/








































































































































































































































































































































































































Author: Павлище В.Т.
Tags: підручник конструювання деталі машин елементи машин з'єднання деталей механічні передачі приводи машин видавництво афіша
Year: 2003



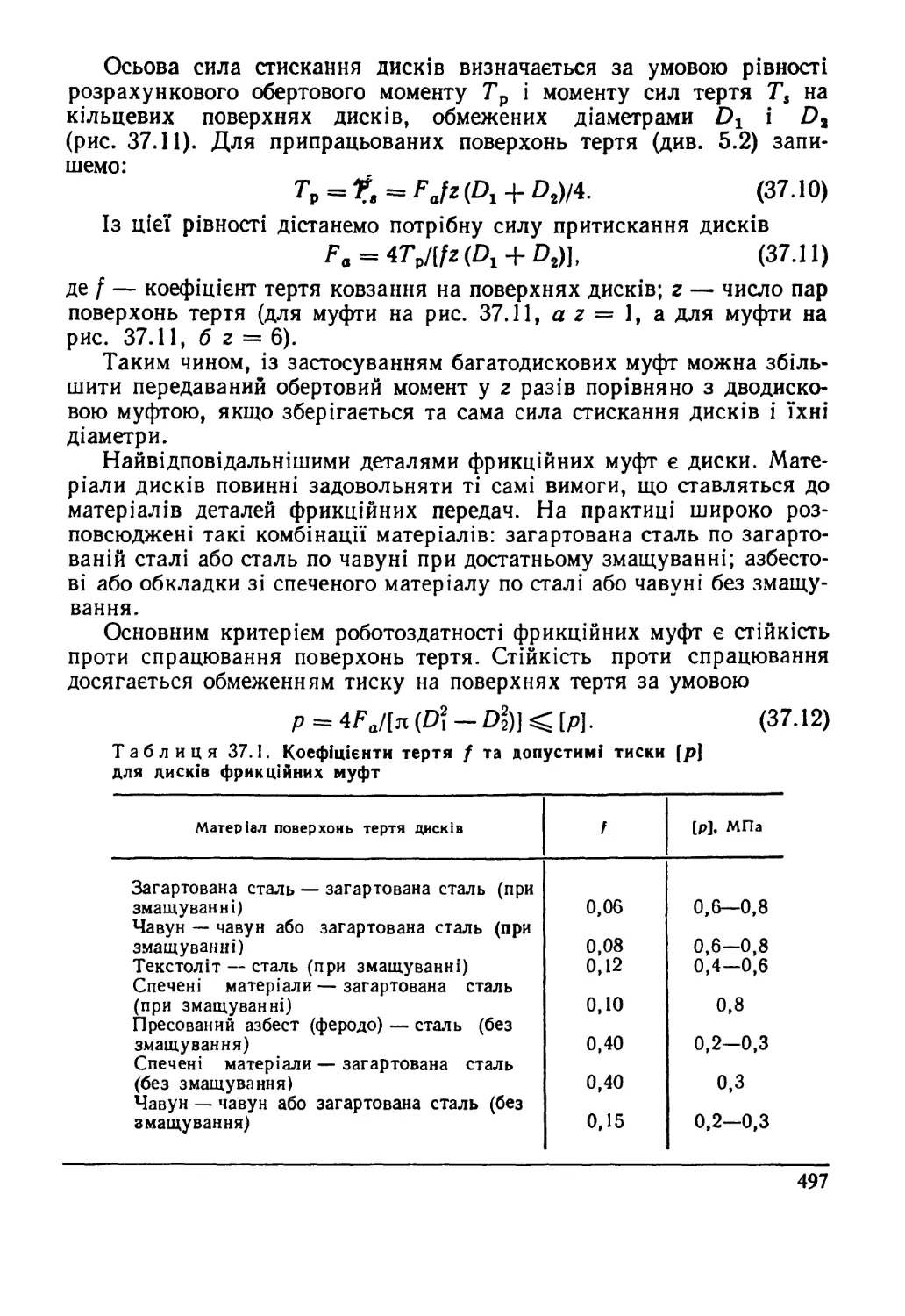
Text
МІНІСТЕРСТВО ОСВІТИ І НАУКИ УКРАЇНИ
НАУКОВО-МЕТОДИЧНИЙ ЦЕНТР ВИЩОЇ ОСВІТИ
НАЦІОНАЛЬНИЙ УНІВЕРСИТЕТ «ЛЬВІВСЬКА ПОЛІТЕХНІКА»
Затверджено Міністерством освіти і науки України
як підручник
для студентів вищих навчальних закладів
(Лист від 26.02.2003 р. №1/11-711)
Павлище В. Т.
П12 Основи конструювання та розрахунок деталей машин: Підруч. —
2-е вид. перероб. — Львів: Афіша, 2003. — 560 с.
І8ВИ 966-8013-58-1
Викладено загальні основи конструювання і розрахунку деталей та окремих
елементів машин загального призначення. Розглянуто методи розрахунків
з’єднань деталей і пружних елементів, механічних передач, валів та їхніх опор,
а також подано основи конструювання приводів машин.
Для студентів вищих навчальних закладів, що навчаються за інженерно-
технічними спеціальностями (дисципліна «Деталі машин і основи конструювання»)
ББК 34.42я73
УДК 621.81.001.6
В. Т. ПАВЛИЩЕ
ОСНОВИ КОНСТРУЮВАННЯ
ТА РОЗРАХУНОК
ДЕТАЛЕЙ МАШИН
Видання друге, виправлене
Підручник
Львів
Афіша
2003
ББК 34 42я73
П 12
УДК 621 81 001 6
Рецензенти
П. М. Гащук
д-р техн наук, проф ,
зав каф експлуатації та ремонту автомоб техн
(Національний ун-т «Львівська політехніка»)
Є. М. Лютий
д-р техн наук проф ,
зав каф приклад мех
(Львівський держ лісотехнічний ун-т)
Свідоцтво про внесення до державного реєстру
ДК № 618 від 02 10 2001 р
Підписано до друку 21 03 2003 Формат 64x84/16
Папір писальний Гарнітура літературна Друк офсетний
Умови друк арк 32,55 Обл -вид арк 35,16
Тираж 1000 Замовлення № 05-03
Повне товариство — видавнича фірма «Афіша»
79005 м Львів, вул Костя Левицького, 4
Тел/факс (0322) 97-14-27
Віддруковано в друкарні ПТВФ «Афіша»
79005 м Львів, вул Костя Левицького, 4
І8ВМ 966-8013-58-1
© В Т Павлище, 2003
© Афіша 2003
ЗМІСТ
і?
Передмова 12
Розділ 1. Загальні принципи конструювання і розрахунку машин та їхніх
елементів
Глава 1 Основні положення про проектування та конструювання машин 14
1 1 Зміст понять проектування і конструювання 14
1 2 Основні етапи створення технічних об’єктів 15
1 3 Види виробів та їхні характеристики 16
1 4 Види і комплектність конструкторських документів 17
1 5 Загальні вимоги до машин та їхніх елементів 18
1 6 Розрахунки при проектуванні і конструюванні 19
Глава 2 Навантаження елементів машин...........................21
2 1 Загальні відомості про навантаження 21
2 2 Розподіл навантаження в часі та типові режими навантаження елементів
машин 22
2 3 Шляхи зменшення навантаження елементів машин 25
Г пав а 3 Машинобудівні матеріали 26
З 1 Сталі, їхнє застосування і методи зміцнення 26~
З 2 Чавуни та їхні властивості 29 ~
З 3 Сплави кольорових металів ЗО ~
3 4 Неметалеві матеріали 31 ~
З 5 Основні механічні характеристики матеріалів 32
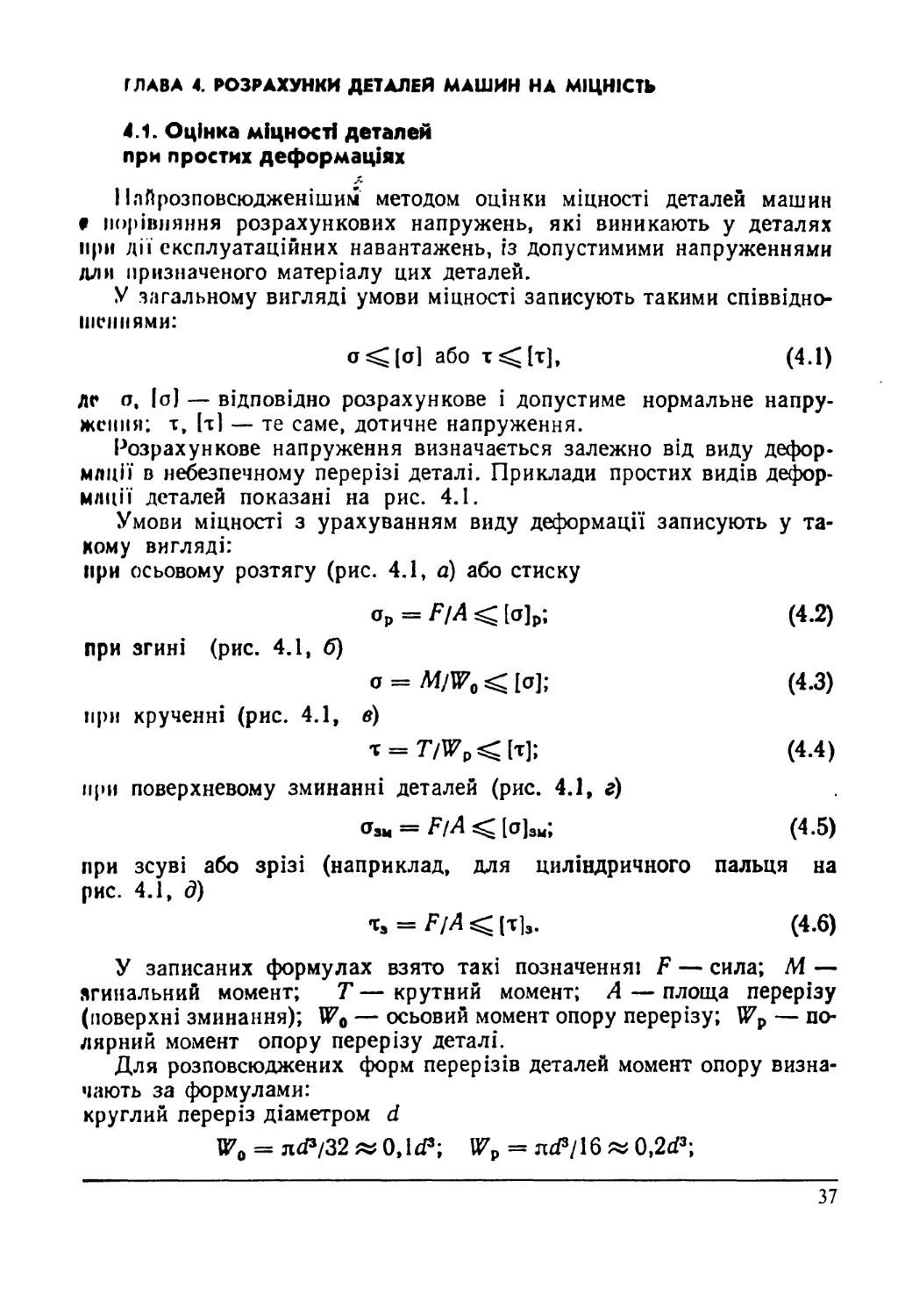
Глава 4 Розрахунки деталей машин на міцність 37
4 1 Оцінка міцності деталей при простих деформаціях 37
4 2 Зміна напружень у часі 40
4 3 Визначення граничних напружень 42
4 4 Допустимі напруження і коефіцієнти запасу міцності 49
4 5 Поняття про ймовірнісні методи оцінки міцності деталей машин 51
4 6 Приклади розрахунків на міцність деяких деталей 52
Глава 5 Тертя та спрацьовування деталей машин 56
5 1 Види тертя та його основні закономірності 56
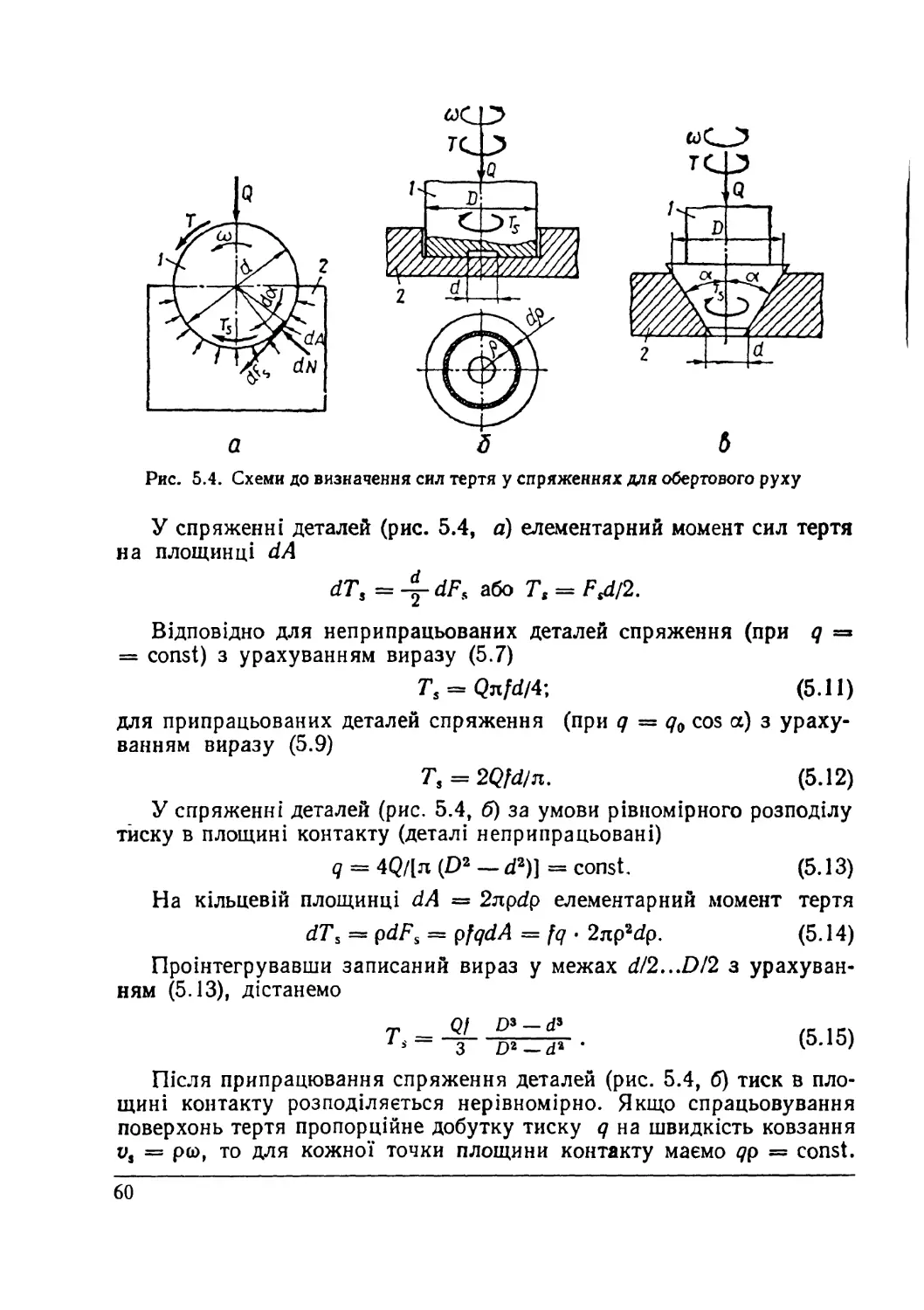
5 2 Втрати на тертя в спряженнях деталей машин 57
5 3 Основні види спрацьовування деталей машин 62
5 4 Оцінка спрацьовування деталей та розрахунки для забезпечення стійкості
проти спрацьовування 63
5 5 Шляхи зменшення спрацьовування деталей машин 65
5
Глава 6. Жорсткість, вібро- і теплостійкість елементів машин............67
6.1. Поняття про жорсткість та шляхи її забезпечення....................67
6.2. Поняття про вібро- і теплостійкість елементів машин................68
Глава 7. Надійність і довговічність машин...............................69
7.1. Терміни та їхні означення у питаннях надійності....................69
7.2. Показники надійності та довговічності..............................70
7.3. Шляхи підвищення надійності машин..................................73
7.4. Приклад розрахунку показників надійності...........................74
Глава 8. Технологічність і економічність машин та їхніх деталей.........75
8.1. Поняття про технологічність деталей і машин........................75
8.2. Умови забезпечення технологічності.................................76
8.3. Стандартизація при конструюванні машин.............................78
8.4. Економічна оцінка нових виробів у машинобудуванні..................79
Глава 9. Точність виготовлення деталей машин............................80
9.1. Взаємозамінність і поняття про допуски та посадки..................80
9.2. Відхилення форми деталей та розміщення поверхонь...................87
9.3. Шорсткість поверхонь деталей, її оцінка та технологічні шляхи забез-
печення .................................................................89
Глава 10. Поняття про оптимальне та автоматизоване проектування.........94
10.1. Загальні відомості................................................94
10.2. Теоретичні аспекти оптимізації....................................95
10.3. Поняття про автоматизоване проектування...........................97
І0.4. Приклади оптимізації деяких об’єктів..............................98
Розділ II. З’єднання деталей машин та пружні елементи
Глава 11. Різьбові з'єднання.......................................... 102
11.1. Загальні відомості.............................................. 102
11.2. Кріпильні різьби та їхні основні параметри...................... 103
11.3. Кріпильні різьбові деталі, їхні конструкції та матеріали........ 105
11.4. Стопоріння різьбових з’єднань................................... 108
11.5. Елементи теорії гвинтової пари.................................. 109
11.6. Розрахунок витків різьби на міцність.............................. 111
11.7. Розрахунок на міцність стержня болта (гвинта) для різних випадків
навантаження з’єднання................................................. 113
11.8. Розрахунок групових болтових з’єднань........................... 121
11.9. Клемові, або фрикційно-гвинтові, з’єднання...................... 125
11.10. Допустимі напруження та запаси міцності в розрахунках різьбових
з’єднань.............................................................. 127
11.11. Приклади розрахунків різьбових з’єднань........................ 128
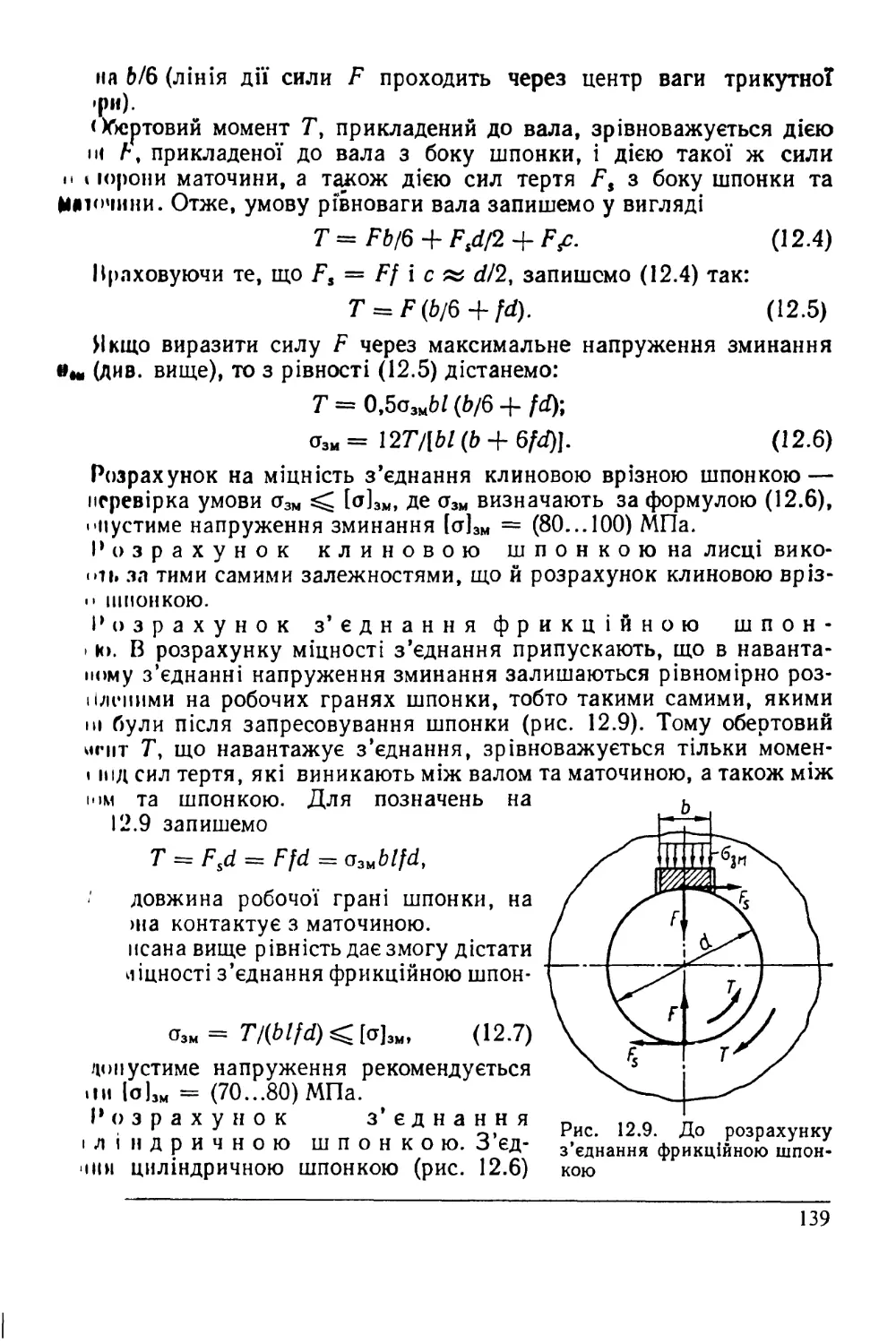
Глава 12. Шпонкові з "єднання......................................... 131
12.1. Основні види шпонкових з’єднань та область їхнього застосування... 131
12.2. Розрахунок ненапружених шпонкових з’єднань...................... 136
12.3. Розрахунок напружених шпонкових з’єднань........................ 138
12.4. Приклади розрахунків шпонкових з’єднань......................... 140
6
І
Глава 13. Зубчасті (шліцеві) та профільні з'єднання................... 141
13.1. Основні типи зубчастих з’єднань і області їхнього використання...... 141
13.2. Розрахунок зубчастих з’єднань................................... 143
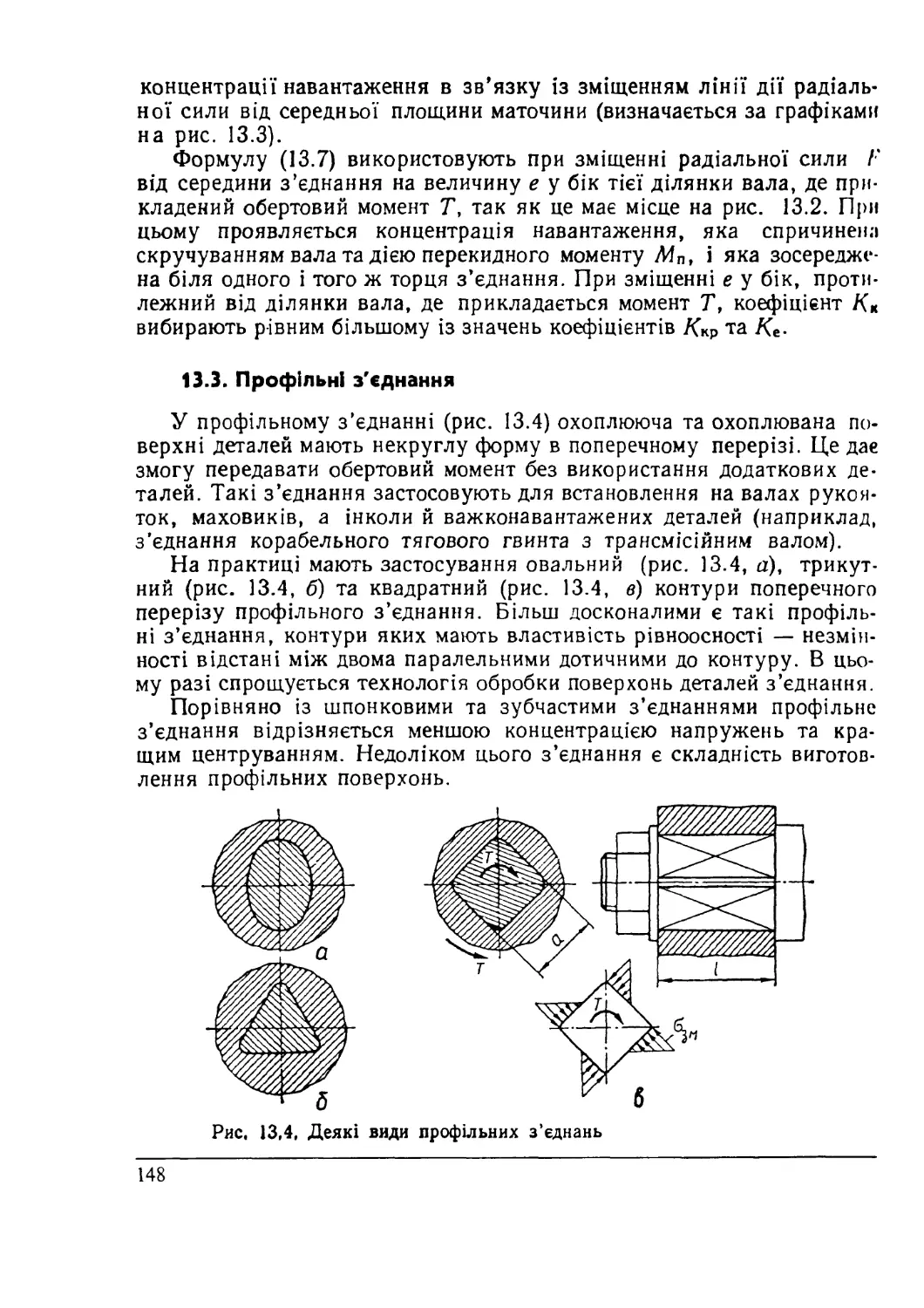
13.3. Профільні з’єднання............................................. 148
13.4. Приклад розрахунку зубастого з’єднання.......................... 149
Глава 14. Пресові з 'єднання.......................................... 150
14.1. Загальні відомості.............................................. 150
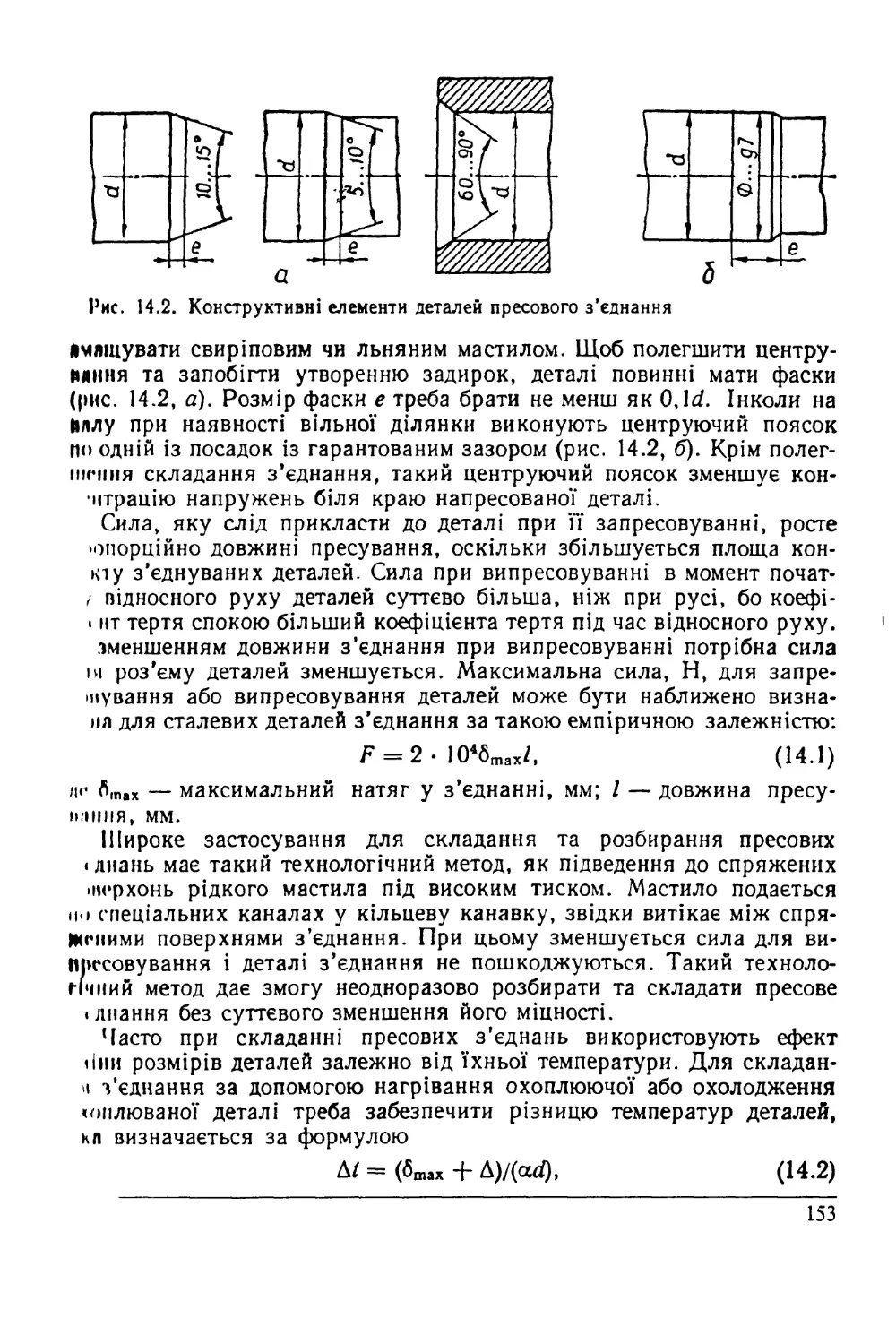
14.2. Деякі питання технології складання пресових з’єднань............ 152
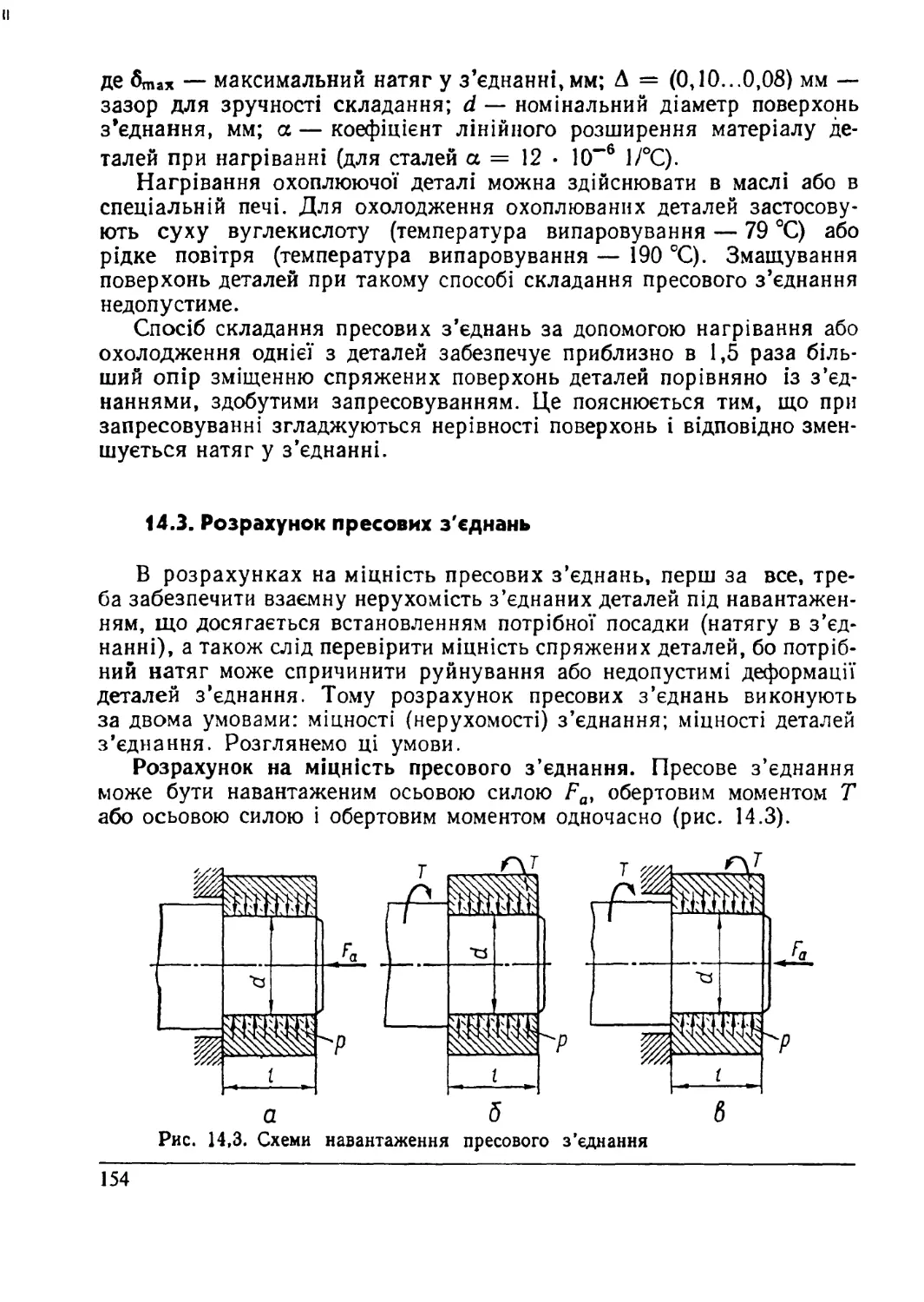
14.3. Розрахунок пресових з’єднань.................................... 154
14.4. Приклад розрахунку пресового з’єднання.......................... 158
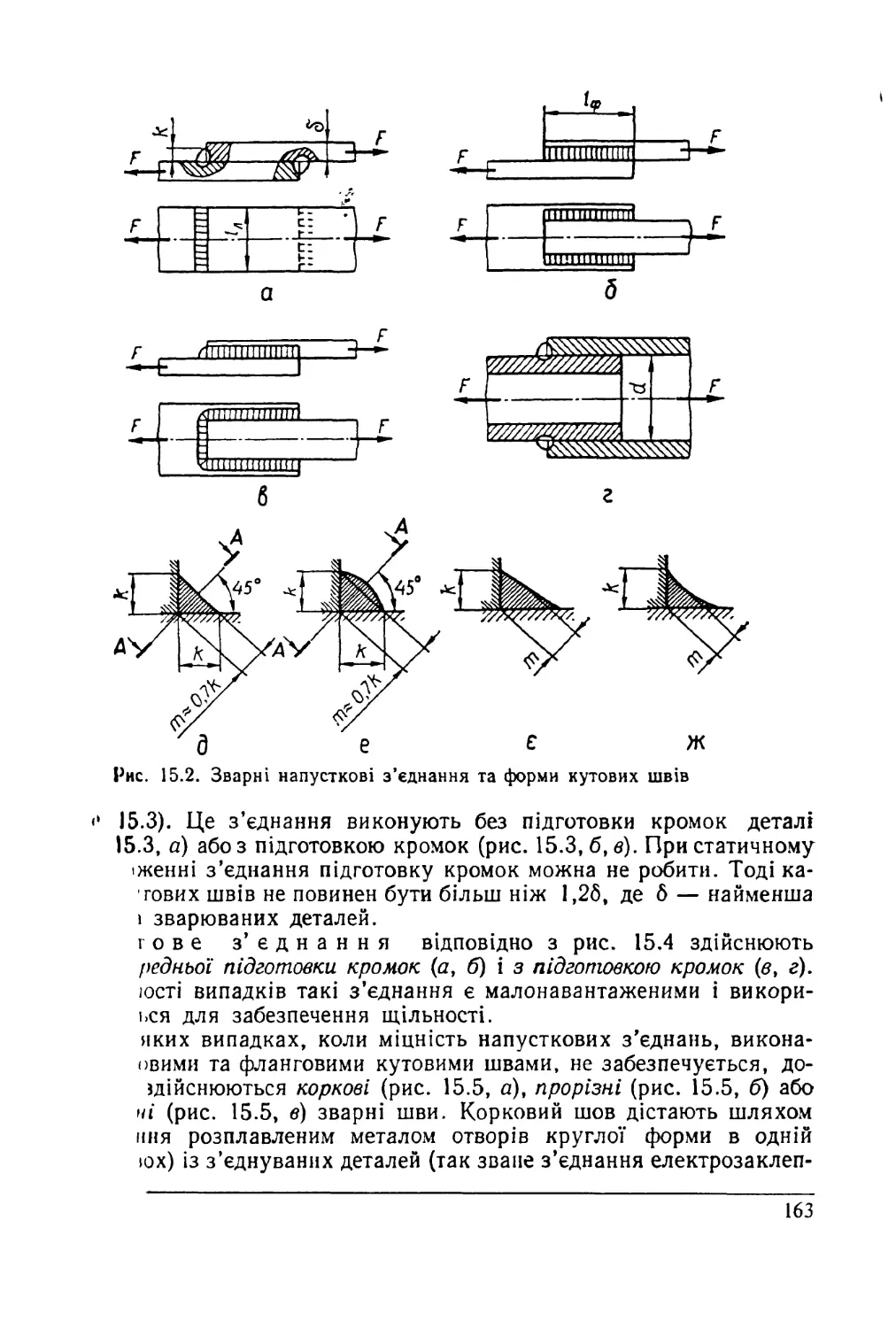
Гл а в а 15. Зварні з 'єднання........................................ 160
15.1. Особливості з’єднання деталей зварюванням і характеристика з’єднань. 160
15.2. Види зварних з’єднань і типи зварних швів....................... 161
15.3. Розрахунок зварних з’єднань на міцність......................... 165
15.4. Допустимі напруження для зварних з’єднань....................... 169
15.5. Приклади розрахунків зварних з’єднань........................... 171
Глава 16. Заклепкові з 'єднання....................................... 173
16.1. Конструкції заклепкових з’єднань та області їхнього використання.... 173
16.2. Розрахунок заклепкових з’єднань................................. 175
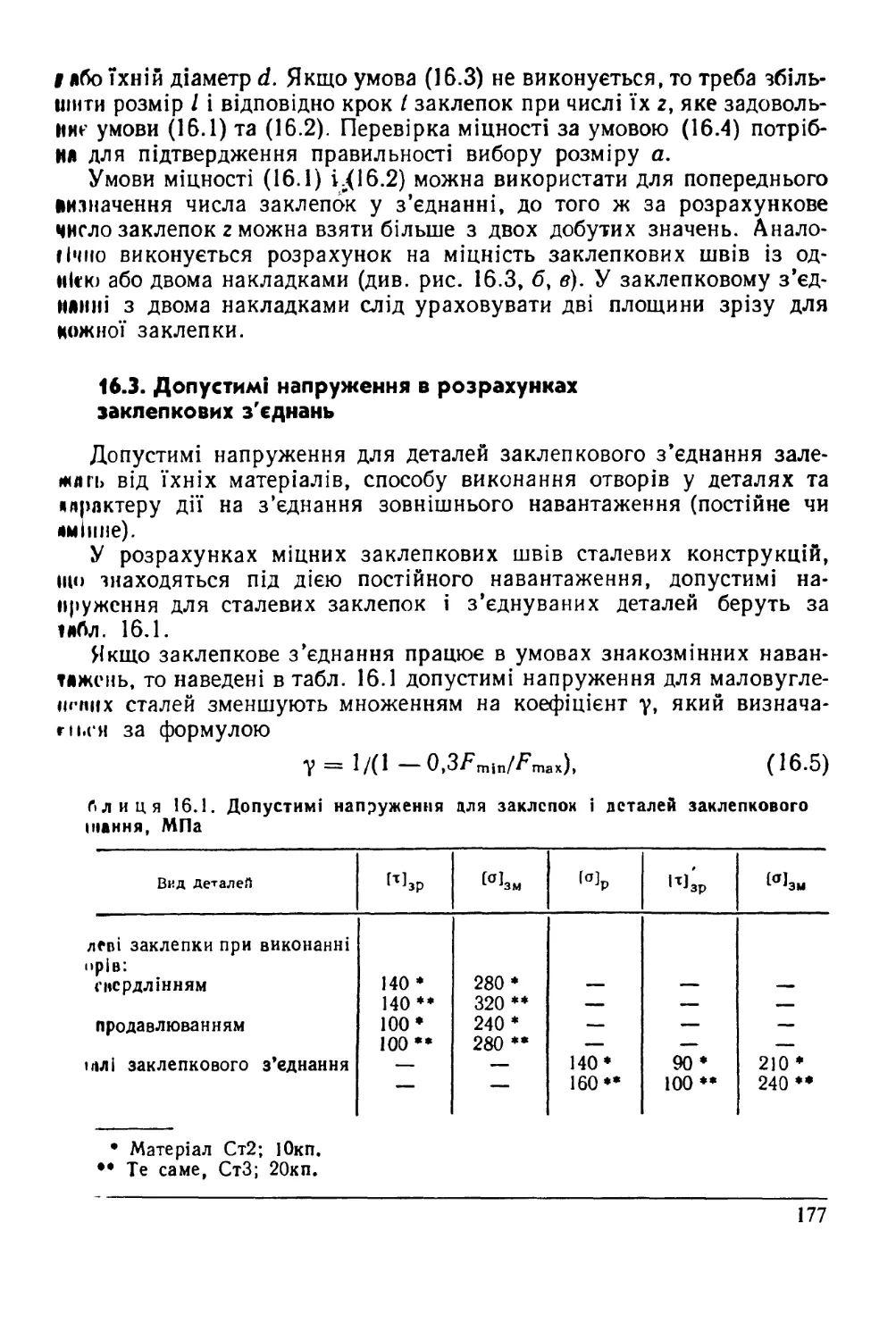
16.3. Допустимі напруження в розрахунках заклепкових з’єднань......... 177
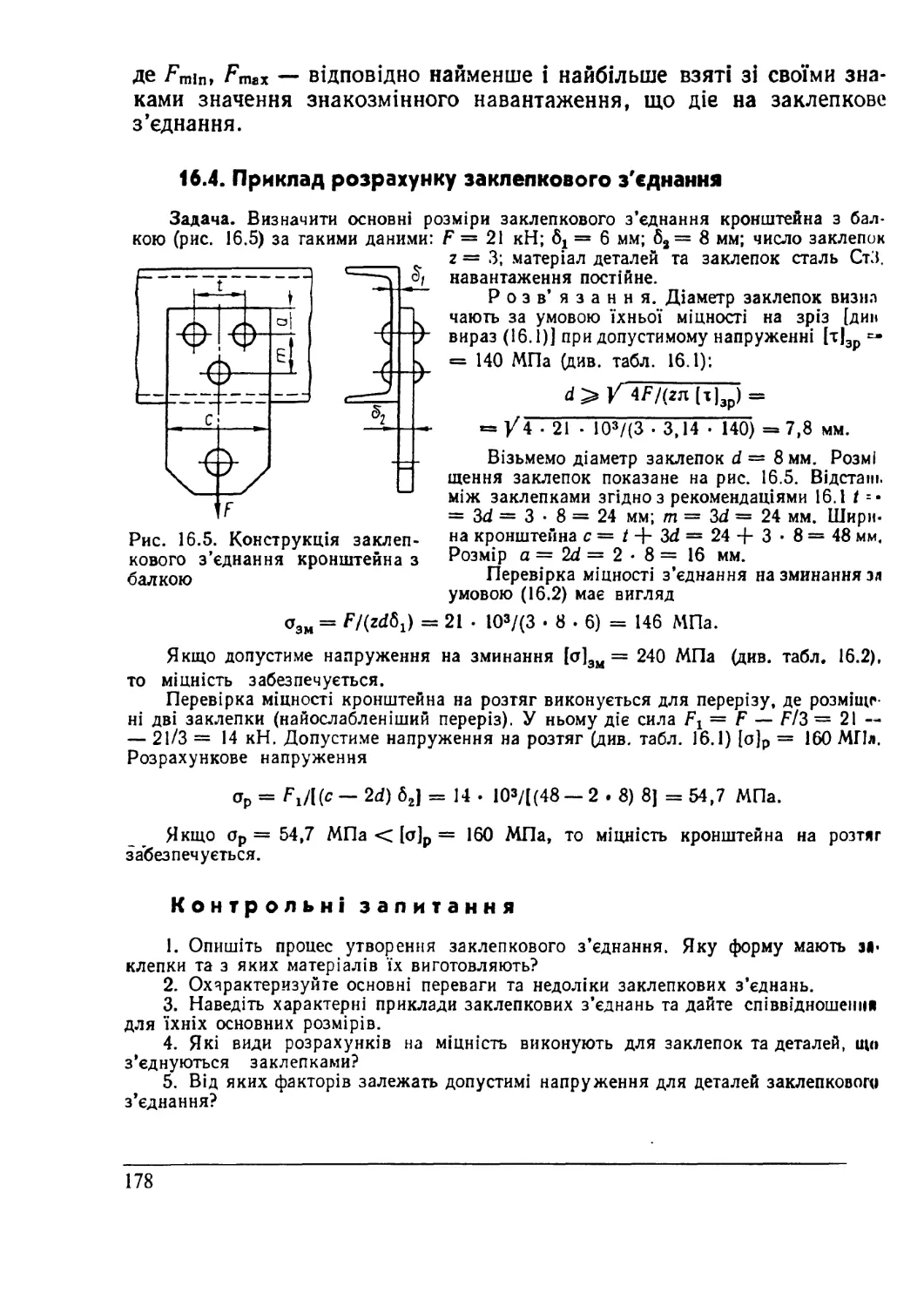
16.4. Приклад розрахунку заклепкового з’єднання....................... 178
Глава 17. З'єднання деталей паянням та склеюванням.................... 179
17.1. Загальні відомості.............................................. 179
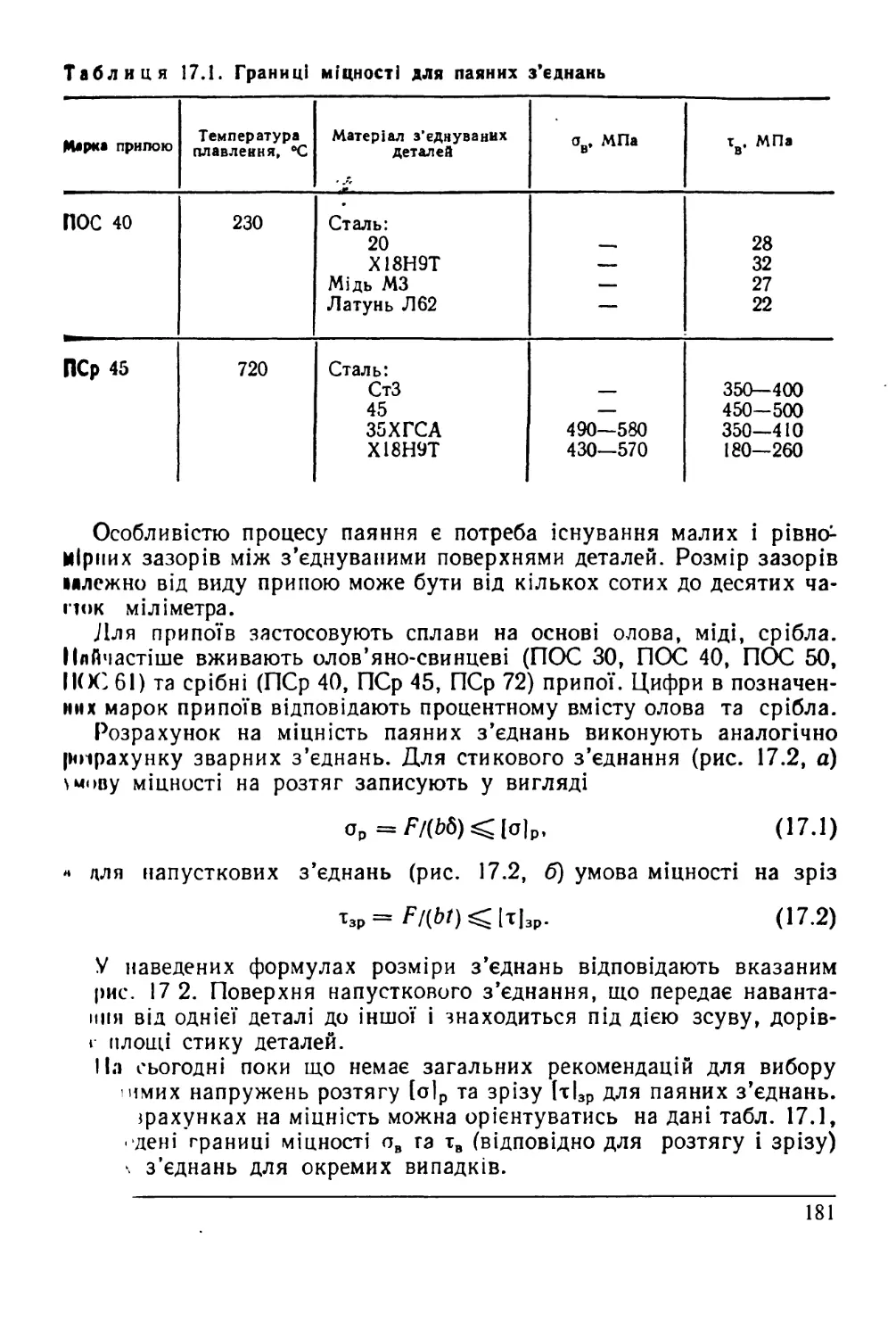
17.2. Паяні з’єднання................................................. 180
17.3. Клейові з’єднання............................................... 182
Глава 18. Пружні елементи машин....................................... 183
18.1. Призначення та конструкції пружин............................... 183
18.2. Матеріали для виготовлення пружин............................... 186
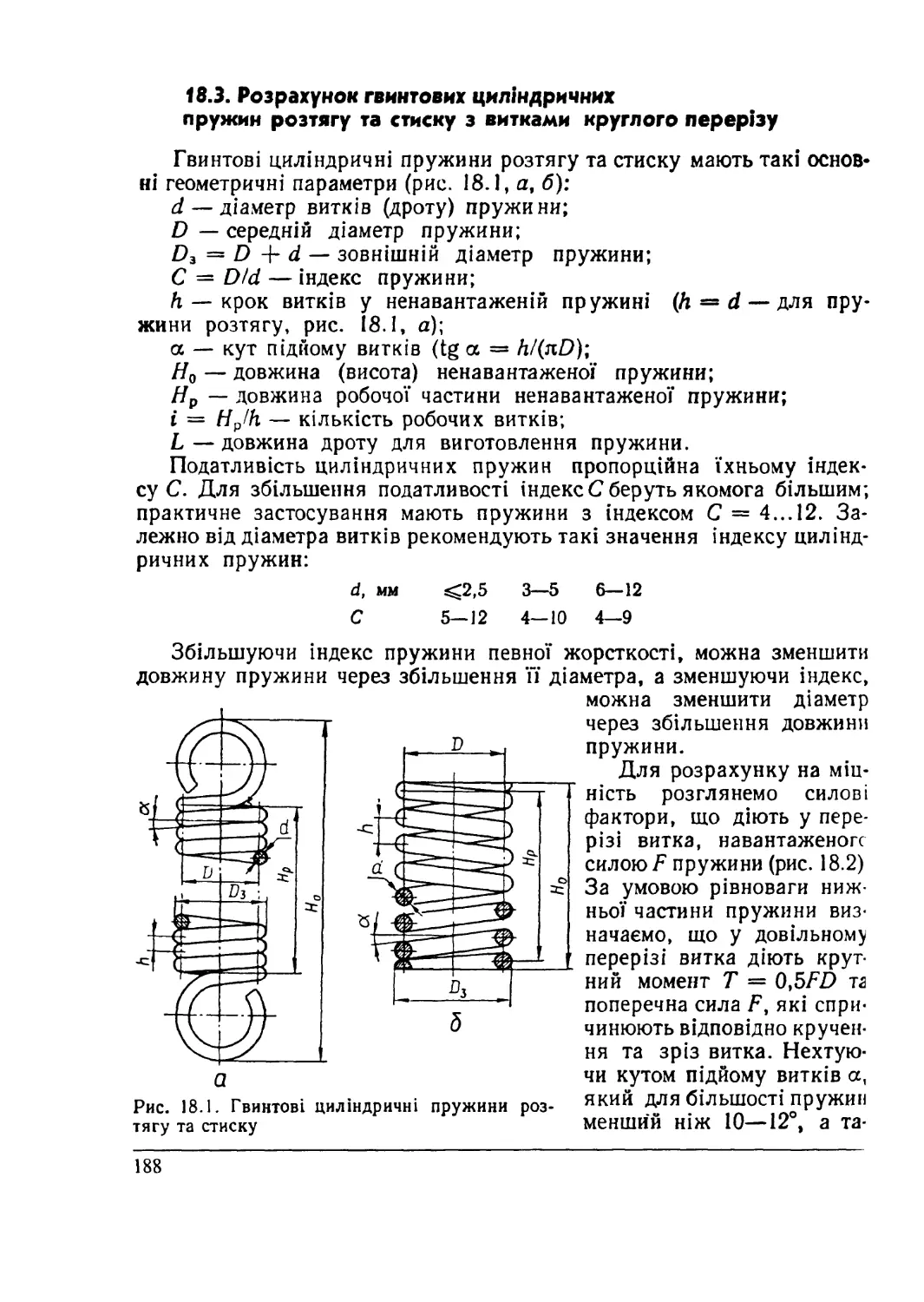
18.3. Розрахунок гвинтових циліндричних пружин розтягу та стиску з витками
круглого перерізу..................................................... 188
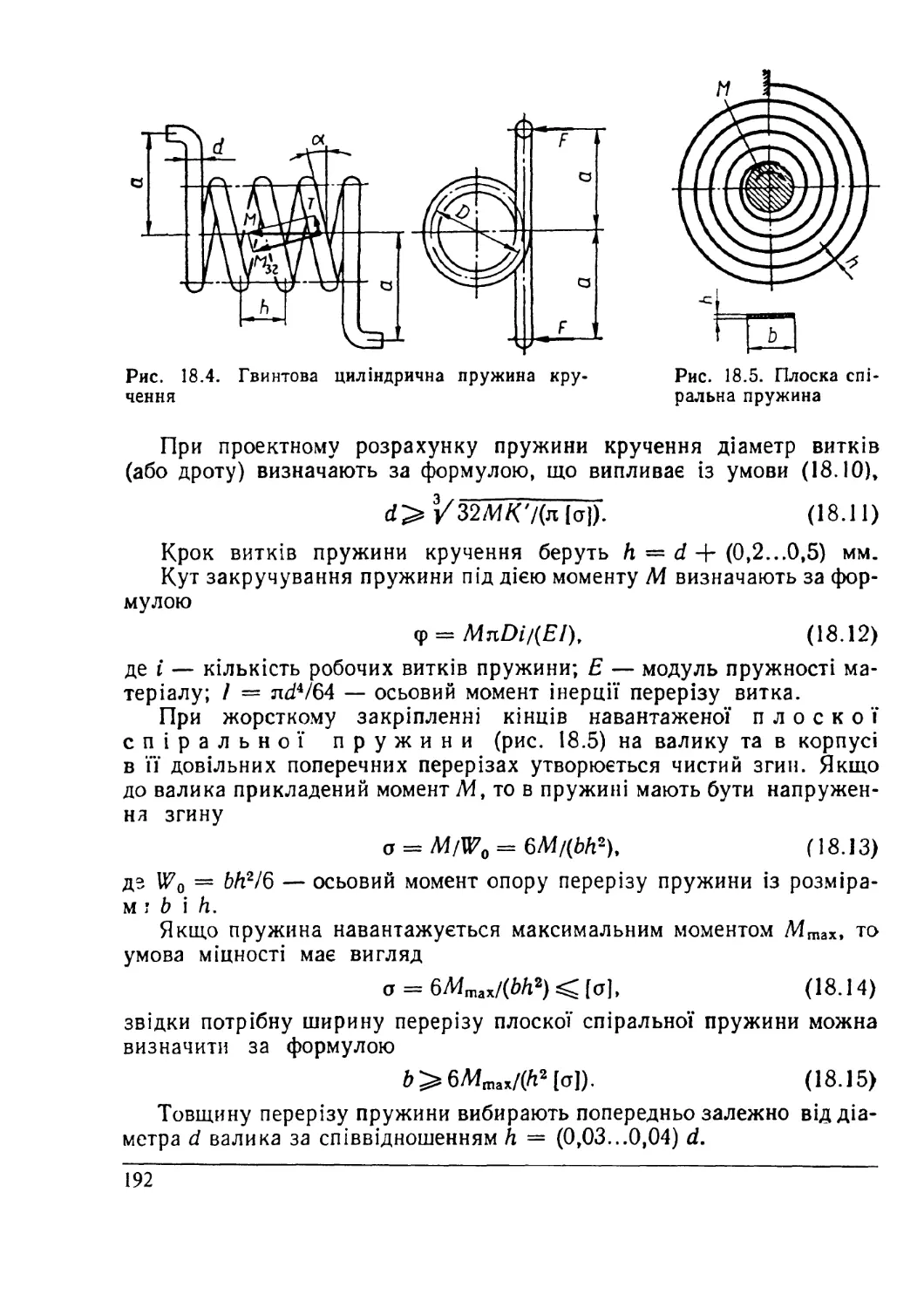
18.4. Розрахунок гвинтових циліндричних пружин кручення та плоских спі-
ральних пружин........................................................ 191
18.5. Розрахунок стержневих (торсіонів) і плоских прямих пружин....... 193
18.6. Допустимі напруження при розрахунках пружин на міцність......... 194
18.7. Гумометалеві пружні елементи машин.............................. 195
18.8. Приклад розрахунку пружини...................................... 197
Розділ III. Механічні передачі
Глава 19. Загальні відомості та параметри для розрахунку механічних пе-
редач ................................................................. 199
19.1. Призначення механічних передач та їхня класифікація............. 199
19.2. Основні співвідношення для кінематичних параметрів і параметрів
навантаження механічних передач........................................200
19.3. Загальні міркування щодо вибору розрахункових навантажень механічних
передач................................................................203
7
Глава 20. Фрикційні передачі..........................................204
20.1. Загальні відомості та класифікація фрикційних передач...........204
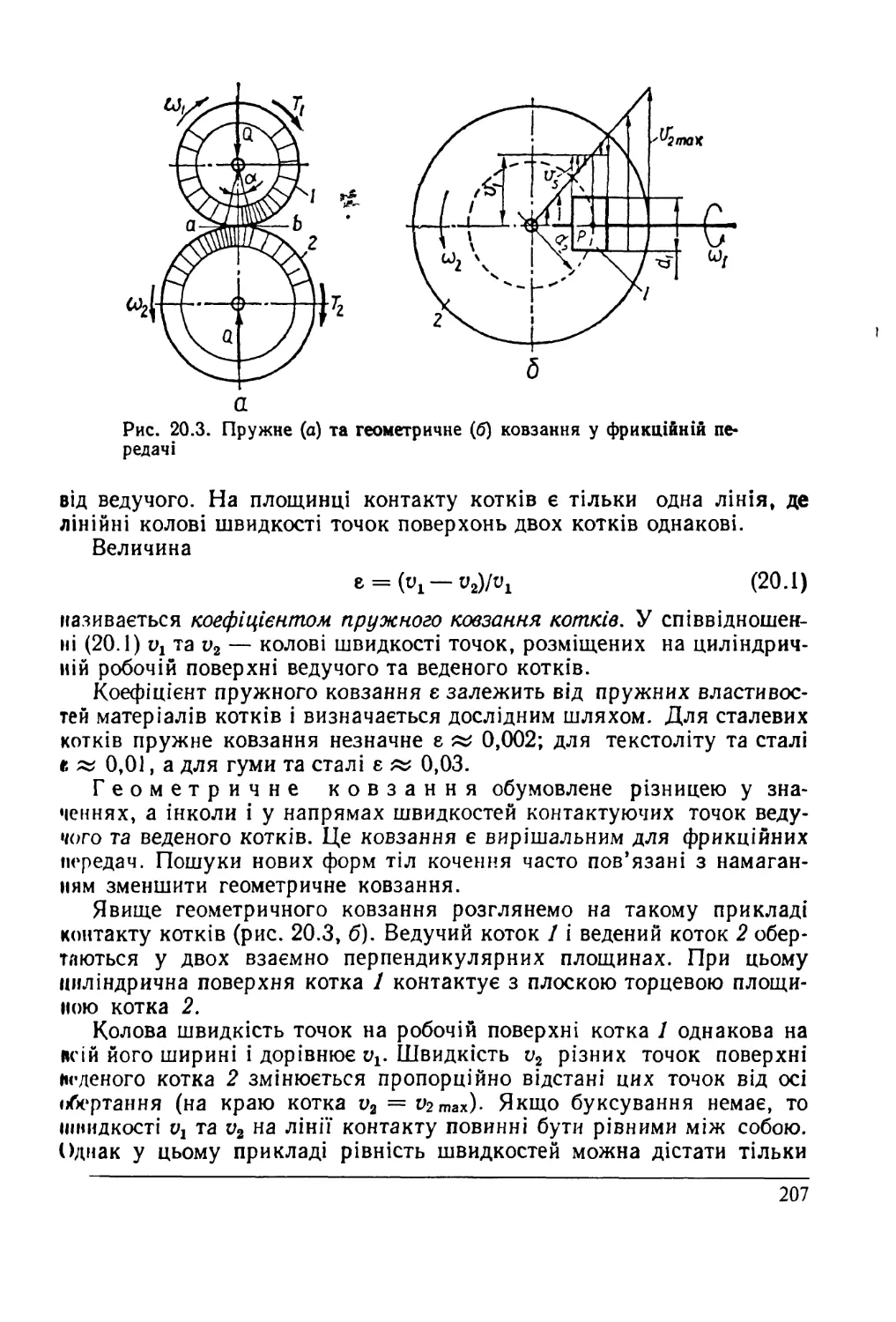
20.2. Явища ковзання у контакті котків фрикційної передачі............206
20.3. Матеріали та конструкції деталей фрикційних передач.............208
20.4. Види руйнування котків і критерії їхнього розрахунку. Допустимі кон-
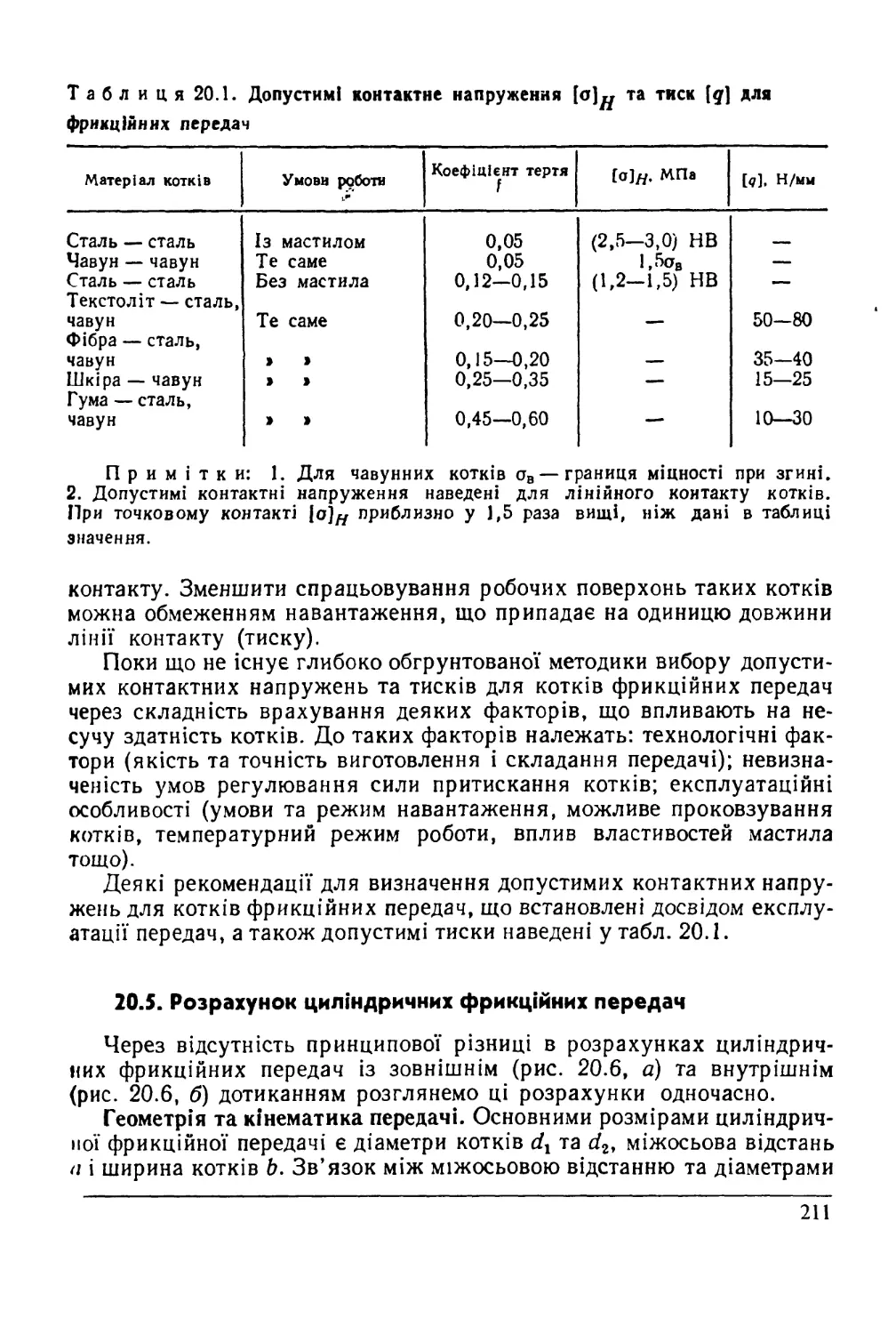
тактні напруження та тиски............................................210
20.5. Розрахунок циліндричних фрикційних передач......................211
20.6. Розрахунок конічних фрикційних передач..........................215
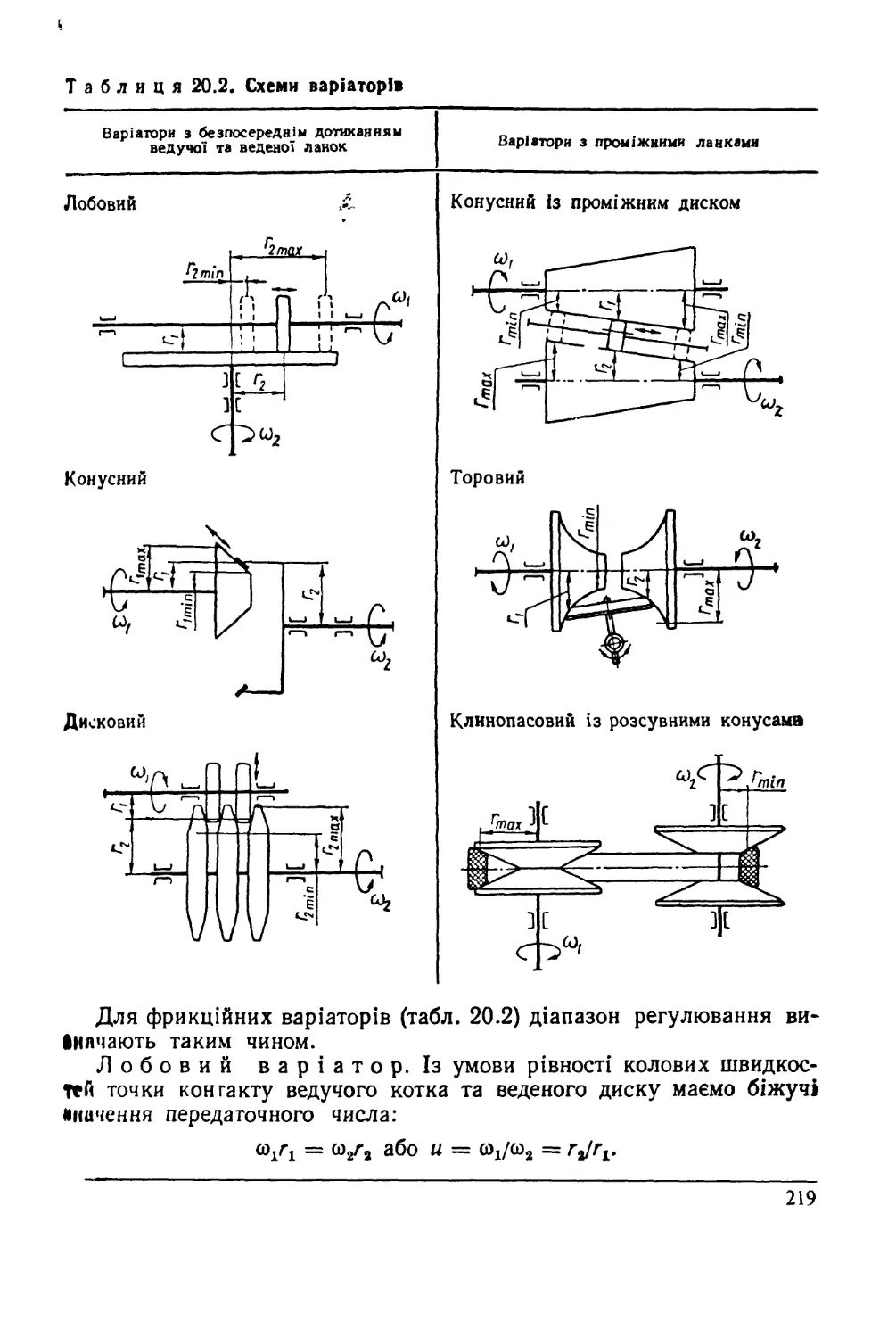
20.7. Фрикційні варіатори.............................................218
20.8. Приклад розрахунку фрикційної передачі..........................221
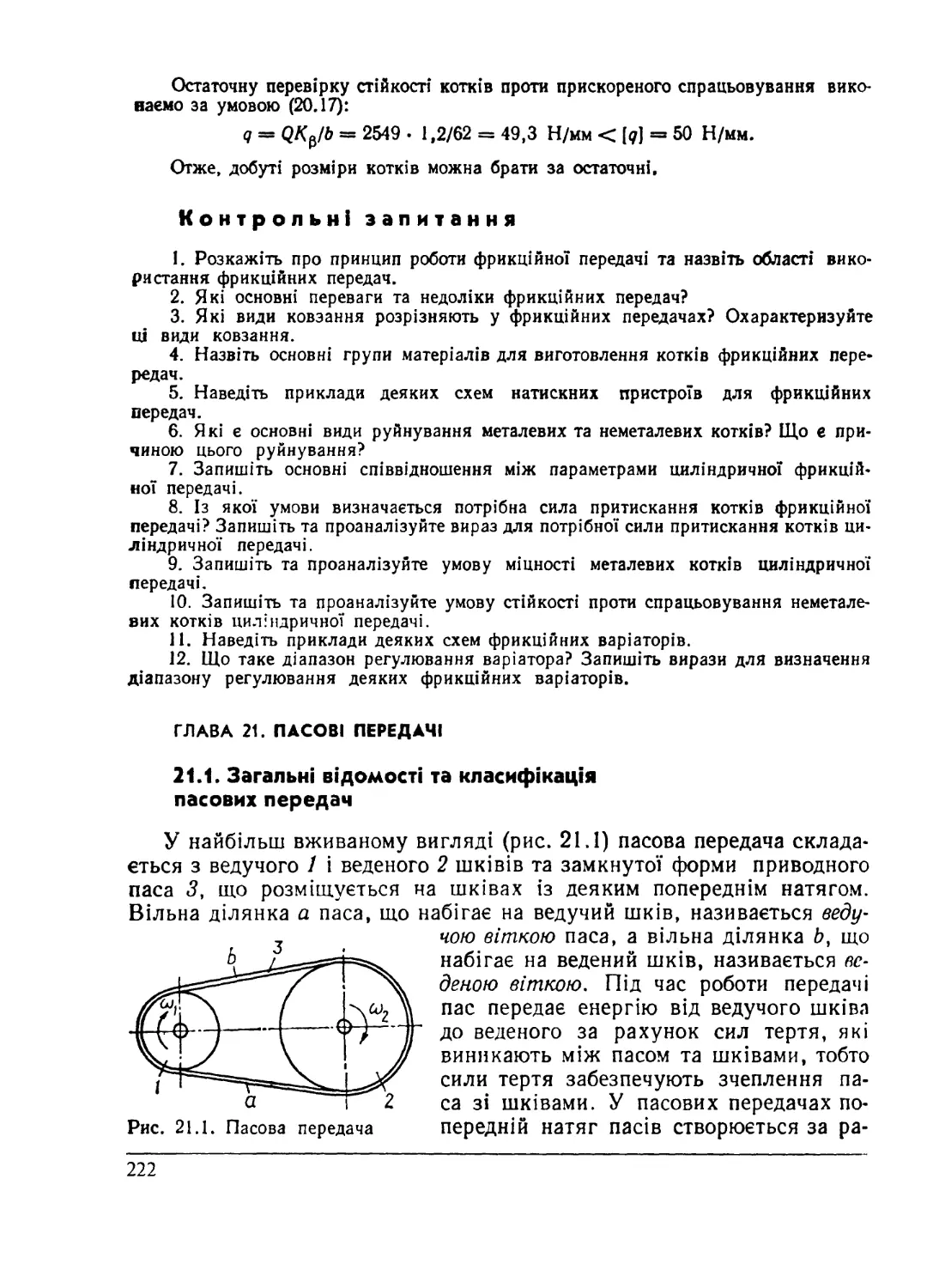
Глава 21. Пасові передачі..............................................222
21.1. Загальні відомості та класифікація пасових передач..............222
21.2. Елементи пасових передач........................................225
21.3. Пружне ковзання паса та кінематика пасової передачі.............233
21.4. Сили та напруження у вітках пасової передачі................... 235
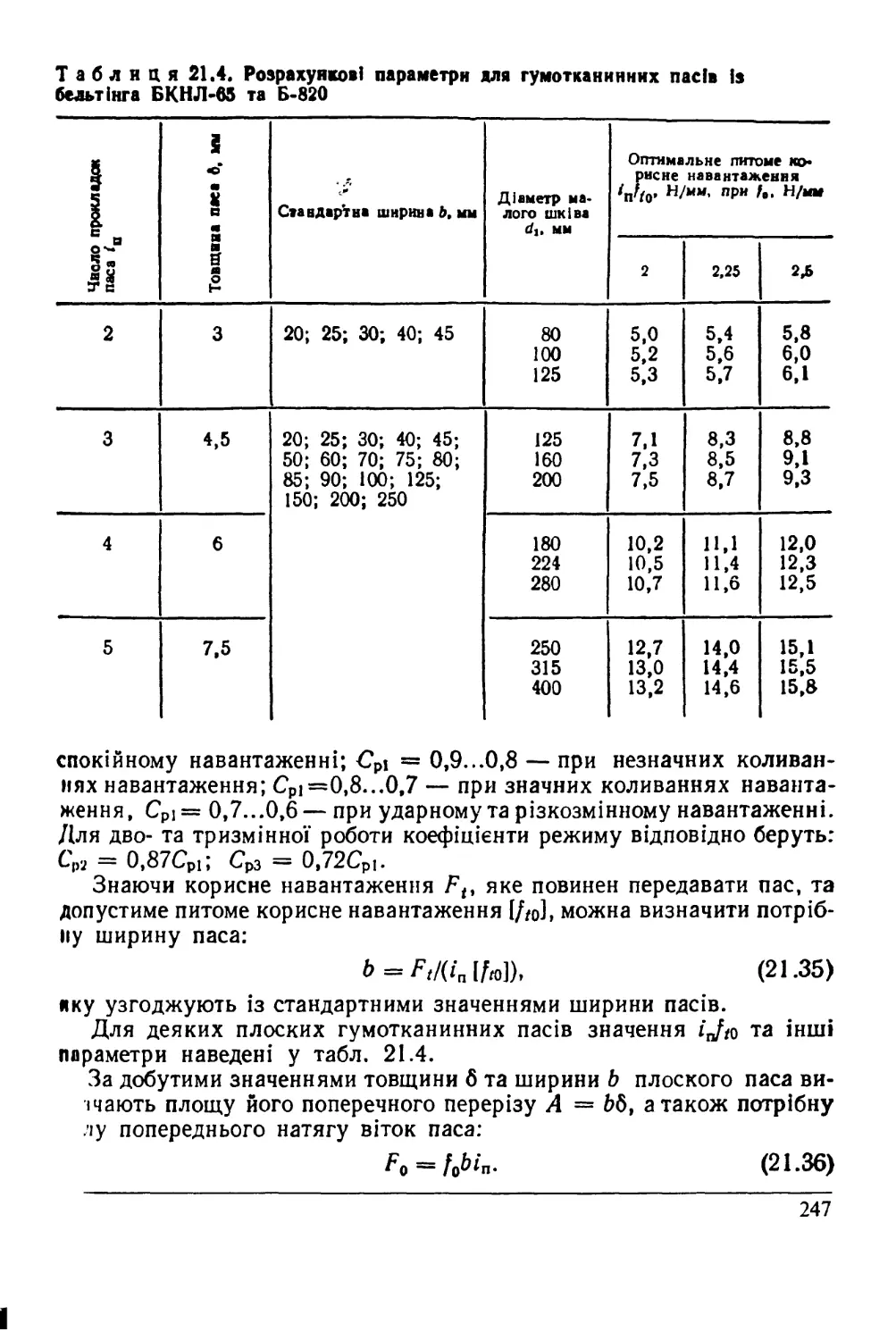
21.5. Вибір та розрахунок параметрів пасової передачі.................241
21.6. Розрахунок пасових передач на тягову здатність і довговічність..243
21.7. Особливості розрахунку плоскопасових передач....................246
21.8. Особливості розрахунку клинопасових передач.....................248
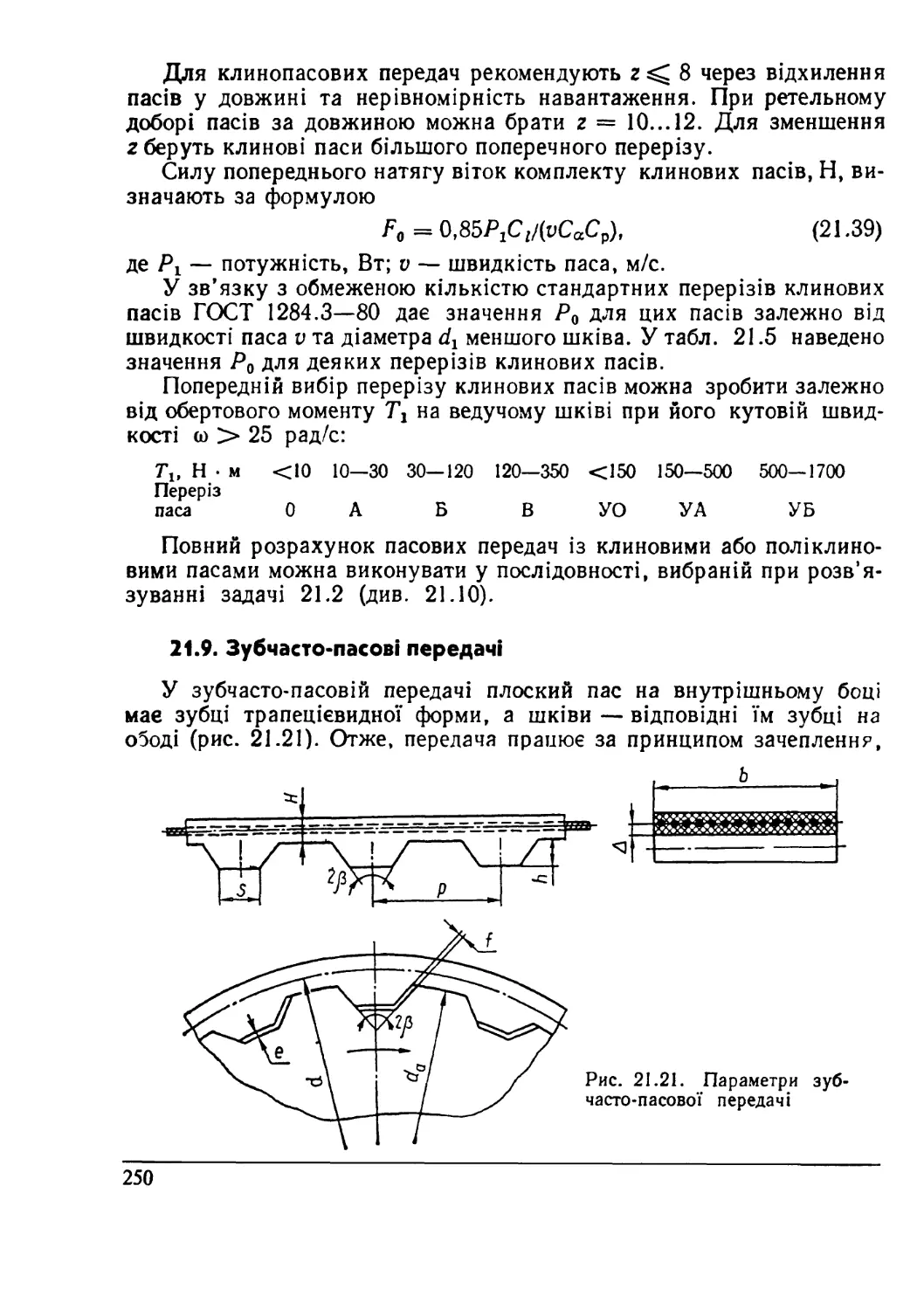
21.9. Зубчасто-пасові передачі .......................................250
21.10. Приклади розрахунку пасових передач.............................252
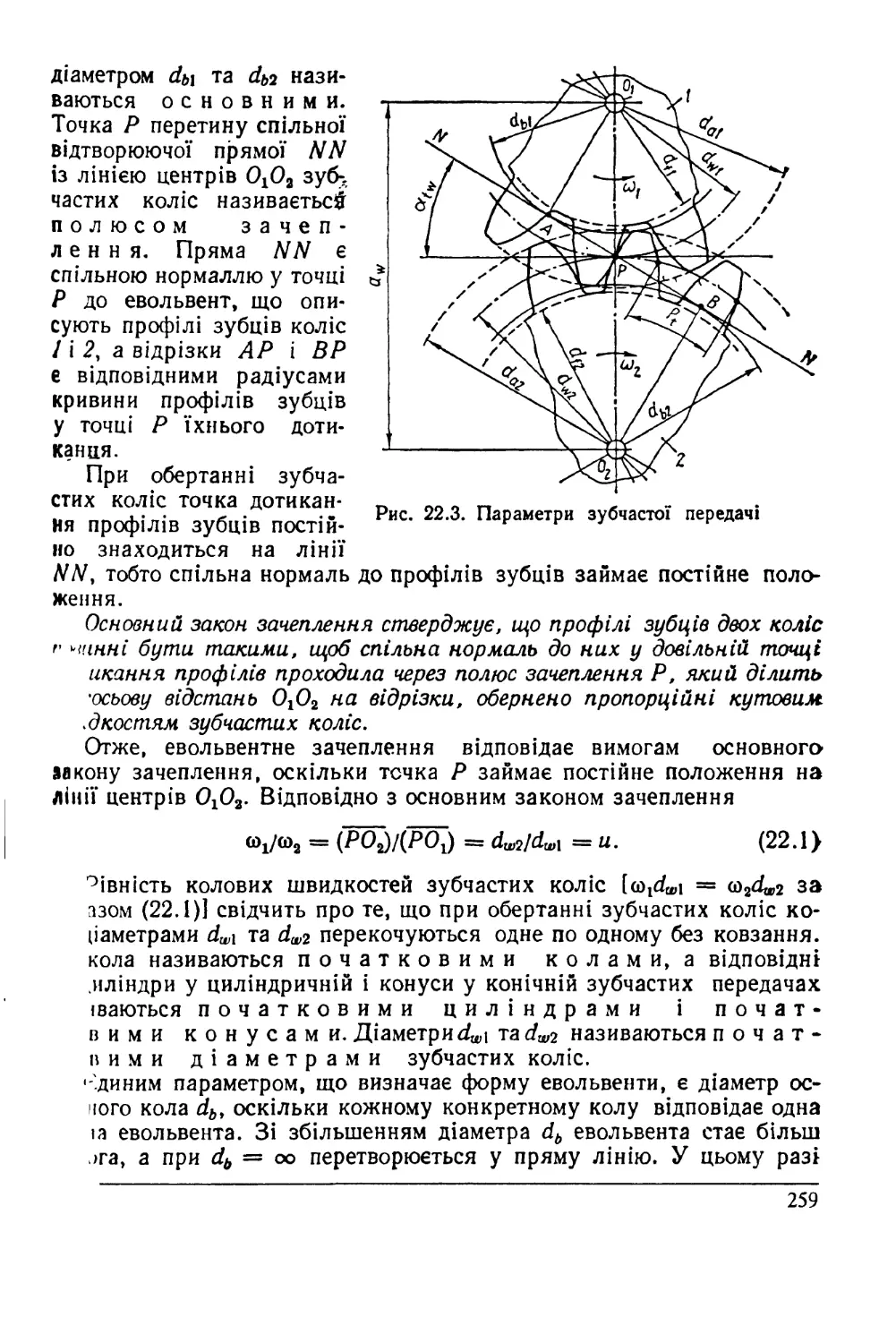
Глава 22. Загальні відомості про зубчасті передачі....................256
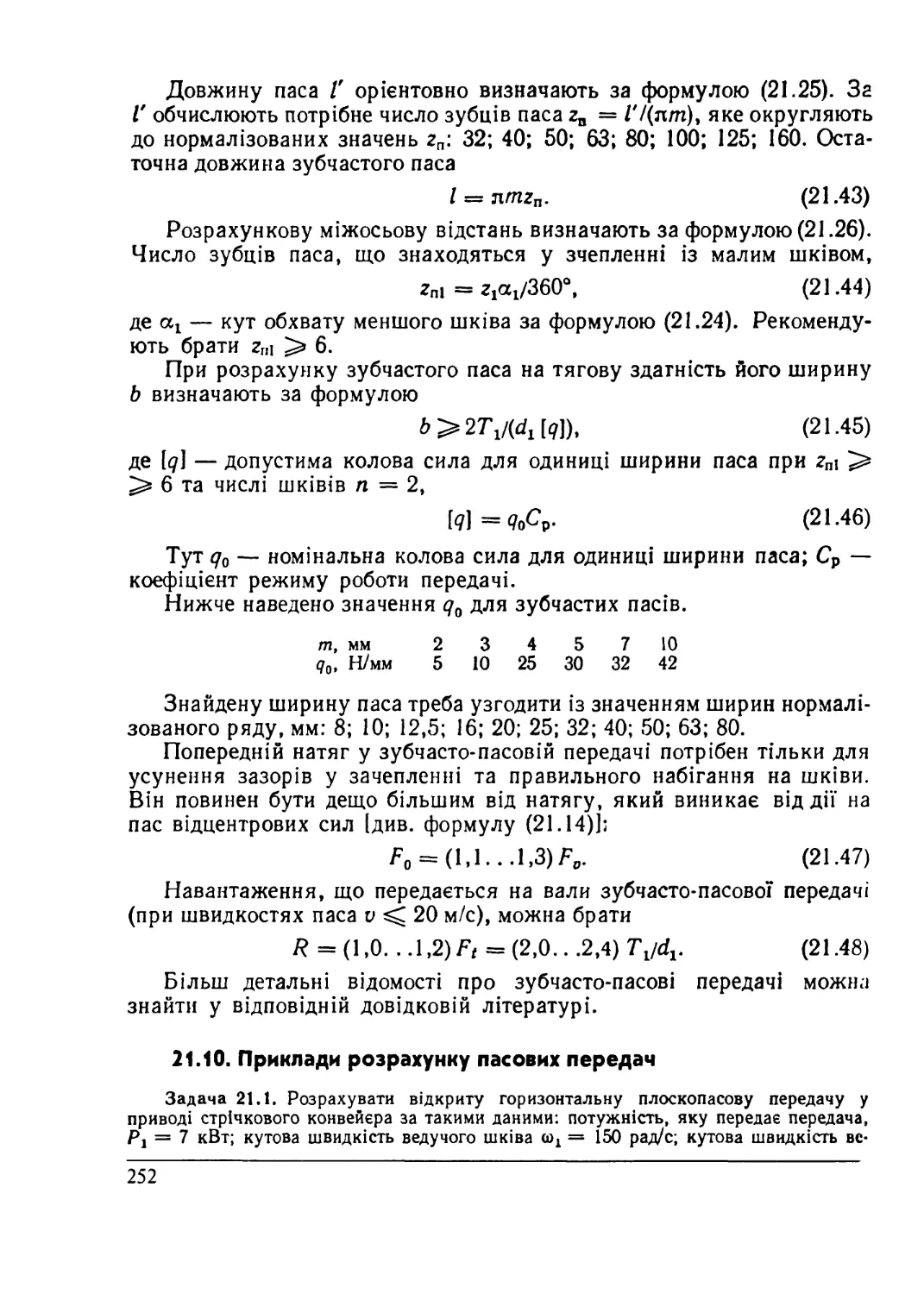
22.1. Застосування зубчастих передач та їхня класифікація.............256
22.2. Основні параметри евольвентного зачеплення .....................258
22.3. Початковий контур зубчастих коліс...............................263
22.4. Коригування зубців циліндричних зубчастих передач...............265
22.5. Порядок розрахунку параметрів циліндричних зубчастих передач зов-
нішнього зачеплення...................................................268
22.6. Ковзання і тертя у зачепленні зубців............................268
22.7. Конструкції зубчастих коліс та їхнє виготовлення................271
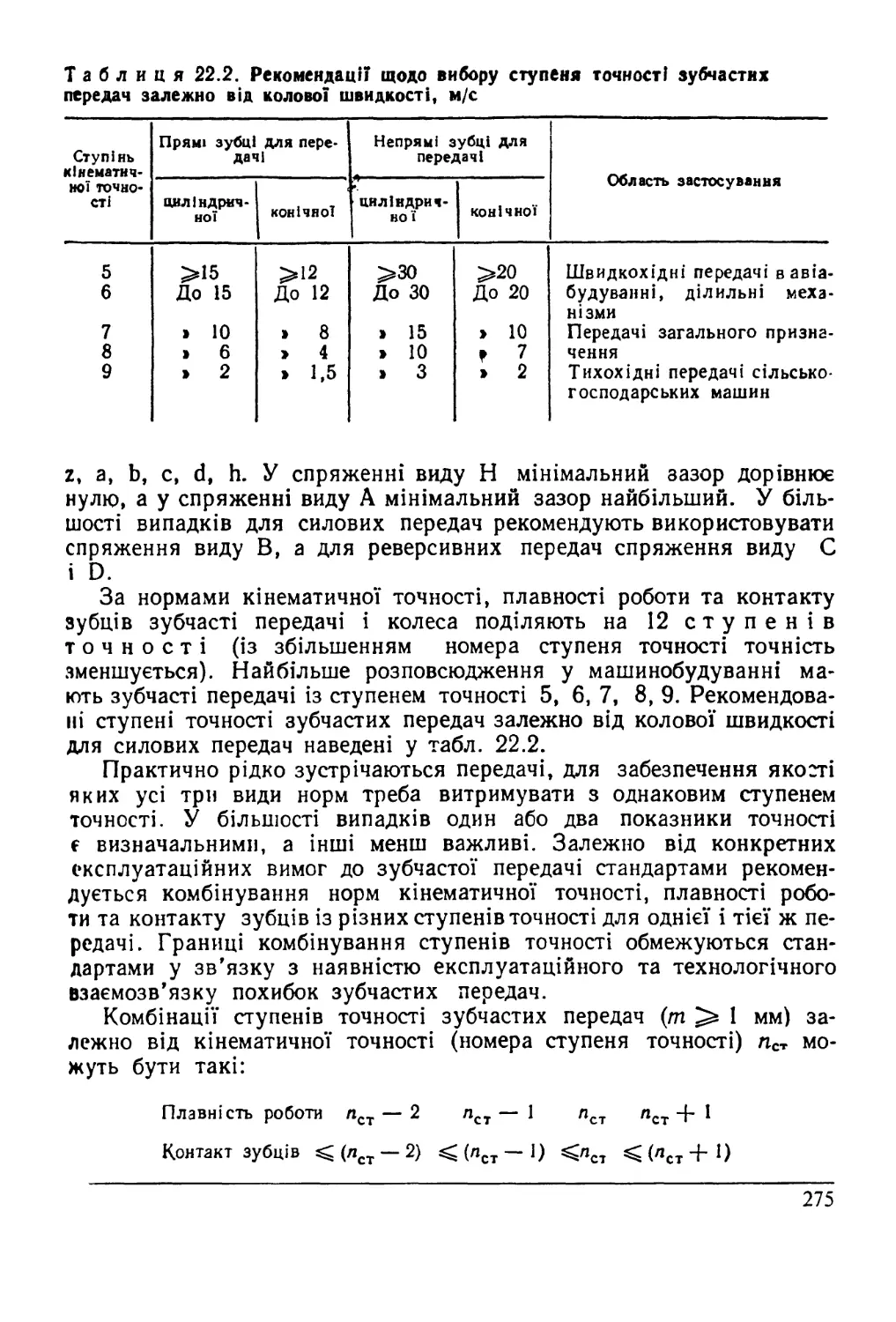
22.8. Точність зубчастих передач......................................274
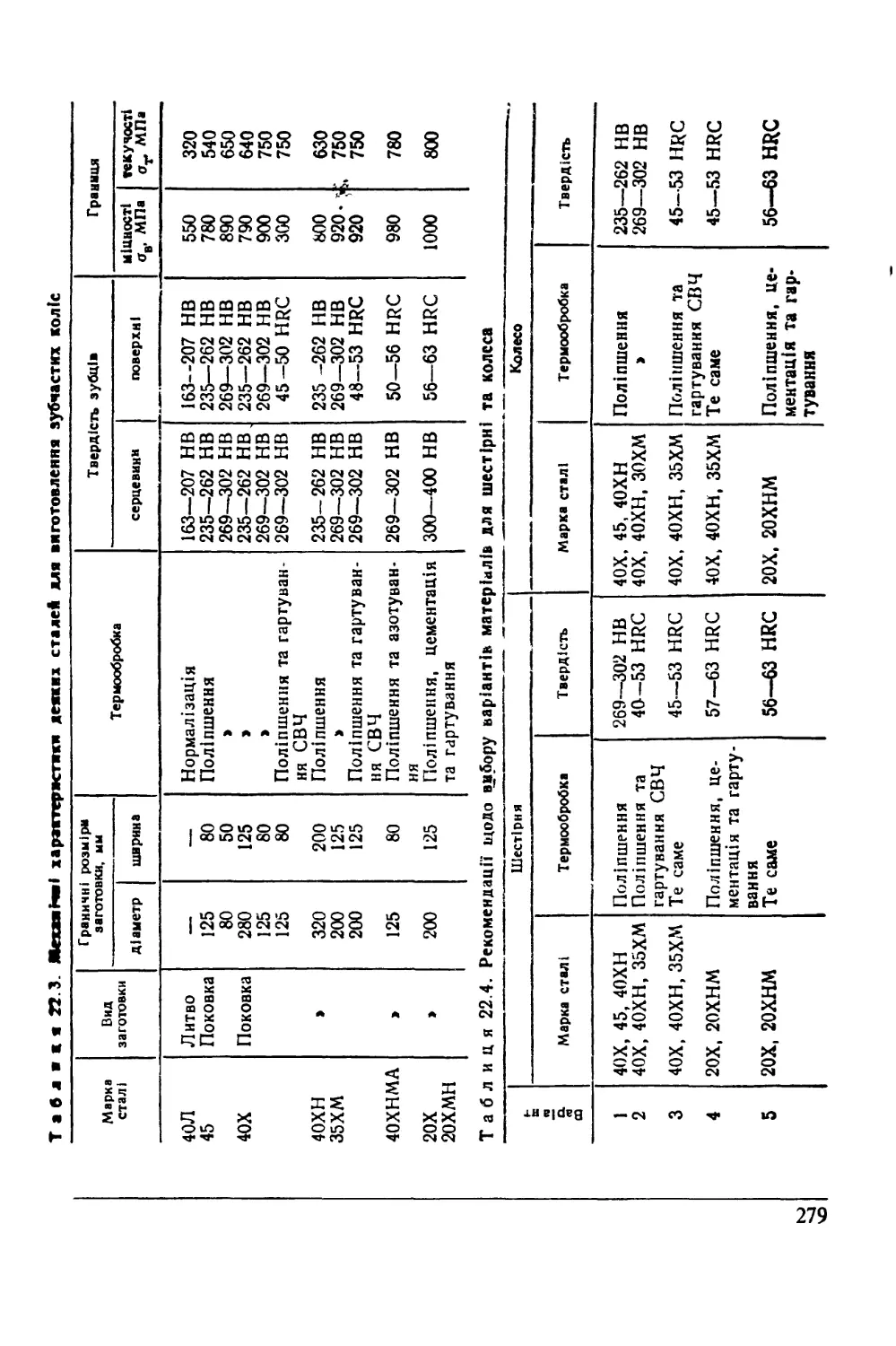
22.9. Матеріали і термообробка зубчастих коліс........................276
22.10. Види руйнування зубців та критерії розрахунку на міцність зубчастих
передач...............................................................280
22.11. Допустимі напруження у розрахунках зубчастих передач...........284
Глава 23. Циліндричні зубчасті передачі.............................. 289
23.1. Параметри прямо- та косозубих зубчастих передач.................289
23.2. Навантаження на зубці циліндричних зубчастих передач............295
23.3. Розрахунок активних поверхонь зубців на контактні витривалість і міц-
ність.................................................................302
23.4. Розрахунок зубців на витривалість і міцність при згині..........303
23.5. Проектний розрахунок циліндричних зубчастих передач та особливості
розрахунку відкритих зубчастих передач................................306
23.6. Приклад розрахунку циліндричної зубчастої передачі..............309
Глава 24. Конічні зубчасті передачі...................................314
24.1. Особливості конічних зубчастих передач .........................314
8
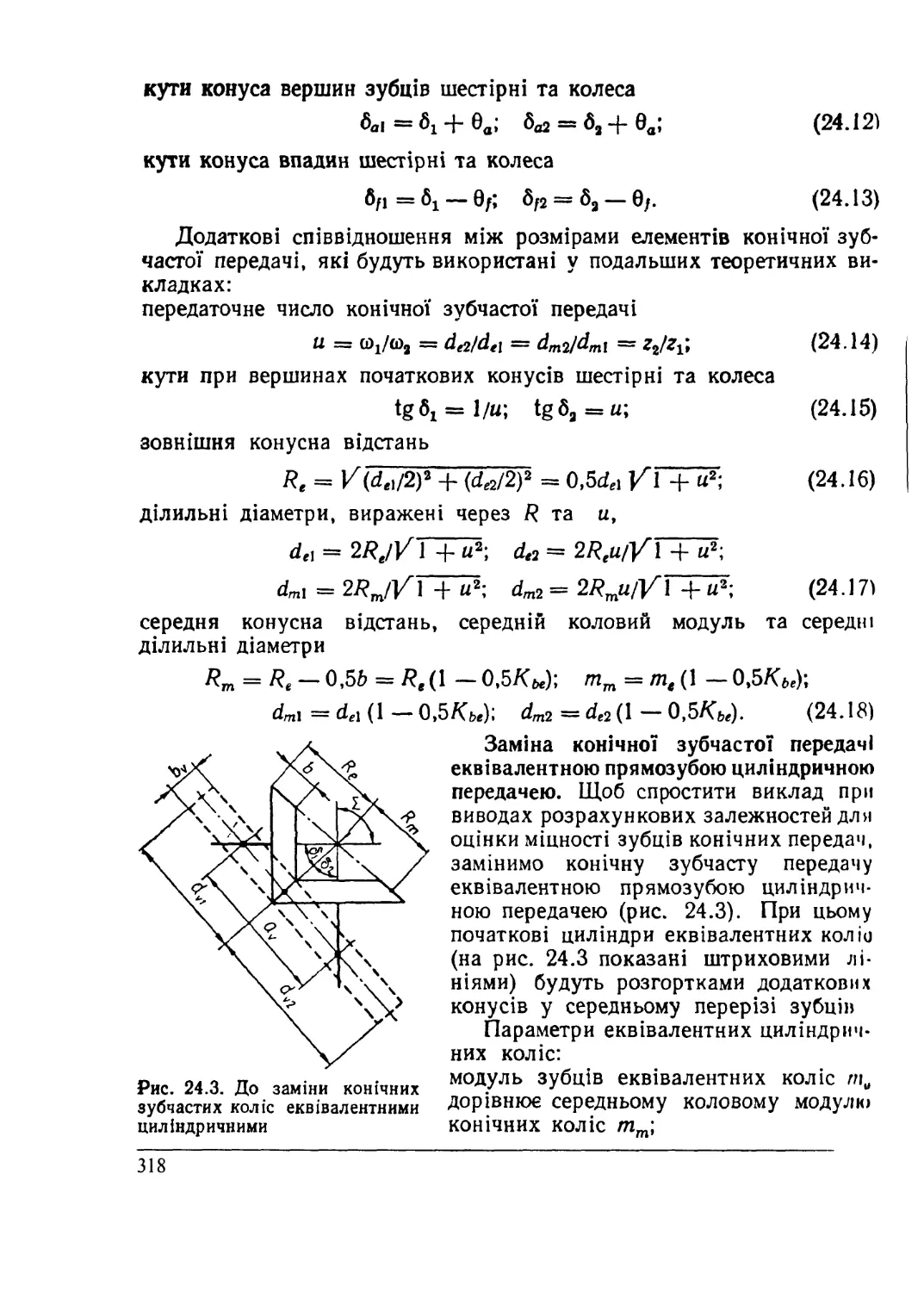
24.2. Основні параметри конічної прямозубої передачі...................316
24.3. Навантаження на зубці конічної зубчастої передачі................319
24.4. Розрахунок зубців конічних зубчастих передач на контактні витривалість
і міцність, на витривалість і міцність при згині.......................322
24.5. Проектний розрахунок .щонічної зубчастої передачі................323
24.6. Особливості конічних зубчастих передач із непрямими зубцями......325
24.7. Приклад розрахунку конічної зубчастої передачі...................326
Глава 25. Циліндричні зубчасті передачі із зачепленням Новікова........330
25.1. Особливості передач із зачепленням Новікова......................330
25.2. Параметри зубчастої передачі із зачепленням Новікова.............332
25.3. Особливості розрахунків на міцність циліндричних передач Новікова .... 334
25.4. Приклад розрахунку передачі Новикова.............................336
Глава 26. Гвинтові та гіпоїдні зубчасті передачі...................... 338
26.1. Загальні відомості...............................................338
26.2. Гвинтова зубчаста передача.......................................339
26.3. Гіпоїдна зубчаста передача.......................................340
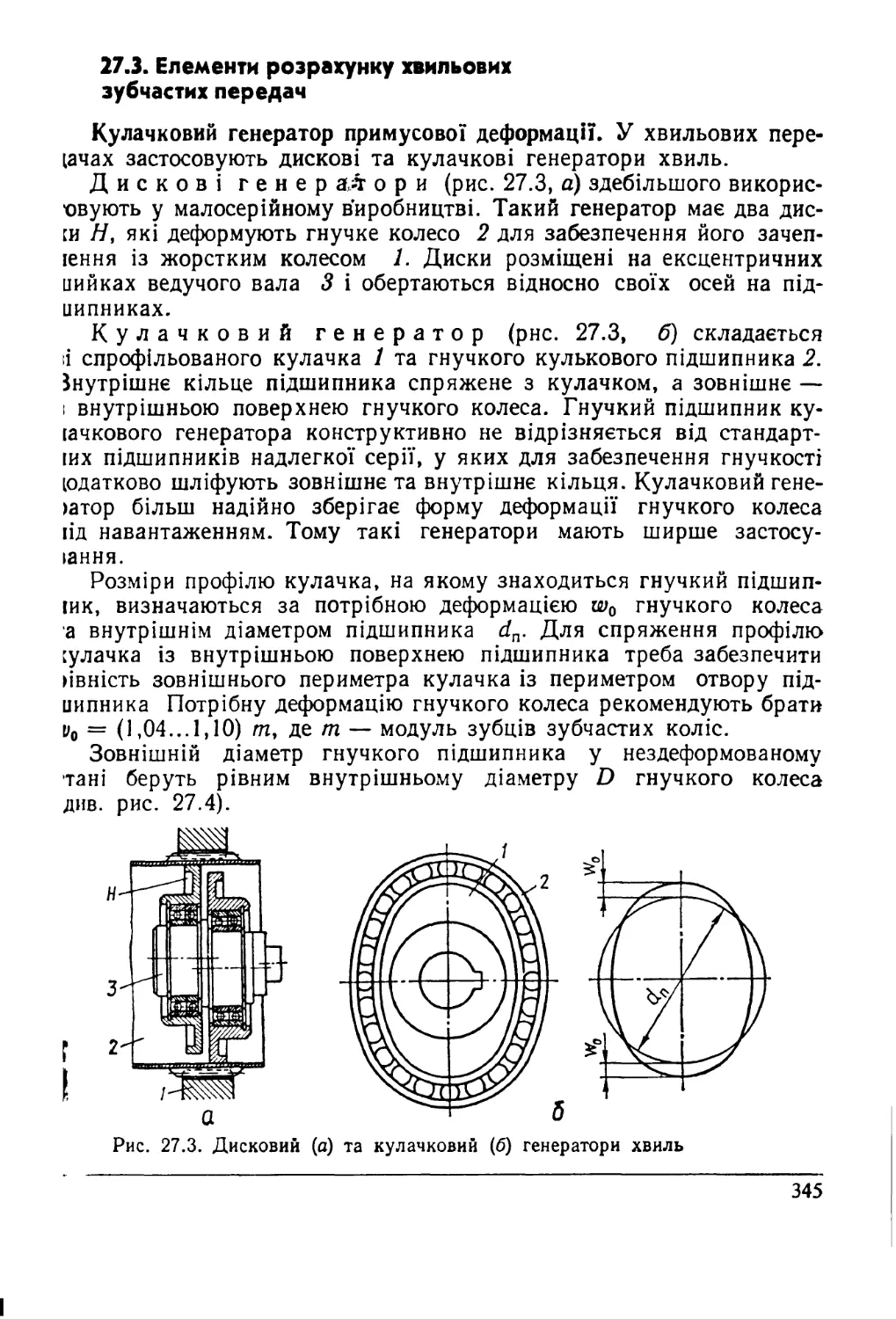
Глава 2 7. Хвильові зубчасті передачі..................................342
27.1. Принцип роботи та деякі схеми хвильових зубчастих передач .......342
27.2. Кінематика хвильової зубчастої передачі..........................344
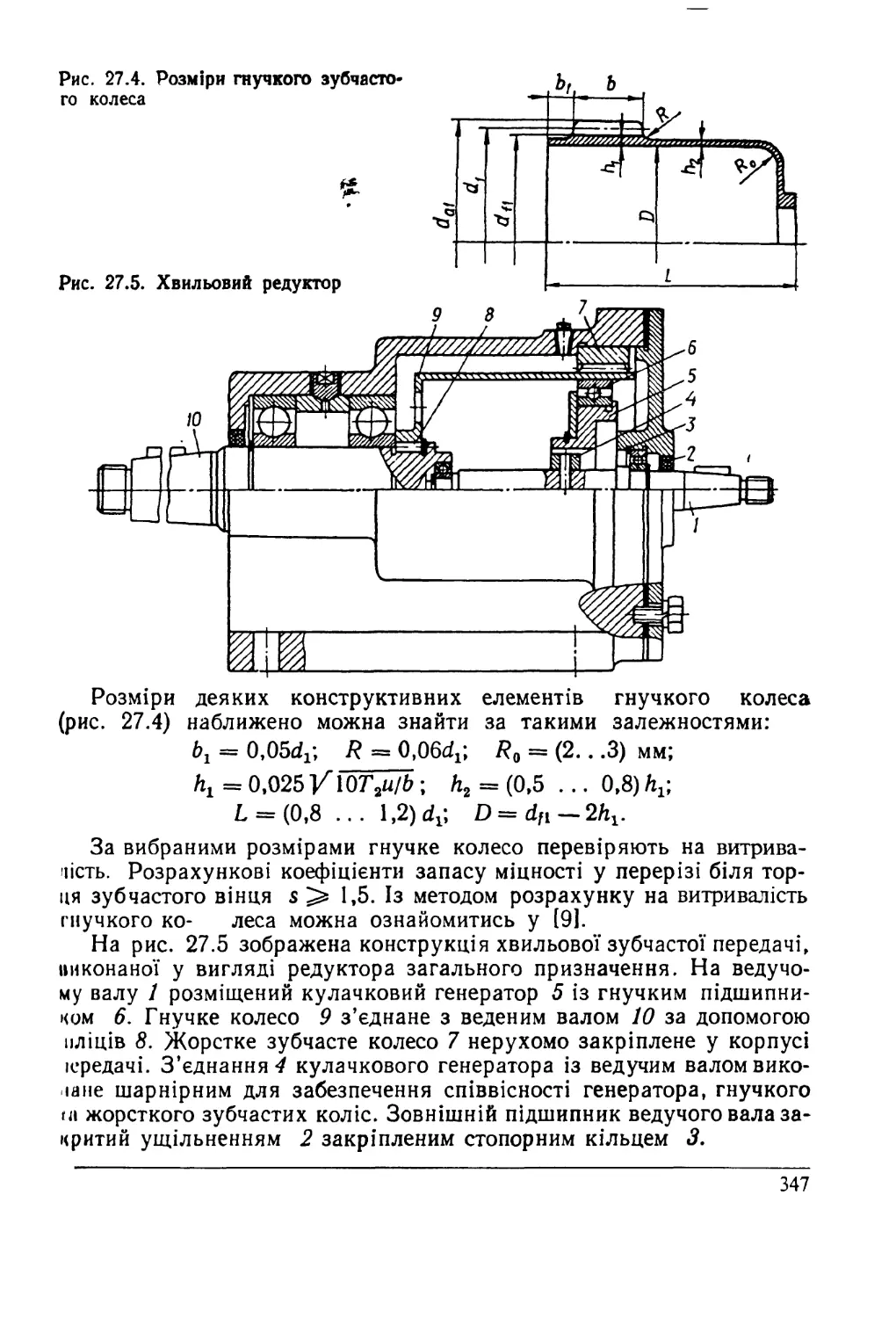
27.3. Елементи розрахунку хвильових зубчастих передач..................345
Глава 28. Черв’ячні передачі...........................................348
28.1. Загальні відомості та класифікація черв’ячних передач............348
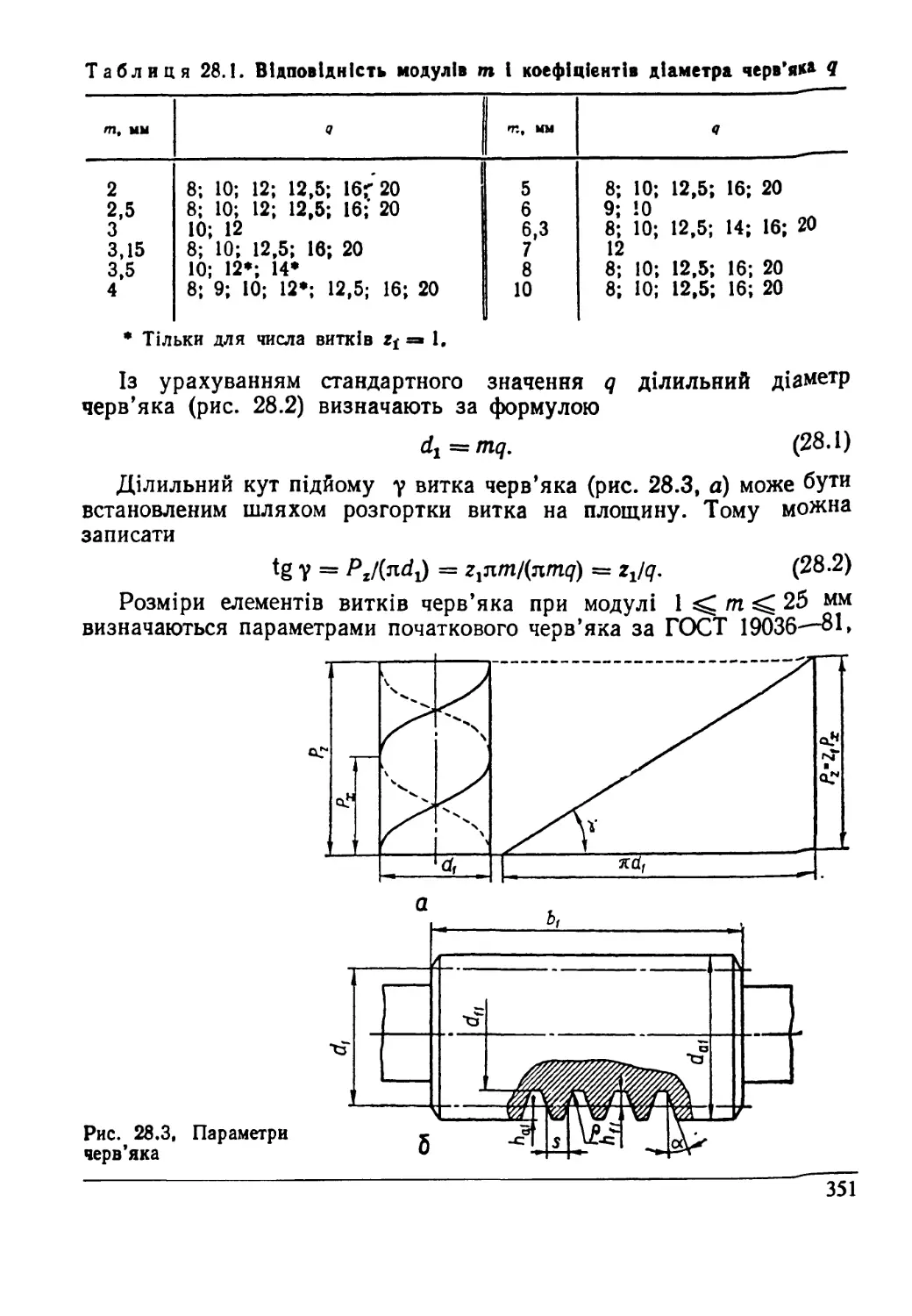
28.2. Параметри черв’ячної передачі....................................349
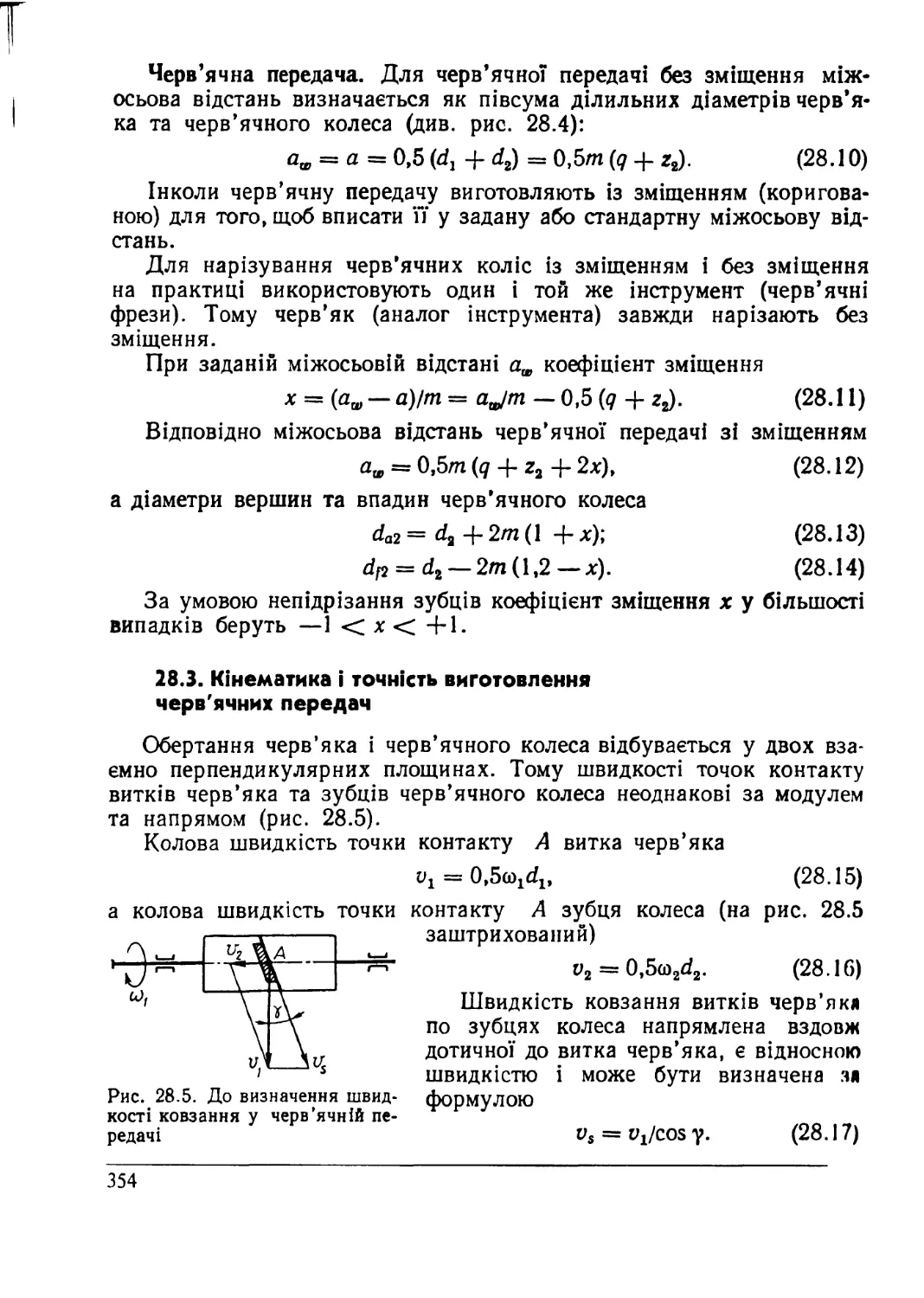
28.3. Кінематика і точність виготовлення черв’ячних передач............354
28.4. Матеріали і конструкції деталей черв’ячної передачі. Критерії робото-
здатності та розрахунків...............................................356
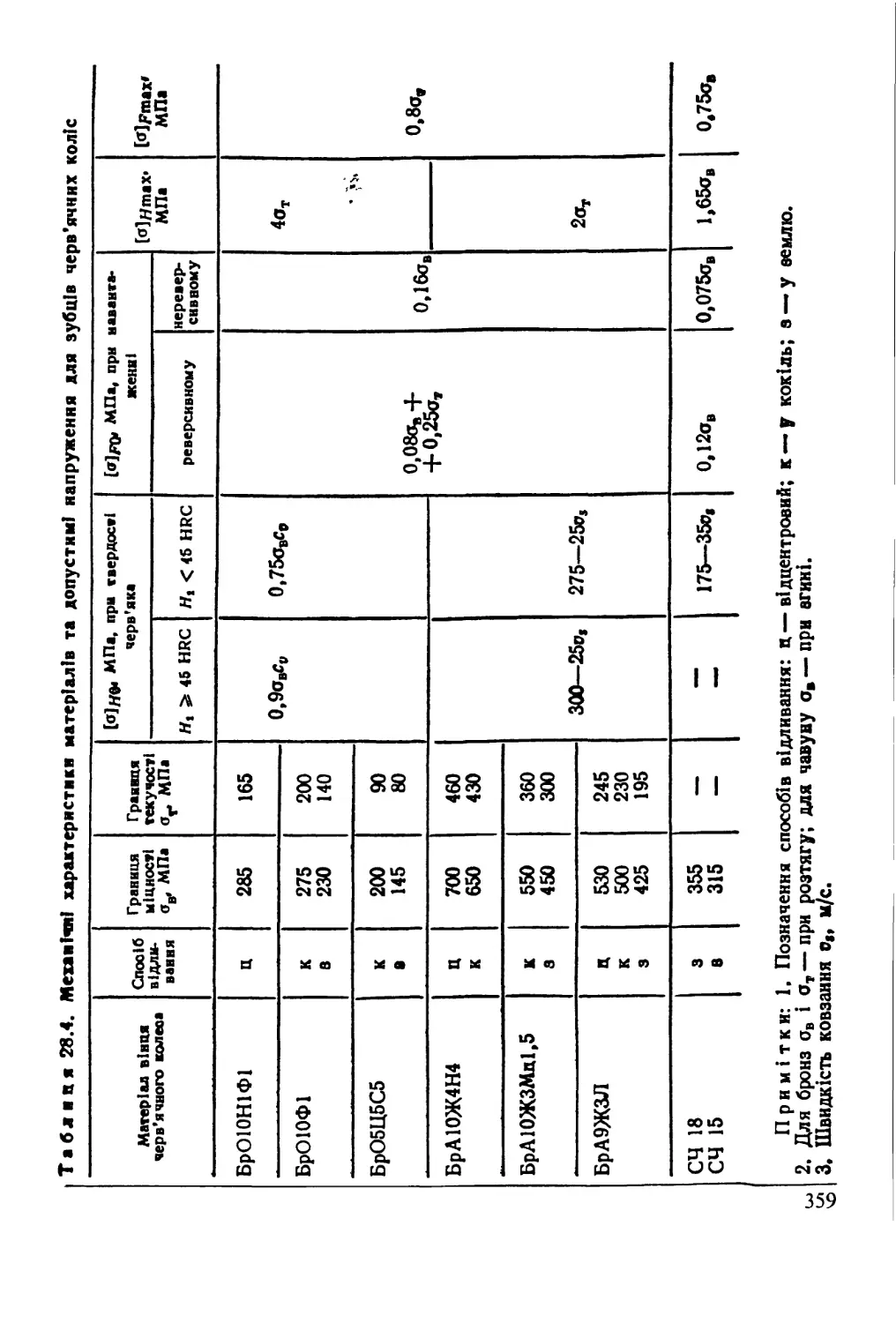
28.5. Допустимі напруження у розрахунках черв’ячних передач............358
28.6. Навантаження на зубці черв’ячного колеса.........................360
28.7. Розрахунок активних поверхонь зубців черв’ячного колеса на контактні
витривалість і міцність при дії максимального навантаження.............363
28.8. Особливості розрахунку зубців черв’ячного колеса на згин.........364
28.9. Проектний розрахунок черв’ячної передачі.........................365
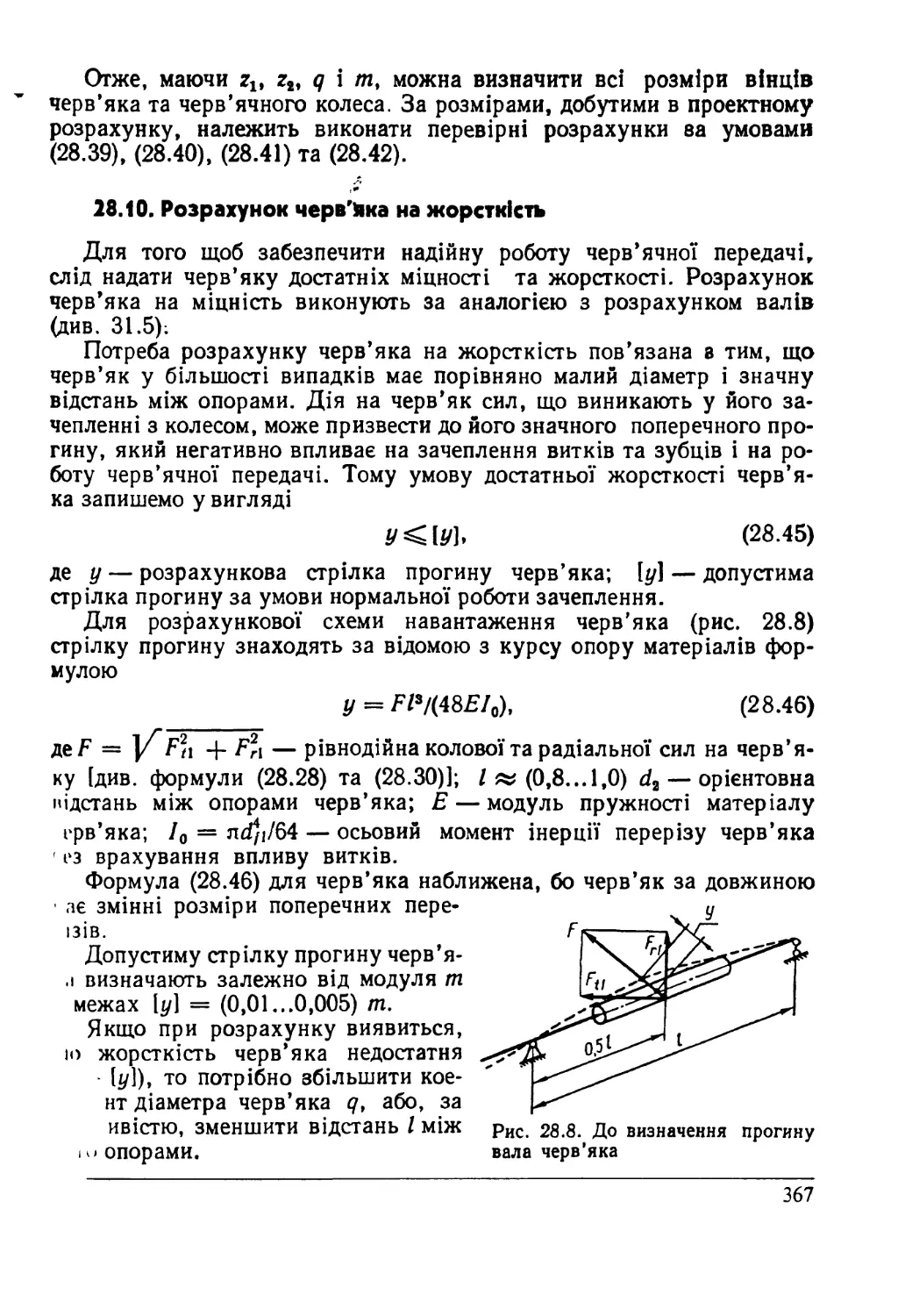
28.10. Розрахунок черв’яка на жорсткість...............................367
28.11. ККД черв’ячної передачі та її тепловий розрахунок...............368
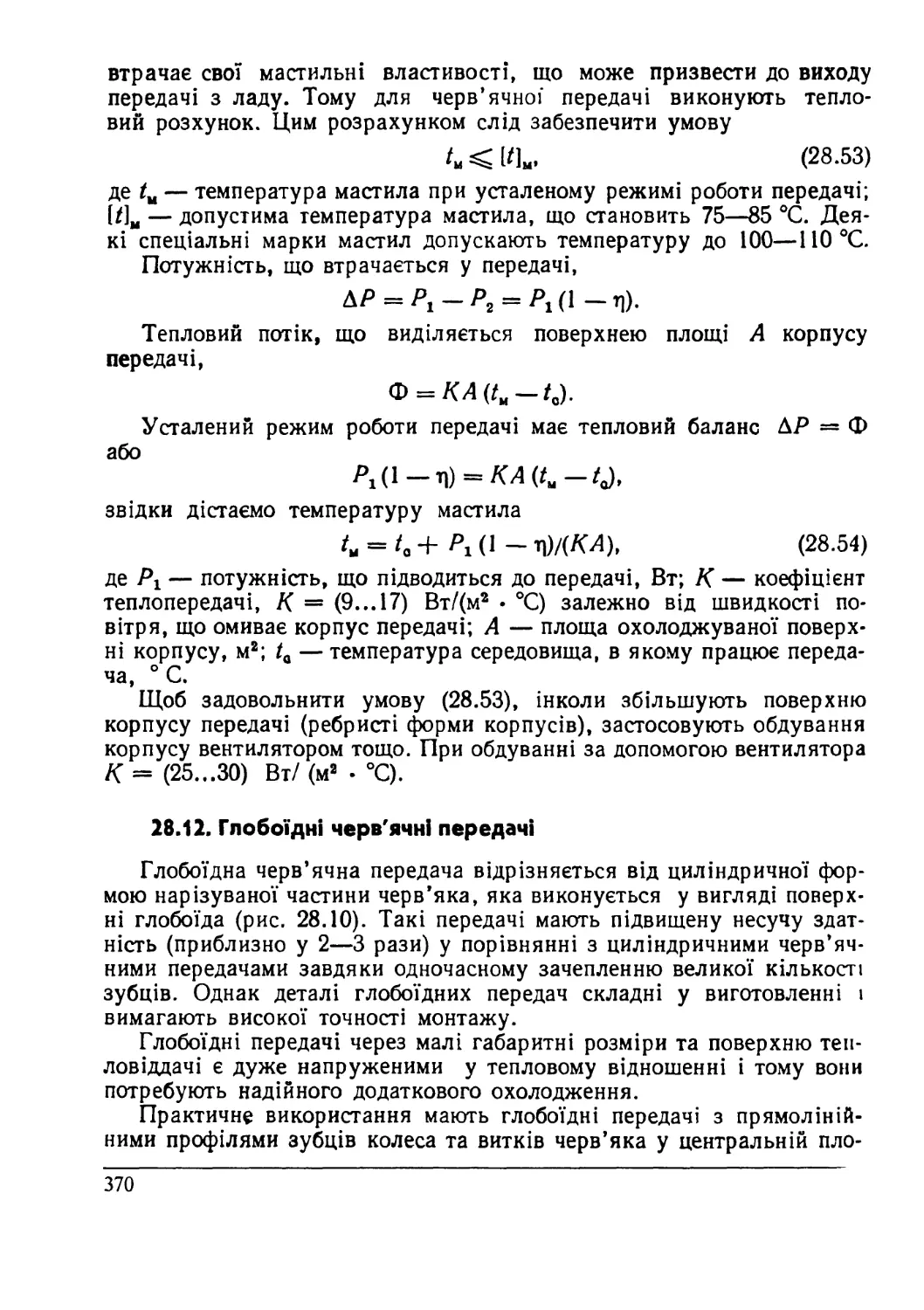
28.12. Глобоідні черв’ячні передачі....................................370
28.13. Приклад розрахунку черв’ячної передачі..........................371
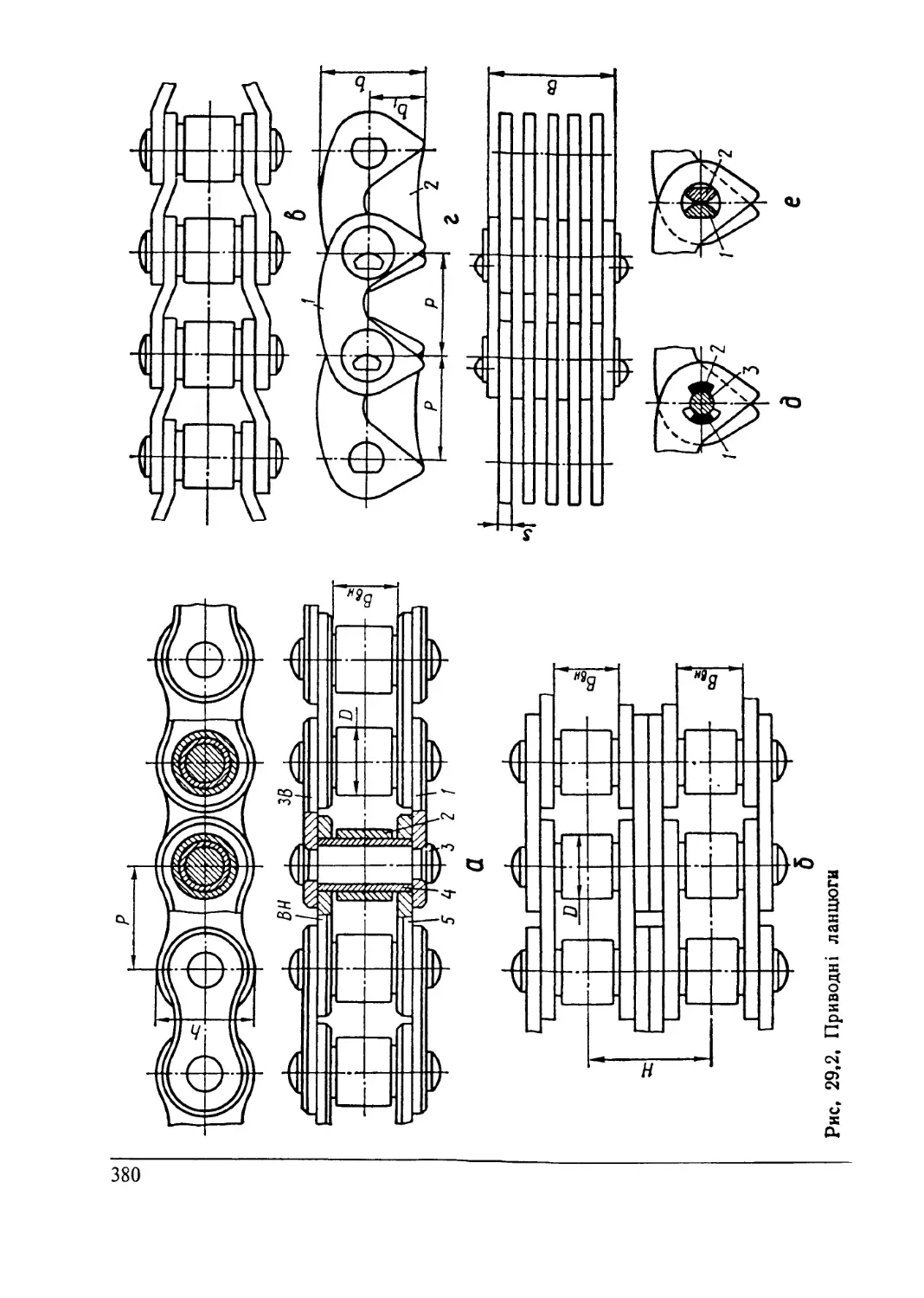
Глава 29. Ланцюгові передачі...........................................377
29.1. Загальні відомості та класифікація ланцюгових передач............377
29.2. Деталі ланцюгових передач........................................378
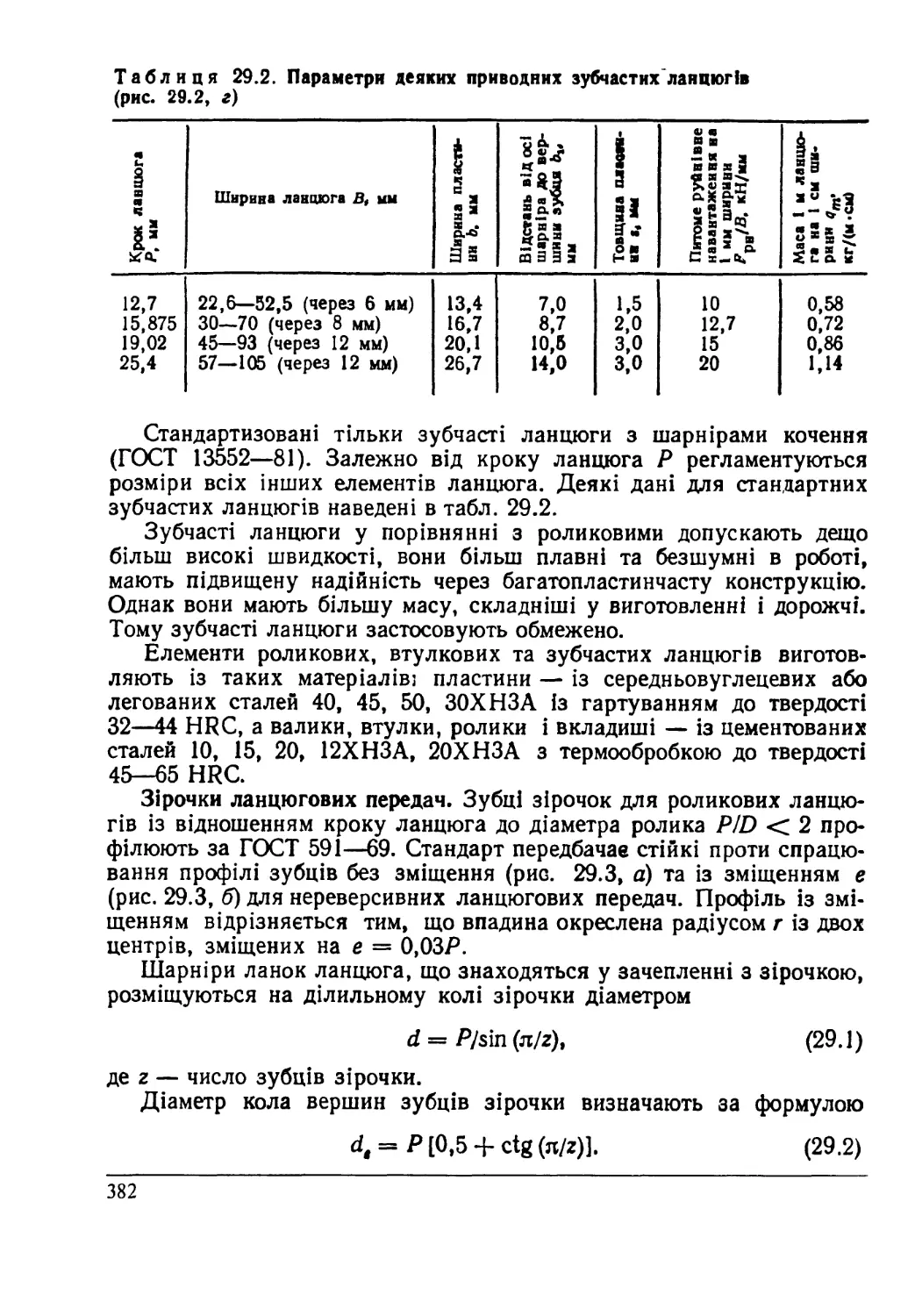
29.3. Основні розрахункові параметри ланцюгових передач................386
29.4. Критерії роботоздатності та розрахунок ланцюгових передач .......389
29.5. Приклад розрахунку ланцюгової передачі ..........................392
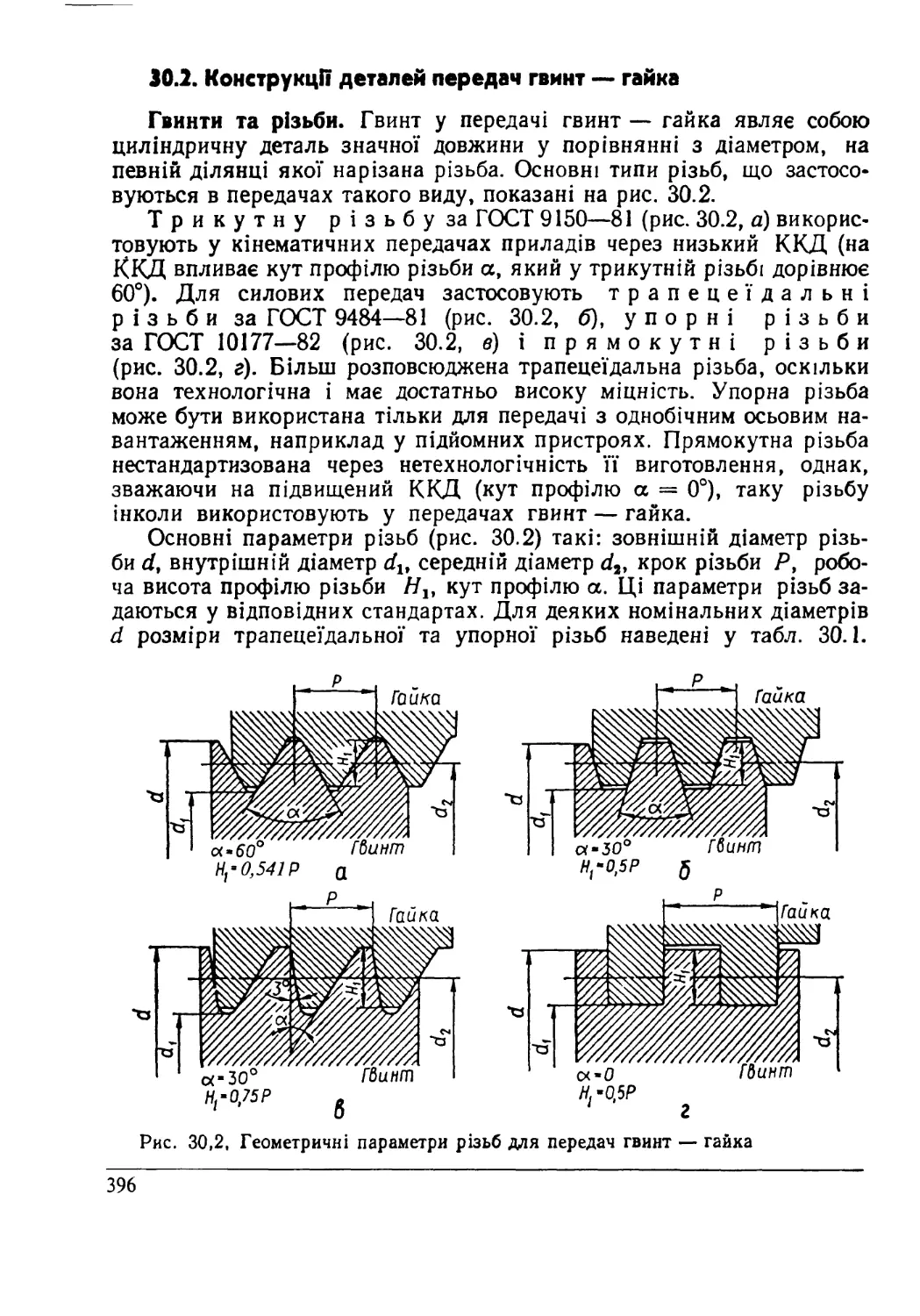
Глава ЗО. Передачі гвинт— гайка........................................395
30.1. Загальні відомості...............................................395
30.2. Конструкції деталей передач гвинт — гайка........................396
9
30.3. Розрахунок передач гвинт — гайка................................398
30.4. Приклад розрахунку передачі гвинт — гайка.......................401
Розділ IV. Осі та вали. Підшипники і напрямні
Глава 31. Осі та вали.................................................405
31.1. Загальні відомості. Конструкції та матеріали осей і валів.......405
31.2. Розрахункові схеми валів та осей. Критерії розрахунку...........409
31.3. Розрахунок осей на міцність і стійкість проти втомного руйнування.412
31.4. Розрахунок валів на статичну міцність...........................413
31.5. Розрахунок валів на витривалість................................415
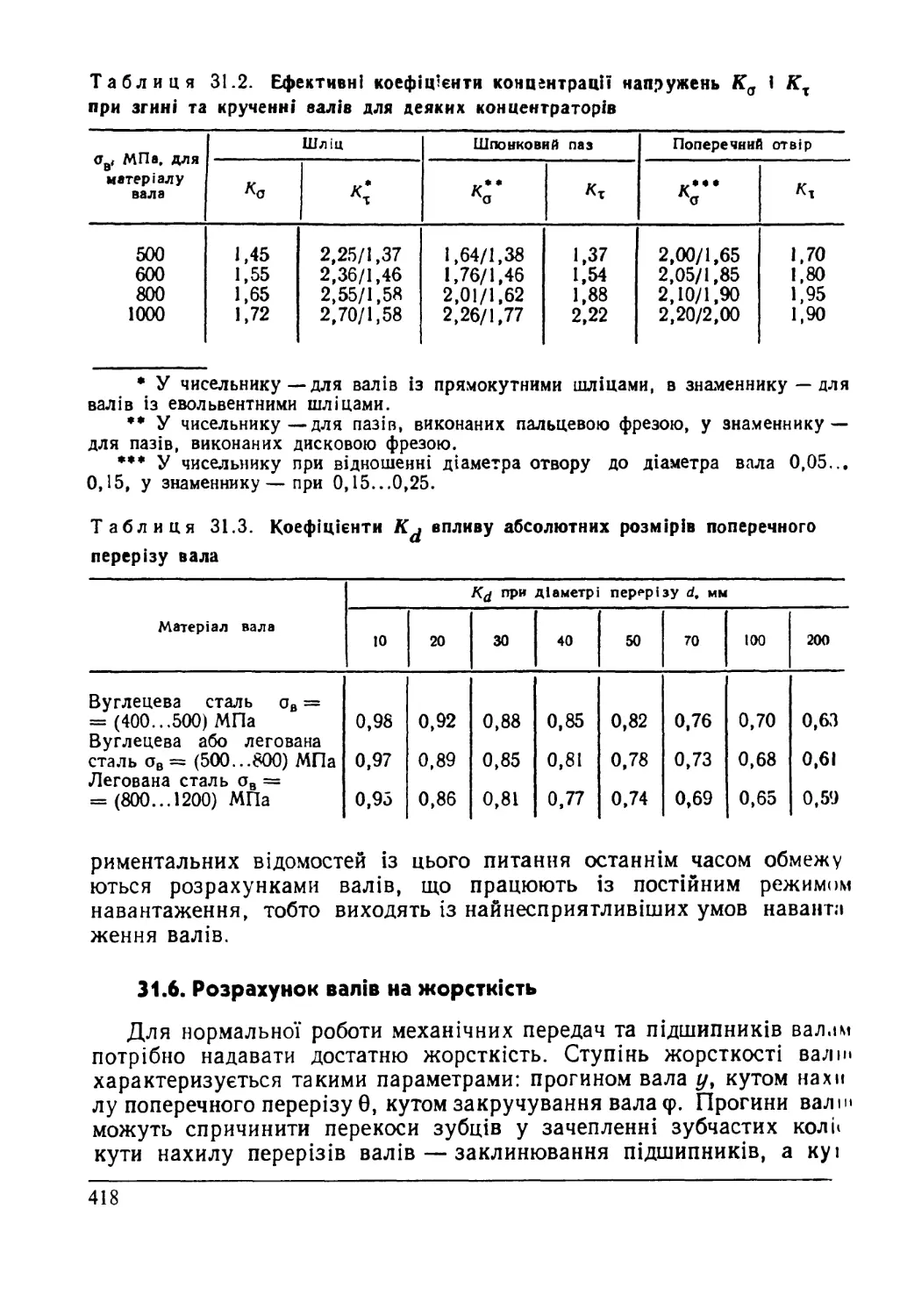
31.6. Розрахунок валів на жорсткість..................................418
31.7. Розрахунок валів для запобігання поперечним коливанням....420
31.8. Проектний розрахунок валів та їхнє конструювання................422
31.9. Приклад розрахунку і конструювання вала.........................423
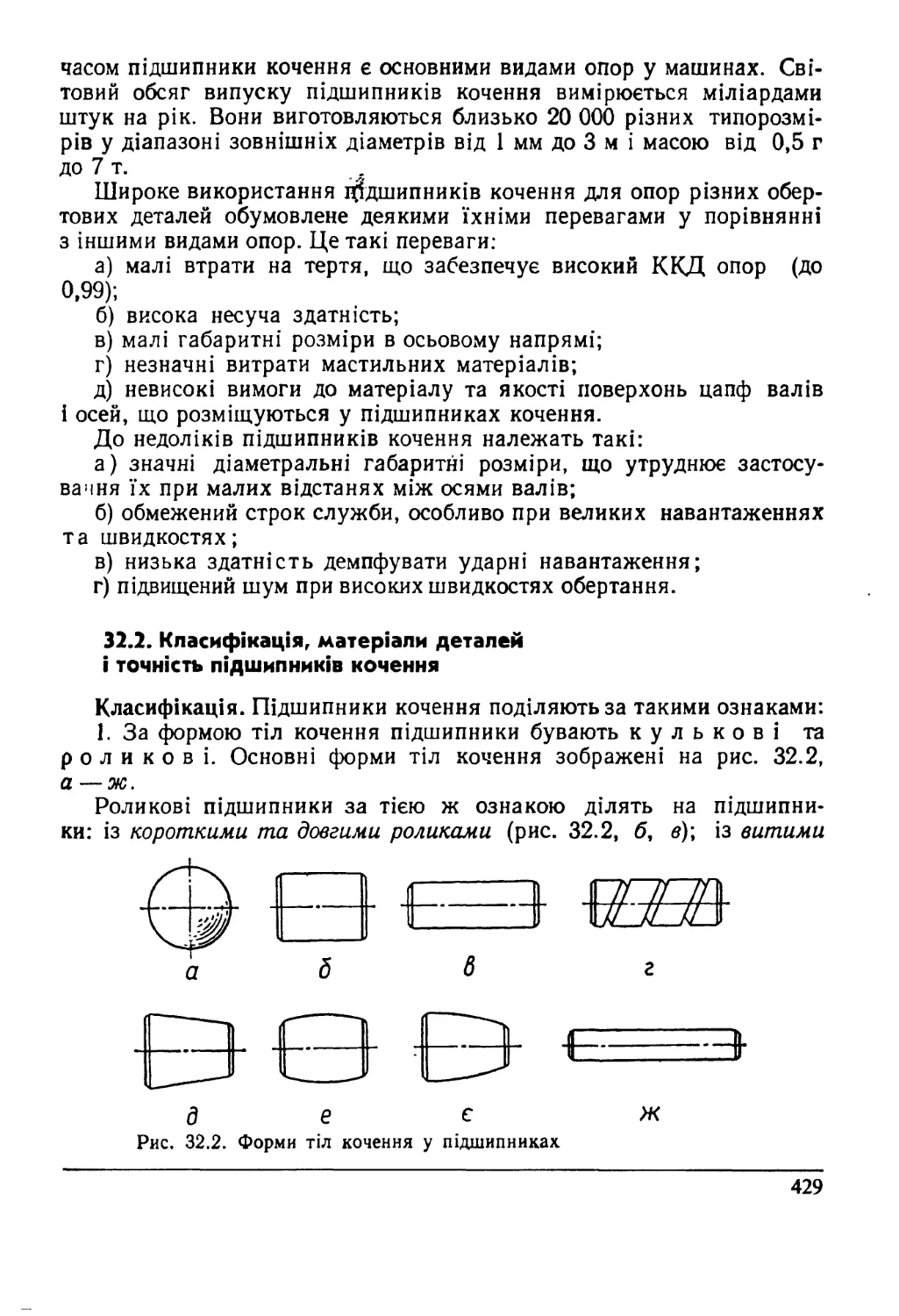
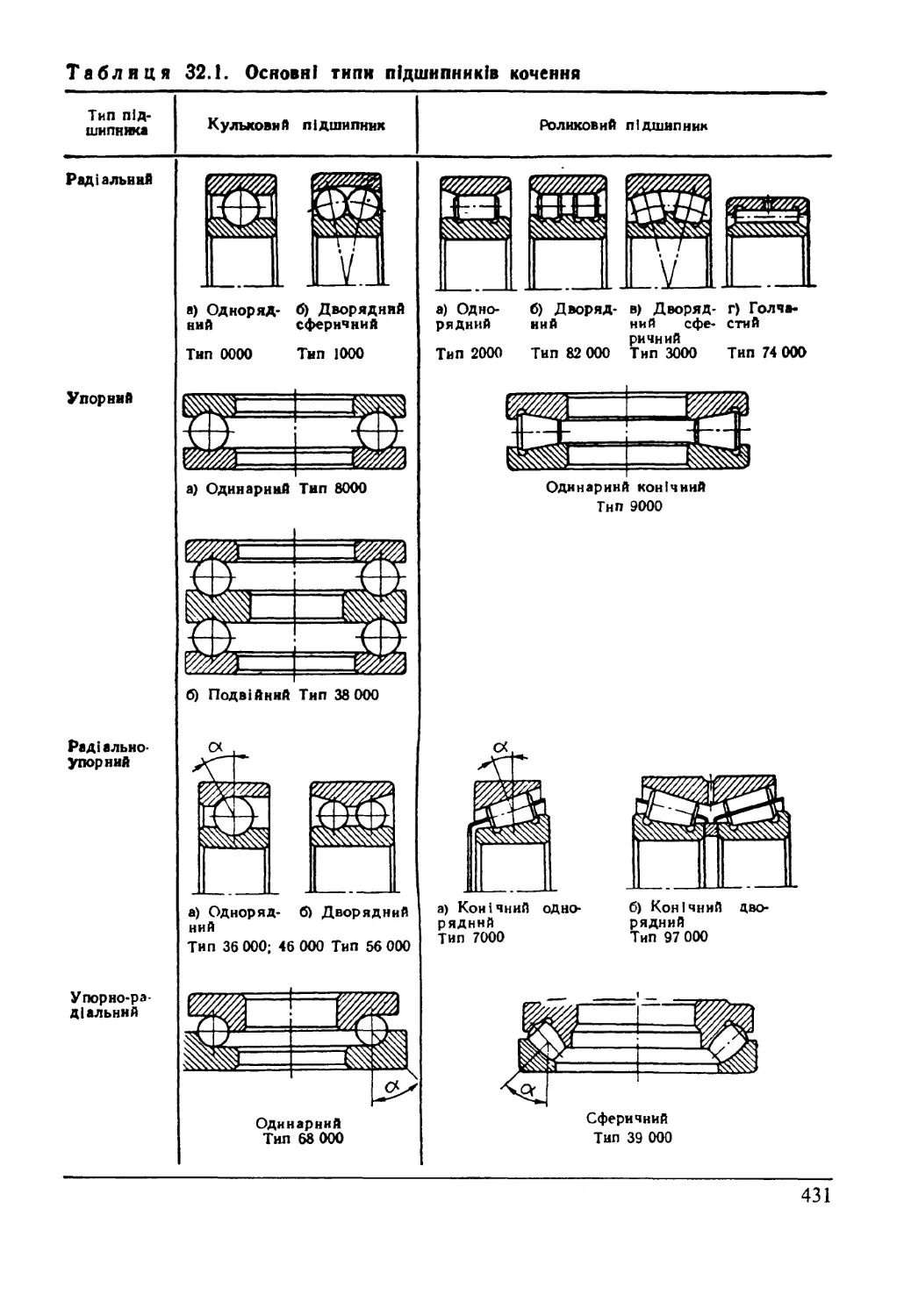
44 Глава 32. Підшипники кочення.........................................428
32.1. Загальні відомості..............................................428
32.2. Класифікація, матеріали деталей і точність підшипників кочення....429
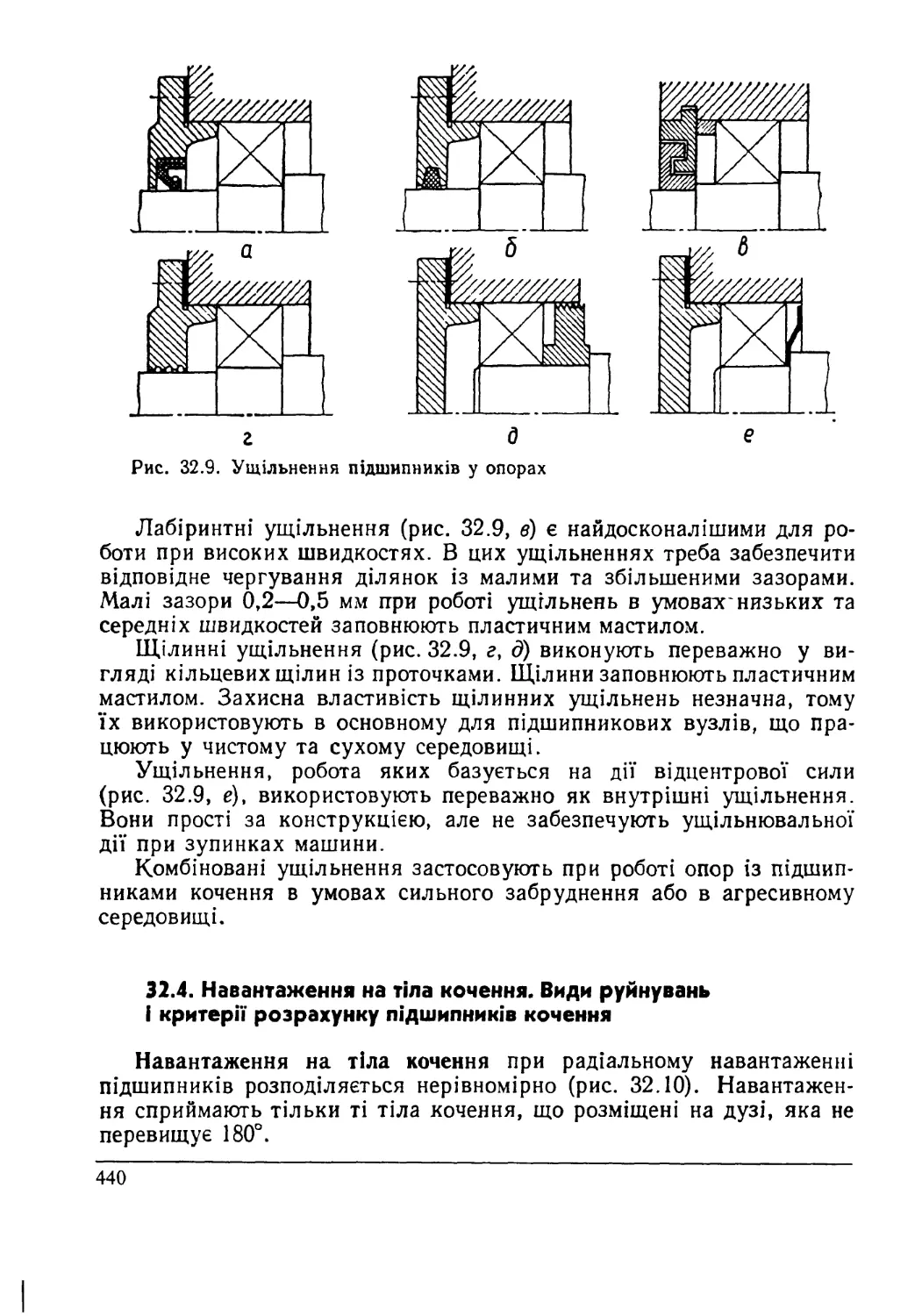
32.3. Монтаж, змащування та ущільнення підшипників кочення............433
32.4. Навантаження на тіла кочення. Види руйнувань і критерії розрахунку
підшипників кочення...................................................440
32.5. Підбір підшипників кочення за статичною та динамічною вантажністю.443
32.6. Розрахункове еквівалентне навантаження на підшипники кочення......444
32.7. Рекомендації щодо вибору підшипників кочення....................448
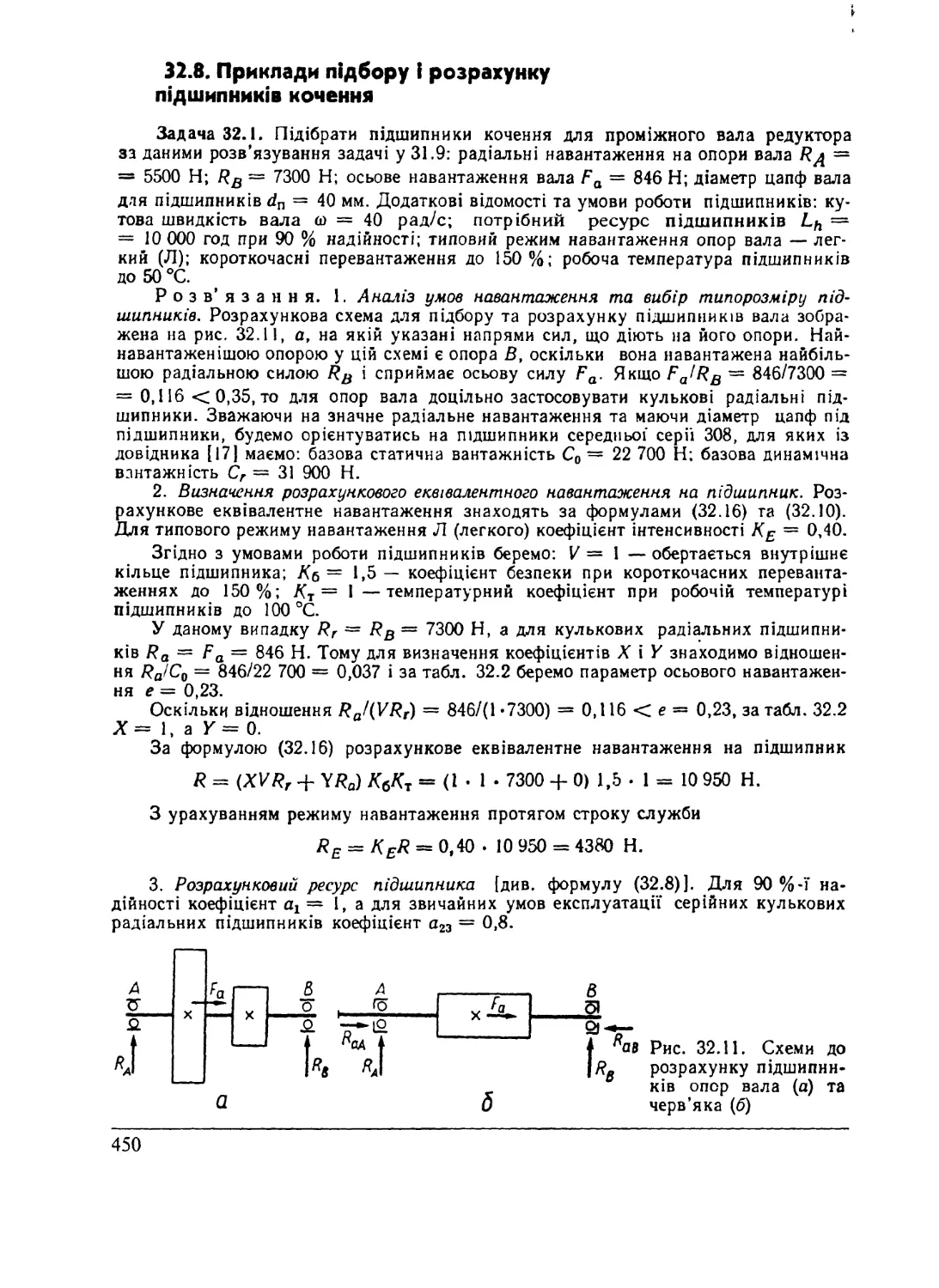
32.8. Приклади підбору і розрахунку підшипників кочення...............450
З
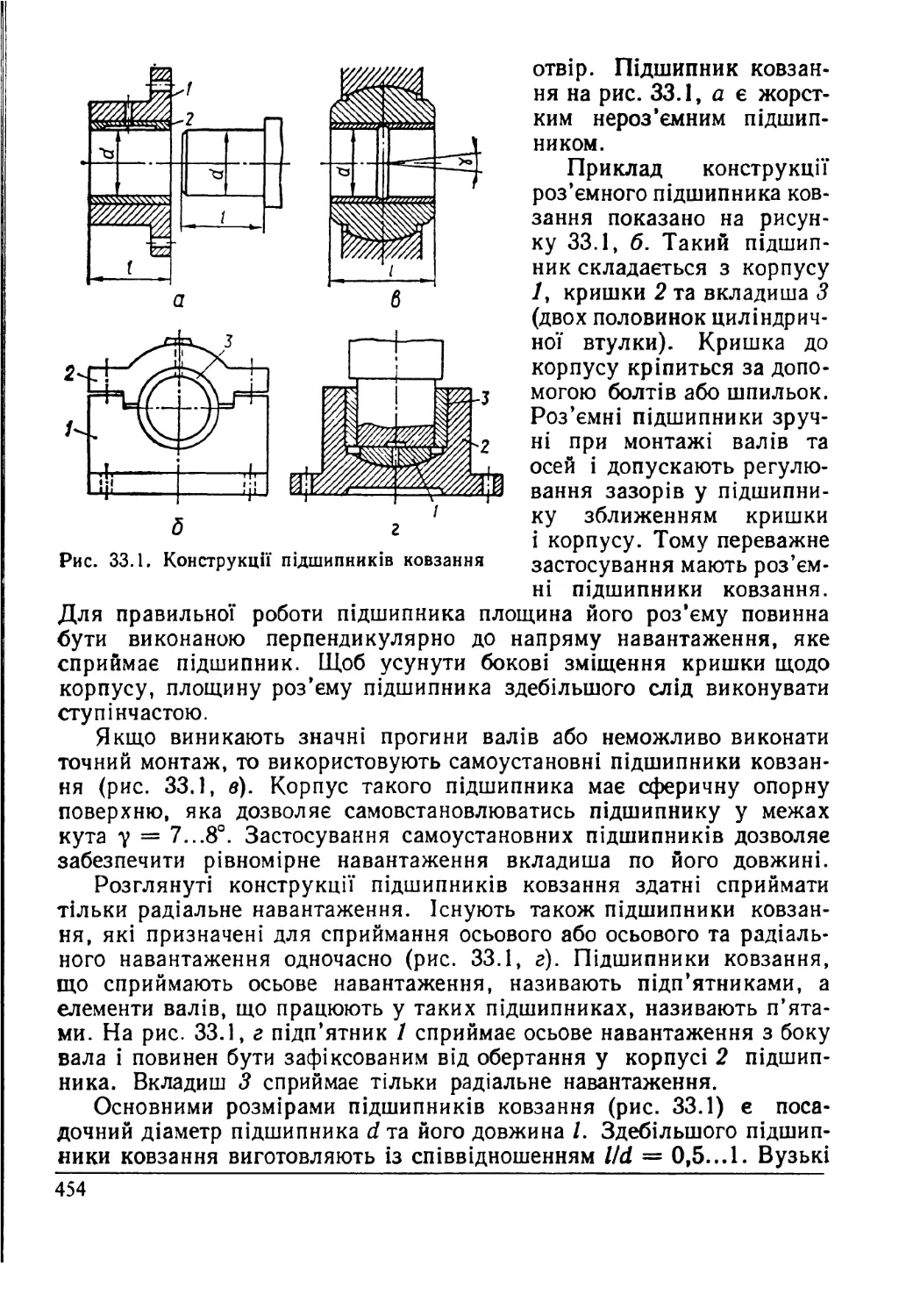
Глава 33. Підшипники ковзання.........................................452
33.1. Загальні відомості..............................................452
33.2. Конструкції та матеріали підшипників ковзання...................453
33.3. Змащування підшипників ковзання.................................457
33.4. Робото здатність і режим рідинного тертя у підшипниках ковзання...458
33.5. Розрахунки підшипників ковзання.................................460
33.6. Деякі спеціальні підшипники ковзання............................464
33.7. Приклад розрахунку підшипника ковзання..........................465
Глава 34. Напрямні прямолінійного руху................................467
34.1. Області застосування та конструкції напрямних...................467
34.2. Основи розрахунку напрямних прямолінійного руху.................468
Розділ V. Основи конструювання приводів машин
/ Глава 35. Загальна характеристика приводів машин......................471
35.1. Структура машин та їхній привод.................................471
35.2. Структурні схеми приводів машин.................................473
35.3. Порівняльна оцінка механічних передач приводів машин............474
/ Глава 36. Двигуни у приводах машин....................................476
36.1. Загальна характеристика двигунів................................476
36.2. Визначення потужності та типу електродвигуна привода............478
36.3. Приклад підбору електродвигуна привода машини...................482
10
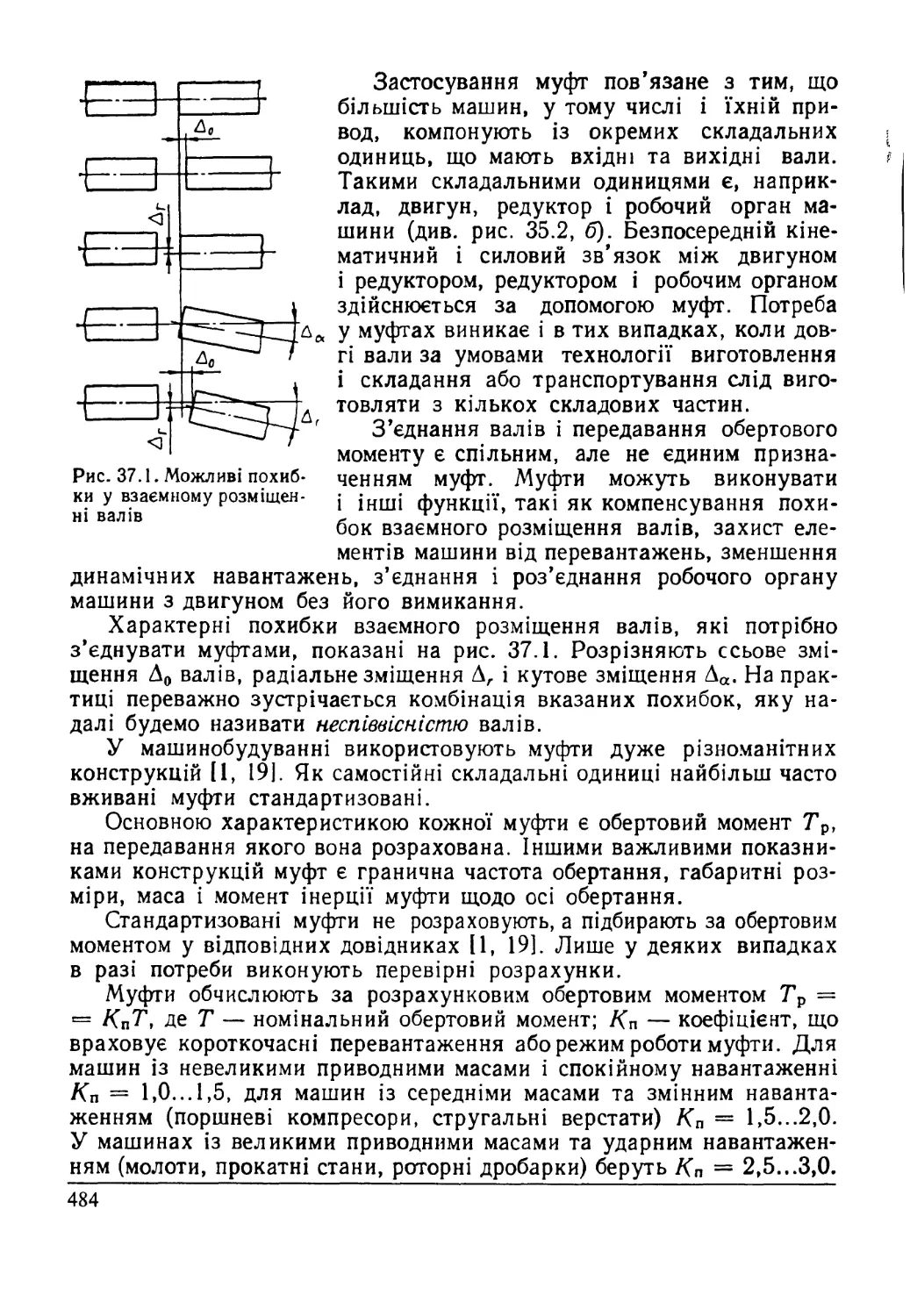
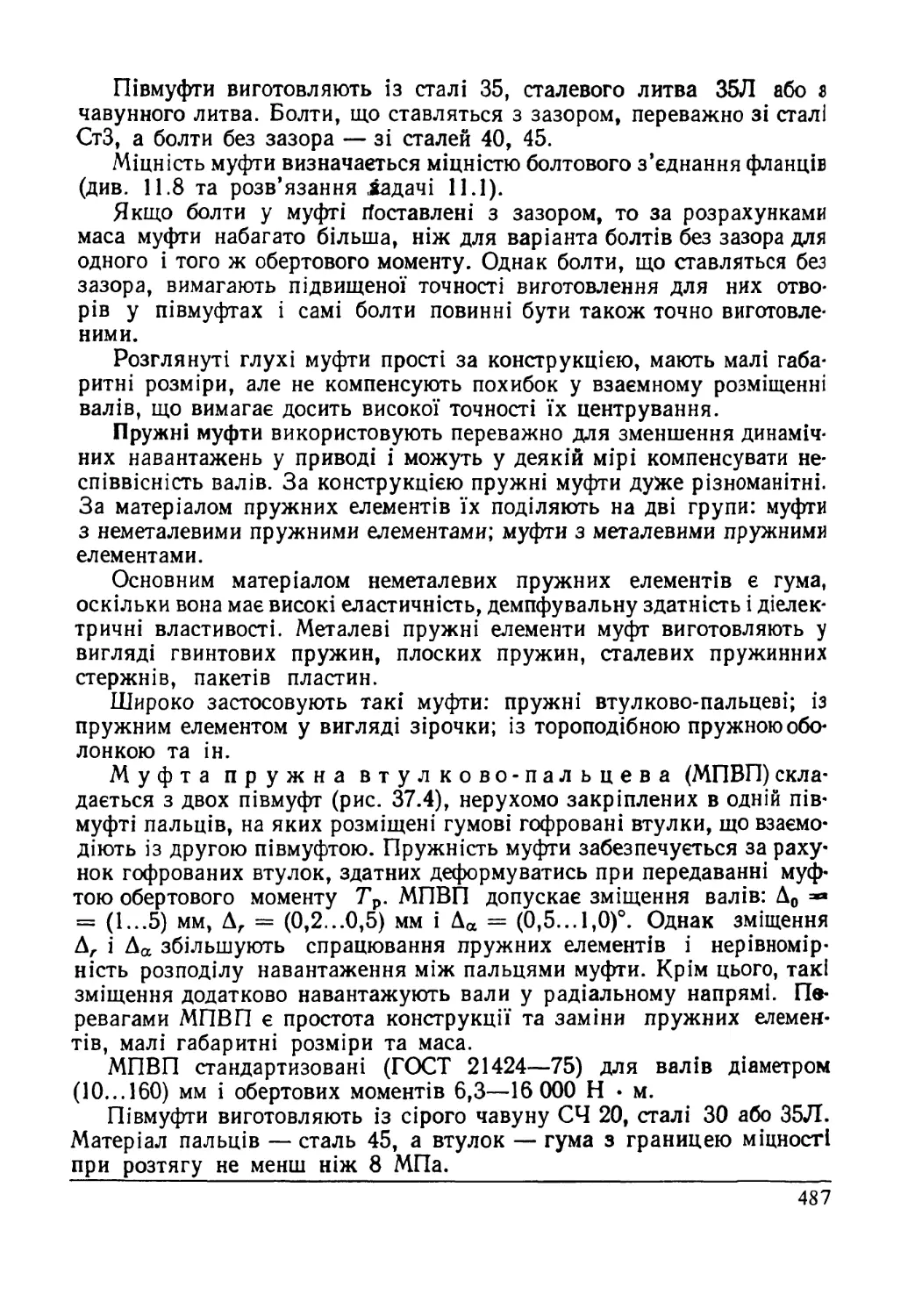
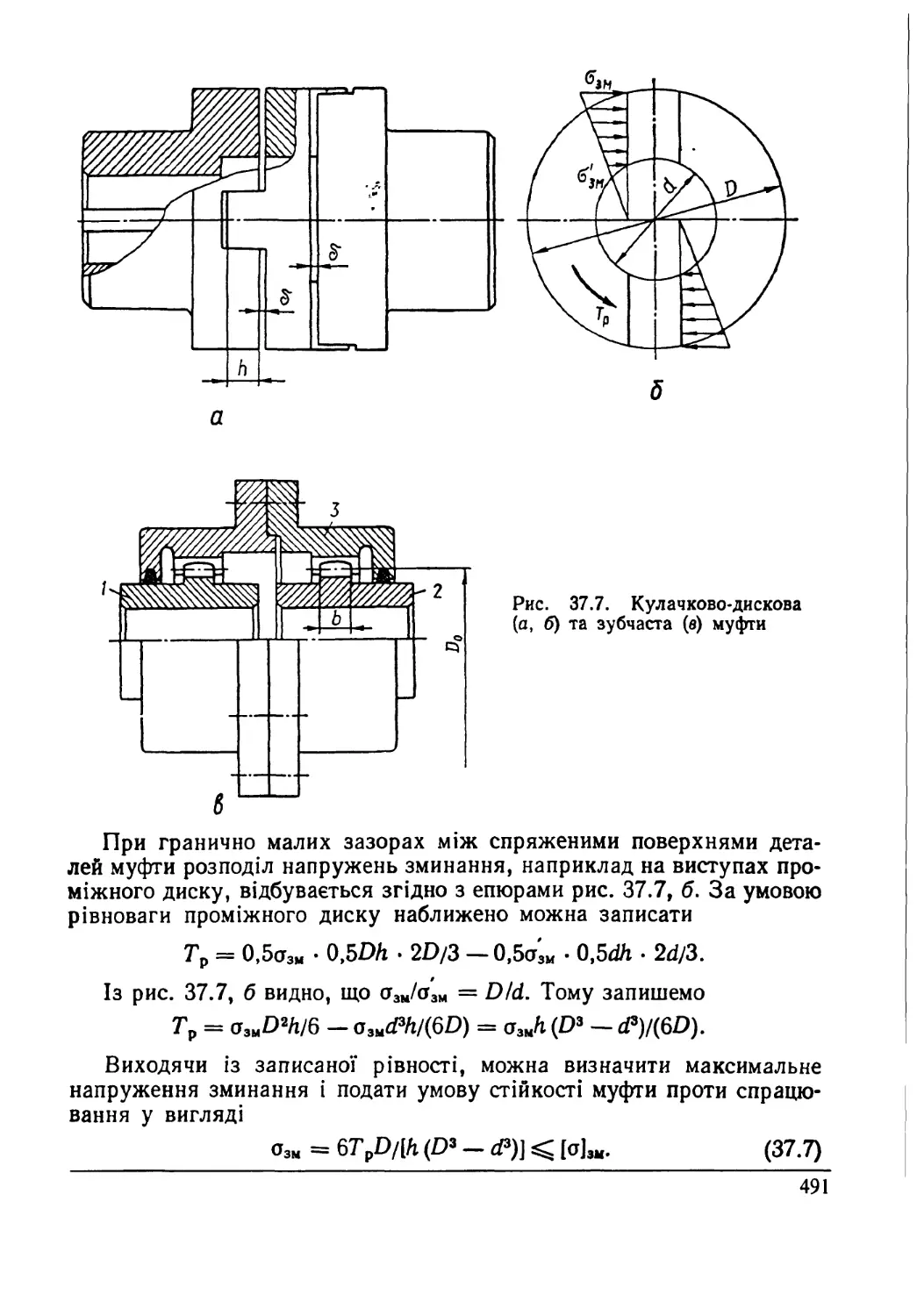
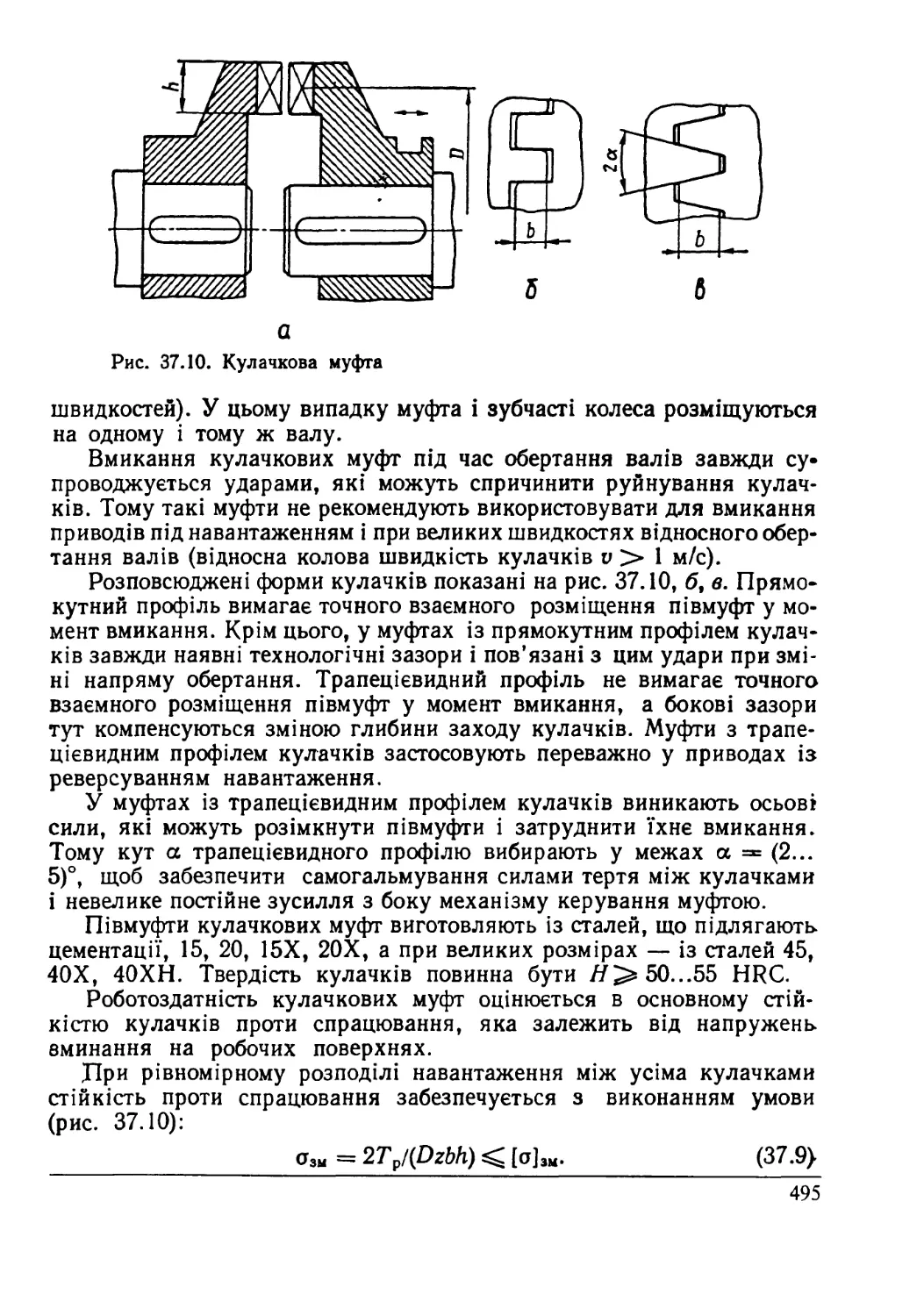
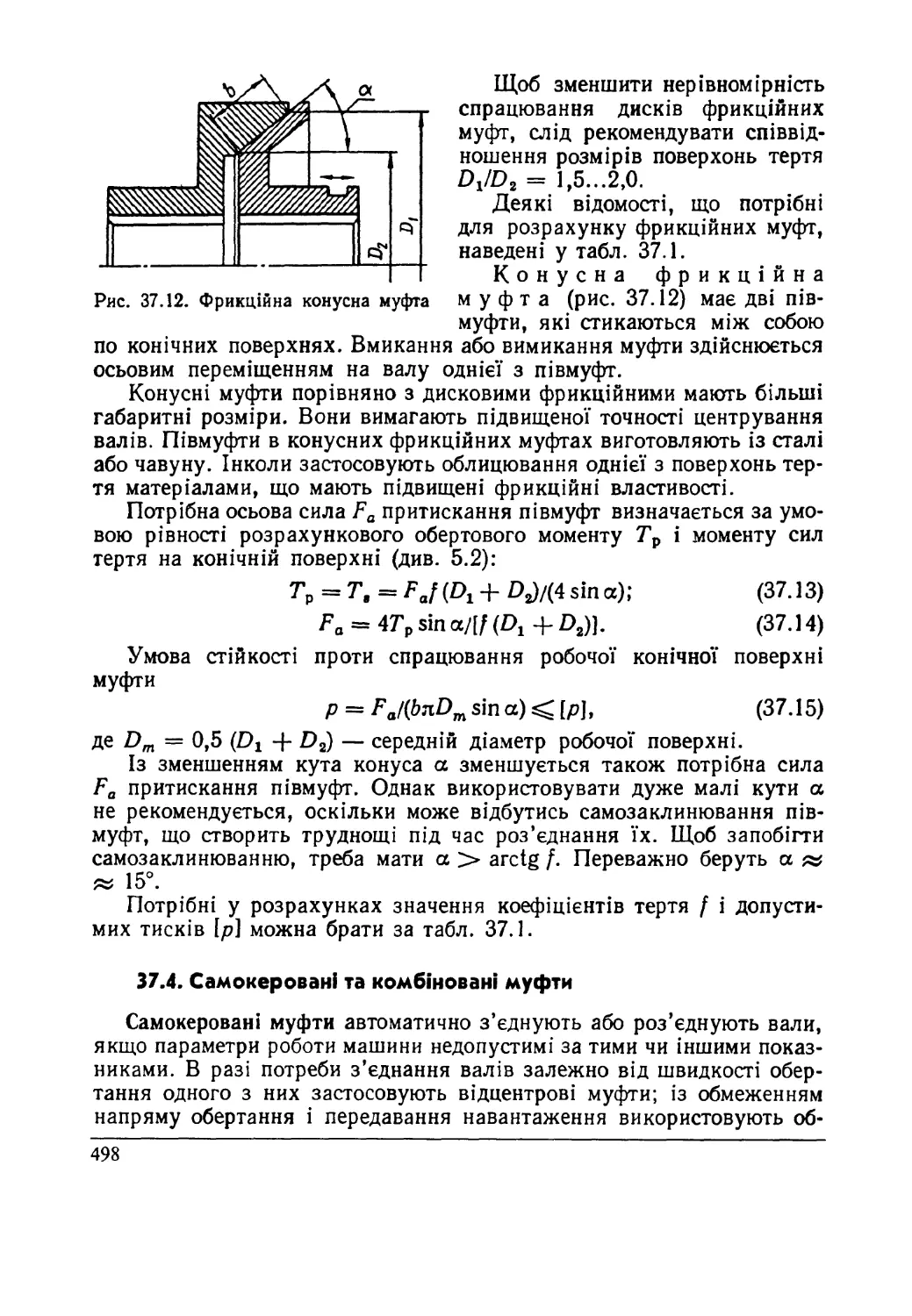
Глава 37. Муфти приводів....................................................... 483
37.1. Загальні відомості та класифікація муфт.......................483
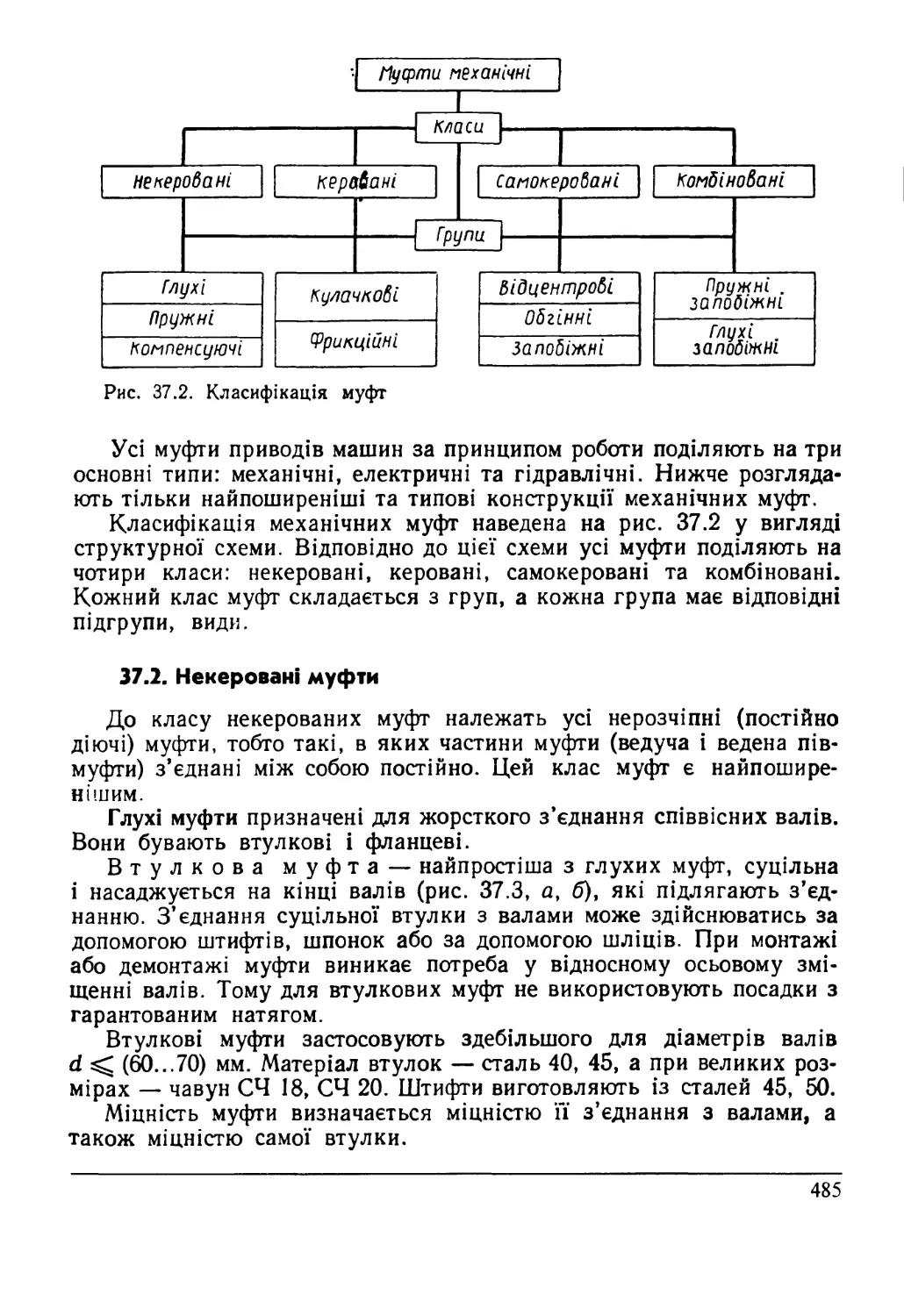
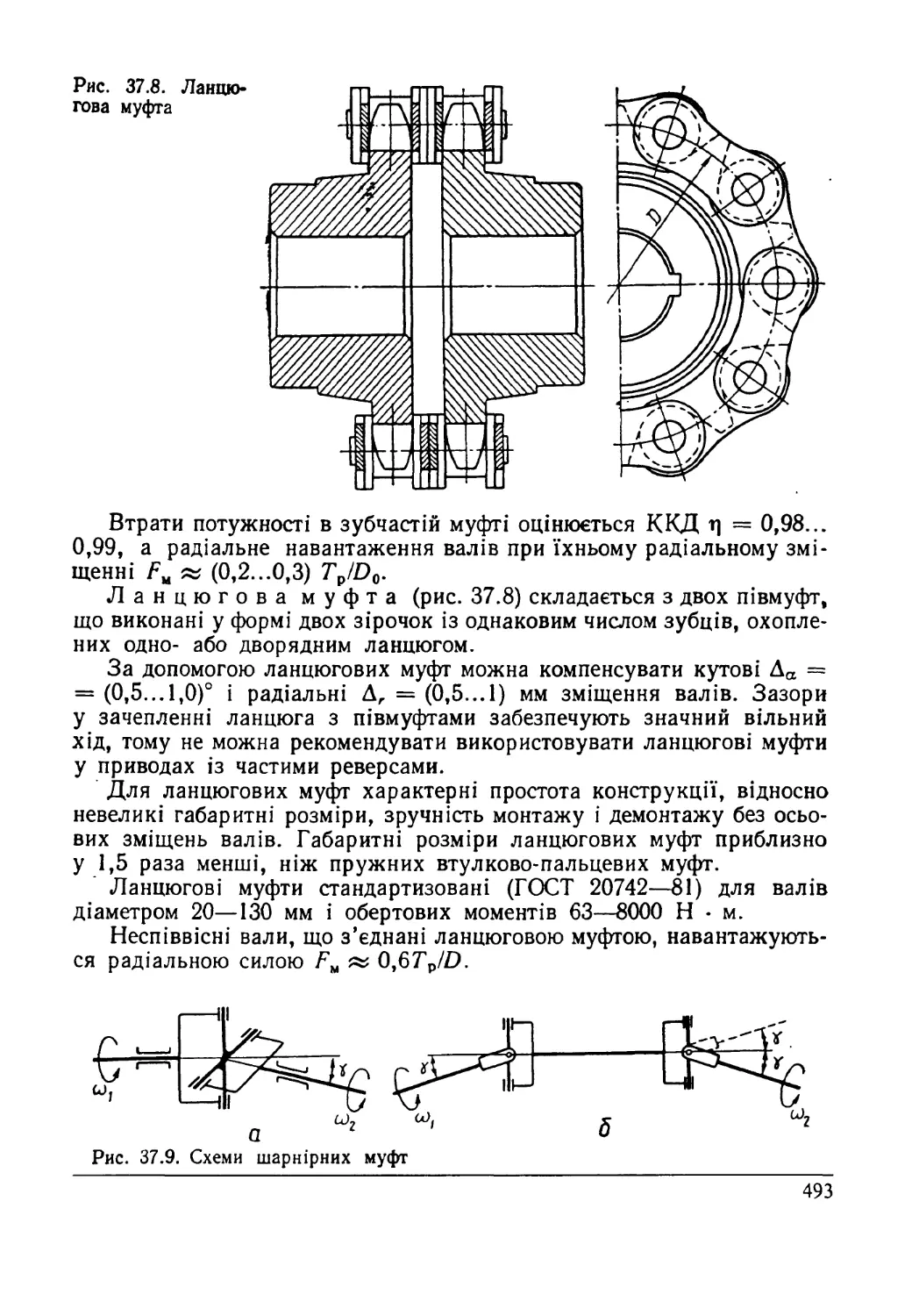
37.2. Некеровані муфти..............................................485
37.3. Керовані муфти................................................494
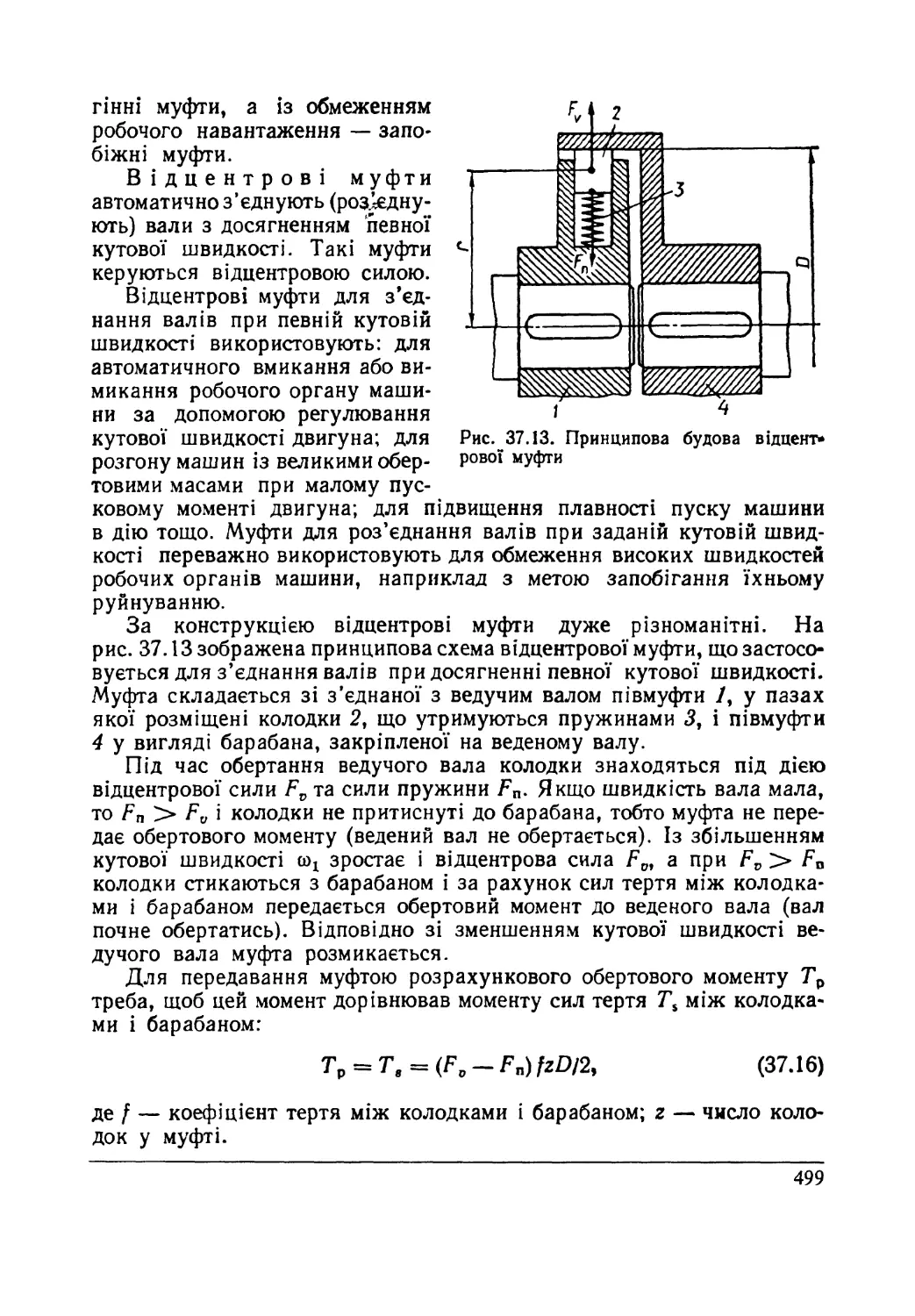
37.4. Самокеровані та комбіновані муфти.............................498
Глава 38. Редуктори............................................................ 505 \/
38.1. Загальні відомості............................................505
38.2. Основні схеми рядових редукторів..............................506
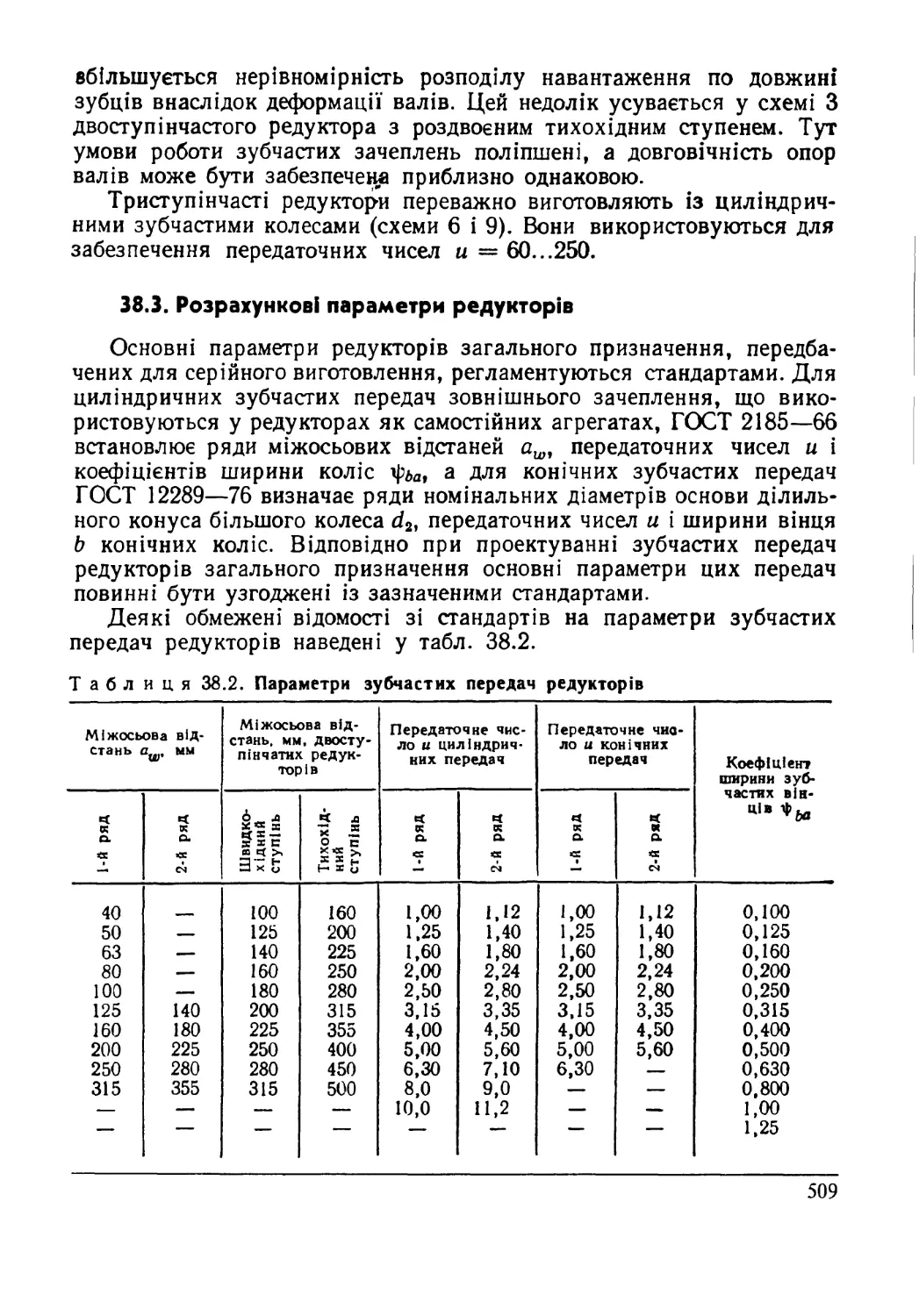
38.3. Розрахункові параметри редукторів.............................509
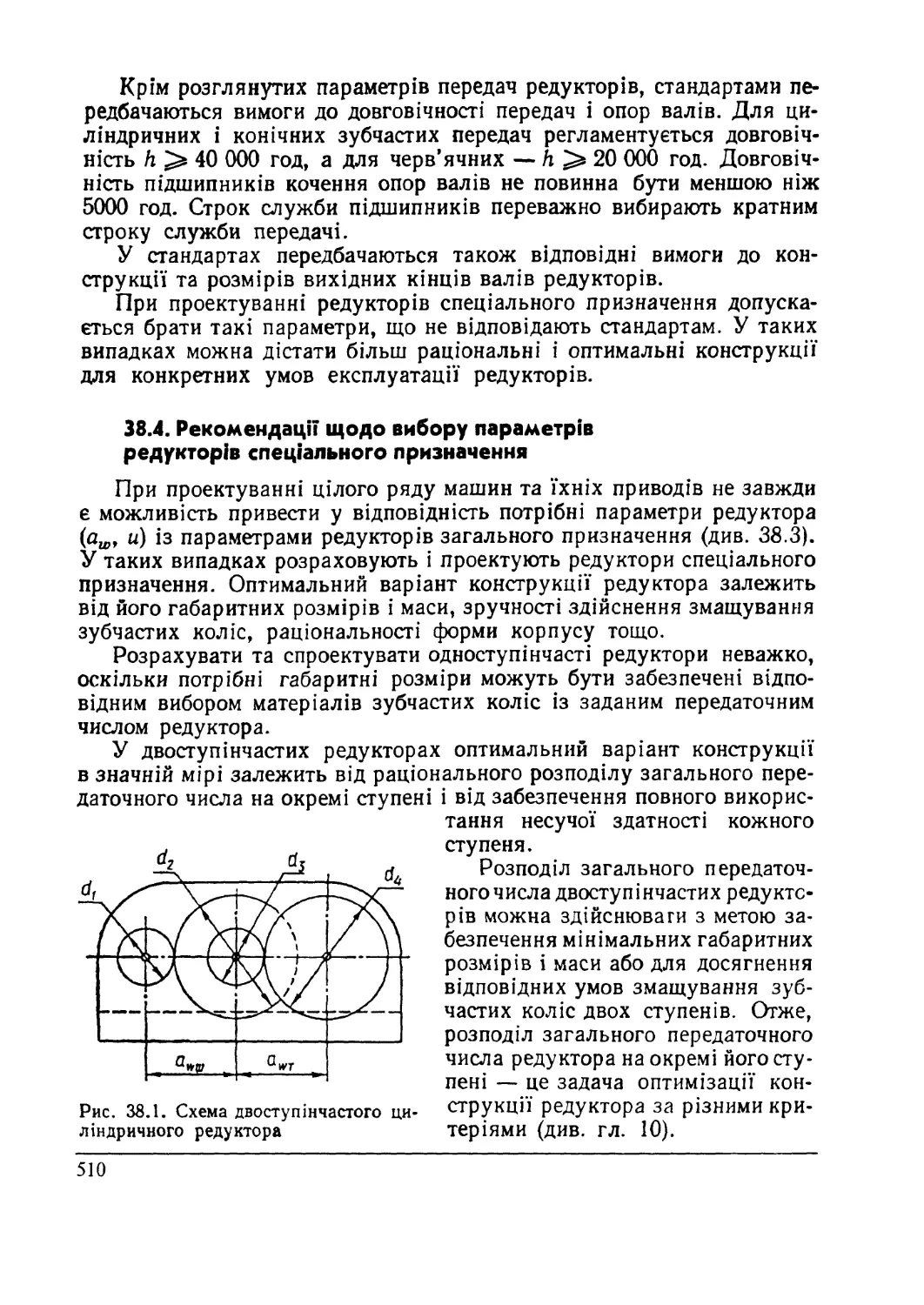
38.4. Рекомендації щодо вибору параметрів редукторів спеціального призна-
чення ..............................................................510
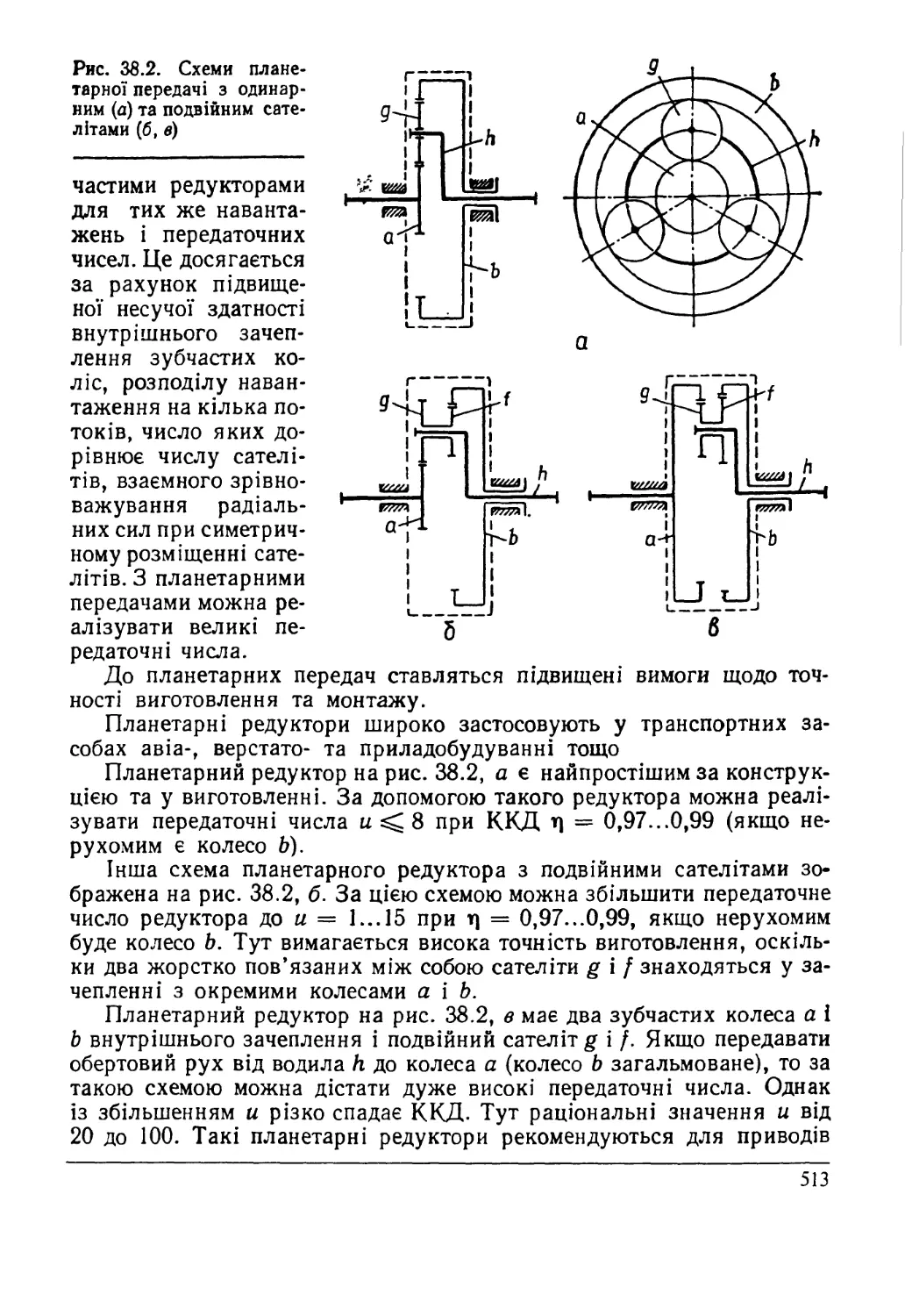
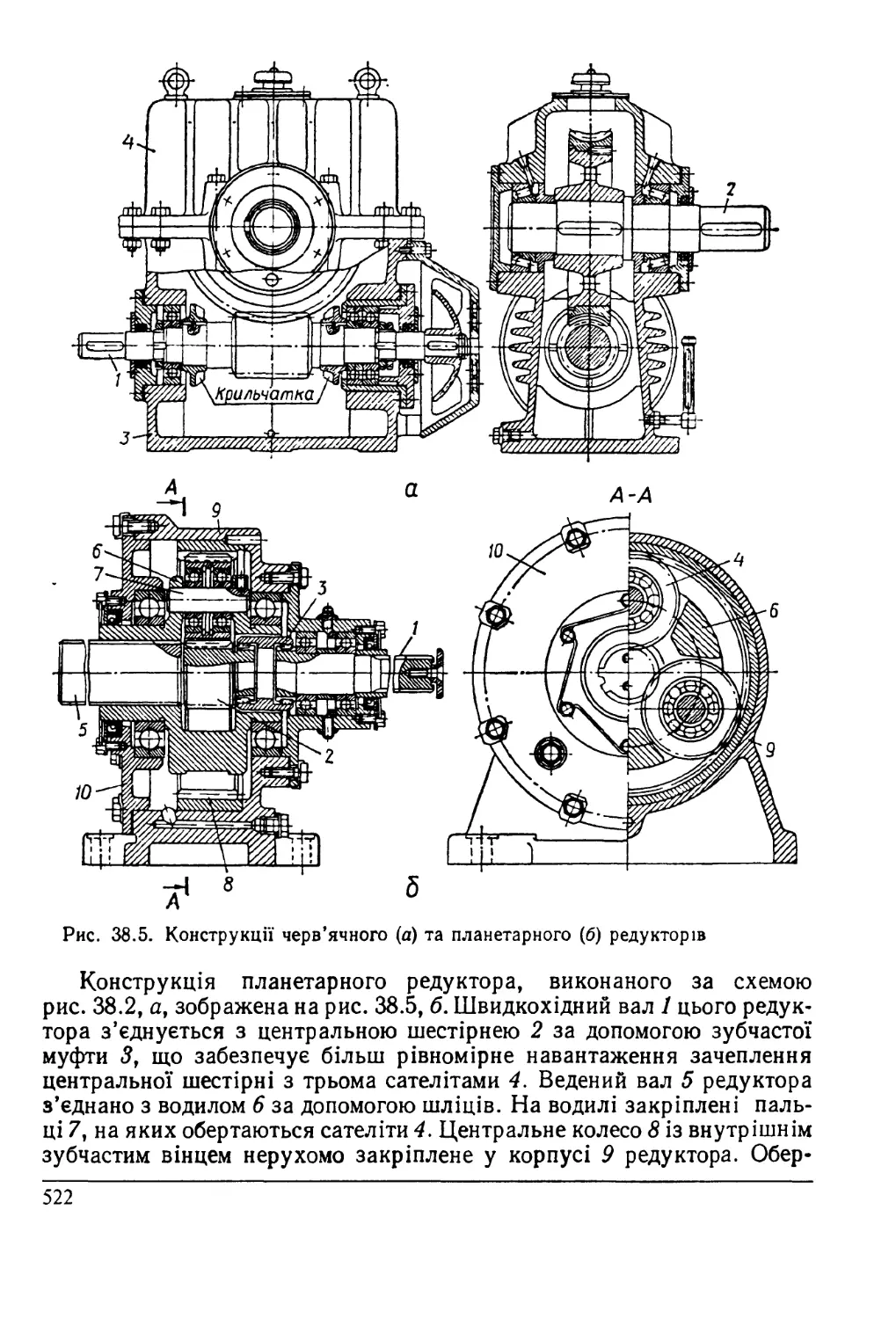
38.5. Планетарні редуктори, їхнє застосування та основні схеми......512
38.6. Кінематика планетарних редукторів.............................514
38.7. Особливості розрахунків на міцність зубчастих передач планетарних
редукторів..........................................................516
38.8. Змащування зубчастих передач редукторів.......................518
38.9. Конструкції деяких редукторів.................................520
Глава 39. Стандартизовані редуктори і мотор-редуктори.............. 523
39.1. Загальна характеристика стандартизованих редукторів і мотор-редукторів.523
39.2. Стандартизовані циліндричні редуктори.........................526
39.3. Черв’ячні редуктори загального призначення....................530
39.4. Планетарні редуктори загального призначення...................532
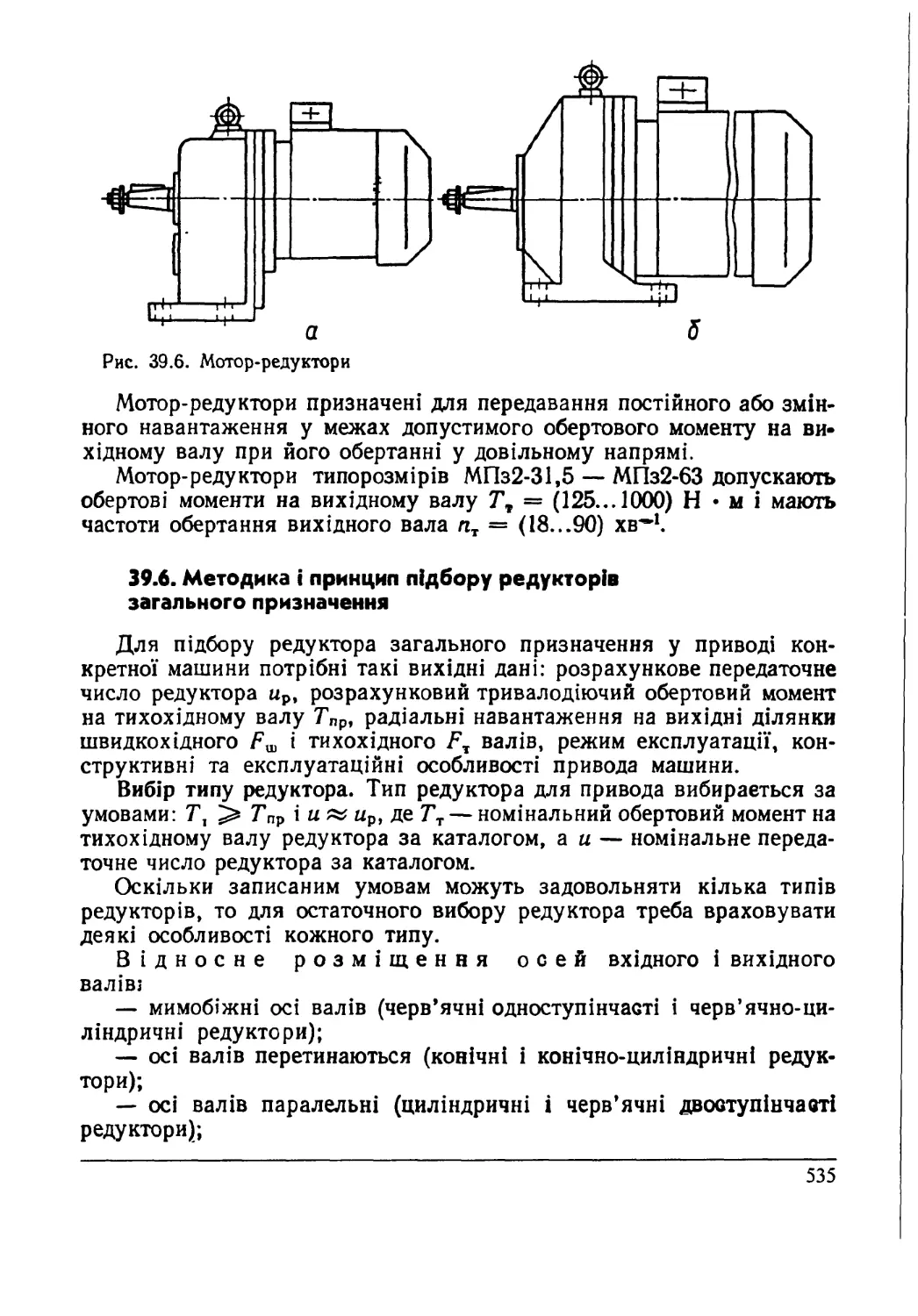
39.5. Мотор-редуктори...............................................534
39.6. Методика і принцип підбору редукторів загального призначення.............535
Глава 40. Загальні задачі при конструюванні приводів машин.......... 539 '/
40.1. Узгодження параметрів двигуна, муфти та редуктора у приводі...........539
40.2. З’єднання та кріплення елементів привода......................541
40.3. Принципи розрахунків на міцність деталей кріплення двигуна та редук-
тора ...............................................................544
40.4. Перевірка умов появи резонансу крутильних коливань у приводі.............547
40.5. Елементи оптимізації при проектуванні приводів машин.....550
40.6. Приклад оптимізації привода...................................552
Додаток.............................................................555
Список використаної і рекомендованої літератури..............557
ПЕРЕДМОВА
Провідна роль машинобудування серед інших галузей промисловості визна-
чається тим, що всі процеси в матеріальному виробництві, транспорті,
будівництві та сільському господарстві пов’язані з використанням машин
Конструкції машин неперервно вдосконалюються згідно з вимогами
експлуатації та виробництва, а також на основі можливостей, що виявляються
з розвитком науково-технічних досліджень, появою нових матеріалів і способів
надання їм потрібних форм та властивостей
Створення нових машин, які відповідали б сучасним вимогам, пов’язане
з потребою підготовки висококваліфікованих інженерних кадрів машино-
будівного профілю, здатних розв’язувати питання розрахунків, конструювання,
виробництва та експлуатації машин високого технічного рівня Така підготовка
ведеться на базі викладання студентам фундаментальних загальноосвітніх,
загальноінженерних і спеціальних дисциплін Завершальним етапом
загальноінженерної підготовки є вивчення дисципліни «Основи конструювання
та розрахунок деталей машин»
Ця дисципліна відповідно до діючих типових програм та навчальних планів
має назви «Деталі машин», «Основи конструювання машин», «Деталі машин
і основи конструювання» та ін Не змінюючи фактичного змісту та обсягу
програмного матеріалу, перелічені назви дисципліни охоплюють потрібний
базовий матеріал, а також деякі питання, що належать до профілю майбутньої
спеціальності студентів Назву дисципліни «Основи конструювання та
розрахунок деталей машин» можна розглядати як узагальнену, де
передбачається викладання базового програмного матеріалу, як підсумкового
і завершального етапу прикладного застосування теорії та методів
фундаментальних і загально інженерних дисциплін для бакалаврського
освітньо-кваліфікаційного рівня підготовки фахівців напрямку «Інженерна
механіка»
Друге видання підручника відкоректоване і уточнене зі збереженням
попередньої структури, яка включає п’ять розділів
Перший розділ містить найбільш загальні питання проектування,
конструювання та розрахунків деталей машин Тут подані у стислій формі
загальні задачі проектування, відомості про навантаження елементів машин,
машинобудівні матеріали і їхні характеристики, елементи розрахунків на
міцність, розглянуті питання тертя та спрацювання деталей, точність
виготовлення, надійність та довговічність, загальні питання оптимізації
конструкцій машин та їхніх деталей при конструюванні Матеріал цього розділу
переважно побудований на основі знань, набутих із попередньо вивчених
загальноінженерних дисциплін, але він зведений до такої форми, яка
12
використовується у подальшому викладенні розрахунків та основ конструюван-
ня деталей машин загального призначення
У другому розділі розглянуті питання розрахунків на міцність найпо-
ширеніших з’єднань деталей машин та пружних елементів У третьому розділі
викладені основи теорії, розрахунки на забезпечення роботоздатності та основи
конструювання механічних передач Розрахунки і конструювання валів та їхніх
опор наведено у четвертому розділі Завершальний п’ятий розділ присвячений
основам конструювання приводів машин
У додатку наведена тематика завдань для розвитку творчих навиків при
вивченні даної дисципліни, що містять задачі по вдосконаленню та уточненню
методів та принципів розрахунків елементів машин, а також задачі по створенню
більш досконалих і оригінальних конструкцій деяких пристроїв і складових
частин машин
Матеріал підручника відповідає загальним тенденціям викладання
дисципліни «Основи конструювання та розрахунок деталей машин» і
побудований на використанні сучасних методик розрахунків, принципів
конструювання та діючих стандартів Для більш глибокого розуміння та
засвоєння програмного матеріалу значна кількість глав має типові приклади
розрахунків окремих деталей, їхніх з’єднань, механічних передач, опор валів
тощо У підручнику в обмеженій мірі подано деякий довідковий матеріал для
розв’язування певних практичних задач
Вивчення курсу «Основи конструювання та розрахунок деталей машин»
завершується курсовим проектуванням Підручник може бути теоретичною
базою для виконання курсового проекту, але не може замінити інших навчальних
посібників та довідників
Останнім часом набувають широкого застосування комп’ютеризовані методи
розрахунків деталей машин з використанням розроблених відповідних
програмних засобів Ці методи можна розглядати як революційні фактори
розвитку проектування та розрахунків машин та їхніх деталей Однак
усвідомлене і творче застосування комп’ютеризованих методів розрахунків
можливе тільки після глибокого розуміння суп і засвоєння наближених, умовних
і в певній мірі спрощених підходів до сучасних розрахунків, на які акцентується
увага у підручнику «Основи конструювання та розрахунок деталей машин»
Тому після вивчення дисципліни «Основи конструювання та розрахунок деталей
машин», як її логічне продовження, доцільно мати в навчальних планах таку
дисципліну як, наприклад, «Системи автоматизованого проектування
в машинобудуванні», де розглядаються сучасні програмні засоби і методи
розрахунків машин та їхніх елементів із застосуванням комп’ютерної техніки
Автор далекий від думки, що підручник вільний від недоліків, 1 з вдячністю
сприйме критику, всі зауваження і пропозиції, які можна надсилати за адресою
видавництва 79005, м Львів, вул Костя Левицького, 4, ПТВФ «Афіша»
І
Розділ
ЗАГАЛЬНІ ПРИНЦИПИ КОНСТРУЮВАННЯ
І РОЗРАХУНКУ МАШИН ТА ЇХНІХ ЕЛЕМЕНТІВ
ГЛАВА І. ОСНОВНІ ПОЛОЖЕННЯ ПРО ПРОЕКТУВАННЯ
ТА КОНСТРУЮВАННЯ МАШИН
1.1. Зміст понять проектування і конструювання
Інженерне проектування — це неперервний процес,
в якому наукова і технічна інформація використовується для створен-
ня нового пристрою, машини або системи, що дають суспільству певну
користь. Нові вироби розробляє інженерно-технічний персонал шля-
хом проектування і конструювання. Проектування і конструювання
є процесами взаємопов’язаними, доповнюючими один одного. Кон-
структивна форма об’єкта уточнюється за допомогою методів проекту-
вання — виконанням розрахунків експлуатаційних параметрів, на
міцність і надійність, оптимізацією проектних рішень. Проектуван-
ня можливе тільки для попередньо прийнятих варіантів конструктив-
ного виконання об’єкта. Часто ці два процеси не розділяють, бо вони
виконуються спеціалістами однієї професії — інженерами-конструк-
торами. Однак проектування і конструювання — процеси різні.
Проектування передує конструюванню і є пошуком науково
обгрунтованих, технічно здійсненних та економічно доцільних рі-
шень. Результат проектування — проект створюваного об’єкта. Про-
ект, тобто технічна документація, виконаний у результаті проекту-
вання, обговорюється, аналізується, коректується і приймається
як основа для подальшого опрацювання.
Конструювання — створення конкретної однозначної кон-
струкції об’єкта згідно з проектом. Конструкція — це будова, взаєм-
не розміщення частин і елементів будь-якого предмета, машини, при-
ладу, яка визначається його призначенням. Конструкція передба-
чає спосіб з’єднання, взаємодію частин, а також матеріал, з якого ви-
готовляються окремі елементи. Конструювання базується на резуль-
татах проектування і уточнює всі інженерні рішення, прийняті під
час проектування.
Проектування і конструювання мають одну мету — створення
нового виробу, який ще не існує або існує в іншій формі і має інші
розміри. Проектування і конструювання — це види розумової ді-
яльності, пов’язаної зі створенням конкретного уявлюваного обра-
зу. Уявлюваний образ зазнає розумових перетворень (перестановка
складових частин, заміна їх іншими елементами чи надання їм ін-
14
шої форми). Одночасно ведеться оцінка ефекту внесених змін, визна-
чається вплив змін на кінцевий результат. Уявлюваний образ об’єк-
та створюється відповідно до загальних принципів логічного мислен-
ня і набуває згодом кінцевої, технічно обгрунтованої форми і будови.
1.2. Основні етапи створення технічних об'єктів
Процес створення нової машини, приладу або споруди можна
розділити на ряд етапів. Це дозволяє контролювати і затверджувати
проекти на різних стадіях їхньої розробки.
Практикою вироблена така найзручніша послідовність проекту-
вання і конструювання:
Технічна пропозиція — початкова стадія проекту-
вання, яка є відповіддю проектувальника на поставлену задачу, ви-
моги і обмеження, що наведені в технічному завданні. Запропонова-
ні один або кілька варіантів об’єкта ретельно обгрунтовуються з ви-
користанням для цього теоретичних розрахунків і аналізу, а також
практичного досвіду. Важливість цього обгрунтування обумовлена
тим, що технічний рівень і якість передбаченого варіанта мають ве-
ликий вплив на подальшу розробку і визначають усі основні характе-
ристики створюваного об’єкта.
Ескізний проект розробляється в тому разі, коли це
передбачено технічним завданням або протоколом розгляду техніч-
ної пропозиції. На цьому етапі проводиться конструкторське опра-
цювання оптимального варіанта до рівня принципових конструктор-
ських рішень, які дають загальне уявлення про будову і принцип ро-
боти об’єкта. В ескізному проекті закладаються основи використання
типових стандартизованих і уніфікованих складових частин техніч-
ного об’єкта. Особлива увага надається використанню відомих і
випробуваних на практиці складових частин. Уточнюються техніч-
ні вимоги на окремі вузли і матеріали деталей, розробку і виготовлення
яких доцільно доручити іншим організаціям.
Технічний проект виконується після ескізного проекту-
вання і містить сукупність конструкторських документів, які відоб-
ражають повне технічне розв’язування проблеми і всі дані, достатні
для повного уявлення про будову всього об’єкта і його складових
частин, принцип роботи і взаємодію основних елементів. У техніч-
ному проекті повинні бути розв’язані всі питання забезпечення висо-
кого технічного рівня створюваного об’єкта в процесі його виготов-
лення, складання, випробування та експлуатації. Одним із головних
завдань розробки технічного проекту є надання об’єкту проектуван-
ня таких властивостей, які можуть бути реалізованими при мінімаль-
них трудових і матеріальних затратах як у споживача, так і в організа-
ції — виконавця.
15
Робоча конструкторська документація по-
трібна для забезпечення можливості виготовлення дослідного зразка
або початкової серії спроектованого виробу На цій стадії завершу-
ється відпрацювання конструкції на технологічність виготовлення
і складання, забезпечення техніко-економічних показників, на точ-
ність, надійність та ін.
Наявність всіх стадій при розробці нових технічних об’єктів не
завжди є обов’язковою. Окремі етапи проектування залежать від
ступеня новизни, складності створюваного об’єкта і від обсягу про-
грами його виготовлення. Часто окремі стадії розробки об’єднуються
і таким чином скорочується час проектних робіт. Але це не означає,
що можна ігнорувати вимоги окремих етапів до створюваної кон-
струкції.
1.3. Види виробів та їхні характеристики
Поняття «виріб» має широкий діапазон значень. До поняття «ви-
ріб» належать і технічні об’єкти.
Технічним об’єктом називають створений людиною реально існую-
чий пристрій, призначений для задоволення певної потреби.
Згідно з ГОСТ2.Ю1—68 виробом називається довільний предмет
або сукупність предметів, які виготовляються на підприємстві. Під
виробом розуміють усі об’єкти матеріального виробництва і їхні
складові частини: різні машини, апарати, прилади, ручні знаряддя
праці та ін. Стандарт встановлює такі види виробів: деталі, складаль-
ні одиниці, комплекси, комплекти.
Деталь — виріб, виготовлений із матеріалу однієї марки без
використання складальних операцій або з використанням місцевих
з’єднувальних операцій (зварювання, паяння, склеювання), чи ви-
конанням декоративного або захисного покриття. Приклади деталей
такі: вал, виготовлений з одного матеріалу; трубка, виготовлена зва-
рюванням листового матеріалу; гайка, покрита хромом.
Складальна одиниця — виріб, складові частини якого
підлягають з’єднанню між собою на підприємстві за допомогою скла-
дальних операцій (згвинчування, зварювання, паяння, пресування
тощо). До складальних одиниць також відносять: вироби, для яких
конструкцією передбачене розбирання на складові частини, наприк-
лад для зручності монтажу, контролю, обслуговування; сукупність
складальних одиниць або деталей, які мають загальне функціональне
призначення, наприклад двигун чи колесо в автомобілі.
Комплекс — виріб, який складається з кількох окремих
виробів, не з’єднаних на підприємстві, яке його виготовляє, складаль-
ними операціями, але призначених для виконання взаємопов’язаних
експлуатаційних функцій. Приклади комплексів такі: цех-автомат
для виготовлення певних виробів; роботизована дільниця для термо-
обробки деталей.
16
Рис. 1.1. Структура виробів
Комплект — кілька виробів загального функціонального при-
значення допоміжного характеру, не з’єднаних на підприємстві скла-
дальними операціями. Приклади такі: комплект запасних частин;
комплект інструментів; комплект вимірювальної апаратури.
Загальна структура всіх можливих виробів показана на рис. 1.1.
Інколи певні вироби називають конструкціями (наприклад, «ме-
талеві конструкції»), маючи на увазі щось конкретне. Конструкція
є однією з властивостей виробу, що дозволяє відрізнити один виріб
від іншого.
1.4. Види і комплектність конструкторських документів
Види і комплектність конструкторських документів на вироби
всіх галузей промисловості встановлює ГОСТ 2.102—68.
До конструкторських документів належать графічні і текстові
документи, які окремо або в сукупності визначають склад і будову
виробу і вміщують потрібні дані для його виготовлення, контролю,
приймання, експлуатації і ремонту. Нижче наведені деякі види кон-
структорських документів.
Креслення деталі — графічний документ, який міс-
тить зображення деталі й інші дані для її виготовлення і контролю.
Складальне креслення — графічний документ, який
містить зображення складальної одиниці й інші дані, потрібні для
її складання (виготовлення) і контролю.
Креслення загального вигляду — графічний до-
кумент, який визначає конструкцію виробу та взаємодію його ос-
новних складових частин і пояснює принцип роботи виробу.
Габаритне креслення — графічний документ, в якому
дається контурне (спрощене) зображення виробу з габаритними,
монтажними і приєднувальними розмірами.
Схема — графічний документ, на якому у вигляді умовних
зображень або позначень показані складові частини виробу і зв’яз-
ки між ними. Схеми бувають кінематичні, гідравлічні, пневматичні,
електричні та ін.
17
Специфікація — текстовий документ, який визначає склад
складальної одиниці, комплексу чи комплекту.
Пояснювальна записка — текстовий документ, який
містить опис будови і принципу дії спроектованого виробу, а також
обгрунтування технічних і техніко-економічних рішень, прийнятих
при розробці виробу.
Розрахунок — текстовий * документ, який містить розра-
хунки параметрів і характерних величин виробу, наприклад кінема-
тичний розрахунок, розрахунок розмірних ланцюгів, розрахунок на
міцність та ін.
Інструкція — текстовий документ, який містить вказівки
і правила для виготовлення або експлуатації виробу.
Для різних стадій, або етапів, проектування та конструювання
технічних об’єктів обов’язковою є розробка тих чи інших конструктор-
ських документів. Більш детальна потрібна номенклатура конструк-
торських документів на вироби інших галузей промисловості наведена
у відповідних стандартах. Ця номенклатура повинна узгоджуватись
із замовником проектних робіт.
1.5. Загальні вимоги до машин та їхніх елементів
Якість машин, приладів та інших технічних об’єктів, а також
їхніх окремих складальних одиниць і деталей залежить від деяких
загальних вимог, які повинен задовольняти створюваний об’єкт.
Розглянемо загальні вимоги, які треба брати до уваги на всіх етапах
і стадіях проектування та конструювання машин.
Р о б о т о з д а т н і с т ь — поняття, що визначає такий стан
машини або довільної її складальної одиниці чи деталі, при якому
вона здатна виконувати задані функції з параметрами щодо вимог
технічної документації зі збереженням міцності, незмінності форми і
розмірів, стійкості проти спрацьовування, потрібної жорсткості, тепло-
і вібростійкості. Ці показники роботоздатності, порушення яких
спричинює вихід з ладу машини чи деталі, називають критеріями
роботоздатності.
Роботоздатність деталей машин забезпечується наданням їм від-
повідних розмірів і форм, раціональним добором матеріалів для ви-
готовлення їх з використанням зміцнюючих технологій, застосуван-
ням антикорозійного захисту і відповідного змащування. Роботоздат-
ність машин та їхніх деталей може бути оцінена розрахунком або ек-
спериментально.
Високі експлуатаційні показники машини
оцінюють існуючими зразками подібних машин. При збереженні
або зменшенні маси і габаритних розмірів нова машина повинна за-
безпечувати більш високі продуктивність і ККД, менше споживання
енергії, підвищену точність, менші затрати праці на обслуговування
18
І ремонт тощо. Всього цього можна досягнути вдосконаленням конст-
руктивної схеми машини, раціональним вибором основних пара-
метрів і конструктивних форм, використанням автоматичних систем
для регулювання і керування машиною та забезпеченням оптимі-
зації робочого режиму.
Висока надійність — властивість машини, складальної
одиниці або деталі виконувати задані функції, зберігаючи при цьому
свої експлуатаційні показники в допустимих межах, протягом напе-
ред заданого проміжку часу. Показником надійності може бути
ймовірність безвідказної роботи машини в призначеному інтервалі
часу. Чим ближче ймовірність безвідказної роботи до одиниці, тим
вище надійність конструкції.
Безпечність в експлуатації характеризує придатність
конструкції машини до нормальної експлуатації протягом визначеного
технічною документацією строку служби без аварійних руйнувань,
небезпечних для обслуговуючого персоналу, виробничого обладнання,
а також інших суміжних об’єктів.
Технологічність і економічність конструкції
машини чи деталі — це найбільша простота і найменші матеріальні
затрати при виготовленні. При розробці проекту треба надавати ви-
робу такі конструктивні форми і розміри, а також використовувати
для його виготовлення такі матеріали і методи їхньої обробки, які
забезпечували б мінімальну масу і витрати матеріалу, найбільш спро-
щене і економне виробництво з урахуванням загального обсягу ви-
готовлення виробів.
Екологічність машини — здатність її виконувати свої
функції без шкідливого впливу на навколишнє середовище. Еколо-
гічність при проектуванні і конструюванні досягається такими захо-
дами: використанням екологічно ч_истих джерел енергії, запобіган-
ням шкідливого забруднення виробничих приміщень, нейтралізацією
продуктів робочого процесу машини, відповідною герметизацією
робочих об’ємів машини, використанням матеріалів для деталей із
урахуванням можливості їх утилізації після виходу з ладу, забезпе-
ченням виконання функції машини з низьким рівнем шуму та віб-
рації.
Усі ці вимоги в значній мірі взаємопов’язані, і лише повне задо-
волення їх дає можливість досягнути високої якості машин при про-
ектуванні і конструюванні.
1.6. Розрахунки при проектуванні і конструюванні
Проектування і конструювання машин нерозривно пов’язані з
розрахунками, за допомогою яких встановлюються технічна характе-
ристика, кінематичні параметри, розміри і форма навантажених дета-
лей, запас міцності, довговічність для всіх умов експлуатації і для
19
всіх навантажень. Розрахунки і конструювання поєднані між со-
бою. Ці творчі процеси завжди коректують і доповнюють один одно-
го. Розрахунки вказують шлях, за яким треба рухатися в напрямі
найкращого технічного результату.
У проектуванні використовують такі види розрахунків: геометрич-
ні (розрахунок розмірних ланцюгів, координат, зазорів); кінематичні
(розрахунок переміщень, швидкостей, прискорень, передаточних чи-
сел кінематичних ланцюгів та ін.); динамічні (розрахунок наванта-
жень деталей і їхніх змін у часі); розрахунки на міцність та жорст-
кість (визначення напружень та деформацій елементів машини в ро-
бочих режимах); енергетичні (розрахунки затрат енергії, параметрів
енергетичного балансу); техніко-економічні (розрахунки продуктив-
ності, вартості, ефективності використання). Якщо кінематичні і ге-
ометричні розрахунки, а також розрахунки на міцність та жорсткість
відповідальних елементів машини виконуються з достатньою точністю,
то інші розрахунки на початковому етапі більш або менш умовні.
Це пояснюється тим, що в процесі проектування і конструювання де-
які дані, які використовуються в розрахунках, є попередніми і в де-
якій мірі наближеними. На кінцевій стадії проектування і конструю-
вання всі потрібні види розрахунків повинні виконуватись із достат-
ньою точністю.
Той чи інший розрахунок треба виконувати за такою схемою:
а) підбір вихідних даних для розрахунку; б) складання розрахунко-
вої схеми; в) визначення основних критеріїв роботоздатності об’єкта
розрахунку; г) безпосереднє виконання розрахунку; д) формулюван-
ня висновків і заключень.
Розрахунки на міцність та жорсткість залежно від їх місця в
усьому процесі проектування і конструювання поділяють на проектні
та перевірні.
Проектні розрахунки використовують для визначення вихідних
розмірів деталей чи їхніх елементів, до того ж ці розрахунки в більшос-
ті випадків виконують за спрощеними методиками. Розміри, здобуті
в проектному розрахунку,— це основа для вибору форми деталі та
її конструктивних елементів і подальшої ув’язки з іншими деталями
в конкретному вузлі машини. Інколи доцільно вибирати конструк-
тивну форму і розміри деяких деталей машин, керуючись досвідом
проектної роботи або беручи до уваги відомі подібні елементи машини,
що перевірені в експлуатації.
Перевірні розрахунки є обов’язковими і найбільш точними.
Вони виконуються за потрібними критеріями роботоздатності на
кінцевих етапах проектування і конструювання для всіх відповідаль-
них деталей машин. Якщо форма і розміри деталі не відповідають
критеріям міцності чи жорсткості, то змінюють її розміри або кон-
струкцію і повторюють розрахунок. Для деталей високого ступеня
відповідальності або деталей складної форми з точно не встановленим
20
характером навантаження доцільно проводити експериментальну
перевірку розрахунків.
Контрольні запитання
1. У чому полягає зміст понять проектування і конструювання?
2. Назвіть послідовність етапів створення технічних об’єктів. Які види роботи
передбачаються на кожному етапі?
3. Назвіть основні види виробів і охарактеризуйте їх.
4. Які види конструкторських документів передбачені стандартом?
5. Дайте визначення деяких графічних і текстових конструкторських документів.
6. Які основні загальні вимоги до машин і їхніх елементів?
7. Що таке роботоздатність машини і які критерії її характеризують?
8. Охарактеризуйте розрахунки, які виконуються під час проектування і кон-
струювання.
9. У чому полягає суть проектних і перевірних розрахунків на міцність та
жорсткість деталей машин?
ГЛАВА 2. НАВАНТАЖЕННЯ ЕЛЕМЕНТІВ МАШИН
2.1. Загальні відомості про навантаження
Навантаження, які діють на окремі елементи машини, поділяють
на корисні та власні (шкідливі).
Корисні навантаження сприяють реалізації маши-
ною виробничого процесу. Власні навантаження неми-
нуче супроводжують роботу машини і в основному складаються із
власної ваги окремих ланок, динамічних сил, сил тертя в з’єднаннях
і місцевих сил, спричинених концентрацією навантаження на поверхні
контакту деталей. Природно, що не всі сили власної ваги і динамічні
сили шкідливі. В машинах ударної (молотах) і вібраційної дії дина-
мічні навантаження використовують для здійснення корисного робо-
чого процесу. Власна вага може також виконувати позитивну роль
(наприклад, противага в підйомно-транспортних машинах) або здій-
снювати робочі функції (у гиревих приладах часу).
За характером зміни в часі навантаження в машинах поділяють
на постійні і змінні.
Постійні навантаження — це в більшості випадків
сили тиску рідини або газу, навантаження від початкового поперед-
нього напруження деталей при їх з’єднанні в процесі складання, а
також власна вага. До цих же навантажень належать і постійні про-
тягом значного періоду або циклу роботи навантаження, характерні
для робочого режиму експлуатації машини. Власна вага має основне
значення в транспортних і підйомно-транспортних машинах, в уста-
новках для буріння глибоких свердловин та інших машинах. Такі
навантаження суттєві для опор важких зрівноважених роторів.
21
Змінні навантаження можуть бути спричинені не-
рівномірністю робочого процесу в машинах-двигунах (наприклад,
у двигунах внутрішнього згоряння); внутрішньою динамікою робо-
ти (запуск у роботу, гальмування, реверсування, неврівноваженість,
неточність виготовлення); зміною робочого процесу машини через
збільшення чи зменшення сил корисного опору та ін.
Змінні навантаження можуть бути стаціонарними або нестаціо-
нарними. Нестаціонарні — це навантаження із змінними параметра-
ми (амплітудою і частотою). Значна кількість машин працює в умовах
нестаціонарного навантаження їхніх елементів.
Розглянемо навантаження, які діють у широко розповсюджених
машинах — автомобілях і металообробних верстатах.
Зміна навантаження деталей автомобіля може бути спричинена
завантаженням кузова (часткова чи повна), поздовжнім профілем
дороги (піднімання, опускання чи горизонтальні ділянки), видом
та якістю покриття дороги, режимом руху автомобіля (гальмування,
зупинка чи процес набирання швидкості) та ін.
Універсальні металообробні верстати, які становлять значну
більшість парку верстатів, можуть працювати так: на обдиранні чи
на кінцевих фінішних операціях; в умовах індивідуального чи се-
рійного виробництва; обробляти великогабаритні чи дрібні деталі
з різних матеріалів. При цьому характерними є часті запуски чи зу-
пинки двигуна, використання'різних інструментів, зміна різальних
властивостей інструментів тощо. Обертові моменти на шпинделі
таких верстатів можуть змінюватись у сотні разів.
На практиці машини з постійним навантаженням зустрічаються
рідко. До них належать машини з постійним робочим режимом робо-
ти (наприклад, насосні станції) або машини, в яких рідко змінюється
робоче навантаження до 20 % від номінального.
2.2. Розподіл навантаження в часі та типові
режими навантаження елементів машин
Згідно з 2.1, навантаження елементів машини може бути постій-
ним у часі або змінюватись у широких межах протягом усього періоду
експлуатації машини. Покажемо можливий характер зміни наванта-
ження у вигляді графіків, побудованих у системі координат наванта-
ження Р (або обертовий момент Т) — час і.
На рис. 2.1, а зображений графік постійного навантаження. В мо-
мент пуску машини навантаження Р спочатку швидко зростає, а по-
тім практично залишається постійним протягом значного часу, на-
буваючи номінального значення Люм, яке є вихідним для виконання
розрахунків на міцність.
Для багатьох машин характерним є змінне навантаження протя-
гом усього періоду експлуатації (рис. 2.1, б). Щоб оцінити інтенсив-
22
Рис. 2.1. Зміна навантаження в часі
Рис. 2.2. Циклограми навантаження елементів машин
ність такого складного режиму навантаження і зробити кількісне
порівняння різних режимів навантаження елементів машини, треба
поділити весь строк служби Л на окремі періоди роботи, або цикли
протягом яких навантаження Р наближено зберігається постійним.
Якщо впорядкувати всі цикли роботи машини за зменшенням наванта-
ження, то можна здобути циклограму навантаження елементів маши-
ни протягом заданого періоду її експлуатації (рис. 2.2, а).
Тривалість циклу роботи машини з однаковими навантаженнями
можна гранично зменшити, що дозволить характеризувати режим
навантаження більш точно. У цьому разі матимемо не ступеневий,.
а плавний характер циклограми навантаження, до того ж її можна
побудувати в системі координат навантаження Р — число циклів
пц появи навантаження даного рівня (рис. 2.2, б). Навантаження різ-
них рівнів відбувається за сумарне число циклів п% роботи машини.
За циклограмою на рис. 2.2, б можна стверджувати, що навантажен-
ня рівня Рі з’являється лці разів протягом усього періоду експлуата-
ції машини.
На практиці можна використовувати циклограми навантаження^
що побудовані в системі координат відносних величин Рі/Р (Ті/Т)
і Цці/пе Такі циклограми показані на рис. 2.2, в. Вони побудовані
для різних режимів навантаження елементів машини і дозволяють
23
Рис. 2.3. Графіки типових режимів на-
вантаження елементів машин
характеризувати відносну інтенсив-
ність цих режимів. Так, режим
за графіком 1 є більш інтенсивним,
ніж режим навантаження за гра-
фіком 2, бо для режиму 1 перева-
жають навантаження більш висо-
кого рівня.
Побудова циклограми наванта-
ження елементів конкретної маши-
ни — дуже складний і трудомісткий
процес. Для цього треба зареєстру-
вати неперервний характер зміни
навантаження протягом значного
періоду експлуатації машини. Та-
ка реєстрація виконується спеці-
альною апаратурою із записом на-
вантаження на магнітну стрічку
або за осцилограмами. Подальша
статистична обробка зареєстрованих навантажень дозволяє побудува-
ти циклограму навантаження конкретної деталі.
У нашій країні і за кордоном стосовно технологічних і транспорт-
них машин, таких як металообробні верстати, автомобілі, трактори,
гірничі і підйомно-транспортні машини, екскаватори, сільськогоспо-
дарська техніка та ін., проведене вивчення навантажень у функції
часу і накопичена деяка узагальнена інформація про діючі наванта-
ження [24]. Це дало можливість дістати типові режими навантаження
машин за відомими із курсу теорії ймовірностей законами розподілу
випадкових величин.
На рис. 2.3 наведені графіки типових режимів навантаження ма-
шин, що побудовані в системі відносних координат Р Р і
Тут взято такі позначення: П — постійний режим навантаження;
В — важкий режим; СР — середній рівноймовірний режим; СН —
середній нормальний режим; Л— легкий режим навантаження.
Для важкого режиму характерний високий рівень навантаження
протягом значного періоду експлуатації машини, а для легкого ре-
жиму — низький рівень навантаження протягом цього ж періоду.
Гірничі машини здебільшого експлуатуються при важкому режи-
мі навантаження, а транспортні — при середньому рівноймовірному
або середньому нормальному. Для металообробних верстатів харак-
терним є легкий режим навантаження. Різні види підйомно-транспорт-
ного обладнання можуть працювати на режимах навантаження від
легкого до важкого.
Постійний режим є найнапруженішим, бо машина протягом прак-
тично всього періоду її експлуатації знаходиться під дією постійного
номінального навантаження. За постійний режим навантаження мож-
24
на брати такий режим, за яким навантаження елементів змінюється
у межах до 20 % від номінального Гном- На практиці постійний ре-
жим навантаження зустрічається значно рідше, ніж інші.
При побудові графіків типових режимів навантаження Ге макси-
мальним, довгочасно діючим. Довгочасно діючими навантаженнями
називають такі навантаження із їхнього загального спектра, сумарне
число появи яких пц > 5 • 104. Максимальні навантаження Гтах»
для яких число появи за час експлуатації машини лц -< 5 • 104,
вважають короткочасно діючими і при розрахунку деталей на втому
до уваги не беруть. За цими навантаженнями виконують розрахунки
деталей на статичну міцність.
Відповідність режиму навантаження тієї чи іншої машини або де-
талі одному з типових режимів на рис. 2.3 встановлюється за подіб-
ністю форми графіків і за середнім значенням навантаження. За роз-
рахунковий треба брати типовий режим, який найбільш близький
до фактичного в області навантажень високого рівня.
2.3. Шляхи зменшення навантаження елементів машин
Для зменшення навантажень, що діють у машинах на окремі де-
талі, можна рекомендувати деякі заходи. Навантаження, що спри-
чинені власною вагою, можуть бути суттєво зменшені раціональним
вибором матеріалів. Наприклад, для слабонавантажених деталей
замість сталей та чавуну можна використовувати легкі сплави або
пластмаси. Масу відповідальних та сильнонавантажених деталей мож-
на зменшити вибором міцніших матеріалів, які забезпечують менші
розміри деталей.
Навантаження, що виникають від початкового попереднього на-
пружування деталей при складанні їх, можна обмежити за допомогою
активного контролю цих навантажень. Наприклад, затяжку болто-
вого з’єднання треба здійснювати ключем граничного моменту, а
напресовування деталей — контрольованим зусиллям. Навантажен-
ня, що виникають від зміни температурних умов експлуатації маши-
ни, можна зменшити деякими конструктивними заходами.
Значної уваги слід надавати зменшенню динамічних навантажень,
що можна досягти зниженням рівня чи запобіганням появи зовнішніх
та внутрішніх збурюючих факторів, вдосконаленням схеми машини
в динамічному відношенні, використанням спеціальних пружних
демпферів та гасіїв коливань, запобіжних пристроїв.
Збурюючі фактори можна зменшити перш за все використанням
двигунів із постійним робочим процесом (електродвигуни, турбіни)
або забезпеченням неперервних та рівномірних робочих процесів
машин. У машинобудуванні має місце закономірна тенденція перехо-
ду на машини неперервної дії: поршневі насоси замінюють відцентрови-
25
ми, стругальні верстати — фрезерними, замість ковшових екскава-
торів застосовують роторні та ін.
Динамічні навантаження в машинах можна зменшити використан-
ням пружних, фрикційних та запобіжних муфт, підвищенням точнос-
ті виготовлення деталей, динамічним балансуванням обертових еле-
ментів.
Контрольні запитання
1. Охарактеризуйте причини виникнення постійних та змінних навантажень
елементів машини.
2. Що таке циклограма навантаження? Поясніть принцип її побудови.
3. Охарактеризуйте основні типові режими навантаження різних машин.
4. Назвіть та розкрийте суть деяких заходів, що дозволяють зменшити наванта-
ження елементів машин.
ГЛАВА 3. МАШИНОБУДІВНІ МАТЕРІАЛИ
3.1. Сталі, їхнє застосування і методи зміцнення
Номенклатура матеріалів, що використовуються в машинобуду-
ванні для виготовлення різних деталей, дуже широка. Вона охоплює
такі основні групи матеріалів: а) чорні метали; б) сплави кольоро-
вих металів; в) неметалеві матеріали. Більша частина машинобудів-
них матеріалів стандартизована. Найрозповсюдженішими (за ма-
сою 85—90 %) є чорні метали — сталі і чавуни.
Сталь — залізовуглецевий сплав із вмістом вуглецю до 2 %. Сталі
можуть мати в своєму складі природні домішки до 1 % (сірку, фосфор,
марганець, кремній). Щоб підвищити якісні показники або надати
спеціальних властивостей, у сталі додають легуючі елементи (хром,
нікель, молібден, титан та ін.).
Різноманітність сталей за їхнім застосуванням і практичним
використанням, за хімічним складом чи за характерними спеціаль-
ними властивостями дуже велика. Для виготовлення різних деталей
машин найбільш широко застосовують вуглецеві і леговані конструк-
ційні сталі.
Вуглецеві конструкційні сталі поділяють на
дві категорії:
1. Сталь вуглецева звичайної якості (ГОСТ 380— 88), яка бу-
ває групи А (постачання за механічними властивостями), групи Б
(постачання за хімічним складом) і групи В (постачання за меха-
нічними властивостями і за додатковими вимогами до хімічного скла-
ду). Ці сталі маркірують номерами в порядку зростання вмісту вуг-
лецю і підвищення характеристик міцності — СтО, Сті, Ст2, СтЗ,
Ст4, Стб, Стб. Ці найрозповсюдженіші, особливо СтЗ і Ст4, та дешеві
26
сталі широко застосовують для виготовлення різних металоконструк-
ція типу ферм і рам, а також таких деталей, як валики, пальці, тяги,
болти, гайки тощо.
2. Сталь вуглецева якісна (ГОСТ 1050—88), яка буває групи І
8 нормальним вмістом марганцю і групи II з підвищеним вмістом мар-
ганцю. Ці сталі в більшості випадків використовують втермооброб-
леному стані. їх маркірують двозначним числом, яке відповідає
середньому вмісту вуглецю в сотих частках процента, наприклад ста-
лі 10, 15, 20, 25, а також сталі 20Г, ЗОГ, 40Г, 50Г (буква Г означає
підвищений вміст марганцю). Якісну сталь постачають із гарантовани-
ми хімічним складом і механічними властивостями. Сталь із підви-
щеним вмістом марганцю характеризується кращими показниками
міцності і стійкості проти спрацювання, але має меншу в’язкість.
Якісні вуглецеві сталі застосовують для виготовлення валів і осей,
важелів, траверс, зубчастих коліс, маховиків та інших деталей.
Леговані конструкційні сталі (ГОСТ 4543—71)
поділяють на якісні і високоякісні. Залежно від основних легуючих
елементів леговані сталі бувають 14 груп: хромисті (ЗОХ, ЗОХРА,
45Х); хромонікелеві (40ХН, 50ХН); хромомарганцевисті (25ХГТ,
40ХГТР); хромомолібденові (ЗОХМА, 35ХМ); хромонікельмолібдено-
ві (20ХН2М, 30ХН2МА); хромомарганцевонікелеві (20ХГНР,
38ХГН) та ін. У марках сталей букви означають: X — хром; Н —
нікель; В — вольфрам; Ф — ванадій; Г — марганець; С — кремній;
Ю — алюміній; М — молібден; Т — титан; К — кобальт; Р — фос-
фор та ін. Двозначне число спереду позначення вказує вміст вуглецю
в сотих частках процента, а цифри, які стоять біля букв,— вміст
даного елемента в процентах (якщо він менше або близько 1 %, то
цифра не ставиться). Для високоякісної сталі в кінці позначення мар-
ки ставлять букву А.
Леговану сталь використовують для особливо відповідальних де-
талей машин, які повинні мати високу міцність при малих розмірах,
або проявляти особливі фізико-механічні властивості (корозійну
стійкість, жароміцність та ін.).
Конструкційна сталь постачається згідно зі встановленим
сортаментом: кругла сталь — діаметром 5...250 мм; квадратна — зі
стороною 5...250 мм; шестигранна — розміром за діаметром 8...
100 мм; кутова — зі стороною 20...250 мм; двотаврові балки і шве-
лери — із висотою перерізу 100...700 мм; листова сталь; прутки, гну-
тий профіль; фасонний прокат; труби тощо.
Для виготовлення деталей машин також можуть використовува-
тись виливки з вуглецевої та легованої сталей. Ці матеріали умовно
позначають так: 45Л; 50Л; 35ХНЛ; ЗОХГСЛ.
Для підвищення механічних та інших властивостей сталей ви-
користовують термічну і хімікотермічну обробку, а також механіч-
не зміцнення.
27
Термічна обробка — процес нагрівання і охолодження
металу при певних температурних режимах. До основних видів
термообробки належать: відпалювання, нормалізація, гартування, від-
пускання. Гартування з високотемпературним відпусканням назива-
ють поліпшенням.
Відпалювання і нормалізацію застосовують для усунення внутріш-
ніх напружень у заготовках деталей, які виготовляють литтям або
обробкою тиском, для поліпшення механічних властивостей і полег-
шення обробки на верстатах.
Гартування застосовують для підвищення міцності, твердос-
ті і стійкості проти спрацювання деталей машин. Гартування може
бути об’ємним або поверхневим. При об’ємному гартуванні термо-
обробка здійснюється по всьому об’єму деталі або на значну глибину
матеріалу. При поверхневому гартуванні зміцнюється тільки
поверхневий шар матеріалу деталі. Для здійснення поверхневого
гартування деталь нагрівають струмами високої частоти (СВЧ) або
газовим полум’ям. Гартування надає сталі високої твердості, але
збільшує крихкість.
Щоб запобігти крихкості сталі після гартування, зменшити внут-
рішні напруження та полегшити обробку на верстатах, застосовують
відпускання. Поліпшення (гартування плюс високотемпературне від-
пускання) підвищує міцність сталі і зменшує її крихкість.
Маловуглецеві сталі з вмістом вуглецю до 0,25 % мають високу
в’язкість, але не сприймають гартування. Якість маловуглецевих
сталей можна підвищити хіміко-термічною обробкою: цементацією
ціануванням і азотуванням.
Цементація — насичення поверхневого шару матеріалу деталі
вуглецем на глибину до 2 мм. Після гартування поверхневий шар
цементованих деталей дістає високу твердість, а решта матеріалу
залишається незагартованою і зберігає початкову в’язкість.
При ціануванні поверхневі шари матеріалу деталі дифузійним
способом насичують вуглецем і азотом, а при азотуванні — тільки
азотом. Ціануванню підлягають вуглецеві сталі, а азотуванню — ле-
говані. Ці види хіміко-термічної обробки підвищують стійкість про-
ти спрацьовування поверхонь деталей, а також їхню границю витри-
валості.
Механічне зміцнення сталей застосовують для під-
вищення твердості і стійкості робочих поверхонь деталі за допомогою
наклепування. Процес наклепування здійснюється струйним обду-
ванням металевими кульками або накатуванням поверхонь деталі
роликом.
28
3.2. Чавуни та їхні властивості
Чавуни як машинобудівні матеріали мають широке застосування.
Чавун — залізовуглецевий сплав із вмістом вуглецю більше 2 %
Із наявністю невеликої кількості таких елементів, як кремній, марга-
нець, фосфор, сірка. За хімічним складом і структурою чавуни поді-
ляють на такі види: а) сірий чавун, в якому вуглець частково знахо-
диться у вигляді графіту; б) білий чавун, в якому вуглець знаходить-
ся у вигляді цементиту (Ее3С); в) ковкий чавун, який дістають із
білого відпалюванням, у результаті чого в чавуні замість вільного
цементиту утворюється графіт.
Сірий чавун е основним ливарним машинобудівним мате-
ріалом, оскільки він має високі ливарні та задовільні механічні
властивості, а із металевих виливок найдешевший. Чавун — крих-
кий матеріал; він непридатний для обробки тиском і слабо чинить
опір ударним і динамічним навантаженням.
Стандарт передбачає такі марки сірого чавуну: СЧ 10, СЧ 15,
СЧ 18, СЧ 20, СЧ 25 та ін. Двозначне число, помножене на 10, у по-
значенні марки чавуну вказує мінімальну границю міцності при роз-
тягу в мегапаскалях (МПа). Ці чавуни використовують для виготов-
лення корпусів, станин, кожухів, шківів, гальмівних барабанів
тощо.
Для відповідальних чавунних деталей застосовують модифікова-
ні і високоміцні чавуни.
Модифікований чавун відрізняється від звичайного сірого вмістом
графітизуючих добавок (феросиліція, силікокальція або силікоалю-
мінія), які підвищують його ливарні та механічні властивості.
Високоміцний чавун за рахунок добавки магнію має, порівняно
ві звичайним сірим, більш високі механічні властивості, які не посту-
паються властивостям сталевого литва. Деякі марки високоміцного
чавуну: ВЧ 45; ВЧ 50; ВЧ 60 і т. д. Двозначне число в марках чаву-
ну, помножене на 10, вказує його границю міцності при розтягу
в мегапаскалях (МПа).
Білий чавун, який загартовується при литті, має вуглець
у пов’язаному стані. Він характеризується високою твердістю (важ-
ко піддається обробці різанням), високою стійкістю проти спрацьо-
вування, а також жаро- і корозійною стійкістю. Білий чавун застосо-
вують для виготовлення гальмівних колодок, колосників, валків про-
катних станів тощо.
Ковкий чавун дістають довгочасним нагріванням при ви-
соких температурах виливок із білого чавуну. Ковкий чавун має
достатню міцність і підвищену пластичність, чинить опір незначним
ударним навантаженням, однак не кується. Деталі машин виготов-
ляють із таких марок ковкого чавуну: КЧ 30-6; КЧ 35-10; КЧ 45-7;
КЧ 50-5; КЧ 55-4 та ін. Перше двозначне число в позначенні марки
29
ковкого чавуну, помножене на 10, вказує його границю міцності при
розтягу в мегапаскалях (МПа), а друге число — відносне видовжен-
ня в процентах (%).
Антифрикційні чавуни використовують для виготовлення вкла-
дишів у підшипникових вузлах тертя: сірий (АСЧ-1; АСЧ-2; АСЧ-3),
високоміцний (АВЧ-1; АВЧ-2) й ковкий (АКЧ-1; АКЧ-2). Такі ча-
вуни мають високі антифрикційні властивості за рахунок наявності
в їхній структурі вільного графіту як мастильного матеріалу.
3.3. Сплави кольорових металів
У машинобудуванні широко використовують мідні і легкі сплави
кольорових металів.
Мідні сплави — латуні і бронзи — відрізняються високою
антикорозійною стійкістю і високими антифрикційними властивостя-
ми. Ці особливості визначають основні області використання їх (ар-
матура, яка працює в корозійному середовищі, та деталі вузлів тер-
тя). Деталі з мідних сплавів можуть бути вироблені литтям або об-
робкою тиском. Ці матеріали добре піддаються обробці різанням.
Латуні — сплави міді з цинком, подвійні або складні з добавками
легуючих елементів, таких як алюміній, кремній, залізо, марганець,
олово, свинець.
Бронзи — сплави міді з оловом або іншими металами (алюмінієм,
свинцем та ін.). Олов’яні бронзи — високоякісні, але найбільш
дорогі і дефіцитні. Дешеві і менш дефіцитні безолов’яні бронзи на
основі свинцю і алюмінію, які найбільше використовують для ви-
готовлення різних деталей.
Легкі сплави мають алюмінієву, магнієву або титанову
основу з добавками міді, марганцю, кремнію, заліза, нікелю та ін.
Ці сплави широко використовують в авіації, а також у загальному ма-
шинобудуванні. Основна перевага цих сплавів — мала густина (не
більше ніж 3,5 г/см3) при достатньо високих показниках міцності.
Із алюмінієвих ливарних сплавів найрозповсюдженішими є си-
луміни (АЛ2, АЛЗ, АЛ4 та ін.), до складу яких входить до 20 % крем-
нію. Алюмінієві деформівні сплави — дуралюміни (АД31, АК6,
АК8, Діб та ін.) застосовують для виготовлення заготовок деталей
обробкою тиском (деформуванням). До складу цих сплавів входять,
крім алюмінію, такі елементи, як мідь, магній, марганець.
Сплави на основі магнію — магналії також бувають деформівні
і ливарні. Через високі пластичні показники і ливарні властивості
з цих сплавів можна виробляти заготовки деталей, які вимагають
мінімальної механічної обробки, що значно знижує трудомісткість
виготовлення їх. Магнієві сплави швидко піддаються корозії в кон-
такті з деякими іншими металами.
ЗО
Останнім часом у машинобудуванні використовують легкі сплави
іитану. Це пов’язане з їхніми високими показниками міцності. Ли-
варні титанові сплави мають значну корозійну стійкість і жароміц-
ність (наприклад, сплав ВТ9Л використовують для навантажених
деталей, які працюють прн^температурах до 500 °С).
3.4. Неметалеві матеріали
До неметалевих матеріалів, призначених для виготовлення дета-
лей машин, належать пластмаси, спечені матеріали тощо.
Пластмаси — високомолекулярні органічні матеріали (по-
лімери), які дістають на основі синтетичних смол. Для надання пласт-
масам відповідних властивостей до них додають різні наповнювачі,
пластифікатори, затверджувані, барвники.
Фізико-механічні властивості пластмас дуже різноманітні. Вони
мають добрі тепло- і електроізоляційні властивості, стійкі проти
впливу агресивних середовищ, а задовільні характеристики міцності
дозволяють використовувати пластмаси для виготовлення деяких
деталей машин та приладів. Одні пластмаси використовують як фрик-
ційні матеріали, інші — як антифрикційні. Із пластмас можна ви-
готовляти деталі литтям, холодним або гарячим пресуванням, різ-
ного роду формуванням, зварюванням і різанням. Майже не обмеже-
ні сировинні ресурси для здобування пластмас. Через відносно низь-
ку вартість вони за короткий строк знайшли широке розповсюдження
як конструкційні матеріали. Однак пластмаси мають і суттєві недолі-
ки: порівняно низьку теплостійкість (100—150 °С), здатність до ста-
ріння та вологопоглинання, що погіршує їхні властивості.
Залежно від природи полімерів пластмаси поділяють на термо-
реактивні, (не допускають повторного формування) і термопластичні
(при нагріванні розм’якшуються і допускають повторне формування).
Термореактивні шаруваті пластмаси — це текстоліт, асботекстоліт,
склопласт, скловолокніт, дерев’яно-шаруваті пластики (ДШП). Тек-
століт має підвищену міцність, стійкість проти спрацьовування та
високі антифрикційні і діелектричні властивості. Його використову-
ють для виготовлення зубчастих коліс, вкладишів до підшипників
ковзання, електротехнічних деталей тощо. Таке ж використання ма-
ють і ДШП. Асботекстоліт має високі фрикційні властивості, достат-
ню теплостійкість і механічну міцність. Цей матеріал використовують
для деталей муфт і гальм.
Термопластичні матеріали — це амілопласти (поліаміди), фторо-
пласт-4 (тефлон), вініпласт, поліакрилат (органічне скло) та багато
інших. Амілопласти (різновиди — капрон, нейлон) мають достатню
міцність і стійкість проти спрацьовування, низький коефіцієнт тер-
тя, здатність надійно скріплюватись із металом. Із поліамідів виго-
31
товляють зубчасті колеса, шківи, паси. Фторопласт-4 за хімічною
стійкістю переважає всі відомі матеріали, включаючи золото і пла-
тину. Оскільки фторопласт-4 має низький коефіцієнт тертя, його зас-
тосовують для виготовлення вкладишів підшипників ковзання, які
працюють в агресивних середовищах. З вініпласта виготовляють тру-
би для подачі агресивних газів та рідин, захисні покриття для мета-
левих резервуарів.
Спечені матеріали дістають пресуванням композицій
металевих та неметалевих порошків і подальшим спіканням. Ці мате-
ріали мають особливі властивості, які відсутні у інших матеріалів —
пористість, високі фрикційні чи антифрикційні властивості, достатню
твердість тощо. Використовують їх для виготовлення вкладишів під-
шипників, фільтрів, гальмових накладок, пластинок для різального
інструменту.
До інших неметалевих матеріалів, які використовують для виго-
товлення деталей машин, можна віднести гуму, шкіру, деревину,
графіт, асбест та ін. Гума допускає великі пружні деформації, за-
довільно гасить коливання і має достатню стійкість проти спрацюван-
ня. її використовують для виготовлення амортизаторів, пружних
елементів муфт, приводних пасів, ущільнень тощо. Шкіру через ви-
соку міцність та еластичність використовують для виготовлення при-
водних пасів, манжет, прокладок, графіт — для виготовлення елек-
тродів, вогнетривких виробів, вкладишів підшипників ковзання,
а також як мастило для поверхонь тертя ковзання в з’єднаннях дета-
лей машин.
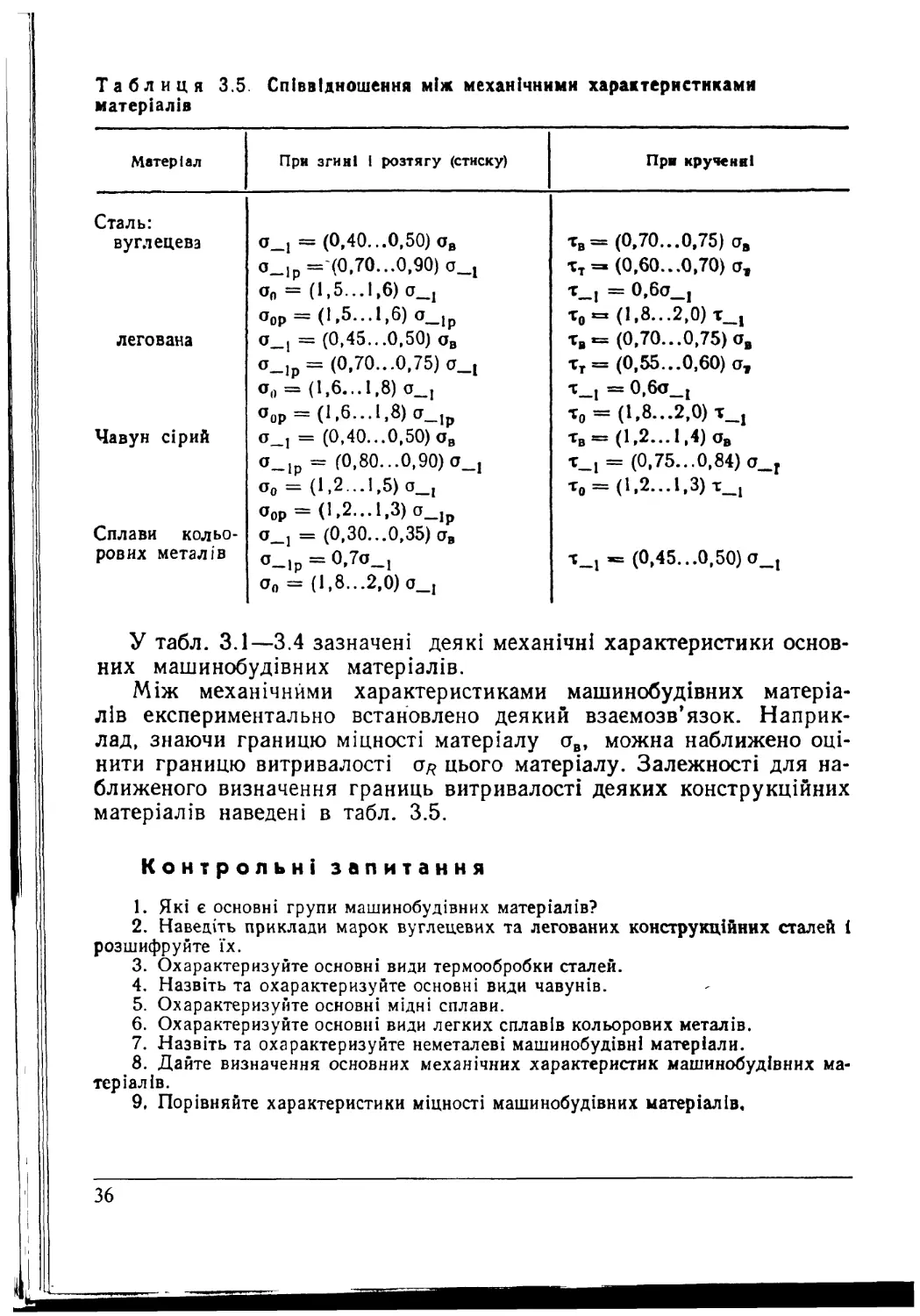
3.5. Основні механічні характеристики матеріалів
Основні механічні характеристики машинобудівних матеріалів
потрібні конструктору для виконання розрахунків роботоздатності
деталей машин, а деякі з них використовують для призначення техно-
логії виготовлення деталей. Механічні характеристики матеріалів
в ізначають лабораторними випробуваннями зразків матеріалів і
наводять у відповідній довідковій Літературі.
До основних механічних характеристик матеріалів належать такі:
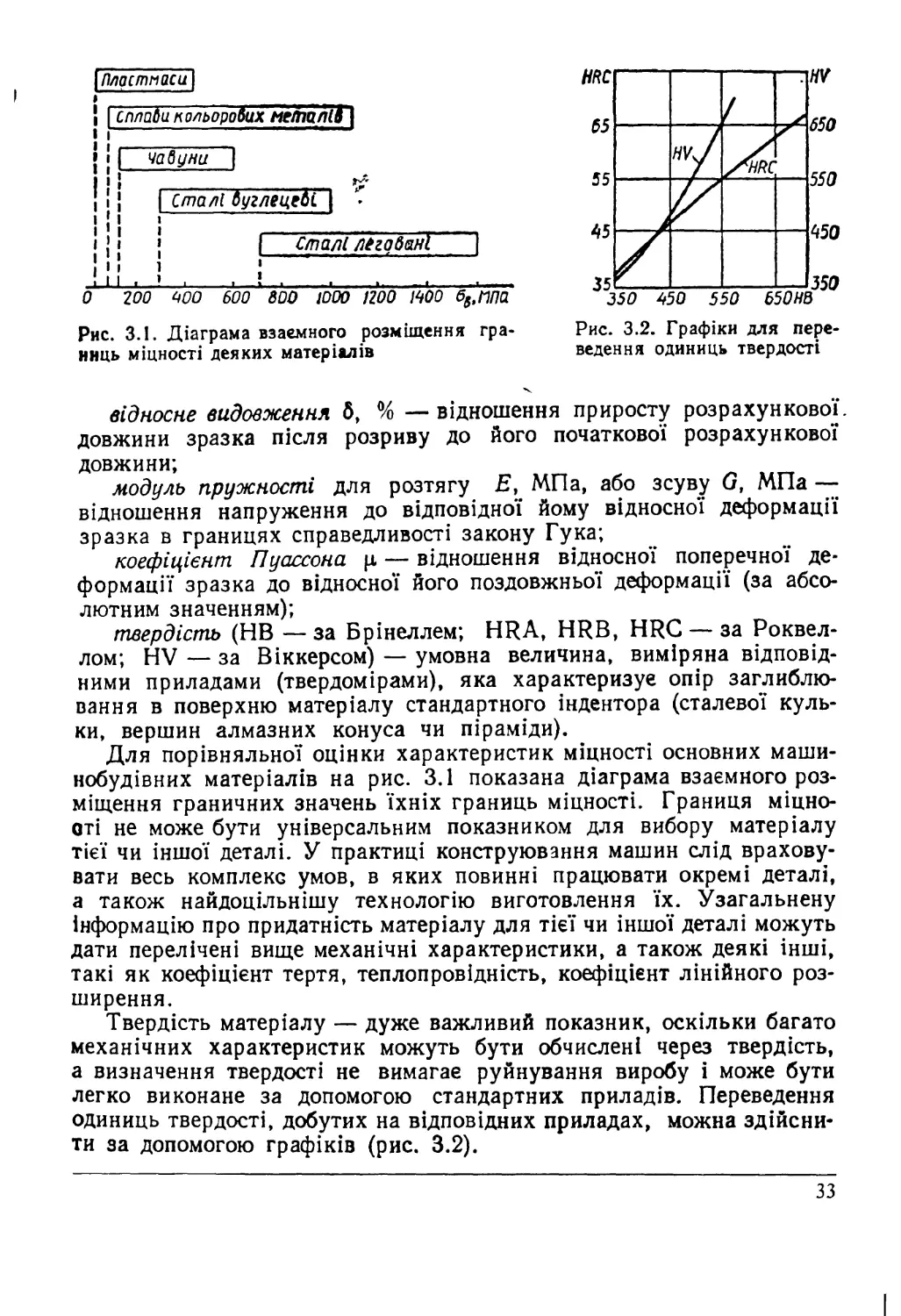
границя міцності ов, МПа — напруження в зразку матеріалу при
найбільшому розтягальному навантаженні, якому передує руйнуван-
ня зразка;
границя текучості ат, МПа — найбільше напруження, при якому
«разок деформується без значного збільшення розтягального наванта-
ження;
границя витривалості МПа — найбільше напруження, при
якому зразок витримує без руйнування задану кількість циклів
зміни напруження, що вибирають за базу випробувань;
32
[Плостмаси\
і
і
і
і
і
і
і
і
і
і
і
і
і
>
і
і
сплаби кольорових метаній |
| чавуни
। ___________
( | Сталі буглецейі \
і і
’ ! І Сталі /тобані
і, ; , :.......................
200 400 600 800 1000 1200 ічоо б$,ппа
і
і
і
і
і
і
_х
О
Рис. 3.1. Діаграма взаємного розміщення гра-
ниць міцності деяких матеріалів
ведення одиниць твердості
відносне видовження б, % — відношення приросту розрахункової,
довжини зразка після розриву до його початкової розрахункової
довжини;
модуль пружності для розтягу £, МПа, або зсуву 6, МПа
відношення напруження до відповідної йому відносної деформації
зразка в границях справедливості закону Гука;
коефіцієнт Пуассона р. — відношення відносної поперечної де-
формації зразка до відносної його поздовжньої деформації (за абсо-
лютним значенням);
твердість (НВ — за Брінеллем; НКА, НКВ, НКС — за Роквел-
лом; НУ — за Віккерсом) — умовна величина, виміряна відповід-
ними приладами (твердомірами), яка характеризує опір заглиблю-
вання в поверхню матеріалу стандартного індентора (сталевої куль-
ки, вершин алмазних конуса чи піраміди).
Для порівняльної оцінки характеристик міцності основних маши-
нобудівних матеріалів на рис. 3.1 показана діаграма взаємного роз-
міщення граничних значень їхніх границь міцності. Границя міцно-
сті не може бути універсальним показником для вибору матеріалу
тієї чи іншої деталі. У практиці конструювання машин слід врахову-
вати весь комплекс умов, в яких повинні працювати окремі деталі,
а також найдоцільнішу технологію виготовлення їх. Узагальнену
інформацію про придатність матеріалу для тієї чи іншої деталі можуть
дати перелічені вище механічні характеристики, а також деякі інші,
такі як коефіцієнт тертя, теплопровідність, коефіцієнт лінійного роз-
ширення.
Твердість матеріалу — дуже важливий показник, оскільки багато
механічних характеристик можуть бути обчислені через твердість,
а визначення твердості не вимагає руйнування виробу і може бути
легко виконане за допомогою стандартних приладів. Переведення
одиниць твердості, добутих на відповідних приладах, можна здійсни-
ти за допомогою графіків (рис. 3.2).
33
Таблиця 3.1. Механічні характеристики деяких сталей
Сталь МПа кз о_, МПа т б, % нв нас
Вуглецева звичайної якості:
Ст2 320—410 215 33 —
СтЗ 360—460 235 27 —
Ст4 400—510 255 25 —
Ст5 Вуглецева якісна! 490—630 285 20 — —
ЗО 490 294 21 175 —
35 529 314 20 203 —
40 568 321 19 183 —
45 598 363 16 193 —
50 627 373 14 203 —
55 Легована термообробле- на: 647 382 13 212 ——
50Г 648 392 13 230—250 —
45Г2 686 402 11 270—300 —
40Х 980 786 10 210—230 —
40ХН 980 588 11 240—270 —
40ХС 1225 1080 12 — 40—45
35ХГСА 1616 1280 9 — 42—48
Таблиця 3.2.
Механічні характеристики деяких чавунів
Чавун ав, МПа НВ
при розтягу при згині
Сірий ливарний:
СЧ 15 150 . 314 160—224
СЧ 18 180 354 167—224
СЧ 20 200 397 167—236
СЧ 25 250 450 176—245
СЧ зо 300 490 177—250
Високоміцний:
ВЧ 35 350 140—170
ВЧ 40 400 140—202
ВЧ 45 450 140—225
ВЧ 50 500 •— 153—245
ВЧ 60 600 - 192—277
Ковкий:
КЧ 35-10 350 * 160
КЧ 45-7 450 203
34
Таблиця 3.3. Механічні характеристики деяких сплавів
кольорових металів
Сплаа Марка сплаву нв а3> МПа
Алюмінієвий:
деформівний АДЗІ 50 235
АК6 98 411
Діб 103 441
ливарний АЛ2 49 147
АЛ5 64 157
АЛ8 59 285
Латунь: АЛ23 59 216
деформівна Л63 67 441
Л70 64 343
Л90 59 275
ливарна ЛЦ16К4 98 294
ЛЦЗОАЗ 78 294
Бронза: ЛІД402 68 215
деформівна БрОФ7-0,2 83—93 372—442
БрОФб, 5-0,15 54—68 295—372
БрАЖ9-4 98—118 392—488
БрА7 64—73 432—490
ливарна БрО4Ц7С5 58 176
БрОЮФІ 88 245
Титановий: БрОІОСЮ 73 196
деформівний ВТ4 — 686
ВТ5 935
ВТЗ-1 1130
ливарний ВТ5Л — 686
ВТ9Л 935
ВТ21Л — 980
Г а б л и ц я 3.4.
Механічні характеристики деяких пластмас
Пластмаси Назва нв о, МПа В Е . 10—3, МПа
при ЗГИНІ при роз- тягу при стис- ку
Иаруваті Текстоліт 34 140—160 85—100 230—250 6—10
Гетинакс 25—30 100-130 80—100 240—340 10—18
Композитні Волокніт 25 50 ЗО 20 8,5
1 срмоплас- Скловолокніт Органічне скло зо 100 80 125—165 18
іичні нена- (полі акрилат) 18 95 65 110 2,8
ювнені Фторопласт-4 Поліамід С (кап- 11 — 14 14—20
рон) 10—12 90 60—65 70—80 —
Поліамід 12-10 Епоксидний полі- 8—10 — 45—55 12—15
мер — 150 56 130 ——
35
Таблиця 3.5. Співвідношення між механічними характеристиками
матеріалів
Матеріал При згині І розтягу (стиску) При крученні
Сталь:
вуглецева а_і = (0,40...0,50) ав а_]р ='(0,70...0,90) а0 = (1,5...1,6) а-! аор = (1,5... 1,6) а_1р Тв = (0,70...0,75) ств тт=» (0,60...0,70) а, т_| = 0,6а_1 т0« (1,8...2,0) т_|
легована а_| = (0,45.. .0,50) ав о_1р = (0,70...0,75) а_( а() = (1,6... 1,8) о_| °ор ~ (1,6... 1,8) ір тв« (0,70...0,75) ав тт = (0,55...0,60) Т_1 = 0,6а_[ *о = (1»8«..2,0) т ।
Чавун сірий Сплави кольо- о_і = (0,40...0,50) ав а—ір = (0,80...0,90) а—1 о0 = (1,2... 1,5) а_г аор = (1 >2... 1,3) °_ір а_] = (0,30...0,35) ов тв= (1,2...1,4) ав т—1 = (0,75...0,84) а_г т0 = (1,2...1,3) т_і
рових металів 1Р = 0,7а_, а0 = (1,8...2,0) а_! т_і «= (0,45...0,50)
У табл. 3.1—3.4 зазначені деякі механічні характеристики основ-
них машинобудівних матеріалів.
Між механічними характеристиками машинобудівних матеріа-
лів експериментально встановлено деякий взаємозв’язок. Наприк-
лад, знаючи границю міцності матеріалу сгв, можна наближено оці-
нити границю витривалості о# цього матеріалу. Залежності для на-
ближеного визначення границь витривалості деяких конструкційних
матеріалів наведені в табл. 3.5.
Контрольні запитання
1. Які є основні групи машинобудівних матеріалів?
2. Наведіть приклади марок вуглецевих та легованих конструкційних сталей 1
розшифруйте їх.
3. Охарактеризуйте основні види термообробки сталей.
4. Назвіть та охарактеризуйте основні види чавунів.
5. Охарактеризуйте основні мідні сплави.
6. Охарактеризуйте основні види легких сплавів кольорових металів.
7. Назвіть та охарактеризуйте неметалеві машинобудівні матеріали.
8. Дайте визначення основних механічних характеристик машинобудівних ма-
теріалів.
9, Порівняйте характеристики міцності машинобудівних матеріалів.
36
ГЛАВА 4. РОЗРАХУНКИ ДЕТАЛЕЙ МАШИН НА МІЦНІСТЬ
4.1. Оцінка міцності деталей
при простих деформаціях
І Іайрозповсюдженішим методом оцінки міцності деталей машин
9 порівняння розрахункових напружень, які виникають у деталях
при дії експлуатаційних навантажень, із допустимими напруженнями
для призначеного матеріалу цих деталей.
У загальному вигляді умови міцності записують такими співвідно-
шеннями:
а^[а] або т [т],
(4.1)
де о, |о) — відповідно розрахункове і допустиме нормальне напру-
ження; т, [ті — те саме, дотичне напруження.
Розрахункове напруження визначається залежно від виду дефор-
мації в небезпечному перерізі деталі. Приклади простих видів дефор-
мації деталей показані на рис. 4.1.
Умови міцності з урахуванням виду деформації записують у та-
кому вигляді:
при осьовому розтягу (рис. 4.1, а) або стиску
ар = Р/А [а]р;
при згині (рис. 4.1, б)
а = Л4/ІГ0 < [а];
при крученні (рис. 4.1, в)
т = 77№р<[т];
при поверхневому зминанні деталей (рис. 4.1, г)
(Узи = РіА [о]зм>
(4.2)
(4.3)
(4.4)
(4.5)
при зсуві або зрізі (наприклад, для циліндричного пальця на
рис. 4.1, д)
= Р(А < [т]3. (4.6)
У записаних формулах взято такі позначення! Р — сила; ЛІ —
згинальний момент; Т — крутний момент; А — площа перерізу
(поверхні зминання); — осьовий момент опору перерізу; ІГР — по-
лярний момент опору перерізу деталі.
Для розповсюджених форм перерізів деталей момент опору визна-
чають за формулами:
круглий переріз діаметром сі
И70 = Л4Р/32 « 0,1 сР; ~ о,2гі3;
37
Рис. 4.1. Схеми простих деформацій деталей машин
прямокутний переріз із розмірами Ь х Н (сторона з розміром Н пер-
пендикулярна до нейтральної осі О — 0 перерізу)
№0 = Ма/6.
При одночасній дії в перерізі деталі напружень згину, розтягу
(стиску) і кручення на основі гіпотези найбільших дотичних напру-
жень для сталевих деталей визначають еквівалентне напруження,
а умову міцності записують у вигляді
ое = И(<* + 0р)2 + 4т2 [а]. (4.7)
Крім звичайних видів руйнування деталей, спричинених розгля-
нутими вище деформаціями, на практиці мають місце випадки лока-
лізованого руйнування їхніх поверхонь. Це руйнування пов’язане
з контактними деформаціями і напруженнями.
Розглянемо деякі положення до розрахунку контактної міцності
деталей без виведення основних формул, які даються в курсі «Тео-
рія пружності», що будемо використовувати надалі як вихідні за-
лежності для розрахунків на міцність деяких деталей машин.
Контактні напруження виникають у зоні контакту двох деталей
у тому разі, коли контакт початково ненавантажених деталей здій-
снюється по лінії або в точці (стиск двох циліндрів із спільною твір-
ною, циліндра і площини, двох сферичних поверхонь та ін.).
Якщо контактні напруження більші за допустимі, то на поверх-
нях деталей можуть виникнути вм’ятини, борозни або дрібні ракови-
ни. Подібні пошкодження спостерігають на робочих поверхнях зуб-
ців зубчастих коліс, на бігових доріжках кілець підшипників кочен-
ня, на колесах і рейках рейкових транспортних засобів та ін.
Для двох характерних випадків умови контактної міцності та ін-
ші розрахункові залежності записують так:
1. Початковий контакт деталей по лінії (два циліндри з пара-
лельними осями, циліндр та площина). На рис. 4.2, а показано при-
клад навантаження двох циліндрів контактним тиском дя= Рціі*.
38
Рис. 4.2. Схеми
дли розрахунку
моитахтних на-
пружень
а
Піл навантаженням лінійний контакт перетворюється в контакт по
вузькій площині. В цьому разі максимальне контактне напруження
визначають за формулою Герца і відповідно умову контактної міц-
ності записують у вигляді
У" ?н/(2рзв) [а|н, (4.8)
де 7М — коефіцієнт, який враховує механічні властивості матеріалів
деталей, що знаходяться в контакті; рзв — зведений радіус кривини
поверхонь деталей у зоні їхнього контакту.
Коефіцієнт
гм = V[£3 (1 - н?) + £, (1 - Нг)]}. (4.9)
де Е1 і £а — модулі пружності матеріалів деталей; щ і ра — відпо-
відно коефіцієнти Пуассона.
Якщо деталі виготовлені з однакового матеріалу (Е1 = Е2 =
~ Е і рі — ра = р), то коефіцієнт 7>м можна визначити за спроще-
ною формулою
7,м = V Е/[л (1 - ц2)|. (4.9а)
Для окремого випадку сталевих деталей (Е = 2,15 • 105 МПа;
р « 0,3) дістанемо в 275 МПаІ/2.
Зведений радіус кривини поверхонь деталей визначають за спів-
відношеннями (знак плюс для зовнішнього контакту за рис. 4.2, а
І знак мінус для внутрішнього контакту за рис. 4.2, б)
1/Рзв = 1/Р1 ± 1/Ра. (4.10)
В окремому випадку контакту циліндра радіусом рх з площиною
(Рі = °°) маємо рзв = рх.
Умова контактної міцності (4.8) справедлива не тільки для круго-
вих, а й для довільних циліндричних поверхонь деталей. Для остан-
39
ніх рі І ра будуть радіусами кривини цих поверхонь у точках їхнього
контакту.
2. Початковий контакт деталей у точці (дві кулі, куля і площина).
У разі стискання двох куль силою Рн (рис. 4.2, в) точковий контакт
перетворюється в контакт по круговій площині. При цьому максималь-
не напруження в зоні контакту і відповідна умова контактної міцнос-
ті мають вигляд
он = %*м /’7їД2рзв)2^ 1<7]/л (4-11)
де 2^ — коефіцієнт, який враховує механічні властивості матеріа-
лів деталей; рзв — зведений радіус кривини поверхонь деталей.
Коефіцієнт
2м = (1 /я) / 12^/іЕ, (1 - ц?) + £1 (1 - Ц2)]2. (4.12)
В окремому випадку, коли деталі виготовлені з однакового мате-
ріалу (Ех = Е2 = Е і щ = р2 = р), коефіцієнт можна визначити
за спрощеною формулою
2'м = (1/л) /3£2/(1 - |л2)2. (4.12а)
Для сталевих деталей маємо 2*м — 1755 МПа2/3.
Розглянуті вище залежності дозволяють визначити розрахункові
напруження в перерізах деталей або на поверхні їхнього контакту
за діючими навантаженнями і конкретними розмірами деталей. Щоб
дістати значення допустимих напружень, потрібно знати характер
зміни діючих напружень у часі і з урахуванням цього характеру, а
також механічних характеристик матеріалу деталей можна визначи-
ти граничні напруження і відповідні їм допустимі напруження.
4.2. Зміна напружень у часі
Під час дії на деталь постійного за модулем та напрямом наванта-
ження в ній виникають постійні напруження. Якщо модуль або на-
прям навантаження щодо деталі змінюється в часі, то і напруження
в деталі будуть мінятися в часі. Наприклад, змінні в часі напруження
будуть тоді, коли навантаження постійне, але змінюється положення
деталі щодо напряму навантаження (постійна за модулем і напрямом
поперечна сила на вісь, що обертається, спричинює в перерізах цієї
осі змінні в часі напруження).
Змінні напруження, що виникають у деталях машин, у більшості
випадків змінюються в часі періодично. На рис. 4.3 показаний гра-
фік можливої періодичної зміни нормального о чи дотичного т на-
пруження в часі і.
Сукупність всіх напружень за один період зміни їх називається
циклом напружень. Цикл напружень характеризується макси-
40
мальним сттая і мінімальним ат|п на-
пруженнями, а також амплітудою
напружень оа та коефіцієнтом аси-
метрії циклу /?. Середнє напруження
ат циклу дорівнює алгебраїчній пів-
сумі максимального і мінімального
напружень:
от = 0,5 (огпах От т). (4.13)
Амплітуда напружень оа циклу —
це алгебраїчна піврізниця максималь-
ного та мінімального напружень:
о Г
Рис. 4.3. Періодична зміна напру-
жень у часі
Од — (Отах —0т1п)«
(4.14)
Відношення мінімального напруження циклу до максимального,
взяте з відповідним знаком, називається коефіцієнтом аси-
метрії циклу
= Огп1п/Оглах« (4.15)
На рис. 4.4 показані різні цикли напружень, які можуть бути
па практиці.
Практичне застосування в розрахунках деталей машин знаходять:
постійне напруження (от = о; оа =0; Н = 1), симетричний (от = 0;
Оа = Отахї Я = —1) І ПУЛЬСУЮЧИЙ (от = О.бОтах’» = 0,5отіХ;
/? = 0) цикли напружень. Усі інші цикли напружень можуть бути
зведені до певної сукупності названих трьох циклів.
Відомо, що змінні напруження спричинюють явища втоми матері-
алу деталей. Характеристикою міцності матеріалу в цьому випадку
виступає границя витривалості Од (відповідно сг_і, для симетрич-
ного і а0, т0 для пульсуючого циклів).
Рис. 4.4. Можливі цикли змінних напружень
41
4.3. Визначення граничних напружень
Вихідною для визначення граничних напружень має бути одна
з нормативних механічних характеристик матеріалу:
а) для постійно діючих напружень — границя текучості от (хт)
для пластичних матеріалів і границя міцності огв (тв) для крихких
матеріалів;
б) для змінних у часі діючих напружень — границя витривалості
о я (Тк).
Нормативні механічні характеристики дістають в лабораторних
умовах для стандартних зразків матеріалів. Оскільки розміри, фор-
ма, умови виготовлення і роботи реальних деталей можуть значно
відрізнятися від зразків, результати лабораторних випробувань не
можна безпосередньо використовувати в розрахунках без відповід-
них поправок. Із переходом від нормативних значень механічних
характеристик до граничних напружень для реальних деталей треба
враховувати деякі фактори.
Вплив абсолютних розмірів деталі (масшабний фактор). Досвід
показує, що зі збільшенням розмірів деталей внаслідок зміни віднос-
ного впливу поверхневого шару матеріалу і збільшення неоднорід-
ності його властивостей характеристики міцності матеріалу мають
тенденцію зменшуватись. Зменшення характеристик міцності врахо-
вують коефіцієнтами Ка впливу абсолютних розмірів:
□тд ~ авд = &—ІД = —!• (4.16)
Тут індексом «д» позначені характеристики міцності деталі.
Наближені значення коефіцієнтів впливу абсолютних розмірів для
деталей із вуглецевих сталей наведені на рис. 4.5 залежно від їхніх
розмірів (діаметра сі чи товщини 5). Більш детальні відомості про кое-
Рис. 4.5. Коефіцієнти впливу абсолютних
розмірів деталей
фіцієнт Ка можна знайти у від-
повідній довідковій літературі.
Вплив форми деталі. Великий
вплив на міцність деталей, особ-
ливо при циклічно змінних напру-
женнях, має місцева зміна форми
деталей і пов’язане з цим явище
концентрації напружень. У міс-
цях різкої зміни форми деталей
(отвори, надрізи, галтелі, проточ-
ки), які називають концентрато-
рами напружень, виникають міс-
цеві піки напружень (рис. 4.6,
а~в).
42
Рис. 4.6. Приклади концентраторів напружень
Відношення найбільших напружень у зоні концентрації огк (тк)
до номінальних напружень (з урахуванням послаблення перерізу кон-
центратором) називається теоретичним коефіцієнтом
концентрації напружень:
«а = стк/0; сст = Тк/т. <4.17)
Безпосереднє використання коефіцієнтів аа і ах в інженерних
розрахунках не дає задовільних результатів. Досвід показує, що
внаслідок виникнення в зоні концентрації об’ємного напруженого
стану, впливу пластичних властивостей та ефекту зміцнення реаль-
них матеріалів максимуми напружень згладжуються, і зменшення міц-
ності матеріалу в зоні концентрації визначається не теоретичними ко-
ефіцієнтами а0 і ах, а так званими ефективними коефіцієнтами кон-
центрації напружень, які безпосередньо повинні вводитись у розра-
хунок. Ці коефіцієнти — відношення механічних характеристик ма-
теріалів, добутих для гладких зразків, до тих же характеристик зраз-
ків з тим чи іншим концентратором. Так, для статичних випробувань
К$а — Ов^вк» К$х — Т'д/Твк» (4.18)
а для випробувань на втому із симетричним циклом
Ко = ог_і/ог_ік; Кх = т-і/г-ік. (4.19)
Між теоретичними та ефективними коефіцієнтами концентрації
напружень існують такі співвідношення: а0 Ко і «т Кх-
Для пластичних матеріалів та крихких із значною внутрішньою
неоднорідністю (чавун, деякі види кольорового литва) при постій-
них напруженнях ефективні коефіцієнти концентрації напружень
К«у і Кзх близькі до одиниці. Тільки для крихких матеріалів із одно-
рідною структурою (загартована сталь) Кю і К$х можуть досягати
значень 1,3—1,4.
Дуже висока чутливість матеріалів до концентрації напружень
при циклічно змінних напруженнях. У цьому випадку ефективні
43
коефіцієнти концентрації напружень можуть досягати значень 2,5—
3,0 і більше.
Вплив стану поверхні деталі і поверхневого зміцнення. При постій*
но діючих напруженнях стан робочих поверхонь деталей має незнач-
ний вплив на їхню міцність. При змінних напруженнях руйнування
деталей пов’язане з появою втомних тріщин, які здебільшого виника-
ють у поверхневих шарах матеріалу. В цьому випадку будь-яке пош-
кодження поверхні деталі спричинює появу концентрації напружень
та зменшення границі витривалості 0%. Таке зменшення а/? більш
помітне для матеріалів із високою границею міцності ов.
Обернену дію має спеціальне зміцнення поверхні деталей накле-
пуванням (наприклад, обдуванням сталевими кульками), поверхне-
вим гартуванням СВЧ, цементацією чи азотуванням. Для деталей
із поверхневим зміцненням поверхні коефіцієнт зміцнення можна бра-
ти ЛГзМ = 1,20... 1,50 (менші значення для високоміцних сталей та де-
талей великих розмірів, більші — для деталей із високими пластич-
ними властивостями та деталей малих розмірів).
Для деталей із полірованою поверхнею Кз* = 1, а для деталей,
що мають поверхні, оброблені різцем (точіння, фрезерування), Кзм =»
= 0,75...0,90. Найменше значення коефіцієнт зміцнення має для де-
талей, які працюють в агресивному середовищі (наприклад, для де-
талей, які працюють у морській воді, Кзм = 0,15...0,40).
Вплив строку служби деталі та режиму навантаження. Строк
служби деталей, що знаходяться під дією постійних напружень, виз-
начається випадковими пошкодженнями при перевантаженнях, ко-
розійним чи абразивним спрацюванням, моральним старінням кон-
струкції або іншими обставинами, які слід враховувати в кожному
конкретному випадку на основі накопиченого досвіду експлуатації
подібних елементів машин.
При роботі деталей в умовах циклічно змінних напружень строк
служби Н суттєво впливає на граничні напруження. Кожний цикл
напружень викликає в матеріалі деталі накопичення фізичних змін,
які спричинюють виникнення мікроскопічних тріщин, розвиток яких
обумовлює поломки — руйнування втомного характеру.
Рис. 4.7. Криві вто-
ми матеріалів
44
Відомо, що циклічні напруження високих рівнів руйнують деталі
при малому числі циклів, а напруження низьких рівнів — деталі
при великому числі циклів. Взаємозв’язок між максимальним напру-
женням циклу атах із коефіцієнтом асиметрії 7? і числом циклів ?УЦ,
при якому відбувається/руйнування матеріалу деталі, встановлю-
ється за допомогою спеціальних експериментально добутих графіків,
які називаються кривими втоми матеріалу, або кри-
вими Веллера. Крива втоми будується для різних матеріалів з попе-
редньо заданою ймовірністю неруйнування. Для однорідних сталей
крива втоми має вигляд, показаний на рис. 4.7, а.
Криві втоми мають дві ділянки: криволінійну, що лежить ліво-
руч від точки Л/о, і близьку до горизонтальної — праворуч від цієї точ-
ки. Це чіткіше видно на графіку, побудованому в системі координат
<>.гах — А'ц (рис. 4.7, 6).
Число циклів напружень N0, що відповідає переходу кривої
втоми в горизонтальну ділянку, називається базою випробу-
вань, а відповідне йому напруження ад — довгочасною або
необмеженою границею витривалості мате-
ріалу.
Найбільше напруження циклу, яке із заданою ймовірністю не-
руйнування може витримати матеріал при числі циклів
називається обмеженою границею витривалос-
т і, яку будемо позначати (рис. 4.7).
Для ряду матеріалів і умов навантаження криві втоми не мають
горизонтальної ділянки. В таких випадках можна говорити лише про
обмежену границю витривалості матеріалів.
Криволінійна ділянка кривої втоми може бути апроксимована рів-
нянням
= соп8І, (420)
де показник степеня для сталей т = 6... 10 характеризує нахил
кривої втоми.
Враховуючи рівність (4.20), можна встановити взаємозв’язок між
необмеженою сід і обмеженою Од, границями витривалості:
авідки
(4.21)
Де Кд — коефіцієнт довговічності, що визначається за виразом
Кь = (4.22)
Число циклів Уц напружень пов’язане із строком служби Н дета-
лі. Якщо строк служби задано (А, год) і відома при постійному наван-
таженні частота зміни напружень за одиницю часу п, с—1 (у більшос-
45
Рис. 4.8. Зведення змінних напружень
до напружень постійного рівня
ті випадків дорівнює або кратна числу обертів чи ходів машини), то
легко обчислити повне число циклів зміни напружень за весь строк
служби деталі за виразом = ЗбООлЛ. У випадку її* < діста-
немо Кь > 1, > од і розрахунок доцільно виконувати за обме-
женою границею витривалості. Якщо #А > Уо, то коефіцієнт дов-
говічності Кь беруть рівним одиниці і відповідно = О/? (при на-
явності горизонтальної ділянки на кривій втоми матеріалу).
Викладені міркування можуть бути основою для розв’язування
оберненої задачі, тобто для визначення строку служби деталей, коли
відомі їхні розміри, матеріал і умови навантаження.
Розглянемо тепер визначення коефіцієнта довговічності /Сь для
випадку змінного в часі навантаження і відповідних цьому наванта-
женню змінних напружень протягом строку служби деталі.
Нехай протягом часу Н1 деталь працює при напруженнях 04 із
частотою зміни цих напружень (рис. 4.8, а), протягом часу Н2 —
при напруженнях ст2 з частотою л2 і т. д. За кожний період Н13 Н2і ..., Ні
число циклів напружень відповідно буде
Л/ці = Nц2 = /1^2» • • ’ > П.І =
а загальне число циклів за строк служби деталі
= ХпіНі — ПеН, (4.23)
де пе — деяка еквівалентна частота зміни напружень.
Вести розрахунок за найбільшими діючими напруженнями і за
числом циклів було б невірно, оскільки напруження от мають
УУці циклів, що значно менше Такий розрахунок призвів би до
невиправданого збільшення розмірів деталі.
У даному разі розрахунок будують на так званому принципі лі-
нійного підсумовування пошкоджень. Суть цього принципу можна
46
сформулювати так: загальна кількість пошкоджень, накопичених
в матеріалі деталі явищами втомного руйнування, дорівнює сумі
пошкоджень за різні періоди роботи при різних рівнях напружень.
Цей принцип наближено виражається такою залежністю:
? (4.24)
де іїці — число циклів дії деякого напруження N — число цик-
лів до руйнування при цьому ж напруженні.
На основі рівності (4.24) складний характер зміни напружень
можна звести до напруження постійного рівня о = атах = з ек-
вівалентним числом циклів № < Л^х і діючого протягом часу Л,
або до деякого еквівалентного напруження Ое <С аь але з числом
циклів /Ух протягом часу Н.
На практиці в більшості випадків використовують зведення склад-
ного характеру зміни напружень до напруження постійного рівня
о = Отах З ЄКВІВЗЛЄНТНИМ ЧИСЛОМ ЦИКЛІВ Ке (рИС. 4.8, б).
Помножимо чисельник і знаменник у рівності (4.24) на о?:
2(^-о7ЖстГ) = 1.
У знаменнику маємо постійну величину, яку відповідно до рівняння
кривої втоми змінимо на Кос^ і винесемо з-під знаку суми:
2/УЦІ-о7 = К^ = соті. (4.25)
На основі залежності (4.25) дію всього комплексу напружень
протягом розрахункового строку служби замінимо дією максимального
напруження з еквівалентним числом циклів /Уе-‘
2/УЦІо7 = /Уе^х. (4.26)
Звідси еквівалентне число циклів напружень
іУе — 2 (^/Л^тах) Кці = 2 (Оі/Отах) =
== ПЕНЯ (Оі/ОтахГ (Пі/ПЕ) (Л//Л).
Враховуючи співвідношення (4.23), а також позначивши
Ке = 2 (оГі/Отах)"1 (Пі/пЕ) (Ні/И), (4.27)
дістанемо кінцеву формулу для визначення еквівалентного числа
циклів
КЕ = КеКх- (4.28)
Величина Ке називається коефіцієнтом інтенсивності змінних
напружень. Оскільки при напруженнях, спричинених змінним наван-
таженням, Ке < І, відповідно КЕ <_ /Ух- У даному випадку коефі-
47
цієнт довговічності згідно з формулою (4.22) буде виражатись таким
чином:
Кь = 7ЛЖ (4.29)
Відношення напружень платах У (4-27) можна замінити відношен-
ням відповідних навантажень Р^Р або ТіІТ. При цьому якщо О/
залежить від Р{ лінійно, що має місце в більшості практичних ви-
падків, то показник степеня ш у (4.27) залишається без змін. Якщо ж
Пі виражається через у вигляді а,- = X УР^ наприклад при виз-
наченні контактних напружень у деталях із лінійним контактом, то
показник степеня повинен бути заміненим на /п/2. Відповідно до
цього коефіцієнти інтенсивності напружень Ке можна виразити через
навантаження і характеризувати інтенсивність їх протягом строку
служби деталі.
Для розрахунків деталей при деформаціях розтягу, згину або
кручення
Ке = 2 (Р^ГГ (щіпе) (Ні/Ну,
т (4.30)
Для розрахунків на контактну міцність деталей з лінійним кон-
тактом
Кне = 2 (П./Пе) (Л,/Л). (4.31)
Коефіцієнти інтенсивності навантаження при типових режимах
навантаження деталей машин (див. рис. 2.3) наведені в табл. 4.1
для випадку, коли частота напружень не змінюється із зміною наван-
таження, тобто щіпе — 1.
Деякі відомості про значення показників степеня т кривої втоми
для різних матеріалів, а також бази випробувань Уо наведені в
табл. 4.2.
Граничні напруження. На основі даних про вплив різних факторів
на граничні напруження в деталях машин і з урахуванням вихідного
Таблиця 4.1. Орієнтовні значення коефіцієнтів та Кир
Типовий режим навантаження за рио. 2.3 *Е *НЕ
т =• б т =* 9 т = 6 т — 8
Постійний (П) 1,00 1,00 1,00 1,00
Важкий (В) 0,30 0,20 0,50 0,41
Середній рівноймовірний (СР) 0 14 0,10 0,25 0,20
Середній нормальний (СН) 0,07 0,04 0,18 0,13
Легкий (Л) 0,02 0,01 0,06 0,05
48
Таблиця 4.2. Значення показника степеня т І бази випробувань
Матеріал Вид деформації т —— .. . »і , , ।
Сталь Згин 6 (Я < НВ 350) 10’... 25-10*
9 (Я > НВ 350)
Розтяг — стиск б 10е
Контактна деформація 6 10’. ..12-10*
Чавун Згин 9 10’
Контактна деформація 6 10’
Бронза Згин 9 10е
Контактна деформація 8 10’
Примітка. Для сталі при крученні значення т можно брати таке саме,
як і при згині, бо відсутні достатньо повні експериментальні дані.
значення однієї з нормативних механічних характеристик матеріалу
можна записати формули для визначення граничних напружень
Оііт реальної деталі:
для деталей з пластичних матеріалів, які працюють при постійних
напруженнях,
^Ііт ~ Тйіт ~ (4.32)
для деталей з крихких матеріалів, які працюють при постійних на-
пруженнях,
ОЦт ~ Т’ііт = ^в^^в/^зг» (4.33)
для деталей з будь-яких матеріалів, які працюють при циклічно змін-
них напруженнях,
^ІІт = Тііт — 'їхКаКзиК ь/Кх. (4.34)
У записаних формулах: 1 — коефіцієнт впливу абсолютних
розмірів деталі; (К5Х); К* (Я\)1 > 1 — ефективні коефіцієнти
концентрації напружень при постійних і циклічно змінних діючих
напруженнях; Кзи 1 — коефіцієнт, який враховує стан поверхні
деталі або її поверхневе зміцнення; Кь 1 — коефіцієнт довговіч-
ності [див. формули (4.22) і (4.29)).
4.4. Допустимі напруження і коефіцієнти
запасу міцності
Допустимі напруження [а], [т] та розрахункові коефіцієнти запа-
су міцності % і визначають за формулами:
[а] = пі іт/[5а]; [т] = тит/^т); (4.35)
5а = апт/а > [5а]; 5Т = Тцщ/Т > [5Т), (4.36)
49
де пит, тпт — граничні напруження; а, т — розрахункові макси-
мальні напруження; ($4, [зх] — допустимі коефіцієнти запасу міц-
ності деталі.
При сумісній дії нормальних напружень розтягу та згину і дотич-
них напружень кручення загальний коефіцієнт запасу міцності
5 = 5а 4- 5? > («І- (4-37)
Формули (4.36) для визначення розрахункових коефіцієнтів за-
пасу міцності при змінних діючих напруженнях можна використову-
вати лише у випадках, коли відомі границі витривалості матеріалу
Од і т#, за якими знаходять граничні напруження ацт і тііт- У біль-
шості випадків експериментально встановлюють границі витривалос-
ті матеріалів при /? = —1 та /? =0, тобто сці і а0 і т0. Для до-
вільного коефіцієнта асиметрії циклів змінних напружень розрахун-
кові коефіцієнти запасу міцності можна визначити за формулами:
За == а__і/[/Сооа/(/(4/(зм) + ФоО%]; (4.38)
Зх = Т_і/[КхТа/(^К3м) 4- ФтТт]. (4.39)
У записаних формулах амплітуди оа, та і середні напруження
от, тт визначають за співвідношеннями (4.13) та (4.14). Коефіцієнти
впливу асиметрії циклів напружень ф0 і фх беруть такії для вугле-
цевих сталей ф0 = 0,1; фх = 0,05; для легованих — фя — 0,15;
фт = 0,1.
Допустимий коефіцієнт запасу міцності має великий вплив на га- <
баритні розміри, масу деталей і відповідно на вартість їх. Із змен-
шенням [з] зменшується також маса виробів, але збільшується мож-
ливість виходу деталей із ладу. Тому вибір [з] є дуже відповідаль-
ним моментом при розрахунках та проектуванні деталей машин.
Деякі рекомендовані значення [з] наведені в табл. 4.3.
Таблиця 4.3. Рекомендовані допустимі коефіцієнти запасу міцності
Матеріал деталі [з] при разрахунку
за границею текучості або витривалості за границею міцності
Сталь пластична (Я < НВ 350) Сталь високоміцна з низькими пластичними власти- 1.3-1,5 —
востями та високоміцний чавун 1,3—1,5 2,0—2,5
Сталеве литво 1,5—2,0 2,5—3,0
Чавун сірий та модифікований Сплав кольорових металів: 2,0—3,0 3,0—3,5
доформівний 1,5—2,0 2,0-2,5 —
ливарний 2,5-3,0
Пластмаса 2,0-3,0 3,0-5,0
50
Менші з рекомендованих у табл. 4.3 значень [$1 належать до більш
достовірних та точних розрахунків і деталей невисокої відповідаль-
ності; більші значення [5] — до менш достовірних розрахунків та
деталей високої відповідальності, вихід із ладу яких може призвести
до аварії і великих матеріальних втрат.
Підвищені значення І5І для відносно рідких розрахунків за границею
міцності пояснюються тими обставинами, що зростання діючих напру-
жень до значення ав загрожує раптовим виходом деталі з ладу. Крім
цього, за границею міцності розраховуються деталі з крихких мате-
ріалів, які характеризуються підвищеною неоднорідністю та ймовір-
ністю дефектів структури, що також обумовлює збільшення [5].
При розрахунках за контактними напруженнями значення [5]
беруть невеликими [5] — 1,1...1,2, оскільки можливі контактні по-
шкодження поверхні деталі мають місцевий характер і не загрожують
раптовим виходом деталі з ладу.
4.5. Поняття про ймовірнісні методи оцінки
міцності деталей машин
Наведені вище методи розрахунків на міцність мають детерміно-
ваний характер, оскільки вони дають змогу оцінити міцність за де-
якими усередненими значеннями навантаження, розмірів та форми
деталей, нормативних механічних характеристик матеріалів тощо.
Всі можливі неточності розрахунків компенсуються, якщо беруть
дещо завищені коефіцієнти запасу міцності. Отже, спроектовані еле-
менти машини можуть мати збільшені габаритні розміри і масу або
при низьких коефіцієнтах запасу міцності деталі можуть виходити з
ладу за реальних умов експлуатації в зв’язку з можливими відхилен-
нями розрахункових навантажень чи в технологічному процесі виго-
товлення їх.
Останнім часом розробляються і використовуються в деяких ви-
падках ймовірнісні методи оцінки міцності деталей машин. Це пов’я-
зане з тим, що деякі параметри розрахункових формул мають суттєве
розсіювання і можуть розглядатись як випадкові величини. Дійсно,
розсіювання розрахункових напружень залежить від статистичних
параметрів навантаження, фактичних розмірів і форми окремих еле-
ментів деталей, ступеня наближення розрахункової схеми до реальної,
а розсіювання граничного напруження пов’язане з нестабільністю
нормативних механічних характеристик матеріалів, коефіцієнтів
впливу абсолютних розмірів, концентрації напружень, поверхневого
зміцнення тощо.
Одним із методів ймовірнісної оцінки міцності деталей машин може
бути метод визначення ймовірності руйнування, тобто визначення
ймовірності ТОГО, ЩО X = Отах — ОЦт буДЄ 6ІЛЬШЄ ВІД НуЛЯ або
51
дорівнювати йому:
Рруйн = Р (х 0).
Оскільки максимальне і граничне (Тит напруження — ви-
падкові величини, то їхня різниця х також випадкова величина. Для
визначення ймовірності руйнування РРуйн треба знати закони розпо-
ділу випадкових величин Птах» ОГ'іт та X, а ТЗКОЖ ЇХНІ ЙМОВІрНІСНІ
характеристики. Закони розподілу максимального та граничного на-
пружень залежать від комбінації законів розподілу інших випадко-
вих величин, від яких залежать атах і ацт. Таким чином, задача ви-
значення ймовірності руйнування деталей не є простою, оскільки
поки що не накопичено достатнього експериментального матеріалу про
статистичні параметри, якими характеризуються випадкові величи-
ни, що впливають на атах та 0Г|іт.
Більш ширші та глибші відомості про ймовірнісні методи оцінки
міцності деталей машин можна взяти в [24, 25].
4.6. Приклади розрахунків на міцність
деяких деталей
Задача 4.1. Визначити за умовами міцності характерні розміри деталей ручного
механізму керування робочим органом машини (рис. 4.9). Відомо, що до важеля 1
на плечі І = 250 мм прикладається максимальна сила Р — 300 Н. Валик 2, маточи-
ну 3 і важіль 1 передбачається виготовити із сталі 40, а штифт 4 — із термообробле-
ної сталі 50. У розрахунках вважати навантаження деталей статичним.
Розв’язання. Для сталі 40 за табл. 3.1 маємо границю текучості от »
= 321 МПа. Для штифта з термообробленої сталі 50 — от = 620 МПа.
1. Визначення розмірів елементів валика. При дії на важіль сили Р валик наван-
тажується крутним моментом
Т = РІ => 300 • 250 = 75 • 103 Н • мм.
За умовою (4.4) міцності при крученні
Т = Т/И7р = 1677(я<і2) < [т]
потрібний діаметр мінімального перерізу валика
> І^ібГЛя іт]) = 16 • 75 • 103/(3,14 • 128) = 14,4 мм.
Тут для матеріалу валика при допустимому коефіцієнті запасу міцності [$х] =
= 1,5 [див. (4.35) і табл. 3.5] допустиме напруження при крученні
[т] = ^ііпЖІ = ММ = 0,60от/[5т] = 0,60 - 321/1,5 = 128 МПа.
Візьмемо Лв~ 15 мм (див. рис. 4.9), а інші діаметри валика конструктивно на-
значимо: гіВ| = 17 мм; с/в2 = 20 мм.
2. Визначення діаметра штифта для з’єднання валика із маточиною. Штифт зна-
ходиться під дією деформації зрізу, до того ж зріз може відбутись у двох площинах
загальною площею
4, = 2л42ш/4 = ясі2/2.
Сила, що зрізує штифт,
= /Ч/(0,5<їВІ) = 300 • 250/(0,5 • 17) == 8824 Н.
52
Рис. 4.9. Конст-
рукція механіз-
му керування
Допустиме напруження зрізу для матеріалу штифта
Мз == *Цт/М = = 0,60от/[5%) = 0,60.620/1,5 = 248 МПа.
З умови міцності (4.6)
Ь = Рш/Аз ~ Іт1з
дістанемо потрібний діаметр штифта
4Ш > К2Рш/(л 1-ї),) = у 2 8824/(3,14 • 248) = 4,76 мм.
Беремо діаметр штифта = 5 мм.
3. Перевірка міцності валика у перерізі, ослабленому отвором під штифт. Для
даного перерізу валика полярний момент опору
№р = л^і (1 — 0,9<іо/гів1)/І6 = 3,14 • 173 (1 —0,9 • 5/17)/16 = 709,3 мм3.
Тут г/0 = = $ мм-
Розрахункове напруження кручення
т = 77№р = 75 • 10»/709,3 = 106 МПа < [т] = 128 МПа.
Отже, міцність валика в ослабленому перерізі забезпечується.
4. Визначення діаметра стержня важеля. Враховуючи діаметр валика </ВІ =
= 17 мм і потребу розміщення у маточині кулькового фіксатора, візьмемо діаметр
маточини О = 50 мм. Тоді довжина стержня важеля може бути /х = 228 мм (із вра-
хуванням наявності лиски на маточині).
Оскільки у важелі виникає деформація згину, максимальний згинальний момент
у його перерізі діаметром <1 (рис. 4.9)
М = РІХ = 300.228 = 68,4 • 103 Н • мм.
За умовою (4.3) міцності при згині
о = А1/1Г0 = 3244/(лгі3) < [<т]
53
Рис. 4.10. Кріплення аморти-
затора
знаходимо
а = ]^32М/(л [01) = 1^32 • 68,4 • 103/(3,14 • 214) = 14,8 мм.
Тут допустиме напруження при згині [о] = = 321/1,5 = 214 МПа.
Беремо діаметр різьбової ділянки стержня <ір — 16 мм, а діаметр стержня «
= 18 мм.
Задача 4.2. Визначити з умови міцності діаметр <1 робочої частини пальця кріп-
лення амортизатора підвіски до кузова автомобіля (рис. 4.10), якщо відомо, що з боку
амортизатора на палець діє регулярна знакозмінна сила Р = 1100 Н, а можливе рід-
кісне перевантаження Ртлк = 2600 Н. Ширина вушка амортизатора а = 48 мм, а
товщина шайби 6=2 мм. Палець передбачається виготовити з термообробленої ста-
лі 40Х.
Розв’язання. Для термообробленої сталі 40Х за табл. 3.1 маємо границю
міцності ов = 980 МПа і границю текучості от = 588 МПа.
У зображеній на рис. 4.10 конструкції палець знаходиться під дією циклічної
деформації двобічного згину. Найнебезпечнішим перерізом пальця є переріз, у якому
його циліндрична ділянка переходить у конічну, оскільки у цьому перерізі є значний
згинальний момент, а концентратором напружень виступає галтель (перехід від діа-
метра й до діаметра сі0).
Згинальний момент у небезпечному перерізі пальця, що спричинюється дією си-
ли Р,
М = Р (0,5а 4- 6) = 1100 (0,5.48 4- 2) = 28 600 Н • мм.
Для деталей, що працюють при циклічно змінних напруженнях, граничне на-
пруження визначають за формулою (4.34)
°ііт = 0яКаК ЗМК іУКа-
Якщо припустити, що напруження згину у пальці змінюються за симетричним
знакозмінним циклом, то границя витривалості матеріалу пальця згідно з табл. 3.5
= 0,45ов = 0,45 • 980 = 441 МПа.
Коефіцієнт впливу абсолютних розмірів пальця попередньо візьмемо К(і = 1,
оскільки поки що не відомий його діаметр. Оскільки поверхні пальця механічно об-
робляються точінням без додаткового зміцнення, коефіцієнт зміцнення Кзм = 0,9.
Строк служби пальця не обмежується і режим його навантаження не заданий, тому
коефіцієнт довговічності = 1. Якщо попередньо взяти відношення « 1,25 і
г[(1 « 0,05, де г — радіус галтелі, то за табл. 31.1 маємо ефективний коефіцієнт кон-
центрації напружень Ка= 2,1.
54
Отже, граничне напруження для пальця
°Нт = 441 . 1 . 0,9 . 1/2,1 = 189 МПа.
За формулою (4.35) при коефіцієнті запасу міцності [$а1 = 1,5 (див. табл. 4.8)
допустиме напруження для пальця
М = <>ііпЛ«а1 в 189/1,5 = 126 МПа.
Виходячи з умови (4.3) міцності при згині
О = М/Го = 32Лї/(л43) С [о],
визначимо діаметр пальця за співвідношенням
(і > ^32М/(л [<?]) = 1^32 • 28 600/(3,14 - 126) = 13,2 мм.
Якщо взяти сі = 14 мм, с/0 = 17 мм і г — 0,5 мм, то за рис. 4.5 Кд — 0,95, а
за табл. 31.1 (4/4 = 17/14 = 1,21; г/сі = 0,5/14 = 0,03) Ка = 2,3.
Для уточнених значень Ка і Ка граничне і допустиме значення напружень таке:
а11іп = 441 . 0,95 - 0,9 . 1/2,3 = 164 МПа;
(о]= 164/1,5= 109 МПа.
За уточненим значенням допустимого напруження діаметр пальця
сі > 1^32 • 2860/(3,14 • 109) = 13,9 мм.
Тепер зробимо перевірку міцності пальця при можливих перевантаженнях. Як-
що діє сила то максимальний згинальний момент у небезпечному перерізі
пальця
Мтах = Ртах (0,5а 4- 6) = 2600 (0,5 - 48 + 2) = 67 600 Н - мм,
а найбільше напруження згину
атах = 32МтиЛП(ІЗ) = 32 - 67 600/(3,14 - 143) = 251 МПа.
Коефіцієнт запасу міцності пальця за границею текучості 5а = °^°тах=
= 588/251 = 2,34, що достатньо для забезпечення статичної міцності при можливих
перевантаженнях.
Контрольні запитання
1. Запишіть умови міцності для простих деформацій і наведіть приклади деяких
простих деформацій деталей машин.
2. Охарактеризуйте параметри, від яких залежать контактні напруження.
3. Назвіть параметри, якими характеризуються цикли змінних напружень.
4. Які механічні характеристики матеріалів є вихідними для визначення гра-
ничних напружень?
5. Назвіть та охарактеризуйте основні фактори, які впливають на граничні на-
пруження деталей.
6. Сформулюйте принципи заміни складного характеру зміни напружень на
напруженння постійного рівня.
7. Зробіть порівняльну оцінку впливу коефіцієнтів інтенсивності навантаження
для типових режимів на коефіцієнт довговічності деталей.
8. Запишіть вирази для визначення граничних напружень та оцініть вплив різ-
них факторів на їхні значення.
9. Дайте словесне визначення допустимого напруження та розрахункового кое-
фіцієнта запасу міцнссті.
55
10. Назвіть фактори, що впливають на вибір допустимого коефіцієнта запа-
су міцності.
11. Чому допустимі коефіцієнти запасу міцності при розрахунках за границею
текучості менші, ніж допустимі коефіцієнти запасу міцності при розрахунках за гра-
ницею міцності?
ГЛАВА 5. ТЕРТЯ ТА СПРАЦЬОВУВАННЯ ДЕТАЛЕЙ МАШИН
5.1. Види тертя та його основні закономірності
Наука, що охоплює комплекс питань із тертя та спрацьовування
деталей машин, має назву триботехніка.
Під тертям розуміють опір, який виникає при відносному русі
двох тіл у площині їхнього дотику при наявності сили, що притискає
одне тіло до другого.
Розрізняють тертя ковзання та тертя кочення. Тертя ковзання має
місце при відносному русі двох тіл, швидкості яких у точках дотику
тіл неоднакові. Тертя кочення виникає у вищих кінематичних парах,
де швидкості точок контакту однакові за модулем та напрямом.
За станом поверхневого шару тіл та наявністю мастила між елемен-
тами контактуючих деталей розрізняють: сухе тертя, що вини-
кає при відсутності на поверхнях тертя мастильного матеріалу будь-
якого виду; граничне тертя — при наявності на поверхнях
тертя шару рідини, що має властивості, відмінні від об’ємних; р і -
динне тертя, при якому виникає явище опору відносному руху між
тілами, розділеними шаром рідини, який проявляє її об’ємні власти-
вості.
Наближено можна вважати, що сухе тертя підпорядковується та-
ким закономірностям:
1. Сила тертя ковзання пропорційна нормальному тиску IV,
прикладена на поверхні стику деталей і направлена у бік, протилеж-
ний швидкості їхнього відносного руху (рис. 5.1, а). Силу тертя ви-
значають за формулою Кулона
= (5.1)
де /—коефіцієнт тертя ковзання безрозмірний, що визначається
Рис. 5.1. Схеми до визначення сил тертя ков-
зання та кочення
експериментально.
2. Коефіцієнт тертя / за-
лежить від матеріалу деталей,
стану їхніх поверхонь та
швидкості їхнього відносного
руху.
Силу тертя ковзання Е3
можна визначити за формулою
(5.1) не тільки для плоских
поверхонь при сухому терті,
56
але й для криволінійних поверхонь за довільних умов змащуван-
ня, якщо в розрахунках використовувати значення коефіцієнта тертя
/, добуті в умовах, що ідентичні умовам роботи деталей.
Опір руху при коченні (рис. 5.1, б) обумовлений ефектом молеку-
лярного зчеплення на площині контакту деталей та гістерезисними
втратами в реальних матеріалах при мікродеформаціях їх у межах
площини контакту. Силу тертя кочення згідно з рис. 5.1, б визнача-
ють за формулою
Гк = №/г, (5.2)
де к — коефіцієнт тертя кочення, мм, а г — радіус ролика, мм.
Коефіцієнт тертя кочення к дістають дослідним шляхом: для пари
деталей із незагартованих сталей к — (0,004...0,005) мм, а для пари
деталей із загартованих сталей к = (0,001...0,002) мм.
Значення коефіцієнтів тертя ковзання / суттєво більше. Напри-
клад, для сталевих деталей без мастила / — 0,12...0,15, а для змаще-
них сталевих деталей / = 0,05...0,08.
Втрати на тертя кочення значно менші, ніж на тертя ковзання.
Тому в багатьох механізмах та машинах конструкції рухомих з’єд-
нань виконують так, щоб тертя ковзання замінити на тертя кочення.
5.2. Втрати на тертя в спряженнях деталей машин
Втрати на тертя в спряженнях деталей характеризуються силою
тертя, що виникає в навантаженому контакті деталей при їхньому
відносному русі. Контакт деталей може здійснюватися по площині
або по криволінійній поверхні, а відносний рух деталей може бути
поступальним чи обертовим.
Якщо вважати дійсним закон Кулона для елементарної площинки
<ІА контакту довільної форми, то
йЛ = ДМГ = &ІА; Г,= ^ч<іА, (5.3)
А
де — тиск на елементарній площинці контакту деталей.
Значення тиску <?, площинки (ІА та границь інтегрування вста-
новлюється залежно від конструктивного виконання спряжених
деталей.
Спряження з відносним поступальним рухом деталей. На рис. 5.2
показані плоскі, клинчасті і циліндричні напрямні 2, що забезпечують
поступальний рух повзуна 1. Щоб перемістити повзун, навантажений
силою (?, вздовж напрямної, треба до повзуна прикласти силу Г,
яка дорівнює силі тертя у контакті цих деталей.
Для плоских напрямних (рис. 5.2, а) при д = -тт- = сопзі
аЛ
N = 4-, ар, = № = (5.4)
57
6
Рис.( 5.2. Схеми до визначення сил тертя у спряженнях для поступального
руху
Для клинчастих напрямних (рис. 5.2, б) при д = сопзі на кожній
поверхні напрямної маємо нормальну силу N і загальну силу тер-
ТЯ Р *•
N = (?/(2 зіп а); Г3 = = <?//зіп а. (5.5)
Для циліндричних напрямних (рис. 5.2, в) при відсутності зазора
між спряженими деталями, тобто при д = сопзі, попередньо знахо-
димо
Л/2 л/2
= І (Ш соз а = 2 і ді -у йа соз а = дісі \ соз асіа ~ дій,
6 о
звідки тиск
ч (5.6)
Сила тертя в спряженні циліндричної напрямної
п
Е, « / ( = І (І 4а, зб° Г3 = (?я//2. (5.7)
а) л) Л»
А 0
Для припрацьованої (притертої) циліндричної напрямної можна
взяти косинусоїдальний закон розподілу тиску д = д0 соз а. Тоді
Я/2 й
(? = У б/У соз а = 2 У д0 соз а/ сіа соз а =
о
Л/2
= д^пій^.
(
58
Звідси
% = <2/(яИ/4). (5.8)
Сила тертя в припрацьо-
ваній циліндричній напрям*
ній
л/2
= 2/ І -^7 С05 а — Ійа. =
о яіа 2
Л/2
= 45//л сов сиіа.
о
Рис. 5.3. До визначення сил тертя у спряжен-
нях із тертям кочення
Кінцеву формулу для визначення сили тертя запишемо у вигляді
^ = <?(4//л). (5.9)
Порівняння сили тертя в неприпрацьованій циліндричній напрям-
ній за формулою (5.7) і в припрацьованій за формулою (5.9) показує,
що в другому випадку при тому самому навантаженні <2 і коефіцієнті
тертя ковзання / опір переміщенню повзуна менший, бо
<3 (4//л) = 1,27/5 < <?л//2 = 1,57/(?.
Розглянемо тепер напрямну з тертям кочення, яка призначена для
поступального переміщення деталі (рис. 5.3, а). Між рухомою де-
таллю 1 і нерухомою 2 уведені тіла кочення (кульки чи ролики). При
коченні кульки по двох площинах (рис. 5.3, б) загальна сила тертя
кочення
Гі = = 251&М,
Д- Сі = 5/2 — навантаження на одну кульку; г — число кульок,
щз сприймають навантаження 5-
Загальна сила тертя кочення при переміщенні деталі 1 (рис. 5.3, а)
Е == тобто
Е = 2(}к/сі. (5.10)
Збільшенням діаметра сі тіл кочення можна суттєво зменшити
силу опору переміщенню в напрямній із тертям кочення.
Спряження з відносним обертовим рухом деталей. Залежно від
напряму зовнішнього навантаження щодо осі обертання рухомої дета-
лі розрізняють спряження з радіальним навантаженням (рис. 5.4 а)
і спряження з осьовим навантаженням (рис. 5.4, б, в). Спряжені
поверхні можуть бути плоскими, циліндричними, конічними або
сферичними.
Щоб забезпечити рівномірне обертання деталі /, навантаженої
силою 5» треба до цієї деталі прикласти обертовий момент Т, який
дорівнює моменту сил тертя в контакті 7\.
59
Рис. 5.4. Схеми до визначення сил тертя у спряженнях для обертового руху
У спряженні деталей (рис. 5.4, а) елементарний момент сил тертя
на площинці 4А
ат, = <ІР, або Т, - РМ2.
Відповідно для неприпрацьованих деталей спряження (при д =
= сопзі) з урахуванням виразу (5.7)
(5.11)
для припрацьованих деталей спряження (при д = д0 соз а) з ураху-
ванням виразу (5.9)
78 = 2(?Д//л. (5.12)
У спряженні деталей (рис. 5.4, б) за умови рівномірного розподілу
тиску в площині контакту (деталі неприпрацьовані)
д = 4ф/[л (Р2 — гї2)] = СОП5І. (5.13)
На кільцевій площинці сіА = 2лр<їр елементарний момент тертя
сП\ == рб/Г5 = іїдйА = (д • 2лр2ф. (5.14)
Проінтегрувавши записаний вираз у межах 6Ї/2...Р/2 з урахуван-
ням (5.13), дістанемо
= 4 ТСТ • (5.15)
Після припрацювання спряження деталей (рис. 5.4, б) тиск в пло-
щині контакту розподіляється нерівномірно. Якщо спрацьовування
поверхонь тертя пропорційне добутку тиску д на швидкість ковзання
= рш, то для кожної точки площини контакту маємо др = сопзі.
60
Із умови
=« дйА = д • 2лрф
дістанемо
Р/2
(? = 2я$р) ( ар = я (до)(О — О).
л'п
Із цього співвідношення маємо
(?р) = <2/[л(£>-^)]. (5.16)
Використовуючи залежності (5.14) та (5.16), дістаємо
0/2
7\= 2л/(?р) ( р^р = С/(Р + ^/4. (5.17)
</’/2
Для суцільної кругової площини контакту (й = 0) відповідно
будемо мати
Л = С/Г>/4. (5.18)
На практиці уникають використання суцільних кругових площин
контакту в спряженнях за рис. 5.4, б, бо в центрі площини тиск тео-
ретично зростає до нескінченності.
Для спряження деталей по конічних поверхнях (рис. 5.4, в) мо-
мент сил тертя визначається аналогічними міркуваннями.
У неприпрацьованій конічній парі (д = сопзі)
• _ З/ рз ~ &
‘ 3 зіп а О2 — '
(5.19)
У припрацьованій конічній парі за умови, що спрацьовування
в кожній точці спряження пропорційне добутку тиску на швидкість
ковзання,
Тя = (#(0-1- £0/(4 зіп а). (5.20)
Якщо взяти а = л/2, то вирази (5.19) і (5.20) зводяться до фор-
мул, добутих для спряження деталей за рис. 5.4, б. Для малих ку-
тів конусності а момент сил тертя дося-
іає великих значень при малих значен-
нях осьової сили (?. Це явище часто
використовують для закріплювання ін-
< грументів (свердла, фрези) у металооб-
робних верстатах.
Широке практичне застосування
мають спряження деталей із викорис-
ілиням тертя кочення, наприклад під-
шипників кочення. В таких спряженнях
трати на тертя дуже малі.
Розглянемо для прикладу установку
Рис. 5.5. Опора вала на упор-
ному кульковому підшипнику
61
вала на упорному кульковому підшипнику (рис. 5.5). Якщо вал на-
вантажений осьовою силою (?, то момент сил тертя можна визначити
за такою формулою [див. вираз (5.10)]:
Тк =Ей/2 = (1ОкІ(1. (5.21)
Добуті в даному параграфі розрахункові формули можуть бути
використані для визначення втрат на тертя в різних рухомих спря-
женнях деталей машин.
5.3. Основні види спрацьовування деталей машин
Спрацьовування — процес руйнування поверхневих ша-
рів деталі в умовах тертя, що спричинює поступову зміну розмірів,
форми та стану поверхні деталі. Спрацювання — результат
процесу спрацьовування.
Спрацьовування є причиною виходу з ладу значної більшості
машин та їхніх деталей (близько 85—90 %). Щорічні видатки на тех-
нічне обслуговування та відновлення спрацьованих деталей при ре-
монтах діючого парку деяких машин (автомобілі, верстати, будівельні
та дорожні машини, сільгосптехніка) перевищують вартість річ-
ного випуску нових машин.
Залежно від характеру процесів, що відбуваються на поверхнях
контакту деталей, розрізняють такі види спрацьовування! механіч-
не, молекулярно-механічне та корозійно-механічне.
Механічне спрацьовування поділяють на абра-
зивне, втомне і спрацьовування через пластичне деформування.
Абразивне спрацьовування є результатом зрізання і пластичного
деформування твердими сторонніми частинками мікронерівностей
спряжених поверхонь при відносному переміщенні їх. Тверді абра-
зивні частинки, що потрапляють у зону контакту деталей, можуть
мати мінеральне походження чи бути металевими у вигляді продук-
тів спрацьовування поверхонь деталей.
Втомне спрацьовування є наслідком циклічно змінних контактних
напружень у зоні контакту деталей. У поверхневому шарі деталі
виникають втомні мікротріщини, розвиток та з’єднання яких спричи-
нюють відрив частинок металу. Цей вид руйнування також назива-
ють втомним викришуванням робочих поверхонь деталей. В інозем-
ній літературі таке руйнування поверхні відоме під назвою пітинг.
Спрацьовування через пластичне деформування виявляється під
час високих навантажень у вигляді пластичного зминання спряже-
них поверхонь із порушенням заданого відносного руху спряжених
деталей.
Молекулярно-механічне спрацьовування
виникає під час високих контактних напружень, через дію яких руй-
нується захисна масляна плівка і починають діяти сили молекуляр-
62
ного зчеплення. Це явище називають схоплюванням. Подальше від-
носне переміщення поверхонь спричинює руйнування їх шляхом
відриву частинок матеріалу. Процес виникнення та розвитку пошкод-
жень поверхонь тертя внаслідок схоплювання називається заїданням.
Небезпечною формою прояву заїдання є задир — пошкодження по-
верхонь тертя у вигляді борозен та рівців, глибина яких може сяга-
ти 0,1—0,2 мм і більше.
Корозійно-механічне спрацьовування бу-
ває окислювальним або спрацьовуванням типу фреттінг-корозії.
Окислювальне спрацьовування — руйнування окисних плівок, що
неперервно поновлюються на поверхнях тертя. Якщо ці плівки до-
сить тонкі, то інтенсивність окислювального спрацьовування досить
низька.
Корозійно-механічне спрацьовування, що виникає при дуже ма-
лих циклічних відносних зміщеннях спряжених поверхонь, обумов-
лених наявністю зазорів та деформаціями деталей, без видалення про-
дуктів спрацьовування із зони контакту називається фреттінг-ко- »
розією. Фреттінг-корозія характерна для поверхонь посадки підшип-
ників на вали, в шпонкових, зубчастих та профільних з’єднаннях де-
талей.
Професором Д. Н. Гаркуновим виявлено механізм так званого
водневого спрацьовування деталей. Цей вид руйну-
вання характерний для поверхонь гальмових башмаків та барабанів,
дисків фрикційних муфт та інших деталей. Особливість його полягає
в тому, що водень при терті і високих температурах насичує поверхне-
ві шари сталевих деталей, спричинює їхню крихкість, появу великої
кількості тріщин, відтак раптове утворення дрібнодисперсного по-
рошку металу.
Всі розглянуті вище види спрацьовування деталей машин не мають
одночасно вирішального значення. Переважний вид спрацьовування
залежить від зовнішніх умов експлуатації машини, способу змащу-
вання (неперервний чи періодичний), ступеня навантаження контак-
ту деталей, питомого тиску, швидкості ковзання та інших факторів.
5.4. Оцінка спрацьовування деталей та розрахунки
для забезпечення стійкості проти спрацьовування
Спрацьовування деталей машин характеризується параметром
який називається інтенсивністю спрацьовуван-
ня — відношення товщини шару матеріалу, втраченого через спра-
цьовування, до шляху тертя (шляху переміщення точки, в якій фік-
сується спрацювання, щодо спряженої поверхні).
Величина, обернена інтенсивності спрацьовування, називається
Стійкістю проти спрацьовування.
63
Рис. 5.6. Зміна інтенсивності спрацьову-
вання та спрацювання в часі
Під час експлуатації машини
інтенсивність спрацьовування
деталей суттєво змінюється.
У початковий період експлуата-
ції через неминучі огріхи спря-
жених поверхонь деталей при ви-
готовленні має місце підвищена
інтенсивність спрацьовування.
Із припрацюванням (взаємним
притиранням) деталей інтенсив-
ність спрацьовування зменшуєть-
ся, потім стабілізується, а у по-
дальшому протягом значного ча-
су залишається постійною. Наступна зміна форми деталей, що спричи-
нена спрацюванням, і зміна умов змащування збільшують інтенсив-
ність спрацювання на кінцевому етапі експлуатації машини.
Графік, що характеризує зміну інтенсивності спрацьовування
і спрацювання /і протягом строку служби машини, показаний на
рис 5.6 (/ — період припрацювання деталей машин; // — період
усталеного спрацьовування і НІ — період інтенсивного спрацьову-
вання на кінцевому етапі експлуатації машини).
Щоб запобігти небезпечним формам пошкодження поверхонь
деталей підчас припрацьовування, слід передбачити полегшений режим
роботи машини, тобто роботу на стендах або в експлуатації з низькими
навантаженнями та швидкостями. З метою зменшення періоду припра-
цювання в мастильні матеріали деколи вводять спеціальні добавки,
що прискорюють припрацьовування за рахунок корозійно-механічного
або абразивного спрацювання. Подібні заходи знижують або навіть
запобігають нагромадженню втомних пошкоджень поверхонь деталей
під час припрацювання їх.
Після досягнення граничного спрацювання Лгр, коли подальша
робота машини неможлива або е небезпечною, закінчується строк
служби машини або окремих її деталей.
Щоб забезпечувати стійкість проти спрацьовування, треба вико-
ристовувати такі розрахунки деталей машин:
а) розрахунок за умовою обмеження тиску в контакті деталей
[<?];
(5.22)
б) розрахунок за умовою обмеження максимального контактного
напруження
[о]нга„; (5.23)
в) розрахунок за критерієм (о5 — швидкість ковзання в контак-
ті деталей)
(5.24)
64
ного зчеплення. Це явище називають схоплюванням. Подальше від-
носне переміщення поверхонь спричинює руйнування їх шляхом
1 відриву частинок матеріалу. Процес виникнення та розвитку пошкод-
жень поверхонь тертя внаслідок схоплювання називається заїданням.
Небезпечною формою прояву заїдання є задир — пошкодження по-
верхонь тертя у вигляді борозен та рівців, глибина яких може сяга-
’ ти 0,1—0,2 мм і більше.
Корозійно-механічне спрацьовування бу-
ває окислювальним або спрацьовуванням типу фреттінг-корозії.
Окислювальне спрацьовування — руйнування окисних плівок, що
неперервно поновлюються на поверхнях тертя. Якщо ці плівки до-
сить тонкі, то інтенсивність окислювального спрацьовування досить
низька.
Корозійно-механічне спрацьовування, що виникає при дуже ма-
лих циклічних відносних зміщеннях спряжених поверхонь, обумов-
лених наявністю зазорів та деформаціями деталей, без видалення про-
дуктів спрацьовування із зони контакту називається фреттінг-ко-
розією. Фреттінг-корозія характерна для поверхонь посадки підшип-
ників на вали, в шпонкових, зубчастих та профільних з’єднаннях де-
талей.
Професором Д. Н. Гаркуновим виявлено механізм так званого
водневого спрацьовування деталей. Цей вид руйну-
вання характерний для поверхонь гальмових башмаків та барабанів,
дисків фрикційних муфт та інших деталей. Особливість його полягає
в тому, що водень при терті і високих температурах насичує поверхне'-
ві шари сталевих деталей, спричинює їхню крихкість, появу великої
кількості тріщин, відтак раптове утворення дрібнодисперсного по-
рошку металу.
Всі розглянуті вище види спрацьовування деталей машин не мають
одночасно вирішального значення. Переважний вид спрацьовування
залежить від зовнішніх умов експлуатації машини, способу змащу-
вання (неперервний чи періодичний), ступеня навантаження контак-
ту деталей, питомого тиску, швидкості ковзання та інших факторів.
5.4. Оцінка спрацьовування деталей та розрахунки
для забезпечення стійкості проти спрацьовування
Спрацьовування деталей машин характеризується параметром
Д, який називається інтенсивністю спрацьовуван-
ня — відношення товщини шару матеріалу, втраченого через спра-
цьовування, до шляху тертя (шляху переміщення точки, в якій фік-
сується спрацювання, щодо спряженої поверхні).
Величина, обернена інтенсивності спрацьовування, називається
стійкістю проти спрацьовування.
65
Рис. 5.6. Зміна інтенсивності спрацьову-
вання та спрацювання в часі
Під час експлуатації машини
інтенсивність спрацьовування
деталей суттєво змінюється.
У початковий період експлуата-
ції через неминучі огріхи спря-
жених поверхонь деталей при ви-
готовленні має місце підвищена
інтенсивність спрацьовування.
Із припрацюванням (взаємним
притиранням) деталей інтенсив-
ність спрацьовування зменшуєть-
ся, потім стабілізується, а у по-
дальшому протягом значного ча-
су залишається постійною. Наступна зміна форми деталей, що спричи-
нена спрацюванням, і зміна умов змащування збільшують інтенсив-
ність спрацювання на кінцевому етапі експлуатації машини.
Графік, що характеризує зміну інтенсивності спрацьовування Д
і спрацювання Н протягом строку служби машини, показаний на
рис. 5.6 (/ — період припрацювання деталей машин; // — період
усталеного спрацьовування і НІ — період інтенсивного спрацьову-
вання на кінцевому етапі експлуатації машини).
Щоб запобігти небезпечним формам пошкодження поверхонь
деталей під час припрацьовування, слід передбачити полегшений режим
роботи машини, тобто роботу на стендах або в експлуатації з низькими
навантаженнями та швидкостями. З метою зменшення періоду припра-
цювання в мастильні матеріали деколи вводять спеціальні добавки,
що прискорюють припрацьовування за рахунок корозійно-механічного
або абразивного спрацювання. Подібні заходи знижують або навіть
запобігають нагромадженню втомних пошкоджень поверхонь деталей
під час припрацювання їх.
Після досягнення граничного спрацювання Лгр, коли подальша
робота машини неможлива або е небезпечною, закінчується строк
служби машини або окремих її деталей.
Щоб забезпечувати стійкість проти спрацьовування, треба вико-
ристовувати такі розрахунки деталей машин:
а) розрахунок за умовою обмеження тиску в контакті деталей
(5.22)
б) розрахунок за умовою обмеження максимального контактного
напруження
Он < [а]нтах; (5.23)
в) розрахунок за критерієм ф>$ (а5 — швидкість ковзання в контак-
ті деталей)
(5.24)
66
( невим гартуванням, азотуванням або боруванням. Підвищення твер-
дості дуже ефективне під час роботи деталей в абразивних середо-
вищах;
— біметалізація дозволяє наносити на поверхні тертя деталей
тонкі шари високоякісних антифрикційних сплавів, що забезпечує
їхню підвищену несучу здатність;
— поверхневе наклепування через обкочування роликами дає
змогу збільшити стійкість проти спрацьовування поверхонь деталей.
Контрольні запитання
1. За яких умов виникають тертя ковзання і тертя кочення?
2. Запишіть та проаналізуйте вирази для визначення сил тертя ковзання та ко-
чення.
3. Спробуйте дістати вирази для визначення сил тертя ковзання та кочення для
деяких спряжень з відносним поступальним рухом деталей.
4. Зробіть те саме для спряження з відносним обертовим рухом деталей.
5. Назвіть та охарактеризуйте основні види спрацьовування деталей машин.
6. Запишіть основні умови, за якими ведуть розрахунки для забезпечення стій-
кості деталей проти спрацьовування.
7. Охарактеризуйте принципи вибору мастильних матеріалів для деталей, що
працюють в умовах тертя.
8. Які основні конструктивні та технологічні шляхи зменшення спрацьовування
деталей машин?
ГЛАВА 6. ЖОРСТКІСТЬ, ВІБРО- 1 ТЕПЛОСТІЙКІСТЬ
ЕЛЕМЕНТІВ МАШИН
6.1. Поняття про жорсткість та шляхи
її забезпечення
Жорсткість — здатність деталей чинити опір зміні їхньої
форми при дії експлуатаційних навантажень. У багатьох випадках оста-
точні розміри деталей беруть за умовами їхньої жорсткості.
Розрізняють власну жорсткість деталі, обумовлену деформаціями
всього матеріалу деталі, і контактну жорсткість, яка пов’язана з
деформаціями тільки поверхневих шарів матеріалу деталі в зоні
контакту з іншою деталлю.
Жорсткість оцінюють співставленням розрахункових деформацій
деталей (прогинів /, кутів повороту перерізів 0, кутів закручуван-
ня ф та ін.) при дії максимальних експлуатаційних навантажень
В допустимими деформаціями; умови жорсткості записують у вигляді
/С[/]; 0<[0]; фСіфЬ (6.1)
Для більшості деталей (валів, штоків, ходових гвинтів точних
п«’|н іатів, елементів корпусних деталей) основне значення має власна
жорі гкість. У такому разі перевірочні розрахунки на жорсткість
67
виконують за формулами та методами, що вивчаються в курсі опору
матеріалів.
Допустимі значення деформацій визначають за емпіричними за-
лежностями або на основі відповідних розрахунків, що відобража-
ють вимоги жорсткості, або на основі довідкових даних, здобутих
в експлуатаційних умовах роботи подібних деталей.
Поняття контактної жорсткості деталей належать не тільки до
випадку початкового контакту по лінії або в точці, але і до випадку
контакту по великій номінальній площі. В обох випадках контактні
деформації суттєві в зв’язку з малою фактичною площею контакту.
В першому випадку такі деформації визначаються номінальною
формою контакту деталей, а в другому —обминанням мікронерівнос-
тей та хвилястостей поверхонь.
Контактні деформації однорідних деталей з початковим дотиком
по лінії або в точці визначають за формулами теорії Герца, а контакт-
ні деформації при великій номінальній площі контакту — на основі
експериментально встановлених коефіцієнтів контактної податли-
вості.
6.2. Поняття про вібро-1 теплостійкість
елементів машин
Вібростійкість — здатність конструкції працювати в за-
даному діапазоні експлуатаційних режимів без недопустимих коливань.
Коливання та вібрації найчастіше проявляються через недос-
татню жорсткість елементів машин, незрівноваженість обертових
деталей, особливості робочих процесів у двигунах та виконавчих ор-
ганах машини, високі робочі швидкості та ін. Вібрації спричинюють
додаткові змінні в часі напруження в деталях, внаслідок чого відбу-
вається швидке втомне руйнування, погіршується якість роботи ма-
шини, зменшується надійність різьбових та пресових з’єднань. Віб-
рації негативно впливають на організм обслуговуючого персоналу.
Високочастотні вібрації супроводжуються значним шумом, що також
шкідливо впливає на організм людини. Приклади шкідливої дії віб-
рації: зменшення точності та чистоти обробки деталей на металорі-
зальних верстатах, самовідгвинчування різьбових деталей, руйну-
вання несучих конструкцій та будівельних споруд, у яких розміщені
машини, прискорене спрацьовування контактуючих деталей, поломка
валів та інших деталей від втоми матеріалу, зменшення точності
та надійності контрольно-вимірювальних приладів.
Розрахунки на стійкість проти вібрації виконують для окремих
деталей і для машини в цілому. Шкідливу дію вібрацій та коливань
можна зменшити підвищенням точності виготовлення деталей, забез-
печенням їм відповідної жорсткості, використанням неперервних ро-
бочих процесів у машинах, зменшенням конструктивними методами
68
сили удару при контактуванні деталей, застосуванням для виготовлен-
ня деталей відповідних матеріалів з підвищеним внутрішнім тертям»
а також застосуванням спеціальних покриттів, амортизаторів та демп-
ферів.
Теплостійкість — здатність елементів машини не втра-
чати своїх експлуатаційних показників при змінах температури.
Робота машин супроводжується виділенням теплоти, що пов’я-
зане з робочим процесом машин та тертям у рухомих спряженнях
деталей. У результаті нагрівання можуть виникнути деякі шкідливі
явища для роботи машини в цілому та окремих її деталей;
1. Зменшення несучої здатності деталей. Під час нагрівання ста-
левих деталей до температури 300—400 °С, а деталей із сплавів кольо-
рових металів і пластмас до температури 100—150 °С значно зменшу-
ються їхні механічні характеристики та виникає явище повзучості.
Повзучість, тобто процес малої неперервної деформації при довго-
часному навантаженні, стає головним критерієм роботоздатності для
окремих деталей машин- лопаток та дисків парових турбін, котлів
високого тиску та ін.
2. Зменшення захисної здатності мастильного шару, що розділяє
деталі, які працюють в умовах тертя, і, як наслідок, поява прискоре-
ного спрацювання та заїдання.
3. Зміна розрахункових зазорів у рухомих з’єднаннях, що може
спричинити заклинювання деталей та аварійний вихід машини з
ладу.
Теплотворення в машинах та механізмах, що пов’язане з роботою
сил тертя, обчислюють безпосередньо або за передаваною механізмом
потужністю та ККД. Теплотворення, що спричинене робочим проце-
сом машини, встановлюють при розрахунках цього процесу.
Контрольні запитання
1. Сформулюйте поняття жорсткості деталей та запишіть основні умови жорст-
кості.
2. Що таке вібростійкість та які шкідливі дії вібрацій?
3. Які шкідливі явища виникають в машинах при роботі їх в умовах підвищення
і«мператури.
ГЛАВА 7. НАДІЙНІСТЬ І ДОВГОВІЧНІСТЬ МАШИН
7.1. Терміни та їхні означення
у питаннях надійності
Термінологія з питань надійності регламентована відповідними
лідартами. Розглянемо тільки деякі основні означення, що мають
іношення до надійності.
69
Надійність — властивість об’єкта виконувати задані функ-
ції, зберігаючи в часі значення експлуатаційних показників у зада-
них межах, що відповідають встановленим режимам та умовам його вико-
ристання, технічного обслуговування, ремонтів, транспортування
та зберігання. Надійність виробів характеризується їхньою безвід-
казністю, довговічністю, ремонтопридатністю.
Роботоздатність — стан об’єкта, при якому він здатний
виконувати властиві йому функції, зберігаючи значення заданих
параметрів у межах, що встановлені нормативно-технічною докумен-
тацією.
Довговічність — властивість об’єкта зберігати робото-
здатність до настання крайнього стану при встановленій системі
технічного обслуговування та ремонту.
Ремонтопридатність — пристосованність об’єкта до
запобігання та виявлення причин його відказів, пошкоджень та
усунення їхніх наслідків виконанням ремонтів і технічного обслу-
говування.
Наробка — тривалість роботи або об’єм виконаної об’єктом
роботи.
В і д к а з — втрата роботоздатності об’єкта.
Безвідказність — властивість об’єкта неперервно збері-
гати роботоздатність протягом деякого, наперед встановленого, про-
міжку часу або деякої наробки.
У теорії надійності розроблені відповідні показники для оцінки та
прогнозування надійності виробів на різних стадіях (від проектного
розрахунку до експлуатації), методи випробування на надійність,
системи нагляду за надійністю виробів в експлуатації. Для оцінки
надійності машин та їхніх елементів використовують ймовірнісно-ста-
тистичні підходи, які доцільні для виробів масового та великосерій-
ного виробництва.
Вибір нормованих показників надійності та регламентація їх
залежать від призначення виробу, режимів його використання, на-
слідків відказів та інших факторів.
7.2. Показники надійності та довговічності
До основних показників надійності належать такі:
ймовірність безвідказної роботи Р (/) — це ймовірність того, що
протягом заданого періоду відказ об’єкта не виникає;
інтенсивність відказів А (/) — умовна щільність ймовірності ви-
никнення відказу об'єкта для певного моменту часу за умови, що до
нього відказ не виникав, тобто це число відказів у одиницю часу, від-
несене до числа справних виробів у даний момент.
Розглянемо деякі співвідношення для визначення числових по-
казників надійності.
70
Нехай Уо — число випробуваних об’єктів, пі — число об’єктів,
що мають відкази за час /, Л/о — Пі = N1 — число справних об’єктів
за час ґ, Е (І) —ймовірність відказу. Тоді ймовірність безвідказної
роботи за час і
Р(/) = #^о= = (7.1)
Графіки ймовірності безвідказної роботи Р (і) та ймовірності
відказу Е (і) показані на рис. 7.1, а. На рис. 7.1, б зображена крива
щільності розподілу наробки об’єкта до відказу:
<іЕ (0 АР (і)
м ~ аі
(7.2)
Якщо Д^ — число об’єктів, що мають відкази від / до / + Д/, то
ДГ(0 = Дп,/^.
За умови, що Д/ -► 0, маємо
З"- (7-3)
Отже, щільність розподілу і (і) може бути наближено визначена
статистично як відношення числа об’єктів з відказами в одиницю
часу до числа випробуваних об’єктів.
Для певного моменту часу інтенсивність відказів
Л (/) = ДМ^ДО- (7.4)
Інтенсивність відказів X (/) наближено може бути визначена ста-
тистично як відношення числа відказів в одиницю часу до числа
Записаний вираз основне рів- рис 7 । Залежність показників
іиня теорії надійності. Він показує надійності від часу
71
АП)
О
Рис. 7.2. Зміна інтенсивності
відказів у часі
зв’язок ймовірності безвідказної роботи
об’єкта з інтенсивністю відказів, тобто
дозволяє за інтенсивністю відказів ви-
значити ймовірність безвідказної роботи.
Залежність А (/), що характерна для
машин та їхніх деяких складальних оди-
ниць, показана на рис. 7.2. Періодпри-
працювання іп характеризується підви-
щеними значеннями інтенсивності від-
казів. Надалі наступає період /н нор-
мальної експлуатації. Інтенсивність відказів при цьому значно мен-
ша, і ці відкази мають випадковий характер, тобто спричинені непе-
редбаченими змінами умов роботи машини. Величина А (/) у період
?н змінюється мало. Пізніше внаслідок спрацьовування, нагромаджен-
ня втомних пошкоджень, старіння та інших факторів наступає період
швидкого збільшення інтенсивності відказів.
Якщо складний об’єкт можна розглядати у вигляді послідовного
з’єднання 1, 2, 3, ..., к елементів, що характерне для більшості ме-
ханічних передач, то згідно з теоремою множення ймовірностей ймо-
вірність безвідказної роботи Р (і) об’єкта дорівнює добутку ймовір-
ностей безвідказної роботи Р,- (/) окремих його елементів:
к
р(І) = Л(/)/>,(і) ... рк(і) = П />,.(0.
6-і
(7-6)
Із формули (7.6) випливає, що надійність складного об’єкта при
послідовному з’єднанні окремих елементів завжди менша надійності
довільного з цих елементів і знижується із збільшенням числа еле-
ментів. Наприклад, якщо число елементів в об’єкті к = 10 з однако-
вою ймовірністю безвідказної роботи Рг (і) — 0,97, то ймовірність
безвідказної роботи всього об’єкта Р (і) = 0,97і0 = 0,74.
При паралельному з’єднанні к елементів в об’єкті забезпечується
дублювання роботи елементів із відказами роботою резервних, пара-
лельно встановлених елементів. Відказ системи настає лише у разі
відказу всіх елементів. Для такого об’єкта
к
Р(0 = 1-П [1-Рг(/)]. (7.7)
І=і
Якщо число паралельно з’єднаних елементів к = 2 з однаковою
ймовірністю безвідказної роботи Рх (/) — 0,90, то Р (І) — 1 —
— (1 - 0,90)2 = 0,99.
Метод підвищення надійності об’єктів через установлення додатко-
вих елементів, що не працюють у нормальних умовах, а вступають
в роботу в моменти відказу системи, називається резервуванням.
Простим прикладом резервування є встановлення на автомобілі за-
72
пасного колеса (ненавантажений резерв) або використання здвоєних
коліс у задніх ведучих мостах автомобілів (навантажений резерв).
Резервування широко застосовують в авіабудуванні та космічній
техніці.
До важливих показників довговічності належать такії
ресурс — наробка об’єкта від початку експлуатації або від її
відновлення після ремонту до настання його критичного стану;
середній ресурс — математичне сподівання ресурсу;
гама-процентний ресурс — це наробка, протягом якої об’єкт
не досягає крайнього стану із заданою ймовірністю у процентів.
Очевидно, що у = 100Р (і). Для багатьох виробів масового вироб-
ництва у = 90 %, тобто використовують 90 %-й ресурс роботи тех-
нічних об’єктів. Це характерне, наприклад, для підшипників ко-
чення.
Під час проектування слід намагатись створювати конструкції
машин високої надійності, які розраховані на економічно оптимальну
довговічність. Але при цьому коефіцієнти запасу міцності не повинні
бути неоправдано високі, а конструкція досить ускладненою. Міні-
мальні значення показників надійності вибирають на основі тех-
ніко-економічного аналізу процесу виробництва та експлуатації ма-
шин.
7.3. Шляхи підвищення надійності машин
Висока надійність машин забезпечується на всіх етапах їх створен-
ня та експлуатації. Шляхи забезпечення надійності при проектуван-
ні зводяться до великої кількості заходів, які повинен виконувати
конструктор при створенні нових чи модернізації вже відомих кон-
струкцій машин. Виділимо деякі з заходів, що сприяють підвищенню
надійності!
1 Створення таких структурних схем машини, щоб число складо-
вих елементів було мінімальним, а надійність кожного елемента була
достатньо високою.
2 . Використання якісних комплектуючих виробів та матеріалів
Ія стабільними фізико-механічними характеристиками. Комплекту-
ючі вироби повинні бути перевірені у відповідних умовах експлуата-
ції, а матеріали — не втрачати своїх властивостей під впливом зов-
нішнього середовища.
1 Широке застосування уніфікованих елементів, що зарекоменду-
іи себе високою надійністю в роботі в інших машинах, а також
підартних виробів, які виготовляються спеціалізованими заводами
прогресивними сучасними технологіями
4 Забезпечення високої надійності резервуванням, тобто введен-
ні у конструкцію додаткових елементів, що не є вкрай потрібними,
<’ дублюють роботу найважливіших робочих елементів машини.
73
5. Оснащення машин контрольними та сигнальними пристроями,
що запобігають виникненню аварійних ситуацій, або таких, що не
дозволяють експлуатацію машини з відхиленнями робочих режимів.
6. Розробка та використання відповідних систем технічних огля-
дів та обслуговування машин протягом усього експлуатаційного пе-
ріоду. Конструкція машини повинна передбачати зручність контролю
та обслуговування найважливіших органів з найменшими затрата-
ми часу.
Фактичні показники надійності (якісні та кількісні) для заново
спроектованої та виготовленої машини можуть бути встановлені
тільки за результатами довгочасних випробувань моделей та дослід-
них зразків. Але заходи, зазначені вище, є важливою і погрібною
передумовою створення машин високої надійності.
7.4. Приклад розрахунку показників надійності
Задача. Визначити ймовірність безвідказної роботи Р (і) об’єкта (наприклад,
замка дверей автомобіля), розрахованого на ресурс 60 000 циклів. На стенді випро-
бувано Л/о = 80 об’єктів з частотою 3000 циклів на годину, тобто за час і = 20 год.
Відкази об’єкта в інтервалі часу Д/ = 4 год характеризуються наведеними нижче
даними:
Інтервал часу, год 0—4 4—8 8—12 12—16 16—20
Число об’єктів Дл/, що ма-
ють відкази 3 2 3 3 5
Розв’язання. Згідно з формулою (7.4) інтенсивність відказів (1/год) для
середини кожного інтервалу часу випробувань становить:
X (2) = 3/(77.4) = 0,0097;
X (6) = 2/(75 • 4) = 0,0067;
X (10) = 3/(72 • 4) = 0,0104;
X (14) = 3/(69 • 4) = 0,0108;
X (18) = 5/(64 . 4) =0,0195.
Якщо припустити, що інтенсивність відказів у часі постійна і дорівнює середньо-
му значенню
Хо == (0,0097 + 0,0067 + 0,0104 4- 0,0108 + 0,195)/5 = 0,0114 год*"1,
то за формулою (7.5) будемо мати
р (і) = ехр (— 0,0114/).
Ймовірність безвідказної роботи об’єкта при і — 20 год (наробка на ресурс
60 000 циклів) Р (20) = 0,796, а при і — 10 год (50 % ресурс) Р (10) = 0,892.
Добуті значення інтенсивностей відказів мають тенденцію до збільшення залеж-
но від часу випробувань. Апроксимуємо X (/) прямою лінією, рівняння якої має вигляд
X (0 = 0,0055 4- 0,0006/.
Тоді ймовірність безвідказної роботи об’єкта
Р (і) = ехр (— 0,0055/— 0,0003/»).
Відповідно Р (20) « 0,794; Р (10) = 0,918.
74
Контрольні запитання
1. Назвіть та дайте означення основних термінів надійності.
2. Охарактеризуйте та запишіть вираз для обчислення ймовірності безвідказної
роботи об’єкта.
3. Охарактеризуйте та запишіть вираз для обчислення інтенсивності відказів
об’єкта.
4. Запишіть основне рівняння теорії надійності та проаналізуйте ймовірність
безвідказної роботи об’єкта на різних стадіях його експлуатації.
5. Яка ваша оцінка ймовірності безвідказної роботи складних об’єктів?
6. Що таке резервування? Наведіть приклади підвищення надійності машин за
допомогою резервування.
7. Назвіть деякі показники довговічності машин.
8. Охарактеризуйте шляхи підвищення надійності машин.
ГЛЛВЛ 8. ТЕХНОЛОГІЧНІСТЬ І ЕКОНОМІЧНІСТЬ МАШИН
ТА ЇХНІХ ДЕТАЛЕЙ
8.1. Поняття про технологічність деталей і машин
Технологічною називають таку конструкцію, яка ви-
готовляється з мінімальними затратами праці, часу та засобів
у конкретних умовах виробництва і забезпечує задані експлуатацій-
ні показники. Технологічність деталі у значній мірі визначається
її формою, раціональним вибором матеріалу та його термообробки,
способом виготовлення заготовки, потрібною точністю виготовлення,
шорсткістю поверхонь, що вимагають обробки різанням, тощо. За-
доволення вимог технологічності є однією з важливих умов створен-
ня економічно доцільних виробів.
Технологічність машин та деталей залежить від обсягу вироб-
ництва. Тому завжди при конструюванні треба мати на увазі одну
її важливих вимог — відповідність конструкції обсягу випуску та
умовам виробництва. Наприклад, деталі ускладненої форми, виго-
юплсні зварюванням окремих елементів, більш технологічні при ви-
пуску малих партій. Такі самі деталі при великосерійному вироб-
ництві доцільно, з точки зору технологічності, виготовляти за до-
рогою об’ємного штампування або лиття. Складні деталі можуть
їй нетехнологічними при використанні універсальних металооб-
’нпіх верстатів. У той же час наявність і можливість використання
•ціалізованого обладнання дає можливість цим деталям стати тех-
'ІОГІЧНИМИ.
Друга вимога технологічності — простота форми та доцільність
іструкції. Простота форми деталей досягається наявністю доступ-
х та простих за формою для механічної обробки поверхонь — цилін-
нчних, конічних або плоских. При цьому доцільність взаємного
імпцення поверхонь узгоджується з базуванням деталі при виго-
«/ісііні та контролі з метою забезпечення відповідної точності.
75
Технологічність деталей не повинна оцінюватись окремо від тех-
нологічності машини в цілому. В ряді випадків спрощення форми
деталей може спричинити значне ускладнення процесу складання ма-
шини, створити труднощі при експлуатації та обслуговуванні, збіль-
шити номенклатуру запасних частин, підвищити вартість ремонтних
операцій.
Отже, машини та їхні деталі треба завжди конструювати відпо-
відно до подальшої технології виготовлення, обсягу і умов вироб-
ництва, умов експлуатації, обслуговування та ремонту.
8.2. Умови забезпечення технологічності
Основними умовами досягнення технологічності деталей та машин
є такі: раціональний вибір способу виготовлення заготовки, призна-
чення доцільних методів механічної обробки деталей та забезпечення
зручності складальних операцій при виготовленні машини.
Заготовки деталей машин. У машинобудуванні заготовки деталей
можна виготовити такими способами: нарізанням із нормального або
спеціального прокату, литтям, куванням, штампуванням і зварюван-
ням. Загальна вимога до заготовок деталей — форма та розміри за-
готовки повинні бути близькими до форми і розмірів готової деталі,
щоб на механічну обробку зняттям стружки залишалась лише фіні-
шна операція для таких поверхонь деталі, що вимагають високої точ-
ності. Вибір форми та способу виготовлення заготовки залежить від
матеріалу деталі, її призначення та характеру навантаження, кіль-
кості, оснащення та стану обладнання на підприємстві.
Нарізання заготовок із прокату використовується для дета-
лей відносно простої форми. В більшості випадків прокат застосову-
ють при виготовленні деталей на автоматичних лініях механічної
обробки деталей. Залежно від форми готової деталі значна частина
матеріалу може йти у відходи виробництва.
Лиття застосовують переважно для виготовлення деталей
складної форми та великих габаритних розмірів (корпусів, станин,
рам). Литтям можна виготовити заготовки з малими припусками на
механічну обробку або навіть без додаткової обробки (точне лиття).
Але литво економічно вигідне лише при багатосерійному або масово-
му виробництві. До недоліків деталей, виготовлених литтям, нале-
жать такії менша міцність, низький опір ударним навантаженням,
а також труднощі у виготовленні виливок з тонкими та різко відмін-
ними у товщині стінками. Через нерівномірність охолодження мета-
лу та його усадку при цьому у виливку можуть виникнути раковини,
тріщини та підвищені внутрішні напруження.
Кування забезпечує заготовкам більш високу міцність по-
рівняно з виливками. Тому ковані заготовки використовують для
більш відповідальних деталей. Ковані заготовки рекомендують засто-
76
совувати для деталей порівняно простих форм. Оскільки кування
малопродуктивне та малоекономічне, його застосовують у більшості
випадків в індивідуальному або малосерійному виробництві.
Штампування гаряче та холодне відрізняється високою
продуктивністю, тому більш вигідне порівняно з куванням. Штампу-
ванням можна виготовити'заготовки деталей більш складної форми
та більш точні, ніж при куванні. Але для штампування заготовок
потрібні матеріал високої пластичності та дороге і складне облад-
нання.
Зварювання використовують для виготовлення деталей,
елементи яких мають форму листів, кутників, труб, швелерів, двс-
таврів та ін. Зварюванням виготовляють такі частини машин, як кор-
пуси, рами, шківи, барабани. Таким способом можна виготовити ду-
же раціональні та легкі конструкції деталей машин. При зварюванні
порівняно з литтям економія металу та зниження вартості деталей
досягає 50 %. Однак виготовлені зварюванням заготовки мають
схильність до викривлення через високі внутрішні напруження.
Щоб усунути такі явища, заготовки, виготовлені зварюванням, слід
піддавати додатковій термообробці.
Механічна обробка деталей. Потрібні кінцеві розміри деталей ді-
ють механічною обробкою заготовок за допомогою різання. Оброб-
зізанням значно дорожча, ніж обробка поверхонь деталей тиском,
у при конструюванні деталей слід намагатися зменшувати обсяг
анічної обробки на металорізальних верстатах. З метою зменшення
содів металу в стружку форма та розміри заготовки повинні бути
близькими до форми і розмірів готової деталі з мінімально допустими-
ми припусками на механічну обробку.
При конструюванні деталей, що вимагають обробки різанням,
Треба надавати такої форми їхнім поверхням, яка б забезпечувала ви-
сокопродуктивні методи механічної обробки. Наприклад, обробка
циліндричних поверхонь точінням чи свердлінням більш продуктив-
на, ніж обробка плоских поверхонь за допомогою фрезерування чи
стругання. Одночасно потрібно передбачати мінімальну кількість
ти мінімальну площу поверхонь деталі, що вимагають механічної
обробки.
Важливе значення для досягнення технологічності деталей мав
передбачення при конструюванні певного металорізального устатку-
йаіііія — універсальних чи спеціальних верстатів, автоматизованих
комплексів та ін. Щоб досягти відповідної точності механічної оброб-
ки, кількість поверхонь базування деталей повинна бути мінімальною,
к кількість оброблюваних поверхонь при тій самій базі — максималь-
ною. Слід мати на увазі також і потребу використання найпростіших
• нисокопродуктивних металорізальних інструментів, а також за-
печення можливості контролю точності виготовлення деталей
допомогою стандартних вимірювальних засобів.
77
Складальні операції. Серед багатьох факторів, що визначають тех-
нологічність машин, складальні операції мають суттєве значення,
бо ці операції достатньо трудомісткі і безпосередньо спрямовані на
забезпечення роботоздатності машини. При конструюванні машин
слід дотримуватись таких умов продуктивного та якісного складання:
1. Повна взаємозамінність окремих деталей чи складальних оди-
ниць, що надходять на складальні операції. Це досягається правиль-
ним назначенням полів допусків з’єднуваних елементів деталей та
граничних відхилень їхньої форми. При складанні повинна забезпе-
чуватись точна означеність взаємного розміщення деталей та певний
ступінь взаємної рухомості чи міцності з’єднання спряжених елемен-
тів деталей.
2. Виключення припасовочних операцій або доробки деталей під
час виконання складальних операцій. Припасовування і доробка дуже
трудомісткі процеси, вимагають багаторазового складання і розби-
рання елементів машини, що різко зменшує продуктивність та якість
складальних робіт.
3. Агрегатний принцип складання — з’єднання деталей в первин-
ні складальні одиниці, потім у самостійні складальні одиниці (агре-
гати) і встановлення останніх у машину. Такий принцип складання
дозволяє проводити поетапний контроль якості складальних одиниць,
а також є потрібною умовою механізації і автоматизації складальних
процесів.
4. Зручність використання монтажних інструментів, доступність
до окремих деталей чи складальних одиниць, що вимагають періо-
дичного регулювання, змащування, ремонту або заміни. Остання умо-
ва забезпечує технологічність машин при експлуатації та обслуго-
вуванні їх.
8.3. Стандартизація при конструюванні машин
Технологічність машин та їхніх деталей пов’язана із стандарти-
зацією.
Стандартизація — встановлення спеціальних обов’язко-
вих норм та правил, яким повинні відповідати певні види виробів
або окремі їхні параметри. Призначення стандартизації — макси-
мальне спрощення та здешевлення виробництва завдяки використан-
ню найдоцільніших, що зарекомендували себе на практиці, видів ви-
робів, їх виконанню, конструктивним формам і розмірам, технічним
і якісним характеристикам тощо.
У машинобудуванні стандартизація має велике технічне та еконо-
мічне значення. Це державна технічна політика, обов’язкова для
всіх галузей, що направлена на обмеження індивідуалізації вироб-
ництва. Стандартизація деталей машин спрощує та прискорює проек-
тування нових машин, створює можливість масового чи великосерій-
78
ного виробництва стандартних деталей із використанням найпрогре-
сивніших технологій, зменшує затрати праці при виготовленні дета-
лей, скорочує номенклатуру та кількість верстатів, інструментів,
знижує витрати машинобудівних матеріалів, полегшує та спрощує
ремонт машин. Завдяки .стандартизації деталей машин значно змен-
шується вартість проектування, виготовлення та експлуатації ма-
шин.
Стандарти в машинобудуванні регламентують: правила оформлен-
ня конструкторської документації; нормальні ряди чисел, на базі
яких вибираються лінійні розміри деталей, потужності двигунів,
кутові та лінійні швидкості, вантажопідйомність та інші величини, що
виражаються числами; машинобудівні матеріали, їхній хімічний
склад, основні механічні властивості та термообробку; шорсткість
поверхні деталей; допуски та посадки; форму та розміри найпошире-
ніших деталей та складальних одиниць (наприклад, кріпильних
різьбових деталей, підшипників кочення, приводних пасів та ланцюгів,
деяких типів муфт); конструктивні елементи багатьох деталей машин
(наприклад, конусності для конічних з’єднань загального призначен-
ня, модулі зубців зубчастих та черв’ячних коліс, діаметри та ширину
шківів); ряди основних параметрів та якісні показники деяких машин.
Розрізняють міжнародні (180), міждержавні (ГОСТ), державні
(наприклад, ДСТУ в Україні), галузеві стандарти та технічні умови.
Найбільш високий рівень мають міжнародні стандарти. Вони роз-
робляються на основі досягнень науки і техніки в найрозвинутіших
країнах. Розробкою таких стандартів займається Міжнародна орга-
нізація з стандартизації (180).
8.4. Економічна оцінка нових виробів
у машинобудуванні
Під час вибору найраціональніших та найдоцільніших варіантів
нових виробів слід порівняти переваги та недоліки різних запропоно-
ваних варіантів за допомогою відповідних техніко-економічних роз-
рахунків, у яких поряд із технічними параметрами є і економічні
Ми >рії—затрати матеріалів, енергії та праці; річний обсяг ви-
і цтва; економічний ефект; собівартість та ін. Техніко-економічні
хунки виконують на всіх етапах створення нових виробів, до
\ точність таких розрахунків повинна поступово зростати.
цільність створення тієї чи іншої нової машини оцінюється за
іими затратами та річним економічним ефектом.
ведені затрати на існуючий та новий зразок машини
чають за формулою
З = 3ВЕВ + Зе, (8.1)
— затрати на виготовлення машини; Ен — нормативний кое-
79
фіцієнт ефективності капітальних вкладень; Зе — затрати при ек-
сплуатації машини.
Перевага віддається тому варіанту машини, який має менші зве-
дені затрати.
Річний економічний ефект від виробництва та
тривалого використання нових машин із ліпшими якісними характе-
ристиками обчислюють за співвідношенням
Ер == (Ев 4-Ее) Ав, (8.2)
де Ев — економія коштів за рахунок більш раціонального виготовлен-
ня машини; Ее — те саме через поліпшення експлуатаційних характе-
ристик машини; Ав — річний обсяг виробництва.
' Економія коштів Ее залежить від довговічності машини. Тому при
малих експлуатаційних затратах коштів і достатній довговічності
машини економічний ефект можна мати при більших затратах кош-
тів на виготовлення машини.
Економічне обгрунтування вибору того чи іншого варіанта кон-
струкції машини може бути здійснене за такими техніко-економічни-
ми параметрами, як матеріалоємність, трудомісткість, собівартість
тощо. Оскільки маса машин в одних випадках відіграє позитивну роль,
а в інших — негативну, часто для оцінки різних варіантів машини ви-
користовують питомі показники, які є відношенням маси виробу до
найхарактернішого його параметра, наприклад продуктивності ма-
шини. Трудомісткість виробу виражається нормованою сумою за-
трат праці (в одиницях часу) на повне його виготовлення. Матеріало-
ємність та трудомісткість значно впливають на собівартість порів-
няльних варіантів заново спроектованих машин.
Контрольні запитання
1. Яка конструкція називається технологічною? Яких вимог при конструюванні
слід дотримуватись для забезпечення технологічності деталей та машин?
2. Назвіть та охарактеризуйте умови забезпечення технологічності.
3. Що таке стандартизація? Яке технічне та економічне значення має стандарти-
зація в машинобудуванні?
4. За допомогою яких показників можна економічно обгрунтувати доцільність
виробництва нових машин?
ГЛАВА 9. ТОЧНІСТЬ ВИГОТОВЛЕННЯ ДЕТАЛЕЙ МАШИН
9.1. Взаємозамінність і поняття
про допуски та посадки
Один із найважливіших показників якості машин, що суттєво
впливає на всі критерії роботоздатності та надійності, а також на
експлуатаційні параметри,— це точність виготовлення та складання
спряжених елементів деталей.
80
Взаємозамінність. Принцип конструювання та виготовлення дета-
лей, що забезпечує можливість правильного складання чи заміни
при ремонтах незалежно виготовлених деталей та складальних оди-
ниць без додаткової обробки і припасовки їх із збереженням відповід-
ної якості та надійності з>єднань, називається взаємозамін-
ністю.
Взаємозамінність — характерна риса сучасного машинобуду-
вання. Без неї було б неможливим серійне чи масове виробництво ма-
шин, а також була б значно ускладнена заміна деталей підчас ре-
монтів.
Розрізняють повну і неповну взаємозамінність. Повна вза-
ємозамінність передбачає правильне з’єднання всіх спряжених де-
талей, що надходять на складальні операції. Вона забезпечується
високою точністю виготовлення деталей. При неповній взаємозамін-
ності досягається правильне з’єднування тільки частини деталей, ви-
готовлених з меншою точністю. Для складання в таких випадках
використовується групове підбирання деталей (селективне скла-
дання) або застосовуються різні компенсатори та інші додаткові тех-
нологічні засоби.
Взаємозамінність деталей машин забезпечується системою до-
пусків та посадок. Загальні положення і основи побудови системи
допусків та посадок для гладких елементів деталей (циліндричних
або обмежених паралельними площинами) із номінальними розміра-
ми до 3150 мм встановлені стандартами: ГОСТ 25346 — 89 і
ГОСТ 25347 — 82.
Поняття про розміри та їхні відхилення. Параметри деталей кіль-
кісно оцінюють за допомогою розмірів. При виготовленні деталей
машин неможливо дістати ідеально точні розміри. Разом з тим для
нормальної роботи машини ідеальна точність виготовлення її деталей
не потрібна. Щоб спряження деталей відповідало цільовому призна-
ченню, їхні розміри повинні знаходитись між двома допустимими гра-
ничними значеннями.
Розмір — числове значення лінійної величини (діаметра, дов-
жини та ін.) у вибраних одиницях. У машинобудуванні розміри наз-
начають в міліметрах. Розміри бувають дійсні, граничні і номінальні
(рис. 9.1).
Дійсний розмір — розмір елемента, що встановлюють
вимірюванням.
Граничні розміри — два гранично допустимі розміри
\ ента, між якими повинен знаходитись (або яким може дорівню-
и) дійсний розмір.
Найбільший граничний розмір — найбільший до-
। гимий розмір елемента.
Найменший граничний розмір — найменший до-
пустимий розмір елемента.
81
Нульова
Рис. 9,1. Граничні розміри і поля допусків для вала та отвору
нульооа
Допуск отвору
Нижнє відхилення
Верхнє відхилення
Номінальний розмір — розмір, відносно якого визна-
чаються відхилення. Номінальні розміри вибирають під час кон-
струювання на основі розрахунків на міцність або за конструктивни-
ми міркуваннями і проставляють на кресленні деталі або з’єднанні
деталей.
Відхилення — алгебраїчна різниця між розміром (дійсним
або граничним) і відповідним номінальним розміром.
Дійсне відхилення — алгебраїчна різниця між дійс-
ним і відповідним номінальним розмірами.
Граничне відхилення — алгебраїчна різниця між гра-
ничним і відповідним номінальним розмірами.
Розрізняють верхнє і нижнє відхилення.
Верхнє відхилення — алгебраїчна різниця між най-
більшим граничним і відповідним номінальним розмірами.
Нижнє відхилення — алгебраїчна різниця між найменшим
граничним і відповідним номінальним розмірами.
Нульова лінія — лінія, що відповідає номінальному роз-
міру, від якої відкладають відхилення розмірів при графічному зо-
браженні полів допусків і посадок. Якщо нульова лінія розміщена
горизонтально, то додатні відхилення відкладають угору від неї,
а від’ємні — вниз.
Поняття про допуски та квалітети. Допуск — різниця між
найбільшим і найменшим граничними розмірами чи алгебраїчна різ-
ниця між верхнім і нижнім відхиленнями (рис. 9.1).
Поле допуску — поле, що обмежене найбільшим і най-
меншим граничними розмірами і визначається допуском та його по-
82
а
А
Отвори
Рис. 9.2. Схема розміщення полів допусків
ложенням щодо номінального розміру. При графічному зображенні
поле допуску обмежене двома лініями, що відповідають верхньому
тл нижньому відхиленням щодо нульової лінії.
Поля допусків для розмірів спряжених елементів деталей встанов-
лені різними для трьох діапазонів номінальних розмірів: малих —
до І мм; середніх — від 1 до 500 мм та великих — від 500 до 3150 мм.
Найуживанішим у машинобудуванні є середній діапазон номінальних
|М> імірів.
Основне відхилення — одне з двох граничних відхи-
лень (верхнє чи нижнє), що визначає положення поля допуску щодо
нульової лінії. В стандартній системі допусків таким є відхилення,
що ближче до нульової лінії.
Для задоволення вимог щодо різних деталей та їхніх посадок із
псиними номінальними розмірами стандартом передбачена гама
д<»п\' ків і основних відхилень, які характеризують положення цих
Л«»Ии ків відносно нульової лінії (рис. 9.2).
83
Розміщення поля допуску щодо нульової лінії, яке залежить від
номінального розміру, позначається буквою латинського алфавіту
(або в деяких випадках двома буквами) — великою для отворів і
малою для валів.
Чим більший допуск на розмір, тим менші вимоги до точності де-
талі, простіше та дешевше її виготовлення. Однак більші деталі важче
виготовляти порівняно з меншими з однаковими відхиленнями від
номінальних розмірів. Тому допуск назначається залежно від розмі-
рів деталі. Крім цього, деталі з одним і тим же номінальним розмі-
ром можуть бути виготовлені більш точно (з меншим полем допуску)
і менш точно (з більшим полем допуску). Стандарт передбачає 20 ква-
літетів.
К в а л і т е т (ступінь точності) — сукупність допусків, що від-
повідають одному рівню точності для всіх номінальних розмірів.
У порядку зменшення точності квалітети позначаються так: 01,
0, 1,2, 3, ..., 17. Квалітети 01, 0, 1, 2, 3 і 4 призначені для кінцевих
мір довжини, калібрів і т. д.; у квалітетах 5... 13 даються допуски
для розмірів спряжених поверхонь деталей; в квалітетах 14...17 —
для розмірів неспряжених поверхонь.
Оскільки поле допуску визначається квалітетом, а його положення
щодо нульової лінії позначається буквою, граничні відхилення лі-
нійних розмірів можуть бути вказані на кресленнях деталей умовни-
ми позначеннями полів допусків. При цьому за числом, що вказує
розмір, йде умовне позначення поля допуску, яке складається з бук-
ви та цифри, що позначає квалітет, наприклад 20Н7 або 42е8.
Поле допуску і граничні відхилення даються в таблицях стандар-
ту, і деколи вони проставляються в дужках після умовного позначення
поля допуску: 20Н7 (+0,021); 42е8 ( Відхилення, що дорів-
0,089/
нюють нулю, у позначенні не проставляються. Два граничних від-
хилення можуть бути додатиіми (якщо два граничних розміри більші
від номінального), від’ємними (два граничні розміри менші від номі-
нального) і одне додатнім, друге від’ємним (один граничний розмір
більший, а другий менший від номінального).
Посадки деталей та системи утворення посадок. Під час складання
двох спряжених деталей розрізняють охоплюючу та охоплювану
поверхні. Хоча не всі такі поверхні є циліндричними, умовно нази-
вають охоплюючу поверхню отвором, а охоплювану — валом.
Згідно зі стандартом встановлена така термінологія:
вал — термін, що умовно вживається для позначення зовнішніх
(охоплюваних) елементів деталей, включаючи і нециліндричні еле-
менти;
основний вал — вал, верхнє відхилення якого дорівнює
нулк?,
84
отвір — термін, що умовно вживається для позначення внутріш-
ніх (охоплюючих) елементів деталей, включаючи і нециліндричні
г елементи;
основний отвір,— отвір, нижнє відхилення якого дорів-
нює нулю. ;
За різницею між розмірами отвору та вала можна судити про
вільність відносного руху спряжених деталей або про міцність їх-
нього нерухомого з’єднання. Характер з’єднання деталей визнача-
ється поняттям «посадка».
Посадка — характер з’єднання двох деталей, що визначається
різницею їхніх розмірів до складання.
Номінальний розмір посадки — номінальний роз-
мір, спільний для отвору і вала, що утворюють з’єднання.
Залежно від розмірів спряжених поверхонь деталей у з’єднанні
може виникнути зазор або натяг.
Зазор — різниця розмірів отвору і вала до складання, якщо
розмір отвору більший за розмір вала.
Натяг — різниця розмірів вала і отвору до складання, якщо
розмір вала більший за розмір отвору.
Всі посадки поділяють на три групи: посадки з зазором, посадки
в натягом і перехідні посадки.
Посадка із зазором — посадка, при якій завжди забез-
печується зазор у з’єднанні, тобто найменший граничний розмір
отвору більше найбільшого граничного розміру вала чи дорівнює
йому (поле допуску отвору розміщене над полем допуску вала).
До посадок із зазором належать також посадки, в яких нижня
границя поля допуску отвору збігається з верхньою границею поля
допуску вала.
Посадка з натягом — посадка, при якій завжди забезпе-
чується натяг у з’єднанні, тобто найбільший граничний розмір отвору
менше найменшого граничного розміру вала чи дорівнює йому (поле
допуску отвору розміщене під полем допуску вала).
Перехідна посадка — посадка, при якій можливі як за-
р, такі натяг у з’єднанні залежно від дійсних розмірів отвору і вала
ля допусків отвору і вала перекриваються частково чи повністю).
Розрізняють дві системи утворення посадок — систему отвору
истему вала.
Посадки в системі отвору — посадки, в яких по-
цчбні зазори і натяги утворюються з’єднанням різних полів допус-
ків валів із полем допуску основного отвору.
Посадки в системі вала — посадки, в яких потрібні
0Л.іори і натяги утворюються з’єднанням різних полів допусків от-
ворів із полем допуску основного вала.
На рис. 9.3 показана схема утворення посадок у системі отвору
І в системі вала. Посадки в системі отвору утворюються зміною роз-
85
Посадки в системі отвору
нульова
лінія о
Поля допусків валів
Посадки в системі дала
Поля допусків отворів
Рис. 9.4. Позначення по-
садки та поля допуску у
технічній документації
Рис. 9.3. Утворення поса-
док у системі отвору та у
системі вала
міщення полів допусків валів щодо поля допуску основного отвору,
а посадки в системі вала — зміною розміщення полів допусків от-
ворів ЩОДО ПОЛЯ допуску ОСНОВНОГО Ве.ла. Для системи отвору і для
системи вала на рис. 9.3 цифрами позначені: 1,2 — поля допусків
посадок із зазорами; 3, 4, 5 — поля допусків перехідних посадок;
6 — поля допусків посадок з натягом.
Якщо в технічній документації зазначається розмір з’єднаних еле-
ментів двох деталей, то в позначення посадки в системі отвору вхо-
дять номінальний розмір і поля допусків кожного елемента, почина-
ючи з отвору, наприклад 40Н7/&6 або 40Н7—£б, або 40 Поле до-
пуску основного отвору завжди позначається літерою Н (див.
рис. 9.2).
У системі вала основним є вал і його поле допуску позначається
літерою Ь. У позначення посадки в системі вала входить номінальний
розмір, спільний для двох з’єднаних елементів (отвору та вала), за
яким іде позначення полів допусків для кожного елемента, напри-
клад 30Р7/Н6 або 30Р7—Н6, або ЗО
Обидві системи утворення посадок є рівноправними. Однак систе-
ма отвору в деякій мірі має переваги, що обумовлено використанням
певного асортименту різального інструменту для обробки отворів.
Приклади проставляння посадок та полів допусків на складаль-
них кресленнях та кресленнях деталей показані на рис. 9.4.
86
отвір — термін, що умовно вживається для позначення внутріш-
ніх (охоплюючих) елементів деталей, включаючи і нециліндричні
елементи;
основний отвір — отвір, нижнє відхилення якого дорів-
нює нулю.
За різницею між розмірами отвору та вала можна судити про
вільність відносного руху спряжених деталей або про міцність їх-
нього нерухомого з’єднання. Характер з’єднання деталей визнача-
ється поняттям «посадка».
Посадка — характер з’єднання двох деталей, що визначається
різницею їхніх розмірів до складання.
Номінальний розмір посадки — номінальний роз-
мір, спільний для отвору і вала, що утворюють з’єднання.
Залежно від розмірів спряжених поверхонь деталей у з’єднанні
може виникнути зазор або натяг.
Зазор — різниця розмірів отвору і вала до складання, якщо
розмір отвору більший за розмір вала.
Натяг — різниця розмірів вала і отвору до складання, якщо
розмір вала більший за розмір отвору.
Всі посадки поділяють на три групи: посадки з зазором, посадки
й натягом і перехідні посадки.
Посадка із зазором — посадка, при якій завжди забез-
печується зазор у з’єднанні, тобто найменший граничний розмір
<піюру більше найбільшого граничного розміру вала чи дорівнює
Лому (поле допуску отвору розміщене над полем допуску вала).
До посадок із зазором належать також посадки, в яких нижня
іраниця поля допуску отвору збігається з верхньою границею поля
допуску вала.
Посадка з натягом — посадка, при якій завжди забезпе-
чується натяг у з’єднанні, тобто найбільший граничний розмір отвору
• іше найменшого граничного розміру вала чи дорівнює йому (поле
іуску отвору розміщене під полем допуску вала).
Перехідна посадка — посадка, при якій можливі як за-
», такі натяг у з’єднанні залежно від дійсних розмірів отвору і вала
ля допусків отвору і вала перекриваються частково чи повністю).
Розрізняють дві системи утворення посадок — систему отвору
истему вала.
Посадки в системі отвору — посадки, в яких по-
бні зазори і натяги утворюються з’єднанням різних полів допус-
। валів із полем допуску основного отвору.
Посадки в системі вала — посадки, в яких потрібні
«ори і натяги утворюються з’єднанням різних полів допусків от-
»ін із полем допуску основного вала.
На рис. 9.3 показана схема утворення посадок у системі отвору
<і системі вала. Посадки в системі отвору утворюються зміною роз-
87
Прилегла
Рис. 9.5. Відхилення форми деталей із плоскою поверхнею
ками, що призначаються за конкретних умов роботи спряжених де-
талей.
Відхилення форми. Згідно з ГОСТ 24642—81 до відхилень форми
деталей з плоскими поверхнями, що підлягають спряженню, належать
непрямолінійність та неплощинність (рис. 9.5).
Непрямолінійність — відхилення від прямої лінії про-
філю перерізу поверхні площиною, нормальною до неї в заданому
напрямі.
Неплощинність — відхилення від прямолінійності в до-
вільному напрямі по поверхні, наприклад випуклість, вигнутість.
Циліндричні поверхні можуть мати відхилення форми в поперечно-
му і в поздовжньому перерізах. У поперечному перерізі можливе від-
хилення контуру поверхні від правильного кола — некругл ість,
частковими видами якої є огранка та овальність (рис. 9.6, а), що ха-
рактеризується рІЗНИЦеЮ б/тах —^тіп-
У поздовжньому перерізі циліндричних поверхонь можливі такі
відхилення форми: бочкоподібність, вигнутість, сідлоподібність та
конусність (рис. 9.6, б).
Сідлоподібність Конусність
Рис. 9.6. Відхилення форми деталей СІтах^тіп ^тах'^тіп
із циліндричними поверхнями Д -----2---- ---------5----
б
88
Рис. 9.7. Позначення граничних відхилень форми деталей на кресленнях
Граничні відхилення форми циліндричних поверхонь обмежують-
ся полями допусків на діаметр цих поверхонь.
Відхилення розміщення поверхонь. Стандарт передбачає такі
Відхилення розміщення поверхонь деталей!
а) для площин: непаралельність, неперпендикулярність;
б) для циліндричних поверхонь: неспіввісність, радіальне та
торцеве биття;
в) для осей: перекіс осей, відхилення від правильного розміщення
осей, що перетинаються, та мимобіжних осей.
Умовні позначення на кресленнях. Граничні відхилення форми та
нщення поверхонь позначаються на кресленнях згідно з
>Т 2.308—79. Знаки умовного позначення допусків форми та
иіщення поверхонь наведені в табл. 9.1.
На кресленнях (рис. 9.7) знак та числове значення відхилення
пписують у прямокутну рамку, розділену на дві або три частини.
В першій частині (ліворуч) зазначають знак допуску, а в другій —
числове значення граничного відхилення в міліметрах, а в третій —
рне позначення бази або іншої поверхні. Бази позначають заті-
им рівнобічним трикутником або великою літерою. Напрям від-
-:у лінії зі стрілкою повинен відповідати напряму вимірювання
підХИЛЄННЯ.
9.3. Шорсткість поверхонь деталей,
її оцінка та технологічні шляхи забезпечення
На поверхнях деталей е сліди механічної обробки, які проявля-
ся у вигляді сукупності виступів та впадин різних форм і розмірів,
ігерій оцінки якості обробки поверхонь — це показник, який на-
їсться шорсткістю поверхні.
Згідно з ГОСТ 2789—73 шорсткість поверхні оцінюється такими
параметрами: Ка — середнє арифметичне відхилення профілю; —
инсота нерівностей профілю за десятьма точками; Ктах — найбіль-
। -» висота нерівностей профілю; 8т — середній крок нерівностей;
середній крок місцевих виступів профілю; гір — відносна опор-
довжина профілю.
89
Таблиця 9.1. Знаки видів допусків форми та розміщення поверхонь
Група допуску Вид допуску Знак
Допуск форми Допуск прямолінійності > площинності » круглості > циліндричності > профілю поздовжнього перерізу
Допуск розміщення Допуск паралельності » перпендикулярності > нахилу » співвісності > симетричності Позиційний допуск Допуск перетинання осей —і \| © 114 ' х
Сумарні допуски форми та розміщення Допуск радіального биття » торцевого биття » биття в заданому напрямі
Допуск повного радіального биття » повного торцевого биття
Допуск форми заданого профілю » форми заданої поверхні
90
Рис. 9.8. До визначення параметрів шорсткості поверхонь деталей
На рис. 9.8 показано профілограму поверхні та її параметри. Се-
реднє арифметичне відхилення пофілю Ка — це середнє арифметичне
абсолютних значень відхилень профілю в межах базової довжини /:
і г і п
Ка ІУіі,
‘ 0 " •=!
де п — число вибраних точок профілю в межах базової довжини;
уі — відстань між ї-ю точкою профілю та середньою лінією т.
Параметр Кг — сума середніх абсолютних значень висот п’яти
найбільших виступів профілю і глибин п’яти найбільших впадин
профілю в межах базової довжини:
і / 5 5 \
Кх = 2 І і тах | Ч~ 2 І шіп |) •
0 і—І /
Вимоги до шорсткості поверхні деталі встановлюють одним або кіль-
। * і параметрами, якщо це потрібно для забезпечення експлуатаційних
тивостей поверхні. Найуживанішими є параметри Ка або Кх;
іметр Кг використовують для грубо оброблених та особливо чис-
і.і ч поверхонь. Надають перевагу параметрам Кх і Ка, поданим у
тибл. 9.2.
Чисті поверхні з малою шорсткістю підвищують міцність та ко-
розійну стійкість деталей, зменшують тертя та спрацьовування
В спряженнях рухомих деталей. Однак при цьому в значній мірі
Таблиця 9.2. Рекомендовані значення параметрів К? і Ка
Параметр шорсткості, мкм Поверхня
грубо оброблена чиста особливо чиста
к. 200; 100; 50; 25; 12,5; 10 — 0,80; 0,40; 0,20; 0,100; 0,050; 0,025
к. 3,2; 1,6; 0,80; 0,40; 0,20; 0,100; 0,050; 0,025
91
Таблиця 9.3. Параметри шорсткості поверхонь для цеяких методів
механічної обробки
Вид поверхні Метод обробки Параметр шорсткості
На
100 50 25 12,5 10 3,2 1.6 0,8 0,4 0,2
Зовнішня циліндрич- на Обточування: попереднє чистове тонке X X X X X X X X X X
Шліфування: попереднє чистове тонке X X XX X
Внутрішня циліндрич- на Розточування: попереднє чистове тонке X X X XX X X X X X
Розвірчування Протягування Свердління X X X X X X X X
Шліфування: попореднє чистове X X X
Плоска Стругання: попереднє чистове X X X X X
Фрезерування: попереднє: чистове X X X X X X
Торцеве точіння: попереднє чистове X X X X X X
Плоске шліфування: попереднє чистове X X X
92
вростає вартість механічної обробки деталей. Тому вибір параметрів
шорсткості поверхонь деталей повинен бути економічно обгрунто-
ваним.
Безпосереднього зв’язку між квалітетами точності розмірів та
іараметрами шорсткості поверхонь не існує. Але не допускається
іисока точність розмірів із'-значною шорсткістю поверхонь, оскільки
іисота нерівностей може бути співрозмірною з допуском на розміри.
Іоверхні деталей, що призначені для з’єднань по посадках, повинні
іати параметр шорсткості Ка у межах 3,2—0,20 мкм.
Для позначення шорсткості поверхні на кресленнях деталей ви-
користовують один із таких знаків» — вид механічної обробки
конструктором не встановлюється; — поверхня утворена зніман-
ням шару матеріалу (обточування, фрезерування, шліфування);
— необроблена поверхня або оброблена без знімання шару <
матеріалу (кування, штампування, прокатування).
Значення параметра шорсткості вказують так: для параметра Ка —
/,6/
без символу, наприклад \ , а для параметра Кг — із символом, на-
Ег <0/
приклад ч / .
Вибираючи параметри шорсткості поверхонь, що вимагають ме-
клиічної обробки, треба враховувати технологічні можливості різних
методів обробки. Деякі орієнтовні дані з цього приводу наведені в
іибл. 9.3.
Контрольні запитання
І. Що таке взаємозамінність деталей машин?
2. Які розміри розрізняють при виготовленні деталей? Що таке відхилення роз-
міру і які бувають відхилення?
3. Що таке допуск, поле допуску і квалітет?
4. Дайте визначення посадки деталей і які бувають посадки. Наведіть прикла-
ді умовного позначення посадок.
5. Охарактеризуйте використання різних посадок у з’єднаннях деталей машин.
6. Назвіть відхилення, що характеризують точність форми та взаємного розмі-
и*кня поверхонь деталей.
7. Що таке шорсткість поверхонь деталей? Назвіть параметри, що характеризу-
шорсткість.
8. Що мають на увазі при назначенні параметрів шорсткості поверхонь деталей?
93
ГЛАВА 10. ПОНЯТТЯ ПРО ОПТИМАЛЬНЕ
ТА АВТОМАТИЗОВАНЕ ПРОЕКТУВАННЯ
10.1 . Загальні відомості
Проектування будь-якого виробу чи технічного об’єкта пов’яза-
не з розв’язуванням задач пошукового конструювання трьох типів.
Задачі першого типу — пошук і вибір найефективнішого фізично-
го принципу дії об’єкта для конкретних умов роботи. Наприклад,
при проектуванні вантажопідйомного пристрою в основу може бути
покладений ручний, електричний чи гідравлічний привод або можли-
ва комбінація їх.
Задачі другого типу — пошук і вибір найраціональнішого техніч-
ного рішення для прийнятого фізичного принципу дії. При розв’я-
зуванні цих задач варіюють конструктивними елементами та їхніми
ознаками для знаходження найдоцільнішого поєднання їх. Розв’я-
зування таких задач є матеріалізацією фізичного принципу дії або
технічної ідеї.
Задачі третього типу — визначення оптимальних значень пара-
метрів прийнятого технічного рішення. При розв’язуванні цих задач
комбінують параметри до тих пір, поки не дістануть їхні оптимальні
співвідношення.
Проблема вибору найкращого конструктивного рішення, що скла-
дається із задач трьох указаних типів, розв’язується методами опти-
мізацїї.
Завдяки зусиллям багатьох інженерів та математиків методи
оптимального проектування розвинулись у важливий розділ приклад-
ної математики, а саме: автоматизоване оптимальне проектування
стало однією із найефективніших областей використання ЕОМ. Ви-
значення на ЕОМ оптимальних параметрів технічних об’єктів знач-
но прискорює проектування, підвищує його якість та дає прямий
суттєвий за розмірами економічний і технічний ефект.
Дістати оптимальне рішення — це значить вибрати такий варіант
конструкції машини, який мав би більші переваги при зведених до
мінімуму недоліках, тобто йдеться про вибір ліпшого варіанта, що
найбільше задовольняє поставлену мету. Наприклад, машина повин-
на мати високу надійність та продуктивність при малій масі та ма-
лих затратах енергії.
Вибір варіанта передбачає наявність критерію порівняння, що
дає змогу зазначити ліпший із наявних варіантів. Критерій порівнян-
ня різних варіантів називається критерієм оптимізації.
Кожній меті оптимального проектування відповідає певний критерій
оптимізації. Наприклад, якщо метою оптимізації деталі або машини
в цілому є забезпечення мінімальної маси, то критерієм оптимізації
буде маса об’єкта.
94
Порівняння варіантів конструкції машини при проектуванні
може здійснюватись за кількома критеріями одночасно. У такому ра-
й мають бути багатокритеріальні задачі оптимального проектування.
Існує такий основний принцип оптимізації: оцінка доцільності
об’єкта даного класу визначається ефективністю його функціонуван-
ня у виробі більш високого класу. Наприклад, оптимальність пере-
даточного числа головної передачі автомобіля треба оцінювати
«а його впливом на роботу всієї трансмісії. Оптимальність передаточ-
них чисел трансмісії повинна оцінюватись в об’єкті більш високого
класу, тобто всього автомобіля. Такою оптимізацією досягають по-
ірібних тягово-швидкісних показників автомобіля.
Із підвищенням класу виробу мета оптимізації стає більш загаль-
ною, а для об’єктів великої складності (комплексів) має соціально-
економічний характер (наприклад, умови оптимізації комплексу
устаткування для автоматизованого виробництва певних деталей).
У більшості випадків можна використовувати локальну або внутріш-
ню оптимізацію окремих елементів чи складальних одиниць об’єкта,
нка є корисною і для глобальної оптимізації.
10.2 . Теоретичні аспекти оптимізації
Інженерна оптимізація конкретного об’єкта (деталі, складальної
одиниці чи машини в цілому) починається з формулювання задачі,
до якого входить таке:
І. Визначення критерію, що характеризує якість об’єкта (крите-
рію оптимізації^). Критеріями оптимізації можуть бути такі
показники: маса, надійність, коефіцієнт корисної дії, продуктивність,
трати енергії, габаритні розміри, точність, довговічність та ін.
2. Установлення незалежних змінних параметрів (парамет-
і оптимізації), що впливають на критерій оптимізації.
їх параметрів оптимізації може бути кілька — х2, •••> хп- При
йнуванні цих параметрів можна дістати різні варіанти об’єкта,
о варіанти з довільним значенням критерію оптимізації Окре-
араметри оптимізації можуть мати певний взаємозв’язок, що ви-
ає умови функціонування об’єкта. Такі взаємозв’язки описуються
.ою системою ізтрівнянь зв’язку (рівнянь рівноваги,
сності деформацій, умов міцності, кінематичних співвідношень).
Ю число рівнянь зв’язку дорівнює числу параметрів оптиміза-
т. = п), то задача оптимізації має єдиний розв’язок. У практиці
ктування зустрічаються задачі, в яких т < п. Кожна така зада-
іає кілька розв’язків і становить об’єкт оптимізації.
Число п параметрів оптимізації може бути різним. Із збільшенням
<ладність та багатоваріантність задачі зростають.
/ деяких випадках зміна параметрів оптимізації допускається
вних межах, що визначаються призначенням об’єкта, технологією
95
виготовлення, вимогами стандартів та ін. Згідно з такими причинами,
обмеження, що накладаються на параметри оптимізації об’єкта для
виконання ним заданих функцій, називаються конструктив-
ними. Призначення обмежень є важливим етапом постановки і а
подальшого розв’язування задач оптимального проектування. Не-
врахування деяких обмежень може призвести до невірного результа-
ту, а надмірні обмеження можуть ускладнити розрахунок та звузити
область проектування.
3. Розробка математичної моделі, що відображає взаємозв’язок
критерію оптимізації з параметрами оптимізації. Постановка задачі
оптимізації на даному етапі зводиться до формалізованого опису
критерію оптимізації через параметри оптимізації за допомогою
математичної залежності
£ = <р (х) =з (%!, х2, , хп).
Така залежність називається цільовою функцією.
Цільова функція може мати простий або складний вигляд. Все
залежить від кількості параметрів оптимізації та їхнього взаємозв’яз-
ку з критерієм оптимізації.
Розв’язування задачі оптимізації об’єкта зводиться до визначення
значень х01, х02, ..., хол параметрів оптимізації, при яких задовольня-
ються всі обмеження і цільова функція набуває екстремального (мі-
німального чи максимального) значення: <р (х) -> ехігешит.
Визначені в результаті розв’язування задачі значення х01, х02, ...,
хоп параметрів називаються оптимальним розв’язком.
Якщо на параметри оптимізації не накладається ніяких обмежень,
то в такому разі розв’язується задача з визначення безумовного екс-
тремуму цільової функції.
Існують багатокритеріальні задачі оптимізації складних об’єктів.
Формулювання таких задач досить складне. Тому для оцінки ефектив-
ності об’єкта треба сформувати комплексний критерій оптимізації
= Г (£ь £к), що об’єднує кілька окремих критеріїв
Враховуючи те, що кожний ї-й критерій залежить від своїх пара-
метрів, тобто = <Рі (х) == ф/ (хь х2, ...» хп), умова оптимального
варіанта об’єкта проектування може бути записана у вигляді умови
екстремуму цільової функції:
Р (§) = Р [<Рі (*). ф2 (х), , <рА (х)] -> ехігетит.
Складність створення цільової функції в багатокритеріальних
задачах оптимізації об’єктів обумовлюється потребою оцінки ступе-
ня важливості окремих критеріїв якості.
Тепер розроблено багато методів розв’язування задач оптиміза-
ції при різних видах цільової функції, рівнянь зв’язку та обмежень,
що накладаються на параметри оптимізації. Ці методи умовно можна
розділити на дві групи: класичні (метод диференціального числення,
96
метод множників Лагранжа, варіаційне числення) і математичного
програмування (методи лінійного та нелінійного програмування, ме-
тод динамічного програмування та ін.). Ці висвітлені в спеціальній
літературі методи дозволяють розв’язувати досить загальні задачі оп-
тимізації технічних об’єктів та систем. Важливим фактором можли-
вості розв’язування їх є забезпеченість швидкодіючими ЕОМ, здат-
ними виконувати математичні операції з великими масивами інфор-
мації.
10.3 . Поняття про автоматизоване проектування
Із ростом складності сучасних технічних об’єктів стає все важче
оцінювати конкретний варіант проекту, його відповідність вихідним
вимогам та найпрогресивнішим тенденціям сучасної техніки. При
цьому збільшується і число можливих варіантів проектних рішень,
які треба детально та глибоко аналізувати. Одночасно нетворчі тру-
домісткі види роботи конструкторів, що пов’язані з пошуком різної
інформації про стандартні елементи, матеріали та їхні характеристи-
ки, відомі та випробовані в експлуатації конструкції, а також роботи
по викреслюванню типових зображень різних елементів, стали домі-
нуючими. Частка творчої праці в загальному обсязі проектування
зменшилась до 20—ЗО %. Але продуктивність праці проектувальників
залишається практично незмінною, і тому час виконання проектних
робіт виріс настільки, що в деяких випадках став більшим від строку
експлуатації технічних об’єктів.
Така ситуація спричинила відповідну зміну та потребу впорядку-
вання процесу і технології виконання проектних робіт. Ускладнення
। тструкції сучасних об’єктів і, як наслідок, збільшення обсягу
)ібної для конструктора інформації, сприяла появі нових методів
іцювання та практичного застосування технічної інформації у
ц іяді автоматизованого проектування. При ав-
іоматизованому проектуванні конструктор ставить задачу для ЕОМ,
а машина обробляє весь обсяг потрібної інформації, систематизує
його і робить первинне підбирання варіантів розв’язків. За кон-
( іруктором залишається право вибору остаточного рішення. Для
нікого взаємного спілкування конструктора з ЕОМ створені сис-
теми автоматизованого проектування (САПР).
САПР — організаційно-технічна система, що призначена для ав-
томатизованого проектування і складається з комплексу засобів ав-
। гітизації проектних робіт та відповідних підрозділів проектної
шізації. Об’єктами проектування за допомогою САПР можуть
і різні вироби (деталі, складальні одиниці, комплекси), техноло-
і процеси та організаційно-технічні системи. За допомогою САПР
ігається високий техніко-економічний рівень створення об’єктів,
іне зменшення часу та вартості проектування.
97
САПР мають блочну структуру, тобто складаються із окремих
підсистем, в яких виконуються закінчені операції. Підсистеми за
характером об’єктів поділяють на об’єктно-орієнтовані (пов’язані
з проектуванням конкретних об’єктів) та об’єктно-незалежні (при-
значені для уніфікованих процедур та операцій).
До складу компонентів підсистем, що забезпечують роботу САПР,
входять: математичне забезпечення (теорія, методики розрахунків,
математичні моделі); програмне забезпечення (транслятори, опера-
ційні системи, пакети прикладних програм); технічне забезпечення
(засоби обчислювальної техніки, у тому числі дисплеї, графопобудо-
вувачі); інформаційне забезпечення (штатний розклад, інструкції).
У перспективі САПР орієнтована на поєднання з автоматизованим
виробництвом. Результат автоматизованого проектування — тех-
нічна документація, яка складається з креслень, що виконуються на
креслярських автоматах за відповідними програмами, та з техніч-
них умов для контролю деталей і складання їх. Разом з тим така за-
кодована інформація може поступати безпосередньо в автоматизова-
ні системи виробництва деталей та складання їх. Таким чином, САПР
у комплексі з системою автоматизованого виробництва сприяє пере-
творенню безпосередньо ідеї та задумки конструктора в готові ви-
роби.
10.4 . Приклади оптимізації деяких об’єктів
Задача 10.1. Сконструювати резервуар циліндричної форми заданого об’єму У»
що має мінімальну зовнішню поверхню Д (потрібна мінімальна кількість листового
матеріалу для виготовлення резервуара).
Розв’язання. 1. Критерієм оптимізації щодо умови задачі є зовнішня по-
верхня резервуара, тобто = А.
2. Параметрами оптимізації, що визначають зовнішню поверхню резервуара, е
діаметр О та висота Н резервуара.
Обмеження, що накладаються на параметри оптимізації:
V = лО2///4 — рівняння зв’язку параметрів;
0 < В, Н < оо — конструктивне обмеження.
3. Цільова функція заданої задачі оптимізації
8а = А = лОН лВ2/2
та повна математична модель
= лВЯ лВ2/2 тіп;
лВ2Я/4 — V = 0;
0<В, Н< оо.
4. Розв’язування такої простої задачі можна виконати так: із рівняння зв’язку
параметрів маємо Н = 4И/(лВ2). Тоді цільова функція набуває вигляду
4У , лО2
8 А = А = О + 2 *
98
Рис. 10.1. Схеми на-
вантаження балки для
пересування електро-
талі
а*0
х*1/і
Х-І
Умова мінімуму поверхні А резервуара
<ІА г. л
-їд=--ог + "°=0-
Із записаної умови маємо И = Відповідно потрібна висота резервуара
Н - 1У4У/л.
Отже, для конструювання циліндричного резервуара із заданим об'ємом V требі
віяти О = Н = "|У4У/л- Тоді буде мінімальною зовнішня поверхня резервуара і
відповідно мінімальні витрати матеріалу.
Задача 10.2. Встановити оптимальне розміщення опор несучої двотаврової бал-
ки для пересування електроталі за умови мінімальної маси балки (рис. 10.1). На бал-
ку довжиною І діє сила Г, координата точки прикладання якої змінюється в межах
0 < х < І.
Розв'язання. 1. Маса стандартної двотаврової балки пропорційна осьово-
му моменту опору її перерізу, який визначається за умови міцності балки на згин
•« формулою №0 > Мтах/[о]. У свою чергу, ЇГО пропорційний максимальному зги-
нальному моменту Лїтах для вибраного допустимого напруження [о]. Тому критерій
оптимізації балкн за її масою = | Мтах |.
2. За параметр оптимізації візьмемо розмір а (див. рис. 10.1), що визначає роз-
міщення опор балки.
Конструктивне обмеження розміру а: 0 а < ї/2.
3. Якщо максимальний згинальний момент залежить від сили Р, розміру а та
координати х точки прикладання сили, то цільову функцію запишемо у вигляді
8т = І мт„ І = ІМпах (Г, а, х) |.
Математична модель даної задачі оптимізації
8т = І ^шах І ГПІП;
0<х</; 0<а<//2.
4. У даній задачі встановлювати залежність Мтах (Г, х, а) немає потреби, бо
пчгпидно, що максимальні згинальні моменти в балці е при таких координатах точки
прикладання сили Р: х = 0; х~ //2; х — І (див« епюри згинальних моментів на
І
Рис. Ю.2. Схема зубчастої передачі
з послідовно розміщеними колесами
рис. 10.1);
ІМ (Г, 0, а) | = | М (В, І, а)\—Раі
р І — 2а
| М (Г, 1/2, а) | = -у •
Із записаних виразів випливає, що із
збільшенням розміру а моменти | М „(Р, 0,а)|
і | М (Р, І, а) | зростають, а | М (Р, 1/2, а) |
зменшується. Тому І (Р, х, а) | ->
-► тіп, якщо є рівність
Р І — 2а
ра = ~2---------
а
звідки а « //6. При такому значенні розміру а маса несучої балки буде мінімальною.
Задача 10.3. Для зубчастої передачі, що складається з трьох послідовно розмі-
щених зубчастих коліс і має загальне передаточне число и =*= (рис. 10.2), знай-
ти проміжні передаточні числа =* та и3 « що забезпечують мінімальну
масу передачі за умови виготовлення зубчастих коліс у вигляді суцільних дисків од-
накової товщини.
Р о з в’ я з а н н я. 1. За умовою критерієм оптимізації заданої зубчастої пере-
дачі є маса трьох зубчастих коліс. Оскільки маса пропорційна сумі площ торцевих
поверхонь Ак зубчастих коліс (колеса виготовлені з одного матеріалу і мають одна-
кову товщину дисків), беремо = Лк.
2. Параметрами оптимізації, що визначають площу торцевих поверхонь зубчас-
тих коліс, є проміжні передаточні числа их та які відображають співвідношення
діаметрів зубчастих коліс.
Обмеження, що накладаються на параметри оптимізації: и^и3 = и — рівняння
зв’язку параметрів; 0 < иІ9 < оа — конструктивне обмеження.
3. Цільова функція даної задачі оптимізації
я « « « п^і о
йт=Лн = — + ----—(І+ «*+«’).
Діаметр виразимо через міжосьову відстань передачі а (рис. 10.2), що висту-
пає як незалежний параметр:
а
а = 0,5 (<і1 а3) + ^2 а^° = 0(5 0 [ ц) । •
Остаточний запис цільової функції
ла2 1 4- «і +
= Лк - 4 (0>5 Ц) + .
Математична модель задачі оптимізації
ла2 4- иі + и*
8т в "Т* (0,5 (1 4- и) 4- ** т,п;
и — иги2 = 0; 0 < и1г иа < оо.
4. Розв’язок даної задачі оптимізації можна дістати в замкнутому вигляді. По-
трібна умова екстремуму для цільової функції
па» 2«і (0,5 (І 4- “) + «і)* — 2 (0,5 (1 4- “) + «і) 0 4-4- “’)
^«і = 4 (0,5(1 4-й) 4-«іР =0-
100
Із записаної умови дістаємо:
а) 0,5 (1 4- и) 4- и2 — 0 або « —0,5 (1 4“ и).
Такий результат не задовольняє взяте обмеження;
б) иг (0,5 (1 4- и) 4* “і) — (1 4~ 4- «’)в 0.
Звідси маємо иг = 2 (1 4- м2)/(1 4" и), а використовуючи рівняння зв'язку пара-
метрів, визначаємо и% — 0,5и 0 4- м)/(1 4- и2).
Добуті вирази для проміжних передаточних чисел заданої зубчастої передачі
дають змогу обчислити співвідношення діаметрів зубчастих коліс, при яких досяга-
ється мінімальна їхня сумарна маса. Наприклад, якщо загальне передаточне число
а * 1, то = 2, а и2= 0,5, тобто діаметр проміжного колеса повинен бути в 2 ра-
аи більшим від діаметрів і ведучого та веденого коліс.
Контрольні запитання
1. Який розв’язок проектної задачі признається оптимальним?
2. Що таке критерій оптимізації? Назвіть деякі критерії оптимізації для різних
технічних об’єктів.
3. Яка інформація потрібна для формулювання задачі оптимізації? Що таке па-
раметри оптимізації?
4. Що таке цільова функція? Яка мета складання цільової функції?
5. Назвіть причини появи систем автоматизованого проектування.
6. Охарактеризуйте в загальних рисах систему автоматизованого проектування.
II
Розділ
З'ЄДНАННЯ ДЕТАЛЕЙ МАШИН
ТА ПРУЖНІ ЕЛЕМЕНТИ
ГЛАВА 11. РІЗЬБОВІ З'ЄДНАННЯ
11.1. Загальні відомості
Будь-яка машина складається з багатьох деталей та окремих скла-
дальних одиниць. Ці деталі та складальні одиниці пов’язані між со-
бою тим чи іншим способом. Зв’язки елементів машини поділяють
на рухомі (шарніри, підшипники) та нерухомі (різьбові, зварні).
Використання рухомих зв’язків елементів обумовлене кінемати-
кою машини. Нерухомі зв’язки застосовують для забезпечення мож-
ливості розбирання машини на деталі та складальні одиниці. Потре-
ба розбирання спричинена спрощенням виготовлення, складання, ре-
монту та транспортування.
Нерухомі зв’язки деталей у машинобудуванні називають з’єд-
наннями. Всі види з’єднань поділяють на роз’ємні та не-
роз’емні.
Роз'ємні з'єднання (різьбові, шпонкові, зубчасті (шліцеві), кле-
мові та ін.) допускають розбирання з’єднаних деталей без пошко-
джень елементів з’єднання.
Нероз'ємні з'єднання (зварні, паяні, клепані та ін.) не дають змоги
виконувати розкладання з’єднаних деталей без пошкодження еле-
ментів з’єднання. Використання нероз’ємних з’єднань обумовлене
в основному технологічними та економічними вимогами.
Проміжне місце між роз’ємними та нероз’ємними займають пре-
сові з'єднання В деяких випадках ці з’єднання проектуються якне-
роз’ємні, і розкладання їх може спричинити пошкодження спряже-
них поверхонь та послаблення посадки деталей. Але при малих на-
тягах, характерних, наприклад, для посадки кілець підшипників
кочення, ці пошкодження незначні, навіть для багатократного на-
пресовування.
З’єднання деталей машин є дуже важливими елементами конструк-
цій, бо багато аварій або порушень нормальних режимів роботи ма-
шини обумовлені незадовільною міцністю та надійністю з’єднань.
Різьбовими називають такі з’єднання, які виконуються за допо-
могою деталей, що мають різьбу.
Широке використання різьбових з’єднань у машинобудуванні
обумовлене їхньою простотою, високою несучою здатністю, надій-
102
кістю, а також зручністю з’єднання та роз’єднання деталей. За-
стосуванню різьбових з’єднань срияють також наявність значної но-
менклатури спеціальних різьбових деталей, пристосованих до різних
конструктивних варіантів з’єднань, їхня широка стандартизація
та мала вартість в умовам масового виготовлення.
Обмеження у використанні різьбових з’єднань пов’язані з наяв-
ністю значної кількості концентраторів напружень на поверхнях
різьбових деталей, що зменшує їх втомну міцність при дії змінних
напружень.
11.2. Кріпильні різьби та їхні
основні параметри
Кріпильні різьби застосовують у деталях різьбових з’єднань.
Залежно від форми поверхні, на якій нарізана різьба, розрізняють
циліндричні та конічні різьби. В основному використовуються ци-
ліндричні кріпильні різьби. Конічну різьбу застосовують у випад-
ках, коли треба забезпечити герметичність з’єднання.
Кріпильні різьби бувають; метричні, трубні та круглі.
Метрична різьба (рис. 11.1, а) є основною кріпильною
різьбою. Вона має назву метричної тому, що всі її розміри задаються
в міліметрах (на відміну від мало розповсюдженої дюймової різьби,
розміри якої даються в дюймах). Метрична різьба має трикутний про-
філь витків із кутом профілю а — 60°. Вершини витків та впадин
притуплені по прямій або по дузі кола, по вершинах та впадинах ут-
ворений зазор. Така конструкція полегшує обробку різьби, зменшує
концентрацію напружень та запобігає пошкодженням різьби в умо-
вах виконання складальних робіт.
Метрична різьба характеризується такими основними геометрич-
ними параметрами- сі — зовнішній (номінальний) діаметр різьби;
с/, — внутрішній діаметр; сі2 — середній діаметр (діаметр уявного
циліндра, поверхня якого перетинає витки різьби по висоті так,
що ширина витка дорівнює ширині впадини); Р — крок різьби (від-
стань між однойменними сторонами двох сусідніх витків, виміряна
в напрямі осі гвинта); Н = 0,866Р — теоретична висота профілю
витка різьби; Нг — 0,541Р — робоча висота профілю, на якій доти-
каються витки гвинта і гайки; п — число заходів різьби (для крі-
пильних метричних різьб п = 1) і ф — кут підйому гвинтової лінії
різьби по її середньому діаметру, що визначається за співвідношенням
= Рп/(Л(І2). (11.1)
Метричні різьби бувають з нормальним або малим кроком. Так,
для різьби із зовнішнім діаметром сі 20 мм стандартами, крім
різьби з нормальним кроком Р = 2,5 мм, передбачені різьби з мали-
103
Рис. 11.1. Кріпильні різьби та їхні параметри
ми кроками: 2; 1,5; 1,0; 0,75 і 0,5 мм. При зменшенні кроку відповід-
но зменшується глибина різьби та кут підйому гвинтової лінії ф.
Позначення метричної різьби» М20 — метрична різьба з нормаль-
ним кроком і зовнішнім діаметром 4 = 20 мм; М20 х 1,5 — метрич-
на різьба з малим кроком витків Р = 1,5 мм і зовнішнім діаметром
сі = 20 мм; М20Х1,5ЬН — та сама різьба, але ліва.
Основні геометричні параметри метричних різьб регламентовані
стандартами ГОСТ 9150—81, ГОСТ 8724—81 та ГОСТ 24705—81
(табл. 11.1).
Трубна різьба (рис. 11.1, б) використовується для гер-
метичного з’єднання труб та арматури. Ця різьба за ГОСТ 6357-81
має кут профілю витків а = 55°, вершини та впадини витків закруг-
лені і відсутній зазор між вершинами та впадинами, що надає
з’єднанню деталей високу щільність.
Трубна різьба має малий крок витків, оскільки нарізується на
трубі з малою товщиною стінки. За номінальний діаметр трубної
різьби беруть внутрішній діаметр труби. Зовнішній діаметр такої різь-
би в дійсності більший номінального на дві товщини стінки труби.
У міжнародному стандарті для трубної різьби зберігається дюй-
мове вимірювання. Позначення трубної різьби в технічній документа-
Таблнця 11.1. Різьба метрична для кріпильних різьбових деталей
Діаметр різьби, мм Крок різьби нормаль- ний Р, мм Діаметр різьби, мм Крок різьби нормаль- ний Р, мм
зовнішній а середній внутріш- ній ал зовніш- ній а середній внутріш- ній ах
Б 4,480 4,134 0,80 20 18,376 17,294 2,50
6 5,350 4,918 1,00 22 20,376 19,924 2,50
8 7,188 6,647 1,25 24 22,051 20,752 3,00
10 9,026 8,376 1,50 27 25,051 23,752 3,00
12 10,863 10,106 1,75 ЗО 27,727 26,211 3,50
14 12,701 11,835 2,00 36 33,402 31,670 4,00
16 14,701 13,835 2,00 42 39,077 37,129 4,50
18 16,376 15,294 2,50 48 44,752 42,587 5,00
104
ції таке: О2-В— трубна різьба із номінальним діаметром 2 дюйми
за класом точності В.
Трубну різьбу можна нарізувати також на конічній поверхні для
досягнення високої щільності з’єднання. Приклад позначення коніч-
ної трубної різьби — Я .3/4*.
Нині замість трубних різьб часто застосовують метричні різьби
з малим кроком витків.
Кругла різьба (рис. 11.1, в) зручна для виготовлення на-
катуванням або витисканням на тонкостінних металевих та пластма-
сових деталях, а також відливанням на чавунних, скляних, пластма-
сових та інших виробах. Профіль витків круглої різьби утворюєть-
ся спряженими дугами кіл, а кут профілю а = 30°.
Круглі різьби мають обмежене застосування, і в основному вони
використовуються для деталей, що часто згвинчуються та відгвинчу-
ються в умовах забруднення (пожежна арматура, вагонні стяжки,
цоколі електроламп та ін.). Параметри круглої різьби регламентова-
ні ГОСТ 6042—83.
11.3. Кріпильні різьбові деталі,
їхні конструкції та матеріали
Для з’єднання деталей використовують болти (гвинти з гайками),
гвинти або шпильки (рис. 11.2, а—в).
Використання болтів для з’єднання деталей не вимагає нарізу-
вання в цих деталях різьби. Це особливо важливо в тих випадках,
коли матеріал деталі не може забезпечити достатню міцність різьби.
Однак у з’єднанні болтом повинен бути передбачений простір для го-
ловки гвинта та гайки, а також має місце деяка незручність виконан-
ня складальних операцій, бо при загвинчуванні або відгвинчуванні
гайки треба утримувати головку гвинта від прокручування. Болто-
ве з’єднання дещо збільшує масу виробу і в деякій мірі
його зовнішній вигляд.
Гвинти та шпильки тре-
ба використовувати в тих
пипадках, коли за конст-
рукцією з’єднання застосу-
пання болтів неможливе
або нераціональне. Гвинти
і а шпильки вимагають пев-
ної глибини загвинчування
в одну із деталей з’єднан-
ії я Якщо при експлуатації
Рис. 11.2. З’єднання за допомогою болта, гвин-
та та шпильки
спотворює
•‘єднання виникає потреба
у багатократному з’єдну-
6
105
ті і
Рис. 11.3. Конструкції гвинтів
ванні та роз’єднуванні деталей, то для запобігання можливому руй-
нуванню різьби деталі перевага надається з’єднанню шпилькою або
болтовому з’єднанню.
У деяких випадках (рис. 11.2, а) під гайку або головку гвинта
ставлять плоску круглу шайбу. Постановка такої шайби зменшує
пошкодження та зминання гайкою поверхні деталі (якщо деталь ви-
готовлена з м’якого матеріалу — алюмінію, пластмаси, дерева) при
загвинчуванні гайки чи гвинта. Плоскі круглі шайби використовують
також у випадку збільшеного діаметра отвору під болт або гвинт або
коли отвір не має круглої форми.
Геометричні форми та розміри гвинтів, гайок, шпильок дуже різ-
номанітні і достатньо описані у відповідних довідниках [15] та стандар-
тах різьбових кріпильних деталей. Деякі види широко застосовува-
них гвинтів, що відрізняються конструкцією головок, показані на
рис. 11.3, а різні форми гайок — на рис. 11.4.
Для виготовлення кріпильних різьбових деталей використову-
ють сталі: вуглецеві звичайної якості, якісні конструкційні та ле-
говані конструкційні. Механічні властивості сталевих кріпильних
деталей нормуються за ГОСТ 1759.4—87, згідно з яким болти, гвин-
ти та шпильки поділяють на 11 класів міцності, а гайки — на
7 класів.
Клас міцності болтів, гвинтів та шпильок позначається двома числа-
ми, розділеними крапкою. Перше число, помножене на 100, визначає
Рис. 11.4. Конструкції гайок
106
Таблиця 11.2. Рекомендації для вибору матеріалу болтів та гайок
Клас МІЦНОСТІ болтів ов, МПа Оу, МПа Марка сталі
тіп тах Болт Гайка
З.б 300 490 200 СтЗ; 10 СтЗ
4.6 400 550 240 20 СтЗ
5.6 500 700 300 ЗО; 35 10
6.6 600 800 360 35; 45; 40Г 15
8.8 800 1000 640 ЗОХ; 38ХА 20; 35; 45
10.9 1000 1200 900 40Г2; 40Х 35Х; 38ХА
мінімальне значення границі міцності ав, МПа, матеріалу болта,
а друге число, поділене на 10 і помножене на ав, дає границю теку-
чості матеріалу болта. Наприклад, для болта класу міцності 5.6 ма-
ємо: сГвтіп = 5 • 100 = 500 МПа; а? = 6 • 500/10 = 300 МПа. Умов-
не позначення болта, наприклад, із номінальним діаметром різьби
4 = 12 мм, малим кроком Р = 1,25 мм, довжиною / = 60 мм та класом
міцності 4.6 записують: Болт М12 х 1,25 х 60.46 ГОСТ 7805 — 70.
Більш детальні відомості про умовні позначення кріпильних де-
талей наведені в ГОСТ 1759.0 — 87. Найнижчим класом міцності
болтів, гвинтів та шпильок буде 3.6, а найвищим — 12.9. Клас
міцності гайок позначається одним числом. Якщо це число помно-
жити на 100, то будемо мати напруження а/?, МПа, від наванта-
ження випробувань. Наприклад, для гайки нижчого класу міцності
4 маємо ар = 4 • 100 = 400 МПа (сталі марок СтЗ, СтЗкп), а для
гайки вищого класу міцності 12 — ар == 12 • 100 = 1200 МПа (ле-
говані сталі 35ХГСА, 40ХНМА). Умовне позначення, гайки, на-
приклад, із номінальним діаметром різьби й = 12 мм, малим кроком
Р = 1,25 мм та класом міцності 8 записують: Гайка М12 х 1,25.8
ГОСТ 5927 — 70.
Механічні характеристики матеріалів різьбових деталей (деякі
ііитяги із ГОСТ 1759.4 — 87) наведені в табл. 11.2 і 11.3.
Таблиця 11.3. Рекомендації для
вибору матеріалу гайок
Клас міц- ності га- йок Напруження від навантаження випробування Ор, МПа Марка сталі
4 400 СтЗ
5 500 10
8 800 20; 35; 45
10 1000 35Х; 38ХА
Вибір матеріалів кріпильних
деталей пов’язаний з особливо-
стями умов роботи з’єднань, ви-
могами до габаритів та маси
з’єднання.
Під час вибору матеріалу гай-
ки рекомендують брати до уваги
таку вказівку: напруження від
навантаження випробування по-
винно відповідати мінімальній
границі міцності матеріалу бол-
та, з яким комплектується гайка.
107
11.4. Стопоріння різьбових з'єднань
Запобігання самовідгвинчуванню різьбових деталей е важливим
заходом у підвищенні надійності з’єднань деталей.
У з’єднаннях деталей із кріпильними різьбами забезпечується
самогальмування, оскільки кут тертя між витками різьби гвинта
та гайки значно перевищує кут підйому гвинтової лінії. Крім цього,
самовідгвинчуванню чинять опір сили тертя між деталями та опорни-
ми поверхнями гайки чи головки болта (гвинта). Але самогальмуван-
ня різьбового з’єднання надійно реалізується тільки при статичному
навантаженні. При дії змінних (вібраційних чи ударних) наванта-
жень різко знижується коефіцієнт тертя між витками, умови само-
гальмування порушуються і спостерігається самовідгвинчування
різьбових деталей, що може спричинити руйнування з’єднання або
навіть аварійний стан у роботі машини.
Щоб запобігти самовідгвинчуванню, слід використовувати сто-
порні пристрої, робота яких базується або на створенні додаткових
сил тертя, або на використанні спеціальних замкових засобів.
Пристрої, що базуються на створенні додаткового тертя, показані
на рис. 11.5, а—г. Контргайка (рис. 11.5, а) створює додатковий на-
рис. 11.5, Способи стопоріння різьбових з'єднань
108
тяг і додаткові сили тертя в різьбі. Пружинна шайба (рис. 11.5, б)
підтримує натяг і додаткові сили тертя в різьбі на деякій ділянці
самовідгвинчування (до 1—1,5 оберта гайки). Крім цього, пружність
шайби значно зменшує вплив вібрації на тертя в різьбі. В гайках із
завальцьованим кільцем-з поліаміду (рис. 11.5, в) додаткове стопо-
ріння здійснюється за рахунок сил зчеплення здеформованого при
загвинчуванні гайки кільця та витків різьби гвинта. Знаходять за-
стосування також гайки на рис. 11.5, г, додаткове тертя в яких ство-
рюється у верхній частині гайки, здеформованої на еліпс після нарі-
зування різьби.
У замкових пристроях для запобігання самовідгвинчуванню ви-
користовують стопоріння шплінтами (рис. 11.5, д), загнутими стопор-
ними шайбами (рис. 11.5, є, є) та іншими способами.
На практиці використовують також і такі способи стопоріння різь-
бових з’єднань, як зварювання (гайка або головка гвинта прива-
рюються до деталі з’єднання) або пластичне деформування з руйнуван-
ням витка різьби кернуванням.
11.5. Елементи теорії гвинтової пари
Співвідношення між осьовою силою, що діє на болт, та моментом
сил, прикладеним до гайки при її загвинчуванні. У болтовому з’єднан-
ні взаємна нерухомість деталей забезпечується відповідною затяж-
кою болта. При загвинчуванні гайки (рис 11.6) осьова сила у
стержні болта зростає; при цьому збільшується і момент Т, що при-
кладається до гайки. Цей момент дорівнює сумі моментів сил тертя в
різьбі та на торці гайки:
Т = Т$р + Т$т. (11.2)
Момент сил тертя в різьбі при загвинчуванні гайки визначається
за формулою [див. вираз (30.5)]
7\р = О,5Гогі2 (Ф 4-р)« (11.3)
Опорна торцева площина гайки має форму кільця, обмеженого ді-
аметрами і £> (рис. 11.6). Тому момент сил тертя на такій площині
при рівномірному розподілі тиску можна
записати у вигляді [див. вираз (5.15)]
т — р і __________2
5Т з Г)2_д2
зв*
У формули (11.3) та (11.4)
такі величини:
входять
б/2 — середній діаметр
різьби болта; ф — кут підйому витків
різьби; р = агсі§ --------зведений кут
Рис. 11.6. До визначення момен-
ту сил опору при загвинчуванні
гайки
104
Рис. 11.7. Схема навантаження витків різьби
тертя в різьбі; а — кут про-
філю витків різьби; / —
коефіцієнт тертя ковзання;
/?зв — зведений радіус сил
тертя на кільцевій площині
торця гайки, що визнача-
ється за виразом
1
“ з •
(11.5)
Підставляючи (11.3) і (11.4) у вираз (11.2), дістаємо
Т = Ро (0,5гі2 (Ф + р) 4- /Лзв). (11.6)
Наближена геометрична подібність метричних різьб різних діаметрів
дає змогу для орієнтовних розрахунків використовувати простіші
співвідношення, що добуті для середніх значень розрахункових пара-
метрів. Для метричної різьби з нормальним кроком можна взяти;
ф « 2° ЗО'; & 0,9б/; 7?зв ж 0,74 і / = 0,15 (для різьби без покрит-
тя). Тоді момент, що прикладається до гайки при її загвинчуванні,
на основі виразу (11.6) може бути визначений за формулою
Т = О,2Ро4. (11.7)
Якщо припустити, що довжина ручного гайкового ключа дорів-
нює в середньому 14б/, то, прирівнюючи момент на ключі, що створю-
ється силою <2 руки, і момент Т, дістанемо співвідношення між осьо-
вою силою Т’о, яка діє на болт, та силою <2, прикладеною до ключа:
Го« 70(?. (11.8)
Таким чином, за допомогою кріпильних різьб можна мати виграш
у силі приблизно в 70 разів (при / = 0,1 — у 100 разів).
Вираз (11.6) беруть за основу при створенні спеціальних динамо-
метричних ключів, що використовуються для контрольованої затяж-
ки різьбових з’єднань.
Розподіл осьової сили, що діє на болт, на витках різьби. Осьова
сила Р на болті передається через витки його різьби на гайку
(рис. 11.7). При цьому кожний виток різьби навантажується відпо-
відно силами /71, Р2, ..., рг. Сума всіх сил становить загальну осьову
силу Р на стержні болта;
= ••• (11.9)
За умови рівномірного розподілу сил на кожний виток
^1 = ^2 = ••• (11.10)
де 2 — число витків різьби в гайці.
по
Рис. 11.8. Конструкції гайок, що спри-
яють рівномірному навантаженню витків
різьби
У такому разі епюру осьових
сил у різних перерізах стержня
болта зображають прямою лі-
нією (рис. 11.7, а). Тут наван-
таження від витка до виука рів-
номірно зменшується на Ї7г.
У дійсності витки різьби у
звичайних гайках навантажую-
ться нерівномірно. Однією із
причин нерівномірного розподі-
лу навантаження на витках різь-
би є те, що стержень болта розтягується (крок його витків збільшу-
ється), а гайка стискається (крок її витків зменшується).
Теоретичне розв’язування задачі про розподіл навантаження на
витках різьби було зроблене М. Є. Жуковським у 1902 р. і в подаль-
ших експериментальних дослідженнях неодноразово підтверджене.
Так, у стандартній гайці з шістьма витками перший зі сторони опор-
ної площини гайки виток різьби сприймає близько 52 % осьової си-
ли Г, а останній, шостий — тільки 2 % (рис. 11.7, б).
Рівномірність розподілу осьової сили на витках різьби можна
поліпшити використанням спеціальних гайок. Одним із способів
досягнення цієї мети є застосування конструкцій гайок, в яких ді-
лянки матеріалу з різьбою деформуються аналогічно з деформацією
стержня гвинта. На рис. 11.8, а, б показані конструкції гайки, в яких
матеріал, що знаходиться в області різьби, розтягується так, як і ма-
теріал стержня гвинта. В наведених прикладах збільшення податли-
вості гайок у зоні найбільш навантажених витків також сприяє ви-
рівнюванню навантаження витків різьби.
Спеціальні гайки в основному застосовують у з’єднаннях, що зна-
ходяться під дією динамічних навантажень. Руйнування різьбових
деталей з’єднання в цьому випадку має втомний характер і відбува-
ється в місцях найбільшої концентрації напружень або в зоні най-
більш навантаженого витка різьби. За дослідними даними викорис-
тання спеціальних гайок може підвищити границю витривалості
різьбових з’єднань на 20—ЗО %.
11.6. Розрахунок витків різьби на міцність
Нерівномірний розподіл навантаження на витки різьби гайки за-
трудняє їх розрахунок на міцність. Тому на практиці застосовують
умовні розрахунки. Умовність розрахунків компенсується порівнян-
ням розрахункових напружень, добутих за умови рівномірного роз-
поділу навантаження на витках, із допустимими напруженнями, що
встановлені дослідним шляхом.
111
Витки різьби розраховують за умовами обмеження напружень
зминання на поверхнях їхнього контакту та напружень зрізу витків
на гвинті або на гайці (рис. 11.9).
Умова міцності витків різьби за напруженнями зминання
ОМ •
(11.11)
де Дзм = — умовна площа зминання витків; Нг — робоча
висота витків; г — кількість витків у гайці висотою Л.
Умова міцності витків за напруженнями зрізу:
для гвинта
Т’р1 “ л3п ~ 0)зрї
(11.12)
для гайки
Тзр2 —
аїьГ [т]зр-
(11.13)
Оскільки а = Ь « 0,8Р (для трикутної різьби), Рг = Л, умови
(11.12) і (11.13) запишемо в такому вигляді:
для гвинта
Тзр1 = О.вл^Л ^зрї (11.14)
для гайки
Тзр2 = ІтЬр- (11.15)
зрізу розраховують
Рис. 11.9. До розра-
хунку витків різьби на
міцність
Якщо матеріал гвинта та гайки однаковий, то за напруженнями
тільки витки гвинта, бо сі > с^. Допустимі на-
пруження зрізу можна брати [т]зр — (0.2...0, 3) от.
Умови міцності витків різьби дозволяють
визначити потрібну висоту гайки Н. При однако-
вих матеріалах гвинта та гайки Н треба вибира-
ти також за умовою рівноміцності витків різьби
та стержня гвинта. Так, якщо взяти за граничні
напруження границі текучості от при розтягу
і тт при зрізі, а також врахувати, що тт « 0,6от,
то умова рівноміцності різьби на зріз і стержня
гвинта на розтяг матиме вигляд:
^ = ^Г = ^ = °-6‘’з = 0-601.16)
Із записаної рівності дістаємо /і « 0,52^.
Висоту стандартних гайок, що працюють у
парі з гвинтами із одного і того ж матеріалу,
беруть Н = 0,&/.
112
За аналогічними міркуваннями встановлюють також норми на
глибину загвинчування гвинтів та шпильок у деталі з’єднання. Так,
глибину загвинчування сталевих гвинтів у сталеві деталі вибирають
Лі = £/, а в чавунні та силумінові деталі —= 1,5Л. Для вказаних
значень глибини загвинчування гвинтів міцність різьби переважає
міцність стержня гвинта, що запобігає руйнуванню різьби в деталях
з’єднання.
Розглянуті вище особливості та співвідношення розмірів дають
змогу зняти потребу в розрахунку на міцність різьби в стандартних
кріпильних деталях.
11.7. Розрахунок на міцність стержня болта (гвинта)
для різних випадків навантаження з'єднання
З’єднання незатягнутим болтом, що навантажене зовнішньою
осьовою силою. Прикладом такого з’єднання може бути кріплення
вантажної петлі (рис. 11.10). Особливістю цього з’єднання є те, що
болт не має попередньої затяжки (між деталями з’єднання є зазор).
При навантаженні петлі силою Р в стержні болта виникає деформація
розтягу. Небезпечним перерізом стержня буде переріз на різьбовій
ділянці, площа якого А — Відповідно умова міцності стержня
болта на розтяг
ар = 4Г/М) < [а]р.
Із записаної умови маємо потрібний внут-
рішній діаметр різьби
4 > /4Г/(л [а]р). (11.18)
Значення округляють до стандартного, за
яким встановлюють номінальний діаметр (і різь-
би болта (див. табл. 11.1).
Допустиме напруження [о]р — от/$, де коефі-
цієнт запасу міцності болта беруть 5 = 2...3.
З’єднання затягнутим болтом без зовнішнього
навантаження. Такі з’єднання зустрічаються
п тих випадках, коли треба закріпити деталі,
на які не діють зовнішні сили, а з’єднання по-
винно бути герметичним (наприклад, кріплення
різних кришок, люків та ін.). Потрібну силу
натяжки болта Рй (рис. 11.11) вибирають із умо-
ви забезпечення герметичності стику деталей
(між деталями знаходиться пружна прокладка).
При затяжці з’єднання стержень болта роз-
тягується осьовою силою Рь і одночасно скру-
чується моментом СИЛ тертя В різьбі 7\р (див. 11.5).
(Н.17)
Рис. 11.10. Осьове на-
вантаження незатягну-
того болта
113
Рис. 11.11. З’єднання
затягнутим болтом без
зовнішнього наванта-
ження
Небезпечним перерізом для болта е переріз діа-
метром на різьбовій ділянці (переріз із най-
меншим діаметром).
Від дії сили Ро напруження розтягу
о, = 4Г0/(Я<Ц). (11.19)
При скручуванні стержня болта моментом Тзр
[див. формулу (11.3)] напруження
16.0,5^, іе (ірЧ- Р)
(11.20)
т = Т
Міцність болта оцінюється за еквівалентним
напруженням
аЕ = Ка’ + 4т2 < [а]. (11.21)
Після підстановки ор та т в умову (11.21) дістанемо
і+4^-і^+-Р)-Г = ^4-<М. (П,22)
у \ аі І ясі*
Тут Р — коефіцієнт, що враховує скручування болта при затяжці:
р/~ 1 4- 4 ( 2б/а + р)
(11.23)
Розрахунки показують, що для стандартних метричних різьб
р « 1,3. Тому болт, затягнутий в такому з’єднанні, можна розрахо-
вувати тільки на розтяг, але не за дійсною, а за збільшеною на ЗО %
силою затяжки Ро. Згідно з умовою (11.22) потрібний внутрішній
діаметр різьби болта
^>/4Г0р/(л[о]). (11.24)
Значення узгоджують із стандартним і вибирають номінальний
діаметр д. різьби болта (див. табл. 11.1).
Болтове з’єднання деталей, що навантажені силами зсуву. В тако-
му з’єднанні основною умовою надійності є відсутність відносного
зсуву деталей. Розглянемо два варіанти виконання з’єднання.
1. Болт встановлено у отвори деталей із
зазором (рис. 11.12, а). Умова відсутності зсуву деталей з’єднан-
ня має вигляд
Р^іР, = іГР„ (11.25)
де Р — зовнішня сила, що діє на деталі з’єднання; Р3 — сила тертя
в одній парі площин стикання деталей; і — число пар площин стику;
114
Рис. 11.12. З’єднання болтом, поставленим із зазором (а) і без зазо-
ра (б)
Го — сила затяжки болта; / — коефіцієнт тертя ковзання в стиках
деталей.
Якщо ввести коефіцієнт надійності з’єднання к, то із умови (11.25)
можна визначити потрібну силу затяжки болта:
Ро = ЬГМ)-
(11.26)
Значення к вибирають: при статичному навантаженні з’єднання
к = 1,3... 1,5; при дії змінного навантаження к — 1,8...2,0.
Сила Ро дає змогу визначити потрібний внутрішній діаметр різь-
би с?! із умови міцності болта на розтяг. Після підстановки (11.26)
о (11.24) дістанемо
4ГЙ0/М [а]). (11.27)
У розглянутому з’єднанні зовнішня сила Р безпосередньо на болт
не передається. Тому болт розраховують тільки на статичну міцність
аа потрібною силою затяжки навіть при дії змінної в часі зовнішньої
сили.
2. Болт встановлено у отвори деталей без
іазора (рис. 11.12, б). Зовнішня сила Р безпосередньо передається
на болт, тому сили тертя між деталями не враховуються, а затяжка
болта не обов’язкова.
Болт у цьому з’єднанні розраховують за умовою міцності на зріз
тзр = Р/Дзр = 2Г/(лбР) [т]зр.
Тут зріз болта відбувається у двох площинах, тому
(11.28)
Дзр = 2лЛ2/4.
115
ІіПІІН
Потрібний діаметр стержня болта може бути визначений за вира-
зом
^>/2^/(л[т]зр).
(11.29)
Інколи в розглянутому з’єднанні виконують перевірку міцності
деталей за напруженнями зминання по циліндричній поверхні контак-
ту болта з деталями з’єднання.
Порівнюючи два варіанти постановки болта (із зазором та без
зазора), слід зазначити, що перший варіант дешевший другого, ос-
кільки він не вимагає точних розмірів болта і отвору. Однак при тій
самій зовнішній силі Р на з’єднання потрібний діаметр болта, встанов-
леного із зазором, суттєво більший (за умовою міцності), ніж діа-
метр болта, встановленого без зазора.
З’єднання затягнутим болтом, що навантажене постійною зов-
нішньою осьовою силою. Приклади осьового навантаження з’єднань
із попередньо затягнутими болтами (напрям дії зовнішньої сили па-
ралельний осі болта) є найпоширенішими у практиці. Для більшос-
ті таких з’єднань треба зберегти певні умови в площині стику (гер-
метичність, нерозкриття стику та ін.) при дії зовнішнього наванта-
ження. Прикладами з’єднань, що навантажені зовнішніми осьовими
силами, можуть бути болтові з’єднання фланців трубопроводів, кри-
шок резервуарів підвищеного тиску, різних кронштейнів та інших де-
талей.
Діаграма сумісних деформацій болта та
деталей з'єднання. Розглянемо послідовність наванта-
ження та деформації деталей болтового з’єднання при затяжці бол-
та і зовнішньому осьовому навантаженні. На рис. 11.13, а показано
Рис. 11,13, Осьове навантаження з’єднання затягнутим болтом
116
Рис. 11.14. Діаграма сумісних деформацій болта та деталей з’єднання
болтове з’єднання деталей, коли болт не має затяжки, а зовнішня
'нла відсутня, тобто болт і деталі з’єднання не навантажені. Після
іатяжки (зовнішня сила на деталі з’єднання не діє) болт навантажу-
’ться силою затяжки Ро, а стик деталей навантажується такою са-
иою силою Ро (рис. 11.13, б). При цьому під дією сили Ро болт де-
Іюрмується (розтягується) на 1б. а деталі з’єднання деформуються
стискаються) на Хд. Після прикладення до деталей з’єднання зовніш-
ньої осьової сили Р (рис. 11.13, в) сила, що навантажує болт, збіль-
шіться і буде мати Гб, а сила в стику деталей з’єднання зменшиться
ш Рц. Тоді ж болт додатково здеформується на АХб, а деформація
іеталей з’єднання зменшиться на АХД.
Зв’язок між силами та деформаціями деталей даного з’єднання
показаний графічно у вигляді діаграми на рис. 11.14. У межах пруж-
них деформацій маємо лінійну залежність між деформаціями і наван-
і.іженням деталей з’єднання. Пряма 1 зображає залежність деформа-
іії болта від його навантаження, а пряма 2 — те саме для деталей
• ‘єднання. Кути а і 0 нахилу графіків до осі абсцис характеризують
іідповідно поздовжню жорсткість болта сб і деталей з’єднання сд.
Ія рис. 11.14 показано, що після навантаження болта силою Го
Іого деформація буде а деталей з’єднання — Хд.
Перенесемо графік деформації деталей із положення 2 в положен-
ій 2'. При цьому ордината точки перетину графіків 1 і 2' буде ви-
бачати силу попередньої затяжки болта Ро.
Після прикладання до з’єднання зовнішньої осьової сили Р болт
юдатково збільшить свою довжину на АХб (рис. 11.14), внаслідок
«но деформація стику деталей зменшиться на таке саме значення
\ХД = АХб, а сила стиску деталей впаде до значення Рл. Повне осьове
^вантаження болта буде дорівнювати сумі Р і Рл.
117
При певній силі попередньої затяжки болта Рй із збільшенням
зовнішньої сили Р зменшується Рл у стику деталей. Якщо Рд — 0,
то порушується нормальна робота з’єднання, наприклад втрачається
герметичність, відбувається розкриття стику деталей або зсув дета-
лей при наявності відповідних бокових сил.
Згідно з рис. 11.14 повне осьове навантаження болта, яке вира-
жено через силу його попередньої затяжки Ло, може бути записане
у вигляді
гб = го + дл (11.30)
де А/7 — частина зовнішньої сили Г, що додатково навантажує болт.
Значення Д/7 визначимо із умови ДХб = АХД:
Д1б = &Р/с6; Дід = (Р — ДГ)/сд; &Р/сб = (Р — кР)!сд.
На основі записаних співвідношень маємо
АГ =/^б/(сб + сд) = ХЛ (11.31)
Тут X — коефіцієнт зовнішнього навантаження, що залежить від
жорсткостей болта та деталей з’єднання,
X = с^{с^ 4~ Сд). (11.32)
Із виразу (11.31) видно, що в з’єднанні з попередньо затягнутим
болтом зовнішня сила Р не повністю передається на болт, оскільки
X < 1.
Згідно із співвідношеннями (11.30) та (11.31) маємо
Р6 = Р* + 1Р. (11.33)
Силу Рд у стику деталей на основі рис. 11.14 можна записати у
вигляді
/7Д = /7О-(Р-А/7) = ГО-Г(І~Х). (11.34)
Щоб запобігти розкриттю стику деталей з’єднання, треба забез-
печити умову Рд > 0, тобто
Г0>Г(1-Х). (11.35)
Достатня сила попередньої затяжки болта Го, що забезпечує не-
розкриття стику деталей, є необхідною умовою надійності та герме-
тичності з’єднання. Практично нерозкриття стику залежить не тіль-
ки від попередньої затяжки болта, а й від збереження цієї сили в ек-
сплуатації з’єднання. Останнє визначається такими факторами, як
якість обробки поверхонь стику, число поверхонь стику, якість різь-
би болта і гайки, надійність стопоріння різьби, наявність прокладок
(пружних чи жорстких) між деталями з’єднання та ін.
Практичний розрахунок з’єднання затягну-
тим болтом, навантаженого постійною зов-
нішньою осьовою силою.
118
Розрахункова сила, що діє на болт, визначається із умови нероз-
криття стику на основі виразу (11.33) з урахуванням скручування
болта при його затяжці (див. 11.6):
== Е$ + ХЕ = (£3 р + %) Е. (11.36)
Оскільки потрібна сила’ попередньої затяжки болта залежить від
ряду факторів, що важко піддаються врахуванню та розрахунку
(в тому числі і від жорсткостей болта і деталей з’єднання, які входять
в коефіцієнт X), доцільно застосовувати високу попередню затяжку.
Це положення повністю підтверджується в умовах експлуатації
різьбових з’єднань. На практиці рекомендують брати
Л = (11.37)
де к3 — коефіцієнт затяжки болта, який при статичному навантажен-
ні з’єднання можна брати: за умови нерозкриття стику деталей з’єд-
нання = 1,2...2; за умови герметичності з’єднання: к3 = 1,3...
2,5 — при м’яких прокладках між деталями з’єднання; к3 = 2...
3,5 — при металевій фасонній прокладці; к3 = 3...5 — при металевій
плоскій прокладці.
Підвищені значення коефіцієнта затяжки болта беруть для випад-
ків з’єднань з некотрольованою затяжкою.
У більшості практичних випадків визначення жорсткостей болта
сб і деталей сд пов’язане із значними труднощами. Тому коефіцієнт
зовнішнього навантаження X у формулі (11.36) можна брати X —
*= 0,2...0,3 для з’єднань без м’яких прокладок між деталями. Це
підтверджується відповідними дослідними даними.
Розрахункова сила на болт Рб.р, що визначається за формулою
(11.36), дозволяє розрахувати потрібний внутрішній діаметр різьби
болта за умовою міцності на розтяг:
<*і>/4Г6р/(л[а]). (11.38)
Згідно із значенням назначають стандартний діаметр різьби
болта.
З’єднання затягнутим болтом, що навантажене змінною зовніш-
ньою осьовою силою. Вище було показано, що в затягнутому болтово-
му з’єднанні зовнішня сила передається на болт частково [див. ви-
раз (11.31)], до того ж із зменшенням жорсткості болта сб і збіль-
шенням жорсткості деталей сл зменшується приріст Д/7 зовнішньої
(нли на болт. Цю обставину використовують на практиці при проек-
туванні з’єднань, що навантажені змінними силами.
На рис. 11.15, а, б показана зміна Д/7 при однакових зов-
нішній Е та повній осьовій силі Еб на болт для випадків більш
іл менш жорсткого болта (сбі 2> Сб2). У першому випадку змінна
гкладова Д/7! повного навантаження Еб болта більша, ніж та
119
Рис. 11.15. До визначення розрахункового навантаження болта при змінній
зовнішній силі на з’єднання
сама складова АГ, у другому випадку. Характер зміни АГі і АГ,
відповідає характеру зміни зовнішньої осьової сили Р.
Внаслідок того що втомна міцність болтів залежить від змінної
складової навантаження, можна дійти висновку, що застосування
болтів малої жорсткості при достатньо жорстких деталях з’єднання
є одним із способів підвищення витривалості болтового з’єднання.
Зменшити жорсткість болтів можна збільшенням їхньої довжини,
зменшенням діаметра у гладкій частині стержня, де відсутня концен-
трація напружень, або висвердлюванням поздовжніх отворів
(рис. П.16) за умови забезпечення однакової статичної міцності бол-
тів у їхніх нарізаній та ненарізаній частинах.
У з’єднаннях затягнутим болтом, що навантажені змінною зовніш-
ньою осьовою силою, розрахунок на витривалість виконують за умови
5 = а-ір/(/СоОа/^ 4- 'ФоПт) > $тіп, (11 -39)
де $ — розрахунковий коефіцієнт запасу міцності; 5тіП — міні-
мально допустиме його значення ($тіп = 3...4 — при неконтрольова-
ній затяжці болта в з’єднанні, $тіп = 2,0...2,5 — при контрольова-
ній затяжці).
Амплітуда напруження оа визначається як половина напружен-
ня від змінної складової А/7 зовнішньої сили, що довантажує болт
(див. рис. 11.15), тобто
а, = ДГ/(2Лб) = 2РХ/(п(ІЇ). (11.40)
Середнє напруження от дорівнює сумі напружень від сили попе-
редньої затяжки Ро та половини АГ змінної складової зовнішньої
сили:
°т = (Г, + 0,5ДГ)/Лб = 4 (к3Р + 0,5%Р)/(лД (11.41)
Тут беруть коефіцієнт зовнішнього навантаження X = 0,10...
0,15 для болтів малої жорсткості, а коефіцієнт затяжки = 3...4.
120
і
Рис. 11.16. Конструкції податливих бол
тів
Рис. 11.17. Ексцентричне навантажен-
ня болтів
Границя витривалості матеріалу болтів при розтягу о_1р « 0,35ов,
коефіцієнти ~ 0,1, « 0,90...0,97 при (16...32) мм, а
Ка = 4,0...5,5 для болтів із легованих сталей і = 3,5...4,5 для
болтів із вуглецевих сталей.
Ексцентричне навантаження болта в з'єднанні. Ексцентричне на-
вантаження болта виникає в разі використання спеціальних болтів
із костильною головкою (рис. 11.17, а) або при перекошених опорних
площинах під гайку або головку болта (рис. 11.17, б). У таких випад-
ках, крім напруження розтягу ор, у стержні болта ще з’являються
напруження згину о:
ар = о = М/Г. = Ге/(0,1Д
При е = (І! маємо о/ор = 7,8, тобто напруження згину значно
перевищує напруження розтягу болта. Ексцентричне навантажен-
ня болта значно знижує його міцність, тому при конструюванні та
виготовленні з’єднання слід запобігти умовам виникнення такого
навантаження болта.
11.8. Розрахунок групових болтових з’єднань
Розрахунок групових болтових з’єднань зводиться до визна-
чення розрахункової сили для найбільш навантаженого болта.
Після цього розрахунок болта виконується за умови міцності на
розтяг аналогічно випадкам, розглянутим у 11.7.
У розрахунках цих з’єднань припускають такі допущення:
а) деталі з’єднання достатньо жорсткі і поверхні стику деталей
залишаються плоскими після навантаження з’єднання;
б) усі болти з’єднання мають однакові розміри і однакову затяжку;
в) болти в з’єднанні розміщені симетрично щодо двох взаємно
121
і
Рис. 11.18. Кріплення болтами криш
ки резервуара
перпендикулярних осей, які про-
ходять через центр ваги площини
стику деталей.
Перелічені допущення можна
брати для більшості конструкцій
болтових з’єднань, що зустрічаю-
ться на практиці.
Болтове з’єднання навантажене
осьовою силою, що проходить через
центр ваги площини стику деталей.
Типовим прикладом такого болто-
вого з’єднання є кріплення кришок
резервуарів, що знаходяться під
тиском рідини або газу (рис. 11.18).
У цьому разі результуюча сила Р
тиску середовища на кришку рівномірно розподіляється на болти
і щодо них є зовнішньою осьовою силою. Для одного болта зовнішня
осьова сила Рг = Г/г, де г — кількість болтів у з’єднанні.
Потрібну силу попередньої затяжки кожного болта вибирають
за умови герметичності з’єднання Ро = к3Рі> де к3 — коефіцієнт
затяжки болтів, який беруть згідно з рекомендаціями в 11.7.
Розрахункову силу для кожного болта з’єднання визначають від-
повідно до залежності (11.36) за формулою
Рб.р = Гор + ХТ^.
(11.42)
Якщо передбачається додаткове підтягування болтів з’єднання
безпосередньо дід дією зовнішнього навантаження, то за розрахунко-
ву силу для кожного болта беруть
Гкр = (Л, + *Л) Р. (11.43)
В останньому випадку розрахункова сила Рб.р більша, ніж для
тих випадків, коли не передбачене додаткове підтягування болтів в умо-
вах дії зовнішнього навантаження. Знаючи Гб.р, потрібний діаметр
болтів визначають за формулою (11.38).
Болтове з’єднання навантажене силами, що діють у площині стику
деталей. Цей випадок навантаження характерний для болтового з’єд-
нання півмуфт у глухих фланцевих муфтах або для кріплення кронш-
тейнів.
Розглянемо один із можливих варіантів закріплення болтами
кронштейна (рис. 11.19, а), навантаженого зовнішньою силою Р.
Припустимо, що кронштейн закріплений трьома болтами, до того ж
середній болт знаходиться у центрі ваги стику. Довільно направле-
ну силу Р замінимо двома її складовими Рг = Р зіп а та Р2 ~ Р соз а,
паралельними двом взаємно перпендикулярним осям симетрії з’єд-
нання.
122
Рис. 11.19. Схема навантаження болтів у кріпленні кронштейна
При розрахунку з’єднання дію сил Рг і Г, замінимо (рис. 11.19, б)
дією таких самих сил, що проходять через центр ваги стику, і мо-
ментом
М = РгН + Р21.
Сили /4, Р2 і момент М зсувають і повертають кронштейн. Наванта-
ження на болти Реї та Р& (відповідно від сил Рг та Га) беруть рівно-
мірно розподіленими на всі болти; навантаження Рвм від моменту
М обернено пропорційне відстаням між осями болтів та центром ва-
ги стику. Для трьох болтів у з’єднанні маємо:
Гбі^Гі/3', Гб2 = Г2/3; Рбм^М^^ІР^+РМ^а).
Сумарне навантаження кожного болта визначається як геометрич-
на сума сил Рбі, Р& та Р^м- За розрахункове беруть найбільше з до-
бутих значень навантаження. Для даного з’єднання (рис. 11.19, 6}
найбільш навантаженим є верхній болт, для якого
Р6 = V (Р<н + Р6мУ +Ра. (И .44),
У з’єднанні болти можуть бути поставлені без зазора і з зазором.
Гюлти, поставлені без зазора, безпосередньо сприймають зовнішню
силу Рб і розраховують їх за умови міцності на зріз (див. 11.7).
Якщо болти поставлені із зазором, то потрібно забезпечити умову
відсутності зсуву кронштейна. При цьому потрібна сила затяжки
болтів згідно з виразом (11.26)
Ро^кРб/Г, (11.45)
л розрахункова сила для найбільш навантаженого болта з ураху-
ініііііям його скручування при затягуванні
Р^ІЩ. (11.46>
123
Рис. 11.20. До розрахунку болтів кріп-
лення кронштейна
Цю силу використовують при
визначенні діаметра болтів із умо-
ви міцності на розтяг ідив. форму-
лу (11.38)]. Для всіх болтів з’єд-
нання назначають однакову затяж-
ку, незважаючи на те, що вони
сприймають різне навантаження.
Довільне навантаження болтово-
го з’єднання. У довільно наванта-
женому з’єднанні всі зовнішні сили
треба звести до центра ваги стику
деталей. У результаті будемо ма-
ти навантаження з’єднання осьо-
вими силами та силами, що ле-
жать в площині стику деталей
(див. 11.7).
Зведені до центра ваги стику
зовнішні сили в загальному випад-
ку розглядаються в трьох взаємно
перпендикулярних площинах, одна
з яких є площиною стику деталей,
а дві інші проходять через дві осі
симетрії з’єднання. Осьові сили на
болти від дії зовнішнього наванта-
ження визначаються у двох площи-
нах, перпендикулярних до площини
стику, а потім відповідним чином
сумуються.
Розглянемо спрощений варіант болтового з’єднання кронштейна
з основою (рис. 11.20, а), навантаженого зовнішньою силою Г, яка
лежить у площині, перпендикулярній до стику в центрі його ваги.
Силу Р розкладемо на дві взаємно перпендикулярні складові Рг =
= Р соз а і Р2 = Р ?іп а. Дію цих складових замінимо дією таких
же сил, але прикладених у центрі О стику, і дією моменту М =
= Ргіі — Р21. Навантаження Р2 та М розкривають стик деталей,
а Рг зсуває кронштейн відносно основи.
Визначення розрахункової сили для бол-
та за умови нерозкриття стику. Зовнішні осьові
сили, що сприймаються одним болтом з’єднання (у даному з’єднанні
4 болти), запишемо у такому вигляді: від дії сили Р2
від моменту М
Рб2 = Р2/4‘,
Рсм = М/(2і).
124
Найбільш навантаженими болтами в з’єднанні є болти, що розмі-
щені ліворуч від центра ваги стику (див. напрям сил Е& та Е^м на
рис. 11.20, б). Тому загальна зовнішня осьова сила на найбільш
навантажений болт
Р& = ^62’+ Ебм = Ег/4 4-
Розрахункову силу для болта за умови нерозкриття стику визна-
чають за виразом (див. 11.7)
Е6.Р = (*з0 + X) Еб. (11.47)
Визначення розрахункової сили для бол-
та за умови запобігання зсуву деталей з’ єд-
най н я. Зсув кронштейна може відбутись під дією сили Ет.
Сила зсуву, що сприймається одним болтом з’єднання, Ем = Ег/4.
Умову запобігання зсуву кронштейна наближено (у бік підвищен-
ня надійності з’єднання) запишемо у вигляді
(Р0~Рб2)Г =^бі. (11.48)
Зовнішню силу Е& у виразі (11.48) взято зі знаком мінус, оскіль-
ки вона сприяє розвантаженню стику деталей. Тут також не врахову-
ється дія моменту ЛІ, бо момент не змінює сумарної сили тертя в
етику.
Потрібна сила затяжки болта з умови (11.48)
Р* = ^Рбі/Г 4- Рб2. (11.49)
Розрахункова сила для болта відповідно може бути записана у
вигляді
Рб.р = (ЬРбі/Г 4- ^Р. (11.50)
За формулою (11.50) визначається розрахункова сила при поста-
новці болтів із зазором. Якщо болти ставлять без зазора, то пере-
вірка їхньої міцності виконується безпосередньо за силою Рб\.
Отже, маємо дві розрахункові формули для визначення Гб.р згід-
но з двома поставленими умовами [див. формули (11.47) і (11.50)1.
Діаметр болтів визначається [див. формулу (11.38)1 за більшою
в двох добутих розрахункових сил.
11.9. Клемові, або фрикційно-гвинтові, з'сднання
Клемові з’єднання застосовують для закріплення на валах та інших
індричних елементах таких деталей, як кривошипи, важелі, шківи,
о вони вимагають частих перестановок. Такі з’єднання передають
пшні навантаження за рахунок сил тертя, створюваних відповід-
затяжкою болтів чи гвинтів. Тому клемові з’єднання інколи нази-
іь фрикційно-гвинтовими.
125
а
Рис. 11.21. Варіанти клемових з'єднань
На рис. 11.21 показані приклади клемових з’єднань важеля з ва-
лом. Ці з’єднання можуть навантажуватись моментом М — 01 або
осьовою силою. За конструктивною ознакою клемове з’єднання може
бути з нероз’ємною (рис. 11.21, а) і з роз’ємною (рис. 11.21, б) маточи-
нами.
Розрахунок клемових з’єднань полягає у визначенні потрібної
сили затяжки болтів Ро, яка може забезпечити (за рахунок сил тертя
в з’єднанні) передачу зовнішнього навантаження.
У клемовому з’єднанні з нероз’ємною маточиною за допомогою за-
тяжки болтів Р^г (г — кількість болтів) створюються сили N тиску
на вал, а сили тертя Р3 = N1 забезпечують передачу зовнішнього на-
вантаження від важеля до вала. Момент сил тертя повинен зрівнова-
жити зовнішній момент, тобто
Щй^кОЦ (11.51)
де к — 1,2... 1,3 — коефіцієнт надійності з’єднання, що вводиться в
розрахунок для компенсації нестабільності коефіцієнта тертя /.
Силу N визначимо за умови рівності моментів сил N і Р^г щодо
точки О (рис. 11.21, а), яку умовно можна взяти за шарнірне з’єднання
верхньої та нижньої частин клеми:
Рог (а + 0,54) = 0,5М4 або N =(2а/4 4-1). (11.52)
Після підстановки N у рівність (11.51) знайдемо потрібну силу
затяжки Ро одного болта в клемовому з’єднанні з нероз’ємною маточи-
ною:
Г0 = &2//[г/(2а4-4)]. (11.53)
Враховуючи скручування болтів при затяжці, запишемо розрахун-
кову силу для болта-
РбФ = Гор = кОІМгї (2а 4- 4)]. (11.54)
126
У клемовому з’єднанні з роз’ємною маточиною (рис. 11.21, б) зов-
нішній момент Лї = також урівноважується моментом сил тертя
1\ = тобто N{(1 — кЦІ.
Якщо сила N = 2Г0 (при наявності двох гвинтів у з’єднанні), то
відповідно матимемо потрібну силу затяжки для одного гвинта:
Ч = О1-55)
Для гвинта клемового з’єднання з роз’ємною маточиною розрахун-
кова сила
^б.Р =А;0ф/(2^). (11.56)
За виразами (11.54) та (11.56) для розрахункових сил двох варіан-
тів клемового з’єднання можна визначити потрібні діаметри болтів
«бо гвинтів за умови міцності їх на розтяг [див. формулу (11.38)].
11.10. Допустимі напруження та запаси міцності
в розрахунках різьбових з’єднань
Допустимі напруження та запаси міцності для різьбових деталей
з’єднань залежать від деяких факторів: впевненості у точності роз-
рлхункових навантажень з’єднання; характеру зміни навантаження
к часі, якості монтажу з’єднань (перекосів опорних площин під гайку
чи головку гвинта), точності забезпечення затяжки болтів (контрольо-
вана чи неконтрольована затяжка).
Для затягнутих болтів та гвинтів, що знаходяться під дією статич-
них навантажень, допустиме напруження беруть [о] — от/$, де коефі-
т запасу міцності 5 = 1,3... 1,5 при контрольованій затяжці з’єд-
ія. Якщо ж затяжка не контролюється, то 5 треба вибирати із
і. 11.4.
1ля болтів та гвинтів, які розраховують на витривалість, допустимі
- нцієнти запасу міцності наведені в 11.7, до того ж для болтів ма-
діаметрів при неконтрольованій затяжці слід брати підвищені
і іення запасів міцності.
Таблиця 11.4. Коефіцієнти запасу міцності для
болтів та гвинтів
Матеріал болта або гвинта Значення $ для діаметрів болтів 4, мм
6—10 16—30 30—60
Сталь: вуглецева легована 4 3—2 4-2,5 2—1,3 2,5-2
127
Рис. 11.22. Болтове з’єднання
фланців муфти
В розрахунках болтів на зріз до-
пустимі напруження беруть (т]зр =
= (0,3...0,4) <*г (більші значення для
статично навантажених з’єднань).
Із наведених даних випливає, що при
неконтрольованій затяжці різьбового
з’єднання для болтів малих діаметрів
треба брати підвищені коефіцієнти за-
пасу міцності. Це пов’язано з можли-
вістю перенапруження або навіть руй-
нування болтів малого діаметра при не-
контрольованій затяжці.
Контрольована затяжка має місце в
великосерійному та масовому вироб-
ництвах, а також використовується для
відповідальних різьбових з’єднань. Пе-
редбаченням контрольованої затяжки при проектуванні можна до-
сягти зменшення маси різьбових з’єднань.
Існує ряд методів контролю затяжки з’єднань, серед яких поширені
метод вимірювання деформації болтів (їхнього видовження) чи спеці-
альних пружних шайб, а також метод затяжки з’єднання за допомогою
спеціальних ключів граничного моменту.
11.11. Приклади розрахунків різьбових з'єднань
Задача 11.1. Визначити діаметр болтів, що з’єднують фланці муфти (рис. 11.22).
Вихідні дані для розрахунку: обертовий момент, який передає муфта, Т = 220 Н • м;
болти, розміщені на колі діаметром £>0 = 110 мм; кількість болтів 2=4.
Розв’язання. Для з’єднання фланців передбачаються болти класу міцнос-
ті 6.6 (див. табл. 11.2), тобто болти виготовляються зі сталі 45 (ов = 600 МПа; от —
= 360 МПа). При коефіцієнті запасу міцності 5=3 (табл. 11.4) допустиме напруження
розтягу для болтів
[о]р = пт/5 « 360/3 = 120 МПа.
Зовнішня поперечна сила на один болт
Р = 2Г/(Пог) = 2.220 • 103/(110 • 4) = 108 Н.
Потрібна сила затяжки болта [див. формулу (11.26)1
Ро = кР/Щ) « 1,5 • ІО’/СІ • 0,15) = 10* Н.
Тут взято коефіцієнт надійності з’єднання к — 1,5; число пар площин стику
/= 1; коефіцієнт тертя ковзання /=0,15.
З умови міцності на розтяг при коефіцієнті £=1,3 потрібний внутрішній діа-
метр різьби болтів
а, > V 4Гор/( л [о]р) = /4 • 10* • 1,3/(3,14 • 120) = 11,74 мм.
На основі даних табл. 11.1 можна взяти для з’єднання фланців муфти болти
М14, для яких — 11,835 мм.
Задача 11.2. Електродвигун 4А10054УЗ (рис. 11.23) закріплено на рамі за до-
помогою чотирьох болтів. На валу електродвигуна розміщено шків пасової переда-
128
Рис. 11.23. До розрахунку болтів кріплення електродвигуна до рами
мі. Розрахувати болти кріплення електродвигуна до рами за такими даними: потуж-
ність двигуна Р = З кВт; кутова швидкість ш = 150 рад/с; сила, що діє на вал дви-
гуна від натягу віток паса, Е — 920 Н; кут нахилу сили Е до горизонту а = 60°;
розрахункові розміри Л = 100 мм; І = 160 мм; Ь = 112 мм; а = 90 мм; діаметр от-
ворів в електродвигуні під болти = 12 мм.
Розв’язання. Якщо діаметр отворів у двигуні під болти відомий <і0 =
12 мм, то для кріплення двигуна можуть бути використані болти М10. У цьому
разі розв’язування задачі зводиться до визначення класу міцності болтів, тобто слід
підібрати потрібний матеріал для болтів.
Розв’язування задачі можна дати у такому порядку.
Обертовий момент, що діє на корпус електродвигуна,
Т = Р/со = 3 • 10»/150 = 20 Н • м.
Силу Е зобразимо у вигляді двох складових (рис. 11.23, а):
Р = Е зіп а = 920 зіп 60° = 796 Н;
5 я* Е соз а = 920 соз 609 = 460 Н.
Перенесемо сили Р і 5 у центр ваги площини стику двигуна і рами, при цьому
додамо і відповідні моменти сил.
129
І
У площинах, перпендикулярних до площини стику (рис. 11.23, б), діють такі
навантаження: сила К; обертовий момент Т; момент сили 5
Л115 = 5/1 = 460 - 100 = 46 • 10’ Н • мм;
момент сили /?
мп = К (а 4- 0,56) = 796 (90 4- 0,5 • 112) = 116,2 . 10« Н . мм.
У площині стику двигуна і рами (рис. 11.23, в) діють такі навантаження: сила 5
та її момент
Лі25 = 5 (а 4- 0,56) = 460 (90 4- 0,5 * 112) = 67,2 . 103 Н . мм.
Зовнішні осьові сили, що сприймаються кожним із чотирьох болтів (рис. 11.23, б),
Гя = £/4 = 796/4 = 199 Н;
Рмя = в П6,2 ’ 1°3/(2 ’ 112) = 520 Н;
Ртм = (Т + М,5)/(21) = (20 • 103 46 . 10’)/(2 . 160) = 206 Н.
Зовнішні поперечні сили, що припадають на кожний із чотирьох болтів
(рис. 11.23, в),
= 5/4 = 460/4= 115 Н;
РМ8 == М2з№) в 67»2 ‘ І03/<4 ‘ 98> в 172 Н-
Тут с — відстань від центра ваги стику до болтів,
с = V(0,5Ь)« 4- (0,5/)а = /(0,5- 112)» 4-(0,5 • 160)» = 98 мм.
Найбільша зовнішня осьова сила сприймається болтом 1 (рис. 11.23, б)
ґое = /> + + Гтм = 199 + 520 + 206 = 925 Н.
Найбільша зовнішня поперечна сила, що припадає на болти 1 і 3 (рис. 11.23, в),
Ра = + ?мз + С05 0 = 15а + 172* + 2 • 115 • 172 соз 55’ =
= 256 Н.
Тут £ — кут між векторами сил Р8 и
0 = агсІ£ (1/Ь) = агсІ£ (160/112) = 55°.
Для болта 1 Із умови нерозкриття стику [див. формулу (11.36)1 розрахункова
сила
^б.р= (М4-*Иоо= О»5, 1 >3 + 0,2) 925= 1988 Н.
Тут взято: коеф цієнт затяжки к3 = 1,5; коефіцієнт, що враховує скручування
болта при затяжці, 0 = 1,3; коефіцієнт зовнішнього навантаження Х= 0,2.
Для болта 1 або 3 із умови відсутності зсуву двигуна щодо рами (див. 11.7) роз-
рахункова сила
4Р = *М/(<7) = 1,8 • 256 . 1,3/(1 • 0,15) = 3994 Н.
Тут взято коефіцієнт надійності з’єднання к= 1,8; 0= 1,3; число пар площин
стику і=1; коефіцієнт тертя ковзання /= 0,15.
У подальший розрахунок беремо до уваги силу Р6 р, оскільки Р6 > Рб р.
Для передбачених болтів М10 маємо внутрішній діаметр різьби = 8,376 мм
(див. табл. Н.1).
130
Напруження розтягу у болті, спричинене СИЛОЮ Рдр,
Ор а 4/^ р/(л<ф = 4.3994/(3,14 - 8,376а) = 72,5 МПа.
При коефіцієнті запасу міцності 5=4 для болтів М10 (див. табл. 11.4) потрібна
границя текучості матеріалу болтів
ат 5ор = 4 • 72,5 = 290 МПа.
За табл. 11.2 маємо потрібний клас міцності болтів 5.6, тобто болти повинні бути
виготовлені із сталі ЗО або 35, а гайки можуть бути виготовлені із сталі 10.
Контрольні запитання
1. Назвіть основні геометричні параметри метричної різьби.
2. Які матеріали застосовуються для виготовлення кріпильних різьбових дета-
лей? Охарактеризуйте їхні класи міцності.
3. Які існують способи стопоріння різьбових деталей?
4. Запишіть та проаналізуйте вирази для визначення моментів сил тертя в різь-
бі та на торці гайки.
5. Назвіть причини нерівномірного розподілу навантаження на витках гайки.
Які конструктивні заходи використовують для підвищення рівномірності наванта-
ження витків різьби?
6. Запишіть основні умови міцності витків різьби. Чому не розраховують на
міцність витки різьби у разі використання стандартних різьбових деталей?
7. Назвіть характерні випадки навантаження різьбових з’єднань. За якими умо-
вами міцності розраховують діаметр болтів для цих випадків навантаження?
8. Накреслігь діаграму сумісних деформацій болта та деталей з’єднання і ви-
•иачте на ній зовнішню силу на з’єднання, силу навантаження болта та силу наванта-
ження стику деталей.
9. Запишіть вираз для розрахункової сили на болт у разі навантаження з’єднан-
ні зовнішньою осьовою силою.
10. Як впливає жорсткість болта та деталей з’єднання на розрахункову силу на
Ймт?
II. Чому при змінних зовнішніх навантаженнях з’єднання доцільно використо-
іи болти малої жорсткості?
12. Охарактеризуйте хід розрахунку групового болтового з’єднання для таких
яків: з’єднання навантажене осьовою силою, що проходить через центр ваги сти-
>лнання навантажене силами, що діють у площині стику; довільне навантаження
••пня. Які умови ставлять до з’єднань для забезпечення їхньої надійної роботи?
ІЗ. Від яких факторів залежать допустимі напруження для різьбових деталей?
II. Чому для болтів малих діаметрів рекомендуються більші коефіцієнти запа-
шності?
ГЛАВА 12. ШПОНКОВІ З'ЄДНАННЯ
12.1. Основні види шпонкових з'єднань та область
їхнього застосування
Шпонкою називають деталь, яку вставляють у пази вала І
очний (втулки) з метою утворення з’єднання, здатного передавати
іиоііий момент від вала до маточини або від маточини до вала.
І Іл рис. 12.1 зображені деталі шпонкового з’єднання! 1 — шпонка,
131
2 — вал і 3 — втулка (або маточина шківа,
УС \ зубчастого колеса).
Л Завдяки простоті та надійності конст-
і рукції, порівняльно низькій вартості, а та-
I ( / \ кож зручності складання шпонкові з’єд-
\ нання широко застосовують у машинобу-
\ дуванні. До недоліків шпонкових з’єднань
Хи /ЖЙЖ належать послаблення вала та маточини
шпонковими пазами, які зменшують попе-
речний переріз і спричинюють значну кон-
центрацію напружень, що сприяє втомному
Рис. 12.1. Шпонкове з’єднай- руйнуванню валів.
ня Розрізняють ненапружені та напружені
шпонкові з’єднання.
Ненапружені шпонкові з’єднання здійснюють
за допомогою призматичних та сегментних шпонок.
Призматичні шпонки за призначенням бувають звичайні
(рис. 12.2, а) та напрямні (рис. 12.2, б). Звичайні призматичні шпонки
(ГОСТ 23360—78) призначені для нерухомого з’єднання маточини
(втулки) з валом. Вони бувають із округленими або плоскими торцями.
Напрямні шпонки (ГОСТ 8790—79) застосовують у тих випадках, коли
деталі, розміщені на валах, можуть рухатись уздовж валів. Напрямну
шпонку закріплюють до вала гвинтами.
Згідно із стандартом ширину призматичної шпонки Ь і висоту /і
вибирають залежно від діаметра вала (і (табл. 12.1). Стандарт також
регламентує глибину паза на валу і у втулці /2. Довжину шпонки
І вибирають за шириною деталі, розміщеної на валу, перевіряють
Рис. 12.2. З’єднання призматичними шпонками
132
І мблиця 12.1. Шпонки призматичні (див. розміри за рис. 12.2, а)
Памггр вала <6 мм Переріз шпонки Глибина пазів Гранична довжина
Ь, мм * Ь, мм мм 'к мм тіп тах
Під 12 до 17 5 5 3,0 2,3 10 56
« 17 > 22 6 6 3,5 2,8 14 70
«22 >30 8 7 4,0 3,3 18 90
« ЗО > 38 10 8 5,0 3,3 22 ПО
. 38 > 44 12 8 5,0 3,3 28 140
« 44 » 50 14 9 5,5 3,8 36 160
. 50 » 58 16 10 6,0 4,3 45 180
. 58 > 65 18 11 7,0 4,4 50 200
• 65 » 75 20 12 7,5 4,9 56 220
• 75 >85 22 14 9,0 5,4 63 250
« 85 » 95 25 14 9,0 5,4 70 280
Примітка. Ряд довжин шпонок, мм: 10; 12; 14; 16; 18; 20; 22; 25; 28;-
Ю. 40; 45; 50; 56; 63; 70; 80; 90; 100; 110; 125; 140; 160; 180; 200.
рдхунком на міцність і також узгоджують зі стандартом. Робочими
ними призматичних шпонок є їхні бічні грані, які контактують з
ними гранями пазів. Робоча довжина призматичної шпонки зі
• уїденими торцями /0 = І — Ь, а для шпонки з плоскими торцями
- / (рис. 12.2, а).
Ширину призматичної шпонки та ширину паза в маточині викону-
іюлем допуску відповідно Ь6 та Н7. Ширина паза вала має поле
У І»6.
ніання за допомогою сегментної шпонки показано на рис. 12.3.
.» посадка шпонки на валу забезпечує їй більш стійке положен-
призматичної шпонки. Це запобігає перекошуванню шпонок
літаженням. Однак глибокий паз значно послаблює вал, тому
ні шпонки використовують головним чином для з’єднання де-
ка малонавантажених ділянках валів, наприклад на кінцях
('єднання сегментними шпонками є технологічними, оскільки
ієни я як шпонок,
іів на валах до-
(>сге.
4СІІГНІ шпон-
стапдартизовані
/4071—80). Розмі-
< птних шпонок та
ін них вибира-
। стандартом за-
і ід діаметра вала (і
З та табл. 12.2).
Рис. 12.3. З’єднання сегментною шпонкою
133
Та блиця 12.2. Шпонки сегментні (див. розміри за рис. 12.3)
Діаметр вала <2, мм Розміри шпонки Ь х Н X Я X 1, мм Глибина пазів, мм
Від 8 до 10 3x5x6,5 X 12,6 3,8 1.4
« 10 » 12 Зх6,5х8х 15,7 5,3 1.4
< 12 » 14 4х6,5х8х 15,7 5,0 1.8
« 14 » 16 4x7,5x9,5х 18,6 6,0 1.8
« 16 > 18 5х6,5х8х 15,7 4,5 2,3
« 18 > 20 5x7,5x9,5х 18,6 5,5 2,3
« 20 > 22 5x9x11X21,6 7,0 2.3
« 22 > 25 6x9x11x21,6 6,5 2.8
« 25 > 28 6X10X12,5X24,5 7,5 2.8
Ненапружені шпонкові з’єднання є найрозповсюдженіїпими. Вони
використовуються в поєднанні з перехідними посадками деталей на
вал або з посадками із гарантованим натягом. У таких випадках за-
безпечується достатнє центрування деталей та висока надійність з’єд-
нання.
Напружені шпонкові з'єднання здійснюються
за допомогою клинових та циліндричних шпонок.
Клинові шпонки за способом розміщення на валах бувають врізні,
на лисці, фрикційні і тангенціальні.
Клинові врізні шпонки (рис. 12.4, а, б) за формою поділяють на
шпонки клинові без головки та шпонки клинові з головкою
(ГОСТ 24068—80). Клинові врізні шпонки без головки бувають із
плоскими та ск| угленими торцями.
Клинові шпонки на лисці (рис. 12.5, а) та фрикційні (рис. 12.5, б)
бувають з плоскими торцями або з головкою.
Рис. 12.4. З’єд-
нання клинови-
ми врізними
шпонками
134
Рис. 12.5. З'єднання шпонкою на лисці (а), фрикційною (б) і тангенціальною
(в) шпонками
Всі клинові шпонки виготовляють з ухилом 1 1 100. Цей же ухил
передбачається і для паза маточини (втулки). Подібно до призматич-
них, клинові врізні шпонки частково розміщуються в пазі вала і част-
ково в пазі маточини. Клинові шпонки на лисці та фрикційні розмі-
шуються по всій своїй висоті в пазах маточини.
Розглянуті з’єднання клиновими шпонками передають обертовий
момент за рахунок сил тертя на широких робочих гранях. Ці сили тер-
ти створюються відповідним натягом у радіальному напрямі при за-
биванні шпонок. Тому зі сторони бічних граней клинових шпонок
передбачаються зазори.
Тангенціальні шпонки (рис. 12.5, в) відрізняються від інших кли-
нових шпонок тим, що натяг між валом та маточиною створюється
шпонками не в радіальному, а в дотичному напрямі. Одна із широких
ірлней тангенціальної шпонки направлена по дотичній до перерізу
млл, а одна із вузьких граней — по радіусу вала. Таке розміщення
піігсіїціальної шпонки спричинює постановку в з’єднанні двох шпо-
нок, розміщених під кутом 120—135°. За технологічними міркування-
ми кожна тангенціальна шпонка виконується з двох однобічно ско-
шених клинів. Тангенціальна шпонка використовується головним
»пшом у важкому машинобудуванні при значному діаметрі з’єднання.
Із клинових шпонок найрозповсюдженішими є врізні, бо порівняно
шпонками на лисці та фрикційними вони більш надійні, а порівняно
• лнгенціальними — більш технологічні. Взагалі клинові шпонки
• обмежене застосування, оскільки вони спричинюють зміщення
ючини відносно осі вала. Якщо перекіс деталі, розміщеної на
не допускається, наприклад для зубчастих коліс, то клинові
н не застосовують. Область використання клинових шпонок
•му проектуванні обмежується тихохідними машинами при необ-
іі частого розбирання з’єднань.
чіндричні шпонки (рис. 12.6) — це циліндричні штифти, що
иються в отвори, паралельні осі з’єднання, по посадках з натя-
135
Рис. 12.6. З’єднання циліндричною шпонкою
гом (посадка Н7/г6). Такі
шпонки можуть використо-
вуватись для закріплення
деталей на кінці вала. От-
вір під шпонку свердлять
та обробляють розверткою
після посадки деталі на вал.
Розміри циліндричних
шпонок стандартизо-
вані (ГОСТ 3128—70;
ГОСТ 12207—79). Діаметр
шпонки = (0,13...
0,16) (1, а довжина шпонки / = (3...4) гіш. Якщо міцність з’єднання
з однією шпонкою не забезпечується, то ставлять дві або три
циліндричні шпонки, зміщені відповідно на кут 180 або 120°.
Для виготовлення шпонок всіх видів використовують спеціальний
точний прокат для шпонок із сталей за ГОСТ 380—88 та ГОСТ 1050—88
з границею міцності не менше ніж 500 МПа.
12.2. Розрахунок ненапружених шпонкових з'єднань
Оскільки шпонкові з’єднання стандартизовані і їхні розміри ви-
бирають залежно від діаметра вала за відповідними стандартами, роз-
рахунок шпонкових з’єднань у більшості випадків виконують як пе-
ревірний.
Розрахунок з’єднання призматичною
шпонкою. В з’єднанні на рис. 12.7, а обертовий момент Т переда-
ється від вала до маточини деталі, розміщеної на ньому, за допомогою
взаємодії бічних вузьких граней шпонки з бічними стінками пазів на
валу та в маточині. Навантажені поверхні зминаються і при незнач-
них мікропереміщеннях спрацьовуються.
Рис. 12.7. До розрахунку з’єднань призматичною та сегментною шпонками
136
Сповним розрахунком з’єднання призматичною шпонкою е роз-
унок за умови обмеження напружень зминання азм = 5/Азм
де Е — сила, що діє на навантажені поверхні, а Л8М — пло-
понсрхні зминання.
'І.ля даного з’єднання маємо наближено Е = 2Т/<і, а площа поверх-
мннання Лзм — (к — і?) 10, де /0 — робоча довжина призматичної
ііікн (див. рис. 12.2, а). Таким чином, умову міцності шпонкового
нліікя записують у вигляді
азм = 2Т/[^/0 (А — /х)] < [а] зм. (12.1)
У формулі (12.1) закладена площа навантаженого контакту шпон-
• » бічною стінкою паза в маточині. Під дією зминання знаходиться
•ж поверхня навантаженого контакту шпонки з бічною стінкою
» на валу. Оскільки в стандартному шпонковому з’єднанні площа
поверхні більша, розрахунок слід виконувати саме по обмеженню
ружень зминання на поверхні контакту шпонки із бічною стінкою
»в маточині. На користь цього обгрунтування може бути і той
і, що розміщена на валу деталь може бути виготовлена з матеріалу,
П чинить менший опір зминанню, ніж сталеві вал та шпонка,
ні умова міцності (12.1) шпонкового з’єднання не виконується,
• і ібільшити довжину шпонки /0, якщо дозволяє довжина маточи-
іГи» передбачити в з’єднанні дві шпонки, взаємно зміщені на 180°
чи не застосовують рідко).
інколи виконують проектний розрахунок з’єднання призматичною
•їїкою. Тоді визначають потрібну робочу довжину шпонки, виходя-
чі умови (12.1):
10>2Т/[а(Н^І1)[а]ЗІЛ]. (12.2)
Чя чпаченням /0 знаходять повну довжину шпонки / = /0 4- А, яку
ігь у відповідність із стандартним рядом довжин.
іматична шпонка в навантаженому з’єднанні знаходиться та-
лією деформації зрізу. Але умова міцності на зріз врахована
ндартизації розмірів призматичних та сегментних шпонок. То-
проектуванні шпонкових з’єднань перевірка міцності на зріз
ґчзкова.
устимі напруження [о1зм для ненапружених шпонкових з’єд-
іежать від режиму навантаження з’єднання, міцності матеріа-
та втулки, виду посадки на вал.
нерухомих з’єднань беруть: при перехідних посадках втулки
Іоізм = (100... 120) МПа (втулка зі сталі) і [а]зм — (70...
д (втулка з чавуну); при посадках з гарантованим натягом
(160... 180) МПа (втулка зі сталі) і [а]зм = (ПО...130) МПа
із чавуну).
іпі з наведених значень [а]зм беруть для різко змінних наван-
шпонкового з’єднання.
137
Для рухомих з’єднань з напрямними призматичними шпонками
допустиме напруження значно знижують із метою запобігання зади-
рів та обмеження спрацьовування. В цьому разі беруть [сг]зм = (20...
ЗО) МПа.
Розрахунок з’єднання сегментною шпон-
кою (рис. 12.7, б) виконують так, як і розрахунок з’єднання призма-
тичною шпонкою, бо умови роботи цих з’єднань аналогічні. Тому умо-
ву міцності на зминання для з’єднання сегментною шпонкою згідно
з виразом (12.1) та позначеннями на рис. 12.7, б, записують у вигляді
Озм = 2Г/[б//(Л - УК [оізм. (12.3)
При невиконанні умови (12.3) у з’єднанні зі значною довжиною
маточини можна поставити в ряд по осі вала дві сегментні шпонки.
Допустимі напруження тут беруть такі самі, як і для з’єднань при-
зматичними шпонками.
12.3. Розрахунок напружених шпонкових з’єднань
Розрахунок з’єднання клиновою в р і з н о ю
шпонкою. В ненавантаженому обертовим моментом з’єднанні на
робочих гранях шпонки мають місце напруження зминання озм, які
є результатом запресовування шпонки (рис. 12.8, а). Ці напруження
розподіляються рівномірно на робочих гранях шпонки. Після наван-
таження з’єднання обертовим моментом Т (рис. 12.8, б) епюра рівно-
мірних напружень зминання перетворюється в трапецоїдну і далі —
у трикутну, що відповідає початку розкриття стику з правого боку
шпонки. Це відбувається тому, що обертовий момент Т намагається
повернути вал щодо маточини.
У крайньому стані з’єднання максимальне напруження зминання
досягає озм, а рівнодійна всіх напружень зминання Р — 0,5 сгзм6/
(І — активна довжина шпонкового з’єднання) зміщена від центральної
Рис. 12.8. До
розрахунку з’ед-
нання клиновою
врізною шпон-
кою
138
на 6/6 (лінія дії сили Р проходить через центр ваги трикутної
ти).
Обертовий момент Т, прикладений до вала, зрівноважується дією
пі А, прикладеної до вала з боку шпонки, і дією такої ж сили
• • * юрони маточини, а також дією сил тертя Р$ з боку шпонки та
Нііо'іини. Отже, умову рівноваги вала запишемо у вигляді
Т = Г6/6 + 7^/2 4- У?/?. (12.4)
Враховуючи те, що Р5 = Р[ і с « б//2, запишемо (12.4) так:
Т = Р(Ь/6 +ї(і). (12.5)
Якщо виразити силу Р через максимальне напруження зминання
вм (див. вище), то з рівності (12.5) дістанемо:
Т = 0,5озм6/ (6/6 4- ДО;
Озм = 12Т/[ЬІ (Ь 4- 6Д01- (12.6)
Розрахунок на міцність з’єднання клиновою врізною шпонкою —
перевірка умови озм [а]зм, де озм визначають за формулою (12.6),
• ’ііустиме напруження зминання [а]зм = (80... 100) МПа.
Розрахунок клиновою шпонкою на лисці вико-
• за тими самими залежностями, що й розрахунок клиновою вріз-
<• шпонкою.
Розрахунок з’єднання фрикційною шпон -
> ю. В розрахунку міцності з’єднання припускають, що в наванта-
пому з’єднанні напруження зминання залишаються рівномірно роз-
тленими на робочих гранях шпонки, тобто такими самими, якими
ні були після запресовування шпонки (рис. 12.9). Тому обертовий
игнт 7, що навантажує з’єднання, зрівноважується тільки момен-
• під сил тертя, які виникають між валом та маточиною, а також між
н їм та шпонкою. Для позначень на
12.9 запишемо Т = Р3сі = Р[сі = азмЬІ^ ’ довжина робочої грані шпонки, на >на контактує з маточиною. нсана вище рівність дає змогу дістати міцності з’єднання фрикційною шпон- егзм = Т/(6/М) [о]зм, (12.7) допустиме напруження рекомендується .ІИ ІОІЗМ = (70...80) МПа. Розрахунок з’єднання і л і н д ри ч ною шпонкою. З’єд- нім циліндричною шпонкою (рис. 12.6) / ( । \ ( Рис. 12.9. До розрахунку з’єднання фрикційною шпон- кою
139
розраховують також за умови обмеження напружень зминання в на-
вантаженому контакті шпонки з валом і маточиною. Для позначень
на рис. 12.6 умова міцності з’єднання може бути такою:
азм = 4ЖК[а]зм. (12.8)
Тут допустиме напруження можна взяти (а]зм = (100... 120) МПа.
12.4. Приклади розрахунків шпонкових з'єднань
Задача 12.1. Сталеве зубчасте колесо з’єднується з валом за допомогою призма-
тичної шпонки зі скругленимн торцями (рис. 12.10). Визначити розміри шпонкового
з'єднання за такими даними: номінальний обертовий момент, що передає з’єднання,
Т = 180 Н • м; діаметр вала, на якому встановлене зубчасте колесо, 4 = 36 мм; на-
вантаження на з'єднання з різкими змінами.
Р о з в* я з а н н я. За діаметром вала (і — 36 мм згідно зі стандартом вибираємо
такі розміри з’єднання (див. табл. 12.1): ширина шпонки Ь=10 мм; висота /і =»
= 8 мм; глибина паза на валу = 5 мм і у маточині колеса = 3,3 мм.
Для сталевого колеса та різко змінного навантаження беремо допустиме напру-
ження зминання [о]зм = 100 МПа.
За формулою (12.2) обчислюємо погрібну робочу довжину шпонки:
/0 == 2Т/[(І (Л — ґі) [о)зм) = 2 • 180 • 10а/(36 (8 — 5) 100] = 33,3 мм.
Повна довжина шпонки
І =. і0 4- ь = 33,3 4- 10 = 43,3 мм.
За стандартом беремо І = 45 мм.
Отже, задане з’єднання можна здійснити призматичною шпонкою 10 X 8 X
X 45 ГОСТ 23360—78.
Задача 12.2. Чавунний шків закріплено на валу за допомогою сегментної шпон-
ки (рис. 12.11). Вибрати розміри шпонки та перевірити міцність шпонкового з’єд-
нання за такими даними: номінальний обертовий момент, що передає з’єднання, Т =»
= 52 Н • м; діаметр вала (і — 24 мм; навантаження постійне.
Розв’язання. Згідно зі стандартом (див. табл. 12.2) для діаметра вала сі =
= 24 мм маємо: ширина шпонки Ь = 6 мм; висота Н = 9 мм; радіус шпонки =
= 11 мм: довжина І = 21,6 мм; глибина пазів на валу та у маточині відповідно ==•
« 6,5 мм 1 /3 — 2,8 мм.
Рис. 12.10. З’єднання вала
із зубчастим колесом за допо-
могою призматичної шпонки
Рис. 12.11. З’єднання ва-
ла зі шківом за допомогою
сегментної шпонки
140
Для з’єднання з чавунною маточиною та постійним навантаженням беремо до-
нн іммс напруження [о)зм = 80 МПа.
Перевіряємо міцність з'єднання на зминання за формулою (12.3):
озм = 2Т/[(11 (К — ґ3)1 =,2 • 52 . 10»/(24 - 21,6 (9 — 6,5)) = 80,2 МПа.
Міцність з’єднання достатня, бо розрахункове напруження практично дорівнює
допустимому для вибраної сегментної шпонки 6x9 ГОСТ 24071—80.
Контрольні запитання
І . Опишіть будову та призначення шпонкових з’єднань. Вкажіть переваги та
идіхн цих з'єднань.
2 , Які е основні види ненапружених та напружених шпонкових з’єднань?
З Наведіть ескізи ненапружених та напружених шпонкових з’єднань. Проана-
\Ате принцип роботи таких з’єднань.
4 За якою умовою міцності розраховують шпонкові з’єднання?
Г» Запишіть вираз для умови міцності з’єднання призматичною шпонкою. Про-
чісуйте цей вираз.
Л Які фактори впливають на допустимі напруження зминання для шпонкових
НІАІПР
ГЛАВА 13. ЗУБЧАСТІ (ШЛІЦЕВІ)
ТА ПРОФІЛЬНІ З'ЄДНАННЯ
13.1. Основні типи зубчастих з'єднань і області
їхнього використання
У випадках, коли не можна забезпечити міцність шпонкових з’єд-
। ігталей із валами (через обмежену довжину маточини), викори-
>гь зубчасті з’єднання. Такі з’єднання утворюються за допомо-
’бців (шліців), що нарізаються на поверхнях вала та отвору
пи деталі, яка з’єднується з валом. За формою профілю зубців
іяють три типи з’єднань (рис. 13.1): прямокутні, евольвентні та
і ні.
З’єднання з прямокутним профілем з у б -
X виготовляють із центруванням за внутрішнім діаметром (і
♦С. 13.1, а), за зовнішнім діаметром й (рис 13.1, б) і за бічними гра-
’ іубців (розмір Ь на рис. 13.1, в). Центрування за внутрішнім
шнім діаметрами забезпечує більш високу точність з’єднання,
рування за бічними гранями зубців — більш рівномірний роз-
иавантаження на зубці.
імокутні зубці використовують для зовнішніх діаметрів валів
до 125 мм; число зубців від 6 до 20. ГОСТ 1139—80 передбачає
іня трьох серій: легкої, середньої та важкої. З переходом від
до середньої та важкої серій при одному і тому ж діаметрі сі
< діаметр О і збільшується число зубців Тому з’єднання серед -
.і важкої серій відрізняються підвищеною несучою здатністю.
141
г б е
Рис. 13.1. Конструкції зубчастих з’єднань
Умовне позначення та допуски з’єднань із прямокутним профілем
зубців регламентовані стандартами. Умовне позначення з’єднання
складається: з літери, що позначає поверхню центрування; числа зуб-
ців г і номінальних розмірів а, О, Ь з’єднання (рис. 13.1, а—в); по-
значення посадок діаметрів та розміру д, які розміщені після відповід-
них розмірів. Допускається не вказувати в позначенні поле допусків
нецентруючих діаметрів. Наприклад, при г = 8; сі = 56 мм; О =
= 62 мм; Ь = 10 мм позначення з’єднання з прямокутними зубцями із
центруванням за зовнішнім діаметром та з посадками за діаметром
центрування Н8/Ь7, за розміром Ь Р10/Й9 має такий вигляд: £) —
8 х 56 х 62Н8ІІЇ7 х 10 Н0/Л9.
Зазори між нецентруючими поверхнями можуть бути збільшеними,
щоб гарантувати спряження по центруючих поверхнях. Призначення
посадок із зазором по центруючих поверхнях визначається вимогами
зручності складання або потребою переміщення деталі щодо вала в
процесі роботи з’єднання. Для підвищення стійкості проти спрацьо-
вування з’єднань, в яких вали навантажені крутним та згинальним
моментами, доцільно мати мінімальні зазори між центруючими по-
верхнями.
З’єднання з евольвентним профілем з у б -
ц і в (рис. 13.1, а, д) згідно з ГОСТ 6033—80 можна виготовляти з цент-
руванням по бічних сторонах, внутрішньому або зовнішньому діа-
метрах. Евольвентні з’єднання використовують для діаметрів від 4 до
500 мм та г — 6...82. За стандартом кут профілю початкового контуру
зубців а = 30°, а за номінальний діаметр з’єднання беруть його зов-
142
ЯІшній діаметр О = т (г + 1,0 + 2х), де т— модуль з’єднання;
д — коефіцієнт зміщення початкового контуру
Позначення з’єднання з евольвентним профілем зубців склада-
ється: з номінального діаметра з’єднання £>, модуля т, позначення по-
> и з’єднання, розміщеного після розмірів центруючих елементів;
?ра стандарту. Наприклад, позначення з’єднання з О = 50 мм;
2 мм; центрування по бічних сторонах зубців із посадкою Н9/&9
м.к вигляд: 50 X 2 X Н9І&9 ГОСТ 6033—80.
В умовному позначенні на розмірах нецентруючих поверхонь
посадки не вказують.
З’єднання з трикутним профілем зубців
. 13.1, е) виготовляють із центруванням тільки по бічних сторонах
іів. Ці з’єднання не стандартизовані і використовуються як неру-
при тонкостінних втулках і обмежених габаритних розмірах за
стром. Згідно з діючими нормалями за номінальний діаметр з’єд-
ія беруть зовнішній або ділильний діаметр; модуль зубців т =
),2...І,6) мм; число зубців г = 20...70; кут профілю зуба стано-
. 60, 72 або 90°.
» розглянутих типів зубчастих з’єднань тепер найрозповсюдже-
<ми є з’єднання з прямокутним профілем зубців. Вони використо-
іься для з’єднання з валами зубчастих коліс, півмуфт та інших
лей. Такі з’єднання можуть бути рухомими або нерухомими,
кою ж метою використовують з’єднання з евольвентним профілем
ив, які порівняно з іншими більш технологічні та здатні переда-
і більші навантаження.
іубчасті з’єднання порівняно із шпонковими мають переваги:
ливість передачі більших обертових моментів (при однакових дов-
лх маточини) завдяки значно більшій поверхні контакту з’єдна-
алей та більш рівномірному розподілу навантаження по цій по-
більш точне центрування деталей на валу; краще напрямлен-
іей при переміщенні їх уздовж вала.
ільшості випадків зовнішній діаметр О зубчастого з’єднання
। лчається з умов міцності та жорсткості вала або технологічними
рваннями. При назначенні довжини / зубчастого з’єднання керу-
»і співвідношенням ПО 1,5.
13.2. Розрахунок зубчастих з'єднань
< Чиновним критерієм роботоздатності зубчастих з’єднань є опір
>чих поверхонь зминанню та спрацьовуванню, яке виникає через
ккчіі мікропереміщення навантажених поверхонь внаслідок де-
млцій вала та зазорів у деталях з’єднання (корозійно-механічне
вування).
іальному випадку для всіх типів зубчастих з’єднань, наванта-
>бертовим моментом Т, умовне напруження зминання робочих
143
Рис. 13.2. Схема навантажен-
ня шліцевого з’єднання
поверхонь зубців визначають за формулою
Озм = ^г/Лзм « 277(4Л/4), (13.1)
де Еі = 2Т/сІт — колова сила в зубчасто-
му з’єднанні; Лзм = — розрахункова
площа дотикання зубців з’єднання; сіт -
середній діаметр з’єднання; Н — висота ро
бочої поверхні контакту зубців; І — дов-
жина зубчастого з’єднання (довжина мато
чини деталі, розміщеної на валу); г — чис-
ло зубців у з’єднанні; & — 0,75...0,80 —
коефіцієнт, що враховує нерівномірність
розподілу навантаження на зубці з’єднан-
ня.
Роботоздатність зубчастого з’єднання забезпечується за умови
Пзм < Мзм, де Іоізм — допустиме напруження, що запобігає зминан-
ню та спрацьовуванню зубців; [о]зм = (10...20) МПа — для рухомих
з’єднань із загартованими робочими поверхнями і спокійного наван-
таження; [оЬм = (80...100) МПа — для нерухомих з’єднань з неза-
гартованими робочими поверхнями; [о1зм = (110... 130) МПа—для
нерухомих з’єднань із загартованими робочими поверхнями.
Розглянутий вище розрахунок зубчастих з’єднань може бути ви-
користаний для з’єднань, навантажених тільки обертовим моментом Т.
При навантаженні з’єднання моментом Т, а також радіальною /•'
та осьовою Е й силами (рис. 13.2) розрахунок треба виконувати згідно
з ГОСТ 21425—75, який розповсюджується тільки на зубчасті з’єднан-
ня з прямокутним профілем зубців. Тут умова (13.1) може бути вико-
ристана лише для орієнтовного визначення довжини / з’єднання.
За стандартом формула (13.1) для визначення умовних напружень
на робочих поверхнях зубців має вигляд
о = 77(^/),
(13.2)
де 8? = 0,5гітНг — питомий сумарний статичний момент площі робо-
чих поверхонь з’єднання щодо осі вала при 5 = 1 (табл. 13.1).
Напруження о, добуте за формулою (13.2), не повинно бути біль-
шим від меншого із двох значень умовних допустимих напружень, тоб-
то [а]сп > а [а]зм, де [а]сп — умовне допустиме напруження для
обмеження спрацьовування, а [а]зм — умовне допустиме напруження
для обмеження зминання.
Для визначення допустимих напружень [о]Сл та [ог]зм (з урахуван-
ням деяких спрощень порівняно з ГОСТ 21425—75) уводять параметри,
що характеризують умови навантаження зубчастого з’єднання
(рис. 13.2):
я|> = /4/(27); є = 4/(7/), (13.3)
144
Змив «мицрв »Швв з ягммива^шивв» врвфквгм вмСвйв
.Лавам ваша Зомвм сє^ія Важка серія
1 мм | ми* г х а х о х Ь т мм V- мм2 г х а х о х ь Ш’ мм мм2
6x23x26x6 24,5 66 6х ІІХ 14x3 12,5 34 10x16x20x2,5 18,0 126
6x26x30x6 28,0 118 6x13x16x3,5 14,5 39 10X18X23X3 20,5 195
6x28x32x7 30,0 126 6X16X20X4 18,0 76 10X21X26X3 23,5 223
8x 32 x 36 x6 34,0 163 6х 18x22x5 20,0 84 10x23x29x4 . > >26,0 312
8x36x40x7 38,0 182 6x21x25x5 23,0 97 10X26X32X4 29,0 319
8x42x46x8 44,0 211 6x23x28x6 25,0 145 10x28x35x4 31,5 426
8x46x50x9 48,0 230 6x26x32x6 29,0 191 10x32x40x5 36,0 576
8x52x58x10 55,0 440 6x28x34x7 31,0 205 10x36x45x5 40,5 749
8х56х62хЮ 59,0 472 8x32x38x6 35,0 308 10X42X52X6 47,5 978
8x62x68x12 65,0 520 8X36X42X7 39,0 343 10x46x56x7 51,0 1020
10x72x78x12 75,0 750 8x42x48x8 45,0 396 16x52x60x5 56,0 1340
]0х82х88х 12 85,0 850 8x46x54x9 50,0 600 16x56x65x5 60,5 1690
10х92х98х 14 95,0 950 8х52х60х Ю 56,0 672 І6Х62Х72Х6 67,0 2140
10x112x108x16 105,0 1050 8х56х65х Ю 61,0 854 16 x 72 x82 x7 77,0 2460
10x112x120x18 116,0 1740 8x62x72x12 67,0 1072
Таблиця 13.2. Середні допустимі напруження МПа, для нерухомих
зубчастих з’єднань
Параметри Термообробка та середня твердість деталей з’єднання
4і е Без термооб- робки НВ 220 Поліпшення НВ 270 Гартування та відпуск
НКС 40 НКС 45 НЯС 52
0,35 0 73 85 105 130 142
0,35 0,25 52 60 77 97 105
0,35 0,50 38 45 60 75 80
0,50 0 47 55 67 85 92
0,50 0,25 32 37 47 60 66
0,50 0,50 22 26 34 42 45
де Р — радіальна сила; Ма — перекидний момент, що визначається
за формулою
Мп = Ге ± 0,5ГЛ. (13.4)
У виразі (13.4) беруть знак «плюс» при дії в одному напрямі двох
складових моменту щодо точки О осі вала, яка лежить на середині
довжини маточини, і знак «мінус» — при дії в різних напрямах.
Умовне допустиме напруження для обмеження спрацьовування
визначають за формулою
[ц]сп = [а]сп К м/(К еКосКм)- (13.5)
Тут [а]сп — середнє допустиме напруження при розрахунку неру-
хомих зубчастих з’єднань, яке беруть за табл. 13.2; Ки = И108/М —
коефіцієнт числа циклів навантаження зубців з’єднання за повний
строк служби, тобто сумарного числа обертів з’єднання щодо вектора
радіального навантаження (М = 60л/і, де п — частота обертання,
хв-1, а Н — строк служби з’єднання, год); Ке — коефіцієнт режиму
навантаження з’єднання (для режимів за рис. 2.3: П — Ке — 1,0;
В — Ке = 0,77; СР - Ке = 0,63; СН - Ке = 0,57; Л — Ке
= 0,43); Кос — коефіцієнт, що враховує осьові переміщення деталей
з’єднання (АГос = 1 — нерухоме з’єднання; К<к = 1,25 — рухоме без
навантаження; Кос = 3 — рухоме під навантаженням); Км — коефі-
цієнт умов змащування рухомого з’єднання (К* = 0,7 — мастило без
забруднень; Км — 1 — мастило середньо забруднене; К№ = 1,4 —
мастило достатньо забруднене).
Умовне допустиме напруження для обмеження зминання в рухо-
мих зубчастих з’єднаннях із загартованими робочими поверхнями бе-
руть [а]зм ~ (10...20) МПа за нормальних умов експлуатації і [а]зм =»
= (5... 10) МПа за важких умов.
146
Таблиця 13.3. Значення коефіцієнта Кт
кр
Серія Зовнішній діаметр з'єднання Ь, мм Коефіцієнт К. п кр
ЦЬ = 1.0 1/0 = 1,5
Легка До 26 1,3 1,7
30—50 1,5 2,0
58—120 1,8 2,6
Середня До 19 1,6 2,1
20—30 1,7 2,3
32—50 1,9 2,8
54—112 2,4 3,5
Важка До 23 2,0 3,0
23—32 2,4 3,5
35—65 2,7 4,1
72—102 2,9 4,3
Для нерухомих з’єднань умовне допустиме напруження
Мзм=ат/(5/СдЛп^к). (13.6)
Іут от — границя текучості матеріалу зубців деталі меншої твер-
іі (для матеріалів з поверхневим зміцненням беруть <гт для поверх-
ів шару); 5 = 1,25...1,40 — коефіцієнт запасу (менші значення
загартованих поверхонь, більші—для загартованих); /Сд =
/Т — коефіцієнт динамічності навантаження; Кп = 1,2... 1,5 —
нт, що враховує похибки виготовлення з’єднання; —
і нт, що враховує нерівно-
і. розподілу навантаження
>цями при дії на з’єднання
ної сили Г (якщо ф = 0,35,
» 1,7; якщо ф = 0,50, то
.0); Кк — коефіцієнт, що
/є вплив поздовжньої кон-
іії навантаження, який ви-
іь за формулою
К« = Ккр+^-1, (13.7)
— коефіцієнт концентрації
іження від закручування ва-
г*л. 13.3); Ке — коефіцієнт
Рис. 13.3. Графіки до визначення ко-
ефіцієнта Ке
147
концентрації навантаження в зв’язку із зміщенням лінії дії радіаль-
ної сили від середньої площини маточини (визначається за графіками
на рис. 13.3).
Формулу (13.7) використовують при зміщенні радіальної сили І-
від середини з’єднання на величину е у бік тієї ділянки вала, де при-
кладений обертовий момент Т, так як це має місце на рис. 13.2. При
цьому проявляється концентрація навантаження, яка спричинена
скручуванням вала та дією перекидного моменту Л4П, і яка зосередже-
на біля одного і того ж торця з’єднання. При зміщенні е у бік, проти-
лежний від ділянки вала, де прикладається момент Т, коефіцієнт Кк
вибирають рівним більшому із значень коефіцієнтів /Скр та /Се-
13.3. Профільні з'єднання
У профільному з’єднанні (рис. 13.4) охоплююча та охоплювана по-
верхні деталей мають некруглу форму в поперечному перерізі. Це дає
змогу передавати обертовий момент без використання додаткових де-
талей. Такі з’єднання застосовують для встановлення на валах рукоя-
ток, маховиків, а інколи й важконавантажених деталей (наприклад,
з’єднання корабельного тягового гвинта з трансмісійним валом).
На практиці мають застосування овальний (рис. 13.4, ц), трикут-
ний (рис. 13.4, б) та квадратний (рис. 13.4, в) контури поперечного
перерізу профільного з’єднання. Більш досконалими є такі профіль-
ні з’єднання, контури яких мають властивість рівноосності — незмін-
ності відстані між двома паралельними дотичними до контуру. В цьо-
му разі спрощується технологія обробки поверхонь деталей з’єднання.
Порівняно із шпонковими та зубчастими з’єднаннями профільне
з’єднання відрізняється меншою концентрацією напружень та кра-
щим центруванням. Недоліком цього з’єднання є складність виготов-
лення профільних поверхонь.
Рис. 13,4, Деякі види профільних з’єднань
148
Профільні з’єднання наближено розраховують за умови обмежен-
папружень зминання, що виникають на спряжених поверхнях,
интажених обертовим моментом деталей з’єднання. При цьому
ускають, що зазор у з’єднанні відсутній. Наприклад, для квадрат-
> контуру профільного з’єднання при розподілі напружень зми-
нім за схемою рис. 13.4; в можна записати рівність
7* __ л °зм а1 а
1 ’ 2 2 3'
Виходячи з цієї рівності, умова міцності квадратного з’єднання
Митиме вигляд
азм = ЗТ/(п2/)< [о]зм. (13.8)
‘ устиме напруження зминання для сталевих термооброблених
ті. и профільного з’єднання беруть [а]зм = (90...120) МПа.
13.4. Приклад розрахунку зубчастого з’єднання
і ’ । та. Перевірити міцність зубчастого з єднання зірочки ланцюгової передачі
(рис. 13.5). Вихідні дані для розрахунку: номінальний обертовий момент,
ае з’єднання, Т = 140 Н • м при 150 хв-1; радіальна сила на зірочці Г =
II; передбачається зубчасте з’єднання 2Х(іхОхЬ=8 X 36 X 42 X
середня серія); довжина з’єднання І = 40 мм; зміщення площини дії сили Г
едньої площини маточини зірочки
і. матеріал вала сталь 45 норма- /----\
(о, = 340 МПа); матеріал зіроч- ________
іль 50 (гартування з відпускай- т
ккий режим навантаження; мож- _ й __ .7иА/К7 7
юткочасні перевантаження в 2,5 На/п 7*7 /7 //
, івняно з номінальним значенням
служби Н — 40 000 год.
। в’ я з а н н я Нерухоме зубчасте
»і навантажене обертовим момен-
тальною силою. Тому розрахунок
ю <а умовними напруженнями на
поверхнях зубців для запобігання
іуванню та зминанню.
•мий сумарний статичний момент
/.очих поверхонь з’єднання щодо
5^ = 343 мм2 (див. табл. 13.1).
робочих поверхнях зубців умовне
пня
//(5Р1) = 140 • 103/(343 • 40) =
= 10,2 МПа.
лметри, що характеризують наван-
вубчастого з’єднання, такі:
-ч Нт!(2Т) = 2400 • 39/(2 X
Рис. 13.5. Зубчасте з’єднання дірочки
з валом
X 140 • 103) = 0,334;
(Н) « 12 -103/(2400 • 40) = 0,125.
149
Тут Л «в 39 мм (за табл. 13.1), а перекидний момент
Мп = Ре = 2400 • 5 = 12 • 103 Н • мм.
За параметрами ф та £ у табл. 13.2 знаходимо допустиме напруження «
= 60 МПа. Число циклів навантаження зубців
М = 60л/і = 60 • 150 • 40 000 = 36 • 10’.
Коефіцієнт числа циклів навантаження
Кц = КТб5/?? = VІО’ЛЗб • 10’) = 0,53.
Коефіцієнт режиму навантаження К£ = 0,77, а коефіцієнти Кос = її Км = !•
Для обмеження спрацьовування зубців умовне допустиме напруження
[°1сп = І^сп = 60 . 0,53/(0,77 . 1 . 1) = 41,3 МПа.
Допустиме напруження для запобігання зминанню зубців визначаємо за фор-
мулою
(°]зМ
Згідно з існуючими рекомендаціями маємо: § = 1,30 — коефіцієнт запасу; /Сд =
= 2,5 — коефіцієнт динамічності; Кп — 1,5. Кн = 1,7, Кк — Ккр ~ 1,9 — відпо-
відно коефіцієнти, що враховують похибки виготовлення з’єднання, нерівномірність
розподілу навантаження між зубцями і вплив поздовжньої концентрації навантаження.
З урахуванням значень розрахункових коефіцієнтів маємо
[а]зм = 340/(1,30.2,5 • 1,5 * 1,7 . 1,9) « 21,5 МПа.
Отже, розрахункове умовне напруження о = 10,2 МПа менше від двох здобутих
значень допустимих напружень [о]сп та [о]зм, що забезпечує роботоздатність зубчас-
того з’єднання.
Контрольні запитання
1. Назвіть та охарактеризуйте основні типи зубчастих з’єднань.
2. Зазначте переваги зубчастих з’єднань перед шпонковими.
3. Назвіть основний критерій роботоздатності зубчастих з’єднань.
4. Запишіть та проаналізуйте умову міцності на зминання зубчастого з’єднання,
яке передає тільки обертовий момент.
5. Чому на міцність зубчастих з’єднань впливають радіальне навантаження та
перекидний момент? Як це враховують у розрахунках?
6. Які фактори впливають на допустимі напруження для зубчастих з’єднань?
7. Наведіть приклади профільних з’єднань і розкажіть принцип їхнього розра-
хунку.
ГЛАВА 14. ПРЕСОВІ З'ЄДНАННЯ
14.1. Загальні відомості
З’єднання деталей за допомогою посадок із гарантованим натягом
називають пресовими. Ці з’єднання займають деяке проміжне
положення між роз’ємними та нероз’ємними з’єднаннями. При неве-
ликих натягах пресові з’єднання допускають неодноразове складання
150
Ті розбирання без пошкодження деталей, але при цьому дещо зменшу-
• ’і.ся несуча здатність з’єднання. При великих натягах під час роз*
,мііня з’єднань можливі значні пошкодження, а деколи і руйнуван-
іргалей з’єднання. Особливістю пресових з’єднань є те, що вони
ненюються без додаткових деталей.
Пресові з’єднання поділяють на дві групи:
І. Пресові з’єднання типу «вал — маточина», в яких з’єднувані
іерхні деталей мають циліндричну або конічну форму. Цей дуже
исюджений, простий, надійний та економічний спосіб з’єднання
і використовують при відносно рідких розбиранні — складанні
і з’єднання, допускає передачу великих навантажень, в тому
вібраційних та ударних. Пресові з’єднання такого типу застосо-
<»п, для з’єднання бандажа з колесом та колеса з віссю колісної
І»и залізничного вагону (рис. 14.1, а), для з’єднання зубчастих коліс
палами (рис. 14.1, б), при закріпленні підшипників на валах
««’. 14.1, в) та ін. У пресовому з’єднанні по конічних поверхнях
іг 14.1, г) потрібний натяг створюється, наприклад, відповідною
іижкою гайки на валу.
V пресових з’єднаннях типу «вал — маточина» навантаження
»вий момент або осьова сила) передається через сили тертя на
« них поверхнях деталей. Потрібний нормальний тиск між цими
:ними створюється силами пружних деформацій деталей, що
;іють через натяг.
151
2. Стяжні з’єднання двох або більшої кількості деталей за допомо-
гою спеціальних стягувальних планок — анкерів (рис. 14.1, д) або
стягувальних кілець (рис. 14.1, е). Контакт деталей у цьому разі
здійснюється по площинах. Стягувальні деталі встановлюють по по-
садках із гарантованим натягом. Через технологічні труднощі виготов-
лення таких з’єднань їхнє використання обмежене рідкими випадками
деяких деталей (збірних станин, маховиків та ін.).
Надалі обмежимось розглядом тільки пресових з’єднань типу
«вал — маточина», які здійснюються по циліндричних поверхнях.
Простота та технологічність такого з’єднання забезпечують йому
низьку вартість і можливість використання в масовому виробництві.
Висока точність центрування деталей і рівномірний розподіл наванта-
ження на всю посадочну поверхню дає змогу застосовувати пресове
з’єднання для скріплення деталей сучасних високошвидкісних машин.
Суттєвим недоліком пресового з’єднання є залежність його несучої
здатності від ряду факторів, які важко піддаються врахуванню: широ-
кого розсіювання значень коефіцієнта тертя та натягу, впливу робо-
чих температур на міцність з’єднання та ін. До недоліків з’єднання
належать також наявність високих напружень в деталях при запресо-
вуванні їх та зменшення опору втомного руйнування внаслідок кон-
центрації напружень біля країв отворів.
На практиці часто застосовують комбінацію пресового та шпонко-
вого з’єднання У цьому разі пресове з’єднання може бути основним
або допоміжним. Якщо пресове з’єднання основне, то воно сприймає
більшу частину навантаження, а шпонка тільки підвищує надійність
з’єднання (резервний елемент). Допоміжна роль пресового з’єднання
відводиться для часткового розвантаження шпонки та центрування
деталей. Точний розрахунок комбінованого з’єднання ще не розроб-
лений у достатній мірі, оскільки існують труднощі у визначенні тієї
частки навантаження, яку передає кожне зі з’єднань. Тому в практич-
них розрахунках наближено припускають, що все навантаження
сприймається основним з’єднанням — пресовим або шпонковим.
Для пресових з’єднань деталей у більшості випадків рекоменду-
ють такі посадки: Н7/п6; Н7/р6; Н7/г6; Н7/з6; N7/116; Р7/И6.
14.2. Деякі питання технології складання
пресових з'єднань
Складання пресових з’єднань здійснюється двома способами: а) за-
пресовуванням (напресовуванням) деталей; б) нагріванням охоплюю-
чої або охолодженням охоплюваної деталі.
Запресовування великих деталей виконують на потужних гідрав-
лічних пресах, дрібних деталей — на ручних гвинтових або важіль-
них пресах. Швидкість запресовування не повинна перевищувати
5 м/с. Поверхні спряження деталей, що з’єднуються, рекомендують
152
Рис. 14.2. Конструктивні елементи деталей пресового з’єднання
•матувати свиріповим чи льняним мастилом. Щоб полегшити центру-
вання та запобігти утворенню задирок, деталі повинні мати фаски
(рис. 14.2, а). Розмір фаски е треба брати не менш як 0,М. Інколи на
•ялу при наявності вільної ділянки виконують центруючий поясок
по одній із посадок із гарантованим зазором (рис. 14.2, б). Крім полег-
шення складання з’єднання, такий центруючий поясок зменшує кон-
нтрацію напружень біля краю напресованої деталі.
Сила, яку слід прикласти до деталі при ЇЇ запресовуванні, росте
'□порційно довжині пресування, оскільки збільшується площа кон-
кіу з’єднуваних деталей. Сила при випресовуванні в момент почат-
/ відносного руху деталей суттєво більша, ніж при русі, бо коефі-
« нт тертя спокою більший коефіцієнта тертя під час відносного руху,
зменшенням довжини з’єднання при випресовуванні потрібна сила
і я роз’єму деталей зменшується. Максимальна сила, Н, для запре-
сування або випресовування деталей може бути наближено визна-
на для сталевих деталей з’єднання за такою емпіричною залежністю:
Р = 2- 1045тах/, (14.1)
/іг Л(пах — максимальний натяг у з’єднанні, мм; І — довжина пресу-
імішя, мм.
Широке застосування для складання та розбирання пресових
«днань має такий технологічний метод, як підведення до спряжених
•вгрхонь рідкого мастила під високим тиском. Мастило подається
*і<> спеціальних каналах у кільцеву канавку, звідки витікає між спря-
женими поверхнями з’єднання. При цьому зменшується сила для ви-
Прссовування і деталі з’єднання не пошкоджуються. Такий техноло-
гічний метод дає змогу неодноразово розбирати та складати пресове
«днання без суттєвого зменшення його міцності.
Часто при складанні пресових з’єднань використовують ефект
ііііи розмірів деталей залежно від їхньої температури. Для складан-
и з’єднання за допомогою нагрівання охоплюючої або охолодження
«□плюваної деталі треба забезпечити різницю температур деталей,
кп визначається за формулою
Д/ = (бтах + Д)/(а<0, (14.2)
153
II
де бтах — максимальний натяг у з’єднанні, мм; А = (0,10...0,08) мм —
зазор для зручності складання; (і — номінальний діаметр поверхонь
з’єднання, мм; а — коефіцієнт лінійного розширення матеріалу де-
талей при нагріванні (для сталей а = 12 • 10~б 1/°С).
Нагрівання охоплюючої деталі можна здійснювати в маслі або в
спеціальній печі. Для охолодження охоплюваних деталей застосову-
ють суху вуглекислоту (температура випаровування — 79 °С) або
рідке повітря (температура випаровування — 190 °С). Змащування
поверхонь деталей при такому способі складання пресового з’єднання
недопустиме.
Спосіб складання пресових з’єднань за допомогою нагрівання або
охолодження однієї з деталей забезпечує приблизно в 1,5 раза біль-
ший опір зміщенню спряжених поверхонь деталей порівняно із з’єд-
наннями, здобутими запресовуванням. Це пояснюється тим, що при
запресовуванні згладжуються нерівності поверхонь і відповідно змен-
шується натяг у з’єднанні.
14.3. Розрахунок пресових з'єднань
В розрахунках на міцність пресових з’єднань, перш за все, тре-
ба забезпечити взаємну нерухомість з’єднаних деталей під навантажен-
ням, що досягається встановленням потрібної посадки (натягу в з’єд-
нанні), а також слід перевірити міцність спряжених деталей, бо потріб-
ний натяг може спричинити руйнування або недопустимі деформації
деталей з’єднання. Тому розрахунок пресових з’єднань виконують
за двома умовами: міцності (нерухомості) з’єднання; міцності деталей
з’єднання. Розглянемо ці умови.
Розрахунок на міцність пресового з’єднання. Пресове з’єднання
може бути навантаженим осьовою силою Ра, обертовим моментом Т
або осьовою силою і обертовим моментом одночасно (рис. 14.3).
Рис. 14,3. Схеми навантаження пресового з’єднання
154
Зовнішнє навантаження зрівноважується силами тертя на спряже-
них поверхнях деталей, які обумовлені нормальним тиском р, що
виникає в результаті натягу в з’єднанні.
Умова міцності з’єднання при його навантаженні осьовою силою
(рис. 14.3, а) має вигляд
' (14.3)
ввідки потрібний тиск на спряжених поверхнях
(14.4)
Умова міцності з’єднання при його навантаженні обертовим мо-
ментом Т (рис. 14.3, б) така:
Т<0,5т/2/р/. (14.5)
З цієї умови потрібний тиск на поверхнях з’єднання
р>2Т/М2//). (14.6)
Умова міцності з’єднання при одночасному навантаженні осьовою
силою Ра та обертовим моментом Т (рис. 14.3, в) має вигляд
Кго + Р2 < яаірі, (14.7)
• Г/ = 2Т/сі — колова (тангенціальна) сила від дії обертового момен-
у Т, віднесена до спряжених поверхонь. Умова (14.7) дає змогу запи-
іги вираз для визначення потрібного тиску в з’єднанні:
Р > уГРа + Р2і/(ясі1[).
(14.8>
У записаних формулах взято такі позначення: сі і І — діаметр та
’пжина поверхонь з’єднання; / — коефіцієнт тертя ковзання.
Коефіцієнт тертя на поверхнях контакту деталей залежить від
илтьох факторів: способу складання з’єднання, виду мастила, що
»• юсовують при запресовуванні деталей, шорсткості поверхонь та
і Тому точне значення / може бути визначене тільки експерименталь-
• • для конкретних деталей та умов складання з’єднання. В наближе-
розрахунках міцності пресового з’єднання сталевих і чавунних
ей беруть: / = 0,08...0,10— при складанні запресовуванням;
,12...0,15— при складанні з нагріванням або охолодженням
і з деталей.
^рахунковий натяг 6Р циліндричного з’єднання (рис. 14.4) по-
пий з тиском р на спряжених поверхнях з’єднання такою залеж-
• (формула Ляме з теорії розрахунку товстостінних циліндрів, що
-* н.ся в курсі опору матеріалів):
6р=ргі(С1/£1 + С2/£2). (14.9)
155
Тут і £2 — модулі пружності при розтягу матеріалів охоплюва-
ної та охоплюючої деталі відповідно; С1'\ Сг — коефіцієнти Ляме, що
визначаються за формулами (розміри див. на рис. 14.4):
<ї’ + <ї?
- а* Ці:
(14.10)
де та р2 — коефіцієнти Пуассона матеріалів охоплюваної та охоп-
люючої деталей відповідно; для сталі ц = 0,28...0,30, для чавуну
р — 0,25...0,27, для бронзи р = 0,33...0,35.
За формулою (14.9) можна визначити розрахунковий натяг пресо-
вого з’єднання за потрібним тиском р, який розраховується за форму-
лами (14.4), (14.6) і (14.8). Дійсний натяг 6Д повинен бути більшим
від розрахункового 6Р у зв’язку з тим, що вимірювання діаметрів по-
верхонь з’єднання виконується по вершинах нерівностей, які зріза-
ються та згладжуються при запресовуванні деталей. Рекомендують
брати
6Д = 6Р4- 1,2(Ягі + Яй), (14.11)
де Я2і, Яг2 — висоти нерівностей поверхонь деталей з’єднання. Зна-
чення Ягі і Яг2 для пресових з’єднань назначають у межах 8—2 мкм.
Якщо складання пресового з’єднання виконують за допомогою
нагрівання або охолодження однієї з деталей, то дійсний натяг бе-
руть рівним розрахунковому, тобто 6Д = 6Р.
За 6Д підбирають відповідну стандартну посадку, для якої наймен-
ший натяг дт|п 6Д.
Розрахунок на міцність деталей пресового з’єднання. При перевір-
ці міцності деталей пресового з’єднання слід брати до уваги найбіль-
ший можливий натяг 6тах
вибраної посадки і відпо-
відний йому найбільший
розрахунковий натяг 6р тах,
Рис. 14.4. Розміри дета-
лей пресового з’єднання
Рис. 14.5. До розрахунку на міцність деталей
пресового з’єднання
156
кий визначають за формулою (при складанні з’єднання запресову-
єш ям)
бр тах = Ьтах 1,2 (Яг1 4-Яг2). (14.12)
Якщо з’єднання складають за допомогою нагрівання чи охоло-
нення відповідної деталі, то 6ртах — 6тах.
Найбільший розрахунковий натяг може спричинити після складан-
ні з’єднання появу відповідного максимального тиску ртах на спря-
(‘них поверхнях:
Ртах — ^р’тах (^і/^і 4~ £2/^2)) • (14.13)
Формула (14.13) записана на основі виразу (14.9).
Епюри напружень у деталях 1 і 2 пресового з’єднання показані
л рис. 14.5, де аг — напруження стиску в радіальному напрямі; он,
- відповідно напруження стиску і розтягу в тангенціальному на-
римі.
/Іля охоплюючої деталі 2 небезпечними є точки її внутрішньої по-
іі. Для цих точок радіальне ог і тангенціальне о/г нормальні на-
.ення визначають за формулами:
= —Ртах» (14.14)
ая = мі + а2)/{а’2 - аг). (14.15)
У точках внутрішньої поверхні деталі 2 виникає плоский напруже-
ній стан, при якому головні напруження ох = о(2; <т2 = 0 і о3 = ог.
• мову міцності для охоплюючої деталі 2 із пластичного матеріалу за
іпотезою найбільших дотичних напружень запишемо
ОЕ2 = а, — а, = рт,х (<ї2 + <? )/(ії2 — сі2) — (— ртах) < [а]2.
Після перетворень записана умова матиме такий кінцевий вигляд:
а£2 = 2&рт„І(£— а5) [а]2, (14.16)
і* І <т1я — допустиме напруження розтягу для матеріалу охоплюючої
п.
ля охоплюваної деталі 1 (рис. 14.5) кільцевого поперечного пере-
пебезпечними є також точки внутрішньої поверхні. В цих точках
кас небезпечний стиск, при якому головні напруження такі:
ох = 0; о, == 0; о3 = сгп = — 2Л2ртах/(сР — а?).
мова міцності для охоплюваної деталі, що складена так, як і для
люючої, має вигляд
а£1 = - о, = Жр^ЛД2 - < [аК, (14.17)
—допустиме напруження для матеріалу охоплюваної деталі,
кщо охоплювана деталь має суцільний переріз, тобто = 0, то
пльній її точці виникає двовісний стиск. Тоді головні напруження
157
Рис. 14.6. Пресове з’єднання шківа з
валом
01 = 0; а, = а3 = —ртлх. Умова
міцності в цьому разі матиме вигляд
П£1= (14.18)
Допустимі напруження [а]х і [сг]а
для деталей пресового з’єднання
можна брати близькими до границі
текучості от матеріалу цих деталей,
бо досвід використання пресових
з’єднань показує, що надійність
з’єднання не зменшується і при на-
явності деякої кільцевої пластичної
зони на внутрішній поверхні охоп-
люючої деталі.
Після складання пресового з'єд-
нання в результаті деформування
деталей 1 і 2 (оис. 14.5) діаметр (і2
збільшується, а діаметр зменшу-
ється на та Д^! відповідно.
При пружних деформаціях деталей
Л42= 2р424г/[£а(422 —4і)];
(14.19)
Д41 = 2Ра1аг/[Е1 (сР — 4?)].
Записані формули (14.19) можуть бути використані для визначен-
ня зміни розмірів деталей пресового з’єднання після його складання.
14.4. Приклад розрахунку пресового з'єднання
Задача. На рис. 14.6 зображене пресове з’єднання сталевого вала із сталевим
шківом плоскопасової передачі. Розрахувати на міцність з’єднання та його деталі
за такими даними: обертовий момент, що передає пресове з’єднання, Т = 40 Н • м;
розміри деталей з’єднання — (1 = 40 мм; (І1 = 12 мм; (і2 = 112 мм; І = 50 мм; мате-
ріал вала — сталь 45 (оТІ = 360 МПа; Ег = 2,1 • 106 МПа; щ = 0,3); матеріал шкі-
ва — сталь 30 (от2 = 290 МПа; Е2 =2,1 • 106 МПа; ра = 0,3); передбачається скла-
дання з’єднання за допомогою нагрівання шківа.
Розв’язання. 1. Розрахунок на міцність пресового з’єднання. Оскільки
з’єднання передає тільки обертовий момент, слід потрібний тиск на спряжених по-
верхнях вала та шківа визначити за формулою (14.6):
р > 277(жР//) = 2 • 40 • 103/(3,14 . 40а • 50 • 0,12) =2,65 МПа.
Тут / = 0,12 — коефіцієнт тертя ковзання при складанні з’єднання за допомогою
нагрівання шківа.
Розрахунковий натяг у з’єднанні дістанемо за формулою (14,9);
6р = рй 4~
—-
Для деталей з’єднання коефіцієнти Ляме
а2 4-^
а» — а?
40» 4- 12»
40» — 12»
— 0,3 = 0,90;
С2
112» 4-40»
112» — 40»
4-0,3 = 1,60.
Для потрібного тиску на спряжених поверхнях р = 2,65 МПа розрахунковий
мі гіг
і
1
бр = 2,65 • 40 [0,90/(2,1 • 10») 4- 1,6/ (2,1 . 10»)] = 0,0013 мм.
Зл цим натягом підбираємо потрібну стандартну посадку, що забезпечує такий
Міні У даному випадку можна вибрати посадку 0 40Н7/р6 (4-О,О25Л£о’22б) 13 га*
1міпжлиим мінімальним натягом бт1п = 0,001 мм (найбільш імовірний значно біль-
•Й), а її можливий найбільший натяг б„„ = 0,042 мм.
При коефіцієнті лінійного розширення сталі а = 12 • 10~6 1/°С потрібна різ
на температур вала та шківа для складання з’єднання за формулою (14.2)
ДГ = (бтах + 0,08)/(а<ї) = (0,042 4- 0,08)/( 12 • 10~б • 40) = 254 °С.
2 Розрахунок на міцність деталей пресового з’єднання. За формулою (14.13)
млниий максимальний тиск на спряжених поверхнях з’єднання
Ртах = «тах/І* (Сі/^і + С2^г)1 =
= 0,042/(40(0,90/(2,1 • 10») + 1,60/(2,1 • 10»))] = 88,2 МПа.
иівалентне напруження в точках на поверхні отвору шківа дістанемо за фор-
Ь» (14.16):
(ГЕ2 = ^тах/^г — = 2 . 112» . 88,2/(1122 _ 402) = 202,2 МПа.
иівалентне напруження в точках на поверхні різьбового отвору вала визна-
чу я формулою (14.17):
п£1 = 24»ртах/(42 — ^) = 2 • 40» • 88,2/(40» — 12») = 193,8 МПа.
Максимальні еквівалентні напруження у шківі оЕ2 та У валУа£і не перевищують
...і. текучості матеріалів цих деталей, що забезпечує достатню міцність шківа та
Контрольні запитання
Які з’єднання називають пресовими? Назвіть основні групи пресових з’ед-
Які е переваги та недоліки пресових з’єднань?
Назвіть та охарактеризуйте основні технологічні методи складання пресових
••,
1л якими умовами розраховують пресові з’єднання?
У чому полягає розрахунок на міцність пресового з’єднання? Запишіть умови
н пресового з’єднання для характерних випадків навантаження.
Як визначається розрахунковий та дійсний натяг пресового з’єднання?
У чому полягає розрахунок на міцність деталей пресового з’єднання?
Запишіть та проаналізуйте умови міцності деталей пресового з’єднання.
159
ГЛАВА 15. ЗВАРНІ З'ЄДНАННЯ
15.1. Особливості з'єднання деталей зварюванням
і характеристика з'єднань
Зварювання — технологічний процес з’єднання деталей,
який здійснюється при місцевому нагріванні стику деталей до розплав-
леного або пластичного стану їх із подальшим взаємним деформуван-
ням. Утворення такого типу з’єднання базується на використанні сил
молекулярного зчеплення.
Ни ні є багато різних способів з’єднання деталей зварюванням.
У машинобудуванні переважне використання знаходять такі способиі
ручне дугове зварювання металевим електродом, автоматичне дугове
зварювання металевим електродом під шаром флюсу, електрошлакове
зварювання та контактне зварювання — стикове, шовне та точкове.
Перші три способи належать до зварювання плавленням, а останній —
до зварювання, що здійснюється деформуванням нагрітого до пластич-
ного стану матеріалу деталей, які підлягають з’єднанню.
Ручне дугове зварювання металевим електродом
здійснюється за допомогою електричної дуги, що виникає між де-
таллю та електродом. Виділена при цьому теплота оплавляє краї дета-
лей і розплавляє електрод, матеріал якого витрачається на форму-
вання зварного шва. Ручне дугове зварювання використовується пе-
реважно для з’єднань із короткими або складними за конфігурацією
зварними швами, а також в індивідуальному та малосерійному вироб-
ництві. Цей спосіб зварювання вживається для з’єднання деталей
завтовшки 1—60 мм і більше.
Автоматичне дугове зварювання металевим
електродом під флюсом відрізняється від ручного тим, що воно вико-
нується зварювальною машиною автоматично і під шаром флюсу.
До складу флюсу входять шлакоутворюючі (для захисту шва від впли-
ву зовнішнього середовища), легуючі та розкислювальні компоненти.
Таке зварювання забезпечує високу продуктивність та якість зварних
швів Цей метод економічно найдоцільніший для неперервних прямо-
лінійних та кільцевих швів значної довжини, особливо в великосерій-
ному та масовому виробництві. При цьому можливе зварювання дета-
лей завтовшки 2—130 мм і більше.
Електрошлакове зварювання металевим електро-
дом відрізняється від дугового зварювання тим, що в ньому джерелом
нагрівання є теплота, що виділяється при проходженні струму від
електроду до деталі через шлакову ванну. Цей спосіб дуже продуктив-
ний при зварюванні сталевих листів завтовн к і 40—50 мм. На сьогод-
ні таким способом зварюють сталеві та чавунні вироби завтовшки до
1 м, наприклад станини прокатних станів, корпуси пресів.
Контактне зварювання основане на нагріванні стику
з’єднуваних деталей теплотою, яка виділяється при проходженні
160
через стик електричного струму. Нагрівання стику деталей здійсню* <
• гься до температури пластичного стану матеріалу (або до оплавлюван-
ня) із подальшим деформуванням (стисканням) деталей. Контактне
шовне зварювання використовують для утворення герметичних швів,
й контактне точкове — дл^Г виготовлення конструкцій, в яких герме-
тичність швів не обов’язкова. Контактним зварюванням з’єднують де-
талі, виготовлені із тонколистових елементів.
При дуговому зварюванні конструкційних вуглецевих та низько-
лсгованих сталей застосовують електроди у формі сталевого стержня
। овстим захисним покриттям, яке при плавленні виділяє велику
.кість шлаку та газу, що утворює захисне середовище для шва. Цим
< зпечують підвищення якості зварного шва, механічні властивості
"о різко погіршуються під впливом кисню та азоту повітря.
<рім розглянутих вище, широко використовують спеціальні спо-
і зварювання. Для з’єднання деталей із високолегованих сталей,
их сплавів та кольорових металів успішно застосовують зварюван-
» середовищі інертних газів (аргону, гелію). Ті самі матеріали, а
>ж тугоплавкі метали і неметалеві матеріали, наприклад кераміка,
атньо добре зварюються у вакуумних камерах електронним про-
*м або дифузійним зварюванням.
іварні з’єднання є найдосконалішими з нероз’ємних з’єднань,
льки вони у значній мірі наближають з’єднані деталі до цілісних.
рювання використовують не тільки як спосіб з’єднання деталей, а
< технологічний метод виготовлення самих деталей. Зварені деталі
ігатьох випадках із успіхом заміняють деталі ковані, штамповані
виготовлені литтям Зварюванням виготовляють станини, рами і
>ви машин, корпуси редукторів, зубчасті колеса, шківи, зірочки,
і)вики, барабани, ферми, колони, різні резервуари, труби, корпуси
ювих та морських суден.
Основними перевагами зварних з’єднань є такі: відсутність додат-
іх з’єднуючих елементів; рівноміцність шва щодо з’єднуваних еле-
іів деталей, економія матеріалу та зменшення маси виробів; висока
іуктивність та простота процесу зварювання
Чо недоліків зварних з’єднань належать: поява температурних
ружень і пов’язана з цим можливість викривлювання деталей
іч зварювання; значна концентрація напружень в області зварних
п; знижена стійкість проти корозії та ін
15.2. Види зварних з’єднань і типи зварних швів
< । ігжно від взаємного розміщення з’єднуваних елементів деталей
г яють такі основні види зварних з’єднань: стикові, напусткові,
та кутові.
ікове з’єднання є найраціональнішим видом звар-
днань. Воно утворюється за допомогою дугового або кон-
161
Рис. 15.1. Стикові зварні з’єднання деталей
тактного зварювання. Таке з’єднання виконується стиковим зварним
швом.
Зварні стикові з’єднання (рис. 15.1) бувають з прямим (а), косим
(б) та кільцевим (в) швами. Деталі поблизу стику повинні мати рівну
товщину б для забезпечення їхнього однакового нагрівання. Залежно
вд товщини 6 зварювані елементи деталей виготовляють із підготов-
леними або непідготовленими кромками. Форми підготовки кромок
деталей наведено на рис. 15.1, г.
Напусткове з’єднання (рис. 15.2) виконують за допо-
могою кутових (валикових) швів. Залежно від розміщення шва щодо
лінії дії сили Е кутові шви (рис. 15.2) називаються лобовими (а), флан-
говими (б), комбінованими (в) і кільцевими (г).
Форма поперечного перерізу кутових швів (рис. 15.2) може бути
нормальною (д), випуклою (е) або поліпшеною (є, ж]. Нормальна ти
поліпшена форми зварних швів досягаються механічною обробкою їх
після зварювання. Випукла форма швів сприяє підвищенню концент-
рації напружень. Мінімальна концентрація напружень має місце в
швах поліпшеної форми при відношенні катетів 1 : 1,5 або 1 : 2. Катеї
зварного шва к треба брати к 6 (див. рис. 15.2, а), але не менш ніж
З мм при товщині з’єднуваних елементів деталей 6 3 мм. Розрахун
кову висоту т кутового шва (рис. 15.2, д—ж) беруть таку, що вона
дорівнює висоті перерізу по бісектрисі А—Л, до того ж для всіх
форм перерізу швів умовно т = к зіп 45° « 0,7 к.
Довжина лобових швів /л у напусткових з’єднаннях не обмежуєть
ся, а довжина флангових швів /ф не повинна бути більш ніж 50 А*,
оскільки зі збільшенням довжини /ф підвищується нерівномірність роз
поділення напружень у шві.
Таврове з’єднання використовують при розміщенні
з’єднуваних деталей у взаємно перпендикулярних площинах
162
б
Рис. 15.2. Зварні напусткові з’єднання та форми кутових швів
15.3). Це з’єднання виконують без підготовки кромок деталі
15.3, а) або з підготовкою кромок (рис. 15.3, б, в). При статичному
іженні з’єднання підготовку кромок можна не робити. Тоді ка-
тових швів не повинен бути більш ніж 1,26, де 6 — найменша
і зварюваних деталей.
гове з’єднання відповідно з рис. 15.4 здійснюють
редньої підготовки кромок (а, б) і з підготовкою кромок (в, г).
юсті випадків такі з’єднання є малонавантаженими і викори-
і.ся для забезпечення щільності.
яких випадках, коли міцність напусткових з’єднань, викона-
овими та фланговими кутовими швами, не забезпечується, до-
ідійснюються коркові (рис. 15.5, а), прорізні (рис. 15.5, б) або
ні (рис. 15.5, в) зварні шви. Корковий шов дістають шляхом
пня розплавленим металом отворів круглої форми в одній
юх) із з’єднуваних деталей (так зване з’єднання електрозаклеп-
163
Рис. 15.3. Таврові
зварні з’єднання
Рис. 15.4. Кутові
зварні з’єднання
Рис. 15.6. З’єднання деталей контактним зварюванням
Рис. 15.5. Коркові, прорізні та проплавні зварні шви
ками). Проріз для прорізного шва виконують уздовж лінії дії сили
Е. Проплавний шов здійснюється проплавленням однієї деталі з’єд-
нання, що має меншу товщину.
З’єднання точковим контактним зварю-
ванням (рис. 15.6, а, 6) застосовують для плоских деталей, сумарна
товщина яких не перевищує 8—10 мм.
При товщині 6 2 мм найтонкішого із з’єднуваних сталевих еле-
ментів діаметр зварної точки сі повинен задовольняти умові 1,26 -|
+ 4 < сі < 1,56 4- 5. Крок і зварних точок не повинен перевищувати
Зб/, а відстань зварних точок від країв деталей 2сІ і /2 = 1,5с/.
164
З’єднання шовним контактним зварюван-
ням (рис. 15.6, в) використовують для тонколистових деталей, до
Того ж товщина 6 деталей не повинна бути більш ніж 2—3 мм.
15.3. Розрахунок зварних з'єднань на міцність
*
Основною умовою при проектуванні зварних конструкцій деталей
«• убезпечення рівноміцності зварних швів та з’єднуваних елементів
лей. Згідно з цією умовою залежно від розмірів та взаємного роз-
сння зварних деталей встановлюють відповідні розміри швів для
>го з’єднання.
/ більшості випадків на практиці розміри зварних швів та тип їх
іачаються за формою та конструкцією деталей. Тому розраху-
зварних з’єднань в основному виконують як перевірний. Надалі
। । и викладенні методів розрахунків допускається, що якість вико-
нання швів задовольняє відповідним технічним нормам.
Розрахунок стикових з’єднань. Стикове з’єднання розраховують
нл міцність за номінальними напруженнями без урахування підсилен-
пвів (місцевого наплавлювання металу) і за тими самими умовами,
й для суцільних елементів деталей. Для схем навантаження стико-
ґєднань із прямим та косим швами (рис. 15.7, а, б) умова міцності
такий вигляд:
о = Р/(6Ь)^ [о]', (15.1)
। — напруження розтягу у шві; Р — сила, що навантажує з’єднан-
6, Ь — товщина та ширина з’єднуваних елементів відповідно;
— допустиме напруження розтягу стикового зварного з’єднання,
’уйнування стикового зварного з’єднання може відбуватись без-
редньо по шву, місцю сплавлювання металу шва з металом деталі
по перерізу деталі в зоні термічного впливу, де в результаті на-
.ніня при зварюванні змінюються механічні властивості металу,
озрахунку цю невизначеність беруть до уваги відповідним вибо-
« допустимого напруження [а]' та з урахуванням властивостей мате-
іу з’єднуваних деталей.
Концентрація напружень, що виникає при якісно виконаних сти-
йоннх швах, у більшості випадків незначна 1,6). Для швів із
«митим механічним способом підсиленням Ко — 1 •
Розрахунок напусткових з’єднань. У напусткових з’єднаннях ку-
шви умовно розраховують на зріз за найменшим перерізом, який
кодиться в бісектрисній площині прямого кута в поперечному пе-
ні шва (див. рис. 15.2, д, е), де розрахункова висота кутового
т = 0,7£.
^ля напусткових з’єднань, навантажених відповідно із схемами
ліс. 15.8, а—в, умову міцності швів записують у вигляді
т = Г/(0Л/)^[тГ, (15.2)
165
Рис. 15.7. До розрахуйк
стикових зварних з'є;
нань
Рис. 15.8. До розрахунку
зварних напусткових з’єд-
нань
де т — розрахункове напруження зрізу; Р — сила, що навантажте
з’єднання; к — катет кутового шва; І — довжина швів; іт]' —допу-
стиме напруження зрізу.
Для з’єднань із кількома швами за розмір І беруть сумарну довжи-
ну швів, наприклад для напусткового з’єднання фланговими швами
(рис. 15.8, а ) І — 2/ф, для з’єднання лобовими швами (рис. 15.8, 6)
І — 21„, а для з’єднання комбінованими швами (рис. 15.8, в) І
= 0,28/л 4- 1,5/ф. В останньому випадку зменшену довжину шил
Рис, 15.9, Схеми навантаження напусткових з’єднань
166
і Агруть у зв’язку з нерівномірністю розподілення навантаження на
иий та флангові шви.
У зварному з’єднанні з несиметричним розміщенням флангових
п щодо лінії дії сили Р (рис. 15.8, г) загальну довжину швів І =
І- /ф2 визначають за-'умовою (15.2). Тоді /фі та /ф2 беруть відпо-
’ ю тих часток сили Г; що припадають на окремі шви:
/фі = ^2/(^1 “Н ^2)» ^Ф2 = ^1/(^1 Ч" ^2)*
। напусткового з’єднання із кільцевим кутовим швом, наванта-
відповідно до схеми на рис. 15.8, д, напруження зрізу в шві
ють окремо від сили Р і від крутного моменту Т. Тоді ці напру-
кладають геометрично (V і тт напрямлені під прямим кутом):
/7(0,7£лгі); тт == Рт/А = 277(0,7£лгї2); т = Ух2? + т? [т]'.
(15.3)
.ому випадку колова сила на шов від крутного моменту Рт =
а площа зрізу шва А — 0,7клсі.
о з’єднання навантажене моментом М (рис. 15.9, а), то напру-
/ швах розподіляються по їхній довжині нерівномірно і напрям
ий (на рис. 15.9, а стрілками вказані напрями напружень зрізу
х точках швів). Нерівномірність розподілення напружень тим
чим більша довжина І швів відносно розміру Ь. У загальному
' максимальне напруження на кінцях швів можна визначити за
>Ю Тлі = М/П7р, де ЇЇ7Р — полярний момент опору перерізу
площині їхнього руйнування.
порівняно коротких швів (/ < Ь), розповсюджених на практи-
іижено можна припустити, що напруження зрізу розподіля-
идовж швів рівномірно (рис. 15 9. б) і спричинюються дією
пий шов сили Р = М/Ь. Тоді наближена умова міцності з’єд-
• може бути записана у вигляді
тм = М/(0,7Ш) < [т]'. (15.4)
'і.іхуванням цих допущень можна розглядати наближений роз-
< зварного з’єднання і для більш загальної схеми навантажен-
15.9, в), де шви навантажуються силами Рх = Р соз а, Р* =
і а, а також моментом М = Р2Н. У цьому разі більш наванта-
<* верхній шов, для якого умова міцності має вигляд (напрям
। гьсіїь на рис. 15.9, в показано стрілками)
Тщах = (Тл + + Тп < М', (15.5)
дові напружень зрізу визначають відповідно за формуламиї
гі - Р./(2 • 0,76/); х?2 = Р>/(2 • 0,76/); хм = ММДкІЬ).
167
Рис. 15.10. До розрахунку тавро-
вого зварного з’єднання
Розрахунок таврових з'єднань.
У таврових з’єднаннях із попередньою
підготовкою кромок напруження в
швах визначають так, як і для су-
цільних деталей, але порівнюють ці
напруження із допустимими напру-
женнями для зварних швів.
Для таврових з’єднань, здійснених
кутовими зварними швами без підго-
товки кромок, розрахунок на міцність
виконують за напруженням зрізу
в зварних швах. Згідно зі схемою
навантаження таврового з’єднання
(рис. 15.10) максимальне напруження
зрізу має місце в точках верхніх кін
ців швів. Це напруження дорівнюй
сумі напружень від дії двох складові4 \
сили Р на двох взаємно перпендикулярних напрямах /4 = Р соз а.
Р2 = Р зіп а та моменту М = Р2Н.
Для двох швів таврового з’єднання
Тгі = Рх/(2 • 0,766); тГ2 = Р2/(2 - 0,766); тм = М/(2№0) = ЗМ/(0,7662)
У виразі для тлі величина Ц70 = — осьовий момент опор
перерізу одного шва в площині його руйнування.
Відповідно умову міцності такого таврового з’єднання записуют
у вигляді
Тгпах — (VI + Тді)2 + Тр2С М'-
(15 і
Для частинного випадку навантаження, наприклад при а = 0, ді
стають
Рг = Р; Р2=0-, М = 0 і т = ту? = Р/(2 - 0,766) [т]'.
Розрахунок з’єднань, виконаних контактним зварюванням. 3\
нання точковим або шовним контактним зварюванням розрахов
ють за напруженнями зрізу. Для з’єднання на рис. 15.11, а за умої
рівномірного розподілу навантаження на всі зварні точки умову міцн<
сті записують у вигляді
т = 4Г/(лсРгі) [т]', (15
др 2 — число зварних точок; і — число площин зрізу (для з’єднанн і
на рис. 15 11, а маємо 2 = 3, а і = 2).
Нерівномірність розподілу навантаження між зварними точками
враховують вибором занижених допустимих напружень [т]'. Числ"
зварних точок, що розміщуються в напрямі лінії дії сили, рекоменд}
ють брати не більш як п’ять.
168
Рис. 15.11. До розра-
хунку з’єднань, вико-
наних контактним зва-
рюванням
Шовне контактне зварювання (рис. 15.11, б) можна розглядати
при розрахунку як неперервний ряд точок, що взаємно перекривають-
ся. Тому умову міцності для з’єднання на рис. 15.11, б можна записа-
ти так-
т = РЦаІ)^ [т]\ (15.8)
а і І — відповідно ширина та довжина зварного шва.
15.4. Допустимі напруження для зварних з’єднань
Різноманітність факторів, що впливають на міцність зварних
• днань, а також наближеність та умовність розрахункових формул
обумовлюють потребу експериментального визначення допустимих
илпружень. Норми допустимих напружень беруть з урахуванням кон-
кретних якісних показників зварювання та характеру навантаження
иішв
Допустимі напруження для зварних швів назначають у частках
Під допустимого напруження розтягу [а]р для основного металу.
В табл. 15.1 наведені дані для визначення допустимих напружень
• Ллиця 15.1. Допустимі напруження для зварних швів при статичному
мнтаженні
Вид технологічного процесу зварювання Допустиме напруження у швах
при розтягу при стивку (ОГ при зрізі 1Я'
юматичне під флюсом та ручне елект- л»ми 342А та 350А. Контактне сти- ки Мр (оір 0,65(а]р
чиє лугове електродами 342 та 350 0,9[о]р [оір 0,60(о1р
•н пік тне точкове та шовне — — 0,5[а]р
Примітка. Допустиме напруження розтягу для основного металу [о]р =
'»,/». де коефіцієнт запасу міцності 5 = 1,35,,, 1,60 для вуглецевих та 5 =
1,50.,.1,70 для низьколегованих сталей.
169
Таблиця 15.2. Значення коефіцієнта Кл
Вид зварного шва Сталь
вуглецева низьколего- вана
Стикові шви з повним проварюванням Кутові лобові шви: 1,2 1,3
при ручному зварюванні 2,3 3,2
при автоматичному зварюванні Кутові флангові шви, що розміщені паралельно лі- 1,7 2,4
нії дії сили 3,4 4,4
Таблиця 15.3. Значення коефіцієнта Ке для контактних
аварних з’єднань
Матеріал З’єднання
точкове шовне
Сталь:
10 (нормалізована) 7,5* б*
ЗОХГСА (стан постачання) Сплав (стан постачання): 12 ♦*
титановий ВТ1 10** 5**
алюмінієвий Д16Т 5** 2,25 •*
* Товщина з’єднуваних елементів (34-3) мм.
Те саме (1,54-1,5) мм.
зварних швів з’єднань деталей із низько- та середиьовуглецевих ста*
лей і деяких низьколегованих сталей при статичних навантаженнях.
Допустимі напруження при циклічному навантаженні зварного
з’єднання визначають за формулами:
[о]д = [а]7 у; [т]^ = [т]7 у, (15.9)
де [сг]' та [т]' вибирають з табл. 15.1.
Коефіцієнт у 1 враховує характеристику = СГтіп/^тах або
= Ттіп/Ттах ЦИКЛІВ ЗМІННИХ НЗПруЖЄНЬ ТЗ ефеКТИВНІ КОефІЦІЄНТИ
концентрації напружень у зварних з’єднаннях. Значення у визнл«
чають за формулою
7 = (О.бКе ± 0,25) - (О,6/се Т 0,25) Я * (15.10)
Верхні знаки в знаменнику цієї формули беруть для дотичних
напружень та нормальних, якщо найбільшими за абсолютним значен*
170
♦ г напруження розтягу, а нижні — якщо напруження стиску,
рівності абсолютних значень нормальних напружень можна бра-
перхні, або нижні знаки.
ненця ефективних коефіцієнтів концентрації напружень для
х з’єднань наведені'в табл. 15.2 та 15.3.
цо за формулою (15.10) дістають у > 1, то в розрахунок беруть
Це має місце при /? >► 0 і означає, що для даного циклу напру-
інрішального значення набуває не втома, а статична міцність.
н*дені вище рекомендації для визначення допустимих напру-
' зварних швах справедливі при якісно виконаному зварюван-
задовольняє вимогам стандартів. Усякі дефекти в зварних
нспровари, підрізи, поруватість, сторонні включення, тріщини)
пюють різке зниження несучої здатності зварного з’єднання,
но при циклічному навантаженні.
> ‘>.5. Приклади розрахунків зварних з’єднань
• иа 15.1. Визначити катет к двох зварних швів, якими кронштейн з’єднаний
,сом згідно з рис. 15.12. Дані для розрахунку: Е = 18 кН; а= 30°; а =
м; Л = 120 мм; І = 80 мм; матеріал деталей з’єднання — сталь СтЗ; допусіи-
хження, за яким здійснено розрахунок кронштейна, [о]р = 140 МПа; шви
і ручним дуговим зварюванням електродами 342; зовнішнє навантаження
нтсйн постійне.
і в’ яз а н н я. Силу Е подамо у вигляді двох складових:
Еі = Е зіп а = 18 • зіп 30° = 9 кН;
Е2 = Е соз а = 18 • соз 30° = 15,6 кН.
ідові Ех та Е2 прикладемо у центрі ваги зварних швів і додамо момент (для
।. тешім еквівалентності навантаження кронштейна)
М -- Ех (Л 4- 0,5/) = 9 • і О3 (120 4- 0,5 • 80) = 144 . 104 Н • мм.
Напруження зрізу у швах від дії Еи Ел та М такі:
тл = Гі/(2 • 0,7кІ) = 9 • 103/(2 . 0,7к • 80) = 80/6;
тГ2 = Е2/(2 • 0,7кІ) = 15,6 • 103/(2 • 0,7к • 80) = 140/&;
тм = М/(а • 0,7кІ) = 144 - 104/( 160 • 0,7к . 80) = 160/*.
При визначенні напруження им припускалось, що кожний шов навантажується
Ем •= М/а, яка діє вздовж швів. Напрями напружень тл, та показані на
, ч- їй |2.
Максимальне напруження буде в лівому шві:
= VСп + тм)! + тл = К(140/* -ь І60/Й)» ч- (80/*)« = 30ІІк < [т)'.
.ібл. 15.1 допустиме напруження для зварних швів
[Тр = 0,6 (а]р = 0,6 • 140 = 84 МПа.
|.»ді потрібний катет швів даного з’єднання
к > 301/[т]7 = 301/84 = 3,6 мм.
171
Рис. 15.12. Зварне з’єднання
кронштейна з корпусом
Рис. 15.13. Конструкція і навантаження
зварного з’єднання
Таким чином, зварні шви у заданому з’єднанні доцільно виконувати з катетом
к = 4 мм.
Задача 15.2. Перевірити міцність зварного з’єднання кронштейна (рис. 15.13).
Кронштейн навантажений змінною силою /гтах = 7,2 кН = 0.0- Зварю-
вання виконане вручну електродами 350. Допустиме напруження для матеріалу де-
талей [о]р = 160 МПа. Відомі такі розміри з’єднання: а= 120 мм; І = 100 мм; катет
чотирьох швів к = 5 мм.
Розв’язання. У з’єднанні всі чотири шви навантажуються силою та
моментом М = Ртлх а = 7200 • 120 = 864 • 103 Н • мм.
Напруження зрізу в швах від дії Ртах та Л4 такі:
V = ЛпахЛ4 ’ °«7*0 = 7200/(4 • 0,7 • 5 • 100) = 5,1 МПа;
хм = М/П70 = 6М/(4 • 0,7к12) = 6 • 864 • 103/(4 . 0,7 • 5 • 100а) = 37 МПа.
У верхніх та нижніх точках кожного шва максимальне напруження зрізу
тт„ = / 4 + 4 = /5.12 +37* = 37,1 МПа.
За табл. 15.1 допустиме напруження для зварних швів
[т]' = 0,60 [о]р =* 0,60 • 160 = 96 МПа.
Якщо /? = 0,1 і Ке = 3,4 (див. табл. 15.2), то коефіцієнт зниження допустимих
напружень для змінних навантажень з’єднання
у = 1 /[(0,6Ке -Н 0,25) - (0,6Ке — 0,25) /?] =
= 1 /[(0,6 • 3,4 + 0,25) — (0,6 • 3,4 — 0,25) 0,1] = 0,476.
Для зварних швів із заданим циклічним навантаженням допустиме напруження
зрізу [т]^ = у [т]' = 0,476 • 96 = 45,7 МПа.
Якщо т_ат = 37,1 МПа < [т]г> = 45,7 МПа, то міцність з’єднання достатня.
Шал &\
Контрольні запитання
1. Назвіть та охарактеризуйте основні способи з’єднання деталей зварюванням.
2. Які переваги та недоліки зварних з’єднань?
3. Які бувають види зварних з’єднань? Назвіть типи зварних швів. Наведіть при-
клади.
172
4. Яка основна умова має бути при розрахунках стикових зварних з’єднань?
ісдіть приклад розрахунку.
5. За якою умовою міцності розраховують кутові зварні шви? Визначте переріз
кцого шва, де проходить його руйнування.
б. Наведіть приклади розрахунку на міпність зварного напусткового з’єднання.
7. Наведіть приклад розрахунку на міцність зварного таврового з’єднання.
8. Охарактеризуйте розрахунок на міцність з’єднань, виконаних контактним
рюванням.
9. Від яких факторів залежать допустимі напруження для зварних швів?
ГЛАВА 16. ЗАКЛЕПКОВІ З’ЄДНАННЯ
16.1. Конструкції заклепкових з’єднань
та області їхнього використання
Заклепкове з’ єднання здійснюють за допомогою спе-
і.іьної деталі — заклепки, яку вставляють у отвори з’єднуваних
•ідей. Заклепка має циліндричний стержень і закладну головку
н*. Іб.І, а) на одному кінці. Після пластичного деформування дру-
• > кінця утворюється замикаюча головка, і таким чином маємо з’єд-
ніві деталей (рис. 16.1, б). Для зручності вставляння заклепки діа-
ір отвору б/0 у з’єднуваних елементах дещо більший, ніж діаметр
» чи сі заклепки. Під час клепання (щоб мати замикаючу головку)
нь заклепки збільшує свій діаметр і щільно заповнює отвір,
тому заклепковому з’єднанні діаметр заклепки дорівнює діа-
спору під заклепку. Заклепки стягують з’єднувані деталі,
и чому частина навантаження з’єднання передається за раху-
і.і тертя в площині стику, а частина сприймається стержнем
кн.
юри в деталях під заклепки дістають свердлінням або продав-
шім. Свердління менш продуктивне, але підвищує міцність за-
•іюго з’єднання.
•гіання виконується ручним або машинним способом. Машинне
пія дає з’єднання кращої якості, оскільки забезпечує однорід-
іосадки заклепок і збільшує сили стиску деталей. Сталеві заклеп-
ки о діаметра (до 12 мм) та
кн з кольорових металів
п» холодним способом, а
і заклепки діаметром біль-
12 мм — гарячим способом
місгшення формування за-
•іої головки). Якість зак-
пи о з’єднання гарячим спо-
іипца, бо досягається кра-
• ииісння отвору та підви-
шпяг у з’єднанні.
Рис. 16.1. Утворення заклепкового з’єд-
нання
173
Рис. 16.4. До розрахунку за-
клепкового з’єднання
зсуву чинять опір сили тертя в стику
з’єднаних деталей та самі заклепки.
Оскільки оцінити силу тертя в заклепко-
вому з’єднанні неможливо, при розра-
хунках допускають, що все зовнішнє
навантаження сприймається стержнями
заклепок Така умовність розрахунку до
певної міри компенсується відповідним
вибором допустимих напружень.
Заклепкові з’єднання конструюють
так, що лінія дії зовнішнього наванта-
ження проходить через центр ваги по-
перечних перерізів заклепок у площині
стику з’єднаних деталей У такому разі
можна припустити, що всі заклепки на-
вантажуються рівномірно.
Як приклад розглянемо розрахунок
заклепкового шва з одним рядом закле-
пок при напустковому з’єднанні деталей
навантажені зовнішньою силою Р, що
(рис. 16.4). Деталі з’єднання
лежить у площині стику і проходить через центр ваги перерізів за-
клепок. Для визначеності припустимо, що бі б2, а розміри б/, /, а
і Ь попередньо вибрані.
У заданій схемі навантаження виконують такі види розрахунків
на міцність заклепкового з’єднання:
І. Перевірка міцності заклепок на зріз
тзр = 4Г/(гш/2) [т]зр, (16.1)
де г — число заклепок у шві.
2. Перевірка міцності заклепок та з’єднуваних листів на зминання
сГм == Рі(г(і\) [а]зм. (16.2)
Тут записана умова міцності на зминання для меншої поверхні
навантаженого контакту заклепок і листа, бо < 62.
3. Перевірка міцності листа на розтяг в ослабленому перерізі
А—А
Стр = р/(61 (/ — 2(1)) [о]р.
(16.3)
4. Перевірка міцності за зріз (виколювання) листа одночасно вдвох
площинах 1—1 за умови, що зріз відбувається на довжині а — 0,5сі,
< = Г/[2гб1 (а - 0,54)] С Мзр- (16.4)
За умовами міцності (16.1) — (16.4) можна виконати перевірний
розрахунок заклепкового з’єднання з відомими розмірами. Якщо не
виконуються умови (16.1) і (16.2), то треба збільшити число заклепок
174
Рис. 16.3. Конструкції
нклепхових з’єднань
пнами по довжині шва називається кроком заклепкового шва.
'ості випадків і — (3...4) й. Відстань між рядами в заклепково-
беруть т — (2,5...3) 7/, а відстань заклепок до краю з’єднува-
ментів а = (1,5...2) (1 і Ь ~ 2(1 (рис. 16.3, г).
ризначенням заклепкові шви поділяють на міцні, щільноміцні
ні. Щільноміцні та щільні шви призначені для з’єднання еле-
котлів, резервуарів та трубопроводів високого або низького
Крім достатньої міцності, до цих швів ставлять вимоги забезпе-
хньої герметичності. На сьогодні такі конструкції виконують
їй, і тому не має потреби в цих заклепкових з’єднаннях. Міцні
ові заклепкові шви використовують головним чином у різних
их конструкціях, що сприймають інтенсивні вібраційні або
навантаження (ферми, обшивка літаків та ін.).
алі заклепкові з’єднання застосовують у конструкціях, що не
ють зварювання через небезпеку викривлення деталей або
ання загартованих деталей, яке може відбутись при нагрі-
. і також у конструкціях, частини яких виготовляються з матері-
і. що не можуть зварюватись. Заклепкові з’єднання досить трудо-
кі, вимагають великих витрат матеріалу, мають малу продуктив-
і. при виготовленні та високу вартість.
16.2. Розрахунок заклепкових з'єднань
че розглянемо основні принципи розрахунку міцних заклеп-
івів, що використовуються в сучасних конструкціях. Оскільки
розмірні параметри заклепкового шва (діаметр заклепок, їх-
к, відстань між рядами) попередньо можуть бути вибрані за
даціями 16.1, розрахунок на міцність заклепкових з’єднань
іься як перевірний або в результаті розрахунку визначають
• число заклепок у з’єднанні.
лі, що з’єднуються заклепками, здебільшого знаходяться під
і, що намагаються зсунути одну деталь відносно іншої. Цьому
175
Рис. 16.4. До розрахунку за-
клепкового з’єднання
(рис. 16.4). Деталі з’єднання
зсуву чинять опір сили тертя в стику
з’єднаних деталей та самі заклепки.
Оскільки оцінити силу тертя в заклепко-
вому з’єднанні неможливо, при розра-
хунках допускають, що все зовнішнє
навантаження сприймається стержнями
заклепок Така умовність розрахунку до
певної міри компенсується відповідним
вибором допустимих напружень.
Заклепкові з’єднання конструюють
так, що лінія дії зовнішнього наванта-
ження проходить через центр ваги по-
перечних перерізів заклепок у площині
стику з’єднаних деталей. У такому разі
можна припустити, що всі заклепки на-
вантажуються рівномірно.
Як приклад розглянемо розрахунок
заклепкового шва з одним рядом закле-
пок при напустковому з’єднанні деталей
навантажені зовнішньою силою Г, що
лежить у площині стику і проходить через центр ваги перерізів за-
клепок. Для визначеності припустимо, що < 62, а розміри сі, і, а
і Ь попередньо вибрані.
У заданій схемі навантаження виконують такі види розрахунків
на міцність заклепкового з’єднання:
1. Перевірка міцності заклепок на зріз
тзр = 4Г/(глгі2) [т]зр,
(16.1)
де г — число заклепок у шві.
2. Перевірка міцності заклепок та з’єднуваних листів на зминання
а=м = [а]зМ. (16.2)
Тут записана умова міцності на зминання для меншої поверхні
навантаженого контакту заклепок і листа, бо 6; <С 62.
3. Перевірка міцності листа на розтяг в ослабленому перерні
А— А
Ор = (І — 2.(1)) [аІР. (16.3)
4. Перевірка міцності за зріз (виколювання) листа одночасно в дво*
площинах 1—1 за умови, що зріз відбувається на довжині а — 0,5*1
тзр = /7/[2г61 (а — 0,5фІ < [т]зр. (16.41
За умовами міцності (16.1) — (16.4) можна виконати перевірнії
розрахунок заклепкового з’єднання з відомими розмірами. Якщо п
виконуються умови (16.1) і (16.2), то треба збільшити число заклепок
176
, або їхній діаметр д.. Якщо умова (16.3) не виконується, то треба збіль-
шити розмір І і відповідно крок І заклепок при числі їх 2, яке задоволь-
нив умови (16.1) та (16.2). Перевірка міцності за умовою (16.4) потріб-
на для підтвердження правильності вибору розміру а.
Умови міцності (16.1) і/16.2) можна використати для попереднього
визначення числа заклепок у з’єднанні, до того ж за розрахункове
число заклепок г можна взяти більше з двох добутих значень. Анало-
гічно виконується розрахунок на міцність заклепкових швів із од-
нією або двома накладками (див. рис. 16.3, б, в). У заклепковому з’єд-
нанні з двома накладками слід ураховувати дві площини зрізу для
ножної заклепки.
16.3. Допустимі напруження в розрахунках
заклепкових з’єднань
Допустимі напруження для деталей заклепкового з’єднання зале-
жать від їхніх матеріалів, способу виконання отворів у деталях та
ддрлктеру дії на з’єднання зовнішнього навантаження (постійне чи
«мінне).
У розрахунках міцних заклепкових швів сталевих конструкцій,
що знаходяться під дією постійного навантаження, допустимі на-
пруження для сталевих заклепок і з’єднуваних деталей беруть за
іабл. 16.1.
Якщо заклепкове з’єднання працює в умовах знакозмінних наван-
тджень, то наведені в табл. 16.1 допустимі напруження для маловугле-
«гніїх сталей зменшують множенням на коефіцієнт у, який визнача-
ться за формулою
V = 1/(1 - 0,3/^п/Лпах), (16.5)
Глиця 16.1. Допустимі напруження для заклепок і деталей заклепкового
інання, МПа
Вид деталей £°1зм І0]р
лсві заклепки при виконанні
прів:
свердлінням 140 • 280* — —- —
140** 320 ** — — —
продавлюванням 100* 240 * — — —
100** 280 ** — — —
млі заклепкового з'єднання — — 140* 90 * 210*
— — 160** 100** 240 *•
• Матеріал Ст2; Юкп.
•• Те саме, СтЗ; 20кп.
177
де Лпіп, Лпах — ВІДПОВІДНО НЗЙМЄНШЄ І НЗЙ6ІЛВШЄ ВЗЯТІ ЗІ СВОЇМИ ЗНЗ-
кзми значення знакозмінного навантаження, що діє на заклепкове
з’єднання.
16.4. Приклад розрахунку заклепкового з'єднання
Задача. Визначити основні розміри заклепкового з’єднання кронштейна з бал-
кою (рис. 16.5) за такими даними: Р = 21 кН; бі = 6 мм; б3= 8 мм; число заклепок
2 = 3; матеріал деталей та заклепок сталь СтЗ.
навантаження постійне.
Розв’язання. Діаметр заклепок визна
чають за умовою їхньої міцності на зріз [дин
вираз (16.1)] при допустимому напруженні [т]зр
= 140 МПа (див. табл. 16.1):
4Г/(гл[т)зр) =
/4 • 21 • 103/(3 • 3,14 • 140) = 7,8 мм.
Рис. 16.5. Конструкція заклеп-
кового з’єднання кронштейна з
балкою
Візьмемо діаметр заклепок сі — 8 мм. РозмІ
щення заклепок показане на рис. 16.5. Відстані,
між заклепками згідно з рекомендаціями 16.1 і -•
= За = 3 • 8 = 24 мм; т = За = 24 мм. Ширю
на кронштейна с=/+3^=24+3«8=48 мм.
Розмір а=2^=2-8=16 мм.
Перевірка міцності з’єднання на зминання зд
умовою (16.2) має вигляд
озм = ^(г^бі) = 21 • Ю3/(3 • 8 . 6) = 146 МПа.
Якщо допустиме напруження на зминання [о]зм = 240 МПа (див. табл. 16.2),
то міцність забезпечується.
Перевірка міцності кронштейна на розтяг виконується для перерізу, де розміще-
ні дві заклепки (найослабленіший переріз). У ньому діє сила Рг = Р — Р/3 — 21 —
— 21/3 = 14 кН. Допустиме напруження на розтяг (див. табл. 16.1) [о]р = 160 МПл.
Розрахункове напруження
ор = — 2а) 62) = 14 • 103/((48 — 2.8) 8] = 54,7 МПа.
Якщо ор = 54,7 МПа < [о]р = 160 МПа, то міцність кронштейна на розтяг
забезпечується.
Контрольні запитання
1. Опишіть процес утворення заклепкового з’єднання. Яку форму мають з*-
клепки та з яких матеріалів їх виготовляють?
2. Охарактеризуйте основні переваги та недоліки заклепкових з’єднань.
3. Наведіть характерні приклади заклепкових з’єднань та дайте співвідношення
для їхніх основних розмірів.
4. Які види розрахунків на міцність виконують для заклепок та деталей, що
з’єднуються заклепками?
5. Від яких факторів залежать допустимі напруження для деталей заклепкового
з’єднання?
178
ГЛАВА 17. З'ЄДНАННЯ ДЕТАЛЕЙ ПАЯННЯМ
ТА СКЛЕЮВАННЯМ
17.1. Загальні відомості
За конструкцією з’єднання паянням (паяні з’єднання) та склеюван-
ням (клейові з’єднання) подібні до зварних з’єднань. На відміну від
впарювання, паяння та склеювання здійснюється без розплавлювання
інуваних деталей. Зв’язок між елементами тут забезпечується си-
ни молекулярної взаємодії або адгезії поверхонь деталей із додат-
нім матеріалом — припоєм або клеєм.
Паянням та склеюванням можна з’єднувати деталі не тільки з од-
идних, а й неоднорідних матеріалів. За допомогою паяння з’єдну-
• галі з чорних та кольорових металів та сплавів, деталі зі скла,
ки, графіту. Склеювати можна деталі з металів із деталями зі
рарфору, кераміки, дерева, гуми.
і міцністю паяні та клейові з’єднання поступаються перед звар-
им, виконаними якісним зварюванням. Тільки при з’єднанні тон-
гінних конструкцій можна досягти рівноміцності з’єднання паян-
м іа склеюванням і матеріалу деталей.
іасть використання паяних та клейових з’єднань у техніці все
розширюється у зв’язку із застосуванням нових конструкцій-
геріалів, високоміцних легованих сталей, багато з яких важко
іься зварюванню. На сьогодні паяння широко застосовують в
іуванні. З його допомогою вдалось замінити маломіцні алюмі-
нлави високоміцними тонколистовими нержавіючими сталями.
>і використовують при виготовленні камер згоряння сучасних
іших двигунів, ядерних реакторів та інших об’єктів (радіаторів
оілів і тракторів, паливних та масляних трубопроводів). Паяні
цім можуть працювати при високих тисках, температурах та в
нпих середовищах. Клейові з’єднання також застосовують у
ідальних конструкціях, у будівництві мостів, авіабудуванні,
га клейові з’єднання дуже широко розповсюджені в приладо-
ИІІІ.
•неси з’єднання деталей паянням та склеюванням порівняно
піддаються механізації та автоматизації. В деяких випадках
кчання паяння та склеювання підвищує продуктивність праці,
• масу та вартість виробів. Ефективність застосування паяних
їх з’єднань деталей, їхні якісні характеристики в значній
ічаються оптимальними параметрами технологічного про-
. ИІІІІЯ.
179
17.2. Паяні з'єднання
На практиці використовують переважно стикові (рис. 17.1, а) та
напусткові (рис. 17.1, б) з’єднання деталей. Міцність стикового з’єд-
нання підвищується, якщо застосовувати ступеневу або косу форму
кромок з’єднуваних паянням деталей. Міцність напусткового з’єд-
нання можна підвищити, збільшуючи напуск або застосовуючи одну
або дві накладки. Аналогічним чином виконують паяні з’єднання тру-
бопроводів (рис. 17.1, в).
Процес з’єднання деталей паянням здійснюється нагріванням
з’єднуваних деталей до температури плавлення додаткового матеріа-
лу — припою. В розплавленому стані припій змочує з’єднувані по-
верхні деталей, заповнює зазори між ними і при затвердненні утво-
рює паяний сплав. Властивості паяного сплаву суттєво відрізняються
від властивостей припою. Це пов’язане з тим, що розплавлений припій
розчиняє матеріал деталей за рахунок дифузійних процесів. З’єдну-
вані поверхні деталей повинні бути знежирені та очищені від оксидів.
Щоб зменшити шкідливий вплив окислювання поверхонь при паянні,
слід застосовувати різні флюси (на основі бури, хлористого цинку,
каніфолі).
Нагрівання деталей та припою при паянні здійснюється паяльни
ком, газовим полум’ям, СВЧ у спеціальних печах. Найпродуктивніше
паяння при зануренні з’єднуваних деталей у металеву (з розплавленим
припоєм) або соляну ванну. Розплавлені солі виконують роль джере-
ла тепла і флюса, з якого утворюється припій.
І .ЧЧХЧЧЧЧЧЧЧЧЧЧЧЧЧ
Рис. 17.1. Конструкції пая-
них з’єднань
Рис. 17.2. До розрахунку
паяних з’єднань
5
180
Таблиця 17.1. Границі міцності для паяних з'єднань
Марка припою Температура плавлення, °С Матеріал з’єднуваних деталей а , МПа 0 т , МПа
ПОС 40 230 * Сталь: 20 Х18Н9Т Мідь МЗ Латунь Л62 1 1 1 1 28 32 27 22
ПСр 45 720 Сталь: СтЗ 45 35ХГСА Х18Н9Т 490—580 430—570 350—400 450—500 350—410 180—260
Особливістю процесу паяння є потреба існування малих і рівно^
Міриих зазорів між з’єднуваними поверхнями деталей. Розмір зазорів
ідлежно від виду припою може бути від кількох сотих до десятих ча-
йок міліметра.
Для припоїв застосовують сплави на основі олова, міді, срібла.
Найчастіше вживають олов’яно-свинцеві (ПОС ЗО, ПОС 40, ПОС 50,
І І(ХС 61) та срібні (ПСр 40, ПСр 45, ПСр 72) припої. Цифри в позначен-
иих марок припоїв відповідають процентному вмісту олова та срібла.
Розрахунок на міцність паяних з’єднань виконують аналогічно
роїрахунку зварних з’єднань. Для стикового з’єднання (рис. 17.2, а)
\м<>ву міцності на розтяг записують у вигляді
ар =/?/(Ьб)^[а1Р, (17.1)
** для напусткових з’єднань (рис. 17.2, б) умова міцності на зріз
тзр = Р/(Ьї) [т]зр. (17.2)
У наведених формулах розміри з’єднань відповідають вказаним
рис. 17 2. Поверхня напусткового з’єднання, що передає наванта-
иіія від однієї деталі до іншої і знаходиться під дією зсуву, дорів-
» площі стику деталей.
На сьогодні поки що немає загальних рекомендацій для вибору
имих напружень розтягу (о|р та зрізу [тІзр для паяних з’єднань,
^рахунках на міцність можна орієнтуватись на дані табл. 17.1,
дені границі міцності пв га тв (відповідно для розтягу і зрізу)
\ з’єднань для окремих випадків.
181
17.3. Клейові з'єднання
Конструкції клейових з’єднань подібні до конструкцій паяних
з’єднань (див. рис. 17.1), тільки замість припою використовується
клей. Після затверднення клею виникають сили адгезії, за рахунок
яких передається з’єднанням деяке навантаження. Процес склеюван-
ня відбувається без нагрівання або в умовах порівняно невеликого
нагрівання з’єднуваних деталей (для прискорення затверднення
клею). Перед склеюванням поверхні деталей повинні бути очищені та
оброблені наждачним папером, оскільки шорсткість збільшує поверх-
ню склеювання.
На сьогодні виготовляються клейові суміші з вибірковою адгезією
до будь-яких певних матеріалів (спеціальні клеї) або з високою адге-
зією до різних матеріалів (універсальні клеї, наприклад, типу БФ).
Несуча здатність клейових з’єднань залежить від товщини клейо-
вого шару (оптимальне значення 0,05—0,15 мм). Найрозповсюджені-
шими є клейові з’єднання, що працюють на зріз (напусткове з’єднан-
ня). На розтяг клейовий шар працює значно гірше.
Розрахунок на міцність клейових з’єднань можна виконувати за
тими самими формулами, що й паяні. Деякі відомості про міцність
клейових з’єднань (границя міцності на зріз тв) різних матеріалів
наведені в табл. 17.2.
Таблиця 17.2. Границі міцності для клейових з'єднань
Марка клею Матеріал з’єднуваних деталей т_, МПа о
БФ-2 Сталь — Сталь — сталь скло 28—38 14
БФ-4 Сталь — Сталь — Алюміній Сталь — сталь скло — алюміній текстоліт 46—60 40—60 6,5 17—30
88 Сталь — Алюміній сталь — шкіра або гума 2,5 1,5
Контрольні запитання
1. Яка є різниця в утворенні паяних та клейових з’єднань порівняно із звар-
Н ІМИ?
2. Які є області застосування паяних і клейових з’єднань, їхні переваги та не-
доліки?
3. Наведіть приклади конструкцій паяних і кленових з’єднань.
4. Від яких конструктивних параметрів залежить міцність паяних і клейових
з’єднань?
182
ГЛАВА 18. ПРУЖНІ ЕЛЕМЕНТИ МАШИН
18.1. Призначення та конструкції пружин
Пружні елементи, або. пружини, належать до розповсюджених
деталей, що використовуються в різних машинах, механізмах та при-
ладах. Вони виконують інколи дуже відповідальні та складні функції.
Пружні властивості пружин дають змогу використовувати їх у та-
ких випадках:
а) для створення потрібних постійних зусиль (у натискних та на-
тяжних пристроях передач тертям, муфітах, гальмах, клапанах);
б) для акумулювання механічної енергії попереднім деформуван-
иим пружин (пружинні двигуни приладів часу та інші пристрої);
в) для віброізоляції та амортизації ударів за рахунок пруж-
них характеристик відповідним чином підібраних пружин (у транс-
портних засобах, опорних пристроях чутливих елементів приладів
тя ін.);
г) для вимірювання сил, що здійснюється фіксацією пружних де-
формацій пружин (динамометри та інші вимірювальні прилади).
Усі пружини за видом навантаження поділяють на пружини роз-
у, стиску, кручення та згину, а за формою та конструкцією — на
нтові та іншої форми (табл. 18.1).
У загальному машинобудуванні найрозповсюдженішими є гвинто-
іружини розтягу, стиску та кручення, виконані із дроту круглого
• іншого перерізу. Гвинтова пружина розтягу виготовляється
цільним навиванням витків, до того ж крайні витки плавно перехо-
ь у спеціальні вушка, які зручні для закріплювання пружини.
І нинтові пружини стиску бувають циліндричної та конічної фор-
Конічна форма забезпечує пружині змінну жорсткість при дефор-
ілнні. В таких пружинах стиску робочі витки не дотикаються між
а лише крайні витки виконуються зі щільною навивкою для
І.1ІІНЯ пружині плсских опорних торців. Гвинтові пружини стиску
(чистіше виготовляють із дроту круглого перерізу, а при великих
н ключих силах застосовують пружини з квадратним або прямокут-
ні перерізом витків. З метою підвищення податливості в умовах об-
і« них габаритних розмірів використовують багатожильні гвинто-
,кини стиску.
інших пружин стиску належать кільцеві та тарілчасті пружини.
чі пружини складаються з набору кілець спеціального профілю,
вантаженні крайніх кілець в осьовому напрямі зовнішні кіль-
уваються на внутрішні, через що перші розтягуються, а другі
оться. При цьому загальна висота пружини зменшується. Піс-
і гтя зовнішнього навантаження кільцева пружина відновлює
исоту. Через значне тертя між конічними поверхнями зовніш-
внутрішніх кілець відбувається розсіювання енергії при дефор-
183
00
Таблиця 18.1. Види пружних елементів
Пружини Розтяг
Стиск
Гвинтові
Інших видів
Кручення
Згин
манії пружини, тобто кільцеві пружини мають високу здатність
амортизувати поштовхи та удари. Тому їх використовують у важко-
навантажених буферних пристроях.
Тарілчасті пружини складаються з набору конусних дисків (тарі-
лок). При осьовому навантаженні за рахунок деформації кожної та-
рілки відбувається зменшення висоти пружини. Тарілчасті пружини
застосовують для великих навантажень при відносно малих габарит-
них розмірах, наприклад як буфери у різних амортизаторів. Стандарт-
ні тарілчасті пружини бувають із зовнішнім діаметром 28—300 мм і
максимальним робочим навантаженням 52 • 104 кН. Деформація одно-
го конусного диску під навантаженням не повинна перебільшувати 0,8
Його висоти.
Гвинтові пружини кручення виготовляють із зазором між витками
• дроту круглого перерізу. Кінцевим виткам надають відповідну
форму, щоб забезпечити можливість навантаження пружини крутним
Моментом.
Крім гвинтових пружин кручення застосовують плоскі спіральні
ТІ стержневі пружини. Плоска спіральна пружина виготовляється
І плоскої сталевої стрічки, що закручується у спіраль, один кінець
якої закріплюють нерухомо, а інший з’єднують із валиком. Спіральні
Пружини допускають великі кути закручування (до 8—10 обертів
цілика залежно від довжини пружини). їх застосовують в пружинних
двигунах як акумулятори енергії (годинникові механізми та ін.).
Стержневі пружини (торсіони) виготовляють у вигляді суцільних
ібо трубчастого перерізу пружних стержнів, навантажених крутним
моментом. Вони застосовуються за потребою сприйняття великого на-
шштаження з невеликими кутами закручування, наприклад, у підвіс-
х іранспортних машин.
До пружин згину відносять плоскі прямі пружини та листові ресо-
і Найчастіше плоскі прямі пружини мають форму плоских пластин
прямокутного перерізу з одним жорстко закріпленим кінцем. Вони
цнкористовуються переважно в приладах, наприклад, у вигляді кон-
1ІКЇНИХ пружин реле та перемикачів, якщо потрібні невеликі зусилля
її переміщення.
Листові ресори виготовляються у вигляді балок рівного опору при
•н” і набираються із сталевих смуг. Із метою зменшення напружень
л надають зігнуту форму так, що у зібраному стані ресора зна-
>ся з попередньою деформацією, протилежною тій, яка спричи-
Й* я силами, що діють на ресору під час її роботи в машині. При
муванні ресори окремі смуги зміщуються одна відносно одної,
її»* мовлює тертя між смугами, яке сприяє поглинанню енергії при
и иннях. Ресори застосовують переважно у транспортних засобах,
я »ж у деяких конструкціях ковальсько-пресового обладнання.
ружини — це пружні елементи машин, які вимагають достатньо
>ї точності розрахунків та виготовлення. Крім розрахунків
185
на міцність, для пружин обов’язкові розрахунки на жорсткість.
У деяких конструкціях розрахунки пружин на жорсткість е вирі-
шальними.
18.2. Матеріали для виготовлення пружин
Матеріали пружин повинні мати високі пружні властивості, до-
статню міцність та стійкість проти втомного руйнування, а при роботі
в умовах підвищених температур також задовільну термостійкість.
Крім цього, за умовами технології виготовлення пружин, у більшості
випадків зберігається і вимога достатньої пластичності. При роботі
в умовах дії агресивного середовища матеріал пружин повинен мати
достатню корозійну стійкість.
Пружини, що використовують у машинобудуванні, виготовляють
із таких сталей:
а) високовуглецевих та марганцевих марок 65, 70, 75, 65Г;
б) інструментально-пружинних У8А, У10А, У12А;
в) спеціальних ресорно-пружинних кремнієвих 55С2, 60С2, 70СЗ,
хромомарганцевої 50ХГА, хромованадієвої 50ХФА, нікель-кремніє-
вої 60С2Н2А та ін.
Вуглецеві сталі відносно дешеві, відрізняються стабільністю своїх
властивостей, але мають низькі показники міцності та прогартовуван-
ня. Тому їх застосовують для пружин із розміром перерізу витків до
10—12 мм. Марганцеві та кремнієві сталі мають підвищені характе-
ристики міцності, дещо краще прогартовування і тому можуть викори-
стовуватись для більших за розмірами пружин із перерізом витків
до 12—20 мм. Найвищі показники міцності, прогартовування та теп-
лостійкості мають сталі, що леговані ванадієм та нікелем. Із цих ста-
лей виготовляють відповідальні пружини довільних розмірів. Пружи-
ни із деяких легованих сталей задовільно працюють при температурах
до 4С0 °С (сталь 50ХФА використовується для виготовлення пружин
клапанів газорозподілу у дизелях).
Ззготоек^ми для виготовлення пружин мають бути дріт, стрічка,
прутки та смуга з розглянутих вище сталей. Для пружин широко ви-
користовують високовуглецевий сталевий пружинний дріт діаметром
до 8 мм (ГССТ 9389—75), що піддається спеціальній термообробці в
розплавленому свинці (патентування) та сильному наклепуванню з
подальшим волочінням. Дріт випускають трьох основних класів:
нормальної міцності III, підвищеної міцності II та високої міцності І.
Механічні властивості сталевого пружинного дроту наведені у
табл. 18.2.
Для виготовлення плоских пружин використовується сталева тер-
мооброблена пружинна стрічка, яка залежно від групи міцності та роз-
мірів має границю міцності ов = (1300... 1900) МПа. Листові ресори
виготовляють із сортового прокату таких самих марок сталей.
__
Таблиця 18.2. Границі міцності сталевого пружинного дроту
Діаметр дроту 4, мм Границя міцності при розтягу ов, МПа, для дроту класів
: пі п і
Менш ніж 0,3 1750—2250 2250—2700 2700—3100
1 1650—2100 2050—2500 2500—2850
1,5 1450—1850 1850—2200 2200—2500
2 1400—1800 1800—2100 2000-2300
3 1300—1650 1650-1950 1700—1950
4 1150—1500 1500—1750 1600-1850
5 1100—1400 1400—1650 1500—1750
6 1050—1350 1350—1600 —
7 1000—1250 1250—1450 —
8 1000—1250 1250—1450 —
Пружини з дроту діаметром до 8—10 мм або із стрічки завтовшки
до 3 мм навивають в холодному стані з попередньо термооброблених
вихідних матеріалів і після виготовлення інколи піддають лише низь-
)гемпературному відпуску. Високовідповідальні пружини холодного
івивання з легованих сталей треба термообробляти (гартувати, відпус-
іги) після навивання.
Пружини, для яких робоче навантаження постійне або змінюється
обмеженим числом циклів, потрібно заневолювати — попередньо
ружнопластично деформувати. Для цього їх протягом 10—50 год
івантажують зусиллям (у напрямі дії робочого навантаження), яке
іричинює напруження вище, ніж границя пружності. В результаті
і.іневолювання зовнішні волокна витків дістають залишкові деформа-
ції. У вільному стані пружини зовнішні волокна витків під час взаємо-
дії з внутрішніми дістають залишкові напруження оберненого знаку
підносно робочих напружень. При навантаженні пружини робочим
/силлям ці залишкові напруження частково компенсують робочі на-
руження, що підвищує несучу здатність пружин на 20—25 %.
Для запобігання корозії сталевих пружин використовують різні
вкриття—фосфатування, цинкування, хромування та ін.
Пружини, що призначені для роботи в хімічно агресивних середо-
ищах, а також деякі пружини приладів часто виготовляють із спла-
ів кольорових металів — кремній-марганцевої бронзи КМцЗ-1, оло-
’яно-цинкової ОЦ4-3 або олов’яно-фосфорної ОФ6,5-0,4 бронз,
грилієвих Б2, Б2,5 та деяких спеціальних сплавів (мельхіор, техніч-
ий титан та ін.). Відповідною спеціальною термообробкою можна на-
дити пружинам із кольорових сплавів високих показників міцності
<»в «= (800... 1000) МПа та вище.
187
18.3. Розрахунок гвинтових циліндричних
пружин розтягу та стиску з витками круглого перерізу
Гвинтові циліндричні пружини розтягу та стиску мають такі основ-
ні геометричні параметри (рис. 18.1, а, б):
(і — діаметр витків (дроту) пружини;
О — середній діаметр пружини;
£>3 = О 4- сі — зовнішній діаметр пружини;
С = й/сі — індекс пружини;
Н — крок витків у ненавантаженій пружині (А (і — для пру-
жини розтягу, рис. 18.1, а);
а — кут підйому витків (1& а = й/(л£>);
Яо — довжина (висота) ненавантаженої пружини;
//р — довжина робочої частини ненавантаженої пружини;
і — Нріїї — кількість робочих витків;
Ь — довжина дроту для виготовлення пружини.
Податливість циліндричних пружин пропорційна їхньому індек-
су С. Для збільшення податливості індекс С беруть якомога більшим;
практичне застосування мають пружини з індексом С = 4... 12. За-
лежно від діаметра витків рекомендують такі значення індексу цилінд-
ричних пружин:
сі, мм <2,5 3—5 6—12
С 5—12 4—10 4—9
Збільшуючи індекс пружини певної жорсткості, можна зменшити
довжину пружини через збільшення її діаметра, а зменшуючи індекс,
Рис. 18.1. Гвинтові циліндричні пружини роз-
тягу та стиску
можна зменшити діаметр
через збільшення довжини
пружини.
Для розрахунку на міц-
ність розглянемо силові
фактори, що діють у пере-
різі витка, навантаженогс
силою/7 пружини (рис. 18.2)
За умовою рівноваги ниж-
ньої частини пружини виз-
начаємо, що у довільному
перерізі витка діють крут-
ни й момент Т = 0,5ГГ) тз
поперечна сила Т7, які спри-
чинюють відповідно кручен-
ня та зріз витка. Нехтую-
чи кутом підйому витків а,
який для більшості пружин
менший ніж 10—12°, а та-
а
188
Рис. 18.2. Наванта-
ження витків пру-
жини стиску
кож напруженнями зрізу від поперечної сили, на-
пруження кручення витків визначають за виразом
т = ТК№Р = 8ГРЯ/(лсР), (18.1)
де — коефіцієнт, що-враховує кривину витків;
ІГР = лсР/16—полярний момент опору перерізу
нитка. Коефіцієнт беруть залежно від індексу С
пружини із співвідношення
К = 1 + 1,4/С. (18.2)
Умову міцності витків пружини на основі ви-
і»лзу (18.1) записують у вигляді
т = 8РОК/(лсі3) < [т]. (18.3)
Потрібний діаметр дроту пружини із умови (18.3) визначають за
;‘ірмулою
У8ГйК/(п [т]). (18.4)
Якщо в умові (18.3) врахувати, що О/сі = С, то формулу для визна-
вшій діаметра дроту пружини можна записати у вигляді
У8ГКС/(л[і]). (18.5)
Добуте значення сі округлюють до значення у стандартному ряду
і.іметрів дроту для виготовлення пружин.
Діаметр дроту пружини дає змогу визначити середній та зовнішній
і.іметри пружини:
О = СсЦ О* = О 4- (і.
Осьову пружну деформацію пружини (розтяг або стиск) під дією
«вантаження Р можна дістати як добуток кута закручування витків
пружини та середнього радіуса пружини 0,50:
X = 0,500 = 0,5ОТлОі/(6/р) = 0,25ГлО3ї/(6/р),
г і — кількість робочих витків пружини; 6 — модуль пружності при
уві матеріалу пружини (для сталі 0 = 8- 104 МПа); /р = га/*/32 —
плярний момент інерції перерізу витка пружини.
Виражаючи /р через сі та враховуючи, щоОЛї = С, вираз для осьо-
»і пружної деформації пружини можна записати у вигляді
X = 8РО3і/(0сі*) = 8РС3і/(6сІ). (18.6)
Відношення навантаження Р до осьової пружної деформації X пру*
піни називається жорсткістю к пружини. Із виразу (18.6)
к = (М4/(8О3ї) = 6бї/(8С3ї). (18.7)
Вираз (18.6) дає змогу визначити потрібну кількість робочих вит-
• Ів пружини, якщо відоме значення X:
і = 0^4Х/(8ГО3) = (МЬ/^РС3). (18.8)
189
Щоб правильно розрахувати та підібрати пружину, треба знати її
робочу характеристику (рис. 18.3, а, б), на якій повинні бути зазна-
чені: Хт,п, ^тах — відповідно мінімальна та максимальна розрахунко-
ві деформації пружини; Гтіп> ^тах, /’їр — відповідно мінімальне і мак-
симальне розрахункові навантаження та граничне навантаження на
пружину (при посадці витків у пружинах стиску і за міцністю витків у
пружинах розтягу).
Для пружин розтягу (рис. 18.3, а), виготовлених із щільним (за-
критим) навиванням витків, початковий натяг (притискання сусідніх
витків) Ро = (0,2...0,3) ГГр. Граничне навантаження для пружин роз-
тягу та стиску беруть ГГр = (1,1... 1,2) Ртах-
Подальший розрахунок пружини розтягу полягає у визначенні
з умови міцності діаметра дроту сі за максимальним навантаженням
Ртах [див. формули (18.4) і (18.5)1 і середнього!) та зовнішньогодіа-
метрів пружини. Потім знаходять потрібну кількість робочих витків
і за формулою (18.8), беручи максимальне розрахункове навантажен-
ня Ртах та деформацію Хтах.
Решту розмірів пружин обчислюють та такими формулами:
1. Для пружин розтягу
довжина робочої частини ненавантаженої пружини (див. рис. 18.1)
Яр = й/;
повна кількість витків ї0 = і 4- (1...2);
довжина ненавантаженої пружини Яо = ІД 4- 2ЛВ,
де Ав = (0,5... 1) й — висота одного вушка;
довжина пружини при максимальному розрахунковому навантажен-
ні Р тах
Я = Яо 4- Хтах == Яо 4~ (Ртах Ро)/& — Яр 4" 8С3ї (Рта» — Р
190
довжина дроту для виготовлення пружини
£ = лР//соза 4- 2/в,
де /в — довжина дроту для одного вушка.
2. Для пружин стиску
янглльна кількість витків і0 = і 4- (1,5...2), де кількість крайніх
щільно навитих витків становить 1,5—2;
мінімальний зазор між витками при максимальному розрахунковому
II. таженні Лпах — Д = (0,1...0,2) Хтах//;
і«І витків ненавантаженої пружини Н = £тйХ/ї 4- сі + Д;
Л< іна пружини, стиснутої до дотику витків, Нгр — (і0 — 0,5) 4;
довжина ненавантаженої пружини Яо = //гр 4- і (Н — б/);
’іовжина дроту для виготовлення пружини Ь = пЕ)і0/соз а.
При великій кількості витків довгі пружини стиску під наванта-
гііням можуть втрачати поздовжню стійкість. Тому рекомендують
ри НрЮ 3 встановлювати пружини стиску на оправках або у від-
відних трубках.
Для гвинтових циліндричних пружин розтягу або стиску з дроту
суїлого перерізу існує також табличний метод визначення розмірів
। відомими навантаженнями (ГОСТ 13765—86).
18.4. Розрахунок гвинтових циліндричних пружин кручення
та плоских спіральних пружин
ІІри навантаженні циліндричної пружини к р у -
н я зовнішнім моментом М = Еа (рис. 18.4) у поперечних пере-
витків утворюється такий же момент М, вектор якого напрямле-
уздовж осі пружини. Якщо розкласти момент М. на складові
ж витка та перпендикулярно до витка, то в поперечному перерізі
і будемо мати крутний Т = М. зіп а і згинальний Л4ЗГ = М соз а
нти. Оскільки кут підйому витків а 10°, скручуванням вит-
южна знехтувати (Т « 0), а розрахунок витків на міцність ви-
иіі.нн тільки на згин за згинальним моментом Л4ЗГ = М = Еа.
Напруження згину для витків циліндричної пружини кручення
вчнлчають за виразом
а = МзгК7^о = 32МК'/(лбР),
(18.9)
г К' = (С — 0,25)/(С — 1) — коефіцієнт кривини витків, що зале-
жить від індексу пружини С = О/сі', П70 = гаР/32 — осьовий момент
нору перерізу витка (дроту пружини) діаметром (і.
На основі виразу (18.9) умову міцності витків на згин записують у
ні ляді
о = 32А1/<7(л^3) [о].
(18.10)
191
Рис. 18.4. Гвинтова циліндрична пружина кру-
чення
Рис. 18.5. Плоска спі-
ральна пружина
При проектному розрахунку пружини кручення діаметр витків
(або дроту) визначають за формулою, що випливає із умови (18.10)»
3/32Ж7(л[а|). (18.11)
Крок витків пружини кручення беруть Н = сі 4- (0,2...0,5) мм.
Кут закручування пружини під дією моменту М визначають за фор-
мулою
<р = Мтійі/(ЕІ), (18.12)
де і — кількість робочих витків пружини; Е — модуль пружності ма-
теріалу; / = л^4/64 — осьовий момент інерції перерізу витка.
При жорсткому закріпленні кінців навантаженої плоскої
спіральної пружини (рис. 18.5) на валику та в корпусі
в її довільних поперечних перерізах утворюється чистий згин. Якщо
до валика прикладений момент М, то в пружині мають бути напружен-
ня згину
а = М/П70 = 6М/(М2), (18.13)
де И70 = 6Л2/6 — осьовий момент опору перерізу пружини із розміра-
м * Ь і Н.
Якщо пружина навантажується максимальним моментом Мтах, то
умова міцності має вигляд
о = бМтах/(М2)^[а], (18.14)
звідки потрібну ширину перерізу плоскої спіральної пружини можна
визначити за формулою
^>бМгпах/(Л2[о]). (18.15)
Товщину перерізу пружини вибирають попередньо залежно від діа-
метра сі валика за співвідношенням Н = (0,03...0,04) (і.
192
Кут повороту валика під дією моменту Л4, за аналогією із виразом
(ЇМ. 12), можна визначити за формулою
ф == МЦ(ЕІ), (18.16)
до /, — загальна довжина стрічки пружини; Е — модуль пружності
Матеріалу; І = ЬН3/\2 — осьовий момент інерції перерізу пружини.
18.5. Розрахунок стержневих (торсіонів)
І плоских прямих пружин
Стержневі пружини (рис. 18.6) здебільшого навантажу-
крутним моментом, який спричинює деформацію кручення,
дії максимального крутного моменту Ттах умову міцності стерж-
»і пружини записують у вигляді
т = Ттах/ІГр = 16Ттах/(л^) < [т], (18.17)
мідки потрібний діаметр стержня пружини
СІ > У ІбТтах/Сл [Т]). (18.18)
Кут закручування стержня пружини при її навантаженні крутним
Моментом Т визначають за формулою
Ф =77/(6/р), (18.19)
— довжина робочої частини стержня; 0 — модуль пружності ма-
плу при зсуві; /р = ші4/32 — полярний момент інерції перерізу
*жня.
Нлоскі прямі пружини (рис. 18.7) найчастіше викону-
консольно закріпленими (а), рідше — розміщеними на двох опо-
(б). При навантаженні таких пружин максимальною силою Гтах
чіхунок виконують за умовою міцності на згин:
схеми навантаження за рис. 18.7, а
а = 6Гтах//(&/і2)<[о1; (18.20)
дам схеми навантаження за рис. 18.7, б
193
Якщо попередньо вибрати, наприклад, товщину Н перерізу пру-
жини, то за умовами (18.20) та (18.21) можна визначити потрібну ши-
рину Ь перерізу.
Найбільші прогини плоских прямих пружин під дією навантажен-
ня Р можна знайти за формулами:
для консольної пружини (рис. 18.7, а)
у=.Р/’/(ЗЕ/); (18.22)
для плоскої пружини на двох опорах (рис. 18.7, б)
у = РРЦЇЗЕІ). (18.23)
Тут 7 = дЛ3/12 — осьовий момент інерції поперечного перерізу
пружини.
18.6. Допустимі напруження в розрахунках пружин
на міцність
Допустимі напруження для пружин залежать від матеріалу пружи-
ни, характеру зміни навантаження та ступеня відповідальності пру-
жини. Циліндричні гвинтові пружини відповідального призначення
виготовляють здебільшого з дроту підвищеної та високої міцності
(див. класи II та І в табл. 18.2). Для таких навантажених статично
пружин допустимі напруження беруть: при розрахунку витків на
кручення [т]с — 0,5ов; при розрахунку на згин [а)с = 0,5сгв.
Якщо під час роботи на пружину діють змінні навантаження, то до-
пустимі напруження треба вибирати з умови запобігання втомному
руйнуванню. У такому разі рекомендують брати [ті = [т]с/<£ та [а] =>
= Іа!с Кд, де [т!с, [а]с — допустимі напруження при статичному на-
вантаженні пружин; Кь — коефіцієнт довговічності, який беруть її
табл. 18.3 залежно від числа циклів навантаження пружини за
строк її служби та коефіцієнтів асиметрії циклів 7? = тт1п/ттах або
7? — Отіп/Отах-
Таблиця 18.3. Коефіцієнти довговічності пружин
Коефіцієнт асиметрії циклів /? Коефіцієнт при числі циклів навантаження пружин
10» 10’ 10« 10» 10* Ю7
0 1 0,85 0,68 0,50 0,42 0,40
0,25 1 0,90 0,74 0,60 0,50 0,50
0,50 1 0,92 0,80 0,68 0,61 0,60
0,75 1 0,96 0,90 0,83 0,80 0,80
194
Пля пружин, виготовлених із пружинно-ресорних сталей, допу-
е напруження кручення [т)0 ~ 750 МПа незалежно від діаметра
у (прутка), а допустиме напруження згину (о]0 = 1,25 (т]с. Зна-
я допустимих напружень для пружин, що підлягають заневолю-
мнню, можна збільшуватікна 10—15 %.
18.7. Гумометалеві пружні елементи машин
В останні роки широко розповсюджені гумові деталі машин або
। ого роду гумометалеві пружні елементи у вигляді різноманітних
грукцій амортизаторів, шарнірів і підвісок, пружних муфт, демп-
в та ін.
умометалеві пружні елементи використовують у вигляді: гасіїв
жочастотних вібрацій та віброізоляторів; пружних несучих еле-
ів, що заміняють або доповнюють пружини; амортизаторів, бу-
в обмежників та пристроїв для поглинання і розсіювання енергії,
«меншують шум та динамічні навантаження в ланках механізмів;
•кних шарнірів, які не вимагають змащування при обмежених
ііііих та кутових взаємних переміщеннях з’єднуваних елементів
.іких шарнірах відсутнє поверхневе тертя та абразивне спрацю-
ія); елементів, що компенсують неточності складання деталей та
ибки розмірних ланцюгів.
умометалеві пружні елементи складаються з пружної гумової
і.її та металевої арматури, яка призначена для спряження та за-
певни цих елементів у вузлах машини. З’єднання гумових дета-
11 металевою арматурою має суттєве значення при конструюванні
•металевих елементів. Використовують переважно гарячі способи
і ієння гуми до металу здебільшого вулканізацією або способи
нання за допомогою клею на каучуковій основі.
'(сякі види гумометалевих пружних елементів наведені на
18 8: гумометалева опора (а); амортизатор стиску (б); гумометале-
буфер (в); втулка-амо-
р (г); пружний шар-
При розрахунках де-
гуми та гумометале-
у кних елементів слід
і увазі їхні специфічні
ості. Зазначимо деякі
д) гумометалеві пружні
менти працюють при від-
ннх деформаціях стиску до
і тому використання
Гука дає результати рис із з Конструкції деяких гумометале-
">му наближенні; ВИХ пружних елементів
195
Таблиця 18.4. Розрахункові залежності для деяких гумометалевих
пружних елементів
Розрахункова схема
Напруження
Деформація
__ РН
6.50А
Р_____________2Г
А ~ п (О (1) Н
Р 1п (РД/)
2лСН
Т (Р2 —
2Р (О — Яр
ї— ЗлЛ6(Р-}-а)3
ь
б) пружні властивості гумометалевих елементів суттєво залеж; і
від форми гумового елемента та конструкції металевої арматури, йоі
кріплення до арматури і можливості вільної формозміни г ми;
в) нелінійна жорсткість гумометалевих елементів залежить ві
швидкості деформації при коливаннях і повинна розраховуватись п
за статичним модулем пружності Ес, а за динамічним £д. Відношенії
£Д'/£С змінюється залежно від твердості гуми, частоти та амплітул
коливань;
г) довговічність гумометалевих пружних елементів суттєво зале
жить від форми поверхні кріплення гуми до металу та форми сам<
гумової деталі, які слід вибирати залежно від виду деформації.
196
/[ля виготовлення гумометалевих пружних елементів використо-
•іь технічну гуму з границею міцності сгв 10 МПа та модулем
, жкості при зсуві О = (0,7...0,8) МПа.
V габл. 18.4 наведені розрахункові схеми та формули для набли-
к»іо визначення напружень та деформацій для деяких гумометале-
> пружних елементів. ’
Допустимі напруження для гуми беруть: при статичних деформа-
\ стиску [о]с1 =(1,5...2) МПа і зсуву [т]зс = (0,2...0,5) МПа;
і динамічних деформаціях відповідно [а]ст = (1,0...1,5) МПа і
«я (0,1...0,2) МПа.
18.8. Приклад розрахунку пружини
»ча. Розрахувати гвинтову циліндричну пружину стиску для кулачкової
оі муфти (рис. 18.9). Вихідні дані для розрахунку: максимальне осьове
що розвиває пружина, Е = 800 Н при її деформації А = 25 мм: середній
пружини О = 50 мм; пружина працює в умовах циклічного навантаження
ування кулачків при короткочасних перевантаженнях муфти) із числом цик-
; 10* за строк її служби при коефіцієнті асиметрії напружень 7? « 0,50.
< в' яз а н н я. Орієнтуючись на виготовлення пружини із пружинного дро-
і.ісу міцності діаметром (1 « 6...7 мм, за табл. 18.2 вибираємо границю міц-
чо дроту ов = 1000 МПа. Тоді за рекомендаціями 18.6 допустиме напружен-
•ння витків
[т] = 0,5оЛ£ = 0,5 • 1000 • 0,8 = 400 МПа.
коефіцієнт довговічності пружини *= 0,8 (див. табл. 18.3).
<> попередньо взяти індекс пружини С' = 7, то матимемо коефіцієнт, що вра-
.. кривину витків Ідив. формулу (18.2)]:
К’ = 1 + 1,4/С* = 1 4- 1,4/7= 1,2.
1а формулою (18.4) потрібний діаметр дроту для виготовлення пружини
а > /ЬРК'С'КЩіІЇ = V 8 • 800 • 1,2 • 7/(3,14 • 400) = 6,54 мм.
Нііьмсмо стандартний діаметр пружинного дроту сі -* 7 мм. Тоді фактичний ін-
дні пружини С = 0/(1 = 50/7 = 7,143.
Рис. 18.9. Кулачкова муфта з пружинним замиканням
197
При граничному навантаженні Гір = 1,1^ = 1.1 • 800 = 880 Н розрахункове
напруження кручення у витках пружини взятих параметрів
х = 8Ггр£Ж/(л(р) =• 8 • 880 • 50 • 1,196/(3,14 • 78) = 390,7 МПа,
що менше від допустимого [ті — 400 МПа (розрахунок т виконано, якщо С = 7,143
і Л = 1 4- 1,4/7,143 = 1,196).
За формулою (18.8) потрібна кількість робочих витків пружини
і = Осі4Л/(8/?0») = 8 - 104 - 74 - 25/(8 • 800 • 503) 6.
Тут О = 8 • 104 МПа — модуль пружності при зсуві для сталі.
Загальна кількість витків пружини /0 = і 4" 2 = 6 4" 2 = 8.
При максимальному осьовому навантаженні Р = 800 Н мінімальний зазор між
витками
Д = 0.2Л/Ї = 0,2 • 25/6 = 0,833 мм.
Крок витків ненавантаженої пружини
Н = к/і 4~ + Д — 25/6 4- 7 4- 0,833 ~ 12 мм.
Довжина пружини, стиснутої до дотику витків,
Нгр = (і0 — 0,5) Д — (8 — 0,5) 7 = 53,9 мм.
Довжина ненавантаженої пружини
/Уо = Л/гр 4- і (Н — Н) = 53,9 4- 6 (12 — 7) = 83,9 мм.
Довжина дроту для виготовлення пружини
Ь = л£>70/со5 а = 3,14 • 50 • 8/соз 4,37° = 1260,3 мм,
Де а = агсі£ (Н/(гс£>)] = агсі£ [12/(3,14 • 50)1 = 4,37°.
Контрольні запитання
1. Назвіть функції, які можуть виконувати пружини в машинах та приладах.
2. Дайте класифікацію пружин за різними ознаками та охарактеризуйте обла-
сті застосування їх.
3. Назвіть основні матеріали для виготовлення різних пружин.
4. За якою умовою міцності визначають діаметр дроту для циліндричних пру-
жин розтягу та стиску7
5. Що таке жорсткість пружини? Які параметри гвинтової циліндричної пру-
жини впливають на її жорсткість7
6. За якою умовою міцності визначають діаметр дроту для гвинтової цилінд-
ричної пружини кручення?
7. Охарактеризуйте принципи розрахунку на міцність плоских спіральних,
стержневих і плоских прямих пружин. Запишіть умови міцності для цих пружин
8. Які основні фактори впливають на допустимі напруження у пружинах?
9. Наведіть приклади гумомегалевих пружних елементів і вкажіть області за-
стосування їх.
III
Розділ
МЕХАНІЧНІ ПЕРЕДАЧІ
ГЛАВА 19. ЗАГАЛЬНІ ВІДОМОСТІ ТА ПАРАМЕТРИ
ДЛЯ РОЗРАХУНКУ МЕХАНІЧНИХ ПЕРЕДАЧ
19.1. Призначення механічних передач
та їхня класифікація
Механічною передачею називають механізм, що пе-
• іє енергію від двигуна до робочого органу машини з перетворюван-
параметрів руху. В більшості випадків механічні передачі пере-
іюють параметри обертового руху, змінюючи модуль або напрям
якості, а інколи і характер руху (обертовий рух перетворюють у
упальний).
)бертовий рух найпоширеніший у машинах з огляду на властиві
/ переваги в порівнянні з іншими видами руху: існує можливість
інення неперервного та рівномірного руху; невеликі втрати на
я в спряженнях обертових деталей; порівняльна простота та ком-
ність деталей, що забезпечують обертовий рух.
>езпосередній зв’язок двигуна з робочим органом машини хоча і
ливий, але використовується рідко, наприклад у відцентрових
юсах, де вал електродвигуна безпосередньо з’єднується з валом
Вса. Потреба впровадження механічної передачі між двигуном та
Вчим органом машини, як складової частини привода, диктується
Вми міркуваннями:
а) потрібні швидкості руху робочих органів машини, як правило,
узгоджуються з найвигіднішими швидкостями двигуна; швидкості
робочих органів машини найчастіше низькі, а створення тихохідних
двигунів спричинює збільшення їхньої маси та габаритних розмірів;
б) у деяких машинах треба регулювати швидкість руху, проте
регулювання швидкості двигуна не завжди можливе та доцільне;
в) вал двигуна здійснює обертовий рух здебільшого з постійною
Швидкістю, а в машинах інколи потрібен нерівномірний рух або рух
Поступальний, гвинтовий тощо.
Отже, основне призначення механічних передач — це узгодження
Оіраметрів руху робочих органів машини з параметрами руху вала
двигуна.
Усі механічні передачі поділяють на дві основні групи’ а) передачі,
нн базуються на використанні сил тертя (пасові, фрикційні); б) пере-
, що базуються на зачепленні (зубчасті, черв’ячні, ланцюгові,
ітові).
199
Таблиця 19.1. Основні групи та види механічних передач
Групи
передач
Передачі з безпосереднім дотиканням
Передачі гнучким
зв’язком
Передачі
тертям
Фрикційна
Передачі
зачеплен-
ням
Зубчаста Черв’ячна Гвин — гайка
Ланцюгова
У свою чергу, передачі тертям та передачі зачепленням можуть
здійснюватись безпосереднім дотиканням ведучого та веденого еле-
ментів передачі (фрикційні, зубчасті, черв’ячні) і за допомогою про-
міжної гнучкої ланки — так звані передачі гнучким зв’язком (пасові,
ланцюгові).
Основні види механічних передач наведені в табл. 19.1.
Більш детальна класифікація механічних передач буде розглянута
при вивченні конкретних видів передач.
19.2. Основні співвідношення
для кінематичних параметрів і параметрів
навантаження механічних передач
Розглянемо загальні співвідношення між деякими параметрами
всіх механічних передач на прикладі зубчастої передачі (рис. 19.1).
Усі параметри механічної передачі, що належать до ведучої ланки,
будемо позначати індексом /, а до веденої ланки — відповідно індексом
2. Під ведучою або веденою ланкою будемо розуміти вал, зубчасте
колесо, шків, зірочку тощо.
200
Рис. 19.1. Розрахункові пара-
метри механічної передачі
Рис. 19.2. Послідовне розміщення
механічних передач
Переважно ведучі ланки або елементи мають більшу швидкість,
а ведені — меншу. Тому перші інколи називають швидкохідними, а
другі — тихохідними ланками.
Основний кінематичний параметр механічної передачі — переда-
точне число
« = сОі/о2, (19.1)
«ке є відношенням кутової швидкості а>! ведучої ланки до кутової
швидкості со2 веденої ланки передачі.
Енергетичними параметрами механічної передачі є передавані
потужності на ведучій ланці Рх і на веденійуіанці Р2, а також коефі-
цієнт корисної дії (ККД) т], Щ° визначається за співвідношенням
П = Р2/Л- (19.2)
ККД характеризує ступінь досконалості механічної передачі і за
ним можна оцінити втрати потужності ДР у передачі:
ДР = Р1-Р2 = РІ(1 — п>- (19.3)
Параметри <о1 і <о2, а також Рг і Р2 є мінімально потрібними для
розрахунку будь-якої механічної передачі.
Передавані потужності, Вт, та кутові швидкості, рад/с, визнача-
ють обертові моменти, Н • м, на валах передачі:
н.і ведучому валу
Л = (19.4)
і веденому валу
Т2 = Р2/щ2. (19.5)
Співвідношення між обертовими моментами на валах механічної
передачі можна встановити за виразами (19.4) та (19.5) і записати у та-
кому вигляді:
Т2/Ті = иг) або Т2 = 7\нт). (19.6)
201
1
Інколи швидкості обертання ланок механічної передачі задаються
у вигляді частоти обертання п, хв~!. Зв’язок між кутовою швидкістю
(о, рад/с, та частотою обертання п, хв-1, виражається співвідношенням
о = лп/30.
У розрахунках механічних передач зустрічаються такі параметри,
як колова швидкість та колова сила. Колова швидкість V — це лінійна
швидкість точок обертової ланки передачі, розміщених на відстані
<4/2 або </2/2 від осі обертання (рис. 19.1):
V = = у2 = со^/2 = со2</2/2. (1^.7)
Колова сила — це сила, що діє на ланку передачі, спричинюючи
її обертання або створюючи опір обертанню, і напрямлена по дотичній
до траєкторії (кола) руху точки її прикладання (рис. 19.1):
Рі = Рп == Рп ~ 27\/<4 = 27^. (19.8)
Потужність, кВт, що затрачається на рух ланки передачі із швид-
кістю V, м/с, у напрямі, протилежному дії на ланку зовнішньої сили
Р, Н, визначають за формулою
Р = /ч»/10\ (19.9)
У приводах машин можуть застосовуватись кілька послідовно роз-
міщених механічних передач 1—4 (рис. 19.2). У цьому разі загальне
передаточне число и привода та його ККД визначаються за наведеними
нижче формулами:
со2 = (йі/Нр со3 = со4 = со3/н3 = ^/(н^з).
Загальне передаточне число привода
и =
Отже, загальне передаточне число привода, що складається з кіль-
кох механічних передач, дорівнює добутку передаточних чисел його
складових передач, тобто
ц = . ,ип. (19.10)
Зв’язок між потужностями на окремих валах привода (рис. 19.2) за-
пишемо у вигляді
Рг - Рз = ЛгПа = ЛіПіПгї Л = ЛЛз = РіПіПгПз-
Відповідно ККД всього приводного механізму
П = р</рі = ’Іі’ІгПз-
ККД привода, що складається з кількох механічних передач, до-
рівнює добутку ККД всіх його складових передач, тобто
Т] = ПіПа- -тіл- (19.11)
202
19.3. Загальні міркування щодо вибору
розрахункових навантажень механічних передач
Навантаження, що передають механічні передачі, можуть бути
постійними або у більшості випадків змінними в часі. Як постійні,
так і змінні навантаження спричинюють у деталях механічних передач
циклічно змінні напруження, що обумовлені, наприклад, періодичним
входом у зачеплення зубців зубчастих передач або зміною положення
паса на шківах у пасових передачах. Рівень циклічно змінних на-
пружень залишається постійним при постійному зовнішньому на-
вантаженні, але змінюється у разі змінного зовнішнього наванта-
ження.
У 4.3 було показано, що змінний режим навантаження можна за-
мінити еквівалентним постійним режимом. При цьому за номінальне
навантаження Т = ТЯ0ІЛ (або Е = ЕНО1Л) беруть максимальне довго-
часно діюче навантаження, число циклів появи якого не менше від
5 • 104 за строк служби машини чи її деталі. Максимальні наванта-
ження Ттах (або/^тах) із числом циклів появи менше від 5 • 104 вважа-
ють короткочасно діючими і беруть тільки у розрахунках деталей на
статичну міцність при перевантаженнях [22].
Стосовно механічних передач вибір номінального навантаження
залежить від призначення приводного механізму:
а) якщо привод проектують для роботи із заданим режимом наван-
таження з обумовленим максимальним довгочасно діючим наванта-
женням, то це навантаження беруть за номінальне розрахункове для
передач цього привода. Приводні двигуни, що використовують в тако-
му випадку, можуть мати потужність, яка відповідає даному номіналь-
ному навантаженню, або ж їхня потужність може бути дещо більшою
від потрібної. В останньому випадку передачі приводного механізму
по будуть перевантажені, це спричинить лише недовантаження дви-
гуна;
б) якщо проектують механічну передачу без конкретних вказівок
її призначення, але з відомим режимом навантаження, то треба мати
ня увазі, що споживач може завантажити передачу на повну потуж-
ність використаного у приводі двигуна. У цьому разі розрахунок пе-
редачі слід виконувати за номінальним обертовим моментом, що ді-
стають із номінальної потужності двигуна;
в) у разі прсектування передачі з невідомим режимом наванта-
ження, але із заданим номінальним навантаженням (наприклад, ре-
дуктори загального призначення) у розрахунках слід брати найваж-
чий для передачі режим — режим з постійним навантаженням.
Максимальні навантаження Ттах у передачах, що обумовлені дією
короткочасних або випадкових перевантажень, можуть у кілька разів
перебільшувати номінальні розрахункові навантаження. В основному
нони залежать від характеру робочого процесу в машинах. У розра-
203
хунках механічних передач максимальне навантаження беруть та-
ким 191:
Гтах = ТКп, (19.12)
де Кп — коефіцієнт короткочасного перевантаження, що беруть за
рекомендаціями на основі досвіду експлуатації конкретних машин.
Якщо рекомендації щодо вибору Кп відсутні, а у приводних при-
строях використовують асинхронні електродвигуни, то значення коефі-
цієнта перевантаження можна брати рівним відношенню пускового мо-
менту до номінального моменту двигуна, яке задається в каталогах
електродвигунів.
Контрольні запитання
1. Шо таке механічна передача? З якою метою застосовують механічні передачі?
2. Назвіть дві основні групи механічних передач та наведіть приклади передач
кожної групи.
3. Що таке передаточне число механічної передачі? Запишіть вираз для ви $ра-
чення передаточного числа.
4. Що таке ККД механічної передачі і шо він характеризує?
5. Запишіть та проаналізуйте вираз для визначення обертового моменту на ва-
лах механічної передачі.
6. Як визначаються загальне передаточне число та ККД частини приводного
пристрою, що складається із послідовно з’єднаних механічних передач?
7. Назвіть характерні особливості приводних пристроїв, за якими здійснюють
вибір номінального навантаження механічних передач.
ГЛАВА 20. ФРИКЦІЙНІ ПЕРЕДАЧІ
20.1. Загальні відомості та класифікація
фрикційних передач
Фрикційна передача в її найпростішому вигляді складається з
двох котків (роликів), які притиснуті один до одного деякою силою.
Рис. 20.1. Схема ци-
ліндричної фрик-
ційної передачі
Обертання від одного з котків до іншого передаєть-
ся за рахунок сили тертя між котками (рис. 20.1).
Потрібна сила тертя між котками фрикційної
передачі досягається примусовим притисканням
котків відповідною силою (}. Якщо сила прити-
скання котків недостатня, то між котками може
виникнути проковзування (буксування), що пору-
шує нормальну роботу передачі.
Фрикційні передачі використовують не тільки
для передавання обертового руху. Принцип фрик-
ційної передачі широко застосовують для перетво-
рення обертового руху в поступальний — у всіх
наземних транспортних машинах (колесо і рейка
або дорога), а також у металургійній промисловос-
204
і і (прокатні стани), де передавання руху за рахунок тертя є основою
технологічного процесу.
Силові фрикційні передачі за передаваним навантаженням значно
поступаються іншим видам механічних передач. Крім того, вони не
забезпечують постійного передаточного числа (через можливе проков-
зування котків) і тому не можуть бути застосованими у точних пере-
даточних механізмах. Фрикційні передачі застосовують у ковальсько-
пресовому обладнанні, фрикційних лебідках, деяких верстатах і від-
носно рідко їх виготовляють у вигляді швидкохідних редукторів неве-
ликої потужності (до 20 кВт).
Більш широке застосування фрикційні передачі мають у переда-
точних механізмах різних приладів, де передавані навантаження не-
значні. Дуже вигідне застосування фрикційних передач у варіаторах —
механізмах для безступеневого регулювання кутової швидкості.
За допомогою фрикційної передачі можна забезпечити достатньо
велике передаточне число, але через обмеження габаритних розмірів
передачі рекомендують брати 10. Значення ККД фрикційних пе-
редач коливається в межах т] = 0,90...0,95.
Фрикційні передачі у порівнянні з іншими механічними передача-
ми мають такі переваги:
— простота та дешевизна виготовлення деталей передачі;
— плавність та безшумність роботи при високих швидкостях;
— передача запобігає поломкам деталей приводного пристрою за
рахунок можливого проковзування котків при перевантаженнях;
а б 6 2
Рис. 20.2. Класифікація фрикційних передач
205
— існує можливість здійснення безступеневого регулювання пере-
даточного числа.
До недоліків фрикційних передач належать:
— несталість передаточного числа через можливе проковзування
котків;
— потреба застосування спеціальних натискних пристроїв;
— високі навантаження на вали та опори валів передачі;
— небезпека пошкодження котків при їхньому буксуванні.
Незважаючи на недоліки в деяких конструкціях приводних меха-
нізмів машин та приладів, фрикційні передачі є найраціональнішими.
Залежно від призначення фрикційні передачі поділяють на дві гру-
пи: передачі з умовно постійним передаточним числом та передачі з
мінливим передаточним числом (варіатори).
Передачі з умовно постійним передаточним числом класифікують
відповідно наведеним на рис. 20.2, а—г ознакам. Передачі з мінливим
передаточним числом (варіатори) будуть розглянуті у 20.7.
20.2. Явища ковзання у контакті котків
фрикційної передачі
Робота навантаженої фрикційної передачі супроводжується яви-
щами ковзання в контакті котків. Ковзання є причиною спрацьову-
вання котків, зменшення ККД та мінливості передаточного числа.
Розрізняють три види ковзання: буксування, пружне та геометричне
ковзання.
Буксування виникає під час перевантажень передачі. При
обертанні ведучого котка відбувається його ковзання та поверхні
надмірно навантаженого веденого котка, спричинюючи його місцеве
спрацьовування та вихід з ладу. Тому при проектуванні фрикційної
передачі треба передбачати достатній запас зчеплення котків для за-
побігання буксуванню.
Пружне ковзання пов’язане з пружними деформаціями
котків у зоні їхнього контакту. Явище пружного ковзання можна на-
ближено пояснити на прикладі циліндричної фрикційної передачі
(рис. 20.3, а). Під дією зусилля 0 притискання котків лінійний кон-
такт котків перетворюється у контакт на площинці, обмеженій точка-
ми а і Ь. У навантаженій передачі моментами 7\ та Т2 ділянки робочої
поверхні ведучого котка / наближаються до точки Ь стиснутими (по-
значені більш щільними штрихами), а відходять від точки а розтягну-
тими. На веденому котку 2, навпаки, ділянки робочої поверхні набли-
жаються до точки Ь розтягнутими, а відходять від точки а стиснутими.
У межах аЬ площинки контакту котків відбувається пружне видовжен-
ня поверхні ведучого котка 1 і пружне стискання поверхні веденого
котка 2, що спричинює пружне ковзання і відставання веденого котка
206
Рис. 20.3. Пружне (а) та геометричне (б) ковзання у фрикційній пе-
редачі
від ведучого. На площинці контакту котків є тільки одна лінія, де
лінійні колові швидкості точок поверхонь двох котків однакові.
Величина
е = (Оі — и2)Л’і (20.1)
називається коефіцієнтом пружного ковзання котків. У співвідношен-
ні (20.1) і?! та і?2 — колові швидкості точок, розміщених на циліндрич-
ній робочій поверхні ведучого та веденого котків.
Коефіцієнт пружного ковзання є залежить від пружних властивос-
тей матеріалів котків і визначається дослідним шляхом. Для сталевих
котків пружне ковзання незначне є « 0,002; для текстоліту та сталі
г. « 0,01, а для гуми та сталі є 0,03.
Геометричне ковзання обумовлене різницею у зна-
ченнях, а інколи і у напрямах швидкостей контактуючих точок веду-
чого та веденого котків. Це ковзання є вирішальним для фрикційних
передач. Пошуки нових форм тіл кочення часто пов’язані з намаган-
ням зменшити геометричне ковзання.
Явище геометричного ковзання розглянемо на такому прикладі
контакту котків (рис. 20.3, б). Ведучий коток 1 і ведений коток 2 обер-
таються у двох взаємно перпендикулярних площинах. При цьому
циліндрична поверхня котка 1 контактує з плоскою торцевою площи-
ною котка 2.
Колова швидкість точок на робочій поверхні котка 1 однакова на
ВСІЙ його ширині і дорівнює Швидкість С2 різних точок поверхні
веденого котка 2 змінюється пропорційно відстані цих точок від осі
обертання (на краю котка о2 = Угтах)- Якщо буксування немає, то
швидкості щ та о2 на лінії контакту повинні бути рівними між собою.
Однак у цьому прикладі рівність швидкостей можна дістати тільки
207
для деякої однієї точки лінії контакту. Цю точку Р називають полюсом
кочення. Через полюс кочення проходить розрахункове коло котка
2 із діаметром е/2. У всіх інших точках лінії контакту спостерігається
ковзання із швидкістю — ц2. Швидкість ковзання у точках лі-
нії контакту котків змінюється за модулем і напрямом (епюра на
рис. 20.3, б). Із зменшенням ширини котка 1 зменшується також і
геометричне ковзання.
Полюс кочення Р знаходиться на середині лінії контакту тільки
при холостому режимі роботи. Під час роботи передачі з навантажен-
ням полюс кочення зміщується від середини на деяку відстань.
Найдосконалішими є фрикційні передачі, в яких немає геометрич-
ного ковзання.
20.3. Матеріали та конструкції деталей
фрикційних передач
Матеріали фрикційних котків повинні задовольняти такі вимоги:
високий модуль пружності для зменшення пружного ковзання та
втрат потужності на перекочування котків; високий коефіцієнт тертя
ковзання; висока контактна міцність та стійкість проти спрацьову-
вання для забезпечення потрібної довговічності передачі.
Найчастіше використовують такі поєднання матеріалів для виго-
товлення ведучого та веденого котків:
загартована сталь — загартована сталь забезпечує найбільшу
контактну міцність передачі та високий ККД, але вимагає достатньої
точності виготовлення деталей та монтажу передачі. Найліпші резуль-
тати дає застосування сталей типу ШХ15 із термообробкою поверхні
до твердості 50—55 ННС. У тихохідних передачах можуть викори-
стовуватись леговані сталі 40Х, 40ХН із гартуванням та середнім від-
пусканням.
Чавун — чавун (або сталь) також забезпечує достатньо високу
несучу здатність передачі та малі її габаритні розміри.
Фрикційні передачі з металевими котками можна проектувати для
роботи в умовах змащування або без змащування.
Текстоліт, фібра — сталь, чавун мають широке застосування у
середньо- та малонавантажених передачах. Завдяки високим значен-
ням коефіцієнта тертя вимагають меншої сили притискання котків.
Шкіра, деревина, гума — сталь, чавун знаходять використання
у малонавантажених передачах та кінематичних передачах приладів.
Ці матеріали мають низьку стійкість проти спрацьовування, але висо-
кий коефіцієнт тертя.
Котки фрикційних передач із неметалевих матеріалів завжди по-
винні працювати без змащування. Як правило, ведучий коток виго-
товляють із більш м’якого матеріалу, щоб запобігти місцевому спра-
208
1
Рис. 20.4. Конструкції фрикційних котків
цьовуванню (утворенню лисок) на робочій поверхні веденого котка
при випадковому буксуванні.
Конструкція котків фрикційних передач. Будова та форма котків
визначаються здебільшого матеріалами, з яких ці котки виготовлені.
Металеві котки (із сталі чи чавуну) виготовляють дискової фор-
ми, а котки малих діаметрів роблять суцільними разом із валом
(рис. 20.4, а, б). Робочі поверхні металевих котків повинні мати малі
параметри шорсткості (Ка 0,63—0,32).
Котки з неметалевих^атеріалів виготовляють збірними насадної
конструкції (рис. 20.4, в — е): маточина з чавуну або сталі призначена
для закріплення дисків або кілець із гуми /, текстоліту 2, деревини
чи шкіри 3.
Натискні пристрої фрикційних передач. Створення потрібної сили
притискання котків фрикційних передач можна здійснити різними
способами. Спосіб притискання має суттєве значення для роботи пере-
дачі. Постійне притискання допустиме тільки у передачах, що переда-
ють постійне робоче навантаження. У тих передачах, що працюють із
змінним навантаженням, бажано, щоб сила притискання котків зміню-
валася автоматично відповідно до навантаження. Довговічність та
ККД таких передач більші, оскільки в цьому разі не виникають над-
мірні сили при передаванні малих робочих навантажень.
На рис. 20,5, а, б показані схеми натискних пристроїв, що забезпе-
чують постійну силу притискання котків за допомогою стиснутої
пружини і за допомогою ваги спеціального тягарця на важелі.
Гвинтовий натискний пристрій, що забезпечує автоматичне регу-
лювання сили притискання конічних котків, показано на рис. 20.5, в.
У такому пристрої слід застосовувати несамогальмівну гвинтову па-
ру. Іншим прикладом автоматично діючого пристрою є передача із
самозатяжним кільцем (рис. 20.5, г). Крім основних котків, передача
209
Рис. 20.5. Натискні пристрої для фрикційних передач
має додатковий холостий ролик 1 та масивне жорстке кільце 2, що
охоплює з невеликим початковим натягом усі три котки.
З іншими схемами натискних пристроїв фрикційних передач можна
познайомитись у спеціальній літературі.
20.4. Види руйнування котків і критерії
їхнього розрахунку. Допустимі контактні
напруження та тиски
Сила притискання котків у фрикційних передачах спричинює на
їхніх робочих поверхнях значні контактні напруження. Оскільки при
обкочуванні котків зона їхнього контакту постійно змінюється, то
контактні напруження мають циклічний характер, до того ж у кожній
точці робочої поверхні котка один цикл зміни напружень відбувається
за один оберт. При такому характері зміни напружень у металевих
котках, що працюють в умовах змащування, руйнування робочих
поверхонь відбута-ться внаслідок втомного викришування. При ро-
боті котків без мастила руйнування здійснюється внаслідок нагрі-
вання та відшаровування частинок матеріалу робочих поверхонь.
Щоб запобігти таким формам руйнування металевих котків фрикцій-
них передач, слід обмежувати контактні напруження на робочих по-
верхнях, що здійснюється відповідним розрахунком котків на міц-
ність.
Робочі поверхні котків, виготовлених із неметалевих матеріалів,
зазнають спрацьовування через значно більше пружне ковзання у зоні
210
Табл и ц я 20.1. Допустимі контактне напруження та тиск [7] для
фрикційних передач
Матеріал котків Умови роботи Коефіцієнт тертя І [а]//. МПа М. н/мм
Сталь — сталь Із мастилом 0,05 (2,5—3,0) НВ
Чавун — чавун Те саме 0,05 1,5ов —
Сталь — сталь Текстоліт — сталь, Бе з мастила 0,12—0,15 (1,2-1,5) НВ
чавун Фібра — сталь, Те саме 0,20—0,25 — 50—80
чавун > > 0,15—0,20 35—40
Шкіра — чавун Гума — сталь, > > 0,25—0,35 — 15—25
чавун > > 0,45—0,60 —— 10—30
Примітки: 1. Для чавунних котків ов— границя міцності при згині.
2. Допустимі контактні напруження наведені для лінійного контакту котків.
При точковому контакті |о]я приблизно у 1,5 раза вищі, ніж дані в таблиці
значення.
контакту. Зменшити спрацьовування робочих поверхонь таких котків
можна обмеженням навантаження, що припадає на одиницю довжини
лінії контакту (тиску).
Поки що не існує глибоко обгрунтованої методики вибору допусти-
мих контактних напружень та тисків для котків фрикційних передач
через складність врахування деяких факторів, що впливають на не-
сучу здатність котків. До таких факторів належать: технологічні фак-
тори (якість та точність виготовлення і складання передачі); невизна-
ченість умов регулювання сили притискання котків; експлуатаційні
особливості (умови та режим навантаження, можливе проковзування
котків, температурний режим роботи, вплив властивостей мастила
тощо).
Деякі рекомендації для визначення допустимих контактних напру-
жень для котків фрикційних передач, що встановлені досвідом експлу-
атації передач, а також допустимі тиски наведені у табл. 20.1.
20.5. Розрахунок циліндричних фрикційних передач
Через відсутність принципової різниці в розрахунках циліндрич-
них фрикційних передач із зовнішнім (рис. 20.6, а) та внутрішнім
(рис. 20.6, б) дотиканням розглянемо ці розрахунки одночасно.
Геометрія та кінематика передачі. Основними розмірами циліндрич-
ної фрикційної передачі є діаметри котків та ^2, міжосьова відстань
а і ширина котків Ь. Зв’язок між міжосьовою відстанню та діаметрами
211
Рис. 20.6. Парамет-
ри та навантажен-
ня елементів фрик-
ційної передачі
котків виражається залежністю
а = 0,5 ± б/2). (20.2)
Тут і надалі верхній знак (плюс) належить до передачі із зовніш-
нім дотиканням котків, а нижній знак (мінус) — до передачі із внут-
рішнім дотиканням котків.
Ширину котків Ь вибирають залежно від міжосьової відстані, для
чого беруть
Ь = фап, (20.3)
де = 0,20...0,40— коефіцієнт ширини котків. Більші значення
беруть для точно виготовлених і змонтованих закритих передач,
а менші — для менш точних відкритих передач.
Основними кінематичними параметрами передачі є кутові швидкос-
ті котків сОї і <о2, а також передаточне число
и — со1/со2.
Передаточне число и можна виразити через діаметри котків з ура-
хуванням пружного ковзання. На основі співвідношення (20.1) діста-
немо:
у і (1 — є) = и2\ (1 — е)/2 = со2б/2/2; и — 0 — є)]-
(20.4)
Оскільки коефіцієнт пружного ковзання малий (є=$С 0,03), то у роз-
рахунках силових фрикційних передач можна брати
и = (20.5)
Інші співвідношення між параметрами циліндричної фрикційної
передачі, які будемо використовувати у розрахунках, такі:
а = 0,5 (б/2 ± сіі) = 0,5^ (и ±2 1);
(іх — 2а/(и ± 1); сі2 = 2аи/(и ± 1). (20.6)
212
Зусилля у циліндричній фрикційній передачі. Щоб запобігти бук-
суванню котків при передаванні зовнішнього навантаження, у фрик-
ційній передачі слід забезпечити умову
(20.7)
де /\ — сила тертя у контакті котків; Е\ — колова сила на котках.
Враховуючи те, що Р5 == 0} і Р( = 27^/^, а також беручи до уваги
коефіцієнт запасу зчеплення котків К, умову (20.7) запишемо у виг-
ляді:
(?/ = 2Т.К/СІ
(20.8)
де 7\ — обертовий момент на ведучому валу передачі. Рівність (20.8)
дозволяє визначити потрібну силу притиску котків (}, яка забезпечує
відсутність їхнього проковзування:
(? = 2ТЛ/О. (20.9)
Коефіцієнт тертя ковзання / можна вибрати за таблицею 20.1 за-
лежно від матеріалів котків та умов їхньої роботи. Коефіцієнт запасу
зчеплення рекомендують брати: К = 1,3...1,5 — для силових фрик-
ційних передач і К = 2,5...3,0 — для кінематичних фрикційних пе-
реда ч.
Сила, що передається на вали фрикційної передачі, дорівнює сумі
сил притиску котків <2 та колової сили (див. рис. 20.6):
р ф + Р2.
(20.10)
Сила Р враховується у розрахунку валів, а сила <2 — у розрахун-
ку котків на міцність та розрахунку натискного пристрою передачі.
Розрахунок котків на міцність. Розрахунок металевих котків ви-
конують за умови контактної міцності робочих поверхонь:
ан<[а]н, (20.11)
а неметалевих котків — за умови обмеження тиску у контакті для за-
безпечення стійкості проти прискореного спрацьовування:
(20.12)
Виходячи із цих умов, можна дістати основні розрахункові за-
лежності. Згідно з формулою Герца (див. 4.1) при лінійному дотиканні
деталей максимальне контактне напруження
ан = 2м іЛ?/(2рпР). (20.13)
Розрахунковий тиск по довжині контакту котків
Я = ЯКь/Ь = 2ТЛ^з/№/Ь), (20.14)
де К$ = 1,1...1,3 — коефіцієнт, що враховує нерівномірність розподі-
лу навантаження по ширині котків. Менші значення беруть для
213
точно виготовлених та змонтованих передач при відносно невеликій
ширині котків (малому значенні фа).
Зведена кривина робочих поверхонь котків
— =— ± — = -7-±-4-=-7-(1 ± —) = • (20.15)
Рпр Рі Р» <іі \ и ) а, и ' >
Тепер на основі (20.11) та (20.12) запишемо остаточні умови міц
ності, що використовуються для перевірного розрахунку:
для металевих котків
ан = /[^(М,)] (и ± 1)/и < [а]«; (20.16)
для неметалевих котків
Я = 0К$/Ь <[?].
(20.17)
Умови (20.16) та (20.17) можна використовувати у перевірних
розрахунках фрикційних котків із відомими розмірами. При цьому
коефіцієнт 7м, що враховує властивості матеріалів котків, треба бра-
ти: 2м = 275 МПа1/2— для сталевих котків; 2м = 210 МПа1/2—
для чавунних котків і 2м = 235 МПа1/2 — для поєднання чавун —
сталь. При невиконанні умов (20.16) і (20.17) слід збільшити ширину
Ь котків.
Формули для проектного розрахунку циліндричних фрикційних
передач можна дістати з умов (20.16) і (20.17) підстановкою в них
сили С із виразу (20.9) та заміною розмірів Ь і через міжосьову
відстань а за формулами (20.3) та (20.6). У результаті маємо такі
формули для проектного розрахунку:
передачі з металевими котками
а > Км (и ± 1) [а&); (20.18)
передачі з неметалевими котками
а > Кн /ЛКв (и ± 1 )/()&,Д,]). (20.19)
Тут = V 6,5 • 103—допоміжний коефіцієнт для мета-
левих котків, що беруть рівним (при К = 1,3): К* = 370 МПа1/3 —
для сталевих котків; Ки = 300 МПа1/3 — для чавунних котків; /<м =
= 330 МПаІ/3 — для поєднання чавун — сталь; /Сн = V—
допоміжний коефіцієнт для неметалевих котків, який беруть рівним:
КИ = 36 — для силових фрикційних передач (К = 1,3); Кн = 50 —
для кінематичних передач (К = 2,5).
У формулах (20.18) та (20.19) 7\ слід підставляти у ньютон-метрах
(Н • м), [о]н — у мегапаскалях (МПа), 1^1 — у ньютонах на мілі-
метр (Н/мм), міжосьову відстань — у міліметрах (мм).
214
Залежності (20.18) та (20.19) дозволяють попередньо визначити по-
трібну мінімальну міжосьову відстань передачі а. За визначеним зна-
ченням а підраховують діаметри котків і сі2 [див. формулу (20.6)1,
ширину котків Ь [див. формулу (20.3)] та потрібну силу притискання
котків <2 [див. формулу ;(20.9) 1. Остаточна перевірка міцності котків
за взятими розмірами виконується за умовами (20.16) та (20.17),
оскільки перевірний розрахунок передачі є вирішальним.
Допустимі контактні напруження [а]н та допустимі тиски [<?] бе-
руть за табл. 20.1.
20.6. Розрахунок конічних фрикційних передач
Конічні фрикційні передачі використовують для передавання
обертового руху між валами, осі яких перетинаються. Кут між осями
валів може бути довільним, але найширше застосування мають
конічні фрикційні передачі з міжосьовим кутом Е = 90°. Принципова
схема такої передачі показана на рис. 20.7.
Геометрія та кінематика передачі. Котки конічної фрикційної
передачі — це зрізані конуси, що взаємно дотикаються по спільній
твірній, а вершини конусів знаходяться у точці перетину осей валів.
Остання умова потрібна, щоб запобігти геометричному ковзанню в
контакті котків.
Основними розмірами конічної фрикційної передачі є середні діа-
метри ведучого та веденого котків сіті і зовнішня /? та середня
Кт конусні відстані, робоча ширина котків Ь, кути при вершинах ко-
нусів 6х та 62. Для конічної фрикційної передачі з міжосьовим кутом
Рис. 20.7. Параметри та навантаження
котків конічної передачі
215
5 = 6і 4- б2 = 90° (рис. 20.7) справедливі такі співвідношення між
параметрами:
Ят = У (4,,/2)2 + (аот2/2)2 = 0,5 /(20.20)
Н = Кт + 0,5Ь-, (20.21)
Ь = і|>д/?т. (20.22)
Тут = 0,20...0,30 — коефіцієнт ширини котків.
Передаточне число конічної фрикційної передачі и = (Ох/сог за
аналогією з циліндричною передачею може бути визначене через діа-
метри конічних котків (без урахування пружного ковзання):
и = ат2/сіт1. (20.23)
Інші співвідношення між параметрами передачі, які використо-
вують у розрахунках [на основі виразів (20.20) ... (20.23)], такі:
Кт = 0,5гітІ /Г+й5; /? = Цт (1 + 0,5фд);
4,1 = 2/?т/ҐГ+1?; = 2/?т«//Т+Т2; (20.24)
= &т\№т.2 == І/М, ^2 == (Іт2/^т\ =
Зусилля у конічній фрикційній передачі. За аналогією з циліндрич-
ною фрикційною передачею умову роботи конічної передачі без буксу-
вання котків записують у вигляді (20.7). Силу тертя у контакті коніч-
них котків та колову силу визначають за формулами:
Г5 = ф; Г, = 27\/йпь (20.25)
де 0 — нормальна до лінії контакту сила притискання котків
(рис. 20.7); 7\ — обертовий момент на ведучому валу передачі. Сила
на рис. 20.7 проекціюється в точку Р.
Беручи до уваги коефіцієнт запасу зчеплення умову відсутності
буксування котків навантаженої передачі можна записати у вигляді
<2/ =
звідки сила
(і = 2Т1К/(с1т1[). (20.26)
Тут коефіцієнт запасу зчеплення котків К беруть таким самим, як
і в циліндричних фрикційних передачах.
Розклавши силу С} за напрямами осей валів передачі, дістанемо си-
ли та що діють на котки передачі паралельно осям їхнього обер-
тання:
= 8Іп 6,; = 5ІП 62. (20.27)
Таким чином, для забезпечення однієї і тієї ж нормальної до лінії
контакту сили <2 уздовж осі меншого котка треба прикладати меншу
216
силу (бо бз < 6, і Сі < 0,)» тобто натискний пристрій доцільно розмі-
щувати з боку меншого котка.
На обидва вали конічної фрикційної передачі передаються колова
сила та сила (?, взаємно перпендикулярними складовими якої є
Ці та ф2. На рис. 20.7 показані сили, що навантажують ведучий вал
конічної фрикційної передачі.
Розрахунок конічних котків на міцність. За аналогією з циліндрич-
ною фрикційною передачею умови міцності та стійкості проти приско-
реного спрацьовування конічних котків записують у вигляді (20.11)
та (20.12) відповідно для металевих та неметалевих котків.
Розрахунковий тиск по довжині контакту конічних котків
(20.28)
де Кр == 1,3...1,5 — коефіцієнт, що враховує нерівномірність розпо-
ділу навантаження у контакті котків. Коефіцієнт для конічних
передач треба брати більшим, ніж для циліндричних передач, через
складність точного виготовлення та монтажу конічної передачі.
Радіуси кривини робочої поверхні конічних котків на довжині
їх спільної твірної неоднакові. За розрахункові беруть радіуси кри-
вини робочих поверхонь у точках середини лінії контакту котків
(див. рис. 20.7):
Р1 = б1 = = 0,Мт| V и2 + 1/и;
р2 = Нт 1§ 62 — іїти = 0,5сітіи Уи2 + 1.
Зведена кривина робочих поверхонь конічних котків
(20.29)
(20.30)
Підставляючи у формулу Герца (20.13) вирази (20.28) та (20.30),
дістанемо остаточну умову міцності для перевірного розрахунку коніч-
них котків із металевих матеріалів:
он = V 1СКр/(Мті)] (У и2 + \/и) [а]и. (20.31)
Для неметалевих конічних котків будемо відповідно мати
<7 = [<?)
(20.32)
У записаних умовах сила б визначається згідно з виразом (20.26),
я коефіцієнт їм беруть таким самим, як і для циліндричної передачі.
Формули для проектного розрахунку конічної фрикційної переда-
ні можна дістати із умов (20.31) та (30.32), якщо в ці умови підставити
() за виразом (20.26), подати робочу ширину котків Ь через с/ті, відтак
Визначити потрібний мінімальний діаметр ведучого котка. Таким
минем дістанемо:
217
для конічної фрикційної передачі з металевими котками
Лті > Жм V[а]2н); (20.33)
для конічної фрикційної передачі з неметалевими котками
4тІ > 2/<в /ТЛв и іїг+Т/[Ч>Л/М (и2 + 1)]. (20.34)
Тут допоміжні коефіцієнти Км та Кн беруть такими самими, як і
в циліндричній фрикційній передачі, обертовий момент Ті підставля-
ють у ньютон-метрах (Н • м), а діаметр д,т\ — у міліметрах (мм).
Діаметри ведучого котка за формулами (20.33) та (20.34) дозволя-
ють визначити всі інші розміри конічних котків, а також потрібну
силу їхнього притискання.
Допустимі контактні напруження [о]// та допустимі тиски [?) тут
також беруть за табл. 20.1.
20.7. Фрикційні варіатори
Фрикційні варіатори — механічні передачі, що за-
безпечують плавне безступеневе регулювання швидкості обертання
веденого вала при постійній швидкості обертання ведучого вала. Ва-
ріатори виготовляють для передавання невеликих потужностей (не
більше ніж 20—ЗО кВт), хоча відомі конструкції для потужностей
100 кВт і більше. Фрикційні варіатори мають застосування у приводах
метало- та деревообробних верстатів, пресів, конвейєрів, у машинах
хімічної, текстильної та паперової промисловості, а також у приладо-
будуванні.
Класифікація фрикційних варіаторів. За конструкцією та принци-
пом роботи фрикційні варіатори дуже різноманітні. Умовно всі ва-
ріатори можна поділити на дві групи: варіатори з безпосереднім кон-
тактом ведучої та веденої ланки та варіатори з проміжними ланками.
Принципові схеми деяких видів фрикційних варіаторів зображені
у табл. 20.2.
Діапазон регулювання варіаторів. Основною регулювальною ха-
рактеристикою варіатора є його діапазон регулювання О — це від-
ношення максимальної кутової швидкості со2тах веденого вала до його
мінімальної кутової ШВИДКОСТІ (О2 тіп при ПОСТІЙНІЙ ШВИДКОСТІ
обертання ведучого вала:
Е) — (1^2 тах/^2 тіп* (20.35)
Враховуючи те, ЩО (й2тах = «1/^тіп та С02 тіп = ^і/«тах, діапазон
регулювання варіатора можна подати і через максимальне та міні-
мальне його передаточне число
& — ^тах/^тіп» (20.36)
218
Таблиця 20.2. Схеми варіаторів
Варіатори з безпосереднім дотиканням
ведучої та веденої ланок
Варіатори з проміжними ланками
Конусний із проміжним диском
Клинопасовий із розсувними конусам»
Для фрикційних варіаторів (табл. 20.2) діапазон регулювання ви-
Внячають таким чином.
Лобовий варіатор. Із умови рівності колових швидкос-
тей точки контакту ведучого котка та веденого диску маємо біжучі
•иачення передаточного числа:
(о1г1 = со2/-2 або и = = г^гг.
219
Рис. 20.8. Схема лобового варіатора
Максимальне та мінімальне пе-
редаточні числа
^тах = ?ї. тах/Гі» ^тіп = ^2 тіп/^р
Діапазон регулювання лобового
варіатора
В = ^тах/^тт = ^2 тах/^2 тіл»
Практичне застосування мають
лобові варіатори з діапазоном ре-
гулювання Р = 2...4.
Конусний варіатор
має діапазон регулювання Р =
= Л тах/Л тіл 3.
Дискові варіатори
мають практичне застосування з
ДІаПаЗОНОМ регулювання Р = Г2тах/Г2тіп ^2.
Конусний варіатор із проміжним диском
може забезпечити діапазон регулювання Р = (лтах/гтіП)2 = 5...6.
Торовий варіатор використовують для діапазонів
регулювання Р = (Гт^/Гщ^)2 = 6...8.
Клинопасовий варіатор із рухомими ко-
нусами дає МОЖЛИВІСТЬ досягнути Р = (Гтах/Гтіп)2 Ю.
Розрахунок фрикційних варіаторів. Фрикційні варіатори розрахо-
вують за такими ж методиками, як і фрикційні передачі. У більшості
випадків один із елементів варіатора (коток або проміжна ланка) ви-
готовляють із неметалевих матеріалів. Тому розрахунок для забезпе-
чення стійкості проти спрацьовування виконують за умови обмеження
тиску у контакті елементів варіатора.
Для прикладу розглянемо принцип розрахунку лобового варіато-
ра (рис. 20.8).
Якщо обертовий момент 7\ на ведучому валу постійний, то на ве-
де юм у валу обертовий момент Т2 ЗМІНЮЄТЬСЯ в межах тІп-.-Т? тахІ
Т2 тіл = Т।УЩтіп» Т 2 п>ах — Т|‘П^’пах«
За умови відсутності проковзування потрібна сила притискання
котка до диску
Умова обмеження тиску у контакті котка та диска
Я = = 2Т.КК^Ь) |с/І. (20.37)
Якщо співвідношення між шириною котка Ь та його діаметром
взяти фьй = Ь/сіу — 0,15...0,20, то з умови (20.37) можна визначити
потрібний мінімально допустимий діаметр котка:
> Ґ2ТЛМ*ММ)- (20-38)
220
р
' Тут значення параметрів АГ, АГр, / і М беруть такими самими, як
і для фрикційних передач.
20.8. Приклад розрахунку фрикційної передачі
Задача. Розрахувати циліндричну фрикційну передачу (див. рис. 20.6, а} для
привода стрічкового конвейєра за умови, що ведучий коток передає потужність Рг =
= 2 кВт при кутовій швидкості — 100 рад/с, а потрібна швидкість обертання ве-
деного котка <о2 = 34 рад/с.
Р о з в’ язання. Для виготовлення котків назначаємо матеріали: ведучий ко-
ток із текстоліту, а ведений із сталі 40. При такому поєднанні матеріалів розрахунок
передачі ведеться з умови стійкості ведучого котка проти прискореного спрацьову-
вання шляхом обмеження тиску в контакті котків.
Для поєднання матеріалів текстоліт — сталь згідно з табл. 20.1 маємо: коефі-
цієнт тертя / = 0,20; допустимий тиск [д] = 50 Н/мм.
Потрібне передаточне число передачі
и = а), /со2 = 100/34 = 2,94.
За формулою (19.4) на ведучому валу передачі обертовий момент
Тх = Рі/ійі = 2 • 103/100 = 20 Н • м.
Для визначення потрібної міжосьової відстані передачі беремо такі значення
розрахункових коефіцієнтів: коефіцієнт ширини котків ф>а = 0,3; коефіцієнт за-
пасу зчеплення К~ 1,3; коефіцієнт, що враховує нерівномірність розподілу наван-
таження по ширині котків, Хр = 1,2; допоміжний коефіцієнт /Сн “ 36.
За формулою (20.19) потрібна міжосьова відстань передачі
О > Кн УТ'К (« + 1)/(^а (<й) =
= 36 /20 • 1.2 (2,94 + 11, (0,2 • 0.3 • 50) = 202,1 мм.
За формулами (20.6) діаметри ведучого та веденого котків такі:
= 2а/(ц 4~ 1) = 2 - 202.1/(2,94 + 1) = І02«б мм;
<ї2 = Лхи = 102,6 • 2,94 = 301,6 мм.
Беремо округлено ф = 102 мм; й2 = 302 мм.
Тоді фактичне передаточне число и = (і.2І(іг — 302/102 = 2,96.
Фактична міжосьова відстань
а = 0,5 (гіг + сі2) = 0,5 (102 4-302) = 202 мм.
Потрібна ширина котків
& — Ч’аа ~ • 202 = 60,6 мм.
емо Ь = 62 мм.
За формулою (20.9) потрібна сила притискання котків
<2 = 2ТЇКК(І1І) = 2 . 20 • 10’. 1,3/(102 . 0,2) == 2549 Н.
Колова сила на котках
= 2Т1/4Ї1 = 2 • 20 • 103/102 = 392 Н.
За формулою (20.10) сила, що передається на вали фрикційної передачі,
Р = 4- р2 = ^25492 4- 3922 = 2579 Н.
221
Остаточну перевірку стійкості котків проти прискореного спрацьовування вико-
наємо за умовою (20.17):
д = = 2549 . 1,2/62 = 49,3 Н/мм < [<?) = 50 Н/мм.
Отже, добуті розміри котків можна брати за остаточні.
Контрольні запитання
1. Розкажіть про принцип роботи фрикційної передачі та назвіть області вико-
ристання фрикційних передач.
2. Які основні переваги та недоліки фрикційних передач?
3. Які види ковзання розрізняють у фрикційних передачах? Охарактеризуйте
ні види ковзання.
4. Назвіть основні групи матеріалів для виготовлення котків фрикційних пере-
редач.
5. Наведіть приклади деяких схем натискних пристроїв для фрикційних
передач.
6. Які е основні види руйнування металевих та неметалевих котків? Що є при-
чиною цього руйнування?
7. Запишіть основні співвідношення між параметрами циліндричної фрикцій-
ної передачі.
8. Із якої умови визначається потрібна сила притискання котків фрикційної
передачі? Запишіть та проаналізуйте вираз для потрібної сили притискання котків ци-
ліндричної передачі.
9. Запишіть та проаналізуйте умову міцності металевих котків циліндричної
передачі.
10. Запишіть та проаналізуйте умову стійкості проти спрацьовування неметале-
вих котків циліндричної передачі.
11. Наведіть приклади деяких схем фрикційних варіаторів.
12. Що таке діапазон регулювання варіатора? Запишіть вирази для визначення
діапазону регулювання деяких фрикційних варіаторів.
ГЛАВА 21. ПАСОВІ ПЕРЕДАЧІ
21.1. Загальні відомості та класифікація
пасових передач
У найбільш вживаному вигляді (рис. 21.1) пасова передача склада-
ється з ведучого 1 і веденого 2 шківів та замкнутої форми приводного
паса 3, що розміщується на шківах із деяким попереднім натягом.
Вільна ділянка а паса, що набігає на ведучий шків, називається веду-
Рис. 21.1. Пасова передача
чою вішкою паса, а вільна ділянка Ь, що
набігає на ведений шків, називається ве-
деною вішкою. Під час роботи передачі
пас передає енергію від ведучого шківа
до веденого за рахунок сил тертя, які
виникають між пасом та шківами, тобто
сили тертя забезпечують зчеплення па-
са зі шківами. У пасових передачах по-
передній натяг пасів створюється за ра-
222
хунок їхнього пружного розтягу при одяганні на шківи або засто-
суванням спеціальних натяжних пристроїв.
Останнім часом пасові передачі застосовують досить широко. їх
використовують у приводах електрогенераторів та різних металооброб-
них верстатів, у робочих механізмах текстильної та паперової промис-
ловості, у приводах вентиляційних систем, сільськогосподарських
машинах та різних приладах, наприклад магнітофонах. Пасові пере-
дачі не забезпечують жорсткого зв’язку між шківами через можливість
проковзування паса на шківах. Тому у кінематично точних приводних
механізмах пасові передачі застосовують дуже рідко.
Пасові передачі переважно використовують для передавання по-
тужностей у діапазоні 0,2—50 кВт. Зустрічаються також передачі
для потужностей 500 і навіть 1500 кВт, проте застосування їх має
унікальний характер.
Передаточні числа пасових передач допускаються до 5—6, рідко
до 10. Найвигіднішими є пасові передачі з передаточними числами
и С 4.
Швидкість руху пасів у передачах загального призначення не пе-
ревищує ЗО м/с. Спеціальні швидкохідні паси допускають при пони-
женій довговічності швидкості до 50 і навіть до 100 м/с.
ККД пасових передач різних типів становить близько 0,90—0,97.
Порівняно з іншими видами механічних передач пасова передача
має ряд специфічних особливостей, які визначають доцільність її за-
стосування. Для оцінки пасової передачі порівняємо її із зубчастою
передачею як найрозповсюдженішою. Тоді можна виділити такі основ-
ні переваги пасової передачі:
— можливість передавання руху між валами, що знаходяться на
значній відстані (до 10 м і більше);
— плавність та безшумність роботи, які обумовлені еластичністю
паса;
— запобігання різкому перевантаженню елементів машини внаслідок
пружності паса та можливості його проковзування на шківах;
— простота конструкції, обслуговування та догляду в експлуата-
ції
До недоліків пасової передачі належать:
— неможливість виконання малогабаритних передач (для однако-
вих умов навантаження діаметри шківів майже у 5 разів більші, ніж
мметри зубчастих коліс);
— несталість передаточного числа через можливе проковзування
іга;
— підвищене навантаження валів та їхніх опор, що пов’язане із
іребою достатньо високого попереднього натягу паса;
— низька довговічність приводних пасів (у межах 1000—5000 год).
Указані недоліки не є перешкодою для застосування пасових пе-
! - дач у цілому ряді механічних приводів різних машин через раціо-
223
Таблиця 21.1. Основні типи пасових передач
Передача за формою
поперечного перерізу
паса
За розміщенням валів та призначенням
Передача
Призначення
Плоскопасова
Клинонасова
Круглопасова
Використовується при пара-
лельному розміщенні валів та
однаковому напрямі їхнього
обертання
Застосовується при паралель-
ному розміщенні валів та про-
тилежному напрямі їхнього
обертання
Використовується у разі пере-
давання руху між валами, осі
обертання яких мимобіжні в
просторі
З поліклиновим
пасом
Багатошківна із натяжним
роликом
Застосовується для передаван-
ня руху кільком паралельно
розміщеним валам із можливі-
стю регулювання натягу паса
наявність та доцільність їх використання в певних умовах експлуа-
тації.
Пасові передачі можна класифікувати за різними ознаками. Основ-
ні типи пасових передач, що характеризуються формою поперечного
перерізу паса, розміщенням валів у просторі та призначенням, наве-
дено в табл. 21.1.
224
21.2. Елементи пасових передач
Приводні паси. У пасовій передачі тяговий орган — приводний
пас — є найважливішим елементом, що визначає роботоздатність та
довговічність передачі. До приводних пасів ставляться такі вимоги:
висока тягова здатність, Хобто достатнє зчеплення зі шківами; достат-
ня міцність, стійкість проти спрацьовування та довговічність; неве-
ликий модуль пружності матеріалу паса; низька вартість.
За матеріалом та конструкцією розрізняють приводні паси кількох
типів. Найрозповсюдженіші з них стандартизовані.
Плоскі паси бувають гумотканинні (ГОСТ 23831—79),
бавовняні суцільноткані, шкіряні (ГОСТ 18679—73) та паси із спеці-
альних синтетичних матеріалів.
Гумотканинні паси є досить розповсюдженими. Вони виготовля-
ються трьох типів (А, Б і В) із кількох шарів міцної тканини, прогу-
мованої вулканізацією.
Нарізні паси типу А (рис. 21.2, а) мають кілька шарів плетеної
бівовняної тканини (бельтінга), між якими розміщені для підвищення
гнучкості прошарки з гуми. Краї пасів типу А покривають водостій-
кими компонентами.
У пошарово загорнутих пасах типу Б (рис. 21.2, б) прокладки з
бельтінга розміщуються таким чином: центральна прокладка охоп-
люється окремими кільцевими прокладками із взаємно зміщеними
стиками. Ці паси виготовляють із гумовими прошарками і без них.
Спірально загорнуті паси типу В (рис. 21.2, в) виготовляють із
одного куска бельтінгової тканини без прошарків між прокладками.
Усі типи гумотканинних пасів виготовляють як із гумовими обклад-
ками, так і без них.
Тканина прокладок забезпечує гумотканинним пасам достатню
міцність та довговічність, а гума є єднаючою речовиною паса як одного
цілого і призначена захищати тканину від пошкоджень, а також за-
безпечувати підвищений коефіцієнт тертя між
пасом та шківами.
Гумотканинні паси виготовляють завширшки
20—1200 мм із числом прокладок 2—9, завтовш-
ки 1,25—2 мм кожна. Вони випускаються проми-
словістю у вигляді довгих стрічок Тільки для
підвищених швидкостей та для машин масового
випуску гумотканинні паси можуть виготовля-
тись замкнутої форми (у вигляді кільця) зав-
ширшки ЗО, 40 і 50 мм, завтовшки 1,75, 2,5
І 3,3 мм і завдовжки 500—2500 мм.
Із гумотканинних пасів переважне поширен-
ня набули паси типу А як найгнучкіші. Модуль
пружності таких пасів Е — 200...350 МПа.
Рис. 21.2. Перерізи
плоских гумотканин-
них пасів
225
і
Допустима найбільша швидкість для пасів типу А — ЗО м/с, типу
Б — 20 м/с і типу В — 15 м/с.
Бавовняні суцільноткані паси виготовляють із бавовняної пряжі
у кілька переплетених шарів певної ширини ЗО—250 мм, завтовшки
4,5—8,5 мм.
Для захисту бавовняних пасів від атмосферного впливу, а також
для збільшення їхньої довговічності і зменшення збігання у вільному
стані їх просочують спеціальним розчином з озокериту та бітуму. Ба-
вовняні паси найдешевші, але за несучою здатністю та довговічністю
поступаються гумотканинним пасам і тому їх застосовують переважно
у передачах невеликої потужності при швидкостях до 25 м/с. Для ро-
боти в сирих приміщеннях або у хімічно активних середовищах, а
також при температурах вище від 50 °С бавовняні паси не використо-
вують.
Шкіряні паси виготовляють із окремих нарізаних смуг шкіри скле-
юванням їх спеціальним клеєм або зшиванням.
Стандартні шкіряні паси завширшки 20—300 мм і завтовшки 3—
10 мм призначені для передавання малих та середніх потужностей.
Шкіряні паси мають високу тягову здатність, достатньо міцні і
тому вони, з точки зору надійності та довговічності, кращі за інші,
особливо при роботі в умовах змінних навантажень. Вони можуть
працювати при швидкостях до 45 м/с, однак через високу вартість шкі-
ряні паси застосовують рідко.
Паси із синтетичних матеріалів є найперспективнішими. Вони
мають високу статичну міцність та довговічність. Армовані плівкові
багатошарові паси на основі синтетичних поліамідних матеріалів мо-
жуть працювати при швидкостях до 80 м/с і передавати потужність
до 3000 кВг. Для підвищення тягової здатності синтетичних пасів ви-
користовують спеціальні фрикційні покриття їхніх робочих поверхонь.
Клинові паси нормального перерізу для приводів загаль-
ного призначення стандартизовані (ГОСТ 1284.1—89). їх виготовля-
ють двох типів: кордтканинні та кордшнурові.
Кордтканинні клинові паси (рис. 21.3, а) складаються з кількох
шарів прогумованої кордтканини 2, яка є основним елементом, що
передає навантаження (вона розміщена приблизно симетрично до ней-
трального шару перерізу паса), гумового або гумотканинного шару
розтягу /, який розміщується над кордом, гумового або рідше гумо-
тканинного шару стиску 3 нижче корду, кількох шарів обгорткової
прогумованої тканини 4.
Кордшнурові клинові паси (рис. 21.3, б) відрізняються від кордтка-
нинних тим, що в них на місці шарів кордтканини передбачається один
шар кордшнура 2 завтовшки 1,6—1,7 мм, шар розтягу 1 виконаний із
гуми середньої твердості, а шар стиску 3 — з більш твердої гуми.
Згідно з ГОСТ 1284.1—89 клинові паси виготовляють семи різних
за розмірами перерізів, які позначаються: О (2), А (А), Б (В), В (С),
226
Рис. 21.3. Перерізи клинових пасів
Г (Г)), Д (Е), Е (ЕО). Тут у дужках вказані позначення, що застосовуй
ються у міжнародній практиці. Основні розміри цих перерізів показа-
ні на рис. 21.3, в. Клинові паси виготовляють замкнутої форми з різ-
ними стандартними довжинами.
Кордішіурові паси як більш гнучкі та довговічні використовують
у більш важких умовах роботи пасової передачі. Допускається мак-
симальна швидкість для клинових пасів з перерізами 0, А, Б і В — до
25 м/с, а для перерізів Г, Д і Е — до ЗО м/с.
У клинопасових передачах із шківами малих діаметрів використо-
вують клинові паси з гофрами (рис. 21.3, г).
Знаходять застосування також вузькі клинові паси з відношен-
ням а/Н ж 1,2 (для пасів нормального поперечного перерізу а/Н «
« 1,6). Вузькі паси передають у 1,5—2 рази більшу потужність, ніж
звичайні, і допускають роботу при швидкостях 40—50 м/с. Такі паси
умовно позначають: УО, УА, УБ і УВ. Вузькі клинові паси поступо-
во витісняють паси нормальних перерізів. Перехід на вузькі клинові
паси в автомобілях та сільськогосподарських машинах у зв’язку з
більшою довговічністю цих пасів дозволив суттєво зменшити загаль-
ний випуск приводних пасів.
Поліклинові паси мають поздовжні клинові виступи на
внутрішній стороні (рис. 21.4) і виконуються замкнутої форми. У плос-
кій частині паса розміщуються кордшнур /, який сприймає наванта-
ження, і гумовий або гумотканинний шар розтягу 2. Ці паси поєдну-
ють переваги клинових пасів (підвищене
зчеплення зі шківами) та гнучкість, ха-
рактерну для плоских пасів, внаслідок
чого мінімальний діаметр малого шківа
можна назначити меншим і збільшувати
редаточне число передачі до 12—15.
Згідно з ТУ 38-105763—84 застосо-
ють поліклинові паси трьох попереч-
Рис. 21.4. Переріз поліклино-
вого паса
227
Рис. 21.5. Способи з’єднання кінців плоских пасів
них перерізів: К, Л, М. Для перерізу К: і = 2,4 мм, Н — 4,0 мм,
Н = 2,35 мм, довжина — 400...2000 мм, число ребер — 2...36. Для
перерізу М: і = 9,5 мм, Н = 16,7 мм, Н = 10,35 мм, довжина —
1250...4000 мм, число ребер — 2...20.
Круглі паси виготовляють шкіряними, гумотканинними,
бавовняними, капроновими. Найуживанішими е круглі паси діамет-
ром 4—8 мм Ці паси мають низьку несучу здатність і їх застосовують
для передавання невеликих потужностей, найчастіше в різних пере-
давальних пристроях приладів.
Ліпшими у роботі є паси із замкнутим контуром. Однак внаслідок
особливостей технології виготовлення та дуже великого розсіювання
можливих міжосьових відстаней передач плоскі паси, як указано ви-
ще, випускаються переважно у вигляді стрічки — у рулонах. При
монтажі передачі кінці паса слід з’єднувати.
Кінці паса з’єднують склеюванням та зшиванням або закріпляють
металевими з’єднувачами (рис. 21.5).
Склеювання широко застосовують для гумотканинних та шкіряних
пасів. Однорідні за матеріалом паси (шкіряні) склеюють по косо-
му зрізу (рис. 21.5, а), а шаруваті паси—по ступеневому зрізу
(рис. 21.5, б).
Зшивання пасів виконуюсь жильними струнами або шкіряними пас-
ками (рис. 21.5, в).
Металеві з’єднувачі застосовують для всіх пасів, крім швидкохід-
них. З їхньою допомогою можна найшвидше виконати з’єднання кін-
ців паса. На рис. 21.5, г показане з’єднання кінців паса за допомогою
шарнірного з’єднувача, а нарис. 21.5, д — за допомогою болтів із
закругленими планками.
'Усі розглянуті з’єднання, особливо останні, так чи інакше підви-
щують жорсткість і масу паса у зоні з’єднання, що погіршує його ро-
228
Рис. 21.6. Конструкції шківів
боту на шківах і не допустимо для передач, які працюють при значних
швидкостях пасів (більш ніж 15 м/с).
Шківи пасових передач. Шків пасової передачі (рис. 21.6, а) у
більшості випадків має обід /, який безпосередньо несе пас, маточину
З, за допомогою якої шків розміщується на валу, та диск 2 (або спиці),
що з’єднує обід із маточиною.
Форма робочої поверхні обода шківа визначається формою попе-
речного перерізу паса.
Для плоских пасів найбажанішою формою робочої поверхні шківа
е гладка полірована поверхня. Для зменшення спрацьовування паса,
яке викликається пружним ковзанням, шорсткість робочої поверхні
обода повинна мати /?2 < 10 мкм.
Щоб забезпечити центрування паса, робочу поверхню одного із
шківів роблять випуклою (рис. 21.6, б), описаною в осьовому перерізі
шківа дугою кола. Основні розміри шківів — діаметр гі, ширина В
(залежно від ширини паса Ь}, а також стрілка випуклості обода у, рег-
ламентовані стандартами. Можна брати: В ж 1,1Ь 4- (5...8) мм; у ж
В/200. Діаметри шківів вибирають із стандартного ряду, мм: 50,
63, 80, 90, 100, 112, 125, 140, 160, 180, 200, 225, 250, 280, 320, 360,
400, 450, 500, 560, 710, 800, 900, 1000. 4000.
Для клинових пасів робочою поверхнею є бокові сторони клинових
жолобків на ободі шківа. Розміри та кількість жолобків визначаються
профілем перерізу паса та кількістю клинових пасів, що одночасно
працюють на шківі (рис. 21.6, в). Профіль перерізу клинового паса
при згині на шківі спотворюється і тому кут клину паса (рис. 21.6, в)
у порівнянні з початковим (<р0 = 40°) змінюється. Отже, кут <р профі-
лю жолобків шківа беруть залежно від його діаметра. Для стандартних
клинових пасів розміри жолобків шківів наведені у ГОСТ 20889—88
(основні з них подані у табл. 21.2 згідно з рис. 21.6, в).
229
Табл и ц я 21.2. Розміри, мм. жолобків шківів для клинових пасів
Переріз пасе с в і в Ь
0 2.5 7,5 12 8 10,1
А 3,5 9 15 10 13,1
Б 4,2 11 19 12,5 17,2
В 5,7 14,5 25,5 17 22,8
УО 2,5 10 12 8 13,2
УА з.з 13 15 10 17,2
Для круглих пасів мінімальний діаметр шківа ^тіп де
— діаметр паса. Профіль жолобків на шківі виконують напівкруг-
лим або клиновим із кутом <р = 40° (рис. 21,6, г, д).
Розміри жолобків обода шківа для поліклинових пасів вибирають
згідно з ТУ 38-105763—84.
Шківи пасових передач виготовляють із чавуну, сталі, легких
сплавів, пластмас.
Чавунні шківи найрозповсюдженіші. Використовують та-
кі марки чавуну: СЧ 15 при швидкості паса 15 м/с; СЧ 18 при
V = 15...ЗО м/с; СЧ 20 при ц — ЗО...35 м/с. Заготовки шківів виготов-
ляють литтям.
Сталеві шківи у більшості випадків виготовляють збірної
конструкції зварюванням відштампованих окремих деталей. Тому
вони відрізняються легкістю і використовуються при високих швид-
костях пасів (у 40 м/с). Інколи заготовками для шківів може служи-
ти сталеве литво або круглий прокат.
Шківи із легких сплавів виготовляють переважно
із алюмінієвого литва. За конструкцією вони такі самі, як і чавунні,
але з більш тонкими стінками. Оскільки шківи з легких сплавів у по-
рівнянні із чавунними та сталевими мають меншу масу, то їх раціо-
нально використовувати в першу чергу у швидкохідних передачах.
Пластмасові шківи здебільшого використовують при
невеликих діамерах (до 300 мм) і виготовляють із текстоліту або во-
локніту. їх виготовляють збірної конструкції, де маточина із сталі або
чавуну. У порівнянні із металевими пластмасові шківи мають малу
масу, а коефіцієнт тертя між пасом та шківом більший. Ці шківи ши-
роко застосовують у швидкохідних пасових передачах.
Натяжні пристрої у пасових передачах застосовують для створення
попереднього натягу, компенсації витягування паса в процесі його
експлуатації, а також збільшення кутів охоплення шківів, які впли-
вають на тягову здатність [5].
За конструкцією та принципом роботи натяжні пристрої можна по-
ділити на три групи: полозки та хитні плити; натяжні та відтяжні ро-
лики; пристрої з автоматичним регулюванням натягу паса.
230
Рис. 21.7. Натяжні пристрої у вигляді полозок та хитної плити
Полозки (рис. 21.7, а) та х и т н і плити (рис. 21.7, б) є
найпростішими натяжними пристроями, що використовуються у
пасових передачах із регульованою відстанню між шківами. Ці прист-
рої прості за конструкцією і забезпечують сталість протягом деякого
періоду експлуатації попереднього натягу паса. Тому їх раціонально
використовувати у передачах з постійним у часі робочим навантажен-
ням.
Натяжні ролики застосовують для пасових передач із
постійною відстанню між осями шківів. Натяжний ролик — шків з
гладким ободом, який притиснутий до зовнішньої поверхні веденої
вітки паса близько меншого шківа і вільно обертається (рис. 21.8, а).
Притискання ролика до паса може здійснюватись встановленим на ва-
желі тягарцем або натягом відповідної пружини. У передачах з на-
тяжним роликом збільшується кут охоплення малого шківа, поліпшу-
ється робота передачі з великим передаточним числом при малій від-
стані між осями валів. Однак ролик спричинює додатковий (і до того ж
в обернену сторону) згин паса, що значно прискорює його руйнування.
Відтяжні ролики застосовують у клинопасових переда-
чах (рис. 21.8, б). Тут пас зазнає лише односторонній згин, що знач-
но менше впливає на його довговічність, проте зменшуються кути об-
хвату пасом шківів.
Натяжні та відтяжні ролики також раціонально застосовувати при
постійному робочому навантаженні передачі, бо вони забезпечують
постійний попередній натяг паса.
Значно ліпшими від описаних вище є натяжні пристрої з автома-
тичним регулюванням натягу паса. У схемі на рио. 21.8, в натяг паса
•мінюється за рахунок реактивного моменту на корпусі електродвигу-
на, який може хитатись відносно нерухомої рами. При збільшенні
231
Рис. 21.8. Способи забезпечення натягу приводних пасів
навантаження передачі росте натяг нижньої ведучої вітки і зменшу-
ється натяг веденої вітки паса. В результаті цього вісь шківа відхи-
ляється у напрямі стрілки, зображеної пунктиром. Загальний натяг
віток паса зростає приблизно пропорційно навантаженню, що передає
пасова передача. При зменшенні навантаження натяг паса відповідно
падає, а при холостому ході і у стані спокою він майже дорівнює нулю.
Тут суттєве значення має правильний вибір ексцентриситету е хитання
Рис. 21.9. Шків для автоматичного регулювання
натягу паса
корпусу двигуна щодо
осі опори О.
Найдосконалішими
є натяжні пристрої
для пасових передач,
які автоматично регу-
люють натяг паса за-
лежно від корисного
навантаження при по-
стійній відстані між
осями валів, не зги-
нають додатково пас
і дозволяють легко та
просто одягати пас на
шківи. На рис. 21.9
зображено шків пасо-
вої передачі, який за-
довольняє перелічені
вимоги. Такий шків
складається з маточини
/, обода 2 та 5-подіб-
них плоских пружин
З, які за допомогою
шарнірів на кінцях
232
з’єднують маточину з ободом. У вільному стані шківа (без паса) 5-по-
лібні попередньо розтягнуті плоскі пружини утримують обід 2 концен-
трично щодо маточини /. Після одягання на шків паса обід займе поло-
ження ексцентрично щодо маточини. Якщо до маточини прикласти обер-
товий момент Т, то відбудеться кутове зміщення маточини щодо обода
(таке взаємне положення маточини та ободу зображене на рис. 21.9).
При цьому виникнуть додаткові сили, які будуть сприяти центруванню
обода щодо маточини, тобто відбудеться додаткове натягування паса.
Це додаткове натягування буде тим більше, чим більший обертовий мо-
мент на маточині, тобто із збільшенням кутового зміщення маточини
збільшуються сили, що сприяють центруванню обода. Явище центруван-
ня обода щодо маточини при її кутовому зміщенні має місце тому, що
жорсткість 5-подібних плоских пружин різко зростає при їх розтягу.
Таким чином, описаний шків дозволяє легко одягати пас при незмін-
ній відстані між осями валів за рахунок можливості зміщення обода
щодо маточини і забезпечує автоматичне регулювання натягу паса у
передачі залежно від корисного навантаження без додаткових його
перегинів. Використання шківів такої конструкції дозволить значно
збільшити довговічність приводних пасів та опор валів передачі.
21.3. Пружне ковзання паса та кінематика
пасової передачі
Під час передавання робочого навантаження зусилля у ведучій
та веденій вітках пасової передачі не рівні між собою. Порівняно із
зусиллям попереднього натягу зусилля у ведучій вітці збільшується,
л у веденій зменшується. Тому робота передачі з пружним пасом неми-
нуче супроводжується пружним ковзанням паса на шківах.
Явище пружного ковзання паса під час роботи передачі пов’язане
тим, що сили натягу і відповідно відносне видовження ведучої та
ігденої віток паса неоднакові. На рис. 21.10 показано розподілення
игиль у пасі при передаванні робочого навантаження. При цьому
і -плачено зусилля у ве-
1 вітці /*\, а у веде-
У відрізку паса,
знаходиться на ве-
ну шківі, зусилля
апрямі руху паса)
иуєгься і відповід-
пас скорочується,
овзуючи на шківі,
веденому шківі зу-
я у відрізку паса
и напрямі його руху)
Рис. 21,10, Ковзання паса на шківах
233
збільшується і при цьому пас видовжується, випереджуючи ШКІВ. ЩО
також спричинює ковзання паса на шківі.
Ковзання паса на шківі відбувається не на всій дузі обхвату аг і
а2 відповідно ведучого і веденого шківів, а тільки на деякій частині
цих дуг Рі та ра. Дуги і р2 називаються дугами ковзання. На
рис. 21.10 короткими стрілками вказано напрям ковзання точок ро-
бочих поверхонь шківів щодо паса.
Сила тертя між пасом та шківом передається в основному на дузі
ковзання, але частково через тангенціальну податливість паса і на ду-
зі спокою. При розрахунках пасової передачі силу тертя на дузі
спокою не враховують. Дуга ковзання завжди розміщена з боку збі-
гання паса зі шківа, а дуга спокою — з боку набігання паса на шківи.
Оскільки на дузі спокою ковзання не відбувається, то колова швид-
кість шківа дорівнює швидкості набіжної вітки паса.
У ненавантаженій передачі, тобто при 7\ = Т2 = 0, пружне ков-
зання відсутнє і відповідно дуги ковзання дорівнюють нулю. З ростом
навантаження передачі дуга ковзання збільшується. Коли дуга ков-
зання досягне всієї дуги обхвату, починається буксування паса на шкі-
ві. що недопустиме в роботі передачі. Буксування паса в передачі
завжди починається на шківі з меншим кутом обхвату.
За умовою неперервності руху паса відносне пружне ковзання до-
рівнює різниці ВІДНОСНИХ видовжень Єі і е2 відповідно ведучої і веденої
віток паса:
— е2. (21.1)
Згідно з законом Гука відносні видовження віток можуть бути
виражені через зусилля у вітках Ех і Г2, площу перерізу А та модуль
пружності матеріалу паса Е:
єі = ^і/(£4); = ^/(ЯЛ). (21.2)
Тому відносне ковзання паса в передачі можна визначити за формулою
е =(Г1-Г2)/(ЕЛ). (21.3)
Швидкість точок паса дорівнює коловій швидкості шківів тільки
на дугах спокою. Але протилежні кінці кожної вітки дотикаються шкі-
вів у точках із різними коловими швидкостями. Зв’язок між цими
швидкостями виражається залежністю
^ = ^(1-8). (21.4)
Оскільки Пі = (0^/2 і и2 = со«Д/2, передаточне число пасової пе-
редачі
и = соі/соз = сГ2/№ (1—8)]. (21.5)
Для пасів у правильно відрегульованих пасових передачах від
носне ковзання здебільшого не перевищує 0,015—0,020. Тому у сило
234
вих пасових передачах допускається передаточне число визначати за
спрощеною формулою
и = (21.6)
21.4. Сили та напруження у вітках
пасової передачі
Зусилля та напруження в пасі від його попереднього натягу. Для
створення умов виникнення сил тертя між пасом та шківами пас треба
одягти на шківи із деяким попереднім натягом. На рио. 21.11, а пока-
«ана пасова передача у передпусковому стані, тобто без навантаження
(Т, = Т2 = 0) і в стані спокою. В цьому разі вітки паса навантажені
тільки зусиллям попереднього натягу /%, яке спричинює в довільному
поперечному перерізі площею А паса напруження попереднього натягу
а0 = Р0/А. (21.7)
Зусилля та напруження в вітках при передаванні робочого наван-
таження. Після прикладення робочого навантаження (обертові мо-
’и 7\ на ведучому шківі і 7\ на веденому шківі) зусилля у вітках
змінюється (рис. 21.11, б): у ведучій вітці зусилля збільшується
еУь а у веденій зменшується і стає Р2. За умовою рівноваги шківа
ю:
Л = (Л — Л>) ^/2 або У7! — Р2 = Рі,
(21.8)
пг Рі — їТ^ісі! — колова сила на шківі, або корисне навантаження
паса.
Зв’язок між Го, та Р2 можна встановити з таких міркувань. Дов-
-і паса не залежить від навантаження і залишається незмінною як
навантаженій, так і у навантаженій передачі. Відповідно додаткове
а б
Рис. 21,11, До визначення зусиль у вітках паса
235
Рис. 21.12. До визначення співвідношення між
зусиллями у вітках паса
витягування ведучої віт-
ки компенсується рівним
скороченням веденої вітки.
Тому збільшення зусилля
у ведучій вітці на АА за-
безпечує зменшення зусил-
ля у веденій вітці на ДЕ
(при лінійній залежності
між силою та деформацією),
тобто
А1 = А04-АА;
А2 = А0-АА.
Записані два рівняння дозволяють дістати вираз
Л + А. == 2А0.
(21-9)
Тепер із рівностей (21.8) та (21.9) випливає
= Ро + 0,5А<; Р2 = Ао ~ 0,5/7 (21.10)
Ці два рівняння виражають сили натягу ведучої та веденої віток
залежно від сили попереднього натягу Ро та корисного навантаження
Ар але не розкривають тягової здатності передачі, яка пов’язана з си-
лами тертя між пасом та шківами.
Співвідношення сил натягів Аі ведучої та Р2 веденої віток при робо-
ті передачі (без урахування дії відцентрових сил) визначають за відо-
мим рівнянням Ейлера, добутим для гнучкої нерозтяжної нитки, що
ковзає по циліндричній поверхні.
Розглянемо відрізок паса, який знаходиться на шківі і обмежений
центральним кутом сйр (рис. 21.12). На цей відрізок паса діють такі
сили: (Ж — нормальна реакція шківа; Р — біжуче значення натягу
паса в перерізі, положення якого визначає кут <р; Р 4- (ІР — натяг
паса в перерізі з координатою ф 4- гіф; — сила тертя на даний
відрізок паса (/ — коефіцієнт тертя між пасом та шківом).
Нехтуючи товщиною паса, запишемо умову рівноваги даного від-
різку паса:
[Р 4- — (Р 4- гіА)] 4/2 = 0 або /гі# = гіА;
дії — А $іп (гіф/2) — (А 4- гіА) зіп (гіф/2) = 0.
Відкидаючи у другій умові рівноваги члени другого порядку ма-
лості (4Р зіп (гіф/2) « 0) та беручи зіп (гіф/2) «гіф/2, дістаємо дР! =*
= Р&р.
Запишемо співвідношення
сір/р = ^гіф.
236
Інтегруючи ліву частину рівності від Рг до а праву — від 0 до
а, дістанемо:
сІР/Р = у /^ф;, 1п (Еі/Гі) = /а; Р^Р^ = е?а.
о
Отже, маємо співвідношення між зусиллями у вітках паса з ураху-
ванням сили тертя між пасом та шківом:
Р1 = Р2е^і (21.11)
іе е— основа натурального логарифму.
Співвідношення (21.11) називають формулою Ейлера.
Розв’язуючи сумісно рівняння (21.10) та (21.11), матимемо:
1 е?а 4- 1
= Рі~Рі~^~Г'' ^ = 0.5^-^-- (21.12)
Формули (21.12) визначають зв’язок сил натягу віток навантаже-
ної силою Рі пасової передачі з факторами тертя / і а.
Цей зв’язок справедливий за умови знаходження паса на грані
буксування на шківі, тобто коли дуга ковзання р дорівнює дузі обхва-
і у шківа а. Інакше кажучи, формули (21.12) визначають граничні
піввідношення між зусиллями в пасі.
Якщо у формули (21.12) замість а підставити значення дуги ков-
ніння р, то дістанемо не граничні, а біжучі, або робочі, значення натя-
у віток паса.
Напруження в поперечних перерізах ведучої та веденої віток мож-
ні знайти, поділивши праві та ліві частини рівнянь (21.10) на площу
1 перерізу паса:
Оі = о0 4- 0,5оь о2 = о0 — 0,5оь (21.13)
де = Р{/А — напруження в пасі від робочого навантаження (ко-
рисне напруження в пасі).
Зусилля та напруження в пасі від дії відцентрових сил. Рух паса
> криволінійних траєкторіях (на шківах) обумовлює появу відцентро-
сил, які додатково навантажують пас. Для визначення натягу
РV від дії відцентрових сил (рис. 21.13) виділимо елемент паса
звжки сії = /т/ф і розглянемо рівновагу цього елемента.
Маса елемента паса сіт — рАсіІ = рДгг/ф, де р — густина матеріа-
ц паса.
На даний елемент паса діє відцентрова сила
= (ц2/г) сіт = рДцМф
д спричинені цією силою зусилля додаткового натягу Ро (рис. 21.13).
Проекціюючи всі діючі сили на напрям запишемо умову рівноваги
— 2Рц зіп (б/ф/2) = 0.
237
Рис. 21.13. Дія на пас від-
центрової сили
Рис. 21.14, Згин паса на шківі
Якщо взяти зіп (4<р/2) ж (1(р/2 та підставити значення Л/о, то діста-
немо
рЛц2с?Ф — 2/\4ф/2 = 0.
Із цього рівняння матимемо формулу для визначення додаткового
натягу паса від дії відцентрових силі
Г0=рЛц2. (21.14)
Відповідно напруження у поперечних перерізах паса від дії на
нього відцентрових сил
а,= 10~врі>». (21.15)
У формулах (21.14) та (21.15): р — у кілограмах на кубічний метр
(кг/м3); V — у метрах на секунду (м/с); А — у квадратних метрах
(м2); ор — у мегапаскалях (МПа); Ео — у ньютонах (Н).
Із формул (21.14) та (21.15) видно, що зусилля Е„ та напруження
Пр від дії відцентрових сил не залежать від діаметрів шківів і однакові
для всіх поперечних перерізів паса.
Відмітимо, що дія відцентрових сил негативно впливає на тягову
здатність пасової передачі, оскільки ослаблюється притискання паса
до шківів. Якщо Ео або о0» то зникає взаємодія паса зі
шківами. Критична швидкість паса визначається з умови а0 —
[1011
Ркр=Ю’/^. (21.16)
Для стандартних клинових пасів, які мають густину р = 1150 кг/м1
і мінімальне рекомендоване напруження попереднього натям
о0 == 1,2 МПа (табл. 21.3), ц<р = 32,3 м/с. Якщо швидкість клинове,
паса V < 10 м/с, то 0,1 Готів- Шкідлива дія відцентрових сі
на тягову здатність пасової передачі зменшується використанні
відповідних натяжних пристроїв.
238
Таблиця 21.3. Параметри для розрахунку пасових передач
Параметр * Тип паса
Г умотка- нинний Бавовня- ний Шкіряний Клиновий
• Границя міцності паса ов, МПа 45 35 22 60
Модуль пружності Е, МПа 300 250 200 400
Густина матеріалу паса р, г/см8 Обмежена границя витривалості Одг, 1,15 0,95 1,05 1,15
МПа, при N0= 107 7 4 10 9
Показник степеня т кривої втоми Напруження попереднього натягу паса 6 5 7 8
о0, МПа 1,6-2,0 1,6—2,0 1.6-2,0 1,2-1,6
Напруження від згину паса на шківах. При обгинанні шківів у
перерізах паса виникають напруження згину (рис. 21.14). У плоскому
пасі нейтральний шар у перерізі збігається з середнім шаром і най-
більші напруження згину можна визначити за відомою з курсу опору
матеріалів формулою
озг = Е (утах/£)•
Враховуючи, що радіус кривини нейтрального шару паса 7? ж
-V сІ/2, а відстань максимально віддалених точок перерізу паса від
(’йтрального шару утах = 6/2, дістанемо формулу для визначення на-
іружень згину в пасі:
а3г = Е6дї, (21.17)
— модуль пружності матеріалу паса.
іким чином, основним фактором, який визначає напруження зги-
відношення товщини паса б до діаметра шківа сі. Чим менше це
шення, тим менше напруження згину у пасі.
хмарні напруження в перерізах паса. Вище було встановлено, що
х перерізах паса навантаженої передачі діє однакове напруження
перерізах ведучої вітки мають місце напруження а у перері-
веденої вітки — напруження о2, різниця між якими дорівнює
/женню від корисного навантаження; у перерізах відрізків
розміщених на шківах, діють відповідні напруження озгі та
1а цими складовими напружень можна побудувати діаграму роз-
у напружень по довжині паса (рис. 21.15).
діаграми розподілу напружень видно, що максимальне напру-
і має місце у ведучій (нижній) вітці в тому перерізі паса, який
іє на менший ведучий шків:
Отах = Оі 0р 4~ ОзП == О0 4~ 0,5(1/ ~І~ Цр ~і~ СГзгЬ (21.18)
239
Рис. 21.15. Розподіл напружень у перерізах приводного паса
Мінімальне напруження виникає у перерізах веденої (верхньої}
вітки паса:
Отіп =о24-^ = Оо — 0,5а/ + а0. (21.19)
Оскільки пас рухається відносно шківів, напруження в його ок-
ремому поперечному перерізі не залишається постійним у часі. Харак
тер зміни в часі сумарного напруження у довільному перерізі паси
наведено на рис. 21.16.
Навантаження на вали пасової передачі. Сили натягу віток паса
передаються на вали передачі та їхні опори. Відповідно до рис. 21.17, н
рівнодійну /? сил натягу Е\ та Г2 віток можна визначити за формулою
Р = Р2 + РІ4- 2РгРг соз 2[3 « 2Г0 8Іп (а/2).
(21.20)
Дію відцентрової сили тут у розрахунках можна не враховувати,
оскільки при середніх швидкостях паса вона незначна і спричинює
Рис. 21.16, Зміна напружень за один пробіг
паса
лише розвантаження валін
(відцентрова сила зрівнова-
жується у пасі).
У пасових передачах і і
натяжним роликом або у ба
гатошківних передачах наван
таження на вали доцільно
визначати графічним способом
за допомогою побудови плану
сил (рис. 21.17, б). Для цьом»
треба накреслити у певному
масштабі схему пасової пере
дачі і попередньо визначнін
240
Рис. 21.17. До визначення навантаження валів пасової передачі
у вітках зусилля та Е2. З довільної точки на плані сил
зображають напрями дії сил Ег та Е2 (паралельно напрямам віток пе-
редачі у бік їхнього руху) і відкладають у масштабі на цих напрямах
сили. Якщо з’єднати кінці відрізків, що зображають сили /4 та Г2,
то дістанемо напрям і у вибраному масштабі значення сил, якими на-
вантажуються вали пасової передачі.
21.5. Вибір та розрахунок параметрів
пасової передачі
При проектуванні пасових передач треба вибрати чи розрахувати
такі параметри, що впливають на роботоздатність передач
(рис. 21.18): діаметри шківів, міжосьову відстань, кут нахилу віток,
кути обхвату шківів, довжину паса.
Діаметр меншого шківа обмежується напруженнями згину у
пасі, які виникають при обгинанні шківа. Для плоских пасів рекомен-
дують брати такі співвідношення між діаметром та товщиною паса
6: ЗО...40 — гумотканинні паси; ^/6 25...30 — бавовняні
паси; ^/6 > 25...35 — шкіряні паси; ^/6 70...80 — синтетичні паси.
Орієнтовно при проектному розрахунку плоскопасової передачі діа-
метр мм, меншого ведучого шківа можна визначити за емпіричною
залежністю [9]:
<^ = (520. ..610)(21.21)
де Рі — потужність на ведучому шківі, кВт; — кутова швидкість,
рад/с.
Діаметр меншого шківа клинопасової передачі беруть за
ГОСТ 20889—88 залежно від вибраного типу перерізу паса.
Діаметр сі2 більшого шківа для плоско- і клинопасової передач
визначають за потрібним передаточним числом із співвідношення
241
сі2 = ш/,. Остаточні діамет-
ри та д,2 повинні бути
узгоджені з відповідним
стандартом.
Міжосьова відстань а па-
сової передачі визначається
конструкцією машини або
її привода. Для відкритої
плоскопасової передачі до-
цільно брати а — (2...
3) Ч-б/а), а для клинопасо-
вої передачі а = (1 ...2) (^ +
„ л „ 4- б/2). При малих міжосьо-
Рис. 21.18, Параметри викритої пасової пере- вих відстанях передачі і
відповідно малих довжинах
паса маємо підвищену частоту пробігів паса, що негативно впливає
на його довговічність, а при значних міжосьових відстанях можуть
виникати недопустимі поперечні коливання віток паса.
Кут нахилу віток р до лінії центрів шківів (рис. 21.18) визнача-
ється із допоміжного прямокутного трикутника ОгВО2і
8ІП р = (Вб2)/(ОА) = № - ^)/(2а).
Оскільки кут р малий для пасових передач при и 5 і рекомендо-
ваних міжосьових відстанях, то можна брати зіп Р « Р, тобто
Р = Ц, - <У/(2а). (21.22)
Кути обхвату пасом шківів відповідно до рис. 21.18 визначають у
радіанах за формулами!
схг = л — 2р = л — (<32 — (І^/а; а2 = л 4~ 2Р = л 4* № — д^/а;
(21.23)
у градусах
«і == 180° — 57° (^ - ^)/а; а2 =180° + 57° (42 — д^/а. (21.24)
Кути обхвату шківів впливають на тягову здатність передачі.
Тому рекомендують брати- 150° — для плоскопасової передачі
і «і 120° — для клинопасової.
Довжину паса І визначають як суму довжин прямолінійних відріз-
ків та довжин дуг на кутах обхвату (рис. 21.18):
І = 2ОГВ 4- а1с11/2 4- <х,2д2/2.
Враховуючи те, що (сі2 — б/г)/(2а) <£ 1, визначимо наближено дов-
жину прямолінійних відрізків паса:
О^В = = а /1 - (42 - «
« а Ц - 0,5 (4, - гу’/(2а)2].
242
З урахуванням виразів для визначення ОгВ та кутів обхвату (21.23)
дістанемо остаточний запис формули для визначення довжини паса:
І = 2а 4- я (гіх + гі2)/2 + (гі2- б/1)2/(4а). (21.25)
Міжосьову відстань пасової передачі за взятою довжиною паса та
діаметрами шківів на підставі виразу (21.25) визначають за формулою
а = 121 — л (а, + а2) + И[2/ — л (4, + а2)Г — 8 (^ — ЛІ)г]/8. (21.26)
При розрахунках довжин пасів та міжосьових відстаней клинопасо-
вих передач оперують розрахунковими діаметрами шківів, які визна-
чаються розміщенням нейтрального шару паса щодо шківа (див.
рис. 21.6, в).
Діаметр натяжного (відтяжного) ролика при гіх < беруть: для
плоскопасової передачі г/р = (0,8...!)^, для клинопасової передачі
гір гіг.
21.6. Розрахунок пасових передач
на тягову здатність і довговічність
Основними критеріями роботоздатності пасових передач е такі:
тягова здатність або міцність зчеплення паса зі шківами; довговіч-
ність паса. Якщо не буде забезпечено перший критерій, пас почне бук-
сувати, а якщо другий,— пас буде швидко руйнуватись.
Розрахунок пасової передачі на тягову здатність є основним. Паси
існуючих типів, що розраховані на тягову здатність у заданих умовах
експлуатації, мають мінімально потрібну довговічність.
Розрахунок пасової передачі на тягову здатність базується на
експериментальних даних для існуючих типів пасів. Дослідним шля-
хом встановлюється взаємозв’язок відносного ковзання в паса та ККД
передачі г] із коефіцієнтом
тяги ф (рис. 21.19).
Коефіцієнт тя-
ги ф — це відношення ко-
рисного навантаження паса
до суми сил натягу віток
передачі і
Ф = ГіМГі + рг) =
= ^//(З^о) = а(/(2а0).
(21.27)
За цим параметром мож-
на визначити частину по-
переднього натягу Ро, яка
використовується для пе-
Рис. 21.19. Криві ковзання та ККД пасової пе-
редачі
243
редавання корисного навантаження тобто характеризує ступінь
завантаженості передачі.
Графіки, що зображені на рис. 21.19, називаються кривими
ковзання та ККД пасової передачі.
Із збільшенням корисного навантаження Рі для деякого заданого
попереднього натягу паса Го, тобто із збільшенням коефіцієнта тяги
Ф від 0 до ф0, спостерігається тільки пружне ковзання паса у переда-
чі. Подальше збільшення навантаження Рг спричинює часткове буксу-
вання паса, а при ф > фтах — повне буксування паса на шківах.
У межах ф0 — фтах спостер і гаються пружне ковзання і буксування
паса (пружне ковзання і буксування розділені продовженим штрихо-
вою лінією графіком).
Робоче навантаження в передачі рекомендують вибирати близь-
ким до критичного значення коефіцієнта тяги ф0 Такому значенню ф
відповідає також і максимальне значення ККД Л передачі. Для плоско-
пасових передач цтах = 0,97...0,98, а для клинопасових передач птах =
= 0,94...0,96.
Роботу пасової передачі в зоні часткового буксування допускають
тільки при короткочасних перевантаженнях, наприклад при пуску
передачі. В цій зоні ККД різко спадає за рахунок збільшення втрат
на ковзання паса, а сам пас швидко спрацьовується. Часткове буксу-
вання характеризує здатність передачі сприймати короткочасні пере-
вантаження. Відношення фтах/фо для різних пасів: плоских гумотка-
нинних — 1,15...1,30; плоских бавовняних — 1,25...1,40; плоских
шкіряних — 1,35...1,50; клинових — 1,50...1,60.
Середні значення критичного коефіцієнта тяги ф0, які дістають
експериментальним шляхом, для пасів [41: гумотканинних та шкіря-
них — 0,6; бавовняних — 0,5; клинових — 0,7
За критичним коефіцієнтом тяги ф0 можна визначити оптимальне
корисне навантаження Р^ при певному попередньому натягу Р$ віток
(або інші оптимальні параметри, такі як корисне напруження а^о або
потужність Ро, яку передає один пас):
Рю = 2Гофо. (21.28)
Вибір попереднього натягу Ро віток паса має суттєве значення для
роботи пасової передачі. При малих значеннях Ра для взятого типу
паса будемо мати відповідно малу корисну силу Г/о, зате достатньо
високу довговічність паса і, навпаки, при високих значеннях Ра—
недостатню довговічність паса та значні навантаження на вали переда-
чі і їхні опори. Для різних типів пасів розроблені відповідні рекомен-
дації для вибору Ро або а0, що забезпечують достатню тягову здатність
паса та допустиму його довговічність.
Відмітимо, що наведені вище середні значення критичного коефі-
цієнта тяги ф0 визначаються на експериментальній передачі з певними
конструктивними параметрами та певними умовами передавання на-
244 ~
вантаження: передаточне число передачі и = 1 (тобто аг =
== а2 — 180°); швидкість паса V = 10 м/с; передача горизонтальна,
тобто кут нахилу лінії центрів шківів до горизонту у = 0; корисне на-
вантаження передачі не змінюється в часі.
Реальні умови експлуатації пасових передач значно відрізняються
від наведених вище. Тому критичні коефіцієнти тяги для різних типів
пасів приводять до конкретних параметрів передачі та заданих умов
її експлуатації за допомогою ряду коефіцієнтів (див. 21.7 та 21.8).
Розрахунок пасових передач на довговічність. Пас працює при змін-
них напруженнях, до того ж один цикл напружень відповідає повному
пробігу паса (див. рис. 21.16). Посередня оцінка довговічності паса
може бути зроблена за умовою обмеження числа пробігів паса і в
одиницю часу, с-1:
ї = у//«^[ї], (21.29)
де V — швидкість паса, м/с; / — довжина паса, м.
Допустиме число пробігів паса рекомендують брати: (її = (5...
6) с~’ для плоских гумотканинних пасів; [її = (12...15) с~1 для кли-
нових пасів.
Якщо умова (21.29) виконується, то вважають довговічність паса
у конкретній передачі задовільною. Підвищити довговічність паса
можна збільшенням міжосьової відстані передачі, тобто довжини паса.
Поки що відсутні достатні та точні дані, які потрібні для визначен-
ня строку служби паса в конкретній передачі. Проте відомо, що руй-
нування пасів обумовлене явищами втоми і для матеріалів пасів спра-
ведливе відоме рівняння кривої втоми (див. 4.3):
а™хЛЇ = (21.30)
Де Отах — максимальне напруження у пасі при роботі передачі; N —
загальне число циклів зміни напружень до руйнування паса; —
обмежена границя витривалості паса при базі випробувань Лї0 =
107; т — показник степені кривої втоми паса.
Якщо позначити строк служби паса /і, год, та припустити, що за
один пробіг паса число циклів напружень п (п — число шківів у пере-
дачі), то загальне число циклів зміни напружень до руйнування паса
N = ЗбООїлЛу, (21.31)
де V — коефіцієнт, що враховує різний ступінь впливу напружень
Згину в пасі на малому та більшому шківах: V — 1 при и = 1; V =
* 0,8 при и — 1,5; V = 0,6 при и = 2; V = 0,5 при и = 3.
Підставляючи вираз (21.31) у рівняння (21.30), знайдемо строк
служби паса [121:
Н == 107 (0/у/0тах)т/(36ООїЛУ). (21.32)
245
Максимальне напруження у пасі при роботі передачі визначається
за формулою (21.18). Залежність (21.32) е наближеною, але вона доз-
воляє зробити порівняльну оцінку довговічності пасів різних варіан-
тів пасових передач та проаналізувати вплив окремих складових
максимального напруження на довговічність пасів.
Деякі усереднені довідкові дані, що потрібні для виконання роз-
рахунків пасових передач, наведені у табл. 21.3.
Середній строк служби пасів при усереднених режимах наванта-
ження згідно з ГОСТ 1284.2—89 становить 2000 год.
21.7. Особливості розрахунку плоскопасових передач
Розрахунок плоскопасових передач базується на використанні
залежності (21.28). Якщо у цій залежності розділити ліву і праву
частини на ширину паса Ь та число прокладок їп, то дістанемо
Ао = 2/0<р0, (21.33)
де Ло = — оптимальне питоме корисне навантаження, що
може передаватись одиницею ширини однієї прокладки паса; /0 =
= — питома сила попереднього натягу паса, що припадає
на одиницю ширини однієї прокладки.
Для гумотканинних пасів рекомендують такі значення /0, Н/мм,
[12]: 2—для передач із попереднім натягом паса за рахунок його
пружності при відносно малій міжосьовій відстані та куті нахилу пе-
редачі більш ніж 60°; 2,25 — те саме, при великій міжосьовій відста-
ні та куті нахилу передачі менш ніж 60°; 2,5 — при автоматичному ре-
гулюванні натягу віток паса.
Знаючи усереднене значення критичного коефіцієнта тяги <р0 для
різних типів плоских пасів, за формулою (21.33) можна визначити
Допустиме питоме корисне навантаження визначають за допомогою
коефіцієнтів, які враховують конкретні параметри пасової передачі
та задані умови її експлуатації:
ІЛо] =МСуСаС0Ср. (21.34)
Коефіцієнт Су враховує нахил передачі до горизонту: Су = 1, якщо
кут нахилу лінії центрів шківів до горизонту у = (0...60)0; Су = 0,9
при у = (60...80)°; Су = 0,8 при у = (80...90)°.
Коефіцієнт Са враховує кут обхвату пасом малого шківа:
Са= 1 -0,003(180°—с^),
а Со — вплив на роботу передачі відцентрових сил,
Со = 1,04 —0,0004ц2.
Коефіцієнт Ср враховує режим роботи передачі. Для однозмінної
роботи передачі коефіцієнт СРі має такі значення: Срі = 1 — при
246
Таблиця 21.4. Розрахункові параметри для гумотканинних пасів Із
бельтінга БКНЛ-65 та Б-820
Чвсло прокладок паса Товщина паса б, мм Стандартна ширина Ь, мм Діаметр ма- лого шківа сії, мм Оптимальне питоме ко- рисне навантаження /п4о’ н/мм* ПРИ н/“*
2 2,25 2,5
2 3 20; 25; 30; 40; 45 80 100 125 5,0 5,2 5,3 5,4 5,6 5,7 5,8 6,0 6,1
3 4,5 20; 25; 30; 40; 45; 50; 60; 70; 75; 80; 85; 90; 100; 125; 150; 200; 250 125 160 200 7,1 7,3 7,5 8,3 8,5 8,7 8,8 9,1 9,3
4 6 180 224 280 10,2 10,5 10,7 П,1 11,4 11,6 12,0 12,3 12,5
5 7,5 250 315 400 12,7 13,0 13,2 14,0 14,4 14,6 15,1 15,5 15,8
спокійному навантаженні; Срі = 0,9...0,8 — при незначних коливан-
нях навантаження; Срі =0,8...0,7 — при значних коливаннях наванта-
ження, СРі = 0,7...0,6 — при ударному та різкозмінному навантаженні.
Для дво- та тризмінної роботи коефіцієнти режиму відповідно беруть:
Ср2 = 0,87Ср1; Ср3 = 0,72СрІ.
Знаючи корисне навантаження РІУ яке повинен передавати пас, та
допустиме питоме корисне навантаження [//о], можна визначити потріб-
ну ширину паса:
Ь = Рі!(іп [До]),
(21.35)
яку узгоджують із стандартними значеннями ширини пасів.
Для деяких плоских гумотканинних пасів значення /„До та інші
параметри наведені у табл. 21.4.
За добутими значеннями товщини 6 та ширини Ь плоского паса ви-
тають площу його поперечного перерізу А = 66, а також потрібну
лу попереднього натягу віток паса:
Го = /о^п. (21.36)
247
При користуванні даними табл. 21.4 можна застосовувати такі фор-
мули:
ь =
ДЄ р'п/л)] =
Повний порядок розрахунку плоскопасової передачі можна брати
таким, який використаний при розв’язуванні задачі 21.1.
21.8. Особливості розрахунку клинопасових передач
Клинопасові передачі можна застосовувати при порівняно малих
міжосьових відстанях та великих передаточних числах, тобто у випад-
ках малих значень кутів обхвату шківів. У вказаних умовах плоско-
пасові передачі працюють незадовільно. Крім цього, у клинопасовій
передачі можна реалізувати більше корисне навантаження, ніж у
плоскопасовій передачі при тому самому попередньому натягу паса.
Дійсно, якщо розглянути елемент паса, притиснутий до шківа силою
Р (рис. 21.20), то сила тертя між пасом та шківом Е8Л = Щ — для ви-
падку плоского паса; Г5К = Р//зіп (ср/2) — для випадку клинового
паса (див. 5.2).
Для кута профілю жолобка ер = 40й маємо //зіп (гр/2) « 3/. Таким
чином, клинова форма паса збільшує його зчеплення зі шківом при-
близно у три рази.
Використання клинових пасів замість плоских дозволяє зменшити
їхній попередній натяг при передаванні одного і того ж корисного на-
вантаження та відповідно зменшити навантаження на вали передачі
та їхні опори.
Розрахунок клинопасових передач (із пасами нормального перері-
зу чи з вузькими або поліклиновими пасами) на тягову здатність ба-
зується також на використанні виразу (21.28). Якщо помножити ліву
та праву частини цього виразу на швидкість паса, то дістанемо відпо-
відні потужності. Тому розрахунок клинопасових передач виконують
не за допустимим корисним натягом паса, а за допустимою потужні-
стю [Р] для одного клинового паса або одного клина полі клинового
паса:
Рис. 21.20. Зчеплення плоского
та клинового пасів із шківами
[Р] =Р0СаСіСрСх. (21.37)
Тут Ро — допустима потужність для
одного клинового паса певного перерізу
у дослідних умовах (сІ1 = сІ2; = а2 =
= 180°; базова довжина /0 паса; спокій-
не навантаження); Са, Ср— див. 21.8;
Сг — V — коефіцієнт фактичної дов-
жини паса /; Сг — коефіцієнт кількості
248
г пасів, що працюють паралельно у одній передачі (Сг = 0,95 при
г — 2...3; Сг = 0,90 при г = 4...6; Сг = 0,85 при г > 6).
За знайденою допустимою потужністю для одного клинового паса
можна визначити потрібне число 2 клинових пасів (або число клинів
полі клинового паса), що працюють у одній пасовій передачі:
- г = ?,/[?], (21.38)
де Рг — потужність, на передавання якої розраховується передача.
Таблиця 21.5. Значення Ро для клинових пасів
Переріз паса та базова довжина 10, мм Площа пере- різу А, мм* Діаметр мен- шого шківа мм Ро, кВт, при швидкості паса V,
5 10 15 20
0 63 0,49 0,82 1,03 1,11
1320 47 71 80 0,56 0,62 0,95 1,07 1,22 1,41 1,37 1,60
А 90 0,84 1,39 1,75 1,88
1700 81 100 112 0,95 1,03 1,60 1,82 2,07 2,39 2,31 2,74
Б 125 1,39 2,26 2,80 — -
2240 138 140 160 1,61 1,83 2,70 3,15 3,45 4,13 3,83 4,73
В 200 2,77 4,59 5,80 6,33
3750 230 224 280 3,15 3,48 5,35 6,02 6,95 7,94 7,86 9,18
УО 63 0,95 1,50 1,68 1,85
1600 56 71 80 1,18 1,38 1,95 2,34 2,35 2,92 2,73 3,50
УА 90 1,56 2,57 3,60
2500 95 100 112 1,89 2,17 3,15 3,72 4,35 4,60 5,61
УБ 140 2,95 5,00 7,01
3550 158 160 180 3,45 3,80 5,98 6,70 7,60 8,80 9,10 10,6
Примі т к а. тандап' гний ряд до вжин кли нових па сів, мм: 400; 450;
Г.<н 560; 630; 710; 800; 900; 1120; 1400; 1600; 1800; 2000; 2240; 2500; 2800; лі .(), 3550; 4000; ...
249
Для клинопасових передач рекомендують 8 через відхилення
пасів у довжині та нерівномірність навантаження. При ретельному
доборі пасів за довжиною можна брати г = 10... 12. Для зменшення
зберуть клинові паси більшого поперечного перерізу.
Силу попереднього натягу віток комплекту клинових пасів, Н, ви-
значають за формулою
= 0,85ЛСЛуСаСр), (21.39)
де — потужність, Вт; у — швидкість паса, м/с.
У зв’язку з обмеженою кількістю стандартних перерізів клинових
пасів ГОСТ 1284.3—80 дає значення Ро для цих пасів залежно від
швидкості паса ц та діаметра меншого шківа. У табл. 21.5 наведено
значення Ро для деяких перерізів клинових пасів.
Попередній вибір перерізу клинових пасів можна зробити залежно
ВІД обертового моменту 7\ на ведучому шківі при його кутовій швид-
кості (о > 25 рад/с:
7\, Н • м <10 10—30 30—120 120—350 <150 150—500 500—1700
Переріз
паса 0 А Б В УО УА УБ
Повний розрахунок пасових передач із клиновими або поліклино-
вими пасами можна виконувати у послідовності, вибраній при розв’я-
зуванні задачі 21.2 (див. 21.10).
21.9. Зубчасто-пасові передачі
У зубчасто-пасовій передачі плоский пас на внутрішньому боці
має зубці трапецієвидної форми, а шківи — відповідні їм зубці на
ободі (рис. 21.21). Отже, передача працює за принципом зачеплення,
250
а не тертя. До пасових передач вона належить умовно тільки за назвою
та формою тягового органу.
Зубчасто-пасові передачі мають малі габаритні розміри, в них
відсутнє ковзання паса на шківах, можна забезпечити великі переда-
точні числа (и 12), ККД досягає 0,92...0,98, на вали передаються
значно менші навантаження.
Використання принципу передачі руху зубчастим пасом було
запропоновано давно, але його практичне використання стало мож-
ливим тільки з появою нових матеріалів — високоякісних пластмас.
Зубчасті паси виготовляють із еластичної маслостійкої гуми або
пластмаси і армують сталевими тросиками або поліамідними нитками
(рис. 21.21). Шківи можна виготовляти із сталі, чавуну, легких
сплавів та пластмас.
Згідно з діючими галузевими стандартами основні параметри зуб-
нії сто-пасової передачі беруть такі [24]: модуль зубців т = Р/л, де
Р — крок зубців паса; висота зубців Н — 0,6т; найменша товщина
зубців 5 = т\ кут профілю зубців 20 = 50 або 40°; товщина паса у
впадинах Н = т 4- 1 мм; розрахункова довжина паса І = лтгп, де
2п — число зубців паса. Рекомендують такі значення модулів т, мм:
2; 3; 4; 5; 7 і 10. Мінімальні числа зубців меншого шківа: гх = 16...20
при т = (2...5) мм; гх = 20...26 при т = (7... 10) мм.
Діаметри ділильних кіл шківів
= тгх; сІ2 = (21.40)
Зовнішні діаметри шківів для зубчастих пасів
гіа1 = — 2Д; аа, = а2 — 2Д, (21.41)
де при діаметрі тросика 0,3...0,4 мм Д = 0,6 мм, а при діаметрі троси-
ка 0,65...0,80 мм А = 1,3 мм.
Між пасом та шківом рекомендуються зазори: бічний /= (0,25...
0,40) т і радіальний е = (0,25...0,35) т.
Розрахунок зубчасто-пасових передач на тягову здатність можна
виконувати у такій послідовності.
Модуль т зубців паса вибирають залежно від потужності Р19 яку
передає передача:
Рг, кВт 0,4 0,4...З 3...5.5 5,5...10 10...22 22...30
т, мм 2; 3 3; 4 4; 5 4; 5: 7 5; 7 7; 10
За вибраним числом зубців меншого шківа 2Х та передаточним чис-
лом и передачі визначають число зубців більшого шківа г2 == игх. Далі
за формулами (21.40) знаходять діаметри ділильних кіл шківів.
Міжосьову відстань зубчасто-пасової передачі можна назначати
\ межах
а = (0,5.. .2,0) № +^2).
(21.42)
251
Довжину паса І' орієнтовно визначають за формулою (21.25). За
V обчислюють потрібне число зубців паса гп — І'Цмі), яке округляють
до нормалізованих значень гп: 32; 40; 50; 63; 80; 100; 125; 160. Оста-
точна довжина зубчастого паса
І = птгп. (21.43)
Розрахункову міжосьову відстань визначають за формулою (21.26).
Число зубців паса, що знаходяться у зчепленні із малим шківом,
гп1 = г^/3600, (21.44)
де — кут обхвату меншого шківа за формулою (21.24). Рекоменду-
ють брати г„і 6.
При розрахунку зубчастого паса на тягову здатність його ширину
Ь визначають за формулою
Ь^2Т1/(<і1[д])і (21.45)
де [7] — допустима колова сила для одиниці ширини паса при гпі
6 та числі шківів п = 2,
М =д0Ср. (21.46)
Тут 70 — номінальна колова сила для одиниці ширини паса; Ср —
коефіцієнт режиму роботи передачі.
Нижче наведено значення д^ для зубчастих пасів.
т, мм 2 3 4 5 7 10
д0, Н/мм 5 10 25 30 32 42
Знайдену ширину паса треба узгодити із значенням ширин нормалі-
зованого ряду, мм: 8; 10; 12,5; 16; 20; 25; 32; 40; 50; 63; 80.
Попередній натяг у зубчасто-пасовій передачі потрібен тільки для
усунення зазорів у зачепленні та правильного набігання на шківи.
Він повинен бути дещо більшим від натягу, який виникає від дії на
пас відцентрових сил [див. формулу (21.14)];
Ро = (1,1.. .1,3)Л,. (21.47)
Навантаження, що передається на вали зубчасто-пасової передачі
(при швидкостях паса V 20 м/с), можна брати
К = (1,0. . .1,2) Р< = (2,0.. .2,4) Т^. (21.48)
Більш детальні відомості про зубчасто-пасові передачі можна
знайти у відповідній довідковій літературі.
21.10. Приклади розрахунку пасових передач
Задача 21.1. Розрахувати відкриту горизонтальну плоскопасову передачу у
приводі стрічкового конвейєра за такими даними: потужність, яку передає передача,
Рі = 7 кВт; кутова швидкість ведучого шківа (14 = 150 рад/с; кутова швидкість вс-
252
деного шківа со2 = 42 рад/с; передача прапюе дві зміни при незначних коливаннях
навантаження.
Р оз в’ язання. Для даної передачі беремо плоский гумотканинний пас із
бельтінга 820 за ГОСТ 23831—79 з числом прокладок іо = 3, завтовшки 6 = 4,5 мм
(див. табл. 21.4).
Передаточне число передачі и = О)і/со2 = 150/42= 3,57.
За формулою (21.21) діаметр меншого ведучого шківа
ах = (520. . .610) = (520. . .610) Д^7ТЇ50 = (187. . .219/ мм.
Згідно зі стандартом беремо — 200 мм.
Відношення аг/б = 200/4,5 = 44,4, що відповідає рекомендаціям 21.5.
Швидкість паса
V = щ^/2 = 150 • 200/2 = 15 • 103 мм/с = 15 м/с,
що допускається для гумотканинних плоских пасів.
Діаметр веденого шківа
й2 = ш!х = 3,57 . 200 = 714 мм.
За стандартом = 710 мм.
Фактичне передаточне число передачі
и аг/ау = 710/200 = 3,55.
Назначаємо орієнтовно міжосьову відстань передачі
а = 2 (4, 4- а2) = 2 (200 + 710) 1820 мм.
Кут обхвату меншого шківа
аі = 180 — 57 (42 — йх)/а = 180 — 57 (710 — 200)/1820 » 164°.
Розрахункова довжина паса
І = 2а 4- п (41 + 4- (гія — 4д)2/(4а) = 2 • 1820 4- 3,14 (200 4- 710)/2 +
4-(710 — 200)2/(4 • 1820) = 5105 мм.
Оцінка довговічності паса за частотою його пробігів
і = VII = 15 . 103/5105 = 2,94 с'1 < [/] = 5 с'1.
Розрахункове корисне навантаження, яке передає передача,
р( = Рї/у = 7 • 103/15 = 467 Н.
Для розрахунку вибраного паса на тягову здатність за табл. 21.4 беремо опти-
мальне питоме корисне навантаження, що може передаватись одиницею ширини па-
са, (’п//0 = 8,7 Н/мм при питомій силі попереднього натягу віток паса, яка припадає
иа одиницю товщини однієї прокладки, /0 = 2,25 Н/мм.
Допустиме питоме корисне навантаження
= іп//оС7СаС^СР = 8’7 ’ 1 ’ °’95 ’ °’95 ‘ °’75 = 5’9 Н/ММ-
Тут вибрані такі значення розрахункових коефіцієнтів:
< у= 1; Ср = 0,75; Са = 1 —0,003 (180 —оц) = 1 — 0,003 (180 — 164) = 0,95;
Су = 1,04 — 0,0004а2 = 1,04 — 0,0004 . 152 = 0,95.
Потрібна ширина паса
Ь = РіІ[їп//01 = 467/5,9 = 79,15 мм.
Вибираємо стандартну ширину паса Ь — 80 мм (див. табл. 21.4).
253
Площа поперечного перерізу паса
А = Ь6 = 80.4,5 = 360 мм3.
Потрібна сила попереднього натягу віток паса
= ї0іоЬ =і 2,25 • 3 • 80 « 540 Н.
За формулою (21.20) навантаження на вали пасової передачі
Я = 2Р0 зіп (аг/2) = 2 - 540 зіп (164/2) — 1070 Н.
Для визначення строку служби паса визначимо складові максимального напру*
ження, яке виникає у пасі під час роботи передачі:
напруження попереднього натягу
о0 = Ро/Л = 540/360 = 1,5 МПа;
напруження від корисного навантаження
о, = = 467/360 = 1,3 МПа;
напруження від дії відцентрової сили
ст0 = 10-6рц2 = 10~6 .1,15-10»- 15* = 0,26 МПа;
напруження згину у пасі
Озг = Ед/с11 = 300.4,5/200 => 6,75 МПа.
Значення р — 1,15 • 103 кг/м3 та Е = 300 МПа вибрані з табл. 21.3.
За формулою (21.18) максимальне напруження у пасі
ашах — °о + 0,5л* 4- Оу -|- озг = 1,5 4- 0,5 • 1,3 4- 0,26 4- 6,75 = 9,16 МПа.
При обмеженій границі витривалості 0^=7 МПа, показнику степеня кривої
втоми т = 6 (табл. 21.3), числі шківів п = 2 та V = 0,5 строк служби паса за
формулою (21.32)
А = 107 (а„/отах)т/(3600Му) =
= 107 (7/9,1 б)6/(3600 • 2,94 - 2 • 0,5) = 1882 год.
Задача 21.2. Розрахувати горизонтальну клинопасову передачу від електродви-
гуна до вала вентилятора системи вентиляції виробничого приміщення за такими да-
ними: потужність, яку передає передача, РА =7кВт при кутовій швидкості ведучого
шківа = 150 рад/с; кутова швидкість вала вентилятора со2 = 60 рад/с; передача
працює в одну зміну при постійному навантаженні.
Розв’язання. Передаточне число передачі
и = (о1/й)2 = 150/60 = 2,5.
На ведучому шківі обертовий момент
Ті = Р]/со1 = 7 - 103/150 = 46,7 Н • м.
Відповідно до рекомендацій у 21.8 будемо орієнтуватися на клинові паси нор-
мального перерізу Б. Для таких пасів за табл. 21.5 маємо площу поперечного пере-
різу А = 138 мм2, базову довжину /0 = 2240 мм і назначаємо розрахунковий діаметр
меншого ведучого шківа — 140 мм.
Діаметр веденого шківа
= 2,5 • 140 = 350 мм.
За стандартом беремо розрахунковий діаметр веденого шківа = 360 мм.
254
Фактичне передаточне число передачі
и = 4,/^ = 360/140 = 2,57.
Швидкість паса
V = е/іД- 150 • 140 • Ю^/2 = 10,5 м/с.
Орієнтовно беремо міжосьову відстань передачі
а9 = 1,5^ + ^) = 1,5(140 4-360) =750 мм.
За формулою (21.25) потрібна довжина паса
Г = 2а' 4- л (^ 4- Лх)/2 4- (б/, — ^)«/(4а') = 2 • 750 -}-
4- 3,14 (140 4- 360)/2 4- (360 — 140)«/(4 • 750) = 2302 мм.
За стандартом (див. табл. 21.5) беремо розрахункову довжину паса І = 2500 мм.
Дійсна міжосьова відстань [див. формулу (21.26)], яка відповідає вибраній довжині
паса,
а = {2/ - л 4- </2) 4- /(2/ - л 4- <*,)]« - 8 (а8 - ^)«}/8 =
= {2 ♦ 2500 - 3,14(140 4-360) 4-
4-/[2 • 2500 — 3,14 (140 4- 360)]а — 8 (360 — 140)2)/8 = 850 мм.
Оцінка довговічності паса за числом його пробігів
І = VII = 10,5 • 103/2500 = 4,2 с~1,
що менше [і] = 12 С—1.
Кут обхвату меншого шківа
ах = 180 — 57 (б/, — а^/а = 180 — 57 (360 — 140)/850 = 165°.
Допустиму потужність [Р] для одного паса перерізу Б визначаємо за формулою
(21.37). Для цього за табл. 21.5 маємо Ро = 2,70 кВт.
Коефіцієнт
Са = 1 — 0,003 (180 — ах) = 1 — 0,003 (180 — 165) = 0,955;
6.--- бг-----------
С1 = /77^ = /2500/2240 = 1,02.
Коефіцієнт Ср — 1, а коефіцієнт Сг — 0,95 (при орієнтовному значенні г — 3).
[Р] = РдС^СрСг = 2,70 • 0,955 . 1,02 . 1 • 0,95 = 2,498 кВт.
За формулою (21.38) потрібне число пасів, що працюють паралельно на шківах
передачі,
г = Р1/(Р) = 7/2,498 = 2,8.
Беремо число пасів г = 3.
Силу попереднього натягу віток комплекту клинових пасів визначаємо за фор-
мулою (21.39):
Ро = О.вбРіС^/^СдСр) = 0,85 • 7 . 10’ • 1,02/(10,5 • 0,955 • І) = 605 Н.
За формулою (21.20) навантаження на вали пасової передачі
Я = 2Р0 зіп (аі/2) = 2 • 605 зіп (165/2) = 1200 Н.
255
Контрольні запитання
1. Дайте загальну характеристику пасових передач та їхню класифікацію.
2. Назвіть основні типи приводних пасів, укажіть їхню будову та матеріал.
3. Наведіть приклади натяжних пристроїв у пасових передачах.
4. Чому у пасових передачах має місце пружне ковзання паса на шківах? Від
чого залежить відносне пружне ковзання та як воно впливає на передаточне число
передачі?
5. Який зв’язок існує між силою натягу віток паса та корисним навантаженням
і попереднім натягом паса?
6. Як впливає дія відцентрової сили на роботу пасової передачі?
7. Запишіть формули для визначення напружень у поперечних перерізах віток
паса. У якому перерізі паса діє максимальне напруження?
8. Від яких факторів залежать навантаження на вали пасової передачі?
9. Чому у пасових передачах обмежують відношення діаметра меншого шківа
до товщини паса?
10. Як впливає кут обхвату пасом шківа на тягову здатність паса? Чому у кли-
нопасових передачах допускають менші кути обхвату, ніж у плоскопасових передачах?
11. Назвіть основні критерії роботоздатності пасової передачі.
12. Що таке коефіцієнт тяги і що він характеризує?
13. Як розраховується тягова здатність пасових передач?
14. Від яких факторів залежить довговічність приводних пасів?
15. Які переваги мають зубчасто-пасові передачі перед звичайними пасовими
передачами?
ГЛАВА 22. ЗАГАЛЬНІ ВІДОМОСТІ
ПРО ЗУБЧАСТІ ПЕРЕДАЧІ
22.1. Застосування зубчастих передач
та їхня класифікація
Зубчасті передачі є найрозповсюдженішими механічними переда-
чами у сучасному машино- та приладобудуванні. Вони застосовуються
як у механізмах найточніших приладів, де розміри коліс вимірюються
кількома міліметрами, так і в найпотужніших машинах із розмірами
коліс до 10 м. Зубчасті передачі здатні працювати в різноманітних
умовах із коловими швидкостями від зовсім малих до 150 м/с і більше.
Зубчаста передача складається з двох коліс, на ободі яких розмі-
щені зубці. Зубці цих коліс входять у зачеплення між собою і завдяки
їхній взаємодії забезпечують передачу обертового руху від одного
колеса до другого. Менше з двох спряжених коліс називають шестір-
нею, більше — колесом; термін «зубчасте колесо» належить до обох
коліс передачі.
У більшості випадків зубчаста передача призначена для переда-
вання обертового руху, але її можна використовувати і як передачу
для перетворення обертового руху в поступальний (передача зубчасте
колесо — рейка).
Зубчасті передачі можуть використовуватись для передавання обер-
тового руху між довільно розміщеними у просторі валами, мають ви-
сокий ККД (ц = 0,94...0,99), можуть легко та зручно компонуватись
256
Рис. 22.1. Зубчасті передачі з паралель-
ними осями валів
Рис. 22.2. Зубчасті передачі з мимобіж-
ними осями валів та осями, що перетина-
ються
у окремі агрегати для серійного виробництва (редуктори), забезпечу-
ють достатній діапазон передаточних чисел (и 20).
У порівнянні з іншими механічними передачами зубчасті передачі
мають такі переваги: сталість передаточного числа; високу надійність
та довговічність роботи; великий діапазон навантажень та компакт-
ність конструкції; незначні навантаження на вали передачі та їхні
опори.
До недоліків зубчастих передач належать такі: відносно високі
вимоги до точності виготовлення та монтажу; шум при роботі з високи-
ми швидкостями; потреба у постійному змащуванні; неможливість без-
ступеневої зміни передаточного числа
У зв’язку з великою відмінністю умов використання зубчастих пе-
редач форма елементів зубчастих зачеплень та конструкції зубчастих
коліс дуже різноманітні Тому зубчасті передачі та колеса можна
класифікувати за цілим рядом ознак.
За формою профілю зубців розрізняють евольвентні
гчасті передачі, що мають переважне поширення, га неевольвентні
едачі. До останніх відносять зубчасті передачі із круговим профі-
і зубців (передачі із зачепленням Новікова) та передачі із цикло-
льним профілем зубців, які в більшості випадків застосовують у
їладах та годинникових механізмах.
За взаємним розміщенням осей валів зуб-
ті передачі бувають:
— із паралельними осями валів — циліндричні передачі зовніш-
нє зачеплення (рис. 22.1, а, б, в), передачі типу зубчасте колесо —
іка (рис. 22.1, а) та циліндричні передачі внутрішнього зачеплення
ІС. 22.1, б);
— із валами, осі яких перетинаються,— конічні зубчасті переда-
(рис. 22.2, а, б);
257
— із мимобіжними у просторі осями валів — гвинтові зубчасті
передачі (рис. 22.2, в).
За розміщенням на ободі та формою з у б -
ц і в розрізняють передачі та колеса: прямозубі (див. рис. 22.1, а, г,
д), косозубі (див. рис. 22.1 б), шевронні (див. рис. 22.1, в) та з круго-
вими зубцями (див. рис. 22.2, б).
За конструктивним оформленням зубчасті пере-
дачі бувають: закриті (розміщені у спеціальному корпусі та забезпе-
чені постійним змащуванням) і відкриті (працюють без мастила або
змащуються періодично).
За коловою швидкістю зубчастих коліс
передачі поділяють на тихо- (о 3 м/с), середньо- (у = (3...15) м/с)
та швидкохідні (у> 15 м/с).
22.2. Основні параметри евольвентного зачеплення
Основною кінематичною умовою для профілів зубців зубчастих ко-
ліс є умова сталості миттєвого передаточного числа. Цій умові задо-
вольняють багато кривих, за допомогою яких можуть бути окреслені
профілі зубців. Однак профілі зубців повинні бути такими, щоб
сприяти нескладному виготовленню зубчастих коліс із різним числом
зубців та забезпечувати високій ККД передачі, достатню міцність
зубців тощо. Цим вимогам найбільше відповідає евольвентне зачеі
лення, і тому його широко застосовують у зубчастих передачах загалі
ного машинобудування.
Евольвентне зачеплення, ідея якого належить Л. Ейлеру, має
суттєві технологічні та експлуатаційні переваги: простота побудови
евольвентних профілів зубців; евольвентні зубці як прямозубих, так
і косозубих коліс можуть бути точно нарізані простим інструментом
рейкового типу; одним інструментом можна нарізати колеса з різним
числом зубців, оскільки профіль евольвентного зубця окреслюється
однотипною кривою; правильність евольвентного зачеплення не пору-
шується при відхиленнях міжосьової відстані коліс від розрахункове
го значення; евольвентне зачеплення допускає виправлення (корив
вання) робочого профілю зубців із метою вибору оптимальних відрі ।
ків евольвенти, що забезпечує кращу роботоздатність, ККД та інпв
характеристики передачі.
Зубці з евольвентним профілем можуть бути нарізані на зубчастих
колесах як зовнішнього, так і внутрішнього зачеплення.
На рис. 22.3 показане зачеплення зубців з евольвентним профілем
двох зубчастих коліс. При перекочуванні прямої NN без ковзання п<
колу діаметром йь\ точка Р, що належить прямій NN. описує еволь
венту, яка є профілем зубця колеса /, а при перекочуванні прям
NN по колу діаметром сіь2 точка Р описує евольвенту, яка є проі
зубця колеса 2. Пряма NN називається відтворюючою, а
258
діаметром сіь\ та ф# нази-
ваються основними.
Точка Р перетину спільної
відтворюючої прямої NN
із лінією центрів ОХО2 зубг
частих коліс називається
полюсом зачеп-
лення. Пряма NN є
спільною нормаллю у точці
Р до евольвент, що опи-
сують профілі зубців коліс
І і 2, а відрізки АР і ВР
е відповідними радіусами
кривини профілів зубців
у точці Р їхнього доти-
кання.
При обертанні зубча-
стих коліс точка дотикан-
ня профілів зубців постій-
но знаходиться на лінії
Рис. 22.3. Параметри зубчастої передачі
/УМ, тобто спільна нормаль до профілів зубців займає постійне поло-
ження.
Основний закон зачеплення стверджує, що профілі зубців двох коліс
г у пінні бути такими, щоб спільна нормаль до них у довільній точці
икання профілів проходила через полюс зачеплення Р, який ділить
'осьову відстань ОХО2 на відрізки, обернено пропорційні кутовим,
.д костям зубчастих коліс.
Отже, евольвентне зачеплення відповідає вимогам основного
аакону зачеплення, оскільки течка Р займає постійне положення на
Лінії центрів ОХО2. Відповідно з основним законом зачеплення
®1/®2 — — ФгЯ/ФлЛ — У*
(22.1)
°ІВНІСТЬ КОЛОВИХ швидкостей зубчастих КОЛІС [со^а,! = (й2Фі)2 за
азом (22.1)] свідчить про те, що при обертанні зубчастих коліс ко-
(іаметрами та перекочуються одне по одному без ковзання,
кола називаються початковими колами, а відповідні
иліндри у циліндричній і конуси у конічній зубчастих передачах
іваються початковими циліндрами і почат-
вими конусами. Діаметри ф^ таф„2 називаються поч ат-
вими діаметрами зубчастих коліс.
•'.диним параметром, що визначає форму евольвенти, є діаметр ос-
іюго кола ф,, оскільки кожному конкретному колу відповідає одна
і а евольвента. Зі збільшенням діаметра ф, евольвента стає більш
>га, а при ф = оо перетворюється у пряму лінію. У цьому разі
259
зубчасте колесо перетворюється у зубчасту рейку, яка має прямоліній-
ний профіль зубців.
Із наведеного вище випливає, що відтворююча пряма (спільна нор-
маль /М) є лінією зачеплення, тобто геометричним місцем
точок контакту спряжених зубців при обертанні зубчастих коліс.
Кут аґа) між лінією зачеплення та прямою, перпендикулярною до
міжосьової лінії, називається кутом зачеплення.
Співвісна циліндрична поверхня зубчастого колеса, яка є базою
для визначення розмірів елементів зубців, називається ділиль-
ною поверхнею (ділить зубець на дві частини — головку та
ніжку).
Концентричне коло, що лежить у торцевому перерізі колеса і на-
лежить ділильній поверхні, називається ділильним колом.
Діаметри ділильних кіл позначають^ і сі2 і називають д і л и л ь н и -
ми діаметрами зубчастих коліс. На рис. 22.3 ді-
лильні та початкові кола збігаються.
За висотою зубці обмежені поверхнею вершин зубців та поверхнею
впадин. Концентричне коло, що належить поверхні вершин, назива-
ється колом вершин зубців, а концентричне коло, що
належить поверхні впадин, називається колом впадин. Діа-
метри кіл вершин зубців позначаються сІа\ і (іа2 (відповідно для шестір-
ні та колеса на рис. 22.1) і називаються д іаметрами вершин
зубців. Відповідно діаметри кіл впадин позначаються і сір і
називаються діаметрами впадин.
Відстань між одноіменними профілями двох сусідніх зубців по ду-
зі концентричного кола зубчастого колеса називається коловим
кроком з у б ц і в і позначається Р( (рис. 22.3 і 22.4, а). Розріз-
няють ділильний, початковий та інші колові кроки зубців, що відпо
відають ділильному, початковому та іншим концентричним колам
зубчастого колеса. Для косих та криволінійних зубців (рис. 22.4, б, в),
крім колового кроку Р{, розрізняють нормальний крок
зубці в Рп, який є най коротшою відстанню по ділильному або одно-
типному співвісному колу зубчастого колеса між одноіменними про-
філями двох сусідніх зубців, а також осьовий крок зубців Рх.
Центральний кут концентричного кола зубчастого колеса, який
дорівнює 2л/г, де г — число зубців зубчастого колеса, називається
кутовим кроком з у б ц і в і позначається т.
Лінія перетину бічної поверхні зубця з ділильною, початковою або
іншими співвісними поверхнями зубчастого колеса називається л і •
нією зубця.
Гострий кут між лінією зубця та лінією перетину співвісної по-
верхні, якій належить ця лінія зубця, з площиною, що проходить че-
рез вісь зубчастого колеса, називається кутом нахилу лі-
нії зубця, або кутом нахилу зубця. Кут нахилу
зубця позначається р (рис. 22.4, б, в).
260
Рис. 22.4. Форма та розміщення зубців зубчастих коліс
Із рис. 22.4, б маємо зв’язок між Рп та Р{ і Рх'.
Рп = Р, соз 0; Рх = Рп/$\п р. (22.2)
Кут повороту зубчастого колеса від моменту входу зубця в зачеп-
лення до моменту виходу його із зачеплення називається кутом
перекриття! позначається фу.
Відношення кута перекриття зубчастого колеса передачі до його
кутового кроку називається коефіцієнтом перекриття
і позначається Єу:
&у = (р7/т. (22.3)
Коефіцієнт перекриття визначає середнє число пар зубців, що одно-
часно знаходяться у зачепленні. Якщо = 1,6, то це означає, що
0,4 періоду зачеплення одного зубця у зачепленні знаходиться одна
пара зубців, а 0,6 періоду зачеплення того самого зубця у зачепленні
знаходяться дві пари зубців.
Із збільшенням коефіцієнта перекриття підвищуються плавність
роботи та несуча здатність передачі, зменшуються динамічні наванта-
ічя та шум передачі. Тому у швидкохідних та високонавантажених
дачах замість прямозубих використовують косозубі, шевронні
са або колеса з криволінійними зубцями, які забезпечують більші
нцієнти перекриття.
Коефіцієнт перекриття завжди повинен бути більшим за одиницю,
ютивному разі при роботі зубчастої передачі можуть виникнути
”‘нти, коли у зачепленні не буде знаходитися жодна пара зубців
зедача буде працювати з ударами.
Іінійна величина, що в л раз менша за коловий крок зубців, нази-
ься коловим модулем зубців а лінійна величи-
•• що в л раз менша за нормальний крок зубців, називається нор-
мальним модулем зубців тп:
ті = Рс/п; тп - Р„/л,(22.4)
261
Для косих та криволінійних зубців на основі формул (22.2) та
(22.4) маємо співвідношення
тп = /тг/со5р, (22.5)
а для прямих зубців тп = т, = т.
Модулі зубців стандартизовані (у прямозубих колесах колові
т( = т, а в косозубих нормальні тп). У ГОСТ 9563—60 наведено зна-
чення модулів, починаючи від 0,05 до 100 мм. Стандартні модулі від
1 до 18 мм такі:
1-й ряд 1 1,25 1,5 2 2,5 3 4 5 6 $ 10 12 16
2-й ряд 1,125 1,375 1,75 2,25 2,75 3,5 4,5 5,5 7 9 11 14 18
Модуль зубців є основною характеристикою розмірів вінців зуб
частих коліс. Надалі стандартний модуль зубців прямозубих коліс
будемо позначати т (без індекса), а при визначенні розмірів косозубих
коліс будемо використовувати стандартний нормальний модуль тп.
Довжина ділильного кола зубчастого колеса
= гРі = гРпІсо$ р.
Із записаного співвідношення визначається ділильний діаметр кс-
созубого колеса
сі =/ипг/со5 р. (22.6)
Для прямозубого зубчастого колеса при Р = 0 відповідно маємо
сі=тг. (22.7)
До параметрів евольвентного зачеплення належить також кут про
філю зубця. Гострий кут у поперечному перерізі зубця між дотичною
до профілю зубця у даній точці та лінією, яка проходить через цю
точку і центр колеса, називається кутом профілю зубця
(рис. 22.4, г). Розрізняють ділильний а, початковий та інші купі
профілю зубця, які відповідають точкам на ділильній, початковій та
інших співвісних циліндричних поверхнях. У разі збігання почат-
кових та ділильних коліс початковий кут профілю зубця дорівнює
куту зачеплення
Не можна змішувати поняття початкового та ділильного кіл зуб-
частих коліс. Ділильне коло — постійна геометрична фігура даного
зубчастого колеса, діаметр якого залежить тільки від модуля та числа
зубців. Початкове коло — поняття кінематичне і у окремо взятого
колеса такого кола не має. Про початкові кола говорять, коли розгля-
дають колеса, що знаходяться у зачепленні. Як зазначалось вище,
ці кола стикаються у полюсі зачеплення і при обертанні зубчастих
коліс перекочуються одне по другому без ковзання.
Якщо міжосьова відстань зубчастої передачі
= (^і + сЦ/2 = тп (*і + *2)/(2 соз 0), (22.8)
262
то ділильні і початкові кола зубчастих коліс збігаються. При зміні
міжосьової відстані передачі діаметри ділильних кіл не змінюються,
а діаметри початкових кіл змінюються пропорційно зміні а*. Тоді
Лиі = 2а^(и 4-1); 4-1), (22.9)
де и — передаточне число зубчастої передачі за співвідношенням
(22.1). Його також визначають і як відношення чисел зубців зубчастих
КОЛІС!
и = г2/г1.
(22.10)
22.3. Початковий контур зубчастих коліс
При безмежно великому діаметрі основного кола зубчасте колесо
« '‘^створюється у зубчасту рейку, а евольвентний профіль зубця — у
молінійний, надзвичайно зручний для виготовлення та контролю
мірів. Можливість зачеплення евольвентного зубчастого колеса із
частою рейкою має важливе практичне значення, що дозволяє виго-
нити зуборізний інструмент у вигляді рейки із зубцями прямолі-
ного профілю.
Профілювання зубців евольвентного профілю та інструменту для
іарізування здійснюється відповідно до початкового контуру, тоб-
ю контуру зубців номінальної початкової рейки у перерізі площи-
ною, перпендикулярною до її ділильної площини та напряму зубців.
Початковий контур стандартизований для циліндричних та коніч-
них зубчастих коліс. Профіль зубців одного і другого контурів е пря-
молінійним на однаковій довжині по обидва боки від середньої лінії
а — а, на якій товщина зубця та ширина впадини рівні між собою
(рис. 22.5, а). Середня лінія рейки називається ділильною прямою.
Початковий контур характеризується кутом головного профілю
а, коефіцієнтом висоти головки ка, коефіцієнтом радіального зазора
р-хт
Р/2 Р/2
Рис, 22,5, Початковий контур для евольвентних зубчастих коліс
263
у парі початкових контурів с*, коефіцієнтом висоти ніжки Л/ — к*а +
+ с*, коефіцієнтом радіуса кривини перехідної кривої р/.
Згідно з названими параметрами початкового контуру розміри зуб-
ців нормального евольвентного зачеплення визначають за формулами
(рис. 22.5, а і 22.6):
кут профілю зубців а = 20°;
висота головки зубців
йа=/фп; (22.11)
висота ніжки зубців
/і/ = = (На 4- С*) Щ'г (22.12)
висота зубців
Н = Щ = (2ка + с*) т; (22.13)
радіальний зазор
с = с*т\ (22.14)
радіус кривини перехідної кривої
р/ = р^/п. (22.15)
Діаметр вершин зубців та діаметр впадин зубчастого колеса мож-
на визначити за виразами:
= сі + 2На = тг 4- 21іат;
(22.16)
= (і — 2Л/ = тг — 2/г'т = тг — 2(Н* 4- с*) т. (22.17)
З метою покращення роботи зубчастого зачеплення у важконаван-
тажених та високошвидкісних циліндричних зубчастих передач із
зовнішнім зачепленням ре-
Рис. 22.6. Розміри зубців евольвентного зубчас-
того колеса
комендують застосовувати
початковий контур із моди-
фікацією профілю головки
зубців (рис. 22.5, б), при
цьому ДЛЯ /72 1 ММ ЛІНІЯ
модифікації пряма.
Параметри модифікації
зубців визначають за таки-
ми залежностями:
кв = Н8т\ А = А*т.
(22.18)
Коефіцієнти висоти мо-
дифікації Н8 0,45 та гли-
бини модифікації А* 0,02.
264
22.4. Коригування зубців циліндричних
зубчастих передач
Із зменшенням числа зубців зубчастого колеса збільшується кри-
вина евольвентного профілю і відповідно зменшується товщина зуб-
ців в їх основі та на вершині. Якщо число зубців 2 менше від деякого
граничного значення гтіП, то при нарізуванні зубців інструменталь-
ною рейкою відбувається підріз ніжок зубців (рис. 22.7, а). Це спри-
чинює значне зменшення їхньої міцності. Мінімальне число прямих
зубців, які можна нарізувати інструментальною зубчастою рейкою
без підрізання, становить 17.
Щоб усунути явище підрізання зубців нормального евольвентного
зачеплення, треба використати спеціальні способи виправлення їхньо-
го профілю, які називаються коригуванням зубчастих
зачеплень.
Коригуванням зубчастого зачеплення при г < гтіп досягається
не тільки підвищення міцності зубців на згин, а й контактної міц-
ності. Крім цього, можна зменшити спрацьовування зубців та усуну-
ти явища їхнього заклинювання. Коригування зачеплення дозволяє
також вписати зубчасту передачу у наперед задану міжосьову від-
стань.
Кориговане зачеплення відрізняється від нормального тим, що
профілі зубців виконують іншими, більш доцільними для даної
передачі відрізками евольвенти того самого основного кола. Кори-
говані зубчасті колеса виготовляють на тому самому обладнанні та
тим же стандартним інструментом, що й некориговані. Різниця поля-
а
Рис. 22.7. Форма некоригованих та коригованих зубців
265
гає в тому, що для коригованих коліс інструмент встановлюють з де-
яким зміщенням у радіальному напрямі. Заготовки зубчастих коліс
виготовляють із зміненим діаметром, а початковий контур дістають
із зміщенням, яке визначають за формулою
Х = х/п, (22.19)
де х — коефіцієнт зміщення; т — модуль зубців.
Коефіцієнт зміщення буде додатнім (х > 0), якщо інструмент
зміщають від центра заготовки, і від’ємним (х «< 0), якщо інструмент
зміщають до центра заготовки.
На рис. 22.7, б показана форма зубців, що нарізані одним і тим же
інструментом 1 на одній і тій же заготовці, але з різними коефіцієн-
тами зміщення. Чим більше зміщення X, тим віддаленішими від ос-
новного кола діаметром сіь відрізками евольвенти окреслюється про-
філь зубців. При цьому зменшується кривина евольвентного профілю
і зубець в основі потовщується, а на вершині загострюється ІЗ].
У нормальній зубчастій передачі коефіцієнти зміщення == х2 = 0.
Тому таку передачу називають нульовою.
Розрізняють висотну та кутову корекцію зубчастого зачеплення.
Зубчасті передачі з висотною корекцією
виготовляють із коефіцієнтами зміщення шестірні і колеса х2, які
відповідають таким умовам:
= — х2; Хе = Хі + х2 — 0, (22.20)
де Хе — сумарний коефіцієнт зміщення.
При висотній корекції висота зубців залишається незмінною, але
змінюється співвідношення висот головок та ніжок зубців і відповід-
но змінюються діаметри кіл вершин зубців та впадин.
У зубчастих колесах із висотною корекцією висоту головок На
зубців та ніжок визначають за формулами:
ка = (К + х) пг, /і/ = (1г* с* — х) т. (22.21)
Початкові кола при висотній корекції збігаються із ділильними
і кут зачеплення не змінюється. Товщина зубців шестірні збільшуєть
ся, а зубців колеса зменшується, але сума товщин на ділильному колі
пари зубців у зачепленні тут залишається постійною і дорівнк
кроку зубців. Тут висотна корекція зубців не вимагає зміни міжосьс
вої відстані передачі.
Висотна корекція дозволяє збільшити міцність зубців шестіріи
з одночасним зменшенням міцності зубців колеса. При великому чиї
лі зубців шестірні та колеса висотне коригування малоефективні
оскільки форма зубців змінюється мало. Тому висотну корекції»»
застосовують тільки при малому числі зубців шестірні і великому
числі зубців колеса.
266
Зубчасті передачі з кутовою корекцією
виготовляють із неоднаковими коефіцієнтами зміщення хг та х2.
Ці коефіцієнти повинні задовольняти умову
+ х2 > 0. (22.22)
Рекомендації щодо вибору коефіцієнтів зміщення циліндричних
зубчастих коліс наведені у ГОСТ 16532—70. Ці коефіцієнти можуть
бути вибрані з умов підвищення контактної міцності активних повер-
хонь зубців або міцності на згин, забезпечення високої стійкості
проти спрацьовування та опору проти заїдання зубців.
При кутовій корекції сума товщин зубців шестірні та колеса на
ділильних колах більша від кроку зубців, і тому ділильні кола не
можуть дотикатись. Тут зубчасті колеса повинні бути зміщеними
одне відносно одного. В результаті цього ділильні кола не збіга-
ються з початковими колами, висота зубців зменшується, а кут профі-
лю зубців буде збільшеним.
Розміри елементів зубців із кутовою корекцією знаходять за фор-
мулами:
висота головки зубців
= + (22.23)
висота ніжки зубців
Н!=(Гі' + с*— х)т. (22.24)
Тут Аг/ — коефіцієнт вирівнювального зміщення, який визнача-
ють за співвідношеннями
Д У = — У, У — — а)/т, (22.25)
а, ат — відповідно ділильна та початкова міжосьові відстані пе-
ачі.
Кутова корекція зубчастого зачеплення у порівнянні з висотною
має ряд переваг, головними з яких є підвищення міцності зубців
двох зубчастих коліс передачі і можливість вписування зубчастої
передачі у наперед задану міжосьову відстань. Кутову корекцію
можна використовувати при довільній комбінації чисел зубців шестір-
ні і колеса. Тому з коригованих зубчастих передач переважне застосу-
н.іння мають передачі з кутовою корекцією.
Граничні значення коефіцієнтів зміщення обмежуються такими
•1’ікторами [81: недопустимим підрізанням зубців при їхньому нарізу-
ні; загостренням зубців, тобто зменшенням їхньої товщини на ко-
виступів нижче, ніж допустимі межі; проявом інтерференції (вза-
ого проникнення) зубців при зачепленні їх; зменшенням коефі-
нта перекриття до граничного значення.
Детальні відомості про вибір коефіцієнтів зміщення хг та х2 можна
йти у довіднику 18].
267
22.5. Порядок розрахунку параметрів циліндричних
зубчастих передач зовнішнього зачеплення
Послідовність розрахунку параметрів циліндричних зубчастих
передач наведена у табл. 22.1, в якій формули дані для коригованих
косозубих передач із зубчастими колесами, нарізуваними інструмен-
том рейкового типу. Щоб дістати формули, придатні для розрахунку
параметрів некоригованих передач із прямими зубцями, слід взяти
коефіцієнти зміщень хх = х2 = 0, кут нахилу зубців р = 0, а нор-
мальний модуль зубців тп замінити на т.
Деякі з наведених розрахункових формул не розглядались вище,
однак вони відомі з курсу теорії машин та механізмів.
Вихідні дані для розрахунку такі: число зубців шестірні г1 та
колеса г2; модуль зубців тп; кут нахилу лінії зубців р; параметри нор-
мального початкового контуру: кут головного профілю а, коефіцієнт
висоти головки зубця /ід, коефіцієнт радіального зазора с*, коефі-
цієнт радіуса кривини перехідної кривої р*; коефіцієнт зміщення
за ГОСТ 16532—70 для шестірні хг та колеса х2.
22.6. Ковзання і тертя у зачепленні зубців
У точці контакту зубців, що знаходяться у зачепленні, мають
місце відносні перекочування та ковзання профілів зубців.Швидкість
ц8 ковзання профілів є одним із основних факторів, які визначають
втрати енергії у зачепленні, стійкість зубців проти спрацьовування
та заїдання.
Розглянемо швидкість точки К контакту спряжених профілів
зубців у довільний момент зачеплення їх (рис. 22.8, а). Абсолютні
значення швидкостей точки А, що належить до зубців шестірні
та колеса ок2, можна визначити за формулами:
Укі = «і (ОД); цК2 = <о2 (ОД).
Ці швидкості направлені перпендикулярно до радіусів ОГК т.і
ОД.
Нормальні та дотичні складові цих швидкостей відповідно маюп.
вигляд:
Упі = ^кі соз = цКі (ОлДОД) = ©і (0^);
Уп2 = Ок2 соз д2 = Цк2 (О2а2)/(ОД) = со2 (б^Г2);
Р/І = УК| ЗІП 6і = ^кіркі/(0Д) = (ОїркЬ
и/2 = Укі зіп 62 = Ук2Рк2/(ОД) = (02рк2.
268
25.1. Порядок розрахунку параметрів циліндричних зубчастих передач
Параметр Розрахункова формула Параметр Розрахункова формула
Ділильна міжосьо- ва відстань а Коефіцієнт суми зміщень Кут профілю зуб- ця а/ Кут зачеплення Початкова між- осьова відстань Ділильний діаметр шестірні (Іі Ділильний діаметр колеса Передаточне чис- ло и Початковий ді- аметр шестірні а = тп (гг 4- г2)/(2соз 0) = *б а/с05 0 іпу а/ш — 2х2 аД?! 4- г2) 4-іпу а, а» = тп (2і 4- г2)/(2со8 0) X X (соз ос//со5 аіи,) — т^/соБ 0 ^2 = /Ллг2/соз 0 « = 221гх б/ші = 2аш/(а -Ь 1) Початковий діа- метр колеса йц}2 Коефіцієнт допус- тимого зміщення у Коефіцієнт вирів- нювального зміще- ння Ьу Діаметр вершин зубців шестірні (іа1 Діаметр вершин зубців колеса сіа2 Діаметр впадин шестірні (Ї/і Діаметр впадин колеса <ї/2 Висота зубця шестірні Ні Висота зубця колеса Н2 = - Р е Є г? Д Б Б * 5? 1 Є - „ 1 7 1 1 € £ І 1 7 1 д- г г і । ->• і м -і— 4“ ~Ь* ® 5 и аг в ьо II и 1 СЧ еч СЧ о о 1 ” < + + 1 1 II II ®* ^3 .. ^3 ^3 ТЗ -с < II 11 II Р е* е» ^3 О 43 ^3 т»
Рис. 22.8. До питання ковзання зубців у їхньому зачепленні
За умовою нерозривності зачеплення
упі = ц„2 = (О^і) = со2 (О2а2).
При контакті зубців у точці К відносна швидкість ковзання їхніх
профілів
и$к = | Ц/1 — Ц/2 |= І (ОіРкі — (О2рк21 = («1 + ю2) (РК), (22.26)
де (РК) — змінна відстань від полюса зачеплення Р до точки К
дотикання профілів зубців.
Отже, швидкість ковзання зубців у зачепленні пропорційна від-
стані точки контакту до полюса. У полюсі Р вона дорівнює нулю, а
при переході через полюс міняє свій знак (епюра на рис. 22.8, а).
Максимальні значення швидкість ковзання має при контакті верхньо)
точки профілю головок зубців із нижньою точкою профілю ніжок
зубців.
Ковзання профілів зубців супроводжується тертям. Тертя є при-
чиною втрат потужності у зачепленні зубців та спрацьовування їхніх
робочих поверхонь.
Ділянки профілів зубців шестірні та колеса, які контактують між
собою при зачепленні, називаються активними профілями,
а відповідні їм поверхні зубців називають активними по-
верхнями зубців.
270
На ведучих зубцях сили тертя направлені від початкового кола,
а на ведених зубцях — навпаки (рис. 22.8, б). При певних діаметрах
зубчастих коліс відстань точок початку Ь2 і кінця зачеплення від
полюса Р (див. рис. 22.8, а), а відповідно і швидкість ковзання збіль-
шується з ростом висоти зубців, тобто їхнього модуля. У коліс із
малим модулем та великим'числом зубців ковзання менше, ніж у ко-
ліс із великим модулем та малим числом зубців.
22.7. Конструкції зубчастих коліс
та Тхне виготовлення
Конструкція зубчастих коліс залежить від їхніх розмірів, мате-
ріалу, способу і технології виготовлення заготовки, експлуатаційних
вимог. Якщо діаметр кола впадин мало відрізняється від діаметра
вала, шестірню виготовляють із валом як одну деталь (рис. 22.9, а, б).
Зубчасті колеса, що допускають посадку та закріплення на валу,
ік правило, виготовляють насадними. Це дає змогу підбирати різні
найвигідніші матеріали і термообробку для вала і колеса, спрощує
іехнологію виготовлення та дає можливість після спрацювання зуб-
ців колеса зробити його заміну, зберігаючи при цьому вал. Однак вали,
виготовлені разом із зубчастими колесами, мають більшу жорсткість,
що позитивно впливає на роботу зубчастої передачі.
Зубчасті колеса невеликого діаметра (сі 200 мм) можуть виго-
овлятись із круглого прокату, кованих або штампованих заготовок
/ вигляді суцільного диска без маточини або з маточиною (рис. 22.9, в).
Колеса середніх діаметрів (сі 600 мм) виготовляють із заготовок
жуванням, штампуванням або литтям. У більшості випадків такі
яолеса мають дискову конструкцію (рис. 22.9, г, д). Наближені розмі-
ні елементів цих коліс такі: діаметр маточини б/м = (1,8...2,0)б/о;
повжина маточини Ім = (1,0...1,2) Ь\ товщина диска 6Д = (0,25...
і,35) Ь\ товщина обода 6О = (3...4) т.
Для великогабаритних передач заготовки для зубчастих коліс
вготовляють литтям (рис. 22.9, д) або зварюванням (рис. 22.9, е).
використанні для зубчастих вінців високоякісних сталей інко-
істосовують бандажовані зубчасті колеса (рис. 22.9, є). У цьому
зубчастий вінець насаджують на центральну колісну частину
। .ірантованим натягом і додатково закріплюють гвинтами.
Сучасні методи утворення поверхонь зубців зубчастих коліс до-
Гйтньо різноманітні і нараховують у загальній кількості близько
М) найменувань. Сюди належать зубонарізування за допомогою зубо-
нх інструментів усіх типів, лиття, порошкова металургія та
гичне деформування, яке забезпечує підвищення міцності зубців
оку продуктивність при виготовленні. Вибір будь-якого методу
юутворення зубців залежить від комплексу економічних, експлу-
271
Рис. 22.9. Конструкції зубчастих коліс
атаційних, технологічних вимог, що ставляться до конструкцій зуб-
частих коліс.
Широке застосування мають два методи нарізування зубців: ко-
піювання та обкочування.
При нарізуванні зубців методом копіювання їх профіль ді-
стають як копію контуру робочої частини зуборізного інструменту
(рис. 22.10) — дискової або пальцевої фрези, що послідовно прорізає
впадини між зубцями. Основні недоліки цього методу — це відносно
низька продуктивність, мала точність та потреба великої кількосн
зуборізного інструменту, оскільки форма профілю зубців залежнії,
не тільки від модуля, а й від числа зубців зубчастого колеса.
Основний, більш продуктивний та точний метод нарізування зуб
ців — це метод обкочування, при якому одночасно нарізується кілі,
ка зубців і профіль зубців
утворюється у вигляді оги-
наючої лінії послідовних
положень різальних кромок
інструменту (рис. 22.11)
Як інструмент тут
використовуватись
альне зубчасте колесо (дон
бач), що здійснює зворої
но-поступальний рух. Од
ним довбачем можна парі
Рис. 22.10, Нарізування зубців методом копію-
вання
МОЖ<
спеці
272
Рис. 22.11. Нарізування зубців методом обкочування
іувати зубчасті колеса з різним числом зубців даного модуля, при-
юму колеса як зовнішнього, так і внутрішнього зачеплень. При без-
межному збільшенні діаметра та числа зубців довбача будемо мати
інструментальну рейку (рис. 22.11) — найбільш простий та точний
інструмент для нарізування зубців за методом обкочування.
Принцип стругання з почерговими робочими та холостими ходами
інструменту, який має місце при нарізуванні зубців довбачем та рей-
кою, не забезпечує високої продуктивності. Якщо замінити інстру-
ментальну рейку черв’ячною фрезою (рис. 22.12), що має у нормаль-
ному перерізі профіль рейки, то процес стругання заміняється непе-
рервним більш продуктивним процесом фрезерування. Цей спосіб
нарізування зубців має переважне застосування. Він використовується
для коліс як із прямими, так і з косими зубцями. Метод обкочування
застосовується і для нарізування зубців конічних зубчастих коліс
(рис. 22.12), яке здійснюється на спеціальних верстатах.
Основними методами остаточної або фінішної обробки зубців
є шліфування, що виконується на спеціальних зубошліфувальних
верстатах, у більшості випадків після термообробки нарізаних зуб-
ців, та шевінгування, при якому інструмент (шевер), який працює
за методом обкочування, знімає дуже тонкий шар металу з профіль-
них поверхонь зубців. Інколи для згладжування мікронерівностей
Рис. 22.12. Нарізування зубців фрезеруванням
273
на робочих поверхнях незагартованих зубців застосовують обкочування
зубчастих коліс протягом кількох хвилин під навантаженням при
зачепленні їх із еталонним колесом високої твердості,
22.8. Точність зубчастих передач
Одним із основних показників якості зубчастих передач є їх точ-
ність. Точність виготовлення зубчастих коліс та передач визначає
не тільки "хні кінематичні та експлуатаційні показники, а й такі ха-
рактеристики, як інтенсивність шуму та вібрації, а також суттєве
впливає на показники міцності передачі, довговічність її роботи,
втрати на тертя тощо.
Термінологія та позначення похибок і допусків для зубчастих
передач регламентовані відповідними стандартами.
Основними показниками точності [8] функціонування евольвент-
них зубчастих передач є такі: кінематична точність; плавність роботи;
контакт зубців; бічний зазор.
Норми кінематичної точності регламентують пов-
ну похибку передаточного відношення — найбільшу похибку кута
повороту: для зубчастого колеса — у межах його одного оберту; для
передачі — за повний цикл зміни відносного положення зубчастих ко-
ліс пари. Величина та характер кінематичних похибок є вирішальними
для зубчастих передач точних кінематичних ланцюгів, ділильних ме-
ханізмів, а також планетарних передач із кількома сателітами.
Норми плавності роботи регламентують циклічні
похибки передаточного відношення — складові повної похибки кута
повороту зубчастого колеса, що багатократно повторюються за одні:
оберт колеса. Такі похибки є найважливішими для особливо точних
відлікових і ділильних пристроїв та для високошвидкісних зубчастих
передач.
Норми контакту зубців визначають точність (повно-
ту) прилягання робочих поверхонь зубців спояжених у передачі
коліс, що є найсуттєвішим для важконавантажених зубчастих передач
Норми бічного зазора регламентують гарантований
(найменший) бічний зазор між неробочими (при одному напрям,
обертання) поверхнями зубців передачі і можливі межі коливання
бічного вазора. Гарантований бічний зазор запобігає заклинювання’
передачі при її нагріванні та появі ударів по неробочих профілях
при динамічних навантаженнях, забезпечує потрібні умови змащу-
вання зубців.
Бічний зазор встановлюють видом спряження зубча-
стих коліс та видом допуску на бічний зазор. Для зубчастих
передач із модулем т 1 мм встановлено шість видів спряження —
А, В, С, О, Е, Н та вісім видів допуску на боковий зазор — х, у,
274
Таблиця 22.2. Рекомендації щодо вибору ступеня точності зубчастих
передач залежно від колової швидкості, м/с
Ступінь к! нема тич- Прямі зубці для пере- дачі Непрямі зубці для передачі Область застосування
мої точно- сті циліндрич- ної конічної циліндрич- ної конічної
5 6 7 8 9 >15 До 15 > 10 > 6 » 2 >12 До 12 > 8 > 4 » 1,5 >30 До ЗО > 15 » 10 > 3 >20 До 20 > 10 ? 7 » 2 Швидкохідні передачі в авіа- будуванні, ділильні меха- нізми Передачі загального призна- чення Тихохідні передачі сільсько- господарських машин
2, а, Ь, с, (І, Ь. У спряженні виду Н мінімальний зазор дорівнює
нулю, а у спряженні виду А мінімальний зазор найбільший. У біль-
шості випадків для силових передач рекомендують використовувати
спряження виду В, а для реверсивних передач спряження виду С
і О.
За нормами кінематичної точності, плавності роботи та контакту
зубців зубчасті передачі і колеса поділяють на 12 ступенів
точності (із збільшенням номера ступеня точності точність
зменшується). Найбільше розповсюдження у машинобудуванні ма-
ють зубчасті передачі із ступенем точності 5, 6, 7, 8, 9. Рекомендова-
ні ступені точності зубчастих передач залежно від колової швидкості
для силових передач наведені у табл. 22.2.
Практично рідко зустрічаються передачі, для забезпечення якозті
яких усі три види норм треба витримувати з однаковим ступенем
точності. У більшості випадків один або два показники точності
є визначальними, а інші менш важливі. Залежно від конкретних
експлуатаційних вимог до зубчастої передачі стандартами рекомен-
дується комбінування норм кінематичної точності, плавності робо-
ти та контакту зубців із різних ступенів точності для однієї і тієї ж пе-
редачі. Границі комбінування ступенів точності обмежуються стан-
дартами у зв'язку з наявністю експлуатаційного та технологічного
взаємозв’язку похибок зубчастих передач.
Комбінації ступенів точності зубчастих передач (т ^> 1 мм) за-
лежно від кінематичної точності (номера ступеня точності) пСт мо-
жуть бути такі:
Плавність роботи лст — 2 лст — 1
л
лст 4- і
Контакт зубців (лст — 2)
("ст-0
^лст
275
Стандартами на допуски зубчастих передач встановлена система
умовних позначень точності та вимог до бокового зазору зубчастих
передач і зубчастих коліс.
При однаковому ступені точності за нормами кінематичної точ-
ності, плавності роботи та контакту зубців для відповідного виду
спряження умовне позначення складається з цифри та літери, розді-
лених тире. Цифра означає ступінь точності, а літера — вид спря-
ження зубців, наприклад:
6 — В ГОСТ 1643—81 — для циліндричної евольвентної пере-
дачі;
7 — С ГОСТ 1758 - 81 — для конічної зубчастої передачі.
При комбінуванні норм із різних ступенів точності в умовному
позначенні послідовно зазначають через тире три цифри, що відповідно
означають ступені точності за нормами кінематичної точності, плав-
ності роботи та контакту зубців, а літера вид спряження зубців:
7 — 5 — 7 — В ГОСТ 1643—81; 8 —7—6 — О ГОСТ 1758—81.
Показники, норми точності та норми бічного зазора для нееволь-
вентних зубчастих передач нормуються галузевими стандартами або
стандартами підприємств.
22.9. Матеріали і термообробка зубчастих коліс
Зубчасті колеса виготовляють із різноманітних матеріалів. Ос-
новним із них є сталь, яка допускає зміцнюючу термічну або хіміко-
термічну обробку. Сталеві зубчасті колеса забезпечують високу
несучу здатність та довговічність зубчастої передачі.
Для виготовлення зубчастих коліс найбільше застосування мають
якісні вуглецеві сталі 40, 45, 50, сталі з підвищеним вмістом марган-
цю 40Г2, 50Г, леговані сталі 40Х, 40ХН, 40ХНМА, 35ХГСА та ін.
Залежно від твердості після термообробки сталеві зубчасті колеса
умовно можна поділити на дві основні групи:
а) зубчасті колеса з твердістю Н 350 НВ після нормалізації
та поліпшення;
б) зубчасті колеса з твердістю Н > 350 НВ після об’ємного гар-
тування, гартування СВЧ, цементації, азотування.
Із твердістю Н 350 НВ зубчасті колеса нарізають після
термообробки заготовки. При цьому досягається достатня точність
виготовлення зубчастих коліс без використання дорогих фінішних
операцій. Колеса цієї групи добре припрацьовуються, а зубці не
піддаються крихкому руйнуванню при динамічних навантаженнях
Для ліпшого припрацьовування зубців твердість шестірні рекомен-
дують назначати більшою від твердості колеса (//, Н2 4- 25..
30 НВ).
У косозубих та шевронних зубчастих передачах інколи назва
чають твердість зубців шестірні значно вищою, ніж твердість зубців
276
колеса (приблизно на 100 одиниць НВ). Цим досягається деяке під-
вищення несучої здатності зубчастих передач із коси»и зубцями.
Технологічні переваги сталей із твердістю Н 350 НВ забезпе-
чили їм широке застосування в умовах індивідуального та малосе-
рійного виробництв, у мало- та середньонавантажених передачах,
якщо не ставляться жорсткі обмеження відносно габаритних розмі-
рів зубчастих передач. Такі сталі можуть бути використані для ви-
готовлення великогабаритних зубчастих коліс, термообробка яких
утруднена.
Сталі зтвердістю//> 350 НВ застосовують для високо-
навантажених зубчастих коліс відносно невеликих розмірів. Спеці-
альні види термообробки дозволяють дістати твердість Н = 50...
60 НКС. Однак висока твердість створює деякі труднощі у виготов-
ленні зубчастих коліс. Нарізування зубців при високій твердості
заготовки неможливе або дуже утруднене. Тому термообробку здій-
снюють після нарізування зубців. Деякі види термообробки (об’ємне
гартування, цементація) супроводжуються значним коробленням зуб-
ців. Тому для виправлення форми зубців потрібні додаткові дорогі
фінішні операції (шліфування, притирання та ін.). Ці труднощі
простіше перебороти в умовах великосерійного та масового виробниц-
тва зубчастих коліс, де значно легше окупаються спеціальні облад-
нання, інструменти, верстати.
Крім того, зубчасті колеса з високою твердістю погано припра-
цьовуються (немає потреби в різниці твердості), що вимагає підви-
щеної точності виготовлення та монтажу передачі, значно більшої
жорсткості валів та їхніх опор.
Високу твердість зубців зубчастих коліс можна дістати різними
видами термічної та хімікотермічної обробки.
О б’є мне гартування — найпростіший спосіб добуван-
ня високої твердості. Для об’ємного гартування використовують
вуглецеві та леговані сталі з середнім вмістом вуглецю 0;35—0,60 %.
При цьому можна дістати твердість Н = 45...55 НКС. Недоліки об’єм-
ного гартування: викривлення зубців і потреба подальших фінішних
операцій; зменшення міцності зубців при ударних навантаженнях;
обмеження розмірів заготовок, які можуть сприймати об’ємне гар-
тування.
Цементація є тривалим та дорогим процесом. Однак вона
забезпечує дуже високу твердість Н = 58...63 НРС. При гартуванні
після цементації форма зубців також викривляється. Для цементації
використовують маловуглецеві леговані сталі 20Х, 12ХНЗА та ін.
Леговані сталі забезпечують підвищену міцність серцевини і цим
запобігається продавлювання крихкого поверхневого шару зубців
при перевантаженнях. Глибина цементації 0,8—1,2 мм. Цементацію
застосовують для зубчастих коліс, маса і габаритні розміри яких
мають вирішальне значення (транспортні засоби, авіація).
277
Поверхневе гартування здійснюють нагріванням СВЧ
або газовим полум’ям; воно забезпечує твердість Н = 48...54 НКС.
Застосовується для зубчастих коліс із порівняно великими зубцями
(т > 5 мм). При малих модулях виникає небезпека прогартовування
зубців наскрізь. При відносно тонкому поверхневому гартуванні зубці
викривляються мало. Для поверхневого гартування використовують
сталі 45, 40ХН та ін.
Азотування також забезпечує високу твердість поверхне-
вого пару зубців (Н = 60...65 НКС). Мала товщина твердого шару
близько 0,1—0,6 мм робить зубці чутливими до перевантажень та
непридатними для роботи в умовах абразивного спрацювання. Сту-
пінь викривлення зубців після азотування невеликий. Тому цей вид
хіміко-термічної обробки доцільно використовувати у тих випадках,
коли важко шліфувати зубці (наприклад, у колесах із внутрішніми
зубцями). Азотуванню піддаються колеса із середньовуглецевих ста-
лей, до складу яких входить алюміній (38ХМЮА, 42Х2Н2МФЮА
та ін.). Заготовки зубчастих коліс, призначених для азотування, тре-
ба попередньо гартувати та зробити відпуск (поліпшення) для під-
вищення міцності серцевини.
Сталеве литво використовують для виготовлення великогабарит-
них зубчастих коліс (і >> 500 мм). При цьому застосовують сталі
40Л, 45Л, 50Л, які треба нормалізувати.
Механічні характеристики деяких марок сталей, що використову-
ються для виготовлення зубчастих коліс, наведені у табл. 22.3.
Для виготовлення шестірні та колеса можна брати однакові або
різні марки сталей. У табл. 22.4 наведено рекомендації щодо вибору
різних варіантів матеріалів для шестірні і колеса та доцільних видів
термообробки і твердості.
Крім сталей для виготовлення великогабаритних тихохідних зуб-
частих коліс використовують чавуни. Чавунні зубці достатньо стійкі
проти заїдання та спрацювання, але мають низьку міцність на згин.
Вони також не можуть працювати в умовах ударного навантаження.
Для виготовлення зубчастих коліс у більшості випадків застосовують
сірі чавуни марок СЧ 18— СЧ 35.
Останнім часом у малонавантажених передачах широко застосо-
вуються зубчасті* колеса з неметалевих матеріалів. Такі колеса виго-
товляють із шаруватих пластиків, текстоліту або поліамідів (кап-
рон, нейлон). Вони здебільшого працюють у парі із сталевими зуб-
частими колесами. Передачі з пластмасовими колесами менш чутливі
до неточностей виготовлення та монтажу, добре припрацьовуються,
створюють менший шум, але поступаються металевим колесам за несу-
чою здатністю та довговічністю Поліамідні колеса достатньо стійкі
при роботі в агресивному корозійному середовищі.
278
Табл ж я Т2.1. МехаяйвІ характеристики деяких стале* для виготовлення зубчастих коліс
Марка сталі Вид заготовки Граничні розміри заготовки, мм Термообробка Твердість зубців Границя
діаметр ширина серцевини поверхні МІЦНОСТІ МПа II текучості аг МПа
40Л Литво — Нормалізація 163—207 НВ 163—207 НВ 550 320
45 Поковка 125 80 Поліпшення 235—262 НВ 235—262 НВ 780 540
80 50 > 269—302 НВ 269—302 НВ 890 650
40Х Поковка 280 125 > 235—262 НВ. 235—262 НВ 790 640
125 80 » 269—302 НВ 269—302 НВ 900 750
125 80 Поліпшення та гартуван- 269—302 НВ 45-50 НКС 300 750
ня СВЧ
40ХН > 320 200 Поліпшення 235- 262 НВ 235 -262 НВ 800 630
35ХМ 200 125 » 269—302 НВ 269—302 НВ 920 • 5 750
200 125 Поліпшення та гартуван- 269—302 НВ 48—53 НКС 920 5 750
ня СВЧ
40ХНМА > 125 80 Поліпшення та азотував- 269—302 НВ 50—56 НКС 980 780
ня
20Х > 200 125 Поліпшення, цементація 300—400 НВ 56—63 НКС 1000 800
20ХМН та гартування
Таблиця 22.4. Рекомендації щодо вибору варіантів матеріалів для шестірні та колеса
ь Шестірня Колесо
ЕБ <0
а СО Марка сталі Термообробка Твердість Марка сталі Термообробка Твердість
1 40Х, 45, 40ХН Поліпшення 269—302 НВ 40Х, 45, 40ХН Поліпшення 235—262 НВ
2 40Х, 40ХН, 35ХМ Поліпшення та гартування СВЧ 40-53 НКС 40Х, 40ХН, ЗОХМ » 269—302 НВ
3 40Х, 40ХН, 35ХМ Те саме 45—53 НКС 40Х, 40ХН, 35ХМ Поліпшення та гартування СВЧ 45—53 НКС
4 20Х, 20ХНМ Поліпшення, це- ментація та гарту- вання 57—63 НКС 40Х, 40ХН, 35ХМ Те саме 45—53 НКС
5 20Х, 20ХНМ Те саме 56—63 НКС 20Х, 20ХНМ Поліпшення, це- ментація та гар- тування 56—63 НКС
22.10. Види руйнування зубців та критерії
розрахунку на міцність зубчастих передач
Підчас роботи зубчастої передачі зубці коліс періодично взаємодіють
між собою. При цьому лінія контакту зібців постійно міняє своє
положення на активній поверхні зубців за час знаходження їх у кон-
такті. Наявність ковзання активних поверхонь призводить до виник-
нення сил тертя між навантаженими зубцями. Такий складний харак-
тер навантаження контакту зубців зубчастих коліс є причиною пев-
них руйнувань як поверхневого шару зубців, так і зубців взагалі.
Практика експлуатації зубчастих передач показує, що найбільш
характерними є такі види руйнування зубців: втомне викришування
активних поверхонь, поломка зубців, відшаровування поверхневих
шарів зубців, абразивне спрацювання, пластична деформація та за-
їдання зубців.
Втомне викришування активних поверхонь
зубців пов’язане з дією циклічно змінних контактних напружень.
Ці напруження спричинюють виникнення втомних тріщин у поверхне-
вих шарах матеріалу зубців, подальший розвиток яких призводить до
викришування частинок металу.
Поява слідів викришування не завжди є ознакою небезпечного
руйнування активних поверхонь зубців. У початковий період припра-
цьовування зубчастих коліс через неточності виготовлення та монтажу,
податливість валів та їхніх опор може бути значна нерівномірність
розподілу навантаження по довжині зубців. На деяких ділянках
поверхонь зубців контактні напруження можуть досягати великих
значень і бути причиною появи локального викришування. Подальше
припрацьовування збільшує контакт зубців і контактні напруження
зменшуються. Підчас подальшої довгочасної роботи передачі кількість
раковин викришування не збільшується. Сліди викришування, що
появились у початковий період роботи передачі, з часом можуть
частково або повністю завальцюватись, зробитись непомітними і навіть
зовсім зникнути. Таке явище називається обмеженим викришуванням.
Воно допустиме при роботі передач і особливо характерне для зуб-
частих коліс із твердістю робочих поверхонь зубців Н 350 НВ.
Якщо число раковин викришування та їхні розміри збільшуються,
то викришування називається прогресуючим. Спотворення профілів
зубців внаслідок викришування їх призводить до порушень правиль-
ності зачеплення і до появи додаткових навантажень на зубці.
У розвитку викришування суттєву роль відіграє мастило. При на-
явності мастила створюються сприятливі умови для розвитку мікро-
тріщин та викришування, перш за все на ніжках зубців, поверхні
яких є відстаючими у відносному русі зубців. На рис. 22.13, а пока-
зані сліди втомного прогресуючого викришування на поверхні ні-
жок зубців поблизу полюсної лінії.
280
Рис. 22.13. Види руйнування зубців зубчастих коліс
Відмітимо особливості втомного руйнування активних поверхонь
зубців у передачах із косозубими колесами. При нахиленому розмі-
щенні контактної лінії (рис. 22.13, б) викришування, що почалось
на ніжках зубців, може не викликати порушень правильності зачеп-
лення, оскільки,головки зубців залишаються роботоз дат ними, спри-
ймаючи більшу частину навантаження. У зв’язку з цим під час експлу-
атації косозубих коліс можна допускати викришування ніжок зубців.
Косозубу передачу вважають спрацьованою, якщо викришування роз-
повсюдилось і на головки зубців.
У передачах, що працюють із великим спрацюванням активних
поверхонь зубців, наприклад в умовах недостатнього змащування та
абразивного забруднення, втомне викришування не спостерігається,
оскільки поверхневі шари матеріалу зубців стираються раніше, ніж
появляються тріщини втоми.
Основні заходи для запобігання викришування активних повер-
хонь зубців такі: обмеження контактних напружень за допомогою
розрахунків розмірів передачі; підвищення твердості матеріалів
вубчастих коліс термообробкою; підвищення точності виготовлення
вубчастих коліс та монтажу передачі.
Поломка зубців внаслідок раптового характеру появи
< дуже небезпечним видом їхнього руйнування. Розрізняють два
пнди поломки зубців зубчастих передач:
а) поломка від великих перевантажень статичної або ударної дії;
б) втомна поломка, що відбувається внаслідок дії змінних напру-
жень згину протягом порівняно тривалого строку експлуатації пе-
редачі.
Довгочасно діючі змінні напруження, спричинені деформацією
чину зубців, сприяють появі мікротріщин, що виникають у зоні
281
концентрації напружень, здебільшого в області переходу зубців
у обід колеса (рис. 22.13, в). Мікротріщини під час подальшої роботи
передачі розповсюджуються в глибину зубця по нормалі до перехідної
кривої. Поломка зубців найчастіше зустрічається в чавунних зуб-
частих колесах і колесах із високою твердістю зубців. У зубчастих
колесах із середньою та низькою твердістю поломки виникають знач-
но рідше, оскільки в цьому разі гранична несуча здатність зубців
визначається стійкістю їхніх активних поверхонь проти втомного ви-
кришування.
При поломці зубців косозубих коліс тріщина виникає біля торце-
вої поверхні колеса в основі зубця (рис. 22.13, г) і розповсюджується
похило по довжині зубця до його вершини.
Загальні заходи запобігання поломки зубців: збільшення модуля
зубців; використання додатних коефіцієнтів зміщення при нарізу-
ванні зубців; термообробка та зміцнення поверхонь зубців у зоні
дії максимальних напружень; підвищення точності виготовлення та
монтажу передачі; захист передачі від великих перевантажень.
Відшаровування поверхневих шарів зубців
спостерігається у тих випадках, коли під зміцненим поверхневим ша-
ром зубців зведені контактні напруження достатньо великі. Через
періодичну дію глибинних напружень під зміцненим шаром мате-
ріалу можуть виникати втомні тріщини, розвиток яких спричинює
відшаровування окремих ділянок поверхневого зміцненого шару
Цей вид руйнування найнебезпечніший для коліс, зубці яких мають
поверхневе зміцнення (цементацію, азотування, поверхневе гарту-
вання). Відшаровуванню сприяє дія підвищених навантажень на
зубці.
Щоб запобігти відшаровуванню поверхневих шарів зубців, треба
забезпечити відповідну товщину зміцненого шару та достатню міц-
ність серцевини зубця.
Абразивне спрацювання зубців — основна при-
чина виходу з ладу зубчастих передач із недостатнім змащуванням
зубців. Суть його полягає в стиранні активних поверхонь зубців,
яке залежить від тиску, швидкості ковзання зубців, можливості по-
падання в зону зачеплення абразивних частинок та ін. Спрацювання
зубців (рис. 22.13, д) може бути у відкритих передачах та недостат-
ньо захищених від забруднення закритих передачах гірничого облад-
нання, сільськогосподарських машинах та ін.
У передачах із спрацьованими зубцями збільшуються зазори
у зачепленні, виникає шум, зростають динамічні навантаження. Одно-
часно міцність спрацьованого зубця зменшується внаслідок зміни
його поперечного перерізу.
Розрахунку зубців із умови запобігання спрацюванню в даний
час не існує, бо закономірності спрацювання дуже складні і залежать
від багатьох випадкових факторів. Однак можна перелічити основні
282
заходи, що сприяють підвищенню стійкості зубців проти спрацюван-
ня- збільшення твердості активних поверхонь, надійний захист пе-
редачі від попадання твердих абразивних частинок, використання мас-
тил із відповідними властивостями.
Пластична де ф^о рмація зубців може виникнути
в зоні контакту зібців, де їх матеріал знаходиться під дією значного
всебічного стиску. Сили тертя спричинюють переміщення поверх-
невих шарів матеріалу у напрямі вектора швидкості ковзання. При
цьому на поверхні ведучих зубців поблизу полюсної лінії утворюєть-
ся впадина, а на поверхні ведених зубців — виступ. Особливо знач-
ні пластичні деформації виникають у зубчастих колесах, виготовле-
них із матеріалів з невеликою твердістю активних поверхонь зубців.
Щоб запобігти пластичним деформаціям, треба збільшити твердість
зубців та використати мастила підвищеної в’язкості.
Заїдання спостерігається переважно у високонавантажених
та високошвидкісних зубчастих передачах. У зоні контакту зубців
цих передач розвивається висока температура, яка сприяє розриву
масляної плівки і утворенню безпосереднього металевого контакту
зубців. Тут відбувається зчіплювання частинок металу з подальшим
підривом їх від менш міцної поверхні. Нерівності, що утворились
при цьому, задирають робочі поверхні зубців у напрямі ковзання
<пнс 22.13, е). Ударні навантаження, особливо кромковий удар,
>ияють заїданню зубців.
Заходи запобігання проти заїдання такі самі, як і проти спрацю-
іня зубців. Ефективними є азотування та ціанування зубців.
Ьажане використання зубців із модифікованим профілем та інтенсив-
но охолодження мастила Позитивні результати дає застосування
протизадирних мастил із підвищеною в’язкістю.
Розглянуті види руйнування зубців зубчастих передач не в однако-
вій мірі вивчені до цього часу. Найглибше теоретично і практично
досліджені явища втомного викришування активних поверхонь зуб-
ців, що спричинені контактними напруженнями о#, та явища втомної
поломки зубців, які є результатом циклічної дії напружень згину
в? у зубцях (позначення контактних напружень о/у та напружень
•гину о> для зубців зубчастих передач узгоджені з позначеннями,
і іятими в іноземній літературі). Вибір норм допустимих напружень
н та [оЬ? сприяє запобіганню появи інших видів руйнування зуб-
і зубчастих передач.
У сучасній методиці розрахунку зубчастих передач на міцність
із двох напружень Он та О/> за основне у більшості випадків беруть
контактне напруження, оскільки в межах заданих габаритних розмі-
рів зубчастих коліс залишається постійним, а можна зменшити,
•більшуючи модуль зубців.
ГОСТ 21354—87 рекомендує такі види розрахунків на міцність
•убців циліндричних евольвентних передач:
283
1. Розрахунок на контактну витривалість виконується, щоб
запобігти втомному викришуванню активних поверхонь зубців.
2. Розрахунок на контактну міцність при дії максимального на-
вантаження (розрахунок на контактну міцність); виконується, щоб
запобігти залишковій деформації або крихкому руйнуванню поверх-
невого шару зубців.
3. Розрахунок на витривалість при згині; виконується, щоб запобігти
втомній поломці зубців.
4. Розрахунок на малоциклову витривалість при згині; виконується,
запобігти поломці зубців від малоциклової втоми при плавному та
ударному навантаженнях.
5. Розрахунок на міцність при згині максимальним навантажен-
ням; виконується, щоб запобігти залишковим деформаціям або крих-
кій поломці зубців.
У розрахунках зубчастих передач треба враховувати умови на-
вантаження зубців. Під час однобічного обертання коліс (нереверсив-
ні передачі) зубці навантажуються тільки з одного боку, а під час обер-
тання удвох напрямках (реверсивні передачі) — із двох боків. Тому
при перевірці на контактну витривалість активних поверхонь зубців
реверсивних зубчастих передач, якщо умови їхньої роботи (наванта-
ження, його тривалість, швидкість обертання) при зміні напряму
обертання міняються, треба для кожного робочого боку зубців зуб-
частих коліс виконувати два самостійних розрахунки. Перевірку
зубців на витривалість при згині виконують за допустимими напру-
женнями, які є різними у разі одно- і двобічного навантажень зубців.
22.11. Допустимі напруження у розрахунках
зубчастих передач
Допустимі контактні напруження. При розрахунках активних по-
верхонь зубців на контактну витривалість допустиме контактне напру-
ження визначають за такою формулою (тут і далі при розрахун-
ках зубчастих передач на міцність уведено деякі спрощення щодо
ГОСТ 21354—87):
[а]н = (он \іть%хКнь)/8н> (22.27)
деонпть— границя контактної витривалості поверхонь зубців, що
відповідає базі випробувань А^о; 7/? — коефіцієнт, що враховує
шорсткість спряжених поверхонь зубців (беруть спільним для пари
коліс, але для більш грубої поверхні одного з них: 2/? = 1 при /?о =»
= 1,25...0,63; = 0,95 при /?о = 2,5...1,25 і 2/? = 0,9 при /?? =»
= 40...10); Кнь — коефіцієнт довговічності; — коефіцієнт запасу
(для зубчастих коліс із однорідною структурою 8н = 1,1, а для коліо
Із поверхневим зміцненням зубців 8н — 1,2).
284
Т а б л и ц я 22.5. Границі контактної витривалості зубців
Сталі Термообробка або хіміко*тер* мічна обробка зубців Твердість повер- хонь зубців °Н Ііт Ь* МПа
Вуглецеві та » Нормалізація або поліп- //<350 НВ "Г
леговані Леговані шення Об’ємне гартування Поверхневе гартування Цементація або нітроце- ментація Азотування 38—50 НЦС 40—50 НКС Н > 56 НКС 550—750 НУ 18Ннкс+ 150 Н“ 200 1050
Границю контактної витривалості поверхонь зубців нть знахо-
дять залежно від виду термічної обробки зубців та їхньої твердості
за табл. 22.5, а базу випробувань Уно — за формулою (твердість #нв
в одиницях Брінелля)
АГно = ЗОЯЙв. (22.28)
Коефіцієнт довговічності Кне враховує можливості збільшення
допустимих напружень при еквівалентному числі циклів і^не на-
вантаження зубців за строк служби передачі, меншому від бази ви-
пробувань Мно-
Кнь = ^но/Ннв. (22-29)
Еквівалентне число циклів навантаження зубців за строк служби
передачі визначають з урахуванням режиму навантаження зубчас-
тих коліс (значення Кне Див. у табл. 4.1):
N НЕ = КнЕ^^з
де сумарне число циклів навантаження зубців за строк служби
/і, год, передачі при кутовій швидкості (о, рад/с, зубчастого колеса
знаходять за формулою
N2 = 1800/со/і/л, (22.30)
де і — число зубчастих коліс, спряжених із даним зубчастим коле-
сом, для якого визначається
Існують такі обмеження коефіцієнта довговічності Кне-
а) при іїно < Мне і постійному режимі навантаження {Кне = 1)
рекомендують брати
Кне — уґ Мнп/МНЕї^
а для інших типових режимів навантаження (див. рис. 2.3) беруть
Кне = 1;
285
б) при Л’но > Мне і однорідній структурі матеріалу зубчастих
коліс Кнь 2,6, а для зубців із поверхневим зміцненням Кнь 1,8.
У розрахунках прямо- і косозубих передач із твердістю зубців
Н > 350 НВ за розрахункове допустиме напруження Іоін беруть
менше із двох значень [стіні та [о]н2, розрахованих для зубців шестір-
ні та колеса. Для косозубих передач, якщо твердість зубців хоча б
одного колеса Н < 350 НВ, за розрахункове допустиме контактне
напруження беруть 16]
[о]н = 0,45 ([а]н1 + [а]Н2) (22.31)
із виконанням умов: [а]/у 1,23 [о)н тіп — для циліндричних зуб-
частих передач; [аін 1,15 [а)н тіп — для конічних зубчастих пере-
дач. Тут [о)н тіп менше 3 ДВОХ ЗНЗЧЄНЬ [а]ні і ІОІН2-
Підвищення несучої здатності передач із косими зубцями та знач-
ною різницею у твердості зубців шестірні та колеса (більше значення
допустимого контактного напруження [оЬ) пов’язане із нахиленим
розміщенням контактних ліній на робочих поверхнях зубців. Ніжки
зубців мають меншу стійкість проти викришування, ніж головки,
бо у них несприятливе поєднання напряму ковзання та перекочування
поверхонь зубців. Відповідно ніжка зубця колеса, що працює з го-
ловкою зубця шестірні, починає викришуватись у першу чергу.
При цьому через нахил контактної лінії навантаження (частково або
повністю) передається на головку зубця колеса, що працює із ніжкою
зубця шестірні. Послаблена ніжка зубця колеса розвантажується
і її подальше викришування не відбувається. Додаткове навантажен-
ня ніжки зубця шестірні не е небезпечним, оскільки її зубці мають
більшу твердість. Використання косозубої шестірні з високою твер-
дістю зубців дозволяє додатково підвищити несучу здатність передачі
до 20—25 %.
Допустиме граничне контактне напруження [а]н тах залежить від
виду термічної або хіміко-термічної обробки зубчастих коліс. Для
зубців зубчастих коліс після нормалізації, поліпшення або об’ємного
гартування з низьким відпусканням (в тому числі і після нагрів.і
ня СВЧ) [пінтах = 2,8ат, де ат — границя текучості при розтяі
Для зубців після цементації, а також після контурного гартувані
при нагріванні СВЧ 1а]н тах = 40Л/нкс. Для зубців після азотуван
(оін тах = 3//ну-
Допустимі напруження на згин. У розрахунках зубців навиїї
валість при згині допустиме напруження визначають окремо для зубим
шестірні [а]и та зубців колеса [а]/?2 за формулою
[а]Р = о/? \\тьКрсКри8р, (22 3'.'і
Де спіть — границя витривалості зубців при згині, що відпові/і •
базі випробувань Мро = 4 • 10е при коефіцієнті асиметрії А?
Кгс — коефіцієнт впливу напряму прикладання навантаження >
286
І
Таблиця 22.6. Границі витривалості зубців при згині
Сталі Термообробка або хім іко-термічна обробка дубців в» Твердість зубців 0РІІтЬ МПа
поверхні і 1 серцевина
Вуглецеві та леговані 40, 45 40Х, 40ХН Нормалізація, поліпшення 180—300НВІ £ 180—300 НВ
Леговані 40Х, 40ХН, 40ХФА Об’ємне гар- тування 45—55 НРС 45—55 НЯС 600
Леговані 20Х, І2ХНЗА 20ХГ? Цементація 56—62 ННС 24—40 НКС 800
Леговані 40Х, 40ХФА, 38ХМЮА Азотування 550—700 НУ 24—40 НЯС 30°+12Янкс
зубні; Крі — коефіцієнт довговічності; з? — коефіцієнт запасу»
гкгй беруть: 5/г = 1,75 — при ймовірності неруйнування зубців
І зр — 2,2 — при ймовірності неруйнування більше від 0,99.
раниця витривалості зубців при згині залежить від виду терміч-
абс хіміко-термічної обробки сталевих зубчастих коліс Деякі
для визначення огіїт й наведені у табл. 22.6.
Іри однобічному прикладанні до зубців навантаження (неревер-
іі передачі) коефіцієнт Крс = 1> а при двобічному прикладанні
інтаження (реверсивні передачі) койинієнт Крс визначають за
лулою
Крс^1-УрсТ\/Ть (22.33;
уРс — коефіцієнт, що враховує здатність матеріалу чинити опір
куванню при зміні напряму навантаження (урс = 0,35 для зуб-
після нормалізації або поліпшення; уЕс = 0,25 — для зубців
оверхневим зміцненням; урс = 0,1 — для зубців після азотуван-
• Ті > Ті — обертові моменти, що навантажують передачу у про-
імлежних напрямах.
Коефіцієнт довговічності
Крь = N ро/МрЕ (22.34)
Тут т? — показник степеня кривої втоми, який беруть: тр — 6
зубчастих коліс із твердістю поверхні зубців Н 350 НВ та зі
«Іюваною перехідною поверхнею незалежно від твердості; тр =
♦ — для зубчастих коліс із нешліфованою перехідною поверхнею
твердості зубців Н > 350 НВ; НрЕ — еквівалентне число циклів
ни напружень згину за строк служби передачі, яке знаходять із
іхуванням режиму навантаження передачі (див. 4.3):
_______________________^ре = Кре^е.___________________________
287
Сумарне число циклів навантаження зубців за строк служби
передачі визначають за формулою (22.30).
Необхідно враховувати такі обмеження коефіцієнта Крь'. якщо
Еро < Мре, то беруть Крь = 1; якщо > МрЕ і пір = 6, то Крь
2,08, а якщо тр = 9, то Крс 1,63.
Граничне допустиме напруження на згин [а]/? тах, що використо-
вують у розрахунках зубців на міцність при згині максимальним на-
вантаженням, визначають за формулою
[ц]/7 тах = ОР ііт м/^р. (22.35)
Тут граничне напруження сг^птм, що не спричинює залишкових
деформацій або крихкої поломки зубців, рекомендують брати таким:
о>іітм — 4,8//нв (МПа) —для легованих та вуглецевих сталей після
нормалізації або поліпшення; О/мішм = 6//Нв (МПа)— для легованих
та вуглецевих сталей після гартування з нагріванням СВЧ та твер-
дістю серцевини зубців 200—300 НВ; а/мітм = 2800 МПа — для ле-
гованих сталей із вмістом нікелю більше ніж 1 % після об’ємного
гартування.
Контрольні запитання
1. Які основні переваги та недоліки зубчастих передач у порівнянні з іншими
передачами?
2. За якими ознаками класифікують зубчасті передачі? Дайте класифікацію зуб-
частих передач за цими ознаками.
3. У чому полягає суть основного закону зачеплення? Сформулюйте цей закон.
4. Чому зубчасті передачі з евольвентним зачепленням мають широке застосу-
вання?
5. Що таке полюс зачеплення, лінія зачеплення та кут зачеплення?
6. Що називається кроком та модулем зубців? Які кроки та модулі розрізняють
у зубчастих колесах?
7. Які кола зубчастих коліс називають початковими і які ділильними? В якому
випадку ці кола збігаються^
8. Який є стандартний початковий профіль рейки евольвентного зачеплений?
Якими параметрами він характеризується?
9. Що таке коригування зубчастого зачеплення? Як змінюється профіль зубнії»
при коригуванні зубчастих коліс?
10. Які види корекції зубчастих передач застосовують на практиці? В чому суть
цих видів корекції та які переваги дають кориговані зубчасті передачі?
II. Як визначається швидкість ковзання зубців у зачепленні? Запишіть вира»
для швидкості ковзання та проаналізуйте його.
12. Яка суть нарізування зубців методом копіювання та методом обкочування?
Дайте порівняльну характеристику цих методів.
ІЗ. Назвіть основні показники точності функціонування зубчастих передач іа
охарактеризуйте їх.
14. Які фактори впливають на вибір ступеня точності виготовлення зубчастим
передач? Які ступені точності використовують для зубчастих передач загального мл-
шинобудування?
15. Які основні групи матеріалів застосовують для виготовлення зубчастим
коліс?
288
16. Чому всі сталеві зубчасті колеса залежно від твердості зубців поділяють на
дві групи?
17. Назвіть основні види термічної та хіміко-термічної обробки зубчастих коліс.
18. Назвіть та охарактеризуйте основні види руйнування зубців зубчастих
коліс.
19. Які види розрахунків де міцність зубців циліндричних евольвентних пере-
дач передбачає стандарт?
20. Які фактори впливають на допустиме контактне напруження для активних
поверхонь зубців? Як впливає режим навантаження передачі на допустиме контактне
напруження?
21. Поясніть, чому для косозубих передач із значною різницею твердості зубців
шестірні та колеса можна брати більші допустимі контактні напруження.
22. Назвіть і проаналізуйте фактори, що впливають на допустимі напруження
згину для зубців зубчастих коліс.
ГЛАВА 23. ЦИЛІНДРИЧНІ ЗУБЧАСТІ ПЕРЕДАЧІ
23.1. Параметри прямо- та косозубих
зубчастих передач
Параметри початкового контуру. Згідно з діючими стандартами
параметри початкового контуру для циліндричних прямо-
та косозубих передач регламентовані такими значеннями
(для зубчастих коліс із модулем т І мм): кут головного профілю
а = 20°; коефіцієнти — висоти головки зубця /ід = 1, радіального
зазора с* = 0,25, висоти ніжки зубця Л/ = Н*а + с* = 1,25, радіуса
кривини перехідної кривої р* = 0,38.
Розміри зубців та вінців зубчастих коліс. Розглянемо основні
залежності для розрахунку розмірів зубців та вінців некоригованих
зубчастих коліс. Особливості для коригованих коліс наведені в 22.5.
Основною відмінністю косозубих коліс у порівнянні з прямозуби-
ми є те, що у косозубих лінія зубців нахилена під деяким кутом р
до твірної ділильного циліндра (рис. 23.1, а). Різновидністю косозу-
бих коліс є шевронні зубчасті колеса (рис. 23.1, б). Шевронне зубчасте
колесо складається як би з двох косозубих коліс, суміщених торцями
тлк, щоб зубці мали протилежний на-
і.
Кут нахилу зубців прямозубих
ііс Р = 0, косозубі колеса ви кори-
гують із кутом нахилу зубців р =
8...20°, а у шевронних колесах бе-
гь р = 20...40°.
Зважаючи на те, що косозубі (ше-
)нні) зубчасті колеса можуть нарі-
затись таким самим стандартним
трументом, як і прямозубі, кут
>філю зубців косозубих (шевронних)
Рис. 23.1. Розміщення зубців на
косозубому та шевронному колесах
289
Рис. 23.2. Параметри циліндричної зубчасто” передачі
коліс у їх нормальному перерізі аге — а = 20° (відповідно до початко-
вого контуру). За стандартний модуль зубців косозубих (шевронних)
коліс беруть модуль тп також у нормальному перерізі зубців У при
мозубих колесах нормальний та коловий модулі однакові; т = тп = т,і
Згідно зі значеннями параметрів стандартного початкового конту-
ру розміри зубців циліндричних зубчастих коліс (рис. 23.2) визнача-
ють за формулами, наведеними у табл. 23.1.
Формули для розмірів вінців циліндричних зубчастих коліс із
числами зубців і г2, що утворюють зубчасту передачу згідно з
рис. 23.2, наведені у табл. 23.2.
Таблиця 23.1. Розміри елементів зубців циліндричних зубчатих коліс
Елементи зубця Колесо
прямозубе косозубе (шевронне)
Висота: головки ніжки зубця Радіальний зазор Радіус кривини пере- хідної кривої На = Н* т = т /і/ = (Л* 4~ с*)т = 1,25т Н = Нс 4- Л/ = 2,25т с = с*т = 0,25т р/ = р‘т = 0,38т = Л* тп = тп Л/ » (Л* 4- с*)тп = 1,25тп Н = Ла 4- Л/ = 2,25тп с — с*тп == 0,25тп РІ = р/ тп = 0,38тп
290
Таблиця 23.2. Розміри вінців пари циліндричних зубчастих коліс
Діаметра вінців Передача
прямозуба косозуба (шевронна)
Ділильні Вершин вубців Впадин 4} = тг^, 42 == тг2 (Іаі = + 2й0 ® сії + 2т; 4аз = 42 + 2На = 42 4- 2т; 4^ = 4г — 2Л/ = 4г — 2,5т; 4/2 = 42 — 2й/ — 42 — 2,5т 4і » /Лд^/созР; 42 — /п„га/со5р = ^і + 2На = 4і 4- 2тп; А аг == 4- 2Нд — 42 4“ 2тп; — 2Л/ = — 2,5тп; 4}2 = 42 — 2Л/ = <І2 — 2,5тп
Міжосьова відстань циліндричних зубчастих передачі
прямозубої
аш = 0,5 № + <4) = 0,5т (гх + г^; (23.1)
косозубої (шевронної)
= 0,5/пл (гг 4- г^/соз р. (23.2)
Враховуючи те, що передаточне число зубчастої передачі и =
«= г^, ділильні діаметри зубчастих коліс (у некоригованих переда-
чах початкові збігаються з ділильними) можуть бути виражені через
міжосьову відстань-
<*! = 2а(в/(а ±1); аг = 2аа^/(а ±1). (23.3)
Тут знак плюс — для передачі зовнішнього зачеплення; знак
мінус — для передачі внутрішнього зачеплення.
Ширину зубчастого вінця Ь2 колеса (рис. 23.2) потрібно брати
ежно від міжосьової відстані передачі!
ьз = (23.4)
де фьа— коефіцієнт ШИрИНИ ВІНЦЯ, ЯКИЙ беруть: фба = 0,1...0,4 —
для прямозубих передач; = 0,2...0,5 — для косозубих та =
•= 0,4...0,8 — для шевронних передач. Менші значення ф/>а вживають
при несиметричному або консольному розміщенні зубчастого колеса
щодо опор вала, а також при твердості зубчастих коліс // > 350 НВ.
Граничні значення повинні бути такими, щоб виконувались
>ви: ум = Ь2/сіі — 0,5фьа (а + 1)< 1 — для прямозубих пере-
, фм 1,5 — для косозубих передач та 2,5 — для шев-
них зубчастих передач.
Ширину зубчастого вінця шестірні беруть на 2—5 мм більшою
ширини вінця колеса з метою забезпечення повноти контакту
ців по довжині їх при можливих похибках у монтажі валів пере-
і в осьовому напрямі.
Коефіцієнти торцевого та осьового перекриття. У 22.2 введено
яття про коефіцієнт перекриття е7, який дорівнює відношенню
а перекриття зубчастого колеса до його кутового кроку.
291
Загальний коефіцієнт перекриття зубчастої передачі
= Єд Єр, (23.5)
Де еа, ер — коефіцієнти торцевого та осьового перекриття зубців
відповідно.
Для зубчастих передач без модифікації зубців і з некоригованими
вубцями коефіцієнт торцевого перекриття можна визначити за такою
наближеною залежністю:
еа = [1,88 — 3,2(1/^ ± 1/г2)] соз р. (23.6)
Тут знак плюс для передач зовнішнього, а знак мінус — внутрішньо-
го зачеплення. Для коригованих зубчастих передач еа визначають за
більш складними залежностями (див., наприклад, ГОСТ 16532—70).
У прямозубих передачах (Р = 0) рекомендують 8а > 1,2, а у ко-
созубих (Р =/= 0) — єа > 1.
Коефіцієнт осьового перекриття єр виражається відношенням ши-
рини зубчастого вінця колеса Ь2 до осьового кроку зубців Рх:
ер = Ьі/Рх = Ь2 5ІП Р/^п = (&з 5ІП Р)/(лтп)- (23.7)
У прямозубих зубчастих передачах ер = 0, а у косозубих переда-
чах рекомендують брати ер 1,1, що досягається вибором ширини
вінця Ь2 при заданих £ та тп.
Заміна косозубих зубчастих коліс еквівалентними прямозубими.
Міцність зубця визначають його розміри та форма у нормальному пе-
рерізі. Форму косого зубця у нормальному перерізі визначають через
параметри еквівалентного прямозубого колеса (рис. 23.3). Нормаль-
ний до зубця переріз зубчастого колеса має форму еліпса з півосямиї
ОХД = 0,5б/; 0гВ = 0,5б//созр.
Максимальний радіус кривини еліпса
ОА = (Ср)2/(б^4) = ^/(2 соз2 р).
Радіус еквівалентного прямозубого колеса беруть рівним макси-
мальному радіусу кривини еліпса, тобто діаметр сІо еквівалентного
прямозубого колеса визначають за формулою
= гі/соз2 р. (23.8)
Ширина вінця еквівалентного прямозубого колеса дорівнює ши-
рині вінця косозубого колеса, тобто Ьо = Ь, а його модуль т0 дорів-
нює нормальному модулю тп косозубого колеса.
Число зубців еквівалентного прямозубого колеса знаходять на
основі співвідношення
а0 = тпг, = т„?/со53 р,
ввідки дістаємо
го = г/со5зр. (23.9)
292
І
Рис. 23.3. До питання заміни косозу-
бого колеса еквівалентним прямозубим
Рис. 23.4. До визначення радіусів
кривини профілів зубців
Заміна косозубих зубчастих коліс еквівалентними прямозубими
використовується у розрахунках на міцність зубців зубчастих пе-
редач.
Радіуси кривини профілів зубців та приведена їхня кривина. У роз-
рахунках зубців зубчастих коліс на контактну витривалість використо-
вують зведену кривину профілів зубців у їхньому нормальному пере-
різі, коли точка контакту профілів знаходиться у полюсі зачеплення.
Для прямозубої передачі (рис. 23.4, а) радіуси кривини профілів
вубців у полюсі зачеплення визначають за такими формулами!
Рі в = 0,5с/, зіп а/»;
1 (23.10)
ра = а3Р = 0,5йг зіп а*.,
де — кут зачеплення, який у некоригованих зубчастих колесах
дорівнює ділильному куту профілю зубців (а^д, = а = 20°).
У косозубому зубчастому колесі радіус кривини профілю у нор-
мальному перерізі зубця (рис. 23.4, б)
рп = а'Р = (аР)/соз = р/соз
293
Відповідно для косозубих шестірні та колеса з урахуванням за-
лежностей (23.10) маємо для нормального перерізу зубців:
рЛЇ = 0,54х зіп ап/соз Рл; р„2 = 0,5<22 зіп ал/соз рд, (23.11)
де В6 — кут нахилу лінії зубців на основному циліндрі діаметром^*
У точці контакту зубців зведена кривина їхніх профілів
1-І 1 __ 2 СО5 Рі? 2 СО5 Рь _ 2 СО5 Р^ / І І \
Рп1 рП2 — зіп ап 5ІП ап зіп ап [ 4, ) '
Якщо то остаточно запишемо
1/Рзв = [2 соз р6/№ зіпап)) (и ± 1)/и.
(23.12)
Тут знак плюс — для передач зовнішнього зачеплення; знак мі-
нус — для передач внутрішнього зачеплення.
Сумарна довжина ліній контакту зубців у зачепленні. Сумарна дов-
жина контактних ліній зубців, що одночасно знаходяться у зачеп-
ленні, залежить від значення коефіцієнтів торцевого 8а та осьовогс
єр перекриття. В прямозубих передачах /2 різко змінюється при
переспряженні зубців (рис. 23.5, а, б). Здебільшого 1 < єа < 2 і су-
марна довжина контактних ліній у період однопарного зачеплення
(рис. 23.5, а) буде 1% — Ь, а у період двопарного зачеплення І? =
= 2Ь (рис. 23.5, б).
У косозубих передачах (рис. 23.5, в) сумарна довжина контакту
= Ьеа/соз р.
(23.13)
Якщо єа або єр — ціле число, то у косозубій передачі не змі-
нюється, оскільки зменшення довжини контакту зубця 1 (рис. 23.5, в)
відповідає такому ж збільшенню довжини контакту зубця 3 при не-
змінній довжині контакту зубця 2.
У загальному випадку єа і вр не цілі числа і /2 коливається у
деяких межах. Тому рекомендується сумарну довжину ліній контак-
Рис. 23.5. До визначення сумарної
довжини ліній контакту зубців у за-
чепленні
ту зубців визначати за формулою
/2 = Кє/?еа/соз р, (23.1 4)
де Ке — коефіцієнт, що враховує
коливання сумарної довжини лі-
ній контакту зубців.
Для розповсюджених на прак-
тиці зачеплень величина Ке зміню-
ється в межах 0,9—1,0. У середньо-
му можна брати Ке — 0,95.
Найвигіднішим для роботи зуб
частої передачі є випадок -
294
= сопзі. Цього можна досягнути відповідним вибором Р та ширини
зубчастого вінця Ь так, щоб коефіцієнт осьового перекриття зр був
цілим числом [див. формулу (23.7)1.
23.2. Навантаження м£ зубці циліндричних
зубчастих передач
Номінальні сили у зачепленні циліндричних коліс. У навантаженій
зубчастій передачі сила взаємодії зубців розподілена вздовж їхнього
контакту. Цю розподілену силу замінимо зосередженою силою, при-
кладеною до зубця у середньому нормальному його перерізі. Силами
гертя, що виникають у результаті ковзання профілів зубців, можна
знехтувати, оскільки коефіцієнт тертя в зоні контакту малий, і тому
таке припущення не впливає практично на кінцевий результат.
На рис. 23.6, а показане косозубе зубчасте колесо, яке наванта-
жене обертовим моментом 7\. Зубці цього колеса взаємодіють із зуб-
цями спареного зубчастого колеса. Схема взаємодії зубців показана
у їх середньому нормальному перерізі А—А.
Сила Рп направлена вздовж нормалі до профілів зубців у точці
їх контакту, тобто вздовж лінії зачеплення, яка утворює кут зачеп-
лення ап із перпендикуляром до лінії центрів коліс. Силу Рп замі-
нимо двома її взаємно перпендикулярними складовими Рт і Р^ які
перенесемо на схему колеса. Тут сила Р, проекціюється у точку Р,
• ' ила Ро направлена перпендикулярно до лінії зубця. Тепер силу
також замінимо двома її взаємно перпендикулярними складовими
1 Р а-
Отже, замість однієї нормальної сили Рп на зубець маємо три вза-
о перпендикулярні її складові Рі9 Ра і Рг. Таке зображення сил,
ііють на зубці у зачепленні, зручне для розрахунків зубчастої
едачі, її валів та їхніх опор.
Рис. 23.6. Зусилля на зубці циліндричних зубчастих коліс
295
Сила Р^ яку будемо називати коловою силою, лежить у площині
дії обертового моменту 1\ і направлена по дотичній до ділильного
кола зубчастого колеса. Тому
Рі=2Т1/а1. (23.15)
Складова Ра, яка перпендикулярна до площини колеса і пара-
лельна осі його вала, називається осьовою силою. Вона може бути ви-
ражена через Рі та кут нахилу зубців р:
Га=Ш- (23.16)
Сила Рт діє у площині колеса і направлена вздовж його радіуса,
тому її називають радіальною силою. Для визначення Рг попередньо
знайдемо
Ро = Гґ/со5 р,
а тоді (див. переріз А—А на рис. 23.6, а) запишемо
Рт = = Р< 1£ап/созр. (23.17)
Нормальна сила Рп до профілів зубців дорівнює геометричній
сумі сил Рі, Ра і Рт.
Модуль цієї сили можна визначити за формулою
Рп ~ Л)/с°5 ап = Л/(соз ап соз Р), або Рп = соз ап соз Р). (23.18)
У разі зачеплення прямозубих коліс (Р = 0) колова сила також
визначається за формулою (23.15), осьова сила Ра = 0, а радіальна
сила може бути знайдена за формулою
Рг = (23.19)
Наявність осьової сили Ра у зачепленні косозубих коліс, що до-
датково навантажує вали та їхні опори, обмежує використання косо-
зубих коліс із великим кутом нахилу лінії зубців р (Ра зростає із
збільшенням Р). Цього недоліку позбавлені шевронні зубчасті пере-
дачі, де осьові сили у зачепленні взаємно зрівноважуються
(рис. 23.6, б), бо лівий та правий півшеврони мають протилежний на-
хил зубців. Цим пояснюється можливість збільшення кутів нахилу
зубців у шевронних колесах у порівнянні з косозубими. Колова
та радіальна сили у зачепленні шевронних зубчастих коліс визнача-
ються відповідно за формулами (23.15) і (23.17).
Розрахункове навантаження на зубці зубчастої передачі. За розра-
хункове навантаження на зубці беруть максимальне значення питомо-
го навантаження, розподіленого вдовж лінії контакту зубців у їхньо-
му зачепленні:
<7 = (Рп/1ї) КаК^К0 = [Р(/(ЬК^а СОЗ аЛ)1 КсЛвК,. (23.20)
Тут Рп та вибрані згідно з формулами (23.18) і (23.14), Ка,
Кр— коефіцієнти, що враховують розподіл навантаження між зуб-
296
иями та за шириною зубчастих вінців коліс відповідно; К9 — коефі-
цієнт, що враховує динамічне навантаження зубців.
Коефіцієнти Ка> К з і Ки різні у розрахунках зубців на контактну
витривалість і на витривалість при згині. Тому вводять такі позначення
коефіцієнтів: Кна, — у розрахунках на контактну витри-
валість Кра, Кгр, Кри — у .розрахунках зубців на вгин.
Додатково введемо поняття питомої розрахункової колової сили:
&НІ = (Рні/Ь) КнаКнеКн», = (Ррі/Ь) КраКр^Кру. (23.21)
На основі виразу (23.20) розрахункове навантаження на зубці
буде визначатись за такими формулами:
при розрахунках зубців на контактну витривалість
дн « соз ап); (23.22)
при розрахунках зубців на витривалість при вгині
Яр = 0>л/(КеЄа С05 ап). (23.23)
Колові сили Р ні і РРі у виразах (23.21) знаходять згідно з форму-
лою (23.15):
Рні = 27і іяДЇр Ррі = 2Т ір/^. (23.24)
Взагалі беруть обертові моменти 7\н = Тір такими, що дорівню-
ють максимальному тривало діючому обертовому моменту 7\ відпо-
відно до заданого типового режиму навантаження передачі (див. 2.2).
Розподіл навантаження між зубцями. У прямозубих зубчастих
передачах та косозубих при єр 1 навантаження у зачепленні може
передаватись однією парою зубців. Тому для таких передач коефі-
цієнт, що враховує розподіл навантаження між зубцями, рекоменду-
ють брати Кна = Кра — 1.
У косозубих та шевронних зубчастих передачах у зачепленні од-
ночасно знаходяться кілька пар зубців. Через похибки кроків та
напрямів нахилу зубців окремі пари контактуючих зубців наванта-
жуються нерівномірно. Цю нерівномірність враховують відповідни-
ми значеннями коефіцієнтів Кна і Клх- Для косозубих та шевронних
вубчастих передач значення Кна наведені у табл. 23.3, а Кра можна
визначити за формулою
Кра = [4 + (еа - 1) (п„ - 5)]/(48а), (23.25)
Де Дот — ступінь точності за нормою контакту зубців. Якщо >
> 9, то беруть = 9 і аналогічно, якщо < 5, то п„ = 5.
Розподіл навантаження по ширині зубчастих вінців. Навантажен-
ня по ширині вінця зубчастих коліс розподіляється рівномірно ТІЛЬ-
КИ при ідеально точному виготовленні та монтажі передачі, а також
при абсолютно жорстких валах та їхніх опорах. У реальних переда-
чі х при їхньому навантаженні зубчасті колеса перекошуються одне
відносно одного (рис. 23.7, а).
297
Таблиця 23.3. Коефіцієнт для косозубих та шевронних передач
Колова швидкість КОЛІС V, м/с Значення Для ступеня точності за нормами плавності
5 6 7 8 9
2,5 1 і.оі 1,03 1,05 1,13
5 1 1,02 1,05 1,09 1,16
10 1,01 1,03 1,07 1,13 —-
15 1,01 1,04 1,09 — ——
20 і ,02 1,05 1,12 — —-
25 1,02 1,06 — —
У результаті деформацій валів та опор і похибок виготовлення та
монтажу передачі із абсолютно жорсткими зубцями мали б кутове
дотикання зубців, як показано на рис. 23.7, б. Через податливість
зубців їх контакт відбувається на всій або на значній частині ширини
зубчастого вінця. Однак пружні деформації зубців по їх довжині не-
однакові і відповідно навантаження у контакті розподіляється нерів-
номірно (див. епюру д на рис. 23.7, б).
Нерівномірність навантаження по ширині вінця Ь враховується
коефіцієнтом Лр, що дорівнює відношенню максимального питомого
навантаження ^тах до його номінального значення д.
Зубці зубчастих коліс можуть припрацьовуватись, через що роз-
поділ навантаження може частково або майже повністю вирівнюва-
а
Рис. 23.7. До питання концентрації навантаження
по ширині зубчастих коліс
тися. Здатність до припрацювання зубців залежить від матеріалів
зубчастих коліс та умов їхньої роботи.
Вважають, що зубці передачі припрацьовуються, якщо матеріал
хоч би одного з коліс має твердість Н 350 НВ, а колова швидкість
коліс V 15 м/с. При твердості зубців Н > 350 НВ і коловій швид-
кості V 2> 15 м/с зубці слабо припрацьовуються або не припрацьову-
ються зовсім. При швидкості V >► 15 м/с систематичне спрацьовуван-
ня зубців відсутнє неза-
лежно від матеріалів ко-
ліс, бо між зубцями ут-
ворюється стійка масля-
на плівка достатньої тов-
щини.
Повне припрацюван-
ня зубців у передачах
можливе не завжди, а
тільки при постійному
навантаженні передачі.
Це пов’язано із закру-
7/////////Л
298
чуванням валів та самого тіла шестірні. При змінному навантаженні
досягається часткове припрацювання зубців і нерівномірність розпо-
ділу питомого тиску у контакті зменшується в недостатній міоі.
Отже, основними факторами, що обумовлюють нерівномірність
розподілу навантаження пр ширині зубчастих вінців, є: податли-
вість валів та їхніх опор; похибки виготовлення зубчастих коліс
та монтажу передачі; розміщення зубчастих коліс на валах відносно
опор; умови, за яких не відбувається припрацювання зубців (висока
твердість зубців, висока колова швидкість та несталість навантажен-
ня передачі). За інших рівних умов нерівномірність розподілу наванта-
ження тим вища, чим більша ширина зубчастого вінця, яка характе-
ризується коефіцієнтом фм =
Для наближеної оцінки коефіцієнта рекомендують графіки,
складені на основі розрахунків та практики експлуатації зубчастих
передач (рис. 23.8). Графіки рекомендують для передач, жорсткість
та точність деталей яких задовольняють нормам редукторобудування.
Явище нерівномірності розподілу навантаження по ширині вінців
зубчастих коліс неоднаково впливає на контактну міцність активних
поверхонь зубців та міцність зубців при згині. Тому за даними на
рис. 23.8 графіками окремо вибирають коефіцієнти Кн$ і Хяр, які
використовуються у відповідних розрахунках зубчастих передач.
Криві 1—7 на графіках відповідають різним випадкам розміщення
коліс 1—7 щодо опор валів, а вплив ширини зубчастого вінця вра-
ховується коефіцієнтом ф^. Графіки розроблені для різних твердос-
тей зубців і для наявних на практиці змінних режимів навантаження
передач при коловій швидкості коліс о < 15 м/с. При постійному на-
вантаженні, твердості одного з коліс передачі Н < 350 НВ і швидкос-
ті V с 15 м/с можна брати Кн$ — — 1-
Динамічне навантаження у зачепленні зубчастих передач. Немину-
чі похибки у виготовленні зубчастих коліс, а також пружні деформа-
ції зубців під навантаженням спричинюють появу динамічних наван-
тажень зачеплення. Основний вплив на динамічні навантаження ма-
ють похибки основного кроку Рь зубців шестірні та колеса і їхня
колова швидкість.
Якщо основний крок зубців колеса більший від кроку зубців
шестірні, то відбувається передчасний вхід у зачеплення кромки
мубця колеса — кромковий удар зубців. У випадку, коли крок зуб-
ців менший від кроку зубців шестірні, має місце запізнення виходу
Н зачеплення попередньої пари зубців — серединний удар наступ-
ної пари зубців. Щоб зменшити ефект кромкового удару в зачепленні,
треба використовувати зубчасті колеса з модифікацією профілів голо-
вок зубців (див. 22.3).
Вплив динамічного навантаження на контакту міцність активних
поверхонь зубців та міцність зубців на згин оцінюється коефіцієнтами
відповідно Кни та Кеу- Точне визначення цих коефіцієнтів достатньо
299
300
Кеефіаіевгтж д—аніжного жаааіггажеииа зубців П[[с ’ ^Ео
Ступінь точності за нормою плавності Твердість зубців колеса КоефіцІ- єнт Колова швидкість зубців V, м/с
1 2 4 6 8 ю
6 Я, < 350 НВ 1,03/1,01 1,06/1,02 1.12/1,03 1,17/1,04 1,23/1,06 1,28/1,07
Кр„ 1,06/1,02 1,13/1,05 1,26/1,10 1,40/1,15 1,53/1,20 1,67/1.25
Нг > 40 НКС 1,02/1,00 1,04/1,00 1,07/1,02 1,10/1,02 1,15/1,03 1,18/1,04
Кр. 1,02/1,01 1,04/1,02 1,08/1,03 1,11/1,04 1,14/1,06 1.17/1,07
7 Нг < 350 НВ 1,04/1,02 1,07/1,03 1,14/1,05 1,21/1,06 1,29/1,07 5-1,36/1.08
Кр„ 1,08/1.03 1,16/1,06 1,33/1,11 1,50/1,16 1,67/1,22 1,80/1,27
Н2 > 40 нкс кНо 1,03/1,00 1,05/1,01 1,09/1,02 1,14/1,03 1,19/1,03 1,24/1,04
Кр, 1,03/1,01 1,05/1,02 1,09/1,03 1,13/1,05 1,17/1,07 1,22/1,08
8 Я2< 350 НВ «н. 1,04/1,01 1,08/1,02 1,16/1,04 1,24/1,06 1,32/1,07 1,40/1,08
Крь 1,10/1,03 1,20/1,06 1,38/1,11 1,58/1,17 1,78/1,23 1,96/1,29
Н2 > 40 НКС ІСн„ 1,03/1,01 1,06/1,01 1,10/1,02 1,16/1,03 1,22/1,04 1,26/1,05
Кр„ 1,04/1,01 1,06/1,02 1,12/1,03 1,16/1,05 1,21/1,07 1,26/1,08
9 Нг < 350 НВ *н„ 1,05/1,01 1,10/1,03 1,20/1,05 1,30/1,07 1,40/1,09 1.50/1,12
1,13/1,04 1,28/1,07 1,50/1,14 1,77/1,21 1,98/1,28 2,25/1.35
Я2 > 40 НКС ^Ни 1,04/1,01 1,07/1,01 1,13/1,02 1.20/1,03 1,26/1,04 1,32/1,05
Кр» 1,04/1,01 1,07/1,02 1,14/1,04 1,21/1,06 1,27/1,08 1,34/1,09
Примітка. У чисельнику — значення для прямозубих передач, у знаменнику — для косозубих.
складне і для розрахунків вубчастих передач можна використати на-
ближені значення коефіцієнтів Кни і які наведені у табл. 23.4.
При цьому колову швидкість зубців визначають за формулою V =
= 0,5(0^!.
23.3. Розрахунок активних поверхонь зубців
на контактні витривалість і міцність
Розрахунок активних поверхонь зубців на контактну витривалість
зводиться до визначення розрахункових контактних напружень і порів-
няння цих напружень із допустимими. Згідно з умовою контактної
міцності (див. 4.1)
он — 2М У <7///(2рзв) [о]н
розрахунок ведеться для моменту зачеплення зубців у полюсі, ос-
кільки втомне викришування активних поверхонь починається в
зоні полюсної лінії контакту на ніжках зубців.
У зубчастій передачі питоме розрахункове навантаження Цн на
лінії контакту зубців визначається за виразом (23.22), а зведена кри-
вина 1/рзв профілів зубців — за виразом (23.12). Після підстановки
виразів для та 1/рзв у записану вище умову дістанемо
сн = у[а>ні/(К^ соз ап)] [соз 5ІП ап)1((“ ± 1 )/«1 Ми-
Якщо взяти соз ал- зіп ап = 0,5 зіп 2ап та позначити
2Н = И2 соз рь/зіп 2ап; 2г = К1 /(Кева),
то дістанемо остаточну залежність для розрахунку активних повер-
хоиь зубців на контактну витривалість
ан = 2мгц2е У(и>ні/^ [(« ± 1)/«] < Ми. (23.2(1)
Тут — питома розрахункова колова сила, що визначається
за формулою (23.21)1
&НІ = (Гні/Ь)
В умові міцності (23.26) маємо: 2м — коефіцієнт, що врахої
механічні властивості матеріалів спряжених у передачі коліс їді
формулу (4.9)]; для сталевих зубчастих коліс 2М ~ 275 МП.і
для поєднання сталь — чавун 2М = 215 МПа’/2; для чавунних к<>
2м ** 200 МПа’/2; 2ц — коефіцієнт форми спряжених поверхонь
зубців; для зубчастих передач із зміщенням (хх =/= 0) 2Н визнач*»
ють за відповідними графіками [8], а для передач без зміщенії*
(хе = 0) — за записаною вище спрощеною залежністю при а„
= 20° Ін = 1,77 соз Р; 2е— коефіцієнт сумарної довжини конпіь
них ліній; для прямозубих передач та косозубих при є# 0,0
302
28 — У (* — еа)/3, а для косозубих при ее > 0,9 та шевронних передач
2е = /і/еа.
Розрахунок активних поверхонь зубців на контактну витривалість за
умовою (23.26) є основним для зубчастих передач. Допустиме контакт-
не напруження [о]# визначають за методикою, наведеною у 22.11.
У розрахунках зубців на контактну витривалість допускається розрахунко-
ве контактне напруження у межах 1,05 [о)/у 0,9 Ісг]/у. Якщо
ця умова не виконується, то можна змінити відповідно ширину він-
ця колеса Ь2, не виходячи за межі рекомендованих значень
(див. 23.1). Якщо це не дає бажаного результату, то змінюють між-
осьву відстань або назначають інші матеріали коліс чи іншу термо-
обробку і розрахунок повторюють.
Розрахунок активних поверхонь зубців на контактну міцність при
дії максимального навантаження виконують з метою, щоб запобігти
появі залишкової деформації або крихкого руйнування поверхнево
го шару зубців при короткочасних перевантаженнях передачі. Умова
відсутності появи руйнувань зубців має вигляд
Он тах ІО]н тах» (23.27)
лг он тах — максимальне розрахункове контактне напруження, що
। ікає при найбільшому навантаженні Тітах із спектра наванта-
які підводяться до передачі навіть при однократній дії за пері-
•ксплуатації; [пінтах — допустиме граничне контактне напру-
ги ння (див. 22.11).
Враховуючи, що контактне напруження пропорційне квадратному
кореню з навантаження, умову (23.27) перепишемо так:
Он тах = онУТг тах/Тін^ Іо]н тах» (23.28)
аг пн — розрахункове контактне напруження, що виникає у зубцях
при навантаженні [визначають за виразом (23.26)1.
23.4. Розрахунок зубців на витривалість і міцність
при згині
’ озрахунок зубців на витривалість при згині. При розрахунках на згин
ць розглядають як консольну балку. Розрахункове навантажен-
ії» икладається до вершини зубця, тобто вибирають найнебезпеч-
ій випадок навантаження зубця з точки зору виникнення макси-
•ного напруження згину у його основі.
І а рис. 23.9 зображена розрахункова схема зубця. Зубець зав-
^ки 1 мм навантажений розрахунковою силою др, яка визнача-
и за виразом (23.23).
Ігренесемо точку прикладання сили др на вісь симетрії зубця
•кладемо цю силу на дві взаємно перпендикулярні складові:
дрі = др соз а'; дрг = д? зіп а*,
303
Рис. 23.9. До визначення на-
пружень згину в зубці зуб-
частого колеса
де а' — кут, що визначає положення век-
тора навантаження дР щодо осі зубця.
У небезпечному перерізі, який розмі-
щений в основі зубця у зоні найбільшої
концентрації напружень, навантаження дРІ
спричинює напруження згину озг, а наван-
таження дРг— напруження стиску оСт (див.
епюри на рис. 23.9):
Озг = (]ріі№п = соз а 7а2;
аст = дргіА = др злпа/а.
На рис. 23.9 показана також епюра
сумарних напружень оР у небезпечному
перерізі зубця. Оскільки втомні тріщини
і руйнування починаються на розтягнуто-
му боці зубців (тобто з боку робочого про-
філю), міцність зубців розраховують саме
з цього боку за умовою, що
Оя = Ув(Сзг — Овт)аА^[о]/г, (23.20)
де Ур — коефіцієнт, що враховує зменшення напружень при нахиле-
ному розміщенні зубців у косозубих передачах; ак — теоретичний
коефіцієнт концентрації напружень.
Розміри І і а (див. рис. 23.9) пропорційні модулю зубців
тп : І = \тп\ а — Ктп (^і і ^2 — коефіцієнти пропорційності). Якщо
це взяти до уваги та підставити значення озг та ост в умову (23.29),
то дістанемо
ар = Уг,ак [6дД1тп соз а7(ХІ/п«) — дР зіп а/(к2тп)] =
= (дРУі>>ак/тп) (6Хх соз а'/КІ — зіп а'Д2) < [еф.
Тепер врахуємо залежність (23.23) для визначення розрахунково-
го навантаження на зубці:
Ор =
Уведемо додаткові позначення:
6А»! соз а* зіп а' \ а*
^2 >-2 у СО5 ап •
Остаточна формула для розрахунку зубців на витривалість при згині
набуде вигляду
аР = УрУьУ№)рі/тп [о]/?.
™рі І 6Хг соз а’ зіп а' \ а*
К&гатп І ~~ Х2 ) соз ап
(23
304
Тут хлзрі — питома розрахункова колова сила, яка визначається
ва формулою (23.21):
Шрі = (Ррі/Ь) КраКр$Кро-
В умові міцності (23.30) маємо такі коефіцієнти: Ур — коефіці-
єнт форми зубців (залежить від розмірів /, а, а' та форми перехідної
кривої зубця, яка впливав на аЛ); Ур визначають за відповідними
графіками [8] залежно від еквівалентного числа зубців го шестірні
та колеса [див. формулу (23.9)] з урахуванням коефіцієнтів зміщен-
ня х; для некоригованих коліс (х = 0) зовнішнього зачеплення
значення Ур наведені у табл. 23.5, а для коліс внутрішнього за-
чеплення наближено можна брати Ур — 4г/(г + 20);
Ув — коефіцієнт перекриття зубців, у розрахунках прямозубих
та косозубих (шевронних) передач можна наближено брати Уе = 1
(більш точні значення Уе для зубчастих передач відповідального
призначення можна знайти у [8]); Ур — коефіцієнт нахилу зубців,
для прямозубих передач Ур= 1, а для косозубих та шевронних
Ур = 1 — р/140°.
Перевірку міцності зубців на витривалість при згині виконують для
зубців шестірні і колеса, оскільки Ур\ та Ур2 різні при Ф г2.
Із співвідношення (23.30) видно, що за інших рівних умов напру-
ження згину в зубцях тим більші, чим менший модуль зубців тп.
Міцність зубців на згин для передачі з відомою міжосьовою відстанню
можна підвищити, збільшуючи модуль та зменшуючи відповідно
числа зубців шестірні та колеса.
Розрахунок зубців на міцність при згині максимальним наванта-
женням виконують для того, щоб запобігти появі залишкової дефор-
мації або крихкої поломки зубців. Цей розрахунок ведуть за най-
більшим короткочасним навантаженням Тішах для зубців того зуб-
частого колеса (шестірні або колеса), для якого напруження згину
Ор більше.
Щоб забезпечити потрібну міцність зубців, треба виконувати
таку умову:
Ор тлах = Ор (Т[ тах/Т'ір) [о]р тах» (23.31)
*! аблиця 23.5. Коефіцієнти ¥р форми зубців
2У Ур Ур 2і> К р
17 4,26 25 3,90 50 3,65
18 4,20 28 3,82 60 3,62
19 4,Н ЗО 3,80 80 3,61
20 4,08 32 3,78 100 3,60
21 4,01 37 3,71 150 3,60
22 4,00 40 3,70 оо 3,63
24 3,92 45 3,68
305
де (Зр тях — максимальне розрахункове напруження згину; а? —
розрахункове напруження згину, що спричинюється дією наванта-
ження Тір (див. формулу (23.30)]; (о]ртах — допустиме граничне на-
пруження згину (див. 22.11).
23.5. Проектний розрахунок циліндричних
зубчастих передач та особливості розрахунку
відкритих зубчастих передач
Проектний розрахунок. Добуті вище розрахункові залежності
(23.26), (23.28), (23.30) та (23.31) використовують для перевірних
розрахунків на міцність зубчастих передач із відомими розмірами
та навантаженням.
Проектний розрахунок має бути тільки для попереднього визна-
чення орієнтовних розмірів передачі і не може замінити виконання
перевірних розрахунків, які є основними.
Як зазначалося вище, габаритні розміри зубчастої передачі ви-
значаються умовою стійкості активних поверхонь зубців проти втом-
ного викришування. Тому розрахункову залежність для визначен-
ня основного розмірного параметра передачі, який визначає її габаритні
розміри, дістанемо з умови (23.26). Таким розмірним параметром для
циліндричних зубчастих передач можна вважати міжосьову відстань
Вихідними даними для проектного розрахунку передачі є такі:
розрахункове тривало діюче навантаження 7\н', передаточне число
передачі и\ параметр ф^ = або ф^ = Ь1йи рекомендації для
вибору яких наведені у 23.1; вид передачі — прямозуба чи косо-
зуба (шевронна); типовий режим навантаження передачі та строк
її служби; матеріали зубчастих коліс, їх термообробка, твердість ак-
тивних поверхонь зубців; за цими даними попередньо розраховують
допустиме контактне напруження [сг]//.
Вивід формули для визначення мінімально допустимої міжосьової
відстані передачі подамо у певній послідовності. У формулі (23.26)
виконаємо заміну!
(Мні/йі ~ КнаКн^Кни — [2 • 103Т]НІ(Ь&)] КнаКньКни-
Виразимо Ь і (Іі через міжосьову відстань передачі аш:
Ь = ф&ааш; ± 1).
Тепер можна записати
= [103Тія(ц ± 1 )2/(2фг«а^)] КнаКн^Кни-
Підставляючи цей вираз у формулу (23.26), дістанемо
он = У [ 1О’Т,н (а ± 1 )2/(2^Ьаа£)] [(« ± 1)/ц] <
С Мн-
306
Із записаного співвідношення визначимо аш*
аш^(и± 1) ><0,5 103(2М2Н2^КнаКн» X
XТінКн^/(и^і>а [о)н).
Якщо додатково позначити
Ка = Vа0,5 • 103 (2м2ц2е)г КнаКни,
то можна дати остаточний запис формули для визначення мінімальної
міжосьової відстані передачі у такому вигляді:
Яс» тіп = (« ± 1) /ТІНКн{№Ь« [<4). (23.32)
У формулі (23.32) обертовий момент Т\Н слід брати у ньютон-мет-
рах (Н • м), допустиме напруження (а]н — у мегапаскалях (МПа),
а міжосьову відстань Оштіп — У міліметрах (мм) [формула узгодже-
на з формою, наведеною у стандарті ГОСТ 21354—87).
Допоміжний коефіцієнт Ка у формулі (23.32) враховує параметри
передачі, які попередньо можуть бути вибрані цілком однозначно,
і параметри, які не можуть бути завчасно і точно визначені (2е, Кна,
Кнч). Тому коефіцієнту Ка надається деяка наближена оцінка і ре-
комендується брати: Яд = 495 МПа1/3, /Са = 415 МПа1/3 — для
прямозубих передач із сталевими та чавунними зубчастими колесами
відповідно; Ка ~ 430 МПа1/3, Ка — 360 МПа1/3 — для косозубих
(шевронних) передач із сталевими та чавунними колесами відповідно.
Коефіцієнт Кн& що враховує нерівномірність розподілу наванта-
ження по ширині зубчастих вінців, вибирають залежно від пара-
метра ‘фм за графіками на рис. 23.8.
Формула (23.32) дає змогу оцінити ступінь впливу окремих параме-
трів передачі ц, фьа, [о]н на її габаритні розміри.
Обчислена за формулою (23.32) міжосьова відстань дає
можливість визначити модуль зубців та розміри вінців зубчастих ко-
ліс. На основі залежності (23.2) потрібний модуль може бути визна-
чений за формулою
== 2#ш тіп СО5 ^/(^1 "І" (23.33)
Значення тп округляють до найближчого стандартного значення
тп згідно з ГОСТ 9563—60 (див. 22.2).
Із співвідношення (23.33) видно, що при одній і тій же міжосьовій
відстані передачі можна дістати різні модулі зубців при зміні чисел
вубців шестірні 2г та колеса г2. При великих значеннях і відповід-
но г2 = и2г маємо зубчасті колеса із малим модулем, а при малих
таненнях 2і та га — із великим модулем.
Маломодульні колеса з великим числом зубців мають переваги
'.і умовою підвищеної плавності роботи (збільшується еа) та за еко-
307
помічними міркуваннями. При малих значеннях т зменшуються
втрати на тертя у зачепленні (зменшується ковзання), скорочуються
витрати матеріалу (зменшується економиться час при нарізу-
ванні зубців (зменшується кількість матеріалу, який зрізається).
Однак при малих модулях зростають вимоги до точності та жорсткос-
ті передачі, суттєво зменшується міцність зубців на згин [див. фор-
мулу (23.30)].
Великомодульні колеса з великими розмірами зубців не так чут-
ливі до спрацювання, можуть працювати тривалий час після початку
втомного викришування активних поверхонь, менш чутливі до пере-
вантажень та неоднорідності матеріалу, але плавність роботи пере-
дачі з такими колесами значно падає.
Виходячи з наведених міркувань, для силових зубчастих передач
рекомендують брати т 1,5 мм.
Здебільшого ЧИСЛО зубців шестірні > гтіп, де 2тіп — мінімаль-
не число зубців за умови непідрізання ніжок. Для некоригованих
прямозубих коліс 2тіп = 17, а для коліс із кутовою корекцією міні-
мальне число зубців може бути 10. У косозубих та шевронних коле-
сах мінімальне число зубців залежить від кута нахилу лінії зуб-
ців, наприклад, якщо £ = 21...24°, то 2тіп = 14, а якщо р = 28...
31 , ТО 2тіп — 12.
З метою зменшення шуму у швидкохідних передачах рекоменду-
ють брати 2і 25.
Щоб остаточно впевнитись у правильності вибору чисел зубців 22
і модуля т, треба перевірити міцність зубців на витривалість при зги-
ні. У разі отримання незадовільного результату зменшують у допус-
тимих межах 2і і відповідно г2 і тим самим збільшують модуль т.
Слід зазначити, що при перевірці міцності зубців на витривалість при
згині можна дістати Ое значно менше від [о]/?. Це не є суперечливим
або недопустимим результатом, оскільки габаритні розміри передачі
за несучою здатністю обмежуються контактною міцністю активних
поверхонь зубців, а не їхньою міцністю на згин.
Якщо розрахункове напруження ое перевищує допустиме [о]/.',
то, крім збільшення модуля зубців, можна застосовувати зубчасті
колеса із зміщенням. У таких випадках вирішальне значення має
не контактна міцність, а міцність зубців на згин. На практиці такі
випадки можуть бути у зубчастих колесах із твердістю активних по-
верхонь зубців Н >* 50...60 НКС у реверсивних передач.
Вибраний модуль за числами зубців шестірні та колеса дозволяє
визначити всі розміри вінців коліс за формулами, що наведені у
23.1. Порядок розрахунку циліндричних зубчастих передач може
бути таким, як у 23.6.
Особливості розрахунку відкритих зубчастих передач. У відкритих
передачах використовують прямозубі циліндричні або конічні коле-
са. Такі передачі працюють при колових швидкостях зубчастих коліс
не більш як 2 м/с. Зубці відкритих передач припрацьо-
вуються при довільних твердостях їхніх робочих по-
верхонь. Здебільшого колеса виготовляють із норма-
лізованих або поліпшених сталей. У процесі роботи
передачі зубці інтенсивно спрацьовуються, що визна-
чає особливості їхнього розрахунку.
Відкриті передачі проектують з вузькими колесами
(коефіцієнт ширини ВІНЦЯ фьа = 0,10.. .0,15). Розміри
передачі визначають із розрахунку на контактну
витривалість з подальшою перевіркою на згин (за анало-
гією закритих передач). Міжосьову відстань переда-
чі визначають за формулою (23.32). При цьому коефі-
цієнти, що враховують розподіл навантаження по
ширині вінця коліс, беруть Кн?> = Кг$ =1.
Спрацювання зубців у відкритих передачах допускається до 25 %
початкової їхньої товщини по ділильному колу. Міцність зубців
на згин при цьому зменшується приблизно у 2 рази. Тому треба так
підібрати модуль зубців, щоб розрахункове напруження згину вр
За формулою (23.30) було в 2 рази менше від попередньо обчисленого
допустимого напруження [от]/?.
Рис. 23.10. Схе-
ма циліндрично-
го зубчастого
редуктора
23.6. Приклад розрахунку циліндричної
зубчастої передачі
Задача. Розрахувати косозубу циліндричну зубчасту передачу одноступеневого
редуктора (рис. 23.10) за такими даними: потужність на ведучому валу Ру — 18 кВт
при його кутовій швидкості (Оі = 100 рад/с; передаточне число передачі и = 3,8;
передача нереверсивна; режим навантаження середній нормальний (СН); можливі
короткочасні перевантаження до 200 % від номінального; строк служби передачі
Л - 20 000 год.
Розв’язання. 1. Параметри навантаження зубчастої передачі. Номіналь-
ний обертовий момент на ведучому валу
7\ = ТЇН = ТІР = РіЛОі = 18 - 103/100 = 180 Н • м.
При короткочасному перевантаженні до 200 % максимальний обертовий момент
їм ведучому валу
Г. тат = 27\ = 2 • 180 = 360 Н . м.
1 ІІІаЛ *
Кутова швидкість веденого вала
= (О1/и — 100/3,8 = 26,316 рад/с.
Сумарне число циклів навантаження зубців шестірні та колеса за строк служби
передачі [див. формулу (22.30)]
= ІбООй^Л/л = 1800 • 100.20 000/3,14= 11,46 • 10\
= 18ООсо2Л/л = 1800 • 23,316 . 20 000/3,14 = 3,02 • 108.
Еквівалентні числа циклів навантаження зубців шестірні та колеса для розрахунку
на контактну витривалість NН£ і для розрахунків на витривалість при згині N рЕ
309
із коефіцієнтами інтенсивності Кіі£ =0,18 і = 0,07 (див. табл. 4.1 для режиму
навантаження СН)
= Хне^іі = °’18 ’ н»46 ’ 108 = 2»12 ’ 108’
ІЇНЕ2 = Кне^ = °»18 * 3.02 • 108 = 0,56 . 108;
іїрЕЇ = КееМїі = °>07 • н ,46 • 108 = 8 25 • 107;
Л>£і = = 0,07 • 3,02 • 108 = 2,17 - 10?.
2. Матеріали зубчастих коліс. Для виготовлення шестірні та колеса вибираємо
відносно дешеву леговану сталь 40Х із термообробкою — поліпшення (див.
табл. 22.4). За даними табл. 22.3 вибираємо:
для шестірні твердість поверхні зубців Нх = 269...302 НВ (найбільш імовірна твер-
дість Нх = 280 НВ), ов1 = 900 МПа, от1 = 750 МПа при діаметрі заготовки до
125 мм;
для колеса твердість поверхні зубців Н2 = 235...262 НВ (найбільш імовірна твер-
дість = 245 НВ), ов2 = 790 МПа, = 640 МПа при діаметрі заготовки до
280 мм.
3. Допустимі напруження для розрахунку зубчастої передачі, а) Допустимі кон-
тактні напруження. Границі контактної витривалості зубців шестірні та колеса (див.
табл. 22.5) будуть такими:
°Н НшМ = 2/Л + 70 = 2 - 280 + 70 = 730 МПа;
ан ііт Ь2 = 2Ні + 70 = 2 ‘ 245 + 70 = 560 МПа.
Базу випробувань для матеріалу шестірні та колеса визначаємо за формулою
(22.28):
ЛГН01 = ЗОН^* = ЗО • 2802-4 = 2.24 - 10’;
= 30й|’4 “ ЗО • 2452,4 =1,63. 10’.
Якщо NЯ01 < ^НЕІ І NН02 < ^НЕ2» то коефіцієнт довговічності для зубців шес-
тірні та колеса = 1.
Допустимі контактні напруження для зубців шестірні та колеса при коефіцієнті
2д= 1 (шорсткість поверхонь зубців Да= 1,25...0,63) та коефіцієнті запасу $н =
= 1,1 знаходимо за формулами (22.27):
(°1яі ~ °н ііш в 78^ ' І • 1/М = 664 МПа;
1°ІЯ2 = °н 1 іт Ь2 в 889 • 1 • 1/1,1 = 509 МПа.
Для зубців косозубої передачі розрахункове допустиме контактне напруження
(див. формулу (22.31)]
[о)н = 0,45 ([о]Н1 + [о]Я2) = 0,45 (664 + 509) = 528 МПа.
Допустиме граничне контактне напруження
Мя тах = 2»8от2 = 2»8 * 640 = 1792 МПа.
б) Допустимі напруження на згин. Границі витривалості зубців при згині для
бази випробувань = 4 • 10е (див. табл. 22.6)
Ор 1іт ьі = Ь87/і = 1,8- 280 = 504 МПа;
°£1іт&2= *.8Н2 = 1,8-245 = 441 МПа.
310
Оскільки Vрд < ЛГ/?£і І ЛГро < Кр£2, коефіцієнт довговічності для зубців
шестірні та колеса КР^ = 1.
Допустиме напруження на згин для зубців шестірні та колеса при коефіцієнті
Лр0 = 1 (нереверсивна передача) і коефіцієнті запасу зр « 2,2 визначаємо за фор-
мулами (22.32):
(сг]/?] = Цр Лгп ьі^Ес^гь^г = 504 • 1 • 1/2,2 = 229 МПа;
[0)^2 = ор П1п ь2КРсКРЬІ$Р = 441 . і . 1/2,2 = 200 МПа.
Для зубців шестірні та колеса граничне допустиме напруження на згин [див.
формулу (22.35)]
Мп тах “ 4>™г/зР = 4,8 • 280/2,2 = 610 МПа;
[а]^ тах « 4,8Я2/$р = 4,8 • 245/2,2 = 534 МПа.
4. Проектний розрахунок передачі. Для проектного розрахунку попередньо бе-
ремо коефіцієнт ширини вінця = 0,40 і відповідно фм = 0,5фЬа (и 4- 1) =
“ 0,5 • 0,40 (3,8 + І) = 0,96.
За графіками на рис. 23.8 залежно від фм (симетричне розміщення зубчастих
коліс відносно опор валів та твердість Н < 350 НВ) визначаємо коефіцієнт нерівно-
мірності навантаження по ширині зубчастих вінців, = 1,07.
Допоміжний коефіцієнт Ла = 430 МПа1/3 для сталевих косозубих коліс.
За формулою (23.32) мінімальна міжосьова відстань передачі
3/-----------------Г
аштіп ~ Ка (« 4- О V Т\нКн^(ихРьа “
= 430 (3,8 4- І) Vх 180 • 1,07/(3,8 - 0,40 • 5282) = 158,7 мм.
Вибираємо фактичну міжосьову відстань 0»= 160 мм. Кут нахилу лінії зубців
попередньо беремо Р = 15°.
Число зубців шестірні = 21, а число зубців колеса г2 = игг = 3,8 • 21 = 79,8.
Вибираємо г2 = 80, тоді фактичне передаточне число и — 2^ = 80/21 = 3,809.
За формулою (23.33) модуль зубців
тп « 20а, соз р/(гі 4- г2) = 2 • 160 • соз 15°/(21 4- 80) = 3,06 мм.
Стандартний модуль зубців тп = 3 мм (див. с. 260). Фактичний кут нахилу
Лінії зубців
соз р = тп (2і 4- 2^)1(200,) = 3 (21 4- 80)/(2 • 160) = 0,94687; Р = 18° 45х 35*.
5. Попередні значення деяких параметрів передачі. Ділильні діаметри шестірні
та колеса будуть такі:
д1 = тпг1/соз р = 3 • 21/0,94687 = 66,53 мм;
= /ппг2/соз р = 3 • 80/0,94687 = 253,47 мм.
Ширина зубчастих вінців
= ф&ааа> = 0,40 • 160 = 64 мм;
= Ь2 4- 2 мм = 64 4- 2 = 66 мм.
Колова швидкість зубчастих коліс
V = 0,5(0^ = 0,5 • 100 • 66,53 • 10~~3 = 3,32 м/с.
311
За даними табл. 22.2 та на с. 273 вибираємо 8-й ступінь точності (лст = 8) для
всіх показників точності зубчастих коліс та передачі.
Еквівалентні числа зубців шестірні та колеса будуть такими:
2о1 = 2,/соз3 р = 21 /0.946873 = 24,74;
го2 = г2/со53 р = 80/0.946873 = 94,24.
Коефіцієнт торцевого перекриття визначаємо за формулою (23.6):
еа= (1,88—3,2(1/2! + 1/г2)] соз Р = [1,88 — 3,2 (1/21 4- 1/80)10,94687= 1,60.
Коефіцієнт осьового перекриїтя зубців дістаємо з формули (23.7):
6^ = д2 зіп р/(ллгп; = 64 • зіп 18° 45' 35*/(3,14 - 3) = 2,18.
Колова сила у зачепленні зубчастих коліс
Г, = ГН( = ГРі = 2Ті/а1 = 2 - 180 - 103/66,53 = 5411 Н.
6. Розрахунок активних поверхонь зубців на контактну витривалість. Для розрахунку
попередньо визначимо такі коефіцієнти:
= 275 МПа1^2 — коефіцієнт, що враховує механічні властивості матеріалів
зубчастих коліс;
2Н = 1,77 соз Р = 1,77 • 0,94687 = 1,676 — коефіцієнт форми спряжених по-
верхонь зубців;
= У 1/еа = У 1/1,60 = 0,79 — коефіцієнт сумарної довжини контактних лі-
ній при Єр > 0,9.
КНа = 1,07 — коефіцієнт, що враховує розподіл навантаження між зубцями
(див. табл. 23.3);
КНр = 1,07 — див. п. 4 розрахунку;
= 1,03— коефіцієнт динамічного навантаження (див. табл. 23.4). За фор-
мулою (23.21) питома розрахункова колова сила
&НІ = (рНіІьг) (5411/64) 1,07 . 1,07 . 1,03 = 99,70 Н/мм.
За формулою (23.26) розрахункове контактне напруження
°н = 1)/« = 275-1,676 - 0,79 х
X У*(99,70/66,53) (3,809 + Ц/3,809 = 501 МПа.
Стійкість зубців проти втомного викришування їхніх активних поверхонь забез-
печується, бо ан = 501 МПа < [о]^ = 528 МПа і лежить у допустимих межах
(див. 23.3).
7. Розрахунок активних поверхонь зубців на контактну міцність. Під час дії мак
симального навантаження за формулою (23.28)
°Н тах = /Л тах/Ля = 501 V = 709 «Па.
Контактна міцність зубців також забезпечується, оскільки
тах 799 МПа < тах = 1792 МПа.
8. Розрахунок зубців на витривалість при згині. Розрахункові коефіцієнти будуть
такими:
УУ1 = 3,90; У3,60 — коефіцієнти форми зубців за табл. 23.5;
¥ і = 1 — коефіцієнт перекриття зубців;
312
Ур — 1 — 0/140 = 1 — 18/140 = 0,87 — коефіцієнт нахилу зубців;
КЕа = І4 + (еа- 0 («ст- 5)1/(4еа) = І4 + (1,60 - 1) (8 - 5))/(4 - 1,60) =
= 0,91 — коефіцієнт, що враховує розподіл навантаження між зубцями;
= 1,12 — коефіцієнт нерівномірності навантаження по ширині зубчастих
вінців (див. рис. 23.8);
= 1,10 — коефіцієнт динамічного навантаження за табл. 23.4.
Питома розрахункова колова сила
иРі = (Г„/Ь2) КРаКР&КРо = (5411/64) 0,91 . 1,12 - 1,10 = 94,79 Н/мм.
Розрахункове напруження згину у зубцях шестірні та колеса визначаємо за фор-
мулою (23.30):
орі = Ур\УгУ^РІ/тп = 3,90 • 1 • 0,87 . 94,79/3 = 107 МПа;
Ор2 = Ур2УеУ^р(/тп = 3,60 . 1 . 0,87 • 94,79/3 = 99 МПа.
Стійкість зубців проти втомного руйнування при згині забезпечується, оскільки
розрахункові напруження згину менші від відповідних допустимих напружень
(о]л = 229 МПа та [о]/г2 = 200 МПа.
9. Розрахунок, зубців на міцність при згині максимальним навантаженням. За
формулою (23.31)
«’Н тах = (Л тах/Ля) = 107 (360/180) = 214 МПа;
тах = °Г2 (Г, т^Т.е) = 99(360/180) = 198 МПа.
Міцність зубців на згин при дії максимального навантаження також забезпе-
чується, бо максимальні розрахункові напруження менші від граничних допустимих
напружень [о]л тах = 610 МПа і [о]г2 тах ~ $34 МПа.
10. Розрахунок параметрів зубчастої передачі (див. 23.1). Розміри елементів
зубців:
висота головки зубця
Ла = тп = 3 мм;
висота ніжки
= 1,25/пп = 1,25-3 = 3,75 мм;
висота зубця
Л = 2,25/Пл = 2,25 • 3 = 6,75 мм;
радіальний зазор
с = 0,25та = 0,25 • 3 = 0,75 мм;
кут профілю зубців
ап = 20°.
Розміри вінців зубчастих коліс:
ділильні діаметри = 66,53 мм і = 253,47 мм (обчислені вище);
діаметри вершин зубців
+ 2тп = 66,53 4~ 2 • 3 = 72,53 мм;
+ 2/пл = 253,47 4- 2 - З = 259,47 мм;
діаметри впадин
= сії — в 56,53 — 2,5 • 3 = 59,03 мм;
^/2 = — 2,5тп = 253,47 — 2,5 • 3 = 245,97 мм,
—
Міжосьова відстань передачі
аш = О,5тп (2| 4- 22)/со5 0 = 0,5 • 3 (21 4- 80)/0,94687 «= 160 мм.
11. Розрахунок, сил у зачепленні зубців передачі. Колова сила Еі = 5411 Н (об-
числена вище).
Радіальну силу визначаємо за формулою (23.17):
Ег = Е{ ап/соз 0 « 5411 20°/0,94687 = 2080 Н.
Осьову силу дістаємо з формули (23.16):
Еа - Рі Р = 6411 <8 18° 45' 36* = 1838 Н.
Контрольні запитання
1. Запишіть формули для визначення основних розмірів вінців циліндричних
пр їмо- та косозубих коліс. Покажіть ці розміри на відповідних рисунках.
2. З якою метою роблять заміну косозубих циліндричних коліс еквівалентними
прямозубими? Як визначаються параметри еквівалентних коліс?
3. Чому у зачепленні міняється довжина лінії контакту зубців? Як оцінюється
довжина лінії контакту зубців у прямо- та косозубих передачах?
4. Запишіть формули для визначення колової, радіальної та осьової сил у за-
чепленні косозубих коліс. Покажіть напрями цих сил на відповідних рисунках. Чо-
му у зачепленні прямозубих коліс відсутня осьова сила?
5. Від яких факторів залежить розрахункове навантаження на зубці циліндрич-
них зубчастих передач?
6. В чому полягає розрахунок активних поверхонь зубців на контактну втому?
Запишіть основну розрахункову залежність та проаналізуйте вплив окремих пара-
метрів на розрахункове контактне напруження.
7. В чому полягає розрахунок активних поверхонь зубців на контактну міцність?
8. За якою залежністю ведеться розрахунок зубців на втому при згині? Який па-
раметр зубців має найбільший вплив на напруження згину?
9. Як ведеться розрахунок зубців на міцність при згині максимальним наванта-
женням?
10. У чому полягає суть проектного розрахунку циліндричної зубчастої переда-
чі? Запишіть основну розрахункову формулу та проаналізуйте вплив окремих пара-
метрів передачі на її розміри.
ГЛАВА 24. КОНІЧНІ ЗУБЧАСТІ ПЕРЕДАЧІ
24.1. Особливості конічних зубчастих передач
Конічні зубчасті передачі застосовуються в тих випадках, коли
осі валів перетинаються. Кут між осями валів може бути довільним,
але на практиці найширше розповсюджені конічні зубчасті передачі
з міжосьовим кутом 5 — 90°. Такі передачі називають ортогональ
ними.
Конічна зубчаста передача (рис. 24.1) складаєть-
ся з двох зубчастих коліс, початковими поверхнями яких є бічні
поверхні прямих кругових конусів, вписаних у сферу радіуса А*,
так, що їхні вершини знаходяться у центрі сфери. Зубці на бічних
поверхнях конусів відрізняються від зубців циліндричних коліс тим,
314
Рис. 24.1. Утворення конічної зубчас-
тої передачі
що їхні розміри в поперечному пе-
рерізі поступово зменшуються з на-
ближенням до вершин конусів.
Під час обертання зубчастих
коліс початкові конуси з кутами
при вершинах і б2 перекочують-
ся один по другому без ковзання.
Профілі зубців конічних зубча-
стих коліс так само, як і циліндрич-
них, окреслюються евольвентою.
Евольвента повинна утворюватись
на сфері радіусом оскільки до-
вільні точки контакту спряжених
профілів зубців повинні знаходи-
тись на однаковій відстані від точ-
ки О. Цій умові задовольняють точ-
ки, що лежать на поверхні сфери.
Профілювання зубців на сфері
утруднене, бо поверхня сфери не
розгортається на площину. Прак-
тично профілювання зубців здій-
снюється наближено на поверхнях додаткових конусів із твірними
ОХА та О2Л, перпендикулярними до спільної твірної О А початкових
конусів.
Зазначені особливості роблять конічні передачі складнішими, ніж
циліндричні у виготовленні та монтажі. Для нарізування зубців ко-
нічних коліс потрібне спеціальне обладнання та інструменти (див.
рис. 22.12). Крім допусків на розміри зубчастих вінців, тут треба
•абезпечити допуски на кути Е, бА і 62, а при монтажі — збіг вершин
конусів з точкою перетину осей валів. Виготовити конічну зубчасту
передачу з одним і тим же ступенем точності значно важче, ніж
циліндричну.
Оскільки осі валів перетинаються, то виникають труднощі з роз-
міщенням опор валів конічної передачі. В більшості випадків одне
• конічних коліс розміщують консольно на валу. При цьому збільшу-
гться нерівномірність розподілу навантаження по довжині зубців.
За дослідними даними несуча здатність конічної зубчастої передачі
суттєво нижча від циліндричної з порівняльними розмірами і стано-
кить близько 85 %. ККД конічної зубчастої передачі становить 0,95—
0.96, що також нижче ККД циліндричної передачі приблизно
на 1 %
Конічні зубчасті колеса бувають із прямими, тангенціальними та
круговими зубцями.
315
24.2. Основні параметри конічної прямозубої передачі
Розміри зубців та вінців конічних зубчастих коліс. Конічна зуб-
часта передача з основними розмірами вінців зубчастих коліс пока-
зана на рис. 24.2. В ортогональній конічній передачі міжосьовий кут
5 = 62 = 90°, де бі — кут при вершині ділильного конуса
шестірні, а б2 — кут при вершині ділильного конуса колеса (у не-
коригованій передачі початковий та ділильний конуси збігаються).
Якщо число зубців конічної шестірні г1т а колеса г2, то кути при
вершинах ділильних конусів визначають за формулами
18йі = 2!/г2; = г2/гг = 90° — (24.1)
Число зубців умовного плоского колеса діаметра Л = 2/?, (рис. 24.2)
гс = (24.2)
Модуль зубців конічних зубчастих коліс не є постійним у різних
нормальних перерізах зубців. Тому вибір стандартного модуля тут
в-рачає зміст. Однак часто з метою полегшення контролю конічних
зубчастих коліс за стандартний беруть модуль у зовнішньому нормаль-
ному перерізі зубців. Такий модуль називається зовнішнім коловим
модулем і позначається те. Надалі будемо брати до уваги, що зов-
нішній коловий модуль зубців стандартний.
Початковий контур конічних зубчастих коліс стандартизований.
Згідно з ГОСТ 13754—81 для 1 мм регламентують такі пара-
метри початкового контура: кут профілю зубця а « 20°; коефіцієнти —
висоти головки зубця На = 1, радіального зазору с* = 0,2, висоти
ніжки зубця Н* — К*а 4- с* = 1,2, радіуса кривини перехідної кривої
у граничній точці профілю р* 0,2, але не більш ніж 0,3.
316
Згідно з параметрами стандартного початкового контура розміри
зубців конічних зубчастих коліс (рис. 24.2) визначаються за форму-
лами:
зовнішня висота головки ^убця
Нае = Н'ате = те;
зовнішня висота ніжки зубця
/уе = к'те = 1,2те;
зовнішня висота зубця
= Нае Н^е = 2,2/ті^,
радіальний зазор
с = с*те — 0,2те.
Розміри вінців конічних шестірні та колеса:
зовнішні ділильні діаметри
== ^е2 ==
зовнішні діаметри вершин зубців
сіаі1 = ае} 2Нае соз 6і = (1е\ 4- 2те соз др
СІде2 == &е2 4~ СОЗ = (Іе2 4“ 2/72в СОЗ дді
зовнішні діаметри впадин
= Леї — соз = Леї — 2,4те соз дх;
^82 == ^82 ~~~~ СОЗ 62 == С^е2 2,4/72^ СОЗ 62»
зовнішня конусна відстань
Яе = 0,5/псгс;
коефіцієнт ширини зубчастого вінця Кье = = 0,25...0,30;
ширина зубчастого вінця Ь = Кьеіїс, але за умови, що Ь 10тпе;
середня конусна відстань
^то = ^-0,5Ь; (24.8)
середній коловий модуль зубців
тт = т1Цт/Ре; (24.9)
ггредні ділильні діаметри шестірні та колеса
= ттгі< Лтз = ттг^, (24.10)
їй головки 0О та ніжки 0/ зубця
0о = /гае/7?е; і§ Є/ = й/е//?,; (24.11)
(24.4)
(24.5)
(24.6)
(24.7)
317
кути конуса вершин зубців шестірні та колеса
бЛі = бх + Єа; баз = ба 4- 0а; (24.12)
кути конуса впадин шестірні та колеса
6л=дг —6Л; 5,2 = 52-0,. (24.13)
Додаткові співвідношення між розмірами елементів конічної зуб-
частої передачі, які будуть використані у подальших теоретичних ви-
кладках:
передаточне число конічної зубчастої передачі
и = Ші/ш, = = 4ті/аті = г,/?!; (24.14)
кути при вершинах початкових конусів шестірні та колеса
4вв1=1/«; іеба=и; (24.15)
зовнішня конусна відстань
Я, = Ґ <^е>/2)3 + (сій/2)2 = ОЛ КПн?; (24.16)
ділильні діаметри, виражені через /? та и,
ае1 = 2^/ТТй5; а.2 = 2Яеи//Г+^;
аті = 2/?т/^ГТ^; ап2 = 2/?ти/КГнЛ (24.17)
середня конусна відстань, середній коловий модуль та середні
ділильні діаметри
Ят = Я, — 0,56 = Я, (1 — 0,5Кбе); тт =т,(1 — О.бЯ».);
Оті = (1-0,5КьЛ. <4й=й2(1-0,5/Ск). (24.18)
Рис. 24.3. До заміни конічних
зубчастих коліс еквівалентними
Заміна конічної зубчастої передачі
еквівалентною прямозубою циліндричною
передачею. Щоб спростити виклад при
виводах розрахункових залежностей для
оцінки міцності зубців конічних передач,
замінимо конічну зубчасту передачу
еквівалентною прямозубою циліндрич-
ною передачею (рис. 24.3). При цьому
початкові циліндри еквівалентних колій
(на рис. 24.3 показані штриховими лі-
ніями) будуть розгортками додаткових
конусів у середньому перерізі зубців
Параметри еквівалентних циліндрич-
них коліс:
модуль зубців еквівалентних коліс піу
дорівнює середньому коловому модулю
конічних коліс тт\
318
ширина вінця еквівалентних коліс Ьо дорівнює ширині вінця
конічних коліс Ь\
ділильні діаметри еквівалентних коліс [з врахуванням (24.15) та
(24.17)]
<Ьл = 2/?т V1 + и’/и = 4ті/соз
= 2/?т 6, = V1 + иг = (іпа/соз б2;
число зубців еквівалентних коліс
<І»1 = = ттг1 /1 4- и*/и,
звідки = г1 У \ +и*!и = г^соз бх;
(іхл = т&я = штг2 Кі + а3.
звідки = г2 V41 4-й3 = г2/соз 62; (24.20)
передаточне число еквівалентної передачі
ао = £ц2/гоі =и2; (24.21)
міжосьова відстань еквівалентної циліндричної передачі визна-
чається як півсума діаметрів коліс та
24.3. Навантаження на зубці конічної
зубчастої передачі
Номінальні сили у зачепленні прямозубих конічних коліс. За ана-
логією з циліндричними передачами силу взаємодії зубців, розподілену
по довжині їхнього контакту, замінимо зосередженою силою, яка
прикладається до зубця у його середньому перерізі. Сили тертя між
вубцями тут також не враховуєм.
У конічній передачі (рис. 24.4, а) взаємодія зубців показана у їх
середньому нормальному перерізі А—А. Якщо до ведучого вала
прикладений обертовий момент 7\, то з боку зубця шестірні на зу-
бець колеса діє нормальна сила Рп, яка направлена вздовж нормалі
до профілів зубців у точці їхнього контакту, тобто вздовж лінії за-
чеплення, яка утворює кут зачеплення а з перпендикуляром до лінії
центрів еквівалентних коліс. Силу Рп замінимо двома взаємно перпен-
дикулярними складовими Р( та Ро, які перенесемо на схему переда-
чі. Тут сила Р{ проекціюється у точку Р, а сила Ро направлена вздовж
сліду площини А—А. Замінивши повторно силу Ро двома взаємно
перпендикулярними складовими Рг2 та Ра2, дістанемо в результаті
три взаємно перпендикулярні компоненти нормальної сили Рп вза-
ємодії зубців: — колову силу; Рл — радіальну силу на колкі
та Ра2 — осьову силу на колесі.
Д-А
Рис. 24.4. Зусилля на зубці конічних зубчастих коліс
Колова сила направлена по спільній дотичній до конічних коліс
і лежить у площині їхнього обертання. Тому ця сила може бути ви-
значена через обертовий момент Ті за формулою
Р< = 2Ті/ату. (24.22)
Нормальна сила Рп і сила Ро виражаються через колову силу
за залежностями (див. паралелограм сил у перерізі А—А на
рис. 24.4, а):
Рп = Р{/соз а = 2Ті/^ті соз а); Го = Р{ а. (24.23)
Подаючи сили РГ2 та Р^ через Ро (див. паралелограм сил на схемі
передачі), дістаємо:
РГ2 = Ро соз б2 = Рі а соз б2; (24.21)
Р а.2 = Р» соз \ = Р 1^0. соз 6Х. (24.25)
Отже, формула (24.23) дозволяє визначити нормальну силу Рп
взаємодії зубців через обертовий момент Т1У а формули (24.22), (24.24)
та (24.25) — її три складові, що діють на зубці конічного колесаі
колову силу Рі, радіальну Гг2 та осьову Раі-
Аналогічні складові діють з боку зубців конічного колеса на зуб-
ці шестірні, але у протилежному напрямі (див. рис. 24.4, б), до того ж
радіальна сила на шестірні Рг\ дорівнює осьовий силі Ра2 на коле-
сі, а осьова сила Ра\ на шестірні — радіальній силі Рг2 на колесі.
Остаточно запишемо компоненти сили Рп взаємодії зубців конічної
прямозубої передачі:
Рі = Рі\ = Рп = 2Т1/(ігп\\
Р я р я 24.26
Рг\ = Ра2 СОЗ Ор '
Ра\ = Рг2 = Рі^СХ, СОЗ 6а.
320
1
2
/,4
/.з
/7
V
ір
1-Опори 5ал$- шарикопідшипники
2-0пори 5а/іїІ- роликопідшипники
З-Опори валів- шарика-адо роликопідшипники
Рис. 24.5. Графіки для визначення коефіцієнтів і Кр$
Зображення сили взаємодії зубців Рп конічних зубчастих коліс
у формі трьох взаємно перпендикулярних складових (24.26) дає пев-
ну зручність при складанні розрахункових схем валів передачі.
Розрахункове навантаження на зубці конічної зубчастої передачі,
аналогією з циліндричними зубчастими передачами Ідив. формули
22) та (23.23)1 розрахункове навантаження на зубці конічної
^едачі визначають за формулами: при розрахунку зубців на кон-
і.іктну витривалість
Ян = ^я//(КєЄа СОЗ а); (24.27)
при розрахунку зубців на витривалість при згині
цР = иоріКК^а. соз а). (24.28)
Під час визначення питомої розрахункової колової сили шні І
треба враховувати такі особливості конічної зубчастої передачі.
>4.1 зазначено, що несуча здатність конічної передачі становить
близно 85 % від несучої здатності еквівалентної циліндричної
едачі, тобто у конічній передачі тільки 85 % ширини вінця Ьефек-
но бере участь у передаванні навантаження. Тому для конічної
частої передачі питому розрахункову колову силу рекомендують
321
визначати за формулами
^Ні = [^//(0,856)1 КнаКн^Кн^ (24.29)
= [РРІ/(0,85Ь)] КгаК^КРо. (24.30)
Тут колові сили Рні = Ррі = Рі визначаються за виразом (24.22),
а коефіцієнти /<а, і Ко мають такий же зміст, як і в циліндрич-
них передачах. Для прямозубих конічних передач Кна = Кра = 1,
а коефіцієнти Кн$ та Кр$ знаходять за кривими 1—3 на рис. 24.5
залежно від схем 1—3 розміщення конічних коліс, виду опор валів,
твердості активних поверхонь зубців та коефіцієнта Лм*
Км = Ь/с^ = [Я/,Л/(2Ят)] и = КЬеи/(2 - Кье). (24.31)
Коефіцієнти динамічного навантаження зубців Кна та Кро можна
брати такі самі, як і для циліндричних зубчастих передач (див.
табл. 23.4) при коловій швидкості зубців V = О.бсо^ті.
24.4. Розрахунок зубців конічних зубчастих передач
на контактні витривалість і міцність, на витривалість і міцність
при згині
Розрахунок активних поверхонь зубців на контактні витривалість
та міцність. Розрахункову формулу для перевірки на контакт-
ну витривалість активних поверхонь зубців конічної зубчастої переда-
чі можна дістати на основі залежності (23.26), яка використовується
у розрахунках циліндричних зубчастих передач. При цьому замість (Ц
і и У цій залежності беремо параметри сІиі і ис еквівалентної цилінд-
ричної передачі, якою можна замінити конічну передачу (див. 24.2).
= ^11^1 4- и2/и; и0 = и2.
Підставивши ці параметри у формулу (23.26) замість та и, ді-
станемо розрахункову залежність для перевірки на контактну витри
валість активних поверхонь зубців конічної зубчастої передачі у вигляді
Он = (Мні/сіті) (К1 4- и^и) < [а]н. (24.32)
Тут їі)ні — питома розрахункова колова сила, яка визначається
за виразом (24.29):
^Ні = [/*7/ґ/(0,85д)] /(нсЛнрКни.
Розрахункові коефіцієнти 2м та 2н в умові (24.32) беруть такими ж,
як і для циліндричних передач, а коефіцієнт 2е = Уг(4 — еа)/3,
де коефіцієнт торцевого перекриття еа можна знайти за числами зуб-
ців та еквівалентних циліндричних коліс [див. формулу (23.6)І:
єа = 1,88 — 3,2 (1/гУі 4- 1/гРг). (24.33)
322
і Розрахунок на контактну міцність активних поверхонь зубців
»• конічних зубчастих передач виконують за умовою (23.28). Допусти-
мі контактне напруження [аін та граничне контактне напруження
тах визначають згідно з рекомендаціями 22.11.
Розрахунок зубців на витривалість при згині та на міцність при
згині максимальним навантаженням. Для розрахунку зубців конічних
передач на витривалість при згині справедлива формула (23.30), яку
дістали для циліндричних передач, тільки замість нормального моду-
ля тп треба брати середній коловий модуль зубців тт конічних коліс,
що дорівнює модулю зубців еквівалентної циліндричної передачі:
ар = У8 У< [о>. (24.34)
Тут також додатково зазначимо, що питома розрахункова колова
сила визначається за формулою (24.30)’
Юрі = [/7Р*/(0»85д)] КраКрьКри-
У розрахунковій залежності (24.34) коефіцієнт форми зубців
Ур знаходять за даними табл. 23.5 залежно від еквівалентних чисел
зубців та ги2 [див. співвідношення (24.20)]. Для конічних передач
із прямими зубцями коефіцієнти У8 = 1 та Ур = 1.
Розрахунок зубців конічних передач на міцність при згині мак-
симальним навантаженням виконують за умовою (23.31).
Міцність зубців на витривалість та на міцність при згині перевіря-
, ють окремо для зубців шестірні та зубців колеса. Методика визначення
г допустимих напружень наведена в 22.11. Якщо результати перевірки
। незадовільні, то треба збільшити модуль зубців тт.
24.5. Проектний розрахунок конічної
зубчастої передачі
У проектному розрахунку конічної зубчастої передачі (за анало-
гією з циліндричними передачами) основний розмірний параметр
визначають також із умови стійкості активних поверхонь зубців
проти втомного викришування. Основним розмірним параметром ко-
нічної передачі, що визначає її габаритні розміри, беруть зовнішній
ділильний діаметр колеса (ід.
Вихідними даними для проектного розрахунку передачі є такі’
— розрахункове тривало діюче навантаження Тіні
— передаточне число передачі и;
— параметр Кье — Ь/Ке або Кьа = Ь/(10\ = Кьеи/(2 —- Кье)\
— вид передачі — із прямими, тангенціальними чи круговими
убцями;
— матеріали зубчастих коліс, термообробка їх та твердість актов-
их поверхонь зубців, за цими даними попередньо визначають допус-
име контактне напруження [о]н.
323
Розрахункову формулу для проектного розрахунку конічної
зубчастої передачі дістанемо шляхом таких перетворень. У виразі
(24.32) зробимо таку заміну:
ЮНіІ&тІ = 1^\/(0>85&4пі)] КнаКн^Кно =
= [2 • КноЛнр/Сни.
Виразимо Ь і сіті через зовнішній ділильний діаметр колеса сід
[див. співвідношення (24.14), (24.17), (24.18)]:
ь = Кь.К, = Яб.0,5^! /т+й» = /Г+й’/и;
сіті — (1 — 0,5Кб.) == сім (1 — 0,5Кб«)/и.
Підставивши відношення шнМпі, в якому Ь та сіт\ подані через
Аг, У розрахункову залежність (24.32) та зробивши наближену за-
міну (1 —0,5Кі,е)4 « 1,03 (1 —КьеК можна знайти формулу для
визначення мінімального зовнішнього ділильного діаметра конічно-
го колеса:
ті» = Кл УТ1нКн^/(Кь, (1 - Кь.) (а]н). (24.35)
Тут допоміжний коефіцієнт Ка об’єднує ряд коефіцієнтів і вира-
жається залежністю
Ка = ^4 • 10’ КнаКн»/(0,85 • 1,03).
У проектному розрахунку прямозубої конічної зубчастої пере-
дачі рекомендують брати; Ка ~ Ю00 МПа,/3 для сталевих коліс;
Ка = 825 МПа’^3 для чавунних коліс. Коефіцієнт Кн$ визначають
за графіками на рис. 24.5.
Слід зауважити, що у формулі (24.35) 7\ беруть у ньютон-метрах
(Н • м), [а]# — у мегапаскалях (МПа), а Агтіп — у міліметрах (мм).
Щоб визначити модуль зубців, треба попередньо вибрати числ.»
зубців шестірні та колеса. Число зубців конічної шестірні для сило
вих конічних передач рекомендується брати в таких межах: г1
= 17...20 при и = 1,0...1,5; — 13...18 при и = 2...4. За вибра-
ним числом зубців шестірні визначають число зубців конічного колі
са г2 — иг^. При цьому бажано виконувати умову гг 4- г2 80...85
Вибравши число зубців конічного колеса, можна визначити по
трібний зовнішній коловий модуль
/Не = ^е2шіп/^2’ (24.36)
який треба узгодити зі стандартним значенням те (див. 22.2).
Знаючи модуль ті та число зубців коліс та г2, за формулами
у 24.2 можна знайти всі розміри вінців конічних зубчастих коліс
У конічних зубчастих передачах перевага надається також маломо
дульним колесам (для силових передач те 1,5 мм), що досягається
324
відповідним вибором чисел зубців шестірні та колеса. Однак оста-
точні висновки про раціональність попереднього визначення модуля
зубчастих коліс можна зробити після перевірних розрахунків за
умовами (24.32) та (24.34).
24.6. Особливості конічних зубчастих передач
із непрямими зубцями
Прямозубі конічні передачі використовують з порівняно невисо-
кими коловими швидкостями до 3 м/с (інколи до 8 м/с) за умови шлі-
фування зубців та 6- або 7-го ступенів точності. При більш високих
швидкостях доцільно застосовувати конічні колеса із тангенціальни-
ми або круговими зубцями (рис. 24.6), які забезпечують більш плавне
зачеплення, більшу несучу здатність і, крім цього, вони більш техно-
логічні.
У конічних колесах із тангенціальними зубцями (рис. 24.6, а) лі-
нія зубців напрямлена по дотичній до деякого додаткового кола ра-
діуса г і утворює з твірною конуса кут р. Кут нахилу зубців Р не по-
винен перевищувати 25—30°. Колова швидкість таких коліс може
бути доведена до 15 м/с. Найбільш ефективні у силових передачах
колеса з тангенціальними зубцями при т 8 мм.
У конічних колесах із круговими зубцями (рис. 24.6, 6) лінія
іубців має форму дуги кола, де рухається інструмент при нарізуван-
!І зубців. Кут нахилу р кругового зубця змінний для різних перері-
іів зубця. За розрахунковий беруть кут нахилу зубців на колі се-
>еднього діаметра колеса. Для коліс із круговими зубцями Р « 35°.
Зикористовують конічні зубчасті передачі з колесами з круговими
іубцями у трансмісіях транспортних машин та у верстатобудуванні.
Чолова швидкість може досягати ЗО м/с.
Для конічних коліс із тангенціальними зубцями за розрахунковий
деруть зовнішній нормальний модуль тпЄ9 а для коліс із круговими
іубцями — середній нормальний
юдуль ГПтп.
Розрахунок конічних зубчас-
их передач з непрямими зубця-
ми наведено у відповідній довідко-
• ій літературі, а їх розрахунки на
ість можна наближено викону-
за формулами (24.32) та
4), враховуючи деякі особли-
цих передач при виборі роз-
нкових коефіцієнтів. Зараз
жо застосовують спеціальні
ахунки конічних передач із
5
Рис. 24.6. Конічні колеса з непрямими
зубцями
325
круговими зубцями А ОМА (США), що розроблені фірмою зуборізних
верстатів «Глісон», яка має великий досвід у проектуванні, виго-
товленні та випробуванні конічних зубчастих передач.
24.7. Приклад розрахунку конічної
зубчастої передачі
Задача. За даними умови задачі в 23.6 розрахувати прямозубу конічну переда-
чу редуктора (рис. 24.7) із передаточним числом и= 1,8, вибравши ті самі матеріа-
ли для виготовлення зубчастих коліс.
Розв* язання. 1. Параметри навантаження зубчастої передачі (див. зада-
чу в 23.6):
7'і==7\// = 7\/? = 180 Н • м; Т| тах = 360 Н • м;
й)2 = ^/и = 100/1,8 = 55,6 рад/с.
2. Матеріали зубчастих коліс брати ті самі, що й у задачі в 23.6.
3. Допустимі напруження для розрахунку зубчастої передачі (див. розв’язання в
23.6): [о)ж = 664 МПа; [о]^ в 509 МПа; [0)/^* = 1792 МПа. Розрахункове до-
пустиме контактне напруження для прямозубої конічної передачі [о]^ = 509 МПа;
Іо)£1 == 229 МПа; [о]^ = 200 МПа; [о]л тах = 610 МПа; [оі^ тая = 534 МПа.
4. Проектний розрахунок передачі. Попередньо беремо коефіцієнт ширини зуб-
частих вінців КЬе = 0,27 і відповідно за формулою (24.31) коефіцієнт
Км = - Кьд в °>27 * Ь8/(2 “ °>27) в 0,28.
За графіком рис. 24.5 залежно від визначаємо коефіцієнт, що враховує не-
рівномірність розподілу навантаження по ширині зубчастих вінців в 1,06.
Для сталевих конічних коліс допоміжний коефіцієнт Ка в 1000 МПа1/3.
За формулою (24.35) мінімальний зовнішній ділильний діаметр конічного колеса
з---------------------------------------------------------—
^е2 тіп = Кат ТінКнї>и*І(КЬе (1 — КЬе) Ми) я
з.------------------------------------
= 1000 V 180 • 1,06 • 1,8а/(0,27 (1 —0,27) 509а) « 228,9 мм.
Вибираємо число зубців шестірні гх = 18, а число зубців колеса = иг1== 1,8 X
X 18= 32,4. Візьмемо = 33. Тоді фактичне передаточне число и = = 33/18 =
= 1,83.
Рис. 24.7. Схема ко«
нічного редуктора
За формулою (24.36) модуль зубців
в тіп/г2 = 228.9/33 = 5,94 мм.
За стандартом (див. с. 260) беремо т, = 7 мм.
5. Попередні значення деяких параметрів передачі. Зо-
внішні ділильні діаметри шестірні та колеса визначаємо за
формулами (24.4):
= т^ = 7 • 18 = 126 мм;
^«2 = ттгі = 7 • 33 = 231 мм»
326
За формулами (24.2) та (24.7) зовнішня конусна відстань
К, = 0,5т, |Лг| + = 0,5-7 V 18» -(- 33» = 131,56 мм.
Ширина зубчастих вінців
і с в ’ 131 ,56 = 35,5 мм»
За формулою (24.8) середня конусна відстань
Ят = /?е — 0,5Ь« 131,56 —0,5 • 35,5 = 113,81 мм.
Середній модуль зубців
тт = т9Кт№9а 7 • 113,81/131,56 » 6,05 мм.
За формулою (24.20) середні ділильні діаметри шестірні та колеса
сІтї = ттгі = 6,05 • 18 = 108,9 мм.
^т2 ~ ттгі в 6,05 • 33 = 199,65 мм.
Кути при вершинах ділильних конусів шестірні та колеса визначаємо за форму*
лами (24.1):
бі = агс (2і/г8) == агс (18/33) ® 28,6104° в 28° 36' 38*;
б, = 90° — бі = 90° — 28°36'38* = 61° 24' 22*.
Колова швидкість зубчастих коліс
о = 0,5й)1^п11 = 0,5 • 100 • 108,9 • 10~3 =» 5,45 м/с.
За даними табл. 22.2 та на с. 273 виберемо 7-й ступінь точності (пп « 7) для
всіх показників точності зубчастих коліс та передачі.
Еквівалентні числа зубців конічних шестірні та колеса знаходимо за формулами
(24.20):
го1 = г, /1 +и*/и = 18 У 1 + 1,83»/1,83 = 20,51;
= г«/14-“’ = 33 V1 4-1.83» = 68,82.
Коефіцієнт торцевого перекриття зубців
®<х в 1»®® — 3,2 (1/гоі 4“ а
= 1,88 — 3,2 (1/20,51 4- 1/68,82) = 1,68.
За формулою (24.22) колова сила у зачепленні зубчастих коліс
Рі « РНІ = Ррі = 2Т^ат1 = 2 . 180 • 103/108,9 = 3306 Н.
6. Розрахунок активних поверхонь зубців на контактну витривалість. Попе -
редньо визначимо коефіцієнти:
2М *= 275 МПа,/2 — коефіцієнт, що враховує механічні властивості матеріалів
вубчастих коліс (для сталевих коліс);
2Н = 1,77 — коефіцієнт форми спряжених поверхонь зубців;
2е = У (4 — 8^/3 = У (4 — 1,68)/3 = 0,88 — коефіцієнт сумарної довжини
контактних ліній;
КНа = 1 — коефіцієнт, що враховує розподіл навантаження між зубцями;
= 1,06 — див. п. 4 розрахунку;
1,20 — коефіцієнт динамічного навантаження (див. табл, 23.4).
_ ___ - —-
За формулою (24.29) питома розрахункова колова сила
= [3306/(0,85.35,5)] 1 . 1,06 • 1,20 = 138 Н/мм,
За формулою (24.32) розрахункове контактне напруження
(У"1 + и2/и) —
= 275 • 1,77 • 0,88 (138/108,9) (/1 + 1,832/1,83) = 515 МПа.
Можна вважати, що стійкість зубців проти втомного викришування їхніх актив-
них поверхонь забезпечується, оскільки розрахункове контактне напруження о# =
= 615 МПа перевищує допустиме [о]/у = 509 МПа на 1,18 % (допускається до 5 %).
7. Розрахунок, активних поверхонь зубців на контактну міцність. При дії мак-
симального навантаження за формулою (23.28)
тах = УТ<. тах/Л = 515 /360/180 = 728 МПа.
Контактна міцність зубців забезпечується, бо оНтах в 728 МПа < [^нтах ~
1792 МПа.
8. Розрахунок зубців на витривалість при згині. Розрахункові коефіцієнти:
УРІ = 4,04, ¥р2 = 3,62 — коефіцієнти форми зубців (див. табл. 23.5);
Уе = 1 — коефіцієнт перекриття зубців;
Ур = 1 — коефіцієнт нахилу зубців (для прямозубої передачі);
КРа = 1 — коефіцієнт, що враховує розподіл навантаження між зубцями;
Лу-р = 1,12 — коефіцієнт нерівномірності навантаження по ширині зубчастих
вінців (див. рис. 24.5);
= 1,45 — коефіцієнт динамічного навантаження зубців (див. табл. 23.4).
За формулою (24.30) питома розрахункова колова сила
У°РІ — І^У//(0,85д)] —
= [3306/(0,85 • 35,5)] 1 • 1,12 • 1,45 = 178 Н/мм.
Розрахункове напруження згину в зубцях шестірні та колеса визначаємо за фор-
мулою (24.34):
оРі = УпУеУрО>ґ//пт = 4,04 .1.1. 178/6,05 = 119 МПа;
Ор2 == УР2¥г¥$і)ріітгп = 3,62 .1.1. 178/6,05 = 107 МПа.
Стійкість зубців проти втомного руйнування при згині забезпечується, оскільки
розрахункові напруження в зубцях шестірні та колеса менші за відповідні допустимі
напруження [о]^! = 229 МПа і [о]^ = 200 МПа.
9. Розрахунок зубців на міцність при згині. Під час дії максимального наванта-
ження за формулою (23.31)
тах = °/п (Л тах/Л) = П9 (360/180) = 238 МПа;
тах = °Р2 (Л тах^і) = Ю? (360/180) = 214 МПа.
Міцність зубців на згин під час дії максимального навантаження також забезпе*
чується, оскільки максимальні розрахункові напруження менші від граничних до*
пустимих напружень [о]п тах = 610 МПа і [о]^ тах = 534 МПа.
328
10. Розрахунок параметрів конічної передачі (див. 24.2). Розміри елементів
зубців:
зовнішня висота головки зубця
Нае а тл = 7 мм;
зовнішня висота ніжки зубця '
» 1,2т, = 1,2 • 7 «= 8,4 мм;
зовнішня висота зубця
Ье = 2,2/лв «= 2,2 • 7 = 15,4 мм;
радіальний зазор
с = 0,2/пе = 0,2.7 = 1,4 мм;
кут профілю зубців
а = 20°.
Розміри зубчастих вінців конічних коліс:
кути при вершинах ділильних конусів (див. п. 5 розрахунку) бг = 28° 36* 38*; ба =
= 61° 24' 22*;
зовнішні ділильні діаметри = 126 мм; = 231 мм (див. п. 5 розрахунку);
зовнішні діаметри вершин зубців
ааеі = ае! + 2т» соз бї = 126 4- 2 • 7 . соз 28° 36' 38* а 138,29 мм;
&ае2 = 4" соз а 231 4- 2 • 7 . соз 61° 24' 22* а 237,70 мм;
зовнішні діаметри впадин
в —ї^т'соз бі = 126 — 2,4.7 • соз 28° 36' 28’ = 111,25 мм;
= ^е2 — %Лте соз 6, = 231 — 2,4.7 • соз 61° 24' 22* = 222,95 мм;
за попередніми розрахунками у п. 5 маємо: = 131,56 мм; /?т = 113,81 мм; Шщ =
в 6,05 мм; Лті = 108,9 мм; (іт2 = 199,65 мм.
аа формулами (24.11) кути головки та ніжки зубців
І£ Єа = Нав/Р9 = 7/131,56 а 0,05321 • Єа = 3,04570° = 3° 02' 45*;
Є/ = Нїе/Ре а 8,4/131,56 а 0,06385; 0^ = 3,65333° а 3° 39' 12*;
за формулами (24.12) кути конуса вершин зубців шестірні та колеса
ба1 = бі 4- 0а а 28° 36' 38* 4- 3° 02' 45* а 31° 39' 23*;
ба2 = ба 4- 0а а 61е 24' 22* 4- 3° 02' 45* а 64° 27' 07*;
за формулами (24.13) кути конуса впадин
а бі — 0; а 28° 36' 38* — 3°_39' 12* а 24° 57' 26*;
б£9 = б3 — 0/ = 61° 24' 22* — 3° 39' 12* а 57° 45' 10*.
11. Сили в зачепленні зубців конічної передачі визначаємо за формулами (24.26).
Колова сила (див. п. 5 розрахунку) Г/ = 3306 Н.
Радіальна сила на шестірні дорівнює осьовій силі на колесі:
а Р^ = Р{ а соз бі а 3306 . 20° соз 28° 36' 38* а 1056 Н.
Осьова сила на шестірні дорівнює радіальній силі на колесі:
= ^2 = соз б, а 3306 • 20°соз61°24' 22* а 576Н.
329
Контрольні запитання
і. Охарактеризуйте конічні зубчасті передачі з точки зору їхньої будови, вико-
ристання та несучої здатності.
2. Назвіть основні параметри конічних зубчастих коліс та запишіть формули для
визначення їх.
3. З якою метою роблять заміну конічної передачі еквівалентною циліндричною
передачею? Запишіть вирази для деяких параметрів еквівалентної циліндричної пе-
редачі.
4. Запишіть формули для визначення колової, радіальної та осьової сил, які
діють на конічну шестірню та конічне колесо. Покажіть напрями цих сил на відпо-
відному рисунку.
5. Назвіть чотири основні розрахунки на міцність конічних зубчастих передач.
6. Запишіть формули для основних розрахунків на міцність конічних передач
та проаналізуйте вплив деяких параметрів на розрахункові напруження.
7. У чому полягає суть проектного розрахунку конічної зубчастої передачі? За
якою формулою ведеться цей розрахунок?
8. Охарактеризуйте особливості конічних зубчастих передач із непрямими зуб-
цями.
ГЛАВА 25. ЦИЛІНДРИЧНІ ЗУБЧАСТІ ПЕРЕДАЧІ
ІЗ ЗАЧЕПЛЕННЯМ НОВІКОВА
25.1 . Особливості передач із зачепленням Новікова
Зубчасті передачі з евольвентним зачепленням при всіх їх незапе-
речних перевагах з точки зору сучасних вимог мають суттєві недолі-
ки: низьку несучу здатність за умови контактної втоми активних
позерхонь зубців (малі зведені радіуси кривини робочих поверхонь
зубців); порівняно високі втрати у зачепленні, що пов’язані з наяв-
ністю двох видів тертя — кочення та ковзання; підвищену чутливість
до перекосів осей колїс у зв’язку з лінійним контактом зубців.
Нове зачеплення підвищеної несучої здатності розроблене у
1954 р. М. Л. Новіковим. Узачепленні Новікова ліній-
ний контакт зубців замінено точковим, який під навантаженням пере
тгорюється у локальний контакт на поверхні. Найпростішими профі-
лями зубців, що забезпечують такий контакт, є профілі, які окресле-
ні дугами кола. При цьому зубці одного колеса роблять випуклими,
а другого — угнутими.
На рис. 25.1, а показана схема зачеплення Новікова, у якому
торцеві профілі зубців 1 і 2 окреслені дугами кіл із радіусами рі
і р2. Ці профілі мають контакт у точці К, яка не збігається з полюсом
зачеплення Р. Зміщення точок контакту зубців від полюса завжди
постійне, тобто = СОП5І. При обертанні коліс із такими профілями
зубців точка контакту рухається вздовж зубців і знаходиться на од-
наковій відстані від полюсної лінії, тобто лінія зачеплення зубців
паралельна полюсній лінії (паралельна осям обертання зубчастих
коліс). Щоб забезпечити неперервність зачеплення і сталість переди-
330
Рис. 25.1. Зачеплення зубців із круговим профілем (зачеплення Новікова)
точного числа, зубчасті колеса із зачепленням Новікова обов’язково
повинні бути косозубими, до того ж осьовий коефіцієнт перекриття
ер повинен бути більшим за одиницю. Торцевий коефіцієнт перекрит-
тя еа у такій передачі дорівнює нулю. Спільна нормаль NN до про-
філів зубців у точці їхнього контакту проходить через полюс Р, цен-
три дуг, якими окреслені профілі, і утворює кут зачеплення а із
тільною дотичною до ділильних кіл, що мають діаметри і <і2.
Оскільки радіуси кривини профілів зубців шестірні рі та колеса
। дуже близькі за значенням, а випукла поверхня одного зубця кон-
тактує з угнутою поверхнею другого зубця, то після припрацювання
іубці контактують на значній частині своєї висоти. У свою чергу,
внаслідок великих радіусів кривини гвинтових поверхонь косих
іубців, їх контакт поширюється і на деяку частину довжини зубців.
>тже, у передачі із зачепленням Новікова навантаження між зубця-
п розподіляється на порівняно велику поверхню контакту.
Під час обертання зубчастих коліс поверхня контакту зубців
ухається вздовж лінії зачеплення із швидкістю
ух = рсі§Р, (25.1)
е V — колова швидкість коліс; р — кут нахилу лінії зубців. Якщо
швидкість значна за значенням, то створюються сприятливі умови
для виникнення масляної плівки значної товщини між зубцями.
Це також сприяє підвищенню несучої здатності передачі із зачеплен-
ням Новікова.
Порівняно з евольвентними зубчасті передачі із зачепленим Но-
йікова мають у 1,5—2 рази вищу несучу здатність, підвищене значення
ККД, а також вищу стійкість проти спрацювання.
331
До недоліків передач із зачепленням Новікова належать підвищена
чутливість до неточностей монтажу і пов’язана з цим потреба достатньо
високої жорсткості валів та їхніх опор.
Лінія зачеплення у передачах Новікова може розміщуватись до
полюсної лінії і за полюсною лінією (за напрямом обертання ведучо-
го колеса). У першому випадку зачеплення називається д о п о л ю с -
ним (рис. 25.1, б), а у другому — за полюсним (25.1, а).
Одна і та сама пара коліс може мати заполюсне і дополюсне зачеп-
лення залежно від того, яке з коліс є ведучим. Ознакою заполюсного
зачеплення є випуклий профіль зубців ведучого колеса і угнутий
профіль — веденого колеса.
Профілі зубців можна виготовити так, щоб одна частина профілю
була випуклою, а друга угнутою. Тоді зубці зможуть зачеплятись
і до полюса і за полюсом. У цьому разі будемо мати варіант доза-
полюсного зачеплення (рис. 25.1, в). Дозаполюсне зачеплення
має дві лінії зачеплення, що проходять через точки а і Ь. Відповідно
у 2 рази збільшується поверхня контакту зубців. У таких передачах
зубці шестірні та колеса мають однаковий профіль: випуклий на го-
ловці і угнутий на ніжці. Дві лінії зачеплення паралельні і знаходять-
ся в одній площині з полюсною лінією. В парі працюють випуклий
профіль головки і угнутий профіль ніжки зубців відповідно шестір-
ні та колеса.
Зубчасті колеса з дозаполюсним зачепленням можна нарізувати
одним інструментом (один початковий контур) і ці колеса мають біль-
шу несучу здатність. Тому переважне розповсюдження мають зубчасті
передачі з дозаполюсним зачепленням.
25.2 . Параметри зубчастої передачі
із зачепленням Новікова
Для циліндричних зубчастих передач Новікова з однією та двома
лініями зачеплення модулі у нормальному перерізі зубців стандарти
зовані ГОСТ 14186 — 69. Деякі стандартні модулі наведені у табл. 25 1
Кути нахилу зубців беруть: 0 = 10...25° — для косозубих і
0 = 25...35° — для шевронних передач Новікова.
Розміри елементів зубців визначаються параметрами стандартною
початкового контура. В передачах з двома лініями зачеплення (доза
Таблиця 25.1. Модулі т циліндричних передач Новікова
Ряд
ГПі мм
1-й 2 2,5 3,15 4 5 6,3 8 10 12,5
2-й 2,25 2,8 3,35 4.5 5,6 7,1 9 11 — 1'1
332
Рп’Ятп
Рис. 25.2. Початковий контур зубців із круговим
профілем
полюсних) зубці повин-
ні відповідати початко-
вому контуру за ГОСТ
15023 — 76 (рис. 25.2),
область застосування
якого обмежується зна-
ченням модуля т
16 мм, коловою швид-
кістю КОЛІС V 20 м/с
та твердістю зубців //
С 320 НВ.
Згідно зі стандартом беруть такі параметри початкового контура:
а„ = 27°; Н* = 0,9; с* = 0,15; = 1,147...1,150; р/ = 1,307...
1,252.
Розрахунок циліндричних передач Новікова виконують на основі
ГОСТ 17744 — 72. Формули для визначення основних розмірів зуб-
частих коліс записують у такому вигляді:
- ділильні діаметри
с?! = тих/соз 0; сі2 = тг2/со$ 0; (25.2)
- діаметри вершин зубців
іїаі = 4- 2/ідШ; іїа2 — сі2 4- 2Ь*ат; (25.3)
- діаметри впадин
сі^=сі1 — 2(Лд4-с*)т; — 2(/ід 4-е*)ги; (25.4)
- осьовий крок зубців
Рх = Л/П/5ІП 0; (25.5)
відношення ширини вінця колеса до осьового кроку зубців (для
передач редукторів загального призначення)
д2/Рх = 1,25... 1,35; (25.6)
ширина вінця шестірні
61==624-(0,4. ..1,5)т; (25.7)
міжосьова відстань
а = 0,5/п (гх 4- г2)/соз 0. (25.8)
Число зубців шестірні вибирають у межах = 12...25, до того ж
іендують брати більшим для високих колових швидкостей,
з зубців колеса відповідно підраховують за формулою г2 =
333
25.3 . Особливості розрахунків на міцність
циліндричних передач Новікова
Як було зазначено вище, контакт зубців у передачах Новікова
здійснюється по деякій поверхні завдяки дотиканню випуклої та уг-
нутої поверхні зубців із великими і близькими за значенням радіу-
сами кривини. Розміри поверхні контакту збільшуються за рахунок
припрацьовування зубців. Тому у передачах Новікова рекомендують
для виготовлення зубчастих коліс використовувати матеріали, які
здатні припрацьовуватись. На практиці найчастіше застосовують
сталеві зубчасті колеса з твердістю Н 320 НВ.
Незважаючи на поверхневий контакт зубців, руйнування їхніх
активних поверхонь проявляється у вигляді втомного викришування.
Контактна теорія Герца до зубців передач Новікова застосовується
умовно. За цією теорією розроблені методи розрахунку зубців на
витривалість їхніх активних поверхонь із урахуванням деяких корек-
туючих коефіцієнтів.
Крім розрахунків на контактну витривалість, для зубців передач
Новікова треба виконувати розрахунки на витривалість при згині
Особливості геометрії зубців у розрахункових формулах враховують
відповідними коефіцієнтами.
Нижче наведені (без виводів) формули для розрахунків на міцність
косозубих циліндричних передач Новікова, форма зубців яких відпо-
відає початковому контуру за ГОСТ 15023 — 76 (дозаполюсне за-
чеплення), а відношення Ь2/Рх = 1,25...1,35.
Перевірний розрахунок за умовою стійкості активних поверхонь
зубців проти втомного викришування ведуть за формулою 124]
V [ІТ^т)! (КнаКн./Кг) (и + 1)/« < [а]„.
(25.9)
У цій формулі маємо такі розрахункові коефіцієнти:
2м — 275 (МПа)1/2 — коефіцієнт, що враховує механічні власті!
вості сталевих зубчастих коліс; 7$ = 0,010 4- 0,2 — коефіцієнт
кута нахилу зубців;
2к = 0,8 — коефіцієнт довжини умовної лінії контакту по висоті
зубця; _____
Кна = 1 + 0,63 и — 1/гі — коефіцієнт нерівномірності розло
ділу навантаження між головкою та ніжкою зубця;
Кно — коефіцієнт динамічного навантаження, який можна брл
ти таким же, як і для евольвентних циліндричних передач (дні»
табл. 23.4);
Ке— 2,15 — коефіцієнт, що враховує розподіл навантаження їм»
поверхнях контакту зубців.
334
Таблиця 25.2. Коефіцієнти ¥р циліндричних передач Новікова
Ур ги Ур г0 Ур
10 6,5 25 4,9 60 4,4
12 6,0 зо 4,8 80 4,3
15 5,6 40 4,7 100 4,2
20 5,1 50 4,5 120 4,1
Розрахунок зубців передач Новікова на витривалість при
згині
можна виконати за такою умовою:
ср = УрУ$Ук 12Т1/(тЧ1)] (КРаК^/Кг) < [<ф. (25.10)
Тут слід вибрати такі значення розрахункових коефіцієнтів:
Ур — коефіцієнт форми зубців, який беруть залежно від екві-
валентного числа зубців 20 = г/соз3р за табл. 25.2;
Ур = 0,006 Р — коефіцієнт нахилу зубців;
Ук « 0,5 — коефіцієнт переміщення контакту вздовж зубців;
Кра ~ І 4- 0,76 — \/г1 — коефіцієнт нерівномірності розпо-
ділу навантаження при згині між головкою та ніжкою зубця;
— коефіцієнт динамічного навантаження (див. табл. 23.4).
При виконанні проектного розрахунку циліндричної передачі
Новікова наближене значення ділильного діаметра шестірні визна-
«іють за формулою, добутою з умови (25.9) при усереднених значен-
их розрахункових коефіцієнтів:
4 тіп = 210 V (Лгі/[а]2н) (« + 1)/«. (25.11)
Тут обертовий момент на ведучому валу передачі 7\ у ньютон-
мстрах (Н • м); [оія — У мегапаскалях (МПа); й\ тіп — у міліметрах
(мм), а число зубців шестірні вибирають згідно з рекомендаціями
2Г>.2.
Допустимі напруження контактне [стін та згину [оі/? для зубців
іиліндричних передач Новікова визначають за такою ж методикою,
к і для евольвентних зубчастих передач.
Сили, що виникають у зачепленні циліндричної передачі Новіко-
передаються на вали та їхні опори, можна обчислити за формула-
3.15), (23.16) та (23.17) для циліндричних евольвентних передач
ови, що кут профілю зубців ап = 273. При визначенні сил реак-
юр валів слід мати на увазі їхню циклічну зміну, оскільки зона
ікту зубців у передачах Новікова переміщається від одного тор-
ги іс до другого.
335
25.4 . Приклад розрахунку передачі Новікова
Задача. Розрахувати циліндричну зубчасту передачу Новікова одноступеневог»
редуктора за даними задачі в 23.6, тобто Р} — 18 кВт; о)2 = 100 рад/с; и = 3,8; пе
редача нереверсивна; режим навантаження СН; строк служби передачі Н = 20 000 год
Розв’язання. 1. Розрахункові параметри вибрати з розв’язання задачі 23.6
обертовий'момент на ведучому валу Тх — 180 Н • м; допустиме контактне напружен
ня [су]/у = 509 МПа; допустимі напруження на згин для зубців шестірні та колес.
[о]л = 229 МПа і [о]р2 — 200 МПа.
2. Проектний розрахунок передачі (передачі з початковим контуром зубчасти:
коліс за ГОСТ 15023—76). Орієнтуючись на малу колову швидкість коліс, виберем»
число зубців шестірні г2 — 15, а число зубців колеса г2 = и21 = 3,8 • 15 = 57. По
передньо назначимо кут нахилу лінії зубців £ — 15°.
За формулою (25.11) мінімальний ділильний діаметр шестірні
тіп в 2Ю у/~(Т\2г) (и 4* 1)/н —
= 210 ^/(180 • 15/5092) (3,8 4- 1 )/3,8 = 49,60 мм.
Розрахунковий модуль зубців
т< = гі^соз Р/2Г = 49,60 • соз 15°/15 = 3,19 мм.
За стандартом виберемо (див. табл. 25.1) т = 3,15 мм.
Фактичний кут нахилу лінії зубців
соз р = тг^йі = 3,15 • 15/49,60 = 0,95262; 0 = 17° 42' 27*.
3. Попередні значення деяких параметрів передачі. За формулою (25.5) осьовий
крок зубців
рж = шп/зіпр = 3,14 • 3,15/зіп 17° 42'27* = 32,535 мм.
При Ь2!РХ = 1,3 ширина вінця колеса [див. співвідношення (25.6)]
Ь2 = 1,ЗРХ » 1,3 . 32,535 = 42,3 мм
Вибираємо Ьа = 43 мм.
Колова швидкість зубчастих коліс
о = 0,5(0^ = 0,5 • 100 • 49,60 . 10“3 = 2,48 м/с.
Еквівалентні числа зубців коліс
= г^соз3 Р = 15/0,95262» = 17,35;
гу2 = г2/соз3 р = 57/0.952623 = 65,93.
4. Розрахунок активних поверхонь зубців на контактну витривалість [див.
формулу (25.9)]. Розрахункові коефіцієнти такі:
2.м = 275 МПа1/2 — коефіцієнт, що враховує механічні властивості сталевим
коліс;
= 0,01 р 4- 0,2 = 0,01 • 17 4- 0,2 = 0,37 — коефіцієнт кута нахилу лінії
зубців;
2-к = 0,8 — коефіцієнт довжини умовної лінії контакту по висоті зубця;
К/уа = 1 4- 0,63 У и — \!гх = 1 4- 0,63 Кз,8 — 1/15 = 1,07 — коефіцієнт по*
рівномірності розподілу навантаження між головкою та ніжкою зубця;
= 1,02 — коефіцієнт динамічного навантаження (за табл. 23.4 для еволі.*
вентних коліс при 8-му ступені точності);
336
К?= 2,15— коефіцієнт, що враховує розподіл навантаження між поверхням!
контакту зубців.
За формулою (25.9) розрахункове контактне напруження
сн = У (КНаКНвІКс) (и + 1)/« =
«= 275 • 0,37 • 0,8 /[2 • 180 • 1СР/(49,602 • 3,15)] (1,07 • 1,02/2,15) (3,8 4- 1)/3,8 =
= 445 МПа.
Стійкість зубців проти втомного викришування їхніх активних поверхонь за-
безпечується, оскільки он ~ 445 МПа < [о]я — 509 МПа.
5. Розрахунок зубців на витривалість при згині [див. формулу (25.10)].
Розрахункові коефіцієнти такі:
= 5,35; ¥р2 ~ 4,38 — коефіцієнти форми зубців за табл. 25.2;
Ур = 0,006 Р = 0,006 • 17 = 0,102 — коефіцієнт нахилу зубців;
Уь= 0,5 — коефіцієнт переміщення контакту вздовж зубців;
КРа = 1 + 0,76/7^1/?!= 1 + 0,76 У 3,8 — 1/15= 1,08 — коефіцієнт не-
рівномірності розподілу навантаження при згині між головкою та ніжкою зубця;
— 1,10 — коефіцієнт динамічного навантаження (див. табл. 23.4).
Розрахункові напруження згину для зубців шестірні та колеса визначаємо за
формулою (25.10):
(Д>аКГїАе) =
= 5,35 • 0,102 • 0,5 [2 • 180 . 103/(3,153 . 15)] (1,08 - 1,10/2,15) = 116 МПа;
Ор2= 4,38.0,102 • 0,5 [2 • 180 • І03/(3,153 • 15)] (1,08 . 1,10/2,15) = 95 МПа.
Стійкість зубців проти втомного руйнування при згині також забезпечується,
бо розрахункові напруження менші від відповідних допустимих напружень [о]^ =
* 229 МПа і [о]Г2 = 200 МПа.
6. Розрахунок параметрів зубчастої передачі (див. формули в 25.2).
Ділильні діаметри шестірні та колеса
= тз^/соз р = 3,15 • 15/0,95262 = 49,60 мм;
= тг2/соз р = 3,15 • 57/0,95262 = 188,48 мм.
Діаметри вершин зубців
да1 = д! + 2Л*т = 49,60 + 2 • 0,9 • 3,15 = 55,27 мм;
аа2 = б?2 + 2Л*/л = 188,48 4-2 • 0,9 • 3,15= 194,15 мм.
Діаметри впадин
—2 (Л* 4- с*) т = 49,60 — 2 (0,9 4- 0,15) 3,15 = 42,98 мм;
^ = ^2 —2(Л’4-с*)/п= 188.48-2 (0,9 4-0,15) 3,15= 181,86 мм.
Ширина вінців колеса та шестірні
її = 43 мм (див. п. З розрахунку); ^ = 4“ 0,06т — 43 4- 0,06 • 3,15 = 45 мм.
Міжосьова відстань передачі
а = 0,5т ($! 4- га)/с05 Р = 0,5 • 3,15 (15 4- 57)/0,95262 = 119,04 мм.
>—----------------------------------------------------------------------------
337
Порівнюючи габаритні розміри (наприклад, міжосьову відстань) косозубої ци-
ліндричної передачі в задачі у 23.6 та циліндричної передачі Новікова даної задачі,
зазначимо, що міжосьова відстань передачі Новікова в 1,34 раза менша для тих са-
мих параметрів навантаження
Контрольні запитання
1. Назвіть особливості контактування зубців у передачах із зачепленням Нові-
кова.
2. Як розміщена лінія зачеплення зубців у передачі Новікова щодо площини
зубчастих коліс?
3. Охарактеризуйте дополюсне, заполюсне та дозаполюсне зачеплення.
4. Чому ширина вінців зубчастих коліс передачі Новікова повинна бути біль-
шою від осьового кроку зубців?
5. Чим пояснюється вища несуча здатність передачі Новікова у порівнянні з
евольвентною передачею?
6. Запишіть формули для визначення основних розмірів зубчастих вінців коліс
передачі Новікова та покажіть їх на відповідному рисунку.
7. Які види розрахунків на міцність передбачаються для зубців циліндричних
передач Новікова?
ГЛАВА 26. ГВИНТОВІ ТА ГІПОЇДНІ
ЗУБЧАСТІ ПЕРЕДАЧІ
26.1. Загальні відомості
Г в и н т о в і і г і п о ї д н і зубчасті передачі за-
стосовують у разі потреби передавання обертового руху між валами,
осі яких мимобіжні у просторі. При такому положенні осей валів
опори можна розміщувати по обидва боки від зубчастих коліс, переда-
вати обертовий рух від одного ведучого вала кільком веденим. Ці
Рис. 26.1. Утворення гвинтових та гі-
поїдних зубчастих передач
особливості зубчастих передач із
мимобіжними осями валів, на від-
міну від передач з осями валів, що
перетинаються, часто використо-
вують у практиці проектування
приводних пристроїв різних машин.
Головним недоліком передач із
мимобіжними осями валів є значне
ковзання у зачепленні зубців і по-
в’язані з ним підвищене спрацюван-
ня та здатність до заїдання зубців.
У гвинтових та гіпоїдних зуб-
частих передачах початкові поверх-
ні коліс утворюються окремими
частинами поверхонь гіперболоїдів
обертання 1 і 2 (рис. 26.1), які до-
тикаються між собою. Якщо за по-
338
чаткові поверхні зубчастих коліс вибрати поверхні горловин гіпербо-
лоїдів, то можна дістати гвинтову зубчасту передачу а. Для спрощен-
ня виготовлення зубчастих коліс поверхні горловин гіперболоїдів
заміняють циліндричними поверхнями. За такої заміни початкові по-
верхні і відповідно зубці крліс контактують у точці, а колеса, що
утворюють такі передачі, .*повинні буїи косозубими ціліндричними.
Якщо за початкові поверхні зубчастих коліс вибрати віддалені
від горловини поверхні гіперболоїдів і замінити їх бічними поверхня-
ми зрізаних конусів, то будемо мати гіпоїдну передачу Ь (рис. 26.1).
Зубчасті колеса гіпоїдної передачі можуть мати тангенціальні або
криволінійні зубці. Теоретично зубці гіпоїдної передачі також по-
винні контактувати у точці, але, застосовуючи відповідні спеціальні
методи нарізування, можна дістати гіпоїдні передачі в лінійним кон-
тактом зубців.
26.2. Гвинтова зубчаста передача
У гвинтовій зубчастій передачі кут між мимобіжними осями валів
може бути довільним, однак, переважне використання мають переда-
чі з кутом 90° між осями валів (рис. 26.2). Гвинтові передачі відріз-
няються низькою несучою здатністю, оскільки початкове дотикання
зубців відбувається у точці з малими приведеними радіусами кривини
активних поверхонь, а умови змащування контакту зубців несприят-
ливі при значних швидкостях ковзання. Щоб підвищити опір заїдан-
ню зубчастих коліс гвинтових передач, слід використовувати поєднання
матеріалів з високими антифрикційними властивостями, наприк-
лад текстоліт — чавун, текстоліт — загартована сталь, чавун — брон-
за. За потребою передавання порівняно великих навантажень оби-
два зубчасті колеса виготовляють із загартованої сталі (40—50 НКС)
за умови застосування відповідних протизадирних мастильних мате-
ріалів.
Розрахунок зубчастих коліс гвинтових передач виконується ана-
логічно розрахунку косозубих циліндричних коліс. Якщо немає
спеціальних обмежень у вибиранні ку-
тів нахилу зубців коліс, то ці кути
у реверсивних передачах беруть одна-
ковими 0! = 02. Для передач, що пере-
дають обертовий рух тільки в один бік,
кути нахилу зубців шестірні беруть
більшими від кутів нахилу зубців у ко-
леса, тобто 0! > 02.
За розрахунковий модуль у гвинто-
вих передачах використовують модуль
зубців тп у нормальному перерізі їх.
Тому ділильні діаметри коліс і міжосьо-
Рис. 26.2. Схема гвинтової зуб-
частої передачі
339
ву відстань визначають за формулами:
= т^/соз 0р б/2 = т^соз Р2; (26.1)
ат = 0,5 + (і2) = 0,5/пл (Иі/соз 0Х + г2/соз Р2). (26.2)
Ширина зубчастих коліс гвинтової передачі залежить від модуля
зубців та кутів їхнього нахилу і підраховується за формулою
&1С2) == Затп зіп Рі<2). (26.3)
Передаточне число гвинтової передачі
и « сох/со2 =
Ч соз Рр г2 = (^2//лп) соз р2.
Тоді при Рі + р2 = 90° дістанемо
« = (<Ш)І£Рі. (26.4)
Якщо с?2/^і = сопзі, то із зміною Рі можна міняти передаточне
число и гвинтової передачі.
Швидкість ковзання зубців у зачепленні гвинтової передачі ви-
значають за формулою
ц5 = ^і/5 іп рі = О.бсо^/зіп рг (26.5)
Розрахунок на стійкість проти спрацювання та заїдання зубців
гвинтової передачі ведуть за умовою обмеження питомого тиску у кон-
такті зубців за емпіричною залежністю [6]:
р = 2Т1/(гі?/Си/С5 созап соз рх) [р]. (26.6)
Тут Ки — 4- Рі)2 — коефіцієнт передаточного числа; К$ —
= (14- 0,5у5)/(1 4- и3) — коефіцієнт швидкості ковзання; ап — кут
зачеплення у нормальному перерізі зубців.
Допустимий умовний тиск у контакті зубців беруть залежно від
поєднання матеріалів зубчастих коліс: [р] = (0,035...0,085) МПа для
матеріалів сталь (Н > 50 НКС) — бронза; [р] = (0,040...0,105) МПа
для матеріалів сталь (Н >> 50 НРС) — сталь (Н > 50 НРС);
[р] = (0,055...0,140) МПа для матеріалів чавун — чавун або
бронза; (р] = (0,070...0,175) МПа для матеріалів пластмаса —
чавун або сталь (Н > 50 НКС). Менші з наведених значень допусти-
мого умовного тиску — для пари гвинтових коліс після короткочас-
ного притирання, більші — для добре притертих гвинтових коліс.
26.3. Гіпоїдна зубчаста передача
Недоліки, які має гвинтова передача, у гіпоїдній передачі виявля-
ються в меншій мірі, оскільки контакт зубців тут здійснюється не в
точці, а по лінії. Тому гіпоїдні передачі мають суттєво більшу несучу
340
вдатність. Швидкості ковзання
у гіпоїдних передачах менші,
ніж у гвинтових.
Причиною виходу з ладу гі-
поїдних передач найчастіше є
заїдання зубців. На практиці
можливість заїдання у значній
мірі може бути зменшена засто-
суванням спеціального протиза-
дирного мастила (гіпоїдне мас-
ло), а також термообробкою ста-
левих коліс до високої твердості
(60—65 НКС). Крім цього, суттє-
вим є обмеження зміщення осей
Рис. 26.3. Схема гіпоїдної зубчастої пе-
редачі
Е (рис. 26.3).
При проектуванні гіпоїдних передач зміщення осей (гіпоїдне змі-
щення) беруть Е = (0,2...0,3) йаЄ2- У передачах легкових автомобі-
лів Е 0,2лп/егс, а у передачах важких транспортних машин Е
< 0,1тґегс, де г0 = ]/"г? 4-
Кут нахилу зубців шестірні в гіпоїдній передачі вибирають за-
лежно від її числа зубців: 0! = 50° при = 6...ІЗ; 0Г — 45° при
г, = 14...15; 0Х — 40° при = 16. Кут нахилу зубців колеса 02 =
= ЗО... 35°.
Передаточне число гіпоїдної передачі визначають за формулою
и — <о1/(о2 = = ^2С05 соз Рі-
(26.7)
Розрахунок зубців на міцність у гіпоїдній передачі виконують
за методикою розрахунку конічних зубчастих передач із криволіній-
ними зубцями. Щоб обмежити спрацювання зубців та зменшити мож-
ливості заїдання, слід передбачити також розрахунок на стійкість
проти спрацювання (обмежити швидкість спрацювання зубців у кон-
кретних умовах експлуатації гіпоїдної передачі).
Контрольні запитання ь
1. У чому полягає принцип утворення зубчастих передач із мимобіжними осями
палів? Який основний недолік таких передач?
2. Назвіть рекомендовані поєднання матеріалів для виготовлення зубчастих
коліс гвинтової передачі.
3. У чому полягає принцип розрахунку гвинтової передачі на стійкість проти
спрацювання?
4. Чому гіпоїдна передача має суттєво вищу несучу здатність у порівнянні з
гвинтовою?
5. Які основні причини виходу з ладу гіпоїдних передач та якими засобами мож-
на досягти підвищення їхньої несучої здатності?
341
ГЛАВА 27. ХВИЛЬОВІ ЗУБЧАСТІ ПЕРЕДАЧІ
27.1. Принцип роботи та деякі схеми хвильових
зубчастих передач
Хвильова передача здійснюється на принципі перетво-
рення параметрів руху хвильовим деформуванням однієї з ланок пе-
редачі. Цей принцип вперше був запропонований російським вченим
А. І. Москвітіним у 1944 р. для варіанту фрикційної передачі та
американським вченим В. Массером у 1959 р. для зубчастої передачі.
Хвильова передача (рис. 27.1) складається з гнучкого зубчастого
вінця /, з’єднаного з веденим валом і здеформованого генератором
хвиль 3, на якому розміщений гнучкий підшипник 2. Гнучкий зуб-
частий вінець у здеформованому стані входить у зачеплення з двох
діаметрально протилежних боків із нерухомим жорстким зубчастим
вінцем 4, який розміщений у корпусі передачі і має внутрішні зубці.
При обертанні генератора хвиль, виконаного у вигляді кулачка, з ку-
товою швидкістю (Оі гнучке колесо і ведений вал, зв’язаний із ним,
будуть обертатись із кутовою швидкістю со2. Передавання обертового
руху із зміною кутової швидкості забезпечується різницею чисел
зубців жорсткого та гнучкого зубчастих коліс. Гнучкий підшипник
призначений для зменшення тертя між генератором хвиль та гнучким
колесом. Передача такого виду називається хвильовою через
хвилеподібне деформування гнучкого колеса при обертанні генера-
тора. Хвильова передача за схемою на рис. 27.1 називається дво-
хвильовою, оскільки за один оберт генератора гнучке колесо сприймає
дві хвилі деформації. Відомі також одно- і трихвильові та рідко за-
стосовувані чотирихвильові передачі. Число хвиль деформації гнуч-
кого колеса залежить від форми та конструкції генератора хвиль.
Рис, 27,1. Принципова схема хвильової передачі
342
Рис. 27.2. Деякі схеми хвильових зубчастих передач
На сьогодні відома велика кількість схем та конструкцій хвильо-
вих зубчастих передач (див. відповідну літературу). На рис. 27.2
показані деякі найпоширеніші схеми хвильових зубчастих передач.
Хвильова передача, що зображена на рис. 27.2, а, має з’єднане
з веденим валом гнучке зубчасте колесо, а жорстке колесо нерухомо
встановлене в корпусі передачі. У хвильовій передачі за схемою
рис. 27.2, б гнучке колесо не обертається, бо воно з’єднане з корпусом,
а жорстке зубчасте колесо обертається разом із веденим валом. На
рис. 27.2, в зображена схема хвильової передачі, за допомогою якої
ножна передавати обертовий рух в ізольований простір. Тут гнучке
<убчасте колесо виготовлене у формі стакана і закріплене герметич-
но своїм краєм із корпусом, а жорстке зубчасте колесо розміщене
на веденому валу, який обертається в ізольованому просторі.
На рис. 27.2 і в подальших випадках вибране позначення числа
зубців гнучкого колеса (незалежно від того, чи воно обертається,
іи закріплене нерухомо), а числа зубців жорсткого колеса — г2.
Доцільність використання принципу хвильової передачі полягає
у багатопарності зачеплення зубців, яка визначає всі переваги такої
передачі у порівнянні з іншими, а саме:
а) достатньо висока несуча здатність хвильових передач при малій
масі та габаритних розмірах;
б) можливість здійснення за допомогою однієї пари коліс великих
передаточних чисел у межах 60—300;
в) достатньо високий ККД, що досягає 0,85—0,90;
г) висока кінематична точність;
д) передача дає змогу передавати обертовий рух у ізольований
простір.
Недоліками хвильових передач є такі:
а) обмеження частоти обертання генератора хвиль (до 4000 хв-1);
б) складність виготовлення гнучкого колеса;
343
в) низька довговічність гнучкого колеса з огляду на великі на-
вантаження та значні деформації.
Сучасний стан використання хвильових передач можна характе-
ризувати як такий, що має перспективу. Розроблено також стандарт-
ний ряд редукторів, до складу якого входять 11 типорозмірів із діа-
пазоном діаметрів ділильних кіл гнучких коліс 50—510 мм і різни-
ми передаточними числами. Діапазон обертових моментів на веде-
ному валу ЗО—ЗО 000 Н • м.
В США, Японії налагоджене серійне виробництво хвильових
редукторів загального призначення.
27.2. Кінематика хвильової зубчастої передачі
Для визначення передаточного числа хвильової передачі може
бути застосований метод Вілліса. При цьому для уявної зупинки ге-
нератора хвиль надамо нерухомому колесу 4 обертання з кутовою
швидкістю <оь але протилежною швидкості обертання генератора (на
рис. 27.1 напрям обертання колеса 4 показано штриховою стрілкою).
Тоді генератор хвиль буде видаватись за нерухомий, а гнучке коле-
со у перетвореному русі дістане кутову швидкість
02 = (Оі (2^).
Дійсна кутова швидкість со2 обертання гнучкого колеса (у не-
перетвореному русі) дорівнює різниці кутових швидкостей <о2 і <ог:
(О2 = (02 — (0х = (Ох (2^) — (Оі = (Оі (г2 —- г^/гр
Отже, передаточне число хвильової передачі, у якій гнучке коле-
со з’єднане з веденим валом (див. рис. 27.1 та 27.2, а),
и = (о1/(о2 = — 2і). (27.1)
Для хвильових передач, у яких гнучке колесо не обертається
(див. рис. 27.2, б, в), передаточне число визначається за співвідношен-
ням
и = (о^/(о2 = г2/(г2 — 2±). (27.2)
У формулах (27.1) та (27.2) у чисельнику міститься число зубців
того колеса, що обертається (гнучкого чи жорсткого), а у знаменни-
ку — різниця чисел зубців жорсткого та гнучкого коліс.
Різниця г2 — 2г повинна дорівнювати або бути кратною числу
хвиль деформації гнучкого колеса (за умовою можливості складання
передачі), тобто
г2 — = А2І7, (27.3)
де /С2 — коефіцієнт кратності, який у більшості випадків дорівнює
одиниці при и > 70; І7 — число хвиль деформації гнучкого коле-
са (найчастіше беруть V = 2).
344
27.3. Елементи розрахунку хвильових
зубчастих передач
Кулачковий генератор примусової деформації. У хвильових пере-
дачах застосовують дискові та кулачкові генератори хвиль.
Дискові генератори (рис. 27.3, а) здебільшого викорис-
овують у малосерійному виробництві. Такий генератор має два дис-
[и Н, які деформують гнучке колесо 2 для забезпечення його зачеп-
іення із жорстким колесом 1. Диски розміщені на ексцентричних
ііийках ведучого вала 3 і обертаються відносно своїх осей на під-
ципниках.
Кулачковий генератор (рнс. 27.3, б) складається
іі спрофільованого кулачка / та гнучкого кулькового підшипника 2.
внутрішнє кільце підшипника спряжене з кулачком, а зовнішнє —
і внутрішньою поверхнею гнучкого колеса. Гнучкий підшипник ку-
іачкового генератора конструктивно не відрізняється від стандарт-
ах підшипників надлегкої серії, у яких для забезпечення гнучкості
ЮДатково шліфують зовнішнє та внутрішнє кільця. Кулачковий гене-
>атор більш надійно зберігає форму деформації гнучкого колеса
гід навантаженням. Тому такі генератори мають ширше застосу-
вання.
Розміри профілю кулачка, на якому знаходиться гнучкий підшип-
іик, визначаються за потрібною деформацією о>0 гнучкого колеса
а внутрішнім діаметром підшипника с!п. Для спряження профілю
[улачка із внутрішньою поверхнею підшипника треба забезпечити
гівність зовнішнього периметра кулачка із периметром отвору під-
иипника Потрібну деформацію гнучкого колеса рекомендують брати
у0 = (1,04... 1,10) т, де т — модуль зубців зубчастих коліс.
Зовнішній діаметр гнучкого підшипника у нездеформованому
тані беруть рівним внутрішньому діаметру Р гнучкого колеса
див. рис. 27.4).
Рис. 27.3. Дисковий (а) та кулачковий (б) генератори хвиль
345
І
Розміри гнучкого та жорсткого зубчастих коліс. Діаметр ділильного
кола зубчастого вінця веденого колеса (гнучкого чи жорсткого) ви-
значають із умови обмеження напруження зминання на поверхні
контакту зубців. При цьому для силових передач рекомендують за-
лежність
а = (27.4)
де Т2 — обертовий момент на веденому валу, Н • м; = Ьій =
= 0,1...0,2— коефіцієнт ширини зубчастого вінця (менші значення
для кінематичних передач або передач із передаточним числом и <
< 100); [а]зм — допустимі напруження зминання, МПа; сі — діа-
метр, мм.
Для сталевих зубчастих коліс (20ХНЗА, 40ХНМА, ЗОХГСА,
40Х та ін.) після гартування та середнього або високого відпускання
{Н = 28...32 НКС) допустиме напруження [о1зм = (10...20) МПа
для середньо- та високошвидкісних передач при задовільних умовах
змащування; для пластмасових коліс [о]зм = (4... 10) МПа.
За діаметром, визначеним із формули (27.4), можна знайти мо-
дуль зубців т = сі/г, де 2 — число зубців веденого колеса.
Якщо з веденим валом з’єднане гнучке колесо, то за формулою
(27.1)
г = гг = и (г2 — гх) = иКгО.
Якщо із веденим валом з’єднане жорстке колесо, то за формулою
(27.2)
г = г2 = а (г2 — гх) = иК.У.
Отже, для двохвильової передачі (К2 = 1; [7 = 2) число зубців
веденого колеса (гнучкого чи жорсткого) 2 = 2н.
Модуль зубців треба округлити до стандартного значення. При
цьому для хвильових зубчастих передач модуль зубців рекоменду-
ють брати в межах 0,2 т 2 мм.
Діаметри ділильних кіл зубчастих коліс згідно з вибраним моду-
лем зубців дістають за формулами:
= тгх; сІ2 = тг2. (27.5)
Щоб запобігти інтерференції зубців коліс, зачеплення слід вико-
нувати коригованим. Методика визначення коефіцієнтів зміщення
для жорсткого та гнучкого коліс наведена у [9]. Там же дається більш
детальний розрахунок хвильової зубчастої передачі.
Ширину зубчастих вінців гнучкого та жорсткого коліс визначають
за вибраними значеннями коефіцієнта ширини, тобто Ь =
346
Рис. 27.4.
го колеса
Розміри гнучкого зубчасто-
Рис. 27.5. Хвильовий редуктор
Розміри деяких конструктивних елементів гнучкого колеса
(рис. 27.4) наближено можна знайти за такими залежностями:
= 0,05^; Я = 0,06б/1; /?0 = (2.. .3) мм;
= 0,025 V\0Т2и/Ь; Н, = (0,5 ... 0,8) /ір
£ = (0,8 ... 1,2) бір О = Лц — 2йр
За вибраними розмірами гнучке колесо перевіряють на витрива-
лість. Розрахункові коефіцієнти запасу міцності у перерізі біля тор-
ця зубчастого вінця 5 > 1,5. Із методом розрахунку на витривалість
гнучкого ко- леса можна ознайомитись у [9].
На рис. 27.5 зображена конструкція хвильової зубчастої передачі,
никонаної у вигляді редуктора загального призначення. На ведучо-
му валу 1 розміщений кулачковий генератор 5 із гнучким підшипни-
ком 6. Гнучке колесо 9 з’єднане з веденим валом 10 за допомогою
пліців 8. Жорстке зубчасте колесо 7 нерухомо закріплене у корпусі
ісредачі. З’єднання 4 кулачкового генератора із ведучим валом вико-
нане шарнірним для забезпечення співвісності генератора, гнучкого
іа жорсткого зубчастих коліс. Зовнішній підшипник ведучого вала за-
критий ущільненням 2 закріпленим стопорним кільцем 3.
347
Контрольні запитання
1. Назвіть основні елементи хвильової зубчастої передачі та поясніть принцип
її роботи.
2. Дайте приклади основних схем хвильових зубчастих передач.
3. Які основні переваги та недоліки хвильових зубчастих передач у порівнянні
з іншими механічними передачами?
4. Запишіть співвідношення для визначення передаточного числа хвильової
зубчастої передачі для випадків, коли гнучке колесо з’єднане з веденим валом та із
корпусом.
5 Як вибирається різниця чисел зубців жорсткого та гнучкого коліс?
6. Які види генераторів хвиль застосовують у хвильових передачах? Охаракте-
ризуйте їхню будову.
7. Із якої умови визначають діаметр ділильного кола веденого зубчастбго колеса
хвильової передачі?
8. Чому зачеплення зубців коліс у хвильовій передачі виконують коригованим?
ГЛАВА 28. ЧЕРВ'ЯЧНІ ПЕРЕДАЧІ
28.1. Загальні відомості та класифікація
черв’ячних передач
За допомогою черв’ячної передачі здійснюється передавання обер-
тового руху між валами, осі яких мимобіжні в просторі і утворюють
прямий кут. Черв’ячна передача (рис. 28.1) складається
із черв’яка 7, що має форму гвинта, та черв’ячного колеса 2, яке на-
гадує зубчасте колесо з косими зубцями угнутої форми. Передаван-
ня обертового руху у черв’ячній передачі здійснюється за принципом
гвинтової пари, де гвинтом є черв’як, а гайкою є колесо — сектор,
вирізаний із довгої гайки і зігнутий по колу.
- У більшості випадків ведучим є черв’як і передача працює на
зменшення частоти обертання веденого вала, хоча можливе переда-
вання обертового руху і від черв’ячного колеса до черв’яка.
У зачепленні контакт витків черв’яка та зубців черв’ячного коле-
са відбувається по лінії (на відміну від гвинтових зубчастих передач,
де є точковий контакт зубців), до того ж із
значним ковзанням. Тому через значні втра-
ти у зачепленні черв’ячні передачі застосо-
вують для передавання малих та середніх
(до 50 кВт) потужностей, хоча зустрічаються
і передачі, які здатні передавати потужність
до 200 кВт.
За допомогою черв’ячної передачі можна
реалізувати велике передаточне число и =
= 7... 100 і більше. Такі передачі як кінема-
тичні, так і силові використовують у підйом-
но-транспортних машинах, різних металооб-
робних верстатах, транспортних засобах тощо.
348
Рис. 28.1. Деталі черв’яч-
ної передачі
І
г
І
| Порівняно з іншими механічними передачами'черв’ячні передачі
ряають такі переваги:
і а) плавність та безшумність роботи при високих швидкостях;
б) достатньо висока надійність та простота догляду в експлуатації;
в) компактність, тобто л^алі габаритні розміри при великому пе-
редаточному числі;
г) можливість виконання передачі самогальмівною (неможлива
передача обертового руху від черв’ячного колеса до черв’яка).
До недоліків черв’ячних передач належать:
а) порівняно невисокий ККД, що не перевищує у деяких випадках
0,70—0,85;
б) потреба використання для черв’ячного колеса дорогих анти-
фрикційних матеріалів;
в) низька несуча здатність у порівнянні з зубчастими передачами.
Мале значення ККД черв’ячних передач не дозволяє використову-
вати їх для передавання великих навантажень, оскільки суттєві
втрати потужності за рахунок тертя у зачепленні призводять до знач-
ного нагрівання передачі. Тому черв’ячні передачі краще застосову-
вати у приводах періодичної дії.
Черв’ячні передачі і їхні елементи класифікують за такими озна-
ками: за формою початкової поверхні черв’яка — циліндричні
чи г л о б о ї д н і; за формою профілю витків черв’яка у торцевій
площині — конволютні (черв’як 22У), евольвентні
(черв’як 7/), архімедові (черв’як /А) та ін.; за розміщенням
черв’яка щодо колеса — з нижнім, верхнім та бічним
розміщенням черв’яка; за конструктивним оформленням — відкри-
ті та з а к р и т і, що працюють у спеціальному корпусі.
На практиці більше застосовують черв’ячні циліндричні передачі
з архімедовим черв’яком 7Л як простіші у виготовленні.
28.2. Параметри черв’ячної передачі
Циліндричні черв’яки. Черв’як — це циліндричне тіло на поверхні
якого є витки за формою гвинтової лінії (рис. 28.2). Якщо у торцевій
площині витки черв’яка мають профіль архімедової спіралі, то такі
черв’яки називають а р х і м е д о в и м и (їх позначають 7А).
В осьовому перерізі А — А (рис. 28.2, а) бічні поверхні витка чер-
в’яка ТА окреслені прямими лініями з профільним кутом а.
Витки черв’яка у торцевій площині можуть мати профіль продов-
женої або скороченої евольвенти. Такі черв’яки називають к о н -
волютними (позначають 7/У; різновидності £N1, £N2, £N3).
Черв’яки типу Тії (рис. 28.2, б) мають прямолінійні профілі у їх
нормальному перерізі В—В. Кут профілю витків у нормальному пе-
рерізі ал.
349
А-А
Якщо витки черв’яка у торцевій площині мають профіль нормаль-
ної евольвенти, то такі черв’яки називають евольвентними
(позначають 2/). Евольвентні черв’яки мають прямолінійний про-
філь витків у перерізі площиною С—С (рис. 28.2, в), паралельною
осьовій, але зміщеною на радіус основного циліндра черв’яка. Важ-
лива перевага евольвентних черв’яків — можливість шліфування
їхніх робочих поверхонь плоским боком шліфувального круга.
Витки архімедових та конволютних черв’яків шліфують коніч-
ними шліфувальними кругами. Черв’як при цьому дістають близьким
до архімедового або конволютного, але поверхня витків дещо відріз-
няється від лінійчатої.
Черв’яки можуть виготовлятись із одним або кількома витками.
Стандартом на силові черв’ячні передачі передбачається застосуван-
ня черв’яків із числом витків — І; 2; 4.
Відстань між відповідними бічними сторонами двох суміжних
профілів, виміряна паралельно осі черв’яка (рис. 28.2), називається
осьовим кроком витків і позначається Рх. Така ж відстань між су-
міжними профілями одного і того ж витка називається ходом гвинто-
вої лінії витка Рг. Якщо = 1, то Ргі — Рх, а в інших випадках
= г,Рх.
Відношення Рх/л = т називається модулем. Для черв’яка він
е осьовим, а для колеса — коловим. Стандартні значення модулів т,
мм, вибираються з ряду; 1; 1,25; 1,6; 2; 2,5; 3,15; 4; 5; 6,3; 8; 10;
12,5; 16; 20; 25; допускається використовувати модулі 1,5; 3; 3,5;
6; 7; 12 і 14 мм.
З огляду на те, що черв’ячні колеса нарізають черв’ячними фре-
зами, які є аналогами черв’яка, треба уніфікувати різальний інстру-
мент. Щоб зменшити номенклатуру черв’ячних фрез, введено понят-
тя коефіцієнта діаметра черв'яка д — дхІт, де — ділильний діа-
метр черв’яка. Стандартні значення д і відповідні їм модулі наведені
в табл. 28.1.
350
Таблиця 28.1. Відповідність модулів т і коефіцієнтів діаметра черв’яка д
т, мм 9 ГП, ММ 9
2 8; 10; 12; 12,5; 16Г 20 1 5 8; 10; 12,5; 16; 20
2,5 8; 10; 12; 12,5; 16; 20 6 9; 10
3 10; 12 6,3 8; 10; 12,5; 14; 16;
3,15 8; 10; 12,5; 16; 20 7 12
3,5 10; 12*; 14* 8 8; 10; 12,5; 16; 20
4 8; 9; 10; 12*; 12,5; 16; 20 10 8; 10; 12,5; 16; 20
♦ Тільки для числа витків =» 1.
Із урахуванням стандартного значення д ділильний діаметр
черв’яка (рис. 28.2) визначають за формулою
<і1=тд. (28.1)
Ділильний кут підйому у витка черв’яка (рис. 28.3, а) може бути
встановленим шляхом розгортки витка на площину. Тому можна
записати
у = = г,лт/(лт<7) = гг/д. (28.2)
Розміри елементів витків черв’яка при модулі 1 т 25 мм
визначаються параметрами початкового черв’яка за ГОСТ 19036—-81,
Рис. 28.3, Параметри
черв’яка
351
які мають такі значення: кут профілю витків а = 20° (для черв’яків
2Л — в осьовому перерізі; для черв’яків 2М та 7/ — у нормально-
му до витків перерізі); коефіцієнт висоти головки витка Н*а = 1;
коефіцієнт радіального зазора с* — 0,2; коефіцієнт висоти ніжки
витка Н} = На + с* — 1,2; коефіцієнт радіуса кривини перехідної
кривої витка р* = 0,3; коефіцієнт розрахункової товщини витка 5* =
= 0,5л.
Згідно з параметрами стандартного початкового черв’яка розміри
елементів витків (рис. 28.3, б) визначають за формулами!
висота головки витка
висота ніжки витка
На\ = Н'ат = т\
Н^ ~ Н^т = 1,2/п;
радіус кривини перехідної кривої витка
р/ = р*т = 0,3т;
розрахункова товщина витка
5 = 5*/п = 0,5л/п.
Інші розміри вінця черв’яка»
діаметр вершин витків
4- 2/іаі = 4- 2т\ (28.3)
діаметр впадин
Фі = — 2Нц =(і1 — 2,4/п; (28.4)
довжина нарізуваної частини черв’яка (ГОСТ 19650—74)
^^(11 4- 0,06г2) т при — 1 або 2;
(12,5 4- 0,09г2) т при г1=4.
(28.5)
(28.6)
Тут г2 — число зубців черв’ячного колеса. Формули для визна-
чення записані для випадку, коли коефіцієнти зміщення х — 0.
Для черв’яків, робочі поверхні яких шліфують, знайдене за форму-
лами (28.5) та (28.6) значення Ьг треба збільшити на 25 мм при т <
< 10 мм і на (35...40) мм при т — (10...16) мм. 2
Черв’ячні колеса. Особливістю геометрії черв’ячного колеса є те,
що бічні поверхні його зубців утворюються інструментом (черв’ячною
фрезою), різальні кромки якого у верстатному зачепленні відтворю-
ють у просторі початковий твірний черв’як. Параметри початкового
твірного черв’яка за ГОСТ 19036—81: кут профілю витків а
— 20°; коефіцієнт висоти головки витка Н*ао = На 4“ с* = 1,2; ко
352
Рис. 28.4. Параметри черв’ячного колеса
та черв’ячної передачі
Таблиця 28.2. Найбільший діаметр
і ширина вінця черв'ячного колеса
Число витків г. ^ам2
1 2/Л ^0,75^о1
2
аі
фіцієнт висоти ніжки витка Л/о не
регламентується; коефіцієнт висо-
ти головки витка до початку зак-
руглення Нако > 1; коефіцієнт раді-
уса закруглення кромки на верши-
ні витка р^о = 0,3.
Для черв’ячного колеса розміри вінця і зубців задаються у його
середньому перерізі площиною, що проходить через вісь черв’яка
перпендикулярно до осі черв’ячного колеса. Тому модуль зубців чер-
в’ячного колеса рівний модулю витків т в осьовому перерізі черв’яка,
а кут нахилу зубців черв’ячного колеса дорівнює ділильному куту
підйому у витків черв’яка.
Розміри вінця черв’ячного колеса з числом зубців га визначають
за формулами (рис. 28.4):
ділильний діаметр
а2 = тг2\ (28.7)
діаметр вершин зубців
б/а2 ~ (і2 + 2т;
діаметр впадин
= й2 — 2,4т.
(28.9)
Ширина вінця Ь2 та найбільший діаметр черв’ячного колеса гіам2»
ЯКІ відповідають куту обхвату черв’яка 26 » 90... 110°, дістають
ВВ формулами, наведеними в табл. 28.2.
353
Черв’ячна передача. Для черв’ячної передачі без зміщення між-
осьова відстань визначається як півсума ділильних діаметрів черв’я-
ка та черв’ячного колеса (див. рис. 28.4):
= а = 0,5 4- (і2) = 0,5т (ц 4- г2). (28.10)
Інколи черв’ячну передачу виготовляють із зміщенням (коригова-
ною) для того, щоб вписати її у задану або стандартну міжосьову від-
стань.
Для нарізування черв’ячних коліс із зміщенням і без зміщення
на практиці використовують один і той же інструмент (черв’ячні
фрези). Тому черв’як (аналог інструмента) завжди нарізають без
зміщення.
При заданій міжосьовій відстані ат коефіцієнт зміщення
X = — а)/т = а^/т — 0,5 (7 4- г^. (28.11)
Відповідно міжосьова відстань черв’ячної передачі зі зміщенням
= 0,5т (<; 4- *2 4~ 2х), (28.12)
а діаметри вершин та впадин черв’ячного колеса
б/а2 = б/а 4- 2т (1 4- х)\ (28.13)
фг = — 2т (1,2 — х). (28.14)
За умовою непідрізання зубців коефіцієнт зміщення х у більшості
випадків беруть —1 < х < +1.
28.3. Кінематика і точність виготовлення
черв’ячних передач
Обертання черв’яка і черв’ячного колеса відбувається у двох вза-
ємно перпендикулярних площинах. Тому швидкості точок контакту
витків черв’яка та зубців черв’ячного колеса неоднакові за модулем
та напрямом (рис. 28.5).
Колова швидкість точки контакту А витка черв’яка
а колова швидкість точки
Рис. 28.5. До визначення швид-
кості ковзання у черв’ячній пе-
редачі
^ = 0,5(0^, (28.15)
контакту А зубця колеса (на рис. 28.5
заштрихований)
у2 = 0,5о)2бї2. (28.16)
Швидкість ковзання витків черв’якя
по зубцях колеса напрямлена вздовж
дотичної до витка черв’яка, є відносною
швидкістю і може бути визначена зя
формулою
= Рі/соз у. (28.17)
354
Якщо
= 12 ?,
то на основі рівностей (28.15) та (28.16) запишемо
(Ма)/(Мі) = ї.
звідки передаточне число черв’ячної передачі можна визначити за
співвідношенням
и = Оі/соа = *£ ?) = (28.18)
Оскільки кут підйому у витків черв’яка практично менший від
30°, у черв’ячній передачі колова швидкість колеса завжди значно
менша від колової швидкості черв’яка а швидкість ковзання п3
у зачепленні більша від
Значне ковзання у зачепленні передачі є причиною низького ККД,
підвищеного спрацювання зубців та їхньої здатності до заїдання.
Точність виготовлення черв’ячних передач вибирають залежно
від швидкості ковзання V!.
У ГОСТ 3675—81 для черв’ячних передач встановлено 12 ступенів
точності (за аналогією з евольвентними зубчастими передачами).
Ступені 3, 4, 5 і 6 рекомендують для передач високої кінематичної
точності, а ступені 6, 7, 8 і 9 — для силових черв’ячних передач.
Основи стандарту на точність черв’ячних передач такі самі, як і для
зубчастих.
Рекомендації для вибору ступенів точності силових черв’ячних
передач наведені в табл. 28.3.
Велику увагу слід надавати нормам точності черв’ячних передач
при складанні їх. Вісь черв’яка завжди повинна знаходитись у серед-
Таблиця 28.3. Вимоги до черв’ячних передач деяких ступенів точності
Ступінь ТОЧНОСТІ Швидкість ковзання о,. м/с Умови виготовлення Застосування
7 >10 Черв’як загартований, витки шліфовані. Колесо нарізають шліфованою фрезою Передачі з високими швид- костями та низьким рівнем шуму. Підвищені вимоги до габаритних розмірів
8 >5 Допускається черв’як із твер- дістю Н < 350 НВ, нешліфова- ний. Колесо нарізають шліфо- ваною фрезою Передачі з середніми швид- костями. Габаритні розміри не обмежуються
9 >2 Черв’як із твердістю Н < < 350 НВ. Колесо нарізають довільним методом Передачі з малими швидко- стями, які працюють періо- дично. Передачі з ручним приводом
355
ній площині черв’ячного колеса. Для цього передбачають можливість
регулювання положення колеса щодо черв’яка. На практиці правиль-
ність зачеплення контролюють за розмірами сліду контакту зубців
колеса з витками черв’яка.
28.4. Матеріали І конструкції деталей
черв'ячної передачі. Критерії роботоздатності
та розрахунків
Наявність високих швидкостей ковзання у зачепленні ставить до
матеріалів черв’ячної передачі такі вимоги, як високі антифрикційні
властивості, стійкість проти спрацювання та стійкість до заїдання.
Черв’яки здебільшого виготовляють із якісних вуглецевих сталей
(45, 50, 40Г2), а у передачах відповідального призначення — із лего-
ваних сталей (40Х, 40ХН, 35ХГСА та ін.). Термообробка до твердості
Нх (45...55) НКС і подальше шліфування та полірування робочих
поверхонь витків черв’яка дозволяють суттєво підвищити несучу
здатність та довговічність передачі, оскільки зменшують можливість
заїдання робочих поверхонь у контакті. У допоміжних, невідпові-
дальних та тихохідних передачах можуть використовуватись черв’яки
з твердістю витків Нг = (300...320) НВ.
Вінці черв’ячних коліс виготовляють переважно з бронзи, а інколи
з латуні та чавуну Олов’яні бронзи БрОІОНІФІ, БрОЮФІ та інші
є кращими матеріалами для вінців черв’ячних коліс при високих
швидкостях ковзання (сх > 5 м/с), однак вони дорогі та дефіцитні.
Тому такі бронзи використовують лише для відповідальних черв’ячних
передач. Менш дефіцитні і дешевші безолов’яні бронзи БрА1ОЖ4Н4,
БрА9ЖЗЛ та ін. Вони мають достатньо високі показники міцності,
але дещо гірші антифрикційні властивості і меншу здатність до при-
працьовування. Безолов’яні бронзи вимагають високих твердості та
чистоти робочих поверхонь витків черв’яка і застосовуються при се
редніх швидкостях ковзання щ = (2...5) м/с.
Для допоміжних, малонавантажених та тихохідних (о5 < 2 м/с)
черв’ячних передач можливе виготовлення черв’ячного колеса і«
чавуну (СЧ 15, СЧ 18) або пластмас (текстоліту, поліамідів).
Конструктивно черв’яки виготовляють у більшості випадків ра
зом із валом як одну деталь (рис. 28.6, а) і лише у рідких випадки'
насадними (рис. 28.6, б).
З метою економії кольорових металів черв’ячні колеса виготовля
ють складеними з двох частин (рис. 28.6, в, а): бронзового вінця, яки ।
з’єднується з чавунним або сталевим колісним центром по відпові і
ній посадці і закріплюється додатково гвинтами або болтами. Можли
ві інші варіанти з’єднання колісного центра з вінцем черв’ячної
колеса. При малих діаметрах черв’ячних коліс або чавунних колеса
застосовують суцільні черв’ячні колеса (рис. 28.6, д).
356
Рис. 28.6. Конструкції черв’яків та черв’ячних коліс
д
Зубці черв’ячних коліс — найслабкіші елементи у черв’ячних
передачах. Значні швидкості ковзання в зачепленні спричинюють
спрацювання та заїдання. Ці явища посилюються невідповідними
умовами змащування контакту, бо напрям швидкості ковзання утво-
рює малий кут із напрямом лінії контакту витків та зубців.
Обмеження можливості виникнення заїдання в зачепленні може
бути досягнуте не тільки вибором відповідних матеріалів черв’яка
га колеса, але й обмеженням контактних напружень. Інтенсивність
спрацювання зубців черв’ячного колеса також залежить від рівня кон-
гактних напружень. Отже, для забезпечення тривалої роботоздатності
черв’ячної передачі слід обмежити контактні напруження на активних
поверхнях зубців черв’ячного колеса. Треба брати до уваги, що не-
суча здатність черв’ячних передач із колесами, виготовленими з оло-
в’яних бронз, обмежується втомною міцністю активних поверхонь
Вубців, а передач із колесами, виготовленими з безолов’яних бронз
Га чавунів,— заїданням. Імовірність'поломок зубців черв’ячного коле-
га від дії циклічних напружень згину суттєва тільки для маломодуль-
Иих черв’ячних коліс.
За аналогією із зубчастими передачами для черв’ячних передач
виконують такі розрахунки:
!1) розрахунок активних поверхонь зубців черв’ячного колеса на
онтактні витривалість та міцність при дії максимального навантаження;
2) розрахунок зубців черв’ячного колеса на витривалість при
гині та на міцність при згині максимальним навантаженням.
Особливості руйнування і специфіка зачеплення витків та зубців
черв’ячній передачі при її розрахунках враховуються відповідним
ибором допустимих напружень.
357
28.5. Допустимі напруження у розрахунках
черв'ячних передач
Допустимі контактні напруження. При розрахунку на контактну
витривалість активних поверхонь зубців черв’ячних коліс, виготовле-
них із олов’яних бронз, допустиме контактне напруження визначають
за формулою
[о]я «[окоКяь (28.19)
де [оіно — допустиме контактне напруження для бази випробувань
ІЇно в 107; /Сиг — коефіцієнт довговічності.
За табл. 28.4 [піно залежить від границі міцності ов бронзи та
коефіцієнта с9 інтенсивності спрацювання зубців: = 0,95 при у5 =»
= 5 м/с; с„ = 0,88 при = 6 м/с; со = 0,83 при и^ — І м/с; с„ =
= 0,80 при 8 м/с. При виконанні проектного розрахунку, коли
розміри передачі ще невідомі, орієнтовне значення швидкості ковзан-
ня м/с, можна дістати за формулою
р, = (^/ІО3)^, (28.20)
де о)! — кутова швидкість черв’яка, рад/с; Тл—обертовий момент
на веденому валу передачі, Н • м.
Коефіцієнт довговічності рекомендують визначати за співвідношен-
ням
Кяь = кТб5Ж, (28.21)
де Мив — еквівалентне число циклів навантаження зубців черв’яч-
ного колеса за строк служби передачі (див. 22.11). Коефіцієнт довго-
вічності обмежується значеннями 0,67 Кнь 1,15.
Для зубців черв’ячних коліс, виготовлених із твердих безолов’я-
них бронз та чавунів, допустиме контактне напруження вибирають із
умови опору заїданню залежно від швидкості ковзання V, і беруть
[а]/у » [а]но за табл. 28.4. Орієнтовне значення и5 дістають за форму-
лою (28.20).
Рекомендації щодо вибору допустимих граничних контактних на-
пружень також наведені в табл. 28.4.
Допустимі напруження на згин. Для зубців черв’ячних коліс, ви-
готовлених із бронз, допустиме напруження для розрахунку на
витривалість при згині визначають за формулою
[ок == (28.22)
Тут [стіл)—допустиме напруження для бази випробувань, що
дорівнює 10® (див. табл. 28.4), залежить від границі міцності ов та
текучості о» бронз; Квь — коефіцієнт довговічності при розрахунку
на згин,
Крь = V ІО’/АГ/в. (28.23)
358
Таблиця 28.4. Механічні характеристики матеріалів та допустимі напруження для зубців черв'ячних коліс
Матеріал вінця черв'ячного колеоа Спосіб відли- вання Г раниця МІЦНОСТІ о # МПа О Границя текучості МПа [о]до* МПа, при твердості черв'яка [о]до МПа, при наванта- женні І^ІНтах» МПа [а]рпаах* МПа
Нх > 45 НКС Ні < 45 НКС реверсивному неревер- снввому
БрОІОНІФІ Ц 285 165 0,9овсв О,750всв 0,080.4- + 0,25®, 0,16а в 4от 0,80,
БрОІОФІ К 8 275 230 200 140
БрО5Ц5С5 К 0 200 145 90 80
БрА10Ж4Н4 ц к 700 650 460 430 300—25с, 275—25о, 20],
БрА10ЖЗМд1,5 к 3 550 450 360 300
БрА9ЖЗЛ ц к 3 530 500 425 245 230 195
СЧ 18 СЧ 15 3 8 355 315 — «мав 175—350, 0,12ав 0,0750В 1,65ав 0.75ов
Примітки: 1. Позначення способів відливання: ц—відцентровий; к —у кокіль; в —у землю.
2. Для бронз ов і ат—при розтягу; для чавуну ов—при вгині.
3. Швидкість ковзання о„ м/с.
Еквівалентне число циклів навантаження зубців за строк
служби передачі обчислюють за рекомендаціями 22.11, а коефіцієнт
довговічності беруть у межах 0,54 Кгь 1. Для зубців чавунних
черв’ячних коліс [а]/? = [а)/?о (див. табл. 28.4). Вибір допустимих
граничних напружень згину [аїр та* для розрахунків зубців на міц-
ність при згині максимальним навантаженням також виконують за
даними табл. 28.4.
28.6. Навантаження на зубці черв'ячного колеса
Номінальні сили у зачепленні черв’ячної передачі. У навантаженій
черв’ячній передачі сила взаємодії між витками черв’яка та зубцями
колеса розподіляється вздовж лінії їхнього контакту. Таку розподі-
лену силу замінимо зосередженою і прикладеною до зубця черв’ячно-
го колеса у його середньому нормальному до осі перерізі. При цьому
сили тертя у зачепленні не враховуються.
Дія обертового моменту Т2 на валу черв’ячного колеса спричинює
появу нормальної сили Рп з боку витка черв’яка на зубець колеса.
Ця сила діє у площині А — А, нормальній до лінії зубця (рис. 28.7, а),
напрямлена по нормалі до профілів витка та зубця у точці їх контакту
і утворює кут зачеплення ап з перпендикуляром до лінії центрів чер-
в’яка і черв’ячного колеса.
Замінимо силуГп двома її взаємно перпендикулярними складови-
ми Рл і Ео, які перенесемо на схему черв’ячного колеса. Тут сила
Рг2 проектується в точку Р, а сила Ро лежить у площині А — А і на-
прямлена по дотичній до початкового циліндра колеса. Зобразимо силу
Ро також у вигляді двох взаємно перпендикулярних складових Рп
і Ра2- Отже, замість нормальної сили маємо три її взаємно перпенди-
кулярні складові Р/2, Рг2 І Ра2-
Рис, 28.7, Зусилля на зубці черв’ячного колеса (а) і витки черв’яка (б)
360
Колова сила на черв’ячному колесі визначається через обертовий
момент
= 2Т2/гіа. (28.24)
Осьова сила на черв’ячному колесі подається через колову силу
' = (28.25)
Для визначення радіальної сили Е& попередньо запишемо,Го =
«= Гй/соз у, а тоді дістанемо
Рг2 = Ео ап = Еп ап/С05 у.
Враховуючи, що ап/соз у = а, де а = 20а — кут зачеплення
у площині, перпендикулярній до осі колеса, запишемо вираз для виз-
начення радіальної сили:
Е^ = Ец^а. (28.26)
Нормальна сила Еп на зубець колеса дорівнює сумі складових
сил Еі2, Ег2 і Еа, з її модуль визначається за формулою
Еп = Е^/соз ап = Гй/(со5 ал соз у). (28.27)
На витки черв’яка з боку зубців колеса діють такі самі сили, але
в протилежному напрямі (рис. 28.7, б), до того ж деякі з них міняють
свою назву.
Колова сила на черв’яку дорівнює осьовій силі на черв’ячному
колесі:
Еп = Еа2 = Ел у. (28.28)
Осьова сила на черв’яку дорівнює коловій силі на колесі!
Еаї =Еп = 2Т^. (28.29)
Радіальна сила на черв’яку дорівнює радіальній силі на колесі:
Егі = Ег2 = Еі2 а. (28.30)
Розрахункове навантаження на зубці черв’ячного колеса. За розра-
хункове навантаження на зубці черв’ячного колеса беремо максималь-
не значення питомої сили, розподіленої по лінії контакту,
д = (28.31)
де Еп — нормальна сила на зубці згідно з формулою (28.27); —
сумарна довжина контактних ліній у зачепленні. Коефіцієнт
що враховує розподіл навантаження по ширині вінця черв’ячного
колеса, та коефіцієнт динамічного навантаження мають той самий
вміст, що і в зубчастих передачах.
Наближено сумарну довжину контактних ліній у зачепленні чер-
в’ячної передачі можна визначити за формулою
/2 = &аЄа/со$ у, (28.32)
361
Таблиця 28.5. Коефіцієнти деформації черв’яка
Число ВИТКІВ черв'яка Коефіцієнт деформації Є при коефіцієнті діаметра <?
8 9 10 12 12,5 14 16
1 72 89 108 138 157 179 194
2 57 71 86 112 125 149 163
4 47 58 70 93 101 120 131
де — ширина вінця черв’ячного колеса; у — кут нахилу зубців,
який дорівнює ділильному куту підйому витків черв’яка; єа — тор-
цевий коефіцієнт перекриття, який у середній площині черв’ячного
колеса становить 1,8—2,2.
У виразі (28.32) не врахована зігнута форма зубців черв’ячного
колеса, але вона компенсується неповнотою дотикання витків та зуб-
ців по дузі обхвату черв’яка 26 (див. рис. 28.4).
Підставляючи (28.27) і (28.32) у вираз (28.31), дістанемо
Я = №//(еа соз ап). (28.33)
Тут — питома розрахункова колова сила, що визначається за
формулою
Щ = (Рі2іЬ2) (28.34)
За аналогією із зубчастими передачами вирази для розрахунково-
го навантаження та питомої розрахункової колової сили записують у
вигляді:
при розрахунку активних поверхонь зубців на контактну витривалість
Ян = чоніКьь соз ап); чоНі « Кн$Кн»\ (28.35)
при розрахунку зубців на витривалість при згині
др = ціЕіЦга соз ал); и)РІ = (ГрпіЬ^ Кр^Кр». (28.36)
Колові сили Гни і Грп згідно з формулою (28.24) мають вигляд:
Гнп == 2Т2н/^2; Ер/2 = 2Т2р/ії2, (28.37)
де обертові моменти Т2н “ Т2Р = Т2 і будуть дорівнювати макси-
мальному тривало діючому обертовому моменту відповідно до заданого
режиму навантаження передачі.
Для черв’ячної передачі беруть Кн$ = Кр$ і Кн» =
Коефіцієнт, що враховує розподіл навантаження по ширині вінця
черв’ячного колеса,
= 1 + (г2/0)3(1 -х), (28.38)
Тут ц — число зубців черв’ячного колеса; 9 — коефіцієнт дефор-
мації черв’яка (табл. 28.5); х — коефіцієнт, що враховує вплив режи-
362
Таблиця 28.6. Значення коефіцієнтів Кр динамічного
навантаження для черв’ячної передачі
Ступінь ТОЧ- НОСТІ передачі Коефіцієнти К при швидкості ковзання ь’ м/с
1.5—3,0 3,0—7,5 7.5—12
6 1,0 1.1
7 1.0 1,0 1.1 1.2
8 1.15 1,25 1.4
9 1,25 —-
му роботи передачі на припрацьовування зубців. Для типових режи-
мів навантаження (див. рис. 2.3) він має такі значення: х == 1 для ре-
жиму П; х = 0,77 для В; х = 0,6 для СР; х = 0,5 для СН; х = 0,31
для Л.
Коефіцієнт динамічного навантаження зачеплення черв’ячної
передачі визначають залежно від ступеня точності передачі та швид-
кості ковзання за табл. 28.6.
28.7. Розрахунок активних поверхонь зубців
черв'ячного колеса на контактні витривалість і міцність
при дії максимального навантаження
Стійкість проти втомного викришування та проти заїдання актив-
них поверхонь зубців черв’ячного колеса забезпечується при вико-
нанні загальної умови
Он =
Для черв’ячної передачі питоме розрахункове навантаження на
зубці колеса визначають за виразом (28.35):
д = ян «= ииніКьа соз ап).
Радіус кривини робочої поверхні ВИТКІВ В осьовому перерізі р! =«
*= оо, а радіус кривини профілів зубців черв’ячного колеса р, можна
•найти за формулою (23.11) для зубців косозубого зубчастого колеса,
•змінивши кут р на у. Тоді матимемо
1/рзв -= 1/Р1 + 1/Ра = 1/Ря « 2 соз у/№ зіп ап).
Після підстановки д і 1/р9в у загальну умову, дістанемо
Он = їм V (ьі)ні/сі2) [соз у/(еа соз ап зіп ап)] < [а]н.
Взявши соз ап • зіп ап = 0,5 зіп 2ап та позначивши
Ін = У% созу/зіп2ал; 2, У ,
363
будемо мати остаточну залежність для розрахунку активних поверхонь
зубців на контактну витривалість у такому вигляді:
он = УҐ[а]н- (28.39)
У виразі (28.39) маємо: 2м — коефіцієнт, що враховує механічні
властивості матеріалів черв’яка та черв’ячного колеса [див. формулу
(4.9)]; для поєднання матеріалів сталь — бронза (Ег = 2,1 • 106 МПа;
£, = 0,9 • 106 МПа; щ = 0,28; щ = 0.33) 2,м = 210 МПа'72;
для матеріалів сталь — чавун (Ег = 2,1 • 106 МПа; Е* — 106 МПа;
щ = 0,28; = 0,27) 2м = 215 МПа,/2; 2н — коефіцієнт форми спря-
жених поверхонь витків черв’яка та зубців колеса, 2н = 1,8 для усе-
реднених значень у; 2е — коефіцієнт сумарної довжини контактних
ліній у зачепленні; у розрахунках беруть 2е = 0,75 (для мінімального
значення коефіцієнта торцевого перекриття еа = 1,8).
Виконання умови (28.39) при перевірному розрахунку черв’ячної
передачі забезпечує стійкість активних поверхонь зубців колеса проти
втомного руйнування та заїдання.
У розрахунках допускається 0,8 [під < он < 1,05 [а)н. При
невиконанні цієї умови треба змінити розміри передачі.
Розрахунок активних поверхонь зубців черв’ячного колеса на кон-
тактну міцність при дії максимального навантаження виконується
аналогічно зубчастим передачам [див. вираз (23.28)]:
Он тая = Он 7*2 тах/7*2Н [ц]/У тах» (28.40)
де Он — розрахункове контактне напруження, що визначається за
виразом (28.39); Тдшах — найбільше навантаження з числа коротко-
часно діючих на валу черв’ячного колеса; Митах— допустиме гра-
ничне контактне напруження.
28.8. Особливості розрахунку зубців
черв’ячного колеса на згин
Точний розрахунок напружень згину зубців черв’ячного колеса
ускладнюється змінною формою перерізів зубця по ширині колеса і
тим, що зубець має угнуту форму. У розрахунках черв’ячне колесо
розглядають як косозубе циліндричне. При цьому у розрахунковій
залежності (23.30) для зубців циліндричної зубчастої передачі роблять
деяке коректування коефіцієнтів, а вигляд формули залишається та-
ким же:
о? = ¥Р¥к¥^РІ/т^. [еф. (28.41)
де (ап — питома розрахункова колова сила на черв’ячному колесі,
що визначається за формулою (28.36); т — коловий модуль зубці її
черв’ячного колеса (осьовий модуль черв’яка).
364
Таблиця 28.7. Коефіцієнти ¥р форми зубців черв’ячного колеса
28
ЗО
32
35
1,80
1,76
1,71
1,64
1,61
1,55
1,48
1,45
60
80
100
150
1,40
1,34
1,30
1,27
Коефіцієнт УР форми та підвищеної міцності зубців черв’ячного
колеса знаходять за табл. 28.7 залежно від еквівалентного числа зуб-
ців = г2/со$8 у.
Коефіцієнт Уе перекриття зубців у розрахунках можна брати 0,75.
Коефіцієнт Ур нахилу зубців черв’ячного колеса слід визначати за
виразом Ур = (1 —у/140)/со5 у, або його можна брати Ур«0,95
(для деякого середнього значення кута нахилу зубців у « 10°).
Виконання умови (28.41) при перевірному розрахунку черв’ячної
передачі забезпечує втомну міцність зубців черв’ячного колеса при дії
циклічних напружень згину.
Перевірку міцності зубців при згині максимальним навантаженням
можна виконати за умовою
Ог тах === О/? (7*2 тах/7'2р) [о]р тах, (28.42)
ле вр — розрахункове напруження згину, що дістають за формулою
(28.41); [стігтах — допустиме граничне напруження на згин.
28.9. Проектний розрахунок черв'ячної передачі
У проектному розрахунку визначають міжосьову відстань черв’яч-
ної передачі як основний параметр, що визначає габаритні розміри
передачі. Міжосьову відстань розраховують із умови стійкості актив-
них поверхонь зубців колеса проти втомного руйнування та заїдання.
Вихідні дані для проектного розрахунку черв’ячної передачі е
акі: розрахункове тривало діюче навантаження Тгні передаточне
исло передачі и; тип черв’яка 2Л, 2М чи 2/; типовий режим наванта-
ження передачі та строк її служби; матеріали для черв’яка та черв’яч-
ого колеса, за якими визначають допустиме контактне напруження.
Несуча здатність черв’ячних передач із архімедовими (2Л), кон-
плютними (2М) та евольвентними (2/) черв’яками може бути оцінена
:і одними й тими ж розрахунковими залежностями (28.39), (28.40),
>8.41) та (28.42). Умовності та деякі припущення, взяті в методиці
! озрахунку, компенсуються відповідним вибором допустимих напру-
жень. Відхилення результатів розрахунку від дійсних при цьому
365
направлено на збільшення запасів міцності ретельно виготовлених та
змонтованих черв’ячних передач.
Розрахункову формулу для проектного розрахунку черв’ячної
передачі дістанемо, використовуючи умову (28.39). В цій умові зроби-
мо перетворення, вибравши наближено Ь2 ~ 0,75^ і подавши діаметри
(11 та <4 через міжосьову відстань а^, за формулами
= 2ацдІ(д 4- сі2 -= 2^^ +
Тоді в перетвореної умови (28.39) будемо мати формулу для визна-
чення мінімальної міжосьової відстані черв’ячної передачі у вигляді
Я» тіп = Ка (г^д + 1) УТшКняЧіА [ой). (28.43)
Тут слід брати обертовий момент 7\н у ньютон-метрах (Н • м),
допустиме напруження [о]д у мегапаскалях (МПа), а міжосьову від-
стань До, тіп у міліметрах (мм).
У формулі (28.43) допоміжний коефіцієнт визначається за вира-
зом
ка = V [2 • ю’кн„/(о,75 • 8)] (гмгнг^.
Для усереднених значень розрахункових коефіцієнтів беруть!
Ка = 310 МПа1/3 — для поєднання матеріалів черв’яка та коле-
са сталь — бронза; Ка = 315 МПаІ/3— для поєднання матеріалів
сталь — чавун.
Для визначення аштпіп треба попередньо вибрати число зубців
черв’ячного колеса г2. У силових черв’ячних передачах рекомендують
28 г2 80. Мінімальне число зубців гатіп = 28 обмежується умо-
вою непідрізання, а максимальне число зубців г2тах = 80 — умовою
обмеження габаритних розмірів передачі та забезпечення міцності зуб-
ців на згин. У деяких випадках допускається число зубців г2 = 100...
150 і більше. При заданому передаточному числі передачі и та вибра-
ному числі витків черв’яка г1 число зубців колеса г2 = игг. Число
витків черв’яка 2г = 1; 2; 4 потрібно брати по можливості більшим
(підвищується ККД передачі), але так, щоб при заданому и число
зубців г2 було у рекомендованих межах.
Коефіцієнт діаметра черв’яка д вибирають із числа стандартних
значень (див. табл. 28.1). Більші значення д рекомендують брати для
насадних черв’яків або при великих передаточних числах, щоб забе.т
печити достатню жорсткість черв’яка.
Модуль черв’ячної передачі знаходять, виходячи з формули
т1 = 2а<ііт^(д + г2). (28.44 >
Значення модуля узгоджують із стандартним за даними 28.2 або
табл. 28.1.
366
Отже, маючи г19 г2, д і т9 можна визначити всі розміри вінців
черв’яка та черв’ячного колеса. За розмірами, добутими в проектному
розрахунку, належить виконати перевірні розрахунки еа умовами
(28.39), (28.40), (28.41) та (28.42).
28.10. Розрахунок черв'яка на жорсткість
Для того щоб забезпечити надійну роботу черв’ячної передачі,
слід надати черв’яку достатніх міцності та жорсткості. Розрахунок
черв’яка на міцність виконують за аналогією з розрахунком валів
(див. 31.5);
Потреба розрахунку черв’яка на жорсткість пов’язана 8 тим, що
черв’як у більшості випадків має порівняно малий діаметр і значну
відстань між опорами. Дія на черв’як сил, що виникають у його за-
чепленні з колесом, може призвести до його значного поперечного про-
гину, який негативно впливає на зачеплення витків та зубців і на ро-
боту черв’ячної передачі. Тому умову достатньої жорсткості черв’я-
ка запишемо у вигляді
У<ІУ], (28.45)
де у — розрахункова стрілка прогину черв’яка; [//] — допустима
стрілка прогину за умови нормальної роботи зачеплення.
Для розрахункової схеми навантаження черв’яка (рис. 28.8)
стрілку прогину знаходять за відомою з курсу опору матеріалів фор-
мулою
у = ГР/(48ЕІ0), (28.46)
де/7 = Е а + — рівнодійна колової та радіальної сил на черв’я-
ку [див. формули (28.28) та (28.30)]; (0,8... 1,0) сі2— орієнтовна
відстань між опорами черв’яка; Е — модуль пружності матеріалу
ерв’яка; Іо — л($і/64 — осьовий момент інерції перерізу черв’яка
сз врахування впливу витків.
Формула (28.46) для черв’яка наближена, бо черв’як за довжиною
• ае змінні розміри поперечних пере-
ізів.
Допустиму стрілку прогину черв’я-
а визначають залежно від модуля т
межах [і/] = (0,01...0,005) т.
Якщо при розрахунку виявиться,
ю жорсткість черв’яка недостатня
[у]), то потрібно збільшити кое-
нт діаметра черв’яка д, або, за
ивістю, зменшити відстань І між рИСі 28.8. До визначення прогину
їй опорами. вала черв’яка
367
28.11. ККД черв'ячної передачі та її
тепловий розрахунок
Загальний ККД черв’ячної передачі можна визначити за залеж-
ністю
П = рі/рі = ТІї'Па'Пз. (28.47)
де Р2, — потужності на веденому і ведучому валах передачі відпо-
відно; г)2, т)3 — ККД, що відображають втрати потужності у зачеп-
ленні, підшипниках та на переміщування мастила у корпусі передачі
відповідно.
Найбільшими є втрати потужності у зачепленні черв’ячної переда-
чі, обумовлені ковзанням витків черв’яка по зубцях черв’ячного ко-
леса. Щоб знайти ККД черв’ячного зачеплення, слід розглянути си-
ли, які діють на виток черв’яка за умови, що черв’як є ведучим
(рис. 28.9, а). Зубець черв’ячного колеса показаний на рисунку за-
штрихованою фігурою.
Сила Ро = Рп соз ап [див. формулу (28.27) і рис. 28.7, а] перпенди-
кулярна до лінії витка черв’яка, а сила тертя Р& = Рп[ напрямлена
вздовж лінії витка. Ці дві сили дають результуючу силу Г, яка скла-
дає з вектором сили Ро кут ф'1
ф' = Р^о = //соз ал; <р' = агсі§ (//соз ал), (28.48)
де ср' — зведений кут тертя, а / — коефіцієнт тертя ковзання.
Розклавши силу Р за напрямами колових швидкостей черв’яка
та черв’ячного колеса, дістанемо колову силу Рп на черв’яку і осьову
силу Ра\, яка дорівнює КОЛОВІЙ СИЛІ Рі2 на черв’ячному колесі:
Рн == Р зіп (у 4- ф'); Раі — Р^ = Р соз (у 4- ф'). (28.49)
ККД черв’ячного зачеплення при передаванні навантаження віл
черв’яка до черв’ячного колеса (черв’як ведучий) можна визначити
за виразом
Пі = ГгОгДТхСО!) = Р^^/іРціі^.
Якщо у записане співвідношення підставити Рц і (див. формули
(28.49)1 і взяти б/2 = тг2, сі± = тд, у = г^д і сох/соз = и = г2/гь
то матимемо остаточну формулу для визначення ККД зачепленим
черв’ячної передачі
Пі = їЛб (? + ф'). (29.50)
де у — ділильний кут підйому витка черв’яка.
За аналогічними міркуваннями можна дістати формулу для ККД
черв’ячного зачеплення при передаванні навантаження від черв’яч-
ного колеса до черв’яка (черв’ячне колесо ведуче). У цьому разі сх<-
ма сил, які діють на виток черв’яка, показана на рис. 28.9, б, а рої-
368
рахункова формула має вигляд
ЛІ = (Т — <Р ')1/1§ V- (28.51)
Значення зведеного кута тертя <р'
для бронзового вінця колеса і стале-
вого черв’яка наведені в?габл. 28.8.
Менші значення відповідають переда-
чам із шліфованим черв’яком і твер-
дістю витків Н > 45 НКС.
Кут тертя <р' спадає з ростом швид-
кості ковзання о5, оскільки при цьому
створюються більш сприятливі умови
для утворення неперервного шару ма-
стила, що розділяє поверхні зубців
та витків (зменшується коефіцієнт
тертя [).
Аналіз формули (28.51) показує,
що при у фх передавати рух від
колеса до черв’яка неможливо, оскільки лі 0. У цьому разі здій-
снюється самогальмування передачі.
ККД черв’ячного зачеплення суттєво залежить від ділильного
кута підйому витків черв’яка у, тобто від числа витків та коефі-
цієнта діаметра черв’яка д. Середні значення ККД зачеплення залеж-
но від числа витків черв’яка такі: Лі = 0,70...0,75 при гх = 1; Лі =
= 0,80...0,90 при = 2...4.
Втрати потужності у підшипниках і на переміщування мастила в
корпусі передачі здебільшого оцінюються ЛзЛз = 0,95...0,96. Тому
загальний ККД черв’ячної передачі рекомендують визначати за фор-
,мулою
Л = (0,95.. .0,96) у/і§ (у + Ф'). (28.52)
- Через значні втрати потужності за рахунок низького ККД черв’яч-
ної передачі відбувається нагрівання корпусу передачі і мастила,
що в ньому знаходиться. При підвищених температурах мастило
Таблиця 28.8. Зведені кути тертя ф' у зачепленні
черв’ячної передачі
.о їв а 1 1 ! 1 1 с <л X і 1 е
0,1
1,0
2
З
4° 34' —5° 09'
2° 35' — 3° 08'
2° 00' —2° 35'
1°36' — 2° 00'
1° 19' _ і°43>
1°02' — 1°29'
0°55' — 1°22'
0°48' — 1°09'
369
втрачає свої мастильні властивості, що може призвести до виходу
передачі з ладу. Тому для черв’ячної' передачі виконують тепло-
вий розхунок. Цим розрахунком слід забезпечити умову
іи С Нм, (28.53)
де — температура мастила при усталеному режимі роботи передачі;
[/]м — допустима температура мастила, що становить 75—85 °С. Дея-
кі спеціальні марки мастил допускають температуру до 100—110 °С.
Потужність, що втрачається у передачі,
Тепловий потік, що виділяється поверхнею площі А корпусу
передачі,
Ф = КД(/М —/0).
Усталений режим роботи передачі має тепловий баланс ДР = Ф
або
Р1(1_П)==/<Л
звідки дістаємо температуру мастила
= (28.54)
де Рг — потужність, що підводиться до передачі, Вт; # — коефіцієнт
теплопередачі, К = (9... 17) Вт/(м2 • °С) залежно від швидкості по-
вітря, що омиває корпус передачі; А — площа охолоджуваної поверх-
ні корпусу, м2; /0 — температура середовища, в якому працює переда-
ча, °С.
Щоб задовольнити умову (28.53), інколи збільшують поверхню
корпусу передачі (ребристі форми корпусів), застосовують обдування
корпусу вентилятором тощо. При обдуванні за допомогою вентилятора
К = (25...ЗО) Вт/ (м2 - °С).
28.12. Глобоїдні черв'ячні передачі
Глобоїдна черв’ячна передача відрізняється від циліндричної фор-
мою нарізуваної частини черв’яка, яка виконується у вигляді поверх-
ні глобоїда (рис. 28.10). Такі передачі мають підвищену несучу здат-
ність (приблизно у 2—3 рази) у порівнянні з циліндричними черв’яч-
ними передачами завдяки одночасному зачепленню великої кількості
зубців. Однак деталі глобоїдних передач складні у виготовленні і
вимагають високої точності монтажу.
Глобоїдні передачі через малі габаритні розміри та поверхню теп-
ловіддачі є дуже напруженими у тепловому відношенні і тому вони
потребують надійного додаткового охолодження.
Практичне використання мають глобоїдні передачі з прямоліній-
ними профілями зубців колеса та витків черв’яка у центральній пло-
370
щині (рис. 28.10). Профілі утворю-
ються прямими лініями, дотичними
до так званого профільного кола
діаметра Ор. ГОСТ 9369—77 регла-
ментує такі параметри глобоїдних
передач: міжосьову відстань а; номі-
нальне передаточне число и\ діаметр
вершин зубців колеса та шири-
ну вінця колеса Ь2. Модулі глобоїд-
них передач не стандартизовані.
Розрахунок глобоїдної передачі
на несучу здатність зводиться до
визначення допустимої потужності
на валу черв’яка за умови стій-
кості зубців колеса проти заїдання
та спрацювання і виконується за
такою залежністю [7]:
Р1 = (/7/ц) [КЛЛр/(1.36(У)].
(28.55)
Рис. 28.10. ГлобоГдна черв’ячна пере-
дача
Тут Н — коефіцієнт потужності, що залежить від міжосьової від-
стані а та кутової швидкості черв’яка (рис. 28.11, а); /См — коефіці-
єнт матеріалу (для олов’яних бронз Км = 1, а для безолов’яних Км =
« 0,8); Кт — коефіцієнт точності (для звичайної точності Кг = 0,8,
для підвищеної Кт = 1); Кр — коефіцієнт режиму роботи (для непе-
рервної цілодобової роботи і при спокійному навантаженні Кр = 1;
при такій же роботі але ударному навантаженні Кр = 0,75; для періо-
дичної роботи — робота 15 хв, зупинка 2 год — Кр = 1,4); и — кое-
фіцієнт передаточного числа и (рис. 28.11, б).
28.13. Приклад розрахунку черв'ячної передачі
Задача. Розрахувати черв’ячну передачу з архімедовим черв’яком одноступене-
вого редуктора за такими даними: потужність на валу черв’яка Рі = 4 кВт при ку-
товій швидкості (Оі = 150 рад/с; передаточне число передачі и = 24; передача нере-
версивна, режим навантаження — легкий (Л); можливі короткочасні перевантажен-
ня до 150 % від номінального; строк служби передачі Н = 10 000 год.
Розв’язання. 1. Параметри навантаження черв'ячної переадчі. При орі-
єнтовному значенні ККД т] = 0,80 потужність на веденому валу передачі
Р3 = Ргх\ = 4 . 0,80 = 3,2 кВт.
Кутова швидкість веденого вала
= <Оі/и = 150/24 = 6,25 рад/с.
Обертові моменти на ведучому і веденому валах передачі визначаємо за форму-
лами:
= Рі/®! = 4 • 10е/150 = 26,7 Н • м;
Т, = Т2Н = Т2Р = Ра/б)а = 3,2 • 108/6,25 = 512 Н • м.
371
Рис. 28.11. Графіки
для визначення пара-
метрів Н (а) і и (6)
10 20 ЗО 40 50 60 80 90 100 І50ц)}ірад/с
5
Під час короткочасного перевантаження до 150 % максимальний обертовий мо-
мент на веденому валу
Г2тах= 1,57\ = 1.5 • 512 = 768 Н - м.
За формулою (28.20) орієнтовна швидкість ковзання в зачепленні
V, = (4сох/103) у'Г, = (4 - 150/103) ^512 = 4,8 м/с.
За строк служби передачі сумарне число циклів навантаження зубців колеса
N^2 = 1800о)яЛ/я = 1800 • 6,25 • 10 000/ 3,14 = 35,8 . 10е.
Для легкого режиму при коефіцієнті Інтенсивності КрЕ = 0,01 (див. табл 4 І)
еквівалентне число циклів навантаження зубців
= КЕе^е2 = °»01 ’ 35»8 ’ 10® = °>358 ’ 10в-
2. Матеріали для виготовлення черв’яка та черв'ячного колеса. Для виготовленим
черв’яка беремо леговану сталь 40Х, термообробка — гартування із відпусканням,
твердість Нх — 45...55 НКС, робочі поверхні витків шліфовані.
372
Для вінця черв’ячного колеса із швидкістю ковзання о$ — 4,8 м/с можна брати
безолов’яку бронзу БрА9ЖЗЛ (відливання в кокіль) з такими характеристиками
(див. табл. 28.4): границя міцності ав = 500 МПа, границя текучості от = 230 МПа.
3. Допустимі напруження для розрахунків черв'ячної передачі, а) Допустимі
контактні напруження. Якщо вінець черв’ячного колеса виготовляти з безолов’яно?
бронзи, то згідно з табл. 28.4 дрпустиме контактне напруження
[а]„ = [о]„0 « ЗОб — 25ов = 300 — 25 . 4,8 = 180 МПа.
За табл. 28.4 допустиме граничне контактне напруження
[о]/у тах = 2от = 2 • 230 = 460 МПа.
б) Допустимі напруження на згин. Для розрахунку зубців колеса на витривалість
при згині допустиме напруження визначається за формулою (28.22). Для бази ви-
пробувань 10е та нереверсивного навантаження допустиме напруження за табл. 28.4
[о)™ = 0,08ав 4- 0,25от = 0,08 • 500 4- 0,25 . 230 = 97,5 МПа.
За формулою (28.23) коефіцієнт довговічності
10>^ЕЕ = у' 10»/0,358 • 10’ =1,12.
Враховуючи обмеження 0,54 Крь 1, беремо Кр^ = 1. Тоді для зубців
черв’ячного колеса допустиме напруження на згин
[о]/? = [<г]р()Кр£ = 97,5 • 1 = 97,5 МПа.
За табл. 28.4 допустиме граничне напруження згину
т.х = °.8от = °.8 • 230 = 184 МПа*
4. Проектний розрахунок черв'ячної передачі. У проектному розрахунку визна-
чаємо мінімальну міжосьову відстань передачі за формулою (28.43).
Допоміжний коефіцієнт Ка = 310 МПа,/3 — при сталевому черв’яку та брон-
зовому вінці колеса.
Число витків черв’яка беремо 23 = 2. Тоді число зубців черв’ячного колеса ?,=
*= иг1 = 24 • 2 = 48.
Коефіцієнт діаметра черв’яка вибираємо за табл. 28.1, д — 10.
Коефіцієнт, що враховує розподіл навантаження по ширині вінця черв’ячного
колеса, дістаємо з формули (28.38):
Кн^ = 1 + (2а/Є)3 (1 - х) = І 4- (48/86)3 (1 -0,31) =1,12.
Тут 0 = 86 (див. табл. 28.5), а х — 0,31 для легкого режиму навантаження пе-
редачі.
Мінімальна міжосьова відстань черв’ячної передачі
З г—————————
аш тіп = № + і) у І0)//)* =
= 310(48/10 4- 1)^512 • 1,12 • 10а/(48 • 180)*= 164,7 мм.
За формулою (28.44) модуль черв'ячної передачі
т' = 2а& тіп/(2а 4- Я) = 2 • 164,7/(48 4- 10) = 5,68 мм.
За стандартом вибираємо т— 6 мм, якому відповідає д = 10 (див. табл. 28.1).
5. Попередні значення деяких параметрів передачі. Ділильні діаметри черв’яка
та черв’ячного колеса
= тд = 6 • 10 = 60 мм; (і2 = тг2 = 6 • 48 = 288 мм.
373
Діаметри вершин витків черв’яка та зубців колеса
да1 = 4- 2т = 60 4- 2 • 6 = 72 мм;
4- 2т = 288 4-2-6 = 300 мм.
Міжосьова відстань передачі
йц, = 0,5 4- йя) = 0,5 (60 4- 288) = 174 мм.
Ширина вінця черв’ячного колеса (див. табл. 28.2)
Ьа 0,754а1 = 0,75 «72 = 54 мм;
вибираємо Ь2 = 54 мм.
Ділильний кут підйому лінії витка черв'яка
ін? = 21/і7 = 2/10 = 0,2; у = 11,3099”= 11е 18'36*,
Швидкість ковзання у зачепленні
о3 = 0,5(0^/соз у = 0,5 • 150 • 60 • Ю”"3/соз 11,3099° = 4,6 м/с,
Уточнене значення допустимого контактного напруження
[о]я = 300 — 25ов = 300 — 25 • 4,6 = 185 МПа.
За рекомендаціями табл. 28.3 ступінь точності передачі пст = 8.
Еквівалентне число зубців черв’ячного колеса
ги2 = 2я/со53 у = 48/соз3 11,3099° =50,9.
За формулою (28.37) колова сила, що діє на зубці колеса,
Г/2 = Гн/2 = Г„2 = 2Т2/аа = 2 - 512 • 1СР/288 = 3556 Н.
6. Розрахунок зубців черв'ячного колеса на контактну витривалість [див. фор-
мулу (28.39)].
Для розрахунку попередньо визначимо коефіцієнти:
2М = 210 МПа1/2 — коефіцієнт, що враховує механічні властивості матеріалів
черв’яка та вінця колеса;
2,н= 1,8 — коефіцієнт форми спряжених поверхонь витків та зубців;
2е = 0,75 — коефіцієнт сумарної довжини контактних ліній у зачепленні;
1,12 (див. п. 4 розрахунку);
= 1,4 — коефіцієнт динамічного навантаження (див. табл. 28.6).
За формулою (28.35) питома розрахункова колова сила
= (РН/2^2^ ~ (3556/54) 1,12 • 1,4 = 103,25 Н/мм.
За формулою (28.39) розрахункове контактне напруження
= 210 . 1,8 • 0,75 103,25/288 = 170 МПа.
Стійкість зубців проти заїдання і втомного викришування забезпечується, ос-
кільки Оуу = 170 МПа < [о]# = 185 МПа і знаходиться в допустимих межах.
7. Розрахунок активних поверхонь зубців черв'ячного колеса на контактну міц-
ність при дії максимального навантаження за формулою (28.40)
°Н го.х = °Н УТі^іТ^ = по |/*768/5Ї2 = 208 МПа.
Контактна міцність зубців також забезпечується, оскільки оНтах = 20® МПа <
< Митах = 460 МПа*
374
8. Розрахунок зубців черв*ячного колеса на витривалість при згині [див. форму*
лу (28.41)]. Розрахункові коефіцієнти такі:
УР — 1,45 — коефіцієнт форми зубців за табл, 28.7;
Уе в 0,75 — коефіцієнт перекриття зубців;
У& = 0,95 — коефіцієнт нахилу зубців;
= — коефіцієнт, що враховує розподіл навантаження по ши-
рині вінця колеса;
КРі) = Х/уу = 1,4 — коефіцієнт динамічного навантаження.
За формулою (28.36) питома розрахункова колова сила
№р( = (Рр^іЬ*) Кр^К= (3556/54) 1,12 • 1,4 = 103,25 Н/мм.
За формулою (28.41) розрахункове напруження згину
ар « УрУеУ$ и>РІІт = 1,45.0,75.0,95 . 103,25/6 = 17,8 МПа.
Втомна міцність зубців при згині забезпечується, бо розрахункове напруження
менше від допустимого [о]р = 97,5 МПа.
9. Перевірка міцності зубців при згині максимальним навантаженням. За фор-
мулою (28,42)
’ртах = (Т2 т„/Т2Р) = 17.8 (768/512) = 26,7 МПа.
Тут також міцність забезпечується, оскільки
тах = 26.7 МПа < [а]Р тм = 184 МПа.
10. Розрахунок параметрів черв'ячної передачі (див. формули в 28.2).
Розміри елементів витків черв’яка та зубців колеса:
висота головки витка черв’яка та зубця колеса
На = т = 6 мм;
висота ніжки витка та зубця
й/ = 1,2т = 1,2 • 6 = 7,2 мм;
висота витка та зубця
й = 2,2/л = 2,2 • 6 = 13,2 мм;
розрахункова товщина витка
з = 0,5л/п = 0,5 • 3,14 • 6 = 9,42 мм,
Розміри вінців черв’яка та черв’ячного колеса:
ділильні діаметри (визначені вище) гіг = 60 мм; 288 мм;
діаметри вершин (визначені вище) (іаї = 72 мм; гі^ = 300 мм;
діаметри впадин
гір = гіі — 2,4/п = 60 — 2,4 • 6 = 45,6 мм;
гі^ = —2,4т = 288 — 2,4 • 6 = 273,6 мм;
найбільший діаметр черв’ячного колеса
^ам2 ^а2 *+* 1 >5/Л = 300 4" 1 >5 ’ 6 = 309 ММ|
довжина нарізуваної частини черв’яка
^>(114- 0,06г±) т = (11 4- 0,06.48) 6 = 83,8 мм;
вибираємо = 108 мм (для черв’яка, витки якого шліфують);
ширина вінця черв’ячного колеса (визначена вище) Ьг = 54 мм,
375
Міжосьова відстань черв’ячної передачі
Дц, = 0,5т (д г2) = 0,5 • 6 (10 4- 48) = 174 мм.
II. Сили у зачепленні черв’ячної передачі. За формулами (28.22)... (28.30) маємо:
колова сила на колесі дорівнює осьовій силі на черв’яку (визначена вище) Еа =
= Еа1 = 3556 Н;
радіальна сила на колесі дорівнює радіальній силі на черв'яку
Е^ = Еп = Е^ а = 3556 20° = 1294 Н;
осьова сила на колесі дорівнює коловій силі на черв’яку
РО2 = рі\ = Р12 V = 3556 • 0,2 = 711 Н.
12. ККД черв’ячної передачі. За формулою (28.52)
і] = (0,95. . .0,96) у/І£ (у + <р') =
= (0,95. . .0,96) іб 11° 18' 36*/і§ (11° 18' 36* + 1° ЗО') = 0,83. . .0,84.
Тут взято з табл. 28.8 зведений кут тертя <р' = Г ЗО'. Значення ККД близьке
до попередньо вибраного т] = 0,80.
13. Перевірка черв’яка на жорсткість. Рівнодійна колової та радіальної сил на
черв’як _________
Е = Е„ + Е* = /7112 + 1294а = 1476 Н.
Осьовий момент інерції перерізу черв’яка
/0 = л^/64 = 3,14 • 45,6 4/64 = 212 241 мм4.
Беремо наближено відстань між опорами черв’яка
І ж 0,8^2 = 0,8.288 = 230 мм.
За формулою (28.46) при модулі пружності для сталі Е = 2,1 • І О8 МПа розра-
хункова стрілка прогину черв’яка
у = Е/8/(48£/0) = 1476 • 2303/(48-2,1- 108 - 212 241) = 0,0084 мм.
Допустима стрілка прогину
[у] = 0,01т = 0,01 • 6 = 0,06 мм.
Жорсткість черв’яка достатня, оскільки
у = 0,0084 мм < [у] = 0,06 мм.
Контрольні запитання
1. Дайте загальну характеристику черв’ячних передач. Вкажіть їхні основні
переваги та недоліки у порівнянні з іншими передачами.
2. Які бувають види циліндричних черв’яків? Чим вони різняться між собою?
3. Назвіть основні параметри черв’яка та запишіть формули для їхнього визна-
чення.
4. Запишіть формули для визначення основних параметрів черв’ячного колеса.
5. З якою метою виготовляють черв’ячні передачі зі зміщенням?
6. Чому у черв’ячній передачі є ковзання витків черв’яка по зубцях колеса?
Запишіть та проаналізуйте вираз для визначення швидкості ковзання.
7. Назвіть основні матеріали для виготовлення елементів черв’ячної передачі
та за якими рекомендаціями вибирають матеріал для виготовлення вінця черв’ячного
колеса?
376
8. Які причини виходу з ладу черв'ячних передач. Які види розрахунків вико-
вують для забезпечення роботоздатності черв’ячної передачі.
9. Покажіть на відповідному рисунку сили, що діють у зачепленні черв’ячної
передачі, та запишіть формули для їхнього визначення.
10. Запишіть та проаналізуйте вирази для визначення ККД черв’ячної передачі
у разі передавання обертового руху від черв’яка до колеса і навпаки.
11. Чому для черв’ячних передач передбачають тепловий розрахунок? У чому
полягає суть цього розрахунку?
12. У чому полягає суть розрахунку черв’яка на жорсткість?
13. Чим відрізняється глобоїдна черв’ячна передача від циліндричної. Чому
глобоїдна черв’ячна передача має більшу несучу здатність?
ГЛАВА 29. ЛАНЦЮГОВІ ПЕРЕДАЧІ
29.1. Загальні відомості та класифікація
ланцюгових передач
У найпростішому варіанті ланцюгова передача
(рис. 29.1) складається з ведучої 1 та веденої 2 зірочок, що розміщені
на відповідних валах, і ланцюга 3 у вигляді замкнутого контура, який
знаходиться у зачепленні із зірочками. За аналогією з пасовими пере-
дачами вільний відрізок а ланцюга, що набігає на ведучу зірочку У,
називається ведучою вішкою, а другий вільний відрізок Ь ланцюга —
веденою. Ланцюг складається із з’єднаних шарнірами ланок, що за-
безпечує гнучкість ланцюга. За рахунок зачеплення ланцюга із зуб-
цями зірочок забезпечується передавання обертового руху від веду-
чої зірочки до веденої.
Швидкість руху ланцюга у передачах загального призначення дося-
гає 15 м/с при передаванні потужності до 100 кВт, а у спеціальних
приводах — до 35 м/с при потужності до 2000 кВт. За допомогою лан-
цюгової передачі можна забезпечити передаточне число и 10, а
найраціональніше мати и 4. Ланцюгові передачі застосовують у
різних верстатах, сільськогосподарських та транспортних машинах,
підйомних пристроях, у приводах конвейєрів тощо. Ланцюгова пере-
дача дозволяє надавати обертовий рух валам, що знаходяться на по-
рівняно великій відстані, а її габаритні розміри значно менші від га-
баритних розмірів пасової передачі. Неможливість проковзування лан-
377
цюга на зірочках забезпечує сталість середнього передаточного числа
передачі.
Ланцюгові передачі порівняно з іншими механічними передачами
мають такі основні переваги: можливість використання при значних
відстанях між валами; достатньо високий ККД, який досягає 0,96...
0,97; можливість передавання обертового руху одним ланцюгом
кільком валам, у тому числі і з протилежним напрямом обертання.
До недоліків ланцюгових передач належать такі: збільшення дов-
жини ланцюга через спрацювання шарнірів і відповідне ослаблення
потрібного натягу; нерівномірність руху ланцюга і пов’язані з цим
динамічні явища у передачі та підвищений шум; низька кінематична
точність при реверсуванні; потреба застосування додаткових при-
строїв для регулювання натягу ланцюга.
Зазначені недоліки не обмежують використання ланцюгових пере-
дач у деяких механічних приводах. Спеціалізовані заводи випуска-
ють сотні тисяч метрів ланцюгів на рік, а потреба у ланцюгах не забез-
печується у повній мірі.
Ланцюгові передачі поділяють за такими ознаками:
за типом ланцюга, яким оснащена передача, розрізняють лан-
цюгові передачі з роликовими, втулковими
та зубчастими ланцюгами;
за можливістю зміни відстані між осями зірочок ланцюгові
передачі бувають із регульованою та постій-
ною міжосьовою відстанню;
за способом регулювання натягу ланцюга розрізняють л а н ц ю -
гові передачі аперіодичним і неперервним
регулюванням натягу;
за кількістю зірочок, що охоплені одним ланцюгом, ланцюго-
ві передачі можуть бути двозірочкові, тризіроч-
к о в і тощо;
за конструктивним виконанням розрізняють відкриті лан-
цюгові передачі і закриті, що працюють у спеціаль-
ному корпусі в умовах неперервного змащування.
29.2. Деталі ланцюгових передач
Приводні ланцюги. У машинобудуванні застосовують ланцюги
трьох груп: вантажні — для підвішування, піднімання та опус-
кання вантажів; тягові — для переміщення вантажів у транспор-
туючих машинах (конвейєрах); приводні — для передавання
механічної енергії від одного вала до другого у ланцюгових передачах.
Нижче будемо розглядати тільки приводні ланцюги. Приводні
ланцюги за конструкцією бувають: роликові, втулкові та зубчасті.
У ланцюгових передачах найбільше використовують роликові
(ГОСТ 13568—75) та зубчасті (ГОСТ 13552—81) ланцюги.
378
Роликовий ланцюг (рис. 29.2, а) складається з ланок
двох типів: зовнішніх ЗВ та внутрішніх ВН. Окремі деталі ланцюга!
1 — пластина зовнішньої ланки; 2 — ролик; 3 — валик; 4 — втулка;
5 — пластина внутрішньої ланки. Пластини внутрішньої ланки на-
пресовані на втулки 4 ^.утворюють нерухоме з’єднання. Валик З
вільно входить у втулку 'і утворює шарнір. Зовнішні пластини на-
пресовані на валики, які на торцях розвальцьовані. Ролик 2 на втулці
4 може вільно обертатись при вході у зачеплення із зубцями зірочки.
У рухомих спряженнях втулки з валиком і роликом має місце тер-
тя ковзання, у спряженні роликів із зубцями зірочок переважає тертя
кочення.
Приводні роликові ланцюги бувають одно- (ПР) (рис. 29.2, а), дво-
(2ПР) (рис. 29.2, б), три- (ЗПР) та чотирирядними (4ПР). Використан-
ня багаторядних ланцюгів дозволяє значно зменшити габаритні роз-
міри передачі у площині, перпендикулярній до осей валів. У зв’язку
з наявністю ланок двох типів число ланок у ланцюговому контурі
повинно бути парним.
Різновидністю роликових ланцюгів є приводні роликові ланцюги із
зігнутими пластинами — ПРИ (рис. 29.2, а). Такі ланцюги мають
однотипні ланки і число ланок у контурі може бути парним або непар-
ним. Роликові ланцюги із зігнутими пластинами мають більшу поз-
довжню податливість, і тому їх застосовують при навантаженнях удар-
ного характеру.
Втулковий ланцюг за конструкцією не відрізняється від
роликового, за винятком того, що він не має роликів. Приводні
втулкові ланцюги бувають однорядними — ПВ та дворядними —
2ПВ. Такі ланцюги прості за конструкцією, мають меншу масу,
більш дешеві, але вони менш стійкі проти спрацювання.
Основним розмірним параметром приводного роликового ланцюга
є його крок Р. Залежно від кроку Р у стандартних ланцюгах вибира-
ють розміри всіх інших деталей. Деякі дані стандартних приводних
роликових ланцюгів із кроком Р = (12,7...38,1) мм наведені в
табл. 29.1. Серед інших розмірних параметрів ланцюгів у табл. 29.1
дана площа опорної поверхні шарніра ЛОп, яка дорівнює добутку
діаметра валика і ширини внутрішньої ланки. Цей параметр ланцюга
враховується у розрахунках шарнірів на стійкість проти спрацю-
вання.
Характеристикою міцності роликового ланцюга є руйнівне наван-
таження /‘‘рн (табл. 29.1), яке визначається дослідним шляхом на під-
приємствах, що виготовляють ланцюги. Воно регламентується стан-
дартом.
Зубчастий ланцюг (рис. 29.2, г) складається з набору
пластин двох типів. Основні пластини 1 мають зовнішні бічні плоскі
поверхні, якими вони спрягаються з двома зубцями зірочки. Напрям-
ні пластини 2 забезпечують центрування ланцюга відносно зірочок.
379
оо
о
Рис, 29,2, Приводні ланцюги
д
е
Таблиця 29.1. Параметри приводних роликових ланцюгів (за ГОСТ 13568—75)
Позначення ланцюга Крок ланцюга Р. мм Відстань між рядами -Я, мм Відстань між внутрішніми пласти нами ^вн* мм Діаметр ролика £), мм Ширина внут- рішньої пласти- ни Н, мм Площа поверх- ні шарніра одно- рядного ланцю- га Доп, мм> Руйнівне наван- таження нН кН Маса 1 м ланцю- га д, кг/м
ПР-12,7-1820-2 12,7 — 7,75 8,51 11,8 50 18,2 0,75
2ПР-12,7-3180 13,92 — 31,8 1,40
ПР-15,875-2270-2 15,875 — 9,65 10,16 14,8 71 22,7 1,00
2ПР-15,875-4540 16,59 — 45,4 1,90
ПР-19,05-3180 19,05 — 12,70 11,91 18,2 106 31,8 1,90
2ПР-19,05-7200 22,78 — 72,0 3,50
ПР-25,4-5670 25,4 — 15,88 15,88 24,2 180 56,7 2,60
2ПР-25.4-11340 29,29 — 113,4 5,00
ПР-31,75-8850 31,75 — 19,05 19,05 30,2 262 88,5 3,80
2ПР-31,75-17700 35,76 — 177,0 7,30
ПР-38,1-12700 38,1 ——— 25,4 22,23 36,2 395 127,0 5,50
2ПР-38,1-25400 45,44 —— 254,0 11,00
Для цих пластин посередині вінця зірочок передбачається відповід-
ний рівець.
Зубчасті ланцюги розрізняють за конструкцією шарнірів. В них
використовують шарніри ковзання (рис. 29.2, д), в яких вкладиші 1
і 2, що закріплені в пластинах на всій ширині ланцюга, контактують
із валиком 3. Шарнір допускає поворот пластин у два боки на кут <р =
"= 30°. Шарніри кочення (рис. 29.2, е) не мають валика. їх виготовля-
ють із двома сегментними вкладишами 1 і 2. При взаємному повороті
пластин вкладиші не ковзають, а перекочуються, що дозволяє підви-
щити ККД передачі та довговічність ланцюга.
381
Таблиця 29.2. Параметри деяких приводних зубчастихланцюгів
(рис. 29.2, г)
Крок ланцюга Р, мм Ширина ланцюга В, мм Ширина пласт- ин Ь, мм Відстань від осі шарніра до вер- шини зубця мм Товщина пламв- ив а, мм Питоме руйнівне навантаження на 1 мм ширини Р^ІВ. кН/мм Маса 1 м ланцю- га на 1 см ши- рини кг/(м>см)
12,7 22,6—52,5 (через 6 мм) 13,4 7,0 1,5 10 0,58
15,875 ЗО—70 (через 8 мм) 16,7 8,7 2,0 12,7 0,72
19,02 45—93 (через 12 мм) 20,1 10,в 3,0 15 0,86
25,4 57—105 (через 12 мм) 26,7 14,0 3,0 20 1,14
Стандартизовані тільки зубчасті ланцюги з шарнірами кочення
(ГОСТ 13552—81). Залежно від кроку ланцюга Р регламентуються
розміри всіх інших елементів ланцюга. Деякі дані для стандартних
зубчастих ланцюгів наведені в табл. 29.2.
Зубчасті ланцюги у порівнянні з роликовими допускають дещо
більш високі швидкості, вони більш плавні та безшумні в роботі,
мають підвищену надійність через багатопластинчасту конструкцію.
Однак вони мають більшу масу, складніші у виготовленні і дорожчі.
Тому зубчасті ланцюги застосовують обмежено.
Елементи роликових, втулкових та зубчастих ланцюгів виготов-
ляють із таких матеріалів: пластини — із середньовуглецевих або
легованих сталей 40, 45, 50, ЗОХНЗА із гартуванням до твердості
32—44 НКС, а валики, втулки, ролики і вкладиші — із цементованих
сталей 10, 15, 20, 12ХНЗА, 20ХНЗА з термообробкою до твердості
45—65 НКС.
Зірочки ланцюгових передач. Зубці зірочок для роликових ланцю-
гів із відношенням кроку ланцюга до діаметра ролика Р/Р < 2 про-
філюють за ГОСТ 591—69. Стандарт передбачає стійкі проти спрацю-
вання профілі зубців без зміщення (рис. 29.3, а) та із зміщенням е
(рис. 29.3, б) для нереверсивних ланцюгових передач. Профіль із змі-
щенням відрізняється тим, що впадина окреслена радіусом г із двох
центрів, зміщених на е = 0,03Р.
Шарніри ланок ланцюга, що знаходяться у зачепленні з зірочкою,
розміщуються на ділильному колі зірочки діаметром
(і = Р/5ІП (л/г), (29.1)
де 2 — число зубців зірочки.
Діаметр кола вершин зубців зірочки визначають за формулою
^ = И0,5 + сіб(л/г)]. (29.2)
382
оо
Рис* 29.3. Зірочки ланцюгових передач
Профілі зубців складаються (рис 29.3, а, б): із впадини, окресле-
ної радіусом г — 0,50252) 4- 0,05 мм; дуги радіуса гг = 0,82) 4- г;
прямолінійного перехідного відрізка та головки, окресленої радіусом
г2. Радіус г2 вибирають таким, щоб ролик ланцюга не котився по всьо-
му профілю зубця, а плавно входив у зачеплення із зубцем до свого
робочого положення на дні впадини або дещо вище. Такі профілі зуб-
ців зірочки забезпечують роботу ланцюга з деякою витяжкою.
Ширина зубчастого вінця зірочки для однорядного ланцюга
(рис. 29.3, в) = 0,93 /?вн — 0,15 мм; те саме для дво-, три- і чотири-
рядного ланцюга (рис. 29.3, г) Ь2 = 0,9 2?вн — 0,15 мм, де Ввн — від-
стань між пластинами внутрішніх ланок ланцюга.
Радіус г3 зубця у поздовжньому перерізі (для плавного набігання
ланцюга на зірочку) та координату к центра кривини беруть- г3 =
= 1,72); к = 0,82).
Профілювання зубців зірочок передач із зубчастими ланцюгами
простіше, оскільки робочі профілі прямолінійні (рис. 29.3, д). Діа-
метр ділильного кола сі визначається за тією самою залежністю (29.1),
що і в зірочці для роликових ланцюгів. Діаметр кола вершин зубців
^ = Рсі§(л/г). (29.3)
Висота зубця к = 4- е, де Ьг — відстань від осі шарніра до вер-
шини пластини і е = 0,1Р — радіальний зазор. Кут вклинювання
ланцюга а = 60°. Подвійний кут впадин зубця 2£ == а — ф, кут за-
гострення зубця у = 30° — ср, де ф = 2л/г.
Ширину зубчастого вінця зірочки для зубчастого ланцюга із внут-
рішнім його центруванням на зірочці беруть (рис. 29.3, е) Вг — В 4-
4- $і, де В — розрахункова ширина ланцюга, а 5Х = 2з — ширина рів-
ця для напрямних пластин, яка дорівнює двом товщинам з пластин.
Основними матеріалами для виготовлення зірочок є середньовугле-
цеві або леговані сталі 45, 40Х, 50Г2, 35ХГСА із поверхневим або
об’ємним гартуванням до твердості 45—55 НКС, або цементовані сталі
15, 20Х, 12ХНЗА на глибину 1,0—1,5 мм І гартовані до 55—60 НКС.
Зірочки тихохідних передач (у < 3 м/с) при відсутності ударних наван-
тажень можна виготовляти з високоміцного або антифрикційного ча-
вунів.
Пристрої для регулювання натягу ланцюга. Натяг ланцюга у лан-
цюговій передачі повинен відповідати корисному навантаженню.
Надмірний натяг погіршує набігання ланцюга на зірочки, збільшує
спрацювання ланцюга та зубців зірочок, підвищує навантаження на
опори валів передачі. Малий натяг спричинює значне провисання ве-
деної вітки, що створює умови для пробуксовування ланцюга на зі-
рочках або його сходу із зірочок.
Потрібний натяг віток оцінюють стрілкою провисання / веденої
вітки передачі. Для передач із кутом нахилу до горизонту до 40°
384
стрілка провисання ( 0,02а, а для передач із кутом нахилу більше
від 40° / 0,015а, де а — міжосьова відстань передачі.
Регулювання натягу ланцюга здійснюється пристроями, анало-
гічними тим, що використовуються у пасових передачах, тобто пере-
міщенням вала однієї із зЦючок, натяжними або відтяжними зіроч-
ками. У деяких випадках застосовують підпружинені натяжні колодки
або ролики. Недоліками таких пристроїв є додатковий згин лан-
цюга, який прискорює його спрацювання, та невідповідність натягу
ланцюга його корисному навантаженню при змінних режимах роботи.
Найраціональнішими є пристрої з автоматичним регулюванням
натягу. На рис. 29.4 зображена спеціальна зірочка, що забезпечує
відповідність натягу ланцюга його корисному навантаженню. Така
зірочка складається з маточини 1 із зубчастим вінцем, обода 2 із зов-
нішнім вінцем для зачеплення з ланцюгом і внутрішнім зубчастим
вінцем для зачеплення з вінцем маточини та дисків З і 4, які забезпе-
чують ексцентричне положення обода щодо маточини та надійне за-
чеплення зубчастих вінців обода і маточини. Взаємний відносний обер-
товий рух маточини відносно обода можливий за рахунок підшипни-
ків кочення, розміщених на маточині і у внутрішньому отворі дисків,
а також на дисках і всередині обода. Підшипники кочення і диски га-
рантують певний ексцентриситет обода щодо маточини і правильне
зачеплення вінців маточини та обода.
Якщо використати таку зірочку в ланцюговій передачі, то у стані
спокою або під час холостого ходу центр Ог обода зірочки буде знахо-
Рис. 29,4. Конструкція спеціальної зірочки для ланцюгової передачі
385
дитись близько лінії, що з’єднує центри ведучого та веденого валів.
При навантаженні передачі у напрямі, показаному стрілкою, зусилля
у ведучій вітці ланцюга зростає, а у веденій нижній спадає. В резуль-
таті центр Оі обода зміщується вниз від лінії центрів валів і відповід-
но зростає натяг ланцюга, до того ж цей натяг буде тим більший, чим
більше корисне навантаження, яке передає ланцюгова передача.
Відповідність натягу ланцюга корисному навантаженню досягаєть-
ся вибором ексцентриситета обода щодо маточини.
Описану конструкцію спеціальної зірочки доцільно застосовувати
у ланцюгових редукторах, де відстань між осями валів постійна, а
суміщення натяжного пристрою з однією із зірочок (ведучою або ве-
деною) значно зменшує габаритні розміри редуктора.
29.3. Основні розрахункові параметри
ланцюгових передач
Швидкість ланцюга та кутові швидкості зірочок обмежуються ін-
тенсивністю спрацювання ланцюга, силою удару шарнірів об зубці
зірочок, а також шумом передачі. У більшості випадків швидкість
ланцюга не повинна бути більшою ніж 15 м/с; інколи при малих кро-
ках ланцюга, великому числі зубців та доброму змащуванні допуска-
ється швидкість ланцюга ЗО—35 м/с. Середню швидкість ланцюга
визначають за формулою
V = Ро)хгх/(2л), (29.4)
де Р — крок ланцюга; <ох — кутова швидкість ведучої зірочки із
числом зубців гх. Кутову швидкість зірочок обмежують, щоб зменшити
удар шарнірів ланцюга об зубці. Граничні рекомендовані кутові
швидкості меншої зірочки залежно від її числа зубців гх та кроку
ланцюга Р наведені в табл. 29.3.
Таблиця 29.3. Граничні кутові швидкості меншої зірочки
^Ітах* РаД/°* 13 кроком ланцюга Р, мм
Число зуб- ців зіроч- ки г. 12,7 15,875 19,05 25,4 31,75 38,1 44,45 50,8
Для роликових ланцюгів ПР, 2ПР, ЗПР, 4ПР та ПРИ
15 230 190 135 115 100 75 65 60
19 240 200 145 120 105 80 70 65
23 250 210 150 125 ПО 80 75 65
27 255 215 155 130 110 85 75 70
Для зубчастих ланцюгів
17-35 330 265 220 165 130 — —— —
386
при и З
атІп = 0,5 (гМ + гій) + (ЗО.. .50) мм;
при и > З
Нщіп == (^еі 4" 4" н)/20.
Тут (Іе\, д,Є2 — діаметри вершин зубців ведучої та веденої зірочок
відповідно. Оптимальна міжосьова відстань ланцюгової передачі
а = (ЗО...50) Р. Не рекомендують брати а > 80Р.
Число ланок ЇГ ланцюга визначають за попередньо вибраною між-
осьовою відстанню а, кроком ланцюга Р та числом зубців зірочок
Зі і г2:
Г = 2а/Р 4- 0,5 (г, 4- г2) 4- (^М) (г2 — 2^/(2^. (29.6)
Формула (29.6) виводиться за аналогією з формулою для довжини
паса і є наближеною. Значення ЇГ слід округлити до найближчого
парного числа.
Після визначення числа ланок П7 ланцюга уточняють міжосьову
відстань передачі за формулою
а = (Р/4) [ЦГ — 0,5 4~ £г) 4-
+ ]/(№ -0,5 (гг + г2))2 - 8 (г, - гі)»/(2я)»]. (29.7)
Щоб забезпечити провисання ланцюга, значення а рекомендується
зменшити на (0,002... 0,004) а.
Число ланок Ц7 ланцюга та його крок Р визначають довжину лан-
цюга І = РУР.
Зусилля у вітках ланцюгової передачі. Різниця між силами натягу
ведучої Т7! і веденої Р2 віток визначає корисне навантаження ланцюга
Р> = - ^2 = 2ТХ, (29.8)
де 7і! — обертовий момент на валу ведучої зірочки, що має ділильний
діаметр
Сила натягу Р2 веденої вітки ланцюга дорівнює більшому значен-
ню від натягу Ру, Н, спричиненого власною вагою вітки, та від натягу
/%, //, від дії відцентрової сили:
Рч = Е„ = до2. (29.9)
Тут — коефіцієнт провисання ланцюга, який залежить від
стрілки провисання / веденої вітки та кута нахилу передачі до гори-
зонту; якщо / = 0,02а, то для горизонтальної передачі = 6 (Кі ~
= 4 під кутом нахилу до горизонту до 40°; К} =2 під кутом нахилу
більшим від 40°; /</ = 1, для вертикальної передачі); а — міжосьова
відстань передачі, м; д— маса 1 м ланцюга, кг/м (див. табл. 29.1);
% — прискорення вільного падіння, м/с2; V — швидкість ланцю-
га, м/с.
388
Для розповсюджених на практиці тихохідних передач та передач
із середніми швидкостями ланцюга а 10 м/с сила натягу веденої
вітки незначна і складає кілька процентів від корисного навантажен-
ня Е(. Тому в розрахунках із достатньою точністю можна брати Га «
~ 0, а Ег « Ес
Сила, що передається «а вали ланцюгової передачі, може станови*
ти Д = 1,15^.
29.4. Критерії роботоздатності та розрахунок
ланцюгових передач
Вихід із ладу ланцюгових передач може бути обумовленим такими
причинами:
— спрацюванням шарнірів, яке спричинює порушення зачеплення
ланцюга з зірочками через збільшення кроку ланок (допустиме збіль-
шення середнього кроку 2,5—3,0 %);
— втомним руйнуванням пластин та роликів; руйнування роли-
ків пов’язане з ударами шарнірів ланцюга при вході їх у зачеплення
в зубцями зірочок;
— ослабленням з’єднань деталей ланцюга у місцях їх запресову-
вання;
— руйнуванням ланцюга при дії великих короткочасних переван-
тажень;
— спрацюванням зубців зірочок.
На основі вказаних причин виходу з ладу ланцюгових передач
формулюються і відповідні критерії роботоздатності, тобто стійкість
проти спрацювання шарнірів ланцюга та зубців зірочок, стійкість
проти втомного руйнування пластин та роликів ланцюга і достатня
міцність деталей ланцюга та їхніх з’єднань під дією максимального
навантаження.
Розглянемо розрахунки передачі на забезпечення стійкості проти
спрацювання шарнірів, деталей на втому та на міцність під час дії
максимальних навантажень [221. За основний розрахунковий параметр
візьмемо тиск р у шарнірі ланцюга.
Розрахунок шарнірів ланцюга на стійкість проти спрацювання
виконують за умови, що
Р = ^'ґ£сп^Сд/(^оп/'СЇЛ) ІРІсп* (29.10)
Тут Еіесп — КеспЕ{ — еквівалентне корисне навантаження лан-
цюга при розрахунку на спрацювання шарнірів, яке визначається із
врахуванням коефіцієнта Кесп інтенсивності режиму навантаження
(табл. 29.4); Кл — коефіцієнт динамічного навантаження (К& = 1 —
при спокійному навантаженні; Кл = 1,3 — при помірних змінах на-
вантаження; /<д == 1,5 — при різких змінах навантаження); Доп —
площа опорної поверхні шарніра ланцюга (див. табл. 29.1); Кт— кое-
389
Таблиця 29.4. Коефіцієнти і для типових режимів
навантаження
Коефічієні інтенсивності Типовий режим навантаження за рис. 2.3
П В СР сн л
«Е'п 1 0,80 0,60 0,40 0,20
1 0,80 0,70 0,65 0,45
Примітка. Значення /(£СП і наведені для типових режимів наванта-
ження з постійною середньою швидкістю ланцюга.
фіцієнт, що враховує число рядів ланцюга (для однорядного ланцюга
Кт в 1; для дворядного — Кт = 1,7; для трирядного — Кт = 2,5
і для чотирирядного — Кт = 3); [р]сп — допустимий тиск у шарні-
рі за умови стійкості його проти спрацювання.
При невиконанні умови (29.10) слід брати ланцюг більшого кроку
або того самого кроку але дво- чи трирядний.
Розрахунок пластин ланок ланцюга на витривалість здійснюють за
формулою
Рвт ~ [р]вт, (29.11)
де Левт = Кевт/^ — еквівалентне корисне навантаження ланцюга при
розрахунку пластин на втому, яке визначається з врахуванням кое-
фіцієнта Кеві впливу інтенсивності режиму навантаження на втомну
міцність (див. табл. 29.4); [р1вт — допустимий тиск у шарнірі за умо-
ви втомної міцності пластин.
Розрахунок ланцюга на міцність при дії максимальних коротко-
часних перевантажень виконують за умови, що
(29.12)
де Грн — руйнівне навантаження, яке задається у стандарті на при-
водні ланцюги (див. табл 29.1); —максимальне короткочасно
діюче навантаження ланцюга, яке може виникнути при роботі пере-
дачі протягом її строку служби; $иііп = 5 — запас міцності ланцюга
Максимальне короткочасно діюче навантаження Лтах визначають
із врахуванням коефіцієнта Кп можливих перевантажень [див. форму-
лу (19.12)] за такими залежностями:
для тихохідних передач
Р /тах =
ДЛЯ швидкохідних передач, V > 10 м/с,
Р/тах == і Ру
390
Таблиця 29.4. Коефіцієнти ^сп і ^вт для типових режимів
навантаження
Коефіцієнт інтенсивності Типовий режим навантаження за рис. 2.3
П В СР сн л
К£оо 1 0,80 0,60 0,40 0,20
1 0,80 0,70 0,65 0,45
Примітка. Значення КЕсп і ^ев-г навеДен1 для типових режимів наванта-
ження з постійною середньою швидкістю ланцюга.
фіцієнт, що враховує число рядів ланцюга (для однорядного ланцюга
Кт = 1; для дворядного — Кт = 1,7; для трирядного — Кт = 2,5
і для чотирирядного — Кт = 3); [р]сп — допустимий тиск у шарні-
рі за умови стійкості його проти спрацювання.
При невиконанні умови (29.10) слід брати ланцюг більшого кроку
або того самого кроку але дво- чи трирядний.
Розрахунок пластин ланок ланцюга на витривалість здійснюють за
формулою
Рвт — ^ІЕвтКд/(АопКІРІВТ» (29.11)
де Еіевт = Кевт^і — еквівалентне корисне навантаження ланцюга при
розрахунку пластин на втому, яке визначається з врахуванням кое-
фіцієнта Кевл впливу інтенсивності режиму навантаження на втомну
міцність (див. табл. 29.4); (р1вт — допустимий тиск у шарнірі за умо-
ви втомної міцності пластин.
Розрахунок ланцюга на міцність при дії максимальних коротко-
часних перевантажень виконують за умови, що
5 = Ррн /Рітах 8щіп> (29.12)
де ГрН — руйнівне навантаження, яке задається у стандарті на при-
водні ланцюги (див. табл 29.1); Р(тах —максимальне короткочасно
діюче навантаження ланцюга, яке може виникнути при роботі пере-
дачі протягоіи її строку служби; $пип = 5 — запас міцності ланцюга.
Максимальне короткочасно діюче навантаження Рітах визначають
із врахуванням коефіцієнта Кп можливих перевантажень [див. форму-
лу (19.12)1 за такими залежностями:
для тихохідних передач
Р /тах — КпР
для швидкохідних передач, у > 10 м/с,
Р/тах = КПРі Ру
390
Тут Ру — сила удару, що виникає вздовж вітки ланцюга при вході
шарніра у зачеплення із зубцем зірочки. Силу Ру, Н, дістають за фор-
мулою
Ру = 13 . (29.13)
де пг — число рядів ланцюга.
Допустимий тиск у шарнірах ланцюга за умови стійкості проти
спрацювання рекомендують визначати за співвідношенням (граничне
значення [р]сп 40 МПа)
[рісп = с!№№'). (29.14)
Тут С= 1,33 • 10е ДР/Р — коефіцієнт роботоздатності передачі,
а &РІР — допустиме збільшення середнього кроку ланцюга у проце-
сі експлуатації передачі, %; при ДР/Р = 3 % (гранична норма спра-
цювання для ланцюгів закритих передач) С = 4 • 10е; /і — строк
служби передачі, год; Ко = V— коефіцієнт, шо враховує вплив
кутової швидкості ведучої зірочки на спрацювання шарнірів; Кр =
~ Кі\КаКи — коефіцієнт ПарЗМЄТрІВ передачі, де Кг\ = 25/Зі, Ка =
= у 40/ар і Ки ~ У'/а — часткові коефіцієнти, що враховують
вплив числа зубців ведучої зірочки, міжосьової відстані, вираженої
у кроках ланцюга, і передаточного числа відповідно; Ке = КвКрКз* —
коефіцієнт експлуатації, де Кв, Кр і Кзм — коефіцієнти, що врахову-
ють умови роботи передачі та її конструкцію (табл. 29.5).
Допустимий тиск у шарнірах, що гарантує для вибраного строку
служби ланцюга витривалість пластин його ланок,
[р]вт = 270КгКн/КвКр. (29.15)
Тут К\ = уТй К» = і/15 • 10»/Л і Кр = £>/25,4 — коефі-
цієнти, що враховують вплив на витривалість пластин числа зуб-
Таблиця 29.5. Коефіцієнти Кн, К і /Сзм для ланцюгової передачі
Умови експлуатації ланцюгової передачі % ^зм
Нахил лінії центрів зірочок щодо гори- зонту: до 70° 1
більш ніж 70° 1,25 —І —
Регулювання натягу віток ланцюга: переміщенням опор валів передачі мм 1
натяжною зірочкою — 1,15 —
вилученням ланок ланцюга —* 1,25 —
Змащування передачі: достатньо надійне —* 0,9—1,5
недостатнє (періодичне, нерегуляр- не) — 3
391
ців ведучої зірочки, строку служби Л, год, та кроку ланцюга відповід-
но; показник кореня к беруть: к = 24 — для ланцюгів із кроком
Р 25,4 мм і к = 6 — для ланцюгів із кроком Р > 25,4 мм; К* =
9<--------
= 10/(0! — коефіцієнт, що враховує вплив кутової швидкості ве-
дучої зірочки на втомну міцність пластин.
Наведена вище методика перевірних розрахунків ланцюгової пе-
редачі відповідає методиці, викладеній в [221 із деяким перетворенням
розрахункових залежностей. Попередній вибір параметрів передачі
з роликовим ланцюгом можна зробити за рекомендаціями 29.3.
Передачі із зубчастими ланцюгами розраховують та проектують
у більшості випадків за рекомендаціями заводів, що виготовляють лан-
цюги, або використовують наближені залежності, які наведені у від-
повідних довідниках.
29.5. Приклад розрахунку ланцюгової передачі
Задача. Розрахувати ланцюгову передачу з роликовим ланцюгом у приводі
стрічкового конвейєра за такими даними: потужність на валу ведучої зірочки Рг =
= 6,5 кВт; кутова швидкість ведучої зірочки сс»! =75 рад/с; передаточне число пере-
дачі и = 2,4; передача горизонтальна; регулювання натягу ланцюга періодичне шля-
хом переміщення ведучого вала; змащування передачі періодичне; помірні зміни
навантаження; коефіцієнт короткочасних перевантажень при пусках Кп = 2,2; типо-
вий режим навантаження — середній нормальний (СН); допустиме збільшення се-
реднього кроку ланцюга ДР/Р = 2,7 %; строк служби ланцюга /і = 8000 год.
Розв’язання. 1. Проектний розрахунок, передачі (див. формули в 29.3).
На валу ведучої зірочки обертовий момент
Т1 = РіДОі = 6,5 • 103/75 = 86,67 Н • м.
Якщо припустити, що крок ланцюга не буде більш ніж 38,1 мм, то для со, =
= 75 рад/с за табл. 29.3 можна вибрати число зубців ведучої зірочки гг = 19. Тоді
число зубців веденої зірочки г2 = иг1 = 2,4 • 19 = 45,6. Вибираємо г2 = 45.
Орієнтовне значення кроку ланцюга
Р' = 13^7^ = 13^86,67/19 = 21,55 мм.
До розрахунку вибираємо роликовий ланцюг ПР-19,05-3180 (див. табл. 29.1),
для якого маємо: крок Р = 19,05 мм; площа опорної поверхні шарніра Доп =
= 106 мм2; руйнівне навантаження Грн = 31,8 кН; маса 1 м ланцюга д = 1,9 кг/м.
Швидкість ланцюга
а = Рсо^/^я) = 19,05 • 10~3.75 . 19/(2 • 3,14) = 4,32 м/с.
Орієнтовно назначаємо міжосьову відстань передачі
а' = 40Р = 40 • 19,05 = 762 мм.
Число ланок ланцюга
№" = 2а'!Р + 0,5 (2; + г,) + (Р/а') (г, - г,)»/(2я)« =
= 2 - 762/19,05 + 0,5 (19 + 45)+ (19,05/762) (45 — 19)’/(2 . 3,14)’= 112,4,
Вибираємо Й7 = 112.
392
Розрахункова міжосьова відстань
а, = (Р/4) (V - 0,5 (г, + г,) 4- | Й7 — 0,5 (гІ 4- га)]> — 8 (г, - а/(2л)*) =
= (19,05/4) {112 — 0,5(19 4-45)4-
4- И [112 - 0.5 (19 4- 45)]» _ 8 (45 — 19)»/(2 • 3,14)») = 758 мм.
Міжосьова відстань передачі «із забезпеченням провисання веденої вітки
а = а0 — О,ООЗдо = 758 — 0,003 • 758 => 755,5 мм.
Ділильні діаметри зірочок
| = Р/зіп (л/гі) = 19,05/зіп (л/19) = 115,74 мм;
і = Р/зіп (л/га) ® 19,05/5іп (л/45) = 273,09 мм.
° Номінальне корисне навантаження ланцюга
Р, = 27'1/б/1 « 2.86,67 . 103/! 15,74 = 1498 Н.
Максимальне корисне навантаження ланцюга при пуску передачі
Р/таХ = Ш == 2»2 * 1498 = 3296 Н’
Максимальна сила, що діє на вали передачі,
«тах = 1 • ^йпах = 1.15 • 3296 = 3790 Н.
2. Розрахунок шарнірів ланцюга на стійкість проти спрацювання [див. формулу
(29.10)]. Якщо коефіцієнт інтенсивності Кгсп = 0,40 для режиму навантаження СН
; див. табл. 29.4), то еквівалентне корисне навантаження ланцюга
І р<Есп = Кєспрі = О»49 • І498 = 600 Н.
І- Коефіцієнт динамічного навантаження (при помірних змінах навантаження)
І Лд = 1,3; для однорядного ланцюга Кт ® 1.
[ За формулою (29.14) з умови стійкості проти спрацювання допустимий таск у
шарнірах
[р)сп = СКККиК^ = 3,59 . 10«/(8000 . 17,8 -1,137 • 3) = 7,40 МПа.
Тут вибрані такі значення розрахункових коефіцієнтів:
С ® 1,33 - 10е ДР/Р = 1,33 . 10е • 2,7 = 3,59 . 10*
при допустимому збільшенні середнього кроку ланцюга &.Р/Р = 2,7
к„ = = 3/75» = 17,8;
Кк = (25/21) (/46/5;) (1/уСІ) =
= (25/19) ({<46/40) (1/|/2Л) = 1.137;
Ке = КнКрКьм в 1 • 1 • 3 ® 3 (див. табл. 29.5).
Розрахунковий тиск у шарнірах ланцюга
Р = р(£МАоаКтп) ~ 699 • 1 >3/( 106 • 1) ® 7,36 МПа.
Стійкість шарнірів ланцюга проти спрацювання забезпечується, оскільки р =»
- 7,36 МПа < [р]сп = 7,40 МПа.
3. Розрахунок пластин ланок ланцюга на витривалість [див. формулу (29.11)].
При розрахунку пластин на витривалість еквівалентне корисне навантаження
393
ланцюга (К£ВТ= 0,65 для режиму навантаження СН)
^ґЕвт = = 0.65 • 1498 =. 974 Н.
За формулою (29.15) допустимий тиск у шарнірах ланцюга, що гарантує витри-
валість пластин його ланок,
ІРІВТ = 270ЛХ>/(К»К>) = 270 ' 1.28 • 1,17/(16,1 . 0,988) =25,4 МПа.
Тут вибрані такі значення розрахункових коефіцієнтів:
К' = у/Т1 = уТ9= 1,28;
= у/~ 15 • 10»/Л = |/ 15 • Ю»/80О0 = 1,17;
10-/Ш1 = 10уг75 = 16,1;
Кр = у' Р/25,4 = т/19,05/25,4 = 0,988.
Розрахунковий тиск у шарнірах за умови витривалості пластин
Рвт = ^ЕвтМ^оп^т) = 974 . 1,3/(106 - 1) = 11,95 МПа.
Витривалість пластин ланцюга достатня, бо
Рві = 11 .95 МПа < (рівт = МПа-
4. Розрахунок ланцюга на міцність при дії максимальних короткочасних пере-
вантажень за формулою (29.12)
« = Гря ^1ПМІ = 31 800/3296 = 9,65 > ат)п = 5.
Міцність вибраного ланцюга при перевантаженнях також забезпечується.
Контрольні запитання
1. Назвіть переваги та недоліки ланцюгових передач у порівнянні їх із іншими
механічними передачами.
2. Які типи приводних ланцюгів мають практичне застосування?
3. Охарактеризуйте будову роликових та зубчастих ланцюгів. У яких випадках
використовують багаторядні роликові ланцюги?
4. Чому обмежують кутову швидкість меншої зірочки залежно від її числа зуб-
ців та кроку ланцюга?
5. Чому доцільно використовувати ланцюги з малим кроком? Яким чином можна
зменшити крок ланцюга у передачі із заданим навантаженням?
6. Із яких міркувань рекомендують вибирати непарні числа зубців зірочок у
передачах із роликовими ланцюгами?
7. Назвіть основні причини виходу з ладу ланцюгових передач.
8. Які види розрахунків передбачають для ланцюгових передач з метою забез-
печення їхньої надійності та тривалої роботи?
9. Назвіть основний розрахунковий параметр, за яким ведеться розрахунок лан-
цюга на стійкість проти спрацювання та розрахунок пластин на витривалість.
10. Яка мета розрахунку ланцюга на міцність за максимальним навантаженням?
394
ГЛАВА ЗО. ПЕРЕДАЧІ ГВИНТ — ГАЙКА
30 .1. Загальні відомості
Передачі гвинт — гайка застосовують для перетворення обертово-
го руху у поступальний. ВЬни використовуються у різних галузях
техніки — від точного приладобудування до важконавантажених при-
водів натискних пристроїв прокатних станів, гвинтових пресів та під-
йомних механізмів кранів. Такі передачі створюють значні сили, за-
безпечують точні переміщення
робочих органів різних верс-
татів та приладів або вико-
нують функції регулювальних
пристроїв.
На рис. ЗО. 1 показані деякі
схеми передач гвинт — гайка.
За схемою передачі на
рис. 30.1, а обертовий рух
гвинта 1 перетворюється в по-
ступальний рух гайки 2, а за
схемою на рис. 30.1, б, нав-
паки, обертовий рух гайки 2
перетворюється у поступаль-
ний рух гвинта /. На схемі
рис. 30.1, в показана переда-
ча для здійснення надзвичай-
но повільного поступального
руху гайки 2 при обертанні
гвинта /. Тут гвинт має дві
різьбові ділянки з малою різ-
ницею кроків різьби.
Передачі гвинт — гайка за-
безпечують великий виграш
у силі та повільні переміщен-
ня, мають високу несучу здат-
ність при малих габаритних розмірах, високу точність переміщень,
простоту конструкції та виготовлення. До недоліків таких передач
належать наявність великих втрат на тертя у гвинтовій парі, що спри-
чинює значне спрацювання та низький ККД передачі.
Передачі гвинт — гайка за призначенням поділяють на с и л о в і
і кінематичні, а за видом тертя — на передачі з тертям
ковзання і передачі з тертям кочення. Останні мають
високий ККД, але складні за конструкцією і досить дорогі у виготов-
ленні.
395
30 .2. Конструкції деталей передач гвинт — гайка
Гвинти та різьби. Гвинт у передачі гвинт — гайка являє собою
циліндричну деталь значної довжини у порівнянні з діаметром, на
певній ділянці якої нарізана різьба. Основні типи різьб, що застосо-
вуються в передачах такого виду, показані на рис. 30.2.
Трикутну різьбу за ГОСТ 9150—81 (рис. 30.2, а) викорис-
трвують у кінематичних передачах приладів через низький ККД (на
ККД впливає кут профілю різьби а, який у трикутній різьбі дорівнює
60°). Для силових передач застосовують трапецеїдальні
різьби за ГОСТ 9484—81 (рис. 30.2, б), упорні різьби
за ГОСТ 10177—82 (рис. 30.2, в) і прямокутні різьби
(рис. 30.2, а). Більш розповсюджена трапецеїдальна різьба, оскільки
вона технологічна і має достатньо високу міцність. Упорна різьба
може бути використана тільки для передачі з однобічним осьовим на-
вантаженням, наприклад у підйомних пристроях. Прямокутна різьба
нестандартизована через нетехнологічність її виготовлення, однак,
зважаючи на підвищений ККД (кут профілю а = 0°), таку різьбу
інколи використовують у передачах гвинт — гайка.
Основні параметри різьб (рис. 30.2) такі: зовнішній діаметр різь-
би б/, внутрішній діаметр сІи середній діаметр сі2, крок різьби Р, робо-
ча висота профілю різьби Н2, кут профілю а. Ці параметри різьб за-
даються у відповідних стандартах. Для деяких номінальних діаметрів
сі розміри трапецеїдальної та упорної різьб наведені у табл. 30.1.
Я,3 0,541 Р а
Рис. 30,2, Геометричні параметри різьб для передач гвинт — гайка
Гайка
Гвинт
Гайка
Гвинт
сх-0
Н1 -0.5Р
а-50°
Н^0,5Р
396
Таблиця 30.1. Розміри трапецеїдально? та упорної різьб для деяких
номінальних діаметрів
Номінальний діаметр <і, мм Крок різьби Р, мм Трапецеїдальна різьба Упорна різьба
Внутрішній діаме*|ф мм. Середи і й діаметр <іг, мм Внутрішній діаметр мм Середній діаметр 4В, мм
20 2 17,5 19 16,528 18,5
3 22,5 24,5 20,795 23,75
26 5 20 23,5 17,322 22,25
8 17 22 12,116 20,0
3 28,5 30,5 26,794 24,75
32 6 25 29 21,586 27,5
10 21 27 14,644 24,5
3 36,5 38,5 34,794 37,75
40 7 32 36,5 27,855 34,75
10 29 35 22,644 32,5
3 46,5 48,5 44,794 47,75
50 8 41 46 36,116 44,0
12 37 44 29,174 41,0
3 56,5 58,5 54,794 57,75
60 9 50 55,5 44,385 52,25
14 44 53 35,710 49,5
4 75,5 78 73,058 77,0
80 10 69 75 62,644 72,5
16 62 72 52,232 68,0
У розрахунках передач гвинт — гайка використовується і такий
параметр, як кут ф підйому витків різьби по її середньому діаметру,
який визначається за формулою
хр = Рг/(л<іг),
де 2 — число заходів різьби.
Матеріал гвинтів повинен мати високу стійкість проти спрацюван-
ня. Гвинти, для яких не передбачене гартування, виготовляють із
сталей 45, 50 або А45, А50 (із вмістом 0,15—0,50 % свинцю); гвинти,
для яких передбачається гартування, можна виготовляти із сталей
65Г, 45Х та ін. Високу стійкість проти спрацювання забезпечує азоту-
вання, яке можна використовувати для сталей 18ХГТ, 40ХФА.
Гайки у більшості випадків мають форму втулки або корпусу з
Відповідними опорними поверхнями для запобігання переміщенню
397
Рис. 30.3. Деякі конструкції гайок
або провертанню. У передачах, в яких ставляться вимоги компенсації
спрацювання і зменшення зазорів, застосовують гайки регульованої
конструкції, наприклад розрізні (рис. 30.3, а) або складні підпружи-
нені (рис. 30.3, б).
Щоб зменшити втрати на тертя при швидкостях ковзання о5 >
>6 м/с, гайки слід виготовляти з олов’яних бронз БрОЮФІ, БрОбЦбСЗ
та ін., а при малих швидкостях та незначних навантаженнях— із
антифрикційного чавуну марок АЧВ-1, АЧС-3 або сірого чавуну
СЧ 15, СЧ 20.
У відповідальних приводах високої точності для підвищення ККД
застосовують передачі гвинт — гайка кочення (рис. 30.3, в), де кон-
такт гвинта і гайки здійснюється через тіла кочення — кульки або
ролики. В таких передачах при обертанні гвинта кульки перекочу-
ються по гвинтових рівцях на гвинті та у гайці і циркулюють по спе-
ціальному обвідному каналу у гайці (на рис. 30.3, в не показаному),
повертаючись у робочу зону. Відомі також інші різновидності і кон-
струкції гайок для передач гвинт — гайка.
30 .3. Розрахунок передач гвинт — гайка
Кінематичний розрахунок. У передачах (див. рис. 30.1, а, б) обер-
тання гвинта (гайки) з кутовою швидкістю со забезпечує поступальний
рух гайки (гвинта) зі швидкістю V. Взаємозв’язок між цими кінема-
тичними параметрами можна встановити на основі рівностей відно-
шень кута повороту гвинта ср до осьового переміщення гайки х за один
повний оберт-
Ф/х = 2л/Рг або х = фРг/(2л), (30 1)
де Рг — Рг— хід гвинтової лінії різьби; г— число заходів різьби
Про диференціювавши ліву та праву частини рівності (30.1) по ч.і
су, дістанемо
Рг/(2л) або V = ш/>г/(2л) = 0,5шгі2 і|>. (30.2)
398
Для передачі за схемою на рис. ЗО. 1, в швидкість переміщення гай*
ки визначають за формулою
V = о (Р1гї - (зо.з)
де Ри гх і Рц г3 — кроки і $исла заходів різьб на двох ділянках гвин-
та. Якщо добутки Р& і Р£і близькі за значенням, то можна дістати
надзвичайно малі швидкості переміщення гайки.
Співвідношення між параметрами навантаження передачі та ККД.
Для створювання осьової сили Ра на гайці (або на гвинті) у передачах
за схемами на рис. ЗО. 1, а, б до гвинта (або гайки) треба прикласти
обертовий момент 7, який дорівнює сумі моменту сил тертя у різьбі
Т$ і моменту сил тертя в опорах гвинта (або гайки) Т&:
(30.4)
Момент сил тертя Т& залежить від конструкції опор гвинта (або
гайки) і для його визначення можуть бути використані формули
в 5.2.
Щоб знайти момент сил тертя у різьбі Та, треба розглянути схему
сил, що діють на виток гвинта (рис. 30.4, а). Нормальна до робочої
поверхні витка сила Рп створює у контакті витків гвинта та гайки силу
тертя Р8 ~ Р^. Складова Рп соз 6 нормальної сили та сила тертя Р8
у сумі дають силу Р, що лежить у дотичній площині до середнього ци-
ліндра гвинта.
Розкладемо силу Р на дві взаємно перпендикулярні складові: ко-
лову Рі на гвинті та осьову Ра сили:
(Ф + ф') = 27?М-
Із записаного співвідношення визначимо момент сил тертя у різьбі:
(30.5)
Т8 = 0,57асі2 (ф + <р'),
а 0
Рис. 30,4, До визначення моменту сил тертя у передачі гвинт — гайка
399
де ф — кут підйому витка різьби по його середньому діаметру; <р' —
зведений кут тертя у різьбі, який визначається за співвідношенням
<£ <р' = Р^(Рп соз 6) = //соз 6. (30.6)
Кут 6 при малих кутах підйому витків можна брати (див. рис. 30.2):
для трикутних та трапецеїдальних різьб б « 0,5а; для упорних різьб
6 « 3°, а для прямокутних різьб 6 = 0.
Формула (30.5) справедлива для випадку, коли осьова сила Ро на
гвинті протилежна напряму швидкості V його поступального руху. Як-
що напрями Ра та V збігаються (див рис. 30.4, б), то вираз для визна-
чення Т$ має такий вигляд (для випадку ф' >> ф):
Т5 = 0,5Гагіа 1£ (ф' - ф). (30.7)
Із формули (30.7) видно, що при великих кутах підйому витків різь-
би (ф >* ф') Т$ від’ємний, тобто передача гвинт — гайка стає несамо-
гальмівною. У такому разі при дії осьового навантаження на гайку
буде забезпечуватись обертання гвинта.
ККД передачі гвинт — гайка можна дістати за співвідношенням
{див. вирази (30.2) та (30.5)1
П = 5ю) = І2 Ф/*£ (Ф + ф')- (30.8)
Формулу (30.8) використовують для визначення ККД передачі при
дії осьового навантаження Ра протилежно швидкості у поступального
РУХУ-
Для різних параметрів та матеріалів гвинта і гайки ККД передачі
може коливатись у межах 0,6—0,8. При використанні самогальмівної
передачі гвинт — гайка (ф < ф') ККД буде менший від 0,5.
Розрахунок передачі на стійкість проти спрацювання. Передачі
гвинт — гайка у більшості випадків виходять із ладу через спрацю-
вання різьби. Стійкість проти спрацювання гвинтової пари забезпе-
чується обмеженням тиску у контакті витків різьби за умовою
(30.9)
Розрахунковий тиск у припрацьованій гвинтовій парі (навантажен-
ня розподілене по витках приблизно рівномірно) визначають за фор-
мулою
р = Ра/А = Р хг^, (30.10)
де Нх — робоча висота профілю різьби (див. рис. 30.2); = Н/Р —
число витків різьби у гайці висотою Н.
Допустимий тиск [р] назначають, виходячи з умов роботи та мате-
ріалів гвинта і гайки. Для пари загартована сталь — бронза беруть
[р] = (12... 15) МПа, а при малих швидкостях ковзання у різних на-
тискних пристроях [р] = (15...18) МПа. Для матеріалів незагарто-
вана сталь — бронза або чавун [р] = 8 МПа і Ір] = 5 МПа відповідно.
400
У передачах гвинт — гайка, які забезпечують точні переміщення,
[р] = (4...5) МПа.
Робоча висота профілю різьби, що віднесена до кроку (X = Яг/Р),
є постійною для певного типу різьби (див. рис. 30.2). Висота гайки Н
обмежується з метою зменшення нерівномірності розподілу наванта-
ження по витках. Тому відношенням е = Н/Л2 — 1,2...2,0 здебільшо-
го задаються. Отже, беручи до уваги X і е і враховуючи вираз (ЗО. 10),
умову обмеження тиску запишемо у вигляді
р = Га/(л4еХ) < [р).
Із записаного співвідношення можна дістати формулу для проект-
ного розрахунку передачі гвинт — гайка, в якому визначають серед-
ній діаметр різьби
Р аІ(пЕ.\{р]). (30.11)
Визначений діаметр різьби д,2 треба узгодити з параметрами стан-
дартної різьби. При цьому висота гайки Н = Є4/2.
Розрахунок гайки та гвинта на міцність. Міцність витків гайки
перевіряють за напруженнями зрізу і
тзр = Ра/Азр = Раі{лМН) < [т]зр. (30.12)
Тут (і — зовнішній (номінальний) діаметр різьби; к — коефіцієнт
повноти різьби (к — 0,87 — для трикутної різьби; к = 0,65 — для
трапецеїдальної; к = 0,5 — для прямокутної); Н — висота гайки.
Допустиме напруження [т]зр = (25...30) ЛШа — для гайки із
бронзи і (тізр = (45...50) МПа — для чавунних гайок.
Руйнування гвинтів зустрічається рідко і тому розрахунки гвин-
тів на міцність виконують тільки при дії на них значних осьових на-
вантажень. Гвинти у більшості випадків підлягають деформаціям
розтягу або стиску від дії осьової сили Ра та деформаціям кручення
за рахунок дії моменту Т від сил тертя в різьбі та в опорах [див, фор-
мулу (30.4)1. Тому міцність гвинтів перевіряють за умовою
= Р^Ор + 4т2 < [а]. (30.13)
Тут ор = 4Га/(ш/о) — нормальне напруження розтягу (стиску),
в т = І6Т/(шЙ) — дотичне напруження кручення. Діаметр сіо гвинта
у небезпечному перерізі здебільшого беруть рівним внутрішньому діа-
метру с!1 різьби гвинта. Допустиме напруження для сталевих гвинтів
Іа] = (0,2...0,3) от.
Гранична довжина гвинтів, навантажених стискаючою силою
Ра, визначається за умовою стійкості (стійкості стержня за Ейлером).
30 .4. Приклад розрахунку передачі гвинт — гайка
Задача. На рис. 30.5 зображена кінематична схема гвинтового підйомника, до
складу якого входять приводний електродвигун із циліндричною шестірнею на його
валу, пов’язане з шестірнею циліндричне колесо, у маточині якого розміщена гайка
401
Рис. 30.5. Кінематична схема
підйомника
передачі гвинт — гайка. Верти-
кальний гвинт верхнім кінцем
утворює поступальну пару в кор-
пусі, а до нижнього кінця за-
кріплюється вантаж. При обер-
танні циліндричного колеса разом
із гайкою гвинт здійснює посту-
пальний рух, піднімаючи чи опу-
скаючи вантаж.
Для підйомника треба піді-
брати електродвигун і розраху-
вати передачу гвинт — гайка за
такими даними: маса вантажу
(вантажність) т = 800 кг, швидкість піднімання о — 0,05 м/с.
Розв’язання. 1. Визначення потрібних параметрів електродвигуна. Осьо-
ва сила, що навантажує гвинт
Га = т§ = 800 • 9,8 « 7840 Н.
ККД приводного механізму підйомника
Пп = П1П2 = °»45 • О»9 = 0»40-
Тут орієнтовно вибрано: Яі = 0,45 — ККД передачі гвинт — гайка; т]2 = 0,9 —
ККД циліндричної зубчастої передачі та опор циліндричного колеса і гвинта.
Потрібна потужність електродвигуна
Р'№ = Гао/Пп = 7840 • 0,05/0,40 = 980 Вт.
Щоб дістати самогальмівну передачу гвинт — гайка, слід орієнтуватись на ма-
лий крок різьби Р = 3 мм (див. табл. 30.1) і число заходів г = 1. Тоді з формули
(30.2) потрібна кутова швидкість гайки
оо = 2ло/(Рг) «2-3,14- 0,05 . 103/(3 • 1) = 104,65 рад/с.
Для привода підйомника можна застосувати електродвигун 4А71В2УЗ з номі-
нальною потужністю Рдв = 1,1 кВт і частотою обертання його вала лдв = 2880 хв""1
або кутовою швидкістю шдв= ллдв/30 = 3,14 • 2880/30 = 301,6 рад/с.
Тоді передаточне число циліндричної зубчастої передачі
и = (одв/ш = 301,6/104,65 = 2,88.
2. Проектний розрахунок передачі гвинт — гайка. Для виготовлення передачі
виберемо такі матеріали: гвинт — із сталі 45, нормалізованої, для якої ов =
= 598 МПа, а ат = 363 МПа (див. табл. 3.1); гайка із сірого чавуну СЧ 20. Допус-
тимий тиск у контакті витків сталевого нормалізованого гвинта і чавунної гайки [р] =
= 5 МПа.
У зв’язку з однобічним осьовим навантаженням гвинта вибираємо для передачі
гвинт—гайка упорну різьбу.
За формулою (30.11) при е = НІ(І2 = 1,5 і X — Н^Р = 0,75 (для упорної різь-
би) середній діаметр різьби гвинта
д2 = /Га/(леХ (рі) = /7840/(3,14 • 1,5 • 0,75 • 5) = 21,06 мм.
Із табл. 30.1 виберемо упорну різьбу з параметрами: крок різьби Р= 3 мм;
номінальний діаметр сі = 26 мм; внутрішній діаметр = 20,795 мм; середній діа-
метр сІг = 23,75 мм.
402
Висота гайки
Я=е4а = 1,5 - 23,75 = 35,62 мм.
Беремо Н = 36 мм.
Число витків у гайці
гв = НІР = 36/3 = 12.
Кут підйому витків різьбила її середнім діаметром
Іб = />2/<іхсї2) = 3 . 1/(3,14 • 23,75) = 0,040207; ф = 2,30248°.
Зведений кут тертя у різьбі при коефіцієнті тертя / = 0,05 для змащених дета-
лей (див. 5.1) та при б = 3° за формулою (30.6)
<р' = //соз б = 0,05/соз 3° = 0,050069; ф' = 2,86633°.
Умова самогальмування різьбової пари виконується, оскільки ф' >• ф.
За формулою (30.8) визначаємо фактичний коефіцієнт корисної дії передачі
гвинт — гайка при підніманні вантажу:
тц = І£ ф/і§ (ф + ф') = 0,040207/іб (2,30248° + 2,86633°) = 0,44.
Фактичний ККД передачі гвинт — гайка з вибраними розмірами практично до-
рівнює попередньо взятому значенню.
3. Розрахунок передачі на стійкість проти спрацювання витків. Розрахунковий
тиск у контакті витків передачі з вибраними розмірами при робочій висоті витків
Нх — 0,75Р = 0,75 • 3 = 2,25 мм [див. формулу (30.10)]
р = РаК^Н^) = 7840/(3,14 • 23,75 • 2,25 - 12) = 3,9 МПа.
Стійкість витків проти спрацювання забезпечується, оскільки р = 3,9 МПа <
< [р] = 5 МПа.
4. Розрахунок гайки на міцність за напруженнями зрізу у витках. За формулою
(30.12)
тзр = Еа/(пМН) = 7840/(3,14 - 26 • 0,5 • 36) = 5,33 МПа.
Тут коефіцієнт повноти упорної різьби к = 0,5.
Допустиме напруження на зріз для витків чавунних гайок [т]зр = 45 МПа. От.
же міцність витків на зріз забезпечується.
5. Розрахунок гвинта на міцність. Нижня частина гвинта знаходиться тільки
під дією розтягу. Тому напруження розтягу у перерізі гвинта з внутрішнім діаметром
різьби
ор = 4Га/(шф = 4 - 7840/(3,14 . 20,7952) = 23,1 МПа.
Запас міцності гвинта за границею текучості
5 = от/ор = 363/23,1 = 15,7,
що забезпечує його достатню міцність.
Верхня частина гвинта (над гайкою) знаходиться тільки під дією кручення від мо-
менту Т3 сил тертя у різьбі (цей момент зрівноважується поступальною парою у кор-
пусі):
Т5 = 0,5Га42 (ф 4- ф') =
= 0,5 • 7840 • 23,75 . (2,30248° + 2,86633°) = 8422 Н • мм;
т = 7\№р = 16Т$/(л<ф = 16 • 8422/(3,14 . 20,795») = 4,8 МПа.
Тут також гвинт має достатньо високий запас міцності за границею текучості
при крученні:
тт = 0,6от = 0,6 • 363 = 218 МПа.
403
Контрольні запитання
1. В яких випадках використовують передачі типу гвинт — гайка?
2. Назвіть переваги та недоліки передач гвинт — гайка.
3. Які типи різьб застосовують у передачах гвинт — гайка? Охарактеризуйте
ці різьби з точки зору доцільності використання.
4. З яких матеріалів виготовляють гвинти та гайки? Які вимоги ставляться до
цих матеріалів?
5. Наведіть приклади деяких конструкцій гайок для передач гвинт — гайка.
6. Запишіть та проаналізуйте формулу, що встановлює зв’язок між швидкістю
поступального руху гайки і кутовою швидкістю гвинта.
7. Запишіть та проаналізуйте формули, що встановлюють зв’язок моменту сил
тертя в різьбі з осьовою силою на гайці.
8. За якими залежностями визначають ККД передачі гвинт — гайка?
9. У чому полягає розрахунок передачі гвинт — гайка на стійкість проти спра-
цювання?
10. За якими умовами ведуть розрахунок на міцність гайки та гвинта?
IV
Розділ
ОСІ ТА ВАЛИ. ПІДШИПНИКИ І НАПРЯМНІ
ГЛАВА 31. ОСІ ТА ВАЛИ
31.1. Загальні відомості. Конструкції та матеріали
осей і валів
Окремі елементи машин, що здійснюють обертовий рух, розміщу-
ють на осях та валах, які забезпечують для цих елементів постійне
положення геометричної осі обертання.
Вісь — деталь видовженої циліндричної форми, що підтримує
елементи машини у їхньому обертовому русі, не передаючи корисного
крутного моменту.
Вал — деталь, яка, на відміну від осей, призначена для переда-
вання крутного моменту та підтримування елементів машини у їхньо-
му обертовому русі. Існують деякі види валів, наприклад гнучкі
дротяні та торсіонні, які не підтримують деталей, а лише передають
крутний момент.
У деяких випадках конструктивне розв’язування певних задач
може бути виконане з використанням осі або вала. Так, у приводі
барабана підйомного механізму у кранах (рис. 31.1, а) зубчасте колесо
1 разом із приєднаним до нього барабаном 2 встановлені на осі 3.
У схемі привода (рис. 31.1, б) зубчасте колесо 1 і барабан 2 виконані
розділеними і встановлені на валу Зу який передає крутний момент на
відрізку між колесом та барабаном.
Конструктивно осі можуть бути виконані з можливістю обертан-
ня (рис. 31.2, а) або нерухомими (рис. 31.2, б). Осі, що обертаються
навіть під час постійного за модулем та напрямом навантаження,
працюють у гірших умовах циклічно змінних напружень, але більш
зручні в експлуатації, бо допускають використання виносних підшип-
ників. Нерухомі осі працюють у більш сприятливих умовах під час
постійних навантажень (за модулем та напрямом), але для них потріб-
ні більш складні та менш зручні в експлуатації підшипники, які влаш-
товуються в насаджуваних на вісь деталях. Осі завжди мають прямо-
лінійну вісь обертання.
Вали за формою геометричної осі можуть бути прямолінійними або
колінчастими. Колінчасті вали використовують у двигунах внутріш-
нього згоряння, поршневих помпах; їхні конструкції та розрахунок
розглядаються у відповідних спеціальних дисциплінах. Різновидністю
405
Рис. 31.1. Конструктивне розв’язування
задачі з використанням осі або вала
Рис. 31.2. Конструкції осей
Рис. 31.3. Конструкції валів
валів із непрямолінійною геометричною віссю є гнучкі дротяні вали,
які також належать до спеціальних деталей.
Найрозповсюдженіші прямолінійні вали за конструкцією можуть
бути циліндричними постійного діаметра (рис. 31.3, а), ступінчастими
(рис. 31.3, б) і з нарізаними на них зубчастими вінцями або шліцами
(рис. З І.З, в). Ступінчасті вали і вали з нарізаними зубчастими вінця-
ми більш складні за конструкцією та у виготовленні, але дають змогу
більш просто здійснити різні посадки деталей на окремих ділянках,
406
а 5 б г д
Рис. 31.4. Форми поперечних перерізів валів
забезпечують створення упорів та буртиків для осьової фіксації вста-
новлених на валах деталей. Крім цього, змінюючи розміри перерізів,
можна наблизити форму вала до найвигіднішої форми бруса рівного
опору, що особливо важливо для валів, навантажених змінними за
довжиною згинальними та крутними моментами.
За видом поперечного перерізу вали можуть бути суцільними
(рис. 31.4, а) або порожнистими (рис. 31.4, б), а за обрисом перерізу
гладкими циліндричними, із шпонковим пазом, шліцевими або прямо-
кутними (рис. 31.4, в, а, б). Із використанням порожнистих валів знач-
но зменшується їхня маса. Наприклад, якщо відношення сі^/сі = 0,5...
0,6, то маса зменшується на 22—ЗО %.
Опорні частини валів та осей називаються цапфами. Проміжні
цапфи називаються шийками, а кінцеві — шипами.
Цапфи валів, що працюють у підшипниках ковзання, можуть бути
циліндричними, конічними або сферичними (рис. 31.5, а). Основне
застосування мають циліндричні цапфи як найпростіші у технологіч-
ному відношенні. Конічні цапфи використовують для регулювання
зазорів у підшипниках, а інколи і для осьової фіксації вала. Сферичні
цапфи, що мають дуже обмежене розповсюдження (через складність
Рис. 31.5. Конструкції опорних ділянок осей та валів
407
Рис. 31.6. Конструктивні форми перехідних ділянок валів
виготовлення), застосовують у разі значних кутових переміщень вала
чи осі.
Цапфи валів для підшипників кочення (рис. 31.5, б) виконують
циліндричними. В деяких випадках вони мають різьбові ділянки або
інші конструктивні елементи для закріплення підшипників.
Перехідні ділянки валів між двома ступенями різних діаметрів ви-
конують такими способами:
1. Із рівцем для виходу шліфувального круга (рис. 31.6, а). Рівці
здебільшого виконують завширшки 3 мм і завглибшки 0,25—0,30 мм
на валах діаметром 10—50 мм, а на валах діаметром 50—100 мм —
завширшки 5 мм і завглибшки 0,5 мм. Рівці повинні мати максимально
можливі радіуси закруглень для зменшення концентрації напружень
і підвищення опору проти втомного руйнування в умовах дії змінних
напружень. Рівці виконують на валах, діаметри яких визначають
за умовою жорсткості, і на кінцевих ділянках валів, у перерізах
яких діють незначні згинальні моменти. Якщо на валу є різьбові
ділянки, то рівці передбачають для виходу різьбонарізного інстру-
менту.
2. Із перехідною поверхнею — галтеллю постійного радіуса
(рис. 31.6, б). Радіус галтелі р вибирають меншим за радіус закруглен-
ня або за радіальний розмір фаски деталі, що розміщується навалу.
Для шийок під підшипники кочення рекомендують //р = 3, а р/сі =
= 0,02...0,04. Для важконавантажених валів у випадках, коли збіль-
шення радіуса галтелі обмежується радіусом закруглення або фаскою
кромок деталей, слід застосовувати додаткові проміжні кільця
(рис. 31.6, в).
3. Із галтеллю спеціальної форми. Небезпечною зоною здебільшого
є перехід галтелі в ступінь меншого діаметра. Тому доцільно викону-
вати галтель із змінним радіусом кривини, до того ж найбільший ра-
діус кривини повинен бути в зоні переходу до ступеня меншого діамет-
ра. Застосовують галтелі еліптичної форми або галтелі, які окреслені
двома радіусами кривини рь р2 (рис. 31.6, а, д). Галтелі з піднутренням
(рис. 31.6, г) важко шліфувати, а галтелі за рис. 31.6, д вимагають
збільшення довжини перехідної ділянки вала. Однак галтелі із
408
змінним радіусом кривини значно підвищують стійкість вала проти
ітомного руйнування.
Ефективним методом підвищення втомної міцності валів у перехід-
їих перерізах є видалення малонапруженого матеріалу виконанням
юзвантажувальних рівців {рис. 31.6, е) або висвердлюванням отворів
у ступенях більшого діаметра (рис. 31.6, є). Такі заходи забезпечують
більш рівномірний розподіл напружень і зменшують ефект концентра-
ції напружень. Шкідливий вплив концентрації напружень можна
значно зменшити, використовуючи пластичне зміцнення галтелей
(обкочування роликом або обдування шротом).
Основними матеріалами для валів та осей є вуглецеві та леговані
сталі. Заготовками для валів діаметром до 150 мм у більшості випад-
ків є круглий прокат, а для валів більшого діаметра та фасонних ва-
лів — поковки. Поверхні валів, що призначені для спряження з ін-
шими деталями, повинні бути точно і чисто оброблені різцями. Пара-
метри шорсткості поверхонь: під підшипники кочення Ка == (3,2...
0,80) мкм, а під підшипники ковзання Ка = (0,40...0,1) мкм.
Для валів, розміри поперечних перерізів яких вибирають за умо-
вою жорсткості, переважно використовують сталі Ст5 і Стб. Для біль-
шості інших випадків застосовують сталі 45, 50, 40Х, 40ХН та ін.
Вали з цих сталей піддаються нормалізації, поліпшенню або гарту-
ванню з нагрівом СВЧ і низьким відпуском (шліцеві вали, вали, що
працюють у підшипниках ковзання, та інші випадки).
31.2. Розрахункові схеми валів та осей.
Критерії розрахунку
Розрахункові схеми валів та осей зображають у вигляді балок на
шарнірних опорах, які навантажені поперечними та осьовими силами,
що виникають у зачепленні встановлених на них зубчастих коліс, від
натягу віток пасової чи ланцюгової передачі, від дії власної ваги шкі-
вів, барабанів та інших встановлених на валу деталей. При складанні
розрахункових схем валів та осей необхідно із певним наближенням
визначити відстань між опорами, місця розміщення деталей, через
які передаються на вали та осі зовнішні навантаження.
При коротких опорах вала чи осі (підшипники кочення, підшипни-
ки ковзання з відношенням довжини цапфи до її діаметра 1/(1 < 0,6)
центр опори суміщають із серединою підшипника (рис. 31.7, а). При
довгих опорах ковзання (і/сі > 0,6) внаслідок нерівномірності розпо-
ділу навантаження по довжині підшипника теоретично центр опори
вважають розміщеним приблизно на відстані (0,25...0,30) І від краю
підшипника з боку навантаженої частини вала чи осі (рис. 31.7, б)-
Подібні міркування можна навести і щодо вибору перерізів вала,
в яких передаються навантаження від насаджених на нього деталей.
409
Рис. 31.7. До складання розрахункових схем валів
Найпростішим є припущення про передачу навантаження у серед-
ньому перерізі по довжині посадочної поверхні. Це припущення мож-
на брати, якщо відстань між опорами вала чи осі значно перевищує
ширину Ь деталі. У противному разі слід враховувати закономір-
ність розподілу навантаження вздовж посадочної поверхні хоча б
рознесенням зовнішнього навантаження Р так, як показано на
рис. 31.7, в.
Розрахункові схеми валів та осей можуть бути надзвичайно різно-
манітними. Об’єктом нашого вивчення будуть двохопорні вали та осі
як статично визначені системи. Власну вагу валів та встановлених на
них деталей здебільшого у розрахунках не беруть до уваги при неве-
ликих їхніх розмірах, хоча її врахування не створює принципових
труднощів.
Деякі найпоширеніші розрахункові схеми осей та валів зубчастих
передач зображені на рис. 31.8.
Найпростішою є розрахункова схема осі (рис. 31.8, а), навантаже-
ної однією (або кількома) поперечною силою Р. Більш складними є
розрахункові схеми валів. На рис. 31.8, б, в зображені розрахункові
схеми валів відповідно циліндричної та конічної передач з розміщен-
ням зубчастого колеса між опорами /, 2 вала і консольним розміщен-
ням колеса. В цих схемах вали навантажуються крутним моментом 7\
поперечними та осьовими силами Рь Рг, Ри, що виникають у зачеплен-
ні зубців відповідної передачі. Крім сил у зачепленні на вал можуть
діяти також сили від натягу віток пасової чи ланцюгової передачі
(сила Р на рис. 31.8, в) або сили від взаємодії деталей муфт, що з’єдну-
ють вали.
Розрахункові схеми проміжних валів багатоступеневих зубчастих
передач зображені на рис. 31.8, г, д, е. Ці схеми відрізняються між со-
бою взаємним розміщенням місць прикладання сил, що виникають у
зачепленні зубчастих коліс, розміщених на валу. Під час аналізу та-
410
Рис. 31.8. Розрахункові схеми осей та валів
411
ких схем навантаження валів слід розглядати окремо силові фактори
в різних площинах, а відтак сумувати геометрично.
Із розглянутих схем видно, що вали в процесі роботи зазнають де-
формацій згину, розтягу або стиску і кручення. Сталість напряму по-
перечних щодо поздовжньої осі вала сил спричинює у валах, що обер-
таються, появу циклічно змінних напружень згину, а дія осьових
сил — виникнення у перерізах валів напружень розтягу або стиску.
Характер зміни дотичних напружень кручення відповідає характеру
зміни в часі крутного моменту Т.
Отже, різні перерізи валів знаходяться під дією змінних у часі
нормальних і дотичних напружень. Тому для більшості валів сучас-
них швидкохідних машин такий критерій міцності, як стійкість валів
проти втомного руйнування, має вирішальне значення. Втомне руйну-
вання відбувається у 40—50 % випадків виходу валів із ладу. Для
тихохідних валів або валів, що зазнають дії короткочасних пікових
перевантажень, основним розрахунковим критерієм є також статична
міцність.
Вали, що мають значні (порівняно з діаметром) відстані між опора-
ми, можуть бути недостатньо жорсткими у поперечному напрямі. Це
може спричинити порушення геометрії зачеплень зубчастих коліс,
заклинювання валів в опорах або недопустимі поперечні коливання
валів. Тому важливим критерієм розрахунку довгих валів є також
умова достатньої жорсткості.
31.3. Розрахунок осей на міцність і стійкість
проти втомного руйнування (витривалість)
У 31.1 зазначено, що конструктивно осі можуть бути виконані
як такі, що обертаються, і нерухомими. При постійній за модулем І
напрямом поперечній силі Р на вісь у нерухомій осі напруження бу-
дуть постійними, а в осі, що обертається, вони будуть змінюватись за
симетричним циклом. Відповідно у першому випадку розрахунок осі
ведуть за умовою статичної міцності, а у другому — за умовою стій-
кості проти втомного руйнування.
Рис. 31.9. До розрахунку осі на міц-
ність
Тут ці два розрахунки відрізняють-
ся між собою лише вибором допу-
стимих напружень.
На рис. 31.9 зображена роз-
рахункова схема осі, навантаже-
ної силою Р, разом із епюрою зги-
нальних моментів по її довжині.
Умова міцності осі при згині
Озг = Мтах/^о [а]. (31.1)
Максимальний згинальний мо-
мент Літах У ПерерІЗІ ОСІ, ДЄ При-
412
кладена сила Е, визначається за співвідношенням
Л4та> = Я їв = = ЕаЬца 4- Ь).
Тут /?х, К2 — реакції опор /, 2 осі,
/?х = ЕЬ&а + Ь)\ Я2 = Еа]{а + Ь).
Враховуючи, що осьовий момент опору круглого перерізу осі ТГ0 =
= лгі3/32, запишемо умову міцності осі у такому вигляді:
озг = 32 ЕаЬ/[псР (а 4- &)] [о]. (31.2)
Допустиме напруження за умовою статичної міцності (нерухомі
осі) [о] — ог/[з], а за умовою забезпечення стійкості проти втомного
руйнування (осі, що обертаються) [о] = о_і^/([5] Ка) (див. 4.4).
У записаних виразах: от — границя текучості матеріалу осі; [$] =
= 1,5...2,5 — допустимий коефіцієнт запасу міцності; о_і — границя
витривалості; Ка — коефіцієнт впливу абсолютних розмірів перері-
зу осі; Ко—ефективний коефіцієнт концентрації напружень.
Вираз (31.2) можна використати для перевірних розрахунків осей
із відомими розмірами, навантажених за схемою на рис. 31.9. Проект-
ний розрахунок такої осі можна виконати за формулою, що дістали
із (31.2) розв’язуванням щодо сі:
сі^ї7 32 ЕаЬ/[л (а 4- Ь) [о]]. (31.3)
Розміри а і Ь, а також допустиме напруження за умовою стійкості
проти втомного руйнування попередньо можуть бути визначені з
певним наближенням.
31.4. Розрахунок валів на статичну міцність
Перевірку статичної міцності валів виконують із метою запобіган-
ня появі пластичних деформацій під час дії короткочасних переванта-
жень. Щоб виконати розрахунок, слід мати всі розміри вала та його
форму, які потрібні для правильного складання розрахункової схе-
ми.
Умову статичної міцності вала беруть у вигляді
Ое тах = ОеКп Ме» (31.4)
де се тах — максимальне еквівалентне напруження у небезпечному
перерізі вала; ое — еквівалентне напруження, яке обчислюють за
номінальним розрахунковим навантаженням; Кп = Тт**ІТ — кое-
фіцієнт, що враховує короткочасні перевантаження; [о]е » 0,8от —
допустиме еквівалентне напруження.
Як приклад розглянемо розрахунок вала зубчастої передачі, кон-
струкція якого наведена на рис. 31.10, а, а розрахункова схема із
епюрами згинального та крутного моментів — на рис. 31.10, б. Вал
413
Рис. 31.10. До розрахунку вала на статичну
міцність
має діаметри окремих сту-
пенів — б/5, а його опорні
цапфи — діаметри (13 і
Відстань від середнього пе-
рерізу вала під зубчастим
колесом до центрів його
опор 1 і 2 відповідно дорів-
нюють а і Ь. Вал наванта-
жений зовнішнім обертовим
моментом Т та силами
Рт і Ра, які виникають у
зачепленні колеса діамет-
ром (1 і передаються на
вал.
Для даної схеми наван-
таження радіальні реакції
опор вала (окремо від дії
кожної з сил Рі9 Р, і Ра)
визначаються за такими
співвідношеннями;
Ри = РіЬ!(а + Ь)\
Ра = Р іа/(а + Ь)\
Ріг = РгкЦа + Ь);
Р2г = РгаІ(а + Ь)\
Ріа ~ Рїа =
= О^РМа + Ь).
Сумарні радіальні реак-
ції опор вала знаходимо як
результат геометричної су-
ми окремих складових:
= V (НІГ + Яіа)2 +
= /(Ягг - Яга)2 + Іїи.
(ЗІ.!'
Осьова реакція опори / дорівнює осьовій силі Ра, тобто Рх\ ~
Після побудови епюр згинальних моментів М (також окремо ні <
дії сил Р{і рг і Ра) та крутного моменту Т можна стверджувати, що
найнебезпечнішим перерізом вала буде його переріз А — А (рис. 31.10,
414
а) під зубчастим колесом. У цьому перерізі діють крутний момент,
який дорівнює зовнішньому обертовому моменту Т, та максимальні
згинальні моменти М„ Ма і Л4, відповідно від сил Рг, Ра і Р^
Мг = Я1га = Ма = Рїаа; = РнЬ.
Результуючий максимальний згинальний момент Мтах визнача-
ється як геометрична сума окремих складових:
м™, = / (Мт + Л1в)» + М (31.6)
Згідно з наведеною схемою навантаження вала у перерізі А —А
мають місце нормальне напруження згину сгзг, дотичне напруження
кручення т та напруження стиску ас, яке обумовлене осьовою силою
Ра та осьовою реакцією опори 1 вала. Тому еквівалентне напружен-
ня можна визначити за формулою (див. 4.1)
ОБ = /(Саг + ас)2ТП^. (31.7)
де складові напруження
озг = 32Л4тах/(л4); ас = 4Ра/(лсЙ); т=16Т/(л^). (31.8)
Отже, визначивши еквівалентне напруження для небезпечного
перерізу вала та маючи коефіцієнт 7<п короткочасних перевантажень,
можна перевірити за умовою (31.4) статичну міцність вала при його
перевантаженнях.
31.5. Розрахунок валів на витривалість
Розрахунок валів на витривалість є основним і обов’язковим.
У ньому враховуються характер зміни напружень, характеристики
витривалості матеріалів, фактори концентрації напружень тощо. Роз-
рахунок на витривалість у більшості випадків виконують у вигляді
перевірки коефіцієнтів запасу міцності в певних перерізах валів за
умовою 5 ^ [$] = 1,5...2,5.
Розрахунковий коефіцієнт запасу міцності визначають у загально-
випадку за формулою (див. 4.4).
5 = 5О5Т/ у 4 + 4, (31.9)
коефіцієнти запасу міцності за нормальними 5оі дотичними $т на-
пруженнями відповідно (без урахування поверхневого зміцнення)
5а = о_\/(Кпаа/КІІ 4- Фаот);
= ^/(Кт^а/Ка 4- ФтТ^). (31.10)
Границі витривалості матеріалу валів для необмеженого строку
служби можна брати: при симетричному циклі згину а_і « 0,45 <тв;
при симетричному циклі кручення Т-і « 0,25 ав (див. табл. 3.5).
415
Для вала, зображеного на рис. 31.10, а, у перерізі А — А нормаль-
ні напруження згину змінюються за симетричним циклом, а нормаль-
ні напруження стиску постійні. Тому для цього перерізу маємо амплі-
туду та середнє значення нормальних напружень:
Оа = Озг ~ ^тах/^0н« = (Тс = Ра]Ац.
Щоб визначити амплітуду та середнє значення дотичних напру-
жень, треба знати дійсний характер зміни крутного моменту Т у
реальних умовах експлуатації машини. Оскільки це важко встанови-
ти, у розрахунках беруть зміну дотичних напружень за пульсуючим
циклом для валів, що обертаються тільки в один бік, і за симетричним
циклом для валів із змінним напрямом передачі навантаження. Від-
повідно в першому випадку (переріз вала А —- А на рис. 31.10, а)
Та = Тт = 0,5т = 77(2№в„),
а у другому
= т = Т№РИ; іт = 0.
У виразах для визначення амплітуд та середніх напружень осьо-
вий ІГон І полярний Ц7рн моменти опору перерізу, а також площу
Аа перерізу треба брати за фактичними розмірами перерізів. Напри-
клад, якщо у перерізі є шпонковий паз (див. рис. 31.10, а), то
№Он = л<4/32 — ьі (аг —
= л£і\&-ьі (а4 - /)2/(2а4);
А„ - лсІІ/4 — Ьі.
Ефективні коефіцієнти концентрації напружень Ко і Кх вибира-
ють залежно від механічних характеристик матеріалу вала та форми
концентратора напружень у перерізі вала, де визначають коефіцієнт
запасу міцності. Концентраторами напружень для валів можуть
бути галтелі, кільцеві рівці, поперечні отвори, різьба, шпонкові па-
зи, напресовка на вал інших деталей тощо. Якщо у перерізі вала є
кілька концентраторів напружень, то у розрахунках беруть той, для
ЯКОГО Ка і Кх більші. ЗнЗЧЄННЯ Ка І Кх ДЛЯ ДЄЯКИХ форм КОНЦЄНТра ГО-
рів напружень наведені у табл. 31.1 і 31.2.
Коефіцієнти, що характеризують чутливість матеріалу вала до
асиметрії циклу напружень, можна брати для сталевих валів:
фа = 0,02 + 2 • 10"”4ов; фх = 0,5фа,
де ав — границя міцності матеріалу вала, МПа.
Коефіцієнти, що враховують вплив абсолютних розмірів перерізу
вала, залежать від його матеріалу та діаметра перерізу і можуть бути
визначеними за табл. 31.3.
416
лблиця 31.1. Ефективні коефіцієнти концентрації напружень Ко і Кх
4 валів із галтелями
о/а г/л для валів із сталі, що має <т , МПа В Кх для валів із сталі, що має ав, МПа
500 800 1000 500 800 1000
0,02 1,70 1,88 2,05 1,24 1,29 1,33
0,05 1,48 1,57 1,63 1.15 1,18 1,20
1,05 0,10 1,28 1,33 1,36 1,08 1,10 1,12
0,15 1,20 1,23 1,25 1,06 1,08 1,09
0,20 1,16 1,20 1,22 1,05 1,06 1,07
0,02 2,0 2,24 2,47 1,40 1,52 1,62
0,05 1,64 1,70 1,75 1,25 1,28 1,30
і.ю 0,10 1,37 1.42 1,45 1,12 1,16 1,18
0,15 1,27 1,31 1,34 1,09 1,12 1,14
0,20 1,20 1,24 1,27 1,06 1,08 1,10
0,02 2,12 2,68 3,10 1,64 1,73 1,80
0,05 1,81 1,97 2,10 1,40 1,45 1,48
1.25 0,10 1,47 1,54 1,60 1,20 1.27 1,32
0,15 1,35 1,40 1,43 1,15 1,20 1,24
0,20 1,30 1,32 1,34 1,09 1,13 1,16
Виконуючи розрахунок вала на витривалість, для визначення
коефіцієнтів запасу міцності потрібно вибирати перерізи, де виника-
нії» максимальні напруження і розміщені концентратори напружень.
У деяких випадках наявність фактора концентрації напружень у будь-
•'кому перерізі вала є достатньою умовою потреби виконання розра-
нку на витривалість навіть при незначних номінальних напру-
•инях у цьому перерізі.
У деяких перерізах валів можуть виникати тільки нормальні
ібо тільки дотичні т напруження. Тоді визначають або 5т, а розра-
пковий коефіцієнт запасу міцності з = $а або з = Зг.
Розрахунок валів на витривалість доцільно виконувати з ура-
нанням змінних режимів навантаження машин протягом строку їх
ужби з метою більш повного використання ресурсів міцності мате-
плу. Однак через відсутність достатньої кількості вірогідних експе-
417
Таблиця 31.2. Ефективні коефіцієнти концентрації напружень Кд і Кх
при згині та крученні валів для деяких концентраторів
<тв, МПа, для матеріалу вала Шліц Шпонковий паз Поперечний отвір
500 1,45 2,25/1,37 1,64/1,38 1,37 2,00/1,65 1,70
600 1,55 2,36/1,46 1,76/1,46 1,54 2,05/1,85 1,80
800 1,65 2,55/1,58 2,01/1,62 1,88 2,10/1,90 1,95
1000 1,72 2,70/1,58 2,26/1,77 2,22 2,20/2,00 1,90
♦ У чисельнику — для валів із прямокутними шліцами, в знаменнику — для
валів із евольвентними шліцами.
* ♦ У чисельнику—для пазів, виконаних пальцевою фрезою, у знаменнику —
для пазів, виконаних дисковою фрезою.
* ** У чисельнику при відношенні діаметра отвору до діаметра вала 0,05...
0,15, у знаменнику—при 0,15...0,25.
Таблиця 31.3. Коефіцієнти Кд впливу абсолютних розмірів поперечного
перерізу вала
Матеріал вала К(і при діаметрі перерізу сі, мм
10 20 зо 40 50 70 100 200
Вуглецева сталь ов = = (400...500) МПа Вуглецева або легована 0,98 0,92 0,88 0,85 0,82 0,76 0,70 0,63
сталь ов = (500...800) МПа Легована сталь ов = 0,97 0,89 0,85 0,81 0,78 0,73 0,68 0,61
= (800... 1200) МПа 0,95 0,86 0,81 0,77 0,74 0,69 0,65 0,59
риментальних відомостей із цього питання останнім часом обмежу
ються розрахунками валів, що працюють із постійним режимом
навантаження, тобто виходять із найнесприятливіших умов наванта
ження валів.
31.6. Розрахунок валів на жорсткість
Для нормальної роботи механічних передач та підшипників валам
потрібно надавати достатню жорсткість. Ступінь жорсткості вали»
характеризується такими параметрами: прогином вала у, кутом нахи
лу поперечного перерізу 0, кутом закручування вала ф. Прогини вали»
можуть спричинити перекоси зубців у зачепленні зубчастих коліс
кути нахилу перерізів валів — заклинювання підшипників, а ку і
418
закручування валів можуть зменшити точність ділильних механізмів
та ін.
Умови достатньої жорсткості валів записують у вигляді:
КИ 6^10]; (31.11>
Допустимі пружні переміщення перерізів валів Іу], [0] і (ф] зале-
жать від конкретних вимог до валів і беруть у кожному окремому
випадку на основі досвіду експлуатації певних систем. Існують загаль-
ні наближені рекомендації щодо вибору допустимих пружних перемі-
щень:
[у] « 0,01/п — для перерізів валів під циліндричними зубчасти-
ми колесами;
Іу] « 0,005/п — для валів конічних, гіпоїдних та черв’ячних
глобоїдних передач (тут т — модуль зубців);
[//] = (0,0002...0,0003) І — для валів загального призначення у
верстатобудуванні (І — відстань між опорами вала);
10] 0,001 рад — для підшипників ковзання;
[01 С 0,01 рад — для радіальних кулькових підшипників;
[0] 0,05 рад — для сферичних кулькових підшипників;
|ф] 5' на їм довжини — для ходових валів важких верстатів;
[фї 15...20' на 1 м довжини — для трансмісійних валів меха-
нізмів пересування мостових кранів.
Мале значення допустимих пружних переміщень перерізів валів
інколи вимагає визначати розміри вала не за умовою міцності, аза
умовою жорсткості. Тоді недоцільно виготовляти вал із дорогих
високоміцних сталей, якщо це не зумовлено деякими іншими умовами,,
наприклад стійкістю цапф вала проти спрацьовування.
Розрахункові значення пружних переміщень перерізів валів ви-
значають відомими методами опору матеріалів. Для двох схемнаван-
Таблиця 31.4. Формули для обчислення пружних переміщень
перерізів валів
= РаЬ (І + Ь)/(6ЕП)
02 = —РаЬ (І а)/(6Е/0
Оз = 0з
0. = РаЬ (Ь — а)/(ЗЕН)
Уі = Ра*Ь*/(ЗЕП)
у3 = —РаІх, (І 4~ а)/(6Е//)
0! = —РсІ/(6ЕІ)
0а = РсІ/(ЗЕГ)
03 = Рс (21 4- Зс)/(6£/)
Уз = (І 4- с)/(ЗЕІ)
419
таження валів значення прогинів та кутів повороту перерізів визна-
чають за формулами табл. 31.4. Формули наведені для валів постій-
ного перерізу діаметром Л і осьовим моментом інерції / = тої4/64.
Цифрами /, 2, 3 і 4 на схемах табл. 31.4 позначені номери перерізів
вала.
Кути закручування валів постійного діаметра довжиною І визнача-
ють за формулою
Ф = П/(О/Д (31.12)
де ф — кут закручування, рад; 0 = 8- 104 МПа — модуль пружнос-
ті при зсуві сталевого вала; /р = гаї4/32 — полярний момент інерції
перерізу вала діаметром й. Якщо вал ступінчастий, то кут ф обчислю-
ють для окремих ділянок, а відтак підсумовують результат.
31.7. Розрахунок валів для запобігання
поперечним коливанням
Більшість швидкохідних валів знаходяться під дією змінних за
модулем або напрямом сил, перпендикулярних до осі обертання, на-
приклад сил, спричинених дисбалансом встановлених на них деталей.
Частота таких збурюючих сил переважно дорівнює частоті обертання
вала. Якщо частота збурюючих сил
стає рівною частоті власних коли-
вань вала, то настає явище резо-
нансу, коли амплітуда коливань
різко зростає і мзже досягнути та-
кого значення, при якому відбува-
ється руйнування вала. Кутова
швидкість вала, що відповідає ре-
зонансним коливанням, називаєть-
ся критичною кутовою
ШВИДКІСТЮ (0Кр.
Розрізняють згинальні та кру-
тильні коливання валів. Крутильні
коливання мають суттєве значення
під час розрахунків валів із вели-
кими приєднаними до них масами,
наприклад роторів потужних тур-
бін. Нижче розглянемо визначення
критичної кутової швидкості валів,
за якої виникає резонанс попереч-
них (згинальних) коливань.
Розрахунок валів для запобіган-
ня поперечним коливанням полягає
у перевірці умови відсутності ре-
420
зонансу під час усталеного режиму роботи. Відповідно до цієї умови
фактична кутова швидкість обертання не повинна знаходитись у межах
від 0,7сокр до І.Зсокр, тобто
0 Дшкр > <о > 1,3сокр. (31.13)
Критичну кутову швидкість вала визначимо на основі таких мір-
кувань. Припустимо, що на валу симетрично щодо опор розміщений
диск масою /и, центр ваги якого зміщений відносно геометричної осі
обертання на величину е (рис. 31.11, а). Під час обертання вала від
дії відцентрової сили на диск відбувається його поперечний
згин. При кутовій швидкості со прогин вала буде у (рис. 31.11, б),
а відцентрова сила
Га = (у 4- е). (31.14}
Відцентрову силу Еу зрівноважує сила поперечної пружності вала
Рщ> = ку, (31.15)
де к — згинальна жорсткість вала (сила, що спричинює прогин вала
на 1 мм).
З усталеним режимом обертання вала зберігається умова —
Епр, тобто
/ПО)2 (у 4- е) =» ку,
звідки можемо дістати вираз для прогину вала:
у = пи£?еі(к — /псо2). (31.16>
З аналізу виразу (31.16) випливає, що при к = та2 прогин у =
= оо, тобто наступає резонанс. Резонансна, або критична, кутова
швидкість вала
<і)кр = И/г//п. (31.17>
Формулу можна подати і в іншому вигляді. Якщо взяти т =
= 6/§, дєО — власна вага диска, § — прискорення вільного падіння,
а С/к = уСт — статичний прогин вала під дією власної ваги диска, то-
“кр = V еіУст (31.18)
Для схеми на рис. 31.11, б згинальна жорсткість вала може бути
визначена, якщо записати прогин вала (див. формулу із табл. 31.4)
у вигляді
у = ЕО1*/(48ЕІ) = куР/(48ЕІ).
Звідси маємо
к = 48Е1/Р. (31.19)
Отже, маючи критичну кутову швидкість <окр вала заданих розмі-
рів, за умовою (31.13) можна перевірити відсутність резонансу при
усталеному режимі обертання з кутовою швидкістю о.
421
Більш детальний аналіз формули (31.16) показує, що при © •< <оКр
(дорезонансний режим обертання вала) знаки е та у однакові, що від-
повідає обертанню вала за схемою рис. 31.11, б. Якщо со > оіКр (заре-
зонансний режим обертання вала), знаки при е та у протилежні.
В цьому випадку при со -> оо у — е, тобто центр ваги (ц. в.) диска
наближається до геометричної осі обертання вала (рис. 31.11, в).
Таке явище називають самоцентруванням вала в закри-
тичній області кутових швидкостей.
Більшість валів працює в докритичній області. Щоб зменшити не-
безпеку резонансу, треба підвищити згинальну жорсткість валів і
тим самим збільшити критичну кутову швидкість. При високих швид-
костях обертання, наприклад у швидкохідних центрифугах та турбі-
нах, застосовують вали, що працюють у закритичній області. В таких
випадках слід передбачати додаткові спеціальні пристрої, що зменшу-
ють прогини валів під час переходу через резонансну область.
31.8. Проектний розрахунок валів
та їхнє конструювання
Розглянуті вище розрахунки валів на статичну міцність при пере-
вантаженнях, на витривалість, жорсткість та для запобігання по-
перечним коливанням є перевірними розрахунками і вони виконують-
ся за відомими розмірами всіх конструктивних елементів валів.
Під час виконання проектного розрахунку на початковому етапі
відомі лише деталі, що розміщуються на валу, та діючі зовнішні
навантаження. Виходячи з умов роботи вала та деяких вимог, що став-
ляться до конструкції вала, вибирають матеріал для його виготовлен-
ня. Надалі орієнтовно визначають діаметр вала у характерних його
перерізах за умовою міцності на кручення
т =Т/ЇГРС(П. (31.20)
Беручи полярний момент опору перерізу ІГр = я^/16, в якому
діє крутний момент Т, із умови (31.20) можна визначити потрібний
діаметр вала:
а > у' 16Т/(л[т]). (31.21)
Діаметр вала за умовою (31.21) визначають для його перерізів,
у яких діє тільки крутний момент, до того ж у цьому випадку для стале-
вих валів допустиме напруження беруть [т] = (35...40) МПа. Напри
клад, у конструкції вала на рис. 31.12, а ділянка вала діаметром <1,
зазнає тільки деформації кручення, тому значення цього діаметра н<>
передньо можна оцінити за умовою міцності на кручення.
У деяких випадках, наприклад у конструкції проміжного валі
зубчастого редуктора (рис. 31.12, б), немає перерізів, що зазнаюі
тільки деформації кручення. Між опорами вал зазнає згин у всі
422
Рис. 31.12. Конструкції валів зубчастих передач
перерізах, а ділянка вала між зубчастими колесами додатково скру-
чується. Тут також діаметр сі під зубчастим колесом попередньо мож-
на оцінити з умови міцності на кручення [див. формулу (31.21)1,
беручи заздалегідь занижене допустиме напруження [т] = (25...
ЗО) МПа.
Маючи розміри деталей, що розміщуються на валу, та враховую-
чи зручність їхнього монтажу і способи їхньої фіксації, надалі роз-
робляють усю конструкцію вала. При цьому слід забезпечувати міні-
мальні перепади діаметрів сусідніх ступенів вала, але достатні для
створення упорних буртиків, потрібних для осьової фіксації деталей.
Радіуси галтелей слід брати достатньо великими для зменшення кон-
центрації напружень. їхнє значення повинно бути однаковим, бо при
цьому зменшується номенклатура різців для обробки вала. Якщо для
вала передбачено кілька шпонкових пазів, то їх слід розміщувати на
одній лінії. Під час конструювання вала треба приділяти значну ува-
гу технологічності та економічності виготовлення з урахуванням об-
сягу виробництва. На цьому етапі назначають також посадки деталей
на вал.
У результаті попередньої розробки конструкції вала дістають роз-
міри всіх його конструктивних елементів. За цими розмірами викону-
ють перевірні розрахунки. Якщо результати розрахунків будуть неза-
довільні, то розміри вала слід коректувати.
31.9. Приклад розрахунку і конструювання вала
Задача. Розрахувати і сконструювати проміжний вал двоступінчастого редукто-
ра (рис. 31.13) за такими даними: крутний момент, що передає вал, Т = 360 Н • м;
ділильні діаметри розміщених на валу зубчастих коліс прямозубого в 78 мм, ко-
созубого ^=212 мм; ширина зубчастих коліс = 62 мм, = 48 мм; кут нахилу
•убців косозубого колеса 0 = 14°; коефіцієнт короткочасних перевантажень Кп =
* 2,2.
423
Рис. 31.13. Схема зуб-
частого редуктора
Ро зв’ я з а н н я. 1. Проектний розрахунок і конст-
руювання вала Для виготовлення вала назначаємо норма-
лізовану сталь 45, для якої от = 363 МПа і ов = 598 МПа
(див. табл. 3.1).
Діаметр вала з умови міцності на кручення попередньо
визначимо для перерізів вала під зубчастими колесами.
Оскільки в цих перерізах одночасно діють крутний і зги-
нальні моменти, то діаметр цих перерізів знайдемо за за-
ниженим допустимим напруженням (ті = 25 МПа.
За формулою (31.21) маємо * 2
4 > У \6Т/(п. Іт]) =
= |/ 16 • 360 • 1О’/(3,и • 25) = 41,8 мм.
Беремо й = 42 мм.
Враховуючи розміри коліс (їх можна виконати насад-
ними), вважаємо доцільним брати конструкцію вала, яка
зображена на рис. 31.14. Тут діаметр вала під підшип-
ники назначимо йп = 40 мм, а діаметр буртика між коле-
сами — = 48 мм. Радіуси всіх галтелей г = 1 мм. Якщо брати відстань між ко-
лесами Ь3 = 5 мм, а ширину дистанційних кілець між підшипниками та колесами
А = 8 мм, то з урахуванням ширини підшипників Вп « 20 мм дістанемо: а = 42 мм;
Ь = 60 мм; с = 49 мм; ї==а-|~&4“С= 42 + 60 -Ь49 = 151 мм.
Розміри шпонкових пазів у перерізах А — А і Б — Б (див. табл. 12.1): Ьш =
= 12 мм; 5 мм.
2. Перевірка статичної міцності вада. Попередньо визначимо сили, що діють
у зачепленні зубчастих коліс і які передаються на вал.
Сили у зачепленні прямозубого колеса:
колова сила
Рп = 2Г/^! = 2 • 360 • 103/78 = 9230 Н;
радіальна сила
Ргї = а = 9230 20° = 3360 Н.
Сили у зачепленні косозубого колеса:
колова сила
Бд « 2Т/ал = 2 • 360 • 103/212 = 3396 Н;
радіальна сила
рг2 а рп «/соз 0 = 3396 20°/соз 14° = 1274 Н;
осьова сила
ра2 = рі2 0 = 3396 14° = 846 Н.
Розрахункова схема вала зображена на рис. 31.15, де вказані напрями сил, що
діють на вал, та показані епюри згинальних моментів М окремо від кожної зовніш-
ньої сили і епюра крутного моменту Т.
Запишемо радіальні реакції опор А і В вала від дії на вал сил у зачепленні колісі
^Агї = РГ^П я 3360 * 49/151 в 1090 н'>
ВВгХ *= рг\ <а + Ь^1 = 3360 (42 + 60)/151 = 2270 Н;
%Аг2 = рг2 & + с)// = 1274 С60 + 49)/151 = 920 Н;
Ява = рпа/1 =1274 •42/151 = 354 н;
424
^Аа2~ Ва2 ~~ —
= 0,5.846.212/151 =594 Н;
^Аіі — ?ПСІЇ ~
= 9230 • 49/151 = 2995 Н;
*вп = (а "Ь =
= 9230 (42 4- 60)/151 = 6235 Н;
ЯЛ/2 = ? І2 "Ь* СМ ~
= 3396 (60 4- 49)/151 = 2451 Н;
^Ві2 = Р П? 11 ==
= 3396 • 42/151 = 945 Н.
Сумарні радіальні реакції
опор вала:
V"№дг\ “Ь ^Аа2
’ -Каг^+^Ап+Яаії)2 =
= /(1090 4-594 — 920)а 4-* * ’“*
’ 4-(2995 4~ 245і)2 = 5500 Н;
^В ~ V (^Вг2 + ^Ва2
— ^Вгі)* + № Вії +
4- &ВІ2)2 и
= /(354 4-594 — 2270)2 4-‘
**' ” 4- (6235 4- 945)2 = 7300 Н.
Згинальні моменти у перері-
зі вала А — А (під зубчастим
колесом діаметром гіі):
Мгі = %Вг1с ==
= 2270 • 49= 111 230 Н . мм;
^г2 = ^Вг^ =
= 354.49 = 17 346 Н • мм;
^а2 ~ ^Ва2с в
= 594 . 49 = 29 106 Н • мм;
Мц в %впс в
= 6235.49 = 305 515 Н . мм;
Рис. 31.14. До конструювання проміжного вала
редуктора
Рис. 31.15 Навантаження проміжного вала ре-
дуктора
425
М& — Яві2с — 945 • 49 = 46 305 Н • мм;
М1 П..Ж = V (ЛІгі-ЛІгг-ЛІ^’ + ^і+^д)’ -
= /(111 230 — 17 346 — 29 106)2 (ЗО5 515 4- 46 305)» = 357 734 Н - мм.
Згинальні моменти у перерізі вала Б — Б (під зубчастим колесом діаметром ф
МГІ = ^лгіа = 1090 • 42 = 45 780 Н . мм;
Мг2 -= = 920 • 42 = 38 640 Н • мм;
(Ь 4- с) = 594 (60 4- 49) = 64 746 Н • мм;
Лїд = НАі\а = 2995 • 42 = 125 790 Н • мм;
Мі2 = Я-АІЇ1 = 2451 • 42 = 102 942 Н • мм;
М? тах = )/* (Мг2 4- ^а2 ~ 4" =
= у (38 640 4- 64 746 — 45 780)а 4- (125 790 4- 102 942)» = 235 874 Н • мм.
Оскільки діаметри вала у перерізах А — А і Б — Б однакові, крутні моменти
також однакові, а згинальний момент у перерізі А — А більший, ніж у перерізі Б —
Б, то перевірку міцності слід виконувати для перерізу А — А.
Номінальні напруження у перерізі А —А:
озг = 32ЛІ! тах/(ЛбР) = 32-357 734/(3,14 - 423) = 49,2 МПа;
°с = 4/га2/(лгіа) = 4 - 846/(3,14 • 42а) = 0,6 МПа;
т = 16Г/(л^3) = 16 - 360 - 103/(3,14 • 423) = 24,7 МПа;
о£ = ]/(озг 4- ос)2 4- 4т’2 =
= /(49,2 4- О.б)2 4 . 24,7а = 70,1 МПа.
Максимальне еквівалентне напруження при короткочасних перевантаженнях
тах = = 70,1 - 2,2 = 154 МПа.
Допустиме еквівалентне напруження
1СТІЕ = 0.8от = о,8 - 363 = 290 МПа.
Умова статичної міцності вала виконується, оскільки
тах = 154 МПа < = 290 МПа-
3. Розрахунок вала на витривалість. Вище було визначено, що найнебезпеч-
нішим є переріз А — А вала. У цьому перерізі концентратором напружень є шпон-
ковий паз, який утворюється пальцевою фрезою. Тому для перерізу А — А доцільно
визначити розрахунковий коефіцієнт запасу міцності. Оскільки у перерізі А — А
е нормальні та дотичні напруження, то спочатку визначимо зо і зх, а відтак і за-
гальний розрахунковий коефіцієнт запасу міцності з [див. формули (31.9) і (31.10)1.
Границі витривалості матеріалу вала:
о_! = 0,45ов « 0,45 - 598 = 269 МПа;
т_! = 0,25ов = 0,25 - 598 = 150 МПа.
426
Амплітуди нормальних і дотичних напружень:
аа « = 357 734/6276 = 57 МПа;
та = Т/(2ТГрн) = 360 . 103/(2 • 13 549) = 13,3 МПа.
У даному випадку моменти одору перерізу вала брали з урахуванням шпонко-
вого паза (див. рис. 31.14):
«70н = шР/32- 6Ш/Х (сі - «
= 3,14- 423/32 — 12 - 5 (42 — 5)»/(2 • 42) = 6276 мм8;
ЇГрн = лЛ3/16 - Ьші1 (<і - М2/(24) =
= 3,14 . 423/16 — 12 • 5 (42 — 5)2/(2 • 42)= 13 549 мм3.
Середні значення нормальних і дотичних напружень:
от = Га2/(Ла2/4 — дш/х) = 846/(3,14 • 422/4 — 12 • 5) = 0,64 МПа;
тт = — 13,3 МПа — для випадку передавання навантаження тільки в
оіин бік.
Ефективні коефіцієнти концентрації напружень від шпонкового паза (див.
табл. 31 2): Ка = 1,76; Кх = 1,54.
Коефіцієнти, що характеризують чутливість матеріалу вала до асиметрії цик-
лу напружень;
% = 0,02 + 2 • 10~4ов = 0,02 4- 2 . 10“4 . 598 = 0,14;
Фх = 0,5фа =0,5-0,14 = 0,07.
Коефіцієнт, що враховує вплив абсолютних розмірів перерізувала, за табл. 31.3
Ка = 0,80.
Коефіцієнти запасу міцності за нормальними та дотичними напруженнями:
«О = О-іЛЯоОо/К,, + фо®т) = 269/(1,76 • 57/0,80 + 0,14 • 0,64) = 2,14;
\ ='ї_|/(/<,і0/К<(+Фттт) = 150/(1,54 • 13,3/0,8 + 0,07- 13,3) = 5,65.
Загальний розрахунковий коефіцієнт запасу міцності вала у перерізі А — А
з = зозт/]/’=2,14. 5,65//2,14» + 5,65» = 2,0.
Оскільки мінімальний допустимий коефіцієнт запасу міцності [5]П1ІП = 1,5, витри-
валість вала у перерізі А — А забезпечується. Коректування діаметра вала
(і = 42 мм не потрібне, бо загальний розрахунковий коефіцієнт запасу міцності
становить 1,5—2,5.
Пропонуємо самостійно перевірити витривалість вала у перерізі В — В (див.
рис. 31.14), де концентратором напружень є галтель із радіусом г = 1 мм.
Контрольні запитання
1. Яка основна різниця між валом і віссю? З якою метою використовують осі
та вали?
2. Назвіть та охарактеризуйте основні конструктивні форми валів.
3. Назвіть матеріали, з яких виготовляють осі та вали. Які види термообробки
застосовують для осей та валів?
4. Подайте деякі схеми навантаження осей та валів. Які основні критерії розра-
хунків валів та осей?
427
Б, У чому полягає різниця в розрахунках осей, що обертаються, і нерухомих?
6, У чому полягає суть розрахунку валів та статичну міцність?
|7. У чому полягає суть розрахунку валів на витривалість?
8. В яких випадках слід забезпечити жорсткість валів? Як ведеться розрахунок
валів на жорсткість?
9. Що таке критична швидкість обертання вала? Як записується умова запобі-
гання поперечним коливанням вала?
10. Від яких факторів залежить критична кутова швидкість вала?
11. У чому полягає проектний розрахунок валів?
12. Які основні рекомендації щодо конструювання осей та валів.
ГЛАВА 32. ПІДШИПНИКИ КОЧЕННЯ
32.1 . Загальні відомості
Підшипники кочення — це елементи опор осей, валів
та інших деталей, що працюють на використанні принципу тертя ко-
чення.
У більшості випадків підшипник кочення (рис. 32.1) складається
із зовнішнього 1 та внутрішнього 2 кілець, тіл кочення 3 і сепаратора
4. Внутрішнім кільцем підшипник розміщують на валу або осі, а зов-
нішнім — у корпусі опори. Відносне обертання внутрішнього кільця
відносно зовнішнього забезпечується за рахунок тіл кочення між
кільцями. Тіла кочення перекочуються по доріжках кочення (бігових
доріжках), які передбачені на зовнішньому та внутрішньому кільцях
підшипника. Сепаратор розділяє тіла кочення і утримує їх на однако-
вій відстані.
Підшипники кочення належать до групи деталей, які найширше
стандартизовані у міжнародному масштабі і централізовано виготов-
ляються на спеціалізованих заводах масовим виробництвом. Останнім
428
часом підшипники кочення є основними видами опор у машинах. Сві-
товий обсяг випуску підшипників кочення вимірюється міліардами
штук на рік. Вони виготовляються близько 20 000 різних типорозмі-
рів у діапазоні зовнішніх діаметрів від 1 мм до 3 м і масою від 0,5 г
до 7 т. .
Широке використання підшипників кочення для опор різних обер-
тових деталей обумовлене деякими їхніми перевагами у порівнянні
з іншими видами опор. Це такі переваги:
а) малі втрати на тертя, що забезпечує високий ККД опор (до
0,99);
б) висока несуча здатність;
в) малі габаритні розміри в осьовому напрямі;
г) незначні витрати мастильних матеріалів;
д) невисокі вимоги до матеріалу та якості поверхонь цапф валів
і осей, що розміщуються у підшипниках кочення.
До недоліків підшипників кочення належать такі:
а) значні діаметральні габаритні розміри, що утруднює застосу-
вання їх при малих відстанях між осями валів;
б) обмежений строк служби, особливо при великих навантаженнях
та швидкостях;
в) низька здатність демпфувати ударні навантаження;
г) підвищений шум при високих швидкостях обертання.
32.2 . Класифікація, матеріали деталей
і точність підшипників кочення
Класифікація. Підшипники кочення поділяють за такими ознаками:
1. За формою тіл кочення підшипники бувають кулькові та
роликові. Основні форми тіл кочення зображені на рис. 32.2,
а —ж.
Роликові підшипники за тією ж ознакою ділять на підшипни-
ки: із короткими та довгими роликами (рис. 32.2, б, в); із витими
д Є є Ж
Рис. 32.2. Форми тіл кочення у підшипниках
429
Рис. 32.3. Співвідношення ширин та діаметрів підшипників ко-
чення
роликами (рис. 32.2, г); із конічними роликами (рис. 32.2, д); із боч-
коподібними роликами (рис. 32.2, е, є) і з голчастими роликами
(рис. 32.2, ж).
2. За числом рядів тіл кочення — одно-, дво- та чотири-
рядні.
3. За способом компенсації перекосів вала — несамоуста-
новні та самоустановні сферичні. Самоустановні
підшипники допускають перекоси кілець до 2—3°, завдяки чому мо-
жуть працювати при збільшених деформаціях валів і при неспіввісно-
му розміщенні отворів під підшипники в окремих опорах вала.
4. За радіальними розмірами підшипники кочення з одним і тим
же внутрішнім діаметром д, ділять на 5 серій діаметрів (надлегка, особ-
ливо легка, легка, середня та важка) і на 4 серій ширин (особливо вузь-
ка, вузька, нормальна широка, особливо широка). Співвідношення
розмірів підшипників різних серій показано на рис. 32.3 (а — особли-
во легка серія; б — легка; в — легка широка; г — середня; д — се-
редня широка; е — важка серія).
5. За напрямом сприйманого навантаження підшипники кочення
поділяють на радіальні — сприймають тільки радіальне наван-
таження, яке направлене перпендикулярно до осі обертання (деякі
радіальні підшипники, наприклад кулькові, можуть сприймати певні
осьові навантаження); упорні — сприймають тільки осьове
навантаження; радіально-упорні — здатні сприймати ра-
діальне та осьове навантаження; упорно-радіальні —
сприймають значне осьове і незначне радіальне навантаження.
Конструкції деяких основних типів підшипників кочення наведе-
ні у табл. 32.1. Кулькові підшипники ліпше працюють при підви-
щених швидкостях обертання і менш чутливі до перекосів. Роликові
430
Таблиця 32.1. Основні типи підшипників кочення
Тип під-
шипника
Кульковий підшипник
Роликовий ПІДШИПНИК
Радіальний
а) Одноряд- б) Дворядний
ний сферичний
Тип 0000 Тип 1000
а) Одно- б) Дворяд- в) Дворяд- г) Голча-
рядний ний ний сфе- стий
ри чн ий
Тип 2000 Тип 82 000 Тип 3000 Тип 74 000
Упорний
а) Одинарний Тип 8000
Одинарний конічний
Тнп 9000
Раді ально-
упорний
б) Подвійний Тип 38 000
а) Одноряд- б) Дворядний
ний
Тип 36 000; 46 000 Тип 56 000
а) Конічний одно-
рядний
Тип 7000
б) Конічний дво-
рядний
Тип 97 000
Упорно-ра-
діальний
Сферичний
Тип 39 000
Одинарний
Тип 68 000
431
підшипники мають більш високу вантажність (приблизно на 70—
100 %) порівняно з кульковими.
Усі підшипники кочення мають умовне позначення, яке склада-
ється з ряду цифр. Дві перші цифри, рахуючи справа, означають
умовно внутрішній діаметр підшипників, до того ж для всіх підшип-
ників із внутрішнім діаметром 20 мм і більше ці дві цифри означають
частку від ділення діаметра (в міліметрах) на 5. Для підшипників із
внутрішнім діаметром до 9 мм перша цифра праворуч показує фактич-
ний розмір внутрішнього діаметра, мм. Внутрішні діаметри 10; 12;
15 і 17 мм позначають двома цифрами 00; 01; 02 і 03 відповідно.
Третя цифра праворуч разом із сьомою свідчать про серію підшип-
ників всіх діаметрів (гї 10 мм): основна з особливо легких серій по-
значається цифрою 1, легка — 2, середня — 3, важка — 4, легка
широка — 5, середня широка — біт. д.
Четверта цифра праворуч показує на тип підшипника: 0 — радіаль-
ний кульковий однорядний; 1 — радіальний кульковий дворядний
сферичний; 2 — радіальний із короткими циліндричними роликами;
З — радіальний роликовий дворядний сферичний; 4 — роликовий із
довгими циліндричними роликами або голчастий; 5 — роликовий із
витими роликами; 6 — радіально-упорний кульковий; 7 — ролико-
вий конічний; 8 — упорний кульковий; 9 — упорний роликовий.
П’ята та шоста цифри праворуч, що вводяться не для всіх підшип-
ників, характеризують їхні конструктивні особливості.
Цифри б, 5, 4 і 2, що стоять через знак «тире» перед умовним позна-
ченням підшипника, означають його клас точності (2 — найвищий
клас точності). Нормальний клас точності позначається цифрою 0,
яка не показується.
Приклади позначення підшипників: 318 — внутрішній діаметр
(і == 18 • 5 = 90 мм; 3 — середня серія; 0 — радіальний кульковий
однорядний підшипник (нулі перед значущими цифрами спереду
позначення не записуються); 7216 — внутрішній діаметр 80 мм, лег-
ка серія, підшипник роликовий конічний.
Основні параметри стандартних підшипників — розміри, маса,
вантажність (статична і динамічна), гранична швидкість обертання —
наводяться у спеціальних каталогах підшипників кочення [16, 17].
Матеріали деталей і точність підшипників кочення. Основний ма-
теріал для кілець та тіл кочення підшипників — це підшипникові
високовуглецеві хромисті сталі ШХ9, ШХ15 і ШХ15ГС. Твердість
після відповідної термообробки кілець і роликів становить 60...
65 НКС, а кульок — 62...66 НКС.
Для основних деталей підшипників кочення великих розмірів ши-
роко застосовують цементовані сталі марок 18ХГТ, 12ХНЗА, 20Х2Н4А
та інші із твердістю 59...60 НКС.
Сепаратори в більшості випадків виготовляють із м’якої вуглеце-
вої сталі методом штампування; для високошвидкісних підшипників
432
використовують масивні сепаратори з антифрикційних бронз, латуні,
алюмінієвих сплавів або пластмас (текстоліту, поліаміду).
Останнім часом для роботи в умовах ударних навантажень та ви-
соких вимог до безшумності починають застосовувати підшипники
з тілами кочення, виготовленими з пластмас (переважно із склопласти-
ків). При цьому різко зменшуються вимоги до твердості кілець і їх
можна виготовляти з легких сплавів.
Підшипники кочення поділяють на п’ять класів точності
(ГОСТ 520—89), які позначаються цифрами (у порядку підвищення точ-
ності): 0, 6, 5, 4 і 2. Точність підшипників кочення в основному харак-
теризується: а) точністю основних розмірів (внутрішнього і зовнішньо-
го діаметрів підшипника та ширини кілець); б) точністю форми вза-
ємного розміщення поверхонь кілець; в) точністю обертання.
Із підвищенням класу точності вартість підшипника кочення знач-
но зростає. Підшипник класу точності 2 приблизно у 10 разів дорож-
чий, ніж підшипник нормальної точності класу 0. Для більшості ва-
лів та осей загального призначення використовують підшипники нор-
мальної точності класу 0, а підшипники більш високих класів точнос-
ті — для валів, що вимагають точного обертання згідно з призначен-
ням машини.
32.3 . Монтаж, змащування та ущільнення
підшипників кочення
Конструкція опор кочення, правильне складання і монтаж підшип-
ників суттєво впливають на надійність та довговічність роботи під-
шипників кочення. Підшипники монтують, щоб забезпечувалось по-
трібне радіальне та осьове фіксування вала, але при цьому вони не
повинні додатково навантажуватись силами від високих натягів у по-
садках кілець, температурних деформацій, перетяжки при монтажі,
перекосів кілець.
Забезпечення жорсткості та співвісності посадочних гнізд. Гнізда
у корпусах, які призначені для розміщення в них зовнішніх кілець
підшипників, повинні бути достатньо жорсткими, бо деформація по-
садочних поверхонь може спричинити заклинювання тіл кочення і
передчасне руйнування підшипника. Заклинювання може відбутись
і в тому випадку, коли не забезпечена співвісність посадочних гнізд
у корпусі для двох опор вала або співвісність посадочних цапф вала.
У разі виникнення значних труднощів у забезпеченні співвісності
посадочних гнізд (наприклад, при неможливості розміщення двох під-
шипників вала в єдиному жорсткому корпусі) використовують само-
установні сферичні підшипники. Такі підшипники застосовують також
при великих поперечних прогинах осей та валів.
Монтаж підшипників кочення. Для осьового фіксування вала і
забезпечення можливості сприймання опорою осьових навантажень
433
Рис. 32.4. Мон-
таж підшипни-
ків кочення на
валах
г
обидва кільця підшипника фіксуються: внутрішнє кільце — на валу,
зовнішнє — у корпусі опори.
На рис. 32.4 показані деякі характерні способи монтажу підшип-
ників на валу. Внутрішні кільця підшипників закріпляють на валах,
використовуючи буртики вала і посадку з натягом (рис. 32.4, а), пру-
жинні стопорні кільця (рис. 32.4, б), торцеві шайби (рис. 32.4, в) і
круглі спеціальні гайки разом із стопорними шайбами (рис. 32.4, г).
Такий монтаж підшипників на валах здебільшого використовується
для валів, що обертаються відносно нерухомого корпусу.
Монтаж підшипників кочення у нерухомому корпусі може здійсню-
ватись за способами, показаними на рис. 32.5.
За потребою забезпечення осьового переміщення опори вала, на-
приклад для компенсації температурних деформацій вала, зовнішнє
кільце підшипника не фіксується в осьовому напрямі в корпусі
(рис. 32.5, а). Однобічна фіксація осьового положення вала може
здійснюватись однобічним закріпленням зовнішнього кільця підшип-
ника буртиком у гнізді корпусу або кришкою підшипника (рис. 32.5, б,
в). Двобічне закріплення зовнішнього кільця в гнізді корпусу викону-
ється за допомогою буртика або пружинного стопорного кільця та
кришки підшипника (рис. 32.5, а, д). Існують також інші способи мон-
тажу та фіксації підшипників кочення у гнізді корпусу.
Розглянемо тепер деякі особливості монтажу підшипників двох
опор вала у випадках використання радіальних, радіально-упорних
та упорних підшипників.
Радіальні підшипники застосовують тільки при ра-
діальному навантаженні опор і деколи при незначному осьовому на-
вантаженні (кулькові радіальні підшипники). На рис. 32.6, а зобра-
жено варіант розміщення вала на радіальних кулькових підшипни-
Рис. 32.5. Кріплення підшипників кочення у корпусі опори
434
Рис. 32.6. Конструкції опор валів на радіальних кулькових підшипниках
ках, який використовується для коротких валів (відношення довжи-
ни вала до його діаметра Псі <; 4). Тут підшипники мають однобічну
фіксацію зовнішніх кілець у двох опорах. Невеликий зазор 0,2—
0,3 мм між зовнішнім кільцем та кришкою передбачають для запобі-
іання заклинюванню тіл кочення при температурному видовжен-
ні вала.
Довгі вали розміщують на радіальних кулькових підшипниках за
варіантом на рис. 32.6, б. У цьому варіанті внутрішні кільця двох
підшипників мають двобічну фіксацію на валу, зовнішнє кільце одно-
го з підшипників зафіксоване у корпусі з двох боків, а зовнішнє кіль-
це другого підшипника має можливість переміщуватись у корпусі
в осьовому напрямі. Цим можна запобігти заклинюванню підшипни-
ків при температурному видовженні вала. Фіксований із двох боків
на валу та в корпусі підшипник сприймає радіальне і осьове наванта-
ження, а вільно розміщений у гнізді корпусу підшипник (плаваюча
опора) — тільки радіальне навантаження (напрями навантаження по-
казані стрілками). Підшипник плаваючої опори повинен бути наванта-
женим меншою радіальною силою.
Схеми монтажу роликових радіальних підшипників в опорах валів
залежать у значній мірі від конструктивних особливостей цих підшип-
ників.
Радіально-упорні підшипники одночасно сприй-
мають радіальне та осьове навантаження. Особливістю цих підшипни-
ків є те, що під час їхнього радіального навантаження виникає осьо-
ва сила, яка обумовлена кутом контакту а тіл кочення (див. табл.
32.1). Ця осьова сила заставляє вал зміщатись в осьовому напрямі
Щоб запобігти таким зміщенням, вали у більшості випадків слід
435
Рис. 32.7. Конструкції опор валів на радіально-упорних підшипниках
розміщувати на двох радіально-упорних підшипниках, до того ж постав-
лених так, щоб осьові сили, які в них виникають, були направлені в
протилежні боки (тобто з протилежним напрямом кутів контакту а).
На рис. 32.7 показані деякі варіанти монтажу радіально-упорних
кулькових та роликових підшипників в опорах валів.
Для коротких валів застосовують варіанти монтажу «у розпір»
(рис. 32.7, а) та «у розтяжку» (рис. 32.7, б). У цих варіантах кожне
кільце двох підшипників має тільки однобічну осьову фіксацію на ва-
лу і в гнізді корпусу опори.
Довгі вали, які навантажені радіальними та осьовими силами,
розміщують на комбінованих опорах (рис. 32.7, в). Одна опора склада-
ється з двох радіально-упорних підшипників, поставлених «у розпір»,
і сприймає радіальне і двобічне осьове навантаження. Для другої
опори вала може бути використаним радіальний підшипник (для
436
сприймання тільки радіального навантаження) із можливістю осьо-
вого переміщення (плаваюча опора) при температурних видовженнях
вала.
Радіально-упорні підшипники вимагають ретельного регулювання.
Регулювання натягу таких підшипників здійснюють при робочій
температурі за допомогою набору прокладок між корпусом та криш-
кою (рис. 32.7, а, в) або за допомогою гайки на валу (рис. 32.7, б).
Упорні підшипники застосовують для сприймання
тільки осьових навантажень вала. Одинарні упорні підшипники сприй-
мають осьове навантаження в одному напрямі, а подвійні підшипни-
ки здатні сприймати двобічне осьове навантаження. Варіанти монта-
жу опор вала з упорними підшипниками зображені на рис. 32.8, а, б.
Інколи в одній опорі можна використовувати радіальний і упорний
підшипники. У цьому випадку така комбінована опора вала здатна
сприймати як радіальні, так і осьові навантаження.
Посадки підшипників кочення. Посадки кілець підшипників на
вал і в гніздо корпусу залежать від режиму роботи, виду навантажен-
ня, типу підшипника та способу його регулювання. Розрізняють два
основних види навантажень підшипників: циркуляційне і місцеве.
Циркуляційне навантаження, при якому кіль-
це підшипника обертається щодо вектора дії сили, наприклад внутріш-
нє кільце підшипника, яке розміщене на валу із зубчастим колесом.
Таке кільце ставлять на вал із натягом. У противному разі через за-
зор воно почне обкочуватись по цапфі, що спричинить її спрацьову-
вання.
Місцеве навантаження, при якому кільце не оберта-
ється щодо вектора діючої сили. Таке навантаження здійснюється від-
носно зовнішнього кільця підшипника, який поставлений на вал із
зубчастим колесом навантаженої передачі. У випадку місцевого на-
вантаження кільця підшипників ставлять із невеликим зазором або
малим натягом. Така посадка дозволяє кільцю під дією поштовхів та
Рис. 32.8. Опори валів на упорних кулькових підшипниках
437
вібрацій періодично повертатись навколо своєї осі та вступати в робо-
ту новим навантаженим ділянкам бігової доріжки.
Поле допуску на вал під підшипник вибирають за системою отво-
ру, хоча сам отвір внутрішнього кільця підшипника має допуск в мі-
нус від номіналу (тобто не за системою отвору). Поле допуску гнізда
корпусу під зовнішнє кільце підшипника назначають за системою
вала.
Вплив режиму роботи підшипників на вибір посадок такий: чим
більше навантаження і чим сильніші його поштовхи, тим посадки
повинні мати більший натяг, оскільки при цьому збільшуються
пружні і залишкові деформації поверхневих шарів вала та гнізда
корпусу і самих кілець. Чим виша частота обертання, тим посадки
повинні бути більш вільними.
Існують такі рекомендації щодо вибору посадок з урахуванням ти-
пу підшипників. Посадки роликопідшипників вибирають більш щіль-
ними, ніж кулькових підшипників, оскільки натяги посадки в них
можуть суттєво змінити зазори (у радіально-упорних підшипниках
зазори усувають при складанні опори та регулюванні).
Кільця підшипників, які повинні при регулюванні зазорів перемі-
щатись на валу або в корпусі, встановлюють по рухомій посадці.
Признаїеяня полів допусків для посадки підшипників кочення
слід робити з урахуванням наведених нижче рекомендацій:
1. Поля допусків вала для посадки внутрішніх кілець підшип-
ників:
при циркуляційному навантаженні (вал обертається) — ]‘6, кб,
тб, пб.
при місцевому навантаженні (вал не обертається) — §6, кб.
2. Поля допусків отворів в корпусі для посадки зовнішніх кілець
підшипників:
при циркуляційному навантаженні (корпус обертається) — К6,
М7, N7.
при місцевому навантаженні (корпус не обертається) — Дз7, Н7,
К6, М7.
Змащування підшипників кочення. Щоб зменшити тертя між тіла-
ми кочення, кільцями і сепаратором, захистити від корозії та підви-
щити герметизацію робочої зони підшипників кочення, їх періодично
змащують.
Практичне застосування для змащування підшипників кочення
мають рідкі мінеральні та пластичні мастила. Деякі відомості про ці
матеріали наведено у 38.8.
Рідкі мастила використовують за потребою мінімальних
втрат на тертя і при підвищених робочих температурах підшипників.
Чим більше навантаження на підшипник і вища температура, тим ви-
щою повинна бути в’язкість мастила. Змащування підшипників рід-
кими мастилами може здійснюватись зануренням у мастильну ванну,
438
розбризкуванням, мастильним туманом або краплинним спссобом.
При змащуванні зануренням підшипників горизонтальних валів рі-
вень мастила повинен бути не вище від центра нижнього тіла ко-
чення.
Пластичні маслила закладають у підшипникові гнізда
корпусів на 0,3—0,6 їхнього вільного об’єму і періодично поновлюють.
Найдоцільніше використовувати пластичні мастила для підшипни-
ків, розміщених у важкодоступних місцях, підшипників, що працю-
ють у забрудненому середовищі, та підшипників із коливним рухом
малої амплітуди. Підвищена надійність захисту від забруднення по-
в’язана із заповненням пластичним мастилом зазорів і відповідно до-
датковим ущільненням опор валів.
При особливо високих температурах для підшипників кочення
застосовують тверді мастильні матеріали у розпиленому стані — гра-
фіт і дисульфід молібдену.
Ущільнення підшипників кочення. Щоб захистити підшипники
кочення від забруднення та запобігти витіканню з них мастила, слід
застосовувати в опорах валів ущільнювальні пристрої.
За принципом дії ущільнювальні пристрої (рис 32.9) поділяють
на такі:
контактні (манжетні та сальникові), що використовуються
при низьких та середніх швидкостях; ущільнювальна дія забезпечу-
ється завдяки щільному контакту деталей пристрою;
лабіринтні та щілинні, які застосовують у необмеже-
ному діапазоні швидкостей; захист здійснюється завдяки підвищено-
му опору витікання мастила через вузькі щілини;
відцентрові, які можуть бути використаними при середніх
та високих швидкостях; принцип дії — відкидання відцентровими
силами мастила та забруднюючих речовин, які попадають у підшипни-
кові вузли;
комбіновані, які поєднують два або більше розглянутих
вище принципів дії.
Манжетні ущільнення (рис. 32.9, а) виконують у вигляді кільцевих
манжет, які встановлюють, наприклад, у кришку з натягом. Манже-
та притискається до вала під дією сил пружності самої манжети
та спеціальної пружини. Манжетні ущільнення стандартизовані
(ГОСТ 8752—79) і належать до досить надійних у роботі. Вони од-
наково можуть бути використаними як для рідких, так і для пластич-
них мастил при колових швидкостях поверхні вала до 10 м/с. Кон-
тактна з манжетою поверхня вала повинна бути полірованою.
Сальникові ущільнення (рис. 32.9, б) виконують у вигляді просоче-
них у гарячому мастилі повстяних або фетрових кілець, що розміщені
з натягом у спеціальних кільцевих жолобах. Використовують сальни-
кові ущільнення для рідких та пластичних мастил при швидкостях
до 5 м/с на полірованих поверхнях валів.
439
Рис. 32.9. Ущільнення підшипників у опорах
Лабіринтні ущільнення (рис. 32.9, в) є найдосконалішими для ро-
боти при високих швидкостях. В цих ущільненнях треба забезпечити
відповідне чергування ділянок із малими та збільшеними зазорами.
Малі зазори 0,2—0,5 мм при роботі ущільнень в умовах низьких та
середніх швидкостей заповнюють пластичним мастилом.
Щілинні ущільнення (рис. 32.9, а, д) виконують переважно у ви-
гляді кільцевих щілин із проточками. Щілини заповнюють пластичним
мастилом. Захисна властивість щілинних ущільнень незначна, тому
їх використовують в основному для підшипникових вузлів, що пра-
цюють у чистому та сухому середовищі.
Ущільнення, робота яких базується на дії відцентрової сили
(рис. 32.9, е), використовують переважно як внутрішні ущільнення.
Вони прості за конструкцією, але не забезпечують ущільнювальної
дії при зупинках машини.
Комбіновані ущільнення застосовують при роботі опор із підшип-
никами кочення в умовах сильного забруднення або в агресивному
середовищі.
32.4 . Навантаження на тіла кочення. Види руйнувань
і критерії розрахунку підшипників кочення
Навантаження на тіла кочення при радіальному навантаженні
підшипників розподіляється нерівномірно (рис. 32.10). Навантажен-
ня сприймають тільки ті тіла кочення, що розміщені на дузі, яка не
перевищує 180°.
440
При симетричному розміщенні
кульок відносно лінії дії радіального
навантаження Рт за умовою рівно-
ваги запишемо (див. рис. 32.10):
+ 2Гі соз
4- 2/% соз 2у 4- • • • 4- 2?п соз пу,
(32.1)
Рис. 32.10. Навантаження тіл ко-
чення радіального підшипника
де у = 360%; 2 — число кульок.
У вираз (32.1) входять тільки ті чле-
ни, для яких кут пу < 90°.
Із розв’язування задачі теорії
пружності про стиск пружних тіл за
умови абсолютної точності розмірів
кульок та кілець і відсутності радіального зазора встановлено такі
співвідношення:
Л == Ло соз372 у; = Го соз372 2у;
/=•„ = Го СО53/2 лу. (32.2)
Якщо Ри Г2, ...» Рп підставити у рівняння (32.1) та розв’язати його
відносно Го, то
Ро = Рг/(\ 4- 2 соз572 у 4“ 2 соз572 2у 4- — 4-2 соз572 лу) = РГК-
Для довільного числа кульок у підшипнику коефіцієнт К = 4,37/г.
Якщо врахувати поправки на вплив радіального зазора та неточностей
розмірів деталей підшипника, то
Ро = 5/>/г; Рп = (5Г,/г) соз3/2 лу. (32.3)
У радіально-упорних кулькових підшипниках сила на найбільш
навантажену кульку більша, ніж у радіальних у відношенні 1/соз а,
тобі о
Ро = ЬРгКг сова), (32.4)
де а — кут контакту тіл кочення (див. табл. 32.1).
Для упорних підшипників розрахункова сила на кульку
ГОа = 1,25^73, (32.5)
де Ра — осьове навантаження на підшипник; 1,25 — коефіцієнт, що
враховує нерівномірність розподілу сил між кульками.
Види руйнувань і критерії розрахунку підшипників кочення. Під-
шипники кочення втрачають свою роботоздатність внаслідок руйну-
вання їхніх деталей, яке проявляється в різних формах.
Втомне викришування робочих повер-
хонь відбувається в результаті дії циклічно змінних контактних
напружень на бігових доріжках кілець і спостерігається у довгочасно
441
працюючих у нормальних умовах підшипників. Здебільшого викришу-
вання починається на доріжках кочення найбільш напружених кілець;
у більшості підшипників — на внутрішніх, а у сферичних — на зов-
нішніх кільцях.
Спрацьовування кілець та тіл кочення
спостерігається при недостатньому захисті підшипників від впливу
зовнішнього абразивного середовища. Спрацьовування підшипників
можна зменшити, забезпечивши достатнє змащування та використо-
вуючи надійні конструкції ущільнень.
Руйнування кілець підшипника та тіл
кочення пов’язане з ударними перевантаженнями, неправильним
монтажем опори, який може спричинити перекоси кілець і заклиню-
вання підшипника. При нормальній експлуатації руйнування кілець
підшипників не спостерігається.
Руйнування сепараторів — результат дії відцент-
рових сил та навантаження сепаратора з боку тіл кочення.
Залишкові деформації на бігових доріж-
ках кілець виникають внаслідок динамічних та ударних наван-
тажень у формі місцевих ямок та вм’ятин. Спостерігаються у важко
навантажених тихохідних підшипниках, а також у підшипниках,
кільця яких при роботі повертаються на невеликий кут.
На сучасному етапі розрахунок підшипників кочення базують
тільки на двох критеріях — за умовою запобігання появі залишкових
деформацій (розрахунок на статичну вантажність) і за умовою запо-
бігання появі ознак втомного руйнування робочих поверхонь протягом
розрахункового строку служби (розрахунок на динамічну вантаж-
ність). Розрахунки за іншими критеріями не розроблені, оскільки ці
критерії пов’язані з випадковими факторами, які неможливо оцінити
на практиці.
Через обмежене число типів та розмірів стандартних підшипників
кочення експериментально встановлені для кожного підшипника ста-
тична та динамічна вантажності, які наводяться у каталогах. Методи-
ка підбору підшипників кочення стандартизована.
Згідно з ГОСТ 18854—82 і ГОСТ 18855—82 розрізняють підбір
підшипників за статичною і динамічною вантажностями.
Для підбору підшипників із числа стандартних потрібні такі
початкові дані: модуль та напрям навантаження на опору вала; харак-
тер та типовий режим навантаження; особливості конструкції опори
та діаметр цапфи вала; частота обертання або кутова швидкість вала;
потрібний ресурс підшипника; робоча температура підшипника
442
32.5 . Підбір підшипників кочення за статичною
та динамічною вантажністю
Підбір підшипників за статичною вантажністю. Підшипники кочен-
ня вважають статично навантаженими тоді, коли кутова швидкість
рухомого кільця підшипника не перевищує 0,1 рад/с (або частої а обер-
тання не більша за 1 хв~1). Підбір таких підшипників здійснюється
з і умовою
(32.6)
де /?0 — розрахункове статичне навантаження на підшипник; Со —
базова статична вантажність (наводиться у каталогах для кожного
типорозміру підшипників).
Базова статична вантажність — це таке ста-
тичне навантаження на підшипник (радіальне — для радіальних
і радіально-упорних підшипників; центральне осьове — для упорних
і упорно-радіальних підшипників), якому відповідає загальна залиш-
кова деформація тіл кочення і кілець у найбільш навантаженій точці
їхнього контакту, що дорівнює 0,0001 діаметра тіла кочення.
Розрахункове статичне навантаження на підшипник визначають
за формулою
/?о = *Л -І- УЛ» (32.7)
де /?г, /?а — радіальне та осьове навантаження на підшипник відпо-
відно, Н; Хо, ¥0 — коефіцієнти радіального та осьового статичного
навантаження відповідно (наведені у табл. 32.2 і у каталогах підшип-
ників). Якщо у розрахунках виявиться, що <; /?г, то треба брати
Якщо умова (32.6) для вибраного за діаметром цапфи вала підтип
ника не виконується, то слід орієнтуватись на підшипники більш паж
ких серій. При незадовільному результаті і в цьому розглянутому ви
падку треба збільшити діаметр цапфи вала чи осі і відповідно вибрати
підшипник більшого діаметра.
Підбір підшипників за динамічною вантажністю. Динамічно на-
вантаженими вважають такі підшипники, у яких рухоме кільце обер
тається зі швидкістю со >> 0,1 рад/с, до того ж при 0,1 < со < 1 рад/с
у розрахунках беруть со = 1 рад/с. Динамічно навантажені підшитім
ки підбирають за фактичною їхньою довговічністю вгаданих умовах
експлуатації за умови відсутності проявів втомного руйнування.
Базова динамічна вантажність — це постійне
радіальне навантаження (а для упорних і упорно-радіальних підшип-
ників осьове навантаження), яке підшипник може умовно сприймати
протягом одного мільйона обертів при ймовірності безвідказної робо-
ти 90 %.
На основі результатів багатьох експериментальних досліджень бу-
ла встановлена залежність між навантаженням на підшипник та його
44.1
ресурсом:
£ = (£,//?)'. (32.8)
Тут Ь — ресурс підшипника до появи ознак втоми, млн об;
Ді і а23 — коефіцієнти; Ст — базова динамічна вантажність; 7? — роз-
рахункове еквівалентне навантаження на підшипник; р — показник
степеня, який згідно з результатами експериментів для кулькових
підшипників дорівнює 3, а для роликових підшипників — 10/3.
Базова динамічна вантажність Сг для всіх типорозмірів підшипни-
ків кочення наводиться в каталогах. Отже, підбір підшипників кочен-
ня за динамічною вантажністю фактично зводиться до визначення їх-
нього ресурсу в конкретних умовах роботи.
Якщо відома кутова швидкість о>, рад/с, рухомого кільця підшип-
ника, то за добутим із формули (32.8) значенням Ь ресурс £л, год,
можна визначити за співвідношенням
Ьн = 106л£/(1800со) = 1745£/со. (32.9)
Потрібний ресурс підшипників £й визначається строком служби
машини між капітальними ремонтами. В загальному машинобудуванні
беруть £л — (3000...50 000) год.
Стандарти запроваджують ресурс підшипників: £л =
= 10 000 год для зубчастих редукторів; £а = 5000 год для черв’ячних
редукторів.
Коефіцієнти Лі і ^23 у формулі (32.8) уведені за рекомендацією
І8О. Коефіцієнт аг враховується в разі потреби мати підшипники
підвищеної надійності: ах — 1 при 90 %-й надійності; аг = 0,62 при
95 %-й; аг = 0,44 при 97 %-й; ах = 0,33 при 98 %-й. Коефіцієнт
а23 враховує якість матеріалу деталей підшипника та умови експлуата-
ції. Для звичайних умов роботи серійних підшипників [17]; кулько-
вих, крім сферичних, Озз — 0,7...0,8; кулькових сферичних і ролико-
вих із циліндричними роликами = 0,5...0,6; роликових конічних
Оаз = 0,6...0,7
Якщо ресурс підшипників, що розрахований за базовою дина-
мічною вантажністю, незадовільний ,то слід підібрати підшипник біль-
шого типорозміру.
32.6 . Розрахункове еквівалентне навантаження
на підшипники кочення
Розрахунковим еквівалентним наванта-
женням/? для радіальних та радіально-упорних підшипників на-
зивається така постійна радіальна сила, яка при її дії на підшипник
(зовнішнє кільце нерухоме, а внутрішнє обертається) забезпечує
ресурс, що даний підшипник буде мати при дійсних умовах наван-
таження і обертання. Для упорних та упорно-радіальних підшипни-
444
сів — це постійна центральна осьова сила при обертанні кільця, за-
кріпленого на валу, і нерухомому кільці у корпусі.
Розрахункове еквівалентне навантаження на радіальні кулькові
га радіально-упорні кулькові і роликові підшипники визначається за
залежністю -л
Я =\ХУЦГ + Г7?а) КбКт. (32.10)
В інших частинних випадках розрахункове еквівалентне наванта-
ження знаходять за більш простими формулами:
іля радіальних кулькових та роликових підшипників, не навантаже-
них осьовою силою (Яа = 0 і X = І),
Я = ИЯЛб^; (32.11)
цля упорних кулькових та роликових підшипників (Яг = 0; V = 1)
К = (32.12)
цля упорно-радіальних кулькових та роликових підшипників
Я = (X/?, + ГЯа) КбКт. (32.13)
У формулах (32.10)...(32.13) взяті такі позначення: Яг, Яа — раді-
альне та осьове зовнішні навантаження на підшипник відповідно;
X і У — коефіцієнти радіального та осьового навантаження відповід-
но; V — коефіцієнт обертання (V = 1 — якщо відносно до вектора
навантаження внутрішнє кільце обертається і V = 1,2 — якщо не
обертається); Яб — коефіцієнт безпеки (Яб = 1 — при спокійному
навантаженні; Кб = 1,2 — при легких поштовхах і короткочасних
перевантаженнях до 125 %; Яб — 1,5 — при помірних поштовхах і
перевантаженнях до 150 % ; К6 — 2 — при значних поштовхах та віб-
раціях і перевантаженнях до 200 %; Кб — 3 — при ударному наван-
гаженні та перевантаженнях до 300 %); Кг—температурний коефі-
цієнт (якщо робоча температура опори 100 °С, то Кг = 1; якщо
Г = 125 °С, то Ят = 1,05; якщо і = 150 °С, то Кт =1,1).
Значення коефіцієнтів X і У вибирають на основі порівняння від-
ношення Ка/У#г і параметра осьового навантаження е (табл. 32.2).
Це пов’язано з тим, що через наявність радіального зазора в підшип-
нику при відсутності осьового навантаження має місце підвищена
нерівномірність навантаження тіл кочення. Зі збільшенням осьового
навантаження при постійному радіальному відбувається зменшення
зазора і навантаження на тіла кочення розподіляється більш рівно-
мірно. Для деякого значення /?а/(У/?г) = е це компенсує у одноряд-
них підшипниках збільшення загального навантаження на підшипник
із ростом осьової сили На. Тому значення X і У різні при /?О/(У/?Г)
е і /?а/(Р7?г) > е. В однорядних підшипниках при 7?а/(У/?г) е
розрахунок ведеться на дію як би одного радіального навантаження,
тобто беруть X = 1 і У = 0.
445
Таблиця 32.2 Коефіцієнти радіальних (X І Хо) і осьових (У і Уо)
навантажень
Типи ПІДШИПНИКІВ се е < е *а/(УНг) > 6 У.
X У X У
Радіальні кулькові однорядні, тип 0000 0,014 0,19 1 0 0,56 2,30 0,6 0,5
0,028 0,22 1,99
0,056 0,26 1,71
0,084 0,28 1,55
0,110 0,30 1,45
0,170 0,34 1,31
0,280 0,38 1,15
0,420 0,42 1,04
0,560 0,44 1,00
Радіально-упорні кулькові однорядні: тип 36000, а = 12° тип 46000, а = 26° тип 66000, а = 36° 0,014 0,30 1 0 0,45 1,81 0,5 0,46
0,029 0,34 1,62
0,059 0,37 1,46
0,086 0,41 1,34
0,110 0,45 1,22
0,170 0,48 1,13
0,290 0,52 1,04
0,430 0,54 1,01
0,570 0,54 1,00
— 0,68 1 0 0,41 0,87 0,5 0,37
— 0,95 1 0 0,37 0,66 0,5 0,28
446
1
і
Продовження табл. 32.2
Типи підшипників • о єн е > * х0 У,
X ¥ X ¥
Радіально-упорні ро- ликові конічні одно- рядні, тип 7000 — 1,5 а (ДИВ. каталог) 1 0 0,40 0,4 сі§ а (див. каталог) 0,5 0,22 а (див. каталог)
Радіальні з цилінд- ричними роликами однорядні, тип 2000; 12000; 32000; 42000 —— — 1 0 1 0 1 0
Параметр осьового навантаження е для кулькових (радіальних
і радіально-упорних типу 36000) підшипників вибирають залежно від
відношення Ка!Сь (табл. 32.2 і каталоги підшипників). Для інших ти-
пів підшипників параметр е безпосередньо беруть у каталозі.
Осьові навантаження на радіальні кулькові підшипники беруть
рівними зовнішнім осьовим силам Ра, що діють на вал.
Осьові навантаження на радіально-упорні підшипники визнача-
ють за зовнішньою осьовою силою Ра, що діє на вал, і осьовими складо-
вими Р&\ та Г52, що виникають удвох опорах вала при радіальному на-
вантаженні їх.
Осьову складову силу що виникає при радіальному наванта-
женні радіально-упорного підшипника, знаходять із залежностей:
= еКг — для кулькових підшипників; Р$ = 0,83 е/?г — для роли-
кових конічних підшипників.
Оскільки для підшипників типу 36000 параметр е залежить від
відношення Ка/С0, для визначення /?а параметр е попередньо можна
обчислити за такою емпіричною формулою:
е = 06 (Яг/С0) - 1,144)/4,729. (32.14)
Розрахункові осьові навантаження і #а2 на радіально-упорні
підшипники двох опор вала визначають залежно від схеми розміщен-
ня радіально-упорних підшипників (див. рис. 32.7, а, б) та напряму
зовнішньої осьової сили Ра. Завжди для двох радіально-упорних під-
шипників опор вала повинні зберігатись умови [9]: /?аі Р&і; /?а2
Р&. З урахуванням цих умов та умови рівноваги вала Ра — /?аі 4-
4* Ра2 = 0 знаходять розрахункові осьові навантаження Яаі та /?а2-
447
Підшипники кочення, що працюють при змінних режимах наван-
таження, можна підбирати за розрахунковим еквівалентним наванта-
женням яке дорівнює силі, що спричинює такий же ефект втоми
підшипника, як і весь комплекс діючих за розрахунковий строк служ-
би навантажень.
Еквівалентне навантаження згідно з [24] визначають за формулою
Яв = /(Яі£, + /?г£2 + • • • + НпЬп)/Ь = /2Я? (£,/£), (32.15)
де — еквівалентне навантаження на підшипник протягом строку
Л — загальний строк служби підшипника (ресурс).
Залежність (32.15) перепишемо у вигляді
НЕ=У/= /? 1^2 (Я,//?)3 (£*,/£*); ЯЕ = КЕЯ, (32.16)
де /? — розрахункове еквівалентне навантаження, що визначається
за формулами (32.10) ..(32.13) згідно з максимальними тривало діючи-
ми силами Яг та Ке — коефіцієнт інтенсивності режиму наванта-
ження підшипників (див. 4.3),
з ,--------------------з --------
Ке = V 2 (/?,//?)’ (соі/со) (£„/£Л) = / К НЕ. (32 17)
Для типових режимів навантаження машин (див. рис. 2.3) та по-
стійного швидкісного режиму роботи підшипників коефіцієнт інтен-
сивності Ке бере такі значення (табл. 4.1): Ке = 1 — для режиму П;
/<£ = 0,80 — для режиму В; Ке = 0,63 — для режиму СР; Ке =
— 0,57 — для режиму СН і Ке = 0,40 — для режиму Л.
Наведені значення коефіцієнтів інтенсивності Ке можуть бути
використані за умови, що відбувається пропорційна зміна радіально-
го Яг та осьового Яа навантажень на підшипники із зміною режиму
навантаження машини. Таке явище має місце, наприклад, у підшипни-
ках кочення валів зубчастих передач. Більш точних значень коефіці-
єнтів інтенсивності Ке навантаження підшипників для типових режи-
мів роботи різних машин поки що немає
32.7 . Рекомендації щодо вибору підшипників кочення
Для опор валів циліндричних зубчастих передач перевагу слід
надавати радіальним кульковим підшипникам як найдешевшим та
простим в експлуатації. їх успішно застосовують для опор валів, де
осьове навантаження становить менше 35 % від сумарного радіально-
го (Еа/(УЯГ) 0,35). Якщо відношення Га/(УЯГ) > 0,35, то рекоменду-
ється використовувати інші типи підшипників, наприклад кулькові
радіально-упорні, але їх вибір повинен бути обгрунтованим. Почат-
ково слід орієнтуватись на підшипники легкої серії. Якщо ж розра-
хунковий ресурс виявиться недостатнім, то беруть підшипники
середньої серії.
448
Конічні та черв’ячні колеса повинні бути точно і жорстко зафіксо-
вані в осьовому напрямі. Кулькові радіальні підшипники мають ма-
лу осьову жорсткість. Тому у силових передачах для опор валів ко-
нічних та черв’ячних коліс використовують роликові конічні підшип-
ники, переважно при значних динамічних навантаженнях та високих
короткочасних перевантаженнях.
Опори черв’яка в силових черв’ячних передачах навантажені знач-
ними осьовими силами. Це вимагає застосування конічних ролико-
в їх підшипників, здатних сприймати великі осьові навантаження.
При довгочасній неперервній роботі черв’ячної передачі, з метою
зменшення її нагрівання, для опор черв’яка використовують також
кулькові радіально-упорні підшипники зі збільшеним кутом кон-
такту тіл кочення типів 46 000 і 66 000.
У передачах із шевронними зубчастими колесами вали та їхні опо-
ри навантажуються значними радіальними силами, а осьові сили від-
сутні. Особливістю таких передач є потреба забезпечення рівномірнос-
ті навантаження двох півшевронів зубчастих коліс. Цього можна до-
сягнути використанням плаваючого вала в осьовому напрямі. Здебіль-
шого таким валом є швидкохідний вал, для опор якого застосовують
роликові радіальні підшипники без буртиків на одному з кілець (типи
2000 і 32 000). Ці підшипники, маючи високу радіальну несучу здат-
ність, забезпечують самовстановлення зубців шевронної шестірні від-
носно зубців колеса, закріпленого на зафіксованому в осьовому на-
прямі вала.
Під час вибору підшипників кочення слід враховувати їхні гранич-
ні швидкості обертання. З ростом швидкості обертання різко зменшу-
ється ресурс підшипників кочення, збільшується температура в
навантаженому контакті тіл кочення і кілець. Зростають при цьому
втрати на тертя між тілами кочення та сепаратором і буртиками кі-
лець. З ростом швидкості обертання збільшується ймовірність відка-
зів, пов’язаних із руйнуванням сепараторів.
Щоб забезпечити потрібну надійність, у каталогах підшипників
зазначені граничні частоти обертання або кутові швидкості з ураху-
ванням виду мастила (рідке чи пластичне).
Гранична швидкохідність підшипників кочення оцінюється умов-
ним швидкісним параметром — добутком діаметра кола центрів
тіл кочення і кутової швидкості внутрішнього кільця, який залежить
від типу підшипника, точності, конструкції сепаратора та виду масти-
ла. Найбільші допустимі значення швидкісного параметра у кулько-
вих підшипників із текстолітовими або масивними металевими сепара-
торами [гїтсо] ж 9 • 104 мм • рад/с. Далі йдуть радіальні підшипники
з короткими циліндричними роликами « 5 • 104 мм • рад/с.
Значно менше значення допустимого швидкісного параметра для роли-
кових конічних підшипників [с?то] ~ 3,5 • 104 мм • рад/с.
449
32.8 . Приклади підбору і розрахунку
підшипників кочення
Задача 32.1. Підібрати підшипники кочення для проміжного вала редуктора
за даними розв’язування задачі у 31.9: радіальні навантаження на опори вала —
я 5500 Н; РЕ — 7300 Н; осьове навантаження вала Ра = 846 Н; діаметр цапф вала
для підшипників = 40 мм. Додаткові відомості та умови роботи підшипників: ку-
това швидкість вала ш = 40 рад/с; потрібний ресурс підшипників =
= 10 000 год при 90 % надійності; типовий режим навантаження опор вала — лег-
кий (Л); короткочасні перевантаження до 150%; робоча температура підшипників
до 50 °С.
Р о з в’ я з а н н я. 1. Аналіз умов навантаження та вибір типорозміру під-
шипників. Розрахункова схема для підбору та розрахунку підшипників вала зобра-
жена на рис. 32.11, а, на якій указані напрями сил, що діють на його опори. Най-
навантаженішою опорою у цій схемі є опора В, оскільки вона навантажена найбіль-
шою радіальною силою і сприймає осьову силу Ра. Якщо РаЇКв = 846/7300 =
= 0,116 < 0,35, то для опор вала доцільно застосовувати кулькові радіальні під-
шипники. Зважаючи на значне радіальне навантаження та маючи діаметр цапф під
підшипники, будемо орієнтуватись на підшипники середньої серії 308, для яких із
довідника [17) маємо: базова статична вантажність Со — 22 700 Н; базова динамічна
вантажність Сг — 31 900 Н.
2. Визначення розрахункового еквівалентного навантаження на підшипник. Роз-
рахункове еквівалентне навантаження знаходять за формулами (32.16) та (32.10).
Для типового режиму навантаження Л (легкого) коефіцієнт інтенсивності КЕ = 0,40.
Згідно з умовами роботи підшипників беремо: V = 1 —обертається внутрішнє
кільце підшипника; = 1,5— коефіцієнт безпеки при короткочасних переванта-
женнях до 150%; КТ — 1 —температурний коефіцієнт при робочій температурі
підшипників до 100 °С.
У даному випадку = 7300 Н, а для кулькових радіальних підшипни-
ків Ра = Ра = 846 Н. Тому для визначення коефіцієнтів X і У знаходимо відношен-
ня Ка'Сц — 846/22 700 = 0,037 і за табл. 32.2 беремо параметр осьового навантажен-
ня е = 0,23.
Оскільки відношення /?а/(Р/?г) = 846/(1*7300) = 0,116 < е — 0,23, за табл. 32.2
Х = 1, а У = 0.
За формулою (32.16) розрахункове еквівалентне навантаження на підшипник
Р = (XV Рг 4- ¥/?а) Лб/<т = (1 • 1 • 7300 + 0) 1,5 . 1 = 10 950 Н.
З урахуванням режиму навантаження протягом строку служби
= КЕЯ = 0,40 • 10 950 = 4380 Н.
3. Розрахунковий ресурс підшипника [див. формулу (32.8)]. Для 90 %-ї на-
дійності коефіцієнт Оі = І, а для звичайних умов експлуатації серійних кулькових
радіальних підшипників коефіцієнт а23 = 0,8.
Рис. 32.11. Схеми до
розрахунку підшипни-
ків опор вала (а) та
черв’яка (б)
450
Розрахунковий ресурс, млн об,
£ = аіаи (СгЖе)р = 1-0,8 (31 900/4380)3 = 309,06.
Тут показник степеня р = 3 для кулькових підшипників.
Розрахунковий ресурс підшипника, год, за формулою (32.9)
Ц = 1745Д/& = 1745 • 309,06/40 = 13 382 год.
Попередньо вибраний підшипник 308 для опори В вала має ресурс більший від
заданого потрібного. Для опори А вала беремо такий самий підшипник.
Задача 32.2. Підібрати підшипники кочення для опор вала черв’яка згідно зі
схемою навантаження (рис. 32.11, б). Радіальні навантаження на опори вала=
= 450 Н, 7?в = 1085 Н. На черв’як діє осьова сила Ра = 3550 Н. Кутова швидкість
вала со = 150 рад/с, а діаметр його цапф під підшипники = 45 мм. Умови роботи
підшипників: потрібний ресурс — 5000 год; типовий режим навантаження
опор вала — важкий (В); короткочасні перевантаження до 120 %; робоча темпера-
тура підшипників до 80 °С.
Розв’язання. 1. Аналіз умов навантаження та вибір типорозміру під-
шипників. Згідно із заданою схемою найнавантаженішою є опора В вала, яка сприй-
має радіальну силу Рв = Рг = 1085 Н та осьову силу Ра — 3550 Н. Оскільки для
опори В осьова сила значно більша від радіальної, доцільно вибрати для опор вала
роликові радіально-упорні конічні підшипники. Орієнтуючись на діаметр цапф під
підшипники дп — 45 мм, беремо підшипники легкої серії 7209, для яких із довідника
[17] маємо: базова статична вантажність Со = 33 400 Н; базова динамічна вантаж-
ність Сг = 42 700 Н; кут контакту тіл кочення а = 15°; параметр осьового наванта-
ження є =0,41.
2. Визначення розрахункового еквівалентного навантаження на підшипник. Роз-
рахункове еквівалентне навантаження на підшипник опори В знаходять за формулою
(32.10).
За умовами роботи підшипників беремо V = 1 — при обертанні внутрішнього
кільця підшипника; К& = 1,2 — коефіцієнт безпеки при короткочасних переванта-
женнях до 120 %; — 1 — температурний коефіцієнт при робочій температурі до
100 °С.
Для визначення осьового навантаження ЯаВ на підшипник опори В попередньо
обчислимо осьові складові сили у підшипниках опор А і В при навантаженні їх ра-
діальними силами і (див. рис. 32.11, б):
РзА = 0,83е/?л = 0,83 • 0,41 . 450 = 153 Н;
РіВ = 0,83е/?в = 0,83 • 0,41 . 1085 = 369 Н.
Рівняння рівноваги вала
ра + *аА — Кав ~
Якщо /?а4 = Р3Д, то
ЯаВ =Ра-\-РзА= 3550 + 153 = 3703 Н> Р$в = 369 Н.
Отже, КаВ визначено правильно.
При відношенні
/?оВ/(У£в) = 3703/(1 • 1085) = 3,41 > е = 0,41
маємо за табл. 32.2 X = 0,40, а У = 0,4 сі& а = 0,4 сі§ 15° = 1,49.
Розрахункове еквівалентне навантаження на підшипник опори В
Я = (ХУЯГ 4- ¥/?д) = (0,40 - 1 - 1085 + 1,49 . 3703) 1,2 - І = 7142 Н.
451
З урахуванням режиму навантаження (режим В), для якого коефіцієнт інтенсив-
ності КЕ = 0,80, розрахункове еквівалентне навантаження
КЕ = КЕР = 0,80 • 7142 = 5714 Н.
3. Розрахунковий ресурс підшипника [див. формулу (32.8)]. Для 90 %-ї на-
дійності підшипників коефіцієнт аг — 1, а для звичайних умов експлуатації серій-
них роликових радіально-упорних підшипників коефіцієнт в 0,7.
Розрахунковий ресурс підшипників, млн об,
£ = 0,0,, (СГ/КЕ)Р = 1-0,7 (42 700/5714)10/3 = 570,86.
Тут показник степеня р = 10/3 для роликових підшипників.
За формулою (32.9) розрахунковий ресурс підшипника, год,
Ьь = 17451/ш = 1745 • 580,86/150 = 664) год.
Отже, для опор вала черв’яка можна брати підшипники 7209, які при заданому
навантаженні та в заданих умовах експлуатації мають ресурс більший, ніж вимага-
ється за завданням.
Контрольні запитання
1. Яка будова підшипників кочення та які їхні переваги і недоліки?
2. Яка класифікація підшипників кочення за різними ознаками?
3. Із яких матеріалів виготовляють деталі підшипників кочення?
4. Які бувають класи точності підшипників кочення? Чим характеризуються
ці класи точності?
5. Які є основні способи закріплення підшипників на валах та у гніздах корпусу
(показати за допомогою ескізів)?
6. Наведіть характерні приклади монтажу опор валів із радіальними підшип-
никами.
7. Наведіть характерні приклади монтажу опор валів із радіально-упорними
підшипниками кочення.
8. Від чого залежить вибір посадки підшипників кочення на вали та у гнізда кор-
пусів опор?
9. Які види мастил застосовують для підшипників кочення?
10. Наведіть приклади конструкцій підшипникових вузлів.
11. Назвіть основні види руйнувань та їхні причини для деталей підшипників
кочення.
12. У чому полягає суть підбору підшипників кочення за статичною вантажніс-
тю? Що таке статична вантажність?
13. У чому полягає суть підбору підшипників кочення за динамічною вантаж-
ністю? Що таке динамічна вантажність підшипника?
14. Запишіть та проаналізуйте вираз для визначення ресурсу підшипників
кочення.
15. За якими формулами визначають розрахункове еквівалентне навантаження
для підшипників різних типів?
ГЛАВА 33. ПІДШИПНИКИ КОВЗАННЯ
33.1. Загальні відомості
Підшипники ковзання — це елементи опор валів І
осей, поверхня цапфи яких взаємодіє через шар мастила або безпосе-
редньо з охоплюючою її нерухомою поверхнею підшипника. Нормаль-
452
на робота підшипників ковзання без систематичного спрацьовування
поверхонь цапфи вала і підшипника можлива лише при розділенні
цих поверхонь шаром мастила достатньої товщини. Наявність шару
мастила між робочими поверхнями може бути забезпечена лише над-
лишковим тиском, який буває гідродинамічним, що створюється при
обертанні цапфи, або гідростатичним, що виникає внаслідок подачі
мастила відповідною помпою. Основне практичне застосування мають
підшипники з гідродинамічним змащуванням.
Підшипники ковзання у сучасному машинобудуванні мають вуж-
че застосування, ніж підшипники кочення. Однак за деякими свої-
ми позитивними характеристиками вони у деяких випадках мають
переважне або рівне використання з підшипниками кочення. Під-
шипники ковзання застосовують у таких випадках:
а) для опор валів (<о > 500 рад/с), у режимах роботи яких довго-
вічність підшипників кочення досить низька;
б) для валів та осей, до яких ставляться високі вимоги щодо точнос-
ті монтажу і забезпечення постійного положення осі обертання;
в) для валів великого діаметра через відсутність стандартних під-
шипників кочення;
г) у випадках, коли підшипники за умовами складання машини
повинні бути роз’ємними (наприклад, для опор колінчастих валів);
д) при роботі підшипників у воді або агресивному середовищі, де
підшипники кочення нероботоздатні;
е) при потребі малих діаметральних розмірів, наприклад для близь-
ко розміщених паралельних валів;
є) для тихохідних валів та осей невідповідальних механізмів, де
підшипники ковзання простіші за конструкцією і дешевші, ніж під-
шипники кочення.
Підшипники ковзання вимагають систематичного нагляду та не-
перервного змащування, мають більш високі втрати на тертя при ма-
лих швидкостях обертання валів і потребують підвищених пускових
моментів під час пуску машини в дію. Крім цього, цапфи валів та осей,
що працюють у підшипниках ковзання, повинні мати високу якість
поверхні для того, щоб запобігти прискореному спрацьовуванню під-
шипника та цапфи.
33.2. Конструкції та матеріали підшипників ковзання
За конструкцією підшипники ковзання бувають дуже різноманітні.
У найпростішому вигляді (рис. 33.1, а) підшипник ковзання склада-
ється з корпусу / та вкладиша 2, який розміщується і фіксується у
корпусі. Взаємодія опорної цапфи вала з підшипником відбувається
через вкладиш та шар мастила між їхніми поверхнями. Для подачі
мастила у корпусі і у вкладиші підшипника передбачається спеціальний
453
отвір. Підшипник ковзан-
ня на рис. 33.1, а є жорст-
ким нероз'ємним підшип-
ником.
Приклад конструкції
роз’ємного підшипника ков-
зання показано на рисун-
ку 33.1, б. Такий підшип-
ник складається з корпусу
/, кришки 2 та вкладиша З
(двох половинок циліндрич-
ної втулки). Кришка до
корпусу кріпиться за допо-
могою болтів або шпильок.
Роз’ємні підшипники зруч-
ні при монтажі валів та
осей і допускають регулю-
вання зазорів у підшипни-
ку зближенням кришки
і корпусу. Тому переважне
застосування мають роз’єм-
ні підшипники ковзання.
Рис. 33.1. Конструкції підшипників ковзання
Для правильної роботи підшипника площина його роз’єму повинна
бути виконаною перпендикулярно до напряму навантаження, яке
сприймає підшипник. Щоб усунути бокові зміщення кришки щодо
корпусу, площину роз’єму підшипника здебільшого слід виконувати
ступінчастою.
Якщо виникають значні прогини валів або неможливо виконати
точний монтаж, то використовують самоустановні підшипники ковзан-
ня (рис. 33.1, в). Корпус такого підшипника має сферичну опорну
поверхню, яка дозволяє самовстановлюватись підшипнику у межах
кута у = 7...8°. Застосування самоустановних підшипників дозволяє
забезпечити рівномірне навантаження вкладиша по його довжині.
Розглянуті конструкції підшипників ковзання здатні сприймати
тільки радіальне навантаження. Існують також підшипники ковзан-
ня, які призначені для сприймання осьового або осьового та радіаль-
ного навантаження одночасно (рис. 33.1, г). Підшипники ковзання,
що сприймають осьове навантаження, називають підп’ятниками, а
елементи валів, що працюють у таких підшипниках, називають п’ята-
ми. На рис. 33.1, г підп’ятник / сприймає осьове навантаження з боку
вала і повинен бути зафіксованим від обертання у корпусі 2 підшип-
ника. Вкладиш З сприймає тільки радіальне навантаження.
Основними розмірами підшипників ковзання (рис. 33.1) е поса-
дочний діаметр підшипника с? та його довжина /. Здебільшого підшип-
ники ковзання виготовляють із співвідношенням Псі = 0,5...1. Вузькі
454
підшипники (І/сі < 0,5) мають низьку вантажність і слабо утримують
мастило. Довгі підшипники (1/д, > 1) вимагають підвищеної жорст-
кості валів та точності їхнього монтажу. Товщина стінки суцільного
вкладиша Д = (0,1...0,2) сі.
Згідно з гідродинамічною теорією змащування рідинне тертя у
підшипнику ковзання може розвиватись тільки в зазорі, що звужу-
ється в напрямі відносної швидкості цапфи вала. Такий зазор нази-
вають клиновим.
У радіальних підшипниках ковзання клинова форма зазора вла-
стива самій конструкції підшипника. Вона утворюється за рахунок
зміщення центрів цапфи вала і вкладиша (рис. 33.2, а). Однак тут
центрування вала може бути недостатнім, а при високих швидкостях
обертання можливе виникнення вібрацій вала.
У підшипниках ковзання швидкохідних навантажених валів,
а також у підшипниках з великою несучою здатністю для запобігання
вібрацій валів використовують самоустановні сегментні вкладиші
(рис. 33.2, б), які завдяки утворенню у підшипнику кількох зазорів
клинової форми забезпечують стійку роботу підшипників. Поряд із
безвібраційною роботою перевагою підшипників із сегментними вкла-
дишами є можливість самоустановлюватись, що запобігає появі кром-
кового контакту цапфи та підшипника.
Для зображених на рис. 33.2, в, г підшипників зазор клинової
форми може бути отриманий використанням однобічних скосів у ра-
діальних рівцях при нереверсивному і двобічних скосів — при ревер-
сивному обертанні вала.
Найвідповідальнішою деталлю у підшипнику ковзання є вкладиш,
який безпосередньо сприймає навантаження. Матеріал вкладишів
повинен бути стійким проти спрацьовування та заїдання, мати достат-
ню пластичність, щоб, не руйнуючись, сприймати ударні навантаження,
а коефіцієнт тертя пари цапфа — вкладиш повинен бути мінімаль-
ним. Бажана також висока теплопровідність для кращого відведення
теплоти від поверхонь тертя у підшипнику.
Рис. 33.2. Конструктивні особливості підшипників ковзання
455
За техніко-економічними міркуваннями більш доцільно, щоб
у парі цапфа — вкладиш більш стійкою проти спрацювання була по-
верхня цапфи. З цією метою цапфи валів піддають поверхневому гар-
туванню, яке забезпечує високу твердість робочої поверхні.
Вкладиші виготовляють із різних матеріалів: чавуну, сплавів ко-
льорових металів, спечених матеріалів, графіту та синтетичних мате-
ріалів.
Чавун (сірий і антифрикційний) придатний для вкладишів при
невисоких безударних навантаженнях та низьких колових швидкостях.
Потрібне припрацьовування чавунних вкладишів на холостих режи-
мах роботи.
До кольорових антифрикційних сплавів належать бронзи, латуні,
бабіти, алюмінієві сплави.
Бронзи з вмістом олова БрОІОФІ та ін. мають високі антифрик-
ційні властивості і їх використовують в умовах високих тисків та
швидкостей. При змінних та ударних навантаженнях вироку стій-
кість має свинцева бронза БрСЗО, яка використовується у підшипни-
ках двигунів внутрішнього згоряння. Широко розповсюджені також
більш дешеві безолов’яні бронзи, наприклад БрА9ЖЗА.
Латуні ЛКС80-3-3, ЛМцЖ52-4-1 та ін. ефективні при порівня-
но високих навантаженнях, але низьких колових швидкостях.
Бабіти використовують для нанесення на робочі поверхні
чавунних або бронзових вкладишів. Високоолов’яні бабіти, наприклад
Б83, використовують при дуже високих швидкостях та тисках. За
антифрикційними властивостями бабіт перевершує всі інші сплави,
але за механічною міцністю значно поступається чавуну та бронзі.
Негативною властивістю бабіту є крихкість та його висока вартість.
З алюмінієвих сплавів найперспективнішими є алю-
мінієво-олов’яні антифрикційні сплави АО9-2, АО9-1 та ін. Вони ма-
ють високу втомну міцність і здатні працювати протягом значного
часу в умовах недостатнього змащування. Ці сплави застосовують у
підшипниках потужних двигунів внутрішнього згоряння.
Спечені матеріали мають у своїй основі мідний або за-
лізний порошок. Вкладиші, які виготовляють пресуванням та спікан-
ням при високій температурі порошка із добавкою графіту, мають
порувату структуру і можуть працювати довший час без подачі масти-
ла за рахунок їхнього попереднього просочування рідким мастилом.
Неметалеві матеріали (гума, тверді породи дерева та
пластмаси) значно розповсюджені як підшипникові матеріали, що
пов’язано з їхніми високими антифрикційними властивостями в парі
із сталевою цапфою вала. їх важливою перевагою є можливість роботи
при змащуванні водою. Серед пластмас для вкладишів підшипників
використовують текстоліти, ДШП, поліаміди (капрон, фторопласт-4)
та ін. Поліаміди у більшості випадків наносять тонким шаром на ме-
талеві вкладиші і завдяки цьому в значній мірі поліпшують умови
456
відведення теплоти. Оскільки пластмаси мають достатню пружність,
виготовлені з них вкладиші підшипників можуть сприймати ударні
навантаження та дещо компенсувати перекоси цапфи вала.
33.3. Змащування підшипників ковзання
Для змащування підшипників ковзання застосовують рідкі, пла-
стичні та тверді мастильні матеріали.
Основним мастильним матеріалом є рідкі мастила, бо вони
рівномірно розподіляються на поверхнях тертя, мають мале внутріш-
нє тертя і задовільно працюють у широкому діапазоні температур.
Переважне застосування знаходять мінеральні мастила, які е продук-
том переробки нафти. Рослинні (льняне, рицинове та ін.) і тваринні ма-
стила мають високі мастильні властивості, але вони дорогі і тому
використовуються лише у спеціальних випадках.
Важливими властивостями мастил, які визначають їхню мастиль-
ну здатність, є в’язкість (при роботі в умовах рідинного тертя) та мас-
лянистість (при роботі без рідинного тертя).
В'язкість — властивість чинити опір при зсуві одного шару ріди-
ни щодо іншого.
Маслянистість — здатність мастильного матеріалу до адсорбції,
тобто до утворення та утримування на поверхнях тертя деталей тонких
плівок.
Із мінеральних мастил широко застосовують такі, як індустріаль-
не, турбінне, авіаційне, циліндрове та ін. (див. табл. 33.2).
Як рідке мастило інколи використовують і воду (наприклад, для
підшипників гребних гвинтів, водяних помп і т. д.). В’язкість води
низька, а теплоємність у 2,0—2,5 рази більша, ніж мінеральних мас-
тил. Тому теплоутворення у підшипниках, змащуваних водою, незнач-
не, а тепловіддача велика. Суттєвим недоліком водяного змащування
є небезпека корозії, що вимагає використання спеціальних матеріалів
для валів.
Пластичні мастила виготовляють згущуванням рідких
мінеральних мастил кальцієвими або натрієвими милами. У першому
випадку дістають солідоли, а у другому — консталіни. Пластичні
мастила добре герметизують підшипники і допускають підвищені
тиски. У порівнянні з рідкими мастилами внутрішнє тертя (в’язкість)
у них більш високе. Солідоли використовують при температурах до
60—80 °С. Суттєвою їхньою перевагою є вологостійкість. При підви-
щених температурах (до ПО—120 °С) використовують натрієві масти-
ла: мастило жирове 1-13, консталін жировий, консталін синтетичний.
Існують універсальні пластичні мастила, які добре працюють у широ-
кому діапазоні температур; мастило УНИОЛ , наприклад, допускає
роботу при 150—160 6С, стійке навіть у киплячій воді.
457
Із твердих мастильних матеріалів в основно-
му застосовують колоїдний (високодисперсний) графіт та двосірчаний
молібден (дисульфід молібдену). Тверді мастила використовують в
умовах, коли рідкі та пластичні мастила нероботоздатні (низька або
висока температура, вакуум, агресивне середовище), а також у тихо-
хідних відкритих підшипниках, що працюють при високих тисках,
де важко утримати рідке чи пластичне мастило.
Подача мастильного матеріалу до підшипників ковзання залежно
від їхнього призначення та умов роботи може бути індивідуальною або
централізованою, періодичною або неперервною, самоподачею або
під тиском. Для змащування використовують спеціальну мастильну
арматуру.
Звичайно подача мастила здійснюється у зону найменшого тиску
у підшипнику ковзання. Розподіл мастильного матеріалу у підшипни-
ках досягається за допомогою мастильних рівців на робочій поверхні
їхніх вкладишів у ненавантаженій зоні.
33.4. Роботоздатність і режим рідинного тертя
у підшипниках ковзання
Критерії роботоздатності та розрахунку підшипників ковзання.
Основними критеріями роботоздатності підшипників ковзання є стій-
кість проти спрацювання та стійкість проти втомного руйнування ро-
бочих поверхонь.
Стійкість проти спрацювання характеризуєть-
ся опором абразивному спрацюванню та заїданню. Абразивне спрацю-
вання може бути при недостатній несучій здатності мастильного шару
в підшипнику під час усталеного режиму роботи і особливо під час
пуску та зупинки машини під навантаженням. Абразивне спрацювання
дуже інтенсивне при попаданні у підшипник разом із мастилом твердих
абразивних частинок, співрозмірних із товщиною мастильного шару.
Заїдання виникає при втраті мастильною плівкою своєї захисної
здатності при високих місцевих тисках і температурах. Воно прояв-
ляється особливо активно при незагартованих цапфах валів і при твер-
дих матеріалах вкладишів. Заїданню сприяють підвищений тиск на
кромках вкладишів, дефекти поверхонь тертя, температурні деформа-
ції валів.
Втомне руйнування вкладишів підшипників ковзання
спостерігається під час дії на них змінних навантажень (наприклад,
у поршневих машинах, машинах ударної та вібраційної дії). Крихко-
му руйнуванню піддаються маломіцні антифрикційні матеріали, такі
як бабіти та деякі пластмаси.
Основним розрахунком підшипників ковзання є розрахунок за
умовою забезпечення рідинного тертя, який базується на тому, що
мастильний шар повинен сприймати все навантаження. При рідинно-
458
Рис. 33 3. До розрахунку підшипників рідинного тертя
му терті досягається стійкість проти спрацювання та заїдання під-
шипника.
Підшипники ковзання тихохідних механізмів, машин із частими
пусками та зупинками під навантаженням, із ненадійним забезпечен-
ням подачі мастила, в яких виникає граничне тертя, розраховують
за умовними критеріями, які базуються на досвіді конструювання та
експлуатації подібних конструкцій підшипників ковзання.
Умови утворення режиму рідинного тертя у підшипниках ковзан-
ня. Під час рідинного тертя робочі поверхні цапфи вала і вкладиша
підшипника розділені шаром мастила (рис. 33.3, а), товщина Н якого
більша суми висот нерівностей поверхонь цапфи та вкладиша
+ (33.1)
Якщо записана умова виконується, що шар мастила сприймає зов-
нішнє навантаження, не допускаючи при цьому безпосереднього доти-
кання робочих поверхонь підшипника. Критичне значення товщини
шару мастила, при якому порушується режим рідинного тертя, бе-
руть
/ікр = (1,5 ... 2,0) (Я2і 4- Яг2). (33.2)
Дослідження режиму рідинного тертя у підшипниках базується
на гідродинамічній теорії змащування, засновником якої є російсь-
кий вчений М. П. Петров. Надалі ця теорія була розвинута в працях
англійського фізика О. Рейнольдса, російських вчених М. Є. Жуковсь-
кого, С. О. Чаплигіна та ін.
Гідродинамічна теорія змащування пов’язана з розв’язуванням
диференціальних рівнянь гідродинаміки в’язкої рідини, до складу
яких входять тиск, швидкість та опір в’язкому зсуву рідини. Теоретич-
ні положення цієї теорії достатньо складні і в даному курсі вивчають
лише принципові поняття про умови виникнення рідинного тертя.
На рис. 33,3, б схематично зображена цапфа вала у заповненому
мастилом підшипнику. Якщо вал не обертається, то під дією радіальної
459
сили Р цапфа зміщена на радіальний зазор і дотикається до вкладиша
підшипника. При цьому між цапфою та вкладишем утворюється зазор
клинової форми.
Під час обертання вала (рис. 33.3, в) мастило за рахунок сил тертя
починає втягуватись у клиновий зазор і при деякій кутовій швидкості
вала > (окр цапфа спливає в мастилі і дещо зміщається в бік обертан-
ня. Із збільшенням кутової швидкості збільшується і товщина Н ма-
стильного шару, а центр цапфи наближається до центра вкладиша.
Якщо со -* оо, то відстань між центрами е 0. Повного збігання цент-
рів цапфи і вкладиша бути не може, оскільки при цьому порушується
клинова форма зазора як одна з умов режиму рідинного тертя.
Зовнішнє навантаження Р на вал зрівноважується гідродинаміч-
ним тиском р у мастильному шарі, який розподіляється нерівномірно
згідно з епюрами на рис. 33,3, в, г.
Дослідженнями встановлено, що у підшипниках ковзання з певни-
ми параметрами товщина шару мастила у навантаженій зоні зростає
зі збільшенням в’язкості мастила та кутової швидкості цапфи і змен-
шується зі збільшенням навантаження Р. Щоб досягти режиму рідин-
ного тертя, потрібні такі умови:
а) наявність між поверхнями ковзання зазора клинової форми;
б) неперервне заповнення зазора мастилом відповідної в’язкості;
в) швидкість відносного руху поверхонь повинна бути такою, щоб
розвинутий гідродинамічний тиск зрівноважив зовнішнє наванта-
ження.
33.5. Розрахунки підшипників ковзання
Умовні розрахунки підшипників ковзання. Ці розрахунки вико-
нують, якщо режим рідинного тертя не може бути забезпеченим. Вони
у наближеній формі передбачають запобігання інтенсивному спрацю-
ванню, перегріванню та заїданню у підшипниках. Суть умовних роз-
рахунків полягає у обмеженні тиску р у підшипнику та у обмеженні
параметра риа. Відповідно розрахункові умови записують у такому
вигляді*
р = рцаї) < [/>]; (33.3)
(33.4)
де Р — радіальне навантаження на підшипник; — діаметр цапфи;
І — довжина підшипника; V, — 0,5аиі — швидкість ковзання або
колова швидкість цапфи.
При високих швидкостях ковзання і невеликих тисках надійність
підшипників ковзання зменшується через підвищення температури.
В цьому разі обмежують також швидкість ковзання за умовою
460
Таблиця 33.1. Допустимі значення (/>], та для
підшипників ковзання
Матеріал вкладиша підшипника [р], МПа [ро,]. МПа. м/о
Чавун:
АЧС-1 2,5 5 10
АЧС-5 20 1 20
Латунь:
ЛКС80-3-3 12 2 10
ЛМцЖ52-4-1 4 2 6
Бронза:
БрСЗО 25 12 ЗО
БрОЮФІ 15 10 15
БрА9Ж4Л 15 4 12
Бабіт:
Б83 10—15 50 50—75
Біб 10 ЗО 3
Фторопласт-4 1,5 5 —
Поліамід АК-7 15—20 4 20
Капрон Б 2—-2,5 5 20
Текстоліт 5 5—10 25
Гума (при змащуванні во- 4—10 10—20 —
дою)
Допустимі значення тиску [р), швидкості ковзання та парамет-
ра [ро5] визначені з досвіду експлуатації підшипників ковзання з різ-
ними матеріалами вкладишів. Деякі з них наведені у табл. 33.1.
Розрахунок радіальних підшипників рідинного тертя. Розрахунок
радіальних підшипників рідинного тертя базується на тому, що шар
мастила між цапфою та вкладишем повинен сприймати все радіальне
навантаження Г, а його розрахункова товщина Н повинна бути біль-
шою від критичної товщини ЛКр за виразом (33.2). Тому запишемо роз-
рахункову умову
ї$]Л. (33.5)
Тут — коефіцієнт запасу надійності підшипника за товщиною
мастильного шару, а [$]Л = 1,5...2 —його допустиме значення, яке
вводиться для врахування можливих відхилень розрахункових умов
від експлуатаційних (за точністю виготовлення підшипника, наванта-
ження, температурним режимом тощо). Критичне значення товщини
шару мастила /ікр за виразом (33.2) беруть із розрахунку, що висота
нерівностей поверхні цапфи повинна бути /??і 3,2 мкм, а висота
нерівностей робочої поверхні вкладиша — /?г2 6,3 мкм.
При розрахунку підшипника ковзання здебільшого відомі (див.
рис. 33.3): діаметр цапфи радіальне навантаження Р\ кутова швид-
кість вала (о. Додатково беруть:
461
Таблиця 33.2. Динамічна в'язкість ц деяких мастил при різних температурах
Марка маепла ц-Ю*. Н-о/мм’, при температурі / °С
ЗО 40 ьо 60 70 зо 90
Індустріальне И-40 0,060 0,038 0,023 0,017 0,010 0,008
И-ЗОА 0,080 0,038 0,022 0,015 0,010 0,006 0,005
И-20А 0,060 0,030 0,018 0,010 0,008 0,005 0,003
Турбінне Т-22 0,040 0,026 0,018 0,012 0,009 0,006 0,005
а) відношення Ш = 0,5...1, за яким визначають довжину І підшип-
ника;
б) відносний зазор у підшипнику ф = 26Лі, за яким знаходять ра-
діальний зазор 6; рекомендують брати (менші значення ф для більших
значень <ї): ф = 0,0005...0,001 при р > 10 МПа і 10 м/с; ф «
= 0,001...0,002 при р < 10 МПа і ц^5 м/с; ф = 0,0015. ..0,0025
при р 3 МПа і > 10 м/с;
в) середню робочу температуру /м = (45...75) °С мастила, за якою
вибирають його марку і динамічну в’язкість р (табл. 33.2).
Розрахункову товщину А шару мастила в підшипнику (див.
рис. 33,3, в) визначають за формулою
А = 6 —е=6(1 — X),
(33.6)
де X = е/6 — відносний ексцентриситет, який визначає положення
цапфи у підшипнику при режимі рідинного тертя. Цей параметр виби-
Рис. 33.4. Коефіцієнт навантаже-
ності підшипників ковзання
рають за графіками рис. 33.4 залежно
від безрозмірного коефіцієнта наван-
таженості підшипника Ф та відношен-
ня 11(1.
Коефіцієнт наванта-
жено с т і підшипника — це
параметр, який характеризує несучу
здатність підшипника ковзання при
певних співвідношеннях його розмі-
рів, кутовій швидкості вала та в’яз-
кості мастила. Його визначають за
формулою
ф = Гфа/(рхо/б/) = рфа/(р,со).
(33.7)
Таким чином, розрахунок підшип-
ників ковзання рідинного тертя зво-
462
даться до визначення за формулою (33.7) коефіцієнта навантаженос-
ті Ф підшипника, за яким по графіках рис. 33.4 вибирають віднос-
ний ексцентриситет X. Маючи відносний ексцентриситет та радіальний
зазор б у підшипнику, за формулою (33.6) обчислюють товщину Л
шару мастила у навантаженій зоні підшипника, яку порівнюють із
критичною товщиною ЛкР відповідно до умови (33.5). Потрібний раді-
альний зазор 6 забезпечується вибором відповідної стандартної по-
садки цапфи вала у вкладиші.
Розглянутий розрахунок радіальних підшипників рідинного тертя
є наближеним. У цьому розрахунку температура мастила вибирається
орієнтовно. Фактична температура може бути іншою, іншою буде і
в’язкість мастила, а відповідно і товщина шару мастила у навантаже-
ній зоні підшипника. Суттєвий вплив на забезпечення рідинного тертя
має і відносний зазор ф у підшипнику, який не завжди може бути точ-
но дотриманим при виготовленні. Неточності наближеного розрахун-
ку можуть бути компенсовані підвищеними значеннями допустимих
коефіцієнтів запасу надійності [$]Л.
Щоб запобігти прискореному спрацюванню або заїданню у періоди
короткочасного порушення режиму рідинного тертя (пуск чи зупинка
машини, затримка у подачі мастила), треба також виконувати умовні
розрахунки підшипників ковзання за умовами (33.3) та (33.4). Більш
повні відомості про розрахунки підшипників ковзання наведені у
124].
Особливості конструкцій та розрахунку упорних підшипників
ковзання. У машинобудуванні упорні підшипники ковзання застосо-
вують, якщо втрати на тертя не мають суттєвого значення, наприклад
у механізмах, що працюють із тривалими перервами, при низьких
швидкостях ковзання тощо. Найпростішими за конструкцією є упор-
ні підшипники з плоскими робочими поверхнями.
На рис. 33.5 зображені упорні підшипники, які відрізняються
між собою конструкцією опорної частини — п’яти. Суцільна п’ята
Рис, 33.5. До розрахунку упорних підшипників ковзання
463
(рис. 33.5, а) використовується рідко через нерівномірний розподіл тиску
по робочих поверхнях. У центрі п’яти, де швидкість ковзання мала,
спрацювання менше, ніж на периферійних ділянках. Тому тиск у
центрі п’яти теоретично досить високий.
Щоб дещо вирівняти тиск, слід застосовувати кільцеві п’яти
(рис. 33,5, б, в), у яких б/0 = (0,6...0,7) д,. У деяких випадках для змен-
шення питомого навантаження використовують гребінчасті п’яти
(рис. 33.5, г) із відповідними підп’ятниками, що мають роз’єм у осьо-
вій площині. Для гребінчастих п’ят беруть сі0 — (0,7...0,8) сі.
У розглянутих конструкціях упорних підшипників ковзання не
завжди можна забезпечити режим рідинного тертя (малі швидкості,
часті пуски та зупинки, нерівномірний розподіл швидкостей ковзан-
ня та ін.). Лише з високими кутовими швидкостями валів і відповід-
ними конструкціями п’ят (див. рис. 33.2, в, г) можна забезпечити рі-
динне тертя. Тому для упорних підшипників ковзання обмежуються
лише розрахунком на стійкість проти спрацювання та заїдання за
тиском р і параметром рV3.
Для плоскої кільцевої п’яти (рис. 33.5, б, в), а також суцільної
п’яти (рис. 33.5, а) при = 0 маємо такі розрахункові умови:
р — (сР — 4)] С \р]; ри> < [рк5), (33.8)
де Ра — осьове навантаження на підшипник; о5 — $,5(мІт — швид-
кість ковзання по середньому діаметру п’яти сІт — 0,5 (сі + сі0) вала,
що обертається з кутовою швидкістю (О.
Для розрахунку гребінчастої п’яти також використовуються умови
(33.8), але при визначенні р треба враховувати число опорних повер-
хонь г (г = 2 на рис. 33.5, г) та нерівномірність розподілу наванта-
ження по окремих поверхнях.
Допустимі значення тиску [р] та параметра [ри5] беруть такими
самими, як і для радіальних підшипників ковзання (див. табл. 33.1).
33.6. Деякі спеціальні підшипники ковзання
Пневмопідшипники — це різновиди гідродинамічних опор і пра-
цюють так само, як і розглянуті вище підшипники рідинного тертя.
Різниця лише у тому, що внаслідок значно меншої в’язкості повітря
порівняно з рідкими мастилами (у сотні разів) такі підшипники поряд
із малими втратами на тертя мають малу несучу здатність. Пневмо-
підшипники практично не обмежують частоту обертання валів, не
нагріваються і зберігають точність положення осі вала. Такі опори
застосовують у центрифугах, гіроскопах, газових турбінах. Створені
конструкції шпінделів для внутрішнього шліфування на пневмопід-
шипниках, які здатні розвивати частоти обертання до З «105 хв-1.
Гідростатичні підшипники. У гідростатичних підшипниках шар
мастила між поверхнями тертя створюється підведенням до них
464
а
Рис. 33.6. Конструктивні
особливості спеціальних
підшипників ковзання
мастила під тиском. Сили тертя в таких підшипниках при різних швид-
кісних режимах обертання вала дуже малі.
Гідростатичний радіальний підшипник (рис. 33.6, а) здебільшого
виконують із чотирма несучими камерами, у які за допомогою систе-
ми дроселів подають підтиском мастило. При навантаженні підшипни-
ка силою /** тиск мастила буде максимальним у нижній камері, оскіль-
ки тут мінімальні зазори і найбільший опір витіканню мастила.
У найпростішому упорному гідростатичному підшипнику
(рис. 33.6, б) мастило, яке подається у камеру підп’ятника, розтікається
у радіальному напрямі, утворюючи неперервний мастильний шар,
що розділяє спряжені поверхні п’яти та підп’ятника.
33.7. Приклад розрахунку підшипника ковзання
Задача. Розрахувати радіальний підшипник ковзання, який повинен працювати
в режимі рідинного тертя в періоди усталеного навантаження. Вихідні дані до розра-
хунку: діаметр цапфи вала сі = 60 мм; радіальне навантаження Р = 2400 Н; кутова
швидкість вала со = 100 рад/с; робоча температура вала — до 60 °С.
Розв’язання. 1. Вибір матеріалу для вкладиша підшипника. Виходячи
з рекомендації ІІд. — 0,5...], вибираємо довжину вкладиша підшипника І = (і =
= 60 мм.
Швидкість ковзання у підшипнику
о9 = 0,5сос( = 0,5 • 100 • 60 • 10~3 = 3 м/с.
Тиск у контакті цапфи вала та вкладиша
р = Р/(сіі) = 2400/(60 • 60) = 0,667 МПа.
Параметр, що характеризує нагрівання підшипника,
ро9 = 0,667 «3 = 2 МПа • м/с.
За даними табл. 33.1, для вкладиша підшипника можна вибрати матеріал — ан-
тифрикційний чавун АСЧ-1, для якого вибрані значення р і ро5 менші від допустимих,
що забезпечує стійкість проти спрацювання вкладиша у періоди порушення режиму
рідинного тертя.
2. Розрахунок та підбір параметрів підшипника для забезпечення режиму рі-
динного тертя. Відносний зазор у підшипнику ф = 26/сі =0,001 (при р < 10 МПа і
о9 <; 5 м/с).
465
Радіальний зазор
6 = 0,5і|х/ = 0,5 • 0,001 • 60 = 0,03 мм.
Для змащування підшипника передбачається мастило — індустріальне И-ЗОА
(див. табл. 33.2), для якого при температурі 60 °С динамічна в'язкість р. = 0,015 X
X 10~6 Н • с/мм2.
За формулою (33.7) коефіцієнт навантаженості підшипника
ф = рф1/(р<і>) = 0,667 • 0,001 «/(0,015 • 10~6 . 100) =0,44.
За графіками на рис. 33.4 визначаємо відносний ексцентриситет: якщо Ид. — 1
і Ф = 0,44, то X = 0,35.
За формулою (33.6) розрахункова товщина шару мастила
Л = 6 (1 — х) = 0,03 (1 — 0,35) = 0,0195 мм.
Критична товщина шару мастила при параметрах шорсткості поверхонь цапфи
вала /?2І = 1,6 мкм і поверхні вкладиша ~ 3,2 мкм:
Лкр в (^?1 “І" Яй) я 1»5 (1,6 + 3,2) = 7,2 мкм » 0,0072 мм.
Коефіцієнт запасу надійності роботи підшипника за товщиною мастильного шару
= Л/Лкр = 0,0195/0,0072 = 2,7 > [$]Л = 1,5.
Надійність роботи підшипника достатня. При робочих температурах, менших
від 60 °С, в’язкість мастила буде більшою і відповідно збільшиться товщина Л шару
мастила та надійність роботи підшипника.
Для спряження цапфи вала та вкладиша підшипника можна вибрати стандартну
посадку Н7/Г7, для якої маємо: отвір вкладиша 0 бО^0,030; діаметр цапфи 0 ^0~о’обО*
При такій посадці мінімальний радіальний зазор дтІп = 0,015 мм, максимальний
зазор бтах = 0,045 мм, а середній радіальний зазор д = 0,030 мм, що відповідає ви-
браному у розрахунках.
Контрольні запитання
1. Коли доцільно застосовувати підшипники ковзання?
2. Наведіть приклади конструкцій підшипників ковзання.
3. Які вимоги ставляться до матеріалу вкладишів у підшипниках ковзання? На-
звіть деякі матеріали для виготовлення вкладишів.
4. Які властивості повинні мати мастила, що використовуються у підшипниках
ковзання. Назвіть основні групи мастил.
5. Які є основні критерії роботоздатності підшипників ковзання?
6. Які потрібні умови для досягнення режиму рідинного тертя в підшипниках
ковзання?
7. За якими умовами ведуть розрахунок підшипників ковзання, коли режим
рідинного тертя не може бути забезпеченим?
8. Що таке критична товщина мастила у підшипнику ковзання?
9. У чому полягає суть розрахунків підшипників рідинного тертя?
10. Що таке коефіцієнт навантаженості підшипника ковзання? Від яких факто-
рів він залежить?
466
ГЛАВА 34. НАПРЯМНІ ПРЯМОЛІНІЙНОГО РУХУ
34.1. Області застосування та конструкції напрямних
Напрямні утримують рухомі частини машини та надають на-
прям їхньому поступальному руху. Най розповсюджені тими в машино-
будуванні є напрямні для забезпечення прямолінійного руху деталей.
Як опори деталей із поступальним рухом напрямні використовують:
у поршневих машинах; в ковальсько-пресовому обладнанні; в метало-
різальних верстатах; у підйомно-транспортних, будівельних і їм по-
дібних машинах. Напрямні для прямолінійного руху широко застосо-
вують у різних приладах та вимірювальних пристроях.
Яків усіх інших опорних елементах деталей машин, на робочих
поверхнях напрямних може виникати тертя ковзання або тертя кочен-
ня. Напрямні ковзання більш прості за конструкцією. Найбільше
поширення мають напрямні з такими видами поперечних перерізів
(рис. 34.1): циліндричні; прямокутні; клинчасті; напрямні типу
^ластівчин хвіст». Більш раціонально застосовувати напрямні, що
показані на рис. 34.1 у нижньому ряді, оскільки вони краще зберіга-
ють мастило на робочих поверхнях.
Робочі поверхні напрямних ковзання працюють в умовах спрацю-
вання, тому для забезпечення точності переміщення деталей передба-
чають відповідні регулювальні пристрої у вигляді притискних пла-
нок, клинів, за допомогою яких можна зменшувати утворені зазори.
Клинчасті напрямні забезпечують підвищену точність переміщень,
оскільки вони мають властивість самоцентрування, але в таких на-
прямних більші втрати на тертя.
Напрямні кочення конструктивно значно складніші і дорожчі,
потребують термообробки робочих поверхонь до високої твердості,
точного монтажу та надійного захисту від забруднення, але вони ви-
гідно відрізняються малим опором на переміщення деталей. Деякі
конструкції напрямних кочення показані на рис. 34.2.
Кулькова напрямна (рис. 34.2, а) із замкнутою траєкторією руху
кульок використовується при обмежених габаритних розмірах по
Рис. 34.1. Фор-
ми поперечних
перерізів на-
прямних із тер-
тям ковзання
467
Рис. 34.2. Конструкції напрямних із тертям кочення
довжині і великих ходах рухомих деталей. Повернення кульок у ро-
бочу зону здійснюється по допоміжних неробочих каналах. У напрям-
них на рис. 34.2, б, в тіла кочення (кульки чи ролики) знаходяться у
сепараторах, виконаних у формі пластин із відповідними гніздами.
Такі напрямні здатні сприймати навантаження, що діють під кутом
до площини переміщень.
Деталі напрямних ковзання у більшості випадків виготовляють
із чавуну марок СЧ 25, СЧ ЗО або сталі 40, 50. Інколи одну із деталей
напрямної виготовляють із бронзи або латуні. У напрямних кочення
деталі, які контактують із тілами кочення, виготовляють сталевими
з термообробкою до високої твердості 50—55 НКС.
34.2. Основи розрахунку напрямних прямолінійного руху
Навантаження, що діють на деталі напрямних, у більшості випад-
ків із достатньою точністю визначаються за умовами статичної рівно-
ваги. Ці навантаження завжди можуть бути зведені до сили Р, при-
кладеної у центрі робочої поверхні напрямної, і до моменту М, що
діє у поздовжній площині напрямної. Розподіл тиску по ширині плос-
кої напрямної беруть рівномірним, а по довжині — таким, що зміню-
ється за лінійним законом. Такі допущення можливі через малу ши-
рину напрямних порівняно з їхньою довжиною і достатню жорст-
кість та точність виготовлення [4].
Стійкість проти спрацювання робочих поверхонь напрямної із
тертям ковзання (рис. 34.3, а) перевіряють за умовою збереження ша-
ру мастила у зоні максимального тиску ртах. Епюра розподілу тиску
по довжині І напрямної, навантаженої силою Р та моментом Л4, пока-
зана на рис. 34.3, а. Для даного випадку навантаження напрямної
умова стійкості проти спрацювання робочих поверхонь може бути за-
писана у вигляді
ргпах = рР + рМ = РЦЬІ) + 6/И/(Ь/2) < [р]. (34.1)
468
Рис. 34.3. До роз-
рахунку напрямних
із тертям ковзання
(а, б) та кочення (в)
Нерозкриття стику робочих поверхонь напрямної забезпечується
при виконанні умови
Ртіп = рр - Рм = РЦЬІ) - 6Л4/(Ь/2) > 0. (34.2)
Для клинчастих напрямних (рис. 34.3, 6) навантаження на поверх-
ню контакту визначається за умовою Р = 2ЇЇ зіп (а/2), звідки N =
= 0,5/75 і п (а/2).
Відповідно умови обмеження максимального та мінімального тис-
ку на робочих поверхнях клинчастої напрямної можна подати у тако-
му вигляді:
Ртах = 0,5 (Р/(ЬІ) 4- 6Л4/(6/2)]/5Іп (а/2) < [рі; (34.3)
Ртіп = 0,5 [Р/(ЬІ) - 6Л4/(&/2)]/8іп (а/2) > 0. (34.4)
Допустимий тиск на робочих поверхнях напрямних ковзання при
досить повільних переміщеннях (у <0,05 м/с) беруть [р] = (2...
3) МПа, а при підвищених швидкостях у зв’язку з поліпшенням
умов змащування [р] = (5...6) МПа.
Якщо умови (34.1) — (34.4) не виконуються, то збільшують довжи-
ну / повзуна, що рухається вздовж напрямної.
Наближений розрахунок напрямних кочення також виконується
для випадку лінійного закону розподілу навантаження на тіла кочен-
ня, що розміщені по довжині напрямної (рис. 34.3, в), тобто нехтують
різницею у діаметрах тіл кочення. Якщо вибрати довжину напрямної
469
І = Рг, де г — число робочих тіл кочення, а Р — їх крок, то силу,
що сприймається найнавантаженішим крайнім тілом кочення, можна
визначити за виразом (34.1)
Рі тк = РтпЬР = Р/г + 6Л!/(22Р), (34.5)
а умову нерозкриття стику — на основі виразу (34.2)
Рх тІП - Рт^ЬР = Ріг - 6М/(г2Р) > 0. (34.6)
За максимальною силою Г\ тах на тіло кочення перевіряють деталі
напрямної на контактну витривалість. Для випадку контакту кульки
діаметром сІк із площиною [див. формулу (4.11)1 маємо
З/• " 1 з л -
~ V Рі тах/(2рзв) = г Р\ тах/^к (^4.7)
Для сталевих деталей коефіцієнт 2„ = 1755 (МПа)2/3. Допустимі
контактні напруження для сталевих загартованих кулькових напрям-
них [а]// = (1800...2000) МПа, а для термічно необроблених — [аІн в
= (500...600) МПа.
Якщо умови (34.6) та (34.7) при розрахунках не виконуються, то
слід збільшити число тіл кочення г, зберігши їхній крок Р та діа-
метр.
Щоб визначити сили опору під час переміщення деталей уздовж
напрямних ковзання чи кочення, можна використати залежності, на-
ведені в 5.2.
Контрольні запитання
1. Які є області застосування напрямних прямолінійного руху?
2. Наведіть приклади напрямних із тертям ковзання та тертям кочення.
3. Як доцільно використовувати напрямні ковзання та напрямні кочення?
4. За якими умовами перевіряють роботоздатність напрямних ковзання?
5. Назвіть і запишіть умови роботоздатності для напрямних кочення.
V
Розділ
ОСНОВИ КОНСТРУЮВАННЯ ПРИВОДІВ МАШИН
ГЛАВА 35. ЗАГАЛЬНА ХАРАКТЕРИСТИКА
ПРИВОДІВ МАШИН
35.1. Структура машин та їхній лривод
Машина — механічний пристрій, що здійснює рух з метою пе-
ретворення енергії, матеріалу або інформації. Залежно від виконува-
них функцій розрізняють такі машини: енергетичні, що перетворюють
довільний вид енергії в механічну або навпаки; робочі, що призначені
для перетворення форми, властивостей, стану і положення матеріалу
або оброблюваного предмета; інформаційні, що призначені для одер-
жання, перетворення, зберігання та відтворення інформації. Робочі
машини ще поділяють на технологічні та транспортні.
У загальному випадку структуру довільної машини можна подати
у вигляді таких складових частин (рис. 35.1): енергоперетворювач
(двигун Д) — передавально-перетворюючий пристрій (механічна пе-
редача МІГ) — споживач механічної енергії (робочий орган машини
РОМ). У деяких машинах зустрічається також керуюча (КС) або
регулююча система, що забезпечує оптимізацію робочого процесу.
В енергетичних машинах енергоперетворювачами можуть бути
парові або газові турбіни, електродвигуни, а споживачами механічної
енергії — електрогенератори, компресори. У технологічних машинах
енергоперетворювачі — це різні двигуни, а споживачі механічної
енергії — це робочі органи машини (шпінделі металообробних верста-
тів, валки прокатних станів, ротори бурових машин, механізми дро-
барок, барабани млинів тощо). У транспортних машинах енергопере-
творювачами можуть бути також різного виду двигуни, а споживачами
механічної енергії — приводні ходові колеса транспортних засобів,
стрічкові, ланцюгові та гвинтові конвейєри, різні помпи.
До складу передавально-перетворюючих пристроїв входять вали,
муфти для з’єднання валів і різного виду механічні передачі (фрик-
ційні, пасові, ланцюгові, зубчасті, черв’ячні, передачі гвинт — гай-
ка). Деякі з механічних передач можуть бути виконаними у вигляді
окремих агрегатів — редукторів, коробок швидкостей, варіаторів.
Такі складові частини, як енергоперетворювач та передавально-
перетворюючий пристрій, утворюють привод машини. Для переваж-
ної більшості машин привод складається з двигуна, системи механіч-
них передач та муфт, що з’єднують окремі вали. Отже, приводом
471
Рис. 35.1. Структурна схема ма-
шини
називається пристрій для приведення
у дію робочого органу машини.
У машинах найрозповсюдженіші
такі механічні приводи, які прості за
конструкцією та в експлуатації, від-
носно дешеві, достатньо надійні
і мають високий ККД.
У сучасній техніці значна кіль-
кість машин має обертовий рух при-
водного вала робочого органу. До таких машин належать транспортні
машини, різні верстати, пристрої та засоби механізації різних робіт.
Приводи більшої частини машин допускають використання стандарт-
них двигунів, муфт та механічних передач, що дає змогу віднести ці
приводи до категорії загального призначення.
Механічні приводи загального призначення класифікують за дея-
кими ознаками, основні з яких такі: число двигунів та тип їх; тип ви-
користаної механічної передачі.
За числом двигунів розрізняють приводи: груповий, одно- і багато-
двигунний.
Г руповим називають п р и в о д, у якому від одного двигуна
за допомогою механічних передач приводять у дію кілька окремих
робочих органів машини. Привод такого типу застосовується у деяких
металообробних верстатах, у різних будівельних і навантажувально-
розвантажувальних машинах. Груповий привод має великі габаритні
розміри, складний за конструкцією і має низький ККД.
Однодвигунний привод є найпоширенішим, особливо
при використанні в приводі машини з одним робочим органом одного
двигуна (у більшості випадків електродвигуна).
Багатодвигунний привод поширений у складних
машинах, що мають кілька робочих органів або один робочий орган,
який споживає велику кількість енергії (наприклад, конвейєр значної
довжини). Кожний робочий орган такої машини приводиться у дію
від індивідуального двигуна. Такі приводи застосовуються у підйом-
но-транспортних машинах, складних металообробних верстатах тощо.
За типом двигунів розрізняють такі приводи: з електродвигунами,
з двигунами внутрішнього згоряння, з паровими та газовими двигуна-
ми, гідро- та пневмодвигунами.
До складу механічних приводів можуть входити такі типи передач:
зубчасті (циліндричні та конічні), черв’ячні, передачі з гнучкою про-
міжною ланкою (пасові, ланцюгові), передача гвинт — гайка. Переда-
чі у приводі можуть бути однотипні або комбіновані.
Елементи механічного привода (двигуни, муфти та механічні пере-
дачі) доцільно розглядати в сукупності як окрему систему машини.
Це пояснюється тим, що особливості складових частин привода повин-
ні бути взаємозв’язані і їх потрібно узгоджувати при проектуванні
472
машин. Наприклад, частоти обертання вала двигуна та його пускова
характеристика повинні бути узгоджені з характеристиками та влас-
тивостями муфт і механічних передач привода, або застосування у при-
воді фрикційних чи пасових передач не потребує запобіжних муфт.
35.2. Структурні схеми приводів машин
При подачі механічної енергії до робочого органу машини слід
узгодити параметри обертового руху двигуна з найоптимальнішими
параметрами обертового руху приводного вала робочого органу. Ці
параметри можуть бути постійними або можуть мінятись із зміною
робочого режиму машини.
Привод машини забезпечує передавання до робочого органу тіль-
ки обертового руху, а його перетворення в інші види (зворотно-посту-
пальний, періодичний обертовий, коливний або інший складний рух)
здійснюється механізмами робочого органу машини згідно з її функці-
ями та призначенням.
Структурні схеми приводів машин бувають дуже різноманітними.
Наявність того чи іншого елемента у структурі привода залежить від
ступеня узгодженості параметрів двигуна і потрібних параметрів руху
(кутової швидкості, обертового моменту, напряму обертання) привод-
ного вала робочого органу машини. Практично до складу всіх приво-
дів входять двигун, механічні передачі та муфти для з’єднання валів.
Механічні передачі можуть бути використані у відкритому вигляді
(пасові та ланцюгові передачі, рідко зубчасті передачі) або виготовле-
ні у вигляді окремих агрегатів (зубчасті та черв’ячні редуктори, ко-
робки швидкостей, варіатори).
Деякі прості схеми приводів машин показані на рис. 35.2.
Рис, 35.2. Найпростіші та ускладнені схеми приводів машини
473
У найпростішому варіанті привода (рис. 35.2, а) вал двигуна 1
з’єднується з приводним валом робочого органу машини 3 за допомо-
гою муфти 2. Такі приводи застосовують, якщо кутові швидкості вала
двигуна збігаються з найдоцільнішою кутовою швидкістю приводного,
вала робочого органу машини.
Більш складні схеми приводів показані на рис. 35.2, б, в, де дви-
гун 1 з’єднується з робочим органом машини 3 через механічну пере-
дачу 4, яка може бути виконана у вигляді окремого агрегату або бути
відкритою. Тоді у першому варіанті для з’єднання валів використо-
вують муфти 2, а у другому варіанті муфти не потрібні.
Структурні схеми приводів машин із комбінованими механічними
передачами зображені на рис. 35.2, г, д. У двох наведених схемах при-
вода присутні механічні передачі, які виконані у вигляді окремих аг-
регатів (наприклад, редукторів), і відкриті передачі (пасова на рис.
35.2, г і ланцюгова на рис. 35.2, д). Після двигуна 1 доцільно розмісти-
ти пасову передачу 3 як таку, що має меншу тягову здатність (порівня-
но з ланцюговою) і допускає більш високі швидкості. Ланцюгові пере-
дачі краще працюють при малих швидкостях і передають більші зу-
силля, тому їх вигідно розміщувати між редуктором 2 і робочим орга-
ном машини 4 (рис. 35.2, б), хоча можуть бути варіанти розміщення
ланцюгової передачі між двигуном і редуктором. Якщо характеризу-
вати дві схеми (за рис. 35.2, а, д) привода машини з точки зору розмі-
щення муфт 5, то можна відмітити перевагу варіанта за схемою рис.
35.2, б, оскільки у цьому варіанті муфта навантажується значно мен-
ш їм обертовим моментом.
Розглянуті вище деякі структурні схеми приводів машин є най-
типовішими і не охоплюють усіх можливих варіантів, що зустрічають-
ся на практиці. Однак принципи аналізу довільних схем приводів та
їхня техніко-економічна оцінка подібні при проектуванні та конструю-
ванні машин різного призначення.
35.3. Порівняльна оцінка механічних передач
приводів машин
Вибір механічних передач у приводі машини є однією з важливих
інженерних задач у розробці проекту машини. Як зазначалося вище,
у деяких приводах можна обійтись без механічних передач, а у інших
застосовують дві і більше механічних передач, до того ж різного типу.
Кінематичним параметром, який визначає потребу застосування меха-
нічних передач у приводі, є його передаточне число. Загальне переда-
точне число привода визначається відношенням кутової швидкості
вала двигуна до кутової швидкості приводного вала робочого органу
машини (рис. 35.3): изаг = (ОдВ/(оПр.
Оскільки кутова швидкість вала більшості двигунів є високою і
постійною або змінюється у незначних межах, а найвигідніша кутова
474
Рис. 35.3. До визначення
розрахункових параметрів
привода
швидкість приводного вала робочого орга-
ну машини є низькою, то передаточне чис-
ло привода изаг > 1. Якщо и = 1, а змі-
ну напряму обертання приводного вала
робочого органу машини можна здійснити
за допомогою реверса двигуна, то привод-
ний вал робочого органу машини можна
з’єднувати муфтою безпосередньо з валом
двигуна. В усіх інших випадках складовою частиною привода є меха-
нічні передачі.
Можливість використання в приводі машини тієї чи іншої механіч-
ної передачі залежить від ряду факторів: особливостей окремих пере-
дач; загального передаточного числа имг привода; передаваної потуж-
ності та швидкості обертання валів; віддалі між валами і їх взаємного
розташування; наявності необхідних умов для технічного обслугову-
вання, ресурсу привода та ін. Для загальної орієнтації в доцільності
використання в приводі машини механічних передач основних типів
можна порівняти усереднині показники (табл. 35.1) деяких характе-
ристик одноступінчастих передач, що найчастіше застосовуються у
серійних приводах енергетичних, технологічних та транспортних ма-
шин. Показники відносних габаритних розмірів, маси та вартості пе-
редач наведені у табл. 35.1 у порівнянні з зубчастою циліндричною пе-
редачею.
Найдоцільніше у приводах машин застосовувати механічні переда-
чі, які виконані у вигляді окремих механізмів — зубчастих і черв’яч-
них редукторів, коробок швидкостей, варіаторів. Редуктори мають
високу несучу здатність, малі габаритні розміри, можуть забезпечити
достатньо високе передаточне число, прості в догляді при експлуата-
ції. Коробки швидкостей застосовують в разі потреби керування ро-
ботою механічного привода ступінчастою зміною передаточного числа
Таблиця 35.1. Деякі характеристики механічних передач різних типів
Тип передачі Найбіль- ша по- тужність, кВт Найбіль- ша коло- ва швид- кість, м/с ККД Пере- даточ- не число Відносний габарит- ний роз- мір Від- носна маса Від- носив вар- тість
Зубчаста цилінд- рична 3000 50 0,98 <8 1 1 1
Зубчаста конічна 500 ЗО 0,97 <5 1,8 1,2 2
Черв’ячна 100 25 0,6—0,8 <80 1,5 1,1 0,8 1.6
Ланцюгова 150 10 0,96 <6 1,6 0,4
Клинопасова 100 25 0,93 ^^7 5 0,5 о,з
Плоскопасова 100 25 0,95 <5 10 0,4 0,2
Фрикційна 20 25 0,94 <6 3 1,5 0,8
475
під час різних режимів роботи машини або зміни напряму обертання
приводного вала робочого органу машини при постійному напрямі
обертання вала двигуна. Варіатори забезпечують можливість плавної
безступінчастої зміни передаточного числа привода і можливість його
реверса. Вони дозволяють вибирати найвигідніші режими роботи ма-
шини, однак, варіатори складні за конструкцією і мають низьку несу-
чу здатність.
Застосування в приводах окремих відкритих механічних передач
(пасових, ланцюгових) у більшості випадків спричинене компоновкою
машини, а також деякими їхніми особливостями і перевагами порівня-
но з іншими передачами.
Розподіл загального передаточного числа привода між передачами
різних типів, а також між ступенями однотипних передач здійснюють
на основі техніко-економічних розрахунків різних варіантів. Крім
цього, при розподілі загального передаточного числа привода слід
брати до уваги габаритні співвідношення передач окремих типів, щоб
дістати відповідні пропорційні форми привода і всієї машини.
Контрольні запитання
1. Що таке машина і яким чином класифікують машини?
2. З яких складових частин складається машина та які функції її складових
частин^
3. Які складові частини утворюють привод машини? Які основні функції вико-
нує привод машини?
4. Наведіть деякі структурні схеми приводів машин. З якою метою використо-
вують механічні передачі у приводах машин?
5. Які типи механічних передач використовують у приводах машин?
6. Як визначається загальне передаточне число привода машини? Від чого за-
лежить потреба використання однієї або кількох механічних передач у приводі
машини?
ГЛАВА 36. ДВИГУНИ У ПРИВОДАХ МАШИН
36.1. Загальна характеристика двигунів
Для приводів машин можуть застосовуватись двигуни таких видіві
електродвигуни, двигуни внутрішнього згоряння, гідро- або пневмо-
двигуни. Тип двигуна вибирається з урахуванням таких факторів:
призначення машини, для якої проектується привод; наявності того
чи іншого джерела енергії; потрібної потужності; обмеження за ма-
сою, габаритними розмірами та умовами роботи; режиму роботи
привода та відповідності його механічної характеристики умовам
роботи.
Гідро- та пневмодвигуни застосовують переважно у
багатодвигунних приводах машин. Енергоносієм для таких двигунів
є стиснена рідина або повітря. Для використання гідро- та пневмодви-
476
Рис. 36.1. Механічна харак-
теристика асинхронного елек-
гунів у приводах окремих агрегатів ма-
шини треба мати відповідні централізовані
системи подачі енергоносія.
Двигуни внутрішнього
згоряння мають найбільше застосу-
вання у транспортних засобах, а також
у приводах енергетичних машин — електро-
генераторів та компресорів. Вони неза-
мінні для приводів машин, що працюють
у віддалених районах, де відсутні лінії
електропередачі. Одним із головних недо-
ліків двигунів внутрішнього згоряння є
забруднення навколишнього середовища продуктами відпрацьованих
вихлопних газів.
Електродвигуни найбільш широко використовують у
приводах енергетичних, технологічних і транспортних машин. Вони
стандартизовані і випускаються промисловістю різних типорозмірів
у діапазоні потужностей 10 Вт — 400 кВт і більше. Електродвигуни
можуть застосовуватись у різних кліматичних умовах, на відкритому
повітрі, в запилених приміщеннях та у вологих і хімічно активних се-
редовищах. За допомогою електродвигунів досить просто здійснювати
зміну напряму обертання валів робочих органів машин.
Електродвигуни поділяють на двигуни постійного і змінного стру-
му. Двигуни постійного струму забезпечують плавне регулювання
швидкості у широких межах, мають відповідні механічні характерис-
тики, дають змогу дістати достатню точність руху. Ці двигуни засто-
совують для привода електричних транспортних засобів, деяких під-
йомних кранів та технологічних машин.
Двигуни змінного струму бувають однофазні асинхронні (мають
невелику потужність і використовуються переважно у приводах по-
бутових машин та приладів), трифазні синхронні (їхня частота обер-
тання не залежить від навантаження, а застосовують у приводах ве-
ликої потужності) і трифазні асинхронні. Останні найрозповсюджені-
ші у різних галузях господарства; їхні переваги порівняно з двигуна-
ми інших типів: простота конструкції, менша вартість, більш висока
експлуатаційна надійність.
На рис. 36.1 зображена механічна характеристика трифазного
асинхронного двигуна, яка виражає залежність частоти обертання п
ротора від обертового моменту Т. В момент пуску (п = 0) двигун роз-
виває обертовий момент Т„. Із збільшенням частоти обертання оберто-
вий момент досягає Ттах, а пізніше зменшується і дорівнює нулю при
досягненні синхронної частоти обертання ротора п = пс. Частота обер-
тання, при якій обертовий момент має Ттах, називається критичною
частотою обертання пкр. Незначне збільшення зовнішнього наванта-
ження на двигун Т > Ттах спричинює його зупинку, а при відсутності
477
відповідних засобів захисту — до перегрівання і руйнування. Стійка
робота асинхронного двигуна досягається на ділянці механічної ха-
рактеристики, де частота обертання п > лкр. При номінальному на-
вантаженні Тном частота обертання лном дещо менша від синхронної
частоти пс. Зміна ТНОм У деяких межах спричинює незначні зміни час-
тоти обертання ротора асинхронного двигуна. Така механічна харак-
теристика називається жорсткою.
До основних типів сучасних електродвигунів змінного струму на-
лежать такі:
1. Трифазні асинхронні двигуни єдиної серії 4А з короткозамкну-
тим ротором потужністю 0,06—400 кВт і висотою осі обертання ротора
50—355 мм. Такі двигуни призначені для приводів машин, до яких
не ставляться особливі вимоги щодо пускових характеристик. Одно-
швидкісні двигуни єдиної серії 4А мають синхронні частоти обертання:
3000, 1500, 1000 і 750 хв-1. У каталогах даних двигунів подаються такі
параметри: тип двигуна, номінальна потужність, Рн, номінальна час-
тота обертання лном» відношення Тп/Тном і Гтах/Гном। габаритні та
установчі розміри, маса та інші дані.
Асинхронні двигуни єдиної серії 4А випускають в основному ви-
конанні (серія 4А), із підвищеним ковзанням (серія 4АС) та із підви-
щеним пусковим моментом (серія 4АР).
2. Трифазні асинхронні двигуни кранові та металургійні з короткс-
замкнутим ротором серій МТКР і МТКН та з фазним ротором серій
МТР і МТН. Вони призначені для приводів кранових механізмів за-
гальнопромислового призначення, а також інших механізмів, що пра-
цюють із короткочасним і повторно-короткочасним режимами роботи
та значними кратностями перевантажень. Кранові і металургійні елек-
тродвигуни сприймають тривалі перевантаження, мають великі пус-
кові моменти і малий період розгону. Для таких двигунів відношення
Тп/ТНом становить близько 2,3—3,2. Ці двигуни мають синхронні час-
тоти обертання 1000, 750 і 600 хв~1 при роботі від електромережі з
частотою 50 Гц і відповідно 1200, 900 і 720 хв~1 — із частотою 60 Гц.
У каталогах двигунів наводяться такі параметри: тип двигуна, номі-
нальна потужність при тривалості вмикання (ТВ) 25, 40, 60 і 100 %,
частота обертання, обертові моменти Гтах і Тп, габаритні і установочні
розміри, маса.
36.2. Визначення потужності та типу
електродвигуна привода
Розглянемо деякі питання підбору асинхронних електродвигунів
як таких, що мають найширше застосування у приводах усіх класів
машин.
Правильний вибір потужності електродвигуна має велике значен-
ня: двигун недостатньої потужності перегрівається і передчасно вихо-
478
дить із ладу (перевантаження двигуна з бавовняною і шовковою ізо-
ляцією обмоток на 25 % зменшує строк служби з 20 р. до кількох мі-
сяців, а перевантаження на 50 % роблять двигун непридатним для ви-
користання протягом кількох годин його роботи); застосування дви-
гуна завищеної потужності економічно недоцільне і, крім цього, спри-
чинює зменшення його енергетичних показників (ККД і коефіцієнта
потужності соз ер), може призвести до підвищеного спрацювання і на-
віть до руйнування елементів машини.
Особливості роботи електропривода різних машин, тобто змінне
навантаження, періодичне вмикання або вимикання, тривалість перерв
у роботі, ставлять специфічні вимоги до вибору потужності електро-
двигуна. Двигун повинен задовольняти таким основним вимогам:
а) пусковий момент Тп електродвигуна повинен бути достатнім для
забезпечення розгону машини з певним прискоренням. Одночасно
потужність електродвигуна не повинна бути надзвичайно великою,
щоб високі прискорення не вплинули негативно на роботу окремих
механізмів машини;
б) при роботі машини в режимі періодичних вмикань чи вимикань
протягом необмеженого часу двигун не повинен перегріватись.
Залежно від характеру виконуваної машиною функції розрізняють
три режими роботи електродвигуна і відповідну їм перевірку двигуна
на перевантаження.
Довгочасний режим роботи характеризується три-
валою роботою, достатньою для того, щоб температура нагрівання дви-
гуна досягала усталеного значення. Якщо в цьому випадку маємо
незмінні обертовий момент Тпр на приводному валу робочого органу ма-
шини та кутову швидкість сопр цього вала (див. рис. 35.3), то розрахун-
кова потужність електродвигуна
^дв.р = Т'пр^пр/ї] (36.1)
де Лзаг — ККД передавального пристрою (муфти і механічних передач)
між двигуном і робочим органом машини. При змінному обертовому
моменті Т на приводному валу робочого органу машини у розрахунок
беруть максимальний довгочасно діючий обертовий момент (див. 2.2).
Маючи Рдв.р, за каталогом можна вибрати електродвигун, номінальна
потужність якого Рдв Рдв.р- У цьому випадку нагрівання не буде
спричинювати передчасний вихід електродвигуна з ладу.
Короткочасний режим роботи характеризується
загальною тривалістю роботи двигуна під навантаженням 10 хв < іт <,
< 60 хв. За такий час двигун не нагрівається до усталеної температу-
ри. Тривалість кожної перерви між окремими періодами навантажен-
ня достатня для вирівнювання температури двигуна з температурою
навколишнього середовища.
При короткочасному режимі роботи електродвигуна його розра-
хункова і номінальна потужності визначаються так само, як і при
довгочасному режимі роботи.
479
Повторно-короткочасний режим роботи від-
різняється частими пусками і зупинками електродвигуна. Тривалість
періоду роботи двигуна під навантаженням іт і періоду перерви
становить іт + і0 10 хв. Тривалість вмикання ТВ, %, електродви-
гуна
ТВ = 100/г/(*г 4- Л>). (36.2)
Тривалість вмикання розраховують за відомими періодами іт і
Щоб вибрати електродвигун, треба взяти найближче до, розрахун-
кового значення ТВ стандартне значення тривалості вмикання ТВ0
із ряду значень, зазначених у каталозі двигунів. Тоді розрахункова
потужність електродвигуна при постійній частоті обертання його ро-
тора ______
^дв р — ТВітВс • Тпр(оПр/т|заг* (36.3)
Тут Тпр, сопр і г|заг — ті самі величини, що й у формулі (36.1). По-
трібний електродвигун і його номінальну потужність для ТВС виби-
рають за умовою Рдв РДв.р.
Якщо навантаження привода в окремих циклах при повторно-ко-
роткочасному режимі роботи змінне, то визначення потрібної потуж-
ності електродвигуна ведуть за середньоквадратичним обертовим мо-
ментом:
Т*пре = К. ^Т^літі!^іті» (36.4)
де К = 1,1... 1,3 — коефіцієнт перевантажень при пусках, а Тпр/ —
обертовий момент на приводному валу робочого органу машини, що
ДІЄ протягом періоду ІТі г-го циклу.
Перевірка електродвигуна на переванта-
ження має на меті запобігання його зупинці під час різкого збіль-
шення зовнішнього навантаження. Перевірка двигуна виконується
для можливих несприятливих умов експлуатації, коли напруга у
електромережі падає на 10 % (це відповідає зменшенню обертового
моменту електродвигуна на 19 %), а навантаження досягає максималь-
ного значення.
Перевантаження електродвигуна і його зупинка не відбудуться,
якщо виконується умова
7дВ тах ^>7^ тах» (36.5)
де максимальний обертовий момент, який може розвинути двигун при
несприятливих умовах експлуатації,
Тдв.тах— 0,81 (36.6)
а максимальний обертовий момент на валу двигуна, що створюється
робочим навантаженням,
Тр тах
— Т'пр тах
/(^загТ]заг)«
(36.7)
480
У формулах (36.6) і (36.7) маємо Тном = РдВ^дв — обертовий мо-
мент на валу двигуна при номінальній його кутовій швидкості а>дв;
Кт = Ттах/Тном — кратність максимального обертового моменту за
каталогом для вибраного електродвигуна; Тортах — максимальний
обертовий момент на приводному валу робочого органу машини; язаг
і Лзаг — відповідно передаточне число та ККД передавального при-
строю між двигуном і робочим органом машини.
Якщо умова (36.5) не виконується, то потрібну розрахункову по-
тужність, за якою вибирають електродвигуни, визначають за фор-
мулою
Рдв.р = Т'пр тах^пр/(0,81/Сг^заг). (36.8)
Тут сопр — кутова швидкість приводного вала робочого органу маши-
ни. Електродвигун, вибраний за умовою Рдв має запас за
температурою нагрівання.
При виборі частоти обертання вала електродвигуна беруть до уваги
реальний діапазон робочих частот обертання стандартних двигунів
різних типів. У більшості випадків частоти обертання приводних ва-
лів робочих органів машин менші за мінімальні частоти обертання дви-
гунів. Тому при виборі частоти обертання двигуна слід розв’язувати
комплексну задачу, пов’язану з вибором двигуна і передавального ме-
ханізму (механічних передач) між двигунм та робочим органом ма-
шини. При цьому критеріями оцінки оптималЬності вибраної частоти
обертання двигуна можут бути габаритні розміри, маса, ККД, елект-
ричні втрати і надійність усієї електромеханічної системи.
У всіх електродвигунах однієї і тієї ж потужності із зменшенням
номінальної частоти обертання значно зростають їхні габаритні роз-
міри, маса і вартість. Тому більш доцільно застосовувати двигуни з
високими частотами обертання. Однак із збільшенням частоти обер-
тання двигуна росте потрібне передаточне число передавального при-
строю (механічних передач) і відповідно його вартість. Практикою
виявлено, що у загальному випадку деяке підвищення вартості меха-
нічних передач скуповується використанням високошвидкісних дви-
гунів.
Вибір типу електродвигуна пов’язаний із характером і режимом
роботи привода. Якщо пуск у дію машини здійснюється без зовніш-
нього навантаження, режими роботи машини короткочасні або довго-
часні, а вимоги до енергетичних показників привода невисокі, то до-
цільно вибирати найдешевші, прості в обслуговуванні і надійні у
роботі асинхронні двигуни з короткозамкнутим ротором основного ви-
конання (серія 4А). Такі двигуни застосовують у приводах металорі-
зальних верстатів, конвейєрів, механізмів пересування кранів, у при-
водах більшості енергетичних машин. Електродвигуни з підвищеним
пусковим моментом (серія 4АР) призначені для приводів машин, що
відрізняються порівняно високими статичними і інерційними наванта-
481
р'
( 4
ис
Рис. 36.2. Схема привода
стрічкового конвейєра
женцями в моменти пуску і порівняно ста-
більним навантаженням при номінальній час-
тоті обертання.
Електродвигуни з підвищеним ковзанням
(серія 4АС) використовують у приводах ма-
шин, що характеризуються великими привод-
ними масами, ударним і пульсуючим харак-
тером навантаження, високою частотою пус-
ків і реверсів, наприклад для молотів, пре-
сів, ножиць для різання металу, вантажних
лебідок тощо.
Трифазні асинхронні електродвигуни з фазним ротором мають
дещо більшу масу, габаритні розміри і вартість, проте втрати енергії
в обмотках при перехідних процесах менші, ніж у двигунів із коротко-
замкнутим ротором. Тому їх раціонально використовувати при висо-
конапружених режимах роботи приводів машин. Такі двигуни вмика-
ються в електромережу і керуються реостатами (контролерами), ввім-
кненими в електричне коло ротора. Це дає змогу здійснювати плавний
розгін машини під час пуску з регулюванням швидкості. Електродви-
гуни з фазним ротором використовують для привода окремих механіз-
мів більшості вантажопідйомних кранів, металургійного устаткування,
роторних екскаваторів та ін.
36.3. Приклад підбору електродвигуна
привода машини
Задача. Підібрати електродвигун для привода стрічкового конвейєра (рис. 36.2).
До складу привода входять електродвигун 7, черв’ячний редуктор 2, муфти 3 для
з’єднання валів. Розрахунковий обертовий момент на приводному валу барабана 4
конвейєра 5 становить Тпр = 420 Н • м, а кутова швидкість приводного вала о)пр =
= 2,4 рад/с. Конвейєр працює у короткочасному режимі, а можливі перевантаження
Характеризуються КОефІЦІЄНТОМ Кп == Лір тах^пр 2.
Розв’язання. Виходячи з розрахункового обертового моменту на привод-
ному валу барабана конвейєра і враховуючи орієнтовно ККД черв’ячного редуктора
Чр = 0.7, визначимо потрібну розрахункову потужність електродвигуна за форму-
лою (36.1):
Рдв р = Л^пр/Пр = 420.2,4/0,7 = 1440 Вт = 1,44 кВт.
За заданими умовами роботи для привода конвейєра можна вибрати асинхрон-
ний двигун єдиної серії основного виконання (серія 4А). Беручи до уваги, що для
черв’ячного редуктора рекомендується передаточне число «р 70, визначимо мак-
симально можливу кутову швидкість вала двигуна і його частоту обертання:
%в < <°приР = 2»4 • 70 = 168 рад/с;
п' < ЗО©' /л = ЗО • 168/3,14 « 1604 хв*1.
Із довідника [20] вибираємо електродвигун 4А80В4УЗ з такими параметрами:
номінальна потужність — 1,5 кВт; номінальна частота обертання лдв
482
= 1415 хв"-1; кратність максимального обертового моменту Кт в 7'тах/Гном в ^,2.
Для такого двигуна потрібне передаточне число редуктора
«р = со^/сонр = ллдв/(30о)пр) = 3,14 . 1415/(30.2,4) = 61,75.
Для перевірки даного двигуну* на перевантаження визначимо такі величини:
номінальний обертовий момент на валу двигуна
гном = рдв/“дв = 30Рдв/(ллдв) - ЗО . 1,5 . 1О’/(3,14 . 1415) = 10,12 Н . м;
максимальний обертовий момент, який може розвинути двигун при несприятливих
умовах експлуатації [див. формулу (36.6)],
Т’дв тах ~ 0,81 ТномЛГг = 0,81 . 10,12.2,2 - 18,03 Н . м;
максимальний обертовий момент на валу двигуна, що створюється робочим наванта
женням [див. формулу (36.7)],
Т9 тах = Лф тах/(ирт)р) = ^Кп/СарИр) - 420 • 2/(61,75 • 0,7) = 19,43 Н м.
Оскільки Тдв тах < Тр тах, за несприятливих умов експлуатації вибраний дви-
гун може зупинитись. Тому розрахункову потужність слід визначати за форму-
лою (36.8):
Рдв.р = Лф тах“пр/(0-8^тЧр) = 420 • 2 • 2,4/(0,81 . 2,2.0,7) = 1616 Вт =
= 1,616 кВт.
Виходячи з цього результату, вибираємо електродвигун 4А90Е4УЗ, який має
номінальну потужність Рдв — 2,2 кВт і номінальну частоту обертання вала Лд, в
= 1425 хв”1.
Контрольні запитання
1. Які основні види двигунів застосовуються у приводах машин?
2. Чому електродвигуни використовують найчастіше? Назвіть основні типи
електродвигунів.
3. Які фактори слід враховувати при виборі електродвигуна для привода
машини?
4. Назвіть та охарактеризуйте основні режими роботи електродвигунів у різ-
них приводах машин.
5. За якими параметрами підбирають електродвигуни для приводів машин?
6. Як визначається розрахункова потужність електродвигуна для різних режи-
мів його роботи?
7. У чому полягає суть перевірки електродвигуна на перевантаження?
8. За яких умов використовують різні типи асинхронних електродвигунів?
ГЛАВА 37. МУФТИ ПРИВОДІВ
37.1. Загальні відомості та класифікація муфт
Муфтами називають пристрої, що з’єднують вали і передають
обертовий момент. Інколи муфтами з’єднують вал із розміщеними на
ньому деталями — зубчастими колесами, шківами, зірочками.
483
Рис. 37.1. Можливі похиб-
ки у взаємному розміщен-
ні валів
Застосування муфт пов’язане з тим, що
більшість машин, у тому числі і їхній при-
вод, компонують із окремих складальних
одиниць, що мають вхідні та вихідні вали.
Такими складальними одиницями є, наприк-
лад, двигун, редуктор і робочий орган ма-
шини (див. рис. 35.2, б). Безпосередній кіне-
матичний і силовий зв’язок між двигуном
і редуктором, редуктором і робочим органом
здійснюється за допомогою муфт. Потреба
у муфтах виникає і в тих випадках, коли дов-
гі вали за умовами технології виготовлення
і складання або транспортування слід виго-
товляти з кількох складових частин.
З’єднання валів і передавання обертового
моменту є спільним, але не єдиним призна-
ченням муфт. Муфти можуть виконувати
і інші функції, такі як компенсування похи-
бок взаємного розміщення валів, захист еле-
ментів машини від перевантажень, зменшення
динамічних навантажень, з’єднання і роз’єднання робочого органу
машини з двигуном без його вимикання.
Характерні похибки взаємного розміщення валів, які потрібно
з’єднувати муфтами, показані на рис. 37.1. Розрізняють ссьове змі-
щення До валів, радіальне зміщення ДЛ і кутове зміщення Да. На прак-
тиці переважно зустрічається комбінація вказаних похибок, яку на-
далі будемо називати неспіввісністю валів.
У машинобудуванні використовують муфти дуже різноманітних
конструкцій [1, 19]. Як самостійні складальні одиниці найбільш часто
вживані муфти стандартизовані.
Основною характеристикою кожної муфти є обертовий момент Тр,
на передавання якого вона розрахована. Іншими важливими показни-
ками конструкцій муфт є гранична частота обертання, габаритні роз-
міри, маса і момент інерції муфти щодо осі обертання.
Стандартизовані муфгги не розраховують, а підбирають за обертовим
моментом у відповідних довідниках [1, 19]. Лише у деяких випадках
в разі потреби виконують перевірні розрахунки.
Муфти обчислюють за розрахунковим обертовим моментом Тр =
= КпТ, де Т — номінальний обертовий момент; 7<п — коефіцієнт, що
враховує короткочасні перевантаження або режим роботи муфти. Для
машин із невеликими приводними масами і спокійному навантаженні
Кп = 1,0... 1,5, для машин із середніми масами та змінним наванта-
женням (поршневі компресори, стругальні верстати) Кп = 1,5...2,0.
У машинах із великими приводними масами та ударним навантажен-
ням (молоти, прокатні стани, роторні дробарки) беруть = 2,5...3,0.
484
Рис. 37.2. Класифікація муфт
Усі муфти приводів машин за принципом роботи поділяють на три
основні типи: механічні, електричні та гідравлічні. Нижче розгляда-
ють тільки найпоширеніші та типові конструкції механічних муфт.
Класифікація механічних муфт наведена на рис. 37.2 у вигляді
структурної схеми. Відповідно до цієї схеми усі муфти поділяють на
чотири класи: некеровані, керовані, самокеровані та комбіновані.
Кожний клас муфт складається з груп, а кожна група має відповідні
підгрупи, види.
37.2. Некеровані муфти
До класу некерованих муфт належать усі нерозчіпні (постійно
діючі) муфти, тобто такі, в яких частини муфти (ведуча і ведена пів-
муфти) з’єднані між собою постійно. Цей клас муфт є найпошире-
нішим.
Глухі муфти призначені для жорсткого з’єднання співвісних валів.
Вони бувають втулкові і фланцеві.
Втулкова муфта — найпростіша з глухих муфт, суцільна
і насаджується на кінці валів (рис. 37.3, а, б), які підлягають з’єд-
нанню. З’єднання суцільної втулки з валами може здійснюватись за
допомогою штифтів, шпонок або за допомогою шліців. При монтажі
або демонтажі муфти виникає потреба у відносному осьовому змі-
щенні валів. Тому для втулкових муфт не використовують посадки з
гарантованим натягом.
Втулкові муфти застосовують здебільшого для діаметрів валів
сі (60...70) мм. Матеріал втулок — сталь 40, 45, а при великих роз-
мірах — чавун СЧ 18, СЧ 20. Штифти виготовляють із сталей 45, 50.
Міцність муфти визначається міцністю її з’єднання з валами, а
також міцністю самої втулки.
485
Рис. 37.3. Втулкові (а, б)
та фланцева (а) муфти
Розрахунок втулки виконують за умовою міцності на кручення:
т = ГР/1ГР = 16Гр/{лй?[1 -&/<№} < [т], (37.1)
а штифтів — за умовою міцності на зріз
т3р — — 47,р/(лс?с?ш) [т]3р.
(37.2)
Розрахункові розміри в залежностях (37.1) і (37.2) відповідають
позначенням на рис. 37.3, а. Допустимі напруження при розрахунках
беруть: [т] = (ЗО...40) МПа; [т]зр = (40...45) МПа.
Розрахунки шпонкового або шліцевого (зубчастого) з’єднання ви-
конують згідно з 12.2 і 13.2.
Фланцева муфта (рис. 37.3, в) складається з двох вико-
наних у вигляді фланців півмуфт, які насаджені на кінці валів і з’єд-
нані між собою болтами. Болти муфти ставлять із зазором (варіант /)
або без зазора (варіант II). У першому випадку момент Тр передається
за рахунок моменту сил тертя, що виникає у площині стику півмуфт
від затяжки болтів, а у другому випадку — безпосередньо болтами,
які знаходяться під дією деформацій зрізу.
Фланцеві муфти стандартизовані (ГОСТ 20761—80) для валів діа-
метром 12—220 мм і обертових моментів 8—45 000 Н • м.
486
Півмуфти виготовляють із сталі 35, сталевого литва 35Л або а
чавунного литва. Болти, що ставляться з зазором, переважно зі сталі
СтЗ, а болти без зазора — зі сталей 40, 45.
Міцність муфти визначається міцністю болтового з’єднання фланців
(див. 11.8 та розв’язання задачі 11.1).
Якщо болти у муфті ^оставлені з зазором, то за розрахунками
маса муфти набагато більша, ніж для варіанта болтів без зазора для
одного і того ж обертового моменту. Однак болти, що ставляться без
зазора, вимагають підвищеної точності виготовлення для них отво-
рів у півмуфтах і самі болти повинні бути також точно виготовле-
ними.
Розглянуті глухі муфти прості за конструкцією, мають малі габа-
ритні розміри, але не компенсують похибок у взаємному розміщенні
валів, що вимагає досить високої точності їх центрування.
Пружні муфти використовують переважно для зменшення динаміч-
них навантажень у приводі і можуть у деякій мірі компенсувати не-
співвісність валів. За конструкцією пружні муфти дуже різноманітні.
За матеріалом пружних елементів їх поділяють на дві групи: муфти
з неметалевими пружними елементами; муфти з металевими пружними
елементами.
Основним матеріалом неметалевих пружних елементів є гума,
оскільки вона має високі еластичність, демпфувальну здатність і діелек-
тричні властивості. Металеві пружні елементи муфт виготовляють у
вигляді гвинтових пружин, плоских пружин, сталевих пружинних
стержнів, пакетів пластин.
Широко застосовують такі муфти: пружні втулково-пальцеві; із
пружним елементом у вигляді зірочки; із тороподібною пружною обо-
лонкою та ін.
Муфта пружна втулково-пальцева (МПВП)скла-
дається з двох півмуфт (рис. 37.4), нерухомо закріплених в одній пів-
муфті пальців, на яких розміщені гумові гофровані втулки, що взаємо-
діють із другою півмуфтою. Пружність муфгги забезпечується за раху-
нок гофрованих втулок, здатних деформуватись при передаванні муф-
тою обертового моменту Тр. МПВП допускає зміщення валів: До =«
= (1...5) мм, Д, = (0,2...0,5) мм і Да = (0,5... 1,0)°. Однак зміщення
Дг і Да збільшують спрацювання пружних елементів і нерівномір-
ність розподілу навантаження між пальцями муфти. Крім цього, такі
зміщення додатково навантажують вали у радіальному напрямі. Пе-
ревагами МПВП є простота конструкції та заміни пружних елемен-
тів, малі габаритні розміри та маса.
МПВП стандартизовані (ГОСТ 21424—75) для валів діаметром
(10...160) мм і обертових моментів 6,3—16 000 Н • м.
Півмуфти виготовляють із сірого чавуну СЧ 20, сталі ЗО або 35Л.
Матеріал пальців — сталь 45, а втулок — гума з границею міцності
при розтягу не менш ніж 8 МПа.
487
Рис. 37.4. Пруж-
на втулково-
пальцева муфта
Роботоздатність МПВП визначається міцністю пальців та гумових
втулок. Перевірний розрахунок гумових втулок виконують за умовою
обмеження тиску на поверхні їхнього контакту із пальцями, а самих
пальців — за умовою міцності на згин.
Навантаження, яке припадає на один палець, визначають за фор-
мулою
= 27р/рг), (37.3)
де й — діаметр кола розміщення пальців (рис. 37.4); г — кількість
пальців у муфті (переважно г — 4...8).
Умова міцності втулок муфти
Р — Рп/(^п^в) ІР1- (37.4)
Умова міцності на згин пальців
о = Лі/Ї^о = 32ГП (0,5/, + с)/(л<ЙХ [о]. (37.5)
У залежностях (37.4) і (37.5): —діаметр пальця; /в —довжина
втулки; с — осьовий зазор між півмуфтами (рис. 37.4).
Допустимий тиск для гуми беруть [р] = (2,0...2,5) МПа, а допусти-
ме напруження згину для пальців [а] = (60...70) МПа.
Якщо МПВП працює в умовах радіального зміщення валів, то ви-
никає додаткове їхнє радіальне навантаження. Усереднене значення
цього навантаження можна визначити за співвідношенням
Л, = (0,5 ... 0,6)Тр/Я.
Робота МПВП супроводжується втратами енергії, які можна оці-
нити ККД у] = 0,96...0,98.
488
Рис. 37.5. Пружна муфта з гумовою зірочкою
Муфта з пружним елементом у вигляді зі-
рочки (рис. 37.5) складається з двох півмуфт, які мають торцеві
кулачки. Кулачки входять у відповідні впадини розміщеного між пів-
муфтами пружного елемента — зірочки, виготовленої з гуми. Кожна
півмуфта може мати два або, як показано на рис. 37.5, три торцеві
кулачки. Взаємодія кулачків двох півмуфт при передаванні обертового
моменту здійснюється через пружний елемент.
Дана муфта досить компактна і надійна в експлуатації, але має
малу податливість. Її роботоздатність різко спадає зі збільшенням
неспіввісності валів. Цей тип муфт також стандартизований
(ГОСТ 14084—76) для діаметрів валів 6—48 мм і обертових моментів
2,5—400 Н • м. Півмуфти переважно виготовляють із СтЗ.
Перевірний розрахунок муфти з пружним елементом у вигляді
зірочки виконують за умовою обмеження тиску на робочих поверхнях
пружного елемента:
Р = 2Тр/(ИгЛЬ) < [р]. (37.6)
Тут г — число кулачків в одній півмуфті, а розміри Р, К і Ь показа-
ні на рис. 37.5. Допустимий тиск беруть [р] = (3...5) МПа (більші зна-
чення [р] при малих кутових швидкостях валів).
Втрати у муфті оцінюються ККД Л = 0,97...0,98, а додаткове ра-
діальне навантаження валів при їх радіальному зміщенні « (0,3...
0,4) Тр/О.
Муфта з пружною оболонкою (рис. 37.6) склада-
ється з двох півмуфт і тороподібної пружної оболонки, яка закріплю-
489
Рис. 37.6. Муфта з пружною оболонкою
ється до півмуфт гвинтами
і додатковими кільцями. Обо-
лонку виготовляють із гуми,
армованої спеціальним кор-
дом. Муфта має високі амор-
тизувальні і демпфувальні
властивості і може компенсу-
вати значну неспіввісність ва-
лів: До = (2...6) мм; Дг =
= (1...4) мм; Да = (2...4)\
Діаметральні габаритні роз-
міри таких муфт більші, ніж
пружних муфт інших типів.
Муфти з пружною оболон-
кою стандартизовані (ГОСТ 20884—82) для валів із діаметром 14—
200 мм і обертових моментів 20—25 000 Н • м, ККД муфти г| « 0,98.
Жорсткі компенсуючі муфти використовують для з’єднання валів
із незначною неспіввісністю, спричиненою неточністю виготовлення та
монтажу, а також пружними деформаціями валів. Вони підвищують
надійність роботи приводів, бо призводять до незначних додаткових
радіальних навантажень на вали.
Для жорстких компенсуючих муфт належать кулачково-дискові,
зубчасті, ланцюгові, шарнірні та ін.
Кулачково-дискова муфта (рис. 37.7, а) складається
з двох півмуфт, що взаємодіють між собою через проміжний диск. На
внутрішніх торцях півмуфт є діаметрально розміщені пази, а проміж-
ний диск має на обох торцях взаємно перпендикулярні виступи, які
входять у пази двох півмуфт. Осьовий зазор б між проміжним диском
і півмуфтами дозволяє компенсувати поздовжні зміщення валів, а
взаємно перпендикулярний напрям виступів на торцях проміжного
диску забезпечує можливість компенсації похибок Дг и Да. Переважно
компенсаційна здатність муфти становить До = (2...4) мм; Д, = (1...
3) мм; Да 0,5°. Розміри муфти вибирають згідно з ГОСТ 20720—81
для діаметрів валів 16—150 мм і обертових моментів 16—16 000 Н • м.
Неспіввісність валів спричинює ковзання виступів проміжного
диску у пазах півмуфт і їхнє спрацювання. Інтенсивність спрацю-
вання зростає зі збільшенням неспіввісності та кутової швидкості
валів.
Деталі кулачково-дискових муфт виготовляють із сталей Ст5 або
45Л. Для важко навантажених муфт застосовують леговані сталі ти-
пу 15Х, 20Х із цементацією робочих поверхонь.
Роботоздатність кулачково-дискової муфти визначається стійкістю
робочих поверхонь проміжного диска і півмуфт проти спрацювання.
Тому на вказаних поверхнях обмежують напруження зминання при
передаванні муфтою обертового моменту.
490
а
Рис. 37.7. Кулачково-дискова
(а, б) та зубчаста (в) муфти
При гранично малих зазорах між спряженими поверхнями дета-
лей муфти розподіл напружень зминання, наприклад на виступах про-
міжного диску, відбувається згідно з епюрами рис. 37.7, б. За умовою
рівноваги проміжного диску наближено можна записати
Тр = 0,5озм • 0,5Р/і • 2И/3 — 0,5азм . 0,5бЛ • 24/3.
Із рис. 37.7, б видно, що азМ/азм = £>/4 Тому запишемо
Тр = Озм^2Л/6 - О3м^/(6Р) = ОзьЛ Р3 — ^)/(6Р).
Виходячи із записаної рівності, можна визначити максимальне
напруження зминання і подати умову стійкості муфти проти спрацю-
вання у вигляді
Озм = 6ТрО/[/і (О3 - й3)] < [а]ш. (37.7)
491
Допустиме напруження зминання для сталевих термооброблених
деталей кулачково-дискової муфти беруть [а]зм = (15...20) МПа.
Спрацювання деталей муфти можна зменшити також змащуванням
поверхонь тертя твердими мастильними матеріалами на основі графіту
або дисульфіду молібдену (рідкі і пластичні мастила не утримуються
на деталях муфти під час її обертання).
Під час передавання муфтою обертового моменту вали наванта-
жуються радіальною силою Ем « (0,3...0,4) ТРЮ.
Зубчаста муфта (рис. 37.7, в) складається з півмуфт 1 і 2,
що мають зубчасті вінці, і роз’ємної обойми 3 з двома внутрішніми
зубчастими вінцями. Дві половинки обойми з’єднуються між собою
за допомогою болтів або гвинтів. Зубці півмуфт і обойми мають еволь-
вентний профіль, аналогічний профілю зубців зубчастих коліс, що
дає змогу нарізати їх нормальним зуборізним інструментом.
Зубчаста муфта компенсує осьове, радіальне і кутове зміщення ва-
лів, бо її зубчасте зачеплення виготовляють із гарантованим боковим
зазором і з можливістю вільного осьового зміщення спряжених зубців,
а самі зубці мають бочкоподібну форму зі сферичною зовнішньою по-
верхнею. Компенсаційна здатність зубчастих муфт: Ао = (3...4) мм;
А, = (1,5...2) мм; Аа = (0,5...1,0)°.
Широке використання у машинобудуванні зубчастих муфт пояс-
нюється їхніми перевагами: невеликою масою і габаритними розміра-
ми; високою несучою здатністю, що визначається великою кількістю
зубців у зачепленні; допускає високі колові швидкості.
Зубчасті муфти стандартизовані (ГОСТ 5006—83) для діаметрів
валів 40—200 мм і обертових моментів 1000—63 000 Н • м.
Деталі зубчастих муфт виготовляють із вуглецевих сталей марок 45,
50 або 40Х. Для підвищення стійкості проти спрацювання зубці пів-
муфт піддають термообробці до твердості не менше, ніж 45 НКС, а
зубці обойми — не менше, ніж 40 НКС. Тихохідні муфти можна виго-
товляти з твердістю зубців Н 350 НВ.
Компенсація неспіввісності валів під час роботи муфти супрово-
джується неперервним ковзанням у контакті зубців і відповідним їх-
нім спрацюванням. Практикою експлуатації зубчастих муфт виявле-
но, що спрацювання зубців є основною причиною виходу їх із ладу.
Для зменшення спрацювання в обойму муфти заливають рідке мастило
високої в’язкості.
Стійкість зубців муфти проти прискореного спрацювання можна
перевірити за умовою
аз» = Тр/(0,9О^) < [а]зм. (37.8)
де Ро — ділильний діаметр зубчастих вінців; Ь — ширина вінця пів-
муфти.
Для стандартизованих зубчастих муфт допустиме напруження
зминання [о]зм = (12... 15) МПа.
492
Рис. 37.8. Ланцю-
гова муфта
Втрати потужності в зубчастій муфті оцінюється ККД Л = 0,98...
0,99, а радіальне навантаження валів при їхньому радіальному змі-
щенні « (0,2...0,3) Тр/Р0.
Ланцюгова муфта (рис. 37.8) складається з двох півмуфт,
що виконані у формі двох зірочок із однаковим числом зубців, охопле-
них одно- або дворядним ланцюгом.
За допомогою ланцюгових муфт можна компенсувати кутові Да =
= (0,5... 1,0)° і радіальні Дг = (0,5... 1) мм зміщення валів. Зазори
у зачепленні ланцюга з півмуфтами забезпечують значний вільний
хід, тому не можна рекомендувати використовувати ланцюгові муфти
у приводах із частими реверсами.
Для ланцюгових муфт характерні простота конструкції, відносно
невеликі габаритні розміри, зручність монтажу і демонтажу без осьо-
вих зміщень валів. Габаритні розміри ланцюгових муфт приблизно
у 1,5 раза менші, ніж пружних втулково-пальцевих муфт.
Ланцюгові муфти стандартизовані (ГОСТ 20742—81) для валів
діаметром 20—130 мм і обертових моментів 63—8000 Н • м.
Неспіввісні вали, що з’єднані ланцюговою муфтою, навантажують-
ся радіальною силою Гм ж 0,67р/£>.
Рис. 37.9. Схеми шарнірних муфт
493
Шарнірні муфти застосовують при значних зміщеннях
з’єднуваних валів. За конструкцією та розмірами вони бувають ду-
же різноманітні. Схеми деяких типів шарнірних муфт зображені на
рис. 37.9.
Найпростішою шарнірною муфтою є одинарна муфта (рис. 37.9, а),
яка складається з двох півмуфт у вигляді вилок, розміщених під пря-
мим кутом, і шарнірно з’єднаної з вилками хрестовини. Недоліком
такої муфти є те, що при рівномірному обертанні ведучого вала веде-
ний вал обертається нерівномірно.
Щоб забезпечити обертання веденого вала з постійно кутовою швид-
кістю або щоб була можливість передавати обертовий рух між пара-
лельними валами, а також збільшити кут у між валами вище від гра-
ничного для одинарної муфти, слід застосовувати здвоєні шарнірні
муфти (рис. 37.9, б). Потрібними умовами сталості кутової швидкості
веденого вала є вимога, щоб обидва вали ведучий і ведений були па-
ралельні і нахилені відносно проміжного вала здвоєної шарнірної
муфти під однаковим кутом, а дві вилки проміжного вала лежали в
одній площині.
Шарнірні муфти допускають перекоси осей валів до 40—45°. За
габаритними розмірами шарнірні муфти поділяють на малогабаритні,
що передають невеликі навантаження, і великогабаритні, які призна-
чені для передавання середніх і великих навантажень.
Малогабаритні одинарні і здвоєні шарнірні муфти стандартизова-
ні (ГОСТ 5147—80) для валів діаметром 8—40 мм і обертових момен-
тів 11,2—1120 Н • м.
37.3. Керовані муфти
До класу керованих належать муфти, за допомогою яких з’єднують
і роз’єднують вали під час зупинки і роботи привода. Ці муфти поді-
ляють на кулачкові і фрикційні.
Кулачкові муфти. У найпростішому вигляді кулачкова муфта
(рис. 37.10, а) складається з двох півмуфт, на торцях яких розміщені
кулачки. Одна півмуфта закріпляється на валу нерухомо, а інша,
що знаходиться на другому валу, може переміщатись уздовж цього
вала. Рухому півмуфту переміщають за допомогою спеціального
пристрою — механізму керування муфтою. Вилку механізму керуван-
ня розміщують у кільцевому пазу рухомої півмуфти. Із введенням у
зачеплення кулачків двох півмуфт здійснюється передавання оберто-
вого моменту від одного вала до другого (на рис. 37.10, а муфта показа-
на у розімкненому стані).
Кулачкова муфта вимагає достатньо високої точності центрування
валів, оскільки перекоси різко зменшують надійність її роботи. Дуже
часто кулачкові муфти застосовують для з’єднання або роз’єднання
із валом розміщених на ньому зубчастих коліс (наприклад, у коробках
494
Рис. 37.10. Кулачкова муфта
швидкостей). У цьому випадку муфта і зубчасті колеса розміщуються
на одному і тому ж валу.
Вмикання кулачкових муфт під час обертання валів завжди су-
проводжується ударами, які можуть спричинити руйнування кулач-
ків. Тому такі муфти не рекомендують використовувати для вмикання
приводів під навантаженням і при великих швидкостях відносного обер-
тання валів (відносна колова швидкість кулачків V > 1 м/с).
Розповсюджені форми кулачків показані на рис. 37.10, б, в. Прямо-
кутний профіль вимагає точного взаємного розміщення півмуфт у мо-
мент вмикання. Крім цього, у муфтах із прямокутним профілем кулач-
ків завжди наявні технологічні зазори і пов’язані з цим удари при змі-
ні напряму обертання. Трапецієвидний профіль не вимагає точного
взаємного розміщення півмуфт у момент вмикання, а бокові зазори
тут компенсуються зміною глибини заходу кулачків. Муфти з трапе-
цієвидним профілем кулачків застосовують переважно у приводах із
реверсуванням навантаження.
У муфтах із трапецієвидним профілем кулачків виникають осьові
сили, які можуть розімкнути півмуфти і затруднити їхнє вмикання.
Тому кут а трапецієвидного профілю вибирають у межах а = (2...
5)°, щоб забезпечити самогальмування силами тертя між кулачками
і невелике постійне зусилля з боку механізму керування муфтою.
Півмуфти кулачкових муфт виготовляють із сталей, що підлягають
цементації, 15, 20, 15Х, 20Х, а при великих розмірах — із сталей 45,
40Х, 40ХН. Твердість кулачків повинна бути 50...55 НКС.
Роботоздатність кулачкових муфт оцінюється в основному стій-
кістю кулачків проти спрацювання, яка залежить від напружень
вминання на робочих поверхнях.
При рівномірному розподілі навантаження між усіма кулачками
стійкість проти спрацювання забезпечується з виконанням умови
(рис. 37.10):
ази = 2Тр/(ОгЬК) < [а]3„. (37.9}
495
Допустиме напруження зминання рекомендують брати: [аізм =
= (90... 100) МПа (вмикання муфти із зупиненим приводом) і [а]зм =
= (35...40) МПа (вмикання муфти під час обертання валів).
Фрикційні муфти передають обертовий момент за рахунок моменту
сил тертя на робочих поверхнях їхніх деталей.
Під час вмикання фрикційних муфт обертовий момент на веденому
валу зростає поступово і пропорційно збільшенню сили притискання
поверхонь тертя. Це дозволяє з’єднувати вали під навантаженням і зі
значною початковою різницею їх кутових швидкостей. У процесі вми-
кання муфта пробуксовує, а розгін веденого вала відбувається плавно
без ударів. Фрикційна муфта може виконувати також функції запобіж-
ного пристрою через можливе проковзування при перевантаженнях
привода.
Фрикційні муфти за формою робочих поверхонь бувають таких
видів: дискові, робочими поверхнями яких є плоскі торцеві поверхні
дисків; конусні, робочі поверхні яких мають конічну форму; цилінд-
ричні, які мають циліндричну робочу поверхню.
Дискові фрикційні муфти бувають із однією парою
поверхонь тертя і з багатьма парами поверхонь тертя. На рис. 37.11, а
показано приклад найпростішої дводискової муфти, а на рис. 37.11, б —
багатодискової муфти. У першому випадку муфта складається з двох
півмуфт, притиснутих одна до другої своїми торцевими площинами
(одна пара поверхонь тертя). Вимикання муфти здійснюється осьовим
зміщенням на валу однієї півмуфти за допомогою механізму керу-
вання.
У багатодисковій муфті є дві групи дисків — зовнішні і внутрішні,
які з’єднані за допомогою шліців із відповідними півмуфтами, що роз-
міщуються на двох валах. Вмикання або вимикання муфти здійсню-
ється осьовим переміщенням натискного диска механізмом керуван-
ня. Використання багатодискової конструкції дозволяє зменшити
осьову силу Ра стискання дисків, що потрібна для передавання певного
обертового моменту Тр.
Рис. 37.11. Фрикційні дискові муфти
496
Осьова сила стискання дисків визначається за умовою рівності
розрахункового обертового моменту Тр і моменту сил тертя Т5 на
кільцевих поверхнях дисків, обмежених діаметрами і
(рис. 37.11). Для припрацьованих поверхонь тертя (див. 5.2) запи-
шемо:
7’Р = Г<=/7а/г(О1 + О2)/4. (37.10)
Із цієї рівності дістанемо потрібну силу притискання дисків
/7а = 4Тр/[/2(Р1 + Р2)], (37.11)
де / — коефіцієнт тертя ковзання на поверхнях дисків; г — число пар
поверхонь тертя (для муфти на рис. 37.11, а г = 1, а для муфти на
рис. 37.11, б г = 6).
Таким чином, із застосуванням багатодискових муфт можна збіль-
шити передаваний обертовий момент у г разів порівняно з дводиско-
вою муфтою, якщо зберігається та сама сила стискання дисків і їхні
діаметри.
Найвідповідальнішими деталями фрикційних муфт є диски. Мате-
ріали дисків повинні задовольняти ті самі вимоги, що ставляться до
матеріалів деталей фрикційних передач. На практиці широко роз-
повсюджені такі комбінації матеріалів: загартована сталь по загарто-
ваній сталі або сталь по чавуні при достатньому змащуванні; азбесто-
ві або обкладки зі спеченого матеріалу по сталі або чавуні без змащу-
вання.
Основним критерієм роботоздатності фрикційних муфт є стійкість
проти спрацювання поверхонь тертя. Стійкість проти спрацювання
досягається обмеженням тиску на поверхнях тертя за умовою
р = 4Го/[л (О? - £>2)] < [р]. (37.12)
Таблиця 37.1. Коефіцієнти тертя / та допустимі тиски [/>]
для дисків фрикційних муфт
Матеріал поверхонь тертя дисків ї [р], МПа
Загартована сталь — загартована сталь (при змащуванні) 0,06 0,6—0,8
Чавун — чавун або загартована сталь (при змащуванні) 0,08 0,6-0,8
Текстоліт — сталь (при змащуванні) 0,12 0,4—0,6
Спечені матеріали — загартована сталь (при змащуванні) 0,10 0,8
Пресований азбест (феродо) — сталь (без змащування) 0,40 0,2—0,3
Спечені матеріали — загартована сталь (без змащування) 0,40 о,з
Чавун — чавун або загартована сталь (без змащування) 0,15 0,2—0,3
497
Рис. 37.12. Фрикційна конусна муфта
Щоб зменшити нерівномірність
спрацювання дисків фрикційних
муфт, слід рекомендувати співвід-
ношення розмірів поверхонь тертя
Пію2 = 1,5...2,0.
Деякі відомості, що потрібні
для розрахунку фрикційних муфт,
наведені у табл. 37.1.
Конусна фрикційна
муфта (рис. 37.12) має дві пів-
муфти, які стикаються між собою
по конічних поверхнях. Вмикання або вимикання муфти здійснюється
осьовим переміщенням на валу однієї з півмуфт.
Конусні муфти порівняно з дисковими фрикційними мають більші
габаритні розміри. Вони вимагають підвищеної точності центрування
валів. Півмуфти в конусних фрикційних муфтах виготовляють із сталі
або чавуну. Інколи застосовують облицювання однієї з поверхонь тер-
тя матеріалами, що мають підвищені фрикційні властивості.
Потрібна осьова сила Ра притискання півмуфт визначається за умо-
вою рівності розрахункового обертового моменту Тр і моменту сил
тертя на конічній поверхні (див. 5.2):
Тр =Т, =^/(£>1 + Разіна); (37.13)
Га = 4Тр5Іпа/П(Е>і +Р2)1. (37.14)
Умова стійкості проти спрацювання робочої конічної поверхні
муфти
Р = 5ІП «) < ІРІ> (37.15)
де Рт — 0,5 (Рі + Р2) — середній діаметр робочої поверхні.
Із зменшенням кута конуса а зменшується також потрібна сила
Ра притискання півмуфт. Однак використовувати дуже малі кути а
не рекомендується, оскільки може відбутись самозаклинювання пів-
муфт, що створить труднощі під час роз’єднання їх. Щоб запобігти
самозаклинюванню, треба мати а > агсі& /. Переважно беруть а «
« 15°.
Потрібні у розрахунках значення коефіцієнтів тертя / і допусти-
мих тисків [рі можна брати за табл. 37.1.
37.4. Самокеровані та комбіновані муфти
Самокеровані муфти автоматично з’єднують або роз’єднують вали,
якщо параметри роботи машини недопустимі за тими чи іншими показ-
никами. В разі потреби з’єднання валів залежно від швидкості обер-
тання одного з них застосовують відцентрові муфти; із обмеженням
напряму обертання і передавання навантаження використовують об-
498
М 2
Рис. 37.13. Принципова будова відцент-
рової муфти
гінні муфти, а із обмеженням
робочого навантаження — запо-
біжні муфти.
Відцентрові муфти
автоматично з’єднують (розладну-
ють) вали з досягненням певної
кутової швидкості. Такі муфти
керуються відцентровою силою.
Відцентрові муфти для з’єд-
нання валів при певній кутовій
швидкості використовують: для
автоматичного вмикання або ви-
микання робочого органу маши-
ни за допомогою регулювання
кутової швидкості двигуна; для
розгону машин із великими обер-
товими масами при малому пус-
ковому моменті двигуна; для підвищення плавності пуску машини
в дію тощо. Муфти для роз’єднання валів при заданій кутовій швид-
кості переважно використовують для обмеження високих швидкостей
робочих органів машини, наприклад з метою запобігання їхньому
руйнуванню.
За конструкцією відцентрові муфти дуже різноманітні. На
рис. 37.13 зображена принципова схема відцентрової муфти, що застосо-
вується для з’єднання валів при досягненні певної кутової швидкості.
Муфта складається зі з’єднаної з ведучим валом півмуфти /, у пазах
якої розміщені колодки 2, що утримуються пружинами З, і півмуфти
4 у вигляді барабана, закріпленої на веденому валу.
Під час обертання ведучого вала колодки знаходяться під дією
відцентрової сили Р„ та сили пружини Рп. Якщо швидкість вала мала,
то Рп > Ру і колодки не притиснуті до барабана, тобто муфта не пере-
дає обертового моменту (ведений вал не обертається). Із збільшенням
кутової швидкості зростає і відцентрова сила Ро, а при Р„> Ра
колодки стикаються з барабаном і за рахунок сил тертя між колодка-
ми і барабаном передається обертовий момент до веденого вала (вал
почне обертатись). Відповідно зі зменшенням кутової швидкості ве-
дучого вала муфта розмикається.
Для передавання муфтою розрахункового обертового моменту Тр
треба, щоб цей момент дорівнював моменту сил тертя Г5 між колодка-
ми і барабаном:
Тр = Тв = (Г0-Гп)да,
(37.16)
де / — коефіцієнт тертя між колодками і барабаном; г — число коло-
док у муфті.
499
Відцентрова сила, що діє на колодку під час роботи муфти у роз-
рахунковому режимі (передається обертовий момент Тр із кутовою
ШВИДКІСТЮ (о),
Го=/л<о2г, (37.17)
де ги — маса колодки; г — радіус розміщення центра ваги колодки.
Сила пружини, що утримує колодку, дорівнює відцентровій силі
у момент вмикання муфти, тобто коли кутова швидкість ведучого вала
має значення соо:
Еа = то&. (37.18)
Після підстановки (37.17) і (37.18) в умову (37.16) дістанемо
Тр = 0,5тг[гО (<о‘ — а?)- (37.19)
Із рівності (37.19) можна визначити потрібну масу однієї колодки
муфти з відомими розмірами Р і г.
т = гТр/іРг/г (ш1 — ш?)|. (37.20)
У формулі (37.20) Тр — обертовий момент, Н • м; г — діаметр
і радіус, м; ©, о0 — кутові швидкості, рад/с; т — маса колодки, кг.
Стійкість проти спрацювання колодок і барабана муфти забезпе-
чується обмеженням тиску на поверхнях тертя (за аналогією фрик-
ційних муфт):
р = (Т, — Ра)/А = тг (ш« — <4)/Л ГРІ. (37.21)
де А — площа стикання колодки із барабаном, мм2; р — тиск у кон-
такті колодки з барабаном, МПа.
Отже, при конструюванні відцентрової муфти треба мати розра-
хунковий обертовий момент Тр, робочу кутову швидкість валів (О і
кутову швидкість ш0, при якій відбувається вмикання муфти (переваж-
но беруть со0 = (0,7...0,8) ш). Розміри муфти назначаються конструк-
тивно, потрібну масу колодок знаходять за формулою (37.20), а стій-
кість проти спрацювання колодок і барабана перевіряють за умовою
(38.21). Розрахована таким чином муфта в діапазоні кутових швид-
костей ведучого вала 0 < со1 соо не передає обертового моменту, при
ш0 < ш муфта пробуксовує і поступово розганяє ведений вал,
а при (*>! (о муфта передає обертовий момент Тр без буксування.
Обгінні муфти передають обертовий момент тільки в од-
ному напрямі. Якщо кутова швидкість веденого вала більша, ніж ве-
дучого, то відбувається автоматичне розмикання кінематичного лан-
цюга привода. Такі муфти широко застосовують у різних верстатах,
автомобілях, мотоциклах, велосипедах та інших машинах.
Обгінні муфти за способом з’єднання півмуфт поділяють на храпо-
ві і фрикційні. Переважне використання мають фрикційні обгінні
муфти з роликами, оскільки у них майже повністю відсутній вільний
хід і вони працюють безшумно.
500
Рис. 37.14. Обгінна роликова муфта
з
Роликова обгінна муфта (рис. 37.14, а) складається з зірочки /,
зовнішньої обойми 2, роликів З і притискних пристроїв 4, які забезпе-
чують мінімальний вільний хід і сприяють рівномірному розподілу
навантажень на ролики. Зірочки переважно розміщують на валу, а
обойма може бути з’єднана із зубчастим колесом, шківом або іншою
деталлю. В деяких випадках обойма розміщується на іншому валу
привода. В муфті на рис. 37.14, а зірочка може бути ведучою ланкою
під час її обертання за годинниковою стрілкою, а обойма — під час
обертання проти годинникової стрілки. Під час роботи муфти ролики
силами тертя затягуються в бік звуження зазора між обоймою та зі-
рочкою і заклинюються. Притискні пристрої у муфті утримують ро-
лики у постійному стиканні з обоймою та зірочкою.
В обгінних муфтах переважно використовують стандартні ролики
із роликопідшипників, а обойму і зірочку виготовляють із сталей
ШХ15, 20X (твердість Н ж 60 НКС після цементації та гартування ро-
бочих поверхонь).
При передаванні обертового моменту Тр на ролик (рис. 37.14, б)
з боку зірочки та обойми діють нормальні сили N і сили тертя
Сили намагаються виштовхнути ролик із клинового зазора, а сили
тертя перешкоджають цьому.
Щоб ролик не висковзнув із клинового зазора, треба виконати
умову
2/7в соз а/2 2М зіп а/2. (37.22)
Враховуючи, що = М/, із виразу (37.22) дістанемо
/ а/2 або а/2 агсі§ /. (37.23)
501
Тут / — коефіцієнт тертя ковзання у парі ролик — обойма і ро-
лик — зірочка. Кут а переважно беруть 5—7°.
Із геометричних співвідношень розмірів муфти можна записати
(рис. 37.14, б):
соз а = (Ь 4- #2)/(£>/2 — а/2) =* (2Ь 4- ф/р — О). (37.24)
За співвідношеннями (37.23) і (37.24) можна визначити діаметр
ролика сі для вибраних значень а, Ь І Р.
За умовою рівноваги обойми запишемо (при числі роликів г):
Тр = Г8гР/2 == 0,5МРг/ = О.бМОг Ц а/2. (37.25)
Із рівності (37.25) визначаємо нормальну силу на ролик під час
передавання муфтою розрахункового обертового моменту Тр, вибрав-
ши для малих кутів а/2 « а/2:
М = 4Тр/(Рга). (37.26)
Міцність ролика і робочих поверхонь обойми та зірочки розрахо-
вують за поверхневими контактними напруженнями. Більші контакт-
ні напруження виникають у контакті ролика і зірочки, оскільки тут
зведена кривина контактуючих поверхонь більша (див. 4.1):
ан = 2,„ V< [а]„. (37.27)
Умова (37.27) дозволяє визначити потрібну довжину роликів /Р.
Для вказаних вище матеріалів деталей муфти допустимі контактні
напруження рекомендують брати [сг]н = (1200... 1500)МПа.
Запобіжні муфти використовують для захисту окремих
органів машини від перевантажень. Вони бувають із неруйнованими
елементами та з руйнованими елементами.
Запобіжні муфти із неруйнованими елементами поділяють на ку-
лачкові, кулькові та фрикційні. Такі муфти спрацьовують (розмика-
ються), коли обертовий момент перевищує деяке наперед задане зна-
чення.
Кулачкові запобіжні муфти (рис. 37.15, а) подібні до керованих
кулачкових муфт, але вони не мають механізму примусового керу-
вання. Тут півмуфти замикаються зусиллям стиснутих пружин. Кут
профілю кулачків а у цих муфтах вибирають великим (а^> 40°). При
перевантаженнях (Тр > Ттах) зачеплення кулачків порушується через
осьове зміщення рухомої півмуфти. Кулачкові запобіжні муфти стан-
дартизовані (ГОСТ 15620—77) для діаметрів валів 8—48 мм і оберто-
вих моментів 4—400 Н • м.
Кулькові запобіжні муфти (рис. 37.15, б) за принципом дії схожі
до кулачкових. При перевантаженнях під дією осьових зусиль, обу-
мовлених формою впадин в одній із півмуфт, кульки зміщаються в
осьовому напрямі і відбувається розмикання муфт. За ГОСТ 15621—77
502
б
Рис. 37.15. Запобіжні муфти
для діаметрів валів 8—48 мм такі муфти допускають обертові моменти
4—400 Н • м.
Фрикційні запобіжні муфти (рис. 37.15, в) відрізняються від фрик-
ційних керованих муфт відсутністю механізму керування. Ці муф-
ти замикаються постійним зусиллям стиснутих пружин. Згідно з
ГОСТ 15622—77 передбачають фрикційні запобіжні муфти для діа-
метрів валів 9—48 мм і обертових моментів 6,3—400 Н • м.
У всіх розглянутих запобіжних муфтах регулювання обертового
моменту Тілах, при якому відбувається розмикання муфти, здійснюєть-
ся відповідним стисканням пружин за допомогою гайок.
Запобіжні муфти із руйнованим елементом застосовують при від-
носно рідких перевантаженнях привода машини. Недоліком цих муфт
є потреба заміни зруйнованих елементів.
На рис. 37.16, а зображена муфта із запобіжним штифтом. Тут
обертовий момент від однієї півмуфти до іншої передається через штифт,
який зрізається при перевантаженні. Для відновлення роботи муфти
штифт заміняють. Загартовані втулки, в яких знаходиться штифт,
503
Рис. 37.16. Муфти із зріз-
ним штифтом (а) та комбі-
нована (б)
запобігають зминанню більш м’якого матеріалу півмуфт штифтом і
тим самим наближають дійсні умови зрізу штифта до розрахункових.
Переважно число штифтів у муфті г = 1, рідше г = 2. Матеріал
штифтів — середньовуглецева сталь.
Максимальний обертовий момент Гтах, при якому відбувається руй-
нування (зріз) штифта, визначається за умовою рівності розрахунково-
го напруження зрізу границі міцності матеріалу штифта на зріз тв:
Т3р = ВТтахД^-^Лб/ці) = Тв;
Ттах = £>гіи&т./8. (37.28)
Якщо ДЛЯ муфти ВІДОМИЙ максимальний обертовий момент Ттах,
то потрібний діаметр штифта можна визначити за формулою
= КбЛпахДРглт,). (37.29)
У записаних виразах £) — діаметр кола, на якому розміщені штиф-
ти. Границю міцності на зріз тв можна наближено визначити залежно
від границі міцності на розтяг ав матеріалу штифта за співвідношен-
ням тв « 0,7ов.
Комбіновані муфти застосовують у тих випадках, коли жодна з
розглянутих вище муфт не може повністю задовольнити усі вимоги,
що ставляться до з’єднання валів приводного механізму.
На практиці переважно використовують комбінації пружних муфт
із запобіжними або керованими муфтами. На рис. 37.16, б зображена
пружна запобіжна муфта — комбінація пружної втулково-пальцевої
504
муфти та запобіжної муфти зі зрізним штифтом. Така муфта об’єднує
переваги МПВП (зменшення динамічних навантажень, деяка компен-
сація неспіввісності валів) і одночасно захищає привод від переван-
тажень.
Розрахунок елементів муфти (рис. 37.16, б) виконують згідно з вка-
зівками, наведеними вище, для МПВП і запобіжної муфти зі зрізним
штифтом.
Існує велика кількість конструкцій комбінованих муфт, які пере-
важно поєднують у собі переваги компенсуючих та запобіжних муфт.
Контрольні запитання
1. Які є основні та додаткові функції, що можуть виконувати муфти у приводах
машин?
2. Які є класи і групи механічних муфт приводів?
3. Наведіть приклади основних груп некерованих муфт. Які функції виконують
ці муфти?
4. В яких випадках застосовують керовані муфти? Наведіть приклади керова-
них муфт.
5. За якими параметрами роботи машини можна здійснювати регулювання робо-
ти самокерованих муфт?
6. Наведіть приклади самокерованих муфт. Які види розрахунків передбачають
для таких муфт?
7. Яка існує потреба у застосуванні комбінованих муфт?
ГЛАВА 38. РЕДУКТОРИ
38.1 . Загальні відомості
Редуктором називають механізм, що складається із змонто-
ваних у окремому закритому корпусі передач зачепленням і призна-
чений для зміни параметрів обертового руху — зменшення швидкості
обертання і відповідно підвищення обертового моменту. Подібні меха-
нізми, які використовуються для збільшення швидкості обертання і
зменшення обертового моменту, називають мультиплікато-
рами.
Інколи виникає потреба зміни кутової швидкості тихохідного вала
редуктора. В цьому разі його передаточне число можна змінювати
переспряженням деяких зубчастих коліс. Такі редуктори, що дозво-
ляють ступінчасто змінювати передаточне число, називають короб-
ками швидкостей.
Розміщення передач зачепленням у окремому закритому корпусі
гарантує достатню точність монтажу, добре змащування і відповідно
високий ККД, менше спрацювання, а також надійний захист передач
від впливу навколишнього середовища.
Редуктори різних типів із постійним передаточним числом надзви-
чайно широко використовують у всіх галузях господарства. Коробки
505
швидкостей використовують переважно в приводі транспортних ма-
шин, металообробних верстатів та деяких інших машин, де потрібна
зміна кутової швидкості приводного вала робочого органу. Мульти-
плікатори застосовують рідше, лише у приводах, де вимагаються ви-
сокі швидкості обертання робочих органів — центрифуг, сепараторів
та ін.
Найрозповсюдженішими є редуктори, що складаються із цилінд-
ричних зубчастих передач. Такі редуктори використовують як в кіне-
матичних ланцюгах різних приладів, так і у високопотужних приво-
дах машин, здатних передавати потужність у десятки тисяч кіловат.
Редуктори, до складу яких входять конічні зубчасті і черв’ячні пере-
дачі, переважно застосовують для передавання малих і середніх по-
тужностей (десятки кіловат, інколи 100—200 кВт). Малопотужні чер-
в’ячні редуктори зручні для здійснення великих передаточних чисел
в одному механізмі малих габаритних розмірів.
Редуктори за особливостями їхньої роботи поділяють на дві основ-
ні групи: прості, або рядові, редуктори, в яких осі
обертання зубчастих коліс не змінюють свого положення у просторі,
і планетарні редуктори, що мають зубчасті колеса,
осі обертання яких переміщаються в просторі. За допомогою плане-
тарних редукторів можна зменшити масу та габаритні розміри, а в
деяких випадках дістати достатньо великі передаточні числа, але при
низькому значенні ККД.
38.2 . Основні схеми рядових редукторів
Вибір схеми рядового редуктора залежить від загальної компонов-
ки привода, для якого призначений редуктор, і таких факторів, як
взаємне розміщення швидко- і тихохідного валів, обмеження за масою
і габаритними розмірами, вимоги до монтажу, зручність експлуатації
та ремонту тощо. Крім цього, на вибір схеми і основних параметрів
суттєво впливають передавана потужність, передаточне число, режим
експлуатації, технологія виготовлення.
Найрозповсюдженіші схеми редукторів наведені у табл. 38.1. На
схемах редукторів буквами Ш, Т і П позначені швидкохідний, тихо-
хідний і проміжний вали відповідно.
За конструкцією найпростішими є одноступінчасті редуктори (схе-
ми 1, 4 і 7 у табл. 38.1). Вони складаються з однієї зубчастої або чер-
в’ячної пари і двох валів. Одноступінчасті циліндричні редуктори (із
циліндричними зубчастими колесами) мають паралельні вали, які
можуть бути розміщені у горизонтальній (схема 1, а) або вертикаль-
ній (схема 1, б) площині. Передаточне число одноступінчастих цилінд-
ричних редукторів и 8, а зубчасті колеса можуть бути прямо- і ко-
созубими або шевронними.
506
Таблиця 38.1. Схеми деяких рядових редукторів
Редуктори з циліндричними передачами
Редуктори з конічними і циліндрич-
ними передачами
Редуктори з черв'ячними і циліндричними
передачами
1. Одноступінчастий циліндричний
4. Одноступінчастий конічний
2. Двоступінчастий циліндричний
3. Двоступінчастий з роздвоєним тихо-
хідним ступенем
5. Двоступінчастий коніч-
но-циліндричний
п
6. Триступінчастий цилінд-
ричний
,_____Л Тт
411- ЦІ------II—
7. Одноступінчастий черв'ячний
9. Триступінчастий із роздвоєним про-
міжним ступенем
В одноступінчастому конічному редукторі (з конічними зубчасти-
ми колесами) осі валів перетинаються (схема 4). Такий редуктор має
меншу несучу здатність порівняно з циліндричним приблизно однако-
вих розмірів. За допомогою одноступінчастого конічного редуктора
забезпечують передаточне число и 5.
Широко застосовують одноступінчасті черв’ячні редуктори. Кон-
структивно вони можуть виконуватись із нижнім, верхнім і вертикаль-
ним розміщенням черв’яка (схеми 7, а — в). Одноступінчасті черв’яч-
ні редуктори реалізують передаточне число переважно у межах и =
= 7...80.
Щоб дістати велике передаточне число, слід застосовувати дво- і
триступінчасті редуктори (схеми 2—9 у табл. 38.1). Великі передаточні
числа можна мати і за допомогою одноступінчастих редукторів, але
їхні габаритні розміри і маса будуть надзвичайно збільшеними. Так,
одноступінчастий циліндричний редуктор із передаточним числом и =
— 10 має габаритні розміри більші, ніж двоступінчастий циліндричний
редуктор із таким самим передаточним числом (за умови передавання
одного і того ж навантаження і використання однакових матеріалів
для зубчастих коліс).
Дво- і триступінчасті редуктори за конструкцією складніші від
одноступінчастих, оскільки вони мають дві або три передачі і, крім
швидко- та тихохідного, мають також проміжні вали. У дво- і тристу-
пінчастих редукторах для швидкохідного ступеня застосовують пере-
дачі з пониженою несучою здатністю, наприклад конічну зубчасту пе-
редачу (схема 5) або черв’ячну передачу у двоступінчастому черв’яч-
но-циліндричному редукторі (схема 8). Черв’ячну передачу для швид-
кохідного ступеня використовують ще й тому, що при підвищених
швидкостях ККД черв’ячної передачі більший.
Із двоступінчастих циліндричних редукторів широко застосовують
редуктори за схемою 2, а як найбільш прості. Співвісні двоступінчасті
редуктори (схема 2, б) мають швидко- і тихохідний вали на одній осі
і дещо зменшені габаритні розміри за довжиною, проте конструктивно
і технологічно більш складні, оскільки вони мають опори валів усе-
редині корпусу. Передаточне число двоступінчастих циліндричних
редукторів и = 8...50, а найбільш оптимальні передаточні числа у
межах и — 10...ЗО.
Двоступінчасті конічно-циліндричні редуктори (схема 5) викорис-
товують за потребою розміщення осей валів під прямим кутом. Вони
можуть застосовуватись для забезпечення передаточних чисел и =
= 8...ЗО, а найбільш раціональні варіанти із и = 8...20.
За допомогою двоступінчастих черв’ячно-циліндричних редукторів
(схема 8) можна реалізувати передаточні числа и = ЗО...300, але такі
редуктори складні у технологічному виконанні.
Редуктори за схемами 2, 5 і 8 мають спільний суттєвий недолік.
Через несиметричне розміщення зубчастих коліс щодо опор валів
508
вбільшується нерівномірність розподілу навантаження по довжині
зубців внаслідок деформації валів. Цей недолік усувається у схемі З
двоступінчастого редуктора з роздвоєним тихохідним ступенем. Тут
умови роботи зубчастих зачеплень поліпшені, а довговічність опор
валів може бути забезпечена приблизно однаковою.
Триступінчасті редуктори переважно виготовляють із циліндрич-
ними зубчастими колесами (схеми 6 і 9). Вони використовуються для
забезпечення передаточних чисел и = 60...250.
38.3 . Розрахункові параметри редукторів
Основні параметри редукторів загального призначення, передба-
чених для серійного виготовлення, регламентуються стандартами. Для
циліндричних зубчастих передач зовнішнього зачеплення, що вико-
ристовуються у редукторах як самостійних агрегатах, ГОСТ 2185—66
встановлює ряди міжосьових відстаней передаточних чисел и і
коефіцієнтів ширини коліс фба, а для конічних зубчастих передач
ГОСТ 12289—76 визначає ряди номінальних діаметрів основи ділиль-
ного конуса більшого колеса ^2» передаточних чисел и і ширини вінця
Ь конічних коліс. Відповідно при проектуванні зубчастих передач
редукторів загального призначення основні параметри цих передач
повинні бути узгоджені із зазначеними стандартами.
Деякі обмежені відомості зі стандартів на параметри зубчастих
передач редукторів наведені у табл. 38.2.
Таблиця 38.2. Параметри зубчастих передач редукторів
Міжосьова від- стань а,.„ мм Міжосьова від- стань, мм, двосту- пінчатих редук- торів Передаточне чис- ло и циліндрич- них передач Передаточне чис- ло и конічних передач Коефіцієнт ширини зуб- частих він- «1»
1-й ряд 2-й ряд Швидко- X ідний ступінь Тихохід- ний ступінь 1-й ряд 2-й ряд 1-й ряд 2-й ряД
40 100 160 1,00 1» 12 1,00 М2 0,100
50 —. 125 200 1,25 1,40 1,25 1,40 0,125
63 140 225 1,60 1,80 1,60 1,80 0,160
80 160 250 2,00 2,24 2,00 2,24 0,200
100 — 180 280 2,50 2,80 2,50 2,80 0,250
125 140 200 315 3,15 3,35 3,15 3,35 0,315
160 180 225 355 4,00 4,50 4,00 4,50 0,400
200 225 250 400 5,00 5,60 5,00 5,60 0,500
250 280 280 450 6,30 7,10 6,30 — 0,630
315 355 315 500 8,0 9,0 — — 0,800
— — —. —. 10,0 Н,2 — — 1,00
— 1 ~ — —— — ~~ - — 1,25
509
Крім розглянутих параметрів передач редукторів, стандартами пе-
редбачаються вимоги до довговічності передач і опор валів. Для ци-
ліндричних і конічних зубчастих передач регламентується довговіч-
ність Н 40 000 год, а для черв’ячних — Н 20 000 год. Довговіч-
ність підшипників кочення опор валів не повинна бути меншою ніж
5000 год. Строк служби підшипників переважно вибирають кратним
строку служби передачі.
У стандартах передбачаються також відповідні вимоги до кон-
струкції та розмірів вихідних кінців валів редукторів.
При проектуванні редукторів спеціального призначення допуска-
ється брати такі параметри, що не відповідають стандартам. У таких
випадках можна дістати більш раціональні і оптимальні конструкції
для конкретних умов експлуатації редукторів.
38.4 . Рекомендації щодо вибору параметрів
редукторів спеціального призначення
При проектуванні цілого ряду машин та їхніх приводів не завжди
є можливість привести у відповідність потрібні параметри редуктора
(аш, и) із параметрами редукторів загального призначення (див. 38.3).
У таких випадках розраховують і проектують редуктори спеціального
призначення. Оптимальний варіант конструкції редуктора залежить
від його габаритних розмірів і маси, зручності здійснення змащування
зубчастих коліс, раціональності форми корпусу тощо.
Розрахувати та спроектувати одноступінчасті редуктори неважко,
оскільки потрібні габаритні розміри можуть бути забезпечені відпо-
відним вибором матеріалів зубчастих коліс із заданим передаточним
числом редуктора.
У двоступінчастих редукторах оптимальний варіант конструкції
в значній мірі залежить від раціонального розподілу загального пере-
даточного числа на окремі ступені
Рис. 38.1. Схема двоступінчастого ци-
ліндричного редуктора
і від забезпечення повного викорис-
тання несучої здатності кожного
ступеня.
Розподіл загального передаточ-
ного числа двоступінчастих редукто-
рів можна здійснювати з метою за-
безпечення мінімальних габаритних
розмірів і маси або для досягнення
відповідних умов змащування зуб-
частих коліс двох ступенів. Отже,
розподіл загального передаточного
числа редуктора на окремі його сту-
пені — це задача оптимізації кон-
струкції редуктора за різними кри-
теріями (див. гл. 10).
510
Розглянемо розподіл загального передаточного числа двоступін-
частого циліндричного редуктора (рис. 38.1), в якому швидкохідний
ступінь косозубий, а тихохідний прямозубий, за умовою забезпечення
рівності діаметрів коліс сі* і гі4 у двох ступенях. Така умова дає можли-
вість дістати однакове занурення двох коліс у мастильну ванну, що
дасть змогу створити близькі умови змащування швидко- і тихохід-
ного ступенів при розміщенні валів редуктора у горизонтальній пло-
щині.
Якщо подати діаметри і гі4 через відповідні міжосьові відстані
швидкохідного і тихохідного Ощт ступенів редуктора, то можна
записати
0 = 2йцпЦт/(Цт 1), (38.1)
де иш, иг — відповідно передаточні числа швидко- і тихохідного сту-
пенів редуктора, добуток яких дорівнює загальному передаточному
числу редуктора, тобто цшит = и.
Підставимо в рівність (38.1) вираз для згідно з формулою (23.32):
[иш/(иш 4-1)}Ка(иш + 1) ТінКн^и^ьааі =
= [ит/(ит + 1)[ Ка (Цт + 1) VТінКн^[и^ьат [о]нт)-
Узявши наближено
Т^н == Тіниш і Кн$ =
а також
иш = и/ит; Ка = 430 (МПа)І/3; Ка = 495 МПа1/3,
із записаної рівності знайдемо формулу для визначення передаточного
числа тихохідного ступеня редуктора:
4/т — 0,9 ")/ її (флат/фдаш) ([Ц]#т/[сг]#ш)2• (38.2)
Відношення коефіцієнтів ширини вінців зубчастих коліс тихо- і
ШВИДКОХІДНОГО ступенів редуктора рекомендують брати ^Ьат^Ьаш ж
= 1,3...2,0.
Аналогічним чином можна дістати співвідношення для вибору пе-
редаточних чисел ступенів інших типів редукторів. Наприклад, для
конічно-циліндричного редуктора (див. схему 5 у табл. 38.1) умова
рівності діаметрів коліс двох ступенів дає таку залежність для визна-
чення передаточного числа тихохідної циліндричної передачі:
иг = 1,85 «Фдат([а]ят/[а]//ш)2. (38.3)
У співвісному двоступінчастому редукторі (див. схему 4, б у
табл. 38.1) міжосьові відстані швидко- і тихохідного ступенів однакові
511
(а^ = тому умова рівності діаметрів коліс і кожного сту-
пеня вимагає
и? = иш = У и. (38.4)
Щоб повно використати несучу здатність швидко- і тихохідного
ступенів співвісного редуктора, слід забезпечити рівність
’Фьят/Фьаш = ([о]аУш/[о,]нт)2 (38.5)
Рекомендації щодо розподілу загального передаточного числа на
окремі ступені для інших типів редукторів можна дістати аналогіч-
но. При цьому можна брати інші умови, наприклад мінімізації маси
зубчастих коліс або габаритних розмірів редуктора.
38.5 . Планетарні редуктори, їхнє застосування
та основні схеми
Планетарними редукторами (планетарними пере-
дачами) називають механізми, які складені із зубчастих коліс, осі обер-
тання яких переміщаються у просторі. Ті зубчасті колеса, осі обертан-
ня яких переміщаються, називаються сателітами (позначають
#). Ланка механізму, на якій розміщені опори сателітів, називається
в о д и л о м і позначається к. Вісь обертання водила називається
основною віссю. Зубчасті колеса, вісь обертання яких збі-
гається з основною віссю, називаються центральними ко-
лесами (колеса а і & на рис. 38.2, а).
Число сателітів у планетарній передачі позначають пш. Найбільше
розповсюдження мають передачі з = 3, хоча зустрічаються і такі,
в яких пш = 3...6.
Ланки планетарної передачі, що обертаються навколо основної осі,
називаються основними ланками (ланки а, Ь і Н на
рис. 38.2, а). Нерухомою може бути довільна одна з основних ланок.
Якщо нерухоме колесо Ь (і£)Ь = 0), то обертовий рух може передаватись
від колеса а до водила Н або навпаки; при нерухомому водилі (сол — 0)
осі обертання всіх зубчастих коліс нерухомі, а обертовий рух переда-
ється від а до Ь або від Ь до а. Якщо рухомі всі три основні ланки, то
планетарна передача називається диференціалом.
Широкі кінематичні можливості планетарних передач надають їм
деякі переваги і сприяють використанню їх: як редуктор із постійним
передаточним числом; як коробку швидкостей, передаточне число якої
можна змінювати, почергово гальмуючи окремі основні ланки; як ди-
ференціальний механізм для розкладання одного обертового руху на
два або складання двох обертових рухів в один. Іншою перевагою
планетарної передачі є компактність і мала маса. Масу планетарних
редукторів можна зменшити у 2—3 рази у порівнянні з рядовими зуб-
512
Рис. 38.2. Схеми плане-
тарної передачі з одинар-
ним (а) та подвійним сате-
літами (б, в)
частими редукторами
для тих же наванта-
жень і передаточних
чисел. Це досягається
за рахунок підвище-
ної несучої здатності
внутрішнього зачеп-
лення зубчастих ко-
ліс, розподілу наван-
таження на кілька по-
токів, число яких до-
рівнює числу сателі-
тів, взаємного зрівно-
важування радіаль-
них сил при симетрич-
ному розміщенні сате-
літів. З планетарними
передачами можна ре-
алізувати великі пе-
редаточні числа.
До планетарних передач ставляться підвищені вимоги щодо точ-
ності виготовлення та монтажу.
Планетарні редуктори широко застосовують у транспортних за-
собах авіа-, верстато- та приладобудуванні тощо
Планетарний редуктор на рис. 38.2, а є найпростішим за конструк-
цією та у виготовленні. За допомогою такого редуктора можна реалі-
зувати передаточні числа и^8 при ККД л = 0,97...0,99 (якщо не-
рухомим є колесо Ь).
Інша схема планетарного редуктора з подвійними сателітами зо-
бражена на рис. 38.2, б. За цією схемою можна збільшити передаточне
число редуктора до и — 1...15 при л = 0,97...0,99, якщо нерухомим
буде колесо Ь. Тут вимагається висока точність виготовлення, оскіль-
ки два жорстко пов’язаних між собою сателіти § і / знаходяться у за-
чепленні з окремими колесами а і Ь.
Планетарний редуктор на рис. 38.2, в має два зубчастих колеса а і
Ь внутрішнього зачеплення і подвійний сателіт# і /. Якщо передавати
обертовий рух від водила Н до колеса а (колесо Ь загальмоване), то за
такою схемою можна дістати дуже високі передаточні числа. Однак
із збільшенням и різко спадає ККД. Тут раціональні значення и від
20 до 100. Такі планетарні редуктори рекомендуються для приводів
513
із короткочасним режимом роботи або малопотужних приводів при-
ладів, у яких ККД не має суттєвого значення.
Розглянуті схеми планетарних редукторів із передачами типу 2к —
Н (за класифікацією В. М. Кудрявцева, де основні ланки — два
колеса а і Ь, а також водило Л) мають переважне розповсюдження. Ві-
домі також інші схеми планетарних передач не тільки з циліндрични-
ми, а й з конічними зубчастими і черв’ячними передачами. Зубчасті
колеса у планетарних редукторах можуть бути з прямими і косими
зубцями.
38.6 . Кінематика планетарних редукторів
У позначенні передаточного числа и планетарної передачі, яке по-
в’язує відносні швидкості двох ланок, ставлять три індекси: два нижні,
які відповідають позначенням цих ланок (перший із них належить до
ланки, кутова швидкість якої у чисельнику, а другий — до ланки, ку-
това швидкість якої у знаменнику), і один верхній, що відповідає лан-
ці, відносно якої взяті кутові швидкості. Наприклад, — це зна-
чить, що передаточне число <оа/(оь при нерухомій ланці Ь.
У планетарних редукторах при дослідженні кінематики суттєве
значення має знак передаточного числа. Вважають, що и > 0, якщо
ведуча і ведена ланки обертаються в одному напрямі, і и < 0, якщо
вони обертаються у протилежних напрямах.
Передаточне число планетарних передач зручно і просто визначати
методом зупинки водила (метод Вілліса). На рис. 38.3, а зображена
планетарна передача, що відповідає схемі рис. 38.2, а у якій колесо а
обертається з кутовою швидкістю соа, ланка Ь має кутову швидкеіть
сод, а водило — кутову швидкість <ан.
Надамо всій передачі умовного обертання з кутовою швидкістю
сол, протилежною швидкості водила (рис. 38.3, б). Тоді для колеса а
Рис. 38.3. До ви-
значення передаточ-
ного числа плане-
тарної передачі
514
кутова швидкість оа — для колеса Ь кутова швидкість — соЛ,
а кутова швидкість водила (оА = 0. У передачі з оберненим рухом осі
обертання всіх ланок нерухомі, тому можна записати як для простої
передачі
Чл = («а — <йк)І(<АІ— иЛ) = — (ге/го) (гь/г^ = — г6/го. (38.6)
У записаному виразі иЬ, < 0, оскільки колеса а і Ь обертаються у
протилежних напрямах (га і гь — числа зубців коліс а і Ь).
Якщо перейти до реальної передачі, у якій колесо Ь переважно не-
рухоме, колесо а — ведуче, а водило Н — ведене, то на основі рів-
ності (38.6) при соА = 0 дістанемо
(<0о — соаІ/С— <0й) = — гй/г0; — (в>а/аь) + І = — гь/га
або
= <0а/<04 = 1 + гь/га. (38.7)
Аналогічним методом можна визначити передаточні числа і для
інших схем планетарних передач. Для планетарної передачі на
рис. 38.2, б можемо записати (водило зупинено):
ПаЬ = (<0а СОА)/((ОА С|)А) = (З^/Ид)
У випадку нерухомого колеса Ь (й)ь = 0) маємо:
(соа — ®Л)/(— Ч) = “ (г8/га) (?<А);
иЬап = (оа/шА = 1 + (гб/га) (гь/г/). (38.8)
Для планетарної передачі на рис. 38.2, в (водило зупинено) діста-
немо
иаь = (<><, — й>А)/(“* — “*) = (г£/го) (г*/г,).
Якщо тепер зробити нерухомим колесо Ь (й)ь = 0), то будемо мати
(ша — <оь)/(— ш4) = (ге/га) (гь/г,);
иЬан = соа/(о4 = 1 — (г8/га) (г^/г,). (38.9)
У передачі за рис. 38.2, в можливий варіант передавання обертово-
го руху від водила к до колеса а при = 0. Тоді передаточне число
передачі можна подати у вигляді
иіа = 1 /и‘л = 1/(1— (2г/га) (г^/л,) ]. (38.10)
За останнім варіантом планетарної передачі можна мати дуже ве-
ликі передаточні числа, оскільки значення и^ц можна зробити надзви-
чайно малим.
Рівняння типу (38.6) можна використати для визначення кутових
швидкостей усіх ланок планетарної передачі. Наприклад, кутову швид-
кість сателітів знайдемо на основі рівняння (див. рис. 38.2 і 38.3, а)
иа& = (соа — Сйй)/(со£ — (0й) = — г£/га,
515
звідки кутова швидкість сателіта відносно водила (така швидкість
потрібна для підбору підшипників сателітів)
«і = со£ — соА = — (га/г&) (соа — соа) (38.11)
і відносно нерухомого корпусу передачі
соя = — (га/г£) (соа — сой). (38.12)
Безпосередньо з кінематичним розрахунком пов’язаний і вибір
чисел зубців зубчастих коліс планетарної передачі, який передує роз-
рахункам на міцність. При заданому передаточному числі и числа зуб-
ців попередньо визначають за допомогою формул (38.7) — (38.9) або
(38.10) залежно від схеми передачі. Ці значення чисел зубців зубчас-
тих коліс треба уточнити за такими умовами можливості складання
планетарної передачі (див. рис. 38.2, а):
1. Умова співвісності
0,5йа 4- = 0,5^ або = 0,5 (гь — га), (38.13)
де сіа, сІ& і йь — ділильні діаметри коліс а, § і Ь відповідно.
2. Умова симетричного розміщення сателітів вимагає, щоб 2а і 2Ь
були кратні числу сателітів пф. Ця умова є загальною для передач із
одинарними і подвійними сателітами і записується у вигляді
(2а + 2ьУПи — ціле число. (38.14)
3. Умова сусідства сателітів — це вимога збереження між суміж-
ними сателітами мінімального зазора. Відповідно з рис. 38.2, а мож-
на записати
0,5 (сіа 4- гі£) зіп (л/пю) > 0,5<ів 4- т
або
(2а + г&) 5ІП (^/Пи,) > 22.
Умови, що накладуються на числа зубців зубчастих коліс плане-
тарних передач, у деякій мірі звужують їхні кінематичні можливості.
38.7 . Особливості розрахунків на міцність
зубчастих передач планетарних редукторів
Розрахунок на міцність зубців окремих передач планетарних ре-
дукторів виконується за тими самими умовами і розрахунковими фор-
мулами, що й розрахунок зубців звичайних зубчастих передач. У пла-
нетарних редукторах розрахунок треба було б виконувати для кожного
зачеплення, наприклад у передачі за рис. 38.2, а для зовнішнього зачеп-
лення коліс а і § і внутрішнього зачеплення коліс § і Ь. Однак вна-
слідок однакових навантажень цих зачеплень і однакових модулів
зубчастих коліс достатньо виконати розрахунок зубців коліс зовніш-
516
Таблиця 38.3. Параметри для розрахунків на міцність зубчастих коліс
планетарної передачі
2і = га;
2&
и=—;
га
©1 = (Од — (0Л; (0, = ((Од — (0А) 2а/2Л
нього зачеплення, оскільки внутрішнє зачеплення за своїми особли-
востями має більшу несучу здатність при однакових механічних ха-
рактеристиках матеріалів коліс.
Щоб забезпечити можливість безпосереднього використання роз-
рахункових формул (23.26), (23.30) і (23.32) для розрахунку на міц-
ність зубців зубчастих коліс планетарної передачі, треба у цій пере-
дачі виділити пари коліс (шестірню і колесо) і встановити параметри
для кожної пари, за якими слід проводити розрахунки. Для плане-
тарної передачі за рис. 38.2, а потрібні параметри, які використовуються
для розрахунку на міцність зубчастих коліс, наведені у табл. 38.3.
У формулах табл. 38.3 Та — обертовий момент на центральному ко-
лесі а; Кс — коефіцієнт нерівномірності розподілу навантаження між
сателітами, який залежить від точності виготовлення передачі і чис-
ла сателітів. Якщо відсутні пристрої, що компенсують похибки виго-
товлення, то Кс = 1,3...2.
517
Щоб підвищити рівномірність розподілу навантаження на зубці
сателітів, слід виконувати одне з центральних коліс із самовстанов-
ленням, тобто без радіальних опор. У цьому випадку при числі сате-
літів — 3 можна брати Кс = 1,1... 1,2.
У планетарних редукторах ширина зубчастих вінців сателітів Ь що-
до їхнього діаметра сі обмежується співвідношенням = ЬІсІ 0,75.
38.8 . Змащування зубчастих передач редукторів
Зубчасті передачі редукторів змащують рідкими мінеральними і
синтетичними мастилами. Основне використання мають такі мастила:
індустріальні (И-40А, И-50А), трансмісійні (ТАП-15В), авіаційні
(МС-14, МС-20). Застосовують також нові леговані індустріальні ма-
стила, в яких за рахунок використання високоякісної мастильної ос-
нови і раціональних композицій добавок поліпшені протизадирні,
антиокислювальні і антикорозійні властивості (АСЗ-6, АСЗп-10,
ИГП-114, ИГП-152 та ін.). Усі перелічені мастила можна застосовува-
ти в широкому діапазоні температур навколишнього середовища —
від —15 до 4-50 °С. Останнім часом ряд фірм пропонують для викори-
стання нові ефективні мастила для редукторів.
Основне призначення змащування — зменшення сил тертя, підви-
щення стійкості проти спрацювання та заїдання і відведення теплоти
із зони контакту зубців. Потрібна кінематична в’язкість мастила по-
винна бути тим більшою, чим вищі контактні напруження у зачеплен-
ні зубців. Однак при цьому погіршується тепловідведення із зони кон-
такту і збільшуються втрати потужності на перемішування мастила зуб-
частими колесами.
З урахуванням таких факторів, як контактне напруження он, МПа,
і колова швидкість ц, м/с, зубчастих коліс (або швидкість ковзання і>3,
м/с, у черв’ячній передачі), потрібна кінематична в’язкість У5о°, мм2/с,
повинна мати значення, що наведені у табл. 38.4.
Для багатоступінчастих редукторів потрібна кінематична в’яз-
кість мастила вибирається за середньою коловою швидкістю зубчастих
коліс швидко- та тихохідного ступенів.
Таблиця 38.4. Рекомендації щодо вибору в’язкості мастила для редукторів
Зубчасті редуктори Черв'ячні редуктори Зубчасті редуктори Черв’ячні редуктори
5.10~6о^/а '’бО0 у100 ’ у50° Поо0
10 34 1,25 8,5 500 120 12,50 21
20 38 2,00 10 1000 160 20,00 26
50 50 3,20 12 2000 220 32,00 33
100 67 5,00 14 5000 350 50,00 42
200 85 8,00 17
518
Таблиця 38.5. Мастила для редукторів та їхня кінематична
в’язкість
Марка мастика Кінематична в'язкість у, мма/с? при температурі, °С,
50 100
Зубчасті редуктори:
ИРП-75 (ТУ 38-101451-78) 72—80 11—13
ИРП-150(ТУ 38-101451-78) 140—160 18—20
И-40А (ГОСТ 20799-88) 40 —
И-50А (ГОСТ 20799-88) 50 7
ТАП-15В (ГОСТ 23652-79) 120 15
ИТП-200 (ТУ 38-101292-79) 220—240 —
Черв’ячні редуктори:
ИГП-114 (ТУ 38-101413-78) 110—120 15
ИГП-152 (ТУ 38-101413-78) 147—158 20
АСЗп-6 (ТУ 38-10111-75) — 6
АСЗп-10 (ТУ 38-101267-72-) — 10
МС-20 (ГОСТ 21743-76) 157 20
Кінематичні в’язкості найуживаніших рідких мастил деяких ма-
рок для зубчастих і черв’ячних редукторів наведені у табл. 38.5.
Змащування зубчастих коліс редукторів із малими і середніми коло-
вими швидкостями (V 15 м/с) здійснюється зануренням їх у мас-
тило, що знаходиться у нижній частині корпусу (картері). Глибину
занурення тихохідних коліс кожного ступеня редуктора беруть (3...5) т,
але не менше, ніж 10 мм. Допускається занурення у мастило на біль-
шу глибину тих зубчастих коліс, що мають меншу колову швидкість.
Для редукторів із високими швидкостями зубчастих коліс (□ >*
> 15 м/с) застосовують циркуляційне змащування під тиском. Тут
відфільтроване мастило подається через спеціальні сопла безпосеред-
ньо в зону зачеплення зубчастих коліс.
У черв’ячних редукторах змащування зануренням застосовують
при швидкостях ковзання у зачепленні у5 < 15 м/с. Із нижнім роз-
міщенням черв’яка глибина його занурення повинна приблизно до-
рівнювати висоті витка. Із верхнім або вертикальним розміщенням
черв’яка змащування зачеплення здійснюється зануренням черв’яч-
ного колеса. Глибина занурення колеса — не менша, ніж висота його
зубця, але не більша від третини його радіуса.
Змащування редукторів є надзвичайно важливою умовою їхньої
нормальної і тривалої експлуатації. Тому в корпусах редукторів пе-
редбачають спеціальні отвори для випуску відпрацьованого мастила,
відповідні вікна для контролю зубчастого зачеплення і заливання мас-
тила, покажчики рівня мастила та іншу арматуру.
519
38.9 . Конструкції деяких редукторів
Зубчасті редуктори за конструкцією бувають дуже різноманітні.
Конструкція редукторів залежить від кількості ступенів передач, вза-
ємного розміщення валів у просторі, конструктивних рішень опор
валів, форми корпусу, способу закріплення редуктора до основи та
багатьох інших факторів. Нижче наведені конструкції деяких редук-
торів, що мають застосування у приводах різних машин.
На рис. 38.4 зображена конструкція двоступінчастого співвісного
редуктора з циліндричними зубчастими колесами (за схемою 2, б у
табл. 38.1). Такий редуктор має дві пари циліндричних зубчастих ко-
ліс і три вали. Швидко- 1 і тихохідний 2 вали розміщені на одній ,госі.
Це вимагає розміщення однієї з опор кожного із цих валів усередині
Рис. 38.4. Конструкція двосту-
пінчастого редуктора
520
корпусу редуктора, що в певній мірі ускладнює конструкцію редукто-
ра і технологію виготовлення, однак зменшуються габаритні розміри
за довжиною. Проміжний вал 3 у даному редукторі має значну від-
стань між опорами, що вимагає достатньої його жорсткості. З цих мір-
кувань шестірня тихохідного ступеня редуктора виготовлена разом
із проміжним валом. Корпус даного співвісного редуктора складається
з двох частин: картера 4 і кришки картера 5. Площина роз’єму корпусу
збігається з площиною осей валів редуктора. Дві частини корпусу
з’єднуються між собою за допомогою відповідних болтів, а для їхнього
точного взаємного центрування передбачають циліндричні або коніч-
ні штифти. У верхній частині кришки картера передбачене вікно для
огляду зубчастих коліс редуктора і заливання мастила. У картері,
який є одночасно і резервуаром для мастила, передбачені отвір
для зливання відпрацьованого мастила і покажчик його рівня.
Для кріплення редуктора до рами машини у нижній частині кар-
тера розміщені виступи з двох боків, у яких передбачені отвори під
болти.
Одна з можливих конструкцій односту пін частого черв’ячного ре-
дуктора показана на рис. 38.5, а. Тут швидкохідний вал 1 виготов-
лений разом із черв’яком і розміщений під черв’ячним колесом, яке
насаджене на тихохідний вал 2. Корпус даного редуктора також скла-
дається з двох частин: картера 3 і кришки картера 4. Площина роз’є-
му корпусу проходить через вісь тихохідного вала. Це пов’язано з
потребою забезпечення можливості складання редуктора. Особливі-
стю редуктора є те, що на неробочому кінці вала черв’яка змонтова-
ний вентилятор із відповідним кожухом для обдування корпусу. Ос-
кільки ККД черв’ячного редуктора невисокий, то втрати потужності
під час тривалої роботи спричинюють значне нагрівання мастила і
корпусу. Щоб збільшити теплопередачу від корпусу у навколишнє
середовище, потрібне інтенсивне обдування корпусу ШВ'ТрЯМ. Цим
і обумовлюється потреба використання вентилятора. Збільшення теп-
ловідведення від корпусу досягається також збільшенням його зов-
нішньої поверхні за рахунок ребер, що направлені вздовж повітряного
потоку, який створює вентилятор. На кришці корпусу також перед-
бачені додаткові ребра, які розміщені вертикально, оскільки тут оми-
вання корпусу повітрям відбувається за рахунок природної цирку-
ляції.
Картер корпусу черв’ячного редуктора є також резервуаром для
мастила, в яке занурюються витки черв’яка і змащують черв’ячне
зачеплення. Щоб збільшити інтенсивність змащування і охолодження
мастила, на валу черв’яка інколи розміщують дві крильчатки, які
розбризкують мастило на черв’ячне колесо і на стінки картера. У кар-
тері передбачені також отвір для випускання відпрацьованого мастила
і покажчик рівня мастила, за допомогою якого ведеться періодичний
контроль стану змащування.
521
Рис. 38.5. Конструкції черв’ячного (а) та планетарного (б) редукторів
Конструкція планетарного редуктора, виконаного за схемою
рис. 38.2, а, зображена на рис. 38.5, б. Швидкохідний вал 1 цього редук-
тора з’єднується з центральною шестірнею 2 за допомогою зубчастої
муфти 5, що забезпечує більш рівномірне навантаження зачеплення
центральної шестірні з трьома сателітами 4. Ведений вал 5 редуктора
з’єднано з водилом 6 за допомогою шліців. На водилі закріплені паль-
ці 7, на яких обертаються сателіти 4. Центральне колесо 8 із внутрішнім
зубчастим вінцем нерухомо закріплене у корпусі 9 редуктора. Обер-
522
товий рух від швидкохідного вала передається до центральної шестір-
ні 2, далі через сателіти до водила і з’єднаного з ним тихохідного вала.
Для забезпечення можливості складання редуктора його корпус
має бокову кришку 10, в якій розміщена одна опора водила, а друга
опора знаходиться безпосередньо у корпусі. Дві опори швидкохід-
ного вала розміщені в іншій?кришці, яка знаходиться з протилежно-
го боку корпусу. Всі опори швидкохідного вала, водила і сателітів
виконані на радіальних кулькових підшипниках.
Контрольні запитання
1. Що таке редуктор, мультиплікатор, коробка швидкостей? Назвіть дві групи
редукторів і їхню основну відмінність.
2. Наведіть деякі схеми одно- і багатоступінчастих рядових редукторів та оха-
рактеризуйте ці схеми.
3. За якими критеріями можна здійснювати розподіл загального передаточного
числа на окремі ступені у багатоступінчастих редукторах?
4. Наведіть основні схеми планетарних редукторів. Які переваги і недоліки ма-
ють планетарні редуктори?
5. За яким принципом визначають передаточне число планетарного редуктора?
Запишіть і проаналізуйте формули для визначення передаточного числа деяких схем
планетарних редукторів.
6. Назвіть та запишіть умови, які треба задовольнити під час вибору чисел зуб-
ців зубчастих коліс планетарного редуктора.
7. Охарактеризуйте особливості розрахунків на міцність зубчастих коліс пла-
нетарних редукторів.
8. З якою метою здійснюється змащування зубчастих коліс редукторів?
9. Залежно від яких факторів слід вибирати кінематичну в’язкість мастила для
зубчастих редукторів?
10. Назвіть деякі марки мастил для змащування зубчастих і черв’ячних редук-
торів.
ГЛАВА 39. СТАНДАРТИЗОВАНІ РЕДУКТОРИ
І МОТОР-РЕДУКТОРИ
39.1. Загальна характеристика стандартизованих редукторів
і мотор-редукторїв
До стандартизованих належать редуктори і мотор-редуктори загально-
машинобудівного застосування, тобто такі, що відповідають техніч-
ним вимогам, спільним для більшості випадків їхнього конкретного
використання у приводах різних машин.
Для стандартизованих редукторів характерні такі особливості: висо-
кий технічний рівень за масогабаритними показниками і обертовим
моментом, що реалізується редуктором конкретного типорозміру; від-
повідність конструкції деталей і ступеня їхньої уніфікації вимогам сз-
рійного виробництва; достатня техніко-економічна ефективність ви-
користання і задоволення вимог проектантів приводів машин.
523
ГОСТ 16162—85 передбачені такі редуктори загального призна-
чення:
— циліндричні одно-, дво- і триступінчасті з міжосьовою відстан-
ню тихохідного ступеня аи,т 710 мм;
— циліндричні планетарні одно- і двоступінчасті з радіусом роз-
міщення осей сателітів (водила) тихохідного ступеня 200 мм;
— конічні одноступінчасті з номінальним зовнішнім ділильним
діаметром веденого колеса сіе 630 мм;
— конічно-циліндричні дво- і триступінчасті з міжосьовою відстан-
ню тихохідного ступеня Оигг 630 мм;
— черв’ячні та глобоїдні одно- і двоступінчасті з міжосьовою
відстанню тихохідного ступеня 250 мм;
— черв’ячно-циліндричні двоступінчасті з міжосьовою відстан-
ню тихохідного ступеня а^т 250 мм.
Характеристики стандартизованих редукторів, що визначають доціль-
ність і можливість їхнього використання в конкретних приводах ма-
шин, регламентуються такими параметрами: передаточне число, обер-
товий момент на тихохідному валу, допустимі радіальні навантаження
на вихідні вали. ККД і маса редукторів.
Стандартизовані редуктори у приводах машин переважно використо-
вують із електродвигунами. За ГОСТ 16162—85 основні параметри
стандартизованих редукторів визначаються для номінальної частоти обер-
тання швидкохідного вала пиі = 1500 хв-1. Стандарт передбачає ви-
користання редукторів і з більшою частотою обертання швидкохід-
ного вала, але колова швидкість зубчастих коліс не повинна бути біль-
шою, ніж 16 м/с, а швидкість ковзання у черв’ячних передачах —
10 м/с. Технічні параметри редукторів із збільшенням частот обер-
тання будуть дещо нижчими від поданих у каталогах і повинні бути
узгодженими між замовником і організацією, що виготовляє редуктори.
Усі стандартизовані редуктори розраховані на тривалий постійний ре-
жим навантаження і можуть працювати з довільним напрямом обертан-
ня валів. 90%-й ресурс зубчастих передач стандартизованих редукторів
становить 36 000 год, черв’ячних передач — 20 000 год, а підшипни-
ків кочення опор валів — 10 000 год.
Вихідні вали стандартизованих редукторів для з’єднання з іншими ор-
ганами машини можуть мати різне виконання. Для переважної біль-
шості редукторів передбачаються вихідні вали такої форми виконання:
циліндричні; конічні; у вигляді зубчастої півмуфти; з формою, при-
датною для приєднання приладів керування; порожнисті вали. Такі
форми виконання вихідних валів, як циліндричні, конічні і у вигляді
зубчастої півмуфти, здатні сприймати одночасно з обертовим момен-
том також і радіальне навантаження, що прикладається до середини
посадочної ділянки. На циліндричних і конічних вихідних валах стан-
дартизованих редукторів передбачається шпонкове з’єднання, а у порож-
нистих валах — шліцеве з’єднання.
524
Рис. 39.1. Варіанти складання редукторів загального призначення
Стандартизовані редуктори за взаємним розміщенням і числом вихід-
них валів мають різні варіанти складання [23]. Графічне зображення
варіантів наведено на рис. 39.1, де двозначними числами дається умов-
не позначення варіанта складання редуктора (перша цифра характе-
ризує взаємне розміщення осей вихідних валів, а друга — взаємне
розміщення і кількість їх). Графічне зображення варіантів складання
стандартизованих редукторів дано на рис. 39.1 у вигляді їхньої проекції
на площину, яка паралельна осям валів. Швидкохідні вали позначені
потовщеною лінією.
Можливі компоновочні рішення приводів машин із використан-
ням стандартизованих редукторів (а) та мотор-редукторів (б) показані на
рис. 39.2, де позначено: 1 — електродвигун; 2 — редуктор; 3 — муф-
та. Такі рішення можуть забезпечити ідентичні вихідні параметри
привода (частоти обертання, обертовий момент), але з різними варі-
антами взаємного розміщення складових частин привода. Викорис-
тання мотор-редуктор і в досить раціональне і перспективне, оскільки
тут електродвигун безпосередньо з’єднується з корпусом редуктора
і його вал несе на собі одне із зубчастих коліс редуктора. Тому за до-
помогою мотор-редукторів, що виготовлені як окремі агрегати, мож-
на зменшити кількість муфт у приводі, а також його масу і габаритні
розміри. Вибір того чи іншого компоновочного вирішення привода
525
Рис. 39.2. Компоновочні рішення приводів машин
а
залежить від конструкції машини, обмежень за габаритними розміра-
ми та масою, наявності комплектувальних виробів та інших техніко-
економічних показників.
39.2. Стандартизовані циліндричні редуктори
Промисловістю освоєно випуск таких циліндричних редукторів
загального призначення: одноступінчастих горизонтальних типу ЦУ;
двоступінчастих горизонтальних типу Ц2У; двоступінчастих гори-
зонтальних із зачепленням Новікова типів Ц2У-Н і Ц2Н; двоступін-
частих співвісних типу Ц2С; триступінчастих горизонтальних типу
ЦЗУ.
Циліндричні одноступінчасті горизонтальні редуктори типу ЦУ
реалізують передаточні числа в межах 2,0...б,3 при обертових момен-
тах на тихохідному валу Тт = (250...4000) Н • м. Основні технічні
характеристики редукторів типу ЦУ, такі як міжосьова відстань
передаточне число и, номінальний обертовий момент на тихохідному
валу Тт, допустиме радіальне навантаження на вихідні ділянки ва-
лів Рг та інші наведені у табл. 39.1.
Форма корпусу редукторів типу ЦУ зображена на рис. 39.3, а. До
складу редукторів входить пара циліндричних косозубих коліс із ва-
лами, розміщеними на конічних роликових підшипниках. Габарит-
ні, монтажні і приєднувальні розміри редукторів наводяться у відпо-
відних каталогах та довідниках (див. [20]).
526
Рис. 39.3. Циліндричні редуктори
Під час експлуатації редуктори типу ЦУ допускають короткочас-
ні перевантаження при пусках або зупинках, що в 2,2 раза переви-
щують номінальні, якщо число циклів появи перевантажень не пере-
вищує 105 протягом усього строку служби редуктора. Під час роботи
редукторів у реверсивному режимі номінальні обертові моменти на
тихохідному валу треба зменшувати на ЗО %.
527
Таблиця 39.1. Характеристики редукторів типу ЦУ
Типорозмір редукторе «аг *“* а Т. н . м Рг Н, на вал ККД Маса, кг
швидко* хідний тихо- хідний
ЦУ-100 100 2; 2,24; 2,5; 2,8; 3,15; 3,55; 4; 4,5; 5; 5,6; 6,3 250 500 2000 0,98 27
ЦУ-160 160 1000 1000 4000 75
ЦУ-200 200 2000 2000 5600 135
ЦУ-250 250 4000 і 3000 8000 і 250
За ГОСТ 20373—80 редуктори типу ЦУ виготовляються за варі-
антами складання (див. рис. 39.1); 11; 12; 13; 21; 22; 23; ЗІ; 32; 33.
Приклад умовного позначення редуктора: Редуктор ЦУ-200-5,6-
12У2, ГОСТ 25301—82, де ЦУ — тип редуктора; 200 — міжосьова
відстань; 5,6— передаточне число; 12 — варіант складання; У2 —
кліматичне виконання (помірний клімат) і категорія розміщення за
ГОСТ 15150—69.
Циліндричні двоступінчасті редуктори типу Ц2У здатні забезпе-
чити передаточні числа у межах 8—40 і обертові моменти на тихохідно-
му валу Тт = (250...4000) Н • м. Основні технічні характеристики дво-
ступінчастих редукторів типа Ц2У наведені у табл. 39.2.
Редуктори типу Ц2У мають форму корпусу, що зображена на
рис. 39.3, б. Основні габаритні, монтажні і приєднувальні розміри ре-
дукторів типу Ц2У беруть у [20].
Під час експлуатації редуктори типу Ц2У допускають короткочас-
ні перевантаження, які у 2,2 раза перевищують номінальне наванта-
ження, якщо число циклів появи перевантажень не більше ніж 105
протягом усього строку служби редуктора. При роботі редукторів
типорозмірів Ц2У-160, Ц2У-200 і Ц2У-250 у повторно-короткочасно-
му режимі допускається збільшення обертового моменту на тихохід-
ному валу у 2 рази у порівнянні з номінальним, якщо число циклів на-
вантаження не більш ніж 10е. Якщо редуктори типу Ц2У працюють у
реверсивному режимі, то номінальні обертові моменти на тихохідному
валу зменшують на ЗО %.
Редуктори типу Ц2У виготовляють за такими варіантами складан-
ня (див. рис. 39.1): 11—16; 21—26; 31—36.
Приклад умовного позначення циліндричного двоступінчастого
528
Таблиця 39.2. Характеристики редукторів типу Ц2У
Типорозмір редуктора і а^, мм, ступеня и •• " • н Н, на вал ККД Маса, кг
швидко- хідного ТИХОХІД- НОГО швидко- хідний тихохід- ний
Ц2У-100 80 100 8: 10; 12,5; 16; 18; 20; 22,4; 25; 28; 31,5; 35,о; 40 250 250 4000 0,97 35
Ц2У-125 80 125 500 500 5600 53
Ц2У-160 100 160 1000 1000 8000 95
Ц2У-200 125 200 2000 2000 11200 170
Ц2У-250 160 250 4000 3000 16 000 320
редуктора: Редуктор Ц2У-160-28-21МУ2 ГОСТ 25301—82. Тут роз-
шифровка параметрів така сама, як і для редукторів типу ЦУ. Буква
М у позначенні редуктора означає, що вихідна ділянка тихохідного ва-
ла виконана у вигляді зубчастої півмуфти. Тихохідні вали редукторів
типу Ц2У виготовляються у чотирьох варіантах: вихідна ділянка ко-
нічна (К); вихідна ділянка у вигляді зубчастої півмуфти (М); із фор-
мою для приєднання приладів керування (КА); із порожнистою фор-
мою (П).
Циліндричні двоступінчасті співвісні редуктори типу Ц2С мають
передаточні числа у межах 8—50 і обертові моменти на тихохідному ва-
лу ТТ = (125... 1000) Н • м. Основні технічні характеристики редук-
торів типу Ц2С наведені у табл. 39.3.
Редуктори типу Ц2С мають корпус у формі, зображеній на
рис. 39.3, в. Такі редуктори випускають із конічними (К) і циліндрич-
ними ділянками вихідних валів.
Приклад умовного позначення редуктора типу Ц2С: Редуктор
Ц2С-100-25-КУЗ, де Ц2С — тип редуктора; 100 — міжосьова від-
стань; 25 — передаточне число; К — конічні ділянки вихідних валів;
УЗ — кліматичне виконання і категорія розміщення.
Циліндричні двоступінчасті редуктори із зачепленням Новікова
типів Ц2У-Н і Ц2Н дають змогу реалізувати передаточні числа у ме-
жах 8—50 і дістати обертовий момент на тихохідному валу Гт =*
= (7000...50 000) Н • м.
529
Табл и ц я 39.3. Характеристика редукторів типу Ц2С
Типорозмір редукторе мм и тг н . м Н, на вал ККД Маса, кг
швидко* хідний тихохід- ний
Ц2С-63 63 8; 10; 12,5; 16; 20; 25; 31,5; 40; 50 125 500 2800 0,98 17,5
Ц2С-80 80 250 800 4000 28
Ц2С-100 100 500 1000 5600 45
Ц2С-125 125 1000 1000 8000 78
Циліндричні триступінчасті редуктори типу ЦЗУ мають передаточ-
ні числа у межах 45—200, а номінальний обертовий момент на тихо-
хідному валу Тт = (1000...4000) Н • м.
39.3. Черв'ячні редуктори загального призначення
Сучасні черв’ячні редуктори, що виготовляються серійно, бува-
ють таких типів: одноступінчасті універсальні обдувні типу Ч і дво-
ступінчасті типів 42 і 24.
Одноступінчасті редуктори типу 4 (типорозміри 4-40, 4-63, 4-80,
4-100, 4-125, 4-160) забезпечують передаточні числа у межах 8—80
і обертові моменти на тихохідному валу Тт == (25...2000) Н • м. Ос-
новні технічні характеристики одноступінчастих черв’ячних редукто-
рів типу 4 задаються залежно від частоти обертання швидкохідного
вала (черв’яка) пш і номінального передаточного числа и. Для черв’яч-
ного редуктора типорозміру 4-125 такі характеристики наведені у
табл. 39.4.
Редуктори типу 4 мають нероз’ємний корпус (рис. 39.4), а бокові
кришки корпусу — це гнізда для опор тихохідного вала. На валу
черв’яка під відповідним кожухом розміщено вентилятор для обдуван-
ня корпусу. Всі корпуси редукторів типу 4 на зовнішній поверхні ма-
ють ребра для поліпшення тепловіддачі. Габаритні, монтажні і при-
єднувальні розміри черв’ячних редукторів наводяться у довідниках
[1, 201.
Черв’ячні редуктори розраховані на тривалу неперервну роботу
при постійному режимі навантаження і температурі навколишнього
530
Таблиця 39.4. Характеристики черв'ячного редуктора типорозміру 4-125
3 Частот» обертання швидкохідного вала лш> хв—1 Р Н, на ти- хохідний вал Маса, кг
500 750 1000 1500 Варіанти вкладання
Т, Н • м т ККД я • X 1. ККД * V Тг н . м ККД Я X ККД СЧ ю ю 8 51; 52 2
8,0 926 0,90 826 0,91 0,89 738 0,92 660 0,93 8000 4000 86 88
10,0 894 0,89 800 712 636
12,5 880 0,88 785 700 0,91 626 0,92
16,0 950 0,83 850 0,86 757 0,87 676 0,89
20,0 817 0,82 820 0,84 730 0,86 653 0,88
25,0 865 0,80 772 0,82 690 0,84 616 0,87
31,5 1000 0,71 1000 0,75 890 0,78 800 0,81
40,0 972 0,69 870 0,73 775 0,76 692 0,79
50,0 900 0,67 803 0,70 717 0,73 640 0,77
63,0 857 0,64 765 0,68 683 0,71 610 0,76
80,0 740 0,56 660 0,60 590 0,63 529 0,69
середовища 20 °С. Температура мастила у корпусі редуктора допу-
скається не більш ніж 95 °С.
Редуктори допускають короткочасні перевантаження, що у 2 рази
перевищують номінальні, за умови, що число циклів перевантажень
на швидкохідному валу не перевищує 3 • 10е протягом строку служ-
би редукторів.
531
Рис. 39.4. Черв’ячний од-
ноступінчастий редуктор
Якщо черв’ячний редуктор працює у повторно-короткочасних ре-
жимах із тривалістю циклів не більше ніж 10 хв, то обертові моменти,
що наведені у табл. 39.4, можна збільшити.
Згідно з ГОСТ 20373—80 редуктори типу Ч виготовляють за ва-
ріантами складання 51, 52, 53 і 56. Вихідні ділянки тихохідних валів
можуть бути циліндричними, конічними або порожнистими.
Приклад умовного позначення черв’ячного одноступінчастого ре-
дуктора загального призначення типу Ч: Редуктор Ч-125-40-51-2-3-
КУЗ, де Ч — тип редуктора; 125 — міжосьова відстань; 40 — пере-
даточне число; 51 — варіант складання; 2 — варіант розміщення чер-
в’ячної пари; 3 — площина закріплення редуктора з боку черв’яч-
ного колеса; К — вихідні ділянки валів конічні; УЗ — кліматичне
виконання і категорія розміщення за ГОСТ 15150—69.
39.4. Планетарні редуктори загального призначення
Серійні планетарні редуктори виготовляються двох типів: плане-
тарні одноступінчасті типу Пз і планетарні двоступінчасті типу
Пз2.
Планетарні одноступінчасті редуктори типу Пз забезпечують пе-
редаточні числа у межах 6,3—12,5 і обертові моменти на тихохідному
валу Тт = (125...31 500) Н • м. Такі редуктори виготовляють за схе-
мою рис. 38.2, а.
Основні технічні характеристики деяких редукторів типу Пз наве-
дені у табл. 39.5. Основним розмірним параметром планетарних редук-
торів є радіус розміщення осей сателітів /?Л. Крім параметрів, харак-
терних для інших типів редукторів, для деяких планетарних редук-
торів обмежується термічна потужність Рт.
Термічна потужність — це максимальна допустима
потужність для редуктора при картерному змащуванні зануренням
зубчастих коліс без штучного охолодження і циркуляції мастила при
температурі навколишнього середовища і0 — 20 °С.
Форма корпусу планетарних одноступінчастих редукторів типу
Пз показана на рис. 39.5. Вихідні ділянки швидко- і тихохідного ва-
лів редукторів мають конічну форму.
532
Таблиця 39.5. Характеристики деяких планетарних редукторів типу Па
Типороз- мір редук- тора мм и тг Н.М * кВ? Рг, Н, ви вал ККД Маса, кг
швидко- хідний тихох їд- кий
Пз-40 40 6,3; 8; 10; 12,5 250 —— 1200 2000 0,97 29
Пз-50 50 500 1700 2800 50
Пз-63 63 1000 — 2400 4000 75
Пз-80 80 2000 22,0 3400 5600 118
Пз-100 100 4000 35,0 4800 8000 235
Пз-125 125 8000 52,0 6800 11 300 0,96 450
Максимальна частота обертання швидкохідного вала редукторів
типорозмірів Пз-40 — Пз-80 становить 3000 хв*1, а редукторів
Пз-100 і Пз-125 — 1500 хв—1. Редуктори призначені для передавання
постійного і змінного навантаження у межах допустимого обертового
моменту при обертанні тихохідного вала в довільному напрямі.
Приклад умовного позначення ©двоступінчастого планетарного
редуктора: Редуктор П3-80-12,5, Пз — тип редуктора; 80 — ра-
діус розміщення осей сателітів; 12,5 — передаточне число.
Двоступінчасті планетарні редуктори Пз2 мають передаточні чис-
ла у межах 31,5—125, а обертові моменти на тихохідному валу Тт я
= (125...31 500) Н . м.
Рис. 39.5,
редуктор
Планетарний
533
39.5. Мотор-редуктори
Мотор-редуктор — це механізм, в якому конструктивно
об’єднані редуктор і електродвигун. Для комплектування мотор-ре-
дукторів використовують асинхронні трифазні електродвигуни з
короткозамкнутим ротором серії 4А...РЗ.
У мотор-редукторах використовують циліндричні двоступінчас-
ті співвісні редуктори (мотор-редуктори типу МЦ2С), одноступінчас-
ті планетарні редуктори (мотор-редуктори типу МПз) і двоступінчасті
планетарні редуктори (мотор-редуктори типу МПз2). Зовнішні фор-
ми мотор-редукторів типів МЦ2С та МПз зображені на рис. 39.6, а, б.
Мотор-редуктори типорозмірів МЦ2С-63 — МЦ2С-125 забезпечують
обертові моменти на тихохідному валу Тт = (125... 1000) Н • м при
частотах його обертання пт = (28... 180) хв-1.
Основні технічні характеристики мотор-редуктора типорозміру
МЦ2С-100 наведені у табл. 39.6 [23].
Таблиця 39.6, Характеристики мотор-редуктора МЦ2С-100
Т¥ Н.М а , хв"*1 т ККД Маса, кг Електродвигун
номі- нальна фактич- не Тип ^Дв’ кВт Л__, хв 1 ККД
500 28 28 5600 0,96 87 4А100І8РЗ 1,5 700 0,74
541 35 38 4А100І6РЗ 2,2 950 0,81
442 45 46
490 56 57 80 87 4А10054РЗ 4А100І4РЗ 3,0 4,0 1420 0,82 0,84
526 71 70
407 90 92
444 112 118 105 4А112М4РЗ 5,5 1450 0,85
490 140 143 105 4А112М2РЗ 7,5 2900 0,87
534
Рис. 39.6. Мотор-редуктори
Мотор-редуктори призначені для передавання постійного або змін-
ного навантаження у межах допустимого обертового моменту на ви-
хідному валу при його обертанні у довільному напрямі.
Мотор-редуктори типорозмірів МПз2-31,5 — МПз2-63 допускають
обертові моменти на вихідному валу Тт = (125... 1000) Н • м і мають
частоти обертання вихідного вала пт = (18...90) хв*1.
39.6. Методика і принцип підбору редукторів
загального призначення
Для підбору редуктора загального призначення у приводі кон-
кретної машини потрібні такі вихідні дані: розрахункове передаточне
число редуктора ир, розрахунковий тривалодіючий обертовий момент
на тихохідному валу Тпр, радіальні навантаження на вихідні ділянки
швидкохідного і тихохідного Еч валів, режим експлуатації, кон-
структивні та експлуатаційні особливості привода машини.
Вибір типу редуктора. Тип редуктора для привода вибирається за
умовами: 7\ Тпр і иРі де Тг — номінальний обертовий момент на
тихохідному валу редуктора за каталогом, а и — номінальне переда-
точне число редуктора за каталогом.
Оскільки записаним умовам можуть задовольняти кілька типів
редукторів, то для остаточного вибору редуктора треба враховувати
деякі особливості кожного типу.
Відносне розміщення осей вхідного і вихідного
валів;
— мимобіжні осі валів (черв’ячні одноступінчасті і черв’ячно-ци-
ліндричні редуктори);
— осі валів перетинаються (конічні і конічно-циліндричні редук-
тори);
— осі валів паралельні (циліндричні і черв’ячні двоступінчасті
редуктори);
535
— осі валів збігаються (співвісні циліндричні і планетарні редук-
тори).
ККД редуктора: найвищий — в одноступінчастих ци-
ліндричних і планетарних редукторів; найнижчий — у черв’ячних
(особливо у двоступінчастих) редукторів.
Рівень шуму: найнижчий — у черв’ячних редукторів; най-
вищий — у циліндричних та конічних редукторів.
Матеріаломісткість (згідно з ГОСТ 16162—85 для одних
і тих же значень обертовогомоменту на тихохідному валу): найвища —
у конічних редукторів; найнижча — у планетарних одноступінча-
стих редукторів.
Габаритні розміри при одних і тих же передаточних
числах і обертових моментах: найбільші осьові — у співвісних і пла-
нетарних; найбільші у напрямі, перпендикулярному до осей валів,—
у циліндричних триступінчастих; найменші радіальні — у планетар-
них редукторів.
Відносна вартість, при одних і тих же значеннях
головного параметра редукторів: при и 63 — низька у ци-
ліндричних, вища у планетарних, найвища у конічних редукторів; при
и > 63 — більш висока вартість у черв’ячних двоступінчастих редук-
торів, нижча у планетарних.
Дефіцитність визначається ринком, станом попиту спо-
живачів та можливостями промисловості.
Наведені особливості різних типів редукторів не є усталеними і
можуть змінюватись залежно від рівня науково-технічного прогресу
в редукторобудуванні.
Вибір типорозміру редуктора. Типорозмір редуктора вибирають
у каталозі за його головним параметром: міжосьовою відстанню
для циліндричних і черв’ячних одноступінчастих редукторів; зов-
нішнім ділильним діаметром конічного колеса </Є2 для конічних ре-
дукторів; радіусом розміщення осей сателітів (радіусом водила) /?Л
для планетарних редукторів.
При виборі типорозміру багатоступінчастого редуктора параметри
(іе2 і визначаються для тихохідного ступеня
Вибраний типорозмір редуктора повинен задовольняти такі умови:
Тт>КрТпР; (39.1)
Рг>КрРр; (39.2)
^тр^^пр* (39.3)
У записаних умовах: Тт і Рг — відповідно номінальний обертовий
момент і номінальне допустиме радіальне навантаження на вихідні
ділянки валів редуктора за каталогом; Тпр і Гр — відповідно тривало-
діючий обертовий момент на тихохідному валу та радіальне наванта-
ження на вихідні ділянки валів під час нормального процесу роботи
536
привода машини; Кр — коефіцієнт режиму роботи привода; Ртр — роз-
рахункова термічна потужність редуктора; Рпр — розрахункова по-
тужність, яку передає редуктор.
Коефіцієнт режиму роботи привода визначається за такою фор-
мулою [23]:
ЇЇр == КдвКгаКтрКмКрев. (39.4)
Окремі коефіцієнти у формулі (39.4) вибирають за такими реко-
мендаціями:
Кдв — коефіцієнт, що залежить від типу двигуна, спареного з ре-
дуктором. Якщо у приводі використовуються електродвигуни, багато-
циліндрові (не менш як 8 циліндрів) двигуни внутрішнього згоряння
або газові турбіни, то Кд» = 1; з використанням чотири- і шестици-
ліндрових двигунів внутрішнього згоряння Кдв = 1,2; з використан-
ням одно- і двоциліндрових двигунів Кдв = 1,4;
Ктв — коефіцієнт, що залежить від тривалості вмикання (ТВ) при-
вода [див. формулу (36.2)], визначають за даними табл. 39 7;
Ктр — коефіцієнт тривалості роботи редуктора протягом доби. Як-
що редуктор працює до 1 год на добу, то Лтр = 0,7; при роботі 1—
З год — Лтр = 0,8; при роботі 8—12 год — Ктр = 1; при роботі про-
тягом 24 год — ЛТр = 1,2;
— коефіцієнт, який залежить від характеру робочого процесу
машини, у приводі якої використовується редуктор. Якщо робота ма-
шини відбувається без різких змін навантаження, із числом вмикань не
більш як 10 на годину і Тпуск/Тт<1х — 1,5...1,8, то берутьЛм = 1. До
таких машин належать електричні генератори, стрічкові та гвинтові
конвейєри, легкі вентилятори, відцентрові компресори, перемішу-
вані речовин рівномірної густини, механізми подачі верстатів тощо.
Якщо робота машини супроводжується помірними змінами наванта-
ження з легкими поштовхами, число вмикань на годину не більш ніж
60 І Тпуск/Ттах = 1,8...2 (ПОТуЖНІ ВЄНТИЛЯТОрИ, ПОВОРОТНІ ПрИСТрОЇ
кранів, механізми головного привода верстатів, поршневі помпи), то
Лм = 1,2. Під час роботи машин із різкою зміною робочого наванта-
ження (приводи пресів, вібраційні машини, ударні дробарки) коефіці-
єнт Ки = 1,4.
•и
Таблиця 39.7. Коефіцієнти для зубчастих і черв'ячних редукторів
РедуктоР Ктв “Р» тв, %
100 60 40 25 15
Зубчастий Черв'ячний 1,00 1,00 0,90 0,80 0,80 0,70 0,70 0,60 0,67 0,50
537
Коефіцієнт КРев рекомендують братні для нереверсивної роботи при-
вода КРев = 1, а для реверсивної роботи Лрев = 1,25.
Якщо у приводі машини передбачається черв’ячний редуктор, то
знайдений за формулою (39.4) коефіцієнт режиму роботи привода КР
слід помножити на коефіцієнт Кч, який беруть: Кч = 1 — при розмі-
щенні черв’яка під колесом; Кч = 1,2 — при розміщенні черв’яка
над колесом; Кч = 1,1 —при бічному розміщенні черв’яка.
Перевірка радіальних навантажень на вихідні вали редуктора
здійснюється за умовою (39.2) окремо для швидко- і тихохідного ва-
лів. Якщо умови (39.1) і (39.2) не виконуються для вибраного типороз-
міру редуктора, то потрібно брати більший типорозмір.
Перевірка відсутності перегрівання редуктора у приводі машини за
умовою (39.3) виконується тільки для тих редукторів, для яких у ка-
талогах наводиться значення термічної потужності Рт (редуктори ти-
пів Ц2У-Н, Ц2Н, Пз, Пз2).
Розрахункову термічну потужність редуктора в приводі машини,
що працює у довготривалому режимі, визначають за формулою
Ртр = Рт (90 -/с)/65, (39.5)
де і0 — температура навколишнього середовища, в якому працює ре-
дуктор, °С.
Якщо машина працює в повторно-короткочасних режимах, а ре-
дуктор не обладнаний вентилятором для обдування його корпусу, то
= Рт (90 - /е)/(65Кр). (39.6)
Під час роботи машини у повторно-короткочасних режимах і об-
дуванні редуктора вентилятором
Агр = Рт (90 - /С)/(65КР ГЄ), (39.7)
де ТВ — тривалість вмикання привода машини за формулою (36.2).
Розрахункову потужність Рпр, яку передає редуктор, в умові (39.3)
визначають за співвідношенням Рпр = 7\р«т/т]р, де (от — кутова
швидкість тихохідного вала редуктора, а г|р — його ККД.
Типорозмір редуктора у значній мірі залежить від коефіцієнта Кр
режиму роботи привода машини, оскільки Кр може бути більшим або
меншим одиниці. Якщо Кр > 1, то розрахунковий обертовий момент на
приводному валу робочого органу машини Тпр завжди менший від но-
мінального обертового моменту на тихохідному валу редуктора Тт.
Якщо Кр < 1, то можна вибрати такий типорозмір редуктора, для яко-
го Тт <С Тпр.
Контрольні запитання
1. Назвіть основні типи стандартизованих редукторів загального призначення.
2. Які форми вихідних валів передбачаються у редукторах загального призна-
чення?
538
3. Які варіанти складання можливі для стандартизованих редукторів?
4. За якими параметрами виконують підбір редукторів загального призначення?
5. Які типи циліндричних редукторів загального призначення випускаються
промисловістю?
6. Назвіть деякі типи черв’ячних і планетарних редукторів загального при-
значення.
7. Що входить в умовне позначення типорозміру різних редукторів?
8. Що таке мотор-редуктор? Назвіть деякі типи мотор-редукторів.
9. Які вихідні дані треба знати для підбору редуктора у приводі машини?
10. Які фактори враховують при виборі типу редукторів загального при-
значення?
11. Запишіть умови, за якими здійснюють підбір типорозміру редуктора.
12. Від яких факторів залежить коефіцієнт режиму роботи привода машини?
ГЛАВА 40. ЗАГАЛЬНІ ЗАДАЧІ ПРИ КОНСТРУЮВАННІ
ПРИВОДІВ МАШИН
40.1. Узгодження параметрів двигуна, муфти
та редуктора у приводі
Розглянуті у попередніх главах даного розділу питання належать до
загальної характеристики, розрахунків та підбору окремих елементів
приводів. Однак проектування і конструювання привода вимагають
узагальненого підходу до всієї його конструкції як окремої складової
частини машини. Деякі питання проектування та узгодження пара-
метрів складових частин привода розглянемо з урахуванням того, що
привод складається із стандартизованих елементів (електродвигуна,
муфти, редуктора).
Відомо (див. гл.39), що стандартизовані редуктори загального призна-
чення мають фіксовані передаточні числа, а найбільш широковжива-
ні двигуни змінного струму — фіксовані частоти обертання ротора при
номінальному навантаженні. Крім цього, діапазони передаточних чи-
сел деяких типів редукторів перекриваються або збігаються. Все це
збільшує кількість можливих варіантів привода, які відрізняються
типами двигунів, редукторів і муфт. Наприклад, якщо врахувати,
що асинхронні електродвигуни єдиної серії 4А з однією і тією ж по-
тужністю можуть мати синхронні частоти обертання 3000, 1500, 1000
і 750 хв”1, то для забезпечення заданої частоти обертання приводного
вала робочого органу машини дістанемо ряд можливих передаточних
чисел редуктора, у якому відношення найбільшого з них до наймен-
шого буде дорівнювати 4. Такий ряд передаточних чисел може пере-
кривати діапазони передаточних чисел редукторів типів ЦУ, Ц2У,
Пз, Пз2, Ч та ін.
Оскільки більшість стандартизованих редукторів загального призна-
чення має обмеження за частотою обертання швидкохідного вала, яка
не повинна перевищувати 1500 хв~1, а в деяких випадках і 1000 хв-1,
кількість варіантів привода можна зменшити. Інші обмеження, що
539
спричинюють зменшення кількості варіантів привода, можуть бути
такими, як умова забезпечення мінімуму маси або вартості, максималь-
ного ККД та ін.
Застосування в приводі машини більш швидкохідних двигунів ви-
магає більшого передаточного числа редуктора, що в деяких випад-
ках змушує переходити від одноступінчастих до дво- або триступінчас-
тих редукторів. Однак питання доцільності застосування швидкохід-
них двигунів із меншими масою та вартістю не розв’язується, оскільки
зростають маса та вартість двоступінчастого редуктора у порів-
нянні з одн©ступінчастим (мається на увазі одне і те ж значення
обертового моменту на тихохідному валу редуктора, яке треба реалі-
зувати для привода робочого органу машини із певною частотою
обертання).
Питання узгодження параметрів електродвигуна і редуктора спро-
щується, коли ряд можливих передаточних чисел привода лежить у
діапазоні передаточних чисел редуктора певного типу (одно-, дво- чи
триступінчастого). У цьому разі більш доцільно вибрати електродви-
гун із найбільшою допустимою для редуктора частотою обертання ва-
ла двигуна. Тоді матимемо менші масу і вартість привода, бо редук-
тори певного типорозміру з різними передаточними числами мають при-
близно однакові масу та вартість, а електродвигун буде мати ці по-
казники найменшими.
Під час проектування привода машини важливе значення має ви-
бір класу і групи муфт для з’єднання валів електродвигуна і редук-
тора, редуктора і робочого органу машини. Клас муфт переважно зале-
жить від призначення машини, особливостей її робочого процесу, по-
треби захисту від перевантажень, пускових характеристик двигуна та
ін. У більшості випадків для з’єднання валів електродвигуна та ре-
дуктора використовують такі класи муфт, як некеровані, самокерова-
ні та комбіновані муфти.
Групу муфти вибирають із урахуванням таких факторів, як потре-
ба компенсації похибок монтажу елементів привода, зменшення дина-
мічних навантажень у приводі, потреби керування роботою машини, за-
хист деталей машини від руйнування тощо. Нижче зупинимось на де-
яких питаннях узгодження параметрів муфт для з’єднання валів
двигуна і редуктора, оскільки параметри, клас і група муфт для з’єд-
нання валів редуктора і робочого органу машини переважно визнача-
ються функціональними особливостями робочих органів.
Муфти між електродвигуном та редуктором повинні допускати по-
трібну частоту обертання і забезпечувати передавання певного обер-
тового моменту. Слід мати на увазі, що застосування швидкохідних
двигунів у приводі дозволяє навантажувати муфти меншими оберто-
вими моментами, тобто вони будуть мати менші габаритні розміри і ма-
су. Використання у приводі пружних муфт сприяє зменшенню ди-
намічних навантажень під час запускання машини в дію.
540
Під час вмикання електродвигуна процес його розгону до номіналь-
ної частоти обертання відбувається швидше, якщо момент інерції муфти
малий (у довідниках подається маховий момент муфт який пов’яза-
ний із моментом інерції співвідношення = 6й2/4). У приводах, при-
значених для розгону великих мас, процес запускання у дію асин-
хронних електродвигунів ^Полегшується використанням відцентрових
або фрикційних муфт. Із відцентровими муфтами можна здійснити
початковий розгін двигуна до певної частоти обертання, а відтак і всієї
машини. Фрикційні муфти також полегшують процес розгону при
умові, що вони відрегульовані на передавання обертового момен-
ту, який менший від пускового моменту електродвигуна. Тут підчас
розгону відбувається проковзування ведучих і ведених елементів
муфти.
З’єднання валів електродвигуна та редуктора за допомогою муф-
ти повинно забезпечити компенсацію похибок у взаємному розміщенні
валів. Це вимагає застосування компенсаційних муфт, оскільки жор-
сткі муфти спричинюють значне додаткове навантаження валів після
закріплення двигуна і редуктора до основи. Особливо це стосується
випадків монтажу елементів привода на основі недостатньої жорсткос-
ті. Оскільки вихідні ділянки валів і відповідні підшипники двигунів
та редукторів розраховані на сприймання відповідних радіальних на-
вантажень, використання тієї чи іншої муфти у приводі повинно бути
узгодженим із допустимими радіальними навантаженнями на вали,
які задаються у каталогах редукторів. Рекомендації для визначення
радіальних навантажень на вали від деяких муфт під час передавання
робочого навантаження подані у гл. 37.
Отже, наведені вище відомості свідчать про потребу врахування
ряду факторів під час проектування привода машини з метою узгод-
ження параметрів його складових частин і вибору найраціональніших
показників при експлуатації.
40.2. З'єднання та кріплення елементів привода
Взаємне розміщення елементів привода залежить від загальної
компоновки машини. Електродвигун і редуктор можуть бути розмі-
щені безпосередньо на корпусі чи рамі машини або привод конструю-
ють як окрему складальну одиницю машини. В останньому ви-
падку двигун і редуктор розміщують на окремій рамі або плиті, за-
кріпленій на фундаменті. Приклад такого привода наведено на
рис. 40.1, де позначено: 1 — рама, 2 — черв’ячний редуктор, З—
муфта; 4 — електродвигун.
Рами (деталі, що виготовляються зварюванням) і плити (деталі,
що виготовляються литтям) є базовими елементами привода. Основні
вимоги, що ставляться до рам і плит, визначаються їхнім призначен-
ням та умовами роботи. Рами та плити повинні забезпечувати
541
достатньо точне базування і стале взаємне розміщення на них двигуна
і редуктора у процесі роботи привода. Оскільки навантаження, що ді-
ють на рами і плити мають вібраційний, а інколи і ударний характер,
конструкція рам та плит повинна забезпечувати достатньо високу жор-
сткість та міцність. Площини базування двигуна і редуктора на рамах
або плитах, а також координати отворів для закріплювання їх виби-
рають із урахуванням форми, розмірів та взаємного розміщення дви-
гуна, муфти і редуктора. Щоб закріпити двигуни та редуктори на ра-
мах, треба використовувати стандартні кріпильні деталі (болти, гай-
ки, рідше гвинти) із урахуванням розмірів отворів у корпусах, які
подаються у каталогах.
Приклад конструкції рами, виготовленої зварюванням елементів із
сортового прокату, показано на рис. 40.2. Найзручнішими для виго-
товлення рам є швелери, кутники, фасонні труби, листова сталь. Під
час зварювання рама значно викривлюється, тому всі базові поверхні
рами обробляють механічно після зварювання, відпалювання та ви-
правлення (рихтування).
Найчастіше рами використовують в індивідуальному або малосе-
рійному виробництві. Маса рам значно менша від плит, але такі опе-
рації, як відпал та правка, трудомісткі і малопродуктивні, що збіль-
шує вартість виготовлення рам.
Конструкція плити для встановлення привода зображена на
рис. 40.3. Форма і розміри плити залежать від розмірів та взаємного
розміщення двигуна і редуктора. Поверхні плити, які є базою для ус-
тановки елементів привода, механічно обробляють достатньо точно,
щоб дістати малі відхилення від площинності та паралельності і звес-
ти до мінімуму деформації деталей при закріплюванні їх на плиті.
Для кріплення двигуна і редуктора у оамі передбачають різьбові от-
вори, а також отвори для кріп-
Рис. 40.1. Привод із черв’ячним ре- Рис. 40.2. Рама
дуктором
542
Рис. 40.3. Плита
СЧ 20. Товщину стінок 6 рами беруть за-
лежно від її габаритних розмірів, вона не
повинна бути менш ніж 6 мм. Жорсткість
рами забезпечується, якщо у конструкції
є відповідні поздовжні та поперечні ребра.
З’єднання валів двигуна та редуктора
за допомогою муфт вимагає відповідної
установки та кріплення півмуфт на валах.
Півмуфти встановлюють на циліндричні
або конічні кінці валів. У електродвигунів
вихідні кінці валів переважно циліндрич-
Рис. 40.4. Кріплення муфт
на валах
б
ні, а у редукторів вали можуть бути циліндричними або коніч-
ними.
На циліндричних кінцях валів півмуфти розміщують із перехід-
ними посадками Н7/т6, Н7/к6. Використання посадок із натягом спри-
чинює значні труднощі, оскільки насаджування півмуфти на вал ви-
магає створювання значних осьових зусиль, через що можуть по-
шкодитись підшипникові вузли двигуна чи редуктора.
При насаджуванні півмуфт на конічні кінці валів можна створити
значний натяг у з’єднанні і забезпечити точне радіальне і кутове по-
ложення півмуфти щодо вала. Тому при значних навантаженнях, ро-
боті привода з поштовхами та ударами і при реверсивній роботі більш
доцільно встановлювати півмуфти на конічних кінцях валів.
Осьова фіксація півмуфт на циліндричних кінцях валів може здій-
снюватись різними способами. На рис. 40.4, а зображена фіксація пів
Рис. 40.5, Контроль взаємного положення
валів
муфти за допомогою спеціально-
го гвинта /, застопореного пру-
жинним кільцем 2. Якщо у валу
є центровий різьбовий отвір,
можна використати спосіб осьо-
вої фіксації півмуфти (рис. 40,4»
б) із використанням торцевої
шайби та гвинта. Приклад осьо-
вої фіксації та створювання на-
тягу у з’єднанні при розміщенні
півмуфти на конічному кінці
вала наведено на рис. 40.4, в.
Нормальна робота муфти і всього привода можлива тільки при
співвісних валах двигуна і редуктора. Фактичні відхилення від спів-
вісності валів не повинні перевищувати допустимих, указаних у до-
відниках для різних типів муфт.
Контроль радіального і кутового зміщень осей валів здійснюють
по дисках півмуфт. Радіальне зміщення осей у цьому випадку ви-
мірюють щупом і контрольною лінійкою (рис. 40.5). Щупом вимірю-
ють також зазори сх і г2. Кутове зміщення валів оцінюється Да = (с2—
— сг)/О. Вимірювання потрібно здійснювати у двох взаємно перпенди-
кулярних площинах. Якщо не можна виконати ці вимірювання, то на
вали попередньо насаджують спеціальні диски, виконують вимірю-
вання, центрують вали за допомогою відповідних прокладок між пло-
щинами установки двигуна і рами, фіксують взаємне положення дви-
гуна і редуктора щодо рами контрольними мітками, а відтак зніма-
ють диски і виконують складання привода за контрольними мітками.
За технікою безпеки відкриті деталі привода, що обертаються, на-
приклад муфти, закривають відповідними кожухами з листової ста-
лі або сітки. Захисні кожухи переважно закріплюють на рамі чи пли-
ті. Оскільки у приводі використовується електродвигун, приводний
пристрій треба надійно заземляти.
40.3. Принципи розрахунків на міцність деталей
кріплення двигуна та редуктора
Двигуни та редуктори закріплюють на рамах переважно за допо-
могою болтів із гайками, а на плитах — за допомогою гвинтів, які
загвинчують у різьбові отвори. У двигунах та редукторах загально-
го призначення не завжди є можливість використовувати для їхнього
кріплення гвинти, оскільки гвинти певної довжини не вдається поста-
вити у отвори, що розміщені у заглибинах корпусу. Застосування бол-
тів із гайками більш доцільно, тому що можна запобігти руйнуван-
ню різьби у отворах дорогої і складної деталі (плити), відновлення
якої не завжди можливе. Незважаючи на те, які кріпильні деталі ви-
544
користовують для з’єднання двигуна і редуктора з рамою чи плитою,
принцип їхнього розрахунку на міцність однаковий.
У корпусах стандартних електродвигунів та редукторів передба-
чені отвори певних діаметрів для постановки кріпильних деталей. Це
обумовлює застосування болтів чи гвинтів цілком конкретних діамет-
рів. Відповідно розрахунок на міцність деталей кріплення двигунів
та редукторів до рами зводиться до визначення напружень, що виника-
ють у цих деталях від дії розрахункових іілшіішіжеііь, за якими на-
значають клас міцності болтів і гайок або і шипів
Щоб виконати розрахунки, треба попередньо скласти схему на-
вантаження двигуна чи редуктора зовнішніми силошіми флкюрлми.
До таких силових факторів належать обертові моменіи, нк» дікль на
вали, і радіальні сили, які прикладаються на середині вихідних кін-
ців валів. Дія зазначених силових факторів зрінноплжугім и відпо-
відними силами реакції болтів, за допомогою яких дпиіуп або редук-
тор закріпляють до рами, та силами тертя у площині < іику.
Радіальні сили на вали можуть бути спричинені діло муфг (власна
вага муфти, сила, що створюється за рахунок компенсації нп піпвіс-
ності валів, відцентрова сила, яка виникає від дисбалшсу муфні), або
дією зусиль натягу віток пасової або ланцюгової передачі, якщо на
валах розміщені шківи чи зірочки. Власна вага муфт тнж має
постійний напрям та модуль, відцентрова сила від дисб.іч.іш \ |<ін
постійна за модулем (при сталій частоті обертання муфіи), а змі-
нює напрям у межах 0—360° за один оберт муфти, а сила під нон н< а-
ції муфтою неспіввісності валів практично постійна за модулем, ллє
має невизначений випадковий напрям. У різних випадках нг ші за-
значені радіальні сили мають домінуюче значення у розрахунках І Іа-
приклад, власна вага деяких муфт незначна і нею можна зпехіупаїн,
або також можна знехтувати відцентровою силою у ретельно підпадай*
сованих муфтах. Не беруть до уваги радіальні сили на вали від ком-
пенсації муфтами неспівісності валів у випадках центрування їх із
високою точністю.
Розглянемо порядок визначення сил, що діють на болти кріплений
електродвигуна до рами. На рис. 40.6, а зображена схема дії актив-
них силових факторів на двигун, до яких належить обертовий момент
Т, що діє на корпус (момент Т дорівнює пусковому обертовому момен-
ту на валу двигуна і направлений у протилежний бік від напряму обер-
тання вала), і радіальна сила Р на вал, наприклад від компенсації муф-
тою неспіввісності валів (див. гл. 37). Оскільки сила Р має невизначе-
ний напрям, можливий її напрям будемо характеризувати кутом а,
який вона утворює з горизонтом. У подальших випадках будемо оці-
нювати дію сили Р ії двома складовими Рх~ Р соз а та Ру~ Р зіп а.
Реактивні силові фактори, що діють на двигун (сили реакції бол-
тів кріплення корпусу двигуна до рами), знаходять із умов його рів-
новаги. Для більшої наочності та спрощення запису умов рівноваги
545
1
Рис. 40.6. До розрахунку болтів кріплення двигуна до рами
двигуна розрахункову схему можна подати у вигляді на рис. 40.6, б,
де зображена площина стику корпусу двигуна з рамою, а сили Рх і
Ру зведені до центра ваги цієї площини. Згідно з правилами зведення
сил для показаних на рис. 40.6, б напрямів координатних осей х, у і г,
крім моменту Т та сил Рх і Ру, прикладених у центрі ваги площини
стику, на корпус двигуна діють моменти сил (розміри с, І і Н наведе-
ні на рис. 40.6, а):
Тх = Ру (с + 0,5/); Ту = Рх(с + №)\ Тг = Р,к.
Рис. 40.7. Навантаження кор-
пусу редуктора
Із наведеної на рис. 40.6, б розрахункової схеми видно, що болти
1, 2, 3 і 4 створюють осьові сили реакцій і поперечні (щодо напря-
му осей болтів) сили реакцій /?Х2, які діють у площині стику. Щоб спро-
стити розрахунки, припускають, що сили реакцій всіх болтів від дії
окремих силових факторів мають однакове значення. Доцільно скла-
дові осьових та поперечних сил реакцій болтів визначати окремо від
дії кожного силового фактору, а відтак знаходити їхню геометричну
суму, тобто для кожного болта дістати
і <^Х2'
Оскільки кут а може бути довільним у
межах 0—360°, то для різних значень а
підраховують Ру і для кожного болта.
Болти розраховують на міцність за мож-
ливими максимальними значеннями /?утах
І /?хгтах ВІДПОВІДНО ІЗ ПрИНЦИПЗМИ, ВИКЛЗ-
деними у 11.7 та підчас розв’язування за-
дачі 11.2.
Принцип розрахунків деталей кріплення
редуктора до рами аналогічний. Однак тут
546
треба мати на увазі (див. рис. 40.7), що на корпус редуктора
діє момент Ті, що дорівнює обертовому моменту на швидкохід-
ному валу і направлений за напрямом обертання цього вала, а та-
кож момент який дорівнює обертовому моменту на тихохідному
валу, але направлений протилежно напряму обертання тихохідного
вала. Моменти сил 7\ і Т2 рїежать у площинах, перпендикулярних до
осей валів. Крім цього, на вали і корпус редуктора можуть діяти ра-
діальні сили і Г2, які спричинені муфтами, що з’єднують вали ре-
дуктора з іншими елементами машини. Напрями дії сил і вза-
ємно незалежні і можуть бути довільними, тому тут задача ускладню-
ється потребою вибору таких напрямів, за яких навантаження деталей
кріплення редуктора до рами найнесприятливіше. Саме для такого ви-
падку слід визначати розрахункові навантаження болтів, що діють
уздовж їхніх осей, а також навантаження з’єднання у площині стику.
За цими навантаженнями розраховують максимальні напруження у
болтах (аналогічно як і для болтів кріплення двигуна), які дають змо-
гу встановити потрібний клас міцності болтів та гайок.
Отже, у розрахунках на міцність деталей кріплення двигуна і ре-
дуктора до рами дуже важливе значення має складання схеми наван-
таження корпусу для визначення максимальних зусиль, що сприйма-
ються деталями з’єднання у можливих найнесприятливіших умовах
роботи привода.
40.4. Перевірка умов появи резонансу
крутильних коливань у приводі
Приводи машин складаються з пружних ланок (муфт, валів) і з’єд-
наних із ними обертових мас (ротора двигуна, муфти, маховиків тощо).
Разом із робочим органом машини, який також має певну рухому ма-
су, привод можна розглядати як пружну коливну систему. Відомо, що
при певних співвідношеннях між параметрами коливної системи і па-
раметрами її періодичного навантаження можуть з’явитись резонан-
сні явища, які становлять небезпеку її руйнування.
Для виявлення умов виникнення резонансу крутильних коливань
у приводі, розглянемо, для прикладу, схему машини (рис. 40 8, а),
до складу якої входять електродвигун /, пружна муфта 2, зубчаста
передача <?, муфта 4 і робочий орган машини 5. Муфта 2 разом із ва-
лами, які вона з’єднує, утворює пружну ланку з крутильною жорст-
кістю с19 а муфта 4 разом із відповідними валами — пружну ланку з
крутильною жорсткістю с2. Найбільшими обертовими масами, які слід
брати до уваги, є ротор двигуна з моментом інерції 7ДВ, муфти 2 і 4 із
моментами інерції відповідно 7муф і 7МуФ, а також обертові маси робо-
чого органу машини з моментом інерції 7М. Переважно моменти інер-
ції зубчастих коліс малі у порівнянні з моментами інерції інших ланок
і тому їх можна не враховувати.
547
Припустимо, що двигун
розвиває обертовий момент
Тдв при кутовій ШВИДКОСТІ (Одв,
а приводний вал робочого ор-
гану машини навантажується
обертовим моментом ТПр =“
= ТдВиг|при кутовій швидко-
сті (оПр = (Одв/н, де и — пере-
даточне число зубчастої пере-
дачі і т| — її ККД.
Для спрощення досліджень
дійсні схеми машин замінюють
їхніми зведеними розрахунко-
вими схемами. Залежно від
мети дослідження і конструк-
тивних особливостей машини
зведена розрахункова схема
може мати одну або кілька мас, з’єднаних пружними ланками. Схе-
му машини за рис. 40.8, а доцільно замінити двомасовою розрахунко-
вою схемою (рис. 40.8, б), для якої ланкою зведення є пружна ланка
з жорсткістю сг. У зведеній розрахунковій схемі за рис. 40.8, б треба
встановити зведені зовнішні навантаження, зведені моменти інерції
мас і /2 і зведену крутильну жорсткість с пружної ланки, що з’єднує
обертові маси 1 і 2. Умовою зведення моментів інерції та жорсткостей
є рівність відповідно кінетичних і потенціальних енергій ланок маши-
ни в дійсній і зведеній схемах. Для даного випадку (рис. 40.8, б)
маємо:
дв + муф»
м (^пр/^дв)2 4“ муф (фпр/фдв)2 ------ м/^2 4" муф/^2>
1/С = ІД?! 4~ ((ОПр/(Одв)2/С2 = 1/6?! 4- 1/(Л2).
Припустимо, що у зведеній розрахунковій схемі на ведучу масу
діє обертовий момент 7\ = ТдВ = Т = сопзі, а на ведену — Т2 ==
= Тпр/(иі]). Для дослідження умов появи резонансу візьмемо оберто-
вий момент Т2, який змінюється в часі і за періодичним законом:
Т2 = Т -\-Т0 зіп со/,
де (о — кругова частота зміни обертового моменту, яка у багатьох ви-
падках збігається з кутовою швидкістю або є кратною їй (наприклад,
під час періодичного навантаження привода за рахунок динамічної
неврівноваженості його обертових ланок або за рахунок особливостей
робочого процесу машини, коли частота робочих циклів кратна час-
тоті обертів). Тоді рух двох мас, який визначається кутами їхнього по-
вороту фі і фа (рис. 40.8, б), описується такими диференціальними рів-
548
няннями:
Лфі + с (Ф1 — ф2) = Т;
Лф2 — с (фі — Фг) = — (Т + То зіп со/). (40.1)
Якщо у системі рівнящ» (40.1) перше рівняння помножити на а
друге — на Уі і відняти д^уге рівняння з першого, то дістанемо відоме
рівняння коливного руху
ф + р2Ф = /(/). (40.2)
де <р = фі — ф2 — кут закручування пружної ланки;
р = у с (^ + Л)/(ЛА) — частота власних коливань;
/ (/) = Тр2/с + (Го/А) зіп со/ — функція, що виражає характер
збудження коливань.
Із теорії коливань відомо, що розв’язок рівняння (40.2) для устале-
ного руху має вигляд
і
= (40.3)
р о
Після підстановки у (40.3) /(/)=/ (£) і відкидання в знайденому
розв’язку членів із соз рі і зіп рі (коливання з власною частотою р
швидко затухають через властиве реальним системам розсіювання
енергії), маємо
Ф = Т/с 4- {Т0/[/2(/?2 — со2)]) зіпсо/ (40.4)
або навантаження пружної ланки
Тл = фе = Т + + ^ір2) 5ІП (40.5)
Аналіз виразу (40.5) показує, що під час збігання кутової швид-
кості со і частоти власних коливань р (со/р = 1) амплітуда змінної скла-
дової навантаження пружної ланки необмежено зростає, тобто у при-
воді виникає явище резонансу крутильних коливань. Отже, критичну
кутову швидкість вала двигуна для розглянутої схеми привода ма-
шини можна знайти за виразом
Фкр = Р — V"С (Л + г)/(^у!г)‘ (40.6)
Для надійного запобігання резонансу крутильних коливань у при-
водах машин потрібно, щоб фактична кутова швидкість со вала двигу-
на відрізнялась від критичної швидкості сокр не менш як на ЗО %. Для
машин, що працюють у повторно-короткочасних режимах величина
(окр завжди повинна бути більшою від со, оскільки при частих пере-
ходах через резонансний стан під час пусків може статись випадкова
затримка роботи привода близько резонансної зони і, як наслідок,
його руйнування.
549
Усунути умови появи резонансу крутильних коливань у приводі
можна зміною крутильних жорсткостей окремих ланок або моментів
інерції рухомих мас при заданій частоті обертання вала приводного
двигуна.
40.5. Елементи оптимізації при проектуванні
приводів машин
Привод машини як об’єкт, що складається з кількох окремих час-
тин, може бути спроектованим у різних варіантах. У приводі можуть
бути використані різні типи двигунів та редукторів, муфти того самого
функціонального призначення можуть мати неоднакову конструкцію.
Все це обумовлює багатоваріантність та неоднозначність розв’язу-
вання задачі проектування приводів різних машин. Остаточний вибір
того чи іншого варіанта привода повинен базуватись на аналізі бага-
тьох параметрів, які характеризують техніко-економічні та експлуа-
таційні показники привода і машини в цілому.
Вибір варіанта привода для машин конкретного функціонального
призначення з урахуванням їхніх конструктивних особливостей та
заданих умов експлуатації можна здійснити на основі розв’язування
задачі оптимізації. Відповідно з викладками, наведеними у 10.2, скла-
дання задач оптимізації пов’язане з вибором критеріїв оптимізації,
встановленням конкретних параметрів оптимізації та їхніх обмежень
і побудовою цільової функції, що описує можливі варіанти об’єкта.
Для приводів машин критеріями оптимізації можуть бути їхні ма-
са, вартість, ККД, надійність у роботі, витрати при експлуатації тощо.
Оскільки привод складається з конкретних дискретних елементів (дви-
гуна, редуктора, муфти), які характеризуються своїми власними па-
раметрами (типорозміром, передаточним числом, частотою обертання,
номінальним обертовим моментом), побудову цільової функції не зав-
жди можна здійснити або вигляд цільової функції може бути досить
складним.
Розв’язування подібних задач оптимізації при невеликій кількості
складових елементів об’єкта (у наведеному випадку привод складаєть-
ся з трьох елементів) можна здійснити методом перебирання можли-
вих варіантів. Наприклад, якщо задана потрібна частота обертання
приводного вала робочого органу машини, то, використовуючи елек-
тродвигуни з різними номінальними частотами обертання, можна діс-
тати кілька передаточних чисел привода. Ці передаточні числа і по-
трібний обертовий момент можна реалізувати у приводі за допомогою
редукторів різних типорозмірів. Кожний типорозмір редуктора харак-
теризується своїм ККД, масою, вартістю та ін. Тими самими параметра-
ми характеризуються двигуни і муфти. Комбінуючи різні варіанти при-
вода із взятих до розгляду двигунів, муфт та редукторів, можна ви-
550
Таблиця 40.1. Орієнтовні значення відносної вартості редукторів загального
призначення
Тип редуктора Відносна вартість редукторів із номінальним обертовим моментом Т, Н-м, на тихохідному валу
250 5оо 1000 2000 4000
ЦУ 0,60 1,00 1,50 2,90
(ЦУ-100) 0,90 (ЦУ-160) (ЦУ-200) (ЦУ-250)
Ц2У 0,75 1,20 1,80 3,25
(Ц2У-100) (Ц2У-125) (Ц2У-160) (Ц2У-200) (Ц2У-250)
Ц2С 0,90 1,10 1,40 — —
(Ц2С-80) (Ц2С-100) (Ц2С-125)
Пз 1,10 1,30 1,75 2,50 3,80
(Пз-40) (Пз-50) (Пз-63) (Пз-80) (Пз-100)
Таблиця 40.2. Орієнтовні значення відносної вартості асинхронних трифазних
електродвигунів єдиної серії 4А
Синхронна частота обер- тання. хв—1 Відносна вартість електродвигунів із номінальною потужністю Р, кВт
1.1 1.5 2.2 з.о 4.0 5,5 7.5 И.б 15,0 18,5 22 зо
1500 1000 0,28 0,31 0,31 0,36 0,36 0,40 0,40 0,55 0,55 0,70 0,70 0,93 0,94 1,10 1,17 1,40 1,41 '1,58 1,62 2,00 2,02 2,27 2,27 3,12
брати такий варіант, що буде за певним критерієм оптимальним для
конкретної машини.
Слід зауважити, що оптимальних об’єктів проектування у загаль-
ному розумінні не буває. В кожному конкретному випадку потрібно
обумовити, в якому розумінні об’єкт повинен бути оптимальним, тоб-
то треба вказати критерії оптимізації. Якщо взято до уваги кілька кри-
теріїв оптимізації, то не завжди задачу оптимізації можна розв’язати
однозначно. В останньому випадку потрібно встановити один із най-
вагоміших критеріїв, за яким вибирають остаточний варіант.
Під час проектування приводів машин за один із критеріїв опти-
мізації часто беруть вартість привода, яка складається з вартостей дви-
гуна, муфти та редуктора. Для наближеної оцінки вартості редукторів
і двигунів як складових частин привода можна скористатись набли-
женими даними [201, поданими у табл. 40.1 і 40.2. У цих таблицях за
одиницю вартості беруть вартість редуктора ЦУ-160, а вартість ін-
ших типорозмірів редукторів та асинхронних трифазних електродви-
гунів наводять у відношенні до вартості редуктора ЦУ-160.
Щоб сформувати інші критерії оптимізації привода, можна вико-
ристати відомі дані про масу складових частин, ККД, затрати під час
551
Рис. 40.9. Конструктивна схема привода
гвинтового конвейєра
експлуатації» надійність роботи
та ін. Якщо такі дані відсутні
або неповні, то керуються при
проектуванні результатами з до-
свіду експлуатації аналогічних
приводів, що працюють у по-
дібних умовах.
У деяких випадках оптималь-
ність конструкції привода маши-
ни може диктуватись компон овоч ними можливостями, безшумністю у
роботі, потребою застосування самогальмівних передач тощо. Роз-
глянуті підходи до проектування приводів свідчать про потребу
всебічного техніко-економічного аналізу різних факторів з метою ви-
бору найраціональніших конструкцій.
40.6. Приклад оптимізації привода
Задача. Привод гвинтового конвейєра (рис. 40.9) складається з асинхронного
електродвигуна 1, пружної муфти 2 та редуктора 3. Потрібна частота обертання при-
водного вала конвейєра плр = 145 хв~1, а розрахунковий обертовий момент на цьому
валу 7'пр = 230 Н • м. Треба підібрати для привода двигун, муфту та редуктор за
таких умов: привод працює у довгочастному режимі; ККД привода т]пр > 0,95; відхи-
лення частоти обертання приводного вала конвейєра від заданої Ап 5 %; вартість
привода та його маса повинні бути мінімальними.
Розв’язання. Розрахункова потужність електродвигуна
Рр = Тпрлппр/(30Ппр) = 230 - 3,14 - 145/(30 . 0,95) = 3676 Вт.
До розгляду беремо електродвигуни двох типів, параметри яких і відповідне
їм передаточне число наведені у табл. 40.3.
Щоб реалізувати знайдені значення розрахункового передаточного числа мр та
заданого обертового моменту Тпр = 230 Н • м, можна використати кілька редукто-
рів (див. гл. 39) із номінальними передаточними числами и = 10 та и 6,3. Пара-
метри цих редукторів наведені у табл. 40.4.
Наведені у табл. 40.4 можливі варіанти електродвигунів та редукторів можна
вибирати за даним обмеженням Ап.
Для привода використаємо просту за конструкцією пружну муфту з гумовою зі-
рочкою (див. 37.2), для якої т]м = 0,98, а маса т1 = 0,9 кг у разі використання дви-
Таблиця 40.3. Параметри двох типів електродвигунів
Тип електро- двигуна Номінальна потужність Р, кВт Частота обер- тання, ХВ-1 Маса т . кг Дв’ Відносив вар- тість вдв Розрахункове пе- редаточне число привода ир
4А100ІЛУЗ 4 1430 42 0,55 1430/145=9,86
4А112МВ6УЗ 4 950 56 0,70 950/145 = 6,55
552
Т аблиця 40.4. Параметри редукторів
тип електро- двигуне Типорозмір редуктора Маса ре- дуктора кг ККД ре- дуктора Відносна вартість редуктора ВР Фактична частота обертання тихо- хідного вала. хв-1 Дл, %
4А100Е4УЗ Ц2У-100-10 35 0,97 0,75 1430/10 = 143 1,38
Ц2С-80-10 28 0,98 0,90
Пз-40-10 29 0,97 1,10
4А112МВ6УЗ ЦУ-100-6,3 27 0,98 0,60 950/6,3=150,8 4,0
Пз-40-6,3 29 0,97 1,10
Таблиц я 40.5. Можливі варіанти приводів та їхні параметри
Варіант привода Тип електродви- гуна Типорозмір редуктора ККД привода ’Ьр Маса привода тпр. кг Відносна вар- тість привода Впр
1 4А100Е4УЗ Ц2У-100-10 0,95 77,9 1,30
2 Ц2С-80-10 0,96 70,9 1,45
3 Пз-40-10 0,95 71,9 1,65
4 4А112МВ6УЗ ЦУ-100-6,3 0,96 84,8 1,30
5 Пз-40-6,3 0,95 86,8 1,80
гуна 4А100Е4УЗ, і т2 = 1,8 кг для двигуна 4А112МВ6УЗ (у двох випадках муфти
передають різні обертові моменти). Оскільки відсутні відомості про вартість муфт,
то її не беремо до уваги з огляду на те, що вартість вибраних для даного привода муфт
становить всього 5—10 % від вартості двигунів та редукторів.
Параметри вибраних до розгляду варіантів привода в цілому, такі, як його ККД
*Іпр = 'ПмПр. маса тпр = тдв т1(2) та вартість Вир = 5ДВ + Вр зведені у
табл. 40.5.
553
Усі варіанти привода за табл. 40.5 задовольняють умову т]пр > 0,95. Найменшу
відносну вартість мають варіанти 1 та 4, а серед них меншу масу має варіант 1. Отже,
виходячи із поставлених у задачі умов, найоптимальнішим для даного гвинтового
конвейєра буде привод, який складається із двигуна 4А100Ь4УЗ та редуктора
Ц2У-100-10.
Контрольні запитання
1. За якими параметрами узгоджують у приводі машин електродвигуни і ре-
дуктори?
2. Які вимоги повинні задовольняти муфти у приводі?
3. Які основні вимоги ставляться до рам і плит привода?
4. Яким чином здійснюють контроль взаємного розміщення валів складових
частин привода?
5. У чому полягає суть розрахунків на міцність деталей кріплення двигуна і
редуктора до рами?
6. Назвіть основні силові фактори, що діють на корпус двигуна і редуктора.
Як направлені ці силові фактори?
7. Чому при проектуванні приводів машин виникають задачі оптимізації?
8. Назвіть деякі критерії, за якими можна оптимізувати привод.
ДОДАТОК
ПЕРЕЛІК ТЕМ ДЛЯ ТВОРЧОГО ОПРАЦЮВАННЯ
1. Розробка нових ефективних способів стопоріння різьбових з'єднань.
2. Розробка конструкцій різьбових з’єднань із рівномірним навантаженням витків
різьби.
3. Розробка конструкцій різьбових деталей із зменшеною концентрацією напружень.
4. Уточнення методів розрахунку групових болтових з’єднань.
5. Розробка ефективних способів контролю затяжки різьбових з’єднань під час ви-
конання складальних робіт.
6. Розробка способів контролю зміни затяжки різьбових з’єднань під час їх екс-
плуатації.
7. Розробка конструкцій з’єднань типу вал — маточина деталі зі зменшеною кон-
центрацією напружень.
8. Аналіз впливу радіального навантаження на міцність шпонкового з’єднання де-
талі з валом.
9. Уточнення методів розрахунку на міцність з’єднання деталі з валом із урахуван-
ням виду посадки і шпонкового з’єднання.
10. Розробка способів та конструкцій для осьової фіксації деталей на валах.
11. Аналіз розподілу напружень зминання по довжині шпонки у з’єднаннях при-
зматичною шпонкою.
12. Розробка конструкцій пристроїв для автоматичного регулювання сили притис-
кання котків фрикційних передач залежно від корисного навантаження.
13. Розробка нових конструкцій фрикційних варіаторів підвищеної несучої здат-
ності.
14. Розробка пристроїв та методів контролю попереднього натягу віток приводних
пасів у пасових передачах.
15. Розробка конструкцій пасових і ланцюгових передач із автоматичним регулюван-
ням натягу віток залежно від корисного навантаження.
16. Аналіз тягової здатності клинопасової передач і з паралельно розміщеними пасами.
17. Аналіз розподілу зусиль у вітках пасової передачі з урахуванням нелінійної за-
лежності деформації паса від навантаження.
18. Розробка конструкцій шківів для вирівнювання натягу окремих паралельно
розміщених пасів у клинопасовій передачі.
19. Кінематична точність пасових передач та шляхи її підвищення.
20. Аналіз та оцінка методів розрахунку на довговічність привідних пасів у пасових
передачах.
21. Розробка нових типів приводних пасів та конструкцій шківів для пасових пере-
дач.
22. Аналіз та оцінка тягової здатності приводних пасів у багатошківних пасових
передачах.
23. Розробка конструкцій зубчастих коліс із вирівнюванням розподілу навантажен-
ня вздовж зубців.
555
24. Конструювання зубчастих передач із пониженим рівнем шуму.
25. Аналіз впливу твердості зубців сталевих зубчастих коліс на масогабаритні по-
казники зубчастої передачі.
26. Оптимізація конструкцій зубчастих передач за їхньою масою.
27. Розробка раціональних схем багатоступінчастих зубчастих передач.
28. Розробка конструкцій беззазорних реверсивних зубчастих передач.
29. Розробка способів та пристроїв для контролю якості монтажу зубчастих передач.
ЗО. Розробка раціональних способів змащування зубчастих та черв’ячних передач.
31. Проектування зубчастих передач із високим передаточним числом і обмеженою
кількістю зубчастих коліс.
32. Оптимізація черв’ячної передачі з точки зору максимального ККД.
33. Конструювання черв’ячної передачі з тертям кочення у зачепленні.
34. Розробка пристроїв для контролю взаємного розміщення черв’яка та черв’ячно-
го колеса в передачі.
35. Розробка способів і пристроїв для запобігання перегріванню черв’ячної пере-
дачі.
36. Оптимальне конструювання валів за їхньою масою та жорсткістю.
37. Конструювання порожнистих валів для редукторів.
38. Конструювання валів із мінімальною концентрацією напружень.
39. Конструювання частково розвантажених від згину валів редукторів.
40. Конструювання опор валів із контрольованим регулюванням радіально-упорних
підшипників.
41. Аналіз та оцінка натягу у посадці підшипників на їхню довговічність.
42. Техніко-економічна оцінка різних варіантів опор валів на підшипниках кочення»
43. Розробка способів та пристроїв для діагностики опор валів на підшипниках ко-
чення.
44. Конструктивні шляхи забезпечення рівномірності спрацювання бігових доріжок
підшипників кочення в опорах валів.
45. Розробка нових конструкцій підшипників ковзання із забезпеченням рідинного
тертя.
46. Конструктивні шляхи зменшення витрат мастила у підшипниках ковзання.
47. Розробка конструкцій муфт із мінімальними радіальним та осьовим навантажен-
нями валів.
48. Розробка конструкцій муфт для з’єднання валів із значним радіальним або куто-
вим зміщенням валів.
49. Розробка нових способів та пристроїв для керування роботою муфт у приводах
машин.
50. Розробка ефективних способів центрування валів складових частин приводів
машин.
СПИСОК ВИКОРИСТАНОЇ І РЕКОМЕНДОВАНОЇ ЛІТЕРАТУРИ
1. Анурьев В. И. Справочник конструктора-машиностроителя: В 3 т.— М. :
Машиностроение, 1979 — 1982.— Т. 1.—728 с.; Т. 2.— 559 с.; Т. 3.— 5В7 С.
2. Г а р к у н о в Д. Н. Триботехника.— М. : Машиностроение, 1985.— 424 с.
3. Г у з е н к о в П. Г. Детали машин.— М. : Внсш. шк.» 1986.— 359 с.
4. Д м и т р и е в В. А. Детали машин: — Л. : Судостроение, 1970.— 792 с.
5. Д у н а е в П. Ф.» ЛеликовО. П. Конструирование узлов и деталей ма*
шин.— М., 1985.— 360 с.
6. Заблонский К. И. Детали машин.— К. : Вища шк. Головнеє изд-во,
1985.— 518 с.
7. Заблонский К. И. Основи проектирования машин.— К. : Вища шк. Го-
ловное изд-во, 1981.— 312 с.
8. Зубчатне передачи: Справ./ Под ред. Е. Г. Гинзбурга.— Л. : Машинострое-
ниє, 1980.— 416 с.
9. И в а н о в М. Н. Детали машин.— М. : Вьісш. шк., 1991.— 383 с.
10. И о с е л е в и ч Г. Б. Детали машин.— М. : Машиностроение, 1988. — 368 с.
11. Киркач Н. Ф., Баласанян Р. А. Расчет и проектирование деталей ма-
шин.— X. : Основа, 1991.— 276 с.
12. К у д р я в ц е в В. Н. Детали машин: Учеб. для студентов машиностр. спец
вузов.— Л. : Машиностроение, 1980.— 464 с.
13. О р л о в П. И. Основи конструирования: Справ.-метод, пособие: В 3 т. - М
Машиностроение, 1977.— Т. 1.— 623 с.; Т. 2.— 574 с.; Т. 3.— 357 с.
14. П а в л и ще В. Т. Основи конструювання та розрахунок деталей машин І
Вищашк., 1993 — 556 с.
15. П а в л и щ е В. Т., Д а н и ло Я Я. Різьби, різьбові з’єднання та кршшімн к
Довідник. — Львів: Інтелект-Захід, 2001. — 239.
16. П е р е л ь Л. Я. Подшипники качения: Расчет, проектирование и обслужнивнн
опор: Справ.— М. : Машиностроение, 1983.— 543 с.
17. Подшипники качения: Справ.-каталог / Под ред. В. Н. ІІармшиии»
Р. В. Коросташевского.— М. : Машиностроение, 1984.— 280 с.
18. Полови нкин А. Н. Основи инженерного творчества: Учеб. шмобин ю-
студентов вузов.— М. : Машиностроение, 1988.— 368 с.
19. П о л я к о в В. С.» Б а р б а ш И. Д., РяховскийО. А. Справочник
по муфтам.— М. ; Л. : Машиностроение, 1979.— 351 с.
20. Приводи машин: Справ./ В. В. Длоугий, Т. И. Муха, А. П. Цупиков и др.;
Под обід. ред. В. В, Ддоугого.— Л. : Машиностроение, 1982.— 383 с.
21. Р а с ч е т деталей машин на ЗВМ І Под ред. Д. Н. Решетова, А. С. Шувалова.—
М. : Вьісш. шк., 1985.—368 с.
22. Р а с ч е т и проектирование деталей машин / К. П. Жуков, А. К. Кузнецов,
С. И. Масленникова и др.; Под ред. Г. Б. Столбина, К. П. Жукова.— М. : Вьісш.
шк., 1978.— 247 с.
23. Редуктори и мотор-редуктори общемашиностроительного применения:
Справ./Л. С. Бойко. А. 3. Висоцкий, 3. Н. Галиченко и др.— М. : Машино-
строение, 1984.— 247 с.
24. Р е ш е т о в Д. Н. Детали машин.— М. : Машиностроение, 1989.— 496 с.
25. Р е ш е т о в Д. Н., И в а н о в А. С., Ф а д е е в В. 3. Надежность машин.—
М. : Внсш. шк., 1988.—238 с.
26. Справочное руководство по черчению І В. Н. Богданов, И. Ф. Малежик,
А. П. Верхола и др.— М. : Машиностроение, 1989.— 864 с.