/























































































Text
А. В. СУЗДАЛЕВ
СЕТИ
ПЕРЕДАЧИ
ИНФОРМАЦИИ АСУ
Е
МОСКВА «РАДИО И СВЯЗЬ» 1983
ББК 32.88
С89
УДК 621.39:681.3
Суз дал ев А. В.
С89 Сети передачи информации АСУ. — М.: Радио й
связь, 1983. — 152 с., ил.
56 к.
Излагаются вопросы построения, функционирования и системного
проектирования сетей передачи информации АСУ. Рассматриваются задачи
программного и математического обеспечения сетей, а также методы и
алгоритмы технико-экономической оптимизации параметров. Приводимые
в книге методы иллюстрируются практическими расчетами.
Для инженерно-технических работников, занимающихся проектирова¬
нием и вводом в эксплуатацию сетей передачи данных. Может быть по¬
лезна аспирантам, а также студентам старших курсов, специализирую¬
щимся в области передачи данных и системного проектирования сетей
связи.
2402040000—061
С 137—83
046(01)—83
РЕЦЕНЗЕНТ В. А. БОГАТЫРЕВ
Редакция литературы по электросвязи
Александр Всеволодович Суздалев
СЕТИ ПЕРЕДАЧИ ИНФОРМАЦИИ АСУ
Ответственный редактор В. И. Васильев
Редактор Е. В. Комарова
Художник И. Д. Жиров
Художественный редактор Р. А. Клочков
Технический редактор Г. И. Колосова
Корректор Т. Г. Захарова
ИБ № 380
Сдано в набор 3.12.82. Подписано в печать 3.03.83.'
Т-05167 Формат 60Х90/)6 Бумага кн.-журн. Гарнитура литературная
Печать высокая Уел. печ. л. 9,5 Уел. кр.-отт. 10,0 Уч.-изд. л. 10,40
Тираж 5000 экз. Изд. № 20193 Зак. № 157 Цена 55 к.
Издательство «Радио и связь». 101000 Москва, Главпочтамт, а/я 693
Типография издательства «Радио и связь» Госкомиздата СССР
101000 Москва, ул. Кирова, д. '10
© Издательство «Радио и связь», 1983
ББК 32.88
6Ф1
ПРЕДИСЛОВИЕ
Автоматизация управления во всех отраслях народного хозяй¬
ства, науки, техники и военного дела на базе использования вы¬
числительных машин стимулирует интенсивные работы в области
теории и техники передачи информации. Особую актуальность на
нынешнем этапе приобретают вопросы, образующие относительно
новую сетевую тематику. Это обусловлено тем, что наряду с про¬
должением работ по созданию Общегосударственной сети переда¬
чи данных (ОГСПД) возник и внедряется целый ряд ло.кальных
и ведомственных сетей, к вопросам проектирования и эксплуата¬
ции которых привлечен большой отряд специалистов по связи и
вычислительной технике.
В последние годы вышел ряд <книг советских и иностранных
авторов, посвященных анализу, синтезу, математическому обеспе¬
чению и архитектуре сетей передачи данных. Однако большинство
из них носит либо сугубо теоретический характер и ориентировано
на сравнительно узкий круг аспирантов и научных сотрудников,
либо базируется на зарубежный опыт и не в полной мере отражает
проблемы и тенденции в реальных путях развития сетей передачи
данных у нас в стране.
Настоящая книга предназначена для широкого круга специа¬
листов, занимающихся вопросами проектирования, внедрения и
эксплуатации сетей передачи данных автоматизированных систем
управления (АСУ), но не всегда имеющих подготовку по специ¬
фическим сетевым вопросам. Кроме того, она может оказаться по¬
лезной для студентов и в определенной части для аспирантов и
научных сотрудников соответствующих специальностей.
Многие положения, излагаемые в книге, являются общими для
сетей передачи данных, телеграфных и телефонных сетей. Поэтому
в заглавии книги используется обобщенное понятие «сети переда¬
чи информации». При рассмотрении вопросов, относящихся исклю¬
чительно -к сетям передачи данных, используется соответствующая
терминология.
Содержание книги охватывает вопросы построения, математи¬
ческого обеспечения и проектирования сетей передачи информации
АСУ. Учитывая ее весьма ограниченный объем, автор не преследо-
1К1Л цели полного изложения всего комплекса сетевых проблем.
Достаточно глубоко и всесторонне рассмотрены только проблемы,
наиболее важные с точки зрения автора или недостаточно осве¬
щенные в литературе. К таким проблемам отнесено математиче-
3
скос обеспечение маршрутизации и управления потоками сообще¬
ний, а также оптимизация топологии, производительности и надеж¬
ности сети. В то же время, учитывая общую ориентацию -книги, в.;
ней приводится минимум сведений по большинству вопросов, вхо¬
дящих в сетевую тематику.
Для понимания содержания книги необходима начальная под¬
готовка по классической теории вероятностей, массовому обслу¬
живанию, линейной алгебре и нелинейному математическому про¬
граммированию. Кроме того, желательно, чтобы читатель имел
представление об основных понятиях в области передачи данных.
Автор выражает благодарность ответственному редактору док¬
тору техн. наук профессору В. И. Васильеву и рецензентам док¬
торам техн. наук Ю. М. Мартынову и В. А. Богатыреву за замечания
и пожелания, способствовавшие существенному улучшению руко¬
писи как по структуре, так и по содержанию. Автор признателен
доктору военных наук профессору В. П. Давыденко и доктору
техн. наук профессору Н. Б. Зелигеру за поддержку на начальном
этапе работы.
Глава 1
ОБЩАЯ ХАРАКТЕРИСТИКА
СЕТЕЙ ПЕРЕДАЧИ ИНФОРМАЦИИ АСУ
1.1. СЕТЬ СВЯЗИ КАК ПОДСИСТЕМА СИСТЕМЫ УПРАВЛЕНИЯ
Информация и управление
В широком смысле информацией является отражение одного
объекта другим. Поэтому для существования информации необ¬
ходимо наличие объекта, состояние -которого отражается, отра¬
жающего объекта и условий, обеспечивающих прохождение процес¬
са отражения. Если отражающему объекту предоставлена возмож¬
ность целенаправленно воздействовать на состояние отражаемого
объекта, то имеет место управление.
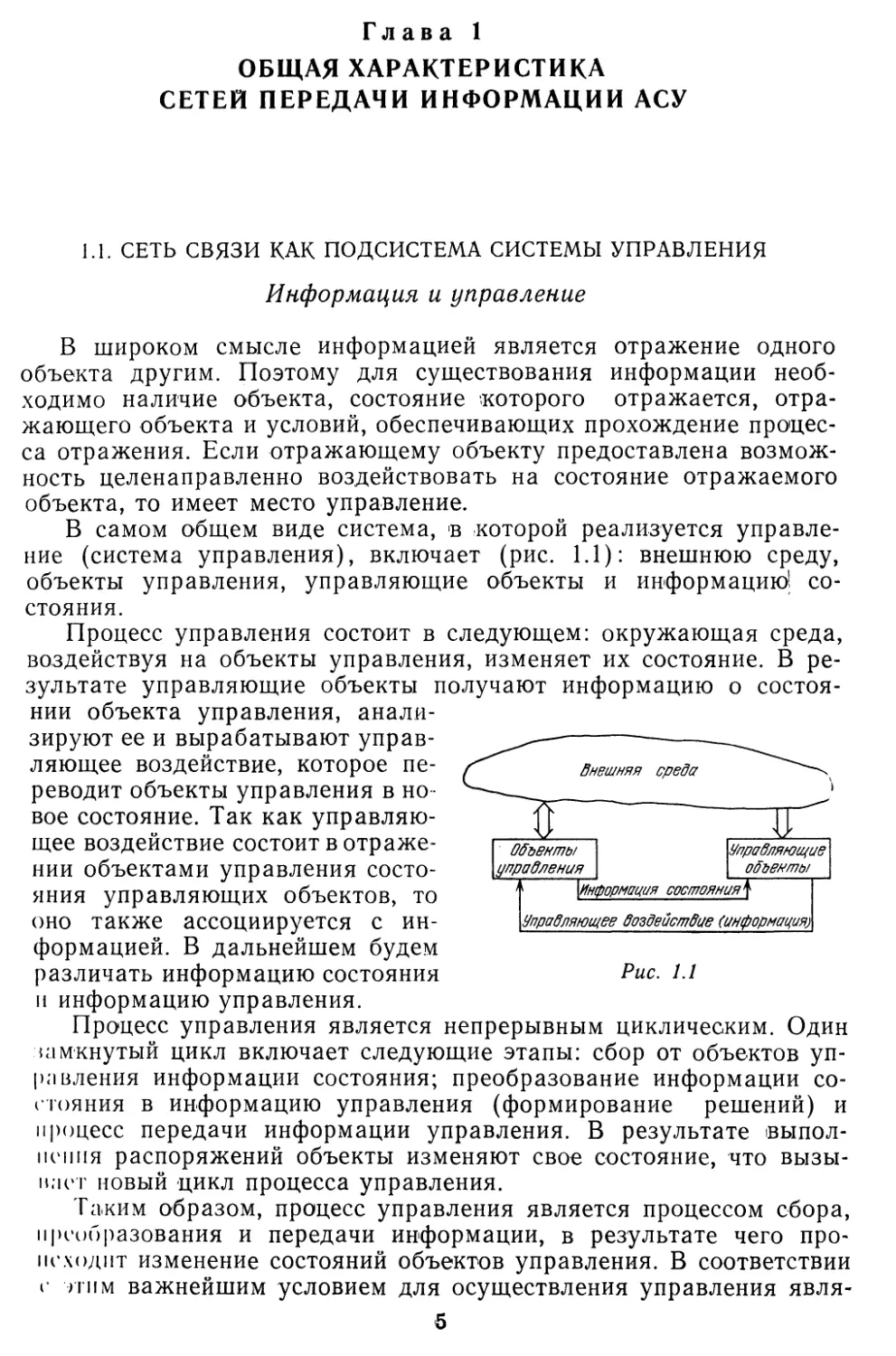
В самом общем виде система, в которой реализуется управле¬
ние (система управления), включает (рис. 1.1): внешнюю среду,
объекты управления, управляющие объекты и информацию! со¬
стояния.
Процесс управления состоит в следующем: окружающая среда,
воздействуя на объекты управления, изменяет их состояние. В ре¬
зультате управляющие объекты получают информацию о состоя¬
нии объекта управления, анали¬
зируют ее и вырабатывают управ¬
ляющее воздействие, которое пе¬
реводит объекты управления в но¬
вое состояние. Так как управляю¬
щее воздействие состоит в отраже¬
нии объектами управления состо¬
яния управляющих объектов, то
оно также ассоциируется с ин¬
формацией. В дальнейшем будем
различать информацию состояния
и информацию управления.
Процесс управления является непрерывным циклическим. Один
замкнутый цикл включает следующие этапы: сбор от объектов уп¬
равления информации состояния; преобразование информации со¬
стояния в информацию управления (формирование решений) и
процесс передачи информации управления. В результате выпол¬
нения распоряжений объекты изменяют свое состояние, что вызы-
и;кт новый цикл процесса управления.
Таким образом, процесс управления является процессом сбора,
преобразования и передачи информации, в результате чего про¬
исходит изменение состояний объектов управления. В соответствии
г чтим важнейшим условием для осуществления управления явля-
б
Внешняя среда
ж
ЗЕ
Объенты
Управляющие
управления
объекты
wlфор нация состояния\
управляющее воздействие (информация)
Рис. 1.1
ется обеспечение обмена информацией между объектами системы
управления, которые, как правило, находятся на значительном уда¬
лении друг от друга.
Количество информации
и неопределенность объекта управления
Количество информации, содержащейся в сведениях о том,
что некоторый объект управления находится в i-u состоянии,
Л = — log л. (1.1)
где pi — вероятность нахождения объекта в i-м состоянии.
Данная формула имеет наглядный физический смысл: чем
меньше априорная (до поступления сведений) вероятность состоя¬
ния, т. е. чем оно неожиданнее, тем больше информации содержит¬
ся в сведениях о том, что оно наступило.
Математическое ожидание количества информации на одно
состояние называется энтропией:
н=—'Я Pi \0g Pi. (1.2)
i
Энтропия является мерой неопределенности объекта управления.
В идеальном случае, когда, во-первых, сведения от объектов уп¬
равления содержат полную информацию о его состоянии и, во-
вторых, информация не теряется в процессе передачи, при полу¬
чении сведений управляющий объект определяет некоторое состоя¬
ние объекта управления с апостериорной вероятностью р\= 1. Так
как 2p'i= 1, то p'i=^h- Отсюда Н' = 0, т. е. неопределенность объ-
i
екта управления устраняется.
В реальных условиях сведения от объектов управления могут
не полностью описывать его состояние, а часть сведений может
быть потеряна в процессе передачи, т. е. р\ф0, г = 1, 2, ... Таким
образом, передача сведений в практических случаях не полностью
устраняет неопределенность объекта управления.
Количественно остаточная мера неопределенности объекта уп¬
равления после получения от него сведений характеризуется услов¬
ной энтропией, которая определяется вероятностью p(i/j) того, что
управляющий объект получит сведения о нахождении объекта
управления в состоянии i, в то время как он находится в состоя¬
нии
Усредненная по всем возможным состояниям объекта управле¬
ния условная энтропия (назовем ее остаточной энтропией)
#ост= — 2 рШ logp(i/j). (1.3)
i Mi-
Таким образом, остаточная энтропия характеризует потери
информации в процессе составления сведений об объекте управле¬
ния и их передачи.
6
Требования системы управления к процессу передачи информации
Информация от объектов управления на управляющие объек¬
ты поступает не непрерывно, а в некоторые, в общем случайные,
моменты времени в виде законченных массивов — сообщений.
Поэтому неопределенность объектов управления изменяется во
времени. Выработка на управляющих объектах корректной инфор¬
мации управления, которая обеспечивает успешное функциониро¬
вание системы управления, возможна только до некоторого уров¬
ня неопределенности. При превышении этого уровня может про¬
изойти срыв процесса управления, так как управляющая инфор¬
мация перестает соответствовать состоянию объекта управления.
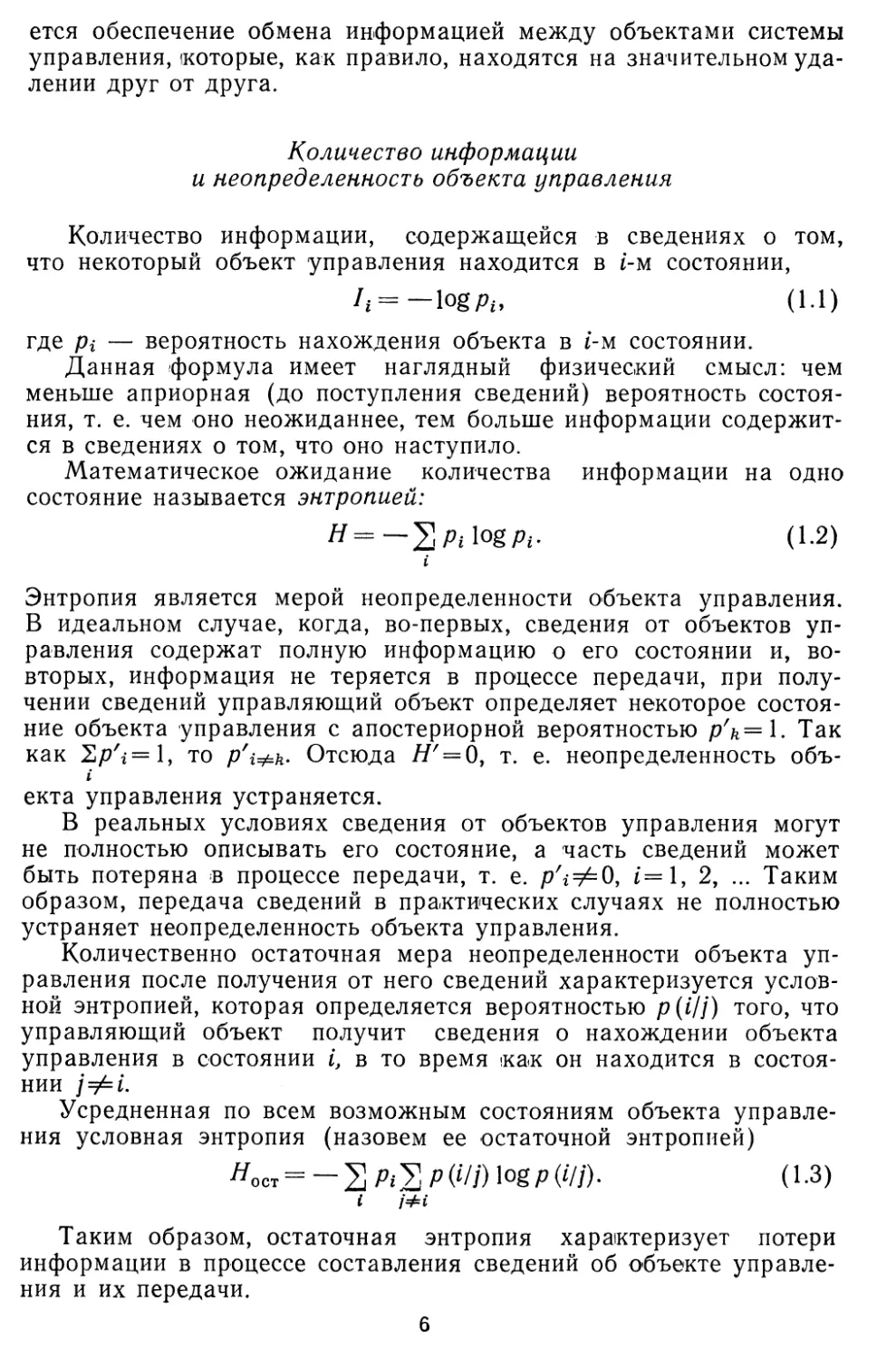
Рассмотрим диаграмму (рис. 1.2), иллюстрирующую измене¬
ние во времени энтропии объекта управления, т. е. неопределен¬
ность его состояния для управляю¬
щего объекта системы управле-
ния. На диаграмме: Ятах — мак-
симальная энтропия, соответству- //доп
ющая случаю, когда вероятности
всех возможных состояний объек¬
та управления равны (максималь- f/0CT(tz)
ная неопределенность); Ядоп — ^(Ь)
максимально допустимое значе-
ние энтропии, соответствующее
максимально допустимой неопре- Рис. 1.2
деленности, при которой еще воз¬
можна выработка обоснованной информации управления; —
моменты обновления информации состояния объектов; Яост(^г) —
остаточная энтропия в момент окончания процесса обновления ин¬
формации состояния объектов ti\ Дт — промежуток времени, в те¬
чение которого отсутствует управление (интервал срыва управ¬
ления) .
Из диаграммы видно, что условием существования процесса
управления является выполнение неравенства #(/)<//доп. Вели¬
чина Н(t) определяется соотношением Н(/) =HOCT(ti) + h(t—/*),
где h(t) — функция, характеризующая процесс изменения энтро¬
пии в промежутках между моментами обновления информации.
Таким образом, условием существования процесса управления
для произвольного момента будет
//ост (tJ + hit-tiXH^.
Из приведенного неравенства вытекают два основных требова¬
ния к обмену информацией в системе управления:
требования к надежности и верности передачи, определяющие
остаточную неопределенность после приема информации Яост;
требования к допустимой задержке сообщений, определяющие
допустимые интервалы обновления информации о состоянии объ¬
ектов управления Дt = ti—U-\.
Вообще говоря, между этими требованиями существует взаимо¬
связь. Действительно, из диаграммы видно, что при увеличении
7
Ност, т. е. при снижении верности и надежности, процесс управле¬
ния можно сохранить, если уменьшить сроки доставки инфор¬
мации.
Для обеспечения процесса передачи информации создается си¬
стема передачи информации или система связи, в которой долж¬
ны выполняться все требования, предъявляемые к процессу пере¬
дачи.
Информация, передаваемая в системе управления, неоднородна
по своему содержанию и может быть разбита по категориям, каж¬
дая из которых характеризуется некоторым уровнем требований к
процессу передачи. Категории могут различаться по важности
информации и срочности. В первом случае они называются кате¬
гориями важности. К процессу передачи информации этих кате¬
горий предъявляются различные требования по надежности до¬
ставки. Во втором случае различают категории срочности, требо¬
вания к которым отличаются по допустимой задержке.
Задание конкретных количественных требований по передаче
различных категорий информации при строгой постановке задачи
является чрезвычайно сложным, что объясняется необходимостью
построения обобщенного критерия эффективности системы управ¬
ления, учитывающего влияние потерь и искажений сообщений раз¬
личных категорий в процессе передачи. На практике в каждом
конкретном случае требования задаются на основе анализа харак¬
тера взаимодействия источников и потребителей информации
(пользователей), в процессе которого производится обмен. При
этом необходимо учитывать, что завышение требований к системе
приводит к значительным дополнительным затратам.
Рассмотрим основные предпосылки, которые' могут быть ис¬
пользованы при задании требований к процессу передачи сообще¬
ний различных категорий.
Сообщения оповещения и телеметрическая информация. Эти
категории могут быть объединены в силу общего алгоритма вза¬
имодействия объектов системы управления, который состоит в
следующем.
Датчики информации объектов управления, осуществляя конт¬
роль некоторых параметров системы, оповещают управляющий
объект о возможном изменении ее состояния (в системах оповеще¬
ния о возможной «катастрофе»). Управляющий объект на основе
этой информации принимает решение и оповещает исполнительные
объекты. Между моментом срабатывания датчика и моментом
возможного изменения состояния системы, как правило, имеется
некоторый интервал времени АТ. Тогда задержка информации
оповещения в процессе передачи не должна превышать
TRon=(AT-tp-ta)/2,
где 1Р и /и — время, необходимое соответственно для принятия ре¬
шения и исполнения команды.
8
В настоящее время для систем оповещения, в которых объем
передаваемой информации достигает нескольких десятков бит,
время Тдоп выбирается от 0,1 до 10 с [20].
Ошибки в сообщении оповещения приводят -к его невосприя¬
тию и, следовательно, к возможной «катастрофе». Исходя из это¬
го допустимая вероятность ошибки в процессе передачи должна
выбираться таким образом, чтобы не оказывать существенного
влияния на общую вероятность возникновения «катастрофы». Тре¬
бования к надежности доставки сообщений оповещения могут за¬
даваться из таких же соображений.
Под «катастрофой» обычно понимается событие практически
недопустимое, поэтому достоверность и надежность доставки
должны обеспечивать практическую невозможность ошибочного
приема или пропадания информации оповещения. Понятие прак¬
тической невозможности определяется в зависимости от области
использования. Так, если задать, что система должна обеспечи¬
вать вероятность ошибки 10-15, то для проверки выполнения этого
требования необходимо осуществлять в течение нескольких десят¬
ков тысяч лет передачи с частотой 1 сообщение/с. Такой экспери¬
мент нереализуем практически.
Если задаться величиной вероятности 10~9, то испытания дол¬
жны проводиться в течение приблизительно одного года, что
является реальным сроком. Исходя из этого значения допустимой
вероятности ошибки и потери сообщений оповещения в большин¬
стве случаев выбираются в пределах 10-9—10~10.
Требования к допустимой задержке телеметрической информа¬
ции задаются так же, как в системах оповещения. Величина АТ в
данном случае определяется частотным спектром измеряемого
процесса. Допустимые значения вероятностей ошибки и потери
сообщения могут быть различными. Обычно более жесткими яв¬
ляются требования к достоверности передачи. Это объясняется
тем, что при пропадании какого-либо из отсчетов измеряемого
процесса последствия могут быть сглажены за счет информации
соседних отсчетов. При появлении ошибки возможны резкий вы¬
брос отсчета и значительные изменения в действиях управляюще¬
го элемента.
Опыт эксплуатации ряда телеметрических систем в автомати¬
зированных системах управления технологическими процессами
показывает, что граничные значения вероятностей потери и ошиб¬
ки следует выбирать равными 10~3 и 10-5 соответственно. В неко¬
торых, например радиолокационных, системах эти требования
должны быть более жесткими, что объясняется интенсивностью
контролируемых процессов и важностью задач, решаемых такими
системами.
Диалоговая и справочная информация. Диалоговая информация
передается между двумя объектами (оператор -— оператор, опе¬
ратор — ЭВМ) и включает запросы и ответы объемом от несколь¬
ких десятков до нескольких сотен бит.
9
Известно, что устный телефонный диалог теряет беглость, если
задержка сигнала превышает 0,3 с. Если диалог организуется
обменом текстов, то беглость утрачивается ввиду необходимости
не только обдумывания, но и подготовки запросов и ответов.
Исходя из этого беглость диалога в данном случае ие может счи¬
таться критерием для задания требований к задержке инфор¬
мации.
С диалоговыми режимами связано понятие времени ответа —
интервала от момента выдачи запроса до момента получения от¬
вета. Дело в том, что данный режим обмена организуется в про¬
цессе решения оператором задач, требующих неоднократного об¬
ращения к удаленному объекту (оператору или ЭВМ). Решаемые
при этом задачи целесообразно различать в зависимости от интен¬
сивности обращения. Если процесс решения состоит из непрерыв¬
ных циклов «запрос — ответ — корректировка», то время ответа
должно выбираться таким образом, чтобы не нарушать хода ум¬
ственной деятельности оператора. При этом верхней границей эф¬
фективности обратной связи является время 2 с (20].
В случае, когда задача распадается на ряд относительно не¬
зависимых этапов, а диалог организуется циклами «подготовка
данных для /-го этапа — запрос решения по i-му этапу — подго¬
товка данных для (i + 1)-го этапа — внесение результатов i-го
этапа», оператор может прервать ход рассуждений и дождаться
результатов по очередному этапу. При этом время ответа огра¬
ничивается временем, отводимым для решения задачи, и может
выбираться в достаточно широких пределах. Желательно, чтобы
оно совпадало со временем подготовки очередного этапа.
При выборе допустимых значений вероятности потери сообще¬
ния следует исходить из того, что в процессе диалога передача
информации находится под контролем оператора. Задержка отве¬
та больше определенных пределов может быть воспринята как по¬
теря информации, что позволяет оператору возобновить цикл.
Исходя из этого диалоговые системы не предъявляют жестких
требований к надежности доставки сообщений. Так, вероятность
потери информации, равная 10_3, соответствует в среднем повто¬
рению одного из 1000 циклов, что составляет несколько десятков
часов непрерывной работы оператора в диалоговом режиме.
Значительно большую опасность для диалоговых систем пред¬
ставляют ошибки в информации. Это обусловлено их кумулятив¬
ным влиянием на результаты решения. При той же вероятности
10_3 и в среднем 20 циклах, требующихся на решение одной зада¬
чи, ошибочные результаты будут получены в 4% задач. При ве¬
роятности ошибки 10-5 неправильные результаты следует ожидать
в 0,004% случаев, что допустимо для большинства практических
систем -широкого назначения.
Справочная информация может запрашиваться в процессе ре¬
шения задачи на одном из циклов вместо решения. При этом ее
объем и требования к системе передачи аналогичны объему и тре¬
бованиям, приведенным для диалоговой информации. В специаль¬
но
ном случае запрос справочной информации представляет собой
самостоятельную операцию и связан с передачей, как правило,
значительных объемов информации (до сотен тысяч бит), вклю¬
чающей набор сведений или числовых значений.
Справочная информация обычно запрашивается для относи¬
тельно длительного использования и требует определенного вре¬
мени на осмысливание. Например, для более или менее подробного
просмотра таблицы чисел или набора сведений объемом 104 бит
необходимо время порядка 10 мин. Очевидно, что задержка дан¬
ной информации на время порядка 3 мин не окажет существенного
влияния на эффективность работы оператора.
Выбор допустимых вероятностей ошибки и потерь знаков ин¬
формации должен основываться на анализе содержания справоч¬
ной информации. Если передаются таблицы чисел, то предпочти¬
тельнее потеря значений, а не ошибочная их выдача.
Большинство систем широкого использования вполне успешно
функционирует при вероятности одного из этих событий порядка
10-6. Достаточно отметить, что содержание всей данной книги
может быть передано не более чем с десятью ошибками или про¬
пусками. С точки зрения пропадания всего запрашиваемого мас¬
сива к надежности доставки не предъявляются высокие требова¬
ния в силу наличия контроля со стороны оператора, .как и в диало¬
говых системах.
При передаче смысловой справочной информации требования
к ее надежности и достоверности задаются идентичными. Для то¬
го чтобы сохранить читаемость текста, обычно достаточно обеспе¬
чить значения вероятностей потери и ошибки порядка 10_3, одна¬
ко наличие в тексте чисел существенно ужесточает требования, как
и в случае передачи таблиц.
Общие донесения и распоряжения. Под общими донесениями и
распоряжениями будем понимать смысловую информацию, кото¬
рая передается между людьми при решении в системе управления
задач, не подлежащих автоматизации. Такие задачи связаны с
циклами управления, в которых решение задачи в управляющем
объекте или выполнение команды (распоряжения) требует значи¬
тельного времени (часы, сутки). Поэтому допустимая задержка
сообщений указанного рода может составлять от десятков минут
до нескольких часов при объеме 103—105 бит.
Допустимые значения вероятностей потери сообщения и ошиб¬
ки, как правило, одинаковы и выбираются в зависимости от роли
одиночного объекта управления. Естественно, что для распоряже¬
ний, предназначенных ряду объектов, эти значения должны быть
выше.
В настоящее время имеется достаточно большой опыт в работе
систем передачи такого рода информации, обеспечивающих впол¬
не приемлемое качество функционирования систем управления при
вероятностях потери или ошибки 10-5.
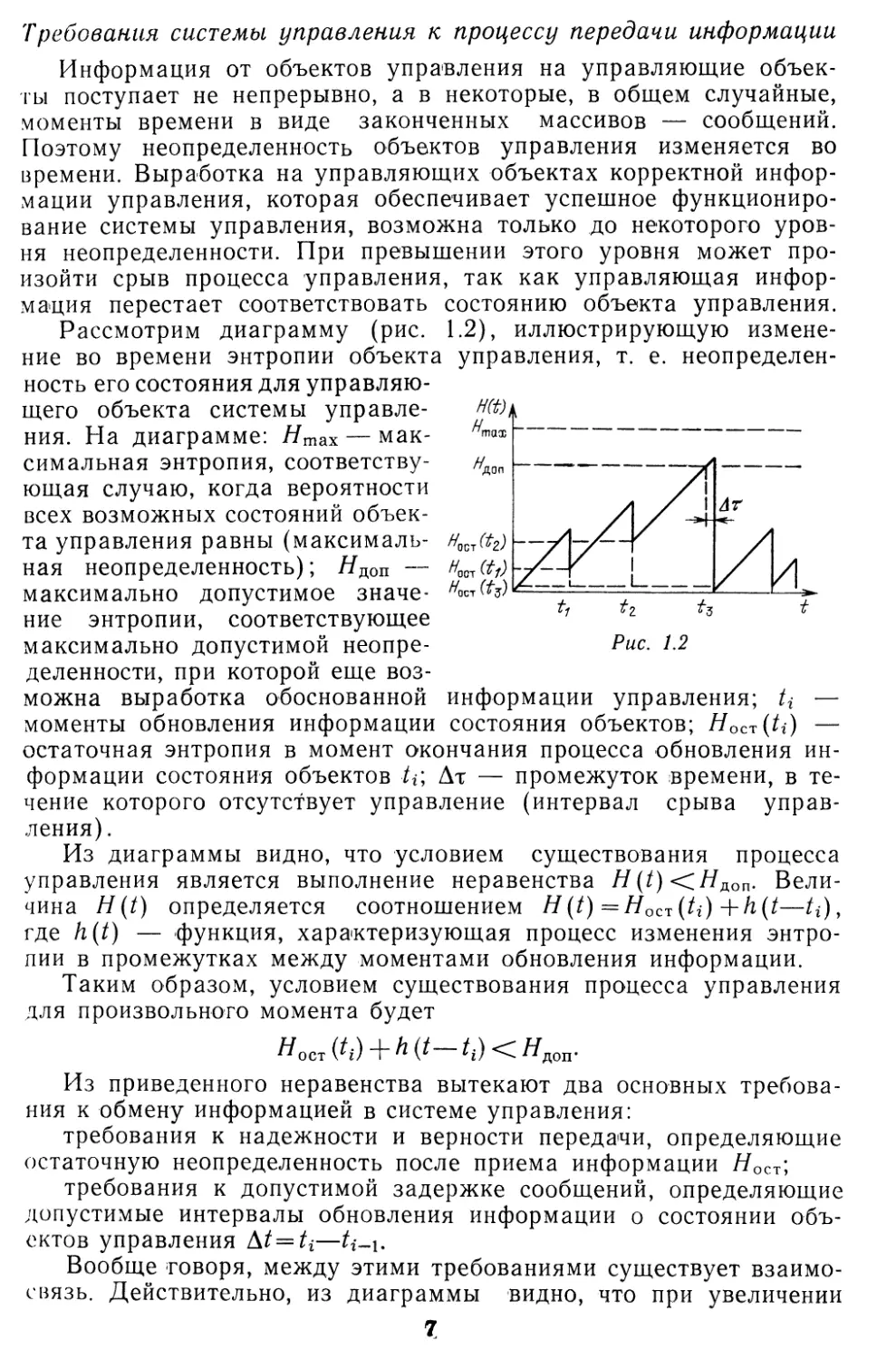
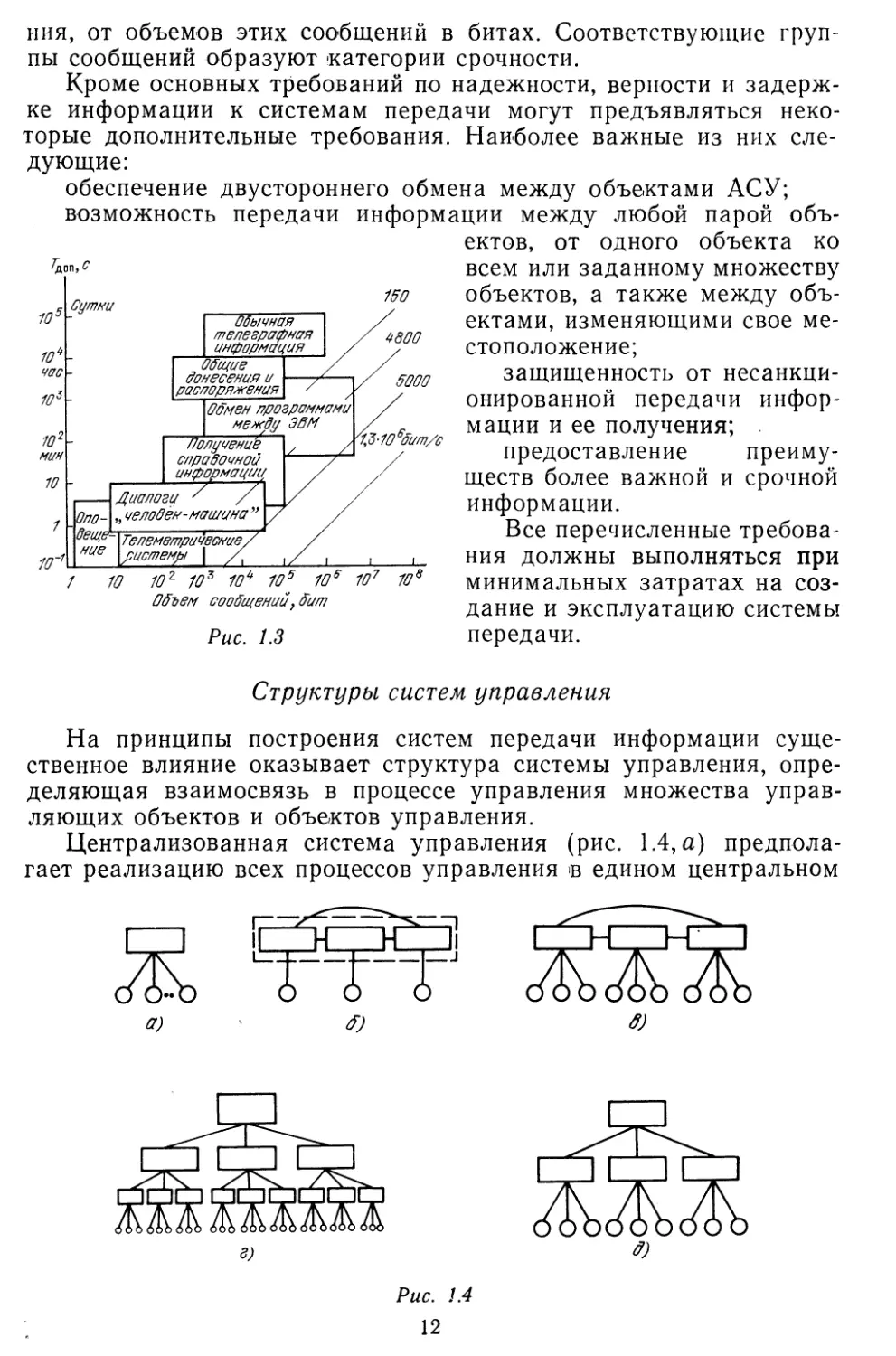
На рис. 1.3 приведены ориентировочные графики зависимости
допустимой задержки информации, содержащей различные сведе¬
111
ния, от объемов этих сообщений в битах. Соответствующие груп¬
пы сообщений образуют категории срочности.
Кроме основных требований по надежности, верности и задерж¬
ке информации к системам передачи могут предъявляться неко¬
торые дополнительные требования. Наиболее важные из них сле¬
дующие:
обеспечение двустороннего обмена между объектами АСУ;
возможность передачи информации между любой парой объ¬
ектов, от одного объекта ко
всем или заданному множеству
объектов, а также между объ¬
ектами, изменяющими свое ме¬
стоположение;
защищенность от несанкци¬
онированной передачи инфор¬
мации и ее получения;
предоставление преиму¬
ществ более важной и срочной
информации.
Все перечисленные требова¬
ния должны выполняться при
минимальных затратах на соз-
объем сообщении,вит дание и эксплуатацию системы
Рис. 1.3 передачи.
woo
1$'10 ffum/c
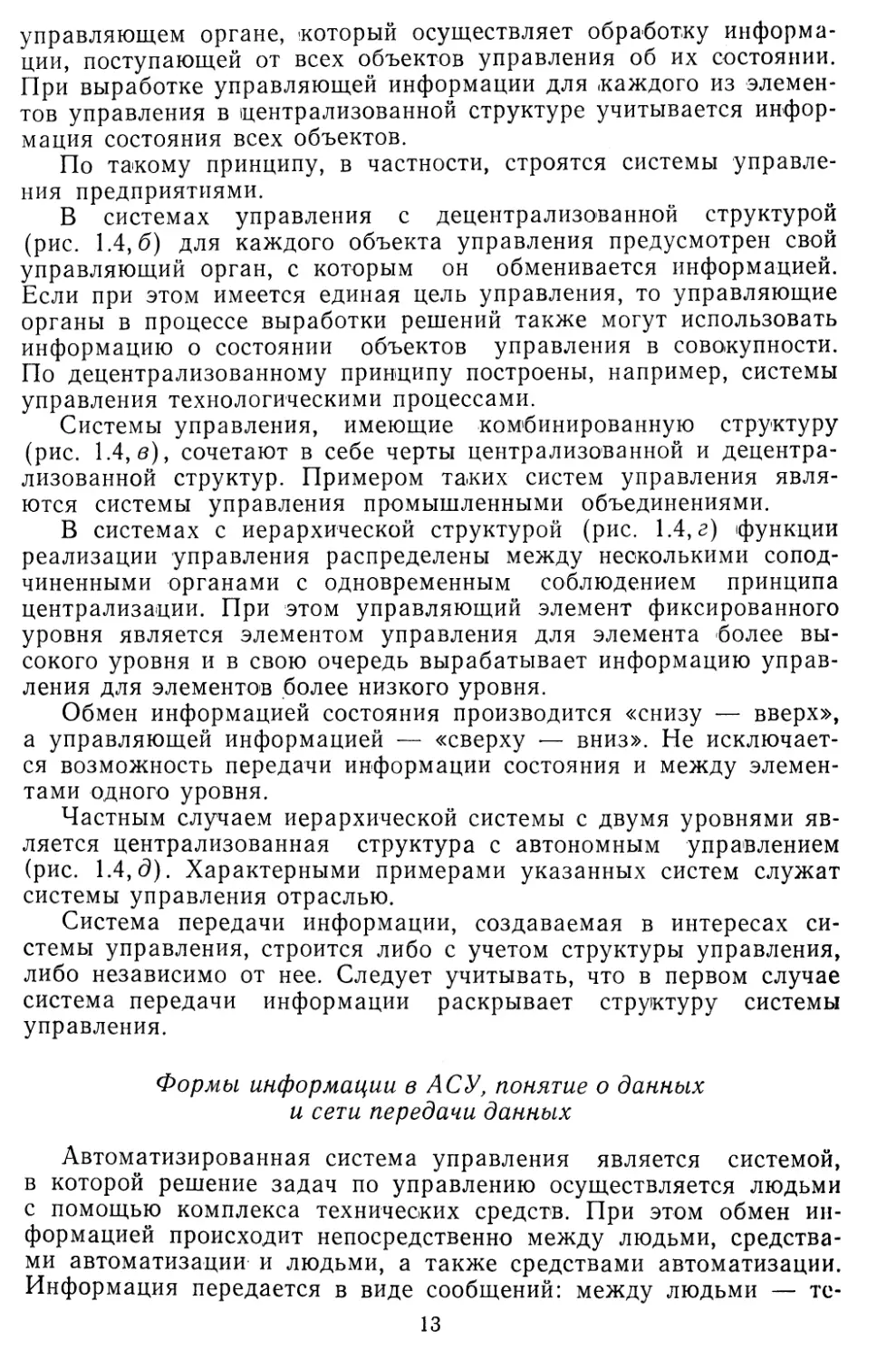
Структуры систем управления
На принципы построения систем передачи информации суще¬
ственное влияние оказывает структура системы управления, опре¬
деляющая взаимосвязь в процессе управления множества управ¬
ляющих объектов и объектов управления.
Централизованная система управления (рис. 1.4, а) предпола¬
гает реализацию всех процессов управления в едином центральном
<£
о)
б)
ГрСрСГ]
жЖж
Рис. 1.4
12
управляющем органе, который осуществляет обработку информа¬
ции, поступающей от всех объектов управления об их состоянии.
При выработке управляющей информации для .каждого из элемен¬
тов управления в централизованной структуре учитывается инфор¬
мация состояния всех объектов.
По такому принципу, в частности, строятся системы управле¬
ния предприятиями.
В системах управления с децентрализованной структурой
(рис. 1.4,6) для каждого объекта управления предусмотрен свой
управляющий орган, с которым он обменивается информацией.
Если при этом имеется единая цель управления, то управляющие
органы в процессе выработки решений также могут использовать
информацию о состоянии объектов управления в совокупности.
По децентрализованному принципу построены, например, системы
управления технологическими процессами.
Системы управления, имеющие комбинированную структуру
(рис. 1.4, б), сочетают в себе черты централизованной и децентра¬
лизованной структур. Примером таких систем управления явля¬
ются системы управления промышленными объединениями.
В системах с иерархической структурой (рис. 1.4, г) функции
реализации управления распределены между несколькими сопод¬
чиненными органами с одновременным соблюдением принципа
централизации. При этом управляющий элемент фиксированного
уровня является элементом управления для элемента более вы¬
сокого уровня и в свою очередь вырабатывает информацию управ¬
ления для элементов более низкого уровня.
Обмен информацией состояния производится «снизу — вверх»,
а управляющей информацией — «сверху ■— вниз». Не исключает¬
ся возможность передачи информации состояния и между элемен¬
тами одного уровня.
Частным случаем иерархической системы с двумя уровнями яв¬
ляется централизованная структура с автономным управлением
(рис. 1.4, д). Характерными примерами указанных систем служат
системы управления отраслью.
Система передачи информации, создаваемая в интересах си¬
стемы управления, строится либо с учетом структуры управления,
либо независимо от нее. Следует учитывать, что в первом случае
система передачи информации раскрывает структуру системы
управления.
Формы информации в АСУ, понятие о данных
и сети передачи данных
Автоматизированная система управления является системой,
в которой решение задач по управлению осуществляется людьми
с помощью комплекса технических средств. При этом обмен ин¬
формацией происходит непосредственно между людьми, средства¬
ми автоматизации и людьми, а также средствами автоматизации.
Информация передается в виде сообщений: между людьми — те¬
13
лефонных и телеграфных, между техническими устройствами, а
также между техническими устройствами и человеком — в виде
сообщений данных. Как правило, сообщение данных — это фор¬
мализованная информация, закодированная по определенным пра¬
вилам с целью обеспечения возможности ее обработки техниче¬
скими средствами.
Данные не предназначены непосредственно для человека как
получателя информации. Осмысливание данных человеком может
происходить только после их соответствующей обработки и пред¬
ставления в форме, удобной для их окончательного использования.
Важной особенностью данных является то, что сообщения данных
не имеют внутренней избыточности, в отличие, например, от теле¬
фонных и телеграфных сообщений.
На рис. 1.5 изображен принцип взаимодействия людей и уст¬
ройств автоматизации в процессе управления на основе использо¬
вания различных видов связи.
Рис. 1.5
При телефонной связи происходит обмен информацией между
людьми, причем этот процесс приближен к личному общению. Те¬
леграфная связь также обеспечивает обмен информацией между
людьми, но в этом случае информация предварительно оформля¬
ется в виде документов (телеграмм).
При передаче данных операторы получают информацию не
непосредственно, а через абонентские пункты, в которых происхо¬
дят преобразование ее в данные и обратное преобразование.
По мере дальнейшего внедрения средств автоматизации в си¬
стемы управления роль данных в общем объеме передаваемой ин¬
формации будет возрастать. Технические средства, являющиеся
источниками и потребителями сообщений данных, могут быть раз¬
биты на следующие группы:
14
1. Автоматические регистрирующие датчики, /которые измеряют
некоторую физическую величину и преобразуют результаты изме¬
рения в сообщение данных. Сюда же относятся устройства, обес¬
печивающие обратное преобразование сообщений данных в неко¬
торую физическую величину.
2. Абонентские пункты (иногда их называют терминалом), ко¬
торые предназначены для преобразования сформированной чело¬
веком информации в данные.
В настоящее время существует большое число различных типов
абонентских пунктов, отличающихся сложностью и своими возмож¬
ностями. Простейшие абонентские пункты состоят из телеграфного
аппарата и электрической пишущей машинки или специального
устройства для считывания информации с промежуточного носи¬
теля (перфоленты, перфокарты, магнитной ленты), на который ее
заносит предварительно человек — оператор. Более сложные або¬
нентские пункты позволяют осуществлять ввод и вывод информа¬
ции с помощью электронно-лучевой трубки, что облегчает работу
оператора по подготовке данных к передаче.
Наконец, существуют абонентские пункты, обеспечивающие
некоторые функции по обработке сообщений (так называемые
«интеллектуальные терминалы»).
3. Электронно-вычислительные машины и банки данных. Эти
элементы осуществляют прием информации, ее обработку (реше¬
ние задач), хранение и выдачу для передачи на любой абонент¬
ский пункт по требованию оператора этого пункта.
В АСУ все перечисленные технические средства автоматизации
разнесены в пространстве на значительные расстояния, причем,
как правило, необходимо обеспечить передачу данных между лю¬
быми двумя техническими средствами. Выполнение этой функции
возлагается на систему связи, в которой создается специальная
подсистема — сеть передачи данных (ПД). Абонентами такой сети
могут быть как непосредственно технические средства, так и опе¬
раторы, осуществляющие ввод и вывод информации.
Обычно ПД строятся и функционируют аналогично сетям те¬
лефонной связи, однако им свойствен целый ряд особенностей, ко¬
торые в основном определяются высоким уровнем автоматизации
процессов, обеспечивающих передачу информации.
1.2. ПРИНЦИПЫ ПОСТРОЕНИЯ СЕТЕЙ ПЕРЕДАЧИ ДАННЫХ
Первичные сети
Основой для создания сети передачи данных является первич¬
ная сеть, которая представляет собой совокупность сетевых узлов,
сетевых станций и линий передачи, образующую сеть типовых
каналов передачи и типовых групповых трактов.
Каналом передачи называется совокупность технических средств
и среды распространения, обеспечивающая передачу сигналов элек¬
тросвязи или в определенной полосе частот, или с определенной
15
скоростью между двумя станциями или узлами. Канал с нормиро¬
ванными параметрами называется типовым.
Групповой тракт — это совокупность технических средств,
обеспечивающая передачу сигналов электросвязи или в полосе
частот, или со скоростью передачи нормированной группы кана¬
лов. Если параметры группового тракта нормированы, то тракт на¬
зывается типовым. Групповые тракты строятся на основе линий
передачи.
Линия передачи первичной сети — это совокупность физиче¬
ских цепей, линейных трактов однотипных и разнотипных систем
передачи, имеющих общие среду распространения, линейные со¬
оружения и устройства их обслуживания. Линии передачи разли¬
чаются в зависимости от первичной сети, к которым они принад¬
лежат, и от среды распространения. В настоящее время наиболь¬
шее распространение получили радиорелейные, тропосферные,
проводные и спутниковые линии передачи.
Сетевым узлом (СУ) первичной сети называется комплекс тех¬
нических средств, обеспечивающий:
организацию и транзит типовых групповых трактов и типовых
каналов передачи первичной сети;
переключение указанных трактов и каналов, принадлежащих
различным линиям передачи;
предоставление необходимого числа каналов и групповых трак¬
тов для образования вторичных сетей.
Сетевые станции первичной сети обеспечивают организацию
типовых каналов и трактов, предоставление их для образования
вторичных сетей и соединения каналов и групповых трактов раз¬
личных вторичных сетей между собой.
Фрагмент первичной сети с различными линиями передачи изо¬
бражен на рис. 1.6.
Первичные сети подразделяются на местные, внутренние, зоно¬
вые и магистральные.
Часть первичной сети, ограниченная территорией города или
сельского района, называется местной первичной сетью.
Внутризоновая первичная сеть — это часть первичной сети,
ограниченная территорией, совпадающей с зоной нумерации, и
обеспечивающая соединение между собой типовых групповых
трактов и типовых каналов передачи разных местных первичных
сетей этой зоны. Зона нумерации, как правило, совпадает с адми¬
нистративными границами области.
Совокупность внутризоновой первичной и местных первичных
сетей на территории, совпадающей с зоной нумерации, образует
зоновую первичную сеть.
Часть первичной сети, соединяющая между собой типовые груп¬
повые тракты, а также типовые каналы передачи внутризоновых
первичных сетей на всей территории страны, образует магистраль¬
ную первичную сеть.
Сетевым узлам и линиям передачи присваиваются наименова¬
ния в соответствии с тем, какой первичной сети они принадлежат.
16
Важным понятием, относящимся к первичным сетям, является
система передачи, под которой понимается совокупность линей¬
ного тракта, типовых групповых трактов и каналов передачи пер¬
вичной сети. Система передачи включает станции системы пере¬
дачи и среду распространения.
Рис. 1.6
АГО — аппаратура группообразования; АУ — аппаратура уплотнения; УДК — устройство дол¬
говременной коммутации; СУ — сетевой узел; ТКП — типовой канал передачи
В системах передачи с частотным разделением каналов (ЧРК)
для передачи сигналов по каждому из каналов выделяется опре¬
деленная полоса частот. Системы передачи, в которых для пере¬
дачи сигналов по каждому из каналов в линейном тракте отводят¬
ся определенные интервалы времени, называются системами с
временным разделением каналов (ВРК).
На современном этапе в магистральных первичных сетях боль¬
шее распространение имеют системы с частотным разделением
каналов. Системы с временным делением внедряются преимуще¬
ственно в местных первичных сетях.
Основными характеристиками первичных сетей независимо от
используемых систем передачи являются:
структура, определяющая взаимное расположение сетевых уз¬
лов станций и линий передачи без учета их положения на мест¬
ности;
топология — структура с учетом реального положения на
местности;
мощность, определяемая числом типовых каналов или суммар¬
ной шириной спектра частот всех каналов связи в линии передачи;
живучесть, которая определяет устойчивость линий передачи
и узлов первичной сети к повреждениям.
17
Устойчивость от повреждений определяется технической на¬
дежностью оборудования, устойчивостью от стихийных бедствий
и рядом других факторов.
Вторичные сети.
Технические комплексы сетей передачи данных
Первичные сети служат основой для создания различного ро¬
да вторичных сетей. Вторичные сети, создаваемые для различных
ведомств, называются ведомственными. В этом случае на первич¬
ной сети выделяются группы каналов, по которым передаются все
виды информации в интересах системы управления, относящейся
к какому-либо ведомству. Например, на общегосударственной пер¬
вичной сети может быть организована вторичная сеть, обеспечи¬
вающая управление некоторой отраслью народного хозяйства. Ка¬
налы такой вторичной сети используются для передачи всех видов
информации [6].
По виду передаваемой информации различают, например, вто¬
ричные сети телеграфной связи, передачи данных, автоматической
междугородной телефонной связи |[6].
Ведомственные вторичные сети в ряде случаев также разделя¬
ются по виду передаваемой информации.
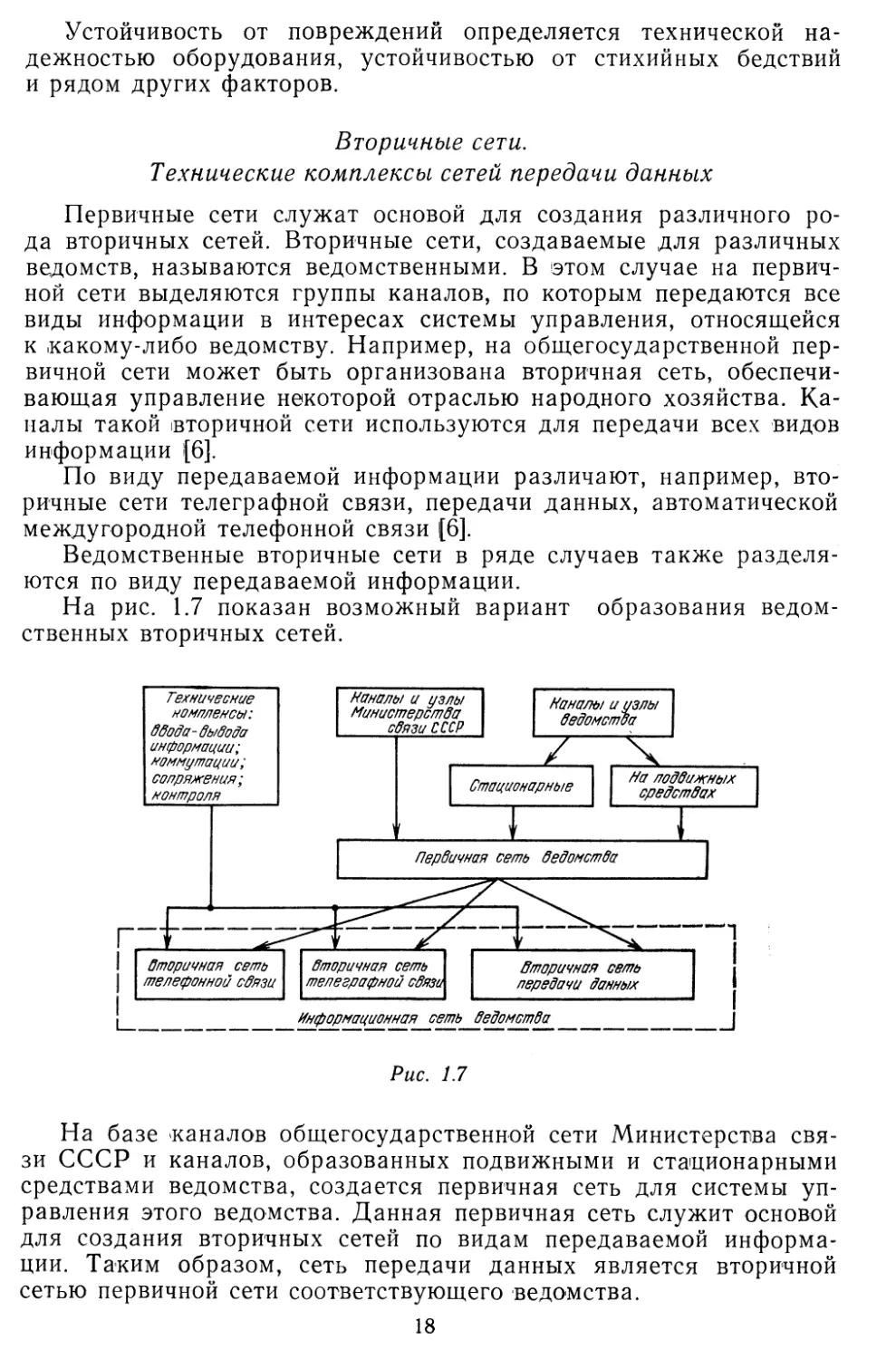
На рис. 1.7 показан возможный вариант образования ведом¬
ственных вторичных сетей.
Рис. 1.7
На базе каналов общегосударственной сети Министерства свя¬
зи СССР и каналов, образованных подвижными и стационарными
средствами ведомства, создается первичная сеть для системы уп¬
равления этого ведомства. Данная первичная сеть служит основой
для создания вторичных сетей по видам передаваемой информа¬
ции. Таким образом, сеть передачи данных является вторичной
сетью первичной сети соответствующего ведомства.
18
Иногда совокупность вторичных сетей по видам передаваемой
информации называют информационной сетью системы управле¬
ния ведомства.
Сеть передачи данных включает ряд технических комплексов,
к одному из которых относится совокупность средств, образующих
каналы связи первичной сети, выделенные для создания сети ПД.
Выделенные каналы первичной сети обеспечивают лишь потенци¬
альную возможность передачи информации, однако для ее реали¬
зации в соответствии с потребностями АСУ необходимо введение
ряда дополнительных комплексов. К ним относятся:
1. Комплекс средств, обеспечивающих образование каналов
ПД на основе каналов первичной сети. Данный комплекс реали¬
зуется в виде совокупности отдельных образцов аппаратуры пере¬
дачи данных (АПД), каждый из которых обеспечивает образова¬
ние одного канала ПД и работает по фиксированному алгоритму.
Такая реализация называется аппаратурной.
В ряде случаев используется программно-аппаратурная реали¬
зация, при которой часть функции АПД выполняется программны¬
ми методами в специализированных или универсальных ЭВМ.
2. Комплекс технических средств, обеспечивающий целенаправ¬
ленную передачу сообщений между абонентами сети при выполне¬
нии требований АСУ к вероятностно-временным характеристикам
задержки. Этот комплекс реализуется как совокупность коммута¬
ционных станций и узлов коммутации каналов и сообщений вме¬
сте с их программным обеспечением.
3. Комплекс средств контроля состояния технических средств
и управления сетью ПД, представляющий собой совокупность ор¬
ганизационных и технических служб, а также технических и про¬
граммных средств, обеспечивающих функционирование сети ПД
в изменяющихся условиях.
4. Комплекс средств сопряжения ПД, представляющий собой
совокупность устройств и алгоритмов, обеспечивающих электри¬
ческое, логическое, кодовое и алгоритмическое согласования раз¬
личных элементов сети ПД, а также элементов сети с техниче¬
скими средствами источников и потребителей информации.
Элементы перечисленных комплексов рассредоточены в сети
и условно могут быть объединены в проблемно-ориентированные
модули (рис. 1.8), каждый из которых выполняет строго опреде¬
ленные задачи по передаче данных и взаимодействию с другими
модулями, вычислительной системой, банком данных и термина¬
лами. Независимо от выполняемых функций модули называются
функциональными единицами сети (ФЕС).
Модуль связи вычислительной системы (или банка данных) с
сетью (СВС) осуществляет взаимодействие между разнородными
ЭВ|М и сетью ПД. Модуль связи терминала с сетью (СТС) обес¬
печивает взаимодействие между различными группами терминалов
и другими элементами сети. Модуль коммуникационных функций
сети (КФС), представляющий собой совокупность узлов коммута¬
19
ции, обеспечивает доставку информации от отправителя к полу¬
чателю по каналам первичной сети.
Технические и программные средства ФЕС вместе с их взаимо¬
связями образуют архитектуру модуля, определяющим для кото¬
рой является реализованный в сети способ коммутации. В настоя-
Стын
с центральным Внутренние Стын
процессором стьш с терминалами
Рис. 1.8
щее время ряд модификаций способов коммутации каналов и ком¬
мутации сообщений (рис. 1.9) рассматривается в качестве само¬
стоятельных.
Любая из версий коммутации каналов предусматривает два
этапа. На первом этапе образуется цепочка из последовательно
соединенных каналов связи между абонентами. На втором этапе
осуществляется передача информации.
Рис. 1.9
В зависимости от типа каналов, используемых при построении
цепочки, можно выделить коммутацию: непрерывных каналов, об¬
разованных системами с частотным уплотнением; цифровых кана¬
лов, образованных системами с временным уплотнением, и ка¬
налов ПД.
При коммутации сообщений реального соединения абонентов
не происходит, а информация в виде формализованных сообщений
20
передается по маршрутам, состоящим из последовательных трак¬
тов ПД. Если на некотором этапе тракт занят или находится в со¬
стоянии отказа, то сообщение ожидает момента, когда он освобо¬
дится или будет восстановлен.
Коммутация сообщений реализуется либо в чистом виде, либо
как коммутация пакетов. Различают два режима коммутации па¬
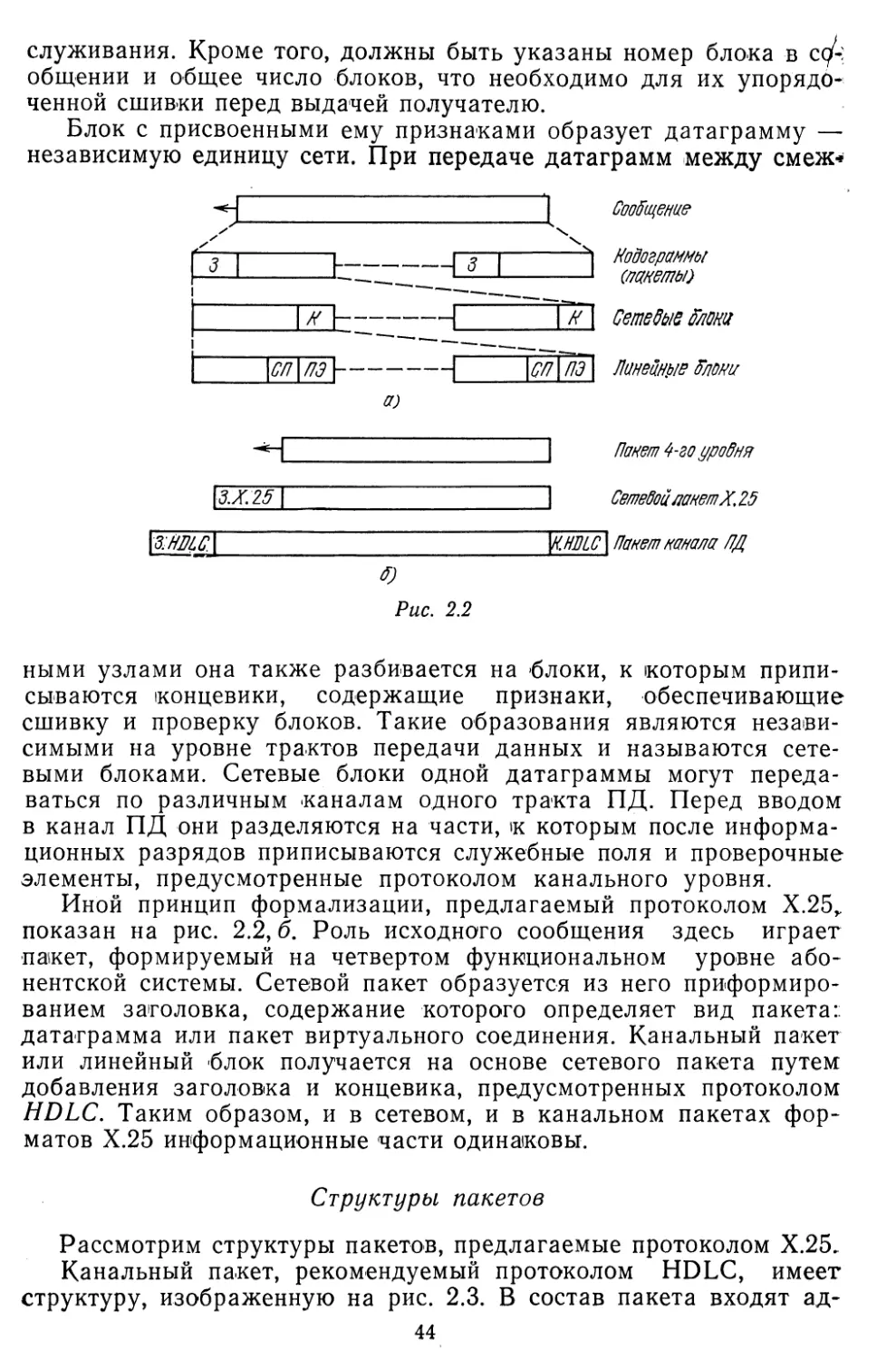
кетов: датаграммный и виртуальных соединений.
В сетях с коммутацией датаграмм сообщение, поступая от
источника на первый же узел коммутации, разбивается на блоки,
к каждому из которых добавляется необходимая служебная ин¬
формация для передачи по сети. Получаемые таким образом бло¬
ки называются пакетами, кодограммами или датаграммами, име¬
ют статус самостоятельных сообщений в сети и передаются по
ней независимо друг от друга, возможно, по различным марш¬
рутам.
В узле коммутации (УК), к которому подключен получатель,
пакеты одного сообщения накапливаются в общем случае произ¬
вольно, что делает необходимым их упорядоченную сшивку перед
выдачей абоненту-получателю. При этом возможны так называе¬
мые компоновочные блокировки памяти узла, при которых его за¬
поминающие устройства оказываются занятыми несобранными со¬
общениями и соответственно не могут освободиться, а недостаю¬
щие пакеты не могут из-за этого быть приняты.
В сетях с виртуальными соединениями перед передачей сооб¬
щения между абонентами устанавливается фиксированный марш¬
рут. С этой целью абонентом-отправителем в сопряженный узел
коммутации дается заявка на организацию соединения. Сопряжен¬
ный узел определяет маршрут передачи и выдает команды во все
промежуточные центры. Команды содержат номер соединения и
номер исходящего тракта для этого соединения. Одновременно по
одному и тому же каналу сети организуется несколько соедине¬
ний с выделением для передачи в каждом направлении определен¬
ных ©ременных позиций — виртуального канала, который закреп¬
ляется либо жестко, либо по методу статистического уплотнения.
Между соседними УК непрерывно передаются кадры, содер¬
жащие пакеты сообщений, сопровождаемые номером соединения.
Размеры пакетов могут быть различными. Если в какой-либо мо¬
мент времени нет очередного пакета для передачи по некоторому
виртуальному каналу, то его временная позиция может занимать¬
ся пакетом другого сообщения, где пакеты в избытке. В каждом
узле коммутации производится разборка пакетов информации для
их перераспределения по исходящим виртуальным каналам в со¬
ответствии с номерами этих каналов.
При использовании виртуальных соединений пакеты, принад¬
лежащие одному сообщению, поступают последовательно, что
снимает проблему их упорядоченной сшивки и опасность компо¬
новочной блокировки.
Ряд исследований, проведенных в последние годы с целью
сравнения способов коммутации, а также опыт эксплуатации се¬
21
тей ПД позволяют сформулировать следующие наиболее общие
рекомендации:
1. С точки зрения эффективности использования каналов ком¬
мутация сообщений предпочтительнее, чем коммутация пакетов,
которая в свою очередь предпочтительнее коммутации каналов.
Преимущество коммутации сообщений по сравнению с /коммута¬
цией каналов проявляется значительнее в случае интенсивных по¬
токов сообщений небольшого объема. Исходя из этого коммутация
сообщений и коммутация пакетов используются в сетях при высо¬
ких интенсивностях! потоков сравнительно коротких сообщений.
Коммутация каналов применяется при незначительных интенсив¬
ностях потоков сообщений большого объема.
2. При выборе между коммутацией пакетов и коммутацией
сообщений следует исходить из того, что в сетях с коммутацией
пакетов могут быть достигнуты значения задержки сообщений, в
несколько раз меньшие, чем в сетях с коммутацией сообщений.
3. Коммутация пакетов или коммутация сообщений должна
использоваться в сетях передачи данных при необходимости обес¬
печения многоадресных передач, приоритетного обслуживания
сообщений, а также при высоких требованиях к надежности и
верности доставки. Последнее объясняется наличием в таких сетях
контроля и защиты от ошибок на всех этапах передвижения со¬
общений по сети. При этом следует учитывать, что приоритетное
обслуживание и многоадресные передачи реализуемы только в да¬
таграммном режиме сетей с пакетной коммутацией.
Вопрос об использовании сетей ПД с коммутацией каналов в
настоящее время достаточно не изучен, однако можно предполо¬
жить, что такой режим окажется эффективным для передачи очень
больших объемов информации при высоких требованиях к верно¬
сти. В сетях с коммутацией первичных каналов обеспечить высо¬
кую верность достаточно сложно ввиду низкого качества состав¬
ных каналов.
Если абоненты предъявляют различные требования к процессу
передачи информации и потоки передаваемых ими сообщений име¬
ют различные интенсивности и объемы, то может оказаться целе¬
сообразным совместное использование различных способов комму¬
тации. При этом обычно предусматривается единый узел комму¬
тации с предоставлением абонентам возможности самостоятельно¬
го выбора способа коммутации.
1.3. ПРЕДСТАВЛЕНИЕ СТРУКТУР СЕТЕЙ
Структуры сетей и элементы теории графов
Одной из характеристик сети является ее структура, которая
определяет взаимное соединение узлов и линий связи независимо
от их фактического расположения на местности. Структура сети
может соответствовать системе управления, в интересах которой
она строится, или выбираться независимо от нее.
22
Существует большое число структур сетей, которые объединя¬
ют заданное множество узлов, однако среди них можно выделить
три типа: древовидные, полносвязная и рекуррентные.
К древовидным структурам относятся все структуры, включаю¬
щие при М узлах N = M— 1 линию связи. Характерный пример
древовидной структуры приведен на рис. 1.10, а. Частными вида¬
ми древовидных структур являются структуры типа «звезда» и ли¬
нейная.
О)
б)
д)
в) Ж)
Рис. 1.10
В линейных структурах (рис. 1.10,6) все узлы, кроме конце¬
вых, выполняют коммутационные функции. Структура типа «звез¬
да» (рис. 1.10, в) используется при соответствии сети централизо¬
ванной системе управления. В этом случае в центральном узле
располагаются ЭВМ и банки данных, а на периферийных узлах —
абонентские пункты. Центральный узел выполняет только комму¬
тационные функции.
Полносвязная структура ■— это структура, в которой каждая
пара узлов соединена линией связи (рис. 1.10, г). Для построения
такой структуры необходимо иметь N = M(M—1) /2 линий связи.
К рекуррентным относятся структуры с повторяющимися фраг¬
ментами простейшего вида.
Наиболее распространенными являются структуры типа решет¬
ка (рис. 1.10, д), соты (рис. 1.10, ж) и иерархическая древовидная
с одинаковым коэффициентом ветвления (рис. 1.10, в).
Реальные сети, как правило, имеют смешанные (распределен¬
ные) структуры. Однако эти структуры обычно могут быть сведе¬
ны к перечисленным видам либо путем выделения фрагментов,
либо путем незначительных упрощений. Примеры распределенных
структур приведены на рис. 1.10, з.
При описании сетей широко используются методы теории гра¬
фов. Введем наиболее часто встречающиеся определения и поня¬
тия, связанные с сетевыми приложениями графов.
23
Граф Т[Х, У] состоит из конечного непустого множества вершин У, содер¬
жащего М вершин, и заданного множества X, содержащего N неупорядоченных
пар различных вершин из У. (Каждую пару вершин (i, j)—xk в множестве X
называют «ребром графа Г[Х, У]. Граф называется помеченным, если его вер¬
шины я ребра имеют некоторые отличные друг от друга индексы.
Если существует ребро Xh—{i, /), то говорят, что вершины t/i и г/j смежны.
Ребро (i, j) является инцидентным для вершин yi и yj.
При наличии в графе ориентированных ребер, помеченных стрелками, граф
называется ориентированным.
Подграфом графа Т[Х, У] называется граф Ti[Xb У2], для которого Х^
еX, У^У. В случае, когда У1 = У, подграф называется остовным.
# Г\Х,У) yz yf г'и;У]
Рис. 1.11
Одна и та же структура сети может быть изображена различными изо¬
морфными графами. Два графа называются изоморфными, если между их мно¬
жествами вершин существует взаимно-однозначное соответствие, сохраняющее
смежность. На рис. 1.11 графы Т[Х, У] и T'[X'Y'] изоморфны, если есть со¬
ответствие yt
Наиболее важными понятиями, относящимися к сетям, являются понятия
маршрутов и связности графов.
Маршрутом в графе называется чередующаяся последовательность вершин
и ребер. Эта последовательность начинается и кончается вершиной, и каждое
ребро последовательности инцидентно двум вершинам. На рис. 1.12 одним из
маршрутов между вершинами yi и у$ является {у\, у2, ys}^Sk(\, 5).
Два любых маршрута между уз-
yz лами ух и yi независимы по ребрам,
если они не имеют общих ребер, и не¬
зависимы по вершинам, если они
не содержат общих вершин.
Открытый маршрут называется
простой цепью, если все его вершины
различны. Замкнутая цепь называет¬
ся циклом. В графе на рис. 1.13 мар¬
шрут (1, 5) является простой це¬
пью, а {г/2, г/4, г/5, г/г} — простым цик¬
лом.
Граф называется связным, если любая пара вершин его соединена простой
цепью.
Длиною маршрута в графе называется число входящих в него 1ребер. Длина
кратчайшей простой цепи между двумя вершинами графа есть расстояние
между этими вершинами, обозначаемое d(i, j). Минимальное расстояние графа
называется его диаметром D:
D = mind(i, j).
i> j
С каждой вершиной графа связано число — степень вершины, равное чис¬
лу инцидентных ребер deg ус
м
У, deg г/* = 2N.
i=i
Рис. 1.13
24
При deg tji = 2N/M—b граф является однородным степени Ь. Величина
- м *1
^i'degyi/M I = Ь
[х]
делая часть величины х.
называется средней степенью узлов сети, где
Если deg yi =1, то вершина концевая.
Связный граф, включающий М вершин и N=M—1 ребер, называется остов-
ным деревом Т[Х, У]. Связный граф, каждые две вершины которого соеди¬
нены ребром, является полносвязным и при М вершинах содержит М(М—1) /2
линий связи. Число помеченных деревьев с М верши¬
нами равно Мм~2.
Существует только одна полносвязная вер¬
шина.
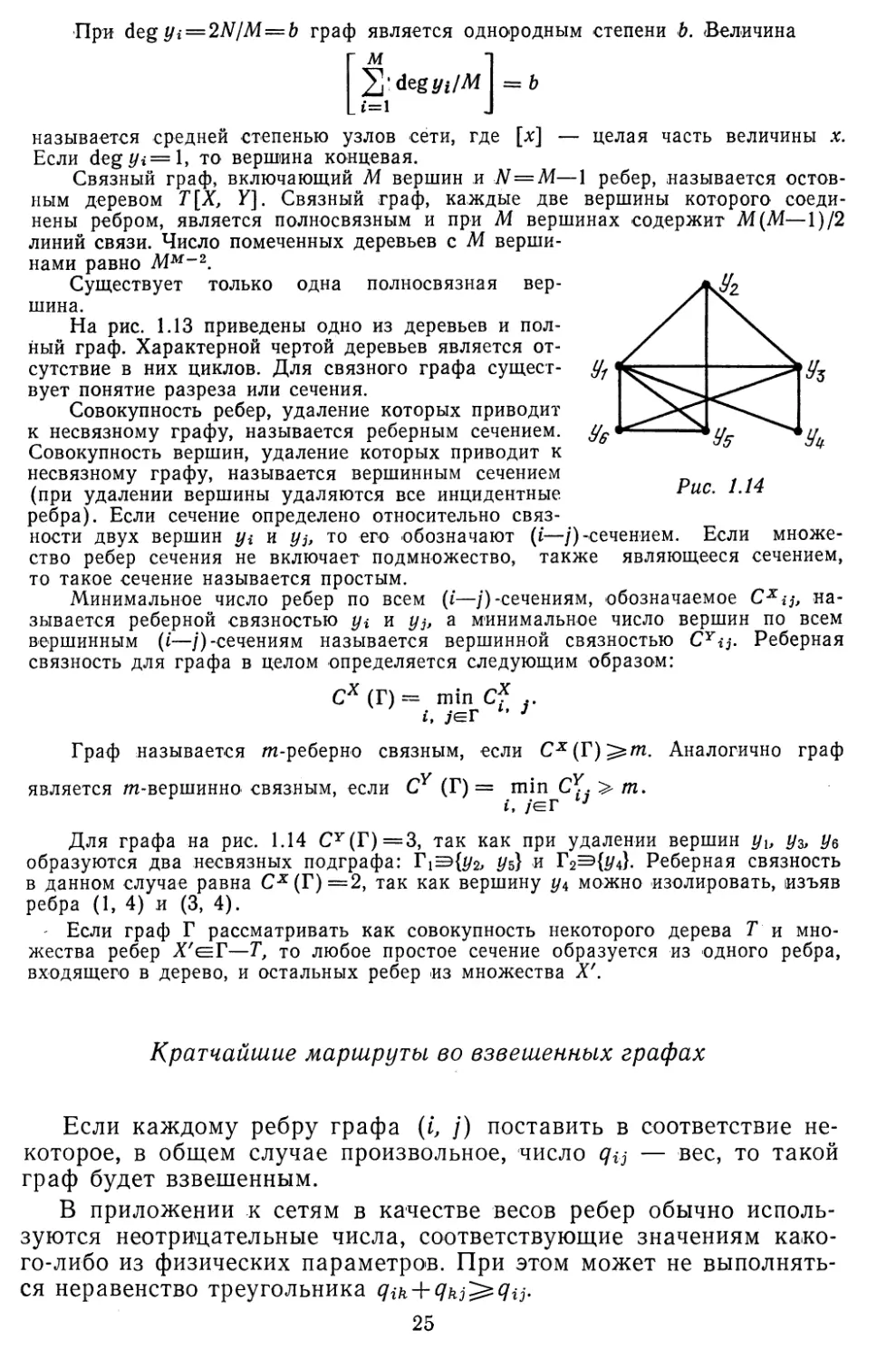
На рис. 1.13 приведены одно из деревьев и пол¬
ный граф. Характерной чертой деревьев является от¬
сутствие в них циклов. Для связного графа сущест¬
вует понятие разреза или сечения.
Совокупность ребер, удаление которых приводит
к несвязному графу, называется реберным сечением.
Совокупность вершин, удаление которых приводит к
несвязному графу, называется вершинным сечением
(при удалении вершины удаляются все инцидентные
ребра). Если сечение определено относительно связ¬
ности двух вершин г/i и г/j, то его обозначают (г—/) -сечением. Если множе¬
ство ребер сечения не включает подмножество, также являющееся сечением,
то такое сечение называется простым.
Минимальное число ребер по всем (г—у)-сечениям, обозначаемое Cxij, на¬
зывается реберной связностью г/г и г/j, а минимальное число вершин по всем
вершинным (г—/) -сечениям называется вершинной связностью CYij. Реберная
связность для графа в целом определяется следующим образом:
Сх (Г) = min cf J.
i, jeГ
Граф называется m-реберно связным, если Сх (Т)'^пг. Аналогично граф
CY (Г) =
Рис. 1.14
является m-вершинно связным, если
min СХ > ш.
и /ег 3
Для графа на рис. 1.14 СГ(Г)=3, так как при удалении вершин уь уъ, Ув
образуются два несвязных подграфа: Т^{у2, Уь} и Т2^{у^. Реберная связность
в данном случае равна С* (Г) =2, так как вершину г/4 можно изолировать, изъяв
ребра (1, 4) и (3, 4).
- Если граф Г рассматривать как совокупность некоторого дерева Т и мно¬
жества ребер Х'еГ—Т, то любое простое сечение образуется из одного ребра,
входящего в дерево, и остальных ребер из множества X'.
Кратчайшие маршруты во взвешенных графах
Если каждому ребру графа (i, j) поставить в соответствие не¬
которое, в общем случае произвольное, число qij — вес, то такой
граф будет взвешенным.
В приложении к сетям в качестве весов ребер обычно исполь¬
зуются неотрицательные числа, соответствующие значениям како¬
го-либо из физических параметров. При этом может не выполнять¬
ся неравенство треугольника qik + qkj^qij-
25
В помеченном графе каждый маршрут 5 (k, I) имеет вес
Q(k,l) = 2 ЯП-
(i, /)€rS (k, /)
Маршрут, имеющий минимальный вес среди всех маршрутов
для некоторой пары вершин уи и у и называется -кратчайшим. Та¬
кой маршрут будем обозначать Smin(&, /), а соответствующий ему
вес — Qmm(k, /). При соответствующей интерпретации кратчай¬
ший маршрут будет физически кратчайшим. В общем случае по¬
нятие кратчайшего маршрута, как и понятие его веса, является
условным. Для кратчайших маршрутов в теории сетей формиру¬
ются два важных положения, которые представим в виде теорем.
Теорема (принцип оптимальности) [35]. Если кратчайший марш¬
рут из уи в yi—Sm[n(k, I) с весом Qm[n{k, I) включает вершину уп,
то каждый из двух участков маршрута: отукЛоуп—S'(k,ri) свесом
Q' (к, п) и от уп до yi—S' (п, I) с весом Q' (п, I) —также будет кратчай¬
шим между соответствующими вершинами, т. е. S'(k, n)=Sm{n(k,
/г), a S'(п, l)=Smin(n, I). При этом Qmin(k, l) = Q'(k, n)+Q'(n, /),
где Q'(k, n)=Qmin(k, n)Q'(n, l)=Qmin(ri, I).
Доказательство [40]. Проведем его от противного для S'(k, п).
Пусть S'(k, n)^Sm'n(k, п). Тогда должен существовать некоторый марш¬
рут S'(\k, п), вес которого Q"(k, ri)<iQ'{k, п). В этом случае Q"(<k, ri)+Q'(n,
l)<Q'(*k, ri)+Q'(n, /), что невозможно, так как по условию Q'(k, I) =
= QminSk, I).
Таким образом, S'(kf ri)=Smin(k, n). Основным следствием данной теоре¬
мы является то, что если определен кратчайший маршрут между некоторой
парой вершин, то при этом оказываются известными кратчайшие маршруты
между всеми промежуточными вершинами.
Теорема. Граф, включающий только кратчайшие маршруты между верши¬
ной yi и остальными вершинами сети, является остовным деревом.
Доказательство. В соответствии с одним из определений остовным деревом
является граф, для которого удаление любого ребра приводит к несвязному
графу.
Доказательство проведем от противного. Пусть граф, состоящий только из
кратчайших маршрутов, не является остовным деревом. Тогда из него может
быть удалено некоторое ребро (\k, /).
Поскольку исходный граф состоит только из кратчайших маршрутов, то
удаленное ребро (k, I) должно принадлежать хотя бы одному кратчайшему
маршруту, например Smin(i, /), ]ф(.
В соответствии с исходными предпосылками рассматриваемый граф не име¬
ет других маршрутов между вершинами yi и у^, а операция удаления ребра
приводит к разрыву этого маршрута, т. е. вершины yi и у$, а следовательно, и
граф оказываются несвязанными. Таким образом, из графа, образованного толь¬
ко кратчайшими маршрутами, нельзя удалить ни одного ребра, не нарушив
связности. Таким графом, в соответствии с определением, является остовнос
дерево, что и требовалось доказать.
Если во взвешенном графе упорядочить множество маршрутов
для некоторой пары (вершин в соответствии с их весом, то К-й
маршрут в этой последовательности будет /С-м кратчайшим марш¬
рутом и обозначается Sm[nK. Значение К каждого маршрута за¬
висит от параметров, используемых в качестве весов ребер.
26
Матрицы, определяющие структуру сетей
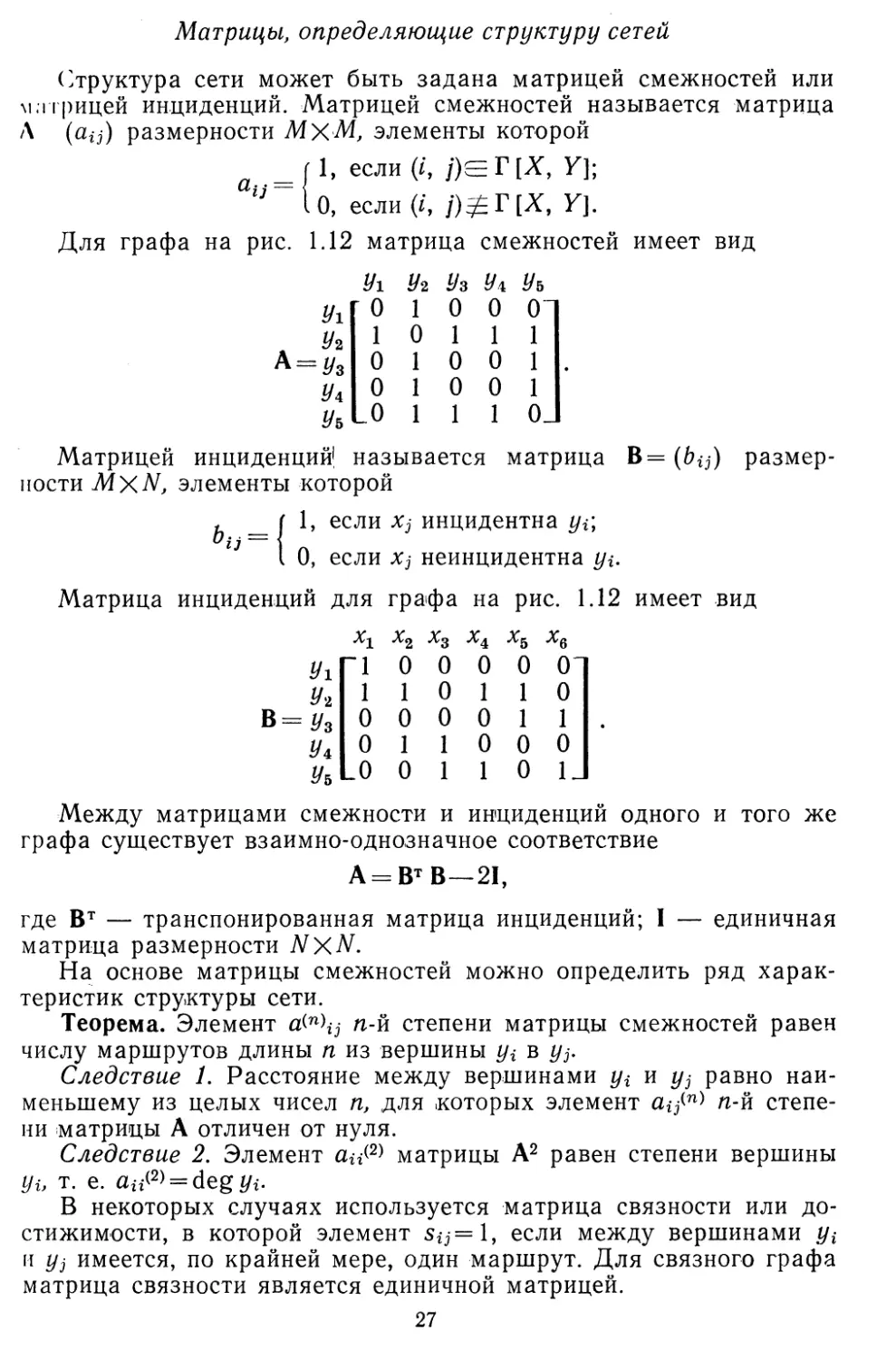
Структура сети может быть задана матрицей смежностей или
матрицей инциденций. Матрицей смежностей называется матрица
Л (aij) размерности МхМ, элементы которой
1, если (г, /)£Г[Х, У'];
.0, если (г, /)^£Г[Х, К].
Для графа на рис. 1.12 матрица смежностей имеет вид
Уг
У*
А=г/3
У*
Уъ
У\ Уг Уз У\ Уъ
0 10 0 0
1
0
0
L0 1
1
0 1 1
10 0 1
10 0 1
1 1 0J
Матрицей инциденций1 называется матрица В ={Ьц) размер¬
ности MxN, элементы которой
1, если Xj инцидентна уг,
если Xj неинцидентна г/г.
Матрица инциденций для графа на рис. 1.12 имеет вид
Hi;
ч
*2
*3
*4
*5
хв
Уг
0
0
0
0
°1
Уч
1
1
0
1
1
0
В = Уз
0
0
0
0
1
1
У4
0
1
1
0
0
0
Уъ
_0
0
1
1
0
1_
Между матрицами смежности и инциденций одного и того же
графа существует взаимно-однозначное соответствие
А = ВТВ—21,
где Вт — транспонированная матрица инциденций; I — единичная
матрица размерности NXN.
На основе матрицы смежностей можно определить ряд харак¬
теристик структуры сети.
Теорема. Элемент a(n\j п-й степени матрицы смежностей равен
числу маршрутов длины п из вершины в yj.
Следствие 1. Расстояние между вершинами yi и уj равно наи¬
меньшему из целых чисел п, для которых элемент а^п) п-й степе¬
ни матрицы А отличен от нуля.
Следствие 2. Элемент a^(2) матрицы А2 равен степени вершины
у и т. е. аи^ = deg у^
В некоторых случаях используется матрица связности или до¬
стижимости, в которой элемент Sij=l, если между вершинами yi
и у^ имеется, по крайней мере, один маршрут. Для связного графа
матрица связности является единичной матрицей.
27
Таким образом, если структура сети задана матрицей смежно¬
стей, то можно путем вычислений определить, имеется ли хотя бы
один маршрут между любой парой узлов.
При ограничении на длину маршрута можно рассматривать
матрицу ограниченной связности. В этой матрице элемент s'7\/= 1,
если имеется хотя бы один маршрут длины не больше допустимой
между узлами ух и yj.
При решении ряда сетевых задач используют матрицы циклов
и матрицы сечений. В матрице циклов С= (сц) каждая строка
соответствует циклу в графе, а каждый столбец ■— одному из ре¬
бер. В матрице простых сечений С* =(£%•) каждая строка соот¬
ветствует сечению в графе, а каждый столбец — также одному из
ребер. Таким образом, если в одной из этих матриц элемент с,,,
c*ij= 1, то ребро Xj входит соответственно в i-и цикл или /-о се¬
чение.
Для представления взвешенных графов обычно используются
не матрицы смежностей, а матрицы весов Q= (qij) размерности
МхМ. Элементы данной матрицы равны: весу ребра для смежных
вершин yi и yj\ бесконечности для несмежных вершин //<• и //,;
нулю при i = ]\
Применительно к матрице весов представляет интерес следую¬
щая теорема.
Теорема. Если операцию суммирования заменить операцией
min, а операцию умножения — операцией суммирования, то эле¬
мент ^j(n) п-й степени матрицы весов равен весу кратчайшего
маршрута между уг- и у$ среди всех маршрутов между этими вер¬
шинами длиною п.
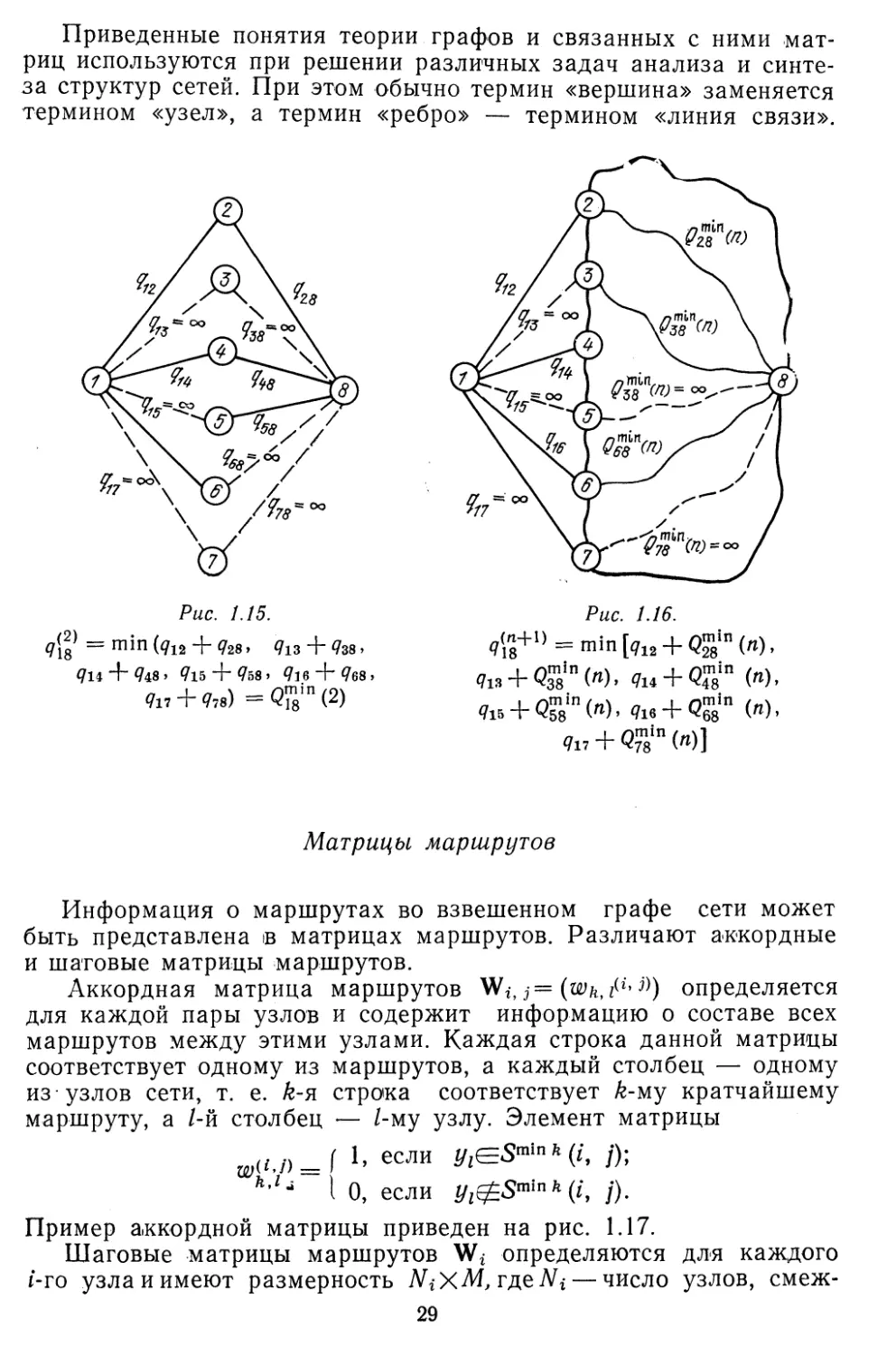
Доказательство. Элемент второй степени матрицы весов
М
= 2 QMh)-
k=\
После преобразования операций
q\f = min (qlk + qkJ) = Q™in (2),
где Qijmin(2) — вес кратчайшего маршрута между вершинами yi и yj среди
всех маршрутов длиной 2 (рис. 1.15).
Элемент третьей степени матрицы весов
М
k=\
или после преобразования операций суммирования в операцию min
Я?} = min (qlk + q$) = mm [qik + Q™.in (2)] = Q™.in (3),
где QijmiTi(3) — вес кратчайшего маршрута из вершины yi в yj среди всех
маршрутов длиной 3. Далее по индукции получим (рис. 1.16)
qff = min [qih + Q^/n (n — 1)] = QfJa (n),
что и требовалось доказать.
28
Приведенные понятия теории графов и связанных с ними мат¬
риц используются при решении различных задач анализа и синте¬
за структур сетей. При этом обычно термин «вершина» заменяется
термином «узел», а термин «ребро» — термином «линия связи».
■<2) = тт(ди + д№, ?13 + <738.
<714 + <
#15 + #58* #16 + <
?mi
18
Яп + Я7в) = Qw,n (2)
Рис. 1.16.
q\n+l) = min [q12 + Qg,n (n),
<?13 + Q™8ln (n) ’ Я1* + @48
?i. + QS,n<»). ffw + QS1
Яп + Qre" («)!
'min (n),
imin (n),
Матрицы маршрутов
Информация о маршрутах во взвешенном графе сети может
быть представлена в матрицах маршрутов. Различают аккордные
и шаговые матрицы маршрутов.
Аккордная матрица маршрутов Wt-, j — (Wh, ;(i’})) определяется
для каждой пары узлов и содержит информацию о составе всех
маршрутов между этими узлами. Каждая строка данной матрицы
соответствует одному из маршрутов, а каждый столбец — одному
из узлов сети, т. е. k-я строка соответствует 6-му кратчайшему
маршруту, а 1-й столбец — /-му узлу. Элемент матрицы
wu.n = f !- если #z&Sminft0\ /);
к'1* \ 0, если yi^Smink(i, j).
Пример аккордной матрицы приведен на рис. 1.17.
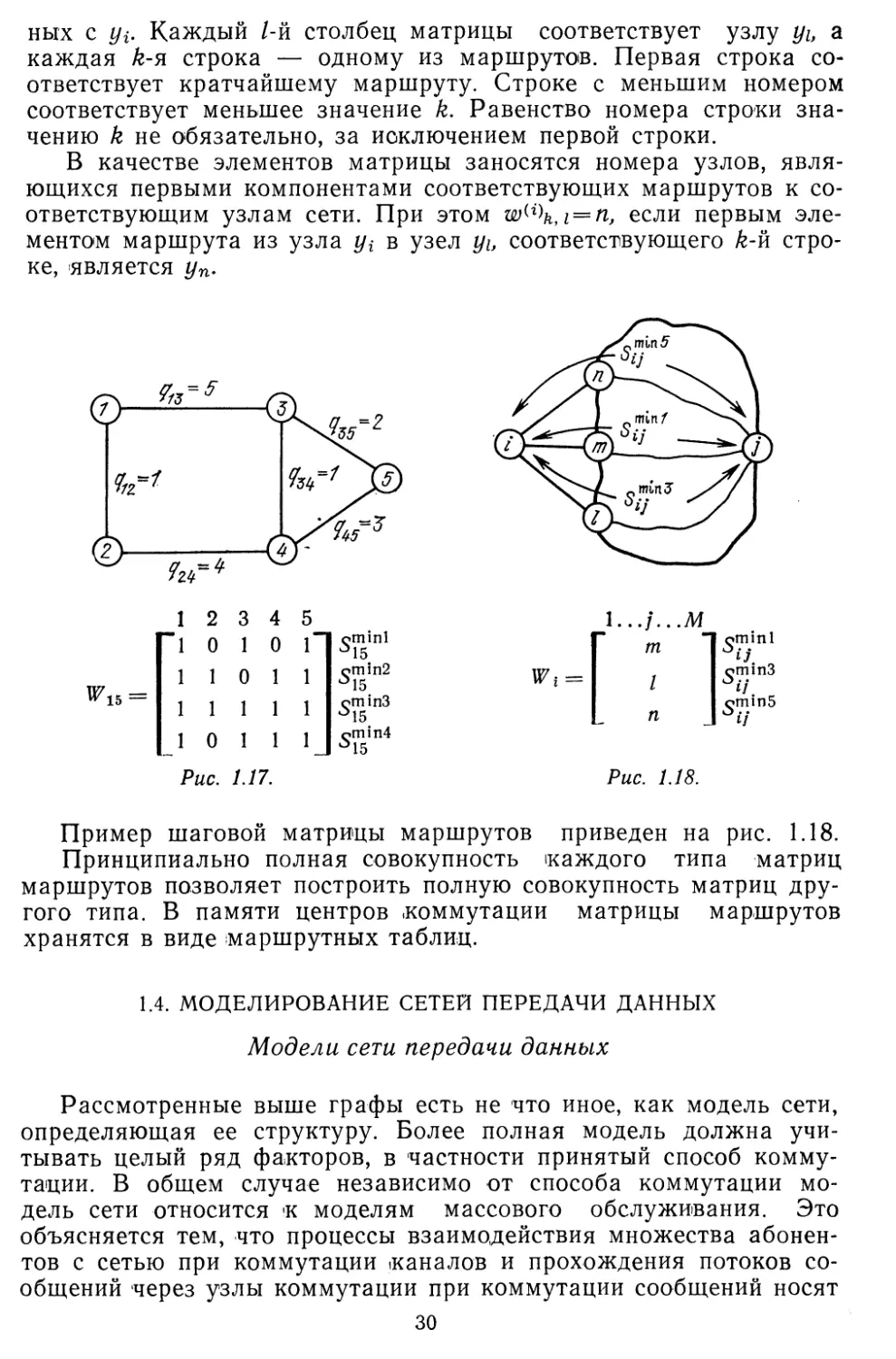
Шаговые матрицы маршрутов W* определяются для каждого
i-ro узла и имеют размерность NiXM,rjieNi — число узлов, смеж¬
29
ных с yi. Каждый /-й столбец матрицы соответствует узлу уи а
каждая k-я строка — одному из маршрутов. Первая строка со¬
ответствует кратчайшему маршруту. Строке с меньшим номером
соответствует меньшее значение k. Равенство номера строки зна¬
чению k не обязательно, за исключением первой строки.
В качестве элементов матрицы заносятся номера узлов, явля¬
ющихся первыми компонентами соответствующих маршрутов к со¬
ответствующим узлам сети. При этом w(\,i = n, если первым эле¬
ментом маршрута из узла yi в узел уь соответствующего k-й стро¬
ке, является уп-
0—
htr*
1 2 3
Wi
1 1
1 1
1
1 0 1
Рис. 1.17.
.mini
15
»min2
15
min3
15
-min4
15
Wi =
[! 1
Puc. 1.18.
ominl
U
огтппЗ
omin5
Пример шаговой матрицы маршрутов приведен на рис. 1.18.
Принципиально полная совокупность каждого типа матриц
маршрутов позволяет построить полную совокупность матриц дру¬
гого типа. В памяти центров .коммутации матрицы маршрутов
хранятся в виде маршрутных таблиц.
1.4. МОДЕЛИРОВАНИЕ СЕТЕЙ ПЕРЕДАЧИ ДАННЫХ
Модели сети передачи данных
Рассмотренные выше графы есть не что иное, как модель сети,
определяющая ее структуру. Более полная модель должна учи¬
тывать целый ряд факторов, в частности принятый способ комму¬
тации. В общем случае независимо от способа коммутации мо¬
дель сети относится к моделям массового обслуживания. Это
объясняется тем, что процессы взаимодействия множества абонен¬
тов с сетью при коммутации каналов и прохождения потоков со¬
общений через узлы коммутации при коммутации сообщений носят
30
«лучайный характер и аналогичны процессам в системах массового
мослуживания.
Каждый узел коммутации каналов обслуживает поток требо-
иаппй на соединение от абонентов, подключенных к данному узлу,
м от смежных узлов. Требования содержатся в заголовке сообще¬
нии, где указаны адреса абонентов, к которым необходимо орга¬
низовать составные каналы. Последовательность требований по¬
ступает на обслуживающие устройства узла коммутации. Посколь¬
ку этих устройств обычно меньше числа абонентов, то в силу слу¬
чайности потока требований некоторые из них могут поступать в
моменты занятости всех приборов. Эти требования теряются, об¬
разуя поток потерянных требований. Кроме того, может быть за¬
нята или неисправна необходимая абоненту линия связи или за¬
нят абонент-получатель, что также приводит к потере требования.
Таким образом, на узлах коммутации каналов имеет место
двухфазное обслуживание с потерями (рис. 1.19).
на первой фКЗв но второй фазе
Рис. 1.19
В общем случае требование на образование составного канала
обслуживается несколькими узлами, различными для каждого
требования. В соответствии с этим моделью сети с коммутацией
каналов является сеть систем массового обслуживания с потерями.
На узле коммутации сообщений (пакетов) обслуживаются по¬
роки сообщений, поступающих от абонентов и по линиям связи от
смежных узлов. Поток входящих сообщений и время их обработ¬
ки в процессоре носят случайный характер, поэтому на входе про¬
цессора образуется конкуренция на обслуживание. Так как в уз¬
лах коммутации сообщений имеется запоминающее устройство, то
сообщения, которые не мотут быть немедленно обслужены, ста¬
новятся в очередь. Таким образом, на входе узла реализуется
процедура обслуживания с ожиданием (рис. 1.20).
31
После обработки в процессоре сообщения направляются дл^
передачи в одну из линий связи. Время передачи является случай¬
ной величиной, определяемой объемом сообщения и пропускно!
способностью выбранного канала. Таким образом, на входе каж
дой линии связи также реализуется процедура массового обслужи¬
вания с ожиданием. j
Рис. 1.20
В соответствии с изложенным моделью узла коммутации сооб¬
щений является двухфазная система массового обслуживания, а
сети с коммутацией сообщений — сеть систем массового обслужи¬
вания с ожиданием.
Приведенные модели сетей — простейшие и отражают наибо¬
лее существенные особенности функционирования основных разно¬
видностей, сетей массового
г обслуживания (рис. 1.21). В
то же время имеются вари¬
анты моделей, учитывающие
специфические стороны кон¬
кретных вариантов реализа¬
ции. Так, в ряде случаев мо¬
дель учитывает ограничен¬
ность объемов запоминаю¬
щих устройств и наличие об-
I 1 ратных связей [59] в сетях
с коммутацией сообщений
или возможность ожидания
(например, при виртуальных*
соединениях) в сетях с .коммутацией каналов. Кроме того, могут
учитываться ненадежность обслуживающих элементов сети и на
личие преимуществ при получении обслуживания.
32
Рис. 1.21
Математические модели, используемые при расчете сетей
Расчет сетей производится на основе математических моделей,
различных по сложности и адекватности отображения процессов
функционирования сетей. Выбор математической модели осуществ¬
ляется на основе данных, полученных в результате статистического
анализа работы аналогов проектируемой сети, или на основе каче¬
ственных соображений.
В соответствии со степенью адекватности процессу функцио¬
нирования сети можно выделить следующие типы моделей.
Модели, основанные на предположении о независимости. При
построении таких моделей предполагается, что процессы во всех
системах обслуживания сети независимы, потоки носят простей¬
ший характер, длительности обслуживания подчиняются экспо¬
ненциальному распределению и отсутствуют какие-либо прерыва¬
ния. Кроме того, используется допущение об абсолютной надеж¬
ности и живучести сети, а соответствующие вопросы рассматри¬
ваются вне зависимости от процессов передачи информации. В
случае выбора данных моделей расчет характеристик сети произ¬
водится непосредственно по соотношениям из теории массового'
обслуживания для одноканальных пуассоновско-экспоненциальных
систем. При решении задач по оценке надежности и живучести се¬
ти в качестве модели используется граф или взвешенный граф,
отображающий структуру.
Модели, основанные на предположении о независимости, обыч¬
но позволяют получить хотя и приближенные, но наглядные ре¬
зультаты и не требуют больших трудозатрат. Применение их це¬
лесообразно на предварительных этапах проектирования, когда
погрешность от упрощений, принятых в модели, соизмерима с по¬
грешностью от неточности исходных данных.
Теоретическим обоснованием приемлемости моделей, основан¬
ных на предположении о независимости, являются предельные
теоремы о потоках, так как входящий поток на каждую из си¬
стем обслуживания сети образуется суперпозицией определенного
числа потоков из других систем обслуживания.
Двухфакторные модели. К классу двухфакторных будем отно¬
сить модели, в которых учитывается какая-либо из следующих
особенностей систем обслуживания сети: взаимозависимость си¬
стем обслуживания сети; многоканальность систем обслуживания;
наличие системы приоритетов и' ненадежность обслуживания
приборов.
Модели данного класса позволяют получить аналитические рас¬
четные соотношения. Однако они значительно сложнее, чем в пер¬
вом случае, и часто при вычислениях требуют использования чис¬
ленных методов.
Применение двухфакторных моделей на предварительном этапе
проектирования позволяет оценить влияние отдельных факторов,
па характеристики сети.
■' 157 33
Многофакторные модели. При необходимости получения харак¬
теристик сети с одновременным учетом ряда особенностей ее функ¬
ционирования приходится строить усложненные модели. Аналитиче¬
ские методы решения при этом практически нереализуемы [12],
что вынуждает использовать методы имитационного моделиро¬
вания.
Принципиально методы имитационного статистического моде¬
лирования позволяют построить модель сети любой сложности с
учетом алгоритмов обмена и маршрутизации, ненадежности и
многоканальное™, системы приоритетов и реальных законов рас¬
пределения потоков и процессов обслуживания. Однако включение
большого числа факторов приводит к значительному усложнению
модели и возрастанию затрат на моделирование. Учитывая это,
при разработке такой модели следует предварительно оценивать
влияние каждого из факторов на достоверность результатов моде¬
лирования. Решение о целесообразности учета того или иного фак¬
тора можно принимать на основе сравнения выигрыша в достовер¬
ности при его включении с погрешностью, определяемой неточно¬
стью исходных данных.
Потоки в сетях передачи данных
При изучении и моделировании процессов, происходящих в се¬
тях передачи данных, широко используется понятие случайного
потока. Случайным потоком называется некоторая последователь¬
ность событий, наступающих в случайные моменты времени. В тео¬
рии сетей передачи данных применяются понятия потоков сообще¬
ний, перерывов связи и ошибок в каналах. Событиями в указан¬
ных потоках являются соответственно: поступления сообщений,
перерывы связи и ошибки в каналах.
Поток может быть задан функцией распределения величины
промежутка времени между моментами наступления событий п =
= ti—ti-ь P(xi^t). Если величины т* независимы в совокупности,
то поток обладает ограниченным последействием. В случае
P(xi^t) =Рдля всех i поток является рекуррентным.
Рекуррентный поток, для которого Р(т^0 = 1—е_Л*> называет¬
ся пуассоновским. Для этого потока вероятность наступления за
промежуток времени [0, /] п событий
pn(t)= {ktS е-*«, (1.4)
а математическое ожидание числа событий, наступивших за вре¬
мя t, Kt, где А, — среднее число сообщений, поступающих в едини¬
цу времени.
Пуассоновский поток характеризуется отсутствием последей¬
ствия. Если, кроме того, соблюдаются условия стационарности и
ординарности, то пуассоновский поток будет простейшим. При
этом стационарность потока выражает собой неизменность его
вероятностного режима во времени, а ординарность — практиче-
31
i-кую невозможность совмещения двух или более событий в один
п тот же момент времени. Величина X в случае пуассоновского по-
кжа обычно называется интенсивностью потока сообщений.
Если Тг = т = const, то поток является регулярным или детерми¬
нированным.
Пусть задан поток событий и t\, U, ... — моменты их наступле¬
ния. Каждому моменту tn поставим в соответствие переменную
<т(/п), принимающую значение 0 или 1. Поток наступающих в мо¬
менты tn событий, для которых o(tn) = l, называется просеянным
потоком.
Теорема. Просеянный пуассоновский поток с интенсивностью
X будет также пуассоновским потоком, но с интенсивностью рХ,
если для произвольного п величина o(tn) = 1 с вероятностью р и
<*(/п)=0 с вероятностью 1—р, т. е. p(%^Zt) = 1—е-^.
Теорема. Просеянный пуассоновский поток является потоком
Эрланга k-и степени, если а(/п)=0 для /г=1, 2, ..., k, & + 2, & + 3, ...
..., 2k, 2& + 2, ... и o(tn) = \ для всех остальных п. При этом про¬
межутки между событиями подчиняются ^-распределению Эрланга
21 k
Р (т < Л = f — е-* dx. (1.51
oJ k\
При k = 0 поток Эрланга превращается в пуассоновский, а при
k = oo вырождается в детерминированный.
Таким образом, операция просеивания не изменяет вероятност¬
ных свойств потока. В результате детерминированной операции
просеивания образуется поток, который ближе к регулярному от¬
носительно исходного потока (т. е. менее случаен).
Потоки могут складываться. Поток, образованный наложением
(суперпозицией) потоков, называется суммарным.
Теорема. Поток, образованный наложением N пуассоновских
потоков с интенсивностями Xi, i= 1, N, является пуассоновским с
интенсивностью X = ^Xi.
i
Теорема (предельная). Поток, образованный наложением про¬
извольных потоков, стремится к пуассоновскому; с N-+ooy если
среднее число событий в единицу времени каждого из потоков
примерно равно Х/N, т. е. ни один из составляющих потоков не
оказывает преимущественного влияния на суммарный поток.
Приведенные теоремы о потоках являются теоретическим обос¬
нованием широкого применения пуассоновского потока при ана¬
лизе и синтезе сетей. С потоком сообщений связана еще одна, в
общем случайная, величина — объем сообщения. Под объемом со¬
общения данных понимается число содержащихся в нем двоичных
единиц информации.
В ряде случаев более целесообразно объем сообщений ассоци¬
ировать с числом двоичных единиц информации, которые необхо¬
димо передать по каналу связи для обеспечения заданного уровня
иернОСТИ.
35
Поток сообщений задан полностью, если каждому моменту tn
поставлена в соответствие случайная величина, определяющая
объем сообщения 1С, поступившего в этот момент времени. Обычно
объем сообщений задается функцией распределения Р(/с^/),
лричем дискретностью величины /с, как правило, пренебрегают.
Если суммарный поток сообщений образуется несколькими
источниками, причем i-и источник генерирует поток с интенсив¬
ностью и объемами сообщений, имеющими функцию распреде¬
ления Pi(lc^l), то функция распределения объемов сообщений
суммарного потока определяется соотношением
Pdc^i) = ^j-h-Pi(ic^i). (1.6)
Если сообщения объединяются в пакеты и каждый пакет рас¬
сматривается как самостоятельное сообщение, то функция распре¬
деления объема такого пакета определяется сверткой функций
распределения составляющих сообщений:
P(Zp<Z) = /7i(Zc</)*P2(Zc</)*...,
где «*» — символ свертки.
В инженерной практике, как правило, используется гипотеза
об экспоненциальном) распределении объемов сообщений, когда
Pt(l0<l) = l-e~l/‘ci ,
где 1ы — средняя длина сообщений i-го источника.
Если данная гипотеза относится только ik отдельным источни¬
кам, то в суммарном потоке согласно (1.6) длины сообщений бу¬
дут иметь гиперэкспоненциальное распределение:
Р(1С^1)= 1-Ете'г/'" (1-7)
i К
Л , _
с математическим ожиданием 1С = 2 hi-
i ^
Если источники генерируют сообщения с одинаковыми экспо¬
ненциальными распределениями, то пакеты, составленные из k
сообщений, имеют k-e распределение Эрланга.
Относительно потоков перерывов связи аналогичные выводы
могут быть сделаны при рассмотрении источников перерывов.
Следует отметить, что в сетях с 'коммутацией каналов обычно
рассматривается поток не сообщений, а требований на установле¬
ние составното соединения.
36
Глава 2
ПРИНЦИПЫ функционирования
СЕТЕЙ ПЕРЕДАЧИ ДАННЫХ
2.1. СТРУКТУРА ФУНКЦИОНАЛЬНОГО ПРОГРАММНОГО
ОБЕСПЕЧЕНИЯ СЕТЕЙ ПЕРЕДАЧИ ДАННЫХ
Функции, выполняемые в сетях передачи данных
Набор и особенности реализации функций, выполняемых сред-
ииами сетей передачи данных, определяются в первую очередь
in пользуемым способом коммутации. В сетях с коммутацией ка¬
налов и сетях с виртуальными соединениями совокупность выпол¬
няемых функций можно разделить на функции по установлению
соединений и функции по передаче сообщений.
Первая труппа функций обеспечивает образование на время
передачи сообщения составного физического или виртуального
капала в соответствии с адресом (номером) абонента-получателя
по одному из возможных маршрутов и выполняется на узлах ком¬
мутации сети (в КФС). Адресная информация вводится в узел се¬
ти абонентом, которым могут быть оператор или программа, при
необходимости передачи сообщения через модуль связи с сетью
(СТС или СВС). Основными функциями узла при этом являются:
автоматический поиск нужного абонента по сети;
выбор маршрута для передачи сообщений;
проверка занятости выбранного маршрута;
реализация преимущества в предоставлении маршрута для пе¬
редачи абонентам большей важности;
информирование абонентов об отсутствии свободных и исправ¬
ных маршрутов к требуемому абоненту-получателю;
электрическое соединение составляющих каналов связи или ло¬
гическое проключение виртуального соединения и предоставление
его абоненту.
Приведенный перечень не является исчерпывающим и может
дополняться различными сервисными функциями.
После составления канала и подключения к нему абонентов
функции узлов коммутации заключаются в поддержании соедине¬
ния и его разрушении при поступлении разрешающего сигнала от
абонента или при необходимости реализовать преимущество для
абонента большей важности. Все функции по передаче сообщения
(согласование и повышение верности) при коммутации каналов
реализуются на оконечных установках передачи данных абонен¬
тов. В сетях с виртуальными соединениями и коммутацией каналов
Iк'редачи данных эти функции рассредоточены по всем модулям
сети. В сетях с коммутацией пакетов в датаграммном режиме
функции выполняются:
при вводе сообщения в сеть;
в узлах коммутации;
при передаче по каналам связи;
при выводе сообщения из сети.
37
Функции сети при вводе сообщения состоят в переводе сообщен
ния с внешнего языка, используемого в АСУ, на внутренний языщ
сети, а также в его разбиении и формализации. Содержание функ¬
ции формализации состоит в присвоении каждому пакету ряда
служебных признаков, обеспечивающих его продвижение по сети
к требуемому абоненту. Кроме этих двух функций на входе сети
может обеспечиваться функция защиты сети от несанкционирован¬
ного доступа.
Перечисленные функции выполняются в модулях связи терми¬
налов и ЭВМ с сетью. На узлах сети реализуются функция по
обеспечению процесса использования памяти и совокупность функ¬
ций по обработке пакетов в процессоре.
Память узла коммутации задействуется в следующие моменты
времени:
при поступлении пакета на узел (первоначальная запись па¬
кета, принимаемого из канала связи);
при ожидании пакета в очереди на его обработку в процес¬
соре;
во время обработки пакетов в процессоре;
при ожидании освобождения линии связи для передачи;
во время передачи по каналу связи;
при ожидании подтверждения о получении пакета.
Обеспечение процесса использования памяти является одной
из функций программного обеспечения узлов коммутации. Кроме
того, программно выполняются такие операции, как
выбор линии и канала связи для дальнейшей передачи пакета;
проверка пакетов на наличие в них ошибок и обеспечение их
повторной передачи;
контроль и учет прохождения пакетов по сети;
размножение пакетов при многоадресной и циркулярной пере¬
даче;
обеспечение преимуществ при выборе пакетов на обработку
и для передачи пакетов сообщений, имеющих большую важность ;
или срочность. j
Перечисленные функции являются основными. Полный перечень
функций для конкретных вариантов сети может включать ряд до¬
полнительных функций.
При передаче пакетов по каналам связи в сети осуществляют¬
ся функции по защите от ошибок, которые возникают в каналах
вследствие помех.
На выходе из сети в модулях сопряжения выполняются функ- ,
ции перевода информации с внутреннего языка сети на внешний
язык АСУ, контроля ошибок, сшивки сообщений и защиты от не¬
санкционированного доступа к абонентским системам.
Функциональные уровни сетей передачи данных \
Совокупность функций, выполняемых программными и аппарат-1
ными средствами сетей ПД, может быть распределена на опреде-;
38
лепные подмножества — функциональные уровни. Уровень каж¬
дого вида содержит установленный набор функций, не зависимых
от функций других уровней.
Такое распределение позволяет разрабатывать и реализовывать
логически самостоятельные алгоритмы и программы независимо
друг от друга.
Совокупность уровней, не относящихся непосредственно к про¬
цессам передачи сообщений по сети, условно объединим и будем
называть верхним уровнем. Верхний уровень в зависимости от
элемента, на котором он реализуется, может включать различные
функции, как по составу, так и по их содержанию.
В простых терминалах обычно выполняются только функции
кодирования и формирования сообщений. В абонентских ЭВМ
помимо прикладных программ верхний уровень включает функции
генерации и интерпретации команд, с помощью которых осуще¬
ствляется взаимодействие ЭВМ или операторов и ЭВМ через сеть.
Кроме того, здесь же сообщения формируются и транслируются
в код сети ПД, организуются и поддерживаются сеансы обмена
данными.
Верхний уровень можно выделить и в ЭВМ узлов коммута¬
ции. По структуре он аналогичен верхнему уровню абонентских
ЭВМ, но отличается спецификой прикладных программ. В состав
этих программ обычно включаются программы управления пото¬
ками сообщений, сбора статистики и диагностики, которые явля¬
ются вспомогательными по отношению к программам, обеспечи¬
вающим процессы передачи и коммутации.
К основным функциональным уровням сети передачи данных
в соответствии с последними рекомендациями можно отнести [43]:
Уровень 1 — управления физическими каналами, который
включает функции, обеспечивающие установление, поддержание и
расторжение соединений с дискретными каналами связи.
Уровень 2 — управления каналами передачи данных, основ¬
ными функциями которого являются защита от ошибок, контроль
дискретных каналов и мультиплексирование передаваемых бло¬
ков информации.
Уровень 3 — управления передачей в сети, который включает
функции, обеспечивающие: приоритетное обслуживание сообще¬
нии, выбор маршрутов передачи, межузловой обмен, локальное
управление потоками и различные сервисные функции.
Уровень 4 — управления передачей сообщений между верх¬
ними уровнями (транспортный уровень), включающий следующие
функции: адресование сообщений (поиск места подключения тре¬
буемого абонента к сети), управление внешними потоками (огра¬
ничение нагрузки сети), контроль ошибок, потерь и задержек со¬
общений, обеспечение восстановления сообщений на приеме и
мультиплексирование сообщений для передачи.
Правила взаимодействия двух смежных уровней получили на-
шапие интерфейса (по аналогии с интерфейсом технических
39
средств). Соответствующие правила для взаимодействия двух
одноименных уровней называются протоколами. ]
Содержание функциональных уровней, интерфейсов и протоко-j
лов определяется 'конкретной реализацией сети и в первую оче-^
редь используемым методом коммутации. Так, при коммутации
каналов на этапе установления соединения в абонентской системе
могут быть задействованы только функции адресования на уровне
4 и функции по установлению соединения уровня 1, а в узле ком-i
мутации — функции уровня 1, функции маршрутизации и приори¬
тетного обслуживания уровня 3.
На этапе передачи данных в абонентской системе может быть;
опущен уровень 3, а функции уровня 1 состоят в поэлементной син¬
хронизации принимаемой и передаваемой информации. Программ¬
ное обеспечение узлов коммутации при этом не задействуется.
В сетях с виртуальными соединениями на этапе установления
соединения полностью задействуются все уровни как абонентской
системы, так и узлов 'коммутации. При передаче данных на узлах
коммутации и в абонентской системе, как правило, не реализуется
функция маршрутизации. В
датаграммном режиме ис¬
пользуется полный набор
функций.
Учитывая отсутствие аб¬
солютных достоинств у вир¬
туального и датаграммного
Рис 2.1. режимов сетей передачи даи-
АС — абонентская система; УК — узел коммута- НЫХ, МОЖНО ПреДПОЛагаТЬ*
ции; ВУ —верхний уровень чт0 наИболее ПерСПеКТИВНЫМ
является их совместное ис¬
пользование по выбору пользователя. Для датаграммно-виртуаль¬
ных сетей уровневая структура и протоколы приведены на рис. 2.1
[39].
Протоколы 1—1 (дискретного канала), 2—2 (канала передачи
данных) и 3—3 (тракта передачи данных) определены для лю¬
бой пары смежных узлов сети и устанавливают:
(1—1) — состав цепей и порядок обмена сигналами при вза¬
имодействии с дискретными каналами связи;
(2—2) — алгоритмы групповой синхронизации, избыточного
кодирования, повышения верности и контроля дискретных .кана¬
лов связи;
(3—3) — процедуры оформления пакетов для передачи по сети,'
межузлового обмена, регулирования по приоритетам, маршрута-:
зации, мультиплексирования и локального управления потоками.
Протокол (4—4) устанавливает для пар абонентских систем:
алгоритмы контроля сквозной передачи через сеть и глобального!
управления внешними потоками сообщений.
Протоколы, так же как и функциональные уровни, должны;
быть независимы друг от друга, что позволяет изменять любой nai
них, не затрагивая остальных.
40
Рекомендации по протоколам в сетях с коммутацией пакетов
Для больших стохастических систем с распределенными ресур¬
сами, к которым относятся сети передачи информации АСУ, ха¬
рактерным является повышение эффективности с ростом масшта¬
бов системы и числа замыкающихся на нее пользователей. Ис¬
ходя из этого оптимальной при соответствующей организации
является единая сеть, обеспечивающая обмен информацией в ин¬
тересах различных по назначению и принадлежности АСУ. Со¬
здание такой общегосударственной сети является генеральной кон¬
цепцией развития передачи данных у нас в стране. В то же время
практическое развитие систем телекоммуникационного доступа в
силу ряда объективных причин идет по пути создания локальных и
ведомственных сетей. Отсутствие общих рекомендаций и единых
предпосылок, а также различие в требованиях ik таким сетям за¬
частую приводят к использованию при проектировании несогласо¬
ванных принципов и алгоритмов, что не позволяет или затрудняет
их объединение.
В связи с этим наряду с рассмотрением проблем сопряжения
различных существующих сетей между собой предусматривается
использование определенных стандартов и рекомендаций при си¬
стемном проектировании новых сетей. В части структуры функ¬
ционального программного обеспечения системных протоколов ряд
таких рекомендаций разработан и предложен различными между¬
народными организациями, в частности МККТТ. Для сетей пере¬
дачи данных общего пользования с коммутацией пакетов основной
рекомендацией (МККТТ является Х.25 [43]. Эта рекомендация
определяет протоколы трех нижних уровней: дискретного канала,
канала передачи данных и тракта передачи данных.
1. Для уровня дискретного канала в составе Х.25 предусмот¬
рены Рекомендация Х.21 ■— сопряжение оборудования данных с
абонентским оборудованием цифровых первичных сетей связи —
н универсальная Рекомендация Х.21 бис — сопряжение с устрой¬
ствами преобразования сигналов и абонентским оборудованием
цифровых сетей. Устройства преобразования сигналов при этом
могут включать схемы, обеспечивающие установление соединений
в сетях с коммутацией каналов. Рекомендация Х.21 подробно
описана в [32], сведения об Х.21 бис приводятся в [39].
2. Для уровня канала передачи данных Х.25 рекомендует про-
юкол HDLC, (который устанавливает:
кодирование информации с целью избежания длинных серий
нулей, что обеспечивает устойчивую поэлементную синхронизацию
в дискретном канале связи;
поблочную синхронизацию с использованием префикса (флага);
кодирование блоков циклическим кодом с образующим поли¬
номом 16-й степени для обнаружения ошибок;
алгоритм исправления ошибок с решающей обратной связью,
непрерывной передачей, стиранием блоков, попавших под блоки¬
41
ровку, и позиционным разделением информационных и служеб¬
ных элементов в блоках;
для одной — тлавной — абонентской системы возможность
мультиплексирования обмена с 254 подчиненными абонентами по»
одной линии (многоточечной или кольцевой);
передачу информации о состоянии процессов на более высоком
уровне;
обмен командами, определяющими подчиненность, подключение
и отключение и информирующими о сбоях форматов и алгоритма
обмена.
Подробно детали протокола HDLC изложены в [32].
3. Для уровня трактов передачи данных в настоящее время
определена Рекомендация Х.25 ■— протокол виртуально-датаграм¬
мной сети. Этот протокол определяет процедуры, связанные с ор¬
ганизацией и использованием виртуальных соединений и передачей
датаграмм.
Виртуальные соединения могут быть постоянными или времен¬
ными. В последнем случае протокол реализуется в виде последо¬
вательности следующих фаз: организации виртуального соедине¬
ния, передачи данных, разъединения. На отдельных фазах исполь¬
зуются различные типы пакетов, отличающиеся по своей структуре
и содержанию служебных полей.
Фаза установления виртуального соединения начинается с по¬
сылки специального пакета ЗАПРОС ВЫЗОВА, который, проходя
по сети аналогично датаграмме, отмечает маршрут для виртуаль¬
ного соединения. Этот пакет может переносить кроме адресной
информации первую порцию данных и требования на дополни¬
тельные услуги [60].
После установки виртуального соединения начинается фаза
передачи данных, на которой используются пакеты ДАННЫЕ и
ПРЕРЫВАНИЕ. Рекомендация Х.25 предусматривает контроль
доставки пакетов по виртуальным каналам. С этой целью в каж¬
дый пакет ДАННЫЕ включается собственный номер пакета и кви¬
танция о номере последнего принятого пакета. Номера меняются
циклически.
Наличие у передающей станции номера последнего заквитиро-
ванного пакета позволяет осуществлять управление числом непод¬
твержденных пакетов, которые могут быть одновременно в вир¬
туальном соединении. Эта величина может назначаться централи¬
зованно либо во время посылки вызова. Если данные передаются
только в одном направлении, то для передачи квитанций преду¬
смотрен специальный вид пакета ГОТОВ К ПРИЕМУ, содержа¬
щий только номер принятого последним пакета данных.
Служебная информация между пользователями может переда¬
ваться либо в составе общих пакетов виртуального соединения,
либо с помощью специального пакета ПРЕРЫВАНИЕ, который
передается как датаграмма, имеющая более высокий приоритет по
отношению к пакетам ДАННЫЕ. Пакет ПРЕРЫВАНИЕ содер¬
жит информацию только о причине прерывания. При обнаружении
42
< {>оя из-за нарушения порядка в передаче последовательности па¬
кетов, ошибок в процедурах управления или переполнения сети об¬
наруживший его абонент и корреспондент обмениваются специаль¬
ными пакетами, инициирующими сброс всех пакетов, находящихся
в виртуальном соединении. Одновременно' обнуляются счетчики
передачи и повторяются все пакеты, по которым не получено кви¬
танций. Если сбой вызван ошибками в процедурах более высокого
уровня, команда на повторную передачу может выдаваться соот¬
ветствующей процедурой.
Фаза разъединения предназначена для снятия виртуального
соединения при окончании передачи данных, отказе в установле¬
нии этого соединения и различных сбоях. При этом инициатор
формирует и передает корреспонденту пакет с запросом о разъ¬
единении, по которому последний переходит в исходное состояние
и выдает ответ. Абонент-инициатор устанавливается в исходное со¬
стояние только после получения ответа. В запросе может содер¬
жаться информация о причине разъединения.
Протокол Х.25 предусматривает некоторые дополнительные
услуги для абонентов сети: приоритеты на установление вирту¬
альных соединений, возможность выбора допустимого числа неза-
квитированных сообщений, разграничение доступа и др. В дата¬
граммном режиме предусматривается использование двух видов
пакетов: один для передачи данных от абонентов, другой — для
передачи между узлами коммутации служебной сетевой инфор¬
мации и квитирования доставки основных пакетов. Набор различ¬
ных услуг для абонентов в этом режиме расширяется и включает:
приоритетное обслуживание сообщений, многоадресные передачи,
задержанную доставку и дополнительную защиту.
В целом протокол Х.25 обладает достаточно широкими возмож¬
ностями, что определяет перспективность его применения в сетях
передачи данных общего пользования.
2.2. ФОРМАЛИЗАЦИЯ СООБЩЕНИИ В СЕТЯХ ПЕРЕДАЧИ ДАННЫХ
Представление массивов информации
Для обеспечения возможности обработки сообщений данных на
различных функциональных уровнях сети производится их форма¬
лизация. Формализация сообщений заключается в присвоении им
набора служебных признаков, размещенных на строго определен¬
ных позициях и предназначенных для организации взаимодействия
одноименных уровней и работы сетевых протоколов.
Один из возможных принципов формализации [21] для дата-
I рам много режима проиллюстрирован на рис. 2.2, а.
Сообщение перед вводом в сеть разбивается на блоки, каждому
п.{ которых приписывается служебная часть — заголовок. Заголо¬
вок содержит все признаки, необходимые для самостоятельного
передвижения блока по сети: адресные признаки, признаки кате-
юрийности, справочные признаки, признаки дополнительного об¬
43
служивания. Кроме того, должны быть указаны номер блока в с(/-:
общении и общее число блоков, что необходимо для их упорядо¬
ченной сшивки перед выдачей получателю.
Блок с присвоенными ему признаками образует датаграмму —
независимую единицу сети. При передаче датаграмм между смеж*
-L Д Сообщение
/ V
(memo
| | | 3 [ ^ Кодограммы
Ш. bz. 1 JL T] Сетевые Плот
\C/t\/?J] 1 \СП\ПЭ | Линейнце длони
ю
1 Пакет 4-го уровни
\З.Х.251 | Сетевой лонетХ.Z5
\з;ЩС\ \tMLC\ Панетнанала ПД
б)
Рис. 2.2
ными узлами она также разбивается на -блоки, к которым припи¬
сываются концевики, содержащие признаки, обеспечивающие
сшивку и проверку блоков. Такие образования являются незави¬
симыми на уровне трактов передачи данных и называются сете¬
выми блоками. Сетевые блоки одной датаграммы могут переда¬
ваться по различным каналам одного тракта ПД. Перед вводом
в канал ПД они разделяются на части, к которым после информа¬
ционных разрядов приписываются служебные поля и проверочные
элементы, предусмотренные протоколом канального уровня.
Иной принцип формализации, предлагаемый протоколом Х.25*
показан на рис. 2.2, б. Роль исходного сообщения здесь играет
пакет, формируемый на четвертом функциональном уровне або¬
нентской системы. Сетевой пакет образуется из него приформиро-
ванием заголовка, содержание которого определяет вид пакета::
датаграмма или пакет виртуального соединения. Канальный пакет
или линейный блок получается на основе сетевого пакета путем
добавления заголовка и концевика, предусмотренных протоколом
HDLC. Таким образом, и в сетевом, и в канальном пакетах фор¬
матов Х.25 информационные части одинаковы.
Структуры пакетов
Рассмотрим структуры пакетов, предлагаемые протоколом Х.25.
Канальный пакет, рекомендуемый протоколом HDLC, имеет
структуру, изображенную на рис. 2.3. В состав пакета входят ад-
44
рссное поле, поле управления, поле данных и проверочные эле>
менты, обрамленные флагами. Флаг в начале пакета обеспечивает*
запуск, а флаг в конце — остановку счетчиков групповой синхро¬
низации приемников. Адресное поле используется в случаях мно¬
готочечных и петлевых систем для идентификации приемника адг
ресата.
В зависимости от содержания поля управления различаются"
ненумерованный, супервизорный и информационный пакеты. Не¬
нумерованный пакет предназна¬
чен для установления связи в мно- , , —,—
готочечных и петлевых системах. \^.АГ\АДрЕС\ УПР \ _ данные \нэ\фла^
Кроме того, он используется для
информирования передающей сто- Рис. 2.3
роны об ошибках в формате. По¬
ле данных этих пакетов не задействуется. Супервизорный пакет
обеспечивает передачу команд готовности абонентов, а также за¬
просов на повторную передачу пакетов, в которых обнаружены
ошибки, и не выполняет функции переноса данных. Информацион¬
ный пакет содержит в поле управления номера передаваемого и
ожидаемого пакетов. Проверочные пакеты входят в состав паке¬
тов всех видов.
Для сетевого уровня в режиме виртуальных соединений прото¬
кол Х.25 предусматривает использование 14 типов пакетов. На
рис. 2.4, а, б представлены два наиболее характерные из них.
Идентификатор
формата
Группа логичес¬
кого канала
Номер логического канала
Длина адреса
источника
Длина адреса
получателя
Адрес источника
Адрес получателя
Длина поля для осодь/х
характеристик
Данные абонента
о)
Особые характеристики I
Идентификатор
формата
Группа логичес¬
кого канала
Номер логического канала
P(R)
М
PCS)
Q
Рис. 2.4
Данные абонента
Ю
Пакет ВЫЗОВ/ЗАПРОС ВЫЗОВА используется для организа¬
ции виртуального соединения (рис. 2.4,а). В поле идентификатора
формата содержится код, определяющий тип пакета. Поля группы
и номера логического канала предназначены для занесения номера
логического канала, используемого для -отметки образуемого вир¬
туального соединения. Адресные поля могут иметь различную
45
длину. Поэтому им предшествует признак, определяющий раз¬
меры.
В пакете предусматриваются переменное поле для особых ха^
рактеристик и соответствующий признак длины. Это поле может
содержать перечень тех средств, которые должны быть в абонент¬
ской системе, чтобы воспринять данные, предназначенные для
передачи по виртуальному соединению.
Пакет ДАННЫЕ (рис. 2.4, б) используется для передачи ин¬
формации абонентов. Номер логического канала в этом пакете
служит для определения на узлах сети своего виртуального соеди¬
нения. Поле P(R) содержит номер ожидаемого, а поле P(S) номер
передаваемого пакетов данных. Признак М предназначен для ин¬
дикации «конечного пакета в последовательности. Признак Q ука¬
зывает на необходимость какой-либо специальной обработки ин¬
формации поля данных.
В датаграммном режиме предусматривается всего два типа
пакетов. Первый из них (рис. 2.5, а) является информационной
датаграммой.
Идентификатор
формата
Группа логичес¬
кого канала
Номер логического канала
Р(Я) М
PCS) Q
Длина адреса
источника
Длина адреса
получателя
Данные абонента
а)
1 Адрес источника
1 1
1
1
Адрес источника 1
1
Адрес получателя
1
Адрес получателя |
Длина поля для,-особых
характеристик
Идентификатор датаграммы
Особые характеристики
1
Тип ситуации
Идентификатор датазра /мы
Место возникновения ситуации
Идентификатор
формата
Группа логичес¬
кого канала
Номер логического канала
PCR) М
PCS) Q
Длина адреса
источника
Длина адреса
получателя
Сетевая информация
Рис. 2.5
Поля, определяющие номер логического канала, в датаграмме
используются только программами уровня 4 абонентских систем
для детализации получателя. Поле идентификатора датаграммы
позволяет указывать особенности в обслуживании датаграммы и
занимает первый байт поля данных. Остальные поля имеют такие
же значения, -как и в предыдущих типах пакетов.
Второй тип датаграммы (рис. 2.5,6) используется для обмена
сетевой информацией между процессами, обеспечивающими управ¬
ление в сети. В отличие от информационной датаграммы, служеб-
46
пая датаграмма имеет дополнительные поля, в которых указыва¬
ются предмет и объект отображения или воздействия (тип и ме¬
сто возникновения ситуации, о которой сообщается), а на место
поля данных заносится сетевая информация.
Все типы пакетов имеют в своих форматах резервные поля, что
позволяет вводить дополнительные признаки при модификации
протокола без изменения структуры пакетов.
Оптимизация размеров пакетов
Размер пакетов выбирается таким образом, чтобы обеспечить
максимальное использование каналов для передачи полезной ин¬
формации сообщений. Конкретное содержание критерия оптималь¬
ности определяется в зависимости от алгоритма обмена сообще¬
ниями между модулями или абонентами сети [23, 44].
Передача сообщений без подтверждения. Алгоритм обмена со¬
стоит в следующем. Полученное сообщение контролируется на на¬
личие ошибки. Если ошибка есть, то оно стирается. Передающий
модуль не информируется о результатах приема.
При случайных длинах сообщений передача блоками стан¬
дартной длины приводит к тому, что часть разрядов последнего
блока оказывается незадействованной (рис. 2.6). Это приводит
к уменьшению коэффициента полезного использования каналов
связи. Снижение потерь пропускной способности может быть до¬
стигнуто за счет уменьшения длины блока, что в свою очередь
приводит к увеличению числа передаваемых пакетов на одно со¬
общение. Поскольку каждый пакет содержит служебную часть,
которая не несет полезной информации, увеличение их числа на
одно сообщение приводит к снижению коэффициента полезного
использования каналов за счет возрастания объема служебной
информации, передаваемой в сети. Таким образом, существует не¬
которое оптимальное значение длины блоков в смысле максимума
коэффициента использования каналов.
Коэффициент полезного использования каналов
Кв.я = Т/1п(10 + Ь)], (2.1)
где I — средняя длина сообщения, дв. ед.; /о — длина блока,
дв. ед.; Ъ — число двоичных единиц в служебных частях; п —
среднее число блоков на одно сообщение.
\1\г\3\4\б\е\7\8\3\10\ tl\lZ\l3\n\lS\№\l7\lS\l9\2Atlkz[z!\zA25\ZS\Z7\C0llfllieme
ИгНФ
блоит
G\7\8\9\70
5лон 2
11\12\1Ъ\п\15\блон 3
Гб\17\1^19\г&6лон4
\11\пЩ14\11кбЛ0н5
\16\17\0\0\0\}Л0К 6
Рис. 2.6
47
Можно положить, что в среднем на каждое сообщение оказы-,
вается незадействованной половина разрядов одного блока /о/2/
Тогда
Подставляя (2.2) в (2.1), получаем /
/Cn.H = ^W + V2)(/0 + b)]. (24)
Для определения оптимального значения /о продифференциру¬
ем (2.3) и приравняем нулю, после чего найдем
10опт = УШ. (2.4)
На практике более целесообразно выбирать значение /о не из
условия максимума Кп.и, а на основе оценки чувствительности
Ки.и к изменению нагрузки (кото¬
рая зависит от величины I) при
различных значениях /о.
На рис. 2.7 представлен гра¬
фик KuM = f(~l/b) при различных
значениях lo/b. Штриховой лини¬
ей обозначена граница макси¬
мально достижимых значений ко¬
эффициента использования.
Для 7/Ь >8 при lo/b = 8 обеспе¬
чивается снижение коэффициента
использования не более чем на
10% его максимального значения.
При больших значениях lo/b коэф¬
фициент использования каналов сильно снижается при коротких со¬
общениях. Уменьшение lo/b приводит к значительному уменьшению
Ки.и при длинных сообщениях. Таким образом, в большинстве прак¬
тических случаев целесообразно принять /0 = 86.
Алгоритм с ожиданием по каждому пакету. В данном случае
после передачи каждого пакета следующие пакеты не передаются
до получения квитанции за переданный пакет. Длина пакета при
этом должна выбираться так, чтобы среднее значение избыточного
времени на ожидание подтверждения и повторные передачи было
минимальным.
Среднее избыточное время при передаче одного пакета
^п.изб — ^под 1C Р1П ^подН ^ (2.5)
где tпод — время ожидания подтверждения; рп — вероятность
ошибки в пакете; R — скорость передачи.
Тогда среднее избыточное время на подтверждения и по:Вторе-
ния при передаче сообщения ?с.изб = п1п.и3б или ввиду того что
оо
Р*П ~ Рп/(1 Рп) >
1=1
Рис. 2.7
п = (1 + 10/2)/10. (2.2
48
^ПОД “Ь ■
Рп
(2.6)
1 — Рп Г'"" Я
Среднее избыточное время передачи, обусловленное введением за¬
головков для пакетов,
^с.изб Я-
1 + Ь'
к - к ■ (27)
где>&' — длина заголовка всего сообщения. Общее среднее избы¬
точное время с учетом (2.2)
с.изб '
^с.изб 1 + ^с.изб 2
/ + 0,5/р
и
I А) + ь
Рп
ПОД г J .
7"+6'
■Рп
+
(2.8)
Дифференцируя последнее выражение по /0 и приравнивая ну¬
лю, после преобразования получаем уравнение, решение которого
дает оптимальное значение длины пакета /о опт*.
dt
с.изб
д /«
(I-J- 0,510)
Pn
tu
lo + b \ . 1
R J R
I
(t + lA±±)
\ ПОД R J
-0.
(2.9)
/0 V под 1 R
где р/п = дрП/д10.
Алгоритм с непрерывной передачей. При реализации алгорит¬
ма с непрерывной передачей пакеты передаются непрерывно один
за другим. По каждому правильно принятому пакету выдается
квитанция. В случае отсутствия квитанции в течение определенно¬
го интервала соответствующий пакет передается повторно как оче¬
редной пакет.
Таким образом, ^Под здесь определяется только временем пере¬
дачи квитанции и значительно меньше (/о + b)/R. Это позволяет
принять tпод== 0. Тогда оптимальное значение /0 определяется из
уравнения
-;г- = <Т+ °’5 го) Р П1(/° t Ь) -I °'512о~1ь = °- (2.10)
д 10 1~Рп
Значения р'п и р определяются характером потоков ошибок
в используемых каналах передачи данных. Если ошибки в сим¬
волах пакетов возникают независимо с вероятностью р, то
Рп = 1— (1— Р)к+ь = 1—1
, (lo + b)(l0 + b-l)p*
2!
<1о + Ь)р +
.&(10 + Ь)р;
(2.11)
Р'п = Р- (2-12).
При группировании ошибок может быть использована двух¬
параметрическая модель с параметром группирования а [21]:
49
Pn = (lo + b)l-a р; (2.1^
Р'п = Р(1—'а)(10 + Ь)~а. (2.14)
Решение уравнений (2.9) и (2.10) после подстановки послед¬
них соотношений должно производиться численно.
Таким образом, факторами, определяющими оптимальную дйи-
ну пакетов, являются длины заголовков, алгоритм обмена и мо¬
дель канала передачи данных.
Сопряжение форматов и кодов
при объединении сетей передачи данных
При объединении различных сетей ПД с коммутацией каналов
(КК) или каналов и сообщений (пакетов) (КП или КС) сопря¬
жение форматов сообщений и кодов осуществляется на абонент¬
ских пунктах заменой либо модернизацией оборудования. Прин¬
ципиально возможно введение сопрягающих устройств для пере¬
кодирования сообщений, однако такое решение в большинстве
случаев менее предпочтительно, так как сложность этих устройств
соизмерима со сложностью оборудования абонентских пунктов.
При объединении сетей с коммутацией сообщений (пакетов)
согласование кодов и форматов осуществляется путем изменений
в средствах одной из сетей (очевидно, меньшей). В таком случае
код и формат сообщений меньшей по числу центров коммутации
сети приводятся в соответствие коду и формату большой сети.
Возможна ситуация, когда более целесообразным является вы¬
работка некоторого кохмпромиссного формата, требующего незна¬
чительных изменений в средствах объединенных сетей. Такой ва¬
риант может оказаться приемлемым, например, в случае одина¬
ковых кодов и размеров полей сообщений, но различных значений
позиций в полях.
Наиболее универсальным способом согласования кодов и фор¬
матов сетей с коммутацией сообщений является использование
центров сопряжения. Этот подход позволяет обеспечить согласо¬
вание любых кодов и форматов без изменений в средствах сопря¬
гаемых сетей.
2.3. АДРЕСОВАНИЕ СООБЩЕНИЙ
Способы адресования избирательных сообщений
Для идентификации абонентов и нахождения места их распо¬
ложения в сети каждому из них присваивается признак — адрес.
Принцип формирования адреса называется способом адресования
и определяется назначением и структурой сети. В сетях с КК спо¬
соб адресования называется системой нумерации.
Способ адресования определяет заполнение адресной части за¬
головка сообщений при КС (КП) или состав служебного сообще¬
50
ния при КК, а также количество адресной информации, которое
хр\анится на узлах коммутации.
'Рассмотрим существующие способы адресования.
'Способ зонной нумерации. Используется в сетях, построенных
по радиально-узловому принципу. При этом способе нумерации
вся территория, обслуживаемая сетью, разбивается на зоны, каж¬
дая из которых включает ряд узлов коммутации, образующих
иерархическую древовидную структуру.
Адрес абонента содержит номера зоны, узла в зоне и абонента
на данном узле и постоянен для всех абонентов-отправителей.
Указанные номера помещаются при передаче в служебной части
сообщения.
Маршрутный способ. Он является расширением метода зонной
нумерации для произвольной структуры сети. В этом случае ад¬
рес содержит номера всех промежуточных узлов, через которые
должно пройти сообщение до узла, к которому подключен або¬
нент-получатель, а также номер соединительной линии, через ко¬
торую абонент подключен к узлу. Указанные данные должны быть
у абонента-отправителя. При этом адрес каждого абонента отли¬
чен для каждого отправителя.
Физическое адресование. В отличие от предыдущих способов
адресования, предусматривающих в адресе маршрут доведения
сообщения, при физическом адресовании адрес включает только
номера узла и линии привязки абонента. Задача выбора маршрута
до узла привязки требуемого абонента решается сетью.
Таким образом, абонент не должен знать структуру сети, а
объем его справочных адресных таблиц значительно меньше, чем
в предыдущих случаях. При этом обязательными условиями яв¬
ляются однозначность и постоянство физических адресов абонентов.
Способ сквозного (логического) адресования. При этом спо¬
собе абоненты нумеруются как элементы упорядоченного множе¬
ства независимо от места подключения их к сети. При введении
сообщения в сеть его адресная часть содержит только номер або-
нента-получателя. Задача поиска абонента по сети (узла, к кото¬
рому он подключен), т. е. процедура адресования и задача вы¬
бора маршрута, решается на узле.
Данный способ обеспечивает передачу сообщений мобильным
абонентам и значительно облегчает процедуру связи для потреби¬
телей сети.
Мобильные абоненты, перемещаясь по району, обслуживаемо¬
му сетью, могут подключаться к различным узлам. Узел комму¬
тации, к которому подключился абонент, должен проинформиро¬
вать об этом все узлы сети.
Реализация способа сквозного адресования может быть раз¬
личной. В наиболее простом случае на каждом узле хранится таб¬
лица привязки, по которой для каждого абонента определяется
его физический адрес. Структура таблиц может учитывать тот
факт, что для целей маршрутизации достаточно знать только но¬
мер узла привязки, которому в свою очередь необходим лишь но¬
S1
мер соединительной линии. Тогда на каждом узле достаточно/»
принципе иметь таблицу узлов привязки абонентов сети и таблицу
номеров соединительных линий привязки абонентов только данного
узла. Таблица узлов привязки не включает записей для абонентов-
данного узла.
Логическая адресация может реализовываться с информаци¬
онной службой. Такой подход предполагает наличие в сети специ¬
альных информационных центров, в обязанности которых входят
хранение и обновление предназначенных для абонентов таблиц со¬
ответствия и предоставление необходимой информации по требо¬
ванию узлов. Для уменьшения интенсивности обращения к инфор¬
мационным центрам наиболее часто используемые и стабильные
адреса хранятся на узлах.
Способ сквозного адресования является наиболее перспектив¬
ным, несмотря на значительную сложность и большое задейство¬
вание памяти на узлах коммутации.
Адресование циркулярных сообщений
Рассмотрим два основных способа адресования циркулярных
сообщений [54]:
1. Перечисление в служебной части адресов всех абонентов.
Этот способ отличается простотой, но при большом числе адре¬
сов приводит к значительному увеличению служебной части мно¬
гоадресных и циркулярных кодограмм.
2. Способ обобщенного адреса. В этом случае группе абонентов
присваивается обобщенный адрес, а на узлах коммутации для
каждого варианта обобщенного адреса имеется список абонентов.
Таким образом, объем служебной части не зависит от числа або-
нентов-получателей.
Возможны два способа использования обобщенного адреса:
только при вводе сообщения в сеть;
не только при вводе сообщения в сеть, но и при передаче
между узлами коммутации.
В первом случае кодограмма, содержащая обобщенный адрес,
на первом же узле коммутации преобразуется в одноадресные
кодограммы. Для выполнения этой операции в памяти t-ro узла
коммутации должно храниться
Щ
^(0 = 2mJ (2-15)
/=1
дополнительных адресов. В формуле rrij — число адресов в /-м об¬
общенном адресе; Mi — число обобщенных адресов — групп або¬
нентов для циркулярной передачи на t-м узле.
Во втором случае кодограмма доводится до всех узло© сети,
а от них — абонентам, входящим в список обобщенного адреса.
При этом в памяти t-.ro узла коммутации должно содержаться
52
^2 (0 = S mi (2-16)
/=1
адресов, где К — общее число обобщенных адресов.
Поскольку в общем случае K>Mif то Bi(i) <cB2(i), т. е. пер¬
вый способ задействует меньший объем памяти. Однако следует
учитывать, что для доведения циркулярных сообщений до получа¬
телей в сети с М узлами необходимо ввести в сеть (из узла от¬
правителя) при первом способе использования обобщенного адре-
tn
са а при втором способе М одинаковых сообщений. Таким
j-i
образом, при первом способе значительно увеличивается числа
передаваемых в сети сообщений.
Обычно второй способ используется, когда циркулярные со¬
общения предназначаются абсолютному большинству абонентов
сети.
Сопряжение систем адресования
Если при объединении сетей с коммутацией каналов, имеющих
свои системы нумерации, организуется сопрягающий центр, адре¬
са абонентов сетей остаются неизменными, но вводится дополни¬
тельный номер узла сопряжения. При этом каждый абонент сети
должен знать номера абонентов не только своей сети, но и сети,
с которой осуществляется сопряжение.
Для установления канала между абонентами различных сетей
вызывающий абонент соединяется с узлом сопряжения в соответ¬
ствии с его адресом и передает в этот узел адрес абонента-полу-
чателя. Составной канал через сопрягаемую сеть образуется под
управлением узла сопряжения в соответствии с этим адресом.
Если сопрягаемые сети имеют незначительные размеры, то мо¬
жет оказаться более целесообразным модернизировать центры
коммутации с целью создания единой системы адресования для
объединенной сети. Для сетей с коммутацией сообщений (паке¬
тов) согласование систем адресования требует определенных из¬
менений в адресно-маршрутных признаках заголовков сообще¬
ний — пакетов. Если используемые в сетях форматы совпадают и
в соответствующих полях заголовка имеются резервные разряды
или признаки, которыми можно пожертвовать, то они могут быть
задействованы для идентификации сети, к которой относится ос¬
новная часть адреса. При этом необходимы только незначительные
изменения в средствах обеих сетей.
Если модификация в рамках старого формата невозможна, то
решение должно быть выбрано между изменением форматов для
обеих сетей и введением центров сопряжения.
Обычно изменение форматов связано с необходимостью значи¬
тельных изменений в средствах сети.
При наличии мобильных абонентов, для которых нужно обес¬
печить сквозное адресование по сопряженным сетям, возникают
53
дополнительные проблемы: необходимость расширения таблиц
привязки и обеспечения их сквозной корректировки. Сквозная кор¬
ректировка таблиц привязки может быть обеспечена созданием
единого формата служебных сообщений и обеспечением их прохож¬
дения по узлам обеих сетей.
При объединении сетей с -коммутацией каналов и сетей с ком¬
мутацией сообщений (пакетов) необходимым условием является
единый алфавит, используемый абонентами для формирования ад¬
реса, так как в сетях с коммутацией каналов традиционно исполь¬
зуется цифровая нумерация, а в сетях с коммутацией сообщений
в адрес могут включаться буквенные символы.
Таким образом, либо сеть с КС (КП) должна быть переведена
на цифровые адреса, либо абоненты сети КК должны иметь воз¬
можность формировать адресную часть сообщений с использова¬
нием буквенных символов.
Адрес при сопряжении сетей с КК и КС содержит две части:
одна для сети с КК, а другая — для сети с КС. Если абонент-от-
правитель подключен к сети КК, то первоначально он в соответ¬
ствии со специальным адресом, присвоенным сети КС, образует
соединение со входом этой сети. Далее формируется сообщение,
содержащее адрес абонента-получателя сети КС, и через сеть КК
вводится в центр коммутации сообщений, через который осуществ¬
ляется объединение сетей. Вторую часть пути до абонента-получа¬
теля сообщение передается по сети КС в соответствии с адресом,
содержащимся в заголовке.
В случае принадлежности абонента-отправителя сети КС адрес
абонента в сети КК должен включаться в служебную часть сооб¬
щения. Доведение сообщения до центра коммутации сообщений,
через который осуществляется сопряжение, производится в соответ¬
ствии с внутренним адресом сети КС. Далее адрес требуемого
абонента сети КК выделяется и используется для его отыскания и
образования соединения.
Таким образом, сопряжение сетей КК и КС требует некоторых
изменений средств сети КС, обеспечивающих включение в формат
сообщения номера абонента сети КК и управление соединением.
2.4. ПРОЦЕДУРЫ ВЫБОРА МАРШРУТОВ
Общие сведения
В любой сети, имеющей распределенную структуру, между каж¬
дой парой узлов имеется несколько маршрутов. Поэтому для цент¬
ров коммутации определяются некоторые правила, в соответствии
с которыми на основе сетевой информации для каждого сообще¬
ния выбирается тот или иной конкретный маршрут к узлу-полу¬
чателю. Эти правила называются процедурой выбора маршрута.
Совокупность матриц маршрутов и процедура выбора полностью
определяют характер распределения внешних потоков сообщений
и образуют план распределения нагрузки.
54
Различают избирательные процедуры, процедуры повышенной
надежности доставки и процедуры передачи циркулярных сообще¬
ний. Каждая из этих процедур может быть управляемой (адап¬
тивной, динамической) или неуправляемой. В данном параграфе
для уяснения особенностей каждой из процедур рассматриваются
только неуправляемые варианты. Вопросы управления процедура¬
ми маршрутизации изложены в гл. 3.
Избирательные процедуры выбора маршрутов
Избирательные процедуры реализуются при передаче одноад¬
ресных сообщений, если не предъявляется особых требований по
надежности доставки. Можно выделить случайную, детерминиро¬
ванную и поисковую избирательные процедуры.
1. Случайная процедура (СП) есть определенное правило, по
которому на каждом узле выбор линии связи для передачи сооб¬
щения производится в соответствии с некоторым вероятностным
распределением, заданным на множестве маршрутов. Существуют
два варианта реализации СП. Первый вариант (назовем его ква-
зислучайной процедурой) предполагает использование только тех
маршрутов, которые заданы маршрутной матрицей. При втором
варианте (чисто случайная процедура) используются все возмож¬
ные маршруты, в том числе с петлями и циклами.
В обоих случаях на множестве линий связи каждого узла за¬
дается распределение вероятностей, в соответствии с которым со¬
общения направляются для передачи. Таким образом, распределе¬
ние входящего потока сообщений заключается в разыгрывании для
каждого сообщения на узле одной из инцидентных линий связи в
соответствии с заданным распределением вероятностей. Распре¬
деление вероятностей определяется в зависимости от характери¬
стик линий связи и в простейшем случае может быть равномерным.
При использовании таких процедур сообщения совершают случай¬
ные блуждающие передвижения по сети в поисках узла-получа¬
теля.
Основными достоинствами СП являются относительно слабая
зависимость значений внешних параметров сети от надежности ее
элементов и достаточность для маршрутизации и поиска абонентов
только локальной сетевой информации. Недостатки СП — возмож¬
ность больших издержек сообщений и значительная интенсивность
внутренних потоков.
Возможна модификация СП, при которой сообщение, проходя
по сети, запоминает некоторое число последних узлов, через кото¬
рые оно прошло. В дальнейшем эти узлы для данного сообщения
являются запрещенными. Таким образом, по мере прохождения па
сети область случайного поиска узла-получателя сужается, что в
конечном итоге приводит к уменьшению длины случайного марш¬
рута и нагрузки сети.
При использовании квазислучайной процедуры сообщение не
совершает случайного блуждания, а передается по одному из раз¬
65
решенных маршрутов, однако выбор конкретного маршрута про¬
изводится на основе установленного распределения вероятностей.
В результате общий поток сообщений между каждой парой узлов
распределяется по маршрутам, информация о которых хранится
в памяти узлов.
2. Детерминированная процедура (ДП) предусматривает для
передачи между каждой парой узлов единственный маршрут. Если
этот маршрут находится в неисправном или занятом состоянии,
сообщение ожидает его восстановления или освобождения.
К достоинствам детерминированной процедуры можно отнести
следующие:
сообщения передаются только по кратчайшим маршрутам, что
обеспечивает при высокой надежности сети потенциально дости¬
жимые значения вероятностно-временных характеристик;
процедура проста в реализации и требует незначительных объ¬
емов памяти центров коммутации для хранения маршрутной ин¬
формации.
Основной недостаток детерминированной процедуры — сильное
влияние ненадежности сети на ее вероятностно-временные харак¬
теристики.
3. При поисковой процедуре выбора маршрутов (ПП) исполь¬
зуются все маршруты, заданные матрицей маршрутов, причем
порядок их использования определяется установленным отношени¬
ем предпочтения.
Каждое поступающее в узел сообщение первоначально произ¬
водит опробование маршрута, имеющего наибольшее предпочте¬
ние. Если передача по этому маршруту невозможна, то опробует¬
ся второй в порядке предпочтения маршрут и т. д. по всему мно¬
жеству маршрутов, заданных матрицей маршрутов.
Таким образом, в поисковой процедуре учитываются как ха¬
рактеристики маршрутов сети при установлении отношения пред¬
почтения на множестве маршрутов, так и текущее мгновенное со¬
стояние отдельных элементов сети при выборе конкретного марш¬
рута передачи.
Средняя длина маршрутов в случае ПП больше, чем при ДП,
но меньше, чем при СП. Действительно, при занятости кратчайше¬
го маршрута сообщения передаются по другим, более длинным,
чем в случае ДП, маршрутам, однако при этом множество возмож¬
ных маршрутов не содержит очень длинных маршрутов, включаю¬
щих петли и циклы. Если передача сообщения по маршруту не¬
возможна из-за его отказа, то сообщение не ожидает его восста¬
новления, а передается по одному из разрешенных исправных
маршрутов. Поэтому в сетях с ПП ненадежность элементов сети
оказывает меньшее влияние на задержку сообщений, чем в случае
ДП. Однако это влияние значительнее, чем при чисто случайной
процедуре, поскольку множество маршрутов в матрице маршрутов
обычно меньше, чем при СП.
56
Таким образом, ПП по своим свойствам занимает промежу¬
точное положение между СП и ДП и сглаживает достоинства и
недостатки каждой из этих процедур.
Следует отметить, что реализация поисковой, процедуры выбо¬
ра маршрутов .в сетях ПД наиболее сложна, так как требует до¬
полнительных операций по опробованию маршрутов и задействует
значительные объемы памяти для хранения информации об этих
маршрутах.
Несмотря на сложность реализации, ПП является наиболее
перспективной «процедурой для сетей ПД.
Процедуры повышенной надежности доставки
Процедуры повышенной 'надежности доставки предназначены
для доведения сообщений, требования к (надежности доставки ко¬
торых превышают уровень, обеспечиваемый в сети. /Возможны два
варианта реализации процедур повышенной надежности.
При первом варианте на узле-отправителе формируется не¬
сколько экземпляров сообщения, каждое из которых передается
получателю как самостоятельное сообщение с использованием
принятой в сети процедуры выбора маршрутов. Число экземпля¬
ров, а следовательно, и задействуемых маршрутов определяется
требованиями к надежности доставки сообщений и характеристи¬
ками сети. Наибольший эффект может быть достигнут при исполь¬
зовании независимых маршрутов для (передачи каждого экземпля¬
ра.
Так как данный метод базируется на принятую процедуру вы¬
бора маршрутов, то для его использования необходима информа¬
ция состояния о сети, однако при этом не требуется специального
программного обеспечения реализации самой процедуры.
Второй вариант, получивший название алгоритма «волна»
[21], не требует информации о состоянии сети и обеспечивает по¬
тенциально достижимую в сети надежность доставки.
Данный алгоритм состоит в формировании на каждом проме¬
жуточном узле копий сообщения и их передаче по исходящим ли¬
ниям связи. Для обеспечения сходимости алгоритма в сети при
вторичном поступлении сообщения на узел оно стирается и далее
не передается. В качестве модификации алгоритма может быть
введен запрет на передачу копии по линии связи, из которой со¬
общение поступило на узел.
Алгоритм «волна» может использоваться в экстремальных ус¬
ловиях, когда на узлах отсутствует информация о состоянии сети,
однако его реализация приводит ,к резкому возрастанию внутрен¬
них потоков и требует введения специальных фрагментов в про¬
граммное обеспечение узлов коммутации. Исходя из этого данный
алгоритм целесообразно применять только для сравнительно ред¬
ких сообщений особой важности, если передача таких сообщений
предусматривается в сети.
57
Обе приведенные процедуры позволяют помимо надежности
повысить верность доставки сообщений. С этой целью на узле-по¬
лучателе может осуществляться сравнение (получаемых копий. В
алгоритме «волна» сравнение может производиться на каждом из
промежуточных узлов. При этом результатом 'Сравнения может
быть либо обнаружение ошибки, либо, если это обеспечивается
числом копий, мажоритарное исправление.
Процедуры передачи циркулярных сообщений
В простейшем случае для передачи циркулярных сообщений
может использоваться последовательная одноадресная процедура
передачи копий. Если циркулярные сообщения относятся к. кате¬
гории особо важных, то их передачу целесообразно осуществлять
с помощью алгоритма «волна», обеспечивающего одновременно
потенциальную надежность доставки.
К специальным циркулярным процедурам относится [46] пе¬
редача:
по минимальному связывающему дереву;
по дереву кратчайших маршрутов;
,по дереву обратных кратчайших маршрутов.
Процедура передачи по минимальному связывающему дереву
базируется на алгоритм вычисления минимального дерева взве¬
шенного графа сети. Наиболее распространенная на практике ре¬
ализация такого алгоритма (алгоритма Прима) приводится в
разд. 4.3.
Процедура состоит в следующем. На каждом узле хранятся
номера тех инцидентных узлу линий связи, которые принадлежат
минимальному дереву. Передача циркулярного 'Сообщения переда¬
ется только по этим линиям, исключая исходную, независимо от
узла-источника.
Процедура передачи по дереву кратчайших маршрутов пре¬
дусматривает использование для передачи циркулярных сообще¬
ний дерева кратчайших маршрутов от узла-источника до всех ос¬
тальных узлов. Таким образом, распространение копий циркуляр¬
ных сообщений производится по различным линиям связи в за¬
висимости от узла-источника.
Данная процедура базируется на алгоритмы вычисления дере¬
ва кратчайших маршрутов (см. гл. 3). При этом каждый узел
должен содержать в памяти информацию о структуре таких де¬
ревьев для всех узлов сети.
Процедура состоит в выборе по индексу узла-источника, со¬
держащегося в заголо:Вке сообщения, соответствующего дерева и
передаче копий по линиям связи, принадлежащих данному дере¬
ву и инцидентных узлу.
Процедура передачи по дереву обратных кратчайших маршру¬
тов отличается от предыдущей реализации и заключается в сле¬
дующем.
58
Когда циркулярное сообщение, содержащее адрес источника,
прибывает на узел, последний отправляет его копии по всем ли¬
ниям связи, кроме исходной, только в том случае, если сообщение
прибыло в этот узел по линии, принадлежащей кратчайшему мар¬
шруту от него в исходный узел. Если такое условие не выполня-
ется, то циркулярное сообщение узлом игнорируется.
Название процедуры объясняется тем, что циркулярное сооб¬
щение распространяется узлами только, если оно прибыло по ли¬
нии связи, являющейся частью кратчайшего пути из данного уз¬
ла обратно в исходный узел.
Для сравнения и оценки процедур циркулярной передачи обыч¬
но используют такие показатели, как среднее число копий или
дополнительные внутренние потоки, передаваемые в сети, сред¬
нее и максимальное время доставки всех копий, надежность до*
ставки, задействованная память и степень использования одноад¬
ресных процедур.
Последовательная одноадресная процедура передачи копий
практически не требует дополнений к программному и информа¬
ционному обеспечению одноадресных процедур, но характеризу¬
ется низкими вероятностно-временными показателями из-за после¬
довательного характера передачи в различные адреса.
Интенсивность внутренних потоков определяется выражением
где d — средняя длина маршрута в сети; X— интенсивность внеш¬
него потока циркулярных сообщений.
Процедура алгоритма «волна» хотя и не зависима от одноад¬
ресной, но достаточно проста в реализации и не требует никакого
информационного обеспечения. Кроме того, она характеризуется
наилучшими вероятностно-временными и надежностными характе¬
ристиками. Ограниченность ее применения вариантами, когда цир¬
кулярные сообщения являются особо важными и появляются
сравнительно редко, объясняется значительным увеличением внут¬
ренних потоков. Так, по полученным в [54] оценкам среднее чис¬
ло шагов, за которое сходится алгоритм, равно
Тогда, полагая, что на каждом шаге происходит передача по всем
инцидентным линиям связи, кроме исходной, а среднее число уз¬
лов, осуществляющих рассылку на произвольном шаге, равно
N/2, интенсивность внутренних потоков можно определить следую¬
щим образом:
Процедура, основанная на использовании минимального дере¬
ва, требует хранения на узлах специальной маршрутной информа¬
ции (для циркулярных сообщений). Кроме того, если предуомат-
Явн — X d N,
(2.17)
(2.18)
Г N 1 Г N
59
ривается возможность коррекции минимального дерева, в про¬
граммное обеспечение узлов должен быть включен дополнитель¬
ный фрагмент.
Интенсивность внутреннего потока линейно зависит от числа
узлов ;в сети:
K* = k(N— 1). (2.20);
По среднему времени задержки данная .процедура уступает
процедуре алгоритма «волна», но превосходит последовательную
избирательную процедуру.
Процедура, использующая дерево кратчайших маршрутов,
обеспечивает минимально достижимое среднее время задержки
(как и алгоритм «волна»), однако, хотя и может базироваться на
•избирательной процедуре, требует значительных изменений в про¬
граммном обеспечении. Внутренние потоки, как и в предыдущем
случае, определяются (2.20) и являются минимально необходимы¬
ми.
Отмеченный недостаток последней процедуры при том же сред¬
нем времени задержки устранен в процедуре, базирующейся на
дереве обратных кратчайших маршрутов, полностью основанной
на избирательной процедуре. Внутренние потоки при этом не¬
сколько возрастают из-за наличия передач по линиям связи, не
относящимся к дереву.
2.5. РЕГУЛИРОВАНИЕ ПОТОКОВ СООБЩЕНИИ ПО ПРИОРИТЕТАМ
Ранги, преимущества и приоритеты
Как отмечалось в гл. 1, множество сообщений, передаваемых
в сетях ПД, можно разделить на некоторые подмножества — ка¬
тегории, к которым со стороны системы управления предъявляют¬
ся идентичные требования. Для того чтобы требования системы
управления по соответствующим категориям выполнялись, приме¬
няется регулирование сообщений по категориям. При этом сооб¬
щениям каждой из категорий присваивается определенный ранг
преимущества (приоритет).
Приоритет — это признак, присвоенный сообщению и опреде¬
ляющий очередность его обслуживания или наличие преимущест¬
венного права на занятие места в очереди. Обычно приоритет при¬
сваивается в виде номера. Сообщениям высшей категории при¬
сваивается меньший номер, а сообщениям низшей ^атртпии _
больший. В ряде случаев используется обратная нумерация прио¬
ритетов.
Регулирование потоков сообщений по приоритетам заключает¬
ся в присвоении каждому сообщению определенного приоритета
и обслуживании его в соответствии с этим приоритетом.
Различают две большие группы приоритетов: внесистемные и
'внутрисистемные.
60
Внесистемные приоритеты
Внесистемные приоритеты — это приоритеты, установленные в
соответствии с категориями сообщений, определенными системой
управления.
По способу реализации различают относительные и абсолют¬
ные приоритеты. При относительном приоритете сообщения стар¬
ших рангов, поступив на узел коммутации, становятся на первое
место в очереди, а обслуживание их начинается немедленно по
«окончании обслуживания предыдущего сообщения. Абсолютные
приоритеты могут реализовываться на обслуживании и в очереди.
В первом случае сообщения старшего приоритета прерывают
обслуживание сообщений младшего приоритета. Для описания
абсолютного приоритета на обслуживание определяются порядок
дообслуживания сообщений, прерванных сообщениями старшего
приоритета.
Существуют два способа последующего обслуживания прерван¬
ного сообщения: передача с места прерывания и передача сообще¬
ния с начала.
При передаче данных могут возобновиться прерванная кодо¬
грамма (пакет) или прерванный сетевой блок. Соответствующие
варианты называются прерыванием на уровне кодограммы (паке¬
та) и на уровне сетевого блока. При этом обеспечивается воз¬
можность сшивки по служебным признакам.
Абсолютный приоритет в очереди означает, что при поступле¬
нии в узел сообщения старшего приоритета и занятости запоми¬
нающего устройства из последнего стирается одно из сообщений
младшего приоритета. Необходимость введения таких приорите¬
тов возникает в случаях, когда сообщения существенно отличают¬
ся по важности, а запоминающие устройства узлов коммутации
имеют незначительную емкость.
Так как обычно абоненты сети неоднородны, то в рамках од¬
ного приоритета может учитываться важность адресата. В этом
случае реализуется абсолютный приоритет в очереди по адресу.
Если категории важности и срочности сообщений совпадают, мо¬
жет использоваться полностью абсолютный приоритет в очереди
и на обслуживании.
Сообщения всех рангов преимущества могут иметь один и тот
же вид приоритета, например относительный. Это означает, что со¬
общения старших рангов занимают в очереди места впереди всех
сообщений младших рангов.
Совокупность отношений сообщений различных рангов преиму¬
щества называется системой приоритетов. Система приоритета за¬
дана, если определены виды приоритетов для сообщений всех ка¬
тегорий. -В сетях ПД используется абсолютная, относительная или
смешанная система внесистемных приоритетов. Задача назначе¬
ния внесистемных приоритетов может решаться следующим обра¬
зом.
61
Для сообщений каждой из категорий срочности определяется
значение Сг, равное стоимости задержки на единицу Бремени со¬
общения г-й категории. Затем находятся 7Г—средние объемы со¬
общений каждой 'Из категорий и вычисляются значения СГ/7Г. Да¬
лее осуществляются упорядочивание и перенумерация категорий
в индексы преимущества таким образом, чтобы
(Ci/li) <(С3//з) <•••
На практике обычно не удается объективно определить зна¬
чения СГу поэтому назначение внесистемных приоритетов произво¬
дится эвристически.
Внутрисистемные приоритеты
Внутрисистемные приоритеты определяют порядок обслужива¬
ния сообщений в рамках одного внесистемного приоритета и не
зависят от категорий, установленных системой управления. Сле¬
дует различать фиксированные и динамические внутрисистемные
приоритеты.
Фиксированные внутрисистемные приоритеты чаще называют
дисциплиной обслуживания. Существуют следующие дисциплины
обслуживания:
1. Обслуживание «первым пришел — первым обслужен». Иног¬
да эту дисциплину называют прямым порядком обслуживания. Та¬
кой порядок обслуживания является наиболее естественным и
справедливым и потому имеет широкое распространение, если не
затрудняет технической реализации.
2. Обслуживание «последним пришел — первым обслужен».
Иногда используют термины «обратный, инверсный порядок обслу¬
живания» или «бункерная система». На практике данная дисцип¬
лина может иметь место, например, в телеграфной связи, если по¬
ступающие телеграммы складываются в стопку, а для обслужива¬
ния каждый раз берется верхняя.
В сетях ПД инверсная дисциплина .малоприемлема и поэтому
представляет собой в основном теоретический интерес.
3. Случайный выбср из очереди. В этом случае очередность
обслуживания сообщений не зависит от очередности их поступле¬
ния. Любое сообщение из очереди может быть выбрано с равной
вероятностью.
Данная дисциплина достаточно точно отображает функциони¬
рование системы обслуживания, когда обслуживающий прибор
последовательно опрашивает (сканирует) элементы памяти, каж¬
дый из которых независимо друг от друга случайным образом со¬
держит или не содержит сообщение.
Все приведенные дисциплины обслуживания обеспечивают оди¬
наковое значение среднего времени ожидания сообщений в очере¬
ди 7пр = ?св = 7обр. Особенности этих дисциплин проявляются в раз¬
личии дисперсий времени ожидания, для которых выполняется не¬
равенство Dtnv<DtCB<Dto6p.
62
Таким образом, наиболее устойчиво около своего среднего зна¬
чения время ожидания три прямом порядке обслуживания. При
инверсном порядке обслуживания значение случайной величины
времени ожидания имеет большой разброс, т. е. отдельные реали¬
зации времени ожидания значительно больше или .меньше мате¬
матического ожидания. Случайный выбор из очереди занимает но
степени разброса промежуточное положение.
4. Дисциплина, -когда первыми обслуживаются более короткие
сообщения. Эта дисциплина обеспечивает меньшее значение сред¬
него времени ожидания, чем остальные дисциплины, однако по
дисперсии она несколько уступает им.
5. Первыми обслуживаются наиболее длинные сообщения.
Все перечисленные дисциплины обслу¬
живания по сути реализуют системы отно¬
сительного приоритета. Особый класс вну¬
трисистемных приоритетов составляют ди¬
намические приоритеты. Сущность послед¬
них состоит в присвоении каждому сообще¬
нию дополнительного преимущества в зави¬
симости от времени, которое оно находится
в сети. Действительно, сообщения одной ка-
тегории срочности могут передаваться меж¬
ду различными по удаленности абонен¬
тами.
В примере, приведенном на рис. 2.8, на
узел tjj поступают два сообщения, предна¬
значенные узлу уь\ одно от абонента узла у\,
а другое — от абонента узла у^ В случае возникновения конкурен¬
ции на обслуживание в узле yj естественно отдать предпочтение
сообщению из узла г/г-, так как оно исчерпало большее время из
допустимого времени пребывания сообщения в сети.
Динамический приоритет может изменять индекс преимущест¬
ва дискретно в зависимости от числа пройденных сообщением
участков сети или непрерывно в зависимости от общего времени
пребывания сообщения в сети. При введении в сети АСУ дина¬
мических приоритетов достигается выравнивание значений време¬
ни задержек сообщений одной категории срочности, проходящих
между абонентами различной удаленности, что в целом улучшает
вероятностно-временные характеристики сети.
Динамические приоритеты могут быть относительными и абсо¬
лютными, причем выбор того или иного варианта определяется
главным образом сложностью реализации. В сетях :ПД, где систе¬
ма управления не жестко определяет 'категории сообщений, воз¬
можно использование только внутрисистемных, в частности дина¬
мических, приоритетов. В сетях с коммутацией каналов реализу¬
ются приоритеты не сообщений, а абонентов. При этом абонент
с более высоким приоритетом имеет возможность в случае заня¬
тости требуемой линии связи разрушить составной тракт, образо¬
ванный для абонента низшей категории.
,63
# *
~\
1
t
/
/
Ук
Рис. 2.8
Закон сохранения среднего времени задержки в сети
Внесистемные приоритеты вводятся для того, чтобы сократить
время пребывания в сети сообщений высших категорий срочности.
Однако следует учитывать, что яри этом увеличивается время за¬
держки сообщений меньших категорий срочности, имеющих более
низкие приоритеты. Для определенного класса приоритетов такой
эффект может быть показан на основе закона сохранения [12].
Условия, .при которых соблюдается да-нный закон следующие:
1. В общем случае система приоритетов должна быть относи¬
тельной.
2. Если система приоритетов абсолютная, то она должна быть
с дообслуживанием, а распределение времени обслуживания сооб¬
щений экспоненциальное.
3. Длина очередей в системах обслуживания не ограничена.
4. Обслуживающие устройства не простаивают, если есть хотя
бы одно сообщение в очереди.
Закон сохранения утверждает: если система обслуживания
имеет г приоритетов и удовлетворяет перечисленным условиям, то
справедливо выражение
2 ^ож r^r^cr~ const,
г
где Хг — интенсивность потока сообщений r-го приоритета; tcr —
среднее время обслуживания сообщений r-го приоритета; /0Жг —
среднее время ожидания сообщений r-го приоритета.
Так как Xrtcr=Pr есть нагрузка сообщениями r-го приоритета,
то можно записать 2pr?o>Kr = const.
г
Основной вывод из закона сохранения состоит в том, что при
перечисленных ограничениях введение в сети системы приорите¬
тов не изменяет усредненного значения времени ожидания сооб¬
щений по всем категориям, т. е. приоритеты не ухудшают усреднен¬
ных характеристик сети.
Рассмотрим случай, когда имеются потоки сообщений двух ка- i
тегорий срочности, создающих нагрузки соответственно р2 и рь;
Тогда из закона сохранения следует, что pi^0>Ki+p2£o>K2 = const. Ес-|
ли ни одной из категорий не отдается преимущество при обслу-j
живании, ТО 7ож1 = ?ож2. i
Пусть теперь для категории сообщений большей срочности!
введен любой приоритет, отвечающий условиям закона сохране-1
■ния. В результате сообщения старшего приоритета обходят в оче-|
реди сообщения младшего приоритета, что приводит к уменьшен]
нию времени их ожидания в очереди. В этом случае, если величи-|
ны pi и р2 фиксированы, из закона сохранения следует, что долж|
но возрасти время ожидания сообщений второго ранга преимуще!
ства. ш
Таким образом, введение системы приоритетов обеспечиваеЦ
улучшение вероятностных характеристик времени задержки ссюм
щений высших категорий срочности за счет ухудшения соответс'Щ
64
вующих характеристик для сообщений других категорий. Данное
положение остается справедливым для любого типа систем при¬
оритетов.
2.6. УПРАВЛЕНИЕ В СЕТЯХ ПЕРЕДАЧИ ДАННЫХ
Задачи управления
Управление в сети передачи данных обеспечивает наиболее эф¬
фективные режимы использования ресурсов сети при изменяющих¬
ся условиях ее функционирования. В зависимости от конкретного
содержания контура управления общий процесс управления в сети
можно разбить на три относительно независимых процесса: управ¬
ление первичной сетью, управление внутренними потоками сообще¬
ний и внешними потоками сообщений.
Управление первичной сетью выходит за рамки задач, решае¬
мых средствами сети ПД, и поэтому далее не рассматривается.
Контур управления внутренними потоками сообщений
Обычно сеть ПД рассчитана на передачу определенных внеш¬
них потоков с заданными характеристиками. Однако распределе¬
ние суммарного внешнего потока между различными парами або¬
нентов может изменяться во времени. Кроме того, отдельные ком¬
поненты сети в процессе работы могут выходить из строя. Эти об¬
стоятельства обусловливают возможность изменения отношения
предпочтения на множестве маршрутов.
Таким образом, чтобы рационально распределить нагрузку в
средствах сети, необходимо предусмотреть функции, обеспечиваю¬
щие перестройку процедур выбора маршрутов с учетом ситуации.
Выполнение таких функций составляет содержание процесса уп¬
равления внутренними потоками. Процедуры выбора маршрутов
при наличии управления называются управляемыми, динамически¬
ми или адаптивными. Совокупность технических и программных
средств, предназначенных для реализации процесса управления,
составляет систему управления внутренними потоками.
Как и любая система управления, система управления внутрен¬
ними потоками объединяет объекты управления и управляющие
объекты, между которыми передаются информация состояния и
информация управления.
Объекты управления —это устройства или программы, обеспе¬
чивающие на узлах коммутации реализацию процесса распределе¬
ния потоков в соответствии с адресами, матрицами маршрутов и
заложенной процедурой. Кроме того, на объектах управления осу¬
ществляется контроль за состоянием элементов сети.
Управляющие объекты — это устройства или программы, осу¬
ществляющие сбор информации о характеристиках и состоянии
элементов сети и формирование матриц маршрутов.
3—157
65
Информация состояния включает информацию двух видов: соб¬
ственно информацию состояния и статистическую информацию о
характеристиках элементов сети и потоков сообщений.
Собственно информация состояния содержит сведения о теку¬
щем состоянии элементов сети: число сообщений в очередях на
узлах коммутации, число каналов в линиях связи и их пропускные
способности, исправность оборудования.
Статистическая информация составляет совокупность сведений
о статистических характеристиках сети за некоторый промежуток
времени: коэффициенты исправного действия элементов сети и ко¬
эффициенты недостоверности, моменты распределений времени за¬
держек и длин очередей на узлах коммутации, интенсивности по¬
токов сообщений.
Информация управления — это команды на изменение матриц
маршрутов в узлах коммутации. Обычно эти команды содержат
полную информацию о вновь сформированных матрицах маршру¬
тов.
В наиболее полном варианте цикл управления потоками сооб¬
щений включает следующие этапы:
сбор информации о характеристиках и состоянии элементов се¬
ти и корректировку матриц весов;
решение задачи формирования матриц маршрутов;
введение матриц маршрутов в действие на узлах коммутации.
Инициирование контура управления может быть программным,
ситуационным и интервальным.
В случае программного управления определенный набор мат¬
риц маршрутов сменяется по некоторому расписанию, которое со¬
ставляется на основе априорных сведений о распределении внеш¬
них потоков во времени.
При ситуационном управлении решение о перестройке матриц
маршрутов принимается на основе текущего контроля весов. Кон-
тур управления инициируется при переходе значений весов через
определенные пороговые величины.
Интервальное управление предусматривает реализацию конту¬
ра через фиксированные интервалы времени, значение которых
выбирается исходя из темпа изменения ситуации в сети.
Возможна комбинированная реализация, при которой тот или
иной принцип используется в зависимости от степени изменения
ситуации.
Объектами управления рассматриваемой системы по сути явля-*
ются средства узлов коммутации. Размещение управляющего объ¬
екта определяет структуру системы управления.
Структуры систем управления потоками
В зависимости от особенностей реализации управляющего объ-i
екта различают централизованные, децентрализованные и комби-?
нированные структуры.
66
Централизованные структуры предусматривают наличие едино¬
го управляющего элемента, совмещенного, как правило, с одним из
узлов коммутации.
В децентрализованной структуре управляющие средства рас¬
средоточиваются по всем узлам сети, причем узловой фрагмент на
основе информации состояния от всех элементов сети решает за¬
дачу -маршрутизации только в 'интересах своего узла.
Комбинированная структура является промежуточным вариан¬
том. В данном случае отдельные фрагменты сети имеют центра¬
лизованное управление, а управляющие объекты фрагментов об¬
мениваются между собой информацией. Взаимодействие управ¬
ляющих объектов может осуществляться и через главный управ¬
ляющий объект, что соответствует иерархическому управлению.
С точки зрения живучести наиболее предпочтительной для се¬
ти ПД является децентрализованная система управления потока¬
ми, так как отказ любого элемента сети не нарушает процесса уп¬
равления. С точки зрения экономичности и оперативности преиму¬
ществом обладает централизованная структура. Экономичность
структуры управления можно оценить потоками служебных сооб¬
щений. Так, в случае изменения состояния К узлов сети при цент¬
рализованном управлении в среднем образуется внутренний поток
с интенсивностью Kd/2, где d — диаметр сети. При децентрализо¬
ванной структуре интенсивность равна KMd/2, т. е. в М раз боль¬
ше.
Оперативность управления определяется временем, необходи¬
мым для реализации цикла. Основной составляющей этого вре¬
мени является время обмена информацией между узлами ком¬
мутации. При децентрализованной структуре время обмена в од¬
ном направлении равно тах/г^-, так как для завершения цикла не-
ij
обходим обмен между всеми парами узлов. Для централизованной
структуры это время составляет max t0j, где t0j — время передачи
J
сообщения от /-го узла к управляющему центру. Данная величи¬
на может быть оптимизирована выбором местоположения управ¬
ляющего центра. -В любом случае max t0j.
i,J J
Наиболее характерной сферой использования третьей структу¬
ры управления является сопряжение сетей ПД, если сопрягаемые
сети имеют централизованные структуры управления. Это обус¬
ловлено, как правило, широкими вычислительными возможностя¬
ми управляющих объектов централизованных структур.
Б случае децентрализованных структур управления объедине¬
ние целесообразно осуществлять на основе общего управляющего
объекта, специально создаваемого в этих целях.
Методы сбора информации в процессе управления
Важным вопросом при обеспечении управления потоками яв¬
ляется передача служебной информации. Рассмотрим основные
методы реализации этого процесса.
3*
67
1. Сбор информации ло специальной сети отображения. Ирл
этом на сети образуется специальная подсеть, состоящая из спе¬
циально выделенных каналов, предназначенных для передачи
только служебной информации. Метод позволяет осуществлять
сбор как информации о мгновенных ситуациях, так и статистиче¬
ской информации об элементах сети. Недостаток метода — неэко¬
номичность, поскольку постоянно задействованные каналы ис¬
пользуются эпизодически, а основная сфера использования — сети
с коммутацией каналов.
2. Использование служебных сообщений. В данном случае при
необходимости передать служебную информацию генерируется
специальное служебное сообщение (пакет) , которое имеет соответ¬
ствующий признак и содержит служебную' информацию.
Каждое такое сообщение может содержать информацию толь¬
ко об одном узле сети либо накапливать данные обо всех узлах,
через которые оно проходит. В первом случае в сети создаются
значительные потоки служебных сообщений, во втором •— сущест¬
венно возрастает длина этих сообщений.
3. Использование информационных сообщений. .В составе слу¬
жебной части каждого информационного сообщения может быть
предусмотрено место, в которое заносится информация служеб¬
ного характера о состоянии элементов сети, пройденных данным
сообщением. По мере прохождения по сети эта информация счи¬
тывается и пополняется в узлах, входящих в маршрут.
4. Использование зонд-сообщения. Данный метод обеспечива¬
ет решение более широкого круга задач, чем сбор информации
состояния.
Сущность использования зонд-сообщения состоит в экспери¬
ментальном определении множества возможных маршрутов и от¬
ношения их предпочтения. Реализуется метод следующим обра¬
зом.
При решении задачи формирования матрицы маршрутов из
узла-отправителя во все инцидентные линии связи посылается ко¬
роткое зонд-сообщение. При достижении зондом узла-получателя
последний формирует отраженный зонд, который передается ло
запомненным при передаче прямого зонда линиям связи. С этой
целью на каждом из промежуточных узлов запоминается номер
линии связи, по которой поступило зонд-сообщение, и заносится в
специальное поле данного сообщения. Число отраженных зон¬
дов будет равно числу маршрутов между соответствующей парой
узлов.
Отношение предпочтения на множестве маршрутов устанав¬
ливается в соответствии с очередностью возвращения экземпля¬
ров отраженного зонд-сообщения. Чем меньше суммарная задерж¬
ка зонда, тем большее предпочтение получает маршрут, по кото¬
рому он прошел.
Таким образом, при использовании зонд-сообщения операция
сбора информации о сети и формирования матриц маршрутов ре¬
ализуется путем натурного эксперимента. Данный метод не тре¬
68
бует значительных затрат вычислительных ресурсов сети, посколь¬
ку не корректируются -матрицы «маршрутов, однако приводит к су¬
щественным дополнительным потокам служебной информации.
Методы управления внешними потоками сообщений
Любые ограниченные ресурсы сети обеспечивают передачу с
заданными характеристиками вполне определенных потоков сооб¬
щений. Если внешние потоки превышают определенные гранич¬
ные значения, то возникают перегрузки, при которых -не выпол¬
няются установленные требования по своевременности и (или) на¬
дежности доставки.
Надежность доставки снижается в случае ограниченности объ¬
емов памяти узлов коммутации из-за потерь сообщений, не полу¬
чивших места в очереди. Невыполнение требований по своевре¬
менности доставки при этом обусловливается увеличением вре¬
мени ожидания.
Для предотвращения таких ситуаций в сетях передачи данных
должно реализовываться управление внешними потоками сообще¬
ний. В настоящее время различают [3] локальное, межконцевое и
глобальное управления внешними потоками.
Локальное управление реализуется на входах сети и состоит
в отключении внешних источников при переполнении (угрозе) па¬
мяти узла, -к которому они подключены. Более тонкая процедура
может блокировать источники избирательно на основе анализа
статистических характеристик потоков, генерируемых ими. Ло¬
кальные процедуры защищают сеть от захвата ресурсов одними
источниками в ущерб другим. Они просты, но имеют низкую эф¬
фективность, поскольку не учитывают взаимосвязи процессов об¬
разования очередей на различных узлах коммутации.
Межконцевое управление обеспечивает ограничение общего
числа сообщений, находящихся в сети в произвольный момент вре¬
мени. Это достигается блокировкой источников, выдавших в сеть
определенное число сообщений и не получивших ни одного под¬
тверждения от получателя. Передача каждого очередного сообще¬
ния в сеть допускается только при получении подтверждения, ко¬
торое свидетельствует о том, что какое-то сообщение покинуло
сеть. Допустимое число сообщений в сети между каждой парой
абонентов может варьироваться в зависимости от ресурсов произ¬
водительности каналов и узлов коммутации.
Межконцевое управление при простоте реализации гарантиру¬
ет отсутствие перегрузок, однако устанавливаемые ограничения не
учитывают реальной флуктуации внешних потоков сообщений
между парами абонентов.
Глобальное управление обеспечивает ограничение общего чис¬
ла сообщений в сети. Наиболее известным методом глобального
управления является изоритмичеекий [9]. Он предусматривает
циркуляцию по сети некоторого числа разрешений —специальных
служебных сообщений. Источник не может ввести сообщение в
69
сеть, шока не получит одно из таких разрешений. Передвижение
сообщения сопровождается разрешением, которое освобождается
после выдачи сообщения из сети потребителю. Чтобы разрешения
были доступны там, где в них возникает необходимость, свобод¬
ные разрешения передвигаются по -сети случайным образом.
Изоритмическое управление имеет по сути децентрализованный
принцип.
Возможна реализация глобального управления путем центра¬
лизованного назначения граничных значений интенсивностей вхо¬
дящих потоков с учетом взаимосвязи процессов в различных уз¬
лах сети. Такой подход может быть реализован только на основе
централизованного управления. При этом получаемые граничные
значения потоков вводятся в виде исходных данных в локальные
процедуры статистического управления внешними потоками.
Глава 3
МАТЕМАТИЧЕСКОЕ ОБЕСПЕЧЕНИЕ МАРШРУТИЗАЦИИ
И УПРАВЛЕНИЯ В СЕТЯХ ПЕРЕДАЧИ ДАННЫХ
3.1. ОБЩИЕ СВЕДЕНИЯ
Математическое обеспечение (М'О) функционирования системы
включает математические модели и методы, используемые при
разработке рабочих алгоритмов и программного обеспечения. В
настоящей главе рассматриваются основные элементы \МО сетей
передачи данных.
Математическое обеспечение процедур маршрутизации вклю¬
чает методы вычисления матриц и векторов маршрутов.
Математическое обеспечение управления внутренними потока¬
ми связано с выбором критериев перестройки плана распределе¬
ния нагрузки и построением процедур контроля весовых парамет¬
ров элементов сети.
(Математическое обеспечение управления внешними потоками
включает методы задания критериев блокирования источников и
алгоритмы, реализующие контроль выполнения этих критериев.
3.2. МАТЕМАТИЧЕСКОЕ ОБЕСПЕЧЕНИЕ
ДЕТЕРМИНИРОВАННЫХ ПРОЦЕДУР ВЫБОРА МАРШРУТОВ
Для реализации детерминированной процедуры маршрутиза¬
ции программное обеспечение узлов коммутации должно вклю¬
чать программу вычисления вектора кратчайших маршрутов. Наи¬
более совершенными методами решения этой задачи являются ме¬
тоды Флойда и Дийкстры, базирующиеся на принципе оптималь¬
ности.
Метод Флойда основан на двух понятиях [35]: базисной ли¬
нии связи и тернарной операции.
70
Линия связи (/, /) называется базисной, если она является
кратчайшим маршрутом из узла yi в узел у,. Заметим, что дере¬
во кратчайших маршрутов состоит только из базисных линий
связи.
Метод обеспечивает выявление базисных линий сети путем
сравнения веса каждой линии связи (i, /) с весами всех маршру¬
тов между узлами yi и yj. Если сеть не -содержит маршрутов с
-весом менее qi,jy то линия (/, /) является базисной.
В процессе поиска базисных линий связи для всех ис¬
пользуются так называемые тернарные операции над элементами
матрицы весов
При этом вес каждой линии связи (i, /) сравнивается с длиной
маршрута из узла yi в узел (/,, проходящего через Ук{кф1ф]).
Если qi,j>qik~[-Qhh то в качестве элемента матрицы весов зано¬
сится q*u = qik+qkj-
При выполнении тернарных операций по всем парам узлов по¬
лученные значения q*ij будут весами кратчайших маршрутов меж¬
ду соответствующими узлами. Доказательство этого утверждения
приведено в '[35]. Смысл тернарных операций пояснен на
рис. 3.1.
Векторы кратчайших маршрутов заполняются в процессе вы¬
числений. При этом одновременно можно строить векторы для
всех узлов сети. Вначале все элементы векторов полагаются ну¬
левыми для несмежных узлов yi и yj, а на позициях, соответству¬
ющих смежным узлам yi и z/j, заносятся i (/, /). Далее при выпол¬
нении каждой тернарной операции осуществляется корректирова¬
ние следующим образом:
Таким образом, алгоритм, реализующий метод Флойда, состо¬
ит в выполнении для всех пар узлов М—2 цикла, в каждом из ко¬
торых поочередно осуществляется сначала операция (3.1), а за¬
тем (3.2). Результатом является совокупность векторов начальных
компонент кратчайших маршрутов для всех М узлов сети. Общее
число требуемых операций составляет \М (М—;1) (М—2).
Достоинства данного метода — простота реализующего алго¬
ритма и возможность получения маршрутной информации сразу
t: =min (qu, qih + qkj)
(3.1)
= (Qij> если Qa < Qik + Ш;
IQik + 4kj> иначе
Qij = min(Qf7-, Qik + Qiij)
Рис. 3.1.
(3.2)
71
для всех узлов сети. Последнее .делает целесообразным его ис¬
пользование при централизованных структурах управления внут¬
ренними потоками. Для децентрализованного управления, когда
каждый узел строит маршруты только от себя, метод Флойда не¬
экономичен.
Метод Дийкстры [35] состоит в поэтапном наращивании дере¬
ва кратчайших маршрутов от исходного узла. При этом 'Необхо¬
димо, чтобы после добавления на каждом этапе линии связи и
узла вновь образуемый кратчайший маршрут был минимально
возможным по всем оконечным узлам, еще не вошедшим в дере¬
во. В процессе построения дерева кратчайших маршрутов вычис¬
ляются векторы весов маршрутов и корректируются векторы на¬
чальных 'компонент кратчайших маршрутов.
Введем ряд понятий и обозначений, используемых при описа¬
нии алгоритма, реализующего метод Дийкстры.
Некоторую часть дерева кратчайших маршрутов будем
называть текущим деревом. Последнее включает N* линий связи.
Узлы, не входящие в это дерево, yj ф. Г* образуют множество со¬
седних узлов Ус.
Как и ранее, — вес линии связи из yi в у у, Wij — элемент
шагового вектора начальных компонент маршрутов (номер перво¬
го промежуточного узла в кратчайшем маршруте из yi в yj); Qik —
вес кратчайшего маршрута между г/г- и yky все узлы и линии связи
которого принадлежат текущему дереву; Q%j — вес кратчайшего
маршрута между ух и у^ все узлы и линии связи которого принад¬
лежат текущему дереву, кроме одного узла z/j и одной линии свя¬
зи (й, /), которые дереву не принадлежат.
Теперь рассмотрим сам алгоритм для некоторого узла yi в
сети с N линиями связи и М узлами.
Шаг 0. Ввод исходных данных: номер исходного узла г/г; матрица весов
{Яи1
Шаг 1. Присвоение начальных значений переменным и массивам:
Аг* : = 0; Т* : = {уь}; Кс : = {у у j Ф i};
Q*u: = яи\ Qa •■ = 0; / = 1 > N'>
. . _fУ1’ если
0)l'7' 1 оо, если qij = {oo, 0}.
Шаг 2. Находится такая линия связи (г, /), не принадлежащая текущему
дереву, которая позволяет построить, используя уже имеющееся дерево Т *, са¬
мый короткий маршрут от узла yi к любому из соседних узлов y^Yc. Иначе,
ищется такой узел у^Ус, для которого выполняется условие (рис. 3.2)
Q*ij= min Q*ik.
ук&с
В соответствии с определением Q*ij — Qir + (Jrj. Поэтому в состав текущего
и |мва на данном этапе включаются линия связи (г, /) и узел у у. Т* :
1 (('- /)» Уз)- Общее число линий связи в текущем дереве при этом увеличи-
п.и |сн на единицу: N* : —N* +1.
V \(\п у^ исключается из множества Ус : Ус—{yj}.
Д;икч‘ производится перерасчет значения Qa с учетом изменений в дереве:
Qir + Qrj.
Ши:i. Проверяется окончание процесса построения дерева кратчайших
Mil | И111» \ I он.
72
Так как любое остовное дерево графа с М узлами имеет М—1 линию свя¬
зи, то проверяется условие N*=M—1.
Если это условие выполняется, то процесс заканчивается ,и следует переход
к шагу 5, иначе переход к шагу 4.
шаг 4. Осуществляется перерасчет значений Q**fc для всех узлов */ьеУс.
При этом для каждого узла ук^Ус сравнивается имеющееся значение Q*ih со
значением, которое получается, если в качестве участка маршрута, принадле¬
жащего дереву, использовать кратчайший маршрут, вес которого Qij был по¬
лучен на шаг£ 2 (рис. 3.3). Другими словами, выполняется тернарная опера¬
ция Q*ik : =min (Q*ih; Qij + qjk).
Если в результате выполнения тернарной операции изменяется значение
Q*ih, то это свидетельствует о том, что найден более короткий маршрут и зна¬
чение соответствующего элемента вектора начальных компонент кратчайших
маршрутов должно быть скорректировано, а именно:
если Q*ik ^ Qij + Qjk\
lh W/, если Q*ik > Qij + qjk >
т. e. в качестве начальной компоненты маршрута из уг в уъ. полагается тот же
узел, который является первой компонентой в кратчайшем маршруте из yi в yj.
Далее следует переход к шагу 2.
Шаг 5. Вывод значений сOij и Qij и остановка алгоритма.
73
Алгоритм, основанный на методе Дийкстрк, является лсулуч-
шаемым по числу операций для вычисления кратчайших маршру¬
тов. Для сети -с М узлами он требует выполнения не более 3 М2
операций. В силу этого для сетей, где каждый узел коммутации
сам решает задачу построения таблиц кратчайших маршрутов,
метод Дийкстры наиболее экономичен.
Пример. Для сети, изображенной на рис. 3.4, а, вычислить вектор начальных
компонент кратчайших маршрутов и вектор весов кратчайших маршрутов от
узла у\.
(ЁУчиГ1
а)
Шаг 0.
г)
0)
Рис. ЗА
1
2
3
4
5 6 7
1
” 0
4
3
1
2
4
0
2
—
2 4 —
3
3
2
0
1
5
(чм) =■= 4
1
—
1
0
— 7 —
5
—
2
5
—
0 — 4
6
—
4
—
7
2 0 1
7
—
—
—
4 1 0_
; У1 = У 1-
Шаг 1. — N : = М — 1=6; N*: = 0; Т* : = [Ух);
— Qij • — / — 1 >
— Q*n : = 0; Q*12: = 4; Q*13: = 3; Q*u: = 1;
Q*is: = °°; Q*i6: = °°; Q*n: = °°;
— Ус:==:{1/2> Уъ* Уь> Уъ* Уъ* Уч}»
— (йц: = 0; щ2 * = *12'» : == *13; : — хи*
со15: = °°; ю1в : = оо; со17: = оо.
Шаг 2 (рис. ЗА,б). min Q*lk = Яи = U
с
74
Т* '■ — Т* + {*14> У4} = {У1’ *14> У*} >
Ус- = Ус— Ы = {Уа> Уз< Уъ» Ув> Ут)\
Q14 : = ?i4 = 11 N* : = W* + 1 = 1.
Шаг 3. Так как N* = l<N=Q, то переход к шагу 4.
Л/аг 4. Q*12: = min(Q*12, Qu + qi2) = min (4, l + oo) = 4;
o)12: = co12 = x12\
Q*13: = min (Q*13, Q14 + qiS) — min (3,1 + 1) = 2;
«13 : — «u;
Q*is: = min (Q*15, Qu + te) = min (00, l+oo) = oo;
ю15: = «>i5 = °°;
Q*ie: = min (Q*16, Qu + qie) = min (00, 1 + 7) = 8;
co16: == co14 = x14;
Q*n ■ == min (Q*17, Q14 + q47) = min (00, 1 + 00) == 00;
co17: = co17 = 00.
Переход к шагу 2 (новый цикл).
Шаг 2 (рис. 3.4,в), min Q*lh =.Q* 13 = Qu + qi3;
Уь&с
Т* : = Г* + {х43, г/g) = {(/!, дс14, г/4, *43, г/3};
кс: = гс — {г/з> = {г/2. #5. г/в. «/?};
N;
= TV* + 1 = 2
; Q13: = Q*i3
= 2.
Так ]
как N* = 2 <6,
то переход к
шагу 4.
Q*12
: = min (Q*12!
» Qis + fe)==
min (4,2 + 2) = 4;
(0i2:
= co12 = x12;
Q*i6
= min (Q*15,
Q13 + йзь) = min (00, 2 + 5) = 7;
«15 *•
**
»r
II
eo
3
II
Q*ie
: = min(Q*ie,
Q13 + Язв) —
min (8,2 «(- oo) = 8;
«16:
= C0i6 = xu;
Q*17
: = min (Q*17,
Q13 + ^37) =
min (oo, 2 + oo) = oo
«17:
= C017 = OO .
Переход к шагу 2.
Я/аг 2 (рис. 3.4,г), min Q*1fl — Q*12 = q12;
T*: = T*+{x 12, y2} = {y1, xu, yit xiS, y3, x12, y2);
YC: = YC— {y2} ={i/5. 2/в> У-,}\
N*:=N*+ 1 =3;
Ql2 '■ — Q* 12 ~ 4-
Шаг 3. Так как A'* = 3<6, переход к шагу 4.
ZZ/аг 4. Q*15: = min (Q*16, Q12 + q25) = min (7,4 -f 2) = 6;
co15 : = co12 = *12;
Q*ie = = min (Q*ie, Q12 + ?2в) = min (8,4 + 4) = 8;
«16 • = «16 “ ^14»
' 75
Q*I,: = min (Q*17) Q12 + q27) = min (oo, 4 + oo) = oo;
CO j 7 ! = CO 2 7 = °°.
Переход к шагу 2.
Шаг 2 (рис. 3.4,д). min Q\u = Q*is = Q12 + Й2ъ = 6;
с
r*:=T*+{jfg5, 1/5} = {yt, хи, Уц, лг46, Уз, *12, у2, лг26, у8};
Гс: = ^с —{«/5>= {</в> У?};
JV*: = W*+1 = 4; Q1S : — Q*15 = 6.
Д/аг 3. Так как N* = 4<6, переход к шагу 4.
Шаг Q*10: = min (Q*ie, Qir, + <?r.e) = min (8,6 + oo) = 8;
со^в : —; co16 — л*14;
Q*i7 •• = min (0*17, Q,r, + flr,7) • mill (oo, (i -f 4) 10;
(0i7: -- co15 = x12.
Переход к шагу 2.
Шаг 2 (рис. 3.4,е). min Q*lk = Q*ie = Q14 + Q4e = 8;
T* : = T* + {х4в, г/в> = , xu, i/4,
x43 ’ Уз > -*12' У2 > *25 > Й' *46 ’ </в};
^:=^c-{!/e}= (</т}; A/*:=JV*+1 =5; Q16: = Q*16 = 8.
Шаг 3. Так как jV* = 5<6, переход к шагу 4. ,
Шаг 4. Q*i7: = min (Q*17, Qu + qe7) = (10,8"+ 1) = 9;
®17 : = ©le ■= *14 •
Переход к шагу 2.
Шаг 2 (рис. 3.4,ас), minQ*lk = Q*17 = Q16 + qQ1 = 9;
Ук^у с
T*: = T* {я67, */:} = Т;
ус : = — {*/7} = 0;
N* : = TV* + 1 = 6; Q17: = Q*17 = 9.
ZZ/аг 3. Так как N* = 6 = </V, то переход к шагу 5.
Шаг 5. К*) = 1 2 3 4 5 6 7
(1 Х12 Я14 *14 *12 *14 *1г)>
1 2 3 4 5 6 7
(Qu) = (0 4 2 1 6 8 9).
Конец.
3.3. МАТЕМАТИЧЕСКОЕ ОБЕСПЕЧЕНИЕ
ПОИСКОВЫХ ПРОЦЕДУР ВЫБОРА МАРШРУТОВ
Поисковые процедуры выбора маршрутов или процедуры, до¬
пускающие альтернативу [9, 12], требуют наличия на узлах ком¬
мутации информации о нескольких маршрутах к узлам-получате¬
лям. В соответствии с этим математическое обеспечение таких
процедур должно содержать программы вычисления не векторов,
76
а матриц маршрутов. Ниже излагаются два пгшГишч* тмч'тиых
метода решения данной задачи: метод кназммппорои и метод об¬
мена минимальными векторами весов.
Метод квазиминоров [28] позволяет вычислить аккордные мат¬
рицы маршрутов для выбранной пары узлов. Вычисление осу¬
ществляется разложением квазиминора соответствующего элемен¬
та матрицы весов. Предварительно элементы, соответствующие
несмежным парам узлов, обнуляются.
Квазиминором элемента матрицы (q^) размерности МХМ
называется определитель особого рода матрицы {qui/n) размер¬
ности {М—1)Х(М—1)> получаемой из (q^) вычеркиванием /-й
строки и i-то столбца. Квазиминор обозначается \ям/п\гз и мо-
жет быть представлен разложением вида
I Qki/ji I tj= 2 У in Ufa • (3.3)
пф i
Здесь U^in — квазиминор матрицы размерности (М—2)Х(М—2),
полученной из (qui/п) вычеркиванием i-й строки и /-го столбца,
т. е. (qu/H/in)•
и\\} = \ 1 ’ "=/: (з.4)
[ \qkl/ii/iin\njy /•
Таким образом, на первом шаге производится разложение по
элементам i-и строки матрицы весов (i — номер узла, от которого
строятся маршруты), в результате чего определяются первые ком¬
поненты всех маршрутов. Заметим, что каждый квазиминор, обра¬
зованный на первом шаге, определяет все маршруты от одного из
смежных с yi узлов к узлу уj.
На втором шаге разложения по элементам п-и строки матри¬
цы весов (п — номер одного из узлов, смежного с yi) определяют¬
ся вторые компоненты всех маршрутов, включающих в качестве
первых компонент узел уп. Каждый полученный на этом шаге ква-
зи минор определяет все маршруты от одного из узлов, являюще¬
гося смежным с уи до узла
Разложение завершается по мере получения квазиминоров, оп¬
ределяющих последние элементы маршрутов, т. е. узлы, смежные
с yi. В результате полного разложения квазиминор
\Qki/ji\ и — 2 П Qki* (3.5)
Sm<=£2 (kl)^S
где Sm — т-и маршрут; Q—множество маршрутов из yi в yj.
Полученное разложение определяет состав каждого из мар¬
шрутов. Для построения аккордной матрицы необходимо вычис¬
лить веса этих маршрутов и упорядочить их в соответствии с при¬
нятым критерием.
Особенностью метода квазиминоров является возможность по¬
лучения информации о маршрутах от выбранного узла. В силу
этого он может быть использован совместно с маршрутным мето¬
дом адресования.
77
Пример. Найти состав маршрутов из уi в t/2 для сети, изображенной на
рис. 3.5.
Процесс разложения показан на рис. 3.6. Матрица весов имеет вид
1 2 3 4 5
О ?i2 ^13 О О
#21 0 0 <724 #25
#31 О
1
2
= 3
4
5
О щ Ям. Ягь
^ #42 #43 О О
_0 #52 #53 0 0 .
Находим квазиминор элемента ^15, для чего вычеркиваем первый столбец и
вторую строку:
“2
3
4
5 "
1
#12
#13
0
0
= 3
0
0
#34
#35
4
#42
#43
0
0
5
—#52
#53
0
0
Далее производим разложение:
Шаг 1. i=l; пфц п — 2,5; /=2;
I Як1/,21 Il2 = #12^12^ "Ь #13^13^ "+■ #14^42) "Н #15^15^ = #12 + #13^13^ •
Для разложения квазиминора 13(2) = |#Аг/21/1з|з2, определяющего маршруты
между узлами 1/3 и у2 (см. рис. 3.6), вычеркнем первую строку и третий стол¬
бец:
2 4 5
3
О #34 Язь
Я\2 О О
#52 ^ О
I Як 1/21/13 I = 4
5
Шаг 2. Произведем разложение:
i = 3; пф2>\ я = 4,51
и® = + Чм№ + = q*V$ + q3bUg' ,
где £/34(2) = |#a?/2i/i3/34|42 определяет маршруты из г/4 в г/г;
^35* = 1 Яы/21/13/35 15г и определяет маршруты из уь-+уг.
78
Шаг 3. Произведем разложение UW3с
2 5
4 Г<742 О
I Чы/ъ\/13/34 I - 5 [ы 0J ;
i = 4; п ф 4; п = 2;
^34^ — #«^2> — ^42'
2 4
Для t/<2)35 имеем | <7^/21/13/35 иг5"4 j^42 °1 ;
^ #52 0J
< = 5; я ^ 5: л = 2; !/<§> = = ды.
Произведя обратную подстановку, получим
I #6//*21 112 = #12 + #13#34#42 + #13#35#52 •
Таким образом, разложение квазиминора содержит информацию о составе
всех маршрутов между соответствующей парой узлов.
Метод обмена минимальными векторами весов в отечественной
литературе известен под названием метода рельефов и описан
главным образом применительно к сетям с коммутацией каналов
и единичными весами линий связи [6].
Практически метод заключается в построении для каждого уз¬
ла специальной матрицы весов маршрутов ко всем остальным
узлам сети. Данная матрица для узла yi имеет число строк Л/"*,
равное числу линий связи, инцидентных уи и число столбцов, рав¬
ное числу узлов сети.
В дальнейшем будем пользоваться термином «матрица релье¬
фов» и обозначать ее следующим образом:
где г(г\/ — вес маршрута из yi в уи если в качестве первого эле¬
мента этого маршрута используются линия связи (г, k) и узел уи
(рис. 3.7).
Каждой строке присваивается индекс одного из смежных уз¬
лов. Формирование матриц рельефов производится по следующе¬
му алгоритму.
Шаг 0. Ввод исходных данных (qij) и задание начальных значений пере¬
менным: матрицам рельефов R*
Шаг 2. Сравнение R'о* и R0i, i= 1, М. Если R'oi—Roi, то процесс форми¬
рования Ri закончен и алгоритм останавливается. Если R'oi=£Roi, то Roi : =R'oi.
Далее переход к шагу 3.
(3.6)
и минимальным векторам r0z(i) : =0; i, 1= 1, М.
Шаг 1. Вычисление минимальных векторов:
*«=('$). /=1> М-’
г01: = min rtf.
k
79
Шаг 3. В матрицах рельефов для всех i строки заменяются минимальными
векторами следующим образом: вектор Ro* заменяет строки с индексом i во
всех матрицах рельефов, имеющих строку с таким индексом, причем при заме¬
не строки в k-й матрице значения элементов вектора увеличиваются на вес
линии связи (i, k) (|рис. 3.8), т. е. Гц(к) : =r0t(i) + qik.
Шаг 4. В матрице Rк элемент Гг^к) : =0 и переход к шагу 1.
- Я1к + Qkj\ г$ =
= qu + Qij у rmj = Ягт + qmj
На s-м цикле алгоритма матрицы рельефов содержат значения
весов маршрутов, длина которых не превышает s. Таким обра¬
зом, алгоритм сходится за число циклов, равное диаметру сети,
т. е. максимальному расстоянию по всем парам узлов.
При практической реализации алгоритма в сети каждый узел
вычисляет свою матрицу рельефов RЧисло строк в матрице
равно числу смежных узлов, а обмен минимальными векторами
весов производится между смежными узлами.
Процесс формирования матрицы рельефов показан на
рис. 3.9.
Матрица рельефов позволяет сформировать шаговую матрицу
начальных компонент маршрутов. Алгоритм формирования матри¬
цы рельефов для i-го узла выполняет следующие операции по
всем I:
определяет такое п, для которого r(2)nj=min и в качестве
k
элемента co(i)u заносит п;
определяет такое тп, для которого r(i)TOi=min и в качестве
кфп
элемента co(i)21 заносит tn.
Данная процедура продолжается до тех пор, пока будет ис¬
черпано множество исходящих из узла линий связи.
Существенным достоинством метода обмена минимальными
векторами весов является совмещение процесса построения мат¬
риц маршрутов с процессом передачи информации состояния.
80
*0j’
Ron
Пример. Для сети, имеющей структуру, показанную на рис. 3.10, и единич
ные веса линий связи, построить шаговые матрицы начальных компонент марш
рутов. Вместо «оо» будем заносить «—».
Шаг 0.
Ri
1 2 3 4 5
1
1
1
1
1
1
О
; R2 = 3
0
1
1
1
1
4
R4 = 3
0 —
Шаг 1.
R'oi = [0 ]; R'02 = Г — 0 ];
R'03=[ 0 ]; R'04=[ о-];
R'o5 = [ 0].
Шаг 2. R'ot Ф RoiS Roi: ^ R^otl i = 1,5.
Шаги 3 и 4.
Ri
0 1 "
D
1
1
1
о
) R2
~ — 10 '
1 _0 —'
R3 =
0 1 —
; R4 =
10-
_ о — 1 _
_ 0 1 _
81
Переход к шагу 1.
Шаг 1.
R'oi = [0 1 1]; R'o2=[1 0 1 1-];
R'03= t- 1 0 1 1); R'04= [ — 1 1 0 1];
R'o*=[I-l 1 0].
Шаг 2. R'o(¥=Roi-
Переход к шагу 3.
Шаги 3 и 4.
Ri —
0 12 2 —
0—221
1 0 2
— 0 1 2 2
— 0212
"2 10 2 — “
“2 12 0—'
"12 —
— 0'
R3 =
— 2 0 1 2
; R4 =
— 2 10 2
; R5 =
— 2 1
2 0
_ 2 —02 1
_2 —20 1 _
- — 2 2
1 о_
Переход к шагу 1.
Шаг 1.
R'oi = [0 12 2 1]; R'o2= [1 0 112];
R'os = [2 10 11]; R'o4 = [2 110 1];
R'05 = [1 2 110]
Шаг 2. R'oi Ф R0t.
Переход к шагу 3.
Шаги 3 и 4.
Ri
Ro —
"2
1
0
2
3'
"2
1
2
0
3“
"1
2
3
3
0"
II
3
2
0
1
2
; R4 =
3
2
1
0
2
; R5 =
3
2
1
2
0
_2
3
0
2
1_
_2
3
2
0
1_
_з
2
2
1
0_
Переход к шагу 1.
Шаг 1.
R'oi ~ [0 12 2 1]; R/oa=[l 0 1 1 2];
R'03= [2 10 11]; R'o4= [2 110 1];
R'o5= [1 2 110].
Шаг 2. R^oi —Roi по всем i.
Остановка алгоритма.
Таким образом, полученные на последнем цикле матрицы рельефов являются
окончательными. На их основе построим шаговые матрицы маршрутов:
82
wx =
О 2 (2,5) (2,5) 5
О 5 (2,5) (2,5) 2
1
W, = 2
I 0 3 -1(1. •'>, 4)
(3,4) 04 3(1, 3. 4)
_(3,4) 0 1 I (I. 3, 4)
1
“(2,5)2
0 (2,5) 5"
1
"(2,5) 2 3 0
5
W3-2
(2,5)4
0 (2,5)4
; w4
= 2
(2,5) 3(2,5) 0
3
3
4 5
0 4 2 _
3
3 5 (2,5)0
2_
1
"1 (1,
3, 4) 3
4 0“
W5 = 2
(3,4) (1,
3, 4) 4
3 0
3
_(3,4) (1,
3, 4) 1
1 о_
■Номера, указанные в скобках, соответствуют начальным компонентам марш¬
рутов с одинаковыми весами. Для упорядочивания таких маршрутов должен
быть введен дополнительный критерий.
3.4, МАТЕМАТИЧЕСКОЕ ОБЕСПЕЧЕНИЕ
КВАЗИСЛУЧАИНЫХ ПРОЦЕДУР ВЫБОРА МАРШРУТОВ
Общие сведения
Математическое обеспечение квазислучайных процедур состо¬
ит в определении вероятности передачи для каждой линии свя¬
зи узла. Иначе определяется часть общего потока сообщений, на¬
правляемая в каждую исходящую линию. При чисто случайной
процедуре соответствующие вероятности полагаются равными.
Квазислучайная процедура учитывает статистическую информа¬
цию о параметрах линий связи, что позволяет оптимизировать ис¬
пользуемое распределение вероятностей пзредач.
В данном параграфе рассматриваются два варианта квазислу-
чайной процедуры, -отличающиеся используемой информацией.
Квазислучайная процедура с локальной информацией
Математическое обеспечение квазислучайной процедуры с ло¬
кальной информацией может быть сведено к решению следующей
задачи для каждого узла коммутации.
При априорно известных по результатам статистического ана¬
лиза пропускной способности и надежности каждой из исходящих
линий связи -найти такое распределение входящего в узел потока
сообщений, при котором будет обеспечено минимальное среднее
время задержки сообщений в узле.
Среднее время задержки в узле определяется соотношением
Г=£л<| = 2!-т-<*’ <3-7)
1=1 i=i А
где U — среднее время задержки при передаче по i-й линии свя¬
83
зи, п — число исходящих линий связи; pi — вероятность передачи
по i-и линии связи; Яг-, Я — интенсивности исходящих потоков по
i-и линии связи и суммарного соответственно.
Величину t{ определим на основе модели одноканальной сис¬
темы обслуживания с ненадежным прибором:
где Rb ipi, Kni и Твг—соответственно пропускная способность, а-
грузка, коэффициент простоя и среднее время восстановления i-я
линии связи.
Задача выбора оптимальных значений X* или, что то же, pi
формулируется следующим образом.
Найти значения Xu i=\,n, при которых обеспечивается
по множеству G наборов А,*, ограниченному условием 2 Xi = X.
t=i
Для получения искомых значений при использовании метода
неопределенных множителей Лагранжа необходимо решить систе¬
му линейных уравнений следующего вида:
где £ — неопределенный множитель.
В качестве выражения для используем (3.8), заменив (1 —
—Кп) на Кг. Тогда из первых п уравнений получим
Подставляя (3.11) в последнее уравнение системы, найдем не¬
определенный множитель, после чего окончательное решение при¬
мет следующий вид:
При расчетах по соотношению (3.12) может оказаться, что не¬
которые значения Ki имеют отрицательную величину. В этом слу¬
чае необходимо исключить соответствующие линии связи из раз¬
решенных для передачи и осуществить перерасчет для нового на-
J. I!Ri~\~ TBiKni(l—Kni)
I-Km-Pi
(3.8)
mint = f [(hi, Rh Kni, TBi), i=l, n]
(3.9)
G
n
df[(Xit Ri Kni, TBi), i=\, n
d h
(3.10)
n
Kri_Ri[~jr Kyi Tyi KriRjTBj
(3.11)
KnRi
K\iR2iTBi(l-Kn)
I
I 2 VKrj Rj I + Krj R2j TBj (1 - Krj)
n
(3.12)
Распределение исходящего потока сообщений сводится к ны-
'(нслснпк) вероятностей pi = 'ki/X и разыгрыванию для каждого со¬
общения одной из разрешенных линий связи в соответствии с эти¬
ми. вероятностями. Такое распределение обеспечивает преиму¬
щественную загрузку линий связи, имеющих более высокие про¬
пускную способность и надежность.
Множество разрешенных линий связи в первоначальном реше¬
нии для конкретного сообщения не должно содержать тех линий
связи, по которым это сообщение ранее передавалось в процессе
случайного блуждания по сети. Расчеты, произведенные для слу¬
чая пяти линий связи с одинаковыми R, но различными Кг в диа¬
пазоне от 0,99 до 0,7, показывают, что применение оптимального
квазислучайного распределения обеспечивает почти двухкратное
сокращение среднего времени задержки по отношению к чисто
случайной.
Квазислучайная процедура при наличии сетевой информации
В данном случае отличие состоит в том, что оптимизируется
распределение потока не на узле, а всего внешнего потока, посту¬
пающего в сеть. Критерием оптимальности при этом является уе-
N Я/ _
редненное по всем линиям связи сети время задержки t= 2—А*.
1 = 1 а
Для решения данной задачи может быть использован метод от¬
клонения потоков [12], сущность которого состоит в следующем.
Каждой линии связи назначается вес, который определяется
производной среднего времени задержки, являющейся линейной
скоростью возрастания U при бесконечно малых приращениях по¬
токов в линии связи: dti/dXi. Далее эти веса используются для вы¬
числения кратчайших маршрутов на основе метода Флойда или
Дийкстры. Полученные при этом маршруты будут наилучшими в
смысле снижения F, а следовательно, к ним может быть откло¬
нена некоторая часть потока.
Определение отклоняемой части потока является внутренней
задачей. После того как она будет решена, вычисляются новые
кратчайшие маршруты и очередные отклоняемые части потоков.
Эта итеративная процедура продолжается до тех пор, пока
имеет место уменьшение весового показателя сети. Алгоритм, ре¬
ализующий вычисление оптимальных потоков в линиях связи,
включает следующую последовательность шагов.
Шаг 0. п:~0; вычислить начальное реализуемое распределение потоком
i=\, N.
Шаг 1. Вычислить веса линий связи dti{n'>ld%i, i= 1, N.
N Q-j (п)
Шаг 2. Вычислить весовой показатель сети |3П : = У, -—
t=1 д Xi
Шаг 3. Решить задачу отыскания потоков по кратчайшим маршрутам. Дли
этого найти кратчайшие маршруты между всеми парами узлов сети для тччж
85
линий связи, вычисленных на шаге 1. Все внешние потоки направить по этим
маршрутам и просуммировать потоки, проходящие по каждой линии связи:
■ = 2 53 Ьк1х м, i =тгж
k I
где k, I — номера абонентов сети; Xhi — поток между k-м и /-м абонентами;
б,£) Г1, если x-t <= Smin(&, /);
*' Ц если хс $ Smin(k, I).
N dt(n)
Шаг 4. Найти весовой показатель сети Ъп : = У] —-—
i=i dhi
Шаг 5 (правило остановки). Если £—Ьп<г, где е>0 — выбранный допуск,
то стоп, в противном случае перейти к шагу 6.
Шаг 6. Найти такое значение а(0^а^1), для которого потоки (1—
—а)Яг(Л) + аЯг минимизируют I в сети (например, с помощью метода Фибо-
начи).
Шаг 7. Произвести отклонение потока, положив Яг(п+1) : = (1—a)A,*(n) + аА,г\
Шаг 8. п: =я +1, перейти к шагу 1.
Для определения начальных реализуемых потоков сообщений
на шаге 0 предложен следующий алгоритм [12, 47].
Шаг 0. Вычисляются веса линий связи dli/dKi при нулевых параметрах
потоков: п: — 0. Весь внешний поток направляется в сеть по кратчайшим марш¬
рутам и вычисляется ta(0), i= 1, N. Часть внешнего потока, направляемого в
сеть, будем обозначать т]п. На данном шаге rio=l.
Шаг 1. On : =max (Xi{n)l/Ri). Если 'CTn/rin<l, то А,г(0) : =Х{(п)/г]п, i= 1, я,
и конец (найден начальный реализуемый поток). Если Onh]п^1, то r]n+i :—
= г|п[ 1—8i(l—сгп)]/(Тп, где 0^8i<l — параметр, определяемый требуемой
точностью.
Шаг 2. Вычислить потоки в линиях связи при внешних потоках r\n+iXki по
всем k и I: ЯгУ(п+1): = (у\п+\1'Цп),К^п), i= 1, п.
Шаг 3. Произвести операцию отклонения для потока Я,</(п+1>, i= 1, N. Для
этого необходимо выполнить шаги 1, 3, 6, 7 основного алгоритма отклонения
потоков. Тогда Яг(п+1):=(1—а)Л/(п+1) + аХг. Если п=0, то перейти к шагу 5,
иначе к шагу 4.
Шаг 4. Проверить наличие реализуемых начальных решений. Если
Ж^ ~%с(п+1)^ 1<ви ,%+t~r,ni<8,
где 0 и б — положительные допуски, то реализуемых решений нет.
В противном случае переход к шагу 5.
Шаг 5. п : =я+1 и переход к шагу 1.
Описанные в данном разделе алгоритмы позволяют по задан¬
ным внешним потокам и известным первичным параметрам линий
связи определить внутренние потоки в линиях связи, минимизи¬
рующие среднее время задержки в сети.
Таким образом, при реализации квазислучайной процедуры
маршрутизации на каждом узле сообщение будет выбирать на¬
правление дальнейшей передачи на основе распределения веро¬
ятностей Pi=Xi/'Z1Xiy где суммирование в знаменателе производит-
i
ся по номерам линий связи, -инцидентных узлу.
В чистом виде изложенный метод имеет преимущественно тео¬
ретическое значение, так как не гарантирует отсутствия циклов и
86
исто,/fi* в маршрутах передачи. Для практической реализации ал¬
горитмы должны модифицироваться путем введения дополнитель¬
ных индексов, дифференцирующих потоки ото парам абонентов.
Общая структура метода при этом -не изменяется.
3.5. ФИЗИЧЕСКИЕ ВЕРСИИ ВЕСОВ ЭЛЕМЕНТОВ СЕТИ
Критерии кратчайших маршрутов
Понятие кратчайшего .маршрута является условным и опреде¬
ляется выбранным критерием. В свою очередь критерий кратчай¬
шего маршрута зависит от показателя, используемого в качестве
весов элементов сети. Все многообразие возможных критериев об¬
разует три класса.
К первому классу отнесем критерии, основанные на аддитив¬
ных показателях таких, как длины линий связи, стоимости пере¬
дачи сообщений, параметры задержки. При этом критерий крат¬
чайшего маршрута
min 2 Яи> (313)
Sk^Q (i,j)^Sk
где Sk—k-и маршрут между некоторой (парой узлов; Q — множе¬
ство всех таких маршрутов.
Второй класс образуют критерии, основанные на мультиплика¬
тивных показателях, обычно вероятностного содержания. Сюда
относятся: коэффициент исправного действия; вероятность безо¬
шибочной передачи; вероятность своевременной доставки. Для это¬
го класса обобщенная запись имеет следующий вид:
max П Яи- (3.14)
sheQ (f. i)eSh
Для упрощения критерий второго класса обычно приводят к
эквивалентному критерию вида (3.13) путем логарифмирования:
"ИХ п <7u~min 2
К третьему классу относится критерий максимина, физическим
параметром для которого является, например, пропускная способ¬
ность элементов сети. Записывается данный критерий следующим
образом:
шах min qu. (3.15)
(i,
При этом кратчайшим будем маршрут, имеющий максимальную
пропускную способность, которая для каждого маршрута опреде¬
ляется минимальной пропускной способностью входящих в него
линий связи. Данный критерий не приводится к общему виду
(3.13), что необходимо учитывать при его использовании в зада¬
чах маршрутизации.
87
В сетях с коммутацией каналов в качестве критерия кратчай¬
шего маршрута обычно выбираются минимум длины, максимум
надежности или минимум вероятности ошибки. Сети с коммутаци¬
ей сообщений (пакетов) в большинстве случаев базируются на
временных версиях весов. Соответствующие характеристики будут
рассмотрены в следующих разделах.
Виртуальное время ожидания
Виртуальное время ожидания является фактическим временем
ожидания для некоторого сообщения, поступившего в конкретный
момент времени.
При отсутствии перерывов процесса передачи виртуальное вре¬
мя ожидания Тв есть величина детерминированная и полностью
определяется числом сообщений в очереди в момент измерения L,
их объемами U и пропускной способностью линии связи:
TB=j]li/R. (3.16)
i=i
Перерывы в процессе передачи, обусловленные особенностями
алгоритмов защиты от ошибок, отказами и обслуживанием прио¬
ритетных сообщений, приводят к тому, что реальное значение вир¬
туального времени ожидания становится случайным: Т'в = Тв-\-
+АГВ, где ДГВ —случайная составляющая, определяемая числом
перерывов в процессе передачи и их длительностью.
Полагая, что перерывы являются событиями взаимонезависи-
мыми, можно записать функцию распределения ЛГВ для двух си¬
туаций. Первая ситуация предполагает рабочее состояние процес¬
са передачи в момент измерения. Для этого случая
Р<*> (АТв < т) = f Рк (Tn) Ph (А Тв < т). (3.17)
k=0
Во второй ситуации момент измерения приходится на интер¬
вал перерыва процесса передачи:
Р<0) (ЛГв<т) = 2 ph (TB) Pk+1 (А Гв<т). (3.18)
о
В выражениях (3.17) и (3,18) ри(Тв) —вероятность того, что
за интервал времени Тв произойдет k нарушений процесса пере¬
дачи; Рь(АТв^х) —функция распределения АТВ в случае возник¬
новения k перерывов.
Известно, что при простейшем потоке событий их число на
заданном интервале распределено по закону Пуассона, а время
до наступления k-vo события подчиняется гамма-распределению
с параметром k. Исходя из этого можно записать:
^(7,в)=^р1е“Л"гв; (3.19)
PK(ATB^r) = I(k, (3.20)
88
где !(к% t/T„) неполная гамма-функция, a 7V среднее время
ипрерыион.
Таким образом, функция распределения случайной составляю¬
щей виртуального времени ожидания в двух ситуациях, соответ¬
ствующих моменту измерения, будет иметь следующий вид:
Р(,)(ДГв<т) = е_Ло гв
1 + 2 ^°,\в) ~ J(k, т/тп)
fc=i k\
(3.21)
Р(°)(АГв<т) = 2 (ХоГв)--е А°Гв
/г=0
!_ Ji Jt[Tnf_e^/Tn
t=0
= Р(1)(АГв<т)—e-<*. V^h)/0 (2 }fXTB%/Tn), (3.22)
где / и /0 — соответственно неполная гамма-функция и модифици¬
рованная функция Бесселя нулевого порядка.
При вычислениях >по полученным соотношениям необходимо
использовать таблицы значений 1[х] и 1б[х], ограничиваясь пер¬
выми членами в соотношении для Р(1)(АГв^т).
Окончательно функция распределения АГВ при коэффициенте
готовности линии передачи Кг будет определяться выражением
Р (А Тв < т) = /(г ра> (А Гв < т) + (1 -/Сг) (А 7В < т). (3.23)
Найденная функция распределения позволяет, определив не¬
посредственно детерминированную составляющую виртуального
времени ожидания, оценить с некоторой вероятностью случайную
составляющую. Вычисления могут производиться путем итера¬
ций.
При использовании в качестве веса виртуального времени
ожидания слабо учитывается статистика процесса в системе об¬
служивания. Для учета и текущей ситуации, и статистического по¬
ведения системы может быть использована оценка .(?+Г'в)/2, где
t — среднее время ожидания сообщения в системе.
Прогнозируемое время ожидания
При известных характеристиках времени ожидания в системах
обслуживания сети в качестве весов можно использовать прогно¬
зируемое время ожидания, вычисляемое на основе измерения по¬
следовательности значений виртуального времени ожидания.
Для случая, когда процесс носит стационарный характер и из¬
вестна функция распределения времени ожидания со средним ?ож
и дисперсией Dt07K, такая оценка может быть получена на основе
линейного предсказания. Наилучший алгоритм линейного пред¬
сказания обеспечивает минимум среднеквадратической ошибки.
Если обозначить случайное время ожидания некоторого п-то
сообщения Гп, прогнозируемую оценку времени ожидания (n-\-h)-
го сообщения T*n,h, а его действительное время ожидания Тп+н, то
проблема предсказания будет состоять в построении правила, при
котором обеспечивается минимум математического ожидания зна¬
чения |7\,|/t—T*nth\=(y2h- Такая оценка может быть получена на
89
основе информации о времени ожидания некоторого числа пред¬
шествующих сообщений.
Соответствующий алгоритм приведен в /[63] и определяется
соотношением
р — нагрузка системы.
При вычисленных коэффициентах а и (3 и известных парамет¬
рах ?ож и DtoiK алгоритм будет состоять в измерении значения
Tn-h для каждого очередного поступающего сообщения и накопле¬
нии полученных значений путем взвешенного суммирования. Зна¬
чение Тп по сути является виртуальным временем ожидания.
Получаемая при реализации данного алгоритма погрешность
прогнозирования
В случае, когда последовательность {Гп}, п = 0, 1,..., имеет
марковский характер, алгоритм упрощается, так как в этом слу¬
чае для прогноза может быть использовано только последнее из¬
меренное значение виртуального времени ожидания. При этом
оценка
Соответствующий алгоритм состоит в определении значения
Тп и вычислении по приведенному соотношению. Получаемая в
данном случае погрешность
Глубина прогноза h должна выбираться таким образом, чтобы
погрешность оценки обеспечивала целесообразность прогнозиро¬
вания.
Производная среднего времени задержки сообщений
В качестве весов линий связи может использоваться среднее
время задержки, которое для пуассоновско-экспоненциальной сис¬
темы с учетом ненадежности обслуживающего прибора определя-
п
T\h = (a-$)ab-'^Tn-h,
k=0
(3.24)
где
b = 1 + &
(1 — а2)>0;
D tож + t2ож
°2h = Dt0iK — Шож-(Шож-*2ож)-^ а2(ft“1)
L Р J
(3.25)
t0K(l — ah), Тп = 0;
(3.26)
о2и — Df t2 a2h —
u h ^ ^ож L ож u л
i —p
(3.27)
90
етсм соотношением (3.8). Данное соотношение получено на основе
результата для системы с абсолютным приоритетом н конечным
источником приоритетных требований путем интерпретации прио¬
ритетных заявок перерывами связи. Интенсивность обслуживании
при: ■>гом выражается через средний объем сообщений 7 и про¬
пускную способность линии связи. Процесс перерывов связи ха¬
рактеризуется коэффициентом простоя и средней длительностью
перерывов.
Все перечисленные параметры можно определить путем ста¬
тистических измерений. Из формулы (3.8) видно, что среднее
время задержки является существенно нелинейной функцией р и
Кп.
Потоки сообщений и потоки перерывов связи на практике не
являются строго стационарными, т. е. на отдельных интервалах
могут иметь приращения различного знака. При этом будут по¬
лучать приращения также р и /Сп.
В связи с нелинейностью функции t = f(p, Кп) приращения р
и Кп могут привести к различной реакции в статистическом пове¬
дении системы в зависимости от их исходных значений. Таким об¬
разом, при упорядочении маршрутов по критерию минимума t воз¬
можны решения, которые будут далеки от оптимального в случае
отклонения показателей нагрузки в надежности.
Исходя из этого (целесообразно в качестве веса линий связи
дать не само значение ?, а скорость ее изменения при изменении
параметров нагрузки и надежности. Такой подход без учета пара¬
метров надежности был предложен в [12], где в качестве веса ли¬
ний связи используется производная среднего времени задержки.
С учетом параметров надежности аналогичный показатель по¬
лучим, если найдем частные производные выражения (3.8):
дТ _ l/R+TBKud~Ku) . /Оооч
др ~ (1 _/сп —р)2 ’
дТ _Tb+1/R-Tb9(1~2Ku)~TbKu(2-Ku) ,оо0ч
дКи (1—/Сп -Р)2 { }
— и сложим их. Тогда для вычисления веса будем иметь следую¬
щее соотношение:
, дТ __2l/R + TB(\-Ku)~TBp(l-~2Ku) /о от
q~dp + дКи ~ (1 —/Сп —Р)2 *
Использование полученного показателя в качестве веса по¬
зволяет при упорядочении маршрутов отдавать предпочтение мар¬
шрутам, которые менее критичны к изменению интенсивности по¬
токов сообщений и отказов.
В качестве примера рассмотрим следующую ситуацию. Пусть
необходимо установить отношение предпочтения между двумя
маршрутами: S\^{xk, Xi} и S2^{xn, xm). Первичные параметры
линий и результаты расчетов весов сведены в табл. 3.1.
Из таблицы видно, что при выборе в .качестве веса линий свя¬
зи среднего времени задержки кратчайшим является маршрут S,.
91
ТАБЛИЦА 3.1
Линия связи
Г/R
Тв
Кп
Р
7
дТ
1
5
0,2
0,4
4,5
24
XI
5
10
0,2
0,4
16
66
s2
хп
2
10
0,1
0,6
10
90
хт
1
5
0,3
0,4
7
41
В случае использования суммы произ¬
водных предпочтение должно быть от¬
дано маршруту Si. Полученное пере¬
распределение обусловлено тем, что
линии связи маршрута S2 работают в
области более высокой нагрузки, в ко¬
торой среднее время задержки резко
возрастает при небольшом увеличении
потока сообщений или потока переры¬
вов. Последнее просматривается на
графике рис. 3.11, где отмечены рабо¬
чие точки, в которых находятся систе¬
мы обслуживания, относящиеся к раз¬
личным линиям связи.
Квантование средних значений весов
Веса линий связи сети являются случайными функциями вре¬
мени. Реализация циклов управления начинается при изменениях
веса какой-либо из линий связи. Для обнаружения изменений ус¬
танавливаются градации в области определения весов qmax—Qmm,
т. е. производится квантование по уровням. Переход веса из од¬
ной градации в другую расценивается как изменение ситуации в
сети.
Увеличение числа градаций обеспечивает более точное управ¬
ление, а следовательно, и лучшее приближение к оптимальным
режимам работы сети, соответствующим непрерывному управле¬
нию. Однако ввиду того что каждый цикл управления связан с
необходимостью передачи служебной информации, увеличение чис¬
ла градаций приводит к более частым переходам весов через гра¬
ницы и возрастанию внутренних потоков служебных сообщений.
Это в свою очередь снижает реализуемые внешние потоки. Таким
образом, можно утверждать, что существует некоторый оптимум
шага квантования весов линий связи сети.
92
При равномерном киаптоиаиии по уровням непрерывного про¬
цесса тмепепия ногой .липни сняли ередпекналратическаи ошибка
определяемм.\ i11ачсч111it
/1 A6/2 A fi
— f &d8 = -^, (3.31)
21/3 V 1
где Лб шаг квантования; б — случайная величина ошибки, рас¬
пределенная равномерно на интервале кванта.
Усредненное влияние числа градаций на качество функциониро¬
вания сети можно оценить по снижению реализуемых внешних по¬
токов.
Пусть к—интенсивность внешних потоков при идеальном (не¬
прерывном) управлении. Тогда квантование весов и соответствую¬
щее отклонение от оптимального распределения внутренних пото¬
ков обусловливают снижение к на
= (3.32)
9с р
где qcp — среднее значение весов.
Усредненную величину потока служебных сообщений в зависи¬
мости от числа уровней квантования можно определить следую¬
щим образом:
= (3.33)
где Ат, Aq — средняя длительность интервала между соседними
экстремальными значениями q(t) и средняя разность между этими
зн ач-ениями соответств енно.
Величина АА,г характеризует снижение допустимых внешних по¬
токов из-за передачи служебных сообщений. Общее снижение ре¬
ализуемых потоков
М = АХ1 + М2. (3.34)
Для определения оптимального значения Аб продифференциру¬
ем (3.34) и приравняем нулю:
дМ
-0.
д А б 2 ~|/3 qCP Д* Л62
Отсюда
АЬ0ПТ=У Aq2V3qcv/(A'cX). (3.35)
Из последнего соотношения видно, что частая шкала квантова¬
ния может применяться в мощных сетях, в которых потоки служеб¬
ных сообщений практически не влияют на внешние параметры, а
изменение весов во времени носит инерционный характер.
При наличии достаточных статистических данных по характеру
процесса изменения весов линий связи сети может оказаться целе¬
сообразным использовать неравномерную шкалу квантования. Во
93
всяком случае при разработке программного обеспечения управ¬
ления потоками желательно предусмотреть возможность перехода
на переменную шкалу.
3.6. МАТЕМАТИЧЕСКОЕ ОБЕСПЕЧЕНИЕ
УПРАВЛЕНИЯ ВНЕШНИМИ ПОТОКАМИ СООБЩЕНИИ
Граничные значения интенсивностей внешних потоков сообщений
В соответствии с функцией, выполняемой процессом управления
внешними потоками, математическое обеспечение этого процесса
должно решать задачу вычисления граничных значений внешних
потоков. Кроме того, для статистического управления математиче¬
ское обеспечение содержит процедуры обнаружения факта превы¬
шения этих значений на входах -сети.
Граничные значения внешних потоков практически удается по¬
лучить только в случае идентичных входов. Для решения задачи
используем следующую модель сети передачи данных. Сеть состоит
из множества Мi входных очередей Уь имеющих каждая L\ мест
ожидания (источников), и множества М2 внутренних очередей У2,
имеющих каждая Ь2 мест ожидания (узлов коммутации), т. е.
Mi-j->M2=iM.
В сети принят алгоритм обмена, при котором прием пакетов
квитируется в каждой линии связи маршрута. При переполнении
памяти очередного узла сообщение теряется, квитанция за него не
выдается, что вызывает повторные передачи. Процедура выбора
маршрута задается вероятностями передачи между узлами рц и
может быть случайной или детерминированной. Граничные значе¬
ния внешних потоков сообщений должны быть такими, чтобы с
учетом алгоритма обмена вероятность переполнения памяти ис¬
точников не превышала заданного значения рзад.
Введем фиктивные узлы с номерами 0 и М+1, первый из ко¬
торых является обобщенным источником, а второй •— получателем
сообщения.
Известно [13], что при заданных матрице вероятностей передач
Pij, / = 0, М, /= 1, М+1, и интенсивности суммарного внешнего по¬
тока X интенсивность потока в /-ю очередь
где в]—решение линейной системы уравнений, которая в матрич¬
ной форме имеет вид
С учетом повторных передач интенсивность фактического пото¬
ка в i-ю очередь
где pi — вероятность блокировки входа i-й очереди из-за перепол-
kj = ejk, / = 1, М,
(3.36)
(ei) = (Poj) + (ej) (Ра)•
(3.37)
(3.38)
нения.
94
Для каждой очереди р* определяется объемом памяти и распре¬
делениями фактического потока сообщений и времени обслужива¬
ния, учитывающими повторные передачи.
В [49] на основе метода декомпозиции получено следующее со¬
отношение:
Pi = Pi (1 — Р*)/(e“v‘ ^-1)-р2г). (3.39)
Здесь рг=Яг?сг — Фактическая нагрузка. i-й очереди, a у* =
= 2(XffCt—1 )/(htciRfi + Rsi). В последнем соотношении:
D4
^ = ^2 : (3-40)
ji 1 {—Pi
^ = Т~2 (!-Рп)РпЧ (3-41)
М J
1 М+1 f п. •
K'i = 1+-+- 2 7(3.42)
t\i /=1 (1-w)2
где fCi — фактическое время обслуживания, a Rji и Ksi — коэффи-
циенты вариации потока и .времени обслуживания соответственно
в i-и системе при (детерминированной длительности обслужива¬
ния сообщений.
Таким образом, задача вычисления граничных потоков состоит
в решении системы уравнений (3.38), (3.39) относительно Xj при
рз^рзаД для y^Yx и нахождении X. Для решения может быть
использован следующий итерационный алгоритм.
Шаг 0. Ввод (Pij); Lx\ L2; р3ад.
Шаг 1. X: = т); pi : =0; i= 1, М.
Шаг 2. Решить систему (3.37) и вычислить Xi, i= 1, М.
Шаг 3. Вычислить Xi по (3.38), i— 1, М.
Шаг 4. Вычислить pi по (3.39), i—U М.
Шаг 5. Для Уг^У\ проверить условие рг^рзад. Если хотя бы для одного i
условие не выполняется, то переход к шагу 7.
Шаг 6. X: =Х + г\ и переход к шагу 2.
Шаг 7. Xi : =Х/Ми вывод результатов и остановка.
Величина т] в алгоритме должна быть достаточно малой, что¬
бы на первом шаге вероятность блокировки в очередях была пре¬
небрежимо мала. Превышение потока, вычисленного в соответст¬
вии с приведенной методикой, приведет к нарушению требований
по вероятности блокировки на входе какого-либо из источников.
Если блокировка для источников сама по себе несущественна, то
шаг 5 алгоритма может быть модифицирован введением другого
ограничения, например по среднему времени ожидания.
Ограничения при межконцевом и изоритмическом управлениях
Оценка допустимого числа сообщений в сети при межконце¬
вом и изоритмическом управлениях внешними потоками может
быть получена на основе граничных значений потоков. Для этого
95
необходимо установить распределение внешних потоков по мар¬
шрутам и определить среднее время задержки в каждом из мар¬
шрутов.
Тогда ориентировочно число сообщений в сети, принадлежа¬
щих направлению обмена между абонентами i и /,
(3.43)
где %i —граничное значение потока для i-го источника; v^-— часть
потока Ки направляемая /-му потребителю; t^ — среднее время за¬
держки сообщений в сети при передаче между абонентами i и /.
Для изоритмического управления ориентировочное число раз¬
решений в сети
m=y}mij. (3.44)
У
Приведенные оценки являются приближенными. Более точные
результаты могут быть получены путем моделирования. При этом
(3.43) и (3.44) целесообразно использовать в качестве исходных.
Контроль интенсивностей потоков на входах сети
Ввиду того что объемы памяти современных 3B|M, являющих¬
ся абонентами сетей передачи данных, достаточно велики, реаль¬
ные существенные перегрузки возникают в тех случаях, когда на¬
рушается основное условие стационарности систем обслуживания
на входах сети р=А1с>1.
Обычно данное условие нарушается на ограниченных интерва¬
лах времени — периодах перегрузки (Гпер), однако последствия
перегрузки прекращаются не сразу, а по истечении определенно¬
го времени — интервала установления (ГуСт).
Исходя из этого процедура определения факта перегрузки
должна реагировать на такое изменение интенсивности входящего
потока, при котором Гпер+^уст не превышает некоторого заданно¬
го значения, равного по сути допустимой длительности перерыва
в процессе передачи информации Т п.доп*
Интервал установления после интервала перегрузки определя¬
ется соотношением [64]
7’уот = ^пер(7’пер)-^] (3.45)
где Я и L — интенсивность потока и средняя длина очереди в ста¬
ционарном режиме; Lnep(7’nep) — средняя длина очереди в услови¬
ях перегрузки как функция .интервала перегрузки.
Лоследняя величина определяется следующим образом:
L (Тпер) = £ + ^пер Т’пер + 7’перИс> (3.46)
где Апер — интенсивность 'потока сообщений на интервале пере¬
грузки. Подставляя (3.46) в (3.45) и раскрывая Г, получаем
туст = [^пер Т пер^с + Т пер]/( 1 — А, Гс). (3.47)
96
Отсюда
Kev = [/уст (1 - * tc)-TmJ>]l(tc ^пер)- (3-48)
Таким образом, соотношение (3.48) определяет входящий по¬
ток, при котором процедура контроля должна блокировать источ¬
ник с целью предотвращения блокировки узла.
В качестве процедуры контроля может быть использована
процедура последовательного анализа Л орден а [53]. Эта процеду¬
ра определяет за минимальное среднее число наблюдений случай¬
ной величины — интервала между событиями — факт изменения
интенсивности потока от К до (1 + 0) X при заданной вероятности
ошибочного решения а.
В нашем случае 10= (АПер—А,)/А, и не превышает ,1.
Процедура состоит в вычислении двойного неравенства
0<n log (1 +0) — 0 2 < l°g Y> (3.49)
1=1
где ti — значение интервала между двумя последовательными со¬
общениями в i-ы измерении; п — номер измерения.
Значение порога
(е +а) [е —log (1 +0)] (350)
У ~ а(1+ 0)2 log(l+0) — а 0(1+0) ‘
При выполнении левого неравенства процедура накопления возоб¬
новляется. Выполнение правого неравенства свидетельствует о
том, что интенсивность потока достигла Апер.
Глава 4
ВОПРОСЫ ПРОЕКТИРОВАНИЯ
СЕТЕЙ ПЕРЕДАЧИ ИНФОРМАЦИИ АСУ
4.1. ЗАДАЧИ СИСТЕМНОГО ПРОЕКТИРОВАНИЯ СЕТЕЙ
Общие сведения
Существует большое число вариантов построения сети передачи
информации, связывающей заданные объекты АСУ. Эти варианты
отличаются структурой, алгоритмами работы, производительностью
линий связи и центров коммутации, надежностью, живучестью и
затратами на создание и эксплуатацию. Множество возможных ва¬
риантов может быть представлено в виде двух подмножеств. Пер¬
вое подмножество включает варианты, обеспечивающие выполне¬
ние требований АСУ, второе — варианты, не обеспечивающие вы¬
полнения соответствующих требований.
Основной задачей расчета и проектирования сети является вы¬
бор варианта, относящегося к первому подмножеству и требующе¬
го минимальных затрат на построение сети.
4—157
97
Процесс проектирования включает два основных этапа: пред¬
варительное (системное) проектирование и инженерное (техниче¬
ское) проектирование. Предварительное проектирование заключа¬
ется в выборе структуры сети, производительности и алгоритмов
функционирования ее элементов. Инженерное проектирование со¬
стоит в изыскании технических решений, реализующих сеть в со¬
ответствии с результами системного проектирования. В большинст¬
ве случаев системное и инженерное проектирование выполняется
параллельно, так как иногда невозможность технической реализа¬
ции заставляет вносить коррективы в результаты системного про¬
ектирования.
В данной главе рассматриваются методы решения основных
задач, решаемых на этапе системного проектирования.
Исходные данные при проектировании
Исходными данными для системного проектирования обычно
являются следующие сведения:
1. Совокупность и характеристика объектов системы управле¬
ния.
2. Требования системы управления к процессу обмена инфор¬
мацией.
3. Условия создания и функционирования сети.
Данные об объектах системы управления включают их геогра¬
фическое положение (координаты), соподчинение, мобильность и
активность. Соподчинение объектов системы управления опреде¬
ляется структурой организации управления. В случае мобильности
объектов могут определяться зоны или ориентировочные марш¬
руты их передвижения.
Под активностью объекта следует понимать сведения о числе
задач, решаемых в единицу времени на объекте, их объемах, по¬
требности для решения в обмене информацией с другими объек¬
тами.
Требования системы управления к процессу обмена информа¬
цией обычно задаются в зависимости от решаемых задач по вер¬
ности, значениям вероятностно-временных характеристик задерж¬
ки сообщений и надежности доставки. Эти требования детализиру¬
ются по категориям сообщений и в ряде случаев по парам або¬
нентов.
Условия создания и функционирования сети могут включать
такие сведения, как:
наличие первичной сети связи и ее структура;
параметры технических средств и их связь с экономическими
затратами;
наличие внешних факторов, влияющих на функционирование
сети.
Исходными данными для инженерного этапа проектирования
являются состав и основные характеристики технических средств.
Эти данные определяются либо возможностями промышленности
98
по созданию новых образцов, либо номенклатурой серийной аппа¬
ратуры.
В ряде случаев в распоряжении системных проектировщиков
могут быть сведения об аналогах проектируемой сети, включаю¬
щие характеристики потоков сообщений между парами абонентов,
полученные по результатам сбора статистических данных о работе
аналога.
Задача подготовки исходных данных — весьма ответственный и
трудоемкий этап проектирования. Для ее решения необходимы
совместные усилия заказывающих организаций и ведомств, на ко¬
торые возлагается эксплуатация, а также разработчиков, предста¬
вителей промышленности и экономистов. Это обусловлено тем, что
от корректности исходных данных в значительной мере зависят ре¬
зультаты всего системного проектирования.
Общая характеристика задачи системного проектирования
По своему характеру задача системного проектирования явля¬
ется оптимизационной и состоит в выборе такого набора значений
внутренних первичных параметров и алгоритмов, при которых
обеспечивается экстремум некоторого функционала полезности. Та¬
кая постановка задачи полностью соответствует оптимизации боль¬
ших систем, к которым, как правило, можно отнести сети передачи
информации АСУ.
На практике для большинства систем такого типа построить
достаточно обоснованный функционал полезности весьма сложно.
Ввиду этого находит применение так называемый маргинальный
подход, суть которого состоит в оптимизации одного из внешних
параметров системы при ограничениях на остальные параметры.
Учитывая специфику сетей передачи информации больших АСУ,
которые характеризуются высокой стоимостью и наличием ряда
жестких требований к значениям внешних параметров, в качестве
критерия оптимальности можно использовать минимум затрат на
создание и эксплуатацию.
Ограничения в общем случае определяются по параметрам ис¬
точников сообщений, времени задержки, верности и живучести.
Кроме того, могут вводиться ограничения на пространство разме¬
щения узлов, координаты абонентов, а также на множество реа¬
лизуемых алгоритмов.
Таким образом, задача системного проектирования сети при
использовании маргинального подхода формулируется так: найти
внутренние параметры сети, ее топологию и алгоритмы функциони¬
рования, при которых для заданного множества абонентов выпол¬
няются требования по времени задержки, верности, надежности и
живучести и минимизируются затраты по множеству наборов воз¬
можных вариантов. Совокупность абонентов задается их коорди¬
натами и характеристиками потоков сообщений.
В процессе решения задачи обычно определяются:
число и координаты размещения узлов коммутации;
99
структура межузловых соединений;
мощность линий связи и узлов коммутации;
параметры надежности и живучести элементов.
Кроме того, осуществляется выбор алгоритмов маршрутизации,
управления потоками сообщений и повышения верности.
Описанная проблема проектирования относится к классу ком¬
бинаторных и может быть сформулирована в терминах дискретно¬
го математического программирования. Однако чрезмерно высокая
размерность делает практически невозможным ее прямое решение
на базе существующих методов и средств. В связи с этим исполь¬
зуются различные упрощения, основная суть которых состоит в
декомпозиции общей задачи на совокупность частных [40]. Рас¬
смотрим один из возможных вариантов декомпозиции и общую
характеристику частных задач, решаемых на отдельных этапах.
Общая задача системного проектирования сети подразделяется
на следующие частные задачи: топологического синтеза, выбора,
алгоритмов функционирования и оптимизации параметров элемен¬
тов. Топологический синтез и выбор алгоритмов производятся па¬
раллельно при использовании исходных данных, доступных на
предварительном этапе проектирования. При оптимизации парамет¬
ров элементов требуется более детальная информация, которая
может быть получена после выбора топологии и алгоритмов.,
Далее рассмотрим более подробно задачи, решаемые при про¬
ектировании сетей на основе декомпозиции.
Топологический синтез. Основной целью топологического синте¬
за является выбор числа и координат узлов коммутации, а также
структуры межузловых соединений.
Число вариантов размещения М узлов на территории, аппрок¬
симированной D дискретными координатными точками, равно
Задача состоит в том, чтобы выбранный вариант размещения уз¬
лов обеспечивал минимум затрат на соединительные линии. В ча¬
стном случае, когда абоненты локализуются компактными груп¬
пами, число узлов коммутации может быть выбрано равным числу
групп. Исходными данными при этом являются координаты або¬
нентов и функции затрат на соединительные линии.
В более общем случае задача выбора числа и местоположения
узлов связана с задачей синтеза структуры межузловых соедине¬
ний. Для множества узлов с заданным расположением существует
большое число связанных структур. Так, если сеть содержит М
узлов, то число вариантов их соединения имеет верхнюю границу
[56] 2м(м-1)/2, а нижнюю границу (1—2М 2~М/2)2М(М~1)/2.
Каждая структура характеризуется суммарной длиной линий
связи (стоимостью), диаметром, средней длиной маршрутов и па¬
раметрами связности, которые определяют живучесть сети. Задача
синтеза структуры заключается в построении конфигурации, обес¬
печивающей заданную живучесть и требующей минимальных зат¬
рат на создание и эксплуатацию линий связи. Возможна и обрат¬
ная постановка задач, а также использование в качестве критерия
100
оптимальности минимума среднего расстояния или диаметра сети.
Исходными данными при решении являются координаты абонен¬
тов, функции затрат на соединительные линии и линии связи, стои¬
мости узлов коммутации и требования по живучести сети в форме
связности.
Взаимосвязь задач размещения узлов и синтеза структуры мо¬
жет быть обеспечена на основе следующего подхода:
для заданного множества абонентов синтезируется связанная
структура сети, минимизирующая затраты на соединительные ли¬
нии, линии связи и узлы коммутации;
полученная минимальная структура направленным образом на¬
ращивается до выполнения требований по живучести.
Если сеть передачи информации должна обеспечивать обслу¬
живание мобильных абонентов, то на этапе топологического про¬
ектирования необходимо решить задачу выбора координат разме¬
щения и числа узлов привязки. Эта задача является самостоятель¬
ной, если не введено ограничение на длину соединительных линий
от узлов коммутации. В противном случае при решении должны
вводиться данные о координатах узлов коммутации.
К задачам топологического проектирования относится и задача
размещения центра управления сетью, хотя в последовательности
системного проектирования она может быть заключающей.
Выбор алгоритмов функционирования. Системные алгоритмы
сети передачи информации составляют основу функционального
программного обеспечения узлов коммутации и сопряжения. К ним
относятся алгоритмы: каналов передачи данных, межузлового об¬
мена. адресования, управления внутренними потоками, управления
внешними потоками. С точки зрения системного проектирования
важно оценить эффективность введения конкретной версии каждо¬
го из алгоритмов или определенного набора.
Предварительное решение об использовании того или иного ал¬
горитма, как правило, принимается на основе качественных пред¬
ставлений и требований к сети. При вьгборе конкретной версии
должны учитываться затраты ресурсов на реализацию алгоритмов
в процессе функционирования. Затраты ресурсов связаны с необ¬
ходимостью задействования вычислительных мощностей и переда¬
чи служебной информации.
Выбор системных алгоритмов может проводиться параллельно
с топологическим синтезом, но при этом обычно используются дан¬
ные о характере структуры сети.
Выбор мощности элементов сети (линий связи и узлов комму¬
тации). Данная задача, так же как и задача топологического син¬
теза, является оптимизационной. При ее решении в качестве исход¬
ных данных используются: структура сети, параметры внешних по¬
токов сообщений, системные алгоритмы, функции затрат.
Содержание задачи состоит в следующем.
Первоначально на синтезированной структуре при выбранных
алгоритмах маршрутизации определяются потоки сообщений, по¬
ступающих на отдельные элементы сети. Далее решается оптими¬
101
зационная задача при одном из двух критериев оптимальности. В
первом случае минимизируются параметры времени задержки со¬
общений. В качестве ограничения используется суммарная мощ¬
ность сети, которая оценивается приближенно исходя из требова¬
ния внешних потоков сообщений в режиме нагрузки, обеспечива¬
ющем устойчивое функционирование. Во втором случае, когда тре¬
буемую суммарную мощность сети оценить не удается, ее мини¬
мизация ставится в качестве цели задачи, а ограничения вводятся
по параметрам времени задержки.
Выбор параметров живучести и надежности элементов сети. Вы¬
бор значений указанных параметров является максиминной зада¬
чей. При этом желательно максимизировать априорную неопреде¬
ленность для воздействующей стороны выбора поражаемых огра¬
ниченными ресурсами объектов. Из всех возможных вариантов,
максимизирующих неопределенность, должен быть выбран такой,
который требует минимальных затрат.
В строгой постановке оптимизация живучести элементов связа¬
на с задачей топологической оптимизации. Однако обычно на эта¬
пе топологического проектирования достаточно сложно определить
частные функции затрат на повышение живучести. В связи с этим,
как уже отмечалось, топологический синтез может производиться
при ограничениях на характеристики связности, которые должны
включаться в исходные данные на системное проектирование. На
выбранной структуре задача построения частных функций затрат
упрощается, что позволяет практически оптимизировать распреде¬
ление средств на повышение живучести сети между ее элементами.
Задача оптимизации надежности элементов сети формулируется
аналогично, однако, учитывая отсутствие источника целенаправ¬
ленного воздействия, единственным критерием оптимальности яв¬
ляется минимум затрат.
Завершающим этапом системного проектирования сети, как пра¬
вило, является статистическое моделирование. При этом результа¬
ты, полученные на предыдущих этапах, используются в качестве
исходных данных для построения модели. Моделирование позво¬
ляет произвести уточнение и корректировку решений.
Прогнозирование потоков сообщений между абонентами сети
Одной из задач предварительного этапа системного проектиро¬
вания сетей ПД является определение параметров потоков сооб¬
щений между абонентами сети. Важность этой задачи обусловлена
тем, что от результатов ее решения в значительной мере зависят
результаты всего системного проектирования. Параметры потоков
сообщений для функционирующей сети могут быть оценены путем
статистического анализа. Однако на предварительном этапе про¬
ектирования такой подход неприемлем ввиду отсутствия самого
объекта исследования — сети Г1Д.
Таким образом, необходимо выбирать значения параметров по¬
токов на основе информации, которая имеется в распоряжении
102
разработчика об абонентах, в интересах которых создается сеть.
При этом в зависимости от наличия такой информации возможны
различные степени неопределенности.
Для решения задачи прогнозирования потоков может быть ис¬
пользован принцип максимума неопределенности [5]. Сущность
данного принципа состоит в выборе таких искомых параметров,
которые являются наименее предубежденными, а следовательно,
и наименее ошибочными с учетом имеющихся априорных сведений
о системе. Количественной мерой неопределенности при выборе
является энтропия, максимум которой по множеству наборов зна¬
чений вероятностей и дает наименее ошибочное решение. При
этом имеющаяся информация играет роль ограничений.
Если Xij — искомый параметр потока сообщений между i-м и
/-м абонентами, а Х = 2 -Xij, то величина Хц!X может интерпре¬
тироваться как вероятность того, что произвольное сообщение, пе¬
редаваемое в сети, принадлежит потоку от i к /. Таким образом,
в формализованном виде задача прогнозирования потоков может
быть сформулирована следующим образом: найти значения Xij, i,
/ = 1, Л1а, при которых обеспечивается
где G — множество возможных наборов значений Xij, ограничен¬
ное имеющейся информацией; Ма — число абонентов.
В общем случае совокупность граничных условий может быть
представлена в следующем виде:
где a{h)ij и Ak — коэффициенты, определяемые характером исполь¬
зуемой информации.
Решение сформулированной задачи может быть получено ме¬
тодом неопределенных множителей Лагранжа. Функция Лагран¬
жа примет следующий вид:
где 1(к) — неопределенные множители.
В соответствии с теоремой Лагранжа решение задачи (4.1)
при ограничениях (4.2) максимизирует FL, определяется системой
уравнений
(4.1)
2 а\*Пи = Ак, 1и>0,
(4.2)
И
(4.3)
dEL 1
S
дки X
[in хи + 1 — in X] + 2 l{h) а}? = 0 (4.4)
и имеет вид
(4.5)
103
где £(fe) получается из системы уравнений, образуемой подстанов¬
кой >(4.5) в (4.2).
Для конкретизации решения рассмотрим варианты предпосы¬
лок, которыми могут располагать системные проектировщики се¬
ти передачи данных.
При отсутствии какой-либо дополнительной информации, кро¬
ме общей нагрузки сети X, из (4.2) и (4.5) получим тривиальное
решение
ьи=т\. (4.6)
Более детальная информация может относиться к абонентам
как источникам и потребителям сообщений, а также учитывать
дополнительные соображения по желательности или целесообраз¬
ности того или иного направления обмена.
Для сетей ПД общего пользования, »в которых передача сооб¬
щений в основном обеспечивает процесс предоставления инфор¬
мации и вычислительных ресурсов удаленным абонентам, можно
сформулировать три вида ограничений.
Первое ограничение связано с абонентами-источниками запро¬
сов. На предварительном этапе проектирования параметр потока
сообщений от каждого такого источника может быть определен
на основе анализа его работы (интенсивности и типов решаемых
задач, необходимости обращения к другим абонентам сети в про¬
цессе решения каждой из задач). Таким образом, первая группа
ограничений имеет вид
= i = l,Ma. (4.7)
)
Второе ограничение может быть сформулировано с учетом то¬
го, что процессы на входе потребителей сообщений носят харак¬
тер процедур массового обслуживания с интенсивностями (lxj.
Отсюда ограничением входящего потока является заданное до¬
пустимое значение нагрузки. Полагая эти значения равными ip (ов
общем случае они различны), запишем следующее ограничение:
2^- = Р- (4-8)
i,j
Наконец, для сети ПД общего пользования вполне оправдан¬
ным является требование, чтобы средняя километрическая длина
маршрутов передачи сообщений отличалась от среднего расстоя¬
ния между абонентами не более чем на заданную величину, т. е.
выполнялось ограничение
2d4
где da — километрическое расстояние между t-м « j-м абонента¬
ми.
С учетом приведенных ограничений решение (4.5) преобразует¬
ся к виду
= Xехр [ -1 -X &(W + ^"_1) da + ^ ^
Подставляя (4.11) в ограничение (4.7), получаем
(4.11)
Отсюда
-(х+х S:s2&(ft)
* \ к=\
(4.13)
х 2 е-Ч &<S-U di)+^s) »l) '
/
Вводя (4.13) в (4.11), найдем решение с неизвестными 1(в_1) и
|(«)
х.. = bi Q~x( *(s-1> di/+5(s) I1/) (4 14)
11 2
/
Для вычисления |(s_1) « |(s) используем (4.8) и (4.9). Подстав¬
ляя в них (4.14), получаем систему из двух трансцендентных
уравнений с двумя неизвестными:
У и, - е_А( 6<s-1) diT+6<$) = р- (4 15)
I
У d,, - е-А (|(s-1) du+l(s) »j) - Д\ (4 16)
J
Решение данной системы относительно £(s-1) и g(s) может быть
получено численными методами и обеспечивает выбор наименее
ошибочных значений, если определена активность каждого або¬
нента и заданы ограничения по нагрузке. Кроме того, предпола¬
гается, что тяготения абонентов находятся в некоторой зависимо¬
сти от расстояния между ними.
4.2. РАЗМЕЩЕНИЕ УЗЛОВ КОММУТАЦИИ
Выбор местоположения узлов
для обслуживания группирующихся абонентов
Группы стационарных абонентов часто локализуются в огра¬
ниченных районах, а узлы сети выполняют функции как комму¬
тационных, так и оконечных узлов. В .связи с этим положение уз-
5—157 105
лов в первом приближении определяется положением прупп або¬
нентов.
Располагая узел в районе локализации абонентов, следует вы¬
бирать такую точку, в которой обеспечивается (минимум суммар¬
ных затрат на соединительные линии от множества абонентов
данного района. Пусть эг-(ф, р) —затраты на создание и эксплуа¬
тацию или аренду соединительной линии от нго абонента до узла
коммутации, расположенного в точке с координатами ср, р, тогда
оптимальными будут такие значения ф = фо и Р = Ро, при которых
обеспечивается тт^-Мф, Р).
ф, р i
При произвольном виде функций эг(ф, р) для вычисления ф0,
ро может быть использован эвристический подход, основанный на
допущении о том, что оптимальная точка расположения узла на¬
ходится внутри области локализации абонентов. Это допущение
позволяет ограничить размерность задачи.
Излагаемый ниже решающий алгоритм основан на сочетании
направленного поиска и метода Монте-Карло. Использование по¬
следнего заключается в том, что задача направленного поиска
решается неоднократно из выбранных случайным образом началь¬
ных точек. Это позволяет уменьшить вероятность получения ло¬
кальных оптимумов в решении. Предварительный этап решения
состоит в очерчивании на карте области с границами пипф*;
шах фminpr, шах рг-, где £ = 1, ‘М — номера абонентов группы, и
i i i
ее дискретизации с некоторым шагом Аф=Лр. Рассмотрим после¬
довательность шагов алгоритма.
Шаг 0. Ввод исходных данных:
значения затрат для дискретных координатных точек эг-(ср, р);
min фг; шах ф*; min fo; max pf;
i i i i
число реализаций z\
/: = 1.
Шаг 1. Выбрать случайные значения фо, ро.
ф/ : = ф0; РУ : = Ро-
Шаг 2. Вычислить эо : = 2 э*(фо, Ро).
Шаг 3. Произвести сдвиги точки в пределах ограниченной области:
если ф0<тахфь то ф0(+> :=Фо + иначе ф0(+): = ф0;
i
если ф0> min ф;, то ф0(-): = ф0 — Аф, иначе ф0<->: = ф0;
i
если Р0<тахРь то ро(+): = р0 + ДР> иначе ГРо(+)_: = Ро;
если Ро > min Р*» то р0(—): = р0 — АР, иначе ’ Р0(“>: = Ро-
i
Шаг 4. Вычислить:
h : = S 9i ^о(+) ’ Р<>); • = 2 П (фо, Ро<+>);
i I
106
Si :=yj Sf (фо<->> Po); »*■ = 2 «i(<Po. Po<_))-
i i
Шаг 5. Если min э»>эо, то перейти к шагу 7, иначе к шагу 6.
i
Шаг 6. Произвести сдвиг фо или |Зо в направлении минимального возрастания
затрат и перейти к шагу 2.
Шаг 7. з7 min : = э0; S =* фо; • = Ро*
Шаг 8. Проверить число реализаций. Если j>z, то перейти к шагу 9, иначе
к шагу 1.
Шаг 9. Вывод значений ф2 = ФоГР2 = Ро‘, э min = 30.
Число требуемых (реализаций, так же как и шаг дискретизации,
определяется требуемой точностью.
В большинстве случаев затраты на соединительные линии явля¬
ются функцией их длины d. Тогда в качестве исходных данных вме¬
сто эг (ф, Р) вводится функция 3(d),
а вычислению затрат при рассмотре-
нии вариантов размещения узла
предшествует определение расстоя¬
ний до него от каждого из або¬
нентов. Ту
Районы локализации абонентов,
как правило, охватывают сравни-
тельно небольшие пространства, по-"
этому при определении расстояния
от i-ro абонента до точки с коорди¬
натами ф, |3 можно не учитывать
кривизну поверхности Земли и ис¬
пользовать теорему Пифагора
АЛФ. Р) = 1/ (ф—Ф;)2 (Р—Рг)
где фг, Рг — <координаты i-ro абонента (рис. 4.1).
Тривиальное аналитическое решение .получается, если на огра-*
ниченном участке функцию затрат удается аппроксимировать квад¬
ратичной функцией длины. Тогда критерий оптимальности будет
тт2^^г(ф. Р), (4.18);
Ф,Р i
где Эг — константа, имеющая смысл нормированных затрат.
После подстановки в последнее соотношение (4.17) получим
min 2 з, [(Ф—Фг)2 + (Р—Рг)2].
Ф,э i
(4.19)!
Найдя частные производные выражения под знаком min по ср
.и р и приравняв их нулю, получим соотношения, определяющие
координаты узла, при которых суммарные затраты на построение
соединительных линий минимальны:
5*
Фо= (2 9i ФО/2 Ро= (2*э* РО/S э1-
i i i i
107
(4.20):
Значение э* равно затратам на строительство единицы длины
соединительной линии к /-му абоненту.
Изложенный алгоритм может быть использован три синтезе то¬
пологии любой системы, имеющей (централизованную структуру.
Оптимизация числа узлов и их размещения
при независимом положении абонентов
В общем случае трудно выделить области локализации групп
абонентов. Таким образом, задача состоит в выборе не только ме¬
стоположения узлов, но и их числа. Увеличение числа узлов приво¬
дит к сокращению затрат на соединительные линии, однако при
этом линейно возрастают суммарные затраты на оборудование и
эксплуатацию совокупности узлов. Таким образом, существует не¬
который оптимум числа узлов и координат их размещения на тер¬
ритории, занимаемой абонентами.
Пусть множество абонентов проектируемой сети включает Ма
объектов, размещенных на некоторой ограниченной территории.
Затраты, необходимые для создания и эксплуатации одного узла,
равны Э, a 3i((pjy |3j) — затраты на создание линии связи от i-т о
абонента до /-го центра коммутации, если последний размещен в
точке с координатами <pj, (3j. К каждому узлу могут быть подклю¬
чены не более k абонентов.
Тогда формальная постановка задачи размещения узлов будет
состоять в следующем: найти число узлов М0Пт и координаты каж¬
дого из них q)j, (3j, оптимальные по критерию
ма м
min 2 ы+мэ
. Ф.Р i=\ /=1 J
min
м
(4.21)
при ограничениях 2 бij^k, /= 1, М, и 2 6ij= 1, t = 1, Ма. Ограниче-
t J
нием является также область возможного размещения узлов.
В настоящее время целый
ряд практических оптимизаци¬
онных задач решается эвристи¬
ческими методами [2, 24, 25],
обеспечивающими достаточ¬
ную точность результатов при
незначительных сложности и
трудозатратах. Для решения
сформулированной задачи мо¬
жет быть использован алго¬
ритм, основанный на идеях ме
тода наискорейшего спуска.
Сущность алгоритма состоит и
следующем. Территория райо¬
на создания сети разбивает-
Рис 42 ся на квадраты, и от нспрс-
108
/
At
'as
N
V
/
Аб
Л
А
1
/
/
Ад
Н.
Уг
■■ I
Аб
/
\
Аб
Аб
7*
Уг
\
1
1
Аб
у*
/
Ai
г
L
Аб
\г
\
>
\
Г
4 д
/
V
у
рывной системы координат переходят к дискретной системе
координат точек (|р,ис. 4.2). Далее последовательно для различного
числа узлов 1, 2, 3, ... производится их оптимальное размеще¬
ние с оценкой суммарных затрат. Увеличение числа узлов М пре¬
кращается, как только прекратится снижение суммарных затрат.
Полученные «три этом значение М и координаты каждого из узлов
будут оптимальными.
Для каждого- значения М алгоритм предусматривает такое по¬
шаговое изменение координат узлов, при котором имеет место наи¬
большая скорость снижения затрат на соединительные линии або¬
нентов в каждом фиксированном положении узлов. Предполагает¬
ся, что подключение абонентов в каждом фиксированном положе¬
нии узлов осуществляется оптимальным образом.
Алгоритм включает следующую последовательность шагов:
Шаг 0. Ввод исходных данных:
массив дискретных координат области;
затраты на создание и эксплуатацию узла и точке с координатами ср*, р* —
затраты на соединительные линии как функция длины f(d).
'Присвоение начальных значений переменным: М: — 1 — число узлов; Э ^
суммарные затраты на узлы и соединительные линии:
Шаг 1. Формирование случайного варианта размещения М узлов — J\
(случайный выбор координат фг, ||3ъ *‘=1, М)\ *9Сл(Л):=°° — затраты на
соединительные линии при варианте размещения узлов J\.
Шаг 2. Сдвиг одного из узлов в одном из направлений. (Для очередного
j yj: =(pj±Acp или Pj : = |^±Лр, где Лер и Ар — шаги координатной -сетки.)
После сдвига образуется вариант размещения /2 (массив из М точек).
Шаг 3. Определение затрат на соединительные линии при оптимальном
подключении к узлам, размещенным по варианту /2—Эcn(h)-
Шаг 4. Если Эс л (/2) <.ЭС л (Л), то /1 : =/2, иначе Л: =/2- Далее переход
к шагу 5.
Шаг 5. Сделано ли 4 М сдвигов? Если да, то переход к шагу 6, иначе пе¬
реход к шагу 2.
Шаг 6. Вычисление суммарных затрат для текущего числа узлов М: Э\ : =
= ЭС л (Л) -\-Эу (/1).
Шаг 7. Если то : =Э'\ М : =М+1 и переход к шагу I,
иначе вывод множества координат J\ и распределение абонентов по узлам.
Останов.
Точность результатов решения и объем вычислений определя¬
ются шагом квантования координат. Для небольших районов рас¬
стояние между объектами по заданным координатам может быть
определено по теореме Пифагора. Для сетей большого масштаба
более точные результаты дают формулы из сферической геометрии
d= 1,853 arc cosy, (4.22)
где у — угловое расстояние, a cos 7 = sin ф! sinq^+cosq^coscpiX
X<cos(p2—pi).
В приведенном алгоритме на шаге 3 решается внутренняя зада¬
ча оптимального подключения абонентов к фиксированному набо¬
ру узлов, которая состоит в определении такого набора перемен¬
ных 6ij из множества возможных наборов /, при котором достига¬
ется
109
ма М
min 2 fo) (4-23)
J i=l /=1
M Msl
при ограничениях 2^=1 и 2
./=l i=l
Выполнение условия (4.23) является задачей целочисленного
линейного программирования, которая может быть решена, напри¬
мер, методом «ветвей и границ» [40].
Решение сформулированной задачи может быть получено спе¬
циальным обходом матрицы затрат [42] размерности М&-М, эле¬
ментами которой являются 9ij = fi(q)j, Pj). Цель такого обхода —
выбор одного элемента в каждой строке (ограничение 1) и не бо¬
лее k элементов в каждом столбце (ограничение 2).
Вначале в первой строке выбирается наименьший элемент и
включается в набор /, содержащий один элемент и удовлетворяю¬
щий ограничениям. Далее то же повторяется для второй строки и
проверяется выполнение ограничений. Если ограничения выполня¬
ются, то в состав / включается выбранный элемент второй с прок и.
Если в данной строке отсутствует элемент минимальной стоимости,
удовлетворяющий ограничениям, эта строка пропускается. Пройдя
таким образом все строки, получим набор элементов, которые не
нарушают ограничений и каждый из которых наименьший в своей
строке.
Далее находим в первой пропущенной строке наименьший эле¬
мент и вычисляем прирост стоимости. Так как столбец, в котором
выбран этот элемент, уже содержит k элементов, то один из них
необходимо удалить и найти в данном столбце другой наименьший
элемент. Новый элемент может привести к нарушению ограни¬
чения.
Таким образом, возникает чередующаяся цепочка введений и
удалений элементов при отслеживании дополнительных затрат.
Наконец, выбирается цепочка наименьшей стоимости и произво¬
дится переход к следующей строке, в которой еще не выбран эле¬
мент. Ниже приводится пример использования изложенного ме¬
тода [43].
Пример. Пусть k = 2, Ма=6, М=4. Элементы, выбранные на очередном шаге,
обводятся кружками.
Шаг 1.
‘111
8
9
10"
111
3
6
9
4
6
8
12
2
3
8
9
8
6
III
3
9
III
5
5
110,
Шаг 2.
111
8
9
10
2
HI
6
9
III
6
8
12
2
3
8
9
8
6
HI
3
9
III
5
5
Шаг 3.
~ 6 8 |1Г| 10~
2 |Т| 6 9
|Т| 6 8 12
|Т| 3 8 9
8 6 |Т| 3
9 111 5 5 _
,На шаге 3 все строки матрицы имеют по одному, а каждый столбец не
более двух отмеченных элементов, т. е. ограничения выполнены. Общие затраты
составляют 21 единицу. В решении оказался неиспользованным четвертый узел.
Таким образом, при исходных данных задачи для получения оптимального ре¬
шения четвертый узел следует исключить.
Размещение узлов для связи с мобильными абонентами
Если сеть передачи информации должна обслуживать мобиль¬
ных абонентов, то для их подключения к сети 'создаются радио-
центры, стационарно связанные с одним или несколькими узлами
коммутации. Размещаются эти 'центры таким образом, чтобы обес¬
печить наилучшее в некотором смысле качество обслуживания
мобильных абонентов на территории, в пределах которой возмож¬
но их перемещение.
Содержательную постановку задачи сформулируем -следую¬
щим образом. Пусть .мобильный абонент может находиться в про¬
извольной точке некоторого района (произвольной конфигурации.
Подключение его к сети может быть произведено через любой из
радиоцентров с некоторой веро¬
ятностью. При любом размещении
радиоцентров в пределах опреде¬
ленного района имеется некото¬
рая (наихудшая) точка, в которой
вероятность установления связи
минимальна. Среди различных
вариантов размещения заданного
числа центров существует такой,
при котором обеспечивается мак¬
симальное значение этой вероят¬
ности. Данный вариант примем в
качестве наилучшего.
Рассмотрим теперь формализованную постановку задачи (рис.
4.3).
Пусть мобильный абонент находится ,в точке с координатами
<р, р. Вероятность того, что он установит связь .с центром уи (рав¬
на p(di), где di — расстояние от точки с координатами ф, Р до
Ш
точки расположения у* с координатами щ, vit Величина p(di) мо¬
жет рассматриваться ih как вероятность связи с учетом рельефа
конкретной трассы между указанными точками.
Вероятность того, что ни с одним из узлов абонент не сможет
установить связь,
м
Р(Ъ Р) = ПП-Р» (4.24)
f=i
Наихудшая точка имеет координаты фо, Ро- Тогда
Р(Фо. Ро) = maxР(ф, р), (4.25)
Ф. Р
где максимум берется то всем точкам района.
Если задать координаты центра векторами \3=(ии им) и
V=(i>i, •••> vm), то решение сводится к определению таких векто¬
ров U0 и V0, при которых обеспечивается
ттР(ф0, р0) = штшахР(ф, р) (4.26)
и, v и, v <р, р
или, переходя к аддитивной целевой функции,
м
min max У, log [1 —/? (rff)]. (4.27)
U,v Ф, p
Ограничением в данном случае являются границы района.
Необходимым условием оптимальности положения М узлов
будет отсутствие такого варианта их (перемещения, >при котором
м
уменьшается максимальное значение logР(ф, р) = 2 logjl —
—P(di)]. Иначе, у системы уравнений
2 /<>1.«Р(Т.Р) 1АИ| + ГД'<«Р(Ф.1» 1 д u, = A logР(ф, Р) (4.28V
ёЛ dui j L dt)i
должно отсутствовать решение, для которого AlogP(cp, (3) <0.
Эти уравнения определяют изменение log Р (ср, (3) в наихудшей
точке таря перемещении М центров. т
Если p(di) дифференцируема, то коэффициенты можно вычис¬
лить <по формулам [66]: =
Г P'(di) 1 —SB-ZZLff*— ; (4.29)
L l-p(dt) J dt ’ y
d\ogP(<p, P) _Г P'W 1 Ф— Щ
dut
a log Р(ф, P) _ Г p' (dt) I p — v, ,4 3Q.
dvt U— рШ\ di
112i
• - В. случае, когда решение дает A log Р (ср, Р) <0, соответствую¬
щие А щ, A Vi определяют перемещение центров, ,цри котором
уменьшается maxlogP((p, Р), т. е. положение улучшается.
ф.Э
При выпуклом характере функции p(di) алгоритм (решения
аналогичен алгоритму, приведенному в предыдущем разделе, и
включает следующие шаги:
Шаг 0. Первоначальное случайное размещение узлов.
Шаг 1. Определение направления перемещения узлов, которое обеспечивает
максимальное снижение (4.25).
Шаг 2. Соответствующее перемещение узлов и переход к шагу 1.
Алгоритм останавливается, когда ни один из вариантов пере¬
мещения не приводит к снижению (4.25). Корректность такой
остановки определяется выпуклым характером функции p(di)r
что гарантирует отсутствие локальных опт им умов.
В общем случае вероятность связи между двумя объектами
при использовании радиосредств зависит от рельефа трассы меж¬
ду этими объектами [11]. П,ри этом на некоторых трассах функ¬
ция p(dj) может быть не только не выпуклой, но ,и не дифферен¬
цируемой, например при наличии на трассе возвышенностей, соз¬
дающих мертвые зоны. Для такого варианта исходных данных
алгоритм должен учитывать возможность появления локальных
оптимумов.
Принципиально не изменяя первоначального алгоритма, мож¬
но избежать локально-оптимального решения, если включить до¬
полнительный внешний цикл, реализующий метод Монте-Карло.
При этом после достижения каждого промежуточного оптималь¬
ного решения запоминаются (полученный вариант «и достигнутое
значение (4.25) и производится повторная реализация алгоритма
при новом варианте первоначального размещения узлов, заданно¬
го случайным образом. Если вновь полученное значение (4.25)
оказывается меньше, то оно и соответствующий вариант запоми¬
наются в качестве оптим.альных, в противном случае не учиты¬
ваются.
Число необходимых реализаций, (как обычно, определяется
требованием к точности решения [24].
Для определения значений вероятностей связи между каждой
парой точек в исходных данных должна быть предусмотрена воз¬
можность введения параметра рельефа — третья координата для
каждой точки. Кроме того, алгоритм должен включать фрагмент,
обеспечивающий вычисление вероятности связи по трассе с за¬
данным рельефом.
Размещение центра управления сетью
К задачам размещения узлов относится выбор местоположе¬
ния центра управления сетью. Принципиальной особенностью
этой задачи является то, что она решается для -сети с заданной
структурой.
— ' ’ 113
Критерием оптимальности выбора местоположения центра мо¬
жет быть максимум надежности обеспечения управления или ми¬
нимум длительности цикла управления, определяемого .временем
сбора информации состояния и доведения управляющей информа¬
ции. При определенных допущениях оба эти .критерия совпадают
и сводятся (К (критерию минимума суммы длин путей от всех уз¬
лов до центра управления, совмещенного- с одним из них.
Для решения задачи размещения центра при указанном кри¬
терии оптимальности может быть использован следующий под¬
ход.
Для каждого из некоторого числа k деревьев сети Тп опреде¬
ляется центр уПу оптимальный по критерию min 2 Q*?, и строится
i
вектор Вп= (Ь/п)), элемент Ьп{п) которого равен '1, а остальные—0.
k
Далее вычисляется вектор В0= 2 Вп и определяется номер макси-
п—1
мального элемента данного вектора, т. е. такое т, для которого
bnS°) = max bi(0). Соответствующий узел уш будет оптимальным
центром сети.
Алгоритм определения центра для дерева осуществляет рав¬
номерное сжатие дерева путем повторения одного и того же цик¬
ла, заключающегося в удалении вершин со степенью 1 вместе с
инцидентными линиями связи. Если на определенном этапе оста¬
ется один узел, то он и является оптимальным центром дерева.
Если остается линия связи, то оптимальным центром будет любой
из узлов, которые она соединяет.
В целом точность решения определяется числом рассматривае¬
мых деревьев. Если деревья выбирать случайным образом путем
формирования случайных векторов, то число реализаций опреде¬
ляется методами, принятыми в статистическом моделировании.
4.3. СИНТЕЗ СТРУКТУРЫ СЕТИ
В общем случае синтез структуры сети заключается в выборе
такой конфигурации соединений заданного множества узлов, ко¬
торая обеспечивает выполнение требований по живучести и явля¬
ется в определенном смысле наиболее экономичной. Многообра¬
зие методов решения сформулированной задачи обусловлено раз¬
личиями исходных данных и используемых критериев. В данном
параграфе рассматриваются методы, которые могут использо¬
ваться в наиболее характерных ситуациях.
Синтез структуры сети
по детерминированным параметрам живучести
Сложность обоснованного задания требований к живучести
сети, а также отсутствие исходных данных по технико-экономиче¬
ским показателям ее элементов приводят к тому, что задача син¬
теза сети становится чисто структурной. 'В этом случае требова¬
114
ния задаются по детерминированным параметрам живучести и
минимизируется число линий связи в сети. Соответствующая за¬
дача сводится к построению максимально связного графа с мини¬
мальным числом ребер при заданной связности.
Если максимально связный граф имеет связность т, а удале¬
ние произвольного ребра приводит к связности т—1, то такой
граф является реберно-критическим и включает наименьшее чис¬
ло ребер из всех т реберно-связных графов. Если требования по
живучести заданы ,в >виде связности, одинаковой для всех узло,в и
равной т, то соответствующая структура будет отображать мак¬
симально связный реберно-критический граф, для которого
Сх = entire (2N/M) = m = b,
где b = deg(yi), i= 1, М, — степень узла. В таком прафе для чет¬
ных b узел yi соединен с узлом yj, причем
/ = i±l (mod М), 1 ^ /^entire (Ь/2). (4.31)
При нечетном b узел yi соединяется также с entire (i +
Ч-М/2) тосШ узлом.
Структуры сетей, соответствующие максимально связным ре-
барно-критическим графам, строятся следующим образом [46].
Все узлы сети нумеруются и размещаются по окружности в со¬
ответствии с присвоенными номерами. Затем каждый узел соеди¬
няется с b (при четном Ь) и b—1 (при нечетном Ь) соседними
узлами. Если b нечетно, то каждый узел также соединяется с
наиболее удаленным от него узлом, т. е. узел yi соединяется с
entire (i + M/2) mod 2 узлом. Граф сети, построенный по изложен¬
ной методике для М = 27, т = 4, изображен на рис. 4.4.
\7
22
I8
2/ I
I9
2#'
*10
W
15 №
Рис. 4.4
Гб' П
Рис. 4.5
Обычно наряду с требованиями по связности должна быть
обеспечена минимально возможная максимальная длина маршру¬
тов (.в числе линий связи). Для построения сети с минимально
возможной длиной маршрутов необходимо синтезировать макси¬
мально связный реберно-критический граф, имеющий минималь¬
ный диаметр.
115
Приближенное построение сети, соответствующей такому гра¬
фу, для т = 4 производится в соответствии со следующим эмпи¬
рически установленным правилом: все узлы размещаются по ок¬
ружности, соседние узлы соединяются линиями связи, а каждый
узел yi соединяется с узлом уи где
Для т = Ъ сеть строится аналогично, но каждый i-и узел до¬
полнительно соединяется с entire (i + M/2) mod М узлом.
Сеть, синтезированная на основе данного правила для М = 27
и т = 4:у представлена на рис. 4.5 и имеет диаметр D - 4. В сети
на рис. 4.4 D = 7.
Если в качестве детерминированного показателя живучести
используется число линий связи, которое должно быть выведено
из строя для отрыва от сети п произвольных узлов б (я), то
структура с меньшим диаметром оказывается более живучей. Со¬
отношение для определения 6 (п) имеет вид
где G — множество наборов по п узлов; А^Гг) — число ребер в
подграфе Гг, включающем п узлов одного из наборов, принадле¬
жащих G.
В соответствии с (4.33) сеть на рис. 4.4 имеет б (7) =6, а сеть
на рис. 4.5 б (7) = 14 узлов. Таким образом, по данному критерию
вторая структура более живуча.
Задача синтеза структуры по детерминированным показателям
может быть расширена, если учитывать:
различия в требованиях по связности для различных пар уз¬
лов;
затраты на построение отдельных линий связи;
увеличение диаметра сети при удалении некоторого числа ли¬
ний связи.
Такое расширение задачи приводит к значительному усложне¬
нию методов синтеза структуры.
Построение структур на основе детерминированных показате¬
лей живучести используется в тех случаях, когда не удается оце¬
нить вероятность вывода из строя элементов сети. Если такая
оценка возможна, то прибегают к синтезу сети на основе вероят¬
ностных методов расчета живучести.
Если при синтезе структуры сети имеется информация о за¬
тратах, необходимых для создания линий связи между парами
узлов, то в -качестве критерия оптимальности структуры следует
использовать минимум затрат при ограничениях, налагаемых на
связность (т).
/ = entire i ± -^2 11 mod М.
J 2
(4.32)
b(n) = nb — 2 max N (Г*),
G
(4.33)
Синтез структуры сети минимальной стоимости
при заданной связности
116
Синтез в этом случае осуществляется следующим образом.
Пусть — подмножество структур в множестве структур на
М узлах G(M), каждая из (которых содержит N(Qi) линий связи.
Необходимо найти такое подмножество Qk, для которого
N(Q*) = minW(a*) (4.34)
и выполняется ограничение
С>т, (4.35)
где С — минимальная реберная связность сети.
Из множества Qk должна быть выбрана структура Гшт, для
которой выполняется условие
Si 5w = min Si 9tJ, (4.36)
<*• »&min rie?_fc
где 9ij — затраты на создание и эксплуатацию линий связи (i, /).
Известно, что условию (4.34) при ограничении (4.35) отвечают
реберно-критические структуры связности т. Число таких струк¬
тур больше М\у что делает прямой перебор для поиска Гтт не¬
эффективным.
Содержание излагаемого метода, являющегося эвристическим,
состоит в совместном решении задач (4.34) и (4.35) путем синте¬
за структуры как суперпозиции последовательности независимых
гамильтоновых циклов.
Соответствующий алгоритм для четных k включает следующие
шаги.
Шаг 0. Ввод исходных данных: (9ij); т; rmin:=0; С: = 0.
Шаг 1. Поиск минимального гамильтонова цикла Гт1п: =Гт1п + Г°т1п;
С : = С+2.
Шаг 2. Если С^т, то останов, иначе переход к шагу 3.
Шаг 3. G(M) : =G(M)—Г°тгп и переход к шагу 1.
При нечетном значении k после окончания алгоритма каждый
узел дополнительно соединяется с наиболее удаленным узлом,
имеющим степень менее Ь.
В алгоритме может быть учтено ограничение по суммарным
допустимым затратам. С этой целью после .построения каждого
очередного гамильтонова цикла должны подсчитываться суммар¬
ные затраты. Если они превышают допустимые, то требования по
связности не могут быть выполнены.
Поиск минимального гамильтонова цикла сводится к решению
задачи коммивояжера, относящейся к классу задач целочисленно¬
го программирования. Применительно к рассматриваемому слу¬
чаю приемлемо использование эвристического алгоритма построе¬
ния минимального гамильтонова цикла [24]. Основная эвристика
при этом состоит в том, что маршрут, проходящий через счетное
множество узлов, расположенных достаточно компактно, оказыва¬
ется наиболее коротким, если двигаться от периферии к центру
или, наоборот, по кривой, близкой к спирали.
117
Условие компактности множества узлов проверяется следую¬
щим образом. Упорядочиваются все N = M(M—1)/2 значений э,,-
(3ij ассоциируется с расстоянием между узлами yi и у3) и пере¬
нумеровываются в порядке возрастания k=\, N. Далее находится
среднее значение расстояния
N
"S 3h
2 (я 1)
и среднее значение разности между эп и 9k+i
А~э-^ЫЖ^-д^-
Если 0,25.9, то множество узлов компактно.
Чтобы организовать обход узлов по спирали, необходимо оп¬
ределить ее центр. Для этого определим (эц)шах и будем считать,
что центр спирали лежит на полпути, т. е. в точке (э*,-) шах/2. Те¬
перь обозначим узлы, для -которых определено (э^-)шах, соответ¬
ственно imах и /шах. Сравнивая значение (зг:?)тах со значением эц
для imах и /=<1, iVn, находим узел /(0), расположенный от /тах на
расстоянии, наименее отличающемся от (9ij)шах/2. То же самое
проделывается для узла /шах.
Если узлы с номерами /(0) и i(0) совпадают или расстояние
между ними находится в пределах 10% среднего расстояния, то
можно считать /(0) или i(0) центром спирали.
О'бхОД уЗЛОВ, начиная С /шах или /шах, можно осуществлять ПО
следующему алгоритму.
Шаг 1. Примем в качестве начальной точки узел tmax и присвоим ему но¬
мер один. Затем просматриваются все значения эм из узла imax=l и выбира¬
ются два наименьших: min эц^тт э{к\ j, 6=1, iVn; j¥=k.
k
Шаг 2. Из двух наименьших расстояний выбирается одно, обеспечивающее
max Сцо), j = Ci(0), и После этого узел tmax=l исключается из дальнейшего рас¬
смотрения на шаге 1. Узлу с номером I присваивается номер 2.
Шаг 3. Для / повторяется процедура шагов 1 и 2.
Шаг 4. Обход узлов множества заканчивается при выполнении условия
l=i(0).
В результате реализации алгоритма получается упорядоченная
последовательность узлов, которая образует гамильтонов цикл,
минимальный с точностью около 5%. Выполнение алгоритма тре¬
бует примерно в 20 раз меньшего машинного времени, чем метод
«ветвей и праниц».
Синтез структуры сети по вероятностным показателям живучести
Одна из возможных методик синтеза структуры сети по веро¬
ятностным показателям базируется на обычно приемлемом пред¬
положении о том, что при одинаковой защищенности более ко¬
роткая линия связи имеет меньшую вероятность выхода из строя.
При этом задача синтеза формулируется следующим образом:
найти структуру Гтт, для которой
118
2 min S. du,
<*• »ermin rJeA («• '‘>eIV
где Л — множество структур, для которых РВыж(Т^А)^
^Рвыж.зад; Рвыш(Г;еЛ) — вероятность выживания структуры
Г,еЛ; Рвыж.зад — требования по .вероятности выживания; da —
длина линии связи (i, /).
Получаемая при решении данной задачи сеть, как правило,
наиболее экономична из всех сетей с заданной живучестью.
Исходными данными для синтеза являются расстояния между
узлами сети и оценку вероятности ,поражения для линий связи в
зависимости от длины. Синтез состоит в выполнении следующего
алгоритма [28].
Шаг 0. Синтезируется минимальное дерево Tmin:
2 dij = min 2' dU<
«, /)еттш Т^Г°Ч, j)eTj
где Г0 — полносвязный граф сети.
Шаг 1. Промежуточному минимальному графу r'min ставится в соответствие
Тшхп '• Г'пПп ’ — Tmin*
Шаг 2. -Производится оценка живучести структуры Рвы ж (r'min).
Шаг 3. Проверяется выполнение требований по живучести. Если
Рвыж(Г/ш1п) ^Рвы» з, то осуществляется переход к шагу 7, иначе к шагу 5.
Шаг 4. Находится граф Г0—r'min.
Шаг 5. Если граф Г0—r'min связный, то находится его минимальное дере¬
во 7,'mim в противном случае находятся минимальные деревья в каждом из
несвязных подграфов: T'min Т'min ъ ...
Шаг 6. Найденные минимальные деревья суммируются с промежуточным
минимальным графом Г'ш1п : =r'min + 7Vmin ’ИЛИ r'min : =r'min + 7Vmin i + TVmin2 +
+ ..., и осуществляется переход к шагу 2.
Шаг 7. Минимальному графу присваивается полученный промежуточный
минимальный граф Гппп : =Г'тт, и процесс синтеза оканчивается.
Проверка связности графа может производиться, например, на
основе алгоритма построения дерева (Дийкстры, Флойда). Наи¬
более известный метод синтеза кратчайшего дерева — алгоритм
Прима. (Необходимо иметь в виду, что кратчайшее дерево в об¬
щем случае не соответствует дереву кратчайших маршрутов [29].)
Алгоритм Прима базируется на двух принципах:
всякий изолированный узел сети должен быть соединен с бли¬
жайшим узлом;
всякий изолированный фрагмент сети должен быть соединен с
ближайшим фрагментом или изолированным узлом кратчайшей
линией связи.
Фрагментом сети называется промежуточная подсеть, образуе¬
мая в процессе синтеза.
Сеть с М узлами связывается кратчайшим деревом после
М—1 операций применения приведенных принципов, так как на
каждом шаге число изолированных узлов уменьшается на еди¬
ницу.
В формализованном виде алгоритм Прима включает следую¬
щую последовательность шагов.
119
Шаг 0. Поставить в соответствие фрагменту множество, включающее един¬
ственный произвольный узел Ф: ~{yh}t и найти узел уг, для которого выпол¬
няется условие dkr=mmdk8.
у8е= ф
Шаг 1. Найти yi и уп^Ф, для которых справедливо условие din = mmda.
yj£0
Шаг 2. Включить в множество узлов и линий связи фрагмента узел у\ и
линию связи (я, /): Ф: =Ф+{yi> (п, /)}.
Шаг 3. Если множество Ф содержит М узлов, то процесс синтеза сети окон¬
чен, иначе осуществляется переход к шагу 2 для нового множества узлов и
линий связи, входящих в фрагмент.
Алгоритм Прима поз-волнет построить минимальное дерево на
заданном фиксированном множестве узлов. В ряде случаев, рас¬
ширяя множество узлов путем введения вспомогательных узлов,
можно получить дополнительное сокращение суммарной длины
дерева [8].
Структуру любого дерева можно представить как совокупность
треугольников. Так, структура, изображенная на рис. 4.6, вклю¬
чает треугольники уи У2, Уъ\ У2, Уз, Уъ\ Уг, Уь Уь- Для уменьшения
длины линий связи, связывающих заданное множество узлов, с
помощью вспомогательных узлов используются следующие поло¬
жения из тригонометрии:
в остроугольных треугольниках кратчайшей сетью, близкой к
минимально возможной, является сеть, построенная с помощью
одного вспомогательного узла, расположенного на медиане наи¬
меньшего угла при удалении от противолежащей углу стороны
на расстояние, равное ее длине, деленной на 2]/3;
в треугольниках, один из углов которых равен или больше
120°, кратчайшей связывающей сетью является сеть, построенная
двумя сторонами, составляющими тупой угол (рис. 4.7).
Из элементарной математики известно, что в треугольнике со
сторонами а, Ь, с величины углов (против этих сторон соответст¬
венно равны:
<Л = 2 arc tg [r/(p—а)]; <В = 2 arc tg [r/(p—b)]\
<C = 2arctg [r/(p—c)],
где p — полупериметр, а г=У (p—a) (p—b) (p—c)/p.
Таким образом, зная расстояния между узлами в каждом тре¬
угольнике минимального дерева, можно определить, возможна ли
дополнительная минимизация его длины с помощью дополнитель¬
120
ных узлов. Целесообразность использования вспомогательных уз¬
лов опредем я с гея получаемым при этом выигрышем в суммарной
длине сети и возможностью создания дополнительных узлов.
На практике может использоваться эвристический метод син¬
теза структуры сети. Данный метод предусматривает после по¬
строения кратчайшего дерева итеративное добавление линий свя:-
зи с оценкой после каждого шага вероятности выживания сети.
Включение новых линий связи осуществляется эвристически ;при
соблюдении следующих рекомендаций:
включаемая линия должна образовывать цикл как можно
большей длины;
линия должна 'быть как можно более короткой.
В процессе синтеза структуры сети приходится неоднократно
оценивать вероятность связности сети, промежуточных вариантов*
и фрагментов. Наиболее характерные методы оценки приводятся
ниже.
При синтезированной по критерию живучести структуре сети
расчет требуемой мощности линий связи заключается в оптими¬
зации .временных характеристик при ограничении на суммарные
затраты. Дополнительными ограничениями являются внешние по¬
токи сообщений и процедура выбора маршрута.
В формализованном виде расчет состоит в определении таких
Ri, i=l, N, при которых обеспечивается
и выполняется ограничение 2 9i(Ri) где G — множество на-
i= 1
боров значений Ri, i= 1, N, удовлетворяющих ограничению;
Si(Ri) — функция затрат на i-ю линию связи; Э — предельно до¬
пустимые общие затраты; T = f(Ri, i= 1, N)— некоторая времен¬
ная характеристика.
Интенсивности потоков сообщений в линиях связи определя1
ются внешними потоками и процедурой выбора маршрутов. Для
случая, когда потоки известны в каждой линии связи, Т интерпре^
тируется k-м начальным моментом задержки сообщения, а функ¬
ция затрат линейна:
Задача (4.37) имеет следующий вид: найти значения Ri, i= 1, N\
при которых обеспечивается
4.4. РАСЧЕТ МОЩНОСТИ ЛИНИИ СВЯЗИ СЕТИ
Оптимизация мощности линий связи сети
при линейных функциях затрат
min [Т = f(Rt, i=l, N)]
G
(4.37)
N
(Ri) = ai Rt.
(4.38)
(4.39)
6—157
121
и выполняется ограничение
N
Э.
(4.40)
Соотношение (4.39) соответствует минимуму k-ro начального
момента задержки, усредненного по всем линиям связи, и спра¬
ведливо только для пуассоновско-экспоненциальной модели.
Решение данной задачи методом неопределенных множителей
Лагранжа дает следующий результат [55]:
Первое слагаемое в данном соотношении определяет мощности
линий связи, минимально необходимые для обеспечения устойчи¬
вости работы систем обслуживания сети.
При k= 1 получаем распределение мощности, известное как
пропорциональное корню -квадратному [12]. Такое распределение
оптимально по критерию минимума среднего времени задержки.
'Дри k—>-оо (4.41) преобразуется к виду
ш обеспечивает минимальный разброс значений времени задержки
ш линиях связи относительно математического ожидания и, как
показано в [22], максимум вероятности своевременной доставки
сообщений. Среднее время задержки сообщения в сети при этом
«будет несколько- больше, чем в предыдущем случае.
Из (4.42) следует, что после назначения минимально необхо¬
димой мощности для каждой линии связи оставшийся резерв
средств распределяется равномерно между всеми линиями.
При нормировании среднего времени задержки сообщения в
сети Гтах выбор мощностей линий связи может быть произведен
на основе решения задачи, двойственной (4.39). Задача состоит в
^нахождении таких Ri, i= 1, N, которые обеспечивают
(4.41)
(4.42)
min 2 Ri
0 i~ l
(4.43)
N
и выполнение ограничения 2
и выполнение ограничения У! — —
i=1 * R—hl
^Гтах. Функция Лагран-,
жа для данного случая имеет вид
Приравнивая нулю dFL/dRi и используя ограничение, вычисляем
значение При этом получаем
Последнее выражение позволяет определить мощности линий
связи, при которых заданное среднее время задержки в линии
связи обеспечивается при минимальных суммарных затратах.
Обычно нормируется время задержки Ттахо не в линиях связи,
а в сети. Для определения 7\Т1ах необходимо найти среднюю дли¬
ну маршрутов сети, которая определяется соотношением
оде Xij и Хо — интенсивности потоков между i-м и /-м абонентами
и суммарного внешнего' потока; dij — расстояние в сети _между
i-м и /-м абонентами. Далее Ттах определяется, как Гтахо/^.
Для произвольного вида функций di(Ri) аналитическое реше¬
ние задачи выбора Ri получить не удается, однако, если данные
функции имеют выпуклый характер, может быть использован ите¬
рационный алгоритм, основанный на идеях наискорейшего спуска.
При этом наращивание мощности сети производится порциями
по AR. На каждом цикле «очередная порция» -выделяется линия
связи, для которой обеспечивается max\dt/dRi \. Процесс продол-
i
жается до выполнения ограничений по суммарным затратам. При
подходе к границе Э из рассмотрения .выводятся линии связи,
приращение мощности которых на AR приводит на соответствую¬
щем цикле к превышению границы.
Алгоритм включает следующую последовательность шагов.
Шаг 4. Э': = Э'+э8 (AR).
Шаг 5. 3'>3?. Если да, то переход к шагу 6, иначе Rs : = Rs-\-AR и пере¬
ход к шагу 2. „
Шаг 6. X : =X—{xs}.
Шаг 7. Х=0? Если да, то переход к шагу 8, иначе к шагу 3.
Шаг 8. Вывод Ri, i= 1, N.
Значение AR целесообразно выбирать равным минимальной
стандартной мощности каналов передачи данных. Если три, этом,
на шаге 2 оказывается, что заданные .внешние потоки не могут
■быть реализованы без нарушения условия устойчивости Kfl/Ri<;1,
6* 123
max
(4.45j
(4.46)
Оптимизация мощности линий связи
при произвольном виде функций затрат
N
Шаг-1. Ri : =&R, i= 1, N\ Э': — 2 3i(AR).
Шаг 2. Определить потоки в линиях связи.
Шаг 3. Найти линию связи xsgI, для которой dt/dRs= шах \dt/dRi\.
X • (EzX.
то начальные мощности должны увеличиваться до тех m>ip, покп
это условие не будет .выполнено для всех i I , N.
Интенсивности потоков .сообщений в линиях сняли могут быть
определены по соотношениям (3.36) и (3.37), где матрица вероят¬
ностей передач определяется используемой процедурой выбора
маршрута.
Среднее время задержки
(3.8), а ее производная dt
dRi
в сети определяется то формуле
%i I
(R-к lf
В [26] [показано, что в рамках пуассоновско-экспоненциальной
модели систем обслуживания сети критерии min
dt
dRi
и min
dtW
dRt
где № —■ й-й начальный момент задержки, дают близкие резуль¬
таты.
Двойственной к задаче (4.37) является задача минимизации
затрат при наличии ограничения ото вероятностно-временным па¬
раметрам. При этом может использоваться алгоритм, в котором
на (каждом цикле «очередная порция AR» выделяется линия свя¬
зи, для «которой э(Д/?) минимальна. Ограничения по вероятност¬
но-временным параметрам должны быть определены для каждой
линии связи. В процессе выполнения алгоритма мощности линий
связи, для (которых выполняются ограничения, фиксируются и да¬
лее не наращиваются.
Задача оптимизации мощности линий связи имеет смысл толь¬
ко при известных внешних потоках и алгоритмах их распределе¬
ния. Если (потоки неизвестны, то мощности линий связи следует
выбирать равными эффективной скорости одного из типовых ка¬
налов передачи данных. При этом значение R3 должно быть та¬
ким, чтобы время задержки одиночного сообщения наибольшей
категории срочности при передаче по маршруту максимальной
длины не превышало допустимого, т. е. Dl/R3^.TAOn—2 tvu где
i
D — диаметр сети; tvi — Еремя распространения сигнала в кана¬
ле i-и линии связи.
Суммирование в правой части неравенства производится по
номерам линий связи, входящим в маршрут наибольшей длины.
При техническом проектировании сети необходимо предусмат¬
ривать возможность наращивания мощности линий связи по мере
набора статистики потоков. Тогда в процессе эксплуатации реше¬
ние оптимизационной задачи может осуществляться периодически
по мере изменения характера распределения внешних потоков со¬
общений.
Методика выбора каналов передачи данных
для линий связи с заданной мощностью
Предварительно определенная мощность линий связи может
быть реализована набором различных по скорости каналов пере¬
дачи данных. Каждый канал ПД k-ю типа в i-й линии связи ха-
124
растеризуется эффективной скоростью и стоимостью (Яш и Эхи
соответственно).
Набор каналов ПД для i-и линии связи должен быть таким,
чтобы выполнялось условие минимума суммарных затрат. Данная
задача является уточнением задачи (4.37) и формулируется сле¬
дующим образом: для i-и линии связи (i = 1, N) найти такое чис¬
ло каналов ПД k-ro типа тк (i — 1, Л/'; &=1, 5), чтобы выполня¬
лось условие
N S
min 2
G 1 = 1 k=l
S
и ограничения 2 nikRik^Ri, i= 1, N; пш^{0; 1; 2; ...}, где 5 —
k~-1
число типов каналов ПД; G — множество возможных наборов
(tiik), удовлетворяющих ограничениям.
Сформулированная задача является двойственной задачей це¬
лочисленного линейного программирования и распадается на N
одинаковых задач с одним ограничением. С достаточной для прак¬
тических целей точностью (не более *5% оптимального) она мо¬
жет быть решена с использованием нормированных функций. При
этом для каждой i-и линии связи определяется нормированная
функция эффективности использования канала k-то типа:
Bik = ^-Rih, (4.47)
s
где 9i= 2 sik/S.
k—\
Выбор типа канала ПД определяется по максимуму этой функ¬
ции. При использовании однотипных каналов ПД, как правило,
образуются невязки, превышающие ограничение Ri. При больших
значениях Rm это может привести к значительным отклонениям
от оптимального решения.
Для уменьшения невязок целесообразно, определяя нормиро¬
ванные функции, при выборе каждого очередного канала ПД про¬
изводить корректировку. Суть корректировки состоит в том, что
перед определением нормированных функций вычисляются не¬
вязки
R" =Ri—'ZtiilRil, (4.48)
1=1
где tin — число каналов ПД I-го вида, уже включенных в состав
линии связи (при выборе первого канала пц = 0; /='1, S).
Далее осуществляется перерасчет по формуле
\Bk, если R" <0;
££Г I н
min [ 1,—- если Rj> 0, (4.49)
* ^ Rik '
и выбор очередного канала по максимуму значения
125
Практически методика сводится к определению по максимуму
(4.47) оптимального типа канала ПД (/-го), вычислению числа
таких каналов ПД nu=[Ri/Rii] и первой невязки Riu-'-~R.i n-uRi-
Далее 'расчет производится циклически с использованием со¬
отношений (4.48) и (4.49).
Пример. В линии связи необходимо обеспечить скорость передачи
22 ООО бит/с.
Имеются четыре типа каналов Г1Д со следующими данными: 3ii = 0,5;
Ru = 600 бит/с; 3i2 = 0,7; Ri2= 1200 бит/с; э<3='1,0; Rir-^Ш Гжт/с; эг-4=1,8;
■/£*4 = 4800 бит/с.
1. э< = 1.
2. В\ = 1200; Лг™ 1700; Вл 2400; В -2700.
3. Выделяем четыре капала ПД четпертого типа.
4. )/<>," 2Н00.
Г). /Г, 1200 mill (1,2800/600) 1200;
/Г. 1700 mill (1,2800/1200): 1700;
Л'а —2400 min (1,2800/2400) =2400;
£'4 = 2700 min (1,2800/4800) = 1570.
6. Выделяем один канал третьего типа.
7. 1/?гН = 400.
8. Б'1==1200 min (1,400/600) =800;
В*2= 1700 min (1,400/1200) =570;
Я'я = 2400 min (6,400/2400) =400;
/iV~ 2700 mill (1,400/4800) —225.
9. Выделяем один канал мерного нида.
Таким образом, линия связи должна быть составлена из четырех каналов
со скоростью передачи 4800 бит/с, одного со скоростью 2400 бит/с и одного со
скоростью 600 бит/с.
4.5. ОПТИМИЗАЦИЯ ПАРАМЕТРОВ ЖИВУЧЕСТИ ЭЛЕМЕНТОВ СЕТИ
Постановка задачи оптимизации параметров живучести сети
В данном параграфе под живучестью будем понимать способ¬
ность сети обеспечить передачу одиночного сообщения между
определенным множеством абонентов после внешнего воздействия
с целью нарушения связности. Надежностью сети является ее
способность обеспечить установленные значения вероятностно-вре¬
менных характеристик при передаче заданных потоков сообщений
с учетом отказов и восстановлений узлов и линий связи.
В то время, как надежность сети полностью определяется
безусловной надежностью ее элементов,^живучесть зависит от со-
отношения ресурсов воздействия и защищенности элементов сети.
-'-'Как' известно, живучесть сети обеспечивается ее структурной
избыточностью и защищенностью элементов.
Пусть имеются две противоборствующие стороны — А и В. По¬
ложим, что структура сети, создаваемой стороной А, определена
на предварительном этапе проектирования по заданным детер¬
минированным параметрам.
Требования по живучести заданы одним из следующих спосо¬
бов:
1) по допустимой вероятности нарушения связности сети;
126
2) по допустимой вероятности нарушения ,связности некоторо¬
го узла более чем с заданным числом узлов;
3) по среднему числу узлов, связь (Которых с определенным
узлом может быть потеряна.
Заданные требования к живучести сети могут быть выполне¬
ны при различных вероятностях вывода из строя элементов сети.
Эти вероятности определяются защищенностью и избыточностью
и, таким образом, являются функциями затрат рк{Эк).
Задача стороны Б заключается в том, чтобы нарушить связ¬
ность сети при минимальных затратах на основе имеющихся све¬
дений о структуре и априорных вероятностях вывода элементов
сети из строя.
Задача стороны Л состоит в выборе и обеспечении таких зна¬
чений рк(Эк), k=l, N, при которых:
суммарные затраты на сеть минимальны;
обеспечиваются требования по живучести сети;
сторона Б вынуждена выделить максимальные средства на
вывод сети из строя по установленному критерию.
Для нарушения связности сети достаточно вывести из строя
одно или некоторое множество сечений в зависимости от крите¬
рия нарушения связности. Поскольку сторона Б должна стремить¬
ся нарушить связность минимальными средствами, то она выби¬
рает в качестве объекта воздействия одно или некоторый набор
простых сечений. При выборе наиболее слабых сечений может
быть использована априорная информация о сети.
В качестве критерия слабости сечения может рассматриваться
min П Ри(эк)- (4-50)
ci хкес}
Степень неопределенности при выборе нарушаемого сечения
стороной Б характеризуется энтропией
H=j]Pcj\ogPcji (4.51)
У=1
где S — число рассматриваемых простых сечений; Pcj =
= YI Ри (з/0.
*h^Cj
Таким образом, сторона А должна обеспечить такие априор¬
ные вероятности нарушения сечений, при KOTqpbix неопределен¬
ность, а следовательно, и затраты стороны Б будут максимальны.
Формально это* соответствует максимуму энтропии при ограниче¬
ниях, определяемых требованиями к живучести сети. Для каждо¬
го сечения распределение априорных вероятностей вывода из
строя отдельных элементов не влияет на затраты, необходимые
для нарушения сечения в целом. (Поэтому при оптимизации ап¬
риорных вероятностей вывода элементов сети из строя в качестве
критерия оптимальности сторона А может использовать минимум
затрат на обеспечение защищенности.
127
Варианты оптимизации параметров живучести сечений
Пусть требования к живучести заданы по допустимой вероят¬
ности нарушения связности Р0. Тогда сеть считается вышедшей
из строя, если нарушено хотя бы одно сечение. ^
При целенаправленном выборе сечения стороной Б вероятно¬
сти нарушения сечений можно прппить независимыми. В этом
случае задача оптимизации априорных нероитностей нарушения
сечений формулируется следующим образом: нанти такие значе¬
ния pejy / = 1, 5, при «которых обеспечивается
где 5 — число рассматриваемых простых сечений.
Для решения -используем метод неопределенных .множителей
Лагранжа. Функция Лагранжа
Дифференцируя FL по pCj и приравнивая нулю, получаем си¬
стему уравнений
Отсюда pcj = P0/S.
Если для сети определена допустимая вероятность отрыва за¬
данного числа узлов М\ то решение остается аналогичным, одна¬
ко рассматриваются только те сечения, нарушение которых при-
Для определения множества простых сечений, связанных с
различными наборами из М по М\ может быть использовано по¬
нятие кограницы. В соответствии с определением [34] кограница
набора вершин графа есть множество ребер, удаление которых
приводит к отрыву от сети всех вершин данного набора. Таким
образом, найдя кограницы наборов по М' узлов, получим множе¬
ство интересующих нас простых сечений.
При определении кограницы для некоторого набора узлов
M'h можно использовать .матрицу инциденций. При этом необхо¬
димо произвести векторное сложение по модулю 2 строк матри¬
max — 2>c,logPc;.
ра I /=1
(4.52)
и выполняется ограничение
о»
(4.53)
FL = S/?c;l0g^ + l >] pcJ — Р0 .
(4.54>
— l°gPcj+ 1 +1=0, /' = 1, 5;
dPcJ
(4.55)
1128
цы инцидендии, соответствующих узлам, входящим в данный на¬
бор :
(С)к- 2 (btj>mod2.
i^M'k
В том случае, когда для сети определено допустимое среднее
число узлов, между которыми невозможна передача информации
Ж, ограничение (4.53) заменяется на
%MjPcj^M9 (4.56)
/= 1
где Mj — число узлов, отрываемых от сети при нарушении сече¬
ния С7-. Соответствующая функция Лагранжа имеет вид
FL= 2 Ра 1°§ Ра + 5 Г2 Mj pcj—M
/=i L/=i
После дифференцирования получим систему уравнений
=l°g>c/+1+1^у = 0, /'=1,5;
дРс}
2^М; = М.
/= 1
Решение этой системы имеет вид трансцен¬
дентного уравнения у1
10М=2МГ1(Г|Л\ (4.58)
/=1
(4.57)
Рис. 4.8
положительный корень которого является значением множителя
Лагранжа. Окончательно получаем
pcj = 10-^г-1. ; (4.59)
Решение приведенного уравнения может быть получено любым
известным численным методом.
В качестве простой иллюстрации рассмотрим следующий -при¬
мер.
Вариант 1. Заданы структура сети (рис. 4.8) и допустимая вероятность
нарушения связности Р0 = 3-10“2. Тогда в соответствии с (4.55) pci = pc2 = pcz =
=/уз='1о-2.
Вариант 2. С узлом уi совмещен управляющий объект. В среднем из у\
.должна обеспечиваться связь хотя бы с одним узлом, т. е. М— 1. Из (4.58)
10 = 2-10“£2+10_£+10~£. Положительный корень уравнения £ = 0,75. Тогда
получаем рС\ = 10—15 = 0,08; рС2 = Рсз = 10-0>75=0,17.
Оптимизация значений априорных вероятностей
вывода из строя элементов сечений
Априорные вероятности вывода из строя элементов сети явля¬
ются функциями затрат ри(Эк), имеющими произвольный, но прин¬
ципиально невозрастающий характер. Оптимальными -будем счи¬
129
тать такие значения ph(9k), k=\, N, элементов сети, дри которых
для множества сечений обеспечивается допустимая вероятность
их нарушения рСг, а суммарные затраты минимальны.
Другими словами, эти значения обеспечивают
min 2 3ft (4.60)
ak k=i
при выполнении ограничения
iCf
где C,ik — элемент матрицы сечений.
Логарифмируя ограничения, получаем
N
^]Cjh\\nph(ah)\^\lnpcj\, /= 1, s.
k=\
При выпуклом характере функции рк{Эк), k=l, S, данная за¬
дача является задачей выпуклого программирования, которая
может быть решена методом нормированных функций. Необходи¬
мыми условиями при этом являются [2]
3feez{0, 1, 2,...}, k=ly N;
Си I In Ph (0) I = 0, j = TTs.
Первое может быть выполнено выбором 'соответствующего ша¬
га измерения затрат. Второе условие, как правило, не выполняет¬
ся. Для того чтобы его обойти, преобразуем ограничения к виду
2! Cjk [ I In Ph (3ft) I — I In ph (0) I ] > I In pcj \—2 CJh I In ph (0) I.
hmi k-1
Таким образом, окончательно задача примет следующий вид: най-
N
ти ph(9h), k=l, N, при которых обеспечивается min S э*. и вы-
эи *=1
полняются ограничения
S Cjh [ I In Pk (3ft) I — In pk (0) | ] > | In pcj | — £ Cjh | In pk (0) |. (4.62)
k-1 k=\
Основная идея используемого метода оптимизации состоит в
том, что на -каждом этапе процесса последовательного распреде¬
ления средств связи очередная единица выделяется тому элемен¬
ту сети, повышение живучести которого на данном этапе оказы¬
вает наиболее существенное (влияние на живучесть сети в целом.
Поскольку необходимым условием окончания процесса оптими¬
зации является выполнение всех граничных условий, то для удоб¬
ства контроля за процессом в смысле приближения к границам
целесообразно, чтобы эти ограничения были одинаковыми. Этого
130
можно достигнуть нормированием с использованием приведенном
границы
S
в=?,
/=1
N
11п /7Су! — S CJh I (°)l
= 1
(4.63)
Тогда система ограничений примет вид
ы S C)kUln рк(эк)\ — |1пХ(°)1]
— 2 C}k I In Ph (0)1 + 1 In Pcj\ *=1
k=\
или, если сомножитель перед суммой обозначить как
В зо = jr ; (4.64)
ПпрсЛ — 2 Cjh I In ри (0)|
h= 1
S CJk Bj0 [ | m ph (9k) I - | in ph (0) I ] > B. (4.65)
k=\
Поскольку каждый элемент сети может входить в состав не¬
скольких простых сечений, то при оценке эффективности внесения
•затрат на элемент необходимо учитывать состояние на данном
этапе процесса оптимизации сечений, включающих данный эле¬
мент.
При использовании метода нормированных функций это осу¬
ществляется умножением абсолютного прироста эффективности
при внесении единицы затрат на элемент на коэффициент Bj/B,
где Bj = B на первом этапе оптимизации и уменьшается по мере
убывания pk(9k)y если k-и элемент принадлежит /-му сечению.
Выполнение условия £,= 0 означает, что требования по живу¬
чести /-го сечения ^выполнены и соответствующее ограничение
должно быть выведено из задачи. Об окончании процесса оптими¬
зации свидетельствует выполнение данного условия для всех / =
= 1, S. Таким образом, алгоритм включает следующую последова¬
тельность шагов.
Шаг 0. Ввод исходных данных: (Cjh) — массив сечений; (ри(Эк)) — мас¬
сивы функций затрат; (pcj) — массив требований к сечениям.
Вычисление исходных величин: S': =S — число ограничений; : = 0 —
затраты на k-й элемент; В — по соотношению (4.63); Bj0\ j= 1, S — по соот¬
ношению (4.64); В'j : —В.
Шаг 1. Для каждой линии связи поочередно для всех сечений вычислить
эффективность внесения единицы затрат
B'i
Д Bjh : — Cjh (I In /7ft (9ft + 1) I — I In pk (9ft) I} — , / = 1, S; k = 1, N.
D
Шаг 2. Вычислить прирост эффективности в смысле повышения живучести
S
сети в целом при внесении единицы затрат на k-й элемент: AGk .= 2 ABjh,
к=\,~N. J~
131
Шаг 3. Определить, на какой элемент сети целесообразно выделять очеред¬
ную единицу средств, т. е. найти такое т, для которого AGm = maxAGft.
k
Шаг 4. Увеличить затраты на т-й элемент: эт : =этч-1. Произвести кор¬
ректировку значений B'j, характеризующих степень удовлетворения ограничений
N
на данном этапе: B'j: = B'j— 2 ABjk, / = 1, S.
k= 1
Шаг 5. Определить сечения, для которых требования выполнены, и вывести
соответствующие ограничения из рассмотрения. Для /=1, 5 проверить условие
Если да, то Cjk = 0, k—\, N\ S': = S'—1 и перейти к шагу 6, иначе
перейти к шагу 1.
Шаг 6. Проверить наличие сечений, требования по которым не выполнены:
S' = 0? Если да, то перейти к шагу 7, иначе перейти к шагу '1.
Шаг 7. Вывести результаты: ж\ ри(эи), /г = 1, N; Э= 2 ж-
k-\
Грубая оценка числа операций, необходимых для реализации
алгоритма, может производиться по формуле S-N-D-Э, где D —
число операций, необходимое для вычислений на шаге 1, а Э —
число единиц затрат, требуемое для выполнения приведенной
границы путем внесения затрат на повышение живучести услов-
_ N f~N
ного элемента, для которого р (эк) = V 2, Ph (%) •
Пример. Для сети, структура которой приведена на рис. 4.8, задано
Ро(Уь У2) =2,4-10-2. Зависимости вероятностей выживания линий связи от вне¬
сенных затрат определяются соотношениями
Pl(s) = 0,6—^—; /?2(з) = 0,4—7— ; Рз(э) — 0>8—.
0,5 + э 1 +5 1,5 + 5
Решение данной задачи с использованием изложенного алгоритма дает
следующие оптимальные по критерию минимума затрат значения допустимой
вероятности вывода из строя линий связи: pi (3) =0,07; р2(2)=0,07; р5(5)=0,18.
Суммарные затраты составляют 10 единиц.
При равных значениях этих вероятностей обеспечение требований к жи¬
вучести сети выполняются, если Pi (2) =р2(3) =р;1(10) =0,11. Соответствующие
суммарные затраты в данном случае будут составлять 15 единиц.
Число произведенных операций равно 240.
В общем случае функции, определяющие зависимость живуче¬
сти элементов сети от затрат, могут иметь характер, отличный от
выпуклого. Однако по очевидным соображениям вид этих функ¬
ций ограничивается классом линейно-ломаных невозрастающих
кривых. Линейно-ломаные функции могут быть заданы в виде
таблиц, а задача в этом случае является задачей аддитивного про-
грам1мир0вания. Решение ее возможно на базе приведенного ал¬
горитма с использованием идей, лежащих в основе метода выпук¬
лых оболочек. В соответствии с этим методом на каждом этапе
решения задачи осуществляется поиск оптимальной длины шага
приращения затрат (в отличие от выпуклых функций, когда при¬
ращение производится с постоянным шагом).
Необходимые операции состоят в вычислении для диапазона
существования функции затрат массивов
132
vh (А з) = А э/A Gh,
где АОй=2С,л{11прй(зй+Аэ)| —|lnpft(3ft)|} k=l, N\ Аэ0~W*
Величина Азтах характеризует границу области определение
функций затрат.
Далее для каждого этапа решения определяются оптимальные
величины приращения затрат на каждый из элементов, а именно
находятся такие Аэк, для .которых выполняются условия
vh(A эи) ^--пипик(Аэ), k=\, N.
А э
Выделение ресурсов на шаге 1 осуществляется в соответствии со
значениями Аэ/*
4.6. ВЫБОР ПАРАМЕТРОВ НАДЕЖНОСТИ ЭЛЕМЕНТОВ СЕТИ
Оптимизация надежности линий связи сети
Принципиальное отличие задачи оптимизации надежности от
оптимизации живучести состоит в том, что при ее решении не тре¬
буется учитывать целенаправленное воздействие на сеть.
В качестве параметра, определяющего надежность сети, ис¬
пользуем вероятность того, что в произвольный момент времени
между каждой парой узлов имеется хотя бы один свободный
маршрут Рен. Максимальное значение данного параметра примем
в качестве критерия оптимальности варианта распределения ре¬
зервных ресурсов сети.
Пусть надежность канала в /-й линии связи определяется ко¬
эффициентом готовности /С™, а затраты на его создание и экс¬
плуатацию — величиной Э{. Суммарные затраты на i-ю линию
связи равны щэи где п{^\ — число каналов, один из которых
является рабочим, а остальные — резервными.
Между каждой парой узлов имеется ровно один маршрут,
если в исправном состоянии находится хотя бы одно остовное
связное дерево сети Т{. Тогда задача оптимизации будет форму¬
лироваться следующим образом: найти такие значения i =
= 1, N, при которых обеспечивается
шах[Рсв = /(пгэг; Кн, i = T7N)] (4.66)
и выполняется ограничение 2 П{Э,г^Э, где Э — имеющиеся сум-
i
марные средства на резервирование линий связи сети.
Анализ соотношений, определяющих вероятность связности се¬
ти [48], позволяет сделать следующие выводы:
1. Непосредственное решение задачи оптимизации в данном
случае затруднено ввиду несепарабельного характера критериаль¬
ной функции.
133
2. Выражение для Рсв представляет собой сумму определенно¬
го числа произведений, сомножителями в которых являются
Лп и 1—Kri различных наборов линий связи сети.
3. Только один член этой суммы не содержит в качестве со¬
множителя 1—Kri и этот член определяет вероятность существо¬
вания связного дерева.
4. Все остальные члены содержат один или несколько сомно¬
жителей вида 1—Kri и, по крайней мере, один из них соответст¬
вует линии связи, принадлежащей дереву, о котором шла речь
в п. 3.
Перечисленные обстоятельства позволяют принять следующую
гипотезу: если надежность дерева в части линий связи оптимизи¬
рована, то при Kri, близких к 1 (>0,9), линии связи, не входя¬
щие в дерево, оказывают несущественное влияние на надежность
«сети в целом. С учетом этой гипотезы сформулированная задача
;может быть решена на основе следующего метода.
Последовательно для каждого дерева решается задача опти¬
мального выделения одного резервного канала. После решения
вычисляется Рсв для сети. Окончательно канал выделяется той
линии связи, в которой он был выделен на этапе, давшем макси¬
мальное значение Рсв.
Алгоритм, реализующий изложенный метод, включает следую¬
щую последовательность шагов.
Шаг 1. При тц : =1, i= 1, N. Вычислить Рсв. 1
Шаг 2. Выбрать остовное связное дерево из множества деревьев сети.
Шаг 3. Присвоить начальные значения числа каналов в линиях связи: т* : =
c=l; i=T\7W.
Шаг 4. Решить задачу оптимизации надежности дерева 7\.
Шаг 5. Вычислить надежность линий связи и сети Kri(mi), Р'св. Если
Р'св>Рсв, то гц : =mi, i=l, N, и Рсв: — Р'св.
Шаг 6. Вывести рассмотренное дерево из множества деревьев сети. Если
•множество деревьев сети пусто, то перейти к шагу 2, иначе значения п\ и Рсв
{соответствуют оптимальному решению.
Для оптимизации надежности дерева используем модификацию
метода нормированных функций [2]. Алгоритм, реализующий дан-
шый метод, на каждом шаге выделяет очередной канал в линии
•связи дерева таким образом, чтобы обеспечить при минимальных
.затратах максимальное приращение надежности.
Алгоритм включает следующую последовательность шагов.
Шаг 1. Для всех линий связи, принадлежащих дереву, вычислить относи¬
тельные затраты
+ • • • + (пк + 0 эк + • • • + nN эм ] — 2. npj
max {in l5l+ • • •+(%+!) эк + • • • + nN 9N ] — 2 }
k j
Максимум в знаменателе берется по всем линиям связи дерева.
Шаг 2. Вычислить относительную эффективность выделения ресурса линиям
связи
134
Wi (tii): = (1 + 91* )/Д Кг i ("0; д /Сг I (0): = Kr
A /Cr i (n*): = (1 — /Сг 0 А /Сг t (лг — 1).
Шаг 3. Найти такую i^-ю линию связи дерева, для которой обеспечивается?
min Wi(tii). Для этой линии связи выделить резервный канал rih : =пн+1.
Шаг 4. Проверить ограничение. При этом:
если ограничение нарушено, то пк : —1; iAj-ю линию связи вывести
рассмотрения .и перейти к шагу 3. После перебора всех линий связи дерева про¬
цесс заканчивается и выдается результат;
если ограничение выполнено точно, то полученные значения оптимальны ш
решение окончено;
если ограничение не выполнено и не нарушено, то переход к шагу 1.
Точность изложенного метода возрастает е увеличением раз¬
меров сети, однако в данном случае трудно осуществить перебор
деревьев. Последнего можно избежать, если использовать метод
Монте-Карло.
Промежуточной задачей оптимального синтеза является вычис¬
ление вероятности связности сети. В тех случаях, когда требова¬
ния по надежности и ограничения по затратам не заданы, пара¬
метры надежности линий связи могут быть выбраны на основе их:
исследования как систем массового обслуживания с ненадежными
приборами. Для таких систем характерна возможность .компенса¬
ции в определенных пределах ненадежности за счет повышения:
интенсивности обслуживания. Это обусловлено тем, что заданные
вероятностно-.временные характеристики могут быть достигнуты
при различных соотношениях соответствующих параметров. Так
как параметры надежности и .мощности линий связи являются
функциями затрат, то минимум суммарных затрат можно задать
в качестве критерия оптимальности, а ограничение наложить на
выбранный параметр задержки сообщений.
Если 9i(R) — функция затрат на повышение мощности абсо¬
лютно надежной i-и линии связи, а Э{(ТВ) и з,г(Я0) — функции
затрат на сокращение среднего времени восстановления и интен¬
сивности потока отказов соответственно, то задача состоит в оп¬
ределении таких значений R, Тв и Л0, при которых обеспечивает¬
ся riling (Тв) + Э{ (ко) +з,г (R) ] и выполняется ограничение.
Вид ограничения определяется используемой математической
моделью системы обслуживания и выбранным параметром за¬
держки. Поскольку критериальная функция в общем случае и
ограничение имеют нелинейный характер, сформулированная за¬
дача относится к классу задач нелинейного математического про¬
граммирования.
В простейшем случае линия связи .моделируется одноканаль¬
ной системой обслуживания, а ограничение вводится по среднему
времени задержки t3ад. Тогда после подстановки в (3.8) Кп=^
= ХоТв/(I +К0ТВ) ограничение будет иметь следующий .вид:
т (l + X0TB)T+T%k0R
О+КТв)[Я-П(1 + Х0Тв)) ^*зад-
Для решения задачи может быть использован эвристический
подход, основанный на пошаговом единичном выделении затрат в
135
направлении наискорейшего на текущем шаге снижения среднего
времени задержки. Остановка процедуры производится при вы¬
полнении ограничения. В .качестве исходных значений .мощности
.линии связи используется величина, определенная без учета на¬
дежности.
Реализация алгоритма состоит в выполнении следующих ша¬
гов.
Шаг 0. Ввод исходных данных: Дэ — единица затрат; ?3ад — ограничение
по среднему времени задержки; э(Я), э(А,о), э(Тп) — функции затрат.
Присвоить начальные значения переменным:
R0 : = значение мощности, выбранное без учета надежности;
Хоо : =значение интенсивности потока отказов для исходного варианта;
Тв0 ; =значение среднего времени восстановления для исходного варианта.
Шаг 1. а) Определить среднее время задержки при выделении единицы
затрат на повышение мощности линии связи:
вычислить затраты на повышение мощности эп : =э(/?0) + Лэ;
найти значение Ro = R' как решение уравнения 3(R)=9r\
вычислить tR при R — R'-, Х0=Хоо; Тв = Тв0.
б) Определить среднее время задержки при выделении единицы затрат на
сокращение Х0:
вычислить затраты на сокращение Хо; э^: = э(Л0)+АЗ;
найти значение А,оо = А/0 как решение уравнения э(Ко) —э
вычислить t при Хо = А/0; R=\Ro\ Тв,= Тв0.
в) Определить среднее время задержки при выделении единицы затрат на
сокращение Ти:
вычислить затраты на сокращение Тп; эТв : =э(Гв) +Аэ;
найти значение Тво — Т'в как решение уравнения э(тв)=этв\
вычислить tB при ТВ==Т'_В, Хо=Яоо; R = Ro.
Шаг 2. tmin : =min (tR, t^, ?гв).
Шаг 3. Определить направление внесения очередной единицы затрат, если:
Шаг 4. Проверить ограничение. Если Zinin то перейти к шагу 5, ина-
"ie перейти к шагу 1.
Шаг 5. Вывод значений R=R0\ Яо=А,оо; Тв = Тв0.
В приведенном алгоритме на каждом цикле производится из¬
менение одного из параметров линии связи оптимальным в смыс¬
ле скорости сокращения среднего времени задержки образом.
При этом t3o4 достигается за минимальное число циклов, что обес¬
печивает оптимальность в смысле минимума затрат.
Учитывая, что, как правило, размерность задачи невелика, ре¬
шение можно получить без применения ЭВМ. При этом функции
затрат предварительно целесообразно представить графически.
Задача вычисления вероятности связности сети является по
своей природе комбинаторной и связана с необходимостью пере¬
бора вариантов, число которых быстро возрастает при увеличении
^rnin = t# ; R0 : = R';
*min — *A0; ^00 : = V0;
^min ~ ^во: = 7"в-
min
Методы вычисления вероятности связности сети
136
размеров сети. Совокупность методов решения этой задачи мо¬
жет быть разбита на аналитические, методы предельных оценок
и методы Монте-Карло. Ниже приводятся наиболее характерные
методы из этих групп.
Метод перебора подграфов. Если каждой линии связи поста¬
вить в соответствие двоичную переменную а,и причем a* = 1 при
наличии линии связи и ai = 0 при выходе линии из строя, то каж¬
дое из 2м состояний сети 1\ можно представить N-мерным двоич¬
ным вектором.
При заданных вероятностях исправности линий связи pi, i =
= 1, N, вероятность состояния сети 1\ определяется следующим
образом:
можно записать соотношение для вычисления вероятности связ¬
ности сети:
Практически вычисления сводятся к перебору всех 2м двоич¬
ных векторов и проверке на каждом шаге связности подграфов,
соответствующих каждому из них.
Изложенный метод весьма прост для расчетов на ЭВМ, но
для больших сетей нереализуем из-за объема вычислений. Послед¬
ний может быть уменьшен, если не рассматривать варианты, для
которых 2 аг<М—1.
Асимптотические оценки вероятности связности. При сравне¬
нии вариантов структуры сети могут быть использованы асимпто¬
тические оценки нижней и верхней границ вероятности связности.
Нижняя граница .[17]
Максимум определяется по множеству базисных сечений.
Верхняя оценка [16]
(4.67)
Введя 'переменную
1, если Г& связный граф;
О в противном случае,
(4.68)
2N 2N N
k— 1
1 = 1
(4.70)
^св max П (1 П Krj).
t=l /ес.
св max
(4.71)
,137
При использовании граничных оценок вероятности связности:1
сети следует соблюдать определенную осторожность, так как раз¬
брос получаемых значений может быть в зависимости от конкрет¬
ной структуры различным. В связи с этим, прежде чем выбрать-
максимум граничного значения в качестве критерия оптимально¬
сти в задаче оптимизации надежности, целесообразно произвести
пробный расчет исследуемой структуры при усредненных значе¬
ниях надежности элементов. Если Ятшах и Рсвтт отличаются
незначительно, то граничные значения являются приемлемым по¬
казателем для критерия оптимальности.
При использовании граничных методов значительно сокраща¬
ется объем вычислений.
Метод Монте-Карло. Отмеченные недостатки методов, относя¬
щихся к предыдущим группам, делают наиболее предпочтитель¬
ным использование для оценки вероятности связности метода
Монте-Карло. Данный метод при значительной простоте реали¬
зующего алгоритма позволяет получить результаты сколь угодно-
высокой точности практически для любой реализуемой структуры
сети.
В качестве исходных данных составляется вектор Кн, i =
= 1, N. Далее производится определенное число экспериментов
z<^2Nt в каждом из которых генерируется N случайных чисел yir
с заданным законом распределения и строится матрица
смежностей. Если оказывается, что yi>KTi, то соответствующий
элемент матрицы смежности принимается равным 0, в противном
случае — 1. Таким образом, образуется некоторый случайный
подграф сети Tj.
После проведения всех г экспериментов с проверкой связности
в каждом из них вычисляется вероятность связности
где 6 (Tj) определяется (4.68).
Точность получаемого значения Рсв определяется числом про¬
веденных экспериментов [24]:
где |3 — требуемая точность результатов; а — вероятность обес¬
печения заданной точности результатов.
Для определения связности подграфов целесообразно исполь¬
зовать метод Дийкстры. Отсутствие в дереве весов кратчайших
маршрутов элементов, равных бесконечности, свидетельствует о
связности структуры сети.
Выбор параметров надежности центров коммутации
Одной из задач, которая должна быть решена при системном
проектировании сети передачи данных, является выработка ре¬
комендаций по надежности технических средств центров комму-
(4.72)
z = log(l— a)/log(l— Р),
(4.73)
1138
тации. В общем случае роль центров коммутации в сети может
быть различной. Достаточно полно важность центра коммутации
S сети определяется степенью вершины N:i, в которой он располо¬
жен. При выборе параметров надежности следует исходить из то¬
го, что его отказ с точки зрения влияния на функционирование
сети эквивалентен одновременному отказу всех инцидентных ли¬
ний связи.
Ввиду того что для территориально больших сетей затраты на
увеличение надежности совокупности линий связи несоизмеримо
больше, чем аналогичные затраты на центры коммутации, практи¬
чески нет смысла оптимизировать соотношение между их показа¬
телями.
Полагая, что параметры надежности линий связи оптимизиро¬
ваны и известны, необходимо обеспечить такие значения соответ¬
ствующих параметров центров коммутации, при которых вероят¬
ность отказа фрагмента сети, включающего центр коммутации и
инцидентные линии связи, пренебрежимо мало отличается от ве¬
роятности пересечения отказовых состояний линий связи. Практи¬
чески приемлемые результаты получаются, если коэффициент го¬
товности для i-го центра коммутации выбирается из условия
1-/Cm< = vli(l -Кг и), (4.74)
7=1
где Nd — число линий связи, инцидентных i-му центру коммута¬
ции; Kvij — коэффициент готовности /-й линии связи, инцидент¬
ной i-му центру коммутации. Так, если центр имеет четыре инци¬
дентные !оавнонадежные линии связи с /Сг = 0,9, то вероятность
пересечения их отказовых состояний равна 10-4. Тогда в соответ¬
ствии с (4.74) (v = 0,1) необходимо, чтобы Кгц=0,99999. Вероят¬
ность отказа фрагмента (центр коммутации — инцидентные ли¬
нии связи) при этом будет не более 1,2-10-4, т. е. практически не
отличается от вероятности одновременного отказа инцидентных
линий.
Полученное в приведенном примере значение Кгц может быть
обеспечено при 100%-ном резервировании оборудования центра,
если последнее имеет среднюю наработку на отказ и среднее 'Вре¬
мя восстановления не менее соответственно 500 и 0,5 ч.
Следует отметить, что для сильносвязанных сетей, базирую¬
щихся на стационарные магистральные каналы, полученные на
основании (4.74) рекомендации могут оказаться практически не¬
реализуемыми на существующей элементной базе. Однако исход¬
ные предпосылки позволяют утверждать, что эти рекомендации
дают рациональную верхнюю границу.
При наличии в процессе функционирования сети наиболее от¬
ветственных интервалов времени необходимо, чтобы заданный ко¬
эффициент готовности обеспечивался с определенной вероятно¬
стью у в течение этого интервала. Зависимость стационарного
139
среднего значения Кг от интервала наблюдения t и значения до¬
верительной вероятности определяется соотношением [62]
Кг (0 = Кг—Zy j/' (К, + КГ)Т\ К Л (4.75)
где Kf и Кг — коэффициенты вариации интервалов безотказной
работы и времени восстановления; Zv находится из уравнения:
0(ZV)= 7; Ф^у) — функция Лапласа.
Поскольку требования обычно задаются к стационарному зна¬
чению /Сг, то при наличии особых интервалов они должны быть
более жесткими. Коэффициент готовности является оперативной
характеристикой надежности. Для технических средств наиболее
часто нормы задаются по интенсивности потока отказов Хо (или
обратной величине — среднему времени между отказами) и сред¬
ней длительности восстановления Тв. Заданное значение Кг мо¬
жет быть обеспечено при различных соотношениях .между Х0 и TBf
что обусловливает дополнительную неопределенность выбора па¬
раметров надежности центров коммутации.
Поскольку центр коммутации функционально является систе¬
мой массового обслуживания, то при задании значений Х0 и ТВт
обеспечивающих определенное значение /Сг, в качестве критерия
оптимальности можно использовать, например, минимум среднего
времени задержки сообщения в системе. Тогда задача_формули-
руется следующим обра_зом: найти такие значения Х0 и Гв, при ко¬
торых достигается min? и выполняется ограничение \/(1+ХдТв) =
= КТ.
Зависимость среднего времени задержки в системе обслужива¬
ния от параметров надежности для пуассоновско-экспоненциаль-
ной модели определяется соотношением (3.8). Отсюда, учитывая,
что Кг= l/(l+X0fB), получаем
^ _____ П + ^в)2 4- ^-о т\ (4 76)
(1 + A*^)[1-P(1 +^7^)] *
Нетрудно видеть, что значение t намного быстрее возрастает
при увеличении Гв, чем Х0. Исходя из этого при отсутствии допол¬
нительных критериев можно признать целесообразным любое со¬
кращение длительности восстановления в пределах заданного
коэффициента готовности. Однако ввиду того что любое сокраще¬
ние и Тв связано с определенными затратами, причем зависи¬
мости затрат от значений этих величин могут существенно отли¬
чаться, при выборе Хо и Тв следует учитывать дополнительное
ограничение на суммарные затраты. На практике, как правило,
при выборе параметров надежности приходится иметь дело с
ограниченным числом вариантов.
Пусть возможно создать m вариантов центра коммутации, от¬
личающихся параметром Х0, а каждый из вариантов может иметь
k модификаций, отличающихся параметром Гв. Таким образом,
для выбора параметров надежности предстоит рассмотреть k-m
вариантов. Варианты, не обеспечивающие границ по Кг или допу-
140
сшмым затратам, отвергаются, а из оставшихся находится ва¬
риант, при котором Тв имеет минимальное значение.
^Пг)и задании Кг (Центров коммутации на основе соотношения
значение v можно 'вычислять как отношение стоимостей
гипотетического центра к стоимости совокупности инцидентных
линий связи. Если v^l (для территориально небольших локаль¬
ных сетей), то использование соотношения (4.74) практически не
будет корректным, так как не выполняется основная предпосыл¬
ка. В этом случае затраты на повышение надежности сети долж¬
ны быть оптимально распределены между центрами коммутации
и линиями связи.
Аналитическая оптимизация внутренних показателей
надежности элементов сети
При заданных значениях показателей надежности элементов
сети возникает задача внутренней оптимизации. Эта задача со¬
стоит в определении таких значений для отдельных элементов
центров коммутации и каналов передачи данных, которые обес¬
печивают заданные границы надежности этих элементов при ми¬
нимальных затратах.
В качестве элементов центров коммутации могут рассматри¬
ваться процессор, запоминающие устройства, каналы ввода—вы¬
вода, операционная система и фрагменты функционального про¬
граммного обеспечения. Элементами каналов ПД являются муль¬
типлексоры, устройства защиты от ошибок, устройства преобразо¬
вания сигналов, специальная, каналообразующая и коммутацион¬
ная аппаратура, фрагменты программного обеспечения, реализую¬
щие протоколы обмена ш> каналу.
Перечисленные элементы (как для канала передачи данных,
так и для центра) в надежностном смысле образуют последова¬
тельные схемы и являются восстанавливаемыми объектами. Ис¬
ходя из этого можно сформулировать обобщенную задачу опти¬
мизации, приемлемую и для центров коммутации, и для каналов
ПД, следующим образом: найти такие значения А,0.г и TBi, i= 1, га,
при которых обеспечивается
В этих соотношениях: С(Хог), C(TBi) — затраты на сокраще¬
ние интенсивности потока отказов и средней длительности восста¬
новления соответственно; га — число элементов центра коммута¬
ции или канала; /СГ.з, Гв.3 — требования по коэффициенту готов¬
ности и среднему времени восстановления; Кои TBi — показатели
надежности i-ro элемента.
min [С (Яог) + С (TBi), i=l, m]
(4.77)
и выполняются ограничения
141
В [64] для аппроксимации функций затрат на (повышение на¬
дежности предложено использовать функции следующего вида:
Ct(koi, AKi)= ~CKt A koi/[koi(koi +A koi)]; (4.78)
Ci(TBi, ATB;) = -CTBiATBi/[TBi(TBi + ATBi)]y (4.79)
где Кои TBi — показатели надежности элементов гипотетической
системы; AA,0;, АГв,г — приращения показателей; С\0. , СТъ1 — от¬
носительные затраты на обеспечение надежности в гипотетической
системе:
^(^0г> ^ W) = S Cf (Xqi, A kQi)\
С (Тв;,г i — 1, т)==ЕСг(Гвг, A TBi).
(4.80)
Поскольку задача имеет два ограничения, то для ее решения
используем метод частной оптимизации с контролем границ. Ме¬
тод заключается в последовательном решении задачи оптимиза¬
ции при одном ограничении и выборе наилучшего варианта. Если
после расчета надежности гипотетической системы (канала или
центра) с параметрами кои Т*.и tn, окажется, что
l/(l + 2^Bi)<tfr,, (4.81)
то, изменив частные показатели элементов k'oi = А-ог + Akoi и Г'вг=
= Гв,; + АГвг, получим
/Cr.3=l/(l + S^olrBl). (4.82)
i
Тогда ограничение примет вид
^ ТВ1 АЯо; + V Д TBi loi + 2 д^оi &TBi = (Кг-Кг.Mr * (4.83)
i i i
Используя для решения задачи (4.77) при ограничении (4.83)
метод неопределенных множителей Лагранжа, запишем
FL= ]Г, С* (A,oi, Akoi) + ^ Сi (Тuh ATBi) +
i i
+1 [ 2 тв1 + 2 a TBi loi + 2 ДА* ATBi - (Kr-Kr.3)/Kr KrJ •
i i i
(4.84)
Дифференцируя последнее выражение и приравнивая нулю, полу¬
чаем систему уравнений:
' = - ■C^°;A>'oi) +1 (TBi + A TBi) = 0; (4.85)
д A/i0i д Дл0г
=д Ci (^т А Гв0+1 (hi + A hi) = 0; (4.86)
адгвг d&TBi
^ = 2 AXoi + 2 А Гв Дог + 2 АХ0Л Гвг - = 0.
i i i "г*\гз
(4.87)
142
ЭЩ система из 2га+1 уравнений имеет 2га+1 неизвестное Д^оь
Ащтыу £ и, следовательно, допускает единственное решение. Под¬
ставляя (4.78) и (4.79) ,в (4.85) и (4.86), после дифференцирова-
нйя находим:
_С^- + ?(^ + АГвг) = 0;
(*о« + Д^ог)
— Ст
(ГВ* + АГВ*)2
После решения будем иметь:
ATBi = (C2TJlCh.)^-TBi-, (4.88)
Л^ = (с!ог/£СГвг)1/з_Яог, (4.89)
Множитель Лапранжа найдем из (4.87) после подстановки
(4.88) и (4.89):
Е =
(*г-*1,з) + *г*Г.з2*«Гв
(4.90)
В ряде случаев расчет по полученным соотношениям дает по¬
ложительные значения ДTBi и ДАюг- Это объясняется тем, что функ¬
ция затрат определяется и в области, где параметры надежности
ниже показателей гипотетической системы. На ранних этапах си¬
стемного проектирования иногда может оказаться целесообраз¬
ным затраты перераспределить таким образом, чтобы ценою сни¬
жения надежности элементов, которым соответствуют положитель¬
ные значения ДА,0г- или ДГв,г, повысить надежность других эле¬
ментов. Однако на практике обычно нежелательно снижать до¬
стигнутый в отдельных элементах уровень надежности. Поэтому
предпочтительнее получить хотя и не строго оптимальное, но прак¬
тически более приемлемое решение.
С этой целью ограничим возможные значения ATBi и ДЯо* от¬
рицательной областью, т. е. рассмотрим только те элементы, у ко¬
торых в результате расчета оказались отрицательные значения
АТв,г, ДА,ог- Тогда ограничение примет вид
2 ^ ^0/ I ’ 2 i Тв i~\~ 2 А^оi ATBi — (Кг КгЖгКг.э,
1фк 1фг 1фк, г
(4.91)
где г - - номера элементов с положительными значениями ДГВг;
k — номера элементов с положительными значениями ДАюг-
Уравнения (4.85) и (4.86) решаются аналогично, но число
уравнений становится равным 2m—г—k. Подставив полученное
•при этом выражение в (4.91), найдем уравнение для вычисле¬
ния I
143
V s (Cr„ chl)V+vr2 Сти*,л+У 2 (C4,7-„)/5 -
i=r,fe i—k 1фг
— S KlTbl~ (Кг- КгЖг Kr.3 = 0.
i
При решении уравнения <в данном случае могут быть исполь¬
зованы численные методы. При найденных значениях ATBi и АХо%
необходимо проверить второе ограничение задачи (4.77) по (7"в).
Если оно не (выполняется, то необходимо увеличить затраты на
сокращение длительности восстановления отказов, причем вы¬
брать такой вариант, при котором это сокращение достигается
наиболее экономичным образом.
Найдем значения AT'Rit при которых обеспечивается
min 2 С; (T\h Д7'в|)
дт„, ;
и выполняется ограничение
А/о
ГВ,= ^(^ + АГ,),
i Л О
где А/ог, Т'в,ь А,'0 — параметры, полученные на предыдущем этапе
решения задачи.
Функция Лагранжа для этой задачи имеет вид
FL=SCl(rBjt дгвг)-н[2 ТГ- (ГвН-АГвг)-Г0
Я'о
Дифференцируя, находим
dFL
сг
Bi
5Г'вг (Гв, + АГв,)*
Используя ограничения, получаем
= 0.
(4.92)
VI
■IV
/
Решение (4.92) может, так же как и на первом этапе, вклю¬
чать положительные значения А Г' в*. Поскольку повышать дли¬
тельность отказов относительно Т'Bi без нарушения ограничения
по Кг нельзя, то в качестве решения должно использоваться со¬
отношение
^вз^ 0!^ ^Т 01
AT'Bi = -^ /=^= Т'вЬ (4.93)
2 V CtJ’oi
где / — номера элементов, для которых AT'Bi при решении (4.92)
имеет положительные значения.
Таким образом, оптимальные значения приращений парамет¬
ров надежности для элементов центров коммутации и каналов
ПД -при заданных граничных значениях Кг и Тв определяются со¬
отношениями (4.89) и (4.93).
144
Оптимизация внутренних показателей надежности
при произвольном виде функций затрат
Изложенный в предыдущем разделе метод оптимизации внут-
5рйних показателей надежности применим только в частных слу-
чкях, -когда функции затрат удается аппроксимировать аналитиче¬
ски выпуклыми зависимостями. В общем случае эти зависимости
не являются строго 'выпуклыми, поскольку надежность может
быть повышена за счет как небольших усовершенствований, так и
принципиальных изменений, обеспечивающих при определенных
затратах резкое возрастание надежности элементов (переход на
новую элементарную базу, существенное упрощение схем или
программ, изменение технологии производства, введение модуль¬
ности, систем контроля и резервирования).
Для оптимизации 'внутренних показателей надежности центров
коммутации и каналов ПД при функциях затрат произвольного
вида может быть использован численный метод, не налагающий
ограничений на эти функции, кроме сепарабельности. Выражение
для коэффициента готовности системы имеет вид
tn
АГг=П{1/[1+^ {сдТь1Ш
1=1
или после преобразования к сепарабельной форме
m
in Кг = 2 In {1 /[ 1 + *0, (ct) TBi (C|)]},
1=1
где Яог(с.г), Тщ(с{) — интенсивность отказов и средняя длитель¬
ность восстановления i-vo элемента при затратах С{. Нулевым зат¬
ратам поставим в соответствие показатели гипотетической си¬
стемы.
Поскольку при каждом варианте затрат средства могут быть
направлены как на повышение безотказности, так и на сокраще¬
ние длительности восстановления, то общая формулировка задачи
будет следующей: найти такое распределение средств на повыше-
нйе надежности, при котором обеспечивается
шах 2 In max {1/[1 +Яог (с^Т^ (0)], 1/[1 +Яог (0)Гвг (с,)]}
ci г
при ограничении
i
В силу принципа двойственности эта задача эквивалентна
(4.77). Для ее решения может быть использован алгоритм, в ос¬
нову которого положен метод выпуклых оболочек [2]. Ниже, не
эстапавливаясь на теоретических особенностях, которые достаточ¬
но подробно изложены в первоисточнике, приводится схема рас¬
чета, ориентированная на решение задачи оптимизации надеж¬
ности.
Первый этап расчета заключается в составлении таблицы ис¬
ходных данных. В таблице число строк соответствует области оп¬
145
ределения функции затрат и значению единицы затрат, а число
столбцов равно удвоенному числу элементов системы. Для обес¬
печения достаточной точности решения единицу затрат наиболее
целесообразно выбирать из условий
Ас = min {с'г-, с"г}; Х01 (с't) = %0i (0)—АХ0;
i
Твг (с"г) = Т’вг (0) — АТВ, (4.94)
где с'и с"% — минимально необходимые затраты для повышения
надежности i-го элемента по безотказности и 'восстанавливаемо¬
сти на Ако и АТв соответственно и находятся из уравнений (4.94);
ДА,0, АТВ — значения допустимой погрешности, определяемые вер¬
ностью исходных данных.
Каждому элементу в таблице соответствуют два столбца. В
первый заносятся интенсивности отказов, а во второй — средние
длительности восстановления при различных затратах.
Второй этап расчета сводится \к графическому представлению
зависимостей коэффициентов готовности элементов от затрат. С
этой целью строится система координат, по оси абсцисс которой
откладываются единицы затрат, а по оси ординат — значения
1001п(1(Жг). (По данным таблицы на систему координат наносят¬
ся модифицированные для удобства расчетов путем введения
множителей функции
Ft (с>) = 100 in (Ю max {1/[1 + ^ (0) TBi (ct)]9
1/11 + Kt (ci)TBi (0)]}) — ЮО In {10/[ 1 (0)TB, (0)]}. (4.95)
В результате образуется семейство неубывающих ломаных кри¬
вых.
На третьем этапе производятся вычисления согласно следую¬
щему алгоритму.
Шаг 0. Обнулить величины: Fit а, С, F, i= 1, m.
Шаг 1. Из начала координат провести касательную к семейству кривых.
Шаг 2. В соответствии с точкой касания определить:
а) номер кривой, к которой проведена касательная I (номер элемента, по
которому осуществляется оптимизация на данном шаге);
б) координаты точки касания, соответствующие приращению модифициро¬
ванной функции AFi(j) ;И средствам, выделенным на данном шаге.
Шаг 3. Вычислить текущие значения общих затрат и модифицированной
функции системы по /-му элементу ci : =с*+/; Fi : = i^+A/7z(/).
Шаг 4. Вычислить текущие значения общих затрат и модифицированной
функции системы: С : =С+/; F : =F-\-AFi(j).
Шаг 5. (Проверить условия:
1) С Cq;
2) F > 100 In (10/Сг 3) - 1002 1п{10/[1+Я„;(0)ГВ( (0)]>.
i
Нарушение первого условия говорит о том, что достигнут максимально воз¬
можный при затратах Со коэффициент готовности системы. Нарушение второго
условия означает, что заданный коэффициент готовности достигнут при мини¬
мальных затратах. В этих случаях расчет останавливается и выводятся резуль¬
таты, т. е. значения си i— 1, по которым определяются окончательные пока¬
затели надежности элементов. Если Xoi (0)ГВг (с*) <Аог (Сг)ТВ{ (0), то следует вы-
146
дшить Сг едимиц средств на повышение восстанавливаемости, в противном
сЖчаг те же средства целесообразнее использовать для увеличения безотказ-
,н«ти t-го элемента. Если не нарушено ни одно из условий, следует перейти к
следующему шагу.
шМ1аг 6. Точку касания перенести в начало координат таким образом, чтобы
B-dJF кривая с номером / переместилась параллельно самой себе. Перейти к
шагу 1.
По окончании 'процесса вычислений необходимо проверить вы¬
полнение ограничений по Гв. Если последнее не выполняется, то
следует повторить оптимизацию относительно' показателей вос¬
станавливаемости. Окончательными в соответствии с методом ча¬
стной оптимизации должны приниматься более жесткие резуль¬
таты.
Задача оптимизации относительно длительности восстановле¬
ния формулируется следующим образом: найти значения a, i =
=т= 1, га, при которых обеспечиваются
mm {2 Koi (ct)TBi (с,)/2 Aoi (с,)}
ci i i
: Cq.
(4.96)
и ограничение S cd
i
В силу принципа двойственности эта задача имеет то же ре¬
шение, что и задача (4.77) при втором ограничении.
При использовании метода выпуклых оболочек в данном слу¬
чае по оси ординат откладываются значения
F\ (ct) = min{Xoi (0) TBi (C|)/2 Kj (0),
/
К (Ci) TBi (0)/[2 Kj (0) + Xoi (сг)]}— TBi (0) Яог (0)/2 Яог (0). (4.97)
i
Графо-аналитический алгоритм расчета соответствует изло¬
женному выше, за исключением условия окончания процесса оп¬
тимизации, которое запишется следующим образом:
т I т
F’> 7V3-2 hi(0)TBi(0) 2^(0).
i= 1
£=1
ТАБЛИЦА 4.1
i
мк
узо
мпд
УПС
КС
^01
1 "В!
^02 1
Т
\ В2
Доз
т
в.з
Яо4
т
Б4
^06
| ^В5
0
0,045
2,5
0,57
1,5
0,029
3,0
0,066
0,8
0,5
0,2
1
0,045
2,5
0,054
1,5
0,029
3,0
0,052
0,8
0,37
0,17
2
0,039
2,5
0,052
1,4
0,029
3,0
0,047
0,6
0,32
0,17
3
0,037
2,2
0,051
1,4
0,027
3,0
0,047
0,6
0,32
0,17
4
0,037
0,9
0,05
1,4
0,021
2,5
0,043
0,6
0,26
0,15
5
0,037
0,9
0,014
0,6
0,016
1,4
0,04
0,5
0,25
0,09
6
0,007
0,5
0,007
0,4
0,007
0,95
0,03
0,3
0,1
0,09
7
0,003
0,1
0,005
0,09
0,003
0,5
0,015
0,16
0,1
0,09
147
После проведения обоих этапов оптимизации окончательны о
значения искомых показателей определяются из условий
Твг = min (71'Л Т$); Я0£ = min ( А&’, ?чн).
Пример. Пусть для канала передачи данных определены требования:
/СГ.з = 0,9; Тв.3 = 0,16 ч. Зависимости показателей надежности от затрат на
элементы (канала первичной сети КС,
устройства преобразования сигналов
У ПС, мультиплексора МПД, устройства
защиты от ошибок УЗО, мультиплексно¬
го канала МК) сведены в табл. 4.1.
Расчет гипотетического (Сг = 0, * =
= 1, тп) канала дает /Сг = 0,67; Тв = 0,6.
Графики модифицированных функций на¬
дежности приведены на рис. 4.9. Пер¬
вая точка касания А принадлежит кри¬
вой, относящейся к пятому элементу, и
имеет координаты /=|1 и AF5=2. Пере¬
нос показан пунктирной линией с индек¬
сом 5{iK Вторая точка касания В при¬
надлежит кривой, относящейся к эле¬
менту. При этом / = 4, A/7i(4)=6. Пере¬
нос для данного случая показан пунк¬
тиром с индексом 1<2). Третья точка ка¬
сания С дает / = 7, Д^4(7) = 10 и т. д.
Результаты расчета с исполь¬
зованием приведенного графо¬
аналитического алгоритма приве¬
дены в табл. 4.2. Расчет среднего
времени восстановления показы¬
вает, что второй этап оптимиза¬
ции не нужен.
Достоинством рассмотренного метода является то, что при не¬
значительной сложности он (Пригоден практически для любых
функций затрат, многообразие которых неизбежно ©виду большо¬
го числа принципиально различных способов повышения надеж¬
ности центров коммутации и каналов передачи данных.
ТАБЛИЦА 4.2
i
1
2
3
4
5
Ci
7
6
5
7
5
KTi
0,995
0,99
0,96
0,999
0,955
^0г * Tq i
0,045 0,11
0,007 1,5
0,016 1,4
0,015 0,8
0,5 0,095
С = 31
Кг = 0,905
148
Размерность задачи при использовании графо-аналитического
алгоритма не должна -превышать десяти (десять элементов, де¬
сять значении затрат), что вполне достаточно для рассматривае¬
мых тииов систем. Число выполняемых при этом операций не пре¬
вышает 100. Отметим, что сплошной перебор в задаче такой раз¬
мерности потребовал бы просмотра 10! вариантов.
СПИСОК ЛИТЕРАТУРЫ
1. Классификация информации, циркулирующей в СПД/К. А. Амосов, В. К.
Иванов и др. — Техника средств связи. Сер. ТПС, 1978, вып. 6, с. 77—81.
2. Берзин Е. А. Оптимальное распределение ресурсов и элементы синтеза си¬
стем. — М.: Сов. радио, 1974. — 303 с.
3. Богуславский JI. Б., Дроффинов В. И., Мартиросян В. А. Методы и модели
управления потоками данных в сетях ЭВМ. — Зарубежная радиоэлектрони¬
ка, 1980, № 10, с. 3—28.
4. Бутрименко А. В. Разработка н эксплуатация сетей ЭВМ. — М.: Финансы
и статистика, 1981. — 255 с.
-5. Вильсон А. Д. Энтропийные методы моделирования сложных систем. — М.:
Наука, 1978. — 248 с.
6. Давыдов Г. Б., Рогинский В. Н., Толчан А. Я. Сети электросвязи. — М.:
Связь, 1977. — 395 с.
7. Джейсуол Н. Очереди с приоритетами. — М.: Мир, 1973. — 297 с.
-8. Домановский Е. И. Выделение дискретного множества субоптимальных ва¬
риантов сетей передачи данных. — В кн.: Информационный обмен в вычис¬
лительных сетях. — М.: Наука, 1980, с. 35—46.
9. Дэвис Д., Барбер Д. Сети связи для вычислительных машин. — М.: Мир,
1976. — 680 с.
10. Захаров Г. П., Петряков Ю. А. К вопросу о построении кратчайшей связы¬
вающей сети. — Вопросы радиоэлектроники. Сер. ТПС, 1974, № 2, с. 3—6.
11. Достижения в области пакетной радиосвязи/Р. Э. Кан, С. А. Гроунмайер
и др. — ТИИЭР, 1978, т. 66, № И, с. 212—247.
12. Клейнрок J1. Вычислительные сети с очередями. — М.: Мир, 1979. — 600 с.
13. Кофман А., Крюон Р. Массовое обслуживание. Теория и приложения. — М.:
Мир, 1965. — 302 с.
14. Крюков А. М., Мартынов Ю. М., Разгон В. Л. Математическое обеспечение
сетей передачи данных. — М.: Связь, 1978. — 158 с.
15. Лазарев В. Г. Методы распределения информации в сетях ЭВМ. — В кн.:
Информационный обмен в вычислительных сетях. — М.: Наука, 1980,
с. 17—27.
16. Ломоносов М. В., Полесский В. П. Верхняя граница надежности информа¬
ционной сети. — Проблемы передачи информации, 1971, т. VII, вып. 4,
с. 78—82.
17. Ломоносов М. В., Полесский В. П. Нижняя оценка надежности сетей. —
Проблемы передачи информации, 1972, т. VIII, вып. 2, с. 47—53.
18. Маккуиллэн Дж. М. Новые методы адресования сообщений в вычислитель¬
ных сетях. — ТИИЭР, 1979, т. 66, № 11, с. 272—284.
19. Малиновский С. Т. Сети и системы передачи дискретной информации в
АСУ. — М.: Связь, 1979. — 383 с.
20. Мартин Дж. Системный анализ передачи данных. Т. 2. — М.: Мир, 1975. —
431 с.
21. Мизин И. А., Уринсон Л. С., Храмешин Г. К. Передача информации в сетях
с коммутацией сообщений. — М.: Связь, 1977. — 327 с.
22. Мейстер Б., Мюллер X. Распределение задержек в коммутационных сетях. —
ТИИЭР, 1972, т. 60, № 6, с. 120—122.
23. О выборе алгоритма обмена данными между смежными центрами коммута-
щш/В. Г. Морозов, В. А. Бирюков и др. — Техника средств связи. Сер. ТПС,
1978, вып. 6, с. 47—58.
149
24. Пашкеев С. Д., Минязов Р. И., Могилевский В. Д. Машинные методы опти¬
мизации в технике связи. — М.: Связь, 1976. — 271 с.
25. Пашкеев С. Д. Некоторые формально-эвристические методы решения задач
линейного программирования. — В кн.: Алгоритмы и организация решения
задач. Вып. 2. — М.: Статистика, 1973, с. 34—38.
26. Петрович В. И., Ткач К. И. Потоки в сетях передачи данных при детерми¬
нированных путевых процедурах. — Вопросы радиоэлектроники. Сер. ТПС„
1971, № 2, с. 3—10.
27. Поваров Г. Н. О структурной теории сетс'и. — В кн.: Проблемы передачи
информации. Вып. 1. — М.: АН СССР, 1959, с. И—19.
28. Полесский В. П. Об одном способе построения структурно надежной сети. —
В кн.: Дискретные автоматы и сети связи. — М.: Наука, 1970, с. 13—19.
29. Прим Р. К. Кратчайшие связывающие сети и некоторые обобщения. — В кн.:
Кибернетический сборник. — М., 1961, вып. 2, с. 95—107.
30. Серф В. Г., Кепстайн П. Т. Проблемы взаимосвязи сетей передачи данных,
использующих метод коммутации пакетов. — ТИИЭР, 1978, т. 66, № 1,
с. 112—138.
31. Сети ЭВМ/Под ред. В. М. Глушкова. — М.: Связь, 1977. — 279 с.
32. Сипсер Р. Архитектура связи в распределенных системах. Т. 1. — М.: Мир,
1981. — 434 с.
33. Фрэнк Г., Фриш И. Сети, связь и потоки. — М.: Связь, 1978. — 447 с.
34. Харари Ф. Теория графов. — М.: Мир, 1973. — 300 с.
35. Ху Т. Целочисленное программирование и потоки в сетях. — М.: Мир,
1974. — 549 с.
36. Ченцов В. М. Системы распределения информации. — М.: Связь, 1980. —
141 с.
37. Шварцман В. О., Михалев Д. Г. Расчет надежностных характеристик трак¬
тов передачи данных. — М.: Связь, 1975. — 147 с.
38. Шнепс М. А. Системы распределения информации. Методы расчета. — М.:
Связь, 1979. — 342 с.
39. Якубайтис Э. А. Архитектура вычислительных сетей. — М.: Статистика,
1980. — 279 с.
40. Янбых Г. Ф. Применение метода «ветвей и границ» для топологической оп¬
тимизации сетей телеобработки данных при ограничении на время реак¬
ции. — Автоматика и вычислительная техника, 1980, № 5, с. 3—7.
41. Янбых Г. Ф., Эттингер Б. Я. Проектирование отраслевой сети вычислитель¬
ных центров. — М.: Энергия, 1974. — 104 с.
42. Boorstyn R. R., Frank Н. Large-scale network topological optimisation. —
IEEE Trans. Commun., 1977, 25, N '1, p. 29—47.
43. CCITT. Sixth Plenary Assembly. — Geneva, 27, September—October 1976.
Orange Book. Vol VIII, 2, Public Data Networks, Genewa, 1977, p. 217.
44. Chu W. W. Optimal Message Block Size for Computer Cammunication with
error detection and retransmision strategies. — IEEE Trans. Commun., 1974*
22, N 10, p. 84—92.
45. Delal Yogen K., Metcalfe Robert. Reverse path forwarding of broadcast
packets. — Commun. ACM, 1978, 28, N 12, 1040—1048.
46. Frank H., Cho W. Connectivity consideration in Design of Survivable Net¬
works, — IEEE Trans. Circuit Theory, 1970, 17, p. 486—490.
47. Gablager R. G. A Minimum Delay Routing Algorithm Using, Distributed
Computations. — IEEE Trans, on Commun., 1977, 25, N 1, p. 73—85.
48. Gopal K., Aggarwal К. K., Gupta J. S. A new approuch to optimal redun-
dency allocation for complex networks. — Microelectron. Reliab., 1979, 19,
p. 387—390.
49. Guy Pujolle. The influence of protocols on the stability conditions in
packet-switching networks. — IEEE Trans. Communs., »1979, 27, N 3, p. 611 —
619.
50. Irland Marek 1. Buffer management in packet switch. — IEEE Trans Com¬
muns, 1978, 26, N 3, p. 328—337.
51. Kuehn Paul J. Approximate analisys of general queuing networks by decom¬
position. — IEEE Trans. Commun., 1979, 27, N 1, p. 113—126.
_ 150
Ё52. Luin S. S. Slorc-and-forward buffer requirements in расксь switching net-
p work. 11 *;I.I. Trans. Commun., 1976, 24, N 4, p. 394—403.
t53. Lordcn (i. De tection of failure rate increases. — Technometrics, 4973, 15,
N I, p. 48 -61.
-54. Me Quillam John M. Message addressing models for computer networks. —
«COMCON», Fall, 78, 17-th IEEE Computer Soc. Int. Conf. — Proc. comput.
Commun networks, 1978, Washington, D. C. New York, p. 80—88.
-55. Meister B. New optimization criteria for Message—Switching network. —
IEEE Trans. Commun., 1971, 19, p. 256—260.
-56. Nesenbergs Matrin. Bounds on number of possible distinct networks. —
IEEE Trans. Commun., 1978, 26, N 2, p. 1315—1316.
-57. Nichols R. J., Messer G. H. A Cost—Bazed Availability Algorithm. — IEEE
Trans, on Reliability, 1971, N 3, p. 95—101.
58. Nokagawa T. A Not on Availability for Interval. — IEEE Trans, on
Reliability, 1973, N 5, p. 121—126.
59. Rubin I. Message path delays in packetswitching communication networks. —
IEEE Trans, on Commun., 1975, 23, N 2, p. 186—192.
«60. Rybezynski A. X. 25 interface and end-to-end virtucel circuit service cha¬
racteristics. IEEE Trans. Commun., 1980, 28, N 4, p. 500—510.
61. Selall A. The modeling of Adaptive Routing in Data Communication Net¬
works. — IEEE Trans. Commun., '1977, 25, N 1, p. 85—95.
‘62. Smallwood R. D. Minimax detection station placement. — Operation research,
1965, N 4, p. 115—121.
€3. Syski R. Waiting time prediction. — 6-th Int. Teletrafic Congrees. —
Munich, 1970, p. 334—337.
<)4. Wagner W. Queuenig systems with priorities and intervals of saturation. —
6-th Int. Teletrafic Congress. — Munich, 1970, p. 38—44.
Предисловие
Глава 1. Общая характеристика сетей передачи информации АСУ .
1.1. Сеть связи как подсистема системы управления ......
Информация и управление
Количество информации и неопределенность объекта управления
Требования системы управления к процессу передачи информации .
Структуры систем управления
Формы информации в АСУ, понятие о данных и сети передачи данных
1.2. Принципы построения сетей передачи данных
Первичные сети
Вторичные сети. Технические комплексы сетей передачи данных
1.3. Представление структур сетей
Структуры сетей и элементы теории графов ".
Кратчайшие маршруты во взвешенных графах
Матрицы, определяющие структуру сетей
Матрицы маршрутов
1.4. Моделирование сетей передачи данных
Модели сети передачи данных
Математические модели, используемые при расчете сетей ....
Потоки в сетях передачи данных
Глава 2. Принципы функционирования сетей передачи данных
2.1. Структура функционального программного обеспечения сетей переда¬
чи данных
Функции, выполняемые в сетях передачи данных
Функциональные уровни сетей передачи данных
Рекомендации по протоколам в сетях с коммутацией пакетов
2.2. Формализация сообщений в сетях передачи данных
Представление массивов информации
Структуры пакетов
Оптимизация размеров пакетов
Сопряжение форматов и кодов при объединении сетей передачи данных
2.3. Адресование сообщений
Способы адресования избирательных сообщений
Адресование циркулярных сообщений
Сопряжение систем адресования
2.4. Процедуры выбора маршрутов
Общие сведения
Избирательные процедуры выбора маршрутов
Процедуры повышенной надежности доставки
Процедуры передачи циркулярных сообщений
2.5. Регулирование потоков сообщений по приоритетам
Ранги, преимущества и приоритеты
Внесистемные приоритеты
Внутрисистемные приоритеты
Закон сохранения среднего времени задержки в сети
2.6. Управление в сетях передачи данных
Задачи управления
Контур управления внутренними потоками сообщений
Структуры систем управления потоками
Методы сбора информации в процессе управления
Методы управления внешними потоками сообщений
Глава 3. Математическое обеспечение маршрутизации и управления
в сетях передачи данных
3.1. Общие сведения
3.2. Математическое обеспечение детерминированных процедур выбора мар¬
шрутов
,152
Стр.
:Ш. (Математическое обеспечение Пансковых процедур выбора маршрутов 76
:ЗЛ|^атематическое обеспечение квазислучайных процедур выбора мар¬
шрута 83
Общие сведения 83
Квазислучайная процедура с локальной информацией 83
Квазислучайная процедура при наличии сетевой информации ... 85
3.5. Физические версии весов элементов сети ' . 87
Критерии кратчайших маршрутов 87
Виртуальное время ожидания 88
Прогнозируемое время ожидания 89
Производная среднего времени задержки сообщений 90
| Квантование средних значений весов . 92
>3.6. Математическое обеспечение управления внешними потоками сообщений 94
h Граничные значения интенсивностей внешних потоков сообщений . . 94
Ограничения при межконцевом и изоритмическом управлениях . . 95
Контроль интенсивностей потоков на входах сети л 96
Глава 4. Вопросы проектирования сетей передачи информации АСУ 97
4.1. Задачи системного проектирования сетей 97
Общие сведения 97
Исходные данные при проектировании 98
Общая характеристика задачи системного проектирования .... 99
Прогнозирование потоков сообщений между абонентами сети . . . 102
4.2. Размещение узлов коммутации . . . 105
Выбор местоположения узлов для обслуживания группирующихся
абонентов 105
Оптимизация числа узлов и их размещения при независимом положе¬
нии абонентов 108
Размещение узлов для связи с мобильными абонентами . . . . 111
Размещение центра управления сетью 113
4.3. Синтез структуры сети 114
Синтез структуры сети по детерминированным параметрам живучести 114
Синтез структуры сети минимальной стоимости при заданной о язности 116
Синтез структуры сети по вероятностным показателям живучесть . . . 118
i 4.4. Расчет мощности линий связи сети . ■ i*i
Оптимизация мощности линий связи сети при линейных функциях
затрат 121
Оптимизация мощности линий связи при произвольном виде функций
затрат ... \12$
Методика выбора каналов передачи данных для линий связи с задан¬
ной мощностью J24.
4.5. Оптимизация параметров живучести элементов сети 1М
Постановка задачи оптимизации параметров живучести сети . . . 12§
Варианты оптимизации параметров живучести сечений . . . . . 12р
Оптимизация значений априорных вероятностей вывода из строя эле-
^M'etifos. сечений 129
4.6.|Выбор! параметров надежности элементов сети 133
^Оптимизация надежности линий связи сети • 133
Методы вычисления вероятности связности сети . . . . . . 136
Выбор параметров надежности центров коммутации 138
Аналитическая оптимизация внутренних показателей надежности эле¬
ментов сети .141
Оптимизация внутренних показателей надежности при произвольном
виде функций затрат 145
Список литературы 149