/




















































































































































Author: Кисель В.А.
Tags: электротехника радиосвязь и радиовещание операционные системы корректоры
Year: 1986




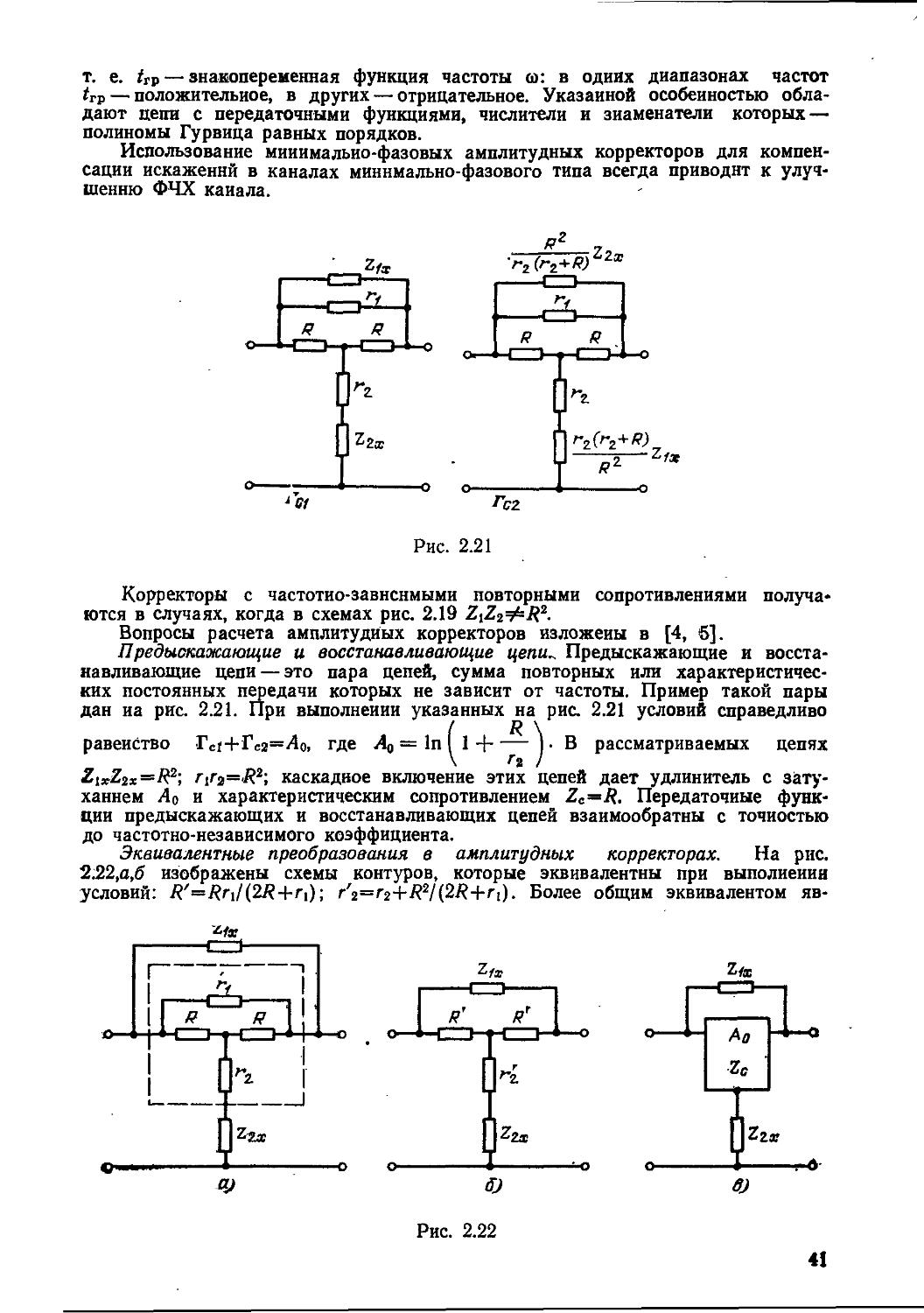
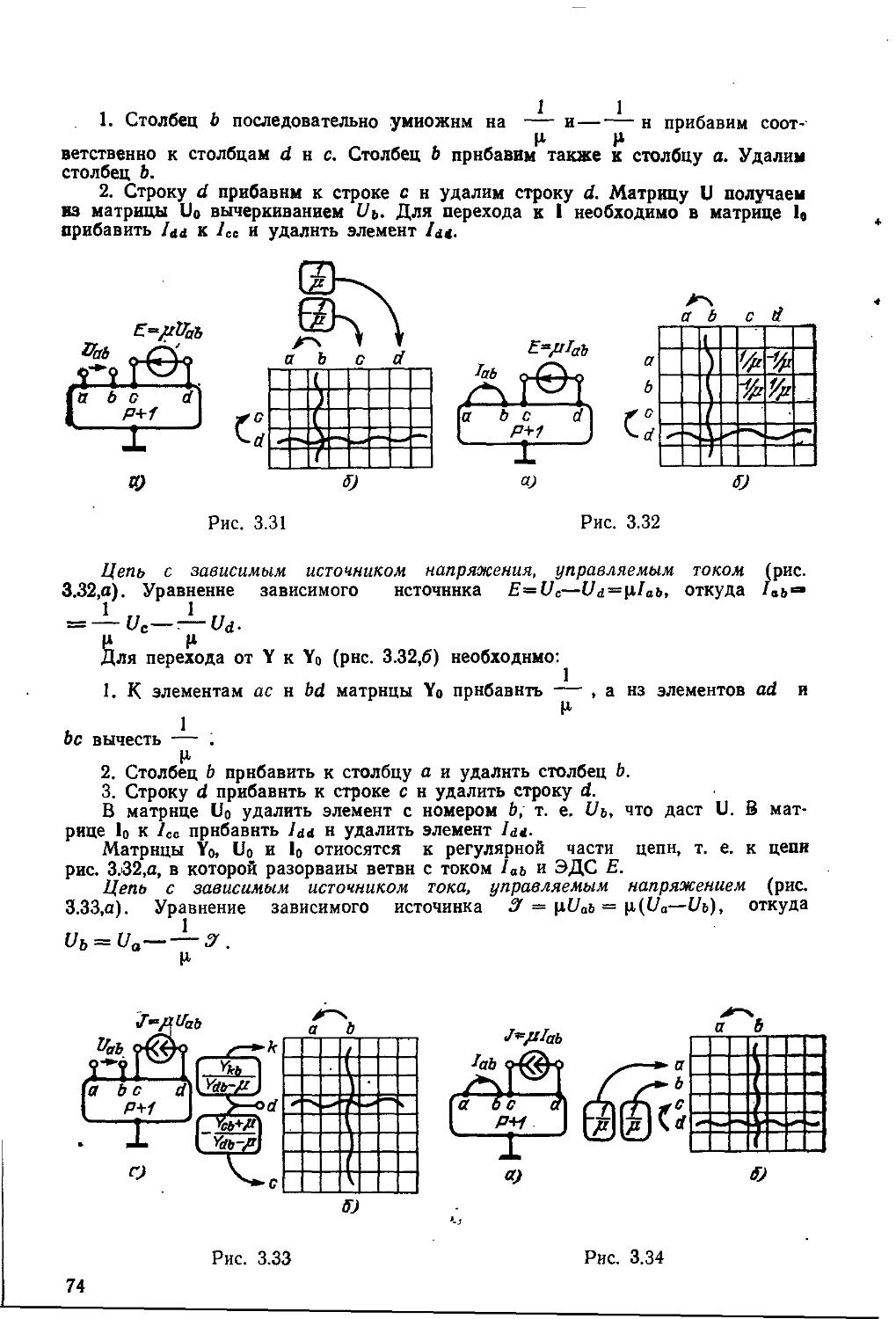
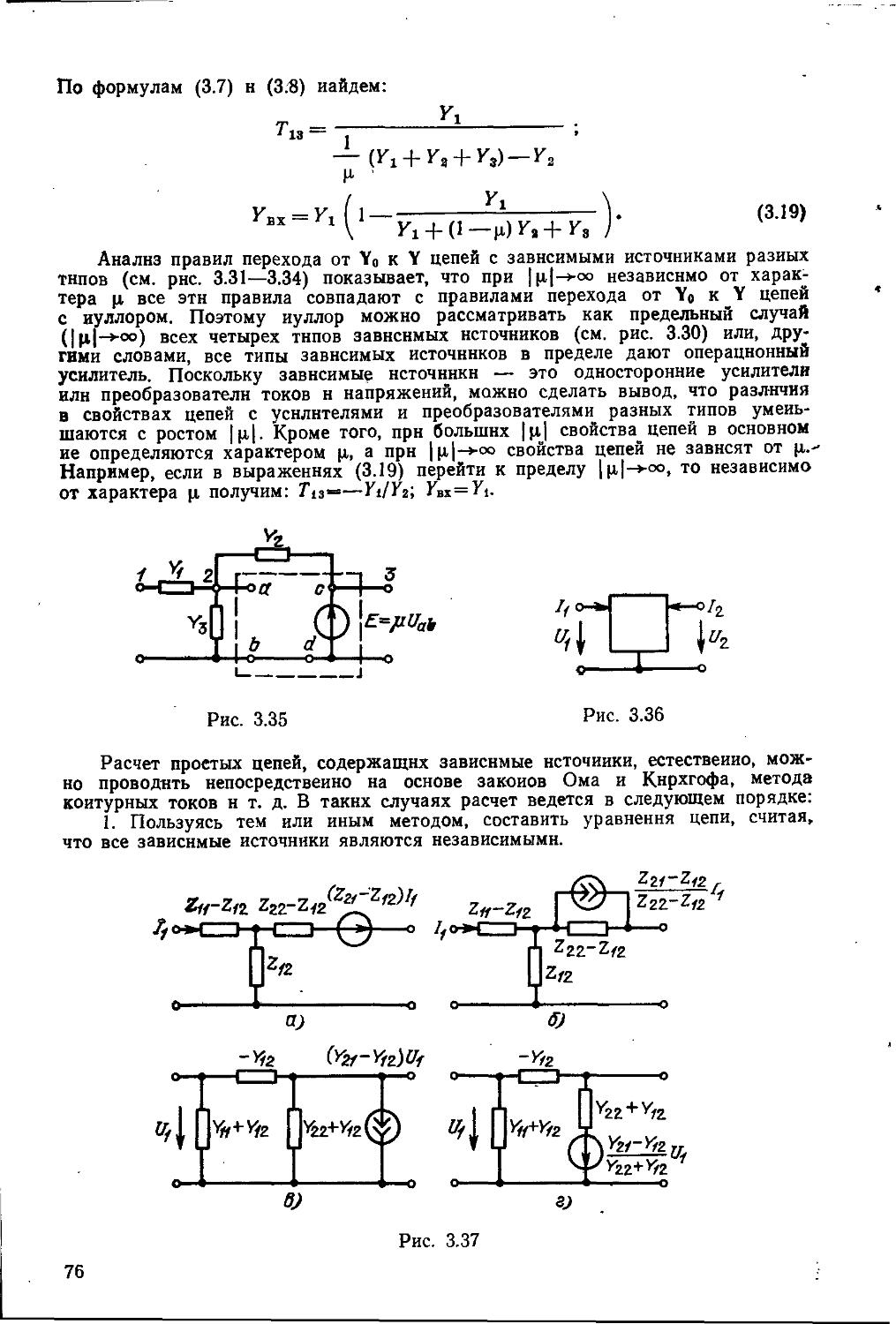
Text
В.А. Кисель
Аналоговые и цифровые корректоры
Справочник
Scan Pirat
©
Москва
.«РАДИО И СВЯЗЬ» 1986
ББК 32.884 К44
УДК 621.372.55
Рецензент 3. И. Голышко
Редакция литературы по электросвязи
Кисель В. А.
К44 Аналоговые и цифровые корректоры: Справочник. — М.: Радио и связь, 1986. — 184 с., ил.
70 к. 15 000 экз.
Приводятся методы построения пассивных и активных аналоговых корректоров» содержащих элементы RLC- и ВС-цепей, операционные усилители, инвертирующие каскады, сумматоры, транзисторы н т. д.» а также цифровых корректоров. Основное внимание уделяется регулируемым корректорам разных типов. Даются конкретные схемы корректоров, основные формулы по расчету н примеры.
Для инженерно-технических работников, специализирующихся в области связи и радиотехники; будет полезен студентам вузов.
2402040000-003 „„ „„
К----------------118-86
046(01 )-86
ББК 32.88
© Издательство «Радио и свдзь>> jgge
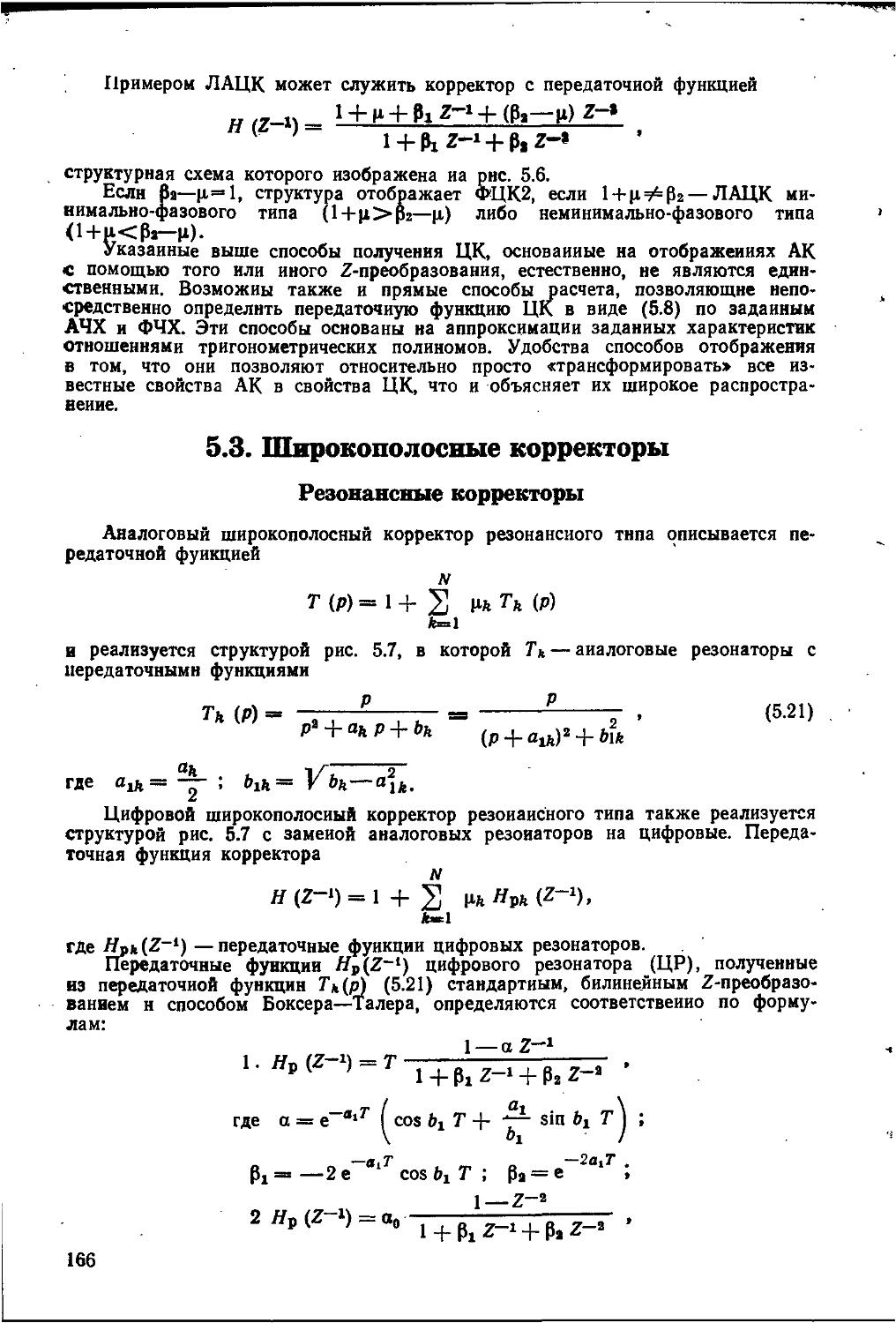
Предисловие
Вопросы разработки корректирующих цепей встают почти перед всеми проектировщиками современной аппаратуры связи, а также систем автоматического регулирования. Обусловлено это тем, что именио коррекция относится к эффективным и в то же время сравнительно простым средствам повышения качественных и количественных показателей систем связи. Например, с помощью коррекции в последние годы достигнут существенный прогресс в росте скорости передачи дискретной информации, дальности и улучшении качества передачи неподвижных и подвижных изображений (в системах многоканальной связи, фототелеграфии, телевидении, видеотелефонин) и т. д.
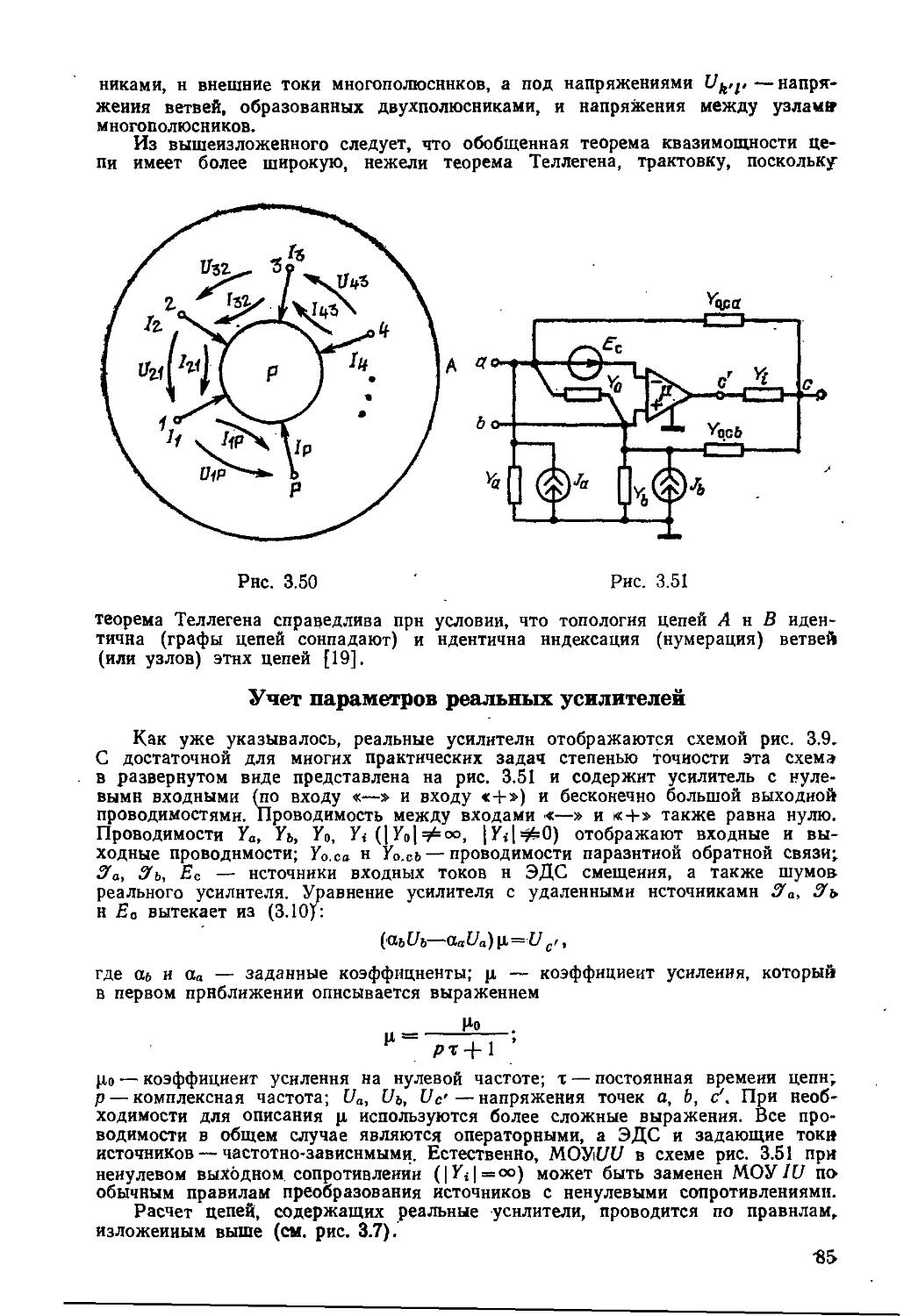
Настоящая книга может служить справочником прн разработке аналоговых и цифровых регулируемых корректоров разных типов как пассивных, так и комбинированных, содержащих активные элементы (усилители с конечным усилением, инвертирующие каскады, сумматоры, транзисторы, гираторы, элементы с отрицательным сопротивлением и т. д.) и 7?£С-двухполюсннки, многочастотных ' регулируемых корректоров и регуляторов тембра локального действия на операционных усилителях, активных кС-корректоров, компенсации влиянии потерь в корректорах на их частотные характеристики, цифровых корректоров, В справочнике содержатся новые результаты по общим вопросам коррекции частотных искажений. Основное внимание уделено построению корректоров с плавной регулировкой таких параметров, как глубина провала затухания, крутизна фазочастотной характеристики, резонансная частота, построению широкополосных корректоров с несимметричными и симметричными регулировочными характеристиками затухания, активным регулируемым корректорам. В справочник также включены матричные методы анализа цепей с миогополюсиыми операционными усилителями разных типов (т. е. с усилителями, содержащими множество входов и выходов), поскольку эти методы в литературе не освещены и в то же время необходимы при вычислении схемных функций корректоров. Приводятся примеры расчета.
Наличие этого материала позволит читателю самостоятельно вести поиск новых схем и анализировать известные схемы корректоров. Учитывай, что задача коррекции не ивляется абстрактной и ее оптимальное решение всегда связано с учетом характера передаваемых сигналов и методов приема, в справочнике даны условия неискаженной передачи заданных параметров аналоговых и дискретных сигналов в системах связи разных типов, доказана оптимальность линейной фазо-частотной характеристики спектров сигналов и на этой основе выведены критерии оптимальной коррекции фазовых искажений Для систем с различными методами приема.
Имеющиеся в настоящее время специальные издания по вопросам коррекции, учебники и учебные пособия по курсам теории электрических цепей, теоретическим основам радиотехники, многоканальным системам связи не охваты-/ вают вышеуказанного круга вопросов.
Отзывы и замечания просьба направлять в. издательство «Радио и связь» по адресу: 101000, Москва, Почтамт, а/я 693.
1. ОБЩИЕ ВОПРОСЫ КОРРЕКТИРОВАНИЯ ИСКАЖЕНИЙ
1.1. Искажения в аналоговых системах
Условия неискаженной передачи аналоговых сигналов
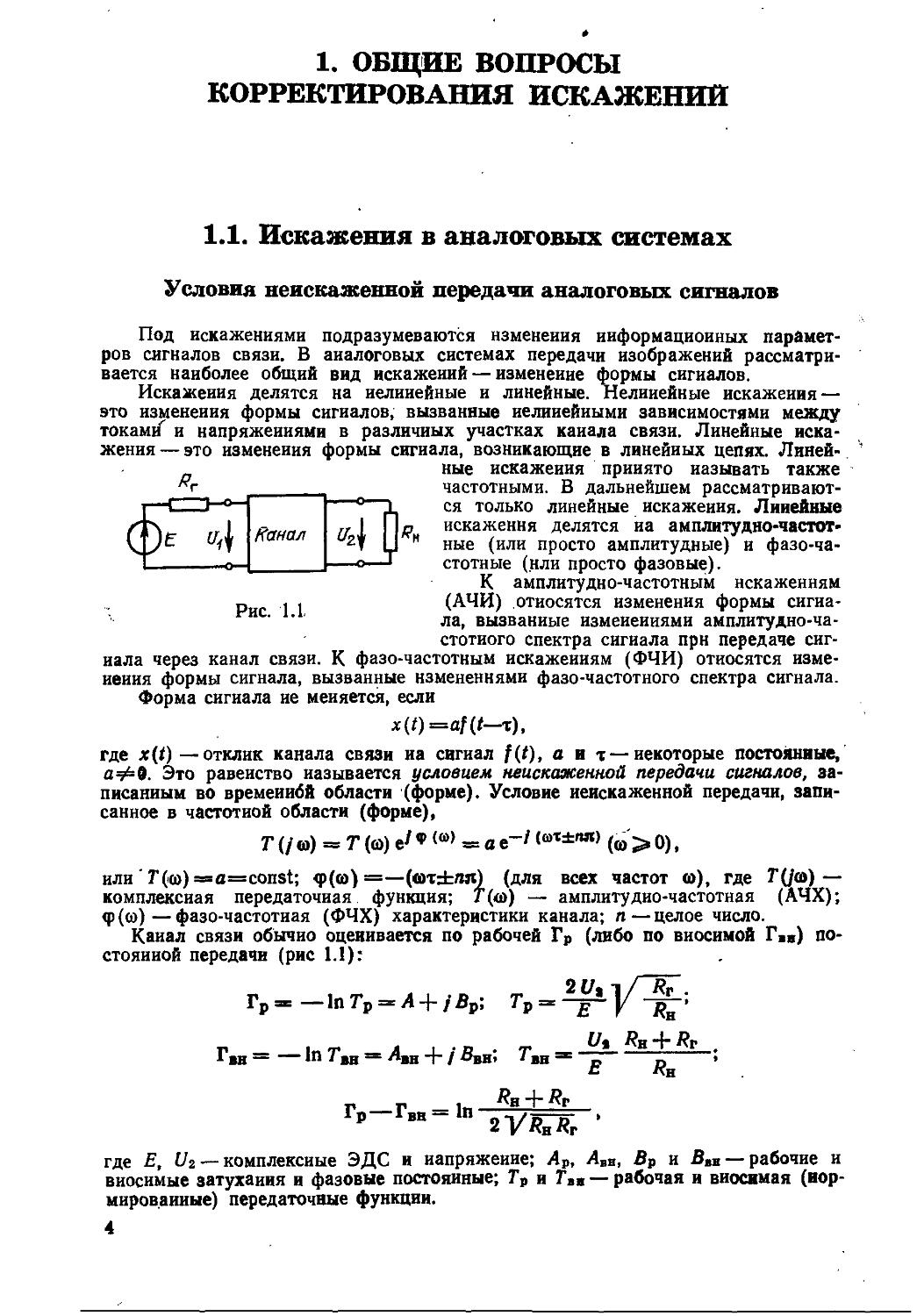
Под искажениями подразумеваются изменения информационных параметров сигналов связи. В аналоговых системах передачи изображений рассматривается наиболее общий вид искажений — изменение формы сигналов.
Искажения делятся на нелинейные и линейные. Нелинейные искажения —
это изменения формы сигналов, вызванные нелинейными зависимостями между токами^ и напряжениями в различных участках канала связи. Линейные искажения— это изменения формы сигнала, возникающие в линейных цепях. Линей-
ные искажения принято называть также частотными. В дальнейшем рассматриваются только линейные искажения. Линейные искажения делятся на амплитудно-частотные (или просто амплитудные) и фазо-частотные (или просто фазовые).
К амплитудно-частотным искажениям (АЧИ) относятся изменения формы сигнала, вызванные изменениями амплитудно-ча-
Рис. 1.1.
стотного спектра сигнала при передаче сигнала через канал связи. К фазо-частотным искажениям (ФЧИ) относятся изменения формы сигнала, вызванные изменениями фазо-частотного спектра сигнала.
Форма сигнала не меняется, если
x(t)=af(t—т),
где x(i) —отклик канала связи иа сигнал f(t), а и т—некоторые постоянные, а=/=9. Это равенство называется условием неискаженной передачи сигналов, записанным во времеиибй области (форме). Условие неискаженной передачи, записанное в частотной области (форме),
Т (i ш) = Т (со) J ’(“> = а е_/ (шТ±пя> (© > 0),
или'Г(ш)=а=сопз1; <р(<в) =—(<от±ля) (для всех частот ш), где Г(/а>)— комплексная передаточная функция; Т (со) — амплитудно-частотная (АЧХ);
<р (со) — фазо-частотная (ФЧХ) характеристики канала; п — целое число.
Канал связи обычно оценивается по рабочей Гр (либо по вносимой Гвв) постоянной передачи (рис 1.1):
Гр-----1п7р = А + /Вр; Tp = -gJ-
Г«н=—In Гвн = Авн-f-/ 5вн‘> Гвн = —-7
.
Я» ’
Гр—Гвн — 1п
+ #г
21/ет. *
где Е, U2 — комплексные ЭДС и напряжение; Ар, Авн, Вр и Ввв — рабочие и вносимые затухания и фазовые постоянные; Гр и Гвв —рабочая и вносимая (нормированные) передаточные функции.
4
Линейные искажения отсутствуют, если
AD = const, Вп = сот±пя; ч г (11)
Лвн — const, Ввн = шт±пяЛ ' ‘
Таким образом, если затухание ие зависит от частоты, а фазовая постоянная линейно меняется с ростом частоты, принимая на нулевой частоте значения, кратные я, то канал ие вносит искажений (неискажающий канал или четырехполюсник). Если затухание ие удовлетворяет условию (1.1), т. е. меняется с изменением частоты, то канал вносит АЧИ, если же фазовая постоянная ие удов-летворяет (1.1), то канал вносит ФЧИ.
Рабочая полоса частот реального канала ограничена по ширине, поэтому условия (1.1) могут выполняться, естественно, лишь в ограниченной полосе частот.
Фазовое и групповое время прохождения сигналов
Для оценки фазовых искажений используются фазовое и групповое время прохождения (пробега, запаздывания или распространения) сигнала.
Фазовое время прохождения. Пусть на входе четырехполюсника (канала) (ем. рис. 1.1) напряжеиие (либо ток) меняетси по закону «1(() = (7т1соз(<о(4-ф). На выходе четырехполюсника напряжеиие меняется по закону uz(t) = = Um2 соз(со(+ф—В), где В —значение фазовой постоянной четырехполюсника на частоте <о, В=—-<р(ш); ф— начальная фаза (ш и ф— произвольные).
Выберем начальный момеит отсчета (точку 0) входного и выходного напряжений и далее иа графике щ(() произвольную точку М, которой соответствует фаза (рис. 1.2)
0=ш(1+ф. (1.2)
На графике U: (() эта же точка М с той же фазой
0==со/2-|“ф—В (1.3)
смещена по оси времени на время /*=/»—it, называемое фазовым временем прохождения сигнала через четырехполюсник. Фазовое время прохождения — это время, в течение которого произвольная точка с неизменной фазой одного гармонического колебания проходит со входа иа выход четырехполюсника.
Вычитая (1.2) из (1.3), получаем
(U) ш ш
Рис. 1.3
Рис. 1.2
5
Для удобства нахождения /ф целесообразно выбрать такую точку, положение которой на графиках Ui(t) и и» (/) определяется легко, например ТОЧКИ Mmax, Mmin или Мо, соответствующие максимуму, минимуму и нулевому значению напряжения. Время прохождения любой из этих точек равно t$.
Групповое время прохождения. Сложные сигналы представляют собой сумму (т. е. группу) гармонических колебаний. Для оценки прохождения через четырехполюсник группы колебаний наряду с фазовым временем используется так называемое групповое время прохождения (ГВП).
Подадим на вход четырехполюсника (см. рис. 1.1) простейшую группу колебаний, представляющую собой сумму двух гармонических колебаний одинаковых амплитуд и близких частот:
«1 (0 = Umi cos (ш / + Фх) + Uml cos (ша t + ф) =
(Дш ф*—ф, \ Г/ Дщ\ Фг + Ф« 1
+ !₽iJCoS + +
где СО2=СО1+Д<»; Дш — достаточно малая величина; toi — некоторая частота; ф] и фа — произвольные начальные фазы. Указанная сумма колебаний дает биения (рис. 1.3). Аналитическая огибающая биений описывается выражением
(KДш фа—ф1 \
— t -|--------- ), а заполнение биений (несущее колебание) — вы-
। А ш \ t । Ф1 + Ф» 1 ей "Г ~2~ ----2--- ’
Напряжение иа выходе четырехполюсника
«*(0 = Umi cos (coi I + Ф1—Bi) + Umi cos (to2 t + ф2—В») =
(Дш ф»—Wi ДВ\ Г/ Дш\ ™ -----_ С08 Ш1+ ъ +
Z Л! Z / |_ \ А /
Ф1 + Фа _ Д1 + Да 1 + 2 2 ]’
где Bi и В2 — значения фазовой постоянной четырехполюсника на частотах Ш1 и Ша; ЛВ=В2—Bt. При записи u2(t) предполагается, что затухания четырехполюсника на частотах ей и ш2 одинаковые. Напряжение u2(t) также дает биения, огибающая которых не отличается по форме от огибающей входных биений; эти огибающие отличаются только сдвигом по фазе иа величину ДВ/2.
Выберем на огибающей входных биений произвольную точку с фазой (см. рис. 1.3)
(1Л)
Аналогичная точка М с той же фазой Дш Фа—Ф1 ДВ
е = Т/а+ 2 Т
(1-6)
на огибающей выходных биений смещена по оси времени иа время trv=t2—ti, называемое групповым временем прохождения сигнала через четырехполюсник.
Групповое время прохождения — это время, в течение которого произвольная точка с неизменной фазой огибающей суммы двух гармонических колебаний оди- о наковых амплитуд и достаточно близких частот проходит со входа иа выход четырехполюсника.
Вычитая (1.5) из (1.6), получаем /гр=ДВ/Дш. Как было оговорено выше, Дш — достаточно малая величина, поэтому, выполнив предельный переход, окончательно получим
. _ Мт АВ dB
rp дшм-о Дш dm dm
(1-7)
6
Таким образом, групповое время прохождения равно первой производной фазовой постоянной четырехполюсника по частоте ко и характеризует крутизну В.
В общем случае в выражениях (1.4) и (1.7) под В подразумеваются как —ср (со), так и любая фазовая постоянная — рабочая, вносимая, характеристическая или повторная. Согласно (1.7) имеем
о
В= — <p(to)=pfPd«o + C(«o>0), (1.8)
f где С — постоянная интегрирования. Из этого выражения вытекает, что В опре-' деляется по известиому групповому времени с точностью до постоянного фазо-' вого сдвига С.
У иеискажающего четырехполюсника фазовая постоянная описывается выражением (1.1), поэтому tTp=dB/dio>=t, т. е. ГВП является постоянной величиной, не зависящей от со. Однако если у четырехполюсника /Гр=const, то в общем случае это ие зиачит, что четырехполюсник ие виосит искажений, так как форма сигнала на выходе четырехполюсника может ие совпадать с формой сигнала на его входе. Действительно, если lrp=T==const, то согласно ’(1.8) имеем
В=шт4-С. (1.9)
Наличие постоянного фазового сдвига С приводит в общем случае к изменению формы сигнала. В частном случае, когда С=±2пя (л= 0, 1, 2,...), изменений формы нет. Если С==±(2п—1)л (п=1, 2,...), то меняется полярность выходного сигнала.
Групповое время меиее полно, нежели фазовое, описывает изменение формы сигнала. Однако групповое время широко используется на практике, поскольку его легче по сравнению с фазовым измерять в практических условиях. Следует заметить, что групповое время, являясь функцией частоты со, может принимать как положительное, так и отрицательные значения в различных областях частот. Таким свойством обладают, например, цепи, у которых ср (со) принимает иа низкой (нулевой) и бесконечно большой частотах нулевые значения.
Задержка заполнения и задержка огибающей
Допустим, что затухание четырехполюсника в некоторой интересующей нас полосе частот coi—со2 равно нулю, а фазовая постоянная описывается выражением (1.9). Вне указанной полосы затухание и фазовая постоянная произвольные. Подадим на вход четырехполюсника амплитудно-модулированиый сигнал
«t(O=fl(O COS (Wof+Ф),
спектр которого УД/со) ограничен полосой cot—со2:
|[/1(/со)| = 0 (|со| > <в2, |со| <сох), ш0 =-у (coj + <»2).
Запишем «i(/)=Refii(t), где
Ul (/) = (/) е1
к т. е. Ui (/) — действительная часть комплексного сигнала Hi (/) со спектром
‘ ®>0;
> У1('“) = (о, со<О. ‘
Спектр выходного сигнала й2(/)
02(/со) ={7i(/to)e~jB (со>0).
Изменим форму записи выражения (1.9):
В = СО Т -р С “ СО /гр -|- COq (/ф“*/гр) (С02 СО С02),
7
где frp“T“ ——; /* = —I =<Гп+ —; /4—фазовое время на частоте» * <0#
те ш«. Тогда
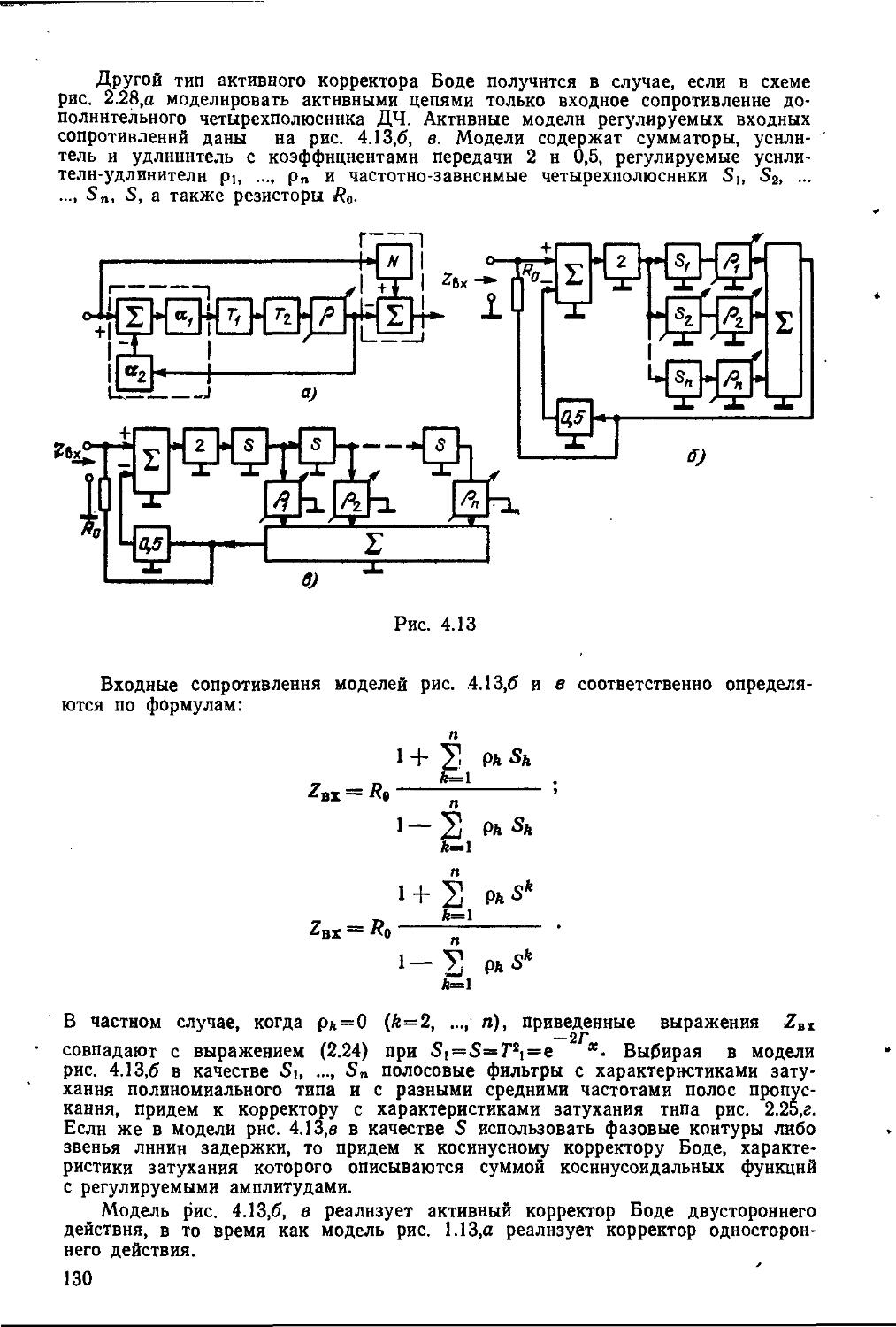
У, (/со) = У1 (/со) е4®‘гр е—,ш* (*Ф—*гр) И
5, (0 = M/— trp) е“1 “• С'Ф-'гр). ?
Следовательно, u2(/)=Reu2(/) = fi(/—/гр) cos [<Во(/—/*)+$].
Таким, образом, огибающая h(/) и заполнение соз(соо/+Ф) входного сигнала «1 (/) задерживаются четырехполюсником соответственно иа время /гр и /* }
(рис. 1.4); эти задержки в общем случае могут быть различными (С^О), что приводит к смещению огибающей по отношению к заполнению и в целом к изменению формы сигнала. Если же С=0(/ф=/Гр) или если С принимает вышеуказанные значения, то изменений формы сигнала нет.
Из изложенного следует, что если
/гр=const=т, (1.10)
то форма огибающей выходного сигнала не отличается от формы огибающей входного сигнала четырехполюсника. При этом форма всего сигнала (а не только огибающей) может измениться.
Если же
С
/ф = т+— (С=±пя), (1.1П)
то форма всего сигнала ие меняется при прохождении через четырехполюсник.
Фазовая и групповая скорости распространения волн
В четырехполюсниках с распределенными параметрами, таких как длинны* однородные и неоднородные лииии, для оценки фазовых искажений используются фазовая и групповая скорости распространения воли. »
Фазовая скорость. Пусть на входе однородной лииии, нагруженной иа согласованную нагрузку (рис. 1.5,а), напряжение меняется по закону ««(/)< = 1/щсо5(ш/+фо) • Тогда в произвольной точке, отстоящей иа расстоянии х от начала линии, напряжение меняется по закону
и(х, /)=yme-“xcos(to/—рх+фо), где а и р — соответственно коэффициенты затухания и фазы линии. Это выражение описывает гармоническую волну напряжения, которая распространяете* по линии (рис. 1.5,6).
8
Выберем произвольную точку волны, например точку М с фазой =ш/—Рх+фо, и определим, с какой скоростью перемещается (распространяется) эта точка по линии при условии, что фаза точки М при перемещении не меняется.
В момент ti точка М находится иа расстоянии Х1=(ш/1—0+фо)/Р, а в момент /2=/14-Д/(Д/>0)—иа расстоянии х2=[ш(Ь+Д0—*+Фо]/Р от начала линии. За время Д/ точка М перемещается иа расстояние Дх=х2—Х1»юД//р се скоростью £7ф=Дх/Д/=<в/р, называемой фазовой скоростью распространения волны.
Фазовая скорость распространения—• это скорость, с которой произвольная точка с иеизмеииой фазой гармонической волны перемещается по линии.
Линия является частным случаем четырехполюсника, и для нее можно определить фазовое время прохождения сигнала. Пусть длина линии равна I, тогда согласно (1.4) для однородной лииии
.____в ?Р/_____L
ф ю ш t/ф’
где В = р/— фазовая постоянная лииии. Линия не виосит фазовых искажений, если выполняетси условие (1.1) или
В С ( , т \ (D
₽ = ~ = шт 4--—, I т = = const |. Для такой лииии t/ф = — =
I I \ I ) р
“1 / I т' + —— 1. В частном случае, если С=0, то Уф=1/т/=const. Это
выражение показывает, что линия не виосит фазовых искажений, если фазовая скорость распространения является величиной постоянной для воли различных длин % (%=£/фГ=2я/Р; 7’«=2я/со).
Групповая скорость. Подадим иа вход лииии группу из двух колебаний одинаковых амплитуд и близких частот
Ио (0 = УтСОЗ (®it+Ф1) 4-t/mCOS (W+Фз) >
где со2=Ш14-Дш; Дш— достаточно малая величина.
В точке, отстоящей иа расстоянии х от начала линии, напряжение меняется по закону
и (х,0 = Um е-®1 х cos (tOi t—Pi x + фх) + Um e~“*x cos (ш, t— Pa x + фя), где at, a2, pi и p2—значения коэффициентов затухания и фазы лииии иа частотах mi и ш2. Каждое из слагаемых этого выражения описывает гармоническую волну напряжения. Поскольку Дш — малая величина, длины волны разнятся также иа малую величину, т. е. u(x, t) описывает группу волн с близкими длинами.
Считаем, что ai = a2=a, тогда
/До ДР ф.—ф, \ Г/ Дш\
«(х, Z) = 2 е-®* cos —-t-------Е-х + V1- )cos ей + v )<-
__ Pi ~f~ Рз , Ф1 + Фа 1
2 + 2 ]’
где Др=р2— Pi.
Огибающая напряжения u(x, t) (фронт группы воли) описывается выражением
(Дш ДР ф«—ф. \
— t----« х+~ о Ь
2 2 2 )
а заполнение — выражением
Г / । ш \ f Pi + Ра , Ф1 + Фа
cos Ш1 +— t---------------+---------
9
На рис. 1.6 изображены графики и(х, t) для двух различных моментов Л и tt (h>h).
Выберем на фронте волн произвольную точку М с фазой
Дш Др ф2—ф1
“ = ~T~t—X +---------
2 2 2
и определим, с какой скоростью перемещается эта точка по линии. В момент ti точка М находится иа расстоянии
Xi = —— (Д ш /1 —20 ф2— ф1),
Др
а в момент tz— на расстоянии
*2 = ~ (д ш /2— 2 е + ф2—фо др
от начала линии. За время Д/=/2—h точка М перемещается на расстояние Дх=Хг—Х1=Д<оД//ДР со скоростью Пгр=Дх/Д£=Д<о/Др, называемой групповой скоростью распространения волн. В пределе (Др-»-О) получим t/rp=dto/dp. Групповая скорость распрост-
Рис. 1.6
ранения — это скорость перемещения произвольной точки фронта двух гармонических волн с одинаковыми амплитудами и близкими длинами волн. Групповая скорость не зависит от постоянной С, и поэтому ею удобнее пользоваться, нежели фазовой скоростью. Групповое время прохождения сигнала связано с групповой скоростью распространения волн соотношением
_ -________________!_
гр dto d«o UTp
Если групповая скорость ие зависит от ш, то фронт воли, рас-
пространяющихся по линии, не ме-
няет своей формы.
1.2. Искажения в дискретных системах
Условия неискаженной передачи дискретных сигналов
В дискретных системах связи принимаемые сигналы регистрируются по значениям некоторых информационных параметров сигналов, отсчитываемых в заданные дискретные моменты. В таких системах форма сигналов не является определяющей, поскольку в общем случае дискретные значения параметров (ДЗП) неоднозначно связаны с формой сигналов. Поэтому условия неискаженной передачи аналоговых сигналов для дискретных систем, как правило, являются избыточными, ие отражающими особенностей дискретных систем.
Искажения в дискретных системах отсутствуют, если ДЗП сигналов принимают • требуемые значения. Оценка искажений производится по так называемым интерференционным помехам, под которыми подразумеваются помехи, вызванные отклонениями ДЗП сигналов от заданных значений. Искажения отсутствуют, если интерференционные помехи равны нулю. Условия отсутствия интерференционных помех в различных системах различные, так как эти помехи опре-1°
Являются частотными характеристиками каналов связи, скоростью передачи сигналов н методами нх приема. Ниже даются общие условия отсутствия интерференционных помех в синхронных системах с линейными методами приема, т. е. в системах, в которых используются линейные каналы и информационные параметры выделяются линейными преобразованиями сигналов.
В вопросах анализа интерференционных помех основополагающую роль играет формула суммирования (Пуассона, согласно которой для произвольного гладкого сигнала f(t) со спектром F(ja>)
справедливо раненстно [13]
2 /(йД# + <0)е-/®<*А <+'•> = fo=—оо
---—2 Г(/ш—/т(0д)е_/“дт'’ (А^д = 2я), т±±оо
где Ы— произвольный заданный интервал; h — произвольный начальный момент отсчета.
Для оценки энергии интерференционных помех важна формула квадратичного эффекта дискретизированного сигнала
2 /»(лд(+<0)= k=z—CO
юд 4я»
<В_4-<В_ ж д
где <Ох — произвольная частота.
Если в левой части формулы суммирования Пуассона н формулы квадратичного эффекта удерживается конечное число членов и суммирование по k ведется от—до k2 (ki в — заданвые числа), то в правой части этих формул необходимо Е(/-(о) заменить на
(Г(/Й)П(/®—jQ)dQ,
JS* хм оо
где П(]а)—спектр произвольной ограниченной функции П(/), удовлетворяющей условию
L — множество целых чисел от —ki до kt. На поведение /7(f) между точками fcAf-f-fo ограничения не накладываются.
Линейные преобразования выполняются двумя способами: фильтровым и корреляционным. Рассмотрим фильтровые и корреляционные системы.
В фильтровых системах (рнс. 1.7,а) рабочий сигнал s(f) с выхода канала поступает на фильтр Ф, на выходе которого дискретные значения сигнала r(t) дают интересующие нас параметры сигнала s(t). Интерференционные (межсимвольные) помехи отсутствуют в том случае, если реакция r(t) системы <ка-нал + фильтр» иа единичный сигнал (импульс или символ) обладает свойством отчетности (селективности) (критерий Найквиста) [8, 13, 16|
{/?„= cons! # 0, k = 0;
Г Ь -U1 и.9 <112>
0. А = ±1, ±2,...,
11
где Д/ —интервал следования сигналов; 1/Д7=/д— скорость передачи; 7?» — заданная величина; /о — начальный момент отсчета. Критерию Найквиста должны удовлетворять системы независимо от вида используемой в канале модуляции.
Критерий Найквиста в частотной форме
2 $(/®—/т®д)Ф(/®—/т<од)е/’== Д(1.13) QO
где S(/a>)—спектр сигнала на входе фильтра; Ф(/®) — передаточная функция фильтра Ф.
Для устранения межсимвольиых помех спектры передаваемых сигналов, частотные характеристики систем связи (каналов) и фильтра Ф должны быть выбраны так, чтобы выполнялось равенство (1.13). На рис. 1.7,6 дан пример низкочастотного сигнала г (/) со свойством (1.12), а также действительной G((o) и мнимой Х(<о) частей его спектра Я(/ш) = 6(ю))+/Х((о) для случая <ос«од^ ^2шс, где а>с — граничная частота фильтра Ф(/о=0). На отрезке [шд—<ос, <0с] (7 (<о) — произвольная нечетная функция относительно точки (шд/2, ДЙ?»/2), а X (ко) — произвольная четная функция относительно точки (<од/2, 0). На указанном отрезке <7(<о) и Х(<о)—неоднозначные, и то время как на отрезке [О, (Од—(Ос] — однозначные:
б((о)=Д</?о, Х((о) =0 (0^<о^<од—(Ос).
Условие отсутствия межсимвольиых помех для систем с корреляционный приемом (рис. 1.8,а) записывается также в виде равенства (1.12), в котором
r(0= J а(т)ф(т—/)</т,
Ех—t
s(t)—сигнал на входе коррелятора (рабочий сигнал); ф(/)—заданный опорный сигнал, отличный от нуля на некотором множестве Et. В общем случае, когда Et — произвольное,
г(АД/-Но)= j з(Оф[#~ао + *ДО]<«(Л = О, ±1, ±2,...),
Et-t,-kb.t
12
где Et—tf—kbt—множество, получаемое сдвигом множества Et на время /о+^А/. В частном случае Et— отрезок [—Д//2, Д//2]. На один из входов перемножите-ля \М подается сигнал s(t), на второй — периодическая последовательность опор-иых\ сигналов ф(/). Интегрирование ведется за время, равное длительности од-ного) опорного сигнала. Значения г(АД/-Но) получаются скалярным перемио* женнвм части сигнала s(t):
(2k—1)Д//2+*></< (2А4-1)А</2+<о
— и сигнала ф(<—/о—kAt) (выделенные отрезки кривых иа рис. 1.8,6) в соответствии с формулой
(2*4-1) А i/2+t.
г(*Д/-На) = ( з(/)ф(<—/0—kM')dt(k = O, ±1, ±2,...).
<2fe—1) A tP+h
Заменив в равенстве (1.13) Ф(/ю) иа ¥*(/<0), получим условие отсутствия интерференционных помех в корреляционных системах, записанное в частотной форме. Здесь '¥(}</>)—спектр опорного сигнала ф(0; * означает комплексное сопряжение.
Если условие (1.12) ие выполняется, энергия межсимвольных помех при передаче единичного сигнала определиется выражением
Д=|з(/0) — Яо|«+ 2 b«(*A* + W-
00
2 Л(/ш—/тшд)е^в,—т<вд^*
2
—7?0Д( d<o,
(1.14)
где Л(/<в)—5(/в>)Ф(/<о) для фильтровых, систем и /?(/a>)=S(/<o)4r*(/<D) для кор реляционных систем.
Многоканальные системы
На рис. 1.9 изображена структурная схема ^канальной фильтровой системы, в которой Fт(/<о) и Фу (/<о) (v=l, 2, ..., N) —коэффициенты передачи соот
ветственно передающих и приемных фильтров, которые включают в себя также устройства модуляции и демодуляции; К(М>)—передаточнан функция группового канала. Обозначим через yip(t) отклик р-го приемного фильтра на единичный информационный сигнал МО. поданный на вход /-го передающего фильтра. Дискретные зиаченин этого отклика yipX. 5<(ЛД/4-/о) при А—0, 1—р оп-
ределяют полезное значение
сигнала, при /=р —меж- Рис- 1,9
символьные и при 1=Ар (k —
любое) — межканальные интерференционные помехи. Интерференционные поме-
хи отсутствуют, если
у1р(ЛД/ + /в)=С1в1рви(О Р=1. 2...,^, А = 0, ±1, ±2,...) , (1.15)
где Ci — заданные величины; 6ц — символ Кронекера:
и. *’ = /; to,
1»
/
Это условие в частотной области эквивалентно условию ।
°®
2 Ui а И—/m Ид) Fl (/ ш—/ т Шд) К (j <о— '
т=—оо
—/тшд)Фр(/ш—/т<0д) е^*0-т<Вд) ** = A/Cjdjp (I, р=1, 2,..., N),
(1.16)
где Ulfja) —спектр ui(t). В общем случае единичные сигналы Ui(f) для различных каналов различные (Z=l, 2,...,N).
Выражение (1.16) дает условия отсутствии межснмвольиых и межканальных помех в многоканальных фильтровых системах, н которых передается параллельно дискретная информация по исем каналам со скоростью 1/AZ, А1= =2п/(0д.
В многоканальных корреляционных системах параллельного типа для устранения межснмвольиых и межканальных помех необходимо выполнить условие
yip(kM+to) = J Si(t)tyP(t—kM—to)dt=CiSip&M
(I, p=l, 2, .... N; Ы, ±1, ±2, ...), (1.17)
где yip(kM+to)—отсчеты сигнала на выходе р-го коррелитора при подаче на его вход рабочего сигнала Si(t), являющегося откликом группового канала на единичный сигнал Ui(t), поданный на вход 1-го канала. Интегрирование в (1.17) ведется по множеству, на котором опорный сигнал фр(<—k&t—to) отличен от нуля.
Условие (1.17) эквнналентно условию
2 £1 (/_“—/т ®д) (/ ®—/ m од) е^ (°~m °д) =
= МС^1р(1, р = 1, 2......N). (1,18)
Выражения (1.15)—(1.18) являются обобщением критерия Найквиста на многоканальные системы.
Энергия межсимвольных помех на выходе каждого из каналов многоканальных систем определяется по (1.14) с заменой Rfj®) на £7|(/(о)/г|(/(о)К(/(о)Ф|(/®) для фильтровых и на Si (/(o)’Fi*(/fi>) —для корреляционных систем. Энергия межканальных помех, нозннкающнх на выходе р-го канала фильтровой системы при подаче единичного сигнала на вход 1-го канала, определяется по (1.14) с заменой R(.p£>) на (/со)/?*(/во)/С(/(о)(/а>) в соответствии с равенством (1.15). Энергия межканальных помех в корреляционных системах определяется аналогично.
Системы, использующие сигналы парциального кодирования
Наряду с системами, удовлетворяющими условию (1.12), используются системы с парцнально-отклнковым кодированием (системы с ПОК-снгналами), характеризующиеся тем, что некоторое конечное число значений r(k&t-{-to) отлично от нуля, а остальные значения равны нулю [16]:
{Ль, keL-.
п (119)
О,
где L — заданное конечное множество значений k, для которых r(k&t+to) равны заданным значениям a*, k = 0, ±1, ±2,...
Равенство (1.19) выполняется, если выполняется равенство (1.13), и котором в правой части Ro заменено на 2 а&е—*.
keL
14
В многоканальных фильтровых н корреляционных системах с ПОК-снгна-лаДи при отсутствии межканальных помех ныходные сигналы обладают свойств
где
a|z), p=l, ksL\
yip(kM + t0)= Qf p=l, k&L; p&l, для всех A;
Up, /=1,2...N; A=±l, ±2, ...),
adl* — заданные для каждого канала значения ПОК-снгнала. Для получе-
ния указанного свойства необходимо, чтобы частотные характеристики фильтровых систем удовлетворяли равенстну (1.16), а спектры корреляционных систем— равенству (1.18), в которых в правых частях Ci заменено на
keL I
1.3. Оптимальные фазо-частотные характеристики
Минимизация изменения формы сигнала
Модель рис. 1.7, а является эквивалентом произвольного линейного инвариантного во времени канала (без учета шумов) с фильтровым приемником Ф. Передаточная функция приемника Ф(]в>) =Ф(ш)е^Ф<®>>. Считаем, что АЧХ приемника (Ф(ш)) задана (фиксирована). Определим требования, которым должна удовлетворять ФЧХ(<р(со)), так чтобы осуществлялся оптимальный (в том или ином смысле) прием сигналов.
Допустим первоначально, что выходной сигнал приемника должен наименее в смысле среднекнадратнческого критерия уклоняться от некоторого заданного сигнала So(Z):
* 1 = f \Г (t) —So (t)I*dt = vT02 + so (® -
— i Я 0
— 2 S (<o) So (co) Ф (to) cos[0o (ш)—0 (co)— <p (<o)]} d<o,
где S(<o)eJ'6<®) и So(a»)eW<B)— спектры сигналов s(t) и So(Z).
Необходимо выбором <p(<o) миннмизироннть r|. Глобальный минимум 1) достигается при
<р((о) =0о(®)—0(ш)±2йп (А=0, ±1, ±2,...). (1-20)
1 “
В этом случае tlmtn=—([ S (to) Ф (со)— So(co)]8dco. я о
Если Ф(ш) отличается от оптимальной, определяемой выражением (1.20), на некоторую величину е(а>), то т] превышает T]min на величину
1 “
Дт) = — f S (со) So (со) Ф (со) [2—2 cose (со)]dсо, я о
О
которая при |е(со)|^О,3 (дли всех ш) будет примерно раина
ь Дт)«—(S (со) So (<о) Ф (со) es(co) da.
я о
Для оптимальной коррекции фазовых искажений необходимо уменьшать Дт], поэтому оптимальным критерием коррекции является квадратичный взвешенный критерий.
Частный случай. Будем подразумевать под Ф(/со) передаточную функцию всей системы «канал + приемник», а под s(t) —сигнал на входе канала. Потре-
15
буем, чтобы сигнал г(0 наименее отличался от s(t), для чего положим r(t} = =as(t—т) и So(<o)=aS(to), 0о(со) =0(со)—сот, где а и т — заданные величины. В результате выражение (1.20) принимает вид <р(со)=—<от±2йя (k^9,r±i, ±2,...). Следовательно, оптимальной ФЧХ системы, наименее искажающей /форму передаиаемого сигнала при произвольной заданной АЧХ, является линейная характеристика. ' /
Максимизация отношения сигнал/шум
Отношение сигнал/шум для момента регистрации Т на выходе приемного фильтра Ф (см. рис. 1.7/1)
q^r(T)/VP; ’
где г(Т)=^= р(т)Ф(®)еЯв(ю,+ч,<“>+<вЛ<1<о; Р—А/(со) -спектральная плотность шума на входе фильтра Ф.
Максимум q для произвольных фиксированных S(co), Ф(со) и А/(<о) достигается при
0(со)-Нр(со) =—соТ±2Ая (£=0, ±1, ±2,...) (1221)
и вычисляется по формуле 1 *?
<7тах =--J S (со) Ф (со) d <о.
яуР 6
Если сумма 0(<о)+<р(со) отличается от оптимальной (линейной) характеристики (1.21) на величину е(со), то q уменьшается по сравнению с фп*х на
А <7 =----—- fs (со) Ф (со) [1—e^8<e,]dco.
2я "у Р —оо
При |е(со) | s£0,3 имеем 1 °° A q »-------------------------—fS (со) Ф (со) в* (со) d ®.
2л "уР о
Оптимальная коррекция ФХЧ сводится к минимизации А?, и оптимальным критерием коррекции является взвешенный квадратичный критерий.
Минимизация искажений дискретных сигналов
Пусть $(/)—отклик канала (см. рис. 1.7,а) на единичный информационный сигнал. На выходе фильтра Ф дискретные значения сигнала r(t) сравниваются с заданными значениями а». Качество системы «канал + приемник» оценивается величиной
Ч- S |г(*А/)-<%!•-
. 0,5 <0д „о 2
0 -л . J 5 Г(/со—п/сод) —Fo(/co) da>
п^.
(1.22)
где Ft (j со) = F/(<») e* e« <“> = A / J ak ; сод<2сос;
F (I co) = S (и) Ф (co) e/1® (•)+♦<•)].
Выбором ф(со) минимизируем т] при заданных Fo(/co), S(co), Ф(со).
16
областях частот Ei, tjifi
2 -S (со—пмд)Ф(ш—п<ОдХГ0 (со),
2
П(Од)Ф(<о—псод)—У7* (со) d <о,
оптимальная фазовая характеристика определяется однозначно нз соотношения 0(<а—лфд)+<р((о—ло>я)= 0о(со). При этом
П1== 2лА/
где интегрирование ведется по областям частот Ei.
В Областях частот Ег, где 2 S(<о—пшк)Ф(ш—nan)>Ft(a>), оптимальная оо фазовая характеристика определяется неоднозначно, так как выбором ф(<о) 00
разность 2 F(/co—п/шд)—F0(j<o) сводится к нулю. В итоге 1)ош1п=т)ь
Максимизация отношения сигнал/шум с учетом межсимвольной интерференции
Отношением сигнал/шум с учетом межснмвольной интерференции оценим величиной
?=г(О)/УРТ?,
где г (0) — значение сигнала иа выходе приемника (см. рис. 1.7,а) в нулевой момент (для простоты полагаем моментом регистрации нуленой момент); Р — энергия аддитивной помехи; т) — энергия межсимвольиых помех, определяемая выражением (1.22), в котором ао#=0, а*=0, fe=±l, 2. йо=г(О).
Выбором <р(ш) максимизируем q. Вели считать, что
2 S(<o—л<од)Ф(ш—и«)д)<Д/г(О)
для всех <о, то оптимальная <р(®) определяется выражением (1.21), в котором Т*=0. При этом достигаются максимум г(0) и минимум Т).
1.4. Оценка и нормирование искажений
Количественная оценка линейных искажений производится по величинам неравномерности АЧХ (ДА) н ГВП (Д1гр) канала связи в интересующих нас диапазонах частот.
Неравномерность АЧХ — это отклонение АЧХ от некоторой постоянной величины До, ДА=А—До, где До — затухание на заданной частоте. Здесь А — рабочее либо вносимое затухание. Аналогично неравномерность ГВП — это отклонение ГВП от некоторой постоянной величины to, Д1Гр=*4р—to, где to—ГВП на заданной частоте. Оценка по неравномерностям АЧХ и ГВП является избыточной, так как не учитывает особенностей различных методой приема сигналов. Из-за своей простоты она широко используется иа практике.
Каналы связи при отсутствии в них фазовых корректоров, как правило, относятся к четырехполюсникам мнннмально-фазоного типа. В таких каналах АЧХ однозначно связана с ФХЧ парой преобразований Гильберта:
_ , . 2 ®х 7 А (<о)
В (Их) = —5s-j - ~ d ш,
Я g ------т2
27 шВ(®)
А (®х) = — ) ----------Г" d
я о (О*--(О*
17
/
где со* — частота, на которой определяется затухание либо фаза канала; /А и В — затухание и фаза канала. Следовательно, в каналах минимально-фазового типа существует однозначная связь между амплитудно-частотными и фазо-частотными искажениями. Однако преобразовании Гильберта достаточно сложны, и поэтому на практике амплитудно-частотные и фазо-частотные искажения рассматриваются раздельно. Необходимо также учесть, что иа качество передачи звуковых сигналов фазовые искажения не влияют. Вопросы оценки и нормирования искажений, а также исследование влияния неравномерностей АЧХ и ГВП на изменения формы сигналов достаточно подробно изложены в литературе, например в [1—7J, и здесь не рассматриваются.
Как вытекает из материалов § 1.1—1.3, условия неискаженной передачи в различных системах связи существенно разнятся между собой, что затрудняет выработку единых неизбыточных требований к частотным характеристикам каналов, адэкватных различным методам приема сигналов.
1.5. Корректирование искажений
Принцип коррекции пассивными и активными схемами
Линейные искажения канала связи или отдельных его частей компенсируются с заданной степенью точности с помощью корректирующих (выравнивающих) цепей (четырехполюсников).
Коррекция пассивными схемами. Представим канал связи или некоторую его часть, вносящую искажения, в виде искажающего четырехполюсника (ИЧ). Включив между ИЧ и нагрузкой /?н корректирующий четырехполюсник (КЧ) (рис. 1.10). Выберем КЧ таким образом, чтобы его повторное сопротивление
/?г
Рнс. 1.10
равнялось RB, тогда Zbx=/?b. В этом случае подключение КЧ не меняет нагрузки ИЧ и, следовательно, не меняет его режима работы (не меняет рабочей постоянной передачи). Рабочая постоянная передачи всей цепи
Гро=Гр+Гк,
U1
где Гр — рабочая постоянная передачи ИЧ (см. рис. 1.1); Гк=1п—повтор-
ная постоянная передачи КЧ. Для симметричных КЧ повторные параметры совпадают с характеристическими параметрами. Вся цепь не вносит искажений, если Гро=Ао+/(от, или
Аро = Ар -f- Ак = Ао = const (рис. 1.11,а);
= Вр -f- Вк = соТ (т = const) (рис. 1.11,6);
^гро — ^гр ^грк — Т ~ const (рис. 1.11,в).
Следовательно, для компенсации искажений необходимо ныбрать повторную постоянную передачи КЧ таким образом, чтобы она дополнила рабочую (либо вносимую) постоянную передачи ИЧ до характеристик ненскажающего канала (четырехполюсника) в заданном диапазоне частот (он—<ов. Рассмотренный принцип называется коррекцией пассивными схемами, так как КЧ, удовлетворяющий вышеуказанным требованиям, можно реализовать в виде пассивного обратимого /?ГС-четырехполюсннка.
Коррекция активными схемами. Для компенсации искажений используются как пассивные, так н активные корректоры, реализуемые на основе невзаимиых 18
элементов — управляемых источников энергии, операционных усилителей, гираторов ш др. Активные корректоры строятся, как правило, в виде четырехполюсников с большим (теоретически — с бесконечно большим) входным сопротивлением н| достаточно малым (теоретически — нулевым) выходным сопротивлением. Поэтому к активным корректорам не предъявляется требование по повторному сопротивлению и корректоры описываются не рабочей или вносимой постоянной передач^, а постоянной передачи, определяемой выражением
I/.
Г=—InT, Т =~-,
где Vi н Vi— комплексные напряжения на нходе и выходе корректора. Постоянная передачи активного корректора удовлетворяет тем же требованиям, что и Гр (или Гвн) пассивного корректора.
Рис. 1.11
Естественно, пассивные корректоры также можно реализовать в виде четырехполюсников с большим входным и малым выходным сопротивлениями, однако такие корректоры неизбежно вносит в канал снязи большое затухание, что не всегда допустимо.
Активные корректоры зачастую совмещаются с усилителями, имеющимися в аппаратуре связи, причем корректоры могут включаться в обратную связь усилителя. Активные корректоры делятся на две группы: 1) корректоры комбинированного типа, содержащие /?АС-двухполюсникн н четырехполюсники, а также невзанмные элементы; в таких корректорах число индуктивностей обычно сведено к минимально возможному н 2) /?С-корректоры, содержащие только RC-цепи и иеизаимиые элементы. Применение /?С-корректоров обусловлено тенденцией микроминиатюризации аппаратуры связи.
Активные корректоры по уровню собственных шумов уступают пассивным корректорам, при этом активные /?С-корректоры уступают корректорам комбинированного типа.
Совместная и раздельная коррекции амплитудных и фазовых искажений
Одним КЧ принципиально можно скомпенсировать и амплитудные, и фазовые искажении (такой четырехполюсник является амплитудно-фазовым корректором). Однако обычно корректирование амплитудных и фазовых искажений проводится раздельно, т. е. с помощью разных четырехполюсников, называемых амплитудными корректорами и фазовыми корректорами. Объясняется это тем, что:
раздельная коррекция практически выполняется проще, нежели коррекция всех видов искажений одним четырехполюсником;
амплитудные и фазовые искажения играют различную роль при передаче сигналов разных видов. Например, при передаче речевых снгналон необходимо корректнронать амплитудные искажения, поскольку фазовые практически не оказывают влияния на разборчивость речи. При передаче же сигналов изображения (телевидения, фототелеграфии и др.) фазовые искажения оказывают большее
19
влияние на качество передачи, нежели амплитудные. Поэтому в разныхоблж-стях техники связи возникает необходимость в раздельной коррекции амплитудных и фазовых искажений.
Форма передаваемого сигнала может изменяться и за счет ограничения рабочей полосы частот. Спектр одиночного импульса конечной длительности имеет теоретически неограниченную по протяженности спектральную плотность, поэтому передача одиночного импульса через канал с конечной шириной рабочей полосы частот неизбежно связана с нзмененнем формы импульса даже в том случае, если в пределах рабочей полосы частот выполняется условие неискаженной передачи. Такне искажения нельзя устранить с помощью корректирующего четырехполюсника.
Прн корректировании фазовых искажений ставится условие: фазовый корректор не должен вносить амплитудных искажений, т. е. его затухание не должно меняться с изменением частоты
AK=const, (1.23)
в частности Ак=0. К фазовой постоннной амплитудного корректора никаких требований не предъявляется, поэтому амплитудный корректор вносит фазовые искажения. Объясняется это тем, что фазовая постоянная амплитудных корректоров строго не удовлетворяет условию Вк=&х (т—const). Естественно, можно построить амплитудные корректоры, у которых в заданном диапазоне частот Вк приближенно линейно зависит от частоты, а Ак имеет нужную форму. Однако такие корректоры сложнее корректоров, у которых к Вк не предъявляются указанные требования. Иначе обстоит дело с фазовыми корректорами. Известен класс фазовых корректоров, удовлетворяющих условию (1.23). Поэтому если необходимо скорректировать и фазовые, и амплитудные искажения, то первоначально корректируются амплитудные искажения, а затем — фазовые. При коррекции фазовых искажений устраняются нскаження и канала связи, и амплитудных корректоров.
Совместная (одновременная) коррекции фазовых и амплитудных искажений осуществляется амплитудно-фазовым корректором (АФК), представляющим собой /?£С-четырехполюсник с заданными АчХ и ФЧХ. Расчет н реализация АФК является классической задачей синтеза ЗДС-цепей по заданным частотным характеристикам н выполняется и дна этапа:
аппроксимации — подбор рациональной функции комплексной переменной р=<т4-/<о, модуль и аргумент которой на мнимой оси /<о совпадают с заданными АЧХ н ФЧХ с допустимой погрешностью;
реализации — построение по полученной, рациональной функции амплитудно-фазового корректора в виде RLC-четырехполюсннка н расчет его элементов R, L, С.
Трудоемкость этапов аппроксимации и реализации даже прн использовании ЭВМ весьма значительна. Кроме того, АФК, реализованные в виде RLC-че-тырехполюсннкон, обладают тем недостатком, что подстройка (или перестройка) нх АЧХ и ФЧХ в практических условиях связана с существенными трудностями, так как элементы R, L, С четырехполюсников достаточно сложно влияют иа АЧХ, ФЧХ и входное сопротннленне корректоров.
По указанным причинам в многоканальной электросвязи, телевидении, фототелеграфии, прн высокоскоростной передаче дискретной информации для сои-местной коррекции случайных амплитудных и фазовых искажений и коррекции временных характеристик (переходных характеристик и импульсных реакций) широко используются полнномные, в частности гармонические, корректоры. Их достоинства:
возможность высокоточной коррекции сложных по форме искажений АЧХ и ФЧХ канала связи либо передаваемых сигналов;
простота регулировки (перестройки) комплексного коэффициента передачи корректора;
возможность оперативной |(«ручной», автоматической либо адаптивной) настройки корректора по специальным испытательным сигналам либо непосредственно по рабочим сигналам (автоматическая и адаптивная коррекции выполняются в течение секунд или долей секунды).
20
Распределение искажений в каналах связи
Амплитудно-частотные искажения (АЧИ) канала либо тракта связи принято'делить на основные, регулярные (систематические) и случайные. К основным относятся искажения, возникающие в линиях связи, фильтрах и усилителях. Искажении в фильтрах являются постоянными, т. е. практически не меняются с течением времени, поэтому их коррекция производится постоянными корректорами. Искажения в линиях связи меняются с изменением климатически условий, поэтому их коррекция производится регулируемыми корректорами. Регулируемые корректоры используются также дли компенсации искажений в усилителях. Корректоры, включаемые в линии, называются линейными.
Регулярные (систематические) и случайные искажения возникают за счет погрешности коррекции основных искажений. Регулярные искажения возникают при использовании однотипных корректоров, поэтому они накапливаются в> канале связи и их компенсация производится как постоянными, так и регулируемыми корректорами. Корректоры постоянных регулярных искажений называются магистральными. Если корректор устанавливается на каждой усилительной станции, то он называется системным. Случайные искажения вызываются производственными допусками на параметры узлов аппаратуры и участков канала связи и изменениями этих параметров под влиянием ряда факторов. Случайные искажения по мере их накопления в канале связи компенсируются регулируемыми корректорами со специальной формой АЧХ. Корректоры регулярных и случайных искажений называются подчистотными.
В основе коррекции АЧИ лежит принцип последовательной коррекции: первоначально устраняются основные искажения отдельных участков канала связи, затем регулярные искажения нескольких участков и далее случайные искажения большого числа участков. Выбор принципа последовательной коррекция связан с необходимостью получения требуемой защищенности сигналов от шума.
Фазо-частотные искажения (ФЧИ) обычно корректируются на выходе канала (тракта) связи, так как коррекция ФЧИ не меняет отношения снгиал/шум. Однако в ряде случаев (например, при передаче телевизионных сигналов) корректоры ФЧИ размещаются совместно с корректорами случайных АЧИ, что упрощает оконечное оборудование.
Более подробно распределение искажений в каналах связи изложено в [б]-
2. ПАССИВНЫЕ КОРРЕКТОРЫ
2.1. Фазовые корректоры
Корректоры с нулевым затуханием и постоянным входным сопротивлением
Основной схемой, используемой для построения фазовых корректоров, является мостовая скрещенная схема (Х-схема) (рис. 2.1,а), для которой:
7 Ui Hi .
_ U» ^я Zt—Zi Z3) .
„ 2Ut -|/~ZT 2VZhZ^(ZsZ4—ZiZg) E V Za - Hi + ZvHi
где Zfi“ZiZg(Zg+Z4)+ZsZ(,(Zi+Z2)+ZB(Zt+Zj) (Zg-J-Zt); (Zi-f-Zg) (Zi-J-+ Z*) +ZH(Zi+Z2+Za+Z4), E, Ui, Ui, Ii, Zi... Z4 — операторные ЭДС, напряжения, ток, сопротивления.
218
(2.1)
(2.2).
РнС. 2.1
Если мостовая схема — уравновешенная Zt=Zs, Zi*=>Zi (рис. формулы (2.1)—(2.3) принимают вид:
_ 2 Zi Zt 4~ (%1 ~Ь £») .
2ZH + Zi + Z» FZh((Z»—ZJ .
2Z1Z, + ZH(Z1 + Z1) ’
T______________2 ~V^Zg Zr (Zt —Zi)_______
'p~ (Zr + ZH)(Z1 + Za) + 2ZHZr + 2Z1Z1
В этом случае характеристические параметры мостовой схемы находятся по формулам:
Zc = Vz^t, = Гс = Ac + iBe.
2.1,6), то
(2.4)
(2.5)
(2.6)
Если Zi и Zt — взаймообратные двухполюсники, Z1Za=/?’= const, то Ze*“R, а (2.4)—(2.6) преобразуются к виду:
2R*z1 + zb(r* + z2A
zBx =------------*----Т22- : (2.7)
2ZaZx + /?* + Z?
ZH(E*—z?) т=i-------: (2.8)
|2^Zx + (₽* + Z?)ZH
2-|/Z^(/?»—Z2) Tp =-----------------r2------1--------• (2.9)
(Zr + ZB) (fl* + Zf) + 2Zx (Zg Zr + Я2)
Далее, если Z1 и Za— взаймообратные реактивные двухполюсники, Zi= ^*jXi, Zt=*—jXi, XtXi=R2, то Ac=0 для всех частот;
Вс = 2 arctg = —2 arctg ; *х К
t d в<= 2 dxl _ 2R dx*
гр lda> R«4-X^ da> R* + X% d<0
(2.Ю)
В этом случае мостовая схема называется фазовым корректором, фазовым контуром, фазовым звеном либо всепропускающим четырехполюсником.
В режиме согласования на выходе схемы Z*==R, а (2.7) (—2.9) упрощаются:
7 _р т R~Z1 Z*—R ГГс U*_____________Ь.
,х R’ R+гГ Zi + R
21/RZ^ R—Zj
Zr + R R + Zt ’
(2.11)
22
В режиме полного согласования на выходе и на входе схемы из (2.7)— (2.9) имеем:
Если поменять местами двухполЮсинки Z1 и X», то Т необходимо умножить на —1. Такая замена эквивалентна перекрещиванию выходных (либо входных) зажимов мостовой схемы, что не меняет затухания схемы, а изменяет ее фазовую постоянную на угол ±л.
Первоначально рассмотрим фазовые корректоры с нулевым затуханием и постоянным входным сопротивлением, характеристики которых описываются формулами (2.10) и (2.11).
Фазовый контур первого порядка. Пусть Zt—jcnL, Zt^l/jaC (рис. 2.2aJ, тогда
- *—/мСТ _ ffi—/<в т _<Ц—Р
У ' R + jtoL l+jatCR <h + /<»’ Р <h + P ’
„ т/Т R 1 1
где R — у c , gj- L - CR - .
Обозначим через p\ корень числителя (нуль функции Т(р)), а через pt корень знаменателя (полюс функции Т(р)). Очевидно, что p't=Oi, pi=—о, pt=—p't (рис. 2.2,6). Поскольку Т(р)—рациональная функция первого порядка переменной р (т. е. равна отношению двух полиномов первого порядка), контур рис. 2.2,а является контуром первого порядка.
Pl
Рис. 2.2
Запишем Т(/<о) в показательной форме:
Т (/со) == Т (со) е^ЧР <«о>, где Т (со) — амплитудно-частотная (АЧХ); ф(со)—фазо-частотная (ФЧХ) характеристики; Т(со) = 1; Ас=0;
со
Вс =—ф (со); ф (со) =—2arctg—.
Групповое время прохождения контура (ГВП) _____________________________2 со *гр~ (1 +Т]2) 01 ’ Т1~ <h ’
Графики Вс и /Гр для различных даны на рис. 2.2,а. Площадь под кривой /гр не зависит от аь
J/rpd<»= JdBc = Вс (°°)—Вс (0) = л = const, о о
Значения элементов контура по известным О] и R находятся по формулам: L=R/0b C=lfotR.
23
Фазовый контур второго порядка. Пусть Z2=/toL2 +----------------------, Zt=R2IZt
j <oCt
<рнс. 2.3,а), тогда
тде
<Oq = — — = ; m = Д/Ьг1Ьг = Д/Ci/Cs-
Li Lt .Двухполюсники Zi и Z» взаимообратиы, если =~т~ = №• Операторная
Cj Ci передаточная функция
« । 2
p.—-p + „,
’ p. + -* p + ^ «>-₽»«>-« ’
tn
'Поскольку T (p) — рациональная функция второго порядка, контур рис. 2.3,a является контуром второго порядка. Нули pft, pf» и полюсы pt, рг передаточной функции расположены в квадратичной симметрии иа окружности радиуса -®» (рнс. 2.3,6):
Р1 = —О2+/Ш2, ₽а=—<Ъ—/®2. Р1=Р1*;
P'j = <T2 + /tl>2, p'i=iO2—/<02, P'i = p'*t‘,
f/t^—pl, f/t^—pt,
-где * означает комплексное сопряжение;
<Jt= , <O3 = Wo ]/1—4^2 > °1 + Ш2 = Ш0 •
'Частотные характеристики (АЧХ и ФЧХ) контура:
1 Ч <>>
Т(<в)=1; Ас = 0; <р(<о) =—Вс ——2 arctg— --------- ; ч= — •
m 1—Ч* Шо
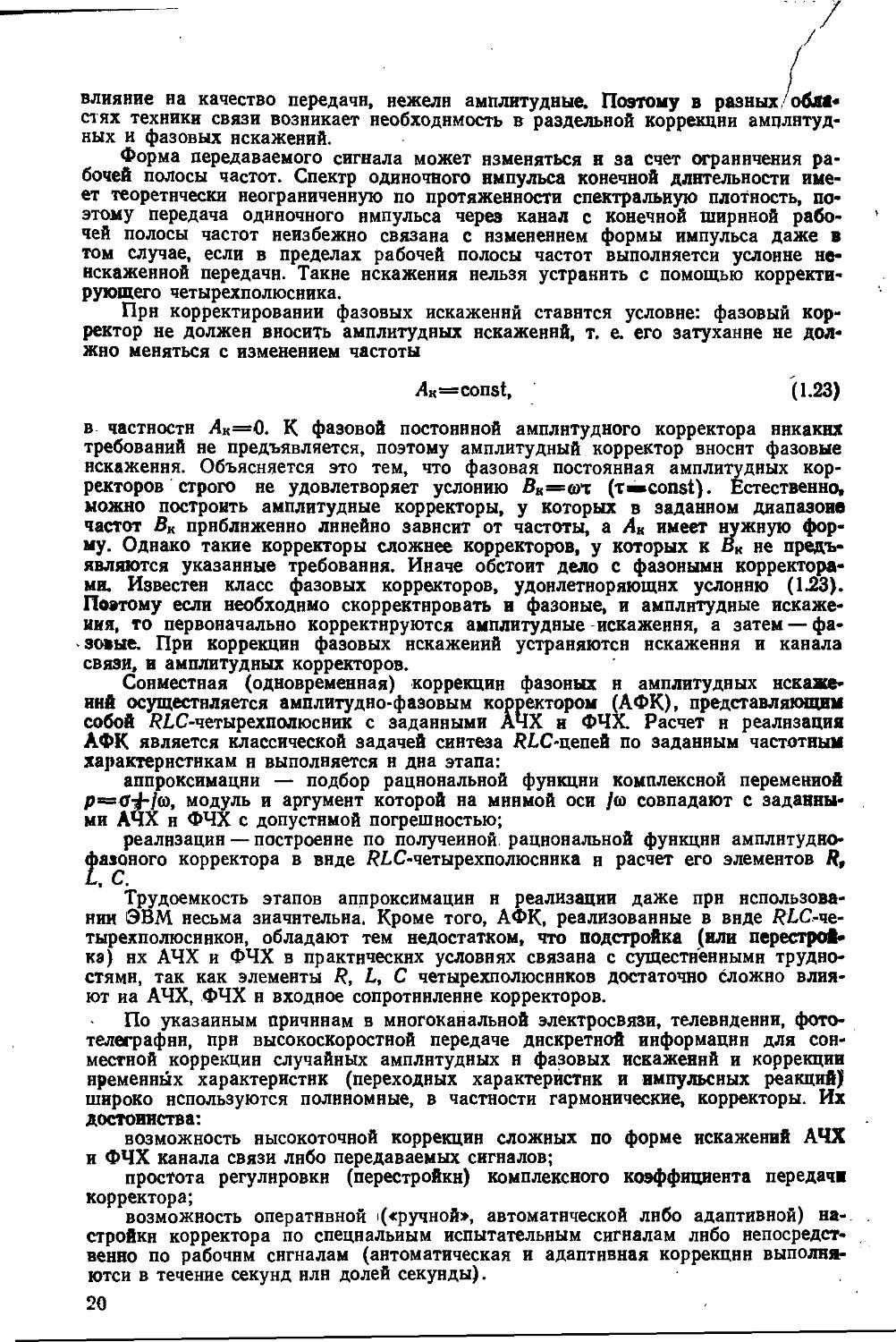
Графики Вв для различных m(mt<mt<mt) даиы на рис. 2.4,а. Чем боль-ше т, тем резче меняется Вс в области частоты <о0. Если со=Шо. ТО В,=п для любых т. Коэффициент т принято называть коэффициентом крутизны фа-24
завой характеристики либо добротностью фазового Контура (в этом случае я» обозначается через Q). Групповое время запаздывания
= 1 2 т (Ч-1!*)
гр Шо т|»+«»(!— П2)2 ’
На рис. 2.4,6 приведены графики tTp для различных т (mi<m2<ms); штриховой линией указана граница максимально возможных значений tTV при любом-т [141:
1 Функция /гр принимает максимально возможное значение на частоте
®тах = ®в Д/ у 1 ; /гр max = ~~ Х
г ’ т* ©#
___________2 т______________ 1/4 т*— 1 (2 m—~[/4т*—1)
1
При любых т имеем ©m»x<©o! если т достаточно велико то
Г d
comax «ш0. Частота ©ти — вещественная для Характерные точки кри-
Г
вой /гр:
<о=0, /гр=2Доот; ш=<оо, /гр=4т/©о.
Для больших т справедливо равенство /гр тах«4т/©о.
00
Площадь под кривой /Гр не зависит от ©о и т: J /rpd©=2n.
О
Значения элементов контура по известным т, ©о и R находятся по формулам:
т . R . mR „ 1
Ci в ~ ; Li = : Lf = ; Cf = “ .
2?©g т ©о с>в т/?©а
Если характер изменения ГВП контура второго порядка такой же,
как и контура первого порядка.
25
Контур второго порядка можно представить в виде каскадного согласованного соединения двух контуров первого порядка только при т<1/2. В этом случае значения Oi контуров первого порядка находятся по формуле
а1 = <ав — ± 1Л —1 ) . \2т г 4 т* /
Фазовый контур высокого порядка. Порядок фазового контура зависит от сложности реактивных двухполюсников Z1 н Z» и определяется по формуле п=т+1, где т — число внутренних нулей н полюсов сопротивления двухполюсника Zi (либо Zt) (нули — частоты резонансов напряжений, полюсы — частоты резонансов токов; внутренние нули и полюсы — это нули и полюсы, не равные нулю или бесконечности). На рис. 2.5 изображены пример двухполюс-нииа Zi и график его сопротивления. Внутренние нули и полюсы обведены
штриховой линией. Если двухполюсник Zi — канонический, т. е. содержит минимальное число реактивных элементов, то порядок фазового контура равен числу реактивных элементов двухполюсника Zi. Например, если в схеме рис. 2.1,6 •использовать двухполюсник Zi рис. 2.5, то получим фазовый контур пятого порядка.
Фазовый контур высокого порядка (п^З) всегда эквивалентен каскадному согласованному соединению контуров первого и второго порядков с различными о, ®о и т, поэтому характеристики Вв и /гр контуров высоких порядков равны сумме соответствующих характеристик контуров первого и второго порядков:
n, n, nt пг
W = s W + s № ; 4? - X 4Р*+Х •
k=l 1=1 k=l 1=1
где индексы (1), (2), (п) указывают порядок контуров, индексы k и I — номера контуров, п4 и «2 — число контуров первого и второго порядков.
Корректоры с ненулевым затуханием и постоянным входным сопротивлением
Если использовать в схеме рнс. 2.1,6 двухполюсник
7 — р а» Р* + а1 Р + а0 1 ° + ’
-где a,, bi — некоторые коэффициенты (г=0, 1, 2; а,=#=0, /ч=#=0), Zi=Ri/Zi, то -при выполнении условий
аг Ьа = Ьг(2.12)
получим фазовый контур второго порядка с постоянным входным сопротивлением и передаточной функцией
:2i
T(p)-n
р2—др 4-6 = R—Zi р» + ар + Ь R+Zt ’
где
bt Vai
. «в h о= — — — а» о»
„ ...................... „ а1Ь1 .
п = ------ ---------- • • ; a = ---- ;
ь» Vaiа» + а» Vbi bt а» ь»
Если ao=O, a2=0, то фазовый контур получается при bt=0. В этом случае n=l; a—RoaiIRbi; b—bolbs, т. е. контур соответствует рассмотренным выше контурам без потерь. Аналогично если oo=Z»2=ej=0, то п=—1; b^at/ati a=RbtlRoOi.
С учетом (2.12) запишем
Z1 = r
Р8 + dt Р + dp
Р2 + dg р + do
(2.13)
где
о °2 j ai г = , dj —
•г/ bi • Я — > dg— , do —
&2
д» _ A
as bt
Тогда:
6 = dg ; ae^/did* ; n =
Vdx^Vdg ’
Переход от T (p) к Zi осуществляется по формулам: о 1~~п л 1 + п r=R—— ; d1==a ---------------------- ;
1 4- п 1—п
кт&лвз выражения (2.13) показывает, что можно получить на основе двухполюсника, вой частоте равно сопротивлению иа бесконечно большой частоте и сопротивление которого не обращается в бесконечность либо в нуль: Zi (0) *=*Zi (оо) «=г.
На рис. 2.6 приведены примеры двухполюсников, удовлетворяющих указанным ограничениям. Для двухполюсника рис. 2.6,а:
Г1 С + L _ j di —_ 9 _
гг LC LC
Если Г2->-оо, то d2=2rJL. Резисторы г4 и га позволяют тушке индуктивности и в конденсаторе.
Для двухполюсника рнс. 2.6,6: г=гг; do—\ILC\ j 1 1 J 1 ui = » a® — Л •
С С Г1 С
do=*;
1—п
1 +п контур с потерями (л<1)
dj = a
фазовый у которого сопротивление иа нуле-
ri rt . J
—:— ’ di —
г? C+L+2 rt rs С
учесть потери в ка-
Рнс. 2.6
27
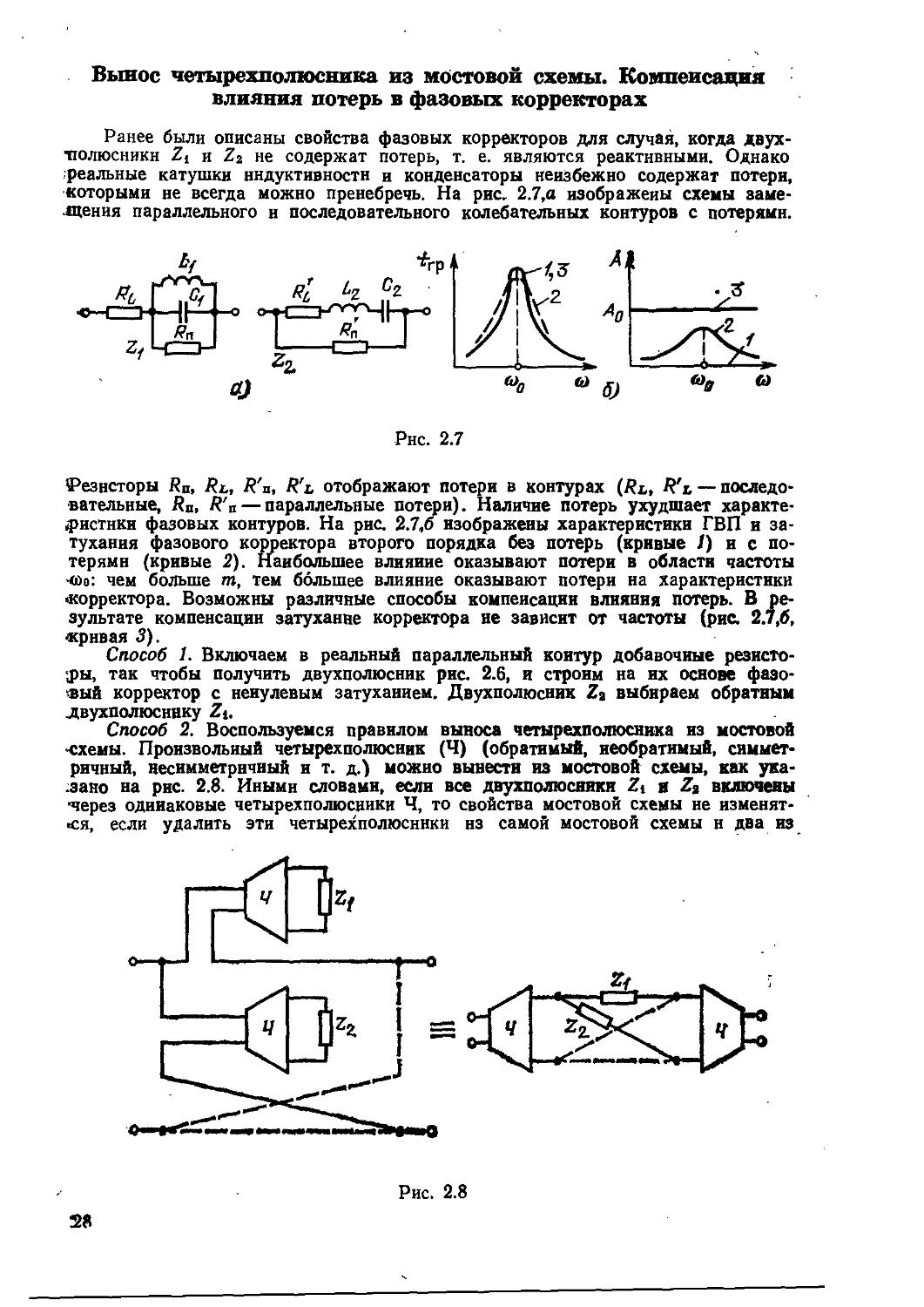
Вынос четырехполюсника из мостовой схемы. Компенсация влияния потерь в фазовых корректорах
Ранее были описаны свойства фазовых корректоров для случая, когда двухполюсники Zj и Z2 не содержат потерь, т. е. являются реактивными. Однако реальные катушки индуктивности и конденсаторы неизбежно содержат потери, которыми не всегда можно пренебречь. На рис. 2.7,а изображены схемы замедления параллельного н последовательного колебательных контуров с потерями.
Рнс. 2.7
Фезнсторы RB, Rl, R'n, R'l отображают потери в контурах (Rl, /?'i, — последовательные, Ra, R'n— параллельные потери). Наличие потерь ухудшает характеристики фазовых контуров. На рис. 2.7,0 изображены характеристики ГВП и затухания фазового корректора второго порядка без потерь (кривые /) и с потерями (кривые 2). Наибольшее влияние оказывают потери в области частоты <оо: чем больше т, тем большее влияние оказывают потери на характеристики •корректора. Возможны различные способы компенсации влияния потерь. В результате компенсации затухание корректора не зависит от частоты (рис. 2.7,6, «кривая 3).
Способ 1. Включаем в реальный параллельный контур добавочные резисторы, так чтобы получить двухполюсник рис. 2.6, и строим на их основе фазовый корректор с ненулевым затуханием. Двухполюсник Zi выбираем обратным двухполюснику Z\.
Способ 2. Воспользуемся правилом выноса четырехполюсника из мостовой -схемы. Произвольный четырехполюсник (Ч) (обратимый, необратимый, симметричный, несимметричный и т. д.) можно вынести из мостовой схемы, как указано на рис. 2.8. Иными словами, если все двухполюсники Zi и Zt включены •через одинаковые четырехполюсники Ч, то свойства мостовой схемы не изменятся, если удалить эти четырехполюсники из самой мостовой схемы и два из
Рис. 2.8
28
них симметрично включить на входе и выходе мостовой схемы. Здесь Zj и Z* могут быть любыми. Указанное преобразование используется для выноса резисторов потерь двухполюсников Z1 и it из мостовой схемы. В частности, четырехполюсники Ч могут представлять собой одиночные резисторы, включенные последовательно либо параллельно двухполюсникам Zi и *2. Эти резисторы можно вынести из мостовой схемы и включить два из них на входе и выходе схемы. Эквивалентность схем рис. 2.8 вытекает из преобразования, излагаемого ниже.
Пусть дан фазовый корректор рис. 2.1,6, у которого Zi н Z2 — реактивные двухполюсники без потерь. Характеристическая постоянная передачи корректора Ге^Ле+уВе, где Лс=0, а Ве определяется формулой (2.10); характеристическое сопротивление Zc=~^ZiZt=R.
Заменим Zi и Z2 некоторыми двухполюсниками Z\ и Z'i, содержащими конденсаторы и катушки индуктивности с потерями. Окружим эти элементы дополнительными резисторами, величины сопротивлений которых подберем так, чтобы характеристическое сопротивление корректора осталось неизменным, а характеристическая постоянная передачи полученной цепи Г'с совпадала с Гс с точностью до постоянного частотно-независимого затухания Ло, т. е. Г'е= >=Гс+Ло. Тогда затухание полученной цепи А'с=Аа, а фазовая постоянная В'е^Ве. Замена Z4 на Z'i и Zt иа Z\ не меняет характеристического сопротивления и фазовой постоянной цепи, а лишь увеличивает затухание цепи на А».
Полученную цепь представим в Виде каскадного согласованного соединения трех четырехполюсников: двух одинаковых удлинителей с характеристическими сопротивлениями Zci=Zc=R, Zcl—pR и затуханием Аи=А0/2 н реактивного мостового четырехполюсника, составленного нз двухполюсников, подобных двухполюсникам Zi я Zt с коэффициентом подобия р. Дли реактивного четырехполюсника Гс — характеристическая постоянная передачи, а — характеристическое сопротивление. Величина р является вспомогательной. Постоянная передачи всей цепи (рис. 2.9,а) равна Г'е.
Воспользовавшись рис. 2.8, внесем удлинители внутрь мостового реактивного четырехполюсника, в результате чего получим цепь рис. 2.9,6. Из рисунка вытекает, что Z'i и Z'i можно представить в виде удлинителей, нагруженных на pZ4 и pZi. Поэтому
29
где р= "Р"1;—. Обозначив е 2Л“ = Р —Za
ражению
1 о К—1
~ . В— , Приходим к вы-Л л + 1
Z' = R h±BR
1 R BZz + R
(2.14)
л г. 2,+ BR
Аналогично Z z=R -----
BZt+R
Компенсация потерь в контуре первого порядка. Для контура первого порядка (см. рис. 2.2,а) без потерь Zi=pL, ZiZ2=/?2. Реализуем этот контур иа элементах с потерями. Из (2.14) определим
Z^ = R
р £ -f~ BR
Р BL+R
По полученному выражению можно определить схему и значения элементов двухполюсника Z\ на основе обычных методов синтеза /?£-двухполюсников. Однако более простым и наглядным является следующий подход. Представим двухполюсник Z\ в виде резистивного четырехполюсника, на выходе которого включена катушка индуктивности с потерями. При этом возможно бесконечно большое число реализаций, из которых наиболее простые приведены в табл. 2.1, где L' — некоторая индуктивность, отличная в общем случае от L. В схемах 3 и 4 потери учитываются резисторами п и п; в схемах 1 и 2 — резисторами г» н г* а резистор п используется для вариации индуктивности L. Параметры элемен-
Тавлица 2.1
Номер схемы Схема двухполюсника Z’l Параметры схемы
ri ^2 Lr P
1 V 2 L? и С +ъ Ам th— 1 shAin -— L
+ С сИАм-^О- /ОсИАн-»^
sh Ам зЬАм 8hAM
2 . ±2 ? о Т X- Г । Sh Дм —" L •—•
/OSh Ам $5СЬАм ^oshAM
сБАм-^» ^OgIiAm-/
Ъ L' [Ъ 5 о I ' Г с+ВАм- £3»Мм ——- ' pL
, Ъ _ l' 2® thAM PL
ПЪ'Ан; ^V^+rj.
Зв
тов двухполюсника Z*t выражены через параметры элементов двухполюсника Zt (через L) и затухание Аы. Двухполюсник Z2 — обратный двухполюснику. Zi и поэтому в табл. 2.1 не приводится. В таблице даны значения элементов, нормированных по отношению к характеристическому сопротивлению ZC=R.
Компенсация потерь в контуре второго порядка. Для контура второго порядка без потерь (см. рнс. 2Да):
---—----- ; Р?=
С1(₽? + р2)
Z1Za = /?«.
Из (2.14) определим Z't=R
аа Р2 Ч~ ai Р 4~ ао Pg ра + i>i р + Ьо
,где
а»=(К— 1) Сх ; a1 = J<4-i ; а0 = (К —1) Сх pf ; 62=(^+1)Сх;
Ъг = К— 1; «>в=(Я+1) CiР?_
Наиболее простые схемы двухполюсника Z'it реализующего эту функцию сопротивления, указаны на рис. 2.10. По аналогии с контуром первого порядка выразим параметры элементов двухполюсника Z't через параметры элементов двухполюсника Zt н Ли. Для схемы рис. 2.10,а прн п=гз имеем L'i=Li; C'i=Ci; гi, г2 и г3 находятся по формуле дли схемы 2 табл 2.1. Если г^гз, то L'i= =р£; C't=Ci/p; rt, r2, г3 находятся по формулам для схемы 2 табл. 2.1. Для схемы рис. 2.10,6 получим £'i=p£1; Ci = Cj/p, а п н г2 находятся по формулам для схемы 4 таблицы. Как и в случае контура первого порядка, увеличение числа резисторон дает дополнительные возможности изменения L'i и C'i.
В целом порядок реализации фазовых контуров на элементах с потерями заключается в следующем: 1) по любой известной методике рассчитываем фазовый контур без потерь; 2) определяем ожидаемые потерн в элементах контура; 3) исходя из табл. 2.1 и рис. 2.10 выбираем схему двухполюсника Z'\ контура. Задаваясь величинами Лм и р, рассчитываем rt, гг, г3. При этом следует
иметь в виду, что для схемы 3 р>1, а для схемы 4 р<1. Может оказаться, что сопротивления потерь в реальной катушке яли конденсаторе не соответствуют сопротивлениям, найденным с помощью приведенных формул. В этом случае для достижения нужного результата изменяем исходное значение Лм.
Пример. Скомпенсируем влияние потерь в фазовом контуре рис. 2.3,а с параметрами: £1=33 мГ; С1=0,166 мкФ; £2=60,75 мГ; С2=0,091 мкФ; Zc= =600 Ом; добротность катушки индуктивности Ql=50 для f=2,0 кГц.
Считая, что потери в катушке отображаются параллельным резистором, реализуем фазовый контур двухполюсником Z\, изображенным иа рис. 2.10,а. ; Допустим, что величины индуктивностей и емкостей контура с потерями долж-Ьны совпадать с величинами индуктивностей и емкостей контура без потерь: 1С'1 = С1; £'1=£г, поэтому р=1; п=Гз. Определим нормированное сопротивление потерь катушки индуктивности
£ rn=Qi<oL/Ze=34,6.
Исходя из условия получения минимально возможного затухания Лж выбираем нормированные сопротивления rt и гз равными сопротивлению потерь, п=Гз=
• “Гп=34,6. Рассчитываем Ли и г2 по формулам для схемы 2 табл. 2.1: Ли=0,52 дБ;
• А=0,06. Окончательно получим денормнрованные сопротивления: г1=г2= >20 760 Ом; г2=36 Ом.
31
Подчеркнем, что рассмотренные способы 1 н 2 приводят к одним и Tetif схемам контуров, но способ 2 более нагляден.
Наиболее общая схема двухполюсника Z'i представлена на рис. 2.11,д к виде резистивного шестиполюсника R, нагруженного на катушку индуктивности н конденсатор без потерь (потери в реактивных элементах включены в шести* иолюсник). Если потери в параллельном колебательном контуре могут быть вынесены из контура, то двухполюсник Z\ удобно представить в виде резистивного четырехполюсника R, нагруженного на параллельный контур без потерь (рис. 2.11,6). На рис. 2.11,в представлена реализация шестиполюсника в виде
Рис. 2.11
трех резистивных четырехполюсников. Согласно (2.13) входные сопротивления схем рис. 2.11 должны удовлетворять следующим условиям: 1) входное сопротивление схемы при закороченной катушке индуктивности и разорванном конденсаторе равно входному сопротивлению этой же схемы при разорванной катушке индуктивности и закороченном конденсаторе; 2) входное сопротивление схем не обращается в нуль или в бесконечность. Первое условие выполняется всегда в схеме рис. 2.11,о в схеме рис. 2.11,а — если резистивный шестиполюсиик симметричен относительно горизонтальной оси, в схеме рис. 2.11,в — если четырехполюсники 1 и 2 одинаковые. Второе условие выполняется, если при закороченных и разорванных реактивных элементах входное сопротивление не равно нулю или бесконечности. Приведенные условия достаточно простые, и им удовлетворяет бесчисленное множество шестиполюсников и четырехполюсников.
Ослабление, вносимое фазовым контуром при использовании в нем двухполюсника Z'i,
Тро —
R—R, R + R*
(2.15)
где Ra — входное сопротивление схем рис. 2.11 при закороченной катушке индуктивности и разорванном конденсаторе (или при разорванной катушке индуктивности и закороченном конденсаторе).
Мостовые корректоры с минимальным числом частотно-зависимых двухполюсников
Выбирая различным образом двухполюсники Z> — Zt в мостовой схеме рис. 2.1/1, получаем корректоры с передаточной функцией
ТР = Л
R—Z1 R + Z1
(2.16)
при меньшем, нежели в схеме рис. 2.1,6, числе частотно-зависимых двухполюсников. Однако такие схемы не будут обладать постоянным входным сопротивлением. Возможные схемы корректоров с двумя и с одним частотно-зависимы-32
мн двухполюсниками даны на рнс. 2.12. Рабочая передаточная функция схемы рис. 2.12,а описывается выражением (2.16), в котором R—Rx—г;
h—2 У /?н Яг/(2 Rx + RB + Rr).
где Rx = г + г2 + г (RB + Rr) -f- RB Rr-
Для схемы рнс. 2.12,6
т = _ 2У<5Г^ Gx—g—y
Р 2GX+GH+ Gr Gx—g + У
где Gx = g + У g2 + g (GB + Gr) + GH Gr-
На схеме рнс. 2.12,6 обозначены проводимости резисторов. Достоинство рассмотренных схем в том, что в ннх учитываются потерн в реактивных двухполюснн-ff
ках Z путем выноса потерь в сопротивление г либо в проводимость g. Если г—0; g=0, приходим к фазовому контуру Дарлингтона, для которого
R = VrTR^ ; ft=2 Ует/(У^+ у^)2.
Схема рнс. 2.12,в является фазовым контуром, если R* и Rv выбраны из условия . .. I >
H(Rx—2r)=H', (2.17)
где H=2RxRv-{-Rv2-{-2RBRv-]-Ri!‘(Rx-i-Ry-i-RB);
Н' ==RxRv2-}-2RxRvRh-}-RtRii (Ях+Я») ~{~RtRb (Ях4-2Я^).
Прн этом R = RX—г, h=2~^RBRrRy/H. Условия получения фазового контура rio схеме рис. 2.12,а идентичны условиям получения фазового контура по схеме рнс. 2.12,в с заменой во всех выражениях сопротивлений двухполюсников на их проводимости. Передаточная функция схемы рис. 2.12,г
Положив г=0, g=G, приходим к фазовому контуру Ватанабе, у которого
d if Ry Rr (Ry + 2 RB)
Rx- V -----2Ry + Rr----
2—66
33
где Ry — в принципе произвольное. В частности, если Ry=2Ra—Rr, то Rx=* = V(2RB-RP)Rr;
д___________2 (2 RH — R?) ~|X Rh Rr_
Rh (8 Rh—3 Rr) + (4 RH — Rr) 1/(2 RB — Rr) Rr
В простейшем случае Rn=Rr=R<=Rj=R; r=0; h=l/4.
Эквивалентные схемы мостовых корректоров
На рнс. 2.13 изображены неуравновешенные схемы, эквивалентные по характеристическим параметрам мостовой скрещенной схеме рнс. 2.1,6. Схемы содержат идеальные трансформаторы. В этих схемах Ze, Zb, Уо, ¥ъ — двухполюсники с произвольными сопротивлениями н проводимостями. При использовании конкретных реактивных двухполюсников Z\ н Z2 (У] и У2), содержащих
Рнс. 2.13
параллельно и последовательно включенные катушки индуктивности, идеальные трансформаторы могут быть • исключены за счет окружения их катушками индуктивности и заменой реальными трансформаторами с последующей их развязкой. Указанные преобразования возможны, если Ze, Zb, У а и Уь — индуктивности.
Замена в мостовой скрещенной схеме и ее эквивалентах двухполюсников Z2 на резисторы R приводит к схемам, у которых в режиме холостого хода (х.х) (ZH=oo) передаточная функция по напряжению
= R—Zj х.х R + Zj
(2.18)
Достоинство таких схем в том, что, сделав R переменным, получим схемы с регулируемыми значениями коэффициента крутизны т. Аналогично замена' двухполюсников Zi на резисторы приводит к схемам, у которых
Тх.х =
Zj—R Zi + R
Взаимная замена двухполюсников Zt и R (Z2 и R) приводит к умножению Гх.х на —1.
Мостовые фазовые контуры первого (см. рис. 2.2,а) и второго (см. рис. 2.3,а) порядков эквивалентны неуравновешенным (трехполюсным) контурам, примеры которых изображены соответственно на рис. 2.14,а н б. Некоторые схемы содержат индуктивно связанные катушки со взаимной индуктивностью М. Полные наборы трехполюсных фазовых контуров с расчетными соотношениями даны в [4]. Эквивалентность контуров вытекает из эквивалентного преобразования, представленного на рис. 2.15,а. Произвольный четырехполюсник (уравновешенный, неуравновешенный), составленный из двух половинок, сим-34
метричных относительно вертикальной оси А—В и соединенных между собой неперекрещивающимися ветвями, может быть заменен эквивалентным мостовым четырехполюсником, у которого в качестве двухполюсников и Z» используются половинки четырехполюсника соответственно с закороченными (кл) н разорванными (х.х) соединительными ветвями. Входные сопротивления половинок обозначим через Z , и Z ,
к.з-g- х.ху Для уравновешенного четырехполюсника, содержащего перекрещивающиеся соединительные ветвн, симметричные относительно и вертикальной, и горизонтальной осей (рис. 2.15,6), справедливо правило «наоборот»: перекрещивающиеся ветви остаются в режиме холостого хода при закорачивании неперекрещнвающихся ветвей н закорачиваются при холостом ходе других ветвей. Если же требование двойной симметрии не выполняется, то перекрещивающиеся провода заменяются планарным 4Х1-по-люсннком (рнс. 2.15,в), где Z— произвольный двухполюсник [9].
Рис. 2.15
Очевидно, что симметричный реактивный четырехполюсник является фазовым контуром, если Z । 2 ]=/?*. Это соотношение позволяет проверять
К.З-g- х.х -у
схемы на принадлежность к классу фазовых контуров и вести поиск новых схем.
Пример. Определить, при каких соотношениях между величинами индуктивностей. и емкостей четырехполюсник рис. 2.16,а эквивалентен контуру рис. 2.3,а Представив четырехполюсник в виде двух половинок, симметричных относительно оси А—В, находим двухполюсники Zj = Z . (рис. 2.16,6) и к-®~
Z, = Z ] (рнс. 2.16,в), нз которых получим условия эквивалентности: Х.ХТ
2*
35
Ci —2Са4-Сь; Lt = L3 = LaLd / — La 4-
i» = Ld/(l+K); C2 = (1 +Ю у Cd;
K = Ld/2Lb = 2Cb/Cd.
Поскольку схемы рис. 2.13 эквивалентны мостовой скрещенной схеме (см. рис. 2.1,6) по характеристическим параметрам, компенсация влияния потерь в них производится так же, как и в мостовой схеме. »
Са 2Се д 2Са 2Са<-Сь~С,
Рнс. 2.16
В корректорах с передаточными функциями типа (246) и (2.18) компенсация влияния потерь производится на основе нижеследующего свойства цепей типа RZ. Под цепями типа RZ подразумеваются цепи, составленные из резисторов и двухполюсников с сопротивлениями atZ, где at — частотно-независимые коэффициенты подобия; Z — произвольное комплексное сопротивление (допускается наличие идеальных трансформаторов). Замена в цепи типа RZ с передаточной функцией
„ . 2
~hR + Z
величины Z на величину
1 _|_ р е (Гс1+Гм>
Х 1—ре~(Ге1+Гс^
приводит к цепи с передаточной функцией
х R-j-Z
pZ'—pR Z'~R „
где р=-----•-------= —----— ;ГС1 и Гсз — произвольные заданные постоянные;
pZ + pR Z + R
p — произвольный множитель; Z'— произвольный заданный комплекс. В частном случае, когда Z=Z', в результате указанной замены передаточная функция Т умножается на е ^Гс1+Гс2)
Указанная замена означает замену двухполюсника Z на двухполюсник, представляющий собой добавочный четырехполюсник с характеристическими сопротивлениями Zel=R, Zci=pR н характеристическими постоянными передачи Гсь Гс2, нагруженный на днухполюсник pZ', где р — произвольная величина: Гс! н ГС2 — постоянные для прямого н обратного направлений передачи 36
(рис. 2.17). Для удлинителя, составленного нз резисторов, ГС1 = =Гс2=Ли; е-(Ги+Г<!») = е-2Л«. Из изложенного следует, что для компенсации потерь в цепях типа RZ с передаточными функциями рНС- 2.17
вида (2.16) и (2.18) полностью
пригодны методы, изложенные выше. При замене двухполюсника Z на двухполюсники рнс. 2.11 передаточные функции умножаются на величину Тро, определяемую по формуле (2.15).
Отметим, что описанным свойством обладают также цепи, которые наряду с элементами цепей типа RZ содержат и двухполюсники с сопротивлением R*
bt ~ , где bt — коэффициент подобия.
Использование дифференциальных тансформаторов
Рабочая передаточная функция и передаточная функция по напряжению цепи с идеальным дифференциальным трансформатором рис. 2.18,а описываются выражениями:
4 (^2 Я1 — па)
4Z1Za + 2(ZH4-Zr) (Z1 + Zg)+ZHZr(2 + -i- + -i-\ «а - «1 /
j, _ ^2 (Zt яг—Zx яа)Ях Fi — яа Fa
l/i 2 Zi Zj -|- ZH (Zi 4-Z2) Fi +Fi+ 2FH
В частном случае, когда Я1=яа=я, передаточная функция (2.19) совпадает с выражением (2.6), правую часть которого необходимо умножить на я, т. е. цепь на рис. 2.18,а эквивалентна симметричной уравновешенной мостовой скре
щенной схеме. Однако схема рис. 2.18,а обладает большими возможностями, нежели мостовая скрещенная схема, в плане компенсации влияния потерь в двухполюсниках Z\ и Za за счет выбора величии коэффициентов трансформации Я1 и я2. Эти возможности иллюстрируются схемами рис. 2.18,6 а передаточные функции которых соответственно
37
если Л—1 +
2g + GH
Я, (Gs + Gn + g)
Ui Y + Gx + GB + g ’
, U* Rh R—Z p . RqRx
Ui /?н + Rx Я -b 2 Rb + Rx*
Rh , 2r если n——------— H------.
Rx + Rh Rx
Как видно из приведенных выражений, рациональный' выбор коэффициента трансформации позволяет скомпенсировать влияние последовательных либо параллельных потерь частотно-зависимых двухполюсников, не окружая двухполюсники дополнительными резисторами.
Еще одна схема, эквивалентная мостовой скрещенной схеме (см. рис. 2.1,6), изображена на рис. 2.18,г Условия эквивалентности: П1=Пз+пг, nj—щ. В схеме используются два идеальных дифференциальных трансформатора. Ее особенность в том, что выбором величин коэффициентов трансформации можно менять соотношения уровней комплексных сопротивлений частотно-зависимых двухполюсников. Трансформатор ДТр2 исключается при /ii=n2=l; Пз—О,
2.2. Амплитудные корректоры
Корректоры с постоянным повторным сопротивлением
Основной схемой является Т-образная перекрытая (мостовая перекрытая либо Т-образная мостовая) схема (рис. 2.19,а), для которой
Ях Ях . т и» га[Ztzt + zt (zt 4- Z,+Z4)] . .
вх 11 Я2 ’ U1 Hl
2Я, -1/ Zr 2 У Zr ZH [Z8 Z4 + Z, (Zt 4- Z, + 2«)1 e V zH “ ях+гРя8 ’
где Ях “= Z4 (Z2 -f- Z8) 4- Zi Z2 Z3 + ZH [(Zj 4" Z4) (^» + ZJ +
я, - (Z, 4- zt) (Zt 4- z,) 4- Z, z4 4- Zh (zx + z„ + zt).
Если Zi и Z2— взаимообратные двухполюсники, ZiZ2—/?2, a Zi=>Z^R (рнс. 2.19,6), то характеристические и повторные параметры Т-образной схемы следующие:
Ze-ZK = 7?J Гс = Гн=1п(14--^-^ = 1п(14-4-У (2.20)
Затухание (дБ) и фаза находятся из выражений:
Лс = Аи = 201g 11 4" ~n I’ = в I 1 *1 d ) ‘ (2.21)
R, I \ а /
Рнс. 2.19
38
По сравнению с Т-образной схемой более экономичными являются Г-образные схемы (рис. 2.19,в,г), в которых также ZiZ2=^2. В этих схемах повторное сопротивление Zki со стороны входа равно R, т. е. при Ra=R
znx — Zhi =
Повторная постоянная передачи рассматриваемых схем (Rb—R)
г« = 1п-у-= ln-урж» Inf I + — Inf 1 4--у-Y
<1 \ К / \ /
Как видно из этого выражения, Гк совпадает с Ге (2.20), поэтому повторное затухание Лк н повторная фаза Вк совпадают соответственно с Л, и В, (2.21). Такям образом, все схемы рис. 2.19,6—г взаимно эквивалентны по коэффициенту передачи (Ra**R)
Ut I» FR Zt_______—гк
= h = zt + R -e
(2.22)
В качестве амплитудного корректора можно использовать мостовую скрещенную схему и все ее эквиваленты, рассмотренные выше. Мостовая скрещенная схема эквивалентна Т-образной перекрытой схеме, если вместо Zt и Zi использовать RZi/(2R+Zt) и R+2Z3. Недостаток мостовой скрещенной схемы заключается в ее сложности.
В дальнейшем рассматривается как основная Т-образная перекрытая схема со взаимообратными двухполюсниками Zt и Zt.
Амплитудные контуры первого и второго порядков. Допустим, что двухполюсник Zi в схеме рис. 2.19,6 имеет указанную иа рис. 2.20/1 структуру, где /Х2— реактивный двухполюсник с минимальным числом емкостей и индуктивностей. Тогда:
. 1 Л , 1 1 К + Х*
Л‘= 2 Л+ 2 ,П1+КХ« ’
Bo = arctg W
arctg хУк;
= =(Х-1)УКХ
0 <0
1—X2 dX х (Х+Х»)(1+ХХ») dfi>’
где Ло=1пХ; Х =
гг
X,
Уг» (К + rs)
Характерные значения Ас, Вс, trp:
Лд — Ас щах — = 0» 0>
Ас — Асmln 0> Вс=0, Х = оо;
Ле «= Л^; Вс=*±ВШах “ i: (arctg X
Х^7=— arctg Ух),
/Гр — о, X —
39
Пример двухполюсника /Х2 дан на рис. 2.20,6, а соответствующие ему графики Х2, Ас, Вс и /Гр в зависимости от частоты <а — на рис. 2.20,в. Приведенные рисунки иллюстрируют связь законов измерения Ас, Ве и tTf со структурой реактивного двухполюсника jXz. Как видно из рисунка, <гр принимает как положительные, так я отрицательные значения. Это свойство иногда используется для получения в заданном диапазоне частот отрицательного группового времени пробега за счет внесения дополнительных амплитудно-частотных искажений.
Амплитудный контур (корректор либо звено) первого порядка — это любая из изображенных на рис. 2j19 схем, в которой Zt содержит только один реактивный элемент. Если Zi содержит два реактивных элемента, приходим к контуру второго порядка. В табл. 2.2 приведены примеры двухполюсников Zt наиболее широко применяемых на практике контуров первого н второго порядков, а также графики Ан, Вк и tn контуров п их передаточные функции 7 (2.22)«
Амплитудные корректоры, построенные с использованием приведенных в табл. 2.2 двухполюсников Zj, а также других двухполюсников Zit являющихся параллельным соединением некоторого резистора н произвольного частотно-зависимого двухполюсника, относятся к минимально фазовым цепям с ограниченным затуханием. У таких цепей Вк(0)=Вк(°°)=0, поэтому
00 оо
Jfrpda>== JdBK = O, о о
40
т. е. /Гр — знакопеременная функция частоты со: в одних диапазонах частот /гр — положительное, в других — отрицательное. Указанной особенностью обладают цепи с передаточными функциями, числители и знаменатели которых — полиномы Гурвица равных порядков.
Использование минимально-фазовых амплитудных корректоров для компенсации искажений в каналах минимально-фазового типа всегда приводит к улучшению ФЧХ канала.
Рис. 2.21
Корректоры с частотно-зависимыми повторными сопротивлениями получаются в случаях, когда в схемах рис. 2.19 Z{Z2=/=R2.
Вопросы расчета амплитудных корректоров изложены в [4, 5].
Предыскажающие и восстанавливающие цепи.. Предыскажающие и восстанавливающие цепи — это пара цепей, сумма повторных или характеристических постоянных передачи которых не зависит от частоты. Пример такой пары дан иа рис. 2.21. При выполнении указанных на рис. 2.21 условий справедливо \
1 + — ) • В рассматриваемых цепях ft /
21х£2х=Л2; rtr2—R2-, каскадное включение этих цепей дает удлинитель с затуханием Ло и характеристическим сопротивлением ZC=R. Передаточиые функции предыскажающих и восстанавливающих цепей взаимообратны с точностью до частотно-независимого коэффициента.
Эквивалентные преобразования в амплитудных корректорах. На рис. 2.22,а,б изображены схемы контуров, которые эквивалентны при выполиеиии условий: /?'=/?п/(2/?+Г1); r'2=r2+R2l(2R+ri). Более общим эквивалентом яв-
41
ляется схема рис. 2.22,в, в которой используется симметричный удлинитель с характеристическим сопротивлением Ze=R и затуханием Д» = In ( 1 + ) =“
(R \
I + — I • Эквивалентность этих схем вытекает из того, что сопротивле-/
иия п, г»=/?2/п, R и R в схеме рис. 2.22,а образуют Т-образный перекрытый четырехполюсник, у которого Zc—R", Гс=Ло.
Другая пара взаимно эквивалентных схем приведена на рис. 2.23,а, б. Усло-
вия эквивалентности: ZlxZSl=^2; гог'о=^2; я — ~; Л<> == In { 1 +'7Г_ ) 5 л + /« \ R !
ZC=R. Характеристическая постоянная передачи Ге==1п[1 + (го+Х1ж)/₽]=Ло + + 1п(1+aZix/7?). Таким образом, вынос резисторов г о и г'а из схемы корректор^ приводит к изменению уровней комплексных сопротивлений двухполюсников Zix и Zax и к включению на входе (либо иа выходе) корректора удлинителя с затуханием Ло и характеристическим сопротивлением ZC=R.
Рис. 2.23
Схема рис. 2.23,в эквивалентна схеме рис. 2.23,а, если Zei=R‘, Za=R'; До" (Г(> \
1+-—); т«—-—. Выбором величины R' можно менять уровень R / R т го
комплексных сопротивлений двухполюсников корректора. В частном случае, если положить 1эт=1, то R'^R+ro, Aa—lnR'/R. Таким образом, использование схемы рис. 2.23,в позволяет произвести эквивалеитиое преобразование схемы рис. 2.23,а без изменения уровней комплексных сопротивлений частотно-зависи-
мых двухполюсников.
Из вышеизложенного вытекает, что иаличие в схеме корректора резисторов Го И г'а не приводит к получеиию иовых форм частотных зависимостей Ле и Вв корректора.
Регулируемые амплитудные корректоры
Корректоры с постоянным характеристическим сопротивлением (корректоры Боде). Для построения регулируемых корректоров с постоянным (частотно-независимым) характеристическим сопротивлением используется корректор Боде (рис. 2.24). Корректор Боде содержит симметричный дополнительный четырехполюсник ДЧ1 с характеристическим сопротивлением Ro и обратный ему дополнительный четырехполюсник ДЧа с характеристическим сопротивлением R3IRo- У четырехполюсников ДЧ1 и ДЧз одинаковые характеристические постоянные передачи ГХ=ДХ+/В«. Кроме того, переменные (управляющие резисторы) Ra и Re — взаимообратные: RaRe=R3, а также RtRi—R3. Здесь R— характеристическое сопротивление корректора Боде. 42
Учитывая, что Zi=RiZwl(Ri+Z^i), ZtZr-W, передаточную функцию корректора в режиме согласования (2.22) запишем в виде
Т == е—Г* = — n Е Z*x 1 — пEY*11
R + ZX P+QZBX1 <2 + РГвх1 ’
где £ = Р = RRxi Q=R4"^i’ D = Ri KBxi== ^/Z^i*
Далее, учитывая, что
(2.23)
—2Г
z _n 1+Ре х
^вхх-ЛГо _2Г
1 —ре х
_ —*0
Р“ Ra+Ra ’
(2.24)
получаем
—2Г
1—рЛГхе 1
—2Г ’
1+рМ2е ®
(2.25)
где
Л4Х =
В1—-Ro .
*+Яо ’
Mt =
QRo—P . QRo + P ’
*+Ro QRo + P
N = D
Из (2.25) следует
— Гс — —— -]- In
—2Г
1—рЛ4хе х
—2Г
1 +рЛГа е «
(2.26)
Воспользовавшись разложением
t п
1—Ьх I +ах
Ь*—а* 2
b» + fl3 *-------------
Ь*—а*
(2.27)
= — (b-^-а) х
и ограничившись первым членом этого разложения, приходим к выражению яр
Гг= Ac + j Вс « А, + (Afx + ЛГа) р е ®,
откуда АС=АО+А~; Л~ = (Afi+Afa)pe-2Ax cos2Bx; Ве=—(Л1,+Л1а)ре-2ЛЖХ Xsin2Bx, где А~.—переменная составляющая Ас; Аа — затухание корректора при согласовании дополнительных четырехполюсников с нагрузками (р=0).
Из приведенных выражений вид-
но, что, выбирая дополнительные четырехполюсники соответствующим образом, можно получить различные законы изменения Л„, причем Л„ линейно зависит от р при малых |р| и может принимать как положительные, так и отрицательные значения. Величина Л— обращается в нуль при р=0 либо иа фиксированных ча-л
стотах, для которых Вж=(2п+1) —
(л=0, 1, 2, ...). На фиксированных частотах происходит вращение Л~ при изменении р.
На рис. 2.25 приведены примеры графиков Л— для случаев, когда дополнительным четырехполюсником являются фазовый контур первого порядка (рис. 2.25,а), фазовый контур высокого порядка (рис. 2.25,6) и амплитудный корректор (рис. 2.25,е).
Рис. 2.24
43
Из выражений (2.25) и (2.26) вытекает, что для получения симметричных относительно горизонтальной оси регулировочных характеристик необходимо положить Л11=Л12. так как при этом в разложении (2.27) обращаются в нуль слагаемые, содержащие четные степени х. В этом случае резисторы в схеме рис. 2.24 необходимо подобрать так, чтобы выполнялось равенство.
Ло = 1п
Ro R1 1
R (Ri+RoJ
Ri = . Ro (R + Ri)
Ro " RRi
Корректоры с характеристикой А„, приведенной иа рис. 2.25,в, принято называть корректорами локального действия (локального типа). В таких корректорах дополнительные четырехполюсники реализуются в виде амплитудных
корректоров (рис. 2.26,а), в которых в качестве Zi(l> используется двухполюсник 4 табл. 22. Входное сопротивление амплитудного корректора ZBX1 не изменится, если поменять местами зажимы 1 и 2 (рис. 2.26,6). Далее в цепи рис. 2.26,6 Ro (зажимы 3—4) можно заменить иа входное сопротивление аналогичной цепи с другими Zi<*> и Z2<*> и т. д., что приводит к указаииой на рис. 2.26,в цепи. Использование цепи рис. 2.26,в в качестве дополнительного четырехполюсника позволяет получить корректор Боде со многими регулируемыми максимумами (либо минимумами) А^ (миогочастотный корректор) (рис. 2.25,г) при соответствующем выборе двухполюсников Zi<*), Zi<2), .... Z2'!), Zz<2>.. Регулировка максимумов (минимумов) осуществляется взаимно неза-
висимо резисторами Rai, Raz, .... Расчет корректора Боде изложен в [4, 5].
Возможно построение регулируемых корректоров, содержащих один дополнительный четырехполюсник ДЧ (рис. 2.27). В этом корректоре ДЧ—уравио-вешеииый (сбалансированный) мост, поэтому ZBXi не зависит от нагрузки ДЧ, подключенной к зажимам 2—2" и, наоборот, ZBX2 ие зависит от нагрузки, подключенной к зажимам 1—Г
Ro+ZR*
Zbxi— Z-\-R ’ —₽0 ’ ^bxi^bx*—Rg.'
Выражение ZBX1 формально преобразуется к виду
-2Г'
7 __ D 1 + (*
ZBX1 =® “о --------— г
44
где p = --------; cth r'x = —. Здесь p не является коэффициентом отражена °о Ro
ния, а Г'х — характеристической постоянной передачи ДЧ; р и Г « введены для придания ZBX1 той же формы записи, что и в выражении (2.24).
Если выбрать коэффициент трансформации n=R!R0 и Л17?2=Л2о, ГХ=Г'Х, то корректоры, изображенные на рис. 2.24 и ‘2.27, будут взаимно эквивалентными по характеристическим параметрам, поэтому характеристическая постоянная
Рис. 2.26
Рнс. 2.27
передачи Гс корректора рис. 2.27 рассчитывается так же, как и корректора рис. 2.24 [5]. Расчетные формулы для сопротивлений корректора рис. 2.27:
/?о= ~“ = 2 R sh Ао ; Л1 = 7?оел°; 7?2 = 7?q/7?1 ;
п
Ra=Ro . I R6 —
1 —р
Корректоры с частотно-зависимым входным сопротивлением (рнс. 2.28) содержат минимальное число дополнительных четырехполюсников ДЧ. При соответствующем выборе резисторов и ДЧ рабочее затухание корректора совпадает с собственным (характеристическим) затуханием корректоров рис. 2.24 и 2.27.
Рабочая передаточная функция цепи рис. 2.28,а описывается выражением
Е + ^вх 1
(2.28)
TP = D
P+QZ^
Рис. 2.28
45
где d в 2 Rh Rr > R—R% > Q — Ri 4* R3 4" Rr 4" Rh »
P = (Rr 4- Ri) (Rs 4- Rh) + Rs (R14- Rr 4- Rs 4- Rh) •
Для цепи рис. 2.28,6
~ __D _ n & "i~ 1
p~ PrBX1 + Q “ P4-Q2BI1 ’
где D — 2 G3 Д/Gh Gr > R = 1 / Ga i P == Gj 4" Gr 4" G3 4“ Gh » Q — (Gr 4” Gi) X
X (G3 4“ GH) 4“ Gs (Gi 4- Gr 4- Gs + GJ ; Уви — входная проводимость ДЧ.
Рабочие передаточиые функции цепей рис. 2.28 совпадают по форме записи с передаточной функцией цепи рис. 2.24 в режиме согласования (2.23), а входное сопротивление ДЧ ZXBi описывается выражением (2.24), поэтому для Тр справедливы в принципе все выражения (2.25)—(2.27), а рабочее затухание и рабочая фазовая постоянная цепей рнс. 2.28 обладают теми же общими свойствами, что н Ас и Вс корректора рис. 2.24. Сводка формул по расчету корректоров рис. 2.28 приведена в [4]. Рассмотренные корректоры не являются единственно возможными. В качестве корректора можно использовать любой резистивный четырехполюсник с одним ДЧ, передаточная функция которого описывается выражением (2.28).
Предельно простой многочастотный корректор синтезируется по схеме рис. 2.29,а, содержащей п потенциометров, подвижные контакты которых через последовательные колебательные контуры, настроенные на различные резонанс-
Рис. 2.29
иые частоты <£н, соединены с нагрузкой RB (i«»I, 2, ..., л). Принцип работы корректора рассмотрим первоначально для случая, когда исключены все потенциометры и контуры, кроме одного, например кроме Ro и Z. Рабочая передаточная функция в этом случае имеет вид
T
T*~DN3 + z ’
(2.29)
2 Rr Rh Ro
ГДе D Ro (R + RH) + Rr (R 4- Ro + Rh) ’ (R 4~ ri)
Ri — D ; Ro — rx 4- ra;
.. rl r2 (R 4- Rh) 4- Rh RRo 4- Rr (Rh 4" rs) (R 4- Г1)
n2= ------------------------------------------------
Ro (R4-RH)4-Rr (R4-Ro + Rh)
Учитывая, что Z=pL+ —“+RX) получаем P c
p2 + p 7- (R« + ^)4- ~
TP~D j -
Pa4-P 7- (Rx4-Rs)4-
(2.30)
46
При выполнении условия rtRB=r»R мост, образованный плечами г, и rj потенциометра Ro и резисторами R и Rb, сбалансирован. Поэтому Тр не зависит от частотных свойств контура Z. На резонансной частоте в
крайнем верхнем положении подвижного контакта (п=0)
мум, а в крайнем нижнем положении (га=0) — минимум Тр. Если Rx=0, то Tpmin=0. Характеристика рабочего затухания АР — несимметричная относительно своего среднего значения (рис. 2.29,6). В общем случае, когда включены все потенциометры и кОитуры, контуры можно рассматривать как «частотные ключи», подключающие иа частотах, близких к резонансным частотам, подвижные контакты потенциометров к нагрузке Rb н отключающие потенциометры на остальных частотах. Это приводит к получению многих регулируемых максимумов и минимумов рабочего затухания корректора.
Для получения характеристик рабочего затухания только с регулируемыми «провалами» можно воспользоваться более простыми корректорами рис. 2.30. Рабочая передаточная функция корректора рис. 2.30,а описывается выражениями (2.29) и (2.30), в которых
21/R^
достигается макси-
Рис. 2.30
.‘V «н . N1 = rt. уа= , я0=Г1+Г2.
Rr Ra 4* Ro Rf4-Rh4-Ro
Для корректора рис. 2.30,6
где У=1/2; N1== Rr
Tp-DY + N2 ’
n 2 ~|/ RB Rr R__ .
Rr (Rh + R) + RbR ’ = (Rh + R + H Rr + RH(R + r) 2 [Rr(Ra + R) + RaRP ‘ j
Используя параллельный колебательный контур с проводимостью У=рС+—М-
4----.получаем
Rae
С
— I — 4s Rz ) "1“
C \RX ) LC
Параллельное включение в корректорах рис. 2.30 нескольких цепочек, аналогичных цепочкам, включенным между точками а и б, приводит к корректорам, характеристика затухания которых имеют несколько регулируемых «провалов» на резонансных частотах контуров.
2.3. Учет влияния пропорциональных потерь
Цепи типа Z1Z2
Реактивные двухполюсники являются неотъемлемой частью фазовых корректоров. Изложенные ранее способы позволяют компенсировать влияние потерь реактивных двухполюсников на свойства фазовых корректоров в том слу
47
чае, когда потери отображаются резисторами, окружающими двухполюсники без потерь (потери «выносятся» из двухполюсников). Ниже излагается способ, позволяющий точно проанализировать влияние полуодиородиых пропорциональных потерь и паразитных параметров на расположение нулей и полюсов входных функций реактивных двухполюсников. Способ основан на теории цепей типа ZiZ2.
Под цепью типа Z1Z2 подразумевается цепь, составленная из соединенных произвольным образом двухполюсников AfZj и btZ3 (а(, bi — произвольные ко эффициенты, »=1, 2, ..., п; /=1, 2, ..., т), соответственно подобных двум заданным двухполюсникам Zi и Z2. Для таких цепей справедлива теорема [10, 11]:
Теорема. Если две цепи (двухполюсные, четырехполюсиые или миогополюс-ные) взаимно эквиваленты при одном ансамбле заданных двухполюсников Z( и Z2. то они эквивалентны и после замены двухполюсников Zi и Z2 на другие произвольные двухполюсники Z\ и Z'3.
Из данной теоремы вытекает ряд следствий.
Следствие 1. Эквивалентность цепей типа ZtZ2 с заданными Z1 и Z2 не нарушится, если в этих цепях умножить Z\ иа одно и то же число (или одну и ту же частотную функцию) Кд, а все Z2— на число (или частотную функцию) . К2.
Следствие 2. Частотные преобразования, выполненные одновременно в нескольких эквивалентных цепях типа LC (RC или RL), ие нарушают эквивалентности последних. Это значит, что после замены в указанных цепях всех
Rt на R{ZR(p), всех Lfp на LiZt(p) и всех —— на—- Zc(p), где С/ р С(
ZR(p), ZL(p) и Zc(p)—произвольные операторные функции (преобразующие функции), эквивалентность в соответствующих новых цепях сохраняется.
Следствие 3. Для произвольной заданной двухполюсной цепи типа ZiZ2 всегда существует эквивалент с минимальным числом двухполюсников, подобных Zi и Z2, в виде любой из цепей, приведенных иа рис. 2.31. Эти цепи мож-
Рис. 2.31
но назвать каноническими схемами двухполюсника типа ZtZ2. Они являются обобщением известных канонических схем реактивного двухполюсника, предложенных Фостером и Кауэром.
Расчет канонической схемы двухполюсника типа ZtZ3 удобно вести в следующем порядке:
1. В заданной цепи заменяем все двухполюсники с комплексными сопротивлениями atZi на катушки с индуктивностями Д,=а; и все двухполюсники
с комплексными сопротивлениями 6,Z2 на конденсаторы с емкостями С, = —~ .
Of
Полученную цепь назовем ДС-отображением двухполюсника типа ZXZ3.
2. Для найденной LC-цепи рассчитываем известными методами требуемую каноническую схему.
48
л В рассчитанной канонической LC-цепи заменяем катушки с индуктивностями Li на двухнолюсники с сопротивлениями и конденсаторы с емкости-ми Ct на двухполюсники с сопротивлением ——Z2. В результате получаем ка-Ci
ионическую схему двухполюсника типа ZtZz.
Сформулированная теорема значительно обобщает и упрощает теорию эквивалентных преобразований многополюсиых цепей, так как позволяет автоматически распространять методы преобразований и реализации многополюсников типа LC иа многополюсные цепи типа ZtZz (в частном случае иа цепи RC и RL), не требуя при этом специальных доказательств. Например, пользуясь LC-отображением, можно распространить все методы синтеза LC-четырехполюсников на четырехполюсники типа ZtZ2.
В табл. 2.3 приведены формулы перехода от операторных функций сопротивления W(p) цепей типа LC, RC и RL к функциям сопротивления IFz(p)
Таблица 2.3
Тип двухполюс ника
Характер преобразования
W(P)
LC
Li PLt Zt,(p);
Ctp Ci
n+1
fe=0
л=о
RC
Ri “Ri (p)> 7r—-*4--Za(p) Ci p Ci
л+1
3 akPk fe=0
P > ? k=0
RL
Ri-t-Ri Zz(p)', Li ~► Li Zj (p)
n S^p* fe=0
цепей, полученных из исходных цепей заменой всех резисторов Rt на двухполюсники с сопротивлениями RiZR(p), замены всех катушек индуктивностей £< иа двухполюсники с сопротивлениями L{Zl (р) и замены всех конденсаторов С,-
на двухполюсники с сопротивлением — Zc(p). Эти же формулы пригодны С i
и для нахождения матриц, сопротивлений цепей типа ZiZ3 по матрицам сопротивлений цепей типов LC, RC и RL.
Учет влияния потерь и паразитных параметров
Воспользуемся свойствами цепей типа ZtZ2 для учета паразитных параметров реактивных цепей [12].
Сопротивление Z(p) реактивных двухполюсников произвольной структуры (без потерь) описывается реактаисной функцией
49
n-f-1'
S akp2k н П (Ра + <ф
Z (р) = W (р) = ---------= -fe=1-3’^2n+1-------------
Р S &Л P2k Р п (Ра + w|) fc==O fc=2,4.....2n
где Я=сопз1; ±j<o* — нули (й=1, 3..... 2n+,l) и полюсы (й=2, 4, ..., 2п)
2(р). Воспользовавшись табл. 2.3, перейдем от функции W(p) к функции W'z(p), которую запишем в виде
Я П [ZxW + o/’zHp)] wz (р) = - fe-1-^--2n+!---------------------
П [Z, (р) + <0fe Za (р)]
Ь2,4.....2n
(2.31)
Полученное выражение позволяет установить связь между сопротивлением заданного реактивного двухполюсника без потерь и сопротивлением этого же двухполюсника, реализованного иа £С-элементах с произвольным характером потерь или паразитных параметров, поскольку под Zi(p) и Z2(p) можно подразумевать сопротивления катушки индуктивности и конденсатора разных типов.
Применим выражение (2.31) к анализу свойств реактивных цепей при различных видах схем замещения катушек индуктивностей н конденсаторов. Начнем со схем замещения, изображенных на рис. 2.32,а. В дальнейшем используются обозначения: Qz’-aL/r, Qc=<nCIG — добротности; бь=г/£, bc=-G/C— коэффициенты потерь соответственно катушки индуктивности и конденсатора; г — сопротивление потерь катушки; G — проводимость потерь конденсатора. Рассмотрим пропорциональные потери, т. е. 6ь и 6с — одинаковые величины для всех катушек и всех конденсаторов. В общем случае потери — полуодио-родиые: 6ь¥=6с.
Для схем рис. 2.32,а имеем: Zt(p) =р+бь; Z2(p) = l/(p+6c). Замена оператора р оператором р+6ь или р+6с приводит к сложному преобразованию частоты
i_*’P + 6z.
р (бьт^М-
1->-Р +
В итоге (2.31) принимает вид
Я П [р2+(б£ + 6с)р+6£6с + ш1]
(р) = fe=1,3.....2п+'_____________________________
(Р + ®с) U [Ра + (®l+6c)p+6l 6c+®*J
k=2,4....2n
50
Нули и полюсы Wz(p) находятся в точс^
или
бд + бС в£ + вс\» .. • ,
= — 2 * |/ \—2------J —(вдОс + ®*) •
Qx, и Qc — добротности на частотах и»; ро=—6с; fe=l, 2, .... 2п+1. Из этих выражений следует, что нули н полюсы реактивного двухполюсника с полуодно-родными потерями смещаются в комплексной плоскости р влево от мнимой оси на величину — (6ь+6с) и при этом меняется частота собственных колеба-
ний (мнимая часть рк). Для больших добротностей справедливо приближенное равенство
KI 1 \ +
В частности, доложив бь=бс=в (случай однородных потерь), приходим к формуле
Ра =—б±/со* =—со* T/j -
Перейдем к схемам замещения, изображенным на рнс. 2.32,6. Очевидно,
Р 6д Р + 6д
21 (р) = —— ; 2г(р) = —— ,
P + 6L Р0с
и выражение (2.31) принимает вид.
н П [ р» (со* + б£ бс)+р ш(б£+ес) + б£ 6С ш2
. k— 113«..., 2п-}-1
(Р> == ~ 2 2 2
Р 6С (P+6J П [р« (со* + б£ бс)4-р co* (6l4-6c)4-6£
А=2.4.....2п
Нули и полюсы W'z(p) определяются из формулы
щй + м Т /* ЩА + М * &L &С МА 2(ш1 + ®Д®с) _2Сша + 6д®с). ша + ®£®С
В точках р=0 и р=—бь находятся полюсы.
На рис. 2.32,в изображены схемы замещения катушки индуктивности и конденсатора, окруженных со всех сторон потерями. Введем обозначения: бы=Г1/£;
Shz—fi/L; &ci — G'ijC\
6ci=G'zlC', G'i = l/r'i', G'i^XJr'i,
Тогда:
, P (6/.1 + б£2) + 6Li бЛ2 P + 6ci + ®C2
Z1 : Zt (₽) = X~ /П -LX Z •
P + °L2 6C1 (P + °C2)
Подстановка Zt(p) и Z2(p) в (2.31) приводит к громоздкому выражению, которое здесь не проводится. Поскольку и в числителе, и в знаменателе выраже-
51
ния (2.31) фигурируют множители одного и того же вида Z^p)+(ti\Z2(p), рассмотрим одни из иих в отдельности:
Р8 ak + Pbk + dk
Z1 (р) + (р) —
(Р + 6д2) (Р ®ci + ®ci ®сг)
ak = 6ci (®£1 + бдг) + Ш1;
dk — $£,1 ®£2 ®С1 ®С2 + “I (®С1 4" ®С2);
bk~ 6ci 1®£1 LL2 + ®С2 (®ы + бдг)] + “1 (6L2 + + 6сг).
Нули и полюсы W'z(p) вычисляются по формуле
Кроме того, в точках р=—6l2 и р——Ьсг находятся полюсы.
Проделанный анализ показывает, что всегда можно определить функцию сопротивления, а также расположение нулей и полюсов произвольного реактивного двухполюсника, реализованного на элементах с полуоднородными потерями по известной функции сопротивления двухполюсника без потерь. Однако возможности рассмотренного способа этим не ограничиваются. Способ позволяет учесть аналогично и влияние других паразитных параметров, величины которых определенным образом связаны с величинами индуктивностей и емкостей.
Допустим, необходимо учесть влияние паразитной емкости Са катушки индуктивности (рис. 2-32,г). Для такой катушки:
zi (Р) = 1+Рр2П ; n = Z.CB = const.
Положим, что потерями в реактивных элементах можно пренебречь. Тогда Рг (1+Пго>1) + сй1 1
Из этого выражения следует, что нули и полюсы W'z(p)
Pk = ± 1 —-=~ •
В точках р=0 и р=±] находятся полюсы. Если же в катушке есть потери (рис. 2.32,д), то
z-(')=t^+8-
Таким образом, использование различных Zi(p) и Z2(p) позволяет достаточно просто учесть влияние различных паразитных параметров на свойствэ реактивных двухполюсников. Дальнейший учет влияния паразитных параметров в целом на свойства фазовых и амплитудных корректоров сводится к подстановке в функции корректоров (2.1)—(2.3), (2Л6) и т. д. вместо сопротивлений реактивных двухполюсников соответствующих функций Wz(p).
52
3. КОРРЕКТОРЫ И РЕГУЛЯТОРЫ ТЕМБРА НА ОПЕРАЦИОННЫХ УСИЛИТЕЛЯХ
3.1. Анализ цепей с многополюсными операционными усилителями
Типы многополюсных операционных усилителей
Основным базовым невзаимным элементом (активным элементом) при построении активных корректоров является операционный усилитель (ОУ). Поэтому в настоящем разделе приводятся правила составления матриц проводимостей н расчет схемных функций цепей, содержащих многополюсные (обобщенные) операционные усилители (МОУ)—усилители со многими входами и выходами. Из этих правил как частный случай получаются правила расчета цепей, содержащих дифференциальные усилители с двумя несимметричными либо симметричными (по току либо по напряжению) входами и выходами (ДОУ), а также цепей, содержащих усилители с одним входом и выходом (ОУ).
В дальнейшем рассматриваются два типа МОУ — усилители напряжения (МОУ U) и усилители тока (МОУ 1). Условное изображение усилителей всех типов дано на рис. 3.1,а. Узлы 1, 2, ..., N являются входами, узлы Af+'l, Af-f-2, ..., N+M — выходами МОУ; в общем случае МОУ содержит W входов и М
Л'+Л/
N+M+1
Чн+м
а)
Рис. 3.1
выходов; один из выходных узлов, например (М+11)-й узел, будем называть базовым выходным узлом (в принципе базовым может быть любой выходной узел); (ЛГ4-Л1-Н1)-й узел МОУ является базовым заземленным узлом всего усилителя. Таким образом, МОУ можно рассматривать как неуравновешенный необратимый (невзаимный) многополюсник, узлы которого разделены на входные и выходные. Параметры выходных узлов (т. е. токи и напряжения) линейно управляются параметрами входных узлов. Это управление описывается выражением
N
И У] ai ^i—^N+1 , i=l
где Xi (i=l, 2, .... /V)—параметры входных узлов; Xx+i — параметр выходного базового узла; а,- (<=;1, 2, .., N) — некоторые коэффициенты, ограниченные ио модулю, |а4|<оо; р — произвольный коэффициент управления (коэффициент
53
усиления). Параметры выходных узлов связаны с параметрами базового выходного узла соотношением
%N+k = Ph (А = 2,3,..., М),
где Р* — произвольные ограниченные по модулю константы 10* | <оо.
Под 2, N+M) можно подразумевать напряжения либо токи.
Оговоримся, что в дальнейшем в основном рассматриваются МОУ с однородными. входными и однородными выходными параметрами, т. е. все входные параметры являются либо напряжениими, либо токами (аналогично и выходные параметры). Поэтому усилители напряжения (МОУU) н усилители тока (МОУ I) можно разбить соответственно иа два подтипа: усилители, управляемые напряжением — МОУ UU, МОУ IU, и усилители, управляемые током — МбУ UI, МОУ II. Естественно, возможны и МОУ со смешанными входными и выходными параметрами. В дальнейшем будет рассмотрен один из таких усилителей, используемый на практике.
Приведем развернутые уравнения, описывающие МОУ разных типов.
Уравнение МОУ UU:
(<iiUi + azU2+ ... 4-акУк)ц.=Ук+1, или
1 аг а»
"1=^+1 -чг •—ЧГ
^ = Мад(* = 2, 3.М);
/1 = 7г=...=7Л, = 0;
(3.1)
токи 7х+л(А=1, 2, ..., М) —произвольные, между ними нет какой-либо связи, так как они определяются цепями, подключенными к МОУ UU. Рассматриваемый усилитель — это источник напряжения со многими выходами, задающее наряжение (ЭДС) которого f/w+t лниейно зависит от взвешенной суммы управляющих (входных) напряжений Uh ..., Un.
Уравнения МОУ Ult
(ai Л + а2 Л + • • • + aN^ n) Р ~ 1/Л,+й = РйУЛ,+1(А = 2,3. МУ,
U! = ut= ... = UN = O;
(3.2)
токи /n+л (А=1, 2... М) — произвольные; МОУ UI — источник напряжения
со многими выходами, управляемый взвешенной суммой входных токов.
Уравнения МОУ IU-.
(aiUi+a2Uz+ ... +atfUn)p.=I n+i, или
1 a® aN
IN+k = 0ft (^ = 2,3,. • > M), /1 = z8= ... = /„ = ();
(3.3)
напряжения t/x+* (A=l, 2... Af)—произвольные; МОУ IU — источник тока co
многими выходами, управляемый взвешенной суммой входных напряжений.
Уравнения МОУ lit
(ai h + a2 li + • • • + a# lN) |x = /
1 ^N+k = 0b ^N+t (A = 2, 3,. ., Af); l/1 = l/2= ... = UN = 0;
(3.4)
54
i/w+*(A=l, 2, M)—произвольные; МОУIU — источник тока со многими выходами, управляемый взвешенной суммой входных токов.
В уравнениях (3.1)—(3.4) коэффициенты а* и 0* — произвольные (вещественные, комплексные, операторные), но ограниченные по модулю; коэффициент ц— произвольный, в том числе допускается |[*|->оо; в разных уравнениях а* и |х имеют разный смысл и размерность, очевидные из уравнений, в которые онн входят.
Уравнения равновесия, матрицы проводимостей и расчет схемных функций цепей с МОУ
Рассмотрим произвольную многополюсную цепь, в которую включен один МОУ (рис. 3.1,6). Многополюсник, остающийся после удаления МОУ (все ветви, соединяющие МОУ с цепью, разорваны), будем называть регулярным многополюсником либо регулярной частью цепи. Цепь содержит Р независимых узлов и (Р+1)-й базовый узел (базис). К узлам а, Ь, ..., с подключены входы, к узлам d, е. f — выходы МОУ. Удалим из цепи МОУ и для регулярной час-
ти цепи обычными методами запишем уравнения по методу узловых напряжений (уравнения равновесия)
Yki(k=£l)—общая проводимость узлов k и I (k, 1=1, 2, ..., Р), равная арифметической сумме со знаком минус проводимостей всех ветвей, связывающих узел k с узлом /; Ул* — собственная проводимость узла k (k=l, 2, ..., Р), равная арифметической сумме проводимостей всех ветвей, образующих узел А; Ui.... Up — напряжения узлов 1, ..., Р относительно базиса Р+1; /и, ..., 1рр —
задающие токи узлов 1....Р;
k k
Т,ЕтУт—алгебраическая сумма произведений проводимостей ветвей на ЭДС
источников ветвей, образующих узел k-, ZJi — алгебраическая сумма задающих k
токов источников ветвей, образующих узел А; ЭДС £* и токи J* источников, направленных к узлу k, входят в выражение для 1хк со знаком плюс, а источников, направленных от узла А, — со знаком минус.
Подключим к цепи МОУ. Запишем уравнения цепи с МОУ в виде (3.5)
YXU = I, (3.6J
где Y, U, I — соответственно матрицы проводимостей, напряжений и задающих токов цепи с МОУ.
Подставляя (3.1)—(3.4) в (3.5), получаем правила, позволяющие перейти от уравнений (3.5) к уравнениям (3.6), т. е. от матриц Yo, Uo, Io перейти к матрицам Y, U и I. Приведем эти правила для МОУ разных типов.
Цепь с МОУ UU. Для перехода от Yo к Y необходимо:
С&2 М
1. Столбец а матрицы Yo последовательно умножить на ——,. ••,----------
а1 а1
и прибавить к столбцам b... с.
2. Столбец а умножить иа ----- н прибавить к столбцу d.
р.а2
55
3. Столбцы е.. f соответственно умножить на р2, 0м и прибавить к
столбцу d.
4. Вычеркнуть столбцы а, е, f и строки d, е, ..., Д В результате получим Y. Перечисленные правила схематически даны на рис. 3.2. Если ||х|->оо, то правило 2 не выполняется.
Рис. 3.2
Рис. 3.3
Матрица U получается из Ug вычеркиванием элементов с индексами а, е, ..., f, а матрица I — вычеркиванием в матрице 1о элементов dd, ее, ..., ff.
Цепь с МОУ VI. Переход от Yo к Y:
1. Столбцы е, .... f соответственно умножим на 02, .... Рм и прибавим к столбцу d.
2. Строку а умножим на ai и прибавим к ней строки Ь, .... с, умноженные соответственно на а2, ..., ах.
3. К элементу ad строки а прибавим 1/ц.
4. Вычеркнем столбцы а, Ь. с, е, ..., f и строки Ь, .... с, d, .... f.
Если то правило 3 не выполняется. Перечисленные правила схема-
тически даиы на рис. 3.3.
Матрица U получается из Ug вычеркиванием элементов с индексами а, Ь, с, е, ..., f. Для получения 1 необходимо в 10 элемент с индексом аа умножить иа «1 и прибавить к нему элементы с индексами 66, ..., сс, умноженные соответственно на аг, ..., ах, а затем удалить оставшиеся элементы с индексами 66, ..., сс, dd, ..., ff.
Цепь с МОУ IV. Переход от Yo к Y:
а2 aN
1. Столбец а последовательно умножим на — ... —— и приба-ai ’ ’ ’ * °i
ним к столбцам 6, ..., с.
—Ука
2. Строку d последовательно умножим иа —----------------- и прибавим к
У da + |x«i
строкам k (k=l, 2, .... Р-, k=£d, е, .... f).
3. Строку d последовательно умножим на -----------------N+q,a (q=2,
У da +
3, ...) н прибавим к строкам N+q (N+q=e...f).
4. Вычеркнем столбец а и строку d.
56
В перечисленных правилах Yn— элементы Y». Правила иллюстрируются схематически на рнс. 3.4 Если ||х]->оо, то при выполнении правил 2 и 3 не" обходимо в соответствующих выражениях перейти к пределу: |р|->оо.
Матрица U получается из Uo вычеркиванием элемента с индексом а. Для получения I необходимо в 10 проделать те же преобразования, что и со строками в соответствии с правилами 2—4.
Рис. 3.4 Рис. 3.5
При ||i|<oo можно пользоваться более простым правилом, которое сводится к следующему.
Запишем матрицу проводимостей МОУ IU с учетом обозначений рис. 3.1:
жат нули, которые опущены для упрощения записи.
Сумма матриц Yo и YMOy дает матрицу Y, т. е.
Y=^+YMoy-
57
1
Матрицы U и I при этом равны матрицам Uo и 1д. Достоинство приведенного правила в его простоте. Однако это правило нельзя непосредственно использовать в предельном случае, когда |р,|->оо.
Цепь с МОУ II. Переход от Yo к Y:
1. Строку а умножим на си и прибавим к ней строки Ь, .... с, умноженные соответственно иа as, ..., ax.
2. Строку d умножим на —— и прибавим к строке а.
3. Строку d последовательно умножим на — р2, ..., —и прибавим соответственно к строкам е, .... f.
4. Вычеркнем столбцы а, Ь. с и строки Ь.. с, d. Если |р|->оо, то пра-
вило 2 не выполняется. Правила иллюстрированы на рис. 3.5.
Матрица U получается из Uo вычеркиванием элементов с индексами а, Ь, ..., с. Для получения I необходимо в 1g проделать те же преобразования, что и преобразования строк в соответствии с правилами 1—4.
Приведенные правила позволяют записать уравнения (3.6) для произвольной цепи, содержащей один МОУ разных типов. Если же цепь содержит несколько МОУ одного или разных типов, то для записи уравнений такой цепи необходимо несколько раз применить соответствующие правила.
Решая уравнения (3.6), находим напряжения интересующих нас узлов цепи (если полученная матрица цепи — неособенная).
Считаем, что регулярная часть цепи не содержит источников. Схемные функции цепи (коэффициенты передачи по напряжению и току, входная и выходная проводимости цепи и т. д.) находятся по матрице Y по тем же формулам, что и для цепей, не содержащих МОУ, поэтому можно пользоваться таблицами схемных функций, данными в [15]. Приведем некоторые из них:
передаточная функция по напряжению между узлами х и у т — &ху — Uy • ху Д~~ Uv ’ *^ХХ L/ X
(3.7)
входная проводимость со стороны узла х
&ХХ Чх
выходная проводимость со стороны узла у
v _ 1у____________Д + Уи &хх
г вых- Uv - &yy + YB'bXXiyy
(3.8)
(3.9)
где Д—определитель матрицы Y; Дх*. Дх», Дур — алгебраические дополнения элементов хх, ху, уу\ &xx,vv— двойное алгебраическое дополнение, т. е. определитель, получаемый из матрицы Y после вычеркивания в ней двух строк и двух столбцов с номерами, соответствующими узлам х и у, Уи — внутренняя проводимость источника, подключенного к узлу х; ДХ1( — умноженный на (—1)*+» определитель, получаемый из матрицы Y после вычеркивания в ней А-й строки, соответствующий узлу х, и s-го столбца, соответствующего узлу у, кхх и находятся аналогично. Здесь следует обратить внимание на то, что нумерация строк и столбцов определителя матрицы Y, так же как и нумерация строк и столбцов самой матрицы Y, не соответствует нумерации узлов цепи, поскольку матрица Y получается из матрицы Yo путем суммирования строк и столбцов, а также удаления строк и столбцов согласно вышеописанным правилам. Нумерация строк и столбцов матрицы Yo, естественно, соответствует нумерации узлов цепи.
Описанные правила формирования матрицы Y по матрице Yo не являются единственно возможными. Выражая в (3.2)—(3.4) один какой-либо ток или одно какое-либо напряжение через оставшиеся токи и напряжеиня и подставляя затем эти уравнения в (3.5), получаем различные формы записи матрицы Y. Проиллюстрируем эту возможность на примере МОУ IIU с двумя входами и выходами (рис. 3.6,а).
58
Рис. 3.6
Уравнения усилителя рис. 3.6,а получаются из (3.1) как частный случай
(a»l/fr-a0l/o)|x-t/e, Ut^Ue. (3.10)
Средн возможных форм записи этих уравнений рассмотрим нижеследующие четыре формы и вытекающие из них правила перехода от матрицы Y к матрице Y цепи рис. 3.6,6.
Форма 1:
Ub = -^-Ua + -J—Ud. Ue=-LUdt ось р Р
Переход от Yo к Y (рис. 3.7,а):
1. Столбец Ъ последовательно умножим на aa/a» и 1/цаьР и прибавим соответственно к столбцам а н d.
2. Столбец с умножим на 1/р н прибавим к столбцу d.
3. Вычеркнем столбцы Ь, с н строки end.
Форма 2:
Ua=—Ub——^—Uc; Ud=$Ue. Ota Pao
Переход от Yo к Y производится согласно схеме рис. 3.7,6.
Форма 3:
Рис. 3.7
5»
Форма 4:
Переход от Yo
Удобство
иа = ^-иь------Uc=±-Ud.
аа И аа Р Р
к Y указан на рис. 3.7,г.
приведенных правил в том, что они в равной мере пригодны для усилителей как с конечным усилением ||х|<оо, так и с бесконечно большим усилением раздаются
||х|->оо; Прн |ц[-*оо выражения, содержащие множитель 1/ц, об-в нуль.
Рис. 3.8
На рис. 3.8 изображены частные случаи усилителя рис. 3.6,а. Переход от матриц Yo к матрицам Y цепей, содержащих эти усилители, производится по следующим правилам:
для усилителя рис. 3.8,а — согласно рис. 3.7,6, в, но при этом не выполняются правила, связанные со строкой и столбцом d, так как выход d усилителя не подключен к цепи;
для усилителя рис. 3.8,6 — согласно рис. 3.7,6, г, но при этом не выполняются правила, связанные с умножением тех или иных строк на аь/аа, поскольку вход Ь усилителя не подключен к цепи;
для усилителя рис. 3.8,в — согласно рис. 3.7,6, но при этом не выполняются правила, связанные со строкой и столбцом d, и правило умножения строки а на аь/а0, так как вход Ь и выход d усилителя не подключены к цепи.
Таким образом, форма 2 и правила рис. 3.7,6 являются наиболее общими для усилителей рис. 3.6,а и 3.8.
Используемые на практике МОУ UU не обладают бесконечно большими входными и нулевыми выходными сопротивлениями и поэтому, строго говоря, не описываются уравнениями (3.1). Одиако эти усилители можно представить в виде соединения некоторого многополюсника Q, отображающего входные, выходные сопротивления усилителя и сопротивления обратной связи (паразитные параметры), и МОУ UU, описываемого уравнениями (3.1) (рис. 3.9). При расчете цепей, содержащих такие усилители, многополюсник Q объединяется с регулярной частью цепи [с (Р+1)-полюсником] и далее расчет производится согласно вышеизложенным правилам. Аналогично учитываются паразитные параметры МОУ других типов.
Рис. 3.9
60
Пример. Определить передаточные функции по напряжению Гн н 7\s между узлами 1 и 4, 5 цепи рис. 3.10. Цепь содержит МОУ UU, описываемый уравнениями
которые сводятся к уравнениям (3.10), например, при
, На «Ь На — 1 — 1
аа=1; аь —------; н = Н1- ----=-----, -------=-----•
Hl аа Н1 Наа Н1
Воспользуемся правилами, схематически указанными на рис. 3.7,6.
Записываем матрицу Yo регулярной части цепи обычными методами:
1
3 4 5
Г1 + Г3 — Л —Г2
-Л У1 + Гз + ГБ + Г7 -Уз — Г5
-Га Г2 + У4+Гв+Ув -Гв —г4
4
5
Для упрощения формы записи нули в матрице не записываются, а отображаются пропусками. Строки 4 и 5 не записываются (отображаются волнистыми линиями), так как они при переходе к Y удаляются. Столбец 2 последовала —1 , ,
тельно умножаем на — и ---------- и прибавляем соответственно к столбцам
3 и 4. Столбец 5 умножаем на ₽ и прибавляем к столбцу 4. Удаляем столбцы 2, 5 и строки 4 и 5. В результате получаем
1 3 4
Y1 + Yi — Ya Л Hi 7Г‘
— Л ~ (Г1 + Гз + Гб + У7) Hi — Y3— (Г1 + Kg + Hi + Гб+Г7) —₽У8
— Га Га + Г4+Гв+У8 -Гв-₽Г4
По Y согласно (3.7) находим:
61
. (Ух + Уз + ^ + У,) —
™ Д14 W
1 14 — Д = ----*
“--------ИЧГ1 + 1'з + П + К,)(Г.+ ₽У4) +
U1
_______________—Г1(Г» + Г4 + Г« + Гв)__________________
+ (Гв + У4 + Ув + F.) ГУ, + р У. + — (Ух + У3 + У6 + У,) L р.
7'h==₽7’i4'
Представляет интерес случай, когда |Ц1|->-оо, |р.2|->о°, но-*— =аг>= М
—const (операционный усилитель с асимметричным дифференциальным входом н бесконечно большим усилением по каждому входу). Как видно из выражения Гн, передаточная функция зависит от асимметрии входов.
Усилители со смешанными входными и выходными параметрами
Примером МОУ, содержащего выходы и с управляемыми напряжениями и с управляемыми токами, может служить усилитель типа DUCCSIDUCUS (дифференциальный источник тока, управляемый напряжением, и источник напряжения, управляемый напряжением) (рис. ЗЛИ,а):
(Ua—Ub)G = lc, Ud = nUc, )
/ 7-/'-п <311)
'а ““ ‘Ь — ‘Q — 0. J
Все правила формирования матрицы Y дыдущем разделе, легко распространяются
по матрице Yo, изложенные в пре-и иа цепи, содержащие усилители
Рнс. 3.11
со смешанными параметрами. Например, подставляя (3.11) в (3.5), получаем правила перехода от матрицы Yo к матрице Y цепи рис. 3.11,6:
1. Столбец а прибавим к столбцу Ь.
2.
3.
Столбец с умножим на — и прибавим к столбцу d.
-Yka
Строку с последовательно умножим на ——>—- и прибавим к строкам
•са— G
k“ 1, 2, ..., Р, k=£c, k&d.
62
4. Вычеркнем столбцы а, с и строки с, d.
Сформулированные правила представлены на рис. 3.12. Правила справедливы для любых С и р, в том числе и для |G|-*oo, |ц|->-оо. Если |О|<«», |р.|<оо, то справедливы также другие правила, представленные иа рис. 3.13:
1. К элементам Уев и Уе» прибавим соответственно —G и G.
2. Столбец с умножим на — и прибавим к столбцу d.
3. Вычеркнем строку d и столбец с.
Рнс. 3.12
Рис. 3.13
Пример. Определить передаточную функцию по напряжению цепи рис. 3.14. Матрица проводимостей регулярной части цепи
Воспользовавшись правилами, схематически указанными на рис. 3.12, получим
1 4
и далее
63
Если воспользоваться правилом рис. 3.13, то
1 2 4
+ — у»
G — G
„ _ д“ _ Д(У1 + гг) 14 ~ ~ 1
11 GY2 — — Уз(Гх—Уа)
И
что совпадает с предыдущим результатом.
Цепи с дифференциальными и недифференциальными операционными усилителями
Наиболее широкое применение находят дифференциальные операционные усилители ДОУ (см. рис. 3.8,а), описываемые уравнениями
(Ub—Ua)n = Uc; >
/а = 1Ь = 0; /„ - любой, J 1 ‘ '
и недифференцнальные усилители (или просто операционный усилитель — ОУ) (см. рис. 3.8,в), описываемые уравнениями
-Ua^ = Uc-, |р,|->оо; ।
1а — 0; /с — любой, /
где /0, 1ъ, 1е — входные и выходной токи усилителей. Недиффереициальный усилитель получается из ДОУ «заземлением» входа Ь.
Уравнения (3.12) и (3.13), естественно, являются идеализированными, однако они в первом приближении достаточно хорошо описывают свойства реальных усилителей и поэтому широко используются при анализе и синтезе цепей с операционными усилителями.
Рассмотрим произвольную цепь с Р+1 узлами [(Р+1)-полюсиик, рис. 3.15,а], в которую включены как ДОУ, так и ОУ. Учитывая (3.12) и (3.13),
Рис. 3.15
64
нетрудно сформулировать правила перехода от матрицы Yo к матрице Y (рис. 3.16,6):
1. Попарно просуммировать между собой столбцы матрицы Yo, соответствующие узлам, к которым подключены симметричные входы дифференциальных операционных усилителей. Вычеркнуть столбцы, соответствующие узлам, к которым подключены входы несимметричных операционных усилителей.
2. Вычеркнуть все строки, соответствующие узлам, к которым подключены выходы всех операционных усилителей. Например, для получения матрицы Y цепи рис. 3.15/1 необходимо в матрице Yo регулярной части цепи проделать следующие преобразования:
1. Объединить (попарно просуммировать) столбец b со столбцом а и столбец е со столбцом d. Это значит, что необходимо столбец Ь просуммировать со столбцом а и удалить столбец b или, наоборот, столбец а просуммировать со столбцом b и удалить столбец а\ аналогично поступить со столбцами d и е. Удалить (вычеркнуть) столбец t.
2. Вычеркнуть строки с, f, s.
Пример 1. Определим передаточную функцию по напряжению и входную проводимость цепи рис. 3.16. Цепь содержит произвольный пятиполюсник с узлами 1, ..., 5; узел 5 — базисный. Записываем матрицу проводимостей регулярной части цепи, т. е. пятиполюсника
12 3 4
Fu У12 Г1, f14
F21 F22 F23 f24
rgl FS2 F33 f34
Г41 F42 Г43 F44
Выполним преобразования: столбец 4 прибавим к столбцу 3 и удалим столбец 4; вычеркнем строку 2. В результате придем к матрице
1 2 3+4
У11 Уи ^13 + ^14
У31 F32 F33 + F3 4
y,i у& ^43 + F44
По этой матрице согласно (3.7) н (3.8) найдем: '
,__п1+2К31 5/33 +5/34 I
у, А13 I F41 F43 + F44 I _
^11 ,__..14-1 F33 + F34
|r«FM + FM
= ^41 (F33 + F34) —F31 (У43+У44) . F32 (F43 + У44) — F43(F33 + F34)
_ A rUFg3(F43 + F44) + F41F13(Fg3 + F34)+ , Au F3a (F43 + Y44) —
x F31 F43 (Fi3+Fi4)—F41 F38 (Fi3+F14)—F31 F12 (F43+F44)—Flx F43 (F33+F34) — F42 (F33 + Y34j
<3J5>
3—66 65
Рнс. 3.16
Рис. 3.17
Пример 2. Определить входную проводимость н передаточную функцию цепей рис. *3.17, содержащих произвольные трехполюсники и ОУ.
Матрица регулярной части цепи рис. 3.17,а
а Ъ с
Hi4’ Иг”
у£> у(В) r 22
где индексы А и В указывают, что соответствующие проводимости относятся к трехполюсникам А и В. Удалив в этой матрице столбец b и строку с, получим матрицу а с
ytf>
а
Y —
4Л>
b
по которой находим:
гг — А°С
* ас — *
Даа
. Y _____________У<л>
Г(В) ’ дао - •
(3.16)
Матрица регулярной части цепи рнс. 3.17,6
a b cd
ИЛ)+Иг У<? у^
у^- У^+У[^ У[?
ytf> У^+У^ у^
У® +
66
Объединив столбцы b и с и удалив строку d, получим а 6+с d
у)Р+ИР ИР + ИР
ИР у^’ + ИР ИР
ИР ИР+И2” ИР
и далее:
- rtf) № + г|° >)-rtf' <^> + ИГ)
" r|?>(rtf’+r[“)—г|“И?+1'|'“|)'
(rtf’ + ИР) W + ПР) И?’ + (ИР +ИР) ИР ИР -
r“ ИР (ПР+ИР)-
-(ИР +ИР) ИР ~№ + ИГО(ИР + ИР) ИР
-ИР (ИР+ИР) ( 1
Из этих формул, как частный случай, получаются формулы (3.16), если соединить узел с с базисным и удалить трехполюсннкн С и D.
Пример 3. Определить передаточную функцию цепи рис. 3.1в, содержащей произвольный шестиполюсник и два дифференциальных операционных усилителя.
Матрица проводимостей регулярной части цепи
Столбцы 3 и 5 прибавим к столбцу 1 и затем удалим столбцы 3 и 5; удалим строки 2 и 4. В результате получим матрицу проводимостей всей цепи 1+3+5 2 4
Ки + Уи + КтБ У1. у»
У31 + У33 + У.Б Уз. Уз<
Ум + Убз + Убб Уб. Ум
Передаточная функция цепи
7* — А*4 _ (Уз1 + Уз. + Узб)----Уз, (Ум + Уб, + Убб)
U Ди УззКи—Г34ГБ1
3*
67
Аномальные элементы
В ряде случаев анализ и синтез цепей с операцноииымн усилителями, а также с полупроводниковыми триодами и электронными лампами, существенно упрощаются, если воспользоваться аномальными (патологическими) элементами, к которым относятся нуллатор, норатор, нуллор и бигенератор.
Нуллатор (рис. 3.19,а) является двухполюсником, который обращает в нуль протекающий через него ток и приложенное к нему напряжение: /=0; £/=0. Норатор (рис. 3.19,6) является двухполюсником, ток и напряжение которого принимают любые, не связанные между собой значения: 1 — любое; U —любое. Нуллатор и норатор нельзя описать с помощью закона Ома [17]. Последовательное соединение нуллатора и норатора эквивалентно разрыву ветви (холостому ходу) (рис. 3.20,а), а параллельное соединение — короткозамкнутой ветвн (короткому замыканию) (рис. 3.20,6).
Нуллор является четырехполюсником (рис. 3.21), у которого входные ток и напряжение равны нулю, а выходные ток и напряжение принимают любые, не связанные между собой значения. На рис. 3.21,а изображен неуравновешенный, а на рис. 3.21,в — уравновешенный нуллор. Нуллор можно представить состоящим из нуллатора и норатора (рис. 3.21,6,г), поэтому пара «нуллатор — иора-тор» эквивалентна нуллору (илн является его схемой замещения).
На рнс. 3.22,а.б изображены соответственно эквивалентные схемы трехэлектродной лампы и полупроводникового триода. Схемы содержат нуллор. Из анализа этих схем следует, что нуллор эквивалентен высококачественному лам
Рис. 3.22
68
повому триоду, у которого 1/S—*-0, /?«-><», либо высококачественному полупроводниковому триоду, у которого (1—а)гк-И), гв**О, г»-И), где S — крутизна; R, — внутреннее сопротивление триода; re, г», Гк — сопротивления базы, эмиттера и коллектора транзистора; а — коэффициент, равный отношению токов коллектора и эмиттера (при гк->-оо).
Сравнение нуллора с недифференциальным операционным усилителем (ОУ) показывает, что нуллор эквивалентен идеальному ОУ, так как у идеального ОУ согласно (ЗЛ'З) входной ток и входное напряжение равны нулю (при конечном выходном напряжении), а выходной ток и напряжение — любые (усиление усилителя равно оо, |ц|->оо). Таким образом, заземленный нуллор можно отобразить одним из трех высококачественных элементов: транзистором, ламповым триодом и операционным усилителем (рис. 3.23,а). База (б) и сетка (с) соответствуют зажиму 1 нуллора, коллектор (к) и анод (а) — зажиму 2, эмиттер (э) и катод (к) — зажиму 3. Нуллор с заземленным выходом отображает ДОУ (рис. 3.23,6), а уравновешенный нуллор отображает уравновешенный ДОУ (рис. 3.23,в).
6)
Рнс. 3.23
Наряду с иуллатором используется также более общий аномальный элемент: бигенератор (двойной генератор) — двухполюсник, задающий ток /о и задающее напряжение Uo которого фиксированы: /o = const, l/o=const' (в частности, ток и напряжение могут обращаться в нуль). Если Ia=Ua=0, то бигенератор вырождается в иуллатор. Бигенератор можно отобразить с помощью иуллатора, источника напряжения Ua и источника тока /о, как указано на рис. 3.24.
Включение аномальных элементов в цепь может привести к нарушению законов и правил теории электрических цепей и появлению цепей с неопределенным состоянием. Примеры таких нарушений:
1. На рис. 3.25 изображена цепь, в которой состояние ветви / не определено, а в ветви 2 нарушаются законы Ома и Кирхгофа.
Рнс. 3.24
Рис. 3.25
69
2. Если в цепи выбрать произвольный двухполюсник, подчиняющийся закону Ома, то режим работы цепи ие нарушится при замене двухполюсника источником напряжения, создающим то же напряжение, что и на двухполюснике, либо источником тока, задающий ток которого равен току двухполюсника. Эти замены не применимы к нуллатору.
3. Известно, что режим работы цепи не нарушится, если соединить между собой эквипотенциальные ее точки и разорвать ветви с нулевыми токами. Это правило не применимо к нуллатору: нельзя закорачивать нуллатор, хотя его зажимы являются эквипотенциальными точками, и разрывать ветвь с нуллато-ром, хотя его ток равен нулю.
4. Цепь без источников, составленная из произвольных двухполюсников, подчиняющихся закону Ома, удовлетворяет принципу взаимности (обратимости). Если же в цепи есть аномальные элементы, то в общем случае она является невзаимной.
Уравнения равновесия произвольной многополюсной цепи, в которую включены аномальные элементы (рис. 3.26), записываются согласно правилам:
1. Удалить из цепи все аномальные элементы (разорвать и удалить ветви с нуллаторами, иораторами и бигеиераторами). Для оставшейся регулярной части цепи записать уравнения (3.5) обычными методами.
2. Включить в цепь аномальные элементы. В записанной системе (3.5) уравнять между собой напряжения узлов, между которыми включены нуллаторы, и учесть, что напряжения узлов, между которыми включены бигенераторы, отличаются иа задающие напряжения бигенераторов. В результате этого уменьшится число неизвестных напряжений на суммарное число нуллаторов и бигенераторов. Например, в цепи рис. 3.26 необходимо положить Ue=Ut\ Ua—0 (узел а связан нуллатором с базисным узлом, напряжение которого равно нулю); Uf=>Ut+Uoi-, Ug — UOf, Uoi, £/oj — задающие напряжения (ЭДС) i-ro и /-го бигенераторов.
3. К правым частям уравнений (3.5), т. е. к задающим токам узлов, между которыми включены бигеиераторы, прибавить либо вычесть задающие токи бигенераторов (в зависимости от направлений токов бигенераторов). Например, в цепи рис. 3.26 необходимо /« прибавить к току Iff и вычесть lot из ТОКа Iее\ к току /дд необходимо прибавить (здесь 1ы, loj— задающие токи бнгенераторов).
4. Просуммировать уравнения узлов, между которыми включены нораторы. Отбросить уравнения узлов, которые соединены с базисным узлом норатором. Это уменьшит число уравнений на число иораторов. Например, для цепи рис. 3.26 необходимо к уравнению узла t прибавить уравнение узла з и отбросить уравнение узла Ь.
Если число нуллаторов и бнгенераторов равно числу нораторов, то в результате проделанных преобразований уравнений (3.5) приходим к системе уравнений, в которой число неизвестных напряжений равно числу уравнений. Далее, если определитель полученной системы уравнений не равен нулю, то состояние цепи (напряжения узлов цепи) находится решением уравнений обычными методами.
70
Допустим, что цепь рис. 3.26 не содержит источников и бигенераторов, ио имеет нуллаторы и нораторы. Матрица проводимостей такой цепи Y формируется по правилам:
1. Удалить из цепи все аномальные элементы. Записать матрицу проводимостей Yo регулярной части цепи.
2. Включить в цепь аномальные элементы. Просуммировать между собой попарно столбцы матрицы Yo, соответствующие узлам, между которыми включены нуллаторы. Вычеркнуть столбцы, соответствующие узлам, соединенным с базисным узлом нуллаторами.
3. Просуммировать между собой попарно строки матрицы Yo, соответствующие узлам, между которыми включены нораторы. Вычеркнуть строки, соответствующие узлам, соединенным с базисным узлом норатором.
В результате проделанных преобразований приходим к матрице Y. Функции цепи с аномальными элементами находятся по матрице Y так же, как и функции цепи с МОУ, т. е. по (3.7)—(3.9).
Пр имер. Найти передаточную функцию по напряжению цепи рис. 3.27,а. На рис. 3.27,6 изображена цепь после замены ДОУ нуллорами. Матрица проводимостей регулярной части цепи
1 2 3 4 5
1
2
3
4
5
Г04-Иж -Ух
— Ух Ух + КУ — КУ
— КУ KY +Y — У
— У — У
В этой матрице прибавим к столбцу 1 столбцы 2 и 4, удалим столбцы 2 и 4, вычеркнем строки 3 и 5. В результате получим матрицу проводимостей всей цепи
14-24-4 3 5
2 У,4- — Ух |________
4 ЛТ4-К | — КУ | — У
По матрице Y согласно (3.7) найдем
Расчет простых цепей, содержащих аномальные элементы, в некоторых случаях удобно проводить, используя непосредственно законы Ома и Кирхгофа. Аномальные элементы не описываются законом Ома. Однако цепи, содержащие аномальные элементы, естественно, удовлетворяют основным законам электрических цепей, т. е. законам Кирхгофа:
1. Первый закон Кирхгофа (закон токов)—алгебраическая сумма токов любого узла (в общем случае — сечения) электрической цепи равна нулю.
2. Второй закон Кирхгофа (закон напряжений) — алгебраическая сумма напряжений любого замкнутого контура электрической цепи равна нулю.
Приведем пример, иллюстрирующий непосредственное применение законов Кирхгофа при расчете цепей с аномальными элементами.
Пример. Найти входное сопротивление цепи рнс. 3.28,а.
71
Замена операционных усилителей нуллорами приводит к цепи рнс. 3.28,6. Очевидно, что (напряжения нуллаторов равны нулю). Поскольку токи
иуллаторов равны нулю, через двухполюсник Zt протекает ток h, через двухполюсники Z2 и Z3 — ток /'г, через двухполюсники Zi н Zu — ток /г.
Уравнения контуров I н 11:
11^4Ч’//2^з=0; =
Из этих уравнений получим h=I3ZiZ3IZ2Zi. Входное сопротивление цепи
У Uj _ U 2_______^4 у
в*~ h ~ л z.z,
Как уже указывалось, высококачественные транзисторы и ламповые триоды можно заменить нуллорами (см. рнс. 3.23,а). Для низкокачественных транзисторов и триодов такая замена, естественно, является приближенной. Тем не менее она используется для приближенной оценки свойств сложных схем, содержащих большое число транзисторов или триодов, поскольку расчет схем с нуллорами проще расчета схем с реальными транзисторами и триодами.
Рис. 3.39
72
Пример. Записать в общем виде приближенную связь между токами и напряжениями на входе н выходе цепи рис. 3.29,а. Заменив в первом приближении транзисторы Т1—Т3 нуллорамн, придем к схеме рнс. 3.29,6. Учитывая, что токи всех нуллаторов равны нулю, нетрудно видеть, что через резистор протекает ток /г, а через резистор Rz— ток Д. Далее, учитывая, что напряжения нуллаторов равны нулю, нетрудно видеть, что напряжение на резисторе Ri равно Ut, а на резисторе Rz— U2< поэтому Ux=IzRi> Ut=IiRz, h = UilRt, h=* — Ui/Ri. Полученные выражения показывают, что цепь рис. 3.29,а является инвертором сопротивления, в частности гиратором, если Ri=Rz (см. [17]).
Зависимые источники
Зависимые (управляемые) источники тока и напряжения — это источники, задающие токи или ЭДС (задающие напряжения) которых линейно зависят от некоторых управляющих токов и напряжений. Известны четыре вида зависимых источников:
1. Источник напряжения, управляемый напряжением, — это источник, ЭДС которого Е прямо пропорциональна управляющему напряжению иаъ, приложенному к некоторым точкам а, b цепи, в которую источник включен (рис. 3.30,а): £=рУаь, где р— безразмерный коэффициент пропорциональности.
а о
Рис. 3.30
2. Источник напряжения, управляемый током (рис. 3.30,6), Е=ц1аь, где р — коэффициент пропорциональности с размерностью сопротивления.
3. Источник тока, управляемый напряжением (рнс. 3.30,в), /=р(/аь, где р — коэффициент пропорциональности с размерностью проводимости.
4. Источник тока, управляемый током (рнс. 3.30,г), J=p/O6, где р — безразмерный коэффициент пропорциональности. Во всех источниках р — произвольный коэффициент, т. е. вещественный, комплексный нлн операторный.
Все зависимые источники — четырехполюсники. Зависимые источники являются односторонними преобразователями, преобразующими управляющие токи и напряжения в задающие токи и напряжения источников. Так, источник рис. 3.29,а — преобразователь напряжения в напряжение (сокращенно — ПНН), источник рис. 3.30,6 — преобразователь тока в напряжение (ПТН), источник рнс. 3.30,в — преобразователь напряжения в ток (ПНТ), источник рнс. 3.30,г — преобразователь тока в ток (ПТТ). Зависимые нсточинки—это предельно простые МОУ с одним входом н одним выходом, поэтому цепи, содержащие зависимые нсточннкн, рассчитываются так же, как и цепи с МОУ, при условии, что одни нз зажимов зависимых источников н одна нз точек цепи управления (точка а или Ь) соединены с базисным узлом цепи.
Общие правила расчета многополюсных цепей с зависимыми источниками следующие.
цепь с источником напряжения, управляемым напряжением (рис. 3.31,а). Уравнение зависимого источника E—Uc—Ud = v(Ua—Uh), откуда Ub = Ua + + —Ud——t/c, где Ua, Ub, Uc, Ud — напряжения узлов a, b, c, d othoch-P p
тельно базисного [(P-l-l)-ro] узла.
Удалим нз цепи зависимый источник (разорвем ветвь с ЭДС Е) и для ос-ставшейся регулярной части цепи запишем уравнения по методу узловых напряжений (3.5). Включим в цепь зависимый источник и запишем ее уравнения в форме (3.6). Переход от Yo к Y произведем по правилам рнс. 3.31,6:
73
1. Столбец b последовательно умножим на — и—— н прибавим соот-р. р
ветственно к столбцам d н с. Столбец Ь прибавим также к столбцу а. Удалим столбец Ь.
2. Строку d прибавим к строке с и удалим строку d. Матрицу U получаем из матрицы Uo вычеркиванием Ub. Для перехода к I необходимо в матрице 10 прибавить к he и удалить элемент 1ц.
Vab
a b
Рис. 3.31
Цепь с зависимым источником напряжения, управляемым током (рис.
3.32, а). Уравнение зависимого источника E=Ue—Ua=fi,Iab, откуда /вь= = — Uc—— Ud.
Для перехода от Y к Yo (рнс. 3.32,6) необходимо:
1. К элементам ас и bd матрицы Yo прибавить — , а нз элементов ad и
1 И
Ьс вычесть — . И
2. Столбец b прибавить к столбцу а и удалить столбец Ь.
3. Строку d прибавить к строке с и удалить строку d.
В матрице Uo удалить элемент с номером Ь, т. е. Ub, что даст U. В матрице 1о к Zee прибавить Idd и удалить элемент 1ц.
Матрицы Yo, Uo и 10 относятся к регулярной части цепи, т. е. к цепи рис. 3.32,а, в которой разорваны ветви с током 1аъ и ЭДС Е.
Цепь с зависимым источником тока, управляемым напряжением (рис.
3.33, а). Уравнение зависимого источника 3 = ц.{7аь = p(U0—Ub), откуда Ub = Ua—— 3.
И
Рис. 3.33
Рис. 3.34
74
Для перехода от Yo к Y (рис. 3.33,6) необходимо:
1. Строку d умножить на — -------- и прибавить к строке k (А=1, 2, ..., Р;
Ydb~ф
k¥=d, k=£c). Строку d умножить на — еЬ и прибавить к строке с. Удалить Ydb — Н
строку а.
2. Столбец b прибавить к столбцу а и удалить столбец Ь.
В матрице Uo удалить элемент с номером Ь, а над элементом матрицы /о сделать те же преобразования, что н над строкой d матрицы Yo.
При записи Yo, Uo и 1» разорвать ветвь с зависимым током Sf.
Другое, более простое правило перехода от Yo к Y: в матрице Yo к элементам da и сЬ прибавить ц н из элементом db и са вычесть р (d и с — номера строк, а н Ь— столбцов матрицы Yo). В результате получается матрица Y. Недостаток этого правила в том, что его нельзя непосредственно использовать при 1ц|->оо.
Цепь с зависимым источником тока, управляемым током (рис. 3.34,а). Урав-
нение зависимого источника 5< = рЛь или /аь =-- Sf.
Регулярной частью цепи в данном случае является цепь, в которой разорваны ветвн с токами 1аъ и Sf.
Для перехода от Yo к Y (рис. 3.34,6) необходимо:
1. Столбец b прибавить к столбцу а и вычеркнуть столбец Ь.
„ „ , 1 •
2. Строку d последовательно умножить на — — и — и прибавить со-р. р
ответственно к строкам ано. Строку d прибавить также к строке с. Удалить строку d.
Переход от Ио к U н от 10 к I производится так же, как н для цепи рис. 3.33,а.
Если какой-либо из узлов цепи, например узел I, соединен с базисным узлом, то необходимо в уравнениях (3.6) положить Ui=0 и отбросить уравнение, соответствующее узлу I. Этим правилом необходимо пользоваться в случаях, когда какой-либо из узлов а, о, с или d соединен с базисным. Например, если узел а (или с) цепи рис. 3.31,а соединен с базисным, то необходимо в матрице Y удалить строку а (с) и столбец а (с), в матрицах U н I—элементы (/а(1/е) и /аа(/сс). Случай, когда узел b (или d) соединен с базисным, сводится к предыдущему с взаимной заменой нумерации узлов а и Ъ (илн с d) и заменой р на —р.
Пример. Найти передаточную функцию по напряжению н входную проводимость цепи рис. 3.35.
Матрица проводимостей регулярной части цепи
1 2 3
1
2
3
Столбец 2 умножим на — и прибавим к столбцу 3, а затем удалим 1*
(вычеркнем) столбец 2. Удалим строку 3. В результате получим матрицу проводимостей всей цепи
1
75
По формулам (3.7) н (3.8) найдем:
Т_____________1_______
Лз- ,
— (^ + Г8 + У,) — Г2 Р
Увх — Л 1
_____^х
Ух + (1— р) У»+Уз
(3.19)
Анализ правил перехода от Yo к Y цепей с зависимыми источниками разных типов (см. рнс. 3.31—3.34) показывает, что при |р|->оо независимо от характера р все этн правила совпадают с правилами перехода от Yo к Y цепей с иуллором. Поэтому нуллор можно рассматривать как предельный случай (|р|-»-оо) всех четырех типов зависимых источников (см. рис. 3.30) или, другими словами, все типы зависимых источников в пределе дают операционный усилитель. Поскольку зависимые источники — это односторонние усилители илн преобразователи токов н напряжений, можно сделать вывод, что различия в свойствах цепей с усилителями и преобразователями разных типов уменьшаются с ростом |р|. Кроме того, прн больших |р| свойства цепей в основном ие определяются характером р, а прн |р|->-<» свойства цепей не зависят от р. Например, если в выражениях (3.19) перейти к пределу |р|->-оо, то независимо от характера р получим: Т13=—Fi/F2; 1'вх=Yt.
Рис. 3.35
Рис. 3.36
Расчет простых цепей, содержащих зависимые источники, естественно, можно проводить непосредственно на основе законов Ома и Кирхгофа, метода контурных токов н т. д, В таких случаях расчет ведется в следующем порядке:
1. Пользуясь тем или иным методом, составить уравнения цепи, считая, что все зависимые источники являются независимыми.
Рис. 3.37
76
2. Выразить зависимые ЭДС и зависимые задающие токи через неизвестные величины, т. е. через искомые токи ветвей, контурные токн и т. д., для которых записаны уравнения цепи.
Решить полученные уравнения относительно неизвестных величин.
Методы расчета цепей с зависимыми источниками пригодны н для расчета цепей с инверторами н конверторами сопротивлений (в частности, с гираторами), траизнсторамн, электронными лампами н любыми другими невзаимными и взаимными многополюснымн элементами, поскольку перечисленные элементы отображаются эквнвалеитнымн схемами с зависимыми источниками. Например, иа рнс. 3.36 изображен произвольный четырехполюсник, описываемый уравнениями:
//1 = 2ц/1+^12/2, //2 = 221/1+222/2, либо /1 = Уц//1 + У12'//2, /2=У21//1 + У22(/г,
а на рнс. 3.37 — его наиболее распространенные эквивалентные схемы. Эти схемы не являются единственно возможными. Меняя, например, в схеме рис. 3.37,в точки подключения зависимого источника и его цепи управления, получаем еще три эквивалентные схемы рнс. 3.38. Аналогичные изменения можно проделать и в схемах рис. 3.37,а, б, г, что также приведет к новым схемам. Схемы рнс. 3.37 и 3.38 используются в качестве эквивалентных схем транзисторов и ламп. Наряду с этими схемами возможны эквивалентные схемы
Рис. 3.38
с двумя зависимыми источниками [18]. Зависимые источники используются также при расчетах связанных цепей, т. е. цепей, между частями которых кроме электрической связи есть и другие виды связей (например, магнитная), поскольку все виды связей отображаются с помощью зависимых источников.
Эквивалентные преобразования цепей с операционными усилителями
Для цепей, содержащих операционные усилители с бесконечно большим усилением (| р, ] —»-оо), справедливы нижеследующие эквивалентные преобразования.
Преобразование 1. Функции цепи не изменятся, если поменять местами точки подключения инвертирующего и неинвертирующего входов ДОУ (рис. 3.39).
Рис. 3.39
Рис. 3.40
77
Действительно, при записи матрицы Y цепи с ДОУ объединяются в столбцы а и Ъ, соответствующие узлам цепи, к которым подключены входы ДОУ (см. рнс. 3.15). Очевидно, что объединение столбцов не нарушится и матрица Y не изменится, если поменять местами входы ДОУ.
Пример. Цепь рис. 3.40 получается из цепи рис. 3.16 взаимным изменением точек подключения инвертирующего и неинвертирующего входов ДОУ (точки 3 и 4), поэтому передаточная функция цепи рнс. 3.40 получается из передаточной функции (3.14) взаимной заменой индексов 3 и 4. Проделав эту замену, получим
У,1 (У«4 + (Y3i + у„)
У а — ^за (Уи + У*а)
что совпадает с (3.14). Аналогично убеждаемся, что входные проводимости цепей рис. 3.40 и 3.16 одинаковые.
Преобразование 2. Функции цепи, содержащей два и более операционных усилителя, не изменятся, если взаимно поменять местами точки подключении выходов усилителей (рнс. 3.41).
Доказательство справедливости этого преобразования очевидно нз рис. 3.15. При записи матрицы Y вычеркиваются строки, соответствующие узлам, к которым подключены выходы ОУ н ДОУ. Поэтому матрица Y не изменится, если взаимно поменять местами точки подключения выходов ОУ н ДОУ.
Пример. На рис. 3.42 приведены эквивалентные схемы; описываемые передаточной функцией
zlza *
где Zt, ..., Zt — сопротивления двухполюсников. Одна цепь получается из другой взаимной заменой точек подключения выходов ОУ1 и ОУ а (точки а и Ь).
Справедливость преобразований 1 и 2 становится очевидной прн использовании нуллорных схем замещения ОУ и ДОУ (см. рис. 3.23). Между нуллаторами, образующими иуллор, нет какой-либо связи, за исключением общей точки, совпадающей с базисным узлом цепи. Зажимы нуллатора равнозначны, и их можно менять местами. Нораторы в схемах замещения разных ОУ и ДОУ также
Рис. 3.41
равнозначны, и их можно менять местами, не нарушая свойств цепи. Эти свойства позволяют сформировать правило «генерирования» эквивалентов сложных цепей, содержащих несколько операционных усилителей:
1. Заменить все ОУ и ДОУ нуллорами.
2. Любой нз иуллаторов формально объединить с любым из нораторов в иуллор н заменить все нуллоры опять ОУ или ДОУ.
Пользуясь этим правилом, можно получить, например, множество эквивалентов схемы рис. 3.28.
78
Преобразование 3. Пусть в некоторой цепи входы усилителей подключены к множеству узлов а, Ь, с таким образом, что выполняется требование: между любыми узлами этого множества существует путь, проходящий через входы усилителей. Свойства цепи не нарушатся, если изменить узлы подключения входов усилителей, но так, чтобы выполнялось вышеуказанное требование (рнс. 3.43).
Рис. 3.43
Рис. 3.44
Справедливость этого преобразования вытекает из того, Что при записи матрицы Y объединяются в один все столбцы матрицы Yo, соответствующие узлам, соединенным между собой входами ДОУ (см. рнс. 3.15).
Преобразование 4. Свойства цепи не изменятся, если входы ОУ и ДОУ подключить к данной цепи через входные дополнительные четырехполюсники, а их выходы — к цепи через дополнительные выходные четырехполюсники (рис. 3.44). При этом дополнительные четырехполюсники (А, В, С, D на рис. 3.44) должны быть такими, что их включение в цепь не приводит к «электрическому» отрыву от цепи или к закорачиванию входов и выХодоа ОУ и ДОУ.
Справедливость данного преобразования вытекает из того, что если четырехполюсник рис. 3.36, удовлетворяющий вышеуказанному ограничению, нагрузить на нуллатор нли норатор, то по входному сопротивлению четырехполюсник эквивалентен опять же нуллатору или иоратору. Например, на рнс. 3.45 изображены эквивалентные цепи с передаточной функцией по напряжению
Yi (Г, + Г, + У«)—У» (Ут + У4 + У») «
. Уз (Yi + + У5) —У4 (Г, + Y3 + У.)
79
I
R входной проводимостью
у (У.П-IW (Ух + Уя)
вх Уа (Ух + У5)-Ух (У. + У») ‘ ( ’
Предостережение. Подчеркнем еще раз, что все рассмотренные преобразования, строго говоря, справедливы для усилителей с бесконечно большим усилением. Для реальных усилителей, имеющих конечное частотно-зависимое усиление, преобразования являются приближенными. Формальное применение преобразований с реальными усилителями может привести к нереализуемым (неустойчивым) цепям, поэтому возможность применения того илн иного преобразования решается в каждом конкретном случае в завнснмостн от структуры цепи.
Порядок электронных цепей
Порядок цепи — это максимальный порядок дифференциального уравнения, описывающего переходный процесс в цепи, нлн максимально возможная степень знаменателя операторной передаточной функции цепи.
Возможны два подхода в определении порядка произвольной электронной цепи, содержащей независимые ЭДС Е н источники тока J, резисторы, конденсаторы, катушки индуктивности, транзисторы, электронные лампы н операционные усилители.
Первый подход. Заменим все транзисторы и электронные лампы эквивалентными схемами с зависимыми источниками (см. рис. 3.37), а операционные уснлнтелн — иуллорамн (см. рнс. 3.23). Порядок полученной цепи вычислим по формуле
N=Nlc—NKc—Nhl—Nyc——N'Kc—N'xl—Л^ус—(3.22) где N — порядок цепи; Nlc— общее число реактивных элементов цепи; NKc — число независимых CEO-контуров, т. е. емкостных контуров, которые кроме конденсаторов могут дополнительно содержать в любом количестве независимые источники ЭДС н нуллаторы (пример такого контура дан иа рнс. 3.46,а); Nkl — число независимых LEO-контуров, т. е. индуктивных контуров, аналогичных СЕО-контурам; Мус— число независимых С^О-сечений (в частности, СЗ'О-
Рис. 3.46
узлов), т. е. емкостных сечений (узлов), в которые дополнительно к конденсаторам могут входить независимые источники тока н нуллаторы (примеры СЗ'О-сечеиия и СУО-узла даны на рнс. 3.46,6; последовательно с конденсаторами могут быть включены произвольные двухполюсники Д); .Myz.— число независимых ЕЗ'О-сечений, т. е. индуктивных сечений, аналогичных СУО-сечениям; А'кс — число независимых CEO-контуров, в которые дополнительно к вышеуказанным элементам входит хотя бы один источник зависимой ЭДС ЕСл вида
ECk = 2 aCk UCk + 2 Ptfe lLk + 2 fCk, (3-23>
k k k
80
где асл, ₽ьк и fch — некоторые постоянные величины; Uch и /гл — соответственно напряжения и токи некоторых конденсаторов й катушек индуктивностей цепи (управляющие токн н напряжения); N'kL~число независимых LE0-контуроз, в которые кроме вышеуказанных элементов входит хотя бы один источник зависимой ЭДС Elk вида
ELk — S aLk ^Lk + 5 Pc* rCk + 3 f Lk, (3.24)
к к k
где аък, ₽сл и fLk — постоянные величины; Ulu и 1ск — напряжения и токи некоторых катушек индуктивностей и конденсаторов цепи; N'yc — число независимых С770-сеченнй (узлов), в которые дополнительно входит хотя бы один зависимый источник тока, описываемый выражением вида (3.24); N'tl — число независимых АЗ'О-сечений, в которые дополнительно входит хотя бы один зависимый источник тока, описываемый выражением вида (3.23).
Источники с зависимыми ЭДС Еск можно разбить на две группы: I) источники ЭДС E'ck, управляемые напряжением; цепи управления источников подключены либо к двум точкам цепи, замыкание которых образует новый независимый С£0-контур, либо к резистивному участку произвольной ветви, удаление которой образует независимое ГЗ'О-сечение (узел) (например, как указано на рис. 3.47,а, б, где а й Ь — точки подключения цепи управления;
Рис. 3.47
Uab — управляющее напряжение источника зависимой ЭДС; Д1 и Дг — произвольные двухполюсники); 2) источники ЭДС Е"ск, управляемые током; цепи управления источников включены, либо в произвольную ветвь, удаление которой образует новое независимое /.S'0-сечение, либо в резистивную ветвь, замыкание которой образует независимый С£0-контур (примеры указаны на рис. 3.47,в, г, где 1аь — управляющий ток источника зависимой ЭДС; Д1 и Дг — произвольные двухполюсники). В свою очередь, контуры и сечения, получаемые соответственно после замыкания точек подключения цепей управления либо после разрыва ветвей управления, могут также содержать ЭДС £'Сл и Е"ск и т. д.
Зависимые ЭДС ELk делятся на две группы по аналогии с Eck- Цепи управления зависимых источников тока, задающие токи которых описываются выражениями типа (3.24), включаются так же, как и цепи управления источников зависимых ЭДС ELk. Аналогично, цепи управления зависимых источников тока, задающие токн которых описываются выражениями типа (3.23), включают так же, как н цепи управления источников ЭДС Есь-,
Нораторы являются элементами, напряжения и токи которых не определены и между ними нет какой-либо связи. Это не позволяет использовать нораторы для получения дополнительных линейных зависимостей между токами и наприжениямн с целью понижения порядка цепи, как это проделано выше с нуллаторами.
При пользовании формулой (3.22) необходимо учитывать, что если какие-либо элементы цепи включены последовательно либо параллельно с нуллато-рамн или нораторами, то эти элементы не влияют на порядок цепи.
Второй подход. Наличие зависимых источников усложняет расчет порядка цепи. Однако при наличии нуллаторов правила определения порядка цепи достаточно простые и легко формализуются, поэтому целесообразно заменить зависимые источники их нуллаторно-нораторными эквивалентными схемами. Такая 81
замена в реальных цепях не связана с какими-либо принципиальными трудностями. Наличие зависимых источников обусловлено заменой транзисторов, электронных ламп, инверторов и конверторов сопротивлений, усилителей с конечным усилением их эквивалентами — схемами, содержащими зависимые источники. Для устранения зависимых источников необходмо все перечисленные элементы заменять нуллаторно-нораторными эквивалентными схемами. Такне эквивалентные схемы для транзистора и лампы даны на рис. 3.22. Эквивалентные схемы конверторов и инверторов сопротивлений и усилителей с конечным усилением (т. е. зависимых источников) здесь не приводятся, так как они достаточно известны (см., например, [17] и др.). Порядок цепи без зависимых источников вычисляется по (3.22), в которой исключены величины N'Kc, N'kl, N'yc. N'yL. Подсчет значений NKC, NKL, Nyc, NyL не связан с какими-либо трудностями.
Следует иметь в виду, что замена зависимых источников их нуллаторно-нораторными схемами замещения приводит к увеличению числа контуров и узлов цепи по сравнению с имевшимся до замены. Указанный недостаток перекрывается простотой расчета порядка цепи после выполнения замен. Из этого, однако, не следует, что рассматриваемые замены всегда оправданы. Возможны случаи, например, для простых схем, когда порядок цепи целесообразно определять непосредственно по (3.22) без выполнения замен.
Если в цепи имеются бигенераторы, то они учитываются так же, как и нуллаторы.
Обобщенная теорема квазимощности цепи
Пусть А и В — две произвольные цепи, между графами которых либо соответствия, т. е. графы цепей в общем случае отличаются
нет какого-числом как узлов, так и ветвей. Кроме того, цепь В может быть цепью с распределенными параметрами. В частном случае цепи А к В могут Совпадать. Условные изображения этих цепей даны на рнс. 3.48,а, б. Точками Е 2, чены узлы цепи А;
, ..., а, Ь, ..., ,N обозна-узлы соединены между собой ветвями, из которых на рис. 3.48,а указана лишь ветвь между узлами а и & (ветвь ab). Структура ветвей — произвольная: ветви могут содержать произвольные двухполюсники, которые на рнс. 3.48,а, б не указаны.
Рассмотрим токи всех ветвей цепи А. Ток ветви ab обозначим через 1аь (ток течет от узла а к узлу Ь, что подчеркивается расположением индексов а и Ь), Условимся считать из некоторого узла токи положительными для этого узла, а втека-токи — отрицательными. Запишем первый закон Кирхгофа для каж-
а)
Рис. 3.48
Ua'i^Ub’ °° б)
о/ oZoo Jab
вытекающие ющие в него дого из узлов цепи
2/м=0 (3.25)
(алгебраическая сумма токов ветвей, образующих узел цепи, равна нулю). Здесь 1м — токи ветвей, образующих тот или иной рассматриваемый узел цепи. Выражение (3.25) для узлов а и b имеет соответственно вид:
... +1аъ+ ...=0; (3.26)
...—1аъ+ ...=0. (3.27)
В этих выражениях записан лишь ток 1аь, остальные токи не записаны.
В цепи В (рис. 3.48,6) выберем У произвольных точек 1', 2', ..., а’, Ь', .... N'„ которые не. обязательно являются узлами цепи В; часть этих точек может совпадать друг с другом, образуя одну общую точку. Подчеркнем, что расположение н нумерация точек — произвольные. В частности, точки могут распола-82
гаться на одной ветви цепи. Внутри либо вне цепи выберем произвольный базис (точку О), который может совпадать с одной из указанных точек. Рассмотрим напряжения всех выбранных точек относительно базиса О. На рис. 3.48,6 указаны лишь напряжения точек а' н b': Ua, и Ub> ; — напряжение между
точками а' и Ъ' (напряжение Ua,b’ направлено от точки а' к точке Ь', что подчеркивается порядком следования индексов а' и Ь'). Если какие-то точки цепи совпадают друг с другом, то напряжения между ними равны нулю.
Умножим уравнения токов (3.25), записанные для узлов цепи А, на напряжения соответствующих точек цепи В. Это значит, что уравнение (3.25), записанное для узла 1 цепи А, умножим на U'i, являющееся напряжением точки Г цепи В; уравнение (3.25), записанное для узла 2 цепи А, умножим на 1}'г и т. д. Например, уравнения (3.26) и (3.27), записанные для узлов а и Ь, умножим соответственно на Ua, н t/b, , что даст:
•+/abUa>+ ••• =0; (3.28)
-----labUb,+ ...=0. (3.29)
Просуммируем полученные произведения. Характер слагаемых всей суммы легко виден нз выражений (3.28) и (3.29). Действительно, при суммировании этих выражений получаем слагаемые вида lai>(Uа,—Ubi)—labUa'b’ Поэтому всю сумму можно, записать в виде
= <3-30)
Полученное равенство является обобщенной теоремой квазимощности и показывает, что сумма произведений токов ветвей цепи А на соответствующие напряжения между произвольно выбранными точками цепи В равна нулю.
Частный случай. Пусть А и В — цепи с одинаковыми графами. Точки 1', 2', ... цепи В выберем так, чтобы они совпали с ее узлами, но при этом допустим, что нумерация узлов и ветвей цепи А не совпадает с нумерацией соответствующих узлов и ветвей цепи В. Записав для этих цепей равенство (3.30), получим, что сумма произведений токов цепи А на напряжения определенным образом выбранных ветвей цепи В равна нулю. Пример таких цепей дан на рис. 3.49,а, б. В цепи А указаны токи ветвей, в цепи В — напряжения ветвей. Нумерация узлов цепи В не совпадает с нумерацией таких же узлов Цепи А (для сравнения в скобках дана нумерация узлов цепи В, совпадающая с нумерацией узлов цепи Л). Развернутая запись равенства (3.30)
Лз U 1'3' + Л.2 Uр2' + 1ц U 1'4' + Лз ^2'3' + ^2'4' + Лз^4'3' —О’ (3.31)
Если нумерация узлов цепи В совпадает с нумерацией узлов Цепи Л, то приходим к теореме Теллегена [19]. Последняя, как известно, обобщает теорему о балансе мощностей, которая утверждает, что для произвольной цепи алгебраическая сумма произведений токов всех ветвей иа напряжения этих же ветвей (сумма мощностей всех ветвей) равна нулю [18].
S/«(/*1=0. (3.32)
83
Используя равенство (3.30), получаем более общее, нежели (3.32), равенство. Действительно, считаем, что цепь В (см. рис. 3.48,6) совпадает с цепью А и, выбрав точки Г, 2', ... произвольным образом, убеждаемся, что для цепи А справедливо равенство (3.30).. Это равенство показывает, что сумма произведений токов ветвей некоторой цепи на напряжения между соответствующими точками этой цепи равна нулю. Например, если на рнс. 3.49,6 цепь В совпа-падет с цепью А, то, учитывая соответствие между номерами узлов 1, 2... N
и номерами точек Г, 2, ..., N’, равенство (3.31) перепишем в виде
/13^24 4-/12^2314^21 + Аз^/ 34 -\-l2tJJ Sl+lliU 14 = 0. (3.33)
В частном случае, когда точки 1', 2', ... совпадают соответственно с узлами 1, 2.. приходим к балансу мощностей
А»САз+ IizUiz+htU 14+Лз Uzi+/24^24+Аз^Аз = 0. (3.34)
Приведем пример записи равенства (3.30) для цепей с разными графами. Пусть цепи Л н В имеют графы, изображенные соответственно на рис. 3.49,а, в, причем точка 3' совпадает с точкой 4'. Для этих цепей справедливо равенство (3.31), в котором необходимо положить: 1/3,4. = 0; ~ Uyy = ^1’4- •
Под цепью В можно также подразумевать часть цепи А н выбрать точки Г и 2' совпадающими соответственно с узлами 1 и 2, а точки 3' и 4' — совпадающими с узлом 4. Тогда равенство (3.31) примет вид
А2А12 +А4А14 +А4'С/24 =—hiUu—I23U23. (3.35)
Как видно из этого равенства, суммарная мощность ветвей 1—2, 1—4, 2—4 определяется по токам ветвей 1—3, 2—3 н напряжениям ветвей 1—4, 2—4. Подчеркнем, что равенства (3.33)—(3.35) справедливы для одной и той же цепи А. Кроме того, нетрудно видеть, что, выбирая точки 1, 2, ... совпадающими с разными узлами цепи А, получаем большое число равенств типа (3.33) — (3.35).
Покажем, что теорема квазимощности (3.30) справедлива не только для цепей, составленных нз двухполюсников, но н для цепей, содержащих произвольные многополюсники. Допустим, что цепь А рис. 3.48,а содержит многополюсник с Р зажимами 1, 2, 3, ..., Р (Р-полюсннк) (рис. 3.50). Зажимы Р-полюсника соединены с узлами цепи А. Обозначим через h, h, 1з........ Ip
токи полюсов, а через /21, /32, Аз, ...» Iip — токи внешних контуров Р-полюс-ника [18]. Между токами узлов и токами внешних контуров существует связь:
А=Ар—/21;
/2=/21—/31;
/3=Аг—Аз;
1р—1р р-1—lip.
Нетрудно видеть, что, задавшись произвольно значением любого из токов внешних контуров, например значением тока Цр, можно всегда найти значения всех остальных токов внешних контуров по известным токам полюсов. Каждый из токрв внешних контуров вытекает нз некоторого одного узла цепи и втекает в некоторой другой узел цепи А, в которую включен Р-полюсник. В этом смысле токи внешних контуров Р-полюсиика не отличаются от токов ветвей цепи Л, поэтому при записи уравнений (3.25) для узлов цепи А с учетом Р-полюсника каждый из токов внешних контуров войдет в какое-то уравнение со знаком «+», а в какое-то — со знаком «—» [по аналогии с током Аь в уравнениях (3.26) и (3.27)]. Следовательно, равенство (3.30) справедливо и для цепей с произвольными многополюсниками с той лишь разницей, что при наличии многополюсников под 1м необходимо понимать токн ветвей, образованных двухполюсниками, и внешние токи многополюсников. В частном случае, когда цепь В совпадает по структуре с цепью А (графы цепей совпадают и в цепях включены одинаковые по числу узлов многополюсники), из равенства (3.30) вытекает теорема Теллегена, расширенная на цепи с многополюсниками. В этом случае под 1м необходимо понимать токи ветвей, образованных двухполюс-84
никами, н внешние токи многополюсников, а под напряжениями —напряжения ветвей, образованных двухполюсниками, и напряжения между узлам» многополюсников.
Из вышеизложенного следует, что обобщенная теорема квазимощности цепи имеет более широкую, нежели теорема Теллегена, трактовку, поскольку
Рнс. 3.50 Рис. 3.51
теорема Теллегена справедлива при условии, что топология цепей А н В идентична (графы цепей совпадают) и идентична индексация (нумерация) ветвей (или узлов) этих цепей [19].
Учет параметров реальных усилителей
Как уже указывалось, реальные усилители отображаются схемой рис. 3.9. С достаточной для многих практических задач степенью точности эта схема в развернутом виде представлена на рис. 3.51 и содержит усилитель с нулевыми входными (по входу «—» и входу «+») и бесконечно большой выходной проводимостями. Проводимость между входами «—» и «+» также равна нулю. Проводимости Ya, Уь, Уо, У. (|Уо|т£о°, |У,|^0) отображают входные и выходные проводимости; Уо.са н Yo.cb — проводимости паразитной обратной связи; З'а, &ъ, Ес — источники входных токов и ЭДС смещения, а также шумов реального усилителя. Уравнение усилителя с удаленными источниками ЗГа, Зъ н £0 вытекает из (3.10):
(осьС/ь—aat7o)p.=t7 с,, где as и ао — заданные коэффициенты; р — коэффициент усиления, который в первом приближении описывается выражением
Ио .
11 Рт+1
Цо — коэффициент усиления на нулевой частоте; т — постоянная времени цепи; р — комплексная частота; Ua, Ub, Uc'—напряжения точек а, Ь, с'. При необходимости для описания р, используются более сложные выражения. Все проводимости в общем случае являются операторными, а ЭДС и задающие токи источников — частотно-зависимыми. Естественно, M.OVUU в схеме рис. 3.51 при ненулевом выходном сопротивлении (|Уг|=°°) может быть заменен МОУ/(7 по обычным правилам преобразования источников с ненулевыми сопротивлениями.
Расчет цепей, содержащих реальные усилители, проводится по правилам, изложенным выше (см. рис. 3.7).
-85
Рнс. 3.52
Пример 1. Найти передаточную функцию по напряжению цепи рис. 3.52,а. Матрица проводимостей регулярной части цепи
1 2 3 4 5
Уп У12 У13 Уи 1
УП У^+П у23 У 24 — У1
Уч У32 У3З у*
У» ^42 Пз У»
—yt У{
где У« (/, А=1, 4) —проводимости пятиполюсиика Р+1;
Y'zZ^ У22+ Уо.оа + Уо.сь; У23—Уо.Са!
Y 24ЯУ±4--Уо.сЬ; Y/32=sYs2-Уо.оа»
У733“ У33 + У« + Уа+Уо.оа! Y'u — Уз4—Уо;
У'42=У42—Уо.с»; У'43=У43-Уо;
У/44=У44+Уо+Уь+УоО.Ь.
Воспользуемся, например, правилами, указанными на рис. 3.7,в: столбец 4 ум-аа 1
ножим последовательно на — н --------и прибавим соответственно к столбцам 3
аъ раъ
и 5, а затем удалим столбец 4 и строку 5. В результате получим матрицу проводимости всей цепи
1 2 3+4 5+4
Уч У и Г13+ J-V14 1 раь - Уи
У 31 У’22 + У1 Г2з+1г^4 1 Уи-У*
Уз! ^32 1 У34
Уч У’ч 1
У44
86
По этой матрице, используя (3.7)—(3.9), можно найти входную, выходную проводимости н передаточную функцию цепи. Ограничимся нахождением передаточной функции Г12=Д12/Ди, где
4“--г“(Гя+ в" Г") (Д» 4
+ Г„ (И,+Г«)х
\ /
— Г34‘> Наь М
(3.36)
Дп = (Г;2 + Гг)(1'зз+-^-^)-^-^ + (^ + ^-^)-^-^^2 + \ / рЯЪ \ аЬ J М^о
Частные случаи: 1. ||1|->-оо, тогда
Если Оа/аь=1, приходим к выражению типа (3.14).
2. |У<|-►<», |[i|=/=oo, тогда
У31 I Л'ч + ~ П.Д — зл 1 43 । 44 /
_____\______аО_____J
(3.39)
Пример 2. Найти передаточную функцию цепи рис. 3.52,6. Проводимости Уо.са, Уо.оь, Уь, Уо включены соответственно в проводимости Уз, У*, Уз, У«.
По аналогии с предыдущим примером получим матрицу проводимостей всей цепи
87
1 2+3 4 3+5
1 У1 + Гз -Уз- —У1 аь цаь У1
2 — Уз У а<*- у Г 22 '0 аь -У, — ——Уз И«ь
3 -У1 -Го+ «ь —Уз _±_ у р.аь 8*
4 -Г8- — Уз “ь Уз + Уз + У{ l—yt-yt Наь
где У22=Уо + Уг+Уз + Ув; Узз=Уа + У1 + У4+Уз. Матрица Y может быть получена из матрицы Y цепи рис. 3.52 с учетом структуры пятиполюсинка Р+1. Передаточная функция цепи 7’14=Д14/Дц, где
Д14 = ^(— ^ЗЗ-^О ) ( 4" Y^ + Yl 1-Г4Гз + \«ь / \Цаь / \
-Г.(гз+ ^~уД
\ «ь /
Наь 88
+ Г« + г4 — Узз • / Наь
(3.40)
(3.41)
Частные случаи:
1. тогда
Уз{— Узз—Уа] — У1{Узз— — У0] \«ь________/____\____«ь /
уДузз-^-У0} — Уз(т-Узз — Уз] \ «ь / \ аь /
(3.42)
Рис. 3.53
Если аа1аь—1, приходим к выражению (3.20). При этом Уо и У,- не влияют иа передаточную функцию, что также подтверждается эквивалентным преобразованием рис. 3.44 и 3.45.
2. |У.|-»-оо, ||i| <оо, тогда
88
_________\«ь______1_ yAy33— — Y.\ — Ys (22- У38_уЛ_ \ ®ь / \аь /
—Yi (Yi3— /o')
__________\____®b /_________
(3.43)
Выражения (3.40) —(3.43), естественно, вытекают из выражений (3.36)— (3.39) при учете соответствия структур цепей рис. 3.52 и 3.53.
Пример 3. Найти входную, выходную проводимости и передаточную функцию цепи рнс. 3.53. Проводимости Уо и Уо.о<х включены в четырехполюсник P+I. Уравнение усилителя Ut=iiUs.
Матрица проводимостей всей цепи
Y =
1 .2 3-|-4
Ги Г12 — /13 И
/21 Г.2 4-^ — н
г.1 Ya* -^-Y г 33 Н
где Уд (/, k—1, 2, 3) —проводимости (Р + 1)-полюсника.
Передаточная функция Где—1Д12/Д11;
Д12 = /.i ( Y за — Yi 'j — K2i Y33 ;
k H / H
Дп = (/.. 4-/.) — Y33— Г82 ( — Y33 — Yt 'j . H k Ц /
Входная проводимость Увх=Д/Ди, где
Д = /ц (/.. + Yi) — Y33 + У21К32 — У13 + Н ц
4-/12/31 ( /зз—/Д— /31 (Ya3 + Yf \ Y13 —
k Н / / Н
--/.1/12-----------/..--------^11^32 ( YM-КД . И к н /
д 4- уи дп
Выходная проводимость УВых= даа уи д-------гДе Уи — внутренняя проводи-
мость источника;
Д22 — Yu Y33 У31 —— У13 ; Дj j, 22 = ^зз •
Рассмотренные примеры показывают, что с ростом |ц| влияние Уо н У,- ча функции цепей уменьшается.
89
Проверка регулярности соединений четырехполюсников
Все корректоры независимо от их структуры и сложности являются четырехполюсниками (2х2-полюсникамн), н для их анализа и синтеза можно использовать общую теорию четырехполюсника. В некоторых случаях анализ сложных четырехполюсников упрощается, если представить их в виде соединения более простых четырехполюсников. На рис. 3.54,а приведены основные
If Iz
а.)
Рис. 3.54 .соединения четырехполюсников: последовательное, параллельное, последовательно-параллельное, параллельно-последовательное и каскадное. Первые четыре .соединения, если они регулярные [18], рассчитываются соответственно путем суммирования Z-, Y-, Н- и G-параметров отдельных четырехполюсников при условии, что параметры ие обращаются в бесконечность. Последнее соединение всегда является регулярным и .рассчитывается путем перемножения матриц Д-параметров четырехполюсников. Проверка регулярности соединений является важным элементом общей теории четырехполюсника и может выполняться на основе схем, приведенных на рис. 3.54,6—д. Здесь рассматриваются четырехполюсники с параметрами, не равными бесконечности.
Если СЛх = О, то
Zn=Z(1>ii + Z(2)ii; Z2I = Z<‘)21 + z<2>21; (рнс. 3.54,6)
ru=ya)„ + y(*)li; У21 = У(1)21+У(2)2Г, (рнс. 3.54,в) /711=/7<1)н+Я(2)11; (рнс. 3.54,г)
GI1 = G<I)11 + G(2>n; G2i = G<‘)2i + G<2)21; (рис. 3.54,6)
•если th—®, то
ZI2=Z<‘)12+Z<2)I2; Z22=Z<*>22+Z<2)22; (рнс. 3.54,6)
Г12=У<‘)12+У<2)12; У22=У(1)22+У<2)22; (рнс. 3.54,в) //i2=^/^42+^^2^i2; //22=Я(1>22+Я(2,22; (рис. 3.54,г) Gi2=G<1)12+G(2>i2; G22=G<i)22-f-G<2)22, (рнс. 3.54,6)
•90
где верхние индексы 1 и 2 указывают, что параметры относятся к четырехполюсникам 1 и 2; отсутствие верхнвх индексов указывает, что параметры относятся ко всему соединению, рассматриваемому как одни четырехполюсник.
Смысл Z-, У-, Н-, G- и A-параметров ясен из различных форм записи урав-веиий четырехполюсника:
Z-форма:
Ziili+ZiiIz=Ui', Zzih+ZzzIz=Uz',
У-форма:
YinUi + YizUz=Ii‘, YuUl + Y2zUz=Iz;
ff-форма:
Н ц/1 + Н цУi; H2ih+H22Uz=fz', G-форма:
GnUi+Gi2lz=fi', GziU i + GzzIz^'Uz', А-форма:
AaUi—AizIz=Ui; AziUt—Azzfz=/i-
Последовательное, параллельное, последовательно-параллельное и параллельнопоследовательное соединения четырехполюсников являются регулярными, если одновременно равны нулю вапряжеиия Ua и Уъ соответственно в схемах рис. 3.54,6—д.
Другие приемы проверки регулярности соединений четырехполюсников даны в [18].
3.2. Простейшие амплитудно-фазовые корректоры
Корректоры с одним операционным усилителем
Простейшие фазовые и амплитудные корректоры комбинированного типа (типа ARZ) строятся на основе обобщенной модели рис. 3.55, содержащей дифференциальный операционный усилитель с бесконечно большим усилением, резистивный многополюсник R и реактивный двухполюсник Z. Передаточная функция и входная проводвмость модели описываются выражениями (3.14) и (3.15). Частной разновидностью этой модели является цепь рис. 3.45, схемные функции которой описываются выражениями (3.20) и (3.21), вытекающими из выражений (3.14) и (3.15), либо из
выражений (3.17) и (3.18). Удаление положительной обратной связи (У4=0) приводит к упрощениям:
У1(У,+ Гв)-У»У8 . у = Га (У1 + У») Г8(У1 + У») ’ “ ^4-Гз
(3.44)
т. е. УВх не зависит от Уз н Ув.
Если все Y< (i= 1, 2, ..., 6) тождественно не равны нулю, то, выбрав один из двухполюсников реактивным, например Yj = Y=l/Z, а все остальные — активными сопротивлениями (проводимостями) Yi=Gi=l/Rf (i=l, 2....... 6;
можно преобразовать (3.20) к виду
T—F }-^RY^FZ-^ =FG~»Y
1 + RY Z + R G + У
(3.45)
Эта функция при p.= 1 описывает передаточную функцию фазового корректора. Пример 1. Положим У1 = У=1/2, Yt = Gt=\/Rt (i=2, 3, ..., 6). Тогда:
Gz Gg Ч~ Gz Gg , r_________Ga_______ .
Gs Gg—G, Gt—Gg G„ ’ ~ G3 Gg — G3 Gg—Gg Gt ’
(G3 + Ge) (Gg Gg—Gz Qg—Gg Ge) GgGg(Gg+Gg)
91
Частные случаи:
1. При Ge=O:
К __ G3 . _ G3 G8—G2 Ge
G3 Gg Gg G4 G3 (G4 4- Gg)
*2. При G4=0 (рис. 3.56,a):
r> n . G3 + Ge Rg (Rs + Re) „ Gg R3 i\ = Kr> Ц- = " ==------------» г = --------= -------' •
Gg Rg Rg G3 Rg
Положив R3=nRg- Re=-----Rgt получим: |i=l; R=RS't F^=—n, где n. — любое
n— 1
•число (n^l). Эта схема удобна тем, что позволяет выбором величины п менять общее усиление всей схемы. Сделав резистор Rs переменным, получим регулируемый корректор.
3. G4 = Gg=0. В этом случае: ц=/?2/Лз; F=—R3/Rg=—1/ц. Если Rg—R3, -то ц= — Е=1.
Пример 2. Положим: У5=У=1/2; У< = 0( (i= 1, 2, ..., 6; i=/=5). Тогда:
F _ Gg G3 4- Gi G6 — Gg Ge G3
Gi Gg — G4 G3 — Gg Ge Gi G3 — Ge Gg—Gg G4
_ Ga (Gi G3 — G4 G6 — Gg Ge) G3(G1G34-GiG,— GgGe)'
Частные случаи:
1. При Gg=0: '
F=l; h=Gz/G3=/?3//?2;
%Gg Ri R2 Re
Gi Gg—GgGe Re—'R1R3
ЙЕсли Rg=R3, to [i=l; R= . Если Gg=G4=0, to (1=1; R=Ri.
2. При G4=0 (рис. 3.56,6): 1
Ga 4- Gg Rg
Gg R3
u =___2*____= . p = p
И G34-G, Rg(R, + R,) ’ v
n
Если выбрать Rs=nRg- R3=-------Rg
n — 1
-рой [i=l, F=n, R^=Re.
«2
(n^l), то приходим к схеме, у кото-
В примерах 1 и 2 входное сопротивление (проводимость) схем является частотно-зависимым, так как Увх зависит от Yi и У2 [см. выражение (3.21)]. Для получения схем с частотно-независимой Ум необходимо положить У4=0, а реактивный двухполюсник У включать в двухполюсник У3 или в Ув> поскольку У,х (3.44) ие зависит от У3 и У6.
Пример 3. Выберем: У3 = У+О3; У4=0; Yi = G{ (i=l, 2, 5, 6) (рис. 3.56,в). В результате получим:
г _ 61 (G3 + G6) — Gj G5 ______1__
(GX + G6)G3 : G33'’
_ _______Gi G3______G5 (Gi + G3)
g Gx (G#+ Ge) — G2 G5 ’ BX ~ Gx + G3 ~ C°"S ’
В частности, если Gi = G2; G5 = Ge+2G3, то ц=1.
Пример 4. Выберем: Ye=GeY/(G6+Y)-, У4=0; Yt = Gi (i=l, 2, 3, 5) (рис. 3.56,г). В итоге получим:
Р 6j Gs—G2 Gs _________ J___ ___ Gx (G3 4- G6) — G2 G5
G3 (Gx + G5) ’ ~ Ge ~ GXG3 — G2G5
. Ум —такая же, как и в предыдущем примере.
Во всех рассмотренных примерах при соответствующем подборе сопротивлений резисторов получим нужные значения ц, F и Д. Примеры ие исчерпывают всего многообразия схем фазовых корректоров, синтезируемых на основе рис. 3.45. Действительно, еще одну схему корректора получим, включив реактивный двухполюсник У в двухполюсник У2 (вместо У2 необходимо использовать последовательное соединение реактивного двухполюсника и резистора). Эта схема здесь ие приводится.
Окружая реактивный двухполюсник резисторами и меняя величину р, получаем различные схемы корректоров с компенсацией влияния потерь реактивных двухполюсников. Например, допустим, что потери в двухполюснике Z •отображаются последовательно включенным резистором г, т. е. Z=Z'+r, где Z'— двухполюсник без потерь. Тогда
т _г 'Z' + r-^R = rZ'-(R + r)
Z'+r + R Z'+(R+r)’
R + 2r гт л .
если g =-----. Далее, допустим, что потерн отображаются параллельно вклю-
R
чеиным резистором: При этом
r^.e-ML+g) G + g-r.
G + K'+g gG + g + K'’
Q
где p=-------. Аналогичным образом учитываются и другие, более сложные
G + 2g
потеря, если они отображаются резисторами, окружающими двухполюсник без потерь. Естественно, для компенсации влияния потерь пригодны и методы, описанные в гл. 2.
По сравнению с цепью рис. 3.45 большими возможностями обладает цепь рис. 3.57 с передаточной функцией
_____________:__________у»1У1(у3+у.)-___________________
Уз [К3 (Ух + г2) + У, (У, + У,)] + (У3 + У,) У3 (Ух + У6) -
_____________------------------------------------------. (3.46)
—{К, [У* (Гх + У2) + г, (Ух + У4)] + У4 (У3 + У.) (У»+У,)}
Из этой функции в результате предельного перехода У9->-оо (двухполюсник У» закорочен) получаем функцию (3.20).
93
Таблица З.-f
Соответствующий выбор двухполюсников У, (i=l, 2, ..., 9) преобразует (3.46) в (3.45). При этом возможно большое разнообразие цепей, наиболее интересные из которых приведены в табл. 3.1. Достоинства этих цепей: 1) допускается изменение общего усиления цепи; 2) потери в реактивных двухполюсниках учитываются в цепях 2 и 5 параллельно включенными резисторами, а в цепях 3 и 4 — последовательно включенными резисторами с проводимостями G; 3) учитывается влияние активной проводимости источника сигнала, подключаемого к Цепи, путем объединения этой проводимости с проводимостью mG.
Цепи рис. 3.56 получаются из цепей табл. 3.1 как частный случай (пг->-оо).
Если в выражении (3.45) ц=#1, то рассмотренные цепи дают амплитудные корректоры. Для получения амплитудных корректоров на основе фазовых корректоров (в том числе корректоров с постоянным
входным сопротивлением) можно воспользоваться приемом, заключающимся в замене двухполюсника Z последовательным или параллельным соединением этого же двухполюсника и резистора (см. гл. 2). Наряду с такими цепями амплитудные корректоры в ряде случаев целесообразно строить и по более простым цепям, приведенным в табл. 3.2.
Цепи рис. 3.56, 3.57 имеют теоретически нулевое выходное сопротивление и некоторые из них — постоянное входное сопротивление. Эти два свойства* могут быть эффективно использованы при построении сложных корректоров по принципу каскадного соединения простейших корректоров. Если между цепью А с выходным сопротивлением Ri и цепью В с входным сопротивлением R включить двухполюсник Z (рис. 3.58), то передаточная функция всей цепи равна Т^ТлТ'гТв, где Та и Тв— передаточные функции цепей А и В:
R + Ri + Z
94
Таблица 3.2
Таким образом, включение двухполюсника приводит к получению дополнительной передаточной функции амплитудного корректора.
В тех случаях, когда нельзя считать, что свойства реального усилителя приближаются к свойствам усилителя с бесконечно большим усилением, корректоры необходимо анализировать по моделям рис. 3.52 с использованием .схемных функций "(3.36)—(3.43). Анализ становится более громоздким, но принципиально не отличается от вышеизложенного.
95
Еще один класс корректоров синтезируется на основе цепи рис. 3,59,а с передаточной функцией
Т =----------------------------------------------------
Y3(Y1+Yi + Yi + Y1)(Yi + Yi + Yt) — Y3Yl+YiYiYi
Для получения корректоров реактивный двухполюсник необходимо включить в один из двухполюсников ¥г, Уз, У* или Уз, а остальные двухполюсники выбрать резисторами. В этом случае реактивный двухполюсник будет «незазем-ленным». Корректоры с заземленными реактивными двухполюсниками получа-
ются в том случае, если в цепи рис. 3.59,а все двухполюсники — резисторы и параллельно одному из двухполюсников У2, Уз, У* или Уз включить цепь рис. 3.59,6 (gi и gz— проводимости резисторов; У — проводимость реактивного двухполюсника). Передаточные функции получаемых корректоров описываются выражением (3.47), в котором необходимо заменить:
а) У2 иа Yz + Yl2 н У7 на У7 + У13, если цепь рис. 3.59,6 подключается параллельно У2;
б) Уз на У3 + У12, если цепь рис. 3.59,6 подключается параллельно У3;
в) У4 иа У4+У12 и Уз на Ув+Узз, если цепь рис. 3.59,6 подключается параллельно У4;
г) У5 иа У5 + У12, Ув на Ув + Узз и У? на У7 + У13, если цепь рис. 3.59,6 подключается параллельно У5. Здесь:
У_________8i 8г . у____________Si Y у _ 8г Y
8i-\~8z~\-Y 13 gi + g2 + У 3 8i + 8г + Y
Рис. 3.60
96
Цепь рис. 3.60 является цепью двустороннего действия. Ее передатоЛпаЯ функция при передаче слева направо (£<=0) т =________________________________________
18 Га(Г0 + Г1 + Г2 + У4 + Г5)(Гг + Г4 + У, + Г, + Ув) — F3F4-|-
____________— F2F7)________________ + У1У1 у, + У2 F4 F, + Fx F, (Yi + У4 + У, + У, + У.) +
"V, У, (Fo + Fl + У2 + F4 + У»)'
Передаточная функция T24 при передаче справа налево (Ео=О) получается из Т13 взаимными заменами У2ч=*Ув, Y0^Yi, У^Ут, Узч^Уз- Для симметричной цепи (Уо=У<, Уг = Ув, Yi=Yi, Уз = Ув; Уз, У4— произвольные) имеем Т1з = Гг4.
Недостаток корректоров, построенных по цепям рис. 3.59 и рис. 3.60, и том, что они вносят затухание.
Корректоры с двумя операционными усилителями
Передаточная функция цепи рис. 3.61,а без учета двухполюсников У2 и У и (эти двухполюсники разорваны) описывается выражением
Рис. 3.61
4—66
В частности, если двухполюсник Y3 закорочен (У8-»-оо), то
F4re--p-r5re+-£- Y3Y7 р _ ________Г 2_______У 2_____
Y, Гв + Г6Гв + ^-Г3 У7 ‘ 2
Разновидности цепи рис. 3.61 и их передаточные функции:
1. Двухполюсник У8 закорочен и подключен двухполюсник У9,
т У1 У3 У7 + У2 У4 У, — У, У5 У, — Yt У, У,
г2у4у8 + у8у5у, + у1у3у7—Y1YsY9 '
2. Двухполюсник У8 закорочен н подключен двухполюсник Ую,
т У1УЯУ7 + У2УДУ6 — у1у5у,_ У2У3Ую
Y? У4 У8 + У2 У6 У8 + Y, У3 У, — У2 У3 У1о ’
"Если при подключении двухполюсника У9 или Ую двухполюсник У8 также •включен в цепи, то необходимо в выражениях (3.50) и (3.51) заменить У2 на
F2 У8 у Y7 Ув
Г2+У,+У8 н 7 на У2+У7+</8
На рнс. 3.61,6—е даны эквиваленты цепи рис. 3.61,а. Цепи рис. 3.61,5, в получены из цепи рис. 3.61,а применением эквивалентного преобразования 3 4см. рис. 3.43), поскольку между точками с (узел 2), а, b (узел 3) и узлом 4 «есть путь, образованный входами операционных усилителей. Цепь рис. 3.61,е. получена из цепи рис. 3.61,5 применением эквивалентного преобразования 2 (см. рис. 3.41), а именно: точка d оторвана от узла 5 и присоединена к узлу 6, В точка q оторвана от узла 5 и присоединена к узлу 5.
Передаточные функции (3.48)—(3.51) получены с использованием правил, изложенных выше (см. рис. 3.15).
Цепи рис. 3.61,а—е пригодны для построения амплитудно-фазовых /?С-кор-ректоров. Выбирая в этих цепях соответствующим образом двухполюсники У» (i=l, 2, ..., 10), получаем различные схемы корректоров. Например, если выбрать в цепи рис. 3.61,а двухполюсники, как указано на рис. 3.61,г, то получим корректор с передаточной функцией
G2 G3
„ „ „ Gi (G2 + G, + Gg) n , Gi „ n P2 C4 C8—p -r—~ G3 Ca + G3 G7 7(0)- 01 °’ — ’----
Р2 Cg С3 + р Gg Ct + G3 G-, G2
Регулировка Gg ведет к изменению добротности, регулировка G3 — к изменению резонансной частоты, а регулировка G3 — к изменению затухания корректора на резонансной частоте. Аналогичными свойствами обладает н цепь рнс. 3,61,5. Частный случай, когда Gi(G24-G7-|-G8) = G2G8, приводит к регулируемому фазовому корректору.
Использование имитаторов элементов
Замена в корректорах типа ARZ катушек индуктивностей двухполюсников 2(У) имитаторами разных типов приводит к различным активным ЯС-коррек-торам. Очевидно, что простейшими будут корректоры, в которых имитируются заземленные индуктивности. Примеры таких. корректоров, использующих известные простейшие ннзкодобротиые имитаторы индуктивности, реализованные на
Рис. 3.62
одном операционном усилителе, даны на рис. 3.62. Передаточная функция корректора рис. 3.62,а
п2-р ------- ---1---- Ч- 3 /?, — I + ------
RxRyC2 к n + 2/г 3) CrCtRxRy
1 ( 2r3R \ 1
Р +Р RxRyCi к Г1 + 2/? +/?2+/?8)+ C1C2RxRy
где Rs^Rx+Ry', Rx и Ry — сопротивления между подвижным контактом потенциометра и его зажимами. Фазовый корректор получается при R2=R3. Передаточная функция корректора рнс. 3.62,6:
Р2—р'с: (д1 + а2) + “о
Т (р) = — п --------р-------------— ;
Р2 + Pel («1 + Оз) + cog
2 G3 £з . 2 G2 g2 ёз + 2 G3 g2 + 2 G2
«2 = 3 £4—£1 ;
aa = £4 + £1
0)2 _ 2 G2 gi g2
° ~ (£2 + 2 G2) Ci C2 ’
где G2=\/R2-, G3=l/R3; gi=\lri (i=l, 2, 3, 4). Выбор r1=r1(£4=£1) соответствует фазовому корректору.
На рис. 3.63 и 3.64 даны высокодобротные имитаторы индуктивности, реализованные на одном операционном усилителе. Входная проводимость цепи рис. 3.63,а
= Y, [У8 (Г! + Yt) + К, [У2 + У8)] —У, [Г4 (У1 + Уз) + У,(Г1 + Г4) ]3 ‘
Уз(У1 + Уз)~УЛУ»+Уз)
9Я»
4*
Положив ^4=0 и выбрав элементы, как указано иа рис. 3.63,6, получим у _______________ 6$ (Gi 4~ G3) . G? (С3 Gs— Св Gi)
ВХ ~ Gi + G, + С3 (G, 4- G.) +
' G, (Gs 62—Gx Ge) 1
p C3 (Gt + G6) э + P Ц '
Как видно из этого выражения, цепь рис. 3.63 в принципе пригодна для имитирования положительных и отрицательных регулируемых индуктивностей L» с параллельными потерями Ga, причем потери могут быть положительными и отрицательными. Значение индуктивности регулируется проводимостью Ge, так как Оэ не зависит от Ge.
Рис. 3.64
Цепи рис 3 64 а, б реализованы иа дифференциальном операционном усилителе типа МОУ1Ш с двумя выходами, напряжения которых связаны между собой соотношением П*=—где ₽ — некоторый коэффициент. Входная проводимость цепи рис. 3.64,а
У»Х = П (!+₽)— ур +₽£-у< •
Выбрав элементы цепи, как указано на рис. 3.64,6, получим
Со , rt г«-«< р+Ю—’x+fjc, •
10С
с
При выполнении условия Gt(l + P)— — Gt=0 цепь рнс. 3.62,6 реализует ии-С2
дуктнвность L3 = C2/3G1G4.
В цепях рис. 3.63 и 3.64 высокая добротность имитаторов индуктивности .достигается компенсационными методами, что ухудшает ее стабильность.
Рнс. 3.65
Применяя вместо 7?ДС-двухполюсннков двухполюсники с частотно-зависимыми отрицательными сопротивлениями, приходим к цепям рнс. 3.65, в которых использованы нмнтаторы сверхъемкостей [20] (D-элементы). Передаточные функции цепи рнс. 3.65,а
Ct + C, 1 р2— р 2--— । ----
СгС,гГРС2 С3г j = с» 4- с8),
Т ” С2 4- С3
р2+р2с^ <-»2 G3 Г
У? С2 С3 г
и цепи рис. 3.65,6
1
Rr Ct С3 / __ С3 С3
С2 + С3
с2 + ся р2— р 2 2 —3 Т (п\ п Г Сз
т (Р) = п с ,г ,
р2 , р2Сг+- 3 + —-------
rCsC3 RrCt С3 Достоинство корректоров, содержащих имитаторы индуктивности и D-эле-меиты, в том, что нх настройка предельно простая, так как заключается в раздельной настройке нмитаторон и контуров, в которые входят имитаторы. Кроме того, корректоры малочувствительны к изменениям их элементов.
3.3. Амплитудно-частотные корректоры и регуляторы тембра с симметричными характеристиками затухания
Обобщенные модели регулируемых активных цепей со взаимообратными передаточными функциями
Обобщенные модели, обладающие тем свойством, что их передаточные функции являются взаимообратными при положениях подвижного контакта потенциометра У, симметричных относительно своего среднего положения, приведены
101
Таблица 3.3
Обобщенная модель
. Угг(Уиг*УщЛ~ Чз(у2г+*'г«9-~Ущ(Угг тУги) -УгзС^г+Ущ.)
г
Угг (Унг +у«<->~ у из (Угг +Уги)~ ~Ущ(Угг +Уги) -Угз(Уиг+Уии)
Yff Y3Z~Y31Y1Z
Y1ZY33~Y3ZY13
в табл. 3.3. Все модели реализованы на одном операционном услителе с симметричным либо несимметричным входом и содержат многополюсник Р, симметричный относительно вертикальной осн. К многополюснику подключен потенциометр У с регулировочной характеристикой, Ьнмметричной относительно среднего положения подвижного контакта. Это значит, что сопротивления потенциометра между средним положением подвижного контакта и двумя произвольными положениями, симметричными относительно среднего, одинаковые. Узлы многополюсника А н С симметричны относительно вертикальной оси, проходящей через узлы В н D. К узлу D подключена средняя точка потенциометра (средняя точка может отсутствовать). В целом многополюсник Р вместе с потенциометром У образуют симметричный многополюсник, если подвижный контакт потенциометра находится в среднем положении. Потенциометр может быть как резистивным, так и реактивным или комплексным.
Передаточные функции моделей приведены в табл. 3.3, в которой Уд — элементы матрицы проводимостей многополюсника вместе с потенциометром У, т. е. У — параметры многополюсника.
Свойства моделей. Модель 1 содержит многополюсник Р, у которого узлы 1, 2, А соответственно симметричным узлам 3, 4, С, а узлы В, D, 5 расположены на вертикальной оси симметрии. Проанализируем в общем виде передаточную функцию Т этой модели при различных положениях подвижного контакта потенциометра У, т. е. при различных У( и У2. Здесь У2 и Yi — проводимости правой и левой частей потенциометра; Yt — проводимость между тониками А и В потенциометра, У2— проводимость между точками С и В, 1/У1 + + 1/У2= l/y=const, У—проводимость всего потенциометра.
1. Подвижный контакт находится в среднем положении: У( = У2. В силу симметрии многополюсника и потенциометра относительно вертикальной оси Yzi — Yta, У41 = Угз, = поэтому согласно табл. 3.3 Г=1 и зату-
хание, вносимое всей моделью, равно нулю.
2. Подвижный контакт не находится в среднем положении: У4=/=У2. В этом случае затухание цепи не равно нулю, а форма частотной зависимости затухания определяется структурой многополюсника, т. е. его У-параметрами. Поменяем местами Yt и У2. Такая замена эквивалентна тому, что подвижный контакт занимает положение, симметричное предыдущему. В силу симметрии многополюсника Р н потенциометра У относительно вертикальной осн взаимная замена У1 и У2 эквивалентна повороту многополюсника вместе с потенциометром вокруг вертикальной оси симметрии, в результате чего узлы 1 и 3, 2 и 4, А и С взаимно меняются местами: 1я±3, 2я*4, Аь^С. Узлы В, D и 5 не меняют своего положения. Заменив индексы 1я*3, 2я&4 в выражении передаточной функции Т модели 1 (табл. 3.3), получим
s Yi3 (у24 + У22)—П, (у44 + у42) = _L Г21 (И44 + У42) — У41 (У24 + ^22) Т '
102
Для обратимого (взаимного) многополюсника /42=^24 прн любых и Уг. Следовательно, функции Т н Т' — взаимно обратные и им соответствуют характеристики затухания одной н той же формы, но отличающиеся знаком (рнс.
3.66), lgT=7—lg Т' прн любых У( н У2.
Из вышеизложенного следует, что для положений подвижного контакта потенциометра У, симметричных относительно своего среднего положения, характеристики затухания модели взаимно симметричны относительно горизонтальной оси. Форма характеристик определяется 'к .
структурой многополюсника Р и входящи-ми в него элементами, а управление харак- •---------—---------- -...ц
теристикамн производится одним потенцно-метром. 2.
Модель 2 табл. 3.3 отличается от у
модели 1 тем, что в ней узлы 2 и 4 многополюсника Р расположены на вер- Рис. 3.66
тикальной оси симметрии. Если в этъй модели поменять местами У1 н У2, то такая замена будет также эквивалентна повороту многополюсника Р вокруг оси симметрии, в результате чего узлы 1 и 3, А и С взаимно поменяются местами: 1^.3, А^С. Проделав взаимную замену индексов 1 и 3 в передаточной функции модели 2, получим _ ^23 (^42+^44) — ^4з (^22 + ^24) _1_ ^41 0^22 + ^24) : ^21 (^42 + ^44) Т
Функции Т и Т'—взаимно обратные, следовательно, соответствующие им характеристики затухания одинаковые по форме и отличаются только знаком.
Модели 1 и 2 отличаются тем, что в них входы дифференциальных усилителей подключены к разным точкам многополюсника. Это дает дополнительные возможности в выборе различных его структур.
Аналогично доказывается симметрия затухания относительно горизонтальной оси моделей 3 и 4 табл. 3.3. Если поменять местами Yt и У2, то в передаточных функциях моделей 3 и 4 взаимно меняются индексы 1 и 3. Это приводит к обратным передаточным функциям.
Все модели табл. 3.3 можно в принципе использовать для синтеза цепей
с регулируемыми характеристиками затухания, симметричными относительно горизонтальной оси. Эти же модели можно использовать и для построения пар предыскажающих и восстанавливающих цепей. Модели отличаются точками подключения входов и выходов операционных усилителей, что влечет различия во входных и выходных сопротивлениях. В рассмотренных моделях используется один потенциометр У, хотя таких потенциометров может быть несколько. Кроме того, средняя точка потенциометра может и не быть соединенной с точкой D многополюсника.
Естественно, приведенные в табл. 3.3 структуры многополюсников не являются единственно возможными. В общем случае для получения цепей со взаимообратными передаточными функциями необходимо управлять У-пара-метрами многополюсника таким образом, чтобы всегда существовали два состояния многополюсника, в которых взаимно меняются местами У-параметры, входящие в числители и знаменатели передаточных функций.
Симметрия многополюсника Р накладывает определенные ограничения на его структуру. Например, если многополюсник Р является резистивным и со-
Рис. 3.67
103
держит только одни двухполюсник с частотно-зависимой проводимостью Уо, то этот двухполюсник должен быть подключен к точкам а и Ь, расположенным либо на осн симметрии, либо симметрично этой оси (рис. 3.67,а; штриховой линией — ось симметрии многополюсника), Два двухполюсника с частотно-зависимыми проводимостями подключаются к резистивному многополюснику, как указано иа рис. 3.67,6; если же двухполюсники одинаковые, то оин подключаются, как указано на рис. 3.67,б,в. Приведенные соображения упрощают поиск новых структур многополюсников.
В табл. 3.4 приведены схемы моделей, обладающих теми же свойствами,, что н обобщенные модели табл. 3.3, но. отличающиеся от последних детализацией структуры многополюсника. В моделях 1—9 многополюсник синтези-
Тадлица .8.4
Модель
Gz(Gi+Gz+G$+
Gz(Gf+G2+Gs+ +Y# +Yiz) ~&f (Gf +•
э -t-gz-i-gg
+Gz+G$ + Ytf + У<2 j
+ G—Yfz) * *(Yl + Yz + Y0)+ х(^ + У2 + У0> ч-У/Уг-У/
G+Yff^ G + Yzz+YfZ
Уг
_G2fy+Yz)+2GYfYz + ~GZ(Yf+Yz)+2GYfYzK (G+Y,)(Y„G-YZ YfZ) +(G+YZ)(Y"G-Yf Yfz)
G2(Yf+YL)+ZGYiVz+-
Gl(Y,+Yz)+2GYfYz+ +(G+Yj) (Yff Yz-GYfZ) +(G+Y2.)(Yf(Yf-GYa)
Y,(G+Yz+Yzz)-
Y2(G+Y,+Y„)-
1
8
2
Примечание. Z и 1-положения подвижное о контакта, симметричные относительно среднего положения (для схем ’ но 10,11)
104
I
рован в виде определенным образом‘соединенных резисторов н частотно-зависимого четырехполюсника, к которому подключен потенциометр Y. Средняя точка потенциометра в моделях не показана (при наличии средней точки она включается так же, как и в общих моделях табл. 3.3). В моделях 1—4, 6, 7 .включены симметричные четырехполюсники, в моделях 5, 8, 9 — несимметричные четырехполюсники. Особое место занимают модели 10 и 11 как предельно простые, и которых имеются только потенциометры (резистивные или индуктивные) и двухполюсники с частотно-зависимыми сопротивлениями. При записи передаточных функций приняты обозначения: G* (/=1, 2, ...)—проводимости резисторов; Yu, У12, У21, У22 — У-параметры четырехполюсника вместе с потенциометром У, если потенциометр входит в состав четырехполюсника (потенциометр подключен к точкам А, В и С моделей 1, 2, 3) либо просто четырехполюсника без потенциометра (модели 4—9); Yi — проводимость между левым зажимом потенциометра и его подвижным контактом; У2— проводимость между правым зажимом и подвижным контактом; в моделях 10 и 11 Y — проводимость двухполюсника; G— проводимость потенциометра. Все передаточные
функции записаны через проводимости входящих в модели элементов. Структуры входящих в модели четырехполюсников могут быть- различными, их примеры даны на рис. 3.68,а, б. Параметры этих четырехполюсников:
(3.52)
В качестве потенциометра У можно применять резистивный потенциометр, у которого Yi = Gi; y2=G2; l/G^ 1/G2=const, либо дифференциальный конденсатор, у которого Yt=pCt; Y2=pC2; Ci + C2=const (рис. 3.68,в).
Звенья активных резонансных корректоров
Выбирая соответствующим образом структуры частотно-завнснмых четырехполюсников и двухполюсников в моделях табл. 3.4, получаем обширный набор переменных корректоров разных типов. В табл. 3.5 приведены схемы
105
локальцых (резонансных) амплитудно-частотных корректоров, пригодные для построения как корректоров аппаратуры связи, так и регуляторов тембра аппаратуры звукового вещания. В корректорах использованы последовательные либо параллельные резонансные контуры, резистивные потенциометры либо дифференциальные конденсаторы, а также резисторы. Передаточные функции всех корректоров описываются выражением
Т (Р) = а0
Р2 + ai Р + Да
Р2 + аз р + а2
(3.53)
где коэффициенты а0, at, аг, аз находятся по формулам, приведенным в табл. 3.4. В этих формулах приняты обозначения: 7?* сопротивления; Gs—проводимости резисторов (Л=1, 2, ...). Обозначения Rk и G* на схемах не даны, а указа-
Таблица З-б
a.-faPg+fy/AUarl/UQ aj-fAPg+pj/ALtao-i;
[?2“g/+^3 x
+Zr2 &Ц Gf G§ j D*Gz~Gf +G$(G2~G1)+ +G2G5— GjGt/
1 GfKCf+Ct) ’ • \Gj(C<*Ct)R2+Cd.
3 GfL(Ct+Cz) ’
Схема корректора
a,-(A+G3)/c;az-f/LC; а3~(В+&з)/с; а0~1',
+G5Gt}
gS2->-C4+p5j(gz»g/J-2fe2~ Of^G^G^i-Ggy/C^ a^G^Gi^y/C; az-1/(L+M)C;
aa=1
10
a^^GfOoRo+Cfy/Gj LCg,
tXf^CG^+Ay/G ,* 1/LCy
a3-(G3+8)/C:, aB — /; ^-ZP^Rit+Pfjy+RifPg+PfPg .
Rz^PifRif+Rgy+PitP^ ’ л_ ^R^Pif+Psy+PifRg+PfPi, Rz^RitRif+Rgy+RuRsi
3
a^1/LC;
fj_+___1 . я* }.
Rf(R3i'Rtfri
±(<-+—1 _+
g W2
+_____*3 )
<zff=-Z R^(.Rз+Rl^У,
7
8
9
Of—(Gfi,Gz+2Ggi-Ggy2.Cy a^(Gfi,G2^‘2G^+GZf)/2Cy az-1/LC; q0*—1
[(Р(+Рз)Ри „"I. L *s+< +*2J’
{(Rf+R^Rg . _1
cIq^I/LC) Qq——1
a^G^
★ GuXc^C); a3--(Gf +Сг+
+Gs)(0f+2C) az=i/i(cf+2G); a0—f
af-y^Gf+Gs)', u
О3 = -^-б?2+<?з),'
az=i/Lc; а0=-1
lOfi
Продолжение таВл. В. 5
Схема корректора
19
^=у(^з+/?2)
14
/? 2 ,
ao=~R5/Ri> (#,+%,)!a3^(R,+R3); az~ 1/LC
15
а1*[(я4*&^-
+G,)G2 \.
+6^62+2ffy^2^3'’ a^T^+(GGG++
L 4 (&5^ +
+£2?£/ \
+%£2*26y6?5?£j-''
&);
(G2+G3+G^G5+G5$~); az= l/4Cj ae=-1
C2 3
Ur^+CC* .
a1= L(C+fy+C2) >
LG$+(C+Cf -4-^2 ) tyfCzRl, °J= iXC+Ci+Crf ’
O ^+/?2£j у
°2~tXCf+C-L+C) ’ a°=~
az-i/Lc;hff dg-1 Ы
,-Lfp i G3+
L \Hs^2B3G^ +Ci \ +Gf(G3^Gif)^ J
+ Gi(G3+CbY а1“^(^5+1}1+^з)^ a-^^Cgi-Gfl-G,,); a2-1/LC; a0~1.
23
24
Pn +гл . a1=~L— ’
„ /?п .
ff3“—’
a^Tclao-f
ны только индексы k (fc=l, 2, ...)• Характеристики затухания корректоров симметричны относительно горизонтальной оси при различных положениях подвижных контактов потенциометра и имеют вид, указанный иа рис. 3.69,а, где Ло = 2О 1g — , Wo = Vo7- Передаточные функции корректоров табл. 3.5 получены из передаточных функций моделей табл. 3.4 с использованием формул (3.52) и с учетом структур четырехполюсников.
Проводимости (сопротивления) между подвижными контактами потенциометра и его левым и правым зажимами (проводимости левого и правого плеч потенциометра) обозначены в различных схемах с помощью разных индексов:
107
в схемах 1, 3, 5, 7, 9, 21 —индексами 4 и 5, в схемах 4, 6, 10, 11, 13, 17, 18» 20 — индексами 3 и 4, в схемах 12, 15, 16, 19 — индексами 1 и 2, в схеме 14 — индексами 2 и 3.
В том, что характеристики затухания всех корректоров симметричны относительно горизонтальной оси, можно легко убедиться при анализе выражений коэффициентов at и а3. Если в этих выражениях взаимно поменять местам» проводимости (сопротивления) плеч потенциометра (либо проводимости плеч дифференциального конденсатора), то взаимно меняются местами коэффициенты at н а3 в передаточной функции Т(р) (3.53), что эквивалентно изменению знака затухания корректора. Например, если в выражениях а( и а3 схемы 5 поменять местами G4 и G3, то at и аз также меняются "местами.
Рис. 3.69
табл. 3.5 последовательных контуров
на
параллельные »
Замена в схемах параллельных иа последовательные (замене подвергаются контуры без потерь) приводит к схемам корректоров с характеристиками, приведенными на рис. 3.69,6 и с передаточными функциями вида
Tln.h h-Pl±p±h_ () 0 + р + ’
где Ьо.. bt — коэффициенты, удовлетворяющие ограничению btbi = b3b3\ Ло=»
=201g т2-; ио= Vb3/bi = "|/bi/b3-, ba=±\.
Ь3
Если исключить (закоротить) катушки индуктивности L во всех схемах последовательных колебательных контуров и разорвать ветви с конденсаторами в схемах параллельных контуров (кроме схем с дифференциальными конденсаторами), то получим характеристики затухания вида рнс. 3.69,в. Наоборот» если закоротить конденсаторы в схемах последовательных контуров (кроме схем с дифференциальными конденсаторами) и разорвать ветви с катушками индуктивности в схемах параллельных контуров, то получим характеристики затухания вида рис. 3.69,г. Передаточные функции соответствующих корректоров:
Т (р) = d0
diP+1 di р + 1
Т (р) = <?о
Р + Я1
Р + Я2
d# Gi
Ао = 20 1g — (рис. 3.69,в); Ао = 20 1g — (рис. 3.69,г); di <71
do ~ ± 1 J <7о — ± 1 •
. В схемах табл. 3.5 использованы резистивные потенциометры и дифференциальные конденсаторы. Использование дифференциальных конденсаторов повышает добротность схем. Добротность повышается и в тех схемах, в которых применено деление контура на две половины (схемы 4, 6, 12, 14, 18—20).
В табл. 3.6 даны примеры регулируемых ЯС-корректоров с характеристиками резонансного типа (см. рис. 3.69,а). Эти корректоры реализованы по модели о табл. 3.4. Таблицы 3.5 и 3.6 позволяют по заданной передаточной функции локального корректора (3.53) рассчитать значения элементов схем корректоров.
108
. Таблица 3.ff
Многочастотные локальные корректоры
Один из способов построения многочастотных локальных корректоров со множествами регулируемых всплесков затухания заключается в каскадном соединении звеньев корректоров табл. 3.5, в которых используются колебательные контуры, настроенные на разные резонансные частоты ш*. Однако более экономичным является способ, заключающийся в использовании в моделях табл. 3.4 сложных четырехполюсников с несколькими потенциометрами, каждый из которых обеспечивает локальную регулировку затухания в области заданной частоты (Os (Л= 1, 2, ..., jV), N—число областей регулнронкн, равное числу потенциометров. Примеры схем многочастотиых корректоров, построенных по этому способу, -даны в табл. 3.7. В таблице обозначены лишь индексы резисторов. Во всех корректорах четырехполюсник со многими потенциометрами реализован в виде параллельного соединения некоторых простейших четырехполюсников с одним регулятором.
Передаточные функции корректоров 1—3:
т= G2[S04 Si]—Gt [So4-S2] .
Gi [So + S2]— Gt [So 4- Si]
So = G, + G2 + G3 ; Si = V (Г<*) + yty .
S2 = g +^21’) .
где .... y<ft>22—У-параметры Л-го простейшего четырехполюсника, образованного k-м потенциометром (либо дифференциальным конденсатором), частотно-зависимым двухполюсником Yk н резисторами (эти резисторы есть только в структуре 3). Для корректора 1
У\V + И? =
G{4k}yk
G?’ 4- + Ук
Yty + =
G(5ft) Уь
G(fe) + G^> + Yk
(3.54)
109
Таблица 3.7
где G<*>* и G<*>5 — проводимости плеч Л-го потенциометра; УЛ — проводимость й-го частотно-зависимого двухполюсника.
Характеристики типа рис. 3.69,а получаются в простейшем случае, когда частотно-зависимый двухполюсник — последовательный колебательный контур
p*+p^ +
где £*, Ch, Rot — индуктивность, емкость и контура. В этом случае:
(3.55)
1___
Lk ck сопротивление последовательного
И1’ + И*’ =
1
р Lh
Р* + Р J I ROk +
ЬЛ \
№
Rn R___________
^fe)^fe)\ [ Г
Rnk J Lk Ch
k
Y® + =
1 W P Lh
Р2 + Р — I Яой + р ) т г
Lit \ Rnk / Cfc
110
I
где
«в
”Й*\+
i
G<‘)
= const ;
R\k) = 1/G^>; /?<*> = l/G^’ .
Анализ корректора \ отличается от анализа корректора 1 заменой в выражениях (3.54) G(*>4 н\рС<*)1 и G<*>5 на рС<*)2-
В отлнчие от корректоров 1 и 2, в корректорах 3 и 7 двухполюсники У* — параллельные колебательные контуры. Анализ этих структур в силу его громоздкости здесь не приводится. Корректоры 1—3, в отличие от остальных корректоров, не являются абсолютно устойчивыми, так как содержат положительную обратную связь. Разрыв резисторов 2 (С?2=0) делает корректоры абсолютно устойчивыми. \
В корректорах табл. 3.7 в Качестве простейших четырехполюсников использованы Т-образные звенья, являющиеся частным случаем четырехполюсника рис. 3.68,6, при Y'i = У'2= У'4 = Уз=Уз = Ув=0, У4 = Уь, поэтому У-параметры четырехполюсников находятся по формулам (3.52).
Передаточная функция корректора 4
N
G+Go+ 2 (И*’ - И?.)
N
G+Go+ 2 (И?-И*’)
А=1
где У<*’ =
G^> + G^’ + Yk
(3.56)
G?1 (П+ 6<5*>)
= G^> (П+ G<*>) .
22 g^’ + gH’ + Ий
У* определяется выражением (3.55).
Передаточные функции корректоров 5 и 6
N
G+2 (И? + И?) л=1
Т =- -------N
G+ 2 (Иг’ + Иг’)
Л=1
где У(*>и, ..., У(*>22 находятся по формулам (3.56) с заменой индексов 4 и 5 соответственно на 3 н 4 для корректоров 5, для корректоров 6— с заменой G<ft>4 на н G<ft>5 — на рС<к>2.
Передаточная функция корректора 8
N
с+ 2 (И*’ —И?) t=i т= --------------------------
G4- 2 (Иг’-Иг’) Л=1
где У(*>ц, .... У(*>22 находятся так же, как и для корректора 5.
111
Операторные передаточные функции всех корректоров свод/гся к виду
2) । у, aft + frife Р + ak dk /
& Рг + Ьлр + <1к /
р_|_ V р* ~^b3hP + a^ dk \ ф Р2 + btk р +.А
Где D, аь, dh, &u.. — коэффициенты, определяемые схемой корректора и
значениями ее элементов. В частности, а*=0. /
В корректорах, содержащих заземленные последовательные нлн параллельные колебательные контуры (/, 2, 4, 7, 8),, можно использовать имитаторы заземленных индуктивностей, что приводят /к регулируемым многочастотным #С-корректорам. Многочастотные .RC-корректоры могут быть получены также каскадным соединением простейших звеньев (см. табл. 3.6).
Принцип действия многочастотных Локальных корректоров проиллюстрируем, например, на корректоре 1. На резонансной частоте сопротивление последовательного контура Yi, мало, поэтому подвижный контакт Л-го потенциометра заземлен и изменение его положения приводит к резкому изменению затухания «ли усиления корректора. На частотах, отличающихся от резонансной, сопротивление контура увеличивается, что приводит к «отрыву» подвижного контакта ют земли и уменьшению влияния его положения на затухание корректора. Если подвижный контакт потенциометра отсоединен от земли, то согласно рис. 3.45 потенциометр ие влияет иа передаточную функцию корректора. Таким образом, каждый последовательный контур подключает на заданной частоте подвижный контакт соответствующего потенциометра к земле, что и приводит в целом к характеристикам затухания со многими всплесками либо провалами.
Общий подход к построению корректоров локального действия сводится к следующему. В усилителе с равномерной АЧХ, которая независимо регулируется в заданных пределах потенциометрами П< (/=1, 2, ..., N), включим потенциометры П( через фильтрующие многополюсники ФМ1, обладающие тем свойством, что каждый ФМ1 «подключает» соответствующий П, к усилителю в заданном диапазоне частот Даь и отключает П, вне этого диапазона, поэтому регулировка П< приводит к изменению усиления только в диапазоне Д<в». В простейшем случае ФМ< могут быть заменены параллельными колебательными контурами г < пар, включенными параллельно потенциометрам, либо последовательными колебательными контурами поел, включенными последовательно с подвижными контактами потенциометров (рис, 3.70). Контуры играют роль «частотных ключей», которые вне заданных диапазонов Да>< шунтируют потенциометры либо «разрывают» ветви с подвижными контактами. Усилители выбираются такими, чтобы шунтирование потенциометров или разрыв ветвей с подвижными контактами не приводил к полному прекращению прохождения сигналов через усилитель.
Все корректоры табл. 3.5—3.7 пригодны для построения как корректоров амплитудно-частотных искажений многоканальных систем связи, так и регуляторов тембра высококачественной звуковоспроизводящей аппаратуры.
Рнс. 3.70
Рис. 3.71
112
Моделирование характеристик с фиксированной точкой ' вращения
Использование операционных усилителей позволяет синтезировать достаточно простые корректоры с характеристиками затухания типа «вращающийся веер», т. е. с характеристикамиДрдна или несколько точек которых не меняют своих положений прн регулировке, корректора (рис. 3.71,а): на частоте шВр затухание корректора не меняется при его регулировке.
Примером может служитьч.цепь рнс. 3.71,6 с передаточной функцией
gi ^2 (gi 4~ ga) У1 ^2~tg1 gi (^1 + yi)
Si ^2 Si yi +\(gx + Si) yi yi~r Si Si + \
где gt и g2 — сопротивления плеч потенциометра. Если Zi = (?+//, Yz—G—jY, то
T = _ (Si + Si) G +Si Sz~f У (Si—Si) (81 + Si) G + Si Si + iy (Si—Si)
и |Г[ = 1.не зависит от gt и ga. Следовательно, на частотах, для которых У» и Yz — взаимно сопряжённые, затухание корректора фиксировано и равно нулю.
Выбрав У1=С, Yi=pC, получим цепь с передаточной функцией
т = _ SiPsCs + pC [(gt Ц- g2) G + gj, gal + SiG2 + g! g2 G g2 p2 C24-p C [(gi + g2) G4-gi gal + gi G24-gi g2 G
и АЧХ типа рнс. 3.71,а, которая имеет одну фиксированную точку иа частоте
©вр = "Z* VGl + 2gG,g= —. Такую цепь можно использовать для С gi + ga
коррекции перекосов АЧХ с фиксированной точкой вращения.
4. АКТИВНЫЕ КОМБИНИРОВАННЫЕ КОРРЕКТОРЫ
4.1. Транзисторные фазовые корректоры
Известны различные транзисторные реализации фазовых корректоров, из которых наиболее простая и широко используемая представлена на рнс. 4.1,а. Ее передаточная функция в предположении, что усиление транзистора достаточно большое [14],
Uj ____ ________^?н (%i Z3— Zz ^4)________________
Ui Z3 [Zi (Zi + Rh) + Zi (Z2 4- /?н)]
а входное сопротивление при том же предположении равно Г1Га/(Г1+г2). Резисторы Г1 и г2 устанавливают рабочий режим транзистора и не влияют иа передаточную функцию.
Выражение (4.1) получается на основе методов расчета цепей с высококачественными транзисторами, изложенных в гл. 3. Действительно, заменив транзистор нуллором, приходим к схеме рис. 4.1,6. Матрица проводимостей регулярной части цепи
113
I
2
3
4
где Yi^l/Zf — проводимости двухполюсников.
Суммируя строку 3 со строкой 2 н столбец 1 со столбцом 2, получаем матрицу проводимостей всей цепи
1+2 3 4
Si + Si
у*+у3 Г4+Г4 — У^—Уъ
— У 2 -У1 Ух + Уг + Ун
по которой находим Увх = т— = gi + §2 J
Ди
Т=Т = = У.-У1 Уа
14 Ди У1 (И4 + ГН) + У4(Г2 + ГН) ’
Переходя от проводимостей к сопротивлениям, получаем выражение (4.1).
114
Включая один из двухполюсников Zi—Z4 реактивный двухполюсник Z и полагая остальные двухполюсники активными сопротивлениями, можно йреоб-разовать (4.1) к вкду
\ ~ Z—и R
' T~F <42>
Пример 1. Положим: Zi=Z; Z2=7?2; Z3—R3; Zi=Rt’, Rb— произвольное сопротивление. Тогда:
р___ . п = р 4~ R* . _ ^4 (R* 4~ ^н)
Ra -f- Rn Rr 4~ Ri R3 (Rt 4* Rh)
Частные случаи:
1) Прн R2=Ri=R имеем p,=R/R3. Если Rs=R, то р,= 1.
2) При Rb=Ri(.R2—R3)/(R3—Rt) имеем р=1,
___Ri (Ri 4- Rh) _Ri Rt
Ra 4- Rh Ra
Пример 2. Положим: Z2=Z; Zi=Rt; Zs=Rs; Zi=Ri. В результате получим:
К___Ri Rh . __ R3 (Ri 4- R4 4- Rh) . p______1_
Ri 4- Rt 4_ Rh ' Rt Rh ц
R IR I R )
В частности, выбрав RB — —--------—— , получим |i=l; R=RiRs1Rb.
Ri—R3
Пример 3. Положим: Zs=Z+/?3; Zi=Rr, Z2=R2-, Zi=Rt. В результате получим: R=R3; у.- (RiRi—RiR3)IRiR3',
p___ ____________Rr Ri___________
Ri(Ri + RH) + Ri(Ri + RH)
Пример 4. Режим холостого хода: RB-+oo. Выражение (4.1) принимает вид
__ Zt—р Z2 _____ Zj_ Zi 4- z2 ’ и ~ z3
Частные случаи:
1) При Zt=R; Z2=Z
R — p Z 1 Z—ц'R 1
T = ------— = —--------E— , u = — .
R 4- Z p/ Z + R p,
2) При Zt=Z; Z2=R
Z — p, R T— -------— .
Z + R
Пример 5. Короткое замыкание: /?н = 0. Разделив предварительно выражение (4.1) на RB и положив затем 7?в=0, получим
р f 2 Zj Z3 Z2 Zj
(Ji Z2 z3 (Zi 4- z4)
Если Z2=R2, Z3=Ri/ii, to
T_ JL Zi—Zi
Ra Zi-j-Zi
Частные случаи:
1) Прн Zi=R; Zi—Z
T=______P Z—R/ц
R2 Z 4* R
115
2) При Zl=Z\ Zt=R
т== 1 Z—pR Ra Z + R
Представляет интерес случай, когда Z3—R3+Z, Zl=Rl, Za=Ra, Zi=Rt.
При этом:
D
F = P ZD 1 В X : Я = *3 ; H = (*2 /?4— R1 R3)/Ri R3. ^2 \^1 “Г A4?
Возможны и другие конкретные реализации фазовых контуров на основе-схемы рнс. 4.1,а, которые отличаются различными сочетаниями реактивного двухполюсника Z и активных сопротивлений. Эти реализации здесь ие приводятся, как не обладающие принципиально новыми возможностями по сравнению с рассмотренными схемами.
Поскольку передаточная функция (4.2) совпадает с функцией (3.45), компенсация влияния потерь реактивных двухполюсников в схеме рис. 4.1,а производится в полной аналогии с компенсацией потерь в корректорах с одним операционным усилителем.
Еще две схемы, пригодные для построения транзисторных фазовых корректоров, даны на рис. 4.1,в, г. Для больших коэффициентов усиления транзисторов передаточная функция схемы рнс. 4.1,в
(Л-Гз) У2 + Л (Гь+Г„+Г7)
(Г1 + Г4 + Гн) (Г2 + Г5 + Гв+Г7)
и схемы рнс. 4.1,2
У1 Уч — Уг И5
^Из+^н+^^ + ^ + ^ + ^з+Гн+Г,) Y6 { f
Вывод этих функций производится так же, как и для схемы рис. 4.1,а.
Перенос в схеме рис. 4.1,в общей точки двухполюсников Ув и У? со входа транзистора иа вход всей схемы приводит к тому, что указанные двухполюсники не влияют на передаточную функцию схемы и необходимо в выражения (4.3) положить Ув=У?=О. Подключение аналогичной цепочки на входе схемы рис. 4.1,г не меняет ее передаточной функции (4.4).
Удалив в схеме рис. 4.1,в двухполюсники Уз—У7(У5=Ув = У7=0) и закоротив двухполюсник У2(У2->-оо), получим предельно простую схему с передаточной функцией
(4.5>
Соответствующий выбор характера и величин проводимостей двухполюсников У1—У? сводит передаточные функции (4.3)—(4.5) к виду (4.2). Перебор возможных вариантов здесь не приводится, поскольку он производится по аналогии с тем, как это сделано для схемы рнс. 4.1,а. Укажем лишь, что для получения фазовых корректоров необходимо в схеме рнс. 4.1,в включать реактивный двухполюсник в двухполюсники, например, Ylt У5, Уз, а в схеме рис. 4.1,2 — в двухполюсник У5 и др. Таким образом, схемы рнс. 4.1,в, г позволяют реализовать корректоры с заземленными реактивными двухполюсниками, что важно прн использовании имитаторов индуктивностей.
Недостаток схем рис. 4.1,в, г в том, что их входные сопротивления, в отличие от схемы рис. 4.1,а, зависят от У1—У?.
4.2. Гираторные корректоры
Гиратор — невзанмный четырехполюсник (рис. 4.2,о), описываемый уравнениями:.
A = Gl/2; /2=—GUi,
116
-где G — проводимость; lfG=R— сопротивление гирации. Стрелка при G указывает направление гирацнн. Изменение направления гйрации эквивалентно взаимной замене входных и выходных зажимов, в результате чего проводимость гиратора меняет свой знак на противоположный (рнс. 4.2,6) и уравнения принимают вид:
Л=—GUz-, li^GUt.
Свойства трехполюсного гиратора не меняются, если его вращать, как. указано на рнс. 4.2,в.
Рис. 4.2
На основе гиратора синтезируются корректоры разных видов, в том числе корректоры с частотно-независимыми характеристическими сопротивлениями и с взаимно-иезавнсимыми характеристическими постоянными для прямого и обратного направлений передачи.
Простейшие схемы с одним и двумя гираторами, их передаточные функции и характеристические параметры даны в табл. 4.1. Стрелки над передаточными, функциями Т совпадают с направлениями гирацнн в соответствующих схемах.
Таблица А./
Схема контура
1 0 c^-g^z+g2. (vj+v'Hjvi+ff2 ' o. — 4— l-р (Vf 4 Гс/=1п^,тсг=б; Zo/ it Z°2 у Hr^gy+g2-r^ g2~gy O it- o--J yHy+52 ’ /?2+У„У
2 p^CfC^pC^G+G^ Ув* 't-г, Убх = 6 o- ♦ * о 5 zc,-zc2 =>?=//<?; ГТггТтзд „ , Уг+g. sb dp dg Гс1 ln Y<~G ’ Zcr '"T3 Zc2 Yf+G о -I—I о
3 zc,=zc2=^=//c; z°/&/^?|y rw=m^;rf2=6,-Zcf ‘-t-’ ZC2 pH y~g 0 1 О-У У+Ун’ У+Ч 6 (е/-у,)(С2-У2)+ Of+Yz+W <^+У3+Ун)+ W Л М5гЛу +Уд(^+У2тУй> , *Т ЦуГГ 1л +^+y2)^-yJ
Особый интерес представляют схемы 3 и 4, которые для прямого направления (передача слева направо) эквивалентны мостовой скрещенной схеме рис. 2.1,6, составленной из взаимно-обратных двухполюсников Zt и Z2, а для обратного направления (передача справа налево) эквивалентны удлинителю с нулевым затуханием. Если в этих схемах двухполюсник У — реактивный, то они являются фазовыми коректорами, если же двухполюсник У содержит реактивные элементы и резисторы, то схемы являются амплитудными корректорами. Например» заменив двухполюсник У дополнительным четырехполюсником, используемым в схемах рис. 2.24 и 2.28, получим гираторный корректор Боде. Достоинство корректоров по схемам 3 и 4 в том, что включение их в цепь связи приводит
117
к изменению затухания и фазы цепи только в ’ одном направлении передачи, поэтому корректоры пригодны для независимой регулировки амплитудно-частотных и фазо-частотных характеристик цепи в разных направлениях передачи.
Включив каскадио противоположными сторонами две схемы 3 или 4, получим схему с постоянными характеристическими сопротивлениями и взаимно-независимыми характеристическими постоянными для прямого и обратного направлений передачи. Примером может служить схема 5. Регулировка в этой схеме величин У1 и У3 приводит к взаимно-независимой регулировке частотных характеристик схемы для прямого и обратного направлений передачи без изменения ее характеристического сопротивления.
Гираторные фазовые .RC-контуры второго порядка реализуются по схемам 1, 2 и 6. Недостаток схем 1 н 2 в том, что в них используется незаземленный гиратор. Положив в схеме 6 У1=У4=0, Gi = G2=Gh = G, Уа=рС2, У3=рС3, получим фазовый контур с передаточной функцией
РаС2С8—pGCg + G*
р2 Ct С3 + р GCi G2
4.3. Фазовые корректоры с отрицательными резисторами
Основной схемой, используемой для построения простейших фазовых контуров с отрицательными резисторами, является схема 1 табл. 4.2. Выбирая соответствующим образом двухполюсники У« (i=l, 2, ..., 5) в виде сочетания резисторов и реактивного двухполюсника У н вводя отрицательные резисторы, формально получаем различные схемы фазовых контуров. Наиболее простые контуры и их передаточные функции представлены схемами 2—5 в табл. 4.2. Из схемы 2 следует, что прн наличии отрицательных резисторов возможно построение фазовых контуров на основе схем, обеспечивающих только один путь прохождения тока со входа иа выход контура. Полезность рассмотренных схем в том, что онн позволяют синтезировать фазовые контуры с таким двухполюсным активным элементом, как туннельный диод.
4.4. Корректоры на основе сумматоров
На рис. 4.3,а приведена обобщенная модель, содержащая проходной многополюсник с одним входом (0) и двумя выходами (/ и 2), поданными на входы сумматора S. Коэффициенты передачи сумматора по входам 1 и 2 соответственно равны т и I.
Рнс. 4.3
Многополюсник реализован на резисторах н одном двухполюснике У. Передаточные функции между входом многополюсника и его выходами в наиболее общем виде определяются по формулам:
Koi —
Л1 + Д1 у
С + У
; Лог —
А2 + В2 Y
С + У
(4-6)
118
No
1
Таблица 4.2
________УгУз+У^Уг + Уз+У^)________
У^Уг+Уъ+У^ + Уэ (Уг+Уз+У^тУ^Уг+У,,)
у-пе
~ у+пе
Условие:
2/7-да+г (jt+1-m) •‘О
Частный случай: п=2,Ъ,Уm-rt+2; 1~п-2
ТСр)=
ар2-Ьр+1 . apz+6p+f ’
2 [тп -I (т+п)] (т+п) аг„2 .
а=--------22^7 R ’
. (m+rbm or . г 2(т+п) Gz—2л=аг~
Условая: 21-т>0; тп-1(т+п)>0
119
где Л], Bt, С, Аг, Вг — некоторые частотно-независимые коэффициенты. Передаточная функция всей модели
• -т Ai + I Аа + (т Bi + I В£ У
1 — т л01 -f- I Лоа — С + F ’
При выполнении равенств
mAi+lA3=FC, mBt + 1В2=—F
____________т -----|__о
Рнс. 4.4 азовым корректором. Согласно
модель рис. 4.3,а является фазовым корректором с передаточной функцией С—У
(4'7)
Из указанных равенств находим: р 4~ Аг . I _ р СД1 + 41 m~F 4хВа— BtA2 ’ ~ F А1В3—В1А3 ' ( 8)
Эти выражения имеют смысл, если AiBs—BiA2=/=0. Коэффициенты 4Ь Вь С находятся по формулам: С=УВХ; Bi=Koik,8; Ai = CKoix.x, где Ув2 — входная проводимость между точками подключения двухполюсника У прн коротком замыкании входа многополюсника; Koik.b и Koix.x — передаточные функции между входом 0 и выходом 1 многополюсника при закорачивании и разрыве двухполюсника У (рнс. 4.3,5). Аналогичным образом находятся и коэффициенты Вг н Л2.
Пример 1. Определим, при каких значениях т и I цепь рис. 4.4 описывается передаточной функцией (4.7), т. е. является рис. 4.3 и вышеприведенным формулам на
ходим:
г Г л. • О °1 •
О — С/ л 4" > Di —— 1 ———— -——
Gx + йг G3 Gr 4~ G2 4~ G3
, Gi(G24~G4) л « Gx O2
®i + Ga G3 Gt 4- G2 4- G3
По формулам (4.8) находим:
/ Go Gs \ F
m~ — F 14- 77*4-77") J /= 7TV-1(02 4-2 G4) (Gj 4-G2 4-G3) 4-
\ Oi Oi / Oi Og
4- Ga (Gi 4" G3)J.
Если G1=G2=G3=G4=G, to m=— 3F, Z=11F.
Достоинства цепи рнс. 4.4: 1) выходная проводимость источника сигнала учитывается в проводимости Gf, 2) входные проводимости сумматора учитываются в проводимостях Оз и Gt; 3) потерн в двухполюснике У учитываются в проводимости G4.
Частный случай: Gr->-oo, C=G2+G4; m=—F-, l=F(2+2Gt!G2). Если G4= = G2=G, to C=2G; m=—F; l=4F.
Упрощенный вариант обобщенной модели рис. 4.3,а представлен на рнс. 4.5,а. В этом варианте Koi=l, поэтому
_ fflC4~^ 424-(nt4~Z В2) У
~ С + У
Пример 2. Используем в модели 4.5,а четырехполюсник рис. 4.5,5 с передаточной функцией й- _ ^2 4-
*02 Ri 4- Rt + Z ’
320
Для получения фазового контура достаточно выбрать
2 (₽1 + ₽з) + 2
т = 1
а _____ R1 Z-.— №+#2)
Pi Н~2^?а Z-f-Pi-|-P2
Передаточная функция модели рис. 4.5,в
Л1 + Bi Zi , . Аз В2 Уг
Т=т — + 1 —7-7-77—
Рис. 4.5
В частном случае, когда многополюсники 1 и 2 — одинаковые, =А, Bi = Bs—B, Ci = C2=C, а двухполюсники У( и У2 — произвольные, У1=#=У2» то прн т=—I получим
(ВС—А) (Уз—Уз) =
С« + С(У1 + У2) + Х1У2
7Г fr-Zi)
= т (ВС—А) —------------------------ •
77 + *7" (Zi + 2а) + z{Zs О о
_ т(ВС-А)
ото выражение совпадает с точностью до множителя ---------
жением (2.6), если ZB=Zr=P; — =R. Следовательно, модель
выра-обла-
С с рис. 4.5,в
дает теми же свойствами, что и мостовая скрещенная схема (см. рис. 2.1,а У с симметричными нагрузками и поэтому широко используется для синтеза активных кварцевых фильтров, модулирующих рабочее затухание мостовых фильтров.
121
Рнс. 4.7
Сумматоры в модели 4.5,а реализуются различными схемами, например на основе операционных усилителей (рис. 4.6). Для сумматора рнс. 4.6,а имеем: Т1з=—I; 7’2з = /(1+/я), а для сумматора рнс. 4.6,6: Tt3——tnv, Таз=((« + 1), где Т13 и Т23 — коэффициенты передачи между точками 1—3 и точками 2—3 сумматоров.
На рис. 4.7 даны схемы регулируемых корректоров с передаточными функциями:
(т—п) G g (n Н- 1) G 4~ g
+ m Gi — Go
(рис. 4.7,a);
T2=—Л (рис. 4.7,6);
Т3 = 1
(т—n) R г (n+ 1) 7? 4-г
+ m Ri —Ro
(»+ 1) (? г
(п+1)7? + г
(рис. 4.7,в);
+ + 7?о
Т4=—Т3 (рис. 4.7,г).
Коэффициенты передачи по различным входам сумматоров схем рис. 4.7,а, г равны — I и ((/п+1), схем рис. 4.7,6, в,--1m и ((/п+1).
Используя в этих схемах сумматоры рис. 4.6 и параллельные или последовательные колебательные контуры, получаем амплитудно-фазовые корректоры (рис. 4.8) с передаточными функциями:
122
Рис. 4.8
1 Г (m—ft) G g C 1 (n+l)G + g
p2 + p ~ тг p2 — p ~~ [ — т zm _ , L । (»+D* + ' T’P 1 г (п+1)Лг „ 1 1
P* + P L l (п+1)Я + г + R1 + R°J + LC 7\ (P) = — T3 (p) (рис. 4.8,г).
При выполнении равенств
£~—.? »r=J) Og +(„_1)01_2в>_()г (» + i)O+s
+<—
(ft+ 1)
pi~PT
1\(Р) = — I-----:
(n+l)Gg
+ m G±— GO1 -f- — -------------------j— (рис. 4.8,a);
+ Gi + Gq + TT'
(n+l)G + g (p)=—T1(p) (рис. 4.8,6);
+ +±.
(рис. 4.8,e);
(4.9>
(4.10>
рассматриваемые схемы являются фазовыми корректорами. Этн равенства легко выполнить, положив, например,
m—2п—1=0; (m—1)G|—2Go=0; (m—1)У?!—2J?o=O.
(4.11); (4.12); (4.13>
Если выполняется равенство (4.11), величины G, g, <R и г не влияют на выполнение соответствующих равенств (4.9) и (4.10), которые превращаются в равенства (4.12) и (4.13), поэтому величинами gar можно менять доброт-
123
«ость, а величинами Gb Go, Ri и Ro — затухание корректоров на резонансной частоте.
Ro R R f R
Обозначив Ro=—- +х, где х меняется от —до меняется
ст 0 до Ro), и выбрав Ro=(/n—l)Ri, преобразуем Тз(р) к виду
Т3(Р) = 1
Рг — Р j- (М—х) +
Р2 + Р~^~ (М + х)+
где
М =
(m-n)Rr Ro _
(n+l)R + r + 1 2
(n+l)Rr Ro _
(«+l)R + r 2
(n+1) Rr (n -f- 1) R + r
+ (»+!) Ri •
При записи M учтено, что выполняется равенство (4.11). Полученное выражение Тз(р) является передаточной функцией амплитудно-фазового локального корректора, в котором меняются крутизна фазовой характеристики (изменение величины М резистором г) и затухание корректора на резонансной частоте e>o=l/LC (изменение величины х). Регулировочные характеристики затухания — симметричные относительно среднего значения, соответствующего х=0.
Рис. 4.9
Изменив в модели рис. 4.3,а взаимное включение сумматора и проходного многополюсника, приходим к модели рис. 4.9,а с передаточной функцией
m Ли _ m (Л1 4- У)
1 — I Roa С— l Л2 + (1 — IBJY ’
оде Roi и fat определяются выражениями (4.6). Пример корректора, реализованного по модели рис. 4.9,а, дан на рис. 4.9,6. Передаточная функция этого корректора
_ . Ri .
z + 4-х
т ----------------- ,
оде х меняется от----— до — , R2 = — -f- х (R2 меняется от 0 до Ri). Вы
124
брав Z=llj(oC, приходим к широкополосному корректору перекосов АЧХ телевизионных каналов. Его достоинства заключаются в больших пределах регулировки характеристики затухания и в том, что наличие заземленного переменного резистора R2 упрощает электронное управление корректором, что важно при разборке автоматических корректоров.
4.5. Использование фазоинверсных каскадов
Корректоры на основе фазоннверсных каскадов (ФИК) реализуются по обобщенной модели рис. 4.10,а с передаточной функцией
Т—I Кю— т I Као — I
— т А2— (т В2— У
(4-14)
С + У
где К.о и Км описываются выражениями (4.6); I н —1т — коэффициенты передачи выходов ФИК; выходные сопротивления ФИК равны нулю. При выборе
т _ ^1 + СВГ ? А2 4- СВ2
А2 4~ СВ2 АгВ2— А2В±
выражение (4.14) преобразуется к виду (4.7). Коэффициенты А., В. и С находятся по формулам: С=УВХ; В1=Кюк.а; А1=К1ох.хС, где смысл УВх, Кюк.з и Кюх.х ясен из рис. 4.10, б. Аналогичным образом находятся и коэффициенты В2 и А2.
Рис. 4.10
Пример 1. Передаточная функция цепи рис. 4.11,а
T=F^Eiy ’ (415)
v Т <
где
р _ — т °i . с _ <?о + (Gi + GH) (Gg + Go) .
G2 Gi -J- GH Gt -|- Ga 4- Gh
c = Gg Go— m Gj (G8 4- Go)
1 Gg— m Gi
Частные случаи:
1. Положим: Gz-»-<»; Ga=0, тогда
T-l Go-mGi + Y
Go4-Gx4-K ’
При выборе (от—l)G( = 2G0 получим фазовый контур. Если Gi = G0, то т=3; если Go=O, то от = 1. Такие фазовые контуры широко применяются иа практике.
125
2. Положим Gi = G2=Go=Ga = G, тогда
Т = I
о'-=^ + >
1 — т 1 — т 3 5
v G+r О
Для получения фазового контура необходимо выбрать
8
/П= — , что
даст
_____Z_ 3 Y—5G Т~ 11 3 У + 5 G '
В цепи рнс. 4.11,а учитываются выходные проводимости ФИК и потери в двухполюснике У.
Рис. 4.11
В общем случае для произвольной цепи с передаточной функцией (4.15) коэффициенты F, С, и С находятся по правилам:
1) С=У»Х — входная проводимость цепи между точками подключения двухполюсника У при удалении из цепи этого двухполюсника и при коротком замыкании на входе цепи;
2) К=Тк.з — передаточная функция цепи прн закорачивании двухполюсника У;
3) C', = Ti.tC!F, где Тх.х — передаточная функция цепи прн разрыве двухполюсника У.
Из сформулированных правил, а также непосредственно из выражения (4.7) вытекает правило проверки RZ-цепи на принадлежность к классу фазовых корректоров: если передаточные функции цепи при закороченном и прн разорванном двухполюснике У отличаются только знаком, то цепь является фазовым корректором (при реактивном двухполюснике У).
Пример 2. Цепь рнс. 4.11,6 описывается передаточной функцией
Г= ---------------------, (4.16)
У (Gj Gi -f- GBX -f- GK -f- т Gx) -J- (Gi + GBX) (G^ -f- GH) которая при соответствующем выборе т и величин проводимостей резисторов сводится к виду (4.7). Эта функция получена на основе методов расчета цепей с зависимыми источниками.
В цепи рнс. 4.11,6 учитываются выходная проводимость источника сигнала, входная и выходная проводимости ФИК. Если необходимо учесть потерн в двухполюснике У, его следует заменить цепочкой, обведенной на рис. 4.11,а штриховой линией, а в функции (4.16) вместо У подставить (Y+Gq)Gs/(Go+ + О2+У) и преобразовать полученное выражение к виду (4.7).
В моделях рнс. 4.10 и 4.11,а ФИК можно заменить идеальным трансформатором с дифференциальным выходом с соответствующими коэффициентами трансформации.
126
Л =
Схемы регулируемых амплитудио-фазовых корректоров представлены на рис. 4.12,
Передаточная функция цепи рис. 4.12,а Т—П\, где
(m-n)Gg 1
— + m Gj — Go I
(« + 1) G + g_______j
(n+ 1) Gg ,r,r,r
-————-------h G, + Go + GH
(n+l)G + g
Общее условие получения фазового корректора (У — реактивный двухполюсник)
(4.17)
(W_2 п—1) G g , , (n+l)G + g +(m-l)G1-2Go-GH_0 .
Это условие можно разделить на два частных условия:
m—2п—1=0; (т—l)Gi—2Go—GH=0.
Разделение производится для того, чтобы не связывать величину G с величинами Gi, Go н Ga.
Частные случаи:
1. g->-oo (двухполюсник g закорочен); при этом с учетом (4.17)
У—[(т—п) G-\-m Gi—Go]
У + ((л + 1)-G + <?i + Go Н~ GH]
2. g->°o; я=1; /=1; /п=3; GB=0; в этом случае приходим к амплитудно-фазовому корректору с передаточной функцией
У— (2G + 3G,—Ср)
Г+(2 04-0,-1-Go) ’
который широко используется на практике. ,
127
Выведем общее условие получения амплитудного корректора с симметричными регулировочными характеристиками затухания.
Обозначим:
(т—п) G g
(n+l) G + g
(ft 4~ 1) G g (n+l)G + g
+ Gt + GH = b.
+ т G-! = а ;
Выберем проводимости резисторов ^так, чтобы а>Ь. Далее выберем Go= = а—Ь и представим Go в виде Go= — G0+x, где х меняется от —— Go до
Go, что соответствует изменению Go от 0 до а—b. С учетом этих обозначе-
ний получим
X
I
Г-
X
Пределы регулировки затухания корректора, дБ,
а
А А = Атах— Ло — Ло Amin ~ 201g о
где Атах, Amin, Ао — максимальное, минимальное и среднее значения затухания корректора.
Таким образом, если а>Ь, то можно построить корректор с симметрии--ными регулировочными характеристиками, если же а<Ь, то получим корректор с односторонней регулировочной характеристикой (регулировка только в сторону увеличения затухания).
Передаточные функции цепей рнс. 4.12,6—г вычисляются по формуле
Т = 1Т2,
где
Т2 =
z__ Г (m-п) R г
(п+ 1) Я + г
Т= —
В частном случае, когда
f- т Ri—Ro
Г 412л;
I
Т = —— Tg (рнс. 4.12,6); (рнс. 4.12,г). т 1
г->-оо (рис. 4,12, 6, г) имеем
Z—[(/я—n) Я + m R2—Яо]
Z+[(n-|-l) Я + Я1 + Яо]
Г1 ;
Все цепи рис. 4.12 используются для построения регулируемых амплитуднофазовых корректоров. Цепи рис. 4.7, 4.8 и 4.12 в общем случае в зависимости от соотношения элементов могут быть как минимально-фазовыми, так и неми-иимально-фазовыми. При использовании их в качестве амплитудно-фазовых корректоров с симметричными регулировочными характеристиками затухания они относятся к неминимально-фазовым цепям.
Передаточная функция локального амплитудно-фазового корректора второго порядка описывается выражением
T(p) = F
рг—р (Oo/Qi + wo
Р* + Р <eo/Q2 + ®o
(4-18)
128
где (о0 — резонансная частота; Qi и Q? — добротности нулей и полюсов Т(р). Частотные характеристики (комплексная передаточная функция, АЧХ, ФЧХ и ГВП) определяются по следующим формулам:
Т (j г)) = F + 1 = рТ (Т)) е/Ф <П) .
/(1—П*)’ + П*/ Qi
Т (г)) = -- -------;
/(1 — п»)«+ VIQ22
1 т] 1Л
ф (л) = -arctg - — - arctg — — ;
= 1 QHI+Л*) 1 Qs (1 +Ла) “О (1~Ч!)? + “» Ла + <22 (1—л2)2
где л = (о/(о0 — нормированная частота.
В зависимости от соотношения величин Q( и Q2 АЧХ корректоров на резонансной частоте (л = 1) имеют всплеск либо провал. Функция Ар(л) — положительная прн всех л и имеет такой характер зависимости от частоты, как 1Гр фазового контура второго порядка (см. рнс. 2.4,6).
Передаточные функции вида (4.18) реализуются, если в цепях рис. 4.12,а, б используются параллельные колебательные контуры, а в цепях рис. 4.12,в, г .— последовательные контуры.
4.6. Активная реализации корректоров Боде
Передаточная функция регулируемого корректора Боде (см. рис. 2.24) описывается выражением (2.25):
1—рЛ^Т?
1+рЛ42Т?
(4.19)
где Т|=е х — передаточная функция дополнительного четырехполюсника (ДЧ, или ДЧ2) в режиме согласования. На рис. 4.13,а изображена структурная схема устройства, передаточная функция которого совпадает с выражением (4.19) при at=2V(Afi-f-Afa); 02=^2/01. Устройство содержит два сумматора с инверсными (—) и иеинверснымн (+) входами, постоянные усилители-удлинители с коэффициентами передачи а,, «2 и М регулируемый усилитель-удлинитель с коэффициентом передачи р и частотно-зависимые четырехполюсники с передаточными функциями Т1=Г2. Возможны различные технические реализации рассматриваемого устройства. Например, обведенные штриховой линией части устройства реализуются сумматорами рис. 4.6 с соответствующим выбором коэффициентов передачи по инверсному и неинверсному входам, регулируемый усилитель-ограничитель с коэффициентом передачи (2.24) ___________________________________
Ra + Яо
реализуется схемой рнс. 3.45, где У1=1//?о! Уг= Гз= 1/A!i (Ri — произвольное, /?1=#=0); У4=У6=0; Уб=1/Яа. Четырехполюсники в зависимости от формы характеристики затухания корректора реализуются различными активными либо пассивными схемами.
5—66 129
Другой тип активного корректора Боде получится в случае, если в схеме рис. 2.28,а моделировать активными цепями только входное сопротивление дополнительного четырехполюсника ДЧ. Активные модели регулируемых входных сопротивлений даны на рис. 4.13,6, в. Модели содержат сумматоры, уснлн- ' тель и удлинитель с коэффициентами передачи 2 н 0,5, регулируемые усилители-удлинители pi, .... рп и частотно-зависимые четырехполюсники Sh S2, ... ..., Sn, S, а также резисторы Ro.
Рис. 4.13
Входные сопротивления моделей рис. 4.13,6 и в соответственно определяются по формулам:
1 + S Рй
= Rt ~ г
i — У! рл sk k=i
п i + S р*
2BX = Rt ~
1-S PkSk fe=i
В частном случае, когда р*=0 (й=2....... п), приведенные выражения iZBX
—2Г
совпадают с выражением (2.24) при S1=S=T2i=e ж. Выбирая в модели рис. 4.13,6 в качестве Si, ..., Sn полосовые фильтры с характеристиками затухания полиномиального типа и с разными средними частотами полос пропускания, придем к корректору с характеристиками затухания типа рис. 2.25,г. Если же в модели рнс. 4.13,в в качестве S использовать фазовые контуры либо звенья линии задержки, то придем к косинусному корректору Боде, характеристики затухания которого описываются суммой косинусоидальных функций с регулируемыми амплитудами.
Модель рис. 4.13,6, в реализует активный корректор Боде двустороннего действия, в то время как модель рис. 1.13,а реализует корректор одностороннего действия.
130
4.7. Локальные корректоры параллельного типа
Общие структуры корректоров
Наиболее простыми по реализации и поэтому наиболее широко применяемыми иа практике являются так называемые корректоры параллельного типа. Возможны три структурные схемы построения амплитудно-частотных корректоров параллельного типа, указанные на рис. 4.14. Передаточные функции этих
Рис. 4.14
корректоров соответственно равны: для структуры (рис. 4.14,а)
Т — Цо + 2 V-kTk,
А=1
для структуры с обратной связью (рис. 4.14,6)
т= _________Но________
1 + Ио 2 V*Tk
й=1
без обратной связи
(4.20)
(4.21)
и для смешанной структуры (рис. 4.14,в) п
Poi 4~ 2 РгА—1 Т2k—1
Т = Иоз ------------------------ . (4.22)
1 4~ Ц02 2 ЦаА Т2k
А=1
где 7\ — передаточные функции частотно-зависимых четырехполюсников; Ph — коэффициенты передачи регуляторов.
Смешанная структура (рис. 4.14,8) эквивалентна каскадному соединению структур рис. 4.14,а и б, поскольку ее передаточная функция (4.22) равна произведению передаточных функций (4.20) и (4.21).
5* 131
Корректоры параллельного типа содержат основной канал с частотно-независимым коэффициентом передачи и п дополнительных (корректирующих) каналов 1, 2, ..., п с частотно-зависимыми регулируемыми коэффициентами передачи. Каждый из дополнительных каналов состоит из четырехполюсника, частотные характеристики которого меняются с помощью некоторого регулятора. В простейшем случае, показанном на рис. 4.14,а—в, дополнительные каналы состоят из нерегулируемых частотно-зависимых четырехполюсников и кас-кадно включенных с ними регуляторов (переменных усилителей-удлинителей).
Выражения (4.20) — (4.22) показывают, что если в качестве частотно-зависимых четырехполюсников Тк выбрать полосовые фильтры с разнесенными по частоте полосами пропускания, то все структуры рис. 4.14 позволяют получить корректоры, в которых изменение коэффициента передачи fe-го регулятора (рл) приводит к локальному (по частоте) изменению амплитудно-частотной характеристики всего корректора, причем область изменения определяется полосой пропускания й-го четырехполюсника.
Чаще всего на практике в качестве частотно-зависимых четырехполюсников используются звенья (контуры) резонансного типа, т. е. звенья полосовых фильтров с передаточной функцией вида
-г /м лл р <*>k/Qk
Tk (Р) = Mk -------------------— , (4.23)
Р2 + Р v>k/Qk 4- “й
где Qh — добротность звена; сщ — резонансная частота; Л4* — усиление (или ослабление) звена иа резонансной частоте. Амплитудно-частотные характеристики звеньев даны на рис. 4.14,г, а АЧХ всего корректора дана иа рис. 4.14,<?.
Конкретная техническая реализации основных звеньев корректоров (частотно-зависимых четырехполюсников, регуляторов, сумматоров) определяет вид корректора (пассивный, комбинированный, RC-корректор и т. д.).
Корректоры рис. 4.14 могут совмещаться с усилителями, используемыми в аппаратуре многоканальной связи. Как правило, такое смещение производится в цепи обратной связи усилителя.
Рис. 4.15
Пассивные и комбинированные корректоры
На рис. 4.15 приведен пример пассивной реализации корректора параллельного типа (см. рис. 4.14,а). Основной канал образован резистором Ro; дополнительные каналы образованы резисторами Rp, реактивными контурами Zi, ..., Zn, резисторами Rc и потенциометрами Rn. Рассмотрим прохождение сигнала по одному, й-му, каналу. Для частот, далеких от частоты юл, иа которую настроен контур Zi, k-ro канала, сопротивление контура мало по сравнению с сопротивлениями резисторов Rp и Rc и поэтому сигнал не поступает иа выход корректора при любом положении подвижного контакта потенциометра RH данного канала. Для частот, близких к (щ, сопротивление контура велико и на контуре выделяется максимальный сигнал. В среднем положении подвижного контакта потенциометра Rn сигнал не поступает иа выход корректора. В крайнем верхнем положении подвижного контакта сигнал с выхода контура Z* суммируется в трансформаторе Тр с сигналом основного канала, что увеличивает сигнал иа выходе
132
корректора. В крайнем нижнем положении подвижного контакта вышеуказанные сигналы вычитаются, что уменьшает общий сигнал иа выходе корректора.
К недостаткам данного корректора относится большое постоянное затухание, что не позволяет использовать его без дополнительного усилителя.
В табл. 4.3 приведены примеры резонансных корректоров, реализованных на последовательных колебательных контурах (Z*). Корректоры содержат сумматоры токов СТ с дифференциальным (схемы 1 и 2) либо недифференциальным (схемы 3 и 4) входами, а также дифференциальные развязывающие каскады ДК (схемы 3 и 4). Выходные сопротивления ДК и входные сопротивления СТ полагаются равными нулю. Принцип действия корректоров, данных в табл. 4.3, аналогичен принципу действия корректора, изображенного на рис. 4.15.
Тайлица 43
Структура корректора
Передаточные функции по напряжению:
_1_ [ у» 1 Р 0>а—а ffti)---------------—\ (дЛЯ схемы 1),
Lb \ fko / Ipt Cfc'
где a — коэффициент асимметрии входов СТ, показывающий, во сколько раз коэффициент передачи по входу «—» отличается от коэффициента передачи по входу «+>; Р — коэффициент пропорциональности между выходным напряжением СТ и током по входу «+>; ар — аналогичный коэффициент по входу «—»; r*i+r*2=r*o=const;
(для схемы 2),
т = р
1 " 1 Р (См—a Cft2)
р 1“ S г 1 1 1
Ro *=1 сло Lk pi+ p Rk + ——
^кэ
где Cfea = — ----5— ; = Сы + = const ; передаточные функции схем
Cfe Cfco
3 и 4 с точностью до постоянных коэффициентов совпадают соответственно с передаточными функциями схем 1 и 2 с той лишь разницей, что для схем 3 и 4 a имеет смысл коэффициента асимметрии выходов ДК. В приведенных передаточных функциях It, Ск, Ri — индуктивность, емкость и сопротивление последовательного контура Zi,; Гм и гм — сопротивления k-ro потенциометра; Сщ и См — емкости k-ro дифференциального конденсатора.
133
Пассивная реализация ДК и СТ (например, с помощью трансформаторов) приводит к пассивным корректорам, активная реализация — к комбинированным корректорам. Пассивные и комбинированные корректоры рис. 4.15 и табл. 4.3 используются для построения широкополосных корректоров амплитудно-частотных искажений каналов и трактов многоканальных систем связи [22].
Входные сопротивления СТ и выходные сопротивления ДК, если ими нельзя пренебречь, в первом приближении учитываются в сопротивлениях гм, rxj и Rh.
Активные локальные Л“С-корректоры
В настоящее время известно большое число схем полосовых активных RC-фильтров с передаточными функциями вида (4.23) [6, 20]. В принципе все известные схемы можно использовать (в качестве частотно-зависимых четырехполюсников Th) в корректорах рис. 4.14,а—в для построения локальных активных /?С-корректоров. Естественно, стабильность характеристик и уровень шумов корректоров определяются стабильностью характеристик и шумами полосовых фильтров.
Рис. 4.16
Пример активного резонансного корректора дан на рис. 4.16. В этом корректоре используются звенья полосовых активных PC-фильтров с передаточными функциями
— pG^/C^
Tk (р) = ------—--------7—--------------------------------- (4.24)
Рг + Р (cfi + + + °2А>)
и сумматор, реализованные иа операционных усилителях. Передаточная функция всего корректора описывается выражением (4.20), в котором
Цо=—GilGs',
л
G,+ S W 1=1
где ак — коэффициент передачи £-го потенциометра. Выражение для справедливо в предположении, что проводимости потенциометров намного больше проводимостей двухполюсников Glk>e и G'k>7- При соответствующем выборе ве-134
лнчин проводимостей изменение аь от 0 до 1 позволяет получить как положительные, так и отрицательные значения рх.
Особенность фильтров с передаточными функциями (4.24) в том, что изменение проводимости GiW приводит к изменению резонансной частоты фильтра без изменения его коэффициента передачи на резонансной частоте, поэтому в корректоре имеется возможность независимого перемещения всех всплесков (провалов) АЧХ по частоте, что расширяет функциональные возможности корректора.
Результаты экспериментальной проверки возможностей корректора рис. 4.16, реализованного на операционных усилителях типа 140УД1-А, с пятью полосовыми фильтрами (л=5) даны иа рис. 4.17. Корректором компенсировались искажения характеристик остаточного затухания стандартного канала тональной частоты. Добротности полосовых фильтров выбраны соответственно 3, 2, 1, 2, 3. Кривые 1 рис. 4.17 показывают частотную зависимость затухания канала до коррекции, а кривые 2 — после коррекции. При этом кривые рис. 4.17,а соответствуют одному переприемному участку, рис. 4.17,6 — трем, рис. 4.17,в —
пяти, рис. 4.17,г — пяти участкам и 12 км соединительных линий. Кривая 3 показывает изменение затухания при увеличении температуры от 20 до 60° С. Из-за невысоких добротностей полосовых фильтров стабильность характеристик достаточно хорошая.
Передаточная функция простейшего резонансного корректора амплитудно-частотных искажений описывается выражением
Т (Р) = F
pa+teiP + aa Рг + а» Р + а^
Ра + Л Р + ®о
F-------------------
Р2 + Р + “о
V2
(4.25)
где ft=±l. При h=—1 корректор относится к цепям неминимально-фазового типа, при Л='1 —минимально-фазового типа.
Частотные характеристики неминимально-фазового корректора (Л=—1) рассмотрены в § 4.5. Частотные характеристики (комплексная передаточная функция, АЧХ, ФЧХ и ГВП) мииимальио-фазового корректора (Л=1) определяются теми же выражениями, что и неминимально-фазового корректора, с заменой Qi иа —<21 (см. § 4.5). Примерные графики АЧХ и ГВП минимально-фазового корректора даны иа рис. 4.18,а и б.
135
Выражение (4.25) всегда преобразуется к виду
„ г, , „ Р (hcb—aj
Т (р) ~ г 4- г ------------- .
поэтому как минимально-фазовый, так и неминимально-фазовый корректоры всегда реализуются, как указано на рис. 4.14,а.
Рис. 4.18
Если в цепи рис. 4.16 удалить все фильтры, кроме одного, закоротить двухполюсник н разорвать двухполюсник Gs, то получим корректор с передаточной функцией (4.25), в которой
G
Ge
. Gi Г (. G6 О» '“‘crr'.’+sr + s
_ о, (С,+0,). ая — «х, о.» — Cj
С1 са
T(p)=F--
Н
В приведенных выражениях опущен индекс «k» проводимостей и емкостей. Выражение (4.25) можно также преобразовать к виду
1_________
р (а,—ai h) ‘ p»4-fta1p + a1
поэтому корректор рис. 4.14,6 реализует только минимально-фазовые корректоры (ftai>0).
Подключив в цепи рис. 4.16 входы полосовых фильтров (резисторы Gi<*>) к выходу всей цепи, придем к корректору с обратной связью. В частном случае, когда включен только один фильтр, а двухполюсник закорочен и разорван двухполюсник Gs, приходим к корректору с передаточной функцией (4.25), в которой
В этом корректоре регулировка затухания и резонансной частоты производится в цепи обратной связи.
Используемый в корректоре рис. 4.16 активный полосовой фильтр позволяет реализовать относительно небольшие добротности (порядка нескольких единиц) при удовлетворительной стабильности характеристик. В ряде случаев эти добротности оказываются достаточными для коррекции затухания каналов связи (например, в каналах тональной частоты и соединительных линиях). В тех же случаях, когда реализуются высокодобротные корректоры, необходимо использовать более сложные высокодобротиые полосовые фильтры.
136
Улучшение локальных свойств резонансных корректоров
Использование полосовых фильтров с передаточными функциями второго порядка (4.23) ухудшает локальные свойства корректоров. Это значит, что регулировка некоторого коэффициента ц* приводит к изменению затухания корректора в области не только резонансной частоты ь>ь fe-ro дополнительного канала, но и резонансных частот соседних дополнительных каналов корректора. В результате возникает взаимная зависимость регуляторов ц* при настройке корректора.
Возможны следующие способы улучшения локальных свойств: 1) увеличение избирательности полосовых фильтров за счет усложнения фильтров; 2) введение перекрестных связей между дополнительными каналами корректоров. Первый способ очевиден, поэтому рассмотрим второй. На рис. 4.19,а приведена
Рис. 4.19
структурная схема корректора с двумя дополнительными каналами, между которыми введены перекрестные связи. Сигналы с выходов фильтров Тц проходя через четырехполюсники Кн, вычитаются из входных сигналов соседних каналов. Это ведет к улучшению избирательности каналов корректора. В простейшем случае, когда четырехполюсниками Кн служат усилители-удлинители, а передаточные функции Tt описываются выражениями (4.23), введение перекрестных связей приводит к появлению нулей в АЧХ дополнительных каналов на резонансных частотах соседних каналов (рис. 4.19,6, кривые i, /), что в свою очередь влечет за собой появление точек вращения АЧХ корректора при регулировке значений На рис. 4.19,в приведен график АЧХ корректора для различных значений р., (p.j=O), из которого видно, что на частоте toj имеется точка вращения АЧХ.
Корректор рис. 4.19,а существенно упрощается, если сумматор S<, фильтр и дополнительный .четырехполюсник Ktj реализуются одной цепью, например цепью рис. 4.20,а. Ее передаточная функция по входу i
Т лл _ -Р
1 W p* + pg/C+\/LC '
По входу Ц передаточная функция описывается аналогичным выражением с заменой на Оц.
Передаточная функция корректора рис. 4.19,а при двух дополнительных каналах i и j
T = ^t + fH
Ti — KtjTiTj Tj—Kji Tt T}
1-KnKuTiTf 1 — KjiKljTtT]
6—66
137
В резонавйй*х корректорах Т< и Tj — передаточные функции вида (4,23) с -разными резонансными частотами, поэтому пренебрежем величиной КцК.цТ\Т} по сравнению с 1 для всех (о, следовательно,
ц0+ t (1—КцТ j) + |XjT j (1—KitTt).
Дополнительные возможности в повышении точности коррекции дает ис-
Выбрав Y=g+pC+l/pL; Gi/g=Gt/Gg=n, получим
— рп (Gaa + g)/C р* + Р (Ga а + g)jC -|- 1/LC
Изменение величины проводимости Gt ведет к изменению добротности передаточной функции Th без изменения ее значения на резонансной частоте. В результате появляется возможность регулировки ширины всплесков (провалов) АЧХ корректора. Пассивным аналогом цепи рис. 4.20,6 является цепь рис. 4.20,в, передаточная функция которой при выполнении условия Gi/g= — GJGt—n
т = _________pn (Gt а + g)/C________
ft P* + p(«+1) (G3a + g)/C+ULC ’
где a, L, C, g — те же, что и для цепи рис. 4.20,6. Использование цепи рис. 4.20,в в корректоре рис. 4.15 расширяет его возможности.
Симметрирование характеристик затухания
К недостаткам структур рис. 4.14,а—в относится асимметрия характеристик затухания относительно среднего значения (см. рис. 2.29,6), что снижает возможности корректоров. Для устранения асимметрии необходимо в корректоре рис. 4.14,а ввести обратную связь, а в корректоре 4.14,6 — прямую связь. В результате приходим к корректорам рис. 4.21,а, 6 с передаточными функциями: (В=1, А = 1/2цо, рис. 4.21,а)
1 + 2 А 2 gfcTfc
1 — 2А J] ИйТЪ
138
(Л——1, ju=2), (рис. 4.21,6)
п
1+2 Hh Tk k=\
n
i 2 ил
*=i
Эти функции в частном случае, когда л=1, по форме записи не отличаются от передаточной функции корректора Боде (рис. 4.19) при следо-
вательно, характеристики затухания рассматриваемых корректоров — симметричные относительно среднего значения.
Рис. 4.21
Результаты экспериментальных исследований корректора, реализованного по схеме рис. 4.21,а, представлены на рис. 4.21,в. Кривые 1 показывают характеристики усиления корректора при предельных значениях различных дополнительных каналов корректора", реализованного по схеме рис. 4.16 без введения обратной связи (В=0), кривые 2 — характеристики усиления этого же корректора с введенной обратной связью (В =/=()). Кривые 1 — несимметричные, кривые 2 — симметричные относительно горизонтальной оси.
Еще одна структурная схема корректора с симметричными характеристиками затухания приведена на рис. 4.22,а [21]. В корректоре используются потенциометры с заземленными средними точками. В зависимости от положения подвижных контактов fe-ro потенциометра (слева или справа от средней точки Ь) k-й фильтр Г к включается либо в обратную связь входного усилители ОУ), либо иа вход выходного усилителя ОУ2 параллельно основному пути сигнала.
6* 139
Передаточная функция корректора
п
B D 1 + X нхл Th
гр __ л\2 fe=l
Ri R3 "
1 + S Нал Th
*=1
где значения цц и цзь зависят от положения подвижного контакта А-го потенциометра:
1) подвижный контакт находится в среднем положении (точка Ь),
И1Л=:Р2*,=О;,
2) подвижный контакт находится слева от средней точки (положение 1), И1Л=-0;
__ ___________Ri Rih__________
^гк Rtk Rih + Rsh Rtk + Rih Rek
где Rm — сопротивление между точкой а и подвижным контактом; Rih — сопротивление между подвижным контактом и средней точкой потенциометра {точкой 6);
3) подвижный контакт находится справа от средней точки (положение 2), Да* = 0;
__ ___________Rs R»h__________
Rth R»k + Rek Rth 4* Rsk Rsk
где R$h — сопротивление „между подвижным контактом и средней точкой потенциометра; Rsh — сопротивление между подвижным контактом и точкой б.
Допустим, что подвижные контакты всех потенциометров, кроме fe-ro, находятся в среднем положении. Тогда в положении 1 подвижного контакта k-ro потенциометра-передаточная функция корректора
т К»** *
1 Л*. 1+ЛкП ’
140
1
а в положении 2
Ti = р2 ff* '
А1 A3
При выполнении условий Ri = Rs, Rak=Rsk, /?7*=/?в* имеем (11*= [Ш в 71^2=const, следовательно, характеристики затухания корректора для положений 1 и 2 отличаются только знаком, т. е. симметричны относительно горизонтальной оси.
В корректоре рис. 4.22,6 входной усилитель совмещен с выходным. Это достигнуто подачей выходов фильтров Tk через сумматор на вход четырехполюсника То и подключением входов фильтров через подвижные контакты соответствующих потенциометров либо ко входу, либо к выходу корректора. В результате упрощается схема корректора. Передаточная функция корректора
m То + 2 «1й Ik То Th гр _ k^\
1 — S lk То Th k=l где m и Ik — коэффициенты передачи по входам сумматора; j
__ ___________Rak Rak__________ .
Rak Rak + Rik Rak + Rik Rak ________________________ _________Rik Rak__________ 2h Rak Rak + Rik Rak + Rik Rak Rih и R2k — сопротивления между подвижным контактом и точками а и б; Rah — входное сопротивление фильтра Тк- Выбрав тТо=—1, приходим к корректору с симметричными характеристиками затухании.
Частный случай корректора рис. 4.22,6, в котором сумматор S четырехполюсника То реализован на одном операционном усилителе, приведен иа рис. 4.22,в. В этом корректоре: гпТо=—RalRo, IkTo——RoIRo к-
В корректоре рис. 4.22,а коэффициенты ц* регулируются на выходах фильтров Tk, а в корректоре рис. 4.22,6 — на входах фильтров, поэтому в корректоре рис. 4.22,а возможно введение перекрестных связей по аналогии с рис. 4.20,а, в то время как аналогичной возможности в корректоре рис. 4.20,6 нет.
Локальные корректоры с регулировкой только высоты всплесков (глубины провалов) АЧХ принято называть корректорами типа И; если предусмотрена регулировка как высоты, так и частоты, на которых имеют место всплески (провалы), то корректоры относятся к типу HS-, универсальные корректоры с регулировками высоты, частоты и ширины всплесков (провалов) относятся к типу HSB. Наиболее просто универсальные корректоры реализуются активными: 7?С-цепями, поскольку именно в активных полосовых ЛС-фильтрах возможна простая регулировка резонансной частоты, добротности и затухания фильтра на резонансной частоте. Примером может служить фильтр, использованный в корректоре рис. 4.16, а также более качественный фильтр, реализованный методом аналогового моделирования (рис. 4.23) с передаточной- функцией [21]:
R2 Р С2 RA2/Oo Ci RAl == "1
Rbi р*/&1 + р/(йо Q + Ra/Ri
1 /~ *Д1
где <о.= ------ I
^rCiC2RA\RA2 г 1 А2
Ra Ra (Ri + Rbi) 4" Ri Rbi
Ra + Rb2
141
Положим R1 — R2 = 2Rj~R', Rai—Ra2—Ra‘, Rbi=Rb2^Rb‘, Cl=aC2=Ct тогда ®o=1/CJ?a; Q=Rb/R- Усиление фильтра иа резонансной частоте (р=/шо) равно 1. Чувствительности добротности и резонансной частоты:
со _ *49 _ ! . cQ _ IM _ J .
- dRBIRB -1 ’ - dR/R -1 •
= »=А^- = -1.
c d C/C ra a Ra/Ra
Рис. 4.24
Цепи с обратной связью позволяют реализовать также фазовые корректоры с широкими пределами регулировки крутизны фазовой характеристики. Примером может служить корректор рис. 4.24 с передаточной функцией
т_ * + К
1 + р. К
где р и К — коэффициенты передачи регулятора и одинаковых частотно-зависимых четырехполюсников. Передаточная функция ие изменится, если помеиить местами регулятор и четырехполюсники, что приведет к схеме с двумя регуляторами и одним четырехполюсником.
v \ р’ + Лар + & р2 + а1ар + «»
Выбрав К (р) = —---------—— , получим Т (р) = ——-------------— ,
г р» + ар + Ь р2 + аа ар + Ь
jt-f-ft рЛ+1
где а. = ------ ; а2= . В частности, если h=—1, то щ=—аг=
1+p 1+р
= (р—1)/(1+р)=а. Прн изменении р от +1 до —1 величина аг меняется от О до оо, в результате чего добротность фазового контура меняется от оо до О, что позволяет получить широкие пределы регулировки крутизны фазовой характеристики контура.
Во всех рассмотренных корректорах симметрия характеристик затухания достигается за счет включения частотно-зависимых четырехполюсников (фильтров) Ть и в прямую, и -в обратную связи корректоров, что отрицательно связывается на запасе устойчивости. Одиако симметричные характеристики затухания можно получить непосредственно и в корректорах без обратной связи (см. рис. 4.14,а), если вместо полосовых фильтров Ть и регуляторов р* использовать звенья локальных корректоров с передаточными функциями типа (3.53) (см. табл. 3.5 и 3.6). При этом необходимо использовать звенья с одинаковыми значениями коэффициента а<> и выбрать цо=ао(1—п), где п — число дополнительных каналов корректора. По такому принципу реализуются /?С-корректоры на основе звеньев, указанных в табл. 3.6. Недостаток этого принципа в том, что использование в структуре рис. 4.14,а звеньев локальных корректоров вместо полосовых фильтров ухудшает шумовые свойства корректора.
142
\ • .
Регулируемые амплитудные корректоры с неизменными
фазовыми характеристиками
\ Описанные в предыдущих параграфах корректоры имеют тот недостаток, что при регулировке их АЧХ неизбежно меняются и ФЧХ. В результате этого при коррекции искажений в немииимальио-фазовых каналах вносятся дополнительные фазовые искажения. Покажем, что использование параллельной структуры рнс. 4.14,а позволяет синтезировать амплитудно-частотные корректоры, у которых ФЧХ ие зависят от регулируемых параметров. Такие корректоры обеспечивают требуемое семейство АЧХ при одной и той же ФЧХ.
Рнс. 4.25
Структурная схема корректора приведена на рис. 4.25,а. Она содержит два одинаковых фазовых четырехполюсника К, два усилителя-удлинителя А, усилители-удлинители В и С и регулятор ц. Передаточная функция корректора при К = е:<р(а)
(Д 4- C/C-f-ДК2) == {В +2Д cos ф (со) ] }е^Фйо).
Выбрав в качестве фазовых четырехполюсников контуры первого порядка /С=(р—а)/(р+а), получим
Р2[В + Р(С + 2 Д)1 —а2 [В + р(С—2 Д)]
Г(₽) (р + а)2
Фазо-частотная характеристика этой цепи при В+ц(С±2Д)>0 ие зависит от pi и совпадает с фазо-частотной характеристикой контура первого ш
<р (ш) = —2 arctg — . а
порядка:
Амплитудно-частотная характеристика описывается выражением
со2 [В + ft (С+ 2 Д)] 4-а2 [В-|-ц (С—2 Д)] т (ffl) . __
и для различных значений ц имеет указанный на рис. 4.25,6 вид. Все характеристики пересекаются на частоте ю)0, являющейся решением уравнения Г(<в)=В либо уравнении С+2Д cos ф(со) =0.
Частные случаи:
1. Пусть С+2Д=0; С—2А — 2С. Тогда со0=<» и Г (со) при различных ft описывает набор характеристик типа сходящегося на бесконечно большой частоте веера. - - -
2. Если С— 2Д=0, то С+2Д=2С; <Оо=0 н Т’(со) описывает набор характеристик типа расходищегося с нулевой частоты веера.
3. Положим С=0, тогда <0о=<х н Т(е>) позволяет получить набор характеристик типа вращающегося иа частоте веера.
143
/ /
/
Таким образом, использование фазовых контуров первого порядка приво/ днт к корректорам перекосов (иаклонов) АЧХ каналов связи.
Выбрав
к = р2—°р + &
Р2 + ар + b
получим
т (р) = (Р2+^|Д+|1(С + 2А)|-а,Ра [В + р(С—2 А)] .
(Р* 4* аР + Ь) *
Фазовая характеристика такого корректора при В+р(С±2А)>0 совпадает с фазовой характеристикой контура второго порядка и ие зависит от р:
, а ш
ф (со) = — 2arctg -—~ .
о—<0
Амплитудно-частотная характеристика корректора описывается выражением
Т (Ш) = (6~а>,)> [Д4-Н(С+2А)1 + а*<о*[В4-Р(С—2А)]
и Для различных ц имеет указанный на рис. 4.25,в вид. Частоты вращения й>( и удовлетворяют уравнению С+2А cos <р(о>) =0. Экстремумы находятся иа частотах 0, <от и оо, удовлетворяющих уравнению cos <р(о>)==±1. Если С-[-2А» = 0, то <01 = 0; 0)2=00, что соответствует корректору резонансного типа. Использование контуров более высоких порядков приводит к корректорам, АЧХ которых содержат несколько одинаковых всплесков либо провалов, управляемых одним регулятором.
К недостаткам рассматриваемого корректора рис. 4.25,а относится его структурная избыточность, связанная с удвоенным числом фазовых контуров по сравнению с корректорами, в которых ФЧХ зависит от регулируемых параметров.
Описание свойств локальных корректоров на основе теории сплайн-приближений
Математическим аппаратом, позволяющим наиболее просто оценить корректирующие возможности локальных корректоров, является теория аппроксимации с помощью В-сплайнов [23]. Базисные сплайны нулевой, первой, второй и третьей степеней переменной х на равномерной сетке описываютси выражениями (рис. 4.26,а):
М0(х)= |
О, х > 0,5 ;
1,0 0,5
Мх
гО, х > 1,0;
11—х, 1 ;
О, х > 1,5 ;
АМ*)= 0,5 (1,5—х)«, 0,5 <х < 1,5 ;
0,75—х», 0<Х<0,5;
(0, х > 2 ;
4- (2— х)», 1<х<2;
6
4" [1 + 3 (1—х) + 3 (1—х)»—3 (1 — х)«], 0 <х< 1. \ 6 '
144
\ Рассматриваемые сплайны — симметричные, Mi(—x)=Afa(x) (Z===0, 1, 2, 3). Сплайны первой, второй и третьей степеней соответственно называются ломаными, параболическими и кубическими. На практике наиболее широко исполь-зуютси параболические и кубические сплайны.
Рнс. 4.26
Узлы сплайна х\ — это точки, в которых терпит разрыв l-я производная Узлы интерполяции х< для сплайнов нечетной степени — это точки, совпадающие с узлами сплайна (х'<=х<), а для четной степени — точки, лежащие-между узлами сплайна (х<= (х'<+1+х',)/2) (табл. 4.4).
Таблица 4.4'
№ Af{ (х) xi xi № Ml (x) / xi xi
1 Мй X) — 0,5; 0,5 0 3 w —1,5; —0,5 0,5; 1,5 — 1;0; 1
2 Mi(x) — 1 ;0; 1 — 1;0; 1 4 A4S (x) — 2 ; —1 0 ; 1; 2 —2; —1 0; 1 ; 2
Прн равиомериой сетке xt и х! i размещаются равномерно, при неравномерной — неравномерно.
Наборы смещенных сплайнов Afl*=Af;(x—Л) (fc=0, 1, 2, ...) образуют ли-иейно-иезависимые базисные функции иа равномерной сетке (рис. 4.26,6).
С помощью этих функций решается задача аппроксимации заданной функции f (х) иа некотором отрезке 1[а, Ь] в виде суммы
f (х) « Sin (х) -= S С* <*>• (« s Ifl’ 6D-
*-0 (4.26)
145-
Для интерполяционных сплайнов
п
f (*<) = S/n (*р = S Ck ^lk (*/)> lai Ы ,
fe=O
или AC=Y, Y и С — векторы-столбцы известных и неизвестных величин f (х<) и С*; А — положительно-определенная с выраженной главной диагональю матрица; х< — в общем случае неравномерные узлы интерполяции отрезка [а, &]. При равномерных узлах для сплайнов нулевого и первого порядка А — единичная матрица, для сплайнов второго и третьего порядков — ленточные матрицы, соответствеиио равные:
~ 3/4 1/8 _ 2/3 1/6 "
1/8 3/4 1/8 1/6 2/3 1/6
1/8 3,4 1/8 1/6 2/6 1/6
A = • • *, * • ; A = *
Приведем некоторые общие оценки аппроксимации сплайнами в простраистве С [23] и др.
Обозначим модуль непрерывности
Q(f, 6)=тах|/(х+Дх)—-/(х)|, х, х+Дхе[а,&]; |Дх|<6; 0<б^Ь—а.
Воспользуемся величинами
|| An || = max (xi+1 — х<), ] « ? fa, ы*
||ДП|| = min (хц-! —х/), J1
Если f(r)EC, то для ломаных сплайнов ||/(x)^Sln(x)||c<Q(f, ИДп11); * '
•если же /(1>(х)еС, то
II f (*)—«in «Ис < Q (/. II Дп II) 4" IIA" И •
Для параболических сплайнов i
Ilf И— S,n (х)||с < ЗЙ ( f, .
где ||Д'п||=тах(х'1+1—xt), [а, &]; если же f<4(x)eC, то ]
II f (x)-S2n (X) lie С у|- на; II’ a (f(.2) HAjjl).
Для кубических сплайнов
/3 . \
II f («)—Ssn (х)||с < (I + — II a„.||/«a;iQ a (f, II An II);
если /!,|(х)еС, то
К f (х) -ssn (xJllcC || /<♦> (X)|| II An II».
-Здесь f(m)(x) — т-я производная f(x)', || • II — норма пространства С. 146
Приведенные оценки позволяют выбирать сетку, степень сплайна, число базисных функций при условии, что известны дифференциальные свойства задаи-нбго класса аппроксимируемых функций f(x).
Характеристики затухания А=—201g 17" | корректоров с передаточными функциями вида рис. 4.14,г можно в первом приближении рассматривать как взвешенные суммы базисных сплайн-фуикций [типа правой части выражения (4.26)]. Это утверждение обосновывается следующими свойствами корректоров рис. 4.14,а—в при малых [порядка ±(3—4) дБ] пределах регулировки затухания: 1) величины всплесков (провалов) затухания линейно зависят от величины щ; 2) формы всплесков (провалов) не меняются при регулировках ц»; 3) форма всплеска (провала) приближается к формам параболических и кубических сплайнов. Для сравнения на рис. 4.27 приведены сплайны разных сте-
Рис. 4.27
пеней и затухание корректора для случая, когда один из коэффициентов ц* не равен нулю, а остальные коэффициенты равны нулю, т. е. когда передаточная функция описывается выражением (4.25), преобразованным к виду (Г=1, q1=q2=Q);
!+/Y*
г=АТТ7ё7: x=-201g|r|’
СО8---<0q
где х— --------------
а щ0
ахоо Шо а
Выбором величии Q и h характеристики затухания совмещены со сплайнами либо в узлах сплайнов х\, либо в узлах интерполяции х<. Как видно из этого рисунка, параболические и кубические сплайны достаточно хорошо аппроксимируют характеристики затухания локальных корректоров, в которых используются частотно-зависимые четырехполюсники с передаточными функциями второго порядка (4.23). Естественно, можно получить и более качественные приближения, используя фильтры высоких порядков, например полосовые фильтры Баттерворса и инверсные фильтры Чебышева, поэтому для описания свойств локальных корректоров пригодны все оценки сплайи-приближений.
4.8. Полиномные корректоры
Гармонические корректоры
Локальные корректоры являются частным случаем полиномных (или полиномиальных) корректоров. Полиномные корректоры параллельного типа строятся по структурам рис. 4.14 и описываются передаточными функциями (4.20)— (4.22), в которых Г* (й=1, 2, ..., п) — система линейно-независимых функций, имеющих тенденцию к полноте иа заданном частотном множестве (в заданном диапазоне частот). Корректоры Последовательного типа без обратной свизи строятся по структуре рис. 4.28,а с передаточной функцией (4.20), в которой •k
П Tv (v=l, 2, ..., п). Соответствующий выбор Г* или 4fv приводит к
147
корректорам разных видов. В частности, ортогональные корректоры соответствуют случаю, когда Тк образуют систему ортогональных функций. Корректоры последовательного типа с обратной связью строятся по аналогии со структурами рис. 4.14,6 и в.
Наиболее распространены гармонические корректоры, которые реализуются на основе секционированной линии задержки с отводами (рис. 4.28,6) и описываются передаточной функцией
Т = Чп акЧк , (4.27)
£==—-п
где 4,=e_JcoA1 — передаточная функция; At — задержка секции линии. Такой корректор вносит задержку nAt по отношению к основному каналу «о. Эта задержка обычно ие учитывается, и коэффициент передачи корректора записывается в виде
Т (/©) = S е~/ЮЙЛ/ “ “о + Л (©) + / В (©) = Т ,
fc=—п
п
где А (со) = 2 (“л + «-ft) cos ©Д <;
fe=i
п
В (со) = 2 (a_ft—ah) sin k ©Д t ;
k=i
,_____________________ , В (©)
T (ш) = V|ao + А (©)I» + B2(©) ; q> (w) = arctg - • - ~ •
Л (co) + ao
При выполнении ограничений
— |Л (со)| < 0,3 ;
®о / л \
0 < ш < — ) (4.28)
1 \ Bt /
— IB (©)| <0,3 «о
справедливы приближенные равенства 7(©)»=ао+Л(<о), ф(со)«—В (со). Ес-а«
ли a» = a-*, приходим к амплитудному корректору с передаточной функцией
п
Т (j ш) = Oj -f- 2 У ак cos k ©Д t .
148
Если <Xfc=—а-*, то Г(/со) =ао+/В(со); А(со)=О и при выполнении ограничений (4.28):
2 п
Т (со) « ос,, = const ; <р (со)« — — 2 sin k taht.
ав ft=i
В этом режиме, называемом синусным, гармонический корректор приближенно является фазовым, не вносящим амплитудно-частотных искажений.
Коррекция искажений в каналах минимально-фазового типа производится косинусными корректорами с передаточной функцией
т (/ со) = Оо + Д ак - а» + А (со) + j В (со) = Т
п п
где А (со) = У] ад cos k соД t ; В (со) = — 2 «л sin £ соД < .
*=1 к=1
Для косинусного корректора А (со) и В (со) связаны между собой преобразованием Гильберта вида
„ 1 7 л (х
В (со) ------f —— dx.
я Joo Ш—X
При выполнении (4.28) Г (со) и <р(со) также связаны между собой преобразованием Гильберта (с учетом Оо).
Коэффициент передачи гармонического корректора описывается отрезком гармонического тригонометрического ряда, поэтому Т (со) и ср (со) — периоди-2 п
•ческие функции с периодом — . Если ал — вещественные, то Т (со) — чет-
кая; Ф(со) — нечетная функции относительно частот I уу (1=0, ±1, ±2, ...).
' Для смещения отрезка I 0, — в заданный диапазон частот [coi, coj] не-I Д * J
обходимо, чтобы фазовая характеристика секции лииии задержки была линейна в диапазоне [coi, сог] и принимала на частотах coi и сог соответственно значения рл и (р+1)л, где р — любое четное число. Вне диапазона [coi, сог] фазовая характеристика секции — произвольная. В этом случае в диапазоне [coi, со2] характеристики гармонического корректора будут такими же, как и в диапазоне [О, уу . Если р — нечетное число, то значения ал при k нечетном умножаются на —1.
Способы расчета гармонических корректоров разных типов изложены в [5, 13].
Корректоры Чебышева
Выбрав в (4.27)
ш2/аге»1пч/ ini I м \
* — е П1 = 1 I . получим
\ _®с /
т (/ п) = e-/2n arcsIn ” [оо + А (Г)) + j В (П) ],
м-де А (Л) = 3 ( —0* (“ft + “-ft) Ttk (n) ; t»l
В (Ч) = S (—1)* (ад—a-k) Uл (ч) ;
*=1
(4.29)
149
Т2ь(т)) и Uik (л) —’ полиномы Чебышева первого рода (четные) й второго рода (нечетные); сое — заданная частота. Рассмотренный выбор эквивалентен использованию в качестве ¥ согласованно нагруженных П- либо Т-образных звеньев ФНЧ типа k (рис. 4.29,а), передаточные функции которых в полосе пропускания равны Чг(сос = 2/ Д/ЛС). Схема корректора принимает указанный
Рис. 4.29
на рис. 4.29,6 вид. Для измененного в соответствии с рнс. 4.29,в расположения отводов передаточная функция
Т (/ л) = arcsin 11 [a,, -j- A (n) + j В (л)], (4.30)
п
где А (т]) = 2 (~ 1)*~1 + Uzh—i (П) ;
k=\
n
в (Л) = 3 (—1)* (afe — a._fe) Tih-t (n) (Ш1<1).
A=1
Корректоры рис. 4.29 относятся к низкочастотным. Полосовые корректоры получаются из низкочастотных заменой звеньев ФНЧ звеньями Полозовых фильтров типа k. Кроме того, замена фильтров типа k фильтрами других типов, например фильтрами типа т, приводит к корректорам Чебышева, характеристики которых деформированы на оси частот.
Корректор" с передаточной функцией (4.29) можно представить каскадным соединением двух четырехполюсников, из которых один описывается передаточной функцией e_j2n агс81п п, т. е. является n-звенным фильтром иижних частот типа k. Этот четырехполюсник вносит фазовые искажения, которые могут быть скомпенсированы дополнительным фазовым корректором (ДФК). В результате приходим к корректору Чебышева, пригодному для совместной компенсации и амплитудных, и фазовых искажений. Аналогичные рассуждения справедливы и для корректора с передаточной функцией (4.30).
Основное достоинство корректора Чебышева — простота его реализации.
Корректоры на фазовых контурах
Используя в структуре рис. 4.28,6 фазовые контуры 4r=e-ie<®>, приходим к корректору с передаточной функцией Т=Т\Тг, где
Т, = e“/ne(tt>) ; Тг = 2 а» e~/fee(tt>) . k=—n
В этом случае ДФК компенсирует искажения, вносимые четырехполюсником Т1.
Функции (k=0, ztl, ±2, ...) образуют замкнутую систему функ-
ций, ортогональных с весом 0' (со) иа произвольном отрезке [соь со2], для которого 0 (со2)—0(coi)=2n, 150
f 0' (co) d(O = I
о, (О, /=±1,±2,„.
Поскольку 0'(<в) — групповое время прохождения фазового контура с передаточной функцией е~-’е<и), рассматриваемые функции ортогональны с весом, совпадающим с характеристикой ГВП фазового контура. Например, использо-
ю
а—j <0 —2 arctg"~
ванне фазовых контуров первого порядка Y = —;-------------- = е
а + / <о
(a=const) дает систему функций, ортогональных иа всей оси частот [—оо, 2а
оо] с весом/Гр=0'(ш)=-т~;—т .
аа + <оа
Характеристика ГВП фазового контура второго порядка имеет максимум на частоте <втах (см. рис. 2.4,6), поэтому использование контуров второго порядка повышает точность коррекции в области частоты шта1.
Корректоры иа фазовых контурах предельно просты по технической реализации активными /?С-цепями. Частотные характеристики корректора Чебышева и корректора иа фазовых контурах с учетом ДФК получаются из характеристик гармонического корректора заменой переменной соД/ на 0(<в).
Сравнение локальных корректоров с гармоническими
На рис. 4.30,а представлены расчетные кривые остаточного затухания 20 усилительных участков системы 6TFV2700 |[22]. Остаточная погрешность коррекции резонансными корректорами типа HS с восемью, десятью и двенадцатью дополнительными каналами (л=8, 10, 12) представлена соответственно иа
Рис. 4.30
151
рис. 4.30,5—е; погрешность, обеспечиваемая гармоническими корректорами с 16 гармониками, представлена на рис. 4.30,д. Как видно из этих рисунков, уже для корректоров с восемью резоиаисами остаточная погрешность незначительная. Исследования показывают, что корректоры с 12 резонансами по качеству коррекции превосходят гармонические корректоры с числом гармоиик 24—30.
Большие возможности резонаисных корректоров иллюстрируются также рис. 4.31, на котором изображены расчетные кривые остаточного затухания 42 усилительных участков системы 4TFV10800 до коррекции (кривые а) и после коррекции (кривые б) корректором типа HSzc десятью резонансами [22].
Дв
Ж Г
Рис. 4.31
Настройка резонансных корректоров проще настройки гармонических корректоров и может осуществляться как визуально, так и с помощью устройств, ^измеряющих средиеквадратическую погрешность. При этом возможна раздельная коррекция в различных поддиапазонах рабочей полосы частот системы. Такой возможностью гармонический корректор не обладает. Время настройки резонансных корректоров в среднем в 2 раза меньше времени настройки гармонических корректоров.
Аппаратурная реализация резонансных корректоров проще гармонических (объем резонансного корректора в- 2—3 раза меньше гармонического).
Компенсаторы переходных помех
В однокабельных цифровых системах передачи основными являются помехи за счет переходных влияний иа ближнем конце между линейными трактами. Пусть переходные влияния для одного участка регенерации описываются передаточной функцией Тв. Концентрированное подавление помех сводится к включению между влияющим и подверженным влиянию трактами компенсатора (корректора) с передаточной функций — Тв. Принцип включения иллюстрируется рис. 4.32, где Pi и Ра — регенераторы; ТВ1 и Тв2 — передаточные функции влияния; Ki, К2 — компенсаторы соответственно для прямого и обратного направлений передачи. Поскольку функции Тв относятся к иемиии-мальио-фазовым, в качестве компенсаторов необходимо амплитудно-фазовые например полиномные (см. рис. 4.28), либо локальные корректоры, в которые дополиительио вводятся регулируемые фазовые звенья, включаемые каскадио с ча-
Рис. 4.32
использовать корректоры, корректоры
стотно-зависнмыми четырехполюсниками Г* (см. рис. 4.28 ).
<52
5. ЦИФРОВЫЕ И ДИСКРЕТНО-АНАЛОГОВЫЕ КОРРЕКТОРЫ
5.1. Переход от аналоговых к цифровым корректорам
Общие положения
Цифровые корректоры (ЦК) обрабатывают дискретные значения сигнала, отображаемые цифрами с конечным числом разрядов (кодовыми комбинациями конечной длительности). Использование кодовых комбинаций конечной длительности неизбежно связано с округлением или усечением (кваитоваиием по уровню) дискретных значений сигналов. В цифровых корректорах применяются цифровые элементы задержки, а арифметические операции сложения и умножения выполняются в цифровом виде с округлением полученных результатов в соответствии с заданным числом разрядов.
Дискретно-аналоговые корректоры (ДАК) осуществляют аналоговую обработку дискретных значений сигналов. В иих не используются операции округления или усечения, поэтому сохраняются все градации дискретных значений. Задержка дискретных значений и арифметические операции над ними выполняются методами аналоговой техники — дискретными элементами задержки, устройствами взвешивания и суммирования [26].
Цифровые и дискретно-аналоговые объединяются в общий класс дискретных корректоров. Первые в силу усечения и округления, строго говоря, являются нелинейными, в то время как вторые — линейными. Однако обычно ЦК относят к линейным, поскольку число разрядов в кодовых комбинациях достаточно велико, поэтому для описания ЦК и ДАК применяется Один и тот же математический аппарат и между ними не делается различия. В дальнейшем используется один термин — цифровые корректоры, подразумевая при этом как цифровые линейные корректоры, так и дискретные аналоговые корректоры.
Цифровые корректоры получаются, как правило, определенным переходом от соответствующих аналоговых корректоров (АК). Наиболее простой переход сводится к следующему: 1) на основе одной из форм iZ-преобразования (стандартного Z-преобразования, согласованного 2-преобразования, билинейного 2-преобразования, способа Боксера — Талера и др.) переходим от операторных передаточных функций АК к передаточным функциям ЦК; 2) реализуем полученную передаточную функцию ЦК в виде рекурсивного цифрового фильтра (ЦФ) той или иной структуры с последующим переходом к разностным уравнениям. Наиболее широко используемые структуры ЦФ: прямая, каноническая, каскадная, параллельная и др.
Между фильтрами и корректорами нет принципиальной разницы, поэтому все методы перехода от аналоговых к цифровым фильтрам пригодны и для перехода от АК к ЦК. Однако переход к ЦК, естественно, имеет свои специфические особенности, связанные с учетом особенностей операторных передаточных функций фазовых и локальных амплитудных корректоров, что позволяет получить оптимальные по числу перемножителей ЦК.
В дальнейшем не рассматриваются вопросы, связанные с учетом усечения и округления, поскольку они в ЦК решаются так же, как и в ЦФ [24, 27, 28].
Стандартное /-преобразование (принцип инвариантности импульсной реакции)
Допустим, что операторная передаточная функция АК является правильной дробно-рациональной функцией с простыми полюсами
153
Т(р) =
(Р’ N(p)
m
2 а* рк ffaxsO
где рн — полюсы Т (р); Д*= соответствующее Т(р),
S bk р‘
А=о
M(Pk)
N' (Pk) имеет вид
.k
= 3 * (т < л)> <51>
*=i р—Рн
Тогда стандартное /-преобразование,
п
H(Z~~1) = 2 ft=l
АкТ
1—еР*Г /-*
где •/_|=е_гт — оператор задержки; сигналов (тактовый интервал). Другая зоваиия
2 a-hZ к ____________ S (Z-i)
" Q (/-1)
2 Ык k=o
Т — интервал дискретизации входных форма записи стандартного Z-преобра-
(5.2)
Н (Z-1) = Т 2 g (п Т) Z~n ,
(5.3)
где g(i) — импульсная реакция АК,
g (о = 2 Ak k=i
Основу стандартного /-преобразования составляет замена
Ak , Ak Т Р Pk 1—еР^Т Z-1
При такой замене имеет место инвариантность импульсной реакции, которая заключается в том, что импульсная реакция ЦК совпадает с дискретизированной импульсной реакцией АК с точностью до множителя Т.
В частотной области стандартное /-преобразование, определяемое выражениями (5.2) и (5.3), эквивалеитио выражению '[24]
П(Р)= -2 Т(Р—/ЛШд)+ g(0+), (5.4)
где <0д=2л/Г; g(0 + ) =g(t) |i=o+- Из этого выражения следует, что Н(р) получается путем наложения сдвинутых по частоте <о иа ±/иод функций Т(р). Функция Н(р) периодична по частоте <о с периодом шд.
Если функция Т(р) ограиичеиа на полосе частот,
|Т (Р)1р=;ш = 0 ( |<о| <од j , (5.5)
то функции Т(р—/л(од) взаимно ие перекрываются при их наложении (п= =0, ±1, ±2, ...), поэтому //(р)=Т(р) в основной полосе частот (|<в|<~ сод).
Если же условие (5.5) ие выполняетси, то Я(р)^Г(р) (|ш| <©д) и ошиб
ка дискретизации
в (р) = Я(р)—т (р)= 2 т (р—in “д)+ V s (° + ) (1®1 < “Г ®д) • П=—ов /
п?(0
154
Качество перехода к цифровым цепям с помощью стандартного /-преоб-разования определяется тем, с какой степенью точности выполняется условие (5.5) (при условии, что арифметические операции выполняются достаточно точно). Передаточные функции фазовых и амплитудных корректоров локального действии не удовлетворяют условию (5.5). Например, АЧХ фазового контура постоянна иа всей оси частот, поэтому непосредственное применение стандартного Z-преобразоваиия для получения цифровых фазовых и амплитудных корректоров не может привести к хорошим результатам. Другим ограничивающим фактором является то, что для передаточных функций фазовых и локальных амплитудных корректоров т=п [степень полинома числители равна степени полинома знаменателя Т(р) ]. Для применения же стандартного Z-преобразова-ния необходимо, чтобы т<п. Эту трудность можно обойти, воспользовавшись следующим приемом. Представим T(p)(m=n) в виде Т(р)=А'+Т\(р), где А' — целая часть Т(р); Т\(р) — правильная дробно-рациональная функция. Согласно (5.2) переходим от Г1(р) к /fi(Z-1) и далее используем в качестве //(/—’) выражение H(Z~') =A'+Ht (Z~').
Для устранения эффекта наложения необходимо каскадио с аналоговой цепью включать ограничивающий фильтр так, чтобы выполнялось условие (5.5) с требуемой степенью точности, которая определяется точностью цифровой обработки сигналов. Естественно, ограничивающий фильтр не должен искажать характеристики аналоговой цепи в интересующем иас диапазоне частот.
При переходе к полосовым цифровым цепям характеристики аналоговых цепей предварительно ограничиваются по частотному диапазону и интервал дискретизации выбирается так, чтобы Н (р) (5.4) достаточно точно отображала Г(р) в заданном диапазоне частот.
В пределе, когда Т-Ч), имеем
lim ------------ = ——— , lim Н (р) = Т (р).
Согласованное (прямое) /-преобразование
Представим Т(р) (5.1) в виде m П (р—р’д т (р) = --------------------------- -
П (р—рь) te=l
где p'k — нули Т(р). Согласованное (прямое) /-преобразование имеет вид
7’n-mS (1 —еР*Г/-1) Н (Z-1) = —---—--------------- •
П (1 —e^Z-i)
Основу согласованного /-преобразования составляет замена
p—Pk-^Y(1~ePkrz~1)- (5.6)
выполняемая как в знаменателе, так и в числителе Т(р). Можно, показать, что такая замена всегда переводит фазовые аналоговые корректоры в цифровые фазовые корректоры.
7*
155..
Билинейное Z-преобразование
Наиболее широко используется билинейное /-преобразование, заключающееся в замене переменной [24—28]
Я (Z-1)
выполняемой непосредственно в функции Т(р) (5.1). В результате приходим к передаточной функции ЦК
п
2 akyk (1— Z-1)* (1+Z-1)"-* fe=0
2 bh ? (1—/-*)* (l+Z-i)n-ft k=o
которая после алгебраических преобразований (раскрытия скобок, приведения подобных членов) преобразуется к виду
S ^Z-k
-------- • (5.8)
S ^z-k
*=o
Форма задания Г(р) — произвольная, т. е. Т(р) может задаваться в виде одной рациональной функции, суммы функций, произведения функций, непрерывной дроби и т. д. .
Эквивалентная форма записи замены (5.7)
.. РТ P-Yth — ,
поэтому билинейное /-преобразование относится к одибй из разновидностей преобразования частоты, широко используемого в теории аналоговых фильтров. Замена (5.7) переводит всю мнимую ось плоскости р (p=ja>) в единичную окружность Z~<=e~i®>r плоскости Z и эквивалентна в частотной области преобразованию частоты следующего вида:
<о Т w-*ytg-^— . (5.9)
При р=/<в и Z~i=^e~^T имеем T(j<o) = Г(1ш)е^Ч><«>> и //(/<о) =Я(<в)е^’1>1“>, где Г(ш), п(<о), <р(<в), ф(<о)—АЧХ и ФЧХ аналоговых и цифровых цепей. Частотные характеристики цифровых и аналоговых цепей связаны простым соотношением: /7(<о) и ф(ш) получаются соответственно из Г (со) и ф(<о) заменой (5.9). Если irp(<o)=—dq>(<B)/d<o — характеристика группового времени пробега (ГВП) аналоговой цепи, а тгр(<о)=—dip(<o)/d®— характеристика ГВП цифровой цепи, то Тгр(<о) получаетси из /Гр(со) заменой (5.9) с последующим умно-уТ со Т
жением всего результата иа Х(со) = — 1 /cos8 —— .
В результате замены (5.9) вся ось частот (от —оо до +°о) сжимается в отрезок [—сод/2, <0д/2] и этот отрезок опять периодически повторяется на всю ось частот. Сжатие является нелинейным: чем выше по шкале частот расположен тот или иной диапазон, тем сильнее он сжимается. Это приводит к деформации и периодизации частотных характеристик аналоговых цепей прн преобразовании их в цифровые. Однако несмотря иа нелинейное сжатие осн частот, если АЧХ аналоговой цепн постоянна с заданной степенью точности в некотором диапазоне частот, то АЧХ цифровой цепи будет постоянной с той же степенью точности в преобразованном (сжатом) диапазоне частот. В связи 156
с этим билинейное /-преобразование всегда переводит передаточную функцию произвольного аналогового фазового корректора в передаточную функцию цифрового фазового корректора, а передаточную функцию локального амплитудного корректора — в передаточную функцию цифрового локального корректора (естественно, характеристики корректоров при этом деформируются). Из-за нелинейного сжатия добротности характеристик только повышаются.
Коэффициент у в выражениях (5.7) и (5.9) выбирается из условия совпадения значения Т (р) на заданной «аналоговой» частоте <в0 со значением на заданной «цифровой» частоте й0:
_ /о т
Т (j ®0) = Н (е о ) ;
71 I сои \
®с = Y tg Qc “7” I IQcI < ”7“ I • (5.Ю)
“ \ “I
Для расчета ЦК с требуемыми АЧХ и ФЧХ пригодны в принципе все •методы расчета АК с предварительным растяжением их характеристик по шкале частот таким образом, чтобы замена (5.9) приводила к требуемым характеристикам в заданном диапазоне частот. В случае расчета ЦК по характеристике ГВП необходимо ие только растягивать, но и предыскажать характеристику ГВП с учетом множителя Х(о>).
Отметим, что все рассмотренные формы /-преобразования ие увеличивают порядка ЦК, а также ие нарушают устойчивости ЦК.
Способы отображения операторов дифференцирования и интегрирования
Различные формы /-преобразования получаются на основе замены либо отображения операции точного дифференцирования операциями приближенного дифференцирования либо операциями некоторого преобразования, выполняемыми в конечных разностях. Это эквивалентно аппроксимации либо отображению переменной р некоторой функцией переменной /~‘, где /-1=е_рГ — оператор задержки. К простейшим относятся отображения, сводящиеся к нижеследующим заменам:
1 IV
где коэффициенты аь. выбираются таким образом, чтобы функция 2— S cu sin kwT
в заданном диапазоне частот совпадала с допустимой погрешностью с заданной нечетной функцией Р(<в), в частности с функцией Р(<о)=<в. Функция р(<в) определяет характер деформации оси частот при отображении; если 3(о>)=о>, то деформация отсутствует. Переход к передаточным функциям /7(/-‘) ЦК заключается в замене в передаточных функциях Т (р) переменной р одним нз выражений 1—3.
Указанные /-преобразования не нашли широкого, применения нз-за присущих им недостатков:
1. Замены 1 и 2 несовершенны, так как приводят к искажениям характеристик аналоговых цепей (потеря избирательных свойств, свойства постоянства АЧХ и др.). ,
2. Замена 3 сложна, и ее использование повышает порядок ЦК по сравнению с порядком АК.
7-66
153
(5.11)
Билинейное /-преобразование также можно рассматривать как замену оператора дифференцировании р приближенным выражением согласно (5.7) или как замену оператора интегрирования р~1 приближенным выражением
p_lw_l.L+£2. F у 1— Z-1
В результате происходит деформация характеристик преобразуемой цепи. Естественно, деформацией можио управлять, используя более сложные по сравнению с (5.7) и (5.11) функции переменной Z-1, обеспечивающие более качественную аппроксимацию оператора р или р~* в интересующей нас полосе частот. Однако при этом возрастает порядок цифровой цепи по сравнению с аналоговой. Для того чтобы порядок ЦК совпадал с порядком АК, необходимо использовать для аппроксимации р и р~1 рациональные функции первого порядка, р2 н р~2 — не выше второго порядка, р3 и р~3 — не выше третьего порядка и т. д. Каждая степень р или р~1 аппроксимируетси своей более точной рациональной функцией переменной Z~l, причем все функции имеют общий знаменатель, порядок которого не превышает наибольшей степени используемых функций р* и р_*. Получение /-преобразования сводится к тому, что операторная функция аналоговой цепи записывается по степени р или р-1 с последующей заменой ph или р~* их аппроксимирующими функциями, приведением функций к общему знаменателю и т. д.
Изложенная идея лежит в основе способа Боксера—Талера. Согласно этому способу операторная передаточная функция АК записывается в виде отношения двух полиномов по переменной р~1 (произведения н суммы передаточных функций не используются). Затем все р-А заменяются своими /-формами (табл. 5.1 [25]). Полученный результат дает передаточную функцию ЦК в виде (5.8). Способ Боксера—Талера расширяет диапазон частот, в котором характеристики АК меиее по сравнению с билинейным /-преобразованием деформируются при переходе к ЦК. В пределе, когда Т-*0, /-формы совпадают с р~*.
Таблица 5.1
р * Z-форма
р— 1 Т 1+/-1 2 I—/-1
р-а Т2 1 4- ю /-1 + z-a 12 (I—/-1)2
р-» т» z-'+z-* 2 (I—/-1)8
р-« Т* /-1+4/-8 + /~8 Т* 6 (1—Z-1)* ~ 120
р-» Т» (Z~* + 11 /~а 4- 11 /~а 4- Z~* 24 (1 _2-i)6
Из вышеизложеииого вытекает, что в математическом плайе /-преобразование заключается в аппроксимации или отображении передаточных функций АК или спектров сигналов функциями переменной Z-1.
Все перечисленные /-преобразования переводят передаточные функции АК в передаточные функции ЦК. Применение этих преобразований к одной и той же передаточной функции АК дает различные передаточные функции ЦК. Конкретный характер различий будет показан ниже на примерах получения передаточных функций фазовых ЦК.
158
Реализация полученных передаточных функций ЦК формально может осуществляться рекурсивными цифровыми фильтрами (ЦФ) традиционных структур — прямой, канонической, каскадной, параллельной и т. д. Такой подход дает в общем случае неэкономичные (по числу перемиожителей) решения, поскольку перечисленные структуры не учитывают особенностей передаточных функций фазовых и локальных амплитудных корректоров, поэтому структуры ЦК отличаются от структур ЦФ. При поиске новых структур ЦК необходимо избегать нереализуемых в цифровом виде контуров без задержки.
5.2. Звенья рекурсивных цифровых корректоров
Фазовые корректоры
Звенья первого порядка. Передаточная функция фазового АК первого порядка
Л (Р) =
«—Р а + р
(5.12)
Применив к ней стандартное (5.2), согласованное (5.6), билинейное (5.7) ^-преобразования и способ Боксера — Талера, получим соответственно нижеследующие передаточные функции Hi(Z~l) фазового ЦК первого порядка <ФЦК1):
a + Z-i
1 + р z-i
1. Ях (Z-1) = К
гдеа=(2аГ—1)еаГ; В=—е-аГ; Х=е-аТ. B4-Z-4 2- Ях(^)-Х 1
где В=—е~аГ; А=еаГ. В 4-Z-1 3.^(7-)- >
а—у где В — « +V В 4- z-1 1 + BZ- »
а Т — 2 Ив «Г + 2 ' Функция , В + z-1 1 + BZ- (5.13)
описывает ЦФК1. В комплексной плоскости Z на (Z-‘ = e-J®r) АЧХ ФЦК1 равна единице для всех со, ляются соответственно по формулам:
единичной окружности а ФЧХ и ГВП опреде-
В sin со Т ф (со) = — со Т + 2 arctg ~— I
1 + р cos со Т
Г 2P(P + coscoT) 1
Тгр(<°) Г11 1 + ₽» 4-2 р cos со Т J
Н (со) = 1.
159
Стандартное Z-преобразоваиие, строго говоря, не переводит фазовый АК в фазовый ЦК, поскольку а=/=р. Однако имеет место асимптотическое равенство а=Р, если Т-+0, т. е. чем меньше интервал дискретизации Т, тем точнее переход к фазовому ЦК. При малых Т все формы Z-преобразоваиия дают аТ—2 практически одинаковый результат, так как (2аТ—1)е“т«—е~оТ« waT—1. Более того, lim//i(Z-4)=7\(p) (Т-+0; р=е-оТ; Z-4=e_’,r).
Согласоваииое Z-преобразование обладает следующим свойством. Пусть а=а±/й>о. Выбрав Т=лл/соо, получим e-ar=e_oTe*in«= (—1)"е~от.
Таким образом, согласованное Z-преобразоваиие переводит фазовый АК первого порядка с комплексным полюсом и нулем в реализуемой ЦК с вещественными коэффициентами р. Таким же свойством обладает стандартное Z-npe-образование относительно полюса передаточной функции Ti(p) (5.12).
Примеры структурной реализации ФЦК1 даиы иа рис. 5.1,a—в. Структуры рис. 5.1,а,б описываются передаточной функцией //t(Z-1) (5.13), структура рис. 5.1,в — функцией Z-4//i(Z-4). Элементы задержки структуры рис. 5.1,6 могут использоваться дважды при каскадном соединении ФЦК1 (рнс. 5.1,г), образуя структуру с передаточной функцией
tf(Z-1) = П i=l
Рг + Z-1
1 + Pt Z-i
Звенья второго порядка. Передаточная функция фазового АК второго порядка
р2—ap-j-6 (Р—ai)2 + &i
_ pi + ар + b (р + Ь2
где ax = a/2; = }/6—; b—af > о.
Из этой функции иа основе стандартного (5.2), согласованного (5.6), билинейного (5.7) Z-преобразоваиий и способа Боксера—Талера получим нижеследующие передаточные функции фазового ЦК второго порядка (ФЦК2):
160
где
«1 =
cos b, T
где
где
где
/ л 2ei r
ая = (1—4 ax T) e
2. H2 (Z-i)
Pi = — 2 е 1 cos b2 Т ;
31 = 2
1. Hi(Z~2) = Ь .. «» + а1г а + г * 1 + Pl z— * 4- раz-»
(Яе cos bi Т 4- — sin
Pi = —2 е~а,Т cos bi Т ; X = ра = е**2а‘Г.
Р1 + Р1 z-2+z—
14- Pi Z~2 4- Pi z-2 ’
—2atT , 2atT e ; Л = е ;
Pa 4- Pi 2-14-2-»
14- Pi 2-14- Р» Z~2 '
b—V3 . „ = V3—g v4-b
у» 4- ay 4- b ’ 2 у» 4- a у -|- b
. „ Pl + Pl z-2 + Z-2
4. Hi (Z 1) = , , n , n 7_. •
Pa=
3. Ht (2—’)
10 b T2—24
Pi = -------,
12 4- 6 а Т + b Т2
Функция
_ 12—6 aT + bT2 Pa~ 124-6aT + ftT« '
= X
Н2 (Z-1)
(5.14)
1 4-Pi 2-14-Pa 2~»
описывает ФЦК2, АЧХ которого равна 1, Я(и) = 1, а ФЧХ и ГВП определяются соответствеиио по формулам:
ф(и) = —2 co T 4- 2 arctg
Pi sin ю T 4- Pa sin 2 ю T
1 4- Pi cos и T 4- Pa cos 2 и T
^гр (и) — 2T
Pl 4- 2P2 4- Pi (1 + 3 Pi) cos ю Г 4- 2 Pa cos 2 ю T
1 4" Pi 4" P2 4" 2 Pi (1 4" Pa) cos co 7 4- 2 Pa cos 2 co 7
Если T-+0, to ai-^Pt, aa-^Pa и стандартное 2-преобразоваиие дает ФЦК2. При малых Т все формы 2-преобразования приводят к одному и тому же результату, поскольку а2«Рг~1—2atT; ai«Pt«2a1T—2.
Примерами ФЦК2 могут служить структура рис. 5.2,а с передаточной функцией
р 4-a (14-3)2-14-2-»
1 4- a (1 4- Р) Z-i 4- Р 2-»
в структура рис. 5.2,6 с передаточной функцией (5.14).
Звенья высоких порядков. Рекурсивный ЦФ с передаточной функцией
рп 4- Pn-i Z-2 4- ... 4- Pl Z~n+l 4- 2-" = м (Z-i) ig) 1 4- Р1 2-14- Ра 2-» 4- ... 4- Pn Z~n N (Z-1)
Нп (2-!) =
является цифровым фазовым звеном л-го порядка. Полиномы M(Z~l) и N(Z~*) отличаются обратным порядком следования коэффициентов Р* (й=1, 2..... п),
поэтому M(Z~l) и ^(2-1) — взаимно-траиспоиироваииые полиномы. Корни транспонированных полиномов взаимообратны, т. е. если, — корень А(2-1), то 1/рг< — корень Л4(2-‘).
161
Рекурсивный ЦФ устойчив, если ||Х{|<1 (i=l, 2, п), следовательно»,
нули и полюсы Я(2-1) расположены в комплексной плоскости Z соответственно вие и внутри окружности единичного радиуса |2| = 1.
Фазовая характеристика звена n-го порядка описывается выражением
п
2 sin k ш Т ф (и) — — п а> Т + 2 arctg ——-------------------- •
1 + 2 Pfc cos k и Т
Звено n-го порядка реализуется каскадным соединением звеньев первого» н второго порядков либо канонической структурой рис. 5.3, а также другим» структурами ЦФ.
Замена в структуре ФЦК1 (см. рис. 5.1,а) блока задержки Z-1 фазовым звеном с передаточной функцией Z-4in(Z-1), где Яп(2~‘) описывается выражением (5.15), приводит к фазовому звену (п+1)-го порядка с передаточной функцией вида (5.15) с новыми значениями коэффициентов Р'ь Эти значения определяются соотношениями P'n+i = P; {01 + 1'}ХР1 = Р2; Pi и 02— матрицы-столбцы соответственно коэффициентов 0* и P'n+1-л; 1 — единичная матрица; V — матрица, у которой все элементы главной косой* диагонали равны 1, а остальные элементы равны 0. В частности, указанная замена приводит к звену, изображеииому на рис. 5.2,а. Если замену выполнять последовательно, используя первоиачально-звено рис. 5.1,а, а затем звенья» полученные в предыдущих заменах, то придем к набору звеньев* 2, 3...............................................л-го порядков с минималь-
ным числом перемножителей » блоков задержки.
На рис. 5.4,а изображено расположение полюсов и нулей передаточной функции (5.14), иа рнс. 5.4,6, в — графики ф(и) и тГр(и) ФЦК1 и ФЦК2 (кривые 1 соответствуют расположению полюсов в правой полуплоскости Z, кривые 2 — в левой).
В расчетах цифровых фильтров важную роль играют преобразования частоты, заключающиеся в замене переменной Z~l на некоторую функцию <t»(Z-1), в результате чего' меняется полоса пропускания фильтра иижних частот (ФНЧ), либо фильтр нижних частот преобразуется в фильтры других видов — верхних
162
частот, полосовой и режекторный. Преобразования выполняются по следующим формулам:
1. Изменение полосы пропускания ФНЧ
2-1-*-
2-1+ «
1 + а 2—1
= Ф1(2-1) .
2. Преобразования ФНЧ в фильтр верхних частот Z-i^~ 0t(2-‘).
Преобразования ФНЧ в полосовой фильтр t_______________ аг 4~ ai 1 4~ ^~3
1 + aj 2-* +а, 2-я
= Ф« (Z-i) .
4. Преобразование ФНЧ в режекторный фильтр
2-‘->—ф2(2"‘).
В приведенных выражениях а, щ и а2— некоторые коэффициенты, опреде-- ляемые частотами среза фильтров.
Z-плоскость
Рис. 5.4 •
Нетрудно видеть, что Ф1(2-1) и Ф2(2-1)—передаточные функции ФЦК1 и ФЦК2. Использование перечисленных преобразований переводит фазовый контур в новый фазовый контур, но при этом не получаются принципиально новые по сравнению с рассмотренными характеристики. Например, замена 2~‘ на Ф1(2-‘), выполненная в функции (5.13), дает опять функцию (5.13), в ко-
Р а торой необходимо заменить р иа —-—— .
Локальные амплитудные корректоры
Звено аналогового корректора локального действия описывается передаточной функцией
163
T(D}= P2 + dP + b = (P + di)a+»2 Р’ + Ч’ + Ь (p + a^+bl ’
где аг = ; ftx = ]/ ft—af ; dx = ; fta = V b—dj .
Коэффициенты передаточной функции цифрового корректора „ ,~_j. _ а2 + а1 1 ~Ь а® %~3
( l+PxZ-’ + P^-2 ’
(5.16>
(5.17>
полученной применением к функции (5.16) стандартного, согласованного, билинейного Z-преобразований и способа Боксера—Талера, определяются соответственно по формулам:
, _ -201Т .
1 и® — Рг :— е >
ах = е °*г I (а—d) Т ( cos 6Х Т -|- — sin ftx Т ) —2 cos 6Х 7*1 ;
L \ bt / j
а2 = 1 4- (d—а) T ; Рх = — 2 <Г“'Т cos 6Х T.
- — diT , „ — 2dtT ,
\ 2. a2= I ; ax = —2 e cos ft2 T ; a0 = e ,
o _ —air , _ o — 2atT
Px =—2 e cos bi T ; p2 = e
Ta + dy + b . „ _ ft _ 2 (*> —V2) .
‘ 2 y2-bay 4-6 ’ 1 P1 y24-a ? + & ’
y2—ay 4- ft y2— dy 4- b
2 y2 a у 4- ft ’ ° y2 4-a ? + ft
_ ft T24- 6 d r 4-12 . _ _ 10 ft T2 —24
‘ 02 “ b T2-p6 a T4- 12 ’ ft y-a 6 a,T+ 12 '
_ b T2—Б а Г4- 12 . _ ft T2— 6 d T4- 12
Pa~ b T24-,6 a T+ 12 ’ “ 6 T24-6 a Т-J-12
В общем случае при выполнении условия ах_____________________________а2____
Pi = Ра ~а°
функция (5.17) принимает вид
Ра + Pi Z-1 4- Z~2 g(z-i)feao Ра^Р2_ Y -•
1 4- Pi z. 14- р2 z
(5.18>
т. e. совпадает с передаточной функцией ФЦК2 (5.14) с точностью до коэффициента <хо- Если же условие (5.18) не выполняется, но выполняется условие-
(“о + аг) = 1 + Рг. ai
то выражение (5.17) дает передаточную функцию локального амплитудного-цифрового корректора (ЛАЦК). Заметим, что выполнение условия (5.18.) всегда
164
(5.19)
влечет за собой выполнение условия (5.19) (обратное утверждение в общем случае неверно). Используя условие (5.19), нетрудно определить, какие формы /-преобразования точно переводят аналоговый корректор в ЛАЦК.
Мниимальио-фазовый ЛАЦК соответствует случаю а2>ао, неминимально-фазовый— случаю а2<ао. Считаем, что условие (5.19) выполняется. Тогда
Н (0) = Я (фд/2)= ,
Pi где Я (ко)—АЧХ ЛАЦК; <од=2л/Т. Для простоты положим си = Р1. График Н (ко) дан на рис. 5.5. На частоте ©о, определяемой из выражения
tc М° = 1/ а2 а1 ~Ь ао = ~\f 1 ~t~ Pi fia 2 г Qg—“Ь а® г 1 "PiH’Pa
Я (и0) =
имеет место максимум либо минимум
О&2--Др I
1—Ра I '
Перемена местами коэффициентов ао и аа в функции (5.17) ие меняет АЧХ ЛАЦК, так как это соответствует в зависимости от значений ао и а2 переходу от минимально-фазового к неминимально-фазовому корректору, и наоборот.
Для анализа свойств (5.17)
прн произвольных значениях ао, ai, а2, Pt, р2 полезен переход из Z-плоскости в p-область, который осуществляется заменой дим к функции
т (р) = q pa + dp + bl , Чр^ + ар + Ьг’
(5.20)
где
«а—2 у (а2 — ао) , „аа + а1 + ао. о = ------ ; а = ------ ; == V* —-; »
1 — pi Рг “I"
2 у (j —Pa) 1 +Р1 + р2
1—Pi + Pa ’ 3 7 1 —Pi + Pa
При выполнении условия (5.19) и при Pt=at функция (5.20) совпадает с функцией (5.16). Возврат к Я(/-1) производится иа основе билинейного /-преобразования.
Рис. 5.6 Рис. 5.7
165
Примером ЛАЦК может служить корректор с передаточной функцией
I + h+SiZ-Ч-Ф.—H)Z-*
H,z iTKz-i+i.^
структурная схема которого изображена иа рнс. 5.6.
Если Ва—р=1, структура отображает ФЦК2, если 1 + р.=/=р2 — ЛАЦК минимально-фазового типа (1+ц>р2—р.) либо неминимально-фазового типа (1+ц<Ра—и).
Указанные выше способы получения ЦК, основанные на отображениях АК « помощью того или иного Z-преобразования, естественно, не являются единственными. Возможны также и прямые способы расчета, позволяющие непосредственно определить передаточную функцию ЦК в виде (5.8) по заданным АЧХ и ФЧХ. Эти способы основаны на аппроксимации заданных характеристик отношениями тригонометрических полиномов. Удобства способов отображения в том, что они позволяют относительно просто «трансформировать» все известные свойства АК в свойства ЦК, что и объясняет их широкое распространение.
5.3. Широкополосные корректоры
Резонансные корректоры
Аналоговый широкополосный корректор резонансного типа описывается передаточной функцией
N
Т (Р) = 1 + 3 Ий Tk (р)
Й=1
и реализуется структурой рис. 5.7, в которой Тк— аналоговые резонаторы с передаточными функциями
Тй (р) - ~а , /п , ь -----Г > <5-21)
Pa + aftp + 5ft (p + a^ + bu
где О1й= у- ; Ь1й= Vbk—а21к.
Цифровой широкополосный корректор резонансного типа также реализуется структурой рис. 5.7 с заменой аналоговых резонаторов на цифровые. Передаточная функция корректора
N
H(Z-‘) = l + 2 pifttfpftfZ-1),
й«1
где Яр* (Z-1) — передаточные функции цифровых резонаторов.
Передаточные функции Hp(Z~l) цифрового резонатора (ЦР), полученные нз передаточной функции 7\(р) (5.21) стандартным, билинейным Z-преобразо-ванием н способом Боксера—Талера, определяются соответственно по формулам:
1 —aZ-1
1 • Яр (Z-i) = Т .
14- Piz1 + Рз z
где a = е—f cos 5* Т + sin 5* Т | ;
\ 01/
Рх =—2е “lT cos bi Т ; Р» = е °*
1—z-2
2 Hp(Z i)=ae 1 + piZ_1 + pjZ_2 .
166
Т2“}-лу-|-Ь 'у2 + в у b
“° т2 + ау+б 1—Z-2
з-^рСг1) a, i + fcz-‘+bz-> ’
6 Т где а« = ------------- •
126 а Т + №
_ 10 ь Г2—24 _ 12—6 a Г-|-6 Г2
Р1~ 12+6aT + bT2 ’ Pi“ 12 + 6 Т + b Т2
Передаточная функция ЦР, полученная согласованным Z-преобразованием, совпадает с функцией, полученной стандартным Z-преобразованием, если в последней положить а=1. Из-за эффекта наложения стандартное Z-преобразование Дает ЦР, передаточные функции которых не обращаются в нуль на нулевой (<»=0, Z=l) и полутактовой ( —<од=л/Г, Z=—1) частотах. Это ухудшает частотные свойства корректоров. Билинейное Z-преобразование и способ Боксера—Талера, этим недостатком не обладают.
На рис. 5.8 приведены примеры корректоров, в которых цифровые резонаторы реализованы в виде канонической (рис. 5.8,а) и прямой (рис. 5.8,6) структур. Резонаторы описываются передаточными функциями, полученными билинейным Z-преобразованием (коэффициенты а» учитываются в коэффициентах рк).
Набор резонаторов ТА... Тц в структуре рис. 5.7 образует гребенку фильтров. Широкополосный корректор может быть построен на основе любой гребенки цифровых фильтров (анализатора спектра), выходы которых через умножители рь объединены общим сумматором. Жестких требований к АЧХ фильтров не предъявляется; ФЧХ каждого фильтра гребенки должна принимать нулевое либо кратное л значение на средней частоте полосы пропускания фильтра.
167
Интерполяция комплексных передаточных функций
Рассмотрим функцию
/1 (ю) = 1 + 2 cos k ю Т = sin <о Т cosec ю ~~ — У] e—/ka>? .
(5.22)
Функция fi(<o) обладает свойством отсчетности:
fl (w) =
2 n + 1, ш = = / шд, 1 — 0, ± 1. ± 2, ...;
m
О, <о = ют = —— Юд, m = ± 1, ± 2, ,
2/1 “Г 1
<»т¥=®Ь (Од = 2 Л/Т.
(Од
Расстояние между нулями функции fi (ю) равно Ди=”——; период равен юд. 2n + 1
Образуем вспомогательные функции:
1. am (со) = (со-—т Д ю) + (со + т Дю) =
п п
_ у elkm&e>T е—)ke> Т । е—/*спДи>Т е—/4<о Г в
fe=—n k=—п
п 2п п
= 2 + 4 У cos km --------- cos k ю T = V Amk e—T , (5.23)
Cl 2n + 1 fe=-n
где Amh = 2 cos km —— = eikm&b> r + e~ T ;
2л + 1
2л
Дю T= —;— ; т = 0, 1, 2,... , п.
2л + 1
2. jbm (ю) = j/х (и—т Дю)—/ft (ю4-т Дю) = п п
в ^-ik№ Т____ у je— jkm&a T e—ike> T _
k=—n k=^—n
n «л "
= 4j У, sinA/n-—— sin^coT= У Втк^~11ийТ • (5.24)
fe=l 2л +1 А=_„
гДе = — 2 * * s>n km ~~~ = j (е^ктЛе>т—e—ikm&aT^ m= i, 2>iTJ, n.
2n + 1
Функции <2т(ю)—вещественные и четные; функции /6т(<о)—комплексные и нечетные; От(ю) и 6т(со) периодичны с периодом юд=2л/Т. Примеры графиков Дт(ю) и для различных т даны иа рис. 5.9.
Допустим, задана некоторая комплексная функция К(/ю) =А(ю)+/В(ю) с четной действительной частью и нечетной мнимой. Всегда существует тригонометрический полином #1(/ю), который интерполирует К(/к») на отрезке [—Юд/2, ®д/2] в точках ют=тДю, т=0, ±1, ±2, ..., ±л;
К (0) 1 п
Hi (/tt) = 97£Г1~п °0 (й) + 5П77 S А (т Дш) ат (<а) + 2П “Г 1 т==1
1 "
+ 7 S /В(тДю)дт(ю) ;
-г 1 т=1
Ях (/т Дю) = К (jm Дю), т = 0, ±1, ±2, ... , ± п.
Общее число точек интерполяции равно 2л+1.
168
Интерполирующие функции am(co) и Z>m(a>) не являются единственно возможными. Рассмотрим функцию
/»(<»)= 14-2 ' cos 4 ® Т = sin л а Г ctg ~ = У ' т . (5.25)
fc=l 2 fc=-n
Здесь н далее индекс ’ показывает, что последние члены суммы (й=л, й=—л) берутся с весом 0,5. Функция ft (и) обладает свойством (рнс. 5.10)
2 л, <o = coj= / ©д, / = 0, ± 1, ± 2, ;
h (®) -
0, и = <om = , m = ± 1, ± 2, ,л ;
2 п
Шт ¥= ®1» фд= 2 nJT.
XJOL
Гг(ы)
«А
1, 2. А
2 А
<У
Рис. 5.11
Рнс. 5.10
169
Расстояние между нулями функции /г(<о) равно Ди=<од/2п; период равен ид.
Вспомогательные функции:
1 • ст (со) =/а (со—т Ди) + f2 (и + т Ди) = 2 ' СпЛ e~fka Т , (5.26)
4=—п
где Стд — 2 cos km — = elkmAe>T + е“/*тД“7’, m = 0, 1, ... , n. п
2. jdm (®) = ifa (®—m (и + т Ди) = 2 ' Dmke~ike>r , (5.27)
fe==—*n
где Pmfc= —2 sin fan — = j(e/*c«A“T—e—m = 1, 2, m ,n. n
При /п=п имеем /г (и—пДн) =/г(и+пДи), поэтому dn(co)=0; сп(ш) =
=2[г (и—лДн) =2fs (и +»Ди).
По функциям Ст (и) и сЛп(и) можно построить интерполирующий тригонометрический полином
Я2 (/и) = с0 (и) + У ' А (т Дш) ст (<о) + 4п 2 п
1 п-1
+ — S j В (т Ди) dm(H), zn m=l
обладающий свойством: Я2(/спДи) =К(//пДи), т=0, ±1, ±2, ..., ±(п—1); Ла(/пДсо) =А(пДи). Полином Яг(/и) по сравнению с полиномом Ht(j<s>) содержит на одно слагаемое меньше, но он не интерполирует мнимую часть К (/со) на частотах ±пДи.
Интерполяция произвольных комплексных функций K(ja>) осуществляется тригонометрическим полиномом:
1 " ,
Н3 (/ ®) = -—— У К (jm Ди) Д (и— т Ди) ;
2n + 1 ni=-n
Ht (jm Ди) = К (jm Ди), m = 0, ±1, ±2.....± п.
Функция fa(a>) позволяет построить интерполяционный полином вида:
1 п
На (/ ®) = 3 % ’
2 П т=_п
Ht(jm Ди) = К (jm Ди), /п = 0, ± 1, ... , ± (п—1) ;
(jn Ди) = Я4 (— /п Ди) = 0,5 [Jf (jn Дш) + К. (—in Д®)]-
Если К(/пДи)¥=К(—/пДи), то полином Я4(/и) в крайних точках интерполяции (и= ±лДш) дает погрешность.
Функции' (5.22)—(5.27) нереализуемы, однако умножение их на е_,п<лТ приводит к реализуемым функциям. Реализация выполняется нерекурсивным цифровым фильтром с передаточной функцией
Н (j и) = e-i™Т 2 аде-^7, . (5.28)
Л==—п
Выбор коэффициентов а* производится в соответствии с выражениями (5.22)—(5.27). Для получения устройств с. передаточными функциями е~1««>тЯу (/и) (v=l, 2, 3, 4) необходимо использовать 2п+1 цифровых фильтров с передаточными функциями вида (5.28), выходы которых через умножители |х< объединяются общим сумматором (рис. 5.11). Выбором значений ц» 170
можно получить требуемый интерполяционный полниом Яу(/ш) (v-»l, 2, 3, 4) с точностью до множителя е~^п®т, описывающего постоянную задержку пТ.
Корректор, реализованный по структуре рис. 5.11, компенсирует и фазовые, и амплитудные искажения на частотах сот=тА<в (л=0, ±1...... ±п). Его не-
достаток в том, что поведение АЧХ и ФЧХ корректора между указанными частотами наперед неизвестно.
Коэффициенты полиномов и НгЦа)—вещественные, а полиномов
и Я*(/со)—комплексные (в общем случае). Соответственно импульсные реакции корректоров с передаточными функциями e~i”«>THv (/со) — вещественные (v=l, 2) и комплексные (v=3, 4).
Реализация корректоров по структуре 5.11 неоптимальиа по числу операций умножения. Уменьшить число операций можно заменой функции ft (ш) (5.22) функцией
2п ] 7—(2n-f-l>
е-/"“ т К (со) = У e-/ft“ т = ------:----- (Z-1 = е"^ г) .
fco [1—Z-1
Тогда:
е-'п<аГат (<о) = (1—г-(2п+1))
(l-Z-i)(-l)mg;
1—amZ-* + Z-?
/ е _/n<0 т bm (а) = (1 _z-(2«+i )j
(l+Z-l)(_l)m+ip;
1 —amZ-i + Z-2
И
е“/яю т Н1 и ш) = (1 _ z-(2n+l}) Г1 +
L *ti -f 1 1 —£ *
+ » A (m Асо) (1—Z-2)(-l)m am + 2n+l 1—«mZ-i + Z-2
" B(m Ao) (l+Z-i)(-l)m+ip;i '
m=i 2 n -|- 1 1 —om Z~1 + Z~2 .
2ir , it „, „ я
где am = 2cosm^7r; am = 2cosm— ; ₽m=2sinrn—.
Далее
е-/пВтЯз (/0)) = (i_ Z-(2n+l)) 2
m=—n
t-inn^r
2 n 4-1 i—e/mierz-1
(5.29)
(5.30)
Выражение (5.30) реализуется в виде передаточной функции комплексного ЦК (рис. 5.12) соответствующим выбором значений цт. Аналогичная структура реализует и передаточную функцию (5.29) с заменой комплексных резонаторов с передаточными функциями 1/(1—e^mA“TZ-1) веществеинымн резонаторами с передаточными функциями
Заменим функцию /г(<а) (5.25) функцией 2л < । । /—I
е-/л“ Th (а» = S ' e-'to т = -5- (1 -Z~2
fe=o 2 1 z
171
в которой крайние члены суммы (А“О, А—2п) берутся с весом 0,5. Тогда:
e-^rcm (<о) = (1 —Z~2 »)
(1—Z—2)(—— 1)от 1—o^Z-4-Z-*
/e-/awrdm((0)=(l—Z-2»)
— pmz-4-D'”
1 —0^2-1 +Z-«
где осщ = 2 cos т Д® Т ;
СОтг
Вт = 2 sin т Д® Т ; Дсо = — 2п
На основе этих функций получим интерполяционные полиномы:
т Я. « .)- (1 - Z-’") [“ ££ + , Л. Л (т Л<0) (1— ?-)<-!)” ,
+ - l-^Z-' + Z-" +
1— amZ-i + Z-2j ’
e-/na> T Hi (j Q) = _L (1 _z-2 x
Л К (/тДм)(—l)m 1 + е/П1А<вГ Z-1 tLn 2n z-i
2«
jCJ on
(5.31a)
(5.316)
Выражение (5-316) реализуется комплексным ЦК, структурная схема которого изображена иа рис. 5.13. Аналогичная структурная схема при соответствующем выборе gm реализует и выражение (5.31а) с заменой комплексных резонаторов
1 4- е/тДи> т z^
1 — е/шДа>Г2-1
вещественными резонаторами с передаточными функциями
Х2 (2) =
1—Z-«
1—amZ-i + Z-»
и t]2(Z) =
—Pm г-i
1 — amZ-2 + Z-2
172
Выше рассмотрена интерполяция комплексных функций и точках о)ж=тД® (/п«=0, ±1, ...» ±п) отрезка i[—<од/2, <од/2]. По функциям fi(co) (5.22) и h(v>) (5.25) можио построить трнгоиометрическне полиномы, интерполирующие комплексные функции в точках со'т= (т— — )Д®, расположенных между точками /иДш (точка ш=0 не используется). С этой целью образуются вспомогательные функции:
ет (ш) = Л со— т—
<7m(«o) = fi р—
и 1т (“) = fi | т~
hm (®) — fi
для которых справедливы соответственно выражения (5.23), (5.24), (5.26) и (5327), а также все последующие выражения с заменой т иа т—По вспомогательным функциям строятся интерполяционные полиномы типа (5.29)— (5.31), в которых перед Z~2n знак меняется иа противоположный н далее полиномы реализуются структурами рис. 5.12 и 5.13.
Наряду с функциями fi(co) (5.22) и fz(co) (5.25) для построения интерполяционных полиномов пригодны и другие функции, например
« ЛЛС— 1 W 1
f3 (со) = 2 >] cos —-— со Т = sin п со Т cosec —— £=i 2 2
и
„ " , 2k— 1 „ . 2n—1 „ L со Т
ft (и) = 2 cos —— со Т = sm —— со Т ctg — .
Свойства этих функций (рис. 5.14,а,б):
f (— l)z 2 n, со = <£>i = I сод, 1 = 0, ±1, ±2, ... ;
fi (м) = -! со-
0, со = com = m , m — ± 1, ± 2, ... ; сот =/= coj ;
р—1)' (2 л—1), со = <£>i = I сод, 1 = 0, ± 1, ± 2, ... ; f« (W) = j (Од .
г 0, со — сощ = —-----j- m, m = ± 1, ± 2, ... ; (от^= со;.
Здесь, как
Дсо=<од/2п, а функции
и раньше, <од=—. Расстояние между нулями функции fs(co) между нулями функции f* (со) Дсо=®д/(2п—1). Используя
-/ 2п -1 <йТ ,__ 7-2 п
е 2 f3 (со) = -----------------— (Z-1 = е-'“ т).
1—Z-1
. 2п-1 _
е 2 fi (со) = 4 (1 — Z-'2"-1») 1±L-1 —
173
получаем интерполяционные полиномы и структуры, нх реализующие, в полной аналогии с тем, как это сделано выше.
Структуры рнс. 5.12 и 5.13 относятся к структурам компенсационного типа. Они представляют собой каскадное соединение гребенчатого фильтра с передаточной функцией вида \±Z~N н набора цифровых комплексных резонаторов с
передаточными функциями вида 1/(1—е*тД®т2-1) или (1+е’тД<»т>2_|)/ (1—е^'пД<лт2-1). Здесь равно 2п+1, 2п или 2п—1 в зависимости от используемой функции ft (а)—fi(a>). Нули передаточной функции 1±Z~W расположены в точках где Дсо имеет указанные для функций fi(co)—ft (со) зна-
чения. Полюсы передаточных функций комплексных резонаторов совпадают с каким-либо нулем передаточной функции гребенчатого фильтра, в результате чего оии взаимно компенсируются. При использовании вещественных резонаторов с передаточными функциями Xi(z), r|i(Z) и т. д. происходит компеисация двух комплексно-сопряженных нулей гребенчатого фильтра полюсами резонаторов. Нетрудно вндеть, что компенсируемые нули и полюсы расположены в комплексной плоскости Z на окружности единичного радиуса. Однако, как указано в [24], из-за квантования полная компенсация ие достигается. Для улучшения свойств цифровых корректоров целесообразно нх нули и полюсы несколько передвинуть внутрь единичного круга. Это выполняется заменой Z-1 ма eraIZ~l, где а — некоторый коэффициент; е-аГ<1.
Дискретное преобразование Фурье
Пусть {з(пТ)}—последовательность нз членов (n=0, 1, 2, ..., N—1). Прямое дискретное преобразование Фурье (ДПФ) этой последовательности определяется выражением
N— 1 —/
S (/йДш) = 2 s(nT)e N (6 = 0, 1, 2, ... ,/V—I). (5.32)
n=0
174
2 л
где Ды= -тгг-. Обратное ДПФ определяется выражением NT
j N—1
S(nT)= — 2 5 (jk Ди) N Go
2 a kn
e N (n=0, I, 2
JV—— 1) •
(5.33)
Прямое ДПФ переводит последовательность {s(nT)} (n=0, N—1) в последовательность {S(/AAa)} (k=0, N—1); обратное ДПФ осуществляет обрат-
ный перевод. Этн переводы взаимно однозначны.
±1 (П-ИЛ’) (k-+qN) ±j
Поскольку е N = е " прн любых целых р н q, выра-
жение (5.32), по существу, определяет последовательность {5(/йДы)} (й=0, 1, ... .... JV—1) на всей дискретной оси частот Мы (А=0, ±1, ±2, ...), превращая ее в периодическую с периодом повторения NAg>. Аналогично выражение (5.33) доопределяет последовательность {s(nT)} (n=0, 1, ..., М—1) на всей дискретной осн времени kT (£=0, ±1, ±2, ...), превращая ее в периодическую с периодом повторения NT.
Рассмотрим дискретный периодический сигнал
N—1
®д.п«=^ s (п Т) р (t—n Т), (5-34).
00
где р (/) = 2 в (/—tn NT) ; б (/) —функция Дирака. Учитывая, что спектр функции p(t) определяется по формуле
00 р а ш) = дш 2 д®) •
fe=—00
для спектра функции здп(/) получаем
оо N—1
$д.п(/®) = д® S «(“—*Д“) S s(nT) е-1а,пГ = k=—оо П=0
ЛГ-1
= Дш 2 5 (jk Дсо) Р (со—k Дсо), (5.35)
k=o
00
где Р(а)— 2 б (со—тУДы); б (со)—функция Днрака частоты со. Функция т==—оо
Д’д.в(/®)—дискретная и периодическая. Таким образом, прямое ДПФ (5.32) определяет спектр 5д.п(/ы) (5.35) сигнала зд.п(0 (5.34), в то время как обратное ДПФ (5.33) определяет сигнал зя.п(/) по его спектру 5д.п(/со).
Цифровая коррекция последовательности {з(пТ)} выполняется теми же методами, что и линейная обработка сигналов. Она сводится к вычислению ДПФ последовательности, т. е. к вычислению последовательности {S(/Mco)}, умножению значений 5 (/Мео) на заданные значения T(jk&<a), что дает последовательность {S (/Мы) Г (/Мы)}, н к вычислению обратного ДПФ этой последовательности. Здесь Т (/Мы) — отсчеты комплексной передаточной функции корректора. Опнсаииый процесс эквивалентен вычислению круговой свертки
J ЛГ-1
г/ («7’)=— 2 s(iT)g(nT—iT) =
N С=0
, N—l
= -T7 2 s(nT—iT)g(iT)(n=O,l.............N— 1) ,
N i=0
175
где {g(n.T)}—обратное ДПФ последовательности {Г (/АД со)}; {у(пТ)}—«откорректированная» последовательность (n=0, 1, —1).
Естественно, с целью экономики вычислений ДПФ необходимо реализовать алгоритмами быстрого преобразования Фурье [23, 27].
В математическом плане коррекция на основе ДПФ совпадает с коррекцией периодических сигналов [13].
Приложение
Коррекция случайных сигналов
Общая постановка задачи и решение. Пусть на вход инвариантного во времени канала связи поступает информационный сигнал s(i), являющийся стационарным в широком смысле случайным процессом с энергетическим спектром S=S(co) н нулевым средним. На выходе канала получаем сигнал /(0=М0 + +т)(1), где Si(/)—случайный процесс с энергетическим спектром S|Т|2, |Т| — модуль комплексной передаточной функции канала Т=Т(/со), т](0 —аддитивный шум, являющийся стационарным в широком смысле случайным процессом с энергетическим спектром W=AZ(co) и нулевым средним.
Сигнал f(t) преобразуется корректором с комплексной передаточной функцией К=К(/со) в сигнал х(/)=зг(0-1-'П1(0> где s2(t)—процесс с энергетическим спектром Л7|/С|2. Выходной сигнал корректора вычитается из эталонного (заданного) сигнала y(t), в результате чего получается сигнал ошибки г(/)=» ==<7(0—^(О. где <7(0 =</(0—МО-
Считаем, что: 1) процессы q(t) и rji(O взаимно иекоррелироваиы; 2) процесс y(t) представляет собой процесс з(/), пропущенный через фильтр с комплексной передаточной функцией P=P(j<£>).
Степень совпадения сигналов x(t) н y(t) оценим величиной взвешенной дисперсии сигнала ошибки
1 °°
<т2= — J [S | Т/С——Р [ 2 U/i дт |/Q 2 И72] rfco, (П.1)
2Л —оо
где W'i и Wz — весовые функции.
Задачу оптимальной коррекции сформулируем в таком виде: выбором функции К минимизировать функционал (П.1) прн ограничениях
1 "
-— J Ci7<d<i)=Ai=const', (П.2)
2IX —оо
1 00
-— f C2|/C|2d<o=A2=const, (П.З)
2Л —00
где S, Т, Р, N, Ct, С2 — заданные функции, At н Аг —заданные константы. Функции Т, К, Р и Ci — комплексные с четными действительными и нечетными мнимыми частями: T—TB+jTM, К=Ка+1Км, P=Pt+jP*, Ci=Clt+jClM; S, N, Wi, №2, C2 — четные положительные функции.
Под каналом подразумевается как физическая цепь с неограниченной полосой пропускания, так и канал (либо тракт) с ограниченной полосой пропускания. В случае физической цепи интегрирование в (П.1)—(П.З) ведется в бесконечных пределах, а в случае канала — в конечных пределах, определяемых полосой пропускания канала. Без потери общности в дальнейшем используются бесконечные пределы интегрирования; однако все результаты будут справедливыми и для частотно-ограниченных каналов с заменой бесконечных пределов на конечные.
Передаточная функция оптимального корректора, являющаяся решением сформулированной задачи,
°-2(SW'1|T|2+yW'2 + C2X2) ‘ (П’4)
176
Множители Лагранжа Xi и Х2 находятся из ограничений (П.2) и (П.З), которые преобразуются в нелинейные уравнения относительно Xi н Х2
1 “ 2SWiT*PCt—Xi|Ci|2
.... I - iZ<o=Ai,
4л Л SI^ITV+A^+C^
1 “ |2SW17'*/>—XiC*i|’C2 ,
---- I ----------------------- S® = A2.
8я |SUz'1|7’|2+WW'2+C2X2|2
В общем случае (при произвольных S, Т и т. д.) решить эти уравнения аналитически не представляется возможным, поэтому Xi и Х2 необходимо искать численными методами. Если Х2 известна, то Xt находится в общем виде.
Равенство (П.2) можно рассматривать как обобщенное ограничение иа импульсную реакцию корректора. Так, если Ct=e3“'o, то фиксируется значение импульсной реакции корректора в момент /о; если же С1 = Ге3'и(о, то фиксируется значение импульсной реакции системы «канал 4- корректор». Равенство (П.З) прн С2=const накладывает ограничение на энергию импульсной реакции корректора, а при С2=|Т|2 — системы «канал + корректор». Это равенство принято называть ограничением на площадь усиления корректора.
Функция Ко доставляет условный минимум функционалу (П.1) с учетом ограничений (П.2) и (П.З). Если какое-либо из указанных ограничений не учитывается, то необходимо положить равными нулю множитель Лагранжа (Xi), левую (Ci) и правую (Ai) части соответствующего равенства (1=1, 2). Например, безусловный минимум функционалу (П.1) доставляет функция
ST^__
SWt\T\*+NW2 v
получаемая из выражения (П.4) при Ci = C2=0, Ai=A2=0, Xi=X2=0.
Анализ частных случаев. Выражение (П.4) является достаточно общим и из него вытекают решения задач как «классической» коррекции, так и оптимального приема сигналов.
Коррекция без учета шумов и ограничений («классическая» коррекция). Положим Ci = C2=0, Ai=A2=0, Xi=X2=0, ^=0, тогда выражение (П.4) преобразуется в выражение Ко—PIT. Если Р=1, то Ко=1/7’. Таким образом, прн отсутствии шумов и ограничений, оптимальным будет корректор, передаточная функция которого обратна передаточной функции канала. Такой корректор обычно используется в задачах «классической» коррекции, когда необходимо скомпенсировать амплитудно-частотные и фазо-частотные искажения канала связи без учета шумов и без каких-либо ограничений на передаточную функцию корректора.
Коррекция детерминированных сигналов с учетом ограничений. Считаем, что s(t) —детерминированный сигнал известной формы с комплексным спектром So. Обозначим SoP=Y, где У— комплексный спектр детерминированного сигнала y(i). Заменив в (П.4) S на |S0|2 и S0P на У, получим выражение
2№7»5*0Г*У—XiC*t
2(W7,|So|2|T|2 + W'^+C2X2) ’ (П,6)
описывающее передаточную функцию оптимального корректора, минимизирующего среднеквадратичную погрешность уклонения выходного сигнала корректора от заданного эталонного сигнала с учетом шума и ограничений (П.2) и (П.З). Оптимальный фильтр Колмогорова — Винера. Задача оптимальной фильтрации непрерывных сигналов формулируется следующим образом: определить передаточную функцию фильтра, преобразующего сигнал s(/)+rj(t) в сигнал x(t), дисперсия уклонения которого от полезного сигнала s(t)—минимально возможная. Полезный сигнал s(t) и шум rj(t)—стационарные некоррелированные случайные процессы.
Оптимальная передаточная функция фильтра Колмогорова — Винера описывается выражением [29] Ko=S/(S+N). Это выражение получается из (П.З) при P=T=l, W2=W2, следовательно, задачу оптимальной коррекции можно рассматривать как обобщенную задачу оптимального приема непрерывных сигналов, а
177
выражение (П.4) — как передаточную функцию оптимального фильтра с учетом ограничении.
Согласованная фильтрация. Пусть иа вход фильтра (корректора) с передаточной функцией К поступают детерминированный сигнал Ci(/) с комплексным спектром Ci и шум с энергетическим спектром N. Выбором функции К минимизируем дисперсию шума иа выходе фильтра
1 00
<т2= — J ЛГ|К|2ВМсо (П.7)
•при ограничениях (П.2) и (П.З). Решение этой задачи будет передаточная функция согласованного фильтра
= 2(NW2+b2C2) (П'8)
В частности, положив Хг=0, С2=0, №2=1 и заменив Ci на придем к
передаточной функции согласованного фильтра, у которого ие накладываются ограничения иа площадь его усиления. Здесь to — заданный момент регистрации выходного сигнала фильтра. Выражения (П.7) и (П.8) получаются как частные случаи соответственно выражений (П.1) н (П.4) при №1=0.
Сглаживание и преобразование. Если подставить в (П.4) Т=1-, то придем к передаточной функции оптимального фильтра (корректора), осуществляющего сглаживание (подавление шума) и преобразование входного сигнала. Характер преобразования задается функцией Р. Например, выбрав P=&v>at получим решение задачи предсказания и сглаживания.
Альтернативные постановки и решения задачи коррекции. Рассмотренная задача коррекции, заключающаяся в минимизации функционала (П.1), ие является едниственно возможной. В зависимости от выбора минимизируемой величины и ограничений возможны различные постановки задачи коррекции.
Пример 1. Выбором передаточной функции корректора К минимизируем дисперсию сигнала q(t)
Л= -4- F S|7K—P|2№1daj (П.9)
2п
при нормированной дисперсии выходного шума
1 ”
—— J JV|K|2№2dco=4o=const. (П.10)
Оптимальная передаточная функция
ST*PWj
К°= SiT^Wi+KWiN’ (ПЛ1)
где X находится из условия выполнения нормировки (П.10).
Пример 2. Выбором К минимизируем левую часть выражения (П.10) при условии, что правая часть выражения (П.9) нормирована. В этом случае оптимальная передаточная функция Ко будет описываться выражением (П.11) -с заменой S иа XS и X^ иа N, где X находится из условия нормировки правой части (П.9).
Проведенный анализ показывает, что (3.9) действительно можно рассматривать как решение обобщенной задачи оптимальной коррекции — фильтрации сигиалов. Его достоинство в том, что оно объединяет оптимальную и согласованную фильтрацию с «классической» коррекцией сигиалов. Согласованная фильтрация является следствием ограничения (П.2). Ограничение (П.З) эквивалентно изменению энергетического спектра шума (к шуму со спектром NW2 добавляется еще шум со спектром \2С2).
Оптимизация иредысказителя. Представим передаточную функцию канала в виде произведения: Т'=7'1Г2, где 71 — передаточная функция предысказителя (передающего формирующего фильтра); Т2— передаточная функция собственно 178
канала. Минимизируем дисперсию (П.1) оптимальным выбором Ti. Возможны различные варианты оптимизации предысказителя. Приведем некоторые из иих.
Вариант 1. Передаточные функции предысказителя и корректора не связаны между собой. Выбором функции 7\ минимизируем функционал (ПЛ) при ограничениях
1 00 j DiTlda=Bl — const, (П.12)
1 "
—— ( O2j7’i|2d(i)=B2=const, (ПЛЗ)
2я
где Dt, Di, Bi и В^ — заданные функции и константы.
Оптимальная передаточная функция предысказителя
т _ 2ST*iK*PWi—XiDi
‘°- 2(S\TiK^Wi+liDi) *
где Xi и находятся нз условия выполнения ограничений (П.12) и (ПЛЗ).
Вариаит 2. Выбором передаточной функции корректора д минимизируем функционал (ПЛ) при ограничениях (П.2), (П.З) и ограничении
TiK=Q, (П.14)
где Q — заданная функция. Искомые передаточные функции корректора и предысказителя
= —Х»Д*1 Q
° 2(lYWi+hiD2) ’ 10 Ко ’
где Xi и Х2 находятся из условия выполнения ограничений (П.2) и (П.З).
Вариант 3. Выбором 7\ минимизируем функционал (ПЛ) при ограничениях (П.12), (ПЛЗ) и (П.14). Оптимальная передаточная функция Тю удовлетворяет уравнению
2iV|Q|2T10^2
=Л1О*14-2Л2О2Г10.
|Гю|4
Если .01 = 0, 1^2= 1, то
i7\0|2=|Q| 1/
j______________2яВ2
2 j IQli/NDiWida)
Равенство (ПЛЗ) прн O2=S накладывает ограничение на энергию выходного сигнала предысказителя, а при O2=S|T|2— иа энергию выходного сигнала канала.
Вариант 4. Выбором Ti минимизируем функционал (ПЛ) при ограничениях (ПЛЗ), (ПЛ4) и ограничении
1 ? Os
“7“ I ~— d<o=B3=const. (П.15)
2я _?«, |Л|2
Искомая функция удовлетворяет равенству lA'IQI^+XsDs Р/.
|Г‘01 I Wi I ’
где Х2 и Xj находятся нз условия выполнения ограничений (ПЛЗ) и (П.15).
179
Совместная оптимизация предысказителя и корректора. Наиболее полное решение задачи оптимального предыскажения и оптимальной коррекции получается в том случае, когда передаточные функции предысказителя и корректора рассматриваются как две независимые функции, между которыми нет какой-либо связи. Поэтому сформулируем задачу совместной оптимизации предысказителя и корректора в таком виде: выбором независимых функций Tt и К минимизировать функционал (П.1) при ограничениях (П.З) и (П.13). Искомые функции Тю и Ко удовлетворяют равенствам
ITiol^Ba- |Ко|2(АГ+Х2С2), iif i2_ ? f К'2В2 __ V2B2
1 0| ~ Тг \NW2+k2C2) SHM^I2 ’
КоЛо= |Ко| |Ло|,
где Х.2 и К'2 находятся из условия выполнения ограничений (П.З) и (ПЛЗ).
Подстановка в выражение Т\Т2К=ТК. вместо К и Ti найденных функций Ко и Гю (выражения (П.4)—(П.6), (П.8) и др.) дает оптимальную передаточную функцию системы «предысказитель + канал + корректор». Нетрудно видеть, что рта функция существенно отличается от условий неискаженной передачи, приведенных в главе 1. Причина отличий — учет шума и ограничений.
Из вышеизложенного вытекает, что. оптимальная коррекция по существу не отличается от оптимального приема сигналов. Поэтому для решения задач коррекции пригодны те же методы, что и для решения задач приема сигналов [29].
Список литературы
1. Авраменко В. Л., Галямичев Ю. П., Лаииэ А. А. Электрические линии задержки и фазовращатели: Справочник/Под ред. А. Ф. Белецкого. — М.: Связь, 1973. — 107 с.
"2. Панкратов В. П. Фазовые искажения и их компенсация. — М.: Связь, 1974.— 344 с.
5. Добровольский Г. В. Передача импульсов по каналам связи. — М.: Госиздат по вопросам связи и радио, 1960. — 216 с.
4. Сильвииская К. А., Голышко 3. И. Расчет фазовых и амплитудных коррек- . торов: Справочник. — М.: Связь, 1980.— 104 с.
5. Коррекция искажений в трактах и каналах связи/Н. Э. Попова, К. А. Сильвииская, В. Д. Москвитин и др./Под ред. Н. Э. Поповой. — М.: Связь, 1979,— 152 с.
6. Справочник по расчету и проектированию ARC-схем/С. А. Букашкин, В. П. Власов, Б. Ф. Змий и др./Под ред. А. А. Ланнэ. — М.: Радио и связь, 1984. — 368 с.
7. Артым А. А. Электрические корректирующие цепи и усилители. — М.—Л.: Энергия, 1965. — 424 с.
8. Кисель В. А. Дискретизация сигналов и интерференционные помехи. — Одесса: Электротехнический институт связи, Министерство связи СССР, 1983.— 64 с.
9. Зелях Э. В. Метод преобразования уравновешенной цепи в неуравновешенную. — Радиотехника, 1974, т. 29, № 2, с. 85—87.
10. Зелях Э. В., Кисель В. А. Канонические схемы двухполюсных цепей, составленных из двухполюсников двух видов. — Радиотехника, 1965, т. 20, № 7, с. 1—8.
11. Зелях Э. В., Кисель В. А. К теории эквивалентных цепей. — Радиотехника, 1968, т. 23, № 1, с. 65—71.
12. Кисель В. А. Двухполюсники с полуодиородными паразитными параметрами.— Электросвязь, 1976, № 9, с. 61—64.
13. Кисель В. А. Синтез гармонических корректоров для высокоскоростных систем связи. — М.: Связь, 1979. — 252 с.
180
14. Allemandou P. Quadripoles passe-tout dephaseurs. Fonctions de transfert, synthese et realisation. — Cables et Transmission, 1968, vol. 22A, N 2, p. 407— 127.
15. Сигорский В. П., Петренко А. И. Основы теории электронных схем. — Киев: Техника, 1967. — 610 с.
16. Бокер П. Передача данных. Т. 1. — М.: Связь, 1980. — 264 с.
17. Основы инженерной электрофизики. Ч. П/П. А. Иоикин, А. А. Соколов, Ф. Е. Пашуканнс и др./Под ред. П. А. Ионкнна. — М.: Высшая школа, 1972, —636 с.
18. Зелях Э. В. Основы общей теории линейных электрических схем. — М.: Изд. АН СССР, 1951, —336 с.
19. Пенфильд П., Спенс Р., Дюннкер С. Энергетическая теория электрических цепей. — М.: Энергия, 1974.— 152 с.
20. Хейилейн В. Е., Холмс В. X. Активные фильтры для интегральных схем.— М.: Связь, 1980. — 656 с.
21. Kiichiro Watari. Universal Frequency Equalizer SH-9090.—Japan, National Technical Report, 1976, vol. 22, N 4, p. 322—329.
22. Schmidt Hans-Joachim. Ein UniverSalentzerrer theorie und ihre Anuwendung auf verchiedene Entzerrerprinzipien. — NTZ-Report, 1976, vol. 21, p. 1—18.
23. Макаров В. Л., Хлобыстов В. В. Сплайн — аппроксимация функций. — М: Высшая школа, 1983. — 80 с.
24. Голд Б., Райдер Ч. Цифровая обработка сигиалов. — М.: Сов. радио, 1973. — 368 с.
25. Ту Юлиус Т. Цифровые и импульсные системы автоматического управления: Пер. с англ./Под ред. В. В. Солодовникова. — М.: Машиностроение, 1964, —704 с.
26. Цикин И. А. Дискретно-аналоговая обработка сигналов. — М.: Радио и связь, 1982. — 160 с.
27. Капелннн В., Константиннднс А. Дж., Эмилиани П. Цифровые фильтры и их применение. — М.: Эиергоатомнздат, 1983. — 360 с.
28. Цифровые фильтры в электросвязи и радиотехнике/А. В. Брунченко, Ю. Т. Бутыльскин, Л. М. Гольденберг н др.; Под ред. Л. М. Гольденберга. — М.: Радио и связь, 1982. — 224 с.
29. Френке Л. Теория сигналов. — М.: Советское радио, 1974. — 344 с.
Содержание
Стр.
Предисловие ......................................................... 3
1. Общие вопросы корректирования искажений ........ 4
1.1. Искажения в аналоговых системах............................ 4
Условия неискаженной передачи аналоговых сигналов............. 4
Фазовое и групповое время прохождения сигналов .... 5
Задержка заполнения и задержка огибающей...................... 7
Фазовая н групповая скорости распространения волн .... 8
1.2. Искажения в дискретных системах . . 10
Условия неискаженной передачи дискретных сигналов .... 10
Многоканальные системы....................................13
Системы, использующие сигналы парциального кодирования .14
1.3. Оптимальные фазо-частотные характеристики...............15
Минимизация изменения формы сигнала.......................15
Максимизация отношения сигнал/шум.........................16
Минимизация искажений дискретных сигналов.................16
Максимизация отношения сигнал/шум с учетом межсимвольиой интерференции.............................................17
1.4. Оценка и нормирование искажений.........................17
1.5. Корректирование искажений...............................18
Принцип коррекции пассивными и активными схемами ... 18
Совместная и раздельная коррекции амплитудных и фазовых искажений ......................................................19
Распределение искажений в каналах связи.......................21
2. Пассииные корректоры.............................................21
2.1. Фазовые корректоры..........................................21
Корректоры с нулевым затуханием н постоянным входным сопротивлением ....................................................21
Корректоры с ненулевым затуханием и постоянным иходным сопротивлением .................................................26
Вынос четырехполюсника из мостовой схемы. Компенсация влияния потерь в фазовых корректорах..................................28
Мостовые корректоры с минимальным числом частотно-зависимых двухполюсников ...............................................32
Эквивалентные схемы мостовых корректоров.................34
Использование дифференциальных трансформаторов .... 37
2.2. Амплитудные корректоры......................................38
Корректоры с постоянным повторным сопротивлением .... 38
Регулируемые амплитудные корректоры.........................42
2.3. Учет влияния пропорциональных потерь........................47
Цепи типа ZiZ2...........................................47
Учет влияния потерь н паразитных параметров ...... 49
182
Стр.
3. Корректоры и регуляторы тембра на операционных усилителях 53
3.1. Анализ цепей с миогополюсными операционными усилителями . . 53
Типы миогополюсных операционных усилителей.........................53
Уравнения равновесия, матрицы проводимостей и расчет схемных функций цепей с МОУ.............................................55
Усилители со смешанными входными и выходными параметрами 62
Цепи с дифференциальными и недиффереициальиыми операционными усилителями................................................64
Аномальные элементы.............................................68
Зависимые источники.............................................73
Эквивалентные преобразования цепей с операционными усилителями 77
Порядок электронных цепей.......................................80
Обобщенная теорема квазимощности цепи...........................82
Учет параметров реальных усилителей.............................85
Проверка регулярности соединений четырехполюсников . • . . 90
3.2. Простейшие амплитудно-фазовые корректоры......................91
Корректоры с одним операционным усилителем......................91
. Корректоры с двумя операционными усилителями....................97
Использование имитаторов элементов ............................... 98
3.3. Амплитудно-частотные корректоры и регуляторы тембра с симметричными характеристиками затухания...............................101
Обобщенные модели регулируемых активных цепей со взаимооб-ратиыми передаточными функциями...................................101
Звенья активных резонансных корректоров...........................105
Миогочастотные локальные корректоры . 109
Моделирование характеристик с фиксированной точкой вращения 113
4. Активные комбинированные корректоры.................................1'13
4.1. Транзисторные фазовые корректоры................................113
4.2. Гираторные корректоры...........................................116
4.3. Фазовые корректоры с отрицательными резисторами . . 118
4.4. Корректоры на основе сумматоров.................................118
4.5. Использование фазоинверсных каскадов............................125
4.6. Активная реализация корректоров Боде............................129
4.7. Локальные корректоры параллельного типа.........................131
Общие структуры корректоров.......................................131
Пассивные и комбинированные корректоры............................132
Активные локальные /?С-корректоры . . 134
Улучшение локальных свойств резонансных корректоров . . 137
Симметрирование характеристик затухания...........................138
Регулируемые амплитудные корректоры с неизменными фазовыми характеристиками..................................................143
Описание свойств локальных корректоров иа основе теории сплайн-приближений.......................................................144
4.8. Полиномные корректоры...........................................147
Гармонические корректоры..........................................147
Корректоры Чебышева.............................................. 149
Корректоры на фазовых контурах....................................150
Сравнение локальных корректоров с гармоническими .... 151
Компенсаторы переходных помех.....................................152
£. Цифровые н дискретно-аналоговые корректоры............................153
5.1. Переход от аналоговых к цифровым корректорам....................153
Общие положения...................................................153
Стандартное Z-преобразоваиие (принцип инвариантности импульсной реакции) . 153
Согласованное (прямое) Z-преобразоваиие...........................155
Билинейное Z-преобразоваиие ..................................... 156
Способы отображения операторов дифференцирования н ните-
183
Стр. грироваиия.................................................157
5.2. Звенья рекурсивных цифровых корректоров................. 159
Фазовые корректоры.........................................159
Локальные амплитудные корректоры.................... . . 163
5.3. Широкополосные корректоры................................166
Резонансные корректоры.....................................166
Интерполяция комплексных передаточных функций..............168
Дискретное преобразование Фурье............................174
Приложение. Коррекция случайных сигналов..........................176
Список литературы.................................................181
ВИТАЛИЙ АНДРЕЕВИЧ КИСЕЛЬ АНАЛОГОВЫЕ И ЦИФРОВЫЕ КОРРЕКТОРЫ
Заведующий редакцией В. И. Вяльцев Редактор В. К. Старикова Художник А. А. Соломатин Художественный редактор Р. А. Клочков Технический редактор Г. 3. Кузнецова Корректор И. Г. Зыкова ИБ № 1036
Сдано в набор 06.06.85 Подписано «в печать 11.10.85
Т-20218 Формат 60x90/i6 Бумага кн.-журн. № 2 Гарнитура литературная
Печать высокая Усл. печ. л. 11,5 Усл. кр.-отт. 11,75 Уч.-нзд. л. 13,6 Тираж 15 000 экз.
Изд. № 20934 Зак. Xs 66 Цена 70 к.
Издательство «Радио и связь». 101000 Москва, Почтамт, а/я 693
Московская типография № 5 ВГО «Союзучетиздат:
101000 Москва, ул. Кирова, д. 40