла [37]:
Р (х) = exp I-----).
\ Xq J
Особенность данного распределения состоит в том, что оно
является обобщающим для таких распределений, как экспонен-
циальное (при 0 = 1,0); Релея (при 0 = 2,0) и усеченного нор-
мального ((Приближенно).
134
На рис. 5.1 дано семейство кривых распределения вероятно-
сти безотказной работы для закона Вейбулла при различных
значениях показателя 0. Из графиков видно, что по мере увели-
чения параметра 0, а именно при 0^s 1,5, меняется знак кри-
визны.
При значениях 0 = 3,25 и выше распределение Вейбулла
имеет достаточно хорошую сходимость с усеченным нормальным
законом. Причем степень этой сходимости возрастает по мере
увеличения 0. Количественно увеличение показателя 0 для усе-
ченного нормального распределения означает уменьшение
коэффициента вариации.
Если принять во внимание, что экспоненциальный закон до-
статочно хорошо описывает внезапные, а усеченный нормаль-
ный — постепенные отказы, то становится очевидным, что пока-
затель распределения характеризует изменение вида отказов.
Как показывают исследования, распределение Вейбулла при
значениях 0^ 1,0 описывает внезапные, а при 0^3,25 только
постепенные отказы. Если это так, то при изменении показа-
теля 0 в интервале от 1,0 до 3,25 распределение Вейбулла может
описывать различные сочетания тех и других отказов, т. е. вне-
запных и постепенных. Доля одних и других зависит от величины
показателя 0: чем ближе к единице, тем доля внезапных отка- ч
зов выше и, наоборот, — с увеличением его доля внезапных
отказов уменьшается, а постепенных растет. Доля постепенных
отказов преобладает при значениях 0> 1,5. Это значит, что рас-
пределение Вейбулла в ряде случаев может заменить суперпо-
зиции двух законов — усеченного нормального и экспоненциаль-
ного. Поэтому исключается необходимость деления отказов при
обработке экспериментальных данных на внезапные и постепен-
ные, а следовательно, исключается и возможность ошибок, свя-
занных с принятием субъективных решений, при классификации
отказов.
Рассматриваемые законы распределений описывают различ-
ные потоки отказов для фиксированных условий испытаний.
Они справедливы для определения физических процессов. Но,
строго говоря, для механических систем и их элементов режимы
работы изменяются во времени. Для большинства механических
систем и их элементов есть режимы включения, установившиеся,
или маршевые режимы в соответствии с заданной программой
испытаний и, наконец, режимы выключения. Для любой системы
можно определить переходные и фиксированные режимы ра-
боты. Но в ряде случаев в соответствии с этими режимами изме-
няются сами физические процессы. Достаточно в качестве при-
мера указать на работу камеры сгорания ЖРД или хотя бы
такого простого элемента пневмогидравлической системы,
как ЭПК-
Последний в режиме «Нормально закрыт» осуществляет
функции запорного элемента. В режиме «Включение» он пропу-
135
описаны каким-лиоо одним
скает определенный расход- газа. В обоих случаях физические
процессы различны и работают различные конструктивные эле-
менты ЭПК, в данном случае как системы.
Для камеры сгорания процессы запуска и работы на марше-
вом режиме совершенно не соответствуют один другому в отно-
шении смесеобразования, горения топлива, динамических и теп-
ловых нагрузок. В силу этого и отказы, свойственные данным
режимам, должны быть различны. Поэтому они не могут быть
из рассмотренных выше распреде-
лений, исключая суперпозиции
нескольких законов. В целом это
подтверждается анализом и об-
работкой статистических данных.
Теоретическое распределение для
потоков отказов, полученное пу-
тем обработки большого числа
испытаний, в подобных случаях ’
0р. ti _ t2 7 имеет изгиб.
На рис. 5.2 последний соот-
Рис. 5.2. Супертозидаи двух зако- ветствует моменту времени а.,
нов 1рашреде!ле1Н1ия для интенсив- Как видно из рисунка, линия 1
мости отказов соответствует экспоненциальному
закону (Х = const), а кривая 2' —
периоду проявления износовых отказов, описываемых усеченным
нормальным законом (X=#const). Кривые 1 и 2, судя по харак-
теру их изменения, по всей вероятности, соответствуют двум рас-
пределениям Вейбулла: при 0i< 1,0 и 02>1,О или распределению
Вейбулла при 0< 1,0 и усеченному нормальному закону. Приве-
денные зависимости могут быть соответственно описаны мате-
матически суперпозицией двух законов или точнее произведе-
нием условных вероятностей:
для 1'—2'
Р (0 = [ехр (- X/J] Fo
\ <з2 /
для 1—2
Р (/) = ехр
где t\ имеет пределы изменения параметра t от нуля
до момента времени а (О^Л^а);
/г — изменяется в пределах от момента времени а до
бесконечности (а^/2^00);
Рг, 02 и foi; ^02 — параметры распределения Вейбулла и матема-
тические ожидания, соответствующие периодам
и t2.
136
Оба распределения являются суперпозициями двух законов.
Если учесть, что экспоненциальное и усеченное нормальное рас-
пределения при соответствующих значениях параметров доста-
точно точно описываются распределением Вейбулла, то супер-
позиция первого распределения практически является частным
случаем второго. Последнее для некоторого количества режимов
может быть представлено в более общем виде
/ d х \
Р (Xi < х) = exp I - У —).
\ Xoi /
В итоге получили новое распределение для любого количе-
ства суперпозиций закона Вейбулла. Оно может применяться
для исследования потока отказов элементов сложных систем,
работающих на нескольких последовательных режимах.
Для данного распределения плотность вероятности равна
d / d р; \
2Р/ P/-i I v х' ।
— Xi1 exp ’
1=1 x°‘ \ ~ x°l /
а интенсивность отказов
Х(х, <л) = У
iS Xoi
Итак, рассмотренное распределение является многопарамет-
рическим законом, способным описать на плоскости комбинации
практически любых потоков отказов, характеризующих различ-
ные режимы работы элементов сложных систем. В этом случае
для оценки нижней границы полной вероятности безотказной
работы в соответствии с центральной предельной теоремой мо-
жет быть использовано выражение вида
Р (X/ х)ниж = Р (X/ <1 х) ар (х.<ху
где ор(хг<х) — суммарное среднеквадратическое отклонение
оценки полной вероятности, определяемое фор-
мулой
а2 = о2 Y 02 _|_
,<w 11 (i), UJ ’
137
среднеквадратическими отклонениями и корреляционным мо-
/ 1 \
ментом текущих значении параметров распределения —
и 0г, характеризующих отдельные режимы работы и свойствен-
ные им потоки отказов.
Далее рассмотрим один из возможных примеров с целью
практического использования рассмотренного закона.
Допустим, система работает на трех режимах. Первый ре-
жим продолжается от нуля до 0,2 (0^Xi^0,2), второй от 0,2
до 2,0 (0,22,0) и третий от 2,0 до х (2,0^х3^х). Взаимо-
связь математического ожидания х0 со среднестатистическим
значением хСр определяется в соответствии с выражением
1
хср = х₽ • I’M- +
\ р /
Характеристика хСр принимается как масштабный фактор и
в нашем случае для всех режимов хср = 5,0.
Как следует из уравнения (5.2), параметры х0 и 0 связаны
между собой. Причем даже незначительное изменение пара-
метра 0 существенно влияет на величину математического ожи-
дания. Так, например, если принять 0 = 2, то при хср = 5 матема-
тическое ожидание х0 = 31,8, при 0 = 3 математическое ожидание
почти на порядок выше (х0=176), а при 0 = 4 х0 = 954. Это гово-
рит о том, что для распределения Вейбулла параметр 0 является
определяющим не только количественно, но и качественно.
Фактически величина параметра 0 указывает на вид потока
отказов.
Наряду с рассмотренными моделями в теории надежности
и математической статистике могут применяться и другие виды
распределений, но область их применения значительно уже.
Указанные распределения учитывают количественную информа-
цию в виде наработки х.
Тем не менее, существуют и статистические модели, позво-
ляющие учитывать качественную информацию. Наибольшее
распространение в практике имеют гипергеометрическое распре-
деление, биноминальный закон и закон Пуассона [21, 76].
Допустим, имеется некоторая совокупность изделий N, из
которых не имеют дефектов М. Мы хотим оценить качество этой
совокупности по испытаниям выборки R. Тогда вероятность того,
что при испытаниях 7? изделий т не будут иметь дефектов,
определится в соответствии с гипергеометрическим распределе-
нием формулой
Р =____________— Л4)! R\ т\______________
(M — m)l(R — m)l((N — M — R + m)\Nlm\
Для гипергеометрического распределения биноминальное
является частным случаем.
138
Учитывая, что этому вопросу\ посвящено большое количе-
ство исследований [21, 76], мы ограничимся изложенным выше.
Возможность практического использования для оценки надеж-
ности качественных моделей будет рассмотрена в следующем
параграфе. Общий недостаток этих распределений следующий.
Они не учитывают физических особенностей исследуемых про-
цессов, времени и видов наработок, причин отказов, а только
сам факт их проявления. Поэтому при обработке результатов
испытаний теряется много ценной информации о поведении
физических параметров. Соответственно для подтверждения
приемлемых уровней надежности требуется всегда чрезмерно
большой объем статистических данных.
Однако с помощью качественных моделей могут решаться
и специфические задачи, решение которых другими методами
не всегда возможно. Например, если изделия массового или
крупносерийного производства должны подвергаться разрушаю-
щим видам контроля, то для оценки качества товарной продук-
ции могут быть использованы качественные модели.
Такие методы находят широкое применение [63, 88]. Если
производство мелкосерийное или даже единичное, то для оценки
качества и надежности этих изделий необходимо искать уже
другие, возможно, физические методы.
§ 2. АНАЛИЗ ДОСТОВЕРНОСТИ ОЦЕНОК ПРИ ОПРЕДЕЛЕНИИ
КОЛИЧЕСТВЕННЫХ ПОКАЗАТЕЛЕЙ НАДЕЖНОСТИ
Определение количественных показателей является итогом
обработки накопленной информации. Расчету предшествует
сбор, систематизация и классификация статистических данных.
Достоверность полученных показателей надежности опреде-
ляется точностью этих данных.
Метод определения количественных показателей зависит от
вида информации, а точность оценки — в основном, от объема
статистических данных. Оценка точности может вестись различ-
ными методами, в частности, с помощью доверительных границ
или среднеквадратических отклонений.
В специальной литературе чаще всего рассматриваются во-
просы обеспечения и контроля надежности элементов радиоэлек-
тронного и электротехнического оборудования. Объясняется это
их массовостью и спецификой проектирования. Массовое произ-
водство элементов позволяет собирать и обрабатывать обширную
информацию, на основании которой достаточно точно уста-
навливаются виды отказов, законы их распределения, характе-
ристики надежности и т. п. Специфическая особенность проекти-
рования заключается в том, что электронные системы в боль-
шинстве своем состоят из типовых стандартных элементов,
характеристики и условия испытаний которых заранее известны.
По ^-характеристикам этих элементов для заданных условий
139
испытаний можно оценивать надежность аппаратуры даже на
таких ранндх стадиях разработки, как проектирование.
Применимость этих методов в большинстве своем основана
на использовании экспоненциального закона распределения,
для которого интенсивность отказов не зависит от времени на-
работки (Z = const).
Во всех остальных случаях, когда распределение отказов
элементов отличается от экспоненциального (Z=#const), приме-
нение ^-характеристик ведет к серьезным ошибкам.
Надежность системы определяется в значительной мере ее
параметрами и условиями испытаний. Для любого оборудования
они оговорены в проектной, технологической и эксплуатационно-
технической документациях. Для электронного оборудования
^-характеристики получены для фиксированных условий, при
которых эксплуатируются системы. Вот почему использование
их для оценки надежности таких систем является обоснованным.
Для неэлектрических систем, в частности, механических, спе-
цифика проектирования и производства иная. Система состоит,
в основном, не из типовых стандартных элементов, а из агрега-
тов и узлов, специально спроектированных для данной системы.
В ряде случаев отсутствуют аналоги и прототипы. В тех слу-
чаях, когда они существуют, их рабочие параметры могут во
много раз отличаться от заданных по величине, а конструктивная
и технологическая схема разнятся степенью совершенства.
Рассмотрим пример: проектируется ЖРД на криогенном
окислителе-кислороде с тягой до 1000 т (0,98-107 Н) и давле-
нием в камере сгорания 300 кгс/см2. Требуется оценить его на-
дежность на стадии проектирования. Постановка задачи
является обоснованной, особенно в тех случаях, когда проекти-
руется несколько конструктивных схем и требуется выбрать наи-
более совершенную по соображениям надежности. Однако, по
всей вероятности, ожидать в ближайшее время появления досто-
верных методов для такой оценки не приходится. Тем не менее,
в публикуемой литературе иногда приводятся ^-характеристики
механических ракетных систем и элементов [16]. О них мы будем
говорить несколько позже, а пока рассмотрим возможность при-
менения ^-характеристик для решения нашей задачи. '
Не вдаваясь в технические подробности, а только применяя
известные математические приемы, можно получить Х-характе-
ристики для элементов ЖРД по результатам испытаний анало-
говых систем. Применительно к решению нашей задачи к ним
относится ряд известных типов ЖРД, работающих на жидком
кислороде.
Анализ и систематизация статистических данных не позво-
ляют найти двигатели-аналоги, близкие к проектному варианту
по параметрам, конструктивному и технологическому решению.
Если придерживаться конструктивных решений двигателя
F-1, то проект двигателя с тягой 1000 т (1,02-IO5 Н) и давле-
140
нием рк = 300 кгс/см2, по всей вероятности, реализовать в настоя-
щее время не удастся. Причина этого, прежде всего, сложность
обеспечения высокочастотной устойчивости камеры сгора-
ния, не говоря уже о том, что с такими параметрами нецелесо-
образно разрабатывать двигатель по схеме «жидкость + жид-
кость» из-за больших потерь удельной тяги на ТНА. Создание
в настоящее время двигателя тягой 1000 т и давлением рк =
= 300 кгс/см2 потребует развития соответствующих областей
техники.
Поэтому рассматриваемый в нашем примере ЖРД дол-
жен в значительной мере отличаться от своих прототипов,
прежде всего, в -конструктивном отношении [101, 102].
Системы-аналоги также отличаются одна от другой не
только энергетикой, конструктивными и технологическими ха-
рактеристиками, но и родом топлива. Это ставит под сомнение
попытку обобщать результаты испытаний ЖРД различного
периода разработок и различного целевого назначения.
Попытка расчета проектной надежности ЖРД по Z-характе-
ристикам приводит к тому, что полученные количественные пока-
затели для разных конструктивных вариантов двигателей с тягой
от 680 до 1000 т (0,67-107 4-0,98-107 Н) практически не отли-
чаются один от другого (тяга в 680 тонн соответствует двига-
телю-аналогу F-1). Такой парадокс объясняется тем, что Х-ха-
рактеристики не учитывают конструктивных и технологических
особенностей перспективных схем. А поскольку информация о их
работоспособности на ранних стадиях проекта отсутствует, то
количественно надежность определить нельзя. Поэтому расчеты
надежности, основанные на ^-характеристиках предшествующих
разработок, не могут быть достоверными.
Сказанное выше не находится в противоречии с известными
работами по надежности. В качестве примера можно привести
следующее утверждение [37]: «.. ..обычно только при электрон-
ном и электромеханическом оборудовании представляется воз-
можным собирать достаточную информацию и получать из нее
обоснованные аналитические зависимости ... Элементы обору-
дования неэлектронного типа по большей части вырабаты-
ваются специально для конкретной системы с ее функциональ-
ной схемой и техническими условиями. В частности, это турбины,
камеры сгорания, газогенераторы и другие элементы ЖРД...
В этих и подобных примерах информация об отказах элементов
обычно весьма ограничена и относится лишь к данной конкрет-
ной системе. Следовательно, ее нельзя применять к другим
системам данного типа».
Это в полной мере относится к ^-характеристикам механи-
ческих систем. Если такие характеристики приводятся, то они
пригодны для расчета надежности только тех систем, по резуль-
татам испытаний которых получены, при условии, что закон рас-
пределения отказов экспоненциальный, т. е. Л = const.
141
Если речь идет о достоверности показателей надежности,
основанные на качественных видах информации, то она в зна-
чительной мере зависит не только от объема и качества исход-
ных данных, но и от объективности экспертов, производящих
статистические оценки. Дело в том, что достоверность показате-
лей надежности в этом случае основывается на методах класси-
фикации результатов испытаний, которые, как правило, сво-
дятся к простейшему делению испытаний на зачетные и неза-
четные с последующим делением зачетных на успешные
и отказы. Однако, как показывает практика, подход к оценке
результатов испытаний у различных групп специалистов в ряде
случаев может быть различным. Это легче всего показать на
следующих примерах.
Допустим, требуется оценить вероятность бездефектной
работы станка-автомата, изготавливающего крепежные винты
одного типоразмера. Для этого берется достаточно большая вы-
борка изделий (одна или несколько) и путем сплошного конт-
роля проверяется их качество. Если рассматривается нормаль-
ный производственный процесс, то все изделия считаются за-
четными. А изделия, не удовлетворяющие техническим условиям,
классифицируются как «отказы». В этом случае однозначность
решения обеспечивается методом контроля.
Другое дело, когда анализируются результаты испытаний
сложных систем. Например, на стенде испытано N двигателей.
Внешний осмотр и последующая дефектация показали, что
в ряде случаев наблюдалась эрозия стенок камер сгорания или
небольшие прогары сопла («пролизы»). Отмеченные дефекты
не привели к изменению технических характеристик изделия.
Если бы это случилось в полете, конечная цель была бы выпол-
нена, а дефекты остались не замеченными. Как же классифи-
цировать данные случаи: как дефекты или отказы? Мнения
здесь могут быть противоречивыми: одни исследователи утверж-
дают, что это дефекты, не приведшие к сколько-нибудь замет-
ным последствиям; другие считают, что это отказы, так как они
связаны с нарушением целостности материальной части.
В ряде случаев ссылками на техническую документацию та-
кие дефекты будут отнесены к отказам, хотя эти решения яв-
ляются в большей мере юридическими, чем техническими.
Подобных примеров существует много и далеко не всегда
они связаны с нарушением целостности материальной части.
Но ясно, что для сложных систем многообразие дефектов
и отказов таково, что их практически невозможно оговорить
в полной мере соответствующими методиками. Это может при-
водить к принятию субъективных или даже волевых решений.
Наряду с этим не менее важен вопрос об оценке представи-
тельности исходной информации для исключения отказов после
произведенных доработок. Если они успешные, то ранее зафик-
сированные отказы из общей совокупности зачетных испытаний
142
можно исключить, Например, когда вид и причина отказа одно-
значно установлены и физические методы контроля подтверж-
дают эффективность проведенной конструктивной доработки.
Но в ряде случаев причина отказа может объясняться целым
рядом гипотез, по каждой из которых проводятся соответствую-
щие доработки. В целом для проверки их эффективности потре-
буется большой объем испытаний.
Если контроль эффективности доработок вести только обра-
боткой качественной информации, объем контрольных испыта-
ний увеличивается. Поэтому на практике широко ведется иссле-
дование физических процессов с целью выяснения физических
причин отказа. При этом количество контрольных испытаний
резко сокращается.
В итоге можно заключить, что использование для оценки
надежности качественных видов' информации требует прежде
всего обоснованного подхода к методам обобщения и класси-
фикации результатов испытаний, знания физических причин
отказов, по которым произведены доработки. Непременным раз-
делом любых методик должны быть четкие правила классифи-
кации результатов испытаний для оценки их представительно-
сти: зачетные и незачетные, успешные и отказы.
При суммировании исходных статистических данных или
обобщении количественных показателей надежности для различ-
ных программ испытаний необходимо обращать серьезное вни-
мание на условия, при которых они получены. Как правило,
полной идентичности или воспроизводимости условий натурных
испытаний в процессе отработки достичь не удается. К тому же
различны цели и программы самих испытаний. Поэтому на прак-
тике часто используется методика дополнения статистических
данных, допускающая обычное суммирование некоторого коли-
чества успешных испытаний со штатными, если первые были
проведены в заведомо более тяжелых условиях. Успешные
испытания изделий в утяжеленном режиме рассматриваются
как зачетные и приравниваются к штатным, а отказы из даль-
нейшего рассмотрения исключаются.
Обработку статистических данных в процессе эксперимен-
тальной отработки следует вести практически непрерывно по
мере их поступления.
Показатели надежности не могут быть точнее информации,
на основании которой они получены [37]. Следовательно, они
не могут сообщить или предопределить большего, чем сами
результаты испытаний.
Первичная информация наиболее достоверна, хотя и содер-
жит ошибки измерения; результаты ее обработки дополняются
ошибками методического плана, а сделанные выводы включают
еще и элементы субъективного подхода к оценке полученных
данных.
143
§ 3. ОПРЕДЕЛЕНИЕ ПОКАЗАТЕЛЕЙ НАДЕЖНОСТИ НА ОСНОВЕ
КАЧЕСТВЕННОЙ ИНФОРМАЦИИ. МЕТОДЫ ОБРАБОТКИ
СТАТИСТИЧЕСКИХ ДАННЫХ
Рассмотрим некоторые методы, основанные на обработке
информации, классифицированной по качественному признаку
«да — нет» или «успех — отказ». Методы не учитывают физиче-
ских особенностей отказов, характера и периодов их проявления.
Для данного вида информации функция распределения
является дискретной. Поэтому методы оценки надежности,
основанные на информации данного типа, в дальнейшем также
будем называть дискретными. Исходной информацией для рас-
чета служат количество проведенных наблюдений (или испыта-
ний) и число благоприятных исходов (или отказов). Дискрет-
ные методы практически в равной мере могут быть использо-
ваны для оценки надежности простейших элементов и
сложнейших систем.
В дальнейшем перейдем к рассмотрению математических
методов оценки надежности, считая, что число успешных испы-
таний и количество отказов известны нам достоверно. Разность
между общим числом испытаний и количеством успешных исхо-
дов равна числу отказов.
Из теории вероятности известно, что отношение некоторого
количества успешных испытаний т к общему числу испыта-
ний N, проведенных при определенных условиях, может харак-
теризоваться некоторой вероятностью безотказной работы Р.
Для малого числа испытаний это отношение будет случайной
величиной, которая может изменяться в весьма широких пре-
делах:
0<Р<1.
При этом характеристика Р = — представляет собой точечную
N
оценку надежности в виде среднестатистической вероятности
безотказной работы. В теории вероятности это отношение (m/N)
чаще называют частостью, или частотой события.
По отношению к истинному значению вероятности безот-
казной работы Р характеристика Р будет несмещенной оценкой
надежности.
Характеристика Р равна математическому ожиданию веро-
ятности при большом числе испытаний. При ограниченном
объеме выработки разность (Р—Р) следует рассматривать как
ошибку е оценки вероятности безотказной работы при заданной
доверительной вероятности а:
а - Вер ((Р - е) < Р < (Р + в)}.
Из данного выражения следует, что при оценке надежности
истинное значение вероятности находится в некотором довери-
144
тельном интервале, для которого (Р—е) характеризует нижнюю,
а (Р + е) верхнюю границы.
Распределения статистических вероятностей могут быть са-
мыми* различными. Но на практике чаще других используются
биномиальный и нормальный законы. Согласно биномиальному
распределению верхняя и нижняя доверительные границы
вероятности безотказной работы определяются соответственно
из уравнений [13]:
pm Л __pJV-m __ я
m\(N — m)\ V 7 2 ’
(5-2)
N=k
m=0
pm Л __p\N~m __ д
m\(N — m)\ V 7 2 *
Рис. 5. 3. Доверительные М1нте|р1валы
вероятностей безотказной работы
Pi и Р2
Практический смысл интервальной оценки заключается
в том, что при ограниченном
числе испытаний искомое значе-
ние вероятности Р находится
внутри некоторого интервала,
границы которого есть нижняя и
верхняя доверительные границы
вероятности безотказной работы
Рниж и Рверх соответственно. __
На рис. 5.3 для частостей Pi
и Р2 доверительные интервалы
показаны в виде заштрихованных
областей, границы которых
асимптотически приближаются к
значениям Pi и Р2 при бесконечно
большом числе испытаний ЛЛ
Количественное значение уровней границ РНИж и Рверх, как видно
из уравнений (5.2), зависит не только от частости Р, объема
испытаний ^, но и от доверительной вероятности а.
Если при одном и том же числе испытаний доверительная
вероятность а по каким-либо причинам снижается, соответст-
венно сужается доверительный интервал и наоборот. При без-
отказных испытаниях, независимо от числа N, верхняя граница
доверительного интервала всегда равна единице.
На практике для оценки надежности иногда оказывается
достаточно использовать только одну нижнюю границу довери-
тельного интервала. При этом оценка с помощью верхней гра-
ницы опускается.
Это значит, что нас удовлетворяет оценка, при которой иско-
мое значение вероятности Р не ниже нижней доверительной
границы Рниж.
145
Таким образом, вводится понятие односторонней оценки
с помощью-* нижней доверительной границы при соответствую-
щей односторонней доверительной вероятности си.
Взаимосвязь двусторонней а и односторонней си доверитель-
ных вероятностей устанавливается с помощью зависимости [13]
а = 2 ai—1.
На рис. 5.4 даны графические зависимости для биномиаль-
ного распределения, устанавливающие взаимосвязь односто-
ронней нижней доверительной границы вероятности безотказной
Рис. 5. 4. Зависимость адиосторС1Н1Н1ей нижней доверительной границы вероят-
ности безотказной работы (биномиальное распределение) РНиж от числа испы-
таний W и количества отказов т0 при си =0,90 (пунктир) и си =0,95 (сплош-
ные линии)
работы с числом испытаний N и количеством отказов mQ при
ai = 0,90 и 0,95. Эти зависимости весьма удобны для практиче-
ского использования. Расчеты показывают, что при значениях
Р N и (1—P)N, больших четырех, для статистических оценок
вероятности безотказной работы может быть использовано с до-
статочной степенью точности нормальное распределение [13].
В данном случае доверительные границы вероятности Р опреде-
ляются исходя из выражения [1’3]:
1+*
р (1 - р)
I
~ . (5-3)
4№ J
146
где /а — коэффициент, характеризующий рассеивание парамет-
ров нормального распределения при заданной довери-
тельной вероятности.
Решение уравнений (5.3) со знаком плюс дает оценку для
верхней границы, а со знаком минус — для нижней. Аналогич-
ные решения можно получить также с помощью гипергеометри-
ческого распределения и закона Пуассона.
Рассмотрим теперь некоторые особенности дискретных оце-
нок, встречающиеся на практике. Для этого вновь обратимся
к рис. 5.3.
Если в процессе испытаний частость Р остается стабильной,
оценки вероятности Р монотонно изменяются в соответствии
с доверительными границами в пределах одной заштрихованной
зоны. Если же в процессе испытаний частость Р нестабильна,
оценки вероятности изменяются не монотонно, а дискретно, так
как оцейки вероятности данной зоны переходят в другую. Так,
например, закончив первую серию испытаний получим
статистическую вероятность безотказной работы Рь при кото-
рой оценка надежности Р находится в интервале 1—1 (см.
рис. 5.3). Затем испытания продолжили и при их суммарном
числе N2 количество отказов увеличилось. В целом это привело
к ухудшению результатов испытаний, в связи с чем частость Pi
снизилась до уровня Р2 (Pi>P2). Соответственно при том же
уровне а оценка надежности Р переместилась в интервал 2—2.
Количественно покажем это на примере. При АО = 10 и Pi =
= 1,0 (zno = O) нижняя граница вероятности безотказной работы
при си = 0,90 составила РНиж = 0,80. Полученная. оценка позво-
ляет утверждать, что при данном исходе испытаний определяе-
мый уровень надежности при си = 0,90 не ниже 80%. Но допу-
стим, что после этого провели еще два испытания и получили
отказы, т. е. ап0 = 2; TV2= 12 и Р = 0,83. Эти результаты соответст-
вуют уровню РНиж = 62% при си = 0,90. Таким образом, наш
прогноз о том, что надежность испытываемых изделий не ниже
80%, не подтвердился, так как РНиж = 62%. Строго говоря, прог-
ноз будет верен при дополнительном условии, что частость Р
в процессе испытаний не меняется. Как следует из опыта веде-
ния экспериментальных работ, при любом числе испытаний
такой гарантии на будущее быть не может.
Следовательно, при малом числе испытаний такие прогнозы
надежности являются малодостоверными, но с увеличением
числа испытаний экспериментальная частость становится все
более стабильной. Для изделий с высокой степенью надежности
при значениях А—100 частость Р, как правило, изменяется
в пределах нескольких процентов. Это значит, что данными ме-
тодами относительно достоверные оценки надежности можно
получать лишь при очень большом числе испытаний. Так, напри-
147
мер, если необходимо подтвердить уровень надежности 0,99 при
а = 0,95, потребуется не менее 298 безотказных испытании (см.
рис. 5.4). При наличии одного отказа, количество испытаний
увеличивается свыше 450 и т. д.
Для подтверждения уровня надежности 0,995 при а = 0,95
количество безотказных испытаний уже равно 598.
Приведенные примеры показывают, насколько нереально
применение дискретных методов для оценки работоспособности
высоконадежных, дорогостоящих изделий, выпускаемых мел-
кими партиями. Это сразу ставит вопрос об актуальности разра-
ботки количественных методов, при которых учитывались бы
физические особенности процессов, весь ход изменения основ-
ных характеристик изделия, а не единственный факт наступле-
ния отказов.
§4 О ПРЕДЕЛЕНИЕ ПОКАЗАТЕЛЕЙ НАДЕЖНОСТИ НА ОСНОВЕ
КОЛИЧЕСТВЕННОЙ ИНФОРМАЦИИ. МЕТОДЫ ОБРАБОТКИ
СТАТИСТИЧЕСКИХ ДАННЫХ
Количественная информация о надежности систем и их эле-
ментов является результатом планируемых испытаний на всех
этапах конструкторской отработки, результатом испытаний
в процессе производства и эксплуатации. В качестве исходных
данных, как правило, используются различные виды наработок
до отказа, на время безотказной работы при испытаниях на
ресурс, на количество циклов и т. д.
После тщательного анализа и классификации статистиче-
ских данных может быть выделена совокупность изделий, испы-
танных по одной программе. Более рационально, если такие
испытания планируются в процессе отработки.
Рассматривается некоторая совокупность изделий, характе-
ризуемая наработкой, измеряемой характеристикой х.
Тогда все возможные исходы можно подразделить на три
группы.
1. Все испытываемые изделия некоторой выборки JR имеют
наработку до отказа, соответствующую ряду эксперименталь-
ных значений хь х2у х3,..., X;,..., хд. Такая выборка в соответ-
ствии с полученными результатами считается полной.
2. При испытаниях по одной программе часть выборки г
доведена до отказа. Оставшаяся часть (/?—г) имеет наработку
не менее ха, но отказы не наступили. В отличие от полной такая
наработка считается усеченной. Соответственно по программе
для безотказных испытаний наработка ха должна превышать
наработку изделий г на отказ. Для методики обработки резуль-
татов испытаний это условие в принципе не является обязатель-
ным. Однако рациональная программа должна строиться сле-
дующим образом. Испытания всей выборки R планируются
до наработки хау отказы отдельных изделий могут наступить
148
и раньше (Xi^Zxa) .В сумме таких изделий должно быть г. После
достижения наработки ха дальнейшие испытания прекращаются.
Однако в ряде случаев испытания могут быть продолжены.
Тогда это равноценно увеличению наработки ха до некоторого
значения хА.
3. При испытаниях изделий выборки 7? по заданной про-
грамме до наработки ха отказы не поступили вообще. При таком
исходе по решению руководителя работ испытания могут быть
продолжены до наработки хА. В ряде случаев, если это значение
не оговорено специальными условиями, оно может приниматься
произвольно, например, равным хА^ (1,54-2,0)ха. Естественно,
что продолжение программы может привести к иным результа-
там, тождественным полной или усеченной выборкам.
Однако при испытаниях высоконадежных изделий с большим
техническим ресурсом исход может остаться прежним, т. е.
отказы могут не наступать. В этом случае, несмотря на общий,
казалось бы, благоприятный результат, отказы или «слабые»
места конструкции останутся не выявленными. Следовательно,
такие испытания не несут в лолном объеме должной информа-
ции, необходимой на этапе конструкторской отработки.
Практика показала, что рациональным следует считать
исход, позволяющий установить виды возможных отказов и при-
чины их проявления, которые затем следует устранить в про-
цессе доработки. Информация об отказах является гарантией
обеспечения высоких уровней надежности.
После реализации программ и классификации результатов
испытаний производится их обработка. При оценке количествен-
ных показателей надежности одной из первоочередных задач
является определение закономерностей распределения отказов
путем проверки соответствия экспериментальных и теоретиче-
ских данных.
В том случае, если объем информации достаточно велик (по-
рядка сотен и более наблюдений), может быть определен фак-
тический закон распределения отказов на основе статистиче-
ских исследований [13]. Наиболее приемлем в этом случае метод
построения гистограмм.
При обработке уникальных и дорогостоящих изделий испы-
тания, как правило, ведутся до полной потери работоспособно-
сти узлов и агрегатов. Если испытания по одной из эксперимен-
тальных программ заканчиваются выходом из строя отдельных
элементов системы, последние подвергаются разборке и дефек-
тации, а узлы и агрегаты, сохранившие работоспособность,
поступают вновь на очередную сборку для подготовки следую-
щей программы. Затем испытания продолжаются, пока они не
закончатся отказом или обнаружением дефектов.
Таким образом, количество испытаний и изделий в выборке
не всегда соответствуют одно другому. Поэтому об испытании
следует говорить как о факте реализации программы,, а об изде-
149
лии — как об объекте, подлежащем экспериментальной про-
верке. Следовательно, и объем испытаний может не соответст-
вовать количеству изделий в выборке. Поэтому, когда речь идет
об установлении вида распределения, мы должны исходить из
информации, полученной по испытаниям большого числа
изделий.
При исследовании случайных процессов их закономерности
проявляются тем точнее, чем больше объем информации. При
этом методика обработки экспериментальных данных должна
исключать второстепенные, мало свойственные исследуемому
процессу явления, характерные для одной ограниченной совокуп-
ности изделий. Для этой цели в математической статистике ши-
роко применяются методы выравнивания или сглаживания ста-
тистических распределений с помощью аналитических зависи-
мостей.
Итак, при большом числе экспериментов статистические дан-
ные с целью обобщения могут быть подвергнуты соответствую-
щей ранжировке, располагающей их в статистический ряд. Для
этого весь диапазон измерения случайной величины х делится
на 104-20 разрядов (чем однороднее и достовернее эксперимен-
тальные данные, тем число разрядов больше). Величины разря-
дов могут быть одинаковыми или различными, это объясняется
особенностями статистического ряда в каждом конкретном слу-
чае. Если диапазон изменения случайной величины х предста-
вить графически в виде линейной оси, то соответствующее число
разрядов заполнит весь диапазон, равный величине (хтах—xmin).
Соответственно каждый разряд (хг+1—Хг) будет характеризо-
ваться определенным количеством наблюдений тг случайной
величины х.
Это позволяет установить для каждого разряда свою экспе-
риментальную частость
Р —
' Я
Если теперь значения статистического ряда перенести на
график вида Р(х), то получится гистограмма. При этом величина
частости Р [(/4-1)_/] определяет ранг разряда. На рис. 5. 5 в каче-
стве примера показано распределение вероятности безотказной
работы для некоторой выборки изделий в зависимости от вре-
мени испытаний. Как видно, величины разрядов не равны между
собой. По вполне понятным причинам первый и последний раз-
ряды (0—1) и (9—10) не следует дробить на более мелкие, так
как изменение частости Рг- в каждом из диапазонов происходит
очень медленно. Средние точки разрядов соединяются плавной
кривой, которая в данном случае является статистической функ-
цией распределения. Чем больше объем экспериментальных
данных, тем точнее ее вид, при этом уменьшается доля и те-
150
ряется вес явлений, не свойственных установленной закономер-
ности, т. е. явлений, случайно проявившихся в данной совокуп-
ности статистической информации.
Если объем выборки ограничен, речь может идти не об уста-
новлении вида функции распределения, а о проверке соответст-
вия результатов испытаний одному из принятых теоретических
распределений. Например, если количество испытуемых изделий
равно 10—15, то в качестве критериев согласия используются
критерии Пирсона —%2 и Колмогорова [76].
Рис. 5.5. Распределение вероятности безотказной работы
для некоторой выборки изделий в зависимости от вре-
мени (гистограмма испит амий)
Важным этапом является определение параметров распреде-
ления по опытным данным. Очень удобен в этом отношении
графо-аналитический метод, при котором функция принятого
теоретического распределения путем логарифмирования пре-
образуется в прямую линию. Этот метод следует считать при-
ближенным. Так, например, для распределения Вейбулла функ-
ция вероятности безотказной работы может быть преобразо-
вана так:
z (х) = In {— In [Р (х)]} = — In х0 + р In х. (5.4)
В данном случае частость Р является функцией параметра х.
Проанализируем уравнение (5.4). Легко заметить, что это
уравнение прямой, отсекающей от оси z(x) отрезок, равный
—lnx0. С целью определения параметров х0 и 0 по эксперимен-
тальным данным строится графическая зависимость z(x) =
= f(lnx;) (рис. 5.6). Аналогичные зависимости могут быть полу-
чены и для других распределений. Например, для экспоненциаль-
ного закона функция z(x) имеет вид прямой, проходящей через
начало координат:
z (х) = In Р (х) =--—,
Хо
или z(x) =—Хх.
151
При этом ^-характеристика равна тангенсу угла между аппрок-
симирующей прямой и осью х:
х = -.£^.
X
Однако не во всех случаях экспериментальное распределение
может быть достаточно хорошо описано каким-либо из законов
в виде прямой линии.
На рис. 5.7 аппроксимирована экспоненциальным законом
в виде прямой 1 только группа экспериментальных точек,
остальные условно ложатся на линию 2. Объяснить это можно
тем, что показанное распределение, по всей вероятности, является
суперпозицией двух экспоненциальных законов с интенсивно-
стями отказов Xi и Z2. Но это не исключает возможность приме-
нения для проверки согласия экспериментальных и теоретиче-
ских данных распределений других видов.
Рассмотренный графо-аналитический метод определения па-
раметров распределений является приближенным и не преду-
сматривает оценки их точности.
В принципе степень согласия экспериментальных данных
с аппроксимирующей прямой может быть определена с по-
мощью критериев Пирсона — х2 и Колмогорова [76].
Более точные оценки параметров могут быть получены с по-
мощью функции правдоподобия Л(х). Эта функция характери-
зует вероятность распределения экспериментальных данных
и в ряде источников принимается как сумма плотностей,
а иногда как сумма их логарифмов. Частная производная функ-
ции правдоподобия, приравненная нулю, определяет максимум
правдоподобия:
дД(х) _р
дх
Это условие используется для оценки значений самих парамет-
ров распределения х0, о или 0.
Указанное свойство функции правдоподобия широко исполь-
зуется в математической статистике. Поэтому для удобства
дифференцирования иногда целесообразно функцию правдо-
подобия представлять в виде суммы логарифмов плотностей рас-
пределения.
Рассмотрим теперь конкретный пример. Если имеются экспе-
риментальные данные по испытаниям выборки с наиболее веро-
ятной плотностью распределения f(x), соответствующие нара-
ботки до отказа (случай 1), тогда
R
£(х) = 2 1пЖ)-
1=1
152
Если же испытания до отказа чередуются с безотказными
(случай 2), тогда функция правдоподобия принимает вид
L (х) = 2 ln/(xz) + (/? - г) In Р (х0).
1=1
Как и следовало ожидать, дальнейшее решение зависит от
вида распределения. Так, например, для распределения Вей-
булла функция правдоподобия может быть представлена:
для полной выборки
R 1 R
L(x) = R (In p-ln x0) + (p - 1) Y In x,- - — Y x₽;
Pihic. 5. 7. Распределение в виде су-
перпозиции двух экспоненциальных
затнов
для усеченной выборки
Цх) = г (In р - 1пх0) + (р - 1) Y 1ПХ,- - — Y х₽ - (R-r)
iS х° & х°
Далее, в зависимости от результатов испытаний, произведем
частное дифференцирование соответствующего вида функции
L(x) с целью определения значений параметров xQ и 0:
«W = 0 и «И = о
sp
\х0/
Попутно заметим, что дифференцирование функции L(x) для
распределения Вейбулла удобно производить не по параметру х0,
а по его обратной величине (—).
\ *0 )
В результате получим зависимости, позволяющие определить
среднестатистические оценки параметров распределения:
153
1 -
для полной выборки Хр = — ^ X? ,
8 = —:----------------------------;
1 /? • _ /?
—2 in Xi — 2 ln xi
Xo (=1 <=l
_________________________ j _ n f
для усеченной выборки x0 = —
1=1
R
2 In Xi + -^r— x9a In xa
(5-5)
1
*0
Эти зависимости, несмотря на их сложность, легко решаются
путем подбора или графо-аналитическим методом.
Аналогично могут быть получены статистические оценки для
усеченного нормального и других законов одно- или двухпара-
метрических распределений. Так как вначале мы задались ви-
дом распределения, то непременным следствием таких оценок
должна быть проверка согласия теоретических и эксперимен-
тальных данных. Методы проверок с помощью критериев согла-
сия Пирсона — %2 и Колмогорова общеизвестны [71, 76].
Если с помощью одного из распределений достигнута прием-
лемая сходимость с экспериментальными данными, то может
производиться оценка доверительных границ вероятности без-
отказной работы. Вероятность в этом случае может использо-
ваться для оценки количественных показателей надежности.
На практике наряду с интервальными оценками в качестве меры
точности применяется среднеквадратичное отклонение вероят-
ности Ор.
Для полной выборки испытаний один из методов оценок для
вероятности безотказной работы покажем на примере распреде-
ления Вейбулла как одного из наиболее общих в теории надеж-
ности. Данное распределение является двухпараметрическим,
поэтому для определения среднеквадратического отклонения
вероятности ор требуется найти не только параметры х0 и 0,
но и корреляционный момент cov н—); 0 и среднеквадратиче-
1\хо / J
ские отклонения параметров! —) и 0, соответственно а/j_\ и оа-
W Ы
С этой целью составим зависимости для экстремальных зна-
чений функции А(х), т. е. условия для максимума правдо-
подобия:
МЛ*) = q и МЛ*) = о
J 1 \
o
154
В соответствии с выражениями (5.5) произведем статисти-
ческие оценки параметров х0 и 0 и найдем вторые производные:
_ р-2
d (— |
d2L (х)
dp2
d2L (х)
D 1 ’ -
= -4------------4 У X? In3 Xi,
02 x0 Й
R _
= -2*? tax,-.
\ Ло /
Далее составим матрицы:
d2L (х).
др2 -
d2L(x)
A =
B =
d2L (х)
д(—4
\Хо/
дЧ (x)
о
cov
а2,
Если справедливо условие B = —[А-1], тогда
В = ——
det А
_ / R _ \
\ i=i J
R _ \ f р 1 R _
- .2 X? In Xi); ( 4 + 4-2 xi 1112 xi
1=1 / \ ₽’ Xo 1=1
где детерминант А равен:
/ р 1 я _ \ _ f R - \з
detA = (^- + 4-2 х?1п2х)/?х2- (у x?lnxj.
\ Р2 Хо z=l J \z=l /
Отсюда получаем зависимости:
1 f р 1 R — \
а2=ЛА,
0 det А
1 * -
-----V х? In
det А 1 1
cov
155
Далее с привлечением метода линеаризации функции Р(х),
зависящей от нескольких переменных, можно определить сред-
неквадратическое отклонение вероятности ар:
Op In2Л
(5.6)
Для изделий с уровнем надежности не ниже 0,95 с доста-
точной степенью точности можно пользоваться следующей зави-
симостью для определения нижней границы вероятности:
Р (^)ниж = Р (•*) ар.
В этом случае нами использовано выражение для нормаль-
ного закона. В принципе подобная оценка нижней границы
вероятности является приближенной, так как распределение
Вейбулла заменяется нормальным. Однако расчеты показы-
вают, что такое допущение справедливо для изделий с высокой
надежностью, для которых в данном случае и производится
количественная оценка надежности при подтверждении задан-
ных уровней. При рассматриваемых уровнях показатель распре-
деления р, как правило, достаточно велик (р^3,25), и поэтому
оба закона (усеченный нормальный и Вейбулла), как было по-
казано выше, достаточно хорошо согласуются между собой.
Представленный математический аппарат может показаться
достаточно громоздким для прикидочных расчетов. Прибли-
женные оценки для высоких уровней надежности, когда проис-
ходят практически только постепенные отказы, можно вести
с помощью зависимостей для нормального усеченного распре-
деления.
Если уровень надежности предположительно нам неизвестен
или случаются внезапные отказы, достаточно хорошие оценки
можно получить практически всегда с помощью распределения
Вейбулла. В этом случае расчетные зависимости целесообразно
запрограммировать для ЭЦВМ.
При безотказных испытаниях (случай 3) суммарная нара-
ботка изделий характеризуется как
ос о .
В данном случае отказы не наступили, следовательно, неиз-
вестен не только их вид, но и характер распределения. Практи-
чески известна только наработка и объем выборки. Поэтому на
практике в подобных случаях при определении количественных
показателей надежности обычно пользуются экспоненциальным
законом, который не дает завышенных оценок.
156
Тогда точечное значение вероятности безотказной работы
можно определить исходя из выражения
Р(х) = ехр(—
\ -*а К
При оценке нижней границы среднестатистическое значение
наработки должно быть уменьшено на соответствующий коэф-
фициент. Он зависит только от доверительной вероятности и ко-
личественно равен In(1—а).
При этом условии нижняя граница вероятности безотказной
работы для выборки с безотказными испытаниями определяется
по формуле
р (Аиж = ехр Г- х ln (1 1. (5.7)
ХаК
При полной или усеченной выборках, когда поток отказов
следует экспоненциальному закону, среднестатистическое зна-
чение наработки равно отношению суммарного периода испыта-
ний к количеству проявившихся внезапных отказов то:
L *
Хо = ~~т~ 2
m° £1
Тогда точечное значение вероятности Р(х) равно
Р (х) = ехр ( — . (5.8)
\ х° J
Выражение (5.8), как и следовало ожидать, характеризует
частный случай распределения Вейбулла при значении пара-
метра р= 1.
Соответственно и оценка для нижней границы вероятности
Р(х) определится как
Р (^)ниж = ехр f >
где коэффициент г2 является функцией числа отказов т0 и дове-
рительной вероятности а. Количественные значения коэффи-
циента г2 имеются в таблице [76].
Рассмотренные методы определения количественных показа-
телей надежности предусматривают использование исходной
информации по результатам доводочных испытаний и испытаний
на надежность элементов и систем многократного действия.
В конкретных случаях в качестве параметров наработки могут
приниматься время безотказной работы, количество циклов до
отказа и другие параметры, определяющие потоки внезапных
и постепенных отказов при фиксированных условиях испытаний.
Непременными условиями таких оценок являются: статистиче-
157
ская независимость выборки, при которой изделия для испыта-
ний не подбирались специальным образом, и строгая фиксация
условий их проведения. Полученные показатели надежности
должны быть справедливы -для условий, при которых получена
исходная информация.
/
§ 5. ОБРАБОТКА РЕЗУЛЬТАТОВ ИСПЫТАНИЙ ДЛЯ ИЗДЕЛИЙ
ОДНОКРАТНОГО И МНОГОКРАТНОГО ДЕЙСТВИЯ В СЛУЧАЕ
НОРМАЛЬНОГО РАСПРЕДЕЛЕНИЯ
Нормальному распределению могут следовать результаты
испытаний изделий однократного и многократного действия.
В первом случае это связано с распределением параметров по
схеме «нагрузка — прочность», во втором — при наличии только
постепенных отказов. Применительно к последним это означает,
что изделие в конструктивном отношении отработано, отсутст-
вуют внезапные отказы и предел работоспособности опреде-
ляется износом, потерей прочности вследствие усталостных явле-
ний и тому подобными причинами. Отказы элементов и систем
однократного действия характеризуются отсутствием срабатыва-
ния их в заданный момент времени.
Как и следовало ожидать, методы обработки результатов
испытаний для обоих типов изделий несколько отличаются,
поэтому рассмотрим их поочередно.
1. Обработка результатов испытаний элемен-
тов и систем однократного д е й с т в и я. Количествен-
ные показатели надежности для изделий однократного действия
могут быть определены при наличии соответствующей информа-
ции исходя из сопоставления параметров, характеризующих
«нагрузку» на стопорный элемент и его «прочность». -В этом
случае для среднестатистических оценок вероятности безотказ-
ной работы в соответствии с нормальным распределением мо-
жет быть использована зависимость (4.2). При этом пара-
метры x'Q, Xq и Qi, о2 являются среднестатистическими оценками
математических ожиданий и среднеквадратических отклонений
параметров распределения. Значения интервальных оценок веро-
ятности Р в каждом конкретном случае зависят от объема
информации и уровня доверия а, при котором ведется расчет.
Исходные данные определяются по испытаниям выборок R
одноименных изделий в фиксированных условиях, близких
к натурным.
При данных испытаниях выборки, определяющие «нагрузку»
(/?н) и «Прочность» (/?п), могут быть равными (/?=/?„ = ^?п) или
/?ну=/?п. в итоге после завершения программы по каждому из
контролируемых параметров, характеризующих «нагрузку»
и «прочность», может быть составлен статистический ряд резуль-
татов испытаний:
158'
PH1’ PhJ • • • Р*Ч' • • • Рн/?»
Рп.’ Рп,’ Рп8» ’ ’ * Рп/ ’ ’ ’ Рп/? *
(5.9)
К числу контролируемых параметров можно отнести давле-
ние (или усилие) нагружения и потери прочности. Точечные зна-
чения параметров распределения соответственно для «нагрузки»
и «прочности» определяются по формулам:
Рп
Далее находим точечное, значение квантиля нормального
распределения
Гт _ Рп Р»
р~ 17-------
и соответственно ее нижнюю границу
Для оценки точности определения квантиля с помощью
среднеквадратического отклонения ни и используем функцию
линеаризации. С учетом этого получим
(5.10)
В данном случае а 2 и а 2 — среднеквадратические отклонения
°П вН
оценок дисперсий °п и ан-
Решая уравнение (5. 10), получим
(5.П)
Теперь есть все исходные данные для определения нижней гра-
ницы вероятности безотказной работы:
Рниж = Fo (Up ta Sjj) .
159
Как видно из уравнения (5.11), на величину отклонения аи
сильное влияние оказывают объемы выборок 7?п и (/?н- Чем они
меньше, тем больше ошибки в оценке точности вероятности
безотказной работы.
Вопросы влияния объема выборки 7? на количественные по-
казатели надежности будут рассмотрены ниже.
2. Обработка результатов испытаний элемен-
тов и систем многократного действия. При ана-
лизе результатов испытаний элементов и систем многократного
действия, отказы которых следуют нормальному распределению,
речь может идти только о полной и усеченной выборках. Без-
отказные испытания не рассматриваются, так как по результа-
там этих испытаний параметры нормального распределения,
в частности, среднеквадратический разброс времени наступле-
ния отказов, установить невозможно.
Для полной выборки, когда известен параметр наработки на
отказ для всех изделий 7?, параметры нормального распределе-
ния х0 и о можно определить по формулам
- 1 * 1 * _
*<>=~ 2Хь °2=1 2 (х° X/)2’
z=i z=i
Далее по известной формуле (4. 1) оценим точечное значе-
ние вероятности безотказной работы.
В данном случае используем усеченное нормальное распре-
деление. Соответственно точечное значение квантиля будет
равно
Гт _
а его нижняя граница
^ниж == U аи ’
где аи — среднеквадратическое отклонение.
Затем для определения дисперсии воспользуемся функ-
цией линеаризации. С учетом этого получим выражение
Решая его, можно найти зависимость
а2 = 1 . U2
°и > 2(Я—1) ’
оценки нижней гра-
Итак, получены все исходные данные для
ницы вероятности безотказной работы:
г. (О
* \Л/ниж .
FO (Ux=0 - ta ау)
(5.12)
160
В уравнении (5. 12) коэффициент усечения вычисляется по
нижней границе квантиля (U — /ааи) при значении х, равном
нулю (х = 0). В случае усеченной выборки параметры распре-
деления могут быть определены исходя из функции правдо-
подобия :
(5.13)
Решение для данного случая приводится в работе [76],
поэтому укажем только рабочие формулы для системы уравне-
ний, по которым ведется расчет с целью определения парамет-
ров х0 и о:
Г / Г \ 2
у =—1—±1—,
f 1 г V
\х“—~ )
i + f—-ik /(k) 17* - Л /(k) Г
у = ' Fo<k) . И г_j_Fo(k).J_ (5Л
Ff * - Л /(к) _ ьГ
\ г / Fo(k)
где к=Л° Ха.
а
В дальнейшем для оцрнки вероятности безотказной работы
могут быть использованы зависимости „(5.12) и (5.14).
Из анализа уравнений (5.13), (5.14) следует, что точность
оценок параметров х0 и о в сильной мере зависит от соотноше-
ния /?/г, т. е. от степени усечения полной выборки.
В каждом конкретном случае, помимо параметров г и точ-
ность зависит также от значений х0, ха и о. Тем не менее, при
решении ряда практических задач установлено, что приемлемая
точность оценок может быть получена при количестве изде-
лий г^0,5/?.
В результате обработки статистических данных по испыта-
ниям изделий, принадлежащих к одной генеральной совокуп-
ности, получена количественная оценка надежности. Если вы-
борка R ограничена, то соответствующие показатели позволяют
судить, в основном, о степени конструктивного совершенства
изделий и лишь в малой степени — о качестве их производства.
Для- оценки качества производственных процессов требуется
информация по испытаниям большого количества изделий.
После завершения определенной экспериментальной про-
граммы рассматриваемая оценка надежности, Как правило, яв-
6 1874
161
ляется не окончательной, особенно в тех случаях, когда данной
программу предшествовал большой объем конструкторских,
доводочных и других видов испытаний. Тогда расчетные значе-
ния полученных показателей должны уточняться. Это дости-
гается простым суммированием статистического ряда (5.9),если
условия испытаний идентичны, или путем обобщения самих
оценок вероятности Р(х), полученных для разных генеральных
совокупностей изделий. Методы обобщения таких оценок до-
вольно различны, поэтому в каждом конкретном случае тре-
буется их увязывать с физическим смыслом задачи.
Основной подход к обобщению статистических оценок, при-
надлежащих к различным выборкам или нескольким сериям
испытаний, изложен в работах [55, 76]. Первоначальная обра-
ботка статистических данных ведется с целью проверки при-
надлежности к одной генеральной совокупности. Только при
этом условии результаты испытаний и сами оценки могут обоб-
щаться. Однако чисто математический подход к проверке при-
надлежности к одной совокупности различных программ испы-
таний не всегда дает должные результаты, а иногда может про-
тиворечить физическому смыслу задачи. При этом ведь
учитывается только степень различия параметров х0 и а для раз-
личных проградом.
Если близки параметры наработки х0 и о, это еще не значит,
что одинаковы условия испытаний. Может быть совершенно
другой состав внешних факторов, тогда близкие по значимости
результаты для двух программ могут получаться благодаря
перераспределению степени влияния факторов. Наконец, близ-
кие результаты могут быть получены случайно вследствие малой
выборки /? для одной из программ.
Следовательно, чтобы избежать серьезных ошибок в подоб-
ных вопросах, необходимо всегда учитывать физическую сто-
рону задачи. Это является своего рода проверкой статистической
модели и ее результатов на адекватность.
§ 6. ОПРЕДЕЛЕНИЕ МИНИМАЛЬНОГО РАЗМЕРА ВЫБОРКИ
ИЗДЕЛИЙ ПРИ ИСПЫТАНИЯХ НА НАДЕЖНОСТЬ
Рассматривая различные методы обработки результатов
испытаний, мы убедились, что объем выборки зависит от вида
информации, требуемого или оцениваемого уровня надежности,
вида распределения, степени усечения выборки и доверительной
вероятности. Под видом информации следует понимать не
только качественный, но и количественный ее состав: например,
степень соизмеримости математического ожидания наработки х0
со среднеквадратическим отклонением о и фиксированным зна-
чением наработки х. Важно также, проведены ли испытания
до отказа или нет и объем испытаний. Это существенным обра-
зом влияет не только на точность определения параметров рас-
162
ноет и для -модели «нагрузка — гтроч-
-ность» (jH=0,5 сгп; а=0,95
пределения, но и на то, какой вид закона следует применять при
обработке экспериментальных данных.
Может оказаться известным вид распределения для данного
типа изделий, но если при испытаниях не было отказов и
неизвестны параметры распределения, то принимается
экспоненциальный закон, дающий заведомо низкие оценки
в сравнении, например, с нормальным при значениях х, мень-
ших Xq.
В качестве меры точности оценок количественных показате-
лей надежности (для таких
распределений, как нормаль-
ное, экспоненциальное, Вейбул-
ла и др.) может быть исполь-
зована величина отклонения
вероятности
е = Р (х) Р (х)ниж.
Для нормального и распреде-
ления Вейбулла это конкретно
означает
е = *«ар-
т. е. при заданном уровне доверия точность оценок вероятности
Р(х) определяется ее среднеквадратическим отклонением ар
или среднеквадратическим отклонением квантиля аи для нор-
мального распределения. Если речь идет об элементах и систе-
мах однократного действия, то с помощью уравнения (5.9)
можно рассчитать и построить графическую зависимость
(рис. 5.8), позволяющую установить объем выборки /? при
определенных соотношениях параметров ап и ан, для которых
отклонение минимально. Расчеты проведены при условии, что
объемы выборок для элементов, характеризующих «нагрузку»
и «прочность», равны (7?п = ^н). Если объемы не равны, то даже
существенное увеличение одного из них (при условии, что вто-
рой является малым) не приведет к существенному повышению
точности оценок Р(х). Если одна выборка стремится к бесконеч-
ности (7?п->оо), то точность оценок квантиля и вероятности
Р(х) будет определяться объемом второй выборки. И если он
мал, то ошибка будет существенной. Сказанное справедливо при
условии, что значения ап и ан примерно одного порядка. С уче-
том этого на практике обычно стремятся к тому, чтобы выборки
/?л и /?н были по возможности равными.
Говоря об элементах однократного действия, следует иметь
в виду прежде всего элементы автоматики, которые мы рассмат-
риваем как высоконадежные изделия с достаточно высокими
количественными значениями квантилей (U^3,0). Проведенные
с учетом этого замечания расчеты показали, что на величину
6*
163
отклонения, вероятности е при прочих равных условиях заметное
влияние оказывает объем выборки при значениях 7?< 154-20.
По всей вероятности, это значение и следует принять за мини-
мальный объем выборки. В каждом конкретном случае объем
выборки можно уточнять, но к существенному изменению это
не приведет.
Особо следует заметить, что при низких уровнях надежности
(U<3,0) оптимум кривых на рис. 5.8 становится неявным.
Однако это не значит, что в этом случае следует увеличивать
объем выборки с целью «подтверждения» высоких уровней на-
дежности. Наоборот, усилия должны быть обращены на кон-
структорскую доработку изделий.
По мере увеличения уровня надежности оптимум кривых на
рис. 5. 8 становится все более очевидным и они приближаются
к осям координат. Если «нагрузка» во много раз превышает
«прочность», то достаточно высокого уровня надежности можно
достичь даже при испытаниях буквально единичных изделий
(порядка трех). Однако и в этом случае рекомендуется объем
выборки увеличить хотя бы до десяти (7?min=10), так как при
очень малых R теряется технологическая представительность
изготавливаемых партий. Это может привести хк тому, что при
неблагоприятных условиях единичный успех производства на
длительный период может быть приписан качеству изделий дан-
ной конструкции.
Сказанное в значительной мере справедливо и для изделий
многократного действия. Только в этом случае во внимание сле-
дует принимать соответствующие соотношения параметров рас-
пределения х0 и о, с одной стороны, и программную наработку х,
с другой.
Установленный минимальный объем выборки 7?min= 154-20
получен путем анализа параметров нормального распределения,
которое в равной мере используется для обработки результатов
испытаний элементов и систем как однократного, так-и много-
кратного действия. Расчеты показали, что установленный таким
образом объем /?тщ практически в равной мере может /отно-
ситься к испытаниям того и другого типа изделий.
Говоря о точности оценок, полученных по испытаниям эле-
ментов и систем многократного действия, мы вынуждены вновь
рассматривать три.исхода: 1) испытания полной выборки; 2) усе-
ченной выборки; 3) безотказные испытания.
Независимо от результатов обработка первых двух исходов
может вестись в соответствии с нормальным законом и распре-
делением Вейбулла.
Рассмотрим результаты испытания полной выборки R в дан-
ном случае применительно к распределению Вейбулла, по-
скольку для нормального закона они нам известны. Для этого
обратимся к уравнению (5.6), из которого следует, что величина
среднеквадратического отклонения вероятности ор определяется,
164
в основном, программным значением наработки х и парамет-
рами распределения х0 и 0. Известно, что влияние параметра 0
является определяющим для данного вида распределения, тем
не менее фактическое отклонение вероятности 8 в каждом кон-
кретном случае зависит от совокупности характеристик х, х0 и 0.
Последние две в свою очередь являются функциями от объема
выборки /?. С учетом этого расчеты величины отклонения 8 про-
водились для определенных значений вероятности Р(х), кото-
рые характеризовали ^влия_-
ние на е величин х, х0 и 0
в комплексе.
В результате получены
данные (рис. 5.9), позво-
ляющие оценить ошибку
определения вероятности
безотказной работы для
распределения Вейбулла в
зависимости от объема вы-
борки /?. Из рис. 5.9 сле-
дует, что для наиболее ве-
роятных уровней надежно-
сти минимальный объем вы-
Рис. 5. 9. Расчетные значения ошибок
оппределения вероятности д<ля распре-
деления Вейбуитла (хСр=5,'О; а=0,95)
борки /?min составляет в
среднем 15-4-20 изделий.
С увеличением параметров
распределения х0 и 0, приводящих к росту надежности, объем
выборки уменьшается. Однако он не должен быть менее при-
мерно десяти (/?min=10) с учетом технологической представи-
тельности партий изделий при серийном производстве.
В случае усеченной выборки на минимальный объем выборки
заметное влияние оказывают также характеристики /?/г и ха.
С увеличением ха параметр распределения 0 падает, а это озна-
чает понижение уровня надежности и, следовательно, увеличе-
ние минимального объема выборки. Неудовлетворительная точ-
ность оценок может быть получена, если коэффициент усечения
выборки (R/r) относительно велик. Сравнительно приемлемые
результаты могут быть получены при значениях /?/г<2,0.
В случае безотказных испытаний минимальный объем вы-
борки может быть получен исходя из выражения (5.7). Точнее
^min Ха —
X In (1 — а)
In Р (х)циж
(5.15)
При этом для минимального объема выборки зависимость
линейная, так как в каждом конкретном случае правая. часть
уравнения (5.15) будет постоянной. При этом значение
обратно пропорционально параметру наработки ха: чем он
больше, тем меньше объем выборки.
165
Для высоконадежных изделий в пределе он может быть
также сведен к очень малому числу, но это не означает, что на
практике объем выборки следует принимать меньше примерно
10 в силу изложенного выше (рекомендуется /?min^l0). Урав-
нение (5. 15) символизирует условие эргодичности, согласно
которому увеличение наработки в несколько раз равноценно
уменьшению во столько же раз объема выборки: например,
испытания 1000 изделий в течение одной минуты равнозначны
испытаниям 10 изделий в,течение 100 мин. В случае экспонен-
циального распределения отказов такие испытания позволяют
оценить конструктивные характеристики изделия, но это не озна-
чает, что при этом можно оценить составляющую надежности,
характеризующей качество производства.
§ 7. СТРУКТУРНЫЕ СХЕМЫ НАДЕЖНОСТИ СЛОЖНЫХ
ТЕХНИЧЕСКИХ СИСТЕМ. ОЦЕНКА НАДЕЖНОСТИ СИСТЕМ
ПО ИХ ЭЛЕМЕНТАМ
Структурная схема надежности отражает связь между эле-
ментами системы в процессе ее работы и обусловливает степень
влияния этих элементов на работоспособность системы в целом.
Структурная схема определяется конструктивной схемой изде-
лия и строится по принципу соединения элементов-звеньев
в структурные цепи. Последние устанавливают порядок располо-
жения и очередность функционирования элементов в системе.
Структурные цепи могут состоять из последовательных, парал-
лельных и последовательно-параллельных соединений элемен-
тов. Схематично эти виды соединений показаны на рис. 5.10.
Рассмотрим некоторые.особенности каждого из них.
Простейший анализ последовательного вида соединения эле-
ментов показывает, что выход из строя любого звена структур-
ной цепи .равнозначен отказу всей системы. В этом случае на-
дежность системы определяется ее «слабейшим» звеном, неза-
висимо от уровня надежности остальных элементов. По этой
причине последовательное соединение применяется только для
высоконадежных систем, когда невозможно использовать резер-
вирование «слабейшего» звена по конструктивным или другим
соображениям. Соответственно надежность элементов должна
быть не менее чем на порядок выше требований, предъявляемых
к системе в целом.
Параллельное соединение элементов рассчитано на то, чтобы
отказ одного из звеньев последовательной цепи не приводил
к отказу системы. Примером последовательно-параллельной,
или комбинированной схемы соединения элементов можно на-
звать последовательный вид соединения с резервированием
«слабейшего» звена.
Применительно к механическим системам последовательное
соединение элементов является наиболее распространенным.
166
Такие системы применяются на основе создания высоконадеж-
ных элементов.
Параллельные схемы соединения элементов при проектиро-
вании механических систем встречаются значительно реже, чем
последовательные. Тем не менее, известны отдельные схемы
параллельного соединения или резервирования автономных бло-
&)
ч — / — ГП— ~— —г* —
X)
(п)
Рис. 5. 10. Структурные схемы соединения элементов:
/—последовательное; //—параллельное; ///—параллельное с дополнитель-
ными связями; /V—комбинированное
ков ЖРД в ДУ ракетной ступени. Комбинированные схемы
встречаются гораздо чаще, напрймер в пневмогидравлических
системах с двукратным или даже трехкратным резервированием
командных датчиков, найболее ответственных ЭПК и т. д.
Если для схемы 1 (см. рис. 5.10) условные вероятности без-
отказной работы элементов Рг (или сами элементы) являются
независимыми, тогда полная вероятность нормального функцио-
нирования системы, состоящей из I элементов, определится про-
изведением
Р^п Р/.
/=1
Соответственно вероятность безотказной работы системы
по схеме //, состоящей из d одинаковых параллельных цепей,
167
каждая из которых имеет k элементов, определится исходя из
зависимости
/ k \d
P2fl = 1 - (1 - п Ру)
(5.16)
Если в такой системе резервирование осуществляется неоди-
наковыми цепями, зависимость (5. 16) следует записать так:
р,а=1
1 - п pyWi - п р^
7=1 / \ <=1 7
k
1-1Ц
e=i
В предельном случае данная схема обеспечивает нормальное
функционирование, если сохранится хотя бы одна цепь. Коли-
чество отказавших элементов в остальных цепях системы не
имеет значения.
Для большинства механических систем нормальное функцио-
нирование схемы с резервированием возможно при условии, что
элемент отказавшей цепи или вся цепь в дальнейшем будут
отключены. В целом ряде случаев это условие является обяза-
тельным, так как элементы отказавшей цепи могут воздейство-
вать на систему: например, вызвать взрыв, пожар, утечку ком-
понентов топлива или газов, вторичные отказы, привести к сни-
жению параметров системы и т. п.
При реализации схемы II отказ системы возможен при усло-
вии, если откажет хотя бы один элемент, но в каждой резерв-
ной цепи. Одновременный отказ элементов в каждой цепи мало-
вероятен, а поочередный выход из строя всех резервных цепей
возможен, например, из-за перегрузки «слабейшего» звена каж-
дой цепи. Естественно, что наступление данного события мало-
вероятно для системы, отработанной в конструктивном отно-
шении.
Примером использования схемы II с учетом некоторых осо-
бенностей можно считать схему двигательной установки первой
ступени ракеты-носителя «Сатурн-1» [16]. ДУ данной ступени
состоит из восьми автономных ЖРД типа Н-1, в то время когда
для «выполнения программы полета достаточно только шести.
Таким образом, два ЖРД находятся в «горячем» резерве. Тер-
мин «горячий» или «нагруженный» (в отличие от «холодного»
или «разгруженного») применяется к тем видам резервных цепей,
которые включаются в работу одновременно с основными, а не
подключаются к основным по мере выхода их из строя.
Поскольку количество резервных ЖРД рассматриваемой ДУ
не соответствует числу основных (два резервных на шесть основ-
ных), то такой резерв в некотором роде является «скользящим».
Но этот термин полностью может соответствовать данной схеме
при условии, если любой из резервных блоков мог бы заменить
любой вышедший из строя основной ЖРД. Схема резервирова-
ния ДУ ступени «Сатурн-1» несколько другая: при возникно-
168
вении аварийной ситуации одного из восьми ЖРД системой
аварийной защиты (САЗ)’ выдаются две команды — на выклю-
чение аварийного блока и диаметрально ему противоположного
ЖРД, даже если он нормально функционирует. Эта мера вполне
оправдана с точки зрения стабилизации полета ракеты и обес-
печения соосности тяги ДУ.
Рассмотрим схему резервирования с точки зрения вероят-
ностной оценки событий, обеспечивающих успешное выполнение
полетной (программы. Если вероятность безотказной работы авто-
номных ЖРД принять равной Ро, то событие характеризуется
тем, что в полете все восемь двигателей ДУ проработали поло-
женное время нормально. Условно это запишем в виде ряда
частных исходов:
Событие № 1: Аь А2, A3, А4, А5, Ag, А7, Ag.
При этом вероятность безотказной работы ДУ до начала
испытаний равна значению Рду =Р08. Но наряду с событием № 1
могут происходить события, связанные с выходом из строя лю-
бого из восьми ЖРД, что условимся отмечать чертой сверху,
например:
Событие № 2: Ai, А 2, A3, А4, А5, Ag, А7, As.
Это событие характеризуется отказом двигателя с порядко-
вым номером 1, следующее событие — отказом двигателя с по-
рядковым номером 2 и т. д. Это можно записать как перечень
событий с отказом одного ЖРД:
Событие № 3: Ai, А 2, A3, А4, А5, Ag, А7, As.
Событие № 4: Aj, А2, Аз, А4, А5, Ag, А7, Ag.
Событие № 5: Ai, A2, A3, A4, A5, Ag, A7, Ag.
Событие № 6: Aj, A 2, A3, A4, A5, Ag, A7, Ag.
Событие JVs 7: Ai, A2, A3, A4, A5, Ag, A7, Ag.
Событие № 8: Ai, A2, A3, A4, A5, Ag, A 7, Ag.
Событие № 9: Ab A2, A3, A4, A5, A6, A7, Ag.
Для последних восьми названных событий, характеризую-
щихся отказом одного ЖРД, вероятность безотказной работы
ДУ определится в соответствии с биномиальным распределе-
нием как
Рду, = С1О-Ро)8-7Ро7.
ИЛИ
РДУ1=8(1-Р0)Р7. (5.17)
В правой части этого уравнения коэффициент, равный восьми,
означает количество событий с рассматриваемым исходом, сте-
пень члена (1—Ро) равна числу допускаемых при этом отказов
и Ро — вероятность безотказной работы оставшихся двигателей.
Последующим расположением благоприятных событий является
одновременное проявление отказов двух диаметрально противо-
положных двигателей. В данном случае они характеризуются
следующим образом:
169
Событий № 10: Ai, А2, Л3, А4, А5, Лб, Ат, Де-
Событие № 11: Д1, Д2, Дз, Д4, Д5, Дб, Д7, Де-
Событие № 12: Ait Д2, A3, А4, Д5, Дб, Ат, Де-
Событие № 13: Дь'Дг, Д3, А4, Д5, Дб, Ат, Де-
Для последних четырех событий вероятность безотказной
работы определится как
РДУ2=4(1-Ро)2Р«. (5.18)
Коэффициент 4 в правой части этого уравнения не опреде-
ляет полного числа сочетаний согласно биномиальному распре-
делению, так как мы рассматриваем только благоприятные
исходы, позволяющие выполнить полетное задание. Поэтому
при оценке вероятности наступления каждого из интересующих
нас событий в формуле для биномиального распределения вме-
сто числа сочетаний Сг необходимо брать числа вариантов для
данного исхода. До первого события, когда все двигатели без-
отказны, количество вариантов Ci = l. Для второго события воз-
можен отказ только одного из восьми двигателей, количество
вариантов С2 = 8 и для третьего благоприятного события, когда
допускаются отказы двух диаметрально противоположных дви-
гателей С3 = 4.
В итоге для любого количества благоприятных событий, до-
пускаемых конструктивной схемой, вероятность безотказной
работы ДУ с резервированием равна
рдУ=2 c,(i-p0)'Pod-';
z=0
где I — количество допускаемых для каждого события Д отка-
зов; d — количество автономных блоков в ДУ.
В нашем конкретном примере
Рду = Р0 + 8 0 — ро) Р0 + 4 0 — ро)2 pg. (5.19)
Однако достоверность данного уравнения основывается на допу-
щении, что надежность системы переключающих устройств и
контроля аварийного состояния блоков равна единице. На прак-
тике это далеко не так — контроль наступления аварийных
ситуаций ЖРД является одним из самых сложных вопросов.
И так как причины отказов могут быть самыми различными,
необходимо ставить на каждый автономный блок большое
число контролирующих элементов. С увеличением их числа,
очевидно, надежность самой системы аварийной защиты падает.
С этой целью введем характеристику вероятности безотказной
работы системы аварийной защиты Рсаз - Последние в ком-
плексе с ДУ в общей структурной схеме надежности системы
170
находятся в последовательном соединении. Поэтому выражение
(5. 19) примет вид
р — р
ГДУ *САЗ ______
. »=0
D
2 с, (1-р0)'Р^-'
(5.20)
и соответственно в рассмотренном примере
Рду = Рсаз [Ро8 + 8 (1 — Ро) Р0 + 4 (1 — Ро)2 Pg].
Количественно это значит, если для условий рассматриваемой
задачи принять надежность автономного двигателя Ро = О,99,
а для системы аварийной защиты Рсаз =0,995, то вероятность
безотказной работы резервированной системы Рду =0,99.
Наряду с этим вероятность безотказной работы нерезерви-
рованной ДУ, состоящей из восьми ЖРД, равна РДУв=0,92,
а из шести ЖРД — Р ду =0,94. Из этого следует, что наличие
системы резервирования (два двигателя из восьми) повышает
надежность ДУ с 0,94 до 0,99. Сказанное будет справедливым
при условии, когда переход с восьми ЖРД на шесть и связан-
ное с ним форсирование каждого автономного блока по тяге
не приведет к снижению надежности ДУ (P0 = const).
В целом, говоря о резервировании таких систем, как ЖРД,
следует иметь в виду, что основным требованием для использо-
вания даже самых совершенных конструктивных схем является
наличие надежной системы аварийной защиты (САЗ). Как уже
следует из выражения (5.20), низкая надежность элементов
САЗ может резко снизить суммарный эффект резервирования.
Более того, вследствие выдачи ложных команд о начале ава-
рийной ситуации могут быть выключены нормально функцио-
нирующие двигатели. В итоге это может привести не к повыше-
нию надежности ДУ вследствие резервирования, а к ее пониже-
нию.
Если теперь вновь обратиться к рассмотренному выше при-
меру, то путем расчета легко установить, что при РСаз =0,945
система аварийной защиты сводит эффект резервирования
к нулю. Точнее, в этом случае надежность ДУ, состоящей из
шести резервированных блоков, равна надежности ДУ с восемью
ЖРД при двух резервных. Если надежность САЗ будет ниже
уровня 0,945 (при Ро = О,99), то эффект от резервирования ста-
новится отрицательным. Это легко проследить на рис. 5.11, где
показано влияние надежности САЗ на надежность ДУ в целом
для конкретной схемы резервирования. На оси ординат пред-
ставлена комплексная характеристика в виде отношения пока-
зателей надежности ДУ с резервированием РдУ(рез) (два Ре-
зервных ЖРД из восьми) и без него.
Из анализа графиков следует, что наличие высоконадежной
САЗ позволяет добиться положительного эффекта от резервиро-
171
вания (Р ду (рез) / Рду =1,0) даже при относительно низком
уровне надежности автономных ЖРД.
В случае снижения уровня надежности САЗ положительный
эффект от резервирования достигается только благодаря повы-
шению надежности двигателей.
В целом надежность резервированной ДУ не может быть
выше, чем надежность САЗ.
Обратимся теперь вновь к рис. 5. 10. Говоря о резервирова-
нии по схеме //, мы рассмотрели полное резервирование цепей
Рис. 5. 11. Влияние надежности системы аварий-
ной защиты Рсаз на надёжность двигательной
установки
в структурной схеме. В нашем примере такой цепью была авто-
номная система ЖРД.
Теоретическим недостатком схемы // является то, что от-
дельные элементы цепи, находясь в последовательном соедине-
нии, не резервированы элементами других цепей. Более совер-
шенной в этом смысле будет схема III. Она допускает выход из
строя отдельных элементов различных цепей, что не приводит
систему к отказам. Если в схеме // выход из строя элементов 1
и 2 означает полный отказ, то при схеме /// работоспособность
системы обеспечена. В этом случае полная вероятность безот-
казной работы системы определится по формуле
к
рш=п [1 - (1 - m (5.2i)
7=1
Для количественной оценки эффективности схемы резерви-
рования рассмотрим следующий пример. Пусть система состоит
из двух сдублированных равнонадежных элементов, соединен-
ных по схемам II и /// (см. рис. 5.10).
Если надежность элементов характеризуется показателем
Р = 0,90, для системы, состоящей из четырех элементов, Р// = 0,96
и Р/// = 0,98.
172
Таким образом, введение в структурную схему надежности
данной системы одной лишь дополнительной связи А (схема III)
уменьшает вероятность отказа практически в два раза.
Применительно к ДУ, состоящей из ряда автономных блоков,
это означает соединение между собой «входов» и «выходов»
ряда основных агрегатов резервируемых ЖРД. Точнее, при
осуществлении схемы /// необходимо соединить напорные ма-
гистрали насосов по линии горючего и окислителя соответст-
венно, газогенераторы и т. д.
Однако появление таких связей вносит долю взаимной кор-
реляции между автономными блоками ЖРД и необходимость
отключающих устройств практически на всех резервированных
элементах цепи. Это сразу ставит под сомнение целесообраз-
ность практической реализации для маршевой ДУ схемы резер-
вирования ///, весьма теоретически совершенной. Для отдельных
узлов пневмогидравлической схемы реализация схемы III, по
всей вероятности, не вызывает особых затруднений и в ряде
случаев может оказаться целесообразной. •
Рассмотрим теперь некоторые особенности последовательно-
параллельных схем соединения элементов (схема IV, см.
рис. 5.10). Практически это наиболее часто встречающиеся
системы с резервированием. Проектируя или отрабатывая та-
кую систему, конструктор в первую очередь решает вопрос о ре-
зервировании малонадежных, малогабаритных элементов. Ре-
зервирование громоздких, крупноразмерных элементов и бло-
ков ведется, как правило, только в исключительных случаях.
Чаще всего обеспечение требуемых уровней надежности систем
достигается путем доработки до требуемых уровней надежности
самих элементов (или блоков), резервирование которых за-
труднено по конструктивным или другим соображениям.
Математическое описание структурных последовательно-
параллельных схем надежности осуществляется путем умноже-
ния вероятностей, характеризующих отдельные участки цепи
с последовательным и параллельным соединением элементов.
В итоге применительно к схеме IV (см. рис. 5.10) можем
записать:
Z f Г k \d]
P/F = n pjl — (1 — П Ру) .
Z=1 I \ 7=1 J J
Могут встречаться и более сложные случаи соединения элемен-
тов в последовательно-параллельные или комбинированные
схемы, но принцип решения вопроса остается прежним.
Итак, мы рассмотрели схемы с «горячим»’ резервированием
элементов. При проектировании и отработке этим схемам, как
правило, отдается предпочтение перед схемами с «холодным»
резервированием. Последнее объясняется тем, что «холодное»
резервирование отличается сложностью конструктивного реше-
173
ния, требует дополнительных подключающих устройств и увели-
чивает пассивный вес изделия.
Но, с другой стороны, до момента включения в работу эле-
менты «холодного» резерва сохраняют свой рабочий ресурс. Это
основное преимущество «холодного» резервирования перед
«горячим». К таким системам, по всей вероятности, ЖРД отне-
сти нельзя, так как основной поток отказов элементов ЖРД
проявляется при запуске и на переходных режимах, а на марше
в пределах времени полетной программы он невелик [54]. В то же
время ЖРД, оставаясь чувствительным к запуску в зависимо-
сти от давления наддува баков, температуры окружающей
среды, поля гравитации, осевых перегрузок и т. д., может ока-
заться не равнонадежным в схеме с «холодным» резервирова-
нием для различных условий запуска при всем многообразии
характеристик и сочетаний внешних и внутренних факторов.
Отработка двигателя, равнонадежного для столь широкого
диапазона варьирования внешних факторов, условий испыта-
ний, — задача довольно сложная.
Промежуточным между «холодным» и «горячим» резервиро-
ванием является «облегченный»^ резерв. До выхода из строя
основного элемента резервный находится во включенном состоя-
нии, но работает на пониженном, облегченном режиме.
Разумеется, что в условиях такого нагружения существует
некоторая вероятность наступления отказа резервного элемента,
но имеется ® виду, что она низка. Примером практического
использования «облегченного» резерва в ракетной технике
является ДУ, состоящая из D автономных ЖРД, из которых d
находятся в «горячем» резерве. Соответственно, на ракете по-
ставленная задача может быть решена с помощью (D—d) дви-
гателей. Если работают все двигатели, суммарная тяга ДУ
может превышать расчетную. Чтобы этого не случилось, произ-
водится их дросселирование. В результате все блоки ДУ рабо-
тают в состоянии «облегченного» резерва по отношению друг
к другу.
По мере выхода из строя одного или нескольких двигателей
(не превышающих d резервных блоков) аварийные отклю-
чаются, а основные форсируются до программного значения
тяги. Но такое понимание «облегченного» резерва в применении
к ЖРД, безусловно, в какой-то мере является условным, так
как диапазон устойчивого дросселирования ЖРД по тяге отно-
сительно невелик. В итоге нетрудно заметить, что рассмотрен-
ный пример резервирования ЖРД в ДУ сочетает в себе эле-
менты «облегченного» и «скользящего» резерва, хотя в целом
этот резерв является «горячим».
В заключение отметим, что применение резервирования эле-
ментов для механических систем с целью обеспечения высоких
уровней надежности должно тесно увязываться с достоверной
оценкой надежности составных элементов. Только при этом
174
условии можно говорить о преимуществах и недостатках тех
или других структурных схем. Если в процессе отработки не
будет обеспечена надежность одного из элементов (в том числе
и САЗ), то это в корне может изменить характеристики системы
и даже саму конструкцию: например, приходится применить
резервирование там, где ранее оно было не предусмотрено. На-
против, при достижении более высоких уровней надежности
можно отказаться от резервирования «слабейшего» звена и т. п„
Вследствие этого структурная схема надежности оказывается
тесно связанной с программами обеспечения надежности эле-
ментов системы и поэтому на завершающих этапах отработки
этих элементов должна постоянно уточняться.
На основе формулы структурной схемы надежности может
быть получена точечная оценка вероятности безотказной работы
всей системы. Точность этой вероятности может быть оценена
методом линеаризации функции Р ду s
Далее, переходя к определению нижней границы вероятности
безотказной работы системы, воспользуемся известным выра-
жением
Рдуниж = Рду ~ ОрДУ
Полученная оценка и является тем конечным критерием, по
которому судят о степени завершенности экспериментальных
работ. При высокой квалификации и большом опыте конструкто-
ров, технологов и испытателей экспериментальная отработка
заканчивается, как правило, полной доработкой отказов по-
веем системам.
В результате этого статистика по испытаниям элементов,
блоков и систем ДУ штатной конструкции оказывается представ-
ленной безотказными испытаниями. Для данного случая опреде-
ление количественных показателей надежности системы по испы-
таниям ее элементов сводится к известному решению Р. А. Мир-
ного и А. Д. Соловьева [28].
Система представлена в виде некоторого количества после-
довательных статически независимых элементов, имеющих
уровни надежности
Рь Р2, Рз, • • . , Pfe-
Тогда надежность системы определится как произведение
РЕ = Р1Р2Р3»...» Л, (5.22)
Если теперь условиться, что количество испытаний для эле-
ментов первого типа N\y для второго — Л^, для третьего — М
175
и т. д., то вероятность того, что при испытаниях не произойдет
ни одного отказа будет соответственно' равна
рлг, рлг, рл/% ... , p*ft > 1 _ а; (5123)
Полученная оценка должна соответствовать уровню доверия
(1—а), при котором ведется расчет.
Теперь допустим, что для некоторого f-го типа элементов
количество испытаний оказалось минимальным
Тогда, используя выражение (5.23) для условия равенства,
можно получить
2_ 1 _ Лл 1 _ 1 -
РХР2Р3... Pft = (1 - a) N‘ Pi Nl Р2 Nl ... Р "1 . >(5.24)
Принимая наше условие (A\=min), легко установить, что все
значения степеней второго, третьего и т. д. членов уравнения
(5.24), кроме Рг, отрицательны. А это значит, что минимальные
значения вероятностей Р1 = Р2 = Рз= ... =Рл= 1,0, поскольку
в пределе они не могут быть больше единицы. Тогда, принимая
во внимание выражение (5.22), получим
1
или Ря = Pz.
ниж
Фактически это означает, что в случае безотказных испыта-
ний надежность системы, состоящей из некоторого числа эле-
ментов, определяется минимальным показателем надежности
одного из элементов, для которого количество испытаний мень-
ше других.
Глава VI
УРАВНЕНИЯ ДИНАМИКИ ОСНОВНЫХ АГРЕГАТОВ ЖРД
§ 1. ДИНАМИЧЕСКИЕ ПРОЦЕССЫ В ЖРД
Современная жидкостная ракетная двигательная установка
представляет собой сложный комплекс взаимосвязанных агрега-
тов и систем, обеспечивающих получение заданных основных па-
раметров на летательном аппарате.
ЖРД работают на установившихся и неустановившихся (пе-
реходных) режимах.
К установившимся следует отнести режимы главной, предва-
рительной и конечной ступеней. В этих случаях параметры дви-
гателя остаются практически неизменными во времени. Откло-
нения параметров от установившихся значений незначительны и
ими можно пренебречь.
На режиме главной ступени (номинальный режим работы)
двигатель работает наиболее продолжительное время и на пол-
ной мощности. Применительно к нему выбираются основные
проектные параметры двигателя.
В настоящее время теория рабочих процессов, происходящих
в агрегатах двигательной установки на установившемся режиме
работы, разработана достаточно полно и позволяет рассчитывать
характеристики ЖРД и настраивать ее на заданный режим.
На переходных режимах двцгатедьные установки работают
при запуске, переключении ступеней, при выключении, при авто-
матическом регулировании и т. п. При аварийных ситуациях,
т. е. при появлении неисправности, ,в двигателе также возникает
переходный процесс, приводящий к значительному изменению
режима работы двигательной установки.
Зависимости, связывающие параметры двигательной уста-
новки при работе на неустановившихся режимах, называются
динам и ч ески м:и х а р а кт ер и ст ик а м и.
Динамические процессы, происходящие в двигательной уста-
новке, сложны, характеризуются большим количеством взаимо-
действующих связей и факторов, быстрым протеканием процес-
сов: например, такой сложный процесс, -как запуск двигателя, не
превышает 2-нЗ с. В связи с этим динамические процессы, проис-
177
ходящие в двигательных установках, изучены еще 'недостаточно,
хотя 1в последнее время появилась литература, освещающая воп-
росы динамики [16, 40, 44, 74].
В процессе создания ЖРД встречается целый ряд задач, свя-
занных с динамикой двигателя. Для самого двигателя — это ус-
тойчивость двигателя вместе с внутридвигательной системой ре-
гулирования, выяснение причин аварийных исходов испытаний,
организация запуска двигателя, переходные процессы при изме-
нении режима работы двигателя.
Интерес к исследованиям в области динамики ЖРД сущест-
венно повысился при переходе от двигателей «открытой» схемы
к двигателям с дожиганием генераторного газа («замкнутой»
схемы).
Существенное уменьшение постоянной времени ЖРД с дожи-
ганием генераторного газа привело к тому, что изменился сам
двигатель как динамический объект регулирования, усилилась
взаимосвязь рабочих процессов во всех агрегатах. Отработка
двигателей «замкнутых» схем вызвала целый ряд существенных
трудностей с организацией надежного запуска, обеспечением ус-
тойчивости системы регулирования двигателя. Высокие статичес-
кие, а главное — динамические нагрузки на корпусы, крыльчат-
ки, турбину, вал и другие детали ТНА приводили к самым разно-
образным поломкам этих деталей.
Для теоретического исследования динамических характерис-
тик двигательная установка рассматривается в виде математи-
ческой модели, представленной системой дифференциальных
уравнений, описывающих рабочие процессы в отдельных агрега-
тах двигательной установки.
Неизвестными функциями времени являются основные па-
раметры двигательной установки. Число уравнений должно быть
равно числу неизвестных параметров ЖРД, т. е. система урав-
нений должна быть замкнутой.
Каждый тип неустановившихся режимов (запуск, отключение,
переходные процессы при аварийных ситуациях) имеет свои спе-
цифические особенности и должен находить отражение в мате-
матической модели либо путем добавления ряда уравнений, либо
их видоизменения в общей модели двигательной установки.
Кроме того, в зависимости от конкретно поставленной задачи вид
уравнений агрегатов двигательной установки .может быть различ-
ным. Так, при исследовании режимов запуска, выключения, ава-
рийных ситуаций, когда параметры значительно отклоняются от
значений, соответствующих установившемуся режиму, необходи-
мо использовать нелинейные дифференциальные уравнения. При
решении задач по регулированию ЖРД, когда наблюдаются
малые отклонения параметров двигательной установки, нелиней-
ные уравнения агрегатов можно использовать в линеаризован-
ном виде.
178
§ 2. УРАВНЕНИЕ ДИНАМИКИ КАМЕРЫ СГОРАНИЯ
Будем рассматривать камеру как газовую емкость. На про-
цессы в камере сгорания ЖРД (<рис. 6. 1) можно влиять измене-
нием секундных весовых расходов окислителя (Go) и горючего
(Gr), а в камере ЖРД с дожиганием генераторного газа
Рис. 6. 1. Схема ЖРД с выбросам ге-
нераторного газа:
/—газовый аккумулятор давления; 2, 8,
/6—электропневмоклапаны; 3—пневмокла-
паны; 4—бак окислителя; 5—турбина;
6—насосы окислителя и горючего; 7—глав-
ный клапан окислителя; 9—аккумулятор
низкого давления; 10—жиклер; //—камера
сгорания; 12—главный клапан горючего;
13—пиростартер; 14—жидкостный газогене-
ратор; /5—клапан; /7—бак горючего;
18—мембраны; 19—газовый редуктор дав-
ления
Рис. 6. 2. Схема ЖРД с дожигани-
ем генераторного газа:
/, 2—газогенераторы для наддува ба-
ков; 3—бак окислителя; 4—пиростартер;
5, 8, /5—дроссельные шайбы; 6—насос
окислителя; 7 и /2—клапаны; 9, 10—
главные клапаны окислителя и горю-
чего; //—камера сгорания; 13—турбина;
/4^насос горючего; 16—регулятор; /7—
газогенератор; 18—бак горючего; 19—
мембраны
(рис. 6.2), кроме того, еще и расходом генераторного газа —
6ф. Эти параметры являются входными сигналами камеры. Вы-
ходным сигналом камеры как газовой емкости является давление
в камере.
При изучении динамики работы камеры сгорания рассматри-
ваются следующие процессы:
1) преобразование жидких компонентов в газообразные про-
дукты сгорания; *
2) накопление газов в объеме камеры сгорания;
3) истечение газов из камеры сгорания.
179
Физическая и химическая природа внутрикамерных процес-
сов весьма'сложна и точно описать их методами математического
анализа трудно. Поэтому при .выводе уравнения камеры сгора-
ния сделаем следующие допущения [40, 16].
1. По истечении времени 'преобразования тпр поступившее в
камеру сгорания топливо полностью и мгновенно превращается
в газообразные продукты сгорания, т. е. действительная кривая
выгорания заменяется ступенчатой (рис. 6.3).
2. В каждый момент (времени t давление газов рк одинаково
для всех точек объема камеры до входа
в сопло, а масса газа в этом объеме изме-
к няется как одно целое, т. е. акустическими
-эффектами и гидравлическим сопротивле-
нием газовой емкости можно пренебречь.
Кроме того, принимается также, что рабо-
тоспособность газов 7?к7к одинакова для
всех точек объема камеры независимо от
специфики местных условий процесса сго-
рания.
Рис. 6. 3. Кривая вы- з. Продукты сгорания рассматриваются
горания как идеальный газ, т. е. для них справедли-
во уравнение Клапейрона — Менделеева.
При сделанных допущениях динамика газового потока в ка-
мере сгорания описывается уравнением 'баланса массы. В данный
момент времени t массовая скорость образования газа в камере
сгорания должна быть равна массовой скорости истечения газа
из камеры и скорости накопления массы газа в самой камере сго-
рания.
На основании закона сохранения вещества можно утверждать,
что изменение весового содержания газов в емкости dQ за беско-
нечно малое время dt равно разности весов подведенного топли-
ва Gmdt и вытекшего из емкости газа Gdt\
dQ=Gmdt—Gdt. (6.1)
В связи с наличием времени преобразования Тпр в процессе
превращения топлива в газообразные продукты сгорания общее
количество сгоревшего топлива в течение промежутка времени от
0 до t
t '-хпр
'Gmdt= J [G0 + G,)d/. (6.2)
о о
Верхний предел интеграла, стоящего в правой части уравне-
ния (6. 2), равён (/—тПр), так как частицы топлива, поступившие
после момента времени —тпр), к моменту времени t еще не при-
нимают участия в процессе сгорания. Отсюда, дифференцируя по
t, получаем
^)[<7о(*-Ч>) + °г(/-хПр)]. (6.3)
180
Согласно первому допущению Тпр=const, т. е. drnp/d^=0.
Тогда, подставляя выражение (6. 3) в уравнение баланса мас-
сы, получаем
= О0 (/ - тпр) + Gr (t - тПр) - G. (6.4)
Количество газа Q в объеме камеры сгорания VK определим
по уравнению состояния
Продифференцировав уравнение (6. 5), получим
dQ __ ' ^Рк______РкУк d С^кЛс) /g g\
dt ~ RKTK ‘ dt (R*Ttf dt ' v ‘ 7
Расход газа через сопло -камеры сгорания определяется зави-
симостью
G = AV (6.7)
Vrktk
к—средний показатель расширения газа в сопле.
Подставив выражения (6.6) и (6.7) в уравнение (6.4), по-
лучим уравнение динамики камеры сгорания
Ук dpK_______РкУк d (RKTK) _ г ( \ л_ П (4_ \__
ЯКТК dt (RKTKY dT TnpJ-t-Urn TnpJ
(6.8)
__ Д РкРкр
к /ад ’
Работоспособность газа RKTK и показатель процесса расшире-
ния х — сложные функции, зависящие для данного рода топлива
от соотношения компонентов топлива k и давления в камере сго-
рания рк. КкТк = КкТк(к, рк); х = х(&, рк), причем определяющее
влияние оказывает коэффициент соотношения компонентов топ-
лива k=G0IGT. Производная работоспособности газа, необходи-
мой для уравнения (6. 8), имеет вид:
d (RKTK) d(RKТк ) dpK . d(RKTK) dk
dt d pK dt dk dt
Локальная производная dkjdt характеризует изменение соот-
ношения компонентов во времени на входе в камеру сгорания и
181
определяется режимом работы системы подачи [44]:
' , г dG0 dGT
dk _ г dt ° dt
dt~ g*
В двигателях с дожиганием генераторного газа уравнение ди-
намики
дением
Ук
Vk
камеры сгорания сохраняет вид уравнения (6.8) с вве-
в его правую часть нового члена
. JE1L _ P*V* .. .а&кТк) = G х ) _|_ G (f _ - )
dt (ЛкТк)а dt ov пр/ । гч пр/
+ Оф-Ак-^^,
Vrktk
где бф — расход генераторного газа, поступающий через газовые
форсунки в камеру сгорания в данный момент времени.
Соотношение компонентов топлива по камере сгорания в этом
случае будет определяться выражением
k'
Go (t тпр) "h ь, j 1 G§
k=-------------,
1
Gr (t — тпр) + G$
где k'— соотношение компонентов топлива по газогенератору.
Условимся в дальнейшем все параметры газогенератора от-
мечать одним штрихом.
Уравнение динамики газогенератора выводится аналогично
уравнению камеры сгорания и имеет вид (6.8). Следует только
иметь в виду, что истечение газа из газогенератора может быть
докритическим и расход газа через турбину в зависимости от ре-
жима течения газа будет определяться:
— для сверхкритического истечения
Ру. ^кр ,
Gr = A'
— для докритического истечения
где р2 — давление за турбиной.
В схемах ЖРД с дожиганием генераторного газа есть ряд
газовых магистралей, по которым газ подается из турбины в ка-
меру сгорания, из рубашки охлаждения (при использовании в
качестве охлаждающей жидкости низкокипящих компонентов) в
другие элементы двигателя.
182
В отношении динамики газовые магистрали аналогичны каме-
ре сгорания и газогенератору, т. е. это газовые емкости с изменя-
ющейся температурой на ;входе. Поэтому и уравнения их практи-
чески совпадают. Только в члене, дающем величину расхода вхо-
дящего в магистраль газа, естественно не будет запаздывания,
характеризующего время преобразования жидкости в газ.
Уравнение газовой магистрали имеет вид
Ум ^Рм_______УмРм d (RMTM) __Q __q
Vm dt (RMTU)* dT T *’
где — давление в газовой магистрали;
VM — объем газовой магистрали;
— работоспособность газа в газовой магистрали;
2
ц у ____— 1 сад
м м х' 2g
где Сад — адиабатическая скорость истечения газа из сопел тур-
бины;
т]т — к. п. д. турбины.
Выведенные для газовых емкостей уравнения справедливы
для большинства случаев расчета динамических характеристик
ЖРД, поскольку в газовых емкостях ЖРД число Маха обычно
не превышает 0,2н-0,3. Следовательно, эти уравнения справедли-
вы в диапазоне частот, представляющих интерес для динамики
всего двигателя (до 30-н50 Гц).
Ограничивающим параметром для применения выведенных
формул в этом диапазоне частот является число Маха. При
М>0,Зн-0,4 необходимо использовать точные решения уравнений
для емкости как системы с распределенными параметрами.
§ 3. УРАВНЕНИЕ ДИНАМИКИ ГИДРАВЛИЧЕСКИХ МАГИСТРАЛЕЙ
Гидравлические магистрали включают систему трубопроводов
с расположенными в них элементами управления (дросселями,
клапанами, регуляторами и т. д.) и служат для подачи компонен-
тов от баков <к насосам турбонасосного агрегата и от насосов к
камере сгорания и газогенератору.
Последовательное расположение топливных баков в больших
ракетах-носителях обусловлено необходимостью подвода одного
из компонентов топлива к двигателю по длинной трубе [23]. Из-
менение количества движения жидкости в магистрали, вызванное
прорывом мембран, открытием или закрытием топливных клапа-
нов, выражается в появлении пиков давления, как при гидравли-
ческом ударе. Такие явления наблюдаются при запуске, при от-
ключении двигателей, при аварийных ситуациях.
Переключения органов управления в гидравлических магист-
ралях от насосов до камер сгорания и появление неисправностей
гидравлических магистралей вызывают переходные процессы в
183
Рис. 6.4. к выводу урав-
нения . динамики гидрав-
лической магистрали
трубопроводах, связанные с изменениями давления и скорости
жидкости и сопровождающиеся появлениями пиков и (Провалов
давлений на входах в насосы.
Инерционные свойства жидкости особенно сильно проявляют-
ся в переходных процессах при малых сечениях и большой длине
трубопроводов.
Нельзя считать, что изменения давления и скорости жидкости
происходят одновременно во всех сечениях трубопровода. Воз-
мущение начального состояния в каком-
либо сечении трубопровода вызывает
возникновение и распространение упру-
гих волн по всему трубопроводу. При
длинных трубопроводах и при длитель-
ности переходного процесса, близкой
к длительности фазы гидравлического
удара, исследование переходных явлений
в гидравлических системах проводится
на основе волновой теории [64].
При коротком трубопроводе, когда
длина его значительно меньше длины
волны, исследование динамики гидравли-
ческих магистралей значительно упро-
щается.
Для составления уравнения динамики
трубопровода сделаем следующие допу-
щения.
1. Жидкость несжимаема, движение
ее одномерное. Трубопровод—абсолют-
но жесткий. В этом случае расход
жидкости по всем сечениям трубопровода постоянен (G = G(/)).
2. Переносное ускорение для всех частиц жидкости в трубо-
проводе одинаково и равно ускорению центра тяжести ракеты /.
Вращением ракеты вокруг ее оси пренебрегаем.
, В этом случае проекция полного ускорения частиц жидкости
на ось трубопровода S, направленную в;сторону установи1вшегося
движения жидкости, будет равна (рис. 6. 4)
где ji — проекция относительного ускорения частицы жидкости;
uj — угол между проекцией относительного ускорения и на-
правлением ускорения центра тяжести ракеты.
Площадь поперечного сечения трубопровода на участке меж-
ду сечениями I—i и i'—i' равна ,F=const, так что скорость жид-
кости относительно стенок трубопровода
(6-9)
G
Wi —
184
и относительное ускорение на этом участке одинаково для всех
частиц жидкости:
dwi 1 dG
dt iFi dt
(6.10)
3. На основном участке трубопровода длиной Ц между сече-
ниями i—i и l'—I' силы трения отсутствуют, а все гидравлические
сопротивления сосредоточены на выходном участке трубопрово-
да (г+1)— (Z+1), г"—i' и учитываются приведенным коэффици-
ентом гидравлических -потерь g.
4. При неустановившихся течениях к жидкости можно приме-
нить уравнение Бернулли, как это сделано в работе [32]:
V®-/ „ . 1 Wl+1 1 wl+l /д1П
p' + 4T = Pl*, + ^T ( ’
Строго говоря, уравнение1 Бернулли справедливо для устано-
вившихся течений. Оправданием сделанного допущения -служит
малая протяженность участка, т. е. малая масса и малая инерци-
онность жидкости, заключенной между сечениями I'—Z' и
(Z+l)-(t + l).
Скорость жидкости в сечении (г + 1) равна
<612)
I ГГ+1
На основании первых трех допущений можно сделать вывод,
что жидкость в основном участке трубопровода движется посту-
пательно, как твердое тело. Поэтому уравнение движения жид-
кости можно записать на основании второго закона Ньютона:
-у- ia = Pi?i — pfi + Qi COS ag, (6.13)
где Qi — сила тяжести топлива, равная
Qz = t^<; (6.14)
ag — угол между направлениями относительного ускорения
и ускорения силы тяжести.
Подставим выражения (6.9) и (6.12) в уравнение (6.11)
р' 4- 7 °2 — п 4- 7 °2 4- 5 7 °2
’ 1+1 T3F?+12^ 2£4Л?+1 ’
откуда
л' _____________ л I ^2 1 + Е_/Д 1
Л-Л+1+2^[ F?+1 F2j- >
Подставив выражения (6. 10) и (6.15) в уравнение (6.13) и
разделив на Fit лоЛучим
185
Qi ас t i ri + e 11^ „ n ,
grp2 ^+2^Т[Г2+1 p2 ] Pi Pi + l +
+-^ (geos а,-Л cosay) (6.16)
SFt
Подставив в уравнение (6. 16) выражение (6. 14), получим
уравнение динамики трубопровода
Z dG . ^>2 .
—+ л0-=А_Д+1+,„,
где а — коэффициент гидравлического сопротивления;
Рмг — давление массовых сил столба жидкости на площадь
сечения i'—i'\
Рш = ~ (g COS a, -Jp COS ay).
gri
Отношение IjgF =b называют коэффициентом инерционных
потерь. С учетом этого уравнение динамики трубопровода можно
записать в виде
6^- + аС2 = А-Л+1+Л;. (6.17)
На установившемся режиме d,G)dt=Q, поэтому уравнение ста-
тики трубопровода получается йз (6.17) в виде
aG2 = Pi- р1+х+р^.
С помощью выражения (6. 13) по известным на установив-
шемся режиме перепаду давления и расходу G определяется па-
раметр
q__ Pl + P*l Pi+1
4 ~ а2
Для гидравлической магистрали неизменной геометрии коэф-
фициент гидравлического сопротивления — величина постоянная
(Q=const), не зависящая от режима работы.
Для гидравлической магистрали с регулирующими органами
уравнение динамики гидравлической магистрали записывается
аналогично нерегулируемой, только в этом случае коэффициент
гидравлического сопротивления магистрали—величина перемен-
ная, зависящая от перемещения регулирующего органа хр.о (на-
пример, перемещения иглы поршня регулятора, перемещения та-
рели клапана и т. д.):
pi - Pi+l + А./ = а. {Х9Л) с* + ь
186
§ 4. УРАВНЕНИЕ ДИНАМИКИ ЦЕНТРОБЕЖНОГО НАСОСА
Основными агрегатами жидкостного ракетного двигателя,
определяющими конфигурацию двигательного отсека ракеты, яв-
ляются камера сгорания и турбонасосный агрегат: конструкция
камеры сгорания определяет требования к топливу, удельную
тягу и тягу ракеты, а турбонасосного агрегата — требования к
ки насоса
системе питания [23]. Система питания включает в себя насосы,
элементы наддува, гидравлические магистрали, элементы авто-
матики и баки.
Одним из важнейших агрегатов системы питания с разгру-
женными баками, обеспечивающим движение компонентов топ-
лива по гидравлическим магистралям, является центробежный
насос. Насос приводится в действие турбиной и обеспечивает при
номинальных оборотах необходимое давление за насбсом и тре-
буемый расход компонента.
Уравнение центробежного насоса должно определять связь
между оборотами ТНА и расходом жидкости с создаваемым на-
сосами напором и потребляемой мощностью.
Вывод уравнения проведем применительно к расчетной схеме
(рис. 6. 5).
По принципу сохранения энергии мощность, развиваемая
крыльчаткой насоса, расходуется на приращение энергии проте-
кающего потока жидкости. Мощность лопастного колеса может
быть определена по угловой скорости и величине момента сил
187
взаимодействия колеса с потоком жидкости, т. е. по крутящему
моменту колеса [38].
Определение результирующего момента взаимодействия ло-
пастного колеса с потоком жидкости представляет собой задачу
гидродинамики, которую, вообще говоря, можно решить лишь
после анализа явлений внутри области колеса, что сопряжено с
целым рядом трудностей и требует значительной схематизации
действительного явления.
Однако решение может быть выполнено на основании уравне-
ния моментов (количества движения, причем состояния потока
внутри колеса неГ рассматриваются и остаются лишь состояния
на границах, т. е. до и после колеса.
Мощность сил, действующих на жидкость в крыльчатке, опре-
деляется крутящим моментом колеса и работой сил давления на
входе и на выходе из колеса [16]:
7V = Мт + pJ\W' — PtF^» (6.18)
где N — мощность;
М — крутящий момент, приложенный к валу;
со — угловая скорость;
Рь р2 — давления на входе и на выходе из рабочего колеса;
^2 — относительные скорости движения жидкости в ко-
лесе (на входе и выходе соответственно);
.Fi, F2 — площади каналов на входе и выходе из рабочего
колеса.
Момент количества движения жидкости, протекающей в ло-
патках колеса, относительно оси вращения
<Sj
Мж = J rcudmY
Si
где г—радиус данного кольцевого элемента в потоке жидкос-
ти;
си — проекция абсолютной скорости на окружную:
си = и—w cos Р;
Р — угол между относительной и окружной скоростями;
dm — элементарная масса, равная dm = qpds\
F — площадь канала между лопатками колеса;
ds — элементарная длина пути жидкости в колесе.
Если на тело действует сила, то вследствие изменения ско-
рости тела количество движения, а следовательно, и момент ко-
личества движения меняются. По теореме о моменте количества
движения секундное изменение момента количества движения
равно моменту внешних сил, действующих на данное тело, т. е.
188
производная по времени от момента количества движения жид-
кости равна крутящему (моменту, приложенному к валу:
5»
Af = — щ cos В) р Fds.
dt dt J v
С учетом того, 4wdsldt = w, получим
2 5j
M = r(u — w cos p) p Fa, I + C r (—— cos p \ p Fds. (6.19)
I J \ dt dt )
1 51
Подставив уравнение (6. 19) в (6. 18), получим выражение
для мощности сил, действующих на жидкость в крыльчатке, учи-
тывая, что u = rco:
2 Sa
N = и (и — w cos р) р Fw | и р Fds cos ₽ j +
1 51
+ — PzFw- (6.20)
С другой стороны, мощность выражается через изменение
кинетической энергии в единицу времени:
Так как с2 = w2 + и2 — cos р, то
N =’ -i- (w3 + и2 — 2zzw cos р) | + у + и —
1 5iL
- [w + и cos р' Р FdS. (6.21)
Приравняв выражения (6.20) и (6.21) и используя уравне-
ние неразрывности w\Fi = w2F2 = const, после некоторых преобра-
зований получим уравнение теоретического напора, развивае-
мого крыльчаткой насоса:
А ~ А = у [(«! - - («? ~ ®?)] -
5а
<6-22>
51
Здесь индексом «1» отмечены параметры на входе в колесо;
индексом «2» — на выходе из колеса.
Повышение давления во входном патрубке можно опреде-
лить по уравнению (6.22), учитывая, что в патрубке u = 0, w = c:
189
' P!-Pbx = y(^-c2bx) ds.
BX
Поскольку O = -\Fc,
= (6.23)
BX
Повышение давления в отводном устройстве определяется
аналогично:
н
(6-24)
2
Полученные уравнения (6.22), (6.23), (6.24) позволяют
определить полное приращение давления в насосе:
"1 н
Р / dw du □ \ 1 dG С ds 1 dG P ds
J \ dt dt ) g dt J FBX g dt J F2
St BX 2
При выводе уравнения (6.25) не учитывались потери напора
в насосе вследствие трения жидкости о стенки, поворот потока,
потери на конечное число лопаток и т. д. Гидравлические по-
тери пропорциональны квадрату расхода, поэтому будем учиты-
вать их введением коэффициента потерь £н.
Определим интегралы, входящие в выражение полного при-
ращения давления в насосе (6.25), которые учитывают дина-
мические составляющие давления, создаваемого насосом с уче-
том
G du nD dn
, ----=-------------,
2 к г <?р b2K sin р dt 60 dt
dw ________1_____ dG
dt 2к r p<p b2K sin p dt ’
где &2к — ширина лопаток на выходе из. колеса;
Ф— коэффициент стеснения, равный 1 —5к ;
6К — толщина лопатки колеса;
i — число лопаток.
Заменим вычисление интегралов численным интегрированием
по участкам средней линии лопаток:
190
/i = p?/^-^Cos₽Us = p?^ds-pC-^-cosprfs =
1 r J \ dt dt r) r J dt r J dt r
Si Si Si
dG _______________A Si________
dt 2 It rz p?z ft2K sin Pz
l—l
Tip ’
бГ-_
1=1
VD/As.-cos p,-^-,
^b dt
(6.26)
где i — число участков.
Аналогично определяются интегралы:
1 т
___ 1 dG С ds dG A $/
а~ ~g ~dt \ ~~~dt ^~gF~i'
ВХ *—1
н
т С dw
/ = р \ — as =
3 rJ dt
2
dG pA Si
(6.27)
(6.28)
Подставив выражения (6.26), (6.27), (6.28) в уравнение
(6.25) и учитывая, что
С* = COS pi + wf, Свх
G . G
Сн =------; W =-------------------,
p F2 2 тер rb2K <p Sin p
___G_
ч Р Л>х ’
к Dn
U =------
60
получим
p» —PBx = dln> — d3nG — d3G2 — DH-^~-j-E„-~-.
. dt dt
(6.25a)
Коэффициент d\ характеризует влияние на напор насоса
размеров рабочего колеса, d2— геометрию проточной части,
d3 — гидравлические потери и влияние входного и выходного
патрубков.
Коэффициенты DH и Ен определяют инерционные составляю-
щие напора по расходу и числу оборотов:.
. 2,75 • 10“3 п2 / ^>2 Л
а, = —1---------- о Di — --------II,
1 + ПЛ Ц Of )
_ 1,67 • 10~2 / 1_______________1 \
2 1 + пл \ Та Mg Ра <Pi bt tg Pt/ ’
d‘ £" + 2в
o.=2
A^ZH I •v» A Szbx . A^z
2itrzP0aK sin Pz gpm gF-w '
£,H = -^yDIA51cos₽/,
60£
191
где ил — коэффициент снижения напора из-за перехода к конеч-
ному числу лопаток.
При понижении давления на входе в насос центробежные
насосы начинают работать в режиме частичной кавитации.
Кавитация — это нарушение сплошности потока жидкости,
обусловленное появлением в ней пузырьков или полостей, запол-
ненных паром или газом, возникающих в тех< местах потока
жидкости, где статическое давление падает ниже давления паро-
образования [16, 19, 49]. В большинстве случаев выделение газа
из раствора не играет существенной роли. В этом случае кави-
тация часто называется паровой.
В центробежном насосе паровая кавитация возникает на ло-
патке рабочего колеса обычно вблизи ее входной кромки. Дав-
ление здесь значительно ниже давления во всасывающем па-
трубке насоса из-за местного возрастания скорости при натека-
нии на лопатку и из-за гидравлических потерь в подводе.
При работе на газифицированных компонентах приходится
иметь дело с потоком жидкости, к которой «подмешаны»
пузырьки газа. При прохождении пузырьков через область по-
ниженного ’ давления происходит их интенсивный рост и, следо-
вательно, увеличение объемной концентрации газа. Резкое на-
рушение режима работы насоса может происходить в результате
того, что в центральной части колеса скапливается газ, отсепа-
рировавшийся от жидкости под действием центробежных сил.
Такое явление называют газовой кавитацией.
В центробежных насосах кавитация сопровождается паде-
нием напора, мощности и к. п. д.
Очень приближенно кавитационный, режим работы насосов
можно учесть введением в характеристики насосов коэффи-
циента, характеризующего глубину кавитации:
' ею ^Ih ----- * ею
где Ни — напор насоса при наличии кавитации;
— напор, создаваемый насосом при отсутствии кавита-
ции в м, Н'=———
7
Р
7
Функция ек является безразмерной и может принимать любые
значения в пределах от 0 до 1.
При полном срыве &к = 0, при полном отсутствии кавитации
Ек — 1 •
Функция gjK зависит от давления на входе в насос рвх, расхода
компонентов, давления упругости паров компонента при данной
температуре рупр и числа оборотов насоса.
Статическая характеристика кавитационной функции е* по-
лучается из экспериментальной кавитационной характеристики
насоса.
192
Кавитационные характеристики представляют собой зависи-
мость напора Ян, расхода и т)н насоса от давления на входе рвх
при n = const (рис. 6.6).
По кавитационной характеристике определяют две характер-
ные точки. Точка излома I характеризует появление частичной
кавитации при снижении давления на входе в насос до опреде-
ленной величины. Это значение давления на входе в насос, при
котором начинает кавитировать насос, будем называть критиче-
ским. Так как начало кавита-
ции не всегда достаточно от-
четливо прослеживается по ха-
рактеристике, то устанавли-
вают обычно условную гра-
ницу начала кавитации, под
которой понимают падение на-
пора на 2—3%.
При снижении давления на
входе в насос до определенной
величины, соответствующей
срыву работы насоса рс, на
кавитационной характеристике
насоса появляется точка изло-
ма //; при этом давление на
выходе начинает падать очень
Рис. >6.6. Кавитационная характерис-
тика 1н.асоса
резко.
Глубина кавитации зависит от тангенса угла наклона спа-
дающей ветви кавитационной характеристики (т. е. прямой,
соединяющей точки излома I и II).
Построим характеристику насоса в координатах, определяю-
щих появление кавитации, — , рКр—рвх (рис. 6.7).
л2 п
Кавитационная характеристика будет располагаться парал-
лельно оси рКр—Рвх- Справа от точки А будет располагаться зона
без кавитации. Точка А соответствует снижению давления на
входе’в насос до критического значения при рВх=Ркр-
Напор, создаваемый насосом при кавитации Ян, будет
меньше напора, создаваемого нормально работающим насосом
при отсутствии кавитации, на величину потери напора при кави-
тации:
Нп = Н'п- НК№.
(6.29)
Геометрическим местом точек, соответствующих потерям на-
пора на кавитацию при уменьшении давления на входе в насос,
является парабола вида
ЯКав — (LX^.
(6.29а)
193
7 1874
Коэффициент а определим по координатам точки 0, соответ-
ствующей полному срыву работы насоса:
Нн
Л — * •
(Ркр Рс)2
Тогда выражение (6.29а) примет вид
ЯкаВ= (Лр-Рс)2
Рис. 6. 7. Характеристика насоса в координатах,
определяющих появление кавитации, ЯНМ2; G/n;
Ркр—'Рвх
Подставим выражение для потерь напора на кавитацию
в уравнение (6.29) и получим
— ~TJ- (Ркр — РвхУ н
1Ркр —РсГ
2 гт, 1 (Ркр Рвх)2
Отсюда получаем выражение для определения статической
глубины кавитации &к.Ст*
______1 (Ркр —Рвх)3
ек.ст — 1 ~
(Ркр —РсУ2
При полном срыве рВх=Рс и ек=0. При рвх=рКр кавитация
отсутствует: ек=1.
Если предположить, что падение напоров и к. п. д. насосов
следуют за провалами давлений не мгновенно, а с запаздыва-
194
нием, то динамику распространения кавитационных явлении
можно описать следующим образом:
d ек ек.ст ек
dt тн
где тн — время пребывания жидкости в насосе:
____ GH V*" ек
тн =-------•
Весовой объем жидкости в насосе GH=VHY,
где VH — объем насоса.
Множитель ]/ек учитывает, что наличие пузырей умень-
шает объем насоса.
§ 5. УРАВНЕНИЕ ДИНАМИКИ ТУРБОНАСОСНОГО АГРЕГАТА
Уравнением динамики турбонасосного агрегата принято на-
зывать уравнение движения его ротора, составленное на осно-
вании принципа Даламбера:
dt 1=1
где Мт — крутящий момент турбины; -
Ми г — момент i-ro насоса, потребный для его вращения;
J — момент инерции ротора ТНА, который складывается
из моментов инерции ротора турбины /т, рабочих
колес насоса JH, жидкости, находящейся в колесах
/ж, и столба жидкости /Ст:
/=Л + 2(Л+/ж) + Лт;
о) — угловая скорость вращения ротора:
Учитывая, что M = N/a>, где N — мощность, уравнение ТНА
можно записать так:
A1nd^-=NT-^iNni,
dt
§ 6. УРАВНЕНИЯ МОЩНОСТИ ТУРБИНЫ И НАСОСОВ
Мощность турбины AZT равна произведению расхода газа че-
рез турбину GT на к. п. д. турбины -qT и на адиабатическую ра-
боту расширения газа в соплах турбины LT:
с2
7*
195
Адиабатическая скорость истечения газа из сопел турбины
зависит от степени расширения газа е=р2/рт, где р2 — давление
газа за турбиной; рт — давление газа перед турбиной.
/ 2 \х""1
При докритическом истечении, когда е > екр = (—-) ,
^ = "|/ 2£;АЛл[1-(е)— .
Критическая скорость истечения газов из сопел турбины
определяется по формуле
^кр = t | ! ,
j x + 1
где JRtTt — работоспособность газа на входе в турбину.
Если не учитывать время пребывания газа в газогенера-
торе, то
/?т7*т = 'R'T'.
Адиабатическая скорость связана с критической соотношени-
ем Сад=Лскр, где приведенная скорость % определяется сте-
пенью расширения е и связана с числом Маха выражением
, _ 1 Г *+1 м
л — I / —— » ,
V 2 , Г----—П------
Расход газа через турбину также зависит от степени расши-
рения газа в сопле турбины.
При е>еКр расход газа через турбину определяют по фор-
муле
0, = и5,|у [(.)-_(.) -
где FT — суммарная площадь сопел турбины;
ц — коэффициент расхода.
При критическом истечении
196
Эффективный к. п. д. турбины является функцией отношения
п/сад (рис. 6.8). При необходимости эту зависимость можно
аппроксимировать полиномом третьей степени:
7iT = aT^ + 6T(-^y + cT(JL\3.
сад \ сад/ \ сад/
Мощность, затрачиваемая на вращение насоса, зависит от
создаваемого насосом напора, расхода и к. п. д.
Рис. 6. 8. Зависимость эффек-
тивного коэффициента полез-
ного действия турбины от
соотношения п!с^
§ 7. УРАВНЕНИЯ ДИНАМИКИ АГРЕГАТОВ АВТОМАТИКИ ЖРД
Работоспособность ЖРД определяется правильным функ-
ционированием его отдельных систем, узлов и агрегатов, в том
числе и агрегатов автоматики.
Внутренние связи между параметрами различных элементов
ЖРД определяют его свойства как объекта автоматического
регулирования. Автоматические устройства накладывают на эле-
менты двигательной установки новые связи, необходимые для
обеспечения требуемых режимов работы ЖРД.
Двигательная установка в процессе работы подвергается
воздействию различного рода внешних и внутренних возмущаю-
щих факторов, которые приводят к нарушению режимов работы,
а при неудовлетворительной отработке двигателя — к отка-
зам [16]. i
Для сохранения выходных параметров двигательной уста-
новки постоянными или изменяющимися по заданному закону,
независимо от возмущающих факторов, осуществляют регулиро-
вание двигательной установки. Современные ЖРД снабжены
разнообразными (по виду выполняемых операций) агрегатами
автоматики.
Широкое распространение получили агрегаты автоматики,
работающие по схеме «закрыто — открыто». Они воздействуют
на двигатель и изменяют его режим по сигналу извне или от
самого объекта. В качестве примера можно привести работу
197
Z—0 регулятор |-
у
X
Рис. 6. 9. Структурная схема
системы регулирования
различных клапанов, отсечных пироклапанов и пневмокла-
панов (см/рис. 6.12), клапанов перепуска газа мимо турбины
[77].
Топливные клапаны предназначены для изменения расхода
компонентов топлива: с их помощью полностью или частично
открывается или закрывается проходное сечение соответствую-
щих магистралей.
Конструкция клапанов должна исключать возможность попа-
дания горючего и окислителя в камеру сгорания и газогенера-
тор ЖРД до начала запуска и после отключения двигателя,
а также обеспечивать возможность
перехода с одного режима на другой.
Применение для управления дви-
гателей пиро-, электро- или пневмо-
автоматики определяется прежде всего
назначением двигателя, типом лета-
тельного аппарата, на который уста-
навливается данный двигатель, и за-
висит от требования одноразового или
многоразового действия клапанов.
Использование на двигателе пиро-
автоматики обеспечивает высокую герметичность и допускает
длительное хранение летательного аппарата в заправленном со-
стоянии, но не позволяет контролировать работу агрегатов
после их установки на двигатель. Кроме того, применение пиро-
автоматики обусловливает быстродействие, простоту конструк-
ции самого клапана, простоту схемы двигателя, использующего
такую автоматику, минимальный разброс времени срабатывания
клапана.
Схема ЖРД с применением пневмоавтоматики более гибка
в отработке, так как позволяет изменять временные характери-
стики процессов подачи компонентов в камеру сгорания, обес-
печивая более плавное или более резкое нарастание давления,
и позволяет после устранения дефекта произвести повторный
запуск без замены агрегатов.
Клапан перепуска газа представляет собой нормально за-
крытый клапан. При запуске и на режиме главной ступени он
закрыт. При переводе двигателя на режим конечной ступени
клапан открывается по команде от системы управления ракеты.
Расход газов через турбину уменьшается, тяга двигателя сни-
жается.
Работа таких автоматических устройств происходит без
обратного воздействия объекта на автоматическое устройство
после его срабатывания.
Большое распространение'в ЖРД получили автоматические
устройства, называемые регуляторами, поддерживающие с опре-
деленной точностью заданный режим его работй.
198
Регулятор замеряет отклонение регулируемого параметра от
заданного значения и воздействует на объект регулирования до
тех пор, пока его отклонение не будет ликвидировано (рис. 6.9).
Следовательно, система регулирования является замкнутой си-
стемой с отрицательной обратной связью.
ЖРД как объект регулирования может иметь несколько
регулируемых параметров для выполнения поставленной задачи
с максимальной эффективностью.
Рис. 6. 11. Принципиальная схема регуля-
тора соотношения компонентов топлива
Рис. 6. 10. Принципи-
альная схема регуля-
тора давления
Основными параметрами двигательной установки являются
тяга и удельная тяга, величины которых при заданных геомет-
рии камеры двигателя и давлении на срезе сопла, определяются
только давлением в камере и соотношением компонентов
топлива:
Р = Р(рК1 fe); Pi = Pi(Pk, k).
Следовательно, давление.в камере сгорания и соотношение
компонентов топлива являются основными регулируемыми пара-
метрами двигательной установки, а для поддержания этих па-
раметров постоянными применяются регуляторы давления
(рис. 6. 10) и регуляторы соотношения компонентов топлива
(стабилизаторы) (рис. 6.11).
Кроме этих основных регулируемых параметров, в двига-
тельной установке могут быть и другие. Выбор этих параметров
диктуется необходимостью обеспечения термостойкости турбины
(поддержание постоянства соотношения компонентов топлива
в газогенераторе) или минимальных гарантийных остатков топ-
лива при выключении двигательной установки (обеспечение ми-
нимального рассогласования уровней в топливных баках).
Широкое распространение получили также; автоматические
устройства, отключающие двигательную установку при появле-
нии опасности выхода ее из <строя: системы аварийного выключе-
199
ния двигателя, системы аварийной защиты двигателя. Например,
на центральном ЖРД F-1 первой ступени, космической ракеты
«Сатурн-5» установлена система автоматического выключения
подачи кислорода в двигатель при появлении чрезмерной виб-
рации [18, 79, 99].
Уравнением движения регулирующего органа автоматическо-
го устройства называется дифферен-
циальное уравнение, определяющее
взаимосвязь между перемещением
регулирующего органа во времени
x(t), параметрами гидравлической
магистрали и соответствующего
автоматического устройства, обеспе-
чивающего это перемещение. Это
уравнение называется просто урав-
нением соответствующего автома-
тического устройства.
Уравнение движения любой
механической системы записы-
вается на основании принципа Да-
ламбера:
U /п^=2Р, (6.30)
Рис. 6. 12. П|р.и!нции11иаль<ная схе- '
ма иневмоклапаиа
где т — приведенная масса движу-
щихся частей (с учетом массы упругих элементов и
гидродинамического сопротивления среды);
2JP/ — сумма сил, действующих на подвижную систему;
i
х — перемещение регулирующего органа.
Сумма сил, действующих на систему в уравнении (6.30), оп-
ределяется конструкцией соответствующего регулирующего уст-
ройства. Уравнение движения регулирующего органа, регуля-
тора давления (см. рис. 6.10) запишется в следующем виде:
- + /т —- = pnFс<эф + Рсо СХ Р2 (^с.эф Т^шт)
где рн — давление настройки регулятора;
рх и р2 — входное и выходное давления гидравлической
магистрали соответственно;
^с.эф — полезная площадь сильфона;
Лит — площадь штока регулирующего органа;
F* — текущая площадь иглы регулирующего органа;
Рсо — суммарное начальное поджатие пружины и силь-
• фона при х = 0;
с — суммарная жесткость пружины и сильфона.
200
Для пневмоклапана (рис. 6.12) уравнение движения тарелки
клапана запишется в виде
т ~ = aF, - A (F - Fa) — (а — ри) Fy— Рсо — ex — fr ~,
где р\ и р2 — давление компонентов на входе и выходе из кла-
пана;
Fi — площадь седла клапана;
F3 — площадь плунжера поршня;
ру—давление управляющего газа на поршень;
Рн — давление окружающей среды;
Fy — площадь поршня;
Рсо — сила пружины при закрытом клапане (начальное
поджатие пружины);
с — жесткость пружины.
§ 8. МОДЕЛИ ОТКАЗОВ ЖРД ПРИ ПОЯВЛЕНИИ НЕИСПРАВНОСТЕЙ
Появление в двигательной установке неисправностей любого
вида вызывает переходный процесс [9, 94].
Метод расчета переходных процессов при появлении неис-
правностей (при аварийных ситуациях) должен отличаться
особой гибкостью, поскольку он должен позволять моделировать
как нормальную, так и аварийную работу двигателя, исследо-
вать работу двигателя при неисправностях различных видов,
которые могут возникать в разных местах гидравлических
магистралей ЖРД различных схем.
Каждая неисправность вносит свои особенности в протека-
ние переходного процесса и требует определенного учета в об-
щей модели двигателя. В связи с этим методика расчета ава-
рийных ситуаций должна включать в себя общую систему нели-
нейных дифференциальных уравнений, описывающих динамику
двигателя, а для рассмотрения аварийных ситуаций необходимо
учесть специфику физических процессов в каждой конкретной
ситуации, которая при математическом описании может приве-
сти к определенным изменениям в этой системе уравнений:
— к изменениям отдельных коэффициентов уравнений, опи-
сывающих динамику отдельных элементов двигателя;
— к видоизменению некоторых уравнений, описывающих
динамику отдельных элементов;
— к введению новых дополнительных уравнений.
Модели отказов ЖРД будем составлять на основе опреде-
ленных представлений о физической картине и количественных
изменениях, происходящих в каждом отдельном элементе дви-
гателя при появлении неисправности.
Полное или частичное перекрытие гидравлической магист-
рали моделируется увеличением коэффициента гидравлического
сопротивления определенного участка магистрали, соответст-
7** 1874
201
вующим возрастанию перепада давления на данном участке
вследствие уменьшения его проходного сечения. При постепен-
ном перекрытии магистрали задается закон нарастания повре-
мени коэффициента гидравлического сопротивления определен-
ного участка магистрали.
При возникновении негерметичности газовых магистралей
вследствие разрушения или прогара через образовавшееся
отверстие газ начинает истекать в окружающую среду. Модели-
рование отказа этого типа предусматривает видоизменение
уравнения газовой магистрали, выражающееся в появлении
нового члена, отражающего утечку газа. Давление окружающей
среды при стендовых и летных испытаниях кгс/см2, по-
этому всегда будет реализоваться сверхкритическое истечение
газа из образовавшегося в емкости отверстия:
Г} иЛггвРк ( 2 \s^x 1) у---- /6 311
где Готв — площадь образовавшегося отверстия;
р, — коэффициент расхода газа при истечении из отвер-
стия.
В связи с этим при утечке газа уравнение газогенератора,
например, запишется в виде
К dp* у'Л dum a-z}-
R'T dt (RT? dt r)-Vgr( r)
*’ +1
(6.32)
И R'r
Аналогично записываются и уравнения других газовых ма-
гистралей при возникновении негерметичности.
При авариях, обусловленных изменением качества смесе-
образования, уменьшается действительный удельный импульс
давления в камере сгорания вследствие уменьшения <рк=Р/Р* —
коэффициента камеры, где 0*—теоретический удельный импульс
давления. В этом случае необходимо пересчитать зависимость
P=f(&) или RT=f(k) с учетом занижения значения коэффи-
циента камеры.
Проводить теоретическое исследование, связанное с кавита-
ционным срывом работы насоса, можно в том случае, если в об-
щей системе уравнений динамики двигателя учтены питающие
магистрали от бака до входа в насос, а также динамика кавита-
ционных явлений. Причем приближенный учет кавитации в этом
случае дает только качественную картину. Чтобы получить
количественное совпадение с экспериментом, необходимо учиты-
вать размеры кавитационных каверн, зависимость объемов
202
кавитационных каверн от числа кавитации (давления на входе
в насос).
Если кавитационному срыву предшествует какая-то другая
неисправность: перекрытие питающей магистрали или негерме-
тичность и, как следствие, понижение давления на входе в на-
сос и напора, создаваемого насосом, то в системе уравнений
динамики двигателя должны найти отражение эти первопри-
чины: необходимо или увеличить значение коэффициента гид-
равлического сопротивления питающей магистрали, или ввести
дополнительное уравнение гидравлической магистрали утечки,
появившейся вследствие разрушения магистрали.
Поломки подшипников насосов, затирание плавающих колеи
приводят к увеличению момента сопротивления насоса, которое
может быть получено за счет снижения к. п. д. насоса. Этот вид
неисправностей будем имитировать понижением к. п. д. насо-
сов, задавая ^H = 0,8iq* (где tq* —номинальное значение к. п. д.
данного насоса).
Неисправности, связанные с дефектами самого насоса — по-
ломками крыльчаток, шнеков, приводят к изменению геометрии
проточной части, а следовательно, к изменению напорной харак-
теристики насоса.
Неисправности турбины (оплавление лопаток турбины, про-
гар ротора турбины) вызывают изменение геометрических раз-
меров каналов сопел, изменяют условия газодинамического тече-
ния в соплах турбины, что приводит к изменению скорости
истечения газов из сопел турбины и в конечном итоге вызывает
понижение к. п. д. турбины и уменьшение располагаемой мощ-
ности турбины. При математическом описании неисправностей
подобного типа можно задавать изменение суммарной площади
сопел турбины (jrFT) и уменьшение к. п. д. турбины.
Разрушение бандажа ротора турбины вызывает резкое тор-
можение ротора ТНА из-за увеличения момента трения на валу
турбины и снижения т)т йз-за появления дополнительных конце-
вых потерь и увеличения потерь на перетекание через увеличен-
ный (из-за отрыва бандажа) зазор. Этот вид неисправностей
можно учитывать понижением к. п. д. турбины или введением
дополнительного члена в уравнение ТНА:
А1П % = ЛГТ - No - NT - (6.33)
При поломке рессоры работу ТНА можно описать двумя
уравнениями:
at
3 2 dt
203
В начальный момент Л1 = п2, что соответствует значению
числа оборотов вала ТНА до возникновения неисправности.
При разрушении гидравлической магистрали или при возник-
новении негерметичности в каком-то месте появляется новый
расход (утечка), являющийся переменной во времени величиной
и определяющийся размером отверстия, через которое происхо-
дит утечка компонента, и перепадом давления, обеспечивающим
истечение. При разрушении гидравлической магистрали истече-
ние происходит в окружающую среду с давлением ра, являю-
щимся в общем случае величиной переменной, зависящей от
высоты подъема изделия pb=f(H).
Место разрушения будем рассматривать как новый узел
в гидравлической системе двигателя.
Для определения величины утекающего из магистрали рас-
хода Gy=f(t) к уравнениям магистралей нормально работаю-
щего двигателя нужно добавить еще одно уравнение, отражаю-
щее как бы появление новой гидравлической магистрали (бак —
место разрушения).
При составлении этого уравнения, кроме гидравлического
сопротивления тракта двигателя до места разрушения, необхо-
димо учитывать сопротивление жидкости при истечении из отвер-
стия. Коэффициент гидравлического сопротивления в этом слу-
чае определится как
a v J-----,
у (и Fotb)2 2g 7
где Fqtb—площадь отверстия, образовавшегося при разрушении;
ц — коэффициент расхода при истечении жидкости из
отверстия.
В уравнении гидравлической магистрали, в которой произо-
шло разрушение, потери на участке от бака до места разруше-
ния нужно определять с учетом утекающего из магистрали рас-
хода, так как до места разрушения идет суммарный расход
G=Gy+Gi, включающий в себя утекающий из магистрали рас-
ход и расход по магистрали двигателя после места разрушения.
Поскольку гидравлические магистрали двигателя могут пред-
ставлять собой многоузловую разветвленную систему трубопро-
водов, то утекающий из магистрали расход должен учитываться
также в уравнениях тех магистралей двигателя, которые име-
ют общий участок трубопроводов с магистралью, в которой про-
изошло разрушение, что соответствует дополнительным потерям
давления на этих участках, а также в уравнениях мощности и
напора, создаваемого насосом.
Глава VII
ИССЛЕДОВАНИЕ АВАРИЙНЫХ СИТУАЦИЙ ЖРД
§1. ВЫЯСНЕНИЕ ПРИЧИН АВАРИЙНЫХ ИСХОДОВ ИСПЫТАНИЙ ЖРД
Будем понимать под аварийной ситуацией ЖРД появление
любой неисправности, вызывающей переходный процесс, и уста-
новление нового режим а, отличного от предшествующего.
Опыт отработки и эксплуатации ЖРД показывает, что уста-
новление причин аварийных исходов испытаний в каждом кон-
кретном случае требует проведения специальных исследований
результатов измерений, материальной части и т. д., а иногда и
специальных экспериментов, цель которых —воспроизведение
характера аварии для определения вызвавших ее причин [6, 9,
12, 94].
Установление причины аварийного исхода летного испытания
ЖРД представляет собой более сложную задачу, чем стендового
испытания, в связи с меньшим объемом информации, трудностя-
ми обнаружения материальной части двигателя, а также из-за
деформаций и разрушений при падении ракеты.
Для установления причины аварийного исхода испытания в
настоящее время проводится целая серия работ, включающих
анализ результатов измерений, осмотр и дефектацию материаль-
ной части, проверку технологических процессов изготовления
узлов и агрегатов, экспериментальные работы, анализ стендовых
и летных испытаний, предшествующих данному, расчетные рабо-
ты и имитацию предполагаемых неисправностей на стенде.
' При выяснении причины аварийного исхода данные результа-
тов измерений являются основным источником информации о
прошедшем испытании двигателя. На основе анализа результа-
тов этих измерений делаются предположения о причине аварии
[6,9, 18, 19]. ,
Наличие материальной части облегчает поиск. В результате
осмотра материальной части сразу же могут быть отброшены
некоторые предположения о причинах аварии, сделанные на ос-
нове анализа измерений.
Осмотр материальной части двигателей I ступени ракет по-
зволяет сделать вывод о наличии высокочастотных пульсаций в
8 1874 205
г
камере сгорания, прогарах огневой стенки камеры сгорания,
газогенератора и других элементов двигателя, оплавлении, эро-
зии металла на входных патрубках насосов, неправильном рас-
крытии мембран, разрушении отдельных узлов двигателя, кото-
рые произошли до падения изделия.
Если произошел отказ в конце работы двигателя II ступени, то
почти исключена возможность установления причины по состоя-
нию материальной части, да и обнаружение остатков материаль-
ной части чрезвычайно затруднительно [19? 78].
Таким образом, при летных испытаниях данные телеметричес-
ких измерений являются отправным пунктом при установлении
причины аварийного исхода.
В ходе выяснения причины аварийного исхода летного испы-
тания проводят экспериментальные работы, включающие в себя
дефектацию узлов, доставленных с места падения ракеты, иссле-
дования в лабораториях и автономные испытания узлов и агрега-
тов, гидро- и пневмоиспытания до разрушения сборок узлов дви-
гателя того же периода изготовления, что и сборка узла двига-
теля, прошедшего летные испытания, определяется возможность
разрушения отдельных узлов при статическом подводе давления
и при имитации динамики заполнения трубопроводов, проверяется
прочность сильфонов, насосов, качество узлов уплотнений и по-
крытий (84].
При выяснении причины ненормального летного испытания
анализируют и материалы стендовых огневых испытаний, что
позволяет в отдельных случаях .установить причины аварийного
исхода в полете. Для этого отбирают и анализируют те из стен-
довых испытаний, при которых была зарегистрирована такая же
картина протекания процессов, что и при летном испытании (6,
9, 94].
Важным звеном при выяснении причины аварийного исхода
испытания являются расчеты, роль которых возрастает при ана-
лизе причин аварийной работы двигателя при летных испытаниях.
Они предполагают увязку основных параметров ЖРД с целью
подтверждения правильности результатов измерений и аналити-
ческие исследования переходных процессов и параметров уста-
новившегося режима работы двигателя в предположении опре-
деленной неисправности.
Методически правильно проведенное аналитическое исследо-
вание облегчает работу по выяснению причины аварийного исхо-
да испытания. Оно позволяет сузить круг поиска возможных при-
чин аварий, отбросить несостоятельные версии и остановиться
на наиболее вероятной, а в отдельных случаях (при достаточном
количестве измерений) однозначно установить причину аварийно-
го исхода [7, 36, 39].
Если характер переходного процесса и параметры нового ус-
тановившегося режима, зафиксированные при аварийном испы-
тании, соответствуют параметрам и характеру переходного про-
;206
цесса, полученным расчетным путем в предположении определен-
ной неисправности, делается вывод о том, что эта неисправность
при натурном испытании явилась причиной его аварийного ис-
хода.
В некоторых случаях при стендовых (испытаниях по состоя-
нию материальной части и результатам измерений также не
удается выявить причину аварийного исхода. Тогда необходимо
проведение аналитических исследований, 'которые позволяют сде-
лать более подробный анализ результатов испытаний. В част-
ности, проведение подобных расчетных исследований может ока-
заться полезным при выяснении первопричины, вызвавшей вто-
ричные дефекты материальной части, которые, в свою очередь,
привели к аварийному исходу испытания.
При необходимости имитации аварийной ситуации результа-
ты расчетных работ позволяют провести специальную настройку
экспериментального двигателя.
Воспроизведение в стендовых условиях характера переходно-
го процесса, возникшего в работе двигателя при летных испыта-
ниях (имитация), является завершающим этапом установления
причины аварийного (исхода испытания. Если характер измене-
ния режима экспериментального двигателя с имитацией опреде-
ленной неисправности и параметры его установившегося режима
соответствуют характеру и параметрам, зафиксированным при
летном испытании, то на основании проведенных эксперимен-
тальных работ делается вывод о том, что эта неисправность при
летном испытании явилась причиной его аварийного исхода (6,
9, 94].
Имитация в стендовых условиях различных типов неисправ-
ностей требует проведения испытаний по специальным програм-
мам и в отдельных случаях серьезных доработок эксперименталь-
ного двигателя, которые бы позволили воспроизвести неисправ-
ность.
Негерметичность магистрали можно имитировать установкой
на трубопроводе, где предполагается негерметичность, дополни-
тельных пироклапанов. Срабатыванием этих пироклапанов на
определенной секунде работы двигателя и создается негерметич-
ность магистрали. На стенде к этим трубопроводам подсоединя-
ют сливной трубопровод для отвода компонента. Для замера
вытекающего из магистрали через пироклапаны расхода в слив-
ном трубопроводе устанавливают расходомеры.
Перекрытие магистрали можно имитировать путем установки
дросселя или дополнительного жиклера в магистраль, в которой
предполагается неисправность. Имитацию полного перекрытия
можно обеспечить срабатыванием пироклапана отсечки компо-
нента.
Более сложным является воспроизведение неисправностей на-
сосов, агрегатов автоматики и турбин. Оно требует конструктив-
\ 8* ' 207
Рис. 7. 1. Давления в двигательной ус-
тановке посадочной ступени ЛЭО-3
(начало -работы):
/—гелий в бачке; 2—гелий на выходе из
блока регуляторов; 3—горючее на входе
в двигатель; 4—камера сгорания
ных доработок этих агрегатов и выполнения их с 'необходимыми
для данного случая дефектами.
В некоторых случаях имитация в стендовых условиях являет-
ся единственным способом установления причины аварийного ис-
хода летного испытания ЖРД.
В заключение приведем несколько примеров из практики по
неисправностям двигательной
установки, выяснению их при-
чин и способам устранения.
Так, по результатам измерений
было установлено, что при лет.-
но-конструкторских испытани-
ях двигательных установок
лунного экспедиционного от-
сека (ЛЭО-3) космического
корабля «Аполлон-9» с самого
начала первого запуска двига-
тельной установки посадочной
ступени отсутствовал наддув
топливных баков вследствие
закупорки гелиевой магистра-
ли (рис. 7.1). Это привело
к нарушению нормальной ра-
боты системы подачи (снизи-
лось давление в системе). За-
купорка гелиевой линии устра-
нилась лишь по истечении 5 с
работы на режиме полной тя-
ги, после чего давления в дви-
гательной установке подня-
лись до их нормальных уров-
ней [9, 84, 94]/
Температурные датчики ге-
лиевой системы показали, что
приблизительно на 35-й се-
кунде резко понизилась тем-
пература на входе в регулятор, а также температура на
входе и выходе внутреннего (гелией-гелиевого) теплообменника.
Этот внезапный приток холодного гелия указал на устранение
закупорки гелиевой линии. Затем температура вернулась к нор-
мальному уровню.
Последующее (изучение причин неисправности двигательной
установки, проводимое в космическом центре Кеннеди, в част-
ности, проверка технологии обслуживания бачка с гелием, пока-
зало, что давление в гелиевой линии может снизиться *в некото-
рых -случаях до нуля, а это может привести к натеканию в ма-
гистраль воздуха из окружающей среды.
Воспроизведение неисправности на экспериментальном образ-
'Й08
це лунного экспедиционного отсека при испытаниях на стенде по-
казало, что наличие вакуума в гелиевой линии в течение пример-
но 20 мин достаточно для того, чтобы заморозить и закупорить
теплообменник. На рис. 7. 2 дано сравнение результатов летных
испытаний ЛЭО-3 и -стендовых испытаний экспериментального
образца [9, 84].
Во время второго запуска двигательной установки посадоч-
ной ступени лунного экспедиционного отсека экипаж космическо-
го корабля «Аполлон-9» отметил нестабильную работу двигателя
на уровне 27% тяги, -которая длилась несколько секунд. При
выяснении причины неисправности проводилась имитация в
стендовых условиях характера работы при летных испытаниях.
Стендовые испытания экспериментального образца проводились
с преднамеренной подачей гелия в двигатель. Сравнение переход-
ных процессов, происходивших при полете космического корабля
«Аполлон-9», и стендовых испытаниях с подачей гелия подтверж-
дает правильность установленной причины неисправности
(рис. 7.3). Рост давлений в магистралях -был обусловлен рабо-
той стабилизаторов расхода в кавитационном режиме. Вследст-
вие большого освободившегося объема в топливных баках (60%),
а также поперечных и угловых ускорений космического корабля
гелий, по-видимому, попал в заборные устройства, а затем в дви-
гатель. Однако стендовые испытания показали, что попадание
гелия в двигатель не вызывает каких-либо дополнительных не-
поладок {9, 84, 94].
В настоящее время ведутся работы, посвященные исследова-
нию аварийных состояний отдельных систем ракеты и разработ-
ке систем автоматического распознавания видов аварий при стен-
довых и летных испытаниях [81, 97, 98].
В докладах [81, 97] указывается, что одной из основных задач
ракетной техники, связанных с дальнейшим развитием космичес-
ких полетов, является создание систем автоматического распоз-
навания и парирования различных видов аварий в полете. Раз-
работано несколько экспериментальных- комплексов, состоящих
из математических моделей отдельных -систем и находящихся в
стадии экспериментальной отработки.
Действующая в настоящее время система «Марк 7А» пред-
назначена для прогнозирования и для моделирования различных
полетных состояний и характеристик двигательной установки
I ступени ракеты-носителя «Сатурн-5». Система позволяет также
моделировать отказы.
По существу математическая модель «Марк 7А» описывает
установившийся режим работы двигательной установки с норма-
лизованными величинами для переходных процессов. В модели
используются коэффициенты влияния (характеристики двигателя
в частных производных). С их помощью вычисляются характе-
ристики двигателя на нерасчетных режимах. В модель включены
соответствующие модели всех систем, оказывающих влияние на
209
Рис. 7. 2. Результаты -имитации по за-
мораживанию теплообменника при на-
текании (воздуха:
О-ЛЭО-3; ф—экспериментальный обра-
зец ЛЭО;---------режимы эксперимента
Рис. 7. 3. Нестабильность работы
двигателя посадочной ступени:
а—давление окислителя на входе
в форсуночную головку; б—давление
горючего на входе в форсуночную го-
ловку; в—давление в камере;
----ЛЭО-3;-------наземные испыта-
ния с подачей гелия
210
входные параметры. По программе вычисляется тяга, секундные
расходы компонентов топлива, давления, уровни компонентов в
баках, время отсечки двигателя и т. д. [7, 98].
Применение систем автоматического распознавания видов
аварий является перспективным, поскольку при про-ведении лет-
ных испытаний такая система позволит быстро оценить характер
аварии и принять решение о целесообразности продолжения или
приостановления полета, а также избавиться от необходимости
поиска и транспортировки остатков материальной части аварий-
ного двигателя й воспроизведения в стендовых условиях харак-
тера аварии.
§2. МЕТОД РАСЧЕТА ПАРАМЕТРОВ УСТАНОВИВШЕГОСЯ РЕЖИМА
ЖРД ПРИ АВАРИЙНЫХ СИТУАЦИЯХ
Моделирование работы ЖРД (7, 39] проведем на основе ана-
лиза его структуры с учетом физических процессов в двигателе,
а также основных видов неисправностей и повреждений, которые
могут произойти во время работы.
1. Система уравнений, описывающая работу двигателя
на установившемся режиме
Рассмотрим достаточно сложную схему 4-камерного двигате-
ля (рис. 7. 4) такую, чтобы большинство схем существующих
ЖРД, работающих по открытой схеме, представляли частные
случаи рассмотренной.
Это исключает необходимость решения и создания программ
для каждой конкретной схемы с меньшим числом камер, так как
в таком случае они получаются упрощением основной программы.
Запишем систему нелинейных уравнений, описывающих рабо-
ту двигателя на установившемся режиме. Предусмотрим возмож-
ность появления утечки по магистралям.
Уравнения статики легко получаются из уравнений динамики
основных агрегатов ЖРД, если приравнять в них нулю производ-
ные по времени (см. гл. VI).
Например, напор насосов на основании уравнения (6.25а)
можно записать в виде
ро= dj? — d2nG0 — d3G2o.
Уравнение мощности после элементарных преобразований
примет вид
No= d4n3 + d5n2G0.
Уравнение турбины
= GT (den - d.tf), Gr = g0-\- g„
где go, gr — расходы компонентов через газогенератор.
211
На установившемся режиме работы dnldt=G и уравнение
ТНА запишется так:
NT = No + Nr.
Уравнение камеры сгорания
Рк=/(Со + Сг),
/24 J
Рис. 7.4. Расчетная схема гидромагистралей окислителя:
/—насос; 2—расходная шайба; 3—газогенератор; 4—клапан; 5— сильфоны;
6, 9—отсечные клапаны; 7, 8—камеры сгорания
где /=р/Лф (0 — удельный импульс давления в камере сгорания).
Для данного рода топлива и постоянного качества рабочего про-
цесса р зависит от k и рк. Но так как р от давления в камере за-
висит значительно слабее, чем от коэффициента соотношения
компонентов топлива, то влиянием рк 'Пренебрежем.
Уравнение газогенератора:
Л=И£о+£г), 1' = -^-
Л<р
212
Уравнения гидравлических магистралей газогенератора:
А>+Лх,0 = Л + 5, g20l + g2 . Рг + Ах.Г = Рк + 5»r g?z+ *2Г g2»
g0S = go+ 8у> grS = gr "Ь gry.
где gi, gir — -коэффициенты гидравлического сопротивления
участков магистралей окислителя и горючего до мес-
та разрушения;
£2, &2г — коэффициенты гидравлического сопротивления участ-
ков магистралей, от места разрушения до газогене-
ратора;
Рвх.о — давление на входе в насос окислителя;
Рвхг — давление на входе в насос горючего.
Гидравлическую магистраль от выхода из насоса до камер
сгорания, представляющую собой многоузловую разветвленную
систему, разобьем на участки простых трубопроводов.Участок 1—I
от выхода из насоса до клапана, с расходом Goi, коэффициентом
гидравлического сопротивления ах и утечкой Gyi. Участки 21 и 2п
от клапана до сечения IIи Па. Расход, коэффициента гидравличес-
кого сопротивления и утечку на участке 21 обозначим О*2, G^2;
соответственно на участке 211—G“2. Магистрали камер
сгорания разбиты на четыре участка: 3, 4, 5, 6. Расходы, коэф-
фициенты гидравлического сопротивления и утечки компонентов
на этих участках будем обозначать индексами «I, II, III, IV»,
соответствующими номерам камер сгорания. Например, расход,
коэффициент гидравлического сопротивления и утечку на 3 участ-
ке I камеры сгорания будем обозначать: G*3, a*, G*3; IV каме-
ры сгорания — G a|v, Gjv.
Давления в I—IV камерах сгорания будем обозначать
РЪ Р"Р™Р?-
Тогда уравнения установившегося движения компонентов топ-
лива по магистралям применительно к двигателю, расчетная схе-
ма магистралей которого представлена на рис. 7.4, запишутся
в следующем виде:
р0 + Ах.о = Р[ + Я1С201 + al ( G^y + al ( G>3)* +
+ ^(^4)2+^(G'5)2+^(Go)2>
Ро + Рвх.0 = Л* + atG201 + al ( G>2)2 + a? ( G’’ у +
+ ( G"y + ay ( G'-)2 + ( G"y,
Po + Pbx.0 = PlK" + a^01 + ay ( G"y + a’-1' ( Gin)2 +
+ < ( G”1)2 + ( GW)2 + ( GW)2.
Po + Ax.o = P™ + ^G201 + ay ( Gy2y + a” ( G^)2 +
+ ^v(GW)2+^v(GW)2+aW(G'v)2.
213
Гидравлические магистрали горючего представляют такую же
многоузловую разветвленную систему и разбиты на такие же
участки, как и магистраль окислителя. Уравнения магистралей
горючего камеры сгорания запишутся аналогично уравнениям
магистрали окислителя, только коэффициент гидравлического
сопротивления магистрали горючего обозначим через аг.
Кроме этих уравнений следует записать еще уравнения балан-
са расходов в точках разветвления:
^4+^3=^.
<?'>+ О” = gj'5,
GJJ4-GJ'= GJJ,
G”44- G''3=GJ'3,
О'з+^з+
Gui+Gm=Gm
GJ^G^GJ'',
Gl0\l+G"'=G'",
g™+g”=g”
g%+g*=g”
g%+g”=g”
G"3'+G”+G"=G",
G'o2+G"+Gyi=G01.
Таким образом, система уравнений, описывающая работу
двигателя на установившемся режиме, имеет следующий вид:
p^d^-d^-d^, (7.1)
No = dj? + t/6«2G0, (7.3)
Nt = GT (den - d.n3), (7.5)
Pi = il ( GJ + GJ), (7.7)
Pi"'='I"(G(J" + G{"), (7.9)
Po ”1“ РвХ.О = Рк + ^1Gq1 4
+ 4(°U)2+^5
Po 4- Pbx.o = p" 4- -
pr = dlTri?—d„nGr— d3rGJ, (7.2)
Nr = d4rn’ 4- d^iPGr, (7.4)
Nr = N0 + N„ (7.6)
pJ' = /"(GJ'4-GJ'), (7.8)
pw=lw^Gw+G^), (7.10)
<4(Go2)2+<4(Go3)2 +
(GJ5)2+aJ(GJ)2, (7.11)
4(GJ2)24-4I(G"3)2 +
4- a” ( G")> 4- ( G")2’,4- ( GJ')2, (7.12)
Po 4- Рвх.0 = P1" 4- «X G201 4- ( GJ')2 + a'" ( GJ")2 4-
4- ( GJ”)2 4- a'" ( GJ'')2 4- ( GJ")2, (7.13)
Po 4- Pbx.o = Pjv 4- a1GJ14- a'' ( GJ' )2 4- ( GJ* )2 4-
+ «T( GJH2+ ^v( GJ5 )24- «Jv( G'V)2, (7.14)
Pr 4- Рвх.г = Pi 4- airG^ 4- a'r ( GJ2)2 4- 4 ( GJ3)2 +
+ ^(OM! + 4(oy! + ^(C!)!. <7-15)
P, + P.,., = P'.' + <X„C?, + al. ( oy1 + <>“ ( G«y +
+ “I! (OJ!)! + (cy2 + < ( O")!. (7.16)
p,+Л...=Pl" + p„o;, + a'! (c;')’ + <>;; (c;y’+
214
= ( Gm)2 + ( G’j1)2 + a™ ( G”'y, (7.17)
Pr + Ax.r = p” + airG^ + &' (G^)2 + (G"tf +
+ ( ^4V )2 + у + < ( GJV)2- (7.18)
p'K = l’(go +grl (7.19)
А> + Ах.о = Х + *1£,ов + ^о’ (7-20)
Pr 4" РвХ.г == P« 4" ^ir gfZ 4~ ^sr gr> (7.21)
GJ + G‘5=G‘5, (7.22)
G>4+ G'3= g;3, (7.24)
(7-26)
G^3+G>> + ^2=^2, (7.28)
+ (7-30)
G’v+G«v=G^, (7.32)
G>v+G;v=G-v, (7.34)
Gi2+G>> + Gyi= G0l, (7.36)
Gox + go^Go. (7.38)
Gf5+G'4r=G;4, (7.40)
GJ‘+G'‘r=G£ (7.42)
+<%=<% (7-44)
Gf"+G>Vr=G^( (7.46)
+ (748)
(7.50)
G>>4-G£+O&=^. (752)
grz = gr + gy." (7.54)
G'5+.G;4= G'4, (7.23)
G>' + G>- = G>', (7.25)
G^+G;' = G'>, (7.27)
°"1 + G’n = Ош (7.29)
+ (7-31)
G^+G^=G^. (7.33)
^' + G^+Gn = Gn, (7.35)
gos = go + gr (7-37)
Gf+G’5r=O;5, (7.39)
g;4+o’3r = g;3, (7.41)
g;i+g& = g» (7.43)
G;3+G^+G>2r=G;2, (7.45)
+ (7-47)
GJv+G$r=G}v, (7.49)
g^+g;v = gjv,(7.51)
Gf’+Gf'+^r=Gri, (7.53)
Gn + grE=Gr. (7.55)
2. Решение системы
Приведенная система уравнений записана для максимального
количества возможных мест негерметичности.
Как правило, в определенный момент времени может возник-
нуть только одна неисправность, поэтому система уравнений в
каждом .конкретном случае будет значительно упрощаться.
Сначала приведем решение для общего случая, т. е. с одно-
временным учетом следующих видов неисправностей: 1) негерме-
тичности магистрали; 2) перекрытия (закупорки) магистрали;
215
3) 'неисправности турбины. Затем из общего решения можно
будет полупить частные, соответствующие одной или двум из
пер ечисленных неиспр авностей.
Исходными данными для решения являются: 1) напорные и
мощностные характеристики насосов; 2) коэффициенты гидрав-
лического сопротивления всех участков магистралей; 3) расходы
компонентов Go, Gr, g0 и gr, ’соответствующие установившемуся
режиму работы двигателя, который предшествовал появлению
неисправностей; 4) значения коэффициентов соотношения компо-
нентов топлива по камерам сгорания и газогенератору kl, ku,
fe111, k'-t 5) коэффициенты, показывающие, в каком соотноше-
нии происходит распределение расходов компонентов по магист-
ралям камер сгорания:
г?1 fit
А = ^-, (7.56) В = -^. (7.57)
О”
До появления неисправностей по магистралям камер сгора-
ния распределение расходов пропорциональное, т. е. А = В=1.
Кроме того, должен быть задан вид неисправности, а именно:
расход утечки при негерметичности, значения коэффициентов
гидравлического сопротивления, соответствующего перекрытию
магистралей и т. д.
Соответственно этим величинам, определяющим неисправ-
ность, и будет осуществляться увязка основных параметров дви-
гателя методом итераций.
Решая совместно уравнения (7.3), (7.4), (7.5) и (7. 6), опре-
делим значения чисел оборотов ТНА:
--+ ^5Г^Г + ^7^0 +У?^г) |
2 (^4 + ^4г)
I I /" Г ^Go 4~ ^srGr + d^gQ 4- d,fgr 2 . gpCe 4~ ffrCer
v L 2 (d± + d4r) d± -|- d±r
Из уравнений (7. 1) и (7.2) находим
Ро = dji? — d2nGQ — dfil,
рг== dirn? d2TnGr dZTG2r.
(7.58)
(7.59)
(7.60)
В уравнение (7.20) подставим выражение для р'к из (7. 19),
и, учитывая, что goz=go+gy, a gT= , получим
_ /'(1 + ^ + 26^' (
ёо~ 2(ех + е2)Л' +
। 1/" ГГ(1 +Л') + 261^']2 ,/><> 4-Рвх.о —
+ V [ 2*'(E. + S.) ] +--------------- (7-61)
В уравнение (7.21) подставим (7.19) и (7.54) и, учитывая,
что g‘Q = k'gT, получим
216
____ ^(1 + + 261г gy г
ёг~ 2(61г + 62г) Н
| т/" I' (1 + ЛЭ + SSu^y.f | Pt + Рвх.г Е1Г £у,г .у gg.
' . 2($lr+6ar) . 6ir + S2r
Давление на входах :в насосы рвх.о и рвхг в расчетах принима-
ем постоянным.
По полученным значениям g0 и gr определяем новые значения
А г goS, grB:
__ g0 80i~ So + gr
*r’ gTl=gt+gy.r
Используя выражения баланса расходов в точках разветвле-
ния (7.36) — (7.38), определим сумму расходов, идущих на ка-
меры сгорания:
&О2 + ^02 = °0 - Gyi — go — gr (7.63)
В общем случае распределение расходов по камерам сгорания
будет неравномерным (0^2 G” ). Используя коэффициент, пока-
зывающий, в каком соотношении происходит распределение рас-
ходов компонента по двум камерам (7.56), выразим расход
через G":
G'oi = AG".
Подставив полученное выражение для в уравнение (7. 63),
получим
(7-64)
примет вид
(7.65)
Лб?о2 + °о2 = Go — Gyi — go — gy
Решим это уравнение относительно ^ :
рц _______________ Go Gyi--go gy
°2~ •
С учетом уравнения (7.64) выражение для G'o2
__________________ -4 (Go Gyi go gy)
°2 = Tqr; •
Теперь можно перейти к определению расходов, поступающих
в камеры сгорания. Подставим в уравнение (7. 11) выражение
для р\ (7.7), 0'2 из уравнения (7. 65) и уравнения баланса рас-
I Go
ходов (7. 22) — (7. 24) и получим с учетом k =-:
G'
G» + ^+^+fli+^)(Go )2+?' ^-«' = 0.
(7.66)
217
где у' = 2а[ ( G’s + Glyi + 0’3) + 2а\ ( G’5 + G’4) + 2а’ G’5;
а* = Ро 4“ РвХ.О (Go Gyj go gy)2
I Л (Go----------------------------------Gyl ---go----gy) 3
— 0^2 - ’
Л + 1
- <4 (q5+q4+ад - (q5 + ад - 4 (с1У5у-
Решение уравнения (7. 66) позволяет определить расход окис-
лителя, поступающий в I камеру сгорания:
Gi = _ I1 (1+*1 ) + ?’*’ ,
0 2*1 ( «з + а4 + а5 + аб)
2
a
_2Л’(а’ + a4 + a5 + аб)з a3 + a4 + as + a6
Используя уравнение (7.12), выражение для р’’ (7.8), GJ2
из уравнения (7. 65) и уравнения баланса расходов (7. 25—7.27),
. п °о .
получим с учетом к = ——:
Gr
G" + (<% + а’’ + а'1 + а”) ( G’’)2 + ф" G’’- а’’=0,
(7.67)
l"
f" = 2aJ' ( G" + 0” + G" ) + 2а» ( C" + 0» ) + 2a" ( 0« );
aI1 = Po "F Pbx.0 ^1 (Po ^yi So Sy)2 &2 X
X A (Gq — Gyi — g0 — gy) 1 _
A + 1 J
- (о;» + - “V (°"s+°;: г - (°“s )2-
Определим расход окислителя, поступающий во II камеру
сгорания, решая уравнение (7.67):
zn(l + fen) + (pnfen
fn(1+feii) + (pnfen
2*’’(a’’ + a’’ + a|I +<#)
Jl Д. /7И X 7711 X л”
a3 ~г a4 ~Г a5 + a6
Расходы окислителя, поступающие в III и IV камеры сгора-
ния, можно определить таким же путем, как и расходы I и II ка-
218
мер. Но для нахождения G”1 необходимо использовать уравнения
(7. 13), (7.9), (7.29) —(7.31) и (7.64):
Gni = _ (1 + *ш) + Тш*ш ,
0 2Л1”(4” + 4"+^П+4")
-- [ Г /1П (1 + ^П1 ) + Т111^111 Г, а111______
У [2Л1” (4" + 4»+4П + 4»)J + 4"+4"+4" + ’
где
Ф1П = 2а'п ( G'{J + G# + G”1) + 2а|" ( G>>> + G'•>) + 2а>" G£;
а1И= Po 4” Рвх.О (^о <3yi So Sy)
X II «?<>-Gyl-go-Sy) 3
[-----ГЙ-------J ~
- oj" (o;1'+°;v+-«!" (ojv+(o»1 }=.
Для определения расхода окислителя, поступающего в IV ка-
меру сгорания, будем использовать уравнения (7.14), (7.10),
(7.32) — (7.34) и (7.64):
Giv = _ /1V(1-M1V) + ?1V*1V ,
0 2*1V (4V+4V + 4V + 4V)
//1У(1 + ^У) + 4УЛ1У Г ______a1V
2AIY(4Y+flf+4v+4Y) J + 4V + 4V + 4V + 4V
где
cpIV = 2a” ( O'v + G;v + G’V) + 2af ( Giv + Giv) + 2a>v G$
~ Po ”Ь Рвх.о (Qq Gy! Sy)3
II (670 Gyi — go — Sy)
— (12 ------------------------------—
2
Л + 1
- (qs+qy + g$)2 - (G%+g‘v)2 _ (qv)2.
Расходы горючего по магистралям камер сгорания определим
аналогичным путем. Используя уравнения баланса расходов по
магистралям горючего (7.53) — (7.55), определим
°г2 + GIr2 = °г — Gyir — Sr — gy.r- (7.68>
Согласно выражению (7. 57) распределение расходов горю-
чего по участкам магистралей двух камер сгорания будет опре-
деляться коэффициентом В:
Q\ = Q\\ D
^г2 иг2°*
219
Подставим полученное выражение в уравнение (7. 68) и ре-
шим последнее относительно :
____ Gr Gyir gr gy.r
r2“
B(fir Gylr gr gy.r)
Т0ГДЭ Gr2 =--------------------------•
(7.69)
(7.70)
Для того чтобы определить расход горючего, поступающий в
I камеру сгорания, необходимо подставить в уравнение (7. 15)
уравнения (7.7) и (7.70). С учетом (7. 39)-н(7. 41)
Z1 (1 + *г) + ф!
2Л1 ( а‘г + а4г + а15т +
"7 f1 (1 + Л1 ) + Ф1 a 1 P1
2( Дзг 4- ^4Г 4- а[5г 4- agj а3г + ^4Г 4- al5r 4- а^г
(7.71)
где ф1 = 2а13г ( O'5r + O'4r + G'3r) +
+ 2aIr(G'5r+q4r) + 2^rG>5r;
Р = Рг 4" Рвх.г Л1Г (Ог Gyir gr Syrr)3
’ - ч (oj»+о;..+-
a2r
В (С?г Gylr-------gr---- gy.r)
B + 1
-4(0J5r+<W-<m2-
Решая совместно уравнения (7. 16), (7.8), (7.70) и (7.42)н-
(7.44), определим расход, поступающий .во II камеру сгорания:
Он= /"(i+m*n ,
гп(1 + Лп) + фп
2 ( а3г + д4г + ajj + flfr)
4--------------*-----------
/711 д_/,11 , _П I ДП
д3г + Д4г + а5г + Д6г
где
Фи = 2^ ( ОИГ + ОИГ + ОИГ) + 2а" ( опг + G"r) + 2а£ G^;
р11 = рг 4" Рвх.г #1Г (fir {5yir Sr gy.r)2
I ГВ(Ог Gyir gr gy.r)
4----------STi--------1 “
- + w - «!! (OJJ, + OJW2 - (OJU2-
220
Расходы горючего, поступающего в III камеру сгорания, опре-
делим, используя уравнения (7.17), (7.9), (7.46) — (7.48),
(7.69), в IV камеру сгорания—на основании уравнений (7. 18),
(7. 10), (7.49—7.51), (7.69):
fnr 0 + feni) + фШ
О”1 = -
Г 9 ( л1н 4. л1Н 4-л1п 4. лпЦ
1 ( а3г + а4г + й5г + а6г )
13
fill (1+ЛП1) + фП1
2(a'{I+4I+a’{I+a^) - J
pi"
(7.72)
где f" = 2а>>• ( G™ + (ЭД + G™) + 2ЭД> ( G™ + G™ ) +
’ +2<ЭД<ЭД;
Р = рг Ч" рвх.г &1Г (fir ^yir gr gy.r)2
2
___ л11 I ^г' ^7yir Sr Sy.r
u2r
B + 1 J
- ( G& + G%r + G"[ )2 - ani ( G™ + G™ у - y.
Выражение для расхода горючего IV камеры 'сгорания имеет
вид (7. 72), только индекс «III» при (коэффициентах этого урав-
нения должен быть заменен на «IV».
Зная значения расходов окислителя по магистралям каждой
камеры сгорания, можно определить по (7. 28) и (7. 35) новые
суммарные расходы по двум камерам сгорания:
о;. + с;1. + о’„ = as + + G}' = о«
и новое значение коэффициента, показывающего, в каком соотно-
шении происходит распределение компонентов по магистралям
камер сгорания (7.56).
Будем отмечать новые значения параметров, необходимых
для следующего приближения, индексом «(н)»:
А
(") ~ о11 '
°о2
Аналогично для магистралей горючего:
GJ, + = О<„: <4
Сй' + CJJ + == OJJ; ой
Новые значения расходов окислителя и горючего через насо-
сы определим, используя уравнения (7.36), (7.38), (7.53) и
(7.55):
9 1874
221
<Л> = GI2 + GJ> + Gyit GJt = GJ2 + GJ* + Gyi,
° о (h) @o + S0s* (н) + 5*гГ
Исходными данными для следующего приближения примем
средние значения заложенных и полученных величин:
G° + Go (н) = Сг + Ог (н) =
2 °’ 2 п
^о + ^О(н) __ ^r + ^TrfH) _
О 60’ п — S Г,
А + Л(н) = д В + В(Н) = в
2 ’ 2
Для получения решения с нужной точностью е необходимо
повторять приближения до тех пор, пока разность между зало-
женныму и полученными значениями в данном приближении не
станет меньше заданной величины е.
3. Способы задания факторов аварийных ситуаций
При возникновении негерметичности расходных магистралей
величина утечки задается в определенном отношении от общего
расхода данного компонета.
Все остальные значения утечек по магистралям данной каме-
ры сгорания, других камер сгорания и газогенератора в этом слу-
чае приравниваются нулю.
Частичное перекрытие (засорение) гидравлической магистра-
ли задается увеличенным (по сравнению с номинальным) значе-
нием коэффициента гидравлического сопротивления соответст-
вующего ее участка.
При полном перекрытии (негерметичности) гидромагистрали
горючего I камеры сгорания давление в этой камере сгорания
необходимо приравнять к давлению насыщенных паров окислите-
ля р^ = ps. При полном перекрытии (негерметичности) гидравли-
ческой магистрали окислителя I камеры сгорания давление в ней
определяется:
Г кр
Расход окислителя при полном перекрытии магистрали I ка-
меры сгорания необходимо приравнять нулю Go=0 и исключить
в решении системы уравнений нахождение величины этого рас-
хода.
222
При полном разрушении коэффициенты (гидравлического со-
противления участков трубопровода за (местом разрушения сле-
дует приравнять нулю. Коэффициент гидравлического сопротив-
ления участка до места разрушения необходимо увеличить на
величину коэффициента сопротивления при истечении из отвер-
стия:
6)
Рис. 7.5. Зависимость основных параметров от сте-
пени негерметичности магистрали:
а—давления в камерах сгорания; б—расходы компонентов
через насосы;
------расчетные значения; О» И» □—экспериментальные
точки
Появление неисправности турбины необходимо учитывать из-
менением коэффициентов сб и с7 в выражении для мощности тур-
бины.
Таким образом, статическая методика позволяет проводить
расчет для следующих видов неисправностей ЖРД: перекрытия
магистрали, негерметичности магистралей, неисправностей тур-
бины. Однако пользование этой методикой не дает возможности
проводить исследования при неисправностях насосов, вызванных
9* ' 223
кавитационным срывом их работы, так как решение системы про-
водилось при постоянных значениях давлений на входе в насос.
На рис. 7. 5 приведены зависимости основных параметров
ЖРД от величины негерметичности гидравлической магистрали
горючего Gr.y, полученные расчетным путем и при стендовых ис-
пытаниях, имитирующих аварийную ситуацию.
Однако иногда при возникновении неисправностей различных
видов в двигателе устанавливаются одинаковые значения пара-
метров, характеризующих режим работы. В таких случаях уста-
новить причину аварийной ситуации на основании проведенных
статических расчетов не представляется возможным. Тогда целе-
сообразно провести расчеты переходных процессов д^я выясне-
ния причины аварии, сравнивая не только параметры установив-
шегося режима, но и характер переходного процесса.
При различных видах неисправностей переходные процессы
в количественном отношении существенно отличаются один от
другого. На рис. 7. 6 даны совмещенные графики переходных
процессов по основным параметрам двигателя для случаев пере-
крытия, негерметичности гидравлической магистрали окислителя
и понижения коэффициента полезного действия насоса окислите-
ля. Видно, что по параметрам Go— расход в камеру; GrE—рас-
ход горючего через насос переходные процессы значительно от-
личаются один от другого, в то же время параметры установив-
шегося режима при этих неисправностях практически не отли-
чаются.
§ 3. МЕТОД РАСЧЕТА ПЕРЕХОДНЫХ ПРОЦЕССОВ В ЖРД
ПРИ АВАРИЙНЫХ СИТУАЦИЯХ
Методика расчета аварийных ситуаций основывается на ре:
шении системы нелинейных дифференциальных уравнений, опи-
сывающих динамику двигателя с учетом моделей отказов при по-
явлении неисправностей. Очевидно, что такую задачу трудно ре-
шать без помощи ЭЦВМ.
Из 'опыта стендовых и летных испытаний ЖРД известно, что
маловероятно одновременное возникновение двух незави-
симых отказов двигателя. Однако систему уравнений и програм-
му на ЭЦВМ целесообразно составлять для одновременной реа-
лизации всех видов неисправностей во избежание переделок
программы в каждбм конкретном случае. При такой постановке
конкретный вариант получается из общей системы автоматичес-
ки, путем задания определенных начальных и граничных условий.
Решение системы нелинейных дифференциальных уравнений
можно проводить численным интегрированием по методу Эйлера
или Рунге — Кутта.
Начальные условия при расчете переходных процессов, воз-
никающих в двигателе при аварийных ситуациях, определяются
параметрами установившегося режима, который предшествовал
224
Ри-с. 7.6. Сравнение переходных процессов ЖРД, возникающих
при различных 1неисп|рав1нюютях:
а—расход окислителя; б—расход горючего через насос; в—напор насоса
горючего;
/—перекрытие гидравлической магистрали; 2—негерметичность гидравли-
ческой магистрали; 3—уменьшение коэффициента полезного действия
насоса
225
£у2
3
А
4
Суь
Рис. 7. 7. Расчетная схема гидромаги-
стралей окислителя двигателя с до-
жиганием генераторного газа:
/—бак окислителя; 2—насос; 3—трубка
Вентури; 4—отсечной клапан; 5—камера
сгорания; 6—газовая магистраль; 7—ста-
билизатор давления; 8—турбина; 9—газо-
генератор; 10—отсечной клапан; //—жик-
лер; 12—газогенератор наддува бака го-
рючего; /3—газогенератор наддува бака
окислителя
Уу
/С стабилизатору
к ставил изатору
г 7
6
От магистрали
горючего \Г)
аварийной ситуации двигателя, и конкретными условиями ава-
рийной ситуации: величина снижения к. п.д., размер образовав-
шегося отверстия цЛэтв при негерметичности гидравлических и
газовых магистралей и т. д.
. Перекрытие магистрали, происходящее по ступенчатому зако-
ну, задается увеличенным по сравнению с номинальным коэффи-
циентом гидравлического со-
противления определенного
участка гидравлической маги-
страли. При постепенном пере-
крытии магистрали задается
закон нарастания по времени
коэффициента гидравлического
сопротивления определенного
участка магистрали.
В случае прогара газовых
трактов задается площадь об-
разовавшегося отверстия цГотв-
Если прогары газовых магист-
ралей отсутствуют, это произ-
ведение равно нулю. При этом
будет осуществляться автома-
тический переход к нормаль-
ной работе двигателя, так как
при Gy = 0 уравнение газовой
емкости равнозначно уравне-
нию нормально работающего
газогенератора.
Поскольку гидравлические
магистрали двигателя пред-
ставляют собой многоузловую
разветвленную систему трубо-
проводов, изменение места раз-
рушения гидравлического трак-
та двигателя, связанное с пере-
несением через узел (точку от-
определенный агрегат двига-
теля), обязательно потребует внесения изменений в программу.
Чтобы избежать этого, в программе нужно предусмотреть места
разрушения после каждого узла гидравлической системы. Это
приводит к тому, что расчетная схема получается более развет-
вленной, чем действительная гидравлическая схема двигателя,
так как добавляются новые ответвления в местах возможных
разрушений.
Особые трудности с гидравлическими магистралями возника-
ют из-за того, что систему уравнений для них приходится решать
совместно, чтобы найти »в явном виде значения производных по
расходу. Например, уравнения гидравлических магистралей
бора какого-нибудь расхода на
226
окислителя, расчетная схема которых показана на рис. 7.7, за-
пишутся следующим образом:
1- Л. - - “о ( О„, - G„)° - 4. -
dt j + Л <МОЙ Gyi) —J-
“ (Лз + Н- Л») (Оо + Оу< + Оуз + gB)2— (b3 + Ь3 + Ь3 + 6в)Х
^Оуз ( dg$
dt + dt
dGy± dGy3
f dG0 dGv^
x
\ dt dt
- h ( dG°
dt ' dt ' dt J ' _J”*'
f dG0 dGyi \ dG0
~ ( ~df~ ~dt~ ) ~ TZ Л»
\ dt dt J jit
где GoE — Go + Gyt + Gyt + Oy2 + ОУ1 + gs + gB г r_,
-- So 4“ Sy> S$ Г.Г So.o "Г So.Ti
2» Рбл ao dt ao ( Gos ^yi)2 bo dt
^y1 \ . _ , n r> \2 i. (dG<n
dt ^Р°~аЛ^<л Gyi) biy dt
— (an + л3+а4+ a6) (Go + Gy4 -f- Gy3 -j- gB)2 — (b3 + b3 + bt + bt) X
dGy^
. _z dGyi f dG0 dGy±
-SiG^-S —^-pt_bA—^ + —
at J dt \ dt * dt
3« Рб.о aQ ^oE dt ao(G0Z ^yi)2 X
227
, / i \2
Л1 “#12 (go + £ gj)
& Per
о
dgo . dgy \
dt dt J
f dgQ , dgy
131 ~7T + ZTT
\ dt dt
9 L dgo , _
-PK = 0,
4. Pf>.o ao^oS ^0 dt + a0 ( GoB GJT1) Ц dt dt
f dG0 dGy± dGys dg* \
-(^ + ^ + ^ + ^)( —4---------^ + ^2_ + _ZL\_
4 2 1 3 r * ’ \ dt dt dt dt
d£v
— (^2 + + л4 + л5) (Go + Oy3 + Oy4 + gB)2 — angB — bu
-- 6 (#12 + Л1з) {go + gyY S (b^ + Ь13) (—-1--------
\ dt ' dt J
. f go + gy \2 e 9 e< dgy
£A Pct ( * j ^iig-y P\i 4“ Po
\ go J
~ ai ( GOE ~ Gyi)2 ~ h ) =0-
к n • h’^dG(rt air Г \2 к (dGrt dGyl\ '
5« Рб.о #o ^o2 fto d+ ao (^oa ^yi) ( di dt ) 4~
l4k \ C4 4 Ut !
f dGn dGvi dGv^ dg^t \
+ Po — {bi + b3 + bi + bj ( —— H———|———h —— J —
\ dt dt dt dt J
-- {a2 + #3 + ^4+ Лб) (Op + Gy4 + Gy3 + g^j2 - ^3^3 --
c, dGy3 „tn n \2 a ( dGos dQyi \
3 dt 4 °a yi> dt dt J
f dG0 dGyt dGy3 \ чо
— be I —-----1 —----1---- ) — 0'S {Go + Gyj + Gyi) = 0,
\ dt dt dt J
6- Pf>.o aQ GoB bo ao ( GoE Gyi)2|
dt ) +Po °oS~ °У‘)2— ( df ~
dG-y\ \ _ rt , dGN2 л
“5Г) ~ SiG^ ~ S2 ~Tt Pi =0’
228
7- Рб.о <?0 Одл bQ м а0 (GoS Оу1)2
r, f ^A)B ^У1
—,«
foa-Gyi)2-^V dt
dGyi \ i ~ ( G rt \2 и ( dG<& dGyi
dt l + Po «t(G0B Oyi) bd~t
\(Я0.0 + go.r)a - G (4- - r2glT -r’^- A.r= 0,
\ dl dt / dl
8- Рб.о aQ ^oB &0 ~Yt ( ^oB G^)2 f Ht
dGy^
dt
а1 ( ^оВ ЗД
^oB ^yi
dt dt
dgp.Q । ^ffo.r
dt *" dt
— Г
г2
0.0
-г;-^-л.о=°,
9- s,q,-s; ^_-A=o,
где
Gyi — расходы утечки ;в различных -местах гидравлических
магистралей камеры сгорания;
gy — расход утечки по магистрали газогенератора;
ро — напор,'Создаваемый насосом окислителя;
bi —коэффициенты гидравлического сопротивления и
инерционных потерь различных участков гидравли-
ческих магистралей;
Дрст — перепад давления на регулирующем органе стабили-
затора давления по магистрали газогенератора;
И, Г2, г3 — коэффициенты гидравлического сопротивления ма-
гистралей газогенераторов наддува баков;
Гр r'2, г3—'Коэффициенты инерционных потерь гидравлических
магистралей газогенераторов наддува баков;
Sj—коэффициент гидравлического сопротивления при
истечении компонента Gy из образовавшегося от-
верстия;
S'j—коэффициент инерционных потерь при истечении .
компонента Gy из образовавшегося отверстия;
go o, go.r—расходы окислителя, отбираемые на газогенераторы
наддува;
Р1--Р4, Рп — давление окружающей среды, куда происходит ис-
течение компонента при появлении негерметичности;
229
Рг.о, Ргг — давления в газогенераторах наддува баков окисли-
теля и горючего;
g*— расход окислителя в газогенератор на номинальном
режиме;
е—условный коэффициент, который позволяет предус-
матривать появление только одной утечки по ма-
гистрали газогенератора (вместо двух) и уменьшить
количество уравнений. При этом, если утечка возни-
кает перед стабилизатором, полагаем е=0, если на
участке за стабилизатором (за точкой В), полагаем
8=11.
Введем обозначения:
Л = Рб.о С2В ( СоВ Оу1)2в+ pQ ( GoB (fyif
-- (#з4“Л3 + + аъ)(@0 + Су44“ С7уз+ £а)2 — (С04~Су4 + Суз)3 —
а7 (Со 4“ Су4)2 ^8С2 Р*'
f = P&Q) С2В (Lq (Со Су1)2 4" р0 СоВ Су1)2
— (а3 + а3+ я4+ аб) (Со+ Су4+ Суз+ gB)2 — ае (Со + СУ4+ Суз)2 —
(Со + Су4)2 S4G24 — р4,
Л = Рб.о % С2В -г- a0(G0 Gyi)9 + Ро (Li { СоВ СУ1)2
— (а2 + а3 + а4 + a*) (Go + СУ4 4- Суз + g^)2 — (g0 + g?)2 —
— (а12 + а13) (g0 + е gy)2 — Д рст ( go+/y- A - aMg2 — р'к,
\ go J
fl ~ Рб,о ^0 Gyi)2 + Ро ( ^оЕ Gy1)2
— (л3 + л3 + а4 + а8) (Оо + Qyt + Оуз + ga)2 — ап (g0 + gy)2 —
— (Лц + Л13) • <(go + gy)2 — д Рст f g° +/4 — 5n — Al.
\ g0 J
f ~ Рб.о C2B d0b(Go Gy,)2 -|- po ( GoB Gyi)2
— (a2 4~’Лз 4” a4 + #5)JCo 4“ Cy4 4- Cy3 4- gz)2 —
— ae (Go 4“ Cy4 4“ Gy3)2 S3G2y3 P&
= Рб.о &о G~a aOj( GoB Gyi)2 4“<Po ( ^ob GyO2
^2 Gy2 p2,
fi= Рб.о я0 C~E a0 ( GoB Gyi)2 4~ po ( GoB Cyi)2
- Г1 (go.o + go.r)2 — r2g2.r - pr.r,
230
fe — Рб.о a0 Одд d0 ( GoS Oyi)2 + p0 «1 ( GoB Gyi)2
— f\ (go.0 + go.r)’ — r3g2 0 — Ртл,
fo = Рб.О ^0 ~~ ^l^yl Pl’
Тогда
(^+^ + ^ + ^ + ^ + ^+^ + 61 + d0+^)^ + (&7 + &e +
+ b3 + b4 + b3 + b2 + bi + b0 + &0) + (b3 + bi + b3 + b2 + #1+
+ b0 + 60) ( ——|——+ (b3 + b3 + bi + b3 + b2 + bi 4- b0 +
' \ at at J
. ,,x dGy3 l / dGy2 dgQtQ ^o.r\
+M—+ ^ + *‘4-Ц—4- —+-^-J +
+ ^o^-=/i. (7.73)
(S4 + b4 4- b3 + b3 + bi + b3 + b2 + bi + b0 + £0) —h (b2 4- be +
4- b, 4- 4- b3 4- b2 4- 4-К 4- b'o) 4- (bt 4- b< 4- bt -f- b2 4- 4-
4- bc> 4- d0) |—4- (b3 4- b6 4- bi 4- b3 4- b2 4- bi 4- b0 4-
++(*.+».+*;> (^4++4r)+
4-^-^-=/3. (7.74)
(^14 4- bi3 4- bi2 4- bn 4- bs 4- bt 4- b3 4- Ь2-\- bi 4-^o+fy>) +
4~ (e bi3 4- e bi2 4- Ьц 4- bt 4* bt 4- b3 4- b2 4- bi 4- b0 4- Ьо] 4"
+ (Ьь 4~ Ь4 4- b3 4- b2 4- bi 4* b0 4- bQ} ——|- {bi 4- b0 4- ^0) X
f dGy3 dg0,0 dg0.r \ , dGyt _
x —+ —Г- + —+ b0 -77- =fv (7-75)
\ at dt dt J dt
(5ц + e bi3 + ^12 + bn + bb + b4 + bz + b2 + + bQ + Z>0) +
+ (^3 + b12 + ьл + bb + b4 + bz + b2 + bY + bQ + bQ) +
231
232
Так как система уравнений гидравлических магистралей линей-
на относительно производных, решение ее находится с помощью
матриц. Матрица составляется из совокупности коэффициентов
инерционных потерь отдельных участков /гидравлических магист-
ралей (7.73) — (7.81). Вектор-столбец составляется из правых
частей дифференциальных уравнений гидравлических магистра-
лей, где эти части обозначены коэффициентами f2,—,fn.
Программа составлена для максимального количества ответ-
влений гидравлического тракта, соответствующего матрице 12-го
порядка. Предусмотрена логическая подпрограмма, автоматичес-
ки исключающая ненужные уравнения и комплектующая матри-
цы нужного порядка. Операции этой подпрограммы как бы «про-
щупывают» порядок матриц с помощью специальных коэффициен-
тов. Каждый коэффициент соответствует определенной гидравли-
ческой магистрали и может принимать только два значения: 1
или 0 при наличии или отсутствии магистрали соответственно.
Если все коэффициенты равны единице, то в программе ника-
ких изменений не происходит.
Логическая программа анализирует систему уравнений гид-
равлических магистралей, оперируя с коэффициентами, и произво-
дит изменения в самой программе решения матрицы, приводя ее
в соответствие с исходной матрицей нужного порядка.
Программа расчета переходных процессов при аварийных си-
туациях составлена для ЭЦВМ и состоит из двух автономных
программ: собственно двигателя и регулирующего устройства.
Благодаря этому в случае изменения принципа действия регули-
рующих элементов основная программа остается без изменений,
поскольку в ней участвуют только выходные параметры регуля-
торов— перепады давления на регулирующих органах.
§4. ПЕРЕХОДНЫЕ ПРОЦЕССЫ ПРИ ПЕРЕКРЫТИИ
ГИДРАВЛИЧЕСКОЙ МАГИСТРАЛИ
Любая неисправность приводит к нарушению режима работы
(аварийной ситуации) ЖРД и вызывает переходный процесс в
нем.
Для каждого класса двигателей характерно свое протекание
переходного процесса при возникновении неисправности, хотя
можно выделить..и некоторые общие закономерности, свойствен-
ные двигателям различных схем.
Характер протекания переходных процессов при аварийной
ситуации можно определить путем проведения расчетов в предпо-
ложении определенной неисправности по методике, изложенной
в § 3. ‘
Анализ этих процессов будем проводить по параметрам, за-
меряемым при стендовых и летных испытаниях (рк, р'к, рм, п, р0,
рп ОгЕ> Go1 g ит. д.) и не замеряемым, но позволяющим
глубже понять причину изменения параметров при аварийной
233
ситуации и облегчающим анализ (Af0, Nri k, k', перемещение
регулирующих органов х и степень расширения газа на турбине
лт).
Работа двигателя во многом определяется специфичностью
регулирующих органов. Анализ результатов расчетов показыва-
ет, что регулирующие органы влияют на количественную и на ка-
чественную стороны переходного процесса при аварийных ситуа-
циях. Поэтому анализ аварийных ситуаций целесообразно прово-
дить как без учета регулирующих органов, так и с учетом кон-
кретной системы регулирования. Это позволит выяснить влияние
работы конкретной системы регулирования на характер переход-
ных процессов и параметры нового установившегося режима в
типичных аварийных ситуациях. Поэтому первоначальная задача
исследования — выяснение характера переходного процесса, воз-
никающего при аварийной ситуации, определение влияния степе-
ни неисправности и места возникшей неисправности на характер
переходного процесса и режим работы нерегулируемого двигате-
ля с восстановительным газогенератором.
к
.Ро
/
0,8
0,6
0,ь
Рвхг
Рис. 7. 8. |Перекрытие участка гидравлической магистрали окислителя от
насоса до точки разветвления на газогенератор нерегулируемого ЖРД
Возникновение одного и того же вида неисправностей в раз-
ных местах гидравлических магистралей может вызвать совер-
шенно разное качественное протекание переходного процесса.
При перекрытии гидравлических магистралей определяющим
фактором является место его. возникновения: до точки развет-
234
вления, по магистрали камеры сгорания или газогенератора. Ко-
личественное и качественное влияние -степени перекрытия цели-
ком будет определяться местом, в котором произошло засорение
магистрали.
Рассмотрим переходные процессы, возникающие при перекры-
тии магистрали окислителя в нерегулируемом двигателе (см.
рис. 7.7). (Стабилизаторы .в этом случае рассматривались как
постоянные сопротивления).
Характер переходного процесса, возникающего вследствие пе-
рекрытия участка гидравлической магистрали окислителя до точ-
ки разветвления на газогенератор (по схеме Д), для этого двига-
теля показан на графиках (рис. 7.8). По оси абсцисс на этих
графиках откладывалось время, по оси ординат — относительные
величины, представляющие собой отношение текущего к номи-
нальному значению соответствующего параметра:
Со = -% Л = = ит. д.
GO Рг °г
Видно, что в рассматриваемом случае наблюдается резкое
уменьшение расхода окислителя по двигателю, а следовательно,
расходов через камеру сгорания и газогенератор. Это приводит
к понижению значений коэффициентов соотношения .компонентов
топлива по камере сгорания и газогенератору (k и k').
Поскольку газогенератор работает на участке резкой зависи-
мости работоспособности газа от соотношения компонентов, а ка-
dR'T' . dRT п
мера сгорания — на пологой ее части, то-— >------. Следова-
тельно, первоначальное снижение давления в газогенераторе
будет больше.
Уменьшение величины лт с одновременным снижением расхо-
да газа через турбину приводит к уменьшению располагаемой
мощности турбины AfT. В двигателях без дожигания генераторно-
го газа понижение AfT связано только с уменьшением расхода
компонентов, поступающих в газогенератор, поскольку давление
в камере сгорания в этом случае не является противодавлением
для турбины.
Уменьшение расхода окислителя разгружает насос, работаю-
щий на этом компоненте, и приводит к понижению мощности,
потребляемой им.
Влияние AfT оказывается более существенным. Происходит
резкое уменьшение числа оборотов турбонасосного агрегата. В
результате этого уменьшаются напоры насосов, расходы компо-
нентов топлива и т. д.
235
Из-за увеличения перепад/ давления по магистрали (вслед-
ствие резкогЪ падения давл^ия в газогенераторе) первоначаль-
но расход горючего воз^Хтает» но снижение напора насосов
приводит в дальнейшее к уменьшению расхода горючего. В ре-
зультате устанавливается пониженный режим по сравнению с
первоначальным.
Рте. 7. 9. Переходной 'Процесс при перекрытии участка
гидравлической магистрали окислителя камеры
сгорания
Прд перекрытии магистрали окислителя резко повышается
давление на входе в насос окислителя. В этот момент на входе
в насос горючего происходит кратковременное понижение дав-
ления с дальнейшим резким повышением до величин, превышаю-
щих номинальные.
Скорость снижения параметров, а также продолжительность
и величина «пиков» и «провалов» давлений на входах в насосы
определяются степенью перекрытия магистрали.
236
Теперь перейдем к рассмотрению установившегося режима
работы двигателя. Чем больше степень перекрытия, тем ниже зна-
чения параметров, характеризующих новый режим работы, при-
чем значения параметров нового установившегося режима в зна-
чительной степени будут определяться уменьшением работоспо-
собности газа в газогенераторе, т. е. зависимостью RT=f(k).
Характер переходного процесса, возникающий в двигателе
при перекрытии магистрали окислителя за точкой отбора (Д) на
газогенератор, совершенно иной, чем при перекрытии этой же
магистрали до точки отбора на газогенератор. При этом сущест-
венной является схема работы двигателя—с дожиганием или
без дожигания генераторного газа.
Можно отметить следующее протекание переходного процесса
при перекрытии участков 6—8 магистрали окислителя камеры
сгорания (за точкой Д) двигателя с дожиганием генераторного
газа (рис. 7. 9).
Вследствие перекрытия гидравлической магистрали окислите-
ля камеры резко уменьшается расход ,в камеру сгорания и воз-
растает расход через газогенератор. Это приводит к снижению
давления в камере сгорания и повышению давления в газогене-
раторе из-за первоначального увеличения расхода и 1возрастания
коэффициента соотношения компонентов топлива k', приводяще-
го к увеличению работоспособности газа R'T'.
Поскольку давление в камере сгорания является противодав-
лением для турбины, понижение его вызывает увеличение степени
расширения газа на турбине лт, связанной с ней, располагаемой
мощности турбины Л’т.
Увеличение NT, а также снижение потребляемой мощности
насоса окислителя из-за уменьшения расхода окислителя, приво-
дят к росту числа оборотов ТНА. Следствием этого является рост
всех основных параметров двигателя: напоров насосов.окислите-
ля и горючего, давления в газогенераторе, расхода горючего.
После первоначального резкого понижения расход окислителя
через насос начинает возрастать, а это приводит к увеличению
расхода через камеру и газогенератор.
Двигатель выходит на новый установившийся режим, форси-
рованный по отношению к первоначальному.
По результатам расчетов переходных процессов при различ-
ных значениях перекрытия магистрали окислителя камеры сгора-
ния построим зависимости основных параметров установившего-
ся режима ЖРД от степени перекрытия магистрали—отношения
дополнительного перепада на определенном участке к давлению
в камере сгорания (= А (рис. 7. 10).
\ Рк J
Анализ этих зависимостей показывает, что при увеличении
степени перекрытия магистрали камеры сгорания параметры ус-
тановившегося режима ЖРД ведут себя неодинаково.
237
Параметры турбонасосного агрегата: число оборотов, напоры,
а также давление в газогенераторе и расход горючего монотонно
возрастают с увеличением степени перекрытия. Скорость (возрас-
тания этих 'параметров уменьшается при увеличении перекрытия,
что связано с понижением значения коэффициента соотношения
компонентов и работоспособности газа в газогенераторе.
।
0,04 0,08 0}12 0,16 0,2 ffip*
Рис. 7. 10. Зависимость основных параметров
ЖРД от степени перекрытия магистрали окис-
лителя камеры сгорания
Несмотря на непрерывный рост числа оборотов и напоров,
расход окислителя через насос и камеру сгорания сначала воз-
растает до определенной величины перекрытия, а затем начинает
уменьшаться. Понижение расхода окислителя в этом случае свя-
зано с работой насоса окислителя в режиме частичной кавитации
на установившемся режиме. Рост оборотов ТНА приводит к повы-
шению критического давления рКр, при котором начинает сни-
жаться напор насоса по кавитационной характеристике. С увели-
чением степени перекрытия участка гидравлической магистрали
окислителя и ростом числа оборотов ТНА глубина кавитации
(gK) увеличивается. Резкого снижения потребляемой мощности
насоса окислителя в этом случае не наблюдается из-за пониже-
238
ния коэффициента полезного действия насоса при уменьшении
отношения G/n. Таким образом, форсирование двигателя с дожи-
ганием генераторного газа можно получить при определенной сте-
пени перекрытия. При дальнейшем увеличении перекрытия, не-
смотря на рост параметров ТНА, наблюдается понижение давле-
ния в камере сгорания.
Если же на двигателе ’будут обеспечены большие кавитацион-
ные запасы насосов, то при увеличении перекрытия участка гид-
равлической магистрали окислителя перед камерой сгорания бу-
дет наблюдаться форсирование по всем параметрам двигателя.
При перекрытии магистрали горючего газогенератора (расчет-
ная схема магистрали показана на рис. 7. И)' можно отметить
следующие характерные черты переходного процесса (рис. 7. 12).
Уменьшение расхода горючего по магистрали газогенератора при
перекрытии вызывает рост коэффициента соотношения компонен-
Рж. 7.11. Расчетная схема гидром а-
гистралей горючего двигателя с дожи-
ганием генераторного газа:
5—камера сгорания; 6—газовая магист-
раль; 8—турбина; 9—газогенератор; 12—га-
зогенератор наддува бака горючего; /5—
газогенератор наддува бака окислителя;
14—отсечной клапан; /5—бак горючего;
16— насос; /7—золотник; 18—трубка Вен-
тури; 19—серводроссель; 20—решетка сер-
водросселя
тон k' и увеличение работоспособности газа в газогенераторе
(R'T'). Однако снижение суммарного расхода в этом случае ока-
зывает большее влияние, чем повышение работоспособности га-
за и вызывает понижение давления в газогенераторе (в рассмат-
риваемом диапазоне зависимости (R'T') =f(k')). Относительное
изменение суммарного расхода компонентов в камеру сгорания
в этом случае гораздо меньше, чем в газогенератор, благодаря
чему давление в камере сгорания падает меньше, чем в газоге-
нераторе.
Как уже говорилось, уменьшение-степени расширения газа на
турбине лт вместе со снижением расхода газа через турбину вы-
зывает резкое понижение располагаемой мощности турбины Nr.
239
Но при этдм падает и потребляемая мощность насоса горючего
Уг из-за уменьшения расхода. В связи -с этим число оборотов тур-
бонасосного агрегата начинает уменьшаться, но скорость этого
уменьшения ослаблена снижением потребляемой мощности насо-
са -горючего.
Рис. 7. 12. Переходные процессы три 1перек|рыти1и магистрали горючего-
газогенератора
Уменьшение числа оборотов ТНА влечет за собой снижение
напоров и расходов насоса, а следовательно, и давлений в камере
сгорания и газогенераторе. Уменьшается и расход окислителя в
газогенератор, который в начале переходного процесса резко воз-
растает вследствие увеличения -перепада по его магистрали от на-
соса до газогенератора.
Таким образом, в результате перекрытия магистрали горючего
ЖРД с дожиганием восстановительного генераторного газа ре-
жим работы двигателя понижается. Аналогично протекает пере-
ходный процесс при перекрытии гидравлической магистрали го-
рючего газогенератора в ЖРД, работающем по схеме с выбросом
генераторного газа. Параметры нового установившегося режима
работы двигателя реализуются при повышенных значениях коэф-
фициентов соотношения компонентов топлива в газогенераторе и
камере сгорания.
240
Рис. 7.13. Влияние степени перекры-
тия магистрали горючего на парамет-
ры ЖРД
Исследование переходных процессов при различных степенях
перекрытия позволяет сделать «вывод, что характер переходного
процесса практически не зависит от степени перекрытия. С уве-
личением степени перекрытия
гидравлической магистрали го-
рючего двигателя с восстано-
вительным газогенератором
режим работы двигателя по-
нижается. Исключением явля-
ются поведение расхода окис-
лителя по магистрали газогене-
ратора и давлений на входах
в насосы.
Рассмотрим установившие-
ся режимы работы двигателя.
На рис. 7.13 приведены за-
висимости основных парамет-
ров установившегося режима
двигателя от степени перекры-
тия^ магистрали горючего
(6Api). Видно, что скорость
изменения параметров при
увеличении степени перекры-
тия переменна: она максималь-
на при небольших значениях
перекрытия и уменьшается
с увеличением его. Это связано
с повышением работоспособности газа в газогенераторе R'T'
из-за роста соотношения компонентов k', парирующей уменьше-
ние суммарного расхода через газогенератор. Этим фактом объ-
ясняется и сравнительно высокий режим работы ЖРД при
больших значениях перекрытия гидравлической магистрали
горючего. Но с увеличением степени перекрытия возрастает
опасность прогаров газовых трактов из-за увеличения темпера-
туры генераторного газа.
§5. ПЕРЕХОДНЫЕ ПРОЦЕССЫ ПРИ НЕГЕРМЕТИЧНОСТИ
ГИДРАВЛИЧЕСКИХ МАГИСТРАЛЕЙ
Негерметичность магистрали может приводить к значительно-
му изменению режима работы двигателя, а в отдельных случаях
и к полному прекращению работы.
Негерметичность характеризуется появлением нового расхо-
да— утечки. Скорость возрастания этого расхода очень велика
из-за больших перепадов, срабатываемых на образовавшихся от-
верстиях. В начальный период утечки (примерно через 0,01 с)
расход через образовавшееся отверстие достигает максимального
значения. Дальнейшее понижение режима работы двигателя вы-
241
зывает и уменьшение величины утечки. Таким образом, появле-
ние утечки происходит с первоначальным забросом, величина ко-
торого тем больше, чем больше образовавшееся отверстие.
Появление расхода утечки приводит к тому, что 'коэффициент
весового соотношения компонентов топлива по двигателю значи-
тельно отличается от соотношения компонентов по камере сго-
рания. Естественно, суммарный расход компонентов по двига-
телю больше суммы расходов по камере сгорания и газогене-
ратору.
Характер переходного процесса, возникающего при появлении
негерметичности гидромагистрали горючего газогенератора, по-
казан на^рис. 7.14. Уменьшение расхода по магистрали газогене-
ратора Gr вызывает резкое понижение давления в газогенераторе,
несмотря на возрастание работоспособности генераторного газа.
Относительное изменение суммарного расхода по камере сго-
рания меньше, чем по газогенератору, в связи с чем и снижение
давления в камере сгорания менее значительно. Процесс сопро-
вождается уменьшением степени расширения в соплах турбины
лт. Совместное влияние уменьшения расхода газа через турбину
и лт вызывает резкое понижение располагаемой мощности тур-
бины 7УТ.
Появление Утечки приводит к возрастанию расхода через на-
сос горючего <7гв,_а следовательно, к увеличению потребляемой
мощности насоса Nr.
Таким образом, если при перекрытии магистрали уменьшение
располагаемой мощности турбины несколько компенсировалось
уменьшением потребляемой мощности одного из насосов, то при
негерметичности изменение и одного и другого параметра на-
правлено в сторону понижения числа оборотов ТНА. В связи с
этим скорость изменения числа оборотов п при негерметичности
больше, чем при перекрытии магистрали (см. рис. 7.12). Двига-
тель выходит на новый установившийся режим, характеризую-
щийся пониженными значениями параметров по сравнению с но-
минальными.
Разрушение гидравлической магистрали сопровождается рез-
ким уменьшением давления на входе в насос данного компонен-
та с последующим повышением и «забросом» выше номиналь-
ного. Уменьшением величины давления на входе в насос до кри-
тического определяется кратковременная работа насоса в режиме
частичной кавитации. На входе в насос второго компонента в
данный момент наблюдается повышение давления с последую-
щим плавным понижением.
На основании результатов расчетов переходных процессов при
различных значениях негерметичности построим зависимости
параметров установившегося режима работы ЖРД от степени
негерметичности, которую будем характеризовать размером обра-
зовавшегося отверстия (рис. 7. 15). Анализ этих зависимостей
242
Рис. 7. 14. Переходный процесс при иегермеличмости гидра1влической магистра-
ли горючего
ю
со
показывает, что с увеличением негерметичности магистрали го-
рючего газогенератора режим работы двигателя понижается.
Величина утечки определяется размером образовавшегося
отверстия pFoTB. Расход утечки на трафиках определялся отно-
Рис. 7. 15. Зависимость основных
параметров ЖРД от степени негер-
метичности гидравлической магист-
рали горючего
шением текущего к максималь-
ному значению утечки в дан-
ном переходном процессе:
Gy =—^— .
у G
max
Однако зависимость Gy=
=/(н^отв) имеет максимум.
Дальнейшее увеличение цГотв
вызывает первоначальное уве-
личение расхода утечки, но
вследствие значительного сни-
жения режима работы двига-
теля уменьшается и расход
утечки.
Возрастание температуры
в газогенераторе из-за повы-
шения k' при значительной не-
герметичности опасно для ма-
териальной части двигателя
из-за возможности прогаров
газовых магистралей.
При возникновении негер-
метичности гидравлической ма-
гистрали окислителя, так же
как и при перекрытии, харак-
тер переходного процесса опре-
деляется местом возникнове-
ния неисправности.
Переходный процесс при
негерметичности участка маги-
страли до точки отбора на га-
зогенератор показан на рис.
7.16. Он характеризуется снижением основных параметров ре-
жима работы ЖРД.
Из рис. 7.16 видно, что происходит одновременно уменьшение
расхода окислителя на камеру сгорания \и газогенератор, но из-за
появления утечки суммарный расход через насос возрастает, уве-
личивается потребляемая мощность насоса окислителя. Сниже-
ние расхода окислителя по магистрали газогенератора приводит
к резкому уменьшению коэффициента соотношения компонентов
и работоспособности газа в газогенераторе, что вызывает резкое
понижение давления в газогенераторе.
244
Рис. 7. 16. Переходный процесс ицри негерметичности участка гидравлической
магистрали окислителя до точки отбора на газогенератор
Вследствие увеличения перепада давления по магистрали го-
рючего, из-за* снижения давления в газогенераторе, начало пере-
ходного процесса сопровождается увеличением расхода горючего
газогенератора.
Уменьшение коэффициента соотношения 'компонентов по ка-
мере сгорания не вызывает значительного понижения работоспо-
собности RT. Поэтому в камере наблюдается плавное снижение
давления. Двигатель выходит на новый установивщийся режим,
пониженный по сравнению с первоначальным.
Отличительной чертой переходного процесса при негерметич-
ности магистрали окислителя газогенератора является уменьше-
ние суммарного расхода через данный насос ву результате отно-
сительно малых величин утечки и номинального расхода окисли-
теля на газогенератор (go <4 % Go). Появление утечки по
магистрали газогенератора полностью компенсируется незначи-
тельным уменьшением расхода по камере сгорания. Расход через
насос при этом первоначально также уменьшается, и потребляе-
мая мощность насоса окислителя падает.
Итак, если при негерметичности участка магистрали до точки
отбора на газогенератор расход через насос окислителя возрас-
тал и это приводило к резкому снижению давления на его входе,
то при негерметичности самой газогенераторной гидравлической
магистрали эти параметры изменяются противоположным обра-
зом.
Анализ параметров установившегося режима работы ЖРД
при различных величинах негерметичности показывает, что с уве-
личением негерметичности режим работы двигателя понижается.
Снижение режима работы двигателя сопровождается увеличе-
нием скорости спада параметров, увеличением глубины и продол-
жительности «пиков» и «провалов» входных давлений, возраста-
нием первоначального заброса расхода утечки.
При возникновении негерметичности гидравлической магист-
рали окислителя перед камерой сгорания за точкой Д характер
переходного процесса качественно отличается от переходного
процесса при негерметичности магистрали окислителя до нее или
магистрали газогенератора (11—14). Эти отличия связаны со
схемой двигательной установки и с непосредственным влиянием
камеры сгорания на работу турбины в двигателях с дожиганием
генераторного газа. Такая негерметичность вызывает резкое
уменьшение расхода и коэффициента соотношения компонентов
по камере сгорания, что сопровождается падением давления в ка-
мере (рис. 7. 17). Она несколько уменьшает также расход окис-
лителя по магистрали газогенератора и приводит к уменьшению
давления в нем. Но это уменьшение существенно меньше, чем по
камере сгорания. Степень расширения газа в соплах турбины воз-
растает, растет ее располагаемая мощность. Это вызывает рост
числа оборотов ТНА, напоров насосов окислителя и горючего.
Увеличиваются расходы компонентов через насосы.
246
Рис. 7. 17. Переходный процесс при негерметичности участка гидравличес-
кой магистрали окислителя камеры сгорания
Рис. 7. 18. Зависимость основных па-
раметров ЖРД от степени негерметич-
ности гидравлической магистрали
окислителя камеры сгорания
247
Вследствие этого возрастает давление в газогенераторе и ка-
мере сгорания. Но если давление в газогенераторе, увеличиваясь,
превышает первоначальную величину (расходы окислителя и го-
рючего по магистрали газогенератора превышают номинальные),
то давление в камере сгорания не достигает первоначального зна-
чения, поскольку расход окислителя в камеру сгорания остается
ниже значения, предшествовавшего появлению неисправности.
Следовательно, при негерметичности гидравлической ма-
гистрали окислителя перед камерой сгорания в двигателях с до-
жиганием восстановительного генераторного газа происходит
форсирование режима работы двигателя по параметрам турбо-
насосного агрегата: р0, рг, п, рк, 7V0, 2Vr, 2VT, а также Ооаи Grz.
Вместе с тем уменьшаются расход окислителя Go и давление в
камере сгорания. Такое протекание переходного процесса свой-
ственно только двигателям с дожиганием генераторного газа.
В двигателях с выбросом генераторного газа происходит дроссе-
лирование режима работы.
Рассмотрим установившиеся режимы работы. Используя ре-
зультаты расчетов переходных процессов при различных значе-
ниях ц^отв, построим зависимости параметров установившегося
режима работы ЖРД от степени негерметичности (рис. 7. 18).
Анализ этих зависимостей показывает, что с увеличением негер-
метичности магистрали окислителя камеры сгорания давление в
ней понижается. Параметры турбонасосного агрегата (п, р0, рг,
рк) зависят от размера образовавшегося отверстия: до опреде-
ленного значения jliFotb они увеличиваются, а затем уменьшают-
ся. Это объясняется резким уменьшением величины R7T7 из-за
соответствующего снижения коэффициента 'соотношения компо-
нентов топлива по газогенератору k7, а также работой насоса
окислителя в режиме частичной кавитации.
§ 6. ПЕРЕХОДНЫЕ ПРОЦЕССЫ ПРИ НЕГЕРМЕТИЧНОСТИ ГАЗОВЫХ
ЕМКОСТЕЙ ИЛИ МАГИСТРАЛЕЙ
Необходимо различать два случая по месту расположения
этой газовой емкости: 1) до турбины, например, детект газогене-
ратора; 2) после турбины (прогар газовода).
Негерметичность газогенератора может наступить из-за от-
рыва штуцеров замера давления в газогенераторе и прогаров
стенок неохлаждаемого газогенератора. Утечка газа приводит к
понижению давления в емкости, уменьшению расхода газа, сте-
пени расширения его на турбине и ее располагаемой мощности.
В результате наступает пониженный (дросселированный) режим
работы двигателя. Поскольку из газогенератора 'происходит утеч-
ка восстановительного газа, коэффициент соотношения компо-
нентов по камере сгорания несколько возрастает при постоянном
коэффициенте соотношения компонентов по двигателю.
248
Негерметичность газоводов за турбиной уменьшает давление
в них. Так как это давление является противодавлением для тур-
бины, расход через которую не изменился, то увеличатся степень
расширения газа по турбине и ее располагаемая мощность.
В итоге двигатель форсируется относительно режима, предше-
ствовавшего появлению рассматриваемой неисправности.
§ 7: ПЕРЕХОДНЫЕ ПРОЦЕССЫ ПРИ НЕИСПРАВНОСТИ НАСОСОВ
Рассмотрим аварийные ситуации, обусловленные ненормаль-
ной работой насосов. Первопричиной этой ненормальности могут
быть внешние и внутренние факторы, действующие отрицательно
на режим работы насоса. К числу внешних факторов относятся
неисправности ® питающем трубопроводе (его перекрытие или
Рис. 7. 19. Переходный процесс игри перекрытии питающей магистрали
окислителя
нарушение герметичности), повышение числа оборотов турбона-
сосного агрегата, загазованность компонентов. Эти факторы .вы-
зывают кавитационный срыв работы насосов. К внутренним фак-
торам относятся дефекты самого насоса: поломки крыльчаток,
шнеков, затирание плавающих колец, поломки подшипников. Они
могут сопровождаться взрывами, возгоранием отдельных узлов
насоса.
Этот вид неисправностей представляет наибольшие трудности
при выяснении причин аварийных исходов испытаний. Даже в
том случае, когда расчетным путем удается получить характер
переходного процесса, аналогичный протекавшему при натурном
испытании, остается невыясненным вопрос, приведет ли данная
неисправность к взрыву. При выяснении таких неисправностей
обычно требуется имитация в стендовых условиях аварийной
ситуации, случившейся при натурном испытании.
249
Характер переходного процесса npin кавитационном срыве
работы на-роса из-за частичного перекрытия питающей расходной
магистрали перед .входом в насос окислителя показан на
рис. 7.19.
Когда входное давление станет ниже критического, при кото-
ром насос начинает кавитировать, падает создаваемый им напор.
Отличительная черта переходного процесса в этом случае—-
первоначальный рост числа оборотов ТНА, напора некавитиру-
ющего насоса горючего и расхода горючего через него из-за
уменьшения нагрузки на ТНА вследствие резкого уменьшения
мощности, потребляемой насосом окислителя.
Уменьшение расхода окислителя в газогенератор приводит к
понижению коэффициента соотношения компонентов и, следова-
тельно, работоспособности газа R'T'. Поэтому, несмотря на пер-
воначальное увеличение расхода горючего, давление в газогене-
раторе рк падает. Это, в свою очередь, вызывает понижение дав-
ления в камере сгорания, однако менее интенсивное, чем в газо-
генераторе, поскольку зависимость RT=f(k) на участке работы
камеры сгорания очень пологая и работоспособность газа изме-
няется слабо. Снижаются число оборотов ТНА, напор насоса
горючего, происходит дальнейшее уменьшение напора, создавае-
мого насосом окислителя. На двигателе устанавливается режим,
пониженный по сравнению с первоначальным.
Характерными параметрами, по изменению которых можно
судить о наличии кавитационного срыва работы насоса вследст-
вие перекрытия питающей магистрали, являются р0, рг, тг, Go?,
Gr, рк, рвх.о, Рвх.г- Переходный процесс в данном случае сопро-
вождается снижением расхода кавитирующего насоса. Если при
перекрытии магистрали за насосом такое поведение расхода
вызывало первоначальный «пик» давления и повышение давле-
ния на входе в насос на установившемся режиме, то при пере-
крытии питающей магистрали давление на входе в насос резко
уменьшается и остается ниже первоначального на установившем-
ся режиме. Переходный процесс по входным давлениям сопро-'
вождается колебаниями давления небольшой амплитуды.
Такое поведение давления на входе в насос будет зарегистри-
ровано при испытаниях двигателя, если перекрытие магистрали
произойдет до места установки датчика замера давления. Если
же перекрытие питающей магистрали произойдет за местом уста-
новки датчика, то датчик давления зафиксирует первоначальное
повышение давления. Записи датчика давления в этом случае не
будут отражать реального изменения давления ца входе в насос.
Характер переходного процесса при кавитационном срыве на-
соса, вызванного негерметичностью питающей магистрали окис-
лителя, показан на рис. 7. 20. Здесь снижение режима происхо-
дит как вследствие уменьшения напора из-за кавитации при сни-
жении входного давления ниже критического, так и в результате
250
уменьшения расхода через насос окислителя из-за появившейся
утечки компонента перед насосом.
Резкое уменьшение напора и расхода через насос окислителя
приводит к снижению /потребляемой мощности насоса. Вследст-
вие этого в начале переходного процесса растут число оборотов
ТНА, напор, создаваемый насосом горючего, и расход горючего
по магистралям двигателя.
Рис. 7.20. Переходный процесс три негерметичности питающей
магистрали
Понижение соотношения компонентов в газогенераторе и сум-
марного расхода, через газогенератор вызывает спад давления в
нем, снижение числа оборотов ТНА, напоров насосов и давле-
ния в камере сгорания.
Уменьшение давления на входе в насос окислителя из-за по-
явившейся утечки вызывает увеличение перепада давления по пи-
тающей магистрали от бака до входа в насос. Это приводит к
возрастанию расхода из бака.
Но если при негерметичности магистрали за насосом начало
переходного процесса сопровождалось резким' увеличением рас-
хода утечки, а в дальнейшем этот расход уменьшался, то при по-
явлении утечки из питающей магистрали происходит увеличение
этого расхода до определенной величины на протяжении всего
переходного процесса. Аналогично изменяется и суммарный рас-
ход из бака.
251
Уменьшение расхода за насосом приводит к повышению дав-
ления на вдоде в насос окислителя. Это вызывает рост, напора,
поскольку насос переходит на участок кавитационной характе-
ристики, на котором наблюдается очень слабая зависимость на-
пора от давления на входе.
Рост напора и расхода через насос окислителя приводит к
увеличению расхода и давления в камере сгорания, расхода и
давления газогенератора. В результате повышаются числа обо-
ротов ТНА й напоры насосов окислителя и горючего.
При небольшом гидравлическом сопротивлении участка ма-
гистрали, в которой произошло разрушение, новый установив-
шийся режим не отличается от первоначального, поскольку при
увеличении суммарного расхода из бака гидравлические потери
на участке до места разрушения остаются сравнительно неболь-
шими.
Неисправности внутреннего характера, вызванные поломками
шнеков, крыльчаток насосов, приводят к изменению геометрии
проточной части насоса, а следовательно, к изменению напорной
характеристики насоса. Можно отметить . отличительную черту
этого рода неисправностей: напор и расход через насос не соот-
ветствуют числу оборотов ТНА. Поэтому если замечено несоот-
ветствие напора и расхода через насос числу оборотов ТНА
(насос работает не по расчетной характеристике), то можно по-
лагать, что в проточной части насоса произошли поломки.
Неисправности, связанные с поломками подшипников насосов,
затиранием плавающих колец, приводят к увеличению момента
сопротивления насоса. Этот вид неисправностей можно имитиро-
вать понижением коэффициента полезного действия насосов. При-
мерный характер переходного процесса в случае понижения
к. п. д. насоса горючего показан на рис. 7. 21. Резкое увеличение
потребляемой мощности насоса из-за снижения к. п. д. насоса
приводит к уменьшению числа оборотов ТНА. Это, в свою оче-
редь, вызывает уменьшение напоров компонентов топлива, соз-
даваемых насосами.
Снижение расходов окислителя и горючего приводит к умень-
шению давления в газогенераторе и камере сгорания. Следует
отметить, что в дальнейшем происходит непропорциональное
уменьшение расходов окислителя и горючего, более интенсивно
падает расход горючего, поэтому повышается соотношение ком-
понентов по камере сгорания.
Установившийся режим, соответствующий рассматриваемому
виду неисправности, является пониженным по сравнению с пред-
шествовавшим ее появлению.
Характерной чертой переходного процесса при снижении
к. п. д. насосов является тот факт, что в начале переходного про-
цесса скорость уменьшения числа оборотов ТНА превышает ско-
рость снижения давления в газогенераторе. Снижение напоров
252
О
1874
насосов окислителя и горючего синхронно. Эти (параметры наибо-
лее чувствительны к данному виду неисправностей.
Протекание переходного процесса при понижении к. п. д. на-
соса окислителя аналогично рассмотренному выше.
При значительном снижении к. 'п. д. насосов окислителя или
горючего переходный процесс протекает с возрастанием коэффи-
циента весового соотношения компонентов топлива по газогене-
ратору. Это приводит /к повышению температуры в газогенерато-
ре и может явиться причиной прогаров газовых магистралей дви-
гателя.
ч
§ 8. ВЛИЯНИЕ СИСТЕМЫ РЕГУЛИРОВАНИЯ ЖРД НА ХАРАКТЕР
ПЕРЕХОДНЫХ ПРОЦЕССОВ ПРИ АВАРИЙНЫХ СИТУАЦИЯХ
Работа двигательной установки, ее режимные параметры и
характер переходного процесса существенно зависят от работы
системы регулирования, используемой, на двигателе.
Для выяснения влияния системы регулирования на характер
переходного процесса и режимные параметры ЖРД при аварий-
ных ситуациях были проведены расчеты переходных процессов,
вызванных различными неисправностями, в двигателе с дожига-
нием восстановительного генераторного газа с конкретной систе-
мой регулирования. Расчеты проводились в широком диапазоне
изменений параметров, характеризующих неисправность: цГотв,
дДр, т) и др., приводящих к значительному изменению режима
работы двигателя (до 80%). Сравнение результатов этих расче-
тов с результатами расчетов аварийных ситуаций в нерегулируе-
мом двигателе аналогичной схемы (см. § 4—7) позволило про-
вести анализ работы системы регулирования при различных
аварийных ситуациях и выяснить ее влияние на характер пере-
ходных процессов и параметры нового установившегося режима.
Поскольку при возникновении аварийных ситуаций, как пра-
вило, происходит значительное изменение режима ЖРД, при ис-
следовании работы регулируемых двигателей особое значение
приобретает достаточный перепад на регулирующих органах для
отработки возмущения. Это требует обязательного учета ограни-
чений по перемещению регулирующего органа, отражающих
реальную работу системы регулирования двигателя.
Исследование влияния регулирующих органов на работу дви-
гательной установки при аварийных ситуациях проведем на при-
мере работы системы внутридвигательной стабилизации соотно-
шений компонентов топлива.
Стабилизация соотношения компонентов на рассматриваемой
схеме двигателя (см. рис. 7.7 и 7. 11) обеспечивается работой
двух стабилизаторов. Стабилизатор расхода включает в себя рас-
ходомерные устройства: трубки Вентури 3 и 18, серводроссель
19 и золотник 17. Он обеспечивает по магистрали горючего дви-
гательной установки расход, пропорциональный расходу окисли-
254
теля через трубку Вентури 3, поддерживая постоянным коэффи-
циент веоового соотношения компонентов по двигателю
А?дв=const.
Стабилизатор давления 7 поддерживает давление рн .ст в точ-
ке В отбора обратной связи за собой по магистрали окислителя
газогенератора (см. рис. 7. 7) равным управляющему давлению
по магистрали горючего (руПр.ст) (в точке Г на рис. 7. 11). При
равенстве давлений (рн ст = РУпр.ст) и равенстве перепадов на
участках магистралей окислителя и горючего от точек отбора В
и Г до газогенератора (необходимые перепады обеспечиваются
подбором жиклера 11 при настройке двигателя), стабили-
затор давления будет поддерживать постоянное соотношение
компонентов топлива <в газогенераторе.
Plwc. 7.22. Золотник
Рис. 7. 23. Серводроссель
Анализ работы системы стабилизации будем проводить с при-
влечением следующих параметров: перемещений регулирующих
органов стабилизаторов расхода и давления (хс и хп), перепадов
на регулирующих органах стабилизатора расхода (Дрс) и стаби-
лизатора давления (Дрп). Увеличению хс и хп соответствует воз-
растание перепадов Дрс и Дрп.
Проведенные исследования показывают, что характер пере-
ходного процесса и параметры нового установившегося режима
при аварийных ситуациях двигателя с системой стабилизации
соотношения компонентов топлива зависят от места возникнове-
ния неисправности— до или после точек отбора на регулирующие
органы. Так, при появлении негерметичности за трубкой Вентури
10*
255
по магистрали 'камеры сгорания и газогенератора расход окисли-
теля через трубку Вентури увеличивается, в связи с чем возрас-
тает перепад на трубке 3 (см. рис. 7.7), мембраны золотника
переместятся к соплу, увеличивая перепад на сопле-заслонке
(рис. 7.22); понижается давление над поршнем серводросселя
(рис. 7.23). Поршень начинает перемещаться на открытие (хс
уменьшается), уменьшая перепад на -регулирующем органе ста-
билизатора расхода — решетке серводросселя. Расход горючего
по магистрали также возрастает.
Рис. 7.24. Стабилизатор
давления
Управляющим давлением (руПр.ст) для стабилизатора, уста-
новленного по магистрали окислителя газогенератора, явля-
ется давление, отбираемое по магистрали горючего газогенера-
тора. Увеличение этого давления приводит к перемещению мем-
браны стабилизатора к соплу и возрастанию перепада на
сопле-заслонке (рис. 7.24). Вследствие этого уменьшается дав-
ление над поршнем в полости Е. Поршень начинает перемещаться
к упору минимального сопротивления магистрали окислителя.
Уменьшается перепад на игле стабилизатора давления.
Благодаря работе регулирующих органов, уменьшающих пере-
пады по магистралям газогенератора, в рассматриваемой аварий-
ной ситуации будет обеспечиваться форсирование режима двига-
теля по всем основным параметрам (в диапазоне регулирования).
Если перекрытие или негерметичность возникают за точкой В
отбора на стабилизатор давления, сразу нарушается соотноше-
ние компонентов топлива по газогенератору. При этом возникно-
вение неисправности по магистрали окислителя приводит к резко-
му снижению режима работы двигателя, причем работа стабили-
затора давления в этом случае усугубляет аварийную ситуацию.
Если неисправность возникает по магистрали горючего за точ-
кой отбора Г управляющего давления на стабилизатор давления
(в диапазоне регулирования), происходит форсирование режима
работы двигателя вследствие «открытия» стабилизатора давле-
ния из-за относительно высокого давления руПр.г ((в точке Г), уве-
личение расхода окислителя и рост работоспособности газа в га-
зогенераторе.
При перекрытии гидравлической магистрали горючего до
точки Г отбора управляющего давления на стабилизатор давле-
256
ния начало переходного процесса -сопровождается понижением
основных параметров (исключая k и k'). Если возникшая неис-
правность находится в диапазоне регулирования двигателя, пос-
ле первоначального снижения параметров ЖРД обеспечивается
их возрастание до значений, предшествовавших аварийной ситуа-
ции. Такое протекание переходного процесса связано с перемеще-
нием поршня стабилизатора расхода к упору минимального со-
противления и уменьшению перепада на (решетке серводросселя
стабилизатора. Как только в результате перекрытия магистрали
превысится располагаемый перепад на регулирующем органе,
поршень стабилизатора расхода достигает упора минимального
сопротивления (хс = 0). Параметры установившегося режима ра-
боты двигателя рк, р'^ р0, рг, л, (7оЕ, (7rfi начнут снижаться
(рис. 7. 25).
В некоторых случаях (при неисправностях насосов, перекры-
тии гидравлической, магистрали окислителя до точки Д (см.
рис. 7.7), перекрытии магистрали горючего до точки Г (см.
рис. 7.11) отбора управляющего давления на стабилизатор, не-
герметичности магистрали горючего и окислителя до трубок
Вентури) данная система регулирования не оказывает влияния
на характер переходного процесса. Но благодаря работе стабили-
заторов расхода и давления (в диапазоне регулирования) су-
щественно повышается режим работы ЖРД, устанавливающий-
ся при этих неисправностях. Так, например, при одинаковой сте-
пени перекрытия участка гидравлической магистрали окислителя
до трубки Вентури (&Др = 0,4) режим работы нерегулируемого
двигателя составляет рк = 0,2/?*, рк = 0,13 (//)*, режим работы
регулируемого двигателя составляет рк = 0,9рк, р'=0,9р’.
При появлении неисправностей типа перекрытия и Негерметич-
ности участка гидравлической магистрали камеры сгорания, не-
герметичности участка магистрали газогенератора до стабилиза-
тора давления работа системы стабилизации соотношения ком-
понентов приводит к качественно новому протеканию переходных
процессов.
Так, при перекрытии гидравлической магистрали окислителя
камеры сгорания характер переходного процесса, возникающего
в регулируемом двигателе (рис. 7.26), совершенно иной, чем в
нерегулируемом. Начало переходного процесса протекает анало-
гично. Но стабилизатор расхода -следит за расходом окислителя
через трубку Вентури, который уменьшается 'вследствие перекры-
тия, увеличивает перепад на решетке серводросселя и уменьшает
расход горючего. В соответствии с понижением управляющего
давления (руПр.г) в точке Г поршень стабилизатора 7 (см,
рис. 7.7) также перемещается к упору максимального сопротив-
ления, увеличивая перепад на регулирующем органе. Расход
окислителя по магистрали газогенератора снижается. Это приво-
дит к понижению давления в газогенераторе, числа оборотов ТНА
257
Рис. 7.26. Переходный процесс
при перекрытии участка гидравли-
ческой магистрали окислителя ка-
меры сгорания регулируемого
ЖРД
Рис. 7.25. Влияние степени пере-
крытия магистрали горючего на
параметры регулируемого ЖРД
р
^вх.г
4 -
3 -
2 -
t -
258
и т. д. Следовательно, после первоначального форсирования пара-
метры ЖРД уменьшаются.
Появление негерметичности гидравлической магистрали окис-
лителя камеры сгорания (в диапазоне регулирования) приводит
к форсированию режима работы двигателя по всем основным па-
раметрам. Это происходит благодаря работе стабилизаторов
расхода и давления, обеспечивающих .в данной аварийной ситуа-
ции увеличение расходов окислителя и горючего по магистралям
газогенератора (рис. 7. 27).
Рис. 7. 28. Зависимость основныЛ
параметров регулируемого ЖРЦ
от степени перекрытия магистрали
окислителя камеры сгорания
Рис. 7. 27. Зависимость основных па-
раметров регулируемого ЖРД от сте-
пени негерметичности гидравлической
магистрали окислителя камеры
сгорания
Влияние степени неисправности тех аварийных ситуаций,
при которых работа регулирующих органов вызывает качествен-
но новое протекание переходного процесса, приводит к неодно-
значности поведения основных параметров установившегося
режима регулируемого двигателя. Например, параметры нового
установившегося режима до определенной степени перекрытия
участка гидравлической магистрали окислителя камеры сгорания
уменьшаются, а при дальнейшем ее увеличении — начинают воз-
растать (рис. 7.28). Эта неоднозначность связана с достижением
регулирующим органом стабилизатора расхода положения «упо-
ра», соответствующего максимальному 'сопротивлению (хс=~-
=const). При этом нарушается соотношение компонентов топли-
ва по двигателю, увеличивается степень расширения газа на тур-
бине и располагаемая мощность турбины.
Глава VIII
МОДЕЛИРОВАНИЕ ФИЗИЧЕСКИХ ПРОЦЕССОВ
ПРИ ОТРАБОТКЕ ЭЛЕМЕНТОВ И СИСТЕМ ДУ
Теория подобия цаходит широкое практическое применение
при физическом моделировании различных процессов. При этом
суть последнего заключается в том, что исследуемый процесс
изучается не на натурном объекте, а на его физической модели.
Полученные результаты могут 'быть перенесены на реальный про-
цесс путем соответствующего пересчета при условии, что модель
подобна натуре.
§ 1. ПРИМЕНЕНИЕ ТЕОРИИ ПОДОБИЯ К ЭКСПЕРИМЕНТУ
Любой физический эксперимент ограничивается эмпиричес-
ким исследованием конкретного изделия по определенной, зара-
нее утвержденной .программе. Однако цели, которые при этом
ставятся, охватывают более широкий круг задач, чем определе-
ние параметров или свойств исследуемого единичного изделия.
Как правило, результаты испытаний стараются распространить
на совокупность изделий, измеряемую всем объемом товарного
производства, или. на исследуемый процесс в целом. Этой цели
наряду с математической статистикой служит теория подобия.
Теория подобия определяет ту область или участок поверх-
ности отклика, на которую можно распространить результаты'
единичного эксперимента. Более того, создается возможность в
критериальном виде составить систему интегральных уравнений,
описывающих моделируемый процесс.
Наиболее важная в практическом отношении область приме-
нения теории подобия состоит в разработке на ее основе методов
физического моделирования. Непосредственно из третьей теоре-
мы вытекают условия и предпосылки, определяющие подобие
модели натуре. Начальным этапам моделирования является уста-
новление условий однозначности, т. е. определяющих параметров
и критериев подобия. При изучении процесса на уменьшенной
модели на основе равенства критерием подобия определяются
ее геометрические размеры, составляются рабочие чертежи, по
которым изготовляется модель. Параметры, входящие в условие
260
однозначности,* для модели и натуры должны быть пропорцио-
нальны.
Согласно третьей теореме модель подобна натуре, если будут
соблюдены следующие три условия:
1) обеспечено геометрическое подобие модели и натуры;
2) физические константы модели пропорциональны соответ-
ствующим константам натурного процесса, (включая граничные
условия;
3) соответствующие критерии подобия для натуры и модели
равны между собой.
Вполне естественно, что точное соблюдение всех условий по-
добия возможно лишь в очень редких случаях, поэтому на прак-
тике :все чаще прибегают к методам приближенного подобия при
моделировании сложных физических процессов [3, 29].
Немаловажную роль в изучении аэро-, газо- и гидродинами-
ческих процессов играют модели с прозрачными стенками. При
этом удается наблюдать физическую картину протекания про-
цессов и при необходимости фиксировать ее с помощью фото-
ил и кинокамеры. Этот метод находит .широкое практическое при-
менение в различных областях техники.
В области экспериментальной отработки агрегатов ЖРД,
например, в научно-исследовательском центре Льюиса (NASA)
выполнялись аэродинамические исследования турбин кислородно-
водородного двигателя М-1 на масштабных моделях (102]. Экспе-
рименты проводились на физических моделях, выполненных в
масштабах 0,450 и 0,646 по оотношению к натурам. В качестве
рабочего тела использовался воздух. Для визуальных наблюде-
ний за потоком была изготовлена прозрачная модель коллектора
турбины. Исследования велись методом фотографирования дымо-
вого потока, позволяющим оценить равномерность течения рабо-
чего тела по каналам коллектора,отсутствие циркуляции и тому
подобных явлений, которые весьма трудно определить каким-ли-
бо другим способом. В результате был выбран оптимальный
профиль лопаток турбин, определены значения к. п. д. и установ-
лена взаимосвязь между потерями полного давления и скоростя-
ми потока в подводящем патрубке.
В настоящее ’время с помощью физических моделей можно
изучать гидродинамику газового потока и конвективную тепло-
передачу практически любого теплового аппарата, двигателя, в
том числе и ЖРД. Однако последний является совокупностью
сложных систем различного класса и методы отработки, приме-
нимые для камер сгорания и ЖГГ, должны быть иными для топ-
ливных насосов или систем питания. По этой причине не могут
быть разработаны единые методы моделирования всех систем
ЖРД. В каждом конкретном случае применительно к каждому
классу систем и агрегатов они будут иными.
Рассмотрим теперь задачу обеспечения подобия центробеж-
ных насосов, используя основные теоремы подобия. Проектирова-
261
ние и отработка 1высокооборотных насосов для больших расходов
и давлений^ может потребовать создания «масштабных моделей,
как для турбин [102]. Одновременно с этим возникнет задача вы-
бора размеров модели при условии подобия ее натуре. Как уже
отмечалось выше, полное подобие предполагает прежде всего
геометрическое подобие, т. е. отношение «сходственных размеров
в соответствии с установленным масштабом. Наряду с этим для
центробежных насосов должно быть обеспечено кинематическое
и динамическое подобие, т. е. геометрическое подобие треуголь-
ников скоростей, напоров, расходов, мощностей и т. п.
Если ввести обозначения для геометрических размеров моде-
ли и натуры (индекс «м» относится к модели, индекс «н»— к на-
туре)
^м» • • • > ^н> ^н> • • • >
то константа геометрического подобия Ci будет равна отноше-
ниям
С(== = ... = 4е- (8.1)
Вводя обозначения для мощности N, объемной производитель-
ности Q, напора Н, числа оборотов насосов п, окружной и, отно-
сительной w и абсолютной с скоростей, получим константы ки-
нематического и динамического подобия:
р ___ gM __ WM _ цм
V>K — — — ,
Сн WH
р ___ р ________ Qm р _______
На' Q„ ’ NH •
При условии равенства для модели и натуры гидравлическо-
го и полного коэффициентов полезного действия т] получим
^м __ Qm
Л^н QH ’
так как в общем случае
кт н -Q
N =-------------------------------- 7,
где у — удельная масса жидкости.
Далее, вводя обозначение для угловой скорости со и радиуса
колеса г, получим с учетом соотношения и = сог следующее выра-
жение для константы кинематического подобия:
(8.4)
С = Гм ' <йм = Q
Так как объемная производительность выражается зависи-
мостью Q = 2itrbc, то
Qm __р пм
Qh “ 1 П* ’
(8-5)
262
Приведенные формулы устанавливают 'Связи между объемны-
ми производительностями, 'скоростями, числами оборотов и гео-
метрическими размерами модели и натуры.
Аналогичным образом могут быть установлены зависимости
для напоров и мощностей:
НМ Q2 / \2
Ня \пя/
Наконец, исходя из уравнений (8.5) и (8. 6)'может быть по-
лучено выражение для коэффициента быстроходности, который и
является универсальной характеристикой подобия проектируемььч
центробежных насосов некоторой эталонной модели, имеющей
одинаковый с натурой коэффициент полезного действия. Подроб-
но эти вопросы рассмотрены в работе [16].
Соотношения (8. 1)-н(8. 6) позволяют на начальных этапах
вести автономную отработку насосов уникальных ЖРД практи-
чески на малоразмерных моделях. Если речь идет об испытаниях
центробежного насоса с производительностью более 1 м3/с, то его
отработку, 'со всех точек зрения, целесообразно начинать с проек-
тирования и испытаний физических моделей, выполненных в зна-
чительно уменьшенных размерах. В результате моделирования
могут быть определены оптимальные размеры и профили основ-
ный элементов: рабочего колеса, коллектора, лопаток и т. п., а
также основные параметры насоса, в той числе и его коэффи-
циент полезного действия.
Таким образом, в процессе моделирования выполняется целый
комплекс исследований, завершающих, в основном, круг задач,
решаемых при проектировании ц автономной отработке. Даль-
нейшие эксперименты проводятся уже на натурном объекте. Их
цель заключается, главным образом, в проверке результатов мо-
делирования, которое все же следует считать приближенным.
§ 2. ФИЗИЧЕСКОЕ МОДЕЛИРОВАНИЕ ПРИ ОТРАБОТКЕ ЭЛЕМЕНТОВ
И СИСТЕМ ДУ
Независимо от сложности экспериментальных программ, коли-
чество дорогостоящих испытаний должно быть сведено к миниму-
му, а суммарная эффективность работ должна быть как можно
более полной. Поэтому экспериментатор ищет возможность за-
мены сложной программы более простой. Причин для такой за-
мены может быть несколько и главная из них состоит в том, что-
бы обеспечить снижение себёстоимости доводочных работ и
исключить необходимость в создании дорогостоящей эксперимен-
тальной базы.
Один из известных путей решения задачи заключается в ис-
пользовании методов физического моделирования, при котором
263
реальный процесс исследуется с помощью физических моделей.
Этот метод допускает возможность появления ошибок, подоб-
ных ошибкам аппроксимации, оценивающих степень соответст-
вия теоретических и экспериментальных данных при методах
математического моделирования..
Замена натуры моделью не исключает возможности того, что
моделируемый процесс практически всегда будет отличаться от
натурного. Тем не менее, критериальное подобие натуры и моде-
ли должно быть обеспечено.
Физическое моделирование основывается на эксперименте, и
только эксперимент наиболее полно позволяет осуществить конт-
роль критериального подобия модели и натуры. Принимая фи-
зическую модель, невозможно пользоваться ее результатами без
оценки степени соответствия моделируемого и натурного процес-
сов. На практике это соооответствие может быть осуществлено
с помощью теории подобия.
Рассматривая конкретную задачу, необходимо определить
цель ад до возможных пределов сузить представление о физичес-
ком процессе, которое бы соответствовало условиям задачи или
программе исследования. Точнее, приходится идти по пути соз-
дания модели, которая отражает не весь комплекс физических
явлений, происходящих в натуре, а только одну, главную сторону.
Приведем простейший пример. Необходимо осуществить гид-
равлическую проливку агрегатов для определения точности на-
стройки ЖРД на основные параметры. К,о,мпоне'нты топлива
агрессивные, поэтому проливка агрегатов на натурных компонен-
тах требует создания специальных защитных средств и стендов,
а также нежелательна по технологическим и другим соображе-
ниям. Предлагается проводить гидравлические испытания на
нейтральной, модельной жидкости, например, на воде. Тогда воз-
никает вопрос, в какой мере это повлияет на точность настройки
двигателя. Ответ зависит от точности обеспечения критериаль-
ного подобия.
Рассмотрим и второй пример. Допустим, нас интересует рас-
пыл и смесеобразование компонентов топлива вновь проектируе-
мой форсуночной головки камеры сгорания ЖРД большой тяги.
Очевидно, что такая постановка задачи на ранних этапах иссле-
дования вовсе не требует проведения эксперимента в натурных
размерах. Более целесообразно на этом этапе ограничиться про-
ведением модельных экспериментов. Для этого необходимо до-
статочно обоснованно выбрать физические модели и, например,
форсунки, группы форсунок, соты, форкамеры, модельные жид-
кости и т. п. После за<вершения экспериментальной программы
результаты исследования переносятся на . натурный объект.
Вполне очевидно, что гидроиспытания полноразмерных фор-
суночных головок камер сгорания ЖРД большой тяги потребуют
создания мощного гидравлического стенда с производительностью
порядка нескольких тонн жидкости в секунду при больших рабо-
264
чих давлениях, больших затрат (времени и средств на изготовле-
ние различных конструктивных вариантов головок и т. п.
Экспериментальное исследование распыла компонентов с по-
мощью физических моделей не представляет особой сложности и
может быть реализовано в лабораторных условиях. В этом слу-
чае исследование можно проводить с более полным учетом влия-
ния различного рода факторов, таких как противодавление,
разрежение среды и т. п., что при испытаниях натурных объектов
в стендовых условиях осуществить довольно трудно.
Более важными, с экономической точки зрения, являются при-
меры применения отдельных моделей в комплексных испытаниях
систем ЖРД и ДУ. Здесь суммарный эффект проявляется тем
заметнее, чем сложнее сама система и дороже ее отработка.
Метод испытания систем с привлечением физических моделей
отдельных элементов позволяет в ряде -случаев сложный экспери-
мент перенести с огневых стендов в лабораторные условия. При
этом путем моделирования определяется степень влияния пре-
дельных значений параметров отдельных элементов и входных
факторов на выходные характеристики системы. Это позволяет
завершить поиск эстремальных условий испытаний, оценить воз-
можность возникновения аварийных ситуаций и обоснованно
определить предельные значения параметров на комплектующие
элементы.
Выше отмечалось, что ЖРД является весьма динамичной сис-
темой с развитой степенью корреляционных связей между эле-
ментами, в результате чего их автономная отработка в ряде слу-
чаев по эффективности может быть сведена к нулю. Повышение
эффективности отработки сильно коррелированных элементов
требует проведения комплексных испытаний этих элементов в
составе всей системы, а это означает увеличение количества до-
рогостоящих испытаний таких систем, как ЖРД .и ДУ. По этой
причине для агрегатов и узлов, подверженных взаимному влия-
нию и имеющих сильные корреляционные связи, целесообразно
проводить испытания с физическими моделями сопредельных эле-
ментов систем. При удовлетворительном подобии физических
моделей их прототипам в процессе функционирования степень
взаимного влияния и корреляции элементов сохраняется, следова-
тельно, условия автономной отработки оказываются приближен-
ными к условиям комплексных испытаний данного элемента в
составе всей системы.
В связи с этим в практике отработки ЖРД -встречаются зада-
чи моделирования несколько иного плана. Например, в систему
вводится модель элемента не для исследования натурных процес-
сов, а для сохранения степени ее корреляции со смежными эле-
ментами системы. Положим, система состоит из двух элементов
1 и 2, коррелированных между собой.
В силу этого, как было 'показано выше, автономная отработка
элемента 1 может оказаться малоэффективной. Вести же его
265
отработку в составе всей системы нерационально. Тогда возни-
кает вопрос, нельзя ли заменить элемент ’2 его физической мо-
делью. Единственным условием такой замены должно быть
соблюдение условий испытаний элемента 1 ,в комплексе с мо-
делью 2. Таким образом, для коррелированной системы в задачу
моделирования условий испытаний совершенно не входит обес-
печение подобия физических процессов'между натурными элемен-
тами и их моделями. В дальнейшем целью такого моделирования
будем считать обеспечение корреляционного подобия между от-
рабатываемыми и модельными элементами.
В качестве примера ’рассмотрим испытания системы питания
двигателя открытой схемы с физической моделью камеры сгора-
ния. В данном случае на выходе напорных магистралей по лини-
ям горючего и окислителя устанавливаются дроссельные шайбы,
обеспечивающие суммарные перепады давлений и секундные
расходы компонентов топлива, эквивалентные натурным. В этом
примере в качестве физической модели камеры сгорания исполь-
зуются дроссельные шайбы. В целом рассматриваемая модель
обеспечивает динамическое функционирование -всех агрегатов
ЖРД (исключая камеру) практически без сгорания топлива,
если не считать относительно малый расход для обеспечения ра-
боты ЖГГ. Такое испытание может проводиться в лабораторных
условиях. Оно не требует для отработки системы питания в
комплексе с генератором и автоматикой комплексных огневых
испытаний двигателя. При этом возможно изучать в динамике
переходные и установившиеся процессы, вопросы регулирования
расходов, изменения тяги и т. п.
При обеспечении параметрического подобия гидравлических
трактов такого рода испытания по информативности не уступают
натурным, исключая внутрикамерные процессы и ‘вопросы взаимо-
влияния камеры и системы питания. В рассматриваемом случае
для проведения испытаний не требуются мощные огневые стен-
ды. Следовательно, модельные испытания могут вестись незави-
симо от других более сложных программ. Достоинство рассмат-
риваемых испытаний еще и в том, что они позволяют проводить
автономную отработку основных агрегатов (например, ТНА)
как бы в комплексе со всем «двигателем».
Таким образом сохраняются корреляционные связи между ис-
пытуемыми агрегатами, в то же время отработка одних элемен-^
тов (блоков) не зависит от степени готовности к испытаниям
других.
Наряду с испытаниями двигателя без камеры сгорания (мо-
дель— дроссельные шайбы) используются также и другие. На-
пример, испытания натурной камеры сгорания с вытеснительной
системой подачи компонентов топлива. В данном случае физичес-
кой моделью является система подачи, критериально и корреля-
ционно подобная натурной системе питания двигателя совместно
с ТНА и автоматикой. Аналогичными являются испытания ДУ
266
с имитацией систем наддува, автономные испытания ндсосов,
автономные испытания ТНА и т. п.
Наряду с рассмотренными выше моделями в практике отра-
ботки могут использоваться модели комбинированные, представ-
ляющие собой синтез физического и математического моделиро-
вания. Смысл их заключается в том, что физическая модель,
имеющая реальный физический «вход», подает выходной сигнал
на преобразующее устройство, придающее ему аналитический
вид в обычном цифровом коде. Далее преобразованный сигнал
поступает в вычислительную программу, описывающую матема-
тическую модель исследуемого процесса.
Комбинированное моделирование является эффективным
средством отработки элементов сложных динамических систем,
если исследуются малоизученные или новые физические процессы,
когда невозможно (воссоздать достоверную математическую мо-
дель данного элемента (блока), так как неизвестен состав зна-
чимых факторов и отсутствует необходимая информация.
Статистические исследования показали, чем шире ведутся
экспериментальные исследования при стендовой отработке эле-
ментов (блоков) и систем, тем выше качество и надежность из-
делий. Моделирование не исключает необходимости в проведении
комплексных натурных испытаний системы в целом. Но в этом
случае они проводятся уже .в значительно меньшем объеме, чем
этого требует автономная отработка.
Цель комплексных испытаний, помимо проверки выполнения
требований технического задания на разработку системы, со-
стоит в проверке работоспособности при взаимодействии элемен-
тов и оценке правильности выбора основных критериев подобия
при моделировании физических процессов.
Физическое моделирование тесно примыкает к структурному,
назначение которого состоит в том, чтобы для выяснения причи-
ны аварии (отказа) воссоздать структурную модель произошед-
шего события. Структурное моделирование требует точного вос-
произведения всех условий и аспектов испытаний (конструкции,
технологии изготовления, процесса подготовки и проведения экс-
перимента). Структурная модель требует сохранения и фиксации
не только внешних и внутренних Связей, но и окружающей обста-
новки. Чем меньше сведений о причине события, тем точнее оно
должно быть воспроизведено. Естественно, что’это требуется
прежде всего для выяснения точных причин аварии или отказа.
Структурное моделирование является своеобразной демонстра-
цией интересующего нас события, а значит и неопровержимым
доказательством его первопричины.
Структурное моделирование основывается на эксперименте и
применяется в исключительных случаях, когда вследствие аварии
(отказа) материальная часть не схранилась в полной мере или
ее состояние таково, что причина неблагоприятного исхода оста-
лась неизвестной. Воссоздание структурных моделей, соответст-
267
вующих наступлению аварийной ситуации при работе ЖРД, и
особенно условий испытаний — задача чрезвычайно трудоемкая.
При этом главная трудность объясняется тем, что объем инфор-
мации в данной ситуации, как правило, бывает весьма ограни-
ченным. В таких случаях обычно идут по пути реализации неко-
торого количества структурных моделей, соответствующих не-
скольким наиболее вероятным гипотезам. Такие меры частично
убыстряют реализацию общей программы, но такой подход дает
возможность исследовать некоторый комплекс возможных ава-
рийных исходов ЖРД при условиях испытаний, близких к гра-
ничным.
Для дополнительной информации весьма важен осмотр остат-
ков материальной части: состояние форсуночной соловки камеры,
газогенератора, ротора турбины, корпусов агрегатов, крыльчаток
насосов, конечное положение исполнительных органов и агрега-
тов автоматики, кабелей, командных приборов и т. п. Если ава-
рия возникла в полете, то разрушение остатков материальной
части при падении на землю является препятствием для выпол-
нения этой работы. В таком случае все усилия группы анализа
должны быть направлены на исследование телеметрических дан-
ных, соответствующих моменту наступления аварийного состоя-
ния. Большим достоинством этого исследования следует считать
сравнительный анализ телеметрических записей аварийного пуска
с успешными испытаниями, проведенными в примерно тех же
условиях. Сравнение должно проводиться практически по всем
контролируемым параметрам, авсе отличия в поведении парамет-
ров должны фиксироваться.
Обобщенные данные по расследованию причины отказа ло-
жатся в основу программы испытания структурной модели, вос-
производящей аварийную ситуацию. Если при этом будет уста-
новлено, что причин несколько то исследуется влияние каждой
из них с целью выявления результирующих условий и неблаго-
приятных сочетаний основных факторов. В таких 'случаях коли-
чество испытаний структурных моделей не может ограничиться
одним экспериментом, а проводится их несколько в соответствии
с изложенными выше факторными планами. Совместно с обоб-
щенными данными факторные планы позволяют создать рацио-
нальную программу экспериментальных исследований.
§ 3. ОБЕСПЕЧЕНИЕ ПОДОБИЯ ДИНАМИЧЕСКИХ ПРОЦЕССОВ
Отработка сложных технических систем требует моделирова-
ния не только -статических (установившихся) процессов, а глав-
ным образом их динамики. Динамические процессы характери-
зуются переменным числом оборотов ТНА, нестационарным дви-
жением рабочего тела, жидкости или газа, а также нестабильным
испарением и горением компонентов топлива (40]. Динамические
268
процессы описываются уравнениями динамики ’или представля-
ются динамическими характеристиками (см. гл. VI). Эти уравне-
ния устанавливают взаимосвязь между основными параметрами
двигателя при переходных режимах работы, когда все парамет-
ры изменяются во времени.
Динамическое моделирование должно включать в себя иссле-
дование переходных процессов: запуска, выключения, режимов
регулирования, различных пульсационных режимов, возникаю-
щих в системе питания, ib газогенераторе и камере сгорания. Кро-
ме этого, при отработке двигательных установок необходимо
обеспечить динамическое подобие стендовых условий летным и
т. п. Динамическое моделирование может вестись лишь на осно-
ве обеспечения подобия модели натуре.
Динамические процессы ЖРД сложны и менее всего изучены.
Но особенно сложны и мало исследованы процессы, протекающие
в период запуска ЖРД. Этот период сопровождается комплекс-
ным взаимодействием различных переходных процессов (механи-
ческих, гидравлических, газодинамических, физико-химических,
тепловых и т. п.). Многие из них невозможно представить в ко-
личественном или параметрическом виде. Следовательно, невоз-
можно достаточно качественно описать этот процесс соответству-
ющими уравнениями динамики. Исследование внутрикамерных
процессов ЖРД с помощью аналитических методов в целом ряде
случаев не приводит к успеху, особенно, если речь идет об устой-
чивости горения, выборе оптимальных характеристик камеры
и т. п. Например, в уравнении динамики камеры учитываются не
все физические особенности динамики (внутрикамерных процессов
(законы поступления компонентов топлива в камеру, распростра-
нение фронта горения, акустические характеристики камеры,
движение ударных волн и т. п.). Не учитываются также конст-
руктивные характеристики, форма камеры сгорания, наличие
поясов завесы и многое другое. Принимая это во внимание, рас-
сматриваемое уравнение следует считать приближенным, а поэ-
тому его применение для вывода условий подобия должно быть
ограничено.
Однако если допустить, что уравнение динамики камеры пол-
ностью отражает исследуемый реальный процесс, то его запись
в критериальном виде мало что меняет. Попытка анализа размер-
ностей всех известных переменных приводит к множеству раз-
личных решений, к интуитивной оценке значимости отдельных
факторов. При этом отсеивание «малозначимых» переменных
также ведет к дополнительным ошибкам.
Поэтому нужны новые пути обеспечения и контроля подобия
систем при динамическом моделировании. Одним из них, очевид-
но, является отказ от определения критериев подобия при иссле-
довании динамических процессов сложных систем. По этой при-
чине при отработке внутрикамерных процессов ЖРД основным
и наиболее достоверным остается пока эмпирический (поиск, кото-
269
рый основывается на эксперименте и моделировании. Если моде-
лируемые процессы с физической точки зрения однородны и обус-
ловлены воздействием одного и того же состава значимых факто-
ров, то контроль обеспечения динамического подобия может
быть произведен путем сравнения характеристик, определяющих
выходное качество процесса.
Например, пусть необходимо оценить летно-технические
характеристики ЖРД по результатам стендовых испытаний. В
данном случае летающий двигатель является «натурой», а его
стендовый вариант — «моделью». Естественно, что первоочеред-
ной задачей следует считать обеспе-
Рис. 8. 1. Динамические ха-
рактеристики выхода двига-
теля на номинальный (мар-
шевый) режим (работы:
/—в летных условиях; 2—в стен-
довых условиях
/
стика, полученная
чение на стенде имитации условий
летных испытаний.
В данном случае у конструктора
и экспериментатора, с точки зрения
совершенствования модели (стенда) и
обеспечения ее подобия натуре, широ-
кое поле деятельности. Оно заклю-
чается в «подгонке» стендовых дина-
мических характеристик к летным.
В том случае, если нас интересует
характеристика выхода двигателя на
номинальный (маршевый) режим, то
до начала летных испытаний за натур-
ную может быть принята характери-
по результатам стендовых испытаний ДУ
в составе ступени.
Практически это означает, что натурные (испытания проводят-
ся на ограниченном количестве изделий при предельных значе-
ниях факторов. В результате может быть получена телеметри-
ческая запись исследуемых параметров (рис. 8.1). В данном
случае характеристика 1 получена по результатам натурных
испытаний, а характеристика 2 при тех же условиях соответству-
ет испытаниям на стенде.
В дальнейшем обе характеристики сравниваются. Если при
этом их масштабы соответствуют один другому, то проверка
сходимости «модели» с «натурой» может быть обеспечена путем
совмещения осциллограмм.
Путем сравнения и анализа характеристик 1 и 2 можно уста-
новить, что выход двигателя на режим в натурных условиях
является более напряженным й жестким, чем на стенде. Об
этом свидетельствует более высокая скорость нарастания давле-
ния рк в соответствии с характеристикой 1 и заброс давления
выше номинального уровня. В -стендовых условиях выход на ре-
жим более плавный, без заброса давления и, следовательно, ме-
нее напряженный. Это значит, что при испытаниях на стенде за-
пуск двигателя должен характеризоваться сравнительно мень-
шей интенсивностью отказов. Последнее с точки зрения качества
270
отработки недопустимо. В целом это потребует доработки стендо-
вых систем питания.
Можно говорить о подобии систем или условий испытаний,
если iB обоих случаях для «модели» и «натуры» интенсивности
отказов будут равны (ХМ = ХН). Для рассмотренных распределений
это означает равенство вероятностей (безотказной работы и их
частостей:
ВДм = ВДн. (8.7)
Так как в данном случае рассматриваются только переходные
процессы, то в качестве закона распределения отказов 'может
быть принят с достаточной степенью достоверности закон Вейбул-
ла. Возможность такого допущения была обоснована в гл. V.
С учетом этого равенство (8.7) должно обеспечивать сходимость
результатов обработки статистических данных для условий ис-
пытаний «модели» и «натуры». При этом для оценки сходимости
может быть предложен графо-аналитический метод, основанный
на логарифмировании функции распределения, рассмотренный
в гл. V. Сходимость результатов обработки статистических дан-
ных для «модели» и «натуры» практически означает равенство
соответствующих параметров распределения х0 и 0. Последние
в данном случае для «модели» и «натуры» должны быть равны
или близки друг к другу:
•^0м==^01Ь 0м===0н«
Отсутствие полного равенства при соблюдении условий по-
добия процессов можно объяснить лишь ограниченностью объема
испытаний. В соответствии с методикой обработки результаты
испытаний обеих совокупностей изделий могут быть представлены
подобно тому, нак это показано на рис. 8.2. Видно, что при на-
личии подобия «модели» и «натуры» их статистические данные
ложатся на одну прямую линию. При отсутствии подобия дина-
мических процессов «модели» и «'натуры» параметры распределе-
ния Вейбулла х0 и 0 должны отличаться один от другого, а
именно:
•^Ом Яон И 0м =7^= 0н •
Соответственно .конечные результаты испытаний «модели» и
«натуры» не могут быть сходными, поэтому отдельные точки
укладываются на различные прямые (рис. 8. 3).
Изложенное выше следует рассматривать как метод проверки
подобия динамических процессов, который основан на обработке
статистических данных. Метод устанавливает статистическое по-
добие динамических переходных процессов. В этом случае можно
говорить о подобии условно: правильнее говорить о соответствии
процессов или их идентичности. Недостатком этого метода, как
и других статистических методов, следует считать их чувстви-
тельность к объему информации.
271
Статистические «критерии» идентичности динамических про-
цессов следует применять в тех случаях, когда отсутствуют досто-
верные физические методы фиксации динамических характери-
стик, в частности, телеметрические записи выходных параметров
системы. При наличии таких параметров проверку динамическо-
го подобия исследуемых процессов, как отмечалось выше, можно
осуществить путем совмещения, или наложения осциллограмм
«модели» и «натуры». Этот метод можно считать достаточно объ-
tn X
Рис. 8. 2. Ер афо-аналитический метод
оценки (сходимости динамических ха-
рактеристик «модели» и «натуры»
('случай наличия подобия):
X—«модель»; Д—«натура »
Рис. 8. 3. Графоаналитический метод
оценки 'сходимости динамических харак-
теристик «модели» и «натуры» (случай
отсутствия подобия):
X—«модель»; Л—«натура»
ективным даже при наличии единичных экспериментов. При этом,
разумеется, должна фактически обеспечиваться воспроизводи-
мость динамических характеристик исследуемых процессов при
повторных испытаниях. Практически это возможно даже для слу-
чайных процессов при известном составе и фиксированных уров-
нях значимых факторов, -влияющих на «вход» системы.
Непременным условием проверки (подобия динамических про-
цессов следует считать их полное соответствие с точки зрения
обеспечения равенства уровней (входных факторов для «модели»
и «натуры».
В качестве количественной меры сходимости динамических
характеристик «модели» и «натуры» может быть предложен
известный критерий согласия Пирсона — %2. Критерий Колмого-
рова в существующем виде [76], к сожалению, применим быть не
может, так как для определения эмпирической функции распре-
деления он предусматривает конечное число реализаций «слу-
чайной величины». В нашем случае это число всегда будет очень
большим, близким к бесконечности, так как запись динамической
характеристики в стендовых условиях ведется контрольными дат-
272
чиками непрерывно, а в летных условиях — с достаточно большой
частотой опроса.
Критерий Колмогорова может быть применим, если за реали-
зацию динамической характеристики принимать не сходственные
точки кривых «модели» и «натуры», а например, их отдельные
сходственные участки. Применительно к динамическим характе-
ристикам запуска, изображенным на рис. 8. 1, такими участками
могут быть интервалы: (0—е—/1) и (04-/j); (/14-/2) и
(/24-/3) и (^4-/3); (/з4-/4) и (/'4-/4); (/4-И5) и (/44-/') .соответ-
ственно для «натуры» и «модели» (со штрихом).
Тогда фактором, определяющим сходимость двух динамичес-
ких характеристик, является максимальная разность контроль-
ных параметров «модели» и «натуры» на каждом из участков. В
рассматриваемом случае это максимальная разность давлений в
камерах сгорания:
^тах ( Ркм /^кн)тах ’
Оценка согласия характеристик исследуемых процессов опре-
деляется по вероятности Р:
Р=Вер{о.„Кя), (8.8)
где R — число реализаций, равное для рассматриваемого примера
числу интервалов (/? = 5).
Как следует из выражения (8.8), рассматриваемая вероят-
ность зависит от двух параметров: Отах и R- Если первый из них
при оценке согласия определяется однозначно, то параметр R в
какой-то мере следует считать условным.
Аналогичное условие существует и для критерия Пирсона—%2.
Оно связано с произвольным выбором числа интервалов, на ко-
торое разбивается исследуемая характеристика динамического
процесса. С целью достижения однозначности предлагается при
использовании критерия % каждый из участков разделять на 3—4
интервала, которые определяются с учетом физики явлений.
Рассматриваемая оценка идентичности динамических процес-
сов имеет важное практическое значение. С ее помощью опреде-
ляется функциональное подобие систем. В рассмотренном кон-
кретном случае можно оценить, насколько полно стендовые усло-
вия соответствуют летным.
Если условия идентичности не обеспечены, должна произво-
диться доработка модели с учетом физических особенностей ре-
ального процесса. При этом важны уровень знаний физики явле-
ний, опыт и интуиция экспериментатора. Что касается интуитив-
ного подхода к решению тех или иных вопросов, то в наиболее
ответственных и сложных случаях целесообразно применять ме-
тод экспертных оценок. При достаточном объеме статистических
данных решения о доработке модели могут приниматься на осно-
273
вании оптимизации частных математических моделей в линейном
варианте.
Еще од-H'rfM условием, имеющим в ряде случаев решающее зна-
чение для практики, является наличие физических -огранцчений,
налагаемых на 'исследуемый процесс. Дело в том, что, достигнув
функционального подобия двух динамических процессов, нельзя
исключить естественный разброс параметров из-за ошибок на-
стройки, технологических факторов первого и второго рода, слу-
чайных явлений, ошибок измерения и т. п.
.1
I] *2 *3*4 t6 t
Рис. 8. 4. Динамическая характеристика давле-
ния жидкости на входе в насос
Если эксперимент ведется при граничных условиях или в экст-
ремальной зоне, возможно качественное изменение какого-либо
из параметров, определяющего условия «входа», выход за грани-
цы, при которых меняется физическое состояние рабочего тела
или элементов конструкции. Примером может служить динами-
ческая характеристика, определяющая изменение давления одно-
го из (компонентов топлива на входе в насос двигателя. Для неко-
торого условного ЖРД она имеет вид, показанный на рис. 8.4.
Момент времени 0 определяет команду на запуск ДУ и начало
наддува баков. Момент времени t\—открытие главного клапана
и начало заполнения свободных полостей двигателя. Этот про-
цесс характеризуется резким спадом давления. По мере запол-
нения полостей процесс восстанавливается. Он характеризуется
турбулентным течением жидкости под действием увеличивающе-
гося напора. Однако воспламенение компонентов топлива в ка-
мере сгорания создает резкое сопротивление потоку и ударную
волну, характеризующуюся появлением «пика» давления в мо-
мент времени /3. За «пиком» следует спад f4. В итоге возникший
колебательный процесс затухает к моменту времени t$. Далее
наблюдаются флюктуации давления, а с момента времени tQ про-
цесс можно считать установившимся.
274
Физические ограничения, налагаемые на рассматриваемую
динамическую характеристику, заключаются в том, что при на-
личии провалов давления в моменты времени t2 и Z4 их уровень
может быть ниже упругости паров компонентов. Тогда соответ-
ствующие моменты времени, особенно t2t 'будут характеризовать-
ся вскипанием компонента. В результате в ТНА и камеру сгора-
ния начнет поступать паро-жидкостная эмульсия, способная выз-
вать неустойчивое горение, колебания и т. д. Если это возможно
в предельных случаях при испытаниях натуры, то указанные
явления не всегда могут быть присущи модели. В итоге функцио-
нальное подобие динамических процессов с математической точки
зрения может быть обеспечено, а граничные условия для модели
не соблюдены. Поэтому необходимо наряду с математической
оценкой идентичности процессов производить физическое обсле-
дование граничных условий и в ’случае необходимости налагать
на модель и натуру соответствующие ограничения.
Вопрос идентичности сложных динамических процессов также
во многом определяется возможностями системы измерения, дат-
чиками и их подводящими каналами. Последние в ряде случаев
могут являться демпферами, «гасящими» колебания и «пики»
давления на осциллограммах, и таким образом искажать реаль-
ный процесс.
Наконец, следует указать еще на одно условие обеспечения
функционального подобия динамических систем. Оно заключается
в использовании для фиксации характеристики подобных процес-
сов единой измерительной аппаратуры, одного типа датчиков и
одинаковой формы и длины подводящих каналов.
Если рассматривается сложный динамический процесс, в кото-
ром не всегда ясны аналитические связи между параметрами
системы, то удобнее всего представить его моделью «черного
ящика». В соответствии с этим при решении задачи обеспечения
динамического подобия будем иметь две модели: одну для на-
турного и вторую для модельного процессов (рис. 8.5).
Известно, что оба процесса имеют одинаковую физическую
природу, идентичными являются входные и выходные характери-
стики. Наличие известного «входа» и «выхода» позволяет в соот-
ветствии с методами, изложенными в гл. V, определить матема-
тическую модель каждого из процессов, т. е. установить недоста-
ющие функциональные связи между параметрами систем.
Вид этих связей может быть выражен полиномами:
-т- для натуры
п' п'
ун = 2 ^х«:+2 b'.jx'.x'+
/=0 i<j
— для модели
Ум = 2 biXi + 2 bijXiXj +...,
z=0 i<j
275
где со штрихом — параметры «натуры», без штриха — «модели».
Если теперь принять условия для «выхода» и «входа»:
= = х'2 = х„...х'п = хп, ум = Ун»
то соответственно будут равны и коэффициенты регрессии
b'o = b0, b\ = bit b'2 = b2 и т. д.
Рис. 8. 5. Схемы «черного ящика» для (натурного и модель-
ного процессов
В результате мы можем получить условия для функциональ-
ного подобия динамических процессов:
У = 2 biXi + 2 bijXixj+... = idem.
i=0 i<j
На основании этого можно сделать вывод: если явления име-
ют одинаковую физическую .природу и существуют идентичные
условия для «входа» и «выхода» модели и натуры, то исследуе-
мые динамические процессы будут функционально подобными.
Это положение в настоящее время достаточно полно провере-
но экспериментальным путем. Оно нашло широкое применение на
практике в методиках испытаний ЖРД.
ЛИТЕРАТУРА
1. Авиационные двигатели. [Сб. под ред. М. А. Левина]. М., «Машгиз»,
1951.
2. Адлер Ю. П. Введение в теорию планирования эксперимента. М„
«Наука», 1970.
3. Алабушев П. М., Г е р о н и м у с В. Б. и др. Теория подобия и раз-
мерностей. Моделирование. М., «Высшая школа», 1968.
4. А л ь т ш у л ь А. Д. Местные гидравлические сопротивления при движе-
нии вязких жидкостей. М., Гостехиздат, 1962.
5. Бруевич Н. Г. О количественной оценке надежности. Доклад на сек-
ции надежности при научном совете по комплексной проблеме. «Кибернетика»,
изд-во АН СССР, 1969.
6. Бойнтон, Клейн кнехт. Итоги трех программ разработки пило-
тируемых космических кораблей. — ВРТ, 1970, № 10.
7. Болл Л. Оценка характеристик двигателей установки первой ступени
ракеты-носителя «Сатурн-5» — ВРТ, 1970, № 3.
8. Большее Л. Н., Смирнов Н. В. Таблицы двухмерного нормаль-
ного распределения. М., «Наука», 1965.
9. Ботвин Р. Летные испытания двигательных установок лунного экспе-
диционного отсека КК «Аполлон». — ВРТ, 1971, № 5.
10. Брюлле, Джонсон, К лете кий. Отыскание неисправностей в
технических устройствах. — «Зарубежная радиоэлектроника», 1961, № 7.
1 Г. Вальд А. Последовательный анализ. М., Физматгиз, 1960.
12. Вендетти, Сайнис. Анализ надежности комплекса «Сатурн-5». —
ВРТ, 1970, № 6.
13. Вентце ль Е. С. Теория вероятностей. М., Физматгиз, 1958.
14. В ер за ко в Г. Ф., Кин шт Н. В., Рабинович В. И. и др. Вве-
дение в техническую диагностику. М., «Энергия», 1968.
15. Дружинин Г. В. Надежность систем автоматики. М., «Энергия»,
1967.
16. Волков Е. Б., Головков Л. Г., С ы р и ц ы н Т. А. Жидкостные
ракетные двигатели. М., Воениздат, 1970.
17. Вопросы ракетной техники, 1961, № 9.
18. Ф а р р е л, К и н г. Переходные характеристики преднасоса с приводом
от гидротурбины. — ВРТ, 1970, № 5.
19. Бэр, Кэмпбелл. Исследование работы двухкаскадного водород-
ного турбонасоса с нулевым кавитационным запасом в баке.—ВРТ, 1970, №9.
20. Г е т е р т Б. Г. Моделирование высотных космических условий при
испытаниях. — «Ракетная техника», 1962, № 16.
21. Гнеденко Б. В. и др. Математические методы в теории надежности.
М., «Наука», 1965.
22. Г о л ь д м а н С., Теория информации. М., ИИЛ, 1957.
23. Двигательные установки ракет на жидком топливе. Под ред. Эллиот
Ринг. М., «Мир», 1966.
24. Ж и р и ц к и й Г. С., Л о к а й В. И., М а к с у т о в а М. К. и др. Газо-
вые турбины двигателей летательных аппаратов. М., Машиностроение, 1971.
25. И в а х н е н к о А. Г. Метод группового аргумента — конкурент методу
277
стахостической аппроксимации.—«Автоматика», № 3, изд-во Института кибер-
нетики АН УССР, 1968.
26. Йетс'Ф. Выборочный метод в переписях и обследованиях. М., «Ста-
тистика», 1965.
27. Касаткин А. С., Кузьмин И. В. Оценка эффективности автома-
тизированных систем контроля. М., «Энергия», 1967.
28. Кибернетику на службу коммунизму, т. 2, М.; «Энергия», 1964.
29. К и р п и ч е в М. В. Теория подобия. Изд-во АН СССР, il953. *
30. Кирпичев М. В., Михеев М. А., Э й г е н с о н Л. С. Теплопере-
дача. М., Госэнергоиздат, 1940.
ЗГ. Креденцер Б. П., Ластовченко М. М. идр. Решение задач
надежности и эксплуатации на универсальных ЭЦВМ. М., «Советское радио»,
1967.
32. Крокко Л., Чжень-Синь-И. Теория неустойчивости горения в
жидкостных ракетных двигателях. М.» ИИЛ, 1958.
33. Кузнецов П. И., Пчелинцев Л. А., Гайденко В. С. Конт-
роль и поиск неисправностей в сложных системах. М., «Советское радио», 1969.
34. К у з ь м и н И. В. Оценка эффективности и оптимизации АСКУ. М.,
«Советское радио», 1971.
35. Борисенко А. И. Газовая динамика двигателей. М., Оборонгиз,
1962.
36. Лин д. Математическая модель процесса испытаний изделия. — ВРТ,
1970, № 12.
37. Ллойд Д., Липов М. Надежность. М., «Советское радио», 1964.
38. Л о м а к и н А. А. Центробежные и осевые насосы. М., «Машинострое-
ние», 1966.
39. Макмунн, Коллинз, Браун, Модель опасных ситуаций при
взрыве твердотопливных ракет. — ВРТ, 1970, № 3.
40. М а х и н В. А., Белик Н. П. и др. Динамика жидкостных ракет-
ных двигателей. М., «Машиностроение», 1969.
41. Мелькумов Т. М., Мелик-Пашаев Н. И., Чистяков П. Г.
и др'. Ракетные двигатели. М., «Машиностроение», 1968.
42. Михеев М. А. Основы теплопередачи. М., Госэнергоиздат, 1949.
43. М о з г а л е в с к и й А. В., Г ас каров Д. В., Глазунов Л. П.
и др. Автоматический поиск неисправностей. Л., «Машиностроение», 1967.
44. М о ш к и н Е. К. Нестационарные режимы работы ЖРД. М., «Маши-
ностроение», 1970.
45. М о ш к и н Е. К. Динамические процессы в ЖРД. М., «Машинострое-
ние», 1964.
46. Надежность технических систем и изделий. Основные понятия. Терми-
нология. М., «Наука», 1965.
47. Н а л и м о в В. В., Ч е р н о в а Н. А. Статистические методы плани-
рования экстремальных экспериментов. М., «Наука», 1965.
48. Новые идеи в планировании экспериментов. М., «Наука», 1969.
49. О в с я н н и к о в Б. В. Теория и расчет насосов ЖРД. М., Оборонгиз,
1960.
50. Парфенов В. А. и др. Авиационное материаловедение. М., Воениз-
дат, 1958.
51. П е р рj) т е А. И., Карташов Г. Д., Цветаев К. Н. Основы ус-
коренных испытаний радиоэлементов на надежность. М., «Советское радио»,
1968.
52. Проблемы надежности радиоэлектронной аппаратуры. [Сб. докладов
национального симпозиума США]. М., Оборонгиз, 1960.
53. Б у р о в М. И., В а р ф о л о м ее в В. И., К о п ы т о в М. И. и др.
Проектирование и испытание баллистических ракет. М., Воениздат, 1970.
54. X е м ф р и с Дж. Ракетные двигатели и управляемые снаряды. М.,
ИИЛ, 1958.
55. РТМ’44—62. Методика статистической обработки эмпирических данных.
Изд. комитета стандартов, 1966.
278
56. Седов Л. И. Методы подобия и размерностей в механике. М., ИТТЛ,
1957.
57. Сейфи-Т. Ф., Ярошенко А. И., Бакаев В. И. Система Канар-
спи — гарантия высокого качества. М., Изд. комитета стандартов, 1968.
58. Синярев Г. Б., Добровольский М. В. Жидкостные ракетные
двигатели. М., Оборонгиз, 1957.
59. Солодовников В. В., Матвеев П. С., Вальденберг Ю. С.
и др. Вычислительная техника в применении для статистических исследований и
расчетов систем автоматического управления. М., Машгиз, 1963.
60. М а л и к о в И. М., П о л о в к о А. М. и др. Основы теории и расчета
надежности. М., Судпромгиз, 1960.
61. С от сков Б. С. Основы теории и расчета надежности элементов и
устройств автоматики и вычислительной техники. М., «Высшая школа», 1970.
62. Справочник по надежности. М., «Мир», 1970.
63. Стандарты статистического контроля (проект). Институт механики, АН
УзССР, 1961.
64. Т а р к о Л. М. Волновые процессы в трубопроводах гидромеханизмов.
М., Машгиз, 1963.
65. Теория информации и ее приложения. [Сб. переводов под ред. А. А. Хар-
кевича]. М., Физматгиз, 1959.
6(6 . У ш а к о в И. А., К о н е н к о в Ю. К. Оценка эффективности функци-
онирования сложных ветвящихся систем с учетом надежности. Кибернетику
на службу коммунизма, т. 2, М., «Энергия», 1964.
67. Федоров В. В. Теория оптимального эксперимента. Изд. МГУ, 1969.
68. Ф и н н и Д. Введение в теорию планирования экспериментов. М., «На-
ука», 1970.
69. Ф и р с т м а н С., Г л а с с Б. Оптимальные маршруты поиска при ав-
томатическом отыскании неисправностей. — «Зарубежная радиоэлектроника»,
1963, № 6.
70. X а л ь д А. Математическая статистика с техническими приложениями.
М., ИИЛ, 1956.
71. Хаммонд, Гейзингер. Безопасность полигонных испытаний ра-
кет. — ВРТ, 1970, № 9.
72. X и к с Ч. Основные принципы планирования эксперимента. М., «Мир»,
1967.
73. Ч г и с И. А., Я б л о н с к и й С. В. Логические способы контроля элект-
рических схем. [Труды математического института им. В. А. Стеклова, т. 51].
изд. АН СССР, 1958.
74, 'Шевяков А. А. Автоматика авиационных и ракетных силовых уста-
новок. М., «Машиностроение», 1970.
75. Шиш он о к И. А., Репкин В. Ф., Б ар венский Л. Л. Основы
теории надежности и эксплуатации радиоэлектронной техники. М., «Советское
радио», 1964.
76. Шор Я. Б. Статистические методы анализа и контроля качества и на-
дежности. М., «Советское радио», 1962.
77. Эдельман А. И. Топливные клапаны жидкостных ракетных двига-
телей. М., «Машиностроение», 1970.
78. Air et cosmos, (1969) No. 322, p. 2'1.
79. Air et cosmos, (1971) No. 372, p. 11.
80. Ball L. C. AIAA Paper No. 69—733; AIAA 5th Propulsion Joint
Spesialist Conf. June 9—13.
81. Bier R. Z., Brolly S. D. Development of computerbasel on lourd
check — out sistem simulator utilizing an alphanumerical display, AIAA 4-th
annual melting and technical Display Anaheim, 1967.
82. Boeing Magazine, (1969) No. 3, p. 7.
83. В о г t w u k Z. C. Development of loxhydrogen engines for the Saturn
(Apollo Lunch vechiles).
84. В ot win R. AIAA 6-th Propulsion Join Specialist Conf. June 15—19,
1970; AIAA Paper No. 70—673.
279
85. Box J/E. P. Wilson K. On the Experimental Attaimment of Opti-
mum Conditions, Journal of the Royal Ctatistical Society Series B. 1951. 13.
No. 1. 1.
86. Burks A. L. Development of Loxhydrogen engines for the Saturn
(Apollo Lunch vechiles, 1968).
87. C a m p b e 11 С. C. IRE Trems on reliability and quality control March,
1960.
88. D о d g e N. F. R о m i g N. G. Samling inspection. N. Y., 1959.
89. Finney D. I. Tte Tractional Replication of Factorial Experiment's,
Annal of Engines, 1945, Vol. 12 N. 4, p. 291.
90. G 1 a s s B. An optimum policy for detecting a fault in a complex system
Operation Research, 1959, vol. 7.
91. Interavia, No, 6193, 6280 (1967).
92. Interavia Air Letter, No. 6873, p. 7, (1969).
93. Journal of Environmental Sciences, 1970. 1-11. vol. 13, No. 1, p 6.
94. Kelly T. I. Flingt Experience with the Apollo Lunar Madule. AIAA
Paper, No. 68—1005.
95. Missiles and Rockets, (1966) vol. 18, No. 6.
96. Moon Warren D. Predicting system shekount error. Electro — Technol.,
1969, vol. 73, No. 1.
97. Olsson A. G. The impact of space craft OCS on the design of ground
support equipment and software, AIAA, 3-rd Flight test, Simulation and Support
Conf, 1969.
98. S—1c. Propulsion sistem performance evalution, Lurry C. Ball, stage
Technology, the Boeing Compony, Mechound, Louisiana, 1969.
99. Space Aeronautics, (1970) vol. 53, No. 6.
100. Space Propulsion, (1969) vol. 7, No. 17, p. 205.
101. S n у d e r I. E. et all — Implemental of Advanced Simulation Techniques
for Predicting the Saturn V Launch Vehide System Behavior, AIAA 5-th Ae-
rospace Meeting NY, January,_N. 22, 1967.
102. S t a b e R. G., К 1 i n e I. F. AIAA Paper No 69—553, AIAA 5-th Propul.
sion Join Specialist Conf. June 9—13, 1969.
103. Will st ad ter R. Dormant missile system checkount effectioness.
Procedings 10 National Symposium on Reliability and Quality Control, 1964.
104. «Proceedings of IAS Aerospace Systems Reliability Symposium», 1962.
p. 26—32.
ОГЛАВЛЕНИЕ
Стр.
Введение............................................................. 3
Глава I. Общие соображения по обеспечению надежности ЖРД ... 7
§ 1. Техническое задание на разработку двигателя............. 7
§ 2. Технический проект...................................... 8
§ 3. Классификация систем и элементов двигательных установок . 10
§ 4. Общие требования к испытаниям и программам отработки . 12
§ 5. Требования к стендовому оборудованию ...................... 16
§ 6. Информативность испытаний.............................. 19
§ 7. Планирование отработку................................. 24,
Г лава II. Экспериментальная отработка ЖРД- Этапы и виды испытаний 27
§ 1. Общие характера стики испытаний........................... 27
§ 2. Опытно-конструкторские, оценочные испытания............... 29
§ 3. Испытания на воздействие окружающей среды с учетом влия-
ния внешних и внутренних факторов.............................. 33
§ 4. Квалификационные испытания.............................. 39
§ 5. Летные испытания.......................................... 41
§ 6. Виды испытаний при серийном производстве. Контроль качест-
ва и надежности................................................ 43
Глава III. Планирование отработки и анализ результатов испытаний 47
§ 1. Особенности планирования испытаний сложных технических
систем........................................................ 47
§ 2. Применение факторных 'Планов к испытаниям сложных техни-
ческих систем................................................... 53
§ 3. Исследование математических моделей сложных физических
процессов.............................................. 5£
§ 4. Ранжировка значимых факторов и выбор их числа. Адекватность
модели................................................. 73
§ 5. Пассивный и активный эксперимент при отработке систем и
элементов..................................................... 79
§ 6. Методы решения 'математических моделей сложных процессов 81
§ 7. Прогнозирование результатов испытаний.............. 86
§ 8. О факторных планах с количеством уровней варьирования
больше двух........................................ 88
§ 9. Общие методы дисперсионного анализа, применяемые при об-
работке экспериментальных данных....................... 96
‘ § 10. -Применение дисперсионного анализа для решения частных
задач............................................................... 99
Глава IV. Испытания на надежность.................................. 108
§ 1. Общие положения. Цель и назначение................ 108
§ 2. Организация испытаний и методика их проведения .... ПО
§ 3. Ускоренные испытания....................................... 115
§ 4. Особенности испытаний на надежность элементов однократно-
го действия.......................................... . . . . 120
281
4 Стр-
§ 5. Испытания на надежность при нестабильных условиях. Плани-
рование испытаний .на надеж1ность . . *.................. 122
§ 6. -Методы утяжеленных испытаний.............................126
Глава V. Прикладные методы теории надежности в системах одноразо-
вого использования ................................................ 130
§ 1. Основные критерии и статистические модели надежности ... 130
§ 2. Анализ достоверности оценок при определении ‘количественных
показателей надежности........................................ 139
§ 3. Определение показателей надежности на основе качественной
информации. Методы обработки статистических данных . . . 144
§ 4. Определение показателей надежности на Основе количественной
информации. Методы обработки статистических данных ... 148
§ б. Обработка результатов испытаний для изделий однократного и
многократного действия в случае нормального распределения 158
§ 6. Определение минимального размера выборки изделий-при ис-
пытаниях на надежность.........................-............... 162
§ 7. Структурные схемы надежности сложных технических систем.
Оценка надежности систем по их элементам.............,............. 166
Глава VI. Уравнения динамики основных агрегатов ЖРД.................177
§ 1. Динамические процессы в ЖРД............................... 177
§ 2. Уравнение динамики камеры сгорания........................ 179
§ 3. Уравнение динамики гидравлических магистралей...........' 183
§ 4. Уравнение динамики центробежного насоса . .'............. 187
§ 5. Уравнение динамики турбонасосного агрегата............... 195
§ 6. Уравнения мощности турбины м насосов..................... 195
§ 7. Уравнения динамики агрегатов автоматики ЖРД.............. 197
§ 8. Модели отказор ЖРД при появлении неисправностей . . . 201
Глава VII. Исследование аварийных ситуаций ЖРД..................... 205
§ 1. Выяснение причин аварийных исходов испытаний ЖРД . . • 205
§ 2. Метод расчета параметров установившегося режима ЖРД при
аварийных ситуациях . . ....................................... 211
§ 3. Метод расчета переходных процессов в ЖРД при аварийных
ситуациях .................................................... 224
§ 4. Переходные процессы при перекрытии гидравлической магист-
рали .......................................................... 233
§ 5. Переходные процессы при негерметичности гидравлических
магистралей....................................................241
§ 6. Переходные процессы при негерметичности газовых емкостей
или магистралей...............................................248
§ 7. Переходные процессы при неисправности насосов............ 249
§ 8. Влияние системы регулирования ЖРД на характер переходных
процессов, при аварийных ситуациях....................... 254
Глава VIII. Моделирование физических процессов при отработке эле-
ментов и систем ДУ ................................................ 260
§ 1. Применение теории подобия к эксперименту................. 260
§ 2. Физическое моделирование при отработке элементов и систем
ДУ...................................................’......... 263
§ 3. Обеспечение подобия динамических процессов............... 268
Литература.................................................... 277
Виталий Антонович Махин, Николай Петрович Миленко,
Людмила Владимировна Пронь
ТЕОРЕТИЧЕСКИЕ ОСНОВЫ ЭКСПЕРИМЕНТАЛЬНОЙ ОТРАБОТКИ ЖРД
Редактор Н. П. Колосова
Техн, редактор В. И. Орешкина
Художник В. Б. Торгашев
Корректор Е. П. Карнаух
Сдано в набор 29/IX 1972 г.
Формат 60X90716
Тираж 3000 экз.
Цена 1 р. 13 к.
Подписано в печать 10/IV 1973 г. Т-05461
Бумага Ха 2 Уч.-изд. л. 18,0
Зак. № 3374
Тем. план 1973 г. № 206
Издательство «Машиностроение», Москва, Б-78, 1-й Басманный пер., 3.
Московская типография № 8 «Союзполиграфпрома»
при Государственном комитете Совета Министров СССР
по делам издательств, полиграфии и книж'ной торговли
Хохловский пер., 7. Тип. зак. 1874
ИЗДАТЕЛЬСТВО «МАШИНОСТРОЕНИЕ»
ПЛАНИРУЕТ ВЫПУСТИТЬ В 1974 ГОДУ
НОВЫЕ КНИГИ
Во л к о в Е. Б., С уд а к о в Р. С., С ы р и ц ы н Т. А. Основы те-
ории надежности ракетных двигателей. 27 л. Цена ориентировоч-
но 2 р. 70 к.
Гликман Б. Ф. Автоматическое регулирование ЖРД. 26 л.
Цена ориентировочно 2 р. 60 к.
Стернин Л. Е. Основы газодинамики двухфазных течений
в соплах. 16 л. Цена ориентировочно 1 р. 65 к.
Шишков А. А. Газодинамика пороховых ракетных двигате-
лей. Изд. 2-е, перераб. и доп. 11 л. Цена ориентировочно 80 к.
Основы теории автоматического управления космическими
ядерными энергетическими установками. Под ред. академика
Б. Н. Петрова. 27 л. Цена ориентировочно 2 р. 95 к.
Уважаемые товарищи!
Своевременно заказывайте и приобретайте в местных книж-
ных магазинах литературу, выпускаемую издательством «Маши-
ностроение».
Специализированный магазин «Техническая книга» (Москва,
К-31, ул. Петровка, 15) с сентября 1973 г. будет принимать пред-
варительные заказы на новую литературу, а также высылает по
почте наложенным платежом литературу, имеющуюся в его ас-
сортименте.