/

Tags: военное оборудование военная техника военное дело
Year: 1972



Text
МИНИСТЕРСТВО ОВОРОНЫ СССР
-»¥«**»
Suvorov AV 63-64@mail.ru для http://www.russianarms.ru
K. j
Зкз* М 4P§9
A
•J:
H
УЛЬТ OTA ЛЕНИ
И
%
МИНИСТЕРСТВО ОБОРОНЫ СССР
Экз. №
hCU
4669
Suvorov AV 63-64@mail.ru для http://www.russianarms.ru
НАЗЕМНАЯ АППАРАТУРА
УПРАВЛЕНИЯ СНАРЯДОМ
9М14М (9М14)
ПУЛЬТ УПРАВЛЕНИЯ 9С415
ТЕХНИЧЕСКОЕ ОПИСАНИЕ
Издание второе, дополненное
Ордена Трудового Красного Знамени
ВОЕННОЕ ИЗДАТЕЛЬСТВО
МИНИСТЕРСТВА ОБОРОНЫ СССР
МОСКВ А—1 9 72
t
Настоящее Техническое описание разработано, согласовано и утверждено по
состоянию отработки образца и технической документации на I июля 1971 г. и
допущено для использования в войсках и комплектования изделий решением
№ A96508I от 26 августа 1964 г.
Внимание! Проверьте наличие вклеек.
В книге всего пронумеровано 88 страниц.
Кроме того, в конце книги имеются 6 тшщшяшшь .вклеек на 6 листах.
2
ВВЕДЕНИЕ
Настоящее Техническое описание предназначено для изучения
устройства и принципа действия наземной аппаратуры управления
снарядом 9М14М (9М14).
Для подробного изучения устройства и принципа действия
снаряда 9М14М (9М14) необходимо пользоваться Техническим
описанием управляемого снаряда 9М14М (9М14).
Настоящее Техническое описание состоит из трех разделов и
приложения.
В первом разделе рассматриваются принципы управления
снарядом 9М14М (9М14), во втором — описание и принцип действия
электронного блока, в третьем — устройство и принцип действия
пульта управления 9С415.
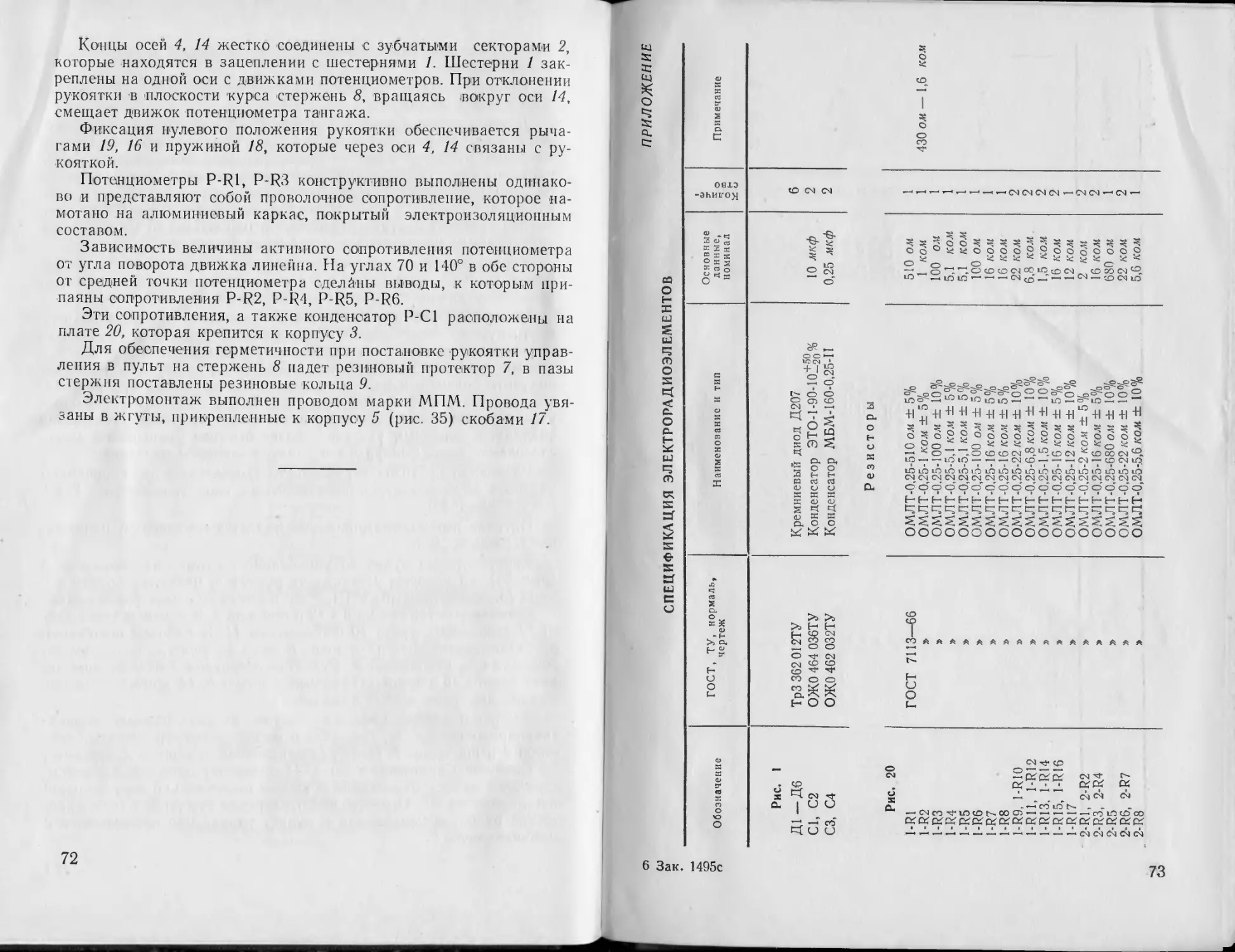
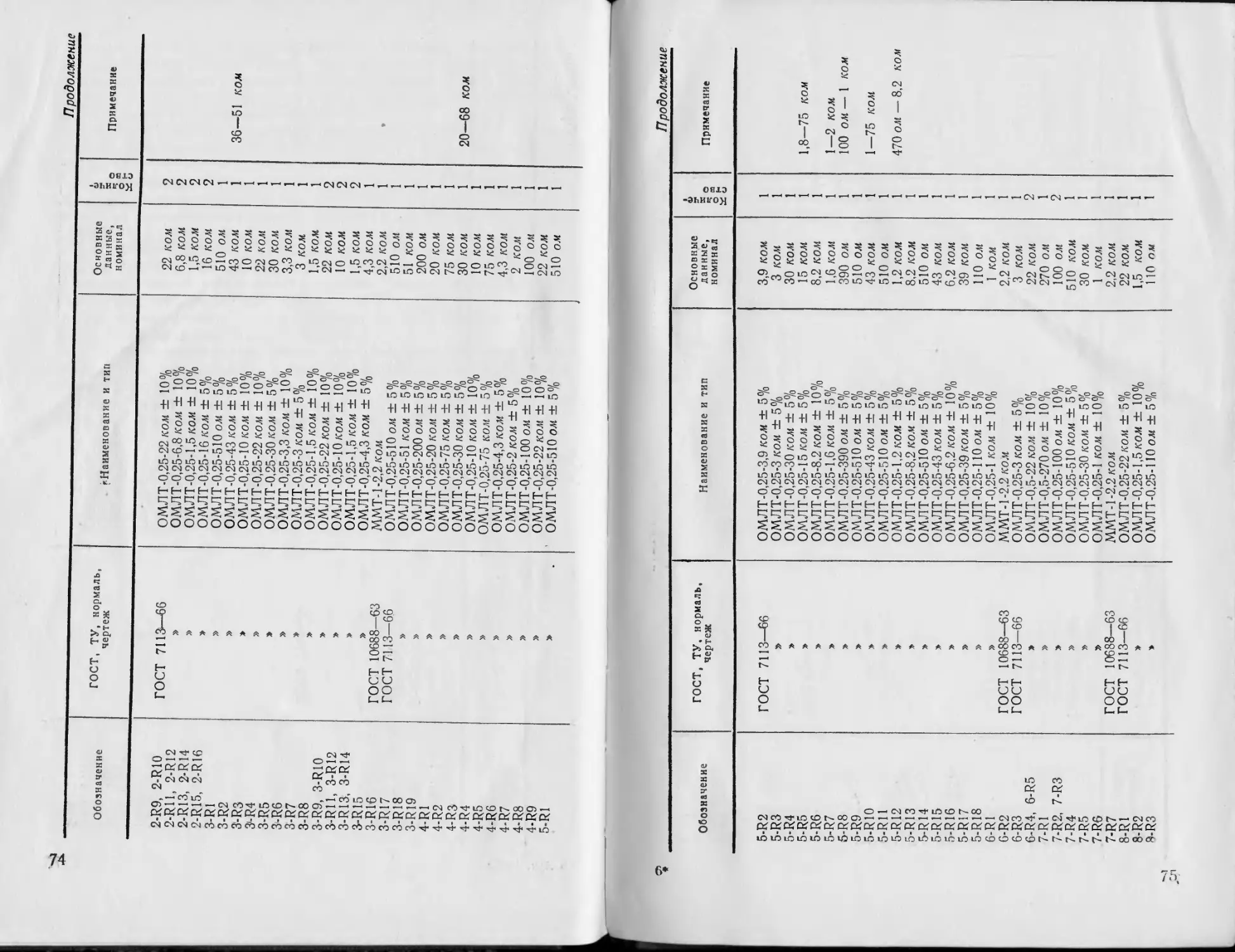
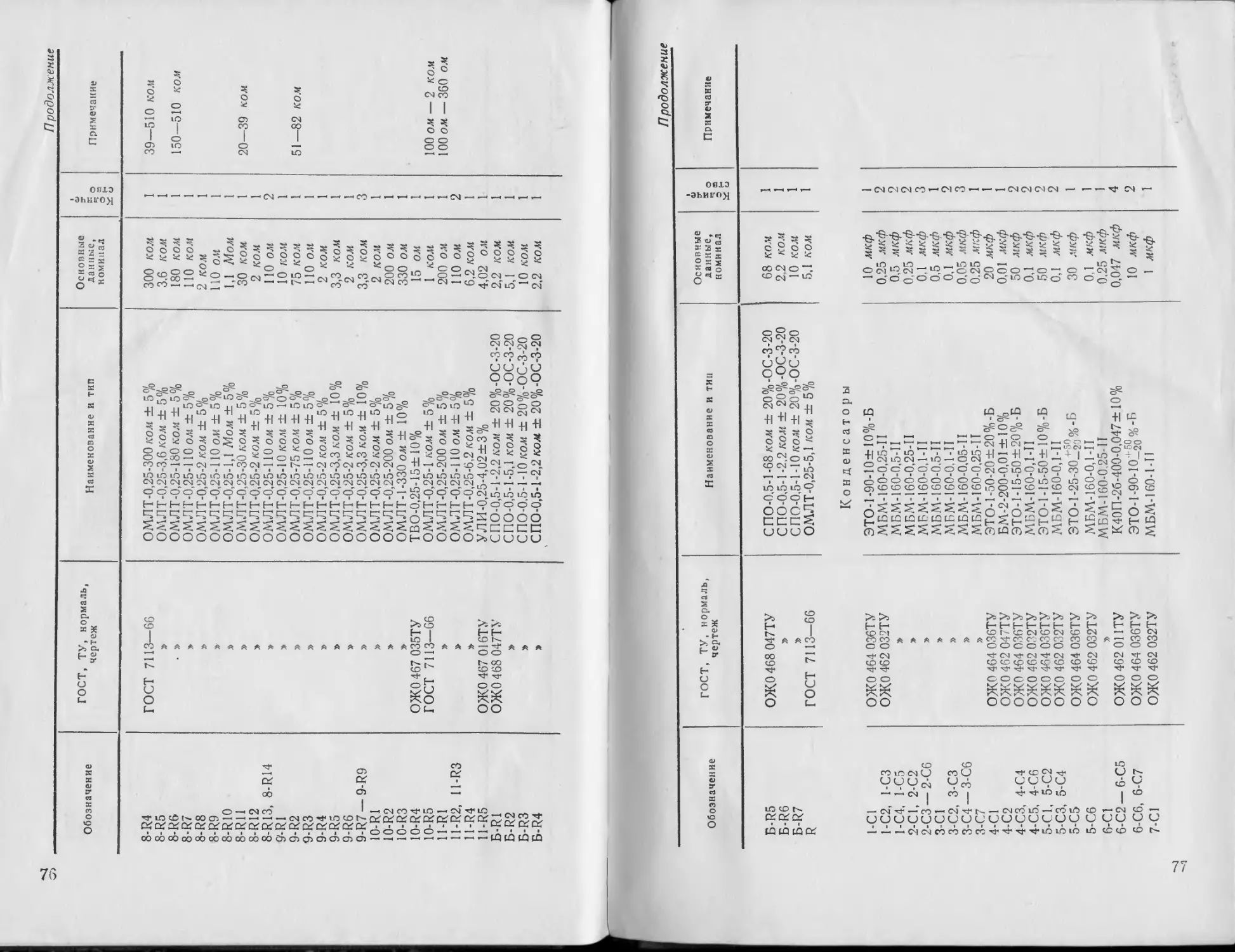
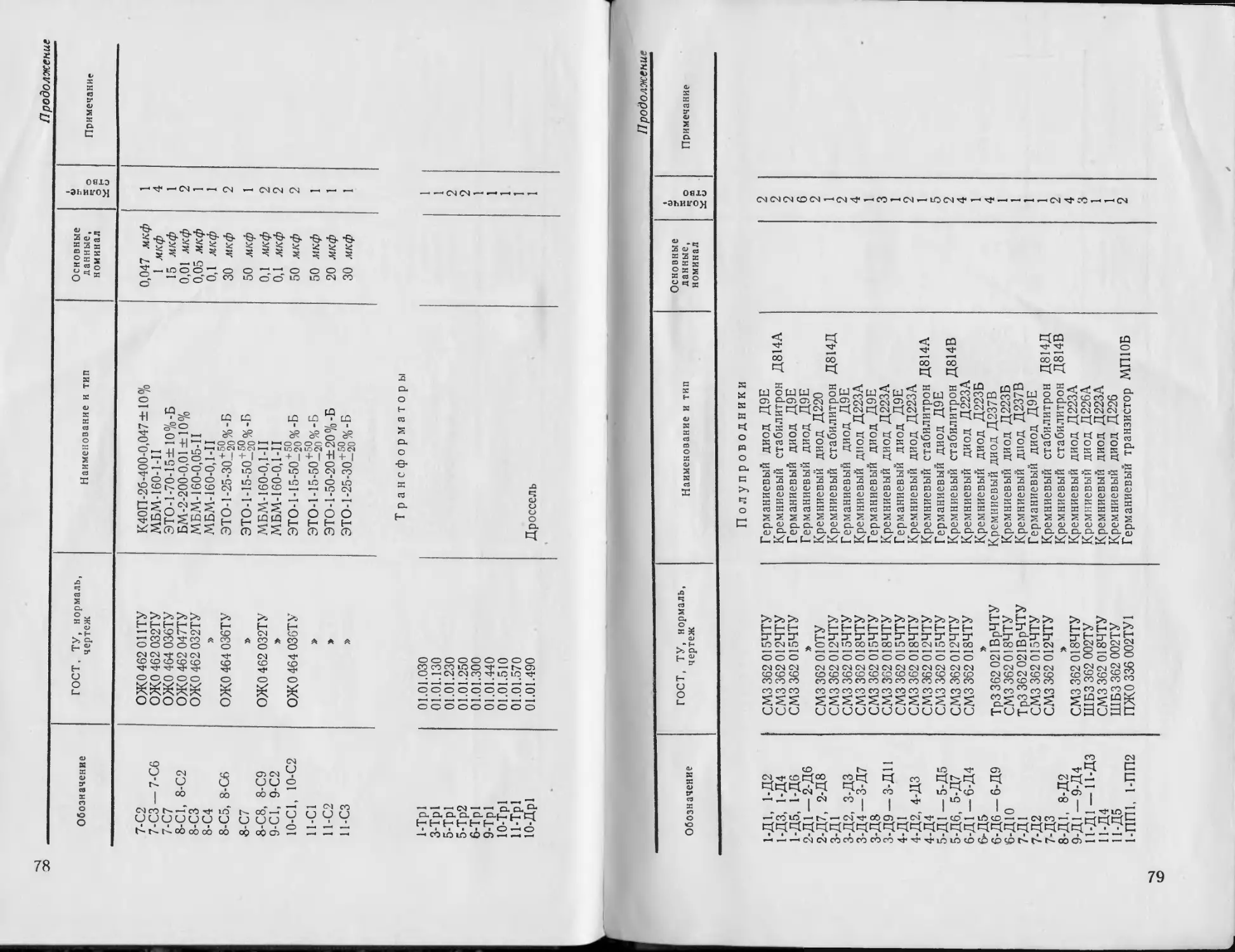
В приложении приведена спецификация электрорадиоэлементов
к рисункам Технического описания *.
С выходом настоящей книги Техническое описание «Наземная
аппаратура управления снарядом 9М14М (ЭМИ). Пульт
управления 9С415», изд. «Машиностроение», 1967 сохраняет силу.
БИ01 '01
* Изменения по ———— введены для пультов, выпускаемых с 1971 г.
-■ 9С415ТО
1* Зак. 1495с
1. ПРИНЦИП УПРАВЛЕНИЯ СНАРЯДОМ
9М14М (9М14)
1.1. ОБЩИЕ СВЕДЕНИЯ ОБ АППАРАТУРЕ УПРАВЛЕНИЯ
Снаряд 9М14М (ЭМИ) является составной частью
(противотанкового комплекса и предназначен для поражения цели.
Составными частяхми снаряда являются бортовая аппаратура и
исполнительные органы.
Бортовая аппаратура предназначена для управления
исполнительными органами, формирования и подачи сигнала информации в
наземную аппаратуру управления. Бортовая аппаратура (рис. 1)
включает в себя:
— трехпроводную линию связи с емкостями СЗ и С4;
— электромагниты ЭМ1 и ЭМ2 с диодами Д6 и Д5;
— выпрямитель, выполненный на диодах Д1—Д4 и емкостях
С1 иС2;
— трехстепенной гироскоп с прерывателем.
(На рис. 1 гироскоп условно не показан.)
Исполнительные органы служат для управления снарядом в
полете и включают в себя рулевую машинку и два насадка.
Насадки расположены симметрично относительно продольной
оси снаряда и приводятся в действие рулевой машинкой. Рулевая
машинка и насадки работают в релейном режиме, т. е. при
изменении полярности управляющего сигнала насадки
перебрасываются из одного крайнего положения в другое на постоянный угол
6 = ±14° (рис.2).
Время tn (рис. 1) отработки насадком управляющего сигнала
равно 11—16 миллисекундам.
Во время полета снаряд вращается вокруг своей продольной
оси по часовой стрелке (если смотреть по направлению полета).
Частота вращения снаряда f в среднем равна 8,5 об/сек, и
соответственно период вращения снаряда Т вокруг своей продольной оси
равен 118 миллисекундам.
Так как tn<t Т, то временем tn можно пренебречь и считать, что
отработка насадком управляющего сигнала происходит мгновенно.
Взаимодействие бортовой аппаратуры и исполнительных
органов во время полета снаряда происходит следующим образом.
*
Управляющий сигнал иущ> (рис. 1), подаваемый с наземной
аппаратуры управления по 1-му и 2-му проводам линии связи,
поступает через диод Дб, если сигнал отрицательной полярности, или
Рис. 1. Принципиальная электрическая схема
бортовой аппаратуры управления и диаграммы,
поясняющие ее работу:
/ — контактная дорожка; 2 — контактное кольцо;
3 — токоподвод; 4 — токосъемник
через диод Д5, если сигнал положительной полярности, на
электромагниты соответственно ЭМ1 или ЭМ2 рулевой машинки, которая
отклоняет одновременно оба насадка в одну или другую сторону
от продольной оси снаряда.
Переброс насадков из одного положения в другое происходит
при смене полярности управляющего сигнала Uywp.
Одновременно сигнал Uywp подается на выпрямитель.
Постоянное напряжение, получаемое с выпрямителя, необходимо для пита-
ния прерывателя гироскопа. Прерыватель формирует сигнал
информации 1/яаф.
■ Прерыватель представляет собой контактное устройство, в
состав которого входят два контактных кольца 2, контактная
дорожка У, два токоподвода 3, два токосъемника 4.
Рис. 2. Схема сил, действующих на снаряд в
полете в вертикальной плоскости (плоскости
тангажа)
С помощью токоподводов подается напряжение с выпрямителя
на контактные кольца. Токосъемниками снимается напряжение
сигнала информации с контактной дорожки.
Через контактные кольца подается напряжение на контактную
дорожку. Токосъемники жестко связаны с корпусом снаряда.
Контактная дорожка жестко связана с наружной рамкой гироскопа и
выполнена в виде четырех сегментов, разделенных изоляционными
прокладками.
Два противоположных сегмента контактной дорожки
электрически замкнуты между собой, а два других связаны с контактными
кольцами; при вращении снаряда токосъемники движутся по
контактной дорожке.
В момент прохождения токосъемников через короткозамкнутые
сегменты напряжение сигнала информации равно 0, а в момент
прохождения через сегменты, находящиеся иод напряжением, оно
равно напряжению с выпрямителя, причем в зависимости от угла
отклонения токосъемников относительно контактной дорожки
напряжение сигнала информации будет положительным,
отрицательным или равным 0.
6
Таким образом, во время вращения снаряда с токосъемников
снимается переменное напряжение с частотой, равной частоте
вращения снаряда, причем длительности положительного,
отрицательного импульсов и пауз между ними равны одной четверти периода
вращения снаряда.
Сигнал информации используется для формирования
управляющего сигнала Uynp.
Напряжение сигнала информации £/ИИф подается по третьему
проводу, а также через емкости СЗ, С4 по первому и второму
проводам линии связи в наземную аппаратуру управления.
На рис. 1 показаны принципиальная электрическая схема
бортовой аппаратуры управления снарядом и диаграммы,
поясняющие ее работу,
где t/ynp — напряжение, подаваемое с наземной аппаратуры
управления;
**эм1 —ток в катушке электромагнита ЭМ1;
Ъм2 — ток в катушке электромагнита ЭМ2;
П — положение насадков во времени;
^инф — напряжение сигнала информации.
1.2. СИСТЕМА СИЛ, ДЕЙСТВУЮЩИХ НА СНАРЯД В ПОЛЕТЕ
Схема сил, действующих «а снаряд в полете в вертикальной
плоскости (плоскости тангажа) в фиксированный момент времени,
приведена на рис. 2,
__где V —вектор скорости полета снаряда;
YcH(a) —вектор аэродинамической подъемной силы;
Qx(cl) —вектор силы лобового аэродинамического
сопротивления;
_Л(6) —вектор силы тяги двигателя;
Лос(б) —вектор осевой составляющей силы тяги;
/?упр(6) —вектор боковой составляющей силы тяги —
управляющая сила;
Мупр—управляющий момент, MJWp = RYnp{d)a (а — плечо
силы /?Упр(6) относительно центра тяжести снаряда ЦТ);
а — угол атаки;
G —угол наклона траектории;
6 —угол отклонения насадка сопла;
G —вектор силы веса снаряда;
© —угловая скорость вращения снаряда относительно
продольной оси л*1.
Как было ранее отмечено, два насадка расположены
симметрично относительно продольной оси снаряда и отклоняются
одновременно.
В каждый момент времени реактивные силы, создаваемые
газами, истекающими через насадки, могут быть просуммированы и
заменены одной равнодействующей силой. В дальнейшем рассмот-
7
рение двух насадков заменяется рассмотрением одного,
расположенного в точке 01.
Струя газов реактивного двигателя, истекающая из насадка,
отклоненного на угол 6 от продольной оси снаряда Х\, создает силу
тяги R(6).
Сила тяги раскладывается на две составляющие:
— составляющую, направленную вдоль оси снаряда хь
называемую осевой составляющей Roc (б);
— составляющую, направленную перпендикулярно оси снаряда
х\, называемую боковой или управляющей силой Лупр(6).
_ Далее будет показано, что среднее значение управляющей силы
-Яупр. ср изменяется в зависимости от управляющего сигнала Uynp.
Управляющая сила У?упр(6) создает управляющий момент Мупр
относительно центра тяжести снаряда. Этот момент отклоняет
продольную ось снаряда Xi от направления вектора скорости полета V
на угол а, называемый углом атаки.
Таким образом, снаряд становится под углом а к набегающему
потоку воздуха, б результате чего создается сила FCH(a),
направленная перпендикулярно направлению потока (скорости V). Эта
сила называется аэродинамической подъемной силой.
При изменении угла атаки а (увеличении или уменьшении его)
подъемная сила Усн(а) также изменяется, что приводит к
изменению направления полета снаряда в вертикальной плоскости.
Из рис. 2 видно, что при отклонении насадка вверх
управляющая сила /?уПр(б) поворачивает снаряд вокруг центра тяжести
(точка ЦТ) в сторону увеличения угла атаки а.
Это приводит к росту подъемной силы FCH(a), т. е. снаряд
будет подниматься вверх. Для всех летательных аппаратов
увеличение угла атаки а соответствует росту подъемной силы УСн(а). Эта
пропорциональность сохраняется до определенного предела —
угла акр, называемого критическим, после которого подъемная
сила FCH(a) резко падает.
Схема сил, действующих на снаряд в горизонтальной
плоскости, аналогична схеме сил, действующих в вертикальной плоскости,
за исключением того, что в горизонтальной плоскости отсутствует
действие веса G.
Следовательно, для перемещения снаряда в нужном
направлении необходимо в том же направлении по команде с земли
отклонять и насадки, при этом управляющая сила будет направлена в
противоположную сторону.
1.3. КОНТУР УПРАВЛЕНИЯ И МЕТОД НАВЕДЕНИЯ СНАРЯДА НА ЦЕЛЬ
Контур управления (рис. 3) является замкнутой системой,
состоящей из оператора, наземной аппаратуры управления и
снаряда. Визуальная обратная связь осуществляется оператором.
Оператор наводит снаряд на цель по методу «трех точек»
(рис. 4).
8
Метод «трех точек» характеризуется тем, что оператор после
вывода снаряда на линию визирования (линия О — Ц) стремится
подавать такие команды гр (рис. 3), чтобы снаряд находился на
этой линии до момента встречи с целью.
Наземная
аппаратура
управления
0
/лр х
ф
Оператор
Д
Снаряд
е
Рис. 3. Схема контура управления снарядом
Линия горизонта
Рис. 4. Схема наведения снаряда по методу «трех точек>
Команды, подаваемые оператором, должны быть
пропорциональны углам рассогласования Ае (рис. 4) между направлениями
«оператор — цель» (О — Ц) и «оператор — снаряд» (О — С) в
горизонтальной и вертикальной плоскостях. На рис. 4
рассматриваются линии наведеиия в вертикальной плоскости,
где О —оператор;
С —снаряд;
Ц —цель;
Ес —угол места снаряда;
8Ц — угол места цели;
Ае = ес — ец — угол рассогласования между направлениями на
цель и на снаряд.
Для горизонтальной плоскости система углов аналогична.
Угол рассогласования Ае наблюдается оператором визуально
непосредственно или с помощью визира.
Оператор подает на снаряд команду гр (рис. 3) с помощью
наземной аппаратуры управления, выводя его на линию «оператор —
цель», при этом угол рассогласования Ае стремится к «улю.
9
1.4. ОСОБЕННОСТИ СИСТЕМЫ УПРАВЛЕНИЯ
Для управления снарядом применена одноканальная система
управления.
Одноканальная система характеризуется тем, ,что управляющая
сила создается только одним исполнительным органом.
Управляющий сигнал, подаваемый на исполнительный орган, управляет
снарядом в двух плоскостях: в плоскости курса (по горизонту) и в
плоскости тангажа (по вертикали). Управление снарядом в двух
плоскостях происходит за счет принудительного вращения
снаряда относительно продольной оси xi с угловой скоростью со = 2nf.
Плоскость переброса насадка Р — Р (рис. 5) жестко связана
со снарядом. (Снаряд на рис. 5 показан с одним насадком, и
плоскость Р — Р есть плоскость 'переброса условного насадка.)
/и г
h a 6
Рис. 5. Положение плоскости переброса насадка
на .снаряде
При вращении снаряда с угловой скоростью со плоскость
переброса Р — Р также вращается со скоростью со.
Далее будет показано, что задавая определенный закон
изменения управляющего сигнала с7упр, а следовательно, и закон
переброса насадка, можно получить среднюю управляющую силу /?уПр. ср
необходимой величины и направления.
Рассмотрим предварительно эпюры управляющей силы /?упр
при подаче на снаряд различных управляющих сигналов Uynp.
1. На снаряд подается управляющий сигнал Uynv в виде
постоянного напряжения (рис. 6,б).
Предположим, что в начальный момент времени t = О (в
момент подачи напряжения UYnv) плоскость переброса Р — Р
совпадает с плоскостью, проходящей через ось z\ (рис. 6,а). Насадок
в плоскости переброса Р — Р находится в точке 1, соответственно
вектор управляющей силы ЛуПр направлен по оси Z\ в сторону
точки О плоскости переброса Р — Р. _
В конце первой половины оборота снаряда вектор /?уПр будет
направлен по оси z\ в сторону ее положительных значений (в
точку 1 оси zi). По окончании второй половины оборота вектор J?ynp
будет снова совпадать с осью z\ и направлен в сторону ее отрица-
10
тельных значений (в точку О оси Zi). Таким образом, за один
полный оборот снаряда векто£ Лупр опишет круг.
Рассмотрим проекции Лупр на оси у\ и Z\ в текущий момент
времени /. Так как за время / вектор ЛуПр повернется на угол со/
относительно оси z\, выражения проекции вектора будут иметь вид:
/?yI = /?ynpSino)/; (1)
Rzi = Ry,pcoswt. (2)
На рис. 6, в, г показаны графики проекций Ryl и Rzi в
зависимости от угла поворота снаряда со/. Из графиков следует, что
среднее значение проекций Ryl и Rzl за время полного оборота
снаряда Т равно нулю, так как площадь, ограниченная кривой и осью со/
в области положительных значений Ryl или Rzlt равна площади,
ограниченной кривой и осью со/ в области отрицательных значений.
Рис. 6. Формирование управляющей силы при
подаче на снаряд постоянного напряжения
Таким образом, при подаче на снаряд управляющего сигнала
Uy-mp постоянной полярности среднее значение вектора
управляющей силы Лупр. ср за время полного оборота снаряда равно нулю.
Следовательно, направление полета снаряда не изменится.
2. На снаряд подается управляющий сигнал в виде
переменного напряжения (рис. 7,а, б), изменяющегося с частотой, равной
частоте вращения снаряда. При этом смена полярности сигнала
происходит через половину оборота снаряда (в точках 0, я, 2я, ...,
пя и т. д.). За начало отсчета принимаем точку О.
Плоскость переброса Р — Р (рис. 7, в) при / = 0 совпадает с
плоскостью, проходящей через ось Z\. Так как положение насад-
11
ка, а следовательно, и направление вектора Дущ, зависят от
полярности управляющего сигнала £/ущ>, то будем считать, что при
положительной полярности сигнала t7ynp (рис. 7,а) насадок_будет
занимать положение / (рис. 7, в) и соответственно вектор /?уПр "будет
направлен в точку О оси zb
При отрицательной полярности сигнала £Уупр (рис. 7,6) насадок
будет занимать положение О и соответственно вектор ЛуПр будет
направлен в точку / оси Z\.
В течение первой половины оборота снаряда (0 ^ mi ^ я)
управляющий сигнал t7ynp (рис. 7, а) представляет собой
напряжение с неизменной полярностью.
Поэтому эпюра управляющей силы Лупр и ее проекции Ryi,
и Rzi в течение первой половины оборота снаряда (рис. 7,в, г, д)
аналогичны эпюре и проекциям, показанным на рис. 6, а, в, г за:
тот же промежуток времени.
В конце первой половины оборота снаряда насадок займет
положение в точке О плоскости Р — Р, а управляющая сила ЛуПр
будет направлена в точку 1 оси Zi (рис. 7,в).
Следовательно, за первую половину оборота снаряда
(О ^С со/ ^ я) эпюра jRynp представляет собой половину круга. Если
бы в течение второй половины оборота снаряда знак с7упр не
изменился, то эпюра Rynp представляла бы собой круг.
Так как в начале второй половины периода произойдет
изменение полярности сигнала с7упр с положительной на отрицательную,,
то насадок перебросится из точки 0_в точку / плоскости Р—Р и
соответственно управляющая сила Лупр также изменит свое
положение и будет направлена в точку /', после чего продолжит свое
движение из точки V в точку 2 оси z\ (рис. 7, в).
Таким образом, во время второй половины оборота снаряда,,
когда я ^ со/ ^ 2я, насадок вновь будет описывать
полуокружность, совпадающую с полуокружностью, которую он описывал за
первую половину оборота снаряда (0 =$; со/ ^ я).
Поэтому эпюра управляющей силы ЯуЩ} за вторую половину"
оборота будет совпадать с эпюрой Лупр за первую половину
оборота. Соответственно и графики проекций Rvi и Rzi за время
я ^ со/ г^ 2я будут аналогичны графикам за время 0 ^ cof ^ яг
(рис. 7, г, д).
Таким образом, при подаче на снаряд управляющего
переменного сигнала (Уупр с нулевой фазой и частотой, равной частоте
вращения снаряда, эпюра управляющей силы Лупр будет представлять
собой половину круга с осью симметрии у\, а следовательно,
величина вектора управляющей силы ЛуПр по абсолютному значению за
время оборота снаряда не изменяется и будет равна
максимальному значению.
Из графика проекций Rzj (рис. 7,д) следует, что за время
полного оборота 'снаряда (со/ = 2я) среднее значение ^zicp^O.
12
о.
с
:>
э -
i ^
Si-
0.
С
3'
'Is
СО
к
'»ю|с4
is
"*5|е«
ос
ю
со
о"
II
о.
о
►ч
ос/*
»о 1
ос V
II ^
X
п
Е J
2^
Ц
/^^^^
LS
ю|еч
15
tele*
eg
*- о
о
к
S
<и
s
О)
с
О)
t?
К
С
сз
К
о
СЗ
я
О)
в*
СЗ
о
с
с
1 К
к
ЕС
3 <Ч
к
о
=к
О)
a
9
га
О.
с
:>>
О)
я
я
га
ю
о
о.
к
о.
о
©
I
К
С
С
сз
13
Среднее значение проекции Rv i ср = 0,637/?'о, где R о—
постоянное значение управляющей силы, определяемое параметрами
двигателя и исполнительных органов снаряда.
Значение Ryicv = 0,637/?'о можно получить, приравняв площадь,
ограниченную двумя полусинусоидами (рис. 7,г), к площади
прямоугольника (показан пунктиром).
Следовательно, средняя управляющая сила ЛуПр. ср при подаче
на снаряд управляющего сигнала £/упр с нулевой фазой и частотой,
равной частоте вращения снаряда, достигает своего
максимального значения, равного 0,637/?0, и направлена по оси у\.
При этом снаряд будет отклоняться в плоскости тангажа. Для
управления снарядом в рассматриваемой системе выбран сигнал
переменной полярности с частотой, равной частоте вращения
снаряда. При таком управляющем сигнале £/упр достигается
максимально возможное значение средней управляющей силы
■Rynp. ср. max = 0,Оо7п о-
Для изменения направления полета снаряда необходимо
изменять направление средней управляющей силы ЛуПр. ср, т. е.
поворачивать вектор ЛуПр. ср на угол ф относительно оси */т (рис. 8,а).
Это достигается тем, что на снаряд подается знакопеременный
сигнал t/ynp с фазой, отличной от нуля, равной ф.
При подаче на снаряд такого сигнала переброс насадка
происходит В ПЛОСКОСТИ, ПрОХОДЯЩеЙ ПОД УГЛОМ ф К ОСИ Zi (ПО ОСИ Z\ *„
см. рис. 8,а).
I' 2'
в
Рис. 8. Формирование управляющей силы лри подаче на снаряд
переменного напряжения с фазой <р
14
Таким образом, чтобы повернуть вектор средней управляющей
силы на угол ф по направлению вращения снаряда необходимо,
чтобы изменение знака управляющего сигнала £/упр, а
следовательно, и момент переброса насадка запаздывали на угол ф.
Эпюра управляющей силы и графики проекции Лупр на оси tj\
и zi при подаче на снаряд управляющего сигнала с фазой ф
показаны на рис. 8, а, в, г.
Как видно из этих рисунков, движение вектора управляющей
силы начинается в точке О и продолжается до точки /.
В точке / происходит смена знака £/упр, а следовательно, и
переброс насадка, поэтому движение /?упр продолжается из точки /'
до точки 2. В точке 2 снова происходит переброс насадка и
движение RjUV продолжается из точки 2' до точки 3. В точке 3 переброса
насадка не происходит и процесс повторяется.
и,
упр
•
wt
- о
а б
Рис. 9. Виды управляющего сигнала
Так как рулевая машинка работает в релейном режиме (ее
срабатывание зависит от изменения знака управляющего сигнала и
не зависит от его величины), то отработка насадком
прямоугольного управляющего сигнала (рис. 9,а) сохраняется и при
синусоидальном сигнале (рис. 9,6), фаза которого совпадает с фазой
прямоугольного сигнала, а моменты срабатывания рулевой машинки
совпадают с моментами прохождения синусоиды через нуль (т. е.
время отработки /п насадком (рис. 1) управляющего сигнала Uynp
не учитывается).
В дальнейшем для простоты изложения управляющий
прямоугольный сигнал заменен синусоидальным с нулевой фазой или с
фазой, равной ф и частотой, равной частоте вращения снаряда.
В этом случае выражения для управляющего сигнала £/упр будут
иметь вид:
U
упр
U0 Sin u>£;
Uyup=UQSln((*it — ср).
Выражение (4) можно написать в следующем виде:
^умр — Uq sIn ш^ COS ср — U0 COS wt Sin <р.
(3)
(4)
(5)
15
Представим выражения для проекции вектора средней
управляющей силы i?ynp.cp на оси У1 и гг (рис. 8, а) в зависимости
от угла ф. Из рисунка следует, что
Яср у I = Яупр. ср COS ср, (6)
Ясрг1 = /?Упр. cpSincp. (7)
Сила i?cPyi управляет снарядом в плоскости тангажа
a flcpzi — в плоскости курса. Из выражения (5) имеем:
UT = U0 sin <at cos cp; (8)
^K^^oCos^^sincp, (9)
.где t/T — составляющая управляющего сигнала в плоскости
тангажа;
UK — составляющая управляющего сигнала в плоскости
курса.
Выражение (5) в дальнейшем принято за основу формирования
управляющего сигнала <Уупр в наземной аппаратуре управления.
При управлении снарядом направление его полета задается
оператором. Соответствие между командами оператора,
положением насадка, положением управляющей силы, ее проекций и
направлением полета снаряда в рассматриваемой системе управления
показано на рис. 10.
Направление полета снаряда совпадает с направлением
подаваемых оператором команд.
Итак, для управления снарядом по курсу и тангажу необходимо
чтооы в наземной аппаратуре управления вырабатывался
управляющий сигнал (см. выражение 4):
Uynp = U0sm(ut — ср),
где угол ф является переменной величиной, зависящей от команд
подаваемых оператором.
Таким образом, для управления снарядом необходимо изменить
фазу^управляющего сигнала. При этом средняя величина
управляющей силы будет всегда иметь максимальное значение, не
зависящее от угла ф.
1.5. ФОРМИРОВАНИЕ УПРАВЛЯЮЩЕГО СИГНАЛА
Рассмотрим взаимосвязь команд, подаваемых оператором, с
положением снаряда. На рис. 11 показаны две системы координат:
система уцОцгп, связанная с целью, и система У\01гъ связанная со
снарядом, но она не вращается и параллельна системе уцОцгц
Оператор находится в точке О, цель —в точке Оц, снаряд —в
точке 01; линия О — Оц — линия «оператор — цель».
При полете снаряд должен находиться на линии О — Оц.
16;
1_ ... Г)
X °
СО »-
со
о
<о
С5
О.
С
ПО
с*>
3
£
0Q
О
CD
О)
«О
з..
У
Ljcl.
э1
"к:
N
»»■ —
М ~-
0£
О
«О
I1KJ
У
О \
О]
<л!
О CJ
■-I
N
сс
н
ГО
с>
V2
/ъа
g"m
га
со
«
о
00
*„
*-
Vz.
ц
«
см
и
о
о
N **'
ik
о
ГО {Э
со
С£ ^
*^Г О
'^Ч .3-
Ъ-
°
ц
"5
"со*—
че.
о
СП»
ю
«—.N
£
т
•as
А'
:£
а г7 *
п Q.
с:
*й
сэ -г
З/^п
а
*= £ к
ГО
Nl
УЛ
СЭ
W
СО
=* «
з; С
^ 5:
со со
П.СО
к
-I'
с
ГР-"
ч
-Г
&«"~«Г
^?f
о
ел
о
сэ
ОЗ
—
№
оз.
о.—.
с
**
:э 1
4-
3"
о
е*Э
со 1
**"iJ
СЭ
со
о
*.1о
э
со
«■ г
с: I -
■=» L—
fc> "sT^
CS
со
—l"5
_J-
_JN
со
п-
о
S* 1
1ГЭ
•3-
о
о
со
о
о
eg-
£ и.
^ со
её
>с
со
0Q
>С en
"• с
со
0Q
CD
CS
П.
С
ОД
ео
3
3Z
0Q
О
СО
а>
со
2 Зак. 1195с
Предположим, что снаряд отклонился от линии «оператор —
цель» и занял положение точки ОН. В этом случае линейное
отклонение снаряда от линии О — Оц будет равно А (рис. 11 а)
Для определения линейного отклонения снаряда по'тангажу»и
курсу необходимо спроектировать А на плоскость, проходящую
через цель (плоскость уцОцгц) и перпендикулярную линии
«оператор— цель» (О — Оц). v
ДГ=Асоз¥< I
М=Д31"п V '°.°1.0ц
*~Vr
Рис. 11. Схема вывода снаряда «а линию
«оператор — цель»
Определим соответствующие проекции линейного отклонения \
на оси уц (AT) и zn (АК) (рис. 11,6):
ДГ = д cos ср — составляющая по тангажу;
Д/(=Д sin ср — составляющая по курсу.
(Ю)
(И)
Оператор, наблюдая отклонение снаряда по курсу и тангажу
(АД и АГ), в целях совмещения снаряда с линией О — Оц
отклоняет рукоятку управления наземной аппаратуры на
соответствующие углы фк и фт, причем
CD
?т — ЛДГ=ЛДС08ср;
•?К = ЛД/( = ЛД sincp,
(12)
(13)
18
где фт —угол отклонения рукоятки в канале тангажа;
фк — угол отклонения рукоятки в канале курса;
Л — коэффициент, связывающий углы отклонения фт и фк с
линейными отклонениями снаряда по тангажу и курсу.
При отклонении рукоятки управления с потенциометров
снимаются напряжения соответственно:
Их = А>т = Д'пЛД cos с?; (14)
U'K = К„?к = КПАЬ sin ср, (15)
где Кп — коэффициент, определяемый параметрами
потенциометров.
Ранее было показано [см. выражения (8) и (9)], что сигналы,
управляющие снарядом по тангажу и курсу, должны иметь вид:
UT = Uо sin w/ cos ср;
UK = U0 cos u>t sin cp.
Чтобы напряжениями сУ'т и U'K [выражения (14) и (15)],
снимаемыми с рукоятки управления, можно было управлять снарядом,
необходимо, чтобы указанные команды изменялись с частотой
вращения снаряда со по закону sin со/ (для сУт) и cos со/ (для U'K).
Управляющие сигналы сУт и t7'K, изменяющиеся по закону
sin со/ и cos со/, формируются в наземной аппаратуре управления
при наличии сигнала информации (/Ш1ф об угловом положении
снаряда.
Умножая выражения (14) и (15) соответственно на sin со/
и cos со/, получим:
UT = Кп ЛД cos ср sin ш/; (16)
t/K = /<n^Asincpcosa)^ (17)
Учитывая выражения (16) и (17), выражение (5) можно
представить в виде
£/упр = КпАЬ. sin ш/ cos ср — Л"ПЛД cos ®t sin cp = /<ПЛД sin (u>£ — ср). (18)
Изменение фазы (угла ф) сигнала (/упр, определяемого
формулой (18), как было ранее показано, вызывает только изменение
направления средней управляющей силы ЛуПр. Ср, действующей на
снаряд. Величина же ЛуПр. ср при этом остается постоянной и не
зависит от амплитуды управляющего сигнала с7упр.
Так как рулевая машинка работает в релейном режиме и
отклоняет насадки всегда на один и тот же постоянный угол (±14°),
а не на угол, пропорциональный поданной команде, то для
получения пропорциональности между величиной управляющей силы и
углом отклонения рукоятки управления в рассматриваемой
системе с основным сигналом управления [см. выражение (4)]
Uy„p= U0sin(iot — ср)
2* 19
(где Uq — амплитуда основного управляющего сигнала)
складывается дополнительный сигнал линеаризации Un (рис. 12). Так же
как и основной сигнал, сигнал линеаризации можно представить в
виде синусоиды. Сигнал линеаризации в этом случае можно
представить выражением
Ua = Ua0slnt»J, (19)
где U„o—амплитуда сигнала линеаризации.
В наземной аппаратуре частота сигнала линеаризации сол
принята равной удвоенной частоте вращения снаряда (сол = 2со).
Такое соотношение частот, как показали расчеты и эксперименты,
позволяет сохранять постоянными характеристики системы
управления при изменении частоты вращения снаряда.
*Y1
А
to
J.
1
, 1 ч
15
у5'J
а
г,
г.ь
М
"VV
ТГ
г
2'
*ZI
2 3
I \
I \
\ ivl
\ I
3 U'
—, в—Cl»f
\ /2ТГ
\ /
/
2'
г и
3 3'
iai
1
N.
\,"
*-ш!
3'
2 2'
тг
ц\/ц'
3 _ 2тг
*—i»-<jjt
в
Рис. 12. Формирование управляющей силы при подаче на
снаряд сигнала линеаризации
На рис. 12, а, б, в, г показаны эпюры управляющей силы, _внд
сигнала линеаризации частотой сол = 2со и графики проекции _Ryiip
на оси уь Zi при подаче на рулевую машинку только сигнала
линеаризации.
Из рисунка видно, что управляющая сила ЛуПр перемещается по
часовой стрелке из точки 1 в точку 2, проходя путь, определяемый
дугой в 90°; в точке 2 происходит переброс насадка, и движение
Йупр продолжается из точки 2' до точки «3, затем снова следует пе-
20
реброс насадка, и ЛуПр продолжает движение от точки 3' до
точки 4, в точке 4— снова переброс насадка, и Лупр продолжает
движение от точки 4' до точки 5.
Из графиков проекций Лупр на оси \)\ и Z\ видно, что сумма
площадей эпюр проекций управляющей силы за один оборот
снаряда равна нулю (рис. 12,в, г).
Следовательно, равна нулю и величина средней управляющей
силы /?vnp. ср.
Управляющий сигнал с учетом сигнала линеаризации имеет вид
U'ynp = U0sin (at — ср) + ил 0 sin 2arf. (20)
При подаче на снаряд управляющего сигнала ^'уПр величина
средней управляющей силы будет зависеть от соотношения ампли-
и0
туд —.
В наземной аппаратуре управления амплитуда сигнала
линеаризации Uno постоянна, а амплитуда основного управляющего
сигнала Uq изменяется в зависимости от угла отклонения рукоятки
управления. Следовательно, абсолютное значение Лупр. Ср зависит
от угла отклонения рукоятки управления.
От соотношения амплитуд — - зависит коэффициент команды.
Коэффициентом команды называется отношение средней
управляющей силы ЛуПр. ср в данный момент времени к максимальной
средней управляющей силе — #ynp. Ср. шах:
K_JWcp_ (21)
*\уир. ср. шах
Абсолютная величина коэффициента команды изменяется от
0 до 1.
Коэффициент команды, равный единице, соответствует такому
управляющему сигналу £/'Упр, при действии которого получается
максимальная средняя управляющая сила, равная О^ЗТЯ'о.
На рис. 13, а, б, в показан пример формирования
управляющего сигнала для отношения амплитуд —' = 1 и q> = 0, причем пунк-
тиром показаны соответственно синусоиды основного сигнала,
сигнала линеаризации и сигнала, образованного от сложения
синусоид основного сигнала с сигналом линеаризации. Кроме того,
на рис. 13, в показан вид реального управляющего сигнала £/упр
(показан сплошной линией), который получается после усиления
и ограничения суммарной синусоиды.
На рис. 13, г показана эпюра управляющей силы. За один
оборот снаряда вектор управляющей силы Лупр перемещается по
часовой стрелке из точки 1 в точку 2, в точке 2 происходит переброс
насадка в точку 2'\ из точки 2' Лугтр перемещается^ в точку 5, в
точке 3 — переброс насадка в точку 3'; из точки 3' Лупр перемещается
21
22
в точку 4, в точке 4 насадок снова перебрасывается в точку 4'\ из
точки 4' Лупр перемещается в точку 5, после чего следует переброс
в точку 5', и весь процесс повторяется.
Из эпюры видно, что за полный оборот снаряда
уравновешиваются две площади: 1-я, ограниченная дугой 2', 1, 4\ и 2-я,
ограниченная дугой 4, 3', 2.
Неуравновешенной остается площадь, ограниченная дугой 2, 4'.
Эта площадь определяет величину и направление управляющей
силы, которая создает управляющий момент.
Из графика проекции Яупр. ср на ось Z\ видно, что среднее
значение проекции управляющей силы на ось Z\ (Rzi) за период равно
нулю [сумма площадей, ограниченных кривой Rzi, равна нулю
(рис. 13, е)].
Среднее значение проекции управляющей силы (Ryi) на
ось yi равно Rv icv = 0,300/?'0 (рис. 13,5).
Коэффициент команды для данного случая
К= *У"Р-СР = 0,30°^ =0,470.
*^упр. ср. max 0,Do7/<Q
В общем случае изменение амплитуды основного управляющего
сигнала Uq при постоянном значении амплитуды сигнала
линеаризации Un о приводит к изменению коэффициента команд К.
Изменение К, в свою очередь, приводит к увеличению или
уменьшению площади сектора 2, 4' (рис. 13,г), а следовательно,
происходит увеличение или уменьшение ЛуПр. Ср- Направление
Яупр. ср определяется фазой основного управляющего сигнала £/упр.
Таким образом, введение в управляющий сигнал сигнала
(линеаризации позволяет изменять среднюю управляющую силу по
абсолютной величине, а изменение угла ф в основном управляющем
сигнале £/упр позволяет изменять направление действия средней
управляющей силы Лупр. ср-
Если во время полета на снаряд подавать управляющий сигнал
£/упр, включающий только сигнал линеаризации, то среднее
значение управляющей силы будет равно нулю и снаряд под
действием своего веса будет снижаться. Чтобы исключить действие веса
снаряда, на него необходимо подавать постоянную команду по
тангажу. Эта постоянная команда называется командой
компенсации веса. Для создания команды компенсации веса в наземной
аппаратуре вырабатывается сигнал компенсации веса. С учетом
сигнала компенсации веса выражение для управляющего сигнала
при нулевом положении рукоятки управления будет иметь вид
Т7'упР = йк.в + ил. (22)
В общем случае сигнал компенсации веса является составной
частью сигнала по тангажу.
В результате подачи на снаряд сигнала компенсации веса
среднее значение управляющей силы будет отличным от нуля.
23
Сигнал компенсации веса вводится в управляющий сигнал по
экспоненциальному закону через 0,7 сек после старта снаряда
(рис. 14). Начало ввода напряжения через 0,7 сек обусловлено
тем, что через это же время начинает работать рулевая машинка
на снаряде (т. е. становится возможным управление), плавное
нарастание напряжения обеспечивает плавный вывод снаряда на
горизонтальный участок траектории.
упр. ср max
VT^ynp. ср max
-*"-Zr
zi max
Рис. 14. Зависимость сигнала
компенсации веса от .времени
Рис. 15. Диаграмма,
поясняющая необходимость
ограничения команды по курсу
В рассматриваемой системе управления значение средней
управляющей силы Rynv. ср независимо от направления ее действия
(угла ф) не может превышать значения Яущ>. ср. max,
соответствующего значению коэффициента_команды, равному единице.
Максимальные значения Лущ,. ср. max при изменении угла <р от
0 до 2л будут лежать на окружности (рис. 15).
При воздействии на снаряд управляющее силы по курсу с
учетом управляющей силы компенсации веса Лк. в ее максимальное
значение i?zimax должно быть меньше _/?упр. ср.тах-
_ Это обусловлено тем, что геометрическая _сумма векторов
-ftzimax и i?K. в не может быть больше вектора liynv cpmax.
Увеличение управляющей силы по курсу Rzi до величины ^'zmax > Rzmax
можно достигнуть уменьшением величины управляющей силы
компенсации веса до значения Я'к. в. Это приведет к снижению
снаряда на траектории.
Таким образом, при превышении управляющей -силы по курсу
значения Rzjm:xx появляется зависимость величины управляющей
силы компенсации веса от управляющей силы Rzi по курсу.
Для исключения этого явления в аппаратуре управления
введено ограничение управляющего сигнала по курсу до величины
Kz Imax-
Итак, для управления на снаряд необходимо подавать сигнал,
состоящий из нескольких составляющих сигналов:
— сигнал по тангажу UT= (KnAA<cosq+ сУк.Е) sinco^ —
напряжение, изменяющееся по синусоидальному закону, причем ампли-
24
туда /Сп^АсоБф пропорциональна углу отклонения рукоятки
управления по-тангажу, а амплитуда £/к. в постоянна и не зависит
от угла отклонения рукоятки управления;
— сигнал по курсу UK=КтАA sin ф cos co£ — напряжение,
изменяющееся по закону cos co£, амплитуда которого /СгЙА sin ф
пропорциональна углу отклонения рукоятки управления по курсу;
— сигнал линеаризации £/л = Vn 0 sin 2со£ —■ напряжение с
постоянной амплитудой, изменяющееся по закону sin2co£ с частотой,
вдвое большей частоты вращения снаряда.
Ux
1Шф
а
о
1 ^л
в
0
л—г
m
■^
^
Ч
.'Q
U)t
ut)t
w
7^6,
-="й-
о.
^Ftr
-*■-COt
Wt
cot
Cl)t
интегрирования
Ж 0
сь-т
Рис. 16. Диаграммы напряжений, поясняющие формирование управляющего
сигнала
25
В рассматриваемой системе управления в целях упрощения
схемного решения сложение синусоидальных напряжений при
формировании управляющего сигнала f/'ynp заменено сложением
пилообразных напряжений.
Все выводы относительно формирования управляющего
сигнала t/'ynp сложением синусоидальных напряжений с достаточной
точностью сохраняются для сигнала, формируемого сложением
пилообразных напряжений.
Пилообразные напряжения, заменяющие закон sin at и cos at,
можно получить интегрированием, прямоугольных напряжений,
сдвинутых относительно друг друга на 90° (рис. 16,6, в).
После интегрирования таких импульсов можно получить
пилообразные напряжения, амплитуды которых пропорциональны
углам отклонений рукоятки по тангажу и курсу. Пилообразные
напряжения будут также сдвинуты друг относительно друга на 90°
(четверть периода вращения снаряда).
Для получения сигнала линеаризации пилообразной формы на
интегрирующую цепь подаются прямоугольные импульсы с
частотой следования, вдвое большей частоты вращения снаряда.
Амплитуда этих импульсов постоянна (рис. 16,г).
Для более точного приближения пилообразного управляющего
сигнала к сигналу, формируемому на синусоиде, необходимо,
чтобы точки перехода пилообразных напряжений команд через
нулевой уровень (точки Ои 02, 03, 04; рис. 16,6, в, г) совпадали с
аналогичными точками пилообразного напряжения сигнала
линеаризации (рис. 16, г).
На частоте линеаризации интегрирующая цепь дает
запаздывание во времени вдвое меньшее, чем на частоте командных сигналов.
Рис. 17. Диаграммы напряжений,
поясняющие наличие фазового сдвига <pt
Поэтому при совпадении фаз прямоугольных напряжений
командных сигналов и сигнала линеаризации фазы пилообразных
напряжений указанных сигналов не будут совпадать (рис. 17). Для
устранения этого прямоугольное напряжение сигнала
линеаризации запаздывает на время Т3 относительно напряжения командных
сигналов.
Время задержки Т3 = 11 мсек определено расчетным путем. Для
формирования прямоугольных напряжений командных сигналов
и сигнала линеаризации с борта снаряда по линии связи поступает
сигнал о вращении снаряда (сигнал информации),
представляющий последовательность импульсов с частотой следования, равной
частоте вращения снаряда (рис. 16,а). Эти импульсы являются
опорными для получения командных сигналов, сигналов
линеаризации и компенсации веса.
1.6. БЛОК-СХЕМА ФОРМИРОВАНИЯ УПРАВЛЯЮЩЕГО СИГНАЛА
Бортовой аппаратурой снаряда формируются прямоугольные
импульсы сигнала информации (рис. 16,а), которые по линии связи
ппдаются со снаряда на входное устройство наземной аппаратуры
управления. Входное устройство отделяет сигнал информации от
помех и разделяет его на два напряжения, сдвинутые по фазе на
90°. Эти напряжения используются как опорные при
формировании команд по курсу (рис. 16,в), тангажу (рис. 16,6),
компенсации веса (рис. 16,д) и линеаризации (рис. 16,г).
Амплитуды сигналов по курсу и тангажу пропорциональны
углам отклонения рукоятки управления.
Для компенсации запаздывания реакции оператора
напряжения, снимаемые с потенциометров курса и тангажа рукоятки
управления, проходят через корректирующие (дифференцирующие)
цепи (рис. 18).
Блок-схема формирования управляющего сигнала показана на
рис. 19.
В блоках каналов тангажа и
курса происходит формирование
команд по тангажу и курсу.
В блоке линеаризации
формируется сигнал линеаризации с ча- / \гдифференцированием
стотой, равной удвоенной частоте / X/
вращения снаряда. Сигнал линеа- / / f
рИЗаЦИИ (рИС. 16, г) СДВИНуТ ВО / / Без дифференцирования
времени на Т3 =11 мсек
относительно командных сигналов
(рис. 16,6, в). В блоке
компенсации веса (рис. 19) формируется
сигнал компенсации веса. Сигнал сР^^шТрГ„1„ГР„рГ„роЯ
компенсации веса по форме ана- хождении через корректирую-
логичен сигналу по тангажу. щую цепь
-*-t
Сумма прямоугольных напряжений сигналов по тангажу и
курсу, компенсации веса и линеаризации (рис. 16, е) подается на
интегрирующую цепь.
С выхода интегрирующей цепи напряжение (рис. 16, ж)
поступает в оконечный усилитель-ограничитель, где происходит
усиление сформированного управляющего сигнала и его ограничение до
амплитуды, необходимой для нормальной работы рулевой
машинки на снаряде. Управляющий сигнал (рис. 16, и) с оконечного
усилителя-ограничителя по линии связи поступает в бортовую
аппаратуру снаряда.
2. УСТРОЙСТВО И ПРИНЦИП ДЕЙСТВИЯ
ЭЛЕКТРОННОГО БЛОКА
2.1. ОБЩИЕ СВЕДЕНИЯ
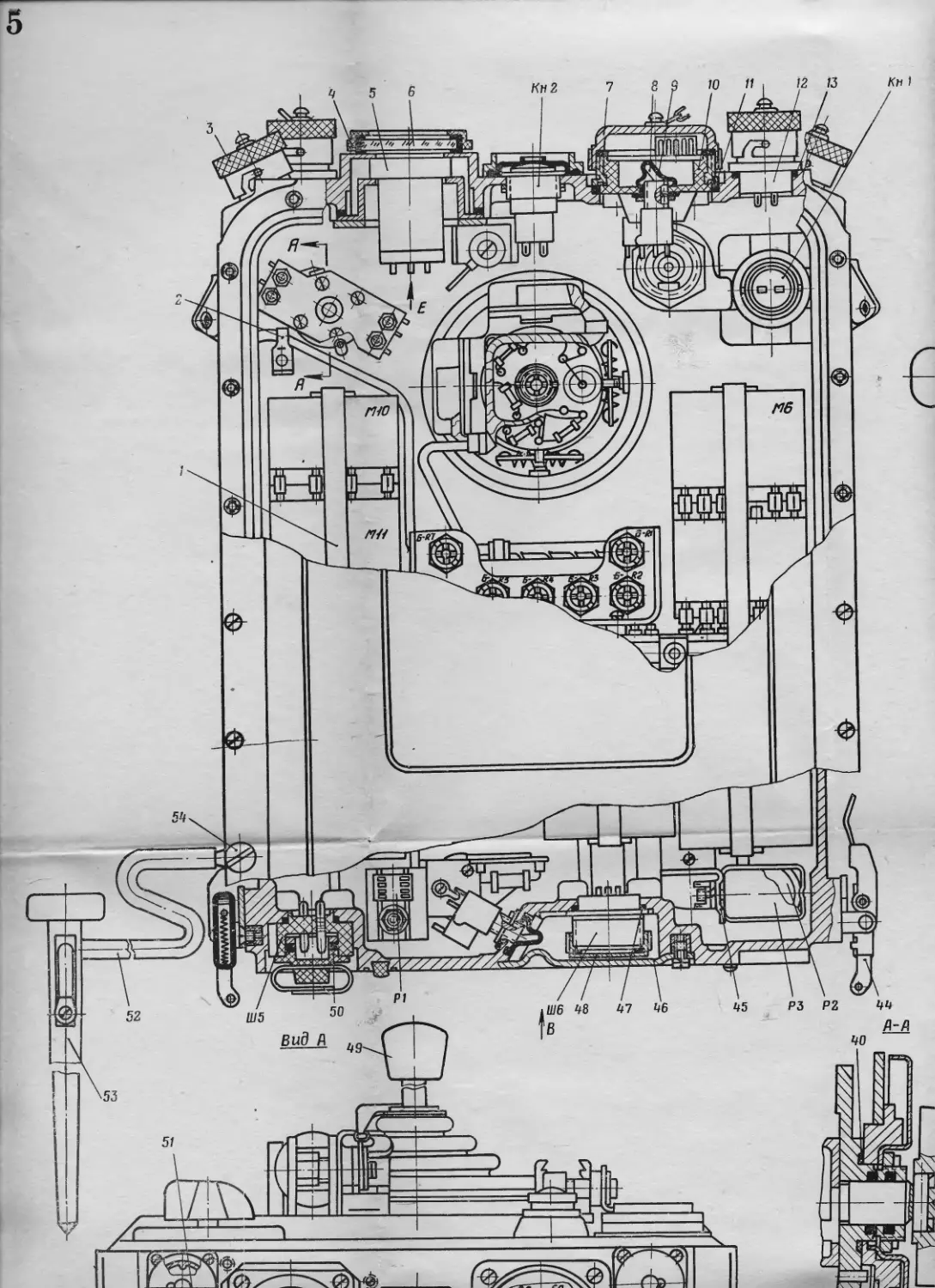
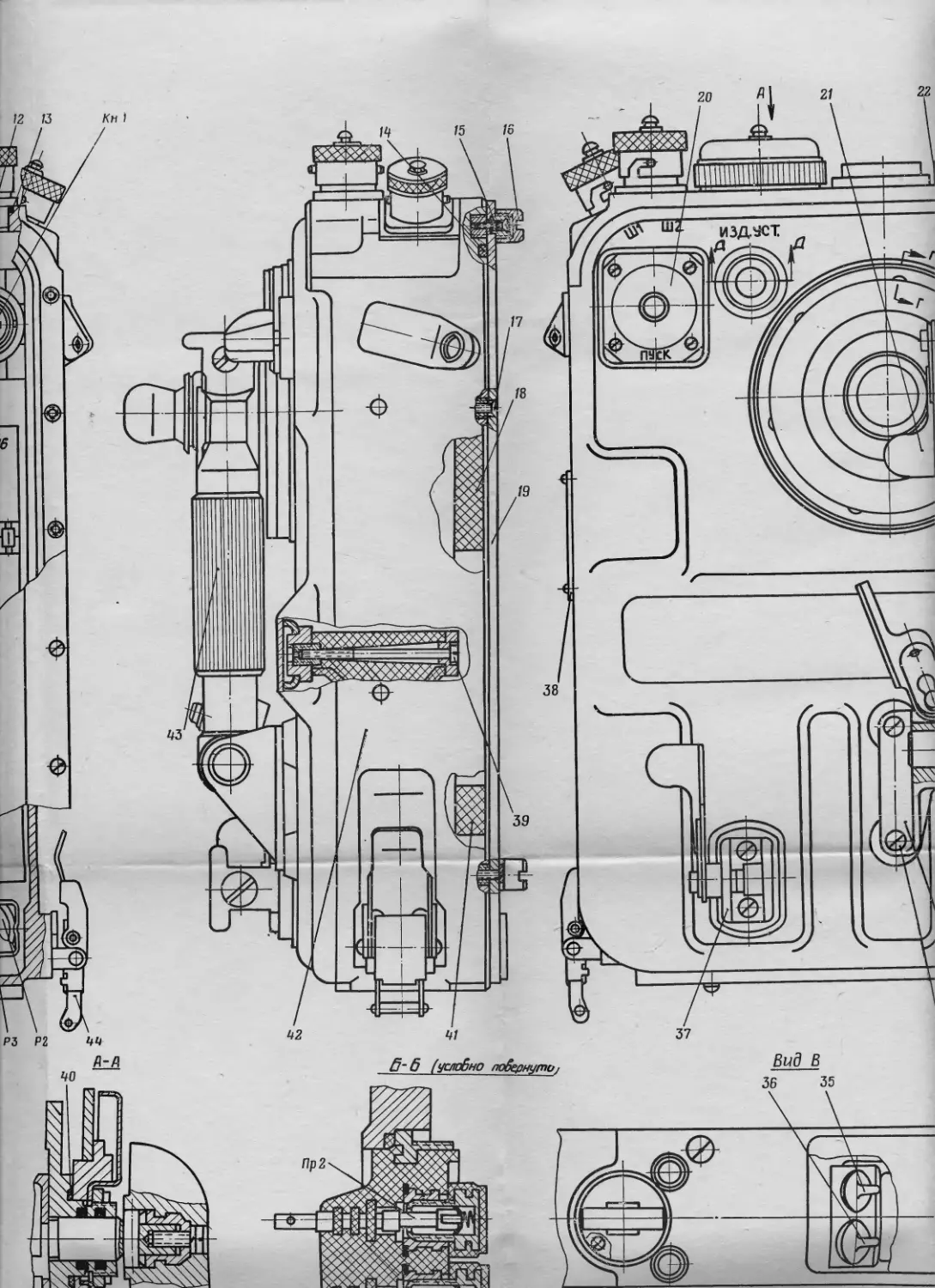
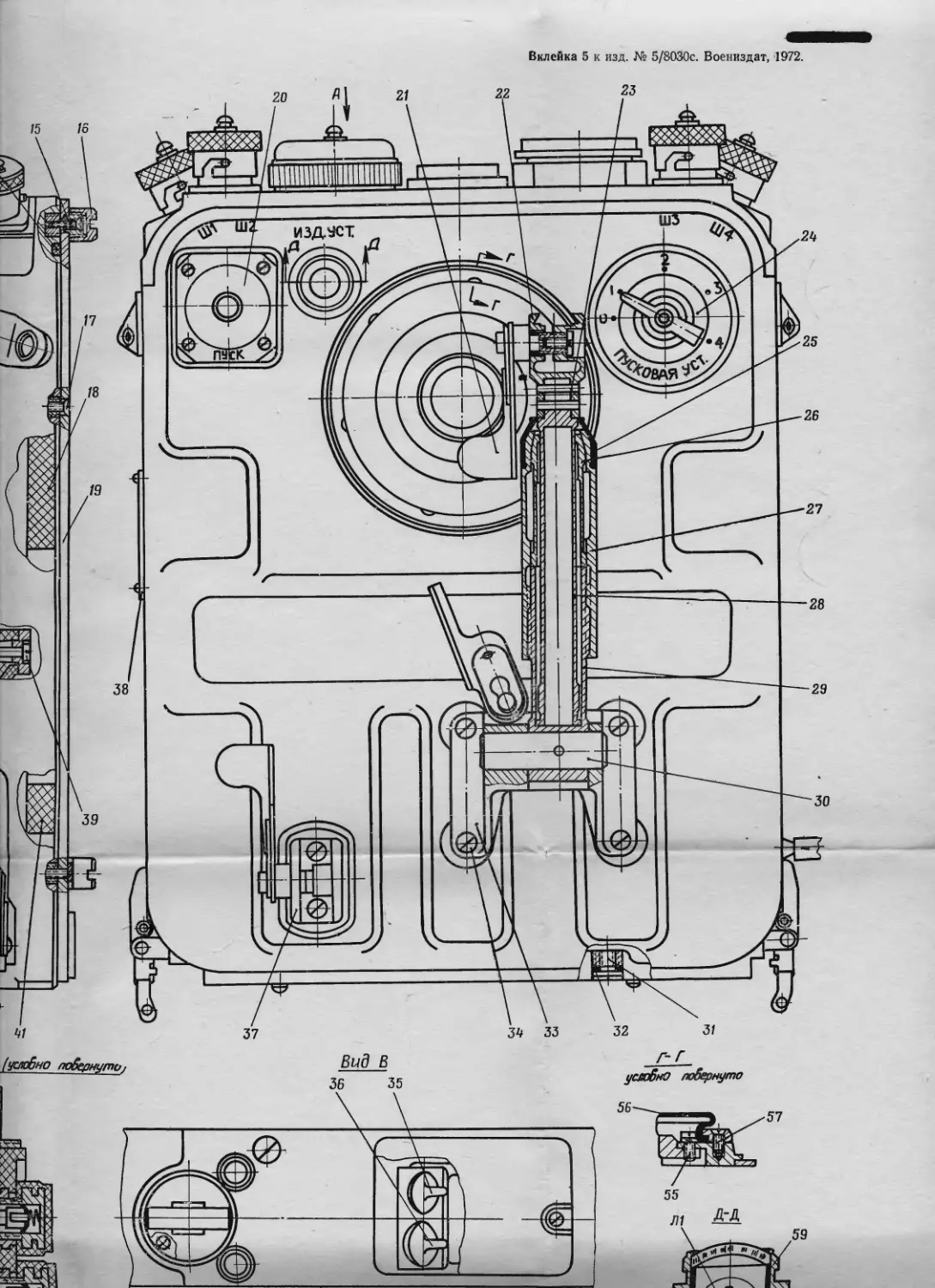
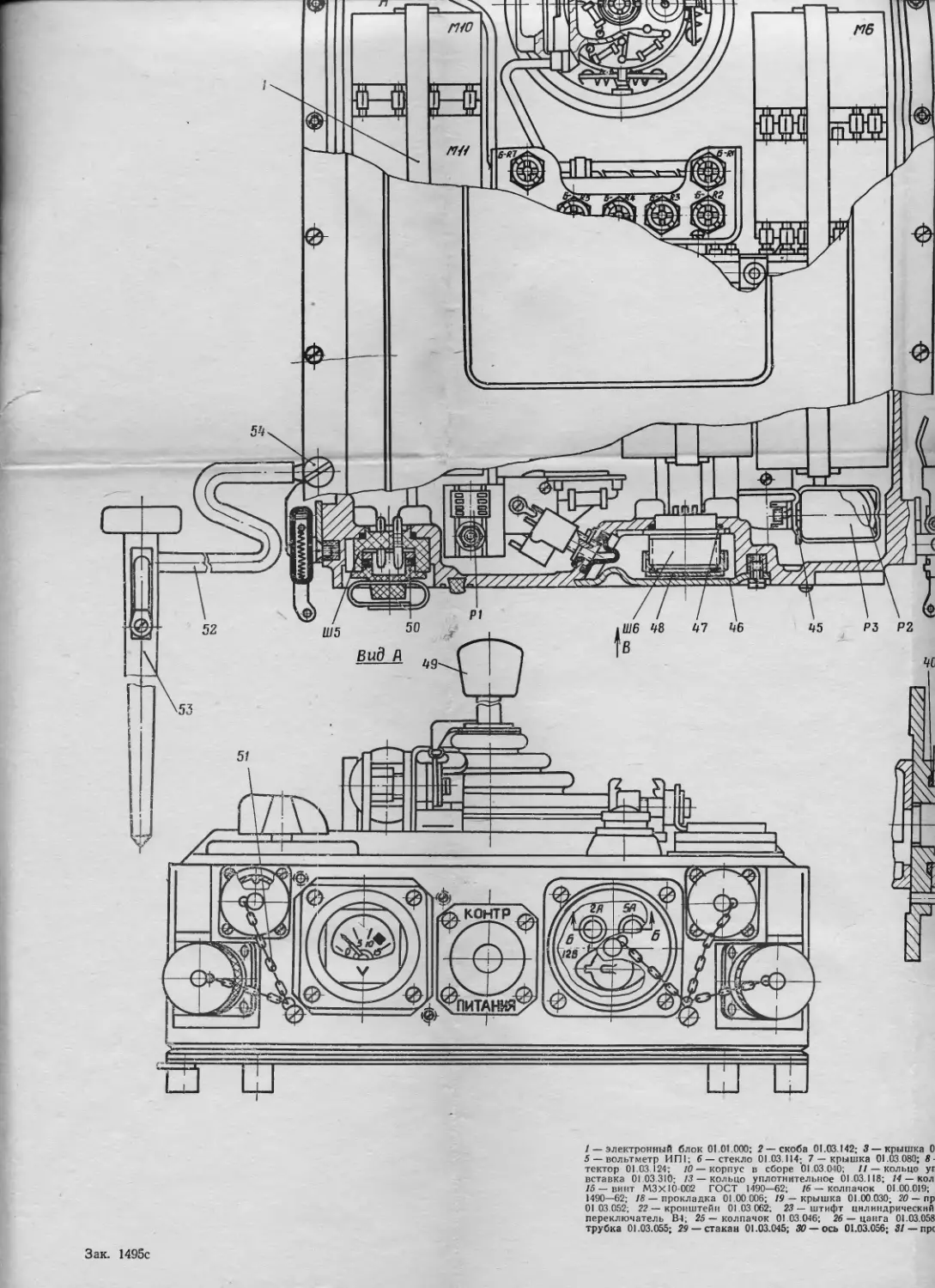
Электронный блок является составным элементом пульта
управления 9С415 и предназначен для формирования
управляющего сигнала в соответствии с командами оператора.
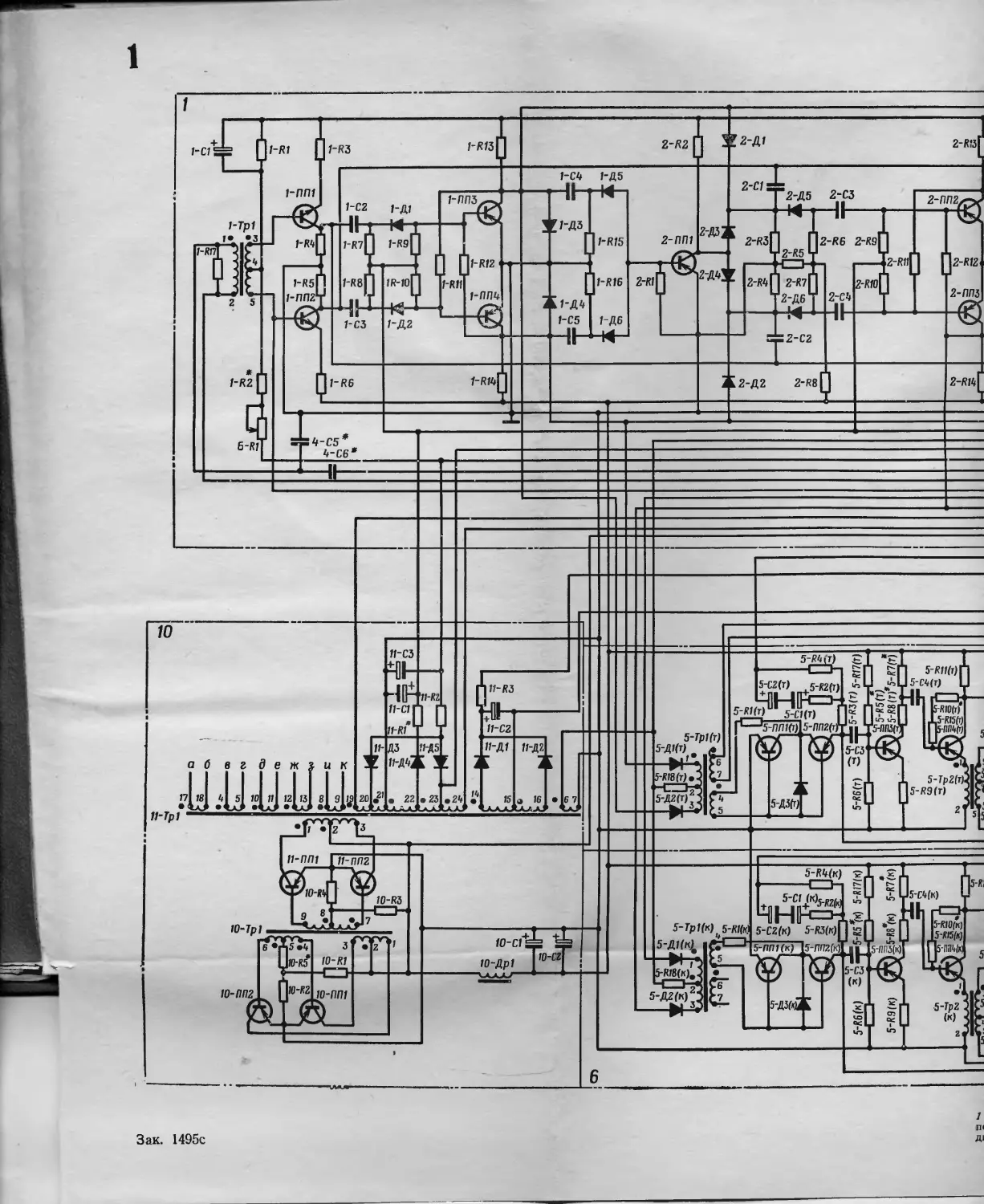
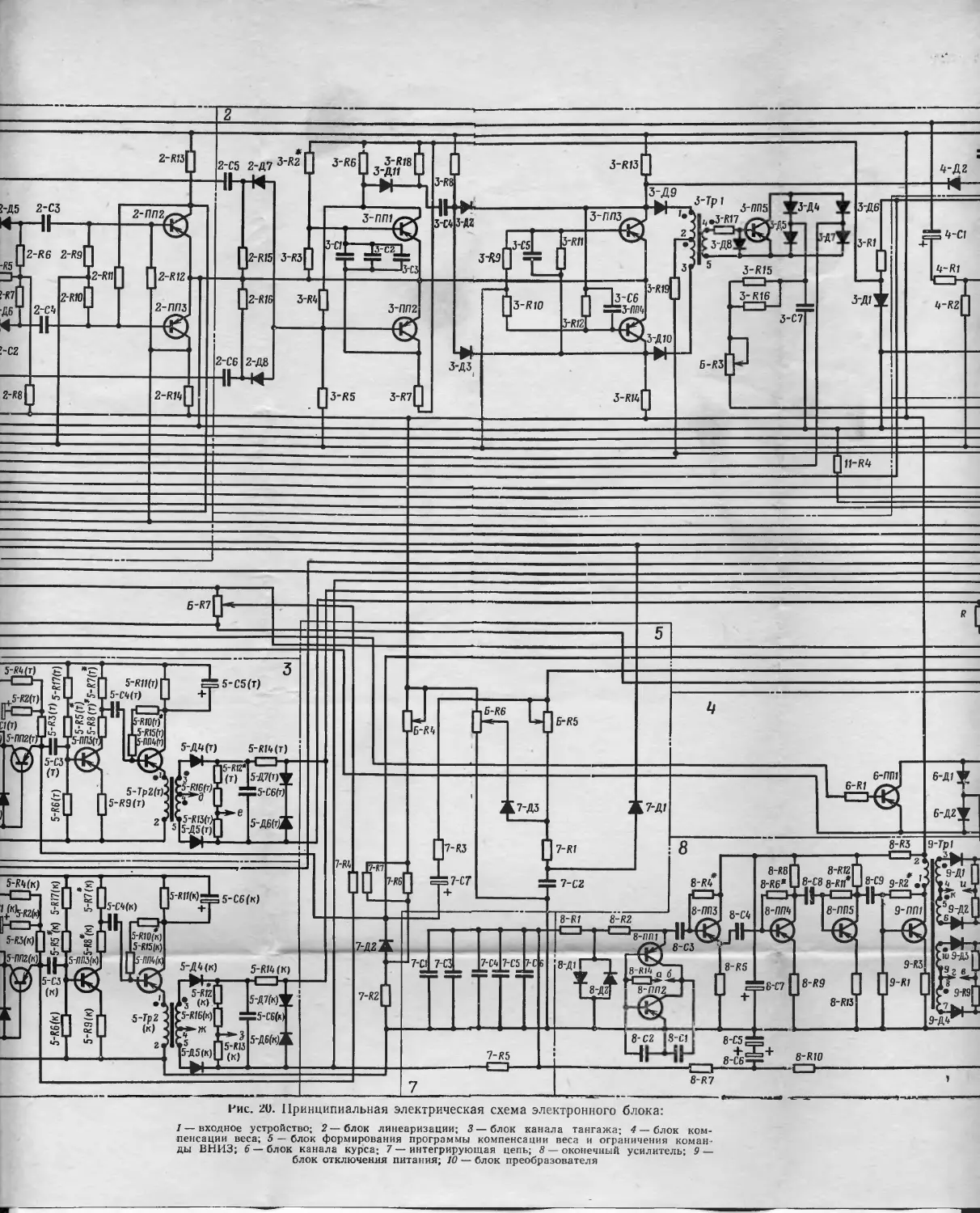
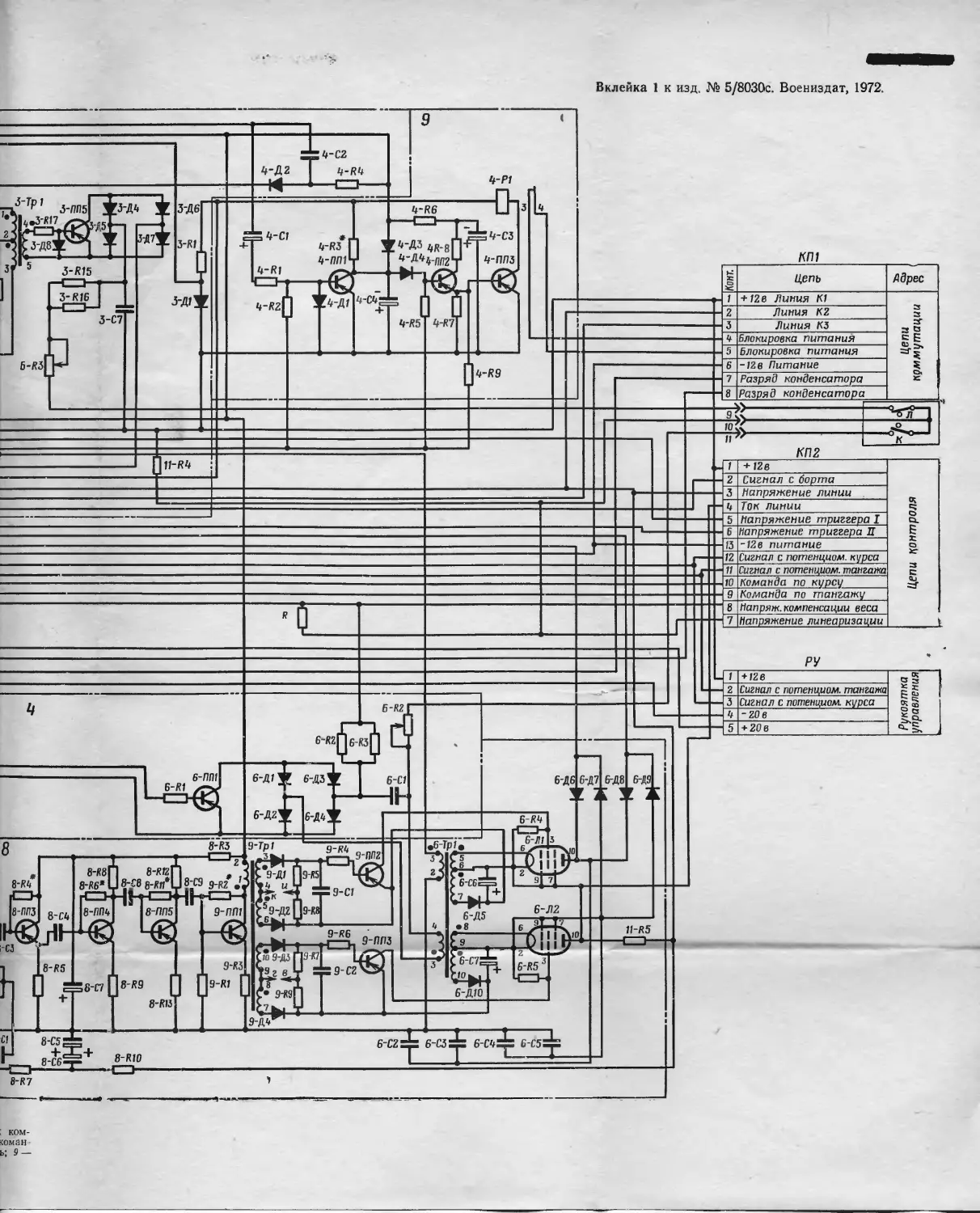
Принципиальная электрическая схема электронного блока
показана на рис. 20.
В электронный блок входят следующие основные блоки и
узлы: входное устройство (1); блок линеаризации (2); блок канала
тангажа (3); блок компенсации веса (4); блок формирования
программы компенсации веса и ограничения команды ВНИЗ (5); блок
канала курса (6); интегрирующая цепь (7); оконечный усилитель
(8); блок отключения питания (9); блок преобразователя (10).
В скобках указаны номера блоков или узлов на
принципиальной схеме электронного блока.
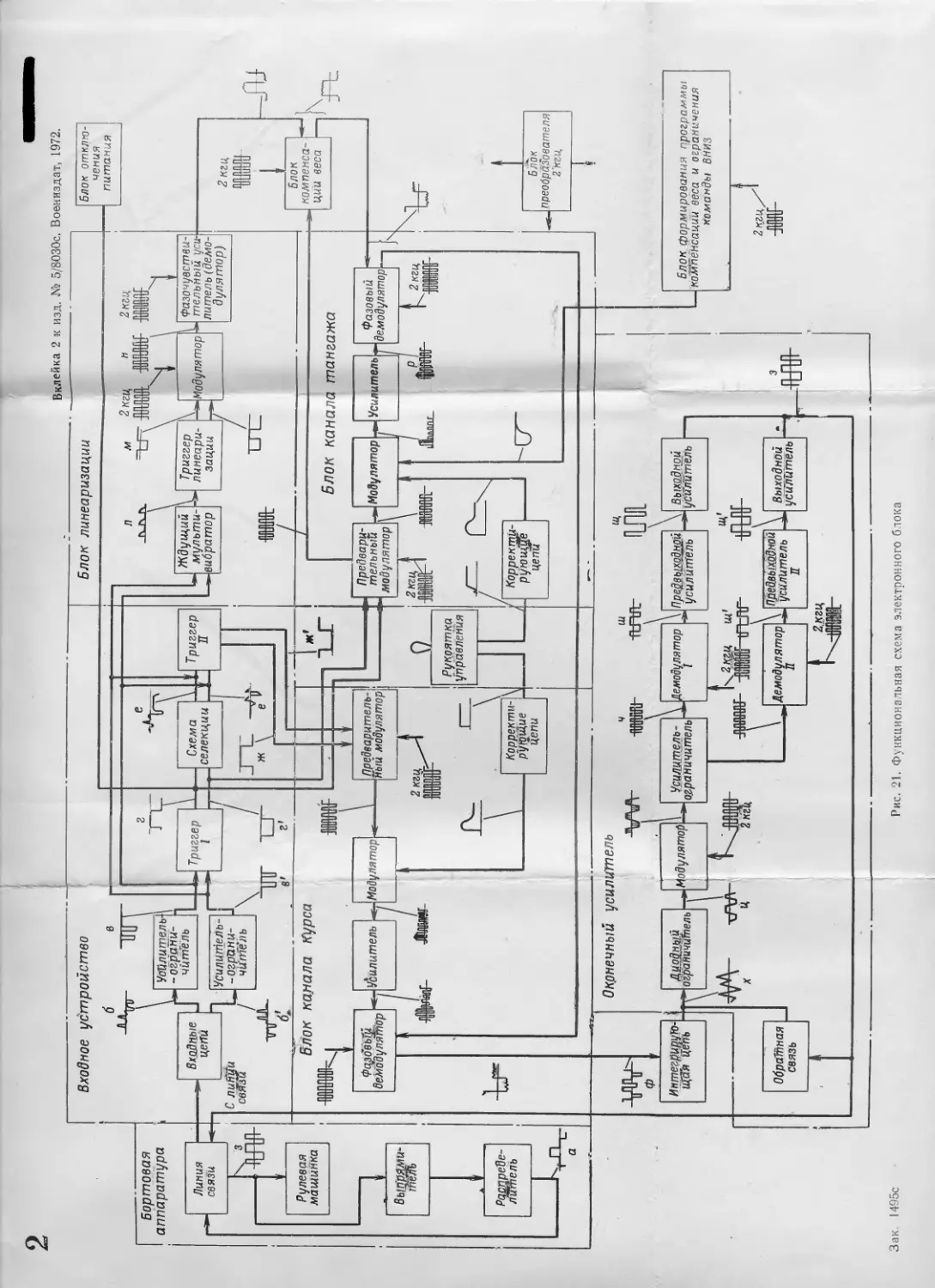
2.2. ФУНКЦИОНАЛЬНАЯ СХЕМА ЭЛЕКТРОННОГО БЛОКА
На рис. 21 и 22 показаны соответственно функциональная
схема электронного блока и диаграммы напряжений, поясняющие
формирование сигнала управления.
На борту снаряда формируются разнополярные прямоугольные
импульсы с частотой, равной частоте вращения снаряда f
(рис. 22,а). Импульсы, поступающие с распределителя бортовой
аппаратуры по проводной линии связи на входное устройство,
дифференцируются входными цепями (рис. 22,6, б'), а затем в проти-
вофазе подаются на усилители-ограничители.
Усилители-ограничители работают в режиме ограничения по
минимуму, и поэтому они усиливают только положительные
импульсы до амплитуды 10—11 в (рис. 22,в, <з'). Одновременно
изменяется их полярность ,на отрицательную. Эти импульсы управляют
работой триггеров I и II. Триггер I запускается импульсами 1 и Г,
а триггер II—импульсами 2 и 2' (рис. 22,в, в').
На выходе триггеров формируются прямоугольные импульсы
напряжений с частотой, равной частоте вращения снаряда
30
I/
и
г
ТА,
X"
-J. m
I I I
ЮГ
Ш
i i
i'
щ
I г
т—|-
I с
Г | I I £
I I I | I I > | I I I
rJ.
и/
Ш
щ
Щ
Рис. 22. Диаграммы напря
(рис. 22,г, г' и ж, ж'). Амплитуда импульсов равна 7—11 в.
Каждый триггер имеет два плеча; сигнал >с одного плеча триггера
сдвинут относительно сигнала другого плеча на 180°.
Напряжение триггера I опережает по фазе напряжение
триггера II на 90°. Схема селекции обеспечивает последующий запуск
триггера II относительно триггера I (рис. 22,е, е'). Выходные
напряжения триггеров I и II используются в качестве опорных
напряжений при формировании команд по тангажу и курсу.
В блоке канала тангажа формируется сигнал по тангажу, для
чего в блок подается напряжение с потенциометра тангажа
рукоятки управления. Напряжение частотой 2 кгц, поступающее с
блока преобразователя, претерпевает двойную модуляцию:
модуляцию по фазе прямоугольным сигналом, поступающим с триггера I,
и по амплитуде напряжением с рукоятки управления. В результате
на выходе блока получаются импульсы с частотой /, совпадающие
по фазе с напряжением триггера I и с амплитудой,
пропорциональной напряжению с рукоятки управления.
Прямоугольные импульсы триггера I (рис. 22, г, гг) поступают
в блок канала тангажа на предварительный модулятор, на который
также подается высокочастотное напряжение (2 кгц) с блока
преобразователя. В предварительном модуляторе происходит
модуляция его по фазе, т. е. при «опрокидывании» триггера I из одного
устойчивого положения в другое фаза высокочастотного
напряжения меняется на 180°.
Промодулированное по фазе напряжение амплитудой 1,5—2 в
подается на модулятор, куда также поступает через
корректирующую цепь напряжение команды, подаваемое оператором с
рукоятки управления, с потенциометра тангажа (рис. 22,я).
При прохождении команды через корректирующую цепь
компенсируется запаздывание реакции оператора.
Модулятор осуществляет амплитудную модуляцию.
Промодулированное переменное напряжение частотой 2 кгц, огибающая
которого изменяется по такому же закону, как и команда с
рукоятки управления с учетом прохождения через корректирующую
цепь, поступает на усилитель, где оно усиливается до амплитуды
порядка 10 в (рис. 22, р) и поступает в фазовый демодулятор.
Последний преобразовывает высокочастотное напряжение частотой
2 кгц в медленно меняющееся напряжение (6—8 гц), амплитуда
которого остается пропорциональна команде с рукоятки
управления с учетом корректирующей цепи, а фаза меняется на 180° в
моменты опрокидывания триггера I (рис. 22,с).
С выхода триггера II прямоугольные импульсы (рис. 22,ж, ж')
подаются в блок канала курса, аналогичный блоку канала
тангажа. На выходе блока канала курса формируются также
прямоугольные импульсы частотой f с амплитудой, пропорциональной
командам с потенциометра курса (рис. 22,г).
Вследствие того что импульсы триггера II смещены по фазе
на 90° по отношению к импульсам триггера I, прямоугольные им-
32
пульсы с выхода канала курса будут также сдвинуты на 90°
относительно импульсов €'выхода канала тангажа.
Напряжения с выходов блоков каналов тангажа и курса
поступают через интегрирующую цепь в оконечный усилитель
(рис. 22,л;).
Блок линеаризации предназначен для получения сигнала
линеаризации частотой 2/ и задержкой во времени Т3 = 11 мсек
относительно сигналов тангажа и курса. На вход блока
линеаризации с усилителей-ограничителей входного устройства поступают
отрицательные импульсы (рис. 22, в, в') порядка 10—12 в,
которые вызывают «опрокидывание» ждущего мультивибратора.
Мультивибратор формирует прямоугольные импульсы
задержки длительностью Т3 = 11 мсек и частотой 4/ (рис. 22,к).
В момент положительного перепада напряжения импульса
задержки, т. е. в момент его окончания, передается кратковременный
импульс (рис. 22, л) на триггер линеаризации и «опрокидывает» его.
На выходе триггера линеаризации формируются прямоугольные
импульсы частотой 2f, задержанные на 11 мсек относительно
сигналов по тангажу и курсу (рис. 22, м). Эти импульсы поступают
на модулятор, в котором модулируется по фазе высокочастотное
напряжение частотой 2 кгц, поступающие с блока
преобразователя.
Модулированное напряжение (рис. 22, н) с амплитудой
порядка 2 в поступает на фазочувствительный усилитель (демодулятор),
в котором происходит демодуляция напряжения при
одновременном его усилении по мощности.
С выхода фазочувствительного усилителя сигнал линеаризации
(рис. 22,о) в виде прямоугольных импульсов частотой 2f и
амплитудой 9—10 в поступает в суммирующее устройство.
Блок компенсации веса предназначен для формирования
сигнала компенсации веса. На вход блока с предварительного
модулятора блока канала тангажа поступает модулированное по фазе
напряжение частотой 2 кгц.
В блоке происходит демодуляция этого напряжения при
одновременном усилении его по мощности. С выхода блока
компенсации веса сигнал компенсации веса в виде прямоугольных
импульсов частотой f поступает на суммирование с другими сигналами
(рис. 22,у).
Для получения плавного нарастания сигнала компенсации веса
в первые 1,5—2 сек управления снарядом введен блок
формирования программы компенсации веса и ограничения команды ВНИЗ,
в котором формируется напряжение, плавно нарастающее по
экспоненте. Это напряжение поступает на модулятор блока канала
тангажа.
При суммировании этого напряжения, прошедшего этапы
усиления и демодуляции в блоке канала тангажа, с сигналом компен-
3 Зак. 1495с
«
33
сации веса получается плавное нарастание результирующего
напряжения компенсации веса (рис. 27, е).
Выходные напряжения с блоков канала тангажа, канала курса,
линеаризации и компенсации веса последовательно суммируются
и подаются на интегрирующую цепь (рис. 22,0).
Пилообразное напряжение (рис. 22, л;) с амплитудой около 2 в
с интегрирующей цепи поступает в оконечный усилитель.
Диодный ограничитель на входе оконечного усилителя
ограничивает суммарный сигнал, поступающий с интегрирующей цепи
до 0,6 в.
После ограничения суммарный сигнал, по форме
приближающийся к трапецеидальному (рис. 22, ц), поступает на модулятор
и в нем модулирует переменное напряжение частотой 2,кгц.
Промодулированное напряжение поступает на четырехкаскад-
ный усилитель-ограничитель. Усиленное напряжение до
амплитуды около 10 в (рис. 22, ч) детектируется двумя демодуляторами,
работающими в противофазе.
На выходе каждого демодулятора формируется напряжение,
приближающееся к прямоугольной форме с амплитудой около 4 в
(рис. 22, ш, ш').
Напряжение с выхода демодуляторов поступает на
предвыходные усилители, на выходе которых формируются прямоугольные
сигналы с амплитудой до 65 в (рис. 22, щ, щ').
Эти сигналы подаются на сетки ламп выходных усилителей.
Выходные усилители работают на общую нагрузку — входное
сопротивление линии связи. С выхода аппаратуры управления в
линию поступают двухполярные прямоугольные импульсы
напряжения (рис. 22, э) с амплитудой 180—260 б с определенным
соотношением временных интервалов, определяющих фазу и величину
команды, подаваемой оператором. Выход оконечного усилителя с
входом соединен обратной связью по постоянному току, которая
уменьшает постоянную составляющую в суммарном сигнале.
По линии связи эти сигналы управления поступают на рулевую
машинку бортовой аппаратуры и после выпрямления — на
прерыватель.
В аппаратуру управления входит также реле отключения
питания и блок преобразователя. В реле поступают импульсы
напряжения с триггера I. В случае если с борта снаряда не поступает
информация, реле через 1—3 сек отключает питание аппаратуры
управления.
Блок преобразователя предназначен для преобразования
постоянного напряжения источника питания 12 в в переменные и
постоянные напряжения, необходимые для питания элементов
аппаратуры управления.
34
2.3. ПРИНЦИПИАЛЬНАЯ ЭЛЕКТРИЧЕСКАЯ СХЕМА
ЭЛЕКТРОННОГО БЛОКА
2.3.1. Входное устройство
Входное устройство предназначено для отделения от помех
сигнала информации, поступающего по проводам линии связи с борта
снаряда, усиления этого сигнала и для разделения сигнала
информации по каналам тангажа и курса.
Входное устройство включает в себя входные цепи, два
усилителя-ограничителя, схему селекции и два триггера.
Сигнал информации (рис. 22, а) с борта снаряда на вход
аппаратуры управления поступает по трехпроводной линии связи.
Элементы входного устройства аппаратуры управления
снаряда и три провода линии связи позволяют осуществить
одновременно передачу двух электрических сигналов (сигнала информации
и управляющего сигнала) по двум каналам.
Один из каналов образован парой проводов 1 и 2 (рис. 23, а) и
служит для передачи управляющих сигналов с аппаратуры
управления на рулевую машинку снаряда. Другой канал образован
проводом 3 и средними точками четырех емкостей О—С4,
подключенных попарно к проводам 1 и 2 со стороны аппаратуры
управления и со стороны снаряда.
По этому каналу передаются сигналы информации с борта
с частотой вращения снаряда.
Схему на рис. 23, а можно преобразовать в упрощенную схему,
как показано на рис. 23, б. При этом межпроводные емкости линии
связи учтены емкостями С12, С32, С31.
Из рис. 23, б видно, что емкости на входе аппаратуры
управления С1, С2, на борту снаряда СЗ, С4 и распределенные межпро-
Еодные емкости С32, С31 линии связи образуют емкостный мост.
Емкость С12 в мост не входит и поэтому не влияет на его
работу.
Как известно, если мост уравновешен, то ток в диагоналях
моста (точки а, б на рис. 23, б) равен нулю. Таким образом
исключаются помехи от управляющего сигнала в канале сигнала
информации.
Необходимым условием равновесия моста является выполнение
равенства
С1 (С4 -f С32) = С2 (СЗ + С31).
Обеспечение равенства емкостей О = С2; СЗ = С4; С32 = С31
является достаточным условием равновесия моста.
Эти условия равенства емкостей обеспечиваются при
изготовлении наземной аппаратуры управления и снаряда.
Практически идеальной симметрии моста добиться
невозможно, поэтому имеет место небольшое прохождение помех от
управляющего сигнала в канал информации. Отделение от помех
сигнала информации осуществляется во входном устройстве.
3*
35
Принципиальная электрическая схема входного устройства
представлена на рис. 20 (1).
Сигнал информации поступает на входные цепи, состоящие из
конденсаторов 4-С5, 4-С6, трансформатора 1-Тр1 и дифференциру-
Входные
цепи
Линия связи
Бортовая аппаратура
снаряда 9M1UM
а
C1Z
I
Входные цепи
I 1
Бортовая аппаратура
снаряда 9MikM
Рис. 23. Схема передачи сигналов по трехпроводнои линии
связи
ется Выводы первичной обмотки трансформатора 1-Тр1 (рис. 20)
соединяются с проводом 3 линии связи (вывод 2) и со средней
точкой конденсаторов 4-С5 и 4-С6 (вывод 1).
Емкостям CI, C2 (рис. 23) на рис. 20 (1) соответствуют
конденсаторы 4-С5 и 4-С6. Выводы вторичной обмотки соединяются
с базами триодов 1-ПП1 и 1-ПП2, на которых выполнены
усилители-ограничители.
36
До поступления импульсов сигнала информации (рис. 22,6, б.)
триоды усилителей заперты отрицательным напряжением 0,8—
1,5 в, которое поступает на базы триодов через половины
вторичной обмотки трансформатора 1-Тр1 с делителя. ^
На делитель, состоящий из сопротивлении 1-К1, 1-КЛ ь-К1,
подаются два напряжения: —20 в с конденсатора 11-СЗ и —12 в
с конденсаторов 11-С1 и 10-С2 блока преобразователя (+12 ей
4- 20 в имеют общую точку).
Сопротивления 1-R4 и 1-R5 являются нагрузкой в коллекторах
усилителей. Сопротивления 1-R3, 1-R6 служат для создания
обратной связи по переменному току. Под действием импульсов сигнала
информации положительной полярности, приходящих на базу
триода 1-ПП1, последний открывается. (Триод 1-11111 и 1-ти
типа п — р—п.) „ , _ .
В результате ток от ЭДС на половине вторичной обмотки 1-1 pi
(выводы 3—4) потечет по переходу база —эмиттер триода ЬШ*1»
сопротивлению 1-R3 и цепочке, состоящей из сопротивления 1-К1
и конденсатора 1-С1.
Конденсатор 1-С1 заряжается таким образом, что на базе
триода 1-ПП2 возрастет запирающий отрицательный потенциал.
Амплитуда помехи от сигнала управления меньше амплитуды
сигнала информации и составляет не более 0,1 в. Поэтому импульсы
помехи, которые оказываются ниже уровня запирающего
потенциала, не проходят через усилитель. ■
Аналогичные изменения потенциала происходят на базе триода
1-ПП1 в момент, когда открыт триод 1-ПП2.
Изменением сопротивления Б-Rl можно изменить величину
запирающего напряжения на базах и таким образом подбирать
требуемую чувствительность аппаратуры управления к сигналу
информации.
С выхода усилителя (с сопротивления 1-R4) за период
вращения снаряда снимаются два отрицательных импульса
длительностью около 2 мсек. С другого усилителя (с сопротивления 1-К5)
снимаются такие же два импульса со .сдвигом по фазе 180
относительно импульсов первого усилителя (рис. 22,в, в').
С выхода обоих усилителей отрицательные импульсы через
переходные цепи, образованные элементами 1-С2, 1-R7, 1-Д1, 1-СЗ,
1-R8, 1-Д2, поступают на запуск триггера I, а через -переходные
цепи, образованные элементами 2-С2, 2-R4, 2-Д6, 2-С1, 2-R3, 2-Д5,
поступают на запуск триггера II.
Переходные цепи служат для разделения каскадов по
постоянной составляющей напряжения.
Благодаря диодам 1-Д1, 1-Д2, 2-Д5, 2-Д6 повышается
надежность переключения триггеров.
Триггер I выполнен на триодах 1-ППЗ, 1-ПП4, триггер II —на
триодах 2-ПП2,2-ППЗ. „ пл л к
На базы триодов триггеров с конденсатора 11-С1 блока
преобразователя поступает запирающее положительное напряжение
37
+4 в: через сопротивления 1-R9, 1-R10 «а триггер I; через 2-R9,
2-R10 — на триггер II. До прихода отрицательных импульсов один
из триодов триггеров заперт. В момент поступления на базу
запертого триода, например, 1-ППЗ отрицательного импульса 1
(рис. 22, в) триод открывается и отрицательное напряжение на его
коллекторе уменьшается.
Это повышение напряжения через сопротивление связи 1-R11
передается на базу второго триода, вследствие чего коллекторный
ток этого триода уменьшается.
Напряжение на коллекторе триода 1-ПП4 возрастает и
передается через сопротивление 1-R12 на базу триода 1-ППЗ, который
еще больше открывается. Происходит лавинообразный процесс
«опрокидывания» схемы, который заканчивается полным
запиранием триода 1-ПП4 и отпиранием 1-ППЗ. Такое состояние схемы
является устойчивым, и оно сохраняется до поступления на базу
триода 1-ПП4 отрицательного импульса 1', сдвинутого на 180° по
отношению к отрицательному импульсу 1 (рис. 22,в, в'). При
поступлении импульса 1' на базу триода 1-ПП4 происходит также
«опрокидывание», но при этом триод 1-ПП4 открывается, а триод
1-ППЗ закрывается.
Аналогично происходит работа триггера II. Особенность работы
триггера II заключается в том, что «опрокидывание» его
происходит под воздействием только отрицательных импульсов 2, 2', в
момент их прихода на базы триодов (рис. 22,в, в').
Сопротивления 2-R11 и 2-R12 являются сопротивлениями
обратной связи.
Стабилитроны 1-ДЗ и 1-Д4 ограничивают напряжение,
снимаемое с коллекторов триодов триггера I на уровне 8 в, тем самым
не допускают прохождения помех из цепи питания в схему
селекции.
Чтобы не было прохождения импульсов 1, Г на вход
триггера II, на триоде 2-ПП1 выполнен селектор импульсов, нагрузкой
которого служит сопротивление 2-R2.
Селектор импульсов работает следующим образом. На базу
триода 1-ППЗ воздействует импульс 1. До того как произойдет
«опрокидывание» триггера I, триод 2-ПП1 закрыт, так как база его
через сопротивление 2-R1 имеет нулевой потенциал. В этот момент
импульс 1 не может воздействовать на триггер II, так как триод
1-ПП4 еще открыт, и импульс 1 проходит по цепи, состоящей из
конденсатора 2-С2, диода 2-Д2 и перехода коллектор—эмиттер
триода 1-ПП4 на нулевой потенциал схемы. (Постоянная времени
этой цепи больше длительности импульса.) Аналогично импульс
V не может поступить на запуск триггера II, так как конденсатор
2-С1 подключен к нулевой точке схемы через диод 2-Д1 и триод
1-ППЗ, открытый к этому моменту времени.
В момент «опрокидывания» триггера I перепад отрицательного
напряжения с коллектора закрывающегося триода 1-ПП4 (или
триода 1-ППЗ) проходит через дифференцирующие цепи (рис. 22, д)
38
1-С5, 1-R16 и диод 1-Д6 (или 1-С4, 1-R15 и 1-Д5) на 'базу триода
2-ПП1 и открывает его.
Последний остается в открытом состоянии в течение времени t,
определяемого временем заряда конденсаторов 1-С4 (1-С5),
которое в 1,5—2 раза больше длительности импульса 1. Поэтому
импульс 1 за это время не может поступить .на запуск триггера II
за счет прохождения его на нулевой потенциал схемы через
конденсатор 2-С2, диод 2-Д4 и малое сопротивление участка
коллектор— эмиттер триода 2-ПП1 (рис. 22, е, е').
Через время t триод 2-ПП1 закрывается и импульс 2,
поступающий со сдвигом на 90° по отношению к импульсу 1,
беспрепятственно проходит через конденсаторы 2-С2, 2-С4 и диод 2-Д6 на
вход триггера II и «опрокидывает» его. Импульс 2' поступает ,на
запуск триггера II через конденсаторы 2-С1, 2-СЗ и диод 2-Д5.
Так как диоды 2-Д4, 2-ДЗ и триод 2-ПП1 имеют какое-то
сопротивление в открытом состоянии, то импульсы 1 и V гасятся
не полностью.
Чтобы предотвратить прохождение на второй триггер остатков
от импульсов 1, V (рис. 22,е, ег), на диоды 2-Д6 и 2-Д5 подается
с делителя 2-R5, 2-R8 через ограничительные сопротивления 2-R6,
2-R7 отрицательное запирающее напряжение амплитудой 1,5 в.
Таким образом, >с выходов триггеров (сопротивления 1-R13,
1-R14 и 2-R13, 2-R14) снимаются прямоугольные импульсы с
частотой, равной частоте вращения снаряда / (рис. 22, г, г', ж, ж'),
сдвинутые по фазе на 90°.
В дальнейшем эти импульсы используются для формирования
команд по курсу и тангажу.
2.3.2. Блок линеаризации
Блок линеаризации предназначен для формирования
прямоугольных импульсов напряжения линеаризации с частотой
следования, вдвое большей частоты вращения снаряда, и с задержкой
Т3 = 11 мсек относительно импульсов напряжения первого
триггера.
Блок линеаризации состоит из следующих элементов:
ждущего мультивибратора, триггера, модулятора и фазочувствительно-
го усилителя.
Принципиальная электрическая схема блока линеаризации
изображена на рис. 20 (2).
Ждущий мультивибратор собран из триодов 3-ПП1, 3-ПП2.
Импульсы (рис. 22,в, в'), снимаемые с коллекторов усилителей-
ограничителей входного устройства, после дифференцирования
на элементах 2-С5, 2-R15 и 2-С6, 2-R16 и ограничения на диодах
2-Д7, 2-Д8 (рис. 22, и) поступают на запуск мультивибратора (на
базу триода 3-ПП2). Частота поступающих импульсов равна 4f.
На базу триода 3-ПП2 через сопротивление 3-R5 подается с блока
39
преобразователя запирающее напряжение смещения +4 в, а на
базу триода 3-ПП1 подается отрицательное, «приоткрывающее»
триод 3-ПП1 напряжение смещения около 2 в с делителя,
образованного сопротивлениями 3-R2, 3-R3.
Вследствие этого схема не может работать в
автоколебательном режиме и при отсутствии пусковых импульсов триод 3-ПП2
всегда закрыт, а триод 3-ПП1 всегда открыт.
Отрицательный импульс, поступая на базу триода 3-ПП2,
открывает его.
Положительный перепад напряжения с коллектора триода
3-ПП2 через конденсаторы 3-С1, 3-С2, 3-СЗ подается на базу
триода 3-ПП1 и запирает его.
Повышение отрицательного напряжения на коллекторе триода
3-ПП1 передается через сопротивление 3-R4 на базу триода 3-ПП2
и еще больше открывает его.
Происходит лавинообразное «опрокидывание» схемы, в
результате которого триод 3-ПП2 открывается, а триод 3-ПП1
закрывается. Длительность такого состояния схемы определяется скоростью
разряда конденсаторов 3-С1, 3-С2, 3-СЗ через сопротивления 3-R2,
3-R3 и открытый триод 3-ПП2. В процессе разряда конденсаторов
3-С1, 3-С2, 3-СЗ понижается положительный потенциал базы
триода 3-ПП1. В тот момент, когда потенциал достигает 0, триод
3-ПП1 открывается. Возникает обратный лавинообразный процесс,
в результате которого схема возвращается в исходное состояние.
В этом состоянии схема остается до поступления на базу триода
3-ПП2 следующего отрицательного импульса.
В итоге на коллекторе триода 3-ПП1 вырабатываются
отрицательные импульсы напряжения прямоугольной формы
длительностью 7=11 мсек с частотой 4/ (рис. 22,/с).
Регулировка длительности импульсов производится при
настройке мультивибратора изменением сопротивления 3-R2.
Чтобы исключить влияние на длительность импульсов
мультивибратора колебаний питающего напряжения, последнее
стабилизируется стабилитроном 3-Д1, на который через ограничительное
сопротивление 3-R1 поступает постоянное напряжение 20 в с блока
преобразователя.
Чтобы импульсы с триггера линеаризации задержать
относительно импульсов триггера I на И мсек (рис. 22,/с), триггер
линеаризации запускается задним фронтом каждого импульса,
снимаемого с нагрузки мультивибратора (сопротивления 3-R6).
Диод 3-Д11 исключает влияние разряда конденсатора 3-С4 на
передний фронт импульса мультивибратора, так как в момент
открывания триода 3-ПП1 конденсатор разряжается через
сопротивление 3-R18, а не через триод 3-ПП1.
Импульсы с выхода мультивибратора через диод 3-Д11 и
дифференцирующую цепь, состоящую из конденсатора 3-С4,
сопротивления 3-R8 и диодов 3-Д2, 3-ДЗ (рис. 22,л), поступают на
коллекторы триодов 3-ППЗ, 3-ПП4 триггера линеаризации.
40
Диоды 3-Д2, 3-ДЗ обеспечивают запуск триггера только
положительными импульсами. Нагрузкой триггера служат
сопротивления 3-R13 и 3-R14. По схеме триггер аналогичен триггерам,
которые работают в блоке входного устройства. Однако в данном
триггере другой способ запуска: запускающие импульсы одновременно
поступают на коллекторы триодов триггера. Триггер работает в
режиме деления, т. е. частота следования его импульсов в 2 раза
меньше частоты пусковых импульсов (рис. 22, м).
Через сопротивления 3-R9 и 3-R10 подается положительный
потенциал на базы триодов 3-ППЗ и 3-ПП4. Чтобы синхронизировать
работу триггера линеаризации с работой триггера I, импульсы с
триггера I после дифференцирования цепочкой 4-С2, 4-R4
поступают через диод 4-Д2 на коллектор триода 3-ППЗ, поэтому моментам
«опрокидывания» первого триггера всегда будет соответствовать
определенное состояние триггера линеаризации, т. е. положительный
перепад напряжения, снимаемый с коллектора триода 1-ППЗ,
приведет к закрытию триода 3-ПП4.
Положительные импульсы (рис. 22,л), снимаемые с
дифференцирующей цепочки 3-С4, 3-R8, поступают через диод 3-ДЗ, емкость
3-С5 на базу триода 3-ППЗ, закрывают его и приводят к
«опрокидыванию» триггера линеаризации. Через диод 3-Д2 закрывающий
импульс не проходит, так как диод заперт отрицательным
напряжением питания триггера.
Во избежание фазовых искажений и дрейфа нуля, неизбежных
при условии низкочастотных сигналов (6—8 гц) в блоке
линеаризации, как и в других блоках, где необходимо усилить
низкочастотные сигналы, усиление производится на переменном токе
высокой частоты (2 кгц), который модулируется по фазе
низкочастотными сигналами.
Прямоугольные импульсы (1/п) с частотой линеаризации,
равной удвоенной частоте вращения снаряда, с коллекторов триодов
триггера линеаризации поступают на модулятор, состоящий из
диодов 3-Д9, 3-Д10 и трансформатора З-Tpl. На рис. 24
изображена эквивалентная схема модулятора, где переключатели К1 и
К2 соответствуют триодам 3-ППЗ и 3-ПП4 триггера линеаризации.
К среднему выводу первичной обмотки трансформатора 3-Тр1
подведено через ограничительное сопротивление 3-R19 с блока
преобразователя переменное напряжение U амплитудой 5 в с
частотой 2 кгц (рис. 24, <Э).
Из принципа действия триггера известно, что к коллектору
одного из его триодов в течение полупериода частоты
переключения приложен максимальный отрицательный потенциал питающего
напряжения, к коллектору другого — нулевой потенциал. Таким
образом, на аноды диодов 3-Д9 и 3-Д10 поочередно подаются
потенциалы, запирающие либо отпирающие диоды с частотой
переключения триггера.
В связи с этим ток частотой 2 кгц будет протекать по той
половине первичной обмотки, которая подключена к проводящему
41
диоду, и, таким образом, ток ib первичной обмотке З-Tpl меняет
свое направление в зависимости от частоты переключения триггера
(рис. 24,6, в). Направления токов в первичной обмотке указаны
на рис. 24.
Следовательно, на вторичной обмотке наводится переменный
ток / с частотой 2 кгц, модулированный то фазе импульсами с
частотой переброса триггера (рис. 24, г).
Со вторичной обмотки трансформатора напряжение с
амплитудой 2—3 в через ограничительное сопротивление 3-R17 поступает
на вход фазочувствительного усилителя.
nnnnrj hnnnr1
**
i
uuuu
e
I
imfuiJWinruimjinjri
v~k
J„(<fe33-C7)jk
Й
I
ПППП
•Ui
umra
ж
ПППП
TJ
-*-t
—1
-*~t
Рис. 24. Принципиальная электрическая схема
модулятора и фазочувствительного усилителя блока
линеаризации и диаграммы напряжений и токов, поясняющие
их работу
42
Усилитель состоит из триода 3-ПП5, включенного в диагональ
моста, образованного диодами 3-Д4 — 3-Д7. В другую диагональ
моста включены нагрузка RH, состоящая из сопротивлений 3-R15,
B-R3, 3-R16, 11-R4, конденсатора 3-С7 и источника питания.
Источником n-итания служит вторичная обмотка трансформатора
11-Тр1 в блоке преобразователя (выводы 21—23), с которой
снимается переменное напряжение частотой 2 кгц,
амплитудой 23 е. J
Триод 3-ПП5 работает в ключевом режиме, т. е. открывается
отрицательным и закрывается положительным импульсом
напряжения. При подаче на базу триода 3-ПП5 модулированного
напряжения 2 кгц (рис. 24, г) при отрицательных полуволнах этого
напряжения через сопротивление RH пойдет ток (рис. 24, е). Этот ток
зарядит конденсатор 3-С7 (полярность показана на рис. 24).
В° время действия положительных полуволн на базе триода
3-ПП5 конденсатор 3-С7 разряжается через сопротивление RH. Во
время разряда конденсатора напряжение на нем уменьшается
незначительно. Полярность напряжения на конденсаторе сохраняется
в течение полупериода Tt модулирующего напряжения, т. е
напряжения с триггера линеаризации (рис. 24, а).
В момент «опрокидывания» триггера фаза модулированного
напряжения (рис. 24, г) изменится на 180°, а фаза
питающего напряжения (рис. 24, д), подведенного к диагонали
моста, не изменится, так как это напряжение подается с
преобразователя.
В результате ток в нагрузке изменит свое направление на
противоположное и сохранит его в течение второго полупериода
модулирующего напряжения (Т2). Этот ток перезаряжает конденсатор
б-и. Полярность напряжения на конденсаторе меняется на
противоположную.
Таким образом, кривая напряжения на конденсаторе 3-С7 в
течение времени, равного периоду модулирующего напряжения по
своей форме подобна кривой, огибающей верхушки импульсов
'модулированного напряжения (рис. 24, га).
Ключевая работа триода 3-ПП5 может быть причиной
искажения формы импульсов напряжения на вторичной обмотке
трансформатора З-Tpl из-за неравномерной нагрузки трансформатора в
разные полупериоды напряжения. Чтобы уравнять нагрузки
параллельно переходу база-эмиттер триода 3-ПП5 включен диод
с5-Д8, который открывается, когда переход база —эмиттер заперт
и закрывается, когда переход открыт. '
Таким образом, с выхода фазочувствительного усилителя
[сопротивление 11-R4-Phc. 20 (2)] снимаются импульсы
прямоугольной формы с частотой 2/ и амплитудой 18 е.
Это напряжение по амплитуде может регулироваться при
настройке сопротивлением B-R3.
43
2.3.3. Блок канала тангажа
Блок канала тангажа предназначен для формирования сигнала
по тангажу с частотой вращения снаряда f и с амплитудой,
пропорциональной величине напряжения, снимаемого с потенциометра
тангажа рукоятки управления.
Блок канала тангажа включает в себя предварительный
модулятор, модулятор-усилитель и фазовый демодулятор.
Принципиальная электрическая схема блока канала тангажа
представлена на рис. 20 (3).
Прямоугольные импульсы с частотой вращения снаряда
(рис. 22, г, г') с коллекторов триодов триггера I блока входного
устройства поступают на вход предварительного модулятора, в
котором происходит модуляция по фазе.
Предварительный модулятор состоит из диодов 5-Д1 (Т),
5-Д2 (Т) и трансформатора 5-Tpl (T).
В среднюю точку первичной обмотки (вывод 2) с блока
преобразователя поступает переменное напряжение с частотой 2 кгц„
По принципу работы предварительный модулятор аналогичен
модулятору, рассмотренному в блоке линеаризации.
С выхода предварительного модулятора через сопротивление
5-R1 (Т) на модулятор, собранный на триодах 5-ПП1 (Т),,
5-ПП2 (Т), поступает переменное напряжение частотой 2 кгц,
модулированное импульсами с частотой переключения триггера I. Это
напряжение (рис. 25, а) служит опорным напряжением для
модулятора (рис. 25).
На эмиттер триода 5-ПП2 (Т) относительно нулевого
потенциала схемы через сопротивление 5-R3 (Т) и корректирующую цепь,
состоящую <из сопротивлений 5-R2 (Т), 5-R4 (Т) и конденсаторов
5-С1 (Т), 5-С2 (Т), с потенциометра тангажа рукоятки управления
подается постоянное напряжение Ur (рис. 25, б), которое после
прохождения корректирующей цепи имеет вид, указанный на рис. 25, в.
Это напряжение является входным напряжением модулятора.
Поскольку характеристика полупроводникового триода
несимметрична для положительной и отрицательной полярности
напряжения UT, в модуляторе использованы два триода, включенных
встречно. Корректирующая цепь за счет дифференцирования
уменьшает время установления команды, подаваемой оператором
с рукоятки управления. Падение напряжения на корректирующей
цепи обозначим через Uc. Известно, что полупроводниковые триоды
обладают свойством двусторонней проводимости. Это свойство
использовано в ключевой схеме модулятора.
При подаче с трансформатора 5-Tpl (T) на базы триодов
5-ПП1 (Т), 5-ПП2 (Т) отрицательного опорного напряжения
сопротивление перехода эмиттер — коллектор становится малым, и
цепь эмиттер — коллектор может проводить ток в обоих
направлениях в зависимости от полярности входного напряжения UT.
44
Импульс положительной полярности опорного напряжения
запирает эти триоды
Когда триоды 5-ПП1 (Т) и 5-ПП2 (Т) открыты, на выходе
модулятора выходное напряжение равно нулю. При закрытых трио-
5-RUT)
5-ПП1(Т)
Корректирующая цепь
5-ЯЗ(Г)А
5-ПП2(Щ
»UT
\5-ПП2(ТЫ 5-С5(Т)
и.
on
I I IIIIIIIIIMIMI НИШ II
I 1 IIIIIII НИМ ПИШИ I
а ! i
«U
(после
дифференцирования)
(в точке с)
(в точке д)
Рис. 25. Принципиальная электрическая
схема модулятора блока канала тангажа и
диаграммы напряжений, поясняющие его
работу
дах выходное напряжение модулятора равно Ur — Uc. Таким
образом, на выходе модулятора в зависимости от полярности
опорного напряжения (рис. 25, а) получается модулированное по
амплитуде напряжение, амплитуда которого соответствует амплитуде
входного сигнала, т. е. напряжению с рукоятки управления
(рис. 25, д).
45
Ключевая работа триодов 5-ПП1 (Т), 5-ПП2 (Т) может быть
причиной искажения формы импульсов напряжения на вторичной
обмотке (выводы 4, 5) трансформатора 5-Tpl (T) из-за
неравномерной нагрузки трансформатора в разные полупериоды
напряжения.
Чтобы уравнять нагрузку, параллельно переходу база —
коллектор включен диод 5-ДЗ (Т), который открывается и закрывается,
когда переход база —• коллектор соответственно закрыт и открыт.
Напряжение с выхода модулятора [эмиттер триода 5-ПП2 (Т)]
подается через конденсатор 5-СЗ (Т) (рис. 25, д) на усилитель.
Первый каскад усилителя выполнен на триоде 5-ППЗ (Т). Второй
каскад — на триоде 5-ПП4 (Т) — является эмиттерным
повторителем, нагрузка которого первичная обмотка трансформатора
5-Тр2 (Т).
Изменением сопротивлений 5-R5 (Т), 5-R10 (Т) настраивают
усилитель для обеспечения линейного режима работы его.
Изменением соотношения сопротивлений 5-R7 (Т) и 5-R8 (Т)
производится регулировка коэффициента усиления каскада,
выполненного «а триоде 5-ППЗ (Т).
С помощью сопротивлений 5-R6 (Т), 5-R9 (Т) и 5-R10 (Т)
стабилизируются соответственно токи эмиттера триода 5-ППЗ (Т) и
коллектора триода 5-ПП4.
Чтобы не создавать в каскаде отрицательной обратной связи по
переменной составляющей и тем самым не сильно снижать
усиление каскада по напряжению, сопротивление 5-R11 (Т) блокируется
конденсатором 5-С5 (Т); 5-СЗ (Т), 5-С4 (Т) —конденсаторы связи.
Со вторичной обмотки трансформатора 5-Тр2 (Т) снимаются
модулированные напряжения частотой 2 кгц— Ei и Е2, которые по
амплитуде изменяются пропорционально величине команды,
подаваемой оператором с рукоятки управления (рис. 26,а, б). Эти
напряжения поступают на демодулятор, состоящий из диодов
5-Д4 (Т), 5-Д5 (Т), сопротивлений 5-R12 (Т), 5-R16 (Т), 5-R13 (Т).
Между средним выводом 4 вторичной обмотки трансформатора
5-Тр2 (Т) и точкой соединения сопротивлений 5-R16 (Т), 5-R13 (Т)
с блока преобразователя подается опорное напряжение частотой
2 кгц (рис. 26,в).
Допустим, что полярности опорного напряжения U0 и
напряжений Ei и Е2 таковы, что к сопротивлениям 5-R12 (Т) и 5-R16 (Т)
прикладывается сумма (рис. 26, г) этих напряжений Ui = U0 + Еи
а к сопротивлению 5-R13 (Т) —разность U2 — U0 — Е2 (рис. 26, д).
При этом Vo > Ei и U0 > Е2.
Направление тока через сопротивление нагрузки RH
определяется разностью напряжений (Д — U2. Этот ток заряжает
конденсатор 5-С6 (полярность показана на рис. 26).
В момент смены полярности напряжений Ei и Е2 на
трансформаторе, что совпадает с моментом «опрокидывания» триггера I в
другое состояние, сумма опорного напряжения и напряжений Е\
46
и Е2 прикладывается к сопротивлению 5-R13 (Т), а разность — к
5-R12 (Т) и 5-R16 (Т)
В результате ток, проходящий через сопротивление нагрузки
(рис. 26, е), изменяет свое направление и перезаряжает конденса-
5 Тр2(Т) S-ДЧТ)
-Н at г- •
I «Ь|
11——t
(6etS-C6)
Рис. 26. Принципиальная электрическая
схема демодулятора блока канала тангажа
и диаграммы напряжений, поясняющие era
работу
тор 5-С6. Полярность напряжения на конденсаторе изменяется и
сохраняется в течение времени, равного полупериоду
модулирующей частоты, т. е. частоты переключения триггера (рис. 26,ж).
Таким образом, кривая напряжения на конденсаторе 5-С6 в
течение времени, равного периоду модулирующего напряжения, по
47
своей форме подобна кривой, огибающей верхушки импульсов
модулированного напряжения (рис. 26,ж). С выхода демодулятора
напряжение через ограничительное сопротивление 5-R14 (Т)
поступает на двусторонний ограничитель, состоящий из диодов 5-Д6
(Т) и5-Д7 (Т).
При положительной полуволне выходного напряжения, если
амплитуда его превышает 10 в, наступает пробой диода 5-Д7 (Т),
при отрицательном—пробой диода 5-Д6 (Т). В результате
обеспечивается стабилизация выходного знакопеременного напряжения
на уровне 10 в.
Таким образом, с выхода блока канала тангажа снимаются
импульсы напряжения с частотой f (рис. 26, ж) и амплитудой не
более 10 в при максимальной команде.
2.3.4. Блок компенсации веса
Блок предназначен для формирования прямоугольного
импульсного напряжения с амплитудой порядка 6 в, совпадающего
по фазе € выходным напряжением блока канала тангажа,
соответствующим команде ВВЕРХ. Частота следования импульсов
(рис. 22, у) равна частоте вращения снаряда f.
Принципиальная электрическая схема блока изображена на
рис. 20 (4).
По схеме и работе блок компенсации веса аналогичен фазочув-
ствительному усилителю, использованному в блоке линеаризации.
На вход блока компенсации 'веса (БКВ) через сопротивление
6-R1 с предварительного модулятора блока канала тангажа
поступает модулированное по фазе переменное напряжение частотой
2 кгц. БКВ состоит из триода 6-ПП1, включенного в диагональ
моста, образованного диодами 6Д1—6Д4. В другую диагональ
моста включена нагрузка из сопротивлений 6-R2, 6-R3, B-R2, R,
конденсатора 6-С1 и источника питания, которым являются
обмотки 3, 4 трансформатора 6-Тр1. Напряжение компенсации веса
снимается с сопротивления R. Регулировка амплитуды напряжения
производится с помощью сопротивления B-R2.
2.3.5. Блок формирования программы компенсации
веса и ограничения команды ВНИЗ
Блок предназначен для формирования программы в'вода
напряжения компенсации веса. Принципиальная электрическая схема
блока приведена на рис. 27, а; 20 (5). Однополупериодный
выпрямитель (диод 7-Д1) выпрямляет переменное напряжение частотой
2 кгц с амплитудой порядка 260 в, поступающее со вторичной
обмотки (выводы 21—24) трансформатора 11-Тр1 блока
преобразователя. Конденсатор 7-С2 сглаживает пульсации выпрямленного
напряжения. Выпрямленное отрицательное напряжение через
ограничительное сопротивление 7-R1 поступает на ограничитель (диод
7-ДЗ), на который через потенциометр B-R6 от источника питания
подается напряжение смещения. Потенциометр B-R6 позволяет
48
осуществить при настройке плавную регулировку напряжения,
поступающего на вход дифференцирующей цепи (сопротивление B-R5,
7-R3, конденсатор 7-С7, входное сопротивление блока канала
тангажа). В момент подачи питания на электронный блок на
дифференцирующую цепь поступает скачок постоянного напряжения.
С выхода дифференцирующей цепи изменяющееся по
экспоненте отрицательное напряжение поступает в блок канала тангажа
/
11-Тр1 7-Д1 т-я/
7-R3 7-С7
) Цепи
коммутации
Блок
канала
тангша\
На сумми-
ровамие Л
7-R2
7-Д2 В блок канала тангажи
Б-Rti
03иф
Максимальное
статическое напряжение
при команде ВНИЗ
^Производная
напряжения при команде ВНИЗ
с ограничением
^Производная напряжения
при команде ВНИЗ
без ограничения
UKOm(t)l
IS
^1л^я^^^^^
t/,
кем
WW
//*W
ьЯЛДЛ
ЛАМ
•ЛЛЛ*
sAMf
лм*
*■
-^•1
и.
д
рез I
*г
1 *
С\.
Г4]
Uw
Ь
г>°Х1
J
■^
*
Г
■vwJ
t2
u
■*
m<***V
п
1
/WS*
^ЛЛ
^\yW
Wn
VMVW
WA»
/**■
^ f
m f
Рис. 27. Принципиальная электрическая схема блока
формирования напряжения компенсации веса а и
ограничения команды ВНИЗ б и диаграммы, поясняющие
их работу
4 Зак 1495с
49
(рис. 27, в), где оно модулируется и усиливается с
последующей демодуляцией (рис. 27, г). При суммировании напряжения
после демодуляции с постоянным по амплитуде напряжением
сигнала компенсации ееса (рис. 27, д) образуется результирующее
напряжение компенсации .веса, изменяющееся по экспоненциальному
закону (рис. 27,в).
Через время /2 напряжение на конденсаторе 7-С7 достигает
практически установившегося значения, и результирующее
напряжение компенсации веса будет равно напряжению, подаваемому
с блока компенсации веса.
Время /2 можно регулировать потенциометром B-R5. Таким
образом, после схода снаряда с направляющей в линию связи
поступают прямоугольные импульсы команды компенсации веса,
величина которой плавно .нарастает по экспоненциальному
закону.
Момент времени, с которого начинается нарастание
напряжения компенсации веса (точка 0; см. рис. 27, е), совпадает с
началом управления снаряда (началом работы рулевых машинок); до
этого времени снаряд не управляется и в течение времени U =
= 0,7 сек управляющий сигнал не вызывает отклонения насадков
снаряда.
Чтобы подготовить аппаратуру управления к следующему
выстрелу, т. е. вернуть схему в исходное состояние, в блоке
предусмотрена схема разряда конденсатора 7-С7 через сопротивление
7-R3 и контакты 4, 6 реле Р1 цепей коммутации (рис. 27).
В блок формирования программы компенсации веса включена
схема ограничения команды ВНИЗ.
■При резком отклонении рукоятки управления вниз команда за
счет корректирующих цепей может значительно превысить
максимальную команду и снаряд может снизиться до падения.
Максимальной командой называется команда, которая
вырабатывается аппаратурой управления при крайнем положении
рукоятки.
Для того чтобы не допустить падения снаряда при резком
отклонении рукоятки, команда ВНИЗ ограничивается на уровне, не
превышающем максимальную установившуюся команду ВНИЗ
более чем на 30% (рис. 27, б).
Ограничение команды ВНИЗ по минимуму осуществляется
диодом 7-Д2. Диод включен параллельно входу модулятора блока
канала тангажа (рис. 27, б).
Уровень ограничения определяется величиной отрицательного
напряжения, снимаемого с сопротивления 7-R2 делителя,
состоящего из сопротивлений 7-R2, 7-R7, 7-R6 и B-R4. Стабильность
ограничения обеспечивается термокомпенсацией характеристики диода
7-Д2 термосопротивлением 7-R7.
С помощью потенциометра B-R4 можно изменять величин>
ограничения команды ВНИЗ.
50
^
' " 2.3.6. Блок канала курса
Блок канала курса предназначен для формирования импульсов
напряжения с амплитудой, пропорциональной величине напряже-
' ния, снимаемого с потенциометра курса рукоятки управления.
Принципиальная электрическая схема блока представлена на
рис. 20 (6). По схеме и принципу работы блок канала курса
совершенно аналогичен блоку канала тангажа. Напряжение на вход
блока поступает с триггера II входного устройства. С выхода
блока канала курса снимаются импульсы напряжения с частотой
вращения снаряда и амплитудой не более 10 в при максимальной
команде.
2.3.7. Интегрирующая цепь
Интегрирующая цепь предназначена для преобразования
прямоугольного напряжения в пилообразное.
Все сформированные сигналы: выходные напряжения с блока
канала тангажа, блока канала курса, блока компенсации веса, •
блока линеаризации последовательно суммируются (рис. 22, ф)
и подаются на интегрирующую цепь, состоящую из конденсаторов
7-С1, 7-СЗ — 7-С6 и сопротивления 7-R5 [рис. 20 (7)].
На выходе интегрирующей цепи формируется пилообразное на-.
пряжение (рис. 22, х).
2.3.8. Оконечный усилитель
Оконечный усилитель предназначен для усиления и
ограничения пилообразного сигнала до амплитуды порядка 220 в, необхо- •
димой для нормальной работы рулевых машинок снаряда.
Оконечный усилитель состоит из ограничителя, модулятора,
усилителя, демодулятора, предвыходного усилителя и выходного
усилителя.
Принципиальная электрическая схема оконечного усилителя
представлена на рис. 20 (8).
Сигнал с интегрирующей цепи (рис. 22, ф) через
ограничительное сопротивление 8-R1 подается на двусторонний диодный огра-?
ничитель, состоящий из диодов 8-Д1 и 8-Д2.
Ограничение происходит на уровне 0,6 в — уровне открывания .
стабилитрона.
Ограниченный сигнал (рис. 22, ц) через сопротивление 8-R2
поступает на модулятор, состоящий из триодов 8-ПП1 и 8-ПП2.^
К точкам а, б рис. 20 (8) модулятора через сопротивление 8-R14 f
подводится переменное напряжение амплитуды порядка 0,8 в
частотой 2 кгц с блока преобразователя.
По принципу действия модулятор аналогичен модулятору блока
канала тангажа.
Конденсаторы 8-С1 и 8-С2 образуют фильтр, устраняющий
высокочастотные наводки IB (цепях, идущих от блока преобразователя
к модулятору.
Через конденсатор связи 8-СЗ модулированное напряжение
поступает на усилитель.
Первый каскад усилителя на триоде 8-ППЗ является эмиттер-
ньгм повторителем, 'Согласующим 'выходное сопротивление
модулятора 'с малым входным 'Сопротивлением второго каскада
(триод 8-ПП4).
Нагрузкой эм'иттерного 'повторителя служит сопротивление
8-R5. Сигнал с эмиттерного повторителя через конденсатор 8-С4
поступает на вход трехкаскадного усилителя-ограничителя
(триоды 8-ПП4, 8-ПП5, 9-ПП1).
Сопротивления 8-R4, 8-R6, 8-R9, 8-R11, 8-R13, 9-R1, 9-R2, 9-R3
являются сопротивлениями отрицательной обратной связи,
благодаря которым повышается температурная стабильность режима
усилителя. Конденсаторы 8-С8 и 8-С9 — конденсаторы связи.
Сопротивления 8-R8 и 8-R12 — нагрузка усилителей. Коллекторной
нагрузкой триода 9-ПП1 является первичная обмотка
трансформатора 9-Т'р1.
Каскад работает в режиме ограничения по максимуму
(усиливает и ограничивает'напряжение до 10 в) (рис. 22, ч).
Сопротивление 8-R3 и конденсатор 8-С7 образуют фильтр в цепи питания
усилителя. Со вторичных обмоток трансформатора 9-Тр1 напряжение
подается на демодуляторы; к точкам к—и, в—г рис. 20 (8)
демодулятора в противофазе подается опорное напряжение частотой 2 кгц
с блока преобразователя.
Первый демодулятор состоит из диодов 9-Д1, 9-Д2,
сопротивлений 9-R5, 9-R8, конденсатора 9-С1; второй демодулятор — из диодов
9-ДЗ, 9-Д4, сопротивлений 9-R7, 9-R9 и конденсатора 9-С2.
По схеме и работе демодуляторы совершенно аналогичны
демодулятору блока канала тангажа.
Демодулированные напряжения ib 'противофазе (рис. 22, ш, ш')
поступают через сопротивления 9-R4, 9-R6 «а предвыходные
усилители, работающие в режиме переключения.
Первый предвыходной усилитель состоит из триода 9-ПП2,
нагрузкой которого является сопротивление 6-R4 (рис. 28).
Переход эмиттер — коллектор триода 9-ПП2 используется как
ключ К в цепи подачи напряжения питания на экранную сетку,
играющую роль управляющей сетки лампы 6-Л1.
Питание осуществляется постоянным напряжением порядка
65 в, поступающим со вторичной обмотки (выводы 6—7)
трансформатора 6-Тр1 через выпрямительный диод 6-Д5.
Конденсатор 6-С6 является фильтром переменных
составляющих напряжения питания.
В момент действия отрицательного импульса UBX (рис. 28, а)
ключ замыкается (триод 9-ПП2 открывается) и плюс источника
52
питания с конденсатора 6-С6 прикладывается к экранной сетке
лампы 6-Л1. Лампа 6-Л1 открывается.
В момент подачи положительного импульса триод 9-ПП2
закрывается, цепь питания экранной сетки лампы 6-Л1 размыкается
и лампа закрывается.
Таким образом, на сетку лампы 6-Л1 с выхода предвыходного
усилителя 'поступают прямоугольные импульсы (рис. 28, б)
амплитудой около 65 в.
Рис. 28. Принципиальная
электрическая схема 1-го предвыходного
усилителя и эпюры напряжений
Работа второго предвыходного усилителя на триоде 9-ППЗ
аналогична первому. Выходное напряжение второго усилителя
(рис. 22, щ') сдвинуто на 180° относительно первого (рис. 22, щ).
Лампы 6-Л1 и 6-Л2 образуют первый и второй выходные
усилители (рис. 29), работающие в режиме переключения. Нагрузкой
выходных усилителей является проводная линия связи Rn,
которая подключается к катоду лампы 6-Л1 и аноду лампы 6-Л2. Такое
подключение нагрузки необходимо для получения двухполярного
напряжения в линии связи.
Напряжение питания около 220 в (положительное относительно
нулевого потенциала схемы) на анод лампы 6-Л1 подается с двух-
полупериодного выпрямителя 6-Д6, 6-Д8, а отрицательное
напряжение питания на катод лампы 6-Л2 — с выпрямителя 6-Д7, 6-Д9.
53
Конденсаторы 6-С2 — 6-С5 являются фильтрами, уменьшающими
пульсации выпрямленного напряжения.
' На оба выпрямителя с блока преобразователя поступает
напряжение 2 кгц с амплитудой порядка 260 в.
Когда открыта лампа 6-Л1, ток /л (рис. 29) протекает от
выпрямителя через лампу 6-Л1 в линию связи.
Когда открыта лампа 6-Л2, ток /л протекает в обратном
направлении. В результате на нагрузке Ил усилителя 'получаются
двухполярные импульсы, необходимые для управления снарядом.
На контроль
в-сг^ 6-сз
|—I——I—L
JL
6-CU S5C-C5
CZ
ч
Напряжение па входе
линии связи
Рис. 29. Принципиальная электрическая схема и эпюра напряжения
выходных усилителей
Время протекания тока в линии связи в любом направлении
определяется длительностью импульсов, приложенных к сеткам
ламп. Сопротивление 11-R5 служит для контроля тока оконечного
усилителя. Таким образом, с выхода оконечного усилителя в
линию поступает импульсное напряжение прямоугольной формы с
фазовым сдвигом q>i по отношению к входному сигналу (сигналу
информации). Фазовый сдвиг <pi вызван наличием реактивных
элементов в электронном блоке (конденсаторы интегрирующей цепи,
конденсаторы связи в усилителях, трансформаторы) и составляет
38° на частоте 8,5 гц (рис. 17).
Потенциометр B-R7 (рис. 20), на который подается иостоян-
54
ное напряжение порядка 20 в с блока преобразователя, -служит для
подстройки фазы ф1 в процессе 'изготовления и настройки
электронного блока. С выхода блока оконечного усилителя на вход
ограничителя (8-Д1, 8-Д2) подведена обратная связь по
постоянному току через цепь, собранную из конденсаторов 8-С5, 8-С6 и
сопротивлений 8-R7, 8-R10.
Назначение обратной связи — скомпенсировать на входе
оконечного усилителя постоянную составляющую, возникающую в
результате разброса номиналов радиоэлементов.
Действие обратной связи основано на том, что с выхода на
вход усилителя подается постоянное напряжение обратной
полярности по сравнению с полярностью постоянной составляющей
входного сигнала. Обратная полярность выходного напряжения по
отношению к входному в оконечном усилителе осуществляется
соответствующим подбором фаз переменных напряжений частотой
2 кгц, питающих модулятор и демодуляторы усилителя.
2.3.9 Блок отключения питания
Блок отключения предназначен для приведения аппаратуры
управления в исходное состояние через 1—3 сек после
прекращения поступления (обрыв линии связи, попадание в цель и т. п.)
с борта снаряда сигнала информации. Принципиальная
электрическая схема блока отключения питания представлена на рис. 20 (9).
Блок отключения состоит из трех каскадов. Первый каскад
(триод 4-ПП1) разрядный; второй каскад (триод 4-ПП2) эмиттер-
ный повторитель; третий каскад (триод 4-ППЗ) выходной.
Нагрузкой триода 4-ППЗ является обмотка реле 4-Р1.
На вход блока через переходной конденсатор 4-С1 и
сопротивление 4-R1 поступают прямоугольные импульсы с триггера I
входного устройства.
На базе триодов 4-ПП1, 4-ПП2, -4-ППЗ через сопротивления
4-R2, 4-R5, 4-R9 соответственно подается с блока преобразователя
запирающее напряжение смещения +4 е. При действии
периодически следующих входных импульсов работает только первый
каскад. При этом триод 4-ПП1 открывается на время действия
отрицательного импульса и закрывается на время отсутствия импульса.
Когда триод 4-ПП1 закрыт, конденсатор 4-С4 успевает за
время отсутствия импульса зарядиться через сопротивление 4-R3 до
напряжения, меньшего пробивного напряжения стабилитрона 4-Д4
(^проб = 8 в), и разряжается, когда 4-ПП1 открыт, через малое
сопротивление перехода коллектор — эмиттер триода 4-ПП1.
Во время действия периодических импульсов сигнала
информации триоды 4-ПП2 и 4-ППЗ закрыты и реле 4-Р1 обесточено. При
этом нормально замкнутые контакты 3, 4 реле 4-Р1 обеспечивают
нормальную работу аппаратуры управления.
Когда сигнал информации со снаряда не поступает, триггер I
не переключается и конденсатор 4-С4 заряжается до напряжения
55
£Лцю'б, достаточного для пробивания диода 4-Д4. В этом случае
триод 4-ПП2 открывается.
Отрицательный перепад напряжения на нагрузке триода 4-ПП2
(сопротивление 4-R7) открывает триод 4-ППЗ. Реле 4-Р1
срабатывает, размьжает контакты 3, 4 и приводит аппаратуру управления
в исходное состояние.
Таким образом, через 1—3 сек после прекращения полета
снаряда аппаратура управления выключается. Время задержки
отключения зависит от состояния триггера в момент его остановки и
времени заряда конденсатора 4-С4. Это время может
регулироваться сопротивлением 4-R3. Диод 4-Д1 служит для фиксации
уровня напряжения на базе триода 4-ПП1.
Диод 4-ДЗ уменьшает время разряда конденсатора 4-С4 ори
выключении питания. Сопротивление 4-R8 ограничивает ток триода
4-ПП2.
В момент включения аппаратуры напряжение 4 в за счет
емкостей сглаживающего фильтра (11-R1, 11-С1) поступает в блок
отключения питания с задержкой по отношению к напряжению 12 в.
Это может .послужить причиной протекания тока по обмотке реле
4-Р1 и срабатывания реле, что недопустимо. Поэтому напряжение
12 в поступает в блок через фильтр, состоящий из сопротивления
4-R6 и конденсатора 4-СЗ, что 'приводит к задержке подачи
напряжения 12 в.
2.3.10. Блок преобразователя
Блок преобразователя предназначен для преобразования
постоянного напряжения 12 в в переменные и постоянные
напряжения, необходимые для питания всех блоков аппаратуры
управления.
Принципиальная электрическая схема блока преобразователя
представлена на рис. 20 (10).
Блок преобразователя состоит из задающего генератора,
усилителя мощности и выпрямителей с фильтрами.
'Преобразование постоянного напряжения в переменное
осуществляется двухтактным задающим генератором, состоящим из
двух триодов 10-ПП1, 10-ПП2 и трансформатора 10-Тр1.
При включении 'питающего напряжения 12 в плюс источника
питания подается на эмиттеры триодов, минус источника через
обмотку трансформатора 10-Тр 1 —на коллекторы триодов.
На базы триодов 10-ПШ и 10-ПП2 подается отрицательное
напряжение с делителя, состоящего из сопротивлений 10-R1, 10-R2.
Это напряжение вызывает открывание одного из триодов,
например 10-ПШ. ЭДС, наведенная в первичной обмотке
трансформатора 10-Тр 1 (выводы 1, 2, 3), передается через вторичную обмотку
(выводы 4, 5, 6) таким образом, что на базе триода 10-ПШ
оказывается отрицательный потенциал, а на базе триода
10-ПП2—положительный.
Это вызывает еще большее открывание триода 10-ПП1 и
закрывание триода 10-ПП2.
Триод 10-ПП1 остается открытым до тех пор, пока ток триода
и магнитный поток в сердечнике трансформатора не достигнут
величины насыщения. В этот момент токи в цепи эмиттер — коллектор
триода 10-ПП1 и первичной обмотке трансформатора 10-Тр 1
становятся постоянными. Следовательно, ЭДС во вторичных обмотках,
будут равны нулю.
Это приводит к тому, что отрицательный потенциал базы
триода 10-ПП1 уменьшается и, следовательно, триод закрывается.
Поэтому ток в первичной обмотке трансформатора 10-Тр 1
уменьшается и во вторичных обмотках наводятся ЭДС обратного знака,
которые закрывают триод 10-ПП1 и открывают триод 10-ПП2.
Параметры схемы выбраны таким образом, что этот процесс
происходит с частотой 2 кгц.
Частота задающего генератора подбирается изменением
сопротивления 10-R5. Напряжение с выходной обмотки трансформатора
10-Тр 1 (выводы 7, 8, 9) подается на усилитель мощности (триоды
11-ПП1, 11-ПП2).
Триоды усилителя работают по двухтактной схеме в режиме
переключения, т. е. в то время как один триод открыт, другой
закрыт, и наоборот.
Сопротивления 10-R3 и 10-R4 обеспечивают необходимый режим
работы триодов.
Нагрузкой усилителя мощности является трансформатор 11-Тр1,
со вторичных обмоток которого снимаются напряжения различной
амплитуды.
Для получения постоянного напряжения 22,5 в, подаваемого
на потенциометры рукоятки управления, используется двухполупе-
риодный выпрямитель (диоды 11-Д1, 11-Д2).
Постоянное напряжение 4 в обеспечивается однополупериод-
ным выпрямителем (диод 11-Д4). Двухполупериодный выпрямитель,
(диоды 11 -ДЗ, 11-Д5) служит для получения постоянного
напряжения 25 в.
Для уменьшения пульсации выпрямленного напряжения
используются сглаживающие фильтры (11-R3, 11-С2, 11-R2, 11-СЗ и 11-R1,
U-C1).
Питание в блок преобразователя подается непосредственно от
источника постоянного тока напряжением 12 в.
Поскольку блок преобразователя работает в режиме
переключения с частотой 2 кгц, то на остальную часть схемы подается
напряжение 12 в через Г-образный фильтр, уменьшающий пульсации
напряжения 12 в, возникающие при работе преобразователя.
Г-образный фильтр собран из элементов 10-С1, 10-С2 и дросселя
57
10-Др1. Блок преобразователя обеспечивает следующие леременные
напряжения:
Величина
напряжения,
•
0,8
5
12
12
Номера выводов обмоток
трансформатора 11-Тр1
17—18
6—7
4—5
8-9
Величина
напряжения,
е
15
15
23
255
Номера вывоюв обмоток
трансформатора 11-Тр1
10—11
12—13
21—23
19—24
7 б
X V
и
№
»"-Ж5 ■■•■■■■■J
WWWWW
дбозхсчше^.
58
2.4. УСТРОЙСТВО ЭЛЕКТРОННОГО БЛОКА
Электронный блок состоит из двенадцати модулей Ml—Mil
(рис. 30), платы / и блока сопротивлений 14 с сопротивлениями
Б-Rl—B-R7. Модули имеют номера с 1 по П. Два модуля имеют
один номер 5.
Каждый модуль представляет собой отдельный функциональный
узел электронного блока, смонтированный из радиоэлементов
способом уплотненного монтажа. Радиоэлементы соединяются лайкой,
а затем заливаются герметизирующим пенопластом.
В каждом модуле заключена часть схемы электронного блока.
Модули 1, 2 образуют блок входного устройства; модуль 3—блок
линеаризации; модуль 4 —реле отключения питания; модули 5 —
блоки каналов курса и тангажа; модули 6, 8, 9 —оконечный
усилитель и блок компенсации веса; модуль 7 —интегрирующую цепь и
блок формирования программы компенсации веса и ограничения
/я
ОЗозначение
узка
нопер
штыря
\
"Опер цаЁодсной)
Напер подула
ихЬш
TqpuaBoie
noSepXHOcnsj
бомрбые
оовергмссп^
Рис. 30. Электронный блок:
1 — плата 01.01.650: 2— штырь 01.01.039- 3~
трубка 01.01.054; 4 — винт 01.01.056- 5 — стяжка
01.01.690—01.01.700; 6 — стяжка 01.01 660—01 01 670-
7 —цанга 01.01.062; 8—гайка 01.01.063; 9 - винт
МЗХ6-602 ГОСТ 1489-62; 10- втулка 0101640-
П -контакт 01.01042; /2-втулка 01.01 041:
/3 —кронштейн 01.01.061; н — блок сопротивле!
ний 01.01.710
команды ВНИЗ, модули 10, И—блок преобразователя. Выводы
электрических цепей модулей оканчиваются штырями 2.
Маркируется модуль нанесением на боковую (поверхность
обозначения чертежа, индекса изделия, порядкового (заводского)
номера и номера модуля. Кроме того, порядковый номер имеется на
торцовой поверхности каждого модуля.
На торцовых поверхностях модулей 6 и 7 кроме номеров
модулей имеются буквы Т и К, указывающие на отношение модуля 5 к
59
каналу тангажа или к каналу курса соответственно. На баковых
поверхностях каждого модуля нанесены номера штырей 2.
Плата / служит для соединения модулей. На обеих сторонах
•платы размещены штыри 2 и контакты //, внутри нее расположены
соединительные провода, залитые пенопластом. Заливка
пенопластом обеспечивает герметичность, вибропрочность и повышает
надежность работы электронного блока. Плата маркируется нанесе
нием на боковую поверхность обозначения чертежа. На торцовых
поверхностях платы нанесены номера штырей, контактов, мест
подсоединения к плате колодок KJ11, KJ12, РУ и обозначения групп
контактов КПЗ и КП4. Для правильного подсоединения модулей 5
и 6, 5 и 7 попарно на боковой поверхности платы нанесены буквы
К и Т.
Места подсоединения колодок КП1, КП2 и РУ служат для
соединения электронного блока с общей схемой аппаратуры
управления. Для подсоединения колодок плата армирована втулками 12 с
резьбовыми отверстиями.
Электрически модули соединяются между собой и с платой /
трубками 3, надеваемыми на штыри 2 с .последующей их пайкой.
Дополнительное крепление модулей между собой и с платой
осуществляется стяжками 5, 6 и винтами 4. Блок сопротивлений 14
крепится к плате 1 винтами 9.
Сопротивления Б-Rl—B-R7 используются при настройке
электронного блока. Они крепятся на кронштейне 13 цангами 7. После
настройки электронного блока движки регулировочных
сопротивлений Б-Rl —B-R7 зажимаются гайками 8. Для крепления
электронного блока на пульте управления 9С415 плата армирована
втулками 10.
60
3. ПУЛЬТ УПРАВЛЕНИЯ 9С415
3.1. ОБЩИЕ СВЕДЕНИЯ
Пульт управления 9С415 является составной частью
переносного комплекса 9КП и предназначен для контроля готовности
комплекса к пуску; поочередного пуска снарядов с четырех пусковых
установок; формирования управляющего сигнала в соответствии
с командами оператора.
Пульт управления 9С415 состоит из пульта 9С415, визира
9Ш16, аккумуляторной батареи ПФГ-400.
Визир 9Ш16 предназначен для визуального наблюдения
оператором за целью и снарядом. Его описание приведено в техническом
описании и инструкции по эксплуатации переносного
противотанкового комплекса 9КП. Аккумуляторная батарея ПФГ-400
предназначена для питания пульта управления 9С415.
Описание аккумуляторной батареи изложено <в техническом
описании и инструкции по эксплуатации переносного
противотанкового комплекса 9К11.
Принципиальная электрическая схема пульта управления 9С415
представлена на рис. 31, а электромонтажная — на рис. 32.
Электрические цепи и элементы пульта управления 9С415 по
своему назначению делятся на цепи контроля и коммутации и цепи
управления. Цепи управления включают в себя цепи электронного
блока и цепи рукоятки управления.
Цепи электронного блока и рукоятки управления на схеме
(рис. 31) не изображены, так как представлены на отдельных
•принципиальных электрических схемах (рис 20 и 36).
На принципиальной электрической схеме (рис. 31) изображены
цепи коммутации и контроля, а также показана связь цепей
контроля и коммутации с цепями электронного блока и рукоятки
управления. Кроме того, на схеме показаны переключатели Л (В1) и
К (В2), относящиеся к цепям управления и предназначенные для
включения и выключения соответственно сигналов линеаризации и
компенсации веса.
Для более полного представления о работе пульта управления
9С415 на его принципиальной электрической схеме показаны цепь
бортразъема и пусковые цепи снаряда 9М14М (9М14) (ЭЗ-СД,
61
ЭЗ-МД, ЭЗ-ТР, ЭЗ-ВЗ), где ЭЗ-СД— электрозапал стартового
двигателя; ЭЗ-МД — электрозапал маршевого двигателя; ЭЗ-ТР —
электрозапал трассера; ЭЗ-ВЗ — электрозапал взрывателя.
3.2. ЦЕПИ КОНТРОЛЯ И КОММУТАЦИИ
Цепи контроля предназначены для контроля .величины
напряжения батареи ПФГ-400 в процессе ее эксплуатации с пультом угп-
равления 9С415 и включают в себя:
— вольтметр ИП1 (рис. 31), предназначенный для контроля
величины напряжения аккумуляторной батареи ПФГ-400 под
нагрузкой;
— сопротивление R1, являющееся нагрузкой при проверке
напряжения батареи;
— кнопку КОНТР. ПИТАНИЯ Кн2, предназначенную для
подключения сопротивления R1 и вольтметра ИП1 к аккумуляторной
батарее ПФГ-400;
— сопротивление R1, но величине эквивалентное нагрузке
батареи при ее эксплуатации.
Нормальная работа аккумуляторной батареи контролируется в
одном из четырех положений переключателя ПУСКОВАЯ УСТ. В4
нажатием кнопки КОНТР. ПИТАНИЯ Кн2.
При этом:
— шлюс напряжения аккумуляторной батареи поступает иг
клемму « + » вольтметра ИП1 через контакт 1 разъема Ш5,
предохранитель Пр2, контакты 2—1 цепи 10 переключателя ПУСКО
ВАЯ УСТ. В4;
— .минус напряжения аккумуляторной батареи поступает н&
клемму «—> вольтметра ИП1 через контакт 2 разъема Ш5 и кон
такты 2—1 микротумблера ВЗ (в положении 13 в) или через кон
такт 3 разъема Ш5 и контакты 3—1 микротумблера ВЗ (в
положении 12 в) и далее через контакты 1—2 цепи 11 переключателя
ПУСКОВАЯ УСТ. В4, контакты 1—4, 2—3 кнопки КОНТР.
ПИТАНИЯ Кн2.
Цепи коммутации предназначены:
—■ для определения готовности пульта управления к пуску
снаряда;
— для подключения линии связи снаряда к электронному
блоку;
— для пуска снаряда;
— для включения электронного блока при сходе снаряда с
направляющей.
Работу цепей коммутации можно разделить на следующие
этапы: исходное положение; подготовка к пуску снаряда; работа при
пуске снаряда.
В исходном положении все реле пульта обесточены,
микротумблер ВЗ установлен в положение 12 В и его контакты 3—1 замкнуты,
62
переключатель ПУСКОВАЯ УСТ. В4 установлен в положение 0, и-
состояние его контактов 1—2, 1—3 цепей 1—11 соответствует
диаграмме. Контакты 1—2 микропереключателей В1 бортразъемов
направляющих замкнуты, а контакты 1—3 разомкнуты.
При этом 12 в батареи поступает на контакт 2 цепи 10
переключателя ПУСКОВАЯ УСТ. В4 через контакт 1 разъема Ш5 и
предохранитель Пр2; —12 в батареи поступает на контакт 1 цепи II
переключателя ПУСКОВАЯ УСТ. В4 через контакт 3 разъема Ш5
контакты 3—1 микротумблера ВЗ.
Подготовка к пуску снаряда осуществляется постановкой
переключателя ПУСКОВАЯ УСТ. В4 в одно из четырех положений..
В зависимости от выбранного положения к пульту подключаются
цепи пуска и управления (контакты 1—6 бортразъема) одного из-,
четырех снарядов, установленных на пусковых установках.
При установке переключателя ПУСКОВАЯ УСТ. В4 в
положение 1 плюс 12 в через контакты 2—1 цепи 10 переключателя
ПУСКОВАЯ УСТ. В4 поступает:
— на сопротивление R1;
— на клем-му « + » вольтметра ИП1;
— на HP (нормально разомкнутый) контакт 1 реле РЗ;
— на HP контакт 1 кнопки ПУСК Кн1;
— на контакт 1 колодки КП1 (цепь питания электронного
блока);
— на контакт 1 микропереключателя В1 бортразъема
подключенного снаряда через контакты 1—3 цепи 9 и контакты 1—2 цепи
6 переключателя ПУСКОВАЯ УСТ. В4, контакт 1 разъема Ш1 и
далее:
— на электрозапалы ЭЗ-СД, ЭЗ-ТР через 2-й контакт
бортразъема снаряда, на первый провод линии связи через 4-й контакт
бортразъема снаряда;
— на 3-й провод линии связи через контакты 1—2
микропереключателя Bl и контакт 6 бортразъема .снаряда;
— на контакт 7 обмотки реле Р1, на лампочку ИЗДЕЛИЕ УСТ.
Л1, на контакт 12 разъема Ш6 через контакт 3 разъема Ш1,
контакты 3—1 цепей 5 и 2 переключателя ПУСКОВАЯ УСТ. В4, НЗ
(нормально замкнутые) контакты 4—5 реле Р2.
Минус 12 в через контакты 1—2 цепи 11 переключателя
ПУСКОВАЯ УСТ. В4 поступает:
— на контакт 15 разъема Ш6;
— на HP контакты 1, 2 кнопки КОНТР. ПИТАНИЯ Кн2;
— на лампочку ИЗД. УСТ. Л1, которая загорается,
сигнализируя о готовности цепей коммутация к пуску /снаряда;
— на контакты 8 обмоток реле PI, P2;
— на контакт 3 кнопки ПУСК Кн1 и далее через НЗ контакты.
1—2 реле Р2 —на контакт 2 кнопки ПУСК Кн1 и на HP контакт 4
реле РЗ;
— на контакт 8 обмотки реле РЗ и на контакт 11 разъема Ш6
63,
через контакт 5 колодки КП1, НЗ контакты 4—3 реле 4—Р1,
контакт 4 колодки КП1 электродного блока.
Таким образом, реле Р1 оказывается под напряжением,
срабатывает и своими контактами 1—3 подготовит цепь подачи
напряжения 12 в на контакт 7 обмотки реле РЗ; контактами 4—6 замкнет
контакты 7—8 колодки КШ электронного блока.
Пуск снаряда осуществляется нажатием кнопки ПУСК Кн1.
При этом 12 в .подается на контакт 7 обмотки реле РЗ через
контакты 1—4 кнопки ПУСК Кн1, замкнутые контакты 3—1 реле Р1.
Минус 12 в подается на контакт 4 реле РЗ через контакты 3—2
кнопки ПУСК Кн1.
Реле РЗ, сработав, своими HP контактами 1—3 с а моб
локируется, оставаясь под током и в том случае, когда обесточивается реле
PI; HP контактами 4—6 подает минус 12 в на все электрозапалы
снаряда (контакт 3 бортразъема) через контакт 4 разъема Ш1.
Так как на электрозапалы ЭЗ-СД и ЭЗ-ТР напряжение +12 в
подано ранее, то они воспламеняются и в результате произойдет
сход выбранного снаряда с пусковой установки.
При сходе снаряда HP контакты 1—3 микропереключателя В1
бортразъема замкнутся и подадут +12 в на электрозапалы ЭЗ-МД
и ЭЗ-ВЗ. В результате произойдет воспламенение маршевого
двигателя и электрозапала взрывателя, который подготовит цепь
срабатывания взрывателя.
НЗ контакты 1—2 микропереключателя В1 бортразъема
разорвут цепь, по которой подается напряжение +12 в на лампочку
ИЗД. УСТ. Л1, которая погаснет, сигнализируя о сходе снаряда с
направляющей № 1, и на контакт 7 обмотки реле Р1.
Реле Р1 отпустит и своими HP контактами 4—6 разомкнет цепь
разряда конденсатора 7-С7 электронного блока, а НЗ контактами
1—2 подаст плюс 12 в через HP контакты 1—3 реле РЗ, которые
находятся под напряжением, на контакт 7 обмотки реле Р2. Так как
напряжение минус 12 в на контакт 8 реле подано ранее, то Р2
сработает и своими HP контактами 6—4 соединит контакт 3 разъема
КШ электронного блока с контактом 3 разъема Ш1, т. е.
подключит третий провод линии связи к электронному блоку через
контакты 1—3 цепей 2 и 5 переключателя ПУСКОВАЯ УСТ. В4 и контакт
3 разъема Ш1; своими HP контактами 1—3 реле Р2 подает —12 в
в электронный блок через предохранитель Пр1 и контакт 6
разъема КП1.
Таким образом, в результате схода снаряда включится
электронный блок и к нему подсоединится 3-й провод линии связи,
после чего станет возможным управление снарядом.
После окончания полета при обрыве линии связи прекратится
поступление сигнала информации со снаряда, в результате чего
сработает реле 4-Р1 электронного блока и своими контактами 3—4
обесточит реле РЗ. Реле РЗ отключит реле Р2, которое, в свою
очередь, снимет питание с электронного блока. В результате схема
придет в исходное состояние.
64
При установке переключателя ПУСКОВАЯ УСТ. В4 в
положения 2, 3, 4 работа схемы при подготовке к пуску и при пуске
снарядов с остальных пусковых установок протекает аналогично
описанному. Отличием является то, что подача напряжения 12 в на
электрозапалы ЭЗ-СД, ЭЗ-ТР, а также соединение 2-то и 3-то
проводов линии связи с контактами 2 и 3 разъема КП1 электронного
блока производится разными цепями переключателя ПУСКОВАЯ
УСТ. В4 в зависимости от его положений.
При установке переключателя ПУСКОВАЯ УСТ. В4 в
положение 2 плюс 12 в поступает на контакт 2 бортразъема (схемы борт-
разъемов направляющих № 2—4 аналогичны схеме направляющей
№ 1 и на рисунке не показаны) через контакты 1—2 цени 9,
контакты 1—3 цепи 8 переключателя ПУСКОВАЯ УСТ. В4 и контакт 1
разъема Ш2; контакт 2 разъема КП1 электронного блока
соединяется с контактом 5 бортразъема (2-й провод линии связи) через
контакты 1—2 цепи 4, контакты 1—3 цепи 3 переключателя
ПУСКОВАЯ УСТ. В4 и контакт 2 разъема Ш2; контакт 4 реле Р2
соединяется с контактом 6 бортразъема (3-й провод линии связи)
через контакты 1—2 цепи 2, контакты 1—3 цепи 1 переключателя
ПУСКОВАЯ УСТ. В4 и контакт 3 разъема Ш2.
При установке переключателя ПУСКОВАЯ УСТ. В4 в
положение 3 плюс 12 в поступаем на контакт 2 бортразъема через
контакты 1—2 цепи 9, контакты 1—2 цепи 8 переключателя ПУСКОВАЯ
УСТ. В4, контакт 1 разъема ШЗ; контакт 2 разъема КП1 электрон
ного блока соединяется с контактом 5 бортразъема (2-й провод
линии связи) через контакты 1—2 цепи 4, контакты 1—2 цепи 3
переключателя ПУСКОВАЯ УСТ. В4 и контакт 2 разъема ШЗ; контакт 4
реле Р2 соединяется с контактом 6 бортразъема (3-й провод линии
связи) через контакты 1—2 цепи 2, контакты 1—2 цепи 1
переключателя ПУСКОВАЯ УСТ. В4 и контакт 3 разъема ШЗ.
При установке переключателя ПУСКОВАЯ УСТ. В4 в
положение 4 плюс 12 в поступает на контакт 2 бортразъема через
контакты 1—3 цепи 9, контакты 1—3 цепи б переключателя ПУСКОВАЯ
УСТ. В4, контакт 1 разъема Ш4; контакт 2 разъема КШ
электронного блока соединяется с контактом 5 бортразъема (2-й провод
линии связи) через контакты 1—3 цепи 4, контакты 1—2 цепи 7
переключателя ПУСКОВАЯ УСТ. В4 и контакт 2 разъема Ш4; контакт 4
реле Р2 соединяется с контактом 6 бортразъема (3-й провод линии
связи) через контакты 1—3 цепи 2, контакты 1—2 цепи 5
переключателя ПУСКОВАЯ УСТ. В4, контакт 3 разъема Ш4.
3.3. УСТРОЙСТВО ПУЛЬТА 9С415
Пульт 9С415 состоит из электронного блока, рукоятки
управления, цепей контроля и коммутации.
Конструктивно пульт выполнен в виде герметичного блока,
состоящего из корпуса 42 (рис. 33) и крышки 19, прикрепляемой к
корпусу 42 винтами 15, 17. Винты 15 пломбируются.
5 Зак. 1495с
65
На верхней наружной поверхности корпуса 42 размещены:
рукоятка управления 49, прикрепляемая к корпусу 42 винтами 55 и
57; стойка визира 43; переключатель ПУСКОВАЯ УСТ. В4 24;
кнопка ПУСК Кн1 с протектором 20; лампа ИЗД. УСТ. Л1, закрытая
колпачком 59; кронштейн с зажимом 37, предназначенные для
крепления визира 9Ш16 в походном положении.
На боковых наружных поверхностях корпуса 42 размещены:
четыре вставки (Ш1—Ш4) 12, закрытые крышками 3; вольтметр
(ИП1) 5, закрытый крышкой 4 со стеклом 6; кнопка КОНТР.
ПИТАНИЯ Кн2; корпус 10 с предохранителями Пр1 2 а и Пр2 5 а е
микротумблером (ВЗ) 8 и крышкой 7; колодка Ш5,
предназначенная для подключения аккумуляторной батареи ПФГ-400,
закрывается крышкой 50; два замка 44, предназначенные для крепления
батареи ПФГ-400 к корпусу 42; пробка 31 для проверки пульта на
герметичность; заводской знак 38; контрольный разъем Ш6 с
крышкой 48 и микротумблерами Л (В1) 35, К (В2) 36, закрытые
накладкой 46.
К контрольному разъему Ш6 подключается контрольно-из'мери-
тельная аппаратура при проверке технических характеристик
пульта.
На внутренней поверхности корпуса 42 размещены: электронный
блок /, прикрепляемый к корпусу 42 двумя винтами 39;
сопротивление R1; реле Р1; блок реле 45, в котором размещены реле Р2 и
- РЗ.
На крышке 19 размещены: резиновые прокладки 18, 41,
прижимающие электронный блок 1 при креплении крышки 19 к
корпусу 42; два колпачка 16 и две опоры 54, которые служат ножками
пульта управления.
Для герметичного крепления крышки 19 с корпусом 42 между
ними установлено уплотнительное кольцо 14.
Для герметичного крепления рукоятки управления 49, вставок
(Ш1—Ш4) 12, корпуса 10, переключателя ПУСКОВАЯ УСТ. В4
24, колодки Ш5, контрольного разъема Ш6, ламподержателя 60,
пробки 31, кнопок Кн1 и Кн2, микротумблеров Bl, В2, ВЗ между
указанными элементами и корпусом 42 установлены протектор 56,
уплотнительные кольца и прокладки 13, 11, 40, 47, 58, 32,
протекторы 20 и 9.
Крышки 3 вставок Ш1—Ш4, крышка 7 корпуса
предохранителей прикреплены к корпусу 42 цепочками 51.
Заземление, состоящее из штыря 53 и шнура 52, крепится к
корпусу винтом 54.
Стойка визира 43 служит для креп леей я визира на 'пульте
управления и позволяет оператору устанавливать визир в положение,
удобное для наблюдения за целью и снарядом при наведении
снаряда на цель.
Стойка визира 43 состоит из стойки 33, которая винтами 34
крепится к корпусу 42; стакана 29, соединенного с проушинами стойки
66
осью 30; зажима 21, предназначенного для закрепления визира в
необходимом положении; втулка 27 с колпачком 25; цанги 26;
трубки 28.
На поверхности втулки 27 имеется накатка, облегчающая
навинчивание втулки на стакан 29 и свинчивание.
В трубке 28 двумя штифтами 23 закреплен кронштейн 22, в
котором визир устанавливается и закрепляется зажимом 21.
Для установки визира в положение, удобное для работы с
пультом управления, производится регулировка стойки визира по
высоте и наведение визира в горизонтальной плоскости.
Для этого, отвертывая втулку 27, освобождают трубку 28 и,
выдвигая и опуская ее при одновременном поворачивании с визиром,
наводят -визир в нужном направлении.
После этого навертывают втулку на стакан 29.
При навинчивании втулка- своим внутренним конусом находит
на конус цанги 26 и последняя, сжимаясь, жестко закрепляет
трубку 28, а вместе с ней и кронштейн 22 с визиром, установленным в
требуемом положении.
Электромонтаж выполнен проводом марки МПМ (рис. 32).
Провода увязаны в жгуты, .прикрепленные к корпусу 42
(рис. 33) с помощью окоб 2.
Переключатель ПУСКОВАЯ УСТ. В4 обеспечивает включение
пульта управления для пуска снаряда и последовательное
подключение цепей пуска и управления к одной из пусковых установок.
У переключателя имеется 5 рабочих фиксированных положений,
расположенных под углами 0, 30, 90, 150, 210° и 3 промежуточных
фиксированных положения, расположенных под углами 60, 120 и
180°. Состояние цепей микропереключателей при повороте ручки
через каждые 30° показано «а диаграмме рис. 34.
Такое включение микропереключателей обеспечивается
различными профилями кулачков.
Переключатель состоит из корпуса 8 (рис. 34), кулачков 12 с
фиксатором, микропереключателей 6, фланца 5, крышки 7, пружин
10 с шариками, ручки /.
Кулачки 12 с фиксатором 9 закреплены на оси 2 со шпонкой 13.
Ось 2 устанавливается во фланец 5 через уплотнительные кольца 3.
Толкатели микропереключателей перемещаются с помощью
подпружиненных скоб //, приводимых в движение кулачками 12.
Рукоятка управления предназначена для управления снарядом
в полете посредством подачи команды управления по курсу и
тангажу.
Механизм рукоятки управления включает в себя: рукоятку
(рис. 35), с помощью которой оператор управляет снарядом;
потенциометры курса P-R1 и тангажа P-R3 с сопротивлениями P-R2,
P-R4, P-R5, P-R6, обеспечивающие необходимый закон изменения
напряжений по курсу UK и тангажу £/т в зависимости от угла
отклонения рукоятки ф; механизм подачи команд 15, связывающий
рукоятку с потенциометрами курса и тангажа; конденсатор Р-С1,
5*
67
■о
00
I I Г I
Отклонение ручки
переключателя
0°
30°
60°
90°
120°
150°
180°
210°
Д
иаграмма
работы
переключателя
Цепи микропереключателей
1-3
I
1-2
х
i
1-3
2
1-2
1-3
i
1-2
1-3
1
1-2
1-3
1-2
XI |X| IXI X
1-3
1-2
1-3
IXIX
7
1-2
1-3
1-2
1-3
1-2
IXI X
1
1-3
0
1-2
1
1-3
1
1-2
XI IXI
XI IX! 1Х| |Х XI I 1X1X1 1Х| |Х| | |Х| IX
XI | |Х|Х|
X] i |Х|х|
IXI IXIXI ! IXIXI
IXI IXIXI .
ixl ixi ixi ixl ixlxi
IXI 1X1 IX! IX IxIXl
XI IXI IXI IXI
XI |X| IXI IXI
|X|X| X
ixixl 1 |x| x x
XI |X| IXIXI |X
ixl ixl ixl ix |x
IXIXI' |X|X| |x| |X | •
!X|X| IXIXI
x | |x! x
X — цепь замкнута.
Рис. 34. Переключатель ПУСКОВАЯ УСТ. В4:
/ — ручка 01.03.270; 2 — ось 01.03.083; 3 — кольцо уплотнительное 01.02.034; 4 — гайка 01.03.103; 5 —
фланец 01.03.082; 6 — микропереключатель МПЗ-1 ОЮО.360.007 ТУ; 7—крышка 01.03.092; 8 — корпус
01.03.U89; 9— фиксатор 01.03.102; 10 — пружина 01.03.099; //— скоба 01.03.094; 12 — кулачок 01.03.168;
13 — шпонка 01.03.084
со
РУ
Чет
+ 126
Culwa*
потенциометра татака
UittfQM
потенциометра курса
-ЛОв
>Ю$
Характеристика потенциометра
канала курса
-<р° w' го
Вправо
Характеристика потенциометра
канала тангажа
Ut ВЫ
-<f° W' 20
Вниз
<.
-Ь.Ув
/
А
\ 1 1 - — —
-We ;*
--С/-"
i
х
А
__Ij
X 1
1 1
1
Г"
-s'' 0° 20'
+ /0 6
Ц1^
г-
♦£,гв
ОоСрА
40° Vе
Рис. 36. Принципиальная электрическая схема рукоятки
управления
70
являющийся фильтром переменной составляющей в цепи питания
потенциометров.
Принципиальная электрическая схема рукоятки управления
представлена на рис. 36.
Движки потенциометров тангажа P-R3 и курса P-R1
механически связаны с рукояткой через механизм подачи команд 28. При
отклонении рукоятки влево — вправо перемещается движо'к
потенциометра курса, при отклонении рукоятки на себя (вверх) —от
себя (вниз) перемещается движок потенциометра тангажа. При
отклонении рукоятки в промежуточное положение движ'ки
потенциометров тангажа и курса отклоняются одновременно на величины,
определяемые направлением отклонения рукоятки.
Характеристики рукоятки управления, т. е. зависимость
напряжений UK и UT, снимаемых с потенциометров курса и тангажа, от
угла отклонения q; рукоятки, представлены на рис. 36.
Начальный участок (0—20°) характеристики имеет небольшую
крутизну, что обеспечивает незначительное изменение выходного
напряжения при больших начальных углах отклонения ручки.
Конечный участок (20—40°) имеет большую крутизну, что позволяет
получить большие изменения выходного напряжения при
незначительных углах отклонения рукоятки. Таким образом, начальный
участок характеристики обеспечивает высокую точность наведения
снаряда, а конечный участок—более быстрое уменьшение
рассогласования между снарядом и целью в процессе наведения.
Различная крутизна характеристик достигается шунтированием
участков потенциометров постоянными сопротивлениями P-R2,
P-R4, P-R5, P-R6.
Питание потенциометров осуществляется постоянным
напряжением, равным 20 в.
Конструктивно рукоятка управления состоит из корпуса 3
(рис. 35), на котором установлена рукоятка, механизм подачи
команд 15, потенциометры P-Rl, P-R3 и плата 20 с электромонтажом.
Рукоятка состоит из цанги 12 и стержня 8. В верхней части
цанги 12 закреплена ручка 10 с колпачком 11. В рабочем положении
рукоятка выдвигается из стержня 8 вверх до упора, в походном
положении она утапливается. Рукоятка соединена с механизмом
подачи команд 15 с помощью стержня 8 и осей 6, 14, причем стержень
8 своим выступом входит в паз оси 4.
Механизм подачи команд 15 состоит из двух взаимно
перпендикулярных осей 4, 14, лежащих в одной плоскости зубчатых
секторов 2 и шестерни 1. Оси 4, 14 закреплены в корпусе 3 втулками
13. Свободное вращение осей 4, 14 позволяет производить
максимальное круговое отклонение рукоятки относительно вертикальной
оси в пределах 40°. Ограничение отклонения стержня, а также
крепление рукоятки управления к пульту управления производится с
помощью диска 5.
71
Ко'нцы осей 4, 14 жестко соединены с зубчатыми секторами 2,
которые находятся в зацеплении с шестернями 1. Шестерни /
закреплены на одной оси с движками потенциометров. При отклонении
рукоятки в 'плоскости 'курса 'Стержень 8, вращаясь .вокруг оси 14,
смещает движок потенциометра тангажа.
Фиксация нулевого положения рукоятки обеспечивается
рычагами 19, 16 и пружиной 18, которые через оси 4, 14 связаны с
рукояткой.
Потенциометры P-Rl, P-R3 конструктивно выполнены
одинаково и представляют собой проволочное сопротивление, которое
намотано на алюминиевый каркас, покрытый электроизоляционным
составом.
Зависимость величины активного сопротивления потенциометра
от угла поворота движка линейна. На углах 70 и 140° в обе стороны
от средней точки потенциометра сделаны выводы, к которым
припаяны сопротивления P-R2, P-R4, P-R5, P-R6.
Эти сопротивления, а также конденсатор Р-С1 расположены на
плате 20, которая крепится к корпусу 3.
Для обеспечения герметичности при постановке рукоятки
управления в пульт на стержень 8 надет резиновый протектор 7, в пазы
стержня поставлены резиновые кольца 9.
Электромонтаж выполнен проводом марки МПМ. Провода
увязаны в жгуты, прикрепленные к корпусу 5 (рис. 35) скобами 17.
72
я
СО
в-
о.
с
«О СМ СМ
ft
>р
ОС
LO(M
о1 °i
»— О
н
X
нис
ова
я
S
03
X
ч
03
S
о.
о
к £
^ ЕГ
-
ь
о
о
<в
а:
0)
се
со
о
чэ
О
■ ■
t^ О О
О ст> СО
(М ■ —■
иод Д
ЭТО-1
МБМ-
ч
,*. О. О,
S О О
Л Н Е-|
И <Л СЗ
(D О О
к к я
х <и <и
S et tf
aj К Я
о. о о
ыхх
>> >>
>> Н Н
l_ со см
сч со со
_-. О О
О Tf <N
см со со
^j Tf Tf
CO О О
<cl**
H О О
о ^
s Чи t
а | ии
<к —
~\ —■ со
.0
о.
О
Е-
U
К
СО
а>
Си
о
СО
о
о
со
Tf
• СМ СМ СМ СМ — СМ СМ—'СМ —
О о ° « « О
о у о о
5? 3? 3?
О О О
« У И
о о
Щ Щ ц Щ Ц Щ g
о о 6 о о о g
« у у у „ * у
с
—' _ § 1" О СО Ш W 00 1С со (^ л, СО 0О CM "^
Ю"„йЮ---Мсо-Г««С)-'ЩСТЮ
о~-_оО
+i T: +i
+1
сЗ*
ю —
т ю т
см см см
о' о' о*
III
ooo
+1 +1 +1
as a* :»
о о 6
_ — о
.. .о
ю ю —
I I I
lO iO Ю
CM CM CM
oo"o*
* I I
Hr-h-
«£
ooo
o2
+1+1
a* as
ooo
У У ii
CO CO CM
— — CM CO
~ Ю ~o~LO
as 3
+i+i+i+i+i'f;+i
a* sj
о as о
« о !<:
см ^ со
—.см —
со ю
^ a*
о о
oo2
+1+1+1
a? a*
о о
i"icD'
CO CM
со
LO LO
CM CM
О CO
1 I
OO
Ю LO
CM CM
о о
I I
HE-
OO
LO LO
см см
о о
oo
LO LO LO
CM CM CM
о" о о
I I I
HHH-
ooo
CD CM Ю
I I I ■
LO LO Lp
CM CM CM
ooo
I I I
HE-H
££:>
ooo
со
T
о
CM
CM Tf СО
— ccSS см ■* ^
J*""" CM CM CM
и
s
л, .«coins - -
— (NrT*lfl(OS00Ol««« — —■ CO lOtD CO
ОТ СсГ K" ££ Ctf K" CC CC CX" СсГ К" СсГ СсГ С£ Ctf СсГ СсГ (X
• llllliliiiliiiili
_rtrt^_„____„«__-i__«CMCMCMCMCM
6 Зак. 1495с
73
4*
Продолжение
Обозначение
2-R9, 2-R10
2-R11, 2-R12
2-R13, 2-R14
2-R15, 2-R16
3-R1
3-R2
3-R3
3»-R4
3-R5
3'-R6
3-R7
3-R8
3-R9, 3-R10
3-R11, 3-R12
3-R13, 3-R14
3-R15
3-R16
3-R17
3-R18
3-R19
4-R1
4-R2
4-R3
4-R4
4-R5
4-R6
4-R7
4-R8
4-R9
5-R1
ГОСТ, ТУ, нормаль,
чертеж
ГОСТ 7113—6G
»
»
»
»
»
»
»
»
»
»
»
»
»
»
»
ГОСТ 10688—63
ГОСТ 7113—66
»
»
»
»
»
»
»
»
»
»
»
»
{-.Наименование и тип
ОМЛТ-0,25-22 ком ±10%
ОМЛТ-0,25-6,8 ком ± 10%
ОМЛТ-0,25-1,5 кож ± 10%
ОМЛТ-0,25-16 кож ±5%
ОМЛТ-0,25-510ол1±5%
ОМЛТ-0,25-43/сол1±5%
ОМЛТ-0,25-Ю/сол1± 10%
ОМЛТ-0,25-22/сол1 ±10%
ОМЛТ-0,25-30/сол1±5%
ОМЛТ-0,25-3,3 ком ±10%
ОМЛТ-0,25-3 ком ± 5%
ОМЛТ-0,25-1,5 кож ± 10%
ОМЛТ-0,25-22 ком ± 10%
ОМЛ Т-0,25-10 кож ± 10%
ОМЛТ-0,25-1,5 ком± 10%
ОМЛТ-0,25-4,3 ком ± 5%
ММТ-1 -2,2 ком
ОМЛТ-0,25-510ож±5%
ОМЛТ-0,25-51 ком ± 5%
ОМЛТ-0,25-200ож±5%
ОМЛТ-0,25-20кож±5%
ОМЛТ-0,25-75кож±5%
ОМЛТ-0,25-30 ком ± 5%
ОМЛТ-0,25-10 кож ± 10%
ОМЛТ-0,25-75 ком ± 5%
ОМЛТ-0,25-4,3 ком ± 5%
ОМЛТ-0,25-2 ком ± 5%
ОМЛТ-0,25-100 ом± 10%
ОМЛТ-0,25-22 ком ± 10%
' ОМЛТ-0,25-510ож±5%
Основные
данные,
номинал
22 ком
6,8 ком
1,5 ком
16 ком
510 ом
43 ком
10 ком
22 ком
30 ком
3,3 ком
3 ком
1,5 ком
22 ком
10 ком
1,5 ком
4,3 ком
2,2 ком
510 oil
51 ком
200 ож
20 ком
75 /сол!
30 /сол!
10 ком
75 /сол!
4,3 ком
2 /сол
100 ол
22 ком
510 ол
Количество
2
2
2
2
2
2
2
Примечание
36—51 ком
•
20—68 /сол
<?
Продолжение
Обозначение
ГОСТ, ТУ. нормаль,
чертеж
5-R2
5-R3
5-R4
5-R5
5-R6
5-R7
5-R8
5-R9
5-R10
5-R11
5-R12
5-R13
5-R14
5-R15
5-R16
-R17
-R18
-R1
-R2
-R3
-R4,
7-R1
7-R2,
7-R4
7-R5
7-R6
7-R7
8-R1
8-R2
«-R3
5-
5-
6-
6-
6-
6-
ГОСТ 7113—66
6-R5
7-R3
ГОСТ 10688—63
ГОСТ 7113—66
ГОСТ 10688—63
ГОСТ 7113—66
Наименование и тип
омлт
омлт-
омлт
омлт
омлт
омлт
омлт-
омлт-
омлт-
омлт-
омлт-
омлт-
омлт-
омлт-
омлт^
омлт
омлт
омлт
ММТ-1
омлт-
омлт-
омлт-
омлт-
омлт-
омлт-
омлт-
ММТ-1
омлт
омлт
омлт
0,25-3,9 ком
■0,25-3 ком ±
0,25-30 ком -.
■0,25-15 ком :
■0,25-8.2 ком
■0,25-1,6 ком
•0,25-390 ом :
-0,25-510 ом:
-0,25-43 ком :
-0,25-510 ом :
-0,25-1,2 ком
-0,25-8,2 ком
-0,25-510 ом :
-0,25-43 ком :
-0,25-6,2 ком
-0,25-39 ком d
-0,25-1 Ю OMd
-0,25-1 ком ±
-2,2 ком
0,25-3 ком ±
0,5-22 ком ±
•0,5-270 ом ±
•0,25-100 omz
•0,25-510 ком
■0,25-30 ком -.
■0,25-1 ком ±
-2,2 ком
■0,25-22 ком
■0,25-1,5 кол
-0.25-110 ом
±5%
5%
ь 5%
Ь5%
± 10%
± 5%
ь 5%
ь 5%
t 5%
t 5%
± 5%
± 5%
t5%
t 5%
± 10%
± 5%
± 5%
10%
5%
10%
10%
= ю%
±5%
-- 5%
10%
± 5%
± 10%
± 5%
Основные
данные,
номинал
3,9 КОМ
3 КОМ
30 ком
15 ком
8,2 ком
1,6 ком
390 ом
510 ом
43 ком
510 ом
1,2 ком
8,2 ком
510 ом
43 ком
6,2 ком
39 ком
ПО ОЛ!
1 ком
2,2 /сол!
3 /сол!
22 ком
270 ол!
100 ом
510 кож
30 кож
1 ком
2,2 кож
22 ком
1,5 кож
ПО п«
XV
Примечание
1,8—75 ком
1—2 кож
100 ож — 1 ком
1—75 ком
470 ож — 8,2 ком
Продолжение
Обозначение
8-R4
8-R5
8-R6
8-R7
8-R8
8-R9
8-R10
8-R11
8-R12
8-R13,
9-R1
9-R2
9-R3
9-R4
9-R5
9-R6
9-R7-
10-R1
10-R2
10-R3
10-R4
10-R5
11-R1
11-R2,
11-R4
11-R5
Б-Rl
B-R2
B-R3
B-R4
8-R14
9-R9
11-R3
ГОСТ, ТУ, нормаль,
чертеж
ГОСТ 7113—66
>
>
»
ОЖО 467 035ТУ
ГОСТ 7113—66
ОЖ0 467 016ТУ
ОЖ0 468 047ТУ
»
Наименование и тип
ОМЛТ-0,25-300 ком ± 5%
ОМЛТ-0,25-3,6 ком ± 5%
ОМЛТ-0,25-180 кол ± 5%
МО ом±5%
5%
ОМЛТ-0,25
ОМ Л Т-0,25-2 ком =и и7о
ОМ Л Т-0,25-110 ол± 5%
ОМЛТ-0,25-1,1 Мом ± 5%
ОМЛТ-0,25-30 ком ± 5%
ОМЛТ-0,25-2 ком ± 5%
ОМЛТ-0,25-110 ом ±5%
ОМЛТ-0,25-10 ком ± 10%
ОМЛТ-0,25-75 ком ± 5%
ОМЛТ-0,25-110ол1±5%
ОШП-0,25-2 ком ± 5%
ОМЛТ-0,25-3,3 ком ± 10%
ОМЛТ-0,25-2 ком ± 5%
ОМЛТ-0,25-3,3 ком ± 10%
5%
5%
ОМЛТ-0,25-2 ком
ОМЛТ-0,25-200 ом
ОМЛТ-1 -330 ом± 10%
ТВО-0,25-15±10%
ОМЛ Т-0,25-1 ком ± 5%
ОМЛТ-0,25-200 ом ± 5%
ОМ Л Т-0,25-110 ом ± 5%
ОМЛТ-0,25-6,2 ком ± 5%
УЛИ-0,25-4,02±3%
СПО-0,5-1-2,2 кол ±
СПО-0,5-1-5,1 ком ±
СПО-0,5-1-10/сол ±
СПО-0,5-1-2,2 ком ±
Основные
данные,
номинал
О)
I;
Примечание
20%-
■ОС-3-20
20%-ОС-3-20
20%-ОС-3-20
20%-ОС-3-20
300 ком
3,6 ком
180 ком
ПО ком
2 ком
НО ом
1.1 Мом
30 ком
2 ком
ПО ом
10 ком
75 ком
ПО ом
2 /сол
3,3 кол
2 кол
3,3 /сол!
2 ком
200 ол!
330 ол!
15 ом
1 кол
200 ом
ПО ол
6.2 /сол!
4,02 ом
2,2 /ссш
5.1 ком
10 /сол!
2.2 ком
39—510 ком
150—510 ком
20—39 ком
51—82 ком
100 ол — 2 ком
ЮОол —360 ом
Обозначение
B-R5
B-R6
B-R7
R
ГОСТ, ТУ, нормаль,
чертеж
ОЖ0468 047ТУ
ГОСТ 7113—66
Наименование и тип
СПО-0,5-1-68/сол1 ± 20%-ОС-3-20
СПО-0,5-1-2,2 ком ± 20%-ОС-3-20
СПО-0,5-1-10 ком ± 20%-ОС-3-20
ОМЛТ-0,25-5,1 ком ± 5%
Основные
данные,
номинал
68 ком
2 2 ком
10 ком
5,1 ком
V
S
ч
э
П родолжение
Примечание
1-С1
1-С2,
1-С4,
2-С1,
2-СЗ-
3-С1
3-С2,
3-С4-
3-С7
4-С1
4-С?
4-СЗ,
4-С5,
5-С1,
5-СЗ,
5-С5
5-С6
6-СЛ
6-С2-
6-С6,
7-С1
1-СЗ
1-С5
2-С2
-2-С6
3-СЗ
- 3-06
4-С4
4-С6
5-С2
5-С4
- 6-С5
6-С7
ОЖ0 464 036ТУ
ОЖ0 462 032ТУ
»
»
»
»
»
»
»
ОЖ0 464 036ТУ
ОЖ0 462 047ТУ
ОЖ0 464 036ТУ
ОЖО 462 032ТУ
ОЖО 4^4 036ТУ
ОЖО 462 032ТУ
ОЖО 464 036ТУ
ОЖО 462 032ТУ
»
ОЖО 462 ОПТУ
ОЖО 464 036ТУ
ОЖО 462 032ТУ
Конденсаторы
ЭТО-1-90-10±10%-Б
МБМ-160-0,25-П
МБМ-160-0,5-И
МБМ-160-0,25-П
МБМ-160-0,1-П
МБАА-160-0,5-П
МВМ-160-0,1-П
МБМ-160-0,05-Н
МБМ-160-0,25-Н
ЭТО-1-50-20 ±20%-Б
БМ-2-200-0,01±10%
ЭТО-1-15-50±20%-Б
МБМ-160-0,1-П
ЭТО-1-15-50±10%-Б
МБМ-160-0,1-Н
ЭТО-1-25-30^20%-Б
МБМ-160-0,1-II
МБМ-160-0,25-II
К40П-2б-400-0,047±10%
ЭТО-1-90-Ю1|5%-Б
МБМ-160-1-П
10 мкф
0,25 мкф
0,5
0,25
0,1
0,5
0,1
0,05
0.25
20
0,01
50
0,1
50
0,1
30
0,1
0,25
0,047
мкф
мкф
мкф
мкф
мкф
мкф
мкф
мкф
мкф
мкф
мкф
мкф
мкф
мкф
мкф
мкф
мкф
10
мкф
мкф
2
9
2
3
1
2
3
1
1
I
2
2
9
2
4
2
1
Обозначение
7-С6
7-С2
7-СЗ
7-С7
8-Cl, 8-C2
8-СЗ
8-С4
8-С5, 8-С6
в-С7
8-С8,
9-С1,
10-С1,
11-С1
11-С2
11-СЗ
8-С9
9-С2
10-С2
ГОСТ. ТУ, нормаль,
чертеж
ОЖО 462 ОПТУ
ОЖО 462 032ТУ
ОЖО 464 036ТУ
ОЖО 462 047ТУ
ОЖО 462 032ТУ
»
ОЖО 464 036ТУ
ОЖО 462 032ТУ
ОЖ0 464 036ТУ
»
»
1-Тр1
3-Tpl
5-Тр1
5-Тр2
6-Тр1
9-Тр1
10-Тр1
11-Тр1
Ю-Др1
01.01.030
01.01.130
01.01.230
01.01.250
01.01.300
01.01.440
01.01.510
01.01.570
01.01.490
Наименование и тип
Продолжение
Основные
данные,
номинал
К40П-2б-400-0,047±10%
МБМ-160-1-II
ЭТО-1-70-15±10°/о-Б
БМ-2-200-0,01±10%
МБМ-160-0,05-11
МБМ-160-0,1-11
ЭТО-1-25-301 IS %"Б
ЭТО -1 -15-50l|g 96 -В
МБМ-160-0,1-11
МБМ-160-0,1-11
ЭТО-1-15-501!оЧ-Б
ЭТО-1 -15-50lg% -Б
ЭТО-1-50-20 ±20%-Б
ЭТО-1-25-301^%-Б
Трансформаторы
Дроссель
0,047 мкф
1 мкф
15 мкф
0,01 мкф
0,05 мкф
0,1 мкф
30 мкф
50 мкф
0,1 мкф
0,1 мкф
50 мкф
50 мкф
20 мкф
30 мкф
в-
s ,
« о
1
4
1
2
1
1
2
1
2
2
2
1
1
1
1
1
2
2
1
1
1
1
1
Примечание
Продолжение
Обозначение
ГОСТ, ТУ, нормаль,
чертеж
Наименование и тип
Основные
данные,
номинал
1>
V
к ,
« о
Примечание
1-Д1,
1-ДЗ,
1-Д5,
2-Д1-
2-Д7,
3-Д1
3-Д2,
3-Д4-
3-Д8
3-Д9-
4-Д1
4-Д2,
4-Д4
5-Д1-
5-Д6,
6-Д1-
6-Д5
6-Д6-
6-Д10
7-Д1
7-Д2
7-ДЗ
8-Д1,
9-Д1-
И-Д1
И-Д4
11-Д5
1-ПП1,
1-Д2
1-Д4
1-Д6
-2-Д6
2-Д8
3-ДЗ
-3-Д7
-3-Д11
4-ДЗ
- 5-Д5
5-Д7
-6-Д4
-6-Д9
8-Д2
-9-Д4
-П-ДЭ
, 1-ПП2
СМ3 362 015ЧТУ
СМ3 362 012ЧТУ
СМ3 362 015ЧТУ
»
СМ3 362 010ТУ
СМ3 362 012ЧТУ
СМ3 362 015ЧТУ
СМ3 362 018ЧТУ
СМ3 362 015ЧТУ
СМ3 362 018ЧТУ
СМ3 362 015ЧТУ
СМ3 362 018ЧТУ
СМ3 362 012ЧТУ
СМ3 362 015ЧТУ
СМ3 362 012ЧТУ
СМ3 362 018ЧТУ
Тр3362 021ВрЧТУ
СМ3 362 018ЧТУ
Тр3 362 021ВрЧТУ
СМ3 362 015ЧТУ
СМ3 362 012ЧТУ
»
СМ3 362 018ЧТУ
ШБЗ 362 002ТУ
СМ3 362 018ЧТУ
ШБЗ 362 002ТУ
ПЖ0 336 002ТУ1
Полупроводники
Германиевый диод Д9Е
Кремниевый стабилитрон Д814А
Германиевый диод Д9Е
Германиевый диод Д9Е
Кремниевый диод Д220
Кремниевый стабилитрон Д814Д
Германиевый диод Д9Е
Кремниевый диод Д223А
Германиевый диод Д9Е
Кремниевый диод Д223А
Германиевый диод Д9Е
Кремниевый диод Д223А
Кремниевый стабилитрон Д814А
Германиевый диод Д9Е
Кремниевый стабилитрон Д814В
Кремниевый диод Д223А
Кремниевый диод Д223Б
Кремниевый диод Д237В
Кремниевый диод Д223Б
Кремниевый диод Д237В
Германиевый диод Д9Е
Кремниевый стабилитрон Д814Д
Кремниевый стабилитрон Д814В
Кремниевый диод Д223А
Кремниевый диод Д226А
Кремниевый диод Д223А
Кремниевый диод Д226
Германиевый транзистор МП10Б
2
2
2
6
2
1
2
4
1
3
1
2
1
5
2
4
1
4
1
1
1
1
2
4
3
1
1
2
Продолжение
Обозначение
1-ППЗ, 1-ПП4
2-ПП1— 2-ППЗ
3-ПП1—3-ПП4
3-ПП5
4-ПП1, 4-ПП2
4-ППЗ
5-ПП1—5-ПП4
6-ПП1
8-ПП1— 8-ПП5
9-ПШ
9-ПП2, 9-ППЗ
10-ПП1, 10-ПП2
11-ПП1, 11-ПП2
4-PI
6-Л1, 6-Л2
Рис. 23
CI — C4
Д1-Д6
ЭМ1 — ЭМ2
Рис. 24
3-R13
3-RI4
3-RI7
Rh
3-С7
3-ПП5
Обозначение
ГОСТ, ТУ, нормаль,
чертеж
!
СБ0 336 007ТУ1
»
»
ПЖ0 336 004ТУ1
СБ0 3Э6 007ТУ1
ПЖ0 336 004ТУ1
СБ0 336 007ТУ1
ПЖ0 336 004ТУ1
СБ0 335 007ТУ1
СБ0 336 007ТУ1
ПЖ0 336 004ТУ1
»
СИ3 355 012ТУ
РСО 452 049ТУ
ТФ3 300 077ТУ
ОЖО 462 032ТУ
Тр3 362 012ТУ
•
ГОСТ 7113—66
»
»
ОЖ0 462 032ТУ
ПЖ0 336 004ТУ1
ГОСТ, ТУ, нормаль,
чертеж
Наименование и тип
Германиевый транзистор МП14Б
Германиевый транзистор МП14Б
Германиевый транзистор МП14Б
Германиевый транзистор МП26
Германиевый транзистор МП14Б
Германиевый транзистор МП25Б
Германиевый транзистор МП14Б
Германиевый транзистор МП26
Германиевый транзистор МП15А
Германиевый транзистор МП14Б
Германиевый транзистор МП26
Германиевый транзистор МП25Б
Германиевый транзистор П214Г
Реле РЭС-10 РС4.524.302П2
Лампа 1П24Б-В
Конденсатор МБМ-160-0,25-11
Кремниевый диод Д207
Катушка 02.01.050
Резистор ОМЛТ-0,25-1,5 коя ± 10%
Резистор ОМЛТ-0.25-1,5 ком ± 10%
Резистор ОМЛТ-0,25-510ол ± 5%
Сопротивление нагрузки
Конденсатор МБМ-160-0,25-11
, Германиевый транзистор МП26
Наименование и тип
Основные
данные,
номинал
0,25 мкф
1,5 ком
1,5 ком
510 ом
0,25 мкф
Основные
данные,
номинал
2
3
4
1
2
1
4
1
5
1
2
2
2
1
2
4
6
2
че-
* о
X, и
Примечание
Продолжение
Примечание
3-Д4 - 3-Д7
3-Д8
3-Д9, З-ДЮ
3-Тр1
Рис. 25
СМ3 362 018ЧТУ
СМ3 362 015ЧТУ
СМ3 362 018ЧТУ
5-R1
5-R3
5-ПП1, 5-ПП2
5-ДЗ
5-СЗ
5-Тр1
Рис. 26
5-R12
5-R13
5-R16
Rh
5-С6
5-Д4, 5-Д5
5-Тр2
ГОСТ 7113—66
ГОСТ 7113—66
СБ0 336 007ТУ1
СМ3 362 015ЧТУ
ОЖ0 462 032ТУ
ГОСТ 7113—66
ГОСТ 7113—66
ГОСТ 7113—66
ОЖ0 462 032ТУ
СМ3 362 015ЧТУ
Кремниевый диод Д223А
Германиевый диод Д9Е
Кремниевый диод Д223А
Трансформатор 01.01.130
Резистор ОМЛТ-0,25-5 Юсш ± 5%
Резистор ОМЛТ-0,25-3/сол1 ± 5%
Германиевый транзистор МП14Б
Германиевый диод Д9Е
Конденсатор МБМ-160-0,1-11
Трансформатор 01.01.230
Резистор ОМЛТ-0,25-1,2 ком ± 5%
Резистор ОМЛТ-0,25-8,2 ком ± 5%
Резистор ОМЛТ-0,25-6,2 ком ± 5%
Сопротивление нагрузки
Конденсатор МБМ-160-0,1-II
Германиевый диод Д9Е
Трансформатор 01.01.250
510 ом
3 ком
0,1 мкф
1,2 ком
8,2 ком
6,2 ком
0,1 мкф
4
1
2
1
1
1
2
1
1
1
1
1
1
1
1
2
1
470 о и —8,2 ком
Рис. 27
7-R1
7-R2, 7-R3
7-R6
ГОСТ 7113—66
ГОСТ 7113—66
ГОСТ 7113—66
Резисторы
ОМЛТ-0,25-270 ком ±10%
ОМЛТ-0,25-100 ол*± 10%
ОМЛТ-0,25-1 ком ±10%
270 ком
100 ом
1 ком
1
2
1
06
ее
Обозначение
7-R7
B-R4
B-R5
B-R6
7-С2
7-С7
7-Д1
7-Д2
7-ДЗ
11-Тр1
Рис. 28
5-R4
6-Сб
6-Д5
6-Л1
6-Тр1
Рис. 29
11-R5
Кп
6-С2 - 6-С5
6-Д6 - 6-Д9
6-Л1, 6-Л2
11-Тр1
ГОСТ, ТУ, нормаль,
чертеж
ГОСТ 10688—63
ОЖ0 468 047ТУ
ОЖО 468 047ТУ
ОЖО 468 047ТУ
ОЖО 462 ОПТУ
ОЖО 464 036ТУ
Тр3 362 021ВрЧТУ
СМ3 362 015ЧТУ
СМЗ 362 012ЧТУ
ГОСТ 7113—66
ОЖО 464 036ТУ
СМ3 362 018ЧТ>
ТФЗ 300 077ТУ
ОЖ0 467 016ТУ
ОЖО 462 ОПТУ
Тр3 362 021ВрЧТУ
ТФЗ 300 077ТУ
Наименование и тип
ММТ-1-2,2 кол»
СПО-0,5-1-2,2 кол» ± 20%-ОС-3-20
СПО-0,5-1-68 ком ± 20%-ОС-3-20
СПО-0,5-1-2,2 коя ± 20%-ОС-3-20
Конденсатор
К40П-2б-400-0,047±10%
Конденсатор ЭТО-1-70-15±10°/о-Б
Кремниевый диод Д237В
Германиевый диод Д9Е
Кремниевый стабилитрон Д814Д
Трансформатор 01.01.570
Резистор ОМЛТ-0,5-22 ком ± 10%
Конденсатор ЭТО-1-90-10^5 %
Кремниевый диод Д223Б
Лампа 1П24Б-В
Трансформатор 01.01.300
Резистор УЛИ-0,25-4,02±3%
Сопротивление линии
Конденсатор
К40П-2б-400-0,047±10%
Кремниевый диод Д237В
Лампа 1П24Б-В
Трансформатор 01.01.570
Основные
данные,
номинал
2,2 ком
2,2 ком
68 ком
2,2 ком
0,047 мкф
15 мкф
22 ком
10 мкф
4.02 ом
0,047 мкф
Количество
1
1
1
1
4
1
1
1
1
1
1
1
1
1
1
1
1
А
4
4
2
1
Продолжение
Примечание
00
Обозначение
Рис. 31
R1
Кн1, Кн2
ИП1
R3—R5
Л1
Р1 — РЗ
Пр1
Пр2
В4
Рис. 32
Ш1 —Ш4
Ш5
Ш6
В1 —ВЗ
В4
Кн1, Кн2
Л1
Р1—РЗ
КП1
КП2
ИП1
ГОСТ, ТУ, нормаль,
чертеж
ГОСТ 6513—62
НА0 360 ОПТУ
ТУ25-05-107—67
ГОСТ 7113—66
МРТУ 2СФ0 337 006
РФ4 523 009ТУ
ОЮ0 480 ООЗТУ
»
ГЕ0 364 НОТУ
ОЮ0 360 015ТУ
НА0 360 ОПТУ
МРТУ 2СФ0 337 006
РФ4 523 009ТУ
ТУ25-05-107—67
Наименование и тип
Резистор ПЭВ-10-10 ом ± 10%
Кнопка НАЗ.604.020 Сп
Вольтметр Ml 131 0—15
Резистор ОМЛТ-2-330±10%
Лампа МН13,5в-0,16а
Реле РЭС-6 РФ0.452.107Д
Предохранитель ВП-1-1-2а
Предохранитель ВП-1-1-5а
Переключатель 01.03.280
Вставка 01.03.310
Колодка 01.03.100
Вилка 2РМГ24Б19Ш1Е2
Микротумблер МТ1
Переключатель 01.03.280
Кнопка НА3.604.020Сп
Лампа МН13,5е-0,16а
Реле РЭС-6 РФ0.452.107Д
Колодка 01.03.250
Колодка 01.03.260
Вольтметр Ml 131 0—15
Основные
данные,
номинал
10 ОМ
1че-
а и
1
2
1
3
1
3
1
1
1
4
1
1
3
1
2
1
3
1
1
1
Л родолжепие
Примечание
Ставится на
кронштейн,
соединенный с корпусом
01.03.073А
00
Продолжение
Обозначение
Рис. 3G
P-R1
P-R2
P-R3
P-R4
P-R5
P-R6
Р-С1
ГОСТ, ТУ, нормаль,
чертеж
ГОСТ 7113—66
ГОСТ 7113—66
ГОСТ 7113—66
ГОСТ 7113—66
ОЖО 464 036ТУ
Наименование и тип
Потенциометр 01.02.120
Резистор ОМЛТ-0,5-200 ом ± 5%
Потенциометр 01.02.120
Резистор ОМЛТ-0,5-200 ом ± 5%
Резистор ОМЛТ-0,5-750 ом ± 5%
Резистор ОМЛТ-0,5-390 ом ± 5%
Конденсатор ЭТО-1-25-30^2 %"Б
Основные
данные,
номинал
200 ОМ
200 ОМ
750 ом
390 ом
30 мкф
Количество
Примечание
Изм.
измененных
замеленных
новых
изъятых
Всего
листов
(страниц)
в докум.
№ документа
оо
Сл
Входящий №
сопроводительного
документа
и дата
Подпись
Ь
3
о
н
чэ
га
S
о
н
>
S
S
S
W
га
х
га
5
3
Дата
СОДЕРЖАНИЕ
Стр
3
Введение '
1. Принцип управления снарядом 9М14М (9М14) J*
1.1. Общие сведения об аппаратуре управления
1.2. Система сил, действующих на снаряд в полете '
1.3. Контур управления и метод .наведения снаряда на цель . . . *
1.4. Особенности системы управления ' ' ' jfi
1.5. Формирование управляющего сигнала ' ' 97
1.6. Блок-схема формирования управляющего сигнала f*
? Устройство и принцип действия электронного блока <*'
2.1. Общие сведения
22. Функциональная схема электронного блока . . . . - ■
2.3. Принципиальная электрическая схема электронного блока . . ob
2.3.1. Входное устройство . ~
2.3.2. Блок линеаризации . i ....•• £J
2.3.3. Блок канала тангажа |'
2 3.4. Блок компенсации веса . .
2.3.5. Блок формирования .программы компенсации веса и ограничения ^
команды ВНИЗ г,
2.3.6. Блок канала курса .
2.3.7. Интегрирующая цепь ..... ... • ^
2.3.8. Оконечный усилитель . . ■ • ; „
2.3.9. Блок отключения питания . • "' 56
2.3.10. Блок преобразователя ^
2.4. Устройство электронного блока . . ■ ' : 61
3. Пульт управления 9С415 .
3.1. Общие сведения . ■ • • fi0
3.2. Цепи контроля и коммутации ..... "*
3.3. Устройство пульта 9С415 . . • .
Приложение. Спецификация электрорадиоэлементов . . .
86
Редактор Ю. А. Николаев
Технический редактор Г. П. Бледных
Корректор Г. И. Селиванова
Сдано в набор 31.1.72 г. Подписано к печати 13.4.72 г.
Формат бумаги 60X90'/ie. Печ. л. 5'/г- Усл. печ. 5,54-
+6 вклеек 4'Д п. л. 4,25 усл. печ. л.
Изд. № 5/8030с Зак. 1495с
87*
наАни П
1-R1 I /-R3
/к/зП
Z-RZ
Г?
1-СЪ /-Д5
2-Д/
2-е/:
—I
2-ЮЗГ
Зак. 1495с
Д1
Рис. 20. Принципиальная электрическая схема электронного блока
4P*^-4J*«J^^
устройство; г—блок линеаризации; 6—блок канала тангажа; 4 — блок
компенсации веса; 5 — блок формирования программы компенсации веса и ограничения коман-
ВНИЗ; б —блок канала курса; 7— интегрирующая цепь; 8— оконечный усилитель; 9—
блок отключения питания; 10 — блок преобразователя
ды
Вклейка 1 к изд. № 5/8030с. Воениздат, 1972.
: ком-
коман
ь; 9 —
fad
Бортовая
аппаратура
Линия
связи
Рулевая
машинка
Вып'рй&Ы'-
Jl
Расцреде-
лШпелъ
XL
Вклейка 2 к изд. № 5/8030с. Воениздат, 1972.
Входное убтройство
6 в
JUW-
Вх&д&ые
цепи
С линии
связи"
шп
Усилитель
-ограничитель
I
Усилитель-
-огръни
чи'телъ
ю- s
4»
Г*
Триггер
tj
Блок карала курса
Блок линеаризации
^
Схелю
селекции
ж
1
Т
Триггер
ФазовьЩ
деМодуляпТор
ъ*
■w
ф
Усилитель
Модулятор
%U- Jtow
' W
ru\rv
л» 2кгц и
2кгц
Блок
отключения
питания
Ждущий
мультивибратор
^
Триггер
линеаризации
Модулятор
1
Фазочувстви-
тельный
усилитель
(демодулятор)
Предварительный модулятор
2кгц
Р"
| ж'
тлг
/
Т-Г
1»
блок канала тангажа
Предварительный
модулятор
£-
\
Корректирующие
цепи
SL
Рукоятка
управления
Интегрирую-
иЩя цепь
2кгц\
JUIJlJUliL
Модулятор -** Усилитель
i
СЬ
Корректирующее
цепи
Фазовый
демодулятор
т:
2кгц
1
■сг
Окрнечный усилитель
V\jA
Обратная _
связь
4йв^м*ч«^*
^VA-
ППППП1
7b- \ Цемодуь
пель ■*" Г
ш
-ftftftr
А
2К2£
Усищ.тель- \\]Целюдулятор
ограничитель
Прей?ШйдЖ$
усилитель
Выхойндй
усилитесь
\2кгц и*'
J№№- dHMP-tftRr-
Демодулятор
П£ейвьждпой
усилитель
Л
Ш
f 2кгц
Выходной
усилитель
2 кгц
Ш
Блок
J
компенсации веса
-JU
\
я=
Я=г
6/70К
преобразователя
2 'кгц
т
да
5лок формирования программы
компенсации веса и ограничения
команды ВНИЗ
2кги,/'
ш-
Зак. 1495с
Рис. 21. Функциональная схема электронного блока
Ш6 (контрольный разъем)
Рукоятка
управления
Кот.
1
Z
3
ч
5
Цепь
+12в средняя точка
потенциометров
Сигнал с двитна ПТ
Сигнал сдвижка ПК
-20в питание
потенциометров
+ Z0 в питание
потенциометров
Зак. 1495с
Рис. 31. Принципиальная электрическая схема пульта управления 9С415
Вклейка 3 к изд. № 5/ШОс. Воениэдат, 1972.
Положение
ручки
переключателя
о
1
Диаграмма работь
Режим
работы
переключателя
ПУСКОВАЯ УСТ
В4
Цепи микропереключателей
1-3
1
1-2
1-3
2
1-2
1-3
3
1-2
1-Л
Выключено IX! ixl ixl |x|
Изделие N» 1 | X | |Х| |Х| X
4
1-2
1-3
1-2
1-3
6
1-2
1X1 IX
1-3
7
1-2
Х|
1-;
1
1-:
-3
х| |х
1-5
10
-3 1-:
1
-3
Х| |Х
1
1-2
ixl I Ixixj xi |х| 1 ixl ix
ixi | ixixl 1 |х| jx|x| | ixjxi i |x|x| ixi
2 1
Изделие № 2 |Х| | 1X1X1 I |Х| |х|Х| |
IXIXI | 1Х| |Х| IX
1 IXI ixl IXI IXI IXIXI |X! |X| IXIXI |X!
3
Изаелие^з! ',Х| |Х| |Х| |Х| |*|Х| 1 |Х| |Х| |Х| |Х| |Х
1 |X| |X| |*| |Xi |X|X| IXIXI |X| IXI IXI
4 I
Изделие № 4 |Х| |Х| |Х| |Х| |Х|Х| |Х|Х| 1Х| | |Х| |Х
I X|~ цепь замкнута.
Вид А
KVKKKKKKKKKKKKKKKKK>.l.KK К к I I I I t I I I I I I к t I I > к t t l I I к I I к к I I »Л
^.
10
с
D
\2)
«111
Ф
Мвт^зтв
КП2
US
■4HHHHHJ-
fiBflgsggffimt
iKflf
ППППП
52 ю го то «1-*
ПППППП
ДННИО=ННРШ=
I 2 3 4,5 6 7 8 9 10 II
Ф
"^
find ;
Поверну!
Вид Б
kkkkkkkkkkk<kkkkkkkkkkikkkkkkikkkkkkikskkyssssSSSSSSSSSSSU4
R^fRj
Li PI
H ф<п|б2 )
5 ■■' В cfo
6)
Р2
РЗ
Z
Рис. 32. Электромон
Вклейка 4 к изд. № 5/8030с. Воеииздат, 1972.
<:
Вид И
Повернуто
BU
/0 8 7
□з
]2
ГТ13 Q0,
И if И
5Б|
asi
251
28i<
24
ЗГ|
221
эЕ
24
Й1
Повернуто
BU
2 4 6
s /г
flud Д
Ш6
■«;
find Ж
Повернуто
82 61
flU0 Г
Вид Е
Р2
Таблица проводов
PEZ
7 2/3
8 5 <» 6
6 4 5 8
Л
3^JlhTV)//37|\il37
й №пЧ
3 / 2 7
цепы
J
2
3
k
5
6
7
8
9
/0
С Я
/2
/3
/4
15
/6
/7
18
/9
20
2/
22
23
24
25
26
27
28
Z9
50
31
32
33
34
35
36
37
38
39
40
4/
42
иъ
44
45
46
41
48
49
50
51
5Z
53
54
55
56
цветка
К
3
3
С
К
3
3
С
С
С
6
6
С
ж
ж
к
ж
с
с
к
к
с
с
с
Б
3
3
к
3
3
к
к
3
3
3
3
3
3
3
3
ж
ж
3
3
3
Б
3
3
Б
3
3
3
3
3
3
3
3
3
ж
3
к
Соединения
шг/1 1—| 6^-8/3
UJZ/Z 1—| В4-3/3
Ш2/3 гл В4-7/3
Ш2/4 1—1Ш//4 1—1Ш*А»—1ШЗ/*1—"я/б
Ш//1 1—I В4-6/2
Ш//2 1—i В4-7/3
Ш//3 1 1 Bk- 5/3
кн11з ■—' м/1 *—'/ад/
/ад/ i—i khz/2
КН2/2 •—'В4- 11/Z «—«Р//8 «—IP2/8
Р2/8 i—i PZ/1
PZ/1 l—i Ш6//5
К/Н/3 •—1 КП1/5
KH1/Z 1—I РЗ/4 I—IP2/2
KH1/U I—I Р//3
Ktil/1 l IP/// l—1ИП/+1—*ВЧ-9/1
В4-9/1 i—i В4-/0//
В4-/0/Н—1 РЗ/1 ■—1К/7Г//
Л//2 i IP//7I—IP2/5I—1Ш6//2
ПрЩ I—i КП1/6
Пр//2 1—i PZ/3
npZ/1 l 1 UJ5/1
npZ/Z i—i B4-W/Z
ВЗ/1 1—i ВЬ-11/1
ВЗ/2 i—i Ш5/3
ВЗ/3 i—i Ш5/2
КН2/4 i—i KH2/3
/адз •—| ит- 1—1 ri/z
ШЗ/3 «—« B4-1/Z
ШЗ/Z 1—' В4-3/2
ШЗ// •—I B4-B/Z
Ш4/3 1—• ВЧ-5/2
U14/Z i—i B4-7/Z
Ш4/1 i—• В4-6/3
В4-9/3 '—« 64-6//
64-7// 1 " В4-4/3
В4-3/1 •—■ B4-4IZ
B4-4//I—i кт/z
В4-5/1 1—• В4-2/3
84-/// "—I B4-2/2
В4-2/7"—1 Р2/4
Р//4 1—" К/7//7
PI/6 ■—i КП//8
Р//2 i—i PZ/7
PI/1 i—I P3/7 ■ 1 P3/3
BZ/1 I—i B/// •—• K/7///0
В//2 i—I KM/9
BZlZ ■—i K/7////
Ш6//6 •—» КЛ2//3
Ш6//4 ■—i КЛ2//2
Ш6//3 ■—' КП2/11
Ш6//1 ■—■ P3/8 1 IK/7//4
Ш6//0 I—1 КЛ2//0
Ш6/9 '—• КЛ2/9
Ш6/8 •—" КЛ2/8
Ш6/7 ■—1 КП2/7
Ш6/6 «—i КЛ2/6
Ш6/5 •—" K/72/5
•JJ6/4 «—1 КЛ2/4
Ш6/3 •—I K/72/3
UI6/Z i—i КЛ2/Я
IkW '—' КП2Ц
P2I6 i—i КЛ//3
Bk-9/Z*—• В 4-8//
Данные
провода
Марка
МПМ
То же
fi
1»
it
it
it
ft
it
»•
ii
ti
it
it
»i
ft
it
ti
I»
|i
it
tt
it
tt
it
tt
it
■ i
it
tt
tt
■ i
■ I
11
tt
it
i«
»»
ti
ii
it
it
?•
ii
ii
ti
»»
tt
tt
it
it
it
»i
it
tt
it
it
ii
t*
■ ■
ii
ii
it
Сечение
0.35A1A12
CUmm2
и
0,35 mm2
it
0,2mmz
11
0,35 мм2
»i
ti
n
0,12 ммг
0,2ммг
0,55mmz
0,1 Z mm2
0,2mm2
i*
0,35aim2
0,1Zmmz
0,35 w A)2
11
if
1»
i*
it
11
11
0,2 мм2
It
■ ■
0,35л«и2
0,2 мм2
tt
0,35 мм2
tt
0,2 мм 2
11
tl
It
it
0,12 mmz
it
„4
ii
It
ti
it
It
11
ti
it
11
■■
ii
ti
•i
ti
*i
ii
it
Примеч.
\
I
'
i
1
i
- 1 !
it
и
" )0,55л;мг
t
I
!
32. Электромонтажная схема пульта 9С415
12 13
Кн 1
£
Kn )
/
-f\
6-6 {ус/юбно noSepHymoj
Вид В
Вклейка 5 к изд. № 5/8030с. Воениздат, 1972.
/ус/юбно повернуто/
Вид В
36 35
усяобнО побернуто
56-
/ — электронный блок 01.01.000; 2 — скоба 01.03.142; 3 —крышка О
5 —вольтметр ИП1; 6 — стекло 01.03.114; 7 — крышка 01.03.080; 8-
тектор 01.03.124; 10 — корпус в сборе 01.03.040; // — кольцо уг
вставка 01.03.310; 13 — кольцо уплотнительное 01.03.118; 14 — кол
15 — винт МЗХ10-002 ГОСТ 1490—62; 16 — колпачок 01.00.019;
1490—62; 18 — прокладка 01.00.006; 19 — крышка 01.00.030; 20 — пр
0103.052; 22— кронштейн 01.03.062; 23 — штифт цилиндрический
переключатель В4; 25 — колпачок 01.03.046; 26— цанга 01.03.058
трубка 01.03.055; 29 — стакан 01.03.045; 30 — ось 01.03.056; 31 — прс
Зак. 1495с
Рис. 33. Пульт 9С415:
— скоба 01.03.142; 3 —крышка 01.03.320; 4 — крышка 01.03.116; 01.03.127; 33— стойка 01.03.043; 34 — винт М4Х10-002 ГОСТ 1490—62; 35 — микротумблер Л (В1);
1.03.114- 7 — крышка 01.03.080; 8 — микротумблер ВЗ; 9 — про- 36 — микротумблер К (В2); 37 — зажим в сборе 01.03.180; 38 — заводской знак 01.03.175А; 39 —
сборе 01.03.040; //— кольцо уплотнительное 01.03.111; 12 — винт 01.00.014; 40 — прокладка 01.03.102; 4/— прокладка 01.00.007; 42 — корпус в сборе 01.03.020;
лотнительное 01.03.118; 14 — кольцо уплотнительное 01.00.016; 43—стойка визира 01.03.170; 44 — замок 01.03.150; 45 — блок реле 01 03.240; 46 — иакладка
1-62; 16 — колпачок 01.00.019; 17 — винт МЗХ12-002 ГОСТ 01.03.126; 47—кольцо уплотнительное 01.03.122; 48 — крышка с прокладкой 01.03 130; 49 — руко-
; 19 — крышка 01.00.030; 20 — протектор 01.03.112; 21 — зажим ятка управления 01.02.000; 50 — крышка 01.03.120: 51 — цепочка АН-889 I803C50—54; 52 — шнур
2; 23— штифт цилиндрический ЗГХ16 ГОСТ 3128—60; 24— 01.00.050; 53 — штырь 01.00.040; 54 — опора 01.00.017; 55 — винт МЗХ8-002 ГОСТ 1491—62; 56 —
к 01.03.046; 26— цанга 01.03.058; 27 — втулка 01.03.059; 28 — протектор 01.02.035; 57 — винт МЗХ10-002 ГОСТ 1490—62; 58— кольцо уплотнительное 01.03.122;
3.045; 30— ось 01.03.056; 31 — пробка 01.03.128; 32 — прокладка 59 — колпачок со стеклом 01.03.220; 60 — ламподержатель 01.03.210
; 34 —винт М4Х10-002 ГОСТ 1490—62: 35—микротумблер Л (В1);
' — зажим в сборе 01.03.180; 38 — заводской знак 01.03.175А: 39 —
01.03.102; 4/— прокладка 01.00.007; 42 — корпус в сборе 01.03.020;
44—замок 01.03.150; 45 — блок реле 0103.240; 46 — накладка
тельное 01.03.122; 48— крышка с прокладкой 01.03 130; 49 — руко-
— крышка 01.03.120; 51 — цепочка АН-889 I803C50—54; 52 — шнур
I; 54 -опора 01.00.017; 55 — винт МЗХ8-002 ГОСТ 1491—62; 56 —
МЗХ10-002 ГОСТ 1490—62; 58 — кольцо уплотнительное 01.03.122;
со стеклом 01.03.220; 60 — ламподержатель 01.03.210
Вид й (вид Б)
Bkj
1495с
Рис. 35. Рукоятка управления 01.02.000 9С415:
/ — шестерня 01.02.013; 2 — сектор 01.02.028; 3— корпус 01.02.057; 4 — ось 01.02.025- б — диск
01.02.033; 6 — ось 01.02.024; 7 — протектор 01.02-035; 8 — стержень 01.02.023; 9 — кольцо уплот-
нительное 01.02.034; 10 — ручка 01.02.090: // — колпачок 01.02.041; /' — цанга 01.02.039; /.? —
01.02.027; 14 — ось 01.02.022; 15 — механизм подачи команд; 16 — рычаг 01.02.089: 17 — скоба
01.02.048; /« — пружина 01.02.032; 19 — рычаг 01.02.029; 20 — плага 01.02.110
Вид Д (вид Б)
Вклейка 6 к изд. № 5<'8030с. Воениздат, 1972.
Движок
потенциометра
Рис. 35. Рукоятка управления 01.02.000 9С415:
/ — шестерня 01.02.013; 2 — сектор 01.02.028; 3 — корпус 01.02.057; 4 — ось 01.02.025- б — диск
01.02.033; 6 — ось 01.02.024; 7 — протектор 01.02.035; « — стержень 01.02.023; 9 — кольцо уплот-
нительное 01.02.034; 10 — ручка 01.02.090; // — колпачок 01.02.041; /2 — цанга 01.02.039; 13 —
01.02.027; 14 — ось 01.02.022; /5 — механизм подачи команд; 16 — рычаг 01.02.089; /7 — скоба
01.02.048; /«—пружина 01.02.032; 19 — рычаг 01.02.029; 20 — плага 01.02 110