/


































































































































































































































































































































































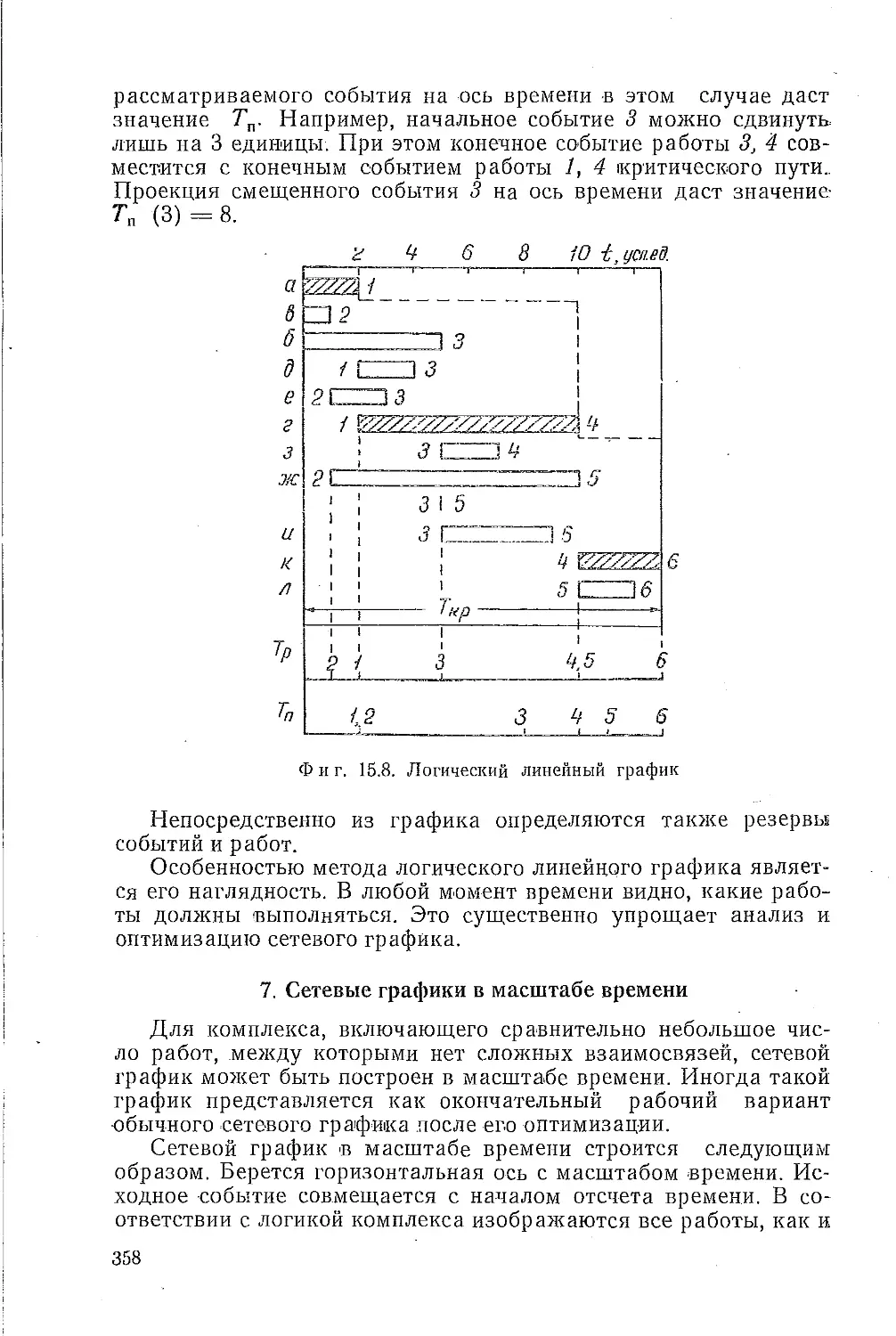






























































































































































Text
ИНЖЕНЕР»'» АВИАЦИОННАЯ
СЛУЖБА И ЭКСПЛУАТАЦИЯ
АВИАНИОННОГО ОБОРУДОВАНИЯ
A. E. АКИНДЕЕВ, В. Д. КОНСТАНТИНОВ, С. В. КРАУЗ,
Е. А. РУМЯНЦЕВ, Н. И. СЕРГЕЕВ, И. М. СИНДЕЕВ
ИНЖЕНЕРНО-АВИАЦИОННАЯ
СЛУЖБА И ЭКСПЛУАТАЦИЯ
АВИАЦИОННОГО ОБОРУДОВАНИЯ
Под редакцией Е. А. РУМЯНЦЕВА
Утвержден Главнокомандующим
Военно-Воздушными Силами
в качестве учебника для слушателей
инженерных ВВУЗов ВВС
i
УДК 629.735.33.08
Книга содержит изложение основных вопросов тео-
рии и практики эксплуатации авиационного оборудо-
вания. В ней последовательно рассматриваются основы
надежности и способы обработки статистических дан-
ных по опыту эксплуатации авиационного оборудова-
ния; методы и технические средства контроля его со-
стояния; основы инженерно-авиационного обеспечения,
организации эксплуатации и ремонта авиационной тех-
ники; способы эксплуатационной оценки авиационного
оборудования и оценки боевой эффективности авиаци-
онных комплексов.
Книга является учебником по одноименному курсу,
читаемому слушателям ВВИА им. проф. Н. Е. Жуков-
ского. Она может быть использована в других высших
авиационных военно-учебных заведениях, а также спе-
циалистами и инженерно-техническим составом научно-
исследовательских организаций и строевых частей ВВС.
Иллюстраций —152; таблиц —68; библиография — 48.
ПРЕДИСЛОВИЕ
Настоящая книга является учебником для слушателей ВВИА
им. ироф. Н. Е. Жуковского по курсу инженерно-авиационной
службы и эксплуатации авиационного оборудования. Этот курс
относится к числу учебных дисциплин, завершающих подготов-
ку инженеров-электриков ВВС по профилю эксплуатации авиа-
ционного оборудования, и опирается на знания, приобретенные
слушателями при изучении специальных дисциплин.
Учебник .имеет целью изложение основных вопросов теории
и практики эксплуатации авиационной техники на базе уста-
новленной в ВВС системы инженерно-авиационного обеспече-
ния боевых действий и боевой подготовки, с учетом имеющихся
данных по обобщению опыта эксплуатации авиационного обору-
дования и публикаций, направленных на развитие научно-тео-
ретических основ эксплуатации.
При изложении материала авторы исходили из того, что
слушатели имеют известный опыт службы в строевых частях
ВВС на должностях технического состава, поэтому некоторые
несущественные детали, связанные с организацией ИАС и ее
деятельности, были опущены. Помимо этого, принималось во
внимание, что изучение особенностей эксплуатации систем
оборудования конкретных образцов авиационной техники осу-
ществляется в процессе проведения специальных лекций и аэ-
родромных практических занятий, по которым имеются соответ-
ствующие учебные пособия.
Учебник состоит из четырех разделов.
В первом разделе рассматриваются основы теории надежно-
сти применительно к восстанавливаемым и невосстанавливае-
мым системам авиационного оборудования, приводятся методы
расчета и способы повышения надежности сложных систем
оборудования и электрических соединений. Большое внимание
в этом разделе уделяется изложению основных сведений по об-
работке статистических данных, полученных из опыта эксплуата-
ции, что имеет важное значение при обобщенном инженерном
анализе отказов и предпосылок к летным происшествиям. Здесь
.же освещаются методы технического прогнозирования, вопросы
проведения ускоренных испытаний на надежность и др.
Второй раздел посвящен методам и техническим средствам
контроля состояния авиационного оборудования. В разделе со-
3
держится изложение основ технической диагностики и способов
исследования авиационного оборудования как объекта контро-
ля. Значительное место занимают вопросы определения опти-
мальной последовательности проверок при поиске неисправно-
стей, отыскания .минимальной совокупности параметров, доста-
точной для различения состояния контролируемого оборудова-
ния. С учетом перспектив развития и применения комплекс-
ных средств инструментального контроля авторы сочли необхо-
димым выделить в отдельные главы материалы по принципам
построения автоматических, в том числе цифровых, систем кон-
троля и систем регистрации полетных данных. В этом же раз-
деле даются основные сведения по аэродромно-техническим
средствам.
В третьем разделе рассматриваются вопросы организации
инженерно-авиационной службы и организации эксплуатации
авиационной техники на земле, включая мероприятия по подго-
товке нс полетам и содержанию техники в исправном состоянии..
При этом значительное место уделено сетевым и другим пер-
спективным методам планирования и выполнения работ по под-
готовке авиационного оборудования к,полетам, организации вой-
скового и капитального ремонта. 'Особо выделены проблемы бе-
зопасности полета, в том числе количественные оценки летатель-
ных аппаратов по безопасности полета, методы восстановления
причин летных происшествий и мероприятия ИАС по их преду-
преждению. В связи с задачами инженерно-авиационного обес-
печения акцентируется внимание на функциональных обязан-
ностях инженера по планированию, выполнению инженерно-опе-
ративных расчетов, технической подготовке и организации работ
в условиях рассредоточенного базирования и укрытия авиаци-
онной техники.
Четвертый раздел содержит изложение способов оценки
эффективности . инженерно-авиационной службы, методов эк-
сплуатационной оценки авиационного оборудования и примене-
ния теории массового обслуживания к решению некоторых
эксплуатационных задач. Раздел завершается освещением во-
просов оценки боевой эффективности авиационных комплексов,
различного назначения.
В теоретическом плане содержание учебника опирается на
теорию вероятностей, математическую статистику и теорию слу-
чайных функций, теорию графов и алгебру логики, теорию ин-
формации и другие разделы технической кибернетики.
Главы XII, XV написаны А. Е. Акиндеевым, гл. XVIII ;—
В. Д. Константиновы м, гл. I, II, III, V, § 6.3, гл. XIII, XIV,
XVII —С. В. Краузом, § 6.1, 6.2, гл. VII, § 8.5, гл. X (кроме-
§§ 10.3, 10.5), гл. XI, XIX, XX, XXI — Е. А. Румянцевым,,
гл. IX, XVI — Н. П. Сергеевым, гл. IV, VIII (кроме § 8.5),.
§ 10.3, 10.5 — И. М. С и н д е е в ы м.
4
Авторы выражают признательность К. С. Смирнову,
А. В. Калашникову и рецензенту книги Г. И. И в а н о в у за
ценные пожелания и замечания, высказанные при просмотре ру-
кописи, К- М. Шп плеву и И. С. Попову — за некоторые
предоставленные материалы и полезные советы при работе над
книгой.
ВВЕДЕНИЕ
Проявляя постоянную заботу об усилении боевой мощи Со-
ветских Вооруженных Сил, Коммунистическая партия Советско-
го Союза уделяет большое внимание развитию и укреплению-
Военно-Воздушных Сил, оснащению их самой совершенной
авиационной техникой, подготовке и воспитанию преданных де-
лу коммунизма высококвалифицированных кадров руководя-
щего, летного и инженерно-технического состава ВВС.
Советские Военно-Воздушные Силы предназначены для на-
несения ударов по наземны-м и морским целям непосредственно-
на театре военных действий и :в тылу противника, ведения -воз-
душной разведки, десантирования войск и боевой техники, по-
давления и уничтожения авиации противника на земле и в воз-
духе ,и решения ряда других ответственных боевых задач.
Высокие требования к боеготовности, сложность и многооб-
разие решаемых ВВС боевых задач обусловливают необходи-
мость непрерывного совершенствования летно-тактических и:
боевых качеств находящихся на вооружении самолетов и вер-
толетов различного типа и назначения.
Благодаря успехам советской науки и техники .в области са-
молета- и ракетостроения, автоматики и электроники, приборо-
строения и вычислительной техники наши Военно-Воздушные
Силы оснащены первоклассными самолетами с высокоэффектив-
ными комплексами бортового оборудования и вооружения. Не-
прерывно увеличиваются дальности, скорости полета и диапа-
зон высот боевого применения самолетов и вертолетов ВВС,,
растет мощь их боевых средств.
Значительное повышение боевой эффективности ВВС дости-
гается установкой на самолеты совершенных комплексов авто-
матического управления и боевого применения, позволяющих
решать боевые задачи в любых метеорологических и климати-
ческих условиях, в любое время суток. Эти комплексы вклю-
чают в себя сложные и точные системы автоматического управ-
ления -и навигации, в том числе системы, обеспечивающие по-
леты и боевое-применение на малых -высотах.
Особое развитие получили авиационные управляемые раке-
ты различных классов, способные поразить любые наземные,
морские и воздушные цели. Повышению боевой эффективности
в значительной мере содействует оборудование самолетов авто-
6
магическими средствами разведки, а также средствами радио-
противодействия и постановки помех.
Автоматизация и комплексирование проникают во все виды
самолетного оборудования. Сложность современных силовых
установок, развитие механизации крыла приводят к широкому
внедрению автоматизированного электропривода и автоматиче-
ских систем управления силовыми установками. В связи с рез-
ким увеличением состава оборудования возрастает мощность и
•сложность автоматизированных электроэнергетических систем.
Комплексирование различных видов оборудования и вооруже-
ния сопровождается установкой на самолеты бортовых вычисли-
тельных машин, позволяющих с наибольшей эффективностью
решать задачи автоматического управления полетом, примене-
ния ракетного и другого вооружения, разведки, десантирования
и другие задачи.
Требование постоянной боевой готовности, усложнение и
расширение круга боевых задач, оснащение самолетов ВВС
сложными комплексами авиационного оборудования диктуют
необходимость неустанного совершенствования боевой выучки
и мастерства летного и инженерно-технического состава частей
ВВС. Особое значение имеет морально-психологическая закал-
ка и подготовка к возможному ведению боевых действий в ус-
ловиях термоядерной войны. Весьма важной является также
четкая организация и обеспечение полетов при рассредоточен-
ном базировании и размещении авиационной техники в укры-
тиях.
Боевая готовность, эффективность боевого применения и
боевой подготовки частей ВВС зависят от инженерно-авиацион-
ного обеспечения, осуществляемого инженерно-авиационной
службой.
Инженерно-авиационное обеспечение включает:
— разработку и проведение мероприятий по поддержанию
авиационной техники в постоянной боевой готовности;
— организацию и проведение эксплуатации и ремонта авиа-
ционной техники;
— проведение анализа технического состояния, выявление
конструктивных и эксплуатационных недостатков авиационной
техники, разработку и проведение мероприятий по предупреж-
дению отказов и неисправностей;
— проведение инженерных расчетов, определение потребных
материальных средств для эксплуатации и ремонта, учет нали-
чия и состояния авиационной техники;
— обучение летного и инженерно-технического состава экс-
плуатации и ремонту;
— анализ деятельности инженерно-авиационной службы с
разработкой мероприятий по совершенствованию ее организа-
ционной структуры и методов инженерно-авиационного обеспече-
ния, распространение передового опыта.
7
Основу инженерно-авиационного обеспечения составляет
эксплуатация авиационной техники на земле и в полете. Ее ус-
пешное проведение достигается высоким уровнем политической
сознательности и дисциплины личного состава; твердым и глу-
боким знанием авиационной техники и точным выполнением ус-
тановленных пр.авил ее эксплуатации; своевременным планиро-
ванием, четким и оперативным руководством со стороны инже-
нерно-авиационной службы; научной организацией труда и по-
стоянным повышением уровня технической культуры.
Эксплуатация авиационной техники на земле осуществляется
инженерно-техническим и летным составом и включает в себя
подготовку авиационной техники к полетам, содержание авиа-
ционной техники в исправном состоянии (осмотры, регламентные
и ремонтные работы, хранение и т. п.).
Инженерно-авиационная служба объединяет и направляет
деятельность инженерно-технического состава ^авиационных ча-
стей и соединений всех специальностей по инженерно-авиацион-
ному обеспечению боевой подготовки и боевого применения
авиационной техники.
Инженеры авиационных частей непосредственно проводят и
организуют работу технического состава по обслуживанию и
обеспечению готовности к применению летательных аппаратов,
вооружения, авиационного и радиоэлектронного оборудования.
Должностные обязанности инженеров включают в себя:
— организацию и проведение подготовки авиационной техни-
ки к полетам и боевому применению;
— организацию и проведение регламентных и профилакти-
ческих работ на авиационной технике, а также производство ее
доработок и ремонта;
— организацию сбережения авиационной техники на уровне,
обеспечивающем полное использование ее технических возмож-
ностей в течение всего срока эксплуатации;
— обеспечение правильного применения авиационной техни-
ки в полете и в процессе подготовки к полетам;
— обеспечение технической подготовки личного состава авиа-
ционных частей;
— проведение систематического контроля состояния авиаци-
онной техники;
— проведение инженерно-штурманских, инженерно-оператив-
ных расчетов и других мероприятий по инженерно-авиационному
обеспечению;
— организацию и проведение мероприятий по обеспечению
безопасности полетов;
— организацию и проведение мероприятий по планированию
деятельности ИАС, материально-техническому снабжению, уче-
ту и отчетности.
8
В современных условиях значительного усложнения обору-
дования выполнение требований по готовности может быть до-
стигнуто при существенном снижении времени и трудозатрат на
все .виды работ на авиационной технике путем внедрения в прак-
тику эксплуатации наиболее прогрессивных методов планирова-
ния, управления и организации, а также широкого применения
средств автоматизации .и механизации трудоемких 'процессов.
Решение всех перечисленных задач требует отличной подго-
товки инженеров в области теории, методов и технических
средств эксплуатации. Весьма важной является выработка у ин-
женеров частей соответствующих качеств и навыков команди-
ров-воспитателей и организаторов.
Одним из подразделений инженерно-авиационной службы
является инженерно-технический состав, осуществляющий экс-
плуатацию авиационного оборудования, которое .включает в се-
бя сложный и многообразный комплекс технических устройств
и систем.
К авиационному оборудованию относятся:
— оборудование автоматического управления полетом —
электронная автоматика: демпферы колебаний и автоматы ус-
тойчивости, автоматы управления и ограничения скорости поле-
та, перегрузок, усилий в системах управления; автопилоты, маг-
нитные, астрономические, инерциальные системы навигации;
командные пилотажно-навигационные системы; системы автома-
тического управления (САУ), аналоговые и цифровые вычисли-
тельные .машины комплексов автоматического управления;
— электрооборудование: бортовые централизованные систе-
мы снабжения постоянным и переменным током, электроавтома-
тика в устройствах запуска авиационных двигателей и управ-
ления их входными устройствами, в противопожарных системах,
в системах кондиционирования; электропривод в устройствах
механизации планера и его взлетно-посадочных органов, топлив-
ных и гидравлических системах; светотехническое оборудование;
— приборное оборудование: приборы пилотажные, контроля
работы авиадвигателей и самолетных систем, централизованные
системы измерения параметров внешней среды и параметров
полета, автоматы измерения и управления выработкой топлива
и центровкой самолета и другие приборы;
— кислородное оборудование и высотное спецснаряжение;
— фбтооборудование и тепловые средства разведки;
— оборудование поиска подводных лодок (.магнитометриче-
ские гидроакустические, тепловые и другие нерадиотехнические
средства);
— бортовые устройства и системы регистрации полетных дан-
ных;
— тренажеры (пилотажные, навигационные, комплексные и
отдельных систем авиационного оборудования);
9
— контрольно-поверочная аппаратура и наземные автомати-
ческие системы контроля авиационного оборудования.
Успешная эксплуатация авиационного оборудования возмож-
на лишь при отличном знании инженерами-электриками ВВС
теории и конструкции этого оборудования, при овладении ими
всеми передовыми формами и методами эксплуатации.
РАЗДЕЛ ПЕРВЫЙ
НАДЕЖНОСТЬ АВИАЦИОННОГО ОБОРУДОВАНИЯ!
и j.m i i ииа^^хн ihj
Глава I
ОБЩИЕ ПОНЯТИЯ И ЗАВИСИМОСТИ
ТЕОРИИ НАДЕЖНОСТИ
§ 1.1. ОСНОВНЫЕ понятия
Боевые качества самолетов ВВС и безопасность полетов в-
значительной степени зависят от надежности авиационной тех-
ники.
Под надежностью понимается свойство авиационной техники
выполнять заданные функции при сохранении своих летно-так-
тических и технических характеристик на земле и в воздухе в-
установленных пределах в течение требуемого промежутка вре-
мени или требуемой наработки.
Надежность авиационной техники в течение ©сего срока ее
эксплуатации обеспечивается системой эксплуатации и ремонта.
Под долговечностью понимается свойство авиационной тех-
ники длительно сохранять работоспособность вплоть до наступ-
ления момента полной технической непригодности или экономи-
ческой нецелесообразности ее дальнейшей эксплуатации.
Свойство приспособленности авиационной техники к выявле-
нию, устранению и предупреждению .неисправностей называется
восстанавливаемостью или ремонтопригодностью.
Вышеприведенные свойства: надежность, долговечность и вос-
станавливаемость — обладают количественными характеристи-
ками и, следовательно, могут быть подвергнуты объективной
оценке.
Предметом теории надежности является исследование и раз-
работка способов оценки и обеспечения надежности техники.
Объектами исследования и обеспечения надежности являются
технические устройства. Термин «техническое устройство» яв-
ляется обобщающим понятием любой конструкции, машины, аг-
регата, прибора, блока, системы и т. п.
В теории надежности пользуются также понятиями «э л е-
м е н т» и «с и с т е м а».
Элемент — составная часть (совокупность деталей или од-
на деталь) сложного технического устройства, которая при рас-
чете и исследовании надежности не подлежит расчленению.
11
Система — совокупность совместно действующих элемен-
тов*, предназначенная для выполнения определенных заданных
функций.
При исследовании надежности оперируют противоположны-
ми понятиями «безотказная работа» и «отказ». Под отказом по-
нимается событие потери работоспособности авиационной тех-
ники, проявившееся как в полете, так и на земле. Отказ, проявив-
шийся в период от момента запуска двигателей перед полетом
до выключения их после .посадки, считается отказом в полете.
Отказы, проявившиеся вне указанного времени, относятся к от-
казам на земле.
Утрата работоспособности может быть полной или ча-
стичной. Во втором случае техническое устройство теряет
способность выполнять хотя бы одну из заданных функций или
выполняет свои функции неудовлетворительно, что выражается
отклонением значения какой-либо из его’ рабочих характеристик
.за пределы установленных допусков.
Все отказы по характеру своего проявления различаются на
постепенны ей внезапные.
Постепенные отказы появляются в результате медленного
развития скрытого повреждения, старения или износа, интенсив-
ного воздействия различных факторов, под влиянием которых
происходит со .временем непрерывный рост величины отклонения
рабочих характеристик технического устройства от номинального
значения, что может привести к выходу величины этого откло-
нения за пределы установленных допусков. При внезапных от-
казах постепенно развивающиеся в техническом устройстве ко-
личественные отклонения в их характеристиках перерастают в
скачкообразное качественное изменение, при котором техниче-
ское устройство утрачивает свойства выполнять заданные функ-
ции.
Отказы как случайные события могут быть независимыми и
зависимыми. Если отказ какого-либо технического устройства
не является следствием отказа другого технического устройства,
то такой отказ является независимым.
Отказ, возникший вследствие отказа других технических
устройств, называется зависимым.
Все отказы технических устройств по своему происхождению
можно разделить на три группы:
— К онстр ук THIB но-п р о .и з в о дс т в ен н ы е отказы,
происходящие, -как привило, на нервом этапе эксплуатации вслед-
ствие недостатков в конструкции и технологии изготовления тех-
нических устройств, несовершенного контроля качества продук-
ции, т. е. вследствие недоработок, незамеченного брака производ-
ства и скрытых дефектов.
* В широком смысле под элементами системы могут подразумеваться не
только технические устройства, но в отдельных случаях физические и хими-
ческие агенты, среда, персонал операторов, летный состав и т. д.
12
— Эксплуатационные отказы, возникающие в про-
цессе эксплуатации вследствие различных случайных причин.
— Отказы, возникающие вследствие таких закономерных
причин, как износ и старение материалов. Они проявляются в
основном на последнем этапе эксплуатации.
Состояние технического устройства, при котором оно не со-
ответствует хотя бы одному из требований, установленному как
в отношении основных рабочих характеристик, так и в отноше-
нии второстепенных признаков, характеризующих внешнее со-
стояние, надежность крепления устройства и т. п., называется
неисправност ь.ю.
Все неисправности и отказы технических устройств происхо-
дят вследствие действия ‘различных факторов, представляющих
совокупность причин, отрицательно воздействующих в процессе
эксплуатации на состояние технических устройств.
К числу такого рода факторов относятся физические, биоло-
гические и психофизиологические факторы.
К психофизиологическим факторам относятся
действия людей в процессе эксплуатации технических устройств,
определяющиеся их способностями, уровнем подготовленности,
возможностями, потребностями, субъективными особенностями
характера и общим состоянием, которые могут привести к по-
вреждениям технических устройств.
К биологическим факторам относятся различные
воздействия животных и растительных организмов, наносящие
вред техническим устройствам.
К физическим факторам относятся физические явле-
ния, процессы и свойства среды, воздействующие на технические
устройства и оказывающие влияние на их состояние.
Физические факторы делятся на внешние и внутренние.
Внешние физические факторы являются совокуп-
ностью физических свойств внешней окружающей среды, оказы-
вающих влияние на работоспособность технических устройств.
Например, чрезмерно высокая или низкая окружающая темпера-
тура, осадки, высокая влажность воздуха, вредные химические-
примеси в атмосфере, низкое давление, действия лучистой энер-
гии, наличие в воздухе взвешенной пыли и т. д.
Внутренние физические факторы представляют
собой те явления и процессы, которые, развиваясь в технических
устройствах во время их функционирования, одновременно вли-
яют на состояние и рабочие режимы этих же технических уст-
ройств и их составных элементов,' а также технических устройств,
в'заимо'С'вяванных с ними. Например, вибрация, ударные воздей-
ствия, электроэрозия, внутренний перегрев и т. д.
Под влиянием длительного воздействия на технические уст-
ройства физических факторов происходит износ их рабочих
деталей и старение материалов, из которых они выполнены.
Износ характеризуется постепенным изменением формы и
13-
размеров рабочих поверхностей отдельных деталей технических
устройств, происходящим в процессе эксплуатации и приводя-
щим к ухудшению рабочих характеристик данного устройства
или к внезапному нарушению его исправности.
Старение характеризуется постепенным структурным измене-
нием материалов деталей технических устройств в процессе хра-
нения и эксплуатации, приводящих к ухудшению рабочих харак-
теристик данного устройства или к внезапному нарушению его
исправности.
Обеспечение надежности технических устройств осущест-
вляется на всех этапах их создания и применения, т. е. в перио-
ды их проектирования и изготовления, в процессе эксплуатации
и хранения.
К числу схемных и конструктивных способов обеспечения на-
дежности технических устройств относятся резервирова-
ние, применение различных средств защиты, подбор
более надежных с о ст а в н ы х э л е м е н т о в, ориентация
на применение облегченных режимов работы
элементов.
К специальным мероприятиям в процессе производства тех-
нических устройств относится отработка элементов, ко-
торые до их применения в системах подвергаются испытаниям
в рабочем режиме, близком к эксплуатационному.
Дефектные элементы в процессе испытания отказывают и
изымаются из дальнейшего употребления. Выдержавшие эти
испытания используются по назначению.
При вводе технических устройств в эксплуатацию применяет-
ся способ их т р е н и р о в к и или приработки. Устройства
до их передачи в эксплуатацию предварительно испытываются в
рабочем режиме, близком к эксплуатационному, до тех пор, пока
количество отказов не установится минимальным.
В процессе эксплуатации надежная работа авиационной тех-
ники обеспечивается путем проведения различных мер профи-
лактики.
Когда авиационная техника не используется по назначению,
для нее создаются условия хранения, позволяющие обеспечить
защиту ее от различных вредных влияний окружающей среды
во время ее бездействия.
§ 1.2. ОСНОВНЫЕ КОЛИЧЕСТВЕННЫЕ ХАРАКТЕРИСТИКИ
НАДЕЖНОСТИ
В настоящее время количественные критерии надежности по-
лучили широкое применение для оценки надежности технических
устройств .в процессе их проектирования и эксплуатации.
В основу теоретических изысканий, применяющихся для вы-
вода общих закономерностей теории надежности, а также для
поиска наиболее рациональных путей обеспечения надежности,
14
положены вероятностно-математические методы, справедливые
главным образом для непрерывных случайных .величин. Для ре-
шения прикладных задач по надежности на основе статистиче-
ского анализа данных, полученных в процессе эксплуатации, бо-
лее приемлемыми являются статистические методы и зависимо-
сти, справедливые для дискретных случайных величин. В свя-
зи с этим все основные характеристики надежности впредь рас-
сматриваются как с теоретико-вероятностной, так и со статисти-
ческой точек зрения.
Вероятность безотказной работы. Одним из основных коли-
чественных критериев надежности является функция надежности
или вероятность безотказной работы.
Вероятность безотказной работы — вероятность того, что за
определенное время работы технического устройства и в задан-
ных условиях эксплуатации отказ не произойдет.
/Д/) = вер (/j > ^). (1.1)
Другими словами, p(t) представляет собой вероятность то-
го, что величина заданного времени функционирования t мень-
ше, чем величина времени появления первого отказа ti.
Противоположная величина функции надежности p(t) —-
функция распределения времени появления отказа или вероят-
ность появления отказа
^(0 = вер(71< t). (1.2)
Сумма вероятностей безотказной работы и появления отказа
как противоположных событий равна единице:
P(t) + ч (1.3)
Если через N (I) обозначить число событий безотказной ра-
боты исследуемых на надежность однотипных технических уст-
ройств в течение времени t, через n(t) — число событий появ-
ления отказов в работе этих устройств в течение того же време-
ни, а через
ДГо = М(О) = ЛА(О + я(О (1.4)
— число однотипных технических устройств, первоначально' взя-
тых под наблюдение, то статистически вероятность безотказной
работы в соответствии с определением вероятности для любого
времени может быть вычислена по формуле
(1.5)
N о
Таким образом, статистическая вероятность безотказной ра-
боты выражается отношением количества исправных в течение
15
заданного времени однотипных технических устройств к числу
технических устройств, первоначально взятых под наблюдение.
При увеличении количества технических устройств No вели-
чина p*(t) сходится по вероятности к истинному значению функ-
ции надежности p (t), т. е.
= (1.6)Y
N <,-*«> Nq
Аналогично статистическая вероятность появления отказа
вычисляется по формуле
9*(^)=4F- (t7>
Очевидно, что с течением времени общее количество отказов-
n(t) в технических устройствах постепенно увеличивается и,
следовательно, согласно (1.7), эта величина и вероятность появ-
ления отказа </(/) являются монотонно нарастающими функция-
Р и с. 1.1. Характеристики вероятности появления отказа и
вероятности безотказной работы
тральную функцию распределения случайной величины — вре-
мени появления отказа технических устройств.
Характеристика p(t) имеет противоположный характер отно-
сительно кривой q(t) и изображает собой монотонно убываю-
щую функцию.
Очевидно, что
О < р (t) < 1; /1(0) = 1; р (t -> со) = О,
Аналогично
q (0) = 0; </(/-> оо) = 1.
16
Пример 1.1. В течение 300 часов налета каждым из 360 самолетов,
взятых под наблюдение, зарегистрировано 27 отказов курсовых систем. Како-
ва в этом случае статистическая вероятность безотказной работы данных
систем?
Согласно (1.3) и (1.7),
27
р* (300) = 1 — q* (300) = 1 - = 0,925.
На практике часто приходится иметь дело со случаем, когда
необходимо определить степень надежности авиационной техни-
ки в течение времени некоторой операции или даже в течение
одного полета, при условии, что данная авиационная техника
длительное время находится на эксплуатации и уже до начала
упомянутой операции или полета имеет некоторую наработку.
Вероятность безотказной работы технического устройства в
течение времени ta -г- tb при условии, что оно уже безотказно
проработало перед этим в течение времени ta, определяется ус-
ловной вероятностью
Р (АЮ = вер > tb - ta), (1,8)
где ti — время появления первого отказа с началом отсчета в
точке ta.
Если известна статистическая функция надежности (1.7),
т. е. известны ее значения
Р* (*а) = и р* (tb) = , (1.9)
/v0 /v0
то
= (1-10)
P(ta)
Из (1.9) и (1.10) следует
= (1-11)
N(ta)
Вероятность безотказной работы технических устройств в
течение времени при условии, что они безотказно прора-
ботали перед этим в течение времени 0 -г- ta, выражается отно-
шением количества исправно проработавших технических уст-
ройств в течение времени 0 -г- tb к количеству исправно прора-
ботавших технических устройств .в течение времени 0-н
Пример 1.2. Найти, пользуясь данными примера 1.1, статистическую ус-
ловную вероятность безотказной работы курсовых систем по истечении 300
часов налета каждым самолетом, если известно, что за это время произошли
отказы курсовых систем на 27 самолетах, причем 9 из них отказали в течение
первых 100 часов налета каждым самолетом.
р.(300/100)- ® „ 360—27
(V(100) N„ — л(100) 360—9
2, Румянцев Е. А. и др*
17
Плотность вероятности отказов. Для получения кривой по-
явления отказов статистическим методом весь диапазон времени
наработки однотипными техническими устройствами разбивает-
ся на равные отрезки:
Д^2> • ч i, где Д^г- — ti f-i—x •
В процессе длительной эксплуатации технических устройств
до момента появления отказа каждого из них производится учет
количества отказов Дпв Д/г2< •, Дм» приходящихся на соответ-
ствующие отрезки времени Д/ь Д£2, ч Д^г. Все отмазавшие тех-
нические устройства в дальнейшей эксплуатации не используют-
ся и новыми не заменяются.
Количество исправных технических устройств в процессе ис-
пытания все время уменьшается и в конце эксперимента стано-
вится равным нулю. На основании полученных в процессе
эксплуатации экспериментальных данных строится статистиче-
ская кривая плотности вероятности отказов. По оси абсцисс от-
кладывается время наработки с момента начала эксплуатации,
а по оси ординат — статистическая плотность .вероятности от-
казов, равная
Aft;
(1-12)
Согласно этому выражению, статистическая плотность вероят-
ности отказов есть отношение количества отказов однотипных
технических устройств в единицу времени, взятое для данного
отрезка времени, к числу технических устройств, первоначально
выбранных под наблюдение. (В литературе по надежности еще
нередко плотность вероятности называется частотой отказов,
что противоречит определению частоты события в курсах тео-
рии вероятностей).
Пример 1.3, Найти статистическое распределение плотности вероят-
ности отказов 500 самолетных угольных регуляторов напряжения, испытан-
ных на нормальном эксплуатационном режиме до полного отказа всех регу-
ляторов.
Отказы угольных регуляторов подсчитаны через каждые 100 часов испыта-
ния. Результаты испытаний и вычислений по формуле (1.12) приведены в
табл. 1.1.
Если перейти от дискретного спектра плотности вероятно-
сти отказов к непрерывному распределению, т. е. в (1.12) при-
нять Д/ 0, то получим выражение
(1.13)
7V0 dt V 7
Классическое распределение .времени появления отказов ха-
рактеризуется кривой (рис. 1.2,Г). В начальное время эксплуа-
тации, соответствующее периоду так называемого «детства» тех-
18
нических устройств, наблюдается повышенная плотность вероят-
ности отказов. На этом этапе обычно отказывают наиболее сла-
бые узлы и элементы, содержащие в себе скрытые производст-
венные дефекты. Особенно значительной плотность вероятности
отказов в этот период бывает у технических устройств, состоя-
щих из большого количества мелких элементов: радиоламп тран-
зисторов, реле, конденсаторов нт. д.
Таблица 1.1
№ П/П Mt в часах ft- Ю-з № п/п в часах Дл/ //10-8
1 0-100 9 0,18 16 1500—1600 3 0,06
9 100—200 13 0,26 17 1600—1700 5 0,10
•О 200—300 16 0,32 18 1700—1800 11 0,22
4 300—400 15 0,30 19 1800—1900 18 0,36
t> 400—500 11 0,22 20 1900—2000 27 0,54
6 500—600 6 0,12 21 2000—2100 38 0,76
7 600—700 3 0,06 22 2100—2200 48 0,96
8 700—800 2 0,04 23 2200—2300 55 1,10
9 800—900 4 0,08 24 2300—2400 52 1,04
10 900—1000 3 0,06 25 2400—2500 46 0,92
11 1000—1100 2 0,04 26 2500—2600 42 0,84
12 1100—1200 5 0,10 27 2600—2700 31 0,62
13 1200—1300 3 0,06 28 2700—2800 15 0,30
14 1300—1400 3 0,06 29 2800—2900 7 0,14
15 1400—1500 4 0,08 30 2900—3000 3 0,06
Ранние отказы могут быть устранены путем отбраковки эле-
ментов. Для этого, до применения элементов в аппаратуре, их
.заставляют работать в режиме, близком к расчетному.
Выдержавшие эти испытания элементы принимаются для
применения их в технических устройствах. Затем перед выпуском
с производства готовые технические устройства подвергаются в
течение определенного времени проверке в режиме приработки
и тренировки. Изделия, выдержавшие эти испытания, .могут быть
рекомендованы для эксплуатации.
Период рабочего' времени технических устройств, в течение
которого наблюдается повышенная частота отказов, вследствие
скрытых производственных дефектов, называется периодом
приработки (рис. 1.2,Г, отрезок кривой I).
Второй участок кривой распределения отказов соответствует
«зрелости» технических устройств, когда в процессе эксплуата-
ции возникают главным образом внезапные отказы, имеющие
случайный характер происхождения. Предсказать, когда они
произойдут, невозможно. Частота появления такого рода отка-
зов обычно бывает небольшой.
Период рабочего времени технических устройств, в течение
которого устанавливается наиболее низкая плотность вероятно-
2*
19
20
сти отказов, называется периодом нормальной экс-
плуатации (рис. 1.2,П, отрезок кривой II).
Последняя часть кривой распределения отказов соответствует
«старости» технических устройств, когда имеет место массовое
проявление отказов вследствие износа деталей технических уст-
ройств и старения материалов, из которых они изготовлены. На
этом участке кривой плотность вероятности отказов сначала зна-
чительно увеличивается, а затем ввиду сильного уменьшения
количества исправных технических устройств падает, снижаясь
постепенного до нуля.
Период рабочего времени технических устройств, в течение
которого наблюдается значительное повышение плотности веро-
ятности отказов вследствие износа деталей и старения их мате-
риала, называется периодом износа и старения (рис.
1.2,Г, отрезок кривой III).
Плотность времени появления ранних отказов, возникаю-
щих вследствие наличия в устройствах производственных дефек-
тов, хорошо согласуется с распределением Пуассона (рис. 1.2,Л)
Tz
(1-14)
где Тта — безразмерное математическое ожидание для рас-
пределения А, выраженное целым числом отрезков
времени;
t — текущее безразмерное количество отрезков време-
ни наработки, выраженное целым числом отрезков
времени;
£ — единичный коэффициент нормирования, отождеств-
ляющий собой размерную величину, равную еди-
нице.
Распределение времени появления внезапных отказов
(рис. 1.2,5) может быть выражено экспоненциальной формулой
_ t__
= Ттб, (1.15)
* tn б
Tjjfi Tm6 — математическое ожидание распределения Б.
Плотность времени появления отказов, возникающих вслед-
ствие износа и старения (рис. 1.2,5), хорошо согласуется с кри-
вой нормального закона распределения
У-Гт6У
в . (1.16)
fAt} = - * е
ав 1/ 2тс
21
Применяя, согласно (1.7), в выражении (1.14) параметр
q (t), получим
Ж = =-^> (1-17>
di dt
где плотность вероятности отказов интерпретируется как ско-
рость увеличения функции распределения или как скорость убы-
вания функции надежности.
Интенсивность отказов. С течением времени технические
устройства, находящиеся на эксплуатации, как это следует из
рис. 1.1, становятся все менее и менее надежными. Поэтому не-
обходимо располагать такой характеристикой, которая позволи-
ла бы оценить степень надежности технического устройства в
каждый данный момент. На первый взгляд может показаться,
что степень надежности технического устройства полностью ха-
рактеризует плотность вероятности отказов. Однако это не так..
Допустим, проводятся испытания на надежность 1000 одно-
типных технических устройств. В первые десять часов работы
отказывает 50 технических устройств. После 300 часов работы
осталось всего 100 исправных технических устройств. В после-
дующие десять часов работы из них отказывают 10 технических
устройств.
Статистическая плотность вероятности отказов, согласно
50
(1.12), в начальный момент испытания составляет --------- =
1000-10
== 0,005, а через 300 часов работы равна: ------=0,001, т. е.
1000-10
•общее количество отказов в единицу времени сокращается ®
5 раз, однако, несмотря на это, оказывается, что в начальный мо-
мент технические устройства работают надежнее, так как в этом
случае за каждый час работы отказывает только одно техниче-
ское устройство из 200, а после 300 часов работы за один час от-
казывает одно техническое устройство из 100. Плотность веро-
ятности отказов позволяет оценить плотность вероятности появ-
ления отказов технических устройств среди их множества, перво-
начально взятого под наблюдение, а в данном случае для оценки
надежности технического устройства необходима характеристи-
ка, выражающая плотность вероятности появления отказа от-
дельно взятого технического устройства.
Такой характеристикой надежности является интенсивность*
отказов X. Она определяется количеством отказов в единицу
* В некоторых литературных источниках интенсивность отказов в отличие
от общепринятой терминологии именуется опасностью отказов, а также лам-
бда-характеристикой.
22
времени, отнесенным к количеству исправно действующих в
данный момент технических устройств, т. е.
Д/г,-
(1.18)
где Nml — среднее статистическое число исправно действующих
технических устройств в течение заданного времени.
Таким образом, интенсивность отказов для заданного отрез-
ка времени является отношением количества отказов однотип-
ных технических устройств в единицу времени, взятым для задан-
ного промежутка времени, к среднему числу исправно действую-
щих технических устройств в течение этого же промежутка вре-
мени.
Пример 1.4. Пользуясь данными примера 1.3, вычислить распределение
интенсивности отказов угольных регуляторов.
В основу вычисления берется формула (1.18).
Среднее число исправно действующих регуляторов в течение /-того от-
резка времени с достаточной степенью точности равно:
i-1
Nml " ~ •
Л-1
Результаты вычисления приведены в табл. 1.2
Таблица 1.2
№ п/п Nml № п/п Nmi
1 495,5 0,182- 10 - 3 16 399,5 0,0751 - IO-8
2 484,5 0,264 - IO-3 17 395,5 0,101 - IO-3
3 470 0,340 - 10—3 18 387,5 0,286- IO-®
4 454,5 0,330 - io—3 19 373 0,483- IO-»
4 441,5 0,249- 10 “8 20 350,5 0,770-10-8
6 433 0,139 • 10“3 21 318 1,197 • IO-8
7 428,5 0,070- 10-3 22 275 1,746 • IO”3
8 426 0,047 IO—» 23 223,5 2,460-10-s
9 423 0,095 - IO-3 24 170 3,059-10-8
10 419,5 0,072-10-3 25 121 3,802 - IO-8
И 417 0,048- 10—3 26 77 5,455 - Ю-з
12 413,5 0,129-10-3 27 40,5 7,654 - IO”3
13 409,5 0,0733- IO-3 28 17,5 9,143-10-e
14 406,5 0,0738 -IO—3 29 6,5 10,769- IO-»
15 403 0,0995-Ю-з 30 1,5 50,000- Ю-з
Кривая интенсивности отказов изображена .на рис. 1.3.
Переходя от выражения (1.18), справедливого для дискрет-
23
ных вычислений, к выражению непрерывного распределения,
т. е. считая, что > 0, получим
1 dn(t)
N(f) dt
(1-19)
Рис. 1.3. Характеристика интенсивности появ-
ления отказов
Согласно (1.19), интенсивность отказов есть плотность веро-
ятности времени появления отказа одного отдельно взятого из
множества технического устройства или, что одно и то же, есть
плотность вероятности времени появления отказа для множества
однотипных технических устройств при условии, что каждый
данный момент времени t, для которого определяется эта вели-
чина, принимается за начальный.
Среднее время безотказной работы. Среднее статистическое
время безотказной работы однотипных технических устройств
(или среднее время появления в каждом из них первого отказа)
определяется как отношение суммарной наработки к общему
числу этих устройств
h
= (1.20)
М)
где tj — время появления отказа /-того технического устрой-
ства.
Математически среднее время безотказной работы множества
однотипных технических устройств определяется как математи-
24
чеокое ожидание времени наработки технического устройства до
появления в нем первого отказа
оо
Tni^tf(t)dt. (1.21)
о
Путем замены в (1.21) значения f(t), согласно (1.17), сред-
нее время безотказной работы может быть выражено через ве-
роятность безотказной работы
Гт=- \t^dt=- [tdp(t), (1.22)
J dt J
0 0
или
co оо оо
Tm = -tp(t) + ^p(t)dt~ ^p(t)dt. (1.23)
0 0 0
Отсюда видно, что среднее время 'безотказной работы чис-
ленно равно площади, ограниченной .кривой вероятности безот-
казной работы и осями координат (см. рис. 1.1).
Аналитические зависимости между основными характеристи-
ками надежности. Все основные характеристики надежности свя-
заны между собой функциональной зависимостью.
Выражение такой зависимости между функцией надежности,
плотностью вероятности и интенсивностью отказов можно полу-
чить путем одновременного умножения и деления правой части
равенства (1.19) на 'Af0 и применения формул (1.5) и (1.13)
40 = ^, (1-24)
P(t)
или
/(/) = /,(» (1.25)
Применяя в (1.24) выражение (1.17), получим зависимость
интенсивности отказов от вероятности безотказной работы
(L26)
р(/) dt
Интегрируя это уравнение, получим
t
- Jx(£) d7=lnp(0, (1-27)
о
или
/2(Z) = e ° . (1.28)
25
Подставляя выражение (1.28) в равенство (1.25), получим
t
- j х (о at
° . (1.29)
Подставляя в (1.23) значение p(t) из (1.28), получим среднее
фремя безотказной работы, выраженное через X (7):
оо t
р - р. (Z) dt
rm= е b dt. (1.30)
о
Три последние формулы позволяют вычислить основные ха-
рактеристики надежности иа основании статистических данных
относительно X (£), полученных в процессе эксплуатации.
Статистическое значение вероятности безотказной работы си-
стемы можно получить посредством следующего выражения:
k z k z
Pk*=\-M S S s /г= и 2 л, (1.31)
i-1 z=l Z=1 /=й-Н
где z — полное число отрезков распределения случайной вели-
чины t.
Аналогично для закона непрерывного распределения, соглас-
но (1.3) и (1.17), получим
t • co t оа
/Н0=1 - J/(0^= \ f^dt- \f(t)dt=^f(t)dt. (1.32)
о о о t
Пользуясь формулами (1.25) и (1.32), получим еще одно вы-
ражение
= (1-33)
\f(t)dt
t
(сводную таблицу формул характеристик надежности см. п. I).
Зависимости между характеристиками надежности для слу-
чая постоянства величины интенсивности отказов. Внезапные от-
казы, имеющие случайный характер происхождения, подчиняют-
ся закону распределения, вытекающему из условий постоянства
интенсивности отказов. Поэтому в течение периода нормальной
эксплуатации (рис. 1.2,Г, интервал II), когда действие других
законов распределения весьма 'незначительно, можно без боль-
шой погрешности считать, что интенсивность отказов техниче-
ских устройств от времени не зависит и практически является
постоянной величиной.
26
Для такого ’случая вероятность безотказной работы, соглас-
но (1.28), равна:
^(/) = е-х'. (1.34)
Плотность вероятности отказов, согласно (1.34),
f(t) = X e~w
и, согласно (1.31),
оо со
Тт = J e-w ± J e-w d ()d) = ± .
О о
(1.35)
(1.36)
Пример 1.6. Интенсивность отказов самолетных генераторов в течение
периода нормальной эксплуатации практически является постоянной величи-
ной и равна 0,021 -10—8.
Пользуясь экспоненциальным законом распределения, определить для
времени наработки генератора t = 500 час вероятность безотказной работы,,
частоту отказов и среднее время безотказной работы.
Согласно выражениям (1.34), (1.35), (1.36) и п. 2, получим
р (500) = е~0’021 • м“8 500 = 0,9896;
/(500) =0,021-10~3 е~0-021 • 10”3 • 5(Ю= 0,02078-10~з;
Т
1П
1
0,021 • IQ-3
= 47600 час.
Подставляя значение X из (1.36) в (1.34), получим
________________________________t
P(t) = e ?m. (1.37)
При
р(Р) = -^0,37.
Таким образом, для обеспечения высокого уровня надежно-
сти невосстанавливаемых технических устройств следует выби-
рать срок службы в зависимости от тактико-технических требо-
ваний намного .меньше, чем среднее время .безотказной работы.
Подставляя в выражение (1.35) значение X из равенства
(1.36), получим зависимость между плотностью вероятности от-
казов и временными параметрами
/(Z)=— е 7«. (1.38)
/и
27‘
Таким образом, если интенсивность отказов является посто-
янной величиной, то вероятность безотказной работы и плот-
ность вероятности отказов являются экспоненциальными функ-
циями.
Если срок службы технического устройства во много раз
меньше среднего времени безотказной работы, то характеристи-
ки надежности удобно рассчитывать по упрощенным формулам.
Разлагая функцию (1.37) в ряд и пренебрегая всеми члена-
ми ряда, имеющими порядок малости выше первого, получим
р(/)^1~-^-=1-Х/; (1.39)
т
(1.40)
* т
При экспоненциальном законе распределения выражение
(1.10) может быть переписано в следующем виде:
-ы
(1-41)
е *
тде е & «— есть безусловная вероятность безотказной работы
системы за время, равное tb — ta.
Таким образом, при X = const вероятность безотказной ра-
боты в течение некоторого времени совершенно не зависит от ве-
личины наработки данного технического устройства, предшест-
вующей отрезку этого времени.
Глава II
ЭКСПЛУАТАЦИОННАЯ НАДЕЖНОСТЬ
§ 2.1. КОЛИЧЕСТВЕННЫЕ ХАРАКТЕРИСТИКИ НАДЕЖНОСТИ
ВОССТАНАВЛИВАЕМЫХ ТЕХНИЧЕСКИХ УСТРОЙСТВ
Настоящий 'Параграф посвящен ’количественным характери-
стикам надежности восстанавливаемых технических устройств,,
т. е. характеристикам, которые учитывают факт восстановления
или замены неисправных технических устройств на исправные,
но не учитывают время, необходимое на восстановление или за-
мену неисправных технических устройств. Предполагается, что-'
возникающие отказы технических устройств устраняются мгно-
венно.
Такого рода характеристики надежности авиационной техни-
ки в отличие от аналогичных характеристик невосстанавливае-
мых технических устройств удобны для .практических целей вви-
ду возможности определить их, используя статистические данные-
об отказах, полученные в авиационных частях.
Средняя статистическая плотность вероятности отказов оп-
ределяется как отношение количества отказавших элементов &п(
в единицу времени к числу элементов N3, находящихся в дей-
ствующих системах, при условии, что все отказавшие элементы-
мгновенно восстанавливаются или заменяются исправными, т. е.
число элементов, находящихся под наблюдением в течение за-
данного времени наработки, сохраняется постоянным
Суммарная статистическая плотность вероятности отказов,
системы выражается полным количеством отказов составных
элементов одной данной системы в единицу времени, взятым в-
границах заданного времени наработки t;
= (2.2));
Среднее время наработки между двумя последующими отка-
зами определяется отношением времени наработки t техническо-
го
го устройства к полному числу отказов элементов, возникших
в нем за это время.
7’мо = -^?. (2.3)
/г (О
Если при оценке надежности учитываются отказы одновре- ’
менно у 'N однотипных восстанавливаемых технических уст-
ройств, то среднее время наработки между двумя последующи-
ми отказами может быть представлено в виде:
w
1^7
По = , (2.4)
2
М
где tj — время наработки /-того технического устройства;
tij — число отказов /-того технического устройства за вре-
мя его наработки .
Сравнивая выражения (2.2) и (2.3), получим равенство
Гмо=г^- (2’5)
.Можно доказать [22], что для любого закона распределения вре-
мени безотказной работы значение средней частоты отказов вос-
станавливаемых устройств в установившемся режиме их рабо-
ты по истечении некоторого времени, практически равного
Т2 1
t = -n—i имеет предел, равный •
о» (0 = ~~ = const. (2.6)
тт
Коэффициенты отказов. В качестве вспомогательного крите-
рия надежности элементов системы применяются коэффициенты
отказов.
Коэффициент отказов представляет собой отношение числа
отказов однотипных элементов или блоков пв к общему числу
отказов в системе /?.с
£и = —• (2.7)
«с
Величина коэффициента отказа позволяет судить о том, ка-
кой тип элемента и в какой степени влияет на надежность систе-
мы в целом.
Однако коэффициент отказа не дает возможности оценить,
какой тип элементов системы менее надежен, а какой более на-
.дежен,
-30
Для этой цели может быть использован относительный коэф-
фициент отказов.
Относительный коэффициент отказов определяется по фор-
муле
^оо —
n3Nz
ncN3
(2-8)
где N3 — количество элементов данного типа в системе;
Nc — полное количество элементов всех типов в системе.
Как коэффициент отказов, так и относительный коэффициент
отказов можно выразить через некоторые другие характеристики
надежности.
Количество отказов системы вследствие неисправных элемен-
тов данного типа за промежуток времени М может быть опре-
делено формулой
пэ = N3w3bt, (2.9)
где °>э — средняя плотность вероятности отказов элементов
данного типа.
За это время в системе произойдет всего отказов:
«С = ЙСД/, (2.10)
где 9С — суммарная плотность вероятности отказов в системе.
Подставив оба эти выражения в (2.7), получим
k0= N3-~ . (2.11)
Ус
Для случая 1-+ со
<оэ -= Хэ
и,следовательно,
k* = N3^-. (2.12)
Аналогичным способом можно найти зависимость относи-
тельного коэффициента отказов от средней и суммарной плот-
ности вероятности отказов
^00=^^-.
^00= чф-.
При Х = const
(2.13)
(2.14)
Таким образом, коэффициенты отказов в некоторых случаях
могут быть выражены через интенсивность отказов.
31
Пример 2.1. В процессе эксплуатации 36 образцов самолетной аппара-
туры произошло 80 отказов.
Определить коэффициенты отказов элементов аппаратуры и относитель-
ные коэффициенты отказов, если заранее известно количество однотипных эле-
ментов в каждом комплекте аппаратуры. Данные о количестве элементов
каждого типа, распределение отказов между типами элементов и полученные
результаты вычисления коэффициентов сведены в табл. 2.1.
Таблица 2.1
Наименование элементов Кол-во мэ Число отказов «э ь Пэ £ о о •ад
Трансформаторы 22 1 0,0125 0,163
Радиолампы 43 26 0,325 2,16
Конденсаторы 63 15 0,1875 0,844
Потенциометры 20 3 0,0375 0,54
Сопротивления 100 8 0,1 0,287
Реле 26 2 0,025 0,276
Штепсельные 13 5 0,0625 1,38
разъемы
Всего 287 80
§ 2.2. ЭКСПЛУАТАЦИОННАЯ НАДЕЖНОСТЬ АВИАЦИОННОЙ ТЕХНИКИ
И ЕЕ КОЛИЧЕСТВЕННЫЕ ХАРАКТЕРИСТИКИ
Эксплуатация авиационной техники и ее надежность. Про-
цесс эксплуатации авиационной техники не следует рассматри-
вать как непрерывный процесс. Обычно выполнение полетов и
заданных боевых функций чередуется с простоем авиационной
техники, который образуется вследствие двух причин:
— бездействия исправной авиационной техники ввиду отсут-
ствия необходимости ее применения или наличия причин и усло-
вий, препятствующих производству полетов. В результате обра-
зуется так называемый конъюнктурный простой;
— проведения мероприятий, связанных с профилактикой и
текущим ремонтом, в результате чего образуется вынужденный
простой.
Таким образом, текущее календарное время эксплуатации
авиационной техники складывается из трех компонент:
ta = it + ^вп + 4п , (2.15)’
где fa — суммарное время наработки технического устройства
в течение определенного календарного времени экс-
плуатации ta\
/вп — суммарное время вынужденного простоя за это же
время эксплуатации;
/кп — суммарное время конъюнктурного простоя.
32
Время вынужденного простоя летательного аппарата, взятое
за некоторое календарное время эксплуатации, выражается
суммой:
2-вп ~ "I" ^нпл ) (2.16)
где tnn — плановое время вынужденного простоя, которое обра-
зуется вследствие проведения регламентированных эксплуата-
ционных работ, таких, как подготовка к полетам, регламентные
и профилактические работы, доработки и т. д. Эта величина
вполне определенная и практически пропорциональна времени
наработки технических устройств;
/нпл — неплановое время вынужденного простоя, которое оп-
ределяется временем восстановления отказавших технических
устройств и простоем авиационной техники вследствие ожидания
ремонта. Эта величина случайная и определяется суммарным
временем , образующимся в связи с восстановлением отка-
завшей в процессе работы авиационной техники в течение опре-
деленного календарного времени эксплуатации.
Критерием эксплуатационной надежности авиационной техни-
ки является коэффициент эксплуатационной готовности, который
представляет собой отношение полного времени наработки в те-
чение определенного срока эксплуатации к сумме полных времен
наработки и вынужденного простоя, взятых за этот же срок
эксплуатации.
Кэг = --^— . (2.17)
‘S + ‘ИП
Коэффициент эксплуатационной готовности является крите-
рием, характеризующим основное тактическое качество авиаци-
онной техники, — готовность ее к применению. Его величина за-
висит не только от надежности и восстанавливаемости, а также
от эксплуатационного совершенства; характеризующегося сте-
пенью ее приспособленности к проведению регламентных работ
и подготовке к полетам.
Ввиду того, что плановое время вынужденного простоя прак-
тически не является случайной величиной и величина его отно-
шения к времени наработки не зависит от количества возникаю-
щих отказов авиационной техники, то в качестве количественной
характеристики эксплуатационной ' надежности применяется
коэффициент готовности технического устройства
=---------, (2.18)
выражающий собой вероятность того, что система в любой мо-
мент времени находится в исправном состоянии.
3. Румянцев Е. А. и др.
33
Поскольку
^2 р — ) Т'рем >
h = п ( h ) Тыо,
где Тыо и Трем —средние'времена наработки между отказами и
восстановления технических устройств, то равенство (2.18) мо-
жет быть выражено в виде:
В данном выражении 4,- определяется посредством коли-
чественных характеристик долговечности технических устройств
(Ты0) и их восстанавливаемости (Тоеи).
Согласно (2.5), выражение (2.19) может быть представлено
в виде:
или, наконец, при /->оо, когда, согласно (2.13), 7\,0 Т,п, по-
лучим
Кг =-------------• (2.21)
Т 4- Т v
‘ m Г 1 рем
Пример 2.2. Среднегодовой налет самолетов равен 450 часам. За это
время каждый самолет подвергается регламентным работам в течение десяти
суток. В среднем 60 часов приходится на текущий ремонт, подготовка к
каждому часу полета занимает 1 чае. 30 минут. Определить коэффициент го-
товности, коэффициент эксплуатационной готовности и степень использования
самолетов для полетов в течение года
ft, + ts реа
450
450 4- 60
0,885;
24-365 24-365
Восстанавливаемость. Восстанавливаемые технические уст-
ройства, по мере появления в них отказов, подвергаются ремон-
ту, а затем после восстановления снова включаются в работу.
Такого рода процесс протекает периодически. Следователь-
но, эксплуатация восстанавливаемых технических устройств
включает в себя две главные составные части: рабочий процесс
и процесс -восстановления отказавших технических устройств.
Процесс восстановления технических устройств сводится к
отысканию причин отказов, т. е. к определению места и харак-
34
тера неисправности, вызвавшей отказ, а затем к устранению этой
неисправности.
, Любая неисправность в общем случае вносит >в эксплуата-
цию элемент случайности. Величины времени, затрачиваемого на
отыскание и устранение неисправности, а также стоимость вос-
становления технических устройств являются случайными вели-
чинами, поскольку характер неисправности может быть каким
угодно произвольным.
Основными показателями количественной оценки эксплуата-
ционной надежности технических устройств являются характери-
стики восстанавливаемости.
Восстанавливаемость — свойство конструктивной
приспособленности технических устройств к выявлению, устра-
нению и предупреждению в них неисправностей.
Численной мерой восстанавливаемости является вероятность
восстановления, под которой понимается вероятность того, что за
определенный интервал времени и в заданных условиях ремон-
та неисправное техническое устройство будет восстановлено.
WpeJ = вер (/0 < /рем), (2.22)
где д0 — фактическое время восстановления;
/рем — текущее время процесса восстановления.
Другими словами, U (/рем) представляет собой вероятность то-
го, что заданная величина текущего времени процесса ремонта
./РеМ больше, чем фактическая величина времени восстановле-
ния /о-
Статистическая вероятность восстановления неисправных тех-
нических устройств выражается следующим равенством:
111 (Сем)
= (2.23)
7^0
где ^(/рем) - число восстановленных -неисправных технических
устройств;
п0 — число взятых под наблюдение неисправных тех-
нических устройств, подлежащих ремонту.
Аналогично количественным характеристикам надежности
применяются характеристики, оценивающие восстанавливае-
мость: плотность вероятности восстановления, интенсивность
восстановления и среднее время восстановления.
Статистическая плотность вероятности восстановления
-где Д£рем i — i-тый отрезок времени ремонта;
Д/нг — число технических устройств, восстановленных в
течение i-того отрезка времени.
3*
35
Аналогично для непрерывной функции
1 tZ/7Z(£peM)
?(^рем)— „
'‘'О и<,рем
Статистическая интенсивность восстановления
&nit
ti kt
"'ml “‘•рем I
(2.25)
(2.26).
где nmi — среднее количество неисправных технических уст-
ройств, находящихся в течение f-того отрезка времени в ожида-
нии ремонта.
Для непрерывной функции
1 ^И(^рем)
^(^рем) ^рем
(2.27}
где и(/рем)— число неисправных технических устройств в задан-
ный момент ^реы, подлежащих восстановлению.
Статистическое среднее время восстановления
2 *рем
'р ____ ________
рем — п
и для непрерывной функции
рем J ^рем Т (^рем)^^рем •
0
(2.28)
(2.29)
По аналогии с (1.25); (1.32); (1.28) и (1.23) также можно до-
казать справедливость следующих равенств:
? (^рем) [1 (^рем)] Iх Дрем)> (2.30)
t
U (^рем) = J <р (W ; (2.31)
J ^рем
<%м)=1-е° ;
Т'рем = J Е1 — U (^рем)] <^рем •
О
(2.32)
(2.33)
Восстановление авиационной техники путем замены отказав-
ших устройств на исправные. В условиях эксплуатации авиаци-
онной техники, при наличии некоторого оборотного фонда за-
пасного технического имущества, оперативность восстановления
неисправной авиационной техники может быть значительно по-
36
вьгшена путем замены отказавших агрегатов, блоков и уст-
ройств на исправные.
В этом случае время восстановления авиационной техники
сильно сокращается до величины, равной времени замены отка-
завшего технического устройства. Поэтому на практике значи-
тельная часть отказов авиационной техники устраняется путем
.замены неисправных устройств или узлов на исправные. Лишь
некоторая часть из них может быть устранена путем проведения
ремонтных работ непосредственно на летательном аппарате.
Замена неисправных агрегатов на исправные производится
главным образом в процессе проведения регламентных работ и
профилактического ремонта.
Суммарное время, затраченное на ремонт и замену неисправ-
ной авиационной техники вследствие появления п отказов, опре-
деляется следующим выражением:
Я
SZP3= [n-n3(U] ^рем + М^пИз, (2.34)
где Грел — среднее время вынужденного простоя, необходимое
для обнаружения неисправности и восстановления
неисправной авиационной техники путем ее ремонта
в условиях эксплуатации;
Г3 — среднее время вынужденного простоя, необходимое
на обнаружение неисправности и замену неисправ-
ных блоков на исправные;
п — общее число отказов авиационной техники;
я3 (7П) — количество отказов, устраненных и предупрежден-
ных в течение времени профилактики ta путем за-
мены неисправных устройств на иопра-вные.
Среднее время вынужденного простоя, необходимое на вос-
становление неисправной авиационной техники частично путем
замены на исправную, а частично путем ремонта, равно:
[«-«зО Грем+ пМ)Т3
/ р3 . (2.35)
/ь
Тогда при восстановлении неисправной авиационной техни-
ки путем частичной замены ее на исправную выигрыш в сокра-
щении времени вынужденного простоя по отношению к аналогич-
ной величине, взятой для авиационной техники, восстанавливае-
мой только путем ремонта, выразится формулой
р _ 7"рем_______________11 Л>ем_______ /О QR\
°рз „ г м мт 1 „ и \ т ’ lz-0D/
7р з [ «з (А1)] ^рем «з (U Г3
Если вероятность восстановления системы путем ремонта
t
Ц,(/) = 1-е 7рем (2.37)
37
и .вероятность восстановления системы как путем ремонта, так и
замены неисправных технических устройств на исправные
Ц>з(Ч = 1-е 7₽3,
то путем простого преобразования получим
1-Ц>(0
учитывая (2.36), имеем
1-г/р(0
_____Р 4 ’ __ е рем
1-t/psW
(2.38)
(2.39)
(2.40)
Откуда
В„з = 1 + in 1 . (2.41)
t 1~Ц>з(0
Среднее время восстановления авиационной техники путем
замены 'неисправных технических устройств на исправные, со-
гласно (2.36), будет выражаться формулой
'д(1 — Вр3)
Д3 Вр3
Т
1 рем
(2.42)
+ 1
Пример 2.3. Среднее время восстановления авиационной техники по-
средством ремонта отказавшей аппаратуры в условиях эксплуатации равно
40 часам. Однако таких отказов, которые вызывают необходимость производ-
ства ремонта, всего б°/о от общего числа отказов п. Все остальные отказы
устраняются путем замены неисправных технических устройств блоков или
элементов на исправные.
Вероятность восстановления авиационной, техники в течение 10 часов
равняется 0,9. Определить, какой получается выигрыш во времени восстанов-
ления неисправной авиационной техники путем замены блоков и частичного
ремонта по отношению к восстановлению авиационной техники только посред-
ством ремонта, и определить величину среднего времени восстановления авиа-
ционной техники путем замены.
Вероятность восстановления авиационной техники посредством ремонта
по истечении 10 часов
___ю
Л/р(10)=1 —е 40 = 1 - 0,9753 = 0,0247.
Согласно (2.41), получим выигрыш во времени восстановления, равный
величине:
D 1 , 40 . 1 - 0,0247 Q й_
BD3 = 1 + •— In---------------- 9,8б.
Р 10 < —
1-0,9
38
Пользуясь формулой (2.42), находим среднее время устранения отказов
путем замены
т =
1 3 -
1
0?95 ’
1 - 9,85
9,85
+ 1 40 = 2 часа.
Количественная оценка эксплуатационной надежности. При
определении надежности таких восстанавливаемых технических
устройств, как различные сложные системы автоматического
управления, электронно-вычислительные машины, требуется учи-
тывать вынужденный простой этих устройств, появляющийся при
отыскании и устранении неисправностей.
Кроме того, надо учитывать, что восстанавливаемые устрой-
ства в любой заданный момент начала отсчета времени могут
находиться в одном из двух состояний: исправном и неисправ-
ном, причем время неисправного состояния технических уст-
ройств определяется временем устранения их неисправности.
Исправное состояние восстанавливаемого устройства в тече-
ние заданного периода рабочего времени i & определяется
следующими двумя необходимыми условиями:
— наличием исправного состояния в любой данный момент
времени t, принятый за начало отсчета;
— непоявлением отказа в полуинтервале времени t -н &, т. е.
исключая момент t.
Количественной мерой эксплуатационной надежности являет-
ся функция эксплуатационной надежности или вероятность ис-
правного состояния технического устройства в течение всего за-
данного периода рабочего времени t &:
Л(9)=Л(^)Р(&). (2.43)
Оно выражается произведением вероятности исправного со-
стояния технического устройства в любой произвольно выбран-
ный момент времени t < принятый за начало отсчета времени
работы ро(О> и вероятности непоявления отказа технического
устройства в течение заданного рабочего времени t -ь '4, обозна-
чаемой р (й ).
Первый сомножитель выражения (2.43) равен: .
(2.44)
где /V — некоторое постоянное количество восстанавливаемых
технических устройств, находящихся под наблюде-
нием;
N (/) — количество восстанавливаемых технических устройств,
находящихся в данный момент t в исправном состоя-
нии.
39
Аналогично вероятность неисправного состояния технического
устройства в любой данный момент t выражается следующим
равенством:
<7oW = ^, (2.45)
где п(t) — количество неисправных технических устройств’ на-
ходящихся в данный момент t в стадии восстановления.
Очевидно, что
А (П+ <7о(О = 1- (2.46)
Средняя эксплуатационная статистическая плотность вероят-
ности .отказов, характеризующая рост количества неисправных
технических устройств в единицу времени с учетом восстановле-
ния технических устройств, ранее отказавших в работе, равна:
(2.47)
N dt
где
cZn0 (zf) = dn (t) — dm (/); (2.48)
dn(t) — число отказов, возникших в технических устройствах
за интервал времени dt;
dm(t) — число восстановленных технических устройств
неисправных за этот же интервал времени dt.
Таким образом,
1 dn,(t) 1 cfrn(t)
N dt N dt ’
или
__ 1 dn(t) N(t) 1 din(t) n(t)
” A/(i) dt N ii (0 ~dt XF
Из (1.19), (2.27) и (2.50) получим
®(0 = ЧО/М*)-Р-(П9о(<).
Так как
Q _ ______ dpa (0
dt
то выражение (2.51) примет вид:
= - k (t)p0 (t) + И (О <70 (t).
из числа
(2.49)
(2.50)
(2.51)
(2.52)
(2.53)
40
В результате замены </©(£) из (2.46) получим следующее
дифференциальное уравнение:
at
(2.54)
Его решение имеет вид:
A(/) = e-H’'W + HWld/ [ J и (/) еИчп + НОВи dt + C ] . (2.55)
При постоянных значениях Аир.
/?0(^) = е-
ep.+rt<4- с
(2.56)
При вычислении постоянной интегрирования С можно исхо-
дить из двух 'предположений: или, что в момент начала эксплуа-
тации техническое устройство исправно, т. е. ро(О) — 1, или, на-
оборот, что оно в начальный момент заведомо неисправно, т. е.
До(О)=О.
При/?о(0) = 1
+ Н
тогда
aoW=441+—е~(Х+11И
A -f- }i L |1
при
А(0) = 0;
С2 = -^-;
А + р.
Pio (О = Г1 - — е-(Х+р') ‘
А + Р L и
(2.57)
(2.58)
(2.59)
(2.60)
Графики изменения /?ю(0 и p2o(t) представлены на рис. 2.1.
При увеличении t эти величины довольно скоро асимптоти-
чески приближаются к'Постоянной величине —!— .
X -Г р
Для того, чтобы оценить, в каких случаях можно считать
р0 — const; необходимо выяснить, при 'каких условиях производ-
ная от ро(О будет иметь величину, близкую к нулю.
Например, для функции (2.56)
dpio(t)
dt
= — X g” (Ь+р«) t ,
(2.61)
41
Приравняем эту величину некоторому весьма малому числу
s 1, позволяющему пренебречь изменением 'величины ро(О
при дальнейшем увеличении до некоторого значения tc, :
е = X е- tCt (2.62)
или
In —
‘с. - - ГТ? <мз>
Рис. 2.1. Характеристика вероятности исправного со-
стояния Ро(О
Таким образом, по истечении времени, равного tC1, можно
практически считать pw ~ const.
Аналогично можно найти время £<?„> мри котором можно
практически считать р<м const.
In —
А-ЙТ (2-64>
Если допустить, что
H = (2.65)
* tn * рем
то, согласно (2.21),
42
Таким образом, заменив первый сомножитель в (2.58) и
(2.60) коэффициентом готовности, получим
Ао(0 = Кг
1 2l e-(>.+ii) t .
и J
(2.67).
Ао(О = А'г[1 -е-О+и-Н]. (2,68).
Практически обычно рассматривают установившийся процесс-
и считают, что
^о=7Гг. (2.69)
Вероятность безотказной работы в течение полуинтервала
времени 0-:Т, являющаяся вторым сомножителем правой части
выражения (2.43), равна:
___t
p(t) = e~rm. (2.70)
Тогда из (2.69) и (2.43) получим
t
pAf)-Krp{t)^K^ (2.71)
или
—р— е-?<
(2.72)
О законе распределения времени восстановления. В предыду-
щих выводах для восстанавливаемости был принят, как и для
вероятности появления отказа, экспоненциальный закон рас-
пределения (2.37).
Однако такое допущение является лишь грубым приближе-
нием к действительности. Обычно на восстановление неисправ-
ного технического устройства требуется время, которое во вся-
ком случае не меньше некоторой определенной величины.
Ввиду этого экспоненциальное распределение времени вос-
становления нельзя признать удовлетворяющим этому условию.
Согласно экспоненциальному закону распределения, значитель-
ная доля случаев восстановления характеризуется весьма крат-
ким временем восстановления. Однако следует иметь в виду,
что практически персонал, обслуживающий авиационную техни-
ку, не в состоянии почти мгновенно приступить без затраты не-
которого времени, связанного с подготовительными операциями,,
к восстановлению очередного неисправного технического уст-
ройства. Таким образом, возникает необходимость внесения
корректива в те жесткие ограничения, которые вытекают из-,
экспоненциального закона распределения.
4$
В этом отношении наиболее приемлемым является разновид-
ность гамма-распределения:
I 7 У
I / I 7? —1 — _Д_—---
/ / \ \ Рем / . у Т
ф /рем) = ^рем £ ₽ем )
(2.73)
предложенная Эрлангом.
Функция ?(^Рем) представляет собой плотность распределения
суммы некоторого числа пу — независимых отказов восстанав-
ливаемых технических устройств, распределенных по экспонен-
циальному закону, причем отказавшие технические устройства
подвергаются ремонту со средним временем восстановления
Графики плотности распределения Эрланга и экспоненци-
ального распределения представлены на рис. 2.2.
1 — экспоненциальное распределение, 2 — распределение
Эрланга
Как показали результаты обработки статистических данных,
распределение плотности вероятности времени восстановле-
ния и (/рем) может быть представлено распределением Эрланга,
если принять п., — 2, т. е.
21
рем
4
<Р /рем) = ^Рем е Р6М • (2-74)
' рем
Соответственно вероятность восстановления определяется сле-
дующим выражением:
, 2^
Г / г» у \ Рем
рем / 2Z \ “ —-
и /реы) = f <₽ /рем) dt^ = 1 - 1 - е г₽ем. (2.75)
od \ ‘ рем /
•ПрИ ^рем Трем
^(Т'рем) = 1 — (1 + 2) е-2 = 0,594.
44
Практически это означает, что из 100 технических устройств,,
ремонтируемых и одинаковых условиях, за .время, равное средне-
му времени восстановления, приблизительно 60 штук окажутся
отремонтированными, а 40 останутся еще невосстановленными..
Интенсивность восстановления, согласно (2.30), (2.74) и
(2.75), выражается равенством
4 /рем е гр™
И (/рем)
2/ \
^рем \
----- е
т /
1 рем /
2^рем
Т
7рем
(2.76)
или
4 ^рем
Р(/рем) у,
* рем \2 рем v ^,*'рем/
(2.77)
Полная вероятность выполнения заданных функций. В том
случае, когда X и р являются величинами одного порядка, наи-
более точные результаты при определении количественных ха-
рактеристик эксплуатационной надежности можно получить,
применяя закон полной вероятности сложного события.
Полная вероятность выполнения заданной функции равна
сумме произведений вероятностей частных событий на вероят-
ности существующих гипотез
Рф(/. /рем) = /<г/’(/)+ (1 -KT)U(tpen)p(t- /реи). (2.78)
J m I 1 рем
____t_
p(t) = e Tm
В данном случае предполагается, что существует только два
состояния: рабочее и восстанавливаемое. Время простоя по Дру-
гим причинам здесь не учитывается.
Т,„
— вероятность исправного со-
стояния технического уст-
ройства;
— вероятность безотказной ра-
боты в течение времени t;
— вероятность неисправного
состояния технических уст-
ройств;
l-/< —--------
Лп+Т’рем
2/рем
\ ' рем/
— вероятность восстановления
неисправного технического,
устройства за время /рем;
45.
_1 fpeu
p (t — 7рем) = e 7'« — вероятность безотказной ра-
боты технического устройст-
ва за оставшееся от ремонта
время t — ^рем, достаточное
для выполнения заданной
функции.
Подставляя эти значения в (2.78), получим следующее вы-
ражение:
рф (t, ^Рем) =---—-----е Т>п 4------Т^-'- X
Г 4J ' 1 рем/ —, | гр гр . гр ' Х
* m । * рем * m г * рем
_ рем
Т
е ™
(2.79)
Пример 2.4. Найти для t — 40 час и ZpeM = ’ 0 час полную вероятность
выполнения заданных функций технического устройства, среднее время появ-
ления отказа которого равно Тт = 100 час, а среднее время восстановления
Трем = 20 час, и сравнить ее с величиной функции эксплуатационной надеж-
ности.
Согласно (2.79), можно написать
Рф(40; 10) =
100
100 + 20
40
— 100
е
20
100 + 20
+ /1 + TL°V^
L \ 20 /
= 0,833 0,6703 + 0,1667 [ 1 — 2 • 0,3679] 0,7408 = 0,603;
40
100 = 0,559.
Рэ
100 4- 20
При 7рем и Тт^ 7’рсм разница между р3 и небольшая,
поэтому с достаточной степенью точности можно1 ограничиться
формулой (2.71). Применение формулы (2.79) целесообразно,
когда Тт и 7’рем, а также I и 7рем имеют один порядок.
Количественные характеристики профилактики. Одним из
эффективных мероприятий по обеспечению эксплуатационной на-
дежности является профилактика.
В процессе проведения мер профилактики осуществляется
проверка состояния авиационной техники, проводятся меры по
защите составных элементов технических устройств от воздейст-
вия различных факторов и по предохранению от ‘износа состав-
ных деталей, устраняются обнаруженные недостатки и неисправ-
ности.
Таким образом, основная цель профилактики заключается в
предупреждении потенциальных отказов, обнаружении и устра-
46
нении неисправностей. Применяют критерий «эффективность
профилактики», который оценивается отношением количества
-отказов, выявленных и предупрежденных в процессе проведения
контрольных проверок и профилактики, к полному числу всех
-отказов, зарегистрированных в процессе эксплуатации авиацион-
ной техники.
tj =---(2.80)
^пр Н- ^раб
где ппр — количество отказов, предупрежденных в процессе
профилактики;
^раб — количество отказов, возникших в процессе примене-
ния технических устройств по их прямому назначе-
нию.
В связи с этим, в условиях эксплуатации следует учитывать,
произошел ли отказ авиационной техники в полете, со всеми вы-
текающими из этого аварийными последствиями, или отказ об-
наружен в процессе профилактических проверок авиационной
техники, чем предупреждена возможность появления аварийной
ситуации в полете, т. е. чем больше процент неисправностей,
выявленных в процессе проведения профилактики, тем выше ее
эффективность.
Величина относительных трудозатрат на проведение профи-
лактики технических устройств оценивается «нормой профилак-
тики»
*нп=^> (2-81)
где тпр — трудозатраты на профилактику;
t — время наработки технического устройства.
Таким образом, норма профилактики представляет трудоза-
траты на профилактику технического устройства, приходящиеся
на единицу времени его наработки.
§ 2.3. КОЛИЧЕСТВЕННЫЕ ХАРАКТЕРИСТИКИ НАДЕЖНОСТИ
АВИАЦИОННОЙ ТЕХНИКИ В ПРОЦЕССЕ ХРАНЕНИЯ
Эксплуатация авиационной техники характеризуется чередо-
ванием кратковременных периодов ее функционирования и до-
вольно длительных периодов бездействия, когда технические
устройства на летательных аппаратах находятся в выключен-
ном состоянии.
Исправное состояние авиационной техники и ее готовность к
последующему выполнению своих рабочих функций в значитель-
ной степени зависят от режима хранения во время ее периоди-
ческого бездействия.
47
Таким образом, понятие «хранение» авиационной техники
включает в себя не только ее сбережение в периоды между вы-
пуском с завода и началом ее эксплуатации ,в авиационных ча-
стях или хранение ее на складах и хранилищах, но также и со-
держание ее на самолетных стоянках, на аэродромах, в процес-
се эксплуатации, в промежутках времени ее бездействия между
последующими полетами.
Основные характеристики надежности при хранении. Основ-
ной целью хранения авиационной техники является содержание
бездействующей авиационной техники в исправном состоянии.
Основной численной мерой сохранности является вероятность
того, что за определенный интервал времени и в заданных ус-
ловиях хранения исправность технического устройства не нару-
шится, или, говоря другими словами, отказ не произойдет
5(У = вер(^>^), (2.82)
где /х — время хранения;
ti — время появления неисправности в условиях хранения.
Статистическая вероятность исправного состояния при хра-
нении выражается формулой, аналогичной вероятности безотказ-
ной работы:
S* (2.83)
где n(tx)— число технических устройств, пришедших в неис-
правное состояние в процессе хранения;
Wo — общее число. однотипных технических устройств,
находящихся на хранении с момента tx = 0.
К числу количественных характеристик сохранности отно-
сятся:
— статистическая плотность вероятности появления неисправ-
ности при хранении
где Д/гхz — число неисправных устройств в t-том интервале
времени хранения,’
Д^х i — t-тый интервал времени хранения;
— интенсивность появления неисправности при хранении
1« A/zx i
Axz = -------— ,
где Nxi — среднее число исправных технических устройств, на-
холящихся на хранении в течение интервала времени хранения
Д^х z.
Величина интенсивности появления неисправности авиаци-
онной техники в условиях хранения обычно на два-три порядка
48
меньше интенсивности отказов, возникающих .во время функцио-
нирования. Однако величина интенсивности возникновения не-
исправности при хранении зависит от режима хранения.
Среднее время исправного 'состояния технических устройств
при хранении
n0
24,
Т"-Дг’ <2ае>
где — время появления неисправности /-того технического
устройства.
§ 2.4. ОПРЕДЕЛЕНИЕ ТЕХНИЧЕСКОГО, МЕЖРЕМОНТНОГО
И ГАРАНТИЙНОГО РЕСУРСА АВИАЦИОННОЙ ТЕХНИКИ
Под техническим (назначенным) ресурсом
понимается допустимый срок службы или время наработки авиа-
ционной техники, в течение которых обеспечивается ее надеж-
ная работа при соблюдении установленных правил ее эксплуата-
ции.
Наиболее высокая надежность авиационной техники может
быть обеспечена в период нормальной эксплуатации, т. е. в те-
чение времени, когда устанавливается постоянная интенсивность
отказов. Авиационная техника, выработавшая установленный
технический ресурс, направляется в капитальный ремонт или
списывается с эксплуатации.
Допустимый срок службы, или наработка авиационной ’тех-
ники после очередного капитального ремонта называется м е ж-
ремонтным ресурсом. В расход ресурса самолета засчи-
тывается только его работа в воздухе. Для авиационного обору-
дования ресурс учитывается по величине его фактической нара-
ботки в воздухе или по налету самолета. - ,
На практике технические устройства чаще всего изымаются
с эксплуатации не потому, что они становятся полностью не-
пригодными к использованию, а вследствие того,'что у них из-
расходован весь технический ресурс, или вследствие' так назы-
ваемого «морального износа».
Величина технического ресурса определяется рабочим време-
нем, в течение которого плотность вероятности отказов находит-
ся в пределах допустимой величины. Поэтому технический ре-
сурс выбирается таким, чтобы он находился в пределах време-
ни, соответствующих периоду II классической характеристики
распределения отказов (см. рис. 1.2,Г).
.Для определения границ времени нормальной эксплуатации
необходимо знать значение абсцисс Д кривой распределения
отказов. Абсцисса характеризуется тем, что при всех О'
вполне допустимо пренебречь влиянием закона.Пуассона.,на "ве-
личину ординатчеривой. . .. ,.i; г.)
4. ’Румянцев Е. А. и др.
Известно, что подчиненная распределению Пуассона случай-
ная величина /-принимает только целые значения: 0, 1, 2 ... с
вероятностью, равной
т‘ —т
Ш = (2.87)
где Тта— математическое ожидание времени безотказной рабо-
ты в течение периода приработки I. Значением /а(/) распреде-
ления Пуассона можно пренебречь, когда эта величина равна
0,05 или меньше. Величина для fa (/) = 0,05 определяется из
следующего выражения:
J'S
—^^о,О5е~г™- ' (2.88)
В качестве Тша в первом приближении .берется номер разря-
да, которому соответствует максимальное значение fait).
Значение /], характеризующее период приработки для каж-
дого значения Тта от 1 до 9, приведено в табл. 2.2, для которой
Тта определяются по максимуму первой части кривой и округ-
ляются до целого числа; значения определяются по. формуле
(2.88) и округляются в сторону большего целого числа.
ром допустимо пренебречь влиянием нормального закона рас-
пределения на величину ординат характеристики.
Для определения абсциссы кривой распределения следует
найти моду -ЛД для III периода кривой и абсциссы точек кри-
вой, для которых
Ж)=Ж) = ^Ч (2.89)
и тогда
/п = МО - (tb - Q. (2.90)
Выраженная формулой (2.90), величина характеризует
•абсциссу точки кривой распределения частоты отказов, для ко-
торой допустимо пренебречь .влиянием нормального закона, вы-
ражающего распределение частоты отказов технических уст-
ройств вследствие износа и старения. Диапазон /ц — t\ и являет-
ся периодом нормальной эксплуатации II с Д s= const.
50
При 'наилучшем решении задачи интервал tx -ч- tn должен
быть несколько больше установленного ресурса самолета или
двигателя, на которых применяется данное техническое устрой-
ство.
Среднее значение от /б (0 в интервале Лопределяется
формулой
1
(2.91)
Технический (назначенный) ресурс определяет установлен-
ный в ВВС срок службы авиационной техники, исходя из экс-
плуатационной целесообразности.
Каждое изделие авиационной техники имеет установленный
авиационной промышленностью, согласно техническим требова-
ниям, гарантийный ресурс (гарантийный срок службы). Гаран-
тийный ресурс авиационной техники определяется периодом
юридической ответственности изготовителя, за надежность вы-
пущенной продукции в течение определенного' времени эксплуа-
тации и оговаривается техническими условиями к договору на
ее поставку.
Возможны случаи, когда гарантийный срок службы и техни-
ческий ресурс авиационной техники по величине совпадают.
Гарантийный ресурс, как правило, характеризуется двумя по-
казателями: гарантийным временем наработки в часах и гаран-
тийным временем хранения в годах.
Критерием выбора гарантийного срока службы является га-
рантийная вероятность безотказной работы Рт- Эта величина
обычно задается техническими условиями на проектирование
авиационной техники.
Чтобы определить гарантийное время наработки следует
исходить из известной формулы
/
___г
Рг'= е Тт . (2.92)
Тогда
tr=~Tm^ = ivTm, (2.93)
1g е
ТДе (2.94)
Ige
Гарантийное время хранения определяется по аналогичной
формуле
(2.95)
где Тх — среднее время исправного состояния технического
устройства при хранении;
4 г — гарантийное время хранения.
4*
'Г \ ‘ Глава Ш
РАСЧЕТ НАДЕЖНОСТИ СИСТЕМ
§ 3.1. РАСЧЕТ НАДЕЖНОСТИ СИСТЕМ НА НАЧАЛЬНОМ
ЭТАПЕ ПРОЕКТИРОВАНИЯ
Выяснение ожидаемой надежности проектируемых систем
осуществляется расчетным способом. Расчеты надежности про-
изводятся на всех этапах проектирования.
Во время эскизного проектирования производится ориенти-
ровочное выяснение надежности вновь создаваемых систем для
сравнения их с заданными в технических условиях величинами..
При недостаточной надежности проектируемых систем про-
изводятся расчеты с целью обеспечения требуемой надежности..
На завершающем этапе проектирования систем производят-
ся подробные проверочные расчеты надежности с учетом влия-
ния различных факторов.
Особенно важнььм является выяснение уровней надежности
авиационной техники, которыми оцениваются ‘безопасность по-
лета летательного аппарата или его 'боевая способность. В этом
случае расчет сводится к выяснению вероятности таких отказов,
авиационной техники, вследствие которых возникает аварийная
ситуация в полете или которые сопровождаются утратой ее спо-
собности выполнять боевые функции.
Для определения характеристик надежности, обладающих
функциональной зависимостью от времени, например, вероятно-
сти безотказной работы, в качестве исходной величины времени
наработки обычно выбирают время одного полета самолета, а
при операции, сопровождающейся серией последующих выле-
тов, — суммарное время полетов самолета в течение операции.
Надежность систем, в том числе и самолетных, определяется
прежде всего надежностью составных элементов, их количест-
вом и структурой самой системы.
К числу простейших структур относится одиночная си-
стема (рис. 3.1) или, как его иногда именуют, «основное»
соединение элементов, при котором отказ одного элемента
влечет за собой отказ всей системы.
Понятие «соединение» в структурных схемах надежности от-
личается от аналогичного понятия в электрических схемах и
52
изображает не фактическое соединение, а лишь условную связь.
Например, пробой одного из-группы параллельно включенных
конденсаторов влечет отказ всей группы, что соответствует оди-
ночной системе элементов, и, следовательно, структурная схема
надежности параллельно включенных конденсаторов изобра-
жается в виде .последовательной цепочки элементов (рис. 3.1).
Рис. 3.1. Схема модели одиночной системы
Если считать первичные повреждения элементов независимы-
ми событиями, то вероятность безотказной работы одиночной
системы Ро может быть выражена на основании теоремы умно-
жения вероятностей следующей формулой:
N
PO=P1P2---PN=T\P{, (3.1)
7 = 1
где Pj(j — 1, 2,... <N) — вероятности безотказной работы от-
дельных элементов системы, состоящей из W элементов.
При .наличии равенства надежности некоторых элементов си-
стемы
Ро = П/7/> (3-2)
где Nj — количество равнонадежных элементов /-того типа.
Для случая, когда все элементы системы равнонадежны,
PO-PN-
(3.3)
Очевидно, что надежность одиночной системы будет тем ниже,
чем больше в ее составе элементов (рис. 3.2), и что вероятность
безотказной работы одиночной системы ниже вероятности без-
отказной работы самого ненадежного элемента системы.
Согласно выражению (1,28), пользуясь (3.1), (3.2) и (3.3),
.можно соответственно написать
и
-N f
Р0 = е 0
(3.4)
(3.5)
(3.6)
53
Таким образом, для расчета надежности систем по формулам
(3.4) — (3.6) необходимо располагать законами распределения
интенсивностей отказов элементов во времени или эксперимен-
тальными кривыми X (Z).
Рис. 3.2. Кривые зависимости вероятно-
сти безотказной работы системы от чи-
сла и вероятности безотказной работы
составных элементов системы
При Х(^) = .const формулы (3.4), (3.5) и (3.6) будут иметь
вид соответственно
w
/~1 (3.7)
= е (3.8)
и
Ро = e~NU. (3.9)
Величина интенсивности отказов одиночной системы определяет-
ся суммой интенсивностей отказов составных элементов
N
Ао= f Nj\
7=1
или
Л0=Л/Х
(3.10)
(3.11)
(3.12)
54
и среднее время безотказной работы одиночной системы
п - 4- - -4- --А- Ola»
>1 .
Приближенный расчет надежности одиночной системы по
среднегрупповым интенсивностям отказов элементов. Такого ро-
да расчет надежности производится главным образом на на-
чальном этапе проектирования авиационной техники с целью
выяснения ориентировочной величины основных параметров на-
дежности разрабатываемого устройства.
Исходными данными для расчета надежности одиночной си-
стемы являются:
— .количество элементов каждого типа, входящих в проекти-
руемую систему Nj;
— 'интенсивности отказов составных элементов системы X,-,
Расчет надежности по ореднегрупповым интенсивностям от-
казов элементов выполняется в следующей последовательности:
— Выясняются все типы элементов, входящих в проектируе-
мую систему, и их количество.
— Из справочных таблиц с данными об интенсивностях от-
казов отдельных типов элементов выписываются значения интен-
сивностей отказов элементов каждой группы Ху.
Ввиду того, что исходные данные X для расчета надежности
системы характеризуются значительным разбросом, то при ори-
ентировочных расчетах надежности одиночных систем или вы-
бираются среднетабличные значения, или используются край-
ние значения интенсивности отказов элементов, а по ним опре-
деляются минимальные и максимальные цифры характеристик
надежности систем.
— Все элементы проектируемой системы разбиваются на не-
сколько групп с одинаковыми внутригрупповыми интенсивно-
стями отказов и производится ориентировочный подсчет коли-
чества элементов в каждой группе Nj.
— Вычисляются произведения МД., характеризующие ин-
тенсивность отказов соответствующей группы элементов.
— Рассчитывается результирующая интенсивность отказов
одиночной системы путем сложения суммарных интенсивностей
отказов всех групп, входящих в одиночную систему элементов:
(3.14)
7=1
где k — число групп элементов в системе.
55
—Определяется среднее время безотказной работы одиноч-
ной системы
(315>
Ло
— Вычисляется вероятность безотказной работы системы со-
гласно формуле:
; ; , _ (3.16)
' Пример, 3.1. Рассчитать по средним значениям интенсивностей отка-
зов элементов ориентировочную величину среднего времени безотказной ра-
боты и вероятность безотказной работы проектируемой самолетной системы
автоматического управления воздухозаборником, если известно, что заданный
срок службы находится в пределах 100 часов.
- По электрической схеме эскизного проекта системы выясняются типы
элементов, входящих в проектируемую систему, и их количество Nj. Данные
об интенсивностях отказов элементов различных типов сведены в табл. П. 2.
По этим данным вычисляется суммарная интенсивность отказов каждой
группы элементов Nj
Т а б л и ц а 3.1
. № п/п Наименование элементов NJ ?v-.io—в ' Njlj-lO-s
1 Генератор с постоянными
магнитами 1 5 5
* 2 Трансформаторы 2 2 4
3 Дроссели 3 0,09 0,27 .
4 Сопротивления проволочные 13 0,19 2,47
5 Подстроечные сопротивления 5 0,9 4,5
6 Потенциометры 2 15 30
7 Германиевые диоды 8 0,38 3,04
8 Германиевые триоды 4 1,9 7,6
9 Конденсаторы. 2 0,04 0,08
... 10 Поляризованное реле 2 1.6 3,2
11 Л4-реле 1 1,15 1,15
12 Реле различные 10 0,8 8,0
13 Соленоидные механизмы 4 0,55 2,2
.• 14 Штепсельные разъемы 9 0,7 6,3
15 Концевые выключатели 3 0,26 0,78
системы равна сумме интенсив-
Результирующая интенсивность отказов
ностей отказов всех составных элементов
15
Ло= = 78,59-10-0.
7=1
Среднее время безотказной работы
т = 1
° Ло 78,59- Ю-8
12700 час.
Вероятность безотказной работы системы управления воздухозаборником
Ро (100) = ё-78*59 • 10““ 100 = 0,992.
56
Расчет систем с переменной структурой. Расчет надежности
систем, у которых составные элементы работают неодинаковое
время, отличается тем, что весь процесс работы такой системы
рассматривается состоящим из отдельных тактов, соответствую-
щих отдельным рабочим состояниям системы. Для каждого так-
та составляется своя функциональная схема, содержащая все
работающие в течение данного такта элементы. После этого по
порядку рассчитываются надежности для каждого такта рабо-
чего процесса системы или, что то же самое, соответствующей
структуры системы.
Вероятность появления отказа системы за полный цикл ра-
боты
Z
Q = (3.17)
z=-i
где z — полное число тактов за весь рабочий цикл системы.
Статистическая плотность вероятности отказов i-той структу-
ры системы
Д.= А. (3.18)
Интенсивность отказов i-той структуры системы -
k
(3-19)
- . А1
где Ху- интенсивность отказов j-того элемента i-той структуры
системы.
. Подставляя в (3.17) выражения (3.18) и (3.19), получим
. .. . 11.
z -
• .Q = S^e Al У).,., (3.20)
’ ‘ ? i
Вероятность безотказной работы в течение L полных циклов
работы системы выразится формулой
z 2
P=l-lSAf;e A1 £Ху. (3.21)
t-i j=i
Расчет надежности при произвольном распределении времени
безотказной работы. Если кривые распределения отказов и ин-
тенсивности отказов не подчиняются известным законам рас-
пределения, то расчет надежности может быть выполнен гра-
фоаналитическим способом. Он основан на вычислении площа-
ди под кривой интенсивности или распределения отказов иссле-
57
дуемого технического устройства на заданном интервале време-
ни с последующим расчетом вероятности безотказной работы по
формуле (3.5).
В качестве исходных данных необходимо располагать экспе-
риментально полученными характеристиками различных элемен-
тов X(/) и f(t).
Зная количество однотипных элементов в системе по группам
и пользуясь формулой (3.11), строят кривую интенсивности от-
каза системы (фиг. 3.3).
Р и с. 3.3. Характеристики интенсивности отказов
системы и элементов, имеющих произвольное рас-
пределение времени безотказной работы
Метод графоаналитического расчета надежности заключается
в следующем: располагая величиной полного срока службы или
другим определяющим интервалом времени, отсекаем площадь,
расположенную под кривой Л (/) и находящуюся левее отметки
на 'оси абсцисс, соответствующей времени t\, для которого необ-
ходимо произвести расчет надежности.
Эта площадь планиметрируется или ее величина определяет-
ся путем подсчета клеток на миллиметровой бумаге
Яд (f) = ct сь. а (г!), (3,22)
где ct — цена клетки по оси времени t;
сд — цена клетки по оси интенсивности отказов Л;
а — количество квадратных миллиметров в искомой пло-
щади.
Затем по формуле (1.28) производится расчет вероятности
безотказной работы
-JA(/)rf<
P(t) = e о =е А . (3.23)
58
В том случае, если вероятность безотказной работы является-
заданной и требуется определить время безотказной работы, ТО'
следует по известной величине P(t) вычислить значение инте-
грала
Aft)di = - 1пР(0 (3.24)'
о
и затем но графику Л(0 определить такое t, при котором пло-
щадь под кривой равнялась бы вычисленному интегралу.
Аналогично можно производить расчет по 'кривым f (Г), имею-
щим произвольный характер, в этом случае вероятность безот-
казной работы элементов вычисляется по формуле
t
Pft)=i- ^f(t)dt (3.25)-
о
или
(3.26)>
P(t)=l-sf(t),
t
где sf—планиметрированная площадь ^f(t)dt.
о
Тогда вероятность безотказной работы одиночной системы,,
состоящей из k групп, содержащих однотипные элементы по N}-
штук каждого типа, будет равна:
7-1
(3.27)=
При расчете вышеизложенным методом не требуется знать,
аналитические выражения закона распределения и параметры
этого закона, а необходимо располагать графиками распределе-
ния.
§ 3.2. РАСЧЕТ НАДЕЖНОСТИ СИСТЕМ С УЧЕТОМ
ПОСТЕПЕННЫХ ОТКАЗОВ
Расчет надежности с учетом износа и старения элементов..
Функция плотности распределения износовых отказов представ-
ляет собой функцию нормального закона распределения (1.16).
Таким образом, вероятность
зов выражается формулой
непоявления такого рода отка-
ft-T
' тп
2</ dt
Рп(0 = 0,5ф1ф
Рп(/) =-----4= I е " = Ф*(:_ ~п 1 (3.28).
оп j/2it J \ °п /
— оО
ИЛИ
I'm п
On V“2
где Тт п — математическое ожидание;
(3.29)s
59»
% — стандартное отклонение времени появления посте-
пенных отказов;
X _ у2 Л-
Ф*(л) =—-— Се 2 dy\ Ф(х)=—^rfe_y,rfy.
V 2rt J У К J
— оо о
—- функции Лапласа. Таблицы их значений можно найти в
И, [3].
Пользуясь формулами (1.24), (1.16) и (3.28), найдем выра-
жение для интенсивности постепенных отказов элементов.
(t-т „)2
_ 4 т п'
2<га
е "
(3.30)
опУ 2к Ф*(-—Ik”
\ °п
Вероятность непоявления постепенных отказов системы, со-
стоящих из k групп различных типов элементов.
(3.31)
гдё А/) — количество элементов /-того типа.
В общем случае .надежность' авиационной техники зависит
как от наличия постепенных, так и внезапных отказов, т. е.
k
- ‘ Y Nji. k г / t—T \lw;
P(i)==PB^t)Pn(t') = & M П Ф*(----------------. (3.32)
'=1L \ ап/ /1
Расчет надежности с учетом изменения определяющих параметров. Пара-
метры системы, по значению которых можно судить об исправном или не-
исправном состоянии системы, называются определяющими.
Отклонение величины определяющих параметров за пределы допустимых
вначений характеризует факт появления постепенного отказа. Вероятность
непоявления постепенных отказов понимается как вероятность сохранения
значений определяющего параметра х в пределах установленных допусков:
£min Хо т О И £шах — Xq т -ф S, (3.33)
тде х0 т — среднее начальное значение определяющего параметра;
о — допустимое отклонение параметра от хо т .
При заданных режиме и условиях работы эта вероятность в общем виде
.выражается интегральной функцией
Jmax
Р (£tnln < X < Uax) = J /п (*) dx. (3.34)
^min
€0
Распределение определяющего параметра х подчиняется нормальному за-
колу.
Тогда можно написать
(3.35>
ИЛИ
Р (Emin < X < Emax) - Ф* -М -Ф*( ---М . (3.36>
\ a I \ а I
\ X / \ X !
Для случая, когда для определяющего параметра устанавливается только
один предел критического значения,
Р и с. 3.4. Изменение плотности распределения определяю-
щего параметра в течение времени эксплуатации элементов
С увеличением времени эксплуатации авиационной техники нормальное
распределение определяющего параметра, как правило, становится более по-
логим (рис. 3.4).
Таким образом, параметры хт и av являются функциями времени, при-
чем практически линейными функциями, т. е.
хт (О хо т i ^х (3.38)>
где kx — угловой коэффициент изменения параметра хт (/).
61>
Стандартное отклонение определяющего параметра является линейно воз-
растающей функцией времени, т. е.
0л- (^) — ° О х "Ь
(3.39)
тде ka —угловой коэффициент изменения <зЛ. (/).
Коэффициенты kx и ka могут быть определены заранее на основании
•опытных данных.
Подставляя значения (3.38), (3.39) в' (3.36), получим формулу вероят-
ности непоявления постепенных отказов, выраженную через значения опреде-
ляющего параметра
Ф* ( ^max - Xonl + kxt\ _ / Smin -^о т +
\ % х / \ 0О х 4“
а для (3.37)
ф* / Smax -^о т +
\ SO х + k. i
(3.40)
(3.41)
§ 3.3. ВЛИЯНИЕ ФИЗИЧЕСКИХ ФАКТОРОВ НА НАДЕЖНОСТЬ
ТЕХНИЧЕСКИХ УСТРОЙСТВ И ИХ УЧЕТ
ПРИ РАСЧЕТЕ НАДЕЖНОСТИ
Влияние окруж-ающей среды характеризуется воздействием
таких физических факторов, как: ' температурные изменения,
влажность, давление, солнечная радиация, осадки, обледенение,
.ветер, наличие песка, пыли, вредных паров и примесей в атмос-
фере, радиоактивность, влияние электромагнитных излучений
и т. д. '
Влияние на надежность режимов работы характеризуется
воздействием механических , перегрузок, вибрации, ударных
нагрузок, механического трения, явлениями, связанными с кана-
лизацией и коммутацией электрической энергии, нагревом, об-
разованием электромагнитного поля и излучения,, электроэро-
зией. Значительное количество .неисправностей в аппаратуре воз-
никает при переходных процессах, связанных с ее включением и
выключением. Именно в этом случае при резких изменениях ра-
бочих режимов наблюдаются электрические перенапряжения,
толчки токов, механические перегрузки.
При проведении расчетов надежности системы на заключи-
тельном этапе их проектирования следует учитывать, что дол-
говечность технических устройств в значительной степени зави-
сит от режима работы устройств и интенсивности воздействия
внешних физических факторов.
При работе в недогруженном режиме или при слабом воздей-
ствии окружающей среды долговечность любого технического
•62
устройства всегда будет больше, чем при перегрузке или при
более высокой интенсивности воздействия физических факторов
(рис. 3.5).
Р и с. 3.5. Изменение интенсивности отказов во
времени:
1 — при номинальном режиме; 2 — при пе-
регрузке
Таким образом, интенсивность отказов каждого составного
элемента системы изменяется в зависимости от величины, харак-
теризующей рабочий режим элемента, от температуры и других
факторов:
где ау- —. относительный коэффициент интенсивности отказов
данного элемента, зависящий от величины парамет-
ра воздействующего фактора;
Хоу — интенсивность отказов для номинального режима ра-
боты элемента в стандартных условиях, т. е. для
15^С и 760 мм рт. ст.
Так, например, для реле величина коэффициента ау- сильно
зависит от рабочего режима (рис. 3.6).
Величина относительного коэффициента интенсивности отка-
зов полупроводниковых диодов (рис. 3.7) сильно зависит от тем-
пературы и электрической нагрузки.
Подобные характеристики дают возможность с достаточной
степенью точности учесть при расчете надежности технических
устройств влияние условий применения и режим работы боль-
шинства элементов.
Метод расчета надежности с учетом режимов работы элемен-
тов и воздействия внешних физических факторов состоит в том,
что в расчетных формулах при определении общей интенсивности
отказов технических устройств вместо ’среднегрупповых интен-
сивностей отказов ХОу для номинального режима и стандартных
условий подставляются значения интенсивности отказов, зави-
сящие от реальных условий и действительного режима работы.
63
Расчет общей интенсивности отказов системы >в данном слу-
чае производится по формуле
k
>1
где Nj — число элементов /-того типа;
k — число типов элементов в системе.
Рис. 3.6. Зависимость коэффи-
циента ’ интенсивности отказов
реле от отношения рабочего
тока в контактах к номиналь-
ному значению
Рис. 3.7. Зависимость коэффициента
интенсивности отказов для полупро-
водниковых диодов от температуры
окружающей среды и электрической
нагрузки
Среднее время наработки на один отказ
г = JL = —1----------
♦н д k
I-1,
и вероятность безотказной работы системы за время t
- i « • х
Р(/) = е >=i
Расчет надежности с учетом влияния на ее характеристики
физических факторов обычно проводится в следующем порядке.
Производится разделение систем на отдельные элементы, при
этом предполагается, что в .процессе технического расчета при
проектирований систем определены или заданы режимы и усло-
вия работы системы. На основании установленных расчетом или
заданных величин параметров, воздействующих физических
факторов для каждой группы однотипных элементов, по графи-
кам или формулам определяются коэффициенты интенсивности
64
отказов оу для соответствующих режимов работы и внешних
условий. Затем по таблицам определяются величины интенсив-
ности отказов ХОу для номинального режима работы и стан-
дартных условий.
Рассчитывается интенсивность отказов для заданных внеш-
них условий и режима работы \ — a.j Хоу.
Определяется интенсивность отказов блоков или системы в
целом путем суммирования интенсивности отказов входящих в
них элементов.
Рассчитываются величина среднего времени безотказной ра-
боты Тт и вероятность безотказной работы системы Рс.
5, Румянцев Е. А. и др.
Глава IV
СПОСОБЫ РЕЗЕРВИРОВАНИЯ
§ 4.1. ОСНОВНЫЕ ПОНЯТИЯ. КЛАССИФИКАЦИЯ СПОСОБОВ
РЕЗЕРВИРОВАНИЯ
Одним из основных методов повышения надежности являет-
ся резервирование. Принцип резервирования заключается в
том, что в систему вводятся дополнительные .(резервные) уст-
ройства (элементы, блоки), являющиеся избыточными по отно-
шению к минимальной функциональной структуре системы, не-
обходимой и достаточной для выполнения заданных функций.
Минимальную .функциональную структуру системы иногда
называют основным соединением элементов или основной систе-
мой.
Совокупность основного элемента и его резервирующих эле-
ментов называется резервированной системой.
Основной характеристикой резервирования является его
кратность, т. е. отношение числа резервирующих элементов к чис-
лу резервируемых (минимально-функционально необходимых).
Кратность резервирования определяется соотношением
где п — общее число элементов резервированной системы;
h .— число элементов основной системы;
п—h — число резервных элементов в резервной группе.
Если h = 1, то считают, что резервирование выполнено с це-
лой кратностью, если /г)>1, то с дробной кратностью. (Кратность
резервирования следует записывать в виде простой дроби без
сокращения, ибо при /О>1 одно и то же т может получаться при
различных п и h).
В зависимости от схемы включения резервных элементов (ре-
зервной системы) принято различать: общее и раздельное ре-
зервирование.
При общем резервировании минимальная функциональная
структура системы резервируется полностью.
Общее резервирование может выполняться связанным, когда
резервные элементы (резервная система) объединены с основной
66
системой общими входными или выходными устройствами
(рис. 4.1,а), или автономным, когда имеется несколько идентич-
ных, полностью независимых 'систем, предназначенных для вы-
полнения одной и той же функции (рис. 4.1,6). В этом случае
каждая из взаимно резервирующих автономных систем имеет
свой вход и выход, а иногда и независимые источники питания.
Рис. 4.1. Схема общего резервирования
Р и с. 4.2. Схема раздельного резервирования
При раздельном резервировании резервируются отдельные,
а иногда и все элементы минимальной функциональной струк-
туры системы (рис. 4.2).
На летательных аппаратах широкое применение находит так-
же так называемое функциональное резервирование, когда
резервирующие системы основаны на различных принципах дей-
ствия.
Одна из этих систем обычно называется основной, а ос-
тальные — аварийными.
Примером функционального резервирования являются систе-
мы гидравлического привода шасси |(основная система) и пнев-
матического привода шасси (аварийная система), авиагоризонт
и дублер авиагоризонта типа ДАГ и др.
Если резервирующие элементы работают в одинаковом (по
нагрузке) режиме с резервируемыми, то такой резерв называют
5* 67
нагруженным. При этом интенсивность отказов резервных и ре-
зервируемых элементов одинакова, а ресурс резервных элемен-
тов расходуется с момента включения в работу всей резервируе-
мой системы. Примером такого рода резерва является парал-
лельная работа самолетных генераторов, механизмы повышен-
ной надежности и др.
Если до момента отказа основных элементов резервирующие
элементы работают в режиме, отличающемся от режима рабо-
ты, связанного с выполнением заданных функций, и лишь после
отказа основных элементов включаются на рабочий режим, то
такой резерв называют резервом с облегченным режимом рабо-
ты или «дежурным» резервом. Примером такого резерва являет-
ся работа подкачивающих топливных насосов в дежурном ре-
жиме в самолетных системах автоматического управления по-
рядком выработки топлива. Естественно, что интенсивность от-
казов при работе элемента в дежурном режиме меньше, чем в
рабочем.
Ненагруженный резерв включается только в момент отказа
резервируемой системы. Интенсивность отказов ненагруженного.
резерва практически близка к нулю, а ресурс расходуется толь-
ко после включения его в работу. Самолетная система центра-
лизованного питания потребителей переменного тока стабильной
частоты, включающая два однотипных преобразователя (основ-
ной и резервный), может служить иллюстрацией резервирован-
ной системы с ненагруженным резервом.
По способу включения резервных элементов резервирован-
ные системы разделяют на системы с постоянным резервирова-
нием и системы с резервированием замещением.
Применение метода постоянного резервирования предпола-
гает для всех резервных элементов использование нагруженно-
го резерва, при резервировании замещением резервные элементы
могут находиться в любом из указанных выше режимов.
При резервировании замещением резервированная система
всегда содержит индикационно-переключающие устройства, слу-
жащие для индикации состояния отдельных элементов (систем),,
исключения отказавших и замены их исправными (автоматиче-
ски или вручную).
Резервированные системы с постоянным резервированием в
свою очередь можно разделить на системы с постоянным пас-
сивным резервированием, в которых резервные элементы вклю-
чены совместно с основными на все время работы, и при отка-
зах ни основные, ни резервные элементы не отключаются; и си-
стемы с постоянным активным резервированием, при отказах
элементов которых происходит отключение отказавших элемен-
тов.
Понятие «резервирование замещением» применимо как к вос-
станавливаемым, тай и к невосстанавливаемым системам.
68
Эффективность способов резервирования характеризуется ве-
личиной
(42>
где Qo(0 — вероятность отказа минимальной функциональной
структуры системы;
Q₽(0 — 'вероятность отказа резервированной системы.
§ 4.2. ПОСТОЯННОЕ ПАССИВНОЕ РЕЗЕРВИРОВАНИЕ
Постоянное пассивное резервирование применяется для по-
вышения безотказности работы отдельных простейших участков
схем, состоящих, как правило, из однотипных элементов (сопро-
тивлений, конденсаторов, полупроводниковых диодов, элементов
солнечных .батарей и т. и.). В общем случае для таких устройств
основными типами отказов являются обрыв и короткое замыка-
ние. В зависимости от типа преобладающих отказов электриче-
ские схемы при пассивном резервировании различаются между
собой. Так, при резервировании элементов, отказывающих вслед-
ствие обрыва, применяется параллельное электрическое соеди-
нение элементов, а для повышения безотказности участков схем,
состоящих из элементов, отказывающих вследствие коротких
замыканий, — последовательное электрическое соединение их.
При определении количественных характеристик надежности
электрических схем соединений элементов необходимо различать
отказы, возникающие из-за обрыва цепей, и отказы, обуслов-
ленные короткими замыканиями.
Оценку вероятности безотказной работы схем при парал-
лельном или последовательном электрическом соединении эле-
ментов для каждого из типов отказов можно проводить по
(формулам, 'приведенным в табл. 4.1.
! Анализ 'надежности, как правило, проводится на основе так
(называемых структурных схем надежности, которые по существу
‘являются логическими схемами, отображающими взаимодейст-
вие элементов системы в смысле надежности.
' Взаимосвязь электрических схем соединений элементов и
^структурных схем надежности с учетом вида отказов элементов
(представлена в табл. 4.1.
i При резервировании с целой кратностью считается, что отказ
(резервированной системы' имеет место только при отказе всех
’элементов, входящих в систему, соединенных в смысле надеж-
ности параллельно. ’
Таким образом, не учитывается влияние изменений в харак-
теристиках резервированной системы при отказах ее отдельных
элементов. '
! Полагая, что отказы являются событиями случайными и не-
зависимыми, выражение для вероятности отказа резервирован-
69
о
Таблица 4.1
Электрическое соедине- Отказы типа обрыва с вероятностью Ро Отказы типа коротких замыканий с вероятностью Рк
ние элементов расчетная формула структурная схема надежности расчетная формула структурная схема надежности
ной системы Qp (t), состоящей из т 1 параллельно, в смысле
надежности, соединенных элементов, получается на основе фор-
мулы умножения вероятностей
т
QP(0=n^)> (4.3)
/=0
где qj{t)— вероятности появления отказов отдельных элемен-
тов;
т — дратность резервирования.
Вероятность безотказной работы такой системы выражается
формулой
т т
PpW=i-Q₽(0=i - П ^(^) = 1-П[1-^(0]. (4.4)
у-о ;=о
Допущение, что резервированная система с постоянным пас-
сивным резервом может выполнять свои функции при сохране-
нии работоспособности хотя бы одного из т-|-1 параллельно
соединенных в смысле надежности элементов, практически вы-
полняется редко. Это допущение справедливо главным образом
для всякого рода контактных схем. Для участков схем, режим
работы которых и параметры изменяются при отказах элемен-
тов, это допущение неправомерно.
Примером таких схем могут служить резервированные си-
стемы, состоящие из параллельно соединенных элементов сол-
нечных батарей, диодов, сопротивлений и др.
Безотказность этих систем с постоянным резервированием
определяется, исходя из требований безотказной работы не ме-
нее чем h элементов, из общего числа их п, т. е. исходя из крат-
ности дробного резервирования т—~ (п— h): h.
Считая, что структурная схема надежности состоит из п сое-
диненных в смысле надежности параллельно равнонадежных
элементов, выражение для вероятности безотказной работы си-
стемы можно написать следующим образом:
j=0
где
Ci -----—-----.
" 7! («-/)!
Так, например, если для исправной работы системы доста-
точно трех элементов из пяти, то
2
Л V) = 2 Cip"-i(t) qi{t) =р* (£) + 5р* (t) q (/) + Юр” (/) q*
J-0
(4.5)
(4.6)
71
Соотношения (4.3) и (4.4) справедливы и для случая общего
резервирования, когда каждый «элемент» является в свою оче-
редь системой, состоящей из г последовательно, в смысле на-
дежности, соединенных элементов, вероятность безотказной ра-
боты каждого из которых характеризуется величиной
Так как вероятность безотказной работы любой / из тЦ-1
систем
(4.7)
то
<7^)=1-ПаД0;
/=1
т
QPW=n
7=0
1- Па, (О
/=1
(4.8)
т
Рр(0=1-П
7=0
1 - П^(0
1=1
(4.9)
Допустим, что интенсивности отказов являются величинами
постоянными.
Тогда
/>р(/) = 1 _ (1 _ e-M)m+if (4.10)
где Хо = X, — интенсивность отказов любой из т-|-1 одина-
i=i ковых систем.
Среднее время безотказной работы резервированной системы
= j>p(/)^= J[1 -(1 - e-x°/)'”+1] dt =
о о
' 2 3 1
(4.И)
'о
а интенсивность отказов резервированной системы
, ... -^р'(^) Х0(от+1)е-х»'(1.л 1О.
Pp(t) 1 - (1-e-x»9"l+1 ’ 4’12
Сопоставляя построенные по выражениям (4.10) и (4.12) за-
висимости Др(Х0/) и Хс(Х0О для резервированных и нерезерви-
рованных систем (рис. 4.3 и рис. 4.4), можно заметить, что наи-
больший эффект общее пассивное резервирование дает в обла-
сти малых значений X0Z. Зависимости Рр(Х0£) в области боль-
ших значений Хо t близки к экспоненте и приближаются к функ-
ции вероятности безотказной работы нерезервированной систе-
72
мы, ибо интенсивность отказов ХС(ХО/) в этой области прибли-
жается к интенсивности отказов Хо нерезервированной системы.
Рис. 4.3. Зависимости вероятности безотказной рабо-
ты системы при различных кратностях общего резерви-
рования
Рис. 4.4. Зависимости интенсивности отказов
системы от времени при различных кратностях
общего резервирования
Кратность резервирования т, необходимую для достижения
путем общего пассивного резервирования заданной надежности
/р(/) в определенный момент времени t при заданной надежно-
сти минимально функциональной структуры системы Ру, можно
найти из выражения (4.4)
1g [1-^(0] !
lg[l-^)]
(4.13)
73
Если элементы, соединенные на структурной схеме надеж-
ности последовательно, равнонадежны, то
1-1
а
/%₽(*) = П - X(0]m+1. (4.14)
Эффективность общего резервирования
Р 1-РгЮ
°Р . [1-^(0]"г+1
2
(4.15)
Для анализа эффективности метода раздельного пассивного
резервирования допустим, что ,в минимальной функциональной
системе, состоящей из г, в смысле надежности, последовательно
соединенных элементов, резервируется каждый из этих элемен-
тов i = 1, 2,..., г с кратностью резервирования т1 (рис. 4.5).
Р и с. 4.5. Структурная схема надежности при
раздельном пассивном резервировании
Выражение для вероятности безотказной работы резервиро-
ванной системы составляется по следующим соотношениям.
Вероятность отказа i-того столбца, включающего иден-
тичных элементов,
тогда
QMO= П[1~ РИ (/)], (4.16)
7=0
Р/Ю = 1-П(1-А7т (4.17)
7=0
Вероятность безотказной работы г столбцов, т. е. резервиро-
ванной системы,
73pW=ri7’z(Z)=ri [1-П(1 -P^t)
1=1 1 = 1 L 7=0
(4-18)
74
При равнонадежных элементах рz,(0 = p{t)i а hzz = т
(/= 1, 2, . . г):
Ррр(О = [1-(1 -ЛОТ'- (4.19).
Необходимая для достижения заданной надежности резерви-
рованной системы Ррр(^) кратность резервирования т опреде-
ляется согласно формуле (4.17)
1
или
ибо
_ 1g(1 ]
lg [1 -
_Jg[l-^ppffl~] J
lg[l-pe(0~]
1 -p{t)= 1 .
(4.20).
(4.21),
Эффективность раздельного резервирования
R Qo(O =_______________1 -Р(У_________
pp Qp(/) -p
(4.22)'
Для сопоставления способов общего и раздельного пассив-
ного резервирования предположим, что минимальная функцио-
нальная структура системы .состоит из г равнонадежных эле-
ментов и что кратность резервирования в обоих случаях рав-
на т.
Составим отношение, полагая, что p(t) ~ р,
= #рр = (i-iou ~РгГ
/?ор 1 - [1 - (1 - •
Так как р = 1 — q, то
[1-(1-^-и
1 - (1 - 7m+1)r
При^<1, что практически всегда имеет место,
1 —u.q и, следовательно,
(1-1+^)"г+1 _г>„
1—1 4-r^+i
Таким образом, при равном количестве элементов
ность раздельного резервирования в гт раз больше, чем общего»
резервирования.
(4.23)'
(4.24),
(1-7)“ —
(4.25).
эффектив-
75>
Оценку выигрыша в весе при раздельном резервировании по
сравнению с общим резервированием можно получить, допустив,
что требуется создать равнонадежные группы из равнонадеж-
ных элементов, но с разными кратностями резервирования, т. е.
= Ррр=Р-
Тогда Р= 1 — [1 -Х]'”о+1= [1 - (1 (4-26)
шли о+ ig(i-r) ’
.а т И ig(i-PT) т0 +1 — lg(l— Р)
Используя разложение в ряд и ограничиваясь первым членом
разложения 1g (1 —х) — х, получим
р
тй + 1 ~ ;
Рг
1
Р~
тр 4- 1 ~ .
Р
Вес резервной группы при общем резервировании равен:
GOp= (^0+
.а при раздельном
ОРР= (m₽+ 1) rg,
ггде g — вес одного элемента.
Тогда
г-1
Сор тге0 + 1 ~ Р г Р
Ср р «гр -1 -1 Рг~г рг ’
шбо г 1.
(4.27)
Из выражения (4.27) следует, что чём большее значение ве-
роятности безотказной работы резервированной’системы Р не-
обходимо достигнуть, тем, при прочих равных условиях, система
с общим резервированием будет иметь больший вес по сравне-
нию с системой при раздельном резервировании.
Необходимо также отметить, что чем меньше значение ®ер'О-
ятностй безотказной работы элемента р, тем эффективнее с точ-
жи зрения минимума веса оказывается раздельное резервирова-
ние.
‘76
§ 4.3. ОСОБЕННОСТИ РЕЗЕРВИРОВАНИЯ ЭЛЕКТРИЧЕСКИХ
СХЕМ
Некоторые элементы электрических систем, как это было
указано выше, могут отказывать как в результате обрыва, так
и в результате короткого замыкания. В этом случае при приме-
нении параллельного или последовательного электрических сое-
динений вероятность безотказной работы схемы увеличивается:
при одном типе отказов и уменьшается при другом.
Для повышения вероятности безотказной работы схем, со-
держащих элементы, отказы которых могут быть двух типов,,
применяют смешанные способы электрического соединения эле-
ментов: параллельно-последовательное и последовательно-па-
раллельное (рис. 4.6,а и б).
Р и с. 4.6. Параллельно-последовательное . (а) и последовательно-
параллельное (б) соединения
Когда .в элементе возможно возникновение двух типов отка-
зов, то справедливо соотношение
Р + 7к + Ча = 1 > (4.28)-
где р — вероятность безотказной работы элемента;
qK и q0 — вероятности отказа вследствие короткого замыка-
ния и обрыва.
Если для повышения вероятности функционирования системы
элемент заменяется т однородными элементами, то, вне зави-
симости от схемы их соединения, сумма вероятностей всех ком-
бинаций различных состояний элементов также составляет пол-
ную группу событий:
(Р + qK + q0}m = 1 (4.29).
или
Рт + Р”1-1 (<7к + ?о) + + (<7к + 7о)'" = 1 • (4.30)
Выражение (4.30) называют каноническим уравнением резер-
вированной системы элементов.
Отдельные члены разложения левой части равенства опре-
деляют вероятности различных комбинаций состояний т элемен-
тов схемы.
Показатели степеней при р, qK и q0 равны соответственно
числу исправных элементов в системе, числу отказавших вслед-
77
ствие короткого замыкания и числу элементов, отказавших
вследствие обрыва. Значение Скт определяет число таких ком-
бинаций.
Для того, чтобы получить из канонического уравнения выра-
жение для вероятности безотказной работы резервированной
системы, необходимо отобрать из уравнения (4.30) только те
члены, которые характеризуют отказы элементов системы, не
приводящие к отказу всей системы.
Для примера рассмотрим минимальную функциональную
схему, изображенную на рис. 4.7,а, резервированную группой
.элементов, подсоединенных, как показано на рис. 4.7,6.
а) 6)
Р и с. 4.7. Минимальное функциональное
соединение (а) и его резервное соедине-
ние^}
Каноническое уравнение для этого случая имеет вид:
(Р + Яо + ?к)4 =Pi + 4/?3 q0 + 4р3 qK + dp2q2 + 12 д2 q0 qK +
+ 6р2 qK2 + 4pq03 + 12р<7о2 qK + \2pq0 q2 + 4pq3 + (qo + qK? = 1.
(4.31)
Анализируя выражение (4.31), можно заметить, что комби-
нации состояний элементов, вероятности которых определяются
членами:
(<7о + <7к)4; 4/?7к3; fyq0\
исключают возможность построения минимальной функциональ-
ной схемы.
Комбинации состояний элементов, выражаемые членами:
12/?7о7к2; 6/?27к!; Sp'q*, (4.32)
:не полностью исключают возможность построения минимальной
функциональной схемы.
Так, например, член 12рq0 ср? объединяет вероятности состоя-
ний системы с тремя отказавшими элементами: один — вследст-
вие обрыва, два — 'короткого замыкания. При этом только ком-
бинации четырех отказов (рис. 4.8, 1—4) приводят к отказу всей
системы, в остальных восьми комбинациях состояний элементов
(рис. 4.8, 5—8), схема будет работать.
78
Таким образом, из группы членов (4.32) выделяют подгруп-
пу:
8pq0 qK2; 4pq0 qK2; 4p2 qK2; 2p2 q02, (4.33)
которая характеризует вероятности комбинаций состояний эле-
ментов, обеспечивающих построение минимальной функционалы .
Рис. 4.8. Состояния резервной группы
Подгруппа членов (4.33) и члены канонического уравнения:
р*; 4р3 q0; 4р3 qK\ Wp2qoqK
определяют вероятность безотказной работы резервированной
системы элементов при двух типах отказов:
jDp = /’t + 4/’3(?o+ ?к) + 12р270?к + 4/^2 <71(8 + 2/?2 <7О2+
+ 8pq0 q2 + 4pq2 qK .
Таким способом можно вести расчет вероятности безотказной
работы схем при любом способе соединения элементов.
При расчетах вероятности безотказной работы последова-
тельно-параллельных и параллельно-последовательных схем сое-
динений, учитывая, что вероятности отказа элементов q0 и qK
значительно меньше единицы, для приближенного вычисления
можно пользоваться формулами, приведенными в табл. 4.1.
При этом допускается, что вероятность обрыва элемента рав-
на нулю (qQ — 0), когда рассматривается безотказность рабо-
ты системы при. коротком замыкании, и что вероятность корот-
кого замыкания равна нулю (qK — 0), когда рассматривается
безотказность при обрыве элементов.
Общее значение вероятности безотказной работы соединения
при этом равно:
Р =-Р Р
1 р 1 о ‘ к •
Анализ схем соединений показывает, что если q0 <( qK, то по-
следовательно-параллельное соединение позволяет достичь боль-
79
ших значений вероятности безотказной работы резервированной
системы.
При обратном соотношении (у0 > qK) эффективнее парал-
лельно-последовательное соединение.
Таким образом, вероятность безотказной работы резервиро-
ванной системы зависит не только от значений q0 и qK, но и от
схемы ^соединения элементов.
При синтезе схем соединения резервированных систем сле-
дует учитывать, что, кроме указанных схем соединения, возмож-
но использование и иных схем, например, схем соединения ти-
на сетки (рис. 4.9).
Рис. 4.9. Структурная схема надежности типа сетки
Значение вероятности безотказной работы этой схемы зави-
сит от длины п и ширины т «сетки».
Значение вероятности безотказной работы соединений тина
«сетки» определяется на основе канонического уравнения. При
постоянном резервировании по схеме «сетки» с нечетными значе-
ниями длины и ширины сетки удается создать резервированные
системы с равными значениями вероятностей безотказной рабо-
ты по каждому из типов отказов (РО = РК)-
§ 4.4. РЕЗЕРВИРОВАНИЕ СПОСОБОМ ЗАМЕЩЕНИЯ
При резервировании способом последовательного замещения
Система содержит индикационно-переключающие устройства, ко-
торые влияют на общую надежность
—Г~д
Рис. 4.10. Структурная
схема резервирования
замещением
системы.
Рассмотрим резервированную си-
стему, состоящую из одного рабочего
(Л) и одного резервного (В) элемен-
тов (рис. 4.10). При отказе элемента
А переключающее устройство Пл от-
ключает его, а переключающее устрой-
ство Пв включает элемент В в систе-
му.
80
Вероятность безотказной работы основной системы Ро (/) оп-
ределяется произведением’ вероятностей безотказной работы
pA(t) элемента А и вероятностью безотказной работы переклю-
чателя рПл(^):
Po(t)=PA(t)PnA(t)-
Соответственно - •
Р1(0=Рв(ДрПВ(/р
Резервированная система будет .выполнять свои функции
при следующих возможных событиях, вероятности которых
равны: •
Ро (0 — основная система в течение времени t работает без-
отказно.
Pi/о (t) — основная система отказала в случайный момент вре-
мени т, а резервная система, будучи исправной в течение време-
ни х, остается исправной и в течение времени (t — xj.
Тогда вероятность безотказной работы резервированной си-
стемы
РР(0 = ЛД)+Р1/о(0-
Значение определяется выражением
t
Р1/0 (/) = J Л (t, т) /0 (т) Л,
о . .
где /о (т) — частота отказов основной системы;
Pt (t, т) — вероятность безотказной работы резервной систе-
мы в течение времени t при условии, что основ-
ная система отказала в момент времени т
Pi(t> = — ’)•
Таким образом,
t
Рр (I) = Ро (£) + J Pi (Z, т)/0 (т) Л. (4.34)
о
Рассмотрим способы определения надежности резервирован-
ной системы при различных режимах работы резерва и при
экспоненциальном законе изменения надежности основной и ре-
зервной систем.
При горячем резерве интенсивности отказов Хо основной и
резервной систем Xj одинаковы
Хо = Xj = Хл -ф Хпа = ^в + ХПв •
Тогда
P0(t) = e~\P-
/о('с) = хо е-х"'1;
б. Румянцев Е. А. и др. 81
Pt(t, т) = е х°^ ’) е_хот == е—;
t ’
Рр (/) = е—?о ‘ + J е~х»1 Хо е-х°т dx =
о
-i ’
= e~x°z4- e-x»z \ е-^ dx = e~x°z [2— е—х°у]. (4.35)
о
: Выражение (4.35) для случая горячего режима работы ре-
зерва может быть получено и из более простых соображений,
Вероятность отказа резервированной системы равна произ-
ведению вероятностей отказов основной и резервной систем
QP (t) = Qo (t) = 4(1-- e-x« ').
Тогда
PpW= l-Qp(0 = e-xo42-e-xo'].
Если число резервных систем равно т, то
/—т
Pp(O = i-nQfW.
i=0
При .ненагруженном режиме работы резервной системы счи-
тают, что интенсивность отказов ее до момента включения в ра-
боту, т. е. до момента отказа основной системы, Xj = 0 при t < х.
После отказа основной системы, т. е. при t > х, = Хо.
В этом случае:
P0(/)=le-V;
/о W е-х°т;
P4(t, = (*-•').
Подставляя полученные соотношения в формулу (4.34), найдем
i
Pp(t) = e-x»z -f- J Хо е“х°т е-х"(/_т) dx — [i 4- хо £].
о
: При наличии нескольких резервных систем выражение для
вероятности функционирования резервированной системы мож-
но получить путем многократного использования формулы (4,34).
? При т — 1
Р„1=1 (/) = Ро (/) + J /0 (т) Р, (t, X) dx = (1 4- хо t) e-V.
О
При tn = 2
Рт=2 (t) = Рт=л (Р + //М=1 W Р1V, dx.
(Г
8'2
Так как
/«=i Р) = ~ -dP-^- = - А [ 1 + М е.-хо V t е-’о S
dt dt
а
ТО'
Р2р, т) = е^о(^),
Продолжая аналогичные вычисления, при кратности резерви-
рования т, получают
^и=т(О = е-’^£ ’
г=о г!
Сравнение зависимостей РС(ХО/), приведенных на рис. 4.11
для постоянно включенного резерва (пунктирные кривые) и ре-
зервирования замещения, позволяет заметить, что резервирова-
Рис. 4.11. Зависимости от времени веро-
ятности безотказной работы системы при
различной кратности резервирования заме-
щением
ние замещением приводит к значительно большему повышению
надежности. Этот выигрыш будет тем больше, чем больше Хо t
т. е. чем менее надежна основная система.
В облегченном режиме работы резервной системы интенсив-
ность отказов резервных систем до включения в работу мень-
ше, чем интенсивность отказов Хо работающей системы, так как
они не включены на нагрузку и находятся только в подготов-
ленном состоянии. , . ,
6* дз
Для этого случая при расчетах также используется соотно-
шение (4.34), но при этом
Ро(0 = e-x°f;
/(0 = Xoe-x»S
т) =
Тогда при т — 1 '
t
Pm=i (t) = е~’°' + р'О е-ХсТ е~хо dz =
где
(4.37),
Интегрируя (4.36) с учетом (4.37), получим
(1 — e~Xi z)2
P,n=2 (t) = е-’-о 41 + р (1 - е-’ч 9 + ± Ml + 21
Проводя аналогичные пошаговые расчеты, можно установить^
что при m-кратном резервировании
Естественно, что облегчение режимов работы резервных си-
стем приводит к увеличению надежности резервированной си-
стемы но сравнению со случаем, когда резерв работает в нагру-
женном режиме.
Переключающие устройства могут оказывать существенное-
влияние на надежность систем, резервированных способом за-
мещения.
В общем случае режим работы переключателей, естественно,,
не совпадает с режимам самих элементов, однако анализ надеж-
ности группы резерва при учете этого 'Обстоятельства становит-
ся чрезмерно громоздким. Поэтому допустим, что интенсивность,
84
отказов переключателей не зависит от момента подключения
резервной системы в работу.
Рассмотрим случай нагруженного резерва резервированной
системы, изображенной на рис. 4.12.
Рис. 4.12. Структурная схема резервирования методом замещения
Вероятность отказа Л-той группы основного соединения
nk
Qok 1 i = 1 П Pokl '
;=i
Вероятность отказа /г-той группы резервирующих элементов
Qk —
k
1 - рп П poki
i=i
mk
Вероятность отказа й-той резервированной группы, состоя-
щей из основного соединения и группы резервирующих элемен-
тов,
Qpk Qok Qk
k
1 - П Pokl
i=l
nk
1 — Рп П Pokl
Вероятность безотказной работы P-той резервированной груп-
пы
PPk-l -
*
1 — П РоМ
1=1
nk
1 Рп И Ром
Вероятность безотказной работы
г г f Г
Рр = П Ppk = П 1 — 1 - П Ром
г резервированных
mk
nk
1 - Рп П Ром
групп
/г=1 /г = 1 I L
При общем резервировании, когда
71 "I
^общ Р 1 1 П Pol
n W
1 — Рп ПРо/ •
(4.38)
(4.39)
85
nk
При раздельном резервировании, когда П Ром == ^о/;> а г—п,
^рР=П{1-(1-/Эой)[1-Л/Эо/гП}-
Й=1
(4.40)
.Этот вариант резервирования ,не предполагает отключение
от общей группы неисправных основных соединений эл&менто'в
и поэтому переключающих устройств не предусмотрено.
Tai? как на практике часто возникает необходимость локали-
зовать место неисправности и в основной системе, то переклю-
чающие устройства включают не только в резервных соедине-
ниях элементов, но и в основном резервируемом соединении.
При этом формулы (4,3'8), (4,39) и (4.40) приобретают вид:
/ п \»«+1
Робщ р ~ 1 I 1 Рп П Poi I
\ 1=1 /
^раздр = П [1—(1 -РпРок.)'Л+1]-
А=1
Сопоставим способы общего и раздельного резервирования
замещением при равном числе равнонадежных элементов в ре-
зервированных системах, тогда
^общр 1 0 рлр")т+1;
^разДр=[1-(1-РпР)т+Т.
Так как
p = i -
= 1 — ?п >
то
Л>бЩр '=1 -[1 -(1-<?„)(!- <7)”]m+1~i - (<7п + «<7)т+1;
/’раздр = {1 - [1 - (1 - <7п)(1 - <7)Г+1}"~ 1 - я (<7п + <7)'и+1.
Раздельное резервирование способом замещения эффектив-
нее общего резервирования, если
р >> р
‘разд р ^общр ч
т. е. если
(qa + nq)m+1 > 11 (7П + q)m+i,
86
<7п + nq>nm+1 (7„+ q\,
УпХ 1 •
rtm+1-l
(4.41)
Применять раздельное резервирование для случаев, когда
условие (4.41) не выполняется, нецелесообразно.
§ 4.5. РЕЗЕРВИРОВАНИЕ С ПРИМЕНЕНИЕМ
ЛОГИЧЕСКИХ СХЕМ
При решении задачи повышения надежности авиационного
оборудования иногда 'практически невозможно применить методы
резервирования, изложенные в §§ 4.2—4.4. Это прежде всего от-
носится к случаям, когда возникает необходимость повысить на-
дежность датчиков информации о режимах работы отдельных
систем, о режимах полета и т. и., для которых недопустимо как
прекращение выдачи информации, так и выдача ложных команд;
к системам передачи электрической энергии (электрическим се-
тям), короткие замыкания -в одной из параллельных ветвей ко-
торых приводят к отказу всей линии передачи, к случаям резер-
вирования систем автоматического управления и др.
Повышение вероятности безотказной работы таких устройств
при наличии возможности возникновения двух типов отказов
достигается применением параллельного соединения функцио-
нальных устройств, подключае-
мых в работу через логическую
схему. Логическая схема на ос-
новании информации, получае-
мой от резервных устройств,
формирует выходной сигнал на
исполнительное устройство.
Пример избирательной схе-
мы, обеспечивающей выходной
сигнал при совпадении сигна-
лов от двух резервных систем
из трех, приведен на рис. 4.13.
В общем случае действие ре-
зервированной системы с логи-
Р и с. 4.13. Избирательная схема
ческим устройством характеризуется следующими параметрами:
1. Вероятностью отсутствия сигнала на выходе логического
устройства вследствие отказов резервных устройств типа обры-
ва цепей. При наличии сигнала на входе системы, т. е. так на-
зываемой вероятностью пропуска сигнала: Рпс.
2. Вероятностью появления сигнала на входе логического
устройства, вследствие отказов резервных устройств типа корот-
87
ких замыканий, при отсутствии сигнала на входе системы, т. е.
так называемой вероятностью ложной тревоги: Р„г.
Оба вида ошибок оцениваются по критерию идеального на-
блюдателя:
^ош = Р М -Рпс+ Р (Хвх) • Рл т, (4.42)
где Р (%вХ) — вероятность появления сигнала на входе;
Р(х№) — вероятность отсутствия сигнала на выходе.
Если в резервируемом и в каждом из резервных датчиков
возможно появление двух видов отказов, т. е. если их состояния
характеризуются следующей таблицей несовместимых состоя-
ний:
^ВХ Л-ВЫХ
Исправна Обрыв Короткое замыкание
1 1 0 1
0 0 0 1
при этом
Р + Qo + <7к — 1,
то для повышения достоверности результатов измерений рацио-
нально использовать п однотипных датчиков и устройство логи-
ческой обработки их показаний, обладающее некоторым «поро-
гом срабатывания» — s. При s — 1 имеет место дизъюнктивная
схема обработки) результатов измерений (схема «ИЛИ»), при
s — п — конъюнктивная (схема «И»), а при s<ji — так назы-
ваемая мажоритарная схема (логичеокое устройство принимает
решение пр иналичии на входе s сигналов).
Обычно
п + 1
s ------,
2
т. е. решение принимается при большинстве в один «голос».
Для любого s
Р^= S д' (1-9о)"Ч
^т=2С'д'(1-?кГ/.
i=s
Тогда
RW*)=P(*BX) S С' ?'(1-д0)'г-г + /;(хвх) У] С'д' (1-дк)л-\
/=л+1— s Z=s
88
Практически при-заданных п и соотношений ? возни-
кает задача определения sonT, при котором IF0IU минимальна.
Значение sonT можно найти по формуле [17]
Р (^вх) Яо
_ р (ЛГВХ) 1 • Qк
_______*7о *7к____
(1 -?0)(1 - q&}
+ 1 - в;
(4.43)
0<е< 1.
Выражение (4.43) справедливо только при условии, что
_____Qo Qk____ < |
(1 — 9о)(1 - <7и)
которое является условием существования экстремума.
Оптимальное значение порога мажорирования sonT зависит
от соотношения qK/q0 и р(хт).
Некоторые зависимости Рп с *=/(Р) и Рлт = /(fi) показаны на
рис. 4.14.
р г/?с ^7
— б'пс
\s = 1 л = 3; Р=0,5
\ / 5=2
г \s‘ -2 —- •—.
—— ч । Н 1 1 8 1
J ~~~2 - — - — . _____, ZZT • 1 — —
О 12 3 4 5 6 7 9
Рис. 4.14. Зависимости Рп с = f (Р) и Рл т = f (р)
§ 4.6. ЗАДАЧИ СИНТЕЗА НАДЕЖНЫХ СИСТЕМ
При разработке технических устройств необходимо не только
обеспечить заданные показатели надежности, но и произвести
это наиболее рациональным способом.
Для самолетного оборудования одним из наиболее важных
требований является требование минимального веса. Естествен-
89
но, что повышение надежности систем путем резервирований ве-
дет к увеличению веса и, следовательно, необходимо при про-
ектировании систем .решать задачи оптимального резервирова-
ния, т. е. задачи распределения резерва, при котором обеспечи-
вается минимальный вес системы.
: Аналогичные задачи возникают и в тех случаях, когда фак-
тором, ограничивающим повышение надежности, является стои-
мость системы. При этом необходимо обеспечить заданную на-
дежность так, чтобы стоимость системы была минимальной.
На практике возникают и обратные задачи, когда при задан-
ном /весе или стоимости системы требуется обеспечить макси-
мальную надежность.
В качестве критерия оценки надежности, который при реше-
нии задач оптимизируется, для невосстанавливаемых систем
обычно принимается вероятность безотказной работы за время
/о, а для восстанавливаемых — коэффициент готовности kr.
Вышеперечисленные задачи относятся к задачам синтеза, оп-
тимальных надежных схем. Перечень задач, возникающих при
проектировании невосстанавливаемых систем, можно предста-
вить в виде табл. 4.2.
Таблица 4.2
Задачи син- ’ теза Заданные параметры Оптимизируемые параметры
Прямые Вероятность безотказной ра- боты — Рс (б Вес системы — (Ос}шт Стоимость системы — { Сс }min Вес и стоимость системы — {GcJtnin И {Gc}min
Обратные Вес системы — Gc Стоимость системы — Сс Вес и стоимость системы — Gc и Сс Вероятность безотказной ра- боты — {бс(б}тах
Для решения этих задач используются методы вариационно-
го исчисления, .методы линейного и динамического программиро-
вания.
Методы динамического программирования целесообразно ис-
пользовать при наличии нескольких ограничений: по весу, стои-
мости, габаритам и др.
При синтезе сложных систем решение задач проводится на
ЭЦВМ, в простейших случаях можно получить решение расче-
тами вручную.
Ниже рассматривается решение задачи оптимизации для не-
которых, наиболее практически важных частных случаев.
90
§ 4.7. ОПРЕДЕЛЕНИЕ ОПТИМАЛЬНОГО КОЛИЧЕСТВА
РЕЗЕРВНЫХ ЭЛЕМЕНТОВ ПРИ ЗАДАННОМ ЗНАЧЕНИИ
НАДЕЖНОСТИ СИСТЕМЫ
Вероятность безотказной работы минимально-функциональ-
ной структуры системы, состоящей из п последовательных эле-
ментов, имеющих функции надежности pi, рг, •. , рп и веса gi„
gz,..., gn , определяется выражением
п
ро = П Pl,
i=1
а общий вес системы
°0 = S gf
1=1
Путем поэлементного резервирования такой системы можно'
увеличить ее надежность до заданного значения Pz. В связи с-
этам возникает задача так распределить резервные элементы в
системе, чтобы при увеличении ее функции надежности от Ро до
Рс вес полученной системы был минимально возможным.
Для этого к каждому элементу одиночной системы добавляет-
ся некоторое число таких же элементов, так что кратности резер-
вирования элементов соответственно равны: mi, тг, ..., тп.
Функция надежности t-той группы, полученной после добав-
ления резервных элементов, выражается посредством равенства:
7^=1
где
Д = 1 - Pi •
Надежность вновь полученной системы
। <
Рс=П /Дг=П(1-<7Д+ Ь (4-44)1
t=i <-1
а вес
1)&- (4-45)'
1=1
Для того, чтобы определить минимальный вес системы, об-
ладающей надежностью Рс, необходимо решить вариационную»
задачу, уравнение (4.44), определяя распределение .
Введем вспомогательную переменную а (0 < а < 1) со-
гласно уравнению
Дг. = 1 - q"lt+1= Pj . (4.46)>
91
1Из (4.44) следует, что
'Согласно (4.46),
(4.47)
а вес системы
Решение этой вариационной задачи проведем методом мно-
жителя Лагранжа.
Составим функцию вида
п
«„) = £ ^^-^-^-g. + pfP^-P], (4.48)
тде P — множитель Лагранжа, а ар а2, • .а„ — варьируемые
.значения.
Так как
^(ai’ Яп) =--------• -с'1П Рс + рРсIn Рс, (4.49)
daz In qt 1 — Р j
то, приравнивая (4.49) нулю, получают ti уравнений вида:
1П^ 1-Р/
РРС = О,
(4.50)
а с учетом, что
п Ц- 1 уравнение относительно /гф-1 неизвестных аь . .., ал и р.
Используя разложение в ряд
In х а
(*-1)2
2%2
:и ограничиваясь первым членом разложения, ибо значение Рс'
близко к единице, из (4.50) получают
а. 1 — p“z
1пРс'^-А-^£. (4.51)
Р-.1
•92
Тогда из (4.51) и (4.50) следует, что
------------1------рРс = О,
In <7/ a; In/3,
Si 1
1
Так как
10
ai ~
In qt Рс In Рс
(4.52>
п
1
n
Рс In Рс ;=1 In qt
Подставляя (4.53) в (4.52), находим
gi
In q{
аг -------—----- .
I п к
(4.53),
(4.54).
/=i
Интересующее нас распределение резервных элементов по.
группам и общий минимальный ,вес получим из (4.47) и (4.45)
с учетом (4.54).
Так же решается и задача распределения элементов по груп-
пам при оптимизации по стоимости.
Для решения обратной задачи, т. е. для случая, когда тре-
буется при заданном весе системы так распределить резервные
элементы, чтобы вероятность безотказной работы достигала,
максимально возможной .величины, составляется функция вида:.
п
* i„ri_ d“/i
Ж>
In qt -1
Проводя решение методом, аналогичным вышеизложенному,,
можно найти оптимальное значение взаимно резервирующих
элементов любой группы по следующему отношению:
Ос
! 1
От/ +1 = ———
2^
где Ос — заданный вес системы.
(4.56)»
93;
Вероятность безотказной работы системы, резервированной
таким способом, .может быть вычислена по формуле .(4.44).
При использовании для резервирования .различных участков
разных способов резервирования (нагруженного резерва, резер-
ва, работающего в облегченном режиме, ненагруженного резер-
ва) .найти оптимальное количество .резервных элементов мето-
дами вариационного исчисления затруднительно. Для таких
случаев это решение целесообразнее находить методом поша-
говой оптимизации*.
Метод пошаговой оптимизации состоит в следующем:
1. Рассчитывается табл. 4.3, в графах которой для каждого
.г-того участка резервирования системы при различных кратно-
стях резервирования т, проставляются значения
.т}- = 1,2,...
Значения Pt (т./) определяются в соответствии со способом
резервирования по формулам §§ 4.2, 4.3, 4.4.
Таблица 4.3
Кратность
резервиро-
вания mj
Участки резервирования
Р2 (;иу )
рп {mj)
0 Л(0) Л(0) РМ
I М(1) Л(1) PnW
2 М(2) ^(2) Рп$)
mj Д1 ('«у) Р2 {т}\
основании данных табл. 4.3 и известных весовых пока-
2. На
зателей элементов £,• составляется табл. 4.4 значений:
Pt (trij + 1) — Pt (mj)
W^mj) = о , / 7
для всех i при различных значениях
(4.57)
Таблица 4.4
Г1 (m7) (mj)
0
1 UM1) UZ2(1) ИД(1)
2 Wi (2) W2 (2) 1^(2)
mj MZi {mj) IF2(m7) ид (mj)
* Основы метода изложены в книге Б. Козлова, И. Ушакова. «Спра-
вочник по расчету надежности». Советское радио, 1966.
94
.3. Все значения W tfnij) таблицы 4.4 перенумеровываются в
порядке убывания величины: WtV, U7<2), ... '
4. Проводится пошаговая оптимизация.
На первом шаге:
а) выбирается максимальная из величин ИД1)— П7(1) ;
б) по таблице 4.4 отыскивается соответствующая величина
ЛИ);
в) вычисляется значение
pm /j-QI р(о)
' Л(0)
где Н(<|) = П (0) — начальное значение вероятности безотказ-
ной работы .системы;
г) вычисляется
GO)=Go+g,.,
где Go — начальный вес системы.
На втором шаге выбирается IE (2) — максимальная среди ос-
тавшихся И7/г(1) для k Р I или IFZ(2);, затем выполняются опе-
рации б, в, г, как и на первом шаге.
Процесс прекращается на таком шаге N, когда для первой
задачи оптимального резервирования выполняется условие
Р"-1 < Ртр < Р”.
Если решается обратная задача, то проверяется выполнение
условия
GN < GTp < GN" .
В качестве иллюстрации метода пошаговой оптимизации рас-
смотрим пример.
Система состоит из элементов, характеристики надежности
которых приведены на рис. 4.15.
9i ° ? 9г" 2 9з= 1 9ч^
р = 0,9 р = 0,9 р = 0,9 р-0,9
Рис. 4.15. Структурная схема надежности
, Для повышения надежности на различных участках приме-
няются различные способы резервирования.
Требуется определить оптимальный резерв для заданного зна-
чения вероятности безотказной работы системы PQ — 0,97.
95
Составляем таблицу 4.5, проводя расчет Pt для первого и
третьего участков по формуле
РД/п,)-!-^1,
а для второго и четвертого
P/(/n7)=e-,v
V t)k
Таблица 4.5
nij Pi W
I = I I =- 2 z = 3 I = 4
0 1 2 3 4 5 0,9000 0,9900 0,9999 0,9000 0,9953 0,9998 0,9000 0,9900 0,9999 0,9000 0,9953 0,9998
По данным таблицы 4.5 составляем таблицу 4.6 для значе-
ний Wt(ntj), рассчитанных по формуле (4.57), и проводим пере-
нумерацию значений
Таблица 4.6
О
1
2
3
0,005 № 4 * * 0,05 № 3 0,100
0,0005 № 9 0,002 № 7 0,009
— — 0,001
№ 1 0,100 № 2
№ 5 0>004 № 6
№ 8
Окончательные результаты расчета приведены в таблице 4.7,
на основе которых определяем для заданного значения Рс иско-
мые значения для каждого участка, соответствующие мини-
муму веса системы
96
Таблица 4.7
Номер шага N Число резервных элементов на участках на N-м шаге Ре Ge
г = 1 z = 2 Z = 3 i = 4
0 0 0 0 0 0,66 6
1 0 0 I 0 0,72 7
2 0 0 1 1 0,79 8
3 0 1 1 1 0,86 10
4 1 1 1 1 0,95 12
5 1 1 2 1 0,97 13
Таким образом,
nil = 1; тг = 1; т3 = 2; т* = 1;
а
G = 13 при Рс=?0,97.
7. Румянцев Е. А. и др.
Глава V
ЭКСПЕРИМЕНТАЛЬНОЕ ИССЛЕДОВАНИЕ НАДЕЖНОСТИ
ЭЛЕМЕНТОВ И СИСТЕМ
§ 6.1. ВРЕМЕННЫЕ ХАРАКТЕРИСТИКИ, ПРИМЕНЯЮЩИЕСЯ
ПРИ СТАТИСТИЧЕСКИХ ИССЛЕДОВАНИЯХ НАДЕЖНОСТИ
Наработка. Определяющим параметром долговечности техни-
ческих устройств является наработка, под которой понимается
продолжительность работы технического устройства. Основной
мерой, оценивающей продолжительность работы, является время
наработки в часах, т. е. время, в течение, которого техническое
устройство выполняет свои рабочие функции. Время наработки
не следует смешивать с временем эксплуатации, т. е. с кален-
дарным временем, в течение которого техническое устройство
находится на эксплуатации.
У некоторых технических устройств мерой оценки продол-
жительности работы являются другие показатели, например,
продолжительность работы электрических аккумуляторных бата-
рей измеряется числом разрядно-зарядных циклов, самолетных
агрегатов дистанционного управления — числом перекладок,
контакторов и реле — числом включений и выключений и т. д.
Таким образом, ,все основные характеристики надежности,
являющиеся функциями времени наработки, могут быть исполь-
зованы и при решении задач надежности, когда определяющие
параметры имеют другую размерность.
В этом случае под t следует подразумевать любой вид нара-
ботки, а под Тт — математическое ожидание появления отка-
за, оценивающееся любой из возможных размерностей.
При оценке надежности системы или самолета в целом по
характеристикам надежности отдельных составных элементов
авиационной техники, имеющих разную размерность наработки,
необходимо, чтобы количественные показатели определяющих
параметров были приведены к одинаковой размерности для всех
элементов системы или самолета в целом. Если для какого-ни-
будь элемента или устройства, входящего в систему, размерность
определяющих параметров надежности равна величине ag, а
для системы в целом равна А, то коэффициент приведения оп-ре-
98
деляющих параметров элементов к размерности соответствую-
щих параметров системы выразится в виде отношения
(5-1)
Таким образом, чтобы привести характеристики наработки
элементов, имеющих размерность «§», к размерности времени, их
следует умножить на коэффициент приведения, например,
Tm(4ac)^=agTmg-, (5.2)
= (5-3)
Суммарное время наработки. При проведении статистических
исследований надежности и эксплуатационных расчетов в каче-
стве определяющего параметра применяется случайная величи-
на — суммарное время наработки технических устройств, взя-
тых под наблюдение в течение некоторого времени эксплуатации
этих технических устройств.
No
h = (5.4)
7-1
где — время наработки /-того технического устройства.
Для непрерывно работающих невосстанавливаемых техниче-
ских устройств можно написать
п- 1
Е + (N0-n+V)tn, (5.5)
;=i
где — время наработки /-того отказавшего технического уст-
ройства;
tn — время, соответствующее п -случаям отказа технических
устройств.
Практически для вычисления суммарного времени наработки
весь испытательный период рабочего -времени разбивается на
разряды, соответствующие равным отрезкам времени АЛ
Если Д/гг — число отказов в течение i-того отрезка рабочего
времени, то суммарное время наработки всех функционирующих
в процессе эксплуатации невосстанавливаемых технических уст-
ройств может'быть выражено следующей формулой:
./в = [А/о — п. (^)] t + 0,5 Д/ Дл/j + 1,5 Д£ Д/г2 +... + (А—0,5) &£ knk,
где 0,5 Д/; 1,5Д/; .. .(k — 0,5) Д/ — времена наработки отказав-
ших устройств;
k — полное число разрядов.
7*
99
Учитывая, что
k
я (t) ~ Д/Zj 4~ A/z2 ”h • • * 4“ “ У
i =1
И
д/ = —
k
получим
1 к
/V - — £(£ + 0,5 - i) Lnt
* z=i
(5.6>
Для восстанавливаемых технических устройств суммарное
время наработки равно:
N k
^ = Ш<- (5.7>
J-1/=1
где tjt — время наработки /-того технического устройства в те-
чение z-того отрезка испытательного времени.
Среднее время наработки является основной количественной:
характеристикой долговечности.
Среднее время наработки технических устройств измеряется:
математическим ожиданием суммарного времени их наработки
с начала эксплуатации до заданного момента времени эксплуа-
тации.
Среднее статистическое время наработки в границах задан-
ного времени эксплуатации есть отношение суммарного времени
наработки однотипных технических устройств за этот период вре-
мени эксплуатации к общему числу данных технических уст-
ройств
Т=—. (5.8)>
N
Среднее время наработки на один отказ. На практике в ка-
чество. критерия надежности часто применяется среднее время'
наработки на один отказ. Эта величина оценивается отношением-
суммарного времени наработки однотипных технических уст-
ройств за заданное время эксплуатации к числу устройств, пре-
кративших в течение этого же времени работу ввиду их отказа.
Величина среднего статистического времени наработки на:
один отказ определяется отношением
Тн/0 = — . (5.9)»
п
10Q
§ 5.2. ЭКСПЕРИМЕНТАЛЬНОЕ ОПРЕДЕЛЕНИЕ ХАРАКТЕРИСТИК
НАДЕЖНОСТИ ЭЛЕМЕНТОВ
Характеристики надежности элементов кай вероятностные
оценки могут быть получены или путем использования статисти-
ческих данных по результатам эксплуатации технических уст-
ройств, или путем проведения специальных испытаний. Основой
.для экспериментального определения надежности авиационной
техники в процессе эксплуатации являются статистические дан-
ные об отказах. Для сбора сведений об отказах применяются
специальные формы учета, например, П. 5.
Достоинством метода получения статистических сведений о
фактической надежности технических устройств в процессе их
эксплуатации являются реальные условия и режимы работы,
обеспечивающие возможность получения наиболее точной инфор-
мации.
Недостатком этого метода является несвоевременное получе-
ние необходимой информации, так как характеристики надеж-
ности становятся известными только после накопления опыта
эксплуатации.
При всех достоинствах способа получения информации пу-
тем проведения специальных испытаний он не всегда является
экономически целесообразным из-за необходимости проведения
длительных и дорогостоящих экспериментов.
Применение ускоренных испытаний элементов и систем, при
которых подвергающиеся испытаниям устройства работают в
режиме повышенных нагрузок, позволяет в значительной степе-
ни сократить время проведения испытаний и отчасти сократить
объем выборки для испытаний.
Для экспериментального определения статистических харак-
теристик надежности могут применяться несколько способов пла-
нирования испытаний (см. табл. 5.1).
Т а б л и ц а 5.1
Номер спо- соба Производит- ся ли заме- на элементов Отмечают- ся ли мо- менты от- казов Что планируется на Что определяется в процессе испытаний
испытаниях
1 Нет Да Испытания ведутся до отказа всех уст- ройств.. Суммарная нара- ботка.
2 Нет Да Число отказов при n<W. Суммарная нара- ботка.
3 Нет Нет Длительность ис- пытаний. Число отказов.
4 Да Да Число отказов. Длительность испы- таний.
5 Да Да Длительность испы- таний. Число отказов.
101
Первые три способа характеризуются фиксированным на-
чальным объемом выборки без применения замены отказавших
устройств.
В случае проведения испытаний до отказа всех элементов вы-
борочной совокупности (способ первый) имеется возможность,
получить полное распределение времени появления отказов, од-
нако при определении статистических характеристик надежности
следует иметь в виду, что различные по своей природе отказы
имеют различные законы .распределения. Внезапные отказы име-
ют экспоненциальное распределение, а износовые — нормальное
распределение. Кроме того, средняя наработка на один внезап-
ный отказ Ттв имеет, как правило, значительно большую вели-
чину, чем средняя наработка на один постепенный отказ Тта.
Определить статистическую величину ТтВ можно лишь на более
раннем этапе, а Ттп — на более позднем, т. е. когда вероят-
ность появления износовых отказов становится доминирующим
фактором с точки зрения надежности и численно подавляет ве-
роятность появления внезапных отказов (рис. 5.1).
Рис. 5.1. Кривые вероятности безотказной
работы:
Р3 (/) — при действии внезапных эксплуата-
ционных отказов; Ра (t) — при действии из-
носовых отказов; P(t) — при одновременном
действии внезапных и износовых отказов
Рассматриваемый способ позволяет определить интенсивность
отказов технических устройств и другие характеристики надеж-
ности.
При проведении испытаний до отказа лишь некоторого опре-
деленного количества элементов выборки (способ второй) имеет-
ся возможность значительно сократить продолжительность ис-
пытаний и вместе с этим исключить 'влияние износа и старения
на надежность элементов, но следует иметь в виду, что при этом
достоверность оценки надежности несколько понижается^
В данном случае на испытание ставится также No элементов,,
102
но испытания заканчиваются в момент, когда отказывают ров-
но n<ZNo элементов.
Доказано [24], [25], что если No элементов подвергнуть ис-
пытаниям способом «без замены» и п из них откажут в моменты
времени t2; ... отсчитываемые от начала испытания, а ис-
пытания прекратятся к моменту времени tn наступления /г-го
отказа, так что Na-—п элементов еще ,не откажут к концу испы-
тания, то оценка максимального правдоподобия средней нара-
ботки на один отказ выражается формулой
п — 1
+ (N — П + 1) tn
= , (5.10)
где числитель представляет собой суммарную наработку всех
испытываемых элементов.
Способ постоянного объема выборки на протяжении всех ис-
пытаний. Элементы, отказавшие в процессе испытаний или экс-
плуатации, немедленно заменяются новыми — из той же гене-
ральной совокупности. Следовательно, если п элементов отобра-
ны для испытания, общее число элементов, проходящих испы-
тание, все время остается равным N. Если испытания прекра-
щаются по истечении времени t после начала испытания при на-
ступлении га-го отказа, суммарная наработка для N элементов
равна Nt, а оценка средней наработки элементов на отказ в этом
случае равна:
7*= — , (5.11)
п
где N — постоянное число однотипных элементов, проходящих
испытание.
Этот вид испытаний не позволяет, за исключением экспонен-
циального закона 'распределения, определить непосредственно
по первичным статистическим данным вид закона распределе-
ния. Такой способ и формула (5.11) широко применяются при
оценке надежности элементов в процессе эксплуатации авиа-
ционной техники, тем более, что >в этом случае имеют место
главным образом эксплуатационные внезапные отказы и в зна-
чительно меньшем количестве износовые отказы.
Определение размера выборки при испытании на надеж-
ность. При ограниченном объеме испытаний возрастает величи-
на риска неправильного решения в приемке или браковке техни-
ческих устройств, проверяемых на надежность.
Величина риска — это убыток, выраженный в стоимости.
Чтобы увеличить информацию и тем самым уменьшить вероят-
ность ошибки, можно увеличить объем выборки или число и вре-
мя испытаний, на основании которых принимается решение. Од-
103
нако испытания обладают сами по себе большой стоимостью,
причем пропорциональной величине выборки числа и времени ис-
пытаний.
Для определения оптимального размера выборки NB следует
задаться предполагаемым значением математического ожида-
ния интенсивности отказов генеральной совокупности эле-
ментов. В качестве ХЯ1 может быть принята известная средняя
интенсивность отказов аналогичных элементов.
Таким образом, в качестве исходной формулы для определе-
ния величины NB может быть принято выражение
= (5-12)
NBt
где пт — математическое ожидание количества отказов в вы-
борке 2VB за время t.
Вероятность того, что за время t во время испытания выбор-
ки произойдет не более п отказов, т. е.
вер (гаи < п),
где — фактическое количество отказов, полученных при испы-
таниях выборки NB за время t, является вероятностью несовме-
стимых событий, представляющих собой совокупность одновре-
менно существующих вероятностей непоявления отказов вообще
или появления одного отказа, или двух, или трех и т. д. до п
включительно.
Такая вероятность представляет собой сумму вероятностей
этих несовместимых событий и, согласно закону Пуассона, мо-
жет быть выражена формулой
/ 11 /2.2 Цп \
вер (гаи < га) = + ...+ е""-». (5.13)
Подставляя сюда выражение пт из (5.12), т.е.
(5.14)
лолучим
’ п
вер (гаи < га) = 1. (5.15)
7=0
•Вероятность того, что число отказов выборки будет не меньше
«-)—1, определяется по формуле
.вер (гаи > га + 1) = 1 — вер(гаи < га). (5.16)
Для определения размера выборки при заданных значениях
Хт и t следует исходить из наиболее приемлемого числа и до-
статочной по величине- вероятности вер (гаи п\ тогда по графи-
104
ку (рис. 5.2), соотавлевному на основании формул (5.13) и
(5.14), можно найти 'величину пт, а затем и количество устройств
выборочной совокупности
Рис.-5.2. Вспомогательный график для определения разме-
ра выборки при испытании на надежность
Пример 5.1. Необходимо провести испытание на надежность новых
•самолетных генераторов постоянного тока. Согласно условиям, испытание
производится в течение 100 часов. Желательно, чтобы в течение этого време-
ни произошло более трех отказов с достоверностью вер (пи > п) = 0,95.
Ориентировочное значение математического ожидания интенсивности отказов
выбираем из справочных таблиц для аналогичных генераторов постоянного
тока X = 3 10 Математическое ожидание количества отказов находим по
графику рис. 5.2 пт = 6. Размер выборки генераторов для испытания опре-
деляем по формуле (5.17)
7VB = ------------— = 200 шт.
100-3-10 * .
§ 5.3. УСКОРЕННЫЕ ИСПЫТАНИЯ НА НАДЕЖНОСТЬ
Ускоренные испытания технических устройств на надежность
проводятся в рабочем режиме с повышенными нагрузками и
представляют собой разновидность метода физического модели-
рования.
Для экспоненциального .закона вероятность безотказной ра-
боты равна:
р (/) == е Ч
Г05
TRep(f) и — являются безразмерными величинами.
Тт
Если- безразмерные коэффициенты модели и реального про-
цесса равны, то в этом случае метод физического моделирова-
ния для опыта применим.
В данном случае
где /у и Тту — временные характеристики надежности при ус-
коренных испытаниях.
Аналогично можно написать
Р Д) = Р (.(у)-
Согласно (5.18),
/=-^у, (5.19)
у
Т
где ----= k — коэффициент подобия.
В данном случае коэффициент подобия выражает собой ве-
личину часов работы технических устройств в условиях нормаль-
ной эксплуатации, соответствующую одному часу ускоренных
испытаний.
Для элементов авиационного оборудования и электронной
автоматики вероятность безотказной работы является функцией
комплексной нагрузки Z п .времени работы t
p = $(Z,t). (5.20)
Комплексная нагрузка включает в себя различные частные
нагрузки, влияющие на величину интенсивности отказов, напри-
мер
Z~g(U, /, (5.21)
где U — электрическое напряжение;
I — ток нагрузки;
t? — температура окружающей среды.
Аналогично времени комплексная нагрузка может быть вы-
ражена в виде 'безразмерного коэффициента и тогда равен-
ство (5.20) может бытывыражено в виде
Р = Ф1(«, т). (5.22)
Аналогично для ускоренных испытаний
Ру = Ф1(£у> ’у)’ (5.23)
где
= Ву; т = ту; р = р
106
Эти равенства и служат критерием соответствия параметров--
при ускоренных испытаниях и .в реальных условиях эксплуата-
ции.
Чем больше коэффициент подобия, тем больше сокращается
срок проведения испытаний, однако надо учитывать, что при
весьма больших значениях коэффициента подобия может быть
нарушено соответствие-между функциями р и ру .
Между коэффициентами подобия по среднему времени без-
отказной работы и -по комплексной нагрузке существует опреде-
ленная функциональная зависимость
= Zy). (5.24)-
* т у
Вид функции h (Z, Zy) зависит от рода элемента, его кон-
струкций, комплекса воздействующих .на него нагрузок и дру-
гих факторов.
Данные коэффициентов подобия при разных коэффициентах
перегрузки при ускоренных испытаниях представлены >в табл. 5.2..
Таблица 5.2
Коэффициент ^\>нагрузки Элементы 1 1,3 1,7 2
Сопротивления 2,2 3,8 5 7,5
Конденсаторы 3 8,2 27 67
Германиевые диоды 27 45 89 134
Для экспоненциального закона распределения среднее время;
безотказной работы при ускоренных испытаниях равно:
Tmy=Ntiy, (5.25).
где — время появления первого отказа при ускоренных испы-
таниях. Очевидно, что чем больше число N, тем достовернее ста-
нет-величина Тту.
На основании (5.24) и Д5.25) определяется среднее время без-
отказной работы для реальных условий
Tm=kTTmy = kTNtly. (5.26).
Согласно (1.3) и (3.13), можно написать
Q*(zfy)=l-[p*(7y)]", (5.27)=
где Q*(ty) — статистическая вероятность отказа, полученная;
при ускоренном испытании N технических уст-
ройств;
ЮГ
желае-
(5.29)
(5.30)
p*(ty) — статистическая вероятность безотказной работы
одного технического устройства, которая, соглас-
но (5.27), может быть определена по формуле
1
p*(*y)==[l-Q*(/y)f (5.28)
Если вместо Q*(/y) подставить верхний доверительный предел,
соответствующий заданному времени tH, то в этом случае р* (tH)
будет выражать с заданной доверительной достоверностью фак-
тическую вероятность безотказной работы устройства.
Количество технических устройств, необходимое для прове-
дения ускоренных испытаний на .надежность с учетом
.мой точности эксперимента, определяется .из уравнения
lg[l-Q(/y)]
•а время ускоренных испытаний определяется отношением
t Т
/ _. ‘•н__J m Н
J
/Зу TVkj'
:где Т,па — минимально допустимое среднее время безотказной
работы.
§ 5,4. МЕТОД СТАТИСТИЧЕСКОГО МОДЕЛИРОВАНИЯ
НАДЕЖНОСТИ
Цифровые электронные вычислительные машины с пристав-
:кой — датчиком случайных чисел применяются для статистиче-
ского моделирования задач по оценке надежности.
Принципиальная особенность этого метода состоит в том, что
влияние различных случайных факторов в процессе опыта учи-
тывается не расчетным, а игровым способом. При статистиче-
ском моделировании в качестве универсального механизма слу-
чайного выбора используется совокупность случайных чисел,
равномерно распределенных в интервале 0 -н1, которые выра-
батываются датчиком случайных чисел.
В ЭВМ этот процесс сводится к выбору случайной величины
-X и последовательной проверке условия
А-1
(5.31)
1=0 1=0
до тех пор, пока это случайное число не будет удовлетворять
этому условию.
Например, три наличии независимых событий Aij. Д2;'А3 и
М4,’составляющих группу, вероятности которых pv = 0.1, р2 =
= 0,3, р3 = 0,2 и pt = 0,4, датчиком случайных чисел выдается
108
случайное число Xj ~ 0,48. При 'последовательной проверке ус-
ловия (5.31) до тех пор, пока оно не выполнятся, получим:
0,48 0,1 — событие Л1 не происходит;
0,48 0,4 — событие А2 происходит;
0,4 0,48 0,6 — событие Д3 произошло.
Затем аналогично производится последовательная проверка-
очередного случайного числа ^+1и т. д. При многократном про-
ведении последовательных проверок, частота попадания случай-
ных чисел на определенный отрезок интервала 0-4-1 постепенно-
приближается к соответствующим вероятностям.
Если мы располагаем совокупностью распределенных в ин-
тервале 0 н-1 случайных величин yh то каждой из них соответ-
ствует определенное для данного вида функции Е(х) =• yt чис-
ло xt, значение которого .находится обратным преобразованием
(т. е. то значение аргумента X, для которого F(x) — у).
Отсюда следует, что процесс -получения последовательности:
случайных чисел xt с заданным законом распределения F(x)
-сводится к решению относительно х: уравнения
F(x)=j f{x)dx = yl, (5.32)-
— сю
Например, если требуется реализовать случайную величи-
ну t, распределенную по экспоненциальному закону с парамет-
ром X, т. е.
F (Z) = 1 - e-w,
то на основании (5.32) получим
1 — e~w = q,
тогда, очевидно,
*1 =---^-ln(l-?z),
А
здесь q-L — последовательность случайных чисел, распределен-
ных в интервала 0-4-1, вырабатываемых датчиком случайных
чисел.
Результаты моделирования представляют собой статистиче-
ские средние значения величин, фиксируемые в качестве иско-
мых параметров, т. е.
(5.33}
К i-i
где — численное, значение искомого параметра в i-той реа-
лизации;
R — число реализаций алгоритма.
109
В соответствии с известными предельными теоремами теории
вероятностей среднее значение стремится к действительному
ожиданию случайной величины при неограниченном возрастании
числа испытаний.
Вследствие ограниченного числа испытаний значение иско-
мого параметра в известной степени будет случайным, т. е. вме-
сто точного параметра .мы получим его приближенное значение,
называемое оценкой, имеющее лишь ограниченную точность.
Абсолютное значение максимального отклонения
6 — tg. Ст J
где /а= ]/2 Ф-1 (а) есть величина средних квадратических откло-
нений ат для нормального закона распределения, которую нуж-
но отложить вправо и влево от центра рассеивания, чтобы веро-
ятность попадания в полученный участок была равна а. Значе-
ния табулированы [12]. Ф-1(«) — функция, обратная функ-
ции Лапласа, т. е. такое значение аргумента, для которого функ-
ция Лапласа равна trj.
Применение универсальных ЭВА1 позволяет осуществить ис-
следование самых разнообразных систем и при этом имитировать
реальные условия эксплуатации. Однако подготовительная ра-
бота (формализация, составление алгоритмов, программирова-
ние) требует весьма значительных трудозатрат. В связи с этим
большое значение имеет разработка стандартных подпрограмм и
алгоритмов для решения типовых задач надежности.
Основной характеристикой, необходимой для последующих
расчетов, является вероятность пребывания системы в опреде-
ленном состоянии Pi(t] для заданного интервала времени t,
при котором она способна нормально функционировать.
В системах с избыточностью таких состояний может быть
большое количество. Для определения конкретных состояний си-
стемы на учет берутся все элементы системы, каждый из кото-
рых может находиться в одном из двух состояний: исправен —
'неисправен.
В результате предварительного анализа процесса функцио-
нирования устанавливается число рассматриваемых состояний,
при которых система способна функционировать, при этом ма-
ловероятные комбинации обычно исключаются.
Решение задачи оценки надежности методом статистического
моделирования, системы сводится к следующему.
Заданный интервал времени разбивается на равные проме-
жутки № ~ — и для каждого М определяется состояние каж-
k
дого элемента системы в соответствии с принятыми законами
распределения времени безотказной работы.
Эта информация используется для определения рабочих со-
стояний системы, соответствующих данному моменту времени.’
ПО
Предполагая, что состояния системы пронумерованы в по-
рядке убывания показателей надежности, фиксируем состояние
с наименьшим номером, т. е. выбирается состояние системы с
наилучшей по надежности комбинацией исправных элементов.
Аналогично повторяем этот процесс для следующего состоя-
ния и т. д. Многократное повторение этого процесса для каждо-
го Д/ позволяет получить оценку для вероятности исправного
j-того состояния Pj(t) в момент времени Л
В результате анализа процесса функционирования системы
из множества различных N состояний выделяется только г со-
стояний, удовлетворяющих требованиям нормального функцио-
нирования системы, и определяется вероятность безотказной ра-
боты системы в течение времени t:
PAt) = T>Pj^- (5.34)
/=!
Алгоритм рассмотренной задачи представлен на рис. 5.3.
Рис. 5.3. Структурная схема алгоритма оценки надежности системы методом
статистического моделирования
Назначение основных операторов ясно из блок-схемы. Опе-
ратор 3 путем сравнения случайных чисел xt с величиной веро-
ятности Pi (Д/) для каждого элемента определяет его состояние.
Оператор 5 проверяет, все ли N элементов просмотрены, и, если
111
i — k (т. e. определено состояние всех элементов), то произво-
дится операция с наилучшей комбинацией элементов (опера-
тор 6) и фиксация номера в памяти.
После проверок на -заданное время t3 и заданное число ре-
ализаций R3 цикл повторяется и процесс вычисления прекра-
щается.
Глава VI
ОБРАБОТКА СТАТИСТИЧЕСКИХ ДАННЫХ ПО ОПЫТУ
ЭКСПЛУАТАЦИЙ АВИАЦИОННОГО ОБОРУДОВАНИЯ
§ 6.1. ТОЧНОСТЬ СТАТИСТИЧЕСКИХ ОЦЕНОК НАДЕЖНОСТИ
Определение показателей надежности устройств авиационно-
го оборудования в практических задачах приходится произво-
дить на основе далеко не полного статистического материала.
Это объясняется тем, что как число однотипных технических
устройств, находящихся ,в эксплуатации или поставленных на
специальные испытания их надежности, так и время наблюде-
ния за ними являются величинами ограниченными. Поэтому все
статистические показатели надежности следует рассматривать
как величины приближенные. Они отличаются от своих точных
(вероятностных) значений. Более того, любые значения того или
иного статистического показателя надежности, вычисленные по
данным эксплуатации, являются величинами случайными. Если,
например, в нескольких авиационных частях одновременно и в
одинаковых условиях эксплуатируются однотипные самолеты, то
статистические показатели надежности одних и тех же устройств
оборудования самолетов ib различных частях окажутся неодина-
ковыми и будут представлять собой случайные-величины.
Приближенное, случайное значение показателя надежности,
рассчитанное по данным эксплуатации, принято называть оцен-
кой этого показателя. Она тем лучше приближается к точному
значению, чем большее число устройств данного типа находится
в эксплуатации и взято под наблюдение. При небольшом числе
устройств и малом времени наблюдения разница между оцен-
кой и точным значением показателя может оказаться значи-
тельной, что приведет к ошибкам и неправильным выводам.
Таким образом, при обработке статистических данных важнд,
с'одной стороны, выбрать такую оценку, чтобы даже при сравни-
тельно небольшом объеме этих данных ошибка от замены точ-
ного значения показателя надежности его оценкой была бы по
возможности малой. С другой стороны, необходимо установить,
с какой степенью уверенности можно ожидать, что эта ошибка
не выйдет за известные пределы. При этом следует иметь в ви-
8. Румянцев Е. А. и др.
113
ду, что само точное значение показателя надежности нам по су-
ществу неизвестно.
Во многих случаях бывает известен закон распределения
случайных событий отказа (или событий восстановления), но
неизвестны его параметры. Тогда в качестве показателей надеж-
ности определяются оценки этих параметров, например, интен-
сивности потока отказов, плотности потока восстановления и т. п.
Обозначим а* оценку для некоторого показателя надежно-
сти а. Закон распределения оценки а*, как величины случайной,
зависит от закона распределения исследуемых событий отказов
(восстановлений), в-частности, от самого неизвестного показа-
теля (параметра) а, а также от числа опытов и.
Оценка а* называется состоятельной, если при увели-
чении числа опытов п она сходится ,по вероятности к показате-
лю а. Свойству состоятельности удовлетворяет, например, ис-
пользуемая в теории надежности оценка среднего времени без-
отказной работы, подсчитываемая как среднее арифметическое
значение времени безотказной работы устройств:
т п
' ‘ Действительно, согласно закону больших чисел, при увели-
чении п величина Тт сходится по вероятности к Тт.
- Оценка а* называется несмещенной, если она удовлет-
воряет условию, гарантирующему отсутствие систематических
ошибок в сторону завышения или занижения:
М [а*] = а.
Легко видеть, что оценка Тт является несмещенной, так как
п
Ътт
Можно показать, что все основные статистические оценки надеж-
ности, в том числе такие, как статистическая вероятность отказа
q*, частота восстановления ?* и другие, являются состоятель-
ными и несмещенными.
Оценка, обладающая по сравнению с другими наименьшей
дисперсией, т. е. удовлетворяющая условию
D [а*] = min,
называется эффективной. В частности, оценка Т% , подсчи-
танная для этапа старения и износа технических устройств, где
отказы подчиняются нормальному закону, будет также и эффек-
тивной.
114
Оценка а* характеризует неизвестный параметр а одним чи-
слом и поэтому называется «точечной». .В. том случае, когда рна
получена на основе малого числа опытов, особое значение при-
обретает вопрос о точности этой оценки, так как в ряде случаев
при ее применении .могут быть допущены серьезные ошибки.
Для характеристики точности оценок используют известные
из математической статистики понятия доверительных интерва-
лов и доверительных вероятностей. Существо этих понятий сво-
дится к следующему. Потребуем, чтобы с некоторой достаточно
большой вероятностью р (например, порядка 0,9; 0,95) откло-
нение точного показателя от его оценки не превосходило,, вели-
чины е, т. е. потребуем 'выполнения следующего условия:
Р(- г <а- а* <е) = р. ' (6.1)
Тогда практически возможные ошибки от замены а на а* будут
Т е. Большие по абсолютной величине ошибки могут появиться
лишь с малой вероятностью а = 1 — р.
Перепишем (6.1) в другом виде:
Р(а* —в<а<а* + в) = р. (6.2)
Равенство (6.2) означает, что с вероятностью р неизвестное
значение показателя а попадет в интервал , ограниченный
значениями а* — е; а*-ре:
/р = (й* — е; а* + е).
Вероятность р называют доверительной вероят-
но с т ь ю, интервал /р — доверительным интервалом,
а его границы а* — в и а* 4- в — доверительными грани-
цами, ' , . . ..
Таким образом, если по опыту эксплуатации некоторого огра-
ниченного числа технических устройств рассчитана оценка а*
показателя надежности, а затем из условий выполнения равенств
-(6.1) или (6.2) найдено значение при заданной р, то по опыт-
ным данным можно утверждать, что с доверительной вероят-
ностью Р точное значение неизвестного показателя надежности а
.заключено между доверительными границами а* — е й а*-f-в,
т. е. находится внутри интервала /р. Очевидно, что с увеличе-
нием количества наблюдаемых в эксплуатации технических уст-
ройств (т. е. увеличением числа опытов) при той же доверитель-
ной вероятности р доверительный интервал /р будет сужаться,
.а доверительные границы й* — е; й*+е — сближаться. Точность
оценок при этом повышается.
Перейдем к вопросу расчета в и /р. Если бы закон распре-
деления случайной: оценки а* был известен (а — величина не-
случайная), то задача нахождения в и /р решалась бы про-
сто: достаточно было бы при заданной р найти такое значение
s, которое удовлетворяет уравнению (6.1), а затем рассчитать /р.
•8* 115
Так, например, при симметричной функции плотности распре-
деления f(x) ошибки х = а — а* уравнение для отыскания е
будет иметь следующий вид:
2 /(х) dx = р.
о
При несимметричном распределении а* обычно требуют, что-
бы вероятности попадания а в диапазон значений слева и спра-
ва от доверительного интервала были одинаковы и составляли
| ______ D
— =-----Тогда уравнение (6.2) можно представить двумя
2 2
уравнениями вида:
Р(«<а!) = у; Р(а2<а)= ~ , (6.3)
где а1 — а* —а; й2=а*-|-е есть соответственно нижняя и верхняя
границы доверительного интервала.
Можно взять также другую пару уравнений:
о at
P(a<Za^ = —\ Р (а < <х>) = 1 — — .
Однако затруднение состоит в том, что закон распределения
оценки а*, как уже упоминалось, зависит от закона распределе-
ния событий отказов и, следовательно, от его неизвестных па-
раметров, в том числе параметра |(или показателя) а. Чтобы
обойти это затруднение, применяют приближенный способ, со-
стоящий в том, что в получаемых на основе (6.2) аналитических
выражениях для /р неизвестные параметры а заменяют их точеч-
ными оценками а*. Такой способ приемлем лишь при достаточ-
но большом статистическом материале, когда число исследуемых
на надежность устройств составляет 30—40 и более.
Точные методы расчета доверительных интервалов предпола-
гают, что обязательно известен вид закона распределения слу-
чайных событий отказов (например, вид закона распределения
времени безотказной работы, времени восстановления и т.п.), а
параметры его, разумеется, неизвестны. Чтобы обойти трудность,,
связанную с тем, что точные значения параметров (и других по-
казателей надежности) .неизвестны, применяют специальный
врием, состоящий в том, что в неравенствах вида (6.1), (6.2)
переходят от случайной величины а* к некоторой функции от
а*, но такой, что закон ее распределения не зависит от неизвест-
ного параметра а, а зависит только от числа опытов п и от вида-
закона распределения событий отказов (событий восстановле-
ния).
116
Как показано ,в .главах I—III, законы распределения для со-
бытий отказов и восстановлений устройств авиационного обору-
дования в настоящее (время хорошо изучены, чго открывает воз-
можности применения точных методов расчета доверительных
интервалов в практических задачах.
§ 6.2. РАСЧЕТ ДОВЕРИТЕЛЬНЫХ ИНТЕРВАЛОВ
ПО СТАТИСТИЧЕСКИМ ОЦЕНКАМ НАДЕЖНОСТИ
НЕВОССТАНАВЛИВАЕМЫХ УСТРОЙСТВ
Известно, что поток отказов авиационных устройств в про-
цессе эксплуатации может быть описан простейшим пуассонов-
ским потоком. В соответствии с законом Пуассона вероятность
того, что за суммарное время наработки произойдет .ровно k
отказов,
/ \k
IJ2LI
= Тт> <6’4)
\ * т / ™ •
где Тт — среднее время безотказной работы, пт = — ма-
Тт 1
тематическое ожидание числа отказов за время 6 Д =-------- —
Тт
плотность потока отказов.
Пусть известно, что в процессе эксплуатации достаточно
большого количества однотипных устройств произошло ровно п
отказов за время й . Это время й является величиной случай-
ной. В другом аналогичном опыте отказ ровно п устройств -мо-
жет произойти за другое время. Это означает, что случайными
будут точечные оценки для среднего времени безотказной рабо-
'Т’.у. , j.
ты 1 т = --, плотности потока отказов л*= —, математическо-
п
го ожидания числа отказов за фиксированный промежуток вре-
мени Пт . Требуется по результатам данного опыта эксплуата-
ции, когда ровно п отказов произошло за время № , найти дове-
рительные интервалы для среднего времени безотказной работы,
вероятности безотказной работы и других показателей надеж-
ности устройства.
В § 6.1 указывалось, что для определения доверительных ин-
тервалов необходимо установить закон распределения* оценок,
тэ < tz tt,
В нашем случае удобно взять оценку —, так как пт = — яв-
'^'т Т'т
ляется параметром распределения Пуассона.
117
В соответствии с (6.4) вероятность появления за время fa*
не менее п отказов будет равна:
k=0
(6.5)
Выражение (6.5) представляет собой не что иное, как инте-
тральную функцию распределения оценки -----. Дифференци-
руя (6.5) по ——, получим функцию плотности распределения
Т т
fa
оценки ----:
(«- О1-
(6.6)
Т
е .
Эта функция зависит как от п, так и от неизвестного нам
2/s
(точного)'параметра Тт> Введя новую переменную х2 =--------->
преобразуем (6.6) к функции, зависящей только от п и не зави-
сящей от параметра Тт:
7?
[ \ (у 2\/z 1_2
(6.7)
Функция (6.7) отвечает известному из теории вероятностей
так называемому х2 распределению с 2/г степенями свободы.
Кривая х2 распределения приведена на рис. 6.1.
Теперь определение доверительных интервалов при заданной
доверительной вероятности Р не представляет особых трудно-
стей. Вероятность попадания случайной величины х2 в область
2 2
значении, меньших, чем х, где Xi_5_— нижняя граница до-
2 2
118
верительного интервала (рис. 6.1), должна быть равна — =-----»
Соотношение (6.8) является уравнением, решение которого
2
дает нижнюю доверительную границу
Вероятность попадания случайной величины у2 в область
значений, меньших, чем у2а, где у2а — верхняя граница довери-
~2 Т
тельного интервала, должна быть равна 1-т. е.
2
х3«_
^(х2<УЛ)=Г2/(х2)^2=1 - — (6.9)
Это соотношение является уравнением, решение которого дает
верхнюю доверительную границу х2а •
V
Таким образом, с вероятностью р
у2 у2 у2
Л. а Л Л а
~ V 7
В литературе по математической статистике решения уравне-
ний (6.8) , (6.9) о1носительно у2 а и у2а для различных п и а
1 — Т Т
сводятся в таблицы. Они приведены в П. 3.
Так как по принятому выше обозначению---= у2, то дове-
ет
119
и
рительные границы для среднего времени безотказной работы
'г * 2i*
1 т будут соответственно равны —
У- а
2
чение Тт с доверительной вероятностью
т (ЧП ЧП
доверительном интервале ----
I X « X к
Х Т 1 - '2
4ti
—5---, а точное зна-
Т «
’"Т
Р будет заключено в
, т. е.
ЧП ' 2tl
-^2~<Т’П<—2------- • (6-10)
Ла Л а
Т “ Т
_ t
Имея в виду, что P(t) = е Г'«, с учетом (6.10) можно полу-
чить доверительный интервал для вероятности безотказной ра-
боты устройства в течение времени t:
где ;
т ЧП т _ ЧП
'1~ 72 ’ '2— 2
Л а Л а
V “Т
Так как X = —, то нетрудно найти доверительный интервал
I'm
для интенсивности отказов:
_L<x<_L.
Л Л
Аналогично находят двухсторонние доверительные интер-
валы для других показателей надежности.
На практике иногда достаточно знать лишь нижний предел
одностороннего доверительного интервала. О.н находится из ус-
ловий удовлетворения требования: вероятность того, что точное
4t*
значение Тт -меньше —должна быть не больше заданной
Ха
вероятности а. Отсюда следуе!
9/х-
(6.11)
Ла
Значения х« при известном п также берутся из таблиц (П.З).
При расчете односторонних и двухсторонних доверительных
интервалов находит применение несколько видоизмененный
120
сравнительно с рассмотренным способ. Представим неравенства
(6.10), (6.11) в следующем виде:
\n<Tm<Z2T*-, (6.12)
Гт>80П, (6.13)
а
где Тт = — — среднестатистическое время безотказной рабо-
п
ты (оценка, полученная из опыта эксплуатации).
Тогда
. 2/г. 2п „ 2п
°1 ~ ; °2 ~ ~у2 ! °0 —
А а А а Ла
Значения коэффициентов
ны в таблицы П. 4.
-82> °о Для различных п сведе-
П ример 6.1. Суммарный налет самолетов авиационной части состав-
ляет 5000 часов; за это полетное время произошло 14 отказов в системах ав-
томатической выработки топлива на самолете. Оценить с достоверностью Р =
= 0,9 доверительные границы для среднего времени безотказной работы
этих систем.
Имеем /J = 5000 час, п = 14,
~ = 0,05. По табл. П. 3 находим
у2 =16 оз-
Л-0,95 U|3’
й05=41>3-
Таким образом,
„ 2-5000
Г, =----------242 час-,
41,3
2-5000 с1.
—---------= 614 час,
16,93
242 < Тт < 614.
т. е. можно утверждать с доверительной вероятностью 0,9, что среднее время
безотказной работы систем больше, чем 242 часа, но меньше, чем 614 часов.
Аналогично можно определить односторонний доверительный интервал:
, О7П -Г 2-5000 .
А. = 3/,9; Тт >----------ss 264 час,
лод . т 3? g
т.-е. с достоверностью 0,9 величина Тт не меньше, чем 264 часа.
Пример 6.2. В три авиационные части поступили в эксплуатацию са-
молеты с новыми бортовыми ЭВМ. По опыту их применения получены сле-
дующие статистические данные:
Часть № Число отказов ЭВМ Наработка ЭВМ (в часах)
1 5 700
2 3 550
3 6 1000
Установить с доверительной вероятностью 0,9, соответствует ли факти-
ческое среднее время безотказной работы ЭВМ оговоренному техническими
условиями значению Тту = 100 часов.
121
. Имеем
з
tl = X tt = 700 + 550 + 1000 = 2250 час;
i -1
71 = 5 + 3 + 6=14; а = 0,1.
Среднестатистическое время безотказной работы
7^ = — = 160 час.
п
По таблице П. 4
По (6.13) односторонний доверительный интервал
7"И1< 0,75-160 = 120 час.
Таким образом, Тт > 7'Гу и с вероятностью 0,9 можно утверждать, чт»
надежность ЭВМ удовлетворяет заданным требованиям.
Пример 6.3. Суммарный налет самолетов авиационного подразделения
в течение некоторого времени составил 2000 часов. За это полетное время за-
регистрировано 10 отказов астроориентаторов. Определить с Р = 0,9 двух-
сторонний доверительный интервал для полетного времени к исходу кото-
рого вероятность безотказной работы астроориентаторов была бы равна
-Тзад (/„) = 0,95.
По экспоненциальному закону распределения времени появления отказов
Отсюда имеем
Лад (*п) = е Т,п .
'Г
m~, 1
In -------
Р
зад
Подставляя это соотношение в неравенство (6.10), получим
2/£ 1п —1
_________
a
“2
2Й
зад
In——
р
___1 зад
у2
>-Т
(6.14)
п = 10;
Д = 31,4;
2
Произведя подстановку всех величин в
Из условий задачи следует:
По таблицам П. 3 находим:
= 2000wzc; — = 0,05.
2
=1о-9-
2
(6.14), после вычислений
получим
6,2 час < tn < 18 час,
т. е. с вероятностью 0,9 к концу полетного времени от 6 до 18 часов астро-
ориентаторы будут работать безотказно с вероятностью 0,95.
122
Выше был рассмотрен случай, когда поток отказов является
простейшим пуассоновским потоком. При этом предполагалось,,
что в эксплуатации находится достаточно большое число одно-
типных устройств. В практике обработки статистических данных:
важное значение имеет другой случай, когда на испытаниях или
в эксплуатации имеется сравнительно небольшое число п одно-
типных устройств (например, 5, 10, 15), а о вероятности их без-
отказной работы судят по статистической оценке — частоте-
т
событий безотказной работы р* = или частоте отказов.
q* — 1 — р*, где п—т —- число отказавших устройств.
Оценка р* является состоятельной, а также несмещенной,,
так как математическое ожидание М(р*) равно р. Дисперсия
величины р* равна:
Д(^*) = ££; q^-\~p.
П
Можно показать, что эта дисперсия является минимально-
возможной, т. е. оценку р* для р следует считать эффективной..
Очевидно, что в рассматриваемом случае, когда число уст-
ройств 11 в опыте ограничено, закон распределения оценки — ча-
стоты р* — отвечает биномиальному распределению: вероят-
ность того, что ровно т устройств из п будут работать безот-
казно,
Рп, п = С„рт qn~m. (6.15)-
Между тем р* есть не что иное, как отношение числа безот-
казно проработавших устройств к числу поступивших в эксплуа-
тацию.
Исходя из биномиального распределения оценки р*, будем:
искать доверительные интервалы для точного, но неизвестного-
значения вероятности безотказной работы устройства р.
Пусть установлено из опыта, что за время t работало безот-
казно k из п устройств, а п—k — отказало. Тогда точечная:
k
оценка р'- = — .
Найдем такое значение вероятности безотказной работы уст-
ройства pz, при котором вероятность безотказной работы k и Me-
tz
, е. с вероятностью —
оценки р* не превышали бы — ). Такое значение рг с учетом.
(6.15) может быть найдено из следующего уравнения:
k
S с“рГ(1-р2Ги = ^-. (б.1б>
т-0
128:
нее устройств из п равнялась бы — (т
Найдем далее такое значение вероятности безотказной рабо-
ты устройства pi, при котором'вероятность безотказной работы k
и более устройств из п также равнялась бы — :
S С?/>Г(1-ЙГ = 1. (6.17)
m-k 2
Нетрудно видеть, что рг и р{ есть доверительные границы
для р, так как с вероятностью $ =1—а при pi<Cp<ZP2 статисти-
ческая частота событий безотказной работы по опытным данным
'будет укладываться'в тот же интервал /р (рр, р2).
Таким образом,
Pl<P < Рг ’
тдр pi и рг есть решения уравнений (6.16), (6.17).
В табл. 6.1 приводятся значения доверительных границ рх и
,р2 Для различных п при р — 0,9.
Таблица 6.1
Р* п = 5 п= 10 11 — 15 п = 25
Pi Рг Pi Рг Pi Рг Р1 Рг
0,8 0,43 0,97 0,56 0,96 0,61 0,93 0,67 0,90
0,9 0,54 0,99 0,68 0,99 0,72 0,98 0,78 0,97
1,0 0,69 1,00 0,83 1,00 0,89 1,00 0,93 1,00
Пример 6.4. На испытания в течение 500 часов были поставлены 10 ге-
нераторов переменного тока новой конструкции. В процессе испытаний отка-
зал один генератор. Найти при ₽ = 0,9 доверительные границы для вероят-
ности безотказной работы в течение 500 часов и интенсивности отказов гене-
ратора.
Из опыта р* — 0,9, п = 10; по табл. 6.1 находим pi = 0,68, р-2 = 0,99.
Значит, 0,68<д<0,99. Так как
то с доверительной вероятностью 0,9 интенсивность отказов будет заключена
ж пределах
0,2 10 -* < X < 7,8 -10~4.
124
§ 6.3. ОЦЕНКА ДОВЕРИТЕЛЬНЫХ ИНТЕРВАЛОВ
ПО СТАТИСТИЧЕСКИМ ХАРАКТЕРИСТИКАМ
ВОССТАНАВ Л И ВАЕМОСТИ
Оценка среднего времени восстановления. Плотность распре-
деления времени восстановления неисправных технических
устройств, как уже было показано раньше (§ 2.2), подчиняется,
закону Эрланга.
Учитывая, что среднее статистическое время восстановления
t N
/рем ~
(6.18>
формулу (2.73) можно
/(7'Р*ем)=^-
* рем
представить в следующем *виде:
1 ( 2пТ*м \2«-1 -
------ ----— е
(2« —1)!\ Треи I
2пТ
«
рем
Т
рем
(6.19).
Применяя вывод, аналогичный рассмотренному в § 6.2, получим,,
что доверительный интервал для оценки Тр(;ы выразится нера-
венством
N 4t N
ремЗ рем 2
у2 ‘ рем <-
Ла Л а
Т ~ Т
(6.20>
Подобно (6.21), доверительные интервалы для среднего вре-
мени 'восстановления могут быть выражены неравенством:
11 /рем <7 * рем Тг 'рем >
(6.21>
где
'11 = 72— И Т2 =
Л а
V
4п
X2
1 - -
(6.22)-
Пользуясь табличными данными хг, имеем возможность рас-
считать значения у и представить их ,в виде графиков зависимо-
сти от величины п и достоверности а.
Доверительные интервалы для коэффициента готовности. Го-
товность авиационной техники в значительной степени зависит
от ее надежности и восстанавливаемости и это свойство опре-
деляется коэффициентом готовности
Т
Кт =-----------
Т Т
1 т> 1 рем
Оценка величины коэффициента готовности авиационной тех-
ники, находящейся в эксплуатации, на основании статистиче-
ских данных производится путем предварительного определения
125
'средней статистической величины коэффициента готовности /<г*
как исходной величины для вычисления двух доверительных гра-
ниц и Кг для искомой величины фактической готовности:
К* = ----T,il , (6.24)
Т* I т* 4 '
1 т * рем
где предполагается, что Тт и Т$еа уже известны.
Задаваясь .величиной вероятности Р того, что искомая вели-
чина фактической готовности попадает в некоторый интервал
ют К* — е до К* + е, где е — величина, характеризующая
рассеяние Кг, можно записать
Р (Кг* -в<КГ< КГ* + е) = р.
(6.25)
Величина е характеризует точность оценки, а величина Р —
достоверность того, что КГ попадает в границы интервала
Кт* - е и Кт* + е.
Распределение оценки средних значений случайных величин
независимо от характера их распределения подчиняется нор-
мальному закону, и <в этом случае вероятность попадания иско-
мой величины Кг в интервал с радиусом е с центром в точке КГ*
выражается формулой
Р (К* - е < Кг< К*+е) = &
е
(6.26)
е
g
— функция Лапласа величины -----— ;
<W=)
где Ф
1°(/Сг*) J
° (К*) — стандартное отклонение величины К*.
Корнем уравнения
(6.27)
является число
е
(6.28)
Зная z и <з(Кг*), можно определить величину е:
е = за (/</), (6.29)
удовлетворяющую выражению (6.26).
Табулированная величина z = /(₽) представлена в табл. 6.2
Таблица 6.2
0,75 0,8 0,85 0,9 0,95 0,96 0,97 0,98 0,99
Z 1,150 1,284 1,440 1,645 1,960 2,054 2,170 2,326 2,576
126
Величина <з(АГг*) вычисляется по формуле стандартного от-
клонения для произвольной функции
/дК*\2 / дК* V
°2 =& °2 (°2 (6-30)
\дТт/ \О1реы /
Учитывая равенство (6.23), подставляем его значение в
1(6.30), которое затем дифференцируем, тогда
J'*2 У’»2
°W)= V а2(Г?“’)- <6-31 >
V ш “Г L рем; V1 ш -г * рем/
откуда
0(кр.) = /<г»2й11/ + ^И=>. (6.32)
j m ' i in * рем
Стандартные отклонения а (Тт ) и а (Трем) находятся, исхо-
дя из следующих соображений.
Пусть имеется п независимых случайных величин времени
появления отказов t\, 12,..., 7„.Их среднее статистическое значе-
ние
г*=—(Л+ ^2+ ... + /„)•
п
Из теории вероятностей известно, что математическое ожида-
ние суммы случайных величин равно сумме математических
ожиданий, а так как в данном случае
7И(^)==Л1(^2) = ... = 7И(/„)==Л4(/), (6.33)
то
Л4(П)=~(6.34)
и
Аналогично получим
°2(П) = 4о2(^ + 4°г^- Так как а2(Л) = </%) = ...-о2 то а2(^) = 4-Л<,2(0 = /г2 Или о(Г )==-1^ V и 4-...+-1о2(/я). (6.35) п2 (6.36) = . (6.37) п L- , (6.38) 127
аналогично находим
(6.39)
Можно показать, что а(/) = Тт, а
3(^ = 2ф-, (6.40)
и,следовательно,
,(П)-^иМ7'И = ^. (6.41)
Подставляя эти значения в (6.32), получим
— + — = \ — (6.42)
п 2п V 2п г ?
Пример 6.9. На основании статистических данных, полученных для
п = 10 отказов авиационной техники, произвести с достоверностью 90%
эксплуатационную оценку величины коэффициента готовности, если известно,
что среднестатистическое время между отказами Г* = 100 час, а средне-
статистическое время восстановления неисправной авиационной техники
Трем = К) ЧИС.
Среднестатистическое значение коэффициента готовности
/<* =-------192----==0,91.
100 4- 10
Критериальный коэффициент для [1 = 0,9 (см. табл. 6.2), г = 1,645
О (Мг*) « 1/ — 0,912 — = 0,034.
V 2-10 100
Находим доверительные границы:
М) = 0,91 —0,034-1,645 = 0,854.
М2 = 0,91 + 0,034-1,645 = 0,966.
Следовательно, можно утверждать с вероятностью 0,9, что коэффициент
готовности авиационной техники больше, чем 0,854, и меньше 0,966.
Глава VII '
ПРОГНОЗИРОВАНИЕ СОСТОЯНИЯ АВИАЦИОННОГО
ОБОРУДОВАНИЯ
§ 7.1. МЕТОДЫ ПРОГНОЗИРОВАНИЯ ПО ДАННЫМ
ПЕРИОДИЧЕСКОГО контроля ОБОРУДОВАНИЯ
.Техническое прогнозирование основывается на предсказании
состояния авиационного оборудования на последующий период
эксплуатации по статистическим данным и результатам контро-
ля его технического состояния за прошедший период эксплуата-
ции. Для практических целей наибольшее значение имеет прог-
нозирование отказов, позволяющее проводить заблаговременные
ремонтно-профилактические работы и замену тех устройств, ко-
торые по прогнозу могут отказать в полете.
В настоящее время методика прогнозирования разрабаты-
вается главным образом применительно к постепенным отказам.
Однако между постепенными и внезапными отказами нет глубо-
кой границы. Всякому скачкообразному изменению состояния
физической системы |(внезапный отказ) предшествует накопле-
ние постепенных изменений. С расширением области контроля
состояния число так называемых внезапных отказов будет сокра-
щаться, а сфера применения методов прогнозирования — рас-
ширяться. •
Из опыта эксплуатации известно, что для многих элементов
и агрегатов авиационного оборудования основную часть состав-
ляют постепенные отказы, обусловленные старением и износом
и выражающиеся в постепенном изменении и выходе определяю-
щих параметров за допустимые пределы. Так, например, интен-
сивность постепенных отказов полупроводниковых и электрова-
куумных приборов (прошедших предварительную тренировку)
в 2—4 раза превышает интенсивность внезапных отказов. Для
электродвигателей постепенные отказы составляют 40—6О°/о от
всех отказов.' Примерно такие же соотношения имеют место для
механических конструкций.
Математические основы прогнозирования включают в себя
аппарат численного анализа (теория экстраполяции, а. также
применяемые при обработке экспериментальных данных способы
наименьших квадратов, приближения функций многочленами,
9. Румянцев Е. А. и др.
рядами и др.) и аппарат теории случайных функций. Примене-
ние тех или иных математических методов определяется имею-
щимися априорными и экспериментальными сведениями о про-
цессах изменения состояния прогнозируемого объекта. При ис-
пользовании данных периодического контроля технического со-
стояния оборудования расчеты по прогнозированию могут вы-
полняться вручную или с применением вычислителей автомати-
ческих систем контроля.
Задача прогнозирования формулируется следующим образом.
Пусть контролируемый параметр объекта представляет собой
функцию x(t), которая в течение периода Т\ эксплуатации при-
нимала в моменты контроля to', t\, • ., ta значения: x(to); x{ti),
Необходимо по известным значениям x(tn); x(n^)...
. .. x(t0) функции x(i) в моменты времени tn—i\ ... t0 в прош-
лом (ta-k € Л, k = 0,1,..., п) предсказать значения %(£«+m),
tn = 1, 2,... для моментов времени tn + i, t,l + 2 . . . tn + т в
будущем,причем tnJs.m^T2 (рис. 7.1). Если Д7' — временной
Рис. 7.1. к постановке задачи прогнозиро-
вания при монотонном изменении опреде-
ляющего параметра
шаг контроля, то т^Т=Тпр — период прогноза. x(t) назы-
вают прогнозируемым параметром. В общем случае для слож-
ных блоков и систем он является, как правило, обобщающим
параметром x(f) = f(a; b; с;..., t), где а; b; с;.... — парамет-
ры входящих в систему элементов и блоков.
Практика показывает, что для некоторых технических, уст-
ройств изменение параметров их состояния во времени имеет
монотонный характер, а прогнозируемая функция не имеет экст-
ремумов (например, коэффициент усиления магнитных усили-
телей с внешней обратной связью по току, полупроводниковых и
ламповых усилительных схем). Для прогнозирования в этих
случаях удобно применять методы численного анализа. Одним
из них является метод, основанный на использовании интерпо-
ляционных полиномов для решения задач экстраполяции.
130
Как известно, задача интерполирования заключается в на-
хождении значений функции x(t) для промежуточных значений
аргумента tt < t < /z+1, где 4 = 0, 1, 2,..., п — дискретные
значения аргумента, при которых функция x(t) известна. При
этом оперируют вместо функции х(1) некоторой функцией F(i),
которая в заданных точках to', , t„ принимает значения
x(t0); x(ti);х (i„), т. е.
F(tt) = x(ti)', 4 = 0; 1; ... /г. (7.1)
Интерполирующая функция F(t) обычно отыскивается в виде
алгебраического полинома.
Задача экстраполирования формулируется так: пр данным
значениям x(t0); x(/i);..., x(tn) найти многочлен F(t) степе-
ни п, удовлетворяющий как условиям (7.1), таки следующим
условиям:
х (^л+1) F (^л+1) < I si 15
х(^я+г) F (^п+г) < I е21! (7.2)
где ех; е2; ... гт — заданные величины, a x(tn+m) — искомые
(прогнозируемые) значения функции x(t). В этом случае поли-
ном называют экстраполяционным. Его и применяют для прогно-
зирования.
В качестве F(t) могут быть использованы полиномы, рассчи-
танные по интерполяционной формуле Лагранжа
F(t) = ху ) +
(*-W-A) •• • +
(^1 ^о) (^1 ^2) • • • (Л ?п)
I *0) ^1) • • • ^л-1) х \
(7,3)
Легко проверить, что при любых дискретных t < tn значения
F(t) их(/) совпадают.
Применительно к задаче прогнозирования формула (7.3) при-
нимает вид:
п\
п П'
+ (7.4)
•9*
131
Lt = (— I)"-1----------Ц------- Cln — коэффициенты Лагран-
(тфп- i)ti\ жа, не зависящие от зна-
чения функций x(i);
Ш п+т-------п — количество шагов прогно-
зирования (тДТ — пери-
од прогноза);
п -ф 1 — число точек (контроля
функции x(t), равное чи-
слу известных значений
этой функции.
Коэффициенты Лагранжа рассчитываются и сводятся в таб-
лицы [28]. При п = 3 и различных т коэффициенты Lt имеют
значения, приведенные в табл. 7.1.
Т а б л и ц а 7.1
Li 1 2 3 4 5
io —1 —4 —10 —20 —35
71 4 15 36 70 120
Ла —6 —20 —45 —84 —140
7з 4 10 20 35 56
Таким образом, прогнозируемая, например, на два шага по
четырем проконтролированным ранее 'значениям параметра
x(t) величина параметра будетравна:
Л(^з + 2ДТ) = —4х(^0)+ 15х(^) - 20х(/2)+ 10x(/s).
В качестве F(f) .могут 'быть использованы также полиномы,,
определяемые по так называемой второй интерполяционной фор-
муле Ньютона
Д2 г
F (t) = Хп + М-1 (t - t„) + (t - t„) (t - tn^ ф . . .
Д/i v*
(^- Ф)> (7.5>
n\
где
д*„-1
К-2
*n - -v-i; д2 ^-2 = 1 - д*„-2;
1 Хп—2> Д2-’Сл-3 = ^хп—2 ^Хн—З’
Дх0 — %! — л0; Д2 хй = Д%! — Дх0;
Д* = Д*-1 — А*'1 ;
132
причем значения t берутся >в прогнозируемой области.
Имея в виду, что ==т— .число шагов прогнозирова-
ния, можно (7.5) преобразовать ic другому виду:
„... , . . т(т + 1) ..
= + ---------- Д’л„_2 + ...
и свести значения коэффициентов Л/) при ^хп_^ № хп_2... в
таблицы. При п = 3 и различных т они имеют следующие зна-
чения (табл. 7.2):
Таблица 7.2
х. т м\ ! 2 3 4 5
Ni 1 2 3 4 5
№ 1 3 6 10 15
№ 1 4 10 20 35
Тогда, например, при т = 3 прогнозируемое значение парамет-
ра будет равно:
F (/3 + 3 АТ) = хп +- 3 Ьхп_х + 6 Д2х„_2 + 10 Д3 .
Существуют способы оценки точности прогнозирования по ос-
таточным членам формул Лагранжа и Ньютона. Практика при-
менения соотношений вида (7.3), (7.5) для целей прогнозирова-
ния показывает, что ошибки не превышают 10—ISVo, если число
шагов прогнозирования невелико |(один — три), а число преды-
дущих точек контроля достаточно велико.
Для прогнозирования могут использоваться также экстра-
поляционные многочлены, вычисленные по .методу наименьших
-квадратов, разложения функции x(f) в ряды, а также эмпириче-
ские формулы.
Если по результатам прогноза на заданный период ожидает-
ся выход параметра за предельно допустимое значение (см. рис.
7.1), то принимается решение о снятии технического устройства
с эксплуатации и замене его.
В большинстве, сложных систем авиационного оборудования
определяющие параметры зависят от многочисленных связей
между отдельными элементами и параметрами их состояния, ко-
торые являются случайными. Влияние большого количества эле-
ментов на состояние системы приводит к тому, что прогнозируе-
мый параметр х(£) приближается к случайному процессу с ма-
лым временем корреляции. Тогда значения параметра в каждый
133
момент контроля to; tt; tz;... , t,t бу рут: случайными величинами.
Как правило, изменение параметра x(t) для сложных уст-
ройств представляет собой стационарный случайный процесс
или процесс, приводимый к стационарному
х (0 = Xi(t) + %2(О,
где Xi(t) — Стационарная случайная, а Хг(0 — неслучайная
функция времени.
Задача прогнозирования в этих случаях решается методами
линейной экстраполяции случайной функции с использованием
корреляционного анализа, причем статистические характеристи-
ки x(t') вычисляются по данным контроля. Математически за-
дача формулируется так: по известным дискретным значениям
случайной функции л(£,;_й), k = 0, 1, 2,.. ., п—1, tn_t £ Тг не-
обходимо предсказать (экстраполировать) значения этой функ-
ции л(/„+,„), tn = 1, 2,... tn+m^T2 для последующего интерва-
ла времени. При линейной экстраполяции . прогнозирующая
функция F U„+m) образуется как линейная комбинация настоя-
щего и прошлого значений случайных величин х
”s akx(tn_k). (7.6)
k = 0
Чтобы обеспечить наименьшие погрешности прогнозирования, на
(7.6) накладывается условие минимума среднего квадрата
ошибки
М ( | х - "е ak X (tn_k) |2 | = a2m . (7.7)
I A’=o J
Здесь x (tn+n^ — действительное, a F — прогнозируемое
на tn шагов значение функции x(t) в будущий момент време-
ни tn+m •
Средний квадрат ошибки экстраполяции а2т легко выра-
жается через корреляционную функцию /?Л. (т) процесса x(t).
Действительно, выполнив в (7.7) операции возведения в квадрат
модуля разности и определения математического ожидания, по-
лучим
(°) “ 2 S ак Rx [(А + от) Д7'] +
+ "£ (7.8)
s-о ото
где, как и ранее, ДГ — шаг прогнозирования по времени U„+m=
= tH + in^T; t„.k=tn-k^T).
134
Значения коэффициентов ац, а2;..., ап, при которых средний
квадрат ошибки будет наименьшим [т. е. условие (7.7) будет
соблюдаться], находятся из системы уравнений
да2 «-1
^=-/?х[(й + т)ДТ]+ S а;/?Л.[(й-/)ДГ] = 0. (7.9)
к 1=0
Из (7.9) следует
ak Rx [k + т) AT] = ak atRx [(A - /) ДГ].
й=0 й=0 l—о
Теперь (7.8) можно записать в другом виде:
л —1
4^ а, ... ап^ = Rx(0) - £ akRx\(k + m) ДТ]. (7.10)
k=0
Если «о; «i; есть решение системы уравнений (7.9),
то экстраполяционная формула (7.6), позволяющая прогнозиро-
вать значения параметра, примет следующий вид:
F (^п+т) ~ -«прогн (Jn+tn) = X (tn) -|- X (/zl_j) "Т Tl—j X (^j)-
(7.H)
При этом обеспечивается минимум среднего квадрата ошибки
прогнозирования, а сама ошибка при необходимости может
быть подсчитана по (7.10).
Если случайный процесс изменения параметра x(t) имеет
корреляционную функцию экспоненциального вида
R_r(vAT) = e-“l’*r|; v = 0, 1, 2...
то, проведя соответствующие выкладки по формулам (7.9),
(7.10), получим следующее выражение для среднего квадрата
ошибки прогнозирования на т шагов:
oL = 7?^(0)(l ~е-2а,пЛГ). (7.12)
Соответственно прогнозируемое значение параметра в момент
4+« будет равно:
-«проги= (^“7"Р > (а0 = е-к7пр; =а2= .. . = ап_} — 0);
при наличии неслучайной составляющей xz(t)
«прогн ~ [«1 ’ -«2 е пр + (^„) ,
где Тпр = тАТ — время прогноза.
Отсюда -следует, что для прогнозирования значения стацио-
нарной случайной функции с экспоненциальной корреляционной
функцией достаточно знать одно значение этой функции в по-
следний момент контроля
135
Если по условиям эксплуатации технического устройства за-
дается допустимое значение ошибки прогноза а2доп, то пр (7.12),
•принимая с?хп = доп, можно определить период прогноза
Т
1 пр
2а
(7.13)
и потребную периодичность (шаг) контроля
/ о2
In 1--^°2.
ДГ =--Ц——
2ат
(7.14)
где дисперсия ал2 = Rx (0) > а2 доп;
Определив время корреляции т0 из условия
ЯЛ.(0)е-иЫ=0,057?Л.(0)>
получим
/ а2
1 _ I , л- доп
"olnll----
Д7’=------_________
2m In 0,05
/ а2
111 Х дс
T°lnV 77
7,,р= 2 In 0,05
(7.15)
Таким образом, как период прогноза, так и шаг контроля пара-
метра при заданной достоверности прогноза полностью опреде-
ляются временем корреляции т0 случайного процесса измене-
ния параметра. Шаг контроля должен быть тем меньше, чем
меньше время корреляции, то же относится и к периоду прогно-
за. Из (7.12) следует, что ошибка прогнозирования снижается с
уменьшением периода прогноза.
Высказанные в связи с формулами (7.13)—.(7.15) соображе-
ния важны потому, что на практике далеко не всегда бывают из-
вестны корреляционные функции Rx (т). Их обычно получают
путем обработки данных контроля по приближенной формуле
S х(^)х^1+чу, v = 0, 1, 2... (7.16)
;=1
Очевидно, что чем больше точек контроля, тем точнее будет
определена Rx(t). При этом особое значение имеет правильный
выбор шага Д7’ (7.15). От неточного знания корреляционной
функции ошибки прогнозирования возрастают.
Рассчитанный по (7.16) график Rx(y) обычно аппроксими-
руется некоторой аналитической функцией. При этом, помимо
136
экспоненциальных, иногда используют корреляционные функции
экспоненциально-колебательного вида:
/?Л. (т) =/? (0) е~аГ| cos шт
или в дискретной форме
/?x(vA7’) = /?(0)e 2 — cos —v АГ, (7.17)
а
где (а = — подбирается при аппроксимации.
ш
При корреляционной функции вида (7.17) по изложенной вы-
ше методике можно получить следующее выражение для прог-
нозирующей функции:
^прогн (^л+/л) = -^2 (^л+m^ “1" [^1 (^л) -^2 (^л)1 4”
+ «2 кЛ^л-1)— -М*л-1)] + • • • +«л[х1(Л)-^г(г£1)].
Значения коэффициентов ас, ас, .. для шага контроля АГ =
= 0,2 т0 сведены в табл. 7.3.
Таблица 7.3
\aJ а1 г?2 а3 аб "о а7
0,1 0,94 —0,08 —0,063 —0,049 —0,039 —0,030 —0,024
0,2 0,85 —0,10 —0,078 -0,061 —0,048 —0,037 —0,029
0,4 0,83 -0,13 —0,098 —0,075 —0,057 —0,043 —0,032
0,8 0,73 —0,12 —0,080 —0,054 —0,036 —0,024 —0,016
1,0 0,71 —0,06 —0,039 —0,024 —0,015 —0,009 —0,006
Коэффициенты по абсолютной величине быстро убывают, и в
практических расчетах прогнозируемых значений параметра ока-
зывается достаточно двух-трех последних замеров.
Графики ошибок 'прогнозирования приведены на рис. 7.2.
Прогнозирование на большое число шагов целесообразно для
137
процессов с малыми р. При больших р-> 1 и малом шаге конт-
роля ДТ можно добиться приемлемой ошибки при прогнозиро-
вании на один шаг.
Рис. 7.2. Зависимость относи-
тельной ошибки прогнозирова-
ния от периода прогноза и па-
раметра р.
§ 7.2. СТАТИСТИЧЕСКИЕ МЕТОДЫ ПРОГНОЗИРОВАНИЯ
Эти методы охватывают задачи прогнозирования времени
комплектной замены элементов или агрегатов одного типа, ра-
ботающих в ‘примерно одинаковых условиях, и связаны, таким
образом, с прогнозированием срока службы этих'элементов и
агрегатов. Методы основываются на вычислении статистических
характеристик надежности.
Для периода нормальной эксплуатации интенсивность отка-
зов Х2 — величина постоянная, для периода старения и износа
интенсивность отказов можно аппроксимировать линейной функ-
цией
хз = х2 + ^1): ^>^1.
где 1\ —длительность периода нормальной эксплуатации.
Тогда вероятность безотказной работы можно определить по
соотношению
- j a2+al)dt _lXs+T ) 'и
A(0 = e 0 =Рве
где — расход ресурса надежности в период нормаль-
ной эксплуатации;
ти = £ — t1 — длительность периода эксплуатации в процессе
старения и износа.
Если потребовать, чтобы ри не превосходила заданной веро-
ятности безотказной работы p3W то из уравнения ра = /?зад мож-
138
но найти искомое выражение для момента .комплектной замены,
элементов (агрегатов):
X / X 2 9
^сл = ^ + ’и; ----2-+]/ Л---------ОпРзад - 1ПРО). (7.18}
а I а. а.
Величины Х2 и а рассчитываются по статистическим данным
в результате наблюдений за работой группы элементов в процес-
се эксплуатации или статистических испытаний. Таким образом,,
моменту замены должна предшествовать большая .работа по уче-
ту и обработке материалов об отказах элементов.
В практике технической эксплуатации авиационного обору-
дования важной является задача прогнозирования в следующей
постановке. По опыту эксплуатации многих технических уст-
ройств одного типа известны статистические характеристики
процесса изменения некоторого определяющего параметра x(t)
во времени (с учетом старения и износа). Например, изменение-
параметра представляет собой нестационарный случайный про-
цесс
л(/) = л0 + «^, (7.19)
где Хо, « — независимые случайные величины, каждая из кото-
рых подчиняется нормальному закону и имеет средние значения
тх и та, дисперсии оЛ.2, аа2 соответственно.
Известно далее предельно допустимое значение параметра
Хд0П,при достижении которого техническое устройство непригодно'
к дальнейшей эксплуатации. Устройство подвергается профилак-
тическим работам, после проведения которых значения пара-
метра x(t) становятся известными. Пусть в момент tk проведена
профилактическая работа и параметр имеет значение X (tk). Тре-
буется указать период Тпр до последующей профилактики, в те-
чение которого с заданной достоверностью параметр x(t) не
превзойдет Хдоп-Или в другой постановке: период между профи-
лактическими работами установлен и равен Тпр, требуется ука‘
зать то значение x(tk) = хпр, при котором за время Тпр пара-
метр x(t) с заданной достоверностью не превзойдет значенияхдоп.
Таким образом, если х (^) < хпр , то
Р (h + Т'пр) •^доп ] “° пр I
где Д1р — достоверность прогноза, т. е. вероятность того, что-
устройство, признанное исправным в данный момент времени, не
выйдет из строя до 'очередной профилактики.
Имея в виду, что (7.19) представляет собой так называемую
веерную функцию, для плотности вероятности /пр будем иметь.
;пр)=
где Длг = хдоп — хпр. (Здесь х заменено на Л'доп, тх на хпр, а-
рассеяние Хо не учитывается, т. е. аЛ.2 = 0).
139»
Достоверность прогноза в течение заданного периода Твр оп-
ределится из выражения
Рпр =
Ax
2а3 f
а пр
^пр •
После подстановки
зования получим
1 '
Pnp=^- ®
1 ——-------е
J v 2w /пр
Др
Дх--та/пр
и =------;---, интегрирования и преобра-
^пр
Ах - та Тп \ /та
------т---L +ф —
°а * пр / \°а
Обозначив /?*р = Рпр---®
2
Хдоп ' ХПр
Т =
' доп —„
2/??р <за + Ш,
(7.20)
Таким образом, если заданы достоверность прогноза рпр и
период между профилактиками Т„р, то можно указать уровень
прогноза хпр. Если во время профилактики окажется, что х (/fe) >
> хпр, то техническое устройство снимается с эксплуатации.
Достоинством такого метода прогнозирования является воз-
можность достижения высокой достоверности прогноза без зна-
чительного сокращения срока службы технического устройства.
Если выбрано х„р, то можно по (7.20) назначить период между
профилактиками Тпр. При этом, однако, нужно иметь в виду,
что, стремясь в интересах снижения трудозатрат увеличивать Твр,
еледует по (7.20) увеличивать уровень хпр, а это е учетом (7.19)
приводит в свою очередь ,к назначению меньшего срока службы
технического устройства, т. е. к более частой комплектной за-
мене технических устройств. По экономическим соображениям
это может оказаться неприемлемым.
§ 7.3. ОЦЕНКА ЭФФЕКТИВНОСТИ ПРОГНОЗИРОВАНИЯ
Усложнение авиационного оборудования, а следовательно, и
увеличение количества применяемых в нем элементов исключа-
ют возможность индивидуального прогнозирования каждого эле-
мента оборудования. Для прогнозирования назначается мини-
мум наиболее ‘ответственных элементов, агрегатов или систем с
наибольшей эффективностью прогнозирования п смысле повы-
шения боеготовности, снижения количества отказов в воздухе и
-повышения безопасности полетов.
140
Для оценки эффективности прогнозирования определенной
группы технических устройств используется коэффициент повы-
шения готовности авиационного оборудования
Кт пр
Ап Г- >
т
где Кг Пр ==--5—— .коэффициент готовности с прогнозирова-
ли + Твп нием отказов;
Т
Кт —----------коэффициент готовности без прогнози-
т+тв
рования отказов;
Т; Тп — средняя наработка на один отказ обору-
дования соответственно без .прогнозиро-
вания и с прогнозированием отказов;
Гв; Т'вп — среднее время восстановления .оборудо-
вания без прогнозирования и с прогно-
зированием отказов.
Пусть оборудование состоит из М групп технических уст-
ройств по М; К2;..., устройств в каждой группе, причем К
групп (W,; N2;.., Nk) из М прогнозируются по постепенным
отказам. Общее число технических устройств равно: N = N[ -|-
-j- Ni Л//г 4- .. + К •
Средняя наработка на один отказ по всем М группам без;
прогнозирования найдется из выражения
(7.21 >
где tLj — наработка на отказ j-того технического устройства-
L-той группы;
nL— общее количество отказов технических устройств;
Л-той группы;
11 — общее количество отказов оборудования.
Средняя наработка на один отказ с прогнозированием К
групп технических устройств определяется следующим соотно-
шением:
п
1 Г «а "к ПМ
— 2 hi + X + • + X hj + • • + X +
n b-i /=i j-i
ni* n* nk
H- Pnp 1 X ^в1/ "Ф Pnp 2 X “(••• H- Рпр к X ^Bkf I •
(7.22)'
где Pnp — достоверность прогноза;
n* — число постепенных отказов в s-ой группе из К про-
гнозируемых;
fBSj —время восстановления.
141
'С учетом (7.1) преобразуем (7.22) к другому виду:
Л,= Т+ ^'>sqspnps TBS,
Л' = 1
где ^ = — — удельный вес отказов за счет элементов s-ой
п прогнозируемой группы;
fl *
qs = —~ — отношение постепенных отказов к их общему
пз количеству в данной группе;
п*
$
X sj
TBs=}—±~*— — среднее время восстановления технических уст-
ns ройств с постепенными отказами s-ой группы.
Приняв обозначение Д Тв s — '>s Тв s — Твs, будем иметь
к
ТВ^Т+ s qspnPs^TBs. (7.23)
s=l
'Соответственно среднее время простоя оборудования при прогно-
зировании К. групп будет равно:
ТВВ=ТВ-^ qspBfs^TBs. (7.24)
.S-1
Таким образом, коэффициент повышения готовности составит
величину, равную
к
S QsPn^s Д^В
Тп(Т +
7(ТП +
При выводе этого соотношения предполагалось, что время на
замену технического устройства, признанного по прогнозу непри-
годным, мало и принималось t3 = 0. Если считать, что t.t =/-(),
то (7.25) преобразуется к виду
S QsPnp S (Д^в л Д Та Л.)
Km = 1 + —----------------------------. (7.26)
Из анализа (7.25), (7.26) следует, что прогнозирование позволя-
ет существенно повысить 'коэффициент готовности оборудования,
причем прогнозирование особенно эффективно для тех групп тех-
нических устройств, которые имеют относительно высокий про-
142
цент постепенных отказов, а доля среднего времени их восста-
новления ДГВЛ. достаточно велика.
Решение задач прогнозирования, отличающихся известной
сложностью обработки данных периодического контроля и ста-
тистических данных по опыту эксплуатации, требует широкого
применения систем автоматического контроля и бортовых систем
регистрации полетных данных с соответствующей аппаратурой
обработки информации, реализующей вычислительные алгорит-
мы прогнозирования.
РАЗДЕЛ ВТОРОЙ
МЕТОДЫ И ТЕХНИЧЕСКИЕ СРЕДСТВА
КОНТРОЛЯ И ЭКСПЛУАТАЦИИ
АВИАЦИОННОГО ОБОРУДОВАНИЯ
Глава VIII
ОСНОВЫ ТЕХНИЧЕСКОЙ ДИАГНОСТИКИ
§ 8.1. ОБОРУДОВАНИЕ ЛЕТАТЕЛЬНОГО АППАРАТА
КАК ОБЪЕКТ КОНТРОЛЯ
Техническая диагностика — это научная дисциплина, иссле-
дующая формы проявления отказов в технических устройствах,
разрабатывающая методы их обнаружения и принципы кон-
струирования диагностических систем.
Особое значение техническая диагностика приобретает в свя-
зи с разработкой систем автоматического контроля, являясь тео-
ретическим фундаментом, на основе которого могут быть созда-
ны оптимальные системы контроля, в наибольшей степени отве-
чающие требованиям эксплуатации.
Предметом исследования технической диагностики являются
технические устройства — объекты контроля.
Объектом контроля будем называть техническое устройство
(систему), информацию о состоянии которого необходимо иметь
в процессе эксплуатации.
Система в общем случае рассматривается состоящей из от-<
дельных частей — элементов, соединенных между собой опреде-
ленным образом. Под словом «элемент», как и в теории надеж-
ности, подразумевается не только неразложимая часть системы,
но и любое устройство, надежность которого изучается незави-
симо от надежности составляющих его частей.
Качества элемента характеризуются параметрами элементов
т. е. реакциями их на определенные входные сигналы.
В простейших системах элементами могут являться детали
(лампы, конденсаторы, реле). В более сложных — узлы и блоки
/электронные усилители, синхронные детекторы, гироскопы и
т. п.). Если анализируется сложный комплекс систем, то за эле-
менты принимают отдельные системы.
* I — параметр, j — элемент.
144
В совокупности одинаковых систем значения параметров оди-
наковых элементов каждой данной системы всегда несколько
отличаются от заранее предопределенных эталонных (номиналь-
ных) величин вследствие допусков производства, старения и из-
носа, неоднородности изменения их при воздействии внешних
факторов и т. п.
Следовательно, параметры элементов системы являются слу-
чайными величинами, если рассматривать весь класс этих си-
стем.
При анализе свойств объекта контроля возможны два под-
хода к оценке значений параметров элементов {оу7}:
1. Учитываются только дискретные значения параметра aJh
что соответствует учету только так называемых внезапных отка-
зов элементов.
При этом, как правило, рассматриваются два значения пара-
метра, соответствующие двум состояниям элемента: значение
•параметра a}i, когда оно находится в допуске, т. е. работоспособ-
ное состояние 'элемента (это значение мы обозначаем «,-<), и
значение параметра а}4, когда оно находится вне поля допуска
(его мы обозначаем а;(), соответствующее неисправному состоя-
нию элемента.
Когда внезапные отказы могут проявляться как в виде ко-
роткого замыкания, так и в виде обрыва цепи, следует учитывать
три возможных значения ау7 а,2, aj3.
В общем случае число возможных дискретных значений па-
раметра dji может быть сколь угодно велико, но счетно.
2. Учитывается непрерывность изменения параметра что
соответствует учету как внезапных, так и постепенных отказов.
При этом число возможных состояний элемента бесконечно ве-
лико.
Система состоит, как было уже указано, из отдельных эле-
ментов, и, следовательно, в каждый данный момент времени со-
стояние системы С определяется значениями ряда независимых
величин — параметрами элементов {«,,}:
С=Ж)]- (8.1)
Если параметры элементов могут принимать лишь некоторое
число дискретных значений, то число N возможных состояний
системы, состоящей из п элементов, не может превысить
п
где kji — число дискретных значений- параметра /-того элемента,-
Если параметры элементов изменяются непрерывно, то чис-
ло возможных состояний системы будет бесконечно велико.
10. Румянцев Е. А. и др.
145
Таким образом, в обоих случаях можно говорить о множест-
ве* {С} состояний объекта.
В первом случае множество состояний конечное, во втором —
бесконечное. Ограничимся рассмотрением объектов, число сог
стояний которого конечно. Методы технической диагностики для
объектов, число состояний которых бесконечно, в настоящее вре-
мя еще находятся в стадии разработки.
Любое техническое устройство предназначено для выполне-
ния определенных функций и характеризуется определенными
качествами. В соответствии со значениями мер качеств {yt} все
возможные состояния технических устройств разделяют на три
группы:
1, Исправные состояния. Состояния, при которых техническое
устройство соответствует всем требованиям, установленным как
в отношении его основных качеств, так и в отношении второсте-
пенных, т. ,е. не влияющих на выполнение заданных функций.
2. Работоспособные состояния. Состояния технического уст-
ройства, при которых оно в данный момент времени соответст-
вует всем требованиям, установленным в отношении его основ-
ных качеств.
3. Неисправные состояния. Состояния технического устройст-
ва, при которых оно в данный момент времени не соответствует
хотя бы одному требованию, установленному в отношении его
основных качеств, и, следовательно, не выполняет заданные функ-
ции или одну из заданных функций.
При рассмотрении задач технической диагностики в настоя-
щее время вряд ли целесообразно ставить вопрос о необходимо-
сти разграничения исправного состояния и работоспособного,
ибо контроль качеств, не влияющих на выполнение заданных
функций, сильно усложнил бы систему контроля.
Таким образом, можно рассматривать лишь две группы со-
стояний: группу работоспособных и группу неисправных состоя-
ний, т. е. множество всех состояний данного технического уст-
ройства можно разбить на два подмножества; подмножество
состояний работоспособных Ср и подмножество состояний не-
исправных Ср.
При этом, очевидно, СрсС и Ср с: С.
Постановка любых задач технической диагностики правомер-
на лишь в том случае, если определено понятие состояний систе-
мы и указаны признаки, их разграничивающие.
* Под «множеством» понимается любое объединение в одно целое Af
вполне различаемых объектов т из нашего восприятия или мысли (которые
называются «элементами» Af).
МС>
§ 8.2. ОПИСАНИЕ СОСТОЯНИЙ СИСТЕМ
С ДИСКРЕТНОЙ СТРУКТУРОЙ
А. Описание состояний объекта методами алгебры логики
Достаточно общее описание состояний'системы с дискретной
структурой может быть составлено на основе методов -математи-
ческой логики: булевой алгебры или й-значной логики.
Описание составляется из ряда элементарных высказываний,
полагая при этом, что они удовлетворяют закону исключенного
третьего и закону противоречия, т. е. каждое высказывание или
истинно или ложно и не может быть одновременно и истинно и
-ЛОЖНО'.
В булевой алгебре всякое высказывание обозначается каким-
либо символом. Содержание высказываний учитывается только
при 'введении их буквенного обозначения и в дальнейшем в рас-
смотрение принимается не содержание его, а только истинность
или ложность, которые соответственно обозначают 1 или 0.
Общее описание состояния системы, составленное из ряда
элементарных высказываний на основе обычных операций алгеб-
ры логики, называется формулой.
Каждая формула определяет некоторую функцию, аргумен-
тами которой являются переменные элементарные заключения:
/[«в а2, ..., а„]. (8.2)
Будем называть функцию (8.2) функцией состояния объек-
та, а дь п2,.. -, ап — параметрами элементов объекта.
Все -возможные состояния объекта с параметрами элементов
<fli, а2, • • • , ап характеризуются функцией /(йц . .., ап], задан-
ной или в канонической форме, или таблицей, а каждое возмож-
ное Сг состояние характеризуется значением / [flj, .. . ап\ на t-том
наборе .
По способу соединения элементов системы разделяют на си-
стемы с последовательным, в смысле надежности, соединением
элементов '(отказ любого элемента приводит к отказу всей си-
стемы), системы с параллельным соединением элементов (от-
каз системы наступает тогда, когда отказывают все элементы,
входящие в систему) и системы со смешанным соединением эле-
ментов.
При последовательном- соединении элементов работоспособ-
ное состояние определяется функцией
, (8.3)
.а неисправные состояния —
Ср = A ai = У (8.4)
а о*
147
Число неисправных состояний равно: 2" — 1, работоспособ-
ное состояние одно.
При параллельном соединении элементов неисправное со-
стояние
Cp = /\az, (8.5)>
а работоспособное —
Ср = у0(. . (8.6>
Число работоспособных состояний 2" —1, а неработоспособ-
ное — одно.
В случае смешанного соединения систему, состоящую из эле-
ментов, можно разбить на ряд групп элементов. Для каждой
группы элементов должно быть известно, приводит к отказу си-
стемы отказ всех элементов этой группы иди нет. Группа эле-
ментов, при отказе которой имеет место и отказ системы, назы-
вается «группой отказа».
«Группа отказа» является минимальной, если никакая ее
подгруппа уже не является «группой отказа». (Минимальная
группа может состоять и из одного элемента).
Если Ai, А2,..., Ат — все минимальные «группы отказа»,,
а Ак — событие, заключающееся в том, что группа Ak не отка-
зала, то
пг
C^/\At. (8.7).
Группы элементов Ak и At называются пересекающимися,
если они имеют общие элементы. Так, если группа Ak включает
элемент (04 С Ak} и группа At также включает этот элемент
щ («1 € Аг), то Ak и At пересекаются (Ak П At).
Так, например, если А{ = ar V а2 V я3 и А2 — aiV то-
Ai и А2 пересекаются (/Ij Q A2j.
Работоспособное состояние этих групп определяется выраже-
нием
Ср = Д Я2 = (о! V а2 V а3) Л (at V а^ — а^а,, \/ а3а^
Вместо вышеприведенных формул для изображения состоя-
ний системы можно использовать таблицу состояний (8.1). Изо-
бражение при этом получается нагляднее.
Качество функционирования системы оценивается при задан-
ных внешних и управляющих воздействиях некоторой заданной
совокупностью критериев качества, которые принято называть,
параметрами системы или признаками работоспособного состоя-
ния — yi,...., ут.
Для систем с дискретной структурой с независимыми (в.
смысле отказов) элементами взаимосвязь параметров элементов
148
или параметров групп элементов, объединенных в «группы отка-
за», с признаками работоспособного состояния задается также
уравнениями алгебры логики.
Таблица 8.1
Номера состояний
1 2 3 4 5 6 7 8 9 10 1 12 13 14 15 16
1 1 1 1 1 1 1 1 1 0 1 1 1 1 1 1 1
2 1 0 1 0 1 1 1 1 1 1 1 1 1 1 0 1
3 1 1 0 1 1 0 1 1 1 1 1 1 0 1 1 1
ct 4 1 1 1 1 0 0 1 1 1 1 1 1 1 0 1 1
<и 2 5 1 1 1 1 0 1 1 1 1 1 1 1 1 1 1 0
то
ТО 9 1 1 1 1 1 0 . 1 1 1 0 0 0 1 1 1 1
К 7 0 1 1 1 1 1 0 1 1 1 0 0 1 1 1 1
8 1 1 1 1 1 1 1 0 1 1 1 1 1 1 0 1
1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
2 1 1 1 1 1 1 1 1 1 1 1 1 1 0 0 0
3 1 1 1 1 1 1 1 1 1 1 1 0 0 1 1 0
4 1 1 1 1 1 1 1 1 1 0 0 0 1 1 0 0
Ss й 5 1 1 0 0 0 0 0 0 0 1 1 1 0 0 0 0
о 6 1 1 0 0 0 0 0 0 0 0 0 0 1 1 1 1
о 7 1 1 1 1 1 1 0 1 0 1 1 1 1 1 1 0
к 8 1 1 I 1 1 1 1 0 1 1 1 0 0 0 0 1
то
S3 то 9 1 1. 1 1 1 0 1 0 0 г 0 1 1 0 0 1
к 10 1 1 1 1 0 1 0 0 0 0 0 0 0 1 0 0
11 1 1 1 0 0 0 0 0 1 0 0 0 1 0 0 0
12 1 1 1 0 1 1 0 0 1 1 0 0 0 0 0 1
13 1 0 1 1 0 0 0 0 0 1 1 1 0 0 0 0
14 1 1 0 0 1 1 1 0 0 0 0 0 1 1 1 1
Признаки состояния являются логическими функциями па-
раметров элементов, т. е.
Vi = >![«!, .... а„]; у2 = у2[а2, .... а„] ... (8.8)
и т. д., которые также могут быть заданы либо формулами, либо
табл. 8.1.
149
В общем случае, как это указано в табл. 8.2, следует разли-
чать четыре варианта взаимосвязи признаков состояния с па-
раметрами «групп отказа» или элементов.
Таблица 8.2
Взаимосвязь групп эле- ментов (групп отказов) Взаимосвязь признаков работоспособности Вид взаимосвязи
Непересекающиеся группы: Л], Ад, • . Ап (Hi = «ц A аЛд, Ад = «215 As — Язь A± = «41) Непересекающиеся признаки: У1. У 2, • ; Ут У1 = Ai, уд = Ад Л А3, Уз = А4 /\ А6
Пересекающиеся признаки: У1> Уз Ут У1 “ Лр у2 = /ЦаДзАЛц’) Уз = Лд Л Д4 !
Пересекающиеся группы: Al, Ад, .. ., An (Ai = «и Л «125 Л2 = «л Л «21> А3 = «315 = «31 Л Я41) Непересекающиеся признаки: У1. •. Ут У1 = At; уд = Ад Д Уз = Л4
Пересекающиеся признаки: У1, • • ; Ут У1 = Ay, Уд = Ai/\Ag/\Ag, Уз = Hi Л А3
При описании состояний системы методами математической
логики не учитываются вероятности отказов как элементов си-
стемы, так и «групп отказов».
В таблице состояний на равных правах представлены как
наиболее вероятные состояния системы, так и состояния, (В ко-
торых практически система никогда не находится (состояния С
большим числом отказавших элементов).
Учет очень большого числа состояний затрудняет анализ обо-
рудования жак объектов контроля и препятствует использованию
результатов.
: Вследствие этого практически обычно учитывают не все со-
стояния, а лишь те, которые встречаются наиболее часто (с од-
ним или двумя отказами).
Б. Описание состояний объекта методами
теории вероятностей
Для того, чтобы дополнить таблицы состояний данными, ха-
рактеризующими вероятности состояний Р (СД необходимо,,
располагая значениями вероятностей (безотказной работы эле-
ментов Pia-i), произвести расчеты по формулам, устанавливаю-
щим соответствие логических операций с вычислением вероятно-
стей событий.
г 150
Если вероятности событий обозначить Р(А), Р(В) и т. д., то
. Р[А УВ] = Р[Д] +Р[£]Д5];
Р [Л А 5] = Р [Л].р [5],
или
Р[А А 5] =-Р[ЛрР [£/Д], Р[Д] = 1—Р[Д]. (8.9)
При этом основное допущение состоит в том, что двум экви-
валентным заключениям приписывается одна и та же вероят-
ность.
Применяя правила (8.9), легко определить вероятности соот-
ветствующих состояний, если известны р (ар.
п
Так, если С„= А сь,
(=1
то Р(Ср) = гЬ(лг); Р(Ср) = 1 - flp(«J;
1 1
' ’ ‘ п _ -
если Ср=Да(,
то Р(.Ср) = 1 — П [1 —(az)] ; Р (Ср) = П [1—/?(«,)].
Вероятность работоспособного состояния системы с Пересе*
кающимися группами элементов определяется по формуле
р [Ср-] == 1 - S P(Ak) + S Р MftA А) - V P(Ak/\ At/\ As) + ...
k k<J k<l<s
... + (-l)mP(Z1A^2A...AAffl).
В качестве объективной характеристики неопределенности со-
стояния системы для наблюдателя до начала процесса контроля
можно принять энтропию системы
^[C] = -S^(C/)10g2P(Cf), (8.10)
(-0
где N — число возможных состояний системы.
Если п
Р[Ср]=П^Ы,
/=1
ТО*
• # [С] = - Е Р [Cz] log Р [CJ = - S Р («/) logр («,-) +
1 _ _ j
+ p(a])\ogp(aj). (8.11)
Информацию о состоянии объекта получают в процессе конт-
роля, проводя проверки объекта, т. е. осуществляя, как это было
указано выше, измерения некоторых признаков состояния У\> уъ,
* Основание логарифма в дальнейшем везде принимается равным 2.
151
Количество информации, которое содержит признак состоя-
ния относительно одного состояния системы (частная инфор-
мация о состоянии Ср, определяется выражением
, Р^Ш
Iyi^cj 1ое p[Cf] •
Количество информации, которое содержит признак состоя-
ния относительно множества состояний (частная информация о
множестве состояний):
Л_с = Я[С] -Я[СШ
где//[С/_у;]— усредненное значение энтропии при условии опре-
деления признака yt .
Каждую проверку я;, т. е. процесс измерения каждого при-
знака состояния _уг, можно характеризовать рядом показателей,
к числу которых прежде всего относятся:
— время, необходимое для осуществления измерения дан-
ного признака с заданной точностью (это время включает как
время, необходимое для возбуждения объекта до заданного ре-
жима работы, так и время, необходимое собственно для самого
измерения значения у,-);
gi — дополнительный вес устанавливаемого на объект обо-
рудования, необходимый для съема, преобразования и нормали-
зации _у(-;
S{ стоимость этого дополнительного оборудования.
Все эти показатели по существу определяют «стоимость» по-
лучения информации.
К числу стоимостных показателей можно отнести и количество
двоичных разрядов >в памяти машины, предназначенных для за-
поминания значения признака, измеренного с заданной точностью
mt = log
где е% —допустимая ошибка измерений.
Как правило, при разработке системы контроля учитывается
лишь один из факторов, однако условно можно оценивать стои-
мость получения информации о состоянии объекта при измере-
нии yt и усредненной величиной стоимости:
/. = а х. + b gt + dSi,
где а, b и d — весовые коэффициенты, значения которых выби-
раются в зависимости от того, какой из факторов играет боль-
шую роль.
152
§ 8.3. КОНТРОЛЬ РАБОТОСПОСОБНОСТИ
.Процесс контроля работоспособности имеет целью устано-
вить, к какому нз подмножеств множества состояний С — под-
множеству работоспособных состояний Ср или подмножеству
неисправных состояний Ср — относится состояние Сг, в кото-
ром находится данный объект.
'' - Для этого необходимо произвести измерение ряда признаков
состояния.
Процесс контроля работоспособности продолжается либо до
выявления первой неисправности, либо до тех пор, пока в системе
не останется непроверенных элементов.
Множество состояний {С} характеризуется множеством при-
знаков {у} = Y.
Назовем достаточным подмножеством признаков Yi такое
подмножество Ki £ Y множества признаков, которое позволяет
выявить наличие любого отказавшего элемента, т. е. подмноже-
ство признаков является достаточным только в том случае, если
после измерения всех признаков этого подмножества в системе
не окажется непроверенных элементов.
‘ Таким образом, первой задачей синтеза алгоритма (програм-
мы) контроля работоспособности является задача выделения из
множества признаков достаточных подмножеств их.
В силу того, что состояние, ,в котором находится данный
конкретный объект, является событием случайным, то и результа-
ты измерений признаков состояния имеют случайный характер.
Это означает, что и число признаков, необходимых для отнесе-
ния состояния данного объекта к подмножеству неисправных со-
стояний, является также случайной величиной.
.. Так как определение каждого признака yt связано с затра-
той некоторого фиксированного времени то общие затраты
времени, связанные с выявлением неисправного состояния, яв-
ляются случайной величиной.
Допустим, что значение признака t/i = О указывает на нали-
чие неисправности. Тогда математическое ожидание времени,
затрачиваемого на установление, к какому из подмножеств отно-
сится данный объект, равно:
T=M[t] = {p(p1 = 0)-t1+p(j/1=1, у2 = 0)(т1 + Т2) + ...
• • • + (?1 — 1 > 3'2 — h • У П-1 ~ Ь Тп = 0) (Т1 + • • + тл)} +
+ Р(л = 1> •••>?„= Шэ + + (8.12)
Сумма членов этого выражения, стоящая в фигурных скоб-
ках, зависит от порядка определения приказов, и, следователь-
но, можно ставить вопрос о нахождении упорядоченной после-
довательности признаков состояния данного их подмножества с
целью определения минимального .значения /Дл , если измере-
ние признаков осуществляется последовательно.
153
Таким образом, каждое достаточное подмножество характе-
ризуется значениями веса его элементов: G — стоимости
5 = 2 s; и минимального среднего времени контроля Tmin- - Со-
поставляя достаточные подмножества по заданному критерию,
можно определить и оптимальное в некотором смысле достаточ-
ное подмножество признаков состояния. -
Выбор критерия оценки достаточного подмножества приз-
наков, используемого для контроля работоспособности, зависит
от требований, предъявляемых к системе автоматического конт-
роля, и характеристик контролепригодности объекта.
Если свойства объекта таковы, что допускается одновремен-
ное измерение признаков подмножества, то в качестве основно-
го критерия оценки можно принять вес встроенных датчиков
(или вес контрольно-поверочной аппаратуры, необходимой для
измерения этих признаков) или максимальное время измерения
признаков подмножества. ' -
В этом случае упорядочения признаков внутри подмножества
не требуется.
Если свойства объекта допускают лишь последовательное из-
мерение признаков, то критерием оценки достаточного подмно-
жества признаков может являться или вес встроенных датчиков,
или вес контрольно-поверочной аппаратуры, или минимальное
среднее время контроля.
В общем случае выделение оптимального подмножества при-
знаков непосредственно из множества их -может быть осущест-
влено только путем перебора.
.Непосредственно из данного множества признаков можно
выделить только некоторое, близкое к оптимальному, подмно-
жество признаков, но оценить при этом, насколько полученное
решение близко к оптимальному (без перебора всех вариантов),
нельзя.
Приближенное решение задачи проводится методом наиско-
рейшего спуска, на основе таблицы состояний вида табл. 8.3.
В качестве ведущей функции при отборе признаков прини-
мается или количество информации, которое содержит признак
У} относительно работоспособного состояния
V^log^1 , (8.13).
если стоимость информации не учитывается, или «цена» полу-
чаемой информации
' ср
Ъ = ——- • (8.14).
В обоих случаях в качестве первого признака выбирается
Признак у}. , ДЛЯ которого {/у _С }шах или hjmax .
154
Таблица 8.3.
Признаки Состояния объекта
ср 1 2 3 4 5 6 7 8
состояний yj Р [С/1
0,8 0,05 0,01 0,01 0,05 0,01 0,01 0,05 0,01
1 1 1 1 1 0 0 1 1 0
2 1 1 0 0 1 0 1 0 1
3 1 0 1 1 0 1. 0 1 0
4 1 0 1 1 1 1 0 0 0
5 1 1 1 0 0 1 1 0 1
6 1 0 1 1 0 1 1 0 1
Так как ГСр] Р L У/ J Р[Ср]Р[у7/Ср] Р[Ср]Р ЬМСР] л-р [Ср] Р[уу|Ср]
____________(8.IS).
P(C,]P(^|Cp] + S[Cp| [1-Р(Л|Ср]
то, полагая, что погрешности измерений отсутствуют, т. е. по-
лагая, что Р [уу | Ср] = 1, получаем
г , 1
1у. С = log ----------—----------1. =
1 ” Р[Ср] + Р[Ср]{1 - Р[у,-|Ср]
= log-------_ 1
l-^[Cp]P[yJCp]
или
/у.. Ср = log------------------. (8.16).
l-SP[Cz]PLvy|CJ
1
Это означает, что ведущая функция вида (8.13) может быть,
заменена ведущей функцией вида*:
£исг]/>
1
21
с.
(8.17)
шах
* Р 1У/|С/] может принимать значение либо 1, либо 0, ибо погрешности из-
мерений не учитываются.
155-
Таким образом, первый признак выбирается в соответствии с
максимальным значением суммы (8.17).
Второй признак выбирается по значению
Jyk I yj - ср = log •--------—------Цу—-------------------.
1 - S Р [Сг] Р [У,| CJ - £ Р [С,] Р [уJ yj | Q ]
1 । (8.18)
Дальнейшая процедура выбора признаков представлена на
рис. 8.1 и 'пояснений не требует.
Отбор признаков заканчивается, когда программа контроля
ТП, включающая набор признаков yi,.........ут, содержит ко-
.личестео информации
j'n^c = log-----------• (8.19)
Р[Ср] Л
Аналогично проводится отбор признаков .и по «цене» полу-
чения информации.
В большинстве случаев на практике используется только
часть признаков достаточного набора. При этом, естественно,
возникает необходимость оценить возможности избранного ме-
тода контроля и используемых измерительных средств с точки
зрения правильности отображения реального состояния объекта
контроля.
В качестве такого критерия используется достоверность оцен-
ки состояния объекта системой контроля.
Достоверность оценки состояния объекта зависит как от из-
убранного метода (глубины) контроля, так и от качества изме-
рительных устройств и средств обработки получаемой информа-
ции.
В общем случае, если до начала процесса .контроля контро-
-лируемый объект с вероятностью Р [Ср] находится в состоянии
Ср, соответствующем работоспособному состоянию, то после
осуществления некоторой программы контроля П;, в результате
^проведения которой получена информация у*, апостериорная
вероятность состояния Ср выражается формулой:
Ср
о *
Р [СР] {Р [Л I ср] р [у,*| У/] + Р [У, I Ср] Р 1Уг* 1У;]}
р [СрН Р [ Л-1 СрИ [yz* | yz] + р [л|Ср_]Р [yz* I J7.]j +
+ Р [Ср] {Р [yd Ср] Р [Л*|yz] + Р [yz| Ср] Р [yz*IЛ1}
(8.20)
где Р [Ср] — вероятность работоспособного состояния;
Р [Ср] — вероятность неисправного состояния;
/->[yz[Cp]— вероятность появления комплекса признаков у/
при условии, что объект контроля находится в
456
Ср 7 2 3 4 5 6 7 8 н
0,8 0,05 0,0/ 0,0/ 0,05 0,0/ 0,0/ 0,05 0,0/ TP[Ci]p[yj/CL]
/ 1 1 1 / 0 0 / 7 0 0,13
2 1 7 0 0 7 D 7 О / 0,/2
3 / 0 7 / 0 / 0 / О 0,08
4 1 0 7 / 7 / 0 0 0 0,08
5 7 7 7 0 0 7 7 О 7 0,09
6 7 0 7 7 0 7 7 0 7 0,15
7 4 7 2 3 5 6 8 1Р[Сг]Р[^.]
0,05 0,05 0,05 0,0/ 0,01 0,01 0,01 0,01
(а) 7 2 3 4 5 0 0 0 7 7 0 1 / 7 7 7 0 1 1 О 1 0 0 1 1 7 1 7 7 0 0 7 1 0 1 0 О 1 0 0,02 0,03 0,02 0,02 0,1
2 3 5 6 8 ХР[Сг]р[^^.] Ci.
0,01 0,01 0,01 0,01 0,01
© 7 0 О 0 7 1 1 О 0 0,01
О 0 0,02
4 5 О 1 О / 0,02 О
Рис. 8.1. Процедура выбора признаков для контроля работоспо-
собности
157
работоспособном состоянии без учета погреш-
ностей измерений;
Р [У/1 £р] — вероятность появления комплекса признаков у
при условии, что объект контроля находится в
неисправном состоянии без учета погрешностей
•измерений;
Р [Л I Ср] = 1 - Р [yz | Ср]; Р [уг | Ср] = 1 - Р [yz | Ср]
Д[уг*|5’/] и Р [yz* |yz] — вероятности отсутствия искаже-
ний комплексов признаков yz или yz за счет 'погрешностей из-
мерений;
Р (У/* I-Уг] и Р [Л* IУ/] — вероятности искажения комплек-
сов признаков за счет погрешностей измерений (Р [yz* |yz] —
•ошибка первого рода; Р [yz* | yz] — ошибка второго рода).
Погрешности измерения и ошибочные оценки, обусловленные
сбоями и отказами измерительных устройств и устройств обра-
ботки информации, учитываются значениями ^°[У/*|У/]> • • •
• • • ^[У,* ]>’«]•
Методические погрешности, обусловленные выбором про-
граммы. контроля П, связаны с величинами [у J Ср] и
^[Л|СР].
Значение Р [Ср ] yz*] = d является мерой достоверности
оценки работоспособного состояния Ср объекта контроля.
Если не учитывать ошибки измерений, Toyz = yz*, а
. Р [Ср] Р [yz | Ср]
•P[Cp]^[yz|Cp] + P[Cp]P[yz|Cp]
(8.21)
характеризует достоверность оценки, обусловленную методом
контроля и априорными значениями вероятностей работоспособ-
ного Р [Ср] и неисправного Р [Ср] состояний.
Для того, чтобы характеризовать только сам метод контроля
(избранную программу его), вводится понятие — достоверность
метода контроля (глубина контроля)
где ам — характеризует методические погрешности данного ме-
тода контроля (данной программы контроля) при оп-
ределении работоспособного состояния.
158
§ 8.4. МЕТОДЫ ПОИСКА НЕИСПРАВНОСТЕЙ
Если в результате .контроля работоспособности установлено,
что объект контроля не удовлетворяет заданным требованиям,
то возникает необходимость поиска неисправности.
Опыт эксплуатации сложных систем показывает, что время
поиска неисправности'существенно больше времени устранения
ее. Собственно поэтому такое большое внимание уделяется раз-
работке методов поиска неисправностей, на основе которых
можно вручную (применяя различную контрольно-измеритель-
ную аппаратуру) или автоматически в наиболее короткий срок
определить неисправный элемент системы.
Очевидно, что наличие неисправности в системе проявляется
в-изменении признаков состояния (параметров системы).
Измерения параметров системы, или, как их .принято назы-
вать, — проверки, и анализ результатов их позволяют устано-
вить неисправность.
Заранее составленная последовательность проверок с указа-
нием моментов анализа результатов их называется программой
поиска.
Анализ результатов проверок в процессе поиска может про-
изводиться:
— после проведения каждой проверки;
— после проведения нескольких проверок;
— после осуществления всей программы поиска, состоящей
из ряда проверок, необходимых для определения неисправ-
ности любого из элементов системы.
Если последовательность проверок в программе поиска не за-
висит от результатов измерений, то такая программа поиска на-
зывается жесткой.
Если очередная проверка выбирается в соответствии с ре-
зультатом проверки, проведенной ранее, то такая программа по-
иска называется гибкой.
Методы поиска неисправностей разделяют на последователь-
ный метод поиска и на комбинационный метод поиска.
Последовательный .метод поиска состоит в последовательном
обследовании элементов системы по жесткой программе поиска.
Под комбинационным методом поиска подразумевается поиск
по жесткой или гибкой программе, при котором одновременно
обследуются группы элементов. Заключение о неисправности от-
дельного элемента можно составить только на основе результа-
тов анализа комбинации измеренных признаков.
При последовательном поиске и при комбинационном поиске
с гибкой программой, вследствие различия времен поиска раз-
личных неисправностей, вероятности появления которых различ-
ны, критерием оценки оптимальности программы поиска являет-
ся математическое ожидание времени поиска.
159
Для сопоставления комбинационных методов поиска с жест-
кой программой можно использовать как время, необходимое
для реализации программы поиска, так и просто числа прове-
рок, введенных для отыскания неисправных элементов, или веса
'встроенных датчиков, необходимых для отыскания неисправно-
стей по данной программе.
Метод последовательного поиска. Элементы системы прове-
ряются по одному в определенной заранее заданной последова-
тельности. Если проверенный элемент оказывается исправным,,
то приступают к проверке следующего элемента, если неисправ-.,
ным, то поиск прекращается и объект восстанавливается.
Оптимальную программу последовательного поиска можно
составить на основе следующих рассуждений.
Предположим, что имеется система, состоящая из п элемен-
тов, один из которых неисправен.
Вероятности отказов элементов qt (i = 1, 2,..., п). Время,,
необходимое для проверки состояния i-того элемента,
Выберем произвольную последовательность поиска неисправ-
ного элемента, например, в соответствии с нумерацией элементов;
(программа Щ).
Математическое ожидание времени поиска при этой про-
грамме
Мп, (т)= <7i Tj + q2(x1 + т2) 4- . . . qn (tj ф- тд).
Переменим порядок проверок (например, и к2), тогда для
второй программы поиска:
Мп3 (*) = q2 т2 + qx (^ + т2) + ... (tj + -с2 + . .. т„),
Мп, (т) — Л'!п, (т) = -tj — qt х2.
Очевидно, что программа Hj эффективнее программы П2, ес-
ли
Мп, (т) — Мп, (t)<0,
т. е. если
< 71Л1 •
Таким образом, упорядочив проверки в соответствии с отно-
шением
_£1> 12 > _ >Чп_
Т2
получим программу, при осуществлении которой математическое
ожидание времени поиска минимально.
(Рассмотренный метод поиска иногда называют поиском по
принципу «время—вероятность»),
160
Комбинированный поиск, с гибкой программой. Программу
комбинированного поиска неисправностей удобно изображать в
виде так называемых деревьев (рис. 8.2). Вершины дерева пред-
ставляют различные возможные состояния системы и изобра-
жаются квадратами.
Программа поиска изображается ломаной, которая начинает-
ся с самой нижней вершины дерева (.корень дерева). Каждая
проверка изображается кружочком и приводит к перемещению
из данной вершины в какую-нибудь из примыкающих верхних
вершин.
При проверке возможны два исхода:
— неисправность не обнаружена — этому исходу соответ-
ствуют левые ветви;
— неисправность обнаружена — правые ветви.
Обозначения состояний системы, состоящей из /V элементов,
составляются из N знаков '(по одному для каждого элемента):
1 — соответствует исправному состоянию элемента, 0 — неис-
правному.
Аналогично составляются обозначения проверок системы:
1 — означает, что данный элемент охвачен проверкой; 0 — что
состояние его не контролируется.
Если допустить, что одновременно может быть исправлен
только один элемент, то обозначение нового состояния с учетом
исхода поиска формируется на основе логической формулы
Cf+1 = “Ь '“7+ 1 Г1+1 СI те/4-1 rl+l I
11. Румянцев Е. А. и др. 161
где Ct — обозначение предыдущего состояния;
irz+1 — обозначение проверки по поиску .неисправности;
rz+1 — исход проверки (1 — если неисправность обнаруже-
на, 0 — если не обнаружена).
Так, например, если
CL = 00001111; «/+1 = 11000000; rz+I = 11111111,
то
Cz= 11110000 Ci= 11Ц0000
^+1 = 00111111 */+!= 11000000
rl+1 = 11111111 ri+l = 00000000
Cz Ww = 00110000 CZKZ+1 rz+1= 00000000
Cz+1 = 00001111 + 00110000 = 00111111.
Если неисправность не обнаружена, т. е. rz+1 = 00000000,
то для этого же случая —
С{= 11110000 С[ = 11110000
п/+1= 00111111 TCZ+1 = 11000000
rl+1 = 00000000 rz+1= 11111111
Ct Ц-+1 rz+1 = 00000000 Cz rcz+1 rz+1 = 11000000
Cz+1 = 00001111 + 11000000 = 11001111.
В общем случае сложную систему можно представить со-
стоящей из ряда блоков, которые >в свою очередь состоят из эле-
ментов. Поиск неисправностей в такой системе лучше произво-
дить .в два этапа: сначала среди блоков системы, а затем среди
элементов неисправного блока.
Естественно, что поиск неисправности на каждом этапе бу-
дет иметь свои особенности и производиться с помощью раз-
личной контрольно-измерительной аппаратуры. Однако, несмот-
ря на это, имеется возможность указать общие методы поиска
неисправностей — общие правила установления последователь-
ности действий при поиске и оценке их эффективности.
Для составления алгоритма поиска неисправностей, близкого
к оптимальному, можно пользоваться методами теории инфор-
мации. Применение их позволяет значительно снизить число про-
верок, необходимых для определения неисправного элемента.
При составлении программы поиска в качестве ведущей
функции могут быть использованы:
1. Количество информации, содержащееся в проверке.
Программа начинается с проверки, несущей наибольшее ко-
личество информации. Следующая проверка выбирается с уче-
том результата предыдущей проверки, также исходя из наи-
большего количества информации.
162
2. «Цена» информации, характеризуемая отношением коли-
чества информации к «стоимости» ее получения.
Поиск начинается с проверки, для которой «цена» информа-
ции оказывается наименьшей.
Рассмотрим составление программы поиска неисправностей,
исходя из максимального количества информации в проверке.
Программа поиска неисправностей в системе составляется,
исходя из следующих допущений:
— известно, что система неисправна;
— в системе имеет место только одна неисправность;
— известны априорные вероятности неисправностей элемен-
тов (блоков) системы.
Неопределенность состояния системы С, в которой осуществ-
ляется поиск неисправности, до начала процесса поиска харак-
теризуется ее энтропией Я[С].
Так как система может быть неисправной вследствие отказа
только одного какого-либо й-того элемента из общего числа их
N с условной вероятностью отказа qk, то
Л'[С] = — Е
N
Ё 1-
ы
Значения qk определяются на основе статистических данных
о надежности элементов (блоков) системы.
Процесс поиска неисправностей определяется программой П,
состоящей не более чем из п проверок (i = 1, 2,..., п).
Каждая проверка априори содержит некоторое количе-
ство информации 4.относительно состояния системы С
1^с = Н[С}-Н[С\т^
где Н [С | тг] — средняя условная энтропия состояния системы
С при условии осуществления проверки .
Если при проверке контролируется m элементов (блоков),
сумма вероятностей отказов которых
то
i-Q,.
И
N q-
+ (i-QI-7)ET^-iog
m+l 1 ^z
41*
163
Тогда
V с = - {Q.z log Q«. + (1 - Q..) log (1 - Q,.)}.
Поиск неисправности в системе следует начинать с провер-
ки несущей наибольшее количество информации.
Легко определить проверку rcz, при которой Л -с макси-
мально.
dh.^c
---= _ {log Q 4-ioge — log (1 - Q. ) - log e};
dCL - 1
log Q.. — log(l — С\) = 0;
Qk.= — ,
1 2
т. е. проверка kz, соответствующая проверке т элементов, сум-
m 1
ма вероятностей отказов которых У q} = —, несет наибольшее
количество информации. y-i 2
Следовательно, программу поиска необходимо начинать с
проверки kz, сумма вероятностей отказов проверяемых элемен-
тов для которой .близка к Г/2.
При комбинированном поиске с гибкой программой следую-
щая проверка выбирается, исходя из результата проверки тч.
Если при 'проверке зафиксировано, что неисправен какой-ли-
бо из элементов 1,...., т = 1), то следующая проверка вы-
бирается по таблице, содержащей только т элементов по макси-
муму количества информации:
Ла.С|Г_1 = /7[С)г;=1]-Я[С|кй].
Если rt = 0, то по таблице, содержащей элементы с номера-
ми m-j-l, , N, найдем
Zn^C|r. = o = //[C|rz = O]-/7[C]Kz].
В качестве примера рассмотрим систему, состоящую из ше-
сти блоков, взаимосвязь которых изображена на рис. 8.3.
М
Р и с. 8.3. Прияципиальная схема системы
164
Известны вероятности отказов блоков:
34 = 0,05; 72 = 0,1; <73 = 0,15; — qb = 0,25; <7G = O,2.
Поиск неисправности можно производить путем осуществле-
ния проверок, перечень которых указан в табл. 8.4. Входные и
выходные сигналы обозначены буквами А, В.......Н.
Таблица 8.4
№ опы- тов Выход- ной сигнал Элементы схемы Входной сигнал S 4 k
1 2 3 4 5 6
1 В 1 0 0 0 0 0 А 0,05
2 С 0 1 0 0 0 0 В 0,1
3 D 0 0 1 0 0 0 В 0,15
4 F 0 0 0 1 0 0 D 0,25
5 G 0 0 0 0 1 0 F 0,25
6 Н 0 0 0 0 0 1 DG 0,2
7 С 1 1 0 0 0 0 А 0,15
8 D 1 0 1 0 0 0 А 0,2
9 Е 1 0 1 1 0 0 А 0,45
10 Е 0 0 1 1 1 0 ' В 0,4
11 Н 1 0 1 0 1 1 AF 0,65
12 Н 0 0 1 0 1 1 BF 0,6
; 13 Н 0 0 0 0 1 1 DF 0,55
. 14 Н 1 0 1 0 0 1 GA 0,4
15 И 0 0 1 0 0 1 GB 0,4
Образование алгоритма поиска неисправностей показано на
рис. 8.4, а соответствующее ему дерево: поиска неисправностей —
на рис. 8.5.
Выбор проверок по максимуму количества информации при-
водит при равных значениях вероятностей отказов блоков к по-
иску неисправностей по методу половинного деления.
Если дана система, состоящая из N последовательно соеди-
ненных блоков (рис. 8.6), и вероятности отказов их одинаковы
1
и равны q = —, то энтропия системы
= ~log-^- = log2V.
1G5
I 2 3 4 5 6
О
R=O
' &=0
• R=O
r- 5
2 6
I О
6
7
1!
12
13
14
15
о
о
О
о
о
о
I
О
1
/
/
166
2
3
4
5
6
7
8
о
о
о
о
о
I
о
о
о
о
О
О
о
о
о
о
о
о
о
О I
о
о
о
о
о
о
о
о
о
о
о
о
о
о
о
о
о
о
Г“£_
ю
II
12
13
14
IS
<256
/ ООО
г 1 0 О
3 ООО
4 ООО
S 0 1 0
6 0 0 1
7 1 О О
8 ООО
10 ООО
fl О / /
12 О t 1
13 0 < г
/4 О О 1
IS О 0 !
J
0,32
0,68
0.32
0.68
О, 68
0,68
0.68
0,68
i О I I О О
о
о
о
I
о
о
о
о
о
о
о
I
1
о
/
о
о
о
о
о
О
о
/
!
О
О
I
1
-^-.8 3
/ 0
0,18
/ О
/ ' 0
0,45
0,37
0.18
f О
/ О
0.82
0,82
0,82
О, 37
0,37
8-1
8-1
-Ь_
О,В5
О, !
О. 15
0,85
0,25
0,2
0,15
0,2
0,45
0,4
0,65
0,6
0.55
0,4
0,4
R~O
1 3 4 ч
1 1 0 0 О.И
г О о О 1 0
3 в t 0 0,33
4 в О / 0,56
5 О О О } 0
6 0 0 О t 0
7 7 0 О 0,1!
1 / 1 О 0.4b
/О 0 1 1 0,89
н ! ! О 0, 06
>2 О 1 О О. 33
13 0 0 О 1 О
/4 / ! о 0,00
15 О / 0 0,33
1 13 Sq.
1 / О 0,25
7 1 0 0,25
10 0 1 0. 75
12 О 1 0. 75
15 [О/ 0.75
Рис. 8.4. Образование алгоритма поиска неисправностей
При осуществлении проверки количество информации
/
//г . т , L т\. /, - т
-Т710ё —+ 1 !°g
N N \ NI \ N.
при условии, что проверяется т блоков из N.
Рис. 8.5. Дерево поиска
/ 2 3 т-1 т т-И т<-2 N~3 N~2 N-l N
Р и с. 8.6. Принципиальная схема системы
., , т 1
Ма?;симум Д. - с соответствует — = —, поэтому первая
проверка сводится к подаче сигнала на вход и измерению реак-
ции в середине схемы системы.
При этом In. с = 1.
Выбирая каждую следующую проверку так, чтобы
Ас, -* С 1-пэ С/сГа ------1п3 С/%1 тс, ==== * • === 1 )
167
найдем, что необходимое количество проверок не превысит
A>logM т. е. 2*>ДГ, где k — целое число.
Практически подобная программа поиска может быть реа-
лизована на основе релейной схемы (рис. 8.7).
/// НО 10/ 100 ОН 010 00/ иии
Рис. 8.7. Электрическая схема для поиска неисправностей
Неисправность фиксируется на световом табло кодом.
Число проверок в программе поиска при составлении алго-
ритма, исходя из количества информации, оказывается значи-
тельно меньше, чем при последовательных проверках элементов,
особенно при большом числе элементов.
При последовательных проверках математическое ожидание
числа проверок в программе
ЛШ)= ± U + 2 + • + ('V-П] = •
N 2
Использование при составлении алгоритма поиска неисправ-
ностей критерия, основанного только на значении количества
информации, не позволяет учесть весьма важного для эксплуа-
тации фактора — «стоимости» получения информации.
При составлении алгоритма поиска по «цене» информации в
качестве первой проверки выбирается проверка те,-, для которой
значение
максимально.
В остальном методика построения алгоритма поиска по «це-
не» информации не отличается от методики построения алгорит-
ма по количеству информации, но, естественно, сами алгоритмы
поиска отличаются друг от друга.
168
Практически критерии, основанные на использовании поня-
тия «цена» информации, целесообразно применять при состав-
лении инструкций по поиску неисправностей в сложных 'Систе-
мах.
Оптимальность всей программы поиска оценивается по кри-
терию
1
где Tk — суммарная стоимость всех проверок, необходимых
для отыскания k-ro элемента, предусмотренных дан-
ным алгоритмом поиска.
Комбинированный поиск с жесткой программой используется
обычно при поиске неисправностей при помощи системы автома-
тического контроля.
Это объясняется тем, что при жесткой программе поиска об-
щее число различных проверок в программе, а следовательно,
и число различных измеряемых величин оказывается меньше,
чем при поиске с гибкой программой, хотя время поиска при
жесткой программе может оказаться и больше, чем при гибкой.
Основой для составления жесткой программы поиска яв-
ляется таблица неисправных состояний. Если возникает необхо-
димость объединения программы контроля работоспособности с
программой поиска неисправностей, то таблица включает и ра-
ботоспособное состояние системы.
В этом случае рассматривается наиболее общая задача тех-
нической диагностики — контроль состояния.
Синтез алгоритма контроля состояния системы сводится к вы-
бору минимального количества проверок, в общем случае с неко-
торой вероятностью определяющей каждое из возможных со-
стояний, т. е. к своеобразному синтезу 'Минимальной логической
схемы с несколькими выходами.
Общая идея отыскания минимальной формы схемы со многи-
ми выходами сводится к тому, чтобы максимально использовать
выражения (или их части), описывающие работу схемы по од-
ним выходам, для построения выражений, описывающих работу
схемы по другим выходам.
Наиболее распространенным способом отыскания минималь-
ных форм для логических цепей со многими выходами является
способ упрощения с помощью диаграмм Вейча, однако примене-
ние его возможно только в случае равновероятных состояний.
Ниже приводится простой метод, основанный на использова-
нии теории информации и дающий возможность установить число
проверок, достаточное для определения всех состояний системы,
заданных таблицей.
Метод дает решение, близкое к абсолютной минимальной
форме.
169
С точки зрения теории информации задача отбора проверок,
определяющих состояние системы, может быть сформулирована
следующим образом:
Система С = {С;} (i — 1, 2,..., N) может принимать одно
i из N возможных состояний с вероятностью pit где Pi=p{C^t
N
У Pi = 1, заданных таблицей.
1
Неопределенность состояния системы С характеризуется энт-
ропией
^[С] = - S/’/lOgP;.
1
Для того, чтобы установить, .в каком i-том состоянии из /V
возможных находится объект, необходимо провести некоторую
программу проверок П (л(, п2, ... кт), состоящую в определе-
нии не более чем т признаков состояния уг, ..ут.
Каждый признак состояния yk содержит некоторую инфор-
мацию /у с относительно состояний объекта С:
Д^с = Я[С]-Я[С|Л],
где ^[С|_уй]— средняя условная энтропия системы при условии
определения .признака yk, а
Н [С | у J = р \yk =\}Hyk = i[C\+p\ yk = 0] НУк = о [С];
HVk = ! [С] = - f. р [Cz\yk = 1] logр [Cz| yk = 1];
i = l
^ft = o [£]= — £ [cz |J/* = о] log[cz |уА = о].
i = l
Минимизация схемы co многими выходами для контроля со-
стояния состоит в таком выборе признаков состояния (прове-
рок), являющихся составляющими сложной программы, чтобы
количество их было минимальным, т. е. чтобы ‘каждый признак
содержал максимально возможное количество информации от-
носительно состояния объекта.
Следовательно, выбор признаков должен начинаться с приз-
нака yk, несущего максимальное количество информации
Iyk . с = и [С] - И [С |Л] = {Iyk . с }тах.
После выбора признака yk система будет обладать энтропи-
ей характеризующей некоторое новое неопределенное
состояние системы, в которое перейдет для наблюдения объект
контроля.
170
Следующий признак выбирается на основании того же кри-
терия, что и первый, но исходя из состояния объекта, характери-
зуемого энтропией, Н[С|_уй1.
Тогда
Лгр-й-с = Я[С|у,]-Я[С|Л, уг]-
где
1 1
^[С|у/г. У/] = 1 S p[yi=j\yk=m\ Hyl = jiyk = m[C],
7=0 m-о
N
Hyt = j\yk = m [C] = - 2 P [СДу^т, yt=j\ iogp [C\yk^m, yr=J].
<=i
Полное количество информации, которое содержит данная со-
вокупность признаков (уп . .yk)y полученная в результате про-
граммы' пров'ерок П == {kj, . ,Tzk], относительно системы С;
Л-»с = Л-, -» с + /Уз । Л с + • • • + Iyk' yL, уг.. - с •
Процесс отбора признаков состояния продолжается до тех
пор, пока Н [С |Ур . . yfe] не станет равной нулю, т. е,
/п_»с = Я[С|.
При этом состояние объекта определяется однозначно.
Рассмотрим пример.
Система С = {Q} (i = 1, 2,..., N) может принимать одно из У воз-
можных состояний, заданных табл. 8.5.
Полагая, что все N состояний объекта, составляющих полную сумму со-
бытий, равновероятны, получим
ЩС] = - Е A1ogPz = logN,
1
так как
|W.
Имеются только два возможных исхода при определении признака
№ ‘-Ук = 1 и у1 = 0 с вероятностями р (у/г) и р (у/г).
Тогда
н [С IУJ = Р [Л] Нук [С] + р [у J Hyk [С], (8.23)
Wy^fC] и Ну^ [С] — энтропия объекта после определения признака со-
стояния ук.
Полагая, что при определении значения ук вероятность появления ошиб-
ки равна нулю, получим
т , -. N — т
—; р =-----------
N N
где т — число 1 в соответствующей А-той строке (табл. 8.5).
171’
Из (8.23) следует
urpi 1 • т 1 । N—m , .
Н[с IУ kJ = — log т + —------- log TV,
.-a
r Г m . m , N — m t N — я
Zy>c = — — log— + —-—log-----------—
A TV /V N
Количество информации, которое содержит второй признак,
например, yt относительно состояний объекта С при условии,
что первый признак yk определен, будет равно:
/уг1^-.с =//[C|yJ-//[C|yft, yz],
где
Н[С I Ук, Nil = Р — НУ11 yk [С] + р — Hyt I yk [С] +
.Ук! L3'ZiJ
г- , - , N — m, — /я,
Р !Ш1 ----
а
Hyt | yk [С] = log /Пр- Hyt । yk [С] = log (от — от,);
#j-zpft[C] = logOT2; Ну^-уь [C] = log (AZ — m — m2),
где пц и m2 — число единиц в t-ii строке соответственно для т
'единиц и N — т нулей /г-той строки.
Тогда
т, , т, , т — т, , т — т
с =----— log — Н-------— log ———
N т N N
AZ
, //4о , ГПа /V — JTI — lilt) . LN — т —
Н------- log-------------1---------------—2- log-------------
N N — m N N — m
Для таблицы состояний (табл. 8.5) энтропия объекта//[С] =
-= log8 = 3. Значения количества информаций /, которые со-
держат признаки состояния относительно состояния объекта,
приведены в табл. 8.5. (Для упрощения в табл. 8.5 признаки со-
стояния и сами состояния обозначены только цифрами).
В качестве первого признака выбирается признак у5.
’172
Таблица 8.5
1 2 3 4 5 6 7 8 ]
‘ 1 1 0 1 1 1 1 1 1 0,55
2 1 0 1 1 1 1 0 1 0,81
3 1 0 0 0 1 1 1 1 0,94
4 1 0 0 0 0 0 1 1 0,94
5 1 0 0 0 0 1 1 1 1 _
9 .1 1 0 0 1 0 0 0 0,94
7 0 1 1 0 0 0 1 1 1
8 1 1 1 1 0 0 0 0 1
9 0 0 0 1 0 1 0 0 0,81
1 6 7 8 2 3 4 5 I
5 1 1 1 1 0 0 0 0 0
1 1 1 1 1 0 1 1 1 0,405
2 1 1 0 1 0 1 1 1 0,81
3 1 1 1 1 0 0 0 1 0,405
4 1 0 1 1 1 0 0 0 0,405
6 1 0 0 0 1 0 0 1 0,905
7 0 0 1 1 1 1 0 0 1
8 1 0 0 0 1 1 1 0 0,81
9 0 1 0 0 0 0 1 0 0,81
7 8 1 6 2 3 4 5 I
7 1 1 0 0 1 1 0 0 0
1 1 1 1 1 0 1 1 1 0,25
2 0 1 1 1 0 0 1 1 0,25
3 1 1 1 1 0 0 0 1 0,25
4 1 1 1 0 0 0 0 0 0,25
6 0 0 1 0 1 0 0 1 I
8 0 0 1 0 1 1 1 0 0,5
9 0 0 0 1 0 0 1 0 0,5
7 8 1 6 9 3 4 5 I
6 1 0 0 1 1 1 0 1 0 0 1 0 0
2 0 1 0.12
3 | 1 1 0
7 8
2 0 1
173
Выбирая из вновь образовавшейся таблицы снова признак,
••содержащий относительно вновь образовавшихся состояний си-
стемы наибольшее количество информации, найдем, что в каче-
стве следующего признака необходимо принять у7. Дальнейший
ход решения пояснений не требует.
Следует заметить, что если в таблицах имеются признаки, не
содержащие информации 1'у с = 0 относительно данного со-
стояния, то учитывать их при дальнейшем рассмотрении не имеет
-смысла.
Если признаки содержат одинаковое количество информации
-относительно состояния объекта, то следует выбирать лишь один
из них (это соответствует логической операции «ИЛИ»),
Рис. 8.8. Логическая схема контроля
Таким образом, в результате расчета находим минимальное
число признаков, необходимых для определения каждого из воз-
можных состояний. В соответствии с данными табл. 8.5 можно
составить логическую схему контроля состояния объекта, изо-
браженную для рассматриваемого случая на рис. 8.8.
174
§ 8.5. ПРИМЕНЕНИЕ ЛОГИЧЕСКИХ МОДЕЛЕЙ
ПРИ КОНТРОЛЕ СОСТОЯНИЯ СИСТЕМ
Логические модели составляются на основе функциональных
схем систем, представляющих собой совокупность связанных
между собой блоков. При разбиении системы на блоки учиты-
ваются особенности конструктивного исполнения, сменность бло-
ков, удобство измерения выходных параметров и другие эксплуа-
тационные особенности.
Каждый блок Bj может иметь в общем случае т входов и п
выходов (рис. 8.9,а). К входам относятся внешние управляющие
сигналы, в том числе тест-сигналы для контроля состояния хи,
JC2i • .. xkl\ сигналы с выходов других блоков системы _у1Р _у2/.. уи;
Рис. 8.9. Модель блока
входы, обеспечивающие питание блока электрической и механи-
ческой энергией мп, u2i... uri.К категории входных следует отне-
сти также воздействия, характеризующие внешние условия функ-
ционирования блока (температура и давление окружающей сре-
ды, уровень вибраций и т. п.), Vu; И2.; ... Vtt.
При составлении логической модели по функциональной
схеме каждый блок представляется п блоками Qn; Q;3; . . . Q/H,
каждый из которых имеет один выход у1} и S} входов, сущест-
венных для выхода Уу (рис. 8.9,6). При этом все связи между
входами и выходами в логической модели сохраняются такими
же, как и в функциональной схеме.
Обозначим логическое высказывание «значение входа допу-
стимо» символом входа x4i (или соответственно yv.t\ VE/).
Тогда символы входов можно считать логическими переменны-
ми, принимающими значения 1, если соответствующие им входы
находятся в допуске, и значения 0 — в противном случае. На-
зовем логическую функцию
~ XU 'Х21 • • Xkl 'Уи У21 • • • У W UU ll2i • • lLrl Уц ^21 ’ • • Vtl
— Sj,
175
являющуюся конъюнкцией Sj входных переменных, функцией,
условий работы блока по выходуу^. Очевидно, что при Ftj <= 1
все входы блока в допуске, при F = О — хотя бы один из них
не находится в пределах своего допуска.
Аналогично символы выходов 'можно считать логическими
выходными функциями, принимающими значение 1, если выход-
ной параметр (сигнал) в допуске, и значение 0, если выходной,
параметр не в допуске.
Если составить логическое высказывание «блок QZj- исправен»
и обозначить его символом 1, то у у можно рассматривать как
конъюнкцию переменных Fi} и Q/jf:
Эта формула означает, что выход блока Qy будет в до-
пуске только в том случае, когда все его входы в допуске (Fу=1)'
и блок Qy исправен (Qy = l).
Очевидно, что контролируемый блок в целом исправен, ес-
ли истинным является логическое высказывание вида
Уп-Уя ••• Уц •• • У1П-1-У1п>
т. е. в допуске находятся все его выходные параметры.
Перейдем к методике оценки работоспособности и поиска не-
исправности в системе, состоящей из нескольких блоков. Рас-
смотрение проведем на примере логической модели системы, изо-
браженной на рис. 8.10 [29]. При этом будем полагать, что все
внешние входы блоков (x,z; Vzi) являются правильными,
т. е. .не превышают заданных допусков.
Рис. 8.10. Логическая модель системы
Найдем минимальную совокупность выходных параметров,
контроль которых позволяет вынести суждение об исправности
всей системы. Для этого составим квадратную матрицу
(табл. 8.7), число столбцов и строк которой определяется числом
блоков логической модели, равным числу выходных парамет-
ров yi, у2, ...,У5.
Заполнение таблицы проведем, руководствуясь следующими
правилами. Допустим, что параметр ух в допуске (что отмечено
176
знаком (х) в первой клетке первой -строки), тогда при правиль-
ных внешних входах, как следует из модели рис. 8.10, обяза-
тельно находятся в допуске также параметры уз и уз. Действи-
тельно, z/j = 1 при Ch =' 1 и уз — 1. В (свою очередь уз =- 1 при
Q5 = 1 и уз = 1, а уз = 1 при Q3 = 1. Таким образом, контроль
параметра yi с 'исходом у{ — 1 (в допуске) позволяет утвер-
ждать, что исправны блоки Qi, Q3> Qs, а их выходы z/i; у3; уз —•
в допуске. В табл. 8.7 проставим знаки (х) в третьей и пятой
клетках первой строки. Допустим далее, что выход у% в допуске.
Рассуждая таким же образом, заполним вторую строку, проста-
вив в соответствии с моделью рис. 8.10 знаки (х) в первой, вто-
рой, третьей и пятой клетках. Аналогично заполним остальные
строки матрицы (табл. 8.7).
Из рассмотрения матрицы (табл. 8.7) следует, что положи-
тельный исход контроля выхода одного из .блоков позволяет
заключить об исправности не только этого, но и нескольких
других блоков. Можно найти наименьший набор выходов, конт-
роль которых позволит сделать заключение об исправности всех
блоков, т. е. системы в целом. Определение минимального числа
выходов по матрице (8.7) сводится к выбору минимальной со-
вокупности таких строк, чтобы в каждом столбце имелся хотя
бы один знак (х), принадлежащий этим строкам. В нашем при-
мере минимальная .совокупность включает в себя строки уг и у4-
Таким образом, .контроль работоспособности системы с логиче-
ской моделью рис. 8.10 целесообразно' осуществлять по выходам
у2 и z/4, подавая в систему допустимые -входы Xi; х2; х3; х4; xs.
Контроль г/г и у4 достаточен для оценки -работоспособности всей
-системы.
Как видно из рассмотренного примера, в простейших случа-
ях отыскание минимальной совокупности строк легко выпол-
нить путем простого просмотра таблицы. В более сложных слу-
чаях приходится применять известные из алгебры логики мето-
ды получения частных минимальных форм при минимизации
булевых функций.
Перейдем к задаче определения минимального набора вы-
ходных параметров блоков, достаточного для поиска неисправ-
ности любого из блоков системы. Для этого составим квадратную
матрицу (табл. 8.8), в которой по -вертикали записываются раз-
личные состояния системы, связанные с отказом того или иного
блока, а по горизонтали — значения выходов блоков при этих
состояниях.
Заполнение таблицы производится следующим образом. До-
пустим, что имеет место отказ 'блока Qi, тогда будут не в допу-
ске выходные параметры 'блоков Q2 и Q<, т. е. у\ = г/2 = У± — 0.
Работа блоков Q3 и Qs не зависит ют -состояния блока Qi, поэто-
му следует принять уз = 1, уз — 1. Затем, -высказывая гипотезу
об отказе блока Q2, заполним вторую строку таблицы: ух = у3 —
= 1/4 = Уз = 1; Уз = 0 и т. д.
12. Румянцев Е. А. и др.
177
Из табл. 8.8 следует, что состояния отказов блоков Qg и Qr,
не различаются по выходным параметрам ...., yg. Это объяс-
няется тем, что логическими методами не представляется воз-
можным выявить отказы блоков, образующих замкнутую систе-
му с обратной связью. Можно установить неисправность систе-
мы, но нельзя указать, из-за отказа ‘какого именно блока система
оказалась неисправной. В нашем случае по модели рис. 8.10 не-
трудно видеть, что блоки Q3 и Qg образуют замкнутую систему.
Поиск неисправностей в замкнутых системах производится спе-
циальными методами, один из которых предполагает размыка-
ние системы.
Объединим состояния отказов блоков Qg и Qg в одно состоя-
ние и составим табл. 8.9.
Таблица 8.9
>1 Уг >3 y< У&
Si — отказ Qi 0 0 1 0 1
Sz — отказ Qs 1 0 1 1 1
Ss — отказ Q3 V QB 0 0 0 0 0
Si — отказ Qi 1 1 1 0 1
Выпишем далее .совокупности выходов, позволяющие попарно
отличать состояние Si от других состояний S2, S3, S4;
Si Sa — yi V y4;
Si Ss _v3 V y6;
Si S'.| у । V У 2 •
178
Логическое произведение этих совокупностей
<У1 V У4)-(У8 V У6) • (л V у2) =У1 Уз V У1 Уз V У2У3 У4 V у2у4 Уз
дает все возможные наборы выходных параметров, по которым
можно отличить состояние 5j от всех других. Минимальными
являются наборы и у$ или у\ и уъ.
Выпишем теперь из табл. 8.9 совокупности выходов, отличаю-
щие попарно все состояния друг от друга:
•^1 ~ У1 V У^1 $2 — У1 V Уз V У4 V Уб!
51*^3 Уз V у у, У2 Vy4;
у, Vy2; 5354-У1 x/л Vy3VyB.
Логическое произведение этих шести совокупностей
(У 1 VУ*) • (Уз VУб) • (у 1 V у2) • <У1 V Уз V у4 V Уб) • (у2 VУ4) X
X (У! Vy2Vy3VyB)
даст наборы выходных параметров, позволяющие различать все
состояния друг от друга. Минимальными из них по составу бу-
дут следующие наборы:
У1У2у3; У1У2ув; УО'зУУ У1У4у6; у2у3у4; у2у4ув.
Для поиска неисправного блока можно взять любой из этих
наборов, так как все они содержат по три параметра.
Для получения минимального набора параметров, позволяю-
щего производить как контроль работоспособности, так и поиск
неисправности, необходимо взять логическое произведение вида
У2 У4 • (У1 V УJ' (Уs V У6) • (У1V Уг) • (У 1 V Уз V У4 V Ув) X
(Уз VyJ’fyi V У2 V Уз V у5) ==У2У4Уз V У2У4УВ-
В этом произведении, помимо тех .же шести совокупностей,
«фигурирует совокупность параметров у2 и yt, которые, как это
было показано выше, являются достаточными для различения
работоспособного состояния от всех других. По результатам ум-
ножения имеем следующие минимальные наборы для контроля
состояния системы: ytiyy?, или уууууа.
Выбрав, например, учуууз, составим таблицу — карту конт-
роля системы (табл. 8.10).
Если, например, по результатам контроля оказалось, что па-
раметры у2 и z/4 не в допуске, а параметр у& — в допуске, то это
означает, что отказал блок (Д.
Подобные карты контроля составляются заранее и выдают-
ся в качестве руководства для оценки состояния различных си-
стем механикам по авиационному оборудованию. . . .
12*
179
Одна из возможных блок-схем автомата .контроля системы
изображена на рис. 8.11, где D — датчики выходных парамет-
ров, отобранных для контроля после 'минимизации, К — устрой-
Таблица 8.10
Признаки Состояние — Уа У4 Уб
So — сист. исправна 1 I 0 1
Si — отказ Qi 0 1
S2 — отказ Q? 0 I 0 1
Sa — отказ Qg V Q3 0 0
S< — отказ Qj 1 0 1
Рис. 8.11. Принципиальная схема автомата контроля
ства сравнения измеренных значений параметров с их допусти-
мыми значениями (компараторы), НЕ, И — логические элемен-
ты. Автомат работает так, что по включению соответствующей
лампочки однозначно устанавливается неисправный блок или
делается заключение об исправности системы.
Автомат может быть дополнен специальной схемой различе-
ния отказов блоков Q3 и Qs друг от друга, однако при этом
потребуется размыкание одной из связей между ними.
180
§ 8.6. ВЫБОР ТОЧНОСТИ ИЗМЕРИТЕЛЬНЫХ СРЕДСТВ
При выборе точности измерительных средств, предназначен-
ных для контроля состояния объекта, следует учитывать общую
погрешность измерений, которая складывается из ошибок, при-
сущих схеме измерения, ошибок, вызванных условиями настрой-
ки и измерений, и погрешностей самого измерительного прибора.
В общем случае погрешности измерений разделяют на систе-
матические и случайные.
Систематические погрешности метода измерений легко мож-
но исключить путем введения необходимых поправок. Случайные
погрешности оцениваются методами теории вероятностей.
При рассмотрении группы однотипных измерительных уст-
ройств, используемых для контроля состояния множества одно-
типных объектов, под случайными погрешностями подразумева-
ются случайно-систематические ошибки, т. е. ошибки, являющие-
ся систематическими для конкретного измерительного устрой-
ства и конкретных условий измерений и имеющие случайный ха-
рактер для группы измерительных устройств. Случайные ошиб-
ки, вызванные вариацией показаний прибора, оказывают относи-
тельно малое влияние на результаты, ибо при необходимости
можно осуществить два-три измерения.
Погрешности измерений приводят к ошибкам в оценке состоя-
ния объекта: часть объектов будет ошибочно забракована,
часть — ошибочно признана годными.
Для того, чтобы количественно оценить вероятность появле-
ния ошибочной оценки, необходимо знать законы распределения
контролируемого параметра и погрешностей измерительных уст-
ройств.
Для случайных погрешностей измерительных устройств, как
показывают многочисленные исследования, может быть принят
нормальный закон распределения.
Контролируемые параметры .могут подчиняться различным
законам распределения, однако в большинстве случаев, вслед-
ствие влияния ла отклонения параметров большого числа фак-
торов, на основе центральной предельной теоремы можно при-
нять, что они также распределены по нормальному закону.
Когда законы распределения контролируемых параметров и
погрешностей измерений известны, то задача о влиянии погреш-
ностей измерения на правильность оценки состояния объекта
может быть решена следующим образом.
Допустим, что fi(yi) — плотность вероятности контролируе-
мого параметра у; а а и b — его предельные допустимые значе-
ния; fz(z) — плотность вероятности погрешности измерений
(рис. 8.12), тогда
6
Р (У) = 1 -Р (J) = J/i (J) dy.
а
181
Вероятность события, .состоящего в том, что при нахождении
параметра в пределах допуска результат измерения у* также
будет находиться в пределах допуска,
Ь Ь—у
Р (У* А Д'] = J/i (>) [ f Л (г) dz ] dy.
а . а—у •
Вероятность события, состоящего в трм, что при нахождении
Рис. 8.12. Плотности вероят-
ности контролируемого пара-
метра и погрешностей измере-
ния
параметра в пределах допуска, результат измерения будет ука-
зывать на выход параметра за пределы допуска,
Ь а—у оо
Р [У* л у] = J/1 (у) [ У /2(г) dz + у /2 (z) dz} dy.
а —со Ь—у
Вероятность события, состоящего в том, что параметр и ре-
зультат измерения будут находиться за пределами допуска,
а Ь—у
Р [у* Лу 1 = У /1 (у) р - У Л (г) dz ] dy +
—со а—у
оо Ь—у
+ У/1(У)р“ у/2(г)^г]А'-
Ь а—у
Вероятность события, состоящего в том, что параметр будет
находиться за пределами допуска, а результат измерения — в
допуске,
а Ь—у со Ь—у
Р [У* А у] = У /1 (у) [ У /1 (г) dz} dy 4- у Л (у) [ у /2 (г) rfzj dy.
— оо а—у Ь а —у
182
При
/1 (у) =-----7=- exp [- (у - т )2 / 2ау2];
5,/2*
А (г) =----7=- ехр [— г2/2аг2]
ог]/2к
значенияр [у* Л у]; р [у*/\ y]j р[у* ЛуГ, Р [у* Л у>1 зависящие
от соотношения ореднеквадратических отклонений ,ог / <зу ==.аэ
Рис. 8.13. Зависимость условных вероятностей от
относительного среднеквадратического отклонения а
и относительного поля допуска Р
и соотношение 8/оу = Р (т. е. от относительного поля допуска)
находят численным методом [8] (рис. 8.13), используя таблицы
функций Лапласа.
183
Для выбора точности измерений должно быть задано Д
3/Оу= ₽ и Д(у).
Так как достоверность системы контроля:
d,--------PJTM_________ „„
р [у* Л и + р [у* Л И
то, задаваясь значением можно найти отношение
Ф = Р 1Т*Лт] = dj
р[У*/\У] [1-^]’
а по графику (рис. 8.14) найти а —ог/ауи, следовательно, пре-
дельную допустимую погрешность измерительного устройства
Д = За2.
Рис. 8.14. График функции a —
Глава IX
НЕАВТОМАТИЧЕСКИЕ СРЕДСТВА
ИНСТРУМЕНТАЛЬНОГО контроля
СОСТОЯНИЯ АВИАЦИОННОГО ОБОРУДОВАНИЯ
§ 9.1. ОБЩИЕ СВЕДЕНИЯ. КЛАССИФИКАЦИЯ НЕАВТОМАТИЧЕСКИХ
СРЕДСТВ ИНСТРУМЕНТАЛЬНОГО КОНТРОЛЯ
Для контроля состояния авиационного оборудования при
различных -видах подготовок, регламентных и ремонтных рабо-
тах широко используются .разнообразные неавтоматические сред-
ства инструментального контроля. Неавтоматические средства
инструментального контроля обычно называют контрольно-изме-
рительной аппаратурой (КИА).
Большинство КИА являются эталонными измерительными
устройствами, с показаниями которых сравниваются значения
измеряемых величин объектов контроля. Однако параметры са-
мих измерительных устройств в процессе эксплуатации не оста-
ются постоянными вследствие старения и износа элементов и уз-
лов КИА, окисления контактов, притупления кернов осей и т. п.
Поэтому возникает необходимость в систематической проверке
самой КИА на соответствие установленному классу точности и
правильность функционирования.
Проверки КИА производятся в специализированных учреж-
дениях или лабораториях, оснащенных образцовыми мерами и
измерительными приборами.
Деятельность подобных учреждений координируется и на-
правляется Комитетом стандартов, мер и измерительных прибо-
ров при Совете Министров СССР.
Учреждения и лаборатории ВВС относятся к так называемому
ведомственному надзору за КИА.
Проверки КИА подразделяются на государственные, обяза-
тельные и периодические.
Государственной проверке подвергаются только те образцо-
вые меры и измерительные приборы, которые не могут быть
проверены® учреждениях ведомственного надзора.
Обязательные проверки КИА осуществляются ведомственны-
ми учреждениями и лабораториями.
185
После выполнения государственных и обязательных проверок
на КИА накладывается .клеймо или выдается свидетельство.
Сроки проведения государственных и обязательных проверок
зависят от типа КИА, но не должны превышать два года.
Периодические проверки выполняются в период между обя-
зательными проверками, но ,не реже одного раза ев год. Резуль-
таты периодических проверок и даты их выполнения записыва-
ются в паспорта КИА.
Сроки проверки КИА планируются и контролируются инже-
нером части по авиационному оборудованию.
В зависимости от назначения и .конструктивного исполнения
вся КИА подразделяется на:
— КИА общего применения;
— КИА группового применения;
— КИА индивидуального применения;
— КИА комплексного применения.
— КИА общего применения предназначена для не-
посредственного измерения определенных физических величин
(параметров). Наиболее часто такими величинами в авиацион-
ном оборудовании являются:
— напряжение постоянного и переменного тока U;
— сила тока I;
— электрическое сопротивление R;
— частота f;
— разрежение (статическое давление) Рст;
— динамическое давление Рл;
— давление жидкостей и газов.
КИА группового применения включает в себя
средства, с помощью которых осуществляется инструменталь-
ный контроль групп устройств и приборов, основанных на одном
и том же принципе действия или предназначенных для измере-
ния одной и той же физической величины.
Как правило, КИА группового применения имеют генераторы
сигналов (датчики физических величин) и измерительные уст-
ройства (рис. 9.1). Генераторы сигналов воспроизводят физиче-
скую величину, которая или измеряется объектом контроля, или
под действием которой он выполняет определенные функции.
КИА группового применения используется при контроле со-
стояния следующих типов авиационного оборудования:
— генераторов постоянного и переменного тока;
— регуляторов напряжения;
— преобразователей постоянного тока в переменный;
— защитной и коммутационной аппаратуры;
— дистанционных электрических тахометров;
— термометров;
— тахометров;
— измерителей расхода топлива;
— агрегатов и устройств кислородного оборудования. -
186
к ИА индивидуального применения по структур-
ной схеме аналогична КИА группового применения (см. рис. 9.1),.
Отличие состоит в том, что с помощью КИА индивидуального'
применения можно производить инструментальный контроль,
только одного типа (или даже только одной модификации) авиа-
Рис. 9.1. Принципиальные схемы подключения измеритель-
ных устройств к объектам контроля:
ОК — объект контроля, ИП; — измерительный прибор, ГС—
генератор сигналов; ЭО — эталонный объект
ционного оборудования. Подобная КИА проектируется с учетомг
особенностей конструкций и электрических схем конкретных,
объектов контроля. Для подключения этой КИА в большинстве-
случаев используются рабочие электрические разъемы контро-
лируемых агрегатов и блоков. Поэтому любая модернизация
объектов контроля приводит к необходимости модернизации ш
КИА.
- С помощью КИА индивидуального применения осуществляет-
ся инструментальный контроль таких агрегатов и систем авиаци-
онного оборудования, как:
— автопилотов;
— демпферов;
— навигационных вычислительных устройств;
, - —= курсовых и пилотажно-навигационных систем;
— авиагоризонтов; .
— систем измерения и выработки топлива;
— панелей запуска и устройств управления режимами рабо-
ты авиадвигателей;
— аэрофотоаппаратов и т. д.
КИА комплексного применения предназначена
для инструментального контроля нескольких (различных.по на-
значению и принципу действия) приборов, агрегатов и систем,
или даже всего комплекса авиационного оборудования данного-
типа летательного аппарата.
Конструктивно подобная КИА выполняется в виде отдельных
комплексных установок, комплексных испытательных стендов.
(КИС) и универсальных полевых лабораторий (УПЛ).
18Г
К КИА, используемой для инструментальных проверок авиа-
ционного оборудования, предъявляются следующие основные
тактико-технические требования:
1. Обеспечивать точность измерения и надежность (в смыс-
ле безотказности КИА) по крайней мере на два порядка выше
соответствующих характеристик объектов контроля.
2. Определять с высокой достоверностью состояние объектов
(контроля, а результаты контроля представлять в простой и на-
глядной форме, ,не требующей сложного анализа и высокой ква-
лификации оператора.
3. Иметь простую и удобную в эксплуатации конструкцию,
обеспечивающую безопасность в обращении и минимум трудоза-
трат на процессы контроля.
4. Обеспечивать проверку? с помощью одной установки (при-
бора) возможно большего числа агрегатов или систем.
5. Иметь (минимальные вес и габариты.
Кроме перечисленных общих требований, к каждому (конкрет-
ному типу КИА могут предъявляться специальные требования,
•определяющие условия эксплуатации, допустимые величины по-
грешностей измерения и т. и. Так, иногда указывается, что' при
перебазировании КИА на автомашинах по проселочным доро-
гам при тряске она должна выдерживать ускорения до 4 g.
Для хранения некоторых типов КИА (особенно высокого
класса точности) требуются сухие, вентилируемые помещения с
температурой Т =. ф- 15 + 10°С.
Допустимые изменения напряжений и частот источников
электроэнергии для абсолютного большинства'КИА не должны
превышать величин:
U_ = 27 ± 2,7 в; U~ = 36 ± 2 в; f= 400 ± 8 гц.
§ 9.2. ЭКСПЛУАТАЦИОННАЯ ОЦЕНКА КИА ОБЩЕГО ПРИМЕНЕНИЯ
В КИА общего применения наибольшую часть составляют
электрические измерительные приборы и недистанционные мано-
метры. Они могут использоваться как отдельные приборы или
входить в состав КИА группового, индивидуального и комплекс-
ного применения.
В таблице 9.1 приведены характеристики некоторой типовой
КИА общего применения, используемой при инструментальных
проверках авиационного оборудования.
Применение многочисленных отдельных измерительных при-
боров и устройств создает ряд неудобств в эксплуатации:
— требуются дополнительные помещения для хранения и
эксплуатации КИА;
— возникают проблемы перебазирования КИА;
— увеличиваются трудозатраты и время на подготовку авиа-
ционного оборудования.
188
Для инструментального контроля авиационного оборудова-
ния целесообразно 'использовать комбинированные измеритель-
ные устройства. Они имеют несколько шкал, комплект шунтов и
приспособлений, что позволяет одним устройством (прибором)
измерять ряд физических величин (U, I, R и т. д) в широком
диапазоне их изменения.
В процессе эксплуатации необходимо тщательно следить за-
состоянием КИА и строго выдерживать сроки обязательной и пе-
риодической проверок.
Таблица 9.1
1 Xs п/п. 1 Наименование и тип прибора Измеряе- мая величи- на Класс точно- сти Пределы измере- ния Примечание
1 Тестер Ц-56 R 1,0 0—3 kQ
J_ J~ 1,0] 1,5/ 0—60 ма; 0—6 а; Допустимое изменение частоты
U- . 1,01 1,5] 0-60 в; 0—600 в; /=50—1000 гц.
2 Амперметр 334315/40 J~ 0,5 0—10 а; 0—50 а; / = 50—400 гц
3 Амперметр М24 J- 1,0 0—100 ма; 0—100 а
4 Амперметр Э421 2,5 0—300 ма; / = 50 гц; /=180-550 гц.
5 Амперметр М4200 ' J- 2,5 0—10 а; 7=20 ±5°С
6 Вольтметр М24-4 U- 1,0 0—50 в; 7=20±5°С
7 Вольтметр М4200 U_ 2,5 0—30 в;
8 Вольтметр лам- повый МВЛ-2М u_ 2,5 0—10 мв; 0—300 в;
9 Вольтметр Д566 u~ 0,5 0—50 в; /= 180—550 гц
10 Вольтамперметр J~, U_ 2,5 100—0—100 ма; 50—0—50 в;
11 Мегометр М-1101 М Сопротив- ление изо- ляции 1,0 0—1000 мгом; ДС/пит = ЮО в
12 Микроомметр М-246 Перех. сопротив- ление 2,5 0—100 мком; от 100 мком до 1000 Мом; Т = 20±5°С
189»
§ 9.3. ЭКСПЛУАТАЦИОННАЯ ОЦЕНКА КИА ГРУППОВОГО
ПРИМЕНЕНИЯ
По конструктивному применению КИА группового примене-
ния подразделяется на испытательные стенды, стационарные
установки и переносные установки.
КИА для проверки электрооборудования. Авиационные гене-
раторы постоянного и переменного тока и стартер-генераторы
проверяются на испытательных стендах. Стенды имеют привод
<с регулируемой скоростью вращения, с которым сочленяется че-
рез редуктор проверяемый генератор.
Использование подобных стендов позволяет оценивать со-
стояние авиационных генераторов как по отдельным парамет-
рам (И, I, f и др.), так и по основным характеристикам:
— холостого хода Е = ср (/в);
— внешней U = <р (/);
— регулировочной 4 = ® (4,
где Е — э. д. с. генератора;
I — ток нагрузки;
1В — ток возбуждения генератора.
В состав стенда входят также система охлаждения '(воздуш-
ная, жидкостная или смешанная), коммутационная и защитная
аппаратура, измерительные приборы.
Электрические нагрузки генераторов создаются с помощью
реостатов, емкостей и индуктивностей.
На рис. 9.2 показана структурная схема стенда для проверки
генераторов постоянного тока. Подобные стенды позволяют про-
Р и с. 9.2. Схема стенда для испытания генераторов постоянного тока:
1 — устройство регулирования скорости вращения привода генератора; 2 — привод ге-
нератора; 3 — редуктор; 4 — датчик тахометра; 5 — тахометр; 6 — муфта сцепления;
7, 8 — регулятор и привод устройства охлаждения, А, Б — подача воздуха и охлаж-
дающей жидкости; 9 — измеритель расхода охлаждающей смеси; , ... , В —
включатели генератора и нагрузки
изводить всесторонние испытания генераторов, а также проверки
и регулировки всех 'остальных устройств энергосистемы (регу-
ляторов напряжений, дифференциально-минимальных реле,
19й
трансформаторов устойчивости, автоматов защиты от перенапря-
жений и т. д.).
Как недостаток, следует отметить их громоздкость, сравни-
тельно большой вес (1—2 т) и значительную потребляемую мощ-
ность. Так, для питания привода генератора типа ГСР-СТ-12ВТ
требуется электрическая мощность около 50 кет. Кроме того,
если в качестве привода используются электродвигатели про-
мышленного типа с малой скоростью вращения, то в стендах
приходится применять сложные редукторы.
Стенды для проверки генераторов применяются в войсковых
ремонтных мастерских и в авиаремонтных предприятиях.
Инструментальная проверка преобразователей постоянного
тока в переменный производится также на стендах. Электриче-
ские схемы таких стендов аналогичны схемам включения преоб-
разователей на летательных аппаратах. Дополнительными явля-
ются лишь устройства и измерительные приборы, позволяющие
регулировать напряжение питания, электрическую нагрузку и
измерять ряд параметров преобразователей.
В таблице 9.2 приведены электрические параметры некоторых
авиационных преобразователей, контролируемые с помощью
стендов.
Таблица 9.2
Тип преобра- зователя Контролируемые параметры Примечание
потреб- ляемый ток, /-1«1 перемен- ное на- пряже- ние U- [в] перемен- ный ток, [«] частота, f [гч] темпера- тура коллек- тора, г°с
ПО-4500 <280 115+4 <39,1 393—416 75 Напряжение
ПО-1500 < 104 115+4 <13 390—416 75 питания преобразо-
ПО-750А < 56 115+3,5 <6,5 380—420 75 вателей
ПТ-1000Ц <60,5 36± 1,8 < 16,1 397—403 60 всех типов U_ = 24,3—
ПТ-600 <43 36+1,8 < 9,6 392—408 60 —29,7 в
Проверка угольных регуляторов напряжения осуществляется
на переносных установках типа ППУР-42 и У-351.
Динамические и статические свойства генераторов в этих ус-
тановках имитируются с помощью магнитных усилителей.
Одним из основных недостатков установки ППУР-42 является
•малая точность измерения на всем диапазоне возможных изме-
нений тока'возбуждения генератора.
Для сравнения точностных характеристик установок
ППУР-42, У-351 и угольного регулятора напряжения типа
РУГ-82 на рис. 9.3 приведены кривые изменения их относитель-
ных погрешностей Axnp в зависимости от тока возбуждения ге-
191
нератора 4- Анализ кривых на рис. 9.3 показывает, что по точ-
ностным характеристикам установка У-351 является более со-
вершенной, чем установка ППУР-42.
Проверки дифференциально-минимальных реле (ДМР) всех
типов выполняются с помощью стационарной установки типа
ПУ-ДМР.
Известно, что для определения момента срабатывания ДМР'
в зависимости от величины обратного тока требуются достаточ-
но мощные источники электро-
Рис. 9.3. Кривые изменения отно-
сительных погрешностей устано-
вок ППУР-42, У-351 и регулятора
РУГ-82
энергии и соответствующие на-
грузки. В установке ПУ-ДМР
предусмотрена возможность опре-
деления момента отключения
ДМР по величине обратного тока,
протекающего не по последова-
тельной, а по шунтовой обмотке
поляризованного реле.
Проверки генераторов, преоб-
разователей, регуляторов напря-
жения, ДМР производятся в ос-
новном в лабораторных условиях,
ню связано со____значительными
трудозатратами (главным обра-
зом на демонтажно-монтажные
работы). Например, для провер-
ки ДМР на установке ПУ-ДМР
требуются трудозатраты около 0,4 чел.-часа, а на демонтажно-
монтажные работы ДМР—1—3 чел.-часа.
Трудозатраты на процессы инструментального контроля элек-
трооборудования (равно как и других видов авиационного обо-
рудования) можно существенно уменьшить за счет:
— обеспечения при конструировании удобных подходов к ос-
новным агрегатами блокам;
— применения креплений агрегатов и блоков, позволяющих
с минимальными трудозатратами производить их съем и уста-
новку;
— 'более широкого внедрения контрольных разъемов и встро-
енных элементов контроля;
— совершенствования методов контроля и конструкции са-
мой КИА.
КИА для проверки приборного оборудования. Инструмен-
тальная проверка группы мембранно-анероидных приборов осу-
ществляется с помощью установок типа УМА-1, УМАП, КПУ-3
(КПУ-5) и установок повышенной точности. Указанные установ-
ки позволяют создавать давление (Дд) и разрежение (/?ст) воз-
духа. Для этих целей они имеют вакуум-насосные агрегаты (ге-
нераторы сигналов).
Конструктивно установка УМА-1 выполнена в виде стойки
192
(рис. 9.4), в верхней части которой размещены барокамера
объемом 21,8 дм? и пульт управления, а ,в нижней — вакуум-на-
сосный агрегат.
Переносная установка УМАП смонтирована в двух металли-
ческих ящиках чемоданного типа. В одном из них размещен ва-
куум-насосный агрегат с электроприводом от сети постоянного
тока, и в другом — четыре контроль-
ных прибора: ВД-25К, КУС-2500К,
ВАР-300К и М-2.5К.
Контрольные приборы по конст-
рукции аналогичны применяемым на
летательных аппаратах. Для повы-
шения точности отсчета они имеют
только увеличенную шкалу (диа-
метром 120 мм вместо 80 мм у обыч-
ных приборов).
На рис. 9.5 изображены кривые
Р и с. 9.4. Внешний вид
установки УМА-1 со
снятым кожухом:
1 — барокамера; 2 — пульт
управления; 3, 4 — баллоны
вакуума и давления; 5 —
компрессор; 6 — электродви-
гатель; 7 — вакуум-насос;
8 — пневмоэлектросхема ус-
тановки
Р и с. 9.5. Кривые изменения
относительных погрешностей
ВД-28, КУС-2500 и установок
УМА-1 и УМАП
изменения относительных погрешностей высотомеров типа
ВД-28 и указателей скорости типа КУС-2500. Там же показаны
кривые изменения относительных погрешностей измерительных
приборов установок УМА-1 и УМАП. Из анализа кривых видно,
что установка УМА-1 имеет точностную характеристику лучше,
чем установка УМАП. Практически с помощью установки
УМАП можно определить лишь работоспособность группы
мембранно-анероидных приборов.
В установках повышенной точности имеется несколько чувст-
вительных элементов, каждый из которых работает только ® оп-
ределенном диапазоне давлений и разрежений. Кроме того,
уменьшены механические нагрузки на чувствительные элементы
13. Румянцев Е. А. и др.
193
за счет применения следящих систем. Один из возможных вари-
антов подобной следящей системы показан на рис. 9.6.
Следящая система установки выполнена таким образом, что
при равенстве воздушных .зазоров в сердечниках магнитопрово-
дов 8j = В2 на входе усилителя У напряжение равно нулю, так
как Ui—U2 = 0. При изменении статического давления дсг за
Р и с. 9.6. Следящая система установки по-
вышенной точности
счет деформации коробки А перемещается сердечник Сь Это
приводит к появлению неравенства о2 ф о,. На входе усилителя
У появляется сигнал U—1Д=Ь 0, фаза которого- зависит от на-
правления перемещения сердечника Сь Под действием усиленно-
го сигнала электродвигатель Д с помощью кулачка К переместит
•сердечник С2 в положение, когда = 82. Одновременно с ку-
лачком перемещается стрелка указателя высоты Ук .
Установки повышенной точности (УКАМП и др.) применяют-
ся при проверке как отдельных мембранно-анероидных прибо-
ров, так и централизованных устройств измерения барометриче-
ской высоты и воздушной скорости полета.
Характеристики одной из таких установок ‘повышенной точ-
ности приведены в табл. 9.3.
Таблица 9.3
Измеряемая величина В ММ. рт. ст. Допустимая абс. погреш- ность в ям. рт. ст.
Статическое давление Диапазоны измерения 815—580; 580—170; 170—8; Динамическое давление Диапазоны измерения 0—200; 200—1400. ±0,25—0,70 ±0,25—2,5
194
Значительную группу авиационных приборов составляют тер-
моэлектрические термометры и термометры сопротивления.
Основным методом проверки термометров является метод
замещения датчика или указателя соответствующим эталоном.
Примером установки для проверки термометров .может служить
установка УПТ-1М. Она имеет милливольтметр класса точности
1,0 с несколькими пределами измерения и сменными шкалами,
регулировочные потенциометры и
калибровочные сопротивления.
Как недостаток установки
УПТ-1М следует отметить тот
•факт, что в ряде случаев она не
обеспечивает требуемой точности
измерения. Так, указатель темпе-
ратуры выходящих газов ТВГ-11
имеет в диапазоне 55—95% изме-
ряемой величины меньшую от-
носительную погрешность, чем
•сама установка УПТ-1М (рис.
9.7). Этот же недостаток, хотя и в
меньшей степени, обнаруживается
и при проверке термометров типа
ТСТ-29.
Рис. 9.7. Кривые изменения
относительных погрешностей
ТВГ-11, УПТ-11М и ТСТ-29
Проверка группы авиационных тахометров осуществляется с
помощью стационарной установки КТУ-1М.
К авиационным тахометрам предъявляются высокие требо-
вания к точности измерения скорости вращения роторов и валов
авиадвигателей: на всем диапазоне измерения величина абсо-
лютной погрешности не должна превышать значения +0,5%.
В установке КТУ-1М в качестве эталонного тахометра при-
меняется мостовая балансирующая схема с нульиндикатором.
Это обеспечивает измерение скорости вращения с погрешностью,
не превышающей +0,3% ее абсолютного значения. Установка
КТУ-1М позволяет проверять комплекты тахометров лишь в ла-
бораторных условиях. Использование установки КТУ-1М непо-
средственно на стоянке затруднено по причине значительного
веса (около 40 кг) и необходимости питания электропривода пе-
ременным напряжением 220/380 в.
Для проверки измерителей мгновенного и суммирующего
расходов топлива используется установка типа УПР-4. Она со-
стоит из гидравлического агрегата и измерительного пульта со
счетчиками. Проверка расходомеров производится путем прока-
чивания через их датчики определенного объема топлива. Этот
объем измеряется одновременно контролируемым и эталонным
расходомерами. Разность между показаниями указателей расхо-
домеров принимается равной абсолютной погрешности измере-
ния.
Применение керосина и бензина в установке УПР-4 создает
195
ряд трудностей при ее эксплуатации (предохранение топлива от
загрязнения и периодическая его замена, противопожарная бе-
зопасность) .
Установка УПР-6 вместо гидравлического агрегата имеет
(вентилятор с приводом от электродвигателя постоянного тока.
Вентилятор прогоняет воздух через датчик расходомера и тем
самым раскручивает его турбинку. Оценить погрешность изме-
рения таким способам весьма затруднительно.
Проверка группы манометров производится .с помощью уста-
новок ГУПМ и ЭУПМ. ГУПМ представляет собой гидравличе-
ский агрегат, .предназначенный для создания давлений жидкости
до 250 кг/см2. Совместно с эталонным манометром он служит
для проверки датчиков манометров гидросистем. Установка
ЭУПМ обеспечивает проверку указателей электрических дистан-
ционных .манометров типа ЭДМУ и ЭМ и используется .в ком-
плекте с ГУПМ.
В табл. 9.4 приведены ориентировочные данные по трудозат-
ратам на процессы контроля отдельных типов авиационного обо-
рудования с помощью КИА группового применения.
Таблица 9.4
№ п/п Наименование выполняемых работ Используемая КИА Средние трудо- затраты в чел-ча- сах
1 Проверка группы мембранно- анероидных приборов (ВД, КУС, М, ВАР) УМАП, УКАМП 2,5
2 Проверка комплекта тахомет- ра типа ИТЭ-2 КТУ-1М 1,2
3 Проверка термометра типа 2ТВГ УПТ-1М 1 f
4 Проверка группы манометров 2M-T50, МВ-250, 2М-40, МГ-250 ГУПМ 1,&
5 Проверка группы преобразо- вателей ПО-750, ПТ-500Ц, ПТ-70Ц Установка для проверки преобра- зователей 3,1
Примечание. В табл. 9.4 не учтено время на демонтажно-монтажные-
работы проверяемых агрегатов, которое неодинаково для различных типоа
летательных аппаратов.
Кислородное оборудование проверяется с помощью устано-
вок КУ-6, КУ-8, КУ-5 и КУ-7. Установки КУ-6 и КУ-8 являются
переносными и предназначены для проверки масок, шлангов,,
кислородных приборов, редукторов, компенсирующей одежды не-
посредственно на борту ЛА.
Установки обеспечивают проверку: герметичности, гидравли-
ческого сопротивления, настройки регуляторов и клапанов.
196
В -качестве основных элементов в установках используются:
— мановакуумметр, позволяющий измерять давление газовой
смеси в пределах О1—2000 мм вод. ст. -и разрежение в пределах
Ю—1500 мм. -вод. ст.;
— реометр (дифференциальный манометр), предназначенный
для измерения расхода кислорода в пределах 0,1—100 л/мин.
Процентное содержание кислорода в газовой смеси, подавае-
мой легочными автоматами, с помощью установок КУ-6 и КУ-8
определить нельзя.
Стационарные установки КУ-5 и КУ-7 предназначены для
проверки комплектов кислородного оборудования с имитацией
условий вы-сотного полета.
Для этих целей в установке, например, КУ-5 имеется баро-
камера емкостью 77 л и вакуум-насосный агрегат, с помощью
которого можно создавать избыточное давление и разрежение
в пределах 0—2000 мм. вод. ст.
Установки КУ-5 и КУ-7 позволяют измерять процентное со-
держание кислорода в газовой смеси, высоту включения и вы-
ключения непрерывной подачи, величины подач кислорода ле-
гочным автоматом в наземных и высотных условиях.
Инструментальная проверка кислородного оборудования в
условиях лаборатории .и непосредственно на ЛА требует значи-
тельных трудозатрат. Для сравнения можно указать, что трудо-
затраты на комплексный осмотр -одного комплекта ККО состав-
ляют в -среднем 0,7 чел.-часа, а на 100-часовыерегламентпыера-
.боты этого же комплекта —около 10 чел.-часов.
§ 9.4. ЭКСПЛУАТАЦИОННАЯ ОЦЕНКА КИА
ИНДИВИДУАЛЬНОГО ПРИМЕНЕНИЯ
КИА индивидуального применения, в зависимости от объектов
контроля, может содержать различное количество* отдельных
установок и пультов. Наиболее характерной в этом отношении
является КИА для проверки некоторых автопилотов.
В качестве примера в табл. 9.7 приведен перечень основных
установок и пультов, применяемых для проверки автопилотов
типа АП-6Е.
Многочисленность пультов и установок является следствием
того, что КИА индивидуального применения разрабатывается к
уже готовым объектам контроля. Образно выражаясь, КИА
«приспосабливалась» для выполнения процессов контроля -опре-
деленных типов авиационного оборудования.
В настоящее время авиационное оборудование исследуется
как -объект контроля на этапе проектирования. Это позволяет
заранее предусматривать -в конструкциях блоков и агрегатов
встроенные элементы контроля и контрольные .разъемы. Так, во
многих агрегатах .и блоках авиационного оборудования контро-
лируются:
197
— напряжение -питания постоянным и переменным током;
— величины потребляемых токов;
— частота;
— коэффициенты усиления;
— порядок чередования фаз и т. д.
Т а б л и ц а 9.7
№ п/п. Наименование контролируемого агрегата или блока автопилота Тип установки или пульта
1 Центральная гировертикаль Пульт проверки ЦГВ, поворот- ная установка
2 Корректор высоты Пульт КВ-11
3 Гирополукомпас (курсовая систе- Пульт ГКП-52АП, блок связи с
ма типа КС) КС, поворотная установка
4 Рулевые машины Установка РПМ-53
5 Усилитель рулевых машин Пульт УРМ
6 Блок демпфирующих гироскопов Пульты БД Г или ДГ, поворот- ная установка
7 Пульт управления Установка ПУ АП-6Е
8 Стабилизатор прицела Пульт СП
При наличии контрольных (и соответственно однотипных)-
разъемов перечисленные параметры можно проверять в любых
устройствах с по,мощью одной универсальной установки.
Наглядным примером использования встроенных элементов,
контроля и контрольных разъемов может служить установка.
ППА-1. Она применяется при проверках автопилота типа КАП
на работоспособность без демонтажа электрожгутов.
С помощью установки ППА-1, подключенной к -бортовому
контрольному разъему, можно -подавать в схему автопилота тес-
товые электрические сигналы. Тестовые сигналы имитируют из-
менение углов крена 7, угловой скорости у.
На рис. 9.8 изображена одна из возможных принципиальных
схем устройства для имитации изменения сигнала у при конт-
роле работоспособности КАП на земле.
Схема работает следующим образом. Нажатие переключа-
теля 271 влево вызывает срабатывание -реле Через замкнув-
шиеся контакты Р12 от выпрямительного моста Ву в обмотку уп-
равления мапн-итного усилителя (МУ) подается тестовой сигнал
определенного знака. Срабатывание реле Р% приводит к измене-
нию знака тестового сигнала на обратный.
Усиленный сигнал поступает в электродвигатель рулевого»
агрегата »(РАУ). Вместе -со штоком РАУ перемещается ползу-
нок I потенциометра обратной связи (ПОС РАУ). На,правде*
198
нйе движения штока РАУ (соответственно и ползунка I) зависит
от знака тестового сигнала, что контролируется с помощью ин-
дикаторной лампы Л1.
Рис. 9.8. Схема контроля работоспособности КАП
Потенциал сетки Лх относительно катода определяется поло-
жением ползунка I на ПОС РАУ. Автопилот считается исправ-
ным, если при включении реле сектор лампы Л{ сужается
(ползунок I перемещается вверх от среднего положения), а при
включении Рч — расширяется (ползунок I перемещается вниз от
среднего положения).
Имитация изменения угла у осуществляется с помощью схе-
мы, показанной на рис. 9.9. Закорачивание фаз сельсинной пере-
дачи переключателем 772 приводит к изменению направления
Р и с. 9.9. Схема имитации изменения угла крена
результирующего потока .в 'сельсине-приемнике (СП) фазочув-
ствительного выпрямителя (ФЧВ). Под действием выпрямлен-
ного сигнала U = у, который усиливается магнитным и релей-
ным усилителями, также происходит перемещение штока РАУ.
На подобном же принципе построена проверка работоспособ-
ности авиагоризонта АГД-1 (рис. 9.10).
199
. Контрольный пульт АГД-1 имеет сельсин-приемник СП2, ро-
тор которого .можно поворачивать с помощью рукоятки РП. Это
позволяет подавать тестовые сигналы определенной фазы в уси-
литель У следящей рамки 1 и тем самым вызывать ее поворот
(искусственное создание крена с углам т). При поворотах сле-
дящей рамки 1 на углы f >+30° на внутреннюю рамку 3 гиро-
вертикали накладывается момент и гироскоп начинает прецес-
сировать в плоскости угла тангажа.
Рис. 9.10. Схема подключения контрольного пульта к АГД-1
Контрольные пульты (для проверки работоспособности демп-
феров, 'курсовых систем), аналогичные описанным выше, весьма
удобны в эксплуатации и позволяют одному специалисту с не-
значительными трудозатратами в периоды подготовок авиатех-
ники к полетам проверять работоспособность сложных систем.
Состояние сложных систем авиационного оборудования, та-
ких, как курсовых, пилотажно-навигационных, измерения и вы-
работки топлива и т. п., определяется по большому числу конт-
ролируемых параметров. Например, при проверке комплекта
курсовой системы КСИ с помощью установки УП КСИ прихо-
дится измерять около 20 параметров, что требует трудозатрат
около 3,2 чел.-часа.
200
§ 9.5. ЭКСПЛУАТАЦИОННАЯ ОЦЕНКА КИА КОМПЛЕКСНОГО
ПРИМЕНЕНИЯ
Комплексные испытательные стенды (КИС) выполняются в
виде специализированных тележек, на которых смонтирована
наиболее часто используемая КИА.
Необходимость в КИС возникает .в тех случаях, когда для
выполнения работ непосредственно на летательном аппарате тре-
буется несколько установок и измерительных приборов (провер-
ка оборудования после выполнения регламентных и ремонтных
работ, проведение 'комплексных осмотров, поиск неисправно-
стей) .
На рис. 9.11 показан внешний вид КИС, предназначенного
для проверок авиационного оборудования одного из типов само-
лета. С помощью этого КИС можно производить инструменталь-
ную проверку:
— мембранно-анероидных приборов;
— авиагоризонта (типа АГД-1);
— курсовой системы (типа КСИ);
— электрической системы управления воздухозаборником
(ЭСУВ);
— автопилота (типа АП-28).
Рис. 9.11. Внешний вид комплексного испытательного
стенда
В состав КИС входят установки УМАП, ППУ-АРУ, КП-АГД,
КП-КСИ, ППД-3, ПА-28, а также измерительные приборы и
шлейфовые осциллографы (типа К-12-22).
Для измерения потребляемых токов (до 150 а) и записи ди-
намических параметров в комплекте КИС имеются переходные
электрожгуты.
201
По сравнению с отдельными установками и приборами КИС
обладают рядом преимуществ:
— создаются более благоприятные условия для специалистовг
производящих проверки (удобное размещение приборов и ус-
тановок, наличие необходимого инструмента, удлинительных
жгутов, предусмотрена защита от непогоды и т. д.);
— КИС можно легко транспортировать в условиях аэродро-
ма вручную или как прицеп к любой автомашине.
Основными недостатками КИС, 'как и любых других неав-
томатических средств контроля, являются:
— большие трудозатраты и время на процессы контроля;
— необходимость выполнения значительного объема демон-
тажно-монтажных работ (только для целей контроля), что мо-
жет влиять также и на снижение надежности авиационного
оборудования.
КИС, предназначенные для контроля состояния авиационно-
го оборудования, силовой установки, систем и агрегатов пла-
нера и т. д., могут устанавливаться в кузове специализирован-
ной автомашины. В этом случае поверочные пульты КИС монти-
руются в один пульт внутри кузова автомобиля.
В задней части пультов имеются контейнеры с кабелями и
шлангами, намотанными на катушки. Через люки в борту авто-
машины с помощью этих шлангов и кабелей проверочные пуль-
ты соединяются с летательным аппаратом (объектом контроля).
Пульты КИС могут использоваться и как отдельные прове-
рочные установки вне кузова автомашины.
Установка КИС на автомашины существенно увеличивает
их мобильность, а. соответственно и боеготовность летательных
аппаратов. Кроме того, двигатель автомашины может быть ис-
пользован в качестве привода генератора постоянного тока, что
особенно важно при подготовках авиационной техники на поле-
вых аэродромах. Так, применение в качестве привода генератора
СТГ-18ТБ двигателя автомашины ЗИЛ-157 позволяет осуществ-
лять поверки оборудования с нагрузкой до 300 а длительно и до
1500 а кратковременно (до 5 сек). Скорость вращения двигателя
автомашины при этом регулируется, как и у обычных АПА
(электромагнитный регулятор управляет дополнительной дрос-
сельной заслонкой карбюратора). Параллельно с генератором
включается аккумуляторная батарея типа 12АСА-145. Эти же
источники электроэнергии могут применяться и для 'запуска си-
ловых установок.
Универсальные полевые лаборатории (УПЛ). Для выполне-
ния регламентных работ и войскового ремонта авиационного
оборудования могут применяться следующие УПЛ:
— лаборатория электрооборудования (ПЛЭ);
— лаборатория электронной автоматики (ЛЭА);
— лаборатория приборного оборудования (ЛПУ);
— лаборатория кислородного оборудования (ЛКУ).
202
Иногда в состав подвижных средств ТЭЧ ап и ВАРМ могут
входить также УПЛ авиационного фото- и кинооборудования.
Оборудование УПЛ монтируется в унифицированных блок-
контейнерах, в которых размещается КИА, инструмент, расход-
ные материалы, источники электроэнергии. По конструктивному
наполнению блок-контейнеры аналогичны КИС.
Применение .блок-контейнеров позволяет перебазировать обо-
рудование УПЛ любыми видами транспорта, что повышает мо-
бильность УПЛ и позволяет более эффективнее использовать ав-
томашины.
В каждой из УПЛ оборудуются несколько рабочих мест для
производства проверок и войскового ремонта авиационного обо-
рудования.
Применение в УПЛ собственных источников электроэнергии
обеспечивает автономность их работы..
Таблица 9.5
№ п/п Наименование контролируемого оборудования Наименование КИА
1 Генераторы, старт ер-генераторы, электрические топливные насосы и двигатели типа МУ Стенд 6 СП
2 Преобразователи типа ПО, ПТ и МА Стенд 3 СП
3 Автоматы защиты от перенапряжений, ДМР панели запуска, коробки аэродромного питания, лампы—фары Пульт 4 ПП
4 Аппаратура систем зажигания авиадвигателей, коробки управления генераторами переменного тока Пульт 2 ПП
5 Электромеханизмы типа МП, МЗК и др. Пульт 1 СП
Таблица 9.6
№ п/п Наименование контролируемого оборудования Наименование КИА
1 Автоматическое навигационное устройство ти- па АНУ-1 КПА-14
2 Автопилот типа АП-28 ПА-28
3 Система автоматической выработки топлива СЭТС-260В УПА-260В
4 Система измерения топлива УПТЕ-2М
5 Астрономический компас типа ДАК-ДБ УПАК-ДБ
6 Пилотажно-навигационная система типа «Путь» УПП-6
7 Курсовая система типа КС-6 УПКС
20$
Не останавливаясь подробно на описании всех перечисленных
УПЛ, рассмотрим кратко лишь состав оборудования двух лабо-
раторий: электрооборудования и электронной автоматики.
Примерный перечень КИА одной ив лабораторий электрообо-
рудования приведен в табл. 9.5.
Возможный вариант состава КИА лаборатории электронной
автоматики перечислен в табл. 9.6,
Кроме мастерских и лабораторий, в состав подвижных средств
ТЭЧ ап и ВАРМ входит также и подвижный диспетчерский
пункт (ПДП).
Таким образом, производственная база УПЛ позволяет свое-
временно и 'качественно выполнять все виды работ, предусмот-
ренные едиными регламентами и технологиями обслуживания и
войскового ремонта авиационного оборудования.
В заключение настоящей главы необходимо отметить, что про-
верки авиационного оборудования с помощью существующих
неавтоматических средств контроля обладают рядом недостат-
ков:
1. В эксплуатации находится большое количество различной
серийной КИА.
2. Унификация КИА применяется лишь в исключительных
случаях.
3. Большинство КИА имеет шкальные измерительные прибо-
ры, что связано с возможным появлением погрешностей измере-
ния за счет субъективных свойств оператора.
4. Время и трудозатраты на процессы контроля достаточно
велики, что затрудняет своевременную подготовку авиационно-
го оборудования к полету.
5. Для производства процессов контроля состояния авиаци-
онного оборудования с применением КИА требуются специали-
сты высокой квалификации.
Глава X
АВТОМАТИЧЕСКИЕ СИСТЕМЫ КОНТРОЛЯ
§ 10.1. НАЗНАЧЕНИЕ И КЛАССИФИКАЦИЯ АВТОМАТИЧЕСКИХ
СИСТЕМ КОНТРОЛЯ
В развитии авиационной техники -за последние годы можно
отметить два важных направления. Одно из них связано с ав-
томатизацией процессов управления и боевого применения само-
лета, которая сопровождается усложнением и высокой степенью
комплектирования различных видов оборудования и вооруже-
ния. Другое направление характеризуется разработкой и внед-
рением в практику эксплуатации комплексных средств инстру-
ментального' контроля самолета и его оборудования, в том числе
автоматических Систем контроля.
Автоматизация и комплексирование различного оборудова-
ния и вооружения обусловлены как расширением и усложнением
круга решаемых боевых задач, так и необходимостью хотя бы-
частично снять большое психо-физиологическое напряжение с
экипажа в полете. Автоматизация контроля в свою очередь дик-
туется необходимостью повышения достоверности и объектив-
ности оценки технического -состояния самолета, а также -сокра-
щения времени и трудозатрат -на подготовку его к полету. Она
непосредственно направлена на повышение надежности и готов-
ности авиационной техники.
Отмеченные направления в развитии авиационной техники яв-
ляются взаимосвязанными и -влияют друг на друга. При жестких
требованиях по боеготовности и безопасности полета автомати-
зация и комплектирование оборудования неизбежно влекут за
собой автоматизацию процессов контроля его состояния на зем-
ле и -в полете. Дело в том, -что увеличение -состава и усложнение
оборудования сопровождаются, -как -правило-, некоторым сниже-
нием его надежности, что требует -более частого и глубокого
контроля состояния как отдельных систем, так и комплекса -обо-
рудования -в целом. В этих условиях даже весьма -совершенные
комплексы оборудования могут оказаться эксплуатационно не-
пригодными без эффективных -средств контроля. При использо-
вании обычных неавтоматических средств значительно увеличи-
ваются как время подготовки -самолета к вылету, так и общие
205>
трудозатраты на содержание его в исправном состоянии. Реше-
ние проблемы состоит в применении автоматических систем
контроля с .построением на их базе прогрессивных, высокопроиз-
водительных способов подготовки самолетов к полетам. Авто-
матизация и ко.мпл0ксирование оборудования, установка на са-
молетах бортовых ЦВМ создают известные к этому предпосылки.
Автоматические системы контроля (АСК) позволяют в сжа-
тые сроки, с относительно малыми затратами труда осуществить
всестороннюю проверку самолета и его оборудования с получе-
нием более полной и объективной информации о их состоянии.
При этом не требуется съем и демонтаж агрегатов оборудования
для его проверки. Особенно важно, что АСК позволяют в про-
цессе .подготовки самолета проводить не только контроль рабо-
тоспособности, но и автоматический поиск неисправностей
(диагностический контроль), а при соответствующем конструк-
тивном выполнении и автоматическое прогнозирование состоя-
ния авиационной техники на предстоящий период эксплуатации.
Автоматический контроль имеет также другую, не менее важ-
ную область применения.
Высокая степень насыщения современного летательного ап-
парата сложными агрегатами, системами и комплексами обору-
дования весьма затрудняет, а на некоторых ответственных эта-
пах полета практически исключает возможность контроля за их
функционированием со стороны экипажа. О трудности управ-
ления и контроля в полете дает представление следующая таб-
лица примерного количественного состава оборудования кабин
современных самолетов:
Приборы, устройства контроля и управления Истребители Бомбардировщики
кабина летчика кабина штурмана
Приборы 30—40 40—50 40—50
Световые сигнализато- 30—50 60—90 50—60
ры Тумблеры, кнопки, рео- 70—130 250—270 230—290
статы и т. п. Рычаги 20—30 10—20 20—40
Всего 150—250 350—400 350—450
В условиях отказов оборудования в полете отсутствие необ-
ходимого контроля и своевременной реакции на отказ может
создать предпосылки к летным происшествиям, привести к не-
выполнению полетного задания или другим тяжелым послед-
ствиям. Кроме того, современные самолеты имеют определенные
.206
ограничения по той или иной группе координат движения (по
скорости, высоте .полета, .перегрузке и т. л.), что вызывает не-
обходимость их- контроля для предупреждения выхода на опас-
ные режимы полета.
Бор/побыв
сдк
лизооаннш
Системы автоматического контроля
и регистрации
Специалй\ [Универ- Д6арий-\ рл
зироВанжц сальные] ные [та
Наземные
САК
орто&ые систе-
мы регистрации
Контроль технического
состояния оборудования
и параметров Допета.
Управление надежностью
и безопасностью 8
полете
Ун ибер -
сальные
Казенно - бортовые
САК
Деиентра Централи
ри:::з::::о: заданные
Эксплуа-
тационные
Контроль техническая
диагностика и прогно-
зирование состояния
оборудования при под-
готовке к полету
Технике с кая диагнос-
тика и прогнозиро-
вание по полетным
данным. Эксплуатация
по фактическому сос-
таянию
Рис.
10.1. Классификация
автоматических систем контроля и регистрации
Эта проблема находит свое разрешение в оснащении самоле-
тов бортовыми автоматическими системами .контроля состояния
оборудования и параметров полета. Подобные системы, разгру-
жая экипаж от многих функций контроля и упрощая управление
оборудованием, автоматически локализуют неисправности, вклю-
чают резерв, анализируют координаты движения и выдают не-
обходимые сигналы членам экипажа и на органы управления.
Таким образом, с помощью бортовых АСК решается весьма
важная задача повышения безопасности .полета и вероятности
выполнения полетного задания.
В качестве объективных средств контроля, помимо АСК, в
настоящее время используются также бортовые системы реги-
страции полетных данных.
Классификация систем автоматического контроля и регистра-
ции по назначению и месту размещения приведена на рис. 10.1.
Там’же указаны и решаемые с их помощью основные эксплуата-
ционные задачи.
207
Наземные автоматические системы контр о-
л я применяются при подготовке летательных аппаратов к по-
лету и служат для получения и автоматической обработки ин-
формации о техническом состоянии летательного аппарата и его
оборудования, включая проверку и оценку их работоспособности,
поиск и указание неисправностей, прогнозирование состояния.
По .составу контролируемого оборудования наземные системы
автоматического контроля разделяют на универсальные и спе-
циализированные.
Универсальные системы приспособлены для контроля
всего комплекса оборудования самолетов одного или нескольких
типов. При разработке универсальных систем контроля в инте-
ресах упрощения их конструкции и уменьшения времени прове-
рок обычно ограничиваются контролем жизненно важных само-
летных систем и агрегатов, от работоспособности которых непо-
средственно зависят безопасность полета и эффективность
боевого применения самолета.
Специализированные системы предназначены для
контроля оборудования только одного вида или для контроля
отдельных комплексов оборудования, например, силовых уста-
новок, комплексов автоматического управления и навигации,
радиоэлектронных комплексов, вооружения и т. п.
Бортовые автоматические системы контро-
л я предназначены для контроля состояния оборудования и уп-
равления им в полете, а также для контроля координат движе-
ния самолета. Эти системы, автоматически формирующие и об-
рабатывающие информацию о состоянии оборудования и
координатах движения, по виду управления оборудованием раз-
деляются на две группы. В первой из них результаты контроля
в виде сигналов об отказах технических устройств и выходе на
критический режим полета выдаются членам экипажа, которые
принимают решение и управляют оборудованием, предотвращая
неблагоприятные последствия. Такие системы называют авто-
матизированными. Во второй группе те же операции уп-
равления выполняются автоматически, например, путем автома-
тического отключения отказавших и включения резервных
устройств, автоматического изменения нагрузки, выдачи сигна-
лов на органы управления самолетом и т. п. Такие системы на-
зываются автоматическими. В них сигнализация летчику
и другим членам экипажа носит вспомогательный характер.
По принципу построения и объему решаемых задач .бортовые
системы контроля классифицируют на децентрализованные и
централизованные.
Децентрализованные системы строятся по принципу
раздельного (индивидуального) контроля технических устройств
и некоторых групп координат движения самолета (параметров
полета). Они не имеют единых, общих устройств обработки ре-
зультатов контроля по летательному аппарату и его оборудова-
208
нию в целом и решают ограниченные, частные задачи. К децент-
рализованным АСК относятся различные устройства встроенного
контроля (УВД), блоки безопасности (ББ), блоки контроля (БК)
(например, блок контроля силовой установки, блок безопасности
САУ и т. .п.). К децентрализованным относятся также блоки
ограничения (БО), .контролирующие основные параметры поле-
та и выдающие сигналы летчику (и на органы управления) при
выходе на критические режимы полета, «блоки подсказки лет-
чику» |(БПЛ), в которых блоки ограничения дополняются блока*
ми речевых команд (БРК), и другие устройства аналогичного
принципа построения.
Централизованные системы осуществляют автомати-
ческий контроль технического состояния оборудования и пара-
метров полета с обработкой всей информации о полетных дан-
ных в едином устройстве, в качестве которого обычно исполь-
зуется- цифровая вычислительная машина. Подобные системы с
централизованной обработкой реализуют контроль и управление
оборудованием ib условиях отказов и возникновения опасных ре-
жимов полета по определенным алгоритмам, обеспечивающим
наибольший уровень безопасности и вероятности выполнения за-
дачи полета. При этом не исключается выдача рекомендаций
летчику (например, через блок речевых команд), помогающих
ему принять правильное решение в особых случаях полета.
Если централизованная бортовая система приспособлена
также для проведения контроля при наземной подготовке само-
лета к вылету, то такую систему называют универсальной
н а з е м н о-б о р т о в о й.
Бортовые системы автоматического контроля различают так-
же по признаку наличия долговременного запоминающего уст-
ройства (ДЗУ), сохраняющего результаты контроля для после-
дующего анализа на земле. Если АСК содержит ДЗУ, то она
становится по существу комбинированной бортовой системой ав-
томатического контроля и регистрации.
Бортовые системы регистрации полетных
данных (БСРПД) предназначены для автоматического полу-
чения, накопления и хранения на борту объективной информации
о полетных данных, включающих в себя параметры техническо-
го состояния самолета и его оборудования, координаты движе-
ния самолета, операции членов экипажа по управлению самоле-
том, их переговоры между собой и землей, данные о внешних ус-
ловиях полета и другие.
В отличие от бортовых систем автоматического контроля
системы регистрации являются устройствами пассивного типа.
Они не формируют каких-либо команд или сигналов управле-
ния и не выполняют активных функций контроля, а только ре-
гистрируют и хранят в той или иной форме в устройствах памя-
ти полетные данные. Обработка накопленной в БСРПД инфор*.
14. Румянцев Е. А. и др.
209
мадии и ее анализ проводятся на земле, после полета. Подробно
Дти системы рассматриваются в гл. XI.
‘ Помимо классификации по назначению, автоматические си-
стемы контроля различают по форме, в которой 'ведется обра-
ботка информации, поступающей от объектов контроля:
-— в аналоговых автоматических системах контроля инфор-
мация обрабатывается в непрерывной форме;
— в дискретных (цифровых) автоматических системах конт-
роля информация от измерительных устройств, поступающая,
как правило, в непрерывной форме, предварительно преобразует-
ся в дискретную форму и затем обрабатывается также в дискрет-
ной (цифровой) форме.
Автоматические системы контроля характеризуются также
способом оценки состояния оборудования.
Системы с д опус ков ым контролем оценивают
состояние объекта по принципу «годен — не годен», «больше —
норма — меньше». При оценке «годен — не годен» устанавли-
вается соответствие критерия качества объекта контроля х эта-
лонному значению с учетом допустимых отклонений — «хн;
Н- р хн. Если
х„(1-а) <х<лн(1+₽),
то система оценивает 'состояние объекта как «годен», если
X > лн(1 -ф Р); х<хн(1—а),
то — «не годен» (рис. 10.2).
Хн X
r.?.H
1 я» ; х
Е— Допуск ----ч
Меньше j_____Норма___j Больше
Xmi.n X Xnjaz ' X
-150 -100 -50 0 50 ЮО
,---1--1—d------,---,---
Хтса Хн Хтпах
h--- Хд —4-— Хд
I I
И--Допуск-------]
Р и с 10.2. Допусковая и количественная
. оценка параметра
210
Если критерий качества объекта задан рядом параметров Xi,
х2; • , хп, для каждого из которых установлен свой допуск, то
АСК оценивает состояние объекта «не годен» при выходе за пре-
делы поля допуска хотя бы одного из этих параметров. Следует
указать, что оценка по принципу «годен — не годен» не позво-
ляет производить регулировки объекта и прогнозировать его со-
стояние.
При оценке по принципу «больше — норма — меньше» уста-
навливается соответствие измеряемого параметра х эталонному
значению хи (с учетом поля допуска) с указанием знака откло-
нения при выходе х из поля допуска. Указание.знака отклонения
контролируемого параметра необходимо для тех объектов, ко-
торые в процессе эксплуатации подвергаются регулировке и под-
стройке. ---- - ----- — — . _
Системы с количественным контролем дают
количественную оценку измеряемого параметра как в виде аб-
солютного значения параметра, так и в относительных единицах
отклонения от номинала в поле допуска (рис. 10.2).
Измерение абсолютного значения параметра или оценка его
некоторым относительным коэффициентом отклонения позволя-
ет производить регулировку объекта_и прогнозировать его со-
стояние на последующий период эксплуатации.
Функциональные возможности АСК определяются тем, какой
из видов контроля они выполняют: контроль работоспособности
(допусковый, количественный), диагностирующий контроль (с
поиском неисправности), контроль с прогнозированием.
§ 10.2. СОСТАВ И ПАРАМЕТРЫ КОНТРОЛИРУЕМОГО
ОБОРУДОВАНИЯ
При разработке автоматических систем контроля последова-
тельно выбирается состав подлежащего контролю авиационного
оборудования, устанавливаются состояния объектов контроля и
их признаки, определяется на этой основе перечень контролируе-
мых параметров. От того, насколько рационально выбран со-
став контролируемых параметров, непосредственно зависит эф-
фективность применения АСК и такие ее показатели, как вес и
габариты, сложность конструкции и др.
Методические основы выбора подлежащих контролю агрега-
тов и систем оборудования являются общими для бортовых и
наземных систем автоматического контроля. Некоторые особен-
ности вытекают из назначения и последующей обработки данных
контроля. Выбор состава контролируемого- оборудования произ-
водится на основе накопленного опыта проектирования и экс-
плуатации по объективным количественным критериям, которые
позволяют оценить ,и сопоставить различные системы оборудова-
ния с учетом их эксплуатационной надежности по степени влия-
ния отказов в них на выполнение полета, отобрать для контро-
14* 211
ля наиболее ответственные и жизненно важные .системы и агре-
гаты. При этом учитывается эффект от применения автомати-
ческого контроля параметров по повышению безопасности поле-
та и вероятности выполнения боевых и учебно-боевых 'задач, по
•снижению трудозатрат и улучшению других эксплуатационных
характеристик.
При выборе количественных критериев исходят из доступных
способов исследования летательного аппарата по этим показа-
телям. К числу таких способов относятся:
— статистическое моделирование полета на различных эта-
пах с применением реального оборудования и аналого-цифровых
моделирующих комплексов, полунатурные и натурные испыта-
ния;
— обработка и анализ имеющихся статистических данных по>
отказам и неисправностям, летным происшествиям и предпо-
сылкам к ним, данных по трудозатратам на техническое обслу-
живание и т. п.;
— экспертные оценки летательного аппарата и его оборудова-
ния летным, инженерно-техническим составом и конструкторами..
Автоматическому контролю подвергаются в первую очередь
так называемые аварийные параметры. Для отбора агрегатов и.
систем, отказы которых в полете могут привести к аварийным
последствиям, используют количественную оценку вероятности
того, что летное .происшествие произойдет из-за отказа данной
/-той системы самолетного оборудования
Р(П,.)Р(ЛП/П,.)
I Р(П7.)Р(ЛП/П,)
;=1
где
/э(Пу)— вероятность отказа /-той си-
стемы;
Р (ЛП/Пу) — условная вероятность летного
•происшествия при отказе /-той
системы;
5 — общее число установленных
на летательном аппарате си-
стем оборудования;
РТ(ЛП)= У, Р(Пу)Р (ЛП/Пу) — вероятность летного происше-
j~i ствия по причинам, связанным:
с отказами оборудования.
Здесь А’(Пу) определяется надежностью /-той системы, кото-
рая может быть рассчитана по известным методам с использо-
ванием статистических данных по интенсивностям отказа. Вели-
чина /-’(ЛП/Пу) зависит от тренированности летчика в пилоти-
10.1 :
212
контроля должна осуществлять
Р и с. 10.3. Распределение причин
летных происшествий
ровании в особых случаях полета, от совершенства системы ин-
формации экипажа об отказах, от внешних условий полета и
других факторов. Значения Р (ЛП/Пр получают статистиче-
ским моделированием с применением тренажеров, а также на
основе статистики по летным происшествиям .и предпосылкам
к ним. Приближенно можно считать
Р(ЛП/П.,)^-----------,
/Ддп “Ь ^плп
где /илп— число летных (происшествий, твлп — число (предпосылок
к ним из-за отказа /-той системы оборудования.
Из (10.1) следует, что
Е Р(Пу/ЛП)= 1,
у-i
т. е. все возможные причины летных происшествий, обусловлен-
ные отказами систем оборудования, образуют полную группу со-
бытий. Таким образом, по соотношению (10.1) можно распреде-
лить все S систем по степени аварийности (последствий их отка-
за и отобрать те из них, которые с наибольшей вероятностью мо-
гут привести к летным происшествиям.
Автоматическая система
контроль технического со-
стояния (как при наземной
подготовке, так и в полете)
такого числа и тех систем
«оборудования, которым от-
вечает заданный показатель
т] («) = v Р(пулп),
7-1
где п — число отобранных
для контроля систем, причем
они нумеруются в порядке
убывания величиныР(Пу/ЛП)
(рис. 10.3). Если, например,
л) = 0,9, то это означает,
что автоматическому конт-
ролю подвергаются те Nt
устройств и систем оборудования, отказы которых с вероят-
ностью 0,9 могут быть причинами летных происшествий.
В качестве другого критерия для отбора подлежащего конт-
ролю оборудования может быть взята вероятность невыполне-
ния полетного задания из-за отказа /-той системы оборудования
Р^ (НЗ) = Р (П7) Р(НЗ/Пу), (10.2)
где
/’(НЗ/Пу)— условная вероятность невыполнения задания из-за
отказа /-той системы.
213
Этот критерий является более широким, чем (10.1), так как.
он охватывает и те системы оборудования, отказы которых прак-
тически не влияют на безопасность полета, но могут привести к
невыполнению задания. Помимо этого, он учитывает отказы не-
только в полете, но и на земле. Отказы на земле, требующие
известных затрат времени на их устранение, могут привести к
задержке вылета или невылету на задание. В формуле (10.2)
это отражается множителем Р(НЗ/П7),под которым следует по-
нимать также вероятность неустранения отказа за время, допу-
стимое из условий выполнения задания (предполагается, что за.
время от момента получения задания до приземления летатель-
ного аппарата происходит только один отказ /-той системы).
По аналогии с (10.1), можно принять
Р(П7/НЗ) = -з---—---------(10.3>
2 Р (П7) Р (Н3/П7)
7-1
п S
тЦ«) = 2Р(П7/Н3); РТ(НЗ) = Е Р(П7) Р (Н3/П7).
j-\ 7=1
Применяя те же способы, по расчетным значениям функций
Р(П7/НЗ); 'О определяют состав и элементы оборудования, под-
лежащие контролю.
Выигрыш от применения АСК оценивается по коэффициентам
эффективности автоматического контроля
РТ*(ЛП) Р/(НЗ)
эф РТ(ЛП) ’ эф~ РТ(НЗ)’
где Рт(ЛП); РТ*(ЛП) отвечают вероятностям летных происшествий
(или невыполнения задания) соответственно для летательных
аппаратов с автоматическим контролем оборудования (в полете
или при наземной подготовке) или без него.
После назначения по критериям (10.1), (10.3) состава агре-
гатов и 'систем оборудования, подлежащих автоматическому
контролю, проводится детальное изучение их возможных состоя-
ний, связанных с отказами, и определяется перечень контроли-
руемых параметров. Отбор параметров производится на основе
индивидуального анализа функциональных связей и особенно-
стей конструктивного исполнения каждой системы оборудова-
ния. При этом в интересах сокращения общего числа контроли-
руемых параметров важно установить наиболее информативные
обобщенные параметры. Однако большое разнообразие систем
авиационного оборудования и необходимость индивидуального
подхода к ним затрудняют разработку какой-либо общей мето-
дики формирования обобщенных параметров.
214
При контроле динамических систем обычно выделяют стати-
ческие и динамические параметры. Статические параметры отве-
чают установившимся режимам в системах. Это, например, углы
отклонения рулей ири заданных сигналах с гиродатчиков авто-
пилота, величина перемещения 1конуса воздухозаборника .при оп-
ределенных оборотах двигателя, напряжение аккумуляторной
батареи при некоторой постоянной нагрузке и т. п. К динамиче-
ским параметрам относятся, .например, интегральные .квадрати-
ческие оценки переходных функций, время регулирования, пере-
регулирование и т. п. Помимо этого, выделяют параметры конт-
роля различных событий, например, событий срабатывания кон-
тактора, открытия створок реактивного сопла, а применительно
к полету — событий включения автопилота, поворота крана вы-
пуска шасси, нажатия кнопки «пуск» снарядов и т. п.
Выбор параметров для контроля существенно зависит от на-
значения АСК и режимов работы оборудования. Так, в бортовых
АСК отбираются преимущественно динамические параметры,
так как оборудование .работает в полете в непрерывном динами-
ческом режиме. В наземных АСК, где для воспроизведения дина-
мических режимов необходимы специальные стимуляторы, воз-
можности контроля динамических параметров ограничены, по-
этому 'значительную часть составляют статические параметры.
Отбор параметров считается законченным, если установлена
минимальная их совокупность, достаточная для различения воз-
можных состояний контролируемого оборудования (включая
работоспособное и состояния 'отказов тех или иных элементов).
При отыскании минимальной совокупности параметров исполь-
зуются методы, основанные на построении логических моделей
систем, информационные способы минимизации числа признаков
и др. (см. гл. VIII).
Состав или, как говорят, пространство контролируемых пара-
метров определяет такую важную характеристику АСК, как
объем контроля. Подробность контроля (до системы, блока,
элемента) обычно характеризуется понятием глубины конт-
роля.
Последовательность контроля. Контроль параметра состоит
в проверке его значения и сравнении с допустимыми пределами
изменения. Каждой проверкой охватывается некоторая груцпа
элементов или один элемент из всех контролируемых.
По результатам одной проверки можно сделать заключение
о состоянии определенной группы элементов, но ничего нельзя
сказать о состоянии других элементов. Проверки называются п е-
рес екающими.с я ^зависимыми), если они охватывают один
или несколько одних и тех же элементов. Некоторая .выбранная
последовательность проверок называется тестом.
Для АСК, выполняющих контроль работоспособности и поиск
неисправности, важно не только выбрать достаточную для раз-
215
личения возможных состояний совокупность проверок, но и
упорядочить эти проверки согласно какому-либо правилу, т. е.
выбрать наиболее рациональную последовательность проверок
во времени. От назначенной последовательности проверок будет
зависеть время поиска неисправности или время получения вы-
вода об исправности объектов контроля, а также вес, стоимость
и другие показатели АСК.
Различают последовательный, параллельный и последователь-
но-параллельный методы контроля, П|ри независимых провер-
ках по последовательному методу они заранее упорядочиваются
и выполняются одна за другой вплоть до получения результата
об исправности контролируемого оборудования или установле-
ния неисправного элемента. Упорядочение проверок обычно про-
изводится по критерию минимума средних затрат на контроль
V = min МLi [С’’''7], (10.4)
г
где CnU — стоимость /-той проверки k1} в некоторой i-той после-
довательности;
Lt— некоторый конечный номер выбранной i-той последо-
вательности проверок;
М — знак математического ожидания.
Стоимость проверки можно оценить по формуле
где ТI- — время проведения проверки;
W ij — стоимость;
Gtj— вес (и габариты) потребной аппаратуры (датчиков,
нормализаторов, линий передачи информации и
т. п.).
Весовые коэффициенты bif\ dtj выбираются в зависимости
от того, какой фактор играет большую роль в оценке стоимости
проверки (ау + bl} + dtj = 1).
Для упорядочения независимых проверок-по критерию (10.4)
подбирают удобную целевую функцию. Так, при распределении
проверок по максимальному приращению отношения апостери-
орной вероятности работоспособного состояния оборудования к
стоимости проверки, проводимой на каждом шаге контроля
/ Ь.Р*к \
! ——— I , они упорядочиваются в ряд
' С- к 'шах
ДР71 _ дрД
С”1 С** -'" c*Lk
При этом последовательность контроля работоспособностиока-
зывается оптимальной по критерию (10.4), если число проверок
Lk выбирается достаточным для заключения о работоспособ-
216
пости. Отыскание оптимальной последо1вательност,и контроля
работоспособности и поиска неисправности при пересекающихся
проверках существенно усложняется. В этом случае последова-
тельность контроля становится условной в том смысле, что ре-
шение о проведении .последующей проверки принимается по ре-
зультатам предыдущей.
Пусть проверяемое оборудование состоит из конечного мно-
жества элементов й = {a>z; i = 1,2 . TV}. Элементы произвольно
соединены между собой и имеют вероятности отказа qt; I =
= 1, 2,..., N. Возможное число состояний отказов оборудования
равно N, работоспособное состояние одно и имеет вероятность
n
S 4i = b
i-0
Для контроля состояния имеется некоторое конечное множе-
ство доступных проверок П = {л}. Каждая проверка к С П ох-
ватывает некоторое подмножество элементов йи с: Q и имеет
стоимость 0 < С" < оо. Подмножества элементов йтс, тг g П пере-
секающиеся. Полагаем, что неисправным может быть только
один элемент, а множества проверок П достаточно для отыс-
кания любого неисправного элемента за конечное число шагов.
Каждая проверка может иметь положительный или отрицатель-
ный исход, причем проверки выполняются идеально, без ошибок.
От исхода проверки зависят принимаемые решения.
Требуется определить оптимальную упорядоченную совокуп-
ность проверок И* ст П, при которой средние потери на поиск
неисправности были бы минимальны.
Как следует из постановки задачи, множество состояний
контролируемого оборудования является конечным и включает
в себя N-j-1 состояний.
На каждом шаге .контроля получают информацию об одном
или нескольких элементах оборудования и оно, таким образом,
переходит в процессе контроля из одного состояния в другое.
Это множество состояний можно представить.АТ-|-1-мерным век-
тором состояний. Будем считать, что /г-тая компонента вектора
равна 0, если /г-тый элемент уже проверен некоторой проверкой
и оказался исправным, и равна 1, если /г-тый элемент еще не
проверен и «подозрителен» на неисправность. Для каждого со-
стояния можно назначить некоторую проверку из множества П,
После проведения которой процесс контроля перейдет из состоя-
ния xt в Xj.
Таким образом, если
8 = {кл; r4k }
есть некоторая произвольная упорядоченная последовательность
проверок (стратегия контроля), то следует найти такую 8*, при
которой ' б
У* = min У8,
217
где V& — потери при контроле по Стратегии 8;
V* — потери при контроле по оптимальной стратегии. 8*.
Задачу определения оптимальной стратегии 8* можно было
бы решать методом перебора всех возможных стратегий 8, од-*
нако такой путь оказывается очень трудоемким, а при сложном
контролируемом оборудовании и (большом числе проверок прак-
тически нереализуемым. . I
Заметим, что процесс контроля в сформулированной поста-
новке является так называемым марковским процессом с погло-
щением, так как переход контролируемого оборудования из со-
стояния ху в состояние х}- зависит только от самого состояния
лг и назначенной в этом состоянии проверки тс и не зависит
от того, как оборудование попало в состояние xt. Кроме того,
всякий контроль предполагает получение конечного ответа о
действительном состоянии оборудования, т. е. процесс контроля
должен всегда окончиться (поглотиться). Доказано, что при ко-
нечных множествах состояний и проверок ’оптимальное управле-
ние 8* однородным марковским подвесом существует и, та-
ким образом, задача определения оптимальной последователь-
ности проверок имеет решение.
Один из способов нахождения решения основывается на при-
менении теории динамического программирования. Соответст-
вующие рекуррентные соотношения выводятся по принципу оп-
тимальности, который в данном случае формулируется так: опти-
мальная последовательность контроля обладает тем свойством,
что каковы бы ни были предыдущие состояния и проверки, по-
следующие проверки должны образовывать оптимальную после-
довательность относительно состояния, являющегося результа-
том применения предыдущих проверок.
При этом рекуррентное соотношение имеет следующий вид:
IA(zi) = mln [Q + P* — 1)], (10.5)
i = 0, 1, 2, . . m; J= 1/2, . . ., m+ 1; «=1,2,...,
где Vz(n) — полные ожидаемые потери за п последующих ша-
гов контроля (до поглощения), если в данный мо-
мент контролируемое оборудование находится в.
состоянии xt и, начиная с («—1)-го шага, после-
довательность проверок оптимальна;
Vj(n—1) — полные ожидаемые потери за («—1) шаг, если
оборудование находится в состоянии х}- и последо-
вательность проверок в дальнейшем оптимальна;
С? — стоимость проверки, применяемой в состоянии xt;
— вероятность перехода оборудования из состояния
xt в состояние Xj за счет проверки тс, подсчиты-
ваемая по априорному распределению вероятно-
стей отказов элементов оборудования;
т — число переходных состояний в множестве Х/х0.
218
г
Решение задачи строится так, что вначале определяются по-
тери при переходе системы в конечное 'Состояние хк, затем по-
тери на предыдущем этапе и' т. д. Поэтому этот метод иногда:
называют обратным рекуррентным методом.
Алгоритм определения оптимальной последовательности про-
верок по (10.5) может быть сформулирован путем построения
направленного графа* состояний оборудования G = (X U) е
начальной вершиной х0 (начальное состояние), конечной вер-
шиной хк и дугами графа U. Для всех вершин -графа {%} в-
соответствии с (10.5) поэтапно рассчитываются значения V* (п)
при п — 1, 2,... Затем пути перехода из хг- в х., отвечающие-
оптимальным потерям, помечаются на графе и им приписывается
проверка X*- Наконец, выделяется оптимальный путь из х0 в хк
и по проверкам, приписанным дугам этого пути, устанавливает-
ся оптимальная стратегия контроля 8*= (тс0*, яД . . . irft*).
Решение задачи определения оптимальной последовательно-
сти проверок может быть найдено и другими, развитыми в на-
стоящее время способами, например, с применением так назы-
ваемого прямого рекуррентного или итерационного метода [50].
При параллельном контроле осуществляется одновременная
проверка всех назначенных для контроля параметров. При та-
ком контроле не возникает задачи упорядочения последователь-
ности проверок. В основу параллельного контроля положен ком-
бинационный способ поиска неисправности, когда анализ резуль-
татов контроля и установление неисправного' элемента произ-
водится после выполнения некоторой комбинации проверок..
В одном из вариантов параллельного контроля исходным мате-
риалом служит матрица состояний, у которой столбцы соответ-
ствуют всем возможным состояниям, а строки — признакам со-
стояний (проверкам). В простейшем случае, когда признаки:
принимают только два значения (0 и 1), матрица имеет следую-
щий вид:
X X X Xn~L Xv
У1 1 О 0 1 0
Уч 1 1 0 0 0
Ут
1 0 0 0 1
* Основные правила построения графов излагаются в гл. XVI.
219»
Если число признаков является достаточным, то по результа-
там измерения значений всех признаков делается однозначный
вывод о том, в каком из состояний находится контролируемое
оборудование.
Параллельный метод контроля применяется в бортовых АСК,
которые одновременно' контролируют в полете все отобранные
параметры состояния оборудования и координаты движения ле-
тательного аппарата. Один из возможных алгоритмов их функ-
ционирования сводится к следующему. Каждый столбец матри-
цы .можно рассматривать как m-разрядный цифровой двоичный
код соответствующего состояния, которым может быть исправ-
ное состояние или состояние отказа того или иного элемента обо-
рудования. Табличные коды признаков состояний хранятся в па-
мяти АСК ('Они могут обновляться в зависимости от режима-по-
лета, выполняемого задания и т. п.). В устройстве сравнения
АСК производится сопоставление кода измеренных в процессе
контроля значений всех признаков с табличными кодами и по
совпадению с одним из них автоматически устанавливается от-
казавший элемент.
Параллельный контроль может быть непрерывным, периоди-
ческим .(в том числе циклическим) или разовым. В бортовых
.АСК применяется -в основном непрерывный, а также цикличе-
ский контроль.
Период между циклами контроля обычно определяют, зада-
ваясь некоторым риском. В наиболее простом случае риск оце-
нивается по вероятности отказа оборудования в течение времени
между двумя циклами контроля.
С учетом экспоненциального закона распределения отказов
у (/) == 1 — &-и
.для среднего риска будем иметь
1 ।
Qcp = т
(1 - е-») dt = 1 + . г
Л 1 ь
—XT X2 т 2
Взяв приближенно е = 1 — Х7’/г + ---------- , получим вы-
2
ражение для периода контроля
2 Qco
k
где величиной риска, как уже говорилось, задаются, а величину
"интенсивности X отказов контролируемого оборудования берут
по статистическим данным.
Из изложенного следует, что важнейшими характеристиками
АСК являются объем и глубина контроля, последовательность
220
и периодичность контроля, стоимость проведения проверок и эф-
фективность автоматического контроля. Весьма 'важной характе-
ристикой АСК служит также достоверность контроля (методика
ее оценки рассматривалась в гл. VIII).
АСК, 'предназначенные для проверок оборудования при про-
ведении предварительной и предполетной подготовки авиацион-
ной техники, обычно строятся по принципу последовательного
или последовательно-параллельного контроля. Ниже приводятся:
некоторые из параметров, которые, как правило', подлежат авто-
матическому контролю при предполетной и предварительной;;
подготовке.
По самолетным системам и силовым установкам:
— величины давления в основной и дублирующей гидроси-
стемах;
— величина давления воздуха (поддавливание) в топливных,
баках;
— суммарные люфты в проводке управления рулями и элеро-
нами;
— положение створок реактивного сопла при различных ре-
жимах работы двигателя;
- - температура газов в характерных точках двигателя;
— обороты двигателя;
— давление и температура масла в маслосистеме;
— время приемистости двигателя ют малого газа до взлетных,
оборотов и др.
По электрооборудованию:
— ЭДС каждого аккумулятора;
— напряжение, аккумуляторной батареи под нагрузкой;
— величина напряжения энергоузла постоянного тока;
— величины напряжения и частоты переменного така;
— изменение величины выхода конуса воздухозаборника в-
зависимости от оборотов двигателя;
— зависимость величины передаточного отношения и загруз-
ки в автоматике от режимов полета и др.
По приборному оборудованию:
— передаточные числа автопилота в режиме демпфирования,,
управления, стабилизации по всем каналам;
— напряжение питания автопилота;
— напряжение на сигнальной лампочке «готов» автопилота;.
— напряжение питания авиагоризонта;
— скорости восстановления гироузла авиагоризонта в каж-
дом из четырех квадрантов;
— напряжения питания и точность показаний курсовой си-
стемы;
— передаточные числа демпферов по всем каналам;
— скорости изменения давления и разрежения в системах
ПВД;
2211
— точности показаний: высотомера, указателя скорости, ва-
риометра, указателя числа М, расходомера топлива и приборов
контроля работы двигателя (в соответствии с создаваемым дав-
лением или разрежением в системах ПВД и программой опро-
бования двигателя);
— сопротивление цепей электрообогревательных элементов
основного и аварийного ПВД;
— соответствие отклонения стрелки указателя поворота ими-
тируемым разворотам самолета;
' — срабатывание концевых 'выключателей автопилота;
— показания интегрирующих элементов навигационных уст-
ройств при эталонных входных сигналах и др.
§ 10.3. АНАЛОГОВЫЕ АВТОМАТИЧЕСКИЕ СИСТЕМЫ КОНТРОЛЯ
Автоматическая система контроля, в которой обработка ин-
формации ведется в непрерывной форме, состоит из следующих
основных элементов (рис. 10.4):
Р и с. 10.4. Структурная схема аналоговых АСК.:
1 — датчики-преобразователи; 2 — нормализаторы; 3 — коммутаторы; 4 — ге-
нераторы входных сигналов; 5 — генераторы эталонных сигналов; 6 — срав-
нивающие устройства; 7 — анализаторы ошибки; 8 — программирующие уст-
ройства; 9 — устройства регистрации результатов контроля; 10 — линии свя-
зи; 11 — устройства управления; 12 — источники питания; ОК — объект
контроля
1. Первичных датчиков-преобразователей, предназначен-
ных для непосредственного измерения контролируемых величин
и преобразования их в электрические сигналы.
2. Нормализаторов, с помощью которых все преобразован-
ные величины приводятся к некоторым, удобным для ввода в си-
стему контроля, уровням.
3. Коммутаторов, предназначенных для коммутации сигналов
от нормализаторов на линию связи объекта контроля с системой
автоматического контроля или коммутации сигналов на вход
контролируемых объектов.
222
4. Генераторов входных сигналов (иногда их называют сти-
муляторами), генерирующих на входе контролируемых объек-
тов различного вида возбуждающие сигналы.
5. Генераторов эталонных сигналов, воспроизводящих вели-
чины, с которыми производится сопоставление результатов из-
мерений.
6. Сравнивающих устройств (компараторов).
7. Анализаторов величин ошибки.
8. Программирующего устройства.
9. Устройств регистрации результатов контроля.
10. Линий связи.
11. Управляющих устройств.
Первичные датчики-преобразователи, нормализаторы, неко-
торая часть генераторов входных сигналов, часть коммутаторов
и устройства уплотнения информации, предназначенные для со-
кращения числа линий, соединяющих борт летательного аппа-
рата с наземной частью, а также бортовые разъемы относятся
к бортовой части системы автоматического контроля.
Все остальные элементы, объединенные в одно конструктив-
ное целое, образуют собственно саму систему автоматического
контроля — специализированную информационную машину ана-
логового типа, предназначенную для обработки и регистрации
информации о состоянии объектов, решения ряда логических за-
дач, производства ряда вычислений (среднеарифметических и
среднеквадратических значений, поправок на температуру, дав-
ление, нелинейность датчиков и т. п.).
Ниже рассматриваются некоторые особенности элементов си-
стем автоматического контроля. Часть этих элементов исполь-
зуется только в системах аналогового типа, часть как в анало-
говых, так и дискретных системах.
Первичные датчики-преобразователи. С целью упрощения об-
работки информации в системах автоматического контроля все
контролируемые параметры, независимо от их физической сущ-
ности, должны быть преобразованы в электрические величины:
— напряжение (постоянного или переменного) токов;
— напряжение в виде импульсов постоянной частоты;
— импульсы напряжения переменной длительности, перемен-
ной частоты и переменной амплитуды.
Для этой цели используются датчики-преобразователи, в
принципе аналогичные по конструкции датчикам, находящим ши-
рокое распространение как в промышленности, так и в оборудо-
вании самолетов для преобразования неэлектрических величин в
электрические.
Датчики являются одним из важнейших функциональных эле-
ментов всякой системы контроля, и их свойства и характеристики
во многом предопределяют характеристики систем автоматиче-
ского контротя в целом.
223
Условия работы датчиков значительно отличаются от усло-
вий работы остальной аппаратуры, ибо датчики находятся в не-
посредственном контакте с контролируемым объектом, благода-
ря чему они могут подвергаться воздействию агрессивных сред,,
электромагнитных полей, 'вибраций и т. и.
Ввиду специфических условий работы датчиков к ним, кро-
ме общих требований, характерных для любых элементов АСК,,
предъявляется также и ряд дополнительных требований.
1. Высокая точность показаний.
2. Высокая чувствительность ж изменению контролируемого'
параметра.
3. Минимальное влияние датчика на характеристику объекта
контроля (включая его надежность).
4. Быстродействие.
5. Высокая перегрузочная способность.
В качестве примера датчиков АСК можно указать как на па-
раметрические датчики типа: емкостные, индуктивные, потен-
циометрические и т. п., так и на генераторные датчики типа:
индукционные, термоэлектрические, пьезоэлектрические и т. п.
Нормализаторы. Устройства, предназначенные для приведе-
ния значения измеряемых величин к некоторому нормализован-
ному уровню, называются нормализаторами, а параметры, зна-
чения которых нормализованы, — приведенными параметрами..
Если значение измеряемой величины U, то нормализованное
значение
U»-kaU,
kn— коэффициент нормализации.
Нормализация проводится с целью унификации измеритель-
ных устройств АСК и упрощения аппаратуры, предназначенной
для преобразования непрерывных величин в дискретные (в АСК
дискретного типа).
При наличии нормализаторов эталонная величина для всех
параметров, нормализованных к данному уровню, может быть,
задана одним значением Uo, что значительно облегчает эталони-
рование.
Уровень нормализации характеризуется максимальным зна-
чением Umax и максимальной погрешностью измерений в диапа-
зоне изменения U от 0 до + Umax.
Для получения необходимой точности измерений обычно в
АСК используют несколько уровней нормализации. Так, напри-
мер, для напряжения постоянного и переменного тока в качестве
уровней нормализации могут быть приняты: 0 + 5 в, 0+10 в,
0 +20 в, 0+100 в.
Выбор уровня нормализации производится по максималь-
ному значению измеряемой величины.
В качестве нормализаторов могут быть использованы дели-
тели напряжения, трансформаторы напряжения и тока и т. щ
224
Нормализация измеряемых значений иногда производится и
с преобразованием вида электрического сигнала. Так, например,'
постоянное напряжение может нормализовываться к частоте им-
пульсов.
Коммутаторы. В процессе контроля состояния оборудования
летательных аппаратов приходится проверять до нескольких со-
тен параметров. Это накладывает особые требования на комму-
тационные устройства, особенно если учитывать, что при ком-
мутации не должны иметь места потери информации.
Одним из основных требований, предъявляемых к коммута-
торам, является точность коммутации, которую характеризуют
погрешностью коэффициента передачи коммутатора
g ^вх ^вых
где UBX и UBbSX— соответственно сигнал на входе и выходе ком-
мутатора.
Второй основной характеристикой коммутатора является ско-
рость коммутации, которую можно оценить количеством пере-
ключений в единицу времени. Эта характеристика определяется
динамическими свойствами элементов коммутатора.
К числу специфических характеристик коммутаторов следует
отнести также максимально допустимое число коммутируемых
каналов Nmax.
В настоящее время в качестве коммутаторов используются
как электромеханические (контактные), так и электронные (бес-
контактные) коммутаторы.
К числу электромеханических коммутаторов относятся шаго-
вые искатели и релейные переключатели, коммутация сигналов
в которых производится путем замыкания и размыкания элек-
тромеханических контактов.
.При небольшом числе коммутируемых цепей шаговый иска-
тель позволяет осуществить достаточно надежный съем инфор-
мации. При числе цепей более 50 схема коммутации значительно
усложняется, а наличие большого числа подвижных контактов
снижает надежность системы.
Релейные переключатели, особенно 'выполненные на гермети-
зированных реле, обладают большей надежностью. '
Используя так называемые пирамидальные схемы (рис. 10,5),
можно осуществлять коммутацию значительного числа цепей,,
однако быстродействие таких коммутаторов относительно мало.
Основным достоинством контактных коммутаторов, обеспе-
чившим им широкое применение в АСК, является малое сопро-
тивление замкнутых контактов и большое сопротивление разомк-
нутых контактов, что позволяет обеспечить высокую,точность
коммутации.
15. Румянцев Е. А. и др.
225'
-Наиболее существенными недостатками их являются малое
быстродействие и относительно небольшая надежность,
- ' В бесконтактных коммутаторах коммутация осуществляется
путем изменения проводимости различных управляемых элемен-
тов электрических цепей (электронных ламп, полупроводниковых
диодов и триодов, фотосопротивлений, дросселей насыщения и
т. ц.), а также с помощью электронного или ионного луча, маг-
нитного потока и т. п.
Р и с. 10.6. Диодная матрица.
П — электронный переключа-
тель
• Бесконтактные коммутаторы обладают несомненными преи-
муществами в отношении быстродействия и надежности по срав-
нению с контактными, однако они не могут обеспечить такой
точности коммутации.
. Примером такого коммутатора может служить диодная мат-
рица (рис. 10.6), основным элементом которой является одно-
диодный ключ (рис. 10.7).
В зависимости от полярности управляющего напряжения £7У
(рис. 10.7,а) диод работает либо в режиме проводимости — ключ
замкнут (точка А на рис. 10.7,5), либо в режиме отсечки — ключ
разомкнут (точка Б).
Для коммутируемого сигнала ключ можно рассматривать как
переменное сопротивление, управляемое напряжением Uy и при-
нимающее два значения: г3 и r.p = ].lgp.
Однако для этого необходимо, чтобы напряжение Ue или ток
/с источника сигнала не выводили рабочую точку характеристи-
ки диода за пределы области А—Л2, когда ключ замкнут,, и
Бг—Б2, когда ключ разомкнут, т. е. при нормальной работе клю-
ча напряжение Ес обычно значительно меньше напряжения Z7y
и величина выходного напряжения определяется в основном ве-
личиной £7у, а не коммутируемым сигналом.
226
Коммутаторы такого рода более пригодны для коммутации
уже 'Кодированных сигналов (преобразованных из непрерывной!
(формы в дискретную).
Для коммутации непрерывных величин необходимо устранить
Рис. 10.7. Схема однодиод-
ного ключа
попадание управляющего напряжения
на выход ключевой схемы, т. е. компен-
сировать его.
Такая компенсация осуществляется
в четырехдиодной мостовой схеме,
изображенной на рис. 10.8.
Коммутацию входной шины обеспе-
чивает управляющий триггер, по'дклю*.
ченный к точкам 1—2.
Когда управляющее напряжение
имеет полярность, указанную на рис.
10.8, диоды Di—£)4 смещены в прово-
дящем направлении и на сопротивле-
нии нагрузки /?н появляется напря-
жение /7ВЫХ, обусловленное только ис-
точником коммутируемого сигнала
(f/вх).
При обратной полярности управ-
ляющего сигнала диоды ££—закры-
ты и напряжение Z7BbIX практически от-
сутствует.
Погрешности измерений в такой
схеме в основном определяются раз-
личием вольт-амперных характеристик
диодов.
Генераторы входных сигналов. Ос-
новным назначением генераторов вход-
ных сигналов является возбуждение
/
-
9
Рис. 10.8. Схема коммута-
тора постоянного тока
проверяемых систем в соответствии с командами, получаемыми
<от программирующего устройства. Каждой командой задается
масштаб и длительность испытательного сигнала.
В большинстве случаев эти устройства представляют собой
15*
227
типовые генераторы электрических или иного вида сигналов,
(импульсов напряжения определенной формы, переменного тока
стабильной частоты и т. п.).
Генератор электрических напряжений должен состоять из;
двух частей: генератора постоянного напряжения (обеих поляр-
ностей) и генератора переменного напряжения. Необходимо'
иметь диапазон регулирования напряжения сигнал-генератор а от
О до 100 в с 1000 дискретно устанавливаемыми значениями-
Если требуется получить более мелкие ступени, то используется:
диапазон 0—10 в.
Генератор частоты должен вырабатывать сигнал с фиксиро-
ванной частотой и амплитудой. Такой генератор может иметь
диапазон частот от 10 гц до 10 Мгц с 1000 ступенями переклю-
чения и диапазон амплитуд от 0,1 до 10 в с 10 ступенями.
Генератор' низкочастотных колебаний должен обеспечивать
подачу колебаний несущей частоты, модулированных низкочас-
тотными сигналами, или непосредственно низкочастотные коле-
бания с диапазоном частот 0,1—1 или 1—10 гц (с 10 ступенями;
переключения и диапазоном напряжений 0—1 в или 0—10 в).
Генератор предназначается для задания условий работы раз-
личных приборов и сервомеханизмов управления, а также для
снятия частотных характеристик систем автоматического регу-
лирования и систем управления летательных аппаратов.
Генератор временных интервалов предназначен для точного»
определения времени срабатывания различных коммутационных:
устройств и программных автоматов.
Получая команды от программирующего устройства, генера-
тор должен выдавать до N сигналов длительностью 10 жсе/с..
Диапазон интервалов времени от 0 до 10 минут.
Вид генерируемых сигналов обусловлен принятым способом:
возбуждения объектов.
Кроме типовых генераторов электрических сигналов, при
контроле авиационного оборудования часто 'приходится исполь-
зовать ’Специальные генераторы. По существу они являются един-
ственной специализированной частью АСК, требующей индиви-
дуальной нодгонки к особенностям каждой проверяемой системы..
К числу таких генераторов относятся: генераторы давления,
имитирующие изменение скоростного напора, изменение высоты,
и т. п., генераторы, вынуждающие объекты совершать переме-
щение, двигаться с заданной скоростью, ускорением и т. ц.
Генератор давления имеет два 'независимых выходных кана-
ла. Для проверки различных датчиков давления (измерителей
высоты, скорости, числа М и т. п.) требуется создавать или ста-
тическое или полное давление в диапазоне, имитирующем изме-
нение высоты полета, скорости, числа М.
Давления должны изменяться ступенями, количество которых.
10—100. Точность значений давления на каждой ступени 1°/о.
228.
Принципиальная схема генератора давления изображена на
рис. 10.9.
Вакуум-помпа 2 и насос 3, приводимые во вращение электри-
ческим двигателем 1, создают в баллонах 4 и 5 соответственно
^пониженное и повышенное давление.
Рис. 10.9. Принципиальная схема генератора дав-
ления
Перепуск сжатого и разреженного воздуха к контролируе-
мому объекту осуществляется с помощью электромагнитных кра-
нов 6 и 7, а в атмосферу — электромагнитными кранами 8 и 9.
Чувствительные элементы 10 и 11 при достижении определен-
ных значений давления и вакуума подключают к генератору со-
ответствующие устройства. Так, например, на входе АРУ с по-
мощью описанного генератора удается создавать входные сиг-
налы, имитирующие изменения скорости V и высоты Н, подоб-
ные изображенным на рис. 10.10.
Р и с. 10.10. Программа изменения ско-
рости V и высоты Н при контроле со-
стояния АРУ
При контроле гироскопических устройств и, в частности, ав-
топилота, без съема .их с самолета возникает необходимость от-
клонять ротор гироскопа, имитируя тем самым эволюции лета-
тельного аппарата. _
‘ В качестве генератора входных сигналов для этого использу-
ются дополнительные обмотки, при протекании по которым тока
создается момент, отклоняющий ротор гироскопа и создающий
229
единичное'Возмущение угла крена, тангажа и рыскания. Для этой
же цели могут быть использованы электродвигатели ускоренной
коррекции.
Генератор входного сигнала, используемый при контроле 'со-
стояния систем электроснабжения, представляет собой проста
эталонное сопротивление нагрузки, включаемое контактором.
В ряде случаев целесообразно для возбуждения контроли-
руемых объектов использовать сигналы от объектов, уже уста-
новленных на летательном аппарате.
При контроле сложных автоматических систем в качестве ге-
нераторов входного сигнала часто используются генераторы «бе-
лого шума».
К генераторам входных сигналов предъявляются особенно вы-
сокие требования в отношении точности воспроизведения испы-
тательных сигналов.
В тех случаях, когда программирующее устройство выдает
команду в виде кода, генераторы входных сигналов содержат
преобразователь, преобразующий команду из дискретной формы
в непрерывную, ибо большинство требуемых испытательных сиг-
налов должно иметь непрерывную форму.
Сравнивающие устройства осуществляют сопоставление ре-
зультатов измерений с эталонными значениями.
На выходе сравнивающего устройства образуется сигнал
ошибки = U — U3, который поступает на анализатор зна-
ка и величины ошибки.
В АСК с обработкой информации в непрерывной форме срав-
нивающие устройства одновременно выполняют функции и ана-
лизатора ошибки.
Простейшие структурные схемы сравнивающих устройств
приведены на рис. 10.11.
Основным элементом схем является реле напряжения, т. е.
устройство, срабатывающее при строго определенном напряже-
нии. В качестве реле устройств сравнения АСК используются ли-
бо обычные электромеханические реле, либо элементы импульс-
ной техники — полупроводниковые реле напряжения, следящие
триггеры и т. п.
Порог чувствительности подобных устройств в лучшем случае
составляет несколько .милливольт.
Напряжение срабатывания полупроводникового реле (рис.
10.12) определяется пороговым напряжением Un стабилитрона
СД{. Сопротивление Д подбирается таким образом, чтобы при
отсутствии входного сигнала триод 7\ находился в открытом со-
стоянии (Z7BbIX = £к)- При входном сигнале выше порогового на-
пряжения стабилитрона триод 7\ запирается и выходное напря-
жение становится практически равным нулю. Если напряжение
Z/вых сжимать с триода, то при открытом триоде £7„ых = 0, а
при закрытом — Ек.
230
Увеличение крутизны релейной характеристики достигается
использованием схемы, изображенной на рис. 10.13,а. При этом
исключается влияние тока нагрузки на характеристики стабили-
трона.
Рис. 10.11. Сравнивающие устройства напряжений постоянного
тока:
а — принципиальная схема, б — характеристики
В этой схеме одно реле фиксирует 'превышение измеряемой
величиной Uх некоторого уровня U3 (1 — я), другое — Ua (1 + Р).
Совокупность реле L/3(l—я); Ux^> Ua(1 + р) и логических
ячеек «НЕ» и «И» дает возмож-
ность получить сравнивающее
устройство с оценкой изме-
ряемой величины по принципу
«годен — не годен».
Измерение ширины зоны до-
пусков (зоны «годен») осу-
ществляется изменением соот-
ношения между сопротивления-
ми входного делителя напря-
жения.
Рис. 10.12. Полупроводниковое
реле напряжения
231
> . На рис. 10.14 приведена схема моста для сравнения напря-
: .женин постоянного тока Uхи Ua. В плечи моста включаются из-
. меряемое Ux и эталонное Ua напряжения.
Рис. 10.13. Сравнивающее устройство на полупроводни-
ковых реле напряжения:
а — принципиальная схема, б — характеристики
Зона допусков, в которых значение U х свидетельствует об
исправности объекта контроля
+а),
устанавливается выбором соотношений между R и Rq.
а) 5)
Рис. 10.14. Сравнивающее устройство напряжений постоян-
. нрго тока:
а — принципиальная схема; б — характеристики . '
232
то
Так как
а
^-//?о-Д^ = О;
£7э-/7?о-Д£72 = О;
t7.v + Z73-Z(2/?o-|-/?) = O,
Д и = + ~э ,
2 сс
л„ U3a + a)-Ux
где
Рис. 10.15. Сравниваю-
щее устройство сопротив-
лений
При.Ux = £7Э(1 + а) С7Э(1 - а) и при Ux=Ua(l Д а) на*
пряжения Д£Д и Д U2 меняют знак (рис. 10.14,6).
Если t/8(l—а) < Z7X, то Д£71>0 и Д£/2>0.
Таким образом, если после мостовой схемы сравнения вклю-
чить фазочув-ствительный элемент (индикатор полярности), то
юн будет осуществлять контроль на-
пряжения Ux по принципу «годен—не
годен».
Аналогично строится схема для
контроля сопротивлений (рис. 10.15).
Для сравнения измеряемого пере-
менного напряжения Ux с эталонным
постоянным напряжением применяет-
ся схема, приведенная на рис. 10.16.
Использование в качестве эталонного
напряжения постоянного тока целесо-
образнее, чем напряжения переменно-
го тока, .ибо в последнем случае необ-
ходимо осуществлять компенсацию
фазовых сдвигов.
На делитель напряжения, собранный на сопротивлениях/? о R
и Ro, подается постоянное напряжение Ug, равное удвоенному
номинальному значению) амплитуды измеряемого синусоидаль-
ного напряжения UH.
Тогда, если постоянная времени -t = RiC^>T (где Т — пе-
риод измеряемого напряжения), то на выходе -выпрямителей
после фильтров Р^Сф получаются пиковые значения разностей
. напряжений:
Д^ = ^-^,
bU2 = Ux-Ub.
Когда Uх < Ua, то при Ux<^ Ub\ . к U2 = 0.
233
Так как
д = Uх- Ux - £7И (1 - а),
х 2R0 + R /
а
A U2 = Ux - ^^o + g) _ jj и ((+ )
2/?о+^
то характеристики сравнивающего устройства имеют вид, пред-
ставленный на рис. 10.18,6. Фазочувствительное устройство»
включенное на выходе, оценивает измеряемое напряжение по
принципу «годен — не годен».
Рис. 10.16. Сравнивающее устройство напряжений
переменного тока:
а — принципиальная схема; б — характеристики
Программирующее устройство. Контроль состояния оборудо-
вания осуществляется по заранее установленной программе.
В процессе контроля программирующее устройство должно вы-
полнять следующие функции:
1. Подготовку в определенной последовательности объектов
к контролю: включение источников питания, нагрузки и т. п.
234
2. Подключение к объекту контроля соответствующего гене-
ратора’входных сигналов, измерительного устройства и эталона,.
3. Выбор необходимого эталонного значения и допуска на
контролируемый параметр.
4. Синхронизацию операций и установление необходимых
временных интервалов между проверками.
5. Подачу команд на начало контроля, считывание информа-
ции и т. п.
6. Подачу команд на самоконтроль АСК-
В простейших установках при небольшом числе контролируе-
мых операций в качестве программирующего устройства исполь-
зуются контактные устройства с моторным реле времени или ша-
говые искатели с релаксационным генератором импульсов.
Несмотря на простоту, подобные программирующие устрой-
ства обладают малым быстродействием и относительно низкой
надежностью.
В АСК, предназначенных для контроля сложных комплексов,,
целесообразно использовать программирующие устройства, про-
грамма в которых записывается на перфорированной или маг-
нитной лентах, магнитных барабанах и т. д.
В качестве считывающих устройств могут применяться кон-
тактные щетки, фотодиоды или магнитные головки.
Наиболее удобным, с точки зрения максимального уплотне-
ния записи, является кодирование программы двоичным кодом.
После считывания программа поступает в дешифратор и ла ис-
полнительные элементы.
Наибольшим быстродействием обладают программирующие
устройства, в которых программа заложена в памяти типа диод-
ной матрицы или памяти на ферритах. Считывание осуществля-
ется специальным обегающим распределительным устройством.
Распределитель представляет собой схему, которая после-
довательно возбуждает входные вертикальные шины програм-
мирующей матрицы (рис. 10.17).
Рис. 10.17. Принципиальная схема распределителя с
двоичным триггерным счетчиком и дешифратором на
диодах
235»
При этом каждому номеру команды, т. е. каждой 'вертикали
матрицы, соответствует свой набор возбуждаемых горизонталей-
(своя комбинация команд, посылаемых на исполнительные эле-
менты) ,
Устройства регистрации результатов контроля предназначе-
ны для представления результатов проведенного процесса конт-
роля в виде, наиболее удобном для дальнейшего использования.
Регистрирующие устройства по их назначению можно разде-
лить на две основные группы:
1. Индицирующие устройства, предназначенные для кратко-
временного хранения и выдачи информации о контролируемом
объекте. Они 'воздействуют непосредственно на органы чувств
человека.
2. Собственно регистрирующие устройства, фиксирующие по-
рученную информацию на' некотором носителе и позволяющие
многократную ее обработку.
В системах автоматического контроля обычно используются
оба вида регистрирующих устройств.
Индицирующие устройства позволяют оператору следить за
ходом прохождения основных этапов контроля, фиксировать сбои
в программе контроля и возникновение аварийных ситуаций.
Непосредственные результаты измерения параметров и оцен-
ки их значений фиксируются регистрирующим устройством.
По виду сигналов, несущих информацию, индицирующие уст-
ройства можно подразделить на сигнализирующие индикаторы и
^знаковые индикаторы.
Сигнализирующие индикаторы выполняются в виде световых
или звуковых устройств.
В световых сигнализирующих индикаторах наиболее часто ис-
пользуются газоразрядные лампы, лампы накаливания или лю-
минесцентные ячейки. К световым сигнализаторам можно отне-
сти также блинк-еры и стрелочные указатели.
В качестве звуковых индикаторов применяют электрические
звонки или электродинамические акустические излучатели.
Знаковые индикаторы обычно используют для представле-
ния абсолютных значений контролируемых параметров, откло-
иения их от номинальных значёний, а также для введения раз-
личных команд оператору.
Знаковые индикаторы выполняются на основе цифровых ин-
дикаторных ламп типа декатронов или типа ИН-1 и ИН-2 (ин-
дикаторов, тлеющего разряда).
Индикаторы ИН-1 и ИН-2, разработанные и серийно выпус-
каемые в Советском Союзе, характеризуются хорошей яркостью
свечения при малой потребляемой мощности.
Прибор представляет собой стеклянный баллон, наполненный-
неоном, в котором заключены десять катодов, выполненных в
форме цифр 0, 1, 2,...., 9 и двух сетчатых анодов.
"236
При подаче напряжения между общим анодом и выбранным:
катодом—цифрой в лампе возникает тлеющий разряд, кото-
рый, покрывая катод отрицательным тлеющим свечением, дает
яркое изображение соответствующей цифры.
Управление цифровыми индикаторными приборами осуще-
ствляется посредством реле или электронных коммутаторов.
В качестве собственно регистраторов в большинстве случа-
ев попользуются быстродействующие механические печатающие
аппараты.
Быстродействующий печатающий аппарат состоит из непре-
рывно вращающегося барабана, на котором в несколько рядов--
расположен набор букв, цифр и знаков. При вращении такого-
барабана в течение десятых миллисекунд мимо места печати на
каждой колонке проходит полный набор печатаемых знаков..
С другой стороны ленты, напротив каждой колонки печати, име-
ются отдельные молоточки, срабатывание которых управляется
при помощи соленоидов. В соленоиды поступают импульсы пи-
тающего напряжения, вырабатываемые электронной схемой:
именно в те моменты, когда в данном ряду барабана, мимо ме-
ста печати, проходит тот знак, который должен быть отпечатан.
Механизм перемещения бумажной ленты, в котором имеется бы-
стродействующая муфта сцепления и тормоз, продвигает бума-
гу на одну строку во время промежутка между печатью.
Скорость таких печатающих устройств составляет до 50 строк:
в секунду. По ширине бумаги может располагаться до 100 зна-
ков.
В настоящее время механические способы печати результатов--
контроля еще удовлетворяют требованиям к регистрирующим
устройствам, АСК,, однако увеличение скорости регистрации и
повышение надежности устройств может быть достигнуто только-
на основе новых принципов регистрации: светографического,,
магнитографического, электрографического и др.
В случае необходимости ввода информации, полученной в-
процессе контроля, -в вычислительную или информационно- ло-
гическую машины регистрация осуществляется на перфолентах,,
магнитной ленте или проволоке, или бумажной ленте со специ-
альным диэлектрическим покрытием.
Системы автоматического контроля с обработкой информа-
ции в непрерывной форме используются главным образом в ка-
честве .специализированных систем контроля, предназначенных:
для оценки состояния отдельных видов оборудования.
При большом числе контролируемых параметров аналоговые
системы оказываются менее надежными и, что, пожалуй, глав-
ное, менее универсальными, чем АСК, сконструированные на ос-
нове ЭЦВМ.
Возможности решения логических в ад ач при поиске неисправ-
ностей в объекте контроля в аналоговых АСК ограничены, а вве-
дение переменных начальных условий, расчет характеристик и:
23Г
прогнозирование состояния вообще практически трудно осуще-
ствимы.
Собственно поэтому большинство известных АСК строятся на
базе ЭЦВМ.
§ 10.4. ЦИФРОВЫЕ АВТОМАТИЧЕСКИЕ СИСТЕМЫ КОНТРОЛЯ
Основная особенность цифровых АСК состоит в том, что ин-
формация о состоянии объектов контроля обрабатывается в них
в дискретной форме с применением специализированных цифро-
вых вычислительных машин.
При количественном контроле параметра х проводится его
измерение с некоторым шагом квантования по уровню зави-
сящим от числа разрядов, используемых в машине при преобра-
зовании аналоговых величин в дискретные и в последующей их
обработке. Непрерывная величина параметра в нормальных ус-
ловиях измеряется в пределах -’Cmax__-Vmin= При шаге кван-
тования по уровню число дискретных значений этой вели-
Хт
чины составит т = —— .
Величина параметра является случайной и имеет функцию
плотности распределения f(x). Вероятность того, что контроли-
руемый параметр будет иметь значение, заключенное между
-^min Ч- i 8Л. и %т|п + (j 1) 8 v) равна:
А’т11гНЦ
Pi = P\(i 1)8^. <4 х • .xmjn i ох] = f „ f(x)dx-, i=\,2...ni.
•’тЫ+С'-ЙЦ
В единичном акте контроля параметра, снимающем неопреде-
ленность его значения, будет получена информация, численно
равная энтропии;
т т
I=~ lLpi^Pi==H\ S Pi = *- (Ю.6)
i=l 1-1
Легко видеть, что количество информации тем больше, чем
меньше шаг квантования по уровню 8Х. Действительно, с умень-
шением 8Х возрастает т, а вероятности p-L попадания парамет-
ра в более узкую зону (Z— 1) снижаются. Так как число т
связано с разрядностью «А» цифрового двоичного кода простым
соотношением т =2*, то отсюда следует, что с увеличением чис-
ла разрядов информация при количественном контроле возра-
стает.
При допусковом контроле возможны два состояния: параметр
в поле допуска (вероятность состояния р), параметр вне допу-
238
<екй (вероятность отказа q=^\— р). Информация при таком конт-
роле будет наименьшей и равной
/2 = —p logp - ?log?. (10.7)
Очевидно, что при этом достаточно взять k 1.
По (10.7) рассчитывается также информация при контроле
событий, причем под р понимается, например, вероятность собы-
тий срабатывания, включения, исполнения команды на бтклю-
чение;органа управления и т. п.
При контроле динамических процессов возможны два вари-
анта. По первому из них контролируются такие величины, как
время регулирования, перерегулирование, интегральная квад-
ратичная оценка переходного процесса и т. п., т. е. некоторые
конечные величины, которые в общем случае являются также
случайными. Здесь возможен 'как- количественный, так и допус-
ковый контроль, причем информация рассчитывается по тем
же соотношениям вида (10.6), (10.7). Во втором варианте про-
водится количественный контроль динамического процесса во
времени. Известно, что в соответствии с теоремой Котельникова
динамический процесс конечной длительности Т, имеющий огра-
ниченный спектр частот F, определяется контролем п = ‘2FT его
значений. Интервал квантования процесса по времени Д Т =
7 1
= — ------. Информация, получаемая при контроле п значений
n2F
дана'мич0ского'продессах(/),будетравна:
I3 = nH=2FTH, (10.8)
где Н определяется формулой (10.6), причем под Pt понимает-
ся вероятность того, что при j-том измерении в момент J ДТ
стационарная случайная функция x(f) примет значение
(i 1) 8х <С х (£) хШ1П i
‘Соотношения (10.6), (10.8) выведены в предположении иде-
ального процесса контроля без помех. В реальных системах дат-
чики контролируемых параметров и устройства преобразования
имеют собственные шумы и погрешности у Ft ). Поэтому (наблю-
дается не параметр х, а некоторая величина z, которая при не-
зависимости х и у может рассматриваться как сумма случай-
ных величин z — х у. Тогда информация, получаемая при
контроле параметра, уменьшится и составит величину
1 = Н(х) — Щх/г), (10.9)
где H(x/z) — условная энтропия, представляющая собой взве-
шенную соответствующими вероятностями сумму частных услов-
ных энтропий Н (xjZj)
m
н (x/z) = S р (zy) Н (xlZj),
239
где Zj — один из возможных результатов контроля, р (zj)— его
вероятность.
Формула для вычисления Н (pcjZj) имеет вид:
т
Н (xlzj) = — S Р (Xi/zj iogp (Xflzj),
>=i
где p(xtjZj) — условная вероятность того, что х находится внут-
ри i-того интервала значений параметра, если по результатам
контроля известно, что z ’соответствует /-тому интервалу.
Имея в виду известные из теории вероятностей соотношения
Р (zflxt)p (xz) = р (x,IZj) р (гр:
т
'ZPtZj/XilptXi), •
i
получим
Н (х/z/) = -----log ъ, (10.10)
1 = 1
а для общей условной энтропии
^Р^/х^р^)
<=1.7=1
Будем считать, что величина х имеет равномерное распреде-
ление внутри области хшах— xmill = т а погрешности измере-
ния и преобразования параметра распределены по нормальному
закону, т. е.
1 1
= —г- : Ф (у) =Ф (z - х)= -==— е V
т 8Л. у 2 л av
При этом
//г
Н[х)= — V—log— = log т.
т т
1=1
Для определения условной энтропии H(x/z) найдем закон рас-
пределения композиции х и у
+ °° Ашах (г—Л')2
= Г f[x)^\z — х) dx = —f —L—е V dx-=
J т°х J V2^ay
“"°0 Лш1п
2/nJ mJ] ( *
240
По аналогии с (10.12) найдем композицию закона распределе-
ния величины х в пределах одного интервала квантования с за-
коном распределения погрешности у
Л-_2г\ ф /2г \~1
^У2°у/ \2]/2оу/]’
(10.13)
где означает, что (г — 1) §Л. < х~ лт1п < i Ъх.
Вероятности отдельных участков композиции (10.13), ограни-
ченных интервалами 8Х, р [(J— 1)оЛ. < г<./од./л'г]= р (Zj/Xi), после
замены переменных
i,5-Sx —
]/ 2 а
0,5-8^-В z
У2оу
будут определяться выражением
1
]/Тр
Р (ZjlXi) =
(7+1)-^= -j ~
V 2 УТ
J Ф(ц) dv— J Ф (и) du
(10.14)
где Р= — — параметр, характеризующий датчик параметра
ау
и устройство преобразования с нормальной погрешностью и оп-
ределяющий значение условной энтропии р (z^x^.
По (10.11) <с учетом (10.14) можно рассчитать условную энт-
ропию H(Xlz) и оценить потерю информации, обусловленную
погрешностями устройств намерения и преобразования пара-
метра.
В практических расчетах [30] обычно юграничиваюдся так на-
зываемой оценкой сверху энтропии Н{x!z)^>H(x/z) по формуле
т
Н (xjz) = - S Р Щх^ log Р (Zjlxt),
I =1
где приближенно
j°x У1 j* У/2
f - e~~V^-7=^-e~V^2^. (10.15)
J и Z тс о у 2 тс О
(У-1)8Л.
График оценки H(x/z) приведен на рис. 10.18. Легко видеть,
что потери информации уменьшаются с увеличением р, т. е. в
системах контроля с малыми погрешностями измерения инфор-
мация выше.
16. Румянцев Е. А. и др.
241
Соотношения вида (10.14), (10.15) позволяют выбрать при-
емлемый шаг квантования по уровню из условий требуемой
точности контроля, если известны характеристики погрешностей
измерения.
Цифровые автоматические системы .контроля состоят из двух
основных частей: бортовой информационно-измерительной и ком-
мутационной аппаратуры, которая стро-
Р и с. 10.18. Зависимость
оценки энтропии Щх/z)
от параметра р
кого) автоматического
ится по тем же принципам, что и в анало-
говых АСК, и цифровой управляющей
вычислительной машины контроля
(УВМК). Блок-схема УВМК изображе-
на на рис. 10.19. В ее состав входят:
пульт оператора и программное устрой-
ство; специализированная ЭЦВМ, выпол-
няющая функции управления контролем,
количественной и логической обработки
его результатов; устройства индикации и
регистрации.
Основным для АСК обычно является
режим последовательного (пооперацион-
контроля, хотя иногда предусматривают-
ся и различные варианты ручного контроля.
Рис. 10.19. Блок-схема управляющей вычислительной машины контроля
цифровой АСК.:
УУ — устройство управления; АЦП — аналого-цифровые преобразовате-
ли; ОЗУ — оперативное запоминающее устройство; АУ — арифметическое
устройство; АРК — анализатор результатов контроля; УСК — устройст-
во самоконтроля; ИСК. — индикатор самоконтроля; УР, УИ — устройства
регистрации и индикации
При автоматическом контроле устройство управления (УУ) в
соответствии с программой подключает через коммутатор выхо-
ды датчиков контролируемых параметров к аналого-цифровым
преобразователям (АЦП) типа «напряжение — код», «часто-
242
та—код» и др. При этом УУ регулирует режимы и диапазоны
измерений в АЦП. Арифметическое устройство (АУ) производит
сравнение кодов полученных с преобразователей величин с ко-
дами номинала и поля допуска контролируемого параметра.
Коды номинала и допуска поступают с программного устрой-
ства (или ic пульта оператора через кнопочные регистры) и хра-
нятся в оперативном запоминающем устройстве ОЗУ на время
проведения данной операции. В некоторых случаях они хранят-
ся непосредственно в УВМК в долговременных ЗУ. АУ обеспе-
чивает количественную оценку параметра как по его физической
величине, так и по относительному отклонению от номинала в
поле допуска. Оно может содержать также вычислительное уст-
ройство прогнозирования. В зависимости от исхода контроля по
текущей операции по. сигналам анализатора результатов конт-
роля (АРК) через УУ осуществляется индикация и регистра-
ция результатов (в случае положительного результата) или пе-
ревод УВМК в режим самоконтроля (по получении отрицатель-
ного результата). Устройство самоконтроля (УСК) имеет тест-
программы, позволяющие проверить исправность УВМК от вхо-
дов АЦП до АРК, а также схемный контроль ПУ. В случае ис-
правности УВМК выдается информация о неисправности объ-
екта контроля и машина 'Переводится в другой режим работы,
например, с остановом по отказу, когда время контроля по дан-
ной операции устанавливается произвольно оператором и ис-
пользуется им для настройки и регулировки. Соответствующие
признаки перевода УВМК в другие режимы закладываются в
программе для каждой операции.
Рассмотрим принципы построения основных устройств УВМК.
Аналого-цифровые преобразователи. В авиационных цифро-
вых АСК необходимо, как правило, преобразовывать в цифровой
код следующие величины:
— напряжение .постоянного и переменного тока (0 ч- Ц„);
— импульсное напряжение (0 -г- Ц„; -с > 5 мксек при скваж-
ности <Ю0);
— частоту синусоидальных колебаний (0,1 гц — 50 кгц)\
— частоту повторения импульсов (0,1 гц — 50 кгц);
— длительности импульсов (10 мксек — 100 сек);
— временные интервалы (10 мксек — 100 сек)-
— активные сопротивления (0 ч- 1 ком).
Величина нормализованного напряжения Un может быть раз-
личной и составляет обычно 0,1; 1,0; 10; 100 в. Для активных со-
противлений производится предварительное преобразование к
постоянному напряжению.
Точность преобразования аналоговых величин должна быть
не хуже 0,1—О,5°/о, а время преобразования напряжений не бо-
лее 3 ч- 5 мксек.
16*
243
Преимущественное распространение в АСК получили преоб-
разователи, основанные на времяимпульсном преобразовании,
принцип действия которого -можно уяснить на примере типичной
блок-схемы преобразователя, изображенной на рис. 10.20.
Ui
Срс£нчоою-^
щее 'Jcmpoi/
cmfio f
Гоператор
flUH
щее уст рос/" 2
стио 2. I
Триггер-
। -s® оентиль
Ю—г—
। Стоп
Счетчик
истдльсйо
ООО,
Сеневатор
</лраВл9ющш,
импулбсо/)
{ в
устройство
КВарце&ыи
'^нератор
С&рое
Рис. 10.20. Принципиальная схема времяимпульсного преобразова-
теля аналог — код
Линейно-изменяющееся напряжение U\ подается на два
сравнивающих устройства. Сравнивающее устройство 1 сраба-
тывает, когда t/i достигает некоторого отличного от нуля уров-
ня <70 и своим выходным импульсом (старт-импульсом) откры-
вает триггер-вентиль. Сравнивающее устройство 2 срабатывает на
уровне UO-^UX, генерируя стоп-импульс, закрывающий триггер-
вентиль.
Два сравнивающих устройства используются с целью исклю-
чения погрешностей, обусловленных нелинейностью начального
участка генератора линейных напряжений и изменением темпе-
ратуры.
Интервал времени tx между старт- и стоп-импульсами про-
порционален входному напряжению
Ux = ktx,
где
dt
В течение времени tx импульсы эталонной частоты f, сформи-
рованные из колебания кварцевого генератора, поступают через
триггер-вентиль на счетчик импульсов (см. рис. 10.20).
При этом
tx=NT,
где N — число импульсов, 'зарегистрированных счетчиком;:
Т — период колебаний кварцевого генератора.
244
Тогда
Р и с. 10.21. Принципиальная схема
аналого-цифрового преобразователя,
построенного по методу сравнения
Ux=kNT.
Погрешность времнимпульсного преобразователя в основном
определяется погрешностью дискретности. Погрешности, обус-
ловленные (нелинейностью пилообразного напряжения и неста-
бильностью кварцевого генератора, не превышают 0,1%.
Погрешность дискретности оценивается абсолютной величи-
ной значения младшего разряда счетчика и может быть выра-
жена формулой:
е = do-16)
Из (10.16) следует, что погрешность преобразования пропор-
циональна периоду колебаний 'кварцевого генератора и обратно
пропорциональна периоду пульсаций линейного генератора на-
пряжений.
Основной недостаток этого метода —сравнительно невысокая
скорость преобразования (по-
рядка сотен измерений в секун-
ду) . К числу преимуществ вре-,
мяимпульсного преобразова-
ния относится простота схемы
и отсутствие в схеме логиче-
ских устройств.
В УВМК применяют также
аналого-цифровые преобразо-
ватели, построенные помето-
ду сравнения с обрат-
ной связью (компенсационные преобразователи). Схема их
включает <в себя прямой преобразователь «аналог—код» — АЦП,
обратный .преобразователь «код—аналог» — ЦАП, устройство
сравнения входного сигнала и сигнала обратной связи — «нуль-
орган» (рис. 10.21). Схема работает так, что когда разность
А и входной величины и величины обратной связи достигает зна-
чения, соответствующего требуемой точности преобразования, на
выходе отсчетного устройства АЦП устанавливается цифровой
код, отвечающий входной величине. Устройство преобразовате-
лей с обратной связью может отличаться выбранной схемой
преобразования аналоговой величины в код (с использованием
счетчика для выработки кода, с поразрядным кодированием и
др.), а также схемой обратного преобразования (суммирование
.аналоговых величин с учетом «веса» разрядов кода или сумми-
рование единичных аналоговых величин, число которых соответ-
ствует входному коду).
Преобразователи с обратной связью являются универсальны-
ми двухсторонними (Преобразователями. Высокая точность пре-
образования от 0,05 до 0,1%, 'сравнимая с точностью преобразо-
245
Рис. 10.22. Схема аналого-цифрового преобразователя с обратной связью
вателей временного кодирования, сравнительно высокая ско-
рость преобразования — 102-н- 104 измерений в секунду, возмож-
ность использования в следящем режиме и построения схем на
высоконадежных полупроводниковых элементах определяют их
применение в системах автоматического контроля.
Одна из схем преобразователя с обратной связью [28] изо-
бражена на рис. 10.22. Схема осуществляет преобразование не-
прерывных напряжений. в дискретную форму и включает в се-
бя нуль-орган (ПТ17, nTiS, ПТ22), инвертор (ПТ19), генератор
импульсов (ЛТ2о, ПТ 21), счетчик импульсов (Г1<- ТТ), преобра-
зователь «код—напряжение» (ПТ12 — ПТц^. Нуль-орган выпол-
нен по схеме несимметричного триггера и выполняет функцию
сравнения двух напряжений: входного Вх{ и обратной связи Вх2.
В исходном состоянии Вх[ заземлен через ключ ПТ22, открытый
отрицательным напряжением смещения — ЯсМ. При этом инвер-
тор открыт, а генератор импульсов ПТ20, ПТ21 заперт положи-
тельным напряжением смещения. При снятии программным уст-
ройством напряжения — Всы с ПТ22 контролируемое напряже-
ние Вх\ подается на первый триод ПТ1& и открывает его, инвер-
тор закрывается и генератор начинает генерировать импульсы,
поступающие в счетчик Т\—Т5.
В табл. 10.2 приведена схема работы счетчика импульсов при
последовательном поступлении импульсов от ГИ.
Кодированное двоичным кодом входное напряжение с выхода
счетчика импульсов поступает в преобразователь «код—напря-
жение», который выполнен по потенциальной схеме. Количество
входов преобразователя равно числу двоичных разрядов кода
(в данном случае пять). В исходном состоянии с коллекторов
закрытых триодов триггеров Ti—ТБ счетчика на входы преобра-
зователя поданы отрицательные напряжения, триоды открыты
и делитель через триод ПТц заземлен. Напряжение на выходе
преобразователя отсутствует. При поступлении в счетчик перво-
го импульса ПТ1В закрывается и на выходе преобразователя по-
явится напряжение. Последующие импульсы от ГИ будут изме-
пять величину этого напряжения, причем чем выше разряд кода,
тем больше величина выходного напряжения. При равенстве
напряжений Вхх и Вх2 на входах нуль-органа несимметричный
триггер опрокидывается (открывается ПТ17 и закрывается ПТ18).
Генерация импульсов ГИ прекращается. Число импульсов, по-
ступивших в счетчик, соответствует величине контролируемого
напряжения.
Рис. 10.23. Схема аналого-цифрового преобразователя с поразряд-
ным кодированием
На рис. 10.23 приведена другая схема преобразователя с об-
ратной связью, построенная по методу поразрядного кодирова-
ния. Она состоит в данном случае из десяти ограничителей на-
пряжения Огр-1—Огр-Ю, нуль-органа, выполненного по схеме
блокинг-генёратора с обмотками положительной и отрицатель-
ной обратной связи, усилителя Ус, регистра 1\—Тю, вентилей
Bi—Вю и сдвигового регистра. К выходам Огр-1—Огр-10 под-
ключаются эталонные сопротивления, величины которых про-
порциональны разрядам регистров —Т[0. Они образуют дели-
тель, с помощью которого устанавливаются уровни напряжений,
соответствующие двоичному коду регистра 7\—Ti0: Сравниваю-
щим элементом нуль-индикатор а являются диоды и Д-2- В за-
висимости1 от величины отрицательных напряжений, поданных
248
-на их катоды, открывается тот или иной диод и включается об-
мотка отрицательной или положительной обратной связи, что
приводит либо к началу генерирования импульсов генератором,
.либо к срыву генерации. Входами нуль-органа являются
их и Usr.
. Преобразование напряжения Их в двоичный код происходит
следующим образом. На вход сдвигового регистра подаются им-
пульсы. С приходом первого из них сдвиговый регистр откроет
Код
Счетчик
Р и с. 10.24. Схема преобразования временных ин-
тервалов в цифровой код
вентиль Bi и переведет триггер Т\ во второе устойчивое состоя-
ние, при этом положительное напряжение с триггера поступит в
Огр-1. На выходе делителя, образованного Огр-1—Огр-Ю, по-
явится отрицательное напряжение U3r. Если контролируемое
напряжение их окажется меньше U31t то нуль-индикатор начнет
генерировать импульсы. Первый его импульс после усиления в
Ус через вентиль Bi поступит к триггеру 1\ и возвратит его в ис-
ходное состояние. Записанная в старшем разряде регистра еди-
ница сохранится. Если их > £7ЭТ, то нуль-индикатор не будет
генерировать. Под воздействием второго импульса, поступившего
на вход сдвигового регистра, откроется вентиль В2, закроется
Bi, триггер Т2 перейдет во второе устойчивое состояние и цикл
работы повторится. Так поразрядно осуществляется кодирова-
ние напряжения их до тех пор, пока их не станет равным £7ЭТ.
При достижении равенства этих напряжений в регистре 7\—Тщ
формируется двоичный код, пропорциональный контролируемо-
му напряжению их.
249
I Признак/
f -а
ЛИЙ w 1=э—
Счет-
чик
Выходной код
Р и с. 10.25. Схема пре-
образования частоты в
код
На рис. 10.24,а приведена блок-схема преобразователя вре»
менных интервалов в код, построенного по методу последова-
тельного счета импульсов тактового генератора.
В момент прихода старт-импульса, соответствующего началу
измеряемого 'временного интервала, триггер Т опрокидывается и
через схему совпадения «И» импульсы с тактового генератора
ГИ поступают на счетчик. Стоп-импульс, соответствующий кон-
цу измеряемого временного интервала, возвращает триггер.?.в
исходное состояние, и схема совпадения «И» прекращает про-
пускать импульсы ГИ. Число импульсов, записанное в счетчике,
соответствует измеряемому временно-
му интервалу. По получении импульса
считывания открываются вентили В и
код счетчика передается для дальней-
шей обработки.
Точность преобразователей такого
типа зависит от дискретности преобра-
зователя, стабильности работы генера-
тора импульсов ГИ и величины по-
грешности Д tk, происхождение
которой поясняется рис. 10.24,6. На
графике кривая а —вход запускающе-
го триггера, b — выход триггера, с. —
.выход ГИ, d — вход счетчика импуль-
сов.
По такому же принципу наполнения временного интервала им-
пульсами может быть преобразована в код любая аналоговая
величина А, если она предварительно преобразуется в импульс
длительностью х = А на входе элемента «И» (рис. 10.24,а).
В рассмотренном ранее преобразователе постоянного напряже-
ния в код (см. рис. 10.20) тоже имеет место предварительное
преобразование напряжения во временной интервал.
Схема преобразования частоты f в код показана на рис. 10.25.
Цифровые вычислительные устройства. В бортовых устрой-
ствах автоматического контроля децентрализованного типа, а
также в некоторых специализированных наземных АСК находят
применение устройства допусковой оценки, которые проектиру-
ются специально для каждой системы контроля. Они включают
в себя запоминающие устройства измеренных значений парамет-
ров и допусков на них, а также сравнивающие устройства (ло-
гические схемы).
Для хранения измеренных значений и допусков на .параметр
чаще всего используются счетчики и регистры. Первые применя-
ются в основном в АСК с времяимпульсными преобразователями
«аналог—код», счетчики которых с дополнительными схемами
совпадения и служат для допусковой оценки.
Использование регистров чаще всего имеет место в АСК с
аналого-цифровыми преобразователями поразрядного кодирова-
250
ния. В устройствах допусковой- оценки в этих случаях опреде-
ляющее значение имеют логические схемы, а сами устройства на-
зывают устройствами последовательного действия (с поразряд-
ным сравнением).
В универсальных бортовых и наземных автоматических си-
стемах контроля для количественной обработки результатов,
измерений используются цифровые вычислители, строящиеся по
тем же принципам, что и ЦВМ. В частности, для допусковой;
оценки применяются арифметические устройства обычных схем,
запоминающие устройства и схемы сравнения. При построении
АСЦ на базе ЭЦВМ наряду с допусковой оценкой легко могут
быть выполнены и некоторые другие операции по обработке ре-
зультатов контроля (например, операции осреднения по ряду
замеров параметра для повышения достоверности контроля)..
Рис. 10.26. Схема арифметического устройства
Структурная схема одного из возможных вариантов АУ, вклю-
чающего п связанных циклическим займом одноразрядных вы-
числительных схем с тремя входами каждая, показана на рис..
25L
10.26,в. Структура и принцип построения одноразрядной вычис-
.лительной схемы поясняются рис. 10.26,а и б соответственно.
Значения контролируемых параметров поступают со счетчика
импульсов аналого-цифрового преобразователя на входы ах —ап
поразрядно. Эталонные значения с программного устройства или
•ОЗУ подаются на Ь{ — Ьп также по разрядам.
Вычислитель производит одновременное вычитание во всех
разрядах чисел в двоичном коде, при этом на его выходе Ci—сп
воспроизводится разность сравниваемых величин, сзн фиксирует
знак разности.
Одноразрядная вычислительная схема (рис. 10.26,а, б) вы-
полняет операцию вычитания трех одноразрядных чисел, одно-
временно поступающих на ее входы, и в соответствии с прави-
лами вычитания двоичных чисел имеет три входам; bt-, два
выхода с;; dt. При этом на входы п;; bt поступают значения вы-
читаемых цифр данного разряда, а на вход d^ — значение,
занимаемое из младшего разряда, только в том случае, если в
младшем разряде происходит вычитание 0—1. Соответственно
на выходах схемы фиксируется результат вычитания в данном
разряде ct и значение сигнала займа для старшего разряда
когда вычитающая схема выполняет операцию 0—1. Ниже, в
табл. 10.3, приводятся все возможные комбинации сигналов на
входах и выходах одноразрядной вычислительной схемы.
Если задается только код номинального значения параметра,
то результаты вычислений в АУ выдаются или непосредственно
в виде отклонения параметра от номинала, или поступают в схе-
му сравнения по принципу «годен — не годен» (рис. 10.27).
В регистр Р\ вносится код, соответствующий контролируемому
параметру. В другой регистр Р2 вводится код, соответствующий-
эталонному значению. Устройство сравнения содержит схемы
совпадения С, поразрядно сравнивающие занесенные в регистры
JPi и Р2 коды. Выходы схем объединяются схемой «ИЛИ». В слу-
-252
чае различия кодов схема сравнения выдает сигнал и таким об-
разом оценит значение параметра по принципу «годен — не го-
ден».-
Если задается номинал и поле допуска, то объем вычислений
увеличивается. Полученная в АУ разность между кодом номина-
ла и кодом измеренной величины поступает в схему сравнения с-
Описание
нормы
Рис. 10.27. Принципиальная схема сравнения по принципу
«годен — не годен»
кодами верхнего и нижнего допусков, в которой формируется'
оценка по принципу «больше — норма — меньше». В цифровых
машинах более совершенных АСК рассчитывается относительное-
количественное отклонение параметра от номинала.
Относительная оценка отклонения от номинала обычно фор-
мируется в процентах от поля допуска по стандартной формуле
обработки контролируемого параметра
и = K|t • 100%,
«д
(10.17);
где ми— измеренная величина параметра;
ин — номинальная величина параметра;
«д — допуск на этот параметр.
Иногда относительные количественные оценки отклонениям
получают в более грубых долях поля допуска с указанием, в ка-
253-
л<ой из зон поля допуска находится параметр. Например,
---«н ,100 = .
Ид
Ч\ % при а0« < 1 «и — «н| < «! w;
«2 О/о при «! И sg | «и — Мн ] < а2 и\
«3 °/о при а2 и < | «и — ин| < а3 и; (10.18)
и4 % при а3 и < | и„ — «н К а4 «;
и5 % при а4 и < | «и — ан | ,
где константы ач -ь а4 имеют следующие значения:
<й0 = 0; а, =; 0,125; а2 = 0,25; а3 => 0,5; а4 = 1. Тогда «1°/о =
= 12,5%; м2«/о' = 25%; и3% = 5О«/о; н4% = 100%; «6%>Ю0%.
Р и с. 10.28. Принципиальная схема сравнения по принципу «больше —
норма — меньше»
Структурная схема сравнения по принципу «больше —• нор-
тиа — меньше» приведена на рис. 10.28. Из запоминающего уст-
ройства коды значений нижнего А и верхнего В допустимых
пределов измеряемой величины X поступают на схему вычитания
В—А, образующую код поля допуска Е => В-—А. В другой схе-
ме вычитания образуется код разности D •= X — А. Сравнение
F — Е — D и D = X — А осуществляется логической схемой
по следующим правилам:
«Годен» «Не годен»
«Больше» «Меньше»
£>>0; Д>0 Д<0 £><0
Нетрудно видеть, что основу схем сравнения составляют АУ,
выполняющие операции вычитания и определения знака разности.
254
Схемы сравнения с оценкой отклонения от номинала в долях
поля допуска строятся по тем же принципам. Они несколько ус-
ложняются, так как из устройств памяти необходимо снимать
значения, отвечающие различным зонам (долям) поля допуска,
и сравнивать их с разностью кодов контролируемого параметра
сброса
Р и с. 10.29. Принципиальная схема оперативного запоминающего
устройства
и номинала. Иногда для этих целей в АУ осуществляется не-
сколько операций арифметического сдвига кода допуска в сторо-
ну младших разрядов, чем достигаете^ «дробление» поля до-
пуска на зоны. Такой способ может быть применен при оценке
по формуле (10.18). Если допуск задан, например, восьмираз-
рядным кодом, то «в АУ при помощи четырех операций арифме-
тического сдвига кода допуска в сторону младших разрядов (что
равносильно последовательному делению поля допуска пополам)
определяется, в какой из четырех зон допуска (100, 50, 25,
12, 5%) находится значение параметра.
Для хранения эталонных значений номинала и допуска, а
также промежуточных данных вычислений в УВМК используются
оперативные запоминающие устройства. Одна из возможных
схем ОЗУ приведена на рис. 10.29,а. Каждому из п разрядов в
двоичном коде соответствует одна ячейка памяти со схемой
рис. 10.29,6. На логических элементах ИЛИг, ИЛИ2 строится
триггер, запоминающий один разряд двоичного числа («0» или
«1»), а на элементах НЕ; ИЛИ строится ключ, позволяющий сни-
мать с триггера сигнал только в определенный момент времени.
255
Сигнал сброса, подаваемый на вХ[, приводит триггеры в «нуле-
вое» положение. Для запоминания «1» на вхг подается импульс.
На выходе ячейки памяти появится «1» только в том случае, ес-
ли с программного устройства на вход инвертора поступит уп-
равляющий сигнал УС.
В качестве запоминающих устройств в УВМК используются
также магнитные барабаны и ленты, схемы на магнитных сер-
дечниках и другие.
Устройство управления (УУ). Оно обеспечивает централизо-
ванное управление всей аппаратурой АСК и осуществляет связь-
с пультом оператора. УУ органически входит в специализиро-
ванную ЦВМ, являющуюся основным звеном УВМК по обра-
ботке результатов контроля и управления им.
Программа, определяющая последовательность и 'содержание
операций контроля, обычно записывается на перфоленте (маг-
нитной ленте или в ДЗУ) в цифровом коде. В одном кадре, оп-
ределяющем проверку одного параметра, имеется несколько мно-
горазрядных регистров, из 'которых часть служит для записи
числовой информации в цифровом коде (номинал, допуск), а
другая часть — для записи кодов операций управления.
Программа считывается и поступает во входные (командные)
регистры УУ, которые и реализуют управление, посылая команд-
ные импульсы в коммутаторы и распределители АСК, узлы син-
хронизации и коммутации АЦП, в устройства местного управле-
ния и другие.
Все операции управления имеют свой код, отвечающий оп-
ределенному признаку., Различают признаки режима работы
(«с остановом по отказу», «ждущий режим», «переход к ручной
регулировке» и др.); признаки установки коммутаторов (номер
первичного коммутатора, номер ‘канала в нем и др.); особые
признаки параметра (аварийный, самоконтроля и др.); приз-
наки аналога и диапазона (номер канала в коммутаторе вида
параметра, аналог «и», диапазон и др.); признаки времени опе-
раций (время выдержки до начала измерения, время контроля
и др.); признаки вывода на печать и индикацию, а также приз-
наки, отвечающие адресам кода номинала, измеренного пара-
метра и др. Операции управления, связанные с вычислениями»
не отличаются от .принятых в обычных ЦВМ.
В устройствах вывода обработанной УВМК информации
обычно предусматривают следующие виды индикации и регист-
рации:
— световую, которая дает представление о номере контроли-
руемого параметра (номере операции), отклонении параметра
от номинальной величины в относительном поле допуска, о го-
товности аппаратуры контроля к действию, о результатах само-
контроля УВМК и другую вспомогательную информацию;
256
— звуковые и световые, при помощи которых оператор может
быть информировал об особо опасных режимах контролируемых
систем или о необходимости выполнения различных операций-по
регулировке, настройке, отключению объекта контроля и т. п.;
— печать результатов контроля на бумажную ленту, в про-
цессе которой может быть отражена разнообразная информация
об измеренных параметрах.
Знак ре- шения Кодиро- ванный № пара- метра Порядок числа Знак числа Количе- ств. оцен- ка пара- метра Особые обозна- чен.
№ системы — 101 —
Стандартная обработка 001 + 080
Физическая величина 001 2 + 152
Аварийный параметр вне допуска — 002 -L 345 1
Критическое отклонение — 003 1 + 124
. 004 — 030
+ . 004 0 + 217
Рис. 10.30. Пример записи результатов контроля
Световая индикация реализуется ,в виде табло, транспаран-
тов, сигнальных ламп и т. п. на стационарном и переносном
пультах оператора. Звуковая сигнализация обычно выполняется
с помощью блока речевых команд (БРК) на базе магнитофона с
местным устройством управления и выборкой записи по сигна-
лам, поступающим с устройства управления УВМК-
Пример записи результатов контроля на ленте печатающего
устройства изображен на рис. 10.30. В первой строке цифры
—101 — означают кодовый номер контролируемой системы, далее
идут- несколько строк с результатами контроля параметров этой
системы. Во второй строке 001 — кодовый номер параметра,
+ 080 — отклонение от номинала, в сторону увеличения на 80°/о
поля допуска,, в третьей строке: 001 — тот же параметр, 2 — вто-
рой порядок числа; 15'2 — физическая величина, которая с уче-
17. Румянцев Е. А. и др. 257
том порядка должна читаться как 15,2. В четвертой строке —
002 + 345! знаком восклицания «!» подчеркивается, что откло-
нение очень большое (345%). В пятой строке знак > указы-
вает на критическое значение 1,24 физической 'величины парамет-
ра. Возможны и другие формы печати результатов контроля, на-
пример, с применением цветовой окраски аварийных и не укла-
дывающихся в поле допуска параметров.
Рассмотрим некоторые варианты построения управляющих
цифровых машин в системах автоматического контроля различ-
ного назначения.
Рис. 10.31. Блок-схема управляющей вычислительной машины контроля на-
земной АСК
На рис. 10.31 изображена 'блок-схема УВМК наземной си-
стемы автоматического контроля.
Ввод программы контроля в машину производится с перфо-
ленты при помощи фото считывающего механизма ФСМ и уст-
ройства ввода, включающего в себя дешифратор и входные ре-
гистры. Программа контроля составляется кооперационно, при
этом отдельной операции контроля или управления соответствует
258
определенный кадр на перфоленте. Покадровый ввод программы
осуществляется в старт-стопном режиме, внутри кадров — в не-
прерывном режиме.
На рис. 10.32 показано размещение информации в одном
кадре, имеющем восемь разрядов и пятнадцать строк. В 3, 4,
10 и 14-й строках кадра записаны признаки, определяющие
вид измеряемого параметра, диапазон измерения, а также приз-
наки записи в оперативное запоминающее устройство (ОЗУ) из-
меренного значения параметра. В 5 — 8-й строках записаны коды
управления для подключения контролируемых цепей объекта к
входам машины, в 9-й строке —„ код времени операции, в 11-й и
12-й строках — код или адрес номинала, в 13-й и 14-й строках —
код допуска или адрес допуска, в 15-й строке — признак окон-
чания считывания кадра. Запись информации в кадре осуществ-
ляется в двоичном коде (двоичной единице соответствует про-
бивка на перфоленте).
Обычно в АСК реализуется 800—1000 операций контроля, что
потребует такого же количества кадров. Для выборочного
контроля предусматривается поиск необходимого кадра. Он ве-
дется в режиме непрерывной работы ФСМ путем сравнения ко-
да номера операции, содержащегося в счетчике номера опера-
ции устройства управления (УУ), с кодом номера операции, за-
писанного в кадре (см. рис. 10.31). После выбора кадра
происходит считывание информации кадра во входные регистры,
которые обеспечивают ее хранение на время проведения опера-
ции.
В конструкции УВМК предусмотрены последовательный ав-
томатический контроль (с любого номера операции) с переходом
к каждой последующей операции после получения положитель-
ного результата контроля и окончания -времени операции (в
кадре задается код времени операции) с остановом и без оста-
нова по отказу объекта контроля, а также выборочный ручной
контроль.
В машине установлены аналого-цифровые преобразователи
напряжения, частоты переменного тока и интервалов времени
1в параллельный десятиразрядный двоичный код. Соответственно
с этим машина выполняет операции контроля с измерением на-
пряжения постоянного тока (в кадре задается признак «и»), из-
мерение интервалов времени (признаки «Т» и диапазона изме-
рения времени), измерение частот (признак «/» и диапазона
частоты), измерение числа импульсов (признаки <ф> и «71»). -По-
мимо этого, выполняется измерение величин, заданных в виде
параллельного кода непосредственно из АСК (признак «Код из
АСК»), операции контроля события и приема сигналов результа-
та контроля объекта от внешних устройств (признак «Управле-
ние из АСК — измерение»).
17* 259
эе 2
г
НОМЕР
KflflPfl
3
РДЗРЕШ.
ввода чи-
сел с ГПО
Нзмсо£чис
АНАЛОГА
Запись пярйметря
q
5
Б
п
р
и
з
н
д
к
И
Режим вы
КОДА
УПРЯЕЛЕН,
Останов
по
ОТКАЗУ
УПРЯВПЕНЯВ
из САК
измерен | Паск
I РЕ Г. У РЕ Г. |ДЦПЧ^2
УПРАВЛЕНИЕ
ЗАПИСЬЮ
Намяло | Сброс .
ЧЕТНОСТЬ
7
с
ч
и
8
Ы
В
Я
9
И
Я
ю
н
12
13
is
с
р
о
к
к
д
fl
р
д
I ПОСЫЛКА КОДЛ УПРАВЛЕНИЯ
2 ПОСЫЛКА КОДА ОПРАВЛЕНИЯ
3 ПОСЫЛКА КОДА УПРАВЛЕНИЯ
<4 ПОСЫЛКА КОДА УПРАВЛЕНИЯ
КОД ВРЕМЕНИ ОПЕРАЦИИ
I ВНД
Гй
АНАЛОГА
Т I f lull»
Адрес номинала
1 Код номинала
АДРЕС ДОПУСКА
Четность.
код с
яцпч-г
Признак
АДРЕСА
НОИННЙЛО
Признак
адреса
ДОПУСКА
Четность
Четность
ЧЕТНОСТЬ
Четность
Четность
ЧЕТНОСТЬ
четность
КОД ДОПУСКА
ДИАПАЗОН ИЗМЕРЕНИЯ_____
Па
/г/ fi
Т ИЛЬ f
Признак
Тили f Т или f
Остановка
Псрсмод
ПО РЕЗУД
КОНТР.
Четность
Р и с. 10.32. Вариант размещения
260
I
I
1 ее зг ЗЕ а а i >— 3£ Q И юЭ ЗйЙРЕЖЙ Й МОТД •) j .4 д'врожкЯ' (8 рязряд ) 5 шзрйжкя (3РАЗРЯД) | Бдвршш (^РАЗРЯД) 7 ДОРОЖИЛ (5 РАЗРЯД) 8 дорожил РАЗРЯД). { 8Q04URIJ - WHDdSHMQ ВЯЖОйОП KflflP Н=9 Признак „измерения йийпогп“ 1Р а ним выййчи кода ншчвления J „ОСТЙИЗКЙ по откязн" КОДЫ ЦЕПЕЙ ВНЕШНИХ ИСТРПЙСТВ ' потемнения датчиков к ПРЕОбРйЗОВЙТВЛК/ ДЦП-1 . Время операции „2 сек’ 1 Признак измерения ( НЙПРЯИЕНиЯ ,,11'' ) । код номииялн ? НАПРЯЖЕНИЯ „2,22с 1 f Нод дописки 0,125 1 J 1 Признак екоичпиия [ считывания кййрд.
I
г
г=- 3
в ©
8 © © ©
.6 © ©
7 © ©
8 © е
8 © ©
Ш © ф ©
11 12 © 1 © । ® ©
е ® ©
13 © ® ©
й в е ©
15 © ©
информации в кадре перфоленты
261
I
!
При измерении аналоговых величин они могут пересылать-
ся в арифметическое устройство (АУ) для допуокового контроля
(в кадре признак «изм. аналога» и исходная числовая информа-
ция) или в регистры ОЗУ (признак «Запись параметра в I или
II регистр»).
Код номинала и код допуска вводятся либо с перфоленты (в
кадре код номинала и допуска), либо с одного из кнопочных ре-
гистров пульта 'оператора (в кадре «адрес номинала», «адрес до-
пуска» и признак адреса соответствующего кнопочного регист-
ра), либо с регистров ОЗУ (в кадре признак «адрес номинала»
и признаки адреса I или II регистра оперативной памяти). На
рис. 10.32 дан пример записи 'информации в кадре.
Обработка результатов контроля в АУ осуществляется с
оценкой отклонения параметра от номинала в процентах (12,5,
25, 50, 100%) по полю допуска. Измерение параметра проводит-
ся троекратно. Результаты сравнения по трем замерам поступа-
ют в анализатор результатов, где достоверная оценка устанавли-
вается по двум совпадающим замерам из трех. В АУ проводится
также измерение события (может принимать значения 1 или 0).
В машине выполняется ряд операций управления. Выдается
код управления (в кадре признак «режим выдачи кода управле-
ния» и коды посылок управления). При этом для управления
внешними устройствами (наземными и бортовыми коммутатора-
ми, цепями подключения сигналов к входам преобразователей
и т. д.) машина обеспечивает вывод по каналу управления че-
тырех признаков управления и четырех последовательных по-
сылок параллельного шестиразрядного двоичного кода управ-
ления. Каждой из посылок кода соответствует один из четырех
признаков (ом. рис. 10.32). Местное управление (МУ) осуществ-
ляет внутренние переключения в УВЛ4К, в том числе пересылку
кодов признаков управления, прекращение контроля в случае
получения отрицательного ответа по операции контроля (в кадре
признак «останов по отказу»), переход к следующей операции
после получения сигнала «пуск» от внешних устройств, переход
к режиму самоконтроля и др.
Самоконтроль измерительного тракта УВМК является тесто-
вым. В диодных матрицах памяти устройства самоконтроля
(УСК) записаны исходные данные для самоконтроля (признаки
измерения, коды управления, коды номиналов и допусков). По
команде перехода на СК данные с матриц УСК пересылаются во
входные регистры программного устройства (см. рис. 10.31).
Машина снабжена устройством вывода на печать и печатаю-
щим устройством, а также индикацией на пульте оператора ре-
зультатов контроля на световом табло и транспарантах.
УВМК рассмотренного типа отличаются невысоким быстро-
действием (несколько тысяч простых операций в секунду), срав-
нительно небольшим объемом оперативной памяти (порядка
50 — 100 двоичных знаков), возможностью довольно быстрой
262
смены программы. С их помощью можно выполнить большой
объем операций контроля, однако заложенный в них принцип
однопрограммного последовательного контроля параметров при-
водит к тому, что время контроля самолета и его оборудования
в процессе подготовки к полету может оказаться большим. Со-
кращения времени можно достигнуть только за счет уменьшения
числа контролируемых параметров.
Помимо этого, автоматические системы контроля подобного
типа не приспособлены для анализа полегных данных, получае-
мых в бортовых системах регистрации параметров.
Рис. 10.33. Блок-схема УВМК с параллельным вво-
дом нескольких программ
На рис. 10.33 изображена одна из возможных блок-схем бо-
лее универсальной УВМК, входящей в состав наземной автома-
тической системы контроля.
Как и в предыдущей схеме, машина содержит йнформацион-
но-упр являющую часть, куда относятся преобразователи анало-
говых величин в цифровой двоичный код, устройство управления
(УУ), пульт оператора (ПО), выходные устройства, и вычисли-
тельную часть, содержащую арифметическое устройство, запо-
минающее устройство эталонных значений (ЗУЭ) и управляющее
устройство. Основные отличия состоят в том, что в машине пре-
дусматривается асинхронное выполнение нескольких программ
контроля одновременно, с параллельным вводом измерительной
информации по нескольким независимым каналам и обработкой
ее в одном вычислительном устройстве. Машина может прово-
дить также обработку информации, записанной на магнитной
ленте бортовых систем регистрации параметров (УВМЛ).
Информационная и вычислительная части машины работают
также асинхронно, чем при высоком 'быстродействии (порядка
нескольких десятков тысяч операций сложения в секунду) мо-
263
Жет быть обеспечена большая производительность в обработке
информации. Несколько программ контроля записывается в про-
граммном .'запоминающем 'устройстве (ПЗУ) в блоках памяти
(/j2). Для обеспечения асинхронной работы по многоканальному
принципу необходимо оперативное запоминающее устройство с
большим объемом памяти (блоки 51). Через ОЗУ осуществ-
ляется связь между информационной и вычислительной частями
/Машины по числовой информации.
Рис. 10.34. Блок-схема бортовой автоматической системы
контроля
Так как УВМК позволяет проводить контроль состояния са-
молета и его оборудования непосредственно в процессе.подготов-
ки, самолета к вылету, а также по полетным данным, записанным
на магнитной ленте, то целесообразно в интересах вторичной
обработки и обобщения получаемой обширной контрольной ин-
формации выводить ее на перфоленту (ВПЛ).
Принципиально машины подобного типа могут быть исполь-
зованы также для оценки качества пилотирования по парамет-
рам управления самолетом, записанным в бортовой системе ре-
гистрации.
Централизованные бортовые автоматические системы конт-
"роля обычно строятся так,, чтобы они обеспечивали проверку
состояния агрегатов и систем самолета в объеме предваритель-
ной и предполетной подготовки, а также циклический контроль
И запись в полете особо важных параметров с выдачей экипажу
необходимых данных об их изменении и визуальных или рече-
вых рекомендаций для принятия мер по предотвращению аварий-
ной Ситуации. '
УВМК таких систем строятся, как правило, по следующей
схеме (рис. 10.34). Система коммутации, обеспечивающая под-
ключение УВМК к точкам отбора сигналов контролируемого
оборудования и подачу управляющих и стимулирующих сигна-
264
лов на объекты контроля, включает в себя ряд первичных ком-
мутаторов (ПК), промежуточные распределительные коробки
(РК) и центральный коммутатор-распределитель (ЦКР). Для
управления коммутаторами используется .многораврядный парал-
лельный двоичный код, из которого одна часть разрядов отво-
дится на выбор точек контроля, а другая — на распределение
•выходных цепей коммутации.
В состав УВМК входят аналого-цифровые преобразователи
(АЦП), цифровое вычислительное устройство (ЦВУ), устройст-
во управления (УУ), блок запоминающих устройств (БЗУ),
пульты операторов (обычно стационарный и выносной), а также
устройства регистрации, индикации и воспроизводства визуаль-
ных или речевых рекомендаций экипажу.
Так как система контроля является бортовой, то программа
контроля запоминается в установленном на самолете долговре-
менном запоминающем устройстве БЗУ, обычно выполняемом на
магнитных барабанах с большим объемом памяти (порядка
5—6 тысяч 18—20-разрядных слов). Заполнение магнит-
ных барабанов производится с помощью аппаратуры ввода,
включающей в себя наземные программные устройства со смен-
ными перфолентами. При такой конструкции имеется широкая
возможность варьировать программы как перед полетом, так и в
полете, и назначать специальные программы для различных эта-
пов полета. Не исключается также ввод отдельных команд опе-
ратором с целью корректировки программы или выполнения
только части ее. В наземных условиях программа может отли-
чаться от полетной.
На магнитных барабанах обычно реализуется и оперативное
запоминающее устройство с достаточно большим объемом па-
мяти.
Цифровое вычислительное устройство УВМК рассматривае-
мого типа с учетом обработки полетных данных строится высо-
копроизводительным (пятнадцати—двадцатиразрядным с быст-
родействием порядка нескольких десятков тысяч простых опе-
раций в секунду). Обработка результатов контроля проводит-
ся, как правило, по принципу количественной оценки с высокой
точностью и реже с допусковой оценкой.
Устройство управления УВМК проектируется по< асинхрон-
ному принципу с разрядной сеткой команд порядка 15—20 раз-
рядов, из которых часть используется для образования кодов
операций, а другая часть является адресной. При этом преду-
сматривается необходимая выдержка времени между моментом
подключения контролируемого параметра и началом измерения,
между выдачей стимулирующего сигнала и производством из-
мерения и г. п.
При наземном контроле для ручной регулировки и настройки
контролируемых блоков оборудования необходимо’ иметь вынос-
ной пульт управления, снабженный визуальной индикацией ре1-
2(55
зультатов контроля. При «ждущем» режиме последовательного
автоматического контроля дальнейшие, операции будут автома-
тически продолжаться при достижении положительного резуль-
тата в ходе регулировки. Для расширения возможностей инди-
видуального, выборочного контроля того или иного параметра
целесообразно на основном пульте оператора иметь специальное
наборное поле.
Одна из важнейших особенностей бортовых АСК состоит в на-
личии не только средств индикации и регистрации результатов
контроля в полете, но и устройств воспроизведения визуальных
или речевых рекомендаций (инструкций) экипажу по предотвра-
щению аварийных ситуаций. Предусматривается каталог запи-
санных, например, в блоке речевых команд инструкций, которые
нумеруются по степени аварийности ситуации, возникающей из-
за отказа контролируемого объекта. Выбор инструкции произво-
дится по принципу приоритета с предпочтением инструкции со
старшим номером, автоматически, по командам УВМК-
§ 10.5. МОДУЛИ ИНДИКАЦИИ НЕИСПРАВНОСТЕЙ
Для непрерывного контроля состояния некоторых наиболее
важных объектов используются так называемые модули инди-
кации неисправностей (МИН), являющиеся неотъемлемой
частью самого объекта (встроенной системой контроля).
Р и с. 10.35. Модули индикации неисправностей
Модули индикации неисправностей наиболее часто исполь-
зуются для сигнализации об отказах системы автоматического
управления летательным аппаратом, радиоэлектронного обору-
дования и т. п.
Индикация 'Отказов может осуществляться с помощью МИН
двух типов:
а) МИН последовательного типа (фиг. 10.35,а), включаемого
на выходе объекта контроля;
б) МИН параллельного типа (фиг. 10.35,6), включаемого
между входом и выходом объекта.
Основными элементами модулей индикации неисправностей
являются: датчик контролируемой .величины, датчик эталонного
266
ее значения, устройство сравнения и индицирующее устройство..
Модули индикации неисправностей параллельного типа обыч-
но включают еще упрощенную модель контролируемого объекта..
Датчики контролируемой величины и ее эталонного значения,
и сравнивающее устройство, как правило, конструктивно объеди-
нены.
Примеры таких устройств описаны в § 10.3.
При использовании МИН вероятность правильной и непра-
вильной оценки неисправностей характеризуется табл. 10.4.
Таблица 10.4
Индикация Реальное состояние
«Годен» Ср «Не годен» Ср
«Годен» G д [Ср| О] Жр| G]
«Не годен» G Р [Ср | G] Р[Ср ( G]
Вероятность, что система при получении сигнала «годен»-
действительно годна, определяется по теореме гипотез
Р Др.
Q
P[Cp]P[GIC0J_
Р[С0]Р [G{CP\ + Р [Cp]P[G\Cp\ ’
Вероятность правильности показаний при получении сигнала,
«не годен» определяется формулой
Р
Р[Ср] P[G|Cp] _
P[Cp]P[G|Cp]+P[Cp]P[G | Ср]
Ошибочные оценки имеют место с вероятностями
P[Cp]P[G|Cp]
Д[Ср!Р[С|Ср]+/ДСр] P[G|C’p] ’
P[Cp]P[G|Cp]
Д[Ср]Д [G |Cp]+P[Cp]P[G|Cp]
Для того, чтобы исключить ошибочность оценок, необходимо-
свести к минимуму значения P[G|Cp] и P[G| Ср].
Практически схемы МИН конструируются таким образом, что-
любая неисиравпость самого модуля фиксируется как-неисправ-
ность объекта, т. е. Р [G | Ср] =0.
При этом условии
P[Cp|G] = l.
267/
Оценка «годен» всегда свидетельствует о работоспособности
контролируемого объекта. _ _
Оценка «не годен» с вероятностью/3 [Ср | G] указывает на
отказ объекта, а с вероятностью Р[Ср | G] — на отказ МИН.
Определение возможной ошибки в этом случае осуществляет-
ся посредством самоконтроля МИН.
При конструировании МИН необходимо, чтобы его надеж-
ность была значительно больше надежности контролируемого
«объекта, т. е. РмИН (/) < Ро к (О-
Тогда
__ — р (1 _ р )
ргС | GJ =-------------------------
Р ^mhh(1-^ok)+AK(1-^mhh)
г, гГ I Ту 1 ^ок (1 ^мин)
₽ р (\—р }+р (1 — р )*
ГМИН\* * QVLji1 ОК\Л' г МИН/
Например, при Рит = 0,98 и Рок == 0,8
Р[Ср |G] = 0,93;
а
Р [Ср | G]= 0,07.
Глава XI
БОРТОВЫЕ СИСТЕМЫ РЕГИСТРАЦИИ
ПОЛЕТНЫХ ДАННЫХ
§ 11.1. НАЗНАЧЕНИЕ И КЛАССИФИКАЦИЯ
СИСТЕМ РЕГИСТРАЦИИ
Под системой регистрации полетных данных понимается со-
вокупность технических устройств, предназначенных для накоп-
ления, сохранения и анализа информации об условиях полета;,
о техническом состоянии и качестве функционирования в полете
летательного аппарата, его силовых установок -и оборудования;,
о психофизиологическом состоянии и действиях экипажа по уп-
равлению летательным аппаратом и другой полетной информа-
ции.
•Первоначально регистрация параметров в полете осуществ-
лялась на этапе летных испытаний новых образцов, авиационной
техники. .При этом было установлено, что запись полетных дан-
ных дает ценную информацию для расследования летных проис-
шествий, оценки действий экипажа и для других целей. В связи
с этим регистрация параметров стала широко применяться не-
только при испытаниях, но и при массовой эксплуатации лета-
тельных аппаратов, а сами регистрирующие устройства в на-
стоящее время быстро развиваются.
Регистрирующее устройство может находиться как на борту
летательного аппарата, так и на земле. В последнем случае для
передачи подлежащих регистрации параметров на землю ис-
пользуется телеметрическая аппаратура. Однако телеметриче-
ским принципам регистрации свойственны определенные ограни-
чения. Помимо этого, телеметрические системы являются устрой-
ствами достаточно, дорогими и сложными. Поэтому при массовой:
эксплуатации летательных аппаратов используются главным
образом бортовые системы регистрации полетных данных.
(БСРПД). При испытаниях новой техники применяются оба ви-
да регистрации.
Основная особенность БСРПД состоит в том, что в полете
(на борту летательного аппарата) они только регистрируют раз-
личные параметры, не осуществляя их анализа. Получаемая и.
накапливаемая при этом информация сохраняется и анализи-
269>
руется после полета (поэтому бортовые системы регистрации
зьногда называют пассивными бортовыми системами контроля).
Наземные средства обработки информации БСРПД включа-
ют в себя в общем случае устройства первичной обработки после
каждого полета летательного аппарата и системы централизо-
ванной (вторичной) обработки информации по многим летатель-
ным аппаратам одного типа (рис. 11.1).
Рис. 11.1. Классификация и назначение бортовых систем регистрации по-
летных данных
Одной из основных задач, которая решается на основе ис-
пользо1вания БСРПД, является анализ причин и предупреждение
.летных происшествий. Наряду с повышением объективности и
сокращением времени расследования аварий и катастроф приме-
нение систем регистрации обеспечивает значительное сокраще-
ние числа летных происшествий с неустановленными причинами,
что позволяет предупреждать подобные происшествия в после-
дующих полетах и, таким образом, повысить безопасность поле-
тов.
Вторая задача, которая решается для каждого летательного
аппарата, заключается в использовании получаемой с БСРПД
информации для технической диагностики его бортовых систем
и оборудования. Преимущество такой диагностики состоит в том,
что она проводится по данным, полученным в естественных усло-
270
«виях работы оборудования ® полете. При этом могут быть обна-
ружены так называемые «исчезающие» отказы, проявляющиеся
только в условиях полета. Использование при диагностике ин-
формации, полученной в полете, повышает достоверность и со-
кращает время контроля летательного аппарата перед вылетом,
а также обеспечивает решение такой важной задачи, как прогно-
зирование его технического состояния.
Третьей важной задачей, решаемой после каждого полета,
является задача обучения летного состава и оценки его действий
при выполнении полетного задания. Особенно полезны системы
регистрации при отработке экипажами таких сложных этапов
полета, как посадка, взлет и перехват воздушных или атака на-
земных целей.
В системах централизованной обработки, кроме анализа при-
чин летных происшествий, разрабатываются предложения по со-
вершенствованию авиационной техники и ее эксплуатации; по
конструктивным доработкам; по изменению режимов работы и
условий применения; по изменению техники пилотирования; по
оптимизации, ресурсов, сроков и объемов профилактических и
других работ не только с учетом времени наработки (налета), но
и с учетом фактического состояния агрегатов и систем оборудо-
вания летательного аппарата.
Классификация БСРПД может быть выполнена по следую-
щим основным признакам.
1. По назначению.
а) Аварийные БСРПД. Основное назначение этих систем —
накопление и сохранение информации, необходимой для рассле-
дования летных происшествий. Число регистрируемых этими
БСРПД параметров, как правило, невелико (от 2—4 до несколь-
ких десятков). Системы этого типа снабжаются специальными
устройствами защиты носителя информации от ударов, огня, во-
ды и агрессивных жидкостейв случае катастрофы, а также сред-
ствами обнаружения (радиомаяками и т. п.).
б) Эксплуатационные БСРПД, накапливающие информацию
для решения таких задач, как техническая диагностика, сбор
статистических данных, оценка действий экипажа и др. Число
регистрируемых этими системами параметров достигает несколь-
ких сотен, а длительность записи в общем случае не меньше
времени полета летательного аппарата на двойной радиус дей-
ствия. Аварийная защита отсутствует. Из специальных требова-
ний, предъявляемых к эксплуатационным БСРПД, следует от-
метить такие, как возможность быстрой смены накопителя ин-
формации (или съема информации с него) и требование скорости
декодирования (восстановления), превышающей в десятки раз
скорость записи.
в) Комбинированные БСРПД, сочетающие функции аварий-
ных и эксплуатационных- систем. Выполняются эти системы в
271
двух вариантах: с единым регистратором, обладающим доста-
точно большой емкостью (от нескольких, десятков до нескольких
сотен записываемых параметров) и защищенным от разрушаю-
щих воздействий, или с двумя регистраторами, один из которых
является аварийным (с защитой), а второй — эксплуатационным.
г) Испытательные БСРПД, используемые на этапе летных
испытаний. Характерная их особенность состоит в большом чис-
ле регистрируемых параметров, которое в некоторых системах
достигает нескольких тысяч. В таких системах обычно обеспе-
чивается самоконтроль их технического состояния и возможность
изменения частоты опроса и других характеристик в соответст-
вии с требованиями программы летных испытаний.
2. По принципу записи информации.
а) БСРПД с механическим принципом записи. Чаще всего
этот принцип применяется в аварийных системах с небольшим
числом регистрируемых параметров. Существенными недостатка-
ми БСРПД с механическим 'принципом записи являются малая
плотность и низкая точность записи, невозможность регистрации
высокочастотных сигналов и большой вес аппаратуры.
б) БСРПД с осциллографическим принципом записи. В этих
системах, как и в обычных осциллографах, запись выполняется
световым лучом на светочувствительной бумаге (фотобумаге):
или пленке. По точности записи эти системы превосходят систе-
мы с механической записью, однако плотность записи все же ос-
тается низкой, в связи с чем вес таких систем быстро возрастает
с увеличением числа записываемых параметров.
в) БСРПД с магнитным принципом записи. Системы этого
типа являются наиболее распространенными, так как они обеспе-
чивают регистрацию большого числа параметров, высокую точ-
ность и большую длительность записи при сравнительно неболь-
ших весах и габаритах. В качестве магнитного носителя инфор-
мации используется магнитная лента, которая отличается устой-
чивостью к воздействию морской воды, самолетных топлив и
обеспечивает запись по нескольким параллельным дорожкам.
г) БСРПД с фотографическим принципом записи. Применяет-
ся как наружное фотографирование'(со стороны хвостовой части
самолета вперед), так и внутреннее (например, в кабине). На-
ряду с определенными преимуществами этим системам присущи
и серьезные недостатки (зависимость от освещенности и т. п.), в.
связи с чем в настоящее время они находят ограниченное приме-
нение.
3. По форме записи информации.
а) БСРПД с аналоговой формой записи. К ним относятся
почти все системы с механическим и осциллографическим прин-
ципом записи, а также диктофоны и магнитофоны, в которых,
применяется прямая запись переговоров на магнитный носитель..
Общий недостаток таких БСРПД — низкая точность регистра-
ции параметров.
272
б)< БСРПД с дискретной формой записи. К этим системам,
можно отнести и некоторые БСРПД с механическим и осцилло*
графическим 'принципом записи, но главным образом — это си-
стемы с .магнитным носителем. Основное преимущество этих си-
стем состоит в высокой точности регистрации (особенно при ис-
пользовании цифровой формы записи в двоичном коде). Недо-
статочная наглядность результатов записи компенсируется тем,
что дискретная (особенно цифровая) форма записи облегчает
автоматизацию процесса восстановления и анализа записанной
информации с помощью ЭЦВМ.
§ 11.2. ПРИНЦИПЫ ПОСТРОЕНИЯ СИСТЕМ РЕГИСТРАЦИИ
Выбор структуры и конструкции БСРПД определяется чис-
лом подлежащих регистрации параметров, требованиями по точ-
ности регистрации и воспроизведения данных, а также алгорит-
мом и временем обработки информации БСРПД, вытекающим
из назначения. Возможности и характеристики БСРПД в значи-
тельной степени зависят от формы записи 'информации.
БСРПД с аналоговой формой записи информации. Аналого-
вая форма записи может быть реализована несколькими спосо-
бами. Наиболее простой из них, механический способ, состоит
в том, что подвижный элемент датчика перемещает пишущую
или царапающую стрелку на ленте специальной бумаги, фольги
или пленки. При записи нескольких параметров для каждого из
них должен быть свой пишущий элемент. Временная развертка
осуществляется перемещением ленты от часового или электро-
привода. В приборах с часовым приводом лента размещается на
одном барабане большого диаметра, который в зависимости от
передаточного(числа редуктора может делать один оборот за
время от 30 минут до 24 часов.
Регистраторы с механическим способом записи иногда назы-
вают самописцами. Они применяются для регистрации двух-трех
параметров. В качестве примера можно указать на бароспидо-
графы, например, типа К-2-717 (рис. 11.2), которые записывают
воздушную скорость и высоту, и трехкомпонентные самописцы
К-3-63, регистрирующие скорость, высоту и вертикальную пере-
грузку, необходимые для восстановления внешней картины лет-
ного происшествия. Самописцы имеют свои индивидуальные дат-
чики V, Н и п. Для уменьшения температурных погрешностей
они оборудуются электрообогревом и простейшей системой тер-
морегулирования.
Существенный недостаток регистраторов с механической за-
писью состоит в том, что конструктивно невозможно располо-
жить все пишущие элементы стрелок на одной линии, что за*
трудаяет расшифровку записей, так как значения параметров,
соответствующие-одному и тому же моменту времени, оказыва-
18, Румянцев Е. А. и др. 273
ются на разных поперечных сечениях ленты. Расшифровка тре-
бует применения специальных тарировочных графиков и шаб-
лонов и связана с большими затратами ручного труда.
Рис. 11.2. Самописец К-2-717:
/ — бронированный стакан; 2 — наматывающая катушка; 3 — электродвигатель;
4 — сматывающая катушка; 5 — запись высоты; 6 — запись скорости; 7 — от-
метка времени; 8 — электромагнит отметки времени
Другой недостаток состоит в мало’м числе регистрируемых
параметров. При необходимости записывать электрические ве-
личины необходимо .предварительное их преобразование к меха-
ническим перемещениям.
Механические самописцы имеют невысокую точность записи.
В приборах с записью острием на бумаге, фольге, пленке наи-
большая доля погрешности обусловлена трением. Так, для упро-
щенной кинематической схемы
регистрации приборной скоро-
сти (рис. 11.3) сила трения,
приведенная к анероидной ко-
робке, будет равна:
а относительная ошибка записи
Рис. 11.3. К оценке ошибок меха- а = J?
нической записи р /
где N — сила нормального давления; f —. коэффициент трения;
F — сила, обусловленная действием разности динамического
(Гдин) и статического (Рст) давлений. Ошибка пропорциональ-
274
на силе нормального давления стрелки на бумагу и передаточно-
му отношению кинематической схемы и составляет в самопис-
цах 2—4°/о.
Более совершенным способом аналоговой регистрации яв-
ляется оптическая запись с использованием многоканальных све-
толучевых осциллографов. По сравнению с механической она
имеет существенное преимущество в весогабаритных характери-
стиках, так как исключаются элементы кинематической схемы
записи. Число параметров, регистрируемых светолучевыми ос-
циллографами, .может находиться ..в пределах 10 ч- 30.
Все регистрируемые параметры преобразуются к электриче-
ским величинам, обычно напряжениям постоянного тока, и нор-
мализуются. Для нормализации напряжений применяются потен-
циометрические делители напряжения и дополнительные сопро-
тивления. Преобразование и нормализация осуществляются в
устройствах согласования. Помимо непрерывных величин, за-
писываются так называемые разовые команды (включение авто-
пилота, открытие створок реактивного сопла и т. п.).
Для быстрого различения записи отдельных каналов в оптиче-
ских регистраторах применяют специальные отметчики линий за-
писи или производят запись на цветной фотобумаге или пленке.
В последнем случае перед каждым вибратором устанавливают
соответствующий светофильтр. Отметки времени наносятся при
помощи гелиевой лампы, включаемой импульсами тока, посту-
пающими от электрочасов через специальный трансформатор.
Гелиевая лампа дает вспышку и наносит узкую полосу по всей
ширине ленты. Для фиксации разовых команд обычно вместо
вибраторов используют лампы накаливания, которые при вклю-
чении наносят на фотопленку продольную линию. Для сокра-
щения запаса фотопленки скорости ее протяжки находятся обыч-
но в пределах 1—2,5 мм/сек, а запас фотопленки составляет
6—12 м при ширине 35 мм.
В целях снижения погрешностей блок вибраторов выполняет-
ся в виде единой замкнутой магнитной системы, обеспечивающей
-весьма высокую стабильность тарировочных характеристик виб-
раторов. Одна из возможных конструктивных схем оптического
регистратора приведена на рис. 11.4. Для снижения температур-
ных погрешностей осциллографы обычно оборудуются системой
электрообогрева и биметаллическим регулятором температуры.
В настоящее время начинают применять осциллографы с за-
писью ультрафиолетовым лучом. Такая запись не требует про-
явления и сохраняется при дневном свете в течение 5—10 дней.
При довольно высокой точности регистрации (не хуже 1%) оп-
тические способы записи не лишены недостатков: сравнительно
низкая плотность записи, относительно узкая полоса пропуска-
ния осциллографических накопителей информации, позволяющая
записывать с приемлемой точностью лишь медленно изменяю-
18*
275
щиеся сигналы с узким спектром частот (порядка 20—30 гц} >
трудность автоматической обработки осциллограмм.
В системах аварийной регистрации параметров типа САРПП
обычно записываются высота, скорость полета, перегрузки, от*
клонение органов управления самолетом, обороты двигателей и
т. п., а также разовые команды — включение форсажа, вклю-
чение максимала, нажатие боевой кнопки, включение автопилота,
давление в силовой и бустерной гидросистемах и т. п.
Рис. 11.4. Блок оптической записи:
1 — магнитный блок; 2 — вибратор; 3 — осветитель; 4 — от-
метчик базовой линии; 5 — редуктор; 6 — двигатель; 7 —
наматывающая катушка; 8 — сматывающая катушка; 9 —
зеркало; 10 — цилиндрическая линза; 11 — оправа с линза-
ми; 12 — блок светофильтров
БСРПД с модуляцией и дискретной формой записи. В БСРПД
этого типа почти исключительно применяются магнитные нако-
пители информации.
Известно, что непрерывный сигнал можно воспроизвести по-
его дискретным значениям. При этом сигнал, спектр которого'
заключен ,в полосе частот шириной 2F, полностью определяется
значениями этого сигнала, измеряемыми через интервалы време-
ни 1/2F. Исходя из этого, .на носителе магнитного типа вместо'
непрерывной аналоговой .записи можно производить дискретную
запись, что позволит существенно уплотнить записываемую ин-
формацию за счет регистрации в одном канале большого числа
параметров. Очень важное преимущество метода магнитной за-
писи информации состоит также в том, что он обеспечивает при-
менение электронной аппаратуры для проведения 'высокоскоро-
стной автоматизированной обработки регистрируемой инфор-
276
мадии. Другое преимущество заключается в многократности
использования носителя информации, что обеспечивает снижение
затрат времени на подготовку БСРПД к очередному полету.
"Регистрация многих параметров в одном канале носителя ин-
формации требует применения коммутационной аппаратуры,
обеспечивающей поочередное подсоединение к этому каналу на-
пряжений от различных датчиков. В качестве 'коммутаторов мо-
гут использоваться как электромеханические, так и электрон-
ные устройства, принципы построения которых такие же, как и
в 'системах автоматического контроля (см. § 3 гл. X).
Частота опроса параметра при записи назначается из усло-
вий неискаженного воопроизведения непрерывного сигнала и со-
ставляет обычно 1—30 гц.
При выборе методов модуляции учитываются как спектр сиг-
налов датчиков, так и динамические свойства записывающей
головки, нижний предел частоты для которой составляет пример-
но 50 гц. Применение амплитудной модуляции (с использова-
нием несущей частоты) связано с амплитудными искажениями,
являющимися следствием неоднородности свойств магнитного
носителя. Свободными от указанного недостатка являются такие
методы модуляции, как частотная, фазовая, времяимпульоная и
кодово-импульсная (цифровая), которые и получили преимуще-
ственное распространение в БСРПД с магнитным носителем ин-
формации.
При частотной модуляции амплитуда модулирован-
ного напряжения остается постоянной, а частота изменяется в
соответствии с законом изменения сигнала
® = шо + х (/),
где /гш — коэффициент пропорциональности; x(t) — регистри-
руемый сигнал; <о0 — частота немодулированного напряжения
(соответствует нулевому значению сигнала).
Из выражения для <о следует, что погрешности в записи при
частотной модуляции 'обусловлены как колебаниями несущей
частоты ш0, так и непостоянством скорости протяжки магнитной
ленты (что эквивалентно изменению со0). Для устранения этих
погрешностей на дополнительной дорожке ленты записывается
частота немодулированного напряжения, что позволяет при об-
работке записи учесть ошибки от колебаний несущей частоты и
скорости протяжки.
Частотная модуляция в БСРПД обычно реализуется путем
включения в колебательный контур реактивных элементов, со-
противление которых изменяется под воздействием регистрируе-
мого сигнала. Тем самым достигается изменение частоты собст-
венных колебаний контура пропорционально сигналу. В качестве
реактивных элементов, изменяющих индуктивное сопротивление
контура, обычно применяются специальные реактивные лампы
277
или магнитные усилители, для изменения емкости используются
вариконды.
На рис. 11.5 представлена блок-'схема БСРПД с частотной
модуляцией. Роль реактивного сопротивления выполняет лампа
Л2, подключенная параллельно колебательному контуру, образо-
ванному генераторной лампой JIi, индуктивностью L и ем-
костью С. Коммутатор БСПРД состоит из трех секций, каждая
Р ис. 11.5. Блок-схема магнитного регистратора с частотной модуляцией
из которых содержит одинаковое число параллельно работающих
(от общего шагового привода) коммутирующих элементов. Пер-
вая секция коммутирует сигналы с датчиков |(таких секций мо-
жет быть несколько); вторая секция коммутирует немодулиро-
ванное напряжение несущей частоты, необходимое для компенса-
ции ошибок при демодуляции; третья секция обеспечивает за-
пись временных отметок в отдельном канале носителя. Шаговый
привод коммутатора работает в старт-стопном режиме от так-
товых импульсов стабилизированной частоты. Таким обравом,
«опрос параметров» проводится через строго фиксированные про-
межутки времени с постоянной частотой. (Заметим, что в более
совершенных схемах БСПРД в интересах большего уплотнения
информации реализуется различная частота опроса параметров
в зависимости от частоты их изменения и даже варьируется ча-
стота опроса одного параметра в зависимости от текущих его-
значений). Модулированные по частоте сигналы после усиления
поступают на записывающие головки ЗГ.
278
Блок-схема наземной аппаратуры декодирования и восста-
новления информации БСРПД 'представлена на рис. 11.6. Сня-
тая с БСПРД кассета Ki устанавливается в устройство воспроиз-
водства (УВ). Сигналы датчиков, записанные на первой дорож-
ке, снимаются головкой воспроизводства ГВг и после усиления в
/7У, и демодуляции (Д1) поступают в корректор ошибок КО, в
котором из демодулированных напряжений датчиков вычитает-
ся демодулированный сигнал ошибки (из-за неравномерности
Рис. 11.6. Схема декодирования и восстановления информации магнитных
регистраторов с частотной модуляцией
протяжки в БСПРД), который воспроизводится на второй до-
рожке. Селектор С, управляемый сигналами электронного бло-
ка управления (БУ), обеспечивает разнесение сигналов датчи-
ков, записанных в одном канале БСПРД по отдельным каналам
осциллоскопа (О), шлейфового осциллографа (ШО) или цифро-
вого печатающего устройства (ЦП). На блок управления посту-,
пают сигналы отметок времени с ГВз, записанные на третьей
дорожке. При 'большом числе регистрируемых в БСПРД пара-
метров в наземной аппаратуре проводится обработка в несколько
приемов (по 20—30 параметров), ввиду ограниченных возмож-
ностей осциллографов и печатающих устройств. Осциллоскопы
используются для экспреос-анализа.
Метод частотной модуляции применен в английской системе
регистрации типа «Мидас», которая имеет коммутатор с восемью
секциями (по 45 ламелей каждая) и с общим шаговым приво-
дом. При этом шесть секций используются для коммутации сиг-
налов с датчиков; одна — для коммутации несущей частоты и
одна — для временных отметок. Несущая частота составляет
700 гц. Шаговый привод обеспечивает четыре времени цикла
коммутации: 0,6; 1; Зм 6 секунд. В соответствии с длительностью
279
цикла коммутации скорость протяжки ленты составляет 25,4;
15,24; 5,08 и 2,54 мм/сек. Регистрация производится на магнитной
Ленте шириной 12,7 мм. Запас ленты составляет 550' м, Общая
ошибка записи и воспроизведения (без учета погрешности дат-
чиков) — не более 1 %.
Рис. 11.7. Блок-схема магнитной системы регистрации с времяимпульс-
ной модуляцией
В БСРПД с времяимпульсной модуляцией на-
пряжения с датчиков преобразуются во временные интервалы
так, что длительность интервала пропорциональна величине на-
пряжения. Блок-схема одного из вариантов Б'СПРД с в'ремя-
импульсной модуляцией приведена на рис. 11.7. Напряжения с
датчиков регистрируемых параметров Дт— Дни подаются че-
рез распределительное устройство на кодирующие ячейки КЯ1—
КЯ12, представляющие собой ждущие ламповые мультивибрато-
ры. Первая кодирующая ячейка КЯ1 запускается импульсом,
полученным при дифференцировании заднего фронта прямо-
угольного импульса кадрового мультивибратора КМ. В ячейке
КЯ1 вырабатывается прямоугольный импульс с длительностью,
пропорциональной мгновенному значению напряжения датчи-
ка Д{.
Задний фронт этого прямоугольного импульса тоже диффе-
ренцируется и одновременно запускается ждущий мультивибра-
тор второй кодирующей ячейки КЯ2, которая формирует пря-
моугольный импульс с длительностью, пропорциональной напря-
жению второго датчика Дг. Циклы запуска последующих коди-
рующих ячеек аналогичны.
Дифференцирование задних фронтов прямоугольных импуль-
сов КМ и КЯ одновременно осуществляется также цепочками
280
ДЦ2 — ДЦИ, выходы которых поступают в смеситель, Таким
образом, на выходе ДЦ\— ДЦ12 образуется последовательность
коротких импульсов, расстояния между которыми (временные
интервалы) пропорциональны напряжениям датчиков, причем
эти временные интервалы последовательно отвечают напряже-
ниям датчиков Дн1—Дн\2- Усиленные импульсы отрицательной
полярности после формирования с помощью ждущего блокинг-
генератора подаются на записывающую головку магнитного ре-
гистратора (на 'схеме рис. 11.7 — контейнер с ЛПМ). Кодирую-
щая ячейка КЯ13 служит для кодирования отметок времени, по-
ступающих от электрочасов.
Поскольку каждый последующий цикл срабатывания коди-
рующих ячеек начинается после подачи очередного импульса от
кадрового мультивибратора, то между концом работы последней
кодирующей ячейки и началом работы первой имеется интервал
времени, зависящий от величины напряжений, снимаемых с дат-
чиков. За один цикл кодирования на магнитной ленте записы-
вается один кадр, содержащий 15 импульсов и 13 временных ин-
тервалов.
Рис. 11.8. Формирование выходных им-
пульсов при времяимпульсной модуляции
На рис. 11.8 для примера покаеан процесс формирования вы-
ходных импульсов, поступающих в записывающее устройство,
для трех регистрируемых параметров: и{; и2; На графике а —•
кривые изменения параметров во времени, б — импульсы кад-
рового мультивибратора (по трем циклам кодирования); в, г,
281
д — широтно-импульсное преобразование каждого из трех на-
пряжений; е — расположение выходных импульсов, следующих
в устройство записи.
Электрическая'схема времяимпульсного кодирования приведе-
на на рис. 11.9. Кадровый мультивибратор выполнен на лампе
Л}1 первая кодирующая ячейка (ждущий мультивибратор) — на
лампе Л2, усилитель—на Л]5 и блок-инг-генератор—на ЛХ6. Диф-
ференцирование осуществляется цепочками Т?8СБ; Ri2C6,
Д1С1; R2C2... Диоды До- Д,2, ••• пропускают на сетку Л\5.
лишь отрицательные импульсы. Сигнал с датчика подается
на сетку Л2. Импульс с кадрового мультивибратора, поступая
на левый анод Л2, закрывает правую половину Л2 на время, рав-
ное времени перезарядки конденсатора С7, а оно пропорциональ-
но напряжению, поданному на сетку левой половины Л2, т. е.
напряжению датчика.
Распределительное устройство ,(см. рис. 11.7) периодически
отключает датчики от кодирующих ячеек и подключает вместо
них на время 0,2—0,5 сек калибровочное напряжение, необходи-
мое для последующего декодирования, и напряжения датчиков
разовых команд Др1 — ДрК.
При сохранении того же количества кодирующих ячеек уве-
личение числа регистрируемых параметров может быть достиг-
нуто путем введения .в БСПРД коммутатора, обеспечивающего
периодическую смену групп параметров, подключаемых к ко-
дирующему устройству.
Блок-схема наземной аппаратуры декодирования изображена
на рис. 11.10. Считанная головкой воспроизведения (в ЛПМ) се-
рия импульсов после усиления поступает в генератор кадровых
импульсов (ГКИ), формирующий кадровые импульсы по первым
импульсам считанных кадров, и в распределительное устройство
(РУ), которое состоит из счетной схемы (Т\—Г4) и диодной мат-
рицы (ДМ). Счетная схема выполнена на триггерных ячейках
с двумя устойчивыми состояниями. Установка ее в исходное по-
ложение производится перед началом обработки каждого кадра
кадровым импульсом ГКИ. Диодная матрица построена так, что
напряжение выделяется на той питие, номер которой соответст-
вует числу импульсов, подсчитанному в счетной схеме (напом-
ним, что число импульсов в кадре без учета первого кадрового
равно числу регистрируемых параметров, сумма k импульсов от-
вечает й-тому параметру).
Напряжение на шине в виде прямоугольного импульса выде-
ляется только в промежутке между импульсами, так как после
прихода очередного импульса счетчик устанавливается в новое
положение. Выход РУ выполнен по типу телефонных гнезд, что
дает возможность выбирать для дальнейших преобразований в
аналоговую форму (ШИМ-AA'I) любые параметры. Запись отме-
ток времени (ОБ) осуществляется по каналу временных отме-
ток РУ.
282
Рдс. 11.9. Электрическая схема времяимпульсногр кодирования
S8S
Времяимпульсная модуляция нашла применение >в отечест-
венных магнитных регистраторах, простейший ив которых
_МСРП-1'2 регистрирует 12 параметров и 12 разовых команд,
имеет частоту опроса порядка 30 гц, точность не хуже 1 % и вы-
полнен в варианте аварийного самописца.
Рис. 11.10. Схема декодирования и восстановления информации
магнитных регистраторов с времяимпульсной модуляцией
Основным недостатком БСРПД с частотной и времяимпульс-
ной модуляцией является трудность одновременной автоматиче-
ской обработки и количественного анализа большого 'числа ре-
гистрируемых параметров. При значительном числе записывае-
мых параметров с учетом требования минимизации времени на
восстановление .и анализ информации и особенно с учетом необ-
ходимости количественного ее анализа эту обработку целесооб-
разно реализовать с помощью ЭЦВМ. Наиболее удобной при
этом формой модуляции является цифровая кодово-импульсная
модуляция, которая к тому же обеспечивает и наибольшую точ-
ность записи на носителе.
В БСРПД с цифровой формой записи сигналы
.датчиков параметров преобразуются в цифровой код. При этом
возможна регистрация отдельных разрядов двоичных чисел как
вдоль магнитной ленты (последовательная запись), так и попе-
рек (параллельная запись).
Для преобразования аналоговых величин в цифровую форму
в БСРПД используются такие же, как и в системах автоматиче-
ского контроля, преобразователи «аналог—код» (см. § 10.4,
гл. X), а для подключения датчиков к преобразователям приме-
няются преимущественно электронные коммутаторы типа диод-
ных матриц (см. § 10.3, гл. X). Особенность состоит лишь в не-
обходимости вывода и записи цифрового кода на магнитный но-
ситель.
2284
На рис. 11.11 приведена схема коммутации и преобразова-
ния сигналов датчиков в цифровой пятиразрядный код. В основу
преобразования положен принцип поразрядного кодирования ПО'
схеме сравнения (с обратной связью). Напряжение цэт на выхо-
де кодирующей матрицы сопротивлений регулируется пятью уп-
равляющими триггерами. Старшему разряду отвечает эталонное
напряжение Е, следующему — Е/2 и т. д. При поступлении пер-
Р и с. 11.11. Кодирующее устройство цифровых магнитных систем регистрации
вого импульса с распределителя первый управляющий триггер ус-
тановит на выходе матрицы «ат = Е. Если Е)>' их^ то на 'выходе
нуль-органа появится напряжение, которое подается на схему
«И» и закрывает схему «НЕ». Первый тактовый импульс через
времят/2 после импульса распределителя через схему «И» опро-
кидывает выходной триггер, подавая на схемы «И1».....«И4»
напряжение. На выходном триггере в старшем разряде появится
импульс «О». Второй импульс с распределителя через «Ир> опро-
кинет первый управляющий триггер, снимая с выхода матрицы
эталонное напряжение Е. Одновременно опрокидывается второй
управляющий триггер и для сравнения 'в нуль-орган поступает
- И9Т = Е/2.
Если Е < ах, то на выходе нуль-органа напряжения
не будет, схема «НЕ» открыта и задержанный на т/2 тактовый:
импульс установит выходной триггер в положение, при котором
с его выхода подается импульс «1» в старший разряд. На схемы-:
«И1».... «И4» напряжение не подается. Второй импульс распре-
делителя опрокинет второй управляющий триггер и к напряже*
нию Е прибавится Е/2 и далее проводится сравнение.
Е '
Всли Е -j- — <_ их, то на выходе в следующем разряде бу*
285-
дет «1», если Е -Д—> ил< г0 Тогда на следующем шаге Е/2
снимется, а добавится Е/4 и т. д. С выходного триггера код ре-
гистрируемого параметра поступает (после усиления и формиро-
вания) на записывающую головку ЗГ.
Функциональная схема наземной аппаратуры обработки ин-
формации цифровых БСРПД приведена на рис. 11.12. Бели
принята последовательная запись, то после усиления (У) и фор-
мирования (БФ) проводится преобразование последовательного
кода в параллельный (ПК). Селектор С распределяет информа-
Р и с. 11.12. Примерная структура устройств для
наземной обработки информации цифровых систем
регистрации
цию по отдельным каналам. Управление селектором осуществ-
ляется через блок управления (БУ) при помощи синхронизирую-
щих импульсов, записанных на одной из дорожек. С выхода се-
лектора информация поступает для анализа и количественной об-
работки в специализированную ЭВМ, в преобразователь в деся-
тичный код и на печатающее устройство. При необходимости мо-
жет быть использован преобразователь «код—аналог» с после-
дующей регистрацией информации — в шлейфовом осциллогра-
фе пли индикацией в осциллоскопе.
Системы с цифровым двоичным кодированием обладают наи-
большей сравнительно с другими методами кодирования точ-
ностью регистрации, причем эта точность повышается с увеличе-
нием числа разрядов. Однако они имеют наименьшую плотность
/записи. Если в БСРПД с частотной модуляцией плотность за-
писи составляет около 30 значений параметров на одном санти-
метре длины магнитной ленты, в БСПРД с времяимпульсной мо-
дуляцией — 12—14 значений, то в цифровых системах регистра-
ции с 15-разрядной записью — примерно 7—8 значений на один
сантиметр длины.
286
Важным элементом БСПРД является записывающее устройст-
во с носителем информации. В настоящее время как у нас, так и
за рубежом в качестве магнитного носителя информации при-
меняется магнитная лента различной ширины . (6,35; 12,7;
19,05; 25,4; 35мм)-. Пластмассовая основа ленты изготовляется из
ацетилцеллюлозы или полихлорида. Наиболее термостойкой и
прочной считается лента с основой из полиэфирной смолы. Та-
кая лента имеет температуру размягчения 220°С, а удельное
разрывное усилие —порядка 40 кг/жм2. С целью повышения
термостойкости и прочности в качестве магнитного носителя в
некоторых конструкциях применяют стальную проволоку с диа-
метром 0,05—0,06 мм, однако на ней можно осуществить лишь
одноканальную запись, в то время как на магнитной ленте число
дорожек записи может быть большим. Перспективным материа-
лом.для носителя информации магнитного типа считается тон-
кая стальная лента, которая при высокой прочности и термостой-
кости позволяет осуществить многоканальную запись.
Записывающие магнитные головки конструктивно выполня-
ются в виде единого узла с числом обмоток, равным числу доро-
жек (каналов). Чаще всего используются головки с плоскими
полюсными наконечниками, но большую плотность записи мож-
но получить с помощью головок с остроконечными полюсными
наконечниками. Ширина щели в сердечнике головки составляет
около 20 микрон.
Кассеты с магнитным носителем в целях сокращения объема
и веса БСПРД располагают одну над другой. Запас магнитной
.ленты в кассетах БСПРД колеблется в пределах от 100 до
1000 м и зависит от числа регистрируемых параметров, частоты
опроса, плотности и длительности'записи,
В зависимости от назначения БСРПД длительность записи
может быть различной — от 30 минут до 50—300 часов. Соответ-
ственно БСРПД может накапливать информацию за несколько
полетов, за один полет или за фиксированный интервал времени
в процессе одного полета. В последнем случае процесс записи
организуется так, что при достижении с момента взлета установ-
ленного времени записи (например, 30 минут) запись новой ин-
формации производится на месте стираемой старой записи. Та-
ким образом, всегда сохраняется информация за предшествую-
щие данному моменту времени 30 минут полета. Такая цикличе-
ская запись характерна для аварийных регистраторов и реали-
зуется чаще всего по принципу реверсирования (например, вна-
чале запись на первой дорожке, затем с реверсом — на второй
дорожке, затем снова реверс и запись на первой дорожке со сти-
ранием старой и т. д.).
Рассмотрим способы защиты и спасения накопителей инфор-
мации аварийных БСРПД и их размещение на летательном ап-
парате. Применительно к задаче расследования причин летных
происшествий необходимо, в случае аварии или катастрофы, за-
287
щитить накопитель информации от воздействия ударов, огня, во-
ды и агрессивных жидкостей. На случай возможного погружения
в воду необходимо обеспечить плавучесть и спасение блока с за-
регистрированной Информацией.
Решение этих задач достигается различными способами.
В ряде конструкций блок с записанной информацией защищает-
ся путем размещения его в шарообразном контейнере с двойны-
ми стенками, пространство между которыми заполнено водой
(рис. 11.13). Каждая из двух полусфер состоит из теплоизоля-
ционной рубашки, представляющей собой полость, образован-
ную двумя алюминиевыми колпаками различного диаметра и
Рис. 11.13. Контейнер с лентопротяжным
механизмом:
J — пенопластовая облицовка; 2 — защитная
оболочка из стеклотекстолита; 3 — теплоизоляци-
онная рубашка с водой; 4 — верхняя кассета;
5 — нижняя кассета; 6 — штуцер подвода воз-
духа; 7 — монтажное основание
покрытую изнутри пенопластом и защитной оболочкой из стекло-
текстолита. Внутренний колпак имеет ряд клапанов из легко-
плавкого металла. Полусферы скрепляются специальным зам-
ком. Такой контейнер обеспечивает защиту от действия огня (до
1000°С в течение 10 минут), жидкости и ударов до 200g; Кон-
тейнер размещается на монтажном основании с помощью бол-
тов, которые при ударе о землю или другое препятствие среза-
ются и контейнер отделяется.
В других БСРПД блок с носителем информации спасается
путем катапультирования. Плавное снижение блока может обес-
печиваться при помощи парашюта или авторотационного устрой-
ства (рис. 11.14). Блок обеспечивается средствами плавучести,
а для быстрого его обнаружения он оборудуется радио- и свето-
маяками, окрашивается в оранжевый цвет. На случай привод-
288
нения блок снабжается запасом красящего вещества, которое со-
здает на водной поверхности большое устойчивое яркое пятно.
Катапультирование блока с носителем информации может про-
изводиться по сигналам датчиков перегрузки, температуры или
давления.
Из условия наибольшей надежности сохранения аварийной
информации регистратор обычно устанавливается в хвостовой
части летательного аппарата, так как в случае катастрофы она
в наименьшей степени подвержена разрушению.
Рис. 11.14. Способы спасения аварийной ин-
формации:
РМ—радиомаяк; I4CM—импульсный све-
томаяк; СОП— средство обеспечения пла-
вучести; НИ — носитель информации
Особенности эксплуатации аварийных систем регистрации по-
летных данных состоят в следующем:
— включение в работу 'бортовых средств регистрации являет-
ся обязательным при выполнении каждого полета, начиная с мо-
мента выруливания на старт и заканчивая заруливанием на сто-
янку;
— при неподготовленных бортовых средствах регистрации
летательный аппарат считается неисправным;
— защитные контейнеры накопителей информации пломби-
руются перед полетом; ’
— в случае летных происшествий или предпосылок к ним за-
прещается вскрытие контейнера с накопителем информации до
прибытия назначенной для.этого комиссии;
— съем и расшифровка информации после нормальных поле-
тов в интересах обучения летного состава и улучшения процесса
эксплуатации осуществляются по указанию командира и стар-
шего инженера части.
19. Румянцев Е. А. и др.
289:
‘ ' § 11.3. РЕГИСТРИРУЕМЫЕ ПОЛЕТНЫЕ ДАННЫЕ
И МЕТОДЫ ИХ ОБРАБОТКИ
? • Количество и состав регистрируемых параметров определя-
ются в основном назначением системы регистрации (аварийная,
эксплуатационная или испытательная БСРПД), типом летатель-
ного аппарата, на котором она устанавливается, а также тем, на-
екалько оптимально осуществлен выбор этих параметров.
Оптимизация состава и числа регистрируемых данных про-
водится, как правило, на основе опыта эксплуатации, теорети-
ческих, экспериментальных и летных исследований. Основные за-
дачи, которые должны быть при этом решены, состоят в обеспе-
чении заданных точности, скорости и достоверности восстанов-
ления и анализа зарегистрированной информации при допусти-
мых весогабаритных и других характеристиках бортовой и на-
земной аппаратуры БСРПД.
В общем случае.регистрируемые в полете данные можно раз-1
делить на следующие основные группы:
1. Параметры, характеризующие воздействие факторов внеш-
ней среды. К ним относятся: температура наружного воздуха,
мощность ионизирующей радиации, горизонтальная дальность
видимости и т. п. Анализ этих параметров обеспечивает оценку
условий полета.
2. Параметры, характеризующие пространственное положе-
ние летательного аппарата. Это такие параметры, как: время,
высота и скорость полета, отметки о прохождении ближнего и
дальнего привода; отклонения от равносигнальной зоны курсово-
го и глиссадного радиомаяков; углы сноса, к^рса, тангажа, кре-
на, атаки; угловые скорости тангажа, крена, рысканья; перегруз-
ки по трем осям; вертикальная скорость. Информация об этих
данных является весьма важной при восстановлении внешней
картины летного происшествия и при оценке правильности вы-
полнения экипажем полетного задания.
3. Параметры, характеризующие действия экипажа в нор-
мальных и аварийных ситуациях, К этим параметрам относятся
положения органов управления рулями, триммерами, автопило-
том, шасси, закрылками, двигателем, аварийными системами и
т. п. Анализ этих параметров проводится в сочетании с парамет-
рами второй группы.
4. Параметры, характеризующие состояние бортового обору-
дования летательного аппарата. Прежде всего это параметры о
состоянии систем управления летательным аппаратом, силовых
установок, труппы пилотажно-навигационных приборов, аварий-
ных и основных самолетных систем (топливных, гидросистем и
др.). При этом регистрируются такие данные, как отклонения
управляющих поверхностей, числа оборотов и крутящие моменты
двигателей, давление в -гидросистеме, расход топлива, напряже-
ния сети постоянного и переменного тока, сигналы об отказах ги-
299
ровертикалей, курсовых систем и т. п. Эта группа содержит
обычно наибольшее число параметров, информация о которых
необходима для расследования летных происшествий и техниче-
ской диагностики бортовых систем летательного аппарата.
5. Параметры, характеризующие психофизиологическое со-,
стояние членов экипажа: частота пульса, легочная вентиляция,
энцефалограмма и др.
6. Служебные данные: дата полета, номер полета и самоле-
та, самолетное время, внутрикабинные переговоры экипажа с
землей.
Регистрация и последующий анализ полетных данных предо-
ставляют весьма ценные сведения для решения ряда эксплуата-
ционных задач.
Представляет интерес оценка количества информации, кото-
рую может доставить регистрация случайного процесса измене-
ния некоторого параметра состояния оборудования или коорди-
наты движения в полете конечной длительности. Важным яв-
ляется также определение .методов отбора тех полетных записей,
которые с точки зрения технической диагностики несут наиболь-
шее количество информации, и изыскание способов' уплотнения
информации для последующей передачи на хранение или стати-
стический анализ по многим реализациям записей.
Заметим, что аналогичные задачи 'возникают при регистра-
ции данных периодического контроля состояния авиационной
техники на земле за некоторый промежуток времени эксплуата-
ции, включающий в себя многие проверки состояния техники.
Будем исходить из того, что регистрируемый параметр может
принимать в полете непрерывные случайные значения х, причем
априори известна функция плотности распределения этих зна-
чений f(x).
При дискретной записи имеет место квантование по уровню
с шагом 8V и по времени с интервалом М. Если хП1ах— Amin
представляет собой диапазон изменения параметра, то с учетом
квантования по уровню число возможных дискретных значений
параметра составит величину ....
____ ^-max -^min
и С —— »
8.
.причем вероятность t-того значения параметра
№л-.
p(xi) = P[(i- 1)8V< Дх <t8,]= j f (Ах) dx, (11.1)
(t-i)8A.
тде А х=л—л*т1п, t = 1, 2,..., m.
События появления того или иного значения параметра обра-
зуют полную группу
/71
Ep(xz)=1.
1=1
19е 291
За ъремя Т записи параметра в полете с учетом интервала:
Т
квантования по времени регистрируется п — значений па-
раметра.
Регистрация параметра производится с помехами, не исклю-
чены также различные отказы в системе регистрации. Поэтому
зарегистрированное значение параметра у будет в общем случае
не совпадать с истинным его значением х. Будем полагать, что>
диапазон регистрации _ршах —ymin согласован с диапазоном из-
менения параметра%тах—%min, так что множество У{г/1; Уг', ,ут}
включает также т элементов, причем принимается правило: при.
регистрации уг- делается заключение о том, что параметр имеет
значение xt.
Частная информация о некотором конкретном значении пара-
метра X;, содержащаяся в единичном акте регистрации значе-
ния yj в произвольный момент времени tK = k A t, будет равна:
= log
P<Xilyj)
P(xi)
где p(Xilyj) — апостериорная-вероятность, которая в отличие от
идеальных процессов регистрации при j = i не равна единице..
Частная информация о множестве значений Х(хг, х2;..., хт\
содержащаяся в записи значения Ур составит величину
Р (Xi/yj) log
Р (Xt/yj)
Р (xi)
(И. 1>
Пусть за полное время регистрации Т записанная дискрет-
ная функцияут(О приняла гц раз значение г/i; п2 раз — значение-
Уч‘, ... , птраз—значениеут. Тогда полная информация о пара-
метре %(/), содержащаяся в записи дискретной функции yT(t}
длиной Т, получится суммированием частных информаций (11.1):
т
Р (Xilyi) log —+ пг 2 Ptxjy^log Р
Р р (Л;)
т
+ • • пт У, р (xjyj log t (11 2>
, P(xi)
где n-
292
Преобразуем (ГГ-.2) к другому виду:
т т
2j Р (xi/yJ 10S ’ f11 -3)
Ml /=1
tlj
где vy. = — - частота повторения значения у7- в данной записи
параметра в течение времени Т.
Как и следовало ожидать, количество информации о парамет-
ре х(£), доставляемое одной реализацией записи, возрастает с
увеличением длительности Т и уменьшением интервала кванто-
вания по времени № (т. е. с повышением «частоты» опроса пара-
метра), так как при этом увеличивается п. возрастает
также с уменьшением шага квантования по уровню (т. е. с уве-
личением разрядности при цифровой записи), так как при этом
в '(П.З) возрастает число членов суммы т, а величина каждого
из них становится большей в связи с уменьшением вероятностей
/»(х(-). Информация возрастает также с уменьшением погрешно-
стей регистрации. При р =1; р (Xilyfr+i = 0
.она становится максимальной.
nj
Заметим, что при значительном увеличении п частота = —
в (Н.З) то вероятности стремится к p(yj)- Тогда средняя инфор-
мация на один акт измерения и регистрации приводится к из-
вестной из теории информации формуле полной (средней) ин-
формации о системе А’, содержащейся в сообщении о том, в ка-
ком состоянии находится система У:
г т т
г 7у^х V , . V / , ч, P(xilyj)
4p = -!L- = 2j Р log ———.(11.4)
П р (Л;)
у-1 г = 1
Однако при оценке информации по (11.4) любая запись с ко-
нечной длительностью Т будет давать одно и то же количество
информации I = п fcp- Между тем, представляется очевидным,
что регистрация процесса конечной длительности, в котором про-
изошли весьма редкие события появления маловероятных зна-
чений х, должна доставлять больше информации сравнительно с
регистрацией процессов, в которых имели место лишь события
.•высоковероятной группы.
Формула (И.З) обладает этим весьма важным свойством.
Действительно, если параметр хв полете приобретал значения хь
имеющие малую априорную вероятность p(xt), что отвечает,
например, выходу параметра за поле допуска, исчезающему от-
казу и т. п., то информация, подсчитанная по (11.3), будет в этом
случае больше, чем для реализации записи «нормального» по-
лета, в котором подобных событий не было. Это свойство дает
293
возможность при обработке записей после полетов отобрать для
последующего детального анализа в интересах технической диа-
гностики (или оценки качества пилотирования) те из них, в-
которых имеет место существенное превышение Л»т-х сравни-
тельно с «нормальными» ее величинами, а также решать задачи
уплотнения -информации.
Рассмотрим эти вопросы подробнее и попутно дадим другую
трактовку оценки (11.3).
Общее число возможных дискретных реализаций процесса
хф/) длительностью Т составит величину
k=mtl. (II.5)
Вероятность некоторой р-ой реализации процесса, в которой
Х[ повторяется «1р. раз, х2 — раз и т. д., будет равна:
m
Ру. = П Р (х2)П29- . . .р (л;„)""'р-,
где Л1р. 4- Д2|1 + • • nmti. ~ п"
Частная информация при идеальном без погрешностей наблю-
дении этой реализации будет равна:
ш m
/fvtx = — log ГТ (^)"ip-= ti '>lv. l°g —7— • (!1 -6)
i=l i=l
Сопоставляя (11.3) при p{^ilyj)i^j = ^t P (xilVj)i=j 1 с со-
отношением (11.6), нетрудно убедиться, что они одинаковы. Та-
ким образом, (11.3) можно трактовать как частную информацию
о процессе x(t), содержащуюся в одной записи конечной дли-
тельности этого процесса с учетом -погрешностей регистрирую-
щей системы.
Отсюда следует также, что максимальное количество полной
информации о процессе x(t) по всем возможным дискретным
реализациям составит величину
.. k
Дпах = X Ру. lOgPp.’
ц=1
где pv.~- вероятность ц-ой реализации, р = 1, 2. . . к.
Каждая :из --возможных k реализаций дискретного процесса
лт(7) представляет собой комбинацию значений xt (t=l, 2,..., т)Л
повторяющихся iiiv. раз|(/г.;р. = 1, 2,..., п). Вероятность любой
из k комбинаций можно найти из соотношения
' [jO('Vi) + p(%2) +• ..-b/7(jc (11.7)
294
Распределим все возможные реализации в (11.7) в порядке
возрастания вероятностей их появления. Так как (11.3) не учи-
тывает порядка следования различных значений в реализации,
то можно-выделить .группы равновероятных реализаций, в кото-
рых частоты выпадения одних и тех же .значений одинаковы, а
порядок следования значений различен. Нетрудно показать, что
общее число таких групп составит величину
... = '
Пронумеруем от 1 до и расположим все группы реализа-
ций в порядке возрастания априорных вероятностей входящих
в них реализаций. При таком распределении информативность
реализаций будет уменьшаться с увеличением номера от 1 до k*.
Подсчет оценки (11.3) с помощью автоматических средств
обработки записей систем регистрации и отнесение записанной
реализации случайного процесса изменения параметра к той или
иной группе (установление ее номера) не вызывают затрудне-
ний. Считается число попаданий значений параметра в у-тый ин-
ft.
тервал (/ = 1, 2,..., т), рассчитываются величины v?. = >
а затем проводится их суммирование, .при котором каждая ве-
личина «взвешивается» с коэффициентом
V i ом р
Р(-П)
7=1
. Эти коэффициенты могут быть рассчитаны заранее с учетом
априорных вероятностей р (х() и погрешностей регистрации.
Рассчитанное таким образом'значение /ут^х сравнивается с
величинами /И Y (X = 1, 2,'..., k*) / подсчитанными для всех
возможных групп реализаций и пронумерованными указанным
выше образом, и устанавливается номер исследуемой реализа-
ции. Если по допуску на параметр или по другим соображениям
назначена область «нормальных» реализаций и указано предель-
нодопустимое /доп значение оценки (.11.3), которое позволяет от-
нести соответствующую реализацию к той или иной области, то
предварительный отбор записей сводится к тому, что все записи
с номером, меньшим Хдоп, отправляются на детальный анализ с
целью выявления отказов, разрегулировок и т. п. ..
Уплотнение информации, доставляемой записью параметрам
полете, для передачи на хранение или последующую статисти-
ческую обработку по многим, летательным аппаратам в простей-
шем-случае можно свести.к указанию номера реализации. -;
При ’записи разовых-команд, а также.регистрации не полной
кривой изменения параметра, а только событий выхода парамет-
ра за поле допуска, оценку количества информации можно полу-
чить по той же формуле (11.3), если в ней принять т == 2, под
p(xj) понимать вероятность выхода параметра из поля допус-
ка, а .под р(х2) — .вероятность противоположного события.
При регистрации многих независимых полетных данных в
дискретной форме общая информация БСРПД подсчитывается
путем суммирования количеств информации, которые несут за-
писи отдельных полетных данных. Такие подсчеты, с учетом при-
нятых форм записи, позволяют оценить информационную ем-
кость БСРПД.
Рис. 11.15. Схема автоматической обработки информации аварийных
БСРПД
Поиск неисправности, восстановление причины летного про-
исшествия и решение других задач технической диагностики по
зарегистрированным полетным данным обычно осуществляются
с применением комбинационных методов. На основе предвари-
тельных исследований каждой возможной причине летного про-
исшествия (или отказу оборудования) ставится в соответствие
вполне определенная комбинация значений различных призна-
ков, сопутствующих этой причине летного происшествия. Если
число причин равно N, то после анализа всех выявленных приз-
наков отбирают минимальную, достаточную для их различения
совокупность т признаков. Все эти признаки записываются в по-
лете одновременно.
Значению признака приписывается 1, если он должен наблю-
даться при некоторой /-той причине летного происшествия, и 0 —
если не должен проявляться. Таким образом, каждой причине
летного происшествия будет отвечать своя особая кодовая дво-
ичная комбинация значений признаков, включающая т разря-
дов.
Одна из возможных принципиальных схем наземного уст-
ройства автоматической обработки информации бортовых систем
регистрации приведена на рис. 11.15. Считываемая с носителя
информации (например, с магнитной ленты) запись процесса из-
менения в полете того или иного параметра поступает в схему
29.6
предварительной обработки, где она анализируется последова-
тельно по времени. При этом устанавливается наличие призна-
ков, отвечающих различным причинам летных происшествий, и
производится формирование цифровых кодов признаков по всем
.зарегистрированным полетным данным. Цифровой т-разрядный
двоичный код признаков, полученных с системы регистрации, по-
ступает далее в устройство сравнения, где он последовательно
сравнивается с кодами признаков первой, затем второй и после-
дующих возможных причин, хранящихся в долговременном за-
поминающем устройстве (ДЗУ), При совпадении кодов фикси-
руется номер причины, а затем по каталогу устанавливается са-
ма причина летното происшествия.
Достоверность восстановления причины летного происшест-
вия по указанному способу будет зависеть от числа неучтенных
возможных летных происшествий, а также от ошибок измерения,
регистрации и обработки полетных данных. Так как в полетах
могут встретиться новые, ранее не встречавшиеся ситуации, свя-
занные с отказами, особыми внешними условиями, ошибками
пилотирования и т. п., то основную роль в анализе полетных
данных играет непосредственное исследование записей со сторо-
ны инженеров-экспертов и других специалистов, в распоряже-
ние которых предоставляются автоматические дешифрирующие
устройства, графопостроители, осциллографы и другая вспомога-
тельная аппаратура.
Глава XII
АЭРОДРОМНЫЕ СРЕДСТВА ОБСЛУЖИВАНИЯ
ЛЕТАТЕЛЬНЫХ АППАРАТОВ
§, 12.1. НАЗНАЧЕНИЕ И КЛАССИФИКАЦИЯ АЭРОДРОМНЫХ
СРЕДСТВ ОБСЛУЖИВАНИЯ
Содержание современных летательных аппаратов в исправ-
ном состоянии, а также быстрая и высококачественная подготов-
ка их к полетам невозможны без применения большого количест-
ва разнообразных устройств, механизмов и специальных машин,,
с помощью которых механизируется и автоматизируется про-
цесс технического обслуживания.
Комплекс технических устройств и специальных машин,,
предназначенный для наземного обслуживания летательных ап-
паратов, называется аэродромными средствами обслуживания.
Аэродромные средства обслуживания летательных аппаратов,
являются одной из составных частей средств аэродромно-техни-
ческого обеспечения. Второй составной частью средств аэродром-
но-технического обеспечения являются специальные аэродромно-
эксплуатационные машины и механизмы, которые применяются
для подготовки, содержания и текущего ремонта аэродромов.
Здесь, кроме механизмов и машин, заимствованных из народно-
го хозяйства, применяются также вакуумно-уборочные машины,,
роторные снегоочистители, тепловые и поливочные машины и
другие специальные .механизмы и устройства.
Третьей составной частью является специальная наземная
техника, используемая авиационно-техническими и специаль-
ными частями для обеспечения полетов и управления самолета-
ми в воздухе.
В зависимости от назначения аэродромные средства обслу-
живания летательных аппаратов можно разделить на ряд основ-
ных групп.
1. Средства заправки топливом, .маслом и другими жидкостя-
ми. К ним относятся: топливозаправщики, маслозаправщики,
оборудование систем централизованной заправки топливом, аг-
регаты механизированной заправки различными жидкостями
и др.
298
2. Средства обеспечения электроэнергией.
3. Средства обеспечения жидким и газообразным кислоро.
до.м, газообразным азотом и другими газами.
4. Средства подогрева и охлаждения кабин, а также подо-
грева силовой установки и других частей летательного аппарата..
5. Грузоподъемные и транспортировочные средства,, тягачи-
К ним относятся подъемные краны, лебедки, гидравлические и
пневматические подъемники, автопогрузчики, транспортировоч-
ные машины, буксировщики и другие виды автомобилей, прице-
пов и тележек.
6. Установки для проверки самолетных гидравлических' си-
стем и другие комбинированные установки. ;
7. Комплексы установок, предназначенные для выполнения
демонтажных, монтажных, ремонтных и других работ на авиа-
ционной технике, а также для осуществления контроля за со-
стоянием и работоспособностью оборудования.
8. Средства доступа к высоко расположенным частям лета-
тельных аппаратов.
9. Средства дегазации, дезинфекции и дезактивации.
10. Противопожарные средства.
И. Вспомогательные машины и оборудование. Сюда относят-
ся различные специальные машины, электропылесосы, смазко-
цагнетатели, приспособления, применяемые при опробовании,
двигателей, и другие устройства.
Аэродромные средства обслуживания летательных аппара-
тов, наряду со специфическими требованиями, которые предъяв-
ляются к отдельным устройствам, должны удовлетворять общим;
требованиям, основными из которых являются:
1. Высокая производительность. Выполнение этого требова-
ния позволяет сократить все виды обслуживания авиационной
техники.
2. Высокая проходимость, подвижность и маневренность. Это-
достигается тем, что большинство аэродромных средств обслу-
живания монтируется на автомобилях, имеющих повышенную-
проходимость, прицепах или специальных тележках, позволяю-
щих легко и быстро транспортировать их с одного рабочего ме-
ста на другое. .
3. Надежность, простота и безопасность в эксплуатации, а:
также безотказность в работе в любых условиях использования
при минимальном числе обслуживающего персонала.
4. Универсальность как в смысле пригодности использования,
для обслуживания различных типов летательных аппаратов, так.
и в смысле многоцелевого назначения. В ряде случаев аэродром-
ные средства располагаются на таких автомашинах, которые
случае необходимости могут быть использованы для выполнения:
других функций. •
5. Стабильность характеристик и точность выдаваемых пара-
метров независимо от условий эксплуатации. '
299»
Одной из основных характеристик средств обслуживания яв-
ляется коэффициент использования
h _ /раб
л>и — ,
/раб 4" /всп
тде /раб -- время работы средств обслуживания, обусловленное
выполнением основных функций;
/всп — время, затраченное на выполнение вспомогательных
операций при выполнении устройством основных
функций.
Следует заметить, что значение вспомогательного времени оп-
ределяется не только степенью совершенства средств обслужива-
ния, но и эксплуатационной технологичностью летательного аппа-
рата.
Ниже рассматриваются только те аэродромные средства об-
служивания, которые используются при технической эксплуата-
ции авиационного оборудования.
§, 12.2. АЭРОДРОМНЫЕ СРЕДСТВА СНАБЖЕНИЯ
ЛЕТАТЕЛЬНЫХ АППАРАТОВ ЭЛЕКТРИЧЕСКОЙ ЭНЕРГИЕЙ
Аэродромные средства снабжения летательных аппара-
тов электрической энергией предназначены для питания элек-
трической энергией постоянного и переменного тока в процес-
се технического обслуживания как бортовых систем и уст-
ройств при их проверке, регулировке и настройке, так и аэро-
дромных средств обслуживания. Кроме того, они обеспечивают
запуск двигателей, имеющих электростартеры.
Таким образом, аэродромные средства снабжения электро-
энергией должны обладать достаточной мощностью, вырабаты-
вать постоянный и переменный ток, напряжения и частота ко-
торого должны соответствовать принятым в системах летатель-
ных аппаратов и обеспечивать запуск двигателей различных
типов.
Аэродромные средства снабжения электроэнергией лета-
тельных аппаратов подразделяются на аэродромные подвиж-
ные электроагрегаты, на установки многоцелевого назначения и
на централизованные системы электроснабжения.
Аэродромные подвижные электроагрегаты (АПА)
Наибольшее применение для обслуживания летательных
аппаратов находят следующие подвижные электроагрегаты:
АПА-2МП, АПА-ЗМП, АПА-4, АПА-2, АПА-35-2М и АПА-50.
‘Основные технические данные этих агрегатов приведены в
табл. 12.1.
Номинальное напряжение сети постоянного тока всех при-
меняемых АПА 28,5 в.
Во всех АПА электроагрегат смонтирован на шасси грузо-
-300
301.
Таблица 12.1
Тип установки Источники электроэнергии ' АПА-2МП АПА-ЗМП АПА-4 АПА-35-2М АПА-50 ЭГУ-3 (электроэнер- гетическая система)
Генератор постоянно- го тока, шт. ПР-600 (1) ПР-600 (1) ПР-600Х2 (D. ПР-600Х2 (1) ГАО-36 (2) ГСР-18000Д (1)
Номинальная мощ- ность, Квт i 17 17 34 34 50 18
Аккумулятор, шт. 12-А0-50 (4) 12-АСА-145 (6) 12-АСА-145 (2) 12-АСА-145 (3) 12-АСА-145 (2) 12-А0-50 (4)
. Генератор -переменно- го тока, щт. . — — — — СГС-90/360 (1) СГО-ЗОУ (1) СГС-ЗОБ (1) СГО-12 (1)
Номинальная мощ-, - несть, ква 50 30 30 12
Преобразователь ПО-4500 ПО-4500 Однофазная электрома- шинная система ПО-6000 ПТ-1500Ц —
Номинальная мощ- ность, ква 4,5 4,5 4,6 6 1,5
«стоянного тока используются
. Управление
1 о двигателем
Рис. 12.1. Схема системы регулиро-
вания напряжения генератора:
1 — двигатель внутреннего сгорания; 2 —
карбюратор; 3 — электромагнитный регу-
лятор
«ого автомобиля, обладающего повышенной проходимостью.
АПА-2МП и АПА-ЗМП имеют кузов грузового автомобиля.
АПА-4 может использоваться в качестве тягача для буксиров-
ки самолетов и аэродромных средств, расположенных на при-
цепах и специальных тележках.
В качестве основных источников электрической энергии по-
нераторы промышленного типа
и самолетные генераторы. Из
генераторов промышленного
типа применяются как одно-
коллекторные генераторы
ПР-600 и ГАО-36, так и двух-
коллекторные —• ' ПР-600Х.2.
Все они представляют собой
машину закрытого, типа с ак-
сиальной самовентиляцией,
имеют смешанную систему воз-
буждения и дополнительные
полюсы.
Вспомогательными источни-
ками электрической энергии
служат аккумуляторные бата-
реи типа 12-АО-50 и
12-АСА-145.
Источниками электрической
энергии переменного тока яв-
ляются электромащинные пре-
образователи, а также трех-
фазные и однофазные генера-
торы.
В АПА-2МП, АПА-ЗМП и АПА-4 генераторы постоянного
тока приводятся во вращение от двигателя автомобиля через кар-
данный вал и муфту переключения. В АПА-35-2М и АПА-50
привод генераторов производится от автономного дизельного
двигателя, имеющего всережимный регулятор скорости враще-
ния.
Стабилизация напряжения генераторов постоянного тока
АПА-2МП и АПА-ЗМП осуществляется электромагнитным
регулятором 3 (рис. 12.1), подвижный якорь которого кинемати-
чески связан с дроссельной заслонкой дополнительного пат-
рубка приводного двигателя 1. Применение в регуляторе двух
обмоток: обмотки напряжения IFH, подключенной на зажимы
генератора, и токовой 1FT обеспечивает регулирование в функ-
ции напряжения и тока нагрузки генератора.Несмотря на это,
статические электромагнитные регуляторы при широком диапа-
зоне изменения тока нагрузки не обеспечивают достаточно высо-
кой точности стабилизации напряжения генератора и хорошего
качества переходных процессов.
302
Лучшими характеристиками обладают системы, в которых
производится стабилизация скорости вращения приводного дви-
гателя с коррекцией по току нагрузки генератора. Постоянство
напряжения достигается за счет смешанной системы возбужде-
ния генератора, напряжение которого с изменением нагрузки в
определенных пределах изменяется незначительно.
Стабилизация скорости вращения приводного двигателя про-
изводится электромагнитным регулятором, обмотка напряжения
Жн. которого подключается на клеммы тахогенератора, кинема-
тически связанного с якорем генератора, а токовая включе-
на последовательно с нагрузкой генератора. Подобная схема
стабилизации применена на АПА-4.
. Напряжение генераторов постоянного тока АПА-35-2М и
АПА-50 стабилизируется с помощью самолетных угольных ре-
гуляторов РУГ-82 и РН-180 соответственно.
В комплект коммутационной и защитной аппаратуры АПА
входят в основном устройства, применяемые в самолетных элект-
роэнергетических системах. Например, на АПА-50 включение ге-
нераторов и защита их от обратной мощности производятся
дифференциально-минимальными реле ДМР-800Д, которые ра-
ботают совместно с автоматами защиты от перенапряжения
АЗП-8М. Защита генераторов и аккумуляторных батарей от ко-
ротких замыканий и перегрузок осуществляется тугоплавкими
предохранителями.
Источниками переменного однофазного тока напряжением
115 в и частоты 400 гц на АПА-2МП, АПА-ЗМП и АПА-35-2Л4
являются самолетные преобразователи типа ПО.
На АПА-4 для получения однофазного переменного тока на-
пряжением 115 в, частота которого может устанавливаться в
диапазоне 400—900 гц, применяется двигатель-генераторная си-
стема. В качестве двигателя используется самолетный генератор
ГС-12Т, а генератором является самолетный генератор перемен-
ного тока СГО-8, с возбуждением от сети постоянного тока. Си-
стема работает в комплекте с регулятором частоты переменного
тока, регулятором напряжения РН-400Б и с коробкой управле-
ния и защиты КРЛ-31.
Система переменного тока АПА-50 состоит из трех отдель-
ных систем.
Система трехфазного переменного тока напряжением 208 в
я частоты 400 гц состоит из синхронного генератора СГС-90/360с
возбуждением от возбудителя постоянного тока и комплекта
пуско-регулирующей и защитной аппаратуры.
Источником трехфазного переменного тока напряжением 36 в,
частоты 400 гц является самолетный преобразователь ПТ-1500Ц.
Система однофазного переменного тока частоты 400 гц имеет
два выходных напряжения: 208 и 115 в. Она включает синхронный
генератор СГО-ЗОУ с возбуждением от сети постоянного тока,
комплект пуско-регулирующей и защитной аппаратуры и транс-
313
форматор Т-15, с помощью которого напряжение генератора 208 &
понижается до 115 в.
В; комплектах пуско-регулирующей и защитной аппаратуры
систем переменного тока преимущественно используются устрой-
ства, применяемые в аналогичных самолетных системах.
Привод генераторов СГС-90/360 и СГО-ЗОУ так же, как и ге-
нераторов ГАО-36, производится от раздаточной коробки авто-
номного дизельного двигателя.
Все рассматриваемые АПА обеспечивают запуск двигателей:
летательных аппаратов как по схеме 24 в, так и по схеме 24—48 в.
АПА-4, АПА-35-2М и АПА-50, кроме того, позволяют произво-
дить запуск по схеме плавного повышения напряжения до 70 в.
Режим 48 в получается в результате последовательного сое-
динения либо генератора ПР-600 и аккумуляторных батарей
(АПА-2МП и АПА-ЗМП), либо двух коллекторов генератора
ПР-600Х2, как это имеет место на АПА-4 и АПА-35-2М, либо^
наконец, двух генераторов ГАО-36 на АПА-50.
Запуск авиационных двигателей при плавном повышении
напряжения от АПА-4 и АПА-35-2М производится при последо-
вательном соединении коллекторов генератора ПР-600Х2 и от-
ключенной системе регулирования напряжения. Питание борто-
вых 'Потребителей постоянным током напряжения 24 а в про-
цессе запуска осуществляется от аккумуляторных батарей АПА»
Запуск с плавным повышением напряжения рассмотрим на при-
мере АПА-35-2М (рис. '12.2).
При включении выключателя Bi питание от аккумуляторных
батарей БА1 и БА2 подается в схему запуска самолета через разъ-
ем III, подготавливая ее и схему АПА для запуска. В обмотку
возбуждения генератора IFB включаются сопротивления Ri и R^
суммарная величина которых больше критической, и гене-
ратор не возбуждается при работающем приводном двигателе.
ДМР-600AM в цепи первоцо коллектор а .и контактор 6/( не вклю-
чены, а контакторы IK, ЗК. и 4/( включены. Обмотка реле ЗР за-
шунтирована перемычкой между клеммами 1 и 2.
При нажатии на кнопку запуска клеммы 3 и 5 оказываются
под напряжением. При этом включаются контакторы в цепи СТГ
и контактор 5К подает ic клемм II напряжение на СТГ (срабаты-
вает реле 5Р, которое включает реле 4Р, подготавливает цепь
включения 1Р, а также шунтирует сопротивления Ri и Rk). В ре-
зультате интенсивного возбуждения напряжение щ ток плавно'
возрастают (участок АД, рис. 12.3). При напряжении 6—8 в сра-
батывает 2Р, включая сопротивления /?| и /Д в цепь воз-
буждения генератора. Возбуждение при этом продолжается за
счет сериесной обмотки IFC (участок БВ). При напряжении 19 в
срабатывает реле 1Р и шунтирует Д2. При этом напряжение про-
должает возрастать по нагрузочной характеристике генератора
смешанного возбуждения (участок ВГ).
304
При окончании запуска снимается напряжение с клеммы 5
разъема III. Реле 5Р и 1Р, а также контактор 5 К отключаются и
схема приходит в исходное состояние. После разрыва цепи кон-
тактором 5К отключаются контакторы самолетной цепи.
Рис. 12.2. Принципиальная схема запуска при плавном повышении напря-
жения от АПА-35-2М
При запуске авиационных двигателей от АПА-50 по схеме
плавного повышения напряжения один генератор ГАО-36 обеспе-
чивает питание бортовой сети постоянным током 28,5 в, а вто-
рой — подключается к стартер-генератору запускаемого двига-
теля. Регулирование отдаваемого тока генераторо>м в 'Процессе
запуска осуществляется пуско-регулирующей коробкой ПРК,
работающей совместно с регулятором постоянного тока РПТ.
Пуско-регулирующая коробка включает в себя регулятор то-
ка, регулятор напряжения, стабилизирующий трансформатор и
коммутационную аппаратуру. Угольные столбики регулятора то-
ка и регулятора напряжения включены в цепь обмотки возбуж-
дения генератора.
Регулятор постоянного тока подключается к управляющим
обмоткам регулятора тока ПРК. Он имеет два выхода: один со-
20. Румянцев Е. А. и др.
305
Рис. 12.3. График измене-
ния напряжения и тока при
запуске с плавным повыше-
нием напряжения
ответствует настройке регулятора тока на ток генератора 250—
300 а, а второй — на 1200—1300 а.
Весь процесс запуска можно разбить на три этапа. На первом
весьма кратковременном этапе происходит ограничение тока ге-
мератора величиной 250—300 а. Это необходимо для плавного
выбора люфтов в кинематической свя-
зи стартер-генератор а с турбокомпрес-
сором двигателя.
На втором этапе запуска отдавае-
мый ток генератором поддерживается
на уровне 1200—1300 а. При этом по
мере увеличения скорости стартер-ге-
нератора напряжение генератора воз-
растает.
Третий этап запуска начинается с
момента достижения напряжения на
генераторе величины 65 ф | в. Он
характеризуется вступлением в рабо-
ту регулятора напряжения ПРК, с по-
мощью которого напряжение 65 ф | в
поддерживается достоянным до конца
запуска.
По окончании запуска вся аппара-
тура возвращается в исходное состоя-
ние.
Все аэродромные подвижные электроагрегаты имеют запас
топлива на 5—6 часов непрерывной работы. Обслуживаются,
как правило, одним человеком. Скорость передвижения по шос-
се 40—60 км/час.
Широкое применение в процессе обслуживания летательных
аппаратов находят подвижные установки многоцелевого назна-
чения. Одной из таких установок является электрогидропневмо-
установка ЭГУ, включающая в себя три системы. Основные дан-
ные электрической системы ЭГУ-3 приведены в таблице Г2.1.
Гидравлическая система ЭГУ позволяет производить назем-
ную подготовку устройств, включенных в гидравлическую си-
стему летательного аппарат'а. Пневмосистема используется при
проверке герметичности кабин летательных аппаратов, для ох-
лаждения аппаратуры и других целей.
Централизованные системы электроснабжения
летательных аппаратов
Централизованные системы электроснабжения летательных
аппаратов позволяют не только сократить сроки подготовки, но
и улучшить организацию и повысить качество обслуживания ле-
тательных аппаратов.
306
Основным требованием, предъявляемым к централизованным
системам электроснабжения, является возможность обслужива-
ния, включая и запуск двигателей различных типов самолетов.
Кроме того, оборудование системы не должно мешать обслужи-
ванию самолетов и их передвижению на аэродроме. Централизо-
ванные системы электроснабжения должны быть приспособле-
ны к использованию в необходимых случаях аэродромных под-
вижных электроагрегатов (АПА) в качестве источников элект-
роэнергии.
Рис. 12.4. Функциональная схема централизованной си-
стемы электроснабжения:
Л — источник электрической энергии постоянного тока; Б —
источник электрической энергии переменного тока; В — пус-
ко-регулирующая аппаратура; Г — аппаратура включения и
защиты
Централизованная система электроснабжения (рис. 12.4)
включает в себя преобразовательную подстанцию 4 с источни-
ками электрической энергии постоянного и переменного тока, ка-
бельную сеть 3 и распределительные колонки 2 с комплектами
кабелей 1 питания потребителей и штепсельных разъемов.
В качестве основных источников электроэнергии постоянного
пока напряжением 28,5 в применяются мотор-генер аторные уста-
новки промышленного типа и 'статические преобразователи.
Вспомогательными источниками являются аэродромные акку-
муляторные батареи, которые в некоторых централизованных си-
стемах используются для запуска авиационных двигателей по
схеме 24—48 в.
20* 307
Источниками электроэнергии переменного однофазного ток®
напряжением 115 в, частоты 400 гц являются или самолетные-
преобразователи типа ПО или промышленные мотор-генератор-
ные преобразователи. Имеются также преобразовательные под-
станции, в которых, кроме источника однофазного переменного»
тока 115 в 400 гц, имеется источник трехфазного переменного»
птока напряжением 36 в или 208 в, частоты 400 гц.
Питание преобразовательных подстанций производится трех-
фазным промышленным током напряжения 380/220 в от аэро-
дромных трансформаторных подстанций через колонку 5 аэро-
дромного питания.
Пуско-регулирующая аппаратура преобразовательных под-
станций аналогична аппаратуре, применяемой на аэродромных:
подвижных электроагрегатах. Включение преобразователей в-
работу со стороны первичной цепи производится с помощью-
промышленной аппаратуры. Широкое применение находят си-
стемы дистанционного управления.
Централизованные системы электроснабжения летательных:
аппаратов подразделяются на стационарные и передвижные.
Преобразовательные подстанции стационарных систем раз-
мещаются в специально оборудованных помещениях. Имеется
постоянно проложенная кабельная сеть, соединяющая как пре-
образовательную подстанцию с колонкой аэродромного пита-
ния, так и преобразовательную подстанцию с распределитель-
ными колонками, которые также установлены стационарно.
В передвижных централизованных системах электроснабже-
ния преобразовательные подстанции, комплект кабельной сети с
распределительными коробками, с помощью которых подклю-
чаются потребители, размещаются преимущественно на одно-
осных автомобильных прицепах. Как и в стационарных системах.,
преобразовательные подстанции питаются трехфазным перемен-
ным током от аэродромных трансформаторных подстанций че-
рез колонки аэродромного питания.
Типовая передвижная преобразовательная подстанция обес-
печивает питание потребителей постоянным током напряжением
28,5 в, запуск двигателей по схеме 24—48 в и по схеме плавного»
повышения напряжения до 70 в. Кроме того, обеспечивает пита-
ние потребителей переменным однофазным током напряжением:
115 в и трехфазным током напряжением 36 в, частоты 400 at/..
Основным источником постоянного тока является промыш-
ленный мотор-генераторный преобразователь типа МГ-600Х2, со-
стоящий из трехфазного асинхронного двигателя .и двухколлек-
торного генератора постоянного тока. Дополнительным источник-
ком постоянного тока напряжением 28,5 в служит выпрямитель-
ный блок с силовым трансформатором. Он используется для пи-
тания постоянным током аппаратуры преобразовательной под-
станции и бортовой сети самолета при запуске его двигателей по»
схеме плавного повышения напряжения.
308
В качестве источников переменного тока используются само-
летные преобразователи ПО-6000 и ПТ-1000Ц.
В комплект преобразовательной подстанции входят также
распределительный щит, панель с зажимами и блоки пуско-ре-
тулирующей аппаратуры, аналогичные АПА-35-2М.
Комплект кабельной сети включает в себя силовые кабели,
распределительные коробки и пульт управления с кабелем. Про-
мышленностью выпускаются комплекты кабельной сети двух ви-
дов: для обслуживания тяжелых самолетов и для обслужива-
ния легких самолетов.
В случае необходимости к рассматриваемой передвижной
централизованной системе электроснабжения может придавать-
ся передвижной преобразовательный агрегат переменного тока с
соответствующим комплектом кабельной сети. Он позволяет
«обеспечить питание переменным током «всевозможных самолет-
ных потребителей и специальных объектов и установок.
§ 12.3. АККУМУЛЯТОРНО-ЗАРЯДНЫЕ СТАНЦИИ
Выполнение всех основных работ по техническому обслужи-
ванию авиационных аккумуляторов и их зарядка производятся
на аккумуляторно-зарядных станциях (АЗС).
Аккумуляторно-зарядные станции разделяются на стацио-
нарные и передвижные, размещаемые на автомобилях или при-
цепах. Как стационарные, так и передвижные АЗС состоят из
источника электрической энергии постоянного тока и зарядно-
распределительного устройства, которое в свою очередь включа-
ет регулировочные реостаты, контрольно-измерительные прибо-
ры и коммутационную аппаратуру.
В качестве источника постоянного тока АЗС широко при-
меняются выпрямительные устройства, подключаемые к сети
переменного тока. Находят применение также генераторы по-
стоянного тока с приводом или от трехфазного асинхронного
двигателя, или от двигателя внутреннего сгорания.
Основные данные селеновых выпрямительных устройств ти-
па ВСА, применяемых для зарядки кислотных и щелочных ак-
кумуляторов, приведены в табл. 12.2.
Таблица 12.2
Наименование ВСА-5 ВСА-111
Напряжение сети переменного тока, в . 127—220 127—220
Потребляемая мощность, ква 2 2
Выпрямленное напряжение, в 0 -:-64 0-5-80
Выпрямленный ток, а 0-5-12 0 н-8
Регулирование напряжения . . . Ручное Ручное
309
Они включают понижающий трансформатор, набор селено-
вых столбиков, регулирующую аппаратуру и контрольно-изме-
рительные приборы. Регулирующая аппаратура позволяет в оп-
ределенных пределах изменять выходное выпрямленное напря-
жение.
При размещении стационарной АЗС должно быть предусмот-
рено помещение для выполнения работ по техническому обслу-
живанию аккумуляторов, для размещения аппаратуры АЗС, а
также для зарядки и хранения аккумуляторов. При этом также-
надо иметь в виду, что необходимы отдельные помещения для
кислотных и щелочных аккумуляторов. Само помещение долж-
но быть чистым, сухим, хорошо вентилируемым и надежно за-
щищенным от попадания пыли. Температура должна поддержи-
ваться в пределах -|-5 -ь +30оС.
Примером передвижной АЗС может служить АЗС-4А. Стан-
ция состоит из двух бензоэлектрических агрегатов АЛ-6/3, за-
рядно-распределительного щита, дисциллятора и вспомогатель-
ных. устройств. Все оборудование смонтировано на одноосном
автомобильном прицепе, оборудованном съемным металличе-
ским каркасом с брезентовым верхом.
Рис. 12.5. Принципиальная электрическая схема зарядной панели:
1 генератор; 2 — выключатель; 3 — амперметр; 4 — реле минимального тока; 5 —
реостат (П — перемычка изменения диапазона тока); 6 — предохранитель; 7 — клем-
мовая панель; 8 — клеммы коммутации панелей; 9 — розетка; 10 — освещение пане-
ли; И — выключатель; 12 — вольтметр; 13 — реостат возбуждения генератора
Бензоэлектрический агрегат состоит из четырехтактного дви-
гателя Л-6/3 с регулятором скорости вращения и генератора по-
стоянного тока смешанного возбуждения ПН-28,5. При номи-
нальном напряжении 120 в генератор развивает мощность 3 кет..
Зарядно-распределительный щит служит для распределения
электрической энергии станции по зарядным цепям аккумулято-
ров и контроля за напряжением и током зарядных цепей. Щит
состоит из двух одинаковых панелей. Они могут быть подключе-
310
ны параллельно к одному из агрегатов или раздельно к каждо-
му агрегату. Каждая панель имеет три отдельные зарядные це-
пи. Принципиальная электрическая схема одной зарядной пане-
ли с подключенным генератором представлена на рис. 12.5. Схе-
ма панелей зарядно-распределительного щита допускает различ-
ные -варианты использования их и включения аккумуляторов на
заряд и разряд. При заряде аккумуляторы включаются между
верхней и средней клеммами, при разряде — между средней и
нижней клеммами данной зарядной цепи.
§ 12.4. АЭРОДРОМНЫЕ СРЕДСТВА СНАБЖЕНИЯ САМОЛЕТОВ
КИСЛОРОДОМ
Зарядка самолетных систем и парашютных кислородных
приборов газообразным кислородом обычно производится, от
автомобильных кислородно-зарядных станций (АКЗС). Пара-
шютные кислородные приборы можно также заряжать от аэро-
дромных баллонов с помощью автономного кислородного комп-
рессора.
Заправка самолетов жидким кислородом производится от
транспортных резервуаров жидкого кислорода (ТРЖК).
Автомобильные кислородно-зарядные станции
Имеющиеся в эксплуатации автомобильные кислородно-за-
рядные станции АКЗС-40, АКЗС-60, АКЗС-75 и АКЗС-75М раз-
личаются в основном ;овоей производительностью 40, 60, 75 мЧчас
Рис. 12.6. Принципиальная схема АКЗС:
1 —- кислородные баллоны; 2 — компрессор; 3 — предохранительный
клапан; 4 холодильник; 5 — влагоотделитель; 6 — осушитель; 7 —
редуктор/ ; 8 — штуцер зарядки систем низкого давления (до>
30 кг/см'2); 9 — штуцеры зарядки систем высокого давления; 10 — шту-
церы зарядки баллонов АКЗС
соответственно. Все они содержат следующие основные агрега-
ты и устройства (рис. 12.6):
311
— батарею 'аэродромных кислородных баллонов для хране-
ния возимого запаса газообразного кислорода под максималь-
ным давлением 150 кг!см2;
— компрессор с приводом от двигателя автомобиля, на ко-
тором смонтирована станция;
— щит управления с измерительной аппаратурой и органами
управления станцией;
— устройства для охлаждения и осушения сжимаемого кис-
лорода;
— соединительные трубопроводы, раздаточные устройства
для зарядки самолетных систем высокого и низкого давлений;
зарядные устройства баллонов АКЗС.
Основные данные АКЗС приведены в табл. 12.3.
АКЗС-75М. отличается от АКЗС-75 более совершенной про-
тивопожарной системой и, кроме того, АКЗС-75М смонтирована
на новой модификации автомобиля ЗИЛ.
Зарядка самолетных кислородных систем от АКЗС происхо-
дит сначала перепуском кислорода, а затем нагнетания с помо-
щью кислородного компрессора.
Заполнение баллонов АКЗС кислородом производится через
зарядное устройство.
Таблица 12.3
Наименование АКЗС-40 АКЗС-60 АКЗС-75
Производительность, яР/час 40 60 75
Рабочее давление, кг/см2 Количество кислорода, 150 150 150
вмещающегося в баллоны, м3 90 24 112,5
Остаточное давление, кг/см2 20 20 20
Транспортные резервуары жидкого кислорода
Транспортные резервуары жидкого кислорода (ТРЖК) при-
меняются для заправки самолетных газификаторов жидким кис-
лородом, для его транспортировки и хранения.
По своему устройству ТРЖК представляет сосуд Дюара, со-
стоящий из внутреннего металлического резервуара и внешнего
кожуха. В крупных резервуарах с емкостью в несколыко сот или
тысяч литров вакууммированное пространство заполняется мик-
ропористым веществом, обладающим высокой теплоизоляцией.
Для поддержания достаточно высокого вакуума применяются
селикагелевые газопоглотители.
312
Все основное оборудование ТРЖК, включающее контроль-
ные приборы, вентили, предохранительные и зарядные устрой-
ства, монтируется на внешнем кожухе.
Жидкий кислород из внутреннего резервуара по трубопрово-
дам и зарядным шлангам подается в самолетную систему под
давлением паров кислорода. Ускоренный подъем давления паров
кислорода перед заправкой и поддержание его на определенном
уровне в процессе заправки производятся системой, подъема
давления; состоящей из испарителей и аппаратуры управления.
Основные данные ТРЖК, наиболее широко применяемых
при обслуживании самолетов, приведены в табл. 12.4.
Т аб лица 12.4
Наименование ТРЖК-2У ТРЖК-4М
Вес жидкого кислорода, вмещающегося 1250 350
в резервуар, кг Рабочее давление в резервуаре, кг/см2 2 2
Испаряемость кислорода при хранении, 0,7 0,385
кг/час
ТРЖК-2У транспортируется на 'автомобилях и на самолетах.
ТРЖК-4М устанавливается обычно на автомобиле ГАЗ-69.
Для длительного хранения жидкого кислорода на аэродроме
применяются аэродромные резервуары жидкого кислорода
АРЖК-1 и ТРЖК-3. АРЖК-1 вмещает 6500 кг, а ТРЖК-3 —
8000 кг.
Кислородно-добывающие станции
Жидкий и газообразный кислород получается в кислородно-
добывающих станциях путем сжатия атмосферного воздуха, глу-
бокого охлаждения, сжижения и последующего разделения его
на составные части кислород и азот. Очистка воздуха от угле-
кислоты, воды и механических примесей осуществляется специ-
альными фильтрами, декарбонизаторами и осушительными ба-
тареями.
Высокую производительность имеют железнодорожные кис-
лородно-добывающие заводы-поезда (ЖКДЗ) и стационарные
кислородно-азотные добывающие станции (СКДС), Широко
применяются также автомобильные кислородно-азотные добы-
вающие станции (АКДС) и автомобильные кислородно-добыва-
ющие станции (АК).
Автомобильная кислородно-азотная добывающая станция
АКДС-ЗОА расположена на двух автомобилях. Третий автомо-
313
биль придается для перевозки запасного имущества и вспомо-
гательного оборудования. Производительность станции по жид-
кому кислороду и азоту при наполнении транспортных резервуа-
ров составляет 29—30 кг/час, по газообразному кислороду и
азоту при наполнении транспортных баллонов — 36 мЧчас. Дав-
ление выдаваемого газообразного кислорода и азота составляет
230 кг/см\
Лучшие характеристики имеет станция АКДС-70М, в которой
несколько упрощена технологическая схема блока разделения.
Улучшено также качество выдаваемого кислорода и азота за
счет более тщательной очистки. Давление выдаваемого газооб-
разного кислорода и азота повышено до 400 кг/см2.
Станция АК-12МД предназначена для получения только'
жидкого и газообразного кислорода. Она размещается также-
на двух автомобилях. Производительность ее по жидкому кис-
лороду составляет 11—12 кг/час, а по газообразному — 8 м3/час..
Давление выдаваемого газообразного кислорода — 165 кг/сл2.
Станции АКДС и АК полностью автономны. Они могут ра-
ботать как от собственного двигателя внутреннего сгорания, так
и от промышленной электросети с напряжением 220/380 в.
Для газификации жидкого кислорода и наполнения газооб-
разным кислородом баллонов имеются установки УГЖК-1 и
УГЖК-1М. Установка состоит из следующих основных устройств:
насоса жидкого кислорода с электроприводом, испарителя, раз-
даточного устройства и контрольно-измерительных приборов.
Производительность УГЖК-1М составляет 10 сорок-алитровых
баллонов в час. Максимальное давление наполнения 165 кг/см?.
РАЗДЕЛ ТРЕТИЙ .
ИНЖЕНЕРНО-АВИАЦИОННАЯ СЛУЖБА
Глава XIII
ОРГАНИЗАЦИЯ ИНЖЕНЕРНО-АВИАЦИОННОЙ
СЛУЖБЫ
§ 13.1. НАЗНАЧЕНИЕ ИНЖЕНЕРНО-АВИАЦИОННОЙ СЛУЖБЫ
И ЕЕ ОСНОВНЫЕ ЗАДАЧИ .
Состояние авиационной техники в процессе ее эксплуатации
зависит от качества инженерно-авиационного обеспечения дей-
ствий авиационных частей.
Инженерно-авиационное обеспечение действий авиации осу-
ществляется инженерно-авиационной службой (ИАС), которая
организует и направляет работу всего инженерно-технического
состава авиационных частей.
Главной задачей ИАС является обеспечение максимально-эф-
фективного использования всех технических и л етно-тактических
возможностей авиационной техники для решения поставленных
задач при высокой готовности авиационной техники к ее приме-
нению.
Успешное решение этой задачи зависит от того, насколько-
организационная структура ИАС и формы эксплуатации авиа-
ционной техники соответствуют уровню развития авиационной
техники и степени совершенства средств ее эксплуатации. Все
остальные факторы имеют подчиненное значение и также в зна-
чительной степени зависят от состояния и уровня развития авиа-
ционной техники, и средств ее эксплуатации.
Круг вопросов, которыми занимается инженерно-авиацион-
ная служба, весьма велик.
Основным содержанием деятельности инженерно-авиацион-
ной'службы являются организация эксплуатации и ремонта авиа-
ционной техники, включающих все мероприятия по контролю^
за состоянием авиационной техники, проведению анализа конст-
руктивных и эксплуатационных недостатков авиационной техни-
ки, разработку и проведение мероприятий по их устранению и.
по поддержанию авиационной техники в постоянной готовности
к применению и обеспечению ее высокой надежности.
315-
Не менее важной задачей ИАС является разработка и прове-
дение в жизнь .мероприятий по обеспечению безаварийных поле-
тов, но предупреждению летных происшествий.
К функциональным обязанностям инженеров авиационных
частей относятся: обучение летного и инженерно-технического
состава основам авиационной техники, принципам ее устройст-
ва, конструкции и методам эксплуатации, осуществление конт-
роля за соблюдением личным составом авиационных частей пра-
вил эксплуатации, обобщение и распространение передовых
методов эксплуатации авиационной техники, организация сбере-
жения авиационной техники и материально-технических средств,
имеющихся в авиационных частях.
Кроме вышеизложенного, инженерно-авиационная служба
разрабатывает нормы времени работы на авиационной технике,
руководит рационализаторской работой, проводит рекламацион-
ную работу, осуществляет: планирование регламентных работ и
доработок авиационной техники, расхода и восстановления ее
ресурса, отхода в ремонт и ввода ее в строй, планирование всех
сторон деятельности ИАС и ведение установленного для ИАС
авиачастей учета и отчетности.
В процессе подготовки авиационных частей к боевым дейст-
•ствиям или учебно-боевым мероприятиям инженерно-авиацион-
ная служба производит инженерно-оперативные и инженерно-
штурманские расчеты, а также расчеты по обеспечению матери-
альными средствами для эксплуатации и ремонта авиационной
техники.
ИАС авиационных частей в своей деятельности руководству-
ется наставлением, определяющим все задачи ИАС, приказами
.и указаниями вышестоящих должностных лиц, относящимися к
деятельности ИАС и к эксплуатации и ремонту авиационной
техники.
§ 13.2. ФОРМЫ ОРГАНИЗАЦИИ
ИНЖЕНЕРНО-АВИАЦИОННОЙ СЛУЖБЫ
Применение механизации и автоматизации трудоемких работ
процесса эксплуатации авиационной техники и улучшение при-
способленности летательных аппаратов к выполнению этих ра-
"бот позволяют, несмотря на значительное усложнение авиацион-
ной техники, сохранять и даже повысить готовность авиационной
техники к применению без увеличения штатов обслуживающего
ее инженерно-технического состава.
В этом отношении немалое значение имеет правильный вы-
бор формы организации инженерно-авиационной службы, соот-
ветствующей уровню развития авиационной техники и средств
•ее эксплуатации.
Все формы организации инженерно-авиационной службы мо-
жно разделить на три группы (рис. 13.1):
:316
1) форму организации инженерно-авиационной службы^,
включенной в состав авиационных частей;
2) форму организации автономной инженерно-авиационной:
службы;
3) смешанную форму организации инженерно-авиационной-:
службы.
Положительной стороной формы организации ИАС, при ко-
торой инженерно-технический персонал включен в состав авиа-
ционных частей, является высокая личная ответственность инже-
нерно-технического персонала за состояние и эксплуатацию са-
молетов части и авиационной техники, применяющейся на них,,
что обеспечивает более глубокое изучение и освоение данной
конкретной авиационной техники и особенностей ее эксплуатации:
личным составом ИАС. Все это способствует повышению каче-
ства подготовки и эксплуатации авиационной техники, гаранти-
рует от возможности выпуска в полет неисправных самолетов и:
обеспечивает высокую степень готовности авиационной техники;
к применению.
Некоторым недостатком этой системы является наличие ®-
авиационных частях большого количества специалистов, не вхо-
дящих в боевой состав летных экипажей, что в военное время
при быстром изменении боевой обстановки и при быстром пе-
редвижении войск несколько замедляет темпы перебазирования,
авиационных частей.
317'
Организация инженерно-авиационной службы, находящейся
в составе авиационных частей, может быть осуществлена тремя
способами:
— : путем персонального закрепления обслуживающего техни-
ческого состава за каждым отдельным самолетом;
— частичным закреплением технического состава за отдель-
ными самолётами;
— групповым способом обслуживания без персонального за-
крепления технического состава за самолетами.
В период применения поршневых самолетов, у которых наи-
более трудоемким объектом обслуживания являлись поршневые
силовые установки, а все другие работы, проводимые в процес-
се эксплуатации самолетов, имели незначительный удельный
вес, получила широкое распространение форма организации ИАС
с персональным закреплением всего обслуживающего техниче-
ского состава за отдельными самолетами.
В период применения самолетов с газотурбинными двигате-
лями, силовые установки которых значительно проще и надеж-
нее в эксплуатации, чем поршневые двигатели, объем работы по
подготовке самолетов складывается главным образом из подго-
товки весьма многочисленного и сложного самолетного обору-
дования и не менее сложного авиационного вооружения.
В этом случае закрепление всего технического состава за от-
дельными самолетами оказалось неэффективным, так как это
потребовало бы значительного увеличения штатов технического
состава.
В связи с этим нашла применение групповая система обслу-
живания в сочетании с закреплением некоторой меньшей ча-
сти технического персонала за отдельными самолетами.
Таким образом, в данном случае основная часть техническо-
го персонала сосредоточена в группах, обеспечивающих подго-
товку авиационной техники к полетам, и в группах регламент-
ных работ.
В таких группах представлен технический персонал всех спе-
циальностей, а также сосредоточены все технические средства
эксплуатации и контрольно-измерительная аппаратура, необхо-
димая для проверки состояния авиационной техники.
Обычно все работы, связанные с подготовкой авиационной
техники к полетам, производятся в масштабе авиационных под-
разделений® группах обслуживания.
Все трудоемкие работы, производимые в процессе эксплуата-
ции (регламентные, профилактические, текущий ремонт) произ-
водятся, как правило, в масштабе авиационных частей группа-
ми регламентных работ.
Технический персонал, закрепленный за отдельными самоле-
тами, будучи освобожден от выполнения трудоемкой части ра-
бот, а также от получения и доставки к самолету запчастей
и расходных материалов, имеет возможность большую часть ра-
318
бочего времени использовать для контроля за качеством выпол-
няемых работ другими должностными лицами технического со-
става и для контроля состояния авиационной техники. Он несет
всю полноту ответственности за состояние самолета и за выпуск
<его в полет в соответствии с его заданием. -
Такая система организации инженерно-авиационной службы
обеспечивает работу без вынужденных простоев личного состава
и технических средств эксплуатации, дает возможность более
узко дифференцировать специализацию, обеспечивая тем самым
высококвалифицированное обслуживание авиационной техники.
Рациональное использование технического персонала позволяет
сократить его численность до минимума и дает возможность ин-
женеру в случае необходимости маневрировать силами и сред-
ствами инженерно-авиационной службы авиационной части.
Групповая система обслуживания без персонального за-
крепления технического состава за отдельными самолетами рас-
пространения не 'получила. Однако в связи с дальнейшим раз-
витием авиационной техники, применением средств автоматиза-
ции контроля состояния авиационной техники и других эксплуа-
тационных работ технический состав, закрепленный за отдель-
ными самолетами, будет освобожден от своих основных функ-
ций и утратит свое значение. В этом случае может оказаться
целесообразным перевести обслуживание авиационной техники
на чисто .групповую систему.
Форма организации автономной инженерно-авиационной слу-
жбы состоит в том, что инженерно-технический персонал в авиа-
ционных частях полностью отсутствует, а обслуживание авиа-
ционной техники осуществляется инженерно-техническим персо-
налом, закрепленным за аэродромом базирования.
В этом случае инженерный и технический персонал аэродро-
ма обеспечивает эксплуатацию самолетов авиационных частей,
которые базируются на данном аэродроме. При такой форме ор-
ганизации командование авиационных частей освобождается от
многих функций, связанных с наличием многочисленного техни-
ческого состава, в связи с чем оперативность и маневренность
летных частей несколько повышаются. Однако ввиду того, что в
военное время при быстром передвижении войск авиационные
части на данном аэродроме базирования долго не задерживают-
ся и часто сменяются, технический состав аэродрома должен
обеспечивать эксплуатацию разнообразных типов самолетов. От
этого качество обслуживания -и контроля состояния авиационной
техники снижается, что ведет к увеличению аварийности.
Подчинение инженерно-авиационной службы, закрепленной
за аэродромом базирования, имеет три разновидности:
—- самостоятельные авиационно-технические части;
— подчинение ИАС аэродромов частям аэродромного обслу-
живания;
319
— подчинение группы технического персонала комендатурам:
аэродрома. Такие группы используются главным образом нд.
транзитных аэродромах для обеспечения перелетов.
Во вторую мировую войну в ВВС некоторых воюющих стран?
автономная система организации ИАС применялась. Однако ока-
залось, что эффективность этой системы из-за низкого качест-
ва обслуживания ввиду обезлички была значительно хуже, чем
в случае, когда ИАС находится в составе авиационных частей.
В условиях войны с применением современных средств пора-
жения, при частых перебазированиях авиации и частых разру-
шениях аэродромов автономная форма организации ИАС вряд
ли найдет применение.
В случае смешанной формы организации ИАС, при наличии
некоторого контингента технического персонала в авиационных
частях, на аэродромах базирования находятся свои авиационно-
технические части и подразделения.
Технический персонал таких частей и подразделений под
контролем технического состава авиационных частей и с его по-
мощью производит все основные работы по подготовке самоле-
тов к полетам, а также все виды регламентных работ.
Эксплуатация авиационной техники обеспечивается техниче-
ским персоналом разных специальностей: авиационными техни-
ками и механиками по профилю 'самолеты и двигатели, техника-
ми и механиками — специалистами по отдельным видам авиа-
ционного оборудования, радиотехнического оборудования и
авиационного вооружения.
Количество технического персонала вышеперечисленных спе-
-циальностей в летных частях и частях обслуживания зависит от-
рода авиации, количества и типа летательных аппаратов, имею-
щихся на вооружении авиационных частей, и уровня автомати-
зации процесса эксплуатации.
§ 13.3. ИНЖЕНЕРНО-ТЕХНИЧЕСКИЙ состав,
ОБСЛУЖИВАЮЩИЙ АВИАЦИОННОЕ ОБОРУДОВАНИЕ
Авиационное оборудование современных самолетов является
видом авиационной техники, представляющим наиболее много-
численную группу разных приборов, агрегатов, устройств и си-
стем.
Для эксплуатации авиационного оборудования в составе ин-
женерно-авиационной службы имеются специалисты по эксплуа-
тации электрооборудования, электронной автоматики, приборно-
го оборудования, кислородного оборудования, высотного спец-
снаряжения и аэрофотооборудования, предназначенного для
разведки и контроля результатов боевого применения.
Инженеры, возглавляющие и обеспечивающие эксплуатацию
авиационного оборудования в системе ИАС, организуют и на-
правляют деятельность всего технического состава, занятого
эксплуатацией авиационного оборудования.
320
Они отвечают: за организацию эксплуатации и содержание
всего комплекса авиационного оборудования в постоянной ис-
правности и в готовности его к применению, за техническое ру-
ководство работами по авиационному оборудованию, за техни-
ческую подготовку личного состава авиационной части по авиа-
ционному оборудованию.
На них возлагается:
— организация и обеспечение своевременного выполнения
всех работ, направленных на поддержание авиационного обору-
дования в исправном состоянии:
— осуществление контроля за состоянием авиационного обо-
рудования и работой личного состава, обеспечивающего его экс-
плуатацию;
— сбор статистических данных по отказам;
— выявление и анализ причин отказов и неисправностей, раз-
работка и проведение в жизнь мероприятий по предупреждению
отказов и неисправности оборудования;
— обеспечение систематического и всестороннего изучения
и совершенствования знаний авиационного оборудования и пра-
вил его эксплуатации летным и техническим составом авиаци-
онной части;
— осуществление технического надзора за работой и состоя-
нием аэродромных средств эксплуатации авиационного оборудо-
вания, действующих тренажеров, барокамер, запасных приборов
и агрегатов, хранящихся на складах М.ТО.
На них также возлагается выполнение всех функций, относя-
щихся к деятельности ИАС в части, касающейся профиля авиа-
ционного оборудования.
Авиационное оборудование является быстроразвивающейся
отраслью авиационной техники.
Л1ногообразие и разнотипность различных элементов авиа-
ционного оборудования по своему устройству и назначению соз-
дает специфические особенности в его эксплуатации и предъяв-
ляет к инженерно-техническому составу, занятому эксплуатаци-
ей авиационного оборудования, повышенные требования в от-
ношении теоретической подготовленности и организаторских
способностей.
Инженерно-технический состав, занятый эксплуатацией авиа-
ционного оборудования, в отличие от других специальностей
ИАС в своей деятельности сотрудничает с широким кругом дру-
гих специальностей и служб ВВС. (Например, при обеспечении
полетов и эксплуатации пилотажно-навигационного и высотного
оборудования — с летным составом; при проверке и устранении
девиации компасов и другого навигационного оборудования —
со штурманской службой; при обслуживании кислородного обо-
рудования и высотного спецснаряжения — с медицинской служ-
бой и т. д.).
21. Румянцев Е. А. и др.
321
Это обстоятельство накладывает на инженерно-технический
состав, занятый эксплуатацией авиационного оборудования, обя-
занность четкой координации своей деятельности с другими
службами.
Инженер, обеспечивающий эксплуатацию авиационного обо-
рудования, осуществляет техническое руководство подразделе-
ниями, обеспечивающими подготовку авиационного оборудова-
ния к полетам, а также подразделениями, выполняющими рег-
ламентные работы по авиационному оборудованию.
Подразделение, выполняющее подготовку авиационного обо-
рудования к полету, занимается проверкой, регулировкой и
опробованием оборудования на работоспособность, заменой не-
исправных устройств, дозарядкой самолетов кислородом, уста-
новкой на самолете съемного оборудования.
Подразделение регламентных работ выполняет трудоемкие
регламентные работы, участвует в доработках авиационной тех-
ники по бюллетеням промышленности, производит текущий ре-
монт и другие профилактические работы по авиационному обо-
рудованию.
В состав этих подразделений входят квалифицированные
специалисты как по комплексам оборудования, так и по отдель-
ным сложным системам.
В настоящее время на инженерно-технический персонал по
авиационному оборудованию возлагается обеспечение эксплуа-
тации пилотажных и других тренажеров.
Глава XIV
ОРГАНИЗАЦИЯ ЭКСПЛУАТАЦИИ АВИАЦИОННОЙ
ТЕХНИКИ
§ 14.1. ФОРМЫ и содержание эксплуатации
АВИАЦИОННОЙ ТЕХНИКИ
Под эксплуатацией, авиационной техники понимается комп-
лекс мероприятий по ее сбережению, обслуживанию, подготов-
ке к полетам и использованию по прямому назначению в процес-
се полета, направленных на обеспечение постоянной готовности к
применению авиационной техники, наиболее надежной и продол-
жительной ее работы и на наилучшее использование всех техни-
ческих и тактических качеств ее в процессе полетов и боевого
применения.
Таким образом, процесс эксплуатации авиационной техники
•включает в себя:
— правильное использование авиационной техники в полете;
— подготовку авиационной техники к полетам;
— выполнение регламентных работ и других мер профилак-
тики;
— проведение доработок авиационной техники по бюллете-
ням промышленности;
— производство ремонта;
— организацию хранения авиационной техники в частях;
— подготовку авиационной техники для проведения специ-
альных мероприятий и в любых условиях базирования.
Независимо от характера и. назначения эксплуатационных
мероприятий все они состоят из ряда последовательных техно-
логических операций. К числу их относятся:
— контроль состояния авиационной техники, выполняемый с
целью выявления и прогнозирования возникающих в процессе
эксплуатации отказов и неисправностей;
— поиск обнаруженных неисправностей, имеющий целью оп-
ределение места и выяснение характера повреждения;
— восстановление неисправной авиационной техники или пу-
тем ее ремонта, или путем замены на исправную;
— меры предупредительной профилактики, включающие в
себя промывку и смазку механизмов, предусмотренную прави-
21* 323
лами эксплуатации, профилактическую замену изношенных де-
талей и элементов, подтяжку крепления, подрегулировку аппа-
ратуры и т. д.;
— собственно подготовка к полетам и применению, включаю-
щая заправку топливом и другими рабочими жидкостями и га-
зами, применяющимися в полете, снаряжение боеприпасами, ре-
гулировку и настройку аппаратуры в соответствии с полетным,
заданием, установку съемного оборудования и снаряжения;
— вспомогательные работы, включающие подготовительные-
и заключительные операции процесса эксплуатации, состоящие
из расчехления, вскрытия и закрытия люков и лючков, установ-
ки и съема приспособлений и вспомогательных устройств, демон-
таж и монтаж оборудования, присоединение и отключение аэро-
дромных средств эксплуатации и технического контроля состоя-
ния авиационной техники и т. д.
Контроль состояния авиационной техники является одним из;
главных элементов процесса эксплуатации.
Все этапы эксплуатации авиационной техники включают в-
себя в качестве неотъемлемой составной части осмотры и про-
верку ее состояния.
В настоящее время применяются следующие способы конт-
роля состояния авиационной техники:
— внешний осмотр;
— проверка работоспособности авиационной техники; ( ' J'
— контроль и проверка состояния авиационной техники с по-
мощью контрольно-измерительной аппаратуры или средств ин-
струментальной проверки.
Внешний осмотр включает всестороннюю визуальную про-
верку внешнего состояния объектов и механическую проверку
надежности их крепления или присоединения. В ряде случаев
вследствие несовершенства существующих методов инструмен-
тального контроля внешний осмотр является единственным сред-
ством вскрытия некоторых дефектов и предотвращения отказов,
оборудования в полете. Внешний осмотр осуществляется нево-
оруженным глазом или с помощью оптических приборов.
Естественно, что возможности внешнего осмотра ограничены,,
ибо он позволяет проверить только открытые для внешнего наб-
людения места и обнаружить лишь явные недостатки.
Внешний осмотр авиационного оборудования имеет целью;
проверить:
— внешнее состояние приборных досок, электрических щит-
ков, приборов, агрегатов и блоков (на отсутствие повреждений
покрытий, вмятин, трещин и поломок видимых деталей, отсутст-
вие их загрязнений), а также трубопроводов и электропроводки:
(на отсутствие повреждения трубок и изоляции проводов, на-
дежность и исправность мест их соединения);
— надежность крепления приборов агрегатов, блоков, тру-
бопроводов и электрических жгутов (качество затяжки крепеж-
324
пых гаек, болтов и винтов, наличие контровки мест крепления,
состояние амортизации);
— состояние и исправность мелких коммутационных элемен-
тов электросети и защиты (выключателей, переключателей,
кнопок, концевых 'выключателей, автоматов защиты, предохра-
нителей и т. д.).
Внешний осмотр, несмотря на свои недостатки (субъектив-
ность оценки результатов и большая трудоемкость), на данной
стадии развития средств контроля пока еще остается одним из
распространенных способов контроля состояний авиационной
техники.
Под проверкой работоспособности технического устройства
подразумевается проверка наличия у него признаков, характе-
ризующих процесс выполнения заданных функций.
В этом случае систему, агрегат или прибор включают в ра-
боту и проверяют (визуально или на слух), выполняет проверя-
емый объект свои функции или не выполняет их.
Проверка состояния авиационной техники посредством конт-
рольно-измерительной аппаратуры (или так называемый инстру-
ментальный контроль) является основной. Такая проверка авиа-
ционного оборудования может производиться непосредственно
ла самолете или в лаборатории после съема его с самолета.
Все виды проверок состояния авиационной техники, методи-
ка и порядок их проведения устанавливаются регламентами и
технологическими картами, в которых даются:
— .маршрут последовательности осмотров и проверок;
— конкретные способы проверок авиационной техники;
— указания на контрольно-измерительную аппаратуру и ин-
струмент, необходимые для производства данной проверки;
— условия и допуски для оценки проверяемых объектов;
— сроки, через которые необходимо проводить данные про-
верки.
Наиболее прогрессивным и новым способом инструменталь-
ного контроля состояния авиационной техники является автома-
тический контроль.
§ 14.2. ПОДГОТОВКА АВИАЦИОННОЙ ТЕХНИКИ
К ПОЛЕТАМ
Постоянная готовность авиационной техники к полетам и
боевому применению всецело зависит от своевременной подго-
товки ее к полету.
Подготовка самолетов к полету слагается из следующих ме-
роприятий:
— предварительной подготовки; ""
— предполетной подготовки; ~~
— подготовки к повторному полету; V "*
— послеполетной подготовки. —
325
(Основным видом подготовки к очередным полетам является
предварительная подготовка. Она производится,' как правило,
накануне дня полетов, но не раньше чем за пять дней до .вылета.
Предварительная подготовка авиационной техни-
ки включает:
— контрольный осмотр;
— устранение неисправностей, обнаруженных в полете и вы-
явленных во время осмотра;
— подготовку авиационных боеприпасов в соответствии с за-
данием;
— проверку состояния и подготовку контрольно-поверочной
аппаратуры и средств автоматизированного контроля, необхо-
димых для выполнения работ на авиационной технике в период
проведения полетов.
Главной составной частью предварительной подготовки яв-
ляется контрольный осмотр. Осмотр производится в оп-
ределенной последовательности, согласно маршруту осмотра и
инструкции, изложенной в едином регламенте технического об-
служивания данного типа самолета.
Контрольный осмотр является, как правило, комплексным,
так как одновременно осматриваются планер самолета, двигате-
ли, авиационное оборудование и авиационное вооружение.
Самолеты, на которых предварительная подготовка не вы-
полнена в установленные сроки, считаются неисправными и до-
пускать их к полетам запрещается.
Исправным считается самолет, имеющий запас техниче-
ского ресурса, на котором выполнены установленные регламент-
ные работы и проведена предварительная подготовка.
Предполетная подготовка авиационной техники
производится непосредственно перед данным конкретным поле-
том и включает:
.—<предполетный осмотр;
— проверку наличия на самолете горючего, масла, спецжид-
костей и газов и его дозаправку, дозарядку и снаряжение само-
лета боеприпасами ,в соответствии с заданием на полет;
— = установку съемного оборудования;
— проверку работоспособности агрегатов и систем, входящих
в состав оборудования самолетов-
Проверка на земле двигателей, настройка и проверка рабо-
тоспособности радиотехнического и авиационного оборудования
перед полетом производится летным составом, пользующимся
этим оборудованием в полете.
Боеготовым считается исправный самолет с запасом тех-
нического ресурса, обеспечивающим выполнение не менее чем
трех полетов на реальную дальность и продолжительность по-
лета, на котором выполнена предполетная подготовка в соответ-
ствии с полетным заданием.
326
Подготовках повторному полету производится в
течение стартового времени перед каждым новым полетом само-
лета на задание и выполняется на технических позициях или
стоянках самолетов.
Подготовка к повторному полету включает:
— стартовый осмотр;
— устранение неисправностей, выявленных в предыдущем
полете и при стартовом осмотре;
— заправку самолета горючим, зарядку кислородом, а так-
же снаряжение самолета боеприпасами согласно заданию на
полет.
Послеполетная подготовка авиационной техники
производится в конце каждого летного дня (ночи) с целью при-
ведения самолетов в состояние готовности для вылета по тревоге
'(самолет, на котором не произведена послеполетная подготовка,
считается неисправным).
Послеполетная подготовка включает:
— послеполетный осмотр с целью проверки состояния
самолета и его готовности к полету по тревоге;
— устранение неисправностей, выявленных в полете и обна-
руженных при осмотре;
— заправку самолета горючим, смазочными материалами,
специальными жидкостями, зарядку газами и снаряжение бое-
припасами в соответствии с заданием.
§ 14.3. РЕГЛАМЕНТНЫЕ И ПРОФИЛАКТИЧЕСКИЕ РАБОТЫ
Для поддержания авиационной техники в исправном состоя-
нии и предупреждения возможности появления неисправностей
в полетах на ней периодически выполняются регламентные и
профилактические работы.
Регламентные работы являются основным видом профилак-
тики и производятся с целью предупреждения износа авиацион-
ной техники и сохранения ее летно-тактических и технических
характеристик в пределах установленных допусков.
Регламентные работы по всему комплексу авиационной тех-
ники выполняются в единые сроки, определяемые налетом са-
молета (через 50, 100, 200 и другое число часов налета). У авиа-
ционной техники, находящейся на хранении или имеющей в те-
чение длительного времени ограниченный налет, регламентные
работы производятся в сроки, определяемые календарным време-
нем, т. е. через 1, 3, 6 месяцев и через 1 год-
Главной составной частью регламентных работ является
контроль состояния авиационной техники. \ /
При производстве регламентных работ*авиационная техника
подвергается инструментальному контролю состояния как непо-
средственно на самолете, так и демонтированного оборудования
в лаборатории подразделения регламентных работ.
327
Посредством инструментального контроля выясняется со-
стояние авиационной техники, обеспечивается получение данных
для прогнозирования состояния на последующий межрегламент-
ный срок эксплуатации.
В случае обнаружения в процессе производства регламент-
ных работ неисправностей, производится работа по определению
места и характера повреждения и по устранению неисправностей.
Другой составной частью регламентных работ являются ме-
ры профилактики: промывка, смазка механизмов, замена изно-
шенных деталей, проверка и подтяжка креплений, нанесение ла-
кокрасочного покрытия, настройка и регулировка аппаратуры.
Порядок, объем и сроки выполнения регламентных работ оп-
ределяются на основании опыта эксплуатации авиационной тех-
ники и ее исследования как объекта контроля и устанавливают-
ся «Единым регламентом технического обслуживания», «Техно-
логией выполнения регламентных работ» и инструкциями по
эксплуатации для данного типа самолета.
Нарушение сроков выполнения и объема регламентных работ
не допускается, и самолеты, на которых не выполнены очеред-
ные регламентные работы, в полет выпускать запрещается.
Кроме регламентных работ, в процессе эксплуатации авиа-
ционной техники эпизодически проводятся другие виды профи-
лактических мероприятий.
Для всестороннего выявления технического состояния авиа-
ционной техники периодически проводится комплексный осмотр
специалистами всех профилей ИАС.
Через определенные периоды календарного времени прово-
дятся парковые дни, в течение которых производятся осмотры
авиационной техники, обучение личного состава практическим
работам по подготовке самолетов к действиям по боевой трево-
ге и к другим специальным заданиям.
В некоторых случаях, например:
— перед сдачей самолетов за пределы авиачасти;
— при замене двигателей;
— перед предстоящим проведением специальных мероприя-
тий, сопровождающихся .массовыми полетами;
— в случаях особо интенсивной эксплуатации авиационной
техники, а также в целях обеспечения безотказной работы авиа-
ционной техники, находящейся в сложных географических и
климатических условиях, могут проводиться внеочередные про-
филактические работы по особому в каждом случае плану.
Для содержания авиационной техники в исправном состоя-
нии с достаточным запасом ресурса проводятся также комп-
лексные, целевые и инспекторские осмотры.
Комплексный осмотр проводится в межрегламентные сроки с
целью всесторонней и углубленной проверки состояния авиаци-
онной техники через установленное число часов полета. Он про-
водится техническими экипажами самолетов и групп обслужи-
328
гания по технологическим картам с привлечением лабораторий
инструментального контроля.
Целевой осмотр проводится для детальной проверки отдель-
ных агрегатов, систем, .механизмов и элементов конструкции
авиационной техники, необходимость которой выявляется со-
стоянием, условиями и сроками эксплуатации.
Инспекторский осмотр проводится для оценки состояния
авиационной техники и правильности ее эксплуатации. Его вы-
полняют назначенные для инспектирования должностные лица.
Оценка состояния проводится по утвержденным нормам.
При длительной эксплуатации авиационной техники, с целью
определения ее общего технического состояния и ликвидации не-
достатков и неисправностей, возникших вследствие износа, ста-
рения и коррозии материалов ее элементов, через определенные
сроки эксплуатации производится так называемый профилакти-
ческий ремонт.
Обнаруженные при профилактическом контроле недостатки и
неисправности авиационной техники устраняются путем ее ре-
гулировки, замены неисправных элементов и узлов и проведени-
ем некоторых других мер восстановления.
Профилактический ремонт является планово-предупреди-
тельным мероприятием, которое позволяет поддерживать на-
дежность авиационной техники в процессе эксплуатации на за-
данном уровне и обеспечивает возможность полной выработки
назначенного технического ресурса.
Рассмотрим задачу определения оптимальной периодичности
выполнения регламентных работ. От длительности межрегла-
ментных сроков эксплуатации в значительной степени зависит
готовность авиационной техники. Увеличение межрегламентных
сроков позволяет сократить время вынужденного простоя .и, сле-
довательно, повысить готовность к применению'авиационной тех-
ники, однако оно связано с определенным понижением ее на-
дежности. Поэтому при выборе периодичности выполнения рег-
ламентных работ надо иметь в виду необходимость обеспечения
как готовности к применению, так и надежности.
Характеристикой, удовлетворяющей этим условиям, являет-
ся функция эксплуатационной надежности
= \ е~Х<ыр’ (14-1)
^.Мр “Г £рр
тде /мр — межрегламентный срок эксплуатации (налет
в часах между двумя последовательными рег-
ламентными работами);
/рр — время, затрачиваемое на выполнение регла-
^мр ментных работ;
-у—ПГТ- — вероятность того, что авиационная техника бу-
г"₽ । грр дет гото:ва к применению в произвольный мо-
мент времени (готовность);
329
X— интенсивность отказов;
e-)AiP — вероятность отказа авиационной техники к кон-
цу межрегламентного периода эксплуатации.
Предполагается, что после проведения регламентных работ
авиационная техника полностью восстанавливается.
Для отыскания оптимального межрегламентного периода
эксплуатации ^мро необходимо найти экстремум функции (14.1).
Используя известные правила определения экстремума функции
одной переменной, возьмем производную (14.1) и приравняем ее-
нулю:
dP э(^ыр)
d Др
Др
(ДР + W2
_Ump \ ->Л,Р =0
‘'мр I 6рр/
(14.2>
Решения этого уравнения дают значения Др0. Уравнение
(14.2) имеет три корня. Отбрасывая два из них, как не имеющие-
физического смысла, получим
/ ГI f \2 t
^=~v + V Ш + (14,3>
Подставляя величину оптимального межрегламентного пе-
риода эксплуатации /мр0 в (14.1), найдем значение эксплуата-
ционной надежности к концу межрегламентного периода, кото-
рое при данных X и £рр является максимально возможным
^тах(М = 7-^е ”₽°- (14.4)
^мро“Г *рр
Пример. Интенсивность отказов кренового автопилота X =0,5 X
ХЮ-8 ----, среднее время выполнения регламентных работ (с учетом про*
час
филактического контроля и восстановления неисправных) составляет 6 ча-
сов. Определить оптимальную длительность межрегламентного срока эксплуа-
тации 4ipo и эксплуатационную надежность к концу этого срока.
По формуле (14.3) найдем
£Мпо= — 3 + |/ 9 Н-------------- 107 нас.
₽ у 0,5-10-8
Подставив это значение в (14.4), получим-
Рэ max ( Дро) = 0>9-
Таким образом, если проводить регламентные работы по креповому ав-
топилоту примерно через каждые 100 часов налета, то вероятность его безот*
казного функционирования в течение межрегламентного срока будет не хуже
0,9.
330
§ 14.4. ДОРАБОТКИ АВИАЦИОННОЙ ТЕХНИКИ
С целью устранения на летательных аппаратах, находящих-
ся в авиационных частях, недостатков, выявленных в процессе-
эксплуатации, и введения на них конструктивных улучшений
производятся доработки авиационной техники.
Доработки проводятся в тех случаях, когда необходимо:
— повысить надежность авиационной техники и обеспечить,
безопасность полетов;
— улучшить условия технической эксплуатации авиационной
техники;
— внедрить на летательных аппаратах, находящихся на
эксплуатации, модернизированные или принципиально новые и
более совершенные типы оборудования и вооружения.
Доработки авиационной техники производятся только по бюл-
летеням и технологиям, разработанным промышленностью или
конструкторскими бюро и введенным в действие в авиационных
частях командованием ВВС.
В бюллетенях о доработках кратко излагаются следующие
сведения:
— по какому вопросу выпущен бюллетень;
— какие работы, согласно данному бюллетеню, необходимо-
выполнить;
— технология выполнения предполагаемых работ;
— перечень материалов, деталей, приспособлений и инстру-
ментов, необходимых для выполнения доработок;
— на какие серии и номера изделий авиационной техники
распространяются доработки по данному бюллетеню;
— чертежи, эскизы, рисунки и схемы, поясняющие выполне-
ние доработок.
Кроме того, в каждом отдельном случае в бюллетенях о до-
работках оговорено: кто их проводит, кто поставляет необходи-
мые детали, сроки поставки их, а также сроки окончания работ.
По степени важности и срочности доработки подразделяются
на:
— неотложные, связанные с устранением недостатков, опас-
ных для полета. Такие доработки выполняются немедленно по-
получении соответствующих бюллетеней;
— текущие, выполняемые при производстве очередных регла-
ментных работ.
В зависимости от сложности и величины объема работ, свя-
занных с выполнением доработок авиационной техники, они
выполняются или силами авиационных частей, или заводскими
бригадами, прикомандированными для этой цели в авиационные-
части.
На самолетах, находящихся на капитальном или профилак-
тическом ремонте, доработки выполняются на авиаремонтных,
предприятиях ВВС. В некоторых исключительных случаях дора-
331’
ботки авиационной техники производятся на самолетостроитель-
ных заводах-
На инженерный состав авиационных частей возлагаются ор-
ганизация проведения доработок и контроль за качеством их
проведения.
При этом решаются следующие задачи: планирование дора-
боток, изучение бюллетеней и технологий с техническим соста-
вом авиационной части, получение необходимых для доработок
.материалов и деталей, практическое освоение технологии дора-
боток и подготовка летательного аппарата эталона, образцо-
во доработанного в соответствии с действующим бюллетенем,
проверка качества выполнения доработок и понумерной учет
их проведения.
Доработки в авиационных частях выполняются, как прави-
ло, заводской бригадой. Со стороны авиационной части оказы-
вается всемерная помощь и содействие, чтобы работа проходи-
ла без простоев. Технический состав части привлекается к вы-
полнению доработок под контролем руководящих должностных
лиц ИАС.
Доработки выполняются по планам-графикам. В них пре-
дусматривается очередность и бесперебойность подачи самоле-
тов на доработки и сроки их выполнения. Контроль за выпол-
нением доработок осуществляют инженеры части.
Производить доработки, переоборудовать авиационную тех-
нику, вносить какие-либо изменения в принципиальные и полу-
монтажные схемы без соответствующих бюллетеней и указаний
и самовольно устанавливать дополнительные или не предусмот-
ренные для данного типа летательного аппарата приборы и аг-
регаты не разрешается.
§ 14.5. ОРГАНИЗАЦИЯ ЭКСПЛУАТАЦИИ АВИАЦИОННОЙ ТЕХНИКИ
НА АЭРОДРОМЕ И В ПОДРАЗДЕЛЕНИЯХ
РЕГЛАМЕНТНЫХ РАБОТ
Под организацией эксплуатации авиационной техники пони-
мается совокупность мероприятий, позволяющих осуществить
оптимальную расстановку сил обслуживающего персонала, ра-
ционально использовать аэродромные средства обслуживания и
?в минимально сжатые сроки выполнить поставленную перед
’ИАС задачу по подготовке самолетов к полетам и по проведению
мер обеспечения наиболее надежной и продолжительной эксп-
.луатации авиационной техники.
К мероприятиям такого рода относятся также организация
на аэродроме образцового порядка, обеспечение безопасности
.для людей, находящихся на аэродроме, и наилучшего сбереже-
ния авиационной техники.
Организация эксплуатации авиационной техники возлагает-
ся на инженеров авиационных частей-
;332
Они осуществляют планирование работ на аэродроме, орга-
низуют деятельность технического состава, осуществляют конт-
роль проводимых работ по эксплуатации самолетов и ведут
учет работы техсостава, состояния авиационной техники и рас-
ходования материальных средств.
Организация руководства личным составом ИАС, контроль за
его деятельностью по подготовке авиационной техники к по-
летам, непрерывная информация о ее состоянии и ходе подго-
товки, оказание квалифицированной консультации летному со-
ставу при появлении особых случаев полета, а также четкое
взаимодействие с авиационно-технической частью осуществля-
ются руководящим составом ИАС. Пункт управления ИАС
обычно располагается в районе стоянок самолета или техниче-
ских позиций..
Пункт управления оборудуется всеми видами и средствами
связи и информации.
Все виды подготовки самолетов к полетам осуществляются
силами инженерно-технического состава подразделений авиа-
ционной части и, как правило, на самолетных стоянках. В том
случае, когда обслуживание полетов самолетов совершается без
их заруливания на стоянки, все работы по подготовке к оче-
редному вылету производятся на .технических позициях.
Подготовка авиационной техники к полетам проводится тех-
ническим составом групповым или поточно групповым методом.
При групповом методе самолеты находятся на стоянках,
группы специалистов, обеспечивающих их подготовку, последо-
вательно переходят от одного самолета к другому, аналогично'
перемещаются средства аэродромно-технического обеспечения.
При этом методе подготовки самолетов применяются главным
образом подвижные и автономные средства эксплуатации.
При поточи о-г р у п п о-в о м методе весь объем подготовки
самолета распределяется на технологические операции. При
этом установленные по каждой специальности операции выпол-
няются последовательно на всей назначенной группе'самолетов,,
а операции по различным специальностям выполняются на них
параллельно. Для достижения наибольшего эффекта в сокра-
щении времени подготовки группы самолетов обычно число-
специалистов различного профиля выбирается пропорциональ-
ным времени, необходимому для выполнения работ по этим
специ альностям.
На рис. 14.1 приведены графики подготовки самолетов к по-
летам: а — групповым методом и б — поточно-групповым мето-
дом.
При групповом методе сначала полностью готовится один
самолет и лишь по окончании его подготовки начинается под-
готовка следующего самолета.
335
В данном случае время подготовки одного самолета
м
тде — среднее время, затраченное на подготовку одного са
молета специалистом t-того профиля;
Рис. 14.1. Графики группового и поточно-группового методов под-
готовки к полетам
М — число различных специалистов, участвующих в под
готовке самолета к полетам;
Тг — время подготовки группы N самолетов
м
Kr = W 2 Ч
!=1
г — ритм подготовки (время между готовностями очеред
ных самолетов в группе)
1-1
Коэффициент загрузки специалистов i-того профиля
i=i
334
При групповом методе обслуживания общее время готовно-
сти группы самолетов сравнительно большое, а коэффициент за-
грузки специалистов низкий.
При поточно-групповом методе подготовки к полетам, по ме-
ре высвобождения специалиста, он переходит на другой само-
лет и его коэффициент использования в данном случае макси-
мальный
где — число специалистов i-того профиля, одновременно
участвующих в подготовке самолетов.
Время подготовки группы N самолетов
T^k-^N-X),
vjye. tf — время подготовки первого самолета и ритм подготовки
-самолетов
Г = 'Чини
где Tmin — минимальное (из всех специальностей) среднее
время, затрачиваемое одним специалистом на подготовку само-
лета.
При параллельном.методе установленные операции по
каждой специальности выполняются одновременно на всех са-
молетах. Параллельный метод является основным методом под-
готовки самолетов экипажами или боевыми расчетами.
При пар аллельн о-п о т о ч н о м методе подготовки уста-
новленные операции техническими экипажами выполняются на
всех самолетах параллельно, а специалисты различных профи-
лей, образующие обслуживающие группы, выполняют установ-
ленные для них операции поточным методом. Указанный .метод
является основным в авиационных подразделениях.
На рис. 14.2 показана примерная технологическая последо-
вательность выполнения предполетной подготовки двух -самоле-
тов одной бригадой специалистов, в распоряжении которой име-
ется один аэродромный пусковой агрегат- Закончив работы на
первой паре самолетов, бригада перемещается и выполняет ра-
боты по той же схеме на следующей паре самолетов и т. д. В ус-
ловиях рассредоточенного базирования общее время подготовки
несколько увеличивается в связи с потерями времени на пере-
ход (или переезд) бригады специалистов.
По аналогичной схеме строится предварительная подготовка.
Технические экипажи выполняют одновременно, параллельно все
свои работы по подготовке самолетов вплоть до назначенного
срока их окончания и прерывают их только на время выполне-
ния операций по подготовке прибывшей бригадой специалистов
(при этом технический экипаж осуществляет контроль за ее
работой). Бригада специалистов последовательно перемещается
335
от самолета к самолету. Обычно она оснащается подвижными:
лабораториями экспериментального контроля и другими средст-
вами автоматизации и механизации трудоемких работ.
Регламентные и профилактические работы, доработки авиа-
ционной техники и другие.трудоемкие работы выполняются под-
разделениями регламентных работ на рабочей площадке или в
ангаре данного подразделения.
5)
Р и с. 14.2. Графики подготовки двух самолетов:
а — при рассредоточенном базировании, б— на групповой стоянке. Р — расчехле-
ние, ВО — внешний осмотр, проверка заправки и другие работы вне кабины,.
РК — работа в кабине, П — переход специалистов к другому самолету, ПА — пе-
реезд АПА, Д — оформление документации
Регламентные работы выполняются как непосредственно на
самолетах, так и в рабочих помещениях подразделения, где про-
веряется и ремонтируется снятое с самолета оборудование. Ла-
боратории подразделения регламентных работ по авиационному
оборудованию обычно размещаются в нескольких помещениях,,
которые оборудованы рабочими столами с контрольными стен-
336
дами, верстаками и шкафами для хранения контрольно-измери-
тельной аппаратуры и другого имущества.
Однако основной технической базой подразделения регла-
ментных работ являются подвижные контрольно-ремонтные
средства, оснащенные соответствующей контрольно-поверочной
аппаратурой и инструментом.
Регламентные и другие трудоемкие работы планируются, ис-
ходя из предполагаемого налета самолетов части, вероятности
истечения у самолетов межрегламентных сроков и из реальных
условий и возможностей подразделения, выполняющего упомя-
нутые работы.
Планирование должно учитывать текущие задачи части так,
чтобы производство любых работ не являлось помехой боевой и
учебно-боевой деятельности авиационной части и вместе с тем
обеспечило бы своевременность их выполнения.
При организации выполнения' регламентных и профилакти-
ческих работ в настоящее время широко применяются поточные
методы работы.
Такие методы характеризуются:
— расчленением всего объема работ на простейшие опера-
ции;
— закреплением операций за определенными специалистами
с учетом полной их загрузки;
— последовательным расположением рабочих мест и спе-
циалистов по ходу технологического процесса;
— ритмичностью процесса выполнения работ. '
Поточный метод выполнения регламентных работ обеспечи-.
вает: расширение фронта работ; равномерный ход выполнения
работ, ритмичное, заранее планируемое поступление на регла-
менты и выпуск с регламента самолетов, сокращение общего
времени выполнения регламентных работ, более узкую специа-
лизацию техников и механиков и повышение качества работ.
Для упорядочения процесса производства регламентных (и
других профилактических) работ разрабатываются диспетчер-
ские графики, в которых устанавливается последовательность
операции, дается расчет времени работ, а также определяются
моменты времени поэтапного контроля произведенных работ.
При организации выполнения регламентных работ на самолете
возникают трудности в организации работы непрерывным пото-
ком специалистов разных профилей из-за наличия узких мест в
общем потоке. Для лучшей организации работ и преодоления
узких мест обычно составляются графики очередности выполне-
ния работ в местах, лимитирующих возможности различным спе-
циалистам одновременно выполнять работы в этих местах.
На рис. 14.3 изображен примерный график выполнения рег-
ламентных работ в кабине самолета истребителя при поточной
организации труда.
22. Румянцев Е. А. и др.
337'
see
Р и с. 14.3. Распределение времени работы регламентных групп в кабине самолета-истребителя
50-часовые регламентные работы 100-часовые регламентные работы Профилактические работы через 2—2,5 года •в g И to Е c»s ° J=i
и Old > о п и > ГО Old > о о tl > Cd РТО > о й Часы Г руппы регламентных работ''"
—
— — to
— я со
1 i ф-
••• Сл •
—
1 — -—- СП
7 8
т- ~~~
- =
—, : СО
— и 10 и
- — — to
• — со
=
1 " — СЛ
в __ ст>
-===- Я i—*
__ ОО 1
1 Я — 5
о
г—9 ю
--= КЗ to .
N3 СО
КЗ
- . КЗ Сл ’
- ко о
Перед выполнением на самолетах регламентных и профилак-
тических работ производится комплексный осмотр и дефектация
самолетов с целью выявления неисправности, определения тру-
доемкости и характера работ.
В случае обнаружения повреждений авиационной техники
для ее восстановления привлекается максимально необходимое
количество специалистов. В первую очередь всегда восстанав-
ливаются самолеты, требующие .меньших трудозатрат.
При работе на авиационной технике следует строго соблю-
дать меры безопасности, правила ее сбережения, определяемые
инструкциями по эксплуатации.
При работах на высоко расположенных частях самолета,
подъеме самолетов, зарядке резервуаров, баллонов и систем с
высоким давлением необходимо применять меры предосторожно-
сти.
Необходимо своевременно применять установленные меры
защиты от высокочастотных облучений, воздействия агрессивных
и вреднодействующих веществ.
Для обеспечения безопасности движения людей, авиационной
техники и автотранспорта обычно выставляются необходимые
-ограничительные, предупреждающие и .запрещающие знаки и
сигналы.
При хранении авиационной техники самолеты, агрегаты обо-
рудования и вооружения укрываются предохранительными чех-
лами. Кабины, эксплуатационные люки и воздухозаборники
плотно закрываются. Поверхность самолетов регулярно очища-
ется от грязи, снега и образовавшегося льда.
§ 14.6. ОРГАНИЗАЦИЯ МЕСТ БАЗИРОВАНИЯ АВИАЦИИ
Местами базирования авиации являются аэродромы, пред-
ставляющие собой специально оборудованные и подготовленные
территории, предназначенные для взлета, посадки, размещения
и обслуживания самолетов.
Крупные авиационные соединения, как правило, занимают
(несколько близлежащих аэродромов, связанных между собой
средствами связи и путями сообщения. Группа таких аэродро-
мов составляет аэродромный узел базирования авиации.
Совокупность аэродромных узлов базирования авиационных
соединений, объединенных под общим командованием, составля-
ют район базирования авиации.
Как правило, аэродромы мирного времени являются посто-
янными. Они обычно имеют бетонированные полосы, оборудо-
ванные самолетные стоянки, многие из них имеют стационарное
«оборудование для производства захода и расчета на посадку и
другие капитальные сооружения.
22*. 339
В военное время сеть аэродромов сильно увеличивается, соз-
даются временные аэродромы с грунтовыми полосами, или, как.
их именуют, полевые аэродромы-
Вся территория современного стационарного аэродрома по-
своему назначению делится на три зоны: летную, служебно-тех-
ническую и городок авйагарнизона (см. рис. 14.4).
ДВиационти гораЗор
Рис. 14.4. Типовая схема аэродрома
Летная территория аэродрома состоит из летного поля (ЛП),
мест стоянок (МС), рулевых дорожек (РД), технических пози-
ций (ТП) .и зоны воздушных походов (ЗВП).
Летное поле является главной частью аэродрома.
Места самолетных стоянок представляют собой специально»
оборудованные площадки для размещения, обслуживания само-
летов и их укрытия от поражения огнем потенциального или:
фактического противника.
Служебно-вспомогательная зона объединяет территорию
аэродрома, на которой располагаются все специальные аэродром-
ные сооружения, предназначенные для обеспечения управления
полетами, связи, навигации, посадки, эксплуатации и ремонта,
самолетов, хранения технического имущества, горюче-смазочных,
материалов и боеприпасов.
К числу сооружений и оборудования аэродрома, предназна-
ченных для обеспечения эксплуатации авиационной техники, от-
носятся технические позиции (рис. 14.5).
Первые и третьи технические позиции (встречи самолетов и
выпуска самолетов) расположены на концах взлетно-посадоч-
340
ной полосы, они оборудованы защитными валами, колонками
централизованного питания электроэнергией, стоянками для
аэродромных средств эксплуатации самолетов. Первая позиция
предназначена для встречи самолетов техническим составом ло-
вле их посадки и подготовки самолетов для переброски на вто-
рую техническую позицию.
Третья — стартовая — техническая позиция предназначена
для производства работ, ввязанных с ’Непосредственным выпу-
©йом самолетав в полет.
Позиция
Вторая техническая позиция подготовки самолетов распола-
гается в районе средней части рулежной дорожки, соединяющей
старт и конец взлетно-посадочной полосы. Она оборудована ко-
лонками электропитания, централизованной системой заправки
самолета топливом, зарядки газами и стоянками для средств
.аэродромно-технического обеспечения.
Вторая техническая позиция используется главным образом
для подготовки авиационной техники к повторному вылету.
Служебные помещения подразделений обслуживания и
подготовки к полетам располагаются вблизи мест стоянок само-
летов.
Помещения подразделений регламентных работ, авиаремонт-
ных частей, аккумуляторно-зарядной станции, кислородно-до-
бывающей станции, компрессорной находятся в служебно-вспо-
могательной зоне.
На некоторых аэродромах имеются аэродромный авиацион-
ный тир, площадка для устранения девиации компасов, юсти-
341
ровки радиоэлектронного оборудования, калибровки прицелов и
площадки для дезактивации авиационной техники.
Самолетные стоянки могут быть групповыми, предназначен-
ными для размещения и обслуживания группы самолетов, или ин-
дивидуальными, предназначенными для отдельных самолетов.
Индивидуальные места стоянок являются в настоящее время
основным видом стоянок для войсковых аэродромов.
Современные условия ведения войны с применением ядерно-
го оружия вносят коренные изменения в порядок размещения
авиационной техники на аэродроме-
Исходя из принципа минимальной поражаемости авиацион-
ной техники при бомбардировке с воздуха, в основу взят груп-
повой способ рассредоточения самолетов.
Самолеты авиационной части рассредоточиваются по подраз-
делениям так, чтобы при взрыве одной ядерной бомбы пораже-
ние больше чем на самолеты одного подразделения не распро-
странялось.
С целью предохранения авиационной техники от воздействия
обычных средств поражения в зонах рассредоточения каждого
подразделения между самолетами устанавливаются такие рас-
стояния, чтобы поражение от одной фугасной или осколочной
бомбы больше чем на один самолет не распространялось (т. е.
на 50—100 метров).
Рассредоточение самолетных стоянок в зонах подразделений
ведет к увеличению времени подготовки к вылету и затрудняет
организацию работы на аэродроме, однако оно позволяет сбе-
речь от возможного поражения основную массу самолетов и
сохранить боевую готовность авиационной части.
Самолетные стоянки оборудуются средствами швартовки са-
молетов. Под колеса шасси устанавливаются специальные ме-
таллические колодки.
Каждая самолетная стоянка оборудуется рабочим верстаком,,
столом для чистки оружия, контейнерами для хранения инстру-
мента и эксплуатационного инвентаря, стеллажами для балло-
нов со сжатыми газами и самолетных чехлов, а также противо-
пожарными средствами: переносными огнетушителями, шанце-
вым инструментом и плотно закрывающимся ящиком с сухим
песком.
Самолетные лестницы, столы, приспособления для буксиров-
ки самолетов и другие средства наземной механизации хранят-
ся вблизи от стоянок в специально отведенных местах.
Основным средством защиты людей и боевой техники от по-
ражения при нападении противника являются оборонительные
инженерные сооружения: оборудованные щели, убежища за-
крытого типа и самолетные капониры, а также средства маски-
ровки авиационной техники и ложные аэродромы.
Глава XV
СЕТЕВОЕ ПЛАНИРОВАНИЕ В ПРОЦЕССЕ
ЭКСПЛУАТАЦИИ АВИАЦИОННОЙ ТЕХНИКИ
§ 15.1. КРАТКИЕ сведения о сетевых методах
ПЛАНИРОВАНИЯ и УПРАВЛЕНИЯ
Сетевое планирование и управление является одной из новых
форм научной организации производственной деятельности
коллективов людей. Оно основано на .использовании сетевых мо-
делей, отображающих процесс деятельности людей, выполня-
ющих тот или иной комплекс работ-
Исследования с помощью сетевых .моделей позволяют полу-
чить определенные оптимальные показатели выполнения комп-
лекса работ. Такими показателями могут быть: минимальное
время выполнения всего комплекса работ, минимальная стои-
мость выполнения, получение максимальной надежности и т. д.
В настоящее время сетевые модели в процессе планирования ча-
ще всего применяются для нахождения наиболее рациональной
последовательности выполнения работ, обеспечивающей окон-
чание всего .комплекса работ в минимальное время. В этом слу-
чае в качестве основной характеристики каждой работы берет-
ся время ее выполнения.
Основным преимуществом метода сетевого планирования и
управления является то, что он позволяет четко представить весь
объем работ, который необходимо выполнить для достижения
конечной цели, и ясно видеть все существенные взаимосвязи и
взаимозависимости.
Сетевой метод позволяет решить принципиально новую зада-
чу планирования — определение критической последовательно-
сти работ, т. е. той цепочки непосредственно следующих друг за
другом работ, которая имеет наибольшую продолжительность, а
следовательно, определяет время выполнения всего комплекса.
Знание критической последовательности работ позволяет руко-
водителю концентрировать внимание управления и контроля
прежде всего на этих работах, а также на тех последователь^
ностях работ, которые близки к.критическим.
343
Несмотря на то, что .метод сетевого планирования не обеспе-
чивает математически оптимального решения, он позволяет
сравнительно легко выбрать логически оправданное решение,
близкое к оптимальному.
Сетевое планирование и управление целесообразно применять
там, где необходимо выполнить определенный комплекс взаимо-
связанных работ, имеющих конечную цель с наилучшими пока-
зателями. Чем сложнее комплекс работ, чем сложнее связи ме-
жду отдельными работами и подкомплексами, чем больше лю-
дей и коллективов занято в выполнении комплекса, тем больший
эффект даст этот метод.
§ 15.2. ПАРАМЕТРЫ И ОСНОВНЫЕ ПРАВИЛА ПОСТРОЕНИЯ
СЕТЕВЫХ ГРАФИКОВ
1. Сетевая модель и ее основные элементы
Сетевая модель является информационно-динамической мо-
делью процесса выполнения комплекса работ. Графическое изо-
бражение ее в виде направленного графа называется сетевым
графиком или просто сетью.
В построении любой сетевой модели применяются логические
элементы двух типов: работы и события. Под работой пони-
мается любой процесс или действие, приводящее к достижению
определенных фиксированных результатов. В сетевом графике
работы изображаются чаще всего в виде стрелок произвольной
длины. На рис. 15.1 представлен примерный сетевой график
предполетной подготовки системы кислородного питания само-
лета. График составлен на основании перечня работ, представ-
ленного табл. 15.1.
Из приведенного перечня работ видно, что имеются работы,
требующие затраты сил, ресурсов и времени, или только ресур-
сов и времени. Под понятие работ подходят также возможные
ожидания, обусловленные технологией отдельных процессов- Та-
кие работы не требуют ни затраты сил, ни затраты ресурсов, но
они занимают определенный промежуток времени.
344
Таблица 15.1
№ ;п/п Наименование работ Обоз- наче- ние работы Продол- житель- ность работы № события Примеча- ние
началь- ного конечного
1 Расчет кислорода, не- обходимого на полет а 0 1
2 Определение запаса
кислорода в самолетных газификаторах б 0 2
3 Подготовка самолет- ной системы для заправ- ки кислородом в 2 4
4 Переезд ТРЖК к са- молету г 2 3
5 Подготовка ТРЖК для заправки д 3 4
6 Заправка самолетных газификаторов е 4 5
7 8 Подъем давления в са- молетных газификаторах ж 5 6
Проверка герметично- сти самолетной системы 3 6 7
9 ПО Проверка работоспо- собности системы непре- рывной подачи кислорода Проверка работоспо- собности системы пре- рывной подачи кислоро- и 7 8
аг да к 7 9
Оформление докумен-
тации и доклад о готов- ности л 9 10
Пунктирными стрелками в сетевом графике изображаются
так называемые фиктивные работы или зависимости. Они вво-
дятся для образования правильной логической взаимосвязи дей-
ствительных работ и не требуют никаких затрат.
Работы между собой связываются с помощью событий, кото-
рые обычно изображаются в виде кружков. Каждая работа сети
имеет,.таким образом, начальное событие, обозначаемое симво-
.ло:м i, и конечное, обозначаемое /. В отличие от работы событие
не требует никаких затрат. Оно лишь фиксирует факт заверше-
ния предшествующих и 1воз<мож.ность .начала непосредственно
•следующих за ним работ.
Каждому событию присваивается номер, проставляемый
внутри кружка. При этом работы могут обозначаться номерами
начального и конечного событий. Например, работа а — 0, 1,
ж — 5, 6 и т. д.
345
Большое значение придается формулировке события. Необ-
ходимо возможно точнее определять, чем должна заканчивать-
ся каждая работа. Например, событие 1 — «расчет кислорода,,
необходимого на полет, закончен». Формулировка события всег-
да записывается в совершенной форме (сделано, закончено, вы-
полнено и т. д.). Если событие соединяет несколько входящих в
него работ, то оно включает и соответствующее число определе-
ний. Например, событие 4 имеет два определения: «ТРЖК для
заправки подготовлен» и «самолетная система для заправки ки-
слородом подготовлена». Подобное событие считается свершив-
шимся только тогда, когда будут выполнены все его определе-
ния.
Исходным событием сети называется событие, которое не-
имеет предшествующих ему событий и отражает начало выпол-
нения всего комплекса. Завершающим событием называется со-
бытие, которое не имеет последующих событий и отражает ко-
нечную цель.
Любая последовательность работ в сетевом графике, в ко-
торой конечное событие одной работы совпадает с начальным,
событием следующей за ней работы, называется путем (L). Пути
могут быть частичные — между двумя событиями и полные —
между исходным и завершающим событиями. Полный путь, име-
ющий наибольшую продолжительность, называется критическим
путем' (Акр).
2. Основные правила построения сетевых графиков
Имеется ряд основных правил, которые следует строго соблю-
дать при построении сетевых графиков.
Так как все работы в сетевом графике должны быть взаимо-
связаны, то наличие «тупиков» в сети (работа б, рис. 15.2,а) ука-
зывает либо на ошибку, либо на то, что результаты этой работы в
данном комплексе никому не нужны, а следовательно, такие ра-
боты не следует изображать на графике. В сети не должно быть
событий, кроме исходного, в которые не входит ни одной работы
(событие 5, рис. 15.2,а). Такие события могут быть объединены с
исходным, как это показано на рис. 15.2,6.
Рис.
15.2. Сетевые графики с замкнутыми контурами и «ту-
пиками»
346
В сетевом графике не должно быть замкнутых контуров (цик-
лов) . Работы и, д, к (рис- 15.2,а) образуют замкнутый контур. На-
личие замкнутых контуров свидетельствует о наличии логических
ошибок в сетевом графике.
Р и с. 15.3. Фиктивные работы сетевого графика
При наличии .между двумя событиями нескольких работ, вы-
полняемых параллельно, для определенности их обозначения но-
мерами событий необходимо ввести дополнительные события (1 и
2, рис. 15.3,а}, определяющие окончания соответствующих работ,,
и фиктивные работы, связывающие дополнительные события 1
и 2 с конечным событием 3. Введение фиктивных работ применя-
ется также тогда, когда имеются дифференцированно зависимые
работы. Начало выполнения работы и (рис. 15.3,а) зависит как
от окончания работы ж, так и от окончания работы г, но начало-
выполнения работы е зависит только от окончания работы г. Та-
кая логическая ситуация разрешается введением фиктивной ра-
боты 4, 7.
Если некоторая работа или группа работ может быть начата
после частичного выполнения предшествующей работы (в, рис.
15.3,6), то последняя разбивается на две (в! и е2, рис. 15.3,е) по-
следовательные работы введением дополнительного события с
четким его определением. В дальнейших исследованиях каждая
часть работы будет считаться самостоятельной.
Естественно, в практической деятельности возможны логиче-
ские ситуации, которые здесь не рассмотрены. Но правильное ре-
шение в любом случае может быть только при соблюдении ос-
новных рассмотренных правил.
При изображении сетевого графика и особенно его оконча-
тельного варианта для большей наглядности необходимо учиты-
вать следующее. Прежде всего следует избегать лишних пересе-
347'
чений стрелок и наличия дублирующих связей. Равномерная
плотность расположения событий, одинаковая направленность
стрелок, слева направо, т. е. от исходного события к завершаю-
щему, и их горизонтальность значительно облегчают пользова-
ние сетевым графиком. Если сетевой график состоит из отдель-
ных подсистем, то применение различных цветов для их изобра-
жения также улучшает наглядность сети и облегчает установле-
ние связей между подсистемами. Вместе с тем при составлении
первого варианта чернового графика не следует слишком увле-
каться внешним видом графика, чтобы не допустить логических
ошибок в изображении взаимосвязей между отдельными рабо-
тами или подсистемами.
3. Нумерация событий
Нумерация событий сети может быть правильной и произ-
вольной- Правильной нумерацией событий называется такая ну-
мерация, когда для любой работы сети номер начального собы-
тия меньше номера конечного
Рис. 15.4. Нумерация событий в сете-
вом графике
события, т. е. i<j. Так как лю-
бые два события сетевого гра-
фика могут соединяться не бо-
лее чем одной стрелкой, то при
такой нумерации событий до-
стигается однозначное опреде-
ление каждой работы указани-
ем номеров событий начала и
конца данной стрелки.
Рекомендуется следующий
порядок нумерации событий.
Исходному событию А (рис.
15.4) присваивается номер 0. Последующие номера нату-
рального ряда чисел присваиваются тем событиям, в
которые входят стрелки из нулевого события, но при
условии, что в эти события не входят стрелки из других собы-
тий. Номер 1 можно присвоить только событию Б, так как в со-
бытия В и Г входят еще стрелки из других событий. Затем рас-
сматривается событие 1 и нумеруются те очередные события, в
которые входят стрелки только из событий 0 и 1 или только из
события 1. Событию Д присваивается номер 2. Рассматривая со-
бытие 2, нумеруем событие Г числом 3 и т. д. Таким образом, со-
бытию присваивается очередной номер только тогда, когда все
входящие в него стрелки выходят из уже пронумерованных со-
бытий. Если сетевой график составлен правильно, то последова-
тельным перебором удается пронумеровать все события. При
этом не только автоматически выполняется условие правильной
нумерации событий (i<j), но и выявляются некоторые ошибки,
.допущенные при составлении графика, такие, как замкнутые
-348
контуры и тупики. Завершающее событие при правильной пуме*
рации будет иметь номер п—1, где п — число событий сети.
Правильная нумерация событий применяется при ручной об-
работке сети. При машинной обработке может применяться про-
извольная нумерация событий.
4. Временные оценки выполнения работ
Каждая работа сетевой модели должна быть точно определе-
на не только по своему объему и конечным результатам, но и по-
числу исполнителей, занятых в ее выполнении, и используемых
при этом технических средств. При таком определении основной
характеристикой каждой работы является время, необходимое на
ее выполнение, или ее продолжительность (£/у-). Время выполне-
ния большинства работ комплекса, по своему существу, является
случайной величиной, полной характеристикой которой является
закон распределения вероятности.
Из известных законов распределения для работ, выполняемых
•на авиационной технике, наиболее всего подходят следующие за-
коны.
Нормальный закон с плотностью __________
/ 1
= (16J>
где t — математическое ожидание продолжительности работы;
о — среднее квадратическое отклонение.
Закон бета-распределения с плотностью.
t)4-\ (15.2)
где с — постоянная величина;
р и q — параметры распределения.
Если /постоянную /величину с выбрать из услойия
t,
с J (15.3)
tl
то математическое ожидание
(15.4)
р + q
Мода (М) мулам: и дисперсия (о2) в этом случае определяются по фор- /W = {р~ 1)^ + (?"П^ . (15.5) а2=(^_/)2 (15.6) (р+?+0(р + з)2
349>
Возможно, что в некоторых случаях применение альфа-рас-
пределения или логарифмически нормального распределения
Окажется более рациональным.
В практике сетевого планирования времена выполнения от-
дельных работ чаще всего задаются двумя числовыми характе-
ристиками: математическим ожиданием и дисперсией. Для нор-
мального закона распределения эти числовые характеристики
единственным образом определяют закон распределения. Для
бета-распределения, кроме t и о2, должны быть заданы еще па-
раметры распределения р и q.
Для работ, которые многократно повторяются, могут быть
получены точные значения t и <з2 времени выполнения этих ра-
бот. В случае, когда получить точные значения t и а2 не представ-
ляется возможным, применяются их приближенные значения,
расчет которых производится по трем или по двум временным
оценкам.
В качестве трех временных оценок берутся следующие: ми-
нимальное время (£min), максимальное время (£тах) и наибо-
лее вероятное время (/нв). Минимальное время или минималь-
ная продолжительность работы — это время выполнения работы
при наиболее благоприятных условиях. Максимальное время или
максимальная продолжительность работы —- время, необходи-
мое для выполнения работы при наиболее неблагоприятном сте-
чении обстоятельств. Наиболее вероятное время или наиболее ве-
роятная продолжительность работы — это время, которое имеет
место при нормальных, чаще всего встречающихся условиях 'вы-
полнения данной работы. При этом также принимается, что ожи-
даемое среднее квадратическое отклонение (аож) составляет ше-
стую часть области между /тах и /min, т. е.
. (15.7)
о
а дисперсия
о2
ож
Приближенное значение математического ожидания времени
выполнения работы, которое будет являться ожидаемым време-
нем (/ож) выполнения работы, может быть получено из выра-
жения
j ^min +4/нв+
^гпах /1 Е л\
*ож ~~ „ • (15.У)
6
Значения о2ж и /ож, вычисленные по формулам (15.8) и
(15.9), достаточно хорошо согласуются со значениями t и <з2,
полученными по формулам (15.4), (15.5) и (15.6) частичного бе-
350
та-распределения с параметрами р = 1,5 и <7=14,5, если поло-
жить = ^min> t<i == ^max И = 4в'
В том случае, когда определение /нв затруднено, применя-
ется система двух временных оценок, которыми являются: ми-
нимальное время (^min) и максимальное время (^тах) выпол-
нения работы.
Значения tox и а^ж в этом случае определяются по следую-
щим формулам:
j 3 ^min 4~ 2 Лпах /1 г- 1
?оЖ =-------------; (15.10)
о
02OJK = O,O4(fmax-fffllI1^ (15.11)
Формулы (15.10) и (15.11) получены из частного бета-распре-
деления с параметрами р—2 и 7=3 при условии ^2=^max-
Если комплекс в своем большинстве состоит из типовых или
часто повторяющихся работ с вполне установившейся техноло-
гией их выполнения, то время выполнения отдельных работ мо-
жет быть задано одной временной оценкой — нормативным вре-
менем выполнения работы (£норн).
Таким образом, время выполнения каждой работы сетевой
модели может быть задано или в виде закона распределения, или
в виде двух числовых характеристик ожидаемого времени вы-
полнения (математического ожидания) и дисперсии, или, нако-
нец, в виде нормативного времени.
Наиболее точным методом исследования моделей, в которых
времена выполнения работ заданы в виде закона распределения,
является метод статистических испытаний, предполагающий ис-
пользование электронных вычислительных машин.
Модель, в которой времена выполнения работ заданы норма-
тивными временами, является детерминированной. Такие моде-
ли при числе событий до 200 относительно легко и достаточно
быстро исследуются и обрабатываются обычными расчетами или
г помощью логических графиков. При числе событий, .превышаю-
щем 300, ручная обработка становится громоздкой и требует
больших временных затрат. Подобные сети целесообразно ис-
следовать с помощью электронных вычислительных машин.
В том случае, когда время выполнения каждой работы зада-
но двумя числовыми характеристиками, исследования проводят-
ся в два этапа. На первом этапе все расчеты и исследования про-
водятся так, как и для детерминированной сети, оперируя с ма-
тематическими ожиданиями. Затем, на втором этапе, во всех
-параметрах сети учитывается величина дисперсии каждой рабо-
ты. Это позволяет все параметры сети получить в виде матема-
тического ожидания и дисперсии.
351
5. Параметры сетевого графика
Основным параметром- сетевого графика является время:
критического пути. Важными параметрами являются также ре-
зервы времени событий и работ.
Резервом времени (R) события называется промежуток вре-
мени, на который может быть задержано свершение события без
нарушения сроков завершения комплекса в целом. Он опреде-
ляется как разность между наиболее поздним (Тп) и наиболее-
ранним (Тр) сроками свершения события
R = T„— Тр. (15.12)
Наиболее ранним сроком свершения события называется
срок, необходимый для выполнения всех работ, предшествую-
щих данному событию.
-----------------Тп(3)-------------Ч
„ । 1 , I
------L(0,3RTp(3)—4— R(3) —-----------------С(3,б)------П
1 1 I
------Z'O--------Н I I Ь------L"(3,6)-----1
1 1 । 1 I
—L"'(0,3)—Ч ! I I !
1 | I I И
------,--,--1----1----1---.---1----1---1----1---1---н---|
/ 2 3 9 5 б 7 8 9 10 // 12 ।
_ ------------------------ -----------------------------4
Р и с. 15.5. Параметры сетевого графика
Если положить, что Т’р(О) =0, то Гр(у) может быть опре-
делено на основании рекуррентной формулы
max
T^j}=j\Tp (Z) + /у], Z</; (Z,y)€P; 1 <_/<«-1, (15.13)
где символом (i, j) € P обозначена принадлежность событий i
и j сети Р.
Начиная с события 1, последовательно определяются време-
на наиболее раннего свершения всех событий сети, в том числе
и завершающего (п—1). Таким образом, время критического
352
пути определяется временем наиболее раннего срока свершения
завершающего события
Ткр=Тр(п-}}. (15.14)
Для сетевого графика (рис. 15.5), где.времена выполнения-
отдельных работ в условных единицах указаны под стрелками
р абот,
Д(1)= ДР)+Д1 = 2;
Т'р (2) = Тр (0) 4- t0,2 - 1;
Гр(3) = max [Д (1)-f-Дз; Д(0) + Дз; Тр (2) + /2,3] -
= шах [4; 5; 3] = 5.
Аналогично определяются: Д(4)—10, Гр (5) =i 10, Д(6)==13.
Отсюда время критического пути Ткр — Тр (6) =i 13.
Наиболее поздним сроком свершения события называется
такой срок свершения события, превышение которого вызывает
соответствующее увеличение продолжительности критического
пути. Он определяется как разность между длиной критического
пути (Др) и максимальной длиной пути между рассматривае-
мым и завершающим событиями:
Т„(1) = Др — Атах (Л п~ 1). (15.15)
Для любого события наиболее поздний срок его свершения
может быть определен рекуррентным соотношением
Тп (I) ="/"’[ Д (у) - Д], i < j, {i, J) £ (15.16)
полагая при этом Tn (n — 1) = Др.
Если при определении Тр перебор событий идет от исходно-
го и заканчивается завершающим, то при расчетах Та перебор
идет от завершающего события и заканчивается исходным.
Для сети (рис. 15.5)
Д(5)= Д(6)-Д6 = 11;
Д(4) = Д(6)- Д6=|10;
Д (3) = mln [ Д (6) - /з,6; Д(5)-Д5; Д(4)-Д6] =min [9; 11; 8]=8.
Аналогично определяются: Д(2) =2; Д(1) =2; Д(0) = 0.
По конечному результату (Д(0) =; 0) контролируется пра-
вильность произведенных расчетов.
Полученные значения 7’р и Д позволяют определить не
только резервы времени событий, но и другие параметры сети.
Полным резервом времени работы называется величина .
RAh /) = Д(/)-Tp{i)~ 1Ц. (15,1Д
23. Румянцев Е. А. и др. 353
Это —.максимальное время, которое дополнительно может быть
использовано для выполнения данной работы без увеличения
продолжительности критического пути. Если полный резерв бу-
дет израсходован весь на выполнение одной работы, то путь
максимальной продолжительности, проходящий через эту рабо-
ту, станет критическим, а резервы других путей соответственно
сократятся.
Полный резерв работы 2, 3 (рис. 15.5)
/?п (2,3) = 7П (3) — Гр (2) —/2,з = 5.
На основании определения резерва времени событий и пол-
ного резерва времени работ можно сформулировать условия
принадлежности событий и работ критическому пути.
Необходимым и достаточным условием принадлежности со-
бытия критическому пути является равенство нулю его резерва
времени
R(j) = о. (15.18)
Работа сетевого графика i, j входит в последовательность
работ критического пути в том и только в том случае, если ее
полный резерв времени равен нулю:
Rn(i, /) = 0. (15.19)
При сетевом планировании применяются еще понятия свобод-
ного (7?с) и независимого (R„) резервов времени выполнения
работы.
Свободным резервом времени называется максимальное вре-
мя, которое дополнительно может быть израсходовано на вы-
полнение рассматриваемой работы без изменения при этом наи-
более ранних сроков начала последующих работ. Он определяет-
ся по формуле
Rc{i, (15.20)
Независимый резерв времени определяется по формуле
R„(i, /)==шах[0, Гр(/)-7’п(/)-^.]. (15.21)
Этот резерв показывает, сколько времени дополнительно может
быть израсходовано на выполнение данной работы без измене-
ния при этом наиболее ранних сроков начала последующих ра-
бот при условии, что все предшествующие работы начинаются в
наиболее позднее время.
Результаты расчетов основных параметров сетевого графика,
как правило, представляются в виде таблиц. Для сложных сетей
производится алгоритмизация процессов расчета на ЭВЛ^.
6. Методы, облегчающие вычисления Тр и Тп
В практике сетевого планирования наибольшее распростра-
нение получили следующие методы: матричный метод, метод вы-
числений на сетевом графике и метод логического линейного гра-
фика. .
354
Матричный метод. Расчет Тр и Тп производится с помощью
матрицы, которая составляется на основании сетевого графика.
На рис. 15.6 представлена матрица для сети рис. 15.5.
Продолжительности работ сети заносятся в клетки матрицы
так, чтобы индексы начального и конечного событий совпадали с
координатами клеток.
В нулевую строку столбца Тр заносится 0, полагая То (0) =0.
Для получения значения Гр(1) просматривается первый столбец
матрицы. В нем имеется единственное, отличное от нуля, число
•to.i =Д Оно и записывается во второй строке. Для определения
Гр (2) просматривается второй столбец, число 1 прибавляется к
Тр (0) = 0 и записывается в третью строку. При определении
Тр(3) просматривается третий столбец. В нем имеется три чи-
сла: 5, 2, 2, которые складываются с соответствующими значе-
ниями Гр : 0, 2, 1 ив четвертую строку заносится большая из
полученных сумм, т. е. число 5. Аналогичным образом находятся
и остальные значения Гр. В скобках у значения Гр указывает-
ся номер события, через которое достигается Гр.
Заполнение строки Гп начинается с Гп(6) =13. Далее рас-
сматривается пятая строка. В ней имеется всего одно число, ко-
торое вычитается из Гп (6), и разность заносится в клетку пя-
того столбца. Аналогично находится Гп (4) = 10. При определе-
нии Т„ (3) рассматривается строка 3. Имеющиеся в ней числа
.2, 0, 4 вычитаются из соответствующих значений Гп: 13, 11, 10
и в столбец 3 записывается меньшая из полученных разностей,
'т. е. число 8. Остальные значения определяются аналогично.
На основании матрицы легко определяется критический путь.
'Он проходит через события, у которых Гр = Гп. Остальные
параметры сети рассчитываются обычным способом.
Вычисления Тр и Гп непосредственно на сетевом графике.
Этот метод применяется для сравнительно простых сетей, когда
число событий невелико. Для записи значений Гр и Тп в круж-
23* 355
ках — событиях каждый из них разбивается на четыре сектора;
(рис. 15.7). В верхнем секторе записывается номер события, ле-
вый сектор отводится для записи вычисленного значения Тр, а
правый — для Т„. В нижнем секторе иногда записывается но-
мер события, через которое проходит к данному событию путь
максимальной продолжительности.
Рис. 15.7. Вычисление параметров
непосредственно на сетевом графике
В левом секторе исходного события ставится цифра 0, так как
Тр (0) =|0. Событием 1 заканчивается только одна работа с
продолжительностью 4,2 =2. Отсюда Тр (1) =2- Это число за-
писывается в левом секторе кружка 1, а в нижнем секторе —
число 0. Аналогично этому в левом секторе кружка 2 записыва-
ется число Г, а в нижнем — 0. Далее рассматривается событие 3,.
которым заканчиваются работы: 7, 3; 0, 3 и 2, 3. Для определе-
ния Гр (3) составляются три суммы: Тр (1)+ Zi,3; Тр (0)-ф- 4,з1
Тр (2) + /2,з • Число большей суммы записывается в левом
секторе кружка 3, а в нижнем — 0, так как через это событие-
получена максимальная сумма. Аналогично рассматриваются
все события сети. Работы критического пути определяются не-
посредственно по номерам событий нижнего сектора.
Для завершающего события Т„ = Тр, поэтому в правом сек-
торе кружка 6 ставится число 13. Рассматривая события 5 и 4,.
находим Гп(5)=7’п (6)— 4,6 и Гп(4) = Тп (6) — 4,6. По-
лученные значения заносятся в кружки 5 и 4 соответственно. Из.
события 3 начинаются работы 3, 4; 3, 6 и 3, 5. Соответственно^
этому составляются следующие разности: Т„ (4) — 4Л; Т„ (6) —4л
и Гп(5) — 4.5- Значение меньшей из них будет равно Гп(3)..
Оно записывается в кружок 3.
Результаты проведенных расчетов указаны на сетевом гра-
фике р-ис. 15.7. Работы критического пути выделены жирными
стрелками.
Метод логического линейного графика. Логический линейный
график строится на основании сетевого графика. В нем все ра-
боты изображаются в масштабе времени. С помощью такого»
графика определяются все основные параметры сети.
356
Логический линейный график для сети с правильной нумера-
цией событий строится следующим- образом. Предварительно со-
ставляется специальная таблица, в которую работы заносятся в
последовательности возрастания номеров конечных событий. Ес-
ли несколько работ имеют одно конечное событие, то они зано-
сятся в порядке возрастания номеров начальных событий. Таб-
лица 15.2 составлена для сети рис. 15.5.
Таблица 15.2
№ начального события (г) № конечного события (/) Код работы Продолжитель ность работы [усл. ед.]
0 1 а 2
0 2 в 1
0 3 б 5
1 3 д 2
2 3 е 2
1 4 г 8
3 4 3 2
2 5 ж 9
3 5 — 0
3 6 и 4
4 6 к 3
5 6 л 2
Берется горизонтальная ось (рис. 15.8) со шкалой времени.
Работы изображаются прямоугольниками в порядке расположе-
ния их в таблице 15.2. Длина каждого прямоугольника соответ-
ствует продолжительности работы. Начало работ 0,1; 0,2 и 0,3
совпадает с началом шкалы времени, а начало работы 1, 3 долж-
но совпадать с окончанием работы 0, 1. Фиктивные работы 3, 5
изображаются вертикальными отрезками. Если несколько работ
имеют одинаковый номер конечного события, то изображение
последующей работы необходимо начинать от того события, ко-
торое дальше всех отстоит от начала шкалы времени.
Продолжительность и работы критического пути определя-
ются непосредственно из графика. Работа 4, 6, заканчивающая-
ся завершающим событием, безусловно, лежит на критическом
пути. Так как она начинается после окончания работы 1, 4, то
последняя также находится на критическом пути. Аналогично
определяются и другие работы критического пути.
Наиболее ранние сроки свершения событий определяются
проектированием начальных событий на ось времени. Для опре-
деления наиболее позднего срока свершения события необходи-
мо рассматриваемое начальное событие сдвигать вправо до тех
пор, пока конечное событие одной из следующих за ним работ не
окажется на вертикали события критического пути. Проекция
357
рассматриваемого события на ось времени в этом случае даст
значение Т„. Например, начальное событие 3 можно сдвинуть
лишь на 3 единицы. При этом конечное событие работы 3, 4 сов-
местится с конечным событием работы 1, 4 критического пути..
Проекция смещенного события 3 на ось времени даст значение-
Тп (3) = 8.
Тп
4__5
Ф и г. 15.8. Логический линейный график
Непосредственно из графика определяются также резервы
событий и работ.
Особенностью метода логического линейного графика являет-
ся его наглядность. В любой момент времени видно, какие рабо-
ты должны выполняться. Это существенно упрощает анализ и
оптимизацию сетевого графика.
7. Сетевые графики в масштабе времени
Для комплекса, включающего сравнительно небольшое чис-
ло работ, между которыми нет сложных взаимосвязей, сетевой
график может быть построен в масштабе времени. Иногда такой
график представляется как окончательный рабочий вариант
-обычного сетевого графика после его оптимизации.
Сетевой график в масштабе времени строится следующим
образом. Берется горизонтальная ось с масштабом времени. Ис-
ходное событие совмещается с началом отсчета времени. В со-
ответствии с логикой комплекса изображаются все работы, как и
358
в обычном сетевом графике, в виде стрелок. Проекция стрелки на
горизонтальную ось должна соответствовать продолжительности
работы, которую она изображает. Логические условия (фиктив-
ные работы) также изображаются пунктирными стрелками.
Рис. 15.9. Сетевой график в масштабе вре-
мени
Сетевой график в масштабе времени, соответствующий сети
рис. 15.<5, представлен на рис. 15.9. Там же указаны значения Тр
и Т,, и резервы времени работы 2, 3. Определение основ-
ных параметров сети происходит так же, как и в логическом ли-
нейном графике.
8. Оптимизация сетевых графиков
Первый вариант сетевого графика, как правило, далек от оп-
тимального. В связи с этим возникает задача оптимизации сете-
вого графика. Так как метод сетевого планирования не обеспе-
чивает математически оптимального решения, то под оптимиза-
цией будем понимать процесс улучшения сетевого графика с це-
лью получения наиболее высоких показателей выполнения
комплекса. Здесь рассматривается оптимизация только по вре-
менному показателю, имея в виду, что ресурсы и другие условия
заданы. Но при этом не следует забывать и о других не менее
важных показателях, таких, как надежность, «стоимость, безопас-
ность выполнения работ и др.
Оптимизация сетевого графика сводится к сокращению как
продолжительности критического пути, так и резервов всех ос-
тальных полных путей. Это осуществляется последовательным,
чаще всего многократным улучшением первоначального вариан-
та сетевого графика.
359
Прежде всего, проводится анализ сети с целью исключения
части работ из критического пути и выполнения некоторых из
них в параллель. При этом частично может измениться логика
сети, но без нарушения технологической последовательности вы-
полнения работ. В ряде случаев частичное выполнение той или
иной работы является достаточным для начала следующей
работы.
Сокращение времени выполнения комплекса также может
быть достигнуто посредством сокращения продолжительности
отдельных работ критического пути, используя для этого имею-
щиеся резервы и совершенствуя технологию их выполнения.
После каждого этапа оптимизации следует вновь делать рас-
четы основных параметров сети. При этом может оказаться, что
работы, которые были критическими, становятся некритически-
ми, а критический путь стал включать работы, которые не были
критическими. Не исключена возможность образования несколь-
ких критических путей. В идеальном случае все пути становятся
критическими, а все работы комплекса будут выполняться с рав-
ным напряжением.
При проведении оптимизации следует иметь в виду, что со-
кращение резервов полных путей усложняет процесс управле-
ния комплексом. В ряде случаев наличие определенных резер-
вов просто необходимо, так как могут быть непредусмотренные
задержки в выполнении некоторых работ, а также изменения
внешних условий, приводящих к увеличению продолжительно-
сти выполнения ряда работ. В связи с этим возникает проблема
рационального распределения резервов .между отдельными ра-
ботами. При этом следует учитывать следующее.
Работы, имеющие большую продолжительность или большую
неопределенность по срокам выполнения, требуют больших ре-
зервов времени. При распределении резервов следует учиты-
вать психологические и физические факторы, влияющие на вы-
полнение работ, а также удаленность работ от начала выполне-
ния комплекса. На работы, более удаленные, необходимо выде-
лять большие резервы.
9. Вероятность окончания комплекса работ
в заданный срок
Продолжительность критического пути как случайную вели-
чину будем определять математическим ожиданием Т’кр и дис-
персией о^р .
При допущении, что продолжительности работ критического
пути являются независимыми величинами, будем иметь
Лр= S 4-; (15.22)
(>', у) еьйр
360
a2 = У a2.. (15.23)
кр Zj '} '
. . (Wle^
Здесь Z,Kp — критический путь сетевого графика.
Вероятность того, что Ткр будет иметь значение в интервале
Д, А,
Р(А<ЛР<А)= dt, (15.24)
4
где f(t) — плотность вероятности случайной величины Ткр,
Так как 7'1(р есть сумма независимых случайных величин
tij и если их число достаточно велико, то в качестве закона
распределения можно принять нормальное распределение с
плотностью
ж>=
1
------7= е
°кР V 2 тс
К-Др)’
2V
Подставляя значение f(t) в выражение (15.24), получим
1 г (t-V
P^<TKp<t^ -= е 2W dt. (15.25)
Окр? 2ir J
4
Окончательно, применяя функцию Лапласа, можно записать
Р < 7'кр< zf2) = Ф* () — Ф*( ) • (15.26)
\ скр ' \ °кр
Для определения вероятности Р3 окончания комплекса работ
не позднее заданного срока Т3 формула (15.26) примет следую-
щий вид: _
Ра (Tw < Т'з) = ф* ( • (15.27)
б \ кр О/ I I
\ кр /
Анализ зависимости (15.27) показывает, что вероятность
окончания комплекса за время Та = Ткр — 3 скр составляет
величину 0,0013, а за время Т3—\ 7’кр -ф Зо1(? —0,9973. На
основании этого принимается Р3 = 0 в случае 7’3 < Ткр — Закр и
Ps =! 1, если Т3 > Ткр + Зокр.
Рассмотренный метод определения вероятности окончания
комплекса работ в заданный срок является приближенным.
Ошибки в определении Тхр и <з2р могут достигать 15—25%'.
Полученное значение Ткр по формуле (15.22) всегда меньше
действительной величины, а а2р, рассчитанная по формуле
361
(15.23), всегда больше своего действительного значения. Анали-
тические методы, позволяющие получить более точные значения
и скр ' являются очень сложными и требуют большого»
объема вычислений.
§ 15.3. СЕТЕВОЕ ПЛАНИРОВАНИЕ ОБСЛУЖИВАНИЯ
АВИАЦИОННОЙ ТЕХНИКИ
1. Особенности применения метода
сетевого планирования обслуживания
авиационной техники
Возможность построения сетевой модели обслуживания
авиационной техники определяется тем, что весь ее про-
цесс может быть расчленен на вполне определенные, огра-
ниченные по объему работы, выполнение которых предусмотрено
Единым регламентом технической эксплуатации. Аналогичное
положение имеет место и при ремонте авиационной техники. Не-
смотря на это, применение метода сетевого планирования об-
служивания авиационной техники имеет ряд специфических осо-
бенностей.
Прежде всего сравнительно небольшая продолжительность
выполнения комплекса работ основных видов обслуживания.
Время выполнения всего комплекса работ основных видов об-
служивания авиационной техники может быть соизмеримо или
значительно меньше того времени, которое необходимо на со-
ставление и исследование сетевых графиков.
Характерной особенностью также является неравномерность
поступления летательных аппаратов на обслуживание, обуслов-
ленная нерегулярностью полетов.
Кроме того, на обслуживание в сильной степени сказывают-
ся метеоусловия, обеспеченность аэродромно-техническими сред-
ствами и другие факторы.
Учитывая особенности обслуживания авиационной техники,
наиболее целесообразной формой применения метода сетевого
планирования является составление и исследование типовых
/графиков по видам обслуживания и отдельным комплексам ра-
бот конкретных типов летательных аппаратов, учитывая при
этом специфические условия эксплуатации.
Методику составления и исследования типовых графиков
обслуживания авиационной техники рассмотрим на примере се-
тевого графика предполетной подготовки условного самолета.
362
2. Сетевой график предполетной подготовки
самолета
Сетевая модель предполетной подготовки самолета состоит
из отдельных подсистем. Построение ее сетевого графика следу-
ет начинать с построения сетевых графиков отдельных подси-
стем. Такими графиками являются частичные сетевые графики
отдельных групп специалистов, непосредственно участвующих в-
предполетной подготовке. При исследовании предполетной под-
готовки нескольких самолетов или групп самолетов составляют-
ся также сетевые графики групп и подразделений аэродромно-
технического обеспечения, обслуживающих подготовку самоле-
тов.
Перечень основных работ предполетной подготовки условно-
го самолета представлен табл. 1 (П.5). Таблица состоит из четы-
рех разделов соответственно группам обслуживания. Каждой
работе присвоен цифровой код, первая цифра которого опреде-
ляет раздел перечня, а последующие — порядковый номер ра-
боты в разделе.
Время выполнения каждой работы предполетной подготовки
взято его нормативным значением (математическим ожиданием)
в условных единицах.
При составлении перечня работ не следует увлекаться излиш-
ней детализацией, поскольку это приводит к усложнению ис-
следований и к потере наглядности сетевого графика. Детали-
зация должна быть такой, чтобы можно было отразить все су-
щественные связи как в частичных графиках, так и в общем се-
тевом графике.
Один из вариантов частичного сетевого графика предполет-
ной подготовки самолета и двигателей (СД) представлен на рис..
15.10,а. За исходное событие принято начало расчехления само-
лета. Эта работа разбита на две составные части: расчехление
кабин (1.1а) и расчехление фюзеляжа и двигателей (1.16). После
.расчехления производится осмотр передней кабины (1.2), ос-
мотр задней кабины (1.3а), подключение аэродромного источника
электроэнергии (1.36) и выполнение работ 1.4 и 1.5. Одновре-
менно с указанными работами последовательно выполняются1
работы: 1.7, 1.8 и 1.6. Работа 1.10 выполняется после окончания
всех работ и заканчивается завершающим событием. Здесь и
на последующих графиках над стрелками работ указан цифро-
вой код, под стрелками — время выполнения. Входящими и вы-
ходящими пунктирными стрелками обозначены логические свя-
зи с другими подсистемами.
Аналогично составлены сетевые графики подготовки авиа-
ционного вооружения (АВ) (рис. 15.10,б), авиационного обору-
дования (АО) (рис. 15.10,в) и радиоэлектронного оборудования:
(РО) (рис. 15.10,г).
363
Составление общего сетевого графика сводится к увязке ме-
жду собой частичных сетевых графиков. При этом необходимо
учитывать технологическую последовательность выполнения ра-
бот, меры предосторожности и другие условия и ограничения.
Рис. 15.10. Частичные сетевые графики предполетной подго-
товки самолета
В рассматриваемом случае принята следующая очередность ра-
боты специалистов в кабинах: передняя кабина — АВ, РО, АО;
задняя кабина —= АО, АВ, РО, СД. Предпочтение в определении
очередности предоставляется группе АВ, так как она имеет наи-
больший объем работ.
За основу при построении общего сетевого графика взят се-
тевой график подготовки самолета и двигателей и к нему при-
строены другие частичные графики. Работа 2.1 подготовки авиа-
ционного вооружения начинается после осмотра кабин техником
самолета и подключения источника электроэнергии, а работы
•361
2.3 и 2.7 — после расчехления самолета. Работа 3.2 подготовки?
АО начинается после работы 1.1, а 3.7 — после работы 1.3. По-
сле работы 3.3 .может быть начата работа 2.6 подготовки АВ. Это-
логическое условие обозначено фиктивной работой. Исходным
событием графика подготовки РО является конечное событии
работы 1.1. Работа 4.3 начинается после работы 2.5, а работа
4.4 — после работы 2.4. Принятая очередность выполнения ра-
бот в кабинах реализуется введением соответствующих фиктив-
ных работ.
Рис. 15.11. Сетевой график предполетной подготовки самолета
Составленный таким образом черновой вариант общего се-
тевого графика (рис. 15.11) тщательно проверяется и упрощает-
ся. После этого можно приступить к нумерации событий. Для
облегчения дальнейших исследований применена правильная
нумерация событий, выполненная по приведенной выше методи-
ке.
3. Анализ и оптимизация сетевого графика
Анализ и оптимизация сетевого графика проводятся с помо-
щью логического линейного графика (рис. 15.12), построенного'
на основании вспомогательной табл. 2 (П.5).
Непосредственно из графика определяется продолжитель-
ность критического пути. Она составляет 48 усл. ед. и является
общим временем предполетной подготовки самолета при приня-
той логике выполнения комплекса работ. Критический путь,
включает следующие работы: 1.1, 1.2, 1.3, Г.10 по СД; 2.1, 2.2,.
2.5 по АВ; 3.1, 3.4, 3.6 по АО; 4.3 по РО. На логическом: линейном
365»
трафике критический путь условно изображен пунктирной ли-
нией, а сами работы заштрихованы. На сетевом графике (рис.
15.11) они выделены жирными стрелками.
- Для проведения оптимизации сконцентрируем работы по
группам, как это произведено на рис. 15.13.
Первым этапом оптимизации является сокращение сроков
предполетной подготовки. Анализ графика (рис. 15.13) показы-
вает, что у специалистов АО имеется перерыв между'работами
3.10 и 3.6. Это позволяет критическую работу 3.1 выполнить по-
сле работы 3.3, а работу 3.9 после 3.10 и, тем самым, сократить
критический путь на 4 усл. ед. Указанные изменения приводят к
образованию нового критического пути, включающего работы:
1.1, 1.2, 1.3, 2.1, 2.2, 2.6, 2.10, 2.11, 2.13 и Г.10.
Дальнейшее сокращение критического пути достигается за
счет параллельного выполнения некоторых его работ. Если вы-
полнение работ в передней кабине начать с 2.2, а работы 2.5 и
'2.1 перенести в конец подготовки, то 2.1 и 2.13 могут быть вы-
полнены параллельно. Естественно, это вызывает перестановку
других работ, как показано пунктирными линиями на графике
рис. 15.13. В результате этого образуется новый критический
путь, продолжительность которого сократилась еще на 1 усл. ед.
Дальнейшее сокращение критического пути посредством изме-
нения логики выполнения работ невозможно, так как критический
путь включает только работы, выполняемые в передней кабине,
и работы, выполнение которых не может быть совмещено с
другими работами. Сокращение предполетной подготовки в этом
случае возможно лишь за счет уменьшения продолжительно-
сти отдельных работ и прежде всего работ критического пути.
Следующим этапом исследований является определение ми-
нимального числа специалистов, обеспечивающее выполнение
комплекса работ за время критического пути.
Занятость специалистов характеризуется коэффициентом за-
грузки
^3= ,
^кр
е
где J] — сумма продолжительностей работ, выполняе-
fe=i
мых специалистом.
Анализ перечня работ показывает, что если каждая группа
будет выполнять работы только своими силами, то в подготов-
ке самолета должно участвовать девять человек: СД—2, АВ—Д
АО—2, РО—2, с коэффициентами загрузки: СД—0,43, АВ—0,85,
АО—0,49, РО—0,38- При. значительной неравномерности в за-
грузке специалистов средний коэффициент загрузки получается
небольшим (0,57).
366
ю
20
30
2
Рс-
27
3-8
: 2-2
3-3
24
4-3
2-/0
4 5
2-5
2-6
212
4-4
-3-6
.2 8
2-11
12
.2 9
8
24
310
13
23
2 4
27i3a
22131 j
4 6
2
7o31
□ <? 1
Осз 34
j
31 '134
28
29
'0\
22125
23 ch 26
==p29
129 ;
1-1
1-7
1-2
42
: 1-8
' 1-3
.3-7
2-3
\ 2-1
' 32
3 4
16
3-9
213
1-5
4-7
31
110
40 t,ycn.ed.
□i
71
7 c
S' c
1111
1111
14 sz.
15a 17
161 18
171 18
I
16119
=12O\
171^0
5
16
19
20c
21124
гз 25
32
28132
32 2^33
I
cp<3
I
34
4
4и35
P и c. 15.12. Логический линейный график предполетной подго-
товки самолета 367
трафика -
368
24. Румянцев Е. А. н др.
______________________________________________________________________________________________;Умев
О ' 7д ' 20~ 30 ’ То ~
Рис. 15.14. Сетевой график предполетной подготовки самолета в масштабе времени
Если принять коэффициент загрузки техника самолета
меньше 0,5, учитывая его функциональные обязанности, то наи-
меньшее число специалистов составит семь человек: техник и
механик самолета, два специалиста по АВ, два—по АО и один—
по РО. При таком составе механик самолета и специалисты по
АО должны привлекаться для выполнения некоторых работ по
авиационному вооружению и радиоэлектронному оборудованию
совместно с соответствующими специалистами.
Один из вариантов распределения работ между отдельными
специалистами представлен технологическим графиком на рис.
15.13. Соответственно этому сделаны и перестановки работ на
линейном графике. Коэффициент загрузки и резервное время
каждого специалиста указаны на технологическом графике.
Средний коэффициент загрузки специалистов в этом случае ра-
вен 0,74.
После проведенных исследований и оптимизации составле-
ние окончательного рабочего сетевого графика не представляет
большого труда. Такой график, построенный в масштабе време-
ни, изображен на рис. 15.14. Работы критического пути изобра-
жены жирными стрелками. Из графика легко определяются все
основные его параметры.
Определим вероятность выполнения предполетной подготовки,
проводимой в соответствии с оптимизированным сетевым гра-
фиком, в заданное время. Предположим, что дисперсии продол-
жительностей работ критического пути 1,1а, 2.7, 2.2, 4.3, 3.6, 3.4,
2.5, 2.1, 1.10 соответственно равны 0,1, 0,6, 0,5, 2,0, 0,6, 0,2, 0,2 1,0,
0,1.
Применяя метод осреднения по формулам (15.22) и (15.23),
найдем Ткр = 43, ='5,3. Для других критических путей
370
дисперсия не превосходит этой величины. Расчет вероятности
Рз для различных значений Т-л произведен по формуле (15.27).
Результаты расчетов представлены графиком рис. 15.15. Таким
образом, с вероятностью 0,99 предполетная подготовка будет
выполнена в срок, не превышающий 49 усл. ед.
При конкретном исследовании и составлении рабочих сете-
вых графиков следует иметь в виду, что в некоторых случаях мо-
жет оказаться целесообразным создавать группу для одновре-
менной подготовки двух самолетов. Заслуживает внимания так-
же метод выполнения некоторых работ последовательно на всех
самолетах подготовляемой группы.
Изложенная методика и последовательность основных эта-
пов анализа и оптимизации предполетной подготовки самолета
могут быть взяты за основу при планировании других видов
обслуживания и ремонта авиационной техники.
24*
Глава XVI
РЕМОНТ АВИАЦИОННОГО ОБОРУДОВАНИЯ
§ 16.1. ОСНОВНЫЕ СВЕДЕНИЯ О РЕМОНТЕ
АВИАЦИОННОЙ ТЕХНИКИ
В процессе эксплуатации авиационная техника может ока-
заться в неисправном состоянии вследствие появления случай-
ных отказов, износа и старения некоторых ее деталей, агрегатов
и узлов, различного рода повреждений, в том числе и боевых.
Совокупность организационно-технических мероприятий, на-
правленных на восстановление и ввод в строй неисправной авиа-
ционной техники, называется ремонтом.
В современных условиях ведения боевых действий с массо-
вым применением летательных аппаратов и увеличением эф-
фективности средств их поражения роль ремонта значительно
возрастает.
Поддержание авиационной техники в исправном состоянии
за счет своевременного и качественного выполнения всех видов
ее ремонта является одной из главных задач инженерно-авиаци-
онной службы.
Различают четыре вида ремонта авиационной техники: мел-
кий; текущий; средний (профилактический); капитальный (вос-
становительный) .
Вид ремонта зависит от трудоемкости и сложности работ, не-
обходимых для восстановления авиационной техники.
Мелкий ремонт характеризуется тем, что незначительные по-
вреждения и неисправности авиационной техники устраняются:
путем восстановления или замены ее отдельных деталей, агрега-
тов и узлов.
Средние трудозатраты на выполнение .мелкого ремонта по-
авиационному оборудованию обычно не превышают величин 10—-
15 чел.-часов.
Текущий ремонт предусматривает устранение повреждений и
неисправностей авиационной техники путем замены или восста-
новления ее агрегатов и узлов с последующей регулировкой и
отладкой.
Трудозатраты на выполнение текущего ремонта по авиаци-
онному оборудованию зависят от типа летательного аппарата-
372
Примерное значение этих трудозатрат находится в пределах 15—
“90 чел.-час.
Средний (профилактический) ремонт. Выполняется при нали-
чии значительных повреждений авиационной техники, требую-
щих замены или восстановления агрегатов, узлов, отдельных
систем, устранения деформаций силовых элементов-конструкций.
Средний ремонт включает в себя также и профилактические
мероприятия, периодичность которых зависит от наработки или
календарного срока эксплуатации авиационной техники. Необ-
ходимость такой профилактики обусловливается следующими
соображениями:
— с увеличением времени наработки в конструктивных эле-
ментах и оборудовании летательных аппа.ратов могут возник-
нуть усталостные и износовые явления;
— характеристики и параметры технических устройств с те-
чением времени не остаются постоянными.
Поэтому в процессе выполнения среднего ремонта основные
агрегаты, узлы и системы летательного аппарата подвергаются
обязательной проверке на техническое состояние, производятся
регулировочные, слесарно-механические и другие виды работ.
Трудозатраты на средний ремонт авиационного оборудовав
лия ориентировочно равны 90—350 чел.-часов.
Капитальный ремонт производится при повреждениях конст-
руктивных узлов, силовых элементов, основных агрегатов, си-
стем или после выработки авиационной техникой межремонтно-
го ресурса.
Капитальный ремонт предусматривает полную разборку и
дефектацию всех без исключения агрегатов, узлов и систем, их
замену или восстановление в случае обнаружения повреждений
и неисправностей, регулировку и испытание.
Трудозатраты на капитальный ремонт авиационного обору-
дования оцениваются уже сотнями и тысячами чел.-часов.
После выполнения капитального ремонта авиационной техни-
ке назначается новый межремонтный ресурс.
Ремонт авиационной техники производится силами и средст-
вами:
— непосредственно частей ВВС (ТЭЧ ап, ТЭЧ аэ);
— .войсковых авиаремонтных мастерских (ВАРМ);
— авиационных ремонтных предприятий (АРП)-
В зависимости от технического оснащения и производствен-
ной мощности указанные ремонтные органы могут производить
следующие виды ремонта:
ТЭЧ аэ — мелкий;
ТЭЧ ап — текущий и мелкий;
ВАРМ — средний и текущий;
АРП — капитальный и средний.
373
§ 16.2. ВОЙСКОВОЙ РЕМОНТ АВИАЦИОННОГО
ОБОРУДОВАНИЯ
Войсковым ремонтом называется ремонт, выполняемый сила-
ми и средствами ТЭЧ и ВАРМ, а также -бригадами АРП и заво-
дов промышленности на местах базирования частей или вынуж-
денных посадок.
Основу войскового ремонта составляют мелкий, текущий и
V частично средний ремонты.
К войсковому ремонту предъявляются следующие основные
требования: ,,
— обеспечение максимальной мобильности; /
— унификация и универсализация технических средств ре-
монта; \/
— обеспечение автономности работы; V
— обеспечение непрерывности управления процессом восста-
новления авиационной техники;
— выбор рациональных форм организации и технических
средств ремонта, обеспечивающих минимальные трудозатраты и
время на восстановление авиационной техники. у
Производственную базу войскового ремонта составляют под-
вижные авиационные ремонтные мастерские (ПАРМ) и стацио-
нарные войсковые ремонтные мастерские (СВАРМ).
ПАРМ и СВАРМ имеют необходимое производственное обо-
рудование (станки, инструмент, контрольно-измерительную ап-
паратуру), источники различных видов энергии.
Мобильность ПАРМ обеспечивается тем, что их оборудова-
ние размещается на автомашинах и автоприцепах со специально
оборудованными кузовами-мастерскими или лабораториями.'
Организационно ПАРМ включаются в подвижные средства
ТЭЧ ап и ВАРМ.
Для СВАРМ не ставится задача перебазирований вместе с
частями и потому их оборудование устанавливается в производ-
ственных помещениях.
/ При войсковом ремонте авиационной техники могут выпол-
'/ няться следующие работы:
— замена авиадвигателей, отдельных частей и агрегатов
планера (стоек шасси, элеронов, щитков-закрылков и т. д.);
— восстановление, замена и регулировка отдельных агрега-
тов гидравлических и воздушных систем;
• — восстановление, замена и регулировка отдельных агрега-
тов и блоков систем вооружения, авиационного и радиоэлект-
ронного оборудования;
— восстановление целостности отдельных узлов и частей кон-
струкции летательного аппарата с помощью сварки, клепки,
склеивания и пайки;
— удаление коррозии и восстановление лакокрасочных по-
крытий на отдельных участках.
374
В принципе все перечисленные работы могут выполняться в
ТЭЧ ап, ВАРМ, и СВАРМ. Загрузка этих ремонтных органов пла-
нируется и направляется инженерно-авиационной службой ча-
стей, которым они подчинены.
Следует заметить, что, кроме войскового ремонта, ВАРМ и
СВАРМ могут выполнять трудоемкие регламентные работы, до-
работки авиационной техники й в отдельных случаях средний
ремонт.
Средние трудозатраты на выполнение различных работ при
войсковом ремонте задаются техническими нормами.
Потребное время на восстановление авиационной техники
зависит от располагаемого суточного фонда рабочего времени,
равного
®v = Ntk3ka, (16.1)
где N — количество специалистов, принимающих участие в
ремонте;
t — максимальное время работы специалистов в течение
суток;
k3 — коэффициент использования рабочего времени
(ka = 0,8—0,9);
kn — коэффициент, учитывающий возможные боевые по-
тери технического состава.
Для войскового ремонта авиационного оборудования наибо-
лее характерным является агрегатный .метод ремонта. При этом
неисправное авиационное оборудование, гарантийный (завод-
ской) ресурс которого не истек, вскрывать и ремонтировать в
условиях войсковых ремонтных органов не разрешается. \/
Технология проверок авиационного оборудования после вы-
работки гарантийного ресурса обычно указывается в техниче-
ских описаниях агрегатов, устройств и' систем. В качестве приме-
ра в табл. 16.1 приведена технология проверки преобразователя
типа ПТ-1000Ц после выработки им гарантийного ресурса.
При выполнении войскового ремонта разрешается прокладка
небольших участков электрических сетей из новых проводов или
дюритовых шлангов взамен неисправных.
Устанавливаемое после войскового ремонта на летательный
аппарат авиационное оборудование подвергается целевому ос-
мотру и проверке с помощью КИА.
Если производится войсковой ремонт генераторов, авиагори-
зонтов, автопилотов, курсовых и пилотажно-навигационных си-
стем, то могут назначаться контрольные полеты. Целью этих по-
летов является проверка (по специальной программе) работо-
способности отремонтированного оборудования в реальных усло-
виях эксплуатации и соответственно оценка качества ремонта.
За качество выполненных ремонтных работ несут ответст-
венность те лица, которые выполняли эти работы.
375
Таблица 16.1
№ п/п Технологиче- ская операция Что подлежит проверке Допустимые значе- ния результатов проверки Примечание
1 Внешний осмотр ПТ-ЮООЦ Наружное со- стояние ПТ-ЮООЦ: Отсутствие на- ружных дефектов:
2 Съем колпа- ка коллектора а) Внешнее со- стояние коллек- тора; б) износ кол- лектора (по диа- метру) ; в) высота ще- ток а) Не должно быть подгарбв, ри- сок и заусенцев; б) -'С 0,5 мм; в) 21 мм При наличии на коллекторе подга- ров, рисок и за- усенцев и его из- носе 0,5 мм ПТ подлежит капи- тальному ремонту
3 Подъем ще- ток Сопротивление изоляции проводов якоря 7?щ > 1 -мом
4 Проверка вращения рото- ра Состояние шари- коподшипников а) После рас- крутки ротор дол- жен иметь инерци- онный выбег без стука в шарико- подшипниках; б) шарикопод- шипники не долж- ны иметь следов коррозии и трещин ПТ с дефектны- ми шарикоподшип- никами подлежат капитальному ре- монту
5 Вскрытие ко- робки управле- ния Внешнее состоя- ние дросселей, вы- прямителей, кон- денсаторов, мон- тажных проводов Не должно быть подгаров, повреж- дения пайки и изо- ляции проводов
6 Демонтаж контактора КМ-100Д а) Состояние си- ловых контактов; б) контактное давление а) Не допускает- ся наличие крате- ров и наплывов ме- талла; б) Рк =0,9— 1-,2 кг При невыполне- нии пунктов а), б) контактор подле- жит замене
7 Проверка электрических параметров ПТ-ЮООЦ (после устране- ния неисправ- ностей) а) Ток нагрузки; б) напряжение переменного тока;. в) частота; г) искрение под щетками; д) сопротивле- ние после 1—2 ча- сов работы ПТ а) < 16,1 а б) 36± 1,8 в в) f = 400±4 гц г) < 1 '/а по шкале ГОСТ 183—55; Д) /?из> 1 мом Если при U— = =27+2,7 в и 1~= =0—100% хотя бы один из парамет- ров не укладывает- ся в допуск, то ПТ-1000Ц подле- жит капитальному ремонту
376
Как правило, при войсковом ремонте авиационного оборудо-
вания осуществляется многоступенчатый контроль качества вы-
полняемых работ (механик—техник—инженер).
Об изменениях состава оборудования при войсковом ремонте
ф формулярах летательного аппарата в обязательном порядке
производятся соответствующие записи.
§, 16.3. ОРГАНИЗАЦИЯ И ОСОБЕННОСТИ РЕМОНТА
АВИАЦИОННОГО ОБОРУДОВАНИЯ НА АВИАРЕМОНТНЫХ
ПРЕДПРИЯТИЯХ
Выше уже указывалось, что в АРП производятся средний и
капитальный ремонты авиационной техники.
АРП являются предприятиями промышленного типа, кото-
рые можно классифицировать следующим образом:
— по характеру подчинения (центральные, окружные);
по способу финансирования (хозрасчетные, бюджетные);
— по специализации производства (АРП ремонта авиадвига-
телей, самолетов (вертолетов), отдельных видов оборудования
и т. п.);
— по производственной мощности (заводы по ремонту авиа-
ционной техники (ЗРАТ) различных категорий).
Рис. 16.1. Примерная организационная структура авиаре-
монтного предприятия
377
На рис. 16.1 представлена одна из возможных структурных
схем организации АРП.
Большинство АРП составляют хозрасчетные предприятия.
Они наделяются основными средствами (производственные зда-
ния, оборудование) и оборотными средствами (расходные мате-
риалы, зарплата), необходимыми для ремонта авиационной тех-
ники.
Производственная деятельность хозрасчетных АРП опреде-
ляется так называемым техпромфинпланом.
Техпромфинплан включает в себя два вида планирования:
— технико-экономическое;
— оперативно-производственное.
Технико-экономическое планирование предназначено для
оценки производственной и финансовой деятельности АРП и
разработки мероприятий по дальнейшему развитию производ-
ства.
Технико-экономическое планирование предусматривает:
— расчет производственной мощности АРП на планируемый
период;
— составление плана мероприятий по улучшению технологии
ремонта, организации труда и повышению экономической эффек-
тивности цехов, производственных участков и отделов;
— составление плана внедрения новых видов оборудования
и расчет экономической эффективности их применения;
— расчет численности производственных рабочих на плани-
руемый период и потребного основного фонда зарплаты.
По результатам технико-экономического планирования со-
ставляются годовые и перспективные планы работы АРП.
Годовая производственная мощность АРП на планируемый
период рассчитывается по одному из главных цехов (например,
сборочному) по формуле:
__ТТП (^р Т пр) • С / \ 7 k%\
~ +100/ \ + Тоо/ ’
(16.2)
где Пп — производственная площадь цеха в м2;
Фр— число рабочих дней в году;
^пр — время (в днях) планового ремонта производствен-
ного оборудования цеха. Рекомендуемое среднее
значение Гпр—0,04—0,06 Фр;
С — число рабочих смен в сутки;
Ц — продолжительность (в днях) производственного
цикла ремонта единицы авиационной техники;
Уп— удельная производственная площадь в м2 на еди-
' ницу ремонтируемой авиационной техники;
ki — коэффициент, учитывающий работы, выполняемые
вне производственных помещений (в %);
k2 — коэффициент, учитывающий повышение производи-
тельности труда на планируемый период (в %).
378
Экономическая эффективность от внедрения новых видов обо-
рудования определяется по годовой экономии в рублях согласно*
зависимости
Э=[(Сс + kcE) - (СН + ^Н£К)]Л, (16.3)
где Сс, Сн — себестоимость в рублях единицы отремонтиро-
ванной авиационной техники до и после внед-
рения новых видов оборудования;
йс, — удельные капитальные затраты на единицу ре-
монтируемой авиационной техники до и после-
1 внедрения новых видов оборудования;
Е =-------нормативный коэффициент окупаемости капи-
ТОк тальных затрат. Считается, что при частичной
замене оборудования время окупаемости Т01, =-
= 1,5—2 года и при этом £ = 0,65—0,50. При
внедрении новых технологических линий Гок =-
= 5—-б лет, а £ = 0,20—0,15;'
Ан —* годовой объем выпуска из ремонта авиацион-
ной техники после внедрения новых видов обо-
рудования.
Численность производственных рабочих находится из отно-
шения трудоемкости работ (в человеко-часах) на планируемый,
период к полезному фонду времени одного рабочего.
Полезный фонд времени одного рабочего равен:
Фпо=ФрЛр( 1 (16.4)
где Т’ср — средняя продолжительность рабочего дня всех про-
изводственных рабочих '(с полным и (сокращен-
ным рабочим днем);
Фр — количество рабочих дней в планируемый период;
п *— средние потери рабочего времени производственных
рабочих в процентах (примерно 10—20 %:).
Основной фонд заработной платы производственных рабочих:
определяется как сумма
tn
(16.5).
4=1
где Tt — трудоемкость t-того вида работ в нормо-часах;
Cz — тарифная ставка, т. е. оплата t-того вида работ за-
единицу времени (час, смену);
k — тарифный коэффициент, учитывающий сложность,
выполняемых работ;
m — количество выполняемых видов работ.
Тарифный коэффициент К зависит от квалификационного-
разряда рабочего. Чем сложнее может выполнять работу рабо-
чий, тем выше его квалификационный разряд и, следовательно,,
оплата труда.
379а
Оперативно-производственное планирование предназначено
для оперативного управления производством АРП и включает в
себя:
— разработку месячных планов работы (на основании годо-
вых планов работы АРП) цехов, участков и доведение этих пла-
нов до исполнителей;
— обеспечение производства ремонтным фондом и расходны-
ми материалами;
— согласование работы между всеми звеньями производства.
Р и с. 16.2. Схема организации диспетчерской
службы АРП
Текущее руководство по реализации оперативно-производ-
'ственных планов осуществляется диспетчерской службой АРП.
В состав диспетчерской службы входят старший диспетчер,
диспетчеры цехов и производственных участков. Руководит дис-
петчерской службой .начальник производства АРП (рис. 16.2).
Диспетчерская служба решает следующие задачи:
— контролирует и учитывает выполнение плановых заданий
всеми цехами и участками;
— обеспечивает контроль за поступлением ремонтного фонда
и расходных материалов в цехи и на отдельные рабочие места;
— предупреждает и локализует аварии, задержки и наруше-
ния ритмичности производства.
Выполнение диспетчерской службой указанных задач состав-
ляет основу диспетчерского управления производством.
Диспетчерское управление производством осуществляется
"согласно диспетчерским графикам. Диспетчер окне графики со-
ставляются с учетом месячных планов работы АРП. В них пла-
нируется по дням месяца начало и окончание работ по ремонту
авиационной техники в процессе ее прохождения по всем техно-
логическим участкам производства.
Выполнение задач диспетчерского управления во многом за-
висит от технических средств управления, к которым относятся:
— средства оперативной связи;
’380
— средства сигнализации;
— устройства отображения производственных процессов.
В качестве средств оперативной связи наиболее часто ис-
пользуются диспетчерские коммутаторы типа ДКЗ-70-ЗМ,
ДКЗ-40-2М, КОС-22М, СДС-50/100 (числа 40, 50, 70 и т. д. ука-
зывают ориентировочно на количество обслуживаемых абонен-
тов) . Они устанавливаются на диспетчерском пункте и обеспе-
чивают телефонную связь с производственными участками.
Большинство коммутаторов имеет усилительные устройства для
громкоговорящей связи.
Средства световой сигнализации выполняются в виде раз-
личного рода светофоров, цифровых индикаторов, табло, уста-
навливаемых на производственных участках и у диспетчера. Код.
световых сигналов устанавливается заранее: например, загора-
ние красного табло с номером указывает, на каком участке
произошло нарушение технологического процесса.
Отображение производственных процессов на АРП может
осуществляться с помощью диспетчерских щитов, специальных
картотек и производственного телевидения.
Средний и капитальный ремонт авиационного оборудования
по объему работ и технологии их выполнения существенно отли-
чается ют войскового .ремонта. Рассмотрим эти Отличия на при-
мере наиболее распространенного типа АРП — самолетного.
Поступающие в АРП самолеты (перелетом с мест базирова-
ния, железнодорожным и другими видами транспорта) прини-
маются в ремонт постоянной комиссией. Комиссия состоит из
представителей отделов технического контроля и материально-
технического снабжения, летно-испытательной станции и цехов
(по видам оборудования). В задачу комиссии входит проверка
технического состояния самолета и его оборудования, укомп-
лектованности положенным имуществом и документами.
По результатам работы комиссии составляется технический
акт, утверждаемый начальником и главным инженером АРП.
Самолеты, принятые в ремонт, передаются в цехи для раз-
борки, дефектации и ремонта.
Дефектацией называется технологическая операция, которая,
предназначена для оценки технического состояния агрегатов,
узлов и систем и определения методов устранения обнаружен-
ных неисправностей.
Как объект ремонта авиационное оборудование подразделя-
ется на съемное и несъемное.
К группе съемного авиационного оборудования относятся
детали, агрегаты и блоки, которые, независимо от их состояния,
обязательно снимаются с самолета и подвергаются разборке,
дефектации и ремонту в специальном цехе АРП.
Соответственно к группе несъемного авиационного оборудо-
вания относятся те детали и агрегаты, которые можно не сни-
381
мать для ремонта с самолета. Однако их подвергают обязатель-
ной дефектации и ремонту непосредственно на самолете.
В большинстве случаев несъемное авиационное оборудование
включает в себя:
— провода и жгуты электропроводки;
— клеммные колодки и штепсельные разъемы;
— распределительные коробки;
— аппаратуру защиты и коммутации (АЗС, АЗР, переключа-
тели, кнопки и т. п.);
— осветительную и сигнальную арматуру.
Дефектация и ремонт несъемного авиационного оборудования.
Электрические провода и жгуты в отсеках шасси, авиадвигате-
лей и в штурвалах (ручках управления) для дефектации и ре-
монта полностью демонтируются, т. е. снимаются хомуты креп-
ления, хлорвиниловые и асбестовые ленты, рассоединяются
штепсельные разъемы и т. д.
Дефектация производится дефектовщиками-специалистами
высокой квалификации согласно технологическим картам (фор-
ма 1).
Форма 1
Технологическая карта дефектации
№ п/п Наименование работ Чертеж или инструкция Инструмент
1 Внешним осмотром убедить- ся в целостности изоляции проводов Чертеж 7 Бинокулярная лупа 4*
k Проверить провода 9—16 на обрыв и КЗ Чертеж 7 фиг. 3 Тестер ТТ-1
На основании дефектных ведомостей нормировщиком цеха
определяются объем ремонтных работ и трудозатраты, которые,
после согласования с начальником цеха, утверждаются плано-
во-экономическим отделом.
Электрические жгуты авиадвигателей при капитальном ре-
монте полностью заменяются новыми, независимо от их состоя-
ния.
Выключатели и переключатели, работающие в цепях с боль-
шими индуктивными нагрузками, также заменяются, а все АЗС и
АЗР проверяются на срабатывание при двойной нагрузке (с по-
мощью нагрузочного пульта и электросекундомеров).
382
Ремонт жгутов, экранирующих оплеток резиновых обтюра-
торов, распределительных коробок, металлизационных перемы-
чек и других элементов электрических сетей производится по
имеющимся в АРП технологиям.
Дефектация и ремонт съемного авиационного оборудования
осуществляются в цехе, имеющем несколько производственных
участков:
— электрооборудования;
— приборов и электронной автоматики;
— кислородного оборудования и т. д.
Каждый из производственных участков в свою очередь под-
разделяется на ряд крупных технологических операций:
— чистки (удаление консервации, щеточной пыли и т. п.) и
мойки; разборки и. дефектации; ремонта; комплектовки и сбор-
ки; регулировки, отладки и испытаний.
Технология и качество ремонта авиационного оборудования
во многом зависят от поточности производства. Поточное про-
изводство характеризуется непрерывностью и ритмичностью тех-
нологических процессов ремонта, а также степенью специализа-
ции рабочих мест. Узкая специализация рабочих мест способст-
вует повышению качества ремонта.
Производственные цехи АРП подразделяются в основном по
видам оборудования. Это приводит к повторению в различных
цехах технологических операций ремонта однотипных (или по-
добных) устройств. Примерами однотипных устройств, исполь-
зуемых в радиотехническом и авиационном оборудовании, авиа-
ционном вооружении, могут служить электромеханизмы, тахоге-
нераторы, гироскопы, элементы и узлы следящих систем и т- п.
Ремонт по видам оборудования не позволяет организовать в
каждом цехе ритмичное поточное производство (по причине его
мелкосерийности) и соответственно узкой специализации рабо-
чих мест.
В таблице 16.2 в качестве примера приведена технология ре-
монта авиагоризонта типа АГД-1 с указанием специализации
рабочих мест и операций, выполняемых на них.
Рабочие места по ремонту таких видов авиационного обору-
дования, как автопилоты, авиагоризонты, курсовые и пилотаж-
но-навигационные системы, специализируются только по круп-
ным технологическим операциям. При ртом большинство опера-
ций ремонта прибора или системы практически выполняется од-
ним рабочим, который должен иметь высокую квалификацию.
Наличие таких «автономных» рабочих мест упрощает про-
цесс управления технологическими процессами, но одновремен-
но и не позволяет достичь высокой производительности труда.
Наиболее прогрессивным является поточно-групповой ме-
тод ремонта авиационной техники. Он состоит в том, что органи-
383
Таблица. 16.2
Специализация рабочего места и его номер Перечень технологических операций Технологическое оборудова- ние рабочего места
1. Разборка ком- 1. Снятие кожуха с ги- Комплект инструмента
плекта АГД-1 роагрегата. 2. Разборка карданных уз- лов. 3. Разборка гироскопи- ческого узла. 4. Разборка указателя. 5, Разборка узла аррети- рования. для разборки гироскопиче- ских приборов
2. Чистка и мой- 1. Промывка металличе- Ванны для моющих жид-
ка узлов и деталей ских деталей в бензине. 2. Промывка латунных де- талей в мыльном растворе. 3. Очистка и просушка де- талей и узлов. костей, волосяные щетки, пинцеты, протирочные ткаь ни, термостат с 7,=100°С.
3. Дефектация 1. Внешний осмотр дета- талей. 2. Измерение электриче- ских сопротивлений обмо- ток, потенциометров и жид- костных переключателей. 3. Проверка шарикопод- шипников гироскопического узла на момент трения. Лупа 5—7* Ампервольтметр тип Ц-57, мегометр М-1101, установка для проверки жидкостных переключателей Установка П-104-67
4. Ремонт, сбор- 1. Устранение неисправно- Комплект инструмента для
ка и регулировка стей, указанных в дефектных ведомостях. 2. Сборка узлов указателя. 3. Сборка и балансировка гироскопического узла. 4. Регулировка. гироскопических приборов, балансировочная машина А-21М.
5. Испытание и 1. Приработка комплекта. Установки ПА-АГД,
проверка АГД-1 2. Проверка АГД-1 на со- ответствие техническим ус- ловиям. 3. Оформление техниче- ской документации и предъ- явление АГД-1 ОТД. УПГ-56
384
зация потока ремонта производится не по отдельным видам обо-
рудования, а по так называемому подобию технологических про-
цессов.
Принцип подобия технологических процессов ремонта
предусматривает разбиение всего оборудования ЛА на группы
по следующим признакам:
— однотипности основных элементов конструкции агрегатов
и узлов;
— однотипности технологических операций и последователь-
ности их выполнения;
— идентичности используемой КИА, инструмента и приспо-
соблений.
Один из возможных вариантов разбиения авиационного обо-
рудования по принципу подобия технологических процессов
представлен в табл. 16.3.
Применение поточно-группового метода ремонта позволяет:
— создавать узко специализированные рабочие места и про-
изводственные потоки и обеспечивать их загрузку;
— полнее использовать КИА, инструмент и технологиче-
скую оснастку;
— обеспечивать ритмичность производства и повышать ка-
чество ремонта авиационной техники.
На рис. 16.3 изображена структурная схема технологии ре-
монта коммутационной и защитной аппаратуры ЛА поточно-
групповым методом.
Внедрение поточно-групповых методов ремонта требует пред-
варительной большой работы по формированию подобных тех-
нологических процессов и согласований между ними. Однако,
как показывает опыт передовых АРП, она оправдывается тем,
что значительно улучшаются экономические и качественные по-
казатели ремонта.
В заключение настоящего раздела следует отметить, что не-
прерывное совершенствование и усложнение авиационного обо-
рудования приводит к соответствующему усложнению и техно-
логии его ремонта. Теперь уже качественный капитальный ре-
монт авиационного оборудования практически невозможен без
применения термостатов, вибрационных установок, термохоло-
дильников, барокамер, гиростатов. Непрерывно увеличивается
состав КИА и инструмента, необходимого для ремонта авиацщ
онного оборудования. Так, для замера деформаций мембранно-
анероидных коробок были созданы специальные барокамеры с
микроскопами, внедрены установки для проверки шарикопод-
шипников гироскопических устройств. Разрабатываются уста-
новки для проверки печатных и пленочных схем и т. д. - ...- -
25. Румянцев Е. А. и др.
385
• Наряду с мероприятиями по улучшению организации труда,
внедрение новых видов технологического оборудования способ-
ствует повышению качества ремонта авиационного оборудова-
ния. ...
Передача изделий на линию
монтажа
Рис. 16.3. Схема технологии ремонта поточно-
групповым методом
Ремонт новых типов авиационного оборудования первона-
чально осуществляется в передовых АРП. Они осуществляют
разработку технической документации и технологического обо-
рудования, опытный ремонт и испытание отремонтированной
техники.
Одновременно устанавливаются нормы времени на ремонт
новых типов авиационного оборудования. Затем техническая до-
кументация и опыт передовых АРП по ремонту новых типов
авиационного оборудования передаются другим АРП.
386
Таблица 16.3
№. п/п Подобные технологиче- ские потоки Состав авиационного оборудования, входящего в группы подобия технологических процессов
1 Ремонт мембранно- анероидных приборов и устройств Высотомеры, указатели воздушной скорости и числа М, вариометры, указатели перепада давлений, бароспидографы
2 Ремонт манометриче- ских устройств, указате- лей температуры и рас- хода, тахометров _. Электрические манометры всех типов, рас- ходомеры типа РТС, тахометры всех типов, термоэлектрические термометры и термометры сопротивления
-3 Ремонт электрических машин и механизмов Электрические двигатели, генераторы, элек- тромашинные части преобразователей и меха- низмов
4 Ремонт гироскопиче- ских устройств Гиро датчики авиагоризонтов, курсовых си- стем, демпферов, автопилотов и т. Д.
5 Ремонт элементов электронной автоматики Навигационные. индикаторы, измерители топлива, автопилоты и курсовые системы (без гиродатчиков) и т. п.
<6 Ремонт коммутацией^ ной, регулирующей и за- щитной аппаратуры Центральные распределительные и соедини- тельные коробки, коробки управления преоб- разователей, контакторы и т. д.
7 Ремонт баллонов и трубопроводов Баллоны и трубопроводы кислородного обо- рудования
Отремонтированной в АРП авиационной технике назначает-
>ся гарантийный межремонтный ресурс. Это означает, что неис-
правности и повреждения авиационной техники, возникающие
:по причине некачественного ремонта, устраняются силами и сред-
•ствами АРП.
Вопросами технического контроля качества ремонта в АРП
.занимаются отдел технического контроля (ОТК) и группа каче-
ства.
ОТК обладает достаточно широкими полномочиями. Он осу-
ществляет окончательную приемку и оценку качества ремонта,
•снимает или вводит новые контрольные операции на отдельных
рабочих .местах, на производственных участках и в цехах. На-
чальник ОТК имеет право и обязан прекращать приемку отре-
монтированной авиационной техники в случае нарушения техни-
ческих условий; браковать запчасти, материалы, инструмент,
25*
387
КИА производства АРП и предприятий поставщиков, если онж
имеют отклонения от установленных норм.
В состав ОТК входят измерительная лаборатория и группы*
(рис. 16.4). В измерительных лабораториях АРП выполняются
выборочные и периодические (а в ряде случаев даже и государ-
ственные) проверки КИА.
L I
Р и с. 16.4. Состав отдела технического контроля
Группа входного контроля занимается техническим контро-
лем поступающих в цехи материалов, деталей, запчастей и т.п..
Группа контроля в цехах осуществляет периодический или вы-
борочный контроль технологических процессов на производст-
венных участках и в цехах. В цехах имеются и постоянные пред-
ставители этой группы — мастера-контролеры.
Инспекторская группа занимается вопросами рекламации и
может использоваться для технического контроля в цехах и на
участках, где отсутствуют постоянные представители ОТК.
Группа анализа качества систематизирует результаты рабо-
ты ОТК за определенный период (месяц, год) и намечает прове-
дение мероприятий, способствующих повышению качества ре-
монта. Кроме перечисленных должностных лиц ОТК, за качест-
во ремонта несет ответственность также и инженерно-техниче-
ский состав производственных участков и цехов.
Группа качества (эту группу не следует отождествлять с
группой анализа качества ОТК), независимо от ОТК, может осу-
ществлять контроль качества ремонта авиационной техники вы-
борочно или в плановом порядке в любом цехе и на любом ра-
бочем месте.
Технический контроль качества производится также пред- '
ставителями части (инженерно-техническим составом и летны-
ми экипажами) при приемке отремонтированной авиационной
техники. Он является составной частью проверки авиационной
техники в объеме комплексного осмотра и контрольных полетов,
'после выполнения .среднего и капитального (ремонта.
388
Оценка качества ремонта указывается в приемном акте пред-
ставителей части.
За качество ремонта АРП несут административную и эко-
номическую ответственность. Некачественно отремонтированная
авиационная техника, прошедшая ремонт в текущем году, ис-
ключается из выполнения плана АРП.
§ 16.4. ТЕХНИЧЕСКОЕ НОРМИРОВАНИЕ ТРУДА
Техническим нормированием называется определение нормы
времени или нормы выработки на выполнение различных видов
работ в известных организационно-технических условиях.
Норма времени — это время (в секундах, минутах, часах),
необходимое на выполнение заданной работы или технологиче-
ской операции в известных организационно-технических усло-
виях.
Р и с. 16.5. Состав рабочего времени
Норма выработки характеризует объем, работ (количество
операций, контрольных измерений и т. п.), который должен быть
выполнен в течение заданного времени (час, смену) и является
величиной, обратной норме времени.
Нормы времени или выработки устанавливаются на основе
научного анализа выполняемых работ, а также опытно-стати-
стических данных.
389
В общем случае норма времени входит в состав рабочего
времени (рис. 16.5) и равна:
Явр= Тпз + Топ+Тоы+Тот!^ (16.6).
где ' Тпз — подготовительно-заключительное вре-
мя, необходимое на получение и сдачу-
инструмента, изучение задания, чер-
тежей, схем;
Топ = То-[- Тв — оперативное время;
' То— основное время на выполнение задан-
ной работы (демонтаж и монтаж обо-
рудования, контроль параметров, ре-
монт агрегатов);
Та — вспомогательное время, т. е. время,
потребное на выполнение вспомога-
тельных работ, связанных с выполне-
нием основной работы (вскрытие тех-
нологических лючков, вынужденное-
снятие других блоков и т. п.);
Тоы— время на обслуживание рабочего ме-
ста (раскладка и уборка инструмента,,
подготовка.контрольно-измерительной
аппаратуры);
7’0тд — время регламентированных переры-
вов на отдых, физкультпаузы, личные
надобности.
Подготовительно-заключительные операции могут выпол-
няться вспомогательными рабочими. В этом случае норма вре-
мени характеризуется так называемым штучным временем.
Тшт==7’оп + Т0м+Тотл
(16.7)
Если ремонту подвергается партия однотипных агрегатов,,
а подготовительно-заключительные операции выполняются толь-
ко один раз в смену, то
Нвр = Л13 + кТшт, (16.8)
где k — количество ремонтируемых в смену агрегатов.
При ремонте, связанном с выполнением большого числа руч-
ных, .монтажных и регулировочных операций, времена Тпз. Тои:
и Тотд задаются в процентах от оперативного времени. Тогда
нвр = ^пз°/о +--ом°/о +.2отД7о) + р6 9);
Технические нормы на ремонт авиационной техники не яв-
ляются постоянными. По мере совершенствования технологии
ремонта, повышения квалификации работников и организации
390
труда они могут изменяться. Изменение технических норм свя-
зано’с проведением- фотографий рабочего времени и хрономет:
ража.
Фотография рабочего времени — это наблюдение и учет всех
затрат рабочего времени при выполнении определенной работы.
Фотография рабочего времени бывает индивидуальной, груп-
повой или маршрутной (метод моментных наблюдений) и произ-
водится с целью оценки , возможностей сокращения времени и
трудозатрат на выполнение заданной работы.'
Фотографии рабочего времени предшествует подготовка со-
ответствующей документации, детальное знакомство с техноло-
гией ремонта на рабочих местах и инструктаж рабочих, которые
будут подвергаться наблюдению.
Примерная форма карты индивидуальной фотографии рабо:
чего времени показана в табл. 16.4.
Таблица 16.4
№ п/п Что наблюдалось Текущее время Продол- житель- ность Совмеще- ние опе- раций Колич, Агрегатов Индекс _ Примеча- ние •
1 Получает задание, ин- струмент и переходит на рабочее место 8.10 10 — — ПЗ — .
2 Вскрывает лючок 8.15 5 .— — ОП От- вертка про- стая
3 Снимает РН-180 и 8.21 6 Осмотр о & ОП —
РН-400Б жгутов
Наблюдатель последовательно записывает в карте все опе-
рации, выполняемые рабочим, условными индексами (ПЗ —
подготовительно-заключительная работа, ОП оперативная ра-
бота и т. д.). При этом по текущему времени отмечаются момен-
ты окончания операций и их продолжительность.
На основании карты индивидуальной (или аналогичной на
2—3 человека групповой) фотографии можно учесть все состав-
ляющие рабочего времени.
Многократное повторение фотографии рабочего времени раз-
личных рабочих, выполняющих одинаковые ремонтные работы,
позволяет установить наиболее прогрессивные нормы времени.
Методы индивидуальной и групповой фотографии рабочего
времени довольно трудоемки. Указанные недостатки частично
устраняются при использовании .метода моментных наблюдений.
Он состоит в том, что для наблюдения выбирается группа рабо-
чих (до 10 и более человек) и намечается маршрут их обхода на
рабочих местах. При моментных наблюдениях не фиксируется
391
действительное время на выполнение той или иной операции, а
учитывается лишь, что делает рабочий в момент наблюдения.
Необходимое количество моментных наблюдений рассчиты-
вается по формуле
(1610)
k3p2
где С — коэффициент, равный двум для условий стабиль-
ного производства и трем — для нестабильного;
ks — средний коэффициент занятости рабочих;
р — допустимая величина ошибки измерений. Обычно
принимается равной 3—10%.
Число обходов каждого рабочего места в течение смены рав-
но отношению количества моментных наблюдений к числу ра-
бочих в наблюдаемой группе. В специальной карте при обходах
против фамилии каждого рабочего индексами отмечается, чем
он занят в момент наблюдения. По суммам одноименных индек-
сов определяется фактическая загруженность рабочих, выявля-
ются нерациональные потери рабочего времени и разрабаты-
ваются рекомендации по организации труда.
Хронометраж — это наблюдение и замеры затрат оператив-
ного времени при многократном выполнении определенной рабо-
ты. Как правило, хронометрируемая работа подразделяется на
отдельные операции, и применяется при разработке технических
норм, изучении передовых методов труда, выявлении причин
невыполнения норм.
При хронометраже все зафиксированные отрезки времени на
выполнение отдельных операций сводятся в хронометражный
ряд. Основными характеристиками хронометражного ряда яв-
ляются;
— коэффициент устойчивости, равный
/?у=~—— , (16.11)
t min
где £Шах — максимальное время на выполнение операции;
^min— минимальное время на выполнение операции;
— среднеарифметическое значение оперативного времени вы-
полнения операции
N
i-1
где N — количество наблюдений;
tj — время выполнения операции при i-том наблюдении;
— прогрессивное среднеарифметическое значение оператив-
ного времени
392
т =
1 пр ОП
(16.13)
где — время на выполнение операции, значение которого
ниже или равно величине
N' — количество замеров хронометражного ряда, значения
которых ниже или равны величине Топ •
Коэффициенты ky для различных видов работ задаются. На-
:пример, для машинно-ручных работ Ау =>1,5, а для демонтаж-
но-монтажных ky — 1,8—2,0. Зависимость между коэффициен-
том устойчивости и минимально необходимым количеством наб-
.людений показана в табл. 16.5.
Таблица 16.5
1,2 1,5 1,7 2,0 2,5 3,0
№ О 4 5 6 8 10
Недостатком описанных методов технического нормирования
труда является то, что для выполнения качественных наблюде-
ний требуются специалисты высокой квалификации. Поэтому в
настоящее время при техническом нормировании труда начинают
широко использоваться автоматические средства. Чаще всего
они применяются для автоматического контроля времени рабо-
ты оборудования и причин его простоя. Имеются как отдельные
устройства подобного типа, так и целые системы.
Дальнейшее повышение производительности труда и качест-
ва ремонта авиационной техники в АРП во многом зависит от
научной организации труда (НОТ). Выполнение этих важных
мероприятий связано с решениями XXIII съезда КПСС, в кото-
рых указывается, что «...необходимо настойчиво проводить курс
на комплексную механизацию производственных процессов, по-
следовательное сокращение удельного веса ручного труда, более
рациональное использование рабочей силы, широкое внедрение
научной организации труда».
В общем случае НОТ охватывает широкий круг вопросов,
таких, как инженерная психология, сетевые методы планирова-
ния, техническая эстетика и другие. НОТ должна предусматри-
вать всестороннее исследование технологических процессов вы-
полняемых работ, их критическую оценку, разработку и внед-
рение конкретных предложений с целью совершенствования ор-
ганизации, повышения производительности и условий труда.
Разработка и внедрение НОТ осуществляются, как правило,
в несколько этапов с привлечением практически всех инженерно-
393
технических работников и производственных рабочих, научно-ис-
следовательских и других организаций, занимающихся вопроса-
ми эксплуатации и ремонта авиационной техники.
Первый этап включает в себя организацию творческих групп,,
которые должны осуществлять постоянное руководство и нап-
равлять практическую деятельность по НОТ. На этом же этаГпе
производится выбор объектов исследования (отдельные рабо-
чие места, производственные участки, цехи, отделы), роставле-
ние программ и .методик исследований.
Второй этап предусматривает анализ существующей органи-
зации труда путем проведения хронометража, фотографий рабо-
чего времени, оценки степени механизации и автоматизации про-
изводственных процессов.
Третий и четвертый этапы включают планирование меропри-
ятий по НОТ, оценку их эффективности и внедрение.
В большинстве случаев внедрение НОТ начинается с ана-
лиза организации рабочих мест и распорядка дня.
Любое рабочее место должно планироваться с целью обеспе-
чения .максимально возможных удобств, исключения лишних
движений и обеспечения безопасности труда- При анализе ра-
бочего места учитывается расположение инструмента, контроль-
но-измерительной аппаратуры, положение рук и корпуса работа-
ющего- Известно, например, что выполнение работы стоя требу-
ет затрат энергии в 3 раза, а в наклонном положении корпуса —
в 4,5 раза больше, чем при выполнении той же работы сидя.
Рациональное оборудование рабочего места, исключение не-
нужных физических усилий позволяет рабочему более качест-
венно выполнять основную работу по ремонту авиационной тех-
ники.
Разработка мероприятий по НОТ на рабочем месте включа-
ет также выбор наиболее рациональных и удобных верстаков,
столов, зон наблюдения и осмотров, подбор цвета окраски обо-
рудования и производственных помещений. Установлено, что
красно-желтый цвет снижает способность человека правильна
воспринимать размеры, а зелено-голубой цвет способствует со-
хранению этой способности. Правильный подбор цветовой гам-
мы окраски оборудования и помещений в ряде случаев позволя-
ет увеличить производительность труда рабочих до 25 %.
Большое значение при внедрении НОТ уделяется оценке сте-
пени совершенствования применяемого инструмента и приспособ-
лений, уровня механизации и автоматизации, учету условий
труда.
Под условиями труда понимаются внешние условия, в ко-
торых выполняется 'работа (шум, вибрации, освещенность рабо-
чих мест, температура и загрязненность воздуха и т. д.).
Длительный шум свыше 80—90 децибел приводит к повыше-
нию кровяного давления у работающих, замедлению их реакций
и другим физиологическим последствиям.
391
Загрязненность воздуха в производственных помещениях па-
рами бензина, керосина, ацетона, окисями углерода и азота
может влиять на нервную систему рабочих и тем самым сни-
жать :Их производительность труда.
Особое влияние на работающих оказывает температура воз-
духа. Так, при температуре Т=+35—40°С через 1—2 часа ра-
боты производительность труда может уменьшиться до 20% ио,-,
сравнению с производительностью труда в нормальных условиях
(Т = +'15—20°С)
Составной частью НОТ является учет разделения-и коопера-
ции труда. Разделение труда предусматривает расчленение тех-
нологического процесса на отдельные виды работ и операции,,
оценку сложности и требование к квалификации рабочих.
Кооперацией труда называется совместное участие многих?
рабочих в выполнении определенной работы (бригада, коллек-
тив производственного участка или цеха).
Анализ работы бригад, участков и цехов обычно начинается-
с разработки мероприятий по ликвидации диспропорций и «уз-
ких» мест. Диспропорции и «узкие» места возникают, в тех слу-
чаях, когда производственные мощности отдельных бригад, уча-
стков и цехов не обеспечивают ритмичной работы ведущего це-
ха (сборочного, испытательного]. Они ликвидируются за счет:
— автоматизации и механизации трудоемких процессов про-
изводства;
— установления более производительного оборудования;
— внедрения более совершенной технологии ремонта;
— повышения квалификации рабочих;
— внедрения прогрессивных методов организации коопериро-
вания между бригадами, участками и цехами (например, с по-
мощью сетевого планирования).
В АРП составляются соответствующие планы мероприятий,
по ликвидации «узких» мест и диспропорций между цехами и,
производственными участками (форма 2).
Ф о р м а 2
К» п/п Наимено- вание це- ха или участка Наименова- ние «узкого» места и его производ. мощность Планируе- мые меро- приятия по устранению диспропор- ций и «уз- ких» мест Объем ра- бот и срок внедрения мероприя- тий Произв. мощность цеха, участка после внед- рения меро- приятий Ответст- венный за внед- рение ме- роприят^
1 2 3 4 5 6 7
39S
Затраты на НОТ производственных участков и цехов АРП
ма планируемый период равны:
Chot=S(Qhot+C^pt), (16.14)
тде С₽нот — затраты на внедрение НОТ производственных
рабочих;
^/нот — затраты на внедрение НОТ инженерно-техниче-
ских работников;
п — количество мероприятий по НОТ.
Очевидно, что внедрение мероприятий по НОТ целесообраз-
но лишь в случае повышения экономической эффективности АРП.
.Экономическая эффективность от внедрения мероприятий по
НОТ определяется разностью
Энот = S Rtot + 5hot) - снот , (16.15)
i =1
здесь Э₽от, — экономические показатели работы про-
изводственных и инженерно-техниче-
ских работников после внедрения меро-
приятий по НОТ;
т — количество месяцев (лет) действия ме-
роприятий по НОТ.
Применение методов НОТ является важным фактором повы-
шения производительности и улучшения условий труда при ре-
монте авиационной техники-
Внедрение комплекса мероприятий по НОТ на передовых
АРП позволило в течение двух лет снизить брак производства
примерно на 10%, заболеваемость производственных рабочих —
на 20—25% и увеличить производительность труда более чем на
-30%.
Глава XVII
ОБЩИЕ ЗАДАЧИ ИНЖЕНЕРНО-АВИАЦИОННОЙ СЛУЖБЫ
ПО МАТЕРИАЛЬНО-ТЕХНИЧЕСКОМУ ОБЕСПЕЧЕНИЮ,
ТЕХНИЧЕСКОЙ ПОДГОТОВКЕ ЛИЧНОГО СОСТАВА
И УЧЕТУ
§ 17.1. МАТЕРИАЛЬНО-ТЕХНИЧЕСКОЕ ОБЕСПЕЧЕНИЕ
Снабжение авиационно-техническим имуществом. Материаль-
но-техническое обеспечение авиационных частей включает: во-
первых, аэродромно-техническое обслуживание и, во-вторых,,
авиационно-техническое снабжение.
Аэродромно-техническое обслуживание выражается в обес-
печении авиационных частей аэродромными средствами эксплу-
атации самолетов: топливозаправщиками, автомобильными ки-
слородно-зарядными станциями, тр;анспортным'и резервуарами:
жидкого кислорода, передвижными электрическими и гидравли-
ческими агрегатами, тягачами и т. д.
Под авиационно-техническим снабжением понимается обе-
спечение авиационных частей горюче-смазочными материалами,,
применяющимися на самолетах жидкостями и газами, авиаци-
онными боеприпасами и авиационно-техническим имуществом,
т. е. различной авиационной техникой, предназначенной для ус-
тановки на самолетах взамен неисправной или выработавшей тех-
нический ресурс, запасными частями, расходными материалами,,
инструментом и аппаратурой контроля состояния и настройки
авиационной техники.
Все авиационно-техническое имущество, которым обеспечи-
ваются авиационные части, подразделяется на следующие груп-
пы:
— табельное; оборотный фонд; имущество, отпускаемое сог-
ласно установленным нормам поставки авиационной техники;
имущество, предназначенное для обеспечения доработок авиа-
ционной техники.
Табельное имущество отпускается согласно утвержденным
штатам и табельным нормам, которыми устанавливаются для
каждого рода авиации номенклатура и количество технических
средств, выделяемых частям. К табельному имуществу авиаци-
397~
<онных частей относятся главным образом аэрофото- и киносъе-
мочная аппаратура, высотное спецснаряжение, контрольно-из-
мерительные приборы и установки, переносные средства обслу-
живания кислородного оборудования и другие средства назем-
ного обслуживания самолетов. Потребность имущества, согласно
табельным нормам, исчисляется соответственно или на один са-
молет, или на подразделение, или авиационную часть.
Оборотным фондом называется запасное имущество, выделя-
емое авиационным частям для обеспечения постоянной готовно-
сти самолетного парка. Оно хранится на складах довольствую-
щих частей и выдается авиационным частям по мере необходи-
мости.:
При использовании запасных технических устройств из обо-
ротного фонда для установки их на самолетах они подлежат
восполнению за счет ремонта и оборачиваемости снятого с само-
летов неисправного имущества или за счет получения нового
технического имущества из центральных снабжающих органов
вместо негодного для дальнейшей эксплуатации и списанного с
учета.
Расходные материалы (краски, текстиль, провода, дюрито-
вые шланги, крепежный материал и т. д.) выдаются частям сог-
ласно плану работ на самолетах и в соответствии с установ-
ленными нормами.
К новым самолетам, поступающим в авиационные части для
текущего использования, придаются одиночные и групповые
комплекты авиационно-технического имущества, инструмент и
другой необходимый инвентарь.
Функции инженеров частей в материально-техническом обес-
печении авиационных частей. В своей практической деятельности
инженеры авиационных частей имеют прямое отношение к ре-
шению вопросов по материально-техническому обеспечению. Они
занимаются планированием отходов авиационной техники, оп-
ределением потребностей частей в авиационно-техническом иму-
ществе, составлением расчетов и заявок на запасные части и
расходные материалы, своевременным оформлением документов
на оприходование и на списание имущества. В их обязанности
входит: контроль за расходованием по назначению авиационно-
технического имущества и материалов, отпускаемых на эксплуа-
тацию и ремонт авиационной техники; технический надзор за
хранением авиационной техники на технических складах, за ка-
чеством горюче-смазочных материалов и медицинского кислоро-
да и составление технического расписания для частей аэродром-
ного обслуживания на периоды боевой и учебно-боевой дея-
тельности авиационных частей.
Организация материально-технического обеспечения. Отпуск
авиационно-технического имущества частям осуществляется, со-
гласно планам авиационно-технического снабжения, которые со-
ставляются довольствующими органами.
398
Исходными данными для составления плана снабжения авйа-
.дщоцшщгехни веским имуществом являются: планы-заявки ИАС
частей,’' а также планы полётов, планы ремонта авиационной
техники, действующие нормы расхода запчастей и материалов,
оборотный фонд, данные об имеющемся имуществе на складе и
т. д.
Главный исходный документ для планирования авиационно-
технического снабжения — план-заявка составляется ИАС
авиационной части совместно с органом МТО.
Учет штатно-табельного имущества, находящегося постоян-
но или временно в авиационной части, ведется непосредственно
в подразделениях под контролем инженеров соответствующей
специальности. Основным документом учета имущества являет-
ся книга учета имущества. Учет самолетов и двигателей органи-
зуется в соответствии с особым положением и ведется отдельно.
Списание израсходованных материалов, числящихся за ча-
стью, осуществляется посредством ежемесячного отчета инже-
нера, который представляется в часть аэродромного обслужива-
ния. Расход материалов должен быть подтвержден записями в
«формулярах и паспортах авиационной техники о произведенных
ремонтных и регламентных работах. Выдача частям имущества
для замены пришедшего в негодность производится при условии
одновременной сдачи на склад неисправного имущества, причем
сдаваемые приборы, агрегаты и аппаратура, подлежащие заме-
не на новые, должны быть обработаны, законсервированы и
укомплектованы паспортами с внесенными в них данными об экс-
плуатации технического устройства. Выдача и сдача имущества
оформляются накладными, выписанными на получателя. Сда-
точная накладная является основанием для списания имущест-
ва, приемная накладная — основанием-на оприходование иму-
щества.
Имущество, утраченное вследствие гибели, порчи, хищения и
т- д., списывается по инспекторскому свидетельству. При уста-
новке имущества на самолеты оно вписывается в формуляры
самолетов, а для списания этого имущества с книги учета со-
ставляется технический акт на данную установку, который и
служит основанием списания.
Во время интенсивных полетов и боевых действий авиацион-
ной части для более оперативного обслуживания их обычно в
районе самолетных стоянок развертывается отделение техниче-
ского склада. Здесь же располагается автотранспорт с горюче-
смазочными и другими материалами и агрегаты аэродромного
обслуживания. В конце летного дня инженер авиачасти с пред-
ставителем части аэродромного обслуживания документально
оформляют расход топлива, масла, боеприпасов, кислорода и
т. д., на основании чего и производится списание .материальных
средств с наличия авиачасти и части материально-технического
обслуживания.
399
§ 17.2. ТЕХНИЧЕСКАЯ ПОДГОТОВКА В АВИАЦИОННЫХ ЧАСТЯХ
Техническая подготовка является составным элементом бое-
вой подготовки личного состава авиационных частей и имеет
целью постоянное повышение технических знаний и практиче-
ских навыков у личного состава для обеспечения квалифициро-
ванной эксплуатации и ремонта авиационной техники.
В процессе технической подготовки изучается авиационная
техника и методы ее эксплуатации. Обучение летного и инже-
нерно-технического состава авиационных частей правилам экс-
плуатации и сообщение знаний ее принципов работы, устройства'
и конструкции обеспечивается инженерно-авиационной службой.
Тематика по дисциплинам технической подготовки разраба-
тывается в соответствии с программами боевой подготовки и
потребцЪстями авиационных частей.
Организация и формы технической подготовки. Основными:
формами технической подготовки являются лекции, классно-
групповые занятия, практические занятия непосредственно на
авиационной технике и тренажерах, а также самостоятельное-
изучение авиационной техники в соответствии с индивидуальны-
ми заданиями.
Эффективными формами повышения уровня технических зна-
ний личного состава являются учебные сборы и технические кон-
ференции.
Учебные сборы проводятся эпизодически в форме групповых
теоретических и практических занятий, на которых изучаются;-
— передовые методы работы инженерно-авиационной служ-
бы;
— наиболее сложные образцы новой авиационной техники и
методы ее эксплуатации;
— некоторые теоретические вопросы, связанные с устройст-
вом авиационной техники и ее эксплуатацией.
Технические конференции проводятся обычно со всем личным
составом части для обсуждения и обобщения опыта эксплуата-
ции авиационной техники или теоретических вопросов, имеющих
важное значение для текущей деятельности авиационной части.
С целью воспитания у личного состава чувства ответственно-
сти в обращении с авиационной техникой и в работе по ее об-
служиванию и эксплуатации периодически с техническим соста-
вом проводятся технические разборы. На технических разборах
подводятся итоги осмотров и подготовки к полету, дается оценка
работы технического состава и авиационной техники, разбира-
ются характерные случаи отказов и неисправностей авиацион-
ной техники, производится анализ с разбором причин отказов,
даются рекомендации для предупреждения и устранения их, раз-
бираются летные происшествия, личный состав знакомится с по-
ступившими руководящими документами, относящимися к НАС.
400
Освоение новой авиационной техники, поступающей в авиа-
ционные части, обеспечивается путем:
— г изучения этой техники на заводах авиационной промыш-
ленности и в военных учебных заведениях;
— создания в частях учебной базы по получаемой технике и
по подготовке руководителей занятия из числа офицеров части;
— стажировки личного состава в авиачастях, освоивших экс-
плуатацию новой авиационной техники.
Функции инженеров в обеспечении технической подготовки
личного состава. Функции инженеров авиационных частей в об-
ласти технической подготовки личного состава весьма обширны,
Обычно инженеры авиационных частей участвуют в составлен
нии планов и программ технической подготовки, разработке кон-
спектов занятий, наглядных пособий и индивидуальных заданий-.
Им необходимо отлично знать свой предмет, быть методиче-
ски хорошо подготовленными к ведению занятий и непрерывно
совершенствовать свои знания и педагогические навыки.
Инженеры периодически проводят инструктивно-методиче-
ские занятия с руководящим техническим составом, который в
подразделениях используется в качестве преподавателей.
Инженерам частей также приходится заниматься организа-
цией и оборудованием учебных классов, организацией и проведе-
нием учебных сборов, участвовать в технических разборах, изу-
чать с личным составом авиационных частей поступающие руково-
дящие документы, относящиеся к ИАС, проводить технические
консультации личного состава, проверять технические знания-,
а также вести учет занятий, проводимых по плану технической
подготовки и успеваемости личного состава.
§ 17.3. ЭКСПЛУАТАЦИОННАЯ ДОКУМЕНТАЦИЯ
АВИАЦИОННОЙ ТЕХНИКИ. УЧЕТ И ОТЧЕТНОСТЬ ИАС
В ведении инженеров авиационных частей находится боль-*
шое количество военнослужащих, обслуживающих авиационную
технику, большое количество летательных аппаратов, средств
эксплуатации и другого авиационно-технического имущества- В
процессе эксплуатации авиационной техники расходуется мно-
го различных материальных ценностей (топлива, боеприпасов,
запасных частей и т. д.), расходуется ресурс авиационной тех-
ники. Поэтому учет данных о деятельности инженерно-техниче-
ского состава и о состоянии авиационной техники является не-
обходимой формой текущей регистрации основных показателей,
характеризующих: качество, эффективность и экономичность
эксплуатации авиационной техники, деятельность ИАС и состоя-
ние материальных ресурсов авиационной части.
Вся существующая учетно-отчетная документация ИАО
делится на следующие составные группы: :
— эксплуатационно-техническую документацию самолетов; '
26, Румянцев Е. А. и др.
401
текущую учетно-отчетную документацию ИАС;
—: технические акты;
— документацию по учету авиационно-технического имуще-
ства и отчетности за его израсходование.
Эксплуатационно-техническая документация. Для обеспече-
ния эксплуатации авиационной техники издается техническая до-
кументация, позволяющая инженерно-техническому составу ос-
ваивать авиационную технику и правила ее эксплуатации. Для
осуществления текущей регистрации наработки авиационной
техники, ее состояния и мероприятий, проводимых на ней в про-
цессе эксплуатации, к каждому объекту авиационной техники
придается учетная документация.
В соответствии с этим вся эксплуатационно-техническая до-
кументация подразделяется на две группы:
1. Типовую документацию, которая включает технические
описания, инструкции по эксплуатации авиационной техники, ре-
гламенты и технологию технического обслуживания, альбомы
схем и т. д. и по своему содержанию является руководящей, экс-
плуатационно-технической документацией.
2. Понумерную или поэкземплярную документацию, которая
включает в себя формуляры летательных аппаратов и авиацион-
ных двигателей, а также паспорта на отдельные технические
устройства. По своему содержанию эта документация является
учетно-технической.
Основным учетно-техническим эксплуатационным докумен-
том является формуляр самолета.
Формуляры двигателей и технические паспорта на другую
авиационную технику представляют собой дополнения к форму-
ляру самолета.
Формуляр самолета является групповым документом и со-
стоит из нескольких частей, включая части на авиационное обо-
рудование. Деление формуляра самолета на части дает возмож-
ность техническому составу каждой специальности производить
необходимые записи независимо от исполнителей работ других
специальностей.
Каждая часть самолетного формуляра содержит: титульный
лист, перечень технических устройств, входящих в соответствую-
щий вид оборудования, данные об изменениях в составе обору-
дования, итоговые сведения о текущей наработке или налете са-
молета, данные о выполнении регламентных работ, производстве
текущего ремонта, доработок, капитального ремонта, о контро-
ле состояния авиационной техники. Заполненный формуляр са-
молета всегда и всюду следует вместе с самолетом на всем, про-
тяжении его эксплуатационного периода. Паспорта составляют-
ся на все технические устройства оборудования и вооружения
самолета, которые требуют проведения регламентных работ в
процессе эксплуатации, или включены в перечень технических
устройств одной из частей самолетного формуляра. В отд ель-
402
иых случаях, когда объект авиационного или другого оборудова-
ния представляет собой многоблочную систему, паспорта выда-
ются на все отдельные блоки этой системы, а на всю систему
выдается сводный паспорт, содержащий сведения о всей систе-
ме в целом.
Паспорт является первичным эксплуатационным документом
технического устройства и содержит в себе краткую техническую
характеристику устройства, гарантии и перечень регламентных
работ, данные о движении технического устройства в течение эк-
сплуатации проведенных регламентных работах, ремонтах и до-
работках и данные о его пригодности к дальнейшей эксплуата-
ции. В процессе эксплуатации паспорта хранятся в отдельных
папках. Паспорта технических устройств, снятых с самолета или
•еще не установленных на самолете, прилагаются к данному тех-
ническому устройству и передаются вместе с .ним при транспор-
тировке, хранении на складе, при направлении в ремонт и в дру-
тие подразделения.
Паспорт, содержащий индивидуальные характеристики техни-
ческого устройства, является основой для заполнения формуляра
и предназначен для записей движения устройства в эксплуатации.
Соответствующая часть формуляра, являющегося групповым до-
кументом, составленным на основе паспортов, предназначена
для ведения групповых записей по техническим устройствам, от-
куда в случае необходимости эти данные переносятся в паспор-
та. Формуляр и паспорта, вместе взятые, содержат исчерпываю-
щие данные о состоянии, работе и движении в процессе эксплуа-
тации всей авиационной техники, установленной на самолетах.
Учетная документация ИАС делится на самолетную
.документацию, документацию подразделений ИАС, документа-
цию по учету авиационной техники, документацию должностных
.лиц ИАС и применяется в форме книг учета, журналов, рабочих
тетрадей, ведомостей учета и карточек учета.
К учетной самолетной документации относятся журналы под-
готовки самолетов к полетам с контрольными листами и листами
учета неисправностей, обнаруженных при осмотрах авиационной
техники, затем специальные карточки статистического учета от-
казов и неисправностей, предназначенные для последующей их
'обработки с помощью счетно-аналитических машин.
В подразделениях производится учет выполняемых работ и
шспользования рабочего времени личного состава, затем учет на-
личия инструмента и контрольно-поверочной аппаратуры, состав-
ляются ведомости на допуск технического состава к работе на са-
молетах.
В масштабе авиационной части производится учет состояния
-авиационной техники, остатка ее ресурса и простоя, самолетов в
шеисправном состоянии, учет выполнения регламентных работ и
26*
403
доработок и выполнения плана осмотров авиационной техники
должностными лицами ИАС авиационной части.
В журналах инженеров всех специальностей ведется учет вы-
полнения руководящих документов ИАС, учет отказов и неисп-
равностей, учет индивидуальных заданий по технической под-
готовке личного состава и записываются замечания должност-
ных лиц, контролирующих работу ИАС.
Технические акты представляют собой документы,,
которые составляются с целью определения технического состоя-
ния авиационной техники. Разновидностями технических актов,
являются приемо-сдаточные акты, акты на списание авиацион-
ной техники и о выполнении доработок на авиационной технике.
Рекламационные акты составляются с целью предъявления пре-
тензий авиационной промышленности и ремонтным предприяти-
ям на неисправную авиационную технику, отказавшую вслед-
ствие конструктивно-производственных недостатков раньше ис-
течения гарантийного ресурса.
Кроме вышеперечисленных учетных документов, применяют-
ся расходно-приходные ведомости по учету горюче-смазочных
материалов, спецжидкостей, газов и боеприпасов, а также рас-
ходных материалов и запасных частей.
Глава XVIII
ПЛАНИРОВАНИЕ И РАСЧЕТЫ
ПРИ ИНЖЕНЕРНО-АВИАЦИОННОМ ОБЕСПЕЧЕНИИ
§ 18.1. ЗАДАЧИ ПЛАНИРОВАНИЯ И РАСЧЕТОВ
ПРИ ИНЖЕНЕРНО-АВИАЦИОННОМ ОБЕСПЕЧЕНИИ
БОЕВЫХ ДЕЙСТВИИ И УЧЕБНО-БОЕВОЙ
ПОДГОТОВКИ
Тщательная разработка планов мероприятий инженерно-
авиационной службы по инженерно-авиационному обеспечению
(ИАО) боевых действий и учебно-боевой подготовки, своевре-
менное уточнение этих планов в процессе их выполнения явля-
ются необходимыми условиями для успешного решения задач
обеспечения. Основу планов должны составлять мероприятия
по поддержанию максимальной боевой готовности авиационных
частей (соединений) и обеспечению высокой эффективности ис-
пользования авиационной техники. Сюда относятся подготовка и
восстановление неисправной авиационной техники, создание не-
обходимых резервов, обеспечение маневра силами и средствами
ЙАС, организация противоатомной и противохимической защи-
ты, техническая подготовка всего личного состава части, си-
стематический контроль выполнения плана ИАО.
Исходя из задач, поставленных вышестоящим командовани-
ем, заместитель командира части по ИАС и инженеры по спе-
циальностям составляют конкретные планы инженерно-авиаци-
онного обеспечения. На основании их составляются соответст-
вующие планы ТЭЧ части и войсковых ремонтных мастерских.
В ТЭЧ части и подразделений разрабатываются также типо-
вые планы выполнения всех видов регламентных работ и подго-
товок авиационной техники к применению.
В процессе разработки планов инженерно-авиационного
обеспечения инженерно-авиационная служба производит расче-
ты. Эти расчеты имеют целью обоснование планируемых меро-
приятий, оценку реальных возможностей, наличных, сил и
средств, выявление наиболее эффективных и целесообразных
способов их использования, определение количества потребных
сил и материальных средств.
405
Расчеты делятся на инженерно-оперативные, инженерно-
штурманские и инженерные.
Г Инженерно-оперативные расчеты проводятся с целью опре-
деления возможностей и потребностей частей (соединений) для
обеспечения учебно-боевой подготовки и боевых действий авиа-
ционной техникой: летательными аппаратами, соответствующими
агрегатами, запасным оборудованием и вооружением, а также-
для подготовки различных вариантов перебазирования. Эти рас-
четы выполняются на конкретный период времени.
? Инженерно-оперативные расчеты проводятся также с целью-
"определения наряда боевых средств и средств радиопротиводей-
ствия для решения конкретных боевых задач полета.
Инженерно-штурманские расчеты производятся заместителем
командира части (подразделения, соединения) по ИАС совме-
стно со штурманом и имеют целью обеспечение полного исполь-
зования летно-тактических возможностей летательного аппарата.
При этом определяются дальности, продолжительности и расхо-
ды топлива по участкам полета, технические и тактические ра-
диусы действия, наиболее рациональные профили и режимы по-
лета, величины заправки и загрузки летательного аппарата.
У Инженерные расчеты имеют целью определение возможно-
стей технического использования летательных аппаратов или от-
дельных агрегатов их оборудования в определенных условиях
эксплуатации. К таким расчетам относятся, например, расчеты
взлетно-посадочных характеристик летательных аппаратов и
возможности их полетов с грунтовых аэродромов, расчеты сече-
ний проводов при изменении необходимой длины жгута аэро-
дромного питания бортовых потребителей и т. д.
Практика показывает, что к выполнению инженерно-опера-
тивных расчетов в части (соединении) могут быть привлечены
инженеры любой специальности. Поэтому знание методики вы-
полнения их является обязательным для каждого инженера
строевой части ВВС.
Расчеты инженерно-авиационного обеспечения выполняются
аналитическими, графическими и графо-аналитическими мето-
дами с широким применением таблиц, номограмм и средств вы-
числительной техники.
§ 18.2. ПЛАНИРОВАНИЕ ИНЖЕНЕРНО-АВИАЦИОННОГО
ОБЕСПЕЧЕНИЯ
Планирование инженерно-авиационного обеспечения делится
на перспективное, текущее и оперативное.
Перспективное планирование охватывает достаточно дли-
тельный период времени работы. В зависимости от условий и це-
левого назначения перспективных планов периодом планирова-
ния может быть месяц, квартал, полгода, год и др. При этом
•на рассматриваемый период разрабатываются:'
406
— план расхода и восстановления технического ресурса
авиационной техники (с учетом планируемого налета части) ;
. — план отхода авиационной техники на регламентные рабо-
ты, в ремонт, на доработки, на перевод техники для зимней и
для летней эксплуатации;
— план комплексных осмотров авиационной техники и пар-
ковых дней;
— план-заявка на потребное 'количество агрегатов и комп-
лектов авиационной техники, контрольно-поверочной аппарату-
ры, горюче-смазочных, материалов, жидкостей и газов, расход-
ных материалов;
— план оборудования ТЭЧ и классов стендами, контрольно-
поверочной аппаратурой, плакатами;
— план выполнения государственных проверок эталонных
контрольно-измерительных приборов, кислородных баллонов и
резервуаров;
— план противохимической и противоатомной защиты лич-
ного состава и материальной части;
— план перебазирования на другие аэродромы;
— планы технической подготовки и тренажей механиков, тех-
ников, инженеров, летного состава части;
— план освоения новой техники, участия в конференциях, сбо-
рах.
В качестве примера перспективного плана рассмотрим план-
график выполнения регламентных работ на один месяц, представ-
ленный табл. 18.1- .
Таблица 18.1
№ п/п № самолета Налет (наработка) на 1-е число планируемого месяца Налет самолетов в течение месяца в час., наимен. и дата планируемых регл. работ
с начала эксплуата- ции после пос- леднего ре- монта 5 10 15 20 25 30 35 40 45 50
само- лета двига- теля само- лета двига- теля
1 04 800
2 40 447
3 38 444
4 23 635
и т. д.
407
Этот план составляется на основе годового плана-графика по-
ступления самолетов на регламентные работы в планируемый ме-
сяц. Номера самолетов в графу 2 записываются в порядке возра-
стания остатка налета (наработки) до очередных регламентных
работ.
В графах 5—14 отмечается отрезок времени налета, правая
граница которого определяет максимально допустимое время на-
лета до направления самолета на регламентные работы.
Так, самолет Яе 04 может налетать еще до 10 часов, но, ввиду
наличия возможности ТЭЧ, он 2 ноября планируется на регла-
ментные работы.
По данным о располагаемом фонде рабочего времени в ТЭЧ и
о потребных трудозатратах на регламентные работы определяет-
ся время нахождения этого самолета в ТЭЧ. Очередной самолет
(№ 40) может планироваться на регламентные работы после вы-
хода из ТЭЧ предыдущего (№ 04) самолета (в рассматривае-
мом примере —. 6 ноября).
у Текущее планирование определяет деятельность личного со-
става ИАС на каждый конкретный день (ночь) учебно-боевой
подготовки или боевых действий части, а также на время выпол-
нения поставленной командованием конкретной задачи. Текущим
планированием обеспечивается своевременное и полное выпол-
нение перспективных планов.
Перед составлением текущего плана выясняется задача, по-
ставленная перед личным составом части, определяется количе-
ство специалистов, которые могут принять участие в выполне-
нии задачи. В текущем плане инженера находит отражение сле-
дующий (неполный) перечень решаемых им вопросов:
— изучение поступивших указаний, распоряжений, эксплуа-
тационной документации;
— распределение и постановка задач подчиненным специа-
листам;
— расчет, распределение и заявка необходимых средств об-
служивания (источников электроэнергии, кислородных стан-
ций и т. п.);
— контроль подготовки и обслуживания авиационной тех-
ники;
— участие в комплексных и целевых осмотрах техники;
— контроль выполнения доработок;
— прием представителей промышленности — изготовителей
эксплуатируемой техники;
— анализ причин неисправностей и отказов техники, состав-
ление рекламационных актов, карточек отказов и неисправно-
стей;
— разработка и доведение до соответствующих лиц меропри-
ятий по предупреждению появления неисправностей и предпо-
сылок к летным происшествиям;
403
— контроль состояния аккумуляторных зарядных и кисло-
родных станций;
— контроль наличного запасного оборудования, соблюдения
правил его хранения на складах органов снабжения части;
— контроль за выполнением перспективных .планов И АО;
— контроль выполнения планов подчиненными специалистами;
— подведение итогов.
Естественно, что в конкретный текущий план могут входить
только некоторые из перечисленных вопросов. В качестве при-
мера на стр. 410 приводится один из текущих планов инженера
части.
В зависимости от поставленной конкретной задачи текущий
план может включать и другие вопросы, как, например, органи-
зации подготовки к противохимической и атомной защите, пе-
ребазирования, технической учебы и т. д.
Оперативное планирование обеспечивает распределение сил,
средств и времени при выполнении определенных видов работ.
'Оперативными планами предусматривается расчленение данно-
го вида работы на отдельные операции с указанием времени и
места ее выполнения. Примерами оперативных планов могут
быть цикловые графики выполнения 50-часо1вых и 100-часо-
вых 'регламентных работ. Наиболее оптимальные опе-
ративные планы могут быть получены с использованием методов
сетевого планирования. Оперативные планы должны быть типо-
выми и в ряде случаев составлены задолго до их возможного
применения.
К таким планам относятся, например, план мероприятий ИАС
по приведению личного состава и техники в боевую готовность,
план перебазирования, план ИАО при сокращенном количестве
технического состава и средств аэродромного обслуживания
и т. д. Эти планы, в случае появления необходимости их исполь-
зования, подлежат только уточнениям, вызванным конкретно
сложившейся обстановкой.
Поскольку все инженеры части представляют собой взаимо-
связанный коллектив, то важно обеспечить согласование тех
пунктов плана, выполнение которых зависит от совместной ра-
боты двух или более инженеров. Так, время начала комплексно-
го осмотра самолета для всех инженеров должно быть единым.
Координация и контроль работы инженеров части облегчается,
если их текущие планы представлять в виде единого сетевого
графика.
Для текущих планов каждый инженер и техник должны иметь
специальную тетрадь. Перспективные планы записываются в со-
ответствующие журналы. В некоторых случаях планы удобно
представлять в виде настенных таблиц-графиков, как, например,
планы комплексных осмотров и парковых дней; план отхода
авиационной техники на регламентные работы, в ремонт, на до-
работки, на перевод техники для зимней и летней эксплуатации.
409
План работы инженера по авиационному оборудованию на 19 . .
№ п/п Наименование мероприятия Время Место Замечания и отметки о вы- полнении
1 Получение указаний коман- дира и зам. командира части по ИАС 9.00-^9.15 На по- строении Вып.
2 Дать указания начальникам групп о проведении целевых осмотров: а) изоляции жгута поэле- ментного контроля батарей 15 СЦС-45; б) качества затяжки гайки крепления термопар Т-90 9.15’:-9.2о я* Вып.
3 Ознакомление с поступившей документацией и указаниями 9.30-5-10.30 Штаб Вып.
4 Проверить состояние техни- ческой документации, КИА и инструмента 10.40 -4-11.10 1.АЭ Несистемати- ческое заполне- ние графика учета указаний и бюллетеней
5 Проверить состояние выпол- нения бюллетеня № 08220991 11.30-^11.50 ТЭЧ Не выполнен на 12 самоле- тах
6 Проверить состояние уста- новки КУ-5 11.50-*-12.10 ТЭЧ Выполнено
7 Контроль выполнения пред- варительной подготовки, конт- роль состояния рабочих мест в группах обслуживания 12.20-:-12.50 13.00-*-13.30 13.40-5-14.10 1АЭ 2АЭ ЗАЭ Выполнено
8 Составление и подача заявки на средства аэродромного об- служивания и уточнение наря- да специалистов на обслужива- ние самолетов 14.20-5-14.50 Штаб Выполнено
9 Беседа с представителем промышленности по реклама- ции 15.00-*-15.30 Штаб Выполнено
10 Технический разбор рабочего дня 15.30-Ы 6.00 Штаб Выполнено
410
Пусть /?р, /?м — число специалистов соответственно _в груп-
пах регламентных работ и в войсковых ре-
монтных мастерских, непосредственно уча-
ствующих в работах с авиатехникой;
/0 — располагаемое время до начала операции
(от момента начала подготовки к ней) за
вычетом времени предполетной подготовки;
tn — средняя интенсивность работы технического
состава, т. е. среднееколичество часов, ко-
торое затрачивается каждым специалистом
непосредственно на выполнение работы в
течение одних суток.
Тогда располагаемые трудозатраты трр (0) групп регламент-
ных работ и трм (0) ремонтных мастерских определяются зави-
симостями:
^р(0) = 7?р- Чо, (18.1)
’₽м(0) = Ям-Л- (18.2)
С целью получения максимального количества боеготовых
•самолетов к моменту первого вылета (начала операции) все си-
лы и средства ТЭЧ и ВАРМ направляются прежде всего на те
самолеты, восстановление которых требует наименьших трудо-
затрат. Самолеты, требующие среднего ремонта, ввиду больших
трудозатрат обычно не могут быть восстановлены ни к началу
операции, ни в ходе самой операции. Поэтому такие самолеты,
наряду с находящимися в капитальном ремонте, обычно можно
полагать безвозвратными потерями для части (соединения) на
все время проведения операции.
Потребные трудозатраты на приведение в исправное состоя-
ние всех самолетов, находящихся на регламентных работах (тпр)
в мелком и текущем ремонте (тпм), равны:
тпр (0) — (®) т50 Н- /1юо (01 тюо (18.3)
Э™(0) = МО) Ч. +«т(0)тт. (18.4)
.При выполнении условий
тпр (0) С трр (0) и 4iM (0) < трМ (0)
все рассматриваемые самолеты к началу операции будут введе-
ны в строй. При несоблюдении этих условий расчет количества
самолетов, вводимых в строй в ТЭЧ и мастерских части к на-
чалу операции, можно выполнить табличным методом, примене-
ние которого поясняется на примере табл. 18.2.
412
§ 18.3. ИНЖЕНЕРНО-ОПЕРАТИВНЫЕ расчеты
С помощью инженерно-оперативных расчетов определяются::
— вероятное количество исправных летательных аппаратов it
заданному моменту первого вылета в планируемой операции;
— количество исправных летательных аппаратов к каждому
из последующих вылетов в операции;
— потребное количество запасного оборудования на расчет-
ное время операции;
— потребное количество боеприпасов, топлива, жидкостей и
газов на расчетное время операции;
— основные характеристики перебазирования (порядок, сро-
ки, транспортные средства и т. д.);
— наряд средств радиопротиводействия и способы его ис-
пользования.
Для того, чтобы выполнить эти расчеты, инженерно-авиаци-
онная служба должна иметь следующие исходные данные в мо-
мент получения задания на подготовку к операции:
— количество и техническое состояние авиационной техники;.
— численность инженерно-технического состава части;
— численность личного состава органов войскового ремонта
(ТЭЧ частей, авиаремонтных мастерских);
— средние трудозатраты, потребные на выполнение регла-
ментных и ремонтных работ;
— статистические коэффициенты отхода авиационной тех-
ники в безвозвратные потери и в различные виды войскового
ремонта; коэффициенты потерь личного состава ИАС при дей-
ствии противника по аэродромам базирования;
— интенсивности отказов- основных агрегатов авиационной:
техники;
— время до начала операции и длительность операции;
— аэродромы перебазирования.
1. Определение количества исправных
летательных аппаратов к моменту начала
операции
Состояние наличного парка летательных аппаратов в мо-
мент t0 получения задания на подготовку к операции характе-
ризуется количеством No исправных летательных аппаратов,.
/г5о(0), «юо (0) и т. д., находящихся соответственно на 50-часовых,.
100-часовых и т. д. регламентных работах, ям(0), пт (0), пс, пк—
находящихся соответственно в мелком, текущем, среднем и ка-
питальном ремонте летательных аппаратов. Трудозатраты, не-
обходимые для приведения в исправное состояние летательных
аппаратов, равны соответственно т50, Тд00, . .тм, тт, тс, че-
ловеко-часам.
411
Таблица 18.2
\ Число \ само- \ летов Видь \ работ \ Потребные трудозатраты Располагаемые трудозатраты Начальное коли- чество неиспр. са- молетов Остаток неиспр. самолетов к на- чалу опер.
1 2 3 4 5
50—ч. рр т50 2 “,~.о Зт80 4^50 5^50 ТрР (0) 3 0
100—ч. р.р. т100 О- ^чоо 3^100 4tioo бЧоо ^р(°)= = ‘т:рр(Ш Зт5о 2 0
200 ч. рр т200 2т200 3'200 4т2оо 5т200 = т*р(0)-2т1ВД о 1
Мелкий ремонт тм гКм 5тм Трм (0) 2 0
Текущий ремонт тт 2т т •К 4тт 5тт II s Is 1 II ЬО И 3 2
Число готовых самолетов 9
В графах потребных трудозатрат предварительно простав-
лены значения необходимых трудозатрат для выполнения работ
на одном, двух, трех и т. д. самолетах.
При расчете сначала заполняется столбец начального коли-
чества неисправных самолетов и записываются величины распо-
лагаемых трудозатрат трр(0) и трн(0).
Сравнением цифр потребных трудозатрат в строке 50-часо-
вых регламентных работ с цифрой трр (0) определяется количе-
ство самолетов, на которых эти работы будут выполнены. Если
все самолеты, находящиеся на данном виде работ, будут готовы,
то определяется остаток трр(0) располагаемых трудозатрат
для ввода в строй самолетов, поставленных на 100-часовые рег-
ламентные .работы, ,и т. д. Штриховкой граф в 'табл. 18.2 отде-
ляются количества самолетов, которые войдут в строй по ка-
ждому из видов работ (для конкретного рассматриваемого при-
мера количество подготавливаемых самолетов будет равно соот-
ветственно 3, 2, 1, 2, 1).
На самолеты, которые не будут введены в строй к моменту
первого полета, составляется график времени их готовности. Этот
график используется при расчете количества самолетов, подго-
413.
товленных к последующим полетам. Расчет времени ввода в
•строй можно производить, используя зависимости:
срр VPM
7,
Здесь t —R -------- — располагаемые трудозатраты на один
24
час работы в ТЭЧ,
трм— то же самое в войсковых ремонтных
мастерских;
индекс v определяет вид регламентных работ, а т) — вид ремон-
та.
2. Определение количества боеготовых летательных
аппаратов к последующим полетам
Как уже отмечалось выше, для определения вероятного коли-
чества боеготовых самолетов к последующим полетам необходи-
мо иметь статистические коэффициенты отхода авиационной тех-
ники:
/г6п —коэффициент безвозвратных боевых потерь;
/гк, /гс, kT, /г,л — коэффициенты отхода соответственно в капиталь-
ный, средний, текущий и мелкий виды ремонта.
Умножением количества TV) самолетов, участвовавших в пер-
овом полете, на эти коэффициенты получаются соответствующие
отходы самолетов. С учетом количества п2 восстановленных в
ТЭЧ и в мастерских за время между первым и вторым полета-
ми количество N2 боеготовых ко второму полету самолетов бу-
дет равно:
N2=Nt — k6aN1 — kK —k^! — kT + n2,
или
7V2 = 7Vi.(l_^6_Ap) + n2, (18.7)
тде
=я=== ^бг: 1 4” ^с>
Ар = /ч + ^м — учитывает такие повреждения самоле-
тов, которые могут быть устранены в
процессе выполнения операции.
К третьему полету количество боеготовых самолетов равно:
W3 = -/V2'а + п3,
где
« = 1 — fe6 - kp;
Пз — количество самолетов, восстановленных за время меж-
ду вторым и третьим полетами.
Для t-того полета
— Л/j • ос —|— .
(18.8),
-414
Переходя от числа 2Vz~i в правой части (18.8) к числу Ny са-
молетов, участвовавших в первом полете, нетрудно получить
следующее выражение для числа самолетов, готовых к i-тому
•полету:
= Nr а'-1 4- «2 а.1~2 -ф . . . -ф а -ф nt. (18.9)
Общее число А самолето-вылетов за предполагаемые k полетов
в операции равно:
A = £nz. (18.10)
Формула (18.9) не учитывает потери самолетов и инженерно-
технического состава на земле в результате возможных ударов
противника по аэродромам базирования. Учет этих ударов до-
статочно точно может быть выполнен лишь при расчете количе-
ства самолето-вылетов соединений и объединений авиации, если
ввести коэффициенты потерь летательных аппаратов на земле.
Если операция рассчитана на .малую длительность времени,
а количество k полетов должно быть достаточно большим (на-
пример, в случае истребительной авиации), то в первом прибли-
жении при расчете общего количества А самолето-вылетов мож-
но пренебречь поступлением летательных аппаратов из ремонта.
Тогда из (18.9) и (18.10) имеет место
4=МФЛфа + Лф«г+- • • (18.11)
Поскольку правая часть (18.11) является геометрической
-прогрессией со знаменателем а, то сумму ее можно представить
в виде
, ЛМ1- а*)
/1 - -------
1 — а
(18.12)
Отсюда, если задано общее число А самолето-вылетов, опре-
деляется необходимое для этого количество k полетов части (со-
единения)
(18.13)
После определения числа k полетов необходимо произвести
расчет времени подготовки каждого полета и времени, потреб-
ного на обеспечение этих полетов. При этом следует учесть ве-
роятные потери технического состава и средств обслуживания.
Данные расчеты целесообразно выполнять с построением соот-
ветствующих сетевых графиков, в которых учитывается взаим-
ное расположение самолетов на аэродроме и, при допущении
ударов противника по аэродромам, вероятное количество бое-
способного технического состава и средств аэродромного обслу-
живания.
415
3. Расчет потребного запаса кислорода
на время операции
Расходуемое ® полете количество кислорода зависит от про-
филя маршрута и времени полета, от количества членов экипа-
жа. Этот расход зависит также от условий полета, т. е. проис-
ходит полет в загерметизированной кабине, или в разгерметизи-
рованной, в чистом или зараженном радиоактивными, химиче-
скими или биологическими веществами воздухе. В случае ис-
пользования жидкого кислорода происходит расход его и на зем-
ле ввиду испарений из сосудов хранения. По результатам расче-
та расхода на одном самолете определяется необходимый общий
запас кислорода для обеспечения всех А планируемых самолето-
вылетов. При этом следует учесть также средний расход кисло-
рода для технических целей (например, для запуска авиадвига-
телей и их форсажных камер), поскольку и в этом случае ис-
пользуется медицинский кислород (чтобы исключить случаи за-
рядки системы жизнеобеспечения экипажа техническим кисло-
родом) .
При расчете потребного количества кислорода для нормаль-
ных условий полета и при полете в разгерметизированной каби-
не по известным результатам инженерно-штурманского расчета
составляется табл. 18.3, в которой весь маршрут разбивается на
участки по высотам полета.
Таблица 18.3'
Пункты маршрута Время полета tb мин Высота полета, /7Z, м Высота в кабине hh м Удельный расход л/мин Расход Qi = Qi ti п
1—2 •2—3 /12 /23 И12 Н23 hi2 I123 qi2 да 1 1 । । '°'9 1 1 ss к i 1
Общий расход кислорода в полете Q3 = Е Qi
Высота /г(- в кабине на t-том участке полета определяется по
характеристике регулятора давления воздуха в кабине. Соответ-
ствующий удельный расход qLопределяется зависимостью
q. = 0,266 ,w, (18.14);
Ph ~ 47
где Ри — давление воздуха в кабине, мм рт. ст.;
W — легочная вентиляция члена экипажа, л!мин.
416
Величина легочной вентиляции может изменяться, в зависимо-
сти от состояния и нагрузки человека, от 7,5 до 40 л!мин. В рас-
чете следует принимать среднее значение легочной вентиляции
W = 20 л]мин.
Тогда вместо (18.14) можно написать
760 —Ph
qt = 5,32--------— л!мин.
Ph ~
(18.15)
Для Ц7 = 20 л/мин по (18.15) на рис. 18.1 построена зависи-
мость q =.q(h) расхода кислорода от высоты h в кабине, исполь-
зование которой значительно сокращает время расчета.
Потребный удельный расход
кислорода в полете обеспечивается
регулятором кислородного прибора.
В последней колонке табл. 18.3 оп-
ределяется расход кислорода Qz на
i-том участке полета всеми п члена-
ми экипажа. Общий расход кисло-
рода в полете получается суммиро-
ванием расходов Qz по участкам
полета.
При расчете потребного запаса
кислорода следует брать .наиболее
неблагоприятный из возможных в
условиях операции маршрутов по-
лета.
Рис. 18.1. Зависимость расхо-
да кислорода от высоты полета
Расход в одном полете кислорода на технические цели при-
ближенно можно оценить по формуле:
QT = 2<у33 + 2<?ф + q3B. (18.16)
Здесь qS3 и q3B — расход кислорода при одном запуске авиа-
двигателей соответственно на земле и в
воздухе;
<?Ф — расход кислорода при одном включении
форсажного режима авиадвигателей.
Необходимый запас газообразного кислорода на время опе-
рации равен:
Q = J4(Q3 + QT). (18.17)
Необходимый запас жидкого кислорода определяется сле-
дующей зависимостью:'
G = A (Q3 + QT)
790
+ mrG0+tcmr g„ , kF.
(18.18)
27. Румянцев E. А. и др.
417
Здесь у = 1,14 кг/л — удельный вес жидкого кислорода;
790 — количество литров газообразного кис-
лорода, при температуре 15°С, которое по-
лучается из одного литра жидкого кисло-
рода;
тг — число газификаторов на самолете;
Go— неучитываемый запас кислорода в газифи-
каторе (вес его равен 20% от веса пол-
ной заправки);
- g„ — потери кислорода в час ввиду испарений
из газификатора (для современных гази-
фикаторов ga = 0,15 кг/час);
tc —г время между моментами заправки кисло-
родом ‘(в период операции).
Следует отметить, что если за время между двумя очередны-
ми полетами остатки кислорода успевают полностью испарить-
ся (/с велико), то потребный запас жидкого кислорода равен:
G = A (Gr + Gn) тГ, (18.19)
где Gr — весовая емкость газификатора;
Gn — потеря кислорода ,при заправке.
При полетах в условиях зараженной атмосферы или когда со-
стояние атмосферы неизвестно, кабина летательного аппарата
герметизируется, вентиляция ее выключается, все члены экипа-
жа переходят на дыхание чистым кислородом. На таких участ-
ках полета расход кислорода максимален и в расчете принима-
ется равным 20 л/мин на члена экипажа. В остальном расчет по-
требного количества кислорода при полетах в условиях зара-
женной атмосферы аналогичен описанному выше.
В ряде случаев на всем маршруте от взлета и до посадки по-
лет выполняется при дыхании чистым кислородом. Тогда табли-
ца 18.3 не составляется, а расход кислорода членами экипажа за
время t полета принимается равным:
Q3 = 20 п, л.
4. Расчет запасного фонда авиационного
оборудования
Одной из важнейших задач при инженерно-авиационном обе-
спечении является своевременное снабжение частей запасным
оборудованием, расходными материалами. Правильный расчет
запасного фонда имеет при этом существенное значение, посколь-
ку излишние запасы ограничивают маневренность снабжающих
органов, а недостаточные запасы могут привести к срыву опре-
деленных боевых задач операции.
Замена устройств авиационной техники может происходить
по трем основным причинам: выработке технического ресурса;
боевым повреждениям; отказам.
418
При большом количестве находящихся в эксплуатации лета-
тельных аппаратов можно полагать, что время наработки уст-
ройств имеет равномерную плотность распределения в пределах
времени Гра ресурса. Это означает, что количество заменяемых
устройств пропорционально общему времени наработки всех
устройств данного типа.
Поэтому количество устройств, для которых окончится ресурс
работы после первого полета АЛ самолетов, равно:
™Pi М a tn-
* ра
Здесь а — количество однотипных устройств на летательном
аппарате;
tn — среднее время полета.
Множитель «1 = 1—k6 учитывает, что замене подлежат уст-
ройства только на тех летательных аппаратах, которые не вхо-
дят в безвозвратные потери во время операции.
После второго полета, в котором участвовало самолетов,
замене подлежат
= -4- М2 a tn
* ра
устройств.
После k-ro полета
а1 .,
ЛЬ k = -у" Nk a tn-
* ра
Общее количество устройств, подлежащих замене после k
полетов ввиду окончания их ресурса работы, равно:
т? = ^pi + /?гр2 + • • • + тр й == а tn (АЛ + А/2 + • • A/ft),
ра
ИЛИ
тр= а tn А. (18.20)
^ра
Здесь
i-л
В (18.20) принимается, что все самолеты, вернувшиеся после
последнего (7г-го) полета в операции, должны быть восстанов-
лены и боеготовы к очередной операции.
Произведя аналогичные расчеты, легко показать, что за пе-
риод осуществления А самолето-вылетов в мелкий и текущий
ремонт отходитkP А самолетов. Поскольку принимается, что эти
27
419
самолеты за время операции должны войти в строй, то для них.
необходимо иметь запас соответствующих устройств, равный:
тб = £р&пааЛ, (18.21)-
где kna — условная вероятность повреждения данного устрой-
ства при условии боевого повреждения самолета.
Для приближенной оценки величины kna может быть ис-
пользовано отношение площади наибольшего сечения устройства
к площади наибольшего сечения самолета. Ориентировочно, в.
зависимости от размеров устройства, можно принимать kna
~ 0,01 ч- 0,1.
Математическое ожидание числа отказавших устройств за:
время А самолето-вылетов, которые подлежат замене из запасов,
органов снабжения частей, равно:
тя = аХ a A tn, (18.22)?
где X — интенсивность отказов устройства.
Таким образом, математическое ожидание всех требующих;
замены устройств определяется суммой
тср = т6 + тн + тр. (18.23)
Здесь следует иметь в виду, что для сменных элементов типа
радиоламп расчет тср должен учитывать только тя; величину
можно не учитывать, так как при повреждении лампы обяза-
тельно повреждается и требует замены все устройство, в котором-
установлена лампа. При расчете количества отказавших элект-
ронных блоков должны учитываться интенсивности их отказов-
без учета интенсивности отказов сменных ламп.
Если количество самолето-вылетов, для которого производит-
ся расчет запасного фонда, невелико (200—300), то результаты
расчета по формулам (18.21) и (18.22) могут значительно рас-
ходиться с действительными потребностями части и соединения..
В данном случае производить расчет следует, исходя из за-
даваемой величины вероятности р того, что за планируемый
период эксплуатации число отказавших ти и поврежденных тб,
агрегатов или приборов данного типа не превзойдет количества
R агрегатов, имеющихся в запасе, т. е. что р = р (/7гн+/тгб</?).
Известно, что вероятность появления ровно i отказов при по-
стоянной величине X интенсивности отказов определяется зако-
ном Пуассона
Здесь тт — среднее (математическое ожидание) число отказов..
Тогда вероятность (3 появления не более R отказов равна:
я R
(18.24>
i =0 /=0
420
Из этой формулы следует, что если в запасе имеется R уст-
ройств, то с вероятностью р их достаточно для возмещения всех
отказавших устройств.
Задаваясь величинами Р, тП1 .и изменяя I в пределах от i — О
.до такого i —/?> гари котором выполняется равенство (18.24) , мо-
жно составить табл. 18.4 зависимости 7? (р, тш).
Таблица 18.4
₽ 0,8 0,85 0,9 0,95 0,98 0,99
R
1 1 2 2 3 3 (4)
2 3 3 4 (5) (5) (6)
3 4 4 4 5 5 6
4 5 5 6 7 8 9
5 6 7 7 8 10 11
6 8 8 9 10 11 12
8 10 И 12 13 14 15
10 13 13 14 15 17 18
20 22 24 26 27 29 31
30 34 36 37 39 41 43
40 45 46 48 50 53 55
50 56 57 59 62 65 67
60 66 68 70 73 76 78
80 87 89 92 95 99 101
100 108 ПО 113 116 120 124
200 210 216 9| о 222 228 233
300 312 320 325 330 335 340
500 516 521 527 535 542 552
1000 1020 1030 1042 1060 1070 1085
Цифры таблицы, заключенные в скобки, не точно соответству-
ют формуле (18.24).
Рассчитав по (18.22) величину игт математического ожида-
ния числа отказов (тт = ina) и задавшись доверительной ве-
роятностью р, по табл. 18.4 определяется необходимое число
запасных устройств.
Можно сделать допущение, что вероятность появления пов-
реждений также подчиняется закону. Пуассона. Это допущение
^оправдывается тем, что в выражении (18.21) для количества по-
врежденных устройств приняты постоянными коэффициенты kB
отхода в мелкий и текущий ремонт и коэффициент kn а повре-
ждения агрегата. Следовательно, математическое ожидание чи-
сла требующих замены устройств ввиду отказов и боевых по-
вреждений будет равно:
m,„ = mH + /n6. (18.25)
421
и необходимый запас технических устройств определяется вы-
ражением
+ тр, (18.26)
где 7? определяется из табл. 18.4.
При м е р. С доверительной вероятностью (3 = 0,95 определить запасной
фснд регуляторов напряжения при условиях: Д=1000; а=4; а = 0,75; /eD=0,2,..
Ап а = 0,01; Х=5-10~4; tn = 10 час, 7’ра =500 час.
Используя формулы (18.20) н- (18.25), находим:
О,?5
из (18.20): /?гр = —- 1000-4.10= 60;
из (18.211): т6 = 0,2.0,01.4.1000 =8;
из (18.22): лгн = 0,75.5.10-4.4.1000-10 = 15;
из (18.25): тт = 15+8=23.
По табл. 18.4 при ₽ =0,95 и »г,;г=23 определяется (с соответствующей
аппроксимацией ввиду отсутствия значения тт =23):
Таким образом, необходимый запас регуляторов напряжения должен быть
равен:
R,„ = R + тр = 31 +60 = 91.
5. Инженерно-авиационное обеспечение
перебазирований
Перебазированием называется перемещение авиационной ча-
сти с одного или нескольких аэродромов на другой или на не-
сколько других аэродромов. Оно должно осуществляться без
перерыва в боевой деятельности части, и подготовка летательных
аппаратов должна производиться на аэродромах как прежнего,,
так и нового базирования. Поэтому в период перебазирования
на каждом аэродроме должен быть личный состав, средства,
аэродромно-технического обеспечения и другие материальные
средства инженерно-авиационной службы, авиационно-техниче-
ской части и других обеспечивающих подразделений.
Следствием непрерывности боевой работы части является не-
обходимость подготовки летательных аппаратов на каждом аэ-
родроме к применению неполным составом сил и средств, увели-
чение общего времени подготовки, уменьшение располагаемого-
количества самолето-вылетов. Необходимо так организовать пе-
ребазирование, чтобы свести до минимума затрачиваемое на не-
го время и тем самым увеличить боевые возможности части.
Поэтому ИАС части как в боевых, так и в мирных условиях,
должна находиться в постоянной готовности к инженерно-авиа-
ционному обеспечению перебазирования. Готовность к перебази-
422
рованию определяется приспособленностью технического имуще-
ства и подготовкой личного состава части к проведению переба-
зирования.
Инженерно-авиационное обеспечение перебазирования пред-
ставляет собой совокупность следующих основных мероприятий:
— • выполнение расчетов и подготовка документации по пере-
базированию;
— подготовка летательных аппаратов к перелету, выпуск их
в полет и прием на новом аэродроме;
— организация обслуживания боевых действий в процессе
перебазирования;
— погрузка, сопровождение и выгрузка имущества ИАС.
Руководство инженерно-авиационным обеспечением и орга-
низацией перебазирования может быть поручено инженеру ча-
сти любой специальности.
Инженерно-авиационное обеспечение перебазирования скла-
дывается из трех периодов:
— заблаговременной общей подготовки;
— подготовки к каждому конкретному перебазированию;
— перебазирования.
Перебазирование начинается с момента свертывания перво-
го эшелона (передовой команды) и длится до момента развер-
тывания на новых аэродромах базирования последней группы
ИАС и авиационно-технической части.
В период заблаговременной подготовки проводятся все меро-
приятия по определению исходных данных и выполнению расче-
тов для типовых вариантов перебазирования, составление соот-
ветствующей документации, практическая отработка вариантов
в процессе учебно-боевой подготовки.
Под вариантами перебазирования понимается: перебазирова-
ние на различное число аэродромов; перемещение всего личного
состава и имущества части авиационным, железнодорожным, ав-
томобильным транспортом или комбинацией этих видов транс-
порта.
К мероприятиям в рассматриваемый период относятся:
1. Планирование количества и порядка отправления эшело-
нов (т. е. групп), на которые разбивается личный состав и иму-
щество части. Обычно формируется два или три эшелона. На
личный состав первого эшелона (передовую команду) возлага-
ется задача встречи и первоначального обслуживания на новом
аэродроме боевых действий летательных аппаратов.
При двухэшелонном перебазировании личный состав второго
эшелона обеспечивает боевую работу со старых аэродромов, вы-
лет летательных аппаратов на новые аэродромы, перевозку ос-
тавшейся части имущества на новые места базирования.
При трехэшелонном перебазировании второй эшелон обеспе-
чивает перевозку основной массы имущества части, а третий
эшелон — боевую работу и перелет со старых аэродромов; тре-
423
тий эшелон после выпуска всех летательных аппаратов сам не-
медленно отправляется на новые места базирования. Если лета-
тельные аппараты части сами способны перевозить личный со-
став и имущество, то они транспортируют третий эшелон.
2. Составляется перечень средств технического обслужива-
ния (имущества ИАС) с указанием их габаритных и весовых ха-
рактеристик.
3. Составляется типовой перечень оборудования и средств тех-
нического обслуживания, придаваемых каждому эшелону.
4. Определяются наивыгоднейшие варианты упаковки и по-
грузки имущества на различные транспортные средства. Изго-
товляются специальные упаковочные ящики для комплектов иму-
щества.
5. Составляется список транспортируемых ящиков и неупако-
ванного имущества с указанием их номеров, весов, объемов и
габаритных размеров, содержания и ответственных лиц (табл.
18.5):
Таблица 18.5
№ контей- нера (ящика' Вес, кг Объем, ,ц3 Габариты м Х-и X м Содержание Ответствен- ное лицо
Всего: . . . кг . . . Ms
6. Определяется типовой состав групп специалистов ИАС,
которые будут входить в каждый эшелон, ,и составляются соот-
ветствующие таблицы (табл. 18.6).
Таблица 18.6
№ п/п Штатная должность Воинское звание, фамилия, инициалы Обязанность в эшелоне
Общее количество . . . чел.
424
7. Составляется типовой план инженерно-авиационного обес-
печения перебазирования части, в котором отражаются решения
по всем отмеченным выше мероприятиям и распределение обя-
занностей между должностными лицами ИАС на период переба-
зирования. В плане отмечаются затраты времени на выполнение
каждого мероприятия.
После утверждения плана командиром части организуется
его изучение личным- составом ИАС.
С момента получения приказа на перебазирование начинает-
ся период подготовки к конкретному перебазированию. При этом
выбирается наиболее приемлемый вариант из имеющихся пла-
нов перебазирования, составляется рабочий план его инженер-
но-авиационного обеспечения. В этом плане должны найти отра-
жение следующие основные вопросы:
— проверка технического состояния и пригодности к перелету
летательных аппаратов;
— проведение ускоренного ремонта неисправных летательных
аппаратов с целью осуществления перелета их максимального
количества. При этом допускается (по решению заместителя
командира по ИАС) перестановка неисправных агрегатов с од-
них неисправных летательных аппаратов на те, которые после
этого будут пригодны для перелета:
— определение конкретного варианта перебазирования;
— уточнение личного состава групп специалистов в эшело-
нах;
— определение общей длительности перебазирования при
данных транспортных средствах или определение необходимых
средств перебазирования при установленных сроках перебазиро-
вания.
При расчете потребного количества транспортных средств
инженер должен учитывать особенности имущества ИАС: значи-
тельные габариты и относительно небольшой вес. Средний объ-
емный вес этого имущества значительно меньше единицы и, в
зависимости от типа авиационной техники, находится прибли-
зительно в пределах уср = 0,05 -и 0,15 т]мъ.
Полное использование грузоподъемности транспортных
средств достигается в том случае, если перевозятся грузовыми
автомобилями грузы с объемным весом 'fcp 0,3 -ь 0,4 т!м?‘, а
транспортными самолетами и вертолетами — с объемным весом
7ср ~ 0,05 н- 0,1 t/м3.
Отсюда видно, что для воздушного транспорта имущество
ИАС оказывается близким к оптимальному. Автотранспорт же
не использует всей своей грузоподъемности при таком малом
объемном весе груза. С целью увеличения (прузюиодъемности ав-
тотранспорта целесообразно применять лрицепы, как это делает-
ся при перевозках в народном хозяйстве.
Исходя из отмеченного выше, расчет потребного количества
ла автомобилей для перевозки имущества ИАС следует произ-
425
водить по величине его габаритного объема, а количества п№
авиационного транспорта -— по весу имущества:
о>г Qi-
Здесь lFr, Qr — общий габаритный объем и вес транспорти-
руемого имущества;
ыг, 7 г — допустимый объем и вес загрузки соответст-
венно кузова автомобиля и кабин летательно-
го аппарата;
5 — 0,7 ч- 1,1 — коэффициент плотности укладки
имущества.
В последнем случае необходимо сопоставлять габаритные-
размеры имущества с размерами грузовых люков.
Если задано время Т„а перебазирования, то располагаемое
время Гпр на непосредственное перебазирование равно:
Т’пр = Т’пз ~ г'св-рв, (18.28}
где ^св-рв — время, затрачиваемое на свертывание и развер-
тывание средств инженерно-авиационного обеспечения.
Время, необходимое на выполнение первого рейса перебази-
рования, определяется соотношением
Лн = ^ + + ^-Р- (18.29)
V п
Здесь Ln — дальность перебазирования;
Vn— средняя скорость движения транспорта;
^п_р— время погрузки и разгрузки;
t0 — время .простоев, отдыха, нерабочих перемещёний
транспортных средств.
Время каждого последующего i-того рейса складывается из
времени движения порожних транспортных средств с нового на
старый аэродром и загруженных — обратно:
^ = 2^+2г10+^_р, (18.30)
где i > 1.
Время, затрачиваемое на п рейсов, равно:
Тап=Тпх + {п-\)Т.,
или с учетом (18.29) и (18.30):
?;,, = 2/г(^ + £0 + ^ £п_рК(^ + /Л. (18.31)
Это время должно быть равно располагаемому (18.28): Тпп=Т„р.-
426
Из (18.31) определяется максимальное количество рейсов п =
= rtpM, которое возможно выполнить за отведенное время пере-
базирования
Т’пр + С^+^о)
ЯрМ= —------------------ (18.32)'
В результате оказывается возможным рассчитать минимальное-
число транспортных средств, обеспечивающих перебазирование-
технических средств обслуживания и личного состава части за
отведенное время:
па min = gIFr - + - Nli , (18.33)-
шг ^р м «я м
?г и «л ^р и
Здесь — количество транспортируемых людей;
пл — допустимое количество людей, размещаемых на-
единице рассматриваемого типа транспортного-
средства.
§! 18.4. ОСОБЕННОСТИ ИНЖЕНЕРНО-АВИАЦИОННОГО
ОБЕСПЕЧЕНИЯ И ЭКСПЛУАТАЦИИ АВИАЦИОННОГО
ОБОРУДОВАНИЯ В УСЛОВИЯХ РАССРЕДОТОЧЕНИЯ
И ПРИМЕНЕНИЯ ОРУЖИЯ МАССОВОГО ПОРАЖЕНИЯ*
В процессе боевых действий при осуществлении инженерно-
авиационного обеспечения инженерно-авиационная служба уча-
ствует также в организации подготовки и защиты личного со-
става и авиационной техники от воздействий оружия .массового
поражения, ликвидации последствий его применения. В данной
работе ИАС тесно взаимодействует с авиационно-технической
частью и со специальными подразделениями. Чем лучше будет
организована защита от оружия массового поражения и лучше
подготовлен личный состав части, тем меньше будут и потери.
Поэтому личный состав части должен быть хорошо обучен дей-
ствиям в условиях применения оружия массового поражения,,
хорошо знать его свойства и способы защиты от его воздействия.
Для сохранения людей и техники необходимо рассредоточе-
ние .их .на достаточно 'большие расстояния, обеспечение их мас-
кировкой и укрытиями. При этом следует максимально исполь-
зовать защитные свойства местности, индивидуальные и коллек-
тивные средства защиты.
* Содержание данной главы основано на материалах открытой отечест-
венной и зарубежной печати.
427
Рассредоточение авиационной техники, средств ее обслужи-
вания и материально-технического обеспечения является важ-
нейшим мероприятием защиты от поражающего действия ору-
жия .массового поражения. Степень рассредоточения определяет-
ся возможностями аэродромов, тактическими соображениями,
шаличие-м искусственных и естественных укрытий, требованиями
к боеготовности.
Непосредственно в районах стоянок летательных аппаратов
.должны быть оборудованы укрытия в виде щелей, блиндажей.
Укрытиями для летательных аппаратов служат насыпные капо-
ниры или котлованы со специальными въездами —выездами
(аппарелями), закрытые маскировочными сетями. По соседству с
ними не должны быть расположены легковозгораемые предме-
ты. Горюче-смазочные материалы следует располагать в закры-
тых котлованах на уровне, 'более низком, чем котлованы с техни-
кой и укрытия для людей. Это исключает возможность попада-
ния в последние горящих потоков жидкостей, если они появля-
ются при воздействии атомного оружия.
В районах расположения техники и укрытий личного состава
должны быть сосредоточены средства тушения пожара, средст-
ва индивидуальной защиты от поражающих факторов ядерного,
химического и бактериологического оружия. Весь личный состав
инженерно-авиационной службы должен быть обучен действиям
с этими средствами.
В плане инженерно-авиационного обеспечения должна быть
предусмотрена организация групп личного состава для ликвида-
ции последствий применения противником оружия массового по-
ражения: противопожарные, дозиметрические, спасательные,
группы обеззараживания, связи и т. д. При ликвидации этих по-
следствий боевая работа части не должна прекращаться, мак-
симальные силы направляются на быстрейшее восстановление и
подготовку к применению боевой техники.
Авиационная техника и личный состав могут оказаться под
воздействием радиоактивных, отравляющих и биологических
средств на аэродроме базирования; летательные аппараты этим
воздействиям могут быть подвергнуты также в полете за преде-
лами своего аэродрома. Поэтому личный состав ИАС, прежде
-чем приступать к работе, должен быть убежден в отсутствии за-
ражения рабочих мест.
В зависимости от конкретной боевой обстановки может ока-
заться необходимым зараженные летательные аппараты под-
вергнуть только частичной специальной обработке. Такая обра-
ботка выполняется непосредственно на стоянках. При этом обез-
зараживаются только те места техники, с которыми вынужден
соприкасаться экипаж в полете, а также основные узлы, с кото-
рыми вынужден работать технический состав при подготовке
техники к боевому применению.
428
Специальная обработка летательных аппаратов производится:
силами экипажа и технического состава части с использованием
средств, выделяемых начальником химической службы.
Работа технического состава на частично обработанной тех-
нике .производится в противогазах с применением средств защи-
ты кожи. Поэтому необходимо учитывать соответствующее уве-
личение сроков подготовки боевой техники к применению как за.
счет времени ее специальной обработки, так и за счет стесненно-
сти действий специалистов, облаченных в средства защиты. Лет-
ные экипажи снимают личные средства защиты только перед са-
мым входом в обезвреженные обработкой кабины.
При появлении первой же возможности производится полная:
обработка летательных аппаратов и средств аэродромного об-
служивания. Она выполняется в специально отведенных местах
аэродрома. После проведения дезактивации, дегазации или дез-
инфекции летательных аппаратов на стоянках последние также-
соответствующим образом обрабатываются с целью обеззара-
живания. Следует помнить, что при нахождении в зараженной:
зоне нельзя курить, пить, принимать пищу.
При организации работ на зараженных радиоактивными
средствами объектах или в зараженной местности инженер дол-
жен обеспечить строгий расчет и контроль получаемой специали-
стами дозы облучения с тем, чтобы не допустить ее опасного-
значения. Это значительно затрудняет организацию подготовки-
техники к применению за короткие сроки. Тем более, что при не-
однократных случаях длительной работы одних и тех же специа-
листов с зараженными объектами может оказаться необходимой
длительная замена этих лиц другими, не подвергавшимися облу-
чению. Следовательно, инженер должен стремиться всеми
мерами экономить допустимый «ресурс» дозы облучения высо-
коквалифицированных специалистов, обеспечивая им макси-
мальную возможность работы только с обезвреженной техникой.
У человека, облаченного в комплект защитной одежды (про-
тивогаз, резиновые перчатки и сапоги, пропитанные специаль-
ным составом комбинезон и подшлемник), нарушается естест-
венный теплообмен. Это особенно наблюдается в жаркую пого-
ду и во время пожара. С целью предупреждения случаев появ-
ления перегревов тела с последующими тепловыми ударами вре-
мя работы в такой одежде не должно превышать допустимых
норм.
Существенно затрудняют управление подготовкой авиацион-
ной техники также ее рассредоточенность, укрытие и маскиров-
ка. Поэтому особенно важной является хорошо налаженная
связь инженеров части со специалистами на стоянках, четкость
в отдаваемых распоряжениях и передаваемых донесениях.
Ввиду ограниченности количеств средств аэродромного об-
служивания чрезвычайно важное значение приобретает опти-
мальное планирование их первоначального распределения по от-
429>
дельным стоянкам летательных аппаратов и последующего пере-
мещения в процессе подготовки к полетам. При этом должен
быть обеспечен непрерывный контроль за полнотой использова-
ния средств и строгим соблюдением установленного графика об-
служивания ими летательных аппаратов.
Для снабжения специалистов групп обслуживания инстру-
ментом, расходными материалами и запасными (наименее на-
дежными) устройствами возникает необходимость в организа-
ции небольшого подвижного склада в каждом подразделении.
С этой целью могут быть использованы мотороллеры с прицеп-
ными фургонами. Обслуживание подвижного склада поручается
-одному из механиков группы, которому должен быть обеспечен
тот или иной вид связи со стоянками.
С целью своевременной доставки на летательные аппараты
аккумуляторных батарей в зимних условиях также оказывается
рациональным использование отдельных утепленных фургонов
для батарей каждого подразделения. В этих фургонах устанавли-
вается и хранится комплект аккумуляторных батарей. Полость
фургона при этом соединяется с отапливаемым помещением. В
случае необходимости фургон прицепляется к автомашине (на-
пример, АПА), которая развозит батареи по стоянкам.
При рассредоточенном базировании стоянки самолетов могут
не иметь питания от источника централизованного электроснаб-
жения. В этом случае целесообразно каждую стоянку обеспечить
тележкой с комплектом аэродромных аккумуляторных батарей.
Последние предназначаются для питания бортовых потребителей
электроэнергии в процессе предполетной подготовки и для запу-
ска двигателей при вылете по тревоге и для выхода из-под удара.
С целью максимального снижения поражающего воздействия
ядерных ударов противника на людей и технику при нахождении
их на марше в момент перебазирования наземным эшелоном этот
этап перебазирования должен быть особенно тщательно сплани-
рован и подготовлен. Наиболее целесообразно планировать пере-
движение в условиях пониженной видимости (ночью, в тумане),
теснины и переправы преодолевать с большими скоростями дви-
жения, обходить крупные населенные пункты, строго соблюдая
маскировку.
В случае движения на открытых .машинах личный состав оде-
вает защитные очки или козырьки для уменьшения возможности
поражения зрения световым излучением ядерного взрыва.
Особое внимание уделяется вопросам организации и .проведе-
ния на марше радиационной разведки. Весь маршрут движения
предварительно должен быть изучен с целью выявления на нем
всех естественных и искусственных укрытий для личного состава
и техники на случай нанесения противником ядерного удара.
Личный состав инструктируется по действиям при. таком ударе
на любом участке маршрута.
430
Специалисты инженерно-авиационной службы должны знать
л особенности работы устройств оборудования в условиях ядер-
цых излучений. Это значительно ускоряет выработку ими грамот-
ных решений как при появлении тех или иных нарушений в ра-
боте оборудования, так и для предупреждения нарушений опре-
деленного вида. Ниже кратко рассматривается влияние ядерных
излучений на работу элементов авиационного оборудования.
При интенсивном облучении, возникающем при взрыве ядер-
ных боеприпасов на достаточно больших расстояниях от лета-
тельного аппарата, могут происходить радиационные поврежде-
ния материалов, связанные с нарушением структуры их кристал-
лических решеток или разрушением молекул. В результате этого
могут изменяться электропроводность, диэлектрическая проница-
емость, магнитные и другие свойства материалов, что приводит к
временному или полному выходу из строя ряда элементов и си-
стем авиационного оборудования. Степень воздействия радиации
зависит от вида, дозы и мощности радиации, энергетического
спектра излучений, природы облучаемого вещества.
Нейтронные излучения вызывают, как правило, необратимые
повреждения, а у-лучи — обычно обратимые повреждения ма-
териалов. Эти излучения наибольшую опасность представляют на
высотах полета свыше 20 000 м.
Влияние излучений на изоляционные материалы. В резуль-
тате химических реакций, вызываемых преобразованием молекул
иод воздействием излучений, в органических изоляционных ма-
териалах происходит выделение газов, ионизация атомов и моле-
кул. Происходит увеличение жесткости и .модуля упругости мате-
риала изоляции, а выделяющиеся газы нарушают ее целостность.
Некоторые полимерные изоляции (резина и др.) превращаются в
твердую стеклообразную массу. Другие полимеры переходят в
полужидкое состояние.' В результате возможны пробои изоляции
и выход из строя систем оборудования как сразу после облуче-
ния, так и по истечении определенного времени после этого. Бо-
лее устойчивы к действию излучений неорганические материалы:
кварц, фарфор, слюда, стекловолокно и др. Отсюда следует не-
обходимость тщательного контроля изоляции проводов после
воздействия излучений.
Влияние излучений на конденсаторы. Под воздействием ра-
диации изменяются характеристики диэлектриков: диэлектри-
ческая проницаемость, сопротивление, потери. При этом изменя-
ются величины утечек и емкостей конденсаторов. Особенно ухуд-
шаются свойства электролитических конденсаторов и конденса-
торов с бумажным и масляно-бумажным диэлектриками. Изме-
нения характеристик конденсаторов нарушают работу резонанс-
ных контуров и других устройств автоматики.
Влияние излучений на полупроводниковые элементы. Пара-
метры полупроводниковых элементов получают значительные
431
необратимые изменения при нейтронных потоках, превышающих
1012—1013 нейтронов/см?. 7 -излучения мощностью более 107 р!сек.
вызывают 'короткие замыкания р—/г-иер входов полупроводников.
После окончания воздействия 7-лучей происходит полное вос-
становление переходов. Таким образом, под воздействием прони-
кающей радиации могут полностью выйти из строя или ложно>
сработать схемы управления и измерения, включающие в себя,
полупроводниковые элементы. Это может явиться причиной рез-
кой перекладки рулевых органов летательного аппарата при ав-
томатическом управлении полетом, отказа пилотажно-навига-
ционных приборов и автоматов, устройств защиты электрической,
сети и т. д.
Влияние излучений на коммутационную аппаратуру. Возни-
кающая в результате излучений ионизация воздуха может быть
причиной появления электрической дуги между размыкающи-
мися контактами коммутационной аппаратуры. Следствием это-
го .могут явиться спекания и разрушения контактов.
Влияние излучений на оптические приборы. Стекло, подвергну-
тое интенсивному облучению, темнеет (окрашивается). Особен-
но это относится к толстым стеклам, объективам кино- и фотоап-
паратов; значительная толщина служит причиной поглощения
большого количества нейтронов и 7 -лучей. Влияние радиации на
оптику значительно уменьшается, если в стекло добавляется
определенное количество окиси церия.
Под действием проникающей радиации засвечиваются фото-
и кинопленки, если не обеспечивается их специальное экраниро-
вание.
Влияние тепловых и световых излучений на средства освещения
и сигнализации. Если проникающая радиация воздействует на
авиационное оборудование при полетах летательных аппаратов,
и ядерных взрывах на больших (свыше 20 000 м) высотах, то-
световые и тепловые излучения могут оказывать значительное-
воздействие на внешние элементы летательных аппаратов и при
небольших высотах полета, т. е. в условиях малой разреженно-
сти атмосферы. При этом на летательный аппарат могут воз-
действовать излучения также при взрыве ядерных средств, сбра-
сываемых с его борта на позиции противника.
Наименее защищенными от этих излучений оказываются
средства освещения и сигнализации, располагающиеся снаружи
летательного аппарата: фары, аэронавигационные и строевые
огни. В момент взрыва ядерного средства тепловое и световое
излучения могут разогреть газы, наполняющие колбы ламп. В
результате резкого повышения давления этих газов происходят
взрывы фар и других облученных электрических ламп освеще-
ния и сигнализации.
С целью уменьшения количества случаев повреждения ламп
последние должны выполняться пустотными (хотя при отсутст-
432
вии в колбах нейтральных газов уменьшается срок службы этих
ламп).
Влияние проникающей радиации на электронные вычислитель-
ные машины. Короткие импульсы проникающей радиации, возни-
кающей при ядерных взрывах, нарушают нормальную работу ак-
тивных электрических цепей вычислительных машин. Это может
привести к срыву задачи полета. Чтобы обеспечить высокую на-
дежность работы электронной автоматики в условиях интенсив-
ного облучения, применяются специальные элементы, устойчи-
вые к действию радиации, используются специальные электри-
ческие цепи, защищающие основную схему в момент действия
импульса радиации. С этой же целью в схемы устройств вклю-
чаются элементы таким образом, чтобы обеспечивалась взаим-
ная компенсация изменения их характеристик при действии ра-
диации.
28. Румянцев Е. А. и др.
Глава XIX
БЕЗОПАСНОСТЬ ПОЛЕТА
§ 19.1. АВАРИЙНЫЕ ФАКТОРЫ И КОЛИЧЕСТВЕННЫЕ ОЦЕНКИ
БЕЗОПАСНОСТИ ПОЛЕТА
Безопасность полета является весьма актуальной и сложной
проблемой, от успешного решения которой непосредственно за-
висит боеготовность и боевая эффективность Военно-Воздушных
Сил. Острота этой проблемы обусловливается возросшими тре-
бованиями по условиям боевого применения ВВС. Основные бо-
евые и учебно-боевые задачи должны выполняться в любых, в
том числе сложных метеоусловиях, днем и ночью, на больших и
предельно малых высотах, в длительных полетах на полный ра-
диус с применением ракетного и других видов вооружения, что
значительно увеличивает психофизиологическую нагрузку на
летчиков и других членов экипажа. В этих условиях исключе-
ние ошибок пилотирования, создающих предпосылки к летным
происшествиям, может быть достигнуто лишь непрерывным по-
вышением квалификации и тренированности летного состава в
пилотировании самолетов в особых случаях полета.
Выполнение боевых задач проводится с применением весьма
сложного современного оборудования, совершенство и надеж-
ность которого в значительной мере определяют нагрузку экипа-
жа и уровень безопасности полета. Отсюда вытекают особые
требования к конструкции летательных аппаратов по обеспече-
нию безопасности полета, а также повышенные требования к
инженерно-авиационному обеспечению, исключающие ошибки
инженерно-технического состава при подготовке авиационной
техники и появление отказов жизненно важных систем и агрега-
тов ® полете.
Среди факторов, создающих угрозу безопасности полета и
приводящих к аварийным последствиям, можно выделить сле-
дующие группы:
Отказы авиационной т ехн и к и, куда относятся:
— разрушения элементов конструкции планера, отказы си-
ловых установок, топливных, гидро- и пневмосистем, электро-
энергетических и других систем;
434
— отказы в каналах информации и управления полетом,
включая отказы в САУ, навигационных системах, в системах
коммутации цепей управления и контроля и т. п.;
— отказы в системах жизнеобеспечения экипажа;
— отказы, приводящие к пожарам, взрывам, разгерметиза-
ции. '
Проявление подобных аварийных факторов в полете, воз-
можно из-за конструктивно-производственных дефектов, нару-
шения технических условий при производстве, некачественного
монтажа, попадания посторонних предметов; недостаточной на-
дежности оборудования и конструкции летательного аппарата;
неудовлетворительного контроля технического состояния лета-
тельного аппарата перед полетом.
Эксплуатационные факторы, к которым относятся:
— ошибки летного состава при пилотировании;
— ошибки руководства полетами, а также отказы и наруше-
ния в системах управления и обеспечения полетов с земли;
— ошибки инженерно-технического и летного состава при
подготовке летательных аппаратов к полетам;
— усталость и резкие отклонения от нормального психофи-
зиологического состояния летчика и других членов экипажа;
— неудовлетворительная организация полетов.
Ошибки летного, инженерно-технического состава и руко-
водства полетами обусловливаются, в частности, недостаточной
квалификацией и плохим знанием техники, отсутствием долж-
ных навыков и тренированности в ее эксплуатации, недисцип-
линированностью, нарушениями установленного регламента тех-
нического обслуживания и т. п.
Внешние факторы, к которым относятся:
— туманы, пылевые и песчаные бури (при посадке), грозо-
вые фронты, турбулентность атмосферы, .мощные восходящие и
нисходящие потоки воздуха и другие обстоятельства, создающие
•чрезвычайные условия для полета;
— обледенение;
— столкновение с посторонними телами (например, птица-
ми) и другие факторы, которые принято относить к объективным.
Как показывает анализ статистических данных, на самолетах
и вертолетах, находящихся в эксплуатации достаточно длитель-
ное время, летные происшествия и предпосылки к ним происхо-
дят редко и главным образом из-за эксплуатационных факторов.
На самолетах, имеющих относительно малое время эксплуата-
ции, значительная часть предпосылок к летным происшествиям
падает на конструктивно-производственные дефекты. Наиболее
опасными являются отказы силовых установок, топливных, гид-
росистем и систем управления.
Высокий уровень безопасности полетов обеспечивается про-
ведением необходимых мероприятий по нескольким важнейшим
направлениям.
28*
435
Техническое направление включает в себя комплекс исследо-
вательских, конструкторских и производственных работ, имею-
щих целью достижение таких характеристик устойчивости и уп-
равляемости летательного аппарата, надежности и совершенст-
ва установленного на нем оборудования, которые исключили бы
опасность возникновения аварийных ситуаций в полете из-за от-
казов и существенно снизили бы нагрузку на летчика. Характер-
ными требованиями к летательному аппарату по безопасности
полета являются, например, следующие: при отказах силовых
установок, гидросистем, триммеров, демпферов, автопилотов и
других систем управления характеристики устойчивости и уп-
равляемости должны обеспечить такое поведение самолета, при
котором в течение пяти секунд без вмешательства летчика в уп-
равление он не выходил бы на недопустимые режимы полета (по»
скорости, перегрузке, углу крена и т. п.); должна обеспечивать-
ся безопасность полета при отказе всех двигателей на одном’
крыле; при отказе одного двигателя должен обеспечиваться без-
опасный взлет и прекращение его; должен обеспечиваться без-
опасный полет в турбулентной атмосфере при непрерывном воз-
действии порывов со среднеквадратической скоростью =
= 2 м/сек и другие требования.
К числу важнейших в техническом направлении следует от-
нести мероприятия по обеспечению надежности, включающие в;
себя разработку высоконадежных технических устройств и ре-
зервирование, разработку бортовых автоматических систем
контроля и систем обеспечения безопасности, автоматически
ликвидирующих последствия отказов в полете, а также разра-
ботку и применение совершенных наземных технических средств
контроля и профилактики.
К техническому направлению тесно примыкает другое на-
правление, которое можно назвать психофизиологическим. Оно>
связано с изучением распределения функций между летчиком и.
автоматическими системами управления, соответствия характе-
ристик летательного аппарата и его оборудования физиологи-
ческим возможностям летчика, построением . оптимальных бор-
товых информационных систем, а также отбором и обучением,
летного состава.
Другое важное направление в обеспечении безопасности по-
летов охватывает вопросы объективного анализа причин лет-
ных происшествий и предпосылок к.ним. Оно включает в себя
детальное и всестороннее исследование статистических данных по-
опыту эксплуатации авиационной техники, разработку научных
методов расследования причин летных происшествий, включая,
объективные методы, основанные на анализе информации бор-
товых систем регистрации полетных данных, а также выработку
обоснованных рекомендаций и заключений по предотвращению
летных происшествий.
436
Организационно-техническое направление включает в себя
совершенствование в . строевых частях планиррвания, организа-
ции, управления и руководства полетами, подготовку и обуче-
ние летного и технического состава и комплекс‘мероприятий по
инженерно-авиационному обеспечению безопасности полетов.
Мероприятия ИАС по обеспечению безопасности полетов и во-
просы расследования причин летных происшествий освещаются
ниже, в .§§ 19.2, 19.3.
Рассмотрим некоторые основные определения. Под летны-
ми происшествиями понимаются события возникновения
на летательном аппарате в полете аварийных ситуаций. При
этом время полета отсчитывается от момента выруливания ле-
тательного аппарата со стоянки до заруливания на стоянку по-
сле посадки и освобождения ВПП.
Аварийной считается такая ситуация в полете, которая
делает невозможным или чрезвычайно затрудняет выполнение уп-
равляемого полета и создает непосредственную угрозу безопасно-
сти членов экипажа. Аварийные ситуации возникают из-за воз-
действия одного или нескольких факторов, рассмотренных вы-
ше. Это, например, возникновение пожара; отказы авиадвигате-
лей, систем управления и жизненно важных приборов и агрега-
тов; недостаток топлива или кислорода; потеря ориентировки;
опасные сближения летательных аппаратов в воздухе; ухудше-
ние здоровья членов экипажа в полете и т. и. Применительно к
пилотированию аварийные ситуации называют особыми случая-
ми в полете.
Так как аварийная ситуация возникает из-за -воздействия ава-
рийного фактора, то можно дать и другое определение летного
происшествия, понимая под ним событие, состоящее в проявле-
нии в полете одного или нескольких аварийных факторов. В зави-
симости от последствий для экипажа, пассажиров и летатель-
ного аппарата летные происшествия подразделяются на полом-
ки, аварии и катастрофы.
Поломкой называется летное происшествие, повлекшее за
собой повреждения летательного аппарата, требующие ремонта.
Аварией называется летное происшествие, повлекшее'за
собой полное разрушение летательного аппарата, но без гибе-
ли экипажа и пассажиров, или такие повреждения, при которых
восстановление летательного аппарата является нецелесообраз-
ным. Потеря летательного аппарата в результате вынужденной
посадки, исключающей возможность или целесообразность его
эвакуации, при отсутствии гибели людей, относится к аварии не-
зависимо от полученных летательным аппаратом повреждений.
Катастрофой называется летное происшествие, повлек-
шее за собой гибель людей из состава экипажа или пассажиров
при разрушении или повреждении летательного аппарата.
437
Гибель в полете членов экипажа или пассажиров без повре-
ждения летательного аппарата относится к категории чрезвы-
чайных происшествий.
В дальнейшем летные происшествия (ЛП), заканчивающие-
ся поломкой, аварией или катастрофой, будем называть летным
происшествием с аварийным исходом (ЛПАИ). Соответствен-
но под аварийным следует понимать такой фактор, который с
вероятностью, не равной нулю, может привести к летному проис-
шествию с аварийным исходом. С точки зрения расследования
летного происшествия воздействовавший на летательный аппа-
рат аварийный фактор является причиной летного происшествия,
которую следует установить. В этом смысле понятия «аварий-
ный фактор», «причина» являются идентичными.
Если полет, -несмотря на воздействие аварийного фактора,
завершился благополучно, то такое ЛП называется летным про-
исшествием с благополучным, исходом (ЛПБИ) или предпо-
с ы л к о й к летному происшествию.
В решении проблем безопасности 'полета важное значение
имеют установление и изучение аварийных факторов, распреде-
ление их по. степени аварийности и количественная оценка ле-
тательного аппарата в целом по безопасности полета. Крите-
рии количественной оценки безопасности полета должны приме-
няться при формировании требований к летательному аппара-
ту на этапе проектирования и выявлении существенных по без-
опасности полета недостатков в конструкции летательного аппа-
рата и его оборудования.
Помимо статистических критериев, таких, как среднее время
налета в часах на одно летное происшествие, а в гражданской
авиации —. налет в пассажирокилометрах на одно ЛП и других,
в последнее время получили развитие вероятностные критерии*
оценки безопасности полета.
К ним относятся:
— условная вероятность летного происшествия с аварийным
исходом от воздействия /-того фактора
Р (ЛПАИ/Пу); (19.1)
— вероятность ЛПАИ от воздействия /-того фактора
РДЛПАИ) =Р(П.)Н(ЛПАИ/Пу); (19.2)
—полная вероятность летного происшествия с аварийным
исходом по всем установленным для данного летательного ап-
парата N аварийным факторам
N
Р(ЛПАИ)= S Р(П7)Р(ЛПАИ/Пу.) (19.3)
i-r
Частично эти критерии рассматривались в § 10.2 гл. X.
438
— или вероятность безопасного полета
Р(БП) = 1 - Р (ЛПАИ). ' (19.4)
Условная вероятность Р(ЛПАИ/Пу) зависит в основном от на*
выков летчиков в управлении самолетом вособых случаях поле-
та (техники пилотирования), а также от летно-технических ха-
рактеристик самолета и его оборудования (например, от устой-
чивости и управляемости самолета, системы информации экипа-
жа об отказах и т. п.). Оценка Pj (ЛПАИ), помимо этого, зависит
от вероятности проявления /-того аварийного фактора Р (ПД
т. е. от вероятности отказов (надежности оборудования), часто-
ты ошибок пилотирования и руководства полетами и т. д. Кри-
терии (19.3), (19.4) являются основными при оценке летатель-
ного аппарата в целом по -безопасности полета. Физический
смысл критерия (19.3) сводится к, следующему. Если, например,
Р(ЛПАИ) = 2-10~6,
то это означает, что в среднем для данного летательного аппа-
рата на.сто тысяч полетов следует ожидать два полета с ава-
рийным исходом. '
В числе N аварийных факторов можно выделить по таких, ко-
торые могут привести к ЛПАИ на всех этапах полета, П\— толь-
ко на этапе посадки, /г2 — только на этапе взлета и набора вы-
соты и т. д. Если общее число этапов полета равно г, то
N = п0 -j- nz -f- . . . + пг
и можно оценить безопасность полета на том или ином этапе.
Например, вероятность ЛПАИ на этапе посадки составит
»о+»1
Рпос= S Р(Пу)Р(ЛПАИ/Пу). (19.5)
j=i
Количество аварийных факторов N для летательного аппа-
рата может оказаться, хотя и счетным, но достаточно большим.
Помимо этого, при расчете по критериям (19.1) — (19.4) основ-
ная трудность состоит в определении условных вероятностей
/’(ЛПАИ/Пу). Их получают путем статистического моделирова-
ния и полунатурных испытаний с использованием тренажеров,
полагая под ЛПАИ событие выхода одной из координат дви-
жения (скорости полета, перегрузки и других) за пределы до-
пустимых значений
Р (ЛПАИ/Пу) =Р.(х€хогр),
где хогр — область недопустимых значений координат X (х^;
х2... хк).
При этом расчет ведется по частоте событий выхода
Р* (ЛПАИ/П-)____т __число событий выхода
’ М число опытов
439
с последующей оценкой по доверительным интервалам и веро-
ятности. Однако для получения достаточно достоверных значе-
ний Р (ЛПАИ/Пу) порядка 0,01 потребуется несколько тысяч, а
Р(ЛПАИ/Пу) порядка 0,001 уже несколько десятков тысяч опы-
тов, что связано с весьма большими трудозатратами. Тем в
большей мере это относится к летным испытаниям.
Статистические данные по предпосылкам к летным происше-
ствиям являются далеко не полными. Получить по ним достаточ-
но надежную и точную оценку условной вероятностиР(ЛПАИ/Пу)
по многим опасным факторам не представляется возможным.
Лишь для самолетов, находящихся длительное время в эксплуа-
тации, когда число появлений опасных отказов какой-либо си-
стемы в полете достигает нескольких сотен, можно рассчитать
условную вероятность летного происшествия, если она заключе-
на в пределах 0,1-4-1. Например, из опыта эксплуатации извест-
но, что с доверйтельной вероятностью Р =0,9 по отказам сило-
вых установок самолетов с одним двигателем (разрушение ло-
)паток компрессора, отказ автоматики компрессора и т. п.)
0,2 < Р (ЛПАИ/Псу) <0,3,
по отказам взлетно-посадочных устройств
0,1 < Р (ЛПАИ/Пвп) < 0,3.
С учетом указанных трудностей целесообразно при оценке
безопасности полета разграничить опасные факторы Пу по ве-
роятности аварийного последствия и отнести к аварийным пер-
вой степени те из них, для которых
Ю^С/^ЛПАИ/ПуХ 1,
к аварийным факторам второй степени те, у которых
IO”2 < Р(ЛПАИ/Пу) < IO'1,
и т. д. Пронумеровав и расположив факторы в порядке убыва-
ния величины Р(ЛПАИ/Пу), можно построить график рис. 19.1,
отражающий установленное число N аварийных факторов и их
разделение по группам в зависимости от степени аварийности, а
затем ввести усеченные оценки
Ра(ЛПАИ)= S Р (Пу) Р(ЛПАИ/Пу), (19.6)
7-1
где Nk — число факторов до £-той степени аварийности включи-
тельно.
Обычно принимают k = 1; k — 2 и реже k = 3.
440
Возможен и другой подход к ограничению числа факторов,
лри котором строится график рис. 19.2, ранжирующий их по ве-
-личине Р/ЛПАИ).Далее проводится оценка того, насколько ве-
роятно ЛПАИ по тому или
иному фактору с учетом or- Р 1пп/ш/п,)
раниченности находящегося
.в эксплуатации (или плани-
руемого) парка самолетов
данного типа и времени его
эксплуатации до морального
старения. Например, при эк-
сплуатации 1000 самолетов
в течение 10 лет при 200 по-
летах в год общее число по^
летов составит v =2 • 10+6.
' '— 1ст—2ст1 Зет |-
Рис. 19.1. Примерное распределение
условных вероятностей летных про-
исшествий по различным причинам
'По частной теореме о пов-
торении опытов вероятность
пожвления ровно р аварий
в v полетах при вероятности
аварии в одном полете Р}
определяется формулой
Рр, , = QPe(l -Р.)-'-^.
Если принять р = 0, то вероятность появления аварий во
»сех м полетах по /-тому фактору
Ру] (ЛПАИ) = 1 — Ро,„ = 1 - (1 - Ру)’ .
Для нашего примера при v =2 • 106; Р} — 10-8
РИ (ЛПАИ) = 2-10-2.
Pj (ЛПДН)
fO'sL
' 10^
(О'6
Ю'8
Pjmin_____
/ 2 3
_~~Т_
Ыогр W
Рис. 19.2. К ограничению числа причин ЛП
441
На рис. 19.3 приведены зависимости PW от ч и Pj, из кото-
рых следует, что для самолетов с «временем жизни» в полетах v
порядка 106 и менее нецелесообразно учитывать те факторы, для
которых Р^<30-8. Вероятность появления хотя бы одной аварии
Рис. 19.3. Зависимости вероятности летного про-
исшествия по /-Тому фактору от предполагаемого
числа полетов
за все время эксплуатации всего парка самолетов при указан-
ном соотношении Р}- и v будет 0,01 и менее. Если задана вели-
чина то при известном v по рис. 19.3 всегда можно ука-
зать минимальное значение Ру min, а значит и ограничить число
учитываемых аварийных факторов величиной Norp (см. рис,
19.2) . Тогда
ЛАО1'Р
Рогр(ЛПАИ)= S Р(П,)Р(ЛПАИ/ПД (19.7)
/-1
Значения вероятностей проявления аварийных факторов
Р (FIj) применительно к отказам определяются на основе дан-
ных по надежности, применительно к ошибкам пилотирования,
ошибкам руководства полетами, особым внешним условиям по-
лета и другим факторам —= на основе изучения статистической
частоты их повторения.
В интересах расследования причин летных происшествий рас-
считывается условная вероятность того, что авария произошла
(произойдет) по причине Пу
Р.-(ЛПАИ) Р(П,)Р(ЛПАИ/П.)
р (П/ЛПАИ)- РЦПТАЙ-) - ------- (1М>
X Р(П,)Р(ЛПАИ/П,)
442
При этом
N
£Р(ПУ/ЛПАИ)=1,' (19.9)
: 7-1
т. е. все N возможных причин ЛПАИ образуют полную группу
1 событий. При ограничении числа учитываемых аварийных фак-
торов в (19.8), (19.9) следует заменить/V на Nk или ААогр.
Построив по (19.8) график «функции плотности вероятно-
сти» причин летных проис-
шествий (рис. 19.4), можно
указать для данного лета-
тельного аппарата наиболее
вероятные причины, которые
могут включать в себя и от-
казы техники в полете, и
ошибки пилотирования и
другие- факторы.
Помимо рассмотренных
общих критериев, использу-
ются некоторые частные по-
казатели безопасности поле-
та, связанные главным обра-
зом.с оценкой действий лет-
чика в аварийных ситуациях.
При возникновении /-того отказа или другого опасного фак-
тора аварийная ситуация развивается в течение некоторого про-
межутка времени tSB достижения одной из определяющих коор-
динат (например, перегрузки) допустимой границы х/доп
1
10'
ю~г-
10~3
1
1234
. £ Р (П'//1ПЛН)
P(nj/лови)
N
Рис. 19.4. Функции распределения
причин летных происшествий
Рис. 19.5. К оценке вероятности парирования от-
каза летчиком
(рис. 19.5). Отказ может быть парирован летчиком, если время'
реакции на него tK будет меньше предельно допустимого време-
ни (пр. Величины tB, tnp, 1ЯВ являются случайными с закона-
ми распределения /рв); /(^Пр); /(^в)-
нз-
Рис. 19.6. Функции распределения времени реакции летчика:
а — при отказах автопилота и вычислителя в продольном ка-
нале; б — при отказах крепового автопилота •
-444
Время реакции летчика обусловлено запаздыванием в по-
ступлении информации об отказе и запаздыванием летчика в
оценке ситуации и принятии решения. На рис. 19.6,а приведе-
ны для примера гистограммы и аппроксимирующие их функ-
ции распределения времени вмешательства У, летчика в управ-
ление при отказах автопилота и вычислителя в продольном ка-
нале автоматической системы управления самолета ИЛ-18, а па
рис. 19.6,6 — функции распределения при отказах кренового ав-
топилота истребителя. С достаточной для практики точностью
законы распределения / (/в), как правило, могут считаться лога-
рифмически нормальными. На рис. 19.7 изображена характер-
ная гистограмма времени развития аварийной ситуации Ат при.
отказах демпфера самолета.
Р и с. 19.7. Гистограмма времени развития аварийной ситуации при
отказах демпфера
Вероятность парирования летчиком отказа или другого ава-
рийного фактора равна:
Р (ПЛ/Пу) — Р(/В7-< = Р (Д/уЭэ 0),
где .
А ^пр j j-
При известных законах распределения fB У) и Др (t) и
независимости случайных величин tnp она может быть
найдена по следующим соотношениям:
Р (ПЛ/ПУ) = Р (А/у > 0) = J /(Д^ЙД^.; (19.10)
(Г
4- оо
/(Д 9 = (19.11)
445.
Если законы распределения величин tnj и /ПР7- являются
нормальными, то их композиция (19.11) дает также нормальный
закон распределения
/(А */)
_ 1 _ е 2oL
^У2^ J
(19.11)
где математическое ожидание A tj— tnpj —
среднеквадратическое отклонение = ]/" + 3?пп •
7 V в; ру
Таким образом, вероятность парирования отказа
Р(ПЛ/П,) = 1--------- е 2’1ь
1 j 3 \ °^})
(19.12)
На рис. 19.8 изображены графики функции (19.12), из кото-
рых следует, что вероятность парирования отказа летчиком тем
Р и с. 19.8. Зависимость вероятности парирова-
ния отказа летчиком от своевременности и бы-
строты его реакции
выше, чем больше A tj (т. е. при tBj < /п₽7-) и чем меньше
дисперсия . Отсюда становится очевидной необходимость
„ i
постоянной тренировки летного состава управлению самолетом
в особых случаях полета и оснащении самолета совершенной си-
стемой информации об отказах. Показатель (19.12) .может ис-
пользоваться для отбора летного состава.
446
Нетрудно видеть, что по рассмотренной схеме развития и
количественной оценке аварийной ситуаций
' 1 -Р (ПЛ/П,) = 1- Ф* ) = Р(ЛПАИ/П •),
\ J
т. е. изложенная методика может применяться для расчета ве-
роятности летного происшествия-Р (ЛПАИ/П,) и последующего
расчета безопасности полета по общим критериям (19.3), (19.4).
К важному показателю безопасности полета относится веро-
ятность того, что в течение времени полета £по„ на данном ре-
жиме летчик не допустит ошибок пилотирования (в том числе
связанных с неправильной эксплуатацией /-той системы обору-
дования). Вопрос о законах распределения времени безошибоч-
ной работы летного состава изучен еще недостаточно. Если до-
пустить гипотезу об экспоненциальном законе распределения, то
вероятность безошибочной работы летчика за время ^пол будет
равна: .
= (19.13)
где интенсивность ошибок летчика Хл определяют на основе
статистических данных по выражению
(19.14)
nt — число предпосылок к летным происшествиям, s — число
летчиков, взятых под наблюдение, Д £нал — налет одного летчи-
ка за рассматриваемый период.'
§ 19.2. МЕТОДЫ ЭКСПЕРТНЫХ ОЦЕНОК ПРИЧИН
ЛЕТНЫХ ПРОИСШЕСТВИЙ
Установление возможных причин летных происшествий с
аварийным исходом на основе экспертных оценок базируется на
опросе летного, инженерно-технического состава авиационных
частей и конструкторов летательного аппарата. Опрос проводит-
ся с учетом специализации по профилю служебной (производст-
венной) деятельности и разбивается на два этапа. На первом из
них экспертам ставится следующий вопрос: назовите возможные
причины ЛПАИ, связанные с отказами, особыми внешними ус-
ловиями полета, ошибками пилотирования, организации и уп-
равления полетом с земли, ошибками в технической подготовке
к вылету, и возможные другие причины. По результатам опроса
составляется общий перечень высказанных возможных причин
447
ЛПАИ, который дополняется имевшими .место ЛПАИ и предпо-
сылками к ним по опыту эксплуатации.
На втором этапе опроса общий перечень причин подвергает-
ся экспертной оценке, например, по стобалльной системе. Всем:
экспертам предлагается каждой возможной причине ЛПАИ
выставить оценку в баллах с^, где 0 < cjt < 100. (Для более-
вероятных и опасных выставляется больший балл).
Все полученные оценки нормализуются по формуле
С/,
d^^-A, (19.15).
7=1
где Cjj — количество баллов по /-той причине, высказанное-
i-тым экспертом, N — общее число причин, А — некоторая по-
стоянная величина. Затем составляется табл. 19.1, в последних
-столбцах которой записываются средние оценки по /-той при-
чине
к
= (19.16)
и средние нормализованные оценки по /-той причине
д dJ^ . (19.17)
yep >
S dj ср
i=l
где К— число экспертов.
N
Нетрудно видеть, что 0<^cps£ 1; S ^°ср=1-
7-1
Заметим, что нормализованные оценки (19.17) не зависят от
того, проводилась или нет предварительная нормализация по
формуле (19.15), однако последняя желательна, как будет вид-
но из дальнейшего, для выяснения степени согласованности мне-
ний экспертов.
При подсчете средних оценок иногда вводятся коэффици-
енты веса, отдающие предпочтение той или иной группе экспер-
тов по определенным причинам ЛПАИ (например, летному
составу по ошибкам пилотирования).
По нормализованным оценкам все причины ЛПАИ рас-
полагаются^ в виде перечня и нумеруются в порядке убывания
значений Д!ср- Если построить график рис. 19.9,а, где по оси ор-
динат откладывается номер причины, а по оси абсцисс d°j ср , то'
огибающая кривая может рассматриваться как экспертная
448
29. Румянцев Е. А. и др. 44g
Возможные причины ЛПАИ летный состав
Ns 1 № 2 № 3 . . .
П.1 ^13
П2 ^21 d22 rf23
П3 <^31 ^32 ^33
А djl dj 2 ^'3
*
Пдг dNl- dN2 dN 3
Таблица 19.1
Эксперты Средние оценки
инж.-тех. состав конструкторы
We z .... № k
du di k ср <р
^2 i d2k di ср ^ср
d$ i ds k ^3 ср d° “Зср
rfycp
dj k dj ср
aNl d^ к fifjV ср "Л'ср
функция плотности вероятности причин ЛПАИ, а кривая
п
У] —как интегральная функция распределения (рис.
J-1
19.9,6).
Рис. 19.9. Распределение причин летных
происшествий по методу экспертных оценок:
а — плотность вероятности; б — интеграль-
ная функция распределения
Применяются и другие способы ранжировки, например, пу-
тем присвоения каждой возможной причине ЛПАИ ранга в
виде порядкового номера от 1 до N. Первые места (ранги) при-
сваиваются наиболее вероятным причинам. Если эксперт не от-
дает предпочтения одной причине ЛПАИ перед другой, то он
может давать им одно и то же место. Далее составляется табли-
ца, подобная 19.1, и проводится ее обработка теми же способа-
ми. При этом djCp будет указывать место j- той причины в ряду
других.
Для обработки информации, получаемой в результате опроса
специалистов, существуют специальные методы, одним из кото-
рых является метод ранговой корреляции. Так, для определе-
450
®ия степени согласия в оценке совокупности причин ЛПАИ раз-
личными экспертами вычисляют коэффициент ранговой корреля-
ции или, в общем случае, коэффициент конкордации (согласия).
Если N причин ЛПАИ оцениваются К экспертами, причем
dp — оценка, выставленная г-тым экспертом /'-той
причине;
к
3tij= У, dp — суммарная оценка /-той причины всеми экспер-
тами;
N
X dji
а——— — среднее значение всех суммарных оценок по N
N причинам;
Д, — m.j— а — отклонение суммарной оценки /-той причины от
среднего значения;
то коэффициент конкордации (коэффициент связи ранжировок)
(Определяется формулой.
S (А2)
W== ’• 1 > W > °; (19.18)
Omax \ )
тде
7-1
a 5ти(Ду-2) -- максимальное значение S (Ау2), которое до-
стигается, если все эксперты ранжируют причины ЛПАИ совер-
шенно одинаково. Таким образом, если IF= 1, то наблюдается
полное совпадение мнений экспертов, если W = 0, то между
оценками экспертов не существует никакой связи, что свиде-
тельствует о малой изученности причин ЛПАИ как объектов
экспертной оценки.
Проведем оценку согласованности ранжировок по N причи-
нам, данных двумя экспертами. Тогда
= dp + dfi;
N
a --------------
AZ
N
7 —dji dx d^ d2,
N
где = —
средняя оценка всех N причин первым
экспертом;
29*
451
N
d2 == — У dj2 — средняя оценка всех N причин вторым эк-
j =i спертом.
Заметим, что при проведении предварительной нормализации;
оценок экспертов по формуле (19.15) как суммарные оценки
лг N N N
2 X ^j2= • • •= 2 ^ji — • = S djk = a,
7=1 7-1 7=1 7=1
так и средние оценки по всем W причинам
_ _ __ д
d\ = d2=-. .. = di = . . . = dk = = d
для всех экспертов есть величины постоянные и одинаковые'.
Таким образом,
, 7 = 1
5raax(A72) = 4f (dj-d)2; djX=dj2 = dj
и коэффициент конкордации
W^}—------------------------ .
n _
4 y; (cf7— d)2
7-1
Пусть, например, N=A и оценки двух экспертов проставляются
путем присвоения порядкового номера. Рассмотрим три вариан-
та ранжировок*.
* При оценке по стобалльиой системе этому примеру соответствуют-
оценки в 10, 20, 30, 40 баллов, а в формуле (19.15) А = 8.
452
Для всех трех вариантов dj = d2 = d = 2,5; Smax =20. Во вто-
ром варианте мнения экспертов гаротивоположны, и коэффициент
конкордации обращается в нуль.
При ранжировке N причин /( экспертами путем присвоения
.рангов от 1 до N (если один эксперт не присвоит одного ранга
двум и более причинам) формула коэффициента конкордации
09.18) примет вид:
12.SGL2)
______' } '
№(№-N) '
Существуют и другие способы оценки согласованности ранг
жировок. Например, по Спирмену коэффициент ра'нговой корг
реляции для двух экспертов ‘
6 (^/i ^/а)
R = 1-----.
А/(№— 1) ;
Здесь ф-1 соответствует случаю, когда оценки обоих экспертов
полностью совпадают, —1 — когда оцецки противоположны,
,Д' = 0 —оценки экспертов считаются независимыми.
Оценка значимости коэффициентов . конкордации произво-
дится теми же способами, что и оценка коэффициентов корре-
ляции в теории вероятности.
Устанавливаемые на базе экспертных оценок возможные
причины ЛПАИ и их ранжировка удовлетворительно согласу-
ются с данными статистики по летным происшествиям и пред-
посылкам к ним и не расходятся с оценками, полученными Дру-
гими методами. Это дает основание распространить метод экс-
пертных оценок на решение задачи отбора признаков, сопутст-
вующих различным ЛПАИ, в интересах установления причины
летного происшествия с использованием объективной информа-
ции бортовых систем регистрации полетных данных.
В процессе опроса экспертам ставится вопрос: какие признаки
надо знать (какие полетные данные надо регистрировать) для
восстановления (различения) /-той причины летного .происшест-
вия. Из всех признаков, которые были названы специалистами,
путем исключения повторяющихся составляется общий перечень
т признаков (параметров) для всех причин П,- и заполняется
табл. 19.2.
В верхней строке таблицы записываются причины ЛПАИ и их
вероятности d7-°, полученные в предыдущем опросе экспертов и
являющиеся нормализованными оценками причин ЛПАИ в табл.
N
19.1. (Напомним, что У d? == 1). В левый столбец заносится пе-
7 = 1
речень т параметров, а в соответствующих клетках таблицы про-
453
ст является 1, если ч-ый признак позволяет, по мнению экспертов,,
различить (установить) /-тую причину, а если нет, то проставля-
ется 0.
При решении вопроса о том, позволяет ли v -ый признак разли-
чить j-тую причину и следует ли поэтому в соответствующую
клетку табл. 19.2 вносить единицу или нуль, могут возникнуть
расхождения в мнениях экспертов. Решение в этих случаях при-
нимается по большинству голосов, для чего перечень т парамет-
ров по /-той причине предлагается К экспертам, которые по ка-
ждому параметру ставят единицу или нуль.
Возможна также оценка значимости каждого признака для
восстановления той или иной причины, когда экспертам предла-
гается выставить оценку а1ч (например, по стобалльной систе-
ме) всем имеющимся в перечне т признакам /-той причины лет-
ного происшествия. Наиболее важному признаку выставляется
наибольший балл. После нормализации оценок по каждому экс-
перту
у d; v
v = 1, 2 . . .т
2 V
454
находятся средние оценки v-ro признака по К экспертам
к т
S Ь1Ч 2^ = 1
1=1 ч--1
с, = ------ ;
К
и оставляются для занесения в табл. 19.2 те т* признаков, для
т*
которых X cv — 9,95.
',=1
При этом нумерация ведется в порядке убывания значений
с,, а оставленным признакам присваивается символ «1».
Таблица 19.2 по своей форме не отличается от таблицы (см.
гл. XI), в которой перечень причин ЛПАИ и перечень подлежа-
щих регистрации в аварийных БСРПД признаков составлялся
на основе технических методов исследования летательного аппа-
рата. Отличие состоит лишь в том, что вместо вероятностей
Р (П; /ЛПАИ) в табл. 19.2 фигурируют адэкватные им по смыс-
лу величины полученные по экспертной функции распределе-
ния причин ЛП. Поэтому при использовании отобранных по ме-
тоду экспертных оценок признаков ЛП для проектирования ава-
рийных БСРПД применяют те же преобразования табл. 19.2 и
те же способы автоматической обработки информации БСРПД.
Правда, достоверность восстановления причин ЛПАИ может
оказаться при этом более низкой.
С другой стороны, метод экспертных оценок обладает важным
преимуществом (помимо простоты, экономичности и малых за-
трат труда), связанным с тем, что в числе признаков ЛПАИ мо-
гут быть такие, которые не представляется возможным регистри-
ровать в полете, в частности, признаки, устанавливаемые при
внешнем осмотре летательного аппарата на месте аварии или ка-
тастрофы. Поэтому применение этого метода, обобщающего мне-
ния и опыт многих специалистов, позволяет наряду с использова-
нием информации БСРПД прийти к правильным выводам о при-
чинах ЛП. Экспертные оценки летательного аппарата в целом
дают возможность выяснить недостатки в конструкции летатель-
ного аппарата и его оборудования с точки зрения безопасности
полета.
§ 19.3. МЕРОПРИЯТИЯ ИНЖЕНЕРНО-АВИАЦИОННОЙ СЛУЖБЫ
ПО ОБЕСПЕЧЕНИЮ БЕЗОПАСНОСТИ ПОЛЕТОВ
Мероприятия в частях ВВС по обеспечению безопасности по-
летов включают в себя:
— улучшение организации полетов и руководства ими;
— повышение квалификации летного и инженерно-техническо-
го состава;
— повышение надежности и технического совершенства’ авиа-
ционной техники и наземных средств обеспечения полетов.
455
Анализ деятельности авиационных частей ВВС показывает,
что из года в год наблюдается повышение безопасности полетов.
Однако, несмотря на большую и систематическую работу по обес-
печению безопасности полетов, время от времени наблюдаются
отдельные случаи летных происшествий.
Для выяснения и установления истинных причин летных про-
исшествий производится их расследование специальными комис-
сиями. В состав комиссии по расследованию летного происшест-
вия входят опытные специалисты: летчики, штурманы',- инженеры,
врачи, представители промышленности и др.
Расследование начинается сразу же после получения донесе-
ния о летном происшествии.
В целях обеспечения объективности расследования, в комис-
сию назначаются лица, не имеющие отношения к данному проис-
шествию и не несущие за него ответственности.
Для согласования действий между членами комиссии состав-
ляется план работы комиссии и краткие методические указания к
нему.
Примерное содержание методических указаний для членов ко-
миссии из инженерно-технического состава можно сформулиро-
вать следующим образом:
— осмотреть место происшествия и внешнее состояние лета-
тельного аппарата (или его разрушенных частей);
— в случае сохранения информации, обработать данные бор-
товых регистрирующих устройств;
— проанализировать возможные причины отказов авиацион-
ной техники в момент происшествия по данным бортовых регист-
рирующих устройств, по характерным признакам, определяющим
положение органов управления, работу авиадвигателей, взаимное
расположение узлов и деталей в агрегатах и т. п.;
— опросить членов экипажа и других очевидцев летного про-
исшествия о работе авиационной техники в полете;
— изучить данные о подготовке летательного аппарата к поле-
ту (кто выполнял какие работы, кто контролировал, оформление
документации);
— изучить материалы .медицинского обследования летного со-
става;
— изучить данные о наработке летательного аппарата, выпол-
нении регламентных и ремонтных работ, доработок;
— просмотреть документацию по дефектам и отказам, имев-
шим место при эксплуатации данного типа летательного аппа-
рата.
Комиссия по расследованию летного происшествия может
привлекать к своей работе различных специалистов, назначать
исследования и испытания аварийной авиационной техники (в
лабораториях и на стендах ремонтных частей, заводов промыш-
ленности, научно-исследовательских институтов).
456
Работа комиссии считается законченной, если установлены
причины летного происшествия, виновные лица и разработаны
мероприятия по предупреждению подобных летных происшест-
вий в дальнейшем.
Сбор статистических данных о причинах и обстоятельствах
появления предпосылок к летным происшествиям и их тщатель-
ный инженерный анализ позволяют выявлять конструктивные
недоработки авиационной техники, недостатки в подготовке лет-
ного и инженерно-технического состава и организации полетов.
Для учета и анализа предпосылок к летным происшествиям
в каждой части имеются специальные журналы.
Важнейшим мероприятием по обеспечению безопасности по-
лета является обучение летных, экипажей действиям в особых
случаях полета.
Наиболее характерные случаи отказов авиационной техники
и рекомендации по действиям экипажа при их возникновении
обычно указываются в инструкции летному экипажу. При этом
ютличное знание экипажами авиационной техники и особенно-
стей ее эксплуатации, практическая подготовленность летного
•состава к действиям в особых случаях имеют решающее значе-
ние для безопасности полетов.
Обучение летного состава действиям в особых случаях поле-
та, разработка рекомендаций экипажам, научный анализ случа-
ев летных происшествий и предпосылок к ним являются прямой
обязанностью инженера части по авиационному оборудованию.
В последнее время для обучения практическим действиям
экипажей в особых случаях полета широко используются авиа-
ционные тренажеры, программирующие устройства и система-
тический тренаж непосредственно в кабинах летательных аппа-
ратов.
Особое значение для обеспечения безопасности полета имеют
организационно-технические мероприятия ИАС, направленные
.на высококачественное выполнение работ по подготовке авиа-
ционной техники к полетам, регламентных, ремонтных и других
работ, а также на воспитание высокой ответственности и дис-
циплинированности личного состава ИАС.
Низкое качество работ, выполняемых на авиационной тех-
нике, слабый контроль за ее состоянием со стороны инженерно-
технического состава могут явиться причинами летных проис-
шествий.
Несвоевременное предупреждение возможных отказов, воз-
никающих вследствие наличия конструктивных и производст-
венных недостатков авиационной техники, несвоевременное про-
ведение профилактических работ и доработок являются наруше-
нием правил эксплуатации, влекущим за собой снижение без-
опасности полетов.
457
В качестве основных мероприятий, проводимых инженером
части по авиационному оборудованию в целях повышения безо-
пасности полетов, можно назвать следующие:
— систематический контроль состояния авиационного обору-
дования летательных аппаратов части;
— - изучение и анализ всех отказов и неисправностей авиаци-
онного оборудования и установление истинных причин их появ-
ления;
— регулярное проведение технических разборов;
— разработка и совершенствование средств и методов экс-
плуатации авиационного оборудования;
— постоянное изучение и совершенствование знаний и прак-
тических навыков эксплуатации авиационной техники летным и
инженерно-техническим составом;
— учет доработок по авиационному оборудованию и оценка
их эффективности после внедрения;
— составление требований к промышленности по устранению
конструктивных и производственных недостатков авиационного
оборудования.
Обеспечение безопасности полетов неразрывно связано с
обобщением опыта эксплуатации однотипной авиационной тех-
ники различными частями.
С этой целью проводятся конференции по обмену опытом,
-выпускаются информационные бюллетени с описанием отказов
и неисправностей и мер по их предупреждению.
Выполнение мероприятий ИАС по обеспечению безопасности
полетов способствует повышению боеготовности частей ВВС.
РАЗДЕЛ ЧЕТВЕРТЫЙ
СПОСОБЫ ОЦЕНКИ ЭКСПЛУАТАЦИОННОЙ
И БОЕВОЙ ЭФФЕКТИВНОСТИ ЛЕТАТЕЛЬНЫХ
АППАРАТОВ
Глава XX
ЭКСПЛУАТАЦИОННЫЕ ОЦЕНКИ АВИАЦИОННОГО
ОБОРУДОВАНИЯ И СИСТЕМ ТЕХНИЧЕСКОГО
ОБСЛУЖИВАНИЯ
§ 20.1. ЭФФЕКТИВНОСТЬ ИНЖЕНЕРНО-АВИАЦИОННОЙ
СЛУЖБЫ И СПОСОБЫ ЕЕ ОЦЕНКИ
В широком смысле под эффективностью инженерно-авиаци-
онной службы понимается степень ее приспособленности к вы-
полнению задач инженерно-авиационного обеспечения учебно-
боевой подготовки и боевых действий частей и соединений ВВС.
Эффективность ИАС зависит от многих факторов, среди ко-
торых важнейшими являются штатная и организационная струк-
тура ИАС, принятые схемы построения и организации техноло-
гических процессов обслуживания авиационной техники, уровень,
подготовки и квалификации специалистов ИАС, оснащенность
ИАС техническими средствами .механизации и автоматизации
процессов обслуживания, совершенство применяющихся средств
контроля оборудования и аэродромно-технических средств, ма-
териальная база ИАС для выполнения ремонтно-профилактиче-
ских работ и другие. Она зависит также от вида и напряжен-
ности учебно-боевой подготовки и боевых действий.
Эффективность ИАС оценивается по количественным крите-
риям, которые могут быть различными для тех или иных перио-
дов деятельности инженерно-авиационной службы. В настоящее-
время применяются главным образом статистические и вероят-
ностные критерии.
Для мирного времени эффективность ИАС части можно оце-
нивать, например, такими статистическими показателями, как
средний процент исправных самолетов, средний налет на один
самолет или среднее число самолето-вылетов, в которых не бы-
ло отказов по вине ИАС за определенный отрезок времени.
459'
Эффективность работы ИАС на отдельных этапах, например,
.за летный день определяется такими показателями, как суммар-
лый налет всех летавших самолетов ZHajI и коэффициент исполь-
зования стартового времени /гст, равный_ отношению среднего
налета одного самолета за летный день Аал к продолжительно-
сти стартового времени
N
_ X Аол I
д Аал Z=1
“-ст= .. , ?
ДСт ** ’ •’СТ
тде /„ал / — суммарное время полета i-того самолета в тече-
ние летного дня;
N — число летавших самолетов.
Значение kCT характеризует, насколько интенсивно использу-
ются самолеты в течение стартового времени, что в значительной
мере определяется работой ИАС.
Для боевых действий в качестве критерия эффективности ра-
боты ИАС может приниматься количество самолето-вылетов, ко-
торое способно обеспечить ИАС в течение заданного времени
при условии отсутствия отказов авиационной техники по ее ви-
не.
Интенсивность использования самолетов характеризуется от-
ношением фактического числа самолето-вылетов Аф к распола-
гаемому Ар:
где Ар отвечает такому числу самолето-вылетов, которое бы-
ло бы при отсутствии задержек в процессе подготовки к выле-
ту (например, из-за устранения неисправностей) и ожидания вы-
лета (готовый самолет немедленно взлетает, а подготовка к сле-
дующему полету начинается сразу после посадки).
Ар= — ZVcp : : - ~ Ncp,
^об Т ^пол
тде t — длительность рассматриваемого периода;
Аб — время оборачиваемости самолета, равное сумме
времени подготовки одного самолета t„ и времени
полета £пол;
ДАр — среднее наличное число самолетов.
Эти статистические показатели эффективности ИАС основы-
ваются на данных эксплуатации авиационной техники и отра-
-жают существующее состояние инженерно-авиационного обес-
печения.
Для решения задач совершенствования структуры и органи-
.зации работы ИАС применяют математические модели деятель-
460
ности ИАС, исследование которых позволяет по определенным'
критериям эффективности- оптимизировать организационные*
формы и методы технической эксплуатации. При этом, как пра-
вило, используют динамические модели, учитывающие случай-
ный характер времени выполнения операций, моментов появле-
ния отказов техники, моментов поступления заявок на вылет са-
молетов и других величин. При построении моделей деятельно-
сти ИАС наибольшее распространение получили методы теории1
массового обслуживания, динамики средних и статистических
испытаний.
При использовании первого из указанных методов инженер-
но-авиационная служба рассматривается как своеобразная си-
стема массового обслуживания, обладающая некоторой про-
пускной способностью.
В теории массового обслуживания предполагается, что поток:
заявок на обслуживание является стационарным пуассоновским
(простейшим) потоком, обладающим свойствами отсутствия по-
следствия и ординарности. Вероятность того, что за промежу-
ток времени Д t поступит т заявок, равна:
т\
где X — постоянный параметр, равный плотности потока одно-
родных заявок.
В частном случае вероятность того, что за тот же промежуток
времени Д t не поступит ни одной заявки, будет равна:
Ро(д0 = е-хЧ (20.1>
Вероятность поступления одной заявки
/^(Д/) =Х ДX Д/. (20.2)
Закон распределения промежутка времени Д/между двумя,
событиями-заявками определяется соотношениями:
/(Д^) = Хе-'Х4Д;
Г(Д^)= 1 - е-’-Ч
Математическое ожидание
7И(Д*) = f Д£/(Д/)^= — .
0
В большинстве задач массового обслуживания допускается,,
что время обслуживания заявки подчиняется показательному
закону распределения с постоянным параметром р:
Аобсл W (Т'обсл </)=! — е-^; /о6сл (/) = ц е~Ч
46Ё
Среднее время обслуживания
оо
^обсл = J t И dt = — .
о
Параметр р представляет собой плотность потока освобож-
дения обслуживающих групп (каналов).
Вероятность того, что за время Д/ ни одна из k групп, заня-
тых обе луж и:в ани ем, не о своб одится,
pk (Д £) = (е-н^)* - = 1 — Ар Д/. (20.3)
Вероятность того, что за время Д t освободится одна группа из
k 1 занятых:
/’i;A+1(^) =q+1e-^!(l -е-^)=(А+1)рДЛ (20.4)
Процесс обслуживания в случае простейшего потока заявок
и показательного закона распределения времени обслуживания
представляет собой случайный процесс Маркова.
Если число состояний системы обслуживания конечно (0, 1,
2,. .п), а в момент t она находилась в состоянии k (т. е. k групп
обслуживания занято), то вероятность того, что она в момент
t 4*' Д t будет находиться в том же состоянии А, будет равна:
Pk (t + д 0 = Pk (О Ро (д0 Pk<M) +рк+1 (Фц Ж (Ы) +Pk-i(t)PiWh
тде Рь, рк+\, Рк-\ — вероятности состояний A, A -f- 1;
А—1 системы в момент t, причем
S Pk= ь
М
Pk (t)Po(A t)Pk(A i) — вероятность того, что в системе, на-
ходящейся в момент t в состоянии
А, за время Д t не произойдет изме-
нений (ни одна группа обслужива-
ния не освободится, ни одна заявка
не поступит). С учетом (20.1), (20.3)
при малых Д t
Pk (t)Po (^}Pk (д 0 = Pk (О e-XliZ е-^4/ s pk (/) [ 1 - (X+ Ар) Д t},
Pa+i (0 Pi;*+i (д^) — вероятность того, что система, на-
ходящаяся в .момент t в состоянии
А-)- 1, перейдет за время Д t в со-
стояние А (одна группа обслужива-
ния освободится). С учетом '(20.4)
при малых Д^
Pk+Mpi* +1(Д0=А+1И(М l)e-ftii4Z(l - е-^)-рй+1(/)(А + 1)рД/,
462
pk-i(t) pr(A вероятность того, что система, на-
ходящаяся в момент t в состоянии
k — 1, перейдет за время А/ в со-
стояние k (поступит одна заявка).
С учетом (20.2) при малых Д
Pk-df)Pi №0^ Pk-i x M = Pk-i (0 д t-
Таким образом,
ph (P + W =Pk (О В - (x + M Д/! + Ph+i (*) (&+1) P M + Pk-ix д^ •
Разделив обе части равенства на Д t и осуществляя предель-
ный переход при Д t -+ 0, получим систему дифференциальных
уравнений для вероятностей p0(i); Pt(i) • pn{t) (уравнений
Эрланга):
dpo(t)
dt
= -Х^0(/)Т р/?,(/);
= ><А-!(О-(Х+ WH0 + (^4- 1)p^+1W; (20.5)
-ДД- =^-1W ~ wpM
Решение этих уравнений при начальных условиях (Ро(О) = 1;
щ (0) = р2(0) = ... = рп (0) = 0) позволяет определить загрузку и
возможности системы обслуживания.
Если в системе обслуживания обращается конечное число т
объектов обслуживания, то в (20.5) следует заменить к на
(т — k) \, а Ар на А*р, значения которого определяются следую-
щими соотношениями:
k* = k при 1 < k < п\
k* = ii при n<.k<m.
(20.6)
Помимо этого, (20.5) дополняется
очевидным соотношением:
т
X pk = 1-
о
Рассмотрим ИАС как систему массового обслуживания по-
летов т самолетов. Заявки на полеты, например, на перехват
воздушных целей или поражение наземных целей, образуют ста-
ционарный пуассоновский поток с параметром X. Самолеты, вер-
нувшиеся с выполнения задания, при наличии свободных групп
463
обслуживания (расчетов) сразу проходят подготовку к следую-
щему полету. Подготовка производится п расчетами, причем
обезличенно, т. е. любой свободный расчет может готовить лю-
бой самолет. Будем считать, что время полета t„0„ и время под-
готовки самолета tn распределены по показательному закону.
Тогда плотность потока обслуживания целей у. и плотность по-
тока подготовки самолетов а соответственно будут равны:
1 1
|1==F"; “““Г’
''ПОЛ ‘'П
где ^пол — среднее время полета;
i„— среднее время подготовки к повторному вылету.
Будем считать также, что к началу операции (t=0) все т
самолетов были готовы, все
С = т-(а-к) самолетов а самолетов' 1г расчетов свободны от об-
Ожидание
Вылета
Полет
jua
^Подготовка
к самолетов
Рис. 20.1. Схема массового обслу-
живания полетов
Допустим, что число самолетов,
а
А
служивания.
В произвольный момент
времени каждый самолет мо-
жет .находиться в одном из
трех состояний:
— подготовлен к полету
и ожидает вылета;
— выполняет боевое зада-
ние в воздухе;
— находится на подго-
товке.
находящихся в воздухе в мо-
мент t, равно а; число самолетов, проходящих подготовку, рав-
но k, тогда число самолетов, готовых к вылету, составит с — т —
— а — k (рис. 20.1). Вероятность этого состояния в системе об-
служивания полетов обозначим ра, к (t).
На рис. 20.2 изображена схема состояний системы, в кото-
рой условно показаны состояние а, /г и смежные с ним состояния
системы, в которые она может переходить или которые могут пе-
реходить в состояние a, k. Стрелками указаны направления пе-
реходов, под стрелками даны значения потоков этих переходов.
По схеме рис. 20.2 с учетом (20.5) нетрудно записать диффе-
ренциальное уравнение для ра, Д/):
<iPa кЩ + *(/)+(£ + i)apa,k+1(^) +
+ ^Ра-1, k (/) + И (а -ф 1)/2а+1; £-1 (£).
При составлении уравнения по схеме вида рис. 20.2 удобно
пользоваться следующим простым правилом: число членов в
464
правой части уравнения равно числу стрелок на схеме, каждый
член равен произведению интенсивности потока на вероятность
того состояния, из которого стрелка выходит. Знак члена поло-
жителен, если стрелка ведет в данное рассматриваемое состоя-
ние, и отрицателен, если стрелка выходит из него.
Р и с. 20.2. Схема переходных состояний в системе мас-
сового обслуживания полетов
Выпишем систему уравнений для вероятностей всех возмож-
ных состояний системы обслуживания полетов:
/1\ , ...
---1-^- = - т ар0, т (0 + р /?1; (/);
at
Р ~ + (k-\-\)apa, k+1 {i) +
at
+ ^Pa-i,s (£)+и-(а_М)Ан-i;*-i (£); (20.7)
dt
Эта система должна быть дополнена очевидным нормирующим
условием:
а—0; Ь=т
S Ра, k (t) = 1 •
а—т; /г=0
Решение системы уравнений (20.7) связано с большими за-
труднениями, однако на практике наибольший интерес пред-
ставляет исследование установившихся режимов обслуживания^
которым отвечает равенство нулю всех производных в (20.7).
30. Румянцев Е. А. и др. 465
''При этом (20.7) преобразуется в систему алгебраических
уравнений:'
О =?= — т ар0, т + ppi, т-i;
О = — (k+pa+ka)Pa, k +(й +1 }аРа, й+1
О — — т Ц рт, 0 + X pm—l, 0 •
\-^Ра-1, й~Гр (^ k-1',
(20.8)
Решение этих уравнений имеет вид:
а=О; k~tn
У) р«+й фй
а=т', А=0
1
а\ s! sk~n
(20.9)
где
К
Р = —
s = k при k < n; s = n
при £>/г.
Длина очереди на подготовку самолетов равна k—n.
Рассмотренная модель системы обслуживания позволяет
учесть отказы в полете, которые приведут к увеличению загруз-
ки ИАС. Если поток отказов простейший с параметром Хв, то
для учета отказов следуете уравнениях (20.7), (20.8) и формуле
(20.9) заменить ц на р* = р 4-Хв.
При известных вероятностях различных состояний системы
обслуживания полетов можно провести анализ эффективности
ИАС по различным критериям,
К числу важнейших показателей эффективности ИАС следует
отнести вероятность необеспечения вылета самолета на боевое
задание 1ИН.
Вылет не будет обеспечен в том случае, когда в момент по-
ступления заявки на вылет нет ни одного готового самолета. Ве-
роятность такого события равна сумме вероятностей тех состоя-
ний, для которых а -1 - k = т,
^н= 2 р^-
a +k=tn
С учетом отказов в воздухе ,
^н=^Рм + -^Ул,й; т)=2^.
1 4-7) р
а+й=т a+k=m—1
Варьируя различными исходными данными, можно получить
закономерности изменения WH и найти рациональный состав и
число групп обслуживания при известном самолетном парке и
типовых потоках заявок на полеты. При этом должно обеспе-
466
чиваться заданное (минимально возможное) значение вероятно-
сти необеспечения вылета WH. Для примера на рис. 20.3 приве-
дена зависимость W„ от числа расчетов обслуживания п, из
которой следует, что при принятых условиях для обслуживания
четырех самолетов нерационально иметь число расчетов подго-
товки более двух.
Ф и с. 20.3. Зависимость вероятно-
•сти необеспечения вылета от чис-
ла обслуживающих групп
Р и с. 20.4. Зависимость коэффи-
циента готовности и других пока-
зателей эффективности ИАС от
числа расчетов обслуживания
Заметим, что величина q(t) = 1—W.a(t) называется относи-
тельной пропускной способностью системы обслуживания.-Для
данного момента t это есть отношение среднего числа обслужен-
ных за единицу времени заявок на полеты (например, на пере-
хват) к среднему числу поступивших. В свою очередь величина
Wn выражает также среднюю долю необслуженных целей. Если,
например, за время операции по перехвату было Na воздушных
целей, то в среднем из них не будут перехвачены.
Рассмотренные методы теории массового обслуживания поз-
воляют оценить эффективность ИАС по ряду других важнейших
показателей. С использованием формул, определяющих pa,k,
можно найти средние значения времени пребывания самолетов в
:воздухе ^пол, простоя в небоеготовом состоянии г?пр, . простоя в
ожидании подготовки t01K и времени нахождения в подготовлен-
ном состоянии trm. Можно найш также среднее время загруз-
ни t3 расчетов обслуживания.
Относя эти времена к стартовому времени, получим значе-
ния таких показателей эффективности ИАС, как:
— коэффициент использования стартового времени ;
СТ
30* -467
— коэффициент простоя в небоеготовом состоянии /гпр
— коэффициент ожидания подготовки k0= 1
Гст
^пр
^ст
— коэффициент готовности самолетов /гг —
— коэффициент загрузки расчетов подготовки k3—-~- •
ГСт
На рис. 20.4 приведены графики этих коэффициентов в зави-
симости от числа расчетов обслуживания для тех же условий,,
что и на рис. 20.3.
Методы теории массового обслуживания позволяют устано-
вить аналитические зависимости показателей эффективности от
•некоторых основных параметров, характеризующих организа-
ционные формы ИАС. Однако этот метод отличается известной,
сложностью, особенно если учесть большое .возможное число со-
стояний в процессе обслуживания полетов.
Поэтому при исследовании эффективности ИАС находит
применение более простой метод динамики средних, основанный
на составлении дифференциальных уравнений процесса обслу-
живания не для вероятностей различных состояний системы, а
для средних количеств объектов обслуживания, находящихся в.
каждом из возможных состояний.
Рассмотрим кратко существо метода применительно к рас-
смотренной задаче. Из .рис. 20.1 следует, что изменение числа:
самолетов в воздухе мож:ет происходить за счет поступления
заявок иа вылеты. За время Д t это приращение будет равно ХД t.
С другой стороны, число самолетов в полете уменьшится за:
счет посадки самолетов, выполнивших задание (а также отка-
завших в полете). Эта убыль за время Д t составит (у- + Хв) аД t„
Отсюда общее изменение Да количества самолетов в воздухе
за время Д/ равно:
Да = X Д£ — (р.Хв) а Д t. (20.8>
Разделив обе части равенства па Д/ и переходя к предель-
ным значениям приД£->0, получим дифференциальное урав-
нение: da
— = X - (и + Хв) а. (20.10),
Аналогично находятся уравнения:
elk
— = — а£ + (р-+ хв) а; (20.11)»
(20.12>
где a-^k~\-c=m,
468
Как и .в предыдущем случае, щри интегрировании этих урав-
нений следует принимать во внимание следующее: когда число
самолетов, требующих подготовки, больше числа групп обслу-
живания (k^>n), образуется очередь длиной k—п, тогда в урав-
нениях следует вместо k писать п.
Решение уравнений (20.10) — (20.12), более простых сравни-
тельно с (20.7), позволяет исследовать динамику системы об-
служивания полетов, оценить ее эффективность по рассмотрен-
ным выше показателям и сделать обоснованные выводы о ра-
циональном числе групп обслуживания.
Следует подчеркнуть, что основные показатели эффективно-
сти ИАС, а также потребное число групп обслуживания сущест-
венно зависят от среднего времени подготовки самолета к пов-
торному вылету (плотности потока подготовки а). В свою оче-
редь эта величина определяется степенью внедрения в практику
эксплуатации автоматических средств контроля и средств меха-
низации трудоемких процессов. Чем больше а, тем лучше все
показатели эффективности ИАС и тем меньший штатный состав
ИАС требуется для обеспечения заданных показателей эффек-
тивности.
Рассмотренные аналитические методы дают приближенные
оценки ИАС. Точность их определяется прежде всего правомер-
ностью допущений о простейшем потоке заявок на полеты и по-
казательном законе распределения времени подготовки и време-
ни полета. Помимо этого, сама модель системы обслуживания
является весьма приближенной, учитывающей лишь некоторые,
далеко не все факторы, влияющие на процесс функционирова-
ния ИАС. Кстати, этот процесс функционирования имеет много-
разовый характер.
В связи с этим в интересах более полного и всестороннего
учета особенностей функционирования ИАС в процессе обслу-
живания полетов применяют методы статистических испытаний
(методы Монте-Карло), предполагающие исследование стати-
стических моделей.
Изучение по опыту эксплуатации сложных алгоритмов функ-
ционирования системы обслуживания, отражающих последова-
тельность протекающих процессов с учетом сложных взаимосвя-
зей и ограничений в системе, с последующим переходом к ста-
тистическому моделированию, дает возможность без больших-
затрат материальных ресурсов многократно проиграть процесс
обслуживания и получить основные закономерности.
Статистическое моделирование проводится с применением
цифровых вычислительных машин. Основные трудности стати-
стического моделирования связаны с большой трудоемкостью
составления алгоритмов. Что касается законов распределения
случайных величин, характеризующих процессы обслуживания,
то они могут быть любыми. При проведении моделирования слу-
чайные значения времени подготовки, времени полета, события
469
появления отказов и т. п. в каждой реализации процесса обслу-
живания воспроизводятся с помощью датчиков случайных чи-
сел и событий, сообразующихся с законами распределения этих
случайных величин.
§ 20.2. ПРИМЕНЕНИЕ ТЕОРИИ МАССОВОГО ОБСЛУЖИВАНИЯ
ДЛЯ РЕШЕНИЯ НЕКОТОРЫХ ЗАДАЧ ТЕХНИЧЕСКОЙ
ЭКСПЛУАТАЦИИ
В предыдущем параграфе были рассмотрены применения ме-
тодов теории массового обслуживания к исследованию эффек-
тивности инженерно-авиационной службы. Эти методы могут
быть использованы также для решения других многообраз-
ных задач технической эксплуатации, например, таких, как оп-
ределение рационального состава и мощностей ремонтных пред-
приятий, определение потребной пропускной способности аэро-
дромов, нахождение рационального состава и мощности центра-
лизованных аэродромных источников снабжения электроэнерги-
ей, средств заправки топливом и газами, определение рацио-
нального числа испытательных стендов при проведении регла-
ментных работ и многие другие задачи.
Рассмотрим задачи определения потребного числа специа-
листов в группе регламентных работ и определения необходимо-
го оборотного фонда оборудования.
Пусть группа регламентных работ из п специалистов произ-
водит обслуживание т самолетов авиационного подразделения.
Поток поступления самолетов на регламентные работы про-
стейший с параметром X, время выполнения регламентных работ
на одном самолете подчиняется показательному закону с пара-
метром р.. Тогда по уравнениям (20.5) с учетом замечания
(20.6) для установившегося режима будем иметь:
0 — Х(/п—pk-i—\[m — k) Х-f р/г] pk -ф (/г +1) y-Pk+i> (1 < & <ft);
0 = X(/n— &+1)pk-\ — [(m— k)X + рп] pk + npPk+i, (n< k< m);.
O = 'Kpm_1 - n?.pm;
m
S Л-1-
A=0
Разрешив эту систему алгебраических уравнений относительно
pk, получим
/ X \й т\ .
Рь I — I ° Ро> - 1 Т-
lk \ р ) (т - k}\
470
pk = —------------------Pq, n <k <.m,
\ p. / n\nk~n
где '
1
Po n m
У m- (_LV 1?m! V 1 f—У
k\ (m— k)\ \ p. / n\ (m — k}\ nk~'1 \ p. /
й=0 fe=n+l
Тогда среднее число самолетов, ждущих выполнения регламент-
ных работ (математическое ожидание длины очереди), будет
равно:
- V и, \ /и! V it, Ч Ро I ^\k
»o« = 2j (&- >^pk=-~ 2^(k-n) ™ .
п\ 1Ък п (fl — k)l \ /
1г=п+\ л-f-l
Коэффициент простоя самолетов
/ * _ ^ОЖ
л>пр — =
^ОЖ 4“
Математическое ожидание числа свободных специалистов груп-
пы регламентных работ:
S,, V (« — k)m\ / к \к
(п - k)pk = “7----—ГГ, ~ А-
k\ (т — &)! \ р. /
А=0 7г=0
Коэффициент загрузки специалистов
Пример. ТЭЧ отдельной АЭ обслуживает 10 самолетов, которые по-
ступают на регламентные работы в среднем через 14 дней. В ТЭЧ имеются
две группы обслуживания, среднее время выполнения регламентных работ
на одном самолете одной группой 1,5 дня.
Таким образом,
от =10; Х = ~^0,07; р= — ~ 0,68; п =2.
14 1,5
По полученным выше формулам найдем
Яож = 0>13; &пр=0,06; «св=1,12; k* = 0,44.
При решении задачи об оборотном фонде система обслужи-
вания характеризуется следующими данными: п — число рабо-
тающих в начальный момент приборов; 1/Х — 'среднее время ра-
боты прибора; 1 /р- —= среднее время ремонта.
471
Под оборотным фондом понимается необходимое количест-
во запасных приборов, обеспечивающих бесперебойную работу
при условии, что отказавшие приборы вновь восстанавливаются
и используются в эксплуатации.
При этих данных поток заявок на ремонт составит X п, по-
ток восстановления —г р. /г. Для установившегося процесса будем
иметь
O = -XnPo + p.₽i;
0=.—(Хп+^) ^ + Х/грА_14-(х(^4-1)рй 1 <k^n-,
й=0
Среднее количество систем, находящихся в ремонте, составит
необходимое число систем в оборотном фонде
11 11
ЬО £=0
После подстановки р0 и выполнения операций суммирования по-
лучим
X
Р
§, 20.3. ЭКСПЛУАТАЦИОННАЯ ЭФФЕКТИВНОСТЬ
АВИАЦИОННОГО ОБОРУДОВАНИЯ И СПОСОБЫ
ЕЕ ОЦЕНКИ
Под эксплуатационной эффективностью авиационного обо-
рудования в широком смысле понимается степень его приспо-
собленности к выполнению предназначенных функций на требу-
емом уровне, в течение заданного времени, в определенных ус-
ловиях технического обслуживания и боевого применения лета-
тельных аппаратов.
Оценка эксплуатационной эффективности авиационного обо-
рудования производится с помощью специальных критериев,
позволяющих установить соответствие оборудования требова-
ниям эксплуатации и боевого применения, предъявлять требова-
ния к оборудованию вновь проектируемых летательных аппара-
тов и производить сравнение по единым показателям различных
по схеме и конструкции устройств авиационного оборудования
одного назначения.
Критерии эксплуатационной эффективности могут быть об-
общенными, распространяющимися на все оборудование лета-
472
тельного аппарата, и частными, применяющимися к отдельным
«идам, комплексам, или системам оборудования. В последнем
случае оценивается, например, эксплуатационная эффективность
пилотажно-навигационной системы или ее отдельных частей,
эксплуатационная эффективность силовых установок и систем
управления ими, эффективность электроэнергетических систем'
и т. п. Обобщенные критерии обычно применяются в связи с
оценкой летательного аппарата в целом по боевой эффективно-
сти (см. гл. XXI), а также в связи с оценками боеготовности.
Так как эксплуатация летательных аппаратов и установлен-
ного на них оборудования носит массовый характер, то крите-
рии эффективности оборудования являются, как правило, ста-
тистическими или вероятностными.
Важнейшей эксплуатационной оценкой авиационного обору’
дования является его эксплуатационная надежность.
Количественные оценки и способы повышения надежности были
подробно рассмотрены в разделе I. Недостаточная надежность
оборудования и средств, обеспечивающих его подготовку, может
резко снизить боевую эффективность летательного аппарата,
имеющего высокие летно-тактические данные. При низкой на-
дежности оборудования неизбежно возрастают эксплуатаци-
онные расходы.
Такие показатели, как вероятность безотказной работы, сред-
нее время наработки на отказ и некоторые другие, применяют-
ся в качестве эксплуатационных оценок как отдельных агрегатов
и систем, так и авиационного оборудования в целом. В качестве
основной компоненты надежность входит во все критерии экс-
плуатационной эффективности оборудования.
Близким к надежности по своему содержанию является экс-
плуатационная (боевая) живучесть — способность оборудова-
ния выполнять свои функции при наличии боевых повреждений
и отказов отдельных элементов этого оборудования. Живучесть
зависит от надежности систем оборудования (в том числе от
кратности и схемы резервирования), от габаритов, размещения
на летательном аппарате и защиты агрегатов оборудования от
поражающего воздействия снарядов противника и других фак-
торов. Количественно живучесть подсчитывается по формулам
вероятности безотказной работы, но с учетом трех возможных
состояний каждого элемента: исправное с вероятностью р, отказ
с вероятностью q, боевое повреждение с вероятностью q&, при-
чем р + 9+' = 1-
Другим важнейшим показателем эксплуатационной эффек-
тивности является безопасность полета, количественные
оценки и способы повышения которой, были рассмотрены в гла-
ве XIX- Безопасность полета зависит от многих факторов, среди
которых большую роль играют надежность авиационного обо-
рудования, оснащенность летательного аппарата и его оборудо-
вания автоматическими средствами контроля и предупреждения
473
аварийных ситуаций. Безопасность полета непосредственно оп-
ределяется степенью согласования эксплуатационных характе-
ристик авиационного оборудования с летательным аппаратом и
психо-физиологическими возможностями экипажа.
Процесс эксплуатации авиационного оборудования включа-
ет в себя непосредственное его применение в соответствии с
функциональным назначением в полете и техническую эксплуа-
тацию на земле (подготовка к полетам, регламентные и другие
работы). В связи с этим другие критерии эксплуатационной эф-
фективности можно разделить на две группы. В первую из них
входят критерии функциональной эф ф е к т и в н о с т и,
отражающие степень эксплуатационного совершенства и при-
способленности систем и комплексов оборудования к выполне-
нию предназначенных функций в полете. Вторая группа объе-
диняет эксплуатационно-технические критерии, от-
ражающие степень приспособленности авиационного оборудова-
ния к эксплуатации .на земле (технологичность и трудо-
емкость обслуживания, контролепригодность и т, п.). Критерии
второй группы рассматриваются в § 20.4.
Каждая система оборудования предназначена для решения
определенной задачи в полете. Функциональная эффективность
устанавливает количественную зависимость вероятности выпол-
нения этой задачи от основных характеристик системы, в каче-
стве которых обычно берутся надежность и точность. Последняя
определяется функцией распределения выходных координат си-
стемы в условиях ее работы в полете по прямому назначению.*
Ввиду того, что данная система является, как правило, состав-
ной частью или элементом другой, более сложной системы, обыч-
но назначают несколько уровней выполнения задачи, а значит и
несколько уровней, на которых проводится оценка функциональ-
ной эффективности. Например, эффективность гировертикали ав-
топилота стабилизации углового положения самолета-разведчика
может оцениваться по вероятности того, что уходы и ошибки ги-
ровертикали в полете не превзойдут некоторой области значений
Si (первый уровень); по условной вероятности того, что автопи-
лот обеспечит угловую стабилизацию самолета с ошибками, не
выходящими из области значений S2, если уходы гировертикали
не превосходят области Si (второй уровень); по условной вероят-
ности успешного фотографирования, если автопилот обеспечивает
стабилизацию с ошибками S2, а уходы гировертикали не превы-
шают значений Si (третий уровень). Оценки эффективности на
втором и третьем уровнях зависят, в частности, от согласования
гировертикали с автопилотом и самолетом. Функциональная эф-
* На этапе проектирования систем представляет интерес также выясне-
ние зависимости функциональной эффективности непосредственно от пара-
метров системы при избранной ее структуре, а в более широком плане от
структуры и конструктивной схемы.
474
фективность на всех уровнях определяется как точностью, так ж
надежностью гировертикали.
Расчёт функциональной эффективности систем ведется по
формулам полной вероятности. Пусть А — событие выполнения
задачи, которое может произойти вместе с одним из несовмест-
ных и образующих полную группу событий Hi: Н2... Нп. Тогда:
функциональная эффективность, равная по определению вероят-
ности выполнения задачи, найдется по формуле
п
W=PfAf= ^Р(Н.) Р (A/Hf,
1
где Р(Ц) — вероятность события Hf,
Р(А/Ну) — условная вероятность выполнения задачи, если:
событие//; произошло.
При оценке функциональной эффективности на первом уров-
не учитываются точность системы безотносительно к конкретной:
задаче полета летательного аппарата и надежность системы.
При этом под Ну понимаются события безотказной работы и со-
бытия отказов различного типа в системе, причем каждому это-
му событию отвечает соответствующая функция плотности вы-
ходных координат f j (xj, где х/ад; х2... хт)-— координаты систе-
мы. Под событием At выполнения задачи понимается событие,
состоящее в том, что ни одна из координат х не выходит из об-
ласти заданных значений S. Тогда
Г, (S) = Р (Д,)= Р(50) j /ой^о) d~x+P(BJ J Л (л/ ВО dx-f ....
S S
• • + Р(Вп) f fn (xlBn)dx^ f P(Bj) f fj (X/Bj }dx, (20.13)
S J-0 s
где P (So) — вероятность события Во безотказной работы:
системы;
P(Bj ) — вероятность события отказа /-того типа в си-
стеме;
С fj (xlBj'jd х — условная вероятность события А — выход-
s ные координаты системы не выйдут из обла-
сти S, если произошло событие отказа /-того’
типа;
fj (x/Bj) — условная функция распределения выход-
ных координат при отказе /-того типа.
При оценке функциональной эффективности на втором уров-
не обязательно принимается во внимание конкретная задача,,
которая выполняется системой оборудования в полете, чем соб-
ственно и определяется ее приспособленность к выполнению’
475-
этой задачи. При этом, как упоминалось, оценка ведется из ус-
ловий выполнения своих функций старшей по отношению к дан-
ной системой, что предполагает назначение области S (или не-
скольких областей SOj ..Sk) выходных координат данной си-
стемы, при которых еще возможно выполнение задачи старшей
системой.
Если Лц — событие выполнения задачи старшей системой,
то эффективность данной системы на втором уровне
1^П = Р(Л11)-^1(5О)Р(Л11/5О)+ W^PtAn/SJ -h • . .+
k
+ W1(Sk')P{AuISk)=yi P(A1; /) Р(ЛП/Л1;У); Р(Л1; ;)= И/, (S; ),
j.Q (20.14)
где P(X1!/S7) — условная вероятность выполнения задачи,
если выходные координаты данной систе-
мы не выходят из области Sj , a W\ (Sj)
рассчитывается по формуле (20.13), в ко-
торой следует принять S ~ Sj .
Под Аи часто понимается событие, состоящее в том, что вы-
ходные координаты старшей системы y(yi; Уг--.уг) не выходят
из области заданных значений G [тогда в (20.14) Р (Ли) =
= IFn (G}|. Но это необязательно. Лп могут представлять
собой, например, такие события, как визуальное обнаружение
щели, захват воздушной цели самолетной станцией самонаведе-
ния, событие посадки и т. и.
Аналогично определяется функциональная эффективность
.данной системы на последующих, более высоких уровнях. Имея
в виду иерархический принцип построения систем, удобно при-
своить данной системе первый ранг, а более старшим соответст-
венно второй, третий и т. д. ранги. Тогда для произвольного
A-того уровня оценки функциональной эффективности данной
системы будем иметь
£Р(Л^1;ЯР(ЛЛ/ЛЛ_1;У). (20.15)
J=0
Число уровней оценки для каждой системы выбирается осо-
бо с учетом ее места в иерархии систем, обеспечивающих вы-
полнение задачи полета.
Рассмотрим пример оценки функциональной эффективности
инерциальной навигационной системы, предназначенной для ав-
тономного вывода ударного самолета в заданную точку.
Пусть известно, что ошибка по дальности и боковая ошибка
вывода самолета при отсутствии отказов имеют нормальный за-
кон распределения с математическими ожиданиями тх и туУ дис-
персиями а,.2 и оу2 соответственно. Известно далее, что цель, по
которой наносится удар, может быть обнаружена с вероятно-
-476
стью 0,9, если самолет выводится в район, очерченный окружно-
стью радиусом г с центром в точке цели, и с вероятностью 0,1,.
если самолет выводится в район, ограниченный окружностями;
радиусами г и R (рис. 20.5). Обнаружение в других случаях не-
возможно. Вероятность безотказной ра-
боты системы р = 0,98, имеется группа
отказов с вероятностью q\ = 0,01, при
появлении которых в полете распреде-
ление ошибок также подчиняется нор-
мальному закону с параметрами mXl,
Шу^ о2 , о2 При другой группе от-
казов, с вероятностью их появления
<72 = 0,01, вероятность вывода самоле-
та в район цели, ограниченный окруж-
ностью R, равна нулю.
Примем для простоты тх = ту ~
= тх=тУ1=0; аЛ=ау=а; аЛ1= ayi — ар
Тогда
Р н с. 20.5. К расчету
функциональной эффек-
тивности
/о (*, Т)=
1
2 тс а2
’+у2
2а’
Так как х = pcos 0; y = p.sin0, то
df0 (р, 0) = ——- ре d 0
2к о2
и функция плотности распределения случайной величины ради-
альной ошибки р выхода самолета на цель примет следующий;
вид:
2г.
/о (р) = Г Р е
о
р р2
^0= 1
о2
Вероятность выхода самолета в области Si и S2 при безотказной:
работе навигационной системы:
г
Р{?< r)= J А(р) dp = 1 — е 2а> ,
О
я _ __ J5L
P(r<P<R)= J /0(р)^Р = е 2°а —е ™ •
Г
При появлении отказов первой группы вероятности выхода:
на цель подсчитываются по тем же формулам, но в них следует
.заменить а2 на Oj2.
447
Таким образом,
х г2 г-
^.№)=/>(1-)+<?!(! -сГ2^'); (20.16)
7~2 /?- 73 У?3
wz /ох / 2<j- 2?3 \ I _ / 2т«3 2т>3 \
l^i(52)=p(e — е ) + ?i(e -е );
1^11 = Р(Л1,)=1У1(51)Р (A^SJ + W^PtAu/S^
тде Лп — событие обнаружения цели, а условные вероятности
Р (А1Д1); P(AnIS2) известны и соответственно равны 0,9 и 0,1.
Если г =.20 км; Д = 40 км; о = 10 км; с1=20 км, то
Д7п=(0,98-0,86+0,01-0,39)0,9-j-(0,98-0,14+0,01-0,47)-0,1^ 0,78.
Функциональная эффективность навигационной системы на
первом уровне может быть оценена по (20.16), как вероятность
выхода в круг с радиусом г и центром в точке цели.
При г = 20 км W\ — 0,762.
Для приборов и измерительно-индикаторных систем оценка
функциональной эффективности на первом уровне проводится
по количеству информации, доставляемой ими относительно из-
меряемых величин. Пусть х есть измеряемая величина, которая
приобретает значения Xi, х2 .. хт, а у — наблюдаемая по при-
бору величина, приобретающая значения yi; у2... ут. Величины
х и у в общем случае не отвечают друг другу из-за ошибок и
помех измерения, а также возможных отказов в приборе. Пол-
ная взаимная информация, которая может быть получена при
наблюдении по прибору за процессом х, составит
fy-x = S S Р {х^Р 1Х^ 1о£
г-1 7=1
P(yjPt)
Р(уП ’
т
тде Р{х^\ Р(У;)= 2 Р kxi) Р(.Уj —соответственно вероятно-
i =1
сти появления значений xt и у;, а Р(у; [х^— условная вероят-
ность появления на приборе значения yj , если измеряемая ве-
личина имеет значение xt. Эта условная вероятность с учетом
полной группы несовместных событий безотказной работы Во и
п событий отказов (у = 1.. л) запишется так:
р (yj /+) = Р (So) Р (у; /•+; So) + Р (В,) Р (yj /ху, В,) +
+ ...+Р(Дг)+(^ /лгВ„),
где P(yj /ху, Вч) — условная вероятность появления значения
У; на приборе, если измеряемая величина
имеет значение xt, а в приборе имеет ме-
сто отказ Bv.
478
При оценке функциональной эффективности приборов и из-
мерительных систем на более высоких уровнях по формулам
вида (20.14) берут условные вероятности выполнения задания
(события Дп), если состоялось событие получения инфор-
мации I, т. е. Р (Лн//).
§ 20.4. ЭКСПЛУАТАЦИОННО-ТЕХНИЧЕСКИЕ ОЦЕНКИ
АВИАЦИОННОГО ОБОРУДОВАНИЯ
Удобство, простота.и оперативность обслуживания любого
технического устройства, установленного на самолете, определя-
ются его приспособленностью для контроля состояния, регули-
ровки, выполнения профилактических работ и замены неисправ-
ных элементов исправными, а также совершенством техниче-
ских средств обслуживания.
К эксплуатационно-техническим оценкам авиационного обо-
рудования относятся трудозатраты и время его подготовки к
применению и проведению профилактики. Обычно применяют
оценку удельной трудоемкости, которая равна трудозатратам в
человеко-часах, необходимым на проведение всех работ, связан-
ных с технической эксплуатацией авиационного оборудования
данного типа, ,и 1приходящимся на каждый час полета самолета
или каждый час работы этого оборудования.
Процесс технической эксплуатации в значительной степени
нормирован, однако суммарные трудозатраты, приходящиеся на
заданный срок службы авиационного оборудования данного
типа, являются случайной величиной, так как они зависят от чи-
сла, последовательности и продолжительности полетов, от числа
возникших в процессе эксплуатации отказов оборудования и
других факторов. Поэтому удельную трудоемкость определяют
но формуле.
Т
где ттэ — математическое ожидание суммарных трудозатрат на
техническую эксплуатацию оборудования за некоторый фикси-
рованный, например сточасовой, или полный срок службы обо-
рудования Т. В качестве Т .может быть взят также некоторый
фиксированный налет самолета в часах или полный налет в те-
чение всего срока службы.
Трудозатраты на техническую эксплуатацию ттэ представ-
ляют собой сумму математических ожиданий трудозатрат на
подготовку полетов %п, на проведение регламентных работ трр, на
проведение профилактических работ тпр, на производство дора-
боток тд. Тогда
479
ftnn = — удельная трудоемкость подготовки к полетам;
&рр= -у,---удельная трудоемкость регламентных работ;
ftnp = ---удельная трудоемкость профилактических работ;
&д = ------удельная трудоемкость доработок.
-8- = ft 4- ft -4- ft 4- ft
итэ nil г ирр Ч ипр I va*
В качестве эксплуатационно-технической оценки применяют
также относительное время технической эксплуатации, которое
характеризует величину среднего времени технической эксплуа-
тации объекта авиационного оборудования на один час налета
летательного аппарата или один час работы агрегата, системы
или вида оборудования
Т
7ТЭ у, 1
где Ттэ — математическое ожидание суммарного времени тех-
нической эксплуатации объекта авиационного оборудования,
приходящееся на некоторое заданное полетное время или задан-
ный период эксплуатации данного объекта Т.
На практике более удобны эксплуатационно-технические-
оценки, величина которых находилась бы в диапазоне от 0 до 1,
при этом большим оценкам отвечали бы лучшие показатели. К
таким оценкам относятся:
Т 1
— коэффициент технической эксплуатации /гтэ =---= -----;
Т’+'Чэ
Т 1
— коэффициент подготовки к полетам k„n—-------= -------
^+тпп 1 "В ‘Ф1П
Т 1
— коэффициент регламентных работ kpp— -уг—------= -———
1 + ’рр 1 + ’’рр
и получаемые аналогично коэффициенты профилактических ра-
бот и доработок.
Относительными являются также следующие оценки:
— коэффициент времени технической эксплуатации
г+т„ 1+ет,
480
— коэффициент времени подготовки к полетам
к т 1
пп Т+Тпп 1+0пп
и т. д.
Рассмотренные оценки существенно зависят не только от при-
способленности оборудования к технической эксплуатации, но
также от квалификации обслуживающего персонала и организа-
ции работ.
По такому же принципу находятся оценки трудозатрат и вре-
мени на контроль состояния авиационного оборудования.
Соотношение основных и вспомогательных трудозатрат
I
тосн -Г %еп
является одной из характеристик эксплуатационной технологич-
ности объектов авиационного оборудования. Здесь тосн — мате-
матическое ожидание суммарных трудозатрат на основные рабо-
ты при технической эксплуатации, приходящихся на некоторое
полетное время или период эксплуатации данного объекта, твсп —
математическое ожидание вспомогательных трудозатрат на тех-
ническое обслуживание, приходящихся на то же время.
К основным работам относятся контроль состояния объекта
оборудования, устранение неисправностей, настройка и регули-
ровка, заправка жидкостями, газами, проведение профилактиче-
ских работ. К вспомогательным относятся такие работы, как
вскрытие и закрытие люков, установка и снятие приспособлений
и вспомогательных устройств, демонтаж и монтаж и т. п.
Коэффициенты эксплуатационной технологичности применя-
ются также для отдельных видов технической эксплуатации. Так,
для регламентных работ может быть определен, например, коэф-
фициент монтажа:
где — средние трудозатраты на проведение собственно рег-
ламентных работ за весь период эксплуатации
объекта авиационного оборудования или заданное
время работы;
тм — средние трудозатраты на проведение монтажных и
демонтажных работ, необходимых при проведении
регламентных работ за то же время.
Аналогичными критериями являются временной коэффи-
циент эксплуатационной технологичности:
Т
TS __ 2 осн
*\ят '
•* ОСН ~ 2 ВСП '
31. Румянцев Е. А. и др.
481
и временной коэффициент монтажа
т*
-------------------------------------
+ Л.
Такие критерии, как /<э1, Км, могут быть применены для
оценки приспособленности авиационного оборудования к от-
дельным операциям процесса технической эксплуатации с уче-
том его размещения и монтажа на летательном аппарате. Для
оценки приспособленности технического устройства к его конт-
ролю можно применить коэффициент времени подготовки к
контролю, для оценки приспособленности объектов авиационно-
го оборудования к работам, проводимым при подготовке к по-
летам, — коэффициент времени вспомогательных работ при
подготовке к полету и другие.
Эффективность профилактики, пригодность и приспособлен-
ность авиационного оборудования к ремонту (восстанавливае-
мость) оцениваются способами, рассмотренными в гл. II.
Экономичность технической эксплуатации характеризуется
величиной стоимости технической эксплуатации летательного
аппарата, а применительно к авиационному оборудованию —
стоимостью эксплуатации авиационного оборудования.
Стоимость технической эксплуатации Сэ складывается из
затрат на содержание технического персонала Сп, стоимости
эксплуатационных средств, как, например, топлива, смазочных
материалов, запасных частей, расходного материала и т. п. —
См; стоимости амортизации вспомогательных приспособлений,
контрольно-поверочных установок, наземных агрегатов, приспо-
соблений и т. п. — Са, прочих дополнительных' эксплуатацион-
ных расходов Сд:
Св = Сп + Сы + Са -ф Сд.
Критерием эксплуатационной экономичности авиационной
техники является коэффициент стоимости технической эксплуа-
тации:
где С — стоимость летательного аппарата (или. соот.ветствен1но
стоимость авиационного оборудования).
Следует отметить, что стоимость эксплуатации Сэ в значи-
тельной мере зависит от надежности авиационной техники. Она
пропорциональна 'количеству неисправностей авиационной тех-
ники, имевших место в течение полного срока ее эксплуатации;
стоимости трудозатрат и расходных материалов, запасных ча-
стей и агрегатов, потребных на устранение неисправностей; сто-
имости амортизации оборудования и инструмента, ‘используемо-
го при ремонте. Очевидно, что стоимость устранения отказов и
неисправностей определяется главным образом приспособленно-
стью авиационной техники к ремонту.
482
Глава XXI
БОЕВАЯ ЭФФЕКТИВНОСТЬ АВИАЦИОННЫХ
КОМПЛЕКСОВ
§ 21.1. БОЕВАЯ ЭФФЕКТИВНОСТЬ УДАРНЫХ
АВИАЦИОННЫХ КОМПЛЕКСОВ
Под ударным авиационным комплексом понимается сово-
купность авиационных средств, предназначенных для пораже-
ния наземных и морских целей с воздуха. К ним относятся
бомбардировочный, истребительно-бомбардировочный и ракет-
ный ударный комплексы.
Процесс функционирования ударного комплекса состоит из
ряда последовательно выполняемых этапов.
На этапе подготовки к вылету производится: назначение по-
требного наряда сил; распределение целей между группами и
самолетами в группе; выбор времени действия, маршрута и
профиля полета с учетом преодоления ПВО противника; назна-
чение состава, маршрута и способов действия обеспечивающих
групп самолетов; техническая подготовка самолетов к полету,
включая их снаряжение и заправку, проверку и подготовку обо-
рудования; подготовка наземных средств наведения и управле-
ния.
На этапе полета к цели производится наведение ударных са-
молетов и их выход к цели с определенной точностью, обеспечи-
вающей ее обнаружение. В зависимости от условий задача на-
ведения на цель .может решаться: с помощью систем автономной
навигации; наведением с наземных пунктов в тех случаях, когда
координаты цели известны с точностью, обеспечивающей доста-
точно высокую вероятность выхода на цель; с помощью самоле-
тов-доразведчиков цели, уточняющих ее положение; свободным
поиском целей, когда координаты их заранее неизвестны. Этап
завершается выходом в район цели. Важнейшим его элементом
является преодоление ПВО противника.
Этап выхода на цель начинается с момента обнаружения це-
ли и завершается пуском ракет и бомбометанием. Основная его
задача состоит в обнаружении цели и подходе к ней с наиболее
благоприятными для пуска ракет и бомбометания условиями.
.Эта задача решается с помощью бортовых технических средств
•31* 483
обнаружения и селекции цели (или визуальным обнаружением) „
а также с помощью бортовых, в том числе автоматических,,
средств управления самолетом.
Этап пуска ракет и бомбометания начинается с момента от-
деления ракет (бомб) и завершается поражением цели. Эффек-
тивность этого этапа определяется начальными условиями в мо-
мент отделения ракет (бомб) и свойствами ракетного (бомбар-
дировочного) вооружения.
При количественной оценке боевой эффективности ударных:
комплексов и эффективности выполнения каждого этапа выпол-
нения задачи применяют вероятностные методы.
Для оценки эффективности решения задачи назначения на-
ряда сил и целераспределения используют математическое ожи-
дание предполагаемого «средневзвешенного» ущерба, нанесен-
ного группе целей,
/=1
где С; — специальным образом сформированный показатель
«важности» цели в соответствии с ее местом в предварительно'
составленном перечне целей, Ft — функция ущерба, нанесенно-
го z-той цели. Обычно Ft принимается равной единице, если и®
данную цель выделяется ударная группа, способная нанести тре-
буемый ущерб с заданной вероятностью, и равной нулю в ос-
тальных случаях. Nr — число самолетов, назначенных для нане-
сения удара.
При назначении наряда сил ударной группы учитывается ве-
роятность того, что за время т от момента поступления задачи
по нанесению удара (t='O) до момента вылета будут:
боеготовыми Л1Г самолетов. Эта вероятность может рассчиты-
ваться с использованием рассмотренных в гл. XVIII способов.
В простейшем случае, если к моменту t = 0 имеется ./V ис-
правных самолетов, то вероятность того, что отдельный самолет-
из этой группы будет готов к вылету в момент т, будет равна::
Рг = Р + ЧРуы = Wi,
где ?=.! — р — вероятность появления отказов в процессе под-
готовки и снаряжения самолета к вылету,
Русл — условная вероятность устранения отказов за
время т.
Соответственно вероятность боеготового к моменту т состо-
яния ровно /Vr самолетов из N исправных будет равна:
^г№=Ф^г(]_а)^Г) (21.1):
а математическое ожидание числа боеготовых самолетов
Nr=prN.
484
При необходимости можно оценить вероятность подготовки к
вылету самолетов, находящихся на восстановлении (см.
гл. XVIII).
При оценке эффективности этапов полета и выхода на цель
обычно используются формулы полной вероятности:
Р(Д) = (21.2)
;=о
где под гипотезами Ht понимаются события выхода в некото-
рую область координат относительного положения ударного са-
молета и цели St, при которой возможно с условной вероятно-
стью Р (AlHj) выполнение задачи последующего этапа — со-
бытия А. Обычно принимается, что с условной вероятностью
Р(А1На) = 1 будет выполнена последующая’задача А, если са-
молет вышел в единственную заданную область So. Во всех ос-
тальных случаях задача А не выполняется, т. е. все остальные п
условных вероятностей Р [AjH^, 1 = 1, 2.. .п принимаются
равными нулю. Тогда формула (21.2) упрощается и принимает
вид:
Р (А) = Р (HQ) = Ps,
где Ps — вероятность выхода самолета в область координат S,
где выполнение последующей задачи возможно.
В свою очередь вероятность Ps с учетом функциональной эф-
фективности самолета и его оборудования (см. гл. XX) зависит
от точности наведения и управления и надежности самолета и его
оборудования:
т
Ps=pA /оЙ dx + V qj [ fj (x)dx, (21.3)
S' j = \ s
где — вероятность безотказного функционирования комплекса
бортового и наземного оборудования, применяемого для наведе-
ния самолета;
fo(x) — функция плотности распределения относительных ко-
ординат x(xi, х2... хп) самолета и цели при безотказной работе
комплекса;
qj — вероятность появления /-того отказа (или ошибки пи-
лотирования, или ошибки наведения и управления о земли);
fj (*) — соответствующая этому случаю функция плотности
распределения координат х.
При упрощенных расчетах вторым членом (суммой) в (21.3)
пренебрегают и принимают:
Ps = Ро J /о ЙЛх.
S
485
Исходя из этого, эффективность выполнения второго этапа —
полета к цели — определяется вероятностью успешного преодо-
ления ПВО противника Рпв0 и условной вероятностью выхода в
район цели с относительными координатами х (xi, х2... ,г„), поз-
воляющими обнаружить цель, при условии преодоления ПВО:
^2 =^>ПВО Р<Л j" /о2 (Х) ^Х<
S,
где х — координаты относительного положения ударного
самолета и цели к концу этапа;
f02(x)— плотность распределения этих координат;
Si — область значений координат x(xi, х2... хп),
внутри которой возможно обнаружение цели.
Эффективность преодоления ПВО противника ударной груп-
пой характеризуется количеством ударных самолетов, дошедших
до цели. Так как это количество является случайной величиной,
то оно обычно оценивается математическим ожиданием числа
самолетов, преодолевших систему ПВО, или отношением этого
математического ожидания к первоначальному составу группы,
т. е. средней вероятностью преодоления ПВО каждым самолетом
группы.
Эффективность выполнения третьего этапа — выхода на
цель — характеризуется условной вероятностью обнаружения
цели Робн, если самолет вышел в район цели с координатами
x(xlt х2... %„), укладывающимися в область Si, и условной ве-
роятностью выхода в такую область S2 значений относительных
координат самолета и цели х(хь х2... хп), в которой возможно
применение по ней ракетного или бомбардировочного вооруже-,
ния.
^3 = ^обн 'Роз J fo3 (-^) Лх,
где /03(х) —плотность распределения относительных коорди-
нат ударного самолета и цели к моменту пуска ракет или сбро-
са бомб.
Заметим, что эффективность выполнения второго и третьего
этапа выполнения задачи в значительной степени определяется
такими эксплуатационными и техническими характеристиками
ударного комплекса, как надежность и точность наземных и бор-
товых систем наведения, определяющих распределение коорди-
нат х и вероятность выхода в заданный район цели, надежность
и точность бортовых систем обнаружения и селекции наземных
целей. Вероятности обнаружения цели и выхода в область S2 за-
висят также от внешних условий полета (туманы, грозовые
фронты и т. п.).
486
Эффективность четвертого этапа — пуска ракет и бомбоме-
тания — определяется условной вероятностью поражения цели
при условии пуска ракет (бомбометания) из области S2. Ес-
ли ракеты имеют телеуправляемый участок наведения, то на ве-
роятность существенное влияние оказывают характеристи-
ки системы наведения ракеты с самолета и тренированность опе-
ратора в выполнении задач наведения.
Перейдем к оценке эффективности ударного комплекса в це-
лом. Если эффективность выполнения этапов выхода на цель и
пуска ракет каждым самолетом ударной группы не зависит от
количества самолетов, преодолевших систему ПВО (например,
когда выход на цель и пуск ракет осуществляются каждым удар-
ным самолетом независимо от других), то показателями боевой
эффективности ударной группы могут служить вероятность по-
ражения цели или математическое ожидание относительного
ущерба, нанесенного цели,- если вся ударная группа действует
по одной цели.
W = 1 - (1 - UZj W21Г31И,)ЛГ-' ;
U 1 - (1 — Wr UZ2IF8t74)^ ,
где W — вероятность поражения цели ударной группой
в составе Nr самолетов;
U — математическое ожидание относительного ущер-
ба цели, наносимого группой в составе NT
самолетов;
W4; U4 — соответственно вероятность поражения цели и
.математическое ожидание относительного ущер-
ба для одного ударного самолета при условии,
что он достигнет цели;
Рт>о — средняя вероятность преодоления ПВО каждым
самолетом группы.
Если каждый ударный самолет группы независимо от других
действует по одной из одинаковых целей, показателем эффек-
тивности ударной группы может служить математическое ожи-
дание числа поражаемых группой целей /пцп или среднее мате-
матическое ожидание ущерба целям Uту:
= NT W, W2 Ws IF4; (21.4)
Чаще всего встречается случай, когда каждая ударная груп-
па действует по одной цели, причем вероятность выхода на цель
группы и вероятность поражения цели каждым самолетом из
ударной группы зависят от числа самолетов, преодолевших ПВО
противника. В этом случае вероятность поражения цели (21.5)
487
или математическое ожидание нанесенного цели ущерба (21.6)
выражаются формулами:
Nr
Е^пво(^) I (k-, п) Wn(k); (21.5)
n=0 k=0
*г п
£Л,Во(п) (21-6)
п -0 k =0
где Рпъо (п)— вероятность того, что ровно п самолетов
из Nr преодолевают ПВО;
Ц7в(/г, п)— условная вероятность того, что на цель
выйдет ровно k самолетов из п, преодо-
левших ПВО;
Ц7„(/г); Utl(k)— соответственно вероятность поражения
цели и математическое ожидание ущерба
цели при действии по ней k самолетов.
Если вероятности преодоления ПВО каждым самолетом груп-
пы одинаковы и равны средней вероятности Рпв0, то
рпМ =cnNP^ ~
где C'v — число сочетаний из Nr по п.
/¥г
Если далее предположить, что группа либо вся выходит на
цель (при условии ее обнаружения хотя бы одним самолетом),
либо вся не выходит на цель в противном случае, т. е.
Ц7В (£, п) = 0, при k < п\
1ИВ (k, п) = IFB, при k = «,
то формулы (21.5), (21.6) упрощаются и примут следующий
вид:
Nr
w= S P«BO (1 - РПВоЛ~" Wn (0); (21.7)
л=0 Г
_ 'Vr
£С»До (1 -PnBOfr-« un (0). (21.8)
Из полученных выражений следует, что одной из основных
характеристик эффективности преодоления ПВО является сред-
няя вероятность преодоления ПВО каждым самолетом ударной
группы. Эта вероятность зависит как от состава группы, так и
от обеспечения ее средствами радиопротиводействия.
Как уже упоминалось, на эффективность боевого применения
ударных комплексов решающее влияние оказывает точность си-
стемы управления и наведения. Для оценки вероятностей W2; W3;
488
Ро5Н, непосредственно зависящих от точности этих систем, су-
ществуют специальные способы (частично рассмотренные в
•§, 20.3).
Так, например, вероятность визуального обнаружения цели
приближенно определяется формулой
»
Л,бн=1-е ”, (21.9)
тде 2г — ширина полосы обзора;
средняя площадь, просматриваемая в единицу времени;
Р(г) — вероятность того, что цель будет обнаружена в поло-
се шириной 2г;
V — скорость полета.
При нормальном законе распределения случайной величины г
/ г \ _______________________________________
р (г) = Ф I------| • о = '/а2 -4- о2
[ } ’ у * ур ун
тде Оур — среднеквадратическая ошибка, с которой известны
координаты цели; с2 н — среднеквадратическая ошибка на-
вигационной системы.
С увеличением а2р, а2н вероятность обнаружения цели
снижается. Представляется очевидным, что при ухудшении точ-
ности наведения снижаются вероятности вывода самоле-
та в области значений координат Si и S2, а значит, и вероятность
поражения цели.
Боевая эффективность ударных авиационных комплексов су-
щественно зависит от эффективности технического обслужива-
ния, что выражается в полученных выше соотношениях в мате-
матическом ожидании числа боеготовых самолетов Nr и веро-
ятности подготовки Pn n = самолетов ударной группы. Она
зависит также от вероятностей безотказной работы оборудова-
ния в полете на отдельных его этапах /201; у02.
Функциональная эффективность самолета, его оборудования
и вооружения непосредственно определяет боевую эффектив-
ность ударного комплекса. Очевидно также, что при оснащении
самолетов надежными и совершенными бортовыми системами
оборудования вероятность выполнения боевого задания при по-
явлении ошибок пилотирования, неблагоприятных внешних ус-
ловий полета повышается.
§, 21.2. БОЕВАЯ ЭФФЕКТИВНОСТЬ РАЗВЕДЫВАТЕЛЬНЫХ
АВИАЦИОННЫХ КОМПЛЕКСОВ
В задачу разведки входит сбор и доставка информации о
противнике с целью выработки решения на боевые действия.
Разведывательные авиационные комплексы, обеспечивающие
боевое применение ударных групп, имеют главной задачей по-
489
иск целей и уточнение сведений о них (координаты цели, система
ПВО противника и т. и.). Данные разведки используются как
для решения задачи целераспределения, так и непосредственно-,
в полете путем корректировки действий ударной группы. Оцен-
ку эффективности разведывательных комплексов этого назначе-
ния удобно проводить по повышению показателей боевой эф-
фективности ударных комплексов.
Разведывательные комплексы, действующие в интересах
командования, организующего операцию на театре военных
действий, имеют главной задачей сбор сведений о более широком
круге объектов противника, в результате чего должны быть по-
лучены достаточно ясные представления об обстановке. Естест-
венно оценивать эффективность таких комплексов авиационной
разведки по приращению информации о реальной обстановке и
достоверности ее оценки на основе разведывательных данных.
Рассмотрим эффективность выполнения некоторых задач, ре-
шаемых разведывательными авиационными комплексами. Одной
из характерных является задача уточнения координат целей, на-
пример, доразведка цели перед ударом по ней ударной авиаци-
онной группы. Показателем эффективности разведывательного
комплекса может служить приращение вероятности поражения
цели (или математического ожидания нанесенного ей ущерба),,
получающегося в результате доразведки цели. Вероятность пора-
жения цели с учетом доразведки равна:
U7(p)= W-P^,
где W — вычисляется ио формулам (21.5), (21.7);
р(р) — вероятность выполнения задачи разведывательной
группой.
Если Р^>о — средняя вероятность преодоления ПВО каждым:
разведчиком, то
" л^р
/>(₽)= X С% [Р(р)]« [1 - Р(р)]^-'"Р(р) (ш),
т-1 Р
где Np — количество разведчиков в разведывательной груп-
пе;
Р(р)(т)— условная вероятность выполнения задачи обнару-
жения и измерения координат целей с заданной
точностью пг долетевшими до цели разведчиками.
Если предварительно координаты цели известны с точностью,
определяемой среднеквадратической ошибкой аур, а разве-
дывательная группа должна обнаружить цель с первого^
захода (предполагается, что ударная группа летит непосредст-
венно за разведывательной) , то вероятность Р<₽) (щ) может быть
рассчитана по формуле (21.9), где вместо следует взять
490
a г заменить на R, равную половине ширины полосы, просмат-
риваемой всей группой из т самолетов- разведчиков:
Р(₽)(/п) = Робн,
Другой характерной задачей разведывательных комплексов,
является поиск целей в некотором районе (с последующим их по-
ражением ударными группами). Цели в общем случае являются
подвижными. Если предположить, что ущерб, наносимый неко-
торыми средствами противника (являющимися целями для удар-
ной группы), пропорционален времени их существования, то эф-
фективность разведывательного комплекса удобно оценивать по.
среднему времени функционирования этих средств противника.
Определим среднее время, потребное для обнаружения це-
лей, если разведку проводят Л^р самолетов. Пусть разведчики
находятся в районе поиска время t„. Тогда условное математи-
ческое ожидание времени, прошедшего до обнаружения, при ус-
ловии, что объект был обнаружен за время поиска tn, равно:
'п
~ 1 f^Po6HW. (21.10).
*обн(/п) J
0
В общем случае интенсивность обнаружений целей
(21.11)
где р — среднее число объектов, приходящихся на единицу
площади, Иу == 7Vp&y. С учетом (21.9), (21.Г1), приняв P(r) = 1,
преобразуем (21.10) к другому виду:
'п
Л>бн = „ 1/2 , ^Оби (А.) — Г (1 — е-Т) dt = —------—- .
Л>бЖИ J J 1 еГп— 1
0 (21.12)
Соотношение (21.12) получено для неподвижных объектов.
Если среднее время нахождения объекта на месте равно 1Ы, а
среднее время движения /дв, причем время перемещения
объекта значительно больше времени его нахождения в поле
зрения разведчика (т. е. разведчик не может измерить коорди-
нат его будущего положения), то это эквивалентно уменьшению -
среднего числа объектов на единицу площади и, следовательно,,
уменьшению интенсивности обнаружений у:
* К
I' = -—- - Т-
+ Цв
491
Ют момента обнаружения целило момента ее поражения удар-
ной группой проходит время /зап = totl + tay -J- 4<м, склады-
вающееся из времени обработки и доставки информации /ои;
времени на принятие решения м подготовку удара Zny; времени
полета ударной группы к цели ^пол.
Вероятность того, что в результате поиска цели в течение
гвремени tn и последующего за ее обнаружением удара объект
будет поражен, равна:
Wa = PrP2W,
(21.13)
:где W —= вероятность поражения цели, если удар состоялся;
Pi — вероятность своевременного удара по цели, завися-
щая от того, застанет ли ударная группа подвижный
объект на месте, указанном разведчиками;
Р2 — вероятность передачи разведывательных данных, за-
висящая от преодоления разведчиками ПВО про-
тивника.
С вероятностью, равной lFn, объект будет существовать в
среднем время £о6и + z!3an.
Если tK и £яап подчинены показательному закону со сред-
ними значениями tM; /зап, то вероятность своевременного уда-
ра, равная вероятности того, что время /за„ будет меньше /м,
составит величину:
са t t Т _
fl t С I t J 41
l e ы I =— e зап dt dt= =—==—
J J ^зап ^мН“^зап
О О
Вероятность передачи разведывательных данных для случая,
когда необходимо возвращение разведчика на свой аэродром,
будет равна вероятности преодоления ПВО. Если средняя веро-
ятность преодоления ПВО
где v —интенсивность потока поражающих выстрелов средств
ПВО противника, приходящаяся на каждый разведчик, то
Р2 = e“vZnB0,
где ^пво — среднее время пребывания в системе ПВО против-
ника.
Выше предполагалось, что в районе поиска ,, находится один
объект. При наличии п. объектов, расположенных случайным
образом независимо друг от друга, математическое ожидание
492
числа пораженных объектов будет равно nWn, а среднее время;
функционирования каждого из объектов:
~ ^оп (^оп ^обн ^зап) ^п>
где ion — время операции, в интересах которой проводится:
поиск объектов.
Из полученных соотношений следует, что эффективность,
разведывательных авиационных комплексов определяется таки-
ми показателями, как запаздывание в обнаружении цели и до-
ставке информации и величина вероятности поражения объекта.
W ударной группой, которая в свою очередь зависит от точности
измерения координат цели разведчиками. Поэтому особое значе-
ние имеет создание систем, обеспечивающих быструю обработ-
ку и передачу информации (в том числе по телевизионным кана-
лам) и повышение точности определения местоположения цели.
К числу задач, решаемых разведывательными авиационными:
комплексами, относится также контрольная разведка, по дан-
ным которой выясняется состояние объектов, подвергшихся уда-
ру, и принимается решение о целесообразности повторного уда-
ра. Эффективность контрольной разведки оценивается по коли-
честву сэкономленных ударных средств в результате прекраще-
ния ударов по данным контрольной разведки. Информация о со-
стоянии объектов имеет значение также для оценки общей об-
становки и намерений противника.
Количественная оценка эффективности авиационных разве-
дывательных комплексов, осуществляющих разведку в интере-
сах командования с целью выяснения обстановки на театре во-
енных действий и намерений противника, представляет извест-
ные трудности. В простейших случаях эти оценки сводят к неко-
торым показателям, характеризующим повышение достоверно-
сти знания обстановки по получении данных разведки.
Пусть разведываемая система X может находиться в неко-
тором конечном числе состояний хь- х2.. .хк, где под состояния-
ми могут пониматься координаты объектов, их число, степень,
готовности к действиям и т. п. Априори, до разведки могут быть,
известны вероятности этих состояний Р (xj, Р(х2), . . ., Р(хй).
При недостатке сведений можно положить состояния равно-
вероятными. После выполнения разведки поступает некоторая,
совокупность сведений Y о разведываемой системе X. С учетом
эксплуатационно-технических характеристик разведывательного-
комплекса (таких, как разрешающая способность, точность опре-
деления координат и т. п.) или по статистическим данным могут
быть определены условные вероятности совокупности сообщений:
при условии, что система находится в z-том состоянии:
P{Y!x^ P(Y/x2)... Р(У/хк).
493
Вероятность того, что система действительно находится в i-том
состоянии, может быть рассчитана по формуле Бейеса
PWr>- /Wp(W .
fp (л,)Р№)
7=1
Очевидно, что чем выше значение Р (xJY), тем достовернее на-
ши представления о реальной обстановке.
§ 21.3. БОЕВАЯ ЭФФЕКТИВНОСТЬ АВИАЦИОННЫХ
КОМПЛЕКСОВ ПЕРЕХВАТА
Авиационные комплексы перехвата предназначены для отра-
жения налета самолетов и других летательных аппаратов -против-
ника и их уничтожения в воздухе на заданных рубежах.
Структура системы перехвата состоит из последовательно
включенных друг в друга и последовательно подчиненных друг
другу подсистем и комплексов. Комплекс средств авиационного
вооружения входит в состав бортовых средств перехвата, обра-
зуя вместе с ними, летчиком и летательным аппаратом боевой
комплекс — собственно перехватчик. Последний в свою очередь
является элементом более сложного комплекса перехвата,
включающего в себя радиолокационную систему наведения и
перехватчик. Совокупность этих комплексов вместе с командным
пунктом и системой радиолокационных станций обнаружения
образуют -всю систему средств, предназначенных для отражения
налета противника.
В процессе функционирования системы перехвата можно вы-
делить следующие этапы.
1. С обнаружением целей и получением команды на перехват
решается задача назначения самолетов на перехват, их распре-
деление по отдельным целям и между пунктами наведения из
условий уничтожения максимального числа целей. На этом
этапе осуществляется подготовка самолетов к вылету.
2. Полет к цели и наведение с земли до .момента перехода на
наведение с помощью бортовых средств перехвата. Пункты на-
ведения осуществляют вывод перехватчика в район цели с наи-
более благоприятными условиями для работы бортового комп-
лекса и выдерживают при этом заданный рубеж перехвата.
3. Наведение с помощью бортового комплекса до пуска ракет
или стрельбы. При этом летчик или система самонаведения пе-
рехватчика обеспечивают возможно более благоприятные усло-
вия для стрельбы.
4. Пуск ракет или стрельба с поражением цели.
Эффективность перехвата, которая обычно оценивается по ве-
роятности поражения воздушных целей до заданного рубежа или
494
по количеству целей, уничтоженных до этого рубежа, определя-
ется эффективностью выполнения каждого из указанных выше
этапов.
Обозначим — событие боеготовности перехватчика к на-
значенному моменту вылета на перехват, причем цели распреде-
лены между перехватчиками, а для последних назначены боего-
товые пункты наведения; Д2 — событие дальнего наведения с
выходом в область координат Si, где возможен захват цели и пе-
реход на наведение с помощью бортовых средств; А3 — событие
ближнего наведения с выходом в область координат относитель-
ного положения перехватчика и цели 32, где возможен пуск ра-
кет (или стрельба), А4 — событие несбития перехватчика атакуе-
мым бомбардировщиком до пуска ракет перехватчиком, As — со-
бытие поражения цели до заданного рубежа при условии, что
пуск ракет производился из области координат 32. Тогда вероят-
ность поражения цели до заданного рубежа будет равна:
w = Р (A.IA, А3 А2 А) Р (А4/А3 А2 AJ Р (А31А2 AJP (А21А1)Р(А1),
тд,е Р(А2/Аг) — условная вероятность дальнего наведения с выхо-
дом в область относительных координат Sj и захватом цели бор-
товыми средствами наведения при условии, что перехватчик был
боеготовым к заданному моменту времени и вылет состоялся;
PfAJA^Ai) — условная вероятность ближнего наведения с
выходом в область 32 при условии выхода в область 3] и захвата
цели в конце дальнего наведения;
PfAi/AaA^Ax) — условная вероятность несбития, если самолет
'вышел в область 32;
Pt(A5/A4—Ai) — условная вероятность поражения цели раке<-
той на заданном рубеже, если события Ai; А2; А3; А4 состоя-
лись. Методы оценки условных вероятностей выхода в
области Si/ S2 1во многом совпадают с применявшимися в
§ 21.1 методами. Для оценки вероятности поражения цели бое-
вой частью ракет или снарядами авиационных пушек существу-
ют специальные методы. Детальное изложение вопросов эф-
фективности перехвата можно найти в [5].
Важно подчеркнуть, что успех перехвата цели на заданном
рубеже непосредственно зависит от функциональной эффективно-
сти системы дальнего наведения и бортового оборудования пере;
хватчика (в том числе от надежности и точности его функциони-
рования) . Особое значение для комплексов перехвата имеет веро-
ятность боеготового состояния самолетов-перехватчиков, что на-
кладывает особые требования на инженерно-авиационную служ-
бу по высококачественной подготовке авиационной техники к по-
летам.
ПРИЛОЖЕНИЕ t
ФОРМУЛЫ ЗАВИСИМОСТИ
МЕЖДУ ОСНОВНЫМИ ХАРАКТЕРИСТИКАМИ НАДЕЖНОСТИ
Pit) qit) fit) X(Z) T t 1 in :
Pit) Pit) i -p(t} _ dp (/) dt 1 dp(t) co p (t)dt b
p(t) dt
q (*) 1 - (f) q(t) dq (t) dt 1 dq (t) 0
)-q(t) dt
/w J f{t)dt t t j fit)dt 0 fit) fit) ^f(t}dt 0 J 0
Х(о _ t J х(/)л e 0 f f >•(«) dl 1-e b t ” J хадл X(^e 0 X(o t - f e 0 dt 0
Тт при X =const t_ T e m t_ T 1 — c m 1 e“T- c m Tm 1 T L ni Tm
496
ПРИЛОЖЕНИЕ 2
ИНТЕНСИВНОСТЬ ОТКАЗОВ ОСНОВНЫХ ЭЛЕМЕНТОВ
СИСТЕМ АВИАЦИОННОГО ОБОРУДОВАНИЯ Х=а-10~б
Наименование элементов а
Сопротивления проволочные Сопротивления угольные Сопротивления металлизированные Переменные сопротивления проволочные Переменные сопротивления непроволочные Потенциометры Нагревательные элементы Конденсаторы бумажные Конденсаторы маслонаполненные Конденсаторы фарфоровые Конденсаторы электролитические Конденсаторы танталовые Конденсаторы слюдяные Конденсаторы керамические Конденсаторы переменной емкости Катушки индуктивные Дроссельные катушки Трансформаторы Магнитные усилители Стабилизаторы напряжения феррорезонансные Соленоиды Катушки обмоток электрических машин и реле Дроссели насыщения Регуляторы напряжения на магнитных усили- телях Регуляторы напряжения угольные Генераторы постоянного тока Генераторы переменного тока Бесконтактные генераторы Двигатели электрические . постоянного тока Двигатели электрические переменного тока Моментные электродвигатели Шаговые двигатели Электроприводы Серводвигатели Преобразователи Сельсины Щеткодержатели Умформеры Лампы электронные: диоды двойные диоды триоды 0,087-4-0,191 0,045 ч- 0,89 0,03 -4-0,058 0,13 -5-0,9 0,25 -5- 0,75 3,00-Ь 15,9 0,02 4- 0,04 0,025-5-0,04 0,3 ч- 0,45 0,09-5-1,02 0,035 -5- 0,054 0,1 -5-2,1 0,075-5-0,132 0,063-5-0,213 0,155-5- 0,35 0,02 —5— 0,1 0,05-5-0,09 0,2 -5-2,08 3,11-5-15,53 0,35-5-0,71 0,05-5-0,55 0,02-5-0,2 0,14-5-0,32 0,5 ч-0,7 9,65-5—13,16 6,27-5-21 2,94-5-18,8 0,8 -4-5,0 9,36 5,24-v-9,36 0,3-г-0,58 0,37 -4-0,71 5,1-4 33,6 1,51-5-5,61 3-ь52 0,35-4-0,61 0,1 -s-l.il 2,8-в-5,5 0,8-:-2,2 1 -4-3,24 1 -ч-2,91
32. Румянцев Е. А. и др.
497
Наименование элементов
а
двойные триоды
усилители мощности
стабилитроны
тиратроны
Лампы сверхминиатюрные
Лампы импульсные генераторные
Лампы накаливания
Лампы неоновые
Соединения ламповых штырьков
Арматура осветителвная
Диоды германиевые
Диоды кремниевые
Выпрямители селеновые
Триоды германиевые
Триоды кремниевые
Транзисторы усилительные
Реле электромагнитные
Реле электронные
Реле электромеханические
Реле общего назначения
Промежуточные реле
Реле мощности
Реле времени
Реле тепловое
Контакторы
Пускатели
Коммутационная аппаратура
Реле пневматические
Термисторы
Концевые выключатели
Рычажные выключатели
Пакетные выключатели
Кнопочные выключатели
Микровыключатели
Кулачковые переключатели
Переключатели рычажные
Разъединители, рубильники
Предохранители плавкие
Держатели предохранителей
Автоматы защиты
Соединения паяные
Гнезда
Зажимы
Штепсельные разъемы
Коробки соединительные
Прерыватели
Зуммеры
Аккумуляторные батареи
Батареи электрические одноразовые
Батареи заряженные
1,34-4-4,31
20,0ч-40,0
0,35-ь 7,1
5 -т-41,0
0,83 -4-4,3
30 -4-43
8 -4-32
10 4- 18,8
0,005/к-ч-0,009/к
0,1 -4-0,71
0,3-:-0,38
0,2-4-0,25
0,6 -4- 1,6
0,334-4-1,91
0,5 4-1,44
0,61-4-1,02
0,3/к-4-0,81/к
1,2-4-1,8
1,5-4-2,57
0,25/кч-0,48/к
0,251/к-ч-0,54/к
0,25/к-4-4,1/к
0,4/к-4-0,8/к
0,4/к-4-1,0/к
0,25/к-ч- 0,4/к
10 -4- 16
0,05/к —4— 1,14/к
0,04/к-ч-1,15/к
0,6 -4-1,4
0,161/ц -4-0,261/ц
0,05/ii-s-0,113/ц
0,175/Ц-4- 0,660/ц
0,063/ц -4-0,11/ц
0,25/ц-4-0,5/ц
0,075ц-4-0,12ц
О,О6/ц-4- 0,123/ц
0,4/ц-4-2,1/ц
0,5-4-0,82
0,02-4-0,1
0,14-5- 0,5
0,004-4-0,005
0,01-4-0,02
0,0005-4-0,0009
0,175-4-0,7
0,04-1-0,58
0,5-^0,8
0,6-4-1,3
2,8-4-21,4
30 -4-300
1,4-4-14,29
* к на 1 контакт;
'-•* Ц — на 1 цикл.
498
Наименование элементов а
Измерительные приборы электрические 0,036-4-5,77
Счетчики электрические 1,35 5,77
Тахометры 0,3 -г-0,55
Датчики температуры 3,3-г-6,6
Датчики уровня жидкости 14,0-4-21,3
Датчики высоты 3,40-:-7,5
Датчики давления 3,5 -4-6,6
Муфты электромагнитные 0,6-4- 0,93
Депи формирования импульса 3,07-4-4,92
Депи задержек 0,6-4-0,96 *
Депи промежуточной частоты 0,4-4-1,06
•Фильтры электрические 0,3-4- 3,0
Изоляторы 0,05-4-0,08
Изоляция 0,5-4-0,72
Термопары 0,6 -4-18
Авиагоризонты 9-4-35
Дистанционные компасы 15-4-65 ।
Манометры 4 -4-7,8
.Муфты фрикционные 0,3-4-0,94
Муфты соединенного вращения 0,025-4-0,5
Нагнетатели 1,45-4-4,3
Дасосы 13,5-4-24,3
Насосы вакуумные 9-4-16,1
Воздуходувки 2,24-4-5,9
Вентиляторы . _. 2,1-4-3,57
Акселерометры 2,8-4-7,5
Гидромеханизмы ’ 4,9-4-11,45
Ваки 1,5-4-2,52 г
Оси _ 0,35-5-0,62
Подшипникйшариковые ~ , 0,5-4-3,53
Подшипники скольжения 0,22-4-0,42
Передачи зубчатые 0,11-5-0,98
Поршни гидравлические 0,2-4-0,35
Прокладки (шайбы) ' , 0,0012,-4-0,015
Пружины ' ' - 0,012 -5-0,42
Диафрагмы _ .1, 6-;-9
32*
499
Наименование элементов а
Фильтры механические 0,3 4-0,8
Цилиндры 0,14-0,81
Шарики термометра 1,0 4-3,3
Шланги 24-3,3
Турбины 10 4-16,7
Секторы зубчатые 0,34-2,1
Сопла 0,554-3,71
Соединения шарнирные 2,4 4-4
Амортизаторы 1,04-3,37
Колеса ведущие 0,0254-0,1
Клапаны шариковые 4,64-7,7
Задвижки 5,14-44,8-.
Клапаны разгрузочные' 5,74-15,31
Регуляторы давления 4,25 4-15,98
Резервуары 1,54-3,37
Сильфоны 2,244-61
Трубопроводы 1,14-4,85
Дифференциалы 1,04-1,58
Рессоры 0,0754-0,1
Коллекторы (распределительные) 2,94-4,85.
Регуляторы расхода жидкости 2,144-5,54
Регуляторы расхода сжатого кислорода 3,04-7,78
Теплообменники 15 4-18
500
ПРИЛОЖЕНИЕ 3
ДОВЕРИТЕЛЬНЫЕ ИНТЕРВАЛЫ ДЛЯ %2 « 2п
СТЕПЕНЯМИ СВОБОДЫ
а / 1 |Z ^1* 0,99 0,98 0,95 0,9 0,8
2 0,020 0,004 0,103 0,211 0,446
4 0,297 0,429 0,711 1,064 1,649
6 0,872 1,134 1,635 2,20 3,07
8 1,646 2,03 2,73 3,49 4,59
10 2,56 3,06 3,94 4,86 6,18
12 3,57 4,18 5,23 6,30 7,81
14 4,66 5,37 6,57 7,79 9,47
16 5,81 6,61 7,96 9,31 11,15
18 7,02 7,91 9,39 10,86 12,86
20 8,26 9,24 10,85 12,44 14,58
22 9,54 10,60 12,34 14,04 16,31
24 10,86 11,99 13,85 15,66 18,06
26 12,20 13,41 15,38 17,29 19,82
28 13,56 14,85 16,93 18,94 21,6
30 14,95 16,31 18,49 20,60 23,4
32 15,74 17,35 19,85 22,18 25,21
34 17,17 18,85 21,45 23,88 27,01
36 68,61 20,35 23,05 25,56 28,81
38 20,04 21,85 24,64 27,33 30,58
40 21,52 23,40 26,28 28,96 32,40
42 22,99 24,92 27,90 36,60 34,20
44 24,50 26,50 29,57 32,40 36,04
46 25,99 28,01 31,21 34,12 37,85
48 27,53 29,85 32,89 35,70 39,66
50 29,03 31,21 34,53 37,59 41,50
52 30,58 32,85 36,21 39,24 43,34
54 32,08 34,36 37,85 41,04 45,13
56 33,70 36,04 39,61 42,88 47,05
58 35,20 37,55 41,23 44,56 48,81
60 36,82 39,25 42,97 46,37 50,70
501
Продолжение приложения 5
\ а \ а: \ 2 2/г \ 0,2 0,1 0,05 0,02 0,01
2 3,22 4,6 5,99 7,82 9,21
4 5,99 7,78 9,49 11,67 13,28
i 6 8,56 10,64 12,59 15,03 16,81
8 11,03 13,38 15,51 18,07 20,1
10 13,44 15,99 18,31 21,2 23,2
12 15,81 18,55 21,0 24,1 26,2
14 18,15 21,1 23,7 26,9 29,1
16 20,60 23,5 26,3 29,3 32,0
18 22,28 26,0 28,9 32,8 34,8
20 25,00 28,4 31,4 35,0 37,6
22 27,3 30,8 33,9 37,7 40,3
24 29,3 33,2 36,4 40,3 43,0
26 31,8 35,6 58,9 42,9 45,6
28 34,0 37,0 41,3 45,4 48,3
30 36,2 40,3 43,8 46,0 50,9
32 38,55 42,51 45,06 49,90 52,74
34 40,77 44,84 48,32 52,43 55,34
36 42,97 47,14 50,70 54,92 57,89
38 45,13 49,40 53,05 57,35 60,39
40 47,34 51,72 55,44 59,84 62,95
42 49,50 53,98 57,78 62,28 65,44
44 51,76 56,29 60,17 64,75 67,98
46 53,87 58,54 62,50 67,17 70,45
48 56,08 59,95 65,92 69,62 70,40
50 58,21 63,06 68,33 72,00 72,97
52 60,39 65,32 69,50 74,42 77,88
54 62,50 67,51 71,76 76,76 80,27
56 64,75 69,86 74,18 79,26 82,82
58 66,82 72,00 76,38 81,54 85,15
60 69,03 74,30 78,75 83,98 87,65
502
ПРИЛОЖЕНИЕ 4
ЗНАЧЕНИЯ КОЭФФИЦИЕНТОВ 82; 50; 71 и у2 при 0 = 0,9
п 81 ®2 80 71 Тв
2 0,4214 5,6272 0,5141 0,5158 2,9304
3 0,4766 3,6607 0,5639 0,5714 2,2944
4 0,5158 2,9304 0,5979 0,6084 2,0100
5 0,5311 2,5381 0,6254 0,6389 1,8433
6 0,5714 2,2944 0,6489 0,6593 1,7329
7 0,5907 2,1309 0,6635 0,6780 1,6539
8 0,6084 2,0100 0,6809 0,6866 1,6121
9 0,6228 1,9313 0,6923 0,7101 1,5618
Ю 0,6389 1,8483 0,7042 0,7215 1,5221
11 0,6490 1,7828 0,7143 0,7313 1,4886
12 0,6593 1,7329 0,7229 0,7393 1,4597
13 0,6684 1,6905 0,7303 0,7482 1,4267
14 0,6780 1,6539 0,7388 0,7549 1,4138
15 0,6849 1,6230 0,7444 0,7620 1,3966
; 16 0,6866 1,6121 0,7528
17 0,7036 1,5851 0,7583
18 0,7101 1,5618 0,7637
19 0,7163 ' 1,5426 0,7692
20 0,7215 1,5221 0,7734
21 0,7269 1,5054 0,7781
22 0,7313 1,4880 0,7817
23 0,7362 1,4771 0,7858
24 0,7393 1,4597 0,7888
25 0,7426 1,4480 0,7929
26 0,7482 1,4361 0,7961
27 0,7525 1,4267 0,7999
28 0,7549 1,4138 0,8016
29 0,7594 1,4067 0,8056
: зо 0,7620 1,3966 0,8075
503
ПРИЛОЖЕНИЕ 5
ПЕРЕЧЕНЬ РАБОТ ПРИ ПОДГОТОВКЕ САМОЛЕТА К ВЫЛЕТУ
Таблица 1
Наименование работ Код работы Продолжит, работы, усл. ед. Число ис- полнителей
1. По самолету и двигателям (СД) |
Расчехление самолета .... Осмотр передней кабины с целью 1.1 3 2
обеспечения безопасности выполне- ния работ 1.2 1 1
Осмотр задней кабины с целью обеспечения безопасности выполне- ния работ и подключение аэродром-- кого источника электроэнергии . 1 3 2 1
Внешний осмотр Проверка оборудования в задней 1.4 10 1
кабине ... 1.5 2 1
Дизаправка сжатым воздухом . Проверка заправки топливом и 1.6 2 1
слив ОТСТОЯ . 1.7 5 1
Дозаправка топливом .... Проверка оборудования в передней 1.8 б 1
кабине (перед посадкой членов эки- пажа) 1.9 1 1
Оформление документации . . 1.10 1 1
2. По авиационному вооружению
(АВ)
Внешний осмотр и проверка под током комплекта бомбоприцела и вычислительных устройств 2.1 8 1
Проверка цепей управления сбра- сыванием бомб 2.2 ' 4 2
Осмотр бомбодержателей и подго- товка к проверке цепей сброса бомб 2.3 2 1
Проверка цепей управления сиг- нальными ракетами (СР) .... 2.4 2 2
Проверка цепей управления авто- матом пассивных помех (АПП) . 2.5 2 2
Проверка цепей аварийного сброса бомб . . 2.6 1 2
Осмотр и подготовка к заряжанию арт. установки, СР и АПП . 2.7 5 2
Заряжание арт. утановки, СР и АПП ........ 2.8 4 2
504
Наименование работ Код работы Продолжит, работы, усл. ед. Число ис- полнителей
Монтаж системы подъема бомб 2.9 3 2
Подготовка и подвеска бомб . 2 10 15 3
Снаряжение бомб взрывателями . 2.11 7 1
Демонтаж системы подъема бомб 2.12 2 2
Предполетный осмотр .... 2.13 2 1
3. По авиационному оборудованию (АО)
Электрооборудование
Внешний осмотр . • • . 3.1 5 х 1
Проверка и установка аккумулято-
ров • 3.2 О 1
Осмотр и проверка оборудования 3.3
под током в задней кабине . О
Осмотр и проверка оборудования под током в передней кабине . 3.4 2 ' 1
Приборное и кислородное
обор уд о в а н и е
Проверка работоспособности ане- роидно-мембранных приборов Осмотр и проверка работоспособ- ности оборудования в передней ка- 3.5 3 2
•бине 3.6 5 I
Осмотр и проверка работоспособ- ности оборудования в задней кабине 3.7 3 1
Осмотр и проверка кислородного оборудования 3.8 3 1
Дозарядка кислородом .... Подготовка бортовой регистрирую- 3.9 3.10 4 1
тцей аппаратуры ..... 2 1
4. По радиоэлектронному
оборудованию (РО)
Контроль выключения питания це- пи взрыва . 4.1 1 1
Внешний осмотр Осмотр и проверка оборудования в 4.2 2 1
передней кабине . . . . . . 4.3 15 1
Осмотр и проверка оборудования в задней кабине 4.4 5 2
Проверка оборудования в специаль-
ных отсеках . . . . . 4.5 3 1
Проверка состояния инерционного
замыкателя ...... 4.6 1 1
Включение питания цепи взрыва 4.7 1 1
505
Таблица 2
№ начального события № • конечного события ’ Код работы Продолжатель ность работы, усл. ед.
0 1 1.1 3
1 2 1.7 5
1 3 1.2 1
1 4 4.2 2
2 5 1.8 8
3 6 1.3 2
6 7 3.7 3
1 8 2.3 2
6 8 2.1 8
1 9 3.2 6
7 9 — 0
7 10 3.8 3
; 8 11 2.2 4
9 12 3.3 6
10 13 3.5 3
1 14 2.7 5
11 14 0
/ 11 15 — 0
12 15 — 0
14 16 2.5 2
15 17 2.6 1
16 18 .— 0
17 18 — 0
1 19 4.1 1
16 19 — 0
8 20 2.9 3
17 20 —. 0
18 21 2.4 2
19 22 4.3 15
20 23 2.10 15
506
№ начального события № конечного события Код работы Пр одолжитель- ность работы, усл. ед.
4 24 4.5 3
21 24 — 0
13 25 3.10 2
22 25 — 0
23 26 2.12 2
24 27 4.4 5
25 28 3.6 5
21 29 2.8 4
23 29 2.11 7
26 29 — 0
6 30 1.4 10
27 30 — 0
22 31 —- 0
27 31 4.6 1
12 32 — 0
28 32 — 0
32 33 3 4 2
.5 34 1.6 2
28 34 3.9 4
29 34 2.13 2
30 34 1.5 2
31 34 4.7 1
33 34 3.1 5
34 35 1.10 1
507
ЛИТЕРАТУРА
1. Крауз С. В., Синдеев И. М„ Захаров А. В. Основы техниче-
ской эксплуатации оборудования летательных аппаратов, ВВИА им. проф.
Н. Е. Жуковского, 1964.
2. В е н тц е л ь Е. С. Теория вероятностей, Физматгиз, М., 1962.
3. Натан А. А. Техническая кибернетика, ВВИА им. проф. Н. Е. Жу-
ковского, 1969.
4. Протопопов В. А. Вычислительные машины военного применения,
ВВИА им. проф. Н. Е. Жуковского, 1967.
5. Мильгр а м Ю. Г., Попов И. С. Боевая эффективность авиационной
техники и исследование операций, ВВИА им. проф. Н. Е. Жуковского, 1969.
6. Константинов В. Д. Авиационное оборудование и его эксплуата-
ция, ВВИА им. проф. Н. Е. Жуковского, 1966.
7. Шишонок Н. А., Репкин В. Д., Б ар винский Л. Л. Основы
теории надежности и эксплуатации радиоэлектронной техники, Советское ра-
дио, 1964.
8. П о л о в к.о А. М. Основы теории надежности, «Наука», 1964.
9. Епифанов А. Д. Надежность автоматических систем, Машино-
строение, 1964.
10. Базовский И. Надежность. Теория и практика, «Мир», 1965.
11. Надежность технических систем и изделий. Сборник рекомендуемых
терминов, Вып. 67а, «Наука», 1965.
12. Крауз С. В. К вопросу об унификации терминологии в теории на-
дежности, ВВИА им. проф. Н. Е. Жуковского, Вып. 91, 1961.
13. Крауз С. В. Оценка надежности авиационной техники по данным
эксплуатации, ВВИА им .проф. Н. Е. Жуковского, Вып. 1108, 1965.
14. Широков А. Н. Основы надежности и эксплуатации электронной
аппаратуры, «Наука и техника», Минск, 1965.
15. Ллойд Д К-, Липов М. Надежность. Организация исследований,
методы, математический аппарат, Советское радио, 1964.
16. Шор Я. Б. Статистические методы анализа контроля качества и на-
дежности, Советское радио, 1962.
17. «Вопросы эксплуатации авиационного оборудования», Под редакцией
Е. А. Румянцева, труды ВВИА им. проф. Н. Е. Жуковского, вып. 1212,
1968.
18. «Вопросы эксплуатации авиационного оборудования». Под редакцией
И. М. Синдеева, труды ВВИА им. проф. Н. Е. Жуковского, вып. 1169, 1967.
19. Гнеденко Б. В., Беляев Ю. Н., Соловьев А. Д. Математиче-
ские методы в теории надежности, «Наука», 1965.
20. С отеков Б. С. Методические указания и справочные данные для
расчета надежности элементов и устройств, МАИ им. Орджоникидзе, 1964.
21. Нечипоренко В. И. Структурный анализ и методы построения
надежных систем, Советское радио, 1968.
22. С а н д л е р Дж. Техника надежности систем, «Наука», 1966.
23. Кузнецов В. А., Основные вопросы надежности радиоэлектронной
аппаратуры, «Энергия», 1965.
24. Козлов Б. А., Ушаков И. Б. Краткий справочник по расчету на-
дежности радиоэлектронной аппаратуры, Советское радио, 1966.
508
25. Солодов А. В. Теория информации и ее применение к задачам ав-
томатического управления и контроля. «Наука», 1967.
26. К а р а н д е е в К. Б. и др. Электрические методы автоматического
контроля, «Энергия», 1965.
27. В а л ь д А. Последовательный анализ, «Физматгиз», 1960.
28. М о з г а л е в с к и й А. В. и др. Автоматический поиск неисправностей,.
Машиностроение, Ленинград, 1967.
29. К ар и б ск и й В. В., Пархоменко П. П., Сотом он ян Е. С.
Техническая диагностика объектов контроля, «Энергия», 1967.
30. Рабинович В. И., Ц а п е н к о М. П. Информационные характери-
стики средств измерения и контроля, «Энергия», 1968.
31. В е р з ак о в Г. Ф., К и ншт Н. В. и др. Введение в техническую,
диагностику. «Энергия», 1968.
32. Долгов В. А., Кении А. В. Электронные датчики для автомати-
ческих систем контроля, Советское радио, 1968.
33. Виноград С., Коуэн Дж. Д. Надежные вычисления при наличии;
шумов, «Наука», 1968.
34. Бишоп В. Б. Индикация неисправностей или проблема последова-
тельного анализа. Сборник «Проблемы надежности радиоэлектронной аппара-
туры», Оборонгиз, 1960.
35. Н о в и ко в П. С. Элементы математической логики, Физматгиз, 1959.
36. Синдеев И. М. К вопросу синтеза логических схем для поиска не-
исправностей и контроля состояний сложных систем. Известия ОТН «Техни-
ческая кибернетика», № 2, 1963.
37. Синдеев И. М. Некоторые общие методы автоматического контроля,
состояния динамических систем и поиска неисправностей, ВВИА им. проф.
Н. Е. Жуковского, вып. 965, 1962.
38. Описания и инструкции по эксплуатации контрольно-измерительной-
аппаратуры и средств аэродромного обслуживания, Воениздат, 1963—1968.
39 . К и т о в А. И., К р и н и цки й Н. А. Электронные цифровые машины;
и программирование, Физматгиз, 1959.
40. Лихачев В. А. Многоканальное быстродействующее регистрирую-
щее устройство РУМБ-2, Го.сэнергоиздат, 1961.
41. Зуховицкий С. И., Радчик И. А. Математические методы се-
тевого планирования, «Наука», 1955.
42. Основные положения по разработке и применению систем сетевого
планирования и управления, «Экономика», 1965.
43. Разумов И. М. и др. Сетевые графики в планировании, Высшая,
школа, 1967.
44. А к инд ее в А. Е., Андреев Н. И. и др. Применение метода сете-
вого планирования и управления при выполнении работ на авиационной тех-
нике, ВВИА им. проф. Н. Е. Жуковского, 1968.
45. М е л ь н о в М. А., Серб П. Ф. Научная организация труда на рабо-
чем месте, «Экономика», 1966.
46. Воронин В. В. и др. Система регулирования аэродромных электро-
агрегатов, «Авиация и космонавтика», № 1, 1966.
47. Мусатов Н. В., Могильских К. Г. Оружие массового пора-
жения и защита от него. Воениздат, 1964.
48. Писарев В. Н. Применение теории массового обслуживания в зада-
чах инженерно-авиационного обеспечения. ВВИА им. проф. Н. Е. Жуковского
1966.
ОГЛАВЛЕНИЕ
Предисловие . ............ 3
Введение ......... . . . . . . , 6
Раздел первый
НАДЕЖНОСТЬ АВИАЦИОННОГО ОБОРУДОВАНИЯ
Глава 1. Общие понятия и зависимости теории надежности
§ 1.1. Основные понятия ............. 11
§ 1.2. Основные количественные характеристики надежности . . . 14
Глава II. Эксплуатационная надежность
§ 2.1. Количественные характеристики надежности восстанавливаемых
технических устройств ..... ............. 29
§ 2.2. Эксплуатационная надежность авиационной техники и ее количе-
ственные характеристики ..... ............. 32
§ 2.3. Количественные характеристики надежности авиационной техни-
ки в процессе ее хранения.............................47
§ 2.4. Определение технического, межремонтного и гарантийного ре-
сурса авиационной техники 49
Глава III. Расчет надежности систем
§ 3.1. Расчет надежности систем на начальном этапе проектирования 52
§ 3.2. Расчет надежности систем с учетом постепенных отказов ... 59
§ 3.3. Влияние физических факторов на надежность технических уст-
ройств и их учет при расчете надежности ....... 62
Глава IV. Способы резервирования
§ 4.1. Основные понятия. Классификация способов резервирования . 66
§ 4.2. Постоянное пассивное резервирование...................69
§ 4.3. Особенности резервирования электрических схем.........77
§ 4.4. Резервирование способом замещения.....................80
§ 4.5. Резервирование с применением логических схем..........87
§ 4.6. Задачи синтеза надежных систем ................... . 89
§ 4.7. Определение оптимального количества резервных элементов при
заданном значении надежности системы........................... 91
Глава V. Экспериментальное исследование надежности элементов
и систем
§ 5.1. Временные характеристики, применяющиеся при статистических
исследованиях надежности .......... 98
§ 5.2. Экспериментальное определение характеристик надежности эле-
ментов ....... 101
§ 5.3. Ускоренные испытания на надежность ....... 105
§ 5.4. Метод статистического моделирования надежности .... 108
510
Глава VI. Обработка статистических данных по опыту эксплуатации
авиационного оборудования
§ 6.1. Точность статистических оценок надежности.113
§ 6.2. Расчет доверительных интервалов по статистическим оценкам
надежности невосстанавливаемых устройств . . . , . .117
§ 6.3. Оценка доверительных интервалов по статистическим характери-
стикам восстанавливаемости................................... 125
Глава VII. Прогнозирование состояния авиационного оборудования
§ 7.1. Методы прогнозирования по данным периодического контроля
оборудования ................................ 129
§ 7.2. Статистические методы прогнозирования . ............................................138
§ 7.3. Оценка эффективности прогнозирования.....................140
Раздел второй
МЕТОДЫ И ТЕХНИЧЕСКИЕ СРЕДСТВА КОНТРОЛЯ
И ЭКСПЛУАТАЦИИ АВИАЦИОННОГО ОБОРУДОВАНИЯ
Глава VIII. Основы технической диагностики
§ 8.1. Оборудование летательного аппарата как объект контроля . . 144
§ 8.2. Описание состояний систем с дискретной структурой . . . .147
§ 8.3. Контроль работоспособности . ................................... . 153
§ 8.4. Методы поиска неисправностей............ 159
§ 8.5. Применение логических моделей при контроле состояния систем 175
•§ 8.6. Выбор точности измерительных средств ....... 181
Глава IX. Неавтоматические средства инструментального контроля
состояния авиационного оборудования
§ 9.1. Общие сведения. Классификация неавтоматических средств ин-
струментального контроля .................................... 185
§ 9.2. Эксплуатационная оценка КИА общего применения . . . .188
§ 9.3. Эксплуатационная оценка КИА группового применения . . .190
§ 9.4. Эксплуатационная оценка КИА индивидуального применения . . 197
§ 9.5. Эксплуатационная оценка КИА комплексного применения . . 201
Глава X. Автоматические системы контроля
§ 10.1. Назначение и классификация автоматических систем контроля 205
§ 10.2. Состав и параметры контролируемого оборудования . . . .211
§ 10.3. Аналоговые автоматические системы контроля ..... 222
§ 10.4. Цифровые автоматические системы контроля ...... 238
§ 10.5. Модули индикации неисправностей....................... 266
Гл а в а XI. Бортовые системы регистрации полетных данных
§ 11.1. Назначение и классификация систем регистрации .... 269
§ 11.2. Принципы построения систем регистрации ....... 273
§ 11.3. Регистрируемые полетные данные и методы их обработки . . 290
Глава XII. Аэродромные средства обслуживания летательных аппаратов
§ 12.1. Назначение и классификация аэродромных средств обслуживания 298
§ 12.2. Аэродромные средства снабжения летательных аппаратов элек-
трической энергией ............. 300
§ 12.3. Аккумуляторно-зарядные станции.......... 309
§ 12.4. Аэродромные средства снабжения самолетов кислородом . . 311
511
Раздел третий
ИНЖЕНЕРНО-АВИАЦИОННАЯ СЛУЖБА
Глава XIII. Организация инженерно-авиационной службы
§ 13.1. Назначение инженерно-авиационной службы и ее основные задачи315-
§ 13.2. Формы организации инженерно-авиационной службы , . .31(5-
§ 13.3. Инженерно-технический состав, обслуживающий авиационное
оборудование ...................................................... 320
Глава XIV. Организация эксплуатации авиационной техники
§ 14.1. Формы и содержание эксплуатации авиационной техники . . 323>-
§ 14.2. Подготовка авиационной техники к полетам................. 325
§ 14.3. Регламентные и профилактические работы ....................327
§ 14.4. Доработки авиационной техники ...........................331
§ 14.5. Организация эксплуатации авиационной техники на аэродроме и
в подразделениях регламентных работ..............................332
§ 14.6. Организация мест базирования авиации ....... 339'
Глава XV. Сетевое планирование в процессе эксплуатации
авиационной техники
§ 15.1. Краткие сведения о сетевых методах планирования и управления 343
§ 15.2. Параметры и основные правила построения сетевых графиков . 344
§ 15.3. Сетевое планирование обслуживания авиационной техники . . 362:
Глава XVI. Ремонт авиационного оборудования
§ 16.1. Основные сведения о ремонте авиационной техники .... 372
§ 16.2. Войсковой ремонт авиационного оборудования...............374
§ 16.3. Организация и особенности ремонта авиационного оборудования
на авиаремонтных предприятиях.................................... 377~
§ 16.4. Техническое нормирование труда............................. 389-
Глава XVII. Общие задачи инженерно-авиационной службы
по материально-техническому обеспечению, .технической подготовке
личного состава и учету
§ 17.1. Материально-техническое обеспечение ... ... 397“
§ 17.2. Техническая подготовка в авиационных частях..............400
§ 17.3. Эксплуатационная документация авиационной техники. Учет и
отчетность ИАС.............................. 401
Глава XVIII. Планирование и расчеты при инженерно-авиационном
обеспечении
§ 18.1 Задачи планирования и расчетов при инженерно-авиационном
обеспечении боевых действий и учебно-боевой подготовки . . 405
§ 18.2. Планирование инженерно-авиационного обеспечения .... 406
§ 18.3. Инженерно-оперативные расчеты ...........................411
§ 18.4. Особенности инженерно-авиационного обеспечения и эксплуата-
ции авиационного оборудования в условиях рассредоточения и
применения оружия массового поражения . ..... 427
Глава XIX. Безопасность полета
§ 19.1. Аварийные факторы и количественные оценки безопасности
полета ......................................................... .434
512
§ 19.2. Методы экспертных оценок причин летных происшествий . . 447
§ 19.3. Мероприятия инженерно-авиационной службы по обеспечению
безопасности полетов ........................................... , 455
Раздел четвертый
СПОСОБЫ ОЦЕНКИ ЭКСПЛУАТАЦИОННОЙ И БОЕВОЙ
ЭФФЕКТИВНОСТИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ
Глава XX. Эксплуатационные оценки авиационного оборудования
и систем технического обслуживания
§ 20.1. Эффективность инженерно-авиационной службы и способы ее
оценки ................. ........ 459
§ 20.2. Применение теории массового обслуживания для решения неко-
торых задач технической эксплуатации..........................470
§ 20.3. Эксплуатационная эффективность авиационного оборудования и
способы ее оценки...................... . . ...............472
§ 20.4. Эксплуатационно-технические оценки авиационного оборудова-
ния , . , ........................ 479
Глава XXI. Боевая эффективность авиационных комплексов
§ 21.1. 'Боевая эффективность ударных авиационных комплексов . . . 483
§ 21.2. Боевая эффективность разведывательных авиационных комплек-
сов . . . .....................................489
§ 21.3. Боевая эффективность авиационных комплексов перехвата . . 404
Приложения I—V.................................... 496
Литература ....................... . . ... . 508
‘в Е. А, и др.
513
Технический редактор В. Н. Лебедева Корректор II. Г, Киселева
Сдано в набор 9/Х—1969 г. Подписано к печати 94/111—1970 г.
Г-856051 Изд. № 5044 Зак. 299
Формат бумаги бОхЭО'/ю 32,25 печ. л. 29,2 уч-изД. л.
(.Лля внутриведомственной продажи цена в переплете №5 — 1 руб. 56 коп.,
в переплете №7 — 1 руб. 66 коп.)
Типография ВВИА имени проф. И. Е. Жуковского