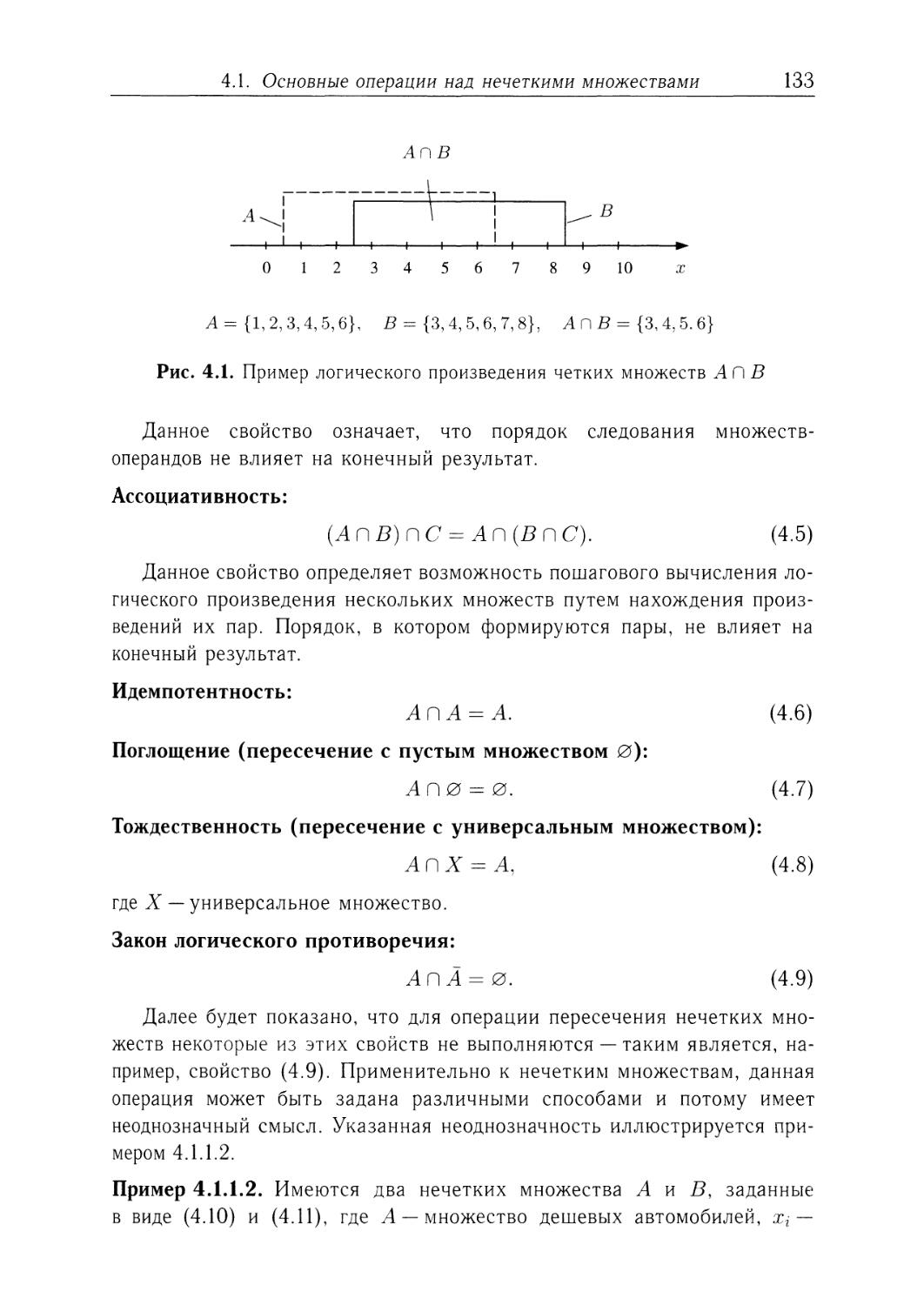
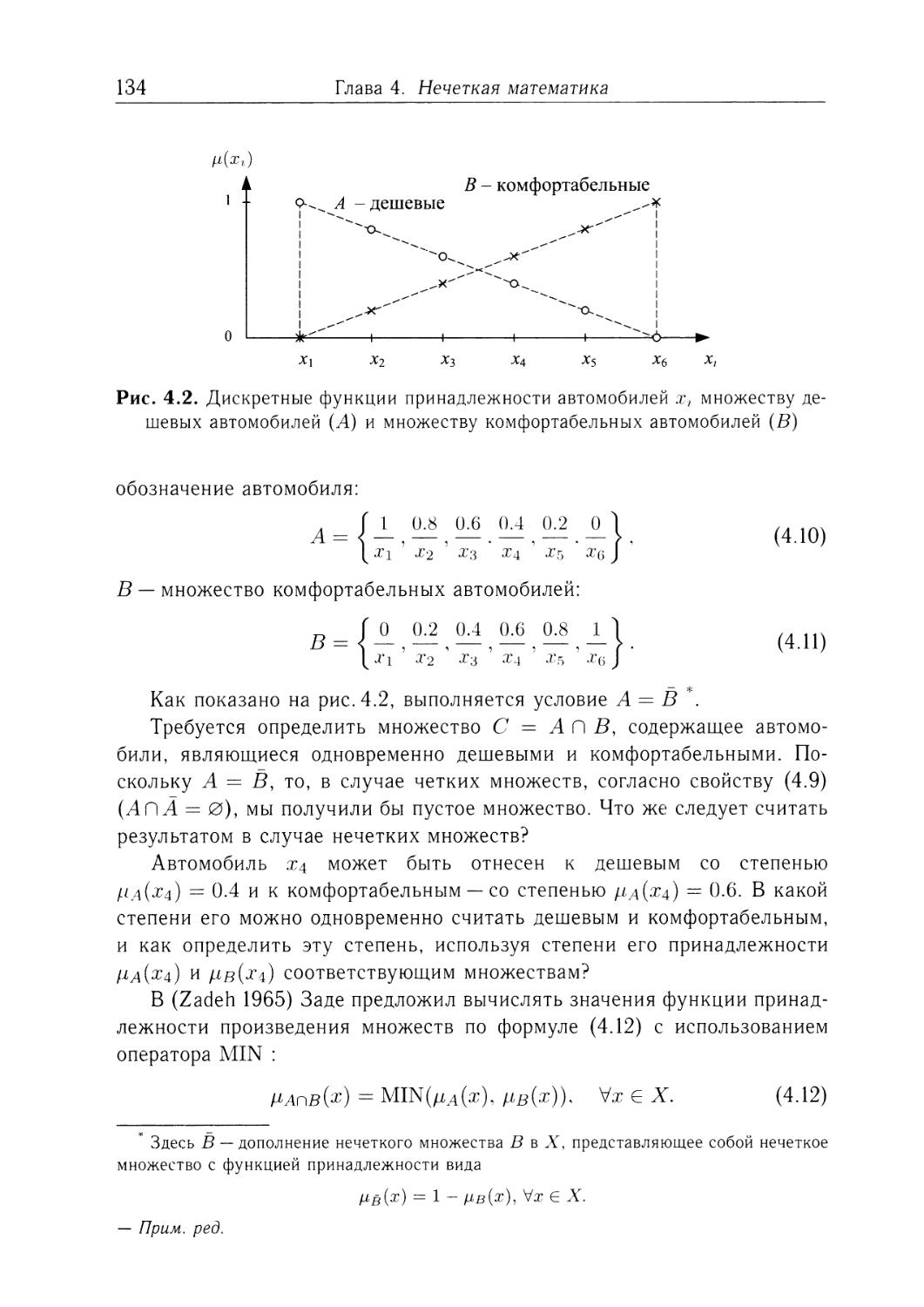
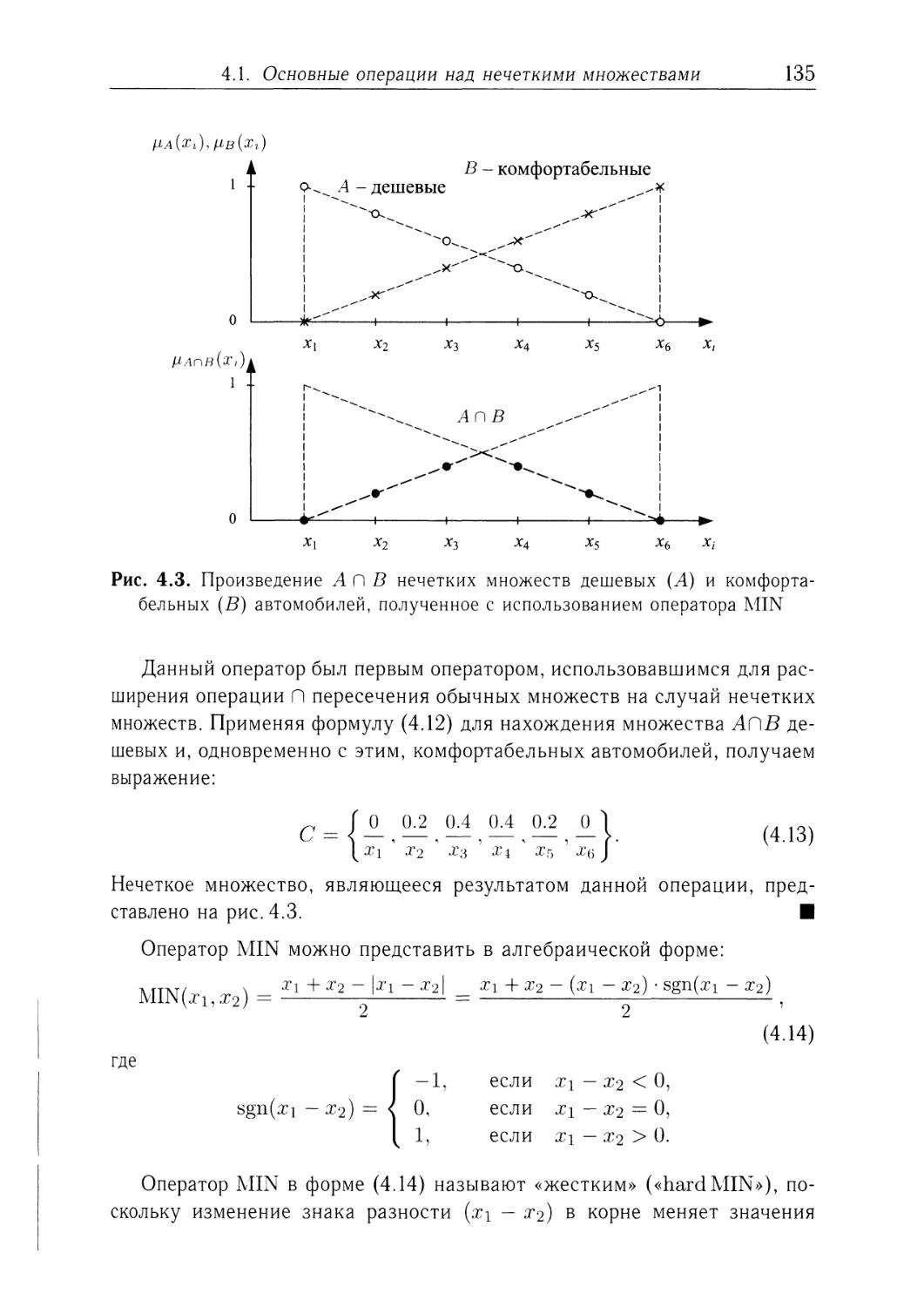
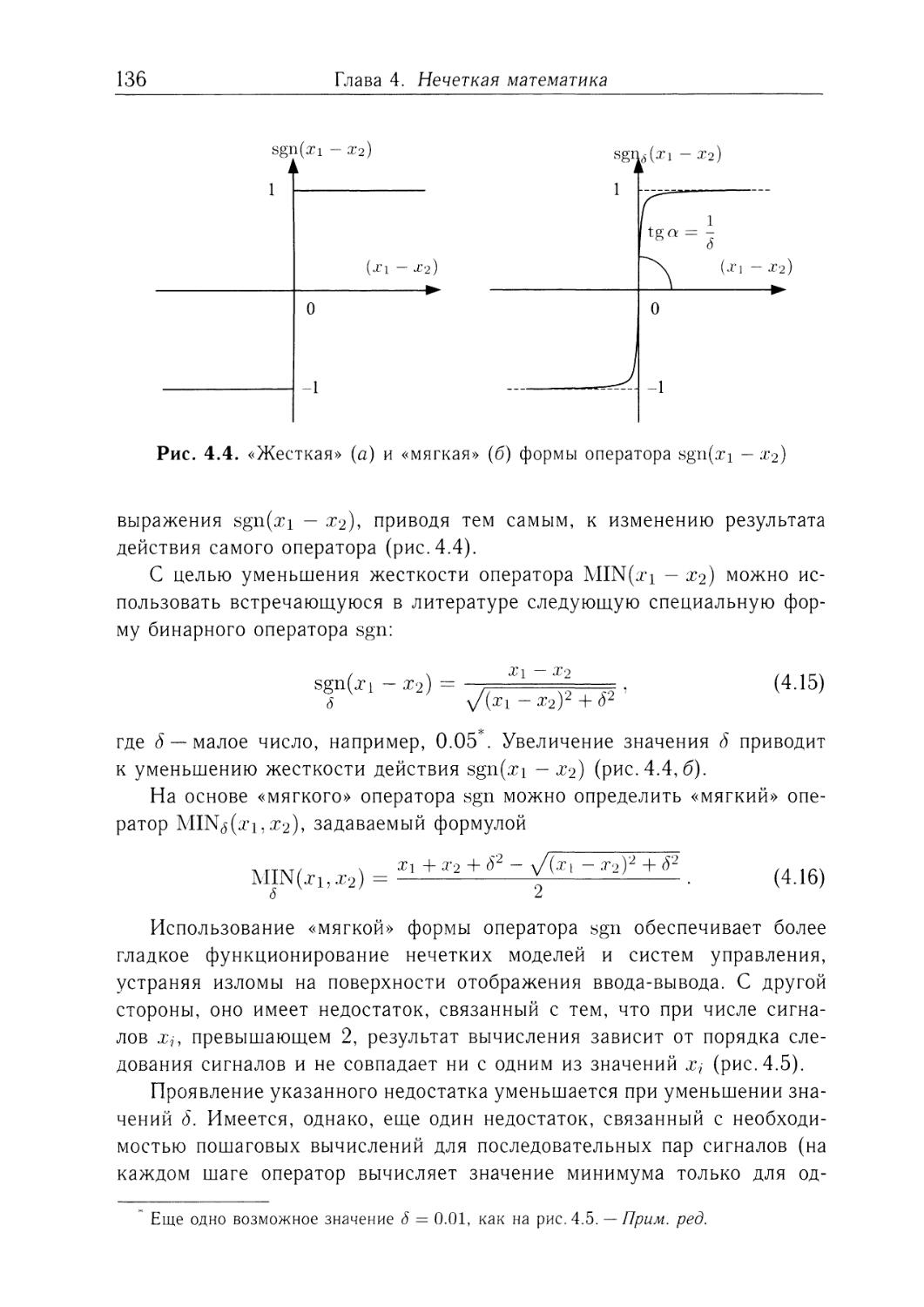
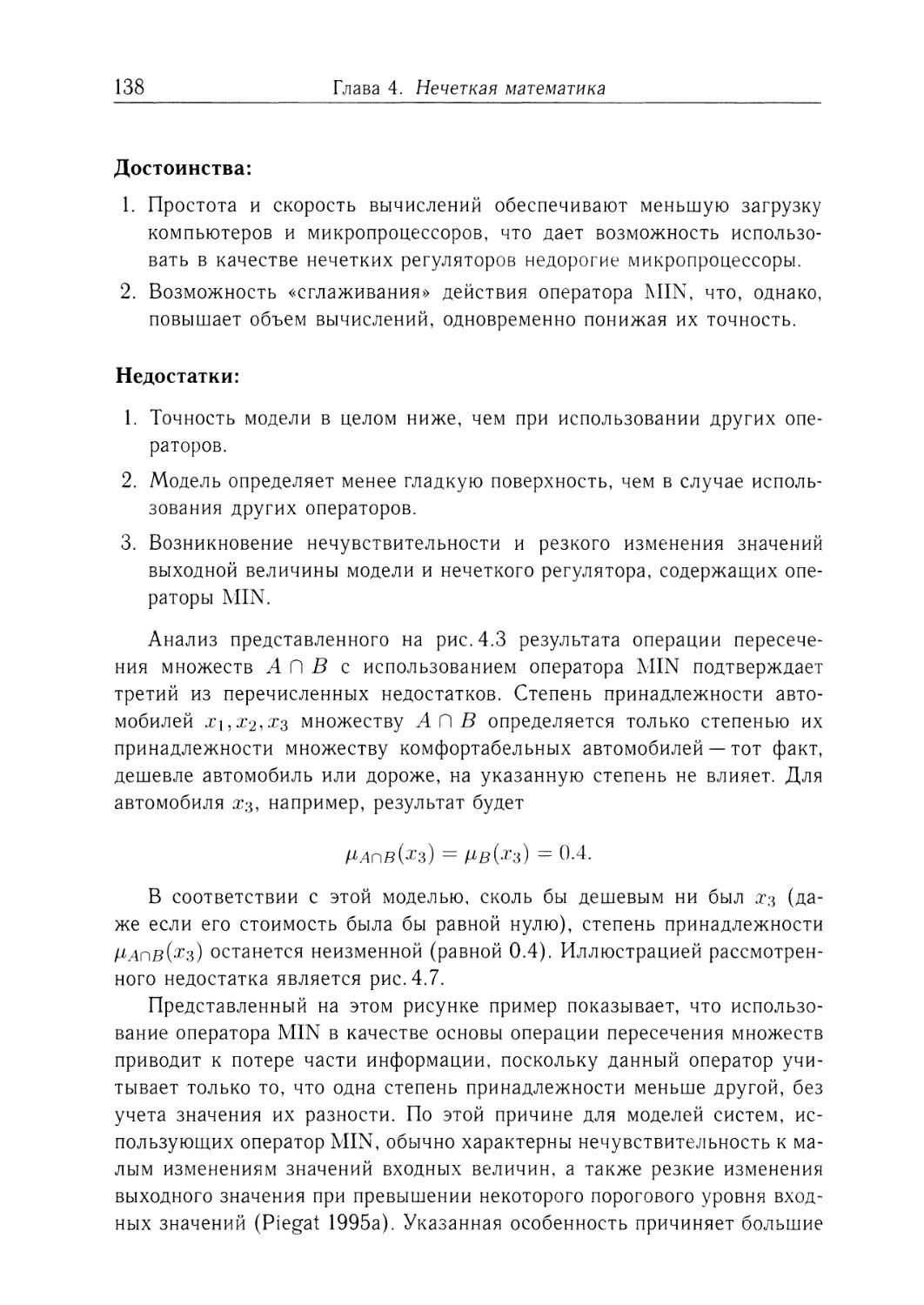
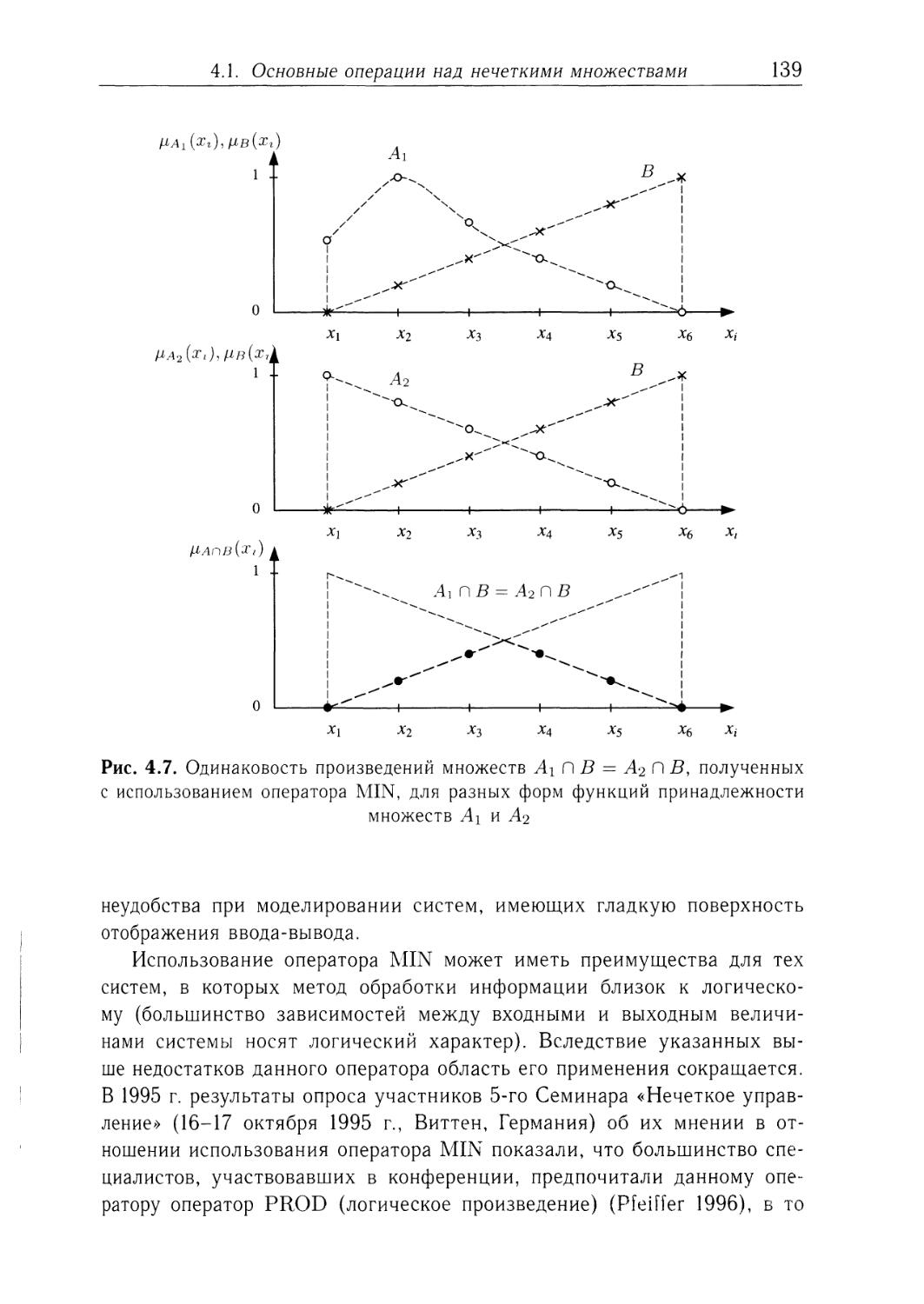
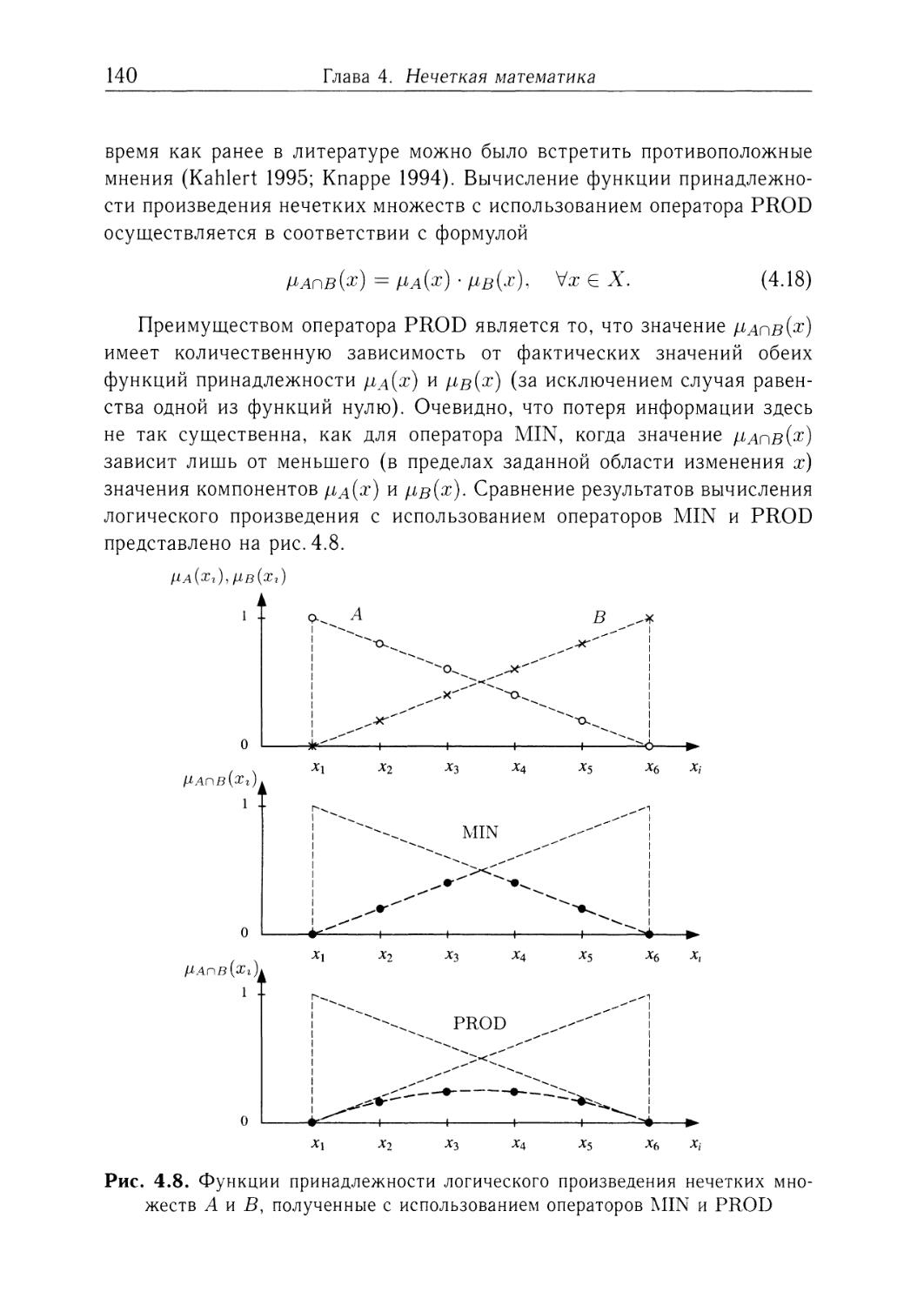
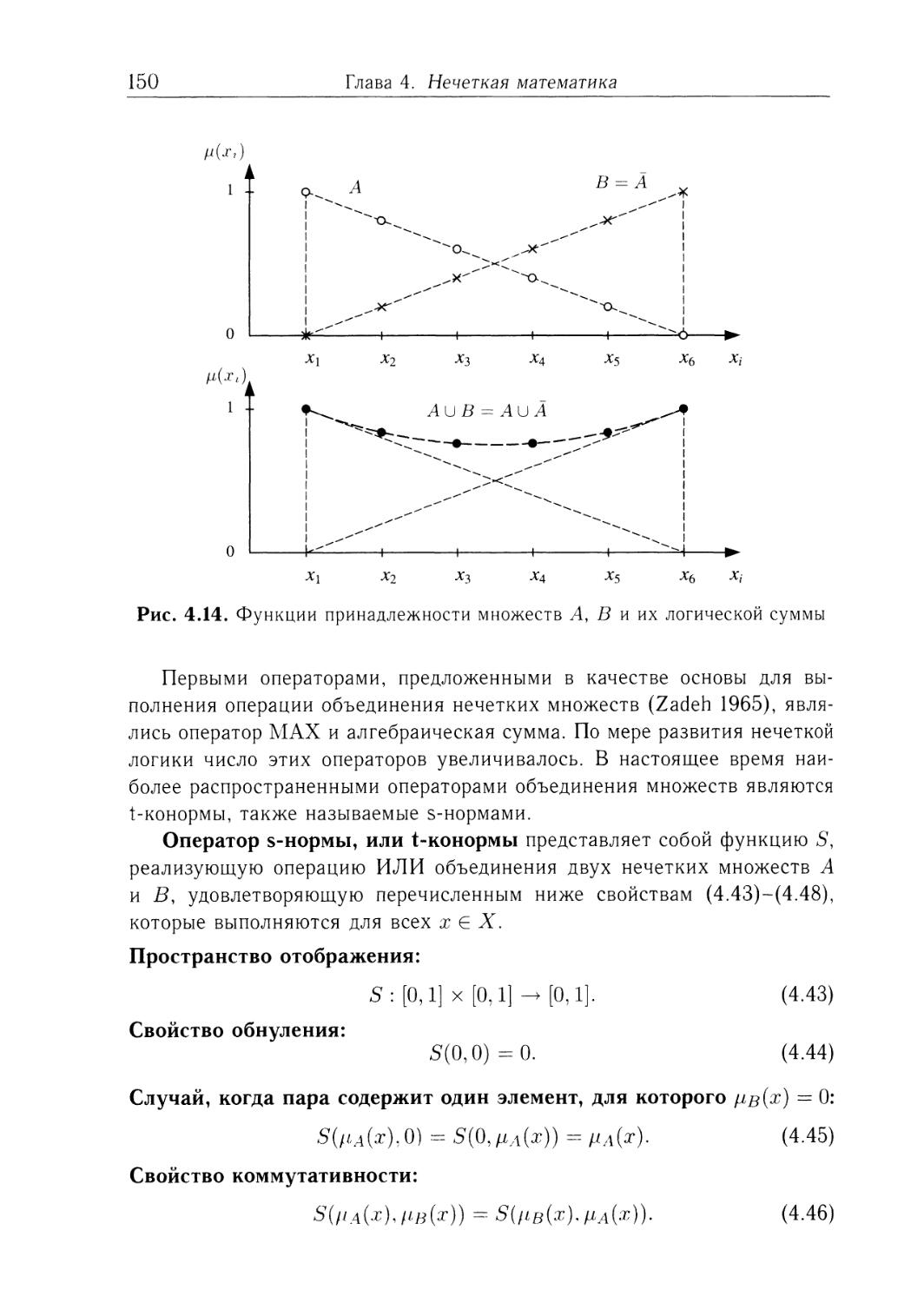
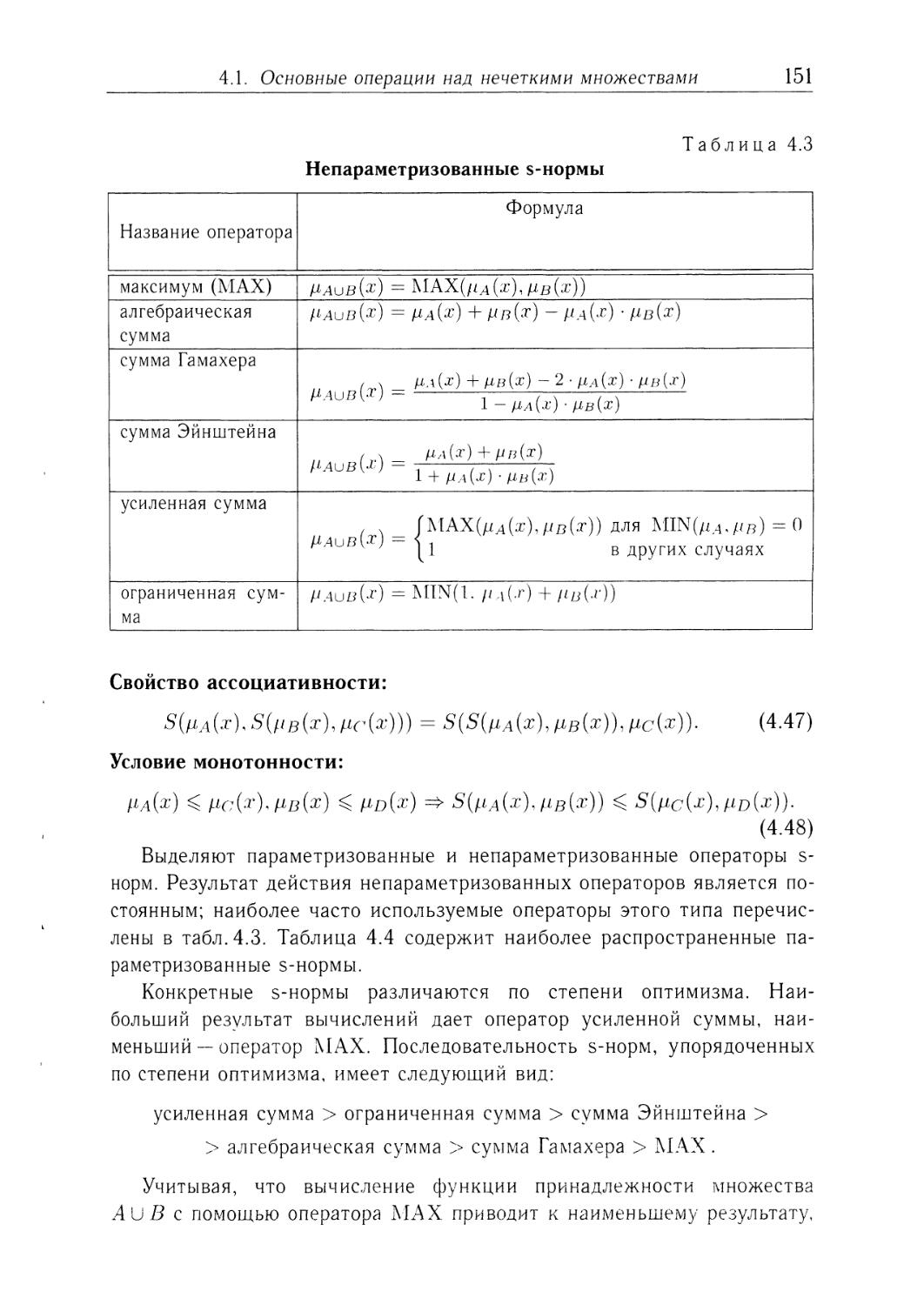
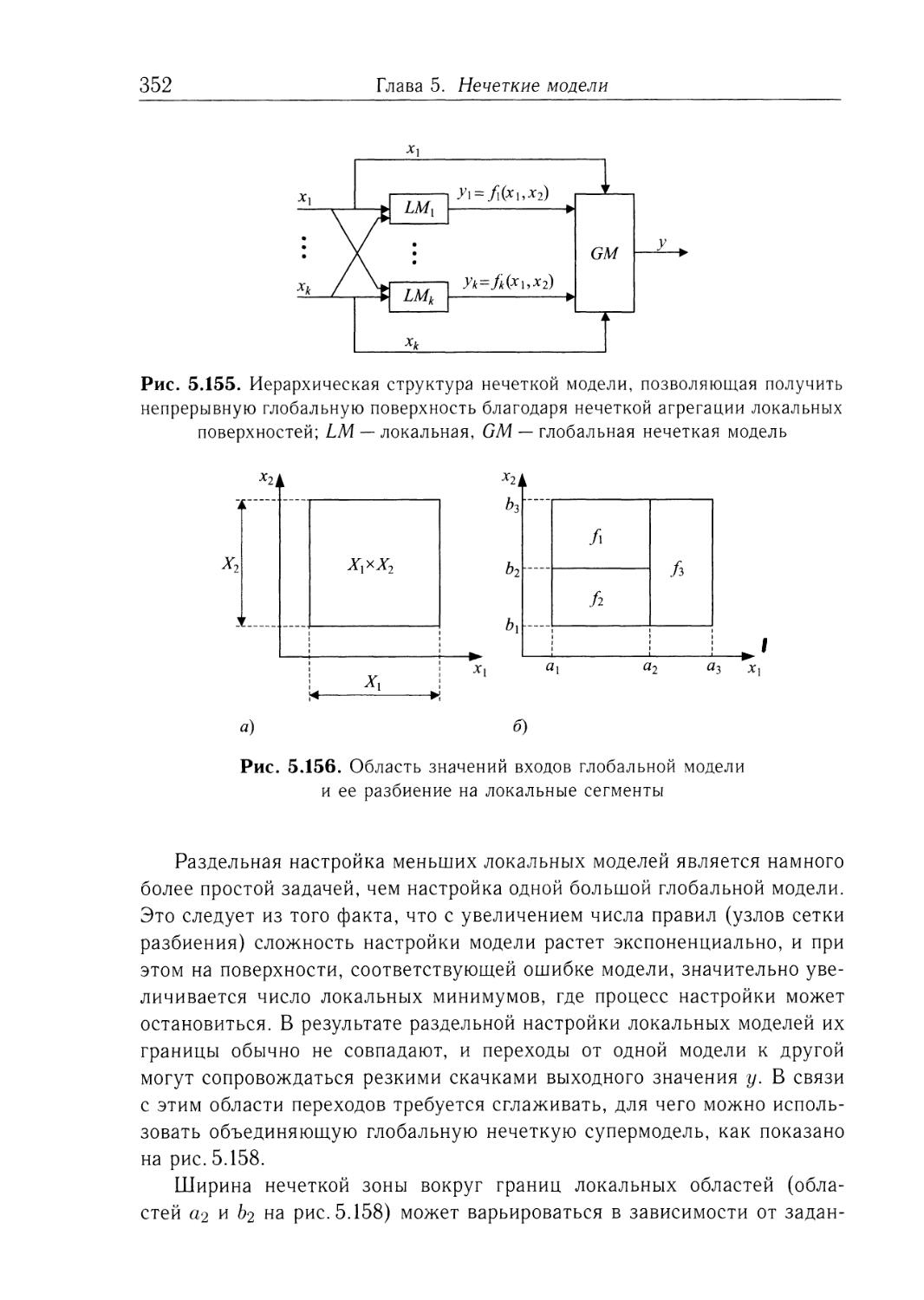
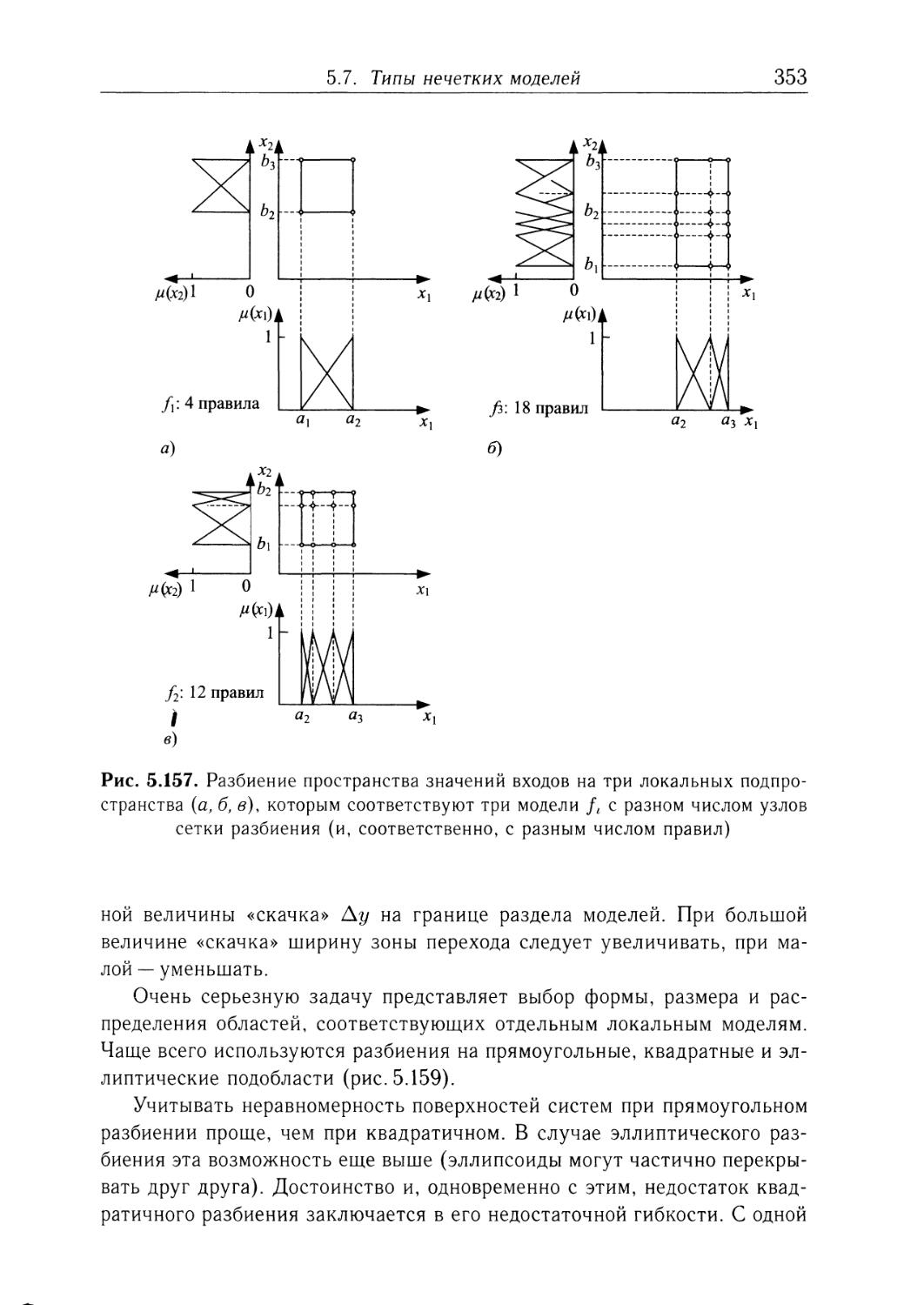
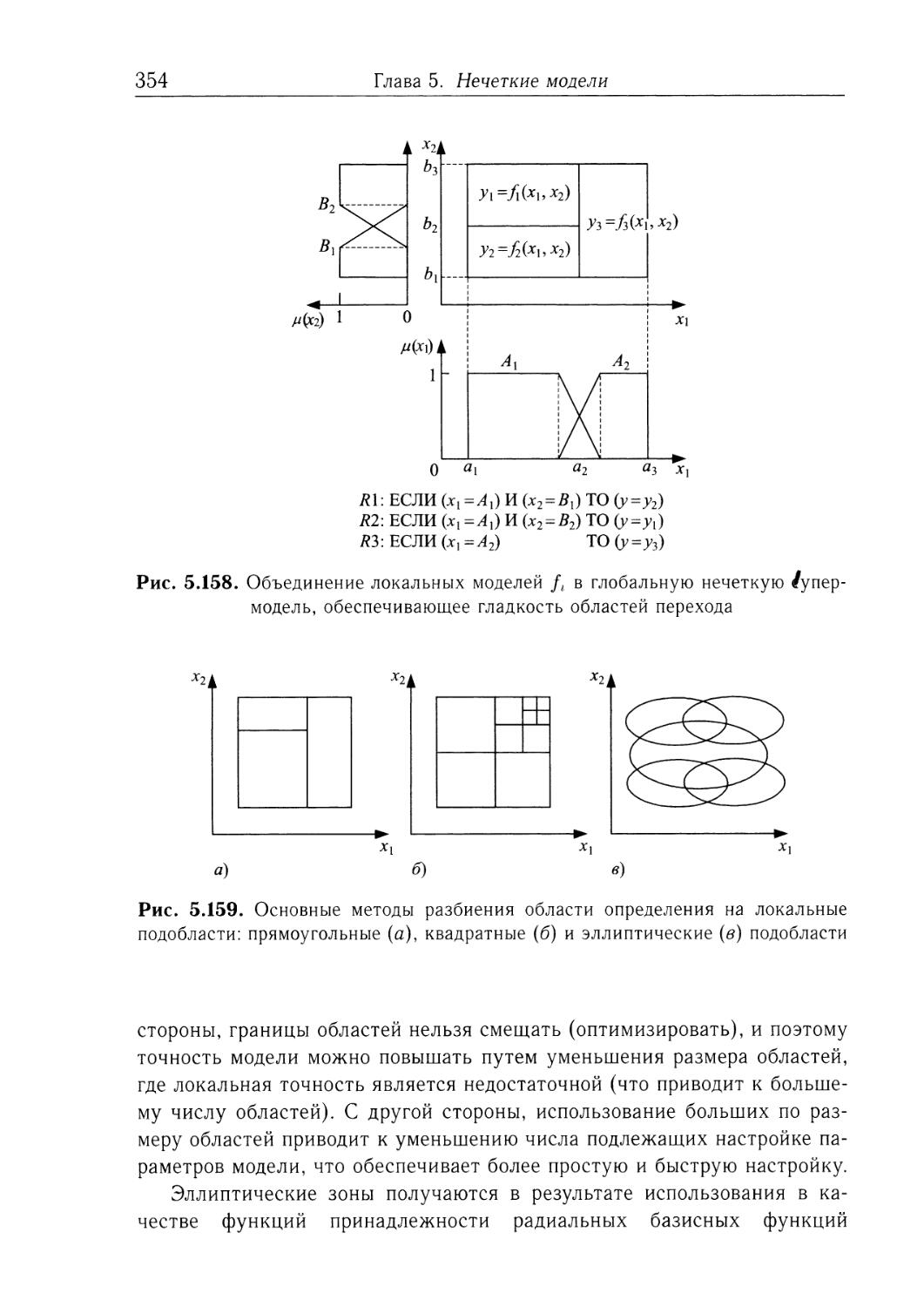
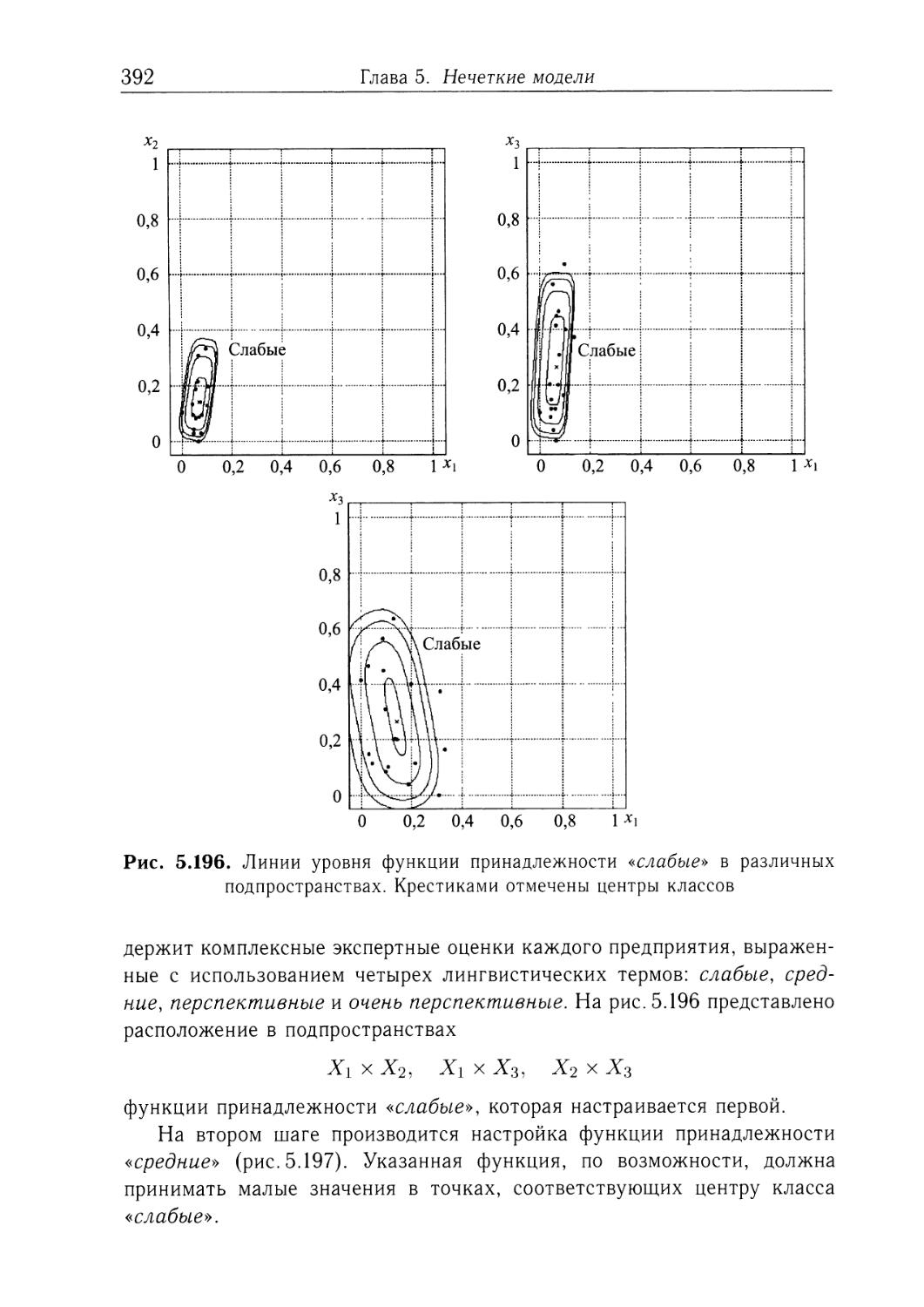
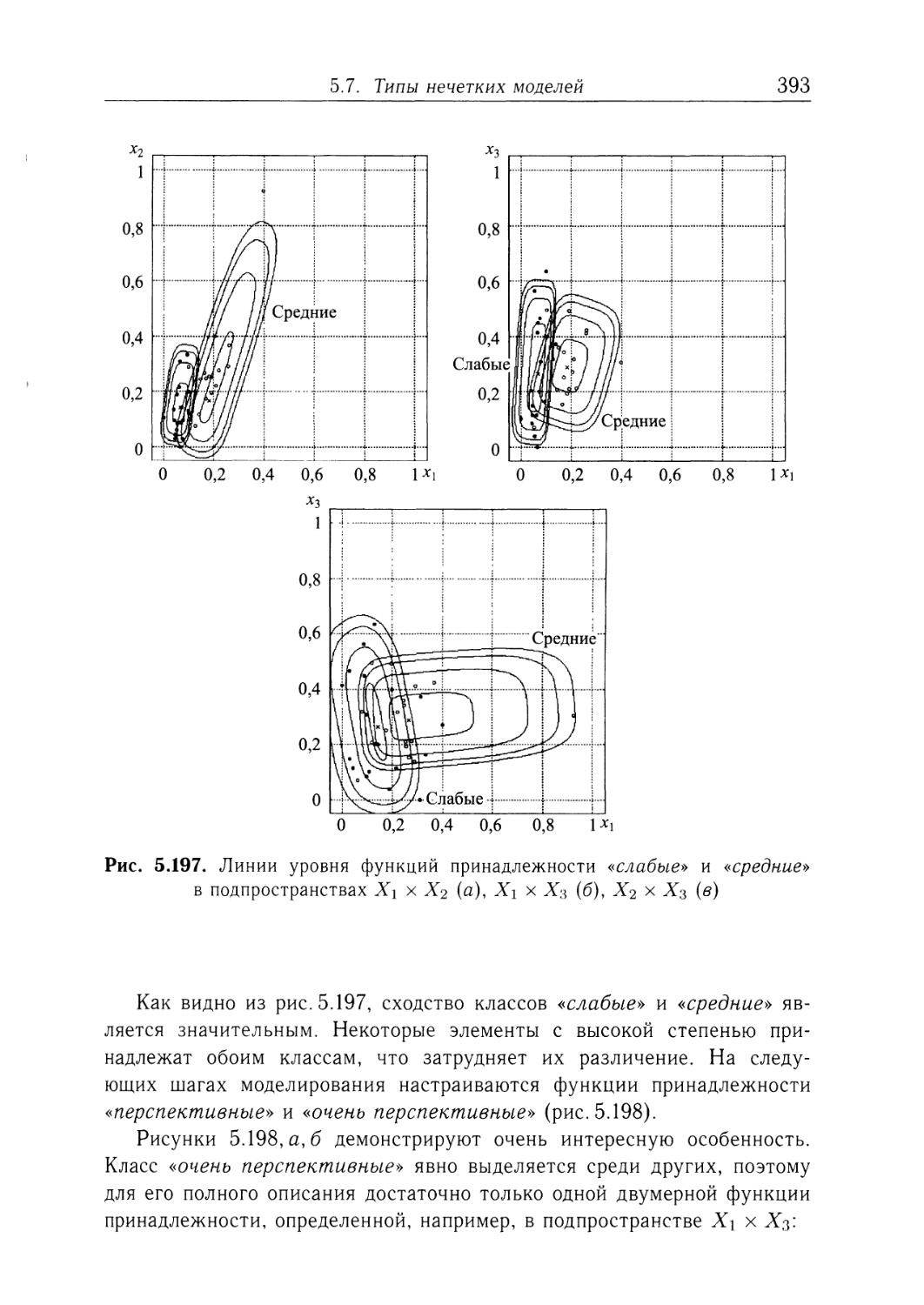
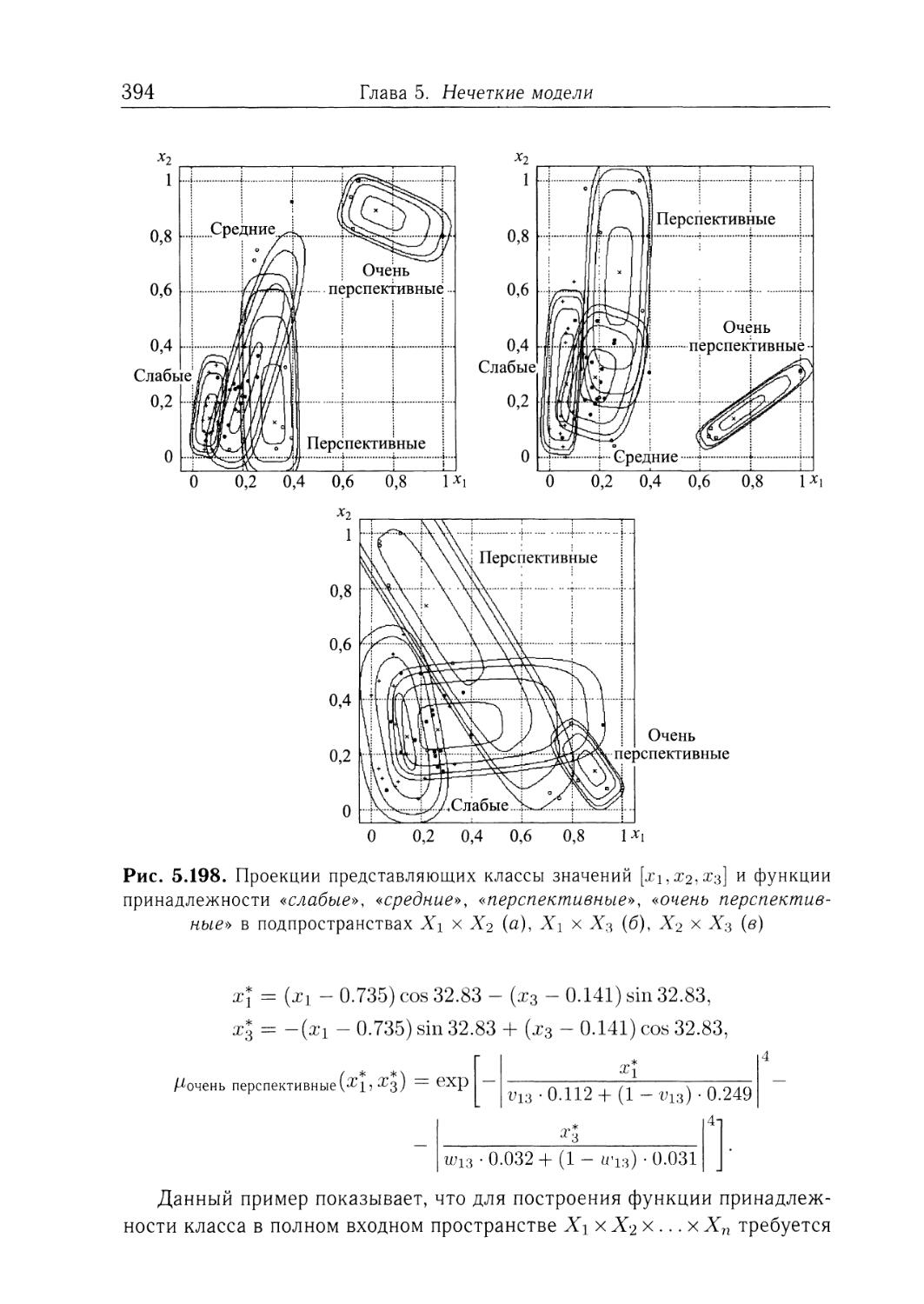
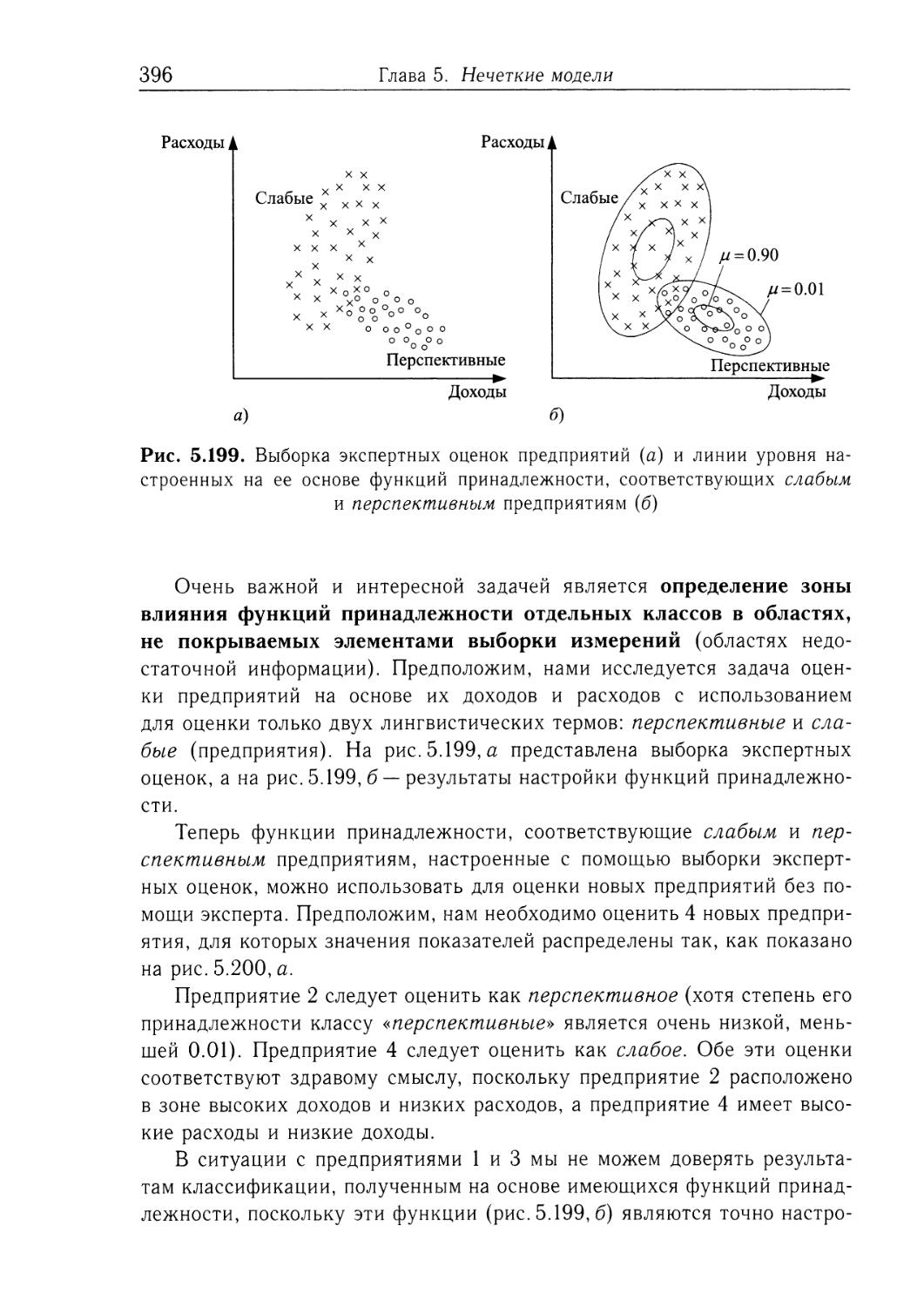
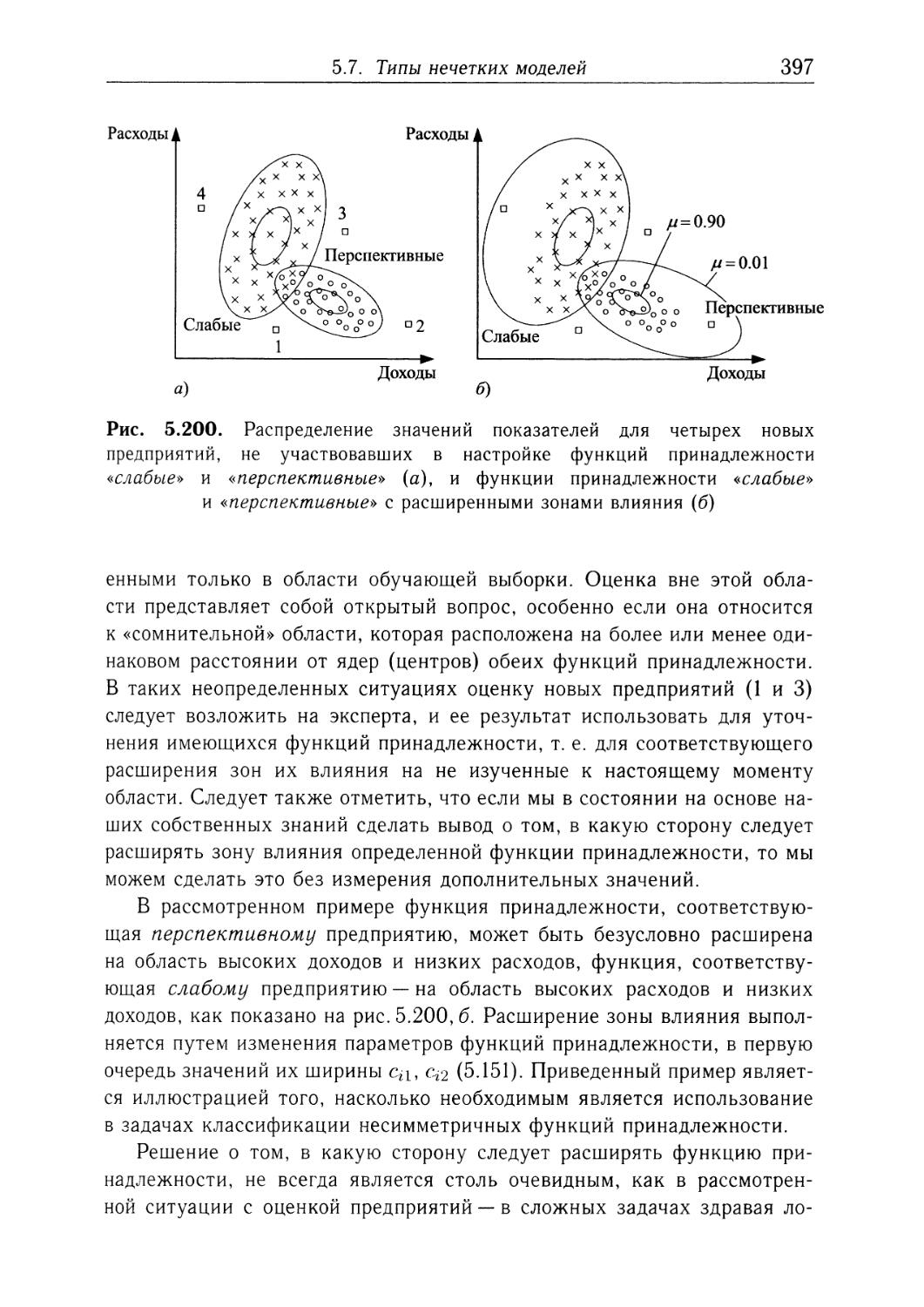
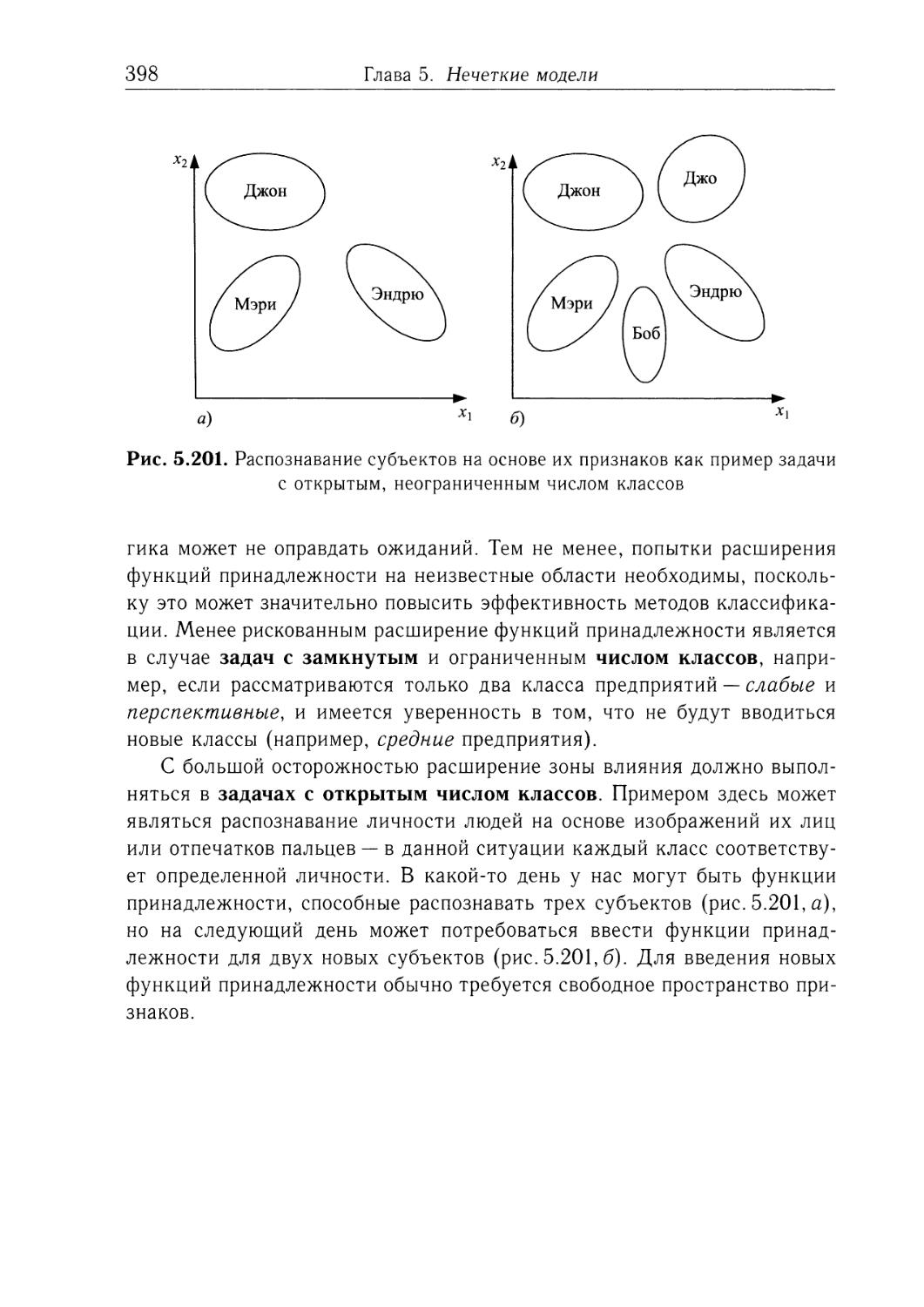
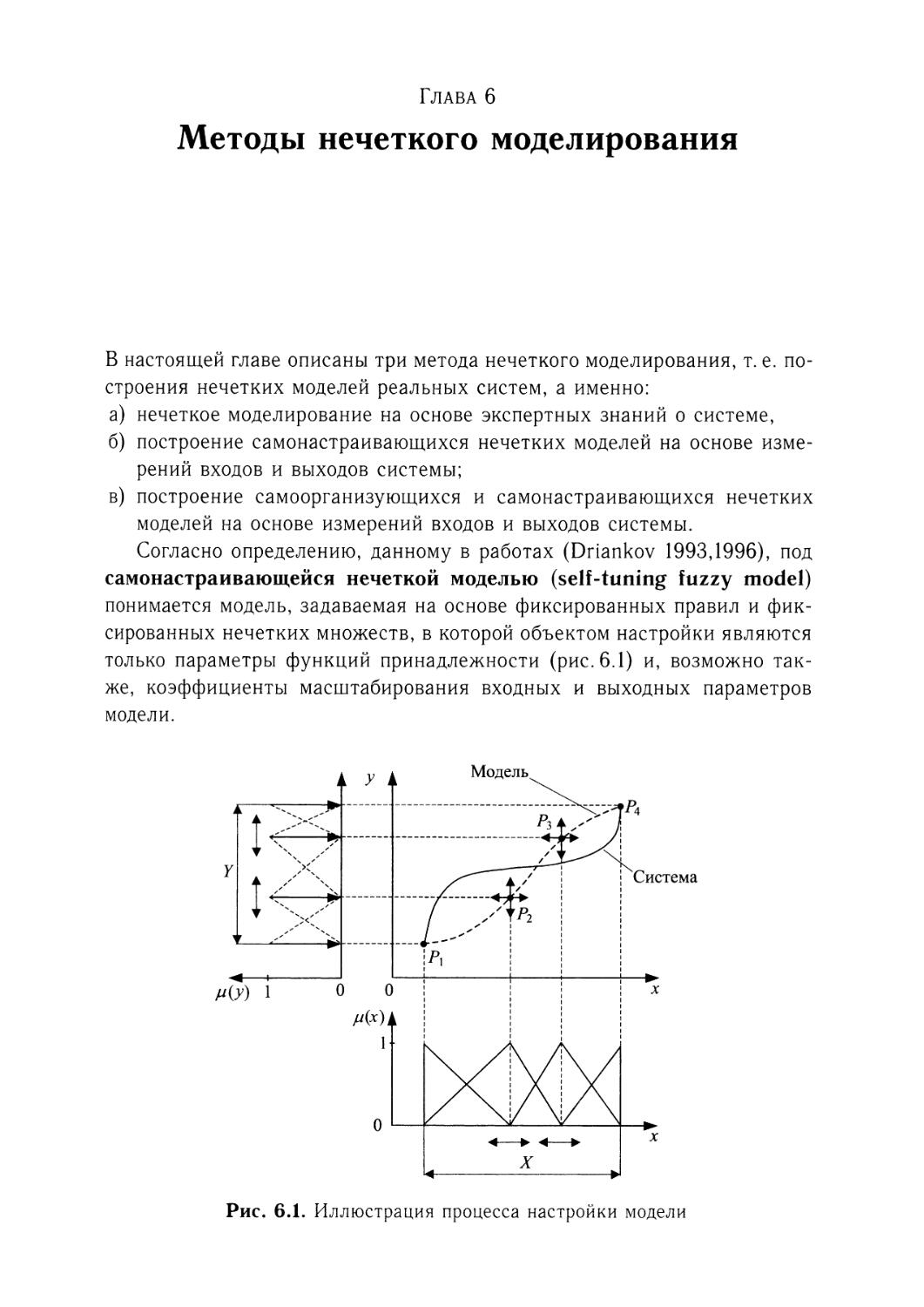
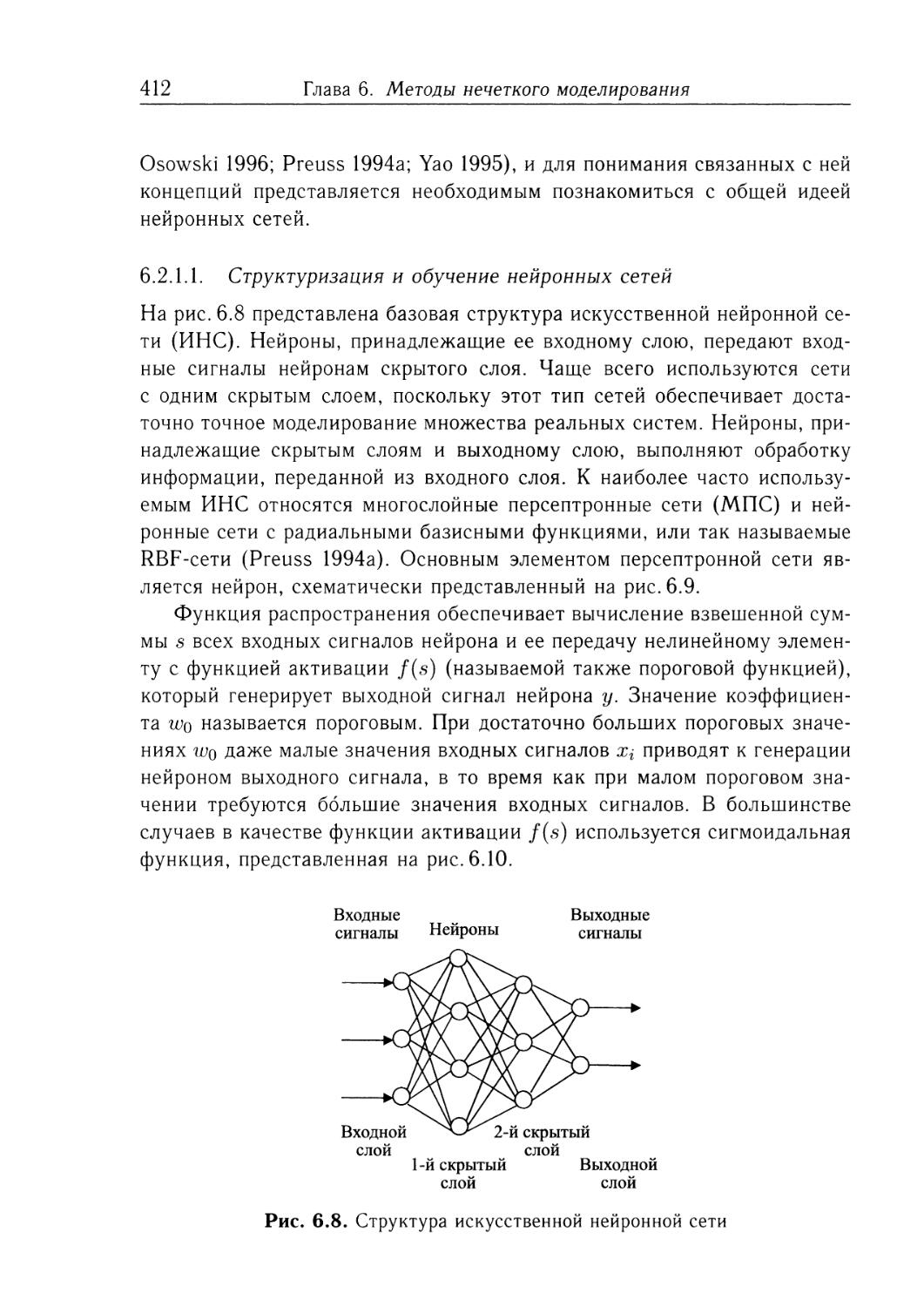
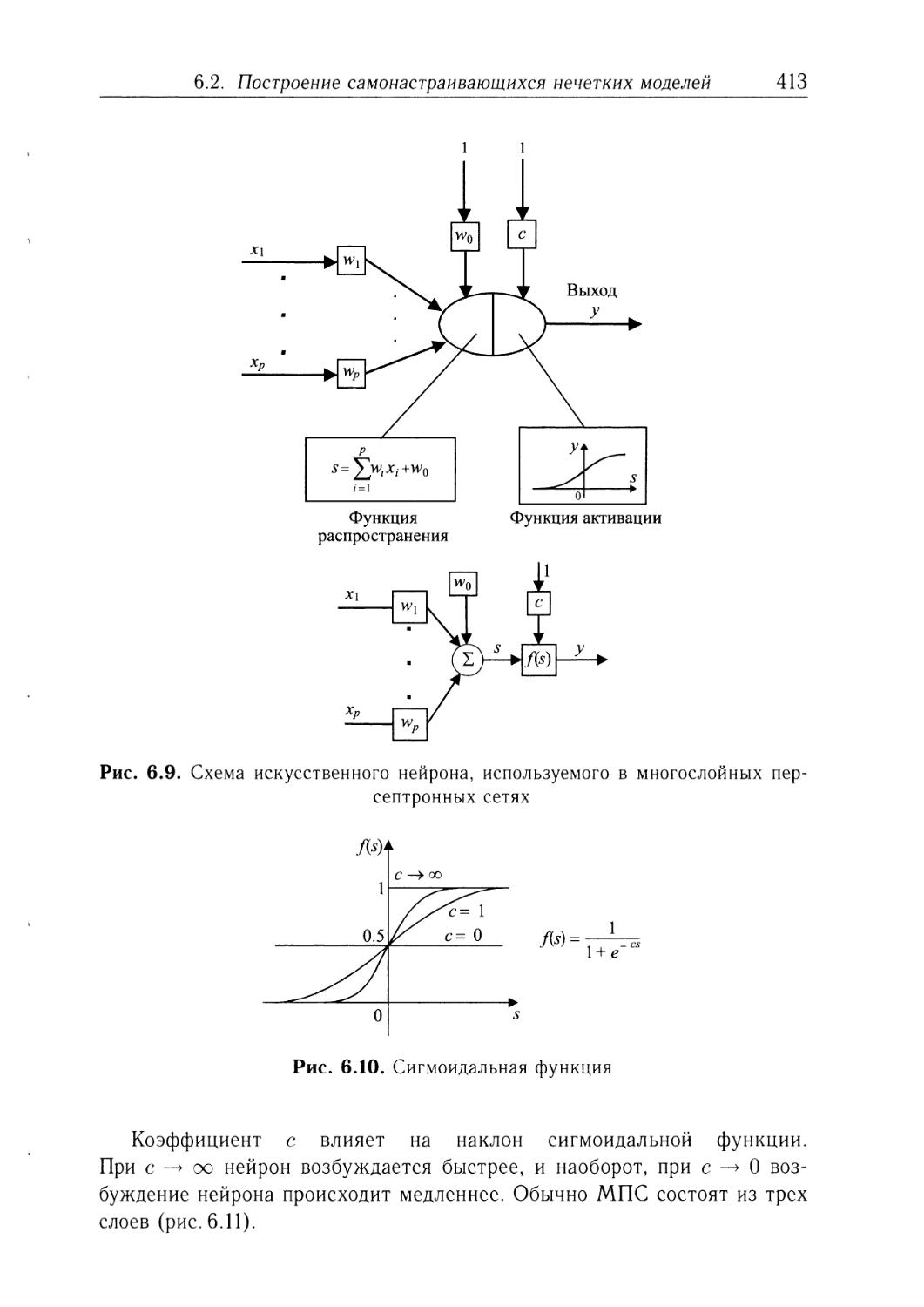
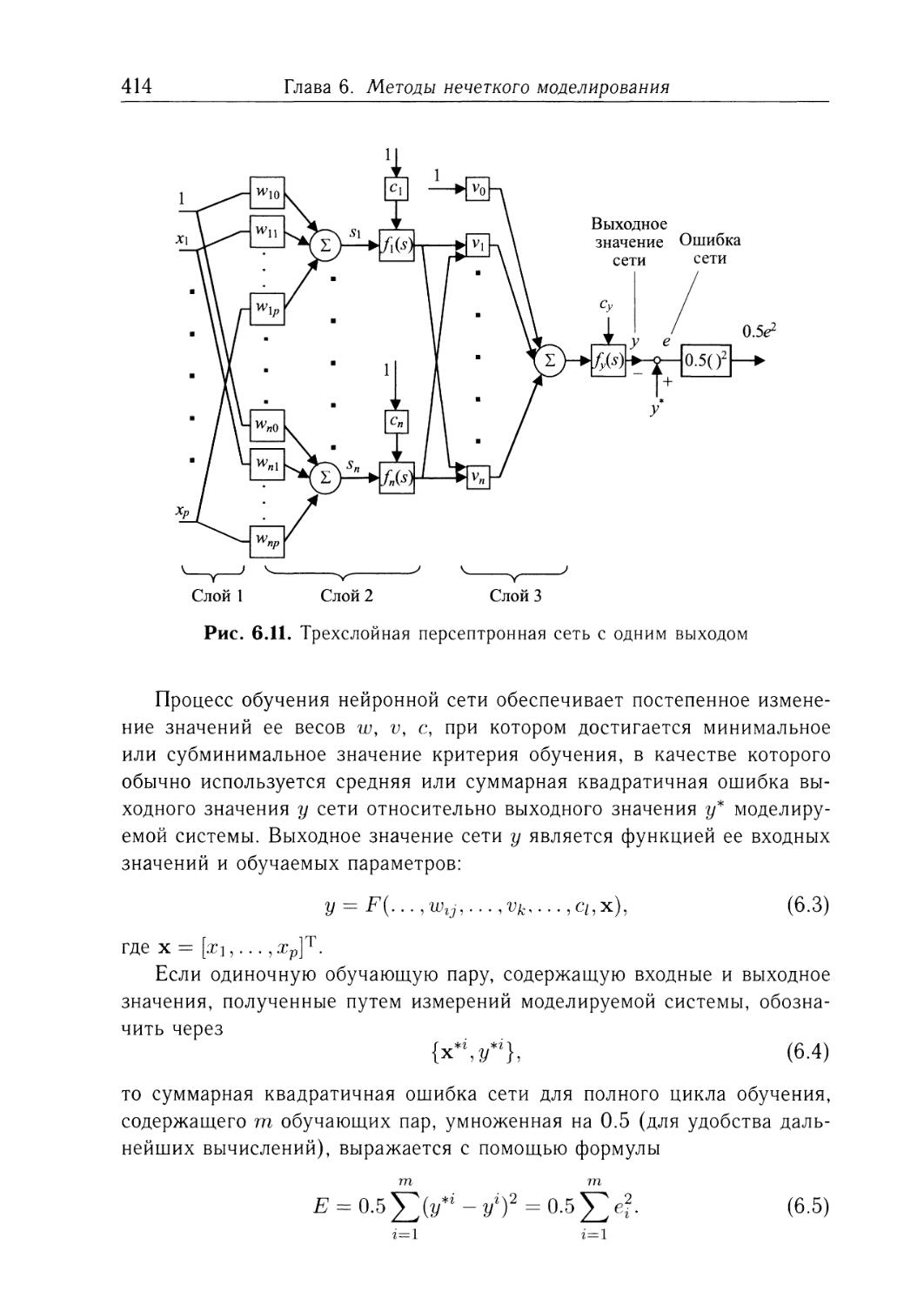
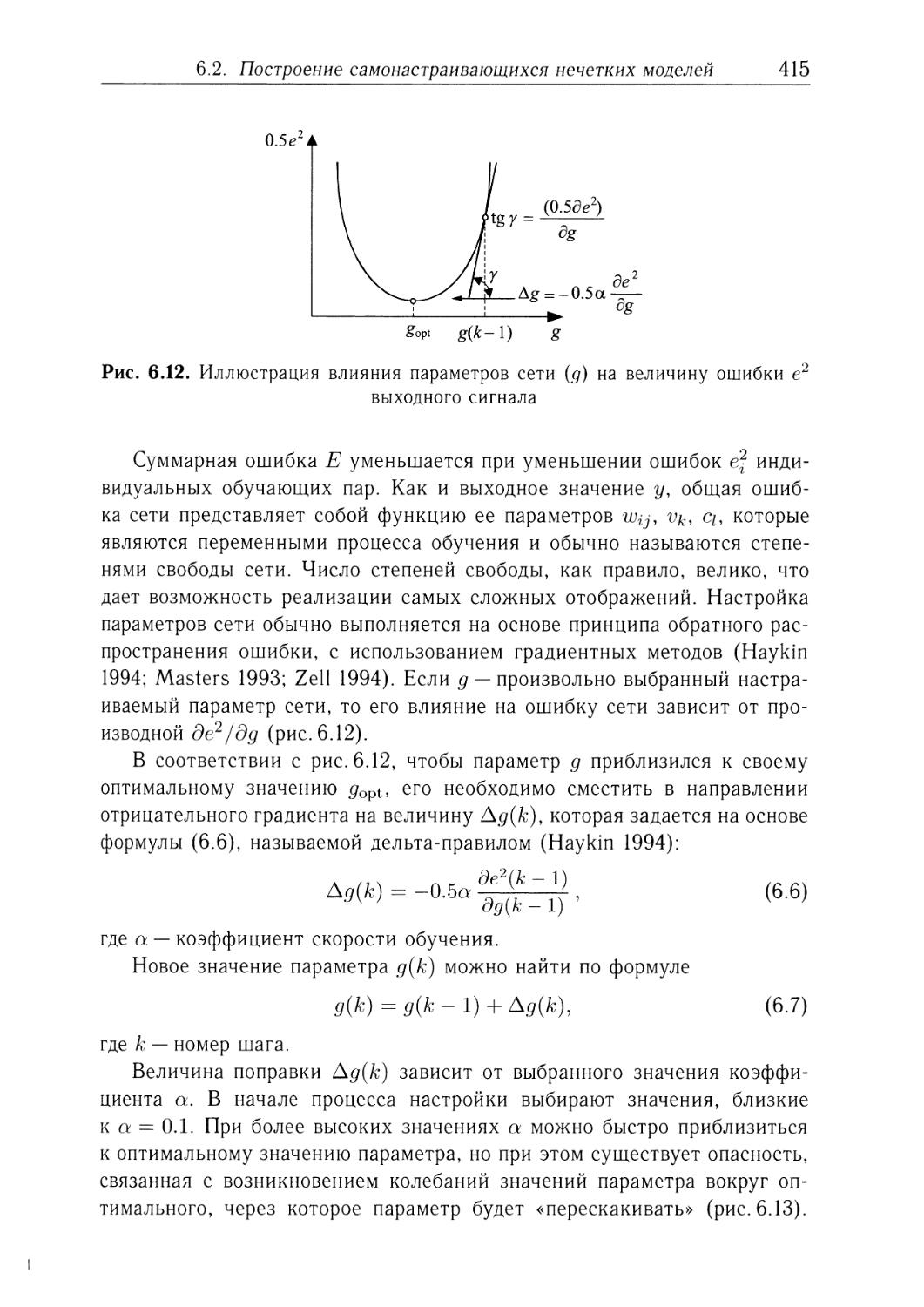
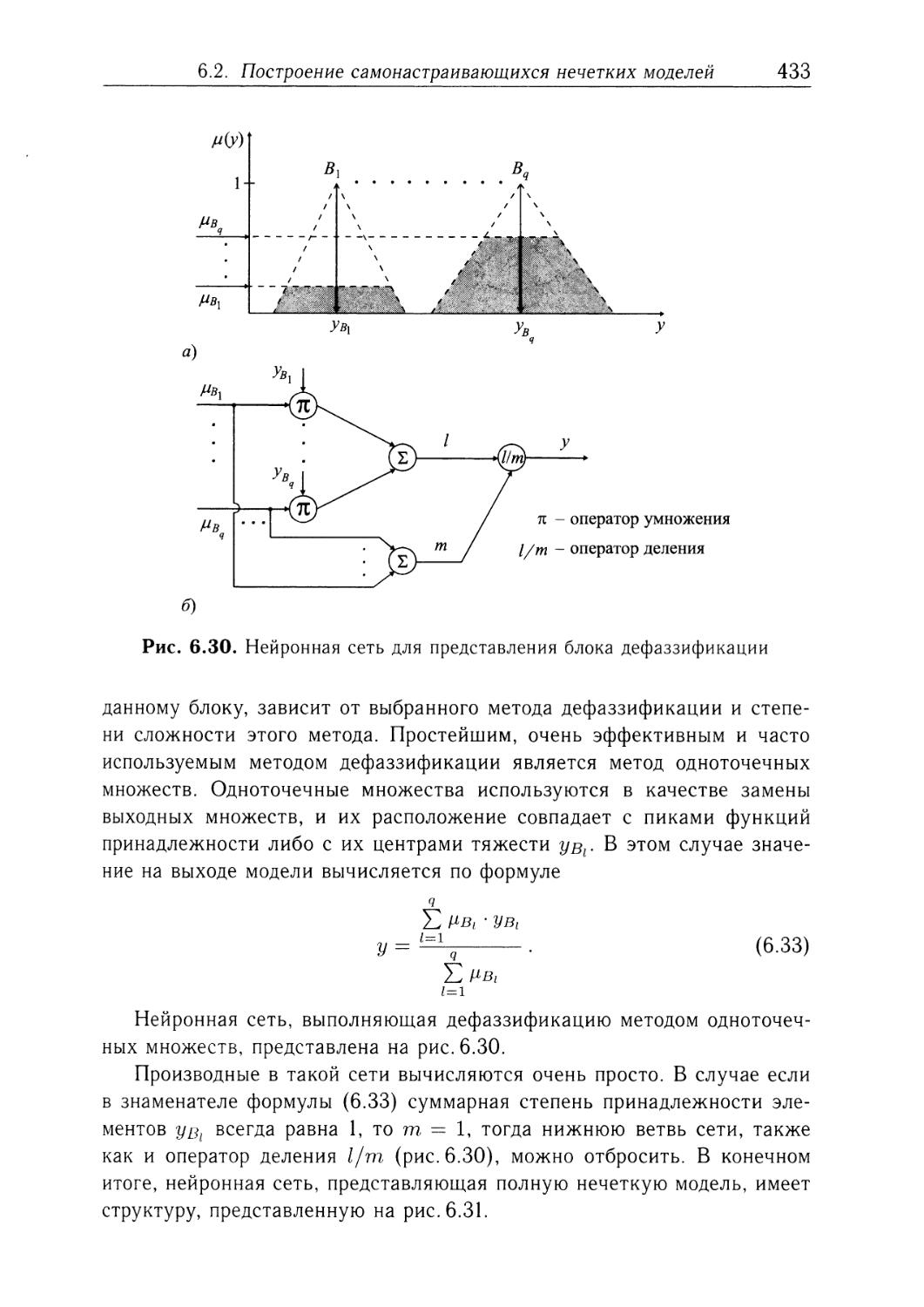
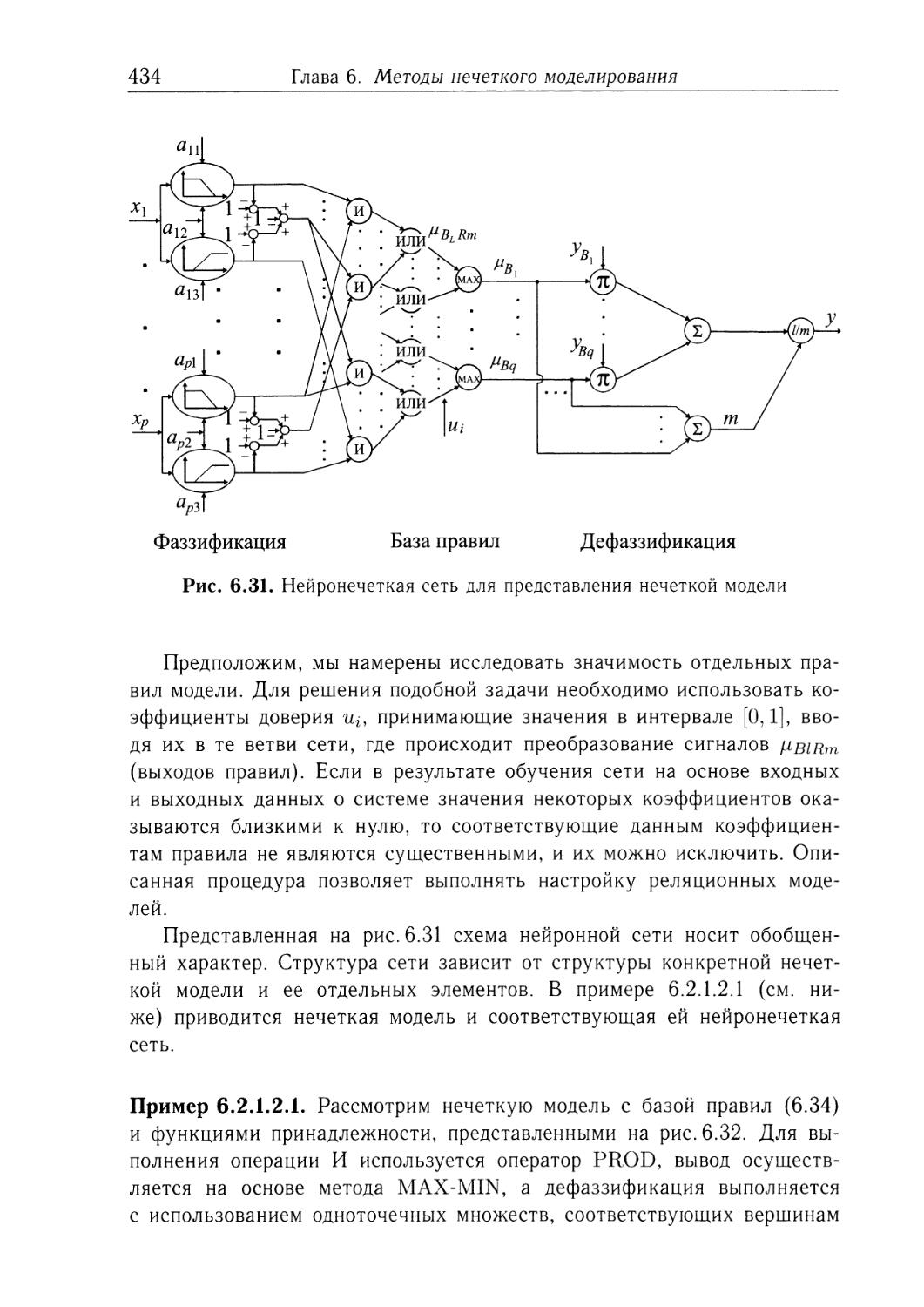
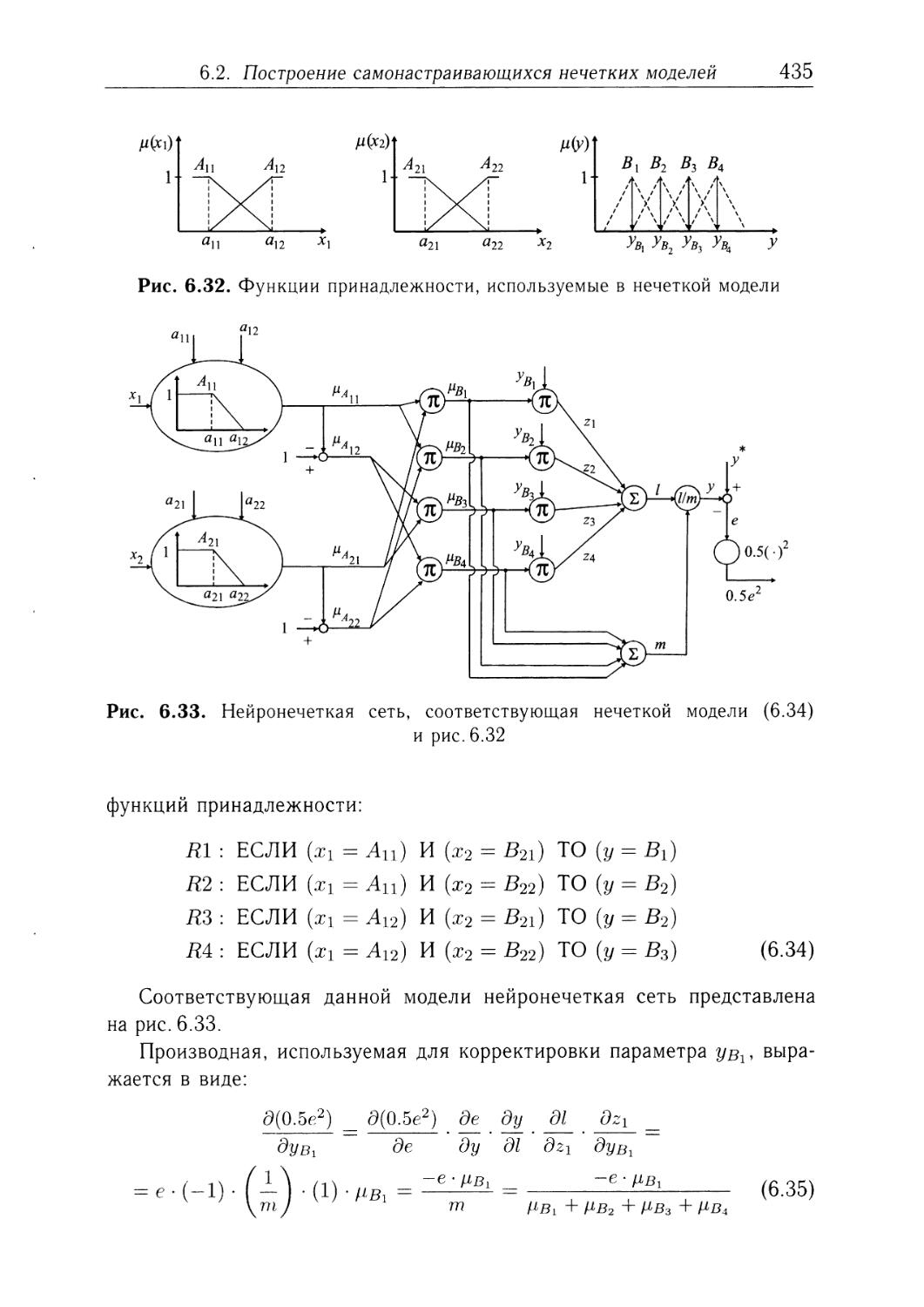
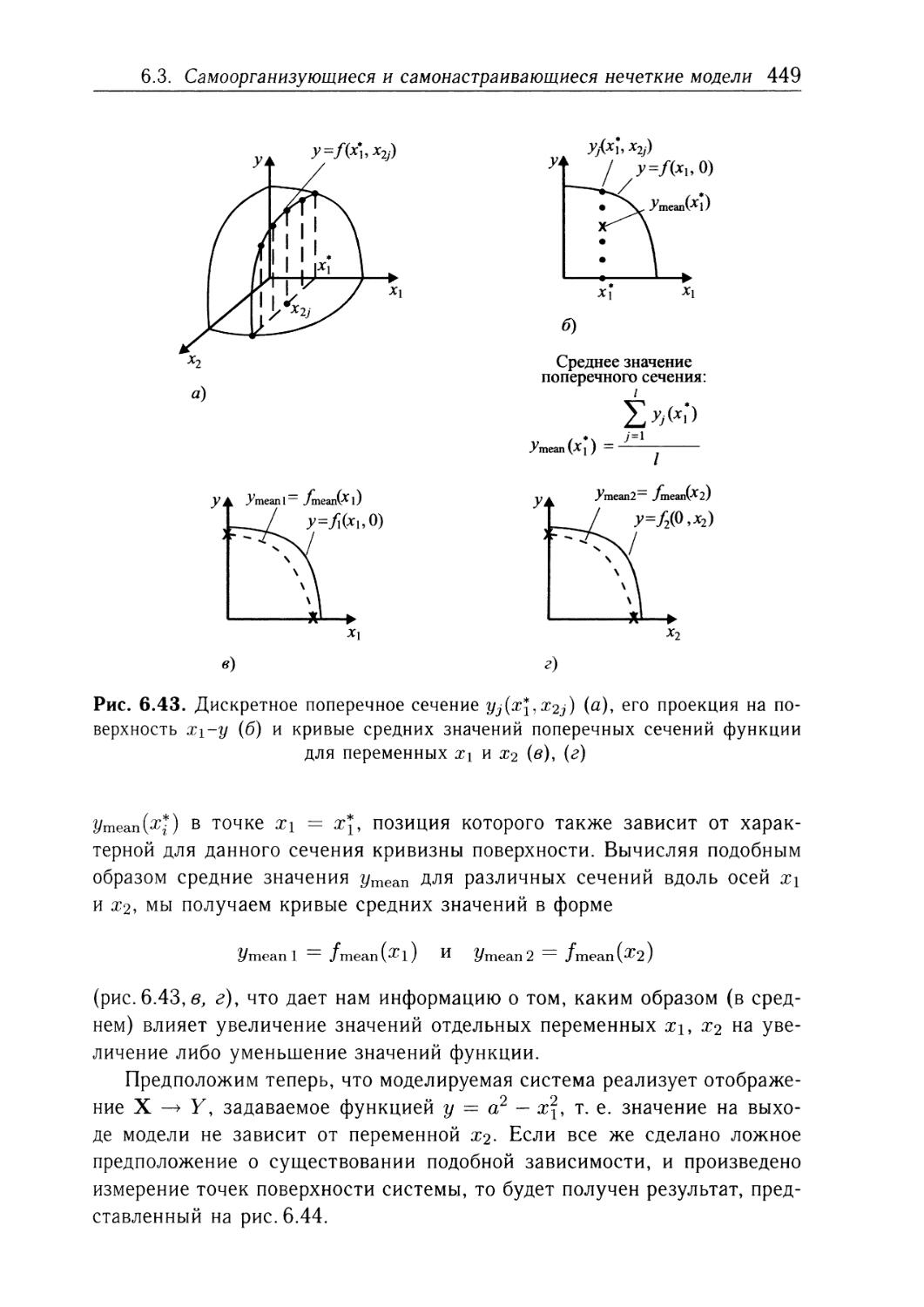
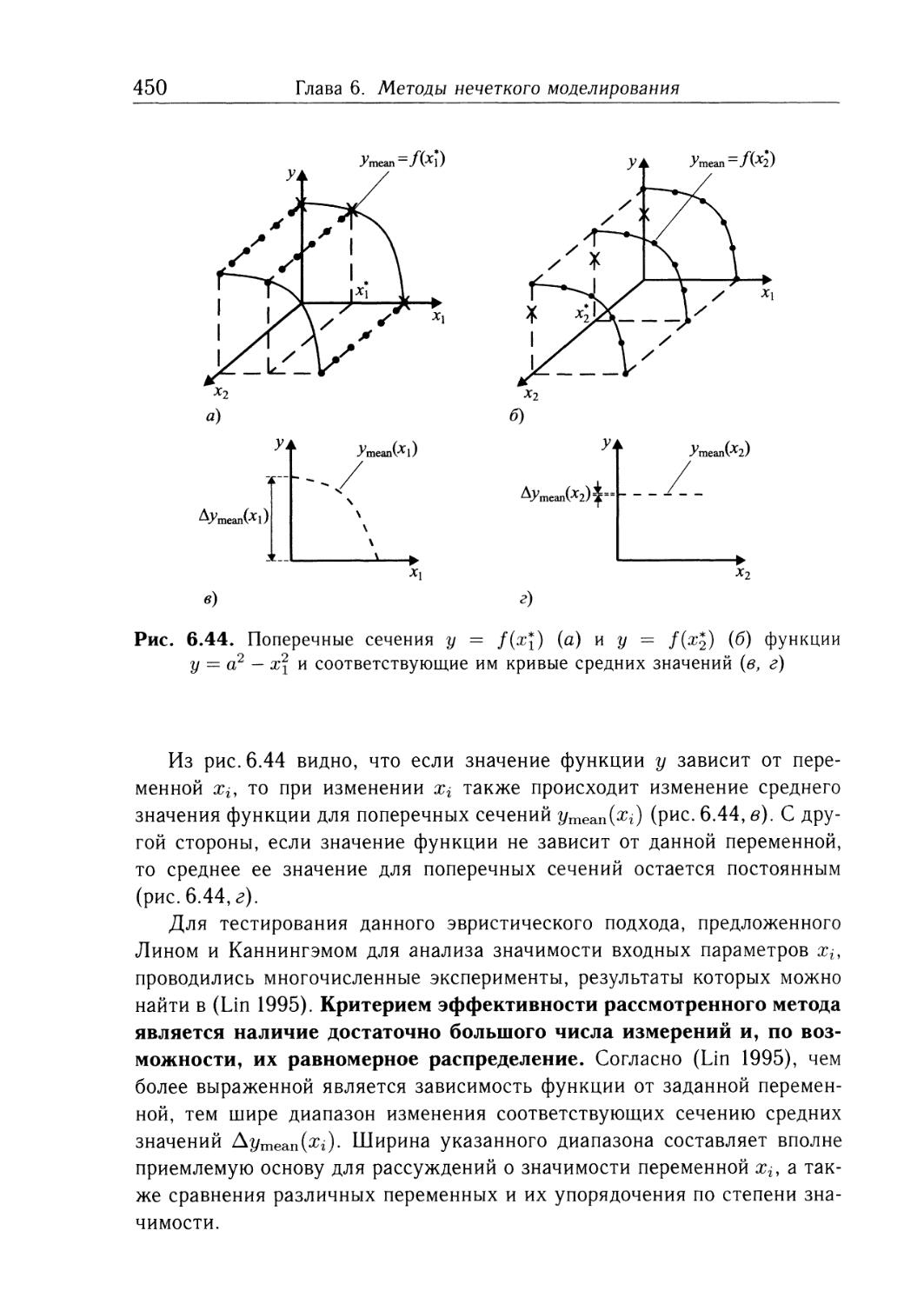
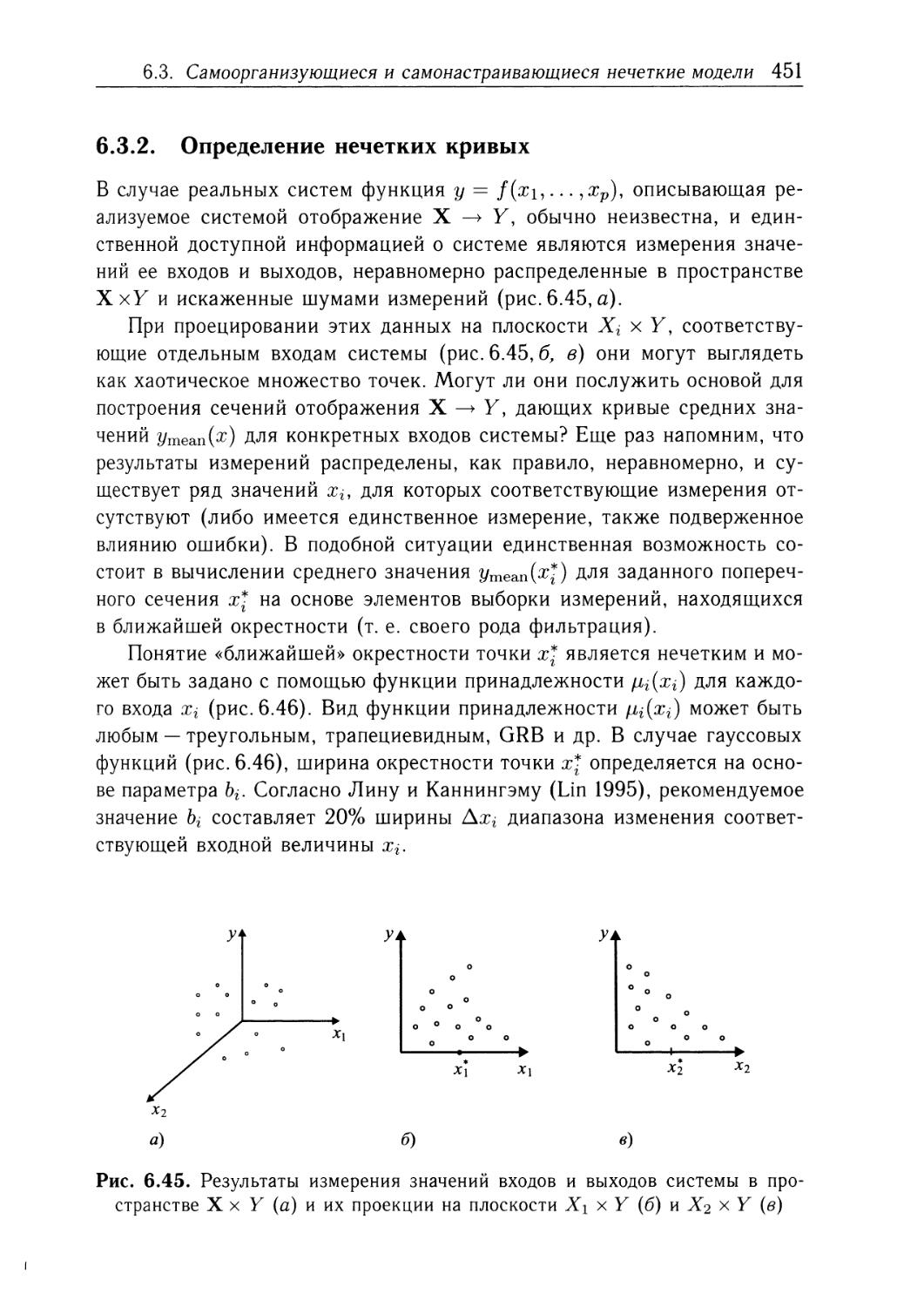
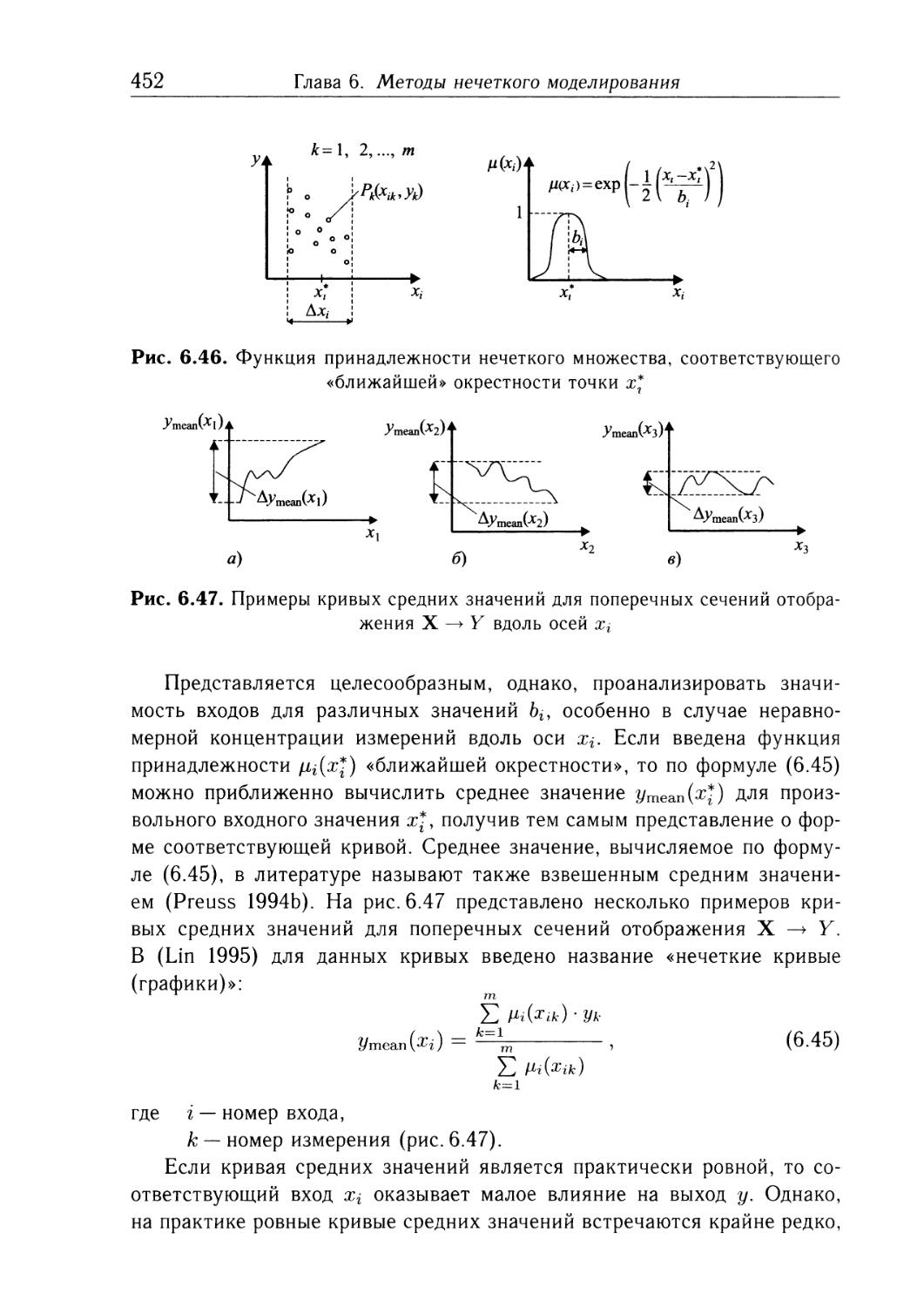
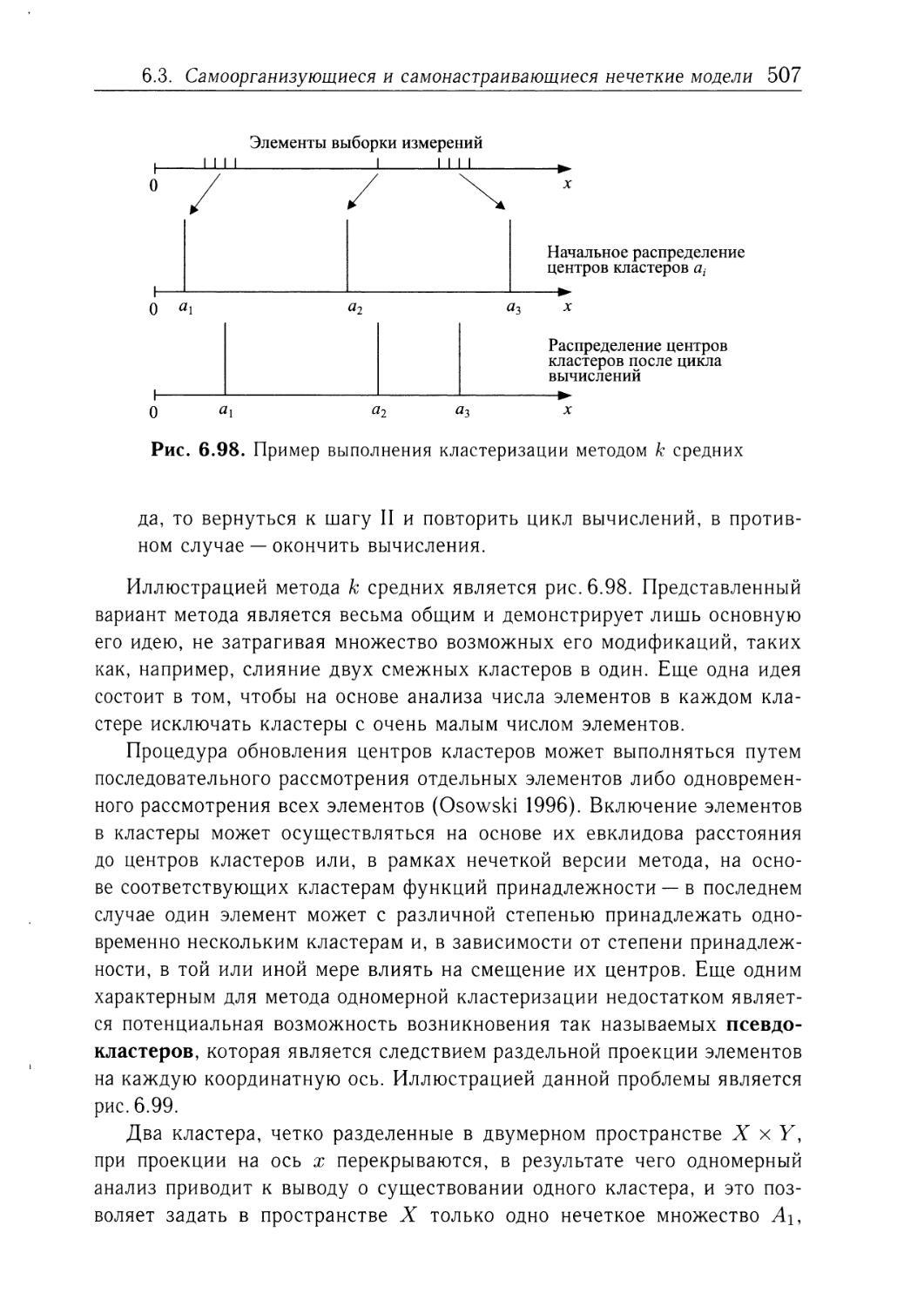
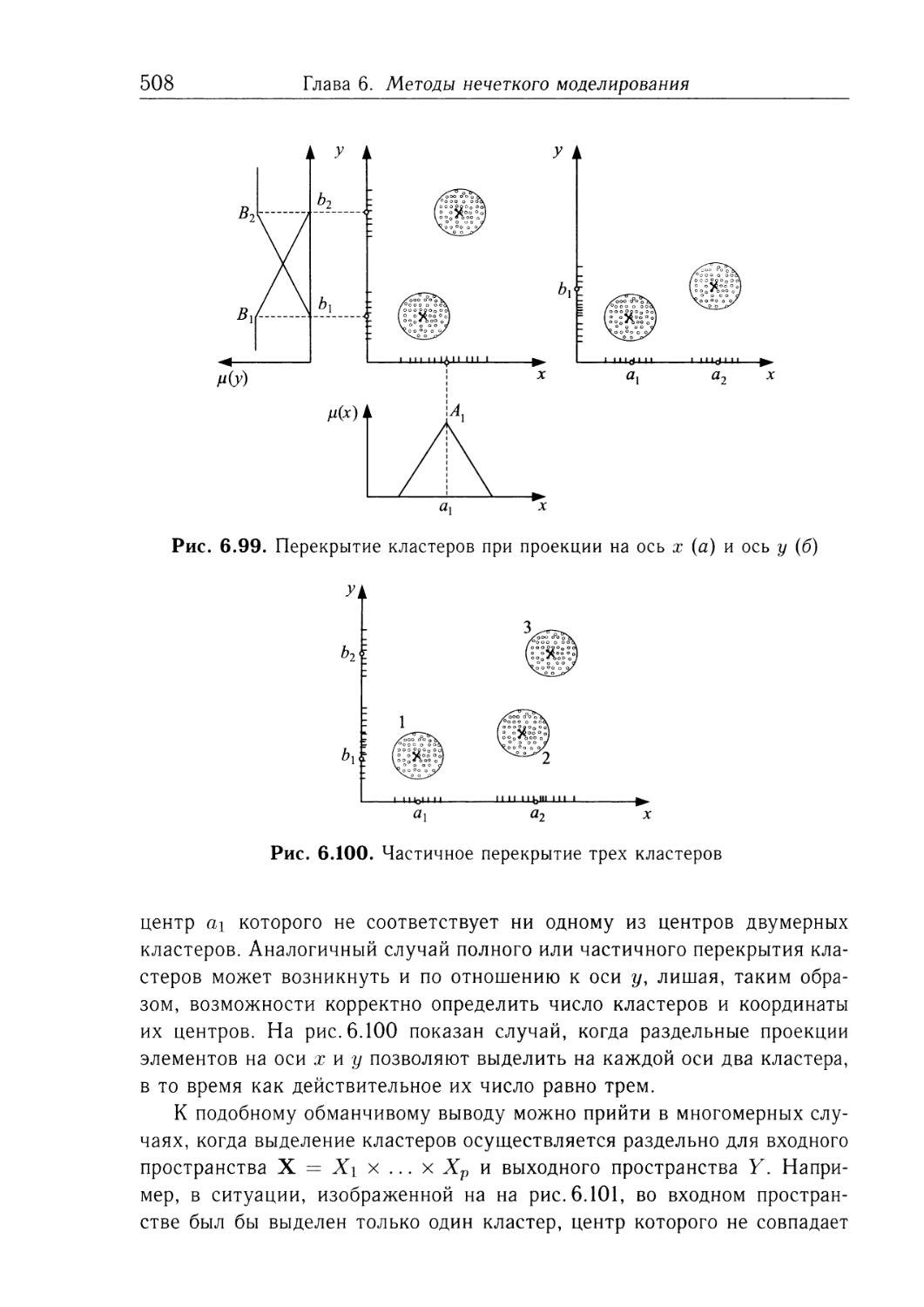
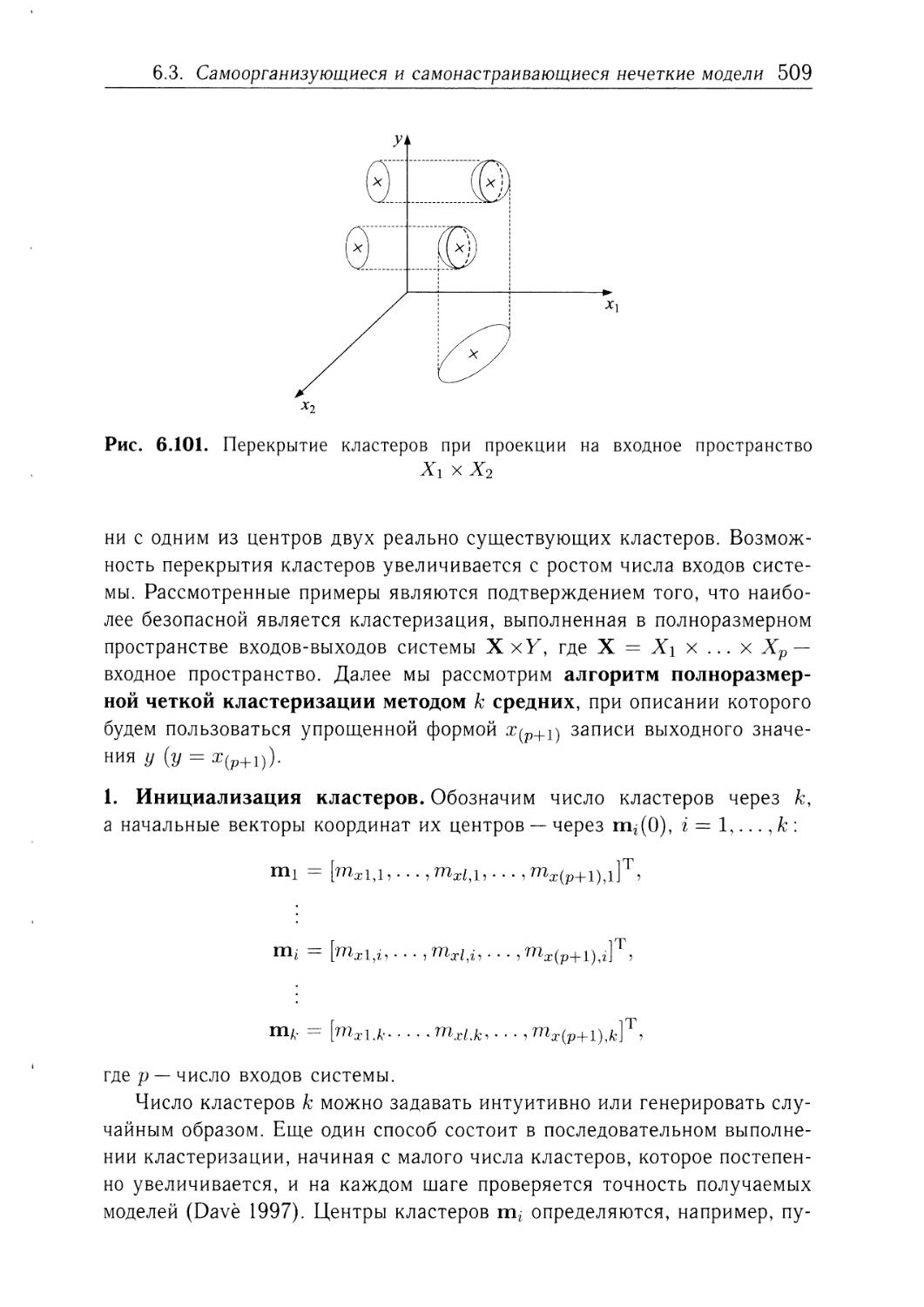
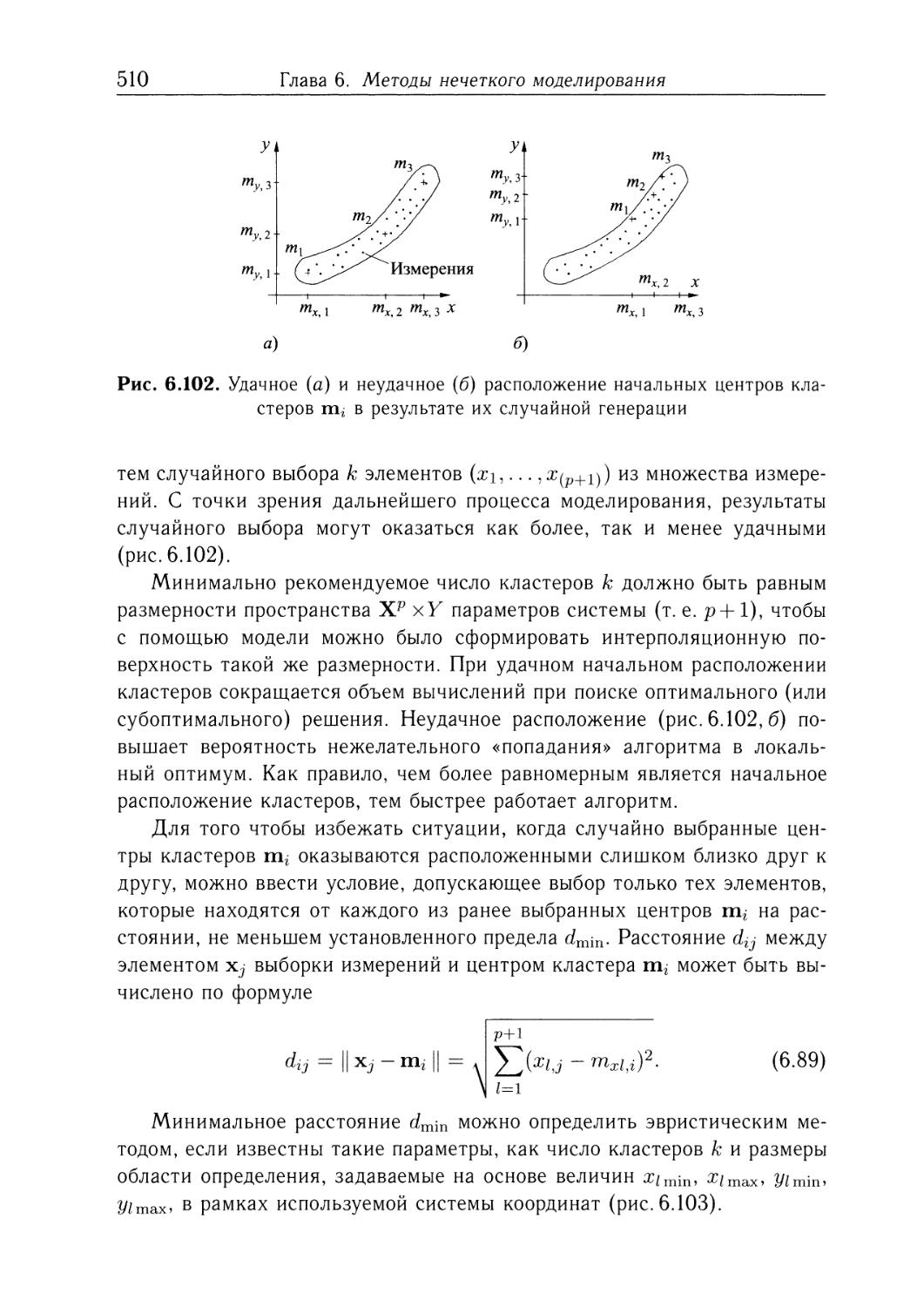
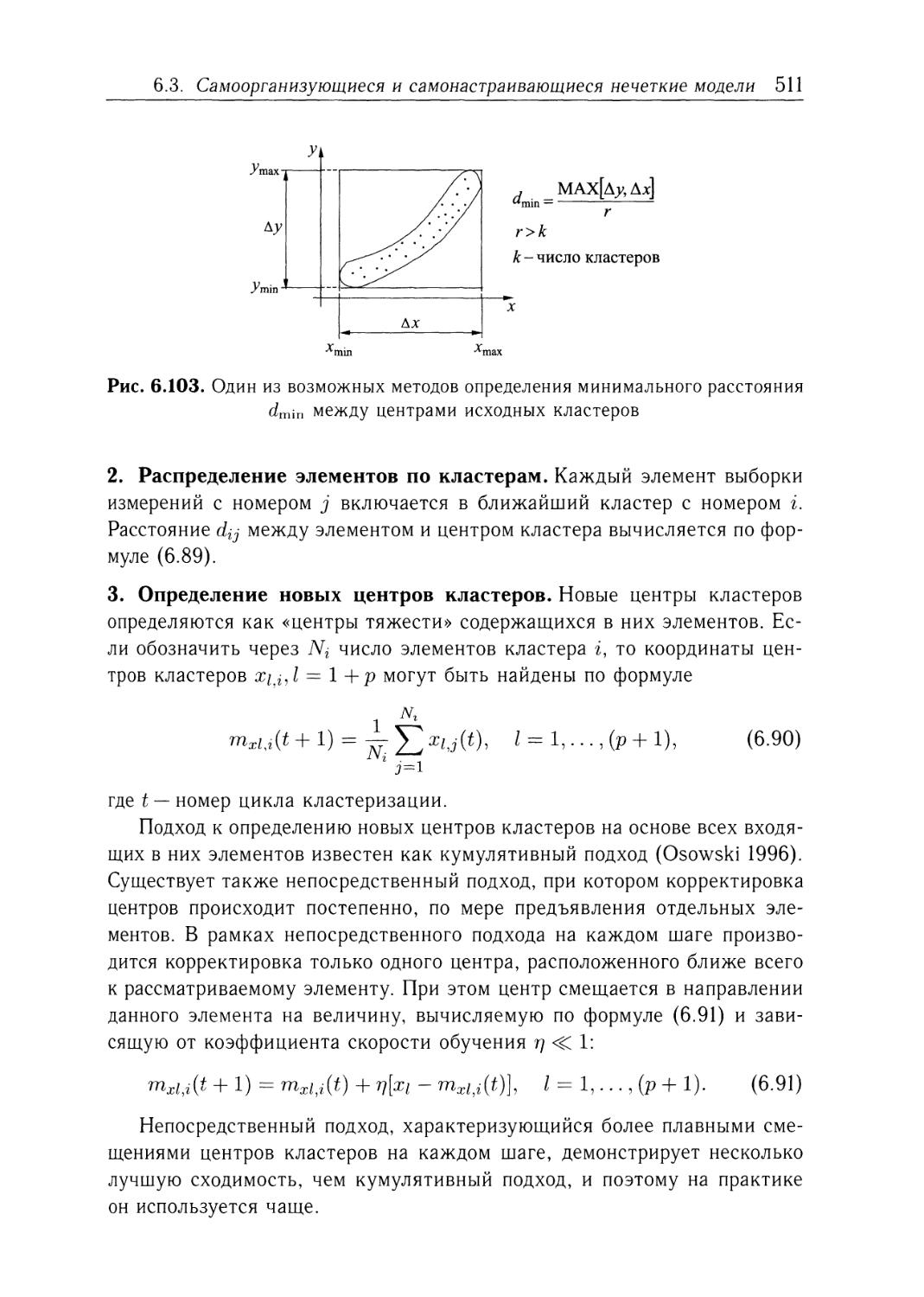
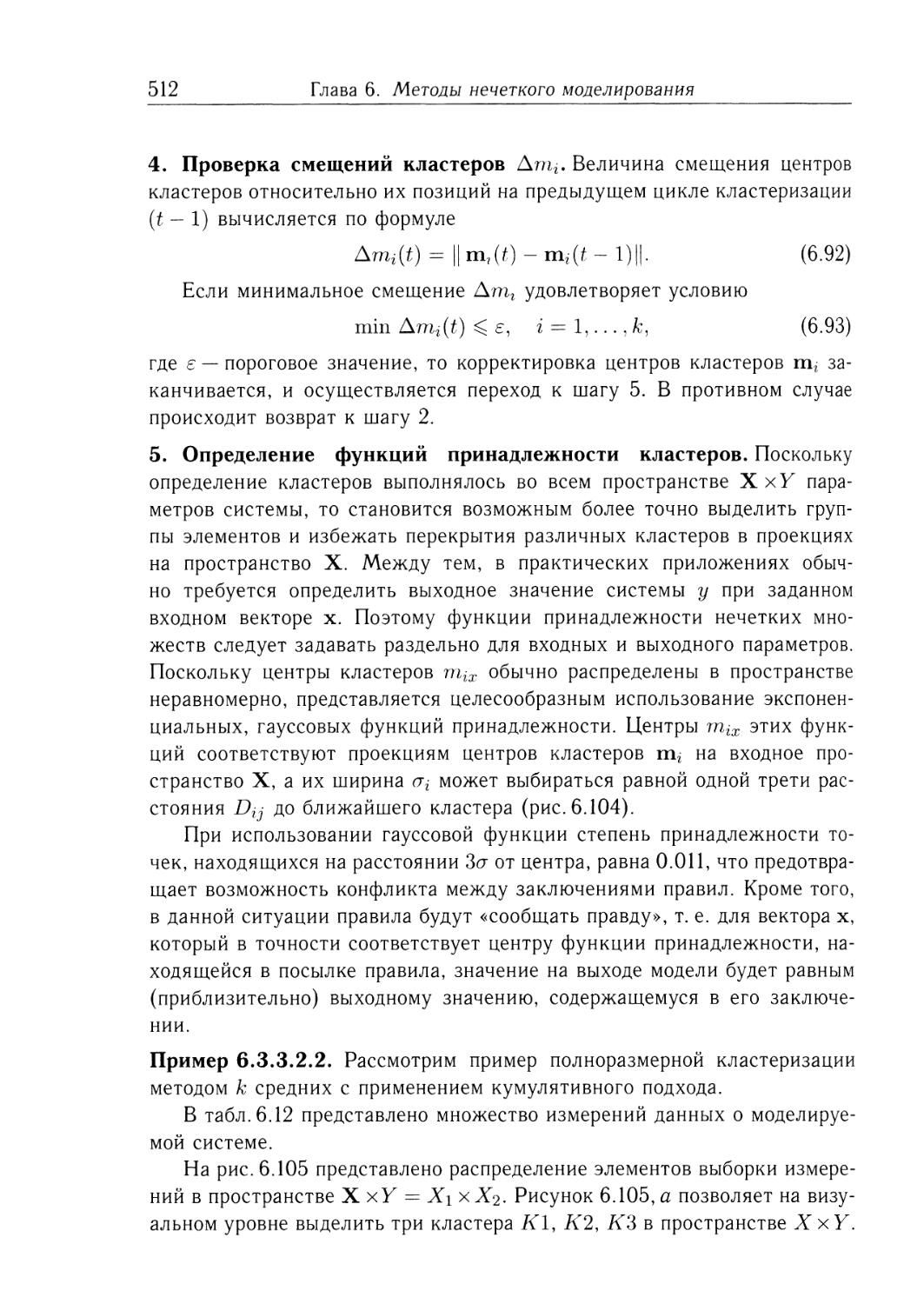
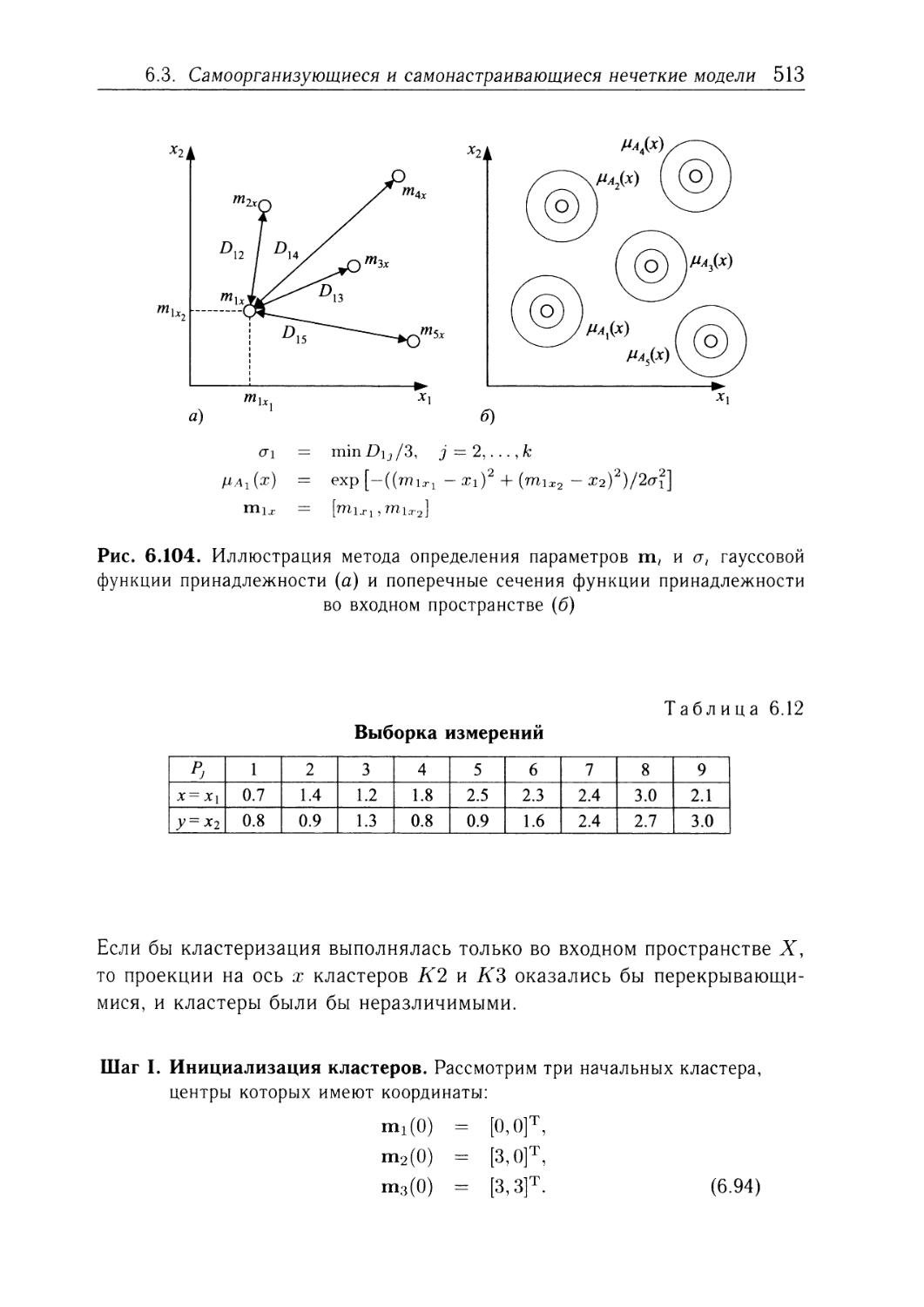
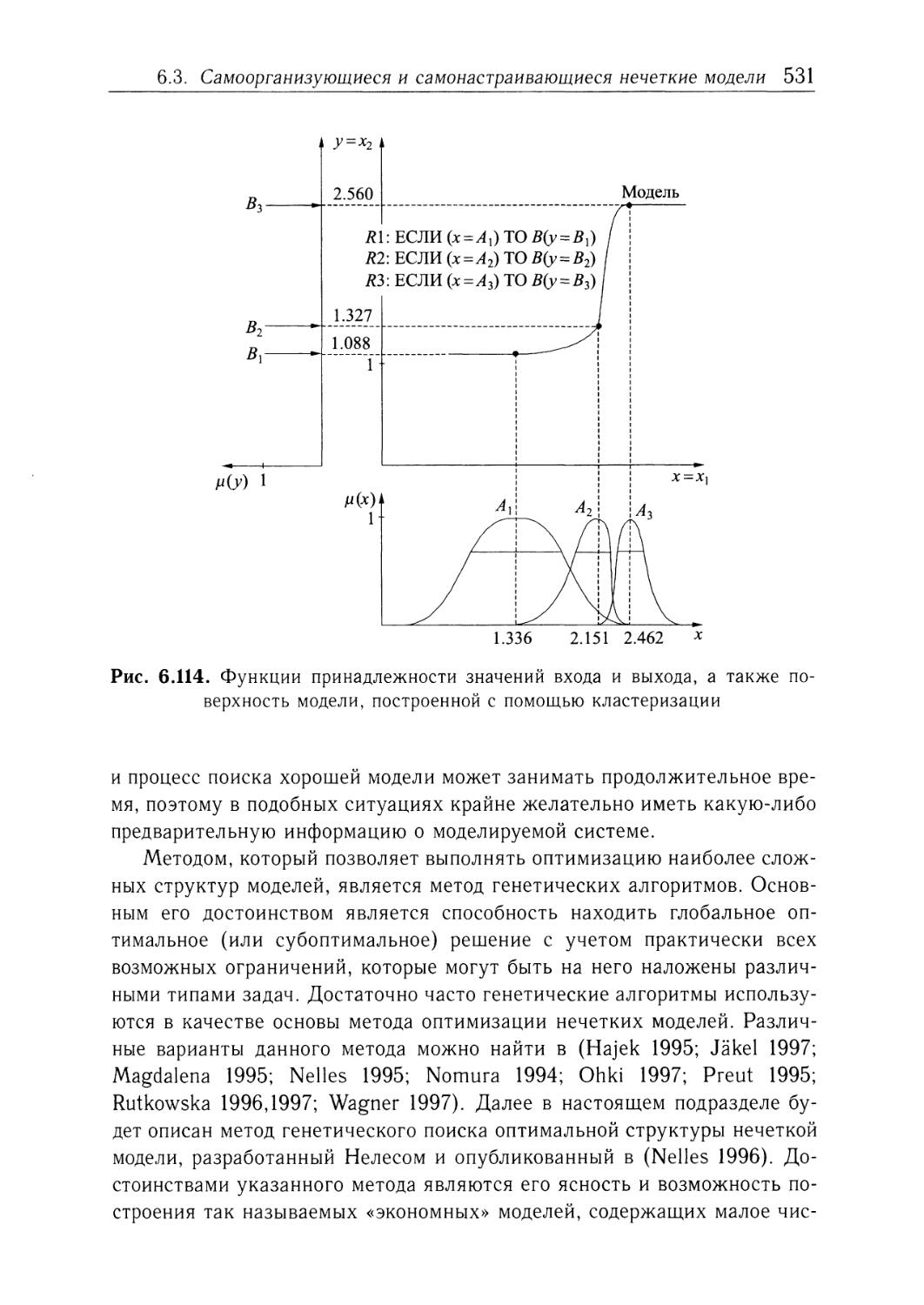
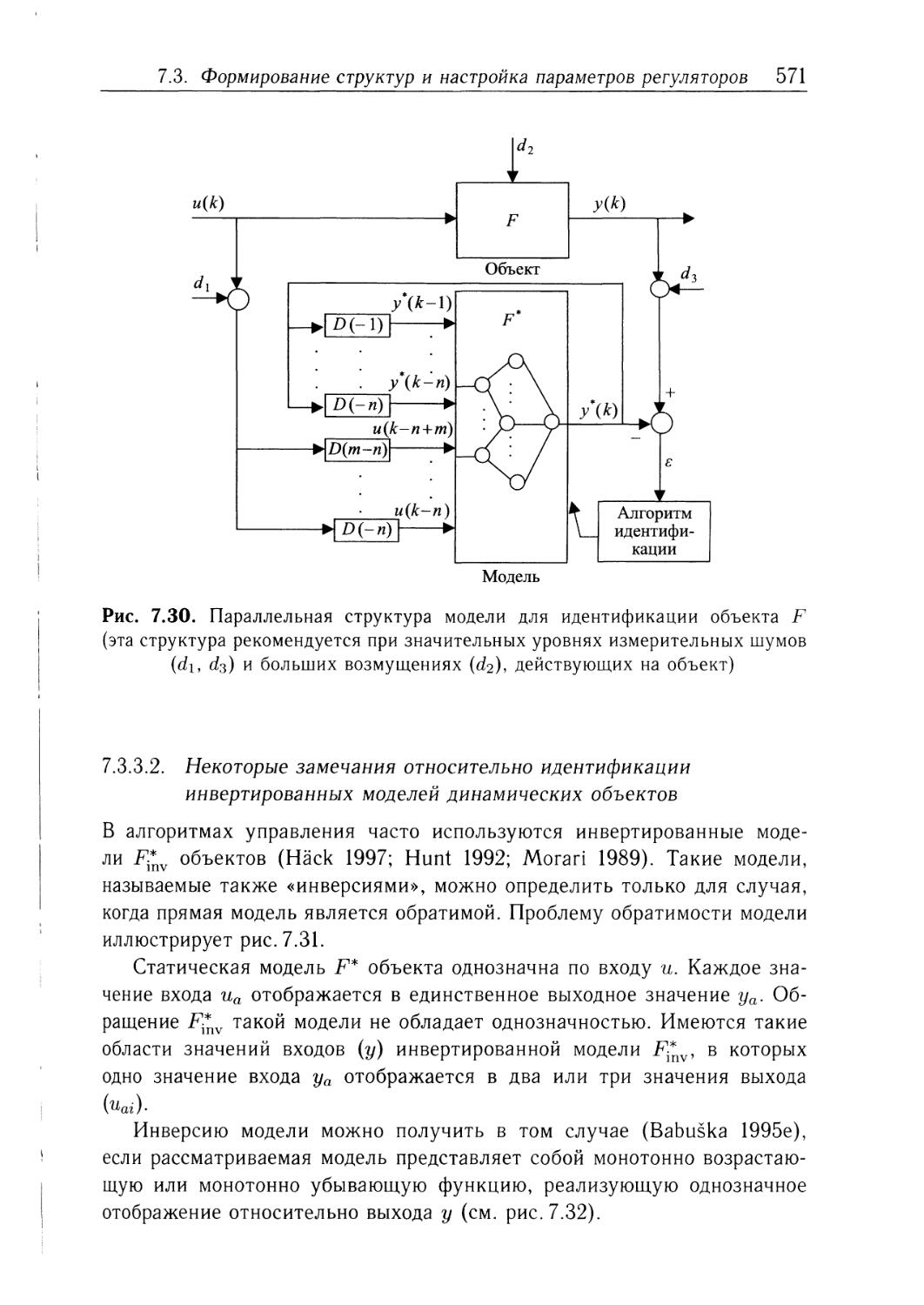
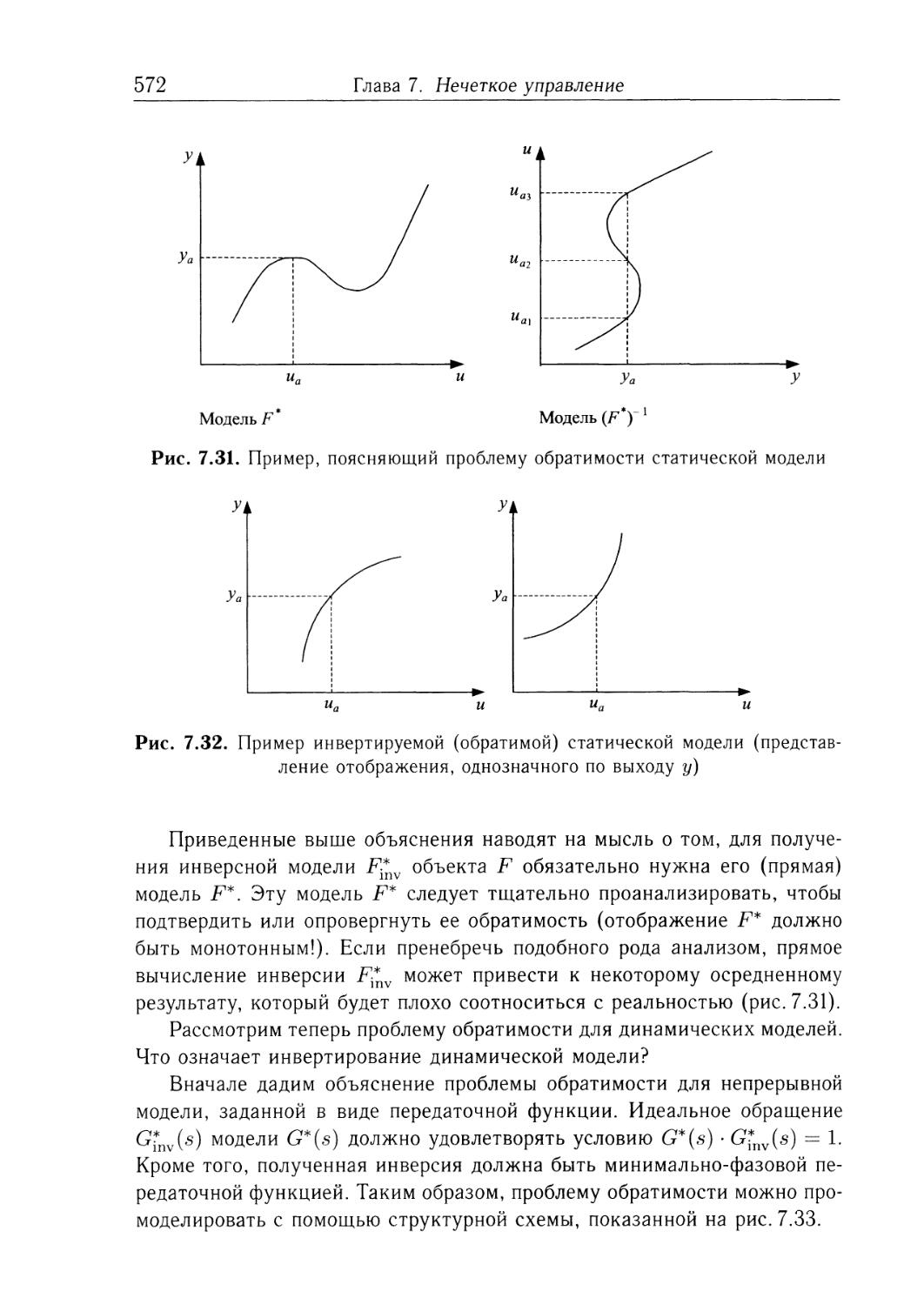
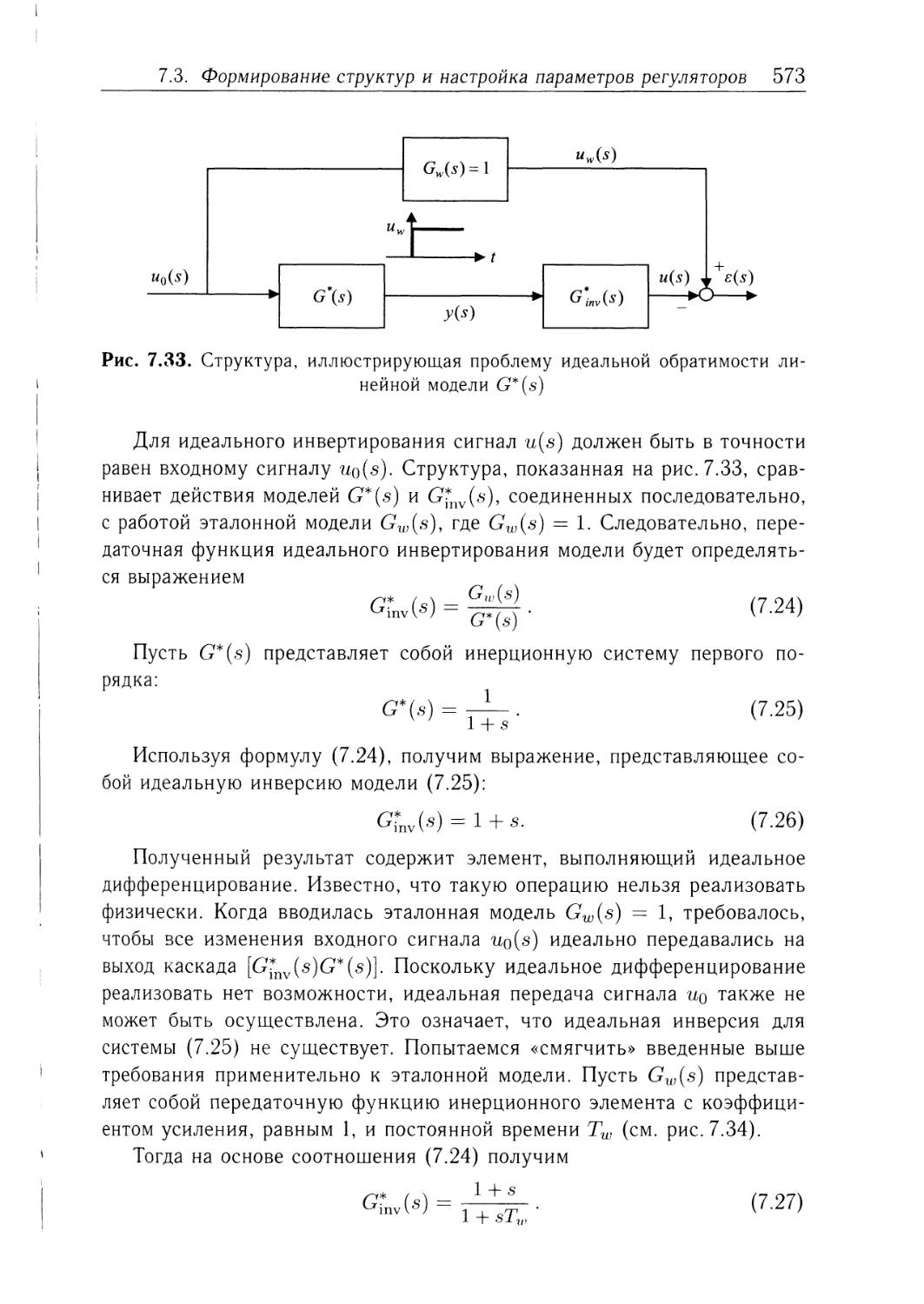
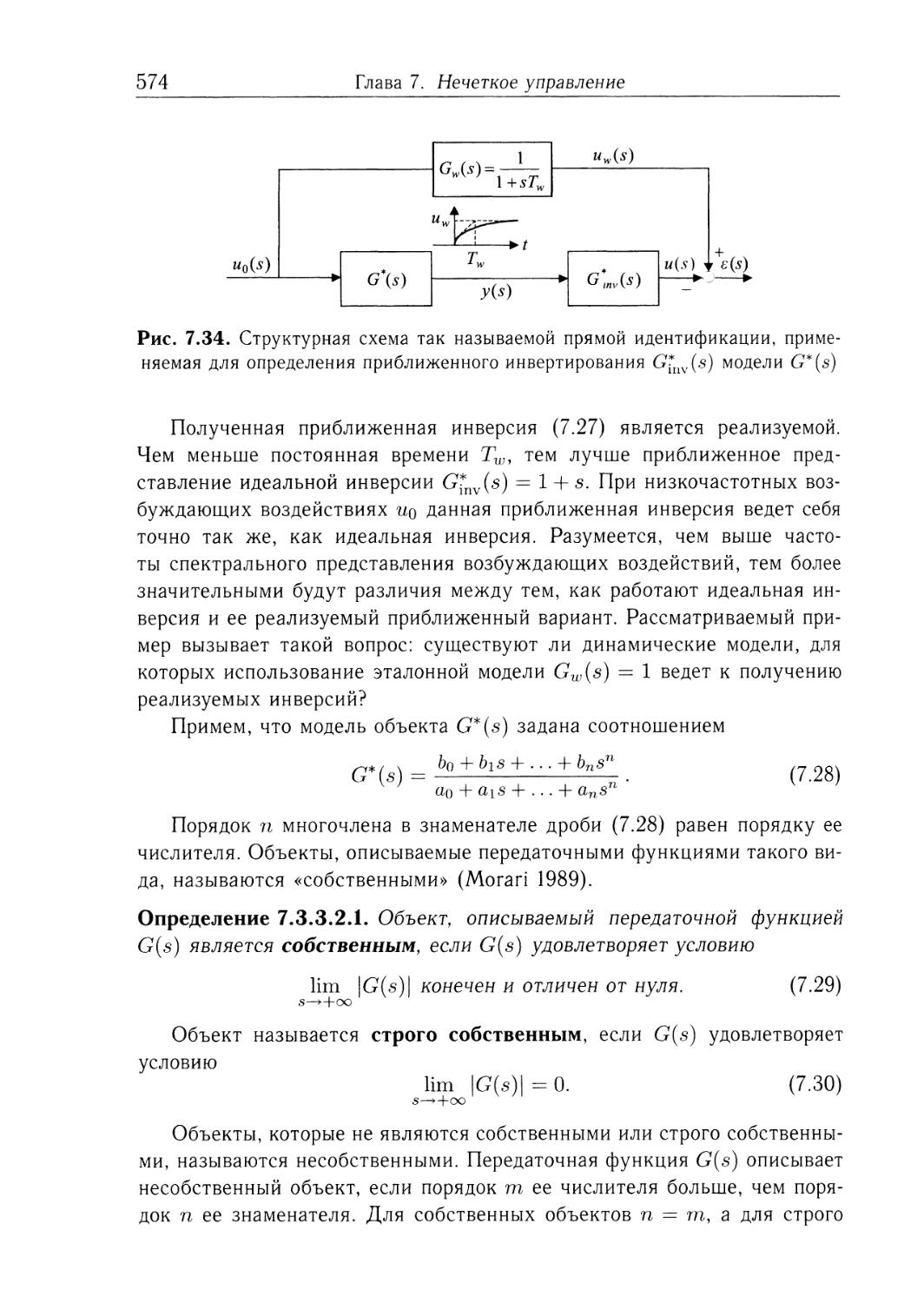
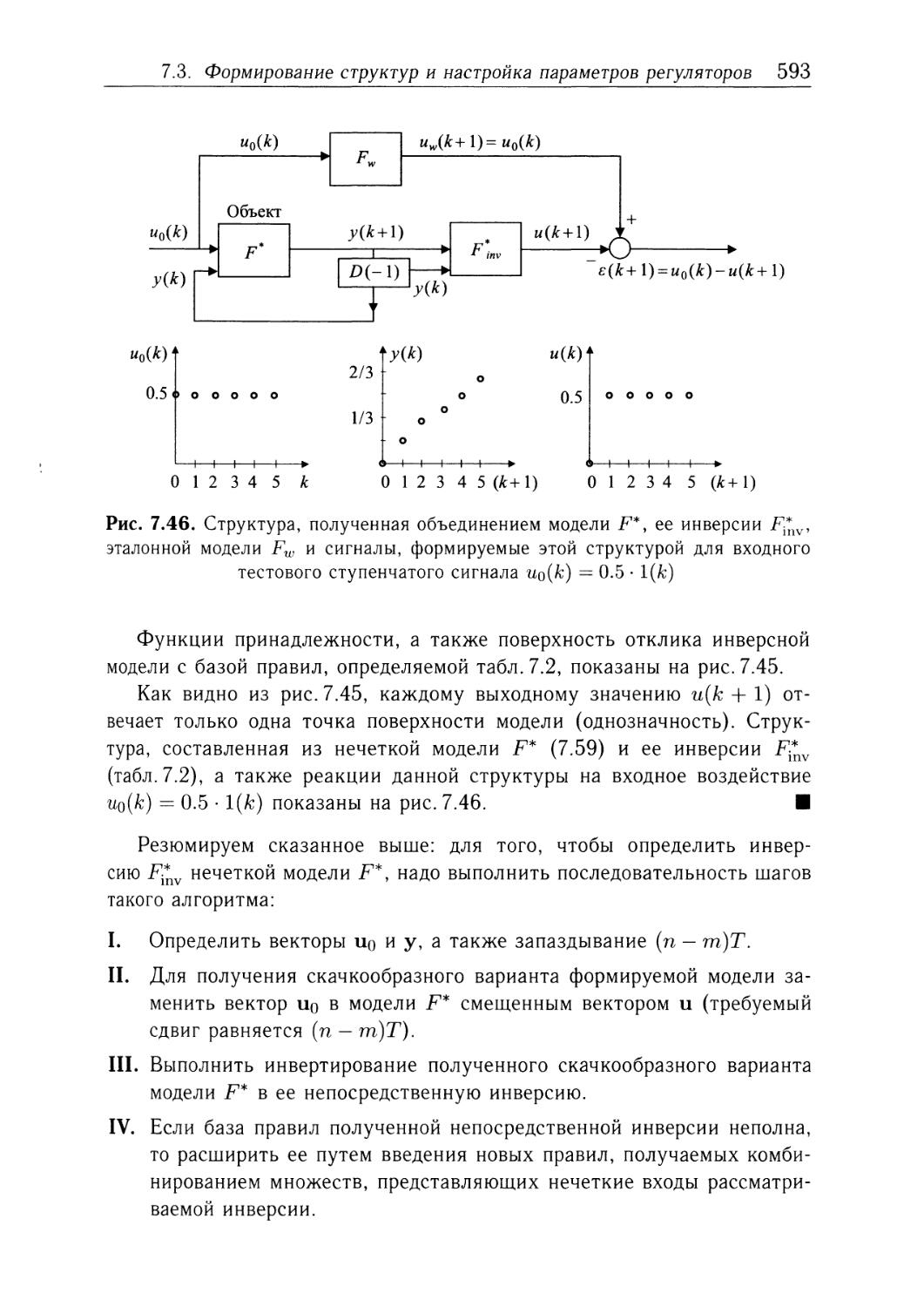
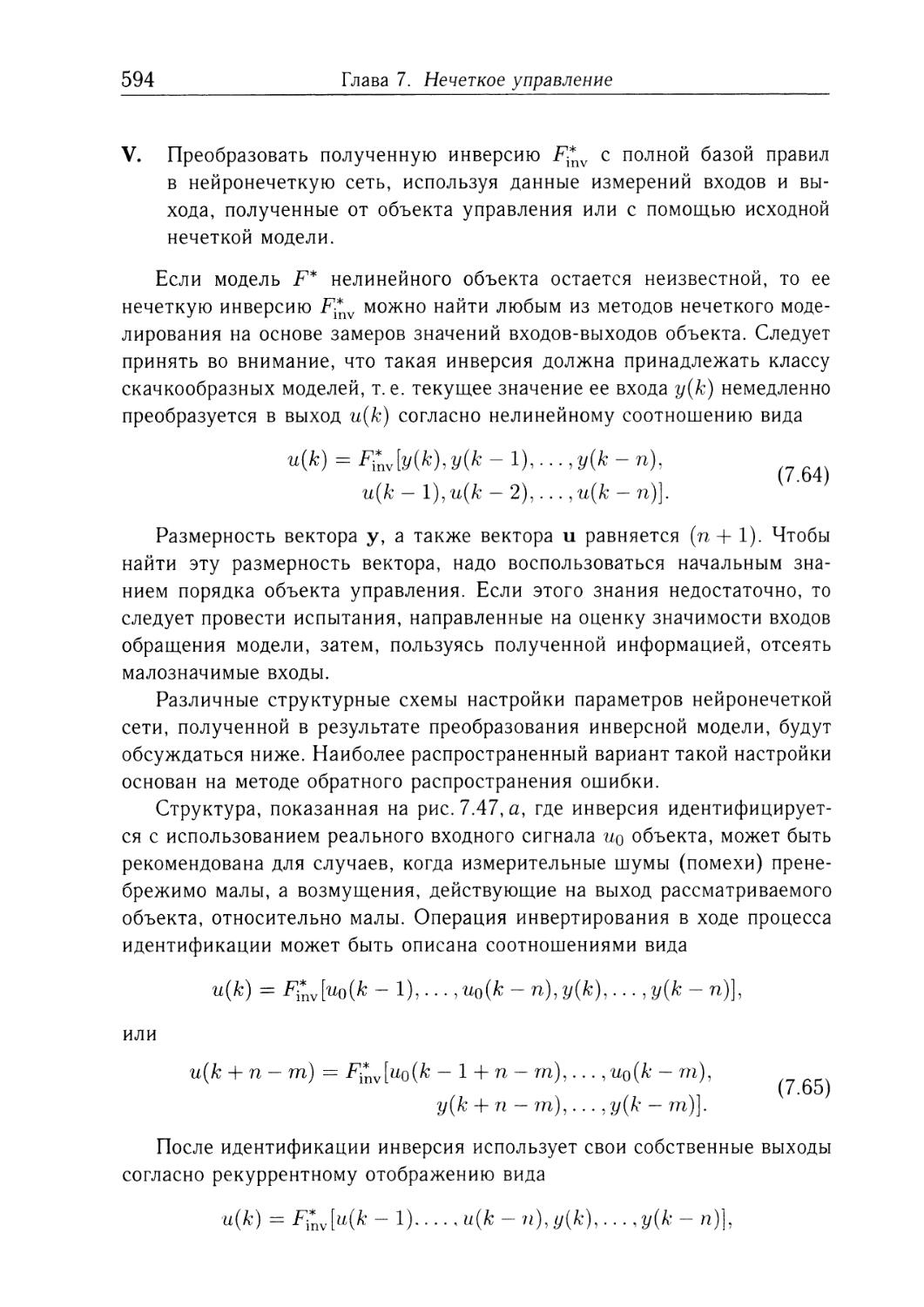
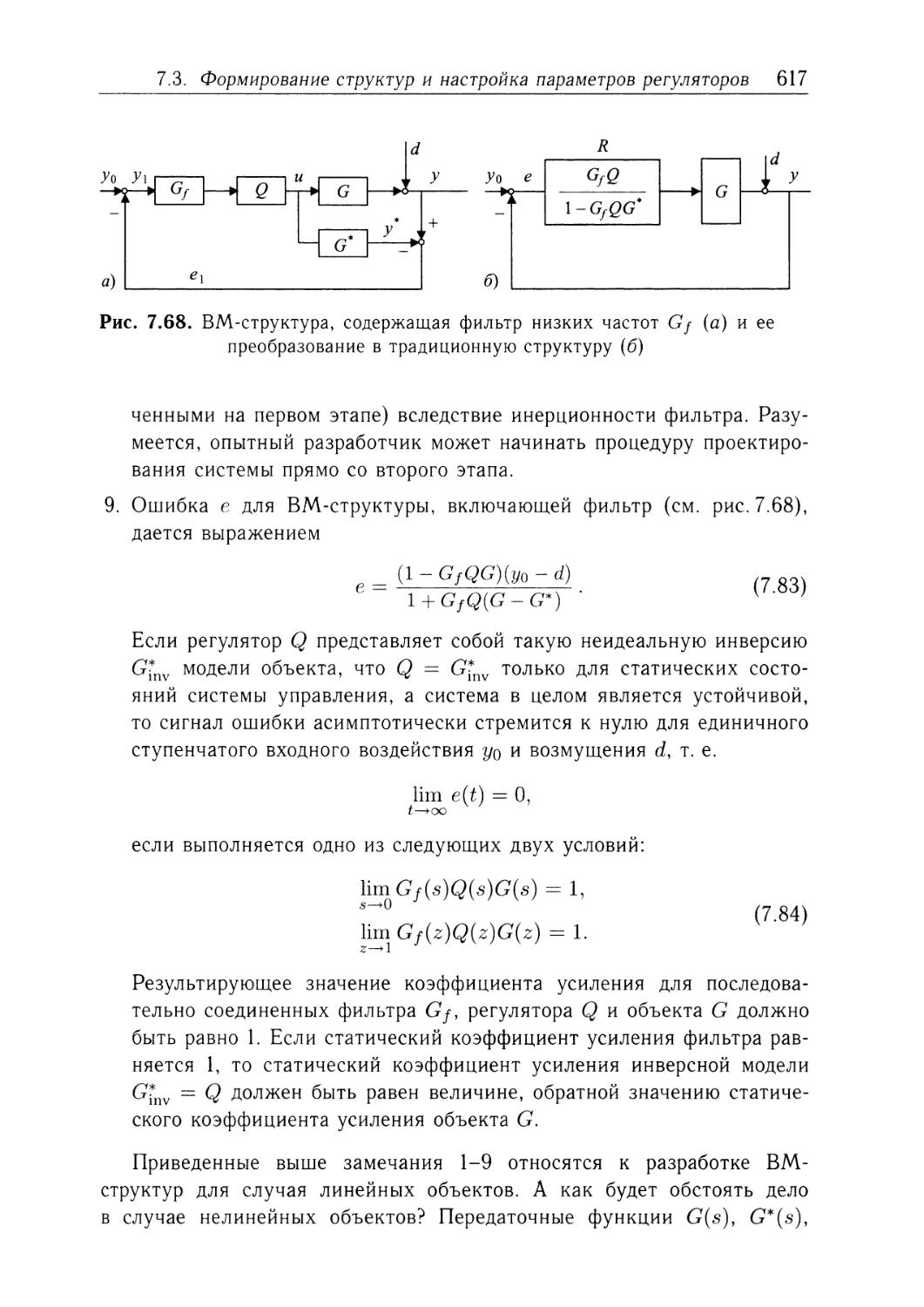
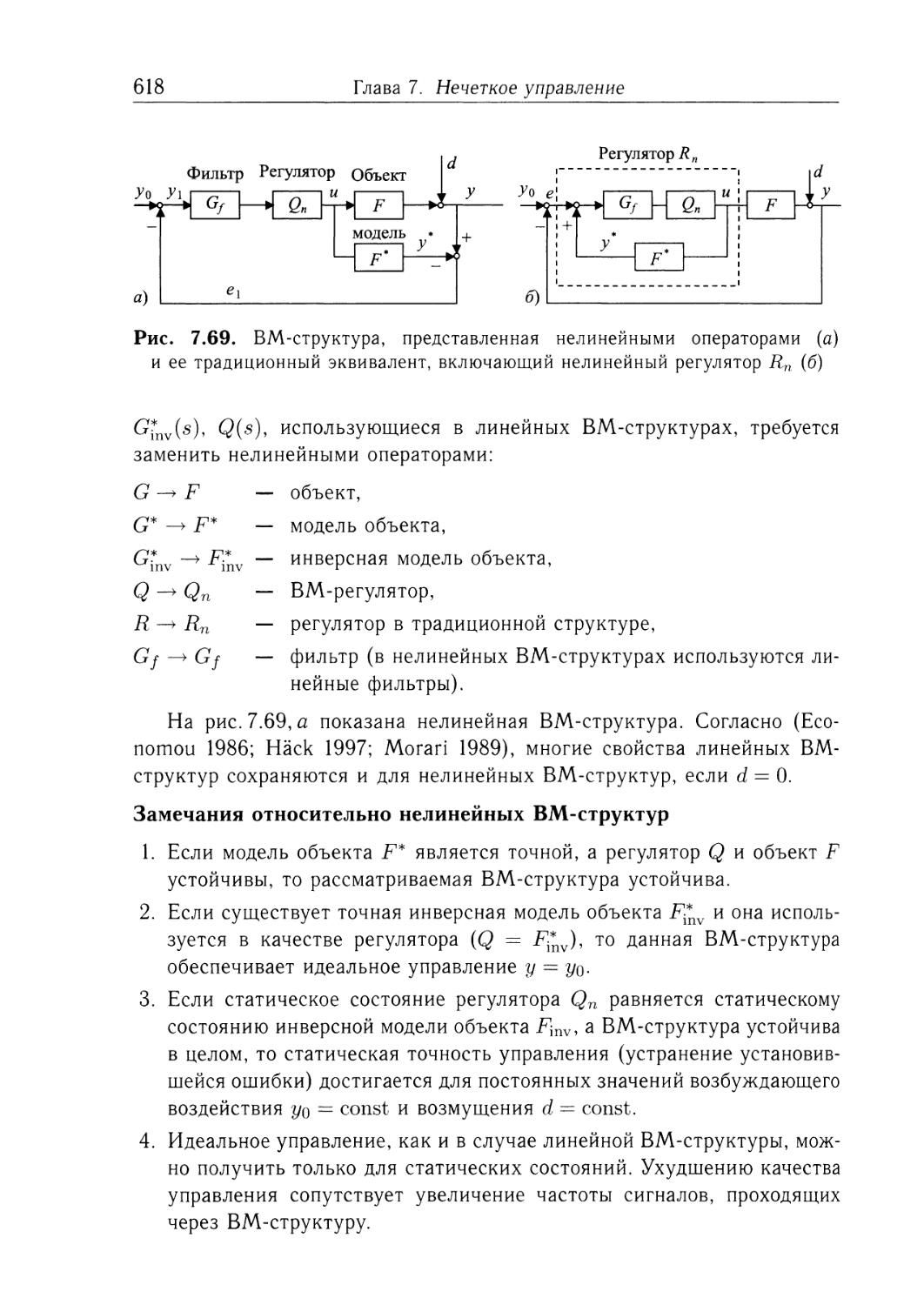
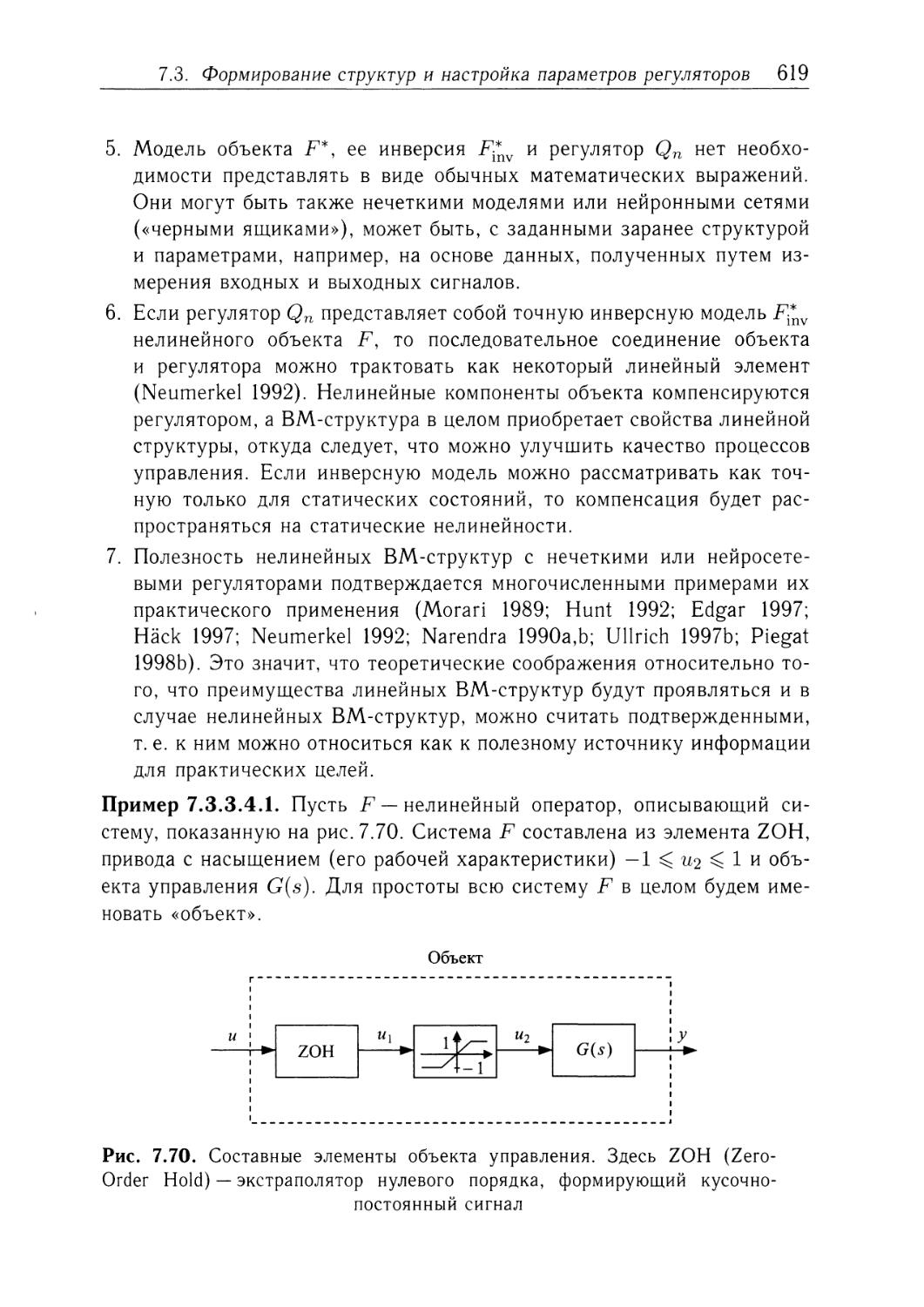
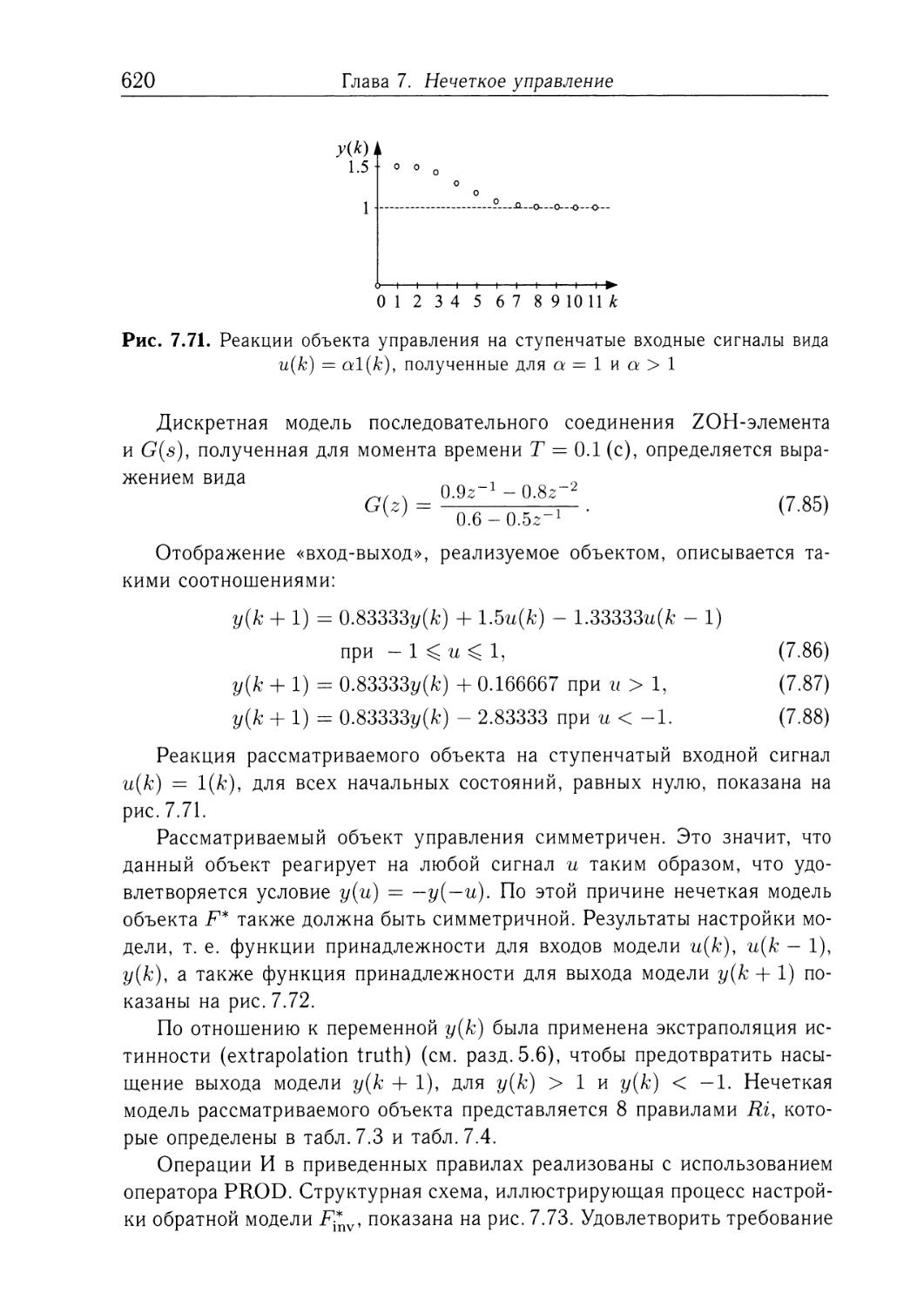
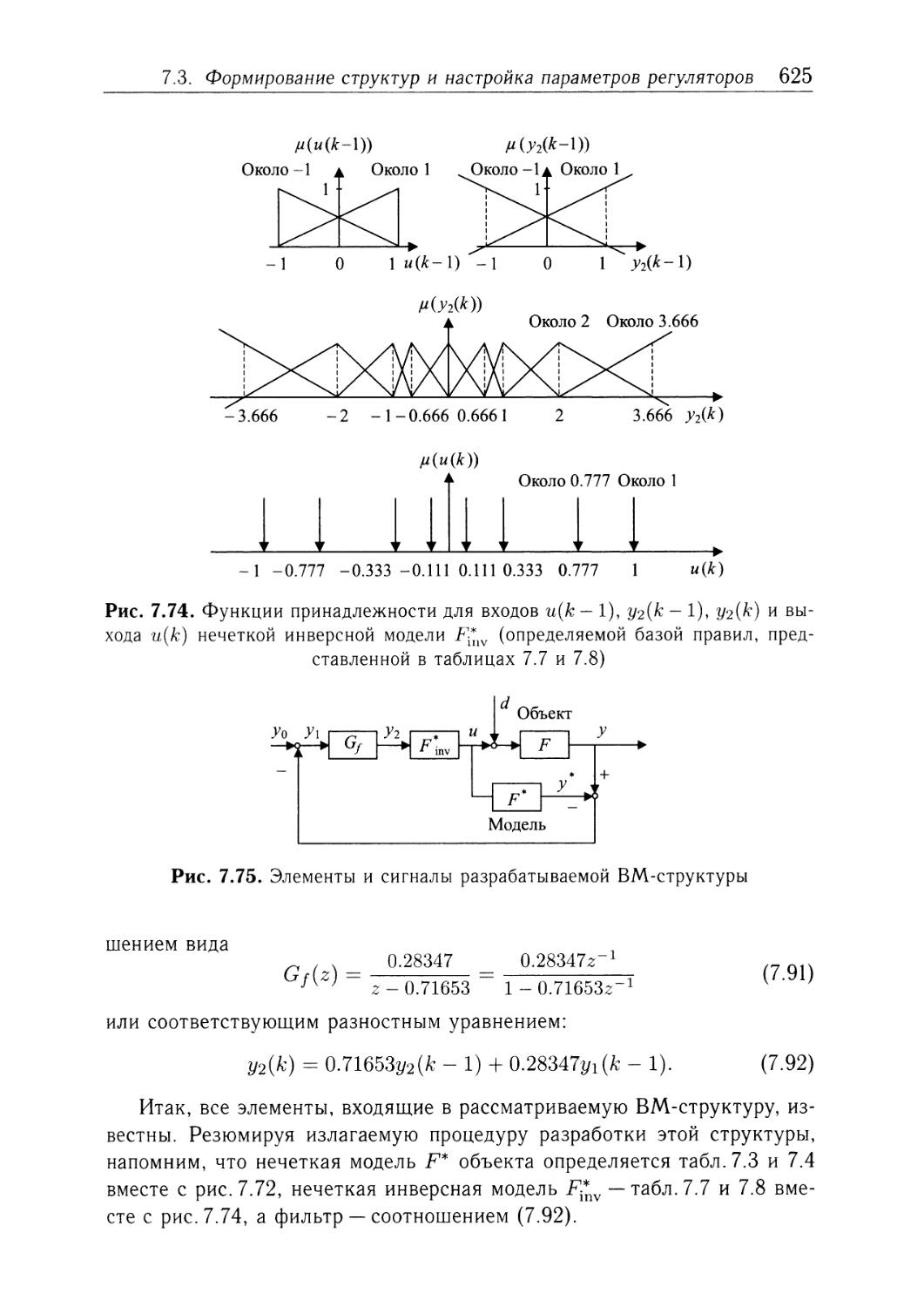
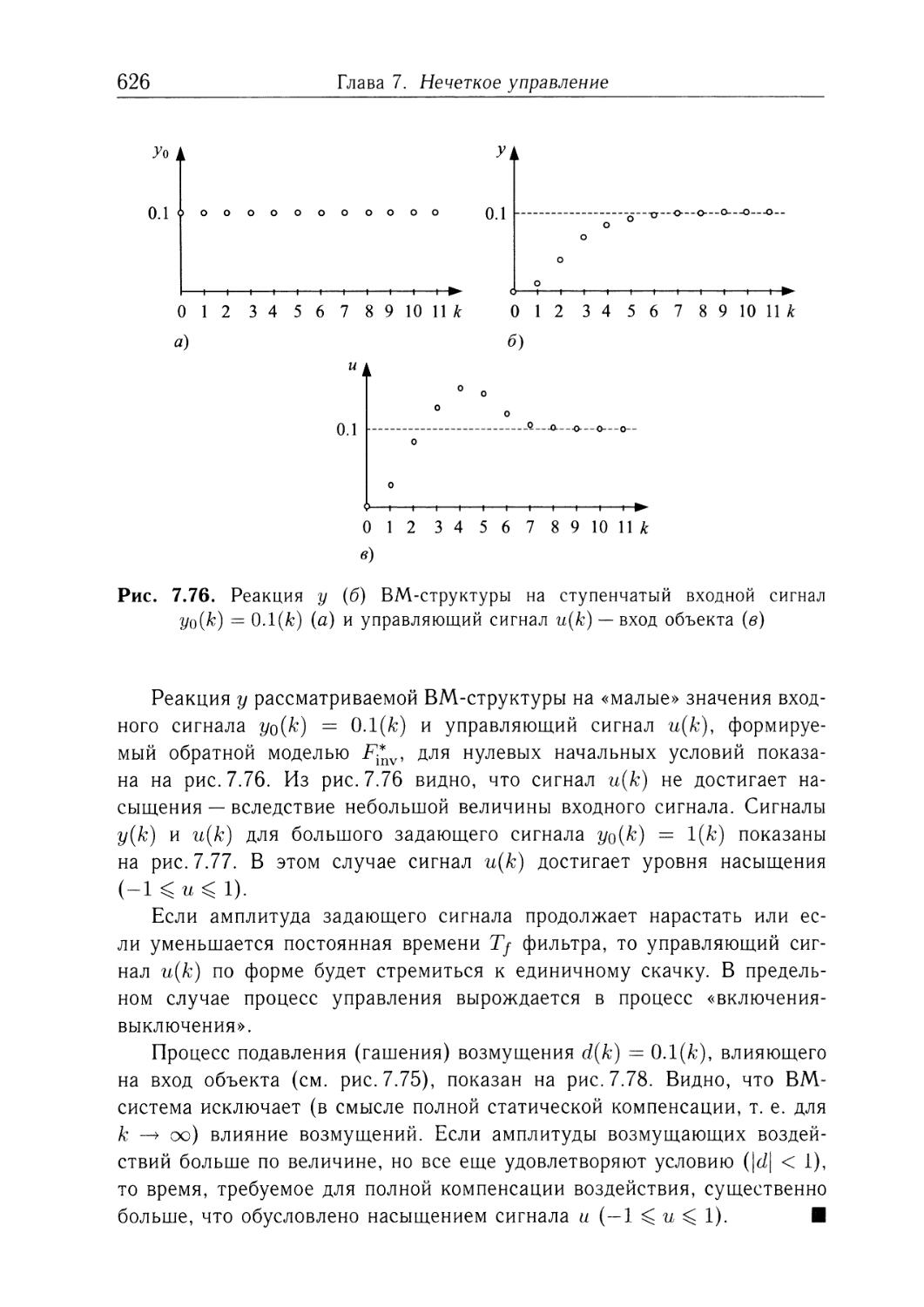
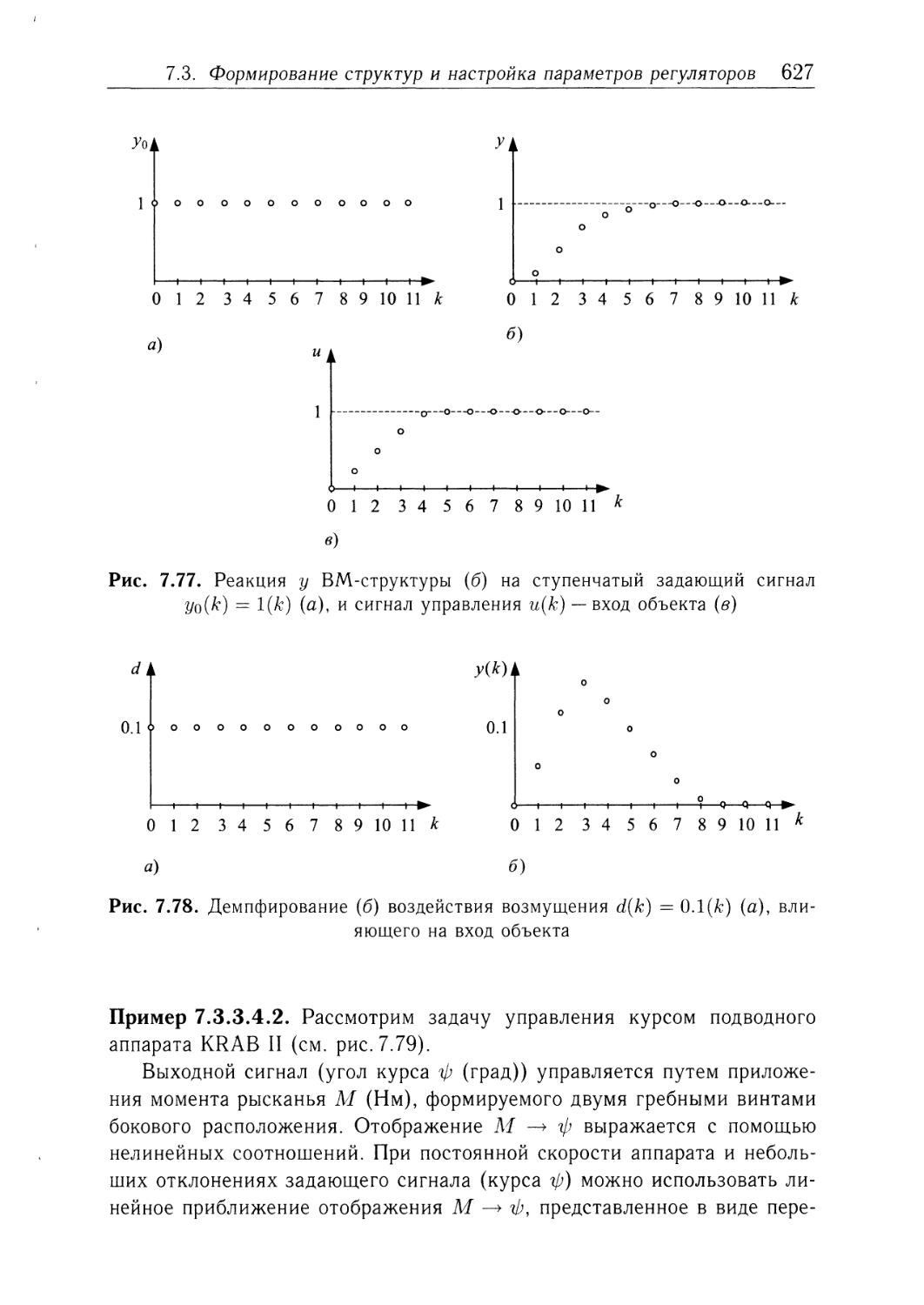
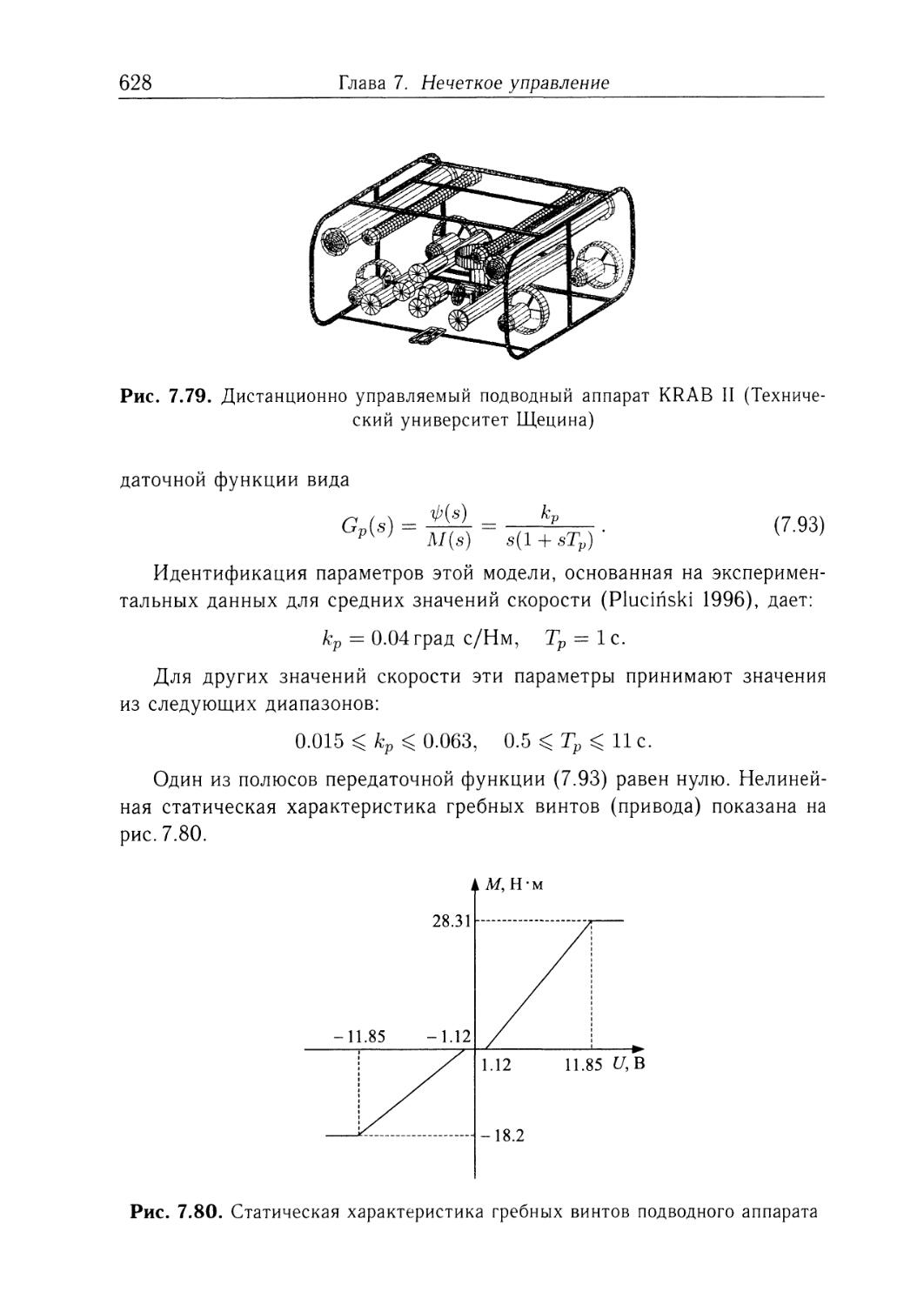
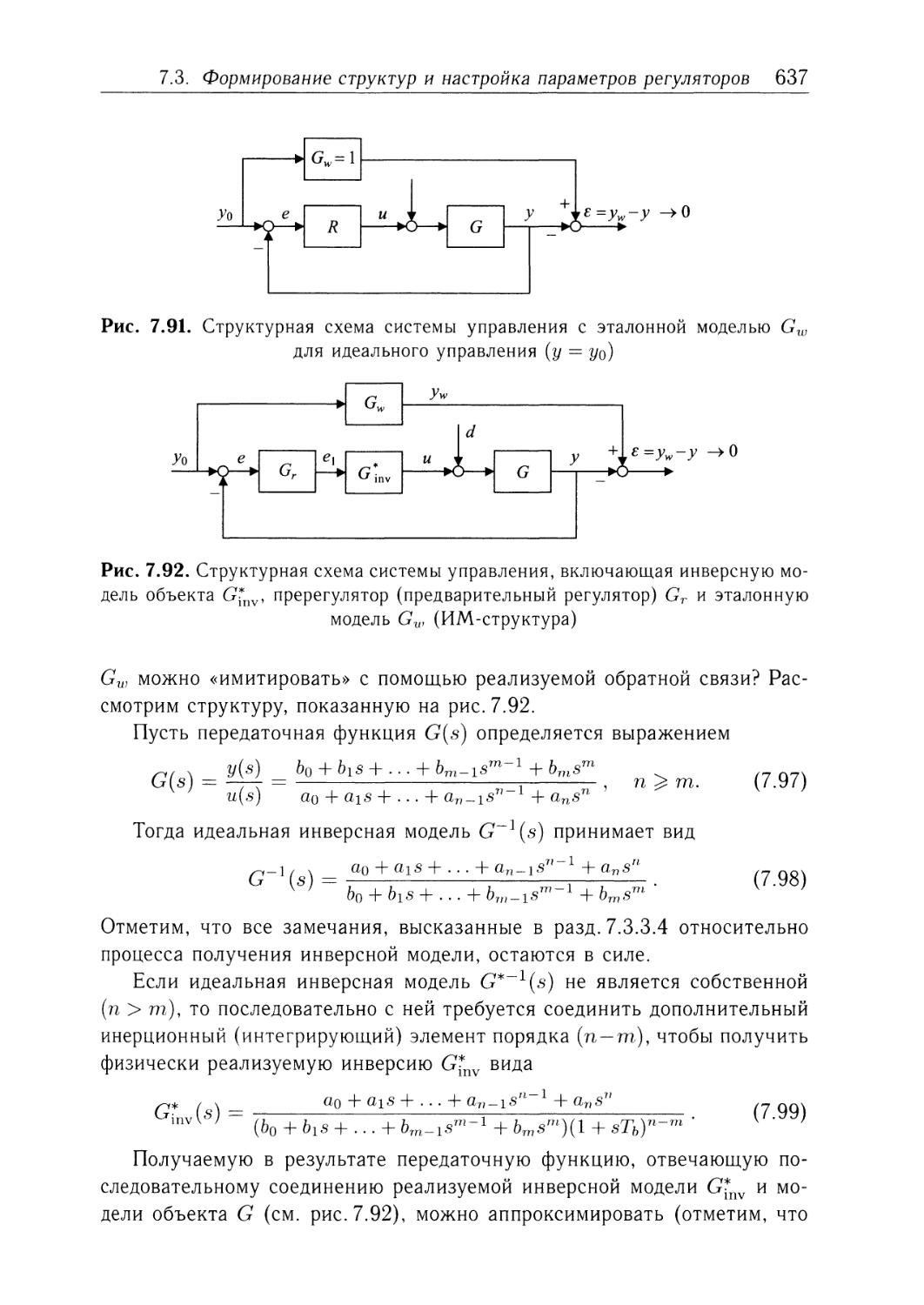
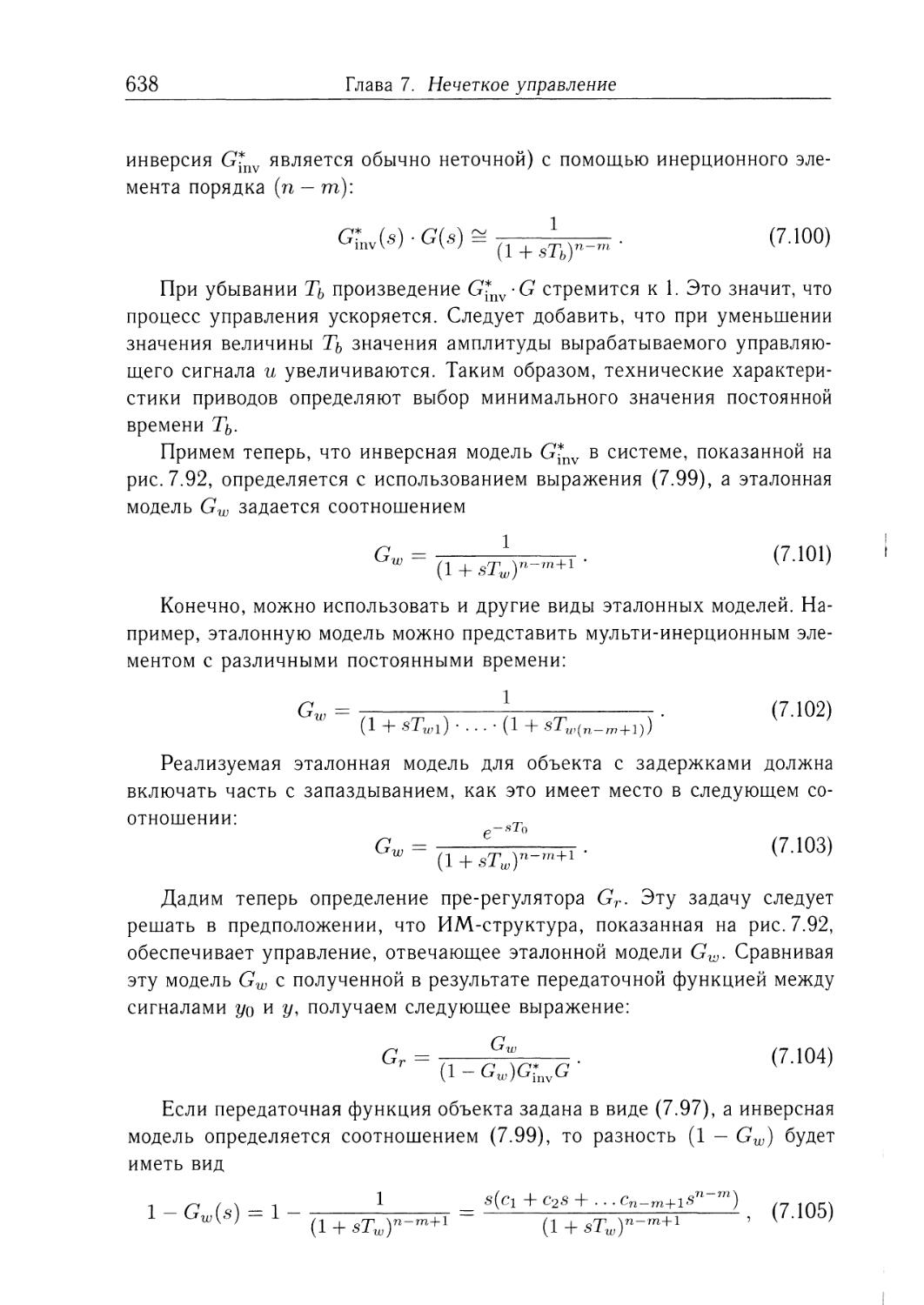
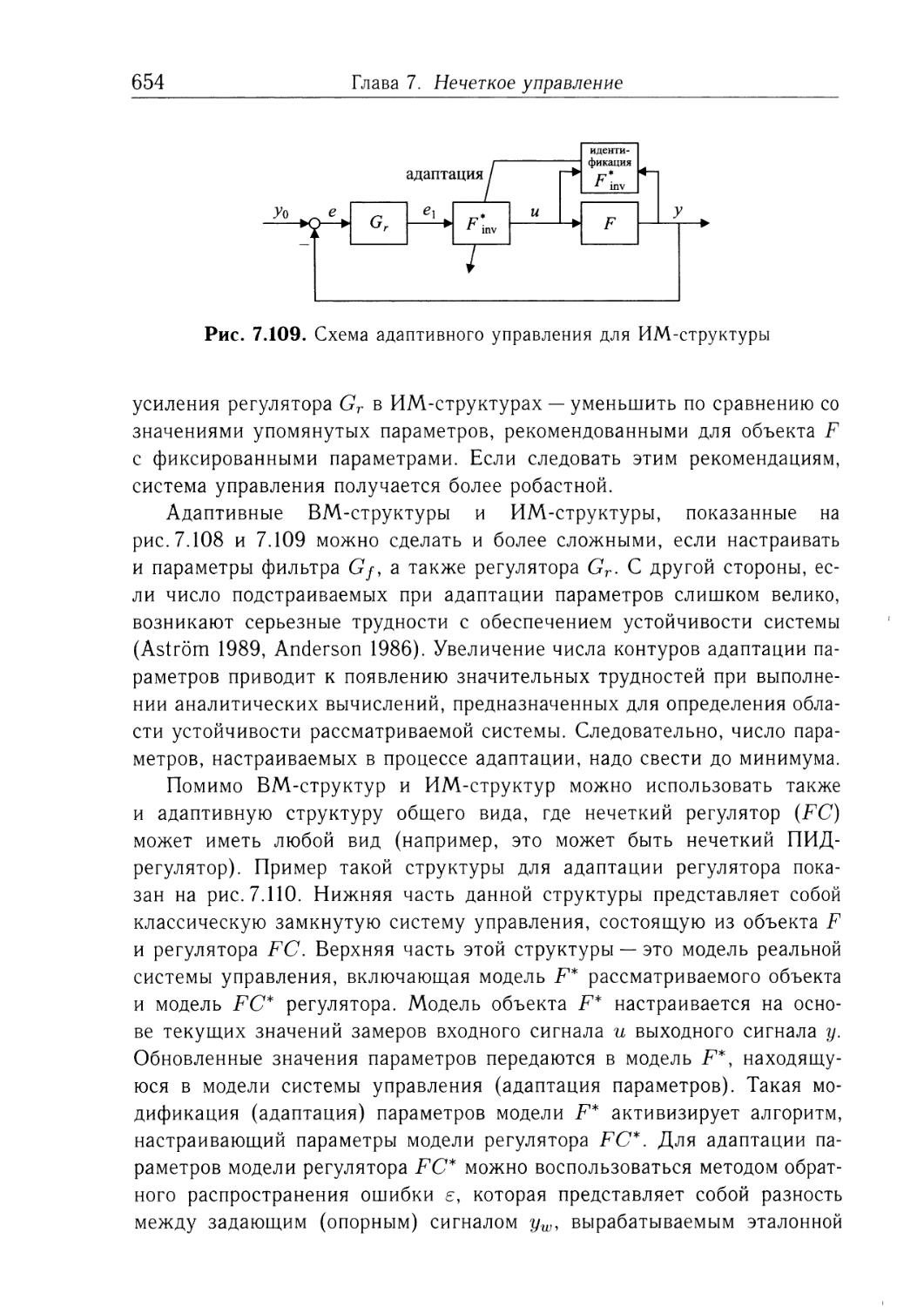
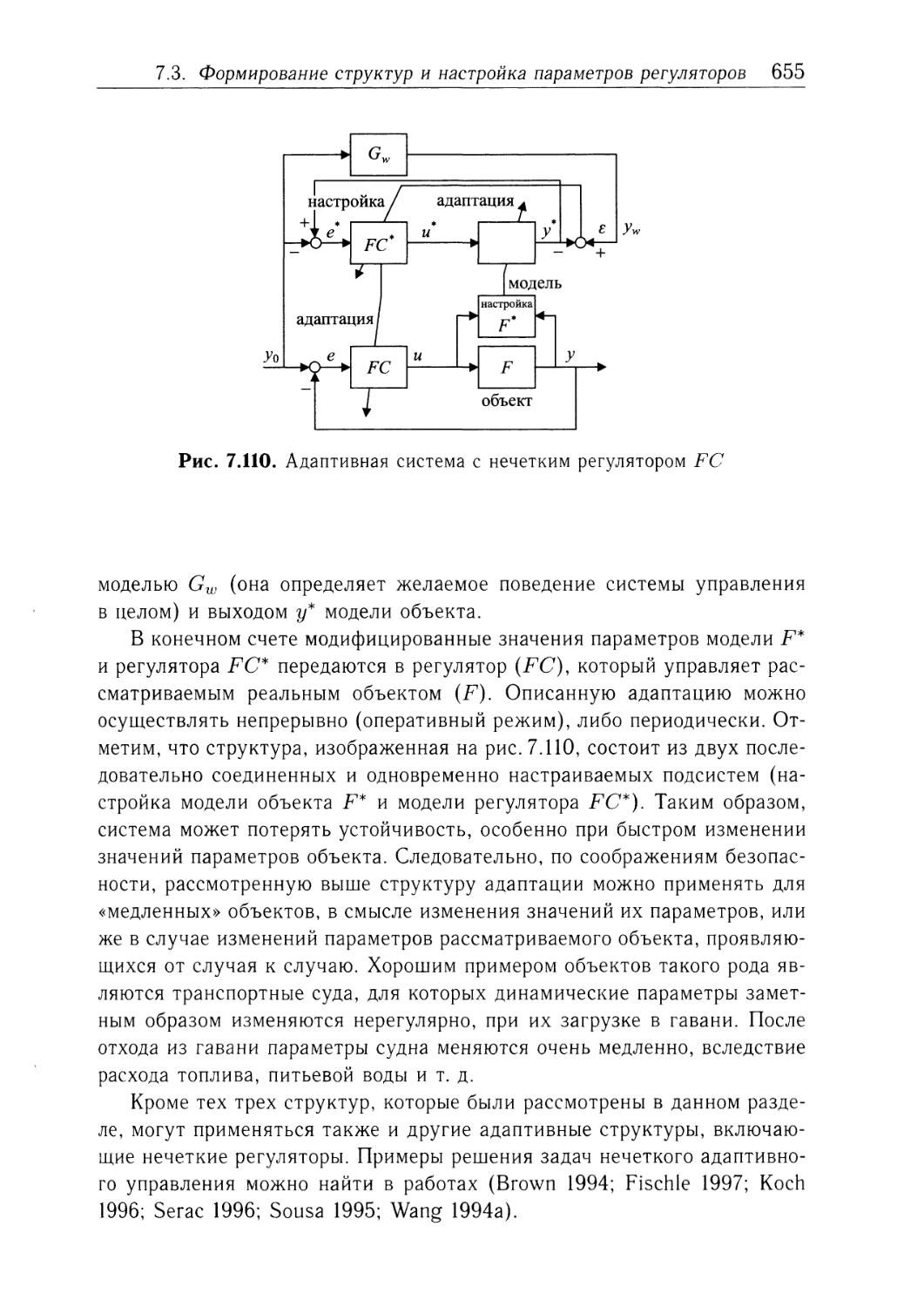
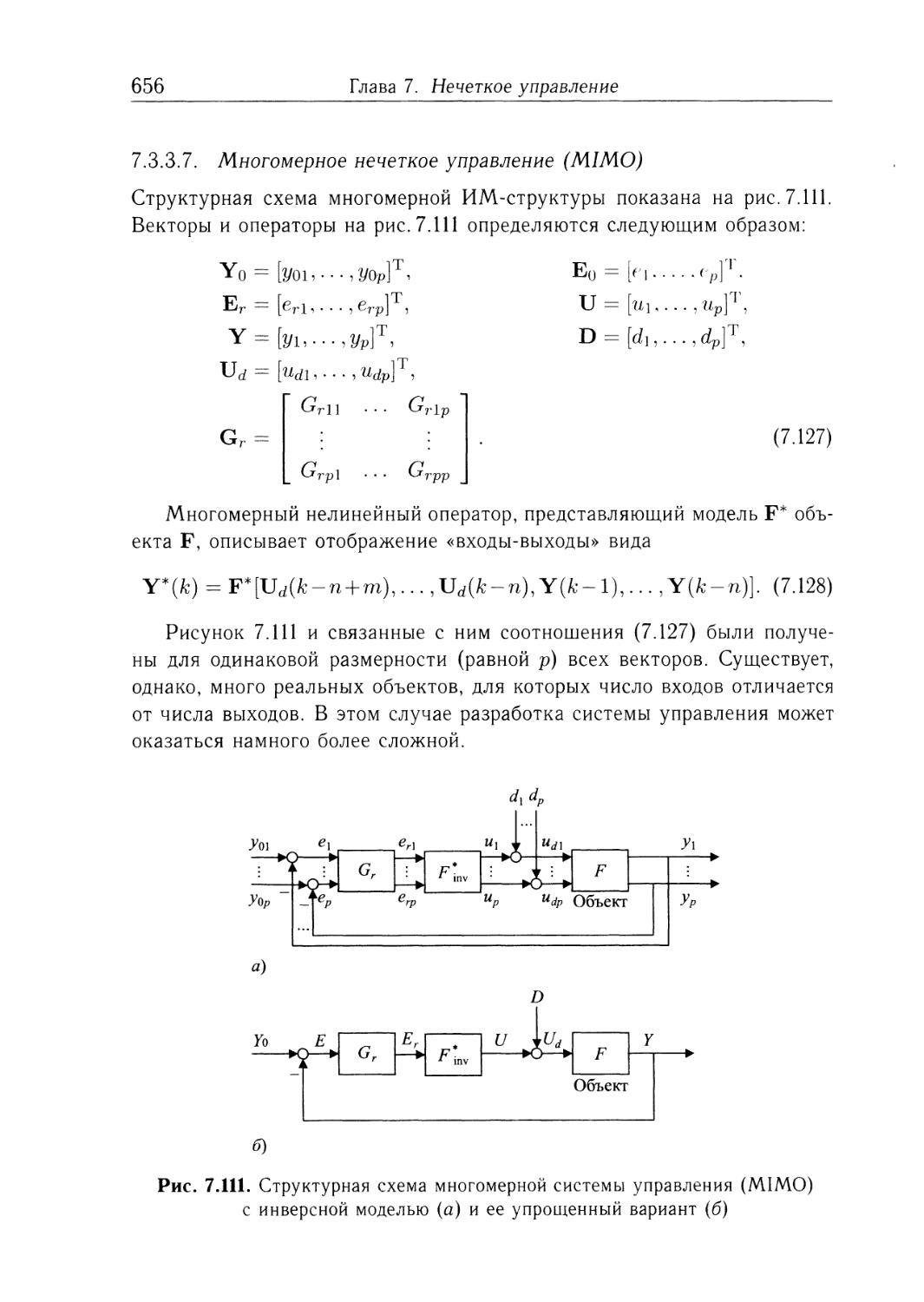
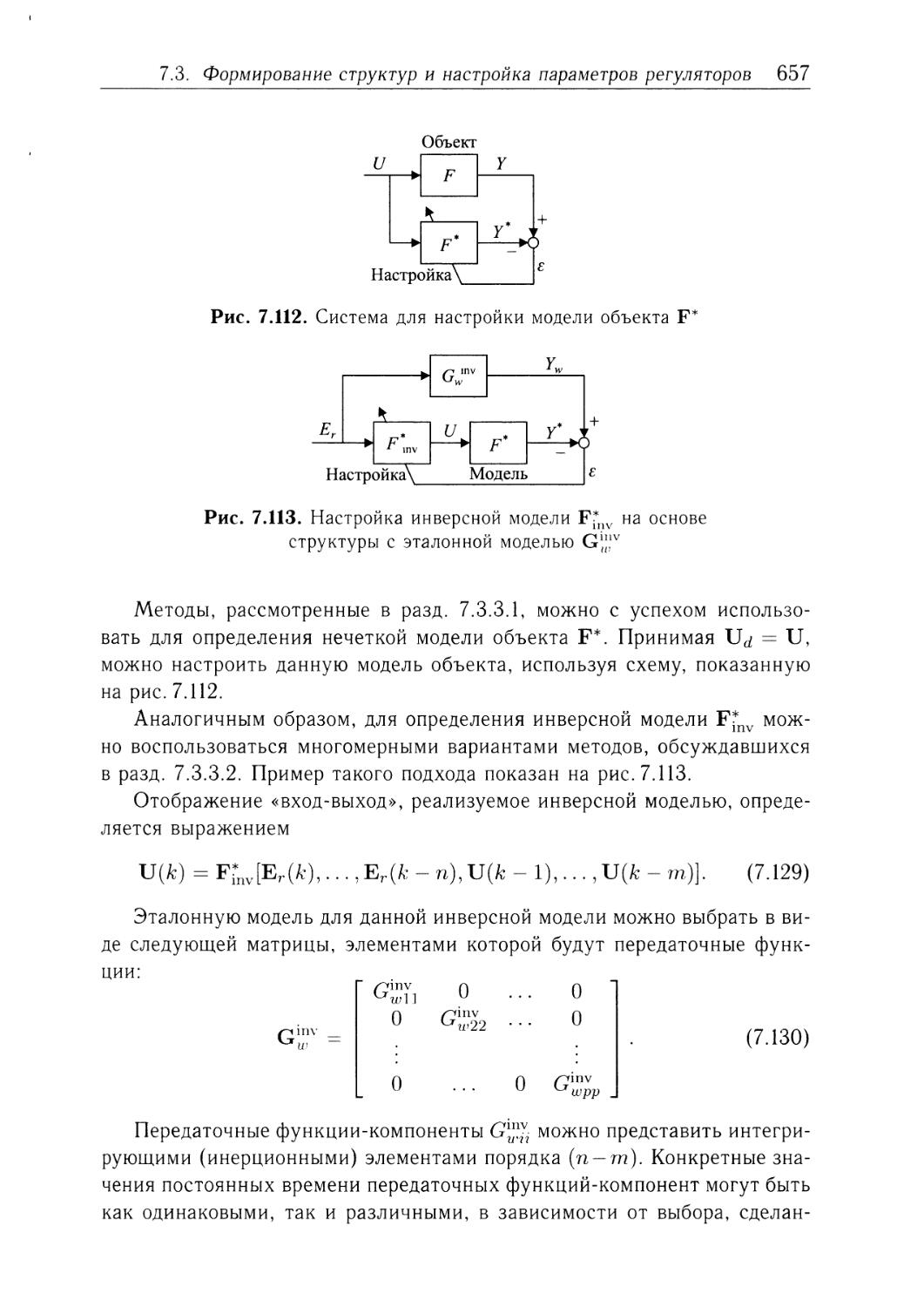
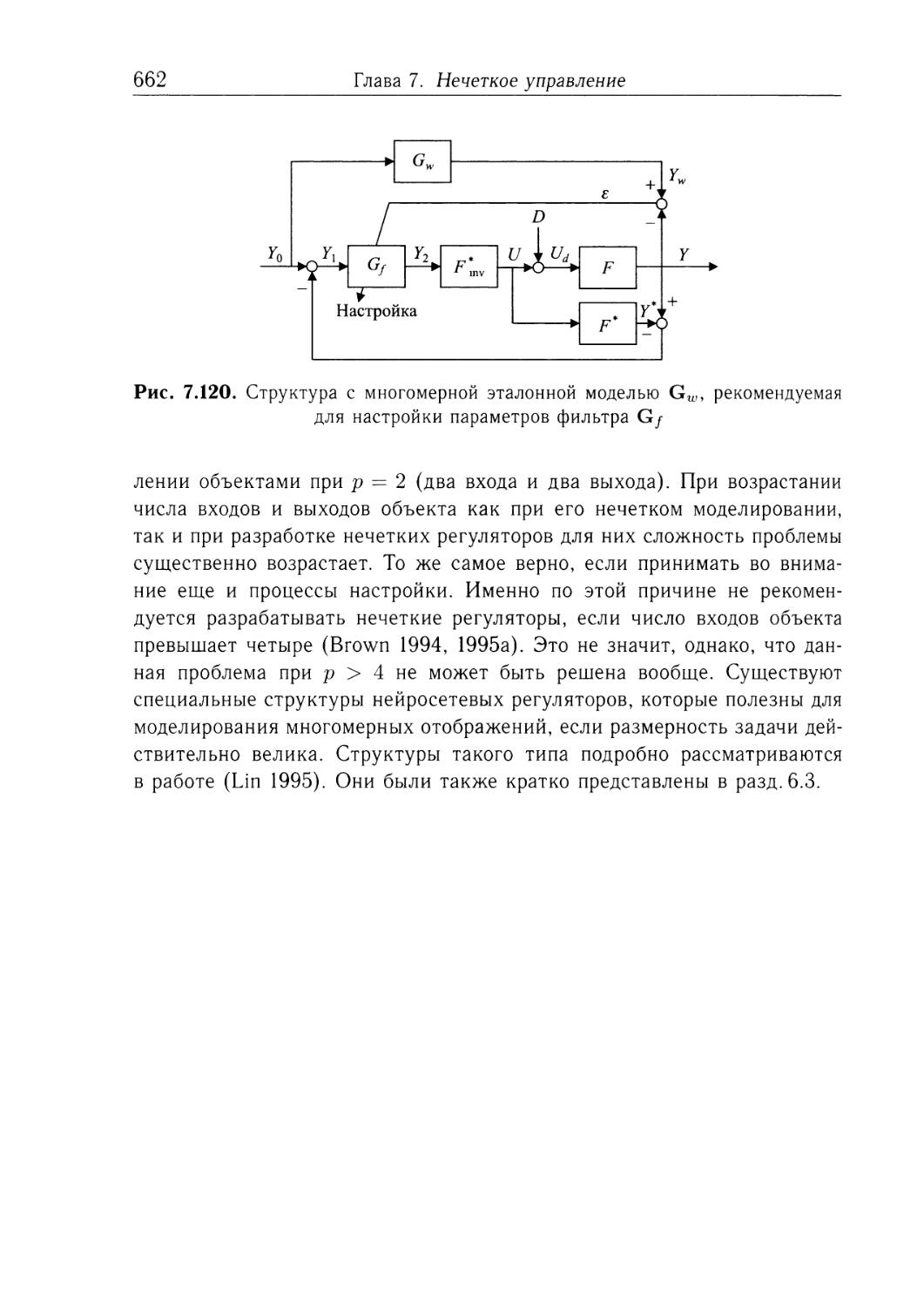
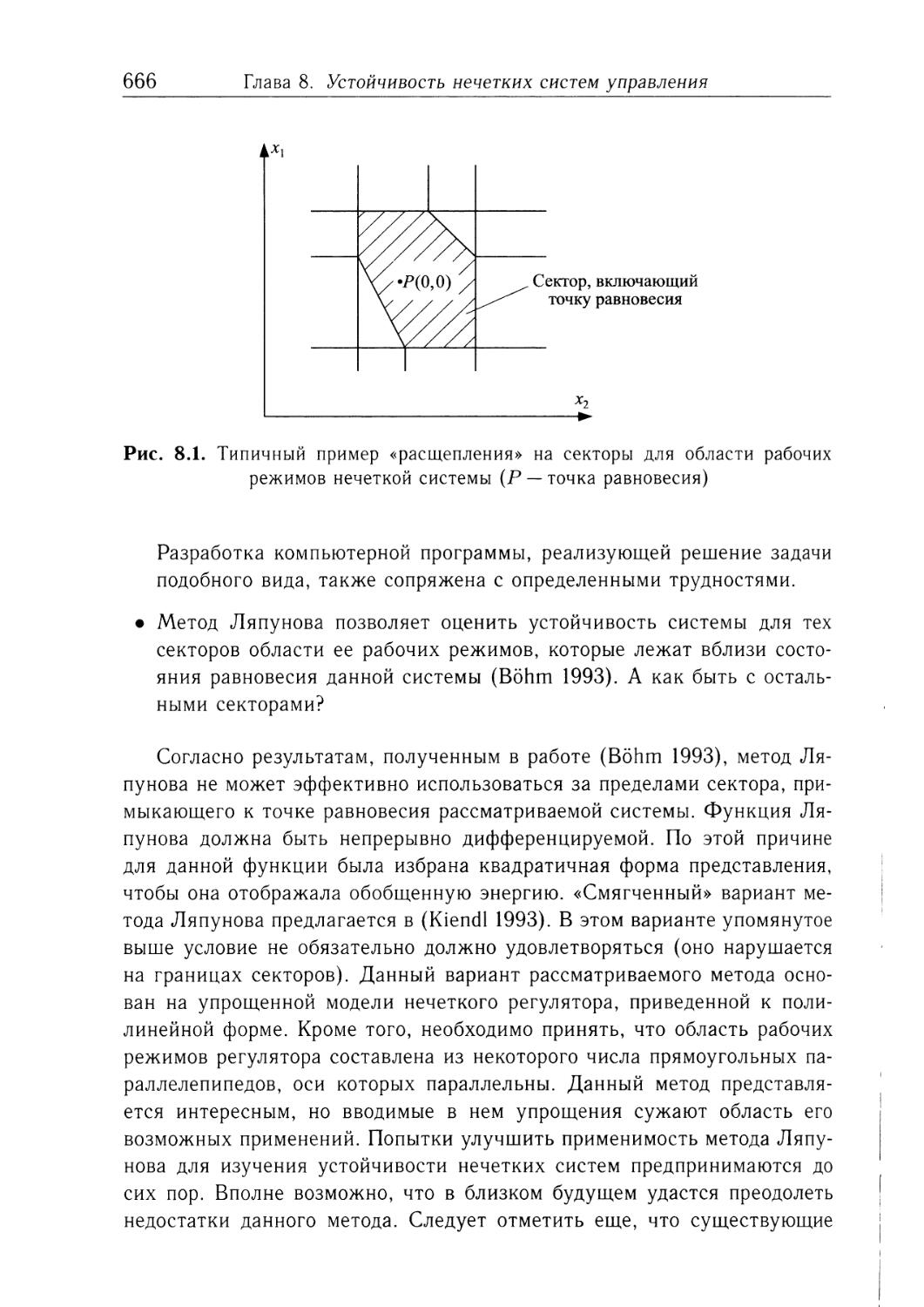
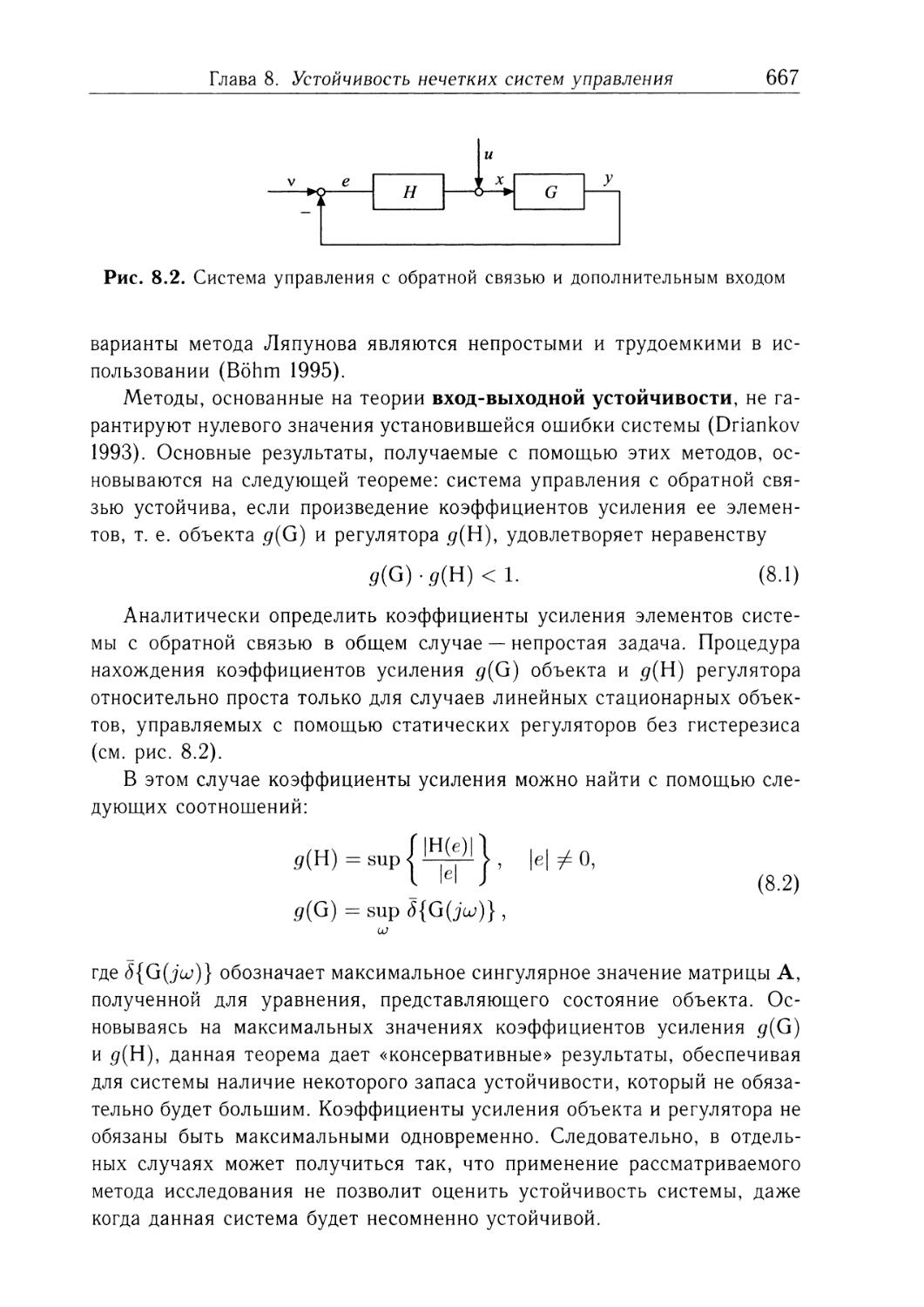
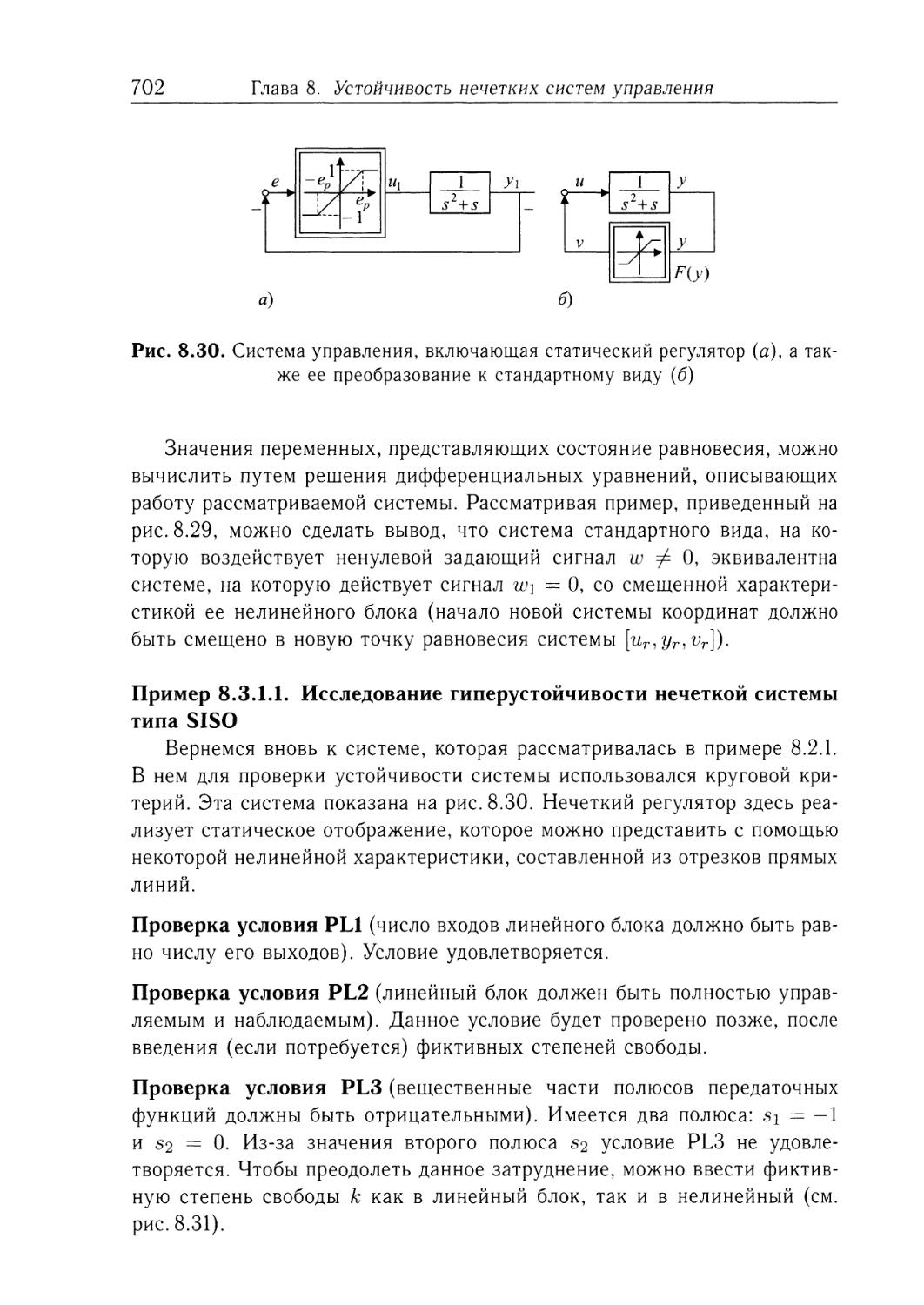
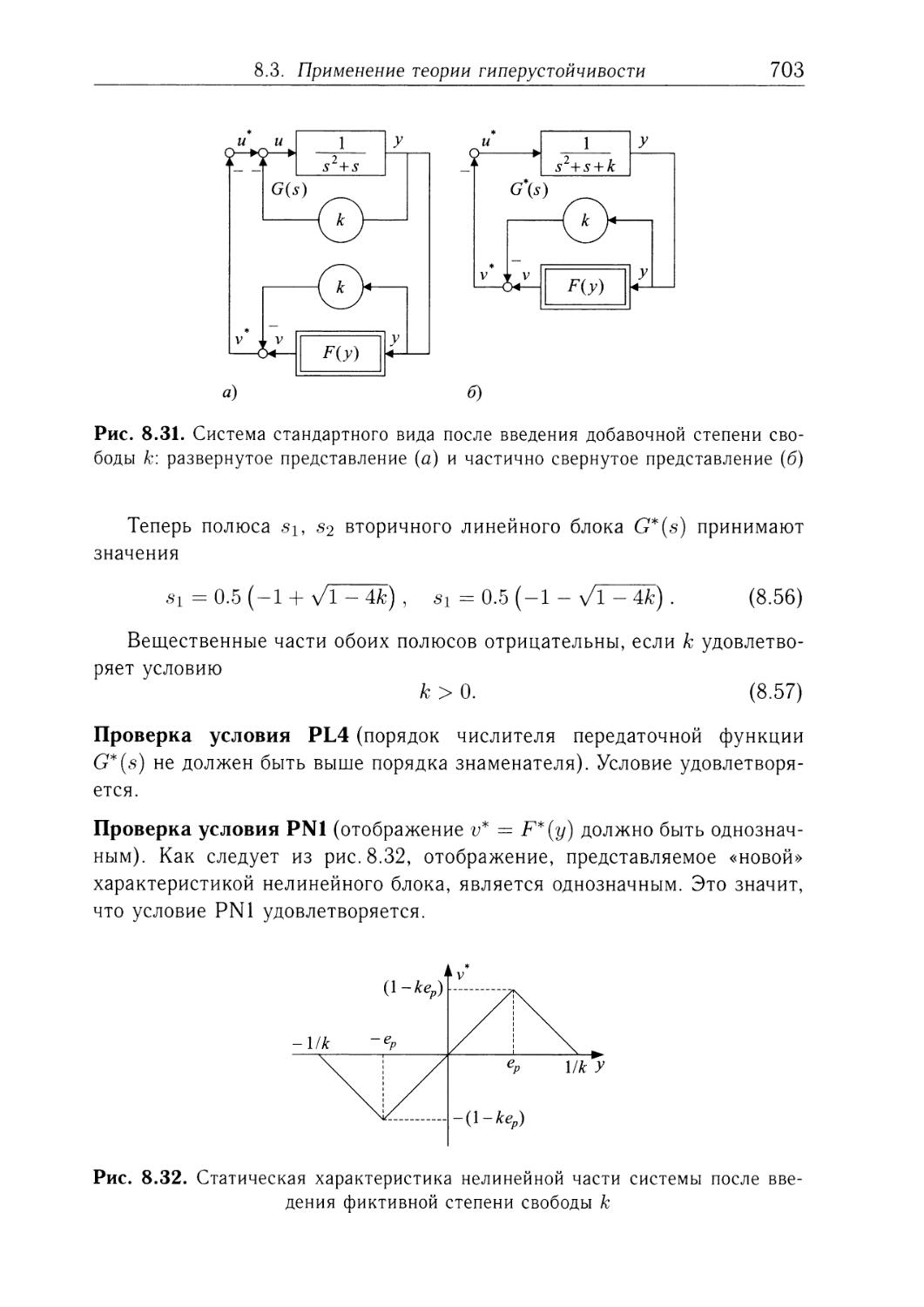
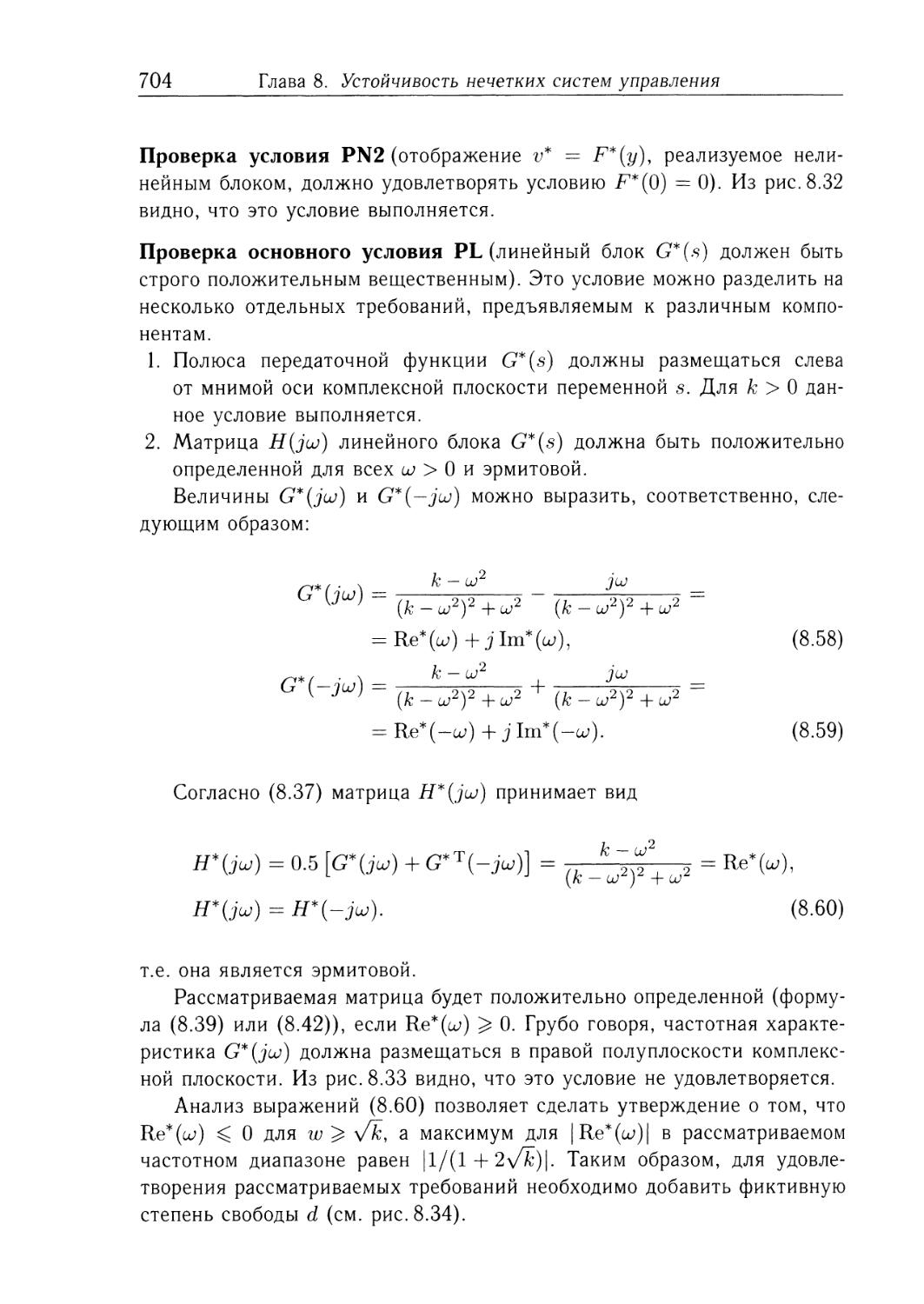
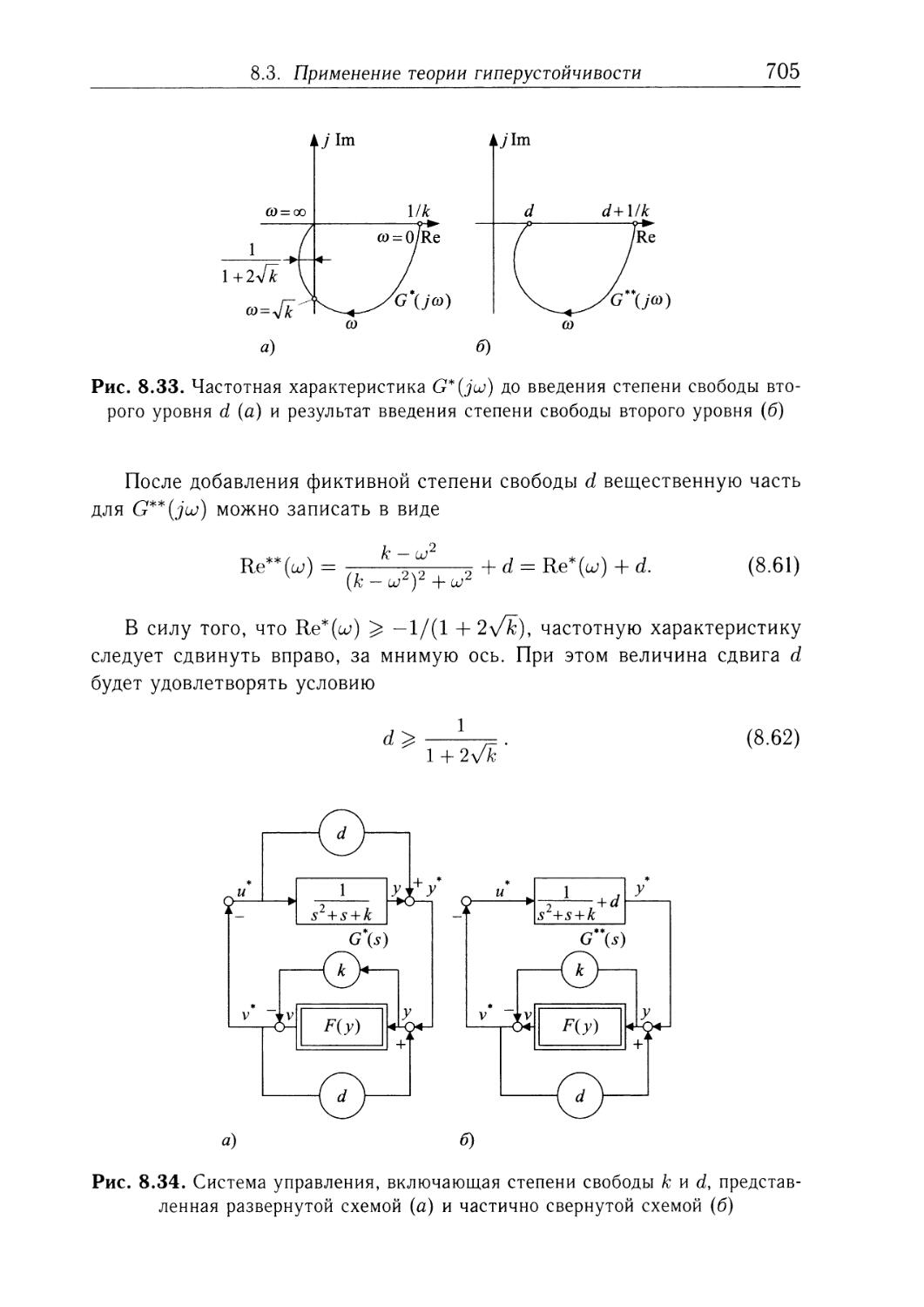
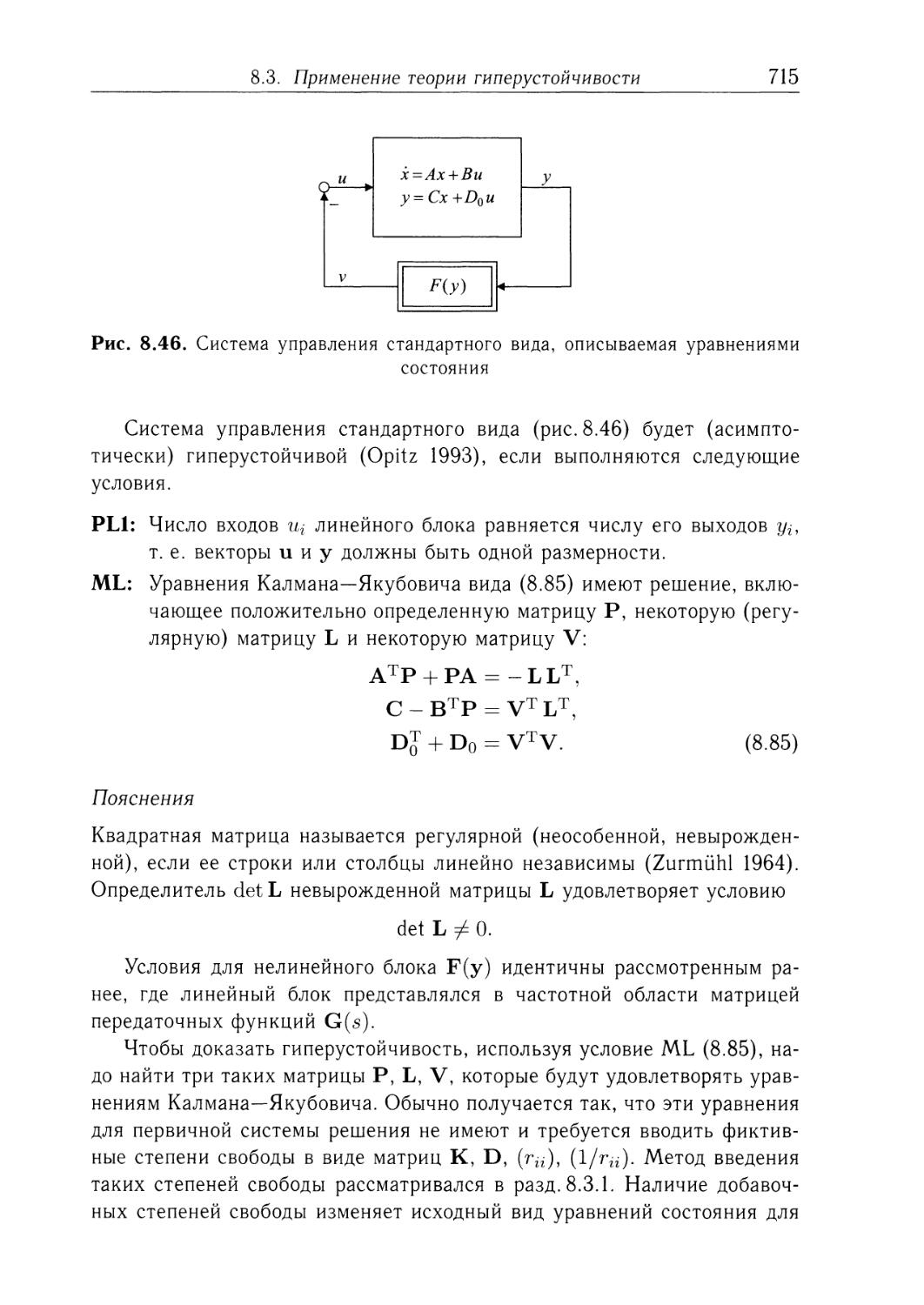
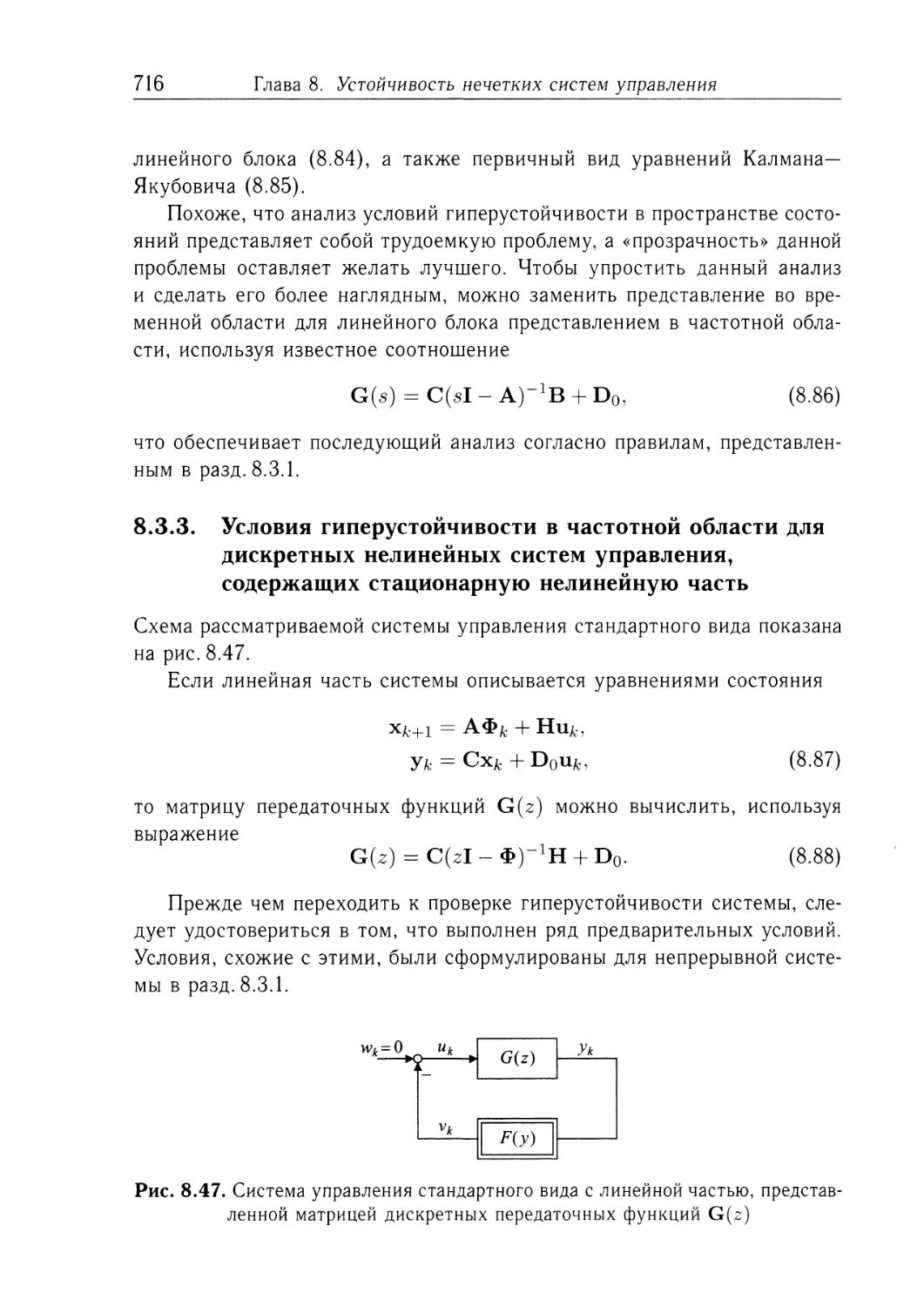
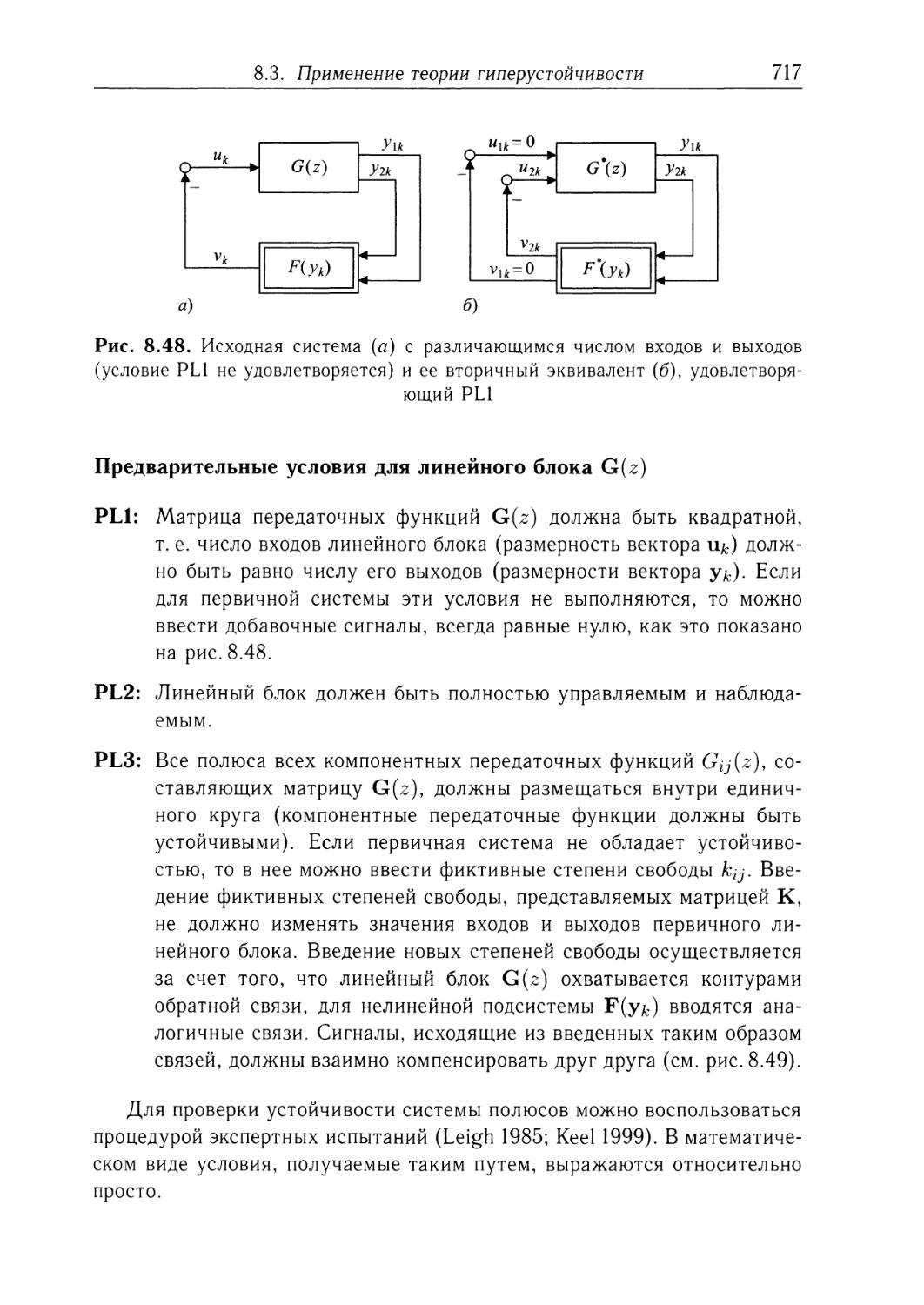
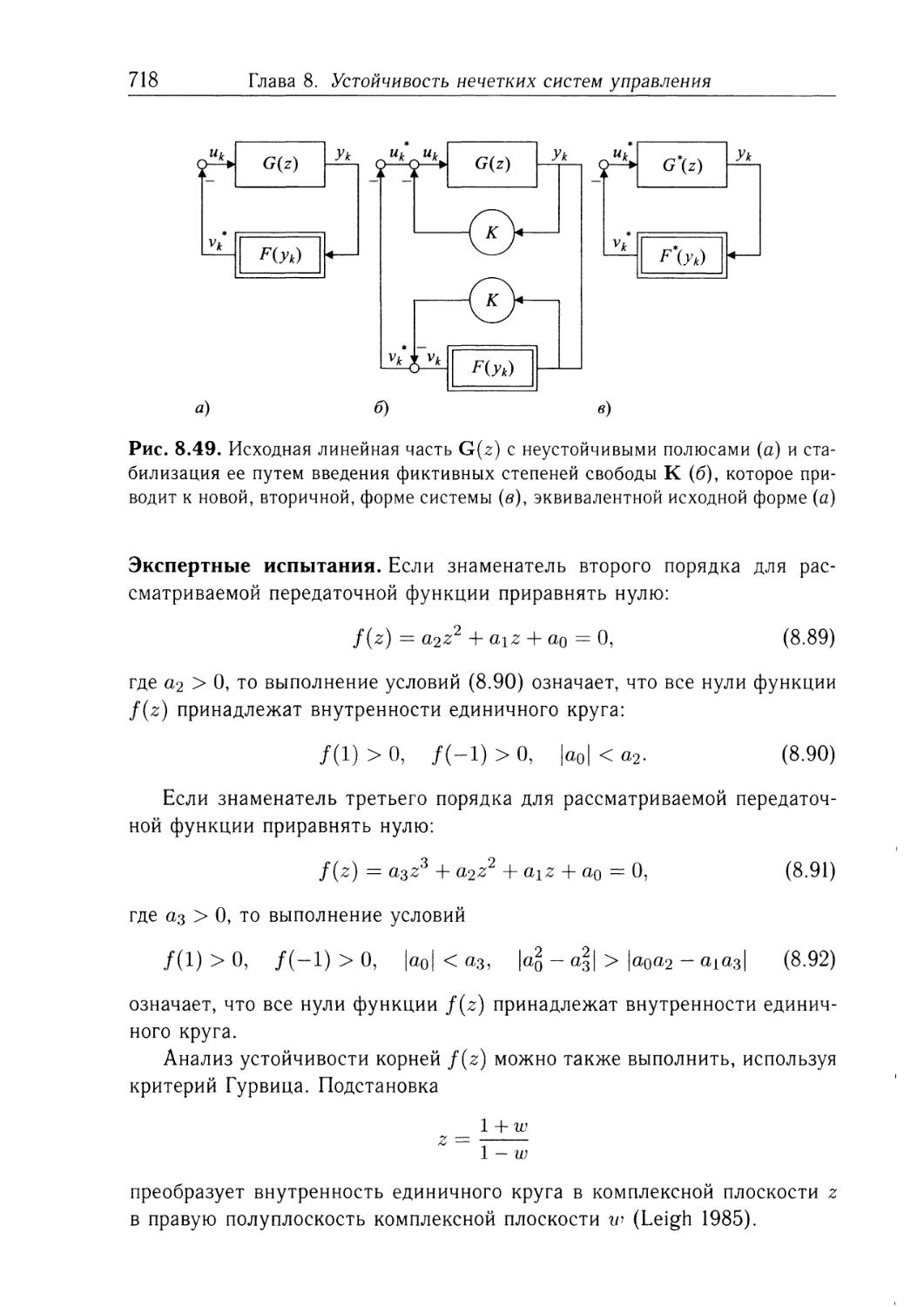
/







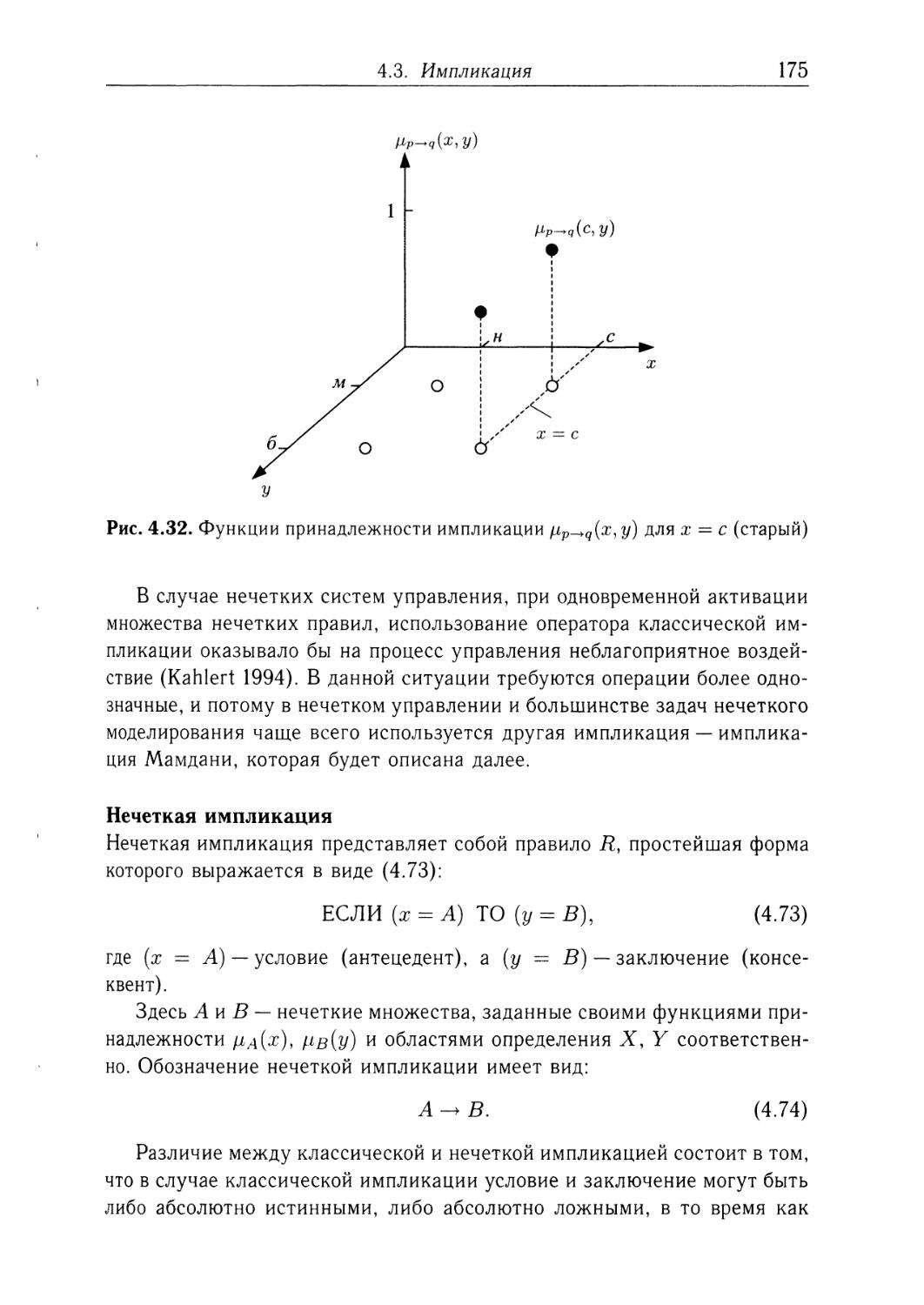
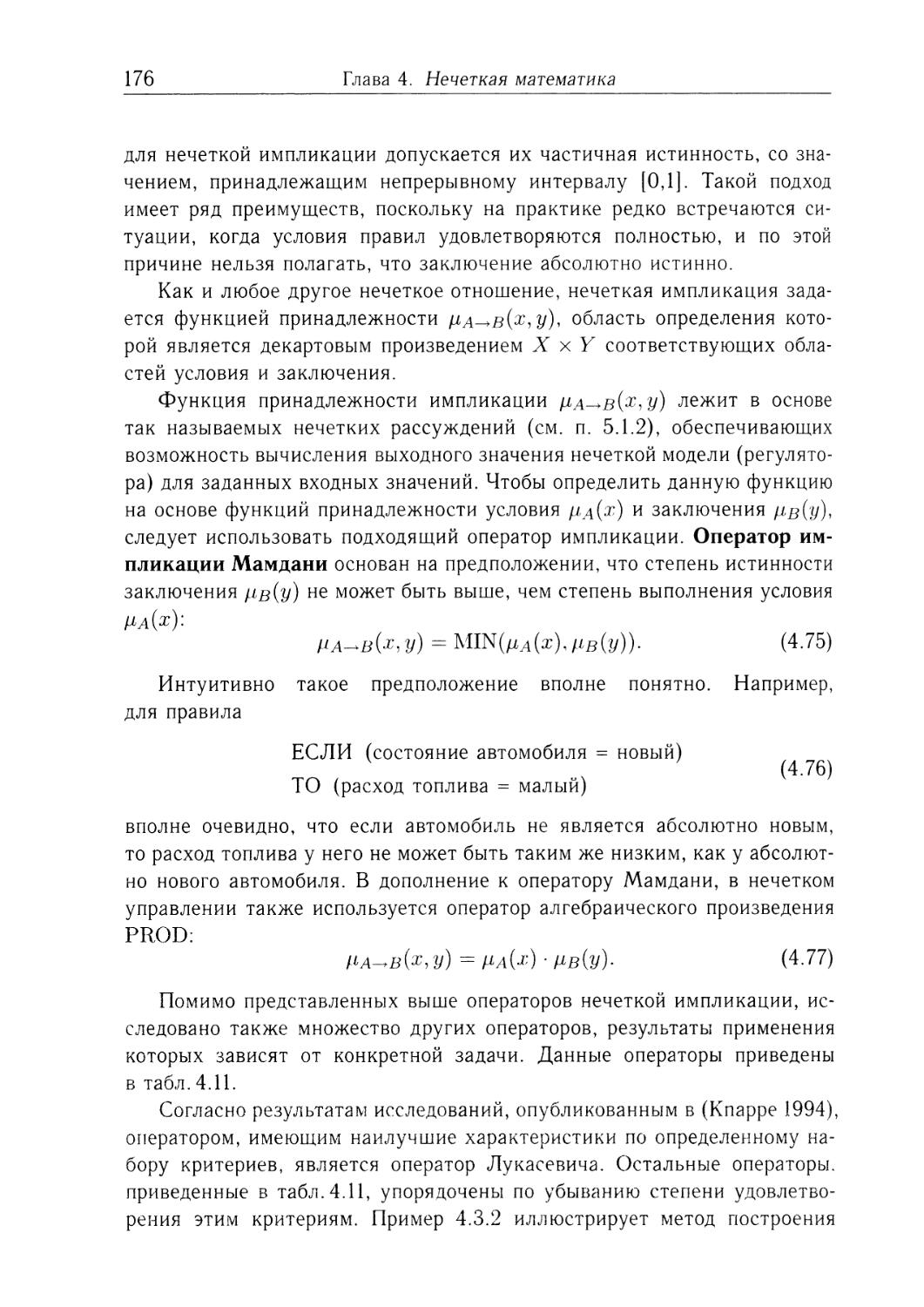
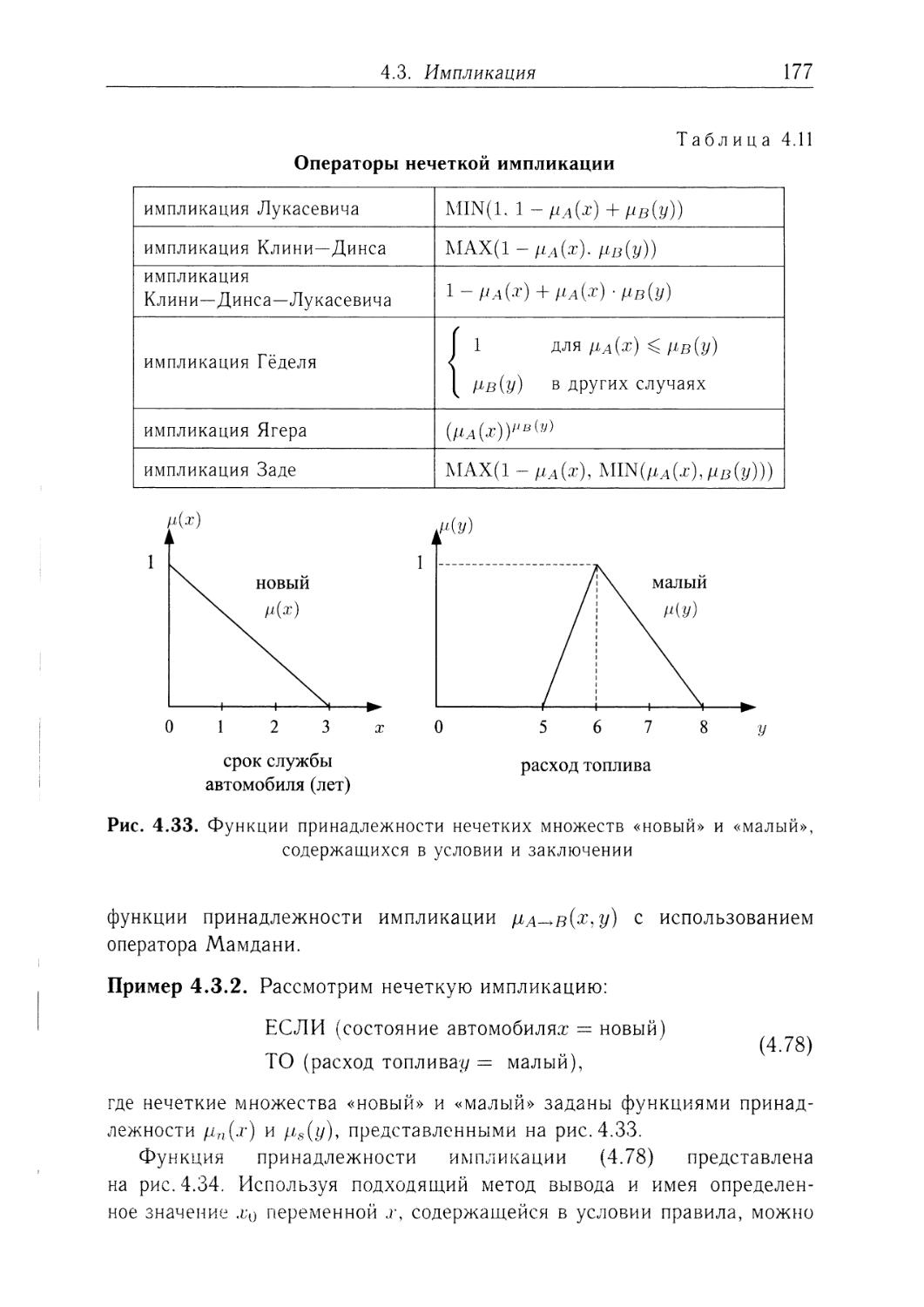
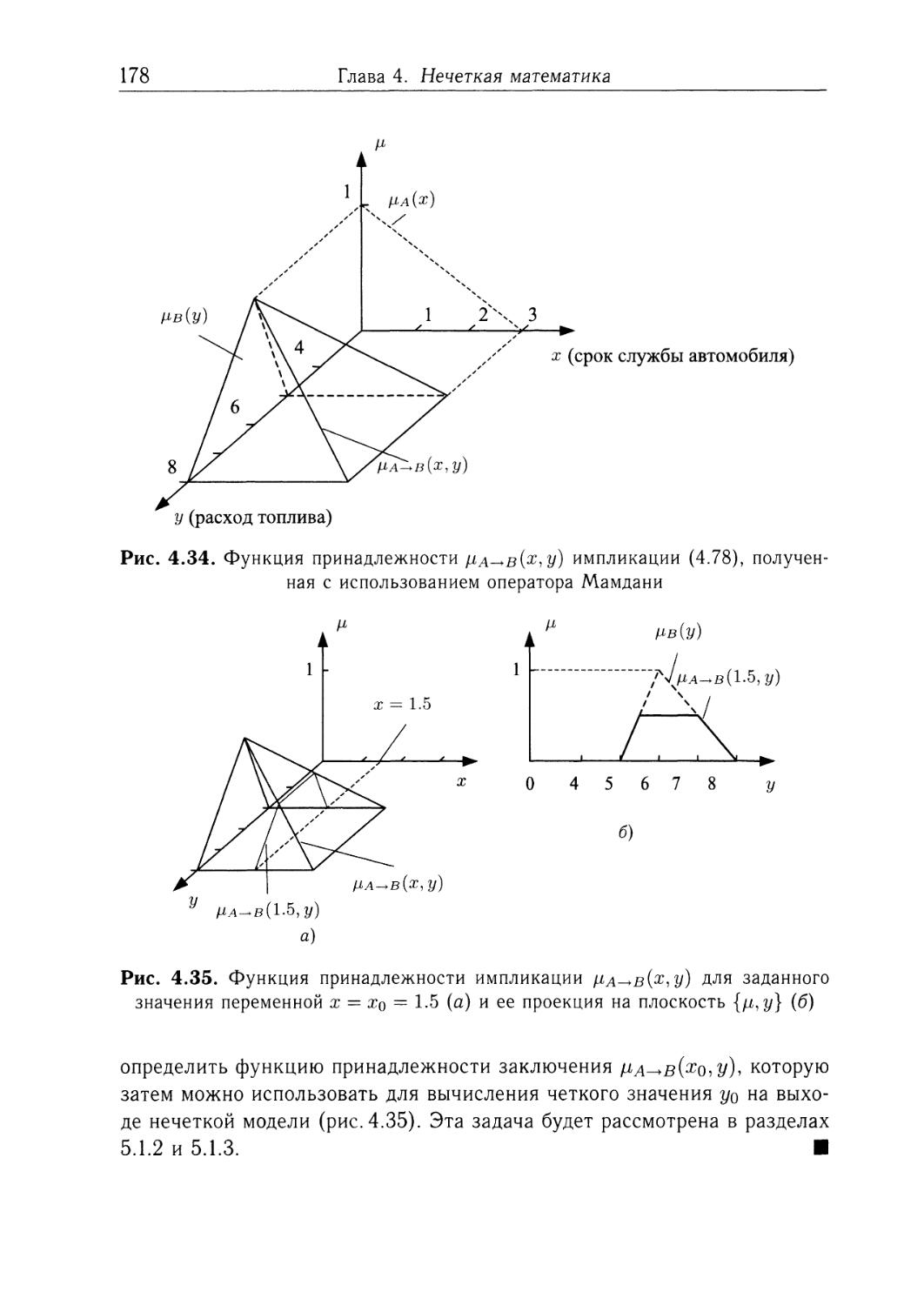

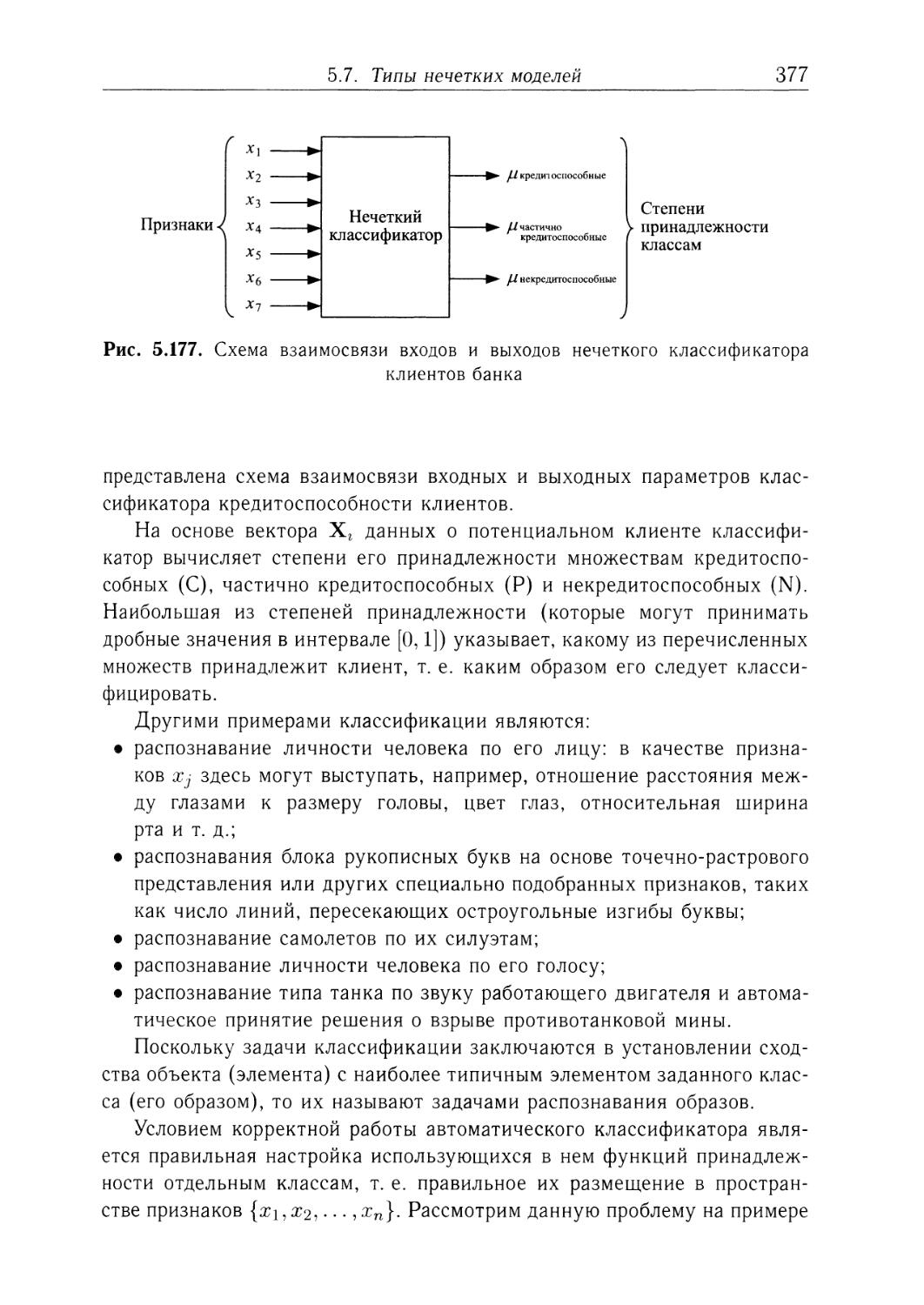
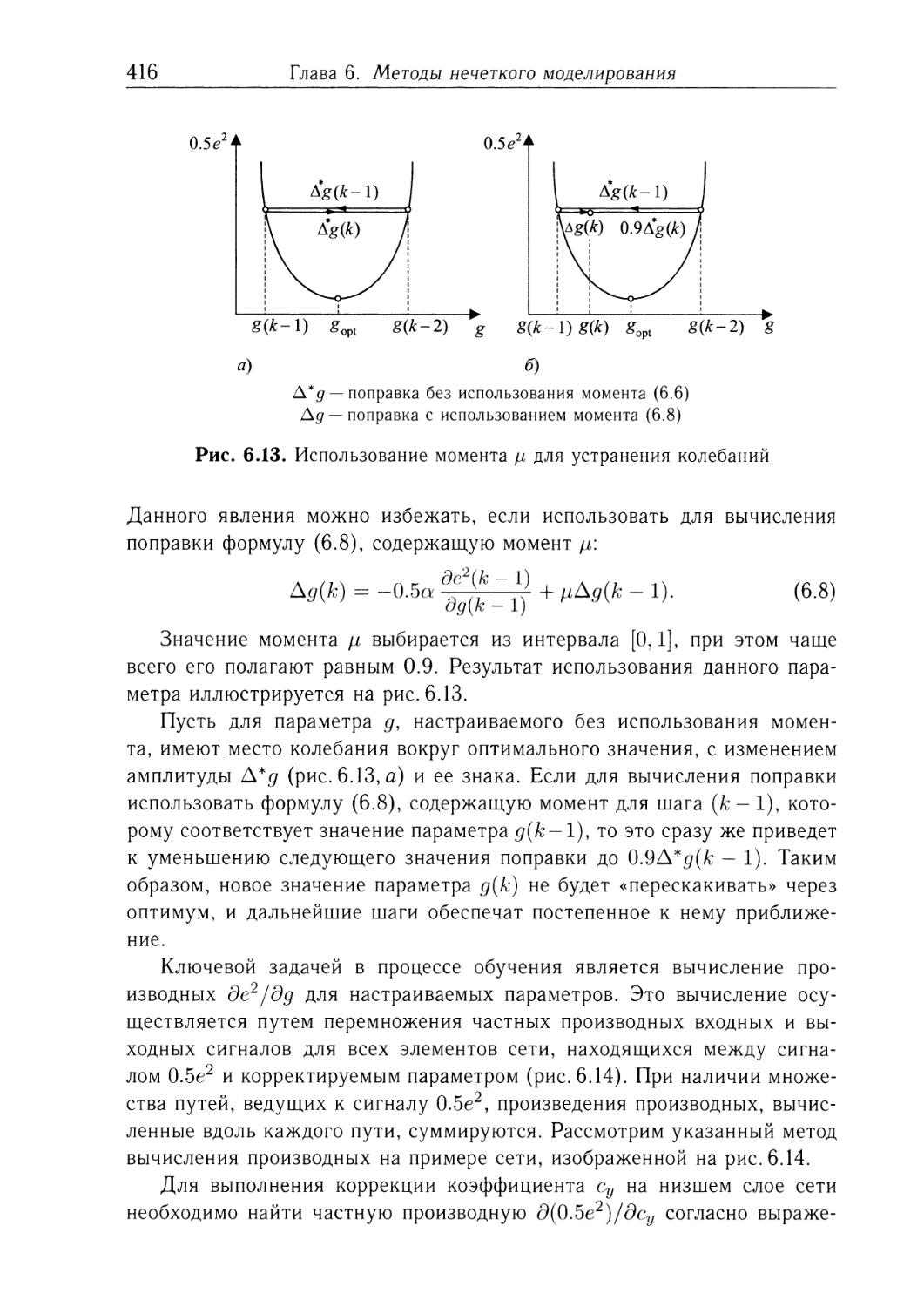
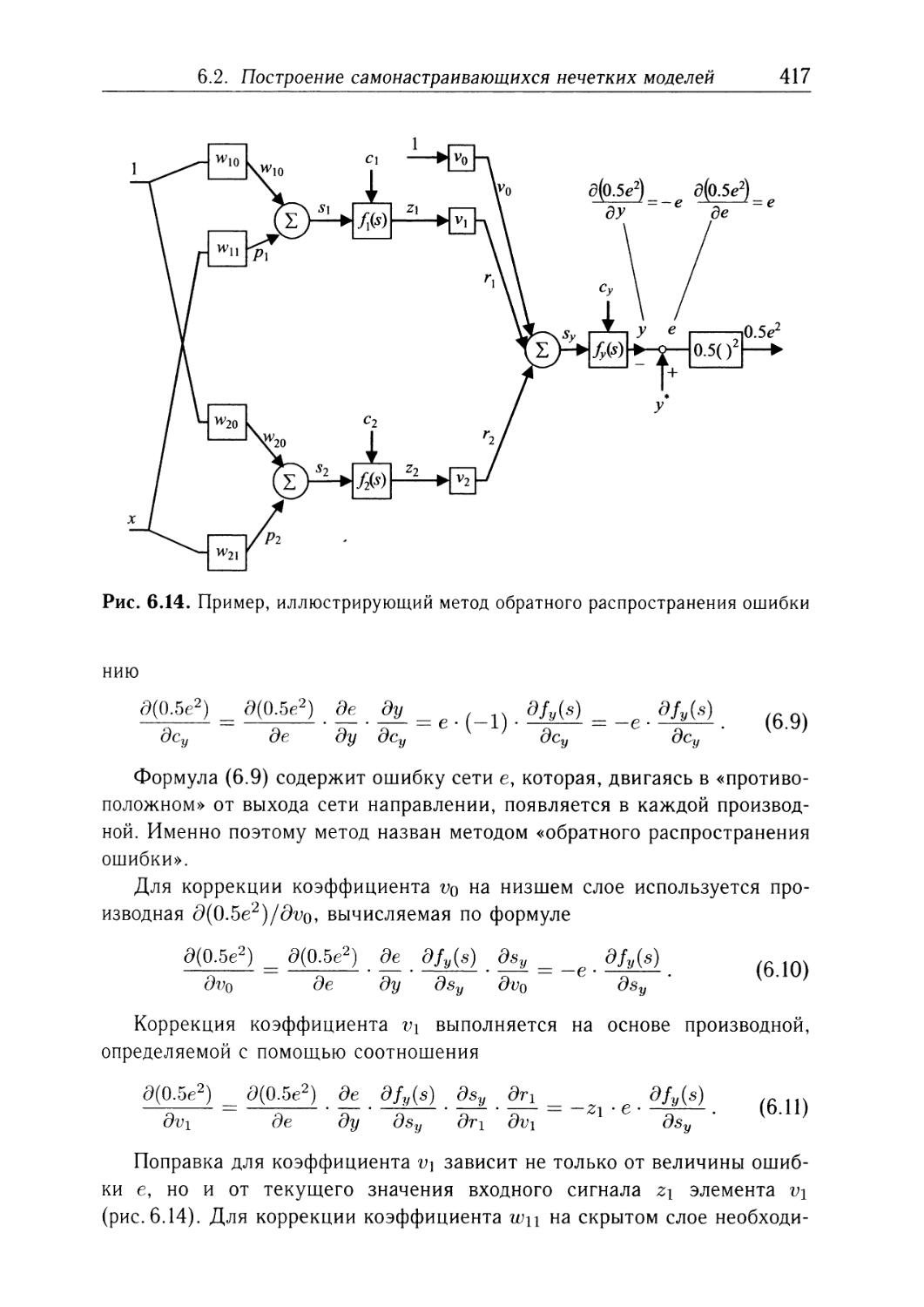
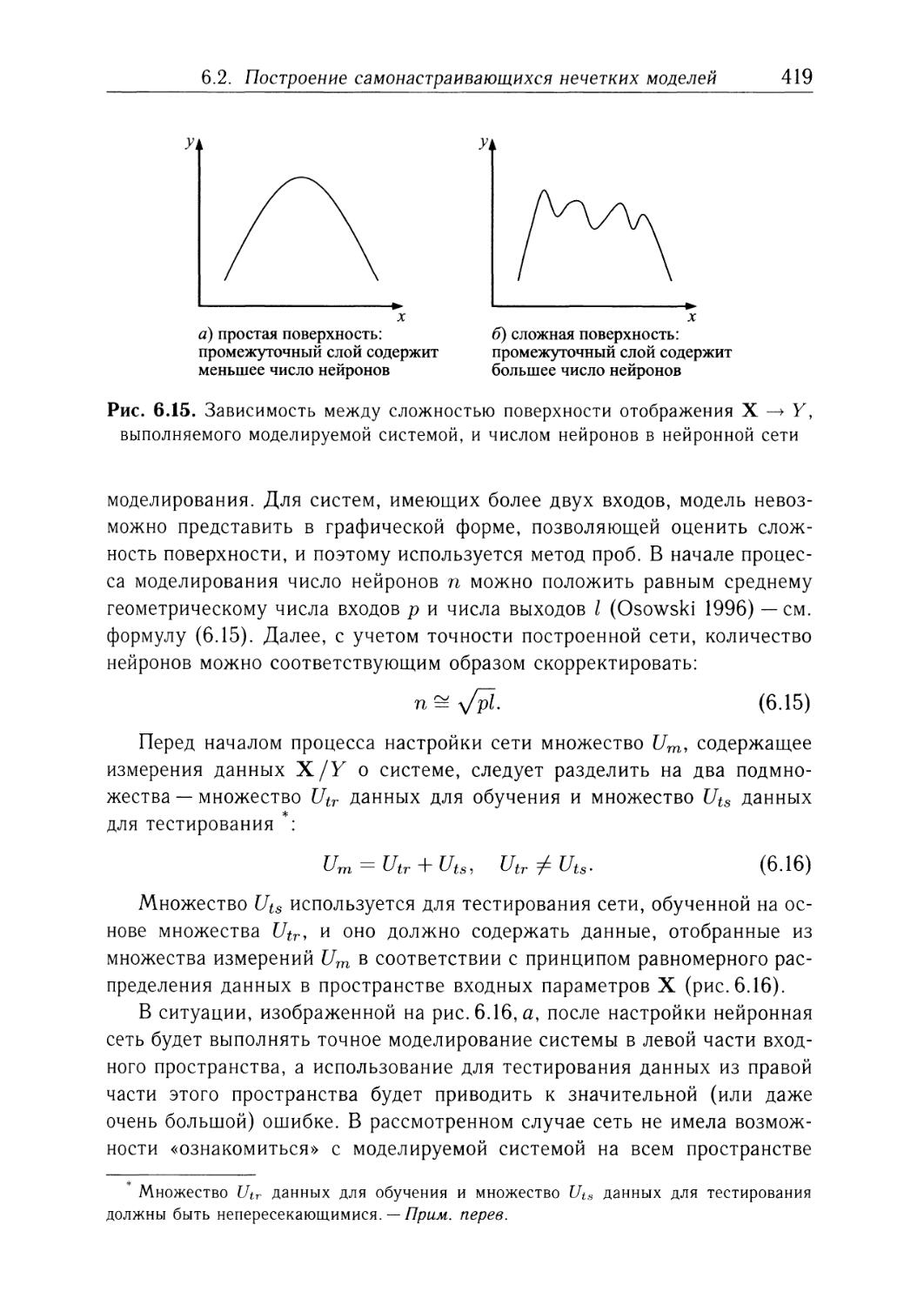






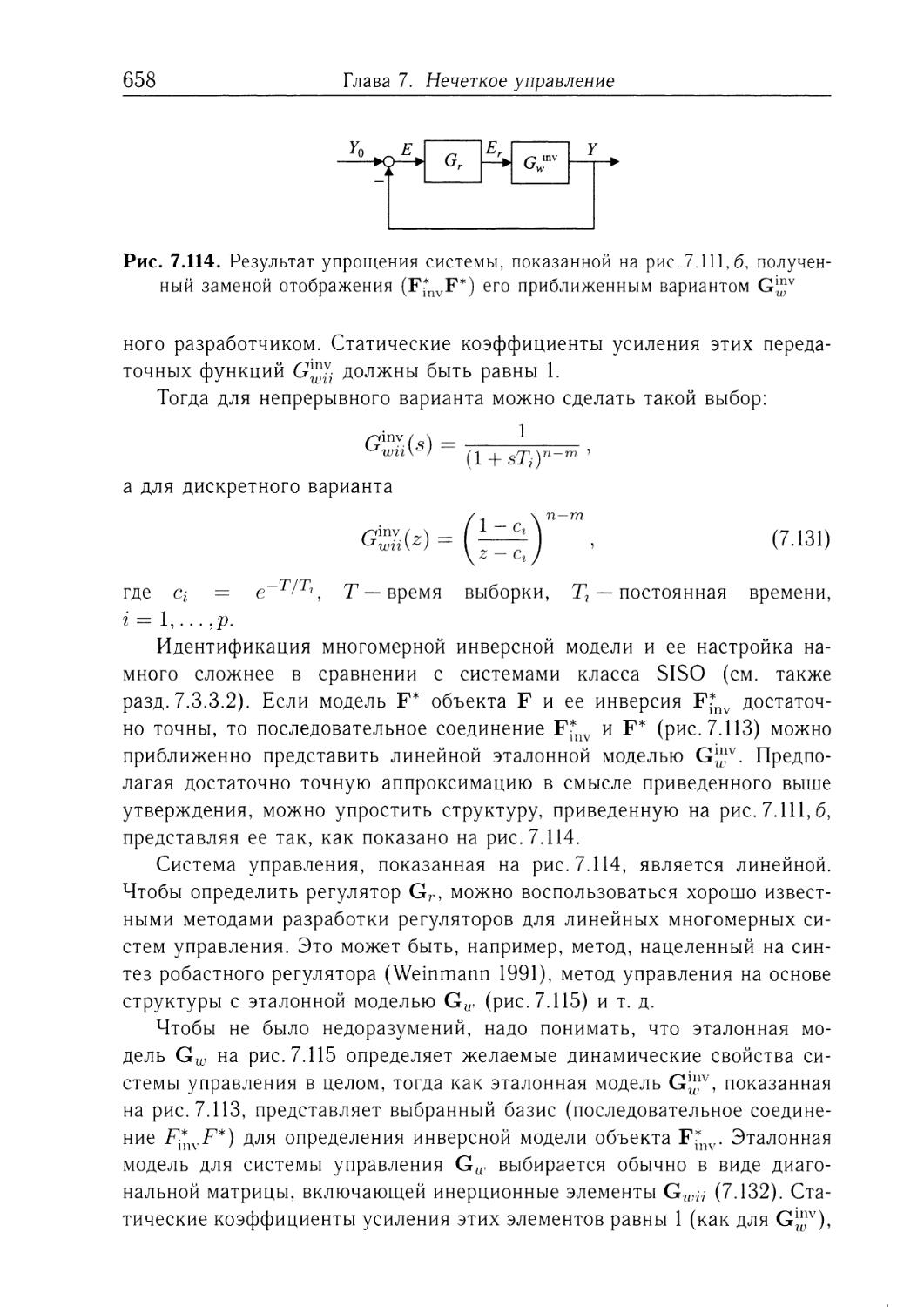
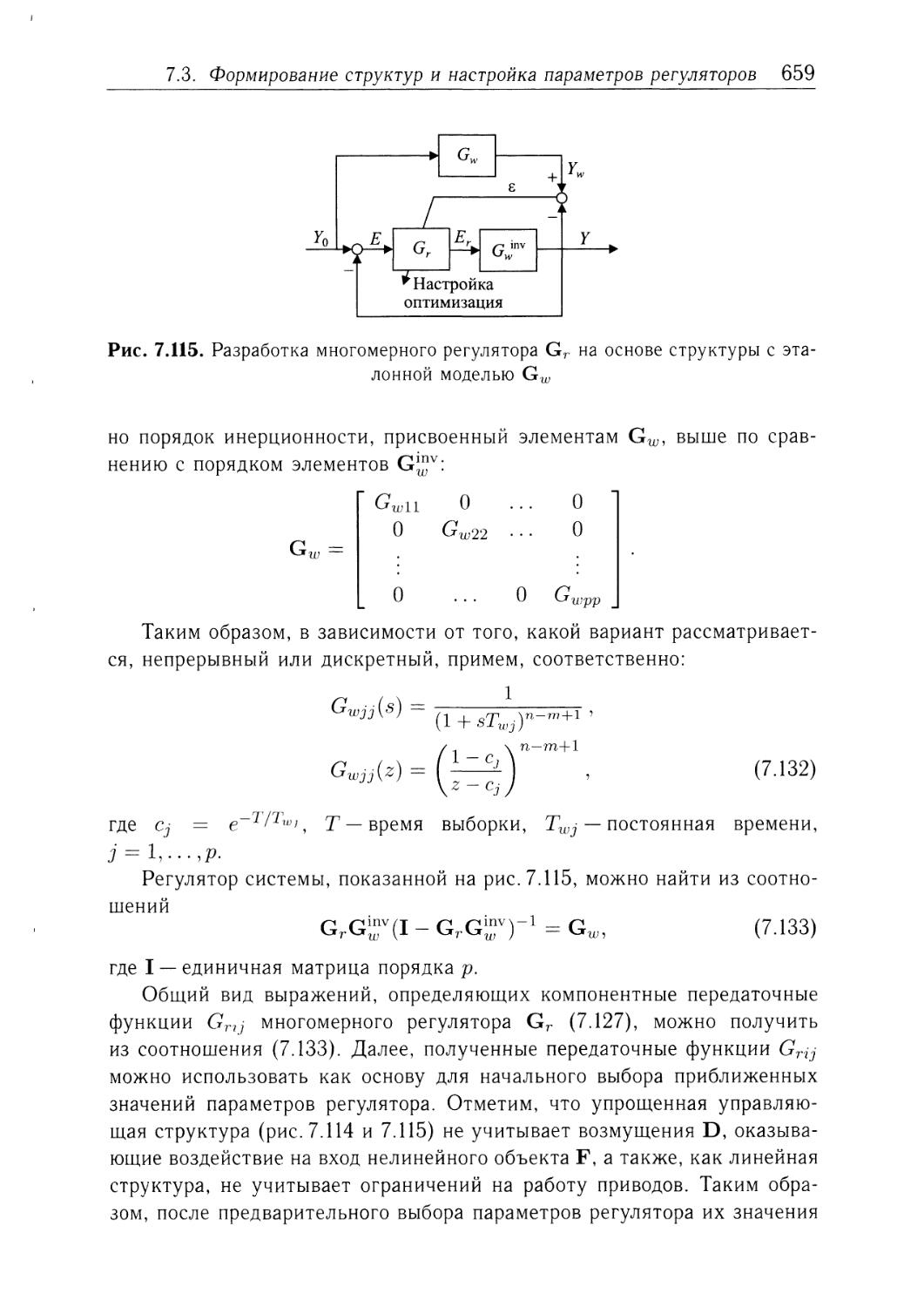
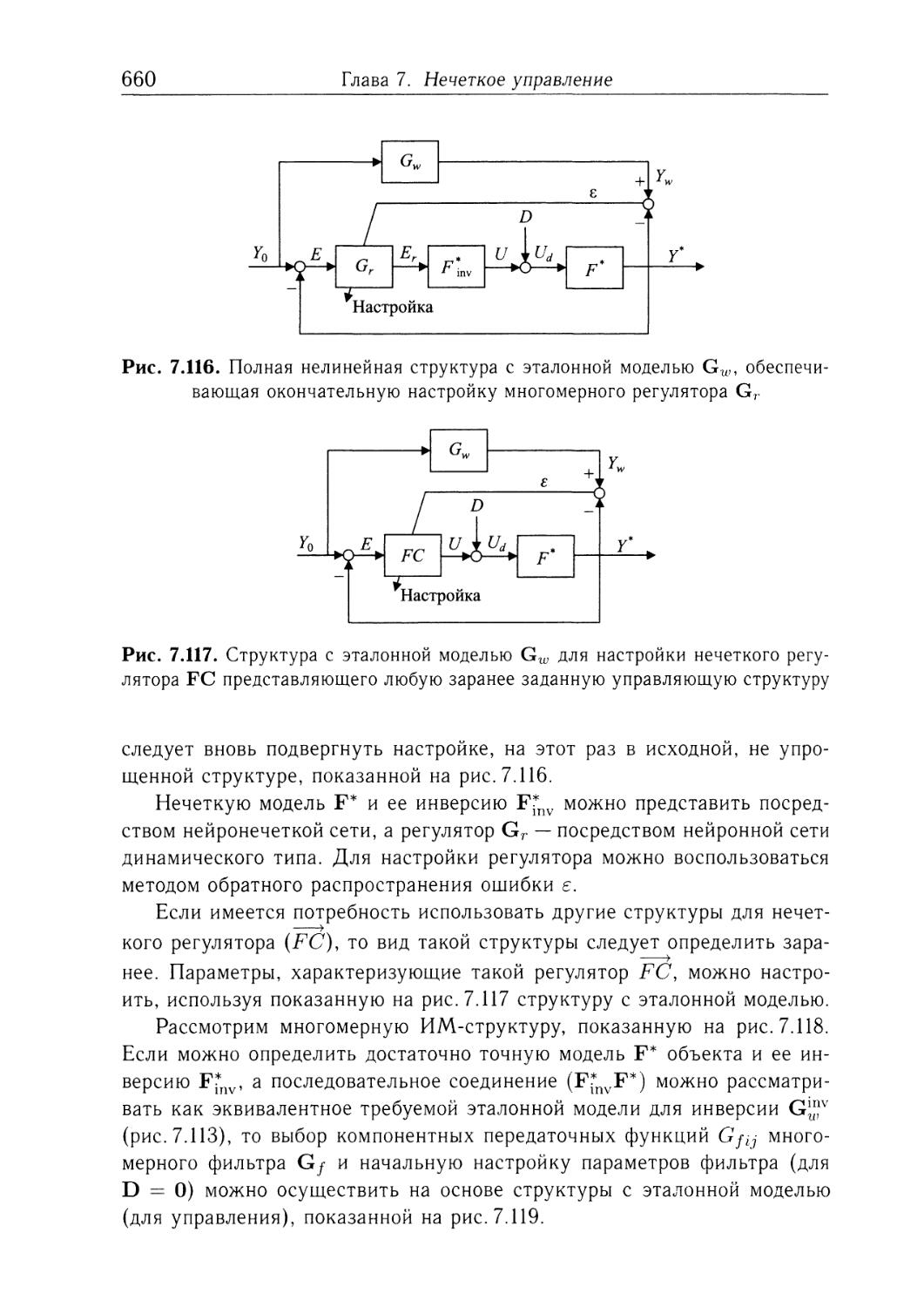
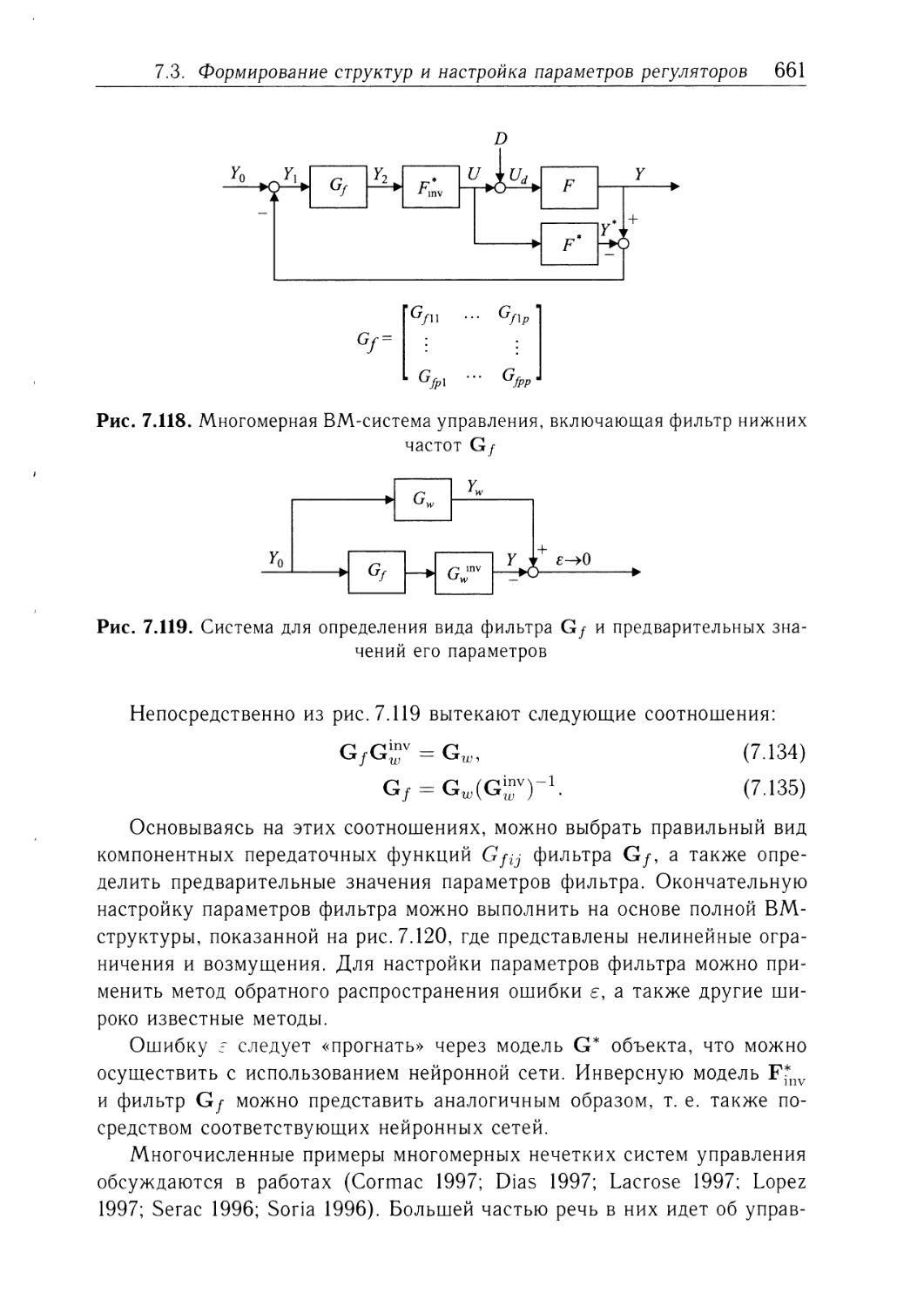
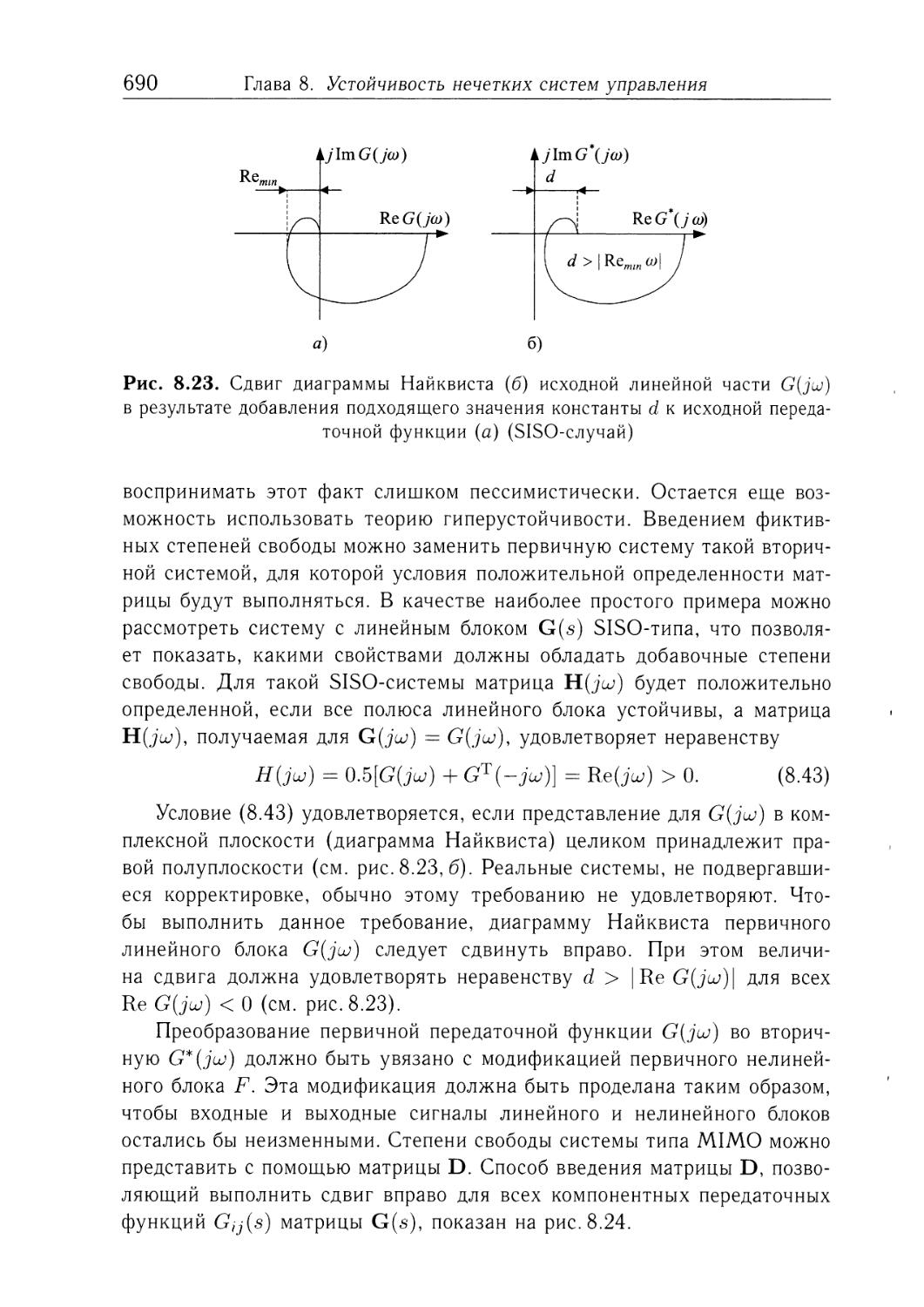
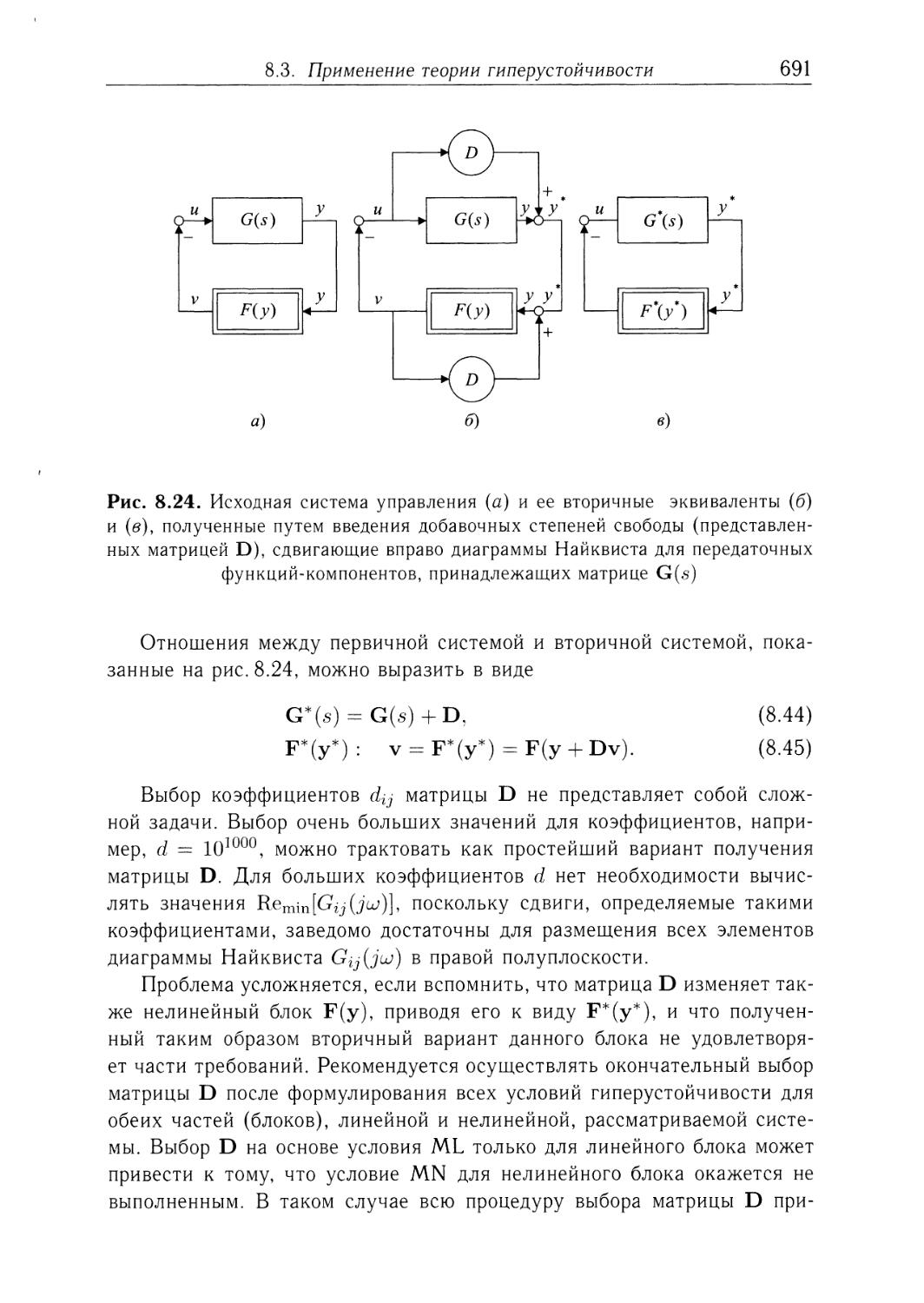

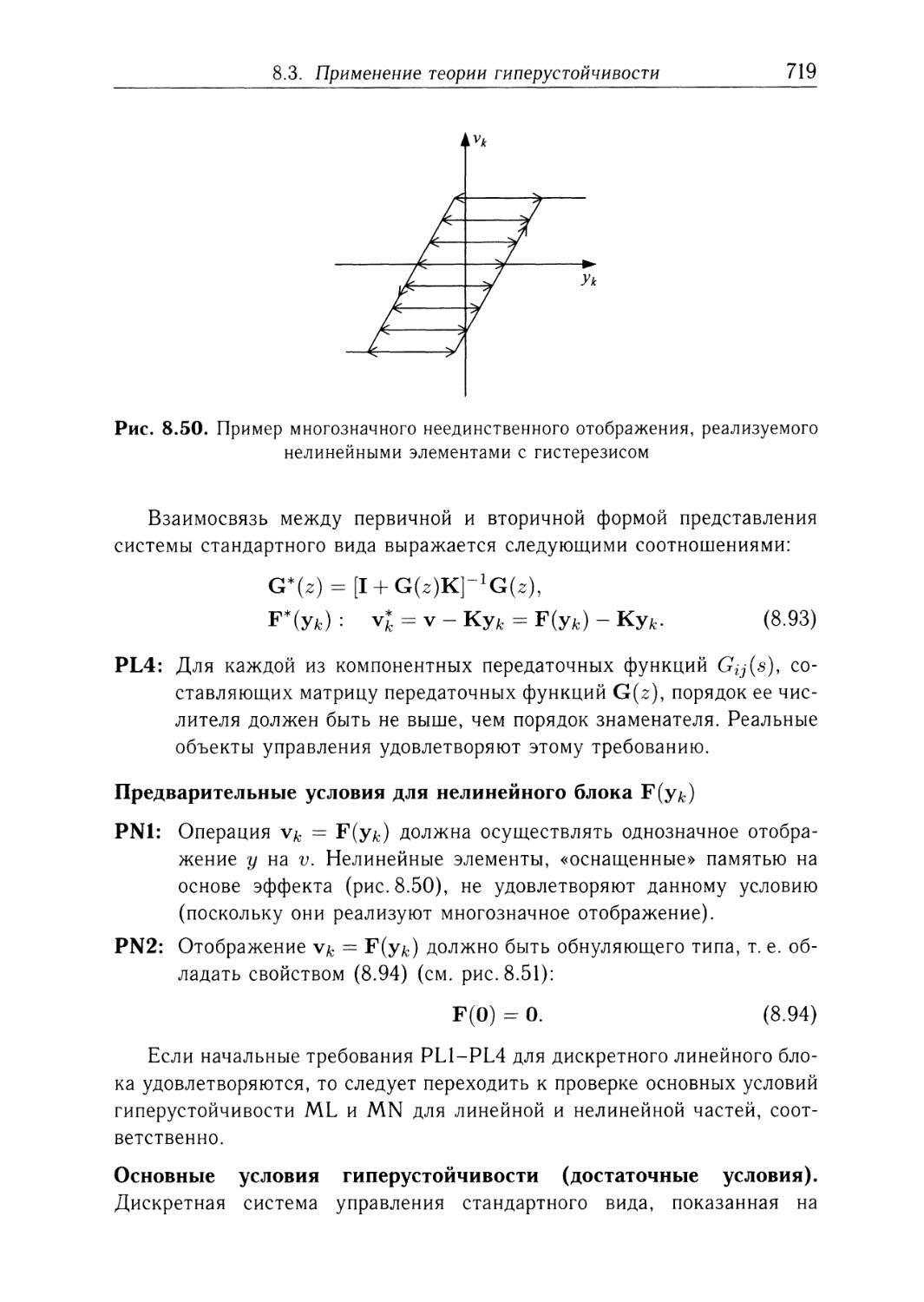
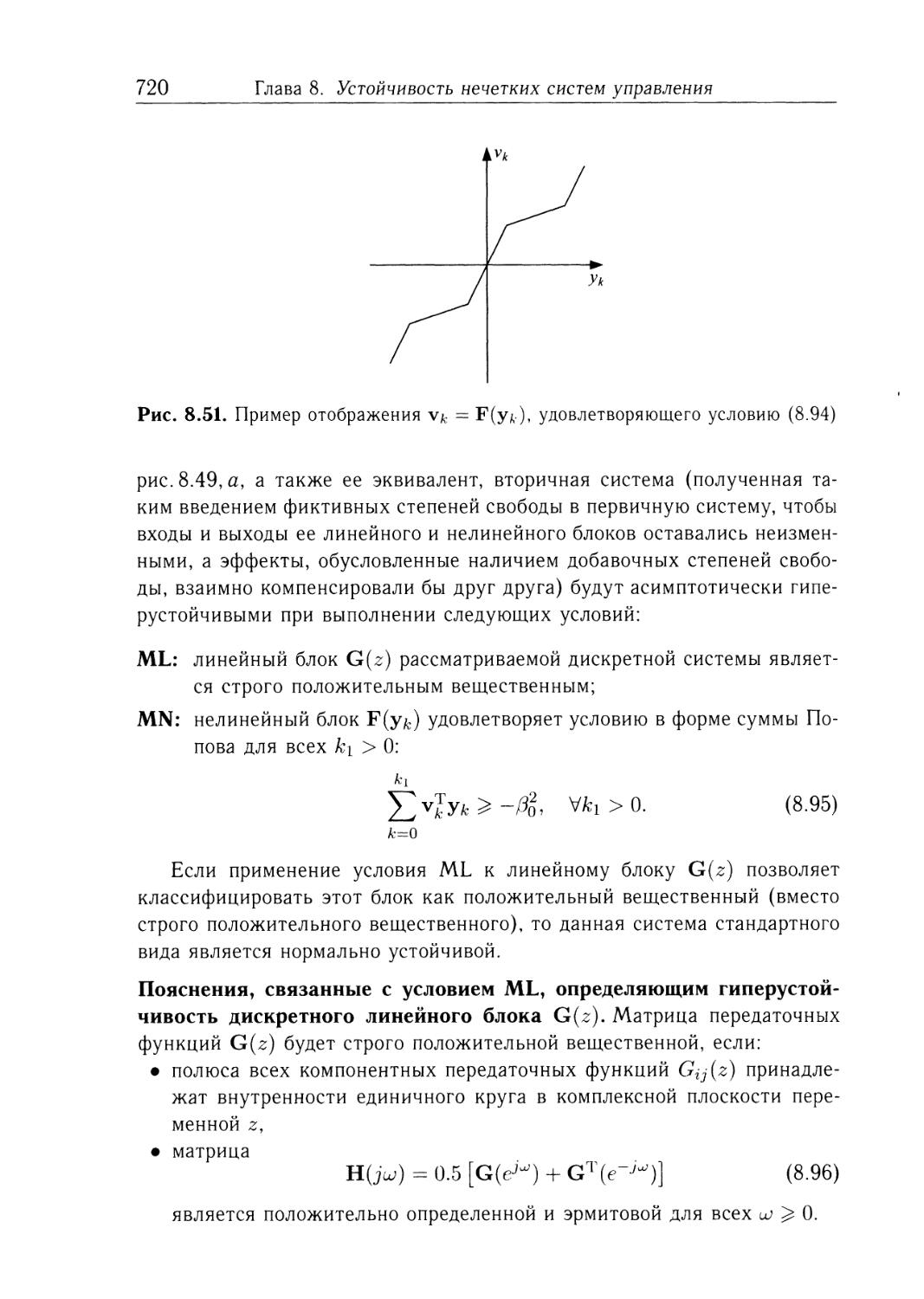
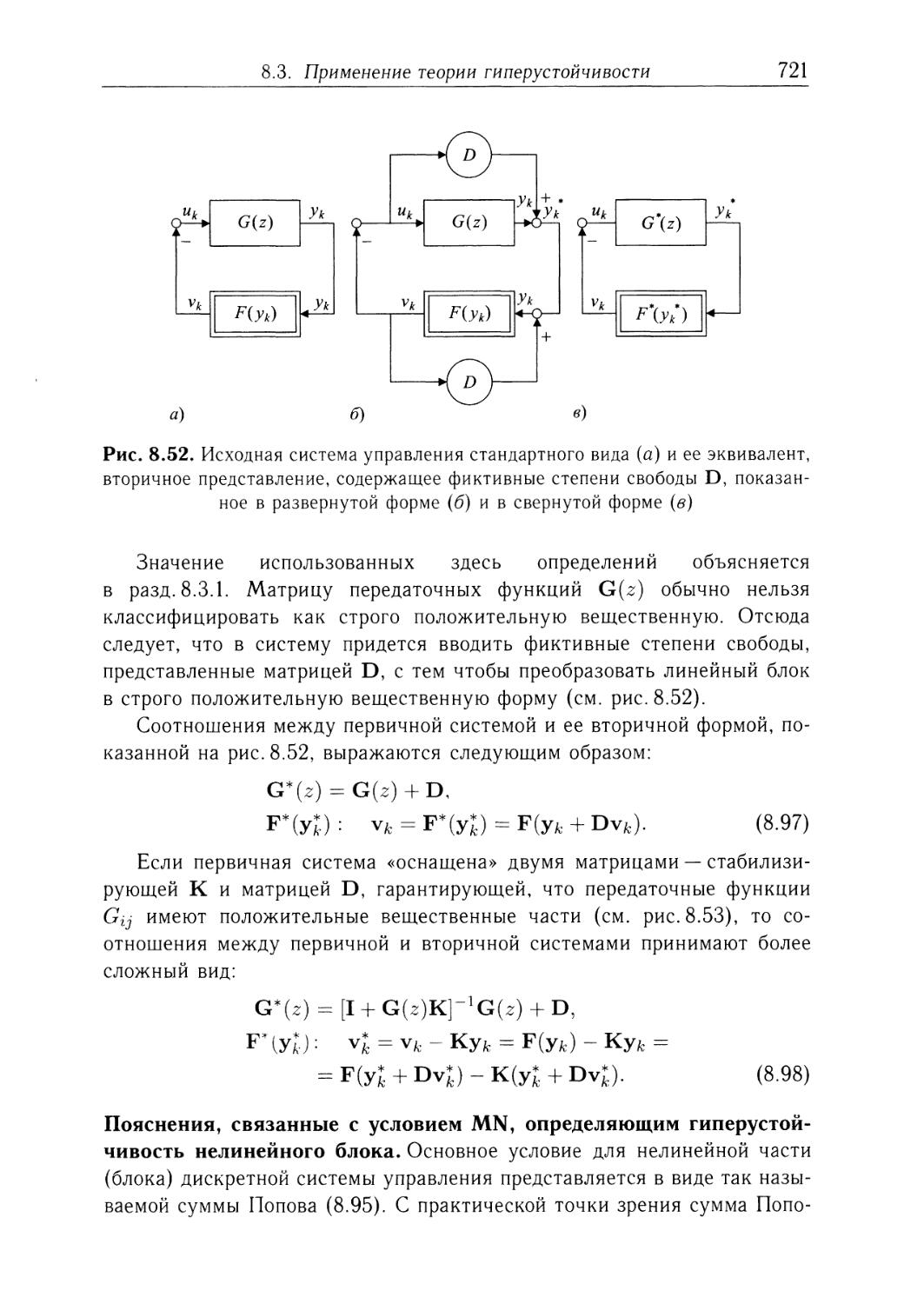
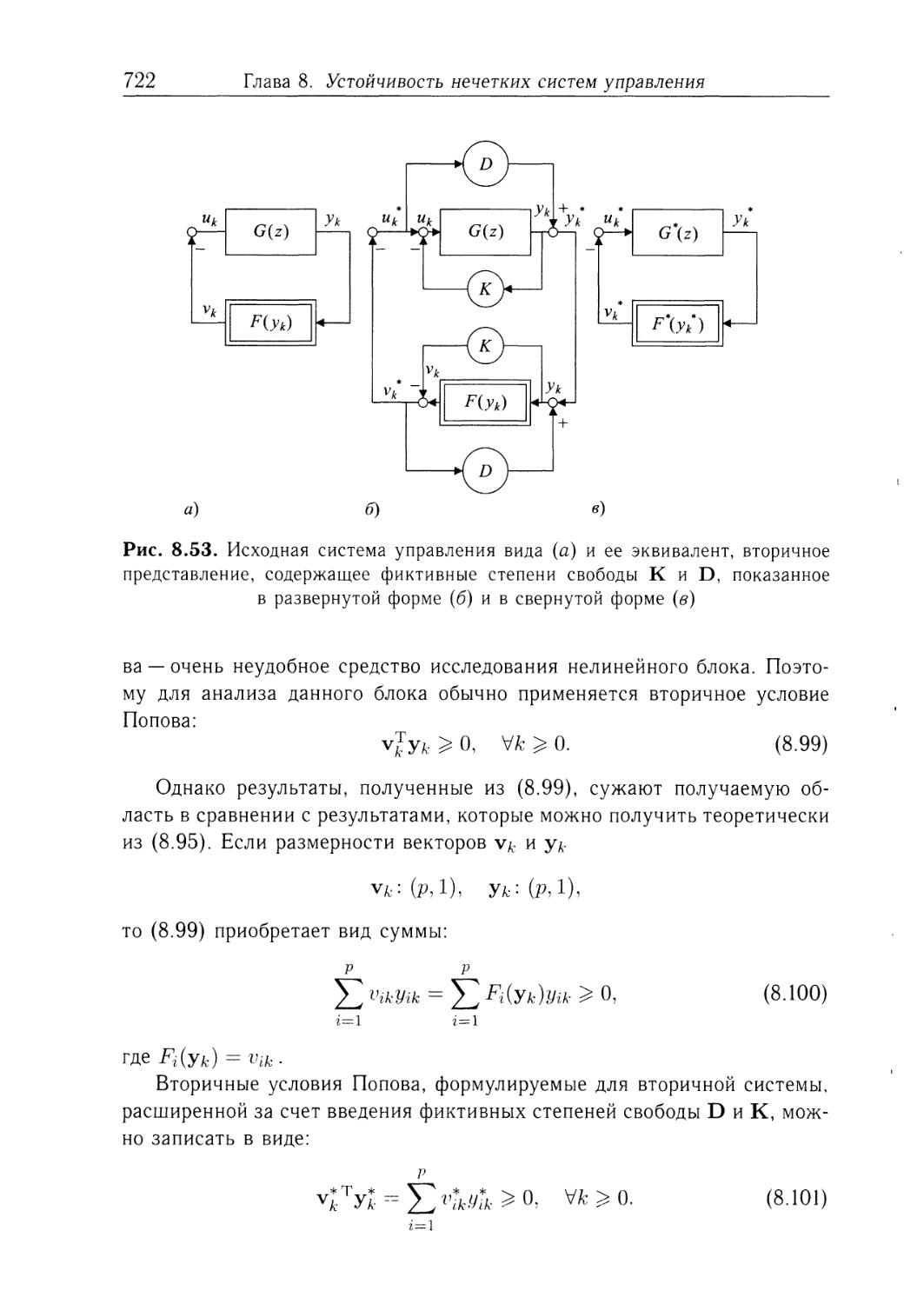






Text
АДАПТИВНЫЕ И
ИНТЕЛЛЕКТУАЛЬНЫЕ СИСТЕМЫ
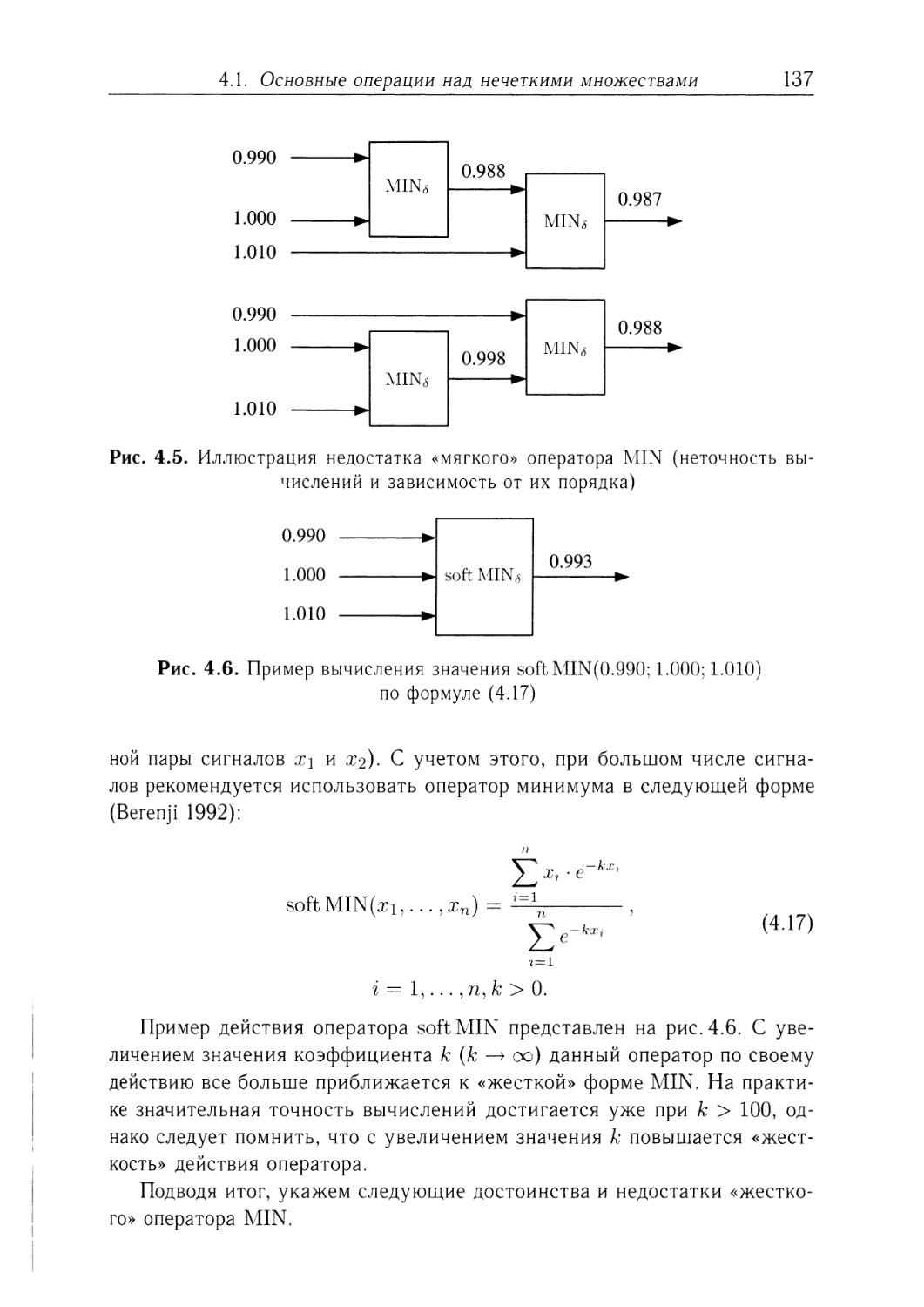
. Пегат
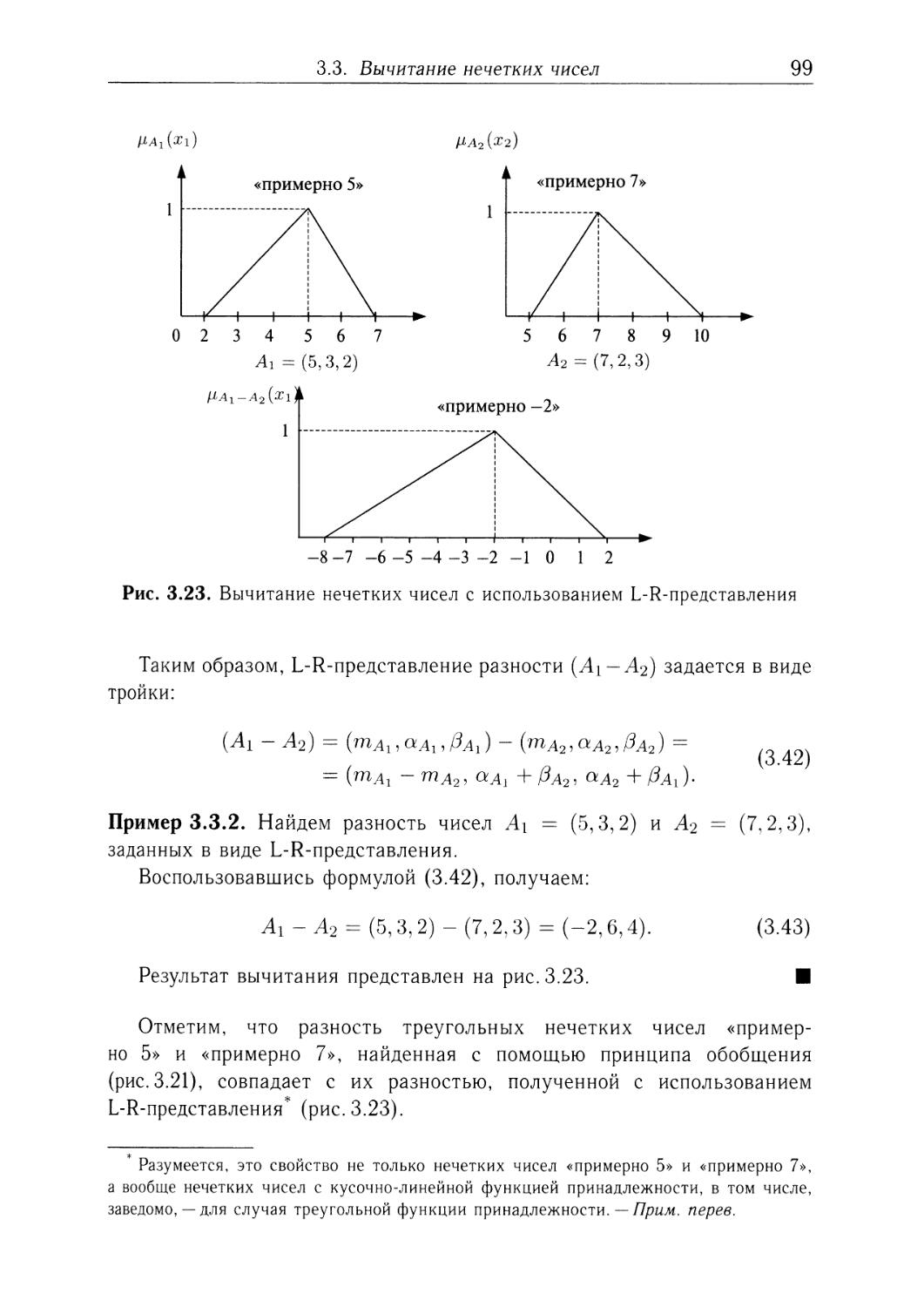
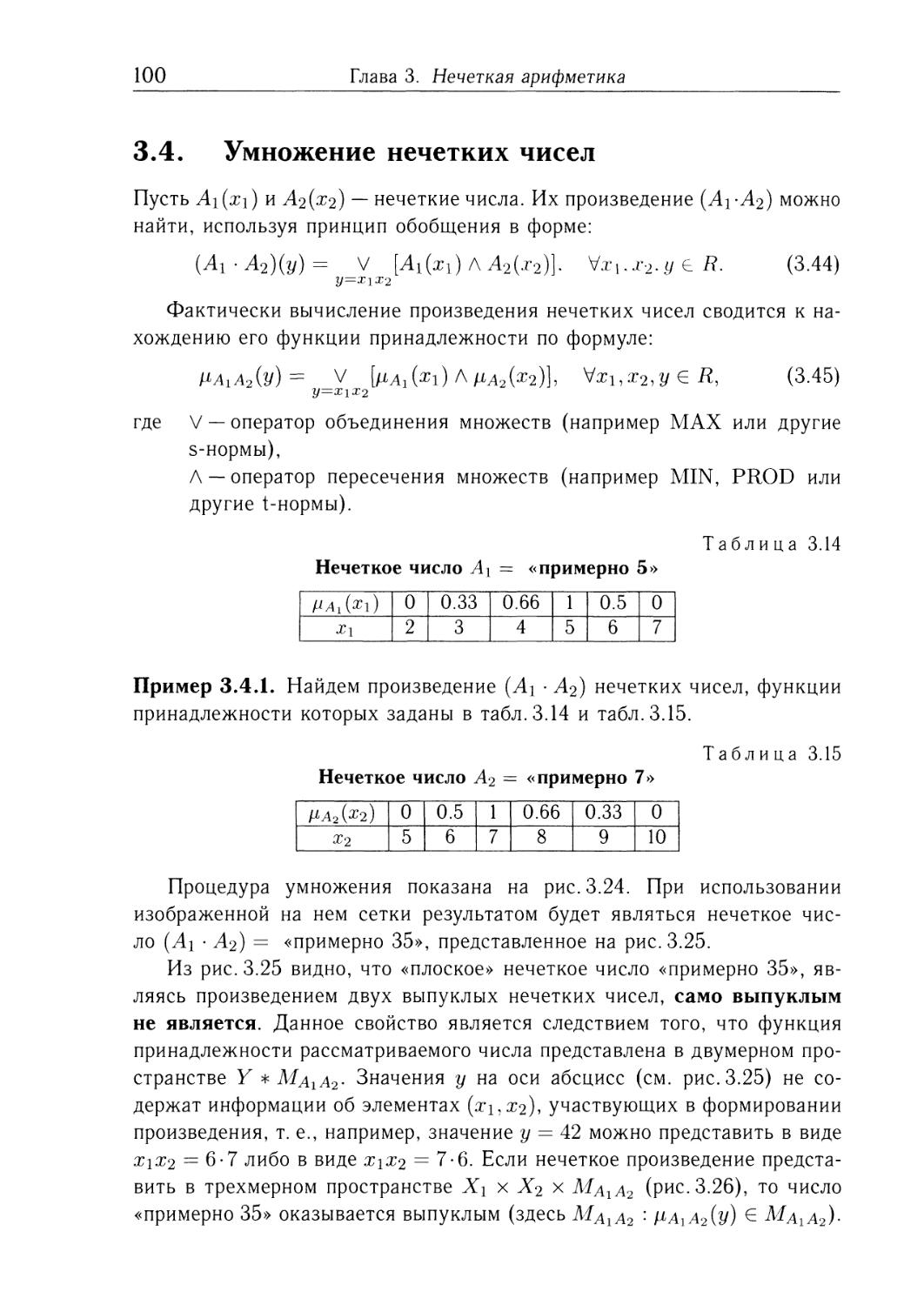
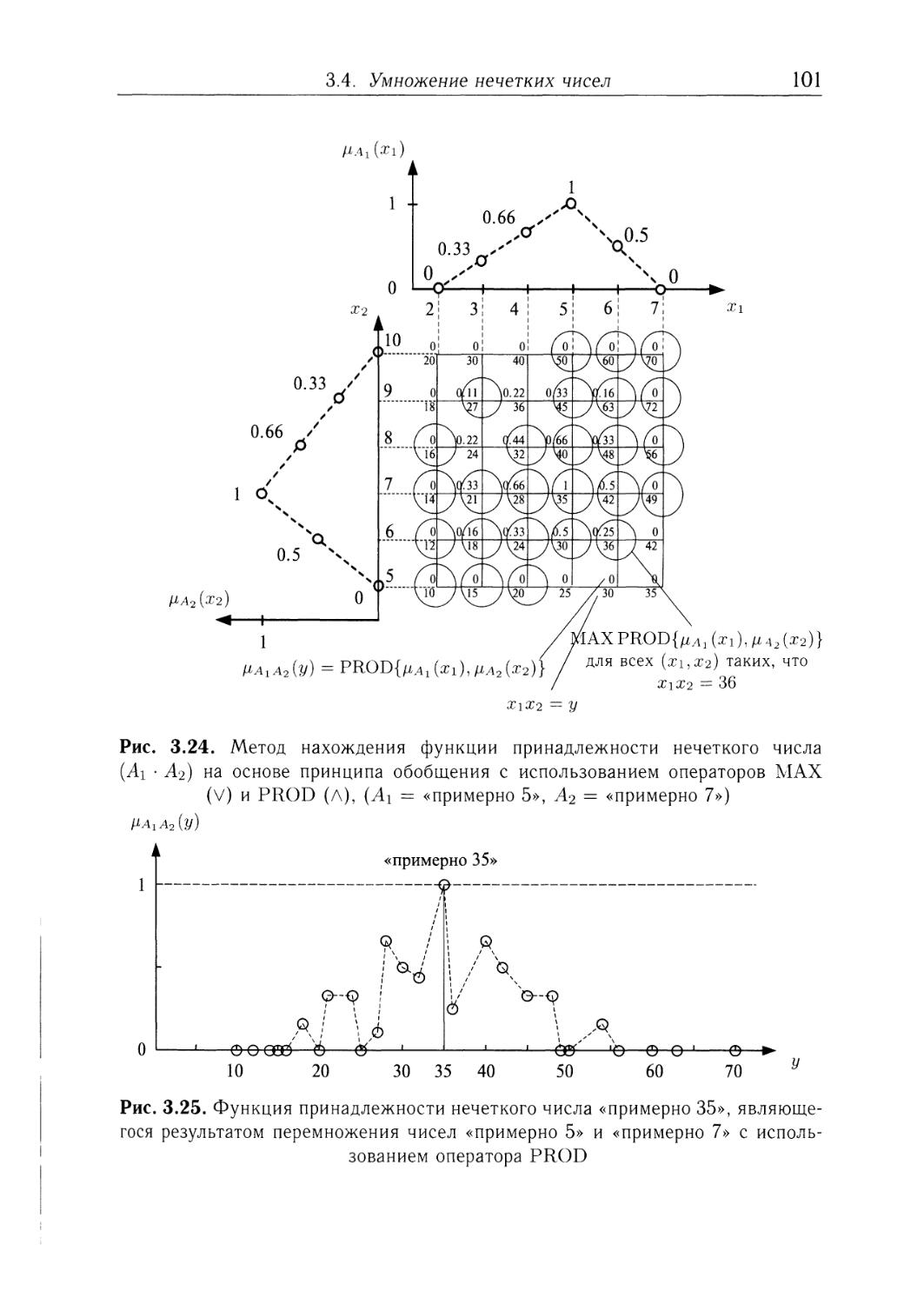
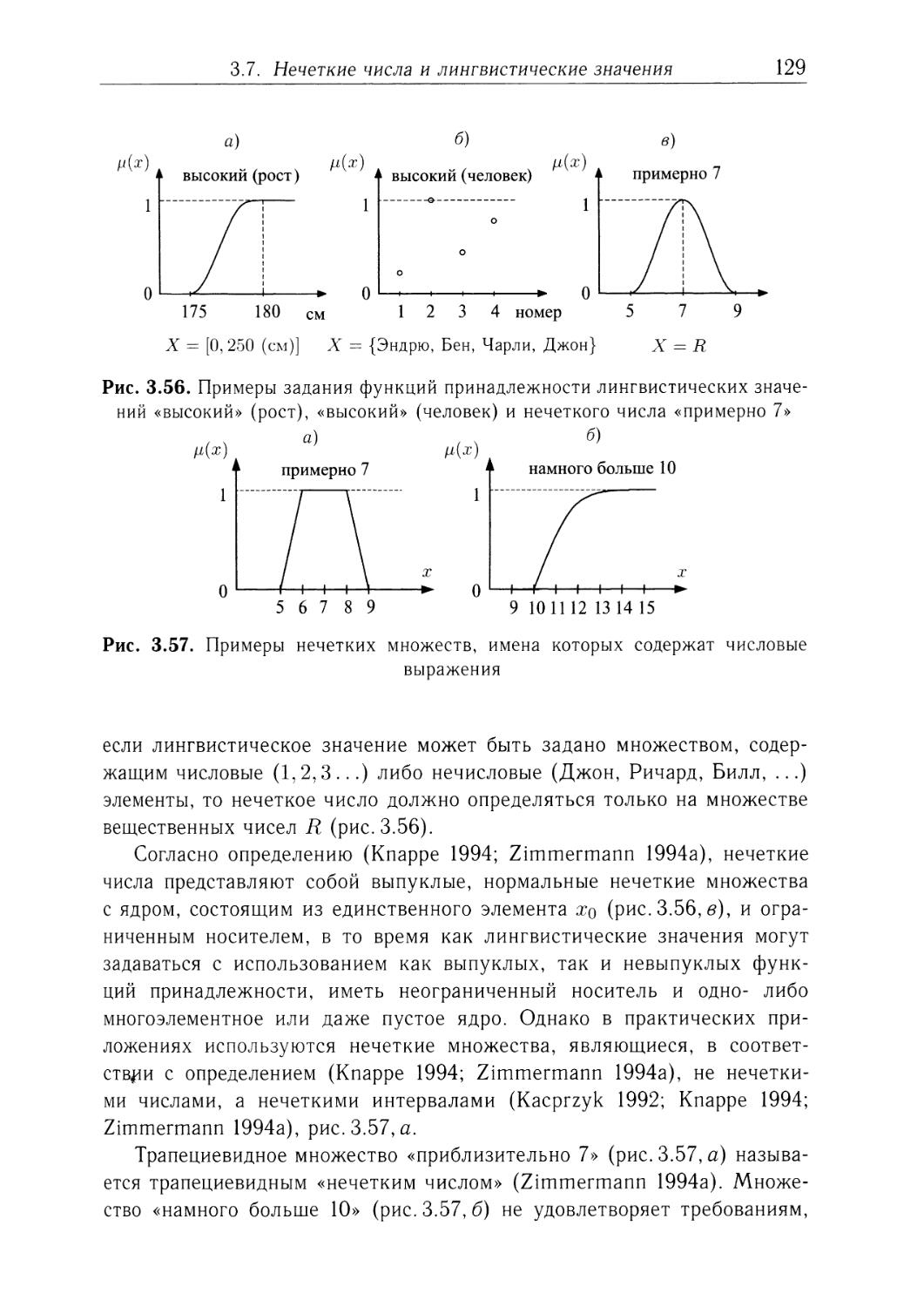
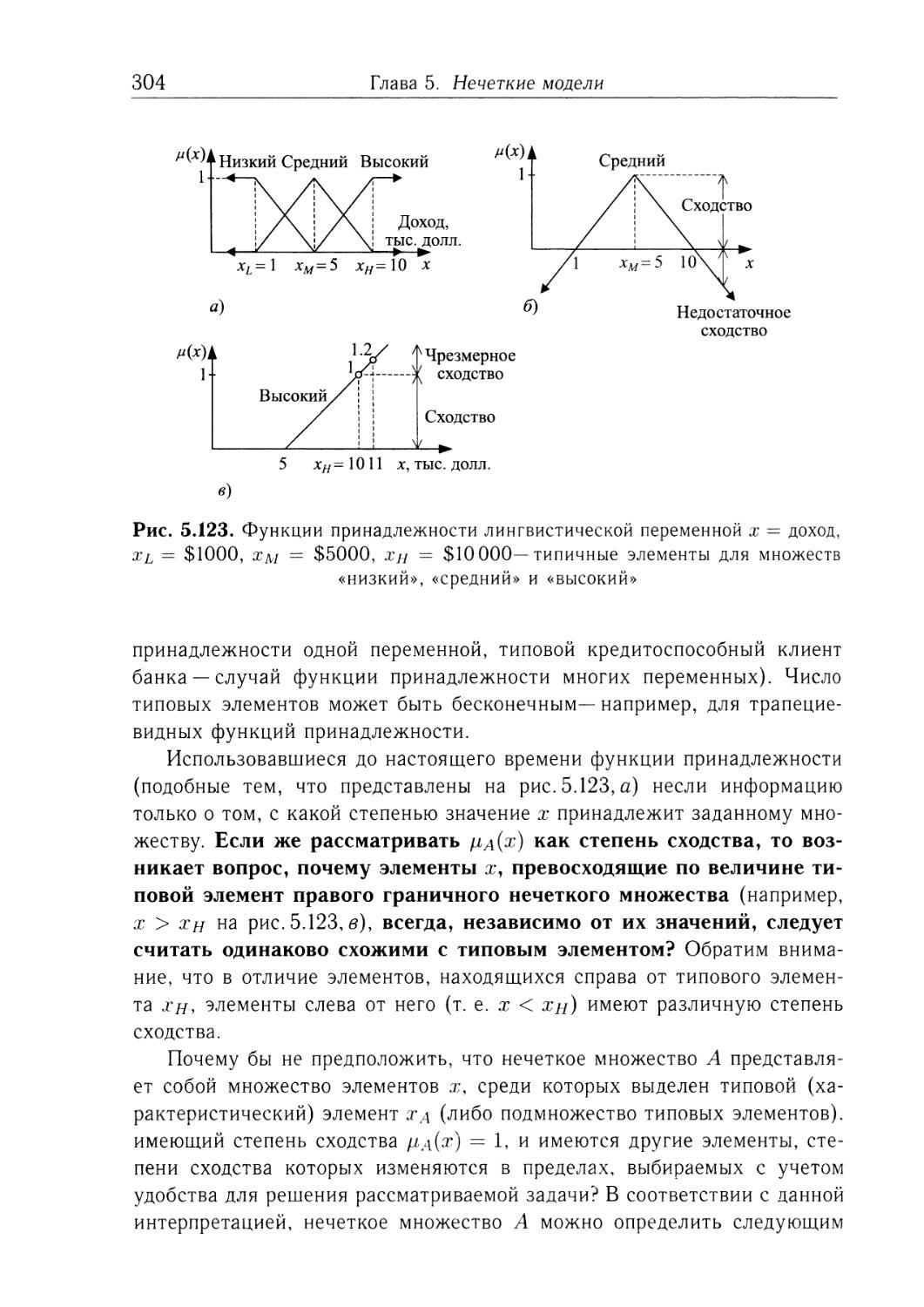
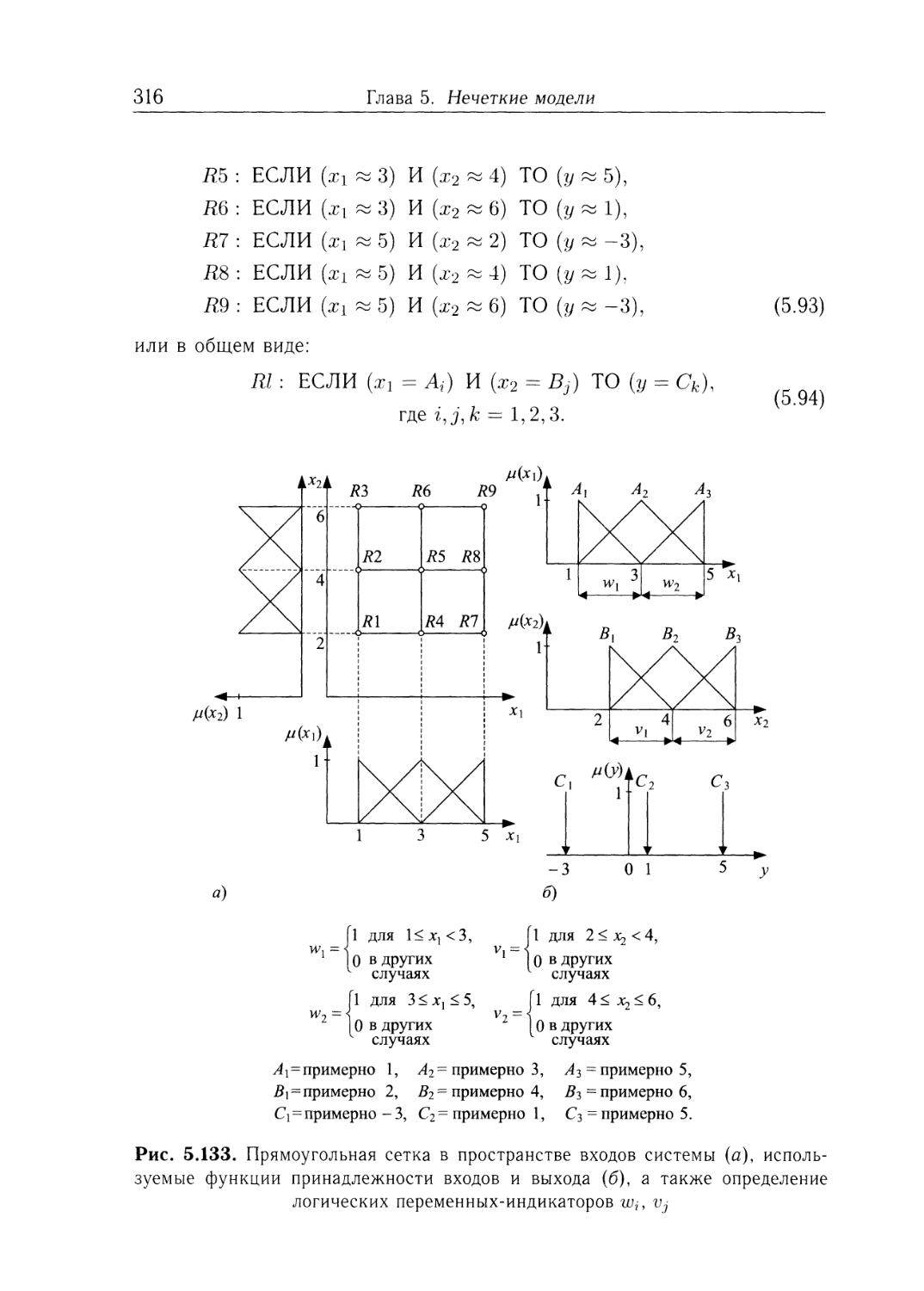
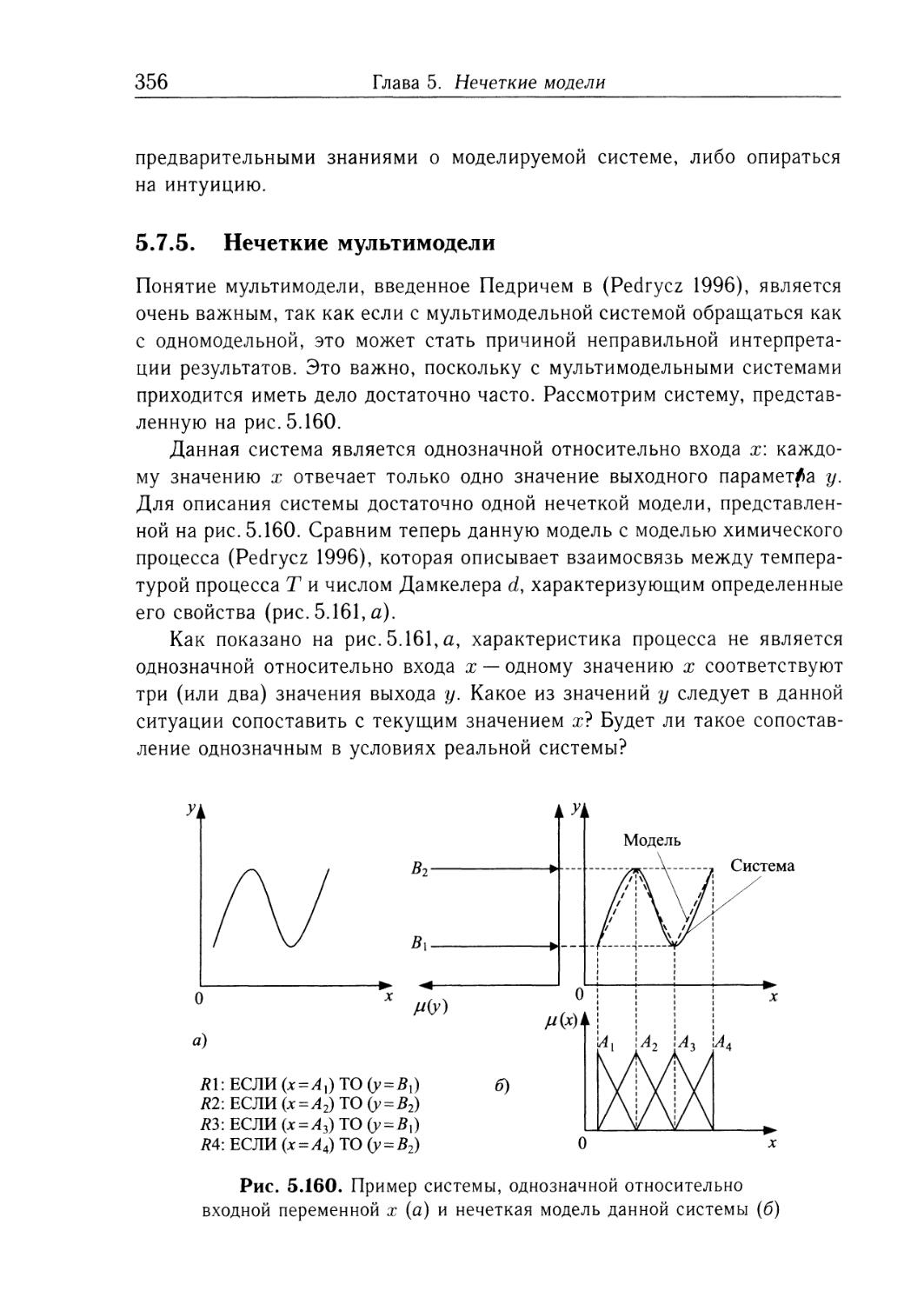
Нечеткое
моделирование
и управление
Теория нечетких множеств
Нечеткая математика
(^ИЗДАТЕЛЬСТВО
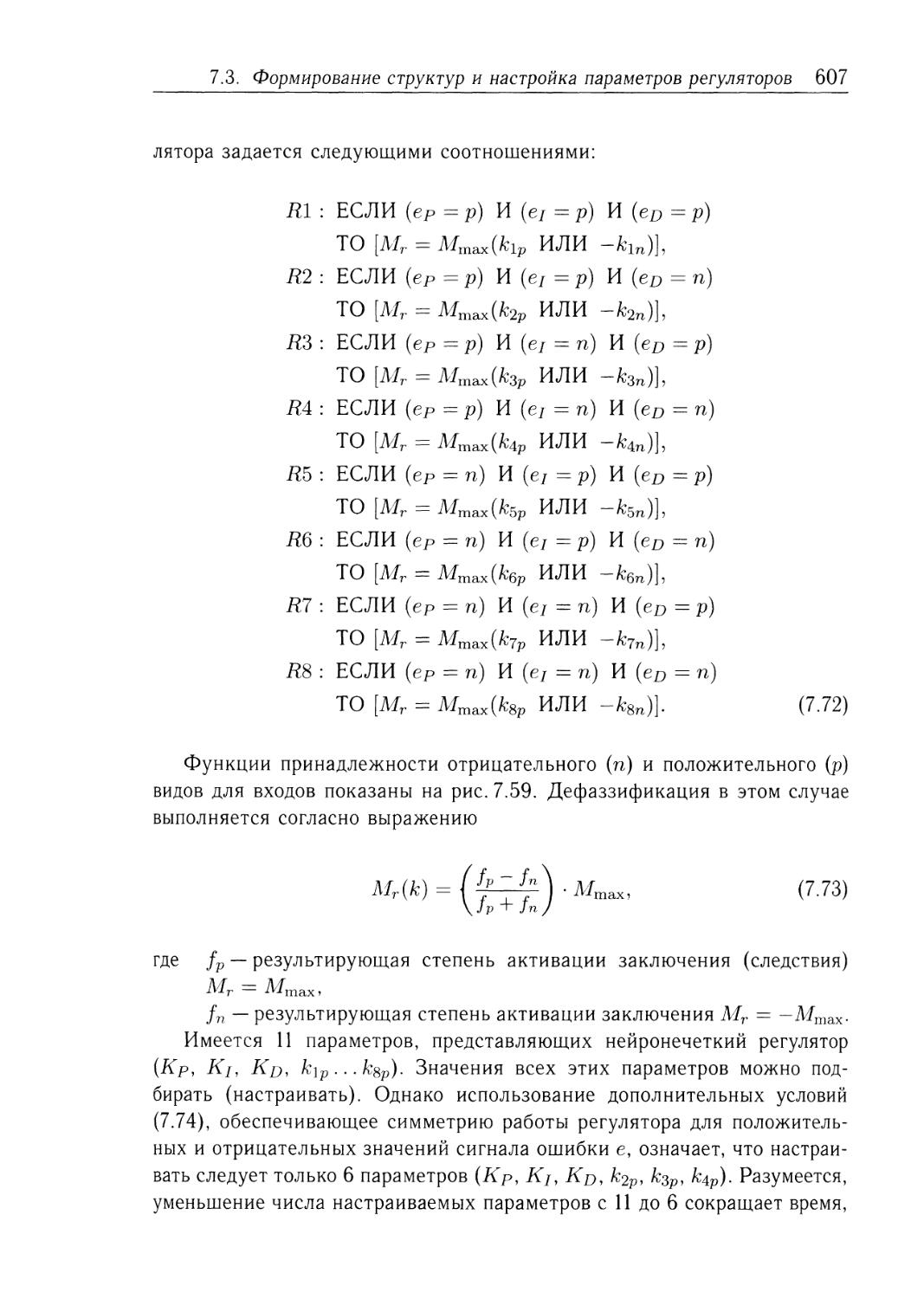
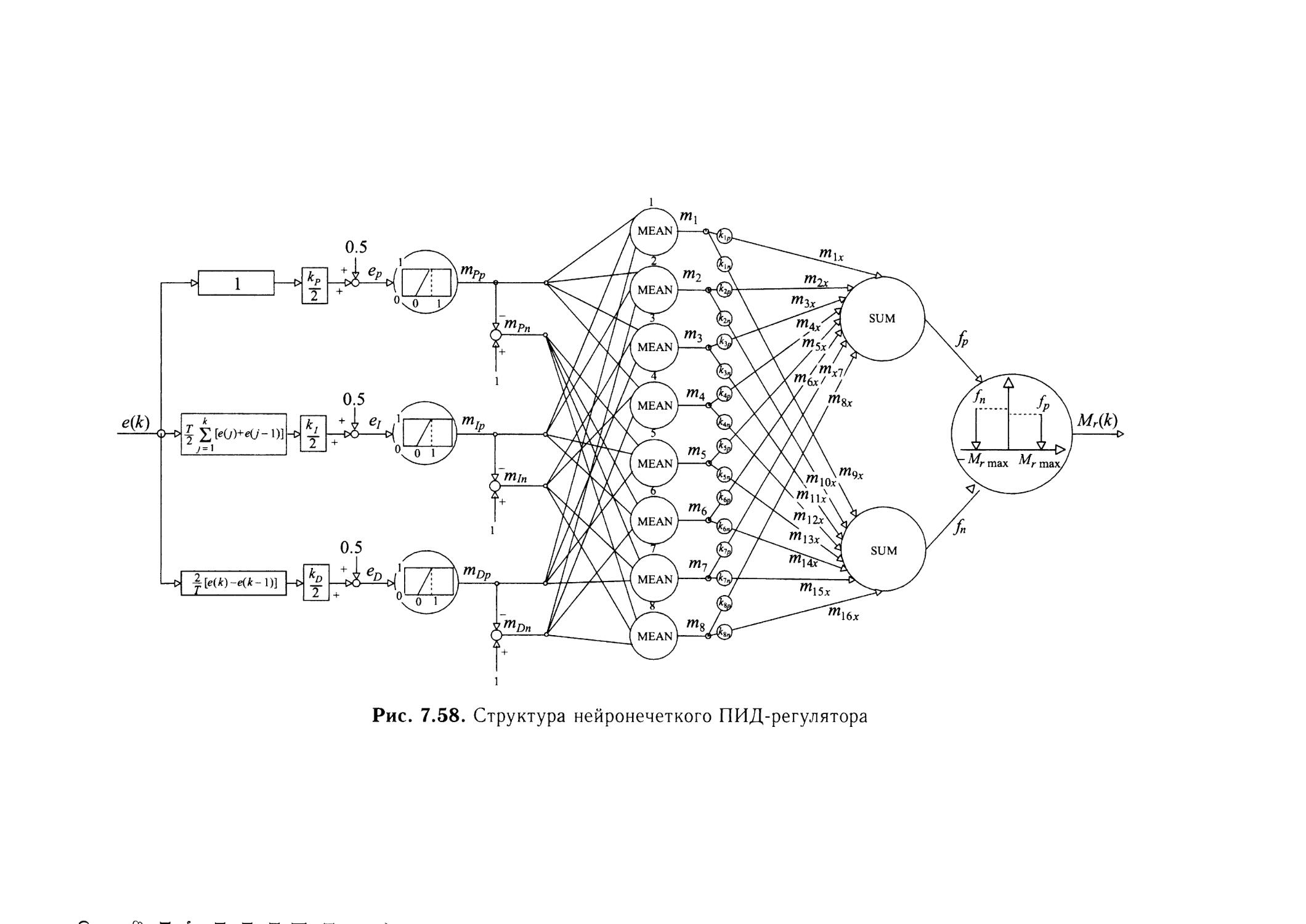
Нечеткие модели
Методы нечеткого
моделирования
Нечеткое управление
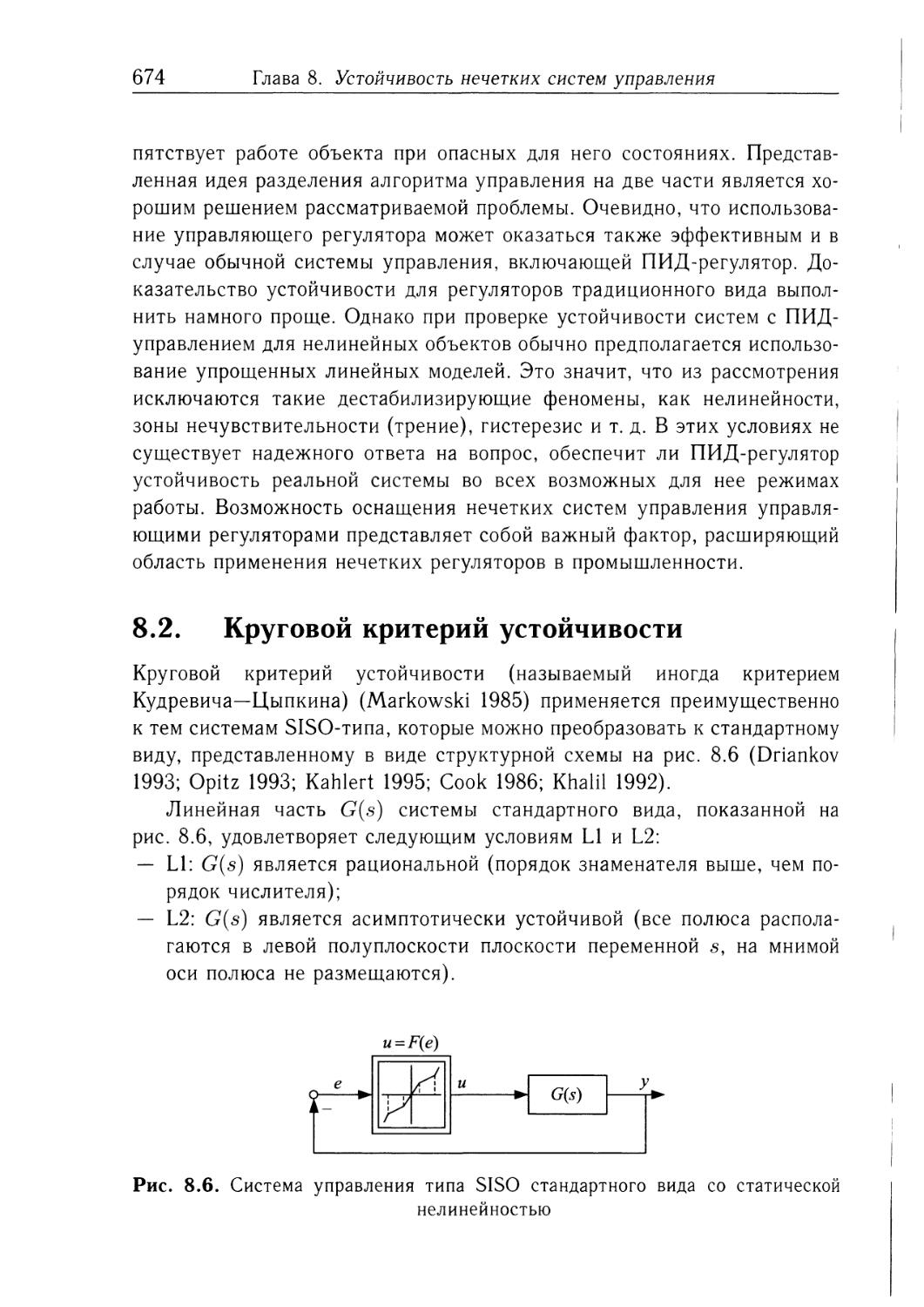
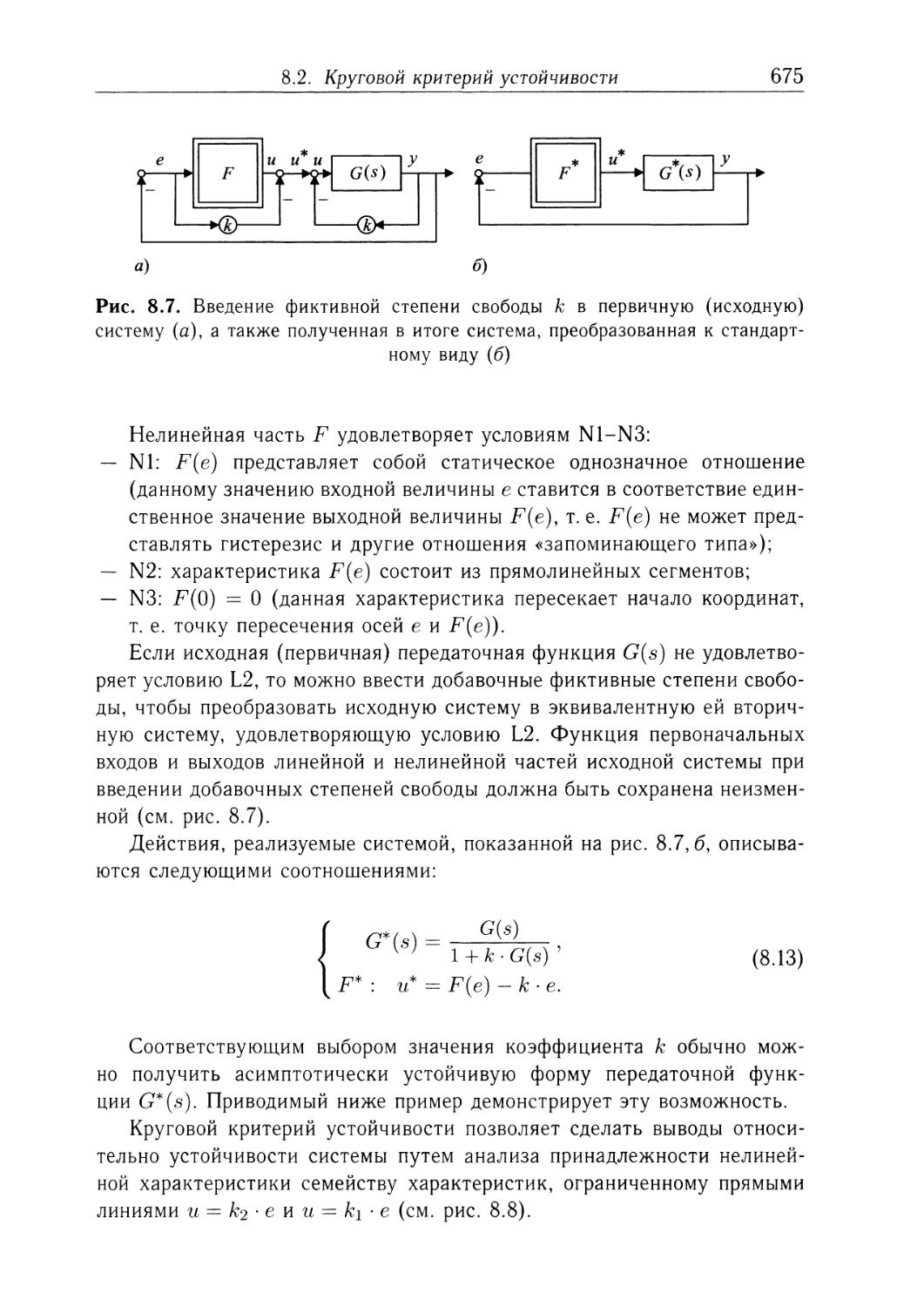
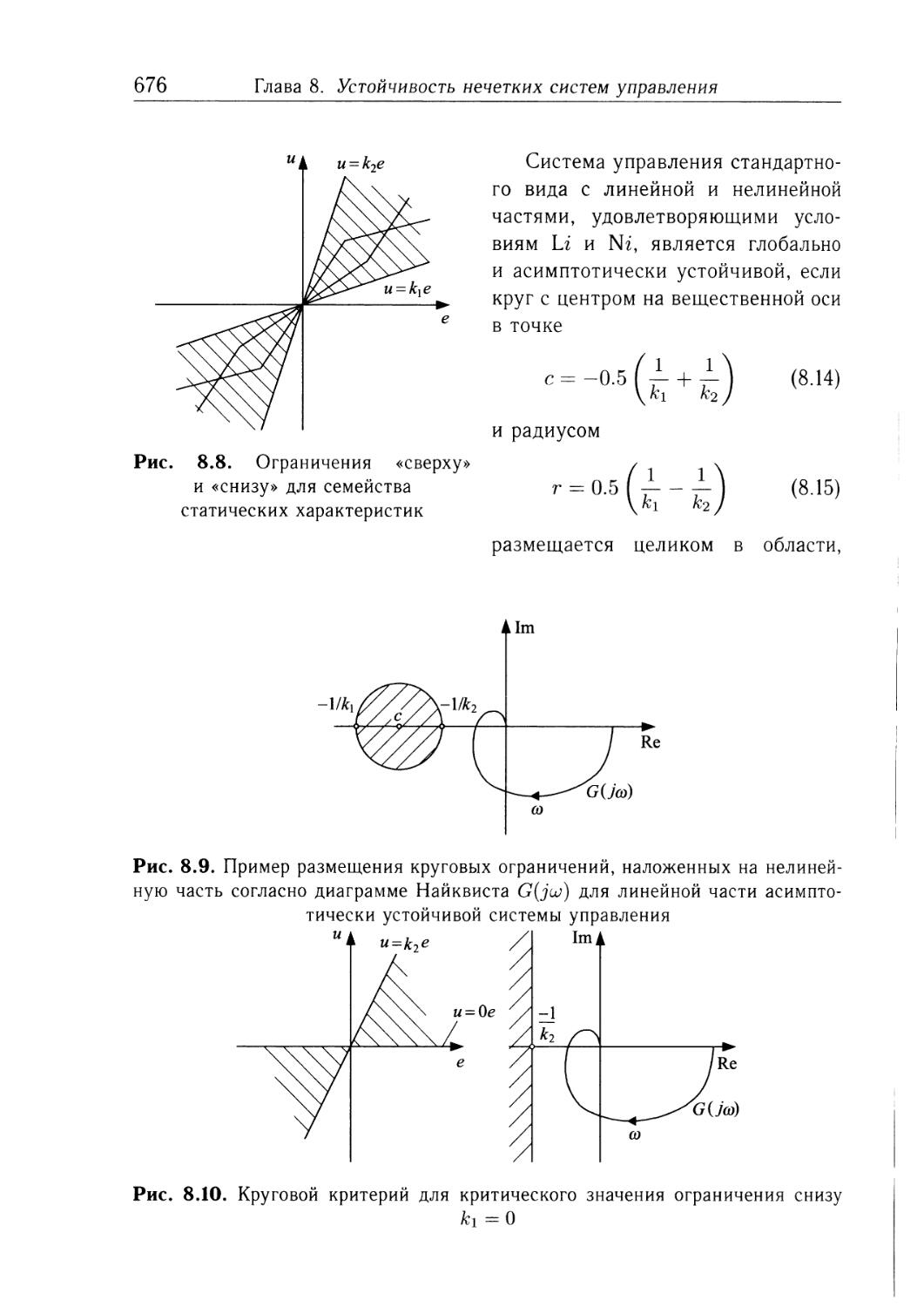
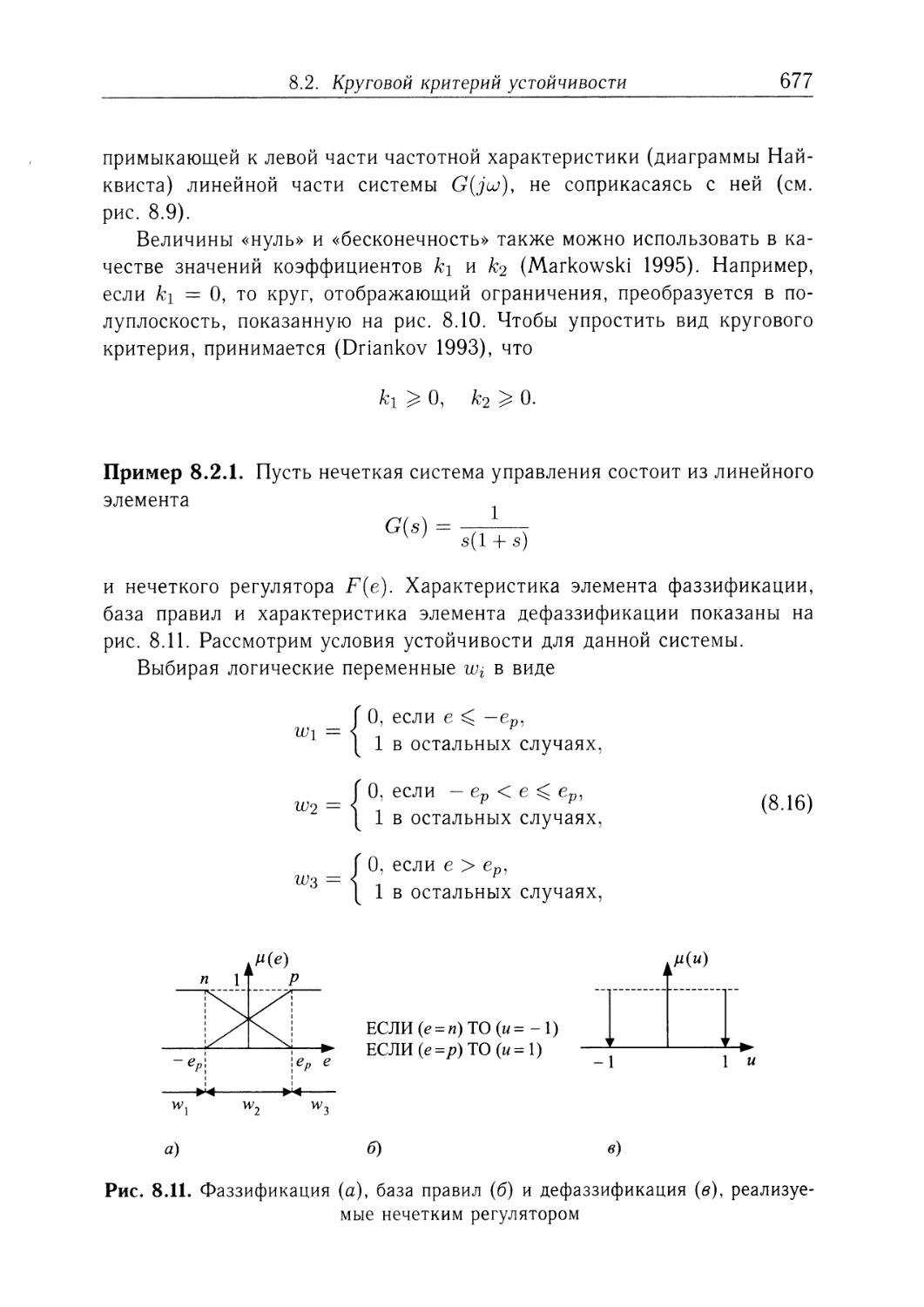
Устойчивость систем
с нечетким управлением
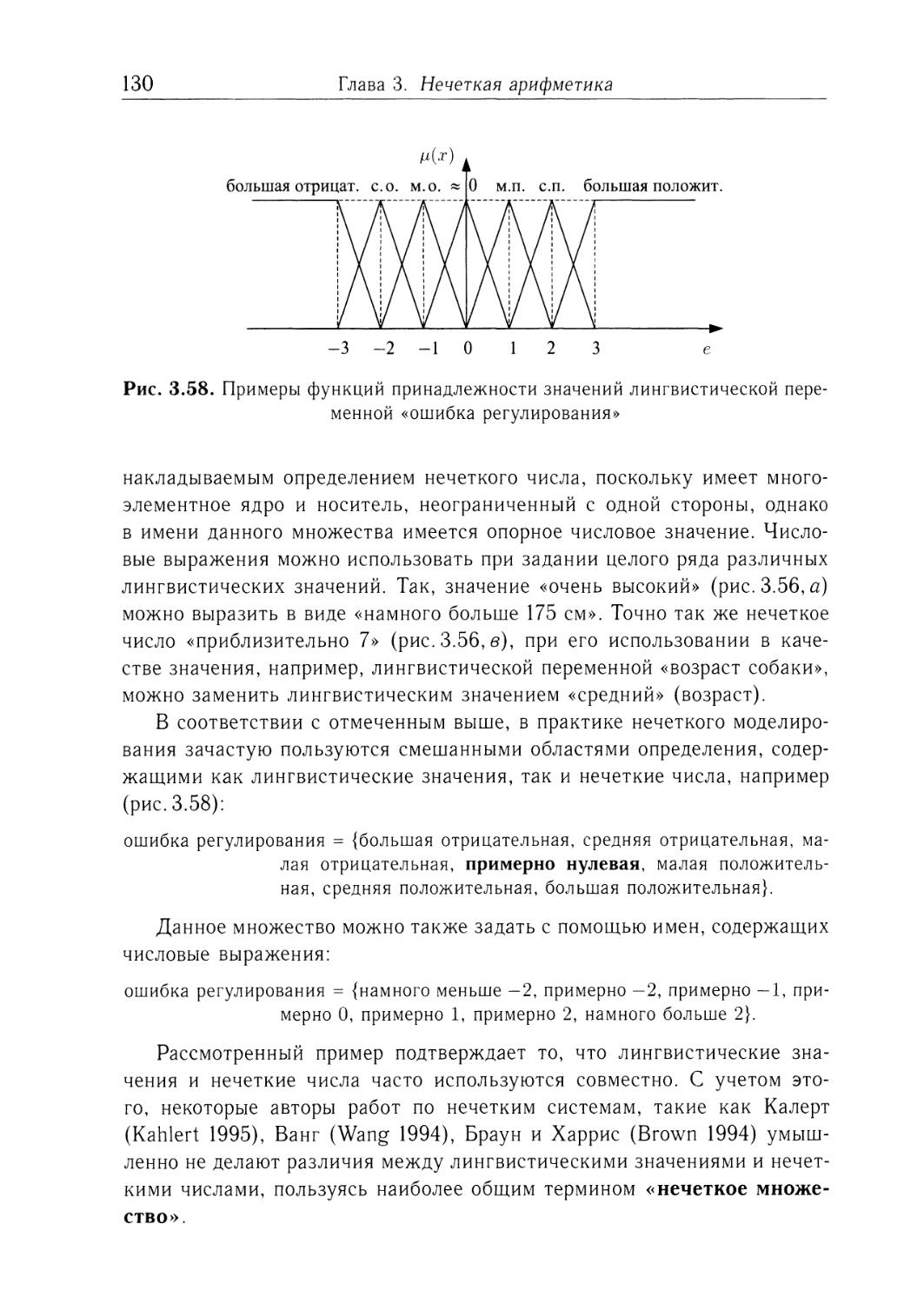
Нечеткое моделирование
и управление
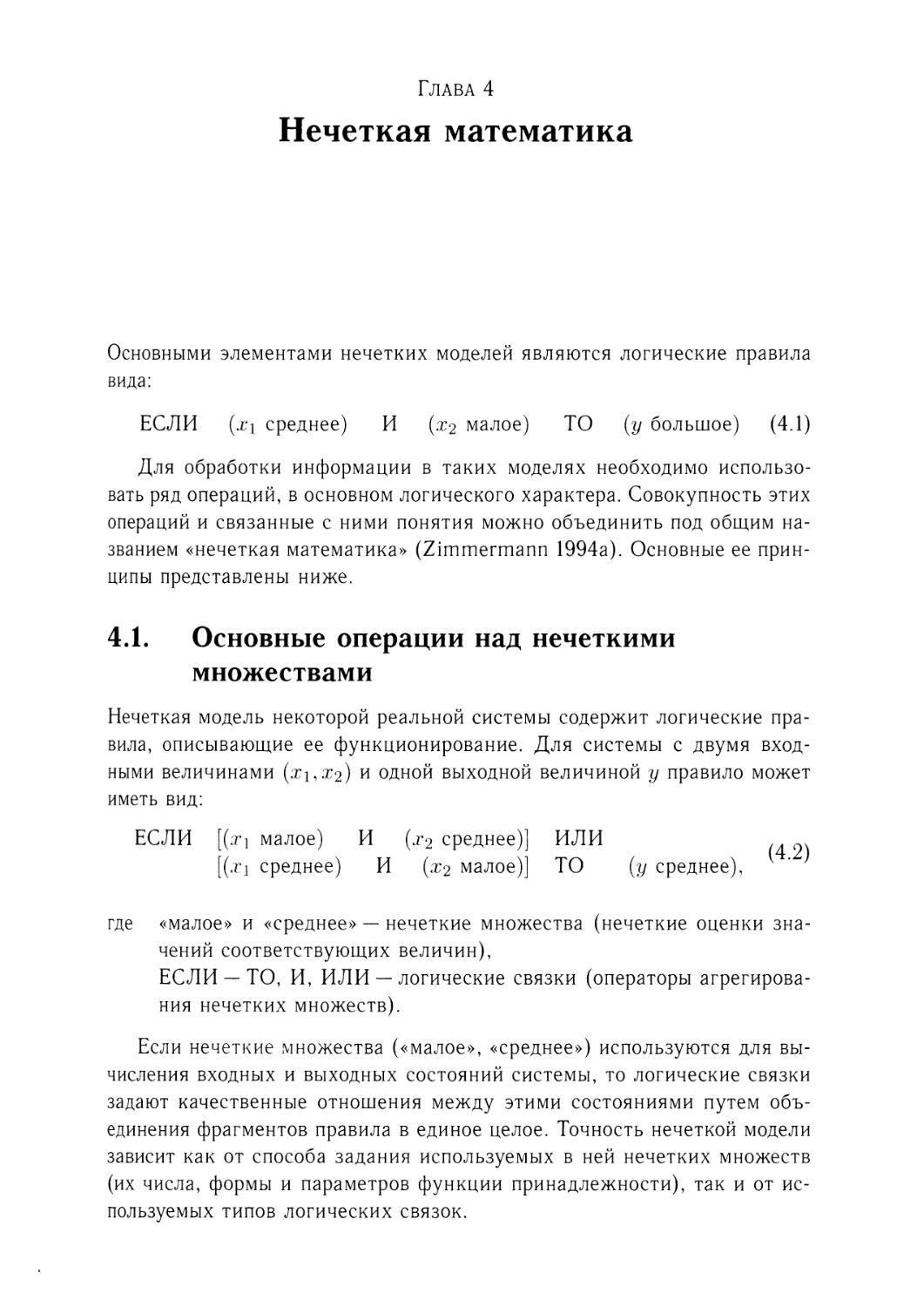
Andrzej Piegat
Fuzzy Modeling
and Control
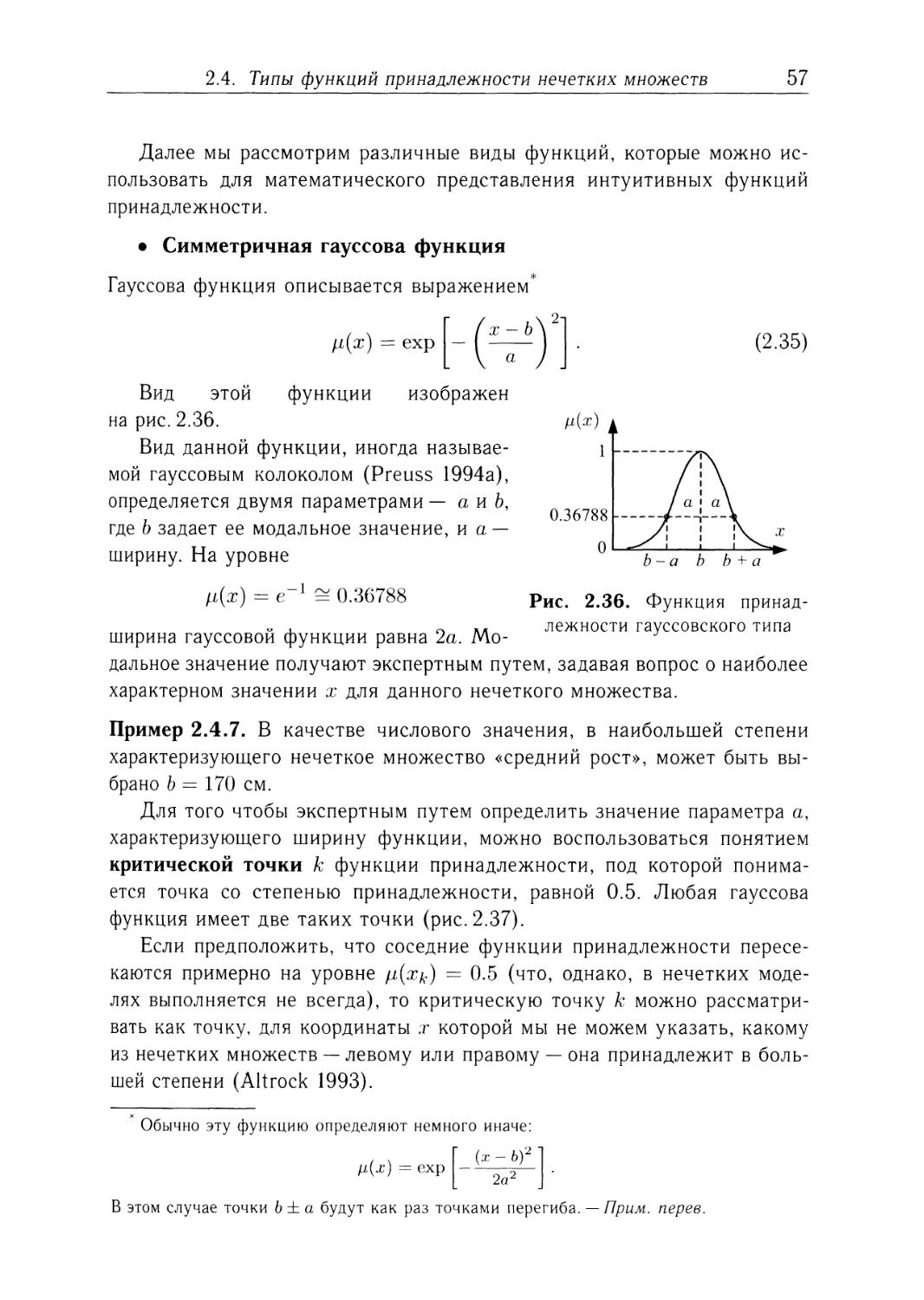
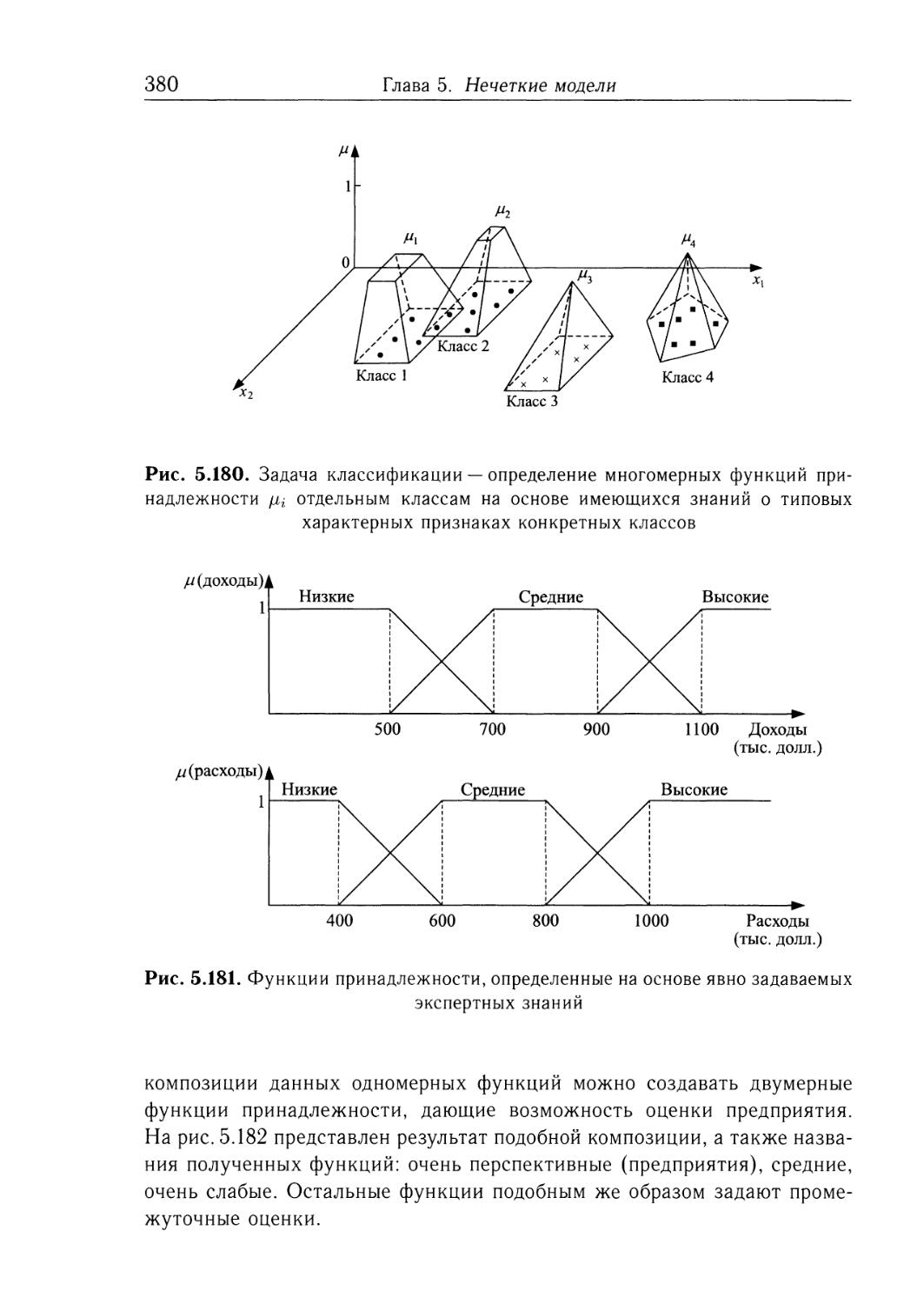
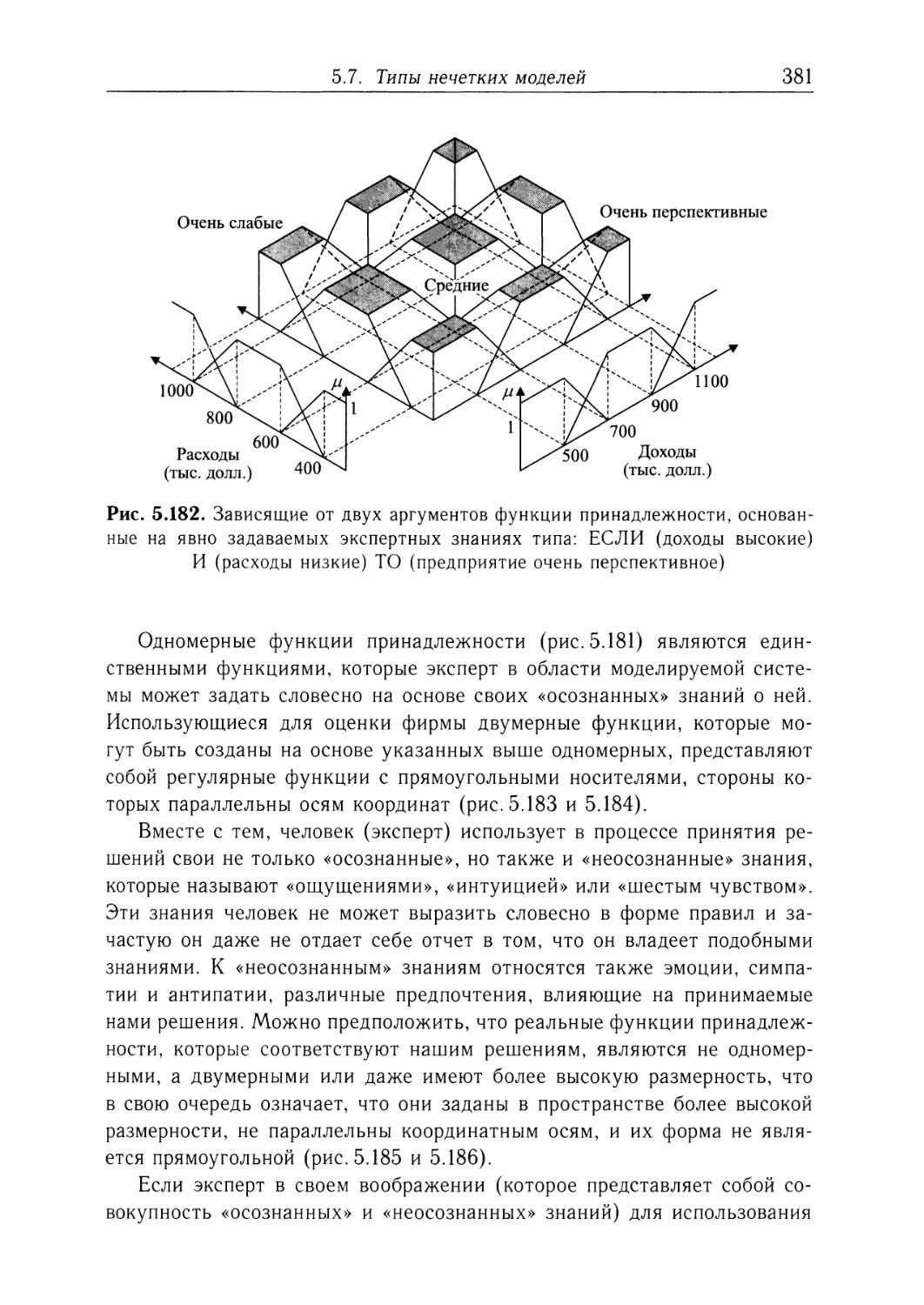
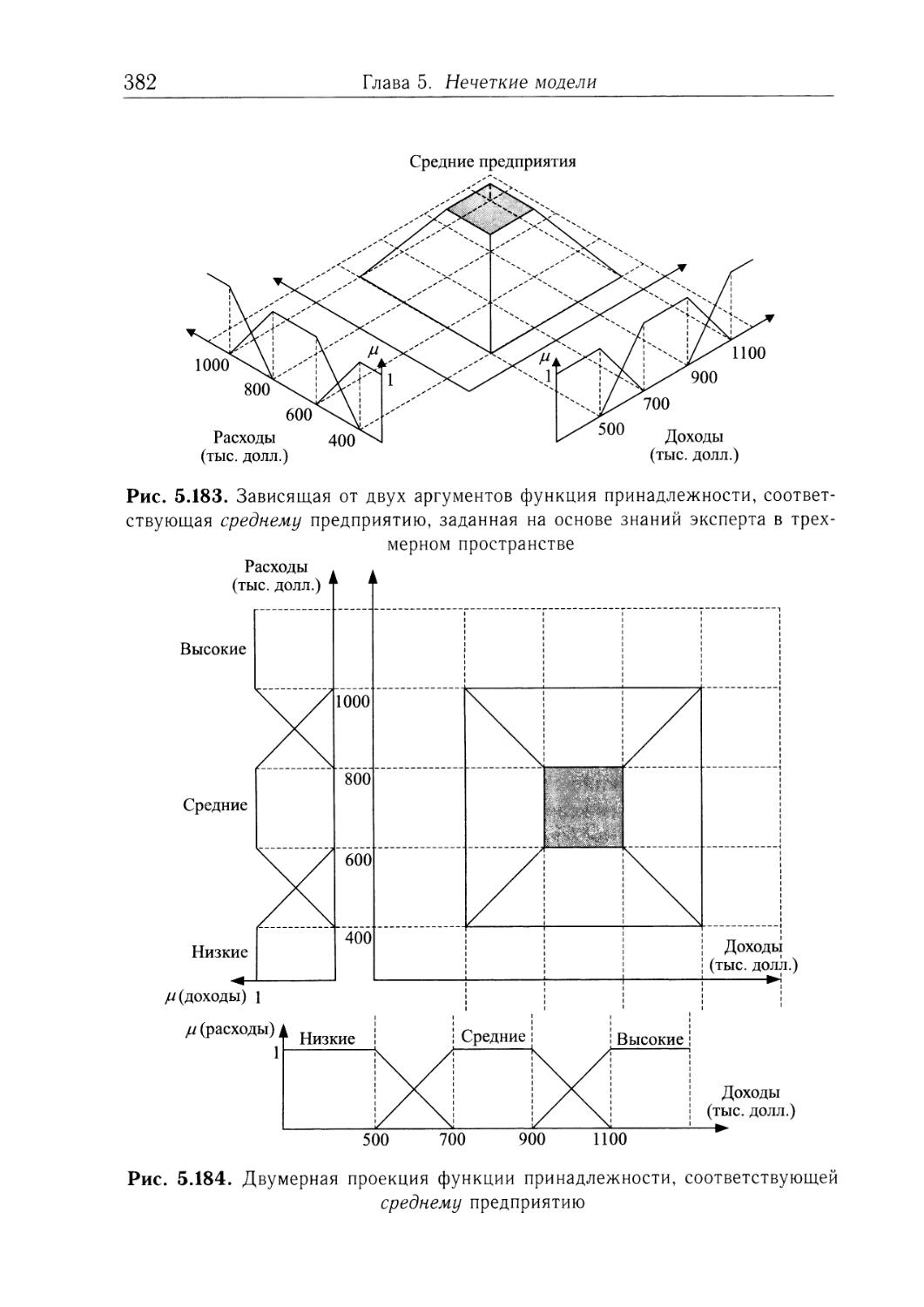
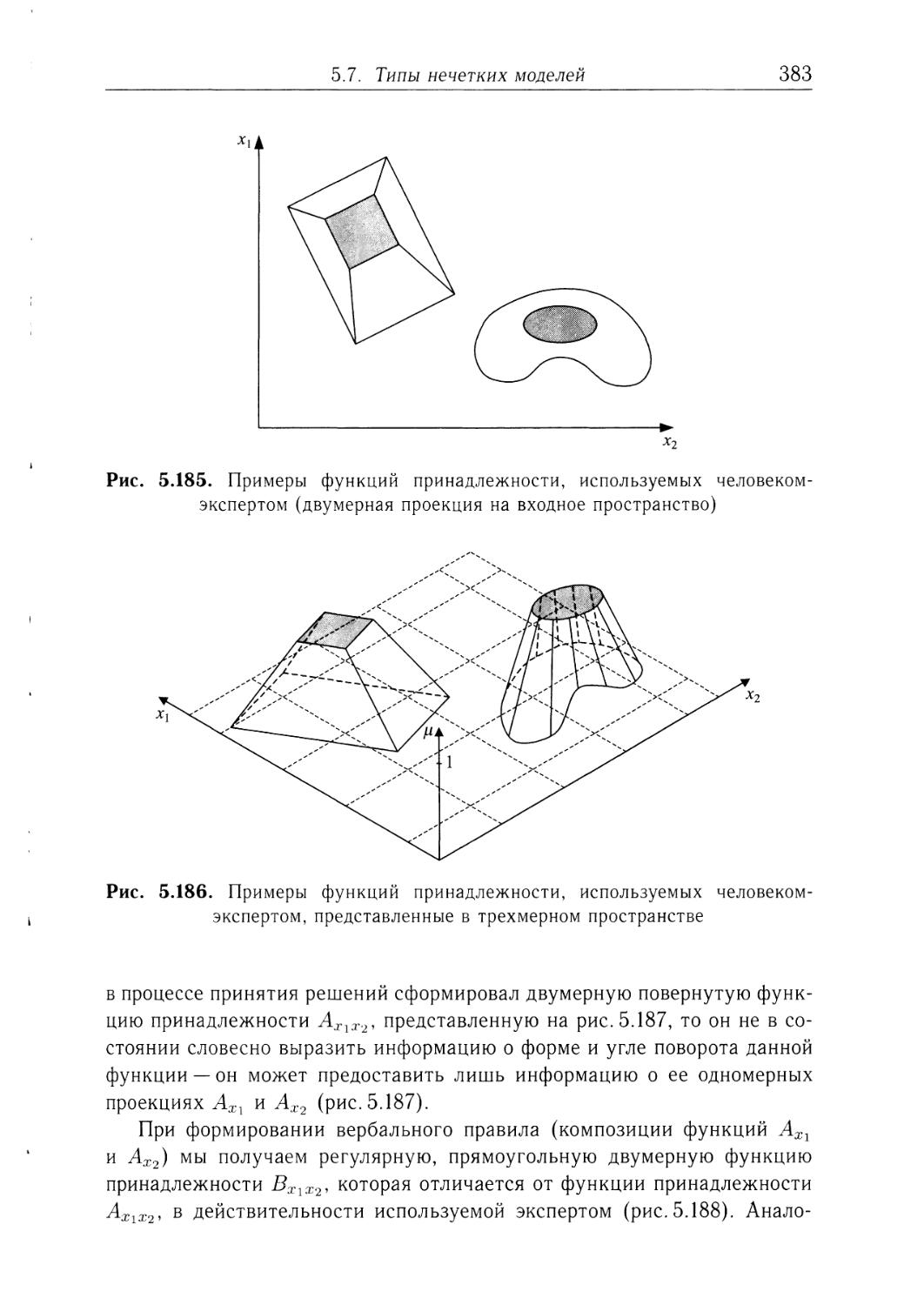
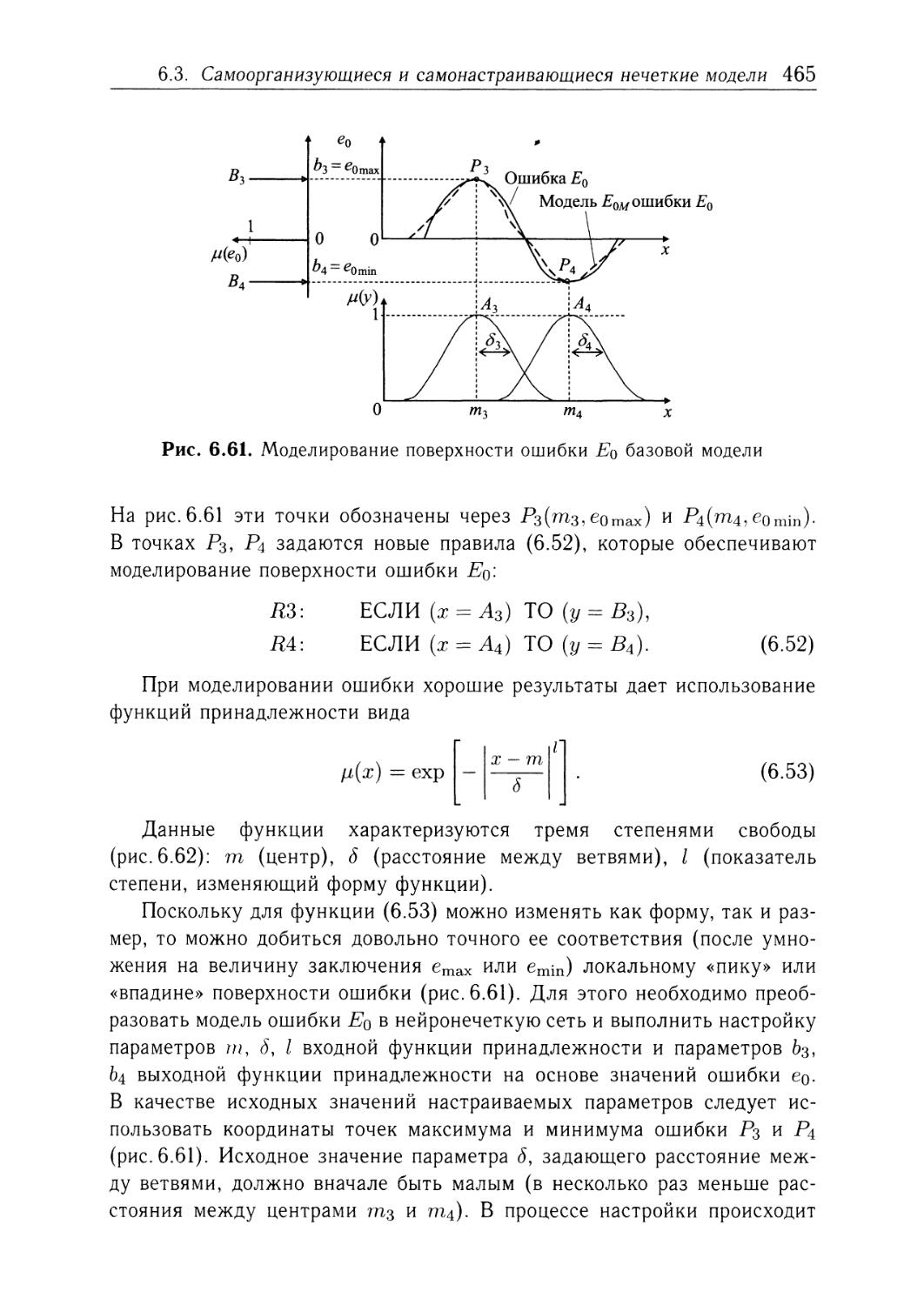
With 680 Figures
and 96 Tables
Physica-Verlag
A Springer-Verlag Company
АДАПТИВНЫЕ И ИНТЕЛЛЕКТУАЛЬНЫЕ СИСТЕМЫ
А. Пегат
Нечеткое моделирование
и управление
2-е издание
Перевод с английского
А. Г. Подвесовского, Ю. В. Тюменцева
под редакцией Ю. В. Тюменцева
Москва
БИНОМ. Лаборатория знаний
УДК 517.11+519.92
ББК 22.18
П23
Серия основана в 2005 г.
Пегат А.
П23 Нечеткое моделирование и управление / А. Пегат ; пер.
с англ.-2-е изд. — М. : БИНОМ. Лаборатория знаний, 2013.—
798 с. : ил. — (Адаптивные и интеллектуальные системы).
ISBN 978-5-9963-1495-9
Дается развернутое введение в проблемы нечеткого и нейронечеткого
моделирования применительно к задаче управления системами. Материал
основан на новейших результатах в данной области и иллюстрируется
многочисленными примерами.
Для специалистов в области нечеткого и нейронечеткого моделиро-
вания и управления, а также студентов и аспирантов соответствующих
специальностей.
УДК 517.11+519.92
ББК 22.18
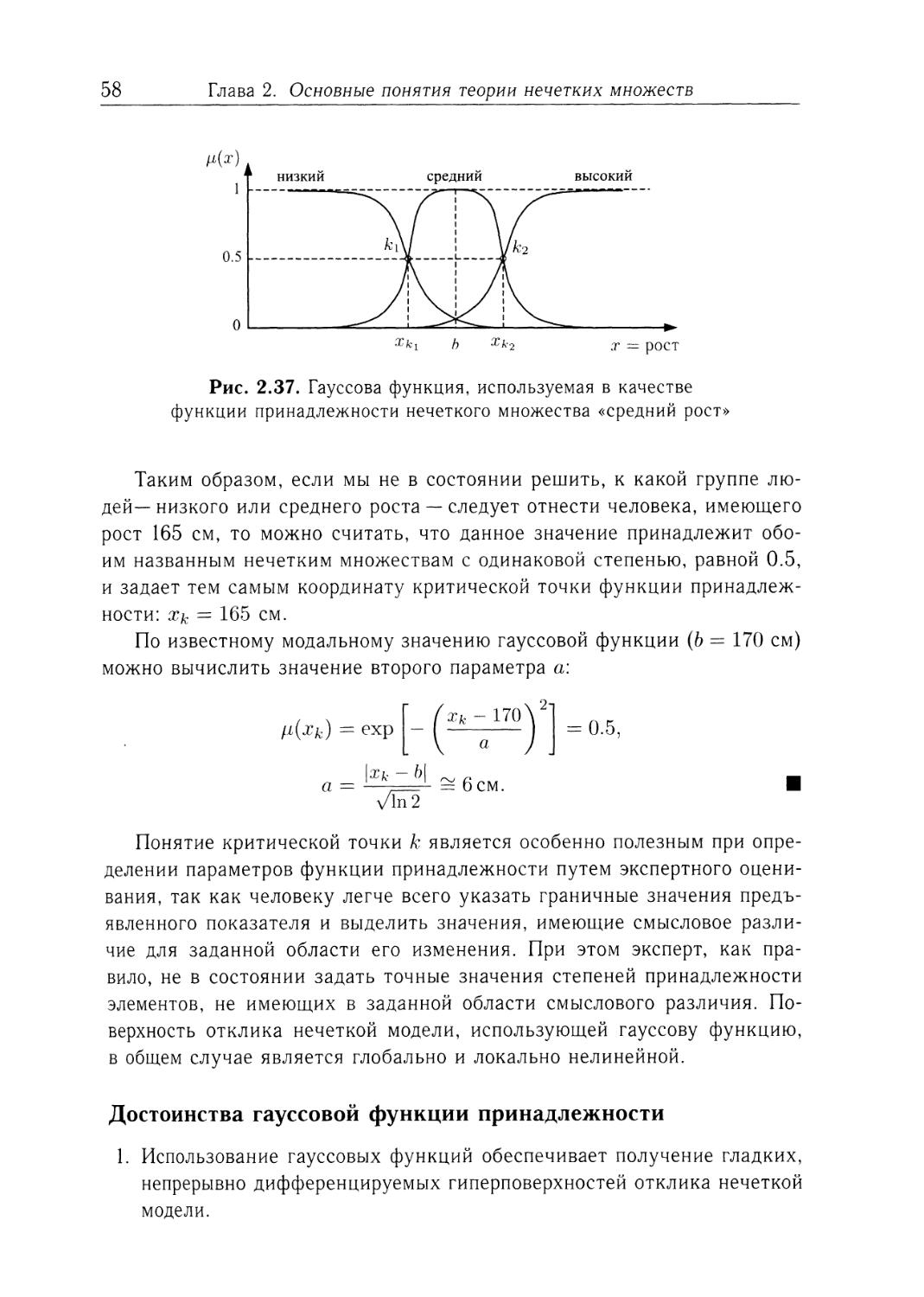
Учебное издание
Серия: «Адаптивные и интеллектуальные системы»
Пегат Анджей
НЕЧЕТКОЕ МОДЕЛИРОВАНИЕ И УПРАВЛЕНИЕ
Ведущий редактор М. С. Стригунова
Художник Н. А. Лозинская
Художественный редактор Н. А. Новак
Технический редактор Е. В. Денюкова
Оригинал-макет подготовлен М. Ю. Копаницкой в пакете ETpX2g
Подписано в печать 26.10.12. Формат 70x 100/16.
Уел. печ. л. 65,00. Тираж 1000 экз. Заказ 8324
Издательство «БИНОМ. Лаборатория знаний»
125167, Москва, проезд Аэропорта, д. 3
Телефон: (499) 157-5272, e-mail: binom@Lbz.ru, http://www.Lbz.ru
При участии ООО Агентство печати «Столица»
тел.: (495) 331-14-38; e-mail: apstolica@bk.ru
Oiпечатано в ОАО «Первая Образцовая типография»,
филиал «УЛЬЯНОВСКИЙ ДОМ ПЕЧАТИ». 432980,1. Ульяновск, ул. Гончарова, 14
ISBN 978-5-9963-1495-9
Translation from the English language edition:
Fuzzy Modeling and Control by Andrzej Piegat
Copyright © Physica-Verlag Heidelberg 2001
All Rights Reserved
© БИНОМ. Лаборатория знаний, 2013
Предисловие редактора перевода
В последние два десятилетия резко возрос интерес к различным аспектам
проблемы интеллектуального управления. Одно из основных направле-
ний, связанных с решением этой проблемы, состоит в использовании ап-
парата нечетких систем: нечетких множеств, нечеткой логики, нечеткого
моделирования и т. п. Применение этого аппарата приводит к построе-
нию нечетких систем управления различных классов, позволяющих ре-
шать задачи управления в ситуациях, когда традиционные методы неэф-
фективны или даже вообще неприменимы из-за отсутствия достаточно
точного знания об объекте управления.
Литература по нечетким системам, вышедшая с 1965 г., даты публика-
ции первой статьи Л. Заде по этой тематике, огромна. Только книг насчи-
тывается несколько сотен. Например, с 1993 г. издательством «Шприн-
гер» выпускается серия «Исследования по нечетким системам и мягким
вычислениям» (Studies in Fuzziness and Soft Computing), редактором ко-
торой является Януш Кацпшик (Janusz Kacprzyk). В этой серии, одним
из томов которой является и книга Анджея Пегата «Нечеткое модели-
рование и управление», по состоянию на середину 2008 г. издано более
230 томов.
На русском языке к числу первых серьезных публикаций по нечетким
системам относится перевод двух больших статей Лотфи Заде [6] и [7]
(вторая из них в соавторстве с Ричардом Веллманом), и книги [8], также
написанной Л. Заде. Ряд книг, в частности, [1] —[22], [27], [28] был издан
в дальнейшем.
Эффективность применения методов нечеткого моделирования
и управления существенно повышается, если их использовать совмест-
но и во взаимодействии с методами, основанными на искусственных
нейронных сетях (см., например, [23] —[31]) и генетических алгоритмах
(см. [28], [32], [33]).
Именно этот круг вопросов и рассматривается в книге «Нечеткое мо-
делирование и управление». Ее автор, Анджей Пегат, профессор Щецин-
ского технического университета (Польша) — видный специалист в обла-
сти мягких вычислений и теории управления.
6
Предисловие редактора перевода
В книге дается расширенное введение в теорию нечетких множеств,
затем обстоятельно рассматриваются вопросы нечеткого моделирования
систем. На этой основе излагаются проблемы построения нечетких си-
стем управления динамическими объектами. Большое внимание уделено
гибридным методам моделирования и управления, в которых сочетается
применение нечетких систем, искусственных нейронных сетей и гене-
тических алгоритмов. Одна из интересных и нетипичных особенностей
книги состоит в том, что методы мягких вычислений излагаются и трак-
туются с позиций специалиста по системам управления.
Книга будет полезна научным работникам, инженерам, аспирантам,
студентам старших курсов, интересующимся математическим моделиро-
ванием, мягкими вычислениями, системами управления, а также приме-
нением этого аппарата к решению задач в разнообразных прикладных
областях.
Работа по переводу книги распределилась следующим образом: главы
с 1 по 6 — А. Г. Подвесовский, вступление, предисловие, главы 7 и 8,
предметный указатель — Ю. В. Тюменцев.
Список литературы
[1] Аверкин А. Н., Батыршин И. 3., Блишун А. Ф., Силов В. Б., Тарасов В. Б.
Нечеткие множества в моделях управления и искусственного интеллекта /
Под ред. Д. А. Поспелова. — М.: Наука, 1986. — 312 с. — (Серия «Проблемы
искусственного интеллекта»)
[2] Алиев Р.А., Церковный А.Э., Мамедова Г. А. Управление производством
при нечеткой исходной информации / Ред.: В. Н. Вагин, В. И. Петухова. —
М.: Энергоатомиздат, 1991. —240 с.
[3] Батыршин И.З., Недосекин А. О., Стецко А. А., Тарасов В. Б., Язенин
А. В., Ярушкина Н.Г. Нечеткие гибридные системы: Теория и практика /
Под ред. Н. Г. Ярушкиной. — М.: Физматлит, 2007. — 208 с.
[4] Борисов А.Н., Алексеев А. В., Меркурьева Г. В., Слядзъ Н.Н., Глушков
В. И. Обработка нечеткой информации в системах принятия решений,—
М.: Радио и связь, 1989. — 304 с.
[5] Дюбуа Д., Прад А. Теория возможностей: Приложения к представлению
знаний в информатике: Пер. с франц. В. Б. Тарасова под ред. С. А. Орлов-
ского. — М.: Радио и связь, 1990. —288 с.
[6] Заде Л.. Основы нового подхода к анализу сложных систем и процес-
сов принятия решений // В со.: Математика сегодня: Пер. с англ. —М.:
Знание, 1974. — С. 5-21. — (Новое в жизни, науке, технике. Серия «Мате-
матика, кибернетика». Вып.7, 1974)
Предисловие редактора перевода
7
[7] Заде Л.. Принятие решений в расплывчатых условиях //В сб.: Вопросы
анализа и процедуры принятия решений / Под ред. И. Ф. Шахнова, с пре-
дисл. Г. С. Поспелова. — М.: Мир, 1976. — С. 172-215.
[8] Заде Л. Понятие лингвистической переменной и его применение к приня-
тию приближенных решений: Пер. с англ. Н. И. Ринго под ред. И. И. Мо-
исеева и С. А. Орловского. — М.: Мир, 1976. — 165 с. — (Серия «Новое
в зарубежной науке: Математика», вып.З / Ред. серии А. Н. Колмогоров
и С. П. Новиков)
[9] Классификация и кластер / Под ред. Дж. Вэн Райзина: Пер. с англ.
П. П. Кольцова под ред. Ю. И. Журавлева. — М.: Мир, 1980. — 389 с.
[10] Кофман А. Введение в теорию нечетких множеств. С предисл. Л. А. Заде'.
Пер. с франц. В. Б. Кузьмина под ред. С. И. Травкина. С предисл. М. А. Ай-
зермана. — М.: Радио и связь, 1982.— 432 с.
[11] Кузьмин В. Б. Построение групповых решений в пространствах четких
и нечетких бинарных отношений. — М.: Наука, 1982. — 168 с. — (Серия
«Теория и методы системного анализа»)
[12] Лю Б. Теория и практика неопределенного программирования: Пер. с англ.
Ю.В. Тюменцева и Ю. Т. Каганова под ред. Ю.В. Тюменцева. — М.: БИ-
НОМ. Лаборатория знаний, 2005. — 416 с. — (Серия «Адаптивные и интел-
лектуальные системы»)
[13] Малышев Н.Г., Бернштейн Л. С., Боженюк А. В. Нечеткие модели для
экспертных систем в САПР. — М.: Энергоатомиздат, 1991. — 136 с.
[14] Мелихов А.Н., Бернштейн Л. С., Коровин С. Я. Ситуационные советую-
щие системы с нечеткой логикой. — М.: Наука, 1990. — 272 с.
[15] Нечеткие множества и теория возможностей: Последние достижения /
Под ред. Р. Р. Ягера\ Пер. с англ. В. Б. Кузьмина под ред. С. И. Травки-
на. — М.: Радио и связь, 1986. — 408 с.
[16] Новак В., Перфильева И., Мочкорж И. Математические принципы нечет-
кой логики: Пер. с англ, под ред. А. Н. Аверкина. — М.: Физматлит,
2006.-352 с.
[17] Орлов А. И. Задачи оптимизации и нечеткие переменные. — М.: Знание,
1980. — 64 с. (Новое в жизни, науке, технике. Серия «Математика, кибер-
нетика». Вып.8, 1980)
[18] Орловский С. А. Проблемы принятия решений при нечеткой исходной ин-
формации. — М.: Наука, 1981. — 208 с. — (Серия «Оптимизация и исследо-
вание операций»)
[19] Прикладные нечеткие системы / Под ред. Т. Тэрано, К. Асаи и М. Сугэно'.
Пер. с япон. Ю. Н. Чернышова. — М.: Мир, 1993. — 368 с.
[20] Пытьев Ю.П. Возможность: Элементы теории и применения. — М.: Эди-
ториал УРСС, 2000. — 192 с.
[21] Пытьев Ю. П. Возможность как альтернатива вероятности: Математиче-
ские и эмпирические основы, применение. — М.: Физматлит, 2007. — 464 с.
8
Предисловие редактора перевода
[22] Шапиро Д. И. Принятие решений в системах организациооного управ-
ления: Использование расплывчатых категорий. — М.: Энергоатомиздат,
1983.- 184 с.
[23] Головко В. А. Нейронные сети: Обучение, организация и применение /
Под общ. ред. А. И. Галушкина. — М.: ИПРЖР, 2001, —256 с. — (Серия
«Нейрокомпьютеры и их применения». Кн,4)
[24] Горбань А.Н., Дунин-Барковский В. Л., Кирдин А.Н. и др. Нейроинфор-
матика / Отв. ред. Е. А. Новиков. — Новосибирск: Наука, 1998. — 296 с.
[25] Горбанъ А. Н., Россиев Д. А. Нейронные сети на персональном компьютере
/ Отв. ред. В. И. Быков. — Новосибирск: Наука, 1996. — 276 с.
[26] Ежов А. А., Шумский С. А. Нейрокомпьютинг и его приложения в эконо-
мике и бизнесе. — М.: Изд-во МИФИ, 1998. — 224 с.
[27] Круглов В. В., Дли М. М., Годунов Р. Ю. Нечеткая логика и искусственные
нейронные сети. — М.: Физматлит, 2001. — 224 с.
[28] Рутковская Д., Пилинъский М., Рутковский Л. Нейронные сети, генети-
ческие алгоритмы и нечеткие системы: Пер. с польск. И.Д. Рудинского. —
М.: Горячая линия — Телеком, 2004. — 452 с.
[29] Сигеру О., Марзуки К., Рубия Ю. Нейроуправление и его приложения:
Пер. с англ. Н. В. Батина под общ. ред. А. И. Галушкина и В. А. Птички-
на. — М..: ИПРЖР, 2000. — 272 с. — (Серия «Нейрокомпьютеры и их при-
менения». Кн. 2)
[30] Терехов В. А., Ефимов Д.В., Тюкин И.Ю. Нейросетевые системы управ-
ления.—М.: ИПРЖР, 2002. —480 с. — (Серия «Нейрокомпьютеры и их
применения». Кн. 8)
[31] Хайкин С. Нейронные сети: Полный курс: Пер. с англ. Н. Н. Куссулъ
и А. Ю. Шелестова под ред. Н. Н. Куссулъ. — М.: Вильямс, 2006. — 1104 с.
[32] Гладков Л. А., Курейчик В. В., Курейчик В.М. Генетические алгорит-
мы. Изд. 2-е, испр. и доп. / Под ред. В. М. Курейчика — М.: Физматлит,
2006.-320 с.
[33] Емельянов В. В., Курейчик В. М., Курейчик В. В. Теория и практика эволю-
ционного моделирования. — М.: Физматлит, 2003. — 432 с. — (Серия «Про-
блемы искусственного интеллекта»)
Вступление
Концепция нечетких множеств, введенная в середине 1960-х гг. проф.
Лотфи Заде из Калифорнийского университета в Беркли, вызвала неод-
нозначную реакцию в научном сообществе. С одной стороны, постоянно
росло число сторонников этой концепции, осознавших потенциальные
возможности нечетких множеств для решения разнообразных приклад-
ных задач. Но, с другой стороны, имелось и весьма значительное чис-
ло противников этого подхода — и достаточно часто из числа известных
ученых и специалистов — которые резко выступали против этого нарож-
давшегося класса средств моделирования. Одним из их аргументов было
отсутствие прикладных результатов.
Ситуация изменилась с середины 1980-х гг., когда начался так на-
зываемый «бум нечеткости». Первоначально он возник в Японии, затем
в Корее и Европе, в существенно меньшей степени — в США. Решаю-
щую роль в этом процессе сыграло появление на рынке разнообразных
устройств, основанных на использовании нечеткой логики, применявших-
ся для решения задач управления поездами метрополитена, подъемными
кранами, лифтами и т. д. Они были первыми успешными примерами при-
менения методов нечеткого управления, основы которого заложили такие
исследователи, как Мамдани, Сугено, Такаги и др.
С тех пор задачи нечеткого управления стали играть роль эталонных
тестовых проблем для нечетких множеств, а многими эти задачи и во-
обще воспринимаются как синоним приложений нечетких множеств. По
данной теме опубликовано множество прекрасных книг. Многие из них,
однако, были написаны авторами, не принадлежащими к сообществу спе-
циалистов по системам управления. Одним из следствий такого положе-
ния дел было то, что в этих книгах слишком большой, на мой взгляд,
акцент делается на логические, реляционные и тому подобные аспекты
нечеткого управления, и при этом слишком мало внимания уделяется
вопросам, связанным с управленческой спецификой.
Одним из таких вопросов является моделирование как основа управ-
ления. На самом деле, значимость моделирования, скорее всего, суще-
ственно выше, чем значимость собственно управления, поскольку об-
ласть применения моделирования несравненно шире как общего средства
и метода для решения проблем практически во всех областях. К сожа-
лению, проблемы моделирования не нашли должного освещения в лите-
10
Вступление
ратуре по нечетким системам, хотя исследования в области нечеткого
моделирования и ведутся достаточно широким фронтом.
Из всей имеющейся на данный момент литературы представляемая
книга, по всей видимости, дает наиболее полное освещение проблем
нечеткого моделирования и управления. Прежде всего, глубоко рассмот-
рена критически важная область нечеткого моделирования, с попыткой
вникнуть во все ее аспекты. В книге обсуждаются все наиболее извест-
ные методы, в частности, моделирование на основе правил, логические
модели, а также гибридные модели, к примеру, нейронечеткие. Подходы
к нечеткому моделированию излагаются автором просто и ясно, но в то
же время достаточно строго, с применением соответствующего формаль-
ного аппарата, что привлечет, несомненно, внимание как тех читателей,
которые интересуются теоретическими аспектами рассматриваемой обла-
сти, так и тех, для кого важнее ее практические применения.
Затем, после подробного изложения нечеткого моделирования, автор
переходит к рассмотрению проблем нечеткого управления. Начинает это
рассмотрение он с более традиционного подхода, который можно было бы
назвать управлением на основе использования только средств нечеткой
логики, без применения нечетких моделей. После этого, автор переходит
к рассмотрению современного подхода, потенциально намного более мно-
гообещающего, основанного на применении нечетких моделей объектов
управления и управляемых систем, а также более развитых схем управ-
ления, включая адаптивное управление и многоконтурное управление.
В завершение автор рассматривает вопросы, относящиеся к устойчи-
вости нечетких систем управления. И опять, трудно указать другие пуб-
ликации, сопоставимые с данной книгой по широте охвата материала.
По моему мнению, это выдающаяся книга, равной которой в суще-
ствующей литературе практически нет. Она дает всестороннее описание
нечеткого моделирования и управления, причем написана в стиле, при-
емлемом для специалистов по системам управления. Написание такой
книги требует не просто хорошего знания соответствующей области, но
глубокой эрудиции и исследовательской зрелости, чтобы отобрать из об-
ширнейшей литературы наиболее многообещающие методы и средства.
Профессор Пегат заслуживает благодарности и признательности все-
го сообщества специалистов и исследователей в области нечетких систем
за подготовку такой исключительной книги, которую должны прочитать
все интересующиеся современными подходами к нечеткому моделирова-
нию и управлению.
Варшава, Польша, декабрь 2000 г. Януш Кацншик
Моей семье
Предисловие
Традиционная математика обеспечивает работу с данными точного
характера, например:
• температура 39.7 °C,
• скорость 90 км/ч,
• коммерческий платеж 12317 долл.,
• высота морской волны 1.75 м.
Однако в окружающем нас мире мы очень часто встречаемся и с
неточной информацией, например:
• высокая температура,
• высокая скорость,
• небольшой коммерческий платеж,
• спокойное (штилевое) море,
• приятный продавец,
• значительный покупательский интерес,
• небольшое помутнение жидкости,
• высокое качество стали, и т. д.
Неточная информация используется людьми уже тысячи лет. Однако
до совсем недавнего времени ее никак нельзя было употреблять в рам-
ках методов, основанных на обычной математике, и она терялась. По
этой причине эффективность многих методов проектирования, управле-
ния, моделирования, прогнозирования и принятия решений была весьма
ограниченной, особенно в случаях, когда об исследуемой системе не бы-
ло никакой другой информации, кроме неточной. Кроме того, каждая
порция «точной» информации измеряется с определенной (часто значи-
тельной) погрешностью, так что на самом деле также является неточной.
Область математики, имеющая дело с неточной информацией, полу-
чила наименование теории нечетких множеств. Эта теория, во взаимо-
действии с обычной математикой, позволяет обрабатывать и использовать
информацию любого вида. Она открывает новые и очень интересные воз-
можности и перспективы для науки и техники.
12
Предисловие
Эта книга предоставляет читателю основную информацию, относящу-
юся к теории нечетких множеств, нечеткому моделированию и управле-
нию. Она основывается на публикациях в данной области, а также на
результатах исследований, проводившихся автором.
Хорошее понимание теории —это основное условие ее применения, а
также база для развития и совершенствования собственных идей и кон-
цепций. Чтобы упростить ее освоение, автор иллюстрирует представляе-
мые методы большим числом рисунков и примеров. Автор надеется, что
читатели извлекут для себя много пользы из информации, содержащейся
в данной книге.
Автор хотел бы выразить свою признательность следующим лицам:
• проректору по научной работе Щецинского технического университе-
та, профессору Валериану Арабчику (Walerian Arabczyk) за финан-
совую поддержку работ по подготовке книги,
• декану факультета вычислительной техники и информационных си-
стем Щецинского технического университета, профессору Ежи Сол-
деку (Jerzy Soldek) за финансовую поддержку работ по подготовке
книги,
• Фонду поддержки разработок Щецинского технического универси-
тета и в особенности его директору Кшиштофу Лещиньскому
(Krzysztof Leszczyriski) за финансовую поддержку работ по подго-
товке книги,
• д-ру Богдану Гживачу (Bogdan Grzywacz), Станиславе Левандов-
ской (Stanislawa Lewandowska) и Еве Лисек (Ewa Lisek) за перевод
книги на английский язык,
• Ричарду Старку (Richard Stark), Великобритания, за помощь в улуч-
шении английского языка данной книги,
• д-ру Марцину Плуциньскому (Marcin Plucinski) за выполнение ком-
пьютерного набора этой книги.
Щецин, декабрь 2000 г.
Анджей Пегатп
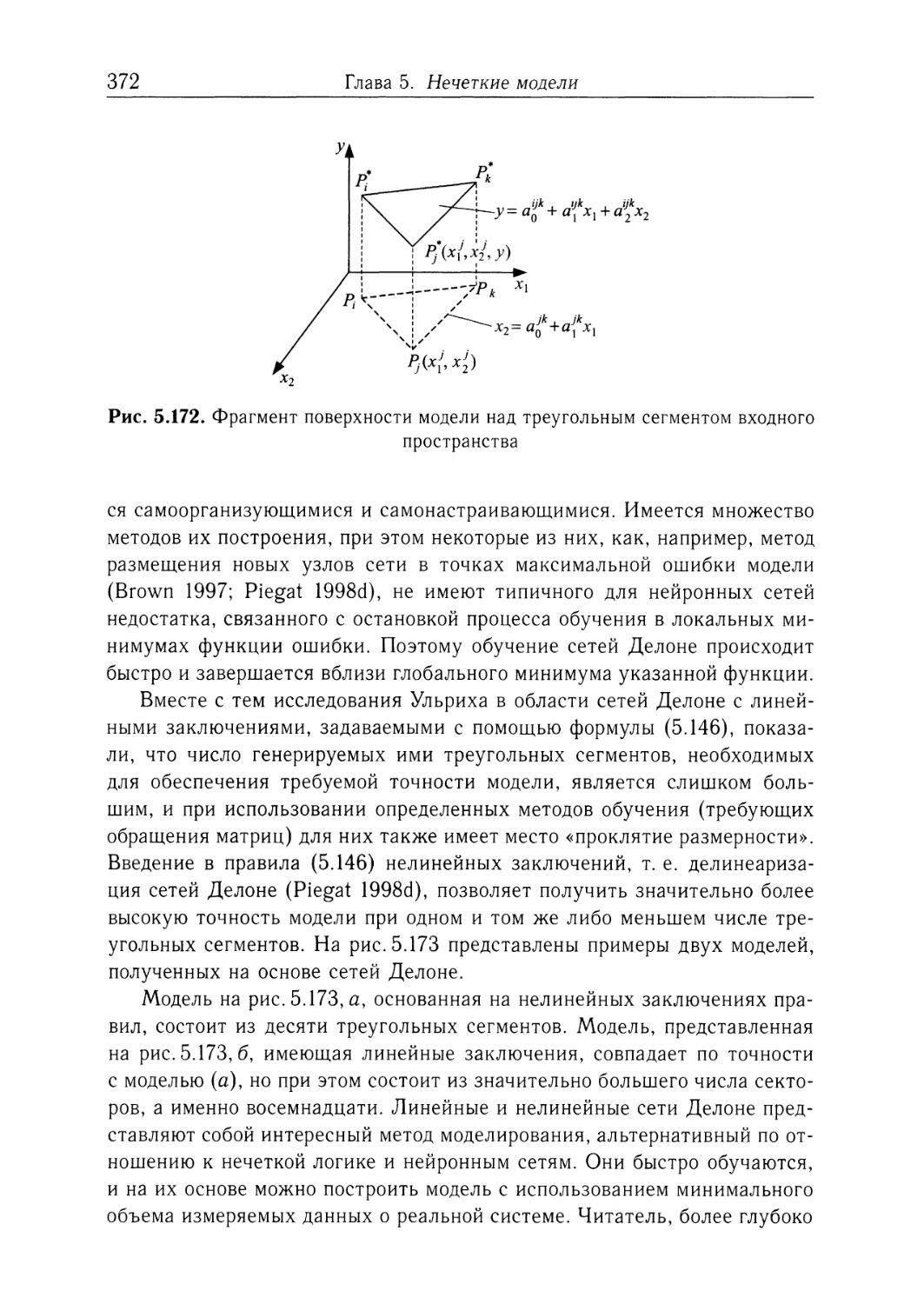
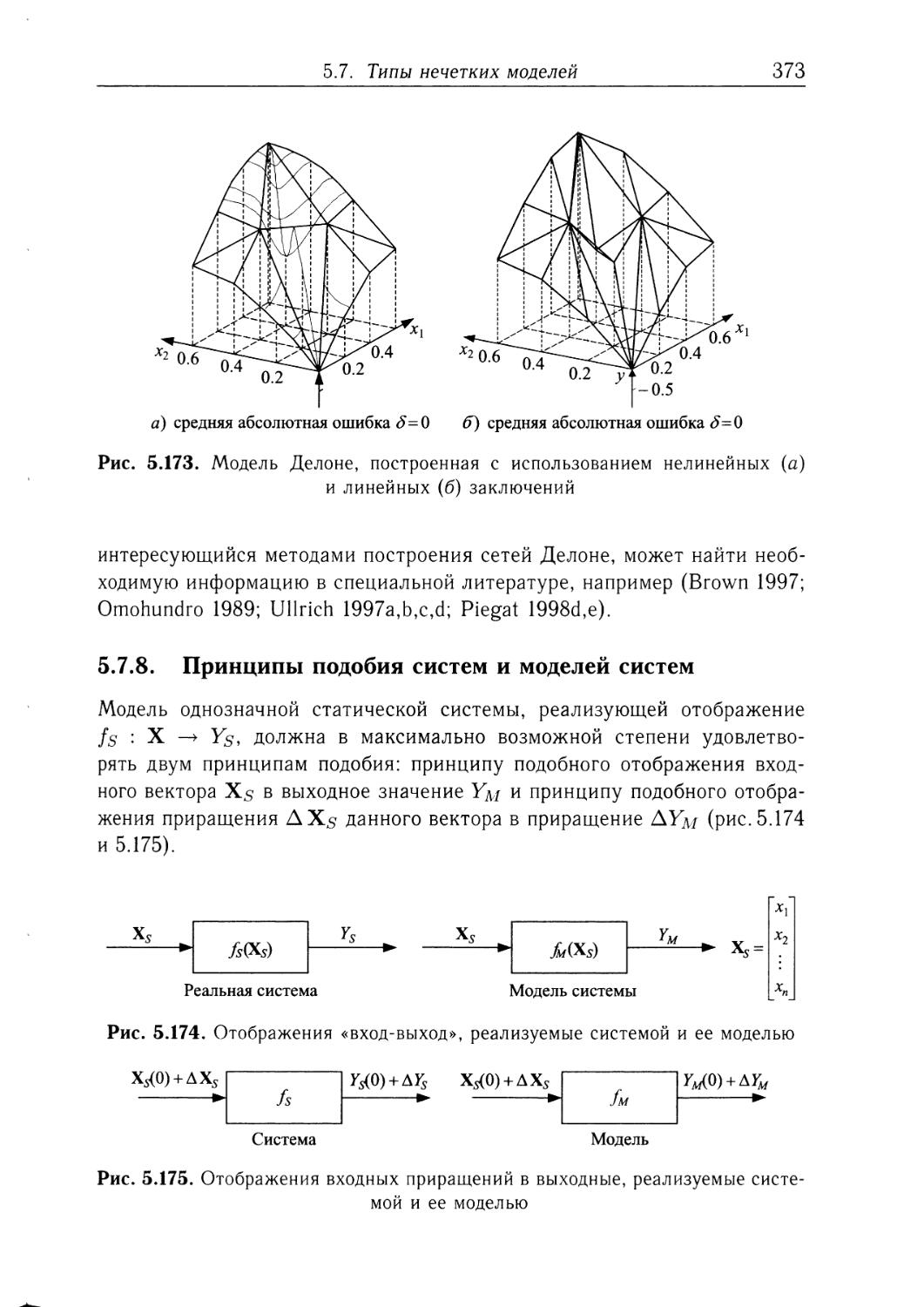
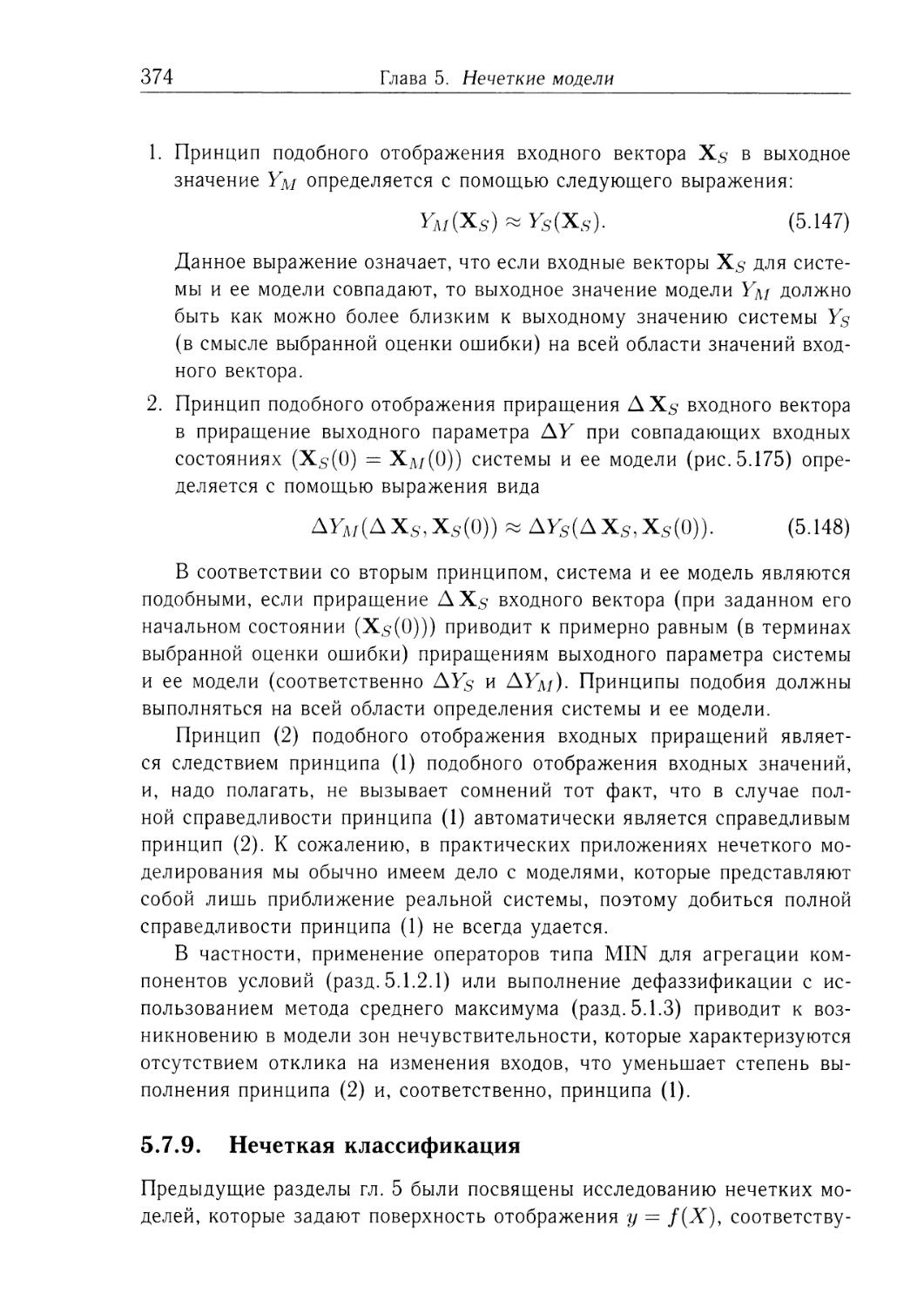
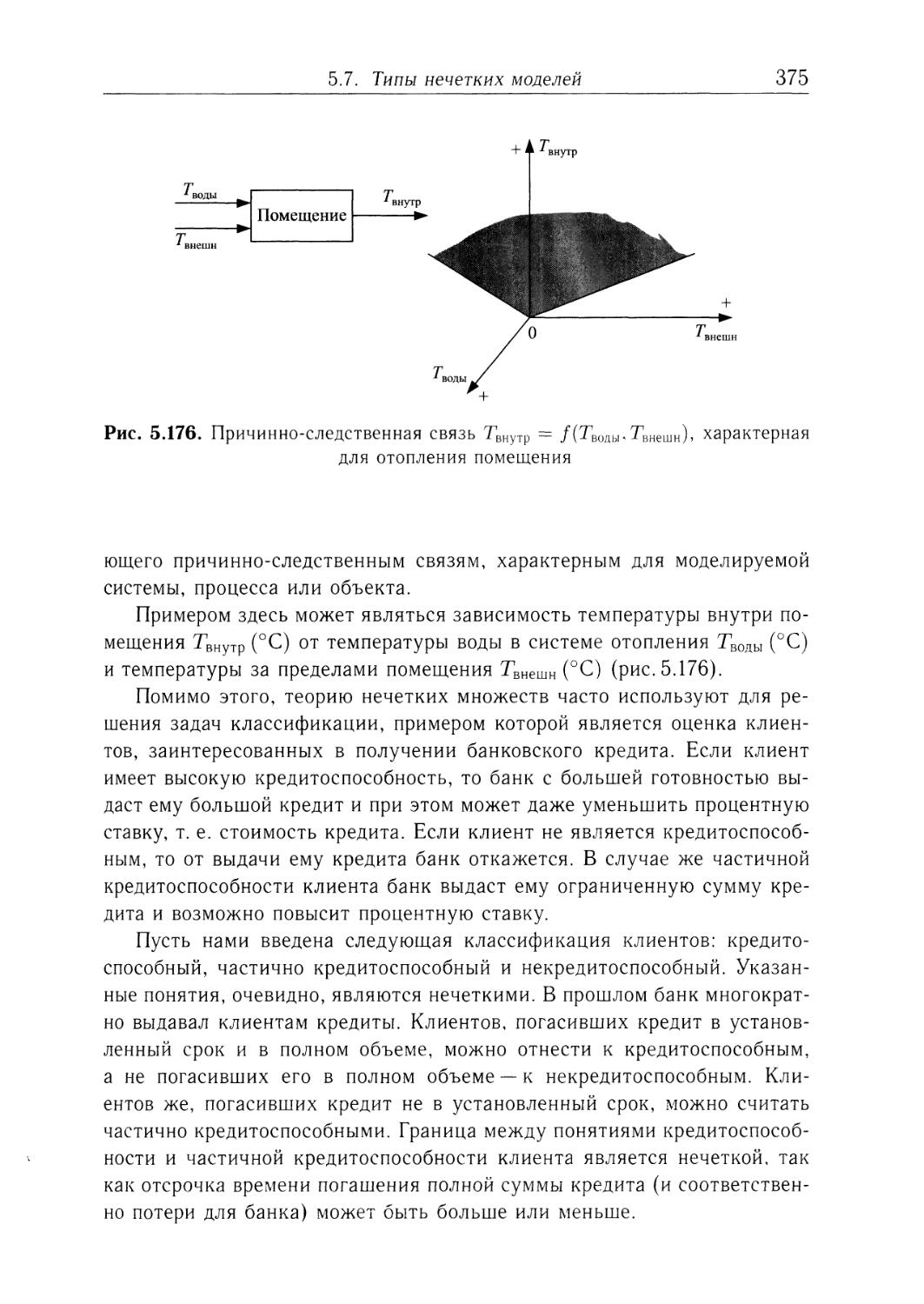
Глава 1
Введение
1.1. Сущность теории нечетких множеств
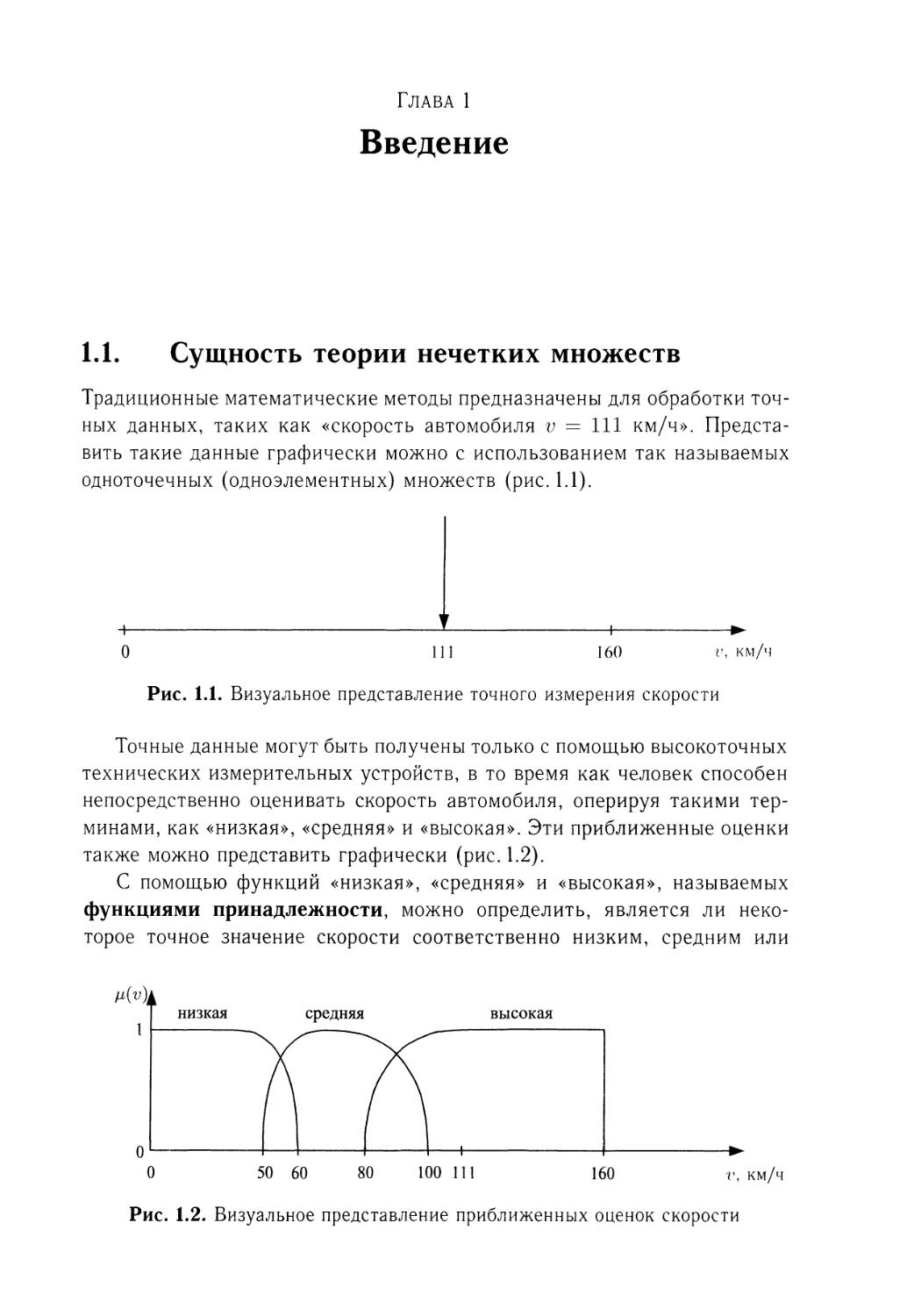
Традиционные математические методы предназначены для обработки точ-
ных данных, таких как «скорость автомобиля v = 111 км/ч». Предста-
вить такие данные графически можно с использованием так называемых
одноточечных (одноэлементных) множеств (рис. 1.1).
О 111 160 г, км/ч
Рис. 1.1. Визуальное представление точного измерения скорости
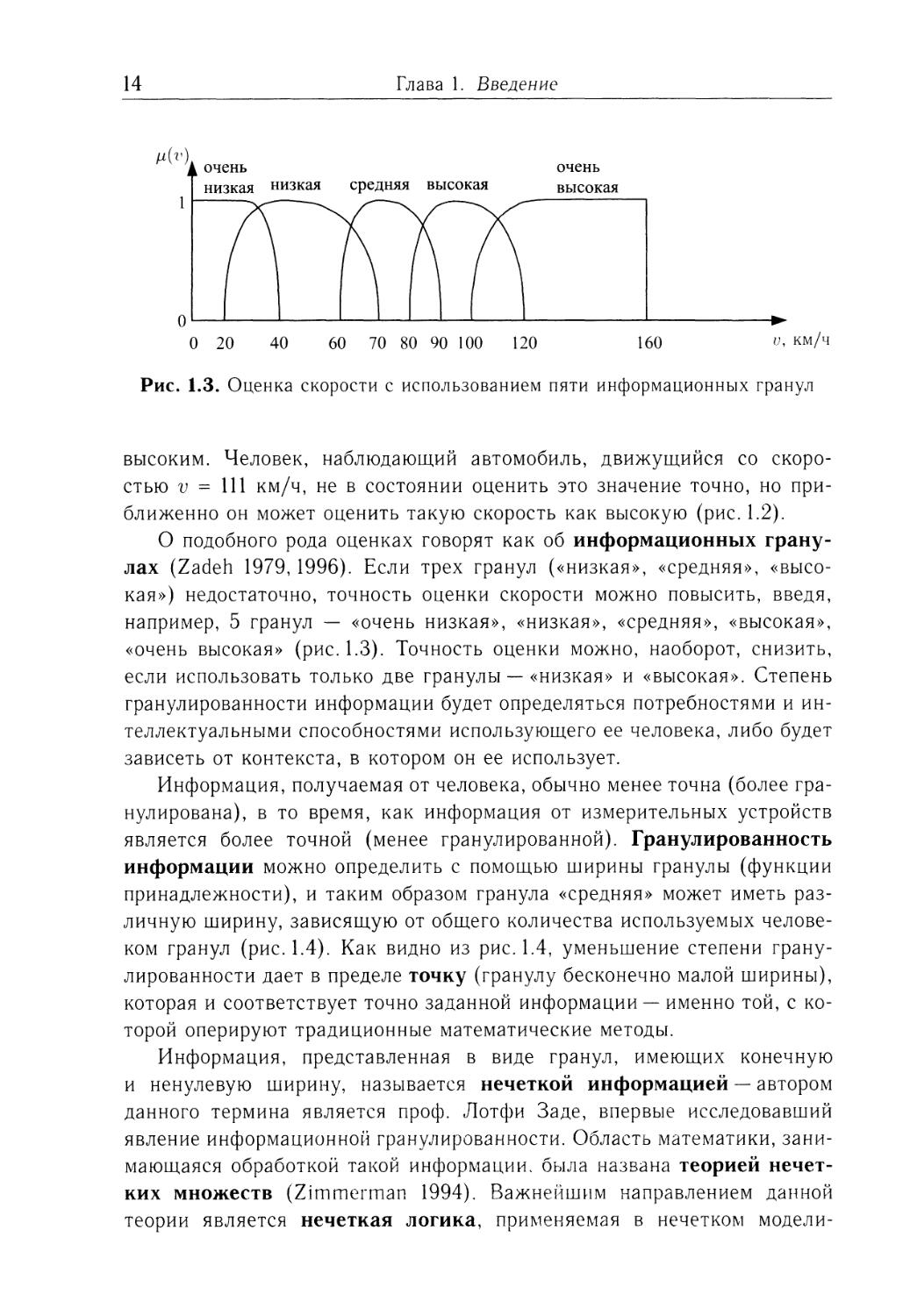
Точные данные могут быть получены только с помощью высокоточных
технических измерительных устройств, в то время как человек способен
непосредственно оценивать скорость автомобиля, оперируя такими тер-
минами, как «низкая», «средняя» и «высокая». Эти приближенные оценки
также можно представить графически (рис. 1.2).
С помощью функций «низкая», «средняя» и «высокая», называемых
функциями принадлежности, можно определить, является ли неко-
торое точное значение скорости соответственно низким, средним или
низкая
средняя
высокая
50 60 80 100 111
V, км/ч
Рис. 1.2. Визуальное представление приближенных оценок скорости
14
Глава 1. Введение
А очень очень
низкая низкая средняя высокая высокая
О 20 40 60 70 80 90 100 120 160 'Л км/ч
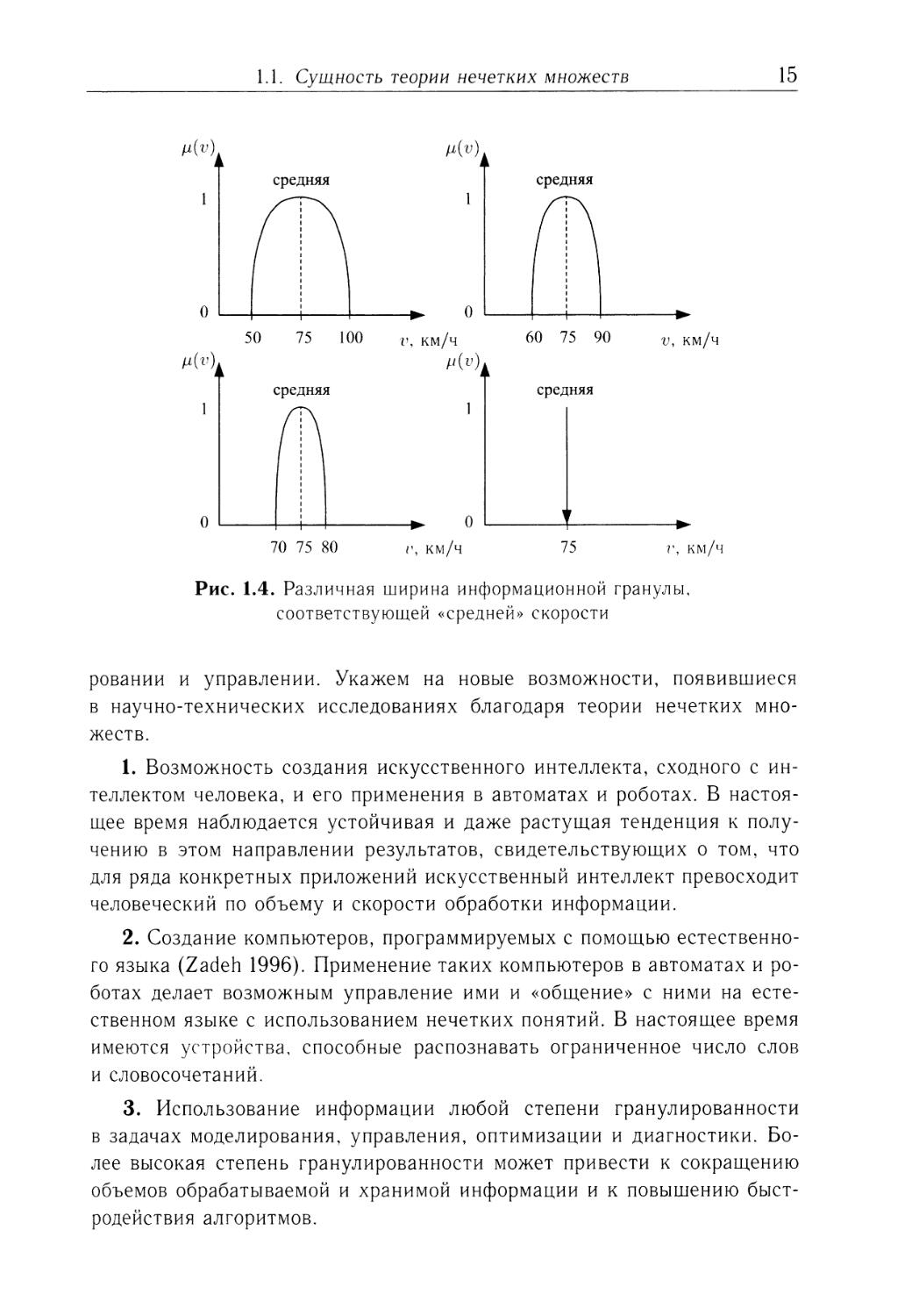
Рис. 1.3. Оценка скорости с использованием пяти информационных гранул
высоким. Человек, наблюдающий автомобиль, движущийся со скоро-
стью v = 111 км/ч, не в состоянии оценить это значение точно, но при-
ближенно он может оценить такую скорость как высокую (рис. 1.2).
О подобного рода оценках говорят как об информационных грану-
лах (Zadeh 1979,1996). Если трех гранул («низкая», «средняя», «высо-
кая») недостаточно, точность оценки скорости можно повысить, введя,
например, 5 гранул — «очень низкая», «низкая», «средняя», «высокая»,
«очень высокая» (рис. 1.3). Точность оценки можно, наоборот, снизить,
если использовать только две гранулы — «низкая» и «высокая». Степень
гранулированности информации будет определяться потребностями и ин-
теллектуальными способностями использующего ее человека, либо будет
зависеть от контекста, в котором он ее использует.
Информация, получаемая от человека, обычно менее точна (более гра-
нулирована), в то время, как информация от измерительных устройств
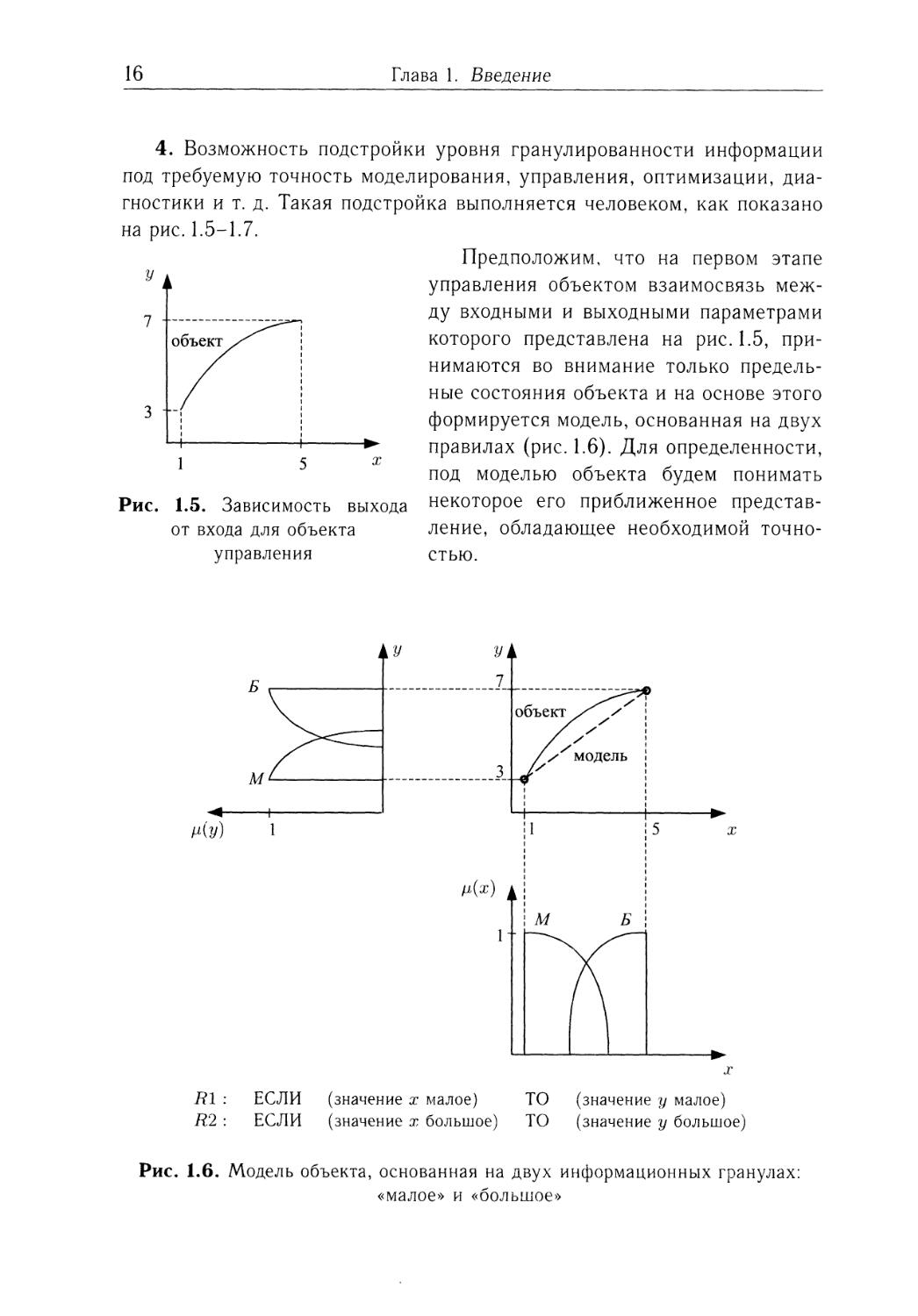
является более точной (менее гранулированной). Гранулированность
информации можно определить с помощью ширины гранулы (функции
принадлежности), и таким образом гранула «средняя» может иметь раз-
личную ширину, зависящую от общего количества используемых челове-
ком гранул (рис. 1.4). Как видно из рис. 1.4, уменьшение степени грану-
лированности дает в пределе точку (гранулу бесконечно малой ширины),
которая и соответствует точно заданной информации — именно той, с ко-
торой оперируют традиционные математические методы.
Информация, представленная в виде гранул, имеющих конечную
и ненулевую ширину, называется нечеткой информацией — автором
данного термина является проф. Лотфи Заде, впервые исследовавший
явление информационной гранулированности. Область математики, зани-
мающаяся обработкой такой информации, была названа теорией нечет-
ких множеств (Zimmerman 1994). Важнейшим направлением данной
теории является нечеткая логика, применяемая в нечетком модели-
1.1. Сущность теории нечетких множеств
15
70 75 80 г, км/ч
75 км/ч
Рис. 1.4. Различная ширина информационной гранулы,
соответствующей «средней» скорости
ровании и управлении. Укажем на новые возможности, появившиеся
в научно-технических исследованиях благодаря теории нечетких мно-
жеств.
1. Возможность создания искусственного интеллекта, сходного с ин-
теллектом человека, и его применения в автоматах и роботах. В настоя-
щее время наблюдается устойчивая и даже растущая тенденция к полу-
чению в этом направлении результатов, свидетельствующих о том, что
для ряда конкретных приложений искусственный интеллект превосходит
человеческий по объему и скорости обработки информации.
2. Создание компьютеров, программируемых с помощью естественно-
го языка (Zadeh 1996). Применение таких компьютеров в автоматах и ро-
ботах делает возможным управление ими и «общение» с ними на есте-
ственном языке с использованием нечетких понятий. В настоящее время
имеются устройства, способные распознавать ограниченное число слов
и словосочетаний.
3. Использование информации любой степени гранулированности
в задачах моделирования, управления, оптимизации и диагностики. Бо-
лее высокая степень гранулированности может привести к сокращению
объемов обрабатываемой и хранимой информации и к повышению быст-
родействия алгоритмов.
16
Глава 1. Введение
4. Возможность подстройки уровня гранулированности информации
под требуемую точность моделирования, управления, оптимизации, диа-
гностики и т. д. Такая подстройка выполняется человеком, как показано
на рис. 1.5-1.7.
Рис. 1.5. Зависимость выхода
от входа для объекта
Предположим, что на первом этапе
управления объектом взаимосвязь меж-
ду входными и выходными параметрами
которого представлена на рис. 1.5, при-
нимаются во внимание только предель-
ные состояния объекта и на основе этого
формируется модель, основанная на двух
правилах (рис. 1.6). Для определенности,
под моделью объекта будем понимать
некоторое его приближенное представ-
ление, обладающее необходимой точно-
управления стью.
R1 : ЕСЛИ (значение х малое) ТО (значение у малое)
R2 : ЕСЛИ (значение х большое) ТО (значение у большое)
Рис. 1.6. Модель объекта, основанная на двух информационных гранулах:
«малое» и «большое»
1.1. Сущность теории нечетких множеств
17
(значение х малое)
(значение х среднее)
(значение х большое)
ТО (значение у малое)
ТО (значение у среднее)
ТО (значение у большое)
Л1 : ЕСЛИ
R2 : ЕСЛИ
R3 : ЕСЛИ
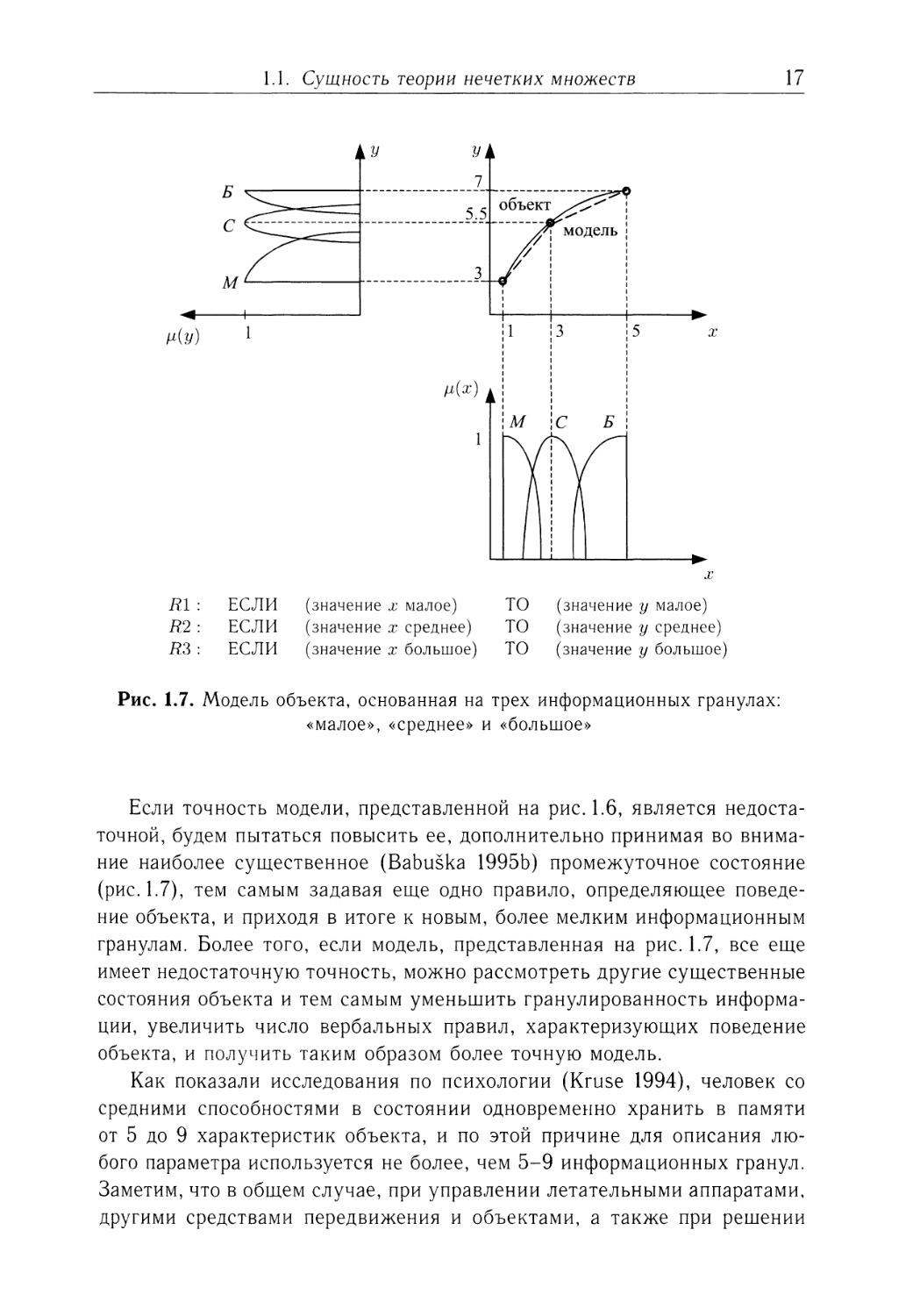
Рис. 1.7. Модель объекта, основанная на трех информационных гранулах:
«малое», «среднее» и «большое»
Если точность модели, представленной на рис. 1.6, является недоста-
точной, будем пытаться повысить ее, дополнительно принимая во внима-
ние наиболее существенное (Babuska 1995b) промежуточное состояние
(рис. 1.7), тем самым задавая еще одно правило, определяющее поведе-
ние объекта, и приходя в итоге к новым, более мелким информационным
гранулам. Более того, если модель, представленная на рис. 1.7, все еще
имеет недостаточную точность, можно рассмотреть другие существенные
состояния объекта и тем самым уменьшить гранулированность информа-
ции, увеличить число вербальных правил, характеризующих поведение
объекта, и получить таким образом более точную модель.
Как показали исследования по психологии (Kruse 1994), человек со
средними способностями в состоянии одновременно хранить в памяти
от 5 до 9 характеристик объекта, и по этой причине для описания лю-
бого параметра используется не более, чем 5-9 информационных гранул.
Заметим, что в общем случае, при управлении летательными аппаратами,
другими средствами передвижения и объектами, а также при решении
18
Глава 1. Введение
множества повседневных задач такая гранулированность является вполне
достаточной.
Компьютерные технологии обеспечивают возможность практическо-
го использования информации любой степени гранулированности, вслед-
ствие чего можно получать значительно более точные модели. Опыт мо-
делирования реальных систем говорит о том, что практически всегда есть
некоторый порог точности, превышение которого не дает особой пользы.
Возникновение подобных ситуаций связано с определенными, имеющими
место в сложных системах эффектами, охарактеризовать которые можно
следующим образом.
1. Существование хаоса. Внутри ядра систем возникают активные воз-
мущения, не поддающиеся измерению. Кроме того, об их существовании
может быть даже не известно. Другими словами, в системах возмож-
ны неконтролируемые процессы. Влияние указанных факторов зависит
от того, насколько они интенсивны, и может привести к непредсказуе-
мым изменениям в системе, которые можно трактовать как хаотические.
2. Стремительный рост числа возможных решений. Увеличение
сложности системы приводит к резкому возрастанию числа факторов,
обусловливающих ее наблюдаемое поведение — этот эффект называется
«комбинаторным взрывом» и его обычно невозможно учесть в математи-
ческой модели. При формировании модели такой системы в нее следует
включать лишь наиболее значимые факторы, влияющие на ее поведение.
Это снижает сложность модели, но может привести к ошибке (из-за зо-
ны нечувствительности модели), обусловленной не столь очевидными,
но существенными факторами.
3. Невозможность точного измерения некоторых сигналов при ра-
боте с системой. При неточном измерении входных сигналов реальной
системы, вычисляемые для нее выходные сигналы (выходная информа-
ция) даже в случае очень точной модели могут не соответствовать пове-
дению реальной системы, известному из опыта.
Признавая существование описанных выше эффектов, основатель
нечеткой логики проф. Л. Заде выдвинул утверждение, названное им
принципом несовместимости (Zadeh 1973):
«По мере возрастания сложности системы наша способность формулиро-
вать точные и при этом осмысленные утверждения о ее поведении уменьша-
ется вплоть до некоторого порога, за пределами которого точность и смысл
становятся практически взаимоисключающими характеристиками».
1.2. Развитие теории нечетких множеств
19
Точное моделирование с использованием очень малых информацион-
ных гранул возможно лишь в случае простых систем с малым числом
входных величин. Для нетривиальных систем, особенно систем с боль-
шим количеством входов, приходится использовать информацию, пред-
ставленную с помощью более крупных гранул — нечеткую информацию.
1.2. Развитие теории нечетких множеств
Теория нечетких множеств вызывает сегодня немалый интерес. По оцен-
кам (Altrock 1993), в 1993 г. насчитывалось от 15 до 16 тыс. публикаций,
связанных с этой тематикой. В 2000 г., на момент написания данной кни-
ги, число публикаций превысило 27 тыс. и продолжало интенсивно расти.
Организуются научные конференции, возрастает количество промышлен-
ных приложений. Что же является причиной столь высокой популярности
теории нечетких множеств в современной науке?
Начало развитию теории нечетких множеств положила основопола-
гающая статья «Fuzzy Sets» («Нечеткие множества»), опубликованная
профессором из США Лотфи Заде (Zadeh 1965), который впервые ввел
понятие нечеткого множества, предложил идею и первую концепцию тео-
рии, которая давала возможность нечеткого описания реальных систем.
Важнейшим направлением теории нечетких множеств является нечеткая
логика (Zimmermann 1994а), применяемая для управления системами,
а также в экспериментах по формированию их моделей.
В 60-е годы начался период быстрого развития компьютеров и циф-
ровых технологий на базе двоичной логики. В то время считалось, что
использование данной логики позволит решать многие научные и тех-
нические проблемы. По этой причине появление нечеткой логики оста-
валось почти незамеченным, несмотря на всю ее концептуальную рево-
люционность. Тем не менее, важность нечеткой логики была осознана
рядом представителей научного сообщества и она получила развитие,
а также практическую реализацию в рамках различных промышленных
приложений. Через некоторое время стал повышаться интерес к ней и со
стороны научных школ, объединявших приверженцев технологий на ос-
нове двоичной логики. Это произошло из-за того, что обнаружилось до-
статочно много практических задач, которые не поддавались решению
с помощью традиционных математических моделей и методов, несмотря
на существенно возросшие доступные скорости реализации вычислений.
Требовалась новая методология, характерные черты которой предстояло
найти в нечеткой логике.
20
Глава 1. Введение
Подобно робототехнике, нечеткая логика была с большим интересом
встречена не в стране своего происхождения, США, а за ее пределами, и
как следствие этого, первый опыт промышленного использования нечет-
кой логики — для управления котельными установками электростанций
(Assilian 1974) — связан с Европой. Все попытки использовать для управ-
ления паровым котлом традиционные методы, порой весьма замыслова-
тые, оканчивались неудачей — настолько сложной оказалась эта нели-
нейная система. И только применение нечеткой логики позволило синте-
зировать регулятор, который удовлетворял всем требованиям. В 1976 г.
нечеткая логика была положена в основу системы автоматического управ-
ления карусельной печью в производстве цемента (Mamdani 1977). И тем
не менее, первые практические результаты применения нечеткой логики,
полученные в Европе и Америке, не вызвали какого-либо значительного
повышения интереса к ней. Точно так же, как было с робототехникой,
страной, которая первой начала повсеместное внедрение нечеткой логи-
ки, осознав ее огромный потенциал, стала Япония (Bellon 1992).
Среди созданных в Японии прикладных нечетких систем наибольшую
известность получила разработанная компанией Hitachi система управ-
ления поездами метрополитена в г. Сендай. Реализация проекта велась
с участием опытного машиниста, знания и опыт которого легли в ос-
нову разработанной модели управления. Система автоматически снижа-
ла скорость поезда при подъезде его к станции, обеспечивая остановку
в требуемом месте. Еще одним преимуществом поезда была его высо-
кая комфортабельность, обусловленная плавностью набора и снижения
скорости (Abel 1991). Имелся и целый ряд других преимуществ по срав-
нению с традиционными системами управления.
Тестирование и совершенствование системы управления продолжа-
лось в течение двух лет. Эти усилия были нацелены на проверку нового
метода управления и обеспечение максимальной безопасности пассажи-
ров. О том, что данный проект можно считать успешным, свидетель-
ствует тот факт, что спустя 12 месяцев разработку своих собственных
приложений с использованием нечеткой логики вели уже 50 крупных
японских компаний. В 1991 г. вклад Японии в мировое производство про-
дукции, использующей нечеткую логику, исчислялся миллиардами дол-
ларов — в абсолютных величинах это составляло 80% (по данным Market
Intelligence Research). Начиная с 1989 г. в Японии было создано не менее
5 научных сообществ, связанных с нечеткой логикой, среди которых:
1. Лаборатория Международных нечетких технических исследований
(Laboratory for International Fuzzy Engineering Research — LIFE).
2. Японское Сообщество теории нечетких множеств и нечетких систем
(Japan Society of Fuzzy Theory and Systems — SOFT).
1.2. Развитие теории нечетких множеств
21
3. Ассоциация биомедицинских нечетких систем
(Biomedical Fuzzy Systems Association — BMFSA).
4. Институт систем нечеткой логики Иидзука
(Fuzzy Logic Systems Institute lizuka — FLSI).
5. Центр развития нечеткой логики
(Center for Promotion of Fuzzy Logic).
C 1986 г. функционирует Японское отделение международной органи-
зации IFSA (International Fuzzy Systems Association — Международная
ассоциация нечетких систем).
Среди перечисленных организаций наиболее известна лаборатория
LIFE, созданная Министерством международной торговли и промышлен-
ности Японии совместно с рядом крупных промышленных предприятий,
среди которых Honda, Kawasaki Steel, Tokyo Electric и др. (общее их
число в 1991 г. составляло 49). Целью деятельности данной лаборато-
рии является разработка нечетких методов для нужд промышленности,
торговли, поддержки принятия решений (например, в области валютных
операций) и т. д. В состав LIFE вошли лучшие специалисты в области
нечеткой логики из японских университетов и промышленных компа-
ний. Помимо этого, финансовую поддержку лаборатории осуществляет
ряд крупных компаний за пределами Японии, среди которых Bosh, Zeiss,
Siemens, Audi, Volkswagen. Спонсоры LIFE посылают в нее своих ин-
женеров для прохождения стажировок и выполнения исследований под
руководством специалистов.
Быстрое развитие нечеткой логики в Японии привело к тому, что
ее практические приложения появились не только в промышленности,
но и в производстве товаров народного потребления. Примером здесь
может служить видеокамера, оборудованная нечеткой подсистемой ста-
билизации изображения (Abel 1991), применявшейся для компенсации
колебаний изображения, вызванных малоопытностью оператора. Данная
задача была слишком сложной для решения ее традиционными метода-
ми, поскольку требовалось отличать случайные колебания изображения
от целенаправленного перемещения объектов съемки (например, движе-
ния людей). Другим примером является автоматическая стиральная ма-
шина, управляемая одним нажатием кнопки (Zimmerman 1994). Подоб-
ная «целостность» вызвала интерес и была встречена с одобрением. Ис-
пользование методов нечеткой логики позволило оптимизировать процесс
стирки, обеспечивая автоматическое распознавание типа, объема и степе-
ни загрязненности одежды, не говоря уже о том, что сведение механизма
управления машиной к одной единственной кнопке позволило значитель-
но упростить обращение с ней. Изобретения в области нечеткой логики
22
Глава 1. Введение
были воплощены японскими фирмами и во многих других устройствах,
среди которых микроволновые печи (Sanyo), антиблокировочные систе-
мы и автоматические коробки передач (Nissan), интегрированное управ-
ление динамическими характеристиками автомобиля (INVEC), а также
регуляторы жестких дисков в компьютерах, обеспечивающие уменьшение
времени доступа к информации.
Находясь в авангарде исследований в сфере приложений нечеткой
логики, японские инженеры получили в данной области огромное ко-
личество патентов. Только компания Omron из города Киото в 1993 г.
владела более чем 700 патентами.
Массовое применение нечеткой логики в изделиях японской промыш-
ленности привлекло внимание во всем мире и особенно в Европе, где вы-
зов лидерству Японии был брошен главным образом учеными и предпри-
нимателями из Германии. В г. Аахен находится штаб-квартира европей-
ской организации ELITE (European Laboratory for Intelligent Techniques
Engineering Foundation), занимающейся разработкой и продвижением
методов искусственного интеллекта, таких как нечеткая логика и ней-
ронные сети, с упором на научные исследования в данных областях. Под
ее эгидой проводится множество международных конференций, среди
которых ежегодная Европейская конференция по искусственному ин-
теллекту EUFIT (European Congress on Intelligent Techniques and Soft
Computing — Европейский конгресс по интеллектуальным технологиям
и мягким вычислениям).
Помимо упоминавшихся выше приложений, с начала 1990-х гг. на-
блюдается интенсивное развитие нечетких методов в рамках целого ряда
прикладных областей, в том числе и не связанных с техникой. Чтобы
дать читателю представление о возможностях нечеткой логики, перечис-
лим некоторые из известных ее приложений.
• система управления электронным кардиостимулятором (Akaiwa 1990;
Kitamura 1991; Sugiura 1991);
• система управления механическими транспортными средствами
(Altrock 1992);
• водогрейные котлы (Bien 1992);
• химические реакторы и установки (Altrock 1995; Bork 1993;
Hanakuma 1989; Hack 1997; Hohmann 1993; Kolios 1994; Roffeld 1991);
• системы охлаждения (Becker 1994; Hakata 1990);
• кондиционеры и вентиляционное оборудование (Tobi 1991; Wata-
nabe 1990);
• оборудование для сжигания мусора (Altrock 1993; Fujiyoshi 1992;
Ohnishi 1991);
1.2. Развитие теории нечетких множеств
23
• стеклоплавильная печь (Aoki 1990; Hishida 1992);
• система контроля кровяного давления (Arita 1990),
• диагностика опухолей (Arita 1991),
• диагностика текущего состояния сердечно-сосудистой системы
(Altrock 1993),
• система управления подъемными и мостовыми кранами (Altrock 1993;
Watanabe 1991),
• насосная станция (Chen 1992),
• обработка изображений (Fijiwara 1991; Franke 1994),
• быстродействующее зарядное устройство (Altrock 1993),
• распознавание слов (Fujimoto 1989),
• лечение диабета и контроль уровня сахара в крови (Jacoby 1994; Kage-
yama 1990),
• электроэнергетическая система (Hiyama 1991),
• оборудование для металлообработки (Hsieh 1994),
• управление биопроцессорами (Hanss 1994),
• отопительные приборы (Heider 1994),
• управление электродвигателями (Kawai 1990; Lee 1992),
• сварочное оборудование и процессы сварки (Murakami 1989;
Reshuffled 1994),
• системы управления движением транспорта (Sasaki 1988; Voit 1994),
• биомедицинские исследования (Takahashi 1990),
• оборудование для уборки помещений (Yamashita 1992),
• оборудование для очистки от шлама (Yu 1990),
• водоочистные сооружения (Altrock 1995).
По теории нечетких множеств издан ряд книг, например
(Altrock 1993,1995; Brown 1994; Bezdek 1981; Driankov 1993,1996;
Gottwald 1993; Hung 1995; Kahlert 1994,1995; Knappe 1994; Kandel 1994;
Kruse 1994; Kiendl 1997; Kaufmann 1985; Koch 1996; Kacprzyk
1986,1992,1997; Nguyen 1995; Pedrycz 1993; Rutkowska 1997; Tilli 1991;
Wang 1994a; Yager 1994,1995; Zimmermann 1994a,1994b).
На рынке программного обеспечения имеется несколько продуктов,
осуществляющих поддержку нечеткого’моделирования и управления. Ин-
формацию о них можно найти в (Ader 1996; Baldwin 1995а; Koch 1996;
Kuhn 1994; Krieger 1994; Krone 1996c).
В Польше исследования в области нечетких множеств ведутся
с 1970-х гг. (Kacprzyk 1977,1978). Польскими учеными, внесшими су-
щественный вклад в развитие данной теории в мире, являются профес-
сора Е. Czogala, J. Kacprzyk и W. Pedrycz (фамилии перечислены в алфа-
витном порядке).
24
Глава 1. Введение
И хотя теория нечетких множеств позволяет решать задачи, с кото-
рыми часто не справляются обычные методы, не следует считать ее «па-
нацеей». Было бы ошибкой говорить о ней как о единственно возможной
замене всех остальных подходов. Практика показывает, что применять
нечеткую логику целесообразнее всего там, где остальные подходы до сих
пор терпели неудачу (Altrock 1993), и следовать традиционным методам,
если приемлемые результаты могут быть получены на их основе.
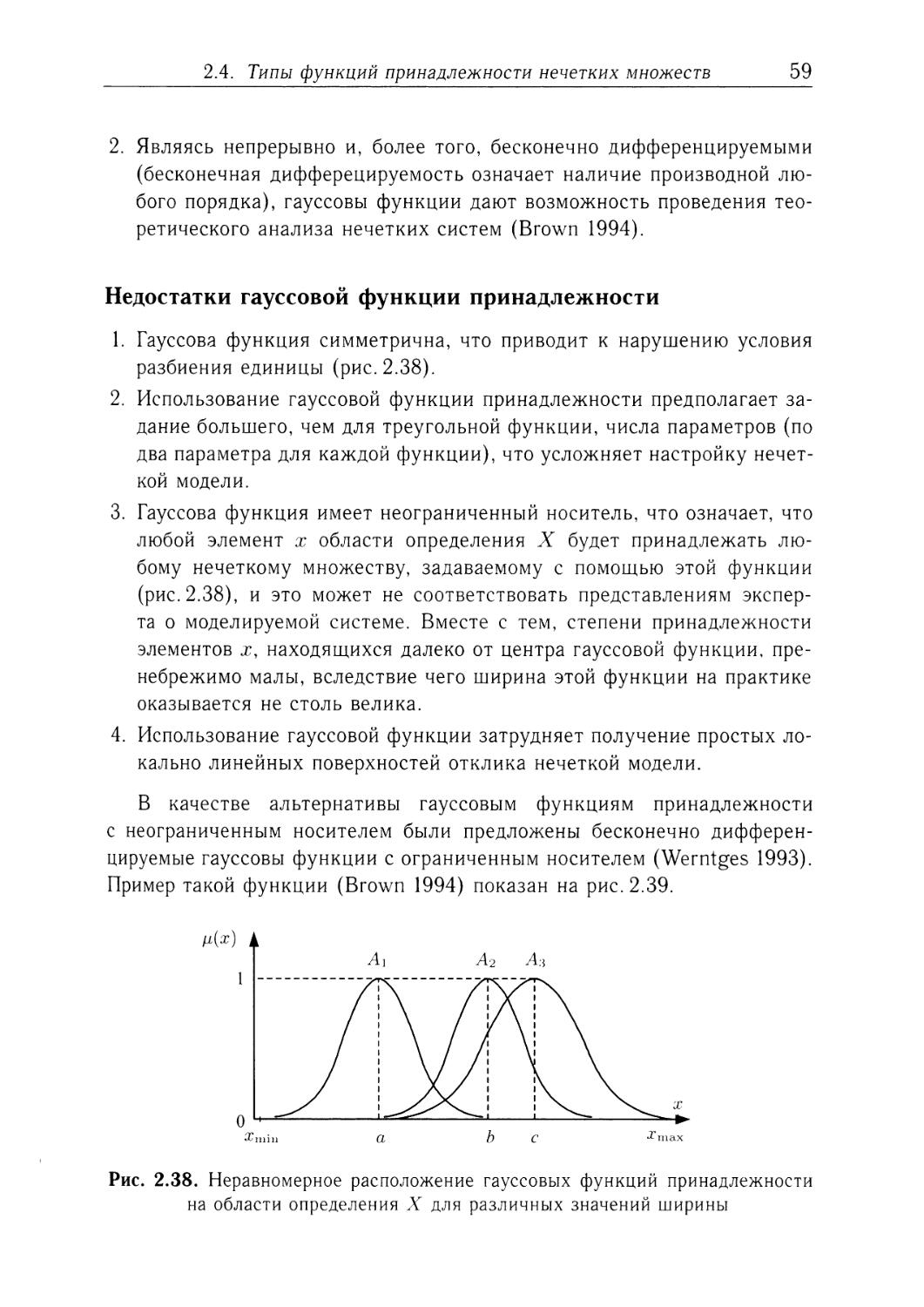
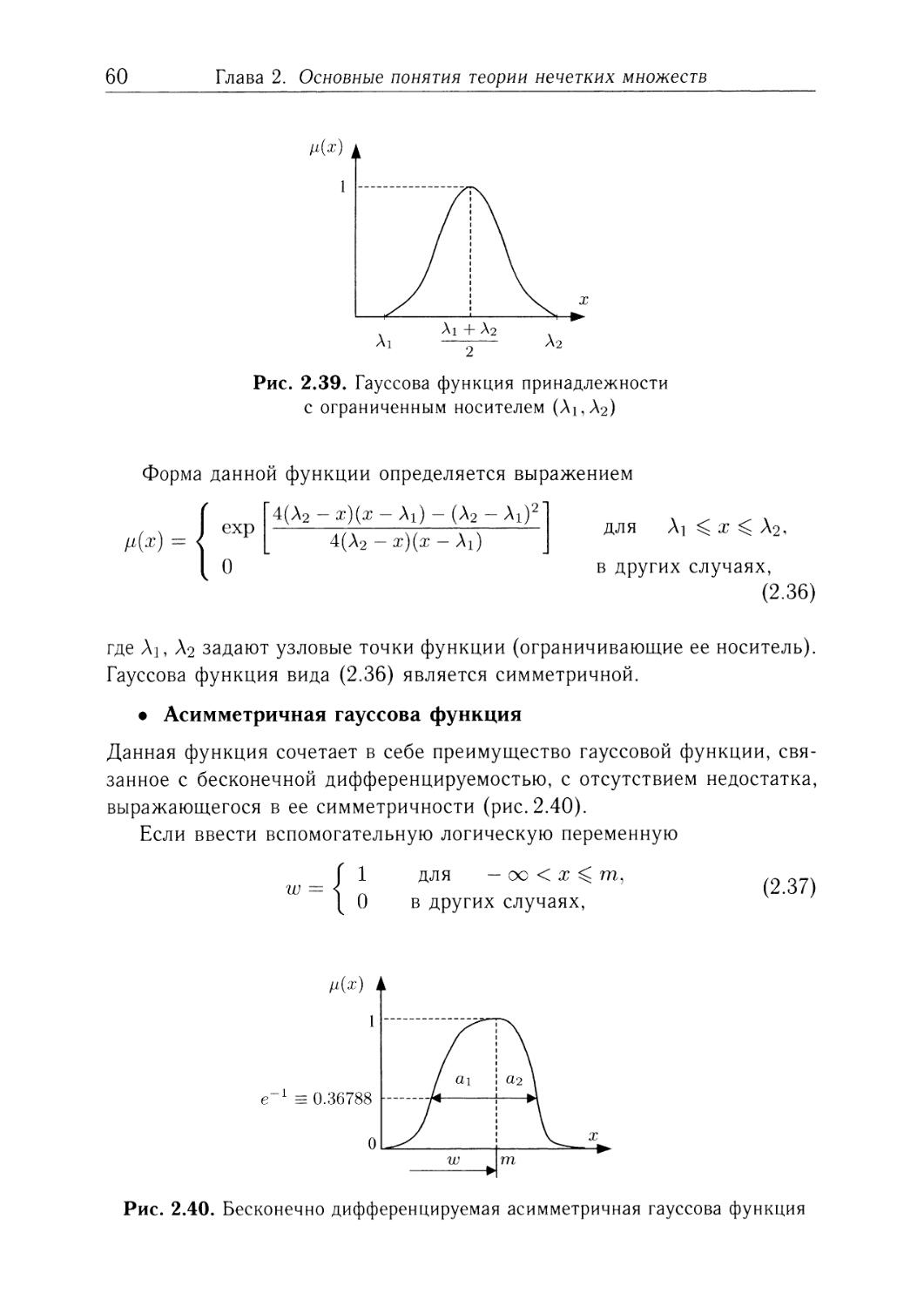
Глава 2
Основные понятия
теории нечетких множеств
2.1. Нечеткие множества
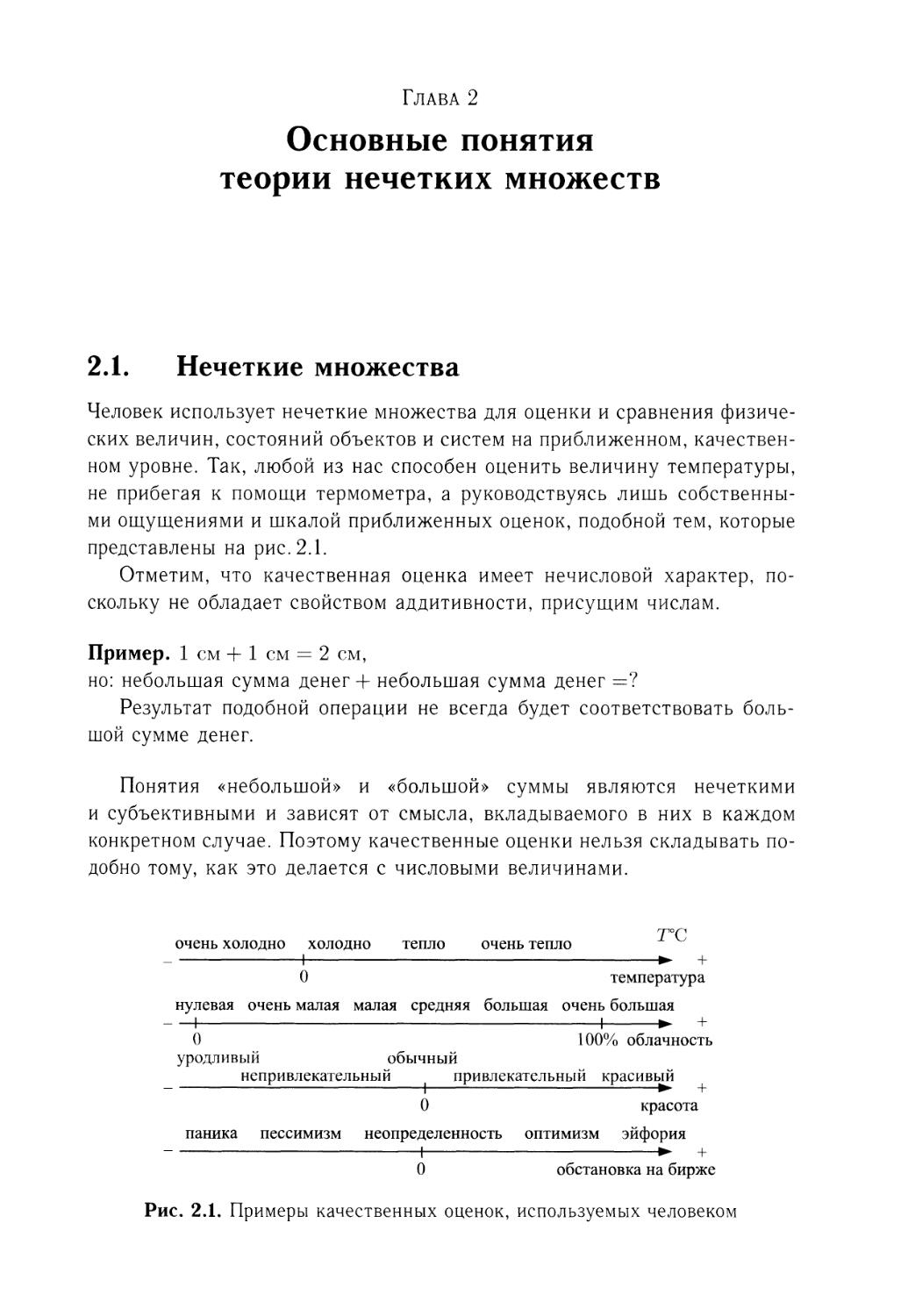
Человек использует нечеткие множества для оценки и сравнения физиче-
ских величин, состояний объектов и систем на приближенном, качествен-
ном уровне. Так, любой из нас способен оценить величину температуры,
не прибегая к помощи термометра, а руководствуясь лишь собственны-
ми ощущениями и шкалой приближенных оценок, подобной тем, которые
представлены на рис. 2.1.
Отметим, что качественная оценка имеет нечисловой характер, по-
скольку не обладает свойством аддитивности, присущим числам.
Пример. 1 см + 1 см = 2 см,
но: небольшая сумма денег + небольшая сумма денег =?
Результат подобной операции не всегда будет соответствовать боль-
шой сумме денег.
Понятия «небольшой» и «большой» суммы являются нечеткими
и субъективными и зависят от смысла, вкладываемого в них в каждом
конкретном случае. Поэтому качественные оценки нельзя складывать по-
добно тому, как это делается с числовыми величинами.
т°с
очень холодно холодно тепло очень тепло
_-------------1-----------------------------------► +
О температура
нулевая очень малая малая средняя большая очень большая
---1----------------------.----------------1------► +
О 100% облачность
уродливый обычный
непривлекательный । привлекательный красивый
0 красота
паника пессимизм неопределенность оптимизм эйфория
0 обстановка на бирже
Рис. 2.1. Примеры качественных оценок, используемых человеком
26
Глава 2. Основные понятия теории нечетких множеств
Качественные оценки человек использует и тогда, когда средства точ-
ного измерения ему доступны. Например, несмотря на точные показания
скорости на спидометре автомобиля, характеризуя свою поездку, води-
тель чаще всего говорит:
• «Я ехал очень быстро»,
• «Я ехал со скоростью примерно 100 км/ч»,
• «Я ехал со скоростью более 100 км/ч».
Если бы водитель попытался вспомнить точное значение скорости
в каждый момент своей поездки, то это бы было, во-первых, практи-
чески невыполнимым, вследствие ограниченных возможностей человече-
ской памяти, а во-вторых, совершенно излишним, поскольку для челове-
ка бывает достаточным сделать грубую оценку, позволяющую избавиться
от больших объемов ненужной информации, сосредоточившись на той,
которая является наиболее существенной, и которую можно быстро об-
работать, чтобы принять необходимое решение.
В окружающем нас мире имеется большое число величин, которые
нельзя оценить с помощью измерительных устройств, поскольку таких
устройств просто не существует. К таким величинам относятся, напри-
мер, женская красота, порядок в доме, опасность начала войны, шансы
на успех в бизнесе и т. п. Но у каждого человека есть свои собственные,
неизведанные или понятные лишь отчасти «измерительные устройства»,
позволяющие ему давать качественные оценки подобных величин и ситу-
аций, представляющихся настолько сложными, что с ними невозможно
справиться средствами современной науки. Пользуясь подобным несовер-
шенным, нечетким механизмом оценивания, люди отлично справляются
с окружающей действительностью, приспосабливаются к ней, преобра-
зуют ее, распознают (идентифицируют) существующие в ней системы,
которыми управляют затем оптимальным или субоптимальным образом.
Качественно оценивая действительность, люди выработали у себя
весьма совершенные логические и интеллектуальные способности, кото-
рыми робототехнические устройства не обладают, несмотря на непрекра-
щающуюся интенсивную работу в этом направлении. По этой причине у
ученых и инженеров возникла идея создания искусственного интеллекта,
который имитировал бы человеческий интеллект и использовал сходные
с ним подходы.
Важнейшее условие создания такого интеллекта состоит в том, что-
бы перевести нечеткие, качественные оценки, применяемые человеком,
на язык математики, понятный вычислительной машине. В результате
станет возможным:
2.1. Нечеткие множества
27
• преобразовывать четкие и точные показания приборов в форму каче-
ственных оценок, применяемых людьми, и использовать их в алгорит-
мах искусственного интеллекта, основанных на правилах, подобных
тем, которые лежат в основе человеческих рассуждений,
• вводить в системы обработки информации, математические модели
управляемых систем и алгоритмы управления величины, определить
которые может только человек, например платежеспособность поку-
пателя, вероятность сбора богатого урожая в данном году и др.
Видно, таким образом, что нечеткие, качественные оценки позволяют
значительно расширить традиционные методы математического модели-
рования, требующие точной информации о входных величинах системы.
Это становится возможным за счет использования информации о пара-
метрах, ранее не учитываемых из-за отсутствия средств их измерения
(т. е. вводятся гибридные модели, имеющие как четкие, так и нечеткие
составляющие). Тем самым, нечеткие методы качественного оценивания
следует рассматривать не как альтернативу, а как дополнение к точным
техническим измерениям, позволяющее создать более полную картину
или модель действительности.
Формализация качественных оценок может осуществляться на осно-
ве теории нечетких множеств. Понятие нечеткого множества появилось
в научной литературе в 1965 г., благодаря работе ученого из США Лот-
фи Заде (Zadeh 1965), внесшего существенный вклад в развитие данной
теории.
Рассмотрим далее основные понятия, связанные с нечеткими множе-
ствами.
• Лингвистическая переменная
Лингвистической переменной является переменная (которая может быть
как входной или выходной, так и переменной состояния) с лингвистиче-
скими значениями, выражающими качественные оценки.
Примеры: скорость судна, электрическое напряжение, температура.
На практике для задания лингвистических переменных можно ис-
пользовать не только лингвистические значения, но и нечеткие числа
(Bertram 1994; Koch 1993), т. е. определенного рода комбинированный
подход.
• Лингвистическое значение
Лингвистическое значение представляет собой значение лингвистической
переменной, выраженное в словесной форме.
28
Глава 2. Основные понятия теории нечетких множеств
Примеры: очень большой отрицательный, средний отрицательный, сред-
ний положительный, очень большой положительный, старый, молодой,
хороший, средний, приятный, неприятный, истинный, ложный.
Лингвистическое значение всегда присутствует в модели совместно
со связанной с ним лингвистической переменной.
Примеры: высокое атмосферное давление, сильное течение, молодой воз-
раст (человека), истинная информация, ложная информация.
• Нечеткие числа
Понятие нечеткого числа будет рассмотрено в главе 3.
Примеры нечетких чисел: около нуля, примерно 5, более (менее) 5,
немного более 9, приблизительно между 10 и 12.
Оценка параметров системы с использованием лингвистических зна-
чений основана на восприятии человека и не требует технических изме-
рительных устройств, в то время как при использовании с этой целью
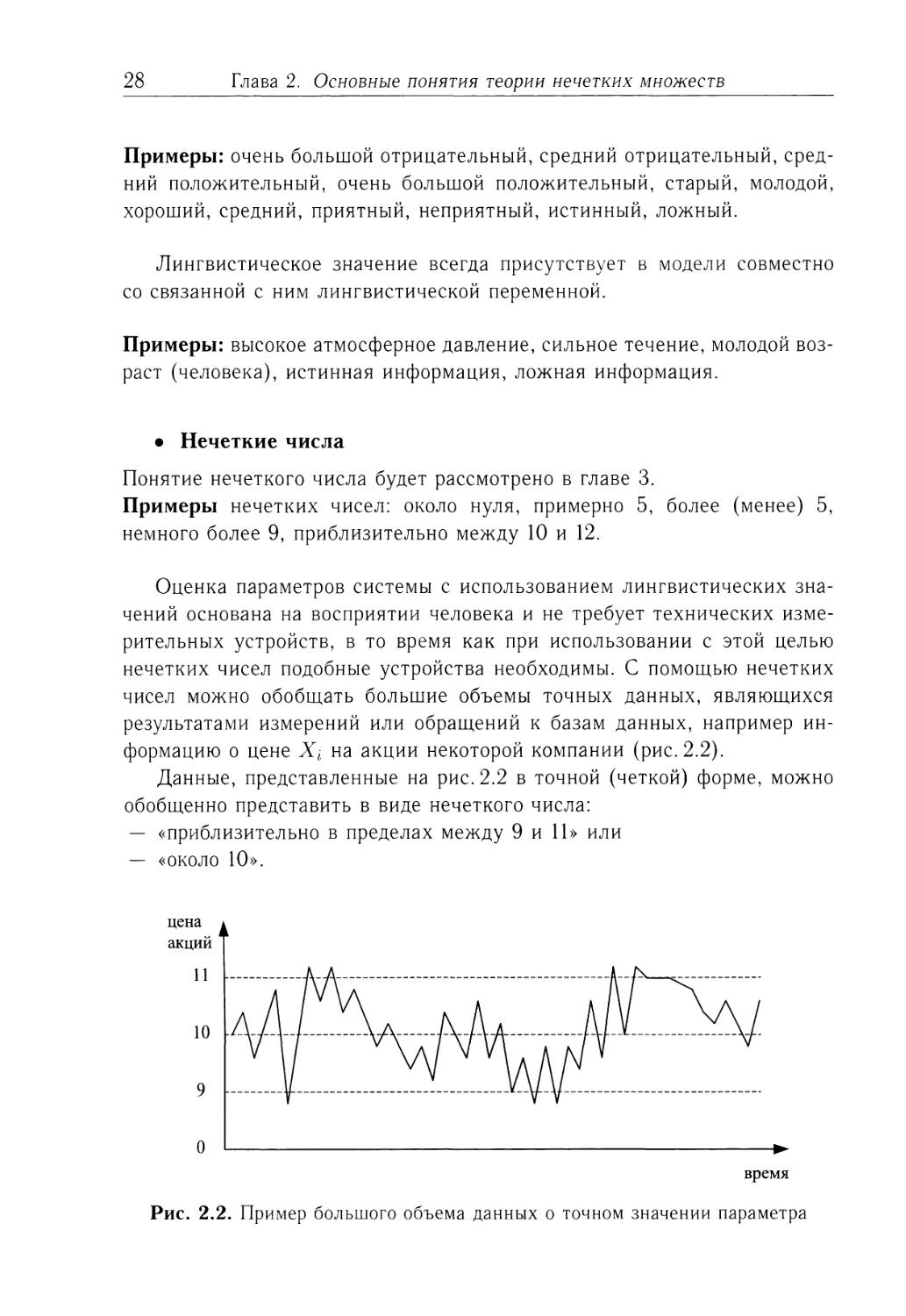
нечетких чисел подобные устройства необходимы. С помощью нечетких
чисел можно обобщать большие объемы точных данных, являющихся
результатами измерений или обращений к базам данных, например ин-
формацию о цене XL на акции некоторой компании (рис. 2.2).
Данные, представленные на рис. 2.2 в точной (четкой) форме, можно
обобщенно представить в виде нечеткого числа:
— «приблизительно в пределах между 9 и 11» или
— «около 10».
цена а
акций
О ------------------------------------------------------------►
время
Рис. 2.2. Пример большого объема данных о точном значении параметра
2.1. Нечеткие множества
29
На практике применяются смешанные наборы значений лингвистиче-
ских переменных — см., например, (Abel 1991; Koch 1993). В частности,
возможны шкалы следующего вида:
— отрицательный, около нуля, положительный,
— большой отрицательный, средний отрицательный, малый отрицатель-
ный, около нуля, малый положительный, средний положительный,
большой положительный.
• Лингвистическое терм-множество переменной
Лингвистическим терм-множеством называется множество всех линг-
вистических значений, используемых для определения некоторой линг-
вистической переменной. Данное множество также называют базисным
лингвистическим множеством (Bertram 1994), лингвистической предмет-
ной областью, либо лингвистической областью (пространством) значе-
ний. Для обозначения терм-множеств будем использовать прописные ла-
тинские буквы:
Хи — {отрицательный, положительный} — {jcia^lz} •
Уь = {малый, средний, большой} = {уиъУь^Уьз} •
Лингвистическая область значений (лингвистический универсум)
представляет собой конечное множество.
• Область значений переменной
Областью значений переменной является множество всех числовых зна-
чений, которые может принимать определенный параметр изучаемой си-
стемы, либо множество значений, существенных с точки зрения решае-
мой задачи (модели системы). Для области значений используются также
следующие названия:
— пространство значений (пространство рассуждений) (Bertram 1994),
— поле значений (Abel 1991),
— пространство (Kacprzyk 1986; Yager 1994,1995),
— множество (Kacprzyk 1986),
— область значений (область рассуждений),
— предметная область (Yager 1994,1995),
— базисный диапазон (Кпарре 1994),
— множество элементарных значений (Kruse 1994).
Слово «числовых» употреблено здесь, чтобы подчеркнуть отличие
этих значений от лингвистических. Области значений переменных бу-
дем обозначать прописными латинскими буквами, например:
30
Глава 2. Основные понятия теории нечетких множеств
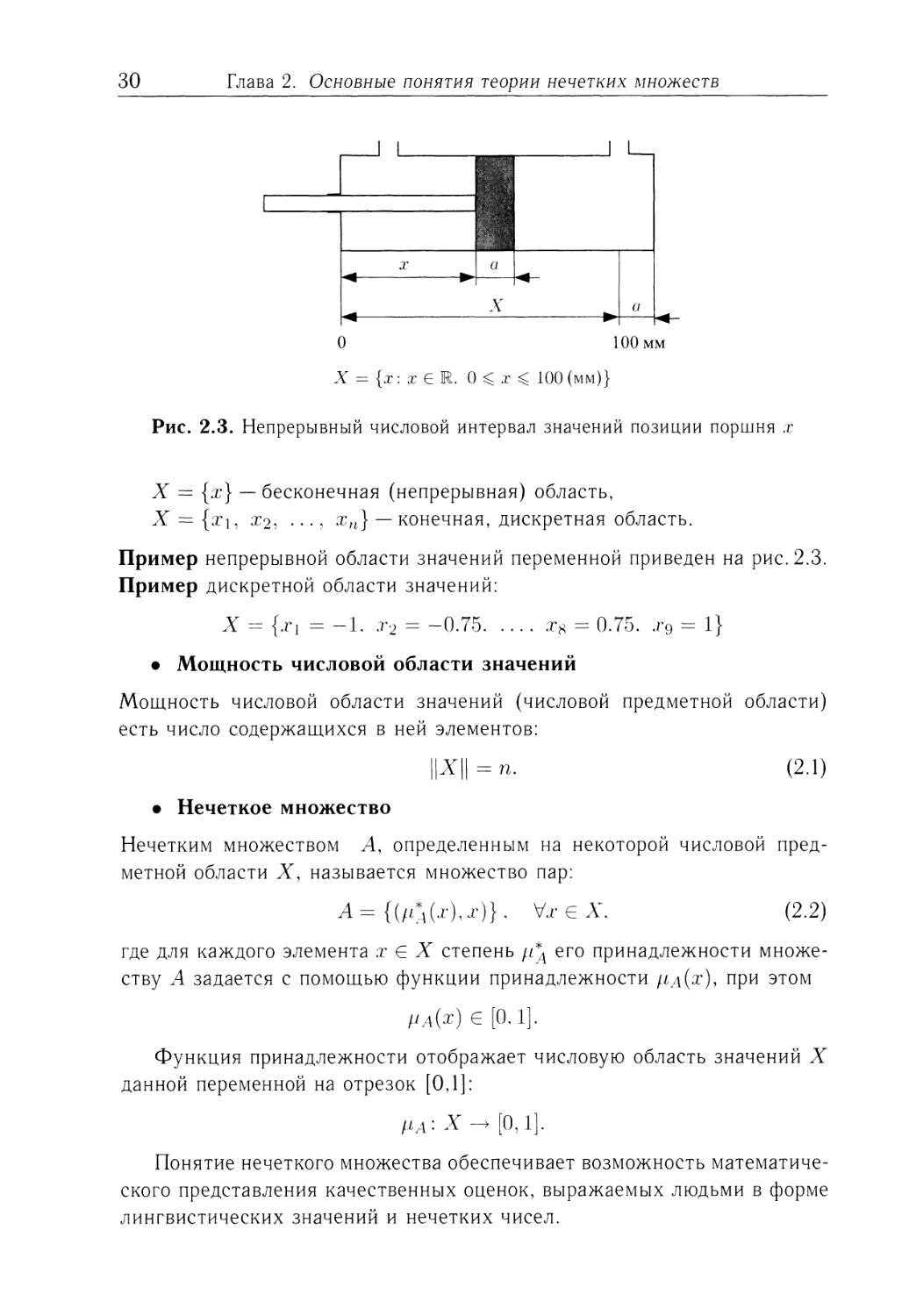
0 100 мм
X = {х: х Е R. О < т < 100 (мм)}
Рис. 2.3. Непрерывный числовой интервал значений позиции поршня х
X — {х} — бесконечная (непрерывная) область,
X = {а?], Х2, ..., хп} — конечная, дискретная область.
Пример непрерывной области значений переменной приведен на рис. 2.3.
Пример дискретной области значений:
X = {.Pi = -1. х2 = -0.75....Х8 = 0.75. ,г9 = 1}
• Мощность числовой области значений
Мощность числовой области значений (числовой предметной области)
есть число содержащихся в ней элементов:
m = (2.D
• Нечеткое множество
Нечетким множеством А, определенным на некоторой числовой пред-
метной области X, называется множество пар:
А = {(//4(.г),т)} . V.r Е X, (2.2)
где для каждого элемента х Е X степень ц 4 его принадлежности множе-
ству А задается с помощью функции принадлежности дд(гг), при этом
/мЦ) G [0.1].
Функция принадлежности отображает числовую область значений X
данной переменной на отрезок [0,1]:
/М: Х-+ [0,1].
Понятие нечеткого множества обеспечивает возможность математиче-
ского представления качественных оценок, выражаемых людьми в форме
лингвистических значений и нечетких чисел.
2.1. Нечеткие множества
31
• Мощность нечеткого множества
Мощность нечеткого множества определяется как число содержащихся
в нем пар Qu*4(т)..г):
||Л|| = п.
Значение мощности нечеткого множества А совпадает со значением
мощности его предметной области X.
• Функция принадлежности и степень принадлежности
Функция принадлежности ставит в соответствие каждому значению х
заданной переменной некоторое число из интервала [0,1]:
/ы(х): X -у [0,1]. Vx е X. (2.3)
Это число, называемое степенью принадлежности, характеризует
степень, с которой элемент х принадлежит нечеткому множеству А.
Функция принадлежности может быть задана в виде:
— графика (в непрерывном случае) или диаграммы (в дискретном слу-
чае),
— аналитического выражения (формулы),
— таблицы,
— вектора степеней принадлежности,
— суммы или интеграла.
При задании функции принадлежности с помощью формулы целе-
сообразно ввести логическую переменную w, ограничивающую область
значений переменной х:
f 1, если — а х а, /г. ..
w = < п (2.4)
[ 0 в других случаях.
В этом случае функция принадлежности, представленная на рис. 2.4,
допускает следующую форму записи:
w ------
\ С
(2.5)
Дискретная функция принадлежности может быть представлена в ви-
де табл. 2.1.
Замечание. В качестве значений х в таблице могут выступать не толь-
ко числа, но и какие-либо объекты, человеческие индивидуумы или аб-
страктные понятия. Например, таблица может содержать информацию
о принадлежности различных компаний множеству А преуспевающих
предприятий (табл. 2.2).
32
Глава 2. Основные понятия теории нечетких множеств
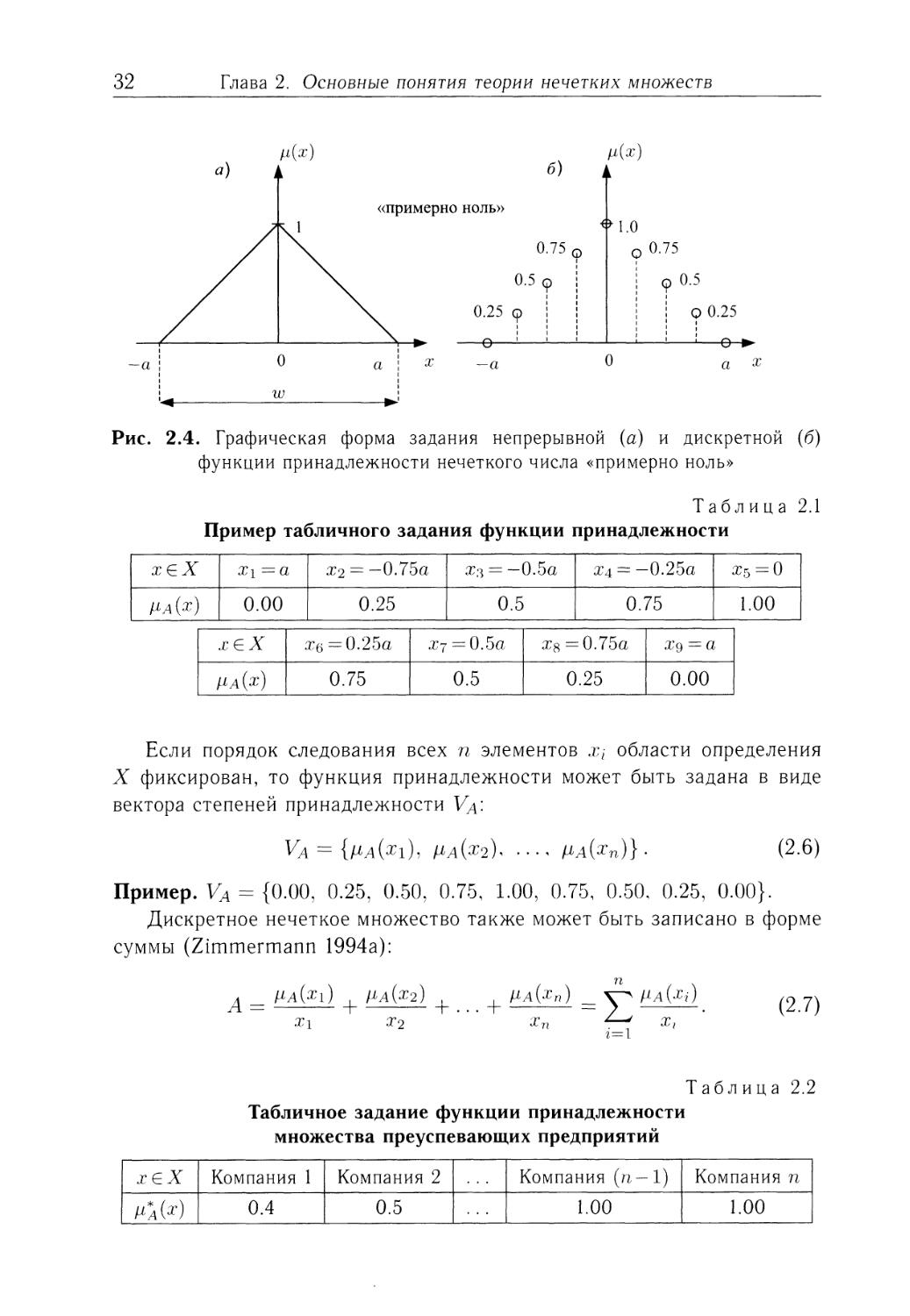
Рис. 2.4. Графическая форма задания непрерывной (а) и дискретной (б)
функции принадлежности нечеткого числа «примерно ноль»
Таблица 2.1
Пример табличного задания функции принадлежности
х&Х Xi—a Х2 = —0.75а л.з = —0.5а ад = —0.25а х$ — 0
0.00 0.25 0.5 0.75 1.00
хеХ Х(у = 0.25а Л7 — 0.5а =0.75а Хд = а
/хА(х) 0.75 0.5 0.25 0.00
Если порядок следования всех п элементов x-t области определения
X фиксирован, то функция принадлежности может быть задана в виде
вектора степеней принадлежности Уд:
VA = ЫдЦ1), цаЧХ)......ца(яп)}. (2.6)
Пример. VA = {0.00, 0.25, 0.50, 0.75, 1.00, 0.75, 0.50. 0.25, 0.00}.
Дискретное нечеткое множество также может быть записано в форме
суммы (Zimmermann 1994а):
_ /м(^1) /м(ж2) + /хА(хп) _
Х2 Хп X,
Таблица 2.2
Табличное задание функции принадлежности
множества преуспевающих предприятий
хеХ Компания 1 Компания 2 Компания (а—1) Компания п
ХАИ 0.4 0.5 1.00 1.00
2.1. Нечеткие множества
33
Приведенная запись означает, что множество А представляет собой
объединение (а не арифметическую сумму) пар (/<4(т)/т)*.
Пример.
л 0.00 0.25 0.50 0.75 1.00 0.75 0.50 0.25 0.00
-а -0.75а -0.5а -0.25а 0 0.25а 0.5а 0.75а а
Непрерывное нечеткое множество может быть записано в виде инте-
грала (Zimmermann 1994а):
А = У (2.8)
X
Приведенная запись означает, что нечеткое множество А представля-
ет собой объединение континуума пар (/лл(х)/х).
Пример. «Вещественные числа, близкие к нулю» (рис. 2.4).
х
При записи функции принадлежности элементы хг, степень принад-
лежности которых нулевая, как правило, опускаются.
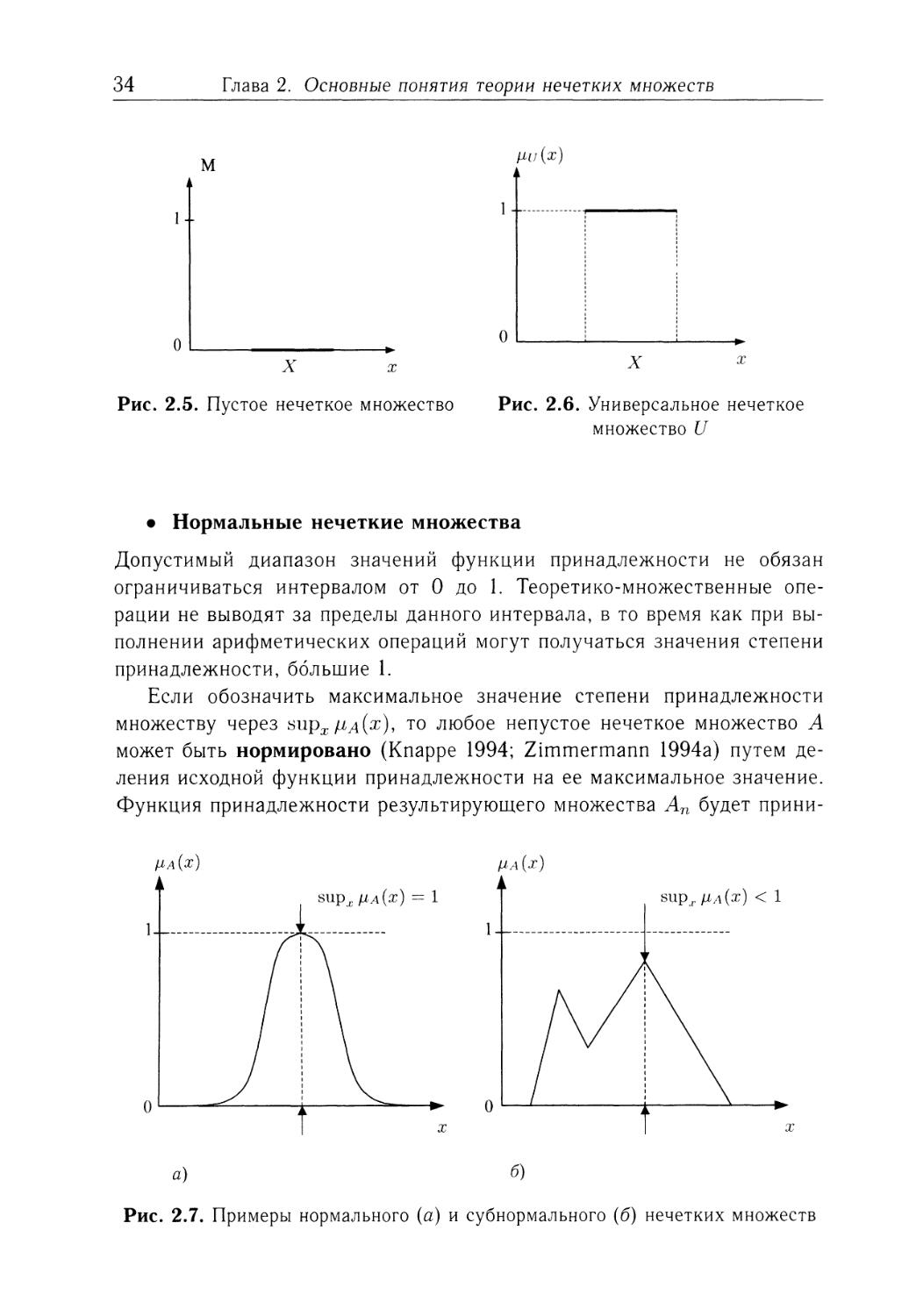
• Пустое нечеткое множество
Нечеткое множество А, функция принадлежности /м(я) которого равна
нулю на всей предметной области X, называется пустым и обозначается
символом 0:
0:/i0(x) = O, ЧхеХ. (2.10)
• Универсальное нечеткое множество
Нечеткое множество, все элементы предметной области которого име-
ют степень принадлежности, равную 1, называется универсальным
(Кпарре 1994) и обозначается символом U:
U: /1и(х) = 1, ЧхЕХ. (2.11)
Пустое 0 и универсальное U множества соответствуют предельным
случаям. Соотношение
0 А U (2.12)
справедливо для любого нечеткого множества А.
Пару дл(жг)/жг, г = 1,... ,п, дд(тг) >0 можно рассматривать как одноэлементное
нечеткое множество. Тогда А есть объединение таких множеств. В случае дискретного
нечеткого множества А это утверждение имеет вид (2.7), где вместо традиционного зна-
ка (J, соответствующего операции объединения множеств, принято использовать знаки +
и 52- — Прим. ред.
34
Глава 2. Основные понятия теории нечетких множеств
М
о L___—
х
Рис. 2.5. Пустое нечеткое множество Рис. 2.6. Универсальное нечеткое
множество U
• Нормальные нечеткие множества
Допустимый диапазон значений функции принадлежности не обязан
ограничиваться интервалом от 0 до 1. Теоретико-множественные опе-
рации не выводят за пределы данного интервала, в то время как при вы-
полнении арифметических операций могут получаться значения степени
принадлежности, большие 1.
Если обозначить максимальное значение степени принадлежности
множеству через ьирж дд(х), то любое непустое нечеткое множество А
может быть нормировано (Кпарре 1994; Zimmermann 1994а) путем де-
ления исходной функции принадлежности на ее максимальное значение.
Функция принадлежности результирующего множества Ап будет прини-
Рис. 2.7. Примеры нормального (а) и субнормального (б) нечетких множеств
б)
supr дд(т) < 1
о
2.1. Нечеткие множества
35
мать значения в интервале от 0 до 1:
_ /1д(х)
МДп ( \ *
SUPj.
Нечеткое множество называется нормальным (нормированным), ес-
ли его функция принадлежности принимает значения в интервале от О
до 1 (при этом существуют элементы, степень принадлежности которых
равна 1).
Нечеткое множество называется субнормальным, если максималь-
ное значение его функции принадлежности меньше 1. Субнормальными
являются результаты некоторых операций над нормальными нечеткими
множествами.
• Набор
Набором (пакетом) В называется любое множество элементов предмет-
ной области (области определения) X, при этом допускаются многократ-
ные вхождения одного и того же элемента в набор.
Пример. На предметной области X — , ^2, хз, ^4} можно задать на-
бор:
В* = {Х1,Х2,Х2,Хз}.
Различие между понятиями множества и набора состоит в том, что
множество не может содержать многократные вхождения одного и то-
го же элемента.
Нечетким набором В (Yager 1994,1995) называется набор пар вида
(элемент х, степень принадлежности элемента х набору В):
В-{(х,^(х)), VxeX}. (2.14)
„ о Г 0-7 0.9 0.6 0.51
Пример. В — { — , — , — , — > .
I Т1 .т2 х2 х3 J
Нечеткие наборы появляются в результате выполнения арифметиче-
ских (т. е. не относящихся к теоретико-множественным) операций над
нечеткими множествами, например, суммирования нескольких нечетких
множеств (Yager 1994,1995). Поскольку один и тот же элемент может
входить в набор многократно, то совокупная степень его принадлежно-
сти (в арифметическом, а не теоретико-множественном смысле) может
превосходить 1.
36
Глава 2. Основные понятия теории нечетких множеств
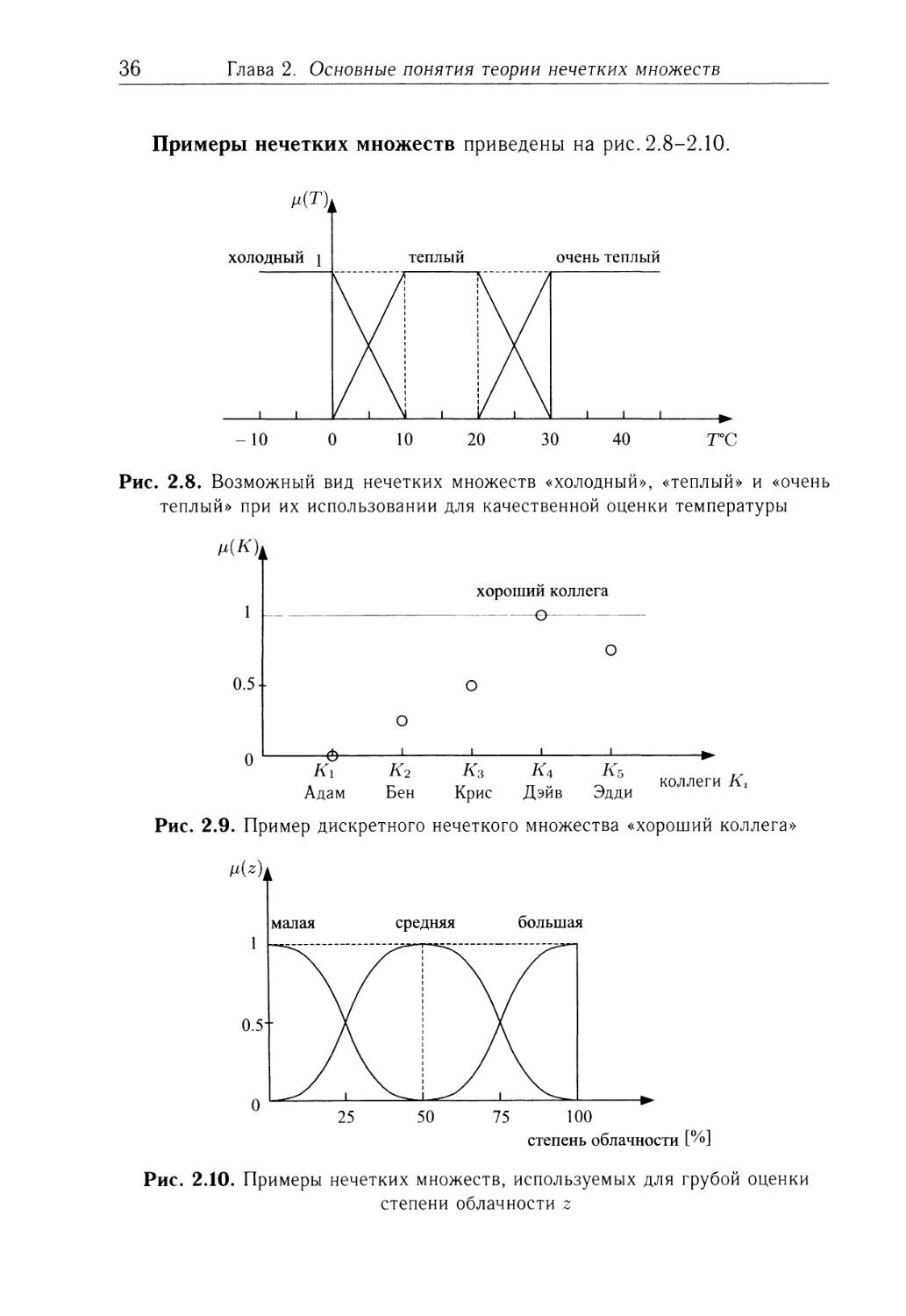
Примеры нечетких множеств приведены на рис. 2.8-2.10.
Рис. 2.8. Возможный вид нечетких множеств «холодный», «теплый» и «очень
теплый» при их использовании для качественной оценки температуры
1
0.5
хороший коллега
-------е--------
О
О
0
К2
Бен
—ё-
Ki
Адам
Кз К4
Крис Дэйв
~ коллеги Кг
Эдди
Рис. 2.9. Пример дискретного нечеткого множества «хороший коллега»
Рис. 2.10. Примеры нечетких множеств, используемых для грубой оценки
степени облачности z
2.2. Характеристические параметры нечеткого множества
37
2.2. Характеристические параметры
(показатели) нечеткого множества
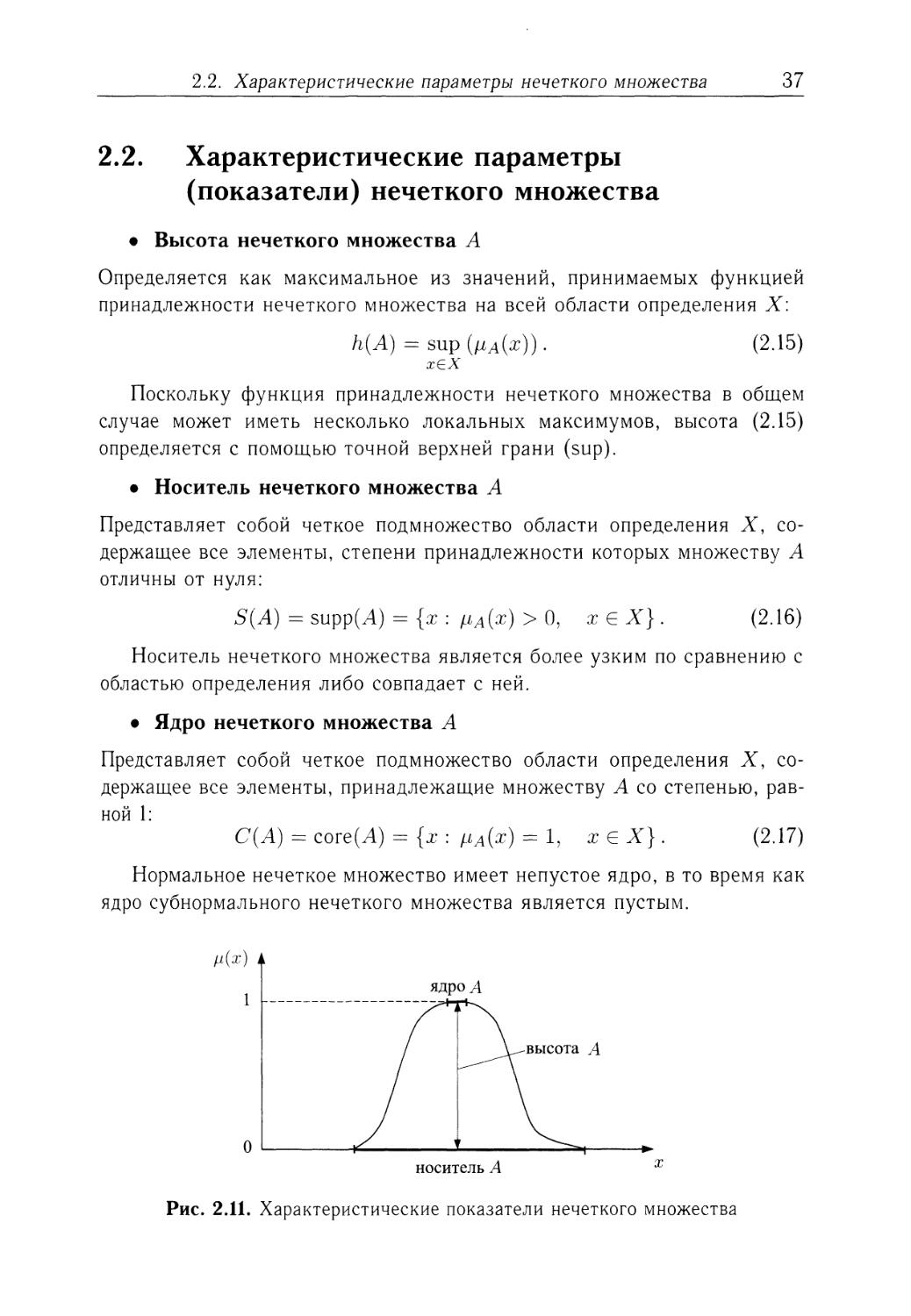
• Высота нечеткого множества А
Определяется как максимальное из значений, принимаемых функцией
принадлежности нечеткого множества на всей области определения X:
h(A) = sup (дд(Ц). (2.15)
хех
Поскольку функция принадлежности нечеткого множества в общем
случае может иметь несколько локальных максимумов, высота (2.15)
определяется с помощью точной верхней грани (sup).
• Носитель нечеткого множества А
Представляет собой четкое подмножество области определения X, со-
держащее все элементы, степени принадлежности которых множеству А
отличны от нуля:
5(A) = supp(A) = {х : Дд(х) >0, х Е X} . (2.16)
Носитель нечеткого множества является более узким по сравнению с
областью определения либо совпадает с ней.
• Ядро нечеткого множества А
Представляет собой четкое подмножество области определения X, со-
держащее все элементы, принадлежащие множеству А со степенью, рав-
ной 1:
С(А) = соге(А) = {х : /2д(х) = 1, х Е X} . (2.17)
Нормальное нечеткое множество имеет непустое ядро, в то время как
ядро субнормального нечеткого множества является пустым.
Рис. 2.11. Характеристические показатели нечеткого множества
38
Глава 2. Основные понятия теории нечетких множеств
1.0
0.5
5(A) = {7}
0 -е—©—е—I-е—е—е-►
456789 10 х
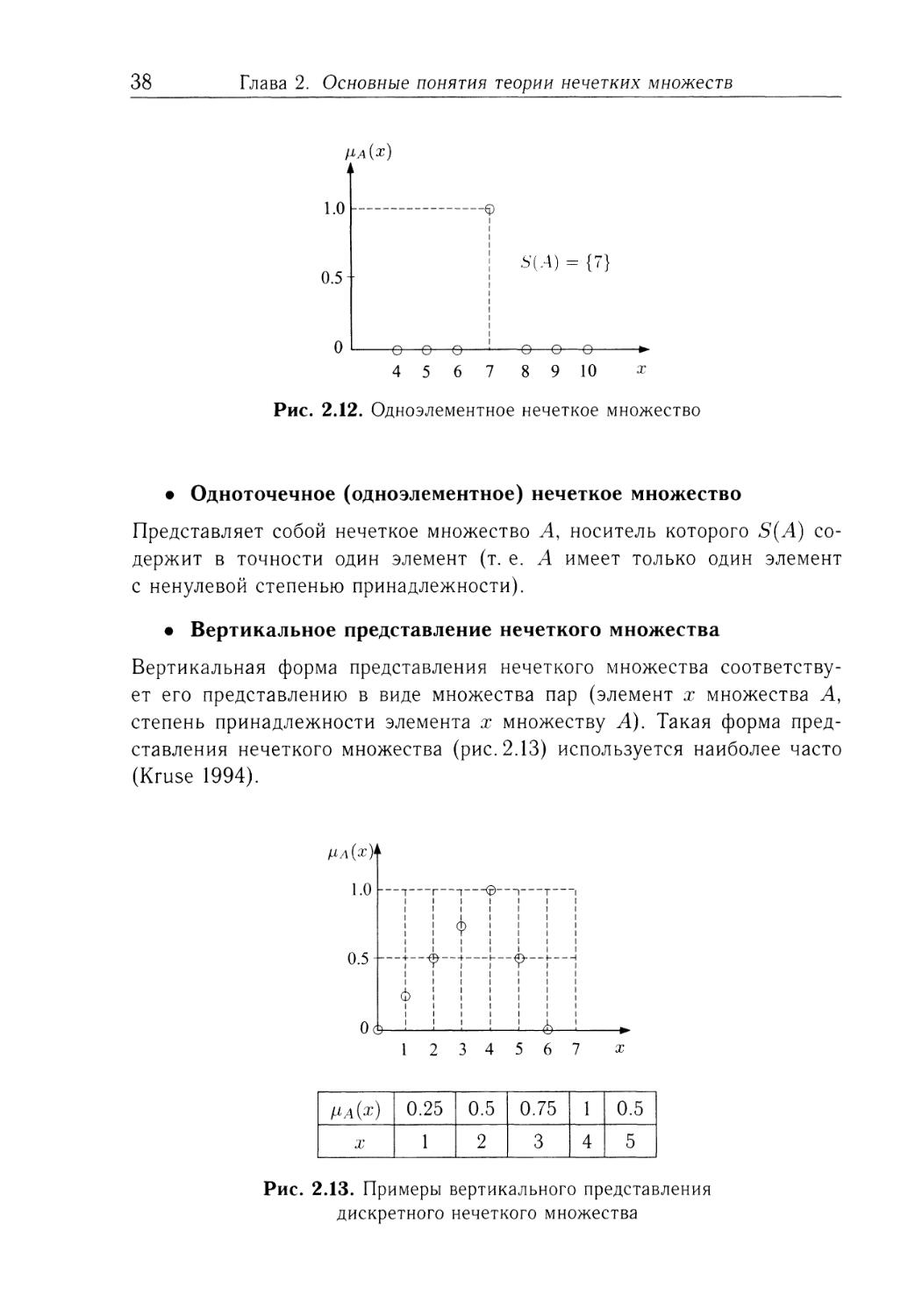
Рис. 2.12. Одноэлементное нечеткое множество
• Одноточечное (одноэлементное) нечеткое множество
Представляет собой нечеткое множество А, носитель которого S(A) со-
держит в точности один элемент (т. е. А имеет только один элемент
с ненулевой степенью принадлежности).
• Вертикальное представление нечеткого множества
Вертикальная форма представления нечеткого множества соответству-
ет его представлению в виде множества пар (элемент х множества А,
степень принадлежности элемента х множеству А). Такая форма пред-
ставления нечеткого множества (рис. 2.13) используется наиболее часто
(Kruse 1994).
1 2 3 4 5 6 7 х
0.25 0.5 0.75 1 0.5
X 1 2 3 4 5
Рис. 2.13. Примеры вертикального представления
дискретного нечеткого множества
2.2. Характеристические параметры нечеткого множества
39
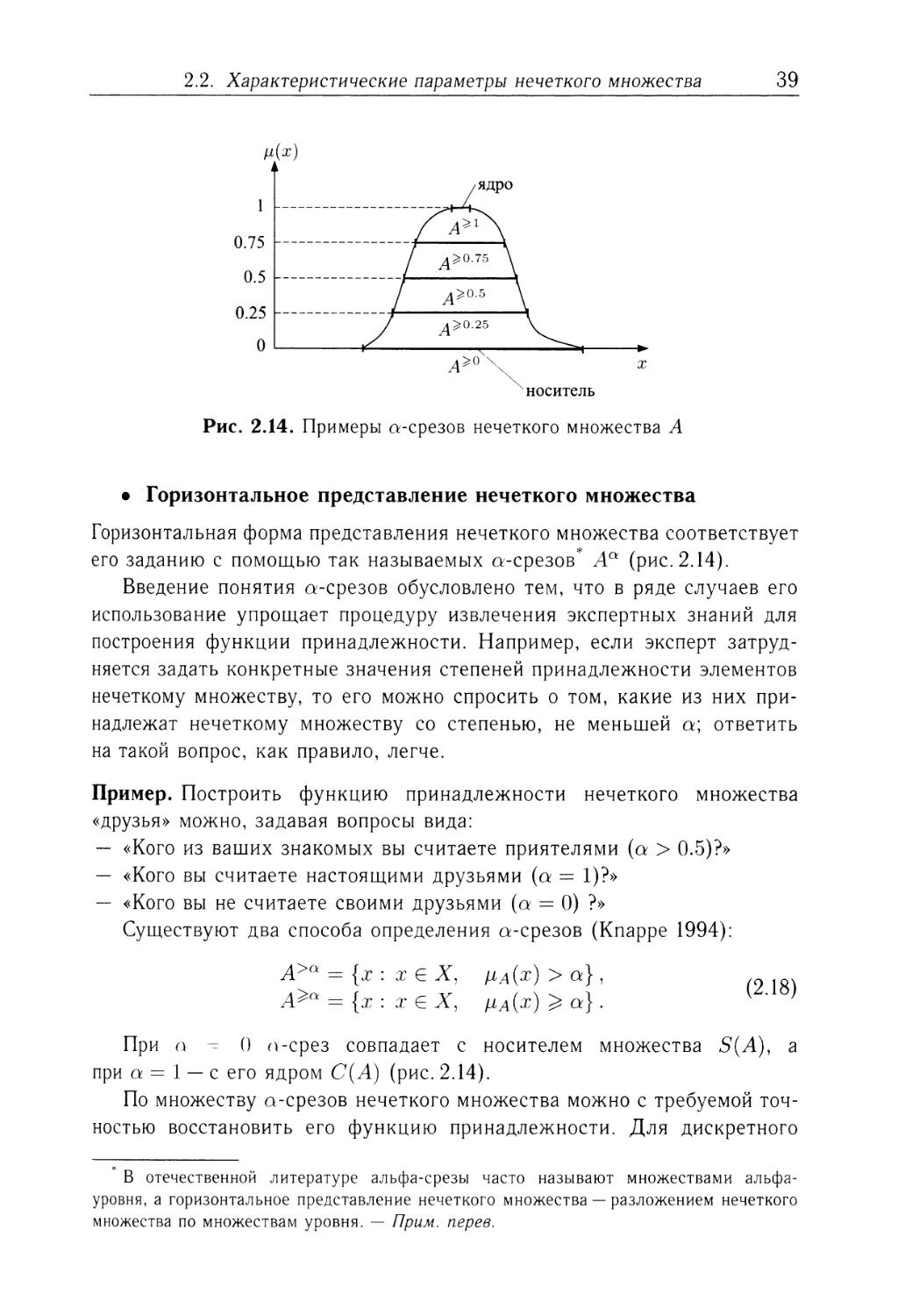
Рис. 2.14. Примеры «-срезов нечеткого множества А
• Горизонтальное представление нечеткого множества
Горизонтальная форма представления нечеткого множества соответствует
его заданию с помощью так называемых «-срезов* Аа (рис. 2.14).
Введение понятия «-срезов обусловлено тем, что в ряде случаев его
использование упрощает процедуру извлечения экспертных знаний для
построения функции принадлежности. Например, если эксперт затруд-
няется задать конкретные значения степеней принадлежности элементов
нечеткому множеству, то его можно спросить о том, какие из них при-
надлежат нечеткому множеству со степенью, не меньшей «; ответить
на такой вопрос, как правило, легче.
Пример. Построить функцию принадлежности нечеткого множества
«друзья» можно, задавая вопросы вида:
— «Кого из ваших знакомых вы считаете приятелями (« > 0.5)?»
— «Кого вы считаете настоящими друзьями (« = 1)?»
— «Кого вы не считаете своими друзьями (« = 0) ?»
Существуют два способа определения «-срезов (Кпарре 1994):
А>а = {х : х Е X, /хА(х) > «} , (С)
А^(Л = {ж : х Е X, /хА(х) > «} .
При « - 0 «-срез совпадает с носителем множества S(A), а
при « = 1 — с его ядром С(А) (рис. 2.14).
По множеству «-срезов нечеткого множества можно с требуемой точ-
ностью восстановить его функцию принадлежности. Для дискретного
* В отечественной литературе альфа-срезы часто называют множествами альфа-
уровня, а горизонтальное представление нечеткого множества — разложением нечеткого
множества по множествам уровня. — Прим, перев.
40
Глава 2. Основные понятия теории нечетких множеств
1.0
0.8
0.6
0.4
0.2
0
а = 1
а = 0.75
а = 0.5
а = 0.25
1234567 89^
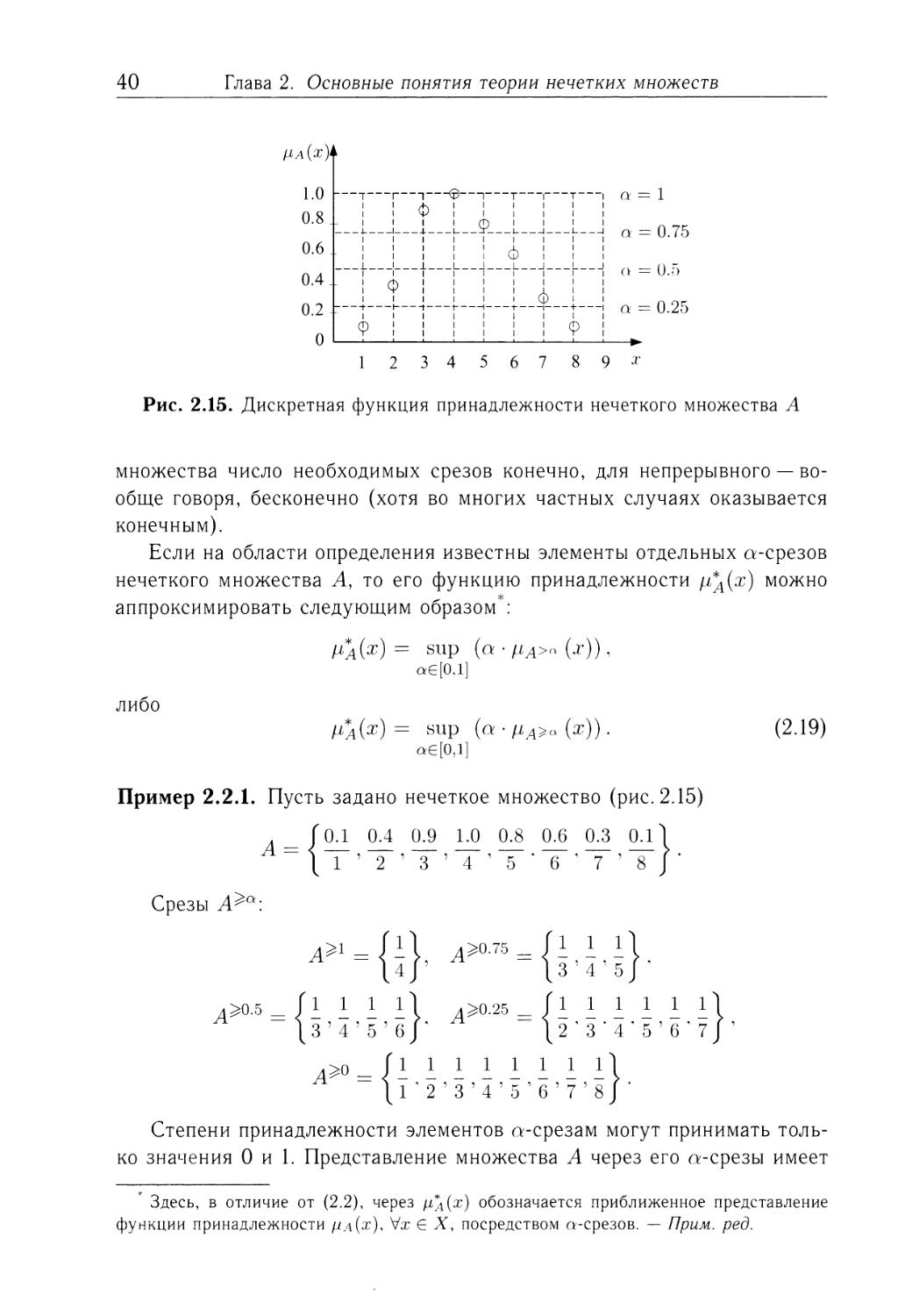
Рис. 2.15. Дискретная функция принадлежности нечеткого множества А
множества число необходимых срезов конечно, для непрерывного — во-
обще говоря, бесконечно (хотя во многих частных случаях оказывается
конечным).
Если на области определения известны элементы отдельных «-срезов
нечеткого множества А, то его функцию принадлежности д^(ж) можно
аппроксимировать следующим образом*:
МдЦ) = sup (а •/1Л>а (Ц),
аб[0.1]
либо
МдЦ) = sup (а •(ж)). (2.19)
«6(0,1]
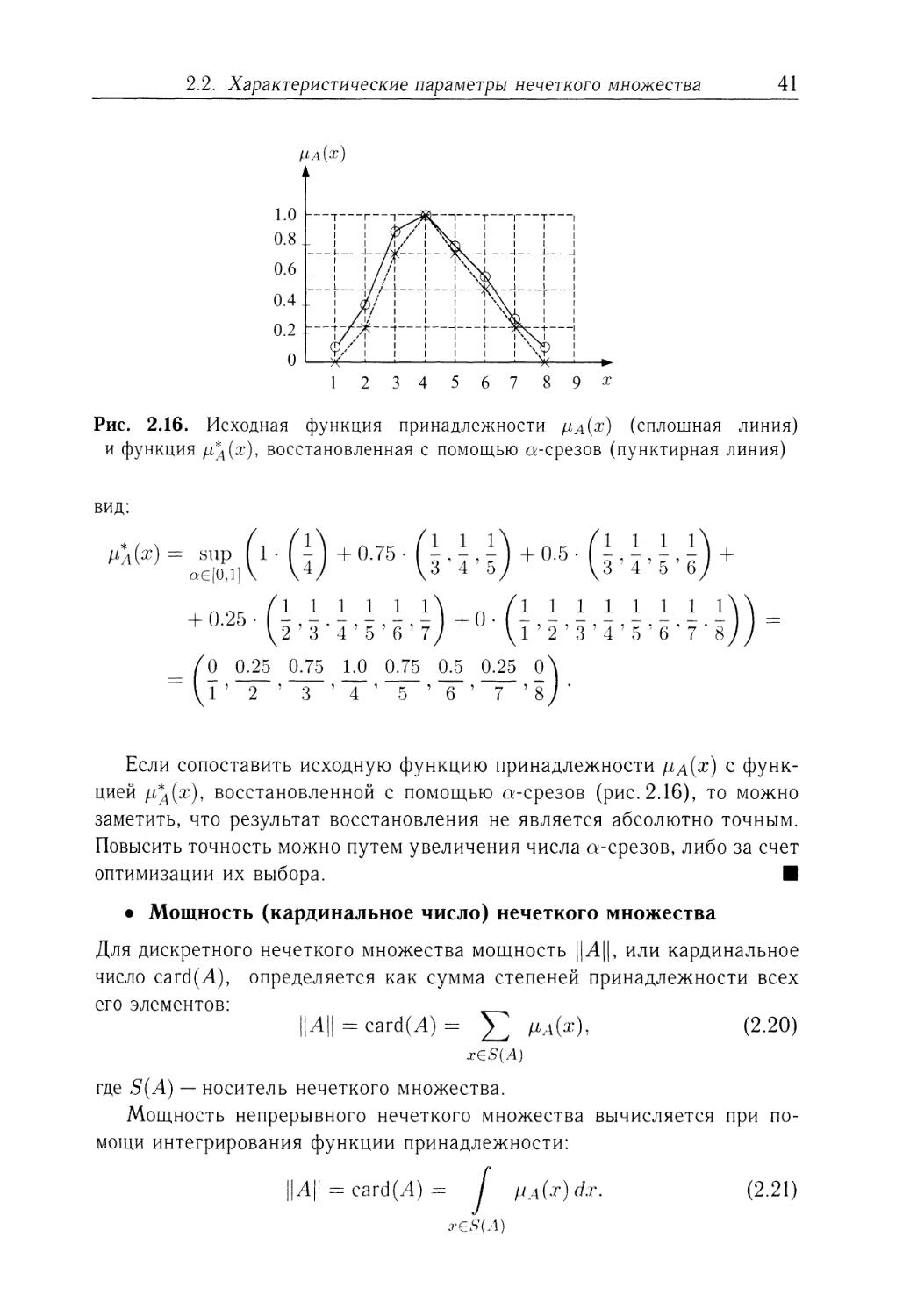
Пример 2.2.1. Пусть задано нечеткое множество (рис. 2.15)
А_ Г 0.1 0.4 0.9 1.0 0.8 0.6 0.3 0.11
Срезы A^Q:
А^1 = < - > тР0-75 = < - - - >
(4 J ’ [3’4’5J '
= Л 1 111 Л^0.25 fl 1 1 1 1 11
[3’4’5’ 6J’ [213 * 4 4 5’6 ’ 7J 1
= <f i ------ -1
\12’3’4’56’7’8J’
Степени принадлежности элементов «-срезам могут принимать толь-
ко значения 0 и 1. Представление множества А через его «-срезы имеет
Здесь, в отличие от (2.2), через Дд(гс) обозначается приближенное представление
функции принадлежности дд(гг), V.r е X, посредством а-срезов. — Прим. ред.
2.2. Характеристические параметры нечеткого множества
41
вид:
Рис. 2.16. Исходная функция принадлежности (сплошная линия)
и функция Дд(х), восстановленная с помощью «-срезов (пунктирная линия)
= SUP ( 1 • ( I ) + °-75 ' ( |
аб[0,1] \ \4/ V
1
4’5/
+ 0.5-
+ 0.25-
1 1 1 1 1 1Л
2’34’5’6’7/
+ 0-
ГГЗ’Гб’б'Т
1 1 1 1\
3’4’5’б} +
/о 0.25 0.75 1.0 0.75 0.5 0.25 0\
’ ~2~ ’ 1Г ’ ~4~ ’ "1Г ’ ~б” ’ ~Т ’ 8 J
Если сопоставить исходную функцию принадлежности /м(я) с функ-
цией восстановленной с помощью «-срезов (рис. 2.16), то можно
заметить, что результат восстановления не является абсолютно точным.
Повысить точность можно путем увеличения числа «-срезов, либо за счет
оптимизации их выбора.
• Мощность (кардинальное число) нечеткого множества
Для дискретного нечеткого множества мощность ||А||, или кардинальное
число card(A), определяется как сумма степеней принадлежности всех
его элементов:
||А|| = card(A) = £ /м(.г), (2.20)
xCS(A)
где S(A) — носитель нечеткого множества.
Мощность непрерывного нечеткого множества вычисляется при по-
мощи интегрирования функции принадлежности:
||Л|| = card(A) f (2.21)
42
Глава 2. Основные понятия теории нечетких множеств
Интегрирование или суммирование производится по элементам носи-
теля нечеткого множества, поскольку степень принадлежности осталь-
ных элементов области определения равна нулю. Понятие мощности поз-
воляет сравнивать различные нечеткие множества между собой. Пустое
нечеткое множество имеет нулевую мощность.
• Относительная мощность нечеткого множества
Относительная мощность дискретного нечеткого множества определяется
как доля его мощности, приходящаяся на один элемент области опреде-
где N — число элементов области определения.
Относительная мощность непрерывного нечеткого множества задает-
ся формулой
f pA{x}dx
f dx
(2.23)
В случае бесконечно большого числа N элементов дискретного нечет-
кого множества или неограниченной области определения непрерывного
нечеткого множества суммирование или интегрирование можно произво-
дить по элементам носителя S(A).
• Выпуклые и невыпуклые нечеткие множества
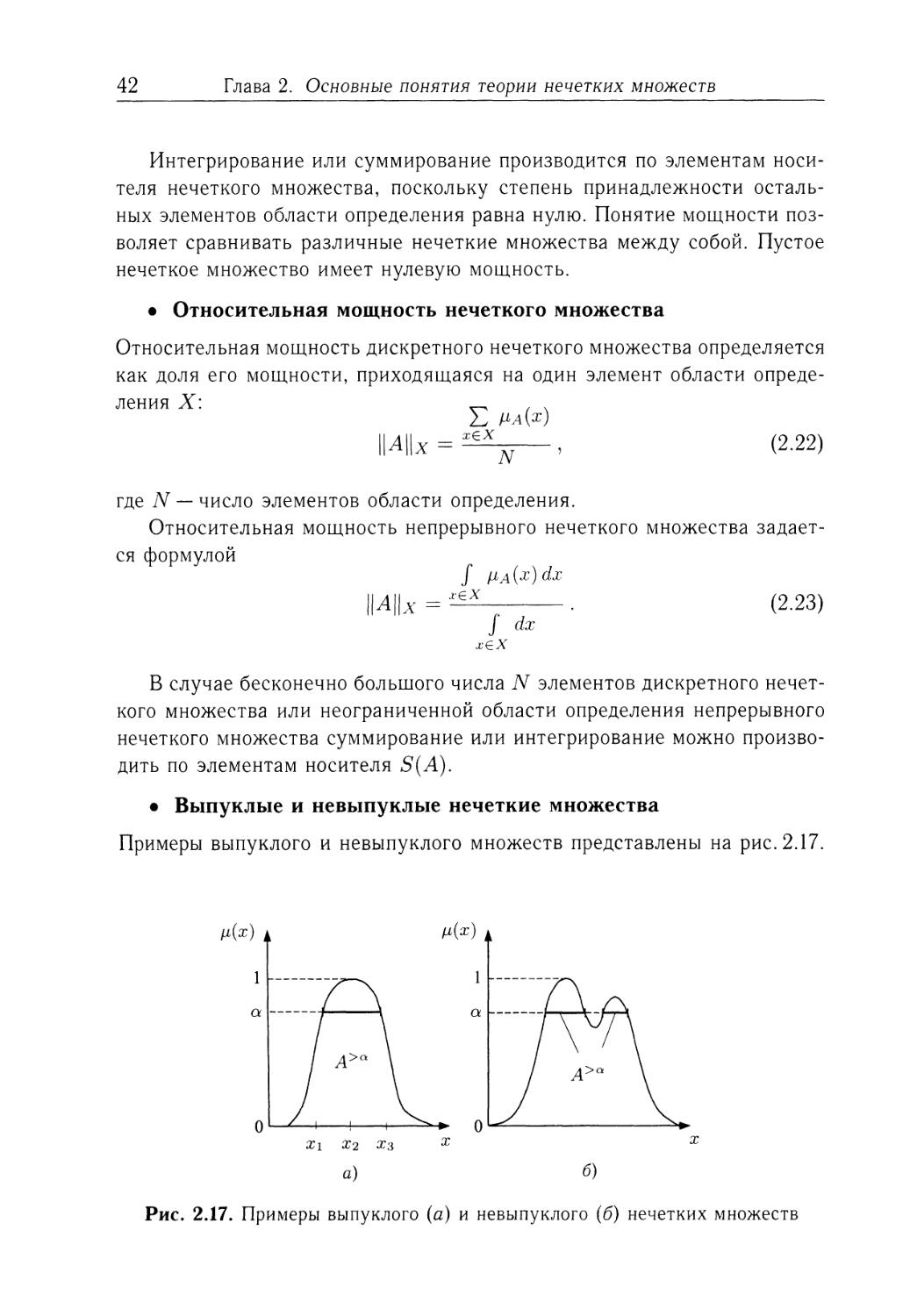
Примеры выпуклого и невыпуклого множеств представлены на рис. 2.17.
д(х)
XI Х2 Хз
Рис. 2.17. Примеры выпуклого (а) и невыпуклого (б) нечетких множеств
2.3. Лингвистические модификаторы нечетких множеств
43
Выпуклое нечеткое множество обладает тем свойством, что все его а-
срезы являются связными, одноинтервальными подмножествами области
определения X. У невыпуклого множества имеются несвязные «-срезы,
состоящие из нескольких частей (рис. 2.17, б).
Невыпуклые нечеткие множества могут возникать в результате вы-
полнения теоретико-множественных, алгебраических и арифметических
операций над множествами (исходные множества при этом могут быть
выпуклыми). Для выпуклых нечетких множеств справедливы следующие
условия:
Х1 < Х2 < х3 => даЩ) > min (да(жх), да(®з)),
Vrr 1, а?2, х3 G X,
или
Д.4 (ЛХ1 + (1 - А)х3) > min (даЦх), да(ж3)),
VA е [0,1] И Vxi,x3eX. }
2.3. Лингвистические модификаторы
нечетких множеств
Лингвистические модификаторы используются для создания нечетких
множеств, являющихся производными от некоторых ранее заданных. На-
пример, если имеется нечеткое множество «холодный», то на его основе
с помощью лингвистических модификаторов можно получить множества
«очень холодный» или «более или менее холодный».
Существуют три основных модификатора (называемых также опера-
торами):
— оператор концентрирования,
— оператор растяжения,
— оператор повышения/понижения контрастности.
• Оператор концентрирования нечеткого множества
Если А —нечеткое множество, соответствующее лингвистическому зна-
чению lit то данный оператор позволяет получить производное значение
«очень 1г». Действие оператора концентрирования можно описать в виде
следующей формулы*:
MCON(A)(^) = CON (дд(т)) = дд(ж)2, Мх е X. (2.26)
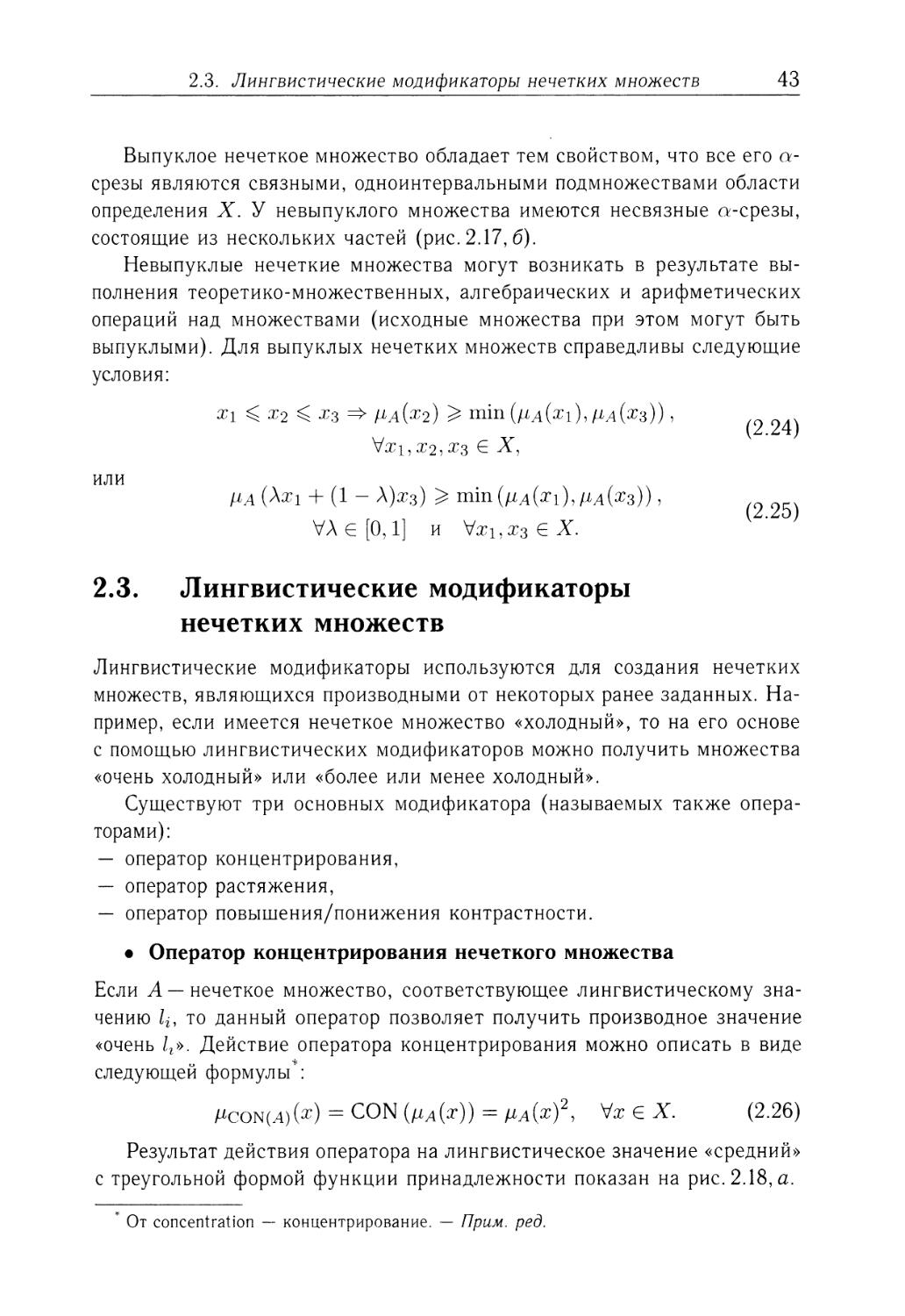
Результат действия оператора на лингвистическое значение «средний»
с треугольной формой функции принадлежности показан на рис. 2.18, а.
* От concentration — концентрирование. — Прим. ред.
44
Глава 2. Основные понятия теории нечетких множеств
Рис. 2.18. Пример действия оператора концентрирования на внутреннее (а)
и крайнее (6) нечеткие множества
Применительно к внутреннему нечеткому множеству с треугольной
формой функции принадлежности (рис. 2.18, а), смысл концентрирова-
ния заключается в том, что «очень средними» следует считать только
те значения х, которые расположены очень близко к центру с носителя
множества. Использование данного оператора возможно и для крайних
нечетких множеств, таких как множество «большой» на рис. 2.18, б, од-
нако вместо этого в подобных ситуациях часто строят новое крайнее
нечеткое множество «очень большой» (рис. 2.19).
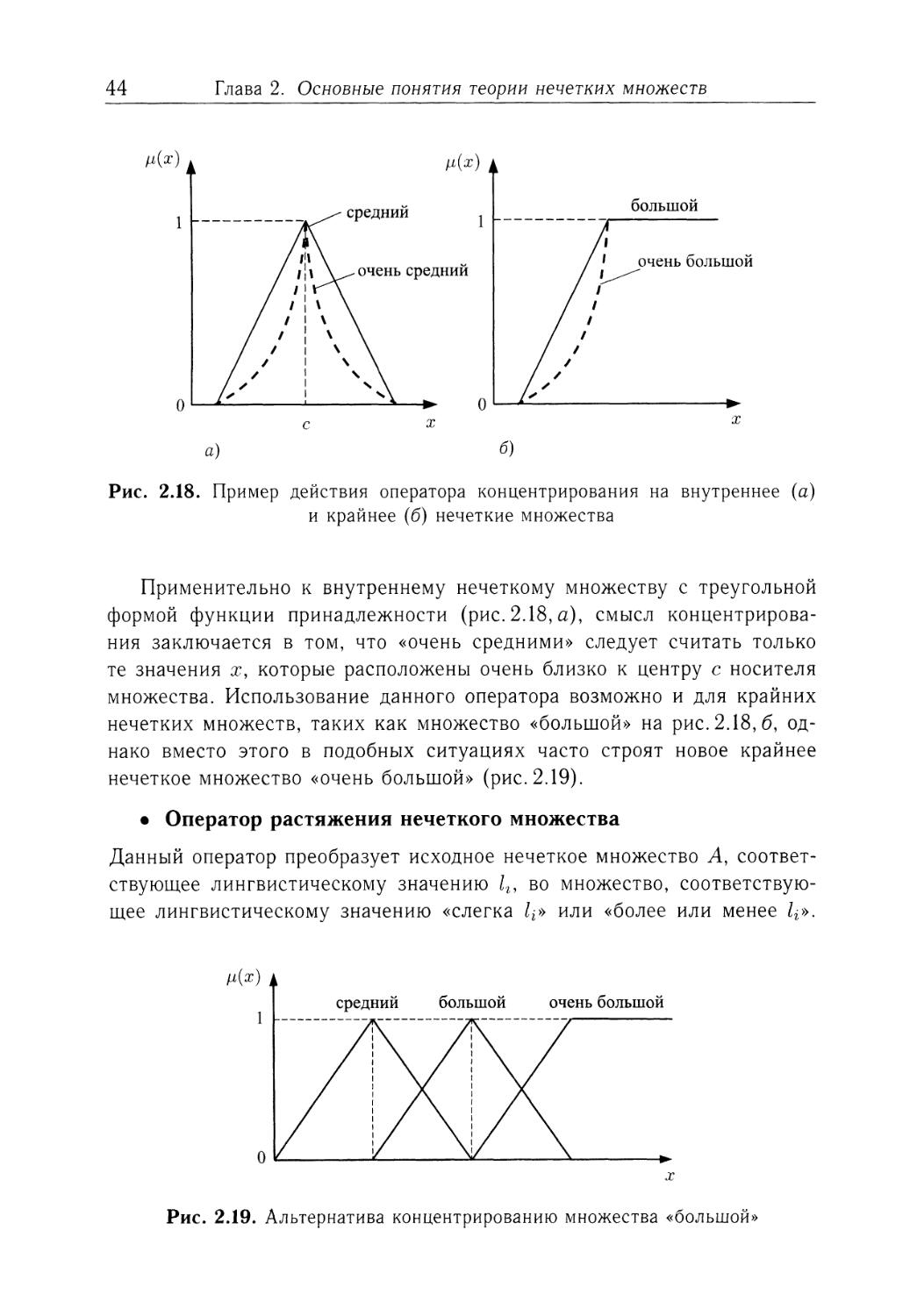
• Оператор растяжения нечеткого множества
Данный оператор преобразует исходное нечеткое множество А, соответ-
ствующее лингвистическому значению /г, во множество, соответствую-
щее лингвистическому значению «слегка Ц» или «более или менее Ц».
Рис. 2.19. Альтернатива концентрированию множества «большой»
2.3. Лингвистические модификаторы нечетких множеств
45
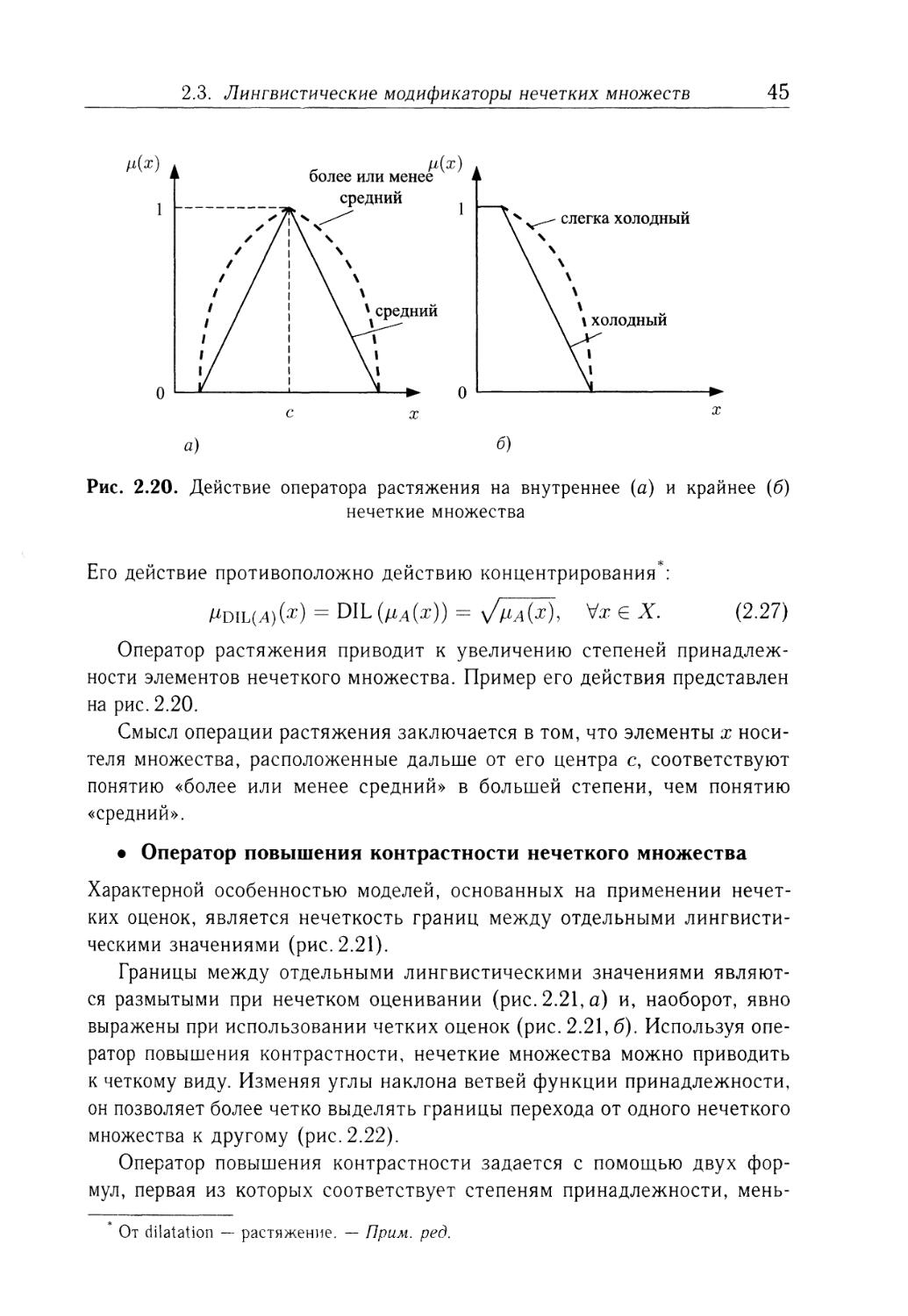
Рис. 2.20. Действие оператора растяжения на внутреннее (а) и крайнее (б)
нечеткие множества
Его действие противоположно действию концентрирования :
Mdil(X)PO = DIL ры(г)) = Va: G X. (2.27)
Оператор растяжения приводит к увеличению степеней принадлеж-
ности элементов нечеткого множества. Пример его действия представлен
на рис. 2.20.
Смысл операции растяжения заключается в том, что элементы х носи-
теля множества, расположенные дальше от его центра с, соответствуют
понятию «более или менее средний» в большей степени, чем понятию
«средний».
• Оператор повышения контрастности нечеткого множества
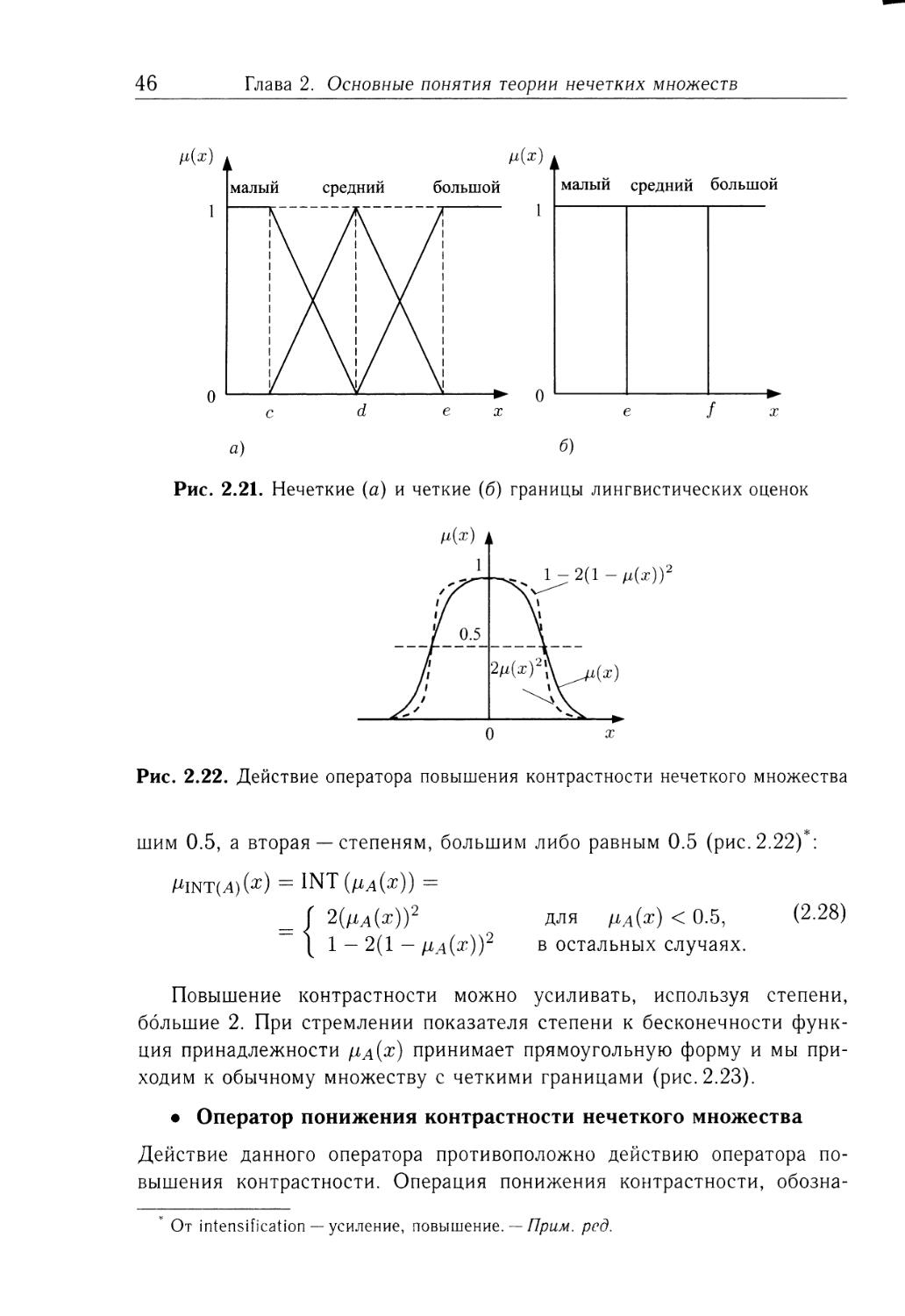
Характерной особенностью моделей, основанных на применении нечет-
ких оценок, является нечеткость границ между отдельными лингвисти-
ческими значениями (рис. 2.21).
Границы между отдельными лингвистическими значениями являют-
ся размытыми при нечетком оценивании (рис. 2.21, а) и, наоборот, явно
выражены при использовании четких оценок (рис. 2.21, б). Используя опе-
ратор повышения контрастности, нечеткие множества можно приводить
к четкому виду. Изменяя углы наклона ветвей функции принадлежности,
он позволяет более четко выделять границы перехода от одного нечеткого
множества к другому (рис. 2.22).
Оператор повышения контрастности задается с помощью двух фор-
мул, первая из которых соответствует степеням принадлежности, мень-
* От dilatation — растяжение. — Прим. ред.
46
Глава 2. Основные понятия теории нечетких множеств
Рис. 2.21. Нечеткие (а) и четкие (б)
границы лингвистических оценок
Рис. 2.22. Действие оператора повышения контрастности нечеткого множества
шим 0.5, а вторая — степеням, большим либо равным 0.5 (рис. 2.22)*:
Mint(A)(z) = 1NT (ма(ж)) =
_ Г 2(/м(ж))2 для ца(х) < 0.5, (2.28)
( 1 — 2(1 — ^д(ж))2 в остальных случаях.
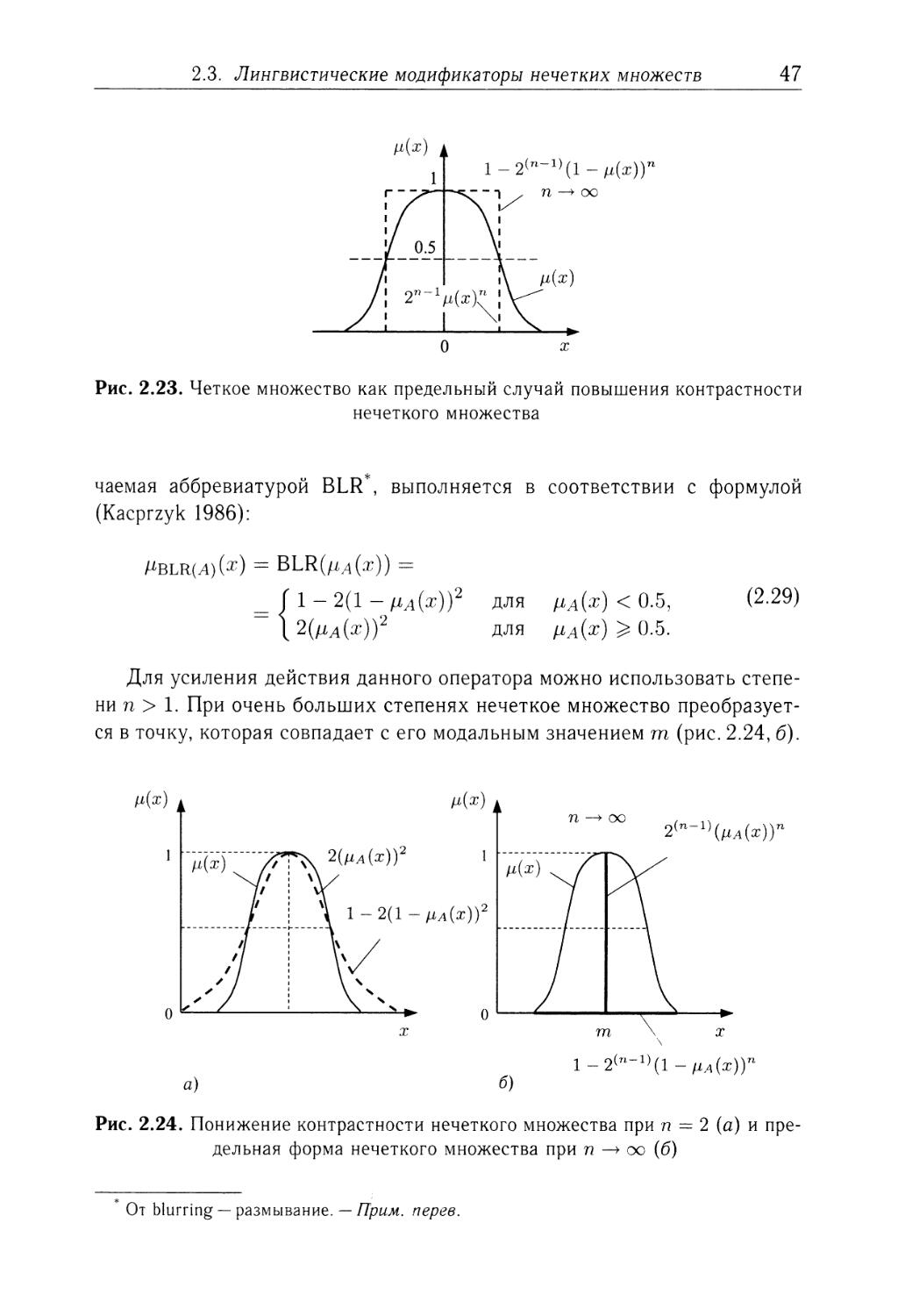
Повышение контрастности можно усиливать, используя степени,
большие 2. При стремлении показателя степени к бесконечности функ-
ция принадлежности цд(х) принимает прямоугольную форму и мы при-
ходим к обычному множеству с четкими границами (рис. 2.23).
• Оператор понижения контрастности нечеткого множества
Действие данного оператора противоположно действию оператора по-
вышения контрастности. Операция понижения контрастности, обозна-
От intensification — усиление, повышение. — Прим. ред.
2.3. Лингвистические модификаторы нечетких множеств
47
Рис. 2.23. Четкое множество как предельный случай повышения контрастности
нечеткого множества
чаемая аббревиатурой BLR*, выполняется в
соответствии с формулой
(Kacprzyk 1986):
Мвьща)(ж) = BLR(/m(z)) =
= Г 1 - 2(1 - мл(ж))2 для
I2(/м(ж))2 для
ца(х) < 0.5,
Р-а(х) 0.5.
(2.29)
Для усиления действия данного оператора можно использовать степе-
ни п > 1. При очень больших степенях нечеткое множество преобразует-
ся в точку, которая совпадает с его модальным значением тп (рис. 2.24, б).
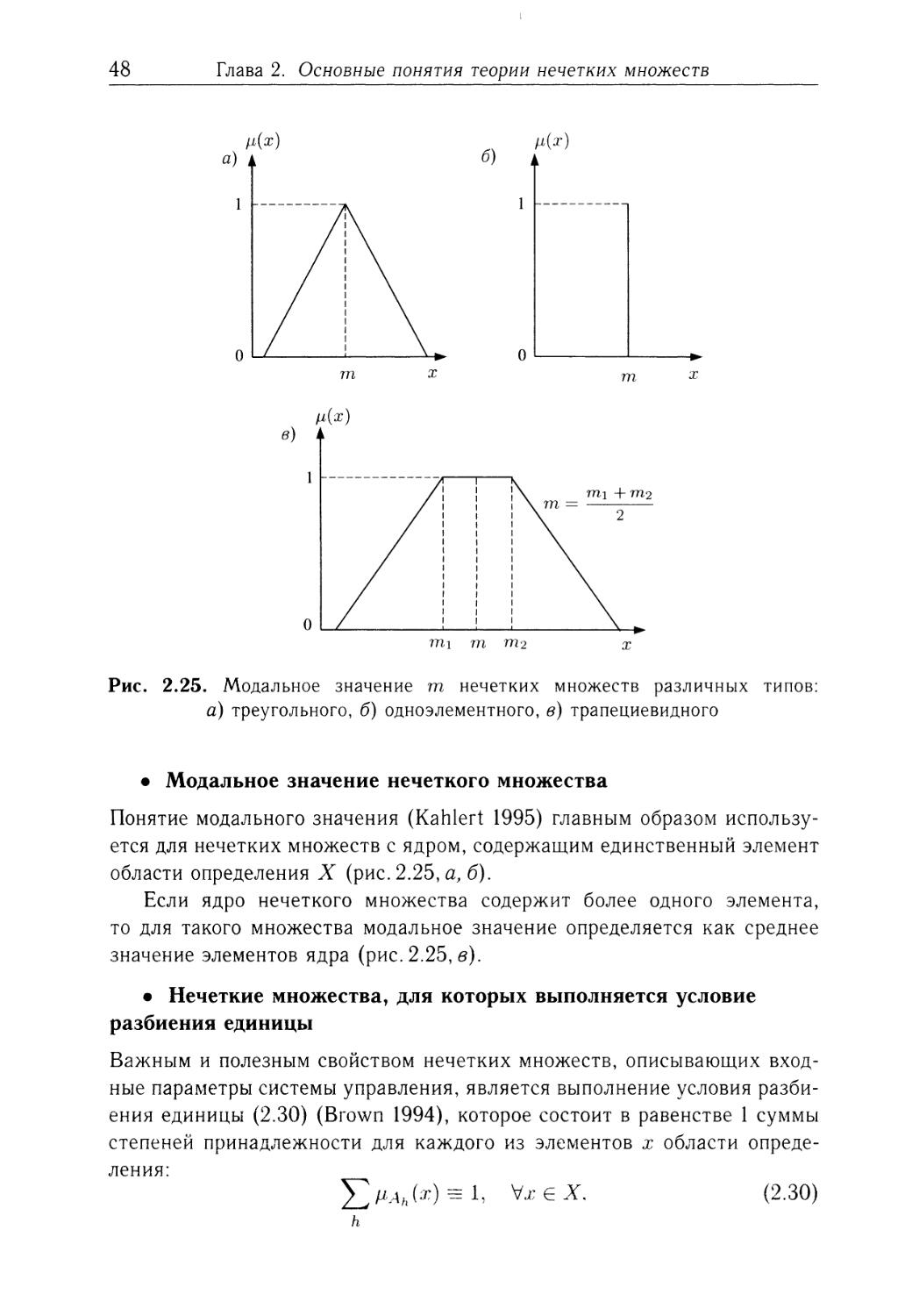
Рис. 2.24. Понижение контрастности нечеткого множества при п = 2 (а) и пре-
дельная форма нечеткого множества при п —> оо (б)
От blurring — размывание. — Прим, иерее.
48
Глава 2. Основные понятия теории нечетких множеств
Рис. 2.25. Модальное значение m нечетких множеств различных типов:
а) треугольного, б) одноэлементного, в) трапециевидного
• Модальное значение нечеткого множества
Понятие модального значения (Kahlert 1995) главным образом использу-
ется для нечетких множеств с ядром, содержащим единственный элемент
области определения X (рис. 2.25, а, б).
Если ядро нечеткого множества содержит более одного элемента,
то для такого множества модальное значение определяется как среднее
значение элементов ядра (рис. 2.25, в).
• Нечеткие множества, для которых выполняется условие
разбиения единицы
Важным и полезным свойством нечетких множеств, описывающих вход-
ные параметры системы управления, является выполнение условия разби-
ения единицы (2.30) (Brown 1994), которое состоит в равенстве 1 суммы
степеней принадлежности для каждого из элементов х области опреде-
ления:
= 1, VxgX. (2.30)
h
2.3. Лингвистические модификаторы нечетких множеств
49
Рис. 2.26. Примеры нечетких множеств Л/г, для которых выполняется (а)
и не выполняется (б, в) условие разбиения единицы
где Л —номер нечеткого множества.
Пример выполнения данного условия приведен на рис. 2.26, а, пример
невыполнения — на рис. 2.26, б, в.
При выполнении условия разбиения единицы модель обычно имеет
более гладкую поверхность отклика по сравнению с моделями, исполь-
зующими нечеткие множества, подобные представленным на рис. 2.26, б,
в то время как множества на рис. 2.26, в приводят к более плоским по-
верхностям. Нечеткие множества, для которых условие разбиения едини-
цы не выполняется, можно привести к виду, удовлетворяющему данному
условию.
Пример 2.3.1. Коррекция нечетких множеств At на рис. 2.27 выполня-
ется следующим образом (А* — преобразованные множества):
* / \ _
° МлДа)+Мл2(й)
(1-А = У'Ау W
141 МЛ1(&) + M/hW
/uja) _ j
МД! (а)
0.2
ол
= 0.5.
50
Глава 2. Основные понятия теории нечетких множеств
Рис. 2.27. Приведение нечетких множеств, не удовлетворяющих условию раз-
биения единицы (а), к виду, для которого данное условие удовлетворяется (б)
Преобразование функций принадлежности нечетких множеств А^,
представленных на рис. 2.27, а, приводит к множествам на рис. 2.27, б.
Однако, следует отметить, что в результате такого действия изменяется
форма функции принадлежности, а также возникают сложности, связан-
ные с обработкой интервалов, не принадлежащих ни одному из множеств,
например интервала (rf; е) на рис. 2.27. Интервалы такого типа могут воз-
никать при подстройке (адаптации) нечетких моделей на основе входных
и выходных данных (т. е. применении алгоритмов самообучения). В ре-
зультате возникает совокупность областей, нечувствительных к измене-
нию соответствующих входных параметров.
Условие разбиения единицы называют иногда также условием пере-
крытия функций принадлежности или условием приведения этих функ-
ций к единице.
2.4. Типы функций принадлежности
нечетких множеств
В практических приложениях теории нечетких множеств используется
большое количество различных типов функций принадлежности. Здесь
мы рассмотрим ряд как простых, так и сложных видов этих функций
и обсудим их свойства.
• Функции принадлежности, состоящие из прямолинейных
участков
Такие функции применяются на практике достаточно часто, что обуслов-
лено их простотой. На рис. 2.28 показаны различные формы наиболее
часто используемой функции многоугольной формы.
2.4. Типы функций принадлежности нечетких множеств
51
Рис. 2.28. Формы наиболее часто используемых кусочно-линейных функций
принадлежности: а — крайняя левая функция принадлежности; б, ж — асим-
метричная треугольная функция принадлежности; в, з — асимметричная трапе-
циевидная функция принадлежности; г — симметричная трапециевидная функ-
ция принадлежности; д — симметричная треугольная функция принадлежно-
сти; е — прямоугольная функция принадлежности; и — крайняя правая функция
принадлежности
Существенным преимуществом многоугольных функций принадлеж-
ности является то, что для их определения требуется наименьший
по сравнению с остальными функциями объем информации, который
в данном случае ограничивается данными об угловых точках, что явля-
ется весьма важным обстоятельством при моделировании систем в усло-
виях ограниченности объема исходных данных. Чтобы определить мно-
гоугольную функцию принадлежности, на практике обычно требуется за-
дать лишь модальное значение соответствующего нечеткого множества.
Пример 2.4.1. Значения входных и выходных величин реальных систем
обычно ограничиваются некоторым диапазоном изменения. Например,
перемещение поршня в серводвигателе может изменяться в пределах диа-
пазона
^min С С З’тах-
Функция принадлежности может иметь форму, представленную
на рис. 2.29.
В случае, представленном на рис. 2.29, для полного задания трех
функций принадлежности достаточно трех (вместо девяти) значений:
3 min, med * «^max •
Если, по мнению эксперта, модальное значение внутренней функции
принадлежности находится в середине диапазона изменения параметра,
то требуется только два значения: xmin и ттах, поскольку в этом случае
значение хтец однозначно определяется на их основе.
52
Глава 2. Основные понятия теории нечетких множеств
Рис. 2.29. Примеры функций принадлежности для случая,
когда диапазон изменения параметра ограничен с обеих сторон
Чтобы определить модальное значение треугольной функции (т. е. ве-
личину rrmed), следует ответить на единственный вопрос о том, какое
значение х следует считать наиболее характерным для данного лингви-
стического значения (например, значения «средний» на рис. 2.29).
Для записи математического выражения многоугольной функции при-
надлежности следует использовать логические переменные wp. {0,1}.
Пример 2.4.2. В случае трапециевидной функции принадлежности
(рис. 2.30, а) вводятся следующие логические переменные:
для а < х < Ь,
в других случаях,
для b < х < с,
в других случаях,
для с < х < d,
(2.31)
в других случаях.
Рис. 2.30. Асимметричная трапециевидная и симметричная треугольная
функции принадлежности
2.4. Типы функций принадлежности нечетких множеств
53
Функция принадлежности, имеющая форму асимметричной трапеции,
может быть представлена в виде
х) = W] т-------- 4- W2 4- w3 ---------
\ о — а / \ а — с
(2.32)
В случае симметричной треугольной функции (рис. 2.30, б) требуется
ввести только одну логическую переменную w:
1 для (е — а) С х < (е + а),
0 в других случаях.
(2.33)
Функция принадлежности может быть записана в виде
(2.34)
Достоинства многоугольных функций принадлежности
1. Для их задания требуется малый объем данных.
2. Простота модификации параметров (модальных значений) функции
принадлежности на основе измеряемых значений входных и выходных
величин системы.
3. Возможность получения в рамках модели отображения
«вход^выход» в виде гиперповерхности, состоящей из линейных
участков.
4. Для многоугольных функций принадлежности легко обеспечивается
выполнение условия разбиения единицы (в соответствии с которым
сумма степеней принадлежности для любого элемента х должна рав-
няться 1).
Недостатки многоугольных функций принадлежности
1. Многоугольные функции принадлежности не являются непрерывно
дифференцируемыми.
Пример 2.4.3. Как можно видеть на рис. 2.31, производная функции
принадлежности в точках разрыва изменяется скачкообразно. Таким об-
разом, модель системы, содержащая подобные функции, также не явля-
ется непрерывно дифференцируемой.
54
Глава 2. Основные понятия теории нечетких множеств
Рис. 2.31. Треугольная функция принадлежности и ее производная
В некоторых работах (Preuss 1994а; Rummelhart 1986) высказывается
мнение о том, что отсутствие непрерывной дифференцируемости функ-
ций принадлежности усложняет процесс адаптации (обучения) нечетких
моделей. Вместе с тем, результаты исследований автора и его коллег
(Piegat 1996,1997а) позволяют утверждать, что модели с функциями при-
надлежности рассмотренного вида все же обладают хорошими адаптив-
ными свойствами.
• Интуитивные функции принадлежности
Функции принадлежности, которые, часто на подсознательном уровне,
использует человек, называют интуитивными функциями принадлежно-
сти. Исследования, преимущественно связанные с методами классифика-
ции решений (Altrock 1993), позволили сделать вывод о том, что для ин-
туитивных функций принадлежности справедлив ряд свойств, именуе-
мых аксиомами Шваба.
Аксиома 1. Интуитивные функции принадлежности д^(х) являются
непрерывными на всей числовой области определения X.
Выражаемая человеком качественная оценка величины х не изменяет-
ся скачкообразно ни при каком достаточно малом изменении ее значения.
Таким образом, интуитивная функции принадлежности не может иметь
вид, представленный на рис. 2.32.
Пример 2.4.4. Весьма сомнительно, что для качественной оценки ро-
ста мы стали бы использовать функцию принадлежности прямоугольной
формы (рис. 2.33), в соответствии с которой человек с ростом 179.9 см
считается имеющим средний рост, а тот, кто всего лишь на 2 мм выше
(т. е. имеет рост 180.1 см), относится уже к высоким людям. Мало кто
согласился бы с подобной классификацией.
2.4. Типы функций принадлежности нечетких множеств
55
Аксиома 2. Первая производная интуитивной функции принадлежности
д(ж):
Д(ж) =
dp(x)
dx
является непрерывной на всей числовой области определе-
ния X.
Это следует из наблюдения, согласно которому скорость изменения
оценки параметра х (т. е. производная этой оценки) не меняется скачко-
образно при любых малых изменениях самого параметра.
Пример 2.4.5. В случае, когда функция принадлежности имеет тре-
угольную форму (рис. 2.34), любое небольшое изменение переменной х
в окрестности точки b приводит не только к скачкообразному изменению
значения производной Д(х), но также и к изменению ее знака. Тем самым,
треугольная функция принадлежности дает весьма грубое приближение
того, как делает оценку человек.
Отмеченное свойство, тем не менее, не означает, что данные функции
не следует использовать в нечетких моделях, поскольку точность модели,
содержащей треугольные функции принадлежности, может быть вполне
удовлетворительной.
Аксиома 3. Вторая производная интуитивной функции принадлежности
d2p(x)
dx2 ’
непрерывна на всей области определения.
Аксиома 4. Интуитивная функция принадлежности имеет минимальное
значение кривизны.
Данное утверждение означает, что из множества возможных функций
принадлежности человек выбирает ту, для которой значение максимума
Рис. 2.32. Функция принадлежности, имеющая разрыв в точке х ~ а
56
Глава 2. Основные понятия теории нечетких множеств
низкии
средний высокий
160 180 х = рост (см)
Рис. 2.33. Пример разрывной функции принадлежности
для лингвистической переменной «рост»
второй производной является минимальным среди всех таких функций:
/1(х) = arg min
м
max
х
Пример 2.4.6. Для треугольной функции принадлежности (рис. 2.34)
значение кривизны в точках (Ь — а), Ь, (Ь + а) столь велико, что ее вторая
производная Д(х) обращается в этих точках в бесконечность. Принци-
пам оценивания, которыми руководствуется человек, в большей степени
соответствует функция, представленная на рис. 2.35, обладающая малой
кривизной и непрерывными первой и второй производными.
Рис. 2.34. Треугольная функция принадлежности и ее производные
Рис. 2.35. Пример непрерывной функции принадлежности с малой кривизной
2.4. Типы функций принадлежности нечетких множеств
57
Далее мы рассмотрим различные виды функций, которые можно ис-
пользовать для математического представления интуитивных функций
принадлежности.
• Симметричная гауссова функция
Гауссова функция описывается выражением*
— ехр
(2.35)
Вид этой функции изображен
на рис. 2.36.
Вид данной функции, иногда называе-
мой гауссовым колоколом (Preuss 1994а),
определяется двумя параметрами — а и 6,
где b задает ее модальное значение, и а —
ширину. На уровне
Рис. 2.36. Функция принад-
лежности гауссовского типа
Ця) = е-1 0.36788
ширина гауссовой функции равна 2а. Мо-
дальное значение получают экспертным путем, задавая вопрос о наиболее
характерном значении х для данного нечеткого множества.
Пример 2.4.7. В качестве числового значения, в наибольшей степени
характеризующего нечеткое множество «средний рост», может быть вы-
брано b = 170 см.
Для того чтобы экспертным путем определить значение параметра а,
характеризующего ширину функции, можно воспользоваться понятием
критической точки к функции принадлежности, под которой понима-
ется точка со степенью принадлежности, равной 0.5. Любая гауссова
функция имеет две таких точки (рис. 2.37).
Если предположить, что соседние функции принадлежности пересе-
каются примерно на уровне /Дхд.) = 0.5 (что, однако, в нечетких моде-
лях выполняется не всегда), то критическую точку к можно рассматри-
вать как точку, для координаты х которой мы не можем указать, какому
из нечетких множеств — левому или правому — она принадлежит в боль-
шей степени (Altrock 1993).
Обычно эту функцию определяют немного иначе:
= ехр
(х - Ь)2
2а2
В этом случае точки b ± а будут как раз точками перегиба. — Прим, перев.
58
Глава 2. Основные понятия теории нечетких множеств
Рис. 2.37. Гауссова функция, используемая в качестве
функции принадлежности нечеткого множества «средний рост»
Таким образом, если мы не в состоянии решить, к какой группе лю-
дей— низкого или среднего роста — следует отнести человека, имеющего
рост 165 см, то можно считать, что данное значение принадлежит обо-
им названным нечетким множествам с одинаковой степенью, равной 0.5,
и задает тем самым координату критической точки функции принадлеж-
ности: = 165 см.
По известному модальному значению гауссовой функции (6 = 170 см)
можно вычислить значение второго параметра а:
ц(хк) = ехр
а —
= 6см.
хк ~ 170
а
-0.5,
Понятие критической точки к является особенно полезным при опре-
делении параметров функции принадлежности путем экспертного оцени-
вания, так как человеку легче всего указать граничные значения предъ-
явленного показателя и выделить значения, имеющие смысловое разли-
чие для заданной области его изменения. При этом эксперт, как пра-
вило, не в состоянии задать точные значения степеней принадлежности
элементов, не имеющих в заданной области смыслового различия. По-
верхность отклика нечеткой модели, использующей гауссову функцию,
в общем случае является глобально и локально нелинейной.
Достоинства гауссовой функции принадлежности
1. Использование гауссовых функций обеспечивает получение гладких,
непрерывно дифференцируемых гиперповерхностей отклика нечеткой
модели.
2.4. Типы функций принадлежности нечетких множеств
59
2. Являясь непрерывно и, более того, бесконечно дифференцируемыми
(бесконечная дифферецируемость означает наличие производной лю-
бого порядка), гауссовы функции дают возможность проведения тео-
ретического анализа нечетких систем (Brown 1994).
Недостатки гауссовой функции принадлежности
1. Гауссова функция симметрична, что приводит к нарушению условия
разбиения единицы (рис. 2.38).
2. Использование гауссовой функции принадлежности предполагает за-
дание большего, чем для треугольной функции, числа параметров (по
два параметра для каждой функции), что усложняет настройку нечет-
кой модели.
3. Гауссова функция имеет неограниченный носитель, что означает, что
любой элемент х области определения X будет принадлежать лю-
бому нечеткому множеству, задаваемому с помощью этой функции
(рис. 2.38), и это может не соответствовать представлениям экспер-
та о моделируемой системе. Вместе с тем, степени принадлежности
элементов х, находящихся далеко от центра гауссовой функции, пре-
небрежимо малы, вследствие чего ширина этой функции на практике
оказывается не столь велика.
4. Использование гауссовой функции затрудняет получение простых ло-
кально линейных поверхностей отклика нечеткой модели.
В качестве альтернативы гауссовым функциям принадлежности
с неограниченным носителем были предложены бесконечно дифферен-
цируемые гауссовы функции с ограниченным носителем (Werntges 1993).
Пример такой функции (Brown 1994) показан на рис. 2.39.
Рис. 2.38. Неравномерное расположение гауссовых функций принадлежности
на области определения X для различных значений ширины
60
Глава 2. Основные понятия теории нечетких множеств
Рис. 2.39. Гауссова функция принадлежности
с ограниченным носителем (Ai,A2)
Форма данной функции определяется выражением
4(А2 - х)(х - Ai) - (А2 - Ai)2
ДЛЯ А1 < X < А2,
ехр
0
мЦ) = <
4(А2 - х)(х - Ai)
в других случаях,
(2.36)
где Ai, А2 задают узловые точки функции (ограничивающие ее носитель).
Гауссова функция вида (2.36) является симметричной.
• Асимметричная гауссова функция
Данная функция сочетает в себе преимущество гауссовой функции, свя-
занное с бесконечной дифференцируемостью, с отсутствием недостатка,
выражающегося в ее симметричности (рис. 2.40).
Если ввести вспомогательную логическую переменную
w =
ДЛЯ
— СЮ < X < ш,
в других случаях,
(2.37)
Рис. 2.40. Бесконечно дифференцируемая асимметричная гауссова функция
1
0
2.4. Типы функций принадлежности нечетких множеств
61
Рис. 2.41. Левая (а) и правая (б) сигмоидальные функции
то асимметричная гауссова функция задается в следующем виде:
//(ж) = w • ехр
х — m
«1
+ (1 — w) • ехр
(2.38)
где тп — ее модальное (среднее) значение.
При использовании асимметричной гауссовой функции имеется воз-
можность выполнения условия разбиения единицы (Brown 1994).
• Сигмоидальная функция принадлежности
Будучи симметричными, гауссовы функции подходят для представления
внутренних нечетких множеств. Для представления крайних множеств
можно использовать левую и правую сигмоидальную функцию (рис. 2.41).
Правая сигмоидальная функция зада-
ется с помощью выражения* :
мЦ) = -------Л-7------777 • (2.39)
v 1 + ехр[-а • (х - Ь)]
Параметр b задает координату точки к,
принадлежащей нечеткому множеству со
степенью 0.5, поэтому его значение мож-
но достаточно легко получить от эксперта.
Коэффициент а определяет наклон функ-
ции в точке перегиба к — с увеличени-
ем его значения растет величина наклона.
При а = 10 вид функции близок к ступен-
чатому (рис. 2.42).
Рис. 2.42. Форма сигмоидаль-
ной функции при различных
значениях коэффициента на-
клона а
* Здесь а > 0, потому что при отрицательных а это уже будет левая сигмоидальная
функция. — Прим, иерее.
62
Глава 2. Основные понятия теории нечетких множеств
Коэффициент наклона а можно вычислить на основе экспертной оцен-
ки значения хо.99, т- е- наименьшего значения переменной х, которое
может с практически полной уверенностью считаться принадлежащим
нечеткому множеству, задаваемому сигмоидальной функцией.
Рассматриваемая сигмоидальная функция достигает значения 1.0
при х сю:
lim ТТ-------------MI = Г (2.40)
х—>ос 1 4- ехр[—а • (х — Ь)\
с учетом чего на практике можно предполагать, что значение функции,
равное, например 0.99, соответствует полной принадлежности значения
переменной х нечеткому множеству.
Пример 2.4.1. Нечеткое множество «высокий рост» можно задать с по-
мощью сигмоидальной функции, представленной на рис. 2.43.
Если предположить, что людей, имеющих рост 180 см, можно с пол-
ной уверенностью (// = 0.99) отнести к высоким, то коэффициент накло-
на а вычисляется согласно выражениям:
М(^О.9о) =
1
1 4- ехр[—а • (.го.99 - Ь)] ’
1п(99) = 1п(99) 0 919
2’0.99 - Ъ 180 - 175
(2.41)
(2.42)
(2.43)
Левая сигмоидальная функция (рис. 2.41, а) задается выражением:
= 1___________________1________= ехр[~а • (* -
14- ехр[-а • (ж - b)] 1 + ехр[-а • (х — 6)]
По аналогии с правой, левая сигмоидальная функция имеет точку
перегиба х = Ь, и ее значение в этой точке равно 0.5. Коэффициент
Рис. 2.43. Сигмоидальная функция принадлежности
нечеткого множества «высокий рост»
2.4. Типы функций принадлежности нечетких множеств
63
Рис. 2.44. Гармоническая функция принадлежности и ее производные
наклона а вычисляется по формуле:
1п(99)
^0.99 — Ь
(2.44)
Сигмоидальная функция имеет те же достоинства и недостатки, что
и гауссова.
• Гармоническая функция принадлежности
Выражение для внутренней гармонической функции имеет вид:
0.5
0
для (6 — а) х (6 + а),
в других случаях.
(2.45)
Вид этой функции показан на рис. 2.44.
Достоинства гармонической функции принадлежности
1. Гармоническая функция имеет ограниченный носитель [(5 —а), (Ь+а)],
что позволяет задавать ее параметры экспертным путем.
2. Будучи бесконечно дифференцируемой, гармоническая функция упро-
щает получение гладких, непрерывно дифференцируемых поверхно-
стей отклика модели.
3. Первая производная гармонической функции в граничных точках но-
сителя равна нулю, вследствие чего данная функция хорошо согласу-
ется с некоторыми из аксиом Шваба.
Недостатки гармонической функции принадлежности
1. Гармоническая функция является симметричной и, если функции при-
надлежности расположены на области определения неравномерно, это
нарушает условия разбиения единицы и отрицательно сказывается
64
Глава 2. Основные понятия теории нечетких множеств
Рис. 2.45. Правая внешняя гармоническая функция принадлежности
и ее производные
на качестве моделирования на участках, слабо охватываемых функ-
циями принадлежности. Для минимизации данного недостатка мож-
но воспользоваться асимметричной гармонической функцией, зада-
ваемой аналогично тому, как это делалось в случае асимметричной
гауссовой функции (2.38).
Правая внешняя гармоническая функция принадлежности задается
с помощью формулы
1 + sin
для х > (6 + а),
для (6 — а) х (6 + а),
для х < (Ь — а).
(2.46)
Вид правой внешней гармонической функции представлен
на рис. 2.45. Как и в случае внутренней гармонической функции, ее пер-
вая производная равна нулю в граничных точках носителя [(6 — а), Ь + а)].
Функция имеет малую кривизну, вследствие чего хорошо (хотя и не пол-
ностью) согласуется с аксиомами Шваба.
Левая внешняя гармоническая функция принадлежности задается
с помощью формулы
для
х > (Ь + а),
р(х) = 0.5
1
— sin
для (6 — а) х (Ь 4- а),
для х < (5 — а).
(2.47)
Функция имеет вид, представленный на рис. 2.46.
2.4. Типы функций принадлежности нечетких множеств
65
Рис. 2.46. Левая внешняя гармоническая функция принадлежности
и ее производные
• Полиномиальные функции принадлежности
Достоинство этих функций состоит в том, что их сложность определяется
числом аксиом Шваба, справедливость которых следует обеспечить.
Наиболее простой является внутренняя полиномиальная функция
принадлежности второго порядка, которая определяется выражением
если (Ь — а) х (5 4- а).
(2.48)
в других случаях.
Вид этой функции показан на рис. 2.47.
Правая внешняя полиномиальная функция принадлежности второго
порядка определяется по формуле
если х < (Ь — а).
если (6 — а) х 6,
(2.49)
если х > Ь.
Рис. 2.47. Полиномиальная функция принадлежности второго порядка
и ее производные
66
Глава 2. Основные понятия теории нечетких множеств
Рис. 2.48. Левая и правая внешние полиномиальные функции принадлежности
второго порядка
Левая внешняя полиномиальная функция принадлежности второго
порядка определяется по формуле
{1, если х < 6,
/ _ , \ 2
1— j , если 6<ж<(6 + а), (2.50)
0, если х > (& 4- а).
Левая и правая полиномиальные функции принадлежности второго
порядка изображены на рис. 2.48.
Достоинства полиномиальной функции принадлежности
второго порядка
1. Функция является непрерывно дифференцируемой во всех точках но-
сителя, а стало быть более гладкой, чем треугольная.
2. Параметры а, b легко задаются экспертным путем.
Недостатки полиномиальной функции принадлежности
второго порядка
1. Функция не удовлетворяет в достаточной степени аксиомам Шваба.
В частности, ее производная не обращается в ноль в граничных точ-
ках носителя (рис. 2.47).
2. Функция симметрична, т. е. для нее может не выполняться условие
разбиения единицы.
Чтобы обеспечить выполнение большего числа (в том числе всех)
аксиом Шваба, следует воспользоваться полиномиальной функцией п-
го порядка, где n = m — 1, m — число основанных на аксиомах Шваба
требований, предъявляемых к функции принадлежности.
2.4. Типы функций принадлежности нечетких множеств
67
Рис. 2.49. Примеры полиномиальной функции принадлежности
Полиномиальная функция принадлежности n-го порядка задается
формулой
z х f anxn 4- 4- ... + алх 4- ап, если хт < х < xr.
lAx) = 5 п -1
[О или 1 в других случаях.
(2.51)
Примеры внешних и внутренней функций принадлежности представ-
лены на рис. 2.49.
Метод построения полиномиальной функции принадлежности рас-
смотрим на следующем ниже примере.
Пример 2.4.1. Предположим, что к левой полиномиальной функции
принадлежности предъявляются следующие основанные на аксиомах
Шваба требования (число требований можно варьировать):
1. Цхь) = 1, 2. м(^7?) = о,
3. ЦхЦ = 0, 4. Д(хд) = О,
где xl, xr — заданные узловые точки функции принадлежности, хм —
ее модальное значение.
Для выполнения указанных условий (т = 4) следует воспользоваться
функцией принадлежности 3-го порядка:
/Дх) = азх3 4- а2^2 4- ацх 4- clq.
Производная этой функции имеет вид
Д(.т) = Зазх2 4- 2а2Х 4- ai.
Полагая координаты узловых точек равными xl = 0, xr — 1, прихо-
дим к системе четырех уравнений, выражающих предъявленные к функ-
ции требования:
1. ao = 1, 2. ai = О,
3. аз 4“ а2 4-1 — 0, 4. Заз 4- 2а2 — О,
68
Глава 2. Основные понятия теории нечетких множеств
решая которую, получаем:
1. do — 1, 2. «1 = О,
3. а2 = -30, 4. а3 = 2.
Окончательно, имеем следующее выражение для функции принад-
лежности:
/л(х) = 2т3 — Зя?2 + 1.
Преимущества полиномиальных функций принадлежности
высокого порядка
1. Возможность выполнения накладываемых на функции принадлежно-
сти условий, связанных с аксиомами Шваба, положением критической
точки (/a(xk) = 0.5) и др.
2. Возможность значительного повышения точности модели и ее адап-
тации к моделируемой системе благодаря большому числу степеней
свободы полиномиальных функций принадлежности.
3. Повышение возможности получения гладких, непрерывно дифферен-
цируемых поверхностей отклика нечеткой модели.
4. Простота построения асимметричных внутренних функций принад-
лежности, что позволяет повысить точность моделирования.
Недостатки полиномиальных функций принадлежности
высокого порядка
1. Сложность нахождения большого числа параметров, необходимых
для задания полиномиальной функции высокого порядка.
2. Невыполнение (вообще говоря) условия разбиения единицы.
• Рекомендации при выборе функции принадлежности
Выбор функции принадлежности в значительной мере определяется объе-
мом имеющейся информации о моделируемой системе, а также качеством
имеющихся в распоряжении исследователя методов настройки модели.
Малый объем информации о системе
При малом объеме имеющейся информации о системе следует исполь-
зовать простейшие функции принадлежности, состоящие из прямоли-
нейных участков, для нахождения параметров которых требуется зна-
чительно меньшее, по сравнению с остальными функциями принадлеж-
ности, количество информации. Кусочно-линейные функции принадлеж-
2.4. Типы функций принадлежности нечетких множеств
69
a
б
Рис. 2.50. Локально линейная (а) и локально нелинейная (б) модель системы
ности приводят к получению локально линейных поверхностей отклика
модели (при условии правильного выбора других составляющих нечет-
кой системы), что положительно сказывается на точности моделирования
в условиях малого объема исходных данных.
Пример 2.4.1. Пусть известны только три точки поверхности отклика
моделируемой системы: Pi, Р2 и Р3 (рис. 2.50).
При отсутствии информации о поведении системы в интервалах меж-
ду точками Pi, Р2 и Р3 наиболее надежным будет использование моде-
ли, состоящей из прямолинейных участков (рис. 2.50, а). Использование
функций принадлежности с криволинейными участками приведет к по-
верхности отклика, также содержащей криволинейные участки, однако,
вследствие сложности нечетких моделей, будет сложно предугадать ве-
личину и направление их кривизны (рис. 2.50, б).
Указанное свойство, вообще говоря, негативно отражается на точно-
сти моделирования. Идентифицировать же параметры нелинейных функ-
ций принадлежности по причине недостатка информации о системе
в этом случае часто не удается.
Большой объем информации о системе
Наличие большого объема информации о системе в форме измеренных
входных и выходных данных дает возможность идентификации больше-
го числа параметров нечеткой модели, что позволяет использовать более
сложные функции принадлежности, такие как гауссовы или полиноми-
альные, и тем самым приводит к моделям более точным, чем в слу-
чае простых функций, состоящих из прямолинейных участков. Вместе
с тем, для идентификации большого числа параметров нечеткой моде-
ли требуются высокоэффективные методы ее адаптации (настройки), ко-
торые не всегда имеются в распоряжении исследователя. Кроме того,
более сложные функции принадлежности состоят из кривых, что повы-
70
Глава 2. Основные понятия теории нечетких множеств
шает степень нелинейности модели, увеличивая в свою очередь число
локальных экстремумов функции ошибок. В результате процесс иденти-
фикации сопровождается значительными трудностями, для преодоления
которых следует применять достаточно мощные генетические алгорит-
мы (Davis 1991; Goldberg 1995; Kahlert 1995), которые, однако, не всегда
дают удовлетворительные результаты (Preuss 1995) вследствие сложно-
сти моделей и наличия у них большого числа степеней свободы. Опыт
автора (Piegat 1996,1997а) и других исследователей (Hensel 1995) поз-
воляет говорить о преимуществе в данной ситуации более простых, со-
стоящих из прямолинейных участков функций принадлежности, упро-
щающих процесс настройки (обучения) нечеткой модели, обеспечивая
при этом ее высокую точность.
Некоторые исследователи (Altrock 1993) рекомендуют на начальном
этапе построения модели использовать простейшие функции принадлеж-
ности, а на последующих этапах проводить тестирование модели с при-
менением более сложных функций для того, чтобы проверить, не приво-
дят ли эти функции к повышению точности модели. Также отметим, что
существующее мнение (Altrock 1995; Zimmermann 1994) о том, что вид
и форма функции принадлежности не оказывают существенного влияния
на точность и качество нечеткой модели, является неверным — об этом
также свидетельствуют результаты исследований, приведенные, в част-
ности, в (Baglio 1994; Brown 1994).
2.5. Нечеткие множества типа 2
Если для множества Ai каждому элементу х области определения X со-
поставлено значение р*А1(х) степени принадлежности этому множеству,
лежащее в интервале [0,1] и задаваемое с помощью функции принадлеж-
ности
МЛ1Ц): [0,1], (2.52)
то об Ai говорят как о нечетком множестве типа 1.
Пример 2.5.1. Множество Ai = «высокий рост»:
X = {170см, 172.5см, 175см, 177.5см, 180см, 190см, 200см},
[ 0 0.25 0.5 0.75 1.0 1.0 1.0 1
1 1 “ \ 170 см ’ 172.5 см ’ 175 см ’ 177.5 см ’ 180 см ’ 190 см ’ 200 см J '
Функция принадлежности множества представлена на рис. 2.51.
2.5. Нечеткие множества типа 2
71
ВЫСОКИЙ
€>-
ч-
190
-н
200
Рис. 2.51. Функция принадлежности нечеткого множества типа 1
«высокий рост»
Однако не всегда возможно определить степень принадлежности точ-
но, в числовой форме — иногда это можно сделать только лингвистиче-
ски, используя нечеткую меру.
Пример 2.5.2. X = {Эндрю, Бен, Чарли} = {дц,х‘2, %з} ~ множество
студентов,
L = {низкая, средняя, высокая} — {Zi, Z2J3} — множество нечетких сте-
пеней принадлежности нечеткому множеству «способных студентов»,
А2 — множество «способных студентов»:
(высокая средняя низкая! _ Г Z3 l2 h 1
2 [ Эндрю ' Бен ’ Чарли f [ Xi ’ Х2 ’ Х3 J
Нечеткие степени принадлежности множеству «способных студентов»
можно наглядно представить так, как это показано на рис. 2.52.
Множество «способных студентов» можно графически представить в
соответствии с рис.2.53.
При оценке способностей студентов обычно трудно точно оценить сте-
пень принадлежности конкретного студента множеству «способных сту-
дентов», в виде, например:
Id а2 (Эндрю) = 0.99.
72
Глава 2. Основные понятия теории нечетких множеств
О 0.5 1 у = способности (непрерывная мера)
Рис. 2.52. Наглядное представление функций принадлежности нечетких степе-
ней принадлежности в множестве «способных студентов»
Единственной разумной формой измерения принадлежности в данном
случае будет ее нечеткая оценка с использованием значений «высокая»,
«средняя» или «низкая».
Другие примеры использования нечетких степеней принадлежности:
• множество привлекательных девушек,
• множество опасных или безопасных периодов для государства,
• множество кредитоспособных клиентов банка.
Если степени принадлежности р*л(х) нечеткому множеству А задают-
ся с помощью нечетких мер (также являющихся нечеткими множества-
ми), то А называется нечетким множеством типа 2. Нечеткое множество
типа 2 представляет собой множество пар (2.53) вида:
(нечеткая степень принадлежности элемента т множеству А2, эле-
мент х).
Индекс 2 в обозначении множества используется, чтобы отличить его
от множеств типа 1:
(2.53)
Ч2 = {(М42(ж)’х)} ’
Рис. 2.53. Графическая форма представления множества «способные студенты»
2.5. Нечеткие множества типа 2
73
где у^2(х) — степень принадлежности элемента х множеству Л, зада-
ваемая с помощью функции принадлежности ^а2(я*) вида:
/M2(z):X^L, (2.54)
где X — область определения множества А2,
L = {Zi,..., lm} — множество нечетких значений степени принад-
лежности А‘2,
{(yz* (у), у)} — нечеткая степень принадлежности множеству А2,
(у) — функция принадлежности нечеткой степени принадлежно-
сти Ц множеству Л2,
Y — область определения нечетких степеней принадлежности,
у : у Е У.
Функция принадлежности множества типа 1 зависит от одной пере-
менной х Е X, в то время как функция принадлежности множества типа
2 является функцией двух переменных вида:
Мд2(х,у): Х^ L,Y L. (2.55)
Пример 2.5.3. X — множество проезжающих мимо автомобилей, обо-
значаемых Ci, г — 1,2,3,4; X = {^1,02,03,04}; Л2 — множество автомо-
билей, превышающих допустимую скорость V — 60 км/ч;
л (N Y Y N
Л2 = < — , — , — , —
[ 01 С2 Сз С4
где N («нет») соответствует скорости, лежащей в допустимых пределах
(V < 60 км/ч), У («да») соответствует скорости, превышающей
ограничение (V > 60 км/ч), L = {7V, У} — множество нечетких
степеней принадлежности.
Измерение скорости производит инспектор полиции, оценивая ее зна-
чения с точностью ±10 км/ч. На рис. 2.54 представлена функция принад-
лежности /ль : V -» L.
Нечеткие множества типа 2 можно использовать при моделировании
систем, для которых возможна оценка значений входных и/или выходных
величин с помощью нечетких мер (рис. 2.55).
Подобная форма оценивания имеет место, например, в экономических
и политических системах, когда в условиях недостатка информации при-
ходится руководствоваться в основном интуицией. Поскольку нечеткие
степени принадлежности («малая», «средняя», «большая») можно пред-
ставить в виде нечетких чисел, нечеткие множества типа 2 можно пре-
образовывать на основе принципа обобщения либо упрощенных методов
74
Глава 2. Основные понятия теории нечетких множеств
Рис. 2.54. Функции принадлежности нечетких степеней принадлежности
множеству автомобилей, превышающих допустимую скорость
м(Х1)д средний
Рис. 2.55. Моделирование системы с использованием нечетких оценок
входных величин
(L-R-представления). Более подробную информацию по данному вопросу
можно найти в (Kacprzyk 1986; Zimmermann 1994а).
2.6. Два вида неопределенности —
нечеткость и вероятность
Поскольку нечеткость часто путают с вероятностью, следует коснуться
различий между этими двумя понятиями. Среди существующих видов
неопределенности выделяют, в частности, следующие два (Altrock 1993):
1. стохастическая неопределенность,
2. лексическая неопределенность.
Примером стохастической неопределенности может служить
утверждение:
Вероятность выиграть главный приз в лотерее «6 из 49» состав-
ляет 1/13983816.
2.6. Два вида неопределенности — нечеткость и вероятность
75
Событие «выигрыш главного приза» является в данном случае точно
определенным и означает наличие шести правильно угаданных номеров.
Точное значение вероятности наступления данного события можно вы-
числить (Empacher 1970), зная число всех сочетаний из 6 элементов
множества, содержащего 49 элементов (тп — 6, п = 49):
Стохастическая неопределенность в данной ситуации проявляется
в виде вероятности возникновения конкретного, точно определенного
события, состоящего в выигрыше главного приза или, что то же самое,
правильном угадывании шести номеров.
Пример лексической неопределенности
В утверждении «Вероятность выиграть большую сумму в лотерею
„6 из 49“ мала» присутствуют два понятия:
1) большая сумма выигрыша,
2) малая вероятность.
Оба эти понятия являются нечеткими, неточными и зависят от субъ-
ективных представлений того, кто их выражает. Так, человек со средним
достатком будет считать большой суммой ту, которую можно выиграть,
угадав четыре или пять номеров, человек же с достатком выше среднего
будет относить сюда только выигрыш при угаданных шести номерах.
Точно определить понятие «малая вероятность» в данном случае так-
же представляет собой сложную задачу, поскольку большинство играю-
щих в лотерею не задумываются не только о точном числовом значении
вероятности выиграть главный приз, вычисляемом по формуле (2.56),
но даже и о приближенном ее значении, оценивая данную величину ин-
туитивно, на основе степени своей уверенности в выигрыше. Тот, у кого
эта степень высокая, в лотерее участвует, тот же у кого она низкая,
от участия отказывается.
Из рассмотренных примеров видно, что нехватка точной информации
об окружающей действительности не является препятствием для дея-
тельности человека и принятия им решений. На протяжении многих лет
ведется разработка точных математических моделей различных явлений
окружающего мира, но говорить об успешных результатах моделирования
можно лишь для малой их части, поскольку построение модели явления
требует наличия большого количества информации о нем.
Вместе с тем, человек, независимо от уровня своей образованности,
способен эффективно моделировать в своем воображении как окружа-
76
Глава 2. Основные понятия теории нечетких множеств
ющую действительность, так и работающие механизмы, машины, авто-
мобили, летательные аппараты и т. п. Подобного рода модели основаны
на использовании таких понятий, как:
• большой, малый,
• привлекательный, отталкивающий,
• разумный, неразумный,
• подобный X, непохожий на X и др.
Все они представляют собой неточные лексические понятия, и их
оценка зависит от способа описания человеком действительности. Чем
шире словарный запас человека, тем точнее формулировки, используемые
им в описании интересующих его объектов окружающего мира.
Сказанное можно подытожить следующим образом:
• стохастическая неопределенность означает неопределенность появле-
ния события, которое является само по себе точно описанным,
• лексическая неопределенность означает неопределенность в описании
события.
Неопределенность описания означает его нечеткость, и теория нечет-
ких систем занимается методикой построения моделей с применением
нечетких понятий, используемых человеком. Отметим здесь, что, поми-
мо лексических нечетких понятий, человек также использует интуитив-
ные понятия и образы, вообще не имеющие словесного описания. Люди,
не знающие ни одного языка, также как и животные, строят информа-
ционные образы объектов окружающего мира на интуитивном, отличном
от лексического, уровне, и такие образы позволяют им в этом мире жить
и действовать. Развитием теории нечеткого моделирования в будущем
может стать теория интуитивного моделирования.
Различие между нечеткостью и вероятностью проиллюстрируем так-
же с помощью следующего примера, основанного на (Bezdek 1993).
Пример 2.6.1. Обозначим через X множество всех жидкостей, через
Ар — множество жидкостей, пригодных для питья, и через An — мно-
жество жидкостей, для питья не пригодных.
Степень принадлежности ключевой воды множеству Ар равна 1,
а степень ее принадлежности An равна 0. Допустим, что речную во-
ду, взятую из устья Вислы, можно отнести к питьевой со степенью 0.6
(ее пьют дикие водоплавающие птицы) и к непригодной для питья — со
степенью 0.4, и что сосуд А наполнен именно такой водой.
Степень принадлежности соляной кислоты множеству Ар равна 0,
а степень ее принадлежности An равна 1. Пусть мы извлекли сосуд В
из корзины, содержащей 10 сосудов, 6 из которых наполнены ключе-
2.6. Два вида неопределенности — нечеткость и вероятность
77
вой водой, а остальные 4 — соляной кислотой. Вероятность извлечь сосуд
с жидкостью, пригодной для питья, равна 0.6.
Пусть мы должны выбрать один из следующих двух сосудов:
Сосуд А
/Мо(-<4) = 0.6
Сосуд В
РаДА) = 0.&
где (Л) — степень принадлежности содержимого сосуда А множе-
ству Ad жидкостей, пригодных для питья,
Pad (Л) — вероятность того, что сосуд В содержит пригодную
для питья жидкость.
Что следует выбрать, если употребление жидкости из сосуда А
опасно для здоровья, а употребление жидкости из сосуда В опасно
для жизни?
Глава 3
Нечеткая арифметика
Нечеткие числа могут применяться при моделировании систем, для ко-
торых зависимость между входными и выходными сигналами известна
и представима в виде традиционной математической модели у = /(X),
однако входные сигналы не поддаются точному измерению, а доступны
лишь приближенной оценке, например:
xi = «примерно 9»,
Х2 = «примерно 10»,
У = ^1 + #2-
В этом случае значение выхода системы у может быть получено в фор-
ме нечеткого числа (рис. 3.1).
Если модель у = /(X) задана в виде математического выражения,
содержащего операции сложения, вычитания, умножения или деления,
то должны быть определены методы выполнения этих операций над
нечеткими числами. Данные методы играют важную роль, поскольку поз-
воляют вводить в традиционную математическую модель системы нечет-
кие оценки входных значений, которые человек формулирует на основе
своего восприятия или интуиции. Кроме того, на основе таких методов
можно создавать гибридные модели, состоящие из четких и нечетких бло-
Рис. 3.1. Нахождение нечеткого выходного значения модели
с нечеткой информацией о входных значениях
3.1. Принцип обобщения
79
ков, при этом четкие элементы модели могут использоваться в том числе
и для обработки нечеткой информации, выдаваемой соответствующими
нечеткими элементами.
3.1. Принцип обобщения
Классическая арифметика предоставляет методы выполнения операций
сложения, вычитания, умножения и деления над четкими числами, таки-
ми как 4, 5, 6. В свою очередь, нечеткая арифметика определяет методы
выполнения указанных операций над нечеткими числами, такими как:
примерно 4,
плюс/минус 5,
приблизительно 6.
В нечеткой арифметике базовые математические операции над
нечеткими числами представляют собой обобщение соответствующих
операций над обычными числами (Kacprzyk 1986; Kaufman 1985;
Driankov 1993,1996). Правила такого обобщения предложены Заде в виде
принципа обобщения, который ниже формулируется в двух вариантах —
для систем типа SISO (с одним входом и одним выходом) и систем типа
MISO (с несколькими входами и одним выходом).
Система типа SISO (один вход — один выход)
Пусть имеется обычная система с одним входом и одним выходом,
реализующая отображение / множества X входных значений во множе-
ство Y выходных значений (рис. 3.2). Если А — нечеткое множество, за-
данное на множестве X, то результатом /(Л) его отображения, в соответ-
ствии с принципом обобщения, является нечеткое множество В — f(A),
определяемое в виде (3.1), где символ V означает операцию ИЛИ (объ-
1
Му)
1
У = f(x)
У
У
хеХ, yeY, f -.х —> У
Рис. 3.2. Традиционная система типа SISO (один вход — один выход) с четкими
входом х и выходом у
80
Глава 3. Нечеткая арифметика
мв(у) =
единение нечетких множеств):
-В(у) = = V {А(ж)//(ж)} = {(мв(у)/у)|у = /(ж), ж Е X} ,
X
Для всех х, для которых/(х) = д.
О в других случаях,
или кратко:
мв(у) = М/(Л)(Л = V ua(x), xeX,yeY. (3.1)
y=f(z)
Для многих реальных систем входные и выходные величины (напри-
мер, напряжение или сила тока) могут быть выражены с помощью ве-
щественных чисел, поэтому в дальнейшем изложении мы будем предпо-
лагать, что универсальные множества X и Y совпадают с множеством
вещественных чисел R. Отметим, что в общем случае X и Y могут
представлять собой множества произвольных элементов. Если входное
значение х и выходное значение у удовлетворяют условию
Vx,yCR, (3.2)
то принцип обобщения для функции одной переменной (случай системы
типа SISO) фактически задает функцию принадлежности /лв (%) выход-
ного параметра по формуле
мв(у) = М/(А)(у) = V цд(х), Ух,уе R. (3.3)
y=fm
Если для выполнения операции V используется оператор МАХ, то вы-
ражение (3.3) может быть представлено в виде:
Ув(у) = МАХ//д(х), Ух,у е R. (3.4)
y=f(x)
Принцип обобщения для функции одной переменной иллюстрируется
рис. 3.3.
Рис. 3.3. Отображение нечеткого входа х в нечеткий выход у
обычной SISO-системой
3.1. Принцип обобщения
81
Пример 3.1.1. Пусть SISO-система реализует отображение X У, где
у = х2. Входное значение х задано в форме нечеткого числа А(х) = «при-
мерно 0», представленного в табл. 3.1.
Таблица 3.1
Нечеткое число А(х), «примерно О»
^а(х) 0 0.5 1 0.66 0.33 0
X —2 -1 0 1 2 3
Для данного входного значения определим нечеткое выходное зна-
чение В(у), функция принадлежности которого может быть получена
по формуле:
— МАХ//л(х), Vx,?/ е R: х е X. у е У. (3.5)
у=^
Например, значение у = 1 соответствует случаю х = 1 или х = —1. По-
этому формулу для вычисления степени принадлежности /хв(у) для у = 1
можно представить в виде:
/лв(у) = МАХ((0.5), (0.66)) = 0.66. (3.6)
у=1
Нечеткое множество В представлено в табл. 3.2.
Таблица 3.2
Нечеткое число В (у), «примерно О»
ДвО) 1 0.66 0.33 0
У 0 1 4 9
На рис. 3.4 представлены нечеткое число на входе системы и резуль-
тат его преобразования на выходе.
о
। «примерно 0»
У в (у)
«примерно0»
чо.
-Ф—।---L
-2 -1 0
ч—$-►
2 3
L-+-> 4>-ф
0 14 9
У
Рис. 3.4. Преобразование обычной SISO-системой входного нечеткого числа
в выходное
82
Глава 3. Нечеткая арифметика
Рис. 3.5. Число А = «примерно 2» и число В = —А — «примерно —2»
Далее мы рассмотрим, как на основе принципа обобщения для функ-
ции одной переменной можно определить некоторые операции над нечет-
кими числами.
• Противоположное нечеткое число
Противоположным для нечеткого числа А является нечеткое число —А,
которое может быть получено на основе принципа обобщения, принима-
ющего в данном случае вид:
М-а(у) = V Ух,уеЯ. (3.7)
у=-х
Пример 3.1.2. Найдем противоположное число для А — «примерно 2»
(табл. 3.3). Результаты вычислений представлены в табл. 3.4 и на рис. 3.5.
Таблица 3.3
Нечеткое число А = «примерно 2»
11А (х) 0 0.5 1 0.5 0
X 1 1.5 2 2.25 2.5
Таким образом, можно прийти к выводу, что число А и противопо-
ложное ему число —А симметричны относительно оси ординат.
Таблица 3.4
Противоположное нечеткое число — А — «примерно —2»
Ца(х) 0 0.5 1 0.5 0
X -1 -1.5 —2 -2.25 -2.5
3.1. Принцип обобщения
83
Параметры противоположных друг другу чисел связаны соотношени-
ями:
т_л = -тл. а_А = /Зд, /3__д = аА. (3.8)
Если число А задано с помощью L-R-представления*:
А = (шд, ад, /Зд), (3.9)
то L-R-представление противоположного ему числа —А имеет вид:
-А = (-тд, /Зд, ад). (3.10)
• Обратное нечеткое число
Обратное нечеткое число А~} вычисляется на основе принципа обобще-
ния в форме:
= V /хд(ж), Чх,у Е R, х Е X. (3.11)
у=7
Пример 3.1.3. Найдем нечеткое число, являющееся обратным к нечетко-
му числу А = «примерно 2», заданному с помощью табл. 3.5. Результаты
вычислений представлены в табл. 3.6 и на рис. 3.6.
Таблица 3.5
Нечеткое число А = «примерно 2»
0 0.5 1 0.5 0
X 1 1.5 2 2.25 2.5
На рис. 3.6 показаны число А и обратное к нему число А * 1
* Нечеткое унимодальное число А является нечетким числом (L-R)-THna (L —Left,
левый; R —Right, правый), если
/ ч Г LRm — x)/a), а > 0,
"Д Я((я:-т)/0), Vx^m, /3 > 0,
где т — среднее значение (мода) нечеткого числа, а и (3 — левый и правый коэффициенты
нечеткости, соответственно. Учитывая введенные обозначения, нечеткое число принято
представлять в виде тройки параметров А = (т,а,/3).
Примерами функций L(x) (также, как и R(x)) могут быть
L(x) = e“w”, р > 0; £(ж) = J ,р Р °
1 +
и т.п. При этом обычно требуют, чтобы функции £(ж) и R(x) удовлетворяли следующим
условиям:
L(-.r) - L(x). R(-x) - Я(т); L(0) = Н(0) - 1.
Нечеткие числа (L-R)-THna часто используются в задачах математического моделирова-
ния. — Прим. ред.
84
Глава 3. Нечеткая арифметика
Рис. 3.6. Нечеткое число А = «примерно 2» и обратное к нему число А 1
найденное с использованием принципа обобщения
Табл ица 3.6
Обратное нечеткое число А-1 = «примерно 0.5»
0 0.5 1 0.5 0
X 1 0.66 0.5 0.44 0.4
Операцию нахождения обратного нечеткого числа можно упрощен-
но определить с помощью L-R-представления (Kacprzyk 1986; Kaufman
1985). Обозначения, используемые в L-R-представлении числа А, пока-
заны на рис. 3.7.
Рис. 3.7. Обозначения разбросов (отклонений) и номинальных значений нечет-
ких чисел А и А-"1
3.1. Принцип обобщения
85
Характеристические точки числа А и обратного к нему А”1 связаны
соотношениями:
1
тд-1 = , тд Ф I);
ШД
тл-1 - ал-1 = ; (3.12)
гид + Ра
п 1
mA~i + рл-1 =----------, тА ф «д.
шд - аА
Используя формулы (3.12), можно получить значения величин левого
и правого разбросов (отклонений) числа А-1:
«А-1 =----/ 0А, „ х , тА^0, (3.13)
тА(тА + рА)
(3A-i =---7-^-----г , тА ф аА. (3.14)
тА(тА - аА)
Таким образом, L-R-представление обратного нечеткого числа А-1
можно выразить в виде формулы
А’1 , 13А , —АА---------) . (3.15)
\тА тА(тА+$А) тА(тА - аА) J
Пример 3.1.4. Используя L-R-представление, найдем обратное нечеткое
число А-1 для А = (2,1,0.5). В результате применения формулы (3.15)
получаем:
А'1 (0.5, 0.1, 0.5).
Рисунок 3.8 позволяет сравнить нечеткое число А-1, полученное
в предыдущем примере с помощью принципа обобщения, и нечеткое чис-
ло А-1, полученное в данном примере с помощью L-R-представления.
Рис. 3.8. Нечеткое число А"1, полученное с помощью принципа обобще-
ния, и упрощенный вариант этого же числа А£^, полученный с помощью
L-R-представления
86
Глава 3. Нечеткая арифметика
Из рис. 3.8 видно, что для обратного нечеткого числа с помощью фор-
мулы (3.15) получаются точные значения номинальной величины и раз-
броса, но в целом функцию принадлежности данная формула описывает
лишь приближенно.
Используя принцип обобщения, можно также определить и другие
унарные операции над нечеткими числами. Дополнительную информа-
цию по данному вопросу можно найти в (Kacprzyk 1986; Kaufmann 1985).
Система типа MISO (несколько входов — один выход)
Пусть имеется обычная MISO-система (рис. 3.9), реализующая отобра-
жение
Входной вектор X определен на декартовом произведении областей
определения отдельных входных величин Х\ х Х2 х • • • х Хп.
Функция / отображает множество элементов области определения
вектора входных величин X на область значений выходной величины У:
/: Xi хХ2 х ... xXn->Y. (3.16)
Если Ai,..., Ап — нечеткие множества, заданные на областях опре-
деления Xi,...,Xn входных величин, то в соответствии с прин-
Рис. 3.9. Обычная MISO-система с нечетким входами и нечетким выходом
3.2. Сложение нечетких чисел
87
ципом обобщения, на выходе системы получим нечеткое множество
В = /(А1,..., Ап), являющееся результатом отображения входных
нечетких множеств:
в(у) = V [Л1(ж1)ЛА2(х2)Л...ЛЛга(хп)] =
xeXi х-хХп,
f(X)=y
= Му)/у\ у = /(X), х е Ху х ... х Хп} (3.17)
Области определения Xi и Y обычно совпадают с множеством веще-
ственных чисел R.
В большинстве практических ситуаций принцип обобщения
для функции нескольких переменных фактически представляет собой
задание функции принадлежности выходного значения системы, исполь-
зуя выражение вида:
Ув(у) = v (/ZAx(.ri) Л/zx2(x2) Л ... Л ддп(хп)),
y=f(xl,.(3.18)
Vti, ... ,хп,у Е R,
где символ V означает объединение множеств* на основе опера-
ции МАХ, алгебраической суммы или другой s-нормы,
символ Л означает пересечение множеств на основе операции MIN,
произведения или другой t-нормы.
Далее мы рассмотрим использование принципа обобщения при выпол-
нении основных арифметических операций для случая системы с двумя
входами.
3.2. Сложение нечетких чисел
Сложение двух нечетких чисел представляет собой отображение входно-
го вектора
X = [.Т1, ®2]Т,
определенного на декартовом произведении RxR, в выходное значение у,
определенное на множестве R (рис. 3.10). Если А± и Д2 ~ нечеткие числа,
то их сумма также является нечетким числом и задается выражением
(Ai + A2)(y)= V [Ai(xi) Л А2(ж2)], Vxi,x2,yE R. (3.19)
* Операции над нечеткими множествами вводятся и объясняются в следующей гла-
ве. — Прим. ред.
88
Глава 3. Нечеткая арифметика
Xi е = R, Х2 е Х2 = R, у eY = R
Рис. 3.10. Обычная система, реализующая сложение двух нечетких чисел
Для вычисления суммы нечетких чисел достаточно определить функ-
цию принадлежности /ла1-та2(у) по формуле
МА1+А2(у)= v [/<41Ц1) Л jtZA2(®2)], Vxj,x2,yeR, (3.20)
где символ V соответствует оператору объединения множеств (напри-
мер, на основе s-нормы* ),
символ Л соответствует оператору пересечения множеств (напри-
мер, на основе t-нормы).
Таблица 3.7
Нечеткое число Ai = «примерно 5»
0 0.33 0.66 1 0.5 0
Х1 2 3 4 5 6 7
Пример 3.2.1. Пусть заданы нечеткие числа Ах — «примерно 5»
(табл. 3.7), А‘2 — «примерно 7» (табл. 3.8). Найдем нечеткое число
(Ai + А2).
Таблица 3.8
Нечеткое число А 2 = «примерно 7»
МАзОД 0 0.5 1 0.66 0.33 0
Т2 5 6 7 8 9 10
Понятия s-нормы и t-нормы вводятся и объясняются в следующей главе. —
Прим. ред.
3.2. Сложение нечетких чисел
89
Таблица 3.9
Нечеткое число (Лх + А2) = «примерно 12»
Уа1+а2(у) 0 0 0.33 0.5 0.66 1 0.66 0.5 0.33 0 0
У 7 8 9 10 11 12 13 14 15 16 17
Рис. 3.11. Метод определения функции принадлежности нечеткого числа
(Ах + А2), где Ах = «примерно 5», Л2 = «примерно 7», и результат (Лх + А2) =
«примерно 12» получен с использованием операторов MAX (V) и MIN (Л)
Вычисление суммы нечетких чисел (Ах + Л2) с использованием прин-
ципа обобщения иллюстрируется схемой на рис. 3.11. Полученный ре-
зультат (А1 + Л2) = «примерно 12» представлен в табл. 3.9 и на рис. 3.12.
Рассмотрим более подробно первый столбец на рис. 3.11. Он содер-
жит значения степеней принадлежности /хд1+42(?/) выходного параметра
при фиксированном значении первого входного параметра хх = 2 и из-
менении значения второго входного параметра х2 в пределах от 5 до 10.
Анализ данного столбца показывает (см. рис. 3.13), что несмотря на то,
что значение выходного параметра моделируемой системы может изме-
няться от 7 до 12, значения степеней принадлежности 1ла1+а2(у) остают-
ся постоянными (равными 0).
90
Глава 3. Нечеткая арифметика
Рис. 3.12. Дискретная функция принадлежности числа «примерно 12», явля-
ющегося суммой нечетких чисел «примерно 5» + «примерно 7» и полученного
с использованием операторов MAX (V) и MIN (Л)
Рис. 3.13. Иллюстрация принципа преобразования изменений входного значе-
ния системы в ее выходное значение в модели сложения двух нечетких чисел
с использованием оператора MIN
Указанное обстоятельство позволяет сделать вывод о том, что в дан-
ной ситуации оператор пересечения MIN не обеспечивает корректного
механизма преобразования изменений входного значения модели в изме-
нение ее выходного значения.
На рис. 3.14 показан метод получения нечеткого числа «пример-
но 5» + «примерно 7» = «примерно 12» с использованием в каче-
стве основы операции пересечения (Л) оператора MEAN (среднего)
3.2. Сложение нечетких чисел
91
Таблица 3.10
Нечеткое число (Ах + Л2) = «примерно 12»
Ца^а-Ау) 0 0.25 0.5 0.66 0.83 1 0.83 0.66 0.5 0.25 0
У 7 8 9 10 11 12 13 14 15 16 17
+ Х2 = Ю
Рис. 3.14. Метод определения функции принадлежности нечеткого числа
В = (Ai + А2), где Ai = «примерно 5», А2 = «примерно 7» и В = «при-
мерно 12», с использованием оператора MEAN (Л)
(Yager 1994,1995). Функция принадлежности числа «примерно 12», вы-
численная с использованием сетки, изображенной на рис. 3.14, представ-
лена в виде табл. 3.10 и в виде графика на рис. 3.15.
Как следует из рис. 3.15, функция принадлежности нечеткой суммы,
полученной с помощью оператора MEAN, является более гладкой, чем
в случае суммы, соответствующей применению оператора MIN. Исполь-
зованная для построения нечеткого числа сетка (рис. 3.15) отражает и тот
факт, что оператор MEAN обеспечивает более корректный механизм пре-
образования входных изменений модели в выходные, чем оператор MIN.
Первый столбец изображенной на рис. 3.15 сетки показан на рис. 3.16.
92
Глава 3. Нечеткая арифметика
А
1.0 ..
МА1+А2Ы
«примерно 12»
0.5
<5—1—।—।—।—I—।—।—।—I—Ь-
78 9 10 11 12 13 14 15 16 17
Рис. 3.15. Функция принадлежности нечеткой суммы «примерно 5» + «пример-
но 7» = «примерно 12», найденной с использованием оператора MEAN (Л)
0
Рис. 3.16. Первый столбец сетки, соответствующей нечеткой сумме «пример-
но 5» + «примерно 7» = «примерно 12»
Исходя из рис. 3.16, приходим к выводу, что при фиксированном зна-
чении х\ = 2 изменение входной величины приводит к изменению
как выходной величины моделируемой системы у. так и функции при-
надлежности Аналогичная ситуация имеет место и для других
столбцов и строк сетки, изображенной на рис. 3.14. Вследствие своей ад-
дитивной природы оператор MEAN обеспечивает более корректное вы-
3.2. Сложение нечетких чисел
93
Рис. 3.17. Характеристические параметры складываемых нечетких чисел
полнение аддитивной операции суммирования нечетких чисел, чем опе-
ратор MIN.
При рассмотрении примера вычисления суммы нечетких чисел на ос-
нове принципа обобщения можно заметить, что данный метод хотя и то-
чен, но при этом является трудоемким. Поэтому в большинстве случаев
используется упрощенный механизм выполнения арифметических опера-
ций, основанный на L-R-представлении нечетких чисел (Kacprzyk 1986;
Kaufmann 1985).
Если нечеткие числа Ai и А2 представлены тройками следующего
вида:
^41 = (тА1, (УА1, /3А1\ А2 = (w2, ад2, /Зд2), (3.21)
а их сумма — тройкой вида
(-4-1 “к А2) (^Ai-TA27 Ч-Д2 1 $А±-|-А2)’ (3.22)
то параметры суммы (Ai + А2) и слагаемых Ai, А2, как показано
на рис. 3.17, связаны соотношениями:
= тА1 + ™а2-
тА1+А2 - &А1+А2 = (mAl - аА1) + (шд2 - ад2), (3.23)
шА1+А2 + /?А1+А2 = (тА1 + /5дх) + (шд2 + Дд2).
С учетом соотношений (3.23), параметры суммы (Ai + А2) определя-
ются с помощью выражений вида:
^A13-A2 <AAi Н- ^Д2
/?Д1+л2 = /3^! + $а2-
(3.24)
94
Глава 3. Нечеткая арифметика
MAi(Ti) Ра2(х2) Ца1+а2(у)
Рис. 3.18. Сложение двух нечетких чисел с использованием L-R-представления
Таким образом, L-R-представление суммы (Ai + А2) может быть вы-
ражено формулой:
(Ai + А2) — (шд1 + тпд2, аД] + <^л2' + ^л2)- (3.25)
Пример 3.2.2. Найдем сумму двух симметричных нечетких чисел
Ai(xi) = «примерно 5» и А‘2(х2) — «примерно 7», функции принадлеж-
ности которых имеют заданы в виде:
)+(.<-,‘-5/1 )а' (3.
ДА2(^2) = т + 7/2у2 , -оо < х2 < +ос. (3.27)
L-R-представление данных чисел задается соотношениями:
41 = i3Al) = (5,1,1), (3.28)
А2 = (шд2.ад2,/?А2) = (7.2,2). (3.29)
В соответствии с формулой (3.25), их сумма представляется в виде
(Ai + А2) = (5,1,1) + (7, 2.2) = (12, 3, 3), (3.30)
а ее функция принадлежности выражается формулой
МЛ1+Л2(У) = 1 + (г/ - 12/3)2 ' (3'31)
Нечеткие числа Ai и А2, а также результат их сложения графиче-
ски представлены на рис. 3.18. Очевидно, что величины разбросов а и (3
для суммы Ai -Г А‘2 больше соответствующих величин для отдельных
слагаемых Ai, А2.
3.3. Вычитание нечетких чисел
95
Пример 3.2.3. Найдем сумму двух треугольных нечетких чисел
^1(^1) = «примерно 5» и Л2^Х2) = «примерно 7», L-R-представление
которых выражено формулами:
МаЩх) = <
= МАХ (О, 1 + -
= МАХ ( 0. 1 —
\ 2
Vxi : xi < 5,
Vxi : Xi > 5.
(3.32)
{МАХ (о, 1 +
/ т -7
МАХ ( 0, 1 — -—-
\ 3
Vt2 : Х2 < 7,
Vx2 : х2 > 7.
(3.33)
L-R-представление суммы (А1 + А2), полученное с помощью формулы
(3.25), имеет вид
(А1 + Л2) = (5, 3, 2) + (7, 2.3) - (12, 5, 5), (3.34)
а функция принадлежности выражена в виде
УА1+А2(у) = <
МАХ ( 0, 1 + -—-
МАХ (0, 1 - —-
Vy:y< 12.
Vy : у 12.
(3.35)
Учитывая то, что нечеткое число (Ai + Л2) является симметричным
(а = /3 = 5), его функцию принадлежности /гА1-нл2(у) можно представить
в более простом виде:
МЛ1+а2(у) = МАХ 0, 1 -
У - 12
5
\/у : —ос < у < 4-ос. (3.36)
Графическая иллюстрация рассмотренного примера представлена
на рис. 3.19.
3.3. Вычитание нечетких чисел
Пусть Ai(xi) и ^2(^2) — нечеткие числа. Их разность может быть полу-
чена с помощью принципа обобщения в форме:
(Л1-А2)(?/) = V [Л1(х1)лЛ2Ы]. \/хъХ2,уеВ. (3.37)
1/=-Т1-^2
96
Глава 3. Нечеткая арифметика
Рис. 3.19. Сложение двух нечетких чисел с использованием L-R-представления
Таблица 3.11
Нечеткое число Ai = «примерно 5»
AAi (a’i) 0 0.33 0.66 1 0.5 0
.Г1 2 3 4 5 6 7
Вычисление разности нечетких чисел фактически сводится к вычис-
лению ее функции принадлежности по формуле:
ца^-аАу) = V А Vzi.x2,yG/?, (3.38)
где V — оператор объединения множеств (например МАХ или другие
s-нормы),
А — оператор пересечения множеств (например MIN, PROD или
другие t-нормы).
Пример 3.3.1. Найдем разность (Аг — А2) двух нечетких чисел, задан-
ных в виде дискретных выборок (табл. 3.11 и табл. 3.12).
Метод вычитания нечетких чисел Ai и А2 показан на рис. 3.20. Функ-
ция принадлежности нечеткого числа (Ai — А2) = «примерно —2», вы-
численная с использованием сетки, показанной на рис. 3.20, представлена
в виде табл. 3.13 и в виде графика на рис. 3.21.
Табл ица 3.12
Нечеткое число А2 = «примерно 5»
Р.42Ц2) 0 0.5 1 0.66 0.33 0
Г 2 5 6 7 8 9 10
3.3. Вычитание нечетких чисел
97
Таблица 3.13
Нечеткое число (Ai — А2) = «примерно —2»
Ма^а2(у) 0 0.16 0.33 0.5 0.66 0.83 1 0.75 0.5 0.25 0
У -8 —7 -6 -5 —4 -3 —2 -1 0 1 2
ув(у) = МЕАК{/1Л1
Рис. 3.20. Метод определения функции принадлежности нечеткого числа
(Ai - А2) на основе принципа обобщения с использованием операторов МАХ
(V) и MEAN (Л) (Ai = «примерно 5», Л2 = «примерно 7», (Ai — А2) = «при-
мерно —2»)
Более простой метод вычисления разности нечетких чисел основан
на использовании L-R-представления (рис. 3.22). Пусть Ai и Л2 пред-
ставлены в форме
Ai = (mA1, аА1, Дц), Л2 = (тд2, аА2, 0а2)-
(3.39)
98
Глава 3. Нечеткая арифметика
Ув(у)
«примерно -2»
-8-7-6-5-4-3-2-1 0 12 у
Рис. 3.21. Функция принадлежности нечеткого числа «примерно -2», полу-
ченного в результате вычитания нечетких чисел «примерно 5» и «примерно 7»
с использованием принципа обобщения
Рис. 3.22. Обозначения, используемые при вычитании нечетких чисел, задан-
ных в виде L-R-представления
Параметры нечетких чисел Л2 и их разности (УЦ — Л2) (рис. 3.22)
связаны соотношениями:
Wi-A2 =
mAl-A2 ~ aA1-A2 = (mA1 ~aA1) ~ (mA2 + /?д2), (3.40)
тЛ1_д2 + /3А1-А2 = (mA1 + (3А1) - (mA2 - ад2),
на основе чего можно получить формулу (3.41) для определения величи-
ны разброса разности (Лх — Л2):
^Л1-Л2 ~ аЛ1 + Ра2, РА]_-А2 = ал2 + ^Ai • (3.41)
3.3. Вычитание нечетких чисел
99
дф1)
/А42(^2)
«примерно 5»
Ai = (5,3,2)
«примерно 7»
Л2 = (7,2,3)
-8 —7 -6 -5 —4 -3-2-10 1 2
Рис. 3.23. Вычитание нечетких чисел с использованием L-R-представления
Таким образом, L-R-представление разности (Л1 —Л2) задается в виде
тройки:
(Ai - А2) = - (тЛ2,ал2,^2) =
= (mA1 ~ тА2, aAl + /Зд2, ад2 + [3Al).
Пример 3.3.2. Найдем разность чисел Ai = (5,3,2) и А2 = (7,2,3),
заданных в виде L-R-представления.
Воспользовавшись формулой (3.42), получаем:
Ai - А2 = (5, 3, 2) - (7, 2, 3) = (—2,6,4). (3.43)
Результат вычитания представлен на рис. 3.23.
Отметим, что разность треугольных нечетких чисел «пример-
но 5» и «примерно 7», найденная с помощью принципа обобщения
(рис. 3.21), совпадает с их разностью, полученной с использованием
L-R-представления* (рис. 3.23).
Разумеется, это свойство не только нечетких чисел «примерно 5» и «примерно 7»,
а вообще нечетких чисел с кусочно-линейной функцией принадлежности, в том числе,
заведомо, — для случая треугольной функции принадлежности. — Прим, перев.
100
Глава 3. Нечеткая арифметика
3.4. Умножение нечетких чисел
Пусть Ai (xi) и А2(х2) — нечеткие числа. Их произведение (Ai -Аг) можно
найти, используя принцип обобщения в форме:
(Ai • А2)(у) = V [Ai(xi) л A2(j”2)]- V.ri.j’2-у е R. (ЗА4)
Фактически вычисление произведения нечетких чисел сводится к на-
хождению его функции принадлежности по формуле:
МА1А2(у) = v [mAj(^i) Л/1л2(®2)], Vx1;x2,yG/?, (3.45)
7/=Х1Ж2
где V — оператор объединения множеств (например МАХ или другие
s-нормы),
Л — оператор пересечения множеств (например MIN, PROD или
другие t-нормы).
Таблица 3.14
Нечеткое число Ai = «примерно 5»
0 0.33 0.66 1 0.5 0
2 3 4 5 6 7
Пример 3.4.1. Найдем произведение (Ai • А2) нечетких чисел, функции
принадлежности которых заданы в табл. 3.14 и табл. 3.15.
Таблица 3.15
Нечеткое число А2 = «примерно 7»
0 0.5 1 0.66 0.33 0
Х‘2 5 6 7 8 9 10
Процедура умножения показана на рис. 3.24. При использовании
изображенной на нем сетки результатом будет являться нечеткое чис-
ло (Ai • А2) = «примерно 35», представленное на рис. 3.25.
Из рис. 3.25 видно, что «плоское» нечеткое число «примерно 35», яв-
ляясь произведением двух выпуклых нечетких чисел, само выпуклым
не является. Данное свойство является следствием того, что функция
принадлежности рассматриваемого числа представлена в двумерном про-
странстве Y * Ma±a2' Значения у на оси абсцисс (см. рис. 3.25) не со-
держат информации об элементах (яд,х2), участвующих в формировании
произведения, т. е., например, значение у = 42 можно представить в виде
xix2 = 6-7 либо в виде xi^2 = 7-6. Если нечеткое произведение предста-
вить в трехмерном пространстве А х12х Маха2 (рис. 3.26), то число
«примерно 35» оказывается выпуклым (здесь Маха2 • №аха2(у) £ Maxa2Y
3.4. Умножение нечетких чисел
101
£1^2 = у
Рис. 3.24. Метод нахождения функции принадлежности нечеткого числа
(Ai • А2) на основе принципа обобщения с использованием операторов МАХ
(V) и PROD (Л), (Ai = «примерно 5», Л2 = «примерно 7»)
/ММ2 (у)
«примерно 35»
10 20 30 35 40 50 60 70
Рис. 3.25. Функция принадлежности нечеткого числа «примерно 35», являюще-
гося результатом перемножения чисел «примерно 5» и «примерно 7» с исполь-
зованием оператора PROD
102
Глава 3. Нечеткая арифметика
Рис. 3.26. Трехмерное представление функции принадлежности //.ц д2 (.Г1. .тд)
произведения нечетких чисел «примерно 5» и «примерно 7», полученного с ис-
пользованием оператора PROD
В практических приложениях характеристики составляющих (а^,^)
результирующего числа у играют очень важную роль, поскольку, напри-
мер, одно и то же значение мощности электрического тока L = и • г
может достигаться при различных значениях напряжения и и силы то-
ка г, при этом в системах электроснабжения величина тепловых потерь
Q = i2Rt существенно зависит от силы тока г, но не зависит от напря-
жения и (здесь t — время, R — сопротивление).
Принцип обобщения Заде определяет упрощенное, «плоское» (дву-
мерное) сечение произведения двух нечетких чисел, представимого пол-
ностью только в четырехмерном пространстве. Представление произведе-
ния в трехмерном пространстве (рис. 3.26) уже является некоторым упро-
щением с потерей информации (отсутствие координаты у). Тем самым,
представление произведения в двумерном пространстве является весьма
существенным упрощением, которое, тем не менее, может использовать-
ся в случаях, когда для моделируемой системы не важно, на основе каких
именно значений xi и х% получено произведение у = жрдд, а важно лишь
само результирующее значение произведения у.
Если нечеткие числа А\ и Л2 заданы в форме дискретных выборок, то
«механическое» использование принципа обобщения приводит к неверно-
му представлению произведения (^ • А2), являющегося на самом деле
выпуклым. Плоское представление произведения — это сечение его трех-
3.4. Умножение нечетких чисел
103
Рис. 3.27. Простейшая линия сечения четырехмерного произведения нечетких
чисел (Ai • Л2)
мерного представления вдоль прямых линий, соединяющих точку, име-
ющую максимальную степень принадлежности (/mm2 — 1)» с точками,
соответствующими минимальному и максимальному значениям произве-
дения. Соединяя указанные точки прямыми линиями, получаем прибли-
женное «плоское» представление нечеткого произведения, которое наи-
более регулярно отражает его выпуклость (рис. 3.27 и 3.28).
В рассмотренном примере при вычислении произведения нечетких чи-
сел использовался оператор PROD (произведение). Поскольку умноже-
ние является операцией мультипликативного типа, использование дан-
ного оператора наилучшим образом отражает принцип преобразования
входных изменений в выходные, т. е. изменения входных величин (xi,t2)
преобразуются в изменение выходной величины у точно так же, как в ре-
альной системе. Вместе с тем, если, например, = 0, то, как и в случае
с реальной системой, независимо от изменения входной величины ж2, от-
сутствуют изменения и на выходе нечеткой модели р>в(у) (первый стол-
бец вычислительной сетки на рис. 3.27). Вместо оператора PROD можно
104
Глава 3. Нечеткая арифметика
рЛ1А2(у) Ai • Л2 = «примерно 35»
10 20 30 40 50 60 70
Рис. 3.28. Простейшее двумерное сечение произведения нечетких чисел
(Ai • Л2)
использовать другие t-нормы, например MIN, однако в этом случае будет
иным и результат умножения.
Возможность приближенного вычисления произведения нечетких чи-
сел А1-Л.2 обеспечивается использованием L-R-представления (рис. 3.29).
Параметры положительных нечетких чисел А], А2 и их произведения
(Ai • А2) связаны соотношениями:
mA1A2 ~ aAiA2 = (тА1 - aA1)(mA.2 - aAz), (3.46)
m.M, + /За!А2 = (тА1 + /3А1)(тА,2 + /Зд2).
Рис. 3.29. Обозначения, используемые при перемножении положительных
нечетких чисел Ai и А2
3.4. Умножение нечетких чисел
105
О —г—I--1-1-1—----► О
Рис. 3.30. Перемножение двух положительных нечетких чисел
на основе L-R-представления
Отсюда можно получить формулы, задающие характеристические па-
раметры произведения (Ai • А2):
^AiА2 ^^A[^A'2 rflAz^A^ 47)
/Х41.А2 mA2/3Al ^Ai^Az’
Таким образом, произведение двух положительных* нечетких чисел,
заданных с помощью L-R-представления, определяется выражением:
(А1 42) = (тА1,аА1,(ЗА1)(тпА2,аА2ЛА2') =
= (тА1тА2,тА1аА2 + тА2аА1 - аА1аА2,тА1вА.2+ (3.48)
+ П1д2^1 + /ЗА1/ЗА2)
для Ai > О, А2 > 0.
Пример 3.4.2. Найдем произведение положительных нечетких чисел
41 = (5.3.2) и А-2 = (7.2.3) (рис. 3.30). Используя формулу (3.48), по-
лучаем:
(41 • А2) = (5,3,2) • (7,2,3) = (35,25,35).
Из рис. 3.28 и рис. 3.30 видно, что в результате перемножения нечет-
ких чисел на основе принципа обобщения и L-R-представления получа-
Положительным считается нечеткое число, носитель которого полностью находится
на положительной полуоси (содержит только положительные числа). — Прим, перев.
106
Глава 3. Нечеткая арифметика
ются нечеткие числа с совпадающими номинальными значениями и ве-
личинами разброса, хотя формы функций принадлежности могут разли-
чаться.
Перемножение положительного и отрицательного чисел
Перемножение нечетких чисел различного знака с использованием прин-
ципа обобщения не имеет никаких отличий от случая двух положитель-
ных нечетких чисел.
Таблица 3.16
Нечеткое число Аг = «примерно 5»
/М1(Ж1) 0 0.33 0.66 1 0.5 0
Xi 2 3 4 5 6 7
Пример 3.4.1. Найдем произведение нечетких чисел Ai и А2, заданных
в виде табл. 3.16 и табл. 3.17 соответственно.
Таблица 3.17
Нечеткое число А^ — «примерно —7»
/М2(^г) 0 0.5 1 0.66 0.33 0
Х2 -5 -6 —7 -8 -9 -10
Число А2 ~ «примерно —7» является противоположным числу А^ —
«примерно 7», которое использовалось в примере 3.4.2. Метод перемно-
жения Ai и Аэ представлен на рис. 3.31, а двумерное представление изоб-
раженного на нем сечения показано на рис. 3.32.
Приближенное произведение положительного и отрицательного
нечетких чисел может быть также получено с использованием L-R-
представления (рис. 3.33).
Параметры чисел Ai и А2 (рис. 3.33) связаны соотношениями:
1Л2 ^'Ai^'A‘2^
mA1A2 - %Д2 = ("1Д1 + )(тд2 - «а2), (3-49)
mA1A2 + @AiA2 = (rnA1 - аЛ1)(тл2 + (За2)-
С учетом соотношений (3.49), параметры произведения положитель-
ного и отрицательного нечетких чисел задаются формулами:
CXAiAz
(3.oU)
/ЗД1А2 ^А] Л2 <AAi$A2"
3.4. Умножение нечетких чисел
107
Рис. 3.31. Произведение положительного и отрицательного нечетких чисел и
простейшая линия пересечения
Рис. 3.32. Приближенное плоское сечение произведения положительного и от-
рицательного нечетких чисел
Таким образом, L-R-представление произведения положительного
и отрицательного нечетких чисел (где Ai > 0, Лг < 0) имеет вид:
(Ах • А2) = (mA1,aA1,0А1)(тА2,аА2, (3А2) =
= (mAlmA2,mAlaA2 - тА2/3А1 + aA2fiAi, (3.51)
'^’Ai^A^ ТПД^Аг
108
Глава 3. Нечеткая арифметика
Рис. 3.33. Обозначения параметров произведения положительного нечеткого
числа Аг и отрицательного нечеткого числа А2
Рис. 3.34. Результат перемножения положительного нечеткого числа Ai и от-
рицательного нечеткого числа А2 с использованием L-R-представления
3.4. Умножение нечетких чисел
109
Пример 3.4.2. Используя L-R-представление, найдем произведение по-
ложительного нечеткого числа Ai и отрицательного нечеткого числа А%:
Al = «примерно 5» = (5,3,2),
А<2 = «примерно —7» = (—7,3,2).
В соответствии с формулой (3.51) получаем:
(Ai • Л2) = (5,3,2)(-7,3,2) = (-35, 35,25).
Результат перемножения представлен на рис. 3.34. Сравнивая его
с произведением, полученным на основе принципа обобщения (рис. 3.32),
легко видеть, что совпадают как величины разброса <уа1а2 и 0AiA2, так
и номинальные значения гпа1а2^ а функции принадлежности имеют сход-
ную форму.
Перемножение положительного и отрицательного нечетких
чисел
L-R-представление произведения нечетких чисел Ai > 0 и Л2 < 0 имеет
вид:
(Ai А2) = (mAi,aA1,/3A1)(mA2,aA2,0A2) =
= (WiW2, -mA10A2 + mA2aA1 + ад1(3л2, (3.52)
3" Q'A2$Ai')'
Перемножение отрицательных нечетких чисел
Произведение нечетких чисел Ai < 0 и А2 < 0 выражается формулой:
(Л А2) (mA1,aA1,/3A1)(mA2,aA2,0A2) =
= (mA1mA2, -mA10A2 - mA2/3A1 - /вА1/3А2, (3.53)
mAj OIA2 W2«Ai “b ^Ai(-XA2) •
Перемножение нечетких нулей
Пусть 41 и 42 — нечеткие числа «примерно 0» с неравными значени-
ями разброса. Процедура перемножения таких чисел с использованием
принципа обобщения описывается в примере 3.4.5.
Пример 3.4.1. Найдем произведение нечетких чисел 41 и А2, соответ-
ствующих понятию «примерно 0», заданных в виде табл. 3.18 и табл. 3.19
соответственно.
по
Глава 3. Нечеткая арифметика
Таблица 3.18
Нечеткое число Ai = «примерно О»
0 0.33 0.66 1 0.5 0
-3 —2 -1 0 1 2
Таблица 3.19
Нечеткое число Л2 = «примерно О»
^а2(х2) 0 0.5 1 0.66 0.33 0
^2 —2 -1 0 1 2 3
Рис. 3.35. Перемножение нечетких нулей с использованием принципа обобще-
ния
Метод вычисления произведения Ai • Л2 с использованием принципа
обобщения представлен на рис. 3.35, а а плоское сечение произведения —
на рис. 3.36.
Для перемножения нечетких нулей можно также использовать L-R-
представление (рис. 3.37).
3.4. Умножение нечетких чисел
111
Дл1(л2)(у)
1 1
-9 -8 -7 -6 -5 -4 -3 -2 -1 О 1 2 3 4 5 6 у
Рис. 3.36. Простейшее плоское сечение результата перемножения нечетких ну-
лей в соответствии с рис. 3.35
Рис. 3.37. Обозначения, используемые при перемножении нечетких нулей на ос-
нове L-R-представления
Параметры чисел Ai, А? и их произведения Aj А2 связаны соотно-
шениями:
Ai = (0, аЛ1, А2 — (0, ал2, 0а2),
тпахА2 = тАгтд2 = О,
аА1А2 = МАХ(аЛ|Дд2. аЛ2/3Л1), (3.54)
0AiA2 = МАХ(аЛ1о?.42, /3А1За2).
112
Глава 3. Нечеткая арифметика
Рис. 3.38. Результат умножения нечетких нулей с использованием
L-R-представления
Таким образом, L-R-представление произведения нечетких чисел вы-
ражается формулой:
(Ai • А2) = =
(3.55)
= (0,МАХ(ад1/Зд2, ад2/3Л1), МАХ(ад1ад2,/Зд1,/?д2)).
Пример 3.4.2. Найдем произведение двух нечетких нулей следующего
вида:
Ai = (0,3,2), А2 = (0,2,3).
С учетом формулы (3.55), L-R-представление произведения А± • А2
имеет вид:
(Ai • А2) = (0,3,2) • (0,2,3) - (0,МАХ(9,4),МАХ(6,6)) = (0,9,6).
Результат умножения представлен на рис. 3.38. Сравнивая произ-
ведения нечетких нулей, полученные на основе принципа обобщения
(рис. 3.36) и L-R-представления (рис. 3.38), можно видеть, что у них сов-
падают номинальные значения и величины разброса, но формы функций
принадлежности между собой только похожи.
Носитель положительного нечеткого числа содержит только положи-
тельные элементы (рис. 3.39, а), в то время как носитель отрицательно-
го числа состоит полностью из отрицательных элементов (рис. 3.39, б),
3.4. Умножение нечетких чисел
113
О
Рис. 3.39. Положительное нечеткое число А± (а), отрицательное нечеткое чис-
ло А2 (б) и число неопределенного знака Д3 (в)
а элементы носителя числа неопределенного знака могут быть любыми
(рис. 3.39, в).
Нечеткие числа неопределенного знака можно перемножать с ис-
пользованием как принципа обобщения (см. пример 3.4.7), так и L-R-
представления (см. пример 3.4.8).
Пример 3.4.3. Используя принцип обобщения, перемножим числа
неопределенного знака, заданные в форме табл. 3.20 и табл. 3.21.
Таблица 3.20
Нечеткое число неопределенного знака А1
МА1Ц1) 0 0.33 0.66 1 0.5 0
£1 —2 -1 0 1 2 3
Процедура вычисления произведения представлена на рис. 3.40, а ре-
зультат вычисления — на рис. 3.41.
Упрощенное произведение двух нечетких чисел неопределенного зна-
ка можно также вычислить, используя L-R-представление (рис. 3.42).
Для произвольных нечетких чисел L-R-представление их произведения
114
Глава 3. Нечеткая арифметика
Рис. 3.40. Перемножение нечетких чисел неопределенного знака с использова-
нием принципа обобщения
Рис. 3.41. Представление произведения двух нечетких чисел неопределенного
знака Ai — «примерно 1» и А2 = «примерно —1» в форме плоского сечения
четырехмерного нечеткого числа (рис. 3.40)
-9 -8 -7 -6 -5 -4 -3 -2 -1 0 1 2 3 4 5 6 у
3.4. Умножение нечетких чисел
115
Рис. 3.42. Обозначения, используемые при перемножении нечетких чисел
неопределенного знака (произвольных чисел)
задается формулой:
(шд1,0^41 ? ’/^^2 ) (^Ai А2 чА2 ? $Ai А2 ),
где:
^АМ2 ^'Ai^>A27
аАтА2 = тА1тА2 - MIN[(m^, - аЛ1)(тд2 - ад2),
(тА1 - аЛ1)(тд2 + /3д2), (тА1 + (3А1'){тпА2 - ад2),
(тА1 + (3А1)(тпа2 + /Зд2)],
/3Л1д2 = МАХ[(тд, -аА1)(тА2 -аА2),(тА1 - аА1)(тА2 + [3А2),
(тАг + /Зд,)(тА2 - ад2), (тд, + /Зд1)(тд2 + /Зд2)]-
-шд^Дз. (3.56)
Пример 3.4.4. Найдем произведение нечетких чисел Ai и А2 неопреде-
ленного знака:
Ai = (1,3,2), А2 = (-1,2,3).
Перемножение по формуле (3.56) приводит к результату (3.57), также
представленному на рис. 3.43:
(А} А2) (гт?.д,д2, qд, д2,/Зд,д2),
116
Глава 3. Нечеткая арифметика
Рис. 3.43. Произведение двух нечетких чисел неопределенного знака Ai =
«примерно 1» и А‘2 — «примерно —1», найденное с использованием L-R-
представления
где:
тД1Л2 = -1,
aA1A2 = -1 - MIN(6, —4, —9,6) = -1 + 9 = 8, (3.57)
f3A1 д2 = МАХ(6, —4, -9, -6) - (-1) = 6 + 1 = 7.
Сравнивая рис. 3.41 и рис. 3.43, можно видеть, что произведения
нечетких чисел неопределенного знака, найденные с использованием
принципа обобщения и L-R-представления, имеют одинаковые номиналь-
ные значения и величины разброса, хотя формы функций принадлежно-
сти имеют некоторое различие.
3.5. Деление нечетких чисел
Пусть Ai и Аг —нечеткие числа. Независимо от их знака, частное
(А1/А2) может быть найдено с помощью принципа обобщения по форму-
ле (3.58):
(Аг/А2)(у) = V [АДх]) Л А2(ж2)], Va?i,x2, у G R,x2 + 0, (3.58)
где V — оператор объединения множеств (например МАХ, алгебраиче-
ская сумма или другие s-нормы),
Л — оператор пересечения множеств (например MIN, PROD или
другие t-нормы).
Деление нечетких чисел фактически сводится к вычислению функции
принадлежности их частного по формуле:
/С+/.42(у) = v [м.41 ('г1) Л д.42(а'2)], V;rj,х2.у е R.x2 ф 0. (3.59)
4/=Zi/.T2
3.5. Деление нечетких чисел
117
Таблица 3.22
Нечеткое число = «примерно 5»
0 0.33 0.66 1 0.5 0
X! 2 3 4 5 6 7
Таблица 3.23
Нечеткое число Л2 = «примерно 7»
Иа2(х2) 0 0.5 1 0.66 0.33 0
Х2 5 6 7 8 9 10
Пример 3.5.1. Найдем частное нечетких чисел Ai и А2, заданных в виде
табл. 3.22 и табл. 3.23 соответственно.
Метод вычисления частного с использованием принципа обобщения
показан на рис. 3.44. Выполнив сечение представленного на этом рисунке
Рис. 3.44. Метод определения функции принадлежности частного нечетких
чисел (Ai/A2) с использованием принципа обобщения
118
Глава 3. Нечеткая арифметика
Рис. 3.45. Плоское представление нечеткого частного (А1/А2), где
Ai = «примерно 5», — «примерно 7»
нечеткого частного, получаем его плоское двумерное представление —
рис. 3.45.
В рассматриваемом примере для вычисления частного используется
оператор PROD (Л). Предпочтительность применения именно такого опе-
ратора обусловлена в данном случае тем, что частное может быть пред-
ставлено в виде произведения Ai • А^1. Тем самым, деление является
операцией мультипликативного типа, и оператор PROD хорошо согласу-
ется с этим свойством. Более того, данный оператор обеспечивает еди-
ный принцип преобразования одинаковых входных и выходных измене-
ний в системе и ее модели.
Частное нечетких чисел можно приближенно вычислять, используя
их L-R-представление (рис. 3.46). Если
-41 = -42 = (тд2, ад2, /Зд2 ),
причем -41 > 0 и -42 > 0, то параметры L-R-представления чисел Ai, -42
и их частного (-41/-42) связаны соотношениями:
тА1/А2 = тА1/тА2,
тА1/л2 - аА1/А2 = (т,А1 ~ аА1)/(тА2 + 0д2), (3.60)
тА1/А2 +Ра1/а2 = (тА1 +(3А1)/(тА2 -ад2).
На основе данных соотношений можно получить формулу (3.61),
определяющую величины разбросов частного:
тА10д2+тА2аА1 .
тл‘ * °-
(3.61)
ТП 42
3.5. Деление нечетких чисел
119
Рис. 3.46. Обозначения, используемые при делении нечетких чисел на основе
их L-R-представления
Формула, используемая для деления положительных нечетких чисел,
заданных с помощью L-R-представления, имеет вид:
(Ai/A2) = (тА1,аА1,13А1)/(тА2,аА2,13А2) =
- (mA1 mAi0A2 +rnA2gA,i mA1aA2 + mA20A1\ (3.62)
\mA2 ’ тл2(тд2 +/3д2) ’ mA2(mA2 - aAJ )'
Пример 3.5.2. Найдем частное положительных нечетких чисел Ai и А2,
где:
Ai = «примерно 5» = (5,3,2),
А2 = «примерно 7» = (7,2,3).
Используя формулу (3.62), получаем следующий результат:
/л /4x^/5 18 24\
( 2)~ (7’35’35)
Сравнивая результаты деления нечеткого числа Ai = «примерно 5»
на нечеткое число А2 — «примерно 7», полученные с помощью принци-
па обобщения (рис. 3.45) и L-R-представления (рис. 3.47), можно видеть,
что у них равны как номинальные значения, так и величины разброса,
в то время как формы функций принадлежности являются похожими,
но не совпадают.
120
Глава 3. Нечеткая арифметика
Рис. 3.47. Деление нечетких чисел «примерно 5» и «примерно 7» с использова-
нием L-R-представления
Деление положительного числа на отрицательное
Деление указанного типа, подобно другим арифметическим операциям
над нечетким числами, может выполняться как на основе принципа обоб-
щения, так и с использованием L-R-представления. В случае деления
L-R-представлений частное выражается формулой:
(Ai/A2) = (mA1,aA1,(3A1)/(mA2,aA2,/3A2) =
mA1 тд1/3д2 - тА2/3А1 mA1aA2 - mA2aAl
тд2' тд2(тд2 + (Зд2) ' тд2(тд2 - ад2)
(3.63)
Деление отрицательного числа на положительное
Ах < 0, А2 > 0, А2 + 0.
Деление такого типа может выполняться с использованием принципа
обобщения либо L-R-представления. L-R-представление частного опре-
деляется по формуле:
(Ai/A2) = =
mAi
тА2
-тА1ад2 + тд2аА1
тид2(тд2 - ад2)
-тА1/3А.2 + mA2/3Al
тА2(тА2 +/3д2)
(3.64)
Деление отрицательных чисел
Ai < О.А2 < 0, А2 0.
Деление такого типа может выполняться с использованием принципа
обобщения либо L-R-представления. L-R-представление частного опре-
3.6. Особенности нечетких чисел
121
деляется по формуле:
(Ai/A2) = =
mA1
mA2
-mA1aA2 - mA2(3A1
mA2(mA2 - ад2)
-mA1f3A2 -
mA2(mA2 4- /Зд2)
(3.65)
Деление нечетких чисел неопределенного (произвольного)
знака
Ai, А2, А2 ф 0.
Деление такого типа может выполняться с использованием принципа
обобщения либо L-R-представления. L-R-представление частного опреде-
ляется по формуле:
/ л / л \ ПТА1 , OtAl, (3А^ / /э \
(А1/А2) — — — (^Ai/A2 ’ &Ai /А<2 1 РА} IА‘2 / ’
772 Д2 •) СХ-А2 •) РА2
где:
Шд.
ШЛ1/Л2 — 1
••1а2
_mAi mA1-aA1 тА1 + (3Al тА1 +/3АЛ
Qyr /А2 — ----- — IVlllM I ------- , -------- , --------- , --------— I
' тпа2 \гпд2 - аА2 тА2 4- Ра2 тА2 - аА2 тА2 4- Ра2 J
0А А = МАХ (тЛ1 ~ аА1 тА1 ~ аА1 тА1 + ^А1 тА1 + ^А1 -
А1/А2 \тА.2 - аА2 ' тА2 4- [3А2 ' тА2 - аА2 ’ тЛ2 4- /Зд2 J
тА1
тЛ2 ’
(3.66)
3.6. Особенности нечетких чисел
Операции над нечеткими числами могут применяться и к четким числам,
и очень важно указать на характерные различия между этими типами,
уделив особое внимание двум числам — 0 и 1. На рис. 3.48 показаны
примеры чисел в нечеткой (индекс f — fuzzy) и четкой (индекс cr — crisp)
формах.
Если А — нечеткое число, —А — число, ему противоположное, то сле-
дующее равенство не выполняется:
A-А = 0сг. (3.67)
Однако равенство
А - А = Of (3.68)
будет при этом справедливо.
122
Глава 3. Нечеткая арифметика
Рис. 3.48. Примеры чисел 0 и 1 в нечеткой (f) и четкой (сг) формах
Указанное обстоятельство является следствием того, что в результа-
те выполнения арифметических операций над нечеткими числами всегда
получаются нечеткие числа — ни одна операция не приводит к четкому
результату. Нечеткое число не может быть сокращено в уравнении так,
как это делается в случае четких чисел, т. е. путем сложения с противо-
положным числом (—А).
Пример 3.6.1. Выполним вычитание двух совпадающих нечетких чи-
сел А (табл. 3.24).
Таблица 3.24
Нечеткое число А = «примерно 1»
ДА (ж) 0 0.5 1 0.5 0
X 0 0.5 1 1.5 2
Метод вычисления разности (А — А) с использованием принципа
обобщения (3.69) показан на рис. 3.49, а сечение разности (А — А)—
на рис. 3.50:
ЦА-д(у) = МАХ (М1Н(дд(ж1),/1_а(ж2))), Vxi,x2,y е R. (3.69)
Представленный на рис. 3.49 и 3.50 пример подтверждает, что раз-
ность двух совпадающих нечетких чисел (А — А) представляет собой
нечеткий нуль (а не четкое нулевое значение), носитель которого всегда
шире, чем носитель числа А.
3.6. Особенности нечетких чисел
123
Рис. 3.49. Вычисление разности двух совпадающих нечетких чисел (А — Л)
с использованием принципа обобщения
Уа-а(у)
примерно О
//
-Си-1-----1-►
-2-1012 у
Рис. 3.50. Результат вычитания двух совпадающих нечетких чисел (А — А),
представленный в форме сечения нечеткого числа на рис. 3.49
В общем случае некорректным является уравнение вида:
X 4- А = Всг,
(3.70)
где X и А —нечеткие числа, но Всг — четкое число. Поэтому данное
уравнение не может быть разрешено относительно X. Вместе с тем, урав-
нение вида
Х + А = В (3.71)
корректно; здесь все входящие в уравнение числа — нечеткие.
124
Глава 3. Нечеткая арифметика
В отличие от ситуации с четкими числами, решение уравнения (3.71)
не представимо в форме:
X = В - А, (3.72)
поскольку после подстановки найденного таким образом числа X в ис-
ходное уравнение (3.71) получаем число С, не равное В:
В-А + А = С/В. (3.73)
У чисел С и В совпадают номинальные значения, но различаются вели-
чины разбросов а и (3. Значение X можно найти приближенным мето-
дом о-срезов (Кпарре 1994), либо на основе L-R-представления нечетких
чисел, используя формулы (3.74), (3.75) и (3.76). То есть если
X = (mx,ax,/3x), А = (mA, aA, /3А), В = (тв,ав,/Зв), (3.74)
ТО
X + А = (тпх + тд, ах + сед, (Зх + ^д) = В = (тв.ав, (ЗвУ (3.75)
Таким образом:
X = (тв ~ тл, &в ~ а а, (3В - [3А\ (3.76)
Пример 3.6.2. Найдем нечеткое число X (неизвестное) для уравнения
Х + А = (5,4,3) = В, (3.77)
где А = (3,3,1).
Пользуясь формулой (3.76), получаем:
X = (2,1,2).
Вычисления представлены на рис. 3.51.
Равенство вида
А-А-1 = 1СГ (3.78)
в общем случае не выполняется.
С другой стороны, справедливо следующее равенство:
А • А-1 = If. (3.79)
Произведение двух нечетких чисел, даже взаимно обратных, никогда
не является четким.
Пример 3.6.3. Используя принцип обобщения, найдем произведение чи-
сел А и А-1, заданных в табл. 3.25 и табл. 3.26.
Схема вычисления произведения А • А-1 представлена на рис. 3.52, а
его плоское сечение — на рис. 3.53.
3.6. Особенности нечетких чисел
125
-4 -3 -2 -1 0 1 2 3 4 5 6 7 8 у
Рис. 3.51. Верное решение X (в) уравнения Х + А = В и неверное его решение,
равное В — А (г), где числа А и В имеют вид (б) и (а) соответственно
Таблица 3.25
Нечеткое число А = «примерно 13»
МА1Ц) 0 0.333 0.666 1 0.5 0
X 10 11 12 13 14 15
Рисунок 3.53 является подтверждением того, что произведение нечет-
кого числа А и обратного к нему числа А-1 является нечетким числом
«1», т. е. «примерно 1». Результат перемножения нечетких чисел не может
быть четким числом, поэтому некорректным является уравнение вида
X • А = Вст.
(3.80)
В то же время уравнение вида
X • А = В
(3.81)
Таблица 3.26
Нечеткое число .1 1 = «примерно 1/13»
/Ы2 Ц) 0 0.5 1 0.666 0.333 0
X 1/15 1/14 1/13 1/12 1/П 1/10
126
Глава 3. Нечеткая арифметика
Рис. 3.52. Произведение нечеткого числа А и обратного к нему числа А 1
в четырехмерном представлении
корректно.
Здесь X, А, В — нечеткие числа, Всг — четкое число.
Уравнение (3.81) нельзя решить относительно X, произведя умноже-
ние обеих его частей на обратное число А-1, как в выражении
X- А-А~} = ВА~\ (3.82)
поскольку X • А • Д ' X. Тем не менее, уравнение (3.81) решается
в нечетких числах с использованием L-R-представления.
Пример 3.6.4. Найдем нечеткое число X в уравнении
X • А = В, (3.83)
где:
А = (7,3,2), В = (35,29,31), X = (тх,ах,/?х).
L-R-представление уравнения (3.83) может быть записано в виде
(mx,QX,/3x) • (7,3,2) = (35,29,31). (3.84)
3.6. Особенности нечетких чисел
127
Маа-1 (у)
А* А 1 = 1] = примерно 1
0.6 0.7 0.8 0.9 1.0 1.1 1.2 1.3 1.4 1.5 у
yx(xi)
Рис. 3.53. Двумерное сечение произведения нечетких чисел А • А Д представ-
ленного на рис. 3.52
Рис. 3.54. Нечеткие числа X и А и результат их перемножения В = X • А
Выполнив умножение по формуле (3.48), получаем:
(7mx,3mx + 4ах, 2тпх + 9(3Х) = (35. 29, 31).
Для определения нечеткого числа X следует решить систему из трех
уравнений:
7тх = 35,
Зп? х + 4а х = 29,
2тх + 9/3 Y = 31.
Решение будет иметь вид:
тх = 5, ах = 3.5, Да-2.33*.
Здесь 2.33 — результат округления точного решения 2 |. — Прим. ред.
128
Глава 3. Нечеткая арифметика
Рис. 3.55. Неверное решение С = X • А • А 1 уравнения X • А = В
L-R-представление нечеткого числа X имеет вид X = (5, 3.5, 2.33), см.
рис. 3.54. Неверное решение уравнения X • А = В показано на рис. 3.55.
Для операций сложения и умножения нечетких чисел справедливы
законы коммутативности, ассоциативности, дистрибутивности и наличия
нейтрального элемента, представимые в виде формул (3.85)-(3.88) соот-
ветственно.
Закон коммутативности:
А + В = В +А,
А • В - В • А. (3.85)
Закон ассоциативности:
А + (В + С) = (А + В) + С,
А • (В • С) = (А • В) • С. (3.86)
Закон дистрибутивности:
А - (В + С) = [А В) + (А С). (3.87)
Наличие нейтрального элемента:
А Д- 0сг = 0сг + А — А,
А • 1СГ = 1СГ • А = А. (3.88)
где 0сг — четкое число О, 1СГ — четкое число 1.
3.7. Различия между нечеткими числами
и лингвистическими значениями
С математической точки зрения, для представления как нечетких чисел
(например «приблизительно 1»), так и лингвистических значений (напри-
мер «низкое напряжение») используются нечеткие множества. Однако
3.7. Нечеткие числа и лингвистические значения
129
X — [0, 250 (см)] X — {Эндрю, Бен, Чарли, Джон} X — R
Рис. 3.56. Примеры задания функций принадлежности лингвистических значе-
ний «высокий» (рост), «высокий» (человек) и нечеткого числа «примерно 7»
mW
1
о
Рис. 3.57. Примеры нечетких множеств, имена которых содержат числовые
выражения
а)
примерно 7
5 6 7 8 9
если лингвистическое значение может быть задано множеством, содер-
жащим числовые (1,2,3...) либо нечисловые (Джон, Ричард, Билл, ...)
элементы, то нечеткое число должно определяться только на множестве
вещественных чисел R (рис. 3.56).
Согласно определению (Кпарре 1994; Zimmermann 1994а), нечеткие
числа представляют собой выпуклые, нормальные нечеткие множества
с ядром, состоящим из единственного элемента xq (рис. 3.56, в), и огра-
ниченным носителем, в то время как лингвистические значения могут
задаваться с использованием как выпуклых, так и невыпуклых функ-
ций принадлежности, иметь неограниченный носитель и одно- либо
многоэлементное или даже пустое ядро. Однако в практических при-
ложениях используются нечеткие множества, являющиеся, в соответ-
ствии с определением (Кпарре 1994; Zimmermann 1994а), не нечетки-
ми числами, а нечеткими интервалами (Kacprzyk 1992; Кпарре 1994;
Zimmermann 1994а), рис. 3.57, а.
Трапециевидное множество «приблизительно 7» (рис. 3.57, а) называ-
ется трапециевидным «нечетким числом» (Zimmermann 1994а). Множе-
ство «намного больше 10» (рис. 3.57, б) не удовлетворяет требованиям,
130
Глава 3. Нечеткая арифметика
Рис. 3.58. Примеры функций принадлежности значений лингвистической пере-
менной «ошибка регулирования»
накладываемым определением нечеткого числа, поскольку имеет много-
элементное ядро и носитель, неограниченный с одной стороны, однако
в имени данного множества имеется опорное числовое значение. Число-
вые выражения можно использовать при задании целого ряда различных
лингвистических значений. Так, значение «очень высокий» (рис. 3.56, а)
можно выразить в виде «намного больше 175 см». Точно так же нечеткое
число «приблизительно 7» (рис. 3.56, в), при его использовании в каче-
стве значения, например, лингвистической переменной «возраст собаки»,
можно заменить лингвистическим значением «средний» (возраст).
В соответствии с отмеченным выше, в практике нечеткого моделиро-
вания зачастую пользуются смешанными областями определения, содер-
жащими как лингвистические значения, так и нечеткие числа, например
(рис. 3.58):
ошибка регулирования = {большая отрицательная, средняя отрицательная, ма-
лая отрицательная, примерно нулевая, малая положитель-
ная, средняя положительная, большая положительная}.
Данное множество можно также задать с помощью имен, содержащих
числовые выражения:
ошибка регулирования = {намного меньше —2, примерно —2, примерно —1, при-
мерно 0, примерно 1, примерно 2, намного больше 2}.
Рассмотренный пример подтверждает то, что лингвистические зна-
чения и нечеткие числа часто используются совместно. С учетом это-
го, некоторые авторы работ по нечетким системам, такие как Калерт
(Kahlert 1995), Ванг (Wang 1994), Браун и Харрис (Brown 1994) умыш-
ленно не делают различия между лингвистическими значениями и нечет-
кими числами, пользуясь наиболее общим термином «нечеткое множе-
ство».
Глава 4
Нечеткая математика
Основными элементами нечетких моделей являются логические правила
вида:
ЕСЛИ (х'1 среднее) И (х% малое) ТО (у большое) (4.1)
Для обработки информации в таких моделях необходимо использо-
вать ряд операций, в основном логического характера. Совокупность этих
операций и связанные с ними понятия можно объединить под общим на-
званием «нечеткая математика» (Zimmermann 1994а). Основные ее прин-
ципы представлены ниже.
4.1. Основные операции над нечеткими
множествами
Нечеткая модель некоторой реальной системы содержит логические пра-
вила, описывающие ее функционирование. Для системы с двумя вход-
ными величинами (ац, х%) и одной выходной величиной у правило может
иметь вид:
ЕСЛИ [(од малое) И (j-2 среднее)] ИЛИ ,
[(.Г] среднее) И (ж2 малое)] ТО (у среднее), ’ 7
где «малое» и «среднее» — нечеткие множества (нечеткие оценки зна-
чений соответствующих величин),
ЕСЛИ — ТО, И, ИЛИ — логические связки (операторы агрегирова-
ния нечетких множеств).
Если нечеткие множества («малое», «среднее») используются для вы-
числения входных и выходных состояний системы, то логические связки
задают качественные отношения между этими состояниями путем объ-
единения фрагментов правила в единое целое. Точность нечеткой модели
зависит как от способа задания используемых в ней нечетких множеств
(их числа, формы и параметров функции принадлежности), так и от ис-
пользуемых типов логических связок.
132
Глава 4. Нечеткая математика
К основным типам логических связок (логическим операторам) отно-
сятся:
• И, А, Л — оператор пересечения (логическое произведение) мно-
жеств,
• или, U , V — оператор объединения (логическая сумма) множеств,
• НЕ, " , -1 — оператор отрицания (логическое дополнение) множеств.
Логические операторы имеют несколько различных форм представ-
ления, в связи с чем возникает задача выбора подходящей формы. Ми-
нимально необходимым условием правильного выбора является знание
основных форм этих операторов.
4.1.1. Оператор пересечения (логическое произведение)
нечетких множеств
Нечеткая логика создавалась на основе классической, четкой, двузначной
логики. Ее основоположник, Лотфи Заде, указал на недостатки класси-
ческой логики применительно к моделированию явлений реального мира.
Введя понятие нечеткого множества, он предоставил возможности усо-
вершенствования моделей, содержащих логические связки. Заде опре-
делил операцию пересечения нечетких множеств как расширение со-
ответствующей операции над обычными множествами, и это означает,
что пересечение обычных множеств должно являться частным случаем
пересечения нечетких множеств. Указанная аксиома часто встречается
в литературе — см., например, (Yager 1994,1995). Вместе с тем, по прак-
тическим соображениям, связанным со стремлением повысить точность
нечетких моделей, используются также и не удовлетворяющие этой ак-
сиоме операторы (Yager 1994,1995).
В классической логике пересечение множеств А и В определяется
(Driankov 1993,1996; Poradnik 1971) без использования функций принад-
лежности по формуле
АГ]В = {х:хеАихе В}. (4.3)
Пример 4.1.1.1. Пример нахождения пересечения ААВ четких множеств
представлен на рис. 4.1.
Основные свойства операции пересечения четких множеств А А В,
заданных на универсальном множестве X, наличие которых ожидается
и в случае нечетких множеств, определяются соотношениями (4.4)-(4.9).
Коммутативность:
А АВ = В А А.
(4.4)
4.1. Основные операции над нечеткими множествами
133
АПВ
0123456789 10 х
А = {1, 2, 3,4, 5,6}, В = {3, 4, 5, 6, 7, 8}, А П В = {3, 4, 5. 6}
Рис. 4.1. Пр имер логического произведения четких множеств АГ\ В
Данное свойство означает, что порядок следования множеств-
операндов не влияет на конечный результат.
Ассоциативность:
(А П В) П С = А П (В П С). (4.5)
Данное свойство определяет возможность пошагового вычисления ло-
гического произведения нескольких множеств путем нахождения произ-
ведений их пар. Порядок, в котором формируются пары, не влияет на
конечный результат.
Идемпотентность:
АоА = А. (4.6)
Поглощение (пересечение с пустым множеством 0):
АП0 = 0. (4.7)
Тождественность (пересечение с универсальным множеством):
АПХ = А. (4.8)
где X — универсальное множество.
Закон логического противоречия:
АпА = 0. (4.9)
Далее будет показано, что для операции пересечения нечетких мно-
жеств некоторые из этих свойств не выполняются — таким является, на-
пример, свойство (4.9). Применительно к нечетким множествам, данная
операция может быть задана различными способами и потому имеет
неоднозначный смысл. Указанная неоднозначность иллюстрируется при-
мером 4.1.1.2.
Пример 4.1.1.2. Имеются два нечетких множества А и В, заданные
в виде (4.10) и (4.11), где А — множество дешевых автомобилей, хг~~
134
Глава 4. Нечеткая математика
А В - комфортабельные
1 Л - дешевые
I I
। 1
О -------------1-------1-------1------1------------►
%1 Х2 *3 *4 *5 *6 *i
Рис. 4.2. Дискретные функции принадлежности автомобилей xt множеству де-
шевых автомобилей (А) и множеству комфортабельных автомобилей (В)
(4.Ю)
(4.П)
обозначение автомобиля:
л f 1 0.8 0.6 0.4 0.2 О
А = < — , — , — . — , — . —
[ .Т1 Х‘2 Х4 2'5 Хб
В — множество комфортабельных автомобилей:
о f 0 0.2 0.4 0.6 0.8 1
В = < — , — , — , — . — , —
[J’i 22 23 24 ' 2'5 2(,
Как показано на рис. 4.2, выполняется условие А = В \
Требуется определить множество С = А П В, содержащее автомо-
били, являющиеся одновременно дешевыми и комфортабельными. По-
скольку А = В, то, в случае четких множеств, согласно свойству (4.9)
(АПА = 0), мы получили бы пустое множество. Что же следует считать
результатом в случае нечетких множеств?
Автомобиль 24 может быть отнесен к дешевым со степенью
1лд(х4) = 0.4 и к комфортабельным — со степенью ^4(24) = 0.6. В какой
степени его можно одновременно считать дешевым и комфортабельным,
и как определить эту степень, используя степени его принадлежности
/24(^4) и ^#(24) соответствующим множествам?
В (Zadeh 1965) Заде предложил вычислять значения функции принад-
лежности произведения множеств по формуле (4.12) с использованием
оператора MIN :
^Аг\в{х) = МШ(/4Л(ж), Дв(ж)), V.r е X. (4.12)
Здесь В —дополнение нечеткого множества В в X, представляющее собой нечеткое
множество с функцией принадлежности вида
= 1 ~ мв(2), V2 е х.
— Прим. ред.
4.1. Основные операции над нечеткими множествами
135
Рис. 4.3. Произведение А А В нечетких множеств дешевых (4) и комфорта-
бельных (В) автомобилей, полученное с использованием оператора MIN
Данный оператор был первым оператором, использовавшимся для рас-
ширения операции А пересечения обычных множеств на случай нечетких
множеств. Применяя формулу (4.12) для нахождения множества АЛВ де-
шевых и, одновременно с этим, комфортабельных автомобилей, получаем
выражение:
(4.13)
О 0.2 0.4 0.4 0.2 0
Xi ' .Т2 Х‘3 ’ ЗД ' ' ^’6
Нечеткое множество, являющееся результатом данной операции, пред-
ставлено на рис. 4.3.
Оператор MIN можно представить в алгебраической форме:
МШ(тьт2) =
+ т2 - |Т1 - т2| _ Хг + х2 - (#1 - х2) • sgn(xi - х2)
2 - 2
(4.14)
где
sgn(a?i - х2) = <
-1,
0,
1,
если
если
если
— х2 < 0,
JA - ^2 = о,
Л - х2 > 0.
Оператор MIN в форме (4.14) называют «жестким» («hardMIN»), по-
скольку изменение знака разности (х\ — в корне меняет значения
136
Глава 4. Нечеткая математика
Рис. 4.4. «Жесткая» (а) и «мягкая» (б) формы оператора sgn(xi — х%)
выражения sgn(a?i — Т2), приводя тем самым, к изменению результата
действия самого оператора (рис. 4.4).
С целью уменьшения жесткости оператора MIN(j*i — #2) можно ис-
пользовать встречающуюся в литературе следующую специальную фор-
му бинарного оператора sgn:
sgn(^i - х2) - , (4.15)
6 уДхг-хзУ + У
где 5 — малое число, например, 0.05*. Увеличение значения S приводит
к уменьшению жесткости действия sgn (яд — Х2) (рис. 4.4, б).
На основе «мягкого» оператора sgn можно определить «мягкий» опе-
ратор MIN^(j*i, Т2), задаваемый формулой
MIN(ji, х2) = Ж1 + а'2 + 62 ~ ~ +— . (4.16)
Использование «мягкой» формы оператора sgn обеспечивает более
гладкое функционирование нечетких моделей и систем управления,
устраняя изломы на поверхности отображения ввода-вывода. С другой
стороны, оно имеет недостаток, связанный с тем, что при числе сигна-
лов .г?, превышающем 2, результат вычисления зависит от порядка сле-
дования сигналов и не совпадает ни с одним из значений х2 (рис. 4.5).
Проявление указанного недостатка уменьшается при уменьшении зна-
чений 5. Имеется, однако, еще один недостаток, связанный с необходи-
мостью пошаговых вычислений для последовательных пар сигналов (на
каждом шаге оператор вычисляет значение минимума только для од-
ж Еще одно возможное значение J = 0.01, как на рис. 4.5. — Прим. ред.
4.1. Основные операции над нечеткими множествами
137
0.990
1.000
1.010
0.990
1.000
1.010
Рис. 4.5. Иллюстрация недостатка «мягкого» оператора MIN (неточность вы-
числений и зависимость от их порядка)
0.990 ► 1.000 ► soft MIN<5 0.993
1.010 ►
Рис. 4.6. Пример вычисления значения soft MIN(0.990; 1.000:1.010)
по формуле (4.17)
ной пары сигналов х\ и x^Y С учетом этого, при большом числе сигна-
лов рекомендуется использовать оператор минимума в следующей форме
(Berenji 1992):
soft MIN(rci,..., хп) —
(4.17)
i = 1,..., n, k > 0.
Пример действия оператора soft MIN представлен на рис. 4.6. С уве-
личением значения коэффициента к (к —> оо) данный оператор по своему
действию все больше приближается к «жесткой» форме MIN. На практи-
ке значительная точность вычислений достигается уже при к > 100, од-
нако следует помнить, что с увеличением значения к повышается «жест-
кость» действия оператора.
Подводя итог, укажем следующие достоинства и недостатки «жестко-
го» оператора MIN.
138
Глава 4. Нечеткая математика
Достоинства:
1. Простота и скорость вычислений обеспечивают меньшую загрузку
компьютеров и микропроцессоров, что дает возможность использо-
вать в качестве нечетких регуляторов недорогие микропроцессоры.
2. Возможность «сглаживания» действия оператора MIN, что, однако,
повышает объем вычислений, одновременно понижая их точность.
Недостатки:
1. Точность модели в целом ниже, чем при использовании других опе-
раторов.
2. Модель определяет менее гладкую поверхность, чем в случае исполь-
зования других операторов.
3. Возникновение нечувствительности и резкого изменения значений
выходной величины модели и нечеткого регулятора, содержащих опе-
раторы MIN.
Анализ представленного на рис.4.3 результата операции пересече-
ния множеств А П В с использованием оператора MIN подтверждает
третий из перечисленных недостатков. Степень принадлежности авто-
мобилей Х1,Х2,тз множеству ЛПВ определяется только степенью их
принадлежности множеству комфортабельных автомобилей — тот факт,
дешевле автомобиль или дороже, на указанную степень не влияет. Для
автомобиля жз, например, результат будет
/МпвЩ) = МвЩ) = 0.4.
В соответствии с этой моделью, сколь бы дешевым ни был хз (да-
же если его стоимость была бы равной нулю), степень принадлежности
Мдпв(^з) останется неизменной (равной 0.4). Иллюстрацией рассмотрен-
ного недостатка является рис. 4.7.
Представленный на этом рисунке пример показывает, что использо-
вание оператора MIN в качестве основы операции пересечения множеств
приводит к потере части информации, поскольку данный оператор учи-
тывает только то, что одна степень принадлежности меньше другой, без
учета значения их разности. По этой причине для моделей систем, ис-
пользующих оператор MIN, обычно характерны нечувствительность к ма-
лым изменениям значений входных величин, а также резкие изменения
выходного значения при превышении некоторого порогового уровня вход-
ных значений (Piegat 1995а). Указанная особенность причиняет большие
4.1. Основные операции над нечеткими множествами
139
А
1 ..
Рис. 4.7. Одинаковость произведений множеств Аг П В = П В, полученных
с использованием оператора MIN, для разных форм функций принадлежности
множеств Ai и А?
неудобства при моделировании систем, имеющих гладкую поверхность
отображения ввода-вывода.
Использование оператора MIN может иметь преимущества для тех
систем, в которых метод обработки информации близок к логическо-
му (большинство зависимостей между входными и выходным величи-
нами системы носят логический характер). Вследствие указанных вы-
ше недостатков данного оператора область его применения сокращается.
В 1995 г. результаты опроса участников 5-го Семинара «Нечеткое управ-
ление» (16-17 октября 1995 г., Виттен, Германия) об их мнении в от-
ношении использования оператора MIN показали, что большинство спе-
циалистов, участвовавших в конференции, предпочитали данному опе-
ратору оператор PROD (логическое произведение) (Pfeiffer 1996), в то
140
Глава 4. Нечеткая математика
время как ранее в литературе можно было встретить противоположные
мнения (Kahlert 1995; Кпарре 1994). Вычисление функции принадлежно-
сти произведения нечетких множеств с использованием оператора PROD
осуществляется в соответствии с формулой
Ддпв(ж) = ма(ж) • дв(ж), Уж 6 X. (4.18)
Преимуществом оператора PROD является то, что значение ^дпв(^)
имеет количественную зависимость от фактических значений обеих
функций принадлежности и (за исключением случая равен-
ства одной из функций нулю). Очевидно, что потеря информации здесь
не так существенна, как для оператора MIN, когда значение ^дпв(^)
зависит лишь от меньшего (в пределах заданной области изменения х)
значения компонентов ^л(т) и ^в(х). Сравнение результатов вычисления
логического произведения с использованием операторов MIN и PROD
представлено на рис. 4.8.
дд(жг), Дв(хг)
0 --------—।------------------1---------1---------1---- ^->-6-----►
. . Х1 х2 Х3 Х4 Х5 Х6 Xi
Х1 х2 х3 х4 х5 х6 х{
/ЛАпв(хг\
Xi Х2 Х3 Х4 Х5 Х6 Xi
Рис. 4.8. Функции принадлежности логического произведения нечетких мно-
жеств А и В, полученные с использованием операторов MIN и PROD
4.1. Основные операции над нечеткими множествами
141
Как видно из рис.4.8, значения функции принадлежности раг\в(х),
получаемые на основе оператора PROD, меньше соответствующих зна-
чений, получаемых с использованием MIN, в связи с чем, упомянутый
выше оператор иногда называют оператором sub-MIN.
Иллюстрация возможности использования в качестве основы для ре-
ализации пересечения нечетких множеств операторов как MIN, так
и PROD, указывает на неоднозначность способа выполнения данной опе-
рации. О том, каким должен быть этот способ, имеется множество мне-
ний, в связи с чем на практике оператор О зачастую выбирается ин-
туитивно, исходя из опыта, на основе каких-либо гипотез или же мето-
дом проб. Предлагался ряд различных операторов пересечения множеств,
но использование любого из них, в зависимости от конкретного прило-
жения, может приводить как к хорошим, так и к плохим результатам.
Наиболее часто в качестве операторов пересечения А А В используются
так называемые t-нормы, определяющие различные формы реализации
данной операции (Driankov 1993,1996; Yager 1994,1995; Кпарре 1994).
Оператор t-нормы представляет собой функцию Г, моделирующую опе-
рацию И пересечения двух нечетких множеств А и В, удовлетворяю-
щую перечисленным ниже свойствам (4.19)-(4.24), которые выполняются
для всех х е X.
Пространства отображения:
Т : [0,1] х [0,1] [0,1]. (4.19)
Свойство обнуления:
Т(0.0) = 0. (4.20)
Случай, когда пара содержит один элемент с — 1:
Т(рА(х), 1) = /лаЦ), T(/j,b(x),T) = (4.21)
Свойство коммутативности:
Г(ма(ж), мв(.т)) = Т(дв(ж), /ла(х')). (4.22)
Свойство ассоциативности:
Т(цА(х),Т(рвЦ), рс(х)У) = Т(Т(дл(х),/2В(ж)), дс(ж))- (4-23)
Условие монотонйости:
РаЦ) < дсЩ дв(ж) < md(x) =J>
=> Т(^л(х).мв(-г)) < TXc(xYpd(x)).
Свойство коммутативности указывает на то, что для данной операции
порядок следования множеств не является существенным. Свойство ас-
социативности говорит о том, что операцию пересечения более, чем двух
142
Глава 4. Нечеткая математика
Таблица 4.1
Некоторые ^параметризованные операторы t-нормы
Название оператора Формула
минимум (MIN) ^Апв(х) = MIN(/m (.?). (.г))
произведение (PROD) Млпв(л) =
произведение Гама- хера / ' _ МО • МО ’ цА(х) + ЦвИ- МО' МО
произведение Эйн- штейна / X Р-а(х) Цв(х) ЛГ]В 2 - (дд(ж) + /хв(х) - • дв(^))
усиленное произве- дение , > _ (МШ(/м(0’/М0) Для МАХ(/лд, дв) - 1 ^АпвуХ) в других случаях
ограниченная раз- ность ^апв(х) = МАХ(0, МО + МО - 1)
множеств, необходимо выполнять последовательно, но порядок образо-
вания пар множеств не влияет на конечный результат. Свойство моно-
тонности означает, что при возрастании значений аргументов результат
операции не убывает.
Выделяют параметризованные и непараметризованные t-нормы. Ре-
зультат действия непараметризованных t-норм является постоянным, то-
гда как для параметризованных t-норм он будет изменяться как коли-
чественно, так и качественно, при изменении любого параметра, явля-
ющегося степенью свободы оператора. В табл. 4.1 перечислены наиболее
распространенные непараметризованные t-нормы, а в табл. 4.2 приведены
наиболее часто используемые параметризованные t-нормы, для которых
также указан характер зависимости операторов от своих параметров.
Пример 4.1.1.3. Данный пример является иллюстрацией действия
нечетких t-норм. На рис. 4.9 представлены функции принадлежности
лингвистической переменной «температура при лихорадке».
Требуется определить функцию принадлежности температуры Т
нечеткому множеству С = «средняя И высокая температура» (С = АПВ),
используя различные непараметризованные операторы. Результаты пред-
ставлены на рис. 4.10.
В соответствии с четкой, бинарной логикой, температура не может
быть одновременно средней И высокой, в то время как нечеткая логи-
ка декларирует возможность существования такого множества. Функция
4.1. Основные операции над нечеткими множествами
143
Таблица 4.2
Некоторые параметризованные операторы пересечения нечетких множеств
Название оператора Формула
Оператор пересече- ния Дюбуа / МАХ[^(4//Й(4а] J « = 0: /мпвЦ-а) = МШ(дд(т)./гвЦ)) a = 1: /МпвЦ-а) = PROD(/m(;t). явЦ))
Оператор пересе- чения Гамахера / \ Дд(т‘) • л >0 РАПВ(Х,')) 7_|_ (1 _ 7)(р4(т) + вв(ж) - ' '' 7 = 0: — произведение Гамахера 7 = 1: МлпвЦ.7) = у = 2: Млпв(«Л7) — произведение Эйнштейна > эс: Ддпв(^л) = усиленное произведение
Оператор пересече- ния Ягера Я4пвЦ,р) = ((1 - рА(х)У + (1 - цвИА-) ,Р > 1 р = 1: ЦАпв(х.р) = ограниченная разность р — ос: рапв(х,р) = рв[х))
Рис. 4.9. Функции принадлежности лингвистической переменной «температура
при лихорадке»
принадлежности этого множества не является строго определенной и за-
висит от используемого оператора t-нормы.
Как видно из рис. 4.10, использование оператора MIN приводит к са-
мым высоким значениям функции принадлежности, вследствие чего дру-
гие операторы t-норм иногда называют sub-MIN-операторами или sub-
MIN-нормами (Кпарре 1994) (рис. 4.11).
Значения функции принадлежности произведения множеств ^лг^в^'У
получаемые с помощью sub-MIN-операторов (t-норм), будут меньши-
144
Глава 4. Нечеткая математика
Рис. 4.10. Функции принадлежности нечеткого множества «средняя И высокая
температура», найденные с помощью различных t-норм
Рис. 4.11. Соотношение между оператором MLN и остальными t-нормами
4.1. Основные операции над нечеткими множествами
145
ми, чем при использовании оператора MIN, что означает, что sub-MIN-
операторы являются более строгими, требующими более высокой степени
выполнения условий А и В, входящих в нечеткое произведение. Поэтому
об операторе MIN говорят, как о наиболее оптимистичном среди t-норм
(Driankov 1993).
Согласно степени оптимизма, t-нормы могут быть упорядочены сле-
дующим образом:
минимум > произведение Гамахера > алгебраическое произведение
> произведение Эйнштейна > ограниченная разность > усиленное про-
изведение.
Для определения операции пересечения также используются операто-
ры, не являющиеся t-нормами (т. е. не обладающие свойствами t-норм).
Примером такого оператора является параметризованный оператор пе-
ресечения на основе среднего (Driankov 1993), задаваемый выражением
(4.25).
Параметризованный оператор пересечения
на основе среднего
МпЩ) = 7 ' MIN(jUx(x). /7в(ж)) + 0.5(1 - + мв(ж)), V.r € X.
(4.25)
где 7 е [0,1].
При 7 = 1 данный оператор сводится к оператору MIN. При 7 = 0 мы
получаем оператор среднего арифметического:
Дапв(ж) = 0.5(/м(х) + а*в(х)), Vx 6 X. (4.26)
Поскольку неравенство:
0.5(/м(т) + Мв(.г)) >MIN(W(x),/ib(j)), VxgX (4.27)
всегда справедливо, оператор среднего называют также super-MIN-
оператором. По степени оптимизма он превосходит наиболее оптимистич-
ную t-норму--оператор MIN.
Для случая п нечетких множеств Ai.....Ап используется формула:
(т*: '' (V 7 ... 4- /М„ (т:) ,, у /. qo\
Д.41П...ПА,, (-Г) =-------------< Vx G Л. (4.28)
146
Глава 4. Нечеткая математика
Оператор среднего гармонического
Для п нечетких множеств Ai,...,An степень принадлежности их пере-
сечению вычисляется по формуле (Yager 1994)
MAin...nA„ (-г) = —---~{----------• Vt 6 X. (4.29)
—- - +... ч-----—-
Оператор среднего геометрического
Для п нечетких множеств Ai,...,An результирующая степень принад-
лежности находится по формуле
МА1П...па„ (ж) = (маЩ) • • • • W„W)1Z". Var е X. (4.30)
Обобщенный оператор среднего
В данном случае для п нечетких множеств А}..Ап используется фор-
мула
v.re,Y. (4.31)
Данный оператор пересечения является параметризованным: в каче-
стве параметра выступает показатель а. В случае
се -ос обобщенный оператор среднего в пределе сводится к опера-
тору MIN,
a — -1 имеем оператор среднего гармонического,
ст — 0 имеем оператор среднего геометрического,
а = 1 имеем оператор среднего арифметического,
се —> 4-эс имеем оператор МАХ.
На рис. 4.12 представлено сравнение результатов действия различных
нечетких операторов для случая пересечения нечетких множеств А и В
из примера 4.1.1.3.
Как видно из рис. 4.12, все операторы, определенные на основе опе-
ратора обобщенного среднего, относятся к типу super-MIN и вследствие
этого являются более оптимистичными, чем оператор MIX. Степень оп-
тимизма возрастает с ростом коэффициента а в формуле (4.31). Опера-
тор среднего арифметического (а 1) обладает свойством аддитивности:
функция принадлежности результирующему множеству изменяется про-
порционально изменению исходных функций принадлежности.
4.1. Основные операции над нечеткими множествами
147
а)
б) MIN (а
в) среднее
гармоническое
(о = -1)
г) среднее
геометрическое
(а = 0)
д) среднее
арифметическое
Рис. 4.12. Сравнение
результатов выполнения пересечения нечетких мно-
жеств Д и В с применением MIN и операторов среднего
148
Глава 4. Нечеткая математика
АиВ
0123456 789 10 х
А = {1,2, 3,4, 5,6}, В = {3,4, 5,6, 7, 8}, Ли В = {1.2, 3, 4, 5, 6, 7, 8}
Рис. 4.13. Пример логической суммы четких множеств
4.1.2. Объединение (логическая сумма) нечетких множеств
В классической логике логическая сумма множеств А и В определяется
без использования понятия функции принадлежности, согласно выраже-
нию (Driankov 1993,1996; Poradnik 1971)
A U В — {х: х 6 А или х G В}. (4.32)
Пример логического суммирования представлен на рис. 4.13.
Результат объединения четких множеств является однозначным, по-
скольку объединение выполняется всегда одним и тем же способом.
В случае нечетких множеств возможен ряд способов выполнения объ-
единения, и тем самым результат его неоднозначен.
С учетом аксиомы нечеткой логики (п. 4.1.1), в соответствии с кото-
рой все ее операции, при применении их к четким множествам, долж-
ны совпадать с операциями классической логики, можно ожидать, что
для операции объединения нечетких множеств выполняются перечислен-
ные ниже свойства (4.33)-(4.38).
Коммутативность:
Лив = ви4. (4.33)
Данное свойство означает, что порядок следования множеств, участ-
вующих в операции объединения, не влияет на конечный результат.
Ассоциативность:
A U (В U С) - (A U В) U С = A U В U С. (4.34)
Объединение нескольких множеств можно выполнять, последователь-
но формируя пары множеств, при этом порядок их формирования не яв-
ляется существенным.
Идемпотентность:
A U А = А.
(4.35)
4.1. Основные операции над нечеткими множествами
149
Объединение с пустым множеством 0:
Ли 0 = А. (4.36)
Поглощение (объединение с универсальным множеством X):
A U X = X. (4.37)
Закон исключенного третьего А:
А и А = X. (4.38)
В следующем примере будет показано, что при переходе к нечетким
множествам некоторые свойства операции объединения, имеющие место
для четких множеств, выполняться не будут.
Пример 4.1.2.1. Пусть заданы множество А дешевых автомобилей (4.39)
и множество В = А комфортабельных автомобилей (4.40), хг — номер
автомобиля:
л ( 1 0.8 0.6 0.4 0.2 0 I А = {—, — , — , — , — У [ Xi Х2 .Г.З -''I Xr, Хе J в_(0_ °-2 °-4 0-6 0-8 И [ £1 ’ Х2 ’ #3 ’ ^4 ’ ^5 ’ ^6 J (4.39) (4.40)
Универсальное множество имеет вид:
ЛГ11111 —I
[ Х\ 1 Х‘2 ’ Хз ' Х4 ’ Х$ ' Х§ J ’
Требуется определить множество С — A U В = A U А, содержащее
дешевые или комфортабельные автомобили.
Если для нахождения объединения АиВ использовать оператор типа
алгебраической суммы (4.41), то результатом будет множество (4.42):
Р-сЦ) = l-iаЦ) + Мв(т) - ра(х) /лвОХ „ _ Л Г? _ / 1 °-84 °-76 °-76 °-84 1 1 С — /1 U Х> — \ , , . , . 7 . 1 Т] Х‘2 Хз Х4 Хз ' Х6 1 (4.41) (4.42)
Функции принадлежности множеств А, В, С представлены
на рис. 4.14.
Как видно из данного примера, если объединение нечетких множеств
A U А определяется на основе оператора алгебраической суммы, то на-
рушается выполнение свойства 6 данной операции (Au А — X), которое
всегда справедливо в случае четких множеств.
150
Глава 4. Нечеткая математика
Рис. 4.14. Функции принадлежности множеств А, В и их логической суммы
Первыми операторами, предложенными в качестве основы для вы-
полнения операции объединения нечетких множеств (Zadeh 1965), явля-
лись оператор МАХ и алгебраическая сумма. По мере развития нечеткой
логики число этих операторов увеличивалось. В настоящее время наи-
более распространенными операторами объединения множеств являются
t-конормы, также называемые s-нормами.
Оператор s-нормы, или t-конормы представляет собой функцию S,
реализующую операцию ИЛИ объединения двух нечетких множеств А
и В, удовлетворяющую перечисленным ниже свойствам (4.43)-(4.48),
которые выполняются для всех х е X.
Пространство отображения:
S : [0,1] х [0,1] [0,1]. (4.43)
Свойство обнуления:
5(0,0) -0. (4.44)
Случай, когда пара содержит один элемент, для которого /7# (ж) = 0:
5(/м(х).0) = 5(0,//л(х)) = /ид(т). (4.45)
Свойство коммутативности:
S(//.4(.r),//.«(r)) = (4.46)
4.1. Основные операции над нечеткими множествами
151
Таблица 4.3
Непараметризованные s-нормы
Название оператора Формула
максимум (МАХ) МАивЦ) = МАХ(//Л(х),/1В(х))
алгебраическая сумма MAub(^) = Ма(ж) + Мв(.т) - МаЦ) • МВ (х)
сумма Гамахера , , М-Л-О + Мв(ж) - 2 МА (ж) • Мв(-г) 1 - /ха(х) Цв(Х)
сумма Эйнштейна ,, НА Мл(^) +рв(а-) 1 4 да{х) Цв(х)
усиленная сумма ( 1 = Щах(МаЦ)’МвЦ)) для MIN(ma-Mb) = 0 Мдиви; — в друГИХ случаях
ограниченная сум- ма Maub(j') = /z.i(.r) + Мв(Н)
Свойство ассоциативности:
S(aaOX Мс(ж))) = 5(5(ма(ж),мв(-'г)),МсЦ)). (4.47)
Условие монотонности:
МаЦ) < мсСН-МвЦ) < /'/>Ц) => 8(/лА(Х), цв(х)) < 5(мсЦ),моЦ))-
(4.48)
Выделяют параметризованные и непараметризованные операторы s-
норм. Результат действия непараметризованных операторов является по-
стоянным; наиболее часто используемые операторы этого типа перечис-
лены в табл. 4.3. Таблица 4.4 содержит наиболее распространенные па-
раметризованные s-нормы.
Конкретные s-нормы различаются по степени оптимизма. Наи-
больший результат вычислений дает оператор усиленной суммы, наи-
меньший — оператор МАХ. Последовательность s-норм, упорядоченных
по степени оптимизма, имеет следующий вид:
усиленная сумма > ограниченная сумма > сумма Эйнштейна >
> алгебраическая сумма > сумма Гамахера > МАХ.
Учитывая, что вычисление функции принадлежности множества
A U В с помощью оператора МАХ приводит к наименьшему результату,
152
Глава 4. Нечеткая математика
Таблица 4.4
Параметризованные s-нормы
Название оператора Формула
оператор объединения Гамахера /Мив(х,7) = ^(^)+^(Д) + (7-1)-^(гГ^(х) _х 1 + 7 ’ • 1лв(т) у = -1: /1дин(^,7) — сумма Гамахера 7 = 0: /Мив(^,7) = алгебраическая сумма 7 = 1: Млив(^,7) — сумма Эйнштейна 7 —> оо: /Мив(яд7) = усиленная сумма
оператор объединения Ягера /Мив(яг.р) = MIN |1, [(jj.a(x))p + (рв(ж))р]₽ } ,р 1 р = 1: paub(x,p) = ограниченная сумма р — эс: рАив(х,р) = МАХ(/м(х),//в(а;))
Рис. 4.15. Соотношение между оператором МАХ и остальными s-нормами
все остальные операторы s-норм называются super-MAX-операторами
(рис. 4.15).
Операторы t-норм и s-норм образуют комплементарные пары, удовле-
творяющие условию
Т[дд(ж), //в(ж)] = 1 - S[1 - 1 - (4.49)
Если задана t-норма, то может быть найдена комплементарная ей s-
норма. В табл. 4.5 приведены комплементарные пары t- и s-норм.
Для реализации операции объединения множеств также применяют-
ся операторы ИЛИ, не являющиеся s-нормам (не обладающие свойствами
s-норм). Примером такого оператора является параметризованный one-
4.1. Основные операции над нечеткими множествами
153
Таблица 4.5
Комплементарные пары t- и s-норм
t-норма комплементарная s-норма
MIN МАХ
алгебраическое произведение алгебраическая сумма
произведение Гамахера сумма Гамахера
произведение Эйнштейна сумма Эйнштейна
усиленное произведение усиленная сумма
ограниченная разность ограниченная сумма
параметризованный оператор пересечения Гамахера параметризованный оператор объединения Гамахера
параметризованный оператор пересечения Ягера параметризованный оператор объединения Ягера
ратор объединения множеств на основе среднего (Driankov 1993):
ДливЦ) = 7 • МАХ[//д(х).^в(ж)]+
+ 0.5 • (1 - 7) • [/мЦ) + МвЦ)],
7G [0,1]. VxGX.
(4.50)
При 7 = 1 оператор (4.50) сводится к оператору МАХ, при 7 = 0 —
к оператору среднего арифметического.
В качестве основы для операции объединения нечетких множеств
можно также использовать оператор алгебраической суммы:
ДЛ1и...ид„(ж) = МЛ1(ж) + • • • + Vj? G X. (4.51)
Данный оператор характеризуется наибольшей степенью оптимизма
среди всех операторов объединения, а также обладает свойством адди-
тивности. Результирующая функция принадлежности возрастает пропор-
ционально росту исходных функций, входящих в формулу (4.51), вслед-
ствие чего указанный оператор, как и оператор среднего арифметическо-
го, можно назвать линейным. Использование этих операторов в нечет-
ких моделях способствует получению линейных секторов на поверхности
отображения ввода-вывода данных моделей. Линейные операторы пре-
образуют участвующие в операции нечеткие множества в так называе-
154
Глава 4. Нечеткая математика
мне нечеткие наборы (Yager 1994,1995), которые далее могут участвовать
в операциях над нечеткими наборами, описанных в главе 2.
Пример 4.1.2.2. Пусть А — множество быстрых автомобилей, В — мно-
жество комфортабельных автомобилей, х,- — обозначение автомобиля:
л fl 1 1 1 1
А=<—, — , —
[ад х2 х3 х4 J
в _ f 0.6 0.7 0.9 J1
( ’ Х‘2 ' Х3 ’ Х4 J ‘
Пусть мы намерены приобрести быстрый ИЛИ комфортабельный ав-
томобиль. Применяя s-норму типа МАХ, приходим к результату:
с = Аив=1 —
‘ х2
II ( 0.6 0.7 0.9 1
— I U —7—
Х4 J I Х‘2 Х3 Х4
Хз Х4
1 1
(4.52)
Х‘2
Хз Х4
В результате использования оператора МАХ у нас имеется информа-
ция о возможности приобретения любого из автомобилей, поскольку сте-
пени их принадлежности множеству «быстрый ИЛИ комфортабельный»
одинаковы и равны 1. При использовании оператора арифметической сум-
мы множества А и В на первом шаге преобразуются в нечеткий набор
(4.53), а затем, на втором шаге — в нечеткое множество (4.54).
Шаг 1
Х\ х
В результате использования оператора арифметической суммы мы по-
лучаем информацию о том, что следует приобрести автомобиль х4, сте-
пень принадлежности которого набору «быстрый или комфортабельный»
является наибольшей (степени принадлежности в (4.54) можно нормиро-
вать так, чтобы они находились в интервале [0,1]). Представляется, что
во многих случаях люди, принимая решения, используют именно такой
оператор, поскольку все же остаются склонными учитывать множество
обстоятельств.
4.1. Основные операции над нечеткими множествами
155
4.1.3. Компенсирующие операторы
Как t-нормы, так и s-нормы можно назвать операторами, основанными
на предположениях, а именно, на предположениях о том, как операции
пересечения и объединения выполняются в представлении человека. К
настоящему моменту эта проблема еще не нашла полного объяснения,
возможно, по той причине, что различные люди используют разные спо-
собы реализации указанных операций, зависящие от особенностей их
характера, настроения и конкретной ситуации.
Исследования операторов, применяемых человеком, выполненные
Циммерманном (Altrock 1993; Zimmermann 1979,1987), привели к фор-
мированию понятия компенсирующих операторов. Обоснованность ком-
пенсации поясним на примере рассуждений водителя, приближающегося
на высокой скорости к препятствию на дороге. Эти рассуждения описы-
ваются правилом вида:
ЕСЛИ (скорость высокая) И (препятствие близко) ,
ТО (тормозить очень резко)
Обозначив скорость автомобиля через и (км/ч), а расстояние до пре-
пятствия — через d (м), исходное условие А можно представить в форме
А - (Аг И А2) = (v = Я) И (d = S'). (4.56)
Чем выше степень истинности условия, тем более резким должно
быть торможение.
Предположим, что функции принадлежности лингвистических значе-
ний «высокая скорость» и «малое расстояние» имеют формы, представ-
ленные на рис. 4.16.
скорость
расстояние
Рис. 4.16. Функции принадлежности нечетких множеств «высокая скорость»
и «малое расстояние»
156
Глава 4. Нечеткая математика
Далее, рассмотрим три возможные ситуации, в которых может нахо-
диться автомобиль, а также как их оценивает водитель, использующий
оператор PROD.
Ситуация 1 — автомобиль приближается к препятствию
v = 70 (км/ч) Мн(п) = 0.25
d = 50 (м) lis(d) — 0.5
Степень выполнения условия А и, соответственно, степень интен-
сивности торможения (степень активации заключения, следующего из
правила (4.55)) равны
Мд (г;, d) = мнО) * Ms(rf) = 0.25 • 0.5 - 0.125.
Ситуация 2 — автомобиль находится в непосредственной близости
от препятствия
v = 70 (км/ч) Мн(^) = 0-25
г/ = 25(м) msW = 0.75
Степень выполнения условия:
Мд(М) = мн(г;) • Ms(rf) - 0.25 • 0.75 = 0.1875.
Ситуация 3 — автомобиль врезается в препятствие
v — 70 (км/ч) Мн(г0 — 0-25
d = 0 (м) fis(d) = 1
Степень выполнения условия А:
liA^hd) = МнОО ' dsid,) = 0.25 • 1 = 0.25.
Анализ ситуаций 1 — 3 показывает, что при использовании в усло-
вии оператора PROD как основы для операции И, степень выполнения
условия равна мд(^<Д вследствие чего, несмотря на быстро приближаю-
щуюся опасность, степень интенсивности торможения не изменяется так
быстро, как следовало бы в данной ситуации. Строго следующий правилу
(4.55) с оператором PROD водитель врезался бы в препятствие. Является
ли, с учетом сказанного, правило (4.55) неверным? Нет, не является.
Анализ поведения людей показывает, что они пользуются так называ-
емым принципом компенсации, модифицирующим операцию И путем
некоторой ее комбинации с операцией ИЛИ. В качестве показателя меры
компенсации выступает степень компенсации у (рис. 4.17).
4.1. Основные операции над нечеткими множествами
157
И или
Рис. 4.17. Зависимость характера оператора от степени компенсации д
На основе экспериментальных результатов исследования принимае-
мых людьми решений, Циммерманн предложил оператор пересечения /7
в форме
/ m \ (1 У)
= (П 1,л )
\z=l /
(4.57)
где 7 — степень компенсации, 0 7 1,
РА — степень выполнения всего условия А = Ai А ... А Ап ,
МЛ — степени выполнения отдельных компонент условия.
Если 7 = 0, то все условие оценивается на основе только операции
пересечения И, с применением оператора PROD, по формуле
Ma = Rma,- (4.58)
г=1
Если 7 = 1, то все условие оценивается на основе формулы (4.59),
т. е. выполняется только операция ИЛИ:
m
МА = 1 - R(1 - МА,)- (4.59)
г = 1
Действие оператора (4.59) похоже на действие оператора МАХ, хотя,
как легко заметить, является более предпочтительным, поскольку опе-
ратор /7 учитывает все составляющие условия, а не только ту, которая
выполняется с наибольшей степенью.
Наиболее вероятно, что значение 7 будет меняться для водителя в за-
висимости от ситуации: оно будет малым при нахождении вдали от пре-
пятствия и большим при нахождении вблизи от него. Используя оператор
/7 для 7 = 1, в ситуации 3 будет получен совершенно иной результат,
чем при использовании оператора PROD.
Как отмечалось выше, Ситуация 3 (автомобиль врезается в препят-
ствие) характеризуется условиями:
v — 70 (км/ч)
d = 0 (м)
рн(у) = 0.25
MS (Л = 1
158
Глава 4. Нечеткая математика
Степень выполнения условия А, вычисленная с использованием опе-
ратора /7,7 = !, будет равной
VA(v,d) = 1 - (1 - 0.25)(1 - 1) = 1.
Тот факт, что условие удовлетворяется полностью, согласно правилу
(4.55), заставит нажать на тормоз с максимально возможной силой, что,
конечно же, является наиболее естественной реакцией в подобной ситу-
ации. Разумеется, правило (4.55) с оператором /7 предложило бы уве-
личивать силу торможения раньше, при уменьшении расстояния до пре-
пятствия.
Поскольку коэффициент компенсации 7 может изменяться в преде-
лах 0 7 1, возникает задача выбора его оптимального значения.
Для технических приложений в (Altrock 1993) рекомендуется выбирать
7 из диапазона
0.1 7 0.4.
Практический метод состоит в том, что вначале выбирается среднее
значение указанного диапазона, 7 = 0.25, после чего исследуется точ-
ность нечеткой модели, основанной на данном значении. Если точность
неудовлетворительна, рекомендуется выполнять пошаговую корректиров-
ку коэффициента с величиной шага Д7 = 0.01 и анализировать точность
получаемых моделей.
4.2. Нечеткие отношения
В разд. 4.1 в качестве области определения операций над нечеткими мно-
жествами рассматривалось одномерное пространство, что иллюстрирует-
ся примером 4.2.1.
Пример 4.2.1. Из множества студентов выделены два подмножества:
подмножество способных студентов и подмножество А2 успевающих
студентов (см. рис. 4.18). Требуется определить множество способных
и успевающих студентов, т. е. Ai Л А%.
X — множество студентов:
X = {si,s2,... ,s5}.
Ai — подмножество способных студентов:
At = {(si,0), («2,0.3), (s3,0.7), (.94.I),
А2 — подмножество успевающих студентов:
л2 = {(si,0.5),(s2,0.8),(s3,1),(«4,1),(s5,0.7)}.
4.2. Нечеткие отношения
159
1
Рис. 4.18. Функции принадлежности
подмножеств Ai (способные студенты)
и А2 (успевающие студенты)
1
5j $2 St, ^4 55 St
Рис. 4.19. Функция принадлежности множества Ai Л А2
(способные и успевающие студенты)
Выполняя операцию Л пересечения подмножеств с использованием
оператора MIN, получаем:
Л1 Л Л2 = =
= {(S1,0), (S2.O.3). (83,0.7), 04, 1), (85,0.7)}.
Множество А} Л А2 представлено на рис. 4.19.
Вследствие того, что оба подмножества имеют общую область опре-
деления X, результат операции пересечения можно представить в форме
поверхности в двумерном пространстве. Как подмножество Аь так и под-
множество А2, могут считаться простыми множествами, поскольку сте-
пени принадлежности сопоставлены с единичными элементами зг
области определения
Помимо одномерных, существуют многомерные области определения,
являющиеся декартовым произведением X некоторого числа составляю-
щих их областей .......Хп, что иллюстрируется примером 4.2.2.
Пример 4.2.2. Х} — множество граждан,
Xi = {ci.c2. • •.,с5}.
160
Глава 4. Нечеткая математика
Таблица 4.6
Дискретное декартово произведение X = Х± х Х2, представленное в форме
таблицы (двумерная область определения)
V\ Cl Cl C3 c4 C5
bi Cl,bl Ci,by C3,bi c4,bi c5,bi
b2 ci,b2 C2,b2 c3,bi Ci,b2 c5,b2
Ьз Ci,b3 c2,b3 сз,Ьз Ci,b3 cs,b3
ь^ ci,bi c2,bi c3,b4 C4,b4 C5,b4
bs ci,b5 c2,bs c},b5 C^b5 C5,b5
Х2 — множество банков,
Х2 = {bi, Ь2,..., 65}.
Декартово произведение X = Х± х Х2 представляет собой множество
всех возможных пар (с^, 6j), i = 1,..., 5, j = 1,..., 5 (табл. 4.6).
Перед рассмотрением нечетких отношений целесообразно познако-
миться с понятием классического отношения (Empacher 1970).
Классическое (двухместное или бинарное) отношение — одно
из важнейших понятий математической логики — является свойством пар
объектов и описывает определенную взаимосвязь, имеющую место меж-
ду объектами. Понятие классического отношения иллюстрируется при-
мером 4.2.3.
Пример 4.2.3. Даны одномерные множества-составляющие Х± и Х2.
Здесь Xi — множество граждан:
= {С1,С2, • • . ,с5},
Х2 — множество банков:
Х2 — {6], Ь2..... 65}.
Примером классического отношения на множестве X = Х± х Х2 яв-
ляется отношение «иметь счет в ...» (табл.4.6). Множество X здесь
выступает в качестве области определения. Отношение может иметь сле-
дующий вид:
R = {(ci, Ь2), (с3, 64), (с4,61), (с5, Ь3)}.
4.2. Нечеткие отношения
161
Рис. 4.20. Представление отношения R в виде трехмерной функции принад-
лежности и в виде матрицы отношения
Отношение R состоит из пар (с*, 6?) и, таким образом, является би-
нарным отношением, сопоставляющим граждан сг с банками 67, где у них
открыты счета. Данное отношение может быть описано с помощью функ-
ции принадлежности [i(ci.bj'), представимой в трехмерном пространстве
(рис. 4.20).
Отношение R можно также представить в виде матрицы R:
R = ’ 0 0 0 1 0 " 1 0 0 0 0 0 0 0 0 1 0 0 10 0 _ 0 0 0 0 0 _
Поскольку у гражданина (> нет счета ни в каком банке, второй стол-
бец матрицы R целиком состоит из нулей.
Матрица R необязательно является квадратной — это зависит от чис-
ла элементов, принадлежащих составляющим областям определения Хг.
Отношение в примере 4.2.3 является дискретным. В примере 4.2.4 пред-
ставлено непрерывное отношение.
Пример 4.2.4. Пусть даны два множества вещественных чисел
XL - {щ : 2 щ < 4},
= {х2 : 1 Х2 5}.
162
Глава 4. Нечеткая математика
Рис. 4.21. Функция принадлежности х2), представленная в форме непре-
рывной поверхности, расположенной над областью определения X = I] х Х2
Введем отношение «меньше либо равно», или «<», заданное на де-
картовом произведении X = Х± х Х2:
R = {(х1,хз) : Xi < хъ}.
Отношение является непрерывным. Его функция принадлежности
представлена на рис. 4.21.
Определение 4.2.1 вводит классическое n-арное отношение R, задан-
ное на области определения X = Х± х ... х Хп.
Определение 4.2.1. Классическим п-арным отношением R, заданным
на области определения
X — Х\ х ... х ХП1
называется упорядоченное множество кортежей из п элементов, имеющее
вид:
R= \(x1,...,xn) G X},
В определениях 4.2.1 и 4.2.2 запись ((xi,..., zn),pr(xi, ...,тп)) следует понимать
как «кортеж (яд,..., хп), степень принадлежности которого отношению R равняется
, Хп)». — Прим. ред.
4.2. Нечеткие отношения
163
где
, ч f 1, если(хх,... ,хп} е R,
цищц, ... ,хп) = < „
(О в других случаях,
представляет собой функцию принадлежности отношения R.
Как известно, функция принадлежности классического отношения
отображает область определения X на дискретное множество {0,1}:
Hr : Xi х ... х Хп -> {0,1}.
Нечеткое отношение отличается от классического тем, что в качестве
области значений функции принадлежности, вместо дискретного мно-
жества {0,1}, содержащего два элемента, рассматривается непрерывный
интервал [0,1].
Определение 4.2.2. Нечетким n-арным отношением R, заданным на об-
ласти определения X = Х± х ... х Хп, называется упорядоченное мно-
жество кортежей из п элементов, имеющее вид
R = {((zi,... ,жп),дя(.Г],... ,хп)) | (xi,... ,xn) 6 X},
где
, жп) : Xi х ... х Хп -» [0,1]
представляет собой функцию принадлежности отношения R, которая
отображает область определения X на непрерывный интервал [0,1].
В общем случае функция принадлежности pr отношения R пред-
ставляет собой гиперповерхность в (п+1)-мерном пространстве. Пример
функции принадлежности для п — 2 представлен на рис. 4.22.
Функции принадлежности нечетких отношений на дискретных об-
ластях определения можно представить в табличной форме, с указани-
ем степеней принадлежности дн(^1, • • •, хп) для каждого дискретного п-
элементного кортежа, что иллюстрируется примером 4.2.5.
Пример 4.2.5. Заданы две дискретные составляющие области определе-
ния Xi, Ху
Ху = {1,2, 3.4}, Х2 - {1,2,3,4, 5}.
В табл. 4.7 приводятся примеры степеней принадлежности отноше-
ния «(^1,Х2) приблизительно равны (3,2)», заданного на множестве
X-Xi хХ2.
Из табл.4.7 видно, например, что пара (xi,^) — (2,3) принадлежит
отношению R со степенью 0.5, или, по-другому, пара (2,3) имеет сход-
ство, в смысле данного отношения, с парой (3,2) со степенью 0.5.
164
Глава 4. Нечеткая математика
Рис. 4.22. Пример непрерывной функции принадлежности нечеткого отношения
Таблица 4.7
Нечеткое отношение «(xi,z’2) приблизительно равны (3,2)»,
представленное в табличной форме
\ Cj V\ Cl C2 Съ c4 C5
bi Cl,bl c2,bi Ci,bi C4,fe1 Ci,bl
^2 ci,b2 С2,Ь2 c3,b2 c4,b2 C5^2
Ьт, ci,b3 с2,Ьз c3,b3 c4,b3 c3,b3
Z>4 ci,Ь^ С2,Ь4 с3,Ь4 С4,Ь4 C5J>4
Ь5 ci,b5 С2,Ь5 c3,b5 c4,bs Ci,b5
X = %! X Х2
Нечеткие отношения можно задавать непосредственно, с помощью
n-элементных кортежей, принадлежащих многомерной области опреде-
ления Xi х ... х Хп, как в примере 4.2.5. Вместе с тем, в нечетком
моделировании и управлении чаще всего приходится иметь дело с от-
ношениями, полученными путем агрегации нечетких множеств, задан-
ных на различных одномерных областях. Примером является правило
4.2. Нечеткие отношения
165
Рис. 4.23. Функции принадлежности нечетких множеств «малый» и «большой»
для отношения (4.61)
ЕСЛИ ... ТО ... вида
ЕСЛИ (^1 = малый) И (х2 = большой) ТО (у = средний), (4.60)
где компоненты условия (зд = малый), (х2 = большой) объединяются
с помощью логических связок И, ИЛИ, образуя бинарное нечеткое от-
ношение R с функцией принадлежности pr(xi^x2), которая определя-
ет степень выполнения данного условия для конкретных числовых зна-
чений аргументов .щ, х2. Агрегацию нечетких множеств «малый» (S)
и «большой» (L) можно выполнять, используя операторы типа t-норм
(4.61) в случае связки И и операторы типа s-норм в случае связки ИЛИ:
МяЦ’1^2) = Т(/75Ц1),^(ж2)). (4.61)
Пусть функции принадлежности и рь(х2) имеют вид, изобра-
женный на рис. 4.23.
Нечеткие множества S и L заданы на разных областях определения,
которые в общем случае могут представлять различные физические ве-
личины (например, напряжение и силу тока). В связи с этим, в отличие
от множеств, заданных на общей области определения, непосредствен-
ная агрегация указанных выше множеств невозможна. Такие множества
вначале следует преобразовать в специальные нечеткие отношения, за-
данные на декартовом произведении Xi хХ2, которые называются цилин-
дрическими продолжениями, и лишь после этого выполнять агрегацию.
Понятие цилиндрического продолжения вводится в определении 4.2.3.
Определение 4.2.3. Пусть Х± и Х2 — четкие множества, и А — нечеткое
множество, заданное на Х±. Цилиндрическим продолжением А* множе-
ства А на область определения Х± х Х2 называется отношение, представ-
ляющее собой декартово произведение множеств А и Х2, т.е. Ах Х2:
A*(xi,.t2) = A(xi) А Х2(х2) = A(xi) А 1 = A(xi),
166
Глава 4. Нечеткая математика
Табл и ца 4.8
Функция принадлежности цилиндрического продолжения множества
A(xi) на Xi х Х2
А* = (хьх2) =
для всех пар (xi,x2) Е Х± х Х2.
В случае цилиндрического продолжения множества A(a?i) на п-
мерную область определения Xi х ... х Хп операция продолжения вы-
полняется в соответствии с формулой:
A*(xi,...,xn) = A(xi) А Х2 \ • • • A Xn = A(xi),
для всех n-кортежей (xi,... ,rcn) eXi х ... х Хп. Цилиндрическое про-
должение иллюстрируется примером 4.2.6.
Пример 4.2.6. Найдем цилиндрическое продолжение A*(xi,x2) множе-
ства А(ж1) на дискретное множество Х± х Х2. Области определения име-
ют вид:
Xi — {ai,a2,as}, Х2 — {Ь1,Ь2,Ьз},
а нечеткое множество определяется выражением:
А = {l/ai,0.5/a2,0/a3}.
Цилиндрическое продолжение множества A(rri) на Xi х Х2 представ-
лено в табл. 4.8.
Следующий пример является иллюстрацией непрерывного цилиндри-
ческого продолжения.
Пример 4.2.7. Пусть имеются два нечетких множества «малый» (S)
и «большой» (L), заданные на множествах Х± и Х2 соответственно
(рис. 4.23). Области определения имеют вид:
Хг = [1,4], Х2 = [1,5].
Функции принадлежности и ^l(x2) показаны на рис. 4.23.
На рис.4.24 представлены цилиндрические продолжения S*(xi,x2)
и L*(xi,x2) нечетких множеств S(xi) и Ь(х2) на Х± х Х2.
4.2. Нечеткие отношения
167
Д(^1,а?2)
н(х1,х2)
Х2
Рис. 4.24. Цилиндрические продолжения S*(xi,#2) и нечетких мно-
жеств S(xi) и L(xq) на двумерную область определения х Х2
Рис. 4.25. Формирование функции принадлежности отношения с ис-
пользованием цилиндрического продолжения множеств-составляющих S и L (а)
и результат этой операции (б), полученный с использованием оператора MIN
Функция принадлежности отношения R(xi,a;2)» задаваемая форму-
лой (4.61), может быть вычислена с использованием в качестве t-нормы,
например, оператора MIN:
^r(xi,x2) = MIN(/z5-(ti,®2),Ml*(®i^2)), Ц1,ж2) е Xi X Х2. (4.62)
Результат этой операции представлен на рис. 4.25.
Если в условии правила (4.60) содержится логическая связка типа
ИЛИ:
ЕСЛИ Ц1 = S) ИЛИ (х2 = L) ТО (у = М\
168
Глава 4. Нечеткая математика
Рис. 4.26. Функция принадлежности отношения ^(ть^), полученная по фор-
муле (4.63) с использованием оператора МАХ
то для вычисления функции принадлежности условия следует восполь-
зоваться какой-либо s-нормой, например МАХ:
M/?(^i,x2) = МАХ(д5.(^1,х2),а^*(^ь^2)), (^1,^2) е X] х Х2. (4.63)
В этом случае функция принадлежности /т^(ж],х2) будет иметь вид
как на рис. 4.26.
В нечетком моделировании встречаются правила со сложными усло-
виями, содержащими связки как И, так и ИЛИ, например:
ЕСЛИ (ti = малый) И (х2 = большой) ИЛИ
(.тц = большой) И (т2 = малый) ТО (у = средний).
Чтобы вычислить степень истинности условия в данном правиле, сле-
дует определить функции принадлежности составляющих его отношений
М/?1Ц1,ж2) и цВ2(х1,х2), где
дкЩьЩ = Т(д5Ц1), ддЦ2)), Ц1,ж2) G Х} х Х2,
= ЖСпЩЫ), Ц1,х2) еХ] х Х2. (4.65)
Здесь Т означает оператор t-нормы, например, оператор MIN. Для на-
хождения результирующего отношения R, которое является логической
4.2. Нечеткие отношения
169
Рис. 4.27. Функции принадлежности нечетких множеств, содержащихся в усло-
вии правила (4.66)
суммой составляющих его отношений R = UT?2, необходимо восполь-
зоваться определением 4.2.4.
Определение 4.2.4. Пусть имеются два бинарных отношения Ri и R2 с
общей областью определения Х± х Х%. Тогда функция принадлежности
суммы Ri U R2 этих отношений задается формулой
fJ-RiURi = Д/?2Ц1,Ж2)),
где S означает s-норму (например, МАХ/
В случае если два бинарных отношения объединены логическими
связками типа И, необходимо использовать определение 4.2.5.
Определение 4.2.5. Пусть имеются два бинарных отношения Rj и R2
с общей областью определения Xi х Х%. Функция принадлежности логи-
ческого произведения R] П R2 этих отношений определяется по формуле
МЛ1ПЯ2 = T(pR1(x1,x2),iJ,R2(x},x2)).
где Т означает t-норму, например MIN.
Данные определения могут быть расширены на случай n-арных отно-
шений. Агрегация бинарных отношений иллюстрируется примером 4.2.8.
Пример 4.2.8. Найдем функцию принадлежности рндх^хз) условия,
состоящего из двух подусловий:
ЕСЛИ (ад = S) И (х2 - L) ИЛИ (х} = L) И (х2 - 5), (4.66)
где функции принадлежности отдельных нечетких множеств представле-
ны на рис. 4.27.
Функция принадлежности первого подусловия может быть найдена
с использованием оператора MIN. Функция принадлежности второго по-
170
Глава 4. Нечеткая математика
Рис. 4.28. Функции принадлежности подусловий Ri и R2, составляющих усло-
вие правила (4.67)
дусловия вычисляется аналогично:
m(^i,x2) = MIN(A4S(xi),/xL(rr2)),
(4.67)
/хД1(гГ1,ж2) = MIN(^L(zi),^s(rr2))-
Функции принадлежности подусловий представлены на рис. 4.28.
Для выполнения операции ИЛИ в правиле (4.66) в качестве s-нормы
можно взять оператор МАХ. В этом случае функция принадлежности
результирующего отношения R = Ri UR2 вычисляется по формуле:
= MAX(№(xi,X2), (4.68)
Указанная функция графически представлена на рис. 4.29.
В нечетких моделях также применяется операция, противоположная
цилиндрическому продолжению. Она называется проекцией. Если ци-
линдрическое продолжение повышает размерность области определения
Xi нечеткого множества A(#i), задавая отношение A*(xi,^2) на обла-
сти определения Ад х Х2, то проекция отношения A(xi,X2), заданного
на области определения Xi хХ2, дает в результате нечеткое множество
A*(a?i) с областью определения Ад, имеющей меньшую размерность. Та-
ким образом, операция проекции противоположна цилиндрическому про-
должению.
Определение 4.2.6. Если А — нечеткое отношение с областью определе-
ния Х± х Х2, то проекцией этого отношения на область Х± называется
нечеткое множество А*, имеющее следующий вид:
A*(xi) = Proj А(:Г1, Х2) = МАХ[А(:Г1? Т2)].
4.2. Нечеткие отношения
171
Рис. 4.29. Результирующая функция принадлежности отношения
определяющего значение истинности сложного условия в правиле (4.66)
Таблица 4.9
Дискретная функция принадлежности отношения A(xi,х2)
\^1 ^2\ 3 4 5
6 1 0.5 0
7 0.5 0.5 0
8 0 0 0
Понятие проекции иллюстрирует пример 4.2.9.
Пример 4.2.9. Имеется отношение А (табл. 4.9), заданное на области
определения X = Х\ хХ2. Найдем его проекцию на область Ху.
= {(*1,^2, аз}5 Х2 = {61,62,Ьз}?
Proj А = MAX[A(xi,x2)] = А*(.п)
•Г 2 <^2
Окончательный вариант проекции представлен на рис. 4.30.
172
Глава 4. Нечеткая математика
Рис. 4.30. Графическая иллюстрация нечеткой проекции дискретного (а)
и непрерывного (б) отношения
4.3. Импликация
Импликацией называется вид отношения, имеющего форму правила, ис-
пользуемого при рассуждениях. Различают классическую и нечеткую им-
пликации.
Классическая импликация выражается с помощью соотношения
(Poradnik 1971):
ЕСЛИ р ТО q. (4.69)
Сокращенная ее форма имеет вид:
Р - Q, (4.70)
где р — утверждение, называемое антецедентом (условием),
(/ — утверждение, называемое консеквентом (заключением, резуль-
татом).
Утверждения в классической логике могут быть абсолютно истинны-
ми (др — l,pQ — 1) либо ложными (рр — 0, — 0). Истинность или лож-
ность импликации зависит от конкретных значений рр и (истинности
антецедента и консеквента). Значение истинности импликации опреде-
ляется ее функцией принадлежности которая может принимать
только два значения, а именно, 0 и 1. Функция принадлежности клас-
сической импликации может быть однозначно задана в форме табл. 4.10
(Poradnik 1971; Кпарре 1994, Kahlert 1994).
Как легко убедиться, функция принадлежности классической импли-
кации может быть вычислена по формуле
Мр_(/= МАХ(1 -/Wz«). (4.71)
4.3. Импликация
173
Таблица 4.10
Функция принадлежности классической импликации цр_+д
Мр /ч Pp—+q
1 1 1
1 0 0
0 1 1
0 0 1
Оператор классической импликации имеет ряд свойств, которые за-
трудняют его использование в нечетком моделировании и управлении.
Пример 4.3.1. Рассмотрим импликацию следующего вида:
ЕСЛИ (состояние автомобиля х = новый)
V 7 (4.72)
ТО (расход топлива у = малый)
Область значений X переменной «состояние автомобиля» имеет би-
нарную форму представления (новый: х — 1, старый: х = 0). Аналогич-
ным образом задана область значений Y переменной «расход топлива»
(малый: у = 1, большой: у — 0).
Утверждение (состояние автомобиля = новый) = р
является антецедентом,
Утверждение (расход топлива = малый) = q является консеквентом.
Можно поставить следующий вопрос: в каком случае импликация
(4.72) будет истинной (рр^д ~ 1) и в каком случае ложной (pp_>q ~ 0)?
Заменяя лингвистические значения (новый, старый) на х и значения
(малый, большой) на у, получаем четыре возможных состояния 8г им-
пликации.
S1: ЕСЛИ (состояние автомобиля = новый) ТО (расход топлива = малый),
Мр — 1? Pq ~ I? Pp—>q “ 1*
При х = новый, у = малый импликация является истинной.
S2: ЕСЛИ (состояние автомобиля = новый) ТО (расход топлива = боль-
шой),
Мр — 1? Pq — 0, рр—— 0.
При х = новый и у = большой импликация (4.72) является ложной.
Данный факт вполне понятен, поскольку условие (состояние автомобиля
174
Глава 4. Нечеткая математика
Рис. 4.31. Дискретные функции принадлежности условия ур и заключения
д9 (а) и функция принадлежности импликации yp_+q, определенной на декарто-
вом произведении X х Y (н — новый, с — старый, м — малый, б — большой) (б)
= новый) не изменилось, и потому изменившееся заключение (расход
топлива = большой) не может быть истинным.
S3: ЕСЛИ (состояние автомобиля = старый) ТО (расход топлива = ма-
лый),
Др — 0, [Лд — 1, flp—1.
При х = старый и у = малый импликация (4.72) является истинной.
Это следует из того, что рассматриваемая импликация (4.72) касается
только факта (состояние автомобиля = новый), не говоря ничего о про-
тивоположном ему факте (состояние автомобиля = старый). Согласно
классической логике в данном случае могут быть истинными как заклю-
чение (расход топлива = малый), так и заключение (расход топлива =
большой), входящее в S4.
S4: ЕСЛИ (состояние автомобиля = старый) ТО (расход топлива = боль-
шой),
Др = 0, Дд — 0, [lp—+q = 1.
Импликация (4.72) для данных значений х, у является истинной
по той же причине, что и в случае S3. Функция принадлежности дис-
кретной импликации fip^q, рассмотренной в данном примере, показана
на рис. 4.31.
Недостаток оператора классической импликации состоит в том, что
если условие вообще не выполняется (др = 0), то импликация являет-
ся истинной, и это приводит к взаимно исключающим выводам (расход
топлива = малый) и (расход топлива = большой) (рис. 4.32).
4.3. Импликация
175
Рис. 4.32. Функции принадлежности импликации yp_+q(x,y) для х = с (старый)
В случае нечетких систем управления, при одновременной активации
множества нечетких правил, использование оператора классической им-
пликации оказывало бы на процесс управления неблагоприятное воздей-
ствие (Kahlert 1994). В данной ситуации требуются операции более одно-
значные, и потому в нечетком управлении и большинстве задач нечеткого
моделирования чаще всего используется другая импликация — имплика-
ция Мамдани, которая будет описана далее.
Нечеткая импликация
Нечеткая импликация представляет собой правило R, простейшая форма
которого выражается в виде (4.73):
ЕСЛИ (х - Л) ТО (у = В), (4.73)
где (х = Л) — условие (антецедент), а (у = В) — заключение (консе-
квент).
Здесь Л и В — нечеткие множества, заданные своими функциями при-
надлежности /1д(х), /лв (у) и областями определения X, Y соответствен-
но. Обозначение нечеткой импликации имеет вид:
А-+В. (4.74)
Различие между классической и нечеткой импликацией состоит в том,
что в случае классической импликации условие и заключение могут быть
либо абсолютно истинными, либо абсолютно ложными, в то время как
176
Глава 4. Нечеткая математика
для нечеткой импликации допускается их частичная истинность, со зна-
чением, принадлежащим непрерывному интервалу [0,1]. Такой подход
имеет ряд преимуществ, поскольку на практике редко встречаются си-
туации, когда условия правил удовлетворяются полностью, и по этой
причине нельзя полагать, что заключение абсолютно истинно.
Как и любое другое нечеткое отношение, нечеткая импликация зада-
ется функцией принадлежности /ла->в(х,у), область определения кото-
рой является декартовым произведением X х Y соответствующих обла-
стей условия и заключения.
Функция принадлежности импликации /ла-^в^,у) лежит в основе
так называемых нечетких рассуждений (см. п. 5.1.2), обеспечивающих
возможность вычисления выходного значения нечеткой модели (регулято-
ра) для заданных входных значений. Чтобы определить данную функцию
на основе функций принадлежности условия /гд(х) и заключения ув(у\
следует использовать подходящий оператор импликации. Оператор им-
пликации Мамдани основан на предположении, что степень истинности
заключения цв(у) не может быть выше, чем степень выполнения условия
/М-вЦ, У) = MIN(/m(x), цв(уУ)- (4.75)
Интуитивно такое предположение вполне понятно. Например,
для правила
ЕСЛИ (состояние автомобиля = новый)
(4.76)
ТО (расход топлива = малый)
вполне очевидно, что если автомобиль не является абсолютно новым,
то расход топлива у него не может быть таким же низким, как у абсолют-
но нового автомобиля. В дополнение к оператору Мамдани, в нечетком
управлении также используется оператор алгебраического произведения
PROD.
дд_в(ж, у) = • Ув(у)- (4.77)
Помимо представленных выше операторов нечеткой импликации, ис-
следовано также множество других операторов, результаты применения
которых зависят от конкретной задачи. Данные операторы приведены
в табл. 4.11.
Согласно результатам исследований, опубликованным в (Кпарре 1994),
оператором, имеющим наилучшие характеристики по определенному на-
бору критериев, является оператор Лукасевича. Остальные операторы,
приведенные в табл. 4.11, упорядочены по убыванию степени удовлетво-
рения этим критериям. Пример 4.3.2 иллюстрирует метод построения
4.3. Импликация
177
Таблица 4.11
Операторы нечеткой импликации
импликация Лукасевича MIN(1, 1 - /лаЦ) + /лв(уУ)
импликация Клини—Динса МАХ(1 - мд(х). цв(у))
импликация Клини—Динса—Лукасевича 1 - /мИ + Уа(х) /лв(у)
импликация Гёделя 1 для Дд(х) Цв(у) < цв(у) в других случаях
импликация Ягера (д.4 (Ц
импликация Заде МАХ(1 - дл(х),
срок службы расход топлива
автомобиля (лет)
Рис. 4.33. Функции принадлежности нечетких множеств «новый» и «малый»,
содержащихся в условии и заключении
функции принадлежности импликации /2д__,в(х,//) с использованием
оператора Мамдани.
Пример 4.3.2. Рассмотрим нечеткую импликацию:
ЕСЛИ (состояние автомобилях = новый)
k ' (4.78)
ГО (расход топлива// — малый),
где нечеткие множества «новый» и «малый» заданы функциями принад-
лежности д/.„(х) и /л8(у), представленными на рис. 4.33.
Функция принадлежности импликации (4.78) представлена
на рис. 4.34. Используя подходящий метод вывода и имея определен-
ное значение х0 переменной х, содержащейся в условии правила, можно
178
Глава 4. Нечеткая математика
Рис. 4.34. Функция принадлежности уд^в&у) импликации (4.78), получен-
ная с использованием оператора Мамдани
Рис. 4.35. Функция принадлежности импликации уд_+в(х,у) для заданного
значения переменной х = х0 = 1.5 (а) и ее проекция на плоскость {//,?/} (б)
определить функцию принадлежности заключения /ц,д_+в(хо,у), которую
затем можно использовать для вычисления четкого значения у0 на выхо-
де нечеткой модели (рис. 4.35). Эта задача будет рассмотрена в разделах
5.1.2 и 5.1.3.
Глава 5
Нечеткие модели
5.1. Структура, основные элементы
и операции в нечетких моделях
На рис. 5.1 представлена типовая структура нечеткой модели системы
с двумя входами и одним выходом.
На входы нечеткой модели поданы два четких числовых значения
#*, х^. Блок «ФАЗЗИФИКАЦИИ» (FUZZIFICATION) вычисляет их
степени принадлежности входным нечетким множествам Д, Bj. Для вы-
полнения указанной операции блок фаззификации должен иметь доступ
к точно определенным функциям принадлежности /мг(^1), Мв/^2) вхо-
дов. Примеры таких функций принадлежности приведены на рис. 5.2.
Вычисленные и представленные на выходе блока фаззификации сте-
пени принадлежности /1дг(^), Мв/^2) Дают информацию о том, в какой
степени числовые значения х\, принадлежат конкретным нечетким
множествам, т. е. насколько эти величины являются малыми (Ль БД
или большими (А2, B^Y
Блок «ВЫВОД» (INFERENCE) на входе получает степени при-
надлежности и на выходе вычисляет так называемую
результирующую функцию принадлежности выходного значения модели
(рис. 5.1). Данная функция обычно имеет сложную форму и определяется
посредством вывода, который может быть осуществлен множеством спо-
собов. Для выполнения вычислений блок вывода должен включать в себя
следующие строго определенные элементы:
• база правил,
• механизм вывода,
• функции принадлежности выходного параметра у.
База правил содержит логические правила, которые задают имею-
щие место в системе причинно-следственные отношения между нечет-
кими значениями ее входных и выходных величин. База правил может,
Операция
ФАЗЗИФИКАЦИЯ
Элементы
• функции принадлеж-
ности входных пара-
метров х}, х2
Ps.Uz)
РаДг)
Операция
ВЫВОД
Элементы
• база правил;
• механизм вывода;
• функции принадлеж-
ности выходного
параметра у
Операция
ДЕФАЗЗИФИКАЦИЯ
Элементы
• механизм
дефаззификации
Рис. 5.1. Структура нечеткой модели системы с двумя входами и одним выходом
5.1. Структура, основные элементы и операции в нечетких моделях 181
Ai = малый (примерно 0), А2 — большой (примерно 2),
Bi — малый (примерно 0), В2 = большой (примерно 2).
Х2 : 0 х2 2
Рис. 5.2. Примеры функций принадлежности нечетких множеств с указанием
их области определения
Ci — малый (примерно 0), С2 — средний (примерно 4). Сз = большой (примерно 8)
Рис. 5.3. Примеры функций принадлежности нечетких значений выхода модели
с указанием области определения
например, иметь следующий вид:
R1 : ЕСЛИ = А]) И
R2 : ЕСЛИ = AJ И
R3 : ЕСЛИ (xi - А2) И
R4 : ЕСЛИ - А2) И
Ц2 = Вг) ТО (у = СД,
Щ - В2) ТО (у = С2),
Ц2 = В3) ТО (у = С2),
Щ = В2) ТО (у = Сз),
(5.1)
где нечеткие значения входных параметров (Ai — малый, А2 — боль-
шой и т. д.) представлены на рис. 5.2, а выходных — на рис. 5.3.
Решение возложенной на блок вывода задачи, связанной с определе-
нием результирующей функции принадлежности preJ/y), обеспечивается
механизмом вывода, который состоит из следующих элементов:
IM1: элемент, вычисляющий степень выполнения каждого правила Ri
в отдельности,
IM2: элемент, вычисляющий активизированные функции принадлежно-
сти заключений каждого правила Ri,
182
Глава 5. Нечеткие модели
IM3: элемент, вычисляющий результирующую функцию принадлежно-
сти /ires(?/) выходного значения на основе активизированных за-
ключений отдельных правил.
Приведем пример механизма вывода для системы с двумя входами:
IM1: агрегация условий правил с использованием оператора PROD
для пересечения множеств (И) и оператора МАХ для объедине-
ния множеств (ИЛИ),
IM2: определение активизированных функций принадлежности заклю-
чений правил с использованием оператора импликации Мамдани,
ПИЗ: определение результирующей функции принадлежности /ires(?/)
выходного значения (аккумуляция) с использованием операто-
ра МАХ.
Блок «ДЕФАЗЗИФИКАЦИЯ» (DEFUZZIFICATION) на основе
результирующей функции принадлежности вычисляет четкое
числовое значение у* выходного параметра, являющееся результатом
для входных числовых значений х*, х2. Данная операция выполняется
посредством механизма дефаззификации, который определяет метод
вычисления. Примером механизма дефаззификации является метод цен-
тра тяжести.
Далее будут описаны отдельные блоки нечеткой модели и различные
варианты выбора их элементов.
5.1.1. Фаззификации
В блоке фаззификации, представленном на рис. 5.4, вычисляются сте-
пени принадлежности числовых значений входных параметров модели
входным нечетким множествам.
Равенство 0.3 степени принадлежности входного значения х* = 1.4
нечеткому множеству Aj (малый) означает, что степень соответствия
данного значения наиболее типичному малому значению (0) равна 0.3.
С другой стороны, утверждение о том, что значение х± = 1.4 большое,
является истинным со степенью 0.7. Таким образом, указанное значе-
ние Xi в большей степени соответствует типичному большому значению
(2), чем типичному малому (0).
Для вычисления степеней принадлежности значений конкретным
нечетким множествам, функции принадлежности последних должны
быть точно заданы на качественном (вид функции) и количествен-
ном (ее параметры) уровне. Как форма функции принадлежности, так
и ее параметры, оказывают существенное влияние на точность модели
5.1. Структура, основные элементы и операции в нечетких моделях 183
х*= 1.4
Х2*= 1.6
операция
ФАЗЗИФИКАЦИЯ
элементы
• функции принадлеж-
ности входных пара-
* метров хьх2
ОГ )»= 0.3
АЖ) = 0.7
) = 0.2
Ад2(х2*) = 0-8
А2 = большой (примерно 2),
В2 = большой (примерно 2)
Ai = малый (примерно 0),
Bi — малый (примерно 0),
Рис. 5.4. Блок фаззификации и пример его работы
(Baglio 1994). Примером математического описания функций принадлеж-
ности (см. рис. 5.4) является совокупность выражений вида:
AtAi(«i) = 0.5(2 - xi), /za2(xi) = 0.5X1,
= 0.5(2 - х2), Mb2(^2) = 0.5х2.
(5.2)
В процессе фаззификации четкий входной вектор X* преобразуется
в вектор М степеней принадлежности, которые, в свою очередь, являются
входными данными для блока вывода:
фаззификация
--------------->
ма2И)
МВ1 (^г)
5.1.2. Вывод
Блок вывода на основе степеней принадлежности ^(xi), вход-
ных значений определяет результирующую функцию принадлежности
Mres(y) выходного значения модели (рис. 5.5). Операция вывода включает
в себя следующие шаги:
1) вычисление степеней выполнения отдельных правил (точнее, их усло-
вий),
184
Глава 5. Нечеткие модели
операция ВЫВОД элементы * база правил; * механизм вывода * функции принадлеж- ности выходного параметра у
Ив2(.Х2\
F
Рис. 5.5. Блок вывода нечеткой модели
2) определение активизированных функций принадлежности заключе-
ний отдельных правил,
3) определение результирующей функции принадлежности вывода
из всех правил, входящих в базу.
В классической логике разработан ряд правил рассуждений, назы-
ваемых тавтологиями*. Одним из наиболее известных является Modus
Ponens, в рамках Факт Импликация которого процесс рассуждений имеет вид: х = А, ЕСЛИ (х = А) ТО (у = В),
Заключение У = В.
В классической тавтологии типа Modus Ponens для условия (х = А)
и заключения (у — В) допустимы только два дискретных значения ис-
тинности — 0 и 1, а факт (ж = ...) должен полностью соответствовать
условной части импликации:
ЕСЛИ (х = А) ТО (т/-В).
Лишь в этом случае импликацию можно использовать в процессе
рассуждений. Как условная, так и заключительная части правил должны
иметь строгую, детерминированную формулировку. Утверждения, содер-
Тавтология — тождественно-истинная формула в исчислении высказываний, кото-
рая при любых возможных истинностных значениях входящих в нее переменных ис-
тинна, т. е. она общезначима исключительно в силу своего синтаксиса. На тавтологии
(р А (р q)) —* q основано одно из наиболее важных правил рассуждений в логике —
правило Modus Ponens. — Прим. ред.
5.1. Структура, основные элементы и операции в нечетких моделях 185
жащие неточные, размытые формулировки, такие как
(х — примерно А),
(х = более чем А),
(у = более или менее В),
являются недопустимыми. В нечетком моделировании и управлении
применяются приближенные рассуждения, позволяющие использовать
в условиях и заключениях правил нечеткие формулировки. Прибли-
женное рассуждение, основанное на тавтологии типа Обобщенный
(generalized) Modus Ponens (GMP), имеет вид:
Факт х = А*.
Импликация ЕСЛИ (х = А) ТО (у = В),
Заключение у = в*.
Здесь А* и В* могут, например, иметь вид А* = более чем А, В* =
более или менее В и т. п. Приведем пример рассуждения, на основе GMP:
Факт маршрут поездки очень протяженный,
Импликация ЕСЛИ (маршрут поездки протяженный) ТО (время в пути длительное),
Заключение время в пути очень длительное.
Рассуждения, основанные на обобщенном Modus Ponens, не всегда
дают хорошие результаты. Это иллюстрируется следующим примером:
Факт время нахождения на солнце очень длительное,
Импликация ЕСЛИ (время нахождения на солнце длительное) ТО (кожа становится загорелой),
Заключение кожа становится очень загорелой.
Приближенное рассуждения, основанное на GMP, приводит к заклю-
чению «кожа становится очень загорелой», хотя после чересчур длитель-
ного пребывания на солнце наша кожа часто становится не загорелой,
а красной из-за солнечного ожога.
Правило вывода GMP можно использовать в том случае, если оно
допускает возможность экстраполяции (Кпарре 1994), которая позволяет
его применять и тогда, когда х лишь приблизительно равно А (нет точ-
ной согласованности факта с условием правила). Получаемые заключе-
ния (у приблизительно равно В) также лишь «приближенно» согласуются
186
Глава 5. Нечеткие модели
Факт: х = примерно 3 = (примерно2)*
Импликация:
ЕСЛИ (х = примерно 2) ТО (у = примерно 4)
Заключение: (у = примерно 4)*
2 3 4 5 6 ^
Рис. 5.6. Пример вывода с использованием обобщенного правила Modus Ponens
(методика нахождения заключения описана в разд. 5.1.2.2)
с действительностью. В практике нечеткого моделирования и управления
схема вывода, основанная на GMP, демонстрирует свою корректность
и является универсальной — см. пример на рис. 5.6.
5.1.2.1. Оценка степени выполнения условия
Для выполнения нечеткого вывода необходимо, прежде всего, определить
степень выполнения (значение истинности) условия каждого отдельного
правила. В отличие от классической логики, в качестве значений дан-
ной степени могут выступать не только 0 и 1, но также дробные числа
из интервала [0,1]. В случае если степень выполнения условия правила
равна 0, то данное правило в процессе вывода не участвует, в то вре-
мя как чем эта степень выше, тем большее влияние правило оказывает
на результат вывода.
5.1. Структура, основные элементы и операции в нечетких моделях 187
Д(*)
1
Рис. 5.7. Определение степени выполнения (значения истинности) простого
условия ЕСЛИ (т = А)
Д(*1)
1
х>1.4 0
1 -
2 xi
PROD
pR(x*,x*2)=().24
^1(^i)=0.3
^2 ^В^Х2^ 0*8
О
= 1.6
2 х2
,*2)= Ра^Рв^)
Рис. 5.8. Определение степени выполнения (значения истинности) конъюнктив-
ного сложного условия ЕСЛИ (xi = И (х2 = В2)
Метод вычисления степени истинности условия зависит от вида по-
следнего. В случае простого условия вида:
ЕСЛИ (х = А), (5.3)
для х — х* степень д/,#(х*) выполнения условия равна степени принад-
лежности значения х* множеству А (рис. 5.7).
В случае сложного условия, состоящего из двух простых подусловий,
связанных логическим союзом И (конъюнктивное условие), что соответ-
ствует выражению
ЕСЛИ (xi = AJ И (х2 = В2), (5.4)
степень выполнения условия для числовых значений аргументов х± = х^
и Х2 — х% определяется как степень принадлежности нечеткому отноше-
нию R:
Vr(x{,xT) = = Т(дЛ1(Х1),^в2(ж2))> (5.5)
где А], В-2 — нечеткие множества, Г —один из операторов t-нормы, на-
пример, PROD (рис. 5.8).
188
Глава 5. Нечеткие модели
/4*1)
1
xj = 1.4 0
/<(*2) А
1 -
At
П /0^)=О.З
п 2 X)
д аЖ)=0.8
П2 п2 -
МАХ
•> х2) — 0.8
О
2 х2
Дя(Л1 —MAXC/^Cxj), Д^2(^2))
Рис. 5.9. Определение степени выполнения альтернативного сложного условия
ЕСЛИ = Л]) ИЛИ (д2 = В2)
Если сложное условие состоит из двух простых подусловий, связан-
ных логическим союзом ИЛИ (альтернативное условие)
ЕСЛИ (дц = Л1) ИЛИ (д2 - В2), (5.6)
то для заданных значений аргументов дц = д^ и д2 = х2 степень выпол-
нения условия вычисляется как степень принадлежности отношению R:
= мливгЧГД) = 5(^л1(Ч)!т(Д)), (5-7)
где S — один из операторов s-нормы, например, МАХ (рис. 5.9).
Условия могут иметь более сложную форму, чем в выражениях (5.4)
или (5.6), и могут состоять из множества частей, связанных союзами И,
ИЛИ, как показано в выражении:
ЕСЛИ (х! = Л1) И (д2 = В2) ИЛИ (д! = Л2) И (д2 - БД. (5.8)
При нахождении степени выполнения сложного условия вначале сле-
дует выполнять все операции пересечения И, а затем все операции объ-
единения ИЛИ. Для этих целей можно использовать определения 4.2.4
и 4.2.5. Процесс вычисления степени выполнения условия (5.8) для зна-
чений аргументов д^ = 1.4, — 1.6 показан на рис. 5.10.
Вычисление степени выполнения сложных условий, являющихся ком-
бинацией простых, иногда называют агрегированием (Кпарре 1994).
В примерах на рис. 5.7-5.10 в качестве аргументов условий выступали
четкие числовые значения д^ = 1.4, х2 = 1.6. Вместе с тем, аргументы
условий (входные значения нечеткой модели) могут быть также заданы
в форме нечетких множеств А*, В*, отличных от нечетких множеств Аг,
В3, фигурирующих в самих условиях.
Рассмотрим простое условие ЕСЛИ (д = А) в ситуации, когда вход-
ное значение модели задано в виде нечеткого числа А*. Степень сходства
5.1. Структура, основные элементы и операции в нечетких моделях 189
/ЦД хд =МАХ(д£|(Д
PrB' Д) =рЛ(х‘) рв(х$
PrB’x*^"Ax^Ax^
Рис. 5.10. Определение степени выполнения сложного условия
ЕСЛИ Сп = Л1) И (,г2 - В2) ИЛИ (ti - Л2) И (т2 - ВА
(или, более кратко, сходство) двух нечетких множеств Л и Л*, которая
является одновременно степенью выполнения /лд(х*) условия правила,
вычисляется по формуле:
h = MAX MIN(MaC4ma*CH)- (5-9)
xQX
При выполнении операции, задаваемой выражением (5.9), на первом
шаге определяется общая часть А А Л* нечетких множеств, а на втором
шаге находится максимум ее функции принадлежности (рис. 5.11, а).
В случае если нечеткое множество А* является одноэлементным, как
показано на рис. 5.11, б, степень сходства h совпадает со степенью при-
Рис. 5.11. Определение простейшей меры сходства h двух нечетких множеств Л
и Л* (а) и частный случай нечеткого множества (одноточечное множество)
Л* - .г* (б)
190
Глава 5. Нечеткие модели
надлежности х* множеству А и равна /м(я*). В результате нахождения
степеней выполнения условий для отдельных правил, получаем инфор-
мацию о том, какие правила должны участвовать в процессе вывода,
и в какой мере должно проявляться данное участие, а также возмож-
ность определения активизированных функций принадлежности заклю-
чений отдельных правил при данных входных значениях х* нечеткой
модели.
5.1.2.2. Определение активизированных функций принадлежности
заключений отдельных правил при заданных входных
значениях нечеткой модели
Определение активизированных функций принадлежности заключений
отдельных правил основано на степени выполнения их условий. Данная
операция, которая может быть названа выводом на правилах, выпол-
няется с использованием операторов нечеткой импликации, описанных
в разд. 4.3. В настоящем подразделе мы опишем эту операцию более
подробно, а также приведем примеры ее использования. Пусть вывод
следует осуществлять в соответствии с правилом:
ЕСЛИ (х = А) ТО (у = В), (5.10)
где функции принадлежности /гд(х), /дв(у) показаны на рис. 5.12, а вход-
ное значение х* = 6.5.
Как видно из рис. 5.12, степень выполнения условия правила рав-
на 0.5. Используя импликацию Мамдани, можно определить активизи-
рованную функцию принадлежности импликации А —> В, которая пред-
ставляет собой некоторое нечеткое отношение R:
= МШ(/2Л(ж), дв(у)),
R-.A^B. (5.11)
Соответствующая данному отношению поверхность изображена
на рис. 5.13.
Поверхность функции принадлежности импликации ци(х,у) полу-
чена на основе цилиндрических продолжений множеств А(х) и В (у)
на декартово произведение X х У. Для заданного входного значения
х = х* можно перейти к двумерной функции принадлежности им-
пликации цв(х*,у) — данная функция представляет собой специальный
срез полной трехмерной функции цв(х,у). Проекция функции р,ц(х*,у)
на плоскость {ц,у}, обозначаемая цв*(у), является результатом вывода
для данного правила.
5.1. Структура, основные элементы и операции в нечетких моделях 191
Рис. 5.12. Функции принадлежности нечетких множеств А и В
Рис. 5.13. Иллюстрация нечеткого вывода для правила
ЕСЛИ (х = А) ТО (у — В) и входного значения х = х*
Легко заметить, что, в зависимости от конкретного входного значе-
ния х*, результат вывода нв*(у) так или иначе отличается от исход-
ной функции принадлежности нв(у)> В отдельном случае, когда степень
выполнения условия /м(х*) = 1, функции нв*(у) и 1^в(у) совпадают.
Функцию принадлежности нв*(у) иногда называют модифицированной
функцией принадлежности заключения, а нечеткое множество В* —
модифицированным нечетким значением В заключения (Кпарре 1994).
Для того чтобы найти модифицированную (активизированную) функ-
цию принадлежности нв*(у) заключения, нет необходимости определять
трехмерную функцию принадлежности нв(х,у) импликации — есть более
простой способ, который и используется с этой целью на практике. Как
192
Глава 5. Нечеткие модели
Рис. 5.14. Упрощенный метод вывода на основе правила
с использованием оператора импликации Мамдани
Рис. 5.15. Вывод с использованием оператор импликации PROD
видно из рис. 5.13, функции цц(х*,у) и /хв*Ы совпадают и, в случае ис-
пользования импликации Мамдани (5.11), могут быть получены простым
усечением функции принадлежности заключения /1в(у) до уровня степе-
ни выполнения /гд(ж*) условия правила. Фактически, операция вывода
на основе импликации Мамдани выполняется в соответствии с рис. 5.14.
Применение других операторов импликации приводит к получению
других модификаций функции принадлежности заключения. На рис. 5.15
показан вывод с использованием оператора PROD.
Если в качестве входного значения х* выступает нечеткое множе-
ство А*, отличное от множества А в посылке правила:
ЕСЛИ (х - А) ТО (у = В),
то модифицированная (активизированная) функция принадлежности
у в* (у) заключения может быть определена на основе композиционно-
го правила вывода Заде (Kahlert 1994,1995), задаваемого с помощью
определения 5.1.2.2.1.
Определение 5.1.2.2.1. Пусть А*—нечеткое множество с областью
определения X, и R —нечеткое отношение двух аргументов, заданное
на области определения X xY. Результатом композиции А* и R (обозна-
5.1. Структура, основные элементы и операции в нечетких моделях 193
h=MAX MIN(^(x), рА*(х))
Рис. 5.16. Нечеткий вывод на основе правила ЕСЛИ (х = Л) ТО (у = В)
в случае, когда входным параметром х модели является нечеткое множе-
ство Л*(х)
чается A*oR) является нечеткое множество В* с областью определения Y
и функцией принадлежности рв*(у), имеющей вид:
Рв*(у) = MAX MIN(^.*(ж, у), МяЦ,у)),
где А** (ж, у) — цилиндрическое продолжение множества А*(х) на область
определения X xY.
Схема построения модифицированной функции принадлежности
изображена на рис. 5.16.
Как следует из рис. 5.16, в результате композиции отношения R(x,y)
и нечеткого множества Л*(х) (или, фактически, его цилиндрического
продолжения Л**(х, г/)), получается нечеткое множество Л* о R(x,y),
функция принадлежности которого имеет вид поверхности в трехмерном
пространстве.
Проекция композиции А* о R на область определения Y приводит
к получению модифицированного нечеткого множества В*, которое соот-
ветствует заключению правила. Функция принадлежности цв*(у) этого
множества имеет вид (5.12) и представляет собой функцию цв(у), высо-
та которой ограничена значением h, выражающим степень выполнения
194
Глава 5. Нечеткие модели
Рис. 5.17. Упрощенный метод вывода в случае, когда входным значением т*
модели является нечеткое множество А*(х)
Таблица 5.1
Дискретная функция принадлежности множества-условия А
X 5 5.5 6 6.5 7
р.д(х) 0 0.5 1 0.5 0
условия:
h - МАХ М1Х(//л(^),^л*(^)). (5.12)
хЕХ
На практике, если в качестве входного значения нечеткой модели вы-
ступает нечеткое множество А*, можно использовать упрощенный метод
вывода, представленный на рис. 5.17.
Если модифицированные функции принадлежности уд(х), /хв(у) яв-
ляются дискретными (табл. 5.1, 5.2), то модифицированную функцию
принадлежности заключения /лв*(у) можно определить, используя таб-
личную или матричную форму представления отношений. Иллюстрацией
этому служит пример 5.1.2.2.1.
Пример 5.1.2.2.1. Найдем модифицированную (активизирован-
ную) функцию принадлежности заключения Ув*(у) правила
ЕСЛИ (х = А) ТО (у = В) для случая, когда входное значение х яв-
ляется четким числом: х — х* = 6.5, а функции принадлежности //д(х)
и /1в(х) представлены в дискретной форме (табл. 5.1, 5.2). Используя
формулу (5.13), построим таблицу отношения R = А В, содержащую
значения /дв(х,у):
цн(х,у) = MJN(paW,MbW)- (5.13)
Функция принадлежности /лв*(у) вывода из правила при входном зна-
чении ж* = 6.5 представлена в таблице отношения в виде строки, соответ-
ствующей данному входному значению. Тот же самый результат можно
5.1. Структура, основные элементы и операции в нечетких моделях 195
Таблица 5.2
Дискретная функция принадлежности множества-заключения В
У 6 6.5 7 7.5 8
Р-В^у) 0 0.5 1 0.5 0
Таблица 5.3
Функция принадлежности отношения R = А —> В
Рис. 5.18. Упрощенный вывод в случае дискретных функций принадлежности
/сф) и рв(х)
получить путем ограничения степеней принадлежности в табл. 5.2 поро-
говым значением 0.5, которое соответствует входному значению х* — 6.5.
Данная упрощенная процедура определения дискретной функции принад-
лежности заключения (у) схематически представлена на рис. 5.18.
В случае если условие правила состоит из множества простых под-
условий, соединенных логическими связками, результирующую степень
истинности общего условия вычисляют, следуя принципам, изложенным
в разд. 5.1.2.1 (агрегирование условий), а на втором шаге выполняют вы-
вод, согласно методике, представленной в данном разделе.
196
Глава 5. Нечеткие модели
Рис. 5.19. Функции принадлежности нечетких множеств,
используемых в базе правил (5.14)
5.1.2.3. Определение результирующей функции принадлежности
вывода из базы правил
В результате вывода из m отдельных правил В?, составляющих базу
правил, будут найдены m модифицированных функций принадлежности
заключений, на основе которых требуется получить одну результирую-
щую функцию принадлежности вывода из всей базы правил. Процесс
определения общего вывода (заключения) иногда называют аккумуля-
цией (Кпарре 1994). Для выполнения аккумуляции существует ряд ме-
тодов, поскольку здесь можно применять множество различных опера-
торов. Далее будут представлены наиболее часто используемые методы
аккумуляции. Рассмотрим пример 5.1.2.3.1.
Пример 5.1.2.3.1. Дана нечеткая модель с базой правил вида:
R1 : ЕСЛИ (х = АД ТО (у = ВД,
R2 : ЕСЛИ (х = Д2) ТО {у = В2). (5.14)
Функции принадлежности используемых в правилах нечетких мно-
жеств представлены на рис. 5.19. Требуется определить результирующую
функцию принадлежности цгеБ(у) вывода из всей базы правил для вход-
ного значения х — х* = 1.4.
Все правила, входящие в базу, можно объединить в одно составное
правило следующего вида:
R-. ЕСЛИ (х = ТО (у = В^),
(5.15)
ИЛИ ЕСЛИ (х = А2) ТО (у = В2).
Правило R состоит из двух простых правил В1 и В2, объединенных
логической связкой ИЛИ , что можно представить так:
R = Bl U В2.
(5.16)
5.1. Структура, основные элементы и операции в нечетких моделях 197
Каждое правило представляет собой нечеткое отношение двух аргу-
ментов (импликацию). Результирующее отношение R можно найти на
основе определения 4.2.4, с использованием одной из s-норм, например,
оператора МАХ, а его функцию принадлежности можно полу-
чить на основе функций принадлежности составляющих его отношений
(импликаций) по формуле (5.17):
Az/?(x,y) = МАХ(дд1(ж,у), дд2(®,?/))- (5.17)
Результирующую функцию принадлежности /ires(?/) вывода из всей
базы правил для заданного входного значения х = х* можно определить
по формуле, задающей срез поверхности отношения при х = х*:
УгДу) = /ля(х*,у). (5.18)
Будем называть данный метод методом 1. Последовательность его
шагов представлена на рис. 5.20, а-г. Результирующую функцию принад-
лежности /ires(?/) можно более точно представить в двумерной системе
координат — см. рис. 5.21.
Метод 2, используемый для получения результирующей функции
принадлежности ^res(^) вывода из базы правил, включает в себя сле-
дующие шаги: вначале определяются модифицированные функции при-
надлежности нв*(у) заключений отдельных правил, а затем, используя
одну из s-норм (например, оператор МАХ) находится результирующая
ФУНКЦИЯ Hresty)'
Угы(у) = МАХ(дв* (у), мв* (у)). (5.19)
Способы получения модифицированных функций принадлежности
рв*(у) заключений отдельных правил описаны в разд. 5.1.2.2. Метод 2
чаще всего применяется на практике, поскольку является более простым.
Пример определения функции Hres(y) на основе данного метода представ-
лен на рис. 5.22 и 5.23.
Если модифицированные функции принадлежности Нв*(у) заключе-
ний отдельных правил определяются с использованием оператора MIN
(рис. 5.22), а для их аккумуляции с целью получения результирующей
функции принадлежности Hres(y) применяется оператор МАХ, то в це-
лом данная операция называется максиминным выводом (MAX-MIN
inference).
В случае если функции нв*(у) определяются с помощью операто-
ра PROD, а функция //гей(т/) —с помощью оператора МАХ, то опе-
рация называется максимультипликативным выводом (MAX-PROD
198
Глава 5. Нечеткие модели
Рис. 5.20. Определение результирующей функции принадлежности вы-
вода из базы правил по срезу результирующей функции принадлеж-
Рис. 5.21. Результирующая функция принадлежности /zres(//) вывода из базы
правил, полученная на основе метода 1
5.1. Структура, основные элементы и операции в нечетких моделях 199
R2: ЕСЛИ (х = Л2) ТО (у = В2),
Ав2*(у)= MIN(a^2(x*), рВ2(у))
Рис. 5.22. Определение модифицированных функций принадлежности /ггеь(?/)
заключений отдельных правил на основе упрощенного метода (вывод
на правилах)
Рис. 5.23. Определение результирующей функции принадлежности pres(y) вы-
вода из базы правил (аккумуляция составляющих его заключений)
/?1:ЕСЛИ(х=Л1)Т0(у = 51),
R2-. ЕСЛИ (х=Л2) ТО (у = В2),
Дгеч(у)= МАХ(дв*О), дв;(у))
200
Глава 5. Нечеткие модели
х 0 1 2 3 4
Рис. 5.24. Дискретные функции принадлежности нечетких множеств, исполь-
зуемых в правилах (5.20)
Таблица 5.4
Дискретное нечеткое множество Ai
X 0 0.4 0.8 1.0 1.4 1.8 2.0
НА, (х) 1.0 0.8 0.6 0.5 0.3 0.1 0
Таблица 5.5
Дискретное нечеткое множество А2
X 0 0.4 0.8 1.0 1.4 1.8 2.0
ЦаАх) 0 0.2 0.4 0.5 0.7 0.9 1.0
Таблица 5.6
Дискретное нечеткое множество Bi
У 0 0.8 1.6 2.0 2.8 3.6 4.0
УвАу) 1.0 0.8 0.6 0.5 0.3 0.1 0
Таблица 5.7
Дискретное нечеткое множество В2
У 0 0.8 1.6 2.0 2.8 3.6 4.0
УвАу) 0 0.2 0.4 0.5 0.7 0.9 1.0
inference). При использовании других t-норм и s-норм будем полу-
чать другие типы процедуры вывода. Ниже приводится пример вывода
для случая нечеткой модели с дискретными функциями принадлежно-
сти.
Пример 5.1.2.3.2. Имеется нечеткая модель с базой правил вида:
R1-. ЕСЛИ Ц = Л) ТО 0 = 5!),
R2 : ЕСЛИ (т = Д2) ТО (у = В2).
Функции принадлежности нечетких множеств, используемых в пра-
вилах, представлены на рис. 5.24 и в табл. 5.4-5.7.
5.1. Структура, основные элементы и операции в нечетких моделях 201
Таблица 5.8
Функция принадлежности отношения R1 (импликации Ai ВД
0 0.8 1.6 2.0 2.8 3.6 4.0
0 1 0.8 0.6 0.5 0.3 0.1 0
0.4 0.8 0.8 0.6 0.5 0.3 0.1 0
0.8 0.6 0.6 0.6 0.5 0.3 0.1 0
1.0 0.5 0.5 0.5 0.5 0.3 0.1 0
1.4 0.3 0.3 0.3 0.3 0.3 0.1 0
1.8 0.1 0.1 0.1 0.1 0.1 0.1 0
2.0 0 0 0 0 0 0 0
Используя максиминную процедуру вывода, найдем результирующую
функцию принадлежности уге$(у) вывода из базы правил для входного
сигнала х = х* = 1.4.
Метод 1. Найдем срез функции принадлежности отношения R = B1UB2,
задаваемого выражением следующего вида:
R = ЕСЛИ (х = АА ТО (у = ВА
V 17 щ 521)
ИЛИ ЕСЛИ (х - Л2) ТО (у = В2\
Прежде всего, по формулам (5.22) и (5.23) следует определить функ-
ции принадлежности отношений импликации R1 и В2, отвечающих со-
ответствующим правилам (вывод на правилах):
= МА1-В, = MIN(//A1(x), цвЛуУ), (5.22)
= МА2-В2 = MIN(/m2(z), мв2(у))- (5-23)
Полученные отношения R1 и R2 представлены в табл. 5.8 и 5.9.
На основе отношений В1 и R2 по формуле (5.24) необходимо по-
лучить отношение R = Bl U R2, после чего следует найти срез данно-
го отношения при х* = 1.4, который и будет являться результирующей
функцией принадлежности /xres(y) вывода из базы правил:
= МАХ(/£Д1Ц,у),№(.г,у)). (5.24)
Полученное отношение представлено в табл. 5.10, а функция /.zres(z/) —
на рис. 5.25.
Метод 2. В рамках данного метода вначале упрощенным способом опре-
деляются модифицированные функции принадлежности заключений от-
дельных правил, а затем выполняется их аккумуляция. Для нахождения
202
Глава 5. Нечеткие модели
Таблица 5.9
Функция принадлежности отношения R2 (импликации
HR2(x,y) =
х\У 0 0.8 1.6 2.0 2.8 3.6 4.0
0 0 0 0 0 0 0 0
0.4 0 0.2 0.2 0.2 0.2 0.2 0.2
0.8 0 0.2 0.4 0.4 0.4 0.4 0.4
1.0 0 0.2 0.4 0.5 0.5 0.5 0.5
1.4 0 0.2 0.4 0.5 0.7 0.7 0.7
1.8 0 0.2 0.4 0.5 0.7 0.9 0.9
2.0 0 0.2 0.4 0.5 0.7 0.9 1.0
Таблица 5.10
Функция принадлежности отношения R = RA U R2 и результирующая
функция принадлежности вывода (заключения) из базы правил
Mres(</) =
х \у 0 0.8 1.6 2.0 2.8 3.6 4.0
0 1 0.8 0.6 0.5 0.3 0.1 0
0.4 0.8 0.8 0.6 0.5 0.3 0.2 0.2
0.8 0.6 0.6 0.6 0.5 0.4 0.4 0.4
1.0 0.5 0.5 0.5 0.5 0.5 0.5 0.5
1.4 03 03 0.4 0.5 М 0.7 0.7
1.8 6.1 0.2 0.4 0.5 0.7 0.9 0.9
2.0 0 0.2 0.4 0.5 0.7 0.9 1.0
Д(у)|
, и A^resCv)
О Q
1
0 3 j.
-------1---------!---------|-------------►
0 1 2 3 4 У
Рис. 5.25. Графическое представление полученной на основе данных табл. 5.10
результирующей функции принадлежности цге&(?/) вывода из базы правил
модифицированной функции принадлежности ув*(у) вывода из прави-
ла R1 используется формула (5.25), а для нахождения функции ув*(у)
5.1. Структура, основные элементы и операции в нечетких моделях 203
Таблица 5.11
Модифицированная функция принадлежности Цв*(у)
для правила R1
У 0 0.8 1.6 2.0 2.8 3.6 4.0
(у) 0.3 0.3 0.3 0.3 0.3 0.1 0
Таблица 5.12
Модифицированная функция принадлежности Цв*(у)
для правила R2
У 0 0.8 1.6 2.0 2.8 3.6 4.0
У-В* (у) 0 0.2 0.4 0.5 0.7 0.7 0.7
Таблица 5.13
Результирующая функция принадлежности yres(y) вывода
(заключения) из базы правил
У 0 0.8 1.6 2.0 2.8 3.6 4.0
P'res(y) 0.3 0.3 0.4 0.5 0.7 0.7 0.7
(правило R2) — формула (5.26):
мвЦу) = = мт(дЛ1ц*),мв1(у)) = MiN(o.3,^B1(y))
(5.25)
МвЦу) = = MIN(^A2(ar*),/ZB2(?/)) = MIN(0.7,/zB2(y))
(5.26)
Функции цв*(у), ув*(у\ найденные с использованием табл. 5.4-5.7
и формул (5.25)-(5.26), представлены в табл. 5.11 и 5.12.
Аккумуляция модифицированных функций принадлежности ув*(у)
и Ув*(у) выполняется по формуле (5.27). Результат представлен
в табл. 5.13:
Mres(y) = MAXES’(у)-МВ* (у))- (5.27)
Сравнивая табл. 5.10 и 5.13, легко заметить, что результаты вывода,
полученные с использованием методов 1 и 2, совпадают. Данная ситу-
ация имеет место при использовании максиминного вывода. В случае,
когда вместо операторов МАХ и MIN используются другие s- и t-нормы,
выводы с применением метода 1 и метода 2 будут приводить к разным
результатам!
На практике чаще всего применяется метод 2, в силу его меньшей
трудоемкости. Ниже представлен общий алгоритм вывода с использова-
нием данного метода.
204
Глава 5. Нечеткие модели
Алгоритм вывода. Целью вывода является определение результирующей
функции принадлежности Kresty) вывода из базы правил. Пусть дана база
правил, содержащая m правил конъюнктивного типа:
7?1 : ЕСЛИ (xi = Ап) И ... И (х, = Аи)
И ... И (х„ = А1п) ТО =
Rj : ЕСЛИ (ап = Ад) И ... И (ж, = AJt)
И ... И (хп = Ад) ТО (у = БД
(5.28)
Rm : ЕСЛИ (xi = Am\) И ... И (хг = Ami)
И ... И (хп — Атп) ТО (у — Вт\
где Лц,..., Ау,..., Атп — нечеткие множества условий,
Bi,..., Вт — нечеткие множества заключений,
яд,..., хп — входы нечеткой модели,
Хр ..., .г* — значения входов нечеткой модели,
у — выходы нечеткой модели.
Шаг 1. По формуле (5.29) определяются степени hj выполнения условий
отдельных правил (агрегация условий):
hi =Т(да11(жЦ,...,да1„Ц’)),
=Т(Мд1ЦЦ,...,дд„Ц*)), (5.29)
=Т(уа,„1(-Ч),---,М.4„1„(х1)).
где Т — какой-либо оператор t-нормы. Согласно результатам опро-
са специалистов по нечеткой логике (Pfeifer 1996), наиболее часто
в качестве t-нормы используется оператор PROD. Могут также
применяться и другие операторы, не являющиеся t-нормами.
Шаг 2. Целью данного шага является определение модифицированных
функций принадлежности ув*(у) заключений отдельных правил
(вывод на правилах), для чего используется формула (5.30). В дан-
ной операции участвуют только те правила, условия которых вы-
полнены со степенью h > 0 — такие правила называются активи-
зированными. Неактивизированные правила (h = 0) не принимают
участия в выводе:
5.1. Структура, основные элементы и операции в нечетких моделях 205
Ив^у) = T(h\, pB1(y)),
1*в;(у) = T(hj,pB](y)), (5.30)
МвДу) = T(hm.pBm(y)).
Шаг 3. На данном шаге определяется результирующая функция принад-
лежности yTCS(y) путем аккумуляции модифицированных функций
принадлежности заключений отдельных правил с использованием
формулы
MresO) = Ув*(у) = ^(мв^у)-- ..,МВ*,(у)), (5.31)
где S — некоторая s-норма, например, МАХ; В* = В{ U • • • U B*v —
нечеткое множество, соответствующее окончательному выводу
из базы правил. Помимо s-норм, для выполнения операции ИЛИ
могут использоваться и другие операторы.
Рассмотренный алгоритм предполагает, что все правила в базе (5.28)
имеют конъюнктивную форму, что не является ограничением, посколь-
ку дизъюнктивная или смешанная, конъюнктивно-дизъюнктивная формы
могут быть преобразованы в конъюнктивную форму. Так, правило вида
ЕСЛИ (Ж1 = АП) И (x2 = Ai2)
(5.32)
ИЛИ (^1 = А21) И (х2 = А22) ТО (у = В1),
имеющее смешанную форму, можно заменить двумя конъюнктивными
правилами:
ЕСЛИ (.-п = А,,) И (,г2 = А]2) ТО (у = ВХ
(5.33)
ЕСЛИ Сп = А21) И (,г2 = А22) ТО (у = ВО,
а вместо правила
ЕСЛИ (ti - Ai) ТО (у = BJ ИЛИ (у - В2) (5.34)
можно использовать два простых правила вида:
ЕСЛИ Од - Ai) ТО (v-Bj,
v 7 (5.35)
ЕСЛИ Сп = ТО Q/-B2).
Для осуществления вывода можно использовать не только различные
операторы t-норм и s-норм, но и другие операторы, реализующие пере-
сечение и объединение нечетких множеств. Как же будет влиять тип
оператора на результат вывода?
206
Глава 5. Нечеткие модели
Вывод MAX-MIN
Вывод MAX-PROD
х* = 1.4
Вывод SUM-MIN
SUM: ограниченная сумма дА ив(х, у) = MIN( 1, дА(х)+дВ(У))
%; = 1.4
Вывод SUM-PROD
\к
х* = 1.4
Рис. 5.26. Результаты вывода с использованием различных t-норм и s-норм
5.1. Структура, основные элементы и операции в нечетких моделях 207
(5.36)
На рис. 5.26 показан вывод для модели с двумя правилами из примера
5 12 3 1
’ ' ’ ’ ’ R1 : ЕСЛИ (х! = Л1) ТО (у = Bi),
R2 : ЕСЛИ (яд = Л2) ТО (у = В2),
выполненный с использованием различных операторов, для входного зна-
чения х* = 1.4.
Анализируя рис. 5.26, легко видеть, что использование в процессе вы-
вода различных логических операторов приводит к получению в качестве
вывода из базы правил нечетких множеств В*, значительно отличающих-
ся друг от друга (имеющих разные функции принадлежности yres(y)).
В связи с этим возникает вопрос, каким операторам следует отдавать
предпочтение при использовании в нечетких моделях, или какие опера-
торы обеспечивают наибольшую точность нечеткого моделирования
и управления?
В случае самообучающихся (самонастраивающихся) моделей и регу-
ляторов вид используемых операторов менее важен, поскольку в ходе
обучения модели (регулятора) ее степени свободы (параметры функций
принадлежности) изменяются с целью достижения максимально возмож-
ной точности. Поэтому выбор менее подходящих операторов в данном
случае будет по крайней мере частично компенсироваться процессом на-
стройки.
В случае ненастраиваемых нечетких моделей и регуляторов влияние
используемых операторов проявляется намного сильнее, поскольку выбор
неподходящих операторов невозможно компенсировать ничем. С учетом
этого, следует использовать метод проб и ошибок, исследуя характери-
стики модели для различных комбинаций операторов и выбирая в резуль-
тате лучшие операторы.
Определенным показателем того, какие операторы лучше, а какие ху-
же, может служить частота их использования специалистами в области
нечеткого моделирования и управления (т.е. их популярность у специали-
стов). Анализ литературы по данной теме, судя по всему, свидетельствует
о том, что агрегация условий чаще всего выполняется с использовани-
ем оператора PROD, который, в отличие от оператора MIN, реагирует
на все входные изменения модели (в то время, как оператор MIN реагиру-
ет только на изменение входа с наименьшей степенью принадлежности).
Комбинацией, наиболее часто используемой в процессе вывода, являет-
ся MAX-MIN. Определенный приоритет также имеет применение опера-
тора MEAN для агрегации условий и комбинации SUM-MIN для вывода.
Оператор SUM (неограниченная сумма), в отличие от оператора МАХ,
при вычислении функции //res(//) учитывает все функции р^ (у), соответ-
208
Глава 5. Нечеткие модели
ствующие отдельным правилам, в то время, как оператор МАХ учитывает
только функцию, для которой степень принадлежности данного выход-
ного значения у является наибольшей. Таким образом, вывод на основе
оператора SUM «демократичнее» вывода с использованием МАХ, кото-
рый можно назвать «диктатурой» наиболее активизированного правила.
В качестве результата вывода будет получена функция принадлеж-
ности /ires(?/) нечеткого множества В*, представляющего общий вывод
(заключение) из базы правил. Если требуется получить на выходе моде-
ли (регулятора) четкое значение у*, необходимо выполнить дефаззифи-
кацию соответствующего нечеткого результата. Методы дефаззификации
будут обсуждаться в следующем разделе.
5.1.3. Дефаззификации результирующей функции
принадлежности вывода из базы правил
Под дефаззификацией нечеткого множества В*(у), являющегося резуль-
татом вывода, понимается операция нахождения четкого значения ?/*,
которое бы наиболее «рациональным» образом представляло это мно-
жество. Естественно, могут существовать различные критерии оценки
«рациональности» значения у* для представления нечеткого множества
В*. О количестве таких критериев можно судить по числу существующих
методов дефаззификации, наиболее известными среди которых являются:
• метод среднего максимума (Middle of Maxima, ММ),
• метод первого максимума (First of Maxima, FM),
• метод последнего максимума (Last of Maxima, LM),
• метод центра тяжести (Center of Gravity, CG),
• метод центра сумм (Center of Sums, CS),
• метод высот (Height, H).
Далее перечисленные методы будут рассмотрены более подробно.
Метод среднего максимума. Функцию принадлежности можно рассмат-
ривать как функцию, которая представляет информацию о сходстве меж-
ду отдельными элементами множества и о наиболее типичном его эле-
менте. Пример приведен на рис. 5.27.
С учетом функции принадлежности, соответствующей «среднему»
значению роста, человек, имеющий рост 170 см, является типичным
представителем данной категории роста (степень принадлежности рав-
на 1), в то время как человека, имеющего рост 175 см, можно со сте-
пенью 0.5 охарактеризовать как «среднего роста» и со степенью 0.5 —
как «высокого». Иными словами, он частично соответствует как людям
среднего роста, так и высоким людям. Таким образом, можно положить,
5.1. Структура, основные элементы и операции в нечетких моделях 209
/М
1-
Средний Высокий
160 170 180 Рост (см)
Рис. 5.27. Нечеткое множество,
соответствующее «среднему» росту
Рис. 5.28. Результирующая функция принадлежности с бесконечным числом
элементов у, имеющих максимальную степень принадлежности (т/i < ?/ < у?)
что наиболее типичным представителем нечеткого множества В*, полу-
ченного в результате вывода и задаваемого функцией принадлежности
ув*(у) — является значение у*, имеющее максимальную степень
принадлежности.
Следует отметить, что множество таких значений часто может содер-
жать более одного элемента и даже бесконечное число элементов, как
показано на рис. 5.28. Решением в данной ситуации будет представление
результирующего множества средним значением, получаемым по фор-
муле:
Д = 0.5(Л + У2). (5.37)
Именно поэтому рассмотренный метод назван методом среднего мак-
симума.
Достоинством данного метода является простота вычислений, что
допускает использование в системах управления более дешевых мик-
ропроцессоров. Вместе с тем, простота вычислений достигается ценой
определенных недостатков.
Недостаток метода состоит в том, что на результат дефаззификации
влияет только нечеткое множество By, имеющее наибольшую степень ак-
тивизации — множества, активизированные в меньшей степени, никакого
влияния на результат не оказывают. В свою очередь, это означает, что
210
Глава 5. Нечеткие модели
Рис. 5.29. Иллюстрация
недостатков метода среднего максимума (ММ)
на результирующее значение у* влияет только то правило, которое содер-
жит это множество в своем заключении (часто это может быть только
одно правило). Тем самым, дефаззификация становится «недемократич-
ной», поскольку не все правила принимают участие в «голосовании».
Результат этого показан на рис. 5.29.
В результате изменения входных значений модели xi степень ак-
тивизации множества на рис. 5.29, б увеличилась по сравнению
с рис. 5.29, а, в то время как степень активизации множества В<2 умень-
шилась. Тем не менее, результаты дефаззификации—выходные значения
модели у* — в обоих случаях совпадают: у* = у^. Данный факт означает,
что выход модели нечувствителен к изменениям ее входов. Нечувстви-
тельность нечеткой модели может рассматриваться как недостаток, если
в рассматриваемой области пространства входных значений реальной си-
стемы (являющейся объектом моделирования) подобная нечувствитель-
ность не проявляется. Если же она имеет место и в реальной системе,
то нечувствительность модели не считается недостатком.
Чувствительность метода дефаззификации и вытекающую из нее
чувствительность нечеткой модели можно определить как существование
отклика Ат/* выходного параметра модели на изменение степеней акти-
визации нечетких множеств Bj(y), соответствующих заключениям базы
правил. Сравнивая рис. 5.29, б и в, мы видим, что здесь имеет место рез-
кое скачкообразное изменение результата дефаззификации у*, так как ус
значительно отличается от уь. Таким образом, малое изменение степе-
ни активизации множеств В] и В2 вызывает большой скачок выходного
значения модели At/*. Данное свойство называется разрывностью (отсут-
ствием непрерывности) метода.
Разрывность метода дефаззификации и вытекающая из нее раз-
рывность нечеткой модели можно определить как возникновение на вы-
5.1. Структура, основные элементы и операции в нечетких моделях 211
Рис. 5.30. Дефаззификация с использованием метода первого максимума (FM),
У* = У1
ходе модели скачкообразной реакции Д?/* на любое малое изменение
степеней активизации нечетких множеств Bj(y) в заключениях правил.
Далее приведем два схожих друг с другом метода дефаззификации,
основанных на максимизации функции принадлежности. Сразу же отме-
тим, что их чувствительность выше, чем у метода ММ.
Метод первого максимума. В методе первого максимума (FM) в ка-
честве четкого значения у*, представляющего результирующее нечеткое
множество-заключение, выбирается наименьшее значение у±, максимизи-
рующее его функцию принадлежности /ires(y). Как показано на рис. 5.30,
с увеличением степени активизации наиболее активизированного множе-
ства (В2), его представитель у* = у± смещается в направлении модаль-
ного значения ут2 данного множества. Если степень активизации В2
уменьшается, то точка у* = у± перемещается в противоположную от его
модального значения сторону, в направлении значения ymi.
Достоинства метода FM:
• низкая стоимость вычислений,
• большая (по сравнению с методом ММ) чувствительность к измене-
ниям степени активизации заключений базы правил
Недостатки метода FM:
• неоднородность,
• учет в процессе дефаззификации только множества Bj с наибольшей
степенью активизации.
Метод последнего максимума. Метод последнего максимума(ЬМ) в ка-
честве четкого значения у* для представления результирующего нечет-
кого множества-заключения выбирает наибольшее значение у2, соответ-
ствующее максимуму функции принадлежности рг^(у) (рис. 5.31).
212
Глава 5. Нечеткие модели
Рис. 5.31. Дефаззификация с использованием метода последнего максимума
(LM), у* = у2
Рис. 5.32. Дефаззификация с использованием метода центра тяжести (CG)
Метод LM имеет те же достоинства и недостатки, что и метод FM,
и один дополнительный недостаток, рассмотренный ниже. В случае, ко-
гда степень активизации множества (из которого выбирается пред-
ставитель у*) уменьшается, а степень активизации множества В± уве-
личивается (т. е. увеличивается значимость множества В± в процессе
рассуждений, рис. 5.31, б), значение у* = у2 должно смещаться в направ-
лении модального значения ymj множества В±, но вместо этого возникает
обратная ситуация: у2 от данного значения удаляется.
Метод центра тяжести. Метод центра тяжести (CG) предполагает,
что в качестве четкого значения у* для представления результирую-
щего нечеткого множества В*, задаваемого функцией принадлежности
P'res(y) = должна выбираться координата ус центра тяжести фи-
гуры, ограниченной графиком этой функции (рис. 5.32).
Значение координаты центра тяжести С может быть найдено по фор-
муле (5.38) как отношение момента фигуры под кривой дгей(?/) относи-
5.1. Структура, основные элементы и операции в нечетких моделях 213
Рис. 5.33. Разбиение
поверхности интегрирования на секторы
тельно вертикальной оси к площади этой фигуры:
у* — у — (5 38)
у — Ус — г / ч j {О.ОО)
J PreS(y)dy
Пределы интегрирования задаются областью определения Y резуль-
тирующего нечеткого множества-вывода В*.
Достоинства метода CG
• В дефаззификации участвуют все активизированные функции при-
надлежности заключений (все активные правила), т. е. метод центра
тяжести является «демократичным» и обеспечивает более высокую
чувствительность нечеткой модели к изменению входных сигналов,
чем методы FM, LM и ММ.
Недостатки метода CG
• Высокая стоимость вычислений, связанная с интегрированием по-
верхностей нерегулярной формы, особенно в случае использования
функций принадлежности, не состоящих из прямолинейных участ-
ков (например, гауссовых функций). Для интегрирования необходи-
мо определить точки пересечения отдельных составляющих функций
принадлежности разбить поверхность на секторы и выполнять
интегрирование в пределах каждого из секторов (рис. 5.33).
Вычисления упрощаются, если использовать прямоугольные функции
принадлежности (рис. 5.34). Еще большего упрощения можно достичь
в случае использования нечетких множеств By имеющих равную шири-
ну I (рис. 5.35).
Отрицательной стороной упрощения дефаззификации путем исполь-
зования прямоугольных функций принадлежности ув^у) является то,
что приходится ограничиваться только одной формой функций принад-
лежности, в то время как другие формы могут оказаться более подходя-
214
Глава 5. Нечеткие модели
Рис. 5.34. Метод центра тяжести с использованием прямоугольных функций
принадлежности множеств Bj, соответствующих заключениям базы правил;
у1 — модальные значения множеств
S/v.
= -----
/=1
-►
У
Рис. 5.35. Метод центра тяжести с использованием нечетких множеств BJy
носители которых имеют равную ширину /, у( — модальные значения множеств
щими для моделируемой системы и обеспечить более высокую точность
моделирования.
• Сужение интервала дефаззификации является еще одним недо-
статком метода центра тяжести (рис. 5.36).
При использовании классического варианта метода центра тяжести
на выходе нечеткой модели (регулятора) невозможно получить минималь-
ное (у* = ?/min) или максимальное (у* = ?/тах) значение из допустимого
диапазона, даже в случае максимальной активизации крайних нечетких
множеств В] или Вз, соответствующих заключениям правил. Подобное
несоответствие поведения нечеткой модели поведению моделируемой си-
5.1. Структура, основные элементы и операции в нечетких моделях 215
3 mm У\ УзУтах У
а) у1е*утт» УЗе* .Утах
Рис. 5.36. Сужение интервала дефаззификации в классическом варианте метода
центра тяжести (о) и устранение этого недостатка при использовании расши-
ренного варианта данного метода (б)
стемы и невозможность генерации нечетким регулятором более широко-
го диапазона управляющих сигналов приводило бы к снижению качества
управления (например, ограничивало бы угол поворота корабельного ру-
ля). Данный недостаток можно устранить, расширяя крайние нечеткие
множества так, чтобы их центры тяжести совпадали с границами диа-
пазона (i/min' 2/шах) возможных значений операции (рис. 5.36, б). Данный
метод называется расширенным методом центра тяжести (Extended
Center of Gravity, ECG).
• Нечувствительность метода в том случае, когда активизируется
только одна выходная функция принадлежности является
еще одним его недостатком. Если несколько правил имеют одина-
ковое заключение (множество В2 на рис. 5.37), либо активизируется
только одно правило, то координата центра тяжести ус не изменя-
ется, несмотря на изменение степени активизации результирующего
множества (рис. 5.37, а, б). Таким образом, модель нечувствительна
к входным изменениям. Данный недостаток можно уменьшить, ес-
ли не использовать в правилах одинаковые нечеткие множества Bj.
Указанным недостатком обладают также методы ММ, CS и метод од-
ноэлементных множеств (если с одним элементом связаны несколько
правил).
• Снижение чувствительности метода CG в случае, когда носители
выходных множеств Bj(y) нечеткой модели значительно различаются
по ширине, также относится к его недостаткам. Данная проблема
представлена на рис. 5.38.
На рис. 5.38 представлен пример ситуации, когда значительное из-
менение степени активизации составляющих множеств (увС- 0.5-0.2,
216
Глава 5. Нечеткие модели
Рис. 5.37. Метод центра тяжести при активизации только одного выходного
нечеткого множества Bj(y) модели
Рис. 5.38. Случай, когда изменение степени активизации выходных нечетких
множеств Bi, Т?2 оказывает малое влияние на результат дефаззификации
ув2‘ 0.5-0.8) вызывает минимальное смещение координаты центра тя-
жести (у* = ус: 3.74-3.96). Причиной здесь является большое различие
между поверхностями составляющих множеств, обусловленное, в свою
очередь, тем, что их носители значительно различаются по ширине
(Вц. 6, В2: 0.5). Для того чтобы изменение степеней активизации ув^у)
и ув2(у) оказывало большее влияние на величину ус, носители обоих
множеств должны быть одинаковыми. Таким образом, для обеспечения
высокой чувствительности метода CG необходимо, чтобы носители от-
дельных множеств Bj мало отличались друг от друга по ширине.
В случае дискретных нечетких множеств выходное значение моде-
ли у* вычисляется по формуле, приведенной на рис. 5.39.
Метод центра сумм. В базе правил нечеткой модели могут часто встре-
чаться правила, в заключении которых содержится одно и то же нечеткое
5.1. Структура, основные элементы и операции в нечетких моделях 217
Рис. 5.39. Дискретный вариант дефаззификации
с использованием метода центра тяжести (CG)
множество Bj. Пример такой базы правил имеет вид:
R1 : ЕСЛИ (xi = Ли) И (;г2 = Л21) то {у = В1)
R2 : ЕСЛИ Щ = Ли) И Щ = Л 22) то (у = в2)
R3 : ЕСЛИ Ц1 = Л12) И Ц-2 = Л21) то (у = в2)
Л.4 : ЕСЛИ (ж. = Л12) И (х2 = л22) то (у = Вз) (5.39)
В заключении правил R2 и R3 содержится одно и то же множе-
ство В2. Предположим, что входные значения и совпадают, а сте-
пень активизации выходных нечетких множеств Bj соответствует ситуа-
ции на рис. 5.40.
Нечеткое множество В2 активизируется двумя правилами В2 и ВЗ.
Если для вычисления функции принадлежности /j,res(y) = ис-
пользовать оператор МАХ, то в результате будет получено множество
В* = В^ U В^2 U В23 U В3, представленное на рис. 5.41.
Из рис. 5.41 видно, что наибольшее влияние на расположение центра
тяжести С и, следовательно, на результат дефаззификации оказывает
множество Вз (правило В4), степень активизации которого максималь-
на (0.8). Вместе с тем, множество В2 активизируется двумя правилами
(В2 и ВЗ) и общая степень его активизации (0.4 + 0.6 = 1.0) выше, чем
для В3.
Существуют базы правил, в которых одно и то же нечеткое мно-
жество Bj на выходе модели активизируется одновременно нескольки-
ми правилами. Следует ли допускать, чтобы на результат дефаззифика-
ции у* влияли все правила, активизирующие данное множество Bj(у)?
Да, в некоторых случаях следует. Учитывать данное влияние позволяет
метод центра сумм (CS), который производит аккумуляцию множеств В*,
218
Глава 5. Нечеткие модели
Рис. 5.40. Пример активизации множеств В3
каждым правилом Ri (5.39) в отдельности
Рис. 5.41. Результирующее нечеткое множество В*,
полученное с использованием оператора МАХ
соответствующих заключениям отдельных правил, по формуле (5.40),
с использованием оператора неограниченной суммы:
m
Atres(y) = (5.40)
В результате использования этого оператора мы получаем функцию
принадлежности, показанную на рис. 5.42, б, из которого видно, что при-
менение оператора SUM существенно увеличивает значимость активи-
5.1. Структура, основные элементы и операции в нечетких моделях 219
1
0.8
0.6
0.4
0.2
я) AresW = MAX^(y)
7=1,. ,m Dj
Рис. 5.42. Сравнение результатов аккумуляции множеств-составляющих В*
с использованием операторов МАХ и SUM
зированного двумя правилами множества В2, что, в свою очередь, сме-
щает центр тяжести С% ближе к модальному значению этого множества.
В случае использования оператора МАХ центр тяжести С\ сильнее всего
«притягивается» множеством В3.
С учетом методики вычисления функции принадлежности уГе$(у)
по формуле (5.40), можно получить разные формулы для вычисления
результата дефаззификации у* = ус:
_ fyyTes(y)dy
flhe»(y)dy
f У У в-(у) dy
У* = , (5.42)
f Е У в* (у) dy
j=i
Ё / УУв; (у) dy
У* = ------------• (5.43)
Е f У в* (у) dy
j=i
Интегрирование производится по области определения Y. Форму-
лы (5.41)—(5.43) эквивалентны. Интерес представляет вариант (5.42),
позволяющий выполнять дефаззификацию без нахождения результиру-
ющей выходной функции принадлежности /ires(?/) — дефаззификации мо-
жет осуществляться на основе знаний о результатах вывода из отдельных
правил цв* (у^-
Если выражение (5.44) назвать моментом множества В*(у) относи-
тельно вертикальной оси р(у) (рис. 5.43):
[ УУв*Ду)Лу = М3' (5.44)
220
Глава 5. Нечеткие модели
а выражение (5.45) — площадью St множества В*(у):
= Sj, (5.45)
то формулу (5.43) можно представить в виде отношения суммы моментов
Mj к сумме площадей Sj\
m
Е м3
У* = (5.46)
22 Sj
Иллюстрацией рассмотренного метода дефаззификации является
рис. 5.43. Метод вычисления моментов Mj и площадей S3 нечетких мно-
жеств представлен на рис. 5.44.
Достоинства метода CS
• Снижение стоимости вычислений по сравнению с методом CG.
• Участие всех правил в процессе рассуждений, что оказывает положи-
тельное влияние на ряд нечетких моделей и регуляторов.
Остальные достоинства и недостатки такие же, как у метода CG.
При использовании формул (5.41) и (5.42) метод центра сумм (CS),
по сути, представляет собой комбинацию метода центра тяжести (CG)
и вывода типа SUM-MIN, где SUM — оператор неограниченной (арифме-
тической) суммы.
В случае дискретных функций принадлежности результат дефаззи-
фикации у* вычисляется по формуле:
I тп
= г=1 2=1---------
7 1 m v 7
Е Е
' = 1 7=1
где I — число элементов дискретной области определения У,
тп — число правил нечеткой модели.
Метод высот. Метод высот (Н) является упрощенным дискретным ва-
риантом метода центра сумм (CS). Каждое нечеткое множество Bj(y)
на выходе модели здесь заменяется синглетоном (одноэлементным мно-
жеством), совпадающим с модальным значением yj — mj этого множе-
ства (рис. 5.45). Поэтому данный метод называют также методом одно-
элементных множеств.
В результате вывода одноэлементные множества в каждом правиле
активизируются так же, как и другие типы нечетких множеств. Для
5.1. Структура, основные элементы и операции в нечетких моделях 221
1 -
В} В2 В3
1 2 3 4 5 У
0.2
0
з
yfiB.(y)dy
1
3
1
4
М22= j У/^уНУ
2
4
s22=
2
4
w23=j У/^'ДМу
2
4
S23=\^y)dy
2
5
M3=^yn^(y)dy
3
5
S3 = I fig'(y)dy
3
* Mj 4- A/22 + ^23 + ^3
<5*1 + S22 "Ь ^23 + ^3
Рис. 5.43. При мер дефаззификации с использованием метода центра сумм (CS)
вычисления значения у* на выходе модели (результата дефаззификации)
используется метод CS. Рисунок 5.46 иллюстрирует применение метода
высот в примере с дефаззификацией на рис. 5.43 (база правил имеет вид
(5.39)).
Результат дефаззификации с использованием метода высот может
быть вычислен по формуле:
222
Глава 5. Нечеткие модели
Д(у) i М= дтах \3тх (а-тх) + 3m2(j3 + т2) - а2 +/32]/6
S= 0.5//max2(w2-w1) + а+0]
Рис. 5.44. Метод вычисления момента М и площади S нечеткого множества
трапециевидной, треугольной (n?i = m2) и прямоугольной (/3 = а = 0) форм
Д(у)А
1 -
В\ В2 Вт,
т\ т2 тт, у
У\ У1 Уз
Рис. 5.45. Замена нечетких множеств В3 одноэлементными множествами
(синглетонами)
Е УзУвДу)
У* = , (5.48)
Е У в; (у)
j=l
где т — число правил.
Достоинства метода высот
• Значительное уменьшение стоимости вычислений по сравнению с ме-
тодами CG и CS.
• Ширина носителей выходных множеств В3 не влияет на результат
дефаззификации у*.
• Вид функций принадлежности /лв}(у) не влияет на дефаззификацию.
(Для некоторых задач это может быть недостатком.)
• Непрерывность.
• Чувствительность.
В нечетком моделировании и управлении метод высот используется
достаточно часто, что обусловлено, прежде всего, простотой вычислений,
а также остальными его преимуществами. Если множества Ду значений
входных величин Xi являются нечеткими (а не одноэлементными, как
выходные), то модель (регулятор) сохраняет свой нечеткий характер.
5.1. Структура, основные элементы и операции в нечетких моделях 223
* У1^в* + уЛ^в* + Нв*) + УМИп
у — ------±------------------------± = 3.6b /
Ив* + У в*2 + Мв*3 + Ив*
Рис. 5.46. Пример дефаззификации с использованием метода высот
5.1.4. Пример нечеткого моделирования
Чтобы проиллюстрировать все операции по обработке информации нечет-
кой моделью, рассмотрим нечеткую модель системы с двумя входами
5- малый, М- средний, L- большой
Рис. 5.47. Функции принадлежности, используемые в нечеткой модели
системы (5.49)
224
Глава 5. Нечеткие модели
и одним выходом, реализующую известное отображение:
У = -El + Х2,
Ху = [0.10],
х2 = [0.10].
У = [0,20].
(5.49)
Знание реализуемого системой отображения позволяет оценить точ-
ность нечеткой модели. Следует, однако, иметь в виду, что для большин-
ства задач моделирования реализуемое системой отображение входных
значений в выходные задается не в математической форме, а в виде чис-
ленных измерений входной и выходной информации, либо в форме зна-
ний о системе, полученных ее оператором или экспертом в результате
наблюдений за ее поведением.
Пусть функции принадлежности значений входных и выходных пара-
метров системы имеют вид как на рис. 5.47, и задана система правил:
ri : ЕСЛИ (лц = S) И (х2 = 5) ТО (у = S),
г2 : ЕСЛИ (ху = S) И (х2 - L) ТО (у =
гЗ : ЕСЛИ (х-1 = L) И (х2 = 5) ТО (у = А/),
г4 : ЕСЛИ (ху = L) И (х2 = L) ТО (у = L).
Среди правил (5.50) имеются два правила (г2 и гЗ) с одинаковым
заключением (у = АТ). Их можно объединить в одно правило Я2, что
позволяет уменьшить количество правил до трех. В результате получаем
базу правил следующего вида:
R1 : ЕСЛИ (ху = 5) И
R2 : ЕСЛИ (ху = 5) И
(х3 = L) И
R3 : ЕСЛИ (.щ = L) И
(т2-5) ТО Q/ = S),
(rr2 - L) ИЛИ
(х2 = S) ТО (у = М)
(x2 = L) ТО (y = L).
(5.51)
Объединение правил не является обязательным — можно также ис-
пользовать модель (5.50) с базой, содержащей 4 правила. Общая схема
нечеткой модели представлена на рис. 5.48.
Элементы модели:
• механизм вывода: MAX-MIN,
• агрегация условий: операторы MIN и МАХ.
Чтобы иметь возможность сравнивать различные ситуации, вычислим
значения у* на выходе нечеткой модели и значения у на выходе модели-
руемой системы для входных значений Ху = 2.5, х^ = 7.5.
5.2. Важные свойства правил, баз правил и нечетких моделей 225
Рис. 5.48. Общая схема рассматриваемой нечеткой модели
На рис. 5.49 представлен процесс вычисления. Для входных значений
= 2.5, ^2 = 7.5 на выходе моделируемой системы, реализующей отоб-
ражение у = xi +^2, мы получаем значение 10. Это же значение будет
получено и на выходе нечеткой модели, хотя следует отметить, что такой
пример был выбран специально. В общем случае нечеткая модель — это
лишь приближение моделируемой системы, и выходные значения не сов-
падают, а являются близкими, при этом степень близости зависит от точ-
ности модели.
5.2. Важные свойства правил, баз правил
и нечетких моделей
Центральным элементом нечеткой модели (регулятора) является база
правил, поскольку именно в ней содержится информация о структуре
модели. Базу правил можно сравнить с каркасом палатки, на который
натягивается ткань. Конструкция каркаса определяет форму и внешний
вид всей палатки. Если продолжить эту аналогию, то можно сказать,
что остальные элементы нечеткой модели (регулятора) — форма функций
принадлежности, типы используемых операций, механизмы вывода и де-
фаззификации — влияют на степень изгиба и натяжения полотна, про-
тянутого между несущими элементами каркаса. База правил содержит
основную информацию о моделируемой системе или главную составля-
ющую «интеллекта» нечеткого регулятора, и потому умение правильно
ее формировать является очень важным условием. Это умение позволя-
ет предотвратить ошибки, которые, учитывая значимость базы правил
для нечеткой модели, обычно относятся к разряду «грубых».
В данном разделе будут рассмотрены свойства, которыми могут обла-
дать правила, базы правил и нечеткие модели. К этим свойствам отно-
сятся:
• локальный характер правил,
226
Глава 5. Нечеткие модели
ФАЗЗИФИКАЦИЯ
ВЫВОД
Рис. 5.49. Схема вычисления выходного значения у* нечеткой модели
для входных значений = 2.5, = 7.5
5.2. Важные свойства правил, баз правил и нечетких моделей 227
• зависимость числа правил от числа содержащихся в модели нечетких
множеств,
• полнота модели,
• непротиворечивость базы правил,
• связность базы правил,
• избыточность базы правил.
5.2.1. Локальный характер правил
Условие нечеткого правила характеризует окрестность некоторой точки
пространства Х± х ... х Хп входных значений, в то время как его за-
ключение задает окрестность некоторой точки пространства Y выходных
значений.
Это утверждение иллюстрируется примером на рис. 5.50. В дан-
ном примере агрегация условий выполняется с применением оператора
PROD, вывод производится на основе метода MAX-MIN, а для дефаззи-
фикации используется метод высот.
Условие правила 7?16, имеющего вид
Я16 : ЕСЛИ (^i = AL4) И (х2 = Л24) ТО (у = В1б),
задает окрестность точки с координатами (ах4,а24), а заключение это-
го правила связывает с данной точкой окрестность точки у = biQ. Если
состояние входов в точности соответствует значению (ai4,a24),
то значение на выходе модели будет в точности совпадать с big. Изобра-
женная на рис. 5.50 поверхность модели состоит из 9 сегментов, вершины
(узлы) которых задаются отдельными правилами.
Изменение модального значения bie множества В16 вызовет смещение
вверх либо вниз опорной точки поверхности модели, что приведет к изме-
нению поверхности в пределах только одного сегмента (6ц, Ь]2, Ь15?Ь1б)-
Таким образом, данное изменение носит локальный характер. В случае
изменения значения Ьц, соответствующего правилу R11:
7?11 : ЕСЛИ = А13) И (т2 = Л23) ТО (у = Вп),
изменятся поверхности прилегающих к этой точке четырех сегментов —
остальные сегменты останутся без изменения.
Можно сформулировать следующее утверждение: изменение заклю-
чения правила приводит к локальному изменению сегментов поверхно-
сти модели, прилегающих к задаваемой правилом опорной точке в про-
странстве Xi х Х2 х Y. На другие сегменты, не прилегающие к данной
точке, изменение заключения правила либо вообще не оказывает влия-
ния (в случае, когда для входных функций принадлежности выполняется
228
Глава 5. Нечеткие модели
Рис. 5.50. База правил, функции принадлежности и поверхность отображения
X = Xi х Х2 — Y
5.2. Важные свойства правил, баз правил и нечетких моделей 229
условие разбиения единицы), либо влияет слабее (в случае не удовлетво-
ряющих условию разбиения единицы функций принадлежности с носите-
лями большой или бесконечной ширины— таких как, например, гауссовы
функции).
Характер изменения условий правил (например, модальных значений
aij содержащихся в них нечетких множеств) не является локальным. Так,
изменение модального значения ai2 множества А12 (рис. 5.50) повлия-
ет на условия всех правил, содержащих данное множество, и приведет
к смещению вправо либо влево опорных точек ((212,(221,^2), (<212, (222, М’
(<212, <223, ^10), (<212^24,^14)-
5.2.2. Зависимость числа правил от числа входных
параметров и нечетких множеств
С повышением уровня сложности модели (увеличение числа правил или
нечетких множеств) точно так же улучшается ее способность описывать
реальную систему.
В этом отношении сложность модели можно считать ее достоинством.
Но с увеличением сложности значительно возрастает тот объем инфор-
мации о моделируемой системе, который необходим для определения
параметров модели (таких, например, как параметры функций принад-
лежности всех нечетких множеств). В то же время объем имеющейся
информации о моделируемой системе часто оказывается недостаточным
для того, чтобы построить более сложную модель, и с этой точки зре-
ния сложность модели является ее недостатком. При рассмотрении задач
нечеткого моделирования необходимо задавать некоторые разумные гра-
ницы уровня сложности. И весьма важно иметь представление о том, что
в первую очередь приводит к усложнению модели.
Если обозначить число входов Xi модели через w, и предположить,
что каждый из них задается одинаковым числом z нечетких множеств,
то число г правил, имеющих простые условия, можно определить по фор-
муле (Kahlert 1995):
r = zw. (5.52)
Отсюда следует, что число г правил экспоненциально зависит от чис-
ла w входов модели и числа z имеющихся в ней нечетких множеств. Для
того чтобы дать читателю представление о характере этой зависимости,
сравним модели с одним и двумя входами (рис. 5.51 — 5.53).
Сравнивая рис. 5.51 и 5.52, можно заметить, что при увеличении чис-
ла входов с одного до двух число правил возросло с 3 до 9. Чтобы полно-
стью определить модель с одним входом, необходимо задать 6 параметров
230
Глава 5. Нечеткие модели
Рис. 5.51. Число правил в модели с одним входом, задаваемым тремя нечеткими
множествами S, М, L
Ri R1 R2 R3
X S М L
у S м L
База правил
функции принадлежности, а в случае модели с двумя входами — 15 па-
раметров. На рис. 5.53 представлена модель с двумя входами. Каждый
вход описывается четырьмя нечеткими множествами.
Сравнивая рис. 5.52 и 5.53, мы видим, что увеличение числа нечет-
ких множеств с 3 до 4 привело к увеличению числа правил с 9 до 16,
а числа параметров функций принадлежности— с 15 до 24. Если предпо-
ложить, что для каждого входа используется одинаковое число нечетких
множеств Ац, и что с каждым правилом связано свое нечеткое мно-
жество Bj, то число параметров для задания функций принадлежности
можно найти по формуле:
р = г + w • z = zlL' + w • z. (5.53)
Резкое возрастание числа правил и параметров функций принадлеж-
ности, требующих определения, с увеличением числа входов w демон-
стрируется в табл. 5.14.
Рост числа правил и параметров функций принадлежности при уве-
личении числа входов модели является столь стремительным, что в ли-
тературе его иногда называют «проклятием размерности» (Brown 1995а).
В случаях, когда для определения параметров функций принадлежности
требуется информация о большом числе точек в пространствах входных
и выходных значений, экспертные методы терпят неудачу, и приходится
использовать методы настройки модели на основе нормативных значений
входных и выходных данных, с использованием, например, нейронечет-
ких сетей (Brown 1994). В то же время при большом числе настраиваемых
5.2. Важные свойства правил, баз правил и нечетких моделей 231
Рис. 5.52. Число правил в модели с одним входом, задаваемыми тремя нечет-
кими множествами
232
Глава 5. Нечеткие модели
\*1 4ц 412 41з 414
^21 В\ Вг В. 54
^22 в5 В6 В~ 5g
^23 в9 ^10 5ц ^12
^24 513 5j4 5!5 516
Рис. 5.53. Число правил в модели с двумя входами, задаваемыми четырьмя
нечеткими множествами
5.2. Важные свойства правил, баз правил и нечетких моделей 233
Таблица 5.14
Иллюстрация влияния числа входов и числа нечетких множеств на уровень
сложности нечеткой модели
Число входов, W Число множеств, Z Число правил, г Число параметров, Р
1 2 2 4
2 2 4 8
3 2 8 14
1 3 3 6
2 3 9 15
3 3 27 36
5 3 125 140
10 3 59049 59079
параметров уменьшается способность нейронечетких сетей к обучению,
а при числе параметров, большем 4, их использование становится прак-
тически нецелесообразным (Bossley 1995). Поэтому, оставаясь в рамках
требуемой точности моделей систем, следует стремиться к разумному их
упрощению.
5.2.3. Полнота нечеткой модели
Рассмотрим нечеткую модель, правила которой содержат набор простых
условий (такие условия также называют элементарными), объединенных
с помощью логической связки типа И:
R1 : ЕСЛИ (ж1 = Ап) ... И (х, = Ан) ... И (х„ = Ain)
то (у = В}),
Rj : ЕСЛИ (®i = Ая) ... И (хг = ... И (xn. = Ajn)
ТО (у = BjY
Rm . ЕСЛИ (х । Ami) ... И (хz Amt) • • • И (х?1 — Атп)
ТО (у = Вт).
234
Глава 5. Нечеткие модели
Рис. 5.54. Неполнота нечеткой модели при неполноте нечеткого разбиения
области входных значений X
Область X входных значений определяется как декартово произведе-
ние областей Xi, i — 1,... , п, числовых значений отдельных параметров:
X = Xi х Х2 х ... х Хп.
Символом Y обозначим область выходных значений.
Определение 5.2.3.1. Нечеткая модель является полной, если с каж-
дым входным состоянием х* = (#*,...,£*), принадлежащим области X,
она может связать некоторое выходное состояние у*. Нечеткая модель
является неполной, если с некоторыми входными состояниями х* нель-
зя связать ни одного выходного состояния у*.
Потенциальная возможность построения нечетких моделей, не явля-
ющихся полными, подтверждается примерами на рис. 5.54 и рис. 5.55. Не
следует при этом путать полноту модели с ее точностью. Полная мо-
дель необязательно должна быть точной, однако условием достижения
высокой точности модели является ее полнота.
Как показано на рис. 5.54, причиной неполноты модели может являть-
ся неполнота нечеткого разбиения области входных значений X.
5.2. Важные свойства правил, баз правил и нечетких моделей 235
Определение 5.2.3.2. Нечеткое разбиение области значений Xt пере-
менной хг является полным, если выполнено следующее соотношение:
m
£ма>*)>о. х*ех,,
где т —число нечетких множеств Aji, которые могут быть значениями
переменной х?.
Определение 5.2.3.2 предполагает, что каждое из значений х* пере-
менной Xi из области значений Хг принадлежит хотя бы одному нечетко-
му множеству Aji. Неполное нечеткое разбиение области значений, как
в примере на рис. 5.54, не является абстрактным понятием — такие раз-
биения встречаются в научных публикациях, и появляются они в некор-
ректно построенных самообучающихся нечетких моделях. В ходе обу-
чения изменяются параметры функций принадлежности, что приводит
к смещению, а также расширению либо сужению последних, и без при-
нятия предупредительных мер возможно появление интервалов, которые
не покрываются ни одним нечетким множеством Aji.
Модель, представленная на рис. 5.55, является неполной, посколь-
ку для входного состояния х — х„1 невозможно определить значение у
на выходе. Причиной этого является неполнота базы правил. Как извест-
но, условия правил содержат лингвистические оценки входных состояний
236
Глава 5. Нечеткие модели
Рис. 5.56. Нечеткая модель с полным разбиением области X входных значений
и полной базой лингвистических правил
(х = S, х = L), а заключения указывают на то, какое выходное состояние
(также заданное в форме лингвистической оценки) соответствует вход-
ному состоянию, заданному в условии. В базе правил, представленной
на рис. 5.55, не содержится ни одного правила, задающего значение у
на выходе модели для входного значения х = М, и если состояние х
на входе оценивается в точности как «среднее» (/хд/(х) = 1), что соот-
ветствует ситуации х = хш, то не активизируется ни одно из правил R1,
R2, и вычислить выходное значение становится невозможным, поскольку
результат дефаззификации неопределен (0/0).
Для сравнения на рис. 5.56 показана поверхность нечеткой модели
из предыдущего примера (рис. 5.55), у которой как база правил, так
и разбиение множества входных значений X являются полными.
Полная нечеткая модель на рис. 5.56 представляет собой более точ-
ную модель реальной системы, чем являющиеся неполными модели
на рис. 5.54 и рис. 5.55. Как несложно заметить, неполная модель зна-
чительно отличается от полной. На рис. 5.57 дано трехмерное представ-
ление модели с лингвистически неполной базой правил. Сплошными ли-
ниями выделены участки, имеющие высокую точность, а пунктиром —
участки, соответствующие низкой точности либо недостаточной надеж-
ности вычислений. Точность модели уменьшается по мере увеличения
расстояния между опорными точками модели, которые задаются на ос-
нове хорошо знакомых правил, содержащихся в базе. С помощью данной
модели невозможно вычислить выходное значение у для представленных
5.2. Важные свойства правил, баз правил и нечетких моделей 237
y(an,a24)=Q/0
y(ai2,a24)=0/0
у(«п,«2з)=0/0
у(Я14,Л21)=0/0
У («14, Я22)=0/0
У («13, а21)=0/0
Х2\ Л]] Л12 Лз А\4
^21 В\ в2
Л 22 В5 В6 By
Лз B\Q Bu В\2
Я24 В,5 516
Рис. 5.57. Нечеткая модель с лингвистически неполной базой правил и полным
нечетким разбиением области входных значений X = х Х2
238
Глава 5. Нечеткие модели
на рис. 5.57 входных состояний (аи,а2Д а также для промежуточных
состояний, лежащих на границе области значений X = Xi х Х2-
Отсутствие ряда правил, т. е., например, отсутствие информации
о том, какое выходное нечеткое множество Вд. соответствует входно-
му лингвистическому состоянию, задаваемому с помощью логического
произведения А±г Л A2j- (наличие в базе правил пустых полей) означа-
ет, что модели можно доверять только в пределах зоны, соответствую-
щей имеющемуся набору правил (рис. 5.57). При удалении от этой зоны,
в пустых полях, степень доверия к модели уменьшается. Для сравнения
на рис. 5.58 дано трехмерное представление модели с лингвистически
полной базой правил.
Следует различать лингвистическую и численную полноту базы пра-
вил. Определим вначале лингвистическую полноту.
Определение 5.2.3.3. Пусть в нечеткой модели каждый вход хг за-
дан элементарным лингвистическим множеством Х\ = (A*i,..., А?>),
пространство входных лингвистических значений задано элементарным
лингвистическим множеством Xz — Х[ х ... х Х1П, которое опре-
деляет все возможные лингвистические состояния входного вектора
(Ai/c, А2/,..., Апр), а выход у задан элементарным лингвистическим мно-
жеством Y1 = (В1,...,ВШ). База правил модели называется лингви-
стически полной, если каждому входному лингвистическому состоянию
(А^, А2/,..., Апр) она ставит в соответствие хотя бы одно выходное линг-
вистическое состояние Bj.
Заметим, что лингвистическая полнота базы правил не является абсо-
лютным или необходимым условием полноты нечеткой модели. Пример,
иллюстрирующий это утверждение, приведен на рис. 5.59.
В представленной на рис. 5.59 ситуации, несмотря на неполноту ба-
зы правил, достичь полноты нечеткой модели удалось за счет правильно
подобранной формы функций принадлежности Таким обра-
зом, с помощью данной модели выходное значение у можно вычислить
для каждого входного значения .г, в том числе для xni, что являлось
невозможным в условиях примера на рис. 5.55.
В литературе приводятся разные определения полноты базы правил,
но они относятся к виду полноты, который можно определить как числен-
ную полноту (Kahlert 1995; Driankov 1993,1996). Приведем определение
численной полноты, которое основано на определении полноты, данном
Калертом (Kahlert 1995) (без указания того, лингвистическая это полнота
или численная).
5.2. Важные свойства правил, баз правил и нечетких моделей 239
^2\ А1 ^12 ^13
^21 51 В2 53 в4
^22 Bs в6 By В*
^23 В9 ^10 5ц ^12
24 ^13 ^14 ^15 5,6
Рис. 5.58. Нечеткая модель с лингвистически полной базой правил и полным
нечетким разбиением областей входных значений X} и Х%
240
Глава 5. Нечеткие модели
Рис. 5.59. Полная нечеткая модель с лингвистически неполной базой правил
Определение 5.2.3.4. Численно полной называется база правил,
для которой каждое четкое входное состояние (а^,..., x*N) приводит к ак-
тивизации хотя бы одного правила (т. е. его заключения).
Поскольку активация «хотя бы одного правила» позволяет вычислить
значение на выходе модели, это определение, по своей сути, соответ-
ствует определению 5.2.3.1 полной нечеткой модели. Согласно данному
определению, в случае неполноты нечеткого разбиения областей зна-
чений входных параметров даже лингвистически полная база правил
может не являться полной численно (рис. 5.54). Вместе с тем, линг-
вистически неполная база правил может быть численно полной, если
подобраны функции принадлежности с достаточно широкими носителя-
ми (рис. 5.59). В литературе по нечетким системам под полнотой баз
правил понимается лингвистическая полнота. В итоге рассмотрения дан-
ной темы могут возникнуть следующие вопросы:
1. Должна ли быть нечеткая модель полной?
2. Должна ли быть база правил лингвистически полной?
3. Должна ли быть база правил численно полной?
Ответы на вопросы 1 и 3 будут одинаковыми, поскольку понятие
полноты модели соответствует понятию численной полноты базы пра-
5.2. Важные свойства правил, баз правил и нечетких моделей 241
А0 \ NM NS Z PS м
NM РМ
NS PS Z
Z РМ PS Z NS NM
PS Z NS
РМ NM
N — отрицательный, Р — положительный, М — средний, S — малый, Z — нулевой,
0 — угловое смещение маятника относительно линии отвеса,
/ — текущая мощность приводного двигателя,
ДО — оценка смещения маятника (изменение угла 0 в единицу времени)
Рис. 5.60. Лингвистически неполная база правил нечеткого регулятора пере-
вернутого маятника
вил. Нечеткая модель может быть неполной, если области ее неодно-
родности лежат в неиспользуемых моделью (регулятором) частях про-
странства входных и выходных значений. Аналогично, база правил мо-
жет быть лингвистически неполной, если не встречающиеся в правилах
входные и выходные состояния модели не являются для нее рабочими.
На рис. 5.60 приводится пример нечеткого регулятора с лингвистически
неполной базой правил, стабилизирующего перевернутый маятник в вер-
тикальном положении* (Kosko 1992).
Вместе с тем, использование неполных моделей связано с риском,
и потому их следует предварительно подвергать тщательному анализу
на предмет выявления неопределенных состояний, которые могут воз-
никнуть в реальных условиях функционирования.
5.2.4. Непротиворечивость базы правил
Определение 5.2.4.1. База правил называется непротиворечивой (со-
гласованной), если она не содержит несовместные правила, т. е. правила,
имеющие одинаковые условия, но разные заключения.
На рис. 5.61 приведен пример модели, содержащей несовместные
правила. Правила R1 и R2 в модели на рис. 5.61 имеют одинако-
вые условия (.г = Малый), но разные заключения (у = Малый)
и (у — Очень большой). Поскольку заключения правил выражают диа-
метрально противоположные понятия («малый» и «очень большой»),
то в данной ситуации можно говорить о «сильной» несовместности пра-
вил.
* Здесь (на рис. 5.60) V(I) — скорость перемещения тележки, на которой установлен
перевернутый маятник. — Прим. ред.
242
Глава 5. Нечеткие модели
База правил
7?1: ЕСЛИ (х = 5) ТО (у = 5)
R2: ЕСЛИ (х=М) ТО (у= VL)
R3: ЕСЛИ (х = М) ТО (у = М)
R4: ЕСЛИ(х = £) TO(y = Z)
S- малый
М— средний
L - большой
VL - оченьболыпой
Рис. 5.61. База правил с «сильной» несовместностью правил R1 и R2, а также
поверхность отображения X Y модели
Рис. 5.62. База правил, содержащая «слабо» несовместные правила R2 и ЯЗ,
а также поверхность отображения X Y модели
В модели на рис. 5.62 также есть несовместные правила. Однако
в данном случае мы можем говорить, что их несовместность является
«слабой», поскольку модальные значения несовместных заключений М
и L расположены близко друг к другу.
Таким образом, степень несовместности правил может быть выше или
ниже, в зависимости от того, как расположены друг относительно друга
5.2. Важные свойства правил, баз правил и нечетких моделей 243
Рис. 5.63. Примеры неоднозначности систем, приводящей к правилам с одина-
ковыми условиями, но разными заключениями
модальные значения их заключений. Рассмотрим, что может являться
причиной существования несовместных правил в базе.
Несовместность может быть вызвана, во-первых, ошибкой, допущен-
ной в ходе формирования правил, особенно в случае большого их чис-
ла. Другой причиной может стать неоднозначность моделируемой систе-
мы, т. е. ситуация, когда измерения входных и выходных данных си-
стемы не являются однозначными, и одному входному состоянию ж*
могут соответствовать различные выходные состояния — см. примеры
на рис. 5.63.
Таким образом, «несовместные» правила не являются таковыми на са-
мом деле, поскольку они отражают верную информацию о системе. Для
того чтобы в случае неоднозначности системы (например, при гистерези-
се*) избежать наличия несовместных правил, необходимо устранить ее
неоднозначность, возникающую, если модель имеет слишком мало вход-
ных параметров. Так, модель гистерезиса (рис. 5.63) становится однознач-
ной при представлении ее в трехмерной системе координат с входными
параметрами x(k), у (к — 1) и выходным параметром у (к) (Piegat 1995с).
В нечеткой модели, содержащей несовместные правила, выполняется
операция усреднения (или близкая к ней, в зависимости от типа ис-
пользуемых операторов). Примером может служить модель на рис. 5.61,
вычисляющая у = 0.5(?/s + yvi) при х — xs, а также модель на рис. 5.62,
для которой у = 0.5(угп 4- yi) при х = хт.
Как отмечалось ранее, несовместность правил может проявляться
в большей или меньшей степени. Интересное определение, позволяю-
щее оценивать уровень несовместности, приводится в (Leichtfried 1995).
В данном определении рассматривается нечеткая модель, содержащая
Гистерезис - в рассматриваемом случае это неоднозначная зависимость некоторой
физической величины от другой величины при циклическом изменении (увеличении
и уменьшении) последней. — Прим. ред.
244
Глава 5. Нечеткие модели
правила следующего вида:
Rj : ЕСЛИ {ху = Лд)... И (хг = Agi)... И (хп = Ajn)
ТО (у = В^
где хг,..., хп — входные значения,
Л1г,..., Ami — нечеткие множества входных значений х^
Bi,..., Bm ~ нечеткие множества выходных значений у,
Xi — область значений переменной ящ
X = Xi х ... х Хп — пространство входных значений модели.
Если для операции И используется оператор PROD, то степень вы-
полнения условия правила Rj для входного состояния х* =
можно найти по формуле:
= /л.А]1 (Д) •... M.4jre(4), Vx* е X. (5.55)
Определение 5.2.4.2. База, содержащая т правил Rj, j = 1,... , m, яв-
ляется полной и совместной, если выполнено соотношение
f>(x*) = l, Vx*eX. (5.56)
j=i
Приведенное соотношение означает, что сумма степеней выполнения
условий всех правил для любого входного состояния х* е X равна 1.
Если сумма выполнения условий меньше 1, то для входного состояния х*
база правил является неполной. Если же данная сумма больше 1, то для
входного состояния х* правила несовместны.
Соотношение (5.56) можно понимать в терминах процесса принятия
решений. Решение у*(х*) определяется базой правил на основе степе-
ней выполнения условий /Р(х*). И если сумма этих степеней меньше 1,
то решение у*(х*) является недостаточно обоснованным, что, в свою оче-
редь, означает неполноту знаний о системе, содержащихся в базе правил.
Если же сумма степеней выполнения условий больше 1, то это свидетель-
ствует о наличии факта несовместности правил, который в данной ситуа-
ции проявляется в следующем: если условие некоторого правила удовле-
творяется полностью (степень выполнения равна 1), то в базе существуют
также другие правила, условия которых выполняются частично.
В результате заключение (выходное значение модели) у*(х*) опре-
деляется не только полностью активизированным правилом, а содер-
жащаяся в этом правиле информация перестает быть истинной (пра-
вило перестает «говорить правду»). Пример подобной ситуации показан
на рис. 5.64.
5.2. Важные свойства правил, баз правил и нечетких моделей 245
База правил
R1: ЕСЛИ (х = 10) ТО (у= 10)
R2: ЕСЛИ (х=20) ТО (у= 14)
R3: ЕСЛИ (х=40) ТО (у = 30)
3
PsiyCm) = •> Рм(%тп) ~ ~ й ’ (^т) 2
-j »э 7
3 = 1
Уз * Psfam) “Ь Ут ’ РМ (^С^п) 4" У1 ’ РЬ^т)
Psfam') “Ь РМ (^’т) ~Ь РЬ&т)
4 (2/3) -Е 14 - 1 -Е 40 - (1/3)
_ -----------------------------
Рис. 5.64. Пример нечеткой модели, в которой сумма степеней выполнения
условий для отдельных входных состояний больше 1
В примере на рис. 5.64 при х = хт = 20 условие правила R2 удо-
влетворяется полностью, т. е. /is (20) = 1. В этом случае, в соответствии
с содержащейся в правиле информацией:
ЕСЛИ (х примерно равно 20) ТО (у примерно равно 14),
выходной параметр у должен получить значение у* = ут = 14. Тем
не менее, поскольку при х = хт активизируются также правила R1 и R2,
то они тоже участвуют в принятии решения в отношении значения у*,
изменяя результат так, что у* — 15. Поверхность модели не проходит
через задаваемую правилом R2 точку Р(20,14), проходя вместо этого
через точку Р\ (20,15).
Модели, в которых сумма степеней выполнения условий отлична от 1,
также имеют право на существование и используются достаточно часто,
246
Глава 5. Нечеткие модели
поскольку сложно обеспечить равенство 1 в любой ситуации. Примеры
подобных моделей легко найти в литературе — см., например, (Кпарре
1995; Altrock 1993; Zimmermann 1994а) и др. При соответствующей на-
стройке параметров указанные модели также имеют высокую точность.
Вместе с тем, нельзя не заметить их недостаток, состоящий в том, что
вычисляемые моделью выходные значения отличаются от тех, которые
фигурируют в правилах.
5.2.5. Связность базы правил
Понятие связности базы правил вводится с помощью определения 5.2.5.1
(Driankov 1993,1996).
Определение 5.2.5.1. База правил называется связной, если в ней нет
смежных правил Rj, Rk таких, что пересечение содержащихся в их за-
ключениях нечетких множеств В3, является пустым, т. е. В3Г\В^ = 0.
Иными словами, для любого у, принадлежащего области значений Y вы-
ходного параметра, выполняется соотношение:
Ув, (у) Увк {у) + о, Vy : у € К (5.57)
Rt R1 R2 R3 R4 R5 R6
X А\ ^3 А
У В\ в5 Вз в2 В6
Рис. 5.65. Нечеткая модель, имеющая несвязную базу правил. Для дефаззифи-
кации используется метод Н (одноэлементных множеств)
5.2. Важные свойства правил, баз правил и нечетких моделей 247
Rt Ri R2 R3 R4 R5 R6
X Л ^2 Аз Л4 Л А
У 5, в5 Вз 54 В2 56
Рис. 5.66. Нечеткая модель, имеющая связную базу правил. Для дефаззифика-
ции используется метод Н (одноэлементных множеств)
Под «смежными» следует понимать правила, задаваемые в смежных
ячейках таблицы правил (рис. 5.65). Нечеткая модель на рис. 5.66 имеет
связную базу правил, а на рис. 5.65 — несвязную. В модели на рис. 5.65
имеется ряд смежных множеств, не удовлетворяющих условию связности
(5.57) — такими множествами являются, например, В5, содержащи-
еся в смежных правилах RI, R2. Сравнивая поверхности моделей со
связной (рис. 5.66) и несвязной (рис. 5.65) базами правил, мы видим, что
связность базы правил повышает гладкость поверхности модели, а несвяз-
ность обусловливает появление на ней участков резкого подъема (круто-
го спуска). Разумеется, в случае связной базы правил не всегда удается
получить поверхности, обладающие такой, как на рис. 5.66, степенью ре-
гулярности— последняя будет зависеть от расположения модальных зна-
чений выходных множеств В7.
Возникает вопрос: должна ли база правил нечеткой модели (регулято-
ра) быть связной? Ответ на него зависит от вида поверхности моделируе-
мой системы. Если поверхность имеет обширные участки крутого спуска,
то для нее невозможно получить точное представление с помощью моде-
ли, имеющей связную базу правил. Если же поверхность гладкая, то мо-
дель со связной базой правил будет точной. В случае нечетких регуля-
торов чаще всего требуются гладкие поверхности отображения входных
248
Глава 5. Нечеткие модели
параметров в выходные, поскольку участки крутого спуска подразуме-
вают сильные и резкие изменения управляющих переменных объекта,
и поэтому в данной ситуации рекомендуется использовать связные базы
правил. Вместе с тем, данное требование не является абсолютно необхо-
димым, поскольку могут существовать и процессы (объекты, системы),
в которых требуются резкие изменения управляющих переменных и, ста-
ло быть, регуляторы с несвязными базами правил.
В модели с одним входом х каждое правило может иметь не более
двух смежных, в то время как в модели с двумя входами х± и х2 может
быть до восьми смежных правил. С увеличением числа входов модели
число правил резко возрастает, что, в свою очередь, приводит к усложне-
нию оценки связности базы правил, поскольку становится невозможным
выполнить эту оценку путем визуального контроля таблицы правил.
5.2.6. Избыточность базы правил
Иногда встречаются нечеткие модели, содержащие два или более иден-
тичных правила (т. е. правила, у которых совпадают условия и заключе-
ния). Причинами подобной ситуации могут быть:
1) ошибка, допущенная при проектировании базы правил (при большом
числе правил);
2) в случае самоорганизующейся нечеткой модели, генерация дополни-
тельных правил, идентичных имеющимся, с целью усиления их за-
ключений.
В первом, очевидном, случае избыточное правило следует исключить.
Второй случай требует разъяснения (рис. 5.67).
Поверхность модели Ml в точке х = хт значительно отличается
от поверхности реальной системы (точки Pi и Р). Столь значитель-
ная ошибка возникла вследствие неправильного выбора параметра ут
выходной функции принадлежности ум(у)- Самообучающаяся модель в
подобной ситуации может сформировать дополнительное правило, сов-
падающее с R2. Два одинаковых правила R2 можно заменить одним
правилом R2*, заключение которого имеет вид логической суммы:
(ЕСЛИ (х - АР) ТО (у = АР)) U (ЕСЛИ (х = АР) ТО (у = АР)) =
= ЕСЛИ (х - АР) ТО (у - АР U АР).
(5.58)
При выполнении логического суммирования на основе операто-
ра МАХ будет получено множество
АР* = АР U М = АР.
5.3. Рекомендации по построению базы правил
249
Рис. 5.67. Сравнение нечетких моделей Ml и М2, соответственно без избыточ-
ности и с избыточностью базы правил
В случае использования других операторов, например SUM (суммиро-
вание функций принадлежности), результирующее множество М* будет
иметь вид MUM 7^ М, приводящий к усилению получаемого заключения
и уменьшения ошибки модели (точки Р и Р2 на рис. 5.67). Таким обра-
зом, несколько совпадающих правил можно заменить одним правилом,
заключение которого соответствующим образом усилено.
5.3. Рекомендации по построению базы правил
База правил должна обеспечивать возможность достижения требуемой
точности нечеткой модели (после того, как определены параметры по-
следней). Одновременно с этим, чтобы уменьшить стоимость вычислений
и сделать модель более «прозрачной» (интуитивно понятной), число пра-
вил, содержащихся в базе, должно быть как можно меньшим. Более того,
сокращение числа правил в модели с несколькими входами может быть
предварительным требованием для выполнения настройки ее параметров.
В литературе можно встретить утверждения о том, что настройка модели,
250
Глава 5. Нечеткие модели
Результаты измерения
значений (х15 х2)
Л2тах j к
X
•Х-2тт 1 т
Область
значений
|^lmin 1^1 max Х[
Рис. 5.68. Задание области X значений входных параметров модели на основе
распределения результатов измерения их значений (^1,^2)
имеющей более четырех входных параметров, практически невозможна
либо трудновыполнима (Bossley 1995).
Указанные свойства нечеткой модели — точность и число правил —
являются взаимоисключающими. При большом числе правил достиже-
ние высокой точности модели потенциально является более простой за-
дачей, а уменьшение числа правил в модели в общем случае снижает ее
точность. При выборе числа правил необходимо учитывать следующие
рекомендации:
1. Число правил увеличивается при уплотнении сетки, используемой
для разбиения пространства X входов модели.
2. Плотность используемой для разбиения сетки следует увеличивать
в случае более рельефной поверхности отображения X —> Y модели.
3. При неизменной плотности сетки (неизменном числе правил) точность
модели может быть повышена путем правильного размещения зада-
ваемых правилами опорных точек ее поверхности.
Приведем пояснения к замечаниям 1-3. Если задано распределение
значений (яц, Т2) входов системы, то можно задать также и область зна-
чений X для них (рис. 5.68).
После того как установлена область X значений входов модели, сле-
дует выбрать плотность сетки ее разбиения. В ситуации, когда мы знаем
либо предполагаем, что поверхность отображения X —> Y системы яв-
ляется существенно нелинейной и рельефной (рис. 5.69), необходимо ис-
пользовать более плотную сетку. В случае плоской (близкой к линейной)
поверхности необходимость в таком разбиении отсутствует (рис. 5.70).
После того, как выбрана плотность сетки разбиения, можно присту-
пать к формированию правил, задающих опорные точки поверхности мо-
5.3. Рекомендации по построению базы правил
251
Рис. 5.69. Пример ситуации, когда плотность разбиения пространства входов
необходимо увеличивать по причине более рельефной поверхности отображения
X У, реализуемого моделируемой системой
Рис. 5.70. Сетка разбиения в случае плоской (или практически плоской) по-
верхности реализуемого системой отображения X У
дели. Существует два фундаментальных метода расположения опорных
точек.
А. Расположение точек по углам прямоугольных сегментов сетки разби-
ения.
Б. Расположение точек в центре сегментов.
252
Глава 5. Нечеткие модели
Рис. 5.71. Пример нечеткой модели с расположением опорных точек по углам
сегментов разбиения пространства X = Xi х Х2 входных значений
На рис. 5.71 приведен пример использования метода А. Если правила
определяются для угловых точек прямоугольных сегментов пространства
входных значений, то соответствующий каждому сегменту участок по-
верхности модели задается четырьмя правилами, соответствующими его
угловым точкам. В случае модели, представленной на рис. 5.71, для зада-
ния поверхности, соответствующей всей области значений X = Xi х Х2,
используется девять правил:
7?1 : ЕСЛИ =Лп) и (ж2 = Л21) ТО =
R2 : ЕСЛИ (П = Л12) И Щ = Л21) ТО (у = В2)
R3 : ЕСЛИ Ои = Л13) И Щ = Л21) ТО (у = В3)
RA : ЕСЛИ (Т1 = АП) И (.Т2-Л22) ТО (у = В4)
R5 : ЕСЛИ (Ж1 = Л12) И (х2 = Л22) ТО (у = В5)
R6 : ЕСЛИ (xi = Л13) И (х2 = А22) ТО (у = Вб)
R7 : ЕСЛИ (Xi = Лп) И (ж2 = Л23) ТО (у = В7)
R8 : ЕСЛИ (хт = Л]2) И (х2 = Л23) ТО (у = Bg)
R9 : ЕСЛИ (Х1 = Л13) И (х2 = Л23) ТО (у = В9) (5.59)
Приведенные правила содержат информацию о выходных значениях
модели при входных состояниях в точности соответствующих
5.3. Рекомендации по построению базы правил
253
Рис. 5.72. Пример нечеткой модели с размещением задаваемых правилами
опорных точек в центре сегментов разбиения области значений
X = XY х Х2
угловым точкам сегментов. Например, для — ai2, х2 = «22 выходное
состояние имеет вид у — Ь$. В пространстве между угловыми точками
нечеткая модель производит интерполяцию, характер которой зависит
от методов вывода и дефаззификации, а также вида функций принад-
лежности.
Метод Б, в рамках которого задаваемые правилами опорные точки
размещаются в центре сегментов, представлен на рис. 5.72.
Используя метод Б для той же области значений X, что и на рис. 5.72,
получаем базу правил вида (5.60), содержащую только 4 правила:
R1 : ЕСЛИ (хх = Ап) И
R2 : ЕСЛИ (дц - Ап) И
R3 : ЕСЛИ (дц - А12) И
7?4 : ЕСЛИ (дц = А12) И
Щ = A2i) ТО (у = В3)
Ц‘2 = Л2г) то (у = Bi)
(.г2 = Л21) ТО (у = В4)
(хз = Л22) ТО (у = В2)
(5.60)
Как видно из рис. 5.71 и 5.72, метод Б позволяет создавать нечеткие
модели с меньшим числом правил, чем в случае использования метода А.
В свою очередь, меньшее число правил приводит к уменьшению объема
измеряемой информации, необходимой для моделирования системы.
254
Глава 5. Нечеткие модели
Правила (5.60) содержат точную информацию о выходных состояни-
ях модели в точках, соответствующих (в большей или меньшей степени)
центрам сегментов. Для точек, находящихся между ними, выходное зна-
чение модели вычисляется на основе нечеткой интерполяции. За преде-
лами участка между опорными точками заметны области насыщения, со
значениями Ьг, которые соответствуют ближайшим опорным точкам. Точ-
ность модели в данном диапазоне, как правило, является низкой. Подводя
итог, для каждого из двух рассмотренных методов определения правил
можно указать следующие достоинства и недостатки.
Метод А (опорные точки по углам сегментов)
• Достоинства:
- более высокая точность модели, в том числе на границах простран-
ства X входных значений.
• Недостатки:
- большее число правил, приводящее к менее «прозрачным» (интуи-
тивно понятным) моделям,
- больший объем информации, требуемой для определения правил.
Метод Б (опорные точки в центре сегментов)
• Недостатки:
- меньшая точность модели по сравнению с методом А, особенно
на границах области значений.
• Достоинства:
- меньшее, по сравнению с методом А, число правил, что приводит
к большей «прозрачности» модели,
- меньший объем измеряемой информации, необходимой для форми-
рования правил.
Перед началом настройки модели параметры опорных точек av, bk
могут, например, быть распределены равномерно. В процессе настрой-
ки происходит изменение позиций опорных точек (параметров нечетких
множеств в правилах), обеспечивая все более высокую точность модели.
Большее число опорных точек потенциально может привести к достиже-
нию большей точности нечеткой модели (при условии эффективно выпол-
ненной настройки), но одновременно с этим процесс настройки модели
становится все более сложным.
5.4. Сокращение базы правил
Основная сложность процесса настройки многомерных самообучающих-
ся нечетких моделей (таких как, например, нейронечеткие сети, основан-
5.4. Сокращение базы правил
255
Рис. 5.73. Бессеточные разбиения входного пространства: прямоугольное раз-
биение (а), квадратичное разбиение (б); а также сеточное разбиение (в)
ные на регулярном гиперпрямоугольном разбиении пространства вход-
ных значений) заключается в большом числе подлежащих настройке па-
раметров. При этом данное число стремительно растет с увеличением
количества входов и числа нечетких множеств, используемых для оцен-
ки их значений. Исследованию данной проблемы, которая уже обсужда-
лась в разд. 5.2.2 и была названа в литературе «проклятием размерности»
(Bossley 1995), посвящен ряд научных работ. Один из способов, предла-
гаемых для ее решения, состоит в переходе от регулярного разбиения
входного пространства к нерегулярному (Su 1995; Kwon 1994), состоя-
щему из непрямоугольных сегментов. Другой способ заключается в том,
чтобы отказаться от сеточного разбиения входного пространства и ис-
пользовать бессеточные разбиения (Brown 1995а), такие как:
• прямоугольное разбиение (k-d tree partition),
• квадратичное разбиение (quad tree partition).
Сущность каждого из этих разбиений поясняется примерами
на рис. 5.73.
Целью применения бессеточных разбиений является уменьшения чис-
ла нечетких сегментов. Разбиение входного пространства будет плотнее
в тех областях, где для моделируемой системы поверхность отображе-
ния X —> Y изменяется более резко (крутые спуски, неравномерности),
и менее плотным в областях с более гладкой поверхностью.
В пределах каждого сегмента разбиения для задания поверхности ис-
пользуется только одно правило, поэтому здесь целесообразно использо-
вать модели Такаги—Сугено, которые будут рассматриваться в разд. 5.7.7,
и в которых заключение каждого правила представляет собой не нечет-
кое множество, а функцию (как правило, линейную). Примером такого
правила может служить выражение вида
ЕСЛИ (.Т1 = Ац) И (.r2 = A2i) ТО (?/= ац^1 + a2iT2 + aOi). (5.61)
256
Глава 5. Нечеткие модели
Рис. 5.74. Бессеточное разбиение входного пространства на три сегмента S1-S3
и заданные функции принадлежности нечетких множеств
Тем не менее, здесь могут использоваться и модели Мамдани — см.
пример 5.4.1.
Пример 5.4.1. Пусть имеется бессеточное прямоугольное разбиение
входного пространства X = Х± х Х2, и заданы функции принадлежно-
сти (рис. 5.74). Каждому сегменту может соотвтетствовать одно правило,
задающее участок поверхности модели, связанный с данным сектором.
Таким образом, вместо четырех, модель содержит три правила следую-
щего вида:
R1 : ЕСЛИ (хг = Лп) И (х2 - Л2Д ТО (у = Вх),
R2 : ЕСЛИ (хх = Л12) И (х2 = Л21) ТО (у = В2),
ВЗ : ЕСЛИ (XI = Л13) И (т2 = Л22) ТО (у = В3). (5.62)
Поверхность модели показана на рис. 5.75.
Возможность задания большого сегмента S3 входного пространства X
(рис. 5.74) при помощи только одного правила обусловлена тем, что в нем
используется функция принадлежности Лхз, ядро которой по своей про-
тяженности охватывает практически всю длину сегмента.
Для использования бессеточного разбиения входного пространства
необходимо предварительно установить характер изменчивости поверх-
ности моделируемой системы в различных его областях — только в этом
случае можно принять обоснованное решение об использовании боль-
шей или меньшей плотности разбиения. Необходимая для этого инфор-
5.4. Сокращение базы правил
257
Рис. 5.75. Поверхность модели (5.62), основанной на бессеточном разбиении
входного пространства
мация может быть получена, например, на основе кластерного анали-
за выборки измерений входных и выходных данных (Babuska 1996) —
см. разд. 6.3.3.2.
Заметим, что база правил (5.62) является лингвистически неполной,
поскольку в ней присутствуют не все возможные комбинации входных
нечетких множеств Ац, A2j. Вместе с тем, она является численно полной,
вследствие использования гауссовых функций принадлежности с неогра-
ниченными носителями. При любом входном состоянии (х*, х%) G Х± хХ2
активизируется хотя бы одно правило, благодаря чему, вне зависимости
от параметров этих функций (величин левого и правого разбросов), мож-
но вычислить выходное значение модели.
Возможность задания большого сектора S3 обусловлена использо-
ванием нечеткого множества А13 с соответствующим размером ядра
(рис. 5.74). Использование подобных функций принадлежности является
одним из методов, позволяющих уменьшить число правил. Существует
также метод, основанный на уменьшении числа используемых в моде-
ли нечетких множеств и позволяющий уменьшить число правил и/или
упростить их форму (уменьшение числа подусловий правил). Поясним
сущность данного метода на примерах (Piegat 1997с).
Пример 5.4.2. Рассмотрим адаптивную нечеткую модель, способную на-
страивать свои параметры на основе измерений входных и выходных дан-
ных моделируемой системы. Предположим, что в начале процесса адапта-
258
Глава 5. Нечеткие модели
7?1: ЕСЛИ (х = 5) ТО (у = 5)
R2: ЕСЛИ (х = М) ТО (у=М)
R3: ЕСЛИ (x=L) ТО (y=L)
R4: ЕСЛИ (х= VL) ТО (у = 7L)
Модель ут(х)
Дефаззификации
с использованием
метода высот
х
S- малый
М— средний
L - большой
VL - очень большой
*5 хм xL xVL х
Рис. 5.76. Поверхности моделируемой системы
и модели в начале процесса
адаптации
ции было выбрано равномерное распределение функций принадлежности
(рис. 5.76). На этом рисунке представлены также поверхность моделиру-
емой системы и начальный вид поверхности нечеткой модели.
Пусть в результате настройки модели получены параметры функций
принадлежности и поверхность модели, показанные на рис. 5.77. Нечет-
кие множества «средний» и «большой» имеют близкие модальные значе-
ния хт и xi, в связи с чем объединение этих множеств в одно множество
М* = М U L не должно привести к чрезмерному уменьшению точно-
сти модели, которая может оцениваться, например, с помощью суммы
величин абсолютных ошибок по формуле:
п
I = 52 ~ (5-63)
i=l
где п — объем выборки входных и выходных измерений значений пара-
метров системы.
Одновременно с объединением множеств М U L в результирующее
множество М* относительно переменной х следует также объединить
относительно переменной у соответствующие множества М и L, находя-
щиеся в заключениях правил. Объединение можно выполнить, например,
по формуле (5.64), с использованием оператора SUM:
Мм*(у) = 8иМ(/ш(?/),мДу))- (5.64)
5.4. Сокращение базы правил
259
Я1: ЕСЛИ(х = 5) ТО (у = S)
R2: ЕСЛИ(х = Л/) ТО (у = М)
R3: ЕСЛИ(х = £) ТО(у = £)
R4: ЕСЛИ(х = VL) ТО (у= VL)
Модель ^(х)
Дефаззификация
с использованием
► метода высот
х
*s *м Ч
XVL X
Рис. 5.77. Поверхности моделируемой системы и модели по завершении на-
стройки параметров
Рис. 5.78. Поверхности моделируемой системы и модели после сокращения
нечетких множеств (М U L = М*)
Результат применения данного метода объединения и полученная
на его основе поверхность модели представлены на рис. 5.78.
Как видно из рис. 5.78, уменьшение числа множеств путем их объеди-
нения не привело (в данном случае) к существенному изменению точно-
260
Глава 5. Нечеткие модели
7?1: ЕСЛИ(х = 5) ТО (у = 5)
R2: ЕСЛИ(х=Л/*)ТО (у=М*)
R3: ЕСЛИ(х = VL) ТО (у= VL)
Модель ут(х)
Дефаззификация
с использованием
метода высот
х Ум*=®-5(Ум+Уь)
xM*=0.5(xM+xL)
xs хм*
XVL х
Рис. 5.79. Поверхности моделируемой системы и модели после объединения
нечетких множеств М и L с применением упрощенного метода
сти модели, хотя число правил уменьшилось с 4 до 3. В случае моделей
со многими входами можно добиться значительно большего сокращения
числа правил (см. разд. 5.2.2).
Для нахождения результирующих множеств М* вместо формулы
(5.64) можно также использовать упрощенный метод, учитывающий то,
что модальные значения этих множеств расположены посередине между
модальными значениями множеств М и L, в соответствии с формулой
(5.65). В этом случае мы получим немного другую поверхность модели,
представленную на рис. 5.79:
Д/* = 0.5(жд/ + xL), ум* = 0.5(уЛ/ + уь). (5.65)
Таким образом, объединение двух нечетких множеств может быть вы-
полнено с применением обычного (5.64) или упрощенного (5.65) метода.
Выбор конкретного метода зависит от того, насколько уменьшится точ-
ность модели при использовании каждого из них. В некоторых случаях
объединение множеств может привести даже к повышению точности.
Функции принадлежности нечетких множеств в примере 5.4.2 удовле-
творяют условию разбиения единицы. Рассмотренный подход применим
для двух смежных множеств во входном пространстве, имеющих близкие
модальные значения. В случае трапециевидных множеств объединение
возможно, если они являются смежными, а их ядра расположены близко
друг к другу.
5.4. Сокращение базы правил
261
В(Л2, Аз) =-----------< А
£max ^min
Рис. 5.80. Пример смежных трапециевидных нечетких множеств, расположен-
ных близко друг к другу
Понятие «близости» множеств связано не только с расстоянием L
между их ядрами (рис. 5.80), но также должно учитывать длину носите-
ля множества (<rmax — ^min)- Таким образом, «близкими» могут считаться
только такие смежные множества A*, А^ц, для которых показатель В от-
носительной близости (схожести), выражаемый формулой (5.66), не пре-
восходит некоторого предельного значения:
В(Аг, Д+1) = La^-- X. (5.66)
Значение А выбирается проектировщиком модели. При больших зна-
чениях А следует ожидать более заметного снижения точности упрощен-
ной модели.
Если содержащиеся в модели функции принадлежности не удовлетво-
ряют условию разбиения единицы, то в ходе настройки возможны любые
изменения их разброса, длины ядра и модальных значений. В этом слу-
чае в результате настройки можно получить функции принадлежности,
в той или иной степени перекрывающие друг друга (рис. 5.81).
Рис. 5.81. Примеры схожих и различающихся нечетких множеств
262
Глава 5. Нечеткие модели
принадлежности сходство множеств
Е Мт[дЛ1(тД,дд2(х7)]
, (5.68)
Е мах[дЛ1(^-).да2(^)]
.7 = 1
Чтобы выбрать подходящие для выполнения объединения множества,
можно воспользоваться понятием меры сходства множеств S (Babuska
1996). Было предложено множество различных мер, каждая из которых
соответствует определенному критерию сходства. Достаточно очевидной
мерой сходства двух множеств Aj и А<2 является мера, задаваемая фор-
мулой:
S(Ar, Л2) = = . (5.67)
v ' 7 \А I I А о Jinax v
11 21 f МАХ[А/Л1(х), рA.2M]dx
•411111
где Tmin,xmax — границы области определения X (рис. 5.79),
| • | — кардинальное число (мощность) нечеткого множества.
В случае дискретных функций
можно оценить по формуле (5.68):
_ |А1 п а2| _
|Ai U А2|
где xj е XD,
Хп — дискретная область значений переменной х.
В соответствии с формулами (5.67) и (5.68), степень сходства мно-
жеств Ai и А2 т^м выше, чем сильнее их общая часть А[ П А2 будет
совпадать с их суммой Ai U А2 (рис. 5.81). В случае полного совпадения
множеств Ai и А2 получаем
Ai ПЛ2 = Ai U А2 = 1,
и таким образом степень их сходства S(Ai.A2) = 1.
Если множества Ai и А2, заданные на пространстве входных значе-
ний X, имеют достаточную степень сходства, т. е. выполнено условие
5(АьА2) > 5. (5.69)
где 6 : 6 е [0,1] — минимально допустимая степень сходства множеств,
то их объединение можно выполнить по формуле:
А = Ai и А2.
/mW = МАХ[/1Л1(ж)4и2(^)]- (5.70)
5.4. Сокращение базы правил
263
Сумма А используется для замены в правилах множеств А± и А2, что
позволяет упростить базу правил. Например, если для модели с одним
входным параметром т и выходным параметром у база правил имеет вид:
В1 : ЕСЛИ (т = А]) ТО (у = Bi),
R2 : ЕСЛИ (х = А2) ТО (у = В2),
R3 : ЕСЛИ (гг = А3) ТО (у = В3),
Л4 : ЕСЛИ (х = А4) ТО (у = В4),
(571)
установлено сходство множеств А3 и А4, и для их замены используется
множество A3 = А3 U А4, то при подстановке в правила множества A3
вместо А3 и А4 мы получаем базу правил следующего вида:
В1 : ЕСЛИ (т = AJ ТО (у = Bj).
R2 : ЕСЛИ (х = А2) ТО (у = В2).
R3 : ЕСЛИ (.г = А3) ТО (у = В3),
В4 : ЕСЛИ (х = А*3) ТО (у = В4).
(5.72)
Поскольку условия правил ВЗ и R4 совпадают, их можно объединить
в соответствии с формулой:
[ ЕСЛИ (х = A3) ТО (у = Вз)] U [ ЕСЛИ (х = А|) ТО (у = В4)] =
ЕСЛИ (х = А3) ТО (у = В3 U В4) =
ЕСЛИ (х = A3) ТО (у = В;). (5.73)
где В3 = В3 U В4.
Таким образом, база правил (5.72) преобразована в базу вида
R1 : ЕСЛИ (х = А,) ТО (у = Bi),
R2 : ЕСЛИ (.г = А2) ТО (у = В2),
R3 : ЕСЛИ (х = А3) ТО (у = В*),
(5.74)
содержащую меньшее число правил.
Сокращенную базу правил (5.74) можно считать допустимой, если она
не приводит к чрезмерному снижению точности модели. Приведем пример
значительного сокращения числа правил в модели с двумя входами.
264
Глава 5. Нечеткие модели
Пример 5.4.3. Рассмотрим модель системы с двумя входами и одним
выходом и лингвистически полной базой правил:
R1 : ЕСЛИ
R2 : ЕСЛИ
R3: ЕСЛИ
R4: ЕСЛИ
R5 : ЕСЛИ
R6 : ЕСЛИ
R7 : ЕСЛИ
Л8: ЕСЛИ
Я9: ЕСЛИ
(xi = Аг) И
(xi = И
(Xi = AJ И
Щ = А2) И
Ц1 = А2) И
(хг = А2) И
Ц1 = А3) И
Щ = Аз) И
(xi = Аз) И
(Х2 = В1)
(0-2 = В2)
(х2 = Вз)
Ц2 = Bi)
(х2 = В2)
(х2 = В3)
(х2 = В1)
(х2 = В2)
(х2 = В3)
ТО (y = G)
то (у = С2)
ТО (у = С3)
ТО (у = С4)
ТО (у = С5)
ТО (у = С6)
ТО (у = Ст)
ТО (у = С8)
ТО (у = С9)
(5.75)
где:
Ai, А2, Аз — нечеткие множества значений входа xi,
Bi, В2, В3 — нечеткие множества значений входа х2,
C*i,..., С*9 — нечеткие множества значений выхода у.
Предположим, что множества А2(яц) и Аз(хх) являются схожими
и могут быть объединены с получением множества A^xi), которое за-
тем может быть использовано для замены в правилах множеств A2(ti)
и А3(гг1) (А2 = А^, A3 = А*2). В результате пары правил (7?4,R7),
(7?5,Я8), (776, Я9) будут иметь одинаковые условные части, и могут быть
объединены с использованием операции ИЛИ, что приведет к базе пра-
вил вида:
R1 : ЕСЛИ (Xi = AJ И (х2 - ТО (у =
R2 : ЕСЛИ (Xi = AJ И (т2 = В2) ТО (у = С2\
R3 : ЕСЛИ (xi = А3) И (х2 = В3) ТО (у = С3),
R4 : ЕСЛИ (xi = А£) И (х2 = ТО (у = С4 U С7),
R5 : ЕСЛИ (xi = И (х2 = В2) ТО (у = С5 U С8),
R6 : ЕСЛИ (xi = А*) И (х2 = В3) ТО (у = С6 U С9). (5.76)
В рассмотренном случае уменьшение числа нечетких множеств на 1
позволяет уменьшит число правил на 3. Упрощенную модель (5.76) мож-
но считать допустимой только в том случае, если, по сравнению с мо-
делью (5.75), не произошло значительного уменьшения ее точности.
Подобная ситуация не всегда имеет место, что подтверждается приме-
ром 5.4.4.
5.4. Сокращение базы правил
265
Рис. 5.82. Поверхности моделируемой системы и
нечеткой модели с четырьмя
правилами
Рис. 5.83. Поверхности моделируемой системы (рис. 5.82) и нечеткой модели
с меньшим числом правил
Пример 5.4.4. На рис. 5.82 приведена исходная нечеткая модель. По-
скольку модальные значения множеств и Аз являются близкими,
эти множества можно попытаться объединить. Полученное в результа-
те нечеткое множество А*? представлено на рис. 5.83.
266
Глава 5. Нечеткие модели
Очевидный вывод, который можно сделать из рис. 5.83, состоит в том,
что в результате объединения множеств и Аз и сокращения числа пра-
вил произошло значительное снижение точности модели. Этого снижения
можно было в определенной степени ожидать вследствие большого рас-
стояния (уз — у2) между точками, представляющими множества В2 и В3
(рис. 5.82).
Для моделей с одним входом произвести такую оценку значитель-
но проще, чем в случае объектов с несколькими входами. Выполнение
объединения нечетких множеств с возможным сокращением числа пра-
вил в последнем примере может быть оправдано лишь тем, что точность
модели уменьшилась незначительно.
Еще одна возможность упрощения нечетких правил связана с сокра-
щением множеств, имеющих сходство с областью определения X —
см. пример 5.4.5.
Пример 5.4.5. Рассмотрим нечеткую модель, представленную
на рис. 5.84. В данной модели нечеткое множество Ai3(j:i) имеет сход-
ство с областью определения Х\ (рис. 5.85).
R3 : ЕСЛИ (XI - А13) И (т2 - А22) ТО (у - ВА)
Рис. 5.84. Нечеткая модель с бессеточным разбиением области значений
X — Xi х Х‘2 на три сегмента
5.4. Сокращение базы правил
267
Рис. 5.85. Функции принадлежности множества Ai3(j;i) и универсального мно-
жества Xi
Если степень сходства множества Ai3(xi) с универсальным множе-
ством Ад, значение которой можно найти по формулам (5.67) и (5.77),
является достаточно высокой (близкой к 1), т. е.
5(Л13(.г1).Х|) =
И13Ц1) И I
|.413(.п) U X, |
1 шах
f MA13(J’l)d'Cl
•F1 max 1 min
(5.77)
то в правилах это множество можно заменить на Х±. Поскольку функция
принадлежности универсального множества равна 1 во всех точках его
носителя, то часть условия, содержащую множество Ащ = Х\, из пра-
вила можно исключить, что приведет к более простому его виду. Для
случая модели на рис. 5.84 мы получаем упрощенную базу правил:
R1 : ЕСЛИ
R2 : ЕСЛИ
R3 : ЕСЛИ
СП = Ап) И
Ц1 = А12) и
(.г2 = А2]) ТО (у = В]),
(rr2 = Ai) ТО (у = В2),
(Х‘2 = Л22) ТО (у = В3).
(5.78)
Упрощенная база правил (5.78) будет допустимой, если точность
нечеткой модели, содержащей эту базу, по сравнению с исходной мо-
делью уменьшится лишь незначительно.
Упрощения нечеткой модели можно достичь путем использования
метода локальных моделей (Bossley 1995; Babuska 1995с). В рамках
данного метода вместо одной глобальной модели, заданной на всей об-
ласти входов X, используется множество локальных моделей, каждая
из которых имеет собственную плотность сетки разбиения связанного
с ней участка пространства входов. Метод локальных моделей можно
использовать в случаях, когда поверхность отображения X Y имеет
участки как малой крутизны («плато»), так и большой крутизны («го-
ры») — см. рис. 5.86.
Участок поверхности над сегментом S\ области значений X (рис. 5.86)
имеет большие различия по высоте и наклону, и для точного его модели-
268
Глава 5. Нечеткие модели
Рис. 5.86. Система, поверхность которой имеет участки значительно различа-
ющейся крутизны
Рш;. 5.87. Различие в плотности нечеткого разбиения универсального множе-
ства для локальных моделей М\ и М2
рования требуется большее число задаваемых правилами опорных точек,
чем для практически плоского участка поверхности над сегментом S2. По
этой причине нечеткое разбиение сегмента Si должно иметь значительно
более плотную сетку, чем разбиение сегмента S2 (рис. 5.87).
Если бы плотность сетки разбиения была одинаковой для всей обла-
сти Х х12, то для задания всех опорных точек потребовалось бы 98
правил. Однако, мы можем использовать разные сетки, и при использова-
нии более плотной сетки для сегмента Si и менее плотной для сегмента
S2 число правил для этих сегментов составит соответственно 49 и 9 (об-
щее число правил будет равным 58). Таким образом, при использовании
5.4. Сокращение базы правил
269
Рис. 5.88. Функции принадлежности смежных локальных моделей с указанием
ПОГраНИЧНОЙ ЗОНЫ аДС! Ti < ХЮ2
двух локальных моделей можно добиться значительного уменьшения ко-
личества правил.
Условием корректной работы модели, состоящей из множества ло-
кальных моделей, является непрерывность поверхности на участках со-
единения локальных моделей. Это условие будет выполняться, если зна-
чения выходных параметров у смежных локальных моделей в точках, ле-
жащих на их общей границе, будут совпадать. В случае двух локальных
моделей ЛД и М2 (рис. 5.87) это условие выражается в виде соотношения
УЛ'Л Счр-зД = УМ2(^}Р,Х2). (5.79)
Условие (5.79) накладывает ограничение на структуру граничащих
друг с другом моделей, состоящее во взаимной зависимости их пара-
метров и являющееся трудно реализуемым, особенно при большом числе
входных параметров модели. Тем не менее, в этом случае непрерывную
поверхность глобальной модели можно также получить путем нечетко-
го объединения локальных моделей. Для этого необходимо определить
пограничные зоны смежных моделей и вычислить выходное значение у
глобальной модели на основе выходных значений ум{ для всех точек по-
270
Глава 5. Нечеткие модели
граничной зоны, умноженных на степени принадлежности этих точек.
Данный метод иллюстрируется на рис. 5.88.
Для тех точек сегмента Si, которые не входят в пограничную зону,
выходное значение глобальной модели у совпадает с выходным значением
локальной модели уцц- Аналогично, для не принадлежащих пограничной
зоне точек сегмента S<2 выходным значением модели будет у — ум2- Ес-
ли же значения входов принадлежат пограничной зоне, выходное значе-
ние глобальной модели вычисляется на основе выходных значений обеих
локальных моделей, для чего используется формула
у(.Г1,х2) = МлауллЩЩ +
V(ti,x2) : x]Gi < Xi < X]G2, т2 е Х2. (5.80)
Увеличение ширины пограничной зоны приводит к более гладкой по-
верхности глобальной модели в пределах этой зоны. Описание различных
методов построения локальных моделей можно найти в (Bossley 1995;
Babuska 1995с; Nelles 1998; Nelles 1999).
5.5. Нормирование (масштабирование) входов
и выхода нечеткой модели
В реальных системах значения входов х?- и выхода у обычно имеют огра-
ниченные пределы изменения (рис. 5.89).
Исключением являются величины, которые выражаются в виде инте-
грала других величин:
о
а) б)
Рис. 5.89. График изменения реальной величины .г в ходе функционирова-
ния системы (а) и график величины .гЛ после нормирования с использованием
какого-либо метода (б)
5.5. Нормирование входов и выхода нечеткой модели
271
xi: xie[xi min? -^Imax]
x2: x2e[x2 min? -^2max]
Xi. Xi G [^Imin? -^Imax] ГГ7]*Ь e [ 1> 1]
------------------------*LYJ-----------------
---------------------------------------------►Пу]-
x2: x2 g [x2mm, x2max] —1 x2: x2 g [ - 1, 1 ]
У maxi
Рис. 5.90. Нормирование входов и выходов модели (N — операция нормирова-
ния, — нормированная величина, DN — операция денормирования)
(например, увеличение угла поворота q вала электродвигателя происхо-
дит при условии, что включен источник питания), а также величины,
являющиеся производными других величин (т = dz/dt) (например, про-
изводная ошибки сигнала в системе управления). Теоретически, инте-
гралы и производные могут возрастать бесконечно, однако, в реальных
системах их значения зачастую также ограничены (хотя и могут быть
очень большими), учитывая ограничения мощности и быстродействия
исполнительных механизмов, продолжительности работы системы и т. п.
Ограниченность сигналов в системе может быть подтверждена результа-
тами наблюдений и измерений, и если ограничения а:тах и xmin известны,
то можно выполнить их нормирование, называемое также масштабиро-
ванием (Driankov 1996; Yager 1995; Kahlert 1995). Нормирование вели-
чины х, имеющей интервал изменения [ттш-я*тах]> заключается в при-
ведении его путем подходящего масштабирования к нормированному ин-
тервалу [—1,1]. Также может использоваться интервал [0,1]. Принцип
нормирования сигналов нечеткой модели показан на рис. 5.90.
Какие преимущества дает нормирование?
1. Для реальных систем, являющихся подобными на качественном
уровне, мы получаем сходные нормированные нечеткие модели, а при
управлении подобными на качественном уровне процессами — сход-
ные нормированные нечеткие регуляторы, что дает разработчику воз-
можность приобрести способности и знания в области проектирова-
ния моделей и регуляторов.
2. Приобретенные способности и опыт проектирования моделей и ре-
гуляторов для качественно подобных систем помогают разработчику
быстро, «на глаз» создавать модели и регуляторы, которые далее тре-
буют только настройки (при этом часто незначительной).
272
Глава 5. Нечеткие модели
Рис. 5.91. Нормирование величины х с использованием интервала [—1,1]
На рис. 5.91 показан метод нормирования с использованием интервала
[—1,1]. Достоинство данного метода состоит в использовании интервала
[-1,1] целиком, а недостаток связан с тем, что нулевые значения вели-
чин х и ,тд не совпадают, в то время как их совпадение иногда может
иметь определенную важность.
Используется также упрощенный метод нормирования (Kahlert 1995),
состоящий в том, что величина х делится только на некоторый постоян-
ный коэффициент (рис. 5.92). Достоинство упрощенного метода состоит
в меньших вычислительных затратах, а также в том, что нормирован-
ная и ненормированная величины имеют общую точку отсчета (нулевое
значение). Недостаток связан с тем, что интервал [—1,1] используется
не полностью.
Как показано на рис. 5.92, при х — xmin значение нормированной
величины xN отлично от —1. В связи с этим упрощенный метод нор-
мирования следует использовать в первую очередь для симметричных
интервалов изменения сигналов, т. е. если |zmm| ~ l^’maxb На рис. 5.93
показан метод нормирования с использованием интервала [0,1].
После вычисления с помощью нормированной нечеткой модели вы-
ходного значения yN, также являющегося нормированным, необходимо
выполнить его денормирование (рис. 5.89). Денормирование представля-
ет собой обратную по отношению к нормированию операцию, и для ее
выполнения должны быть известны максимальное (?/тах) и минималь-
ное (упг.п) выходные значения моделируемой системы либо максимальное
5.5. Нормирование входов и выхода нечеткой модели
273
Рис. 5.92. Упрощенное нормирование величины х с использованием интерва-
ла [-1,1]
Рис. 5.93. Нормирование величины х с использованием интервала [0,1]
^шах ^min
и минимальное значения, выдаваемые исполнительным механизмом си-
стемы управления.
Формулы денормирования непосредственно выводятся из формул нор-
мирования (рис. 5.91-5.93). Следует помнить, что нормированное выход-
ное значение у* нормированной модели имеет симметричный интервал
изменения [—1.1], в то время как интервал [^/miinl/max] изменения де-
нормированного выходного значения у часто является несимметричным.
Поэтому, в противоположность нормированию, здесь обычно возникает
необходимость отображения симметричного интервала в асимметричный,
что слегка усложняет упрощенное денормирование, не оказывая при этом
влияния на полный его вариант (рис. 5.94).
Преимущество метода денормирования, изображенного на рис. 5.94,
состоит в полном использовании выходного диапазона модели
274
Глава 5. Нечеткие модели
У — У (^/max ?/mm) ~F Ушеан i/ineaii — 0.5(?/inax ~F ?/rniii)
Рис. 5.94. Денормирование yN у из интервала yN : [-1,1] с полным исполь-
зованием интервала у : [ут^Уп^]
['Z/min, Z/max], а недостаток связан с несовпадением нулевых значений
в шкалах yN и у (нулевое значение в шкале yN соответствует значению
У — Z/mean-
Для выполнения упрощенного нормирования могут использоваться
два метода, представленные на рис. 5.95 и 5.96.
В случае денормирования с большим коэффициентом преобразова-
ния (рис. 5.95) при yN ~ -1 на выходе нечеткой модели будет полу-
чено значение у = — утах, лежащее за пределами интервала изменения
U/mim//max] реальной системы, и тем самым, нечеткая модель будет вы-
числять несуществующие выходные значения. Будучи, как правило, недо-
пустимой в случае нечетких моделей, подобная ситуация может допус-
каться для нечетких регуляторов, поскольку в этом случае исполнитель-
ным механизмом будет установлено значение у = z/min (эффект насыще-
ния). Тем не менее, такое денормирование вводит в систему управления
дополнительную нелинейность в виде ограничения (насыщения) сигна-
ла. На рис. 5.96 показан другой вариант упрощенного денормирования:
денормирование с меньшим коэффициентом преобразования.
При использовании упрощенного денормирования с меньшим коэффи-
циентом преобразования (рис. 5.96) значение, выдаваемое нечеткой моде-
лью при у*1 = 1, будет отличаться от максимального, выдаваемого в этом
5.5. Нормирование входов и выхода нечеткой модели
275
У — У ‘ АХ( | t/min | • |?/inax|) J/max > 0 i/min < О
Рис. 5.95. Упрощенное денормирование из интервала yN : [—1,1] с коэффици-
ентом преобразования, равным MAX(|?/min|, |</max|)
случае реальной системой, т. е. представление этой системы нечеткой мо-
делью не будет точным. Указанные проблемы, связанные с упрощенным
денормированием, будут отсутствовать в случае симметричного интерва-
ла изменения [ут-т,Утж]' т. е. если ?/тах = -ут[п. На рис. 5.97 показано
денормирование из интервала yN : [0,1].
Из приведенных на рис. 5.91-5.97 формул можно сделать вывод, что
они выполняют линейное преобразование одной величины в другую:
= kr • х 4 Xq или xN — кд • х,
у = ky • yN 4- у(} или у — ky • yN ,
при этом тип линейного преобразования зависит от выбранного метода
нормирования (денормирования). Коэффициенты кд, ку являются посто-
янными, а .Гд , уо — константы, зависящие от границ интервала значений
276
Глава 5. Нечеткие модели
У — У ' MIN( jl/inin 11 j?/max|) ^max > 0 7/min < 0
Рис. 5.96. Упрощенное денормирование из интервала yN : [-1.1] с коэффици-
ентом преобразования, равным |т/тах|)
Рис. 5.97. Денормирование из интервала yN : [0,1] в интервал у : ?/max]
заданной переменной. Получаемую в результате нечеткую модель (регу-
лятор) можно представить в виде схемы, изображенной на рис. 5.98.
5.6. Экстраполяция в нечетких моделях
277
Нормированная нечеткая модель
Рис. 5.98. Нечеткая модель с нормированной частью
Если база правил нечеткой модели задана, то процесс настройки мо-
дели состоит в выборе подходящих модальных значений для каждого от-
дельного нечеткого множества. Изменяя эти значения в интервале [—1,1],
мы изменяем коэффициенты передачи нечеткой модели, и вследствие
ограниченности диапазона изменения указанным интервалом становит-
ся легче понять процесс настройки нечеткой модели и приобрести опыт
в данной области. Выполнять нормирование модели во всех возможных
случаях нет необходимости. Тем не менее, оно применяется во многих
профессиональных системах нечеткого моделирования и управления.
5.6. Экстраполяция в нечетких моделях
Нечеткие модели можно строить на основе выборок измерений входов и
выходов системы. Точность представления реальных систем такими моде-
лями очень сильно зависит от пространственного распределения элемен-
тов выборки, используемых для моделирования. Наиболее благоприятной
является ситуация, когда элементы выборки распределены во входном
пространстве равномерно (рис. 5.99, а).
В практике моделирования часто возникает ситуация, когда область
значений не полностью покрывается элементами выборки. В особенности
это касается больших систем (например, в экономике, биологии, эколо-
гии), когда мы не в состоянии выполнить непосредственные измерения
путем установки различных значений входов системы и снятия значений
ее выходов, как это можно сделать, например, при измерении скоро-
сти движения судна в зависимости от частоты вращения гребного вин-
та и угла установки его лопастей. Для многих систем возможно лишь
пассивное наблюдение входных и выходных состояний, например числа
безработных в зависимости от числа рабочих мест, количества выпускни-
ков учебных заведений и величины пособия по безработице. На области
278
Глава 5. Нечеткие модели
Рис. 5.99. Равномерное регулярное распределение элементов выборки измере-
ний для моделируемой системы в пространстве Xi х Х2 (а) и неравномерное
распределение с пустыми областями (б)
значений, связанной с моделируемой системой, часто появляются внут-
ренние или внешние подобласти, которые, как показано на рис. 5.99, б,
не содержат элементов выборки, и несмотря на отсутствие измеренных
данных, во многих случаях требуются хотя бы приблизительные знания
о поведении системы в этих областях. Эти знания зачастую можно полу-
чить на основе имеющихся элементов выборки. Иногда, с целью допол-
нения информации, содержащейся в измерениях, могут использоваться
качественные знания экспертов о моделируемой системе.
Расширение поверхности модели на внутренние области, для ко-
торых отсутствуют результаты измерений, называется интерполяцией,
а на внешние области — экстраполяцией (рис. 5.100).
Рис. 5.100. Области интерполяции и экстраполяции модели
5.6. Экстраполяция в нечетких моделях
279
В настоящее время ведутся достаточно активные исследования, свя-
занные с моделированием областей входного пространства, для которых
отсутствуют данные измерений. Данное направление называют исследо-
ванием неполной информации (Liao 1999). Анализ литературы по дан-
ному вопросу позволяет сделать вывод, что в большей степени иссле-
дуются задачи интерполяции — см., например, (Koczy 1993; Ullrich 1998;
Dubois 1992) — в то время как задачи нечеткой экстраполяции рассмат-
риваются редко.
Между тем, экстраполяции является более важной для практики, по-
скольку часто необходимо предсказать поведение систем за пределами
текущих областей их функционирования. Вот несколько примеров:
• моделирование и прогноз продаж продукции с относительно неболь-
шой продолжительностью «жизненного цикла», обусловленной ее
«моральным старением», как, например, в ситуации с компьютера-
ми. В нашем распоряжении имеются весьма ограниченные данные
за короткий период продаж, не дающие информации, которая охва-
тывала бы все аспекты данного процесса. Тем не менее, мы должны
принять решение о том, на какие входные параметры следует воздей-
ствовать, и сколько их должно быть, чтобы увеличить объем продаж;
• управление с предсказанием: регулятор должен предсказывать сле-
дующее состояние объекта на основе текущего и прошлых состояний
и определять соответствующий управляющий сигнал для следующего
шага;
• прогнозирование будущих значений курса акций по предыдущим его
значениям (моделирование временных рядов);
• кодирование изображений с предсказанием (Tian-Hu 1998): «для
различных образов предсказываемые характеристики определяются
на основе имеющихся характеристик соседних пикселов с использо-
ванием линейной экстраполяции».
Рассмотренные примеры подтверждают важность и практическую
ценность корректно выполненной экстраполяции. Все мы с той или иной
степенью успеха каждый день используем ее для предсказания буду-
щих событий. Среди ученых есть и противники экстраполяции моделей
(Niederliriski 1997), особенно это относится к статическим моделям. По-
этому представляется целесообразным рассмотреть основной смысл и об-
щую идею экстраполяции.
Рассмотрим, что подразумевается под экстраполяций модели с об-
ластей, где подтверждена ее достоверность, на новые, расширенные
области, достоверность модели на которых не подтверждена.
280
Глава 5. Нечеткие модели
Рис. 5.101. Пример характеристики (модели) у = f(x) системы типа SISO,
определенной на основе имеющихся на данный момент знаний о моделируемой
системе, а < х < b — область определения (00) модели, совпадающая с ОД —
областью, где достоверность модели подтверждена имеющимися к настоящему
моменту данными измерений входов и выходов
Предположим, мы хотим предсказать выходное значение системы у
для входного значения х = с, расположенного за пределами области, где
достоверность модели к настоящему моменту подтверждена. Примером
здесь может служить мост, максимально допустимая нагрузка которого,
согласно ранее проводившимся вычислениям и экспериментам, составля-
ет 35 тонн, но в военных условиях требуется быстро переправить на про-
тивоположную сторону реки груз весом 37 тонн. Возможен ли подоб-
ный риск? Что произойдет с мостом под действием чрезмерной нагруз-
ки — несколько прогнется с превышением допустимого предела или же
сломается? Строительство мостов производится с определенным запасом
прочности, и любой мост должен выдерживать нагрузку, немного превы-
шающую допустимый предел, но наш мост уже достаточно старый и ме-
стами проржавел. Какое решение следует принять: производить или не
производить транспортировку груза, масса которого немного превышает
допустимую?
Решение «транспортировать груз» соответствует предположению
о непрерывности экстраполяции характеристики моста на расширенную
область определения — см. пример на рис. 5.102.
Решение «не транспортировать груз» соответствует принятию гипоте-
зы о том, что увеличение нагрузки до значения х — с приведет к поломке
моста (рис. 5.103).
Пример с мостом является иллюстрацией того, что экстраполяция
модели (показателя) носит характер предположения, которое не мо-
жет быть обосновано вследствие отсутствия в момент принятия решений
5.6. Экстраполяция в нечетких моделях
281
Рис. 5.102. Пример непрерывной экстраполяции характеристики моста на рас-
ширенную область определения
Рис. 5.103. Экстраполяция известной характеристики моста в область увели-
ченной нагрузки х > Ь, предполагающая его поломку при нарузке х = с
информации (результатов измерения) о поведении системы в новой обла-
сти. Подтверждение или опровержение гипотез можно выполнить только
экспериментально, на основе будущих данных о системе, и лишь от нас
зависит, каким образом будет производиться экстраполяция в область
Неизвестного — мы сами отвечаем за собственный риск. Но после то-
го, как принято решение о способе экстраполяции, возникает возмож-
ность получения количественной информации о том, чего можно ожи-
дать от модели в новой, расширенной области. С этой целью необходимо
282
Глава 5. Нечеткие модели
иметь представление о возможных способах экстраполяции. Рассмотрим
базовый метод, который предлагает математика.
Методы экстраполяции, используемые в рамках «традиционных»
математических моделей у = /(дц, Т2,.... хп\ хорошо известны
(Bronsztejn 1996). Ограничимся рассмотрением системы с одним входом
т, модель которой имеет вид у = /(т). Если модель у — /(.г) являет-
ся непрерывной и имеет непрерывные производные в граничных точках
области определения X — [а, Ь], то используя разложение в ряд Тей-
лора, приближенное значение /*(а?) в точке х — b + h, расположенной
в непосредственной близости от области, где достоверность модели под-
тверждена результатами измерений (будем обозначать эту область ОД),
можно вычислить по формуле:
h Ь2 hn
f(b + h) - f(b) + £ f(b) + - f»(b) + ... + - Дп\Ь). (5.81)
где n — порядок экстраполяции.
Простейшим вариантом экстраполяции является экстраполяция ну-
левого порядка, представимая в виде:
/ць + д) = /(&),
/*(а - Л) = Да).
(5.82)
Пример такой экстраполяции приведен на рис. 5.104.
Экстраполяция нулевого порядка является самой простой, и един-
ственная информация об области достоверности модели, которая тре-
буется при ее выполнении — это граничное значение функции /(а) или
/(О-
Рис. 5.104. Экстраполяция нулевого порядка функции /(х); [а, Ь] — область до-
стоверности функции (ОД), х < а, х > Ь — области, в которых достоверность
функции не подтверждена (ОНД)
5.6. Экстраполяция в нечетких моделях
283
Рис. 5.105. Экстраполяция первого порядка: ОД — область, где достоверность
модели подтверждена измерениями, ОНД — область, достоверность модели в ко-
торой не подтверждена
Экстраполяция первого порядка выражается формулами
и ее пример представлен на рис. 5.105.
Экстраполяция первого порядка использует информацию не только
о граничном значении функции /(а) и f (6), но также о значениях произ-
водной /(а) или /(6) на границе области достоверности. Поэтому в дан-
ном случае получение результата, в большей степени согласующегося
с поведением системы в неизвестной смежной области, представляется
более вероятным, чем при экстраполяции нулевого порядка. Указанную
вероятность можно увеличивать, используя экстраполяцию второго по-
рядка (формула (5.84)) или более высоких порядков. Следует, однако,
иметь в виду, что в любом случае мы имеем дело лишь с вероятностью,
а не с фактом, допускающим научное обоснование. Априори, без выпол-
нения измерений в неизвестной области нельзя указать, какой способ
экстраполяции будет более подходящим для конкретной системы. Тем
не менее, во многих случаях требуется принимать решение на осно-
ве экстраполяции знаний, предоставляемых ограниченными моделями
систем, а также нечеткими моделями:
h2 ••
r(b + h) = f(b) + hf(b) + ?-f(H,
h? .. (5-84)
/*(« - h) = f(a) - hf(a) + — f(a).
284
Глава 5. Нечеткие модели
Каким образом можно произвести экстраполяцию нечеткой модели?
Рассмотрим упрощенную задачу о приросте прибыли.
Пример 5.6.1. Концерн супермаркетов в течение нескольких лет инве-
стировал различные суммы в развитие своей сети, что в результате каж-
дый год давало ему различные значения прироста прибыли. Данные об
этом представлены в табл. 5.15.
Таблица 5.15
Капиталовложения концерна и их финансовые результаты
Год 1997 1998 1999 2000
Капиталовложения СЕ [млн долл.] 100 150 210 230
Прирост прибыли ДЕ [млн долл.] 220 270 300
Руководство концерна считает возможным в 2000 г. инвестировать
в строительство новых супермаркетов сумму в 230 млн долл. Какой при-
рост прибыли ДЕ можно при этом ожидать?
Данные табл. 5.15 представляют собой единственную количественную
информацию, которую можно использовать для прогнозирования прибы-
ли от капиталовложений в 2000 г. На ее основе можно построить про-
стую нечеткую модель, содержащую три правила, имеющие вид (5.85).
Данная модель представлена на рис. 5.106.
ЕСЛИ (капиталовложения низкие) ТО (прирост прибыли низкий),
ЕСЛИ (капиталовложения средние) ТО (прирост прибыли средний),
ЕСЛИ (капиталовложения высокие) ТО (прирост прибыли высокий).
(5.85)
Для отдельных регионов ОД можно без труда получить соответству-
ющую нечеткой модели зависимость ДЕ = /(СЕ)—см. рис. 5.106:
ДЕ = СЕ + 120 для 100 С СЕ < 150,
ДЕ = 0.5 • СЕ + 195 для 150 <СЕ < 210. (
При использовании в пределах НД-областей (областей, где не под-
тверждена достоверность модели) функций принадлежности «низкий»,
«средний» и «высокий», значения которых ограничены интервалом [0,1]
(рис. 5.106), будет возникать эффект насыщения, и поверхность модели
будет иметь вид:
ДЕ = 220 для СЕ < 100,
ДЕ = 300 для СЕ > 210. (Ь’87)
5.6. Экстраполяция в нечетких моделях
285
Рис. 5.106. Отображение «вход-выход» нечеткой модели, определяющей вза-
имосвязь между величиной капиталовложений СЕ и приростом прибыли ДВ
концерна супермаркетов, с функциями принадлежности, значения которых огра-
ничены интервалом [0,1]
Данная ситуация соответствует экстраполяции нулевого порядка, ис-
пользующая в НД-областях только информацию о значениях функции
на границе области достоверности. В результате применения такого типа
экстраполяции, при большем объеме капиталовложений, СЕ = 230 млн
долл., прогнозируемое значение прироста прибыли будет таким же, как
в случае меньшего объема вложений, СЕ = 210 млн долл. (рис. 5.106).
Подобный прогноз возможен, но мы вправе принимать и другие гипотезы
о том, каким будет выходное значение модели в неизвестной области.
Введем теперь в нашу нечеткую модель новый тип функции принадлеж-
ности входных значений, как показано на рис. 5.107.
В результате использования данных функций, в пределах области до-
стоверности вид отображения «вход-выход» остается таким же, как и
в случае использования обычных функций принадлежности вида (5.86),
286
Глава 5. Нечеткие модели
Рис. 5.107. Отображение «вход-выход» нечеткой модели, определяющей вза-
имосвязь между величиной капиталовложений СЕ и приростом прибыли ДЕ
концерна супермаркетов, в которой значения крайних функций принадлежности
не ограничены интервалом [0.1]
в то время как в НД-областях формула экстраполяции приобретает сле-
дующий вид:
ДЕ = СЕ + 120 для СЕ < 100,
ДЕ = 0.5 • СЕ + 195 для СЕ > 210.
(5.88)
В соответствии с полученной моделью прогноза, при объеме капи-
таловложений СЕ = 230 млн долл, прирост прибыли ДЕ составит 310
млн долл., что превосходит полученное в рамках предыдущей модели зна-
чение, равное 210 млн долл. (рис. 5.107). Такой результат прогноза тоже
является возможным, и мы сами должны выбрать, какой тип экстрапо-
ляции — нулевого или первого порядка— следует предпочесть. Как пока-
зано на рис. 5.106, нечеткая модель с традиционным видом функций при-
5.6. Экстраполяция в нечетких моделях
287
надлежности нечувствительна к изменениям входных параметров в НД-
областях, где значения функций принадлежности являются постоянными,
равными 0 или 1. В то же время модель, представленная на рис. 5.107,
является чувствительной к изменению входов как в пределах области
достоверности, так и в НД-областях.
В НД-области модель использует информацию не только о граничном
значении выходного параметра ДЕ = 300 млн долл., но также о вели-
чине наклона своей поверхности в прилегающей к границе части области
достоверности, что соответствует экстраполяции первого порядка.
Можно ли обосновать значения степени принадлежности, боль-
шие 1 и меньшие 0 (отрицательные степени принадлежности), с по-
зиций здравой логики? Рассмотрим данный вопрос на примере оцени-
вания роста человека.
Пример 5.6.2. Предположим, что функция принадлежности лингвисти-
ческой переменной «рост» имеет вид, представленный на рис. 5.108.
Элементы х, степень принадлежности /Дт) которых нечеткому множе-
ству равна 1, можно назвать «типовыми элементами» данного множества.
В соответствии с заданными функциями принадлежности (рис. 5.108), ти-
повой человек среднего роста имеет рост 170 см, так как данное значение
роста в полной мере (со степенью 1) соответствует понятию «средний».
Типовой высокий человек имеет рост 185 см, который полностью (со сте-
пенью 1) соответствует понятию «высокий». Типовой «очень высокий»
рост равен 200 см. Степень принадлежности //(ж) элемента х нечет-
Рис. 5.108. Принадлежность трех разных человек F1 (190 см), Р2 (200 см)
и РЗ (210 см) результату экстраполяции граничного нечеткого множества «вы-
сокий»
288
Глава 5. Нечеткие модели
кому множеству можно интерпретировать как степень его сходства
с типовым элементом данного множества.
Степень сходства человека F1, имеющего рост 190 см, с типовым
высоким человеком равна 2/3, а с типовым очень высоким она состав-
ляет 1/3. Иными словами, он обладает чертами «высокого» человека со
степенью 2/3 и чертами «очень высокого» — со степенью 1/3.
Человек Р2, имеющий рост 200 см, имеет полное сходство с типо-
вым очень высоким человеком (степень сходства равна 1), а степень его
сходства с типовым высоким человеком равна 0. Таким образом, он пол-
ностью обладает чертами «очень высокого» человека и совсем не обладает
чертами «высокого».
Человек РЗ, имеющий рост 210 см, обладает чертами «очень высо-
кого» человека в большей степени (5/3), чем типовой высокий человек
с ростом 200 см. Иначе говоря, этих черт у него больше, чем у типового
очень высокого человека.
С другой стороны, чертами «высокого» человека он обладает в мень-
шей степени, чем Р2, для которого эта степень равна 0. Тем самым, сте-
пень обладания РЗ чертами «высокого» человека является отрицательной
(равной —2/3). Отрицательную степень сходства можно интерпретиро-
вать как меру несходства (различия) с типовым элементом заданного
множества.
Если считать сходство относительной мерой объема черт, присущих
заданному элементу по отношению к объему этих черт, имеющихся
у наиболее типового элемента рассматриваемого нечеткого множества,
то становится понятной возможность существования элементов, принад-
лежащих этому множеству со степенями, большими 1, а также с от-
рицательными степенями. С учетом этого рассмотрим вопрос: почему
для внутренних множеств всегда следует использовать функции
принадлежности, значения которых ограничены интервалом [0,1],
а функции со значениями, выходящими за пределы этого интерва-
ла, можно использовать только для внешних множеств?
Рассмотрим нечеткое множество, соответствующее среднему росту
(рис. 5.109).
Каждое из множеств определяет некоторый класс роста. Отдельные
классы отличаются друг от друга, поэтому каждый из них можно каким-
либо образом выделить и охарактеризовать. Типовой человек среднего
роста должен отличаться от типового высокого человека, иными словами,
у него не должно быть большого сходства с типовыми представителями
смежных классов. Таким образом, для внутреннего класса, соответствую-
щего «среднему» росту, функция принадлежности, по мере приближения
5.6. Экстраполяция в нечетких моделях
289
Рис. 5.109. Нечеткие множества «очень низкий», «низкий», «средний», «высо-
кий», «очень высокий» со своими типовыми элементами: 130 см (очень низкий),
150 см (низкий), 170 см (средний), 185 см (высокий), 200 см (очень высокий)
к смежным классам, соответствующим «низкому» и «высокому» росту,
должна убывать, принимая на их типовых элементах (150 и 185 см) ма-
лое либо нулевое значение.
Если функция, соответствующая классу «средний», при приближе-
нии к центру смежного с ним класса (например, «высокий») возрастает,
то значение в этом центре будет больше 1, и таким образом, типовой рост
высокого человека, равный 185 см, будет «более» средним, чем типовой
средний рост (170 см). В случае внутренних множеств каждый эле-
мент х можно сравнивать с типовыми элементами двух ближайших
смежных классов. Например, рост 175 см (рис. 5.109) можно сравнивать
с ростом 170 см, который является типовым для «среднего» класса, и с
ростом 185 см, типовым для «высокого» класса. Только таким образом
рост можно однозначно определить на основе двух степеней принадлеж-
ности:
2 1
Мсредний(175) = — , Мсредний(175) = — .
Определение данного значения роста на основе принадлежности толь-
ко одному классу, например классу «средний», будет являться неодно-
значным, поскольку рост 163.3 см принадлежит данному классу с той же
степенью:
2
/^средний (175) — , Передний (163.3) — .
О о
Это следует из того, что внутренние функции принадлежности имеют
две ветви и в дополнение могут быть симметричными. Поэтому с целью
обеспечения однозначности задания входных значений (фаззифика-
290
Глава 5. Нечеткие модели
ции) необходимо учитывать принадлежность двум смежным мно-
жествам. Требование однозначности является важным при модели-
ровании причинно-следственных связей между входами и выходами
системы, когда нам требуется знать не только степень принадлежности
элемента, но и то, находится он слева или справа от типового элемента
множества. Однозначность несущественна для задач распознавания
образов и классификации, в которых требуется знать лишь меру близо-
сти определенного элемента к типовому, и при этом не имеет значения,
с какой стороны от него он находится. Если же входное значение ле-
жит за пределами граничного нечеткого множества, например, множества
«очень высокий» на рис. 5.109, то смежные множества находятся только
с одной стороны, и заданный элемент х, равный, например, 205 см, можно
сравнивать только с типовыми элементами смежных множеств, находя-
щихся слева — «очень высокий» и «высокий». Казалось бы, для обеспе-
чения однозначности фаззификации значения х достаточно использовать
только одно ближайшее внешнее множество «очень высокий», поскольку
оно позволяет различать два разных входных значения х, например, х =
205 см и х — 210 см:
4
3 ’
Дочень высокий
(205) =
Мочень высокий
(210) = |
О
с помощью степеней принадлежности. Вместе с тем, представление
в нечеткой модели внешних значений х с использованием только одной
функции принадлежности приведет к экстраполяции не первого, а ну-
левого порядка — это следует из того, что в данном случае в обла-
сти экстраполяции всегда будет активизироваться только одно правило,
и в соответствии с общей формулой дефаззификации (5.38) или (5.48),
на выходе модели, содержащей одно правило, будет всегда постоянное
значение, равное координате ув одноэлементного множества, представ-
ляющего нечеткое заключение правила у — ул*Ув/Уа, где у а — степень
истинности условия этого правила.
Для выполнения экстраполяции первого порядка необходима ин-
формация о величине наклона поверхности нечеткой модели в ее
граничной области. Данную информацию можно получить на осно-
ве двух множеств: граничного и непосредственно ему предшествующего.
На рис. 5.109 это множества, соответственно, «очень высокий» и «высо-
кий».
В случае если граничные функции принадлежности принимают зна-
чения только в интервале [0,1], как на рис. 5.110, невозможно обеспечить
однозначность задания (фаззификации) входных значений, находящихся
5.6. Экстраполяция в нечетких моделях
291
Рис. 5.110. Классификация роста людей при ограничении степеней принадлеж-
ности внешним множествами значениями из интервала [0,1]
за пределами типовых значений внешних множеств (например, значений
роста, равных 205 и 210 см), поскольку:
Мочень высокий (205) = 1,
/^ВЫСОКИЙ (205) = 0,
Мочень высокий (210) = 1,
/^ВЫСОКИЙ (210) = 0.
Это означает, что после выполнения фаззификации нечеткая модель
не сможет их различать, и для всех входных значений х > 200 см будет
получено одно и то же выходное значение. Подобная нечеткая модель
выполняет экстраполяцию нулевого порядка.
Принадлежность нечеткому множеству можно интерпретировать
в терминах истинности (как истинность того факта, что элемент принад-
лежит множеству или обладает соответствующими заданному множеству
чертами). В классической логике используются два значения истинности,
0 и 1 (т. е. множество {0,1}). Указанные значения можно назвать «четкой
истинностью».
Между тем, в нечеткой логике используются также дробные значе-
ния истинности, принадлежащие интервалу [0,1]. Поскольку нечеткая
модель, основанная на данном интервале значений истинности, зада-
ет интерполяционную поверхность между точками пространства входов
и выходов, задаваемыми с помощью логических правил (например, пра-
вил (5.85), рис. 5.106), то значения истинности, принадлежащие ин-
тервалу [0,1], автор предлагает называть «интерполяционной истин-
ностью». Возможность экстраполяции первого порядка обеспечивается
использованием значений истинности, лежащих за пределами интер-
вала [0,1], поэтому эти значения можно назвать «экстраполяционной
истинностью». На рис. 5.111 показаны интервалы с различными типами
истинности.
292
Глава 5. Нечеткие модели
Нечеткая
экстраполя-
ционная
истинность
Нечеткая
интерполя-
ционная
истинность
Нечеткая
экстраполя-
ционная
истинность
------------6------------►
0 I \ /Т 1 A W
; Четкая |
| истинность [
//(х) <0 ' 0 < //(х) < 1 1 //(х) > 1
Рис. 5.111. Типы истинности утверждений о принадлежности нечеткому мно-
жеству
А(*2>
А(*1)
Поверхность
экстраполяции
нулевого порядка
Область
достоверности
Поверхность,
соответствующая
области достоверности
*1
Рис. 5.112. Расширение поверхности модели с использованием экстраполяции
нулевого порядка
Область
достоверности
Для иллюстрации понятий нечеткой экстраполяции нулевого и пер-
вого порядков до настоящего времени использовались примеры систем
с одним входом. На рис. 5.112 и 5.113 показаны различия между поверхно-
стями экстраполяции нулевого и первого порядков для системы с двумя
входами.
5.6. Экстраполяция в нечетких моделях
293
^(х2)
Поверхность
экстраполяции
нулевого порядка
Поверхность,
соответствующая
области достоверности
Область
достоверности
х2
Х>
Область
достоверности
Рис. 5.113. Расширение поверхности модели с
использованием экстраполяции
первого порядка
Исследования автора и его коллег (Piegat 1997с) подтвердили прак-
тическую обоснованность использования в нечетких моделях понятия
экстраполяционной истинности.
Для настройки нечетких моделей, представленных в форме нейро-
нечетких сетей, можно использовать метод обратного распространения
ошибки (Brown 1994). На входы нейронечеткой сети подаются измерения
параметров моделируемой системы, и сеть вычисляет ее выходное значе-
ние, а также ошибку на выходе, которая используется для корректиров-
ки параметров функции принадлежности, например, параметров аь а2,
аз, ад на рис. 5.114.
Корректировка параметров производится до тех пор, пока не будут
найдены их оптимальные (или субоптимальные) значения, минимизиру-
ющие среднюю ошибку сети. В начале процесса настройки значения па-
раметров обычно задают случайным образом, и если эти значения, как
показано на рис. 5.114, находятся близко друг к другу, то при исполь-
зовании ограниченных крайних функций принадлежности (рис. 5.114, а)
часть измеренных данных, попавшая в зону нечувствительности модели
294
Глава 5. Нечеткие модели
Настроечные измерения входов
Рис. 5.114. Различные формы граничных функций принадлежности и их влия-
ние на возникновение зон нечувствительности, замедляющих процесс настройки
нейронечетких сетей: а) ограниченные функции принадлежности, б) неограни-
ченные функции принадлежности
(с нулевыми производными), не приводит к какой-либо коррекции настра-
иваемых параметров, вследствие чего процесс настройки замедляется.
При использовании неограниченных крайних функций принадлеж-
ности (рис. 5.114, б) зоны нечувствительности не возникают, и все из-
меренные данные обеспечивают корректировку параметров, что приво-
дит к ускорению обучения. Влияние экстраполяционной истинности на
процесс настройки нейронечетких сетей исследовалось экспериментально
(Piegat 1997с).
Пример 5.6.3. В эксперименте исследовалось влияние экстраполяцион-
ной истинности на скорость и точность настройки нейронечеткого регу-
лятора. Задача состояла в настройке регулятора на работу в качестве
классического ПИД-регулятора (рис. 5.115). Структура нейронечеткого
регулятора представлена на рис. 5.116.
5.6. Экстраполяция в нечетких моделях
295
Рис. 5.115. Схема настройки нейронечеткого регулятора
Таблица 5.16
Ошибка настройки нейронечеткого регулятора с использованием экстра-
поляционной истинности (С те) и без ее использования (С/) после прохож-
дения 500 эпох
Начальное состояние Абсолютная средняя ошибка
о С1Е
5! 0,331 0,168
Si 0,330 0,108
S3 0,466 0,442
st 0,296 0,074
S5 0,369 0,009
В качестве обучающего использовался треугольный сигнал е(&) еди-
ничной амплитуды длительностью 10 с. В ответ на этот сигнал, пред-
ставленный на рис. 5.117, а, моделью регулятора генерировался выходной
сигнал, представленный на рис. 5.117, б.
Указанные сигналы использовались для настройки двух нейронечет-
ких регуляторов: регулятора Ст, в котором применялась только интер-
поляционная истинность, и регулятора Cie, использующего как интер-
поляционную, так и экстраполяционную истинность. Настройка каждого
регулятора осуществлялась в течение 500 эпох. Были выполнены пять
экспериментов по настройке сети для пяти различных начальных состо-
яний 5]....S\. Их результаты приведены в табл. 5.16.
Данные табл. 5.16 говорят об очевидном, основанном на экстраполя-
ционной истине, преимуществе регулятора Cje в отношении скорости
настройки — в течение выбранного временного периода для данного ре-
гулятора была достигнута более высокая точность. Другие эксперимен-
ты показали, что преимущество регулятора Cie перед Ст значительно
увеличивается с возрастанием амплитуды входного сигнала (рис. 5.117).
296
Глава 5. Нечеткие модели
Рис. 5.116. Нейронечеткий регулятор, использовавшийся в эксперименте
В случае уменьшения амплитуды, при достаточно малом ее значении
настройка обоих регуляторов начинает происходить с одинаковой скоро-
стью. Таким образом, результаты эксперимента позволяют сделать вывод
о негативном влиянии зон нечувствительности функций принадлежно-
сти на скорость настройки нейронечетких сетей. На рис. 5.118 показаны
типичные различия в скорости и точности настройки регуляторов Ci
И Cie-
5.6. Экстраполяция в нечетких моделях
297
Рис. 5.117. Обучающие сигналы, генерируемые моделью ПИД-регулятора:
е — входной, Mrm — выходной сигналы
Рассмотренные эксперименты подтверждают, что указанные практи-
ческие преимущества являются следствием использования в нечетких
моделях экстраполяционной истинности. Кроме того, данный тип истин-
ности позволяет более эффективно восстанавливать числовые входные
сигналы на основе их нечетких кодов — указанная задача была поставле-
на Бартоланом и Педричем в (Bartolan 1997).
Далее приведем пояснения к нескольким наиболее частым вопро-
сам и сомнениям, касающимся экстраполяции первого порядка, спо-
собствующие более глубокому пониманию ее сути.
Вопрос 1. Идея экстраполяции функций принадлежности за пределы ин-
тервала [0,1] на самом деле не является необходимой. Можно ввести
новые внешние термы, используя при этом обычные функции принад-
298
Глава 5. Нечеткие модели
Рис. 5.118. Сравнение скорости и точности настройки регуляторов с использо-
ванием экстраполяционной истинности (С7е) и без ее использования (С/)
лежности, и тот же самый результат будет достигнут без нарушения
принципов теории нечетких множеств.
Ответ 1. Рассмотрим пример простой нечеткой модели с базой правил
вида
R1: ЕСЛИ (х = малый) ТО (у = малый),
R2: ЕСЛИ (х = средний) ТО (у — большой),
R3: ЕСЛИ (х = большой) ТО (у = средний),
Я4: ЕСЛИ (х — очень большой) ТО (у = очень большой), (5.89)
и функциями принадлежности, представленными на рис. 5.119.
Для расширения модели путем введения новых внешних нечетких
множеств «очень малый» (VS) и «огромный» (Я) необходимо:
а) определить модальные значения xys и хн этих множеств (рис. 5.119);
5.6. Экстраполяция в нечетких моделях
299
Рис. 5.119. Расширение области определения (00) модели за пределы ОД —
области, в которой достоверность модели подтверждена измерениями входов
и выходов моделируемой системы, путем введения новых внешних нечетких
множеств «очень малый» (V S) и «огромный» (Я) для входа х и выхода у
б) ввести в модель новые правила, ставящие в соответствие новым вход-
ным значениям х = VS и х — Н выходные множества у — В\
ну = В2:
R0 : ЕСЛИ (ж = очень малый) ТО (у = BJ,
R5 : ЕСЛИ (х = огромный) ТО (у — В2);
в) определить модальные значения новых выходных множеств В\ и В2,
используемых для оценки параметра у (рис. 5.119).
Каким образом выполнить требования а) и в) при отсутствии дан-
ных измерений входов х и выходов у моделируемой системы в новой,
расширенной области определения модели?
Определение модальных значений на основе данных из области до-
стоверности нечеткой модели означало бы применение экстраполяции,
и в этом случае следовало бы выбрать определенный ее тип (нулевого,
первого или более высоких порядков). Определение новых модальных
значений без использования информации из области достоверности мо-
300
Глава 5. Нечеткие модели
Очень Очень
130 150 170 185 200 х, см
л)
Рис. 5.120. Пример нечеткой классификации человеческого роста (а) и нечеткое
множество «очень высокий», расширенное за пределы интервала [0, 1] (б)
дели (а, стало быть, вообще без использования какой-либо информации)
представляло бы собой ни на чем не основанные догадки.
Вопрос 2. Допуская корректность предложенного расширения области
значений функции принадлежности за пределы интервала [0,1], в ситу-
ации с оценкой роста можно утверждать, что для задания роста любого
человека достаточно только множества «очень высокий» (рис. 5.120, б).
И так как с помощью этого множества можно представить (закодиро-
вать) все возможные значения роста, понятие принадлежности оказыва-
ется бесполезным.
Ответ 2. Пример нечеткой классификации значений человеческого роста
представлен на рис. 5.120, а. Действительно, используя только множество
«очень высокий», продолженное в области значений, больших 1, и зна-
чений, меньших 0, можно представить (закодировать) все возможные
значения роста. Однако, такое кодирование предоставляет информацию
только о степени соответствия определенного значения роста типовому
значению «очень высокий», равному 200 см, не давая при этом инфор-
мации о том, насколько данный рост соответствует «очень низкому»,
«низкому», «среднему» или «высокому». Ни одну обоснованную класси-
фикацию нельзя выполнить, используя для оценки роста только одну
функцию принадлежности (один класс). Поэтому расширение внешних
нечетких множеств не означает, что другие множества (классы) не явля-
ются необходимыми.
Вопрос 3. Если интерпретировать степень принадлежности /1д(х) = 1
как «х принадлежит множеству А», то непонятно, как интерпретиро-
вать степень /2д(х) > 1. Если интерпретировать степень принадлежности
/м(^) = 0 как «х не принадлежит множеству А», то непонятно, как
интерпретировать степень /м(^) < 0.
5.6. Экстраполяция в нечетких моделях
301
Рис. 5.121. Пример нечеткой модели системы типа SISO, где: S — малый,
М — средний, L — большой, VL — очень большой
Ответ 3. Рассмотрим нечеткую модель, представленную на рис. 5.121, со-
держащую правила вида
ЕСЛИ (х = Л) ТО (y — Bj),
т. е., например,
ЕСЛИ (х = очень большой) ТО (у — очень большой),
и укажем на два важных вида информации, которую несет функция при-
надлежности, задающая нечеткое множество в условной части правила.
1. Функция принадлежности задает область значений входного парамет-
ра х, в пределах которой правило имеет силу и может быть активизи-
ровано. Например, правило Я4: ЕСЛИ (х = VL) ТО (у — VL) имеет
силу только на интервале хц < х < хуц. Если значение х находится
за пределами данной области (носителя функции принадлежности),
то заключение правила не активизируется (т. е. не срабатывает) во-
обще и, тем самым, не участвует в выводе. Сказанное справедливо
и в случае многомерных функций принадлежности составных условий
правил в системе типа MISO.
2. Функция принадлежности условной части правила определяет сте-
пень активизации его заключения для заданного входного значе-
ния х (или входного вектора X в случае системы типа MISO).
302
Глава 5. Нечеткие модели
Если входное значение х совпадает с модальным значением усло-
вия правила 7?4 (х = хуь), то заключение данного правила:
ЕСЛИ (х = VL) ТО (у = VL) активизируется со степенью 1.
При х — хь (рис. 5.121) степень активизации правила равна 0, а при
значении х, лежащем в интервале xl < х < ту l, данная степень
является дробным числом. Таким образом, сила активизации заклю-
чения правила зависит от расстояния между входным значением х
и модальным значением функции принадлежности, соответствующей
условию правила, а также от формы данной функции, которая в об-
щем случае выбирается не произвольно, а так, чтобы обеспечить как
можно большую точность модели (Baglio 1994).
Если требуется расширение нечеткой модели вправо, то необходи-
мо расширить область действия правил, связанных с ее правой границей.
Для модели, представленной на рис. 5.121, таким правилами являются Z?4
и R3. Расширение области действия правил подразумевает расширение
области определения функций принадлежности их условий. При расши-
рении области определения граничных функций принадлежности «боль-
шой» и «очень большой» так, как показано на рис. 5.122, а, мы получаем
нулевой порядок экстраполяции модели, а при расширении, показанном
на рис. 5.122, б, — первый порядок. Тем самым, мы должны принять ре-
шение о том, какой тип экстраполяции необходим для нашей системы.
В модели, представленной на рис. 5.122, а, степень активизации за-
ключения «граничного» правила Л4: ЕСЛИ (х = VL) ТО (у = VL)
при х > хуь всегда равна 1, а в модели, представленной на рис. 5.122, б, —
всегда больше 1, и именно такой вариант активизации (/z(x) > 1) необхо-
димо использовать, если требуется первый порядок экстраполяции. Тем
самым, мы получаем ответ на первую часть вопроса 3 об интерпретации
значений /ха(х) > 1: в моделях типа «вход-выход» степень принадлеж-
ности /гд(х) > 1 может означать, что условие правила «более чем
выполняется», и это приводит к усилению активизации заключе-
ния (сказанное относится только к граничным входным нечетким множе-
ствам, но не к внутренним— см. пояснение к примеру 5.6.2). Утверждение
вида «условие более чем выполняется» часто используется людьми в по-
вседневном общении. Аналогично, степень принадлежности ^д(х) < 0
может означать, что условие правила «более чем не выполняется»,
и это приводит к отрицательному уровню активизации заключения.
Значение /1д(х) понимается чаще всего как степень принадлежно-
сти х нечеткому множеству А. Степень принадлежности является по-
ложительной, и ее точная верхняя грань (супремум) равна 1 (для нор-
5.6. Экстраполяция в нечетких моделях
303
Рис. 5.122. Расширение нечеткой модели, представленной на рис. 5.121, с при-
менением экстраполяции нулевого (а) и первого (б) порядка
мированного нечеткого множества) (Zimmermann 1991). Помимо этого,
степень принадлежности /1д(х) можно понимать как степень сходства
заданного элемента х с типовым для множества А элементом ха, ко-
торый полностью (со степенью, равной 1) принадлежит данному множе-
ству (например, типовая температура теплого воздуха — случай функции
304
Глава 5. Нечеткие модели
1-
сходство
А Чрезмерное
—)( сходство
Сходство
ф
X, тыс. долл.
5 х^-1011
в)
Рис. 5.123. Функции принадлежности лингвистической переменной х = доход,
xl = $1000, хм = $5000, хн = $10000—типичные элементы для множеств
«низкий», «средний» и «высокий»
принадлежности одной переменной, типовой кредитоспособный клиент
банка — случай функции принадлежности многих переменных). Число
типовых элементов может быть бесконечным— например, для трапецие-
видных функций принадлежности.
Использовавшиеся до настоящего времени функции принадлежности
(подобные тем, что представлены на рис. 5.123, а) несли информацию
только о том, с какой степенью значение х принадлежит заданному мно-
жеству. Если же рассматривать /хд(х) как степень сходства, то воз-
никает вопрос, почему элементы х, превосходящие по величине ти-
повой элемент правого граничного нечеткого множества (например,
х > хн на рис. 5.123, в), всегда, независимо от их значений, следует
считать одинаково схожими с типовым элементом? Обратим внима-
ние, что в отличие элементов, находящихся справа от типового элемен-
та хн, элементы слева от него (т. е. х < хн) имеют различную степень
сходства.
Почему бы не предположить, что нечеткое множество А представля-
ет собой множество элементов х, среди которых выделен типовой (ха-
рактеристический) элемент хд (либо подмножество типовых элементов),
имеющий степень сходства д/д(х) = 1, и имеются другие элементы, сте-
пени сходства которых изменяются в пределах, выбираемых с учетом
удобства для решения рассматриваемой задачи? В соответствии с данной
интерпретацией, нечеткое множество А можно определить следующим
5.6. Экстраполяция в нечетких моделях
305
образом:
А = {(ж,/1д(т))| ХА, /ZAmin < Мл(Ц < МАтах,Я-’ G А}. (5.90)
Например, нечеткое множество Аз = «высокий доход», представлен-
ное на рис. 5.123, в, определялось бы в этом случае так:
а с/ / ч х ~ 5000
Аз = {(ж,М4з(ж) = -5Q-00- ХАЯ = 10000,
0 < дд3(х) < 199 999, х G [0,1000000]}.
Нормированное нечеткое множество в данной ситуации можно интер-
претировать как множество, типовой элемент (или подмножество типо-
вых элементов) которого имеет степень сходства, равную 1. Об интервале
0 < < 1 можно говорить, как об интервале сходства, об интерва-
ле —оо < /м(х) <0 — как об интервале несходства или различия и об
интервале 1 < < ос — как об интервале чрезмерного сходства
(рис. 5.123, б, в). В условиях каждой конкретной задачи можно исполь-
зовать собственный интервал значений принадлежности, не обязательно
ограничивая его пределами [0,1].
Вопрос 4. Понятие экстраполяции связано с линейным расширением
(продолжением) стандартных треугольных или трапециевидных функций
принадлежности — линейность подтверждается разложением в ряд Тей-
лора. Поэтому в простейших случаях, когда для моделирования линг-
вистических термов используются треугольники, линейное расширение,
по крайней мере на первый взгляд, представляется обоснованным. Но
что же будет при использовании функций принадлежности П-, S- и Z-
типов? В этом случае первая и последняя функции (имеющие соответ-
ственно Z- и S-тип) на участках продолжения будут постоянными, по-
скольку, в соответствии с определением этих функций, их производные
в пиковых точках равны нулю. И что будет в случае гауссовых функций
принадлежности?
Ответ 4. Ограничимся рассмотрением нечетких моделей, внутренние
множества Аг которых удовлетворяют условию разбиения единицы
п
(]Г г 0- Экстраполяция нечеткой модели подразумевает расши-
г—1
рение ее области определения за пределы участка достоверности моде-
ли. Это можно выполнить путем расширения областей действия двух
содержащихся в модели граничных правил, при этом «линейный ме-
тод расширения и продолжения» применяется только в случае функций
принадлежности треугольного, но, как будет показано далее, не тра-
пециевидного типа. В соответствии с формальным, математическим
306
Глава 5. Нечеткие модели
Рис. 5.124. Экстраполяция первого порядка нечеткой модели с трапециевидны-
ми функциями принадлежности значений входа х
определением (5.83), экстраполяция первого порядка предполагает
линейное расширение, или продолжение наклонной поверхности моде-
ли из внутренней приграничной области во внешнюю, расположенную
с ней по соседству. Наклон поверхности определяется, главным обра-
зом, ее опорными точками, координаты которых задаются заключениями
отдельных правил при входных значениях равных модальным зна-
чениям (типовым элементам) нечетких множеств, находящихся в усло-
виях правил (см. разд. 5.2.1). В связи с этим расширение граничных
функций принадлежности следует выполнять таким образом, что-
бы обеспечить их прохождение через точки, соответствующие мо-
дальным (типовым) значениям этих функций. Пример экстраполяции
нечеткой модели с трапециевидными функциями принадлежности пред-
ставлен на рис. 5.124.
Таким образом, расширение области действия граничных пра-
вил путем линейного продолжения граничных функций принадлеж-
ности возможно только при использовании в модели треугольных
функций принадлежности (рис. 5.125).
5.6. Экстраполяция в нечетких моделях
307
Рис. 5.125. Экстраполяция первого порядка нечеткой модели с треугольными
функциями принадлежности значений входа х
На рис. 5.126 показан метод выполнения экстраполяции моделей с
гауссовыми функциями принадлежности, приводящий к небольшому на-
рушению условия разбиения единицы (J2 АМ?(Х) = !)•
г=1
Поскольку экстраполяция первого порядка по определению являет-
ся линейной, то для продолжения гауссовых функций принадлежности
используются прямолинейные участки, проходящие через точки пересе-
чения графиков граничных функций с линиями, проходящими через их
модальные (типовые) значения перпендикулярно оси абсцисс. Для функ-
ции принадлежности VL (рис. 5.126) такими точками являются аъ и аз,
а для функции L — ац и а±. Благодаря указанному обстоятельству, на гра-
ницах области достоверности (ОД) не произойдет скачкообразного изме-
нения выходного значения модели. Для гауссовых функций принадлеж-
ности возможна также экстраполяция первого порядка, существенно на-
рушающая условие разбиения единицы, но она является более сложной,
поскольку в ней требуется учитывать более двух граничных правил. Для
сравнения на рис. 5.127 приведен метод выполнения экстраполяции нуле-
вого порядка для гауссовых функций принадлежности, а на рис. 5.128 —
для трапециевидных функций принадлежности.
308
Глава 5. Нечеткие модели
Рис. 5.126. Экстраполяция первого порядка нечеткой модели с гауссовыми
функциями принадлежности значений входа х
Рис. 5.127. Экстраполяция нулевого порядка нечеткой модели с гауссовыми
функциями принадлежности, ОД — область достоверности модели
5.6. Экстраполяция в нечетких моделях
309
Рис. 5.128. Экстраполяция нулевого порядка нечеткой модели с трапециевид-
ными функциями принадлежности значений входа х
Вопрос 5. На чем основано предположение о допустимости расширения
функций принадлежности за пределы области существующих данных?
Связь между отображением «вход-выход» моделируемой системы и кон-
кретным выбором функций принадлежности не является однозначной.
В таком случае почему следует считать адекватным именно линейное
продолжение модели? Теоретическое обоснование данного факта отсут-
ствует, а «слепое» расширение границ может привести к нежелательному
эффекту, связанному с наличием высоких, резко выделяющихся значений
(выбросов) степеней принадлежности данных.
Ответ 5. Продолжение функций принадлежности за пределы области су-
ществования данных необходимо в том случае, если предпринимается
попытка выполнить экстраполяцию нечеткой модели. Используемый тип
экстраполяции (нулевого, первого или более высоких порядков) при этом
имеет характер предположения и зависит от нашего выбора. Будет ли вы-
бранный метод экстраполяции корректным, в момент выбора установить
нельзя, в силу отсутствия данных о поведении системы в неизученной,
расширенной области. Подтвердить обоснованность выбора можно лишь
впоследствии, после того, как будут получены соответствующие данные
из расширенной области. Выбор метода экстраполяции определяет спо-
соб продолжения граничных функций принадлежности, при этом рас-
310
Глава 5. Нечеткие модели
Рис. 5.129. Меньшее (а) и большее (б) расширение области определения (00)
нечеткой модели в зависимости от степени ее нелинейности в области досто-
верности (ОД)
Поверхность
модели
ОД
Расширение 00 »
ширение нечеткой модели не обязательно должно быть линейным —
можно выбирать другие методы, которые, по нашему мнению, могут при-
вести к лучшим результатам. Большие отклонения (выбросы) расширен-
ной нечеткой модели возникают при неправильном выборе метода экс-
траполяции. Кроме того, поскольку вероятность возникновения выбросов
увеличивается по мере удаления от области достоверности модели, рас-
ширение не должно быть очень большим.
Вопрос 6. Область достоверности экстраполяции представляет собой от-
крытый вопрос, требующий конкретного рассмотрения.
Ответ 6. Расширение области определения модели не должно быть боль-
шим — например, расширение до 105% от исходной области является бо-
лее предпочтительным, чем до 150%. При значительной изменчивости
(нелинейности) поверхности модели следует выбирать меньшее расшире-
ние (рис. 5.129, а), а в случае малой кривизны (рис. 5.129, б) расширение
может быть большим.
Вопрос 7. Степени принадлежности, выходящие за пределы интервала
[0.1], не имеют никаких преимуществ.
Ответ 7. Благодаря знанию методов экстраполяции нечетких моделей,
можно расширять их исходные области определения путем добавления
к ним участков, непосредственно прилегающих к областям достоверно-
сти моделей (пример 5.6.1). Как было показано в примере 5.6.3, использо-
вание экстраполяции первого порядка в нейронечетких моделях (сетях)
приводит к повышению скорости их настройки.
5.7. Типы нечетких моделей
311
5.7. Типы нечетких моделей
По мере развития нечеткой логики разрабатываются новые типы нечет-
ких моделей (Babuska 1995b,с; Pedrycz 1994а; Yager 1994; Brown 1994).
Целью создания новых моделей является обеспечение большей точно-
сти и размерности, а также упрощение их структуры. Необходимость
разработки новых моделей вызвана также большим разнообразием су-
ществующих реальных систем, различными видами информации об этих
системах и разной степенью ее доступности.
Основное преимущество нечетких моделей по сравнению с традици-
онными математическими моделями связано с возможностью использова-
ния для их разработки значительно меньших объемов информации о си-
стеме, при этом информация может носить приближенный, нечеткий ха-
рактер. Далее будут представлены два основополагающих типа нечетких
моделей и рассмотрена взаимосвязь между ними.
Важнейшим и наиболее часто используемым типом нечеткой модели
является модель Мамдани. Рассмотрению данной модели, а также других
моделей, производных от нее, посвящен настоящий раздел.
5.7.1. Модели Мамдани
Концепция лингвистической нечеткой модели, воспроизводящей челове-
ческий способ мышления, была предложена в первых работах Заде. Идея
применения данной концепции к нечеткому управлению динамически-
ми объектами принадлежит Мамдани (Mamdani 1974,1977), который на-
ряду с этим представил способ построения модели человека-оператора,
управляющего объектом. Предложенный Мамдани метод моделирования
был встречен с большим интересом и получил одобрение в связи с его
простотой и доступностью. В настоящее время этот метод использует-
ся чаще всего, хотя были разработаны и другие типы моделей, среди
которых наиболее важными являются модели Такаги—Сугено (они бу-
дут рассмотрены в разд. 5.7.2). В рамках метода Мамдани моделируемая
система рассматривается как черный ящик, характеризующийся недоста-
точностью информации о происходящих внутри него физических явлени-
ях (Babuska 1995а,b).
Целью является разработка модели, выполняющей такое отображение
своих входов (вектор X) в выход Y (ограничимся далее рассмотрением
систем типа MISO с одним выходом), которое обеспечивало бы как мож-
но более точную аппроксимацию реальной системы (например, в смысле
средней абсолютной погрешности). Указанное отображение предполага-
312
Глава 5. Нечеткие модели
ет существование некоторой геометрической поверхности, которую будем
далее называть поверхностью отображения, в пространстве, задаваемом
декартовым произведением X хУ.
Модель Мамдани представляет собой множество правил, где каждое
правило задает в указанном пространстве некоторую нечеткую точку.
На основе множества нечетких точек формируется нечеткий график, ме-
ханизм интерполяции между точками в котором зависит от используемо-
го аппарата нечеткой логики.
Пример 5.7.1.1. Моделируемая система типа SISO реализует отображе-
ние
у = Ц - 2)2 + 1
(рис. 5.130). Ее нечеткую модель Мамдани можно представить в виде
множества правил
R1 : ЕСЛИ (.г = Аг) ТО (т/ = ВД
R2 : ЕСЛИ (х - А2) ТО (у = В2),
R3 : ЕСЛИ (х - А3) ТО (у = В3), (5.91)
где Ai = примерно 1, Л2 = примерно 2, А3 = примерно 4,
Bi = примерно 2, В2 = примерно 1, В3 = примерно 5,
Рис. 5.130. Иллюстрация того, как влияет расположение «существенных» точек
на точность нечеткой модели
5.7. Типы нечетких моделей
313
Используемые в правилах функции принадлежности показаны
на рис. 5.130, а.
Каждое правило определяет важную типовую особенность поведения
системы, геометрически соответствующую точке пространства ХхУ.
«Существенные» точки модели могут располагаться непосредственно
на характеристике реальной системы (рис. 5.130) — в этом случае они
будут являться точками ее пересечения с характеристикой модели и,
следовательно, точками, в которых модель «сообщает правду» о системе.
В частности, правило R1, имеющее вид
ЕСЛИ (ж примерно 1) ТО (у примерно 2),
задает точку R1, которая является существенной одновременно для си-
стемы и ее модели.
Вместе с тем, существенные точки нечеткой модели не обязатель-
но должны всегда принадлежать характеристике (поверхности) реальной
системы. Как показывает рис. 5.130, б, другое расположение этих точек
может обеспечить более высокую точность модели. В данной ситуации
параметры функций принадлежности изменяются (что в свою очередь
приводит к новым нечетким множествам Л2, В*, В2), и таким образом,
правила будут иметь следующий вид:
R1* : ЕСЛИ (х = 41) ТО (у = В*),
В2* : ЕСЛИ (х = Л^) ТО (у = В2*),
ВЗ : ЕСЛИ (х - Л3) ТО (у = В3). (5.92)
Правила В1* и В2* в (5.92) не сообщают правду о системе, поскольку
задаваемые ими точки не принадлежат ее характеристике. Вместе с тем,
средняя точность здесь будет выше, чем в случае модели, изображенной
на рис. 5.130, а.
Вид характеристики нечеткой модели на участках между «существен-
ными» точками, для задания каждой из которых используется отдельное
правило, зависит от используемого аппарата нечеткой логики (т. е. мето-
дов выполнения фаззификации, дефаззификации и т. д.). Если в примере
на рис. 5.131, а ввести другую функцию принадлежности множества Л2,
то вид характеристики модели изменится (рис. 5.131, б).
Как показано на рис. 5.131, введение трапециевидной функции при-
надлежности множества Л2 приводит к изменению типа интерполяции,
выполняемой моделью на участках между ее «существенными» точка-
ми RI, R2, R3 — интерполяция имеет нелинейный характер, но при этом
является локально линейной. Использование на участках между «суще-
ственными» точками модели Мамдани нелинейной интерполяции может
314
Глава 5. Нечеткие модели
а)
Рис. 5.131. Влияние
изменения функции принадлежности нечеткого множе-
ства А2 на вид характеристики модели (5.91)
привести к повышению точности модели, вследствие того, что харак-
тер изгиба поверхности модели между данными точками будет совпадать
с характером изгиба поверхности системы.
Вместе с тем, на практике характер выпуклости указанной поверх-
ности в общем случае неизвестен, и имеется лишь небольшой объем
информации о координатах отдельных точек, для которых выполнялись
измерения. Кроме того, в случае нечеткой модели на характер выпук-
лости поверхности влияет столь большое число элементов модели, что
предугадать тип локальной выпуклости оказывается достаточно слож-
ным, особенно для систем с многими входами.
Рассмотрим влияние типа оператора (используемого для агрегации
условий в модели системы с двумя входами) на вид поверхности нечет-
кой модели с помощью следующего примера.
Пример 5.7.1.2. В табл. 5.17 и на рис. 5.132 представлена информация
о взаимосвязи входов и выхода для системы с двумя входами х\ и х2.
Поскольку проекции точек Ri совпадают с узлами регулярной пря-
моугольной сетки в пространстве Х± х Х2 входов объекта (рис. 5.132
и 5.133), то можно непосредственно использовать эти точки для постро-
5.7. Типы нечетких моделей
315
Таблица 5.17
Информация об отображении «вход-выход», которое реализует моделиру-
емая система
Ri R1 R2 R3 R4 R5 R6 R7 Я8 R9
Х1 1 1 1 3 3 3 5 5 5
*2 2 4 6 2 4 6 2 4 6
У -3 1 -3 1 5 1 -3 1 -3
* - точка в пространстве входов Х{ х Х2
• - точка в пространстве входов-выходаА^х^хУ
Рис. 5.132. Расположение точек измерения (представляющих информацию
о системе) в пространстве входов х Х2 и в пространстве входов-выхода
Хх х Х2 х Y
ения базы правил (5.93) и функций принадлежности входов и выхода.
R1 : ЕСЛИ (xi 1) И (х2 2) ТО (у ъ -3),
R2 : ЕСЛИ (гщ 1) И (х2 ~ 4) ТО (у 1),
R3 : ЕСЛИ (xi 1) И (х2 6) ТО (у -3),
Л4 : ЕСЛИ (^1 3) И (х2 ъ 2) ТО (у 1)
316
Глава 5. Нечеткие модели
R5 : ЕСЛИ (xj as 3)
R6 : ЕСЛИ (Ж1 « 3)
R7 : ЕСЛИ (Ж] « 5)
R8 : ЕСЛИ (яд ss 5)
И (ж2 « 4) ТО (у « 5),
И (ж2 6) ТО (у « 1),
И (1-2 « 2) ТО (у « -3),
И (x2Ri4) ТО (у^1),
R9 : ЕСЛИ (од « 5) И (х2 « 6) ТО (у « -3),
(5.93)
или в общем виде:
RI : ЕСЛИ (яд = Л) И (х2 = ВД ТО (у = Ск),
где i,j, к = 1,2,3.
(5.94)
11 для 1 < х1 < 3,
ИЛ =
о В других
v случаях
fl для 3<Xj<5,
ич = <
О в других
случаях
1 для 2 < %2 < 4,
О в других
случаях
1 для 4< Х2 < 6,
О в других
к случаях
Ai- примерно 1
#1 = примерно 2,
Q = примерно -
Л2 = примерно 3,
В2 = примерно 4,
>, С2 = примерно 1,
А2 = примерно 5,
В2 = примерно 6,
С3 = примерно 5.
Рис. 5.133. Прямоугольная сетка в пространстве входов системы (а), исполь-
зуемые функции принадлежности входов и выхода (б), а также определение
логических переменных-индикаторов Wj, Vj
5.7. Типы нечетких моделей
317
Для задания функций принадлежности входов можно использовать
логические переменные wz, Vj, играющие роль индикаторов сегментов:
= 0.5(3 — /ia2(ti) — 0.5(ti - 1)гщ + 0.5(5 - лц)и>2,
дд3(а?1) = 0.5Ц1 - 3)w2; Щ) = 0.5(4 - Ж2М.
= 0.5(х2 - 2)vi + 0.5(6 - Х2)ъ'2, ЦвАхД = 0.5(.t2 - 4)u2-
(5.95)
Эти переменные определены на рис. 5.133, б.
Влияние типа оператора, используемого для операции пересечения
множеств (И). При использовании оператора PROD (алгебраического
произведения) в качестве основы для выполнения встречающейся в усло-
виях правил (5.93) операции И, значение на выходе нечеткой модели
будет вычисляться по формуле
/(^1 Х2) = (^2)1-3) + Л.41СГ1)рв2(-т2)(1) + Щ41Ф’1)/<Вз(-г2)(-3) j
, Щ42(у1)А<Д1О2)(1) + ^-42(a,l)/2B2(j,2)(5) +/Г42(Д,1)ЛВз(а'2)(1) ,
+ М*
/<4з(^1)/^В1(.Г2)(-3) + Ца3(х^ВВ2(х-2)Ч) + М.4з(а'1)//Вз(-Г2)(-3)
+ М*
3 3
где М* = (5.96)
?=] j=l
При использовании для выполнения операции пересечения множеств
(И) в правилах (5.93) оператора MIN значение у** на выходе нечеткой
модели будет задаваться выражением
-ЗМШ[цЛ1(.Т1).ЦВ1(^2)] + 1МШ[цд1(Т1),Цв2(Т2)] !
У ’ ,г2; — ду-** +
-3MIN[/ZA1(.r1)./7B3(-T2)] + 1 МЖ[цд2 (Т1), Цвг (т2)]
5МШ[цд2(т1). дгв2(т2)] + 1 MIN[^2(ti), цВзU2)] ,
-4- --------------------------------------------- ~т-
АГ*
-ЗМ^/иД.гф.ц^Ог)] + 1МШ[р.43(х1),дв2(т2)]
-г--------------------------------------------------г
л/**
-ЗМШ^Дз^^.ДВзС^)]
+ л/**
з з
где ЛГ* = мв/^2)]. (5.97)
j=i
318
Глава 5. Нечеткие модели
Таблица 5.18
Примеры выходных значений нечеткой модели (5.93),
вычисленных с использованием операторов PROD и MIN
1.5 2.5 3.5 4.33
Х2 2.5 2.5 3.5 5.33
PROD у* -1 1 3 -0.33
MINT/** -0.33 1 2.66 0.2
Поскольку формулы (5.96) и (5.97) не совпадают, то для одно-
го и того же входного вектора [xi,T2]T выходные значения
и г/**(ж1,Х2) будут различными, хотя они и могут совпадать в отдельных
точках, например, в тех, которые задаются условиями правил (5.93), т. е.
в «существенных» точках модели. Таким образом, механизмы интерпо-
ляции, выполняемой моделью (5.93), для операторов PROD и MIN будет
различными. На рис. 5.134 представлены поверхности нечетких моделей,
полученные в результате использования операторов PROD и MIN.
В табл. 5.18 даны примеры выходных значений у* и у** для входных
векторов [xi,Х2]т, не использовавшихся при построении модели.
На рис. 5.134 видно, что поверхность нечеткой модели, соответству-
ющая оператору PROD, является более гладкой, чем в случае операто-
ра MIN. Чтобы определить, какая модель является более точной, необ-
ходимо иметь тестовое множество измерений векторов значений вход-
ных и выходных параметров моделируемой системы, на основе которого
следует найти величину средней (либо квадратичной) ошибки. Интерес
представляет вопрос, какой тип интерполяции обеспечивает модель Мам-
дани на участках между пресловутыми «существенными» точками, зада-
ваемыми с помощью правил.
Для модели из рассматриваемого примера описание интерполяцион-
ной поверхности может быть получено на основе формул (5.96) и (5.97).
Для каждого сегмента входного пространства Х± х X? участки поверх-
ности будут задаваться по-разному. На рис. 5.135 представлены формулы
поверхностей, получаемые в результате применения оператора PROD.
Интерполяционные поверхности в рассматриваемом примере являют-
ся линейными, несмотря на использование в модели нелинейного опера-
тора PROD. Данный случай является особым, поскольку представленные
на рис. 5.132 и в табл. 5.17 опорные точки модели, соответствующие узлам
изображенной на рис. 5.135 сетки, расположены так, что через них мож-
5.7. Типы нечетких моделей
319
Рис. 5.134. Поверхности отображения «вход-выход» нечеткой модели (5.93),
полученные в результате использования операторов PROD (а) и MIN (б)
но провести четыре линейных сегмента. В общем случае, использование
оператора PROD, кусочно-линейных функций принадлежности для вход-
ных параметров и одноточечных функций для выходных параметров, как
правило, приводит к получению нелинейных интерполяционных функций
полилинейного типа (полилинейных функций), содержащих произведе-
ния.
В случае трех входов такая функция имеет вид
у = ao + ab'D + а2х2 + 03X3 + а $Х}Х2 + a3xix3 + а&^хз + a7xiX2X3. (5.98)
На границах сегментов интерполяционные функции в модели Мамда-
ни имеют общие вершины (узлы) и общие ребра (т. е. значения функций
на границах совпадают). Убедиться в этом можно на примере, показан-
320
Глава 5. Нечеткие модели
Рис. 5.135. Формулы для вычисления интерполяционных поверхностей модели
(5.93), соответствующих отдельным сегментам входного пространства Х-^ х Х2
(с использованием оператора PROD)
ном на рис. 5.135. Таким образом, на границах сегментов сохраняется
непрерывность поверхности модели.
Используя непрерывно дифференцируемые функции принадлежности
входных параметров модели (например, гауссовы функции), можно обес-
печить непрерывность первой производной (а также производных более
высоких порядков) для данной поверхности, при условии, что не исполь-
зуются операторы типа MIN, связанные с возможностью резкого измене-
ния значений.
Для любой нечеткой модели можно теоретически вывести форму-
лу, задающую ее поверхность в явном виде (т. е. у = /(X)). Вместе
с тем, на практике эти формулы не выводят в силу трудоемкости данно-
го процесса, которая значительно возрастает с увеличением числа входов
и функций принадлежности. Значение на выходе нечеткой модели полу-
чают путем последовательного вычисления выходных значений отдель-
ных ее элементов при заданном векторе входных значений X. С учетом
этого, на практике, при применении модели Мамдани, точные форму-
лы, задающие интерполяционную поверхность, неизвестны. Исключение
составляют следующие простые случаи:
5.7. Типы нечетких моделей
321
• при использовании кусочно-линейных функций принадлежности, удо-
влетворяющих условию разбиения единицы, для входов, одноточеч-
ных функций для выходов, а также операторов MEAN (среднего зна-
чения) и SUM (неограниченной суммы) получаем глобально нелиней-
ную поверхность модели, состоящую из локально линейных сегмен-
тов, которые задаются функциями вида:
у = а0 + + «2^2 + • • • + апХп, (5.99)
где п — число входов;
• при использовании кусочно-линейных функций принадлежности, удо-
влетворяющих условию разбиения единицы, для входов, одноточеч-
ных функций для выходов, оператора PROD для пересечения и опе-
ратора SUM для объединения множеств поверхность модели состо-
ит из полилинейных сегментов, которые задаются функциями вида
(5.98).
В остальных случаях использование модели Мамдани приводит к по-
лучению различных нелинейных поверхностей со сложной формой опре-
деления.
Лингвистические и нелингвистические модели Мамдани. В самом на-
чале в моделях Мамдани использовались, как правило, только лингвисти-
ческие метки типа «малый» или «большой». Нечеткие модели, использу-
ющие подобные метки для обозначения нечетких множеств, называются
лингвистическим моделями. Между тем, как было замечено на практике,
присвоение нечетким множествам лингвистических меток часто оказыва-
ется лишенным особого смысла. Рассмотрим примеры на рис. 5.136.
В примере на рис. 5.136, а нечеткое множество «примерно 9» нахо-
дится настолько близко к множеству «примерно 10», что считать его
«средним» можно лишь с большим трудом. Наличие большого числа мно-
жеств в примере на рис. 5.136, б привело бы к необходимости использо-
вания большого числа меток (например, «малый», «близкий к малому»,
«между малым и средним», «близкий к среднему», «средний» и т. д.),
что стало бы, в свою очередь, причиной их трудноразличимости. Более
практичным здесь является использование меток в виде нечетких чи-
сел («примерно 1», «примерно 2», «примерно 3» и т. п.), поскольку с их
помощью проще представить позицию каждого множества.
На рис. 5.136, в приведен пример ситуации, когда использование линг-
вистических меток типа «малый», «средний», «большой» имеет смысл.
При малом числе нечетких множеств их ядра находятся на достаточно
большом расстоянии друг от друга. Нечеткие модели, в которых метки
322
Глава 5. Нечеткие модели
Рис. 5.136. Примеры, иллюстрирующие обоснованность присвоения нечетким
множествам лингвистических меток (в) либо представления множеств в форме
нечетких чисел (а, б)
множеств представлены в форме нечетких чисел, называются нелингви-
стическими моделями.
В каких случаях правила в модели Мамдани «не сообщают правду»?
Истинность информации, содержащейся в условиях и заключениях пра-
вил модели Мамдани, очень важна для понимания взаимосвязи входов
и выходов как модели, так и моделируемой системы. Наиболее предпо-
чтительной является ситуация, когда правила «сообщают правду», т. е.,
например, если одно из правил имеет вид
ЕСЛИ (xi примерно 2) И (х2 примерно 1) ТО (у примерно 5),
то в результате подачи на вход модели вектора [яц,Ж2]т = [2,1] на ее
выходе будет получено значение у = 5, которое задается заключением
указанного правила. Тем не менее, не всегда подобная ситуация имеет
место, и это подтверждает следующий пример.
Пример 5.7.1.3. Рассмотрим нечеткую модель объекта с двумя входами,
база правил которой имеет вид
R1 : ЕСЛИ (xi 1) И (х2 к 1) ТО (у я 4),
R2 : ЕСЛИ (xr 1) И (ж2 2) ТО (у к 13),
R3 : ЕСЛИ (Х1 2) И (х2 ~ 1) ТО (у ъ 5),
Я4 : ЕСЛИ (xi 2) И (х2 2) ТО (у ъ 16),
(5.100)
а функции принадлежности представлены на рис. 5.137.
Ь.7. Типы нечетких моделей
323
Г / \ 2-1 Г / 9 \
Mi 01) = ехр - ——- М2(М = ехр -
y(J. 78825 у J [_ \U.78825 у
Г / \ 2-1 Г / \
/ \ ( Х*2 1 \ 2 \
Д1(ж2 = ехр — ------- Ц2\Х2) = ехр — --------------------------
/ V 7 у0.78825у J v 7 [ у0.78825/
Рис. 5.137. Гауссовы функции принадлежности нечетких множеств, задающих
значения входов и выхода для рассматриваемой системы с двумя входами
В процессе вычисления значения у на выходе модели для векторов
входных значений, содержащихся в условиях правил, т. е.
Х(Я1) = [1,1]т, X(/?2) = [1,2]т,
Х(ЯЗ) = [2,1]т, Х(Я4) = [2,2]т,
происходит одновременная активизация всех правил, а не только прави-
ла, в посылке которого содержится заданный вектор Х(Яг).
Поскольку в вычислении выходного значения всегда принимают уча-
стие все правила, оно будет отличаться от значения yt, которое задается
заключением правила Ri. Например, при вычислении значения на выходе
модели для входного вектора Х(7?4) = [2, 2]т (с использованием опера-
тора PROD в качестве основы для выполнения операции И) степени
выполнения условий отдельных правил будут следующими:
/'ri (2,2) = М1Ц1)^1Цг) = 0.04,
уид2(2,2) = мхЦОмгЦг) = 0.2,
дяз(2,2) = = 0.2,
MR4(2,2) = /12(Ж1)№(®2) = 1-
Полученные степени истинности условий (jlri приводят к активизации
заключений всех правил, и значение на выходе модели будет вычисляться
324
Глава 5. Нечеткие модели
Таблица 5.19
Сравнение выходных значений ут„ вычисляемых с помощью моде-
ли (5.100), со значениями уг, задаваемыми заключениями правил данной
модели
Правило Ri R\ R2 ЛЗ Л4
Входной вектор *1 1 1 2 2
х2 1 2 1 2
Заключение У, 4 13 5 16
Выходное значение Ут1 5.72 11.94 6.61 13.72
по формуле:
_ _ 4 • 0.04 + 13 • 0.2 + 5 • 0.2 + 16 • 1
Ут - -д - 0.04 + 0.2 + 0.2 + 1
X Уйг
Полученное выходное значение т/т(2,2) не совпадает со значением
уд. = 16, которое задается заключением правила R4. В табл. 5.19 приведе-
но сравнение выходных значений модели ymi для векторов входных значе-
ний (5.101), содержащихся в условиях правил (5.100), со значениями yi,
содержащихся в их заключениях. Из табл. 5.19 видно, что вычисляемые
с помощью модели выходные значения ymi не совпадают со значениями
yi, задаваемыми заключениями правил, и таким образом, правила не «со-
общают правду». Введем теперь в рассматриваемую модель другие типы
функций принадлежности, а именно функции, удовлетворяющие условию
разбиения единицы (рис. 5.138).
Для выполнения операции И в условиях правил (5.100) будем ис-
пользовать оператор PROD. При вычислении значения утд на выходе
модели для входного вектора Х(Л4) = [2,2]т будут получены следующие
Рис. 5.138. Кусочно-линейные функции принадлежности входов, удовлетворя-
ющие условию разбиения единицы, и одноточечные функции принадлежности
выходного параметра рассматриваемой системы с двумя входами
Ь.7. Типы нечетких моделей
325
Таблица 5.20
Сравнение выходных значений вычисляемых моделью (5.100), исполь-
зующей треугольные функции принадлежности, со значениями yt, содер-
жащимися в заключениях правил данной модели
Правило Ri R1 R2 R3 Я4
Входной вектор Х1 1 1 2 2
х2 1 2 1 2
Заключение У/ 4 13 5 16
Выходное значение У mi 4 13 5 16
степени истинности условий отдельных правил:
/о?1 (2, 2) = Л61(Ж1)/Х1(Ж2) = О,
№(2. 2) = Д1Ц1Ц2Ц2) = О,
Мяз(2,2) = М2Ц1Ц1Ц2) = О,
/зд4(2. 2) = = 1-
Поскольку степень истинности, отличную от нуля, имеет только одно
правило (Л4), то только это правило будет активизировано, и выходное
значение нечеткой модели будет соответствовать значению тд, содержа-
щемуся в его заключении:
4
_ ,?!_4-0+13-0 + 5- 0+16-1
Ут~ Д “ о + 0 + O+ l
Теперь правило /?4 согласуется с вычислениями, осуществляемыми
моделью. Аналогичная ситуация имеет место и для остальных правил.
Значения ymi на выходе модели для векторов входных значений, содер-
жащихся в условиях правил, приведены в табл. 5.20.
Как видно из табл. 5.20, при использовании для входных парамет-
ров модели (5.100) треугольных функций принадлежности, удовлетво-
ряющих условию разбиения единицы, все правила предоставляют ин-
формацию, согласующуюся с результатами осуществляемых моделью вы-
числений.
Правила «сообщают правду», если:
• для реализации операции И используются t-нормы, а для операции
ИЛИ — s-нормы, т. е. такие операторы, для которых выполняются
326
Глава 5. Нечеткие модели
Рис. 5.139. Примеры функций принадлежности входов модели, при которых
правила могут «сообщать правду»
Рис. 5.140. Примеры функций принадлежности входов модели Мамдани,
при которых невозможно достичь эффекта «сообщения правды» правилами
условия = 0 и 1 (этим условиям не удовлетворяют,
например, операторы SUM (арифметическая сумма) и MEAN),
• в качестве функций принадлежности входных нечетких множеств ис-
пользуются функции, которые имеют конечный носитель (данному
условию не удовлетворяют гауссовы функции) и принимают нулевое
значение в точках, соответствующих модальным значениям (ц(х) = 1)
смежных с ними функций. Примеры приведены на рис. 5.139.
На рис. 5.140 приведены примеры функций, которые не позволяют
достичь эффекта «сообщения правды» правилами.
Влияние удаленных (не являющихся смежными) опорных точек мо-
дели Мамдани на локальную интерполяцию. Существуют два способа
построения нечеткой модели. В рамках первого способа на форму интер-
поляционной поверхности, соответствующей заданному сегменту вход-
ного пространства, влияют только те опорные точки, которые непосред-
Ь.7. Типы нечетких моделей
327
ственно примыкают к данному сегменту. В рамках второго способа та-
кое влияние могут оказывать и некоторые другие (а иногда даже все),
а не только непосредственно примыкающие точки. В последнем слу-
чае настройка параметров функций принадлежности (адаптация модели
на основе измерений данных о реальной системе) становится значительно
сложнее. Поясним эту проблему на примере.
Пример 5.7.1.4. Рассмотрим систему с одним входом и одним выходом.
В табл. 5.21 приведены результаты измерений ее параметров, которые
можно использовать для построения нечеткой модели системы.
Таблица 5.21
Данные измерений параметров системы типа SISO
X 1 2 3 4
У 1 4 9 16
В первой версии модели для входов будем использовать треугольные
функции принадлежности, удовлетворяющие условию разбиения едини-
цы, а для выходов — одноточечные функции (рис. 5.141). Правила модели
имеют следующий вид:
R1 : ЕСЛИ 1) ТО (у & У1),
R2 : ЕСЛИ (х ъ 2) ТО (у у2),
R3 : ЕСЛИ (ж 3) ТО (у к г/3),
Е4 : ЕСЛИ (х 4) ТО (у у±}, (5.102)
где = 1, у2 = 4, у3 = 9, У4 = 16.
Используя логические переменные wi, определенные на рис. 5.141,
можно получить формулы (5.103), которые задают отдельные функции
принадлежности входа х:
= (2 - s)wi,
M2W = (ж - l)wi + (3 - ж)ад2,
ЯзЦ) = Ц - 2)w2 + (4 - x)w3,
Д4(ж) = (ж — 3)и>з. (5.103)
Формула для вычисления значения на выходе модели в пределах всей
области значений входного параметра 1 х < 4 имеет вид
?/ = z/i(2 - x)wi + у2[(х - l)wi + (3 - x)w2]+
(5.104)
+ у3[(х - 2)w2 + (4 - x)w3] + у4(х - 3)w3.
328
Глава 5. Нечеткие модели
Рис. 5.141. Используемые в первой версии модели функции принадлежности
входа и выхода (обеспечивающие «сообщение правды» правилами) и определе-
ние логических функций wt
На основе формулы (5.104) можно получить интерполяционные фор-
мулы, соответствующие участкам пространства между отдельными «су-
щественными» точками модели (рис. 5.141):
R1 - R2: wi = 1, у = 7/1(2 - х) + у2(х - 1).
R2 - R3: w2 = 1, у = Ы3 - х) + у3(х - 2),
R3 - R4: w3 = 1, у = т/3(4 - х) + у4(х - 3).
(5.105)
Анализируя формулы (5.105), легко видеть, что интерполяционные
функции модели между ее опорными точками
Ri — R(i + 1)
зависят только от параметров у1У t/?+i, соответствующих точкам, которые
лежат на границе рассматриваемых сегментов. Локальные интерполяци-
онные поверхности можно в этом случае определить на основе локальных
измерений информации о системе. Подобный эффект достигнут благодаря
использованию входных функций принадлежности, принимающих нуле-
вое значение в точках, соответствующих модальным значениям смежных
с ними функций принадлежности.
В случае системы с двумя входами, при использовании функций по-
добного типа, а также t-норм и s-норм (для выполнения операций пе-
5.7. Типы нечетких моделей
329
Рис. 5.142. Иллюстрация зависимости локальной интерполяционной поверхно-
сти только от непосредственно прилегающих опорных точек
ресечения и объединения содержащихся в нечеткой модели множеств),
интерполяционная поверхность будет зависеть только от координат бли-
жайших опорных точек, соответствующих угловым точкам прямоуголь-
ного участка входного пространства [яд, яд], (рис. 5.142) или же угловым
точкам гиперпрямоугольного участка при большем числе входов.
Таким образом, интерполяционная поверхность проходит непосред-
ственно через опорные точки, и ее форма зависит от ряда элементов
модели — используемых методов вывода, дефаззификации, типов опера-
торов. В данной ситуации правила модели будут «сообщать правду» об ее
выходных значениях. Теперь рассмотрим другой вариант входных функ-
ций принадлежности, который представлен на рис. 5.143.
Представленные на рис. 5.143 функции принадлежности входного па-
раметра можно задать с помощью формул (5.106), содержащих логиче-
ские переменные гщ:
^i(z) = 0.25[(5 - x)(wi + ш2 + шз)],
АдМ = 0.25[(я: + 2)ш] + (6 - z)(w2 + шз)],
^з(х) 0.25[(х + l)(wi + w2) + (7 - х)ш3],
/х4(.т) — 0.25[x(wi + w2 + w3)].
(5.106)
330
Глава 5. Нечеткие модели
У4
У*
^(уТ1
Уз
У2
А УА
► 44.8
40-
30-
20
16
9
4 -
► 0.81 :
► -4
► -10
X: 1<х<4
для 1 < х < 2,
в других
случаях,
для 2<х<3,
в других
случаях,
для 3<х<4,
в других
случаях.
-2 -1 0 1 234 5 6 7 х
Рис. 5.143. Используемые во второй версии модели функции принадлежности
входа и выхода (не обеспечивающие «сообщения правды» правилами) и опреде-
ление логических функций и'г
База правил модели имеет вид
R1* : ЕСЛИ (rr^l) ТО
RT : ЕСЛИ (я? 2) ТО (у уЦ
ЯЗ* : ЕСЛИ (т 3) ТО (у ^),
Я4* : ЕСЛИ (я? 4) ТО (у ъ ^).
(5.107)
На основе формул (5.106) и (5.107) можно получить выражение
для определения поверхности модели:
у = 0.1?/1 [(5 - a?)(wi + w2 + w3)] + O.lj/2Ш + 2)wi + (6 ~ a")(w’2 + «’з)]+
+ 0.1уз[(х + l)(u>i + w2) + (7 - x)w3] + 0.1г/4[x(wi + w2 + tt’3)].
(5.108)
5.7. Типы нечетких моделей
331
Интерполяционная поверхность между отдельными опорными точка-
ми Ri — R(i + 1) задается с помощью формул:
Я1-Я2: Wi = 1, у = 0.1[т/1(5 - х) + у2(х + 2) + уДх + 1) + у4х],
R2 — R3: w2 = 1, у = 0.1[т/^(5 - х) + 7/2(6 - х) + у3(х + 1) + у4х\,
R3-R4: w3 = 1, у = 0.1[у1(5 - х) + 7/2(6 - х) + у3(7 - х) + у^х].
(5.109)
Анализируя формулы (5.109), мы видим, что в данной версии модели
локальные интерполяционные поверхности, расположенные между каж-
дой парой смежных опорных точек, зависят не только от этих, но и от
всех остальных опорных точек, поскольку в каждой из интерполяцион-
ных формул (5.109) присутствуют все координаты у^, у%, задавае-
мые заключениями правил (5.107) (которые в данной версии не являются
«сообщающими правду»).
Если считать опорными точками модели точки R*:
я* = яг(1,?/а
R3 = R3*(3,yl),
R% = R2*(2,y2'),
R*4 = R4*(4,y*4),
(5.110)
а опорными точками моделируемой системы точки Ry
Ri = 7?1(1, У1), У1 = 1, R2 = Л2(2, т/2), у2 = 4,
Дз-^З(З^з), Уз = 9, Я4 = Д4(4,7/4), 1/4 = 16, (5.111)
то при соответствующем выборе параметров модели у* можно добиться,
чтобы ее поверхность проходила непосредственно через опорные точки
системы Rt, как показано на рис. 5.141.
Определение значения у* носит глобальный характер, т. е. выполня-
ется одновременно для всех точек модели R* на основе представленных
в табл. 5.21 данных измерений параметров системы, а также формулы
(5.108) для определения выходного значения у. Подставляя координаты
«существенных» точек системы из табл. 5.21 в формулу (5.108), получаем
следующую систему уравнений:
Ш(1,1) => 0.4/4 + 0.31/2* + 0.2уз + 0.17/4* = 1,
2?2(2,4) => О.Зу* + 0.41/2 + О.Зуз + 0.2/4 = 1,
В3(3, 9) => 0.2т/1 + О.Зт/2 + 0.4?/з + О.Зг/4 = 1,
Л4(4,16) => 0.1/4 + 0.27/2* + 0.3/4 + 0.4/4 = Г (5.112)
332
Глава 5. Нечеткие модели
решение которой имеет вид
У1 = 0.8, * 1/2 = - 10, * Уз = = -4, 1/4* = 44.8. (5.113)
С учетом (5.113) базу правил (5.107) можнс > представить в виде
ЛГ: ЕСЛИ (х « *1) ТО (у ~ 0.8),
R2*: ЕСЛИ (х к '2) ТО (у ~ -ю),
R3*: ЕСЛИ (х » ^3) ТО (у: ~ ~4),
R4*: ЕСЛИ (ж R .4) ТО (у % 44.8). (5.114)
Анализ результатов использования функций принадлежности, пред-
ставленных на рис. 5.143, носители которых выходят за пределы, задава-
емые модальными значениями смежных функций принадлежности, поз-
воляет сделать следующие выводы.
• Интерполяционная поверхность модели имеет тот же качественный
тип (в рассматриваемом примере — линейный), что и в случае функ-
ций принадлежности, не выходящих за пределы модальных значений
смежных с ними функций. Таким образом, расширение носителей
функций принадлежности не изменяет свойств интерполяции.
• Настройка параметров модели в рассматриваемой ситуации должна
происходить не локально, с использованием только непосредствен-
но прилегающих опорных точек, а глобально, с использованием всех
опорных точек системы. Учитывая явление, называемое «проклятием
размерности», глобальная настройка значительно сложнее локальной.
• Полученная после завершения процесса настройки модель является
корректной (поверхность модели проходит через опорные точки Ri
системы), но при этом ее правила «не сообщают правду», что делает
модель более сложной для понимания.
Таким образом, по ряду рассмотренных в данном примере причин, ис-
пользование в моделях Мамдани функций принадлежности, носители ко-
торых не выходят за пределы, задаваемые смежными с ними функциями
(в частности, функций, удовлетворяющих условию разбиения единицы),
является более предпочтительным.
5.7.2. Модели Такаги—Сугено
Впервые модели Такаги—Сугено (TS-модели) были описаны в (Takagi
1985). Эти модели также называют моделями Такаги—Сугено—Канга
(Nquyen 1995; Yager 1994,1995), квазилинейными моделями и нечеткими
линейными моделями (Babuska 1995а,b). От моделей Мамдани модели
Такаги—Сугено отличаются формой правил. Если в случае модели Мам-
5.7. Типы нечетких моделей
333
дани, описывающей систему с одним входом и одним выходом, правила
имели вид
ЕСЛИ (х есть Л) ТО (у есть В), (5.115)
(где Л, В —нечеткие множества типа «малый» или «близкий к 5»),
то в случае TS-модели правила имеют вид
ЕСЛИ (х есть Л) ТО (у = /(я)). (5.116)
Вместо нечеткого множества заключение каждого правила содержит
функцию /(ж), которая может быть нелинейной, хотя обычно использу-
ются линейные функции. Таким образом, правила TS-модели имеют вид
ЕСЛИ (х есть Л) ТО (у = ах 4- 6)). (5.117)
Если в модели системы типа SISO база правил имеет вид
Я1 : ЕСЛИ (х есть Лг) ТО (у = /](х)),
Rm : ЕСЛИ (х есть Лш) ТО {у = /т(а:)), (5.118)
то значение на выходе модели вычисляется на основе степеней активиза-
ции отдельных заключений fa i = 1,... , m, в соответствии с формулой
m
Е Да,(^)Л(ж)
(5.119)
Е дд, (ж)
Пример 5.7.2.1 иллюстрирует некоторые особенности TS-моделей.
Пример 5.7.2.1. Рассмотрим TS-модель системы типа SISO с базой
правил вида (5.120) и функциями принадлежности, представленными
на рис. 5.144:
R1: ЕСЛИ (х есть Л1)
R2: ЕСЛИ (х есть Л2)
ВЗ: ЕСЛИ (т есть Л3)
ТО (у = — х 4- 3),
( 4х - 10"
то [у = —-—
( ~х + 24
ТО I у = —-—
(5.120)
334
Глава 5. Нечеткие модели
Рис. 5.144. Функции принадлежности входных параметров и поверхность
отображения для рассматриваемой модели Такаги—Сугено
С помощью формул (5.121) введем следующие логические переменные:
f 1
= 1 о
”'2 = {()
г 1
W3 = ( о
“ч = { о
f 1
= о
для 0 < х < 2,
в других случаях,
для 2 < х < 4,
в других случаях,
для 4 < х < 7,
в других случаях,
для 7 х < 9,
в других случаях,
для 9 < х < 12,
в других случаях.
(5.121)
Тогда функции принадлежности будут иметь вид
= wi - 0.5(х - 4)w2,
/М2 ~ 0.5(т — 2)и’2 4- w3 — 0.5(1- — 9)иц,
ДА3 — 0.5(х - 7>4 + W5.
(5.122)
5.7. Типы нечетких моделей
335
Рассматриваемые функции принадлежности удовлетворяют условию
разбиения единицы:
з
= (5-123)
г=1
Значение на выходе модели определяется по формуле:
з
Е/ \ г / \ / W‘i(7x2 — 39х + 56)
МД,(ЦЛ(Ц = + 3) + —i---------------- +
г=1 (5.124)
шз(4я; — 10) иД— 5х2 + 77.г — 258) ws(—х + 24)
+ _ + _ + _ .
Анализ формулы (5.124) позволяет сделать вывод, что поверхность
модели в точности соответствует заключениям правил (5.119) только
в тех областях входного пространства, степени принадлежности элемен-
тов которых соответствующим множествам Д- удовлетворяют условию
/ДА; (ж) = 1
(области Ш1, W3, W5). В областях, где эти степени являются дробны-
ми (W2, W4), поверхность модели переходит из одной линейной формы
(задаваемой соответствующим заключением) в другую. Ширина обла-
стей перехода определяется шириной областей дробных значений функ-
ций принадлежности (^лД^) < 1), а математическое выражение функций
перехода зависит от типа используемых функций принадлежности.
В рассматриваемом примере функции перехода имеют квадратичную
форму. Следует отметить, что характеризующая модель функция (5.124)
непрерывна и не имеет скачков на границах областей. Вместе с тем, про-
изводная этой функции непрерывной не является и изменяется на гра-
ницах областей скачкообразно, что является следствием типа исполь-
зуемых функций принадлежности (их кусочной линейности). Непрерыв-
ность производной поверхности модели и, тем самым, большую гладкость
последней можно обеспечить путем использования непрерывно диффе-
ренцируемых функций принадлежности, например гауссовых функций.
В данном примере использованы трапециевидные функции принадлеж-
ности, которые имеют зоны четкости, характеризующиеся тем, что их
элементы полностью (со степенью, равной 1) принадлежат соответству-
ющему множеству.
Интерес представляет вопрос, связанный с тем, как будет выглядеть
поверхность модели с той же самой базой правил, но при условии ис-
336
Глава 5. Нечеткие модели
Рис. 5.145. Пример модели Такаги—Сугено с треугольными
(не трапециевидными) функциями принадлежности
пользования других типов функций принадлежности. Рассмотрим с этой
целью пример 5.7.2.2.
Пример 5.7.2.2. Рассмотрим TS-модель системы типа SISO с базой пра-
вил вида (5.125) и треугольными функциями принадлежности, представ-
ленными на рис. 5.145:
R1 : ЕСЛИ (х есть AJ ТО (у = — х + 3),
R2 : ЕСЛИ (х есть А2) ТО (у - (4ж - 10)/3),
R3 : ЕСЛИ (х есть Аз) ТО (у = (-х + 24)/3).
(5.125)
Определим логические переменные wi, w2 с помощью формул (5.126):
I 1
= о
f 1
W*=- о
для 0 < х < 5.
в других случаях,
для 5 х 12,
в других случаях.
(5.126)
5.7. Типы нечетких моделей
337
Получим формулу (5.127), задающую поверхность модели:
_ — 0.2wi(x — 5)(—х + 3) 0.2wirr(4rr — 10) ,
У - - Н - I-
—W2^x — 12)(4rr — 10) W2^x — 5)(—х + 24) _
н — к -
_ u?i(7x2 — 34ж 4-45) W2(—5х2 + 87ж — 240) /с; Ю7\
= - + . (Ь. 12 о
Как видно из формулы (5.127) и рис. 5.145, поверхность модели не яв-
ляется линейной ни в одной из областей Wi, задаваемых заключениями
правил (5.125). И даже в точках, полностью (со степенью, равной 1)
принадлежащих множествам Аь А2 или A3, касательные к поверхности
модели не соответствуют задаваемым правилами линейным функциям
(рис. 5.145).
В частности, касательная к поверхности модели в точке х — 0, пол-
ностью принадлежащей множеству Ai, задается уравнением
14х - 34
У ~ 15 '
хотя, в соответствии с заключением правила /?1, принадлежащего базе
(5.125), следовало бы ожидать, что данное уравнение будет иметь вид
у — —х + 3.
Подобная ситуация имеет место в точках х = 5 и х = 12, принадле-
жащих со степенью, равной 1, соответственно множествам А2 и A3.
Как показывает приведенный пример, применять TS-модели следует
главным образом в тех случаях, когда функции принадлежности имеют
трапециевидную или подобную ей форму (рис. 5.146).
Следует отметить, что при использовании трапециеподобных функ-
ций с нелинейными ребрами (например, гауссовых функций), вместо по-
верхности, задаваемой непосредственно заключениями соответствующих
Рис. 5.146. Типы функций принадлежности, рекомендуемые для использования
в моделях Такаги—Сугено: трапециевидные (а) и трапециеподобные (б) функции
338
Глава 5. Нечеткие модели
4Х21
*1
Rk : ЕСЛИ (т есть Аг П ТО (у = /ДД),
i,j = к = 1....,9
Рис. 5.147. Рекомендуемая форма функций принадлежности для модели
Такаги—Сугено с двумя входными параметрами, которая позволяет получить
прямоугольные сегменты, поверхности которых в точности соответствуют функ-
циям Д, задаваемых заключениями правил Rk. Заштрихованные участки соот-
ветствуют областям перехода между отдельными заключениями Д
правил Ri (даже в тех областях, в которых степень принадлежности эле-
ментов множеству Аъ равна 1), будет получена поверхность, в той или
иной степени измененная под влиянием функций Д из других правил.
Причиной этого является то, что гауссовы функции принадлежности име-
ют бесконечный носитель, не удовлетворяют условию разбиения единицы
и существенно расширяют области влияния отдельных заключений Д.
В случае систем с двумя (или более) входами использование трапе-
циевидных функций принадлежности приводит к получению прямоуголь-
ных (или гиперпрямоугольных) сегментов, в которых степени принадлеж-
ности пересечениям множеств равны 1 (рис. 5.147).
Интерес представляет вопрос, касающийся взаимосвязи между моде-
лями Мамдани и TS-моделями и возможности отображать и преобразо-
вывать один тип модели в другой. Для систем типа SISO это вопрос
обсуждался в (Babuska 1995а,Ь).
5.7. Типы нечетких моделей
339
Для отображения TS-модели в модель Мамдани необходимо иметь
координаты «существенных» точек поверхности модели. Для моделей
Такаги—Сугено «существенными» являются граничные точки отдельных
сегментов входного пространства, а также точки максимума, минимума
и точки перегиба поверхности модели. На основе TS-модели следует вы-
числить выходные значения у для «существенных» точек ее поверхности,
по результатам чего сформировать нечеткие правила Мамдани, задающие
состояние модели в этих точках, а также функции принадлежности. Ил-
люстрацией данного метода служит пример 5.7.2.3.
Пример 5.7.2.3. Задача состоит в построении модели Мамдани, которая
соответствует модели Такаги—Сугено из примера 5.7.2.2. На рис. 5.148
представлена TS-модель с указанием «существенных» точек.
Для «существенных» точек поверхности TS-модели сформированы
правила Мамдани, определяющие состояние модели в указанных точках.
База правил модели Мамдани имеет следующий вид:
Я1: ЕСЛИ (rr^O) ТО Q/~ 3),
Я2: ЕСЛИ (х^2) ТО (у 1),
R3: ЕСЛИ (х ъ 2.8) ТО (у 0.3),
Я4: ЕСЛИ (х ^4) ТО (у я 2),
R5: ЕСЛИ (х 7) ТО (у 6),
R6: ЕСЛИ (х 7.7) ТО (у ъ 6.4),
R7: ЕСЛИ (z^9) ТО (?/^5),
R8: ЕСЛИ (гг 12) ТО (у ъ 4).
(5.128)
Функции принадлежности и поверхность полученной модели Мамда-
ни представлены на рис. 5.149.
Сравнивая рис. 5.148 с рис. 5.149, можно заметить, что эквивалентная
модель Мамдани содержит большее число правил и нечетких множеств,
чем TS-модель, что обусловлено использованием в TS-моделях трапеци-
евидных функций принадлежности с широкими носителями, задающих
большие участки поверхности модели не поточечным, а функциональным
образом.
Если предположить, что точки минимума и максимума областей пе-
рехода для модели не важны (в рассматриваемом примере это точки
(2.8,0.3) и (7.7,6.4)), и что «существенны» только граничные линии об-
ластей, задаваемых заключениями TS-модели (рис. 5.148), то будет полу-
чена более простая, но менее точная модель Мамдани, которая представ-
340
Глава 5. Нечеткие модели
R1 : ЕСЛИ (х есть Ai) ТО (у = —х + 3)
( 4х — 10
Я2 : ЕСЛИ (х есть А2) ТО ( у - ----
R3 : ЕСЛИ (х есть Аз) ТО ( у = ~Х + 2"
Рис. 5.148. Модель Такаги—Сугено с «существенными» точками поверхности
отображения X Y
лена на рис. 5.150. Упрощенная модель имеет базу правил вида (5.129):
R1 ЕСЛИ (ж ? S 0) ТО (у й = 3),
R2 ЕСЛИ (г s 2 2) ТО (у й
R3 ЕСЛИ (х ? * 4) ТО (у й ^2),
7?4 ЕСЛИ (х р S 7) ТО (у * ^6),
R5 ЕСЛИ (х ? S 9) ТО (у * ^5),
R6 ЕСЛИ (х ? s 12) ТО (у = «4)
(5.129)
Представленная на рис. 5.144 TS-модель содержит 3 правила и 3 вход-
ных нечетких множества. Эквивалентная ей упрощенная модель Мам-
Ь.7. Типы нечетких моделей
341
Рис. 5.149. Функции принадлежности и поверхность модели Мамдани, прибли-
женно эквивалентной модели Такаги—Сугено, представленной на рис. 5.148
дани содержит 6 правил и 6 входных нечетких множеств, тем самым
являясь более сложной.
Рассмотренный метод проектирования модели Мамдани, эквивалент-
ной заданной модели Такаги—Сугено, на основе «существенных» точек
поверхности является относительно простым в случае систем типа SISO.
Для систем с несколькими входами «существенными» являются угловые
точки прямоугольных (или гиперпрямоугольных) сегментов, образован-
ных с помощью пересечения нечетких множеств во входном простран-
стве. В модели Мамдани правила определяют только выходные состо-
яния у модели в этих точках (рис. 5.147). Характер функции Д, соот-
ветствующей заданному сегменту, зависит от выбранных типов операто-
ров для выполнения операций И и ИЛИ, вида функций принадлежности
и метода дефаззификации. По этой причине точное преобразование TS-
модели в модель Мамдани, особенно для более сложных функций Д
в заключениях правил, на практике оказывается очень сложным либо
вообще невозможным.
Укажем преимущества использования моделей Такаги—Сугено.
342
Глава 5. Нечеткие модели
Рис. 5.150. Эквивалентная представленной на рис. 5.144 TS-модели модель
Мамдани, правила которой задают состояние модели только на граничных лини-
ях «существенных» областей TS-модели и не учитывают «существенные» точки
(2.8,0.3) и (7.7,6.4), характеризующие области перехода
TS-модели сочетают в себе описание системы на основе лингвистиче-
ских правил с традиционным функциональным представлением процесса
ее функционирования, которое является привычным для нас, а зачастую,
в случае реально существующей системы, и хорошо нам известным. По-
лучить описание функционирования системы на локальном уровне, и осо-
бенно линейное описание, достаточно легко. Помимо этого, имеются сле-
дующие дополнительные преимущества.
• Сложные, нелинейные поверхности можно аппроксимировать с помо-
щью множества плоских линейных сегментов. Каждый такой сегмент
можно задать одним правилом TS-модели.
• TS-модели являются особенно подходящими для описания регулято-
ров. В настоящее время имеются хорошо развитые методики проекти-
рования линейных регуляторов, и в случае сложных нелинейных объ^
ектов можно разработать оптимальные линейные регуляторы для наи-
более важных их характеристик (областей функционирования), а за-
тем объединить их путем создания одного нечеткого TS-регулятора
(Сао 1997).
Ь.7. Типы нечетких моделей
343
• Вследствие локально линейной структуры TS-формы, ее использова-
ние для представления объектов и регуляторов упрощает доказатель-
ство устойчивости систем управления (Domariski 1997).
Модель Мамдани можно рассматривать как простейшую форму TS-
модели, а TS-модель—как обобщение модели Мамдани. Это следует
из сравнения используемых в данных моделях правил в форме (5.130)
и (5.131).
Правило Мамдани:
ЕСЛИ (xi есть Л]) И ... И (хп есть Лп) ТО (у cq). (5.130)
Правило Такаги—Сугено:
ЕСЛИ (xi есть Л1) И ... И (хп есть Лп)
(5.131)
ТО (у = а0 4- ОДХ1 + ... + апхп).
Поскольку в TS-модели получаемое заключение имеет более сложное
математическое представление, оно обладает меньшей обозримостью, чем
заключение в модели Мамдани. Методика идентификации локально ли-
нейных моделей изложена в (Babuska 1995а).
5.7.3. Реляционные модели
Реляционные модели были предложены Педричем в 1984 г. (Pedrycz
1984). Их описание можно найти также в (Hung 1995; Pedrycz 1993).
Фундаментальная особенность данных моделей состоит в том, что вме-
сто лингвистических правил, считающихся абсолютно истинными, в них
рассматриваются частично (более или менее) истинные лингвистические
правила. С каждым правилом сопоставляется соответствующий коэффи-
циент доверия.
База правил задается с помощью нечеткого отношения, и для ее
идентификации и анализа применяется теория реляционных уравнений
(Kacprzyk 1986; Pedrycz 1993). Понятие коэффициента доверия правила
поясняется с помощью примера 5.7.3.1.
Пример 5.7.3.1. База правил (5.132) задает отношение между умствен-
ными способностями ребенка и результатами его учебы в школе:
R1: Способный ребенок учится хорошо.
R2: Обычный ребенок учится на среднем уровне.
/?3: Не очень способный ребенок учится плохо. (5.132)
Поверхностный анализ правил (5.132) позволяет считать их истин-
ными. Приведенные правила можно представить в форме реляционной
344
Глава 5. Нечеткие модели
Таблица 5.22
Реляционная таблица для представления базы правил (5.132) с однозначно
определяемыми коэффициентами доверия правил
успеваемость уровень умственных способностеи^^^__ хорошая средняя плохая
способный 1 0 0
обычный 0 1 0
не очень способный 0 0 1
таблицы (табл. 5.22), которая содержит коэффициенты доверия, равные О
или 1, связывающие входные множества с выходными.
Вместе с тем, проводимые в школах статистические исследования,
а также опыт большинства родителей показывают, что существуют спо-
собные дети, которые показывают средние и даже плохие результаты
учебы, также как и не очень способные дети, имеющие средние резуль-
таты. В результате статистического анализа групп способных, средних
и малоспособных учеников в каждой группе можно получить процент-
ное соотношение детей, демонстрирующих хорошие, средние и плохие
результаты, на основе чего мы можем определить коэффициенты доверия
для реляционной таблицы, примером которой является табл. 5.23.
Таблица 5.23 соответствует базе правил следующего вида:
R1: Способный ребенок учится хорошо (0.6)
на среднем уровне (0.3)
плохо (0.1)
R2 : Обычный ребенок учится хорошо (0.1)
на среднем уровне (0.7) (5.133)
плохо (0.2)
R3: Не очень способный хорошо (0)
ребенок учится на среднем уровне (0.3)
плохо (0.7)
Заключения правил (5.133) уже не являются однозначными, но при
этом они в большей степени отражают реальную ситуацию, чем правила
(5.132).
В реляционных нечетких моделях перед выполнением процесса рас-
суждений соответствующие заключениям нечеткие множества обычно
5.7. Типы нечетких моделей
345
Таблица 5.23
Пример таблицы сопоставления уровня умственных способностей ребен-
ка с результатами его учебы с использованием нечетких коэффициентов
доверия (истинности) правил
успеваемость уровень умственных способностей^--^ хорошая средняя плохая
способный 0.6 0.3 0.1
обычный 0.1 0.7 0.2
не очень способный 0 0.3 0.7
дефаззифицируются и заменяются одноточечными множествами (син-
глетонами), после чего выполняется агрегация с учетом коэффициен-
тов доверия отдельных правил. Соответствующая процедура вычислений
приведена в примере 5.7.3.2. Возникает вопрос, является ли достаточ-
ным использование для практических целей нечетких моделей Мамдани,
и почему (или в каких случаях) необходимо использовать реляционные
нечеткие модели.
В задачах моделирования мы многократно сталкиваемся с ситуаци-
ями, когда функции принадлежности выходной переменной задаются
априори, на основе знаний или интуитивных представлений эксперта
(в случае отсутствия знаний о системе эксперт может предположить,
что функции принадлежности распределены равномерно). Если парамет-
ры (и особенно модальные значения) указанных функций не являют-
ся оптимальными, то имеется возможность повысить точность модели.
В примере 5.7.3.2 представлена модель, для которой введено предположе-
ние о равномерном распределении функций принадлежности на области
определения.
Пример 5.7.3.2. Система типа SISO имеет следующую область опреде-
ления:
X: 1 < .т < 3.
У: 5 < у < 15.
На начальном этапе функционирования системы хорошо известны
только граничные точки Pi(l,5), Р2(3,15) области определения. Предпо-
лагается, что модальные значения функций принадлежности расположе-
ны симметрично, в соответствии с рис. 5.151. Пусть имеется база правил
346
Глава 5. Нечеткие модели
S - малый, М— средний, L - большой
Рис. 5.151. Первая версия нечеткой модели с равномерно распределенными
функциями принадлежности входов и выходов
вида
R1 : ЕСЛИ (х малый) ТО (у малый),
R2 : ЕСЛИ (х средний) ТО (у средний),
R3 : ЕСЛИ (х большой) ТО (у большой). (5.134)
С учетом введенного предположения о виде функций принадлежности
и системы правил (5.134), поверхность модели является прямолинейной
и проходит через точки Р±, Р2, Рз (рис. 5.151). Это начальная, грубая
модель системы.
Правилам (5.134) соответствует табл. 5.24, содержащая коэффициен-
ты доверия правил.
В результате дальнейших наблюдений и более детального изучения
системы выясняется, что при значении входного параметра х — 2 вы-
Табл ица 5.24
Реляционная таблица для базы правил (5.134)
У X \ S м L
5 1 0 0
М 0 1 0
L 0 0 1
5.7. Типы нечетких моделей
347
5- малый, М- средний, L - большой
Рис. 5.152. Вторая версия модели, соответствующая базе правил (5.135)
ходной параметр у получает значение, равное 12, а не 10, которое было
в первой версии модели. Эту информацию можно учесть путем использо-
вания реляционной нечеткой модели (рис. 5.152) с базой правил (5.135),
в которой правило R2 имеет неоднозначное заключение:
R1: ЕСЛИ (х малый) ТО (у малый) (1),
R2: ЕСЛИ (х средний) ТО (у средний) (0.6), (у большой) (0.4),
R3: ЕСЛИ (х большой) ТО (у большой) (1). (5.135)
Новое правило R2 приводит к заметному смещению одноточечного
выходного множества «средний» в новую позицию у = 12, что увеличи-
вает точность модели. Базу правил (5.135) можно представить в форме
реляционной таблицы (табл. 5.25).
Таблица 5.25
Реляционная таблица, содержащая коэффициенты доверия,
для базы правил (5.135)
\ У х^\ S
S 1
м 0
L 0
М L
0 0
0.6 0.4
0 1
348
Глава 5. Нечеткие модели
Коэффициенты доверия получены на основе новой позиции (М*) од-
ноточечного множества «средний» (рис. 5.152).
Как показывают примеры 5.7.3.1 и 5.7.3.2, реляционные нечеткие мо-
дели обеспечивают возможность повышения точности модели путем вве-
дения для правил коэффициентов доверия, позволяющих выражать за-
ключения новых правил в виде выпуклой комбинации смежных нечетких
множеств, соответствующих выходному параметру модели. Оптимальные
значения коэффициентов доверия можно определить на основе измерений
входных и выходных значений с использованием нейронечетких сетей,
методов векторного квантования (Pedrycz 1993) либо метода наимень-
ших квадратов (Babuska 1995а).
При увеличении числа входных параметров форма представления ре-
ляционной нечеткой модели значительно усложняется. Так, в случае двух
входов базе правил будет соответствовать трехмерная реляционная таб-
лица, которую необходимо представлять в виде срезов. Пример реляци-
онной модели с двумя входами, которая соответствует системе правил
(5.136), представлен в табл. 5.26.
R1: ЕСЛИ Щ = S) И (ж2 = S) то (у = S) (.У = М) (0.73) (0.27),
R2: ЕСЛИ (xr = S) И (ж2 = М) то (у = S) (0.66)
(у = М) (0.34),
R3: ЕСЛИ Ц1 = S) И (ж2 = L) ТО (у = S) (0.44)
(у = М) (0.56),
RA-. ЕСЛИ (xi = М) И (х2 = S) ТО (у = М) (0.68)
(у = L) (0.32),
Л5: ЕСЛИ (п = М) И (г2 = М) ТО (у = S) (0.06)
(у = М) (0.94),
R6: ЕСЛИ Щ = М) И (х2 = L) ТО (у = S’) (0.32)
(У = М) (0.68),
R7: ЕСЛИ (xj = L) И Ц2 = S') ТО (у = М) (0-7)
(V = L) (о.з)
R8: ЕСЛИ Ц] = L) И (т2 = М) ТО (у = М) (0.33)
(У = £) (0.67),
R9: ЕСЛИ = L) И (х-2 = L) ТО (у = М) (0-4)
(y = L) (0.6). (5.136)
5.7. Типы нечетких моделей
349
Таблица 5.26
Пример реляционной таблицы для модели с двумя входами
Х1 - средний
XI - большой
\ У S м L
5 0 0.68 0.32
М 0.06 0.94 0
L 0.32 0.68 0
\ У *2\ S м L
5 0 0.7 0.3
М 0 0.33 0.67
L 0 0.4 0.6
:, М- средний, L —
5.7.4. Глобальные и локальные нечеткие модели
Все чаще и чаще обсуждается вопрос, связанный со значимостью гло-
бальных и локальных нечетких моделей. В качестве примеров можно при-
вести такие публикации, как (Babuska 1995с; Bossley 1995; Brown 1995а;
Nelles 1997; Zeng 1996).
Первые нечеткие модели носили глобальный характер, т. е. относи-
лись ко всей области определения. Между тем, было очень быстро за-
мечено, что для некоторых систем стремление к высокой точности гло-
бальной модели приводило к ее чрезмерной сложности, выражающейся
в большом числе правил. Выяснилось также, что с точки зрения на-
стройки параметров глобальные модели эффективны лишь при достаточ-
но небольшом числе входов, п < 4 (Bossley 1995; Brown 1995а). Иллю-
страцией указанной проблемы является рис. 5.153.
Чтобы обеспечить высокую точность отображения показанных
на рис. 5.153 «пиков», в области их местонахождения требуются плот-
ные функции принадлежности. Таким образом, мы получаем сетку раз-
биения, содержащую 13 - 13 = 169 узлов (опорных точек), и поскольку
с каждым узлом сопоставляется отдельное нечеткое правило, то общее
число правил в модели будет большим (равным 169). Между тем, ес-
ли в областях «пиков» требуется высокая плотность узлов, то для при-
емлемого по точности описания областей «плато» достаточно меньшего
числа правил (и соответственно узлов). Поэтому целесообразно разде-
лить глобальную модель на 4 локальных модели, которые представлены
на рис. 5.154. В рамках локальных моделей для описания областей «пла-
то» (рис. 5.154, а, г) используются только 4 правила, в то время как об-
ласти «пиков» (рис. 5.154, б, в) задаются с помощью большего числа (49)
правил. Общее число правил в четырех локальных моделях составляет
106, т. е. на 63 меньше, чем в глобальной модели.
350
Глава 5. Нечеткие модели
Рис. 5.153. Разбиение пространства Xi хХ2 входов глобальной модели системы,
имеющей два «пика» и два «плато»
Для идентификации модели с меньшим числом правил достаточно
иметь меньший объем данных измерения входов и выходов системы. Это
очень важное преимущество локального моделирования, поскольку име-
ющийся объем данных о моделируемой системе часто бывает недостаточ-
ным по причине высокой стоимости, трудоемкости измерений, а также
больших временных затрат на их проведение.
Необходимым и желательным свойством набора локальных моделей,
которые используются вместо одной глобальной модели, является непре-
рывность в областях стыковки локальных моделей — в указанных обла-
стях не должно быть резких изменений выходного параметра у. Ме-
тод, с помощью которого можно обеспечить выполнение данного свой-
ства в случае линейных локальных моделей Такаги—Сугено, описан
в (Babuska 1995с). Другой метод, применяющийся как для моделей Мам-
дани, так и для TS-моделей, состоит в использовании иерархической
структуры, которая представлена на рис. 5.155 для случая двух входов.
В рамках иерархической структуры вначале вычисляются значения
на выходе локальных нечетких моделей LM^, после чего происходит аг-
регация этих значений с использование трапециевидных (или подобных
им) функций принадлежности, имеющих переменные значения на грани-
цах областей. Иллюстрацией данного метода служит пример 5.7.4.1.
Ь.7. Типы нечетких моделей
351
в)
Рис. 5.154. Четыре локальные модели,
на рис. 5.153 глобальной модели
используемые вместо представленной
Пример 5.7.4.1. Пусть область значений входов модели разделена на три
сегмента, как показано на рис. 5.156.
Для всех сегментов построены отдельные нечеткие модели /г, ос-
нованные на различных локальных разбиениях входного пространства
(рис. 5.157).
Как показано на рис.5.157, плотность и распределение узлов сетки
разбиения, а стало быть число правил и параметры функций принад-
лежности являются разными для каждого сегмента и зависят от уровня
сложности поверхности системы над данным сегментом. Для определе-
ния оптимальных параметров каждую локальную модель Д можно на-
страивать отдельно, используя, например, нейронечеткие сети.
352
Глава 5. Нечеткие модели
Рис. 5.155. Иерархическая структура нечеткой модели, позволяющая получить
непрерывную глобальную поверхность благодаря нечеткой агрегации локальных
поверхностей; LM — локальная, GM — глобальная нечеткая модель
а) б)
Рис. 5.156. Область значений входов глобальной модели
и ее разбиение на локальные сегменты
Раздельная настройка меньших локальных моделей является намного
более простой задачей, чем настройка одной большой глобальной модели.
Это следует из того факта, что с увеличением числа правил (узлов сетки
разбиения) сложность настройки модели растет экспоненциально, и при
этом на поверхности, соответствующей ошибке модели, значительно уве-
личивается число локальных минимумов, где процесс настройки может
остановиться. В результате раздельной настройки локальных моделей их
границы обычно не совпадают, и переходы от одной модели к другой
могут сопровождаться резкими скачками выходного значения у. В связи
с этим области переходов требуется сглаживать, для чего можно исполь-
зовать объединяющую глобальную нечеткую супермодель, как показано
на рис. 5.158.
Ширина нечеткой зоны вокруг границ локальных областей (обла-
стей а2 и Z>2 на рис. 5.158) может варьироваться в зависимости от задан-
Ь.7. Типы нечетких моделей
353
Рис. 5.157. Разбиение пространства значений входов на три локальных подпро-
странства (а, б, в), которым соответствуют три модели Д с разном числом узлов
сетки разбиения (и, соответственно, с разным числом правил)
ной величины «скачка» £±у на границе раздела моделей. При большой
величине «скачка» ширину зоны перехода следует увеличивать, при ма-
лой — уменьшать.
Очень серьезную задачу представляет выбор формы, размера и рас-
пределения областей, соответствующих отдельным локальным моделям.
Чаще всего используются разбиения на прямоугольные, квадратные и эл-
липтические подобласти (рис. 5.159).
Учитывать неравномерность поверхностей систем при прямоугольном
разбиении проще, чем при квадратичном. В случае эллиптического раз-
биения эта возможность еще выше (эллипсоиды могут частично перекры-
вать друг друга). Достоинство и, одновременно с этим, недостаток квад-
ратичного разбиения заключается в его недостаточной гибкости. С одной
354
Глава 5. Нечеткие модели
Я1: ЕСЛИ (%! =Л) И (х2 = Вх) ТО (у=у2)
R2: ЕСЛИ (jq =АХ) И (х2 = В2) ТО (у=^)
R3: ЕСЛИ (%! =А2) ТО (у=у3)
Рис. 5.158. Объединение локальных моделей ft в глобальную нечеткую /упер-
модель, обеспечивающее гладкость областей перехода
Рис. 5.159. Основные методы разбиения области определения на локальные
подобласти: прямоугольные (а), квадратные (б) и эллиптические (в) подобласти
стороны, границы областей нельзя смещать (оптимизировать), и поэтому
точность модели можно повышать путем уменьшения размера областей,
где локальная точность является недостаточной (что приводит к больше-
му числу областей). С другой стороны, использование больших по раз-
меру областей приводит к уменьшению числа подлежащих настройке па-
раметров модели, что обеспечивает более простую и быструю настройку.
Эллиптические зоны получаются в результате использования в ка-
честве функций принадлежности радиальных базисных функций
5.7. Типы нечетких моделей
355
(Brown 1994), которые задаются с помощью соотношения
у = expf — — Xj)2/2 • а2 |, (5.137)
\ j=i /
где Cj — координата центра функции относительно оси переменной Xj,
Oj — среднеквадратическое отклонение относительно оси перемен-
ной Xj.
Оптимизацию размеров эллиптических областей и распределение их
центров можно выполнить с помощью нечетких радиально-базисных ней-
ронных сетей (Brown 1994), обучаемых на основе выборки значений вход-
ных и выходного параметров моделируемой системы либо методов кла-
стеризации (Dave 1997).
Глобальное разбиение области определения модели на локальные сег-
менты представляет собой очень сложную задачу. В общем случае для об-
ластей, где поверхность системы является плоской, требуется меньшее
число сегментов, а для областей с рельефной поверхностью — большее
число. Вместе с тем, не так просто выделить плоские и рельефные об-
ласти на основе данных, подверженных воздействию шума измерения,
особенно в случае многомерных систем. Данная проблема исследовалась
Педричем и Реформатом (Pedrycz 1997), которые ввели понятие изменчи-
вости F поверхности отображения «вход-выход» моделируемой системы:
/
где X = Xi х Х-2 х ... х Xn — область определения,
/ = /(xi,a:2,... xN) — функция, соответствующая реализуемому
моделируемой системой отображению «вход-выход».
В рамках предложенного ими метода на области определения выделя-
ются подобласти, соответствующие большей и меньшей изменчивости F,
и в зависимости от этого выбирается соответственно большая или мень-
шая плотность разбиения входного пространства. Однако существующий
в настоящее время вариант указанного метода является применимым
для нечеткого моделирования только тех систем, которые описываются
традиционными математическими функциями. В условиях зашумленной
информации данный метод, к сожалению, не работает.
Задача выбора в указанной ситуации оптимального разбиения обла-
сти определения, вероятно, требует дальнейшего исследования. В настоя-
щее же время можно использовать метод проб и ошибок, руководствуясь
356
Глава 5. Нечеткие модели
предварительными знаниями о моделируемой системе, либо опираться
на интуицию.
5.7.5. Нечеткие мультимодели
Понятие мультимодели, введенное Педричем в (Pedrycz 1996), является
очень важным, так как если с мультимодельной системой обращаться как
с одномодельной, это может стать причиной неправильной интерпрета-
ции результатов. Это важно, поскольку с мультимодельными системами
приходится иметь дело достаточно часто. Рассмотрим систему, представ-
ленную на рис. 5.160.
Данная система является однозначной относительно входа ,г: каждо-
му значению х отвечает только одно значение выходного параметра у.
Для описания системы достаточно одной нечеткой модели, представлен-
ной на рис. 5.160. Сравним теперь данную модель с моделью химического
процесса (Pedrycz 1996), которая описывает взаимосвязь между темпера-
турой процесса Т и числом Дамкелера d, характеризующим определенные
его свойства (рис. 5.161, а).
Как показано на рис.5.161, а, характеристика процесса не является
однозначной относительно входа х — одному значению х соответствуют
три (или два) значения выхода у. Какое из значений у следует в данной
ситуации сопоставить с текущим значением х? Будет ли такое сопостав-
ление однозначным в условиях реальной системы?
/ v :
-------------► —
X / X
^(у)
7?1:ЕСЛИ(х=Л1) ТОО^)
R2: ЕСЛИ (х=А2) ТО (у = В2)
R3: ЕСЛИ (х=А3) ТО (у = В{)
Я4: ЕСЛИ (х=Л4) ТО (у=В2)
Рис. 5.160. Пример системы, однозначной относительно
входной переменной х {а) и нечеткая модель данной системы (б)
5.7. Типы нечетких моделей
357
М2: М3:
R1: ЕСЛИ (Г=Л) ТО (d=B2) Ri: ЕСЛИ (T=^) ТО (d=B3)
R2: ЕСЛИ (Т=А2) ТО (d = B3) R2: ЕСЛИ (Т=Л2) ТО (d=B4)
Рис. 5.161. Неоднозначная характеристика химического процесса (а)
и три составляющие нечеткие модели Mi (б, в, г)
358
Глава 5. Нечеткие модели
Изображенная на рис. 5.161, а ситуация обусловлена тем, что размер-
ность пространства, в котором представлены характеристики, является
недостаточной для однозначного представления взаимосвязи между ни-
ми. Для реальных систем, демонстрирующих неоднозначность своего по-
ведения, должен существовать дополнительный вход, который определя-
ет выбор некоторой части характеристики системы в заданный момент.
В случае системы с неоднозначной двумерной характеристикой, имеющей
форму буквы S (рис. 5.161, а), однозначно определить выходное состоя-
ние d в заданный момент t можно только при наличии дополнитель-
ной информации о значениях двух переменных, задающих направление
возникающих в ходе процесса изменений: d(t), а также T(t).
Представление характеристики процесса в 4-мерной системе:
d(t) = f(T(t),d(t),t(t)'),
которое невозможно изобразить графически, обеспечивает выполнение
свойства однозначности.
Со свойством, которое названо неоднозначностью, часто приходит-
ся сталкиваться в технике: неоднозначной, например, является механи-
ческая система, представляющая собой подпружиненный поршень. Для
этой системы характерен гистерезис, обусловленный трением (рис. 5.162).
Систему гистерезисного типа можно однозначно представить в виде
4-мерной зависмости
x(t~) = f(F(t),
(Piegat 1995с). Проблема неоднозначности поясняется с помощью
рис. 5.163.
Если модель системы не содержит (или не учитывает) некоторые ее
входы (из-за отсутствия информации об их значениях либо нашей неуве-
ренности в их существовании), то выходное состояние не может быть
однозначным, поскольку на него влияют также и не принимаемые во вни-
мание входы, вызывая определенные изменения, характер которых неиз-
вестен. Рассмотрим, как следует решать проблему неоднозначности.
Первый способ заключается в выяснении того, какие входы не были
учтены, с последующим представлением модели системы в расширенном
пространстве. Иллюстрацией данного метода является пример 5.7.5.1,
в котором рассматривается задача, подобная той, что рассматривалась
в примере 5.7.3.1.
Ь.7. Типы нечетких моделей
359
Рис. 5.162. Механическая система и ее двумерная гистерезисная характеристика
%m +1 Хп
т<п
хь ..., хт - учитываемые (известные) входы
xm+i,..., хп - неучитываемые (неизвестные) входы
Рис. 5.163. Иллюстрация для пояснения неоднозначности модели
Пример 5.7.5.1. Обратимся к реляционной нечеткой модели (5.139),
устанавливающей взаимосвязь между умственными способностями ре-
бенка и его успеваемостью в школе. Модель задана в двумерном про-
странстве (умственные способности, успеваемость):
360
Глава 5. Нечеткие модели
R1: Способный ребенок учится хорошо (0.6)
на среднем уровне (0.3)
плохо (0.1)
R2: Ребенок со средними хорошо (0.1)
способностями учится на среднем уровне (0.7) (5.139)
плохо (0-2)
R3: Не очень способный ребенок хорошо (0)
учится на среднем уровне (о.з)
плохо (0-7)
Модель (5.139) обладает ярко выраженными характеристиками мул!/
тимодели, в которой выходное состояние является неоднозначным, и мож-
но указать лишь одно из его вероятных значений. Степень вероятности
определяется в данном случае с помощью коэффициентов доверия. Вме-
сте с тем, если принять во внимание еще один важный вход, оказыва-
ющий немалое влияние на успеваемость ребенка, а именно трудолюбие
(прилежание), то можно сделать рассматриваемую модель в достаточной
степени однозначной. База правил модели в расширенном пространстве
(умственные способности, трудолюбие, успеваемость) представлена в ви-
де множества правил:
R1: Способный и трудолюбивый ребенок учится хорошо.
R2: Способный ребенок со средним трудолюбием учится
на среднем уровне.
R3: Способный, но не трудолюбивый ребенок учится плохо.
Я4: Трудолюбивый ребенок со средними способностями учится хорошо.
R5: Ребенок со средними способностями и трудолюбием учится
на среднем уровне.
R6: Не трудолюбивый ребенок со средними способностями учится плохо.
R7: Не очень способный, но трудолюбивый ребенок учится
на среднем уровне.
R8: Не очень способный ребенок со средним трудолюбием учится плохо.
R9: Не очень способный и не трудолюбивый ребенок учится плохо.
(5.140)
5.7. Типы нечетких моделей
361
Одной из причин неоднозначности может также являться не до конца
установленная взаимосвязь между входами и выходами системы, резуль-
татом чего является невозможность определить выходное состояние, да-
же если известны входные данные (примером здесь может служить про-
гноз погоды). Если неизвестны причинно-следственные зависимости меж-
ду входами и выходами системы, или неизвестна часть входов, то можно
воспользоваться методом описания системы, заключающимся в присво-
ении различным состояниям выхода у вероятностей их возникновения
при заданном состоянии входного вектора X, как было показано в при-
мере 5.7.5.1, модель (5.139).
В (Pedrycz 1996) Педрич определил мультимодель как «множество
моделей ЛД, М2,..., Мс, снабженное соответствующим механизмом пе-
реключения между моделями, либо, если необходимо, механизмом аг-
регации результатов, предоставляемых отдельными моделями». Работа
переключающего механизма происходит на основе дополнительной ин-
формации о системе (ее входных параметрах), а механизма агрегации —
на основе коэффициентов доверия отдельных моделей.
Следующая важная проблема, связанная с мультимоделями, состоит
в том, что на основе измерений входных и выходных данных необходимо
устанавливать, является ли заданная система однозначной (т. е. соответ-
ствует модели) или неоднозначной (т. е. соответствует мультимодели).
Указанная проблема схематически представлена на рис. 5.164. Данные
измерений входов и выходов системы обычно зашумлены (имеет место
шу^ измерений) и/или подвержены влиянию не учтенных в модели вхо-
дов — в последнем случае систему следует описывать с помощью муль-
тимодели (при условии, что влияние неучтенных входов «достаточно»
•УА
Модель?
Мультимодель?
Модель?
Мультимодель?
Рис. 5.164. Иллюстрация проблемы, связанной с оценкой однозначности модели
на основе степени разброса результатов измерений
362
Глава 5. Нечеткие модели
велико). Рассмотрим, каким образом можно отличить первый указанный
выше случай от второго.
Если разброс результатов измерений выхода небольшой (в пределах
погрешности измерительного устройства), то для представления системы
следует использовать однозначную модель (рис. 5.164, а).
При большом разбросе (рис. 5.164, б) систему необходимо представ-
лять в форме мультимодели. Понятия «небольшого» и «большого» разбро-
са являются нечеткими и существенно зависят от наших интуитивных
представлений или предварительных знаний о моделируемой системе.
При увеличении размерности системы (числа входов) отличить влияние
шума измерений от влияния неучтенных входов становится значительно
сложнее.
Интересный метод идентификации мультимоделей, основанный на на-
правленной кластеризации, был предложен Педричем в (Pedrycz 1996),
где были также указаны направления дальнейших исследований и пути
улучшения данного метода, учитывающие сложность проблемы, связан-
ной с возможностью распознавания мультимоделей.
5.7.6. Нейронечеткие модели
Чтобы построить нечеткую модель, необходимо определить все ее эле-
менты: базу правил, число и тип функций принадлежности для каж-
дой переменной модели, параметры функций принадлежности, логиче-
ские операторы и т. п.
Первые нечеткие модели создавались на основе экспертных знаний
о моделируемой системе. Получение информации о системе осуществля-
лось с помощью эксперта в соответствующей предметной области, а за-
тем эксперт в области нечеткого моделирования выполнял преобразова-
ние этой информации в нечеткую модель. Указанный метод называется
приобретением знаний (Preuss 1994а) и является эффективным в том
случае, когда эксперт полностью обладает знаниями о системе и может
выразить эти знания в словесной форме и передать их. На практике зна-
ния эксперта часто являются неполными, неточными, слабо поддающими-
ся формулированию и могут даже содержать в себе противоречия. Кроме
того, эти знания субъективны, т. е. мнения отдельных людей о функци-
онировании одной и той же системы могут различаться. С учетом всего
сказанного, представляется целесообразным, чтобы в основе модели ле-
жала объективная информация о системе. Такой информацией являются
результаты измерения значений ее входов и выходов.
5.7. Типы нечетких моделей
363
Процесс приобретения знаний на основе этих данных называет-
ся извлечением знаний. Подобной возможностью обладают нейрон-
ные сети. По этой причине создаются и исследуются методы преоб-
разования нечетких моделей в нейросетевые, называемые, с учетом
своих специфических особенностей, нейронечеткими сетями. Описа-
ние разнообразных аспектов этой интересной проблемы можно най-
ти в (Altrock 1993; Brown 1994,1995а,b; Culliere 1995; Carpenter 1992;
Eklund 1992; Feuring 1996; Gupta 1994; Higgins 1994; Hensel 1995;
Hauptmann 1995; Halgamuge 1996; Horikawa 1992; Ishiguchi 1993;
Kochlert 1994,1995; Lin 1991,1995; Nobre 1995; Osowski 1996; Piegat
1996,1997a; Pal^ga 1996; Rutkowska 1997; Su 1995; Simpson 1992;
Yao 1995).
Нейронечеткая сеть представляет собой особую эквивалентную фор-
му нечеткой модели. Например, нечеткая модель с кусочно-линейными
функциями принадлежности Ау значений входных параметров хх, х?,
одноточечными функциями В^. для описания значений выходного пара-
метра у и базой правил вида
: ЕСЛИ (хх = АХ1) И (х2 = А2Х) ТО (у = Вх),
R2 : ЕСЛИ (хх = Ап) И (х2 = А22) ТО (у = В2),
R3 : ЕСЛИ (хх = АХ2) И (х2 = А2Х) ТО {у - В3),
7?4 : ЕСЛИ (хх = АХ2) И (х2 - А22) ТО (у - В4), (5.141)
может быть преобразована в нейронечеткую сеть, представленную
на рис. 5.165.
Настройка данной сети может быть произведена на основе выбор-
ки измерений входных и выходного параметров моделируемой системы,
с использованием метода обратного распространения ошибки или других
методов, применяемых для нейронных сетей.
Растущий интерес к нейронечетким сетям (ННС) обусловлен следу-
ющими их неоспоримыми преимуществами.
Преимущества нейронечетких сетей (ННС)
1. ННС обеспечивают возможность оптимизации (настройки) парамет-
ров нечетких моделей на основе данных измерения входов и выходов
реальных систем.
2. ННС позволяют корректировать недостаточно точные нечеткие моде-
ли, формируемые экспертами.
3. ННС дают возможность расширения формируемых экспертами нечет-
ких моделей на те области пространства входов, экспертные знания
о которых отсутствуют.
Рис. 5.165. Нейронечеткая сеть, соответствующая нечеткой модели (5.141)
5.7. Типы нечетких моделей
365
4. Структура и параметры ННС (множества типа «большой» и «малый»,
лингвистические правила) являются понятными человеку, а также
допускают обобщение знаний, содержащихся в зашумленных изме-
ряемых данных о моделируемой системе, и представление их в фор-
ме хорошо интерпретируемых лингвистических правил (извлечение
знаний). В этом отличие ННС от персептронных нейронных сетей,
параметры которых не несут никакой информации, кроме числовой,
и содержащиеся в них знания недоступны для интерпретации чело-
веком — подобную сеть можно назвать сетью типа «черный ящик».
5. При наличии предварительных или частичных знаний о моделируемой
системе их можно легко отразить в ННС. В персептронных сетях это
сделать невозможно либо крайне сложно.
6. В случае ННС определение структуры сети представляет собой зна-
чительно более простую задачу, чем в случае персептронных сетей,
где обычно используется метод проб и ошибок. Знание правильной
структуры сети ускоряет процесс обучения и уменьшает влияние со
стороны локальных минимумов функции ошибок.
Методика преобразования нечеткой модели в нейронечеткую сеть яв-
ляется достаточно сложной и зависит от типа модели. Преобразование
в ННС модели Мамдани описывается в разд. 6.2.1.2, а модели Такаги—
Сугено — в разд. 6.2.1.3.
5.7.7. Альтернативные модели
Нечеткие модели Мамдани имеют следующие особенности:
а) они осуществляют прямоугольное (или гиперпрямоугольное) разбие-
ние входного пространства (рис. 5.166),
б) границы прямоугольных сегментов являются, как правило, линей-
ными,
в) поверхности локальных сегментов являются обычно «слабо» нелиней-
ными (например, полилинейными).
В зависимости от выбранного критерия оценки, указанные особенно-
сти могут являться как достоинствами, так и недостатками нечетких мо-
делей. Прямоугольное разбиение входного пространства позволяет фор-
мулировать модель с помощью понятных человеку правил. Вместе с тем,
поскольку функции принадлежности задаются отдельно для каждой вхо-
дящей в модель переменной, попытка добавить в модель хотя бы одну но-
вую функцию приводит лишь к значительному увеличению числа правил.
Еще один недостаток прямоугольного разбиения входного пространства
иллюстрируется на рис. 5.167, а, б.
принадл ежно сти
Рис. 5.166. Иллюстрация особенностей (а, б) и (в) нечеткой модели Мамдани
5.7. Типы нечетких моделей
367
Рис. 5.167. Поверхность моделируемой системы с выделенными уровнями (а),
прямоугольное разбиение входного пространства (б) и нерегулярное непрямо-
угольное разбиение (в)
368
Глава 5. Нечеткие модели
Поверхность у = /(х1,я?2) моделируемой системы состоит из двух
«пиков» и двух плато (рис. 5.167, а). Для точного моделирования «пи-
ков» необходимо большее число функций принадлежности (рис. 5.167, б).
Для построения точных моделей плато функций принадлежности и пра-
вил требуется значительно меньше. Вместе с тем, диктуемая «пиками»
большая плотность функций принадлежности переносится на зоны плато,
заставляя задавать их с использованием необоснованно большого числа
правил. В рамках модели Мамдани каждый узел Ргд сетки разбиения
подразумевает наличие одного правила и трех подлежащих настройке
параметров, и таким образом большое число узлов приводит к необходи-
мости получения большого объема измеряемой информации о моделиру-
емой системе. Увеличение числа параметров модели существенно услож-
няет процесс ее настройки, с риском превысить пределы возможностей
последней (проклятие размерности).
Использование нерегулярного (например, треугольного) разбиения
пространства входов (рис. 5.167, в) позволяет значительно уменьшить ко-
личество сегментов и согласовать плотность их распределения со сте-
пенью нелинейности моделируемой области. Большее число треуголь-
ных сегментов требуется в области «пиков», а в случае плато доста-
точной точности можно добиться, используя значительно меньшее число
больших по размеру сегментов. В качестве примера на рис. 5.168, а изоб-
ражена поверхность модели, полученная на основе треугольного разбие-
ния входного пространства, представленного на рис. 5.168, б. Для сравне-
но
б)
Рис. 5.168. Поверхность модели (а), полученная путем разбиения входного про-
странства Xi х Х‘2 (б) на треугольные сегменты
Ь.7. Типы нечетких моделей
369
Рис. 5.169. Поверхность нечеткой модели, основанная на регулярном прямо-
угольном разбиении входного пространства
ния на рис. 5.169 представлена поверхность нечеткой модели, основанная
на прямоугольном регулярном разбиении входного пространства.
В случае прямоугольного разбиения для задания участка поверхности
модели, соответствующего одному прямоугольному сегменту, необходимо
измерить четыре значения входных и выходного параметров моделируе-
мой системы, а при треугольном разбиении требуется только три таких
значения. Нечеткая модель системы с тремя входами основана на кубои-
дальном разбиении входного пространства (рис. 5.170, а), а альтернатив-
ная модель —на тетраэдральном разбиении (рис. 5.170, б).
Рис. 5.170. Сегмент входного пространства Xi х Х2 х Хз при регулярном ги-
перпрямоугольном (а) и нереулярном гипертреугольном (б) разбиениях входного
пространства
370
Глава 5. Нечеткие модели
В случае системы с тремя входами для задания поверхности модели
над одним кубоидальным сегментом входного пространства (рис. 5.170, а)
требуется измерение восьми значений входных и выходного параметров
системы. При использовании тетраэдральных сегментов (рис. 5.170, б) до-
статочно только четырех значений. С увеличением числа п входных па-
раметров моделируемой системы разница в количестве измерений резко
увеличивается. При гиперпрямоугольном разбиении входного простран-
ства минимальное число требуемых измерений
р = 2п, (5.142)
а при гипертреугольном разбиении оно составит всего лишь
р — п + 1. (5.143)
Зависимость (5.142) имеет нелинейный, экспоненциальный характер,
в то время как зависимость (5.143) является линейной.
В системе, имеющей 10 входов, число измерений, необходимых для за-
дания одного гиперпрямоугольного сегмента, составляет р = 1024, и все-
го лишь 11 измерений требуется, чтобы задать один гипертреугольный
сегмент. Разница, таким образом, огромная. Особые преимущества ис-
пользование моделей с гипертреугольным разбиением дает в случае си-
стем с большим числом входов, систем, которые заданы с использованием
меньших объемов измеряемых данных, а также когда проведение измере-
ний сопровождается сложностями, связанными, например, с их высокой
стоимостью, отсутствием измерительной аппаратуры и т. д. С недоста-
точными объемами измеряемой информации особенно часто приходится
сталкиваться в экономических системах. Помимо этого, большое число
точек, используемых для задания поверхности модели над одним гипер-
прямоугольным сектором —см. формулу (5.142) — значительно усложня-
ет настройку нечеткой модели и является причиной «проклятия размерно-
сти» (Bellmann 1961; Brown 1995а). В случае нечеткой модели Мамдани
каждому узлу сетки разбиения соответствует одно правило вида (5.144),
определяющее выходное состояние модели у (рис. 5.171):
ЕСЛИ (тц хь) И (х2 ъ x2j) ТО (у уч). (5.144)
Положение задаваемой этим правилом точки PtJ определяется коор-
динатами x2j, y2j. Вместо традиционного нечеткого правила вида
(5.144) можно использовать правило вида (5.145), которое задает поверх-
ность у — Лф.щ.тд) над прямоугольным сегментом к входного простран-
Ь.7. Типы нечетких моделей
371
Рис. 5.171. Прямоугольное разбиение входного пространства, являющееся
типичным для нечеткой модели Мамдани
ства другим способом:
ЕСЛИ (хн < X! < x1(i+1)) И (,X‘2j < Х2 < ®2(j+l))
то (у = АЩ,ж2)).
Для моделей Мамдани с оператором PROD и кусочно-линейными
функциями принадлежности поверхность Д над сегментом имеет по-
лилинейную форму (Zeng 1996), которая задается с помощью формулы
на рис. 5.171. Границы каждого сегмента имеют вид прямых участков.
При треугольном разбиении входного пространства поверхность модели
над отдельным сегментом задается линейной зависимостью, приведенной
на рис. 5.172. Каждому треугольному сегменту в модели соответствует
одно правило вида
ЕСЛИ (^2 «0 + a^xi) И (х2 агок + агкХ1) И (ж2 a3Qk + a[kxi)
ТО (//----/,Сщ./д)). (5.146)
В последние несколько десятилетий модели с правилами вида (5.146),
содержащими линейные заключения, известны под названием «сети Де-
лоне» или «триангуляция Делоне». Первоначально они использовались
для геодезического описания земельных участков, а затем для них бы-
ли найдены новые приложения в моделировании технических систем
и управлении (Omohundro 1989; Ullrich 1997а,b,с). Сети Делоне являют-
372
Глава 5. Нечеткие модели
Рис. 5.172. Фрагмент поверхности модели над треугольным сегментом входного
пространства
ся самоорганизующимися и самонастраивающимися. Имеется множество
методов их построения, при этом некоторые из них, как, например, метод
размещения новых узлов сети в точках максимальной ошибки модели
(Brown 1997; Piegat 1998d), не имеют типичного для нейронных сетей
недостатка, связанного с остановкой процесса обучения в локальных ми-
нимумах функции ошибки. Поэтому обучение сетей Делоне происходит
быстро и завершается вблизи глобального минимума указанной функции.
Вместе с тем исследования Ульриха в области сетей Делоне с линей-
ными заключениями, задаваемыми с помощью формулы (5.146), показа-
ли, что число генерируемых ими треугольных сегментов, необходимых
для обеспечения требуемой точности модели, является слишком боль-
шим, и при использовании определенных методов обучения (требующих
обращения матриц) для них также имеет место «проклятие размерности».
Введение в правила (5.146) нелинейных заключений, т. е. делинеариза-
ция сетей Делоне (Piegat 1998d), позволяет получить значительно более
высокую точность модели при одном и том же либо меньшем числе тре-
угольных сегментов. На рис. 5.173 представлены примеры двух моделей,
полученных на основе сетей Делоне.
Модель на рис. 5.173, а, основанная на нелинейных заключениях пра-
вил, состоит из десяти треугольных сегментов. Модель, представленная
на рис. 5.173, б, имеющая линейные заключения, совпадает по точности
с моделью (а), но при этом состоит из значительно большего числа секто-
ров, а именно восемнадцати. Линейные и нелинейные сети Делоне пред-
ставляют собой интересный метод моделирования, альтернативный по от-
ношению к нечеткой логике и нейронным сетям. Они быстро обучаются,
и на их основе можно построить модель с использованием минимального
объема измеряемых данных о реальной системе. Читатель, более глубоко
Ъ.7. Типы нечетких моделей
373
а) средняя абсолютная ошибка 6=0
Рис. 5.173. Модель Делоне, построенная с использованием нелинейных (а)
и линейных (б) заключений
интересующийся методами построения сетей Делоне, может найти необ-
ходимую информацию в специальной литературе, например (Brown 1997;
Omohundro 1989; Ullrich 1997а,b,с,d; Piegat 1998d,e).
5.7.8. Принципы подобия систем и моделей систем
Модель однозначной статической системы, реализующей отображение
fs : X —» Ys, должна в максимально возможной степени удовлетво-
рять двум принципам подобия: принципу подобного отображения вход-
ного вектора Xs в выходное значение Ym и принципу подобного отобра-
жения приращения AXs данного вектора в приращение ДУ?и (рис. 5.174
и 5.175).
Реальная система
Модель системы
Система
Рис. 5.175. Отображения входных приращений в выходные, реализуемые систе-
мой и ее моделью
Рис. 5.174. Отображения «вход-выход», реализуемые системой и ее моделью
Модель
374
Глава 5. Нечеткие модели
1. Принцип подобного отображения входного вектора Xs в выходное
значение Ym определяется с помощью следующего выражения:
yM(Xs)^Ks(Xs). (5.147)
Данное выражение означает, что если входные векторы Xs для систе-
мы и ее модели совпадают, то выходное значение модели Ym должно
быть как можно более близким к выходному значению системы Ys
(в смысле выбранной оценки ошибки) на всей области значений вход-
ного вектора.
2. Принцип подобного отображения приращения A Xs входного вектора
в приращение выходного параметра ДУ при совпадающих входных
состояниях (Xs(0) = Хм(0)) системы и ее модели (рис. 5.175) опре-
деляется с помощью выражения вида
АУЛ/(АХ5,Х5(О)) АУ5(АХ5,Х5(0)). (5.148)
В соответствии со вторым принципом, система и ее модель являются
подобными, если приращение A Xs входного вектора (при заданном его
начальном состоянии (Xs(0))) приводит к примерно равным (в терминах
выбранной оценки ошибки) приращениям выходного параметра системы
и ее модели (соответственно Ays и АУд/). Принципы подобия должны
выполняться на всей области определения системы и ее модели.
Принцип (2) подобного отображения входных приращений являет-
ся следствием принципа (1) подобного отображения входных значений,
и, надо полагать, не вызывает сомнений тот факт, что в случае пол-
ной справедливости принципа (1) автоматически является справедливым
принцип (2). К сожалению, в практических приложениях нечеткого мо-
делирования мы обычно имеем дело с моделями, которые представляют
собой лишь приближение реальной системы, поэтому добиться полной
справедливости принципа (1) не всегда удается.
В частности, применение операторов типа MIN для агрегации ком-
понентов условий (разд. 5.1.2.1) или выполнение дефаззификации с ис-
пользованием метода среднего максимума (разд. 5.1.3) приводит к воз-
никновению в модели зон нечувствительности, которые характеризуются
отсутствием отклика на изменения входов, что уменьшает степень вы-
полнения принципа (2) и, соответственно, принципа (1).
5.7.9. Нечеткая классификация
Предыдущие разделы гл. 5 были посвящены исследованию нечетких мо-
делей, которые задают поверхность отображения у — соответству-
Ь.7. Типы нечетких моделей
375
Рис. 5.176. Причинно-следственная связь Твнутр = /(Тводы,Т^ешн), характерная
для отопления помещения
ющего причинно-следственным связям, характерным для моделируемой
системы, процесса или объекта.
Примером здесь может являться зависимость температуры внутри по-
мещения Твнутр (°C) от температуры воды в системе отопления ТВ0Ды (°C)
и температуры за пределами помещения Твнешн (°C) (рис. 5.176).
Помимо этого, теорию нечетких множеств часто используют для ре-
шения задач классификации, примером которой является оценка клиен-
тов, заинтересованных в получении банковского кредита. Если клиент
имеет высокую кредитоспособность, то банк с большей готовностью вы-
даст ему большой кредит и при этом может даже уменьшить процентную
ставку, т. е. стоимость кредита. Если клиент не является кредитоспособ-
ным, то от выдачи ему кредита банк откажется. В случае же частичной
кредитоспособности клиента банк выдаст ему ограниченную сумму кре-
дита и возможно повысит процентную ставку.
Пусть нами введена следующая классификация клиентов: кредито-
способный, частично кредитоспособный и некредитоспособный. Указан-
ные понятия, очевидно, являются нечеткими. В прошлом банк многократ-
но выдавал клиентам кредиты. Клиентов, погасивших кредит в установ-
ленный срок и в полном объеме, можно отнести к кредитоспособным,
а не погасивших его в полном объеме — к некредитоспособным. Кли-
ентов же, погасивших кредит не в установленный срок, можно считать
частично кредитоспособными. Граница между понятиями кредитоспособ-
ности и частичной кредитоспособности клиента является нечеткой, так
как отсрочка времени погашения полной суммы кредита (и соответствен-
но потери для банка) может быть больше или меньше.
376
Глава 5. Нечеткие модели
Каждый клиент, желающий получить кредит, должен предоставить
банку ряд данных, например:
Xi — среднюю величину чистого дохода,
Х2 — количество материально зависимых лиц (иждивенцев),
хз — объем имеющихся долгов,
<Г4 — оценка стоимости его активов,
хз — период занятости на текущем месте работы,
Хб — период занятости на предыдущих местах работы,
хт — запрашиваемая сумма кредита,
и другую информацию.
Данные Xj можно считать признаками клиента. Они дают банку ин-
формацию о том, сможет ли клиент погасить предоставленный ему кре-
дит (об этом можно судить, например, по величине х± дохода клиента),
и возможно ли возвращение кредита в случае его непогашения (для чего
можно, например, использовать стоимость активов х^).
Для каждого из клиентов, ранее обслуживавшихся банком (обо-
значим номер клиента через i), можно получить вектор признаков
(xu,X‘2i,... ,хл). С учетом этого на основе имеющейся предыстории по-
гашения кредитов экспертом банка построена необходимая для принятия
решения классификация (С — кредитоспособный, Р — частично креди-
тоспособный, N — некредитоспособный). Пример базы данных клиентов,
обслуживавшихся банком до текущего момента, представлен в табл. 5.27.
Оценка кредитоспособности представляет собой сложную задачу, ко-
торая связана с необходимость рассмотрения большого объема данных
(обычно выходящего за пределы семи показателей), поэтому для ее ре-
шения можно создать автоматический классификатор, который может
обучаться на основе данных о предыдущих клиентах банка (табл. 5.27),
а затем использоваться для оценки будущих клиентов. На рис. 5.177
Таблица 5.27
База данных клиентов банка
Номер клиента х,($) х2 х3($) Х4 ($) *5 Хб х7($) Кредито- способность
1 5600 1 0 100 000 26 0 10 000 с
500 1500 6 30 000 2000 0.5 0.08 50 000 N
1000 3100 3 1000 50000 4 6 20 000 Р
Ь.7. Типы нечетких моделей
377
*2
*3
Признаки 7 х4
Х5
Хб
jU. кредитоспособные
y£Z частично
кредитоспособные
y£Z некредитоспособные
Степени
> принадлежности
классам
Рис. 5.177. Схема взаимосвязи входов и выходов нечеткого классификатора
клиентов банка
представлена схема взаимосвязи входных и выходных параметров клас-
сификатора кредитоспособности клиентов.
На основе вектора Хг данных о потенциальном клиенте классифи-
катор вычисляет степени его принадлежности множествам кредитоспо-
собных (С), частично кредитоспособных (Р) и некредитоспособных (N).
Наибольшая из степеней принадлежности (которые могут принимать
дробные значения в интервале [0,1]) указывает, какому из перечисленных
множеств принадлежит клиент, т. е. каким образом его следует класси-
фицировать.
Другими примерами классификации являются:
• распознавание личности человека по его лицу: в качестве призна-
ков Xj здесь могут выступать, например, отношение расстояния меж-
ду глазами к размеру головы, цвет глаз, относительная ширина
рта и т. д.;
• распознавания блока рукописных букв на основе точечно-растрового
представления или других специально подобранных признаков, таких
как число линий, пересекающих остроугольные изгибы буквы;
• распознавание самолетов по их силуэтам;
• распознавание личности человека по его голосу;
• распознавание типа танка по звуку работающего двигателя и автома-
тическое принятие решения о взрыве противотанковой мины.
Поскольку задачи классификации заключаются в установлении сход-
ства объекта (элемента) с наиболее типичным элементом заданного клас-
са (его образом), то их называют задачами распознавания образов.
Условием корректной работы автоматического классификатора явля-
ется правильная настройка использующихся в нем функций принадлеж-
ности отдельным классам, т. е. правильное их размещение в простран-
стве признаков {xi,x2, • • • л}- Рассмотрим данную проблему на примере
378
Глава 5. Нечеткие модели
а)
Линия разделения
• - кредитоспособные клиенты
о - частично кредитоспособные клиенты
х - некредитоспособные клиенты
Рис. 5.178. Идеализированное четко-разделимое распределение значений при-
знаков клиентов банка во входном пространстве (пространстве признаков)
{xi,хт} (а) и четкие функции принадлежности классам клиентов: кредитоспо-
собные, частично кредитоспособные, некредитоспособные (б)
с клиентами банка, уменьшив для простоты число входных параметров
до двух:
Xi — средняя величина чистого дохода клиента,
хт — запрашиваемая сумма кредита.
Пусть в настоящее время значения признаков банковских клиентов
распределены, как показано на рис. 5.178, а.
Приведенный на рис. 5.178, а пример распределения признаков пред-
ставляет собой задачу с четким разделением. Отдельные классы клиентов
не пересекаются, и можно однозначно определить линии их разделения,
на основе которых можно легко построить четкие функции принадлеж-
ности отдельным классам клиентов (рис. 5.178, б). На практике распреде-
ление с возможностью четкого выделения классов встречается редко —
отдельные классы, как правило, частично перекрываются. В частности,
распределение значений признаков клиентов обычно является подобным
изображенному рис. 5.179, а.
Точки, соответствующие кредитоспособным клиентам, расположены
главным образом в области высоких доходов и малых сумм кредита, точ-
ки, относящиеся к некредитоспособным клиентам, лежат в области низ-
ких доходов и больших сумм кредита, а точки, соответствующие частич-
но кредитоспособным клиентам, расположены в промежуточной области.
Встречаются, однако и клиенты с высоким доходом, не полностью пога-
сившие кредит, а также клиенты с низким доходом, которые погасили
Ь.7. Типы нечетких моделей
379
• - кредитоспособные клиенты
о - частично кредитоспособные клиенты
х - некредитоспособные клиенты
Рис. 5.179. Реальное нечетко-разделимое распределение значений признаков
клиентов банка в пространстве признаков (а) и функции принадлежно-
сти классам клиентов: кредитоспособные (С), частично кредитоспособные (F),
некредитоспособные (7V) (б)
кредит полностью и в установленный срок (рис. 5.179). Таким образом,
проблема оценки кредитоспособности является нечеткой, и любой потен-
циальный клиент может быть отнесен как минимум к двум классам.
Настройка модели, приведенной на рис. 5.179, на основе обучающей
выборки (показателей предыдущих клиентов банка и информации о пога-
шении выдававшихся им банком кредитов) заключается в выборе такой
величины угла /3, которая позволила бы как можно точнее оценивать
клиентов и относить их к конкретным классам.
В общем случае задача классификации заключается в определении
размера, формы и местоположения функций принадлежности отдельным
классам в пространстве признаков Х\ х х ... х Хп. В случае наличия
двух признаков яц, х^ данная задача может выглядеть подобно той, что
представлена на рис. 5.180.
Отдельные классы могут частично перекрывать друг друга, как, на-
пример, и //2 на рис. 5.180, либо быть четко отделены друг от дру-
га, как классы ^3 и /14. В последнем случае проведение классификации
не представляет никакой сложности.
Одномерные функции принадлежности представляют собой наиболее
часто используемый в нечеткой логике тип функций. На рис. 5.181 даны
примеры таких функций для переменных «доходы» и «расходы». Путем
380
Глава 5. Нечеткие модели
Рис. 5.180. Задача классификации — определение многомерных функций при-
надлежности fii отдельным классам на основе имеющихся знаний о типовых
характерных признаках конкретных классов
Рис. 5.181. Функции принадлежности, определенные на основе явно задаваемых
экспертных знаний
композиции данных одномерных функций можно создавать двумерные
функции принадлежности, дающие возможность оценки предприятия.
На рис. 5.182 представлен результат подобной композиции, а также назва-
ния полученных функций: очень перспективные (предприятия), средние,
очень слабые. Остальные функции подобным же образом задают проме-
жуточные оценки.
5.7. Типы нечетких моделей
381
Рис. 5.182. Зависящие от двух аргументов функции принадлежности, основан-
ные на явно задаваемых экспертных знаниях типа: ЕСЛИ (доходы высокие)
И (расходы низкие) ТО (предприятие очень перспективное)
Одномерные функции принадлежности (рис. 5.181) являются един-
ственными функциями, которые эксперт в области моделируемой систе-
мы может задать словесно на основе своих «осознанных» знаний о ней.
Использующиеся для оценки фирмы двумерные функции, которые мо-
гут быть созданы на основе указанных выше одномерных, представляют
собой регулярные функции с прямоугольными носителями, стороны ко-
торых параллельны осям координат (рис. 5.183 и 5.184).
Вместе с тем, человек (эксперт) использует в процессе принятия ре-
шений свои не только «осознанные», но также и «неосознанные» знания,
которые называют «ощущениями», «интуицией» или «шестым чувством».
Эти знания человек не может выразить словесно в форме правил и за-
частую он даже не отдает себе отчет в том, что он владеет подобными
знаниями. К «неосознанным» знаниям относятся также эмоции, симпа-
тии и антипатии, различные предпочтения, влияющие на принимаемые
нами решения. Можно предположить, что реальные функции принадлеж-
ности, которые соответствуют нашим решениям, являются не одномер-
ными, а двумерными или даже имеют более высокую размерность, что
в свою очередь означает, что они заданы в пространстве более высокой
размерности, не параллельны координатным осям, и их форма не явля-
ется прямоугольной (рис. 5.185 и 5.186).
Если эксперт в своем воображении (которое представляет собой со-
вокупность «осознанных» и «неосознанных» знаний) для использования
382
Глава 5. Нечеткие модели
Рис. 5.183. Зависящая от двух аргументов функция принадлежности, соответ-
ствующая среднему предприятию, заданная на основе знаний эксперта в трех-
Рис. 5.184. Двумерная проекция функции принадлежности, соответствующей
среднему предприятию
Ь.7. Типы нечетких моделей
383
Рис. 5.185. Примеры функций принадлежности, используемых человеком-
экспертом (двумерная проекция на входное пространство)
Рис. 5.186. Примеры функций принадлежности, используемых человеком-
экспертом, представленные в трехмерном пространстве
в процессе принятия решений сформировал двумерную повернутую функ-
цию принадлежности АТ1Т2, представленную на рис. 5.187, то он не в со-
стоянии словесно выразить информацию о форме и угле поворота данной
функции — он может предоставить лишь информацию о ее одномерных
проекциях АХх и АХ2 (рис. 5.187).
При формировании вербального правила (композиции функций АХ1
и АХ2) мы получаем регулярную, прямоугольную двумерную функцию
принадлежности ВХ1Х2, которая отличается от функции принадлежности
ЛЖ1ГЕ2, в действительности используемой экспертом (рис. 5.188). Анало-
384
Глава 5. Нечеткие модели
Рис. 5.187. Проекция двумерного повернутого нечеткого множества ДГ11-2
из пространства Х± х Х2 * М на одномерные пространства Хь х М, с полу-
чением в результате нечетких множеств АХ1 и ЛГ2
гичная ситуация возникает, если эксперт использует вогнутую функцию
принадлежности ДГ1.Г2, представленную на рис. 5.189.
Задавая вербальную информацию об этой функции в виде одномерных
функций АХ1 и АХ2, он точно так же не в состоянии описать вогнутую
форму двумерной функции. Использование в нечеткой модели компози-
ции двух одномерных функций принадлежности АХ1 и АХ2 на основе
операции И в данном случае также приводит к выпуклой, регулярной,
прямоугольной функции принадлежности, параллельной координатным
осям Xi, (рис. 5.188).
Как показывают рассмотренные выше примеры, нечеткие модели,
полученные на основе композиции одномерных функций принадлежно-
сти, не дают возможность формирования для условий правил многомер-
ных функций принадлежности, имеющих нерегулярную вогнутую форму,
а также функций, повернутых относительно координатных осей. Таким
образом, подобные модели не позволяют точно отобразить знания че-
ловека (эксперта в области моделируемой системы), и если мы хотим
повысить точность нечетких моделей, мы должны в условиях правил
и при выполнении фаззификации использовать не только одномерные,
но и многомерные функции принадлежности.
Поскольку эксперт не в состоянии словесно задать форму и угловое
положение подобных функций, единственным способом их определения
ЬЛ. Типы нечетких моделей
385
Рис. 5.188. Построение двумерного (выпуклого) нечеткого множества ВХ1Х2
на основе композиции двух одномерных нечетких множеств АХ1 и АХ2, полу-
ченных путем проекции повернутого множества ЛЖ1Ж2 на рис. 5.187
Рис. 5.189. Проекции двумерного вогнутого нечеткого множества ЛТ1Ж2 их про-
странства Х| х Х2 х М на одномерные подпространства Xi х М и Х2 х М
(нечеткие множества АХ1 и АХ2)
386
Глава 5. Нечеткие модели
Рис. 5.190. Построение двумерного (выпуклого) нечеткого множества ВХ1Х2
на основе композиции двух одномерных нечетких множеств АХ1 и АХ2, полу-
ченных путем проекции вогнутого множества ДГ1.Г2 на рис. 5.189
является формирование и настройка на основе информации о тех реше-
ниях, которые были приняты экспертом в реальных условиях, т. е. вы-
борки измерений входных и выходных параметров для самого эксперта.
Данный метод, рассмотренный в примере 5.7.9.1, позволяет определить,
какие функции принадлежности на самом деле применяются экспертом,
когда он использует свои полные («осознанные» и «неосознанные») зна-
ния.
Задание и настройка многомерных нерегулярных функций принад-
лежности на всем пространстве входных параметров (признаков) моде-
лируемой системы возможны, но весьма затруднительны, особенно в си-
туациях со смешанными выборками измерений для различных классов.
Указанная задача представляет собой интересное направление будущих
исследований в области нечеткой логики. Однако уже сейчас в данной об-
ласти можно продвинуться вперед путем построения нечетких моделей,
основанных на двумерных, а не только одномерных функциях принад-
лежности. Преимущество двумерных функций принадлежности состоит
в возможности их представления и графического изображения. Визуа-
лизация функций принадлежности большей размерности (в том числе
трехмерных) не является возможной.
5.7. Типы нечетких моделей
387
Далее мы рассмотрим метод нечеткой классификации, называемый
методом двумерной проекции многомерных кластеров. Автор данной
книги в 1999 г. сам вывел этот метод, но тем не менее, в силу простоты
и очевидной, напрашивающейся идеи последнего, считает, что его ранее
разработал кто-то из других исследователей. К сожалению, автор не мо-
жет этого подтвердить, поскольку не знает имени настоящего, исходного
создателя данного метода.
Нечеткая классификация с помощью двумерной проекции много-
мерных кластеров. На основе обучающей выборки (например, точек,
задающих значения признаков для предыдущих клиентов банка) в про-
странстве признаков Xi х х ... х Хп образуется кластер выбранного
класса. На рис. 5.191, а представлен пример для случая трехмерного про-
странства.
В основе метода двумерной проекции лежит предположение о том, что
если какой-либо элемент принадлежит кластеру рассматриваемого класса
в n-мерном пространстве, то его проекции также принадлежат проекциям
этого кластера на любое из двумерных подпространств Xt х Xj. Таким
образом, чтобы определить n-мерную функцию принадлежности класте-
ра заданного класса /iz(xi,X2,... ,хп), необходимо определить функции
а) б)
Рис. 5.191. Кластер заданного класса, сформированный на основе обучающей
выборки (а), и его проекции на двумерные подпространства (б)
388
Глава 5. Нечеткие модели
принадлежности его проекций на отдельные подпространства:
а затем, используя один из операторов пересечения нечетких множеств,
например PROD, определить n-мерную функцию принадлежности:
/^(#1,^2, • • • ,^п) = Мг(^1,^2) ’ Мг(^Ь^з) * • • • ‘ Мг^Ь^п)*
X /1^(Ж2,Х3) • . . . • /li(^2,^n) ’ • • * /1г(^п-Ь^п)- (5.150)
Как будет показано на примере, в окончательную функцию принад-
лежности (5.150) не требуется включать все п!/[2!(п — 2)!] комбинаций
подпространств (rrj,^). Иногда для точного определения заданного клас-
са достаточно только одного терма /x^Xj^Xk).
В качестве функций принадлежности /^(xj,^) проекций кластеров
могут использоваться различные типы функций, например, обобщенные
вращаемые* несимметричные гауссовы функции:
х* = (xi — пц) cos aij — (xj — mj) sin
x* = —{xi — siiiQv + (xj — mj) coso^-,
= exp
__________<__________
Vij • Cil + (1 - Vij) сг2
(5.151)
где:
mi — координата центра гауссовой функции относительно оси хг,
т3 — координата центра гауссовой функции относительно оси Xj,
— угол, образуемый главной осью среза (линии уровня) гауссовой
функции (см. рис. 5.193),
kjiy kj2 — показатели степени,
fij, Wij — логические переменные (со значениями 0 и 1) для выбора раз-
личных значений ширины сц, Ci2, Cji, Cj2 несимметричной гауссовой
функции (см. рис. 5.193),
сц, сг2 — различные значения ширины несимметричной гауссовой функ-
ции.
На рис. 5.192 изображена трехмерная гауссова функция принадлеж-
ности. В двумерном пространстве значений входных параметров такую
’ В данной книге «вращаемыми» именуются функции принадлежности, для которых
в ходе настройки можно менять расположение осей координат путем их поворота на
некоторый угол а. Подробнее об этом см. текст на с. 479, а также рис. 6.78.
5.7. Типы нечетких моделей
389
Рис. 5.192. Трехмерная гауссова функция принадлежности
Рис. 5.193. Срезы (линии уровня) обобщенной несимметричной гауссовой функ-
ции при ее проекции на подпространство х Xj, где i = 1, j — 2
функцию можно представить с использованием срезов (линий уровня)
для разных значений высоты (рис. 5.193).
Изменение значений параметров ш*, mj приводит к смещению гаус-
совой функции вдоль осей, изменение вызывает вращение функции,
параметры сг], с?2 асимметричным образом изменяют ширину функции,
a kji, kj2 изменяют ее форму. Благодаря указанным параметрам, гаус-
сову функцию можно визуально или автоматически переместить в центр
выборки измерений заданного класса, а затем повернуть ее и изменить
390
Глава 5. Нечеткие модели
Рис. 5.194. Начальная позиция настраиваемой функции принадлежности (а),
помещение центра функции в центр выборки (б), поворот функции и ее под-
стройка к распределению элементов выборки (в)
Рис. 5.195. Вблизи центров смежных классов степень принадлежности задан-
ному классу должна быть малой (намного меньше 1)
ее форму таким образом, чтобы она охватила все или большинство эле-
ментов класса (рис. 5.194).
При настройке значений ширины ауь bjk функции принадлежности
необходимо придерживаться принципа, в соответствии с которым зна-
чения функции принадлежности заданному классу в центрах и точках
ядер функций принадлежности смежным классам должны быть малыми,
например, равными 0.1 (рис. 5.195).
В некоторых случаях указанному принципу следовать невозможно,
в связи с тем, что в проекции на пространство Xj х два класса
практически совпадают друг с другом, и их нельзя разделить. Вместе
с тем, классы могут различаться в проекции на другие пары пространств,
например, Xj+i х Хь+2, и в этом случае они могут быть разделены.
Ь.7. Типы нечетких моделей
391
Если разделение классов в n-мерном пространстве невозможно, то ре-
комендуется повысить порядок (размерность) данного пространства, т. е.
число принимаемых во внимание признаков, либо изменить систему ко-
ординат.
Для иллюстрации метода классификации на основе двумерной про-
екции рассмотрим следующий пример (Piegat 2000а).
Пример 5.7.9.1. Оценка 49 предприятий сталелитейной промышлен-
ности с использованием метода двумерной проекции. В процессе при-
нятия экономических решений необходимо учитывать множество спе-
цифических данных, которые в конечном итоге должны быть обобще-
ны в единый комплексный показатель, на основе которого производится
окончательный выбор. Поскольку сложные, многокритериальные оцен-
ки большей частью носят нечеткий характер, теория нечетких множеств
подходит здесь как нельзя лучше.
В данном примере мы рассмотрим применение метода двумерной про-
екции для комплексной оценки предприятий на основе трех показателей,
несущих информацию об их финансовом положении:
валовая прибыль + амортизация
Х1 общая задолженность ’
_ сумма баланса оборот
Х2 общая задолженность ’ Хз сумма баланса ’
В табл. 5.28 приведены нормализованные в интервале [0,1] значения
этих показателей для некоторых из 49 подвергнутых исследованию поль-
ских предприятий сталелитейной промышленности и черной металлургии
за период с 1 июня 1994 г. по 31 декабря 1997 г. Последний столбец со-
Таблица 5.28
Нормализованные значения трех важнейших экономических показате-
лей Х[ и экспертные оценки у для отдельных предприятий
№ *1 *2 Класс
1 0.0540 0.0845 0.5643 слабое
19 0.2029 0.4047 0.2714 среднее
36 0.1457 0.0287 0.9714 перспективное
49 1.0000 0.7997 0.3119 очень перспективное
392
Глава 5. Нечеткие модели
Рис. 5.196. Линии уровня функции принадлежности «слабые» в различных
подпространствах. Крестиками отмечены центры классов
держит комплексные экспертные оценки каждого предприятия, выражен-
ные с использованием четырех лингвистических термов: слабые, сред-
ние, перспективные и очень перспективные. На рис. 5.196 представлено
расположение в подпространствах
Xi х Х2, Xi х Х3, Х2 х Хз
функции принадлежности «слабые», которая настраивается первой.
На втором шаге производится настройка функции принадлежности
«средние» (рис. 5.197). Указанная функция, по возможности, должна
принимать малые значения в точках, соответствующих центру класса
«слабые».
5.7. Типы нечетких моделей
393
Рис. 5.197. Линии уровня функций принадлежности «слабые» и «средние»
в подпространствах Хг х Х2 (a), Xi х Х3 (б), Х2 х Х3 (в)
Как видно из рис. 5.197, сходство классов «слабые» и «средние» яв-
ляется значительным. Некоторые элементы с высокой степенью при-
надлежат обоим классам, что затрудняет их различение. На следу-
ющих шагах моделирования настраиваются функции принадлежности
«перспективные» и «очень перспективные» (рис. 5.198).
Рисунки 5.198, а, б демонстрируют очень интересную особенность.
Класс «очень перспективные» явно выделяется среди других, поэтому
для его полного описания достаточно только одной двумерной функции
принадлежности, определенной, например, в подпространстве Xi х Х3:
394
Глава 5. Нечеткие модели
Рис. 5.198. Проекции представляющих классы значений [^1,^2,^з] и функции
принадлежности «слабые», «средние», «перспективные», «очень перспектив-
ные» в подпространствах Xj. х Х2 (а), Х\ х Х3 (б), Х2 х Х3 (в)
= (Х1 - 0.735) cos 32.83 - (х3 - 0.141) sin 32.83,
= -(xi - 0.735) sin 32.83 + (х3 - 0.141) cos 32.83,
4
Мочень перспективные(+1 ? х3) — ехр
V13 • 0.112 4- (1 — 1713) • 0.249
wi3 -0.032+ (1 - U’i3) -0.031
Данный пример показывает, что для построения функции принадлеж-
ности класса в полном входном пространстве Х± х Х2 х ... х Хп требуется
Ь.7. Типы нечетких моделей
395
найти ее проекции не на все подпространства Xt xXj, а только на те, для
которых характерна достаточно четкая идентификация данного класса.
Среди остальных классов — «слабые», «средние» и «перспективные» —
уже нет столь явно выделяющихся, и поэтому для их описания необхо-
димо использовать проекции на все подпространства Xi х Xj. Например,
функция принадлежности «перспективные» задается с помощью следу-
ющих соотношений:
/^перспективные^!? ^2? ^з)
— /^перспективные (^1, ^2) ’ /^перспективные (^1 ? ^з) X
X /^перспективные
х* = (Ж1 - 0.329) cos 1.68 - (х2 - 0.128) sin 1.68,
.г 2 = —(ж1 — 0.329) sin 1.68 + (хз — 0.128) cos 1.68,
/^перспективные , яД — ехр
«12 • 0.094 +(1 -г>12)- 0.067
w12 • 0.136+(1 - wi2) -0.363
X* = (Ж1 - 0.279) cos(—2.99) - Щ - 0.669) sin(-2.99),
х* = -(Ж1 - 0.279) sin(-2.99) + (х3 - 0.669) cos(-2.99),
МперспективныеуЗ-15 З-з) — ехр
W13 • 0.091 + (1 - «1з) • 0.084
wi3 • 0.334 + (1-wi3)-0.283
х* = (х2 - 0.218) cos 3.47 - (х3 - 0.739) sin 3.47,
х* = -(х2- 0.218) sin 3.47 + (ж3 - 0.739) cos 3.47,
/ * * \ ___
/^перспективные!3^’ хз' — СХр
f23 • 0.088+ (l-v23)-0.155
* И
w23 0.592 + (l-w23)- 0.542
Результаты нечеткой классификации предприятий с применением
метода проекции совпали с результатами экспертной классификации
для 43 предприятий (из 49) и не совпали для 6 предприятий. Такой
результат можно считать вполне приемлемым, если учесть, что три клас-
са — «слабые», «средние» и «перспективные» — оказались очень близки-
ми и относительно трудно различимыми, а также что в процессе оценки
экспертом могли быть допущены ошибки.
396
Глава 5. Нечеткие модели
Рис. 5.199. Выборка экспертных оценок предприятий (а) и линии уровня на-
строенных на ее основе функций принадлежности, соответствующих слабым
и перспективным предприятиям (б)
Очень важной и интересной задачей является определение зоны
влияния функций принадлежности отдельных классов в областях,
не покрываемых элементами выборки измерений (областях недо-
статочной информации). Предположим, нами исследуется задача оцен-
ки предприятий на основе их доходов и расходов с использованием
для оценки только двух лингвистических термов: перспективные и сла-
бые (предприятия). На рис. 5.199, а представлена выборка экспертных
оценок, а на рис. 5.199, б — результаты настройки функций принадлежно-
сти.
Теперь функции принадлежности, соответствующие слабым и пер-
спективным предприятиям, настроенные с помощью выборки эксперт-
ных оценок, можно использовать для оценки новых предприятий без по-
мощи эксперта. Предположим, нам необходимо оценить 4 новых предпри-
ятия, для которых значения показателей распределены так, как показано
на рис. 5.200, а.
Предприятие 2 следует оценить как перспективное (хотя степень его
принадлежности классу «перспективные» является очень низкой, мень-
шей 0.01). Предприятие 4 следует оценить как слабое. Обе эти оценки
соответствуют здравому смыслу, поскольку предприятие 2 расположено
в зоне высоких доходов и низких расходов, а предприятие 4 имеет высо-
кие расходы и низкие доходы.
В ситуации с предприятиями 1 и 3 мы не можем доверять результа-
там классификации, полученным на основе имеющихся функций принад-
лежности, поскольку эти функции (рис. 5.199, б) являются точно настро-
5.7. Типы нечетких моделей
397
Рис. 5.200. Распределение значений показателей для четырех новых
предприятий, не участвовавших в настройке функций принадлежности
«слабые» и «перспективные» (а), и функции принадлежности «слабые»
и «перспективные» с расширенными зонами влияния (б)
енными только в области обучающей выборки. Оценка вне этой обла-
сти представляет собой открытый вопрос, особенно если она относится
к «сомнительной» области, которая расположена на более или менее оди-
наковом расстоянии от ядер (центров) обеих функций принадлежности.
В таких неопределенных ситуациях оценку новых предприятий (1 и 3)
следует возложить на эксперта, и ее результат использовать для уточ-
нения имеющихся функций принадлежности, т. е. для соответствующего
расширения зон их влияния на не изученные к настоящему моменту
области. Следует также отметить, что если мы в состоянии на основе на-
ших собственных знаний сделать вывод о том, в какую сторону следует
расширять зону влияния определенной функции принадлежности, то мы
можем сделать это без измерения дополнительных значений.
В рассмотренном примере функция принадлежности, соответствую-
щая перспективному предприятию, может быть безусловно расширена
на область высоких доходов и низких расходов, функция, соответству-
ющая слабому предприятию — на область высоких расходов и низких
доходов, как показано на рис. 5.200, б. Расширение зоны влияния выпол-
няется путем изменения параметров функций принадлежности, в первую
очередь значений их ширины си, ею (5.151). Приведенный пример являет-
ся иллюстрацией того, насколько необходимым является использование
в задачах классификации несимметричных функций принадлежности.
Решение о том, в какую сторону следует расширять функцию при-
надлежности, не всегда является столь очевидным, как в рассмотрен-
ной ситуации с оценкой предприятий — в сложных задачах здравая ло-
398
Глава 5. Нечеткие модели
Рис. 5.201. Распознавание субъектов на основе их признаков как пример задачи
с открытым, неограниченным числом классов
гика может не оправдать ожиданий. Тем не менее, попытки расширения
функций принадлежности на неизвестные области необходимы, посколь-
ку это может значительно повысить эффективность методов классифика-
ции. Менее рискованным расширение функций принадлежности является
в случае задач с замкнутым и ограниченным числом классов, напри-
мер, если рассматриваются только два класса предприятий — слабые и
перспективные, и имеется уверенность в том, что не будут вводиться
новые классы (например, средние предприятия).
С большой осторожностью расширение зоны влияния должно выпол-
няться в задачах с открытым числом классов. Примером здесь может
являться распознавание личности людей на основе изображений их лиц
или отпечатков пальцев — в данной ситуации каждый класс соответству-
ет определенной личности. В какой-то день у нас могут быть функции
принадлежности, способные распознавать трех субъектов (рис. 5.201, а),
но на следующий день может потребоваться ввести функции принад-
лежности для двух новых субъектов (рис. 5.201, б). Для введения новых
функций принадлежности обычно требуется свободное пространство при-
знаков.
Глава 6
Методы нечеткого моделирования
В настоящей главе описаны три метода нечеткого моделирования, т. е. по-
строения нечетких моделей реальных систем, а именно:
а) нечеткое моделирование на основе экспертных знаний о системе,
б) построение самонастраивающихся нечетких моделей на основе изме-
рений входов и выходов системы;
в) построение самоорганизующихся и самонастраивающихся нечетких
моделей на основе измерений входов и выходов системы.
Согласно определению, данному в работах (Driankov 1993,1996), под
самонастраивающейся нечеткой моделью (self-tuning fuzzy model)
понимается модель, задаваемая на основе фиксированных правил и фик-
сированных нечетких множеств, в которой объектом настройки являются
только параметры функций принадлежности (рис. 6.1) и, возможно так-
же, коэффициенты масштабирования входных и выходных параметров
модели.
Рис. 6.1. Иллюстрация процесса настройки модели
400
Глава 6. Методы нечеткого моделирования
В ходе процесса настройки осуществляется изменение параметров
функций принадлежности (определяющую роль обычно играет измене-
ние модальных значений), которое вызывает смещение задаваемых линг-
вистическими правилами узлов Рг поверхности модели. Целью настройки
является такое расположение узлов, при котором поверхность модели как
можно более точно аппроксимирует форму поверхности соответствующей
системы в смысле минимизации критерия моделирования, где в качестве
последнего может выступать средняя абсолютная ошибка, средняя квад-
ратичная ошибка, максимальная ошибка и т. п. При этом ни число нечет-
ких множеств, ни число правил (число узлов Р^ в процессе настройки
не изменяются, и, кроме того, не изменяются форма правил, а также
число и тип входов модели. Структура модели, тем самым, остается по-
стоянной.
Термин «настройка» может дополнительно подразумевать изменение
типов логических операторов (И, ИЛИ), типов функций принадлежности
(кусочно-линейные, гауссовы и т. д.), а также методов вывода или де-
фаззификации. Изменение указанных элементов приводит к изменению
типа и размера кривизны участков поверхности модели (т. е. к измене-
нию типа интерполяции) между задаваемыми на основе правил узлами
интерполяции Pi (рис. 6.1).
Под самоорганизующейся нечеткой моделью (self-organizing
fuzzy model) понимается (Driankov 1993, 1996) модель, имеющая соб-
ственные автоматические процедуры определения оптимального числа
и формы правил и нечетких множеств, использующихся для описания
всех (входных и выходной) переменных модели. Термин «самооргани-
зация» подразумевает также процесс определения существенных входов
модели и ее структуры (т. е., например, разделение глобальной модели
на локальные, задание связей в иерархической модели, определение мо-
делей, составляющих мультимодельную структуру). Результат изменения
числа нечетких множеств и правил представлен на рис. 6.2.
Увеличение числа нечетких множеств и правил позволяет достичь
большей точности модели (при условии правильной настройки послед-
ней). Вместе с тем, это резко усложняет настройку модели, особенно
в случае большого числа входов, и если модель оказалась очень сложной,
то ее настройка может быть практически неосуществимой. Более того,
указанная сложность модели зачастую является причиной ее неспособно-
сти к обобщению результатов измерения входов и выходов системы или,
наоборот, приводит к ненужному воспроизведению шумов и помех изме-
рений (рис. 6.3), особенно в случае малого числа или обширного разброса
последних. Поэтому не следует использовать модели необоснованно раз-
Глава 6. Методы нечеткого моделирования
401
Рис. 6.2. Влияние числа нечетких множеств и правил (числа узлов Рг) на по-
тенциально возможную точность модели
вернутой и сложной структуры, а число правил и нечетких множеств
необходимо ограничивать разумными пределами. Оптимизация структу-
ры нечеткой модели представляет собой сложную, но выполнимую зада-
чу, и для ее решения используются самоорганизующиеся модели.
402
Глава 6. Методы нечеткого моделирования
Рис. 6.3. Воспроизведение шумов измерений моделью, содержащей избыточное
число нечетких множеств и правил (узлов)
6.1. Нечеткое моделирование на основе
экспертных знаний о системе
Моделирование на основе экспертных знаний о системе представляло со-
бой первый использовавшийся на практике подход к нечеткому модели-
рованию. В основе данного подхода лежит использование знаний и опыта
человека, глубоко компетентного в вопросах, связанных с моделируемой
системой. В процессе наблюдения за некоторой системой или выполне-
ния операций с ней (например, производства механизма, машины, са-
молета или корабля) человек приобретает определенные знания об этой
системе, которые могут быть как явными, осознанными, так и неявны-
ми, неосознанными (способность интуитивно «чувствовать» механизм).
Говоря об осознанном восприятии, можно указать его главное свойство,
связанное с тем, что эксперт способен вербально выразить свои знания
и, тем самым, передать информацию другим людям. В отличие от это-
го, неосознанные (неявные) знания подобным образом сформулировать
невозможно — они могут проявляться только в ходе практических опера-
ций с системой (например, в процессе управления автомобилем), в фор-
ме способности человека «чувствовать» систему и предсказывать ее ре-
акцию на определенные действия оператора (водителя). О совокупности
накапливаемых в мышлении эксперта осознанных и неосознанных знаний
о реальной системе говорят как о ментальной модели (mental model)
(Babuska 1995b). Путем беседы с экспертом можно извлечь только «яв-
ную» часть имеющихся у него знаний о системе, выраженную в форме
6.1. Нечеткое моделирование на основе экспертных знаний о системе 403
вербальных правил, которые описывают взаимосвязи между входными
и выходным параметрами системы и имеют, например, следующий вид:
ЕСЛИ (педаль газа нажата сильно) И (передача высокая)
ТО (скорость высокая),
или, в общем случае:
ЕСЛИ (xi есть Аг) И (ж2 есть В7) ТО (у есть СД (6.1)
где xi, Х2 — входы системы,
у — выход системы,
Ai, Bj,Ck — нечеткие множества, используемые экспертом
для лингвистической оценки значений входов и выходов.
Эксперт также может предоставить информацию об используемых
лингвистических значениях, например:
• «Говоря о сильном нажатии педали газа, я подразумеваю, что ее по-
ложение соответствует более, чем 80% величины рабочего хода»,
• «говоря о высокой передаче, я имею в виду 4-ю или 5-ю передачу».
Опираясь на указанные примеры, можно утверждать, что лингви-
стические правила, определяющие взаимосвязь между входными и вы-
ходным параметрами системы, эксперт способен выражать точнее, в то
время как информация, относящаяся к используемым лингвистическим
значениям, обычно выражается менее точно, поскольку эта информа-
ция во многом зависит от «чувственного» восприятия системы экспертом
и «неявной» части его знаний.
Множество вербально выражаемых правил, описывающих взаимо-
связь между входами и выходами системы, и вербальная информация
об используемых экспертом лингвистических значениях называется вер-
бальной моделью системы. Вербальная модель является, как правило,
менее содержательной, чем ментальная, поскольку она не включает неяв-
ную, неосознанную часть знаний эксперта о системе, т. е. ту часть, кото-
рую он не в состоянии передать другим. Более того, эксперт не в состоя-
нии передать свои знания ни о протекающих в его мышлении процессах
вывода, ни о типе (форме) функций принадлежности, используемых им
для описания лингвистических значений, ни о типе логических операто-
ров, применяемых в процессе обработки информации, и т. п.
Все перечисленные виды информации, необходимой для построения
нечеткой лингвистической модели заданной системы, должны быть по-
лучены на основе предположений либо интуиции человека, осуществля-
ющего построение модели, которого можно назвать экспертом по нечет-
404
Глава 6. Методы нечеткого моделирования
Рис. 6.4. Процесс построения нечеткой лингвистической модели
реальной системы
кому моделированию. На рис. 6.4 показаны потоки информации, имею-
щие место в процессе построения нечеткой лингвистической модели.
Приведем пример нечеткой модели.
Пример 6.1.1. Предположим, что оператор наблюдает систему с двумя
входами xi, Х2 и одним выходом у, регистрируя ее поведение путем из-
мерения их значений. Список зарегистрированных состояний системы
приведен в табл. 6.1.
Задача оператора состоит в определении таких значений входных сиг-
налов xi, Х2, при которых выход у принимает характеристические зна-
чения— минимальное, максимальное, среднее и т. д. Подобного типа зна-
ния приобретаются оператором после достаточно длительного периода
наблюдения за системой и работы с ней. Достаточная длительность под-
разумевает, что в течение данного периода имели место все возможные
состояния системы.
На основе данных табл. 6.1 можно прийти к выводу, что имеются 4 со-
стояния входов системы (выделенные жирным шрифтом), при которых
выход принимает максимальное значение (равное 9), и одно состояние,
при которым его значение является минимальным (равным 1). Представ-
ленная в табл. 6.1 информация составляет объективные знания, получен-
6.1. Нечеткое моделирование на основе экспертных знаний о системе 405
Таблица 6.1
Результаты измерения состояний реальной системы
*1 55555 66666 7 7 7 7 7 8 8 8 8 8 99999
х2 0 1234 0 12 34 0 1234 0 12 34 0 1234
У 96569 63 2 3 6 52125 0 3 2 3 6 96569
1
min mean max
P(x2) A .
mm mean max
^(xi)A .
min mean max
y(y)k
0 1 2 3 4 x2
123456789 У
ч—।—।—।—।---►
5 6 7 8 9
Рис. 6.5. Заданные экспертом модельные значения лингвистических оценок:
min — минимум, mean — среднее, max — максимум
ные на основе измерений. В случае, когда измерительные устройства
недоступны, а значения входов ац, х? устанавливаются вручную (напри-
мер, с использованием рычага), оператор имеет возможность предоста-
вить лишь нечеткую информацию, имеющую вид, например:
• «минимально возможное положение первого рычага»,
• «максимально возможное положение второго рычага»,
• «положение первого рычага, близкое к среднему»,
• «положение второго рычага чуть ниже максимально возмож-
ного» и т. п.
Для системы, описываемой с помощью данных табл. 6.1, эксперт мо-
жет выбрать следующие лингвистические значения:
xi : минимум (min), среднее (mean), максимум (max),
Х2 : минимум (min), среднее (mean), максимум (max),
у : минимум (min), среднее (mean), максимум (max).
Заданные экспертом модальные значения отдельных лингвистических
оценок представлены на рис. 6.5.
На основе объективных знаний о моделируемой системе, представ-
ленных в табл. 6.1, эксперт может задать правила следующего вида, опи-
сывающие функционирование системы:
R1 : ЕСЛИ (х\ = min) И (#2 = min) ТО (у = шах),
R2 : ЕСЛИ (xi = min) И (ж2 = mean) ТО (у = mean),
R3 : ЕСЛИ (.ri = min) И (я2 = max) ТО (у = max),
RA : ЕСЛИ (xi = mean) И (xq — min) ТО (у — mean),
406
Глава 6. Методы нечеткого моделирования
R4 : ЕСЛИ (a?i = mean) И (#2 = min) ТО (у = mean),
R5 : ЕСЛИ (#1 = mean) И (х2 = mean) ТО (у = min),
R6 : ЕСЛИ (ti = mean) И (х% = max) ТО (у — mean),
R7 : ЕСЛИ (яд = max) И (а?2 = min) ТО (у = max),
R8 : ЕСЛИ (ац = max) И (х2 = mean) ТО (у = mean),
R9 : ЕСЛИ (зц = max)
И (х2 = max) ТО (у = шах). (6.2)
Информация, относящаяся к представленным на рис. 6.5 лингвисти-
ческим значениям и множеству правил (6.2), составляет вербальную
модель системы. Ментальную модель в данном случае будут составлять
те знания эксперта о выходных значениях системы, которые он в состо-
янии хранить и восстанавливать в памяти, а также его «чувственное»
восприятие системы, т. е. возможность определять ее выходные состоя-
ния с помощью методов, которые им самим до конца не осознаются.
Средний человек в состоянии помнить не более, чем 5-9 состояний
системы, т. е. значительно меньше, чем число состояний, представлен-
ных в табл. 6.1. Более того, человек не может указать используемые им
в процессе мышления методы фаззификации (форму и параметры функ-
ций принадлежности), агрегации условий правил (применяемый тип опе-
ратора И) и дефаззификации. Тем не менее, для создания нечеткой мо-
дели системы указанная информация необходима. Построение нечеткой
модели выполняет эксперт по нечеткому моделированию (рис. 6.4), ко-
торый, действуя на основе «соображений интуиции» (опыта, интуиции,
знаний), должен дополнить вербальную модель недостающими элемен-
тами аппарата нечеткой логики. В зависимости от адекватности выбора
этих элементов модель получается более либо менее точной.
Если предположить, что экспертом по нечеткому моделированию вы-
браны треугольные функции принадлежности для фаззификации зна-
чений входов xi, Х2, одноточечные функции для представления значе-
ний выхода у (рис. 6.6) и оператор PROD для выполнения операции И,
то нечеткая модель будет вычислять значения выходов у*, приведенные
в табл. 6.2.
С другой стороны, если для фаззификации значений входов х±, Х2
выбраны гауссовы функции, для представления значений выхода у — од-
ноточечные функции (рис. 6.7), а для выполнения операции И — опера-
тор MIN, то нечеткая модель будет вычислять выходные значения у**,
представленные в табл. 6.3.
Анализ результатов, приведенных в табл. 6.2 и табл. 6.3, подтвержда-
ет, что каждая из двух моделей вычисляет выходное значение по-разному
6.1. Нечеткое моделирование на основе экспертных знаний о системе 407
Рис. 6.6. Первый вариант выбора функций принадлежности для входов и вы-
ходов модели
Таблица 6.2
Сравнение выходного значения у реальной системы и выходного значе-
ния у* нечеткой модели, использующей треугольные функции принадлеж-
ности значений входов (рис. 6.6) и оператор PROD
Х1 5 5 5 5 5 66666 77777 8 8 8 8 8 99999
х2 0 1234 0 1234 0 1234 0 1234 0 1234
У 96569 6 3 2 3 6 52 125 63 2 36 96569
У 97579 7 5 3 5 7 53 135 7 5 3 57 97 5 79
|у-у| 01010 12 12 1 01010 12 12 1 0 10 10
средняя абсолютная погрешность модели |y-y|mean== 0.8
Таблица 6.3
Сравнение выходного значения у реальной системы и выходного значения
у** нечеткой модели, использующей гауссовы функции принадлежности
значений входов (рис. 6.7) и оператор MIN
Х1 5 5 5 5 5 6 6 6 6 6 7 7 7 7 7 8 8 8 8 8 9 9 9 9 9
х2 0 12 3 4 0 12 3 4 0 12 3 4 0 12 3 4 0 12 3 4
У 9 6 5 6 9 6 3 2 3 6 5 2 12 5 6 3 2 3 6 9 6 5 6 9
** У 7 6 5.4 6 7 6 5.4 4.9 5.4 6 5.4 5.5 4.7 5.5 5.4 6 5.4 4.9 5.4 6 7 6 5.4 6 7
2 0 0.4 0 2 0 2.4 2.9 2.4 0 0.4 3.5 3.7 3.5 0.4 0 2.4 2.9 2.4 0 2 0 0.4 0 2
средняя абсолютная погрешность модели |y-y**|mean~ 1-43
и с разной точностью, обеспечивая тем самым разные виды отображения
входных значений в выходные.
Подытоживая рассмотренный пример, можно сделать вывод о том, что
точность модели, построенной на основе знаний эксперта, определяется
следующими двумя факторами:
а) исчерпывающими знаниями эксперта о реальной системе, а также
его возможностью преобразовывать их в правила и лингвистические
значения,
408
Глава 6. Методы нечеткого моделирования
Mmin(Ti) = ехр[-((д?1 - 5)/1.5765)2]
Mmean(Tl) = 6Хр[-((Т1 - 7)/1.5765)2]
Mmax(Ti) = ехр[-((а?1 - 9)/1.5765)2]
Mmin(T2) = ехр[-((х2 - 0)/1.5765)2]
Мтеап(т2) = СХр[-((т2 - 2)/1.5765)2]
Мтах(гг2) = ехр[-((ж2 - 4)/1.5765)2]
Рис. 6.7. Функции принадлежности, выбранные для представления значений
входов xi, Х2 и выхода у во втором варианте модели
б) опытом, знаниями и интуицией эксперта по нечеткому моделирова-
нию, задачей которого является дополнение модели, разработанной
экспертом по системе, соответствующими элементами аппарата нечет-
кой логики.
Замечания к нечеткому моделированию на основе экспертных зна-
ний о системе.
• Ментальные модели одной и той же системы, построенные разными
экспертами, могут различаться в зависимости от интеллекта, позна-
вательных способностей, квалификации и опыта эксперта, а также
от степени его знакомства с системой, количества ее состояний, ко-
торые он способен воспринимать, и т. д.
• Качество вербальной модели, передаваемой эксперту по нечеткому
моделированию экспертом по системе, зависит не только от каче-
ства созданной в процессе мышления последнего ментальной модели,
но и от его возможностей и умения точно и адекватно передавать
свои знания.
• Вербальная модель, передаваемая экспертом по системе, может со-
держать неполное множество правил, противоречивые правила или
неполную информацию о лингвистических значениях и поэтому тре-
бует всесторонней верификации и при необходимости настройки или
пополнения.
• Если вербальная модель содержит только множество правил, без ин-
формации о лингвистических значениях параметров, то она также
является применимой, при условии ее использования в комбинации
с методами, которые дают возможность определения недостающих па-
раметров. К таким методам относятся, например, методы проб и оши-
6.2. Построение самонастраивающихся нечетких моделей
409
бок, настройка нейронечеткой сети на основе данных о значениях
входов и выходов системы и др.
• Если для механических и электрических систем иногда удается
построить достаточно точные вербальные модели (Isermann 1995),
то для тепловых или химических систем вербальные модели, как пра-
вило, менее точны. Биологические системы попадают в третий класс
точности, а экономические и социологические системы соответствуют
наименее точным моделям. Возникают сложности, связанные с фор-
мулированием термов и их нечетким характером, с проведением изме-
рений и определением существенных входов систем, а также с выпол-
нением экспериментов, для которых характерны заведомо длительные
сроки получения достаточного объема данных.
• Качественные вербальные модели могут быть построены только
для систем небольшой размерности, главным образом, для систем
с одним или двумя входами. Особенности человеческого восприятия
исключают возможность запоминания состояний для большего чис-
ла входов. В последнем случае человек может демонстрировать лишь
фрагментарные знания о соответствующей системе.
• Возможность идентификации системы и формирования ее качествен-
ной модели зависит от скорости происходящих в системе изменений.
В случае быстро протекающих процессов задача моделирования си-
стемы, имеющей даже один вход, может оказаться неосуществимой.
• Владение лишь фрагментарными качественными знаниями о системе
может на самом деле оказаться весьма полезным, поскольку в данном
случае можно определить по крайней мере структуру модели системы
(или фрагмент такой структуры), что может значительно сократить
объем работы, необходимой для идентификации системы и использо-
вания других методов нечеткого моделирования.
Метод нечеткого моделирования на основе экспертных знаний о си-
стеме позволяет строить модели типа Мамдани, в то время как модели
типа Такаги—Сугено могут создаваться только адаптивными методами
на основе измеренных данных о входах и выходах системы.
6.2. Построение самонастраивающихся нечетких
моделей на основе измеренных данных
о входах и выходах системы
Первые нечеткие модели строились на основе экспертных знаний о систе-
ме. Приобретенный в тот период практический опыт позволил выявить
410
Глава 6. Методы нечеткого моделирования
ряд неудобств, связанных с данным подходом. Среди них наиболее важ-
ны следующие:
а) сложность точного определения параметров используемых экспертом
нечетких множеств (вклад подсознания эксперта в построение мен-
тальной модели системы),
б) сложность или невозможность сбора информации о методах эксплу-
атации и управления, применяемых в случае систем с большим чис-
лом входов (более двух), быстро изменяющихся систем или систем
со сложной формой отображения входов в выходы, вследствие чего
неспособность эксперта сформировать нечеткую модель системы по-
добного рода.
Указанные обстоятельства послужили причиной интереса исследова-
телей к разработке нечетких самонастраивающихся моделей. Обсужде-
нию данной темы посвящен ряд публикаций, среди которых (Babuska
1995а,b,с,d,e; Baldwin 1995b; Bossley 1995; Brown 1994,1995a,b; Cao
1997a; Carpenter 1992; Cipriano 1995; Cho 1995; Dave 1997; Delgado
1995,1997; Driankov 1993,1996; Eklund 1992; Feuring 1996; Fiordaliso
1996; Fukumoto 1995; Furuhashi 1995; Gonzales 1995; Gorrini 1995;
Gupta 1994; Hajek 1994,1995; Halgamuge 1996; Hanss 1996a; Hauptman
1995; Hensel 1995; Higgins 1994; Horikawa 1992; Ishibuchi 1993,1995;
Jackel 1997; Kahlert 1995; Kandel 1994; Katebi 1995; Kiriakidis
1995; Krone 1996a,c; Kwon 1994; Langari 1995; Lin 1991; Lin 1996;
Locher 1996a,b; Magdalena 1995; Mannle 1996; Murata 1995; Narazaki
1993,1995; Nelles 1996,1997; Nobre 1995; Nomura 1994; Osowski 1996;
Otto 1995; Park 1995; Pedrycz 1997; Piegat 1996; Preus 1994a,b,1995;
Preut 1995; Rovatti 1996; Rutkowska 1996,1997; Simpson 1992; Su 1995;
Takagi 1985; Tan 1995; Wakabayashi 1995; Yao 1995; Zhou 1995).
В данном разделе под настройкой нечеткой модели будет понимать-
ся главным образом процесс определения параметров функций принад-
лежности входных и выходных значений с целью минимизации ошибки
модели относительно моделируемой системы, задаваемой на основе ис-
пользуемого метода оценки ошибки (средней квадратичной, средней аб-
солютной либо максимальной ошибки). Кроме того, предполагается, что
структура модели известна и не подлежит изменению.
Для настройки модели, т. е. оптимизации ее параметров, чаще всего
применяются следующие методы:
I. Методы, основанные на использовании нейронечетких сетей.
II. Поисковые методы.
III. Методы, основанные на кластеризации.
6.2. Построение самонастраивающихся нечетких моделей
411
IV. Методы, использующие обычные (не нечеткие) нейронные сети.
V. Эвристические методы.
Для практических приложений наиболее важными являются пер-
вые три группы методов. Методы первой группы связаны с преобра-
зованием нечеткой модели в нейронечеткую сеть (Bossley 1995; Brown
1994,1995а,b; Gupta 1994; Hauptmann 1995; Nelles 1997; Osowski 1996;
Piegat 1996; Yao 1995) и применением для настройки параметров модели
методов обучения сети на основе измерений входных и выходных данных
о системе. Учитывая практическое и познавательное значение указанных
выше методов, в разд. 6.2.1 дано их детальное описание.
Методы второй группы представляют собой методы прямого поиска
оптимальных параметров нечеткой модели. Процесс поиска может быть
как упорядоченным, так и неупорядоченным (метод проб и ошибок). Наи-
более часто используемым методом упорядоченного поиска является ме-
тод, основанный на применении генетических алгоритмов (Murata 1995;
Nobre 1995), который представлен в разд. 6.2.2.
Методы, основанные на кластеризации, сочетают в себе настройку
параметров модели и ее структуризацию. Эти методы будут рассмотрены
в разд. 6.3. Методы, связанные с использованием нейронных сетей для
настройки нечеткой модели, не получили широкого распространения. За-
интересованные читатели могут найти примеры применения указанных
методов в (Carpenter 1992; Hauptmann 1995; Ishibuchi 1993; Narazaki
1995). Это же относится и к эвристическим методам (Eklund 1992;
Gorrini 1995; Simpson 1992). Различные интересные аспекты нечеткого
моделирования и соответствующие примеры можно найти в (Beigy 1995;
Bartolan 1997; Culliere 1995; Hathaway 1996; Krone 1996b; Lofti 1996;
Piltz 1996; Shmilovici 1996; Wang 1995a; Zizka 1996).
6.2.1. Применение нейронечетких сетей для настройки
параметров нечеткой модели
Обучение нейронных сетей может производиться на основе измерений
входных и выходных данных о моделируемой системе. В настоящее вре-
мя существует множество методов обучения — все они широко описаны
в профессиональной литературе (Haykin 1994; Masters 1993; Zell 1994).
Нечеткую модель можно представить в форме специальной нейронной
сети, и настройка параметров модели может быть выполнена на осно-
ве одного из методов обучения. Построенная подобным образом сеть
называется нейронечеткой сетью (neuro-fuzzy network) (Bossley 1995;
Brown 1995a,b; Gupta 1994; Hauptmann 1995; Horikawa 1992; Nelles 1997;
412
Глава 6. Методы нечеткого моделирования
Osowski 1996; Preuss 1994а; Yao 1995), и для понимания связанных с ней
концепций представляется необходимым познакомиться с общей идеей
нейронных сетей.
6.2.1.1. Структуризация и обучение нейронных сетей
На рис. 6.8 представлена базовая структура искусственной нейронной се-
ти (ИНС). Нейроны, принадлежащие ее входному слою, передают вход-
ные сигналы нейронам скрытого слоя. Чаще всего используются сети
с одним скрытым слоем, поскольку этот тип сетей обеспечивает доста-
точно точное моделирование множества реальных систем. Нейроны, при-
надлежащие скрытым слоям и выходному слою, выполняют обработку
информации, переданной из входного слоя. К наиболее часто использу-
емым ИНС относятся многослойные персептронные сети (МПС) и ней-
ронные сети с радиальными базисными функциями, или так называемые
RBF-сети (Preuss 1994а). Основным элементом персептронной сети яв-
ляется нейрон, схематически представленный на рис. 6.9.
Функция распространения обеспечивает вычисление взвешенной сум-
мы s всех входных сигналов нейрона и ее передачу нелинейному элемен-
ту с функцией активации J(s) (называемой также пороговой функцией),
который генерирует выходной сигнал нейрона у. Значение коэффициен-
та wq называется пороговым. При достаточно больших пороговых значе-
ниях шо даже малые значения входных сигналов Xi приводят к генерации
нейроном выходного сигнала, в то время как при малом пороговом зна-
чении требуются большие значения входных сигналов. В большинстве
случаев в качестве функции активации J(s) используется сигмоидальная
функция, представленная на рис. 6.10.
Входные w Выходные
сигналы Нейроны сигналы
слой слой
Рис. 6.8. Структура искусственной нейронной сети
6.2. Построение самонастраивающихся нечетких моделей
413
Рис. 6.9. Схема искусственного нейрона, используемого в многослойных пер-
септронных сетях
Коэффициент с влияет на наклон сигмоидальной функции.
При с —» оо нейрон возбуждается быстрее, и наоборот, при с —» 0 воз-
буждение нейрона происходит медленнее. Обычно МПС состоят из трех
слоев (рис. 6.11).
414
Глава 6. Методы нечеткого моделирования
Рис. 6.11. Трехслойная персептронная сеть с одним выходом
Процесс обучения нейронной сети обеспечивает постепенное измене-
ние значений ее весов w, v, с, при котором достигается минимальное
или субминимальное значение критерия обучения, в качестве которого
обычно используется средняя или суммарная квадратичная ошибка вы-
ходного значения у сети относительно выходного значения у* моделиру-
емой системы. Выходное значение сети у является функцией ее входных
значений и обучаемых параметров:
у = (6.3)
где х= [xj,..., жр]т.
Если одиночную обучающую пару, содержащую входные и выходное
значения, полученные путем измерений моделируемой системы, обозна-
чить через
KW*}. (6.4)
то суммарная квадратичная ошибка сети для полного цикла обучения,
содержащего m обучающих пар, умноженная на 0.5 (для удобства даль-
нейших вычислений), выражается с помощью формулы
m m
Е = 0.5 £(?/«-уг)2 = 0.5 £е2. (6.5)
i=l i=l
6.2. Построение самонастраивающихся нечетких моделей
415
0.5е2А
gopt g(k-V) g
Рис. 6.12. Иллюстрация влияния параметров сети (д) на величину ошибки е2
выходного сигнала
Суммарная ошибка Е уменьшается при уменьшении ошибок е2 инди-
видуальных обучающих пар. Как и выходное значение у, общая ошиб-
ка сети представляет собой функцию ее параметров Wij, гщ, ci, которые
являются переменными процесса обучения и обычно называются степе-
нями свободы сети. Число степеней свободы, как правило, велико, что
дает возможность реализации самых сложных отображений. Настройка
параметров сети обычно выполняется на основе принципа обратного рас-
пространения ошибки, с использованием градиентных методов (Haykin
1994; Masters 1993; Zell 1994). Если д — произвольно выбранный настра-
иваемый параметр сети, то его влияние на ошибку сети зависит от про-
изводной де2/дд (рис. 6.12).
В соответствии с рис. 6.12, чтобы параметр д приблизился к своему
оптимальному значению gopt, его необходимо сместить в направлении
отрицательного градиента на величину Ag(fc), которая задается на основе
формулы (6.6), называемой дельта-правилом (Haykin 1994):
= <6-6’
где a — коэффициент скорости обучения.
Новое значение параметра д(Е) можно найти по формуле
</(£) = 5(A;-1) + A5(fc), (6.7)
где к — номер шага.
Величина поправки A</(fc) зависит от выбранного значения коэффи-
циента а. В начале процесса настройки выбирают значения, близкие
к а = 0.1. При более высоких значениях а можно быстро приблизиться
к оптимальному значению параметра, но при этом существует опасность,
связанная с возникновением колебаний значений параметра вокруг оп-
тимального, через которое параметр будет «перескакивать» (рис. 6.13).
416
Глава 6. Методы нечеткого моделирования
—поправка без использования момента (6.6)
Дд —поправка с использованием момента (6.8)
Рис. 6.13. Использование момента р для устранения колебаний
Данного явления можно избежать, если использовать для вычисления
поправки формулу (6.8), содержащую момент р:
= -0.5а д^к ~ 1} + д^д(к - 1). (6.8)
од\к — jj
Значение момента р выбирается из интервала [0,1], при этом чаще
всего его полагают равным 0.9. Результат использования данного пара-
метра иллюстрируется на рис. 6.13.
Пусть для параметра д, настраиваемого без использования момен-
та, имеют место колебания вокруг оптимального значения, с изменением
амплитуды Д*д (рис. 6.13, а) и ее знака. Если для вычисления поправки
использовать формулу (6.8), содержащую момент для шага (к — 1), кото-
рому соответствует значение параметра д(к — 1), то это сразу же приведет
к уменьшению следующего значения поправки до 0.9A*g(fc — 1). Таким
образом, новое значение параметра д(к) не будет «перескакивать» через
оптимум, и дальнейшие шаги обеспечат постепенное к нему приближе-
ние.
Ключевой задачей в процессе обучения является вычисление про-
изводных де2/дд для настраиваемых параметров. Это вычисление осу-
ществляется путем перемножения частных производных входных и вы-
ходных сигналов для всех элементов сети, находящихся между сигна-
лом 0.5е2 и корректируемым параметром (рис. 6.14). При наличии множе-
ства путей, ведущих к сигналу 0.5е2, произведения производных, вычис-
ленные вдоль каждого пути, суммируются. Рассмотрим указанный метод
вычисления производных на примере сети, изображенной на рис. 6.14.
Для выполнения коррекции коэффициента су на низшем слое сети
необходимо найти частную производную д($.Ье2)/дсу согласно выраже-
6.2. Построение самонастраивающихся нечетких моделей
417
Рис. 6.14. Пример, иллюстрирующий метод обратного распространения ошибки
%(*)
rdsv
нию
d(0-5e2) = <9(0.5е2) де ду_ . dfy(s) = dfy(s) (
дсу де ’ ду' дсу 4 ’’ дсу ' дсу ' К ’
Формула (6.9) содержит ошибку сети е, которая, двигаясь в «противо-
положном» от выхода сети направлении, появляется в каждой производ-
ной. Именно поэтому метод назван методом «обратного распространения
ошибки».
Для коррекции коэффициента vq на низшем слое используется про-
изводная d(0.5e2)/dvo, вычисляемая по формуле
<9(0.5е2) _ 3(0.5е2) де dfy(s) dsy _
3vq де ду dsy dvo
Коррекция коэффициента гц выполняется на
определяемой с помощью соотношения
а(0.5е2) = <9(0.5е2) де dfy(s) ds^ дп = _ dfy(s) . .
дгг де ' ду' dsy ' дгх' дщ 1 ‘ ’ dsy ’ ' ' ’
Поправка для коэффициента щ зависит не только от величины ошиб-
ки е, но и от текущего значения входного сигнала z\ элемента щ
(рис. 6.14). Для коррекции коэффициента мц на скрытом слое необходи-
(6.10)
основе производной,
418
Глава 6. Методы нечеткого моделирования
мо использовать производную, вычисляемую по формуле
<9(0.5е2) _ Э(0.5е2) de ду dsy дг± dz^ ds\ др^
9wn де dy dsy дг± dz^ ds\ dpi dwn
Преимущество сигмоидальной функции активации (рис. 6.10) связано
с простотой методов вычисления ее производных:
« = •
df(s) с - е cs с • е es + с — с z 2\ ГВ
ds (1 + е~“)2 (1 + e-cs)2 [У У
дс = $(у - У2). (6.14)
Одной из сложностей, возникающих при обучении нейронной сети,
является проблема, связанная с определением ее структуры, т. е. числа
нейронов в промежуточных слоях сети и взаимосвязей между нейрона-
ми отдельных слоев. Поскольку наиболее часто используются структу-
ры, содержащие три слоя, один из которых является скрытым, то задача
определения структуры фактически сводится к задаче определения чис-
ла нейронов п в скрытом слое. В литературе можно найти множество
полезных рекомендаций по решению указанной задачи —см., например,
(Haykin 1994; Osowski 1996; Zell 1994), — но при этом они не гарантируют
выбора оптимальной или даже просто приемлемой структуры. Причины
этого будут в свое время рассмотрены.
Цель настройки (обучения) нейронной сети состоит в получении та-
кой поверхности аппроксимации отображения «вход-выход» моделируе-
мой системы, которая соответствует измерениям данных о системе и дает
информацию о характере ее функционирования. При этом должно оста-
ваться справедливым следующее общее утверждение о структуре сети:
«чем сложнее поверхность выполняемого системой отображения X —> У,
тем большее число нейронов скрытого слоя требуется для ее моделиро-
вания» (рис. 6.15).
К сожалению, при моделировании реальных систем информация об
уровне сложности поверхности зачастую оказываются неполной, особен-
но в случае систем со многими входами. Имеется обычно лишь информа-
ция о результатах измерения входных и соответствующих им выходных
значений, которая при этом полна ошибок измерения и подвержена влия-
нию со стороны входных параметров, которые не были учтены в процессе
6.2. Построение самонастраивающихся нечетких моделей
419
промежуточный слой содержит
меньшее число нейронов
х
б) сложная поверхность:
промежуточный слой содержит
большее число нейронов
Рис. 6.15. Зависимость между сложностью поверхности отображения X —> У,
выполняемого моделируемой системой, и числом нейронов в нейронной сети
моделирования. Для систем, имеющих более двух входов, модель невоз-
можно представить в графической форме, позволяющей оценить слож-
ность поверхности, и поэтому используется метод проб. В начале процес-
са моделирования число нейронов п можно положить равным среднему
геометрическому числа входов р и числа выходов I (Osowski 1996) — см.
формулу (6.15). Далее, с учетом точности построенной сети, количество
нейронов можно соответствующим образом скорректировать:
n=y/pt. (6.15)
Перед началом процесса настройки сети множество Um, содержащее
измерения данных X /У о системе, следует разделить на два подмно-
жества — множество Utr данных для обучения и множество Uts данных
для тестирования *:
Um = Utr + Uts, Utr^Uts. (6.16)
Множество Uts используется для тестирования сети, обученной на ос-
нове множества Utr, и оно должно содержать данные, отобранные из
множества измерений Um в соответствии с принципом равномерного рас-
пределения данных в пространстве входных параметров X (рис. 6.16).
В ситуации, изображенной на рис. 6.16, а, после настройки нейронная
сеть будет выполнять точное моделирование системы в левой части вход-
ного пространства, а использование для тестирования данных из правой
части этого пространства будет приводить к значительной (или даже
очень большой) ошибке. В рассмотренном случае сеть не имела возмож-
ности «ознакомиться» с моделируемой системой на всем пространстве
* Множество Utr данных для обучения и множество Uts данных для тестирования
должны быть непересекающимися. — Прим, перев.
420
Глава 6. Методы нечеткого моделирования
а) неправильное разделение множества измерений Um на множество
обучающих данных Utr и множество тестовых данных
б) правильное разделение множества измерений Um на множество
обучающих данных U[r и множество тестовых данных
Рис. 6.16. Иллюстрация проблемы, связанной с разделением множества изме-
рений
ее функционирования. В ситуации, представленной на рис. 6.16, б, как
для обучения, так и для тестирования сети используются данные, распре-
деленные по всему пространству функционирования системы, и в этом
случае множество данных для тестирования будет обеспечивать объек-
тивную, корректную оценку точности сети.
По результатам анализа начальной структуры необходимо корректи-
ровать число п нейронов на скрытом слое до тех пор, пока не будет
отмечено улучшение результатов тестирования, т. е. пока средняя ошиб-
ка сети на множестве тестовых данных Uts, либо на общем множестве
данных иш, не уменьшится. В отдельных случаях обучение выполняется
без использования тестовых данных, особенно если множество данных
небольшое. Процесс обучения и корректировки структуры продолжается
до достижения функцией ошибки минимального значения (при условии
что сеть не переобучена — см. рис. 6.17)).
Изменения структуры могут выполняться с использованием двух ме-
тодов: конструктивного и деструктивного. Конструктивный метод пред-
полагает, что процесс обучения начинается с небольшого числа нейронов,
которое постепенно увеличивается, пока не будет достигнут оптимальный
результат. При использовании деструктивного метода обучение начина-
ется с большого числа нейронов, которое затем постепенно уменьшается.
Результаты некоторых исследований (Fukumoto 1995) показали, что при-
менение деструктивного метода позволяет получать структуры с мень-
6.2. Построение самонастраивающихся нечетких моделей
421
г) незашумленные данные,
корректное обучение и обобщение
а) зашумленные данные,
корректное обобщение
б) зашумленные данные,
переобобщение (недообучение)
д) незашумленные данные,
переобобщение (недообучение)
отсутствует (переобучение)
отсутствует (переобучение)
Рис. 6.17. Иллюстрация обобщения измеренных данных нейронной сетью
422
Глава 6. Методы нечеткого моделирования
шим числом нейронов и меньшей погрешностью обучения, в то время как
при использовании конструктивного метода обучение происходит быст-
рее. Вместе с тем, к подобным выводам следует относиться с осторож-
ностью ввиду большого разнообразия сетей и многостороннего характе-
ра задач моделирования, а также того факта, что в других публикациях
можно встретить иную точку зрения на эти два метода. Основная задача,
связанная с обучением сети, состоит в том, чтобы обеспечить коррект-
ность обобщения сетью данных и избежать ее переобучения. Указанная
задача представлена на рис. 6.17.
Недостаточно обученная сеть демонстрирует чрезмерно высокую сте-
пень обобщения данных (рис. 6.17, б, б). Погрешность сети является вы-
сокой как для множества обучающих данных Utr, так и для множества
тестовых данных Uts. Причинами этого могут быть, например, слишком
малое число нейронов или недостаточное обучение. Для соответствую-
щей нейросетевой модели обычно характерен простой вид поверхности
отображения X Y.
Средняя ошибка переобученной сети (рис. 6.17, в, е) является очень
малой, а ее поверхность отображения очень точно проходит через точ-
ки, соответствующие данным измерений. Однако между этим точками
поверхность может в корне отличаться от реальной поверхности модели-
руемой системы. Распознать ситуацию, связанную с переобучением сети
легко, поскольку в этом случае сеть демонстрирует очень низкую по-
грешность на множестве обучающих данных и высокую— на множестве
тестовых. Причиной переобучения может являться как слишком большое
для данного уровня сложности моделируемой системы число нейронов,
так и слишком малый объем обучающих данных. Объем данных не дол-
жен быть меньше числа степеней свободы сети (т. е. числа подлежа-
щих настройке параметров). При меньшем количестве данных настрой-
ка некоторых параметров осуществляется случайным образом, и поверх-
ность модели между обучающими элементами имеет непредсказуемый
характер (рис. 6.17, в, е).
На основе приведенных выше рассуждений можно получить инте-
ресный, но при этом достаточно неожиданный вывод о том, что сеть,
безупречно выполняющая аппроксимацию множества обучающих дан-
ных Utr, необязательно является оптимальной сетью. Характеристикой
«оптимальная» должна обладать сеть, обученная на основе множества
обучающих данных и обеспечивающая минимальную ошибку на всем
множестве результатов измерений Um.
Нейронные сети RBF-типа состоят из нейронов с радиальными базис-
ными функциями активации. Свойства этих сетей зависят от расстояния
6.2. Построение самонастраивающихся нечетких моделей
423
Рис. 6.18. Гауссова радиальная базисная функция (GRB-функция) в двумерном
пространстве
||х — с|| между точкой х, принадлежащей входному пространству, и цен-
тром функции с. Радиальные базисные функции задаются с помощью
формулы (6.17) (Brown 1994):
у = /(х) = Д||х-с||), (6.17)
где х = [ti, ..., хр]т — входной вектор,
с = [ci,..., ср]т — вектор координат центра функции.
Из радиальных базисных функций чаще всего используется гауссова
радиальная базисная функция (GRB-функция). На рис. 6.18 представлена
форма данной функции в двумерном пространстве. Дисперсия 6 GRB-
функции определяет степень отклонения ее ветвей (рис. 6.18). Величина
наклона равна 6 при высоте, равной
у = ехр(—0.5) = 0.60653.
GRB-функция, известная как гауссов «колокол» (Preuss 1994), имеет
некоторые полезные свойства. Значения данной функции являются близ-
кими к 1 только для входных значений х, близких к центру функции с.
Указанное свойство делает функцию особо полезной для применения
в случае нечетких правил, задаваемых в форме
ЕСЛИ (х близок к с) ТО (у близок к у$), (6.18)
где
У = /(ж) = Уоехр[-(х - с)2/2<52].
Многомерные GRB-функции, задаваемые с помощью формулы (6.19),
используются для моделирования систем со многими входами:
У = /(х) = ехР
(6.19)
424
Глава 6. Методы нечеткого моделирования
Рис. 6.19. GRB-функция с двумя входами и ее параметры
где х = [ti,..., хр]т — входной вектор,
с — [щ,..., ср]т — вектор координат центра функции,
6 = [51,, <ут — вектор дисперсий (отклонений) относительно
осей переменных х^.
На рис. 6.19 представлены параметры гауссова «колокола» с двумя
входами.
Выходное значение GRB-функции со многими входами является близ-
ким к 1, только если входной вектор х расположен вблизи от центра
функции, задаваемого с помощью вектора с (6.19). Данная функция эф-
фективно выполняет оценку сложных условий в нечетких правилах вида
ЕСЛИ (xi близок к ci) И ... И (хр близок к ср)
ТО (у близок к i/o), (6.20)
где
р
У = Дх) = Уо ехр < - ^2
Используются два типа RBF-сетей (рис. 6.20): простые (ненормализо-
ванные) и нормализованные.
Недостаток простой RBF-сети (рис. 6.20, а) связан с несовершенством
интерполяции в тех случаях, когда ветви соседних GRB-функций слегка
перекрывают друг друга. В подобной ситуации на участках поверхности
нейросетевой модели между отдельными гауссовыми «колоколами» могут
наблюдаться «спады» (рис. 6.21, а). В случае же, если расстояния меж-
ду центрами «колоколов» являются большими, а охватываемые ветвями
диапазоны — малыми, на поверхности модели могут возникнуть «ямы»,
6.2. Построение самонастраивающихся нечетких моделей
425
Простая RBF- сеть:
п
y = '£Jwifi
1=1
Рис. 6.20. Структуры RBF-сетей
Нормализованная
RBF-сеть:
п
вызванные локальной нечувствительностью модели к входным изменени-
ям (рис. 6.21, б).
Характерных для простых RBF-сетей «спадов» и «ям» можно из-
бежать, если для смежных функций ввести зависимость величины
охвата ветвей от расстояния между их центрами с*. Имеются некото-
рые эвристические рекомендации, в соответствии с которыми, например,
величина 6 должна быть равной удвоенному среднему расстоянию меж-
ду центрами смежных функций (Preuss 1994а). Вместе с тем подобная
«жесткость» выбора величины 8i охвата ветвей по сути означает их ис-
ключение из числа степеней свободы в процессе настройки, и таким об-
разом настройке подвергаются только центры q, а величины охвата 6j
выбираются в зависимости от расположения центров. В случае же, ко-
гда объектами настройки являются как центры, так и величины охвата,
в ходе обучения простой RBF-сети могут возникнуть «спады» и «ямы»,
если в начале обучения выбраны слишком малые величины охвата 8i, и
для некоторых областей входного пространства отсутствуют данные из-
мерений. Адаптация параметров в подобной ситуации может оказаться
сложной. Указанные выше недостатки обычных RBF-сетей можно зна-
чительно уменьшить, если использовать нормализацию сетей (рис. 6.20),
предложенную в работе (Moody 1989).
Достоинством и, одновременно с этим, недостатком GRB-функций
является бесконечная ширина их носителей, покрывающих все вход-
426
Глава 6. Методы нечеткого моделирования
а) обычная RBF- сеть:
эффект «спадов»
б) обычная RBF- сеть:
эффект «ям»
в) нормализованная
RBF- сеть
Рис. 6.21. Потенциальные опасности, связанные с моделированием систем на
основе использования обычных RBF-сетей, и их предотвращение путем норма-
лизации этих сетей
ное пространство модели (рис. 6.18). Это дает возможность использо-
вать неполные базы правил, исключая из модели несущественные или
мало существенные правила, в то время как сама модель остается чис-
ленно полной, т. е. генерирует выходное значение для каждого входного
состояния (см. разд. 5.2). Таким образом, становится возможным созда-
ние «разреженных» нечетких моделей (Brown 95а). Основным свойством
GRB-функций, которое иногда трактуется как их недостаток, является
невозможность выполнения условия разбиения единицы (равенства еди-
нице суммы смежных функций принадлежности), вследствие чего любое
состояние входных параметров нечеткой модели приводит к активизации
всех имеющихся в ней правил, но при этом заключения правил не «со-
общают правду» (см. разд. 5.7.1).
Можно также использовать асимметричные GRB-функции, имеющие
разные величины охвата 6 для областей положительных и отрицательных
значений переменной. Достоинство GRB-функций связано с их непре-
рывной дифференцируемостью, что упрощает обучение сети. Для обуче-
ния RBF-сетей обычно используются градиентные методы, как, например,
6.2. Построение самонастраивающихся нечетких моделей
427
Фаззификация База правил
Дефаззификация
Рис. 6.22. Общая схема нечеткой модели
в случае персептронных сетей или методов кластеризации (Preuss 1994а;
Osowski 1996) —см. разд. 6.3.3.2.
Когда известны структура и основные методы обучения нейронных
сетей, можно переходить к следующему этапу преобразования нечеткой
модели в нейронечеткую сеть — см. разд. 6.2.1.2.
6.2.1.2. Преобразование нечеткой модели Мамдани
в нейронечеткую сеть
На рис. 6.22 представлена нечеткая модель системы типа MISO. В данном
разделе будут рассмотрены методы преобразования различных элементов
Рис. 6.23. Преобразование кусочно-линейных функций принадлежности (а)
во фрагменты нейронной сети (б)
428
Глава 6. Методы нечеткого моделирования
нечетких моделей в элементы нейронных сетей и алгоритмы вычисления
производных, применяемые в градиентных методах обучения.
Преобразование элементов блока фаззификации. Рисунок 6.23 ил-
люстрирует преобразование кусочно-линейной функции принадлежности
во фрагмент нейронной сети. В процессе обучения сети выполняется на-
стройка параметров ог функции принадлежности, с учетом чего необхо-
димо определить производные выходных значений блока фаззификации
по указанным выше параметрам. Функции принадлежности и их произ-
водные определяются с помощью формул (6.21)—(6.30):
P-s(x) = <
если
если
1,
а2 ~ х
02 — «1 ’
о,
х < ai,
tti < X < tt2,
X tt2',
d^s(x) да\ О2~Х , если (21 < X < (22, в остальных случаях;
= 1 («2 - С11)2 0
д/лДх) х — а± , если а\ < х < «2,
= < (а2 - аД2
(JO2 0 в остальных случаях;
Z 0, если х < а2,
лЩ) = < х - а2 если а2 < х < аз,
аз ~ а2
к 1, если х аз;
д^Дх) Дл гл S х — аз , если а*2 < х < аз,
= < (а3 - а2)2
(ДО2 0 в остальных случаях;
дцДх) даз Z а2 - х , если 02 С х < аз, в остальных случаях;
= < л (а3 - а2)2 0
= МАЛ (ж) + ММгЦ) = 1 - ЛзЦ) - Ц Дх),
дцм(х) _ _ дцз(х)
да± dai
дрм(Х) _ _ dns(x)
да2 да-2
дцДх)
да-2
дцм(х') _ _ дцДх)
даз даз
(6.21)
(6.22)
(6.23)
(6.24)
(6.25)
(6.26)
(6.27)
(6.28)
(6.29)
(6.30)
Для моделирования функций принадлежности авторы большинства
публикаций по нейронечетким сетям рекомендуют использовать толь-
6.2. Построение самонастраивающихся нечетких моделей
429
Рис. 6.24. Замена кусочно-линейной функции принадлежности на GRB-
функцию равной площади
Рис. 6.25. Нейрон, реализующий GRB-функцию
ко непрерывно дифференцируемые GRB-функции. Некоторые авторы
(Horikawa 1992; Kahlert 1995; Preuss 1994а) предлагают заменять
кусочно-линейные функции на GRB-функции (сохраняя равенство пло-
щадей заменяемых функций —см. рис. 6.24) и строить нейронечеткие
сети исключительно на основе GRB-функций. Нейрон, реализующий
GRB-функцию, представлен на рис. 6.25. Вычисление производных дрь/дс
и др/дЪ в этом случае является очень простым.
Замена кусочно-линейных функций принадлежности на GRB-
функции приводит к возникновению так называемой ошибки преобра-
зования (Preuss 1995), которая обусловлена тем, что носители и фор-
мы этих функций не совпадают. Поскольку в нечетких моделях обыч-
но используются асимметричные треугольные функции принадлежности,
их необходимо заменять асимметричными GRB-функциями с различ-
ными величинами правостороннего и левостороннего разбросов, и это
еще больше усложняет задачу. Однако, исследования, проводившиеся
автором данной книги (Piegat 1996), а также Хензелем, Хольцманном
и Пфайфером (Hensel 1995), показали, что обучение нейронечетких се-
тей с кусочно-линейными функциями принадлежности является столь же
эффективным, как и в случае сетей с непрерывно дифференцируемыми
функциями принадлежностями. Единственным условием, ограничиваю-
щим возможность применения определенной функции принадлежности
430
Глава 6. Методы нечеткого моделирования
в нейронечеткой сети, является возможность вычисления производной
этой функции и конечное значение производной.
Преобразование элементов блока базы правил. Выходными значения-
ми блока фаззификации являются степени принадлежности входных зна-
чений Xi нечетким множествам А^- со своей лингвистической областью
определения. Указанные выходные значения одновременно представляют
собой степени выполнения подусловий, содержащихся в части ЕСЛИ(...)
нечетких правил вида
ЕСЛИ (xi = Ап) И (х2 = A2i) И ... И (хр = Ар1)
ИЛИ (^ - А12) И (х2 = А22) И ... И (хр = Ар2)
ИЛИ ...
ТО^-Вх). (6.31)
Блок базы правил определяет результирующую степень выполнения
всего сложного условия (антецедента правила) на основе степеней вы-
полнения подусловий, находящихся в части ЕСЛИ (...) правил, а так-
же на основе типов используемых в этой части логических операторов
(И, ИЛИ). В свою очередь, указанная степень активизирует функцию
принадлежности Bi, находящуюся в заключении (консеквенте) правил.
Обычно используется метод вывода типа MAX-MIN. Условие правила
можно представить в виде фрагмента нейронной сети, изображенного
на рис. 6.26. Для выполнения операций И, ИЛИ могут использоваться
t-нормы и s-нормы либо другие операторы. Каждое правило выполняет
активизацию одного из выходных нечетких множеств В[. Поскольку од-
но и то же нечеткое множество Bi может активизироваться несколькими
правилами Rm, то для получения окончательной формы активизирован-
ной функции принадлежности выходного нечеткого множества Bi
необходимо выполнить композицию их заключений, для чего, как прави-
ло, используется оператор МАХ. Общая схема нейросетевого представ-
ления базы правил обычно имеет вид, показанный на рис. 6.27.
Сеть, соответствующая базе правил, содержит нейроны, которые вы-
полняют логические операции. Вычисление производных выходных зна-
чений по входным для этих нейронов обычно не составляет труда, за ис-
ключением случая операторов МАХ или MIN, присутствующих в сети
независимо либо в составе других операторов. На рис. 6.28 представлен
оператор МАХ со многими входами.
6.2. Построение самонастраивающихся нечетких моделей
431
Рис. 6.26. Нейросетевая диаграмма условия правила Rm с нейронами И и ИЛИ,
приводящего к активизации множества В[ значений у на выходе модели
Рис. 6.27. Общая нейросетевая диаграмма базы правил
432
Глава 6. Методы нечеткого моделирования
если у = хъ
если у хг
Рис. 6.28. МАХ-нейрон (а), формула для вычисления производных выходных
значений по входным и поверхность функции MAX(xi,#2) (6)
— дув
Рис. 6.29. Преобразование оператора отрицания в элемент нейронечеткой сети
МАХ-нейрон дает отклик на изменение Дх^ входа Xi в виде измене-
ния Д1/ выхода, только если
Xi — MAX(#i,..., хр).
Изменение других входов не приводят к формированию отклика. Поэтому
значение производной по указанному выше входу равно 1, а по всем
остальным параметрам равно 0 (рис. 6.28). Аналогично, для MIN-нейрона
производные вычисляются по формуле
dy ( 1, если у = хг,
дхг [ 0, если у Xi.
(6.32)
Если несколько входов имеют одинаковые значения, которые при этом
являются максимальными (минимальными), то значения производных
по каждому из этих параметров будут равны 1. Моделирование оператора
отрицания также не является проблемой — соответствующее преобразо-
вание представлено на рис. 6.29.
Преобразование блока дефаззификации. Входными параметрами бло-
ка дефаззификации являются степени активизации ув;(у) нечетких мно-
жеств Bi на выходе модели. Структура нейронной сети, соответствующей
6.2. Построение самонастраивающихся нечетких моделей
433
Рис. 6.30. Нейронная сеть для представления блока дефаззификации
данному блоку, зависит от выбранного метода дефаззификации и степе-
ни сложности этого метода. Простейшим, очень эффективным и часто
используемым методом дефаззификации является метод одноточечных
множеств. Одноточечные множества используются в качестве замены
выходных множеств, и их расположение совпадает с пиками функций
принадлежности либо с их центрами тяжести увг В этом случае значе-
ние на выходе модели вычисляется по формуле
q
Е № • УВг
У = l—q------• (6.33)
Е
1=1
Нейронная сеть, выполняющая дефаззификацию методом одноточеч-
ных множеств, представлена на рис. 6.30.
Производные в такой сети вычисляются очень просто. В случае если
в знаменателе формулы (6.33) суммарная степень принадлежности эле-
ментов всегда равна 1, то m — 1, тогда нижнюю ветвь сети, также
как и оператор деления l/m (рис. 6.30), можно отбросить. В конечном
итоге, нейронная сеть, представляющая полную нечеткую модель, имеет
структуру, представленную на рис. 6.31.
434
Глава 6. Методы нечеткого моделирования
Рис. 6.31. Нейронечеткая сеть для представления нечеткой модели
Предположим, мы намерены исследовать значимость отдельных пра-
вил модели. Для решения подобной задачи необходимо использовать ко-
эффициенты доверия принимающие значения в интервале [0,1], вво-
дя их в те ветви сети, где происходит преобразование сигналов рвшт
(выходов правил). Если в результате обучения сети на основе входных
и выходных данных о системе значения некоторых коэффициентов ока-
зываются близкими к нулю, то соответствующие данным коэффициен-
там правила не являются существенными, и их можно исключить. Опи-
санная процедура позволяет выполнять настройку реляционных моде-
лей.
Представленная на рис. 6.31 схема нейронной сети носит обобщен-
ный характер. Структура сети зависит от структуры конкретной нечет-
кой модели и ее отдельных элементов. В примере 6.2.1.2.1 (см. ни-
же) приводится нечеткая модель и соответствующая ей нейронечеткая
сеть.
Пример 6.2.1.2.1. Рассмотрим нечеткую модель с базой правил (6.34)
и функциями принадлежности, представленными на рис. 6.32. Для вы-
полнения операции И используется оператор PROD, вывод осуществ-
ляется на основе метода MAX-MIN, а дефаззификация выполняется
с использованием одноточечных множеств, соответствующих вершинам
6.2. Построение самонастраивающихся нечетких моделей
435
Рис. 6.32. Функции принадлежности, используемые в нечеткой модели
у
Рис. 6.33. Нейронечеткая сеть, соответствующая нечеткой модели (6.34)
и рис. 6.32
функций принадлежности:
R1 : ЕСЛИ (xi = Лц) И (х2 = В2Х) ТО (у = Вх)
R2 : ЕСЛИ (хх = Лхх) И (х2 = В22) ТО (у = В2)
R3 : ЕСЛИ Щ = Ai2) И (ж2 = В21) ТО (у = В2)
R4 : ЕСЛИ Щ = Л12) И (х2 = В22) ТО (у = Вг) (6.34)
Соответствующая данной модели нейронечеткая сеть представлена
на рис. 6.33.
Производная, используемая для корректировки параметра уВ1, выра-
жается в виде:
<Э(0.5е2) _ <Э(0.5е2) de ду dl dz\ _
дуВх де ду dl dzx дуВ1
= е (-1) • (-Y (1) • уВ1 = ----- (6.35)
\m J т yBl + Ув2 + Ув3 + Ув3
436
Глава 6. Методы нечеткого моделирования
Аналогично можно получить формулы для вычисления производных
параметров aij нейронов, принадлежащих слою фаззификации. Однако
их математическое выражение выглядит значительно сложнее.
Для обучения нейронечеткой сети могут использоваться следующие
процедуры:
1. Настройка только параметров yst слоя дефаззификации, с сохране-
нием постоянных значений параметров входных функций принадлеж-
ности (например, с сохранением равномерного распределения функций
на области определения). Настройка обычно происходит быстро и зача-
стую обеспечивает высокую точность модели.
2. Одновременная настройка всех параметров сети. Процесс настрой-
ки может быть длительным и сложным, вследствие большого числа пара-
метров и наличия у функции ошибки локальных минимумов. При очень
большом числе параметров настройка сети может оказаться практически
неосуществимой. Потенциально данный метод позволяет добиться луч-
ших результатов настройки. Для начального выбора параметров можно
использовать метод генетических алгоритмов (генетико-параметрическое
представление сети).
3. Настройка параметров слоя дефаззификации и слоя фаззифи-
кации по отдельности. Поскольку каждый цикл обучения связан с на-
стройкой только определенных параметров модели, то эффект появления
локальных минимумов функции ошибки является менее выраженным,
а приемлемый набор значений параметров сети можно получить быстрее.
Процесс обучения сети может быть реализован на основе генетического
поиска.
6.2.1.3. Преобразование в нейронечеткую сеть нечеткой модели
Такаги—Сугено
Основное различие между моделями Мамдани и Такаги—Сугено связа-
но с формой представления заключений правил. Типовое представление
правила Ri в модели Такаги—Сугено имеет вид
ЕСЛИ (.п = Ап) И (х2 = А21) И ... И (хр = Ар1)
ИЛИ (тг = А12) И (х2 = А22) И ... И (хр = Ар2)
ИЛИ ...
ТО (у = blQ 4- ba'Xi + •.. + bipxp), (6.36)
где i — номер правила.
Xl
^Ri - степень активизации заключения правила Ri,
х-----------------by - параметры функции в заключении правила Ri.
Рис. 6.34. Общая схема нейронечеткой сети для представления модели Такаги—Сугено
438
Глава 6. Методы нечеткого моделирования
Рис. 6.35. Аппроксимация результатов измерений в области, задаваемой функ-
цией принадлежности с использованием локальной модели
Заключения правил модели Такаги—Сугено в большинстве случаев
содержат линейные функции — см. формулу (6.36) — хотя можно исполь-
зовать также и произвольные нелинейные функции. Таким образом, вме-
сто нечетких множеств в заключениях правил находятся математические
зависимости, описывающие локальную поверхность модели. Общая схема
нейронечеткой сети для представления модели Такаги—Сугено приведена
на рис. 6.34.
Для обучения сети, которая соответствует TS-модели, можно исполь-
зовать те же методы, что и в случае сети, соответствующей модели Мам-
дани (см. разд. 6.2.1.2). Однако, при этом существует возможность пред-
варительной идентификации параметров bij выражений у = /(ж1?... ,хр),
содержащихся в заключениях правил (6.36) (Cho 1995; Cipriano 1995;
Park 1995; Takagi 1985).
В некоторых случаях сегмент входного пространства, над которым
поверхность системы может быть аппроксимирована с помощью одной
локальной модели у = /(X) (рис. 6.35), известен.
Если локальная модель задана в многомерном пространстве с помо-
щью выражения
у = bo + ^xi + ... + Ьрхр, (6.37)
где р — число входов, то матрица модели имеет вид
у = ВХ, (6.38)
где В = [Ьо,^1, • • • ,М’ хТ - • ,Хр]-
6.2. Построение самонастраивающихся нечетких моделей
439
Координаты точки измерения Pi равны Хг, у\ где:
х’т = [1,^,4,.. .,4].
Если число всех точек измерения равно $, то вектор измерений вы-
ходов Ym и матрицу измерений входов Хт можно представить, соответ-
ственно, в виде
' у1 ’ У2 . ys . , Xm
1 1 ... 1
гу» 1 /у» 2 »S JU i JU . . . JU i
= /у» 1 /у» 2 s </>2 ^2 • * ’ *^2
/-V» 1 /V» 2 rp S Лр . . . _
(6.39)
Оптимальный вектор коэффициентов Bopt можно получить на основе
метода наименьших квадратов по формуле
Bopt = [Ьо,bl, • ,ьр] = [Х£ X,„-L XT Ym. (6.40)
Если оптимальные значения параметров bij заключений правил из-
вестны, то из процесса настройки сети, соответствующей TS-модели
(рис. 6.34), их можно исключить, в результате чего потребуется выпол-
нить настройку только параметров ау функции принадлежности, принад-
лежащих слою фаззификации. Тем самым, настройка сети значительно
упрощается. Однако, метод общей настройки всех параметров модели
является потенциально более точным.
Различные интересные методы настройки и организации TS-моделей
можно найти в (Babuska 1995с; Fiordaliso 1996; Mannle 1996; Pedrycz
1997). Ниже приведен пример TS-модели и соответствующей ей нейро-
нечеткой сети.
Пример 6.2.1.3.1. Рассмотрим нечеткую TS-модель с функциями при-
надлежности и правилами, представленными на рис. 6.36. Соответствую-
щая данной модели нейронечеткая сеть изображена на рис. 6.37.
6.2.2. Настройка параметров нечеткой модели с помощью
генетического алгоритма
Генетические алгоритмы позволяют производить настройку большинства
сложных нечетких моделей, однако их использование связано со зна-
чительными временными затратами. Примеры решения подобных за-
дач можно найти в (Bastian 1996; Jakel 1997; Murata 1995). В контек-
сте генетического алгоритма область значений каждой переменной рас-
сматривается как пространство, разбитое на конечное число интерва-
440
Глава 6. Методы нечеткого моделирования
Рис. 6.36. Поверхность у = f(x), функции принадлежности и правила нечеткой
модели Такаги—Сугено
Рис. 6.37. Нейронечеткая сеть, соответствующая модели Такаги—Сугено, пред-
ставленной на рис. 6.36
лов (рис. 6.38). Если заданный интервал содержит пик функции при-
надлежности, то он кодируется с помощью цифры 1, в противном слу-
чае — с помощью цифры 0. Закодированная строка, соответствующая
функции принадлежности для одной переменной, называется хромосомой
6.2. Построение самонастраивающихся нечетких моделей
441
Рис. 6.38. Пример кода функции принадлежности в виде генетической строки
(хромосомы)
1 0 1 1 0 0 0 1 0 1 1
(10110001011), а ее элементы (0 или 1) называются генами. Существу-
ет множество методов кодирования, из которых здесь рассмотрен только
один.
Увеличение числа генов, составляющих хромосому (т. е. числа интер-
валов разбиения области значений) приводит к увеличению разрешающей
способности поиска оптимального решения. Вместе с тем, чем более вы-
сокое разрешение имеет разбиение, тем быстрее происходит рост числа
потенциальных решений («комбинаторный взрыв»), что в свою очередь
приводит к значительному увеличению трудоемкости.
В случае системы со многими входами генетическому кодированию
подлежат все входные и выходные параметры модели (рис. 6.39).
При фиксированном выборе числа нечетких множеств, используемых
для оценки всех входных и выходных параметров модели, а также базы
правил и остальных элементов модели, ее точность будет зависеть только
от координат пиков отдельных функций принадлежности, т. е. от располо-
жения единиц в хромосомах. Точность модели, называемая ее функцией
приспособленности (оценки) D, зависит от конкретного генетического
представления R^
(6.41)
Перед началом процесса поиска случайным или любым дру-
гим способом генерируется определенное число исходных пред-
ставлений, составляющих так называемую начальную популяцию
Pq = {Ri/D},.... Rrn/Dyn}. С каждым представлением Ri связана со-
ответствующая ему точность модели Dj.
Представления Ri, содержащиеся в начальной популяции, использу-
ются для генерации новых представлений R* (родители производят по-
томков). С этой целью применяются так называемые генетические one-
442
Глава 6. Методы нечеткого моделирования
Рис. 6.39. Пример генетического представления R нечеткой модели с двумя
входами, задаваемой с помощью фиксированного числа множеств для каждой
переменной и фиксированной базы правил
раторы, осуществляющие модификацию генов в соответствующих хромо-
сомах (изменение позиций пиков функций принадлежности). Основными
генетическим операторами являются мутация и кроссинговер.
Мутацией (рис. 6.40) называется процесс образования потомства R*
заданного представления Ri путем модификации одного или нескольких
его генов (1 —> 0 или 0 1). Если процесс настройки ограничен исключи-
тельно функциями принадлежности, мутацию необходимо осуществлять
таким образом, чтобы число 1-генов (нечетких множеств для соответ-
ствующей переменной) оставалось постоянным.
Кроссинговером (рис. 6.41) называется процесс обмена одним или
более генами между двумя хромосомами (родителями) с целью получе-
ния новых хромосом (потомков). Если настройка затрагивает исключи-
тельно функции принадлежности, кроссинговер должен выполняться так,
чтобы число 1-генов в хромосоме каждого типа (CHXi, CHXz, CHY)
оставалось неизменным.
Каждому новому представлению R* ставится в соответствие его сте-
пень приспособленности D*, и оно вводится в начальную популяцию, да-
вая начало новой популяции Р±. Новая популяция просматривается, и из
нее исключаются худшие представления, т. е. представления, у которых
степень приспособленности минимальна. К оставшимся представлениям
применяются генетические операции для образования новых, более пер-
6.2. Построение самонастраивающихся нечетких моделей
443
Рис. 6.40. Пример применения оператора мутации для формирования нового
представления нечеткой модели
(СНХ^: 0 10 110
(СНХх)2: 10 0 10 1
(СНХСщ О 10101
(CHXj2. 100110
Рис. 6.41. Операция кроссинговера: (СЯА4)1, (CHXi)2 — родители; (СНХ^
и (C//JV] — потомки
спективных потомков. Данный процесс повторяется до тех пор, пока сре-
ди вновь образованных представлений не будет найдено такое представ-
ление, степень приспособленности которого удовлетворяет требованиям
точности модели.
Таким образом, генетический алгоритм включает в себя следующие
операции:
• кодирование задачи с целью получения ее генетического представле-
ния R и определение функции приспособленности D(R) для данного
представления,
• формирование начальной популяции Pq,
• размножение и отбор полученной популяции, до тех пор пока не бу-
дет получено такое представление Яо, которое удовлетворяет тре-
бованиям, связанным со степенью приспособленности (например,
Dq С ^min)-
444
Глава 6. Методы нечеткого моделирования
Существует много методов решения задач с применением генетиче-
ских алгоритмов. В настоящее время генетические алгоритмы составля-
ют обширное и непрерывно развивающееся научное направление, и любая
попытка детального его описания потребовала бы отдельной монографии.
И поскольку по данной теме имеется множество книг, автор этой работы
рекомендует их читателям, желающим расширить свои познания (Davis
1991; Kinnebrock 1994; Kahlert 1995; Michalewicz 1996; Mitchell 1996).
Применение генетических алгоритмов дает возможность поиска оп-
тимальных решений в задачах повышенной сложности, включая зада-
чи, возможность решения которых, с учетом их сложности, ограничена.
По этой причине данный метод получил очень большую популярность,
и число его приложений постоянно растет. Вместе с тем, метод имеет
определенный недостаток, связанный с необходимостью разбиения про-
странства значений переменных модели на конечное число интервалов,
чтобы обеспечить конечное число бит в генетическом представлении.
В силу дискретизации пространства решений не всегда удается получить
такие же хорошие решения, как и в случае применения методов, действу-
ющих в непрерывном пространстве, например, нейронечетких сетей. Тем
не менее, при правильном выборе разрешения дискретизации указанный
недостаток практически не проявляется, поэтому генетические алгорит-
мы можно рекомендовать к применению. Помимо этого, дополнительное
преимущество данного метода состоит в возможности его применения
при исследовании влияния на точность модели различных ее составляю-
щих — типов операторов И и ИЛИ, методов вывода и дефаззификации,
используемых типов функций принадлежности и т. д.
Если в качестве одной из переменных модели ввести тип оператора И,
областью значений которого является множество, содержащее семь опе-
раторов t-нормы:
{И} = {MIN, усиленное произведение, оператор И Лукасевича,
произведение Эйнштейна, произведение Гамахера,
алгебраическое произведение, оператор И Ягера}, (6.42)
то представление модели следует расширить, добавив семибитную хро-
мосому:
CHAND = 0000010, (6.43)
позиция 1-гена в которой соответствует выбранному из множества { И }
оператору. В результате представление будет иметь вид:
СЯХ1 СНХ2 CHY CHAND
R1 : 1011011, 1110101, 11000101, 0000010
(6.44)
6.3. Самоорганизующиеся и самонастраивающиеся нечеткие модели 445
Следует, однако, помнить, что добавление новых хромосом хотя и поз-
воляет найти лучшую модель, но, с другой стороны, требует значительно
большего объема вычислений.
6.3. Построение самоорганизующихся
и самонастраивающихся нечетких моделей
на основе измеренных данных о входах
и выходах системы
Под самоорганизующейся моделью понимается модель, которая само-
стоятельно определяет свои существенные входные параметры, задает
оптимальное число нечетких множеств для входных и выходных пара-
метров, и устанавливает форму и число правил. Самонастраивающейся
называется модель, способная самостоятельно определять оптимальные
параметры функций принадлежности, задавать коэффициенты доверия
правил и т. д. Самоорганизующиеся нечеткие модели описаны, напри-
мер, в (Baldwin 1995b; Delgado 1995; Furuhashi 1995; Gonzales 1995;
Gorrini 1995; Gupta 1994; Hajek 1994; Ishibuchi 1995a; Katebi 1995;
Krone 1996a,c; Locher 1996a,b; Rovatti 1996; Wakabayashi 1995). Моде-
ли, являющиеся одновременно самоорганизующимися и самонастраива-
ющимися, рассматриваются в (Cho 1995; Cipriano 1995; Delgado 1997;
Fiordaliso 1996; Fukumoto 1995; Halgamuge 1996; Hanss 1996a;
Horikawa 1992; Kwon 1994; Langari 1995; Lin 1991,1996; Magdalena 1995;
Meanle 1996; Murata 1995; Narazaki 1993,1995; Nobre 1995; Osowski 1996;
Park 1995; Preuss 1995; Su 1995; Tan 1995; Yao 1995; Zho 1995).
Одновременное применение методов самоорганизации и настройки,
как правило, обеспечивает более высокую точность нечеткой модели. Ос-
новной целью самоорганизации модели является получение минималь-
ного числа правил, нечетких множеств и параметров, подлежащих на-
стройке, при условии сохранения приемлемой точности модели. При про-
стой структуре модели она легче поддается интерпретации и настрой-
ке, и кроме того, это позволяет уменьшить объем измеряемых данных,
необходимых для настройки (т. е. объем информации, которая извлека-
ется из моделируемой системы, но при этом не всегда является легко
доступной). Построение сложной модели и, таким образом, расширение
числа содержащихся в ней правил и нечетких множеств потенциально
может повысить точность модели (в случае непрерывной функции, опре-
деленной на замкнутом подмножестве входного пространства (Lin 1995)).
Сложность настройки параметров, однако, возрастает при этом до такой
446
Глава 6. Методы нечеткого моделирования
степени, что при достижении некоторого уровня сложности модели ее
настройка становится практически невозможной. Таким образом, стрем-
ление к упрощению структуры моделей можно считать вполне обосно-
ванным подходом.
Наиболее выгодным способом упрощения модели является исключе-
ние из нее всех малозначащих входов — число правил в данном случае
уменьшается в геометрической прогрессии. В следующем подразделе бу-
дут описаны методы выявления несущественных входов модели.
6.3.1. Выявление существенных и несущественных входов
модели
Определение существенных входов модели представляет из себя весьма
нетривиальную задачу. При моделировании динамических систем типа
SISO обычно делается предположение о том, каким должен быть порядок
модели, и, в зависимости от порядка, в качестве входов модели могут
рассматриваться различные сигналы, например*
y(kT - Т\у(кТ - 2Т),у(кТ - ЗТ)и т.д.
При моделировании статических систем типа MISO возникает задача
определения множества входов в отношении которых предполагается,
что они оказывают существенное влияние на выход у. В случае моде-
лирования динамических систем с многими входами число «кандидатов»
на роль существенных значительно увеличивается:
х\(кТ\ ...,х\(кТ — П1Т),..., Х2(кТ\ ... , Х2(кТ — П2Т),...
..., у(кТ\ ..., у(кТ — тТ).
Особенно сложной задача определения существенных входов явля-
ется для экономических систем. Какие факторы, например, оказывают
влияние на число безработных в стране? Зависит ли уровень безработи-
цы от уровня безработицы в соседних странах? Каким образом влияет
размер социального пособия? Насколько сильной является зависимость
от такого показателя, как ежегодное число выпускников университетов?
Какой эффект дает ведение «ограничительной» политики принуждения
безработных к трудоустройству? Оказывает ли влияние размер «серой»
экономической зоны (и как ее измерить)? Подобных примеров можно
* При решении задачи идентификации модели или в случае инверсной модели
(см. разд. 7.3.3.1 и 7.3.3.2). Здесь у(кТ) — желаемый выход системы в момент време-
ни кТ, Т — шаг по времени, к — некоторое положительное число. — Прим. ред.
6.3. Самоорганизующиеся и самонастраивающиеся нечеткие модели 447
привести множество. Определение несущественных входов моделируе-
мой системы приводит не только к упрощению необходимой структуры
ее модели, что в свою очередь упрощает настройку параметров, но также
и к сокращению затрат на получение информации путем измерений. В от-
дельных случаях определение несущественных входов процесса помогает
ответить на вопрос о принципиальной возможности его моделирования,
поскольку среди параметров могут быть такие, для которых измерения
значений ранее не проводились, и отсутствует возможность как получе-
ния, так и оценки этих данных (например, измерения среднемесячной
температуры до того, как был изобретен термометр, определение коли-
чества янтаря, ежемесячно собираемого отдыхающими на Балтийском
побережье и т. п.)
Задача, связанная с исключением несущественных входов модели, за-
частую вообще не принимается в расчет, в качестве входов рассматрива-
ются все возможные «кандидаты». Еще одним подтверждением недооцен-
ки этой задачи является достаточно малое число публикаций по данной
теме. Существуют следующие методы оценки значимости входов нели-
нейной модели:
I. Метод проб и ошибок.
II. Метод средних нечетких кривых (Lin 1995).
Метод проб и ошибок может использоваться как в конструктивном,
так и в деструктивном плане. В случае применения конструктивной вер-
сии строится модель с минимальным числом входов и оценивается ее
точность. На следующем шаге происходит расширение модели путем
добавления нового входа из числа «кандидатов», оценивается точность
расширенной модели, и, в зависимости от полученного результата, новый
вход принимается или отбрасывается и т. д. В рамках деструктивной вер-
сии метода проб и ошибок строится начальная модель, содержащая мак-
симальное число входов (все множество «кандидатов»), и производится
оценка ее точности. Дальнейшие шаги соответствуют последовательному
исключению входов и сравнительной оценки точности получаемых упро-
щенных моделей. Метод проб и ошибок является достаточно трудоемким
и недостаточно определенным, а его объективность зависит от точно-
сти настройки модели при заданном числе входов. При этом чем больше
число подлежащих рассмотрению входов, тем сложнее становится про-
цесс настройки, и в конечном итоге настройка может оказаться практи-
чески неосуществимой. Кроме того, при использовании данного метода
необходимо иметь одинаковые объемы измеряемых значений для каждо-
го анализируемого входа, в то время как на практике для одних входов
448
Глава 6. Методы нечеткого моделирования
о)
Рис. 6.42. Поверхность системы у = /(яц,^) = a2 — xl — х% (а), поперечное
сечение вдоль поверхности у = /(ж*,Х2), соответствующее точке xi = (б)
обычно имеется больше данных, а для других — меньше. Усовершенство-
ванный, менее трудоемкий вариант конструктивного метода определения
существенных входов можно найти в (Sugeno 1993).
Другим методом оценки значимости входов, который лишен описан-
ных выше недостатков, является метод средних нечетких кривых, раз-
работанный Лином и Каннингэмом (Lin 1995). Преимущество данного
метода состоит в том, что он исследует влияние каждого входа Xi на
выход у по отдельности, что дает возможность визуализации результатов
с помощью двумерных кривых y-xi, у-х^, .. ., у-хр, а также позволя-
ет выполнять сравнительную оценку значимости входов (т. е., например,
значимость входа х\ выше, чем для входа ^2) и оценивать тенденцию
влияния заданного входа xi на выход у (если Xi возрастает, то у возрас-
тает). Помимо этого, с помощью метода средних нечетких кривых можно
определять структуру модели и выбирать начальные значения ее пара-
метров, обеспечивающие ее быструю настройку. Идея данного метода
описана ниже.
Рассмотрим непрерывную функцию
У = f(xi,x2) = a2 - х2 - xl
(рис. 6.42, a). Если при х\ — произвести измерения значений функции
с постоянной величиной шага, равной Дх2, то будет получено поперечное
сечение (рис. 6.42, б, 6.43, а), задаваемое с помощью множества дискрет-
ных точек yj(x\, X2j\
Расположение проекций точек на поверхность ху-у (рис. 6.43, б), яв-
ляется неравномерным и зависит от кривизны поверхности функции
у — /(xi,^2). Для всего сечения можно определить среднее значение
6.3. Самоорганизующиеся и самонастраивающиеся нечеткие модели 449
Среднее значение
поперечного сечения:
У mean (х । ) = ~
Рис. 6.43. Дискретное поперечное сечение yj(x^xzj) (а), его проекция на по-
верхность xi~y (б) и кривые средних значений поперечных сечений функции
для переменных хг и х2 (в), (г)
2/mean(^*) в точке xi = х*. позиция которого также зависит от харак-
терной для данного сечения кривизны поверхности. Вычисляя подобным
образом средние значения т/теап для различных сечений вдоль осей х\
и х2, мы получаем кривые средних значений в форме
?/mean 1 ~ /теап(^1) и ?/mean2 = /mean (^2)
(рис. 6.43, в, г), что дает нам информацию о том, каким образом (в сред-
нем) влияет увеличение значений отдельных переменных яд, х2 на уве-
личение либо уменьшение значений функции.
Предположим теперь, что моделируемая система реализует отображе-
ние X —> У, задаваемое функцией у — а2 — х2, т. е. значение на выхо-
де модели не зависит от переменной х2. Если все же сделано ложное
предположение о существовании подобной зависимости, и произведено
измерение точек поверхности системы, то будет получен результат, пред-
ставленный на рис. 6.44.
450
Глава 6. Методы нечеткого моделирования
Рис. 6.44. Поперечные сечения у = /(х^) (а) и у — /(х^) (б) функции
у — а2 — х2 и соответствующие им кривые средних значений (в, г)
Из рис. 6.44 видно, что если значение функции у зависит от пере-
менной хг, то при изменении Xi также происходит изменение среднего
значения функции для поперечных сечений t/mean(^) (рис. 6.44, в). С дру-
гой стороны, если значение функции не зависит от данной переменной,
то среднее ее значение для поперечных сечений остается постоянным
(рис. 6.44, г).
Для тестирования данного эвристического подхода, предложенного
Лином и Каннингэмом для анализа значимости входных параметров Xi,
проводились многочисленные эксперименты, результаты которых можно
найти в (Lin 1995). Критерием эффективности рассмотренного метода
является наличие достаточно большого числа измерений и, по воз-
можности, их равномерное распределение. Согласно (Lin 1995), чем
более выраженной является зависимость функции от заданной перемен-
ной, тем шире диапазон изменения соответствующих сечению средних
значений Дутеап(^г)« Ширина указанного диапазона составляет вполне
приемлемую основу для рассуждений о значимости переменной Xi, а так-
же сравнения различных переменных и их упорядочения по степени зна-
чимости.
6.3. Самоорганизующиеся и самонастраивающиеся нечеткие модели 451
6.3.2. Определение нечетких кривых
В случае реальных систем функция у = /(#i, - • • ,яр), описывающая ре-
ализуемое системой отображение X —> У, обычно неизвестна, и един-
ственной доступной информацией о системе являются измерения значе-
ний ее входов и выходов, неравномерно распределенные в пространстве
ХхУ и искаженные шумами измерений (рис. 6.45, а).
При проецировании этих данных на плоскости Xi х У, соответству-
ющие отдельным входам системы (рис. 6.45, б, в) они могут выглядеть
как хаотическое множество точек. Могут ли они послужить основой для
построения сечений отображения X —> У, дающих кривые средних зна-
чений ?/mean(^) для конкретных входов системы? Еще раз напомним, что
результаты измерений распределены, как правило, неравномерно, и су-
ществует ряд значений х^ для которых соответствующие измерения от-
сутствуют (либо имеется единственное измерение, также подверженное
влиянию ошибки). В подобной ситуации единственная возможность со-
стоит в вычислении среднего значения t/mean(^*) для заданного попереч-
ного сечения х* на основе элементов выборки измерений, находящихся
в ближайшей окрестности (т. е. своего рода фильтрация).
Понятие «ближайшей» окрестности точки х* является нечетким и мо-
жет быть задано с помощью функции принадлежности pi(xi) для каждо-
го входа Xi (рис. 6.46). Вид функции принадлежности pi(xi) может быть
любым — треугольным, трапециевидным, GRB и др. В случае гауссовых
функций (рис. 6.46), ширина окрестности точки х* определяется на осно-
ве параметра bi. Согласно Лину и Каннингэму (Lin 1995), рекомендуемое
значение bi составляет 20% ширины Xxi диапазона изменения соответ-
ствующей входной величины Xi.
a) б) в)
Рис. 6.45. Результаты измерения значений входов и выходов системы в про-
странстве X х У (а) и их проекции на плоскости Xi х У (б) и Х2 х У (в)
452
Глава 6. Методы нечеткого моделирования
k- 1, 2,..., m
Рис. 6.46. Функция принадлежности нечеткого множества, соответствующего
«ближайшей» окрестности точки х*
Рис. 6.47. Примеры кривых средних значений для поперечных сечений отобра-
жения X —> У вдоль осей Xi
Представляется целесообразным, однако, проанализировать значи-
мость входов для различных значений особенно в случае неравно-
мерной концентрации измерений вдоль оси Xi. Если введена функция
принадлежности рг(х*) «ближайшей окрестности», то по формуле (6.45)
можно приближенно вычислить среднее значение i/mean(^*) для произ-
вольного входного значения х*, получив тем самым представление о фор-
ме соответствующей кривой. Среднее значение, вычисляемое по форму-
ле (6.45), в литературе называют также взвешенным средним значени-
ем (Preuss 1994b). На рис. 6.47 представлено несколько примеров кри-
вых средних значений для поперечных сечений отображения X —> Y.
В (Lin 1995) для данных кривых введено название «нечеткие кривые
(графики)»:
Е • ук
?/mean(^i) ~ ч (6.45)
^7 Pit^Cik}
к=1
где i — номер входа,
к — номер измерения (рис. 6.47).
Если кривая средних значений является практически ровной, то со-
ответствующий вход Xi оказывает малое влияние на выход у. Однако,
на практике ровные кривые средних значений встречаются крайне редко,
6.3. Самоорганизующиеся и самонастраивающиеся нечеткие модели 453
Таблица 6.4
Результаты измерений входов и выходов моделируемой системы
к 1 2 3 4 5 6 7 8 9
1 1 1 2 2 2 3 3 3
*2 1 2 3 1 2 3 1 2 3
*3 1 2 2 3 2 3 3 1 1
*4 2 3 1 2 1 3 3 1 2
У 2 5 10 3 6 11 4 7 12
вследствие ошибок измерений, а также наличия неизмеряемых величин.
Поэтому степень того, насколько они являются ровными, можно оценить
на относительном уровне, т. е., например, сравнить диапазоны At/mean(^)
изменения отдельных входов и на основе этого упорядочить последние
по уровню значимости, что даст возможность проводить тестирование
только моделей с наиболее существенными входами. Вывод о несуще-
ственности входа можно легко сделать тогда, когда значения Д?/теап(Х)
четко различаются для разных входных значений. В противном случае
подобное решение принять сложнее, и хорошие результаты может дать
последовательное исключение входов, сопровождающееся анализом точ-
ности модели, т. е. применение метода проб и ошибок.
Пример 6.3.2.1. Рассмотрим множество результатов измерений пере-
менных системы, реализующей отображение у — х\ + (табл. 6.4).
В качестве «кандидатов» на роль входов рассматриваются переменные
яд, яд, яд, из которых существенными являются только первые две.
Входы хз и яд существенными не являются — их значения в рассмат-
риваемой выборке сгенерированы случайным образом. Задача состоит
в исследовании того, сможет ли метод средних нечетких кривых обес-
печить правильное разделение входов на существенные и несуществен-
ные. На рис. 6.48 показаны проекции измерений на различные плоскости
Хг х У.
Уже на основе только визуального анализа проекций, представленных
на рис. 6.48, можно сделать вывод о значимости входов х±, яд, т. е. об
их влиянии на выход системы у (увеличение яд и х% приводит к уве-
личению среднего значения у). Функция принадлежности «ближайшей»
окрестности для всех входов имеет вид:
ЫД = ехр
(6.46)
Коэффициент bi = 1, задающий величину разброса гауссовой функ-
ции, соответствует 50% диапазона изменения входов ж,. Вычисление
454
Глава 6. Методы нечеткого моделирования
15-
10- •
15-
10- •
5- •
О —।—।—।—►
О 1 2 3 *2
У^
15-
О 1 2 3 *3
У^
15-
10- •
5- •
• •
О -I-1---1--1—►
О 1 2 3 х4
0 1-г . ►
О 1 2 3 *1
Рис. 6.48. Проекции измерений на плоскости Xi х Y, i — 1,..., 4
средних нечетких значений для различных поперечных сечений произво-
дится по формуле:
9
Е • у к
УтеаЩг) = , 2 = 1, • • • , 4, (6.47)
Е
к=1
где к — номер измерения. Графики средних нечетких значений представ-
лены на рис. 6.49.
Рисунок 6.49 позволяет сделать вывод о том, что наиболее суще-
ственным является вход х%. Расположение всех рассматриваемых входов
в порядке убывания их значимости имеет вид
Х2, ^1,^4,
Таким образом, результаты эксперимента подтвердили зависимость
= xi + х^), фактически имеющую место. Степень значимости входов
хз, Х4 является минимальной.
Исследования, проводившиеся автором данной книги, показали, что
предложенный Лином и Каннингэмом в (Lin 1995) метод определения
значимости входов на основе разности Д?/Шеап(^г) является приближен-
ным и может применяться для слабо нелинейных систем с монотонны-
ми поверхностями отображения «вход-выход». Для сильно нелинейных
и волнообразных поверхностей отображения X —» Y оценка значимости
входов на основе разности Дутеап(^г) является ненадежной, поскольку
в данном случае нечеткие кривые также оказываются более волнисты-
ми (рис. 6.50, а), чем в случае слабо нелинейных или линейных систем
(рис. 6.50, б).
6.3. Самоорганизующиеся и самонастраивающиеся нечеткие модели 455
Рис. 6.49. Графики средних нечетких значений t/mean(#i)
моделируемой системы
Рис. 6.50. Пример волнообразной (а) и неволнообразной (б) нечетких кривых
456
Глава 6. Методы нечеткого моделирования
Рис. 6.51. Иллюстрация понятия дугоугольного индекса Sa значимости входной
переменной Xj (Li — длина нечеткой кривой)
Изображенной на рис. 6.50, а нечеткой кривой z/mean(^) соответствует
то же значение Дутеап(^г), что и кривой на рис. 6.50, б, хотя указанные
кривые имеют различную степень волнистости. Более высокая волни-
стость нечеткой кривой говорит о более сильной зависимости выхода си-
стемы у от соответствующего входа хг. В условиях примера на рис. 6.50
вход Xi является более значимым, чем Xj. В качестве показателя зна-
чимости, который учитывает степень волнистости нечеткой кривой, ис-
пользуется индекс Sa, смысл которого поясняется с помощью рис. 6.51.
Чем более волнистой является нечеткая кривая, тем сильнее выра-
жена зависимость выходного параметра системы от соответствующего
входного параметра Xi. Помимо этого, нечеткая кривая с большей вол-
нистостью имеет большую длину Li. Если выпрямить нечеткую кривую,
как показано на рис. 6.51, то большим значениям длины Li будут соответ-
ствовать большие значения угла с^. Величина угла, представляющая со-
бой усредненный индекс значимости входного параметра х^ может быть
найдена по формуле
где
= arccos
max min
(6.48)
В практических задачах длина Д определяется численно, на осно-
ве приближенной формулы (6.49), поскольку точное математическое вы-
ражение, которое описывает нечеткую кривую, чаще всего неизвестно,
6.3. Самоорганизующиеся и самонастраивающиеся нечеткие модели 457
Рис. 6.52. Обозначения, используемые при численном определении длины Д
нечеткой кривой
и кривая задается на основе множества дискретных точек:
п
Li y/[Z/mean (Д min "Ь /ьДжг) — ?/mean(^imin 4" 1)Дх^)]^ 4” *
к=1
(6.49)
Обозначения, используемые в формуле (6.49), поясняются на рис. 6.52.
Для системы, рассматривавшейся в примере 6.3.2.1, можно полу-
чить следующие значения дугоугольного индекса значимости (arc-angle
significance index, AAS-индекс) входов, несущие информацию о средней
величине абсолютного наклона соответствующих нечетких кривых:
«1 = 35.17°, а2 = 70.58°, q3 = 21.00°, а4 = 29.55°.
Использование дугоугольного индекса значимости (AAS-индекса)
позволяет правильно определить порядок следования переменных (наи-
более значимыми являются х2 и xi). На основе результатов прово-
дившегося Шведко (Szwedko 2000) сравнительного анализа индекса
Аушеап(^г), предложенного Лином и Каннингэмом, и дугоугольного ин-
декса ai = a(xi), можно сделать вывод о том, что в случае матема-
тических функций, свойства которых известны, AAS-индекс позволяет
получить корректную оценку значимости переменных и дает в среднем
лучшие результаты, чем индекс, основанный на разности Дутеап(^г)-
Проблема оценки значимости входных параметров системы требует
дальнейшего исследования, поскольку рассмотренные в данном разде-
ле индексы значимости способны дать лишь приближенную оценку. Но-
вые, более усовершенствованные методы, основанные на нечетких кри-
вых и нечетких поверхностях, заинтересованный читатель может найти
в (Lin 1998). Автором данной книги и его коллегами также ведется раз-
458
Глава 6. Методы нечеткого моделирования
работка методов, основанных на вычислении длины нечеткой кривой,
результаты которых предполагается опубликовать в 2001 г.
6.3.3. Самоорганизация и самонастройка параметров
нечеткой модели
Основополагающими элементами структуры нечеткой модели являют-
ся база правил и число нечетких множеств, соответствующих каждо-
му входу и выходу модели. Существенные входы модели предполага-
ются известными. В литературе часто можно встретить методы опре-
деления структуры нечеткой модели, не учитывающие характер рас-
пределения результатов измерений, описывающих моделируемую систе-
му. Оптимизация параметров модели также часто выполняется без уче-
та оптимизации ее структуры. Подобных публикаций довольно мно-
го (Baldwin 1995b; Delgado 1995,1997; Furuhashi 1995; Gonzales 1995;
Gorrini 1995; Gupta 1994; Hajek 1994; Ishibuchi 1995a,b; Katebi 1995;
Krone 1996a; Locher 1996a,b; Rovatti 1996; Wakabayashi 1995).
Наилучших результатов моделирования можно достичь в том случае,
когда оптимизация структуры модели сочетается с оптимизацией ее па-
раметров. Данное утверждение поясняется примером на рис. 6.53.
Л1: ЕСЛИ (х = 5) ТО (у = 5)
Я2:ЕСЛИ(х=А) ТО(у=Т)
Данные ~
ичмепемий
С1 у U2 Ct^ @4 %
б)
Я1: ЕСЛИ (х = 5) ТО (у = 5)
R2: ЕСЛИ (х=М) ТО (y = L)
АЗ: ЕСЛИ (х = £) ТО (у = М)
Я4: ЕСЛИ (х = VL) ТО (у = VL)
Рис. 6.53. Иллюстрация взаимосвязи между структурой модели, параметрами
функций принадлежности и двумерным распределением результатов измерений
входов и выходов моделируемой системы
6.3. Самоорганизующиеся и самонастраивающиеся нечеткие модели 459
Исследованию указанной проблемы посвящен ряд публикаций, на-
пример (Cho 1995; Cipriano 1995; Delgado 1997; Fiordaliso 1996;
Fukumoto 1995; Halgamuge 1996; Hanss 1996a; Horikawa 1992; Kwon 1994;
Langari 1995; Lin 1991,1996; Magdalena 1995; Mannle 1996; Murata 1995;
Narazaki 1993,1995; Nobre 1995; Osowski 1996; Park 1995; Pedrycz 1997;
Preuss 1995; Tan 1995; Yao 1995; Zhou 1995).
Если распределение результатов измерений говорит о линейности мо-
делируемой системы (рис. 6.53, а), то для построения точной нечеткой
модели достаточно двух правил. В случае нелинейного распределения
(рис. 6.53, б) число правил должно быть больше. Можно также заме-
тить, что положение функций принадлежности внутренних множеств М
и L выбирается не произвольным образом, а в соответствии с точками
(а2, из, Ь2, Ь3), которые задают локальные экстремумы функции у =
представленной в виде выборки измерений. Число правил, а также пара-
метры функций принадлежности зависят от реализуемого моделируемой
системой (объектом) отображения «вход-выход», и их нельзя определить
заранее, без учета типа самой системы. Более того, их не следует за-
давать отдельно друг от друга. Далее будут представлены три основных
метода (или группы методов) самоорганизации и настройки нечетких мо-
делей:
I. Метод «существенных» точек поверхности системы.
II. Методы кластеризации.
III. Методы поиска.
Перед началом построения нечеткой модели следует убедиться в су-
ществовании устойчивой взаимосвязи между качеством измерений с од-
ной стороны и качеством и достоверностью результирующей модели
с другой стороны. На рис. 6.54 представлено несколько вариантов рас-
пределения результатов измерений в пространстве входов для случая си-
стем с двумя входами и одним выходом. Наиболее благоприятным яв-
ляется представленное на рис. 6.54, а равномерное распределение, обес-
печивающее достоверную аппроксимацию поверхности реализуемого си-
стемой отображения X —> Y на каждом участке области определения.
В остальных случаях либо невозможно сформулировать какие-либо пра-
вила для областей, где отсутствуют результаты измерений, либо в ука-
занных областях модель являлась бы недостаточно достоверной.
По аналогии с этапом построения модели, для ее тестирования необ-
ходимо использовать данные, распределенные по всему пространству вхо-
дов. Тем не менее, возникает вопрос, что делать в ситуации, когда до-
ступны данные, покрывающие только часть области определения. В этом
460
Глава 6. Методы нечеткого моделирования
д)
Рис. 6.54. Различные распределения результатов
Xi х Х2 значений входов моделируемой системы
измерений в пространстве
случае необходимо выделить те области пространства, для которых от-
сутствуют данные измерений, и если эти области имеют большой размер,
то следует исключить их из процесса моделирования, поскольку для «пу-
стых» областей не требуется формирование правил, задающих выходные
состояния модели. Пользователей, которым предназначена модель, сле-
дует проинформировать о тех областях входного пространства, в кото-
рых модель достоверна и пригодна к использованию. Для обнаружения
областей, в которых отсутствуют данные измерений, можно, например,
разбить область определения на прямоугольные (или гиперпрямоуголь-
ные) сегменты, подсчитать число элементов выборки измерений в каж-
дом из них и выполнить поиск групп смежных друг с другом пустых
сегментов (см. рис. 6.55).
Рис. 6.55. Разбиение области определения на прямоугольные сегменты с целью
идентификации подобластей, для которых отсутствую данные измерений
6.3. Самоорганизующиеся и самонастраивающиеся нечеткие модели 461
Рис. 6.56. Данные измерений, подверженные незначительному (а) и значитель-
ному (б) воздействию шума
Еще одним важным фактором, влияющим на точность модели, явля-
ется уровень шума или возмущений, приводящих к возникновению оши-
бок измерения (т. е. неизмеримые входные параметры) — см. рис. 6.56.
В случае, когда воздействие шума является значительным (рис. 6.56, б),
от модели не следует ожидать высокой точности. С подобными ситуа-
циями приходится часто сталкиваться в экономических системах, когда
заявляемые предприятиями значения показателей, касающихся их про-
изводства, прибыли и т. д., могут быть намного ниже их действительных
значений.
6.3.3.1. Самоорганизация и настройка нечеткой модели с применением
геометрического метода точек максимума абсолютной ошибки
В публикациях по вопросам организации нечетких моделей часто рас-
сматривается подход, согласно которому правила нечеткой модели реко-
мендуется размещать в «существенных» точках поверхности реализуе-
мого системой отображения X —> У —см., например, (Babuska 1995b;
Lin 1995). К таким точкам обычно относятся экстремумы поверхности
(рис. 6.57).
Для многомерных MISO-систем экстремумами являются вершины
«пиков» и днища «впадин». В случае, когда поверхность системы
можно описать с помощью непрерывной математической зависимости
у = /(xi,... ,хр), нахождение точек экстремума не составляет труда.
Однако при моделировании реальных систем имеющаяся в распоряжении
информация о поверхности обычно представляет собой набор поточечных
дискретных измерений, искаженных шумом — в подобных ситуациях об-
наружить «пики» и «впадины» поверхности достаточно трудно. Хиггин-
сом и Гудманом в (Higgins 1994) был предложен метод структурной орга-
низации и настройки нечеткой модели, в соответствии с которым правила
462
Глава 6. Методы нечеткого моделирования
Рис. 6.57. Нечеткая модель, построенная на основе задания правил в экстре-
мумах поверхности
размещаются в «существенных» точках поверхности системы, но вместо
экстремумов поверхности под «существенными» здесь понимаются точки
максимума абсолютной ошибки модели по отношению к системе.
Несмотря на то, что часть правил, размещенных с помощью дан-
ного метода, находится вблизи локальных экстремумов, остальная их
часть все же оказывается в других областях поверхности. Данный метод
представляет собой так называемый «геометрический» подход к задаче
моделирования (Babuska 1995), отличающийся от частотного подхода,
применяемого в рамках методов кластеризации. Использование метода
Хиггинса и Гудмана, обеспечивающего возможность последовательного
уточнения единой глобальной модели, приводит к обширному росту коли-
чества правил, что может в свою очередь привести к явлению «проклятия
размерности». В данном подразделе будет рассмотрен метод, лишенный
указанных недостатков.
Несмотря на всю понятность и убедительность метода точек максиму-
ма абсолютной ошибки, который далее будем называть методом МАЕР
(Maximum Absolute Error Points), его можно применять в основном
для моделирования систем, заданных на основе измерений, которые
не искажены либо слабо искажены шумами. В случае сильной зашум-
ленности имеющихся данных их необходимо подвергнуть фильтрации,
например, с помощью метода, использующего функции принадлежности
«ближайшего окружения», который был описан в разд. 6.3.2. Опишем
вначале кратко основную идею метода МАЕР.
6.3. Самоорганизующиеся и самонастраивающиеся нечеткие модели 463
R1Mq: ЕСЛИ (x = Ai) ТО (у=Вх), R2Mq: ЕСЛИ (х=А2) ТО (у = В2)
Рис. 6.58. Поверхность системы (а) и базовая нечеткая модель Л/о (б)
Рассмотрим поверхность системы, представленную с помощью выбор-
ки измерений. На рис. 6.58,61 эта поверхность изображена непрерывной
линией.
На первом шаге метода из множества измерений выбираются точки
Pi и Р2, соответствующие максимальному и минимальному значениям
входа х (в рамках области его значений). В этих точках размещаются
первые два правила R1 и R2, которые в свою очередь задают параметры
сц, bi функций принадлежности (т. е. происходит настройка параметров).
Базовая модель представляет собой наиболее приближенное обобще-
ние моделируемой системы. Содержащиеся в ней правила описывают об-
щие закономерности, присущие системе. В частности, если выразить пра-
вила, представленные на рис. 6.58, в виде (6.50), то можно сделать вывод
о том, что при увеличении входа х увеличивается (в среднем) также вы-
ход у:
R1: ЕСЛИ (х близок к 1) ТО (у близок к 5),
R2: ЕСЛИ (т близок к 10) ТО (у близок к 50). (6.50)
В базовой модели можно использовать различные типы функций при-
надлежности, что иногда позволяет повысить ее точность. Однако, без
проведения вычислительных экспериментов обычно трудно предсказать,
какие функции были бы наиболее подходящими. Возможна также оп-
тимизация базовой модели Mq путем ее преобразования в нейронечет-
464
Глава 6. Методы нечеткого моделирования
Рис. 6.59. Повышение точности базовой модели: (я) — исходная модель,
(б) — модель после оптимизации
Рис. 6.60. Разделение поверхности системы S
на поверхность базовой модели Mq и поверхность ошибки Eq
кую сеть и настройки с использованием результатов измерений входов-
выходов моделируемой системы. Обоснованием для оптимизации может
служить рис. 6.59.
Поверхность S реализуемого системой отображения X Y можно
условно представить с помощью формулы
S = Mq + Eq, (6.51)
где Eq — поверхность, соответствующая ошибке базовой модели Mq (от-
носительно поверхности системы S). Смысл формулы (6.51) поясняется
с помощью рис. 6.60.
Далее из множества измерений следует выделить точки, в которых ве-
личина ошибки является максимальной (воmax) ИЛИ минимальной (воmin)-
6.3. Самоорганизующиеся и самонастраивающиеся нечеткие модели 465
х — m
6
/1(ж) = ехр
На рис. 6.61 эти точки обозначены через Рз(^з, сотах) и eomin)-
В точках Р3, Р4 задаются новые правила (6.52), которые обеспечивают
моделирование поверхности ошибки Ещ
ВЗ: ЕСЛИ (х - Л3) ТО (у = В3),
RP. ЕСЛИ (т - Л4) ТО (у = В4). (6.52)
При моделировании ошибки хорошие результаты дает использование
функций принадлежности вида
(6.53)
Данные функции характеризуются тремя степенями свободы
(рис. 6.62): m (центр), 6 (расстояние между ветвями), I (показатель
степени, изменяющий форму функции).
Поскольку для функции (6.53) можно изменять как форму, так и раз-
мер, то можно добиться довольно точного ее соответствия (после умно-
жения на величину заключения етах или emin) локальному «пику» или
«впадине» поверхности ошибки (рис. 6.61). Для этого необходимо преоб-
разовать модель ошибки Eq в нейронечеткую сеть и выполнить настройку
параметров m, J, I входной функции принадлежности и параметров Ьз,
64 выходной функции принадлежности на основе значений ошибки cq.
В качестве исходных значений настраиваемых параметров следует ис-
пользовать координаты точек максимума и минимума ошибки Вз и Р4
(рис. 6.61). Исходное значение параметра 5, задающего расстояние меж-
ду ветвями, должно вначале быть малым (в несколько раз меньше рас-
стояния между центрами m3 и т4). В процессе настройки происходит
466
Глава 6. Методы нечеткого моделирования
Рис. 6.62. Иллюстрация влияния параметров функции /1(т) = с м' на ее
форму и положение
«развертывание» ветвей функции, и ее форма подстраивается под фор-
му «пиков» и «впадин» на поверхности модели. Поскольку ветви кривой
могут быть асимметричными, то целесообразно использовать асиммет-
ричные экспоненциальные функции принадлежности вида (рис. 6.63)
/г(х) = ехр
х — тп
(6.54)
v5p + (1 - v)6i
Рис. 6.63. Асимметричная экспоненциальная функция принадлежности (6.54)
6.3. Самоорганизующиеся и самонастраивающиеся нечеткие модели 467
Рис. 6.64. Определение поверхности остаточной ошибки Е\ модели
где
( 1 ДЛЯ X тщ
V = <
[ 0 в других случаях.
На следующем шаге метода поверхность модели ошибки Eqm вычи-
тается из поверхности ошибки базовой модели Eq. Результатом данной
операции является поверхность остаточной ошибки Е± (рис. 6.64).
После определения остаточной ошибки моделирования Еу необходи-
мо вычислить ее среднее абсолютное либо среднее квадратичное значе-
ние. Если найденная величина является достаточно малой, то процесс
моделирования можно завершить. В противном случае строится нечет-
кая модель следующей остаточной ошибки, которая добавляется к уже
имеющимся моделям — таким образом осуществляется общее повышение
точности всех моделей. В конечном итоге будет получено множество па-
раллельных нечетких моделей (рис. 6.65), имеющих простую структуру,
содержащих небольшое число правил и нечетких множеств и легко под-
дающихся настройке.
Разделение глобальной модели на базовую модель и модели остаточ-
ных ошибок фактически соответствует ее разделению на одну простую
базовую модель, покрывающую всю область определения, и множество
локальных моделей, ориентированных исключительно на индивидуаль-
ное описание «пиков» и «впадин» поверхностей остаточных ошибок. По-
скольку локальные модели заданы в локальных областях, они могут быть
очень простыми. Рассмотренный метод позволяет избежать интенсивного
роста числа правил, который является характерным для ситуаций, свя-
занных с необходимостью представления «пиков» и «впадин» в рамках
глобальной модели (рис. 6.66).
468
Глава 6. Методы нечеткого моделирования
Рис. 6.65. Концепция разделения глобальной модели на базовую модель и мо-
дели остаточных ошибок
Приведенные ниже шаги I—VIII описывают упрощенный вариант ал-
горитма моделирования с применением метода точек максимума ошибки.
I. Определение базовой модели Mq системы.
II. Настройка базовой модели на основе результатов измерений входов-
выходов системы.
III. Проверка точности базовой модели. Если точность удовлетворитель-
на — завершить моделирование, в противном случае — перейти к шагу
IV.
IV. Определение ошибки Eq базовой модели.
V. Идентификация точек максимума и минимума ошибки базовой моде-
ЛИ Ео (ео max ^Omin)*
VI. Определение двух правил в соответствии с позициями экстрему-
мов—в результате получаем модель ошибки ЕЬль
VII. Настройка параметров функции принадлежности модели ошибки
Eqm на основе выборки значений ошибки Ео базовой модели.
VIII. Добавление модели ошибки Е^м к базовой модели Mq. Объеди-
нение указанных двух моделей образует новую модель М]. Проверка
точности модели. Если она удовлетворительна — завершить моделиро-
вание, иначе — определить остаточную ошибку Е± и продолжить про-
цесс моделирования, пока не будет достигнута требуемая точность.
6.3. Самоорганизующиеся и самонастраивающиеся нечеткие модели 469
Рис. 6.66. Увеличение числа правил при описании «пика» поверхности системы
в рамках одной глобальной модели (а, б) и двух параллельных моделей (в, е)
Возможны различные усовершенствования и модификации рассмот-
ренного алгоритма. Например, на тех шагах, где производится одновре-
менное устранение наибольших по высоте или глубине «пиков» и «впа-
дин» поверхности ошибки, можно выполнять устранение раздельно и по-
следовательно, т. е. устранять выступы, соответствующие наибольшей
абсолютной ошибке. Еще одна возможность заключается в устранении
на поверхности ошибки выступов, которые не являются наибольшими,
но при этом захватывают достаточно большую область входного про-
странства либо область, содержащую большое число элементов выборки
измерений. Устранение подобных выступов должно привести к значи-
тельному повышению точности модели (рис. 6.67).
Настройку моделей ошибки Ei можно выполнять двумя способами:
каждая последующая модель ошибки может настраиваться совместно
470
Глава 6. Методы нечеткого моделирования
Рис. 6.67. Пример ситуации, когда устранение меньшего по высоте «пика» по-
верхности ошибки (пика II) в большей степени повышает точность модели, чем
устранение самого высокого «пика» (пика I)
а) кусочно-линейная
функция принадлежности
б)экспоненциальная
функция принадлежности
Рис. 6.68. Примеры многомерных функций принадлежности
с базовой моделью и всеми ранее построенными моделями ошибки, либо
она может настраиваться отдельно, с использованием только значений
остаточной ошибки.
При моделировании систем с многими входами целесообразно исполь-
зовать многомерные функции принадлежности (Lin 1996). Примеры таких
функций представлены на рис. 6.68. Использование многомерных функ-
ций принадлежности дает очень полезную возможность отказаться от ре-
гулярного сеточного разбиения входного пространства и выбрать вместо
него нерегулярное разбиение (рис. 6.69), что в свою очередь позволяет
значительно сократить число правил в модели.
6.3. Самоорганизующиеся и самонастраивающиеся нечеткие модели 471
Рис. 6.69. Неравномерное расположение функций принадлежности во входном
пространстве (я) и разбиение входного пространства на области чувствительно-
сти (зоны влияния) отдельных функций (б)
При использовании функций, представленных на рис. 6.66, общее
число правил в базе определяется перемножением значений, равных чис-
лу функций принадлежности, для каждого входа. В случае многомерных
функций принадлежности минимальное число правил просто совпада-
ет с числом функций принадлежности. Применение подобных функций
для систем с менее сложными поверхностями отображения X —» Y позво-
ляет строить модели, содержащие только два правила, независимо от ко-
личества входов системы! Таким образом можно преодолеть проблему,
связанную с «проклятием размерности».
Пример 6.3.3.1.1. Рассмотрим выборку измерений для системы с двумя
входами и одним выходом (табл. 6.5). Примерный вид поверхности си-
стемы (полученный на основе полилинейной интерполяции) представлен
на рис. 6.70.
Представленную на рис. 6.70 поверхность системы можно задать с по-
мощью двух правил (6.55), используя при этом только одну многомерную
функцию принадлежности А значений входов и одноточечную функцию
принадлежности В значений выхода (рис. 6.71). Второе правило R1N,
Таблица 6.5
Выборка измерений входов-выхода системы
X} 2 3 4 2 3 4 2 3 4
х2 1 1 1 2 2 2 3 3 3
У 998.3 999.1 997.9 999.2 999.9 998.8 998.2 998.8 997.7
472
Глава 6. Методы нечеткого моделирования
Рис. 6.70. Дискретное представление поверхности X -+ Y
производное от первого, играет лишь вспомогательную роль и не содер-
жит новой информации о моделируемой системе, давая лишь возмож-
ность нечеткой модели функционировать таким образом, как будто она
содержит не менее двух правил, поскольку модель, содержащая един-
ственное правило R1, вычисляла бы всегда постоянное выходное значе-
Дл(Т1, х2) = ехр [- |(Х1 - 3)/10|3 - |(х2 - 2)/10|3]
1 для у = 1000,
0 в других случаях.
Рис. 6.71. Функции принадлежности входного и выходного нечетких множеств
для правила (6.55)
6.3. Самоорганизующиеся и самонастраивающиеся нечеткие модели 473
ние:
R1 : ЕСЛИ = А) ТО (у = В),
R1N : ЕСЛИ ((хъх2) = НЕ А) ТО (у = 0). (6.55)
С учетом свойств экспоненциальной функции, функцию принадлеж-
ности, изображенную на рис. 6.71, можно представить в виде
/1(х1,х2) = ехр
Xi — 3
10
х2 - 2
10
xi - 3
10
ехр
= (6.56)
= ехр
Кроме того, правило R1 (6.55) можно выразить в конъюнктивной фор-
ме (6.57), где в качестве условий выступают одномерные множества Ai
и А2, а для выполнения операции И используется оператор PROD:
Bl* : ЕСЛИ (ti - Аг) И (х2 = А2) ТО (у = В). (6.57)
Использование в данном случае других t-норм не гарантирует экви-
валентность правил В1* (6.57) и В1 (6.55). На рис. 6.72 представлены
Рис. 6.72. Проекция функции принадлежности pa(xi,x2), зависящей от двух
переменных, на плоскости (p,xi) и (д,х2), результатом которой являются функ-
ции одной переменной рд^хг) и рд2(х2)
474
Глава 6. Методы нечеткого моделирования
Таблица 6.6
Результаты моделирования системы с использованием
правил (6.55) или (6.56)
*1 2 3 4 2 3 4 2 3 4
*2 1 1 1 2 2 2 3 3 3
У 998.3 999.1 997.9 999.2 999.9 998.8 998.2 998.8 997.7
Ум* 998.0 999.0 998.0 999.0 1000.0 999.0 998.0 999.0 998.0
Ео 0.3 0.1 -0.1 0.2 -0.1 -0.2 0.2 -0.2 -0.3
функции принадлежности и /М2Ст2), соответствующие проекци-
ям многомерной функции принадлежности /1д(х1,гг2) на плоскости (//,xi)
И
Разложение многомерной функции принадлежности на функции од-
ной переменной делает нечеткие правила более доступными для понима-
ния. Условие правила, заданное на основе использования функций одной
переменной:
ЕСЛИ (xi близок к 3) И (х2 близок к 2),
является намного более понятным, чем условие, заданное с использова-
нием функции двух переменных:
ЕСЛИ (xi,T2) близок к (3,2).
Других преимуществ, кроме представления правил в более доступной
для понимания форме, операция разложения многомерной функции на од-
номерные не имеет. Вместе с тем, обратная ей операция, т. е. создание
многомерной функции на основе одномерных, с последующим исполь-
зованием ее в модели, позволяет сократить число правил по сравнению
с традиционной нечеткой моделью, основанной на прямоугольной сетке
разбиения входного пространства.
В табл. 6.6 представлены значения у на выходе системы в сравнении
со значениями ум0 на выходе модели, а также ошибка базовой модели Eq.
Модель Mq (6.57) можно представить в виде нейронечеткой сети
(рис. 6.73).
После настройки данной сети были получены следующие результаты:
= 3, Ш1 = 3, Ji = 10, h — 3, m2 = 2, 52 — Ю. Средняя абсолютная
ошибка модели составила
Ы = 0 189
г=1
6.3. Самоорганизующиеся и самонастраивающиеся нечеткие модели 475
РАг = ехр |(тг - тг)/6г\1г j , i = 1, 2,...
Рис. 6.73. Представление базовой модели Mq в виде нейронечеткой сети
Если точность базовой модели признана неудовлетворительной,
то можно выполнить моделирование ее ошибки, приведенной в табл. 6.6.
Максимальное значение ошибки составляет 0.3 и достигается в точке
(21,22) = (2,1), а минимальное значение, равное —0.3, достигается в точ-
ке (21,22) = (4,3). В указанных точках находятся модальные значения
(центры) новых функций принадлежности:
/ха34(ж1,Х2) = ехр
/м56(ж1,ж2) = ехр
m3 = 3, Ш4 = 1, ms -= 4. то — 3.
(6.58)
Для настройки параметров и Ц сформирована нейронечеткая сеть,
выполняющая моделирование поверхности ошибки Eq (рис. 6.74).
В результате настройки сети были получены следующие параметры
функций принадлежности: 23 = 2, I3 = 3, 51 = 0.3, 7724 = 1, /4 = 0.5,
64 = 10, ms = 4, Z5 = 2, J5 = 1, то = 3, /б = 1, 4б = 2. В табл 6.7
представлены результаты моделирования: значения ем0 на выходе модели
ошибки и остаточная ошибка ei = oq — ед/0.
Моделирование остаточной ошибки может продолжаться до тех пор,
пока точность модели не будет признана удовлетворительной. Тем не ме-
нее, предположим, что полученная точность (среднее значение абсолют-
ной ошибки, равное 0.0035) нас удовлетворяет. Таким образом, получена
модель Mi = Mq + Em0, представимая с помощью формул (6.59)и (6.60):
У Мг = Vmq + ем^
476
Глава 6. Методы нечеткого моделирования
р,Аг — ехр Г- |(ж7 - m2)/di\ltI . I = 3,4.5, 6, j = 1,2.
Рис. 6.74. Нейронечеткая сеть, осуществляющая моделирование поверхности
ошибки ЕМо
Таблица 6.7
Результаты моделирования ошибки EG
Х1 2 3 4 2 3 4 2 3 4
*2 1 1 1 2 2 2 3 3 3
Со 0.3 0.1 -0.1 0.2 -0.1 -0.2 0.2 -0.2 -0.3
Сд/о 0.3 -0.041 -0.11 0.218 -0.067 -0.182 0.192 -0.11 -0.3
С1 0 0.141 0.01 -0.018 -0.033 -0.018 0.008 -0.09 0
9
среднеквадратическая ошибка: 52 1ен|/9 = 0.035
Базовая модель Mq:
R1 : ЕСЛИ ((xi,x2) = Ai2) ТО (уМо = #12),
R1N : ЕСЛИ ((хъх2) = НЕ Л12) ТО (уМо = 0),
МА12 = ехР
Xi — 3
10
Х‘2 - 2
10
ДНЕ Д12 = 1 - МА12,
( 1 для у = 1000,
[ 0 в других случаях.
(6.59)
6.3. Самоорганизующиеся и самонастраивающиеся нечеткие модели 477
Модель ошибки Ему.
ед//0 — еМ)34 + ед/05б,
R2 : ЕСЛИ ((xi,x2) = Л34) ТО (еМо34 = В34),
R2N : ЕСЛИ ((хьх2) - НЕ Л34) ТО (ел/о34 = 0),
х2 - 1
10
3
0 1
•5 ,
МА34 = еХР -
Xi - 2
0.3
М НЕ Д34 = 1 - МАз4)
( 1 для ед/оз4 = 0.3,
М#34 — Л
(О в других случаях,
R3 : ЕСЛИ ((xi,x2) = ^56) ТО (е^о5б =
R3N : ЕСЛИ ((хьт2) = НЕ А5б) ТО (ед/о56 = 0),
2
МА56 = ехР
М НЕ А.56 =
Г 1
- 1 о
- 4
1
1 - /М56,
для ед/05б = —0.3,
в других случаях.
Х2 - 3 1
(6.60)
2
Нейронечеткая сеть, соответствующая модели А/], представлена
на рис. 6.75.
Нейронечеткая сеть, представляющая модель, построенную на основе
метода максимума ошибки, похожа на нейронную сеть типа RBF. Разли-
чие состоит в типах используемых нейронов (функции активации не яв-
ляются типовыми гауссовыми функциями) и применяемом методе обуче-
ния. Обучение нейронечеткой сети происходит последовательно, по ча-
стям: первой обучается базовая модель Mq, затем, в зависимости от ре-
зультатов, выполняется обучение модели ошибки Ем0 и т. д. Посколь-
ку в каждый момент времени обучается только часть сети, то подобное
обучение выполнить проще, чем обучение сети целиком, поскольку в по-
следней ситуации возможен взаимный конфликт отдельных нейронов, что
может привести к замедлению процесса адаптации.
Эффективность процесса обучения как базовой модели Mq, так и мо-
дели ошибки Ем,, можно повысить еще больше, если ввести дополни-
тельную степень свободы с, обеспечивающую возможность сдвига по-
верхности модели вверх или вниз вдоль оси ординат у (рис. 6.76).
Использование данной степени свободы может способствовать даль-
нейшему упрощению модели и сокращению числа правил в случае много-
мерных нечетких моделей. В частности, если поверхность ошибки имеет
478
Глава 6. Методы нечеткого моделирования
Рис. 6.75. Нейронечеткая сеть, соответствующая модели АД, задаваемой с по-
мощью формул (6.59) и (6.60)
Рис. 6.76. Дополнительная степень свободы с позволяет выполнять сдвиг по-
верхности конкретной модели вдоль оси ординат у
вид, представленный на рис. 6.77, а, то для ее моделирования необходимо
использование двух правил и двух функций принадлежности. Если же
сдвинуть эту поверхность вверх на постоянную величину с, то достаточ-
но использовать одну функцию принадлежности, требующую настройки,
6.3. Самоорганизующиеся и самонастраивающиеся нечеткие модели 479
Я1:ЕСЛИ(х=Л1)ТО(еА/о=Я2)
R2: ЕСЛИ (х=Л2) ТО (ем=Вх)
Як ЕСЛИ (х=а\) ТО ((еМо-Ьх) = В2)
R 1*У: ЕСЛИ (х = НЕ Ах) ТО ((^0 - Ьх) = 0)
с = -Ьх
Рис. 6.77. Способы сокращения числа правил в модели путем сдвига моделиру-
емой поверхности на величину с вдоль оси ординат
и ее отрицание, необходимость в настройке которого отсутствует (впо-
следствии величину с необходимо вычесть из выходного значения моде-
ли). Преимущество такого подхода значительно увеличивается в случае
многомерных моделей.
Еще одним подходом к повышению точности нечеткой модели явля-
ется применение эллиптических функций принадлежности с возможно-
стью вращения главных осей (рис. 6.78). Экспоненциальная эллиптиче-
ская функция принадлежности, зависящая от двух переменных, имеет
вид (6.61) и обладает четырьмя степенями свободы (mi, m2, а, Ь), в то
время как вращаемая функция (6.62) имеет пять степеней свободы (mi,
m2, а, Ь, а). Однако, введение дополнительной степени свободы связа-
но с определенным побочным эффектом, который выражается в большей
сложности нахождения производных и большем числе параметров, под-
480
Глава 6. Методы нечеткого моделирования
Xi — (#i — mi) cos a — (x2 — m2) sin a
x2 = (x* — mi) sin a 4- (a?2 — m2) coso
Рис. 6.78. Сечение эллиптической экспоненциальной функции, оси которой по-
вернуты на угол а относительно системы координат (xi,x2)
лежащих настройке:
)2 / \2\
( хг - т2\ [
--- ) р (6.61)
)2
-
/ \ 2 \
/ (xi - mi) sin а + (х2 - т2) cos а \ 1 /д ао\
Показатель степени может рассматриваться как дополнительная сте-
пень свободы. Общая формула для выражения невращаемой эллиптиче-
ской функции (6.61) двух переменных имеет вид
= exp{-(aiT| + a2xl + аз^1 + а4Х2 + «5)}- (6.63)
Общая формула, соответствующая функции, повернутой на угол a
(6.62), содержит произведение bsxix2:
(x(xi.x2) ~ exp{-(b]xf + b2Xz + + Ь4^1 + b$x2 + bQ)}. (6.64)
В случае модели с тремя входными параметрами выражение для вра-
щаемой эллиптической функции (6.65) будет содержать три произведе-
ния:
мЩ ж2, ®з) = exp{-(ci£Ci + с2.г| + с3х3 + с4Ж1®2 +
(6.65)
+ С5Х1Х3 + С6Х2Х3 + С7Х! + С8х2 + СдХ3 + Сю)).
6.3. Самоорганизующиеся и самонастраивающиеся нечеткие модели 481
При большем числе п входных параметров модели число m произве-
дений определяется соотношением
п\
Ш = 2!(п —2)! ’
(6.66)
а число к независимых элементов, содержащихся в выражении для невра-
щаемой эллиптической функции (6.61) может быть найдено по формуле
к = 2п.
(6.67)
Если модель имеет 10 входных переменных, то невращаемая функция
содержит к = 20 независимых элементов, т. е. параметров, подлежащих
настройке. Отсюда вращаемая функция содержит (к 4- тп) = 65 парамет-
ров, т. е. на 45 параметров больше! В случае же 100 входных переменных
мы получим к = 200 и (fe + m) = 5150, т. е. число дополнительных па-
раметров, подлежащих настройке, составит ни много ни мало, а 4950!
Таким образом, при использовании вращаемых функций принадлежно-
сти мы неизбежно сталкиваемся с проблемой «проклятия размерности».
Указанный эффект можно ослабить, если выполнять оценку значимости
отдельных произведений используя описанный в разд. 6.3.1 метод
средних значений срезов функции (нечетких кривых), либо путем после-
довательного введения элементов в выражение для невращаемой функ-
ции принадлежности, исследуя их влияние на точность модели.
Еще одна проблема, возникающая при моделировании систем с мно-
гими входами, состоит в определении базовой модели Mq. Ниже описаны
некоторые дополнительные методы решения этой проблемы.
В случае системы с одним входом ее базовую модель можно постро-
ить путем размещения правил в тех точках измерений, которые соот-
ветствуют экстремальным (или граничным) значениям входных парамет-
ров (рис. 6.79, а). В случае системы с двумя входами, представленной
на рис. 6.79, б, для угловых точек области определения результаты изме-
рений отсутствуют, т. е. в подобной ситуации невозможно указать зна-
чения координаты ?/, которые должны соответствовать заключениям пра-
вил, находящихся в угловых точках. Для решения указанной проблемы
можно взять точки, ближайшие к угловым (на рис. 6.79, б эти точки обо-
значены крестиками) и их координаты ург использовать в заключениях
правил.
Если указанные точки имеют координаты
Pl (xiPj. х2рх, УРХ Р4 (х-[ р. , .Г2Р4 , ур4 ),
482
Глава 6. Методы нечеткого моделирования
R1: ЕСЛИ (х=А) ТО (у = В{)
R2: ЕСЛИ (х = Л2) ТО (у = В2)
aU al2 Х1
б)
Рис. 6.79. Базовая модель Мо системы с одним входом (о) и пример ситуа-
ции, связанной с отсутствием измерений в угловых точках области определения
системы с двумя входами (б)
то правила базовой модели имеют вид:
R1 : ЕСЛИ (xi = Ап) И (яд = Ал) ТО (у близок к ур^,
R2 : ЕСЛИ (яд = Ai2) И (яд = A2i) ТО (у близок к ур2),
R3 : ЕСЛИ (яд = Ai2) И (я?2 = А22) ТО (у близок к ур3),
R4 : ЕСЛИ (яд = Ап) И (яд = А22) ТО (у близок к ypj. (6.68)
Параметры ург заключений правил (6.68) можно использовать в ка-
честве начальных значений для настройки нейронечеткой сети, соответ-
ствующей базовой модели. Можно также задать начальные значения ург
случайным образом, однако это приведет (в общем случае) к усложне-
6.3. Самоорганизующиеся и самонастраивающиеся нечеткие модели 483
Рис. 6.80. Расширение области определения модели за границы области опре-
деления системы
нию процесса настройки сети. Недостаток расположения правил базовой
модели в угловых точках области определения связан с явлением «про-
клятия размерности».
В рассмотренном нами случае число правил, содержащихся в базовой
модели, равно
г = 2п,
и тем самым резко увеличивается с ростом числа п входных парамет-
ров. Проявление упоминавшегося выше недостатка можно ослабить, если
расширить область определения модели за границы области опреде-
ления моделируемой системы (рис. 6.80), предполагая, таким образом,
что область определения модели имеет форму треугольника со следую-
щими координатами вершин:
Р1 (<*11, <*21, УРТ ), ^2(<*12, <*21, УР2\Р1 (<*11, <*23,*/Р3)*
Правила базовой модели расположены в вершинах треугольника
и имеют вид
R1 : ЕСЛИ (xi = Ап) И (т2 — A2i) ТО (у близок к ypj,
R2 : ЕСЛИ (яц = Ai2) И (т2 = A2i) ТО (у близок к ур2\
R3 : ЕСЛИ (xi = Ап) И (т2 = А2з) ТО (у близок к урз\ (6.69)
Перед началом обучения базовой модели значения ург можно вы-
брать на основе ближайших точек измерений либо случайным образом.
484
Глава 6. Методы нечеткого моделирования
Рис. 6.81. Область определения системы с тремя входами (8 угловых точек)
и область определения модели (4 угловых точки)
В процессе обучения, объектом которого является соответствующая мо-
дели (6.69) нейронечеткая сеть, параметры функций принадлежно-
сти правил можно положить постоянными — это один подход. В рамках
второго подхода вводится условие, запрещающее изменения точек Рг,
находящихся во внутренней прямоугольной части области определения
системы. Таким образом, настройке подвергаются главным образом ор-
динаты ург.
Несмотря на неполноту базы правил (6.69) в смысле традицион-
ной нечеткой логики (Driankov 1996), базовая нечеткая модель является
численно полной. С ее помощью можно вычислить выходные значения
для всех точек прямоугольной области определения системы, посколь-
ку три правила (6.69), расположенные в точках Рг, порождают интер-
поляционную модель с треугольной поверхностью, включающей в себя
область определения системы. В случае системы с тремя входами вме-
сто треугольной области будет получен тетраэдр, внутри которого будет
содержаться кубическая область определения системы (рис. 6.81). В ука-
занной ситуации минимальное число правил, необходимых для задания
модели в кубической области, равно 8, а для области, имеющей форму
тетраэдра, полностью охватывающего область определения системы, это
число составляет только 4.
В случае модели с п входами число г правил в модели, область опре-
деления которой имеет форму гипертетраэдра, составляет г = п + 1. Если
число входов равно 100, то число правил, требующихся для базовой мо-
дели:
г 1.2676506 • Ю30,
6.3. Самоорганизующиеся и самонастраивающиеся нечеткие модели 485
а число правил, требующихся для модели на основе гипертетраэдра:
г = 101.
Комментарии излишни.
Выход за границы области определения системы позволяет ослабить
действие «проклятия размерности». В некоторых случаях (рис. 6.82) чис-
ло правил базовой модели можно сократить еще больше. Поверхность,
RA: ЕСЛИ (xj = Ап) И (%2-^21) ТО (у близок кyPl)
R\N: ЕСЛИ (jq = НЕ Ап) И (%2 = НЕ Л21) ТО (у = 0)
Рр (ап, а2ь Ур])
Да ~ 1 ~ Дне а
Рис. 6.82. Базовая модель с двумя правилами
486
Глава 6. Методы нечеткого моделирования
порождаемая моделью с двумя правилами, может быть достаточно точ-
ной при условии корректной настройки ее параметров на основе измере-
ний данных о системе. О численной полноте модели с двумя правилами
можно говорить при условии, что области чувствительности (носители)
функций принадлежности являются достаточно большими для того, что-
бы обеспечить покрытие всей области определения системы, как показано
на рис. 6.82.
В отдельных случаях, когда выполнено данное условие, правило R1
можно поместить во внутреннюю точку прямоугольной области значений
входов системы (рис. 6.82, б), зависящую от формы связанной с ней по-
верхности. Также возможны ситуации, когда выход за границы области
определения позволяет получать модели с двумя правилами для много-
мерных систем, т. е. способствует построению экономных нечетких моде-
лей (Brown 1995). Наибольшую эффективность метод моделирования, ос-
нованный на расположении правил в точках экстремума ошибки модели,
демонстрирует в том случае, когда измерения не подвержены или лишь
незначительно подвержены влиянию шума. В условиях более сильно-
го шума для повышения эффективности метода необходима фильтрация,
для выполнения которой можно использовать метод взвешенных средних
(Preuss 1994b), обсуждавшийся в разд. 6.3.2.
Предположим, что данные о системе представляют собой за-
шумленную выборку измерений с распределением, представленным
на рис. 6.83,4/. Элементы выборки (xi,yi) соответствуют зашумленному
представлению поверхности модели. Поскольку измерения как входов х^
так и выходов у±, могут содержать ошибку, то определение наиболее
достоверного значения у* выхода для точки х — Xi на основе только па-
ры (xi,yi) не может быть достаточно объективным. Более объективного
результата можно добиться, если значение у* выхода вычислять на осно-
ве других элементов выборки, принадлежащих ближайшей окрестности
элемента (х^,^).
Для задания окрестности можно ввести функцию принадлежности
«близок к х^>, тип которой может быть произвольным. Наиболее целе-
сообразным представляется использование гауссовой функции принад-
лежности (рис. 6.83), поскольку ее область чувствительности (носитель)
является неограниченной, и, с учетом этого, смежные элементы учи-
тываются даже в случае очень большого расстояния между ними, что
невозможно обеспечить при использовании треугольных функций при-
надлежности с неправильно выбранным или слишком узким носителем.
6.3. Самоорганизующиеся и самонастраивающиеся нечеткие модели 487
Рис. 6.83. Подверженные шуму измерения до (а) и после (б) фильтрации
//(*,)= ехр
средних по формуле
Представление у* поверхности системы в точке х = Xi можно вычис-
лить методом взвешенных
Е yj ехр
2<52
(6.70)
Е ехр
2<52
Элемент выборки Xj, находящийся ближе к х^ в большей степени
влияет на значение у*, чем элементы, находящиеся дальше. Размеры бли-
жайшей окрестности можно настраивать путем изменения величины от-
клонения 8 функции принадлежности. На расстоянии 35 от точки Xi зна-
чение функции принадлежности равно 0.011, т. е. элементы, расположен-
ные за пределами соответствующей области, фактически не оказывают
влияния на взвешенную среднюю величину у*. При большей плотности
выборки и более изменчивой (в соответствии с ожиданиями) поверхности
моделируемой системы величину 8 следует уменьшать. Используя фор-
мулу (6.71), можно также найти представление у* поверхности системы
в произвольной точке х, не принадлежащей выборке измерений:
п Г f . А 2
Е Уз ехр
* 7 = 1
У г = —-------Г
Е ехр
282
(6.71)
282
Рассмотренный метод позволяет генерировать искусственные «изме-
рения» для тех областей, для которых результаты измерений отсутствуют
488
Глава 6. Методы нечеткого моделирования
(рис. 6.83, б; при этом следует помнить, что значимость и достоверность
подобных искусственных элементов ниже, чем у реальных измерений).
Кроме того, с его помощью можно уменьшить число элементов выборки
измерений в областях, для которых характерны слишком большие скоп-
ления этих элементов, путем замены большего числа элементов (х^,?д)
меньшим числом представлений (т£,г/£). Таким образом, метод взвешен-
ных средних позволяет сократить объем информации. Если число входов
системы равно р, то формула для вычисления взвешенного среднего у*
представлений системы в точке хг имеет вид
У{ (^И ? • • • ? %ki ? •
• • %pi
п
Е Уз ехР
7=1
_ Р (xkl - xk])‘2'
2Ja2 .
п
Е ехр
j=i
(xkl - xk])2'
261
(6.72)
где k — номер входа, j — номер измерения.
Приведем пример применения геометрического подхода к нечеткому
моделированию трехмерной системы у — /(^1,^2), использующего гра-
фическую визуализацию распределения выборки измерений на экране
компьютерного монитора.
Пример 6.3.3.1.2. В табл. 6.8 приведены результаты измерений данных
о моделируемой системе с двумя входами X], Х2 и выходом у, нормиро-
ванные к интервалу [0,100].
Измерения, представленные в табличной форме — не более, чем груда
абстрактных чисел. Менее абстрактным и более образным является их
Таблица 6.8
Результаты измерения значений входов яц, х2 моделируемой системы
и соответствующего им значения выхода у
*1 0 0 0 0 0 0 20 20 20 20 20 20
х2 0 20 40 60 80 100 0 20 40 60 80 100
У 35.3 31.3 25.7 18.4 13.5 8.7 67.0 59.7 48.7 36.8 25.7 16.5
40 40 40 40 40 40 60 60 60 60 60 60
х2 0 20 40 60 80 100 0 20 40 60 80 100
У 92.3 81.9 67.1 51.2 36.0 23.3 92.3 82.2 69.5 60.1 50.0 37.2
*1 80 80 80 80 80 80 100 100 100 100 100 100
х2 0 20 40 60 80 100 0 20 40 60 80 100
У 67.0 60.1 55.5 62.5 65.7 42.2 35.3 31.6 28.2 28.8 28.2 18.1
6.3. Самоорганизующиеся и самонастраивающиеся нечеткие модели 489
*2 А
10 -
80 -
60 -
40 -
20 -
0 -
-20 -
8.7 16.5
о о
13.5 25.7
о о
18.4 36.8
о о
25.7 48.7
о о
31.3 59.7
о о
35.3 67.0
23.3 32.2
о о
36.0 50.0
о о
51.2 60.1
о о
67.1 69.5
о о
81.9 82.2
о о
92.3 92.3
42.2 18.1
о о
65.7 28.2
о о
62.5 288
о о
55.5 28.2
о о
60.1 31.6
о о
67.0 35.3
_л-------1-------1_______।_______।______।_______।_______।_______।____________
0 20 40 60 80 100 120 140 160
У* = 2 ехр
X! - 150
20
Рис. 6.84. Представление результатов измерения для моделируемой системы
во входном пространстве и пример начальной позиции первой двухвариантной
гауссовой функции
представление в виде точек входного пространства Х\ х Х2, в соответ-
ствии с рис. 6.84.
Гауссова функция представлена с помощью изолиний, соответствую-
щих различным уровням, например 1/3 и 2/3 высоты. До начала процесса
настройки необходимо выбрать исходные значения параметров функции,
определяющие ее начальную позицию, ширину и форму (которая соот-
ветствует показателю степени). В рассматриваемом примере исходные
значения были выбраны в соответствии с рис. 6.84. В процессе настройки
вручную осуществляется перемещение гауссовой функции и ее растяже-
ние вдоль плоскости входных параметров, при этом на экране монитора
отображаются разности (6.73) между значениями у измерений и соот-
ветствующими значениями у*, полученными на основе текущего вида
функции. Наблюдение значений ошибки а дает нам информацию о том,
в каком направлении следует перемещать гауссову функцию и каким
образом изменять ее форму:
е,=у-у*. (6.73)
На основе рис. 6.84 мы находим точки, соответствующие наибольшим
значениям у (равным 92.3), т. е. определяем, куда необходимо поместить
490
Глава 6. Методы нечеткого моделирования
Рис. 6.85. Позиция и изолинии первой гауссовой функции (базовой функции)
и значения ошибки ei для конкретных элементов выборки измерений моделиру-
емой системы
центр гауссовой функции. Перемещение, расширение и/или уменьшение
функции выполняется до тех пор, пока не будет достигнуто минималь-
но возможное значение критерия Ко, в качестве которого используется
средняя абсолютная ошибка для всей выборки измерений:
m
Е Ы
Ко = , (6.74)
тп
где m — объем выборки.
На рис. 6.85 показаны найденная после нескольких попыток опти-
мальная позиция гауссовой функции, ее форма (изолинии) и величины
ошибки относительно конкретных элементов выборки измерений. Оп-
тимальное значение высоты базовой гауссовой функции равно 100. По-
лученная на основе данной функции нечеткая модель Mq может быть
задана с помощью правил
R1 : ЕСЛИ (xi 50) И (х2 ~ -20) ТО (у ъ 100)
R1N : ЕСЛИ НЕ (.тц 50) ИЛИ НЕ (х2 -20)
ТО (у « 0) (6.75)
и функций принадлежности, представленных на рис. 6.86.
6.3. Самоорганизующиеся и самонастраивающиеся нечеткие модели 491
Д%5о(Ж1) = ехр
Д^-2о(ж2) = ехр
Х2 + 20
100
Рис. 6.86. Одновариантные функции принадлежности для базовой модели Л/о
100 -
80-
60-
40-
20-
о-
0.0 0.0 0.5 9.4 25.7
о о о о о
0.0 0.0 0.7 14.7 40.0
о о о о о
0.0 0.0 0.5 9.4 25.7
о о о о о
0.0 0.0 0.1 2.5 6.8
о о о о о
0.0 0.0 0.0 0.3 0.7
о о о о о
0.0 0.0 0.0 0.0 0.0
о о о о о
Значения ошибки
для базовой функции
25.7—-------"
О
Вторая функция,
40.0 используемая для
о моделирования
0 20 40 60 80 100 120 140 160 *
е* = 10 ехр
Xi — 150 2 Х2 — 10
20 “ 30
Рис. 6.87. Значения ошибки ei для базовой модели Mq и начальная позиция
второй гауссовой функции
Среднее значение абсолютной ошибки базовой модели Mq равно 6.55.
Если такая точность недостаточна, то базовую модель можно дополнить
второй гауссовой функцией для моделирования ошибки ei. На рис. 6.87
представлены значения ошибки базовой модели и начальная позиция вто-
рой гауссовой функции.
Путем изменения параметров второй гауссовой функции осуществля-
ется ее перемещение, а также расширение либо сужение, до тех пор, пока
не будет минимизирована ее ошибка 62. Ошибку ошибки будем называть
492
Глава 6. Методы нечеткого моделирования
*2 А
0.0 0.0 0.0 0.0
100 о о о ° /
0.0 0.0 0.0 °г / 0.0
80 0 о о
0.0 0.0 0.0 О.Н К 0.0
60 о о о ° \
0.0 0.0 0.0 0.0 0.0
40 о о о о о
0.0 0.0 0.0 0.0 0.0
20 о о о о о
0.0 0.0 0.0 0.0 0.0
0 0 о о о о
0.0 Конечная позиция
ч о второй гауссовой
\ функции
0\0
у.о
' о
0.0
о
q 0__—— Значение остаточной
о ошибки е2
0.0
о
J-----1-----1------1------1-----1--------►
0 20 40 60 80 100 *1
61 - 40 ехр
х'2 — 80
30
Рис. 6.88. Конечная позиция второй гауссовой функции после ее настройки
и значения остаточной ошибки е2
остаточной ошибкой, для нахождения которой используется формула
е2 -е\. (6.76)
Оптимальная позиция и параметры второй гауссовой функции пред-
ставлены на рис. 6.88.
Нечеткая модель ошибки Ед/0 базовой модели Mq задается с помощью
правил
R2 : ЕСЛИ (ад ъ 80) И (х2 80) ТО (ех 40),
R2N : ЕСЛИ НЕ (ад 80) ИЛИ НЕ (ад 80),
ТО (ei 0) (6.77)
и функций принадлежности, представленных на рис. 6.89.
Как следует из рис. 6.88, средняя абсолютная ошибка модели, со-
стоящей из двух подмоделей Mq и Ем0 в рассматриваемом примере рав-
на 0, т. е. вторая гауссова функция полностью подавила ошибку модели.
На рис. 6.90 совместно представлены две гауссовы функции, составляю-
щие полную модель. Общая структура модели, включающей в себя две
параллельные подмодели, показана на рис. 6.91.
Геометрический подход можно использовать не только в нечетком,
но также и в нейросетевом моделировании. Пример такого моделирования
6.3. Самоорганизующиеся и самонастраивающиеся нечеткие модели 493
Рис. 6.89. Одновариантные функции принадлежности для ошибки модели Ем0
Рис. 6.90. Две гауссовы функции, составляющие полную модель
Рис. 6.91. Структура полной модели системы
494
Глава 6. Методы нечеткого моделирования
с использованием гауссовых функций без возможности вращения можно
найти в (Stoicman 1999), а пример, в котором вращение функций допус-
кается — в (Piegat 2000). Применение геометрического моделирования
возможно не только для трехмерных задач, но и для задач большей раз-
мерности — в этом случае вначале происходит настройка нейронов в под-
пространстве X} х затем в подпространстве Х$ х Хд и т. д. По завер-
шении первого цикла настройки во всех подпространствах происходит
возврат к первому подпространству Aj х Х2. В нем и в остальных под-
пространствах цикл настройки повторяется до тех пор, пока имеется воз-
можность повышать точность модели. Пример нечеткого геометрического
моделирования в четырехмерном пространстве приведен в (Korzeri 2000),
а нейросетвого геометрического моделирования — в (Rzepka 2000).
6.3.3.2. Самоорганизация и самонастройка нечетких моделей методами
кластеризации
Помимо описанного в разд. 6.3.3.1 метода размещения правил модели в
«существенных» точках поверхности системы, существуют другие мето-
ды, которые можно назвать частотными. Для многих явлений правила
(закономерности, обобщения) могут быть выявлены на основе оценки от-
носительной частоты различных вариантов проявления связанных с ними
свойств. Примерами могут служить правила, представленные ниже:
R1: ЕСЛИ (закат красный) ТО (завтра будет хорошая погода),
R2: ЕСЛИ (студент прилежен в учебе) ТО (он получит хорошую работу),
R3: ЕСЛИ (человек занимается спортом) ТО (он будет жить дольше).
Рассмотренные правила носят статистический характер, и при на-
личии достаточно большого числа измерений (наблюдений) вероятность
того, что они являются истинными, превосходит 50% (что и обуслов-
ливает возможность их выявления и формулировки). Для небольшого
числа измерений (один или несколько элементов) правила могут ока-
заться и ложными. Например, отдельные люди, занимающиеся спортом,
могут прожить меньше, чем кто-то из тех, кто не занимается спортом или
курит. Кому-то из прилежных студентов может достаться работа хуже,
чем его более слабому соученику, и т. д. Тем не менее, следует помнить,
что подобные правила опираются не на один или несколько случаев,
а на их статистическое большинство. Достоверность частотных правил
можно оценить с помощью коэффициентов (факторов) доверия, которые
отражают относительное число наблюдений, подтверждающих соответ-
ствующее правило. Возникает вопрос, можно ли использовать частотные
6.3. Самоорганизующиеся и самонастраивающиеся нечеткие модели 495
р(у)
Рис. 6.92. Нечеткая модель (в), полученная на основе частоты элементов вы-
борки измерений, в проекции на ось у (а) и ось х (б)
методы формирования правил при моделировании поверхности реализу-
емого системой отображения X —> У. Обратимся к примеру, который
представлен на рис. 6.92.
Если поверхность системы представлена точками, расположенными
равномерно вдоль оси х с шагом Дх (рис. 6.92, а), то примерное распо-
ложение точки максимума поверхности можно определить на основе их
проекций на ось у — в окрестности точки максимума имеет место наи-
большая плотность таких проекций. В этой точке размещается функция
принадлежности В<2, на основе которой можно сформулировать правило,
определяющее максимум.
С другой стороны, если поверхность системы представлена точка-
ми, расположенными вдоль оси у с одинаковым шагом Д?/ (рис. 6.92, б),
то плотность их проекций на ось х в окрестности точки максимума будет
496
Глава 6. Методы нечеткого моделирования
Рис. 6.93. Примеры неравномерного распределения элементов выборки измере-
ний во входном пространстве системы
наименьшей, и в этой точке размещается функция принадлежности Aq.
На основе двух функций принадлежности и Л2 можно сформули-
ровать правило R2, задающее окрестность максимума. Остальные два
правила (RY и РЗ) задают границы области определения X.
На основе рис. 6.92 можно утверждать, что информация, получен-
ная в результате одномерного (отдельно для проекции на каждую ось)
анализа частоты элементов выборки, при условии равномерной дискре-
тизации Дх, Ху, дает возможность формирования правил для описания
несложных поверхностей X —> У. К сожалению, в реальных системах
результаты измерений редко бывают распределенными в пространстве
равномерно — в одних областях функционирование системы может на-
блюдаться чаще, чем в других. Например, движение судна обычно про-
исходит на так называемой экономной скорости, которая, в зависимости
от типа судна, может равняться, например, 14, 15 или 16 узлам. При-
меры неравномерного распределения элементов выборки представлены
на рис. 6.93.
В случае, показанном на рис. 6.93, а, элементы сконцентрированы во-
круг точки Р2. Точка максимума поверхности системы находится спра-
ва от нее, но поскольку для данной области нет результатов измере-
ний, то определить координаты этой «существенной» точки невозмож-
но. С другой стороны, в силу отсутствия данных о функционировании
системы в окрестности максимума, поверхности модели без этой точки
для практических целей достаточно.
На рис. 6.93, б также показан случай, когда основная концентрация
элементов наблюдается в окрестности Р2. В других областях элементы
6.3. Самоорганизующиеся и самонастраивающиеся нечеткие модели 497
Рис. 6.94. Построение нечеткой модели путем расположения правил и пиков
функций принадлежности в центрах кластеров
распределены более или менее равномерно, вследствие чего становится
возможным определить координаты точки максимума и поместить в нее
правило. С другой стороны, более целесообразным может оказаться раз-
мещение правила в точке Р2, поскольку в этом случае можно добиться
значительного уменьшения средней ошибки модели в окрестности дан-
ной точки, где находится большинство элементов выборки. Неудачное же
размещение правила в значительной мере способствовало бы росту сред-
ней ошибки модели.
В рамках частотных методов в качестве «существенных» точек си-
стемы вместо экстремумов ошибки модели рассматриваются точки мак-
симальной плотности элементов выборки измерений, и правила распола-
гаются именно в этих точках. Возможность задания базы правил, функ-
ций принадлежности и их параметров определяется способностью выяв-
лять кластеры с плотными скоплениями элементов и находить их центры
(рис. 6.94).
Следует еще раз подчеркнуть, что даже если кластеры элементов
по своему расположению не совпадают с окрестностями точек экстрему-
ма поверхности системы, модель, построенная методами кластеризации,
может иметь очень высокую точность, если функционирование системы
наблюдается в основном в области кластеров, а возникновение других
498
Глава 6. Методы нечеткого моделирования
состояний носит лишь спорадический характер. Поскольку значения, по-
лученные путем измерения входов и выходов системы, обычно представ-
ляют собой малопонятный набор чисел, и в случае систем с многими
входами часто бывает трудно представить этот набор графически и выде-
лить кластеры на визуальном уровне, то для выделения кластеров необ-
ходимо использовать специальные математические методы. Простейшим
из них является метод одномерной кластеризации (Preuss 1995), кото-
рый осуществляет проекцию измерений на каждую из осей (xi,... ,хр,у)
в отдельности и позволяет выявлять одномерные кластеры.
На рис. 6.95 представлены проекции трехмерных элементов
(Xj х Х2 х Y) на двумерную плоскость (Xi х Х2), а также на оси
Ал и Х2. Вершины au, a2j функций принадлежности множеств Ац, A2j
совпадают с центрами одномерных кластеров. Следующий шаг состоит
в заполнении базы правил-«кандидатов»:
Rr : ЕСЛИ (хх = И (х2 = Л2;) ТО (у = Вк\ (6.78)
где i — 1,... ,mi — номера нечетких множеств для входа xi,
j = 1,... .m2 — номера нечетких множеств для входа х2,
к — 1..........m3 — номера нечетких множеств для выхода у.
Данная база содержит тгт2-тз правил (все возможные комбинации
Ли х Л27- х Вк). Некоторые из этих правил вводить нельзя, поскольку
они соответствуют областям входного пространства, для которых отсут-
ствуют результаты измерений, и это может означать, что данные области
не входят в диапазон функционирования системы. Если элемент Р/ име-
ет координаты (xiux2u^)’ то степень дг, с которой он подтверждает
достоверность правила Rr, может быть вычислена по формуле
= MIN(/Z41((>ip), 1ЛА2]^2р),ЦвДУр))- (6-79)
Вместо оператора MIN можно использовать оператор PROD или дру-
гие t-нормы. Элементы выборки подтверждают достоверность каждого
правила-«кандидата» в разной степени. Если выполнено условие
MAX/ir(a?i;,x2/,yz) > 0, (6.80)
где I = 1,... , m — номер элемента выборки, то правило Rr потенциально
может претендовать на включение в базу. Выполнение указанного усло-
вия означает, что правило соответствует такому участку области опреде-
ления, где имеются данные измерений, на основе которых можно иссле-
довать достоверность правила.
Если выполнено условие
МАХ цг(хп, х2/, yf) = 0, I — 1,..., rrtp.
6.3. Самоорганизующиеся и самонастраивающиеся нечеткие модели 499
Рис. 6.95. Одномерная кластеризация (а) и формирование функций принадлеж-
ности кластеров (б)
500
Глава 6. Методы нечеткого моделирования
то правило-«кандидат» необходимо исключить. Среди множества правил,
подтвержденных с положительной степенью, могут содержаться правила,
взаимно противоречащие друг другу, например:
R1 : ЕСЛИ (#i малый) И (х2 малый) ТО (у малый). /д\ = 0.9,
R2 : ЕСЛИ (дц малый) И (х2 большой) ТО (у большой), = 0.7.
Данные правила имеют одинаковые условия, но разные заключения.
Подобная ситуация возникает, когда данные измерений искажены шумом
или подвержены влиянию определенных входных параметров, которые
не были учтены в модели. При наличии противоречащих друг другу пра-
вил отбрасывается то правило, которое имеет меньшую степень достовер-
ности (в рассматриваемом примере это правило /?2), и остается правило,
достоверность которого подтверждена с более высокой степенью (прави-
ло R1). Противоречащие правила также можно сохранять, при условии
что заключение каждого правила умножается на соответствующий ко-
эффициент доверия МАХ ДО’ —в этом случае мы придем к реляционной
модели. В конечном итоге будет сформировано множество (база правил),
содержащее правила, которые были подтверждены с положительной сте-
пенью. Приведем пример подобной задачи.
Пример 6.3.3.2.1. В табл. 6.9 представлены результаты измерений дан-
ных о системе, а на рис. 6.96 — их проекции на пространство входов.
Кластеры в данном примере были выделены визуально, поскольку
группы элементов здесь ясно различимы. Центры кластеров были найде-
ны по формуле
Е
ац = —-----, i = 1,2, (6.81)
J mc
где mc — число элементов кластера с.
В случаях, когда число элементов велико, а границы между их груп-
пами недостаточно различимы, применяются специальные методы авто-
матического поиска кластеров, к которым, например, относится метод
к средних. (Babuska 1995е; Cho 1995; Cipriano 1995; Delgado 1996,1997;
Таблица 6.9
Результаты измерений данных о моделируемой системе
/ 1 2 3 4 5 6 7 8 9 10
Х1 1.3 0.9 1.0 1.8 2.2 2.1 3.1 3.0 2.9 2.7
*2 0.8 1.2 0.7 2.1 1.7 1.9 2.8 3.1 3.3 2.9
У 0.9 1.1 1.3 3.9 4.3 4.1 7.1 6.9 7.2 4.5
6.3. Самоорганизующиеся и самонастраивающиеся нечеткие модели 501
Halgamuge 1996; Hanss 1996а; Kwon 1994; Langari 1995; Narazaki 1993;
Osowski 1996; Rutkowska 1997; Su 1995; Yao 1995; Zhou 1995). Указанные
методы будут описываться далее в настоящей главе.
Модальные значения функций принадлежности совпадают с центрами
кластеров aij (рис. 6.96). Формулы для задания функций принадлежности
имеют вид:
/Мц(*1) = * ' 1 ДЛЯ < <2ц, Х1 — <212 ДЛЯ <2ц С 2*1 < «12, 1 <2ц ~ «12
МД12(^1) = * xi «11 ДЛЯ <2ц С х\ < «12, <212 “ «И xi <213 ДЛЯ <212 х\ < «13- Ч а12 — «13
МД13 (^l) < ( X! - <212 ДЛЯ <212 Х1 < «13, <213 - «12 . 1 ДЛЯ Х-[ «13,
МД21 (^2) < ' 1 для а?2 < Й21- Х2 - «22 , ДЛЯ (121 С х2 < «22, 1 <221 — «22
/^22(^2) = < ——— для «21 х-2 < «22, «22 - «21 (6.82) ^2 ~ «23 . V 7 ДЛЯ <122 х2 < «23, Ч <222 — «23
МД2з("^2) < Г Х2 - «22 пгт ДЛЯ <122 х2 < «23, «23 — «22 , 1 ДЛЯ Х2 «23,
/J-Bt (у) = S Г1 для у < 6], . У - Ь2 , . , , , ДЛЯ bi < у < 62, 1 01—02
мв2(у) = < f у — bi . 7 для bl у < Ь2, «2 — 01 у — 63 7 7 для Ь2 < у < 63, 1 ь2 - 6.3
МВз(у) = * г у — Ь2 7 , для Ь2 у < Ьз, Оз — 02 . 1 для у Ь3.
Затем формируется множество правил-«кандидатов» (6.83), построен-
ных на основе всех возможных комбинаций входных и выходных нечет-
502
Глава 6. Методы нечеткого моделирования
«п = 1.067
«12 = 2.033
«13 = 2.925
«21 = 0.9
а12 = 1.9
«23 = 3.025
^ = 1.1
Л2 = 4.2
Ь3 = 7.067
Рис. 6.96. Проекции результатов измерений на отдельные оси, координаты кла-
стеров и функции принадлежности, расположенные в центрах кластеров
ких множеств Ан, A^j, В^:
Я1 : ЕСЛИ (Ж1 = Лц) И (®2 = Л21) ТО (у = Вх),
R2 : ЕСЛИ (Ж1 = Ли) и (ж2 = Л21) то (у = В2),
R3 : ЕСЛИ (Ж] = Ли) и (^2 = Л21) то (у = -Вз),
R4 : ЕСЛИ (Ж1 = Ли) и (х2 = Л22) то (У = ВЦ
R5 : ЕСЛИ (Ж] = Л] i) и (ж2 = Л22) ТО (у = В2),
R6 : ЕСЛИ (Ж1 = Ли) и (ж2 = Л22) ТО (у = В3),
R27 : ЕСЛИ (xj = Л13) И (ж2 = Л23) ТО (у = В3). (6.83)
Таким образом, множество содержит 27 правил-«кандидатов». Для
каждого правила вычисляются коэффициенты доверия уг, соответству-
ющие конкретным элементам выборки измерений, на основе чего затем
6.3. Самоорганизующиеся и самонастраивающиеся нечеткие модели 503
Таблица 6.10
Коэффициенты доверия правил-«кандидатов» (6.83)
Правило № г М/Х#- 1 0.935 2 0.064 3 0 4 0.3 5 0.241 6 0 7 0.097 8 0.178 9 0
г 10 11 12 13 14 15 16 17 18
МЖА, 0 0 0 0.097 0.925 0.105 0.097 0.252 0.105
г 19 20 21 22 23 24 25 26 27
МАХ а 0 0 0 0.032 0.748 0.2 0 0.105 0.972
определяются максимальные значения указанного коэффициента. Напри-
мер, для правила /?1, значение коэффициента уг, соответствующее эле-
менту (1.3, 0.8, 0.9), вычисляется по формуле
М1(1.3,0.8,0.9) = МШ(//Лп(1.3),М1(0.8),№(0.9)) =
= MIN((1.3 — а12)/(ац — а12), 1,1) =
- MIN(0.759,1,1) = 0.759. (6.84)
Степень, с которой этот же самый элемент подтверждает правило R3,
вычисляется по формуле
Мз(1-3,0.8,0.9) - Мт(МЛ11(1.3),М421(0.8),№(0.9)) =
= MIN(0.759,l,0) = 0. (6.85)
Для каждого из правил-«кандидатов» среди значений коэффициента
доверия, соответствующих всем элементам выборки измерений, выби-
рается максимальное. Результаты вычислений, полученные в условиях
рассматриваемого примера, представлены в табл. 6.10.
В соответствии с табл. 6.10, положительную оценку получили 15 пра-
вил. Остальные 12 правил имеют коэффициенты доверия МАХ^Г = 0,
и из множества правил их следует исключить. Тем самым, получено но-
вое множество, содержащее 15 правил-«кандидатов», среди которых, од-
нако, имеются правила, противоречащие друг другу, т. е. имеющие одина-
ковые посылки, но разные заключения. В табл. 6.11 представлен резуль-
тат группировки правил по данному признаку. Для простоты, правила,
имеющие вид
ЕСЛИ (ад = А1г) И (х2 = А27) ТО (у = Bky
представлены в сокращенной форме (Ан, A2j-, Вд.).
Проблему, связанную с наличием взаимно противоречащих правил,
можно решить двумя способами. Первый из них состоит в создании ре-
ляционной базы правил (6.86), где заключения умножаются на коэффи-
504
Глава 6. Методы нечеткого моделирования
Таблица 6.11
Группы противоречащих друг другу правил
Правило № г МАХд ЛцЛ212?1, А\\A2\B2 0.935, 0.064 А11^22^1, ЛцЛ22^2 0.3, 0.241 ЛцЛ2з2?1, ЛцЛ2з2?2 0.097, 0.178
Правило № г МАХд Л 12^22^1, А[2А22В2, А\2A22B3 0.097, 0.925, 0.105 А12А23В1, А12А23В2, А12А23В3 0.097, 0.252, 0.105
Правило № г МАХд А 13^22^1, Л1зЛ22^2, Л1зЛ22^3 0.032, 0.748, 0.2 А 13^23^2, Л1зЛ2з^З 0.105, 0.972
циенты доверия:
R1 : ЕСЛИ (х! = Ап) И (х2 - A2i)
ТО (у = 0.935BJ ИЛИ (у = 0.064В2),
R2 : ЕСЛИ (гл = Ап) И (,т2 = А22)
ТО (у = 0.3BJ ИЛИ (у = 0.241В2),
R3 : ЕСЛИ (Ж1 = Лп) И (а>2 = Л23)
ТО (у = 0.097В1) ИЛИ (у = 0.178ВД
В4 : ЕСЛИ (zj = Л]2) И Ц2 = Л22)
ТО (у = 0.097В!) ИЛИ (у = 0.925В2) ИЛИ (у = 0.105В3),
R5 : ЕСЛИ (^ = Л12) И Ц2 = Л23)
ТО (у = 0.097Вх) ИЛИ (у = 0.252В2) ИЛИ (у = 0.105В3),
Л6 : ЕСЛИ Ц) = Л]3) И (ж2 = Л22)
ТО (у = 0.032В],) ИЛИ (у = 0.748В2) ИЛИ (у = 0.2В3),
R7 : ЕСЛИ (Ж1 = Л13) И (х2 = Л23)
ТО (у = 0.105В2) ИЛИ (у = 0.972В3). (6.86)
Если, например, заключение имеет вид (у = 0.935В1), то это озна-
чает, что при выполнении дефаззификации степень MBi(y) активизации
множества-заключения В] необходимо умножить на коэффициент дове-
рия у,. = 0.935. Реляционная модель (6.86) является более сложной,
но обычно обеспечивает более высокую точность.
Вторым методом учета взаимно противоречащих правил является ме-
тод выбора доминирующих заключений, т. е. заключений с наибольшим
коэффициентом доверия. Остальные правила, заключения которых имеют
меньшие коэффициенты доверия, подлежат отклонению. Данный метод
приводит к более простым и доступным для понимания моделям. Резуль-
тат упрощения реляционной модели (6.86) с применением данного метода
6.3. Самоорганизующиеся и самонастраивающиеся нечеткие модели 505
Рис. 6.97. Значительное различие модельных значений множеств Вх и В2, со-
ответствующих заключениям правил
имеет вид:
R1 : ЕСЛИ (xi - АХ1) И [(т2 = А21) ИЛИ (х2 = А22)] ТО (у = Вх),
R2 : ЕСЛИ (хх = Лхх) И (х2 = А23) ТО (у = В2\
R3 : ЕСЛИ (хх = АХ2) И [(х2 = Л22) ИЛИ (х2 = А23)] ТО (у = В2),
Я4 : ЕСЛИ (xi = А13) И (т2 = Л22) ТО (у - В2),
R5 : ЕСЛИ = Лхз) И (х2 = Л23) ТО (у - В3). (6.87)
Точность упрощенной модели (6.87) обычно ниже, чем для соответ-
ствующей реляционной модели, при этом перепад точности тем больше,
чем меньше различие между коэффициентами доверия сохраненных и от-
брошенных правил. Рассмотрим, например, правило R2 из базы правил
(6.86):
R2 : ЕСЛИ (х, = Лп) И (х2 - Л22)
ТО (у = 0.3В1) ИЛИ (у = 0.241В2),
с малым превосходством (у = 0.3Вх) над (у = 0.241В2). Принятие за-
ключение (у = 0.3В1) и отклонение заключения (у = 0.241В2) может
привести к значительному изменению точности модели, особенно если
модальное значение множества В2 значительно превосходит модальное
значение множества Вх (рис. 6.97).
Множество В2 в рассматриваемом примере оказывает большее вли-
яние на результат дефаззификации, чем множество Вх. Произведение
коэффициента доверия рг и модального значения 6Х равно 0.3-1.1 = 0.33,
а для множества В2 аналогичное произведение равно 0.241 • 4.2 = 1.01.
Если в качестве критерия доминирования заключения выбирает-
ся не коэффициент доверия а его произведение с модаль-
ным значением множества Bk (/ir(B^) 6^), то это обычно приво-
дит к меньшему перепаду точности модели, а также к другой форме
правил. Таким образом, упрощенное правило (6.88) можно представить
506
Глава 6. Методы нечеткого моделирования
в виде
R2 : ЕСЛИ (zx = Ап) И (х2 = А22) ТО (у = 0.241В2),
а не в виде
R2 : ЕСЛИ (хх = Ахх) И (х2 = А22) ТО (у = 0.3Вх).
Рассмотренные выше методы построения базы правил, тем не менее,
не лишены недостатков. Один из существенных недостатков является
следствием того, что коэффициенты доверия правил-«кандидатов» вычис-
ляются на основе выборки измерений, которые могут быть в значительной
степени подвержены влиянию шума. По этой причине сама оценка так-
же может оказаться зашумленной и, следовательно, неточной. С учетом
этого, полученную модель можно рассматривать как начальную, которая
должна быть преобразована в нейронечеткую сеть, а затем настроена
на основе измерений данных о системе. Подобные действия часто при-
водят к значительному повышению точности модели. Метод исключения
правил-«кандидатов» на основе их коэффициентов доверия можно при-
менять при построении базы правил без использования кластеризации.
Область определения каждого входного параметра хд и выходного пара-
метра у системы можно разделить на произвольно (интуитивно) заданное
число нечетких множеств, распределение которых может быть, например,
равномерным. На следующем шаге необходимо построить полную базу
правил-«кандидатов», содержащую все возможные комбинации входных
и выходных множеств, и для каждой комбинации (правила-«кандидата»)
на основе элементов выборки измерений определить коэффициент дове-
рия.
Существуют различные методы выполнения одномерной кластериза-
ции, среди которых одним из наиболее распространенных является метод
к средних (Preuss 1995; Osowski 1996). Приведем алгоритм данного ме-
тода для одномерного случая:
I. Задать количество к кластеров и начальные координаты ах,...,а^
их центров.
II. Включить каждый элемент выборки измерений в ближайший к нему
кластер.
III. Вычислить новые координаты ах,... центров кластеров на основе
включенных в них элементов.
IV. Проверить, произошли ли какие-либо изменения в расположении
кластеров (в смысле среднего или максимального относительного
смещения) по сравнению с предыдущим циклом вычислений. Если
6.3. Самоорганизующиеся и самонастраивающиеся нечеткие модели 507
Элементы выборки измерений
______________I______LLLL_
Начальное распределение
центров кластеров
I-----L
0 «1
щ х
Распределение центров
кластеров после цикла
вычислений
h
0
Рис. 6.98. Пример выполнения кластеризации методом к средних
да, то вернуться к шагу II и повторить цикл вычислений, в против-
ном случае — окончить вычисления.
Иллюстрацией метода к средних является рис. 6.98. Представленный
вариант метода является весьма общим и демонстрирует лишь основную
его идею, не затрагивая множество возможных его модификаций, таких
как, например, слияние двух смежных кластеров в один. Еще одна идея
состоит в том, чтобы на основе анализа числа элементов в каждом кла-
стере исключать кластеры с очень малым числом элементов.
Процедура обновления центров кластеров может выполняться путем
последовательного рассмотрения отдельных элементов либо одновремен-
ного рассмотрения всех элементов (Osowski 1996). Включение элементов
в кластеры может осуществляться на основе их евклидова расстояния
до центров кластеров или, в рамках нечеткой версии метода, на осно-
ве соответствующих кластерам функций принадлежности — в последнем
случае один элемент может с различной степенью принадлежать одно-
временно нескольким кластерам и, в зависимости от степени принадлеж-
ности, в той или иной мере влиять на смещение их центров. Еще одним
характерным для метода одномерной кластеризации недостатком являет-
ся потенциальная возможность возникновения так называемых псевдо-
кластеров, которая является следствием раздельной проекции элементов
на каждую координатную ось. Иллюстрацией данной проблемы является
рис. 6.99.
Два кластера, четко разделенные в двумерном пространстве X х Y,
при проекции на ось х перекрываются, в результате чего одномерный
анализ приводит к выводу о существовании одного кластера, и это поз-
воляет задать в пространстве X только одно нечеткое множество Ai,
508
Глава 6. Методы нечеткого моделирования
Рис. 6.99. Перекрытие кластеров при проекции на ось х (а) и ось у (6)
Рис. 6.100. Частичное перекрытие трех кластеров
центр ai которого не соответствует ни одному из центров двумерных
кластеров. Аналогичный случай полного или частичного перекрытия кла-
стеров может возникнуть и по отношению к оси у, лишая, таким обра-
зом, возможности корректно определить число кластеров и координаты
их центров. На рис. 6.100 показан случай, когда раздельные проекции
элементов на оси х и у позволяют выделить на каждой оси два кластера,
в то время как действительное их число равно трем.
К подобному обманчивому выводу можно прийти в многомерных слу-
чаях, когда выделение кластеров осуществляется раздельно для входного
пространства X = Х± х ... х Хр и выходного пространства Y. Напри-
мер, в ситуации, изображенной на на рис. 6.101, во входном простран-
стве был бы выделен только один кластер, центр которого не совпадает
6.3. Самоорганизующиеся и самонастраивающиеся нечеткие модели 509
Рис. 6.101. Перекрытие кластеров при проекции на входное пространство
Xi х Х2
ни с одним из центров двух реально существующих кластеров. Возмож-
ность перекрытия кластеров увеличивается с ростом числа входов систе-
мы. Рассмотренные примеры являются подтверждением того, что наибо-
лее безопасной является кластеризация, выполненная в полноразмерном
пространстве входов-выходов системы ХхУ, где X = Xi х ... х Хр —
входное пространство. Далее мы рассмотрим алгоритм полноразмер-
ной четкой кластеризации методом к средних, при описании которого
будем пользоваться упрощенной формой Т(р+1) записи выходного значе-
НИЯ у (у = Ж(р+1)).
1. Инициализация кластеров. Обозначим число кластеров через к,
а начальные векторы координат их центров — через шДО), i = 1,..., к :
mi = [тж1д,... ,тх1д,... ,
m, = [mxU,..., тхщ,..., тх(р+1),г]Т,
где р — число входов системы.
Число кластеров к можно задавать интуитивно или генерировать слу-
чайным образом. Еще один способ состоит в последовательном выполне-
нии кластеризации, начиная с малого числа кластеров, которое постепен-
но увеличивается, и на каждом шаге проверяется точность получаемых
моделей (Dave 1997). Центры кластеров ш? определяются, например, пу-
510
Глава 6. Методы нечеткого моделирования
Рис. 6.102. Удачное (а) и неудачное (б) расположение начальных центров кла-
стеров т7 в результате их случайной генерации
тем случайного выбора к элементов (яц,... ,Я(р+1}) из множества измере-
ний. С точки зрения дальнейшего процесса моделирования, результаты
случайного выбора могут оказаться как более, так и менее удачными
(рис. 6.102).
Минимально рекомендуемое число кластеров к должно быть равным
размерности пространства Хр хУ параметров системы (т. е. р+1), чтобы
с помощью модели можно было сформировать интерполяционную по-
верхность такой же размерности. При удачном начальном расположении
кластеров сокращается объем вычислений при поиске оптимального (или
субоптимального) решения. Неудачное расположение (рис. 6.102, б) по-
вышает вероятность нежелательного «попадания» алгоритма в локаль-
ный оптимум. Как правило, чем более равномерным является начальное
расположение кластеров, тем быстрее работает алгоритм.
Для того чтобы избежать ситуации, когда случайно выбранные цен-
тры кластеров ш7 оказываются расположенными слишком близко друг к
другу, можно ввести условие, допускающее выбор только тех элементов,
которые находятся от каждого из ранее выбранных центров ш7 на рас-
стоянии, не меньшем установленного предела dmin- Расстояние dij между
элементом х? выборки измерений и центром кластера шг может быть вы-
числено по формуле
dij = II xj - m, || =
р+1
- тх1^2-
i=i
(6.89)
Минимальное расстояние dmin можно определить эвристическим ме-
тодом, если известны такие параметры, как число кластеров к и размеры
области определения, задаваемые на основе величин x/min, x/max, 2/Zmin,
в рамках используемой системы координат (рис. 6.103).
6.3. Самоорганизующиеся и самонастраивающиеся нечеткие модели 511
Рис. 6.103. Один из возможных методов определения минимального расстояния
dmin между центрами исходных кластеров
2. Распределение элементов по кластерам. Каждый элемент выборки
измерений с номером j включается в ближайший кластер с номером i.
Расстояние dij между элементом и центром кластера вычисляется по фор-
муле (6.89).
3. Определение новых центров кластеров. Новые центры кластеров
определяются как «центры тяжести» содержащихся в них элементов. Ес-
ли обозначить через Ni число элементов кластера г, то координаты цен-
тров кластеров хщ,/ = 1 + р могут быть найдены по формуле
М
mxi'i(t + 1) = I = 1,...,(р + 1), (6.90)
г j —1
где t — номер цикла кластеризации.
Подход к определению новых центров кластеров на основе всех входя-
щих в них элементов известен как кумулятивный подход (Osowski 1996).
Существует также непосредственный подход, при котором корректировка
центров происходит постепенно, по мере предъявления отдельных эле-
ментов. В рамках непосредственного подхода на каждом шаге произво-
дится корректировка только одного центра, расположенного ближе всего
к рассматриваемому элементу. При этом центр смещается в направлении
данного элемента на величину, вычисляемую по формуле (6.91) и зави-
сящую от коэффициента скорости обучения р <С 1:
mxiti(t + 1) = I = 1,..., (р + 1). (6.91)
Непосредственный подход, характеризующийся более плавными сме-
щениями центров кластеров на каждом шаге, демонстрирует несколько
лучшую сходимость, чем кумулятивный подход, и поэтому на практике
он используется чаще.
512
Глава 6. Методы нечеткого моделирования
4. Проверка смещений кластеров Дт2. Величина смещения центров
кластеров относительно их позиций на предыдущем цикле кластеризации
(t — 1) вычисляется по формуле
= || m?(0 - mi(t - 1)||. (6.92)
Если минимальное смещение Дтг удовлетворяет условию
min АтД^) <6, i = 1,..., /с, (6.93)
где е — пороговое значение, то корректировка центров кластеров шг за-
канчивается, и осуществляется переход к шагу 5. В противном случае
происходит возврат к шагу 2.
5. Определение функций принадлежности кластеров. Поскольку
определение кластеров выполнялось во всем пространстве ХхУ пара-
метров системы, то становится возможным более точно выделить груп-
пы элементов и избежать перекрытия различных кластеров в проекциях
на пространство X. Между тем, в практических приложениях обыч-
но требуется определить выходное значение системы у при заданном
входном векторе х. Поэтому функции принадлежности нечетких мно-
жеств следует задавать раздельно для входных и выходного параметров.
Поскольку центры кластеров mix обычно распределены в пространстве
неравномерно, представляется целесообразным использование экспонен-
циальных, гауссовых функций принадлежности. Центры гщх этих функ-
ций соответствуют проекциям центров кластеров т7 на входное про-
странство X, а их ширина может выбираться равной одной трети рас-
стояния Dzj до ближайшего кластера (рис. 6.104).
При использовании гауссовой функции степень принадлежности то-
чек, находящихся на расстоянии За от центра, равна 0.011, что предотвра-
щает возможность конфликта между заключениями правил. Кроме того,
в данной ситуации правила будут «сообщать правду», т. е. для вектора х,
который в точности соответствует центру функции принадлежности, на-
ходящейся в посылке правила, значение на выходе модели будет равным
(приблизительно) выходному значению, содержащемуся в его заключе-
нии.
Пример 6.3.3.2.2. Рассмотрим пример полноразмерной кластеризации
методом к средних с применением кумулятивного подхода.
В табл. 6.12 представлено множество измерений данных о моделируе-
мой системе.
На рис. 6.105 представлено распределение элементов выборки измере-
ний в пространстве X хУ = х Хъ- Рисунок 6.105, а позволяет на визу-
альном уровне выделить три кластера KI, К2, КЗ в пространстве XxY.
6.3. Самоорганизующиеся и самонастраивающиеся нечеткие модели 513
<71 = minPij/3, j = 2,..., k
(х) = ехр [-((7771.П - rd)2 + (тп1Х2 - я?2)2)/2сГ1]
гпп = [m1T1,mi.T2]
Рис. 6.104. Иллюстрация метода определения параметров ш? и сгг гауссовой
функции принадлежности (а) и поперечные сечения функции принадлежности
во входном пространстве (б)
Таблица 6.12
Выборка измерений
Pj 1 2 3 4 5 6 7 8 9
Х = *1 0.7 1.4 1.2 1.8 2.5 2.3 2.4 3.0 2.1
У=х2 0.8 0.9 1.3 0.8 0.9 1.6 2.4 2.7 3.0
Если бы кластеризация выполнялась только во входном пространстве X,
то проекции на ось х кластеров К2 и КЗ оказались бы перекрывающи-
мися, и кластеры были бы неразличимыми.
Шаг I. Инициализация кластеров. Рассмотрим три начальных кластера,
центры которых имеют координаты:
mi(0) = [0,0]т,
т2(0) = [3,0]т,
тз(0) = [3,3]т. (6.94)
514
Глава 6. Методы нечеткого моделирования
Рис. 6.105. Распределение элементов выборки измерений в пространстве
У=х2к
1 2 3
X х Y (а) и исходные кластеры для алгоритма (б)
Таблица 6.13
Расстояния между элементами Pj и начальными центрами кластеров
шг(0), вычисленные по формуле (6.95)
Pj 1 2 3 4 5 6 7 8 9
d\j 1.06 1.66 1.77 1.97 2.66 2.80 3.39 4.04 3.66
d2j 2.43 1.84 2.22 1.44 1.03 1.75 2.4 2.70 3.13
d3J 3.18 2.64 2.48 2.51 2.16 1.56 0.85 0.30 0.90
Шаг II. Распределение элементов по кластерам. Для каждого элемен-
та Pj по формуле (6.89) вычисляются евклидовы расстояния dtj
до центров кластеров тпр.
dij = || Xj - m, || =
2
- mxizi)2.
(6.95)
Результаты вычислений представлены в табл. 6.13.
На основе данных табл. 6.13 для каждого элемента Pj определяется
ближайший центр кластера (в табл. 6.13 соответствующие поля выделе-
ны). Полученные результаты представлены в виде соотношений (6.96)
и рис. 6.105, б.
#1(0) = (Pi,P2,P3), М=3,
#2(0) = (Р4,Р5), #2 = 2,
#3(0) = (Р6,Р7,Р8,Р9), #з = 4. (6.96)
6.3. Самоорганизующиеся и самонастраивающиеся нечеткие модели 515
Шаг III. Определение новых позиций центров кластеров. Новые центры
кластеров тД1) вычисляются кумулятивным методом по формуле
тХ1Л = (б-97)
Полученный результат представлен в виде:
mi(l) = [1.1,1.0]т,
т2(1) = [2.15,0.85]т,
т3(1) = [2.45,2.425]т. (6.98)
Шаг IV. Вычисление перемещений кластеров Дш*. На данном шаге про-
изводится вычисление расстояний, на которые сместились центры
кластеров ш7. Результат является основой для решения о дальней-
шем продолжении процесса кластеризации. Перемещения опреде-
ляются по формуле
Дтг = ЦтДО) - тД1)||. (6.99)
В результате получаем:
Ami = 1.49, Дш2 = 1.20, Дт3 = 0.80.
Поскольку все величины перемещений Дтг превосходят пороговое
значение (е = 0.1), процедуру кластеризации следует продолжать.
Шаг V. Распределение элементов по новым кластерам.Вычисляются
расстояния dtj между элементами Pj и центрами новых класте-
ров шД1). Результаты вычислений представлены в табл. 6.14.
На основе данных табл. 6.14 произведено следующее распределе-
ние (в табл. 6.14 соответствующие поля выделены):
#1(1) = (Pi,P2,P3), М-3,
#2(1) = (Р4,Р5,Рб), М-3,
#3(1) = (Р7,Р8,Р9), м-з.
Таблица 6.14
Расстояния между элементами Pj и центрами кластеров Шг(1)
Pj 1 2 3 4 5 6 7 8 9
d\j 0.45 0.32 0.32 0.73 1.40 1.26 1.91 2.46 2.24
d2j 1.45 0.75 1.05 0.35 0.35 0.76 1.57 2.04 2.15
dij 2.39 1.85 1.68 1.75 1.53 0.84 0.06 0.61 0.67
516
Глава 6. Методы нечеткого моделирования
Рис. 6.106. Кластеры, полученные на шаге II и шаге IV алгоритма
Шаг VI. Определение новых позиций центров кластеров.Новые позиции
центров кластеров, найденные на основе содержащихся в них эле-
ментов, имеют следующие координаты:
mi(2) = [1.1,1.0]т,
т2(2) = [2.2,1.1]т,
ш3(2) = [2.5,2.7]т.
Кластеры Ki и их центры mz представлены на рис. 6.106.
Шаг VII. Определение величин перемещений кластеров Дт,, Перемеще-
ния центров кластеров Дго; = ||тД1) - тД2)|| равны:
Ami = 0, Ат2 = 0.255, Дтз = 0.279.
Поскольку величины перемещений Дт2 и Дтз превосходят вы-
бранное пороговое значение (е = 0.1), процедура кластеризации
продолжается.
Шаг VIII. Распределение элементов по вновь полученным кластерам.
В табл. 6.15 представлены величины расстояний dLj между элемен-
тами Р3 и новыми центрами кластеров mz(2). На основе данных
табл. 6.15 выполняется распределение элементов по кластерам (со-
ответствующие поля в таблице выделены):
#1(2) = (Р1,Р2,Рз), #1-3,
#2(2) = (Р4,Р5,Р6), #2-3,
#3(2) = (Р7,Р8,Р9), #3-3.
Результаты данного шага совпадают с результатами, которые были
получены на шаге V.
6.3. Самоорганизующиеся и самонастраивающиеся нечеткие модели 517
Таблица 6.15
Расстояния dtJ между элементами Pj и центрами кластеров шг(2)
Pj 1 2 3 4 5 6 7 8 9
d{j 0.45 032 032 0.73 1.40 1.26 1.91 2.46 2.24
dV 1.51 0.81 1.22 0.45 032 0.41 1.41 0.85 2.00
dh 2.62 2.11 1.91 2.02 1.8 0.92 032 0.50 0.50
Шаг IX. Определение новых позиций центров кластеров. Новые пози-
ции центров кластеров тДЗ), найденные на основе содержащихся
в них элементов, имеют следующие координаты:
mi(2) = [1.1,1.0]т, ш2(2) = [2.2.1.1]т, ш3(2) = [2.5, 2.7]т.
Шаг X. Определение величин перемещений кластеров Дт,, Величины
перемещений кластеров Ат, = Цпт,-(2) — гл,-(3)||, 1 — 1.2.3, равны:
Ami = 0, Д?п2 = 0, Дшз = 0.
Поскольку все величины сдвига кластеров меньше порогового зна-
чения (е = 0.1), корректировку их центров можно завершить. Те-
перь необходимо определить остальные параметры функций при-
надлежности кластеров.
Шаг XI. Определение типа и параметров функций принадлежности
кластеров. Поскольку кластеры были определены на всем про-
странстве X х Y входов-выходов системы, это обеспечивает воз-
можность их полной идентификации и предотвращает эффект пе-
рекрытия проекций кластеров К2 и КЗ на входное простран-
ство X. Вместе с тем, построение модели обычно связано с необхо-
димостью вычисления выходного значения у, соответствующего за-
данному входному значению х, и поэтому функции принадлежно-
сти нечетких множеств должны задаваться отдельно для входного
и выходного пространств. В данном примере входное пространство
является одномерным, и можно было бы использовать кусочно-
линейные функции принадлежности, однако, учитывая неравно-
мерность распределения центров кластеров в случае многомерно-
го входного пространства, более целесообразным является исполь-
зование экспоненциальных функций, центры которых совпадают
с центрами кластеров, а значения ширины ст зависят от рассто-
яния между соседними функциями. В рассматриваемом примере
были выбраны функции, изображенные на рис. 6.107.
Значения ширины ai выбраны равными одной трети расстояния
\mxi ~ между центрами соседних кластеров во входном про-
518
Глава 6. Методы нечеткого моделирования
У
В2
В\
К1: ЕСЛИ (х=Л1) ТО (у=Вх)
R2: ЕСЛИ (х=А2) ТО (у = В2)
КЗ: ЕСЛИ (х=Л3) ТО (у=В3)
АДх) = ехр[-(х- 1.1)2/0.222]
Ал2(х) = ехр[- (х — 2.2)2/0.035]
Да3(х) = ехр[- (х - 2.5)2/0.035]
Ку) 1
р(х)
1.1 2.2 2.5
Рис. 6.107. Нечеткая модель, полученная в результате кластеризации
странстве:
|2.2 —1.1| |2.5 — 2.2|
ai = J---------= 0.367, а2 = (тз = -------= 0.1.
о о
HAi(x') = ехр
Соответствующие гауссовы функции принадлежности задаются в виде
Ci - х)2 1
Г
Нечеткая модель системы, которая описывается зависимостью
f (ж-1.1)2'! ( (х-2.2)2] f (х-2.5)2 1
1-ехрГЛГ2б^} + 1|-ехр{~^)Л^1+
( (х —1.1)2 1 f (х — 2.2)2 1 (
ехр i +ехр 1-----------блГ^ J +ехр
в графической форме представлена на рис. 6.107.
Существуют другие методы нечеткой кластеризации, в рамках ко-
торых распределение элементов по кластерам не является однознач-
ным — один и тот же элемент может быть с разной степенью включен
в несколько кластеров. Наиболее часто используемым методом нечеткой
кластеризации является FCM-метод (fuzzy c-means). Идея метода была
0.02
6.3. Самоорганизующиеся и самонастраивающиеся нечеткие модели 519
предложена Данном (Dunn 1973) в 1973 г., а затем обобщена Бездеком
(Bezdek 1981,1984), которого обычно считают автором данного метода.
Алгоритм FCM-метода
Шаг 0. Инициализация алгоритма.На данном шаге определяются следу-
ющие параметры: число с центров кластеров, показатель д, опреде-
ляющий степень нечеткости функций принадлежности кластеров,
и пороговое значение е > 0, которое задает условие завершения
процесса кластеризации. Этап инициализации соответствует ите-
рации с номером t — 0. Кроме того, на данном шаге случайным
образом задается начальная матрица 0(0) = (//^(0)) степеней при-
надлежности точек j кластерам i.
Шаг I. Корректировка центров кластеров шг, i = 1,...,с. Корректи-
ровка координат центров кластеров тхщ выполняется последова-
тельно, по формуле
Е м’/<)' Xl’j
тх1л = , \/г = 1,..., с, (6.100)
E^W
где I = 1,..., (р + 1), (a?p+i = у).
Координаты центра кластера с номером i имеют вид
ГПг — [тх1л, . . . , mXpi, '^'x(p-l-l), г] •
Шаг II. Корректировка матрицы степеней принадлежности 0. На каж-
дом цикле корректировки (t+1) происходит вычисление новых зна-
чений 1) степени принадлежности элементов j кластерам i
по формуле:
Pij(t +1) = - 2 ,
Е йп ”1 <610’>
Vz = 1,..., с, и Vj = 1,..., N,
где — расстояние между элементом j и кластером i, для ко-
торых вычисляется степень принадлежности. Величины dkj(t),
к = 1,..., с, соответствуют расстояниям между элементом и всеми
кластерами.
Для вычисления расстояния dij(t) используется формула
dijtt) = ||х - m8(t)m = У(х; - m,(0)TA(xj - (6.102)
520
Глава 6. Методы нечеткого моделирования
где х7- — вектор координат элемента j,
А — положительно определенная симметричная матрица порядка
(р + 1) х (р + 1), где р —число входных параметров, определяю-
щее тип нормы ||... || для вычисления расстояния dy.
Полагая А = I (тождественная матрица), получаем евклидову норму
(евклидово расстояние), и формула (6.102) принимает вид
djj(t) —
р+1
^2(x/j - mx^(t))2,
i=i
Z = l,...,(p+1).
(6.103)
Функция принадлежности pij(t + 1) является симметричной по всем
направлениям, а ее поперечное сечение имеет вид круга (или гипер-
круга). Если положить А = С, где С — положительно определенная,
симметричная корреляционная матрица вектора х7 (С = [diag(crj)]-1),
порождающая норму Махаланобиса (Zimmermann 1994а), а ст2 — диспер-
сия элемента j, то будут получены функции принадлежности /j,y(t 4- 1)
с эллиптическими (или гиперэллиптическими) поперечными сечениями,
которые обычно обеспечивают более высокую точность модели. Значе-
ние показателя степени q в формулах (6.100) и (6.101) выражает степень
нечеткости функции принадлежности, соответствующей кластеру г.
При q = 1 кластеризация перестает быть нечеткой («жесткий вари-
ант» алгоритма), и каждый отдельный элемент j однозначно принадле-
жит только одному кластеру г. Недостатком «жесткой» кластеризации яв-
ляется ее высокая чувствительность к шуму, воздействию которого обыч-
но подвержены измерения. Увеличение показателя q (q > 1) приводит
к усилению нечеткости кластера, т. е. к увеличению расстояния между
ветвями функций принадлежности («мягкий» вариант алгоритма), что
уменьшает влияние на модель шума измерений и повышает ее обобща-
ющую способность (способность к обобщению информации, полученной
в результате измерений). При q сю центры кластеров приближаются к
точке, соответствующей центру масс всех элементов (максимальное обоб-
щение информации), и для каждого входного вектора модель вычисляет
одинаковое выходное значение, равное среднему всех элементов.
Оптимальное значение q следует подбирать в соответствии со степе-
нью влияния шума на результаты измерений. При больших значениях q
влияние на расположение центра кластера i элементов, находящихся да-
леко от данного кластера, проявляется в большей степени; при меньших
значениях q влияние более удаленных элементов уменьшается, и одно-
временно с этим увеличивается влияние элементов, расположенных бли-
же. В начале процесса кластеризации обычно полагают q = 2.
6.3. Самоорганизующиеся и самонастраивающиеся нечеткие модели 521
Шаг III. Проверка условия завершения процедуры кластеризации. Су-
ществуют различные методы сравнения новой матрицы степеней
принадлежности 0(t + 1) с матрицей 0(f), полученной на преды-
дущем шаге. Три из них можно выразить в виде (6.104)—(6.106):
ЕСЛИ || 0(t + 1) - 0(t)||
ТО окончание кластеризации, (6.104)
с N
ЕСЛИ ЕЕ 1) С ^2
г=1 j = l
ТО окончание кластеризации, (6.105)
с N
ЕСЛИ Ш ЕЕ
7 = 1 .7 = 1
ТО окончание кластеризации, (6.106)
где |... | означает абсолютную величину приращения степени при-
надлежности р^ по отношению к предыдущей итерации, a exTV —
количество элементов матрицы 0. Величины е соответствуют про-
извольно выбираемым пороговым значениям, определяющим усло-
вия завершения процедуры кластеризации. При меньших порого-
вых значениях требуется большее число итераций.
Наиболее простым для интуитивного определения, по-видимому, яв-
ляется пороговое значение £3 в условии (6.106), которое связано со сред-
ним абсолютным изменением степени принадлежности элемента j кла-
стеру i. Если для двух последовательных итераций изменения степеней
принадлежности ру являются достаточно малыми, то перемещения цен-
тров кластеров становятся незначительными — в этом случае процедуру
кластеризации можно завершить и перейти к шагу IV. При невыполнении
условия завершения процесс необходимо повторить с шага I.
Критерии сходимости FCM-алгоритма
а) Для каждого элемента выборки измерений сумма степеней его при-
надлежности всем с кластерам должна быть равной 1:
с
г=1
б) значение степени принадлежности должно быть ограничено интерва-
лом [0,1]:
jdij Е [Q, 1], V? = l,...,c, и 4j = l,...,N.
522
Глава 6. Методы нечеткого моделирования
Шаг IV. Определение нечеткой модели. В результате кластеризации цен-
тры т? всех кластеров определены в полноразмерном простран-
стве X хУ, что позволяет избежать перекрытия проекций двух
(или нескольких) кластеров на входное пространство X. Вместе
с тем, поскольку цель создания модели связана с вычислением вы-
ходного значения у для заданного входного вектора х, необходи-
мо выполнить проекцию центров найденных кластеров на входное
пространство, сформировать в этом пространстве кластеры и по-
строить соответствующую нечеткую модель, реализующую отоб-
ражение X —» У.
В результате выполнения кластеризации в пространстве X хУ по-
лучены с кластеров mz, координаты центров которых выражаются
в виде
т? = (6.107)
где р —число входов системы,
Х(р+1) = у — значение на выходе системы.
Координаты центра т* проекции кластера i на входное пространство
имеют вид
= [ттцг, • • • ,mxp,i]- (6.108)
Степень принадлежности = 1м(х/) произвольного элемента j (век-
тора х7- = [xij,... ,xpj]T во входном пространстве) кластеру i в простран-
стве ХхУ определяется по формуле (6.101) таким же образом, как и в
случае полного пространства. Единственное различие состоит в том, что
расстояние между вектором х7- и центром кластера определяется
только во входном пространстве по формуле
= ||х-тгх(г)||л = У(xj - mf (f))TA(xj - m*(f)). (6.109)
Размерность матрицы А равна р х р. Выходное значение у для задан-
ного вектора х/, принадлежащего входному пространству, вычисляется
по формуле
Е W(P+i)., • м;Х)
у(хД = 1-^—с--------------. (6.110)
Е m«(xJ
i=l
Вместо формулы (6.101) для вычисления степеней принадлежности
fii(xj) можно воспользоваться гауссовыми функциями принадлежности.
В этом случае центры указанных функций должны соответствовать цен-
трам найденных кластеров, а значения ширины оу следует определять как
одну треть расстояния до ближайшего кластера во входном пространстве.
Использование гауссовых функций принадлежности значительно сокра-
щает трудоемкость вычислений.
6.3. Самоорганизующиеся и самонастраивающиеся нечеткие модели 523
Замечания к FCM-методу
а) FCM-метод позволяет находить центры кластеров т; путем миними-
зации критерия взвешенной суммы квадратов евклидовых расстояний
между элементами j и кластерами г, который выражается в виде:
с N
Q = У'У2(Ми)<?11х7 - md|2min • (6.111)
г=1 j = l
б) Получаемое решение обычно соответствует только локальному,
а не глобальному оптимуму (т. е. является субоптимальным), кото-
рый зависит от начальных параметров. Поэтому для инициализации
метода следует использовать различные варианты начальных значе-
ний параметров.
в) Если выбрано подходящее число кластеров с, и структура данных
подходит для кластеризации, то FCM-метод обычно порождает сход-
ные* кластеры (устойчивость решения).
г) Подходящее число кластеров с может быть найдено методом проб
и ошибок. Менее значимые кластеры можно отбрасывать, если про-
водить оценку значимости кластеров путем их сравнения по каким-
либо критериям. В качестве критерия можно, например, использовать
мощность кластера Card;, степень /; заполнения кластера элемента-
ми, либо показатель Vai; обоснованности кластера (Dave 1997). Чем
выше суммарная степень принадлежности всех N элементов класте-
ру г, тем выше его мощность (рис. 6.108).
Степень заполнения кластера i элементами вычисляется по формуле
При различных вариантах начальных значений параметров. — Прим. ред.
524
Глава 6. Методы нечеткого моделирования
где N — число элементов. Степень заполнения характеризует среднюю
степень принадлежности элементов кластеру. Показатель Val7 обос-
нованности кластера i можно определить в соответствии с формулой,
представленной на рис. 6.109.
Определение показателя обоснованности кластера, рассматриваемое
в (Dave 1997), не поддается простой и однозначной трактовке. Чем даль-
ше элементы расположены от центра кластера ггц, и чем при этом выше
степень их принадлежности, тем большим будет значение Val2.
На основе результатов применения какого-либо показателя обосно-
ванности кластеры можно упорядочить по убыванию степени их обос-
нованности (значимости) и, по возможности, исключить те кластеры,
для которых эта степень будет наименьшей. Затем кластеризацию можно
повторить, но уже при меньшем числе кластеров. Исключение класте-
ров может сопровождаться некоторым риском, связанным с потерей важ-
ной информации о моделируемой системе. В примере на рис. 6.110 кла-
стер КЗ, представленный только одним элементом, имеет соответственно
очень низкую степень заполнения по сравнению с кластерами К1 и К2.
Между тем, данный кластер несет информацию о наличии в соответству-
ющей области входного пространства существенного скачка поверхности
модели (рис. 6.110, б). Удаление кластера КЗ и включение принадлежав-
шего ему элемента в кластер К2 приведет к модели, представленной
на рис. 6.110, в, которая будет значительно отличаться от более сложной
модели, представленной на рис. 6.110, б.
Методы кластеризации должны являться устойчивыми. Класте-
ризация считается устойчивой (Dave 1997), если выполнены следующие
условия.
1. Модель системы, полученная путем кластеризации, демонстрирует
высокую (в достаточной степени) точность. Если данные измерений
являются «чистыми» (не искажены шумом), то полученная модель
должна приводить к результатам, находящимся в некоторых установ-
ленных пределах допустимости.
6.3. Самоорганизующиеся и самонастраивающиеся нечеткие модели 525
Рис. 6.110. Кластеры, характеризующиеся большим разбросом степеней запол-
нения (а) и влияние исключения одного из кластеров (в) на точность модели (б)
2. Наличие слабой зашумленности данных не должно оказывать суще-
ственного отрицательного влияния на точность модели.
3. Сильная зашумленность данных не должна приводить к сбою моде-
ли, т. е. к такому ее поведению, которое абсолютно не соответствует
поведению моделируемой системы.
С точки зрения практических приложений, третье условие означа-
ет, что вряд ли возможно построить хорошую и устойчивую модель, если
уровень шума (ошибок) измерений превышает определенный предел (тео-
ретически, это 50%). На основе данных, чрезмерно подверженных вли-
янию шума, можно построить несколько моделей, которые будут иметь
одинаковую точность, но при этом значительно отличаться одна от дру-
гой и выдавать абсолютно разные и даже противоположные результаты,
и в такой ситуации практически невозможно указать, какая из моделей
будет подходящей или лучшей.
Обеспечение устойчивости процедуры кластеризации представляет
собой очень сложную теоретическую задачу, которая еще до сих пор
не решена. Постоянно проводятся исследования устойчивости тех или
иных методов кластеризации и разработка хороших критериев устойчи-
вости. В соответствии с результатами, полученными к настоящему мо-
менту, одно из важнейших условий обеспечения устойчивости кластери-
зации состоит в том, чтобы исключать или игнорировать подмножества
элементов, расположенных вдали от центра кластеров, в так называемой
«сомнительной области» (Dave 1997). Вместе с тем, для определения ука-
занных областей довольно сложно разработать оптимальный численный
показатель — можно ввести лишь некоторое общее предположение о том,
что устойчивость модели может быть повышена, если выявить так назы-
ваемые «большие ошибки», т. е. неправдоподобные или маловероятные
элементы выборки измерений — «выбросы» (рис. 6.111) — и исключить
их из множества данных о системе.
526
Глава 6. Методы нечеткого моделирования
Рис. 6.111. Иллюстрация понятия достоверности элемента выборки измерений
Таблица 6.16
Выборка измерений данных о моделируемой системе
Pj 1 2 3 4 5 6 7 8 9
Х=Х\ 0.7 1.4 1.2 1.8 2.5 2.3 2.4 3.0 2.1
У = *2 0.8 0.9 1.3 0.8 0.9 1.6 2.4 2.7 3.0
Понятие «достоверности элемента» является нечетким, и его опреде-
ление зависит как от субъективных взглядов исследователя, выполняю-
щего построение (задание) модели, так и от самой задачи.
Как и другие методы, основанные на минимизации суммарной квадра-
тичной ошибки, FCM-метод является чувствительным к шуму измерений
(Dave 1997). Наличие шума может стать причиной возникновения допол-
нительных локальных минимумов, где процедура кластеризации заходит
в тупик. Примером очень устойчивого метода может считаться метод
обобщенной кластеризации Хока (Dave 1997). Однако, следует отметить,
что FCM-метод имеет ряд других преимуществ, обусловливающих его
распространенность. Ниже приведен пример решения задачи с использо-
ванием FCM-метода.
Пример 6.3.3.2.1. Кластеризация с использованием FCM-метода.
Рассмотрим множество измерений данных о моделируемой системе
(табл. 6.16).
6.3. Самоорганизующиеся и самонастраивающиеся нечеткие модели 527
Рис. 6.112. Элементы выборки измерений и исходные кластеры
Шаг 0. Инициализация алгоритма. В качестве начальных параметров
выбраны:
• число кластеров: с = 3,
• показатель степени: q = 2,
• пороговое значение: е — 0.1,
• начальная матрица степеней принадлежности элементов j кла-
стерам i (выбираемая произвольно):
i
- 0.9 0.1 о -
0.9 0.1 0
0.9 0.1 0
е(о) = (/Мо)) = 0.1 0.1 0.9 0.9 0 0 1 j
0.1 0.9 0
0 0.1 0.9
0 0.1 0.9
. 0 0.1 0.9 _
Шаг I. Корректировка центров кластеров i = 1,...,с. На основе
матрицы ®(0) и формулы (6.113) определяются координаты кла-
стеров:
9
52 Mzj ’ ^Z.J
----------•
Полученные результаты представлены на рис. 6.112.
(6.113)
528
Глава 6. Методы нечеткого моделирования
Таблица 6.17
Расстояния dl3(0) между элементами j и центрами кластеров шДО)
'V 1 2 3 4 5 6 7 8 9
1 0.533 0.237 0.29 0.645 1.315 1.257 1.843 2.478 2.188
2 1.487 0.796 0.922 0.544 0.510 0.402 1.193 1.705 1.760
3 3.028 2.513 2.321 2.408 2.119 1.48 0.71 0.372 0.68
Шаг II. Корректировка матрицы степеней принадлежности. По форму-
ле (6.114) вычисляются расстояния dij между элементами j и от-
дельными кластерами г. Результаты представлены в табл. 6.17:
dij(O) =
2
~ Wu(0))2, 7 = 1,2.
z=i
(6.114)
Для вычисления значений элементов матрицы 0(1), т. е. степеней
принадлежности элементов кластерам используется формула
1
Д ЩО)'
L^(o).
(6.115)
Отсюда получаем:
i —->
’ 0.863 0.110 0.027 ‘
0.845 0.081 0.074
0.897 0.081 0.014
0.404 0.568 0.028
®(1) ~ — 0.124 0.828 0.048 i j
0.087 0.850 0.063
0.099 0.236 0.665
0.021 0.044 0.935
. 0.078 0.120 0.802 .
з
= Vj = l,...,9.
Z--1
6.3. Самоорганизующиеся и самонастраивающиеся нечеткие модели 529
У = х2
з-
2-
1 -
ти1(0) = (1.336, 1.088)
т2(0) = (2.151, 1.327)
т3(0) = (2.462, 2.560)
---1-1--1-►
0 12 3 х = х1
Рис. 6.113. Центры кластеров, полученные на итерации t = 1
Шаг III. Проверка условия завершения кластеризации. В качестве
критерия окончания процедуры кластеризации выбрано условие
(6.116), которое получено на основе формулы (6.106):
окончание процедуры.
(6.116)
ЕСЛИ ^EElMv(l)-^(0)l^0.1 то
/=1 J=1
Имеем:
- 0.863 0.110 0.027 -
0.845 0.081 0.074
0.897 0.081 0.014
0.404 0.568 0.028
@(1)-0(0)1 = 0.124 0.828 0.048
0.087 0.850 0.063
0.099 0.236 0.665
0.021 0.044 0.935
_ 0.078 0.120 0.802 _
О • ’
3^9 Е Е 1МЧ - /%(0)| = 0.073 < е3 = 0.1.
7 = 1 J = 1
Поскольку среднее изменение степеней принадлежности элементов
кластерам меньше порогового значения е = 0.1, процедуру кластериза-
ции можно завершить. Новые центры кластеров, полученные на основе
матрицы 0(1), показаны на рис. 6.113.
Средняя величина Атт^ смещения кластеров по сравнению с их пози-
цией на предыдущей итерации равна 0.267.
530
Глава 6. Методы нечеткого моделирования
Шаг IV. Построение нечеткой модели X —> У. В результате проекции
кластеров на входное пространство X получаем:
= 1.336, m* = 2.151, = 2.462.
Функции принадлежности р* (определенные во входном простран-
стве) расположены в центрах кластеров и имеют вид
ЛЦх) = з * 2 = г = 1.2,3, j = (6.117)
JX
k=i L akj J
где d* определяется по формуле
d*(х) = ||ж - т*\\ — |х - т*\. (6.118)
Выходные функции принадлежности одноточечного типа определены
в точках т( проекции центров кластеров на ось у.
т\ = 1.088, т% = 1.327, гп% = 2.560.
Функции принадлежности значений входного и выходного параметров
модели представлены на рис. 6.114.
Значение у на выходе нечеткой модели, построенной с помощью про-
цедуры кластеризации, вычисляется по формуле
Е
уЦ) = —3-----------• (6.П9)
Е
i=l
6.3.3.3. Самоорганизация и самонастройка нечетких моделей методом
поиска
Задача настройки параметров нечеткой модели (параметров входных
и выходных функций принадлежности) рассматривалась в разд. 6.2.
В данном подразделе будет рассмотрена задача одновременной настройки
и самоорганизации параметров.
Термин «самоорганизация» означает определение числа и формы пра-
вил и функций принадлежности входов и выходов модели, а также,
по возможности, вида функций принадлежности, типов операторов И,
ИЛИ и метода дефаззификации. Поиск оптимальной структуры и пара-
метров можно осуществлять методом проб и ошибок, исследуя различ-
ные, произвольно выбираемые виды структур. Вместе с тем, при приме-
нении данного метода многое остается за пределами нашего внимания,
6.3. Самоорганизующиеся и самонастраивающиеся нечеткие модели 531
У = х2
Рис. 6.114. Функции принадлежности значений входа и выхода, а также по-
верхность модели, построенной с помощью кластеризации
и процесс поиска хорошей модели может занимать продолжительное вре-
мя, поэтому в подобных ситуациях крайне желательно иметь какую-либо
предварительную информацию о моделируемой системе.
Методом, который позволяет выполнять оптимизацию наиболее слож-
ных структур моделей, является метод генетических алгоритмов. Основ-
ным его достоинством является способность находить глобальное оп-
тимальное (или субоптимальное) решение с учетом практически всех
возможных ограничений, которые могут быть на него наложены различ-
ными типами задач. Достаточно часто генетические алгоритмы использу-
ются в качестве основы метода оптимизации нечетких моделей. Различ-
ные варианты данного метода можно найти в (Hajek 1995; Jakel 1997;
Magdalena 1995; Nelles 1995; Nomura 1994; Ohki 1997; Preut 1995;
Rutkowska 1996,1997; Wagner 1997). Далее в настоящем подразделе бу-
дет описан метод генетического поиска оптимальной структуры нечеткой
модели, разработанный Нелесом и опубликованный в (Nelles 1996). До-
стоинствами указанного метода являются его ясность и возможность по-
строения так называемых «экономных» моделей, содержащих малое чис-
532
Глава 6. Методы нечеткого моделирования
ло правил, что, в свою очередь, позволяет эффективно применять этот
метод для систем с довольно большим числом входов.
Для оптимизации задачи с использованием генетического алгоритма
(ГА), задачу необходимо представить (закодировать) в виде двоичной
строки, называемой особью, хромосомой или организмом.
Хромосомой называется строка закодированных параметров задачи
или элементов ее структуры, подлежащих оптимизации. Каждая хромо-
сома представляет собой одно из возможных решений задачи и, таким
образом, соответствует точке многомерного пространства поиска. Эле-
менты хромосом, называемые генами,представляют отдельные элементы
решаемой задачи оптимизации. Множество хромосом образует популя-
цию. Размер популяции, в которой производится поиск лучшей особи,
определяется пользователем. Каждая хромосома, входящая в популяцию,
оценивается с помощью критерия, называемого функцией приспособ-
ленности.
Рассмотрим последовательность шагов традиционного ГА.
1. Инициализация алгоритма.
Кодирование задачи в виде генов и хромосом.
Определение функции приспособленности.
Определение условия завершения алгоритма (минимально допустимо-
го значения функции приспособленности).
Выбор начальной популяции хромосом.
2. Оценка степени приспособленности хромосом в популяции.
3. Проверка условия завершения поиска и, при его выполнении, вы-
бор хромосомы (решения), удовлетворяющей данному условию (конец
поиска). В противном случае переход к шагу 4.
4. Селекция хромосом, т. е. их разделение на «лучшие» и «худшие»
с целью отбора «кандидатов» на порождение новых хромосом.
5. Выполнение генетических операций. Отобранные хромосомы-
«кандидаты» используются для порождения новых хромосом с по-
мощью специальных генетических операторов.
6. Создание новой популяции. Новая популяция подлежит оценива-
нию — возврат к шагу 2.
В каждом новом поколении, т. е. на каждой итерации алгоритма про-
исходит улучшение и усиление популяции хромосом (решений). Веро-
ятность того, что конкретная хромосома переживет селекцию, т. е. ста-
нет элементом следующей популяции, пропорциональна ее степени при-
способленности. Путем селекции осуществляется смещение популяции
6.3. Самоорганизующиеся и самонастраивающиеся нечеткие модели 533
в пространстве решений в направлении областей повышения приспособ-
ленности. Наиболее часто используемыми генетическими операторами
являются операторы мутации и кроссинговера.
Операция кроссинговера рассекает строковые представления двух
хромосом в случайно выбранной позиции и производит между ними об-
мен полученными в результате рассечения фрагментами.
Операция мутации изменяет в строковом представлении хромосомы
значение одного из битов на противоположное.
Вероятность кроссинговера и мутации хромосом задается пользовате-
лем. По аналогии с естественными условиями, вероятность скрещивания
обычно близка к 1, а вероятность мутации близка к 0. Выбор подходя-
щей вероятности представляет собой непростую задачу, поскольку не все
биты (гены), составляющие хромосому, имеют одинаковую, с точки зре-
ния оптимизации, значимость. Например, хромосома 10000 соответству-
ет десятичному числу 16, и в результате мутации первого гена будет
получена хромосома 00000, соответствующая десятичному числу 0 —
в данном случае мутация привела к значительным изменениям. Если
мутации подвергается последний ген хромосомы 00001, то в результате
также будет получена хромосома 00000, что в десятичной системе соот-
ветствует изменению 1 на 0, уже не столь значительному, как в первом
случае. Поэтому представляется целесообразным каждому гену ставить
в соответствие свое значение мутации. Примером значения вероятности
кроссинговера является 0.9, а вероятность мутации составляет 0.2.
Основной задачей, возникающей в процессе поиска оптимальной базы
правил, является разработка подходящего метода кодирования. На пер-
вом этапе следует на основе предварительно заданных функций принад-
лежности определить множество всех возможных правил модели. Рас-
смотрим систему с двумя входами и одним выходом и предположим,
что с каждым входом связаны три треугольные функции принадлежно-
сти, а с выходом — множество одноточечных функций принадлежности,
при этом каждому правилу соответствует свое одноточечное заключение.
На рис. 6.115 представлено разбиение входного пространства X, а также
одноточечные множества В3 в пространстве Y.
База правил может содержать как элементарные, так и обобщающие
правила — последние представляют собой логические комбинации эле-
ментарных правил.
Примером элементарного правила является правило
Rj : ЕСЛИ (xi - А13) И (х2 = Л22) ТО (у = В3).
(6.120)
534
Глава 6. Методы нечеткого моделирования
Рис. 6.115. Пример разбиения входного пространства на основе выбранных
функций принадлежности
Элементарное правило ставит в соответствие множествам Ахз и Л22
из входного пространства одноточечное множество Bj из выходного про-
странства. Это означает, что область выходного пространства вокруг точ-
ки bj, в которой находится одноточечное множество Bj, соответствует
области входного пространства вокруг точки (рис. 6.115).
Примером обобщающего правила является правило
Rj : ЕСЛИ (xi = Ai2) ТО (у = ВД (6.121)
Данное правило получено на основе логической комбинации трех эле-
ментарных правил
R2 : ЕСЛИ = Д12) И (х2 = А21) ТО (у = ВД
R5 : ЕСЛИ (хх = ДХ2) И (х2 = А22) ТО (у = ВД
R8 : ЕСЛИ Дх = Дх2) И (х2 = Д23) ТО (у = ВД (6.122)
Указанная логическая комбинация имеет вид:
R2 ИЛИ R5 ИЛИ R8 =
ЕСЛИ Дх = Д12) И [Д2 - Д2Х) ИЛИ (х2 = Д22) ИЛИ (х2 = Д23)]
ТО (у = В7) = ЕСЛИ (ti = ДХ2) ТО (у = ВД
С помощью одного обобщающего правила, подобного (6.121), можно
описать большую область входного пространства, включающую окрест-
ности точек Р2, Р5, Р8 (рис. 6.115). Поскольку для данного правила то же
самое заключение (у = Bj) относится к большей по размеру области
входного пространства, чем в случае элементарного правила, точность
6.3. Самоорганизующиеся и самонастраивающиеся нечеткие модели 535
7?2 7?3 А9 Я10 ЯП Я12 Я13 Я14 Я15
| 1 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 1 | 1 | о | о | 0~|
Рис. 6.116. Хромосома, соответствующая одной из возможных структур базы
правил
модели, содержащей обобщающие правила, обычно ниже, чем точность
модели с элементарными правилами. С другой стороны, возможность
описания большой области на основе единственного правила позволя-
ет сократить число правил и получить «экономную» модель. Тем самым,
применение данного метода позволяет избежать явления, называемого
«проклятием размерности».
Оптимальная нечеткая модель может содержать как элементарные,
так и обобщающие правила. Поэтому до начала кодирования задачи необ-
ходимо задать множество всех возможных правил Rj. В рассматриваемом
примере подобное множество имеет следующий вид:
В1 R2 ЕСЛИ (xi = Ап) ТО (у = ВО, ЕСЛИ (xi = А12) ТО (у = ВО,
R3 ЕСЛИ (xi = А13) ТО (у = В3),
R4, ЕСЛИ (x-i = А21) ТО (у = ВО,
R5 ЕСЛИ (Ж1 = А22) ТО (у = во,
R6 ЕСЛИ (xi = А23) ТО (у = ВО,
R7 ЕСЛИ (хх = Ац) И (х2 = А21) ТО (у = В7),
R8 ЕСЛИ (zi = Ац) И (х2 = А22) ТО (у = В8),
R9 ЕСЛИ (Ж1 = Ап) И (х2 = А23) ТО (у = В9),
R1Q ЕСЛИ (Ж1 = А12) И (х2 = А21) ТО (у = В10),
R11 ЕСЛИ (хх = А12) И (х2 = А22) ТО (у = Вхх),
R12 ЕСЛИ (хх = А12) И (х2 = А23) ТО (у = В12),
R13 ЕСЛИ (хх = А13) И (х2 = А21) ТО (у = Вхз),
В14 ЕСЛИ (хх = А13) И (х2 = А22) ТО (у = В14),
В15 ЕСЛИ (хх = А13) И (х2 = А23) ТО (у = В15). (6.123)
Каждому элементу Rj множества возможных правил ставится в со-
ответствие определенный ген в хромосоме (рис. 6.116).
Позиции, занятые 1-генами, задают одну конкретную структуру базы
правил. Представленной на рис. 6.116 хромосоме соответствует такая база
536
Глава 6. Методы нечеткого моделирования
правил:
В1 : ЕСЛИ (Ж1 = АП) ТО (у = ВГ),
R3 : ЕСЛИ (zi = 413) ТО (у = В3),
Л10 : ЕСЛИ (xi = А12) И (z2 = A21) ТО (у - В10).
Till : ЕСЛИ (Ж1 = И12) И (ж2 = Л22) ТО (у = Вп),
Я12 : ЕСЛИ (xi = А12) И (ж2 = Лаз) ТО(у = В]2). (6.124)
Несмотря на то, что база (6.124) содержит только 5 правил, она по-
крывает всю область значений входов. При использовании только элемен-
тарных правил для покрытия той же области потребовалось бы 3 • 3 = 9
правил (R7-/?15), входящих в базу (6.123).
Еще одной важной задачей, возникающей на этапе инициализации
алгоритма, является определение функции приспособленности. Для оце-
нивания структуры модели представляется целесообразным использовать
функцию F, которая учитывала бы следующие два аспекта: число R пра-
вил в базе и точность модели, выражаемую, например, с помощью абсо-
лютной ошибки Е в условиях используемой выборки измерений:
F =
(6.125)
N
г=1
N — число элементов выборки измерений, у — выходное значение систе-
мы, у™ — значение на выходе модели.
Функция приспособленности F является обратной по отношению
к функции потерь S = Е + &R, которая является мерой «неприспособ-
ленности» модели. Коэффициент а, задаваемый пользователем, изменяет
важность и значимость числа правил по отношению к форме получаемого
решения. При больших значениях а решение будет содержать меньшее
число правил, обеспечивая при этом меньшую точность модели, в то вре-
мя как меньшие значения а будут приводить к противоположным резуль-
татам. На этапе постановки задачи можно задать максимально возмож-
ное значение числа правил, и тогда в процессе поиска модели с большим
числом правил будут отбрасываться.
Если требуется выполнить оптимизацию нечеткой модели с учетом
не только числа правил, но и других параметров, например, числа функ-
ций принадлежности для каждой переменной, типа операторов И, ИЛИ,
метода импликации, метода дефаззификации и др., то строка генов, зада-
ющих правила (6.121), должна иметь дополнительные связанные с ними
6.3. Самоорганизующиеся и самонастраивающиеся нечеткие модели 537
а) Число функций принадлежности для каждой переменной
2 3 4 5 ...............
I О I 1 I О I О I I I
б) Оператор И
MIN PROD H.PROD. MEAN ..................
I О I 1 I о I о I ~
в) Оператор ИЛИ
MAX L.SUM E.SUM H.SUM .................
I О I 1 I о I о I
в) Метод дефаззификации
Z?2 D3 . . .
I О I О I 1 I 0~Г
где: Di - метод одноточечных множеств,
D2 - метод центра тяжести при выводе типа МАХ - MIN,
D3 - метод центра тяжести при выводе SUM - MIN,
D4-...
Рис. 6.117. Примеры фрагментов генетической строки, кодирующих различные
параметры нечеткой модели
участки, соответствующие закодированному представлению интересую-
щих элементов модели (рис. 6.117).
Хромосома, которая содержит фрагменты, отвечающие закодирован-
ному представлению всех параметров и элементов структуры нечеткой
модели, представляющих интерес для пользователя, называется струк-
турной хромосомой или кодом структуры модели.
В начале процесса поиска произвольным образом создается исходная
популяция структурных хромосом, которая, в соответствии с процедурой
генетического алгоритма, далее подвергается эволюции. При этом оцен-
ка степени приспособленности хромосомы может представлять собой от-
дельную проблему, поскольку каждая хромосома задает лишь структуру
модели, не определяя ее оптимальных параметров. Поэтому поиск оп-
тимальных параметров для каждой хромосомы в популяции становится
отдельной, самостоятельной задачей, которую можно рассматривать как
локальную оптимизацию в пределах структуры, задаваемой конкретной
хромосомой. Объектами параметрической оптимизации являются модаль-
ные значения, значения ширины и другие параметры входных и выходных
538
Глава 6. Методы нечеткого моделирования
функций принадлежности, представленных в модели, и для выполнения
подобного типа оптимизации можно использовать как глобальные мето-
ды, например, генетические алгоритмы (см. разд. 6.2.2), так и локальные
методы, например, нейронечеткие сети, обучение которых осуществляет-
ся на основе измерений входных и выходных параметров системы или
метода наименьших квадратов суммарной ошибки.
Методы ГА позволяют найти приемлемое глобальное решение сре-
ди сколь угодно большого их множества, избежав при этом комбина-
торного «взрыва». Тем не менее, эмпирическим путем было установлено
(Nelles 1996), что с увеличением пространства решений увеличивается
также время поиска. Поэтому число параметров модели и элементов ее
структуры, подлежащих оптимизации, рекомендуется ограничивать необ-
ходимым минимумом. Вместо одновременной оптимизации параметров
всех имеющихся функций принадлежности можно выбрать определен-
ные значения параметров входных функций и оптимизировать параметры
только выходных функций, т. е. координаты одноточечных множеств —
это обеспечит возможность быстрой оптимизации на основе метода наи-
меньших квадратов.
Помимо этого, использование генетических алгоритмов увеличивает
время поиска при оптимизации параметров входных и выходных функций
принадлежности. Хотя генетический метод и носит глобальный характер,
он оперирует лишь с ограниченным числом дискретных значений соот-
ветствующих параметров, т. е., в отличие от нейронных сетей, он работает
в дискретном, а не в непрерывном пространстве. Поэтому на практике,
несмотря на то, что нейронная сеть выполняет лишь локальную опти-
мизацию, ее использование может обеспечить лучшие решения, чем те,
которые получаются с помощью генетических алгоритмов.
Подводя итог, укажем, что для оптимизации структуры модели, ко-
торая имеет дискретную природу, рекомендуется использовать глобаль-
ные методы, например генетические алгоритмы. Но при этом оптимиза-
ция параметров с непрерывной областью значений должна выполняться
с применением методов, имеющих более высокое быстродействие, таких
как метод наименьших квадратов или метод, основанный на использова-
нии нейронечетких сетей. Теоретические положения и подробное описа-
ние генетических алгоритмов можно найти во многих книгах, например
(Mitchell 1996; Goldberg 1995; Michalewicz 1996)*.
* См. также книги на русском языке: Гладкое Л. А., Курейчик В.М., Курейчик В. В.
Генетические алгоритмы. М..: Физматлит, 2006; Емельянов В. В., Курейчик В.М., Ку-
рейчик В. В. Теория и практика эволюционного моделирования. М.: Физматлит, 2003.—
Прим. ред.
Глава 7
Нечеткое управление
7.1. Статические нечеткие регуляторы
Статическими объектами, а также некоторыми из динамических объектов
можно управлять с помощью статических регуляторов. Это осуществля-
ется путем формирования сигнала управления и на основе сигнала ошиб-
ки е согласно характеристике регулятора и = F(e) (рис. 7.1).
Такие регуляторы обычно используются при работе с объектами, для
которых требования по точности управления невысоки. В качестве при-
мера можно указать управление температурой в комнате, управление ра-
ботой холодильника, регулирование температуры электрического утюга,
управление оборотами электродвигателя в некоторых устройствах и т. п.
Если статический регулятор справляется с задачами, возложенными
на него, то его использование совершенно оправданно, особенно если
учесть его невысокую стоимость. На рис. 7.2-7.7 дается ряд типичных
примеров различного рода статических регуляторов, а также их нечетких
вариантов.
Из рис. 7.2-7.7 видно, что для любого из традиционных статических
регуляторов можно привести его нечеткий вариант. Это относится и к
регуляторам с гистерезисом (рис. 7.5), однако в данном случае регулятор
будет уже динамическим, а не статическим, поскольку его текущий вы-
ходной сигнал u(f) зависит от значения выхода u(t—1) в предшествующий
момент времени. Из рис. 7.6 видно, как можно упростить характеристику
регулятора путем соответствующего выбора функций принадлежности.
С другой стороны, увеличение числа входных и выходных функций при-
Рис. 7.1. Система управления со статическим регулятором
540
Глава 7. Нечеткое управление
Рис. 7.2. «Линейный» статический регулятор и его нечеткий вариант
L
S
е
1
Д11ЕСЛИ (е = 5)ТО (м = 5)
R2-. ЕСЛИ (е = £) ТО (м = £)
1-
L
е
Рис. 7.3. Двухпозиционный регулятор действий и его нечеткий вариант
надлежности, как это показано на рис. 7.7, позволяет повысить степень
сложности характеристики регулятора.
Если использовать функции принадлежности различного вида, можно
получить любую нелинейную характеристику регулятора. Исследования,
проведенные специалистами в области нечеткой логики (см., например
(Wang 1994)), показали, что нечеткие модели являются универсальными
аппроксиматорами для моделируемых систем, т. е. с их помощью мож-
но получать приближенные представления систем с любой наперед за-
данной точностью. Различие между обычным статическим регулятором
и нечетким статическим регулятором заключается в том, что алгоритм
7.1. Статические нечеткие регуляторы
541
Рис. 7.4. «Линейный» статический регулятор с зоной нечувствительности и
насыщением и его нечеткий вариант
R2: ЕСЛИ (e(t) = N2) ТО (u(t) = N2)
R3: ЕСЛИ 0(0 = Z) И 0(0 - e(t - 1) > 0) ТО (w(0 =
R4: ЕСЛИ 0(0 = Z) И (e(t) - e(t - 1) = 0) И (u(t - 1)=N2) ТО (w(0 = N2)
R5: ЕСЛИ 0(0 = Z) И 0(0 - e(t - 1) = 0) И (u(t - 1) = Px) TO (u(t) = Px)
R6: ЕСЛИ O(0 = Z) И l)<0) TO 0(0 = Л)
Rl: ЕСЛИ О(0 = Л) TO (u(t) = P{)
RZ: ЕСЛИ 0(0 = P2) TO 0(0 = Л)
Рис. 7.5. Регулятор с гистерезисом и насыщением и его нечеткий вариант
работы нечеткого регулятора формулируется с помощью простых и по-
нятных лингвистических правил, а не в виде математических выражений
общепринятого вида.
542
Глава 7. Нечеткое управление
R1: ЕСЛИ (e = N) ТО (u = N) R2: ЕСЛИ (е = Р) ТО (и = Р)
Рис. 7.6. Статический регулятор с насыщением по входному сигналу и его
нечеткий вариант с кусочно-линейными функциями принадлежности (а) и с
гладкими функциями принадлежности, такими, например, как функция Гаусса
или sin(x) (б)
7.2. Динамические нечеткие регуляторы
Наиболее часто используемый на практике динамический регулятор —
это ПИД-регулятор*. Настройку его можно выполнить, например, ис-
пользуя простые и надежные правила Циглера—Николса. Система управ-
ПИД — пропорционально-интегрально-дифференциальный. — Прим. ред.
7.2. Динамические нечеткие регуляторы
543
: ЕСЛИ (е=Ар ТО (и = Вх)
R2: ЕСЛИ (е=А2) ТО (и = В2)
ЯЗ: ЕСЛИ (е=А3) ТО (и = В3)
Я4: ЕСЛИ (е=А4) ТО (и = В4)
R5: ЕСЛИ (е=А5) ТО (и = В5)
R6: ЕСЛИ (е=А6) ТО (и = В6)
R7: ЕСЛИ (е=А7) ТО (и = В7)
Я8: ЕСЛИ (е=Л8) ТО (и = Я8)
Рис. 7.7. Усложненная статическая характеристика регулятора и ее нечеткий
вариант
ления общего вида показана на рис. 7.9, а система с ПИД-регулятором —
на рис. 7.10.
Если положить ki = 0, получим ПД-регулятор, упрощенный вари-
ант ПИД-регулятора. При кы = 0 ПИД-регулятор преобразуется в ПИ-
регулятор, а при kj = ко = 0 — в П-регулятор. Встречаются также и ре-
гуляторы, более сложные, чем ПИД-регулятор, например, ПИДД2.
В цифровых вариантах регуляторов численное дифференцирование
наиболее часто осуществляется с использованием выражения вида
ер(/с) =
е(к) - е(к — 1)
Т
(7.1)
544
Глава 7. Нечеткое управление
Z-----►----
N-----► -
7? 1: ЕСЛИ (e = N)TO (u = N)
R2: ЕСЛИ (e = Z)TO(u = Z)
/?3: ЕСЛИ (е = Р)ТО (и = Р)
1
Рис. 7.8. Трехпозиционный регулятор действий и его нечеткий вариант
сравнивающий
обобщенный объект
Рис. 7.9. Система управления с динамическим регулятором: обозначения
где Т — интервал дискретизации по времени. Численное интегрирование
выполняется согласно выражению
к
edk) = T-22e(j),
,r=1
(7.2)
7.2. Динамические нечеткие регуляторы
545
Рис. 7.10. Система управления с обычным ПИД-регулятором, kp, kj, кр = const
или, в более точном варианте, с помощью метода трапеций Тастина:
к
еН^) = |-Е(Ф) + Ф'-1))- (7.3)
Операция D2 (DD) может выполняться путем вычисления дискретной
аппроксимации второй производной сигнала ошибки согласно выражению
e(fc)-2e(fe-l) + e(fe-2)
На практике для подавления высокочастотных возмущений к диффе-
ренцирующему элементу D добавляется некоторый фильтр (звено перво-
го порядка с запаздыванием, с постоянной времени Ту). В таком случае
выход ер данного элемента вычисляется в соответствии с выражением.
eD(k) = e.(fc)"e(fc-l) + r/eD(fc-1) . (7.5)
Т + Tf
С элементом типа DD может использоваться фильтр второго порядка.
Интегрирующее звено лучше работает вместе с так называемым эле-
ментом компенсации нелинейностей типа «насыщение» (Franklin 1986)
согласно схеме, показанной на рис. 7.11.
Для приводов характерны ограничения (насыщение) t/cmax и [7cmin
по величине вырабатываемого сигнала. По этой причине они могут ока-
заться не в состоянии выдать то значение сигнала управления, кото-
рое вычислил регулятор согласно используемому им алгоритму. Элемент
компенсации нелинейностей типа «насыщение» предотвращает перегруз-
ку интегрирующего элемента и выдачу им слишком больших значений
сигнала. Таким способом удается уменьшить перерегулирование и коле-
бания в рассматриваемой системе, а также обеспечить работу регулятора
546
Глава 7. Нечеткое управление
Рис. 7.11. Схема соединения элемента компенсации нелинейности типа «насы-
щение» с интегрирующим звеном в ПИД-регуляторе
с более высокими значениями коэффициентов усиления, что повышает
качество регулирования.
Нечеткие ПИД-регуляторы чаще всего реализуются в цифровой фор-
ме. При этом используется один из двух вариантов: прямое регулирова-
ние (рис. 7.12, а) и инкрементное регулирование (рис. 7.12, б).
В варианте прямого регулирования регулятор вычисляет непосред-
ственное значение управляющего сигнала Uk на каждом шаге дискрети-
зации. В инкрементном варианте вычисляется только величина Дг/&, на
которую следует изменить управляющий сигнал, после чего полная ве-
личина управляющего сигнала определяется с помощью суммирующего
элемента. Следует также отметить, что в инкрементном варианте, в дина-
мической части рассматриваемого регулятора, вычисляются только при-
ращения входов Дщ: и Д(Дзд), отвечающие первой и второй производ-
ным сигнала ошибки. Сумма
к
('<=Т^ ei
J=1
здесь не вычисляется, в отличие от варианта с прямым регулировани-
ем. Вариант с прямым регулированием менее чувствителен к шуму е
во входном сигнале. По этой причине регулятор данного вида будет ни-
же предметом изучения. В обычном ПИД-регуляторе выход регулятора и
вычисляется как сумма выходов динамической части, умноженных на
соответствующие коэффициенты усиления:
и — кр • ер + kj • е/ + кр • ер.
(7-6)
7.2. Динамические нечеткие регуляторы
547
Рис. 7.12. Варианты нечеткого ПИД-регулятора для прямого (а) и инкремент-
ного (б) регулирования
Итак, выход и представляет собой линейную комбинацию входов ста-
тической части. Коэффициенты усиления кр, к/, кр постоянны и не за-
548
Глава 7. Нечеткое управление
висят от значений сигналов. В случае нечеткого ПИД-регулятора стати-
ческая часть которого показана на рис. 7.13, все выглядит по-другому.
В общем виде структура нечеткой части рассматриваемого регулятора
показана на рис. 7.13. Для фаззификации каждого из сигналов ер, ер, е/
используются три нечетких множества N, Z, Р. Дефаззификация осу-
ществляется по методу одноэлементных нечетких множеств с использо-
ванием 27 множеств Bi,... . В27- В соответствующую базу правил входит
27 элементов-правил:
R1 : ЕСЛИ (ер - N) И (е/ = N) И (ер = N) ТО (u = BJ,
R2 : ЕСЛИ (еР = N) И (е/ = N) И (eD - Z) ТО (и = В2\
R27 : ЕСЛИ (еР = В) И (е7 = В) И (ер = Р) ТО (и = В27). (7.7)
Все возможные комбинации множеств входов TV, Z, В выражают-
ся посредством исходных посылок в правилах, порождая в итоге прави-
ла (7.7). При этом некоторому данному правилу Ri соответствует един-
ственное выходное множество Вг, i = 1,... ,27.
Фаззификация, реализуемая на основе двух нечетких множеств, N
и Р, позволяет получить менее сложный вариант нечеткого ПИД-
регулятора, как это показано на рис. 7.14.
Описанная выше ситуация означает, что полная база правил будет
состоять из 8 правил. Таким образом, существуют различные варианты
реализации нечетких ПИД-регуляторов. Рост числа нечетких множеств,
связанных с входами, «порождает» увеличение числа используемых пра-
вил. Кроме того, это приводит к усложнению структуры формируемого
нечеткого регулятора.
В связи с этим возникает несколько вопросов:
1. Сколько нечетких множеств следует поставить в соответствие входам
и сколько правил надо использовать в нечетком регуляторе?
2. В чем состоят различия между обычным ПИД-регулятором и нечет-
ким ПИД-регулятором?
Рис. 7.14. Простейший вариант дефаззификации
для нечеткого ПИД-регулятора
7.2. Динамические нечеткие регуляторы
549
3. Есть ли какие-то соображения относительно предпочтительности
использования нечетких ПИД-регуляторов, если обычные ПИД-
регуляторы с успехом применяются уже несколько десятков лет?
Выражение (7.6) определяет линейный оператор, реализуемый обыч-
ным ПИД-регулятором. Нелинейная операция, осуществляемая нечетким
ПИД-регулятором (см. рис. 7.15), может быть выражена в виде
4 4 4
U = У2 52 52 viwj^(.aoijk + a2ijkei + a3ijkeD + a4yfeepe/+
i=l j = l k=l
4- (Zujfcep + a5ijkepep + a^ij^ejep + aTijk^peiep). (7.8)
Здесь фаззификация основана на использовании трех нечетких мно-
жеств, логическая операция И реализуется с помощью оператора PROD,
а для дефаззификации применяется метод одноточечных множеств.
Логические переменные Wj, отражают информацию относитель-
но текущих значений принадлежности рассматриваемых входных сигна-
лов некоторому заданному сектору используемого входного пространства.
Например, значение и* задается с помощью отношений следующего вида:
Щ =
m =
для ер epi,
в остальных случаях;
для epi < ер < ер2,
в остальных случаях;
для ер2 < ер ерз,
в остальных случаях;
для ерз < ер,
в остальных случаях.
(7.9)
Аналогичное объяснение можно дать и для переменных wj,
(см. рис. 7.15). Можно просто проверить, что некоторый нечеткий ПИД-
регулятор (далее для него иногда будет использоваться аббревиатура
550
Глава 7. Нечеткое управление
НПИД) реализует отображение входов в выходы, которое можно предста-
вить в виде полилинейной гиперповерхности, собранной из 64 сегментов
(все возможные комбинации г^, Wj, q^, i, j,k = 1,2,3,4). Конечно, такую
поверхность, характеризующую способ функционирования регулятора,
нет возможности представить в графическом виде (пространство К4). От-
сюда следует, что последующее изложение надо сосредоточить на НПД-
регуляторах. В этом случае (см. рис. 7.16) требуемая гиперповерхность,
отвечающая отображению входов в выходы, состоит из 16 прямоугольных
полилинейных секторов.
Поверхность такого рода, отвечающая традиционному ПИД-
регулятору, показана на рис. 7.16, а. Это обычная плоскость с двумя
свободными параметрами kp, kp, задающими ее наклон в принятой
системе координат. Соответствующая поверхность для нечеткого ПИД-
регулятора составлена из 16 сегментов, представляющих собой полили-
нейные поверхности, стыкующиеся между собой по отрезкам прямых
линий (ребрам). Эти сегменты могут быть расположены в пространстве
различным образом. К тому же, можно воздействовать на характеристи-
ки выпуклости этих сегментов. Настройки, о которых идет речь, можно
выполнять, подбирая соответствующим образом значения 15 свободных
переменных в описании данной поверхности (модальные значения функ-
ций принадлежности для входов ер, ер и выхода и). Возможность гибко
изменять форму нелинейной поверхности переключения для данного
регулятора очень важна, поскольку позволяет обеспечить высокое каче-
ство регулирования. Такое повышение качества легче обеспечить, если
регулятор обладает большей гибкостью. Разумеется, такая гибкость тем
выше, чем большее число сегментов образует поверхность переключе-
ния регулятора. Это число сегментов прямо зависит от числа функций
принадлежности. Тем не менее, следует минимизировать число функций
принадлежности, чтобы избежать серьезных трудностей, которые могут
возникнуть при подборе значений многочисленных параметров настрой-
ки регулятора. Таким образом, приемлемый вариант регулятора должен
быть максимально простым из числа тех, что обеспечивают требуемую
точность управления объектом.
Превосходство нечеткого ПИД-регулятора подтверждается следую-
щими соображениями. Должным образом спроектированный нечеткий
ПИД-регулятор (т. е. такой, для которого корректно выбраны вид опе-
раторов И, процедуры дефаззификации и вывода на правилах, а так-
же функции принадлежности) может «воспроизвести» отображение вхо-
дов в выходы, осуществляемое любым обычным ПИД-регулятором (Voit
1994). Обратная задача («воспроизведение» нечеткого ПИД-регулятора
7.2. Динамические нечеткие регуляторы
551
Рис. 7.16. Поверхность, представляющая отображение входов в выходы для
обычного ПД-регулятора (а) и нечеткого ПД-регулятора (б)
с помощью обычного ПИД-регулятора) решения обычно не имеет. По
мнению ряда авторов (см., например, (Isermann 1996)) нечеткие ПИД-
регуляторы следует применять только для управления нелинейными объ-
ектами, особенно в случаях, когда модель такого объекта с требуемой
точностью получить трудно или вообще невозможно. Согласно этому
552
Глава 7. Нечеткое управление
Рис. 7.17. Система управления с обратной связью
спорному подходу, линейными объектами надо управлять с помощью
обычных ПИД-регуляторов.
Чтобы разобраться в этой проблеме, сформулируем следующий во-
прос: в самом ли деле линейный регулятор, применяемый для управления
линейным объектом, обеспечивает «более высокое» качество регулиро-
вания по сравнению с нелинейным регулятором? Обсуждаемое качество
управления оценивается на основе критериев (показателей) качества, вы-
бранных некоторым образом. Что же выражают эти критерии?
На рис. 7.17 показана система управления с обратной связью. Наи-
более распространенная «мера», оценивающая качество регулирования
для таких систем — квадратичный критерий. Эта мера представляет со-
бой площадь под кривой, полученной как квадрат реакции e2(t) рассмат-
риваемой системы на единичное ступенчатое входное воздействие, если
данная ступенчатая функция представляет собой задающий (входной)
сигнал yo(t) = l(t), (^Що) или возмущающее воздействие d(f) — l(t),
(7<ы). Разработчик системы стабилизации должен понимать, что демп-
фирование возмущений d — это более важная задача, чем отслеживание
значения входного сигнала.
Квадратичные критерии для непрерывных (индекс «с») и дискретных
(индекс «d») систем управления могут быть представлены в таком виде:
^1У0 = min / еуо (f) dt, К?у0 = min еу0
о fc=1
сю сю
Kid = min [ ea^dt, K^d = miny2ed(k') 'т- (71°)
о
Согласно другой точке зрения, следует минимизировать обобщенные
«расходы» на управление (сигнал и) в ходе работы регулятора и демпфи-
рования возмущений. Критерии, отвечающие такому подходу, могут быть
7.2. Динамические нечеткие регуляторы
553
представлены в следующем виде:
оо
«у0 (t) dt, К%у0 = min u20 (k) T,
о ^=1
oo
K2d = min / u2d(t) dt, K%d = min У2 u2d(k) T. (7.11)
о fc=i
Существуют системы управления, основанные на минимизации квад-
рата производной (скорости изменения) входного сигнала и объекта
управления. Такая «оптимизация» обеспечивает «плавную» работу при-
вода (Kuhn 1994), а также минимизацию числа переключений (+/-). По-
мимо интегральных показателей, оценивающих характеристики регули-
рования, очень полезными могут оказаться критерии, выражаемые через
значения некоторых величин, характеризующих процесс изменения сиг-
нала ошибки е при воздействии на систему единичного начального откло-
нения yo(t) — l(t) или возмущающего сигнала d(t) = l(t) (см. рис. 7.18
и рис. 7.19).
Качество отслеживания системой управления задающего сигнала, по-
даваемого на ее вход, оценивается обычно с помощью таких показателей,
Рис. 7.18. Сигнал ошибки е для опорного сигнала уД1) — 1(f)
Рис. 7.19. Сигнал ошибки е, полученный в качестве реакции
на возмущающий сигнал d(t) = 1(£)
554
Глава 7. Нечеткое управление
как статическая (установившаяся) ошибка estyo, перерегулирование ovyo
и время успокоения системы tsyo, Соответствующие условия, определя-
ющие приемлемое качество процесса отслеживания входного сигнала,
устанавливают, что величины этих показателей должны лежать в допу-
стимых пределах. Сопротивляемость системы управления по отношению
к возмущающему воздействию d можно измерить с помощью таких по-
казателей, как время успокоения системы tsd, максимальная амплитуда
сигнала ошибки emmd и статическая ошибка estd-
Амплитуды сигнала ошибки е для всех t > ts, где ts — так называемое
время успокоения системы, удовлетворяют условию |е| < 5, где 5 пред-
ставляет собой требуемую точность регулирования (см. рис. 7.18 и 7.19).
Например, можно положить 5 равным 2% или 5% от амплитуды задаю-
щего сигнала. Относительное перерегулирование ovyo определяется вы-
ражением
ovV0 = . (7.12)
Уо
Установившаяся ошибка est может быть определена как амплитуда
сигнала ошибки системы управления после завершения переходного про-
цесса, вызванного воздействием сигналов у$ или d. Тогда набор инте-
гральных критериев К\ и К? можно дополнить «сегментированными»
критериями следующего вида:
К3у0 = mintsyo, K3d = mintsd.
KiyQ = min ovyo, • ^mmd - mm —-— , d
K5yo = minestyo, K$d = mine^. (7.13)
Все приведенные выше критерии Ki представляют собой нелиней-
ные функции параметров регулятора, даже для случая линейного объек-
та управления и линейного регулятора. Таким образом, если исходить
из качества регулирования, то любую задачу управления, независи-
мо от вида регулятора (линейного или нелинейного), можно тракто-
вать как нелинейную (Hunt 1992).
Нечеткий регулятор, фактически реализующий нелинейное отображе-
ние входов в выходы, отвечает задаче оптимизации по нелинейному кри-
терию намного лучше, чем линейные регуляторы. Кроме того, у нечетких
регуляторов больше обычно и степеней свободы (настраиваемых пара-
метров). Например, рассмотренный выше нечеткий ПИД-регулятор, ос-
нованный на трех нечетких множествах для каждого входа, обладает
15 степенями свободы, тогда как обычный линейный ПИД-регулятор —
всего лишь тремя (можно выбирать значения параметров кр, к[ и кр).
7.3. Формирование структур и настройка параметров регуляторов 555
Значимость числа степеней свободы регулятора, имеющихся в рас-
поряжении разработчика управляемой системы, можно лучше ощутить,
если представить себе, что значения критериев обычно анализируются
для различных амплитуд сигналов уо и d. Кроме того, следует принять
во внимание, что оценка качества управления часто осуществляется на
основе нескольких частных критериев Ki одновременно. Это значит, что
задачу оптимизации управляемой системы следует трактовать как мно-
гокритериальную:
К = min(aiAj + 02^2 + ... + anKn), (7.14)
где — весовые коэффициенты, п — количество частных критериев.
Широко используемый критерий, основанный на учете ошибки и сто-
имости управления
t
К = min J [qc2(^) + (1 — a)u2(t)] dt, (7.15)
о
представляет собой один из хороших примеров использования многокри-
териальное™.
Большее число степеней свободы, которыми обладает нечеткий ре-
гулятор, означает, что требование минимизации по частным критериям
в многокритериальных задачах можно выполнить намного проще! Отно-
сительно небольшое число степеней свободы, присущее обычному линей-
ному ПИД-регулятору, делает решение упомянутой задачи существенно
сложнее (из-за взаимосвязей между частными критериями, противоре-
чивости требований, обусловленных различными показателями и т. д.).
Итак, есть важные причины предпочесть нечеткие регуляторы и в слу-
чае линейных объектов управления.
7.3. Формирование структур и настройка
параметров нечетких регуляторов
К числу подходов, ориентированных на синтез нечетких регуляторов,
относятся следующие:
I. На основе знаний, полученных от экспертов.
II. Путем моделирования действий эксперта в качестве регулятора (на
основе управляющих сигналов, вырабатываемых экспертом).
III. На основе модели объекта управления.
Нечеткое управление представляет собой одну из наиболее важных
областей применения методов нечеткой логики (Abdelnour 1992; Cao
556
Глава 7. Нечеткое управление
1997b; Fisher 1996; Fischle 1997; Gupta 1991; Gorez 1996; Hanss 1996b;
Hunt 1992; Iwasaki 1990; Isaka 1993; Isermann 1996; Jantzen 1997; Kouatli
1991; Koch 1994; Kang 1995; Kuhn 1996; Li 1995; Lewis 1996; Lopez 1997;
Preuss 1992; Wang 1995b; Wu 1994; Ying 1993).
Модели объектов управления не являются безоговорочно необходи-
мыми для синтеза нечетких регуляторов (Ying 1994). Этот факт сле-
дует рассматривать как огромное преимущество нечеткого подхода, по-
скольку проектирование обычных систем управления с использованием
пространства состояний или частотных представлений основывается на
приближенных моделях объектов управления. Разумеется, сказанное вы-
ше не означает, что знание об объекте управления бесполезны для слу-
чая нечетких регуляторов. Если рассуждать формально, методы I и II
не используют моделей объектов управления, поскольку они основаны
на знаниях некоторого опытного эксперта, который освоил «искусство»
управления объектом в ходе многочисленных экспериментов (попыток),
выполняя свою повседневную деятельность, относимую к категории «руч-
ное управление объектом». Очевидно, что «внутри» экспертного знания,
относящегося к свойствам объекта управления и его динамическому по-
ведению, содержится интуитивная модель некоторого вида для данного
объекта. Чтобы успешно управлять автомобилем, водителю нет необходи-
мости знать его математическую модель. Этому водителю просто нужен
опыт и практика, что дает ему возможность «ощущать» и «понимать»
поведение автомобиля в различных условиях (например, при различных
скоростях, уклонах дороги и т. п.) и при различных управляющих воз-
действиях (вращение рулевого колеса, нажатие на педали тормоза, сцеп-
ления и акселератора, переключение передач и т. д.). Общеизвестно, что
даже хорошему водителю требуется привыкнуть к новому для него ав-
томобилю, ведь только «чувство автомобиля» позволяет ему управлять
легко и непринужденно. Существует много областей, где математические
модели объектов управления можно заменить опытом экспертов (пило-
тирование самолетов, управление судами, управление подъемными кра-
нами, диспетчерское управление производственными процессами и т. д.)
7.3.1. Проектирование нечетких регуляторов на основе
экспертного знания об объекте управления
Для проектирования нечеткого регулятора можно использовать знания
эксперта относительно объекта управления. Разработчик нечеткого регу-
лятора должен накопить требуемый объем знаний путем опроса опытно-
го оператора, работающего с данным объектом. Получаемое экспертное
7.3. Формирование структур и настройка параметров регуляторов 557
знание может быть выражено как совокупность лингвистических правил
следующего вида:
ЕСЛИ (х = Л) ТО (у = (7.16)
где у — управляемый сигнал, ах — набор сигналов, воспринимаемых экс-
пертом. Здесь Аи В представляют собой лингвистические оценки, напри-
мер, «малый», «большой», «медленный», «быстрый» и т. д. Помимо линг-
вистических правил, эксперт должен сообщить о своем понимании этих
лингвистических оценок. Такого рода информация важна для определе-
ния существенных параметров функций принадлежности, в особенности
их модальных значений.
Пример 7.3.1.1. Разработку нечетких регуляторов на основе экспертного
знания можно проиллюстрировать следующим примером, который отно-
сится к управлению крановой тележкой портального крана (Watanabe
1991; Zimmermann 1994b).
При транспортировке контейнеров (см. рис. 7.20) случается так, что
контейнер начинает раскачиваться (трос, крепящий контейнер к крановой
тележке, выходит из отвесного положения), причем угловые перемеще-
ния 0 контейнера могут быть весьма велики. Эту раскачку следует оста-
новить до того момента, когда контейнер будет доставлен к месту назна-
чения. В противном случае раскачивающийся контейнер, подобно тяже-
лому молоту, может повредить соседние контейнеры. Оператор порталь-
ного крана управляет скоростью перемещения крановой тележки посред-
ством рычага, который может быть помещен в любое положение, находя-
Рис. 7.20. Портальный кран, транспортирующий контейнер
558
Глава 7. Нечеткое управление
щееся между двумя крайними положениями данного рычага. Оператор
должен «чувствовать» реакции тележки при различных массах контей-
неров (массы различных контейнеров могут отличаться друг от друга),
чтобы предпринимать соответствующие управляющие действия с исполь-
зованием рычага управления. Есть два возможных способа управления
тележкой, при которых в экспертном знании нет необходимости.
Первый из эти двух подходов состоит в том, чтобы перемещать тележ-
ку на достаточно малой скорости, при которой раскачка груза не возни-
кает. Второй способ заключается в переноске контейнера на высокой ско-
рости в точку, которая находится над местом назначения. В этом случае
может возникнуть раскачка груза. Поэтому оператор, быстро переместив
контейнер в указанную точку, должен затем выждать некоторое время,
требуемое для затухания колебаний. После этого груз медленно опуска-
ется на то место, куда он должен был быть перемещен. Оба этих способа
требуют значительного времени для выполнения транспортировки кон-
тейнера. Опытный оператор портального крана применяет другие способы
управления. Он может переместить контейнер в требуемое место очень
быстро, с последующим эффективным гашением раскачки груза над этим
местом. Обычный ПИД-регулятор не в состоянии справиться с задачей
управления крановой тележкой вследствие существенной нелинейности
процесса, которым требуется управлять. Если расстояние d между те-
лежкой и местом назначения велико, на раскачку контейнера можно не
обращать внимания и оператор может поддерживать высокую скорость
перемещения тележки. По мере сокращения этого расстояния, оператор
начинает гасить раскачку груза. В конце концов, угловые перемещения
0 контейнера вблизи места назначения почти полностью затухают. Это
значит, что контейнер можно быстро опустить вниз сразу же, как только
будет достигнуто место назначения. Опытный оператор может успешно
менять свои управляющие действия, если возникают какие-либо возму-
щения. Такого рода изменения зависят от интенсивности и направления
ветра, а также от веса контейнера.
Наличие трения покоя (статического трения) существенно усложняет
управление движением портального крана. Чтобы кран начал движение,
крутящий момент электродвигателя должен «пересилить» сопротивление,
обусловленное трением покоя. Когда кран пришел в движение, сопротив-
ление трения внезапно становится малым. Этот феномен (особенно когда
контейнер находится недалеко от места назначения и требуемые переме-
щения для него невелики) существенно осложняет для неопытного опе-
ратора решение задачи перемещения груза. Ему приходится переключать
двигатель «вперед» и «назад», причем делать это многократно. Частое
7.3. Формирование структур и настройка параметров регуляторов 559
реверсирование вращения электродвигателя сокращает его срок служ-
бы. Кроме того, такие переключения вызывают рывки, которые мешают
гасить колебания груза.
Хотя управление транспортировкой контейнера представляет собой
непростую задачу, есть возможность справиться с ней успешно. Правила,
представленные ниже, были получены на основе значительного по объ-
ему опроса операторов крана (экспертов), а также путем наблюдений за
их «реакциями» на описанное выше явление при перемещении грузов
(Alltrock 1993):
R1: ЕСЛИ (d = большое) ТО (F = положительное большое),
R2: ЕСЛИ (d = малое) И (0 = отрицательное большое)
ТО (Р = отрицательное среднее),
R3: ЕСЛИ (d = малое) И (0 = отрицательное малое ИЛИ нулевое ИЛИ
положительное малое) ТО (Р = положительное среднее),
Л 4: ЕСЛИ (d = малое) И (0 = положительное большое) ТО (Р = поло-
жительное большое),
Л5: ЕСЛИ (d = нулевое) И (0 = положительное большое ИЛИ малое)
ТО (Р = отрицательное среднее),
R6: ЕСЛИ (d = нулевое) И (0 = нулевое) ТО (Р = нулевое),
R7: ЕСЛИ (d = нулевое) И (0 = отрицательное малое) ТО (Р = поло-
жительное среднее),
R8: ЕСЛИ (d = нулевое) И (0 = отрицательное большое) ТО (Р = по-
ложительное большое).
Здесь d — расстояние, 0 —угловое смещение, Р —мощность, разви-
ваемая электромотором (оператор управляет этой мощностью, перемещая
рычаг управления).
Следует учитывать, что другой оператор портального крана при тех
же самых обстоятельствах будет использовать другие правила. Это зави-
сит от его опыта, присущих ему рефлексов, темперамента и, возможно,
каких-то других его особенностей его личности. Обсуждаемые правила
могут также зависеть от типа портального крана, технических характе-
ристик его электромотора, максимального расстояния, на которое произ-
водится перемещение грузов, значения сопротивления трения и т. д. Это
значит, что рассмотренные выше правила нельзя трактовать как уни-
версальные, они представляют собой, скорее, лишь один из возможных
примеров такого рода наборов правил.
560
Глава 7. Нечеткое управление
Рис. 7.21. Функции принадлежности для следующих лингвистических перемен-
ных: расстояние (d), угловое смещение (0), мощность (Р)
Для оценки конкретных «сигналов» и «величин» (лингвистических
переменных) оператор использовал следующие варианты их значений:
d — большое (L), малое (S), нулевое (Z),
0 — положительное большое (PL), положительное малое (FS), нулевое
(Z), отрицательное малое (NS), отрицательное большое (NL),
Р — отрицательное большое (7VL), отрицательное среднее (JVM), ну-
левое (Z), положительное среднее (РМ), положительное большое
(PL).
Функции принадлежности конкретных переменных показаны на
рис. 7.21.
Значение мощности Р регулируется путем перемещения соответству-
ющего управляющего рычага. Крайнее положение данного рычага, отве-
чающее движению «вперед», можно обозначить как «1», а другое его
крайнее положение для движения «назад» — как «—1» (см. рис. 7.21).
В ходе опроса оператор крана (эксперт) должен дать разработчику ре-
гулятора информацию относительно модальных значений функций при-
надлежности: ds, di, @ns, &ps> Qpl, Pnm> Ppm- Это довольно
непростая задача, поскольку оператор осуществляет управление боль-
шей частью «интуитивно» и обычно не в состоянии изложить детали его
7.3. Формирование структур и настройка параметров регуляторов 561
«ментальной модели управления». Из этого следует, что в распоряжении
разработчика регулятора будет лишь довольно неточная информация. Ес-
ли доступный объем информации слишком мал, настройку параметров
нечеткого регулятора можно выполнить, используя нейронечеткую сеть,
на основе сигналов ввода-вывода, вырабатываемых и получаемых опера-
тором в ходе сеансов управления реальным объектом.
На практике применение методов синтеза нечетких регуляторов на ос-
нове экспертного знания ограничивается, как правило, случаями относи-
тельно медленных, не очень сложных объектов управления, для которых
число управляющих величин не превышает двух. Человек в качестве «ре-
гулятора» не в состоянии управлять ни объектами со многими управляю-
щими входами (это ограничение обусловлено ограниченными возможно-
стями человека по восприятию и обработке информации), ни относитель-
но «быстрыми» объектами (это ограничение вызвано ограниченностью
скорости обработки информации человеком). Однако даже эти небла-
гоприятные обстоятельства не исключают участия человека в процессе
сбора информации, связанной с управлением рассматриваемым объектом.
Человек-оператор может дать разработчику системы управления хотя бы
частичную (неполную) информацию, относящуюся к решению рассматри-
ваемой задачи. Эта начальная информация может затем быть использова-
на в процессе обучения регулятора или модели объекта. В таком случае
регулятор или модель обучаются на основе данных, полученных путем
регистрации процессов управления. Рассматриваемое начальное знание
может рассматриваться также как «источник вдохновения» при форми-
ровании требуемой базы правил, выборе функций принадлежности и т. д.
7.3.2. Разработка нечеткого регулятора на основе модели
эксперта, управляющего объектом
В ряде случаев эксперт не в состоянии сформулировать свои «ментальные
знания», относящиеся к управлению объектом. В таком случае сигналы,
формируемые экспертом в процессе управления объектом, можно исполь-
зовать для создания модели данного эксперта (см. рис. 7.22).
Рис. 7.22. Эксперт как регулятор в системе управления с обратной связью
562
Глава 7. Нечеткое управление
Чтобы построить модель эксперта, следует измерить и записать сиг-
нал ошибки e(t) (на нем основываются решения, принимаемые экспер-
том) и сигнал u(t), вырабатываемый экспертом для управления объектом.
К этим записям сигналов e(t) и u(t) надо применить соответствующие
решаемой задаче методы, чтобы построить математическую модель изу-
чаемого эксперта, т. е. регулятор.
Знание структуры ручного управления объектом очень полезно для
создания экспертной модели. Есть результаты, описывающие свойства
человека, рассматриваемого в качестве элемента системы управления
(Pfeiffer 1995; Gruszecki 1994). Этот «человек-регулятор» работает как
нелинейная адаптивная система управления. При небольших ампли-
тудах сигнала ошибки человека-оператора можно моделировать ПИ-
регулятором. По этой причине человек в состоянии ликвидировать ста-
тические ошибки. Это значит, что человек-оператор в состоянии успешно
стабилизировать курс корабля или самолета. При увеличении значения
сигнала ошибки человек работает (приближенно) как ПД-регулятор. При
больших значениях сигнала ошибки управление, реализуемое операто-
ром, становится релейным (двухпозиционным) (Pfeiffer 1995), т. е. таким,
в котором управляющий сигнал u(t) часто и скачкообразно переключает-
ся между двумя значениями — максимальным (верхнее насыщение) и ми-
нимальным (нижнее насыщение).
Человек-оператор приспосабливает метод управления к конкретному
объекту управления. Например, если человек управляет моделью вер-
толета (передаточная функция такой модели имеет один или два по-
люса, равных нулю), тогда его действия будут подобны действиям ПД-
регулятора (интегрирующие действия от человека-оператора в данной си-
туации не требуются, поскольку они реализуются компонентами объек-
та управления, представленными в его передаточной функции полюсами,
равными нулю, следовательно, статические ошибки будут ликвидировать-
ся без интегрирующих действий человека). Приближенную передаточную
функцию такого человека-оператора можно записать в виде
_ krO 0 (1 + sTd)
V Ф) “ (l + sTnm)(l + sTr)- 7
Измерения значений времени запаздывания То, характерных для че-
ловека при управлении моделью вертолета, дают основания считать эту
постоянную равной
То = 0.1-0.2 с.
Однако задержка То возрастает, если управление производится в затруд-
ненных условиях и принимаемые решения должны основываться на об-
7.3. Формирование структур и настройка параметров регуляторов 563
работке многочисленных данных. Инерционность нервной системы (п)
и мышечной системы (гл) отражается постоянной времени Tnm. Оценка
величины Tnm дает значения
Tnm = 0.1-0.6 с.
Значения коэффициента усиления kr и постоянной времени 7^, характе-
ризующих коррекцию по производной, а также постоянной времени Тг
зависят от рассматриваемого объекта управления.
Аналогичным образом, как ПИ-регулятор, работает человек-оператор,
управляющий холодильной установкой, состоящей из поршневого на-
гнетателя и двигателя. Принимая во внимание изложенные выше фак-
ты, можно сделать заключение, что человек, осуществляющий управ-
ление, может действовать как ПИД-регулятор, «нагруженный» добавоч-
ной инерционностью и запаздыванием. Временем запаздывания То можно
пренебречь, если человек управляет медленными объектами, для кото-
рых время дискретизации Г > 0.25 с, а также в случаях, когда человек
имеет выдающееся (очень короткое) время реакции. Динамику челове-
ка, управляющего объектом или процессом, можно приближенно описать
передаточной функцией вида
\ u(s) e~sT° А 7 kj\
G(s) = = и , "'Т—wi "V а \kp + kD - s -]-). (7.18)
о(з) (1 И- sTrlrn)(l sTr) у s J
Следует иметь в виду, что коэффициенты усиления kp, кр>, kj мо-
гут изменяться (например, когда человек подстраивает свои управляю-
щие действия к параметрам объекта, виду входного (опорного) сигнала,
виду возмущающего воздействия). К тому же, при некоторых условиях
человек может работать с объектом при кр — 0 или kj — 0. Такого ро-
да переменные коэффициенты усиления, значения которых определяются
вышеупомянутыми факторами (амплитуда сигнала ошибки, вид объекта
управления и т. д.), можно с успехом моделировать с помощью нечет-
ких или нейросетевых регуляторов. Обычный линейный ПИД-регулятор
не в состоянии справиться с такой задачей. В приводимом ниже приме-
ре обсуждается моделирование человека, осуществляющего управление
объектом, с помощью нейронечеткого ПИД-регулятора (Palega 1996).
Пример 7.3.2.1. Решаемая задача состоит в управления курсом модели
подводного аппарата KRAB II, созданного в Техническом университете
Щецина (Польша). Этот аппарат показан на рис. 7.23.
Момент рысканья М, порождаемый парой гребных винтов, изменяет
курс аппарата Ф. Значения момента рысканья, обусловленные техниче-
скими характеристиками гребного винта, лежат в диапазоне [—18.3.28.3]
564
Глава 7. Нечеткое управление
Рис. 7.23. Подводный аппарат как объект управления
Рис. 7.24. Ручное управление подводным аппаратом
(см. рис. 7.24). Имеют место два уровня насыщения для значений мо-
мента М: верхний и нижний. Отсутствие симметрии в значениях этих
уровней усложняет управление аппаратом. В ходе эксперимента оператор
наблюдает фактическое значение курса аппарата Ф(£) и сравнивает его
с заданным значением Фо- Расхождение между этими двумя величинами
компенсировалось выбором соответствующего положения ручки управле-
ния (джойстика). Положение этой ручки преобразовывалось в электриче-
ский сигнал М* управления гребными винтами. В конечном счете, тяга
гребных винтов порождала момент рысканья М, разворачивающий ап-
парат. В ходе проводившегося эксперимента записывались сигналы M(t)
и Ф(£), полученные для различных наборов значений угла Фо. Примеры
таких записей показаны на рис. 7.25.
Результаты регистрации перечисленных выше сигналов подтверди-
ли, что человек действует как нелинейный регулятор (резкие изменения
управляющего сигнала, нерегулярности в сигнале курса Ф(/)). Сигналы
e(t) и M(t), записанные в процессе ручного управления аппаратом, были
использованы для настройки нейронечеткого ПИД-регулятора, реализу-
ющего представление 27 правил, см. рис. 7.26 (Piegat 1996). Операции И
в этом регуляторе были реализованы на основе оператора MEAN. Таким
образом, сумма возбуждений всех заключений правил (дефаззификации)
была постоянной. Это позволило упростить выполнение дефаззификации,
поскольку схема деления, подсоединенная к выходу сети, в этом случае
становится излишней.
7.3. Формирование структур и настройка параметров регуляторов 565
Рис. 7.25. Примеры сигналов, представляющих момент рысканья M(t) (а), курс
аппарата Ф(£) (б) и сигнал ошибки е(£) (в), полученные при ручном управлении
аппаратом
Настроенный регулятор был введен в состав системы управления, по-
сле чего осуществлялась оценка его работоспособности. Сравнение зна-
чений регулируемой величины (курс Ф(£)), полученных для рассматри-
ваемого нечеткого регулятора, со значениями, зарегистрированными при
ручном управлении аппаратом, показано на рис. 7.27, а. На рис. 7.27, б
приводится сигнал управления Л/, формировавшийся нечетким регулято-
ром.
Оценка характеристик системы управления дает следующие резуль-
таты:
зо зо
/ |е| dt = 1.07, / |u|dt = 41.30,
о
о
566
Глава 7. Нечеткое управление
Рис. 7.26. Схема
нейронечеткого ПИД-регулятора,
моделирующего ручное
управление курсом подводного аппарата
для ручного управления, и
зо зо
|e| dt = 0.95, У |u| dt = 45.86,
о о
для нечеткого регулятора.
Эти значения критериев эффективности подтверждают, что нечет-
кий регулятор несколько точнее (J |e|dt), но расходы на управления у
7.3. Формирование структур и настройка параметров регуляторов 567
о) б)
Рис. 7.27. Сравнение курсов при ручном управлении и управлении с помощью
нечеткого регулятора (а), сигнал управления М, формируемый нечетким регу-
лятором (б)
него (f \u\ dt) были несколько больше. Это цена, которую пришлось за-
платить за повышение точности управления. Сравнивая действия этих
регуляторов (т. е. человека и нечеткого регулятора) можно сделать вы-
вод, что нечеткий регулятор управляет объектом мягче и спокойнее (см.
рис. 7.25, а и 7.27,6). Человек довольно часто совершал резкие, времена-
ми излишние и хаотические движения ручкой управления.
7.3.3. Разработка нечеткого регулятора на основе модели
объекта управления
Рассматриваемый ниже подход можно использовать в тех случаях, когда
имеется модель объекта управления. Объективную идентификацию моде-
лей объектов можно осуществлять на основе временных рядов, представ-
ляющих собой последовательности записанных значений входов и выхо-
дов исследуемого объекта. Такая идентификация состоит из двух этапов,
подробно рассмотренных в главе 6:
I. Определение набора значимых входов для рассматриваемого объекта.
II. Определение структуры и параметров модели.
Особое внимание следует уделить определению значимых входов
для рассматриваемого объекта, поскольку это дает возможность снизить
сложность получаемой модели. В разд. 7.3.3.1 содержатся общие сооб-
ражения, относящиеся к моделированию динамических объектов с помо-
щью самообучающихся систем.
568
Глава 7. Нечеткое управление
7.3.3.1. Некоторые замечания относительно идентификации моделей
динамических объектов
Есть ряд исключительных случаев, когда объекты управления можно
рассматривать как статические. Статические объекты описываются соот-
ношением вида
y(k) = F[u(fc)], (7.19)
где и — вход, у — выход объекта, к — порядковый номер замера.
Статическую модель можно применять в случаях, когда переходные
процессы в объекте управления затухают быстро, т. е. продолжительность
переходных процессов существенно короче интервала времени выбор-
ки (замера значений величин, характеризующих поведение объекта) Т.
Отношение «вход-выход» для большинства объектов управления можно
представить нелинейным отображением F следующего вида:
у(к + 1) = F[y(k),... , у(к - п + 1),, u(k — m + 1)]. (7.20)
Значение у выхода объекта для момента времени, отвечающего но-
меру выборки (к + 1), зависит от предшествующих значений входов,
представленных предыдущими m замерами входа и, а также от предше-
ствующих значений выходов, представленных предыдущими п замерами
выхода у. Есть несколько подходов к идентификации параметров нейро-
сетевой модели F*. Ниже дается несколько советов, относящихся к их
использованию.
Если идентифицируемый объект F почти полностью свободен от воз-
действия шумов и возмущений, то рекомендуется схема идентификации
его модели F*, показанная на рис. 7.28 (Hunt 1992). Математический
оператор D означает здесь запаздывание, например:
v(k — 1) = D(—l)(v(fc)).
Модель объекта определяется на основе значений сигналов, полу-
ченных от реального объекта. Отображение «вход-выход» для данного
объекта можно представить следующим эквивалентным соотношением:
у(к + n — m) — F[u(k),... , и(к — m), у(к + п — т — 1),..., у(к — т)],
или:
y(F) = F[u(k — п + т),... , и(к — n), у(к — 1),..., у(к — п)]. (7.21)
Отображение «вход-выход» реализуемое в ходе идентификации моде-
ли (нацеленной на определение структуры модели и подбора значений ее
параметров) можно представить в виде
у* (к + п — т) — F*[u(fc),... ,и(к — т),у(к + п — т — 1),... ,у(к — ш)],
7.3. Формирование структур и настройка параметров регуляторов 569
Модель
Рис. 7.28. Последовательно-параллельная структура модели для идентифика-
ции объекта F. (Эта структура рекомендуется при невысоких уровнях измери-
тельных шумов (di, с?з) и небольших величинах возмущений (J2), действующих
на объект.)
или:
у* (k) = F*[u(k — n + тп),...,u(k — n),у(к — 1),, у(к — п)]. (7.22)
Процесс подбора значений параметров модели для последовательно-
параллельной структуры модели (модель обеспечена входами и выходами
объекта) более устойчив в сравнении с другими подобными структурами
(Hunt 1992; Narendra 1990а,b).
После завершения идентификации выход модели у*(к + п — ш) соеди-
няется с ее входом, взамен выхода объекта y(k + n — т). Таким образом,
для практических целей (системы управления и т. п.) структура моде-
ли F* модифицируется так, как показано на рис. 7.29.
Соотношение (7.23) представляет отображение, реализуемое моде-
лью F* после ее идентификации:
= (7.23)
= F*[u(k),..., u(k — m), у* (к + n — m — 1), (к — т)].
Если измерительные шумы (db d3) и возмущения (</2), воздейству-
ющие на объект, велики, то можно рекомендовать идентификацию, ос-
нованную на параллельной структуре модели (см. рис. 7.30). Разумеет-
570
Глава 7. Нечеткое управление
Рис. 7.29. Модифицированная структура последовательно-параллельной модели
после идентификации
ся, введенные выше атрибуты «большой» и «малый», характеризующие
уровни шумов (помех) и возмущений, следует трактовать как нечеткие.
Эти атрибуты нет возможности определить точно (свойства «большой»
и «малый» надо рассматривать во взаимосвязи с чувствительностью рас-
сматриваемого объекта по отношению к соответствующим воздействиям).
Обычно выбор подходящей структуры модели опирается на опыт и интуи-
цию (в противном случае потребуется значительное число экспериментов,
чтобы «открыть» хорошую структуру).
Часть входов рассматриваемой параллельной модели (см. рис. 7.29
и 7.30) свободна от шумов и возмущений, поскольку они «взяты» из вы-
хода модели у* (k + п — тп). Соответственно, итоговая точность иденти-
фикации может быть выше. Данная модель отображает входы в выходы
согласно соотношению (7.23).
Чтобы получить хорошую модель F*, которая действует подобно рас-
сматриваемому объекту F, требуется формировать ее, используя все воз-
можные сигналы и, влияющие на объект в реальных условиях его работы.
Особое внимание следует уделить амплитудному и спектральному пред-
ставлению сигналов и, подаваемых на вход модели при ее настройке. Тем
не менее, даже хорошие модели практического характера дают результа-
ты, близкие к тем, что демонстрирует реальный объект F, если входные
сигналы и представлены низкочастотными компонентами спектра. Точ-
ность модели падает с повышением доли высокочастотных компонент
в спектральном представлении сигналов u (Hack 1997).
7.3. Формирование структур и настройка параметров регуляторов 571
Модель
Рис. 7.30. Параллельная структура модели для идентификации объекта F
(эта структура рекомендуется при значительных уровнях измерительных шумов
(di, d3) и больших возмущениях ((/2), действующих на объект)
7.3.3.2. Некоторые замечания относительно идентификации
инвертированных моделей динамических объектов
В алгоритмах управления часто используются инвертированные моде-
ли объектов (Hack 1997; Hunt 1992; Morari 1989). Такие модели,
называемые также «инверсиями», можно определить только для случая,
когда прямая модель является обратимой. Проблему обратимости модели
иллюстрирует рис. 7.31.
Статическая модель F* объекта однозначна по входу и. Каждое зна-
чение входа иа отображается в единственное выходное значение уа. Об-
ращение F*nv такой модели не обладает однозначностью. Имеются такие
области значений входов (у) инвертированной модели F*nv, в которых
одно значение входа уа отображается в два или три значения выхода
(^аг)«
Инверсию модели можно получить в том случае (Babuska 1995е),
если рассматриваемая модель представляет собой монотонно возрастаю-
щую или монотонно убывающую функцию, реализующую однозначное
отображение относительно выхода у (см. рис. 7.32).
572
Глава 7. Нечеткое управление
Модель F*
Рис. 7.31. Пример, поясняющий проблему обратимости статической модели
Модель (F*) 1
Рис. 7.32. Пример инвертируемой (обратимой) статической модели (представ-
ление отображения, однозначного по выходу у)
Приведенные выше объяснения наводят на мысль о том, для получе-
ния инверсной модели F*nv объекта F обязательно нужна его (прямая)
модель F*. Эту модель F* следует тщательно проанализировать, чтобы
подтвердить или опровергнуть ее обратимость (отображение F* должно
быть монотонным!). Если пренебречь подобного рода анализом, прямое
вычисление инверсии F*nv может привести к некоторому осредненному
результату, который будет плохо соотноситься с реальностью (рис. 7.31).
Рассмотрим теперь проблему обратимости для динамических моделей.
Что означает инвертирование динамической модели?
Вначале дадим объяснение проблемы обратимости для непрерывной
модели, заданной в виде передаточной функции. Идеальное обращение
G*nv(s) модели G*(s) должно удовлетворять условию G*(s) • G*nv(s) = 1.
Кроме того, полученная инверсия должна быть минимально-фазовой пе-
редаточной функцией. Таким образом, проблему обратимости можно про-
моделировать с помощью структурной схемы, показанной на рис. 7.33.
7.3. Формирование структур и настройка параметров регуляторов 573
Рис. 7.33. Структура, иллюстрирующая проблему идеальной обратимости ли-
нейной модели G*(s)
Для идеального инвертирования сигнал u(s) должен быть в точности
равен входному сигналу uq(s). Структура, показанная на рис. 7.33, срав-
нивает действия моделей G*(s) и G*nv(5), соединенных последовательно,
с работой эталонной модели Gw(s), где Gw(s) = 1. Следовательно, пере-
даточная функция идеального инвертирования модели будет определять-
ся выражением
G-M = . (7.24)
Ст (Sj
Пусть G*(s) представляет собой инерционную систему первого по-
рядка:
СЩ) = -4-. (7.25)
Используя формулу (7.24), получим выражение, представляющее со-
бой идеальную инверсию модели (7.25):
G*nv(s) = 1 + s. (7.26)
Полученный результат содержит элемент, выполняющий идеальное
дифференцирование. Известно, что такую операцию нельзя реализовать
физически. Когда вводилась эталонная модель Gw(s) = 1, требовалось,
чтобы все изменения входного сигнала uq(s) идеально передавались на
выход каскада [G*nv(s)G*(s)]. Поскольку идеальное дифференцирование
реализовать нет возможности, идеальная передача сигнала uq также не
может быть осуществлена. Это означает, что идеальная инверсия для
системы (7.25) не существует. Попытаемся «смягчить» введенные выше
требования применительно к эталонной модели. Пусть Gw(s) представ-
ляет собой передаточную функцию инерционного элемента с коэффици-
ентом усиления, равным 1, и постоянной времени Tw (см. рис. 7.34).
Тогда на основе соотношения (7.24) получим
О) = • (7-27)
574
Глава 7. Нечеткое управление
Рис. 7.34. Структурная схема так называемой прямой идентификации, приме-
няемая для определения приближенного инвертирования Gfnv(s) модели G*(s)
Полученная приближенная инверсия (7.27) является реализуемой.
Чем меньше постоянная времени Tw, тем лучше приближенное пред-
ставление идеальной инверсии G*nv(s) = 1 4- s. При низкочастотных воз-
буждающих воздействиях uq данная приближенная инверсия ведет себя
точно так же, как идеальная инверсия. Разумеется, чем выше часто-
ты спектрального представления возбуждающих воздействий, тем более
значительными будут различия между тем, как работают идеальная ин-
версия и ее реализуемый приближенный вариант. Рассматриваемый при-
мер вызывает такой вопрос: существуют ли динамические модели, для
которых использование эталонной модели Gw(s) = 1 ведет к получению
реализуемых инверсий?
Примем, что модель объекта G*(s) задана соотношением
G*(s) = Ьо + Ь1* + --- + М» . (7 28)
Порядок п многочлена в знаменателе дроби (7.28) равен порядку ее
числителя. Объекты, описываемые передаточными функциями такого ви-
да, называются «собственными» (Morari 1989).
Определение 7.3.3.2.1. Объект, описываемый передаточной функцией
G(s) является собственным, если G(s) удовлетворяет условию
lim |G(s)| конечен и отличен от нуля. (7.29)
з—>+оо
Объект называется строго собственным, если G(s) удовлетворяет
условию
lim |G(s)| -0. (7.30)
s—>+оо
Объекты, которые не являются собственными или строго собственны-
ми, называются несобственными. Передаточная функция G(s) описывает
несобственный объект, если порядок тп ее числителя больше, чем поря-
док п ее знаменателя. Для собственных объектов n = т, а для строго
7.3. Формирование структур и настройка параметров регуляторов 575
Рис. 7.35. Структурная схема вычисления реализуемых инверсий для моделей
линейных объектов на основе инерционной эталонной модели
собственных объектов п > тп. Собственные и строго собственные объ-
екты — физически реализуемые. Несобственные объекты не могут быть
реализованы физически. Их можно было бы реализовать, если бы бы-
ла возможна операция идеального дифференцирования. Конечно, такой
возможности нет из-за ограничений физического характера.
В смысле введенного выше определения, модель (7.28) является соб-
ственной. Ее обращение, вычисляемое на основе выражения (7.24) для
эталонной модели Gw(s) — 1, задается соотношением
/ \ _ Gw(s) _ + ais + ... + ansn Qn
inv^} ” ~G^s} ~ bo + 61s + ... + 6n^ • ( }
Для собственных моделей (n = т) можно воспользоваться эталонной
моделью Gw(s) = 1. Для строго собственных моделей данную эталонную
модель использовать нельзя. Таким образом, если п > ш, в качестве
эталонных следует использовать инерционные модели соответствующего
порядка. Каким образом выбрать правильный порядок инерции nw для
эталонной модели? На этот вопрос существует простой ответ:
nw = n — m, n > пт. (7.32)
Структурная схема вычисления инверсии для инерционной эталонной
модели показана на рис. 7.35.
Структура, показанная на рис. 7.35, приводит к следующему соотно-
шению, представляющему собой обращение строго собственных моделей
объектов:
р* / \ _ Щ) + ai s + ... + ari s11
inv S ~ (6o + 61S + • •. + Wn)(l + sTwyn~m^ '
Следующий вопрос связан с наличием запаздывания То в модели объ-
екта. Существует ли инверсия модели
G*(s) = e~sT° -G*0(s), (7.34)
576
Глава 7. Нечеткое управление
если передаточная функция Gq(s) является собственной или строго соб-
ственной?
Предположение об идеальной инверсии (Gw(s) = 1) приводит к сле-
дующему соотношению:
_ Gw(s) _ u(s) _ e^Ic>
= G^~^=G*^Y
(7.35)
Полученная инверсия Ginv(s) является нереализуемой. Объясняется
этот вывод очень просто: чтобы вычислить текущий выход u(t), необхо-
димо знать будущие значения входов y(t + To), например, если Gq(s) = 1,
то u(t) = y(t + Т0).
Реализуемую инверсию
p-sTo
Gw(s) =---------;---г (7.36)
можно получить в приближенной форме, если ввести запаздывание Tq
в эталонную модель.
Приведенная выше эталонная модель приводит к инверсии в форме
(7.33), которая идентична полученной ранее для модели объекта без за-
паздывания. Для устойчивых состояний инверсия, вычисляемая с помо-
щью введения запаздывания в эталонную модель (7.36), в точности равна
теоретической инверсии (7.35). Это свойство сохраняется, если рассмат-
риваются очень медленно изменяющиеся сигналы. Ошибка приближен-
ной инверсии быстро возрастает с ростом частоты входного сигнала у.
Из приведенного выше обсуждения инвертирования моделей с запаз-
дыванием следует, что приближенные инверсии таких моделей можно
использовать лишь для стационарных и квазистационарных состояний.
Это достаточно ограниченная область применимости, т. е. инверсии для
объектов с запаздыванием используются совсем редко (Hack 1997; Hunt
1992; Morari 1989). Следует добавить, что модели с запаздыванием мож-
но без труда использовать в качестве упрощенных моделей инерционных
объектов высоких порядков. В таком случае проблемы инвертируемо-
сти можно упростить, используя инерционные модели объектов высоких
порядков (наподобие модели Стрейча (Strejc) (Zuchowski 1998)) взамен
моделей с запаздыванием.
Идея собственных и несобственных моделей может быть приведена
в исполнение для дискретных линейных моделей объектов.
Определение 7.3.3.2.2. Объект, описываемый дискретной передаточной
функцией G(z), является собственным, если удовлетворяется следую-
7.3. Формирование структур и настройка параметров регуляторов 577
щее условие (Morari 1989):
lim G(z) конечен и отличен от нуля. (7.37)
2—>ОО
Если выполняется условие
lim G(z) = 0, (7.38)
Z —>оо
то рассматриваемый объект классифицируется как строго собственный.
Объект, не являющийся собственным или строго собственным, клас-
сифицируется как несобственный. Передаточная функция G(z) описыва-
ет несобственный объект, если порядок пт ее числителя выше, чем поря-
док п ее знаменателя. Для собственных объектов п = т, а для строго
собственных п > т. Собственные и строго собственные объекты являют-
ся физически реализуемыми. Несобственный объект нельзя реализовать
физически, поскольку прогнозирование значения его входа потребовало
бы вычисления выхода объекта, например:
С(г) = О y(k) = u(k + 1) + и(к),
где у — выход объекта, и — вход объекта.
Эталонную модель Gw(z) = 1 можно использовать для дискретной
собственной модели G(z). Для строго собственной модели (п > т) мож-
но отыскать приближенное обращение, выбирая эталонную модель Gw(z)
в форме единственного дискретного полюса порядка (п — т):
у _ \(п—т)
Gw(z) = —- 0 < с < 1. (7.39)
у z — су
Реакции nw(fc) единственного дискретного полюса
Сш(г) = — (7.40)
z — с
на ступенчатый входной сигнал щ^к) = l(fc), к = 1,2,... , ос, показаны
на рис. 7.36.
Изучение результатов, представленных на рис. 7.36, позволяет сде-
лать вывод о том, что инерция (инертность), «наполняющая» рассматри-
ваемую эталонную модель, увеличивается с ростом значения параметра с.
Увеличение инертности снижает точность получаемого обращения. Наи-
более точная инверсия (пригодная для быстро изменяющихся возбуж-
дающих воздействий) получена при с — 0. В случае эталонной модели
578
Глава 7. Нечеткое управление
С = 1
0123456789 к
uw{k)^(\-c)uQ(k- \) + cuw(k- 1), u0(£) = W £=0,1,...,oo.
Рис. 7.36. Реакции эталонной модели (7.40) на ступенчатое входное воздей-
ствие для различных значений параметра с
вида
(7.41)
возникают наиболее серьезные проблемы, связанные с инверсией. Струк-
турная схема «быстрого» вычисления инверсии для линейной мо-
дели G*(z) объекта показана на рис. 7.37.
7.3. Формирование структур и настройка параметров регуляторов 579
Рис. 7.37. Структурная схема «быстрого» вычисления инверсии G*nv(z) для
линейной модели G*(z) объекта
Инверсия, отвечающая схеме на рис. 7.37, выражается в виде соотно-
шения
р* / \ _ Gw(z) _ u(z) _ ao 4- a±z + • • • + anzn
~ G*(z) ~ y(zj~ (bo + b^z + + bmzm)z^n~m^ ’
Следует еще раз повторить, что идеальный вариант эталонной мо-
дели Gw(z) = 1 нельзя использовать для строго собственных объектов
(п > ш), т. е. для объектов, характеризующихся инерционностью или
запаздыванием. Чем больше разность (п — т), тем более значительной
будет неточность получаемой инверсии. Для больших значений (п — т)
инверсия будет получаться неточной, за исключением случая статиче-
ских или квазистатических состояний (при наличии очень «медленных»
сигналов). Потерей точности сопровождается и увеличение частоты вход-
ного сигнала у.
Реализуемая инверсия G*nv(z), определяемая выражением (7.42), все-
гда принимает форму собственной передаточной функции. Это означа-
ет, что порядки знаменателя объекта, числителя и знаменателя обраще-
ния будут одинаковыми и равными п. Имея в виду проблемы, связанные
с идеальной эталонной моделью и приближенной инверсией, можно сде-
лать вывод, что реализуемая инверсия G*nv(z) обычно будет отличаться
от обратной передаточной функции объекта. Обычно это проявляется
в том, что знаменатель инверсии будет отличаться от числителя переда-
точной функции объекта. Выражение (7.43) преобразует передаточную
функцию модели G*(z), основанную на операторе г, в форму на осно-
ве оператора г-1. Получающееся в итоге разностное уравнение, соот-
ветствующее преобразованной передаточной функции рассматриваемой
580
Глава 7. Нечеткое управление
Модель объекта
Рис. 7.38. Входы и выход модели объекта (оператор D(—п) обозначает запаз-
дывание по времени, равное пТ)
модели, завершает последовательность преобразований:
G*(z} — — bQ + blZ^----h bmZm =
Uo(z) do + arz ч-----anzn
_ boz~n + • • • + 4- brrtz~n+m .
clqz n + • • • + an_\z 1 + an
any(k) +----h aiy(k - n + 1) + aoy(k - n) =
= bmuo(k — n + m) + ... + b]U$(k — n + 1) + bouo(k — n).
Векторы у и uo для разностного уравнения (7.43) определяются со-
отношениями:
Ут = [у(^),y(k - 1),..., у(к - п)],
uo = l«o(fc — n + m),uo(k — n + m — 1),... , u$(k — n)]. (7.44)
Входы и выходы рассматриваемой модели показаны на рис. 7.38.
Функция F* здесь реализует линейное отображение «вход-выход», опре-
деляемое уравнением модели объекта (7.43). В общем случае, отображе-
7.3. Формирование структур и настройка параметров регуляторов 581
ние F* может быть нелинейным:
y(k) = F*[uo(k — n + m),..., u$(k — n), y(k — 1),..., y(k — n)]. (7.45)
Если для входов uo(k — n + m) и uo(k — n) известны запаздывания,
то можно найти значения пит. Для реализуемой инверсии (?*пу(г)
линейной модели получим следующие соотношения:
р* / х _ ц(г) _ Др -h Ч-----------h gnzn _
invl^ ” y(z) ~ bozn~m + 61z"-m+1 + • • • + bmzm ~
_ aQz~n 4-----h an-1z~1 4- an
boz m 4- • • • 4- bm~[Z 1 4- bm
bQu(k - m) 4--+ brn-ru^k - 1) + bmu(k) =
(7.4b)
= aQy(k - n) 4----h an^y(k - 1) + any(k).
Векторы у и u для инверсии модели определяются выражениями
(7.47). Для сравнения, векторы у и uq задаются соотношениями (7.48).
Инверсия F*nv модели объекта:
uT = [w(fc), u(k — 1),..., u(k — m)],
Ут = [y(k"), y(k -l),...,y(k- n)]. (7.47)
Модель F* объекта:
uj = [uo(fc — n + m),uo(k - n + m — 1),... ,uo(k — n)],
УТ = [yW, y(k - 1),..., y(k - n)]. (7.48)
Сопоставление векторов: u для рассматриваемой модели и uo — для
инверсии этой модели, приводит к выводу о том, что сдвиги во времени
соответствующих элементов обоих векторов одинаковы (—п + т = 0),
если т — п (т. е. модель является собственной). Если данная модель
будет несобственной (—п + т > 0), то сдвиги во времени соответству-
ющих элементов обратного вектора и будут меньше, откуда следует что
обращение обрабатывает наиболее ранние отсчеты сигнала и (например,
если (—п + m) = 1, то и(к) представляет собой первый элемент векто-
ра сигнала и, обрабатываемый данной инверсией, а ио(к — 1) —первый
элемент, обрабатываемый рассматриваемым объектом). Схема инверти-
рованной модели показана на рис. 7.39.
Число входов модели (см. рис. 7.38) и число входов инверсии (см.
рис. 7.39) совпадают и равны (п + т 4- 1). Это означает, что совпадают
также и размерности обоих входных пространств.
Если линейная модель является строго собственной (п > ттг), то век-
тор модели ио будет сдвинут (смещен) на время (п — т)Т по отношению
582
Глава 7. Нечеткое управление
Рис. 7.39. Схема инвертированной модели (оператор D(—п) обозначает запаз-
дывание по времени, равное пТ)
к вектору и рассматриваемой инверсии. Чтобы найти инверсию такой мо-
дели, следует преобразовать ее в форму собственной модели с вектором
смещения uq на время (п — т)Т. После такого преобразования можно
определить инверсию. В примере 7.3.3.2.1 даются разъяснения способа
вычисления данной инверсии.
Пример 7.3.3.2.1. Пусть собственная модель, заданная в форме пере-
даточной функции G*(z) или соответствующего разностного уравне-
ния (7.49), описывает линейное отображение «вход-выход», реализуемое
некоторым объектом:
х = = г + 0-75
uq(z) z2 + z — 0.25 ’
у (k + 1) + у (к) — 0.25у(к — 1) = ио(к) + О.75г/о (к — 1),
m = 1, n = 2, n — m — 1. (7.49)
Выполним сдвиг вектора uj = [uo(k), uo(k — 1)] на время IT. Такая
операция приводит к получению вектора uT = [tz(fc +1), n(fc)] обращения.
Затем полученный вектор обращения подставляется в уравнение модели
(7.49). В результате будет получено разностное уравнение обращения, а
7.3. Формирование структур и настройка параметров регуляторов 583
У(к)
y(k-\)
uo(k)
u0(k-l)
u0(k)
Модель
«ДО
уДОДО
У(к\
inv
u(k+V) v
-I—->o-----------►
dyk) = [woW ~ u(k+ 1)]—> 0
_________ Инверсия
w0(£)f
1<
уДО| «ДО+
......—► I.......
0123456 A: 0 1 2 3 4 5 6 £
*— .< »-» —► .........
0123456 £ 0123456 £
i
Рис. 7.40. Структурная схема модели F*, ее инверсии F*nv и эталонной модели,
а также важные сигналы, связанные с данной структурой в предположении, что
uw(k) = u0(k)
также передаточная функция, отвечающая этому уравнению:
у (k + 1) + у (к) — 0.25у(к — 1) = u(k + 1) + 0.75и(к),
(С*( п _ п(г) _ z2 F z — 0.2Ь (7.50)
^irlv = у(Д = z2+0.75z
Выход модели у (к + 1) определяется уравнением (7.51), получаемым
из (7.49), а выход обращения — уравнением (7.52), полученным из (7.50):
у(к + 1) = и0(к) + 0.75щ)(^ - 1) - у(к) + 0.25т/(/с - 1), (7.51)
u(k + 1) - у(к + 1) + у(к) - Q.25y(k - 1) - 0.75u(fc). (7.52)
Схема, основанная на последовательном соединении F* и ее обраще-
ния F*ny, представлена на рис. 7.40.
Подставляя выражение (7.51) в уравнение (7.52), получим соотноше-
ние вида u(k + 1) = f[uv(k)], которое для условий, сформулированных
выше, принимает вид
u(k + 1) = u0(k) + O.75tzo(fc - 1) - 0.75tz(fc). (7.53)
Сигнал u(k) показан на рис. 7.40. Имеется соответствие между сиг-
налом и(к) и эталонным сигналом uw, формируемым эталонной моделью
Fw • — 1/z для возбуждающего воздействия uo(k) = l(fc)
584
Глава 7. Нечеткое управление
и нулевых начальных условий. Порядок данной эталонной модели нахо-
дится как разность (n — т), определяемая порядками п знаменателя и m
числителя передаточной функции объекта G*(z) (см. (7.49)).
Приведенный выше пример подтверждает, что инверсию для неко-
торой строго собственной линейной модели можно получить непосред-
ственно из модели объекта F* путем ее формального обращения и сдвига
во времени вектора uq (uq —> и).
А как обстоит дело с инвертированием нечетких моделей нелиней-
ных объектов? Можно ли в этом случае воспользоваться аналогичной
процедурой?
Нелинейный объект можно представить дискретной моделью вида
y(k) = F*[uo(k — nF m),...,uo(k — n),y(k — 1),,y(k — n)]. (7.54)
В случае n — m = 0 данная модель принимает вид
y(k) = F*[uo(k),.. .,uo(k - n),y(k - 1),... ,y(k - n)]. (7.55)
Выходная переменная y(k) этой модели зависит непосредственно
от переменной uo(k). Это означает, что вход uq для момента време-
ни кТ непосредственно влияет (без какого-либо запаздывания) на те-
кущее состояние у (к) модели. Модели, обладающие таким свойством,
называются «скачкообразными» моделями (Hack 1997). Такие модели
способны передавать ступенчатое входное воздействие на выход модели
(см. рис. 7.41, б).
Дискретные линейные модели, являющиеся собственными моделями,
относятся к классу скачкообразных моделей. Строго собственные моде-
ли не принадлежат к этому классу. Исходные определения 7.3.3.2.2 для
собственной и строго собственной моделей относятся к случаю линейных
моделей. Однако в случае нелинейных моделей следует принимать также
во внимание принадлежность (или отсутствие принадлежности) модели
классу скачкообразных.
Рис. 7.41. Реакция у (к) модели со скачкообразным переходом (б) и модели
без таких переходов (в) на входное возбуждающее воздействие ио(к) в форме
дискретной ступенчатой функции (а)
7.3. Формирование структур и настройка параметров регуляторов 585
Пусть нечеткая модель объекта является стандартной моделью Мам-
дани с результирующей частью на основе использования одноэлементных
множеств, причем эта модель обладает следующими свойствами:
• посылки треугольных функций принадлежности нечетких множеств
удовлетворяют условию разбиения единицы (^2 Mi — 1),
• правила представлены в конъюнктивной форме, а для реализации опе-
рации И используется оператор PROD,
• для дефаззификации используется метод одноэлементных множеств:
к
Ё 0зсз
У = , (7.56)
Ё 0j
3=1
где — степень удовлетворения посылки (условия) данного правила
с номером J, а К — число правил в базе правил,
• нечеткая модель представляет собой однозначное отображение по от-
ношению к выходной величине у(к),
• рассматриваемая модель относится к классу скачкообразных (разрыв-
ных) моделей и содержит правила вида:
ЕСЛИ (-uo(fc) = Ai) И ... И (uo(k — n) = Лп+1)
И (у(к - 1) - BJ ... И (у(к -п) = Вп) ТО у(к) = с.
(7.57)
где Л1,..., Лп+1, Bi,..., Вп — нечеткие множества, а с —одноэле-
ментное множество.
Тогда инверсия этой модели в целом может быть получена путем по-
следовательности инвертирований для каждого отдельного правила. Это
значит, что посылка (ио(к) — Л1) данного правила заменяется его след-
ствием (у(к) = с) и наоборот (Babuska 1995е).
Таким образом, искомая инверсия представляется нечеткой моделью,
включающей правила вида:
ЕСЛИ (uQ(k - 1) = Л2) И ... И (u0(fc -п) = Лп+1) И (у(к) - С)
И (у(к - 1) - BJ ... И (у(к - п) - Вп) ТО ио(*0 =
(7.58)
где ai — одноэлементное множество с модальным значением, равным
модальному значению множества Ль
С — треугольное нечеткое множество с модальным значением, рав-
ным модальному значению одноэлементного множества с.
586
Глава 7. Нечеткое управление
Приводимый ниже пример 7.3.3.2.2 иллюстрирует описанную проце-
дуру инвертирования модели, принадлежащей классу скачкообразных.
Пример 7.3.3.2.2. С целью демонстрации процедуры инвертирования
была выбрана нечеткая модель объекта y(k + l) = F*[uo(k), у(к)], для ко-
торой функции принадлежности входов и выходов показаны на рис. 7.42,
а база правил определяется соотношениями следующего вида:
R1 : ЕСЛИ (uo(k) около 0) И (у(к) около 0)
ТО (у(к + 1) около 0),
R2 : ЕСЛИ (ио(к) около 1) И (у(к) около 0)
ТО (у(к + 1) около 1/3),
R3 : ЕСЛИ (ио(к) около 2) И (у(к) около 0)
ТО (у(к + 1) около 4/3),
7?4 : ЕСЛИ (ио(&) около 0) И (у(к) около 1)
ТО (у(к + 1) около 1/6),
R5 : ЕСЛИ (uo(fc) около 1) И (у(к) около 1)
ТО (у(к + 1) около 0.5),
R6 : ЕСЛИ (ио(к) около 2) И (у(к) около 1)
ТО (у(к + 1) около 1.5),
R7 : ЕСЛИ (ио(к) около 0) И (у(к) около 2)
ТО (у(к + 1) около 2/3),
R8 : ЕСЛИ (uo(fc) около 1) И (у(к) около 2)
ТО (у(к + 1) около 1),
R9 : ЕСЛИ (uo(fc) около 2) И (у(к) около 2)
ТО (y(k + 1) около 2). (7.59)
Из показанного на рис. 7.42 представления модели видно, что нечет-
кая модель F* реализует операцию, однозначную в отношении ее выхода
у(к + 1). Из этого следует, что данная модель является обратимой. Хотя
ребра, ограничивающие отдельные области поверхности функции принад-
лежности, являются отрезками прямых линий, фрагменты поверхности,
ограничиваемые этими линиями, вовсе не представляют собой плоско-
сти. В общем виде полилинейное уравнение, определяющее поверхности
в конкретных областях, представляется следующим образом:
у(к + 1) = a0 + aiuo(^) + Я2У(к) + а3и0(к)у(к). (7.60)
7.3. Формирование структур и настройка параметров регуляторов 587
1
Рис. 7.42. Функции принадлежности для входов и выхода, а также поверх-
ность отклика нечеткой модели с базой правил (7.59). Числовые метки узлов
поверхности представляют собой координаты этих узлов
На втором этапе процесса инвертирования модели вектор
uo(fc) = uo(k) подвергается сдвигу, причем значение этого сдвига со-
ставляет (п — тп). Для рассматриваемого примера величина сдвига будет
равна 1. Данный сдвиг вектора u0(fc) преобразует нескачкообразную
(неразрывную) модель (7.59) в скачкообразную (разрывную) модель
вида:
R1 : ЕСЛИ (uo(k + 1) около 0) И (у(к) около 0) ТО (у(к + 1) около 0),
R9 : ЕСЛИ (w0(fc + 1) около 2) И (у(к) около 2) ТО (у(к + 1) около 2).
(7.61)
588
Глава 7. Нечеткое управление
На третьем этапе выводы правил, содержащие переменную y(k + 1),
заменяются условиями, включающими величину uo(k + 1), и наоборот.
Эти обмены приводят к получению базы правил следующего вида:
R1 : ЕСЛИ (у(к + 1) около 0) И (у(к) около 0)
ТО (uo(k + 1) около 0),
R2 : ЕСЛИ (у(к + 1) около 1/3) И (у(к) около 0)
ТО (uo(k + 1) около 1),
R3 : ЕСЛИ (у(к + 1) около 4/3) И (у(к) около 0)
ТО (uo(k + 1) около 2),
R4 : ЕСЛИ (у(к + 1) около 1/6) И (у(к) около 1)
ТО (uo(k + 1) около 0),
R5 : ЕСЛИ (у(к + 1) около 0.5) И (у(к) около 1)
ТО (uo(k + 1) около 1)
R6 : ЕСЛИ (у(к + 1) около 1.5) И (у(к) около 1)
ТО (uo(k + 1) около 2),
R7 : ЕСЛИ (у(к + 1) около 2/3) И (у(к) около 2)
ТО (uo(k + 1) около 0),
R8 : ЕСЛИ (у(к + 1) около 1) И (у(к) около 2)
ТО (uo(k + 1) около 1),
R9 : ЕСЛИ (у(к + 1) около 2) И (у(к) около 2)
ТО (uo(k + 1) около 2). (7.62)
Входное пространство для непосредственного инвертирования модели
с базой правил (7.62), а также функции принадлежности для входов
показаны на рис. 7.43.
Из рис. 7.43 видно, что база правил (7.62), полученная прямым инвер-
тированием модели, неполна. Информация о значениях выходов доступна
только для 9 узлов входного пространства — это связано с числом пра-
вил в исходной модели (7.59). Неполная база правил не дает возможно-
сти вычислять выходы, связанные с теми областями, где для некоторых
узлов нет соответствующих правил. Чтобы преодолеть это затруднение,
требуется расширить базу правил (7.62) до полной базы правил (7.63),
в которой содержится 9 х 3 = 27 правил. Это значит, что требуется опре-
делить дополнительные значения выхода u(k + 1) для всех тех узлов,
7.3. Формирование структур и настройка параметров регуляторов 589
//(у(£+1)) ▲ Около 1/3 Около 1
Около 2
О 1/6 1/3 0.5 2/3 1 4/3 1.5 2 у(*+1)
Рис. 7.43. Функции принадлежности для входов, разделение входного про-
странства и узлы, определяемые правилами (7.62), полученными с помощью
процедуры прямого инвертирования модели (7.59)
которым не приписаны правила:
R1 : ЕСЛИ (y(k + 1) около 0) И (у(к) около 0)
ТО (uo(k + 1) около aL),
R2 : ЕСЛИ (у(к + 1) около 0.5) И (у(к) около 0)
ТО (uo(fc + 1) ОКОЛО Q1),
R3 : ЕСЛИ (у(к + 1) около 1) И (у(к) около 0)
ТО (ио(к + 1) около аз),
R27 : ЕСЛИ (у(к + 1) около 2) И (у(к) около 2)
ТО (ио(к + 1) около а2?)« (7.63)
Посылки (условия) правил из базы (7.63) включают 27 (все возмож-
ные) комбинаций, определяемых нечеткими множествами, используемые
для представления входов. Параметры следствий (заключений) ai пред-
ставляют собой значения (позиции) одноэлементных множеств. Значения
9 одноэлементных множеств в (7.63) известны как результат прямого
590
Глава 7. Нечеткое управление
Таблица 7.1
Значения одноэлементных множеств полученных в результате
настройки полной инверсии для модели (7.63)
i 1 2 3 4 5 6 7 8 9 10 11 12 13 14
ai 0 0.5 1 1.167 1.333 1.667 2 0 0.833 1 1.167
i 15 16 17 18 19 20 21 22 23 24 25 26 27
ai 1.5 1.833 2 0 1 1.333 1.5 2
инвертирования исходной модели, например, «1 = 0, «27 = 2. Значе-
ния остальных одноэлементных множеств можно найти с использованием
процедур, приводимых ниже.
I. Первая процедура преобразует полную базу правил (7.63) в нейроне-
четкую сеть с функциями принадлежности для ее входов, идентичны-
ми показанным на рис. 7.43, и функциями принадлежности одноэле-
ментных множеств для выхода. Для настройки параметров нейроне-
четкой сети можно использовать замеры значений входов и выходов
объекта, которые служат исходными данными для метода обратного
распространения ошибки. Возможен также альтернативный вариант,
основанный на тех же исходных данных, но с вычислением а* с при-
менением метода наименьших квадратов.
И. Вторая процедура совершенно аналогична первой. Есть, однако и раз-
личие между ними. Оно состоит в том, что нейронечеткая сеть на-
страивается на основе значений входов и выходов, порожденных ис-
ходной нечеткой моделью (7.59).
Процедура I обычно более точна. Некоторые преимущества и недо-
статки обеих процедур будут рассмотрены в дальнейшем. Первая про-
цедура использовалась для нахождения значений одноэлементных мно-
жеств ai. Полученные при этом значения собраны в табл. 7.1.
В табл. 7.1 имеются пустые поля. Это явление объясняется просто.
Измеренные значения входов и выхода объекта неравномерно распределе-
ны в его входном пространстве, определяемом в рассматриваемом случае
следующими неравенствами:
0 < uQ(k) <2, 0 < у(к) <2, 0 < у(к + 1) < 2.
Диапазон значений измеренных величин, используемых при обучении
сети, также показан на рис. 7.42. Из-за отсутствия обучающих данных
в некоторых областях входного пространства, требуемых для прямого
7.3. Формирование структур и настройка параметров регуляторов 591
Около 2
л Qkojio 1/6 Около!
О 1/6 1/3 0.5 2/3 1 4/3 1.5
2
Рис. 7.44. Подпространство (заштрихованная область) входного пространства
инверсной нечеткой модели, где выход может быть вычислен на основе резуль-
татов измерений, полученных от исследуемого объекта
5(Ь1)
инвертирования модели (рис. 7.43), нет возможности настроить одноэле-
ментные множества в таких областях. Таким образом, можно настраи-
вать только те одноэлементные множества, которые связаны с областями
входного пространства, «покрытыми» обучающими примерами (заштри-
хованная область на рис. 7.44).
Реальная база правил инверсной модели, включающая 19 правил, по-
казана в табл. 7.2. На основе результатов измерений, полученных от объ-
екта и помещенных в соответствующие правила (7.63), можно вычислить
значения 19 величин выходных одноэлементных множеств.
Таблица 7.2
База правил инверсной модели (7.62)
У (к) у(к+Г)<^ около 0 около 1/6 около 1/3 около 0.5 около 2/3 около 1 около 4/3 около 1.5 около 2
ОКОЛО 0 0 0.5 1 1.167 1.333 1.667 2
около 1 0 0.833 1 1.667 1.5 1.833 2
около 2 0 1 1.333 1.5 2
ы(£+1)
u(k+ 1) A
Около 2
Около 1
д(Я*+1))
Около О
◄—I-
/z(u(fc+l))
Около 1/6 Около 1 Около 2
О 1/6 1/3 0.5 2/3 1 4/3 1-5 2 И*+1)
Рис. 7.45. Поверхность отклика и функции принадлежности инверсной модели (7.62) с базой правил, определяемой
табл. 7.2
7.3. Формирование структур и настройка параметров регуляторов 593
yW
2/3
1/3
«о(Л)“
0.5 о о о о о о
—I—I—I—I—I—►
0 1 2 3 4 5 k
0.5
0 1 2 3 4 5 (k+1)
0 1 2 3 4 5 (£+1)
Рис. 7.46. Структура, полученная объединением модели F*, ее инверсии F*lv,
эталонной модели Fw и сигналы, формируемые этой структурой для входного
тестового ступенчатого сигнала uo(k) — 0.5 • l(fc)
Функции принадлежности, а также поверхность отклика инверсной
модели с базой правил, определяемой табл. 7.2, показаны на рис. 7.45.
Как видно из рис. 7.45, каждому выходному значению u(k + 1) от-
вечает только одна точка поверхности модели (однозначность). Струк-
тура, составленная из нечеткой модели F* (7.59) и ее инверсии F*ny
(табл. 7.2), а также реакции данной структуры на входное воздействие
no(fc) = 0.5 • l(fe) показаны на рис. 7.46.
Резюмируем сказанное выше: для того, чтобы определить инвер-
сию F*ny нечеткой модели F*, надо выполнить последовательность шагов
такого алгоритма:
I. Определить векторы ио и у, а также запаздывание (п — т)Т.
II. Для получения скачкообразного варианта формируемой модели за-
менить вектор ио в модели F* смещенным вектором и (требуемый
сдвиг равняется (п — ш)Т).
III. Выполнить инвертирование полученного скачкообразного варианта
модели F* в ее непосредственную инверсию.
IV. Если база правил полученной непосредственной инверсии неполна,
то расширить ее путем введения новых правил, получаемых комби-
нированием множеств, представляющих нечеткие входы рассматри-
ваемой инверсии.
594
Глава 7. Нечеткое управление
V. Преобразовать полученную инверсию F*nv с полной базой правил
в нейронечеткую сеть, используя данные измерений входов и вы-
хода, полученные от объекта управления или с помощью исходной
нечеткой модели.
Если модель F* нелинейного объекта остается неизвестной, то ее
нечеткую инверсию F*nv можно найти любым из методов нечеткого моде-
лирования на основе замеров значений входов-выходов объекта. Следует
принять во внимание, что такая инверсия должна принадлежать классу
скачкообразных моделей, т. е. текущее значение ее входа у (к) немедленно
преобразуется в выход и(к) согласно нелинейному соотношению вида
и(к) = F-mvMk),у(к - 1),..., - п),
u(k — 1), и(к — 2),..., и(к — п)].
Размерность вектора у, а также вектора и равняется (n + 1). Чтобы
найти эту размерность вектора, надо воспользоваться начальным зна-
нием порядка объекта управления. Если этого знания недостаточно, то
следует провести испытания, направленные на оценку значимости входов
обращения модели, затем, пользуясь полученной информацией, отсеять
малозначимые входы.
Различные структурные схемы настройки параметров нейронечеткой
сети, полученной в результате преобразования инверсной модели, будут
обсуждаться ниже. Наиболее распространенный вариант такой настройки
основан на методе обратного распространения ошибки.
Структура, показанная на рис. 7.47, а, где инверсия идентифицирует-
ся с использованием реального входного сигнала uq объекта, может быть
рекомендована для случаев, когда измерительные шумы (помехи) прене-
брежимо малы, а возмущения, действующие на выход рассматриваемого
объекта, относительно малы. Операция инвертирования в ходе процесса
идентификации может быть описана соотношениями вида
u(k) = F*nv[u0(k - 1),.. .,u0(k - n),y(k), ...,у(к- n)],
или
u(k + n-m) = F*m[u0(k - 1 + n - m),... ,uo(k - m),
(7.o5)
y(k + n — m),....y(k — m)].
После идентификации инверсия использует свои собственные выходы
согласно рекуррентному отображению вида
u(k) = F*nv[u(k - 1)...и(к - п),у(к),.. .,у(к - п)|,
7.3. Формирование структур и настройка параметров регуляторов 595
Эталонная модель
Рис. 7.47. Структурная схема прямой идентификации инверсной модели F*nv,
рекомендуемая для невысокого уровня измерительных помех (шумов) и прене-
брежимо малого влияния возмущения на объект —схема (а). Схема (б) реко-
мендуется для тех случаев, когда шумами d± и с/з, а также возмущениями d2
пренебречь нельзя
или
u(k + n — m) = F* [u(k — 1 + п — ш),..., u(k — m),
(7.66)
y(k in - m),..., y(k — m)J.
Если в измерениях сигналов содержатся существенные шумы и/или
выход объекта «загрязнен» возмущениями, то подходящей будет струк-
турная схема идентификации, показанная на рис. 7.47,6, поскольку, со-
гласно упомянутой схеме, инверсная модель F*nv использует свои соб-
ственные, свободные от шумов замеры u(k). Разумеется, отображение,
реализуемое этой инверсией, будет при этом задаваться соотношения-
ми (7.66). Если известна точная модель F* рассматриваемого объекта, то
ее можно использовать для идентификации, поскольку отображение F,
реализуемое этим объектом (см. рис. 7.47), можно заменить его моде-
лью F*.
596
Глава 7. Нечеткое управление
У использования прямых структур для идентификации есть свои до-
стоинства и недостатки. Параметры инверсной модели можно настро-
ить, используя хорошо известные алгоритмы обратного распространения
ошибки е. Имеются, однако, трудности, связанные с определением наи-
лучших обучающих сигналов uq. Более того, в качестве входов рассмат-
риваемой инверсии нельзя использовать сигналы ступенчатой формы.
Рассматриваемая инверсия используется в системах управления в ка-
честве регулирующего элемента, формирующего сигнал управления объ-
ектом и. Требуемое значение выхода объекта известно либо для ста-
билизирующего действия данного регулятора, если эталонный сигнал
= const, либо для программного управления, где ^(^ — перемен-
ная величина, являющаяся функцией времени. Действительное значение
выхода объекта «колеблется» в окрестности эталонного (задающего) сиг-
нала yo(t). Приближенное значение частоты и амплитуды таких колеба-
ний обычно известны. Непросто определить, какого вида входной сигнал
u(t) должен воздействовать на рассматриваемый объект, чтобы объект
преобразовал его точно в выходной сигнал требуемого вида y(t) = yo(t).
Решение этой задачи, особенно в случае сложных объектов управления,
сопряжено со значительными трудностями. Поскольку наиболее выгод-
ные с точки зрения обучения обучающие сигналы uo(t) не известны,
следует использовать набор таких сигналов, чтобы «покрыть» возмож-
но более широкий диапазон изменения таких параметров, как частота,
среднее значение, амплитуда. Помимо проблемы многочисленных вход-
ных сигналов, имеется еще одно «узкое место». Его можно обозначить
как «отсутствие ориентированности на цель управления» (Hunt 1992).
Это обстоятельство отрицательно сказывается на качестве управления
в реальном диапазоне условий работы объекта.
Инверсию, «ориентированную на цели управления», можно получить,
используя так называемую «специализированную» структурную схему
идентификации, показанную на рис. 7.48.
Идентификацию инверсии, осуществляемую на основе специализи-
рованной структуры, можно выполнить с помощью обучающих сигналов
у* (к), которые «близки» к тем, что порождаются рассматриваемым объек-
том в окрестности заданного значения yo(t). Тогда инверсия F*nv форми-
рует такие сигналы и(к) для управления этим объектом, что они будут
поддерживать значение выхода объекта вблизи заданной точки. Таким
образом, специализированная структура дает возможность определить
(распознать) диапазоны изменения частоты и амплитуды управляющих
сигналов 'u(fc), «ориентированных на цели управления».
7.3. Формирование структур и настройка параметров регуляторов 597
Эталонная модель
Рис. 7.48. Специализированная структурная схема идентификации инверсной
модели, взаимодействующей с реальным рассматриваемым объектом
Метод обратного распространения ошибки нельзя применить в слу-
чае специализированной структуры, показанной на рис.7.48, поскольку
с выходом объекта у(к) в данном случае следует обращаться как с одной
из компонент сигнала ошибки в этой структуре. Однако объект F неиз-
вестен. Это значит, что ошибку нельзя «прогнать» назад через данный
объект и идентификацию придется выполнять на основе других мето-
дов, описываемых в гл. 7. Но если достаточно точная модель F* объекта
известна, то метод обратного распространения ошибки (как и другие ме-
тоды) можно использовать для идентификации модели обращения. Соот-
ветствующие структуры показаны на рис. 7.49. Ошибку s таких структур
можно пропустить в обратном направлении через известную модель F*,
параметры которой не настроены (получение инверсии этой модели яв-
ляется единственной целью настройки).
Схему идентификации на рис. 7.48, использующую объект, можно ре-
комендовать для случаев, когда измеренные значения сигналов не иска-
жены измерительными шумами (помехами, ошибками), а влияние возму-
щений на выход объекта пренебрежимо мало. Если уровни измеритель-
ных шумов и возмущений велики, то более предпочтительной будет иден-
тификация на основе структуры, использующей модель (см. рис. 7.49).
Согласно (Hunt 1992), структура, показанная на рис. 7.49, б, приводит
к получению весьма точных инверсий даже для неточной модели F*, что
является результатом использования действительного выхода объекта у
при вычислении ошибки с.
В рамках этой главы следует упомянуть, что не все модели являют-
ся обратимыми (инвертируемыми). Свойство, называемое обратимостью,
присуще монотонным моделям, которые представляют собой однозначные
598
Глава 7. Нечеткое управление
Модель
б)
Рис. 7.49. Специализированные структуры для идентификации инверсных мо-
делей с использованием обратного распространения ошибки: (я) структура с мо-
делью объекта; (б) структура с объектом и его моделью
отображения по отношению к своим выходам у (Babuska 1995е; Hunt
1992). Как же быть с моделями, которые не удовлетворяют указанным
условиям?
Можно ли «инвертировать» неинвертируемую модель? В примере
7.3.3.2.3 рассматривается сформулированная выше проблема для статиче-
ского объекта класса SISO*. Данное рассмотрение, однако, можно обоб-
щить и на случай динамических систем класса MISO, поскольку они
содержат, помимо динамической, еще и статическую часть.
Пример 7.3.3.2.3. Рассмотрим «открытую» систему управления (без об-
ратной связи), показанную на рис. 7.50. Объект управления в этой систе-
* SISO — Single Input Single Output, объект с одним входом и одним выходом; MISO —
Multiple Input Single Output, объект с несколькими входами и единственным выходом. —
Прим. ред.
7.3. Формирование структур и настройка параметров регуляторов 599
Рис. 7.50. Система управления (а), содержащая статический объект F. Кри-
вая (в) представляет собой модель F* этого объекта, а кривая (б) — инвер-
сию F*1V модели F*
ме можно классифицировать как статический объект вида SISO. Строит-
ся регулятор, основанный на обращенной модели этого объекта.
Эта инверсия не представляет собой однозначное отображение, по-
скольку единственному значению входа уо отвечают два выходных значе-
ния, uq и —од, как это показано на рис. 7.50,6. Отметим, что управление
должно быть нацелено на получение требуемого значения выхода у = уо,
а упомянутая цель может быть достигнута с использованием частичной,
положительной инверсии и = у/ао — у (см. рис. 7.51).
Эта частичная инверсия формирует такие управляющие сигналы и,
которые позволяют получить любое доступное значение уровня выхода у.
Регулятор, работающий с положительной частью инверсии (рис. 7.51, 6),
формирует только положительные сигналы управления и (если исполь-
зовать отрицательную часть инверсии, то регулятор будет формировать
только отрицательные управляющие сигналы и).
600
Глава 7. Нечеткое управление
Рис. 7.51. Система управления (а) со статическим объектом F. Кривая (в) пред-
ставляет собой модель объекта F*, а кривая (б) — ее частичную положительную
инверсию F*nv
В случае объекта класса SISO с более сложными характеристиками,
можно обратить лишь ту часть характеристик, которая необходима для
практической работы объекта (выбранная часть характеристик должна
«покрывать» требуемый диапазон Ау выходной величины у), как это ил-
люстрирует рис. 7.52. Аналогичным образом можно определить инверсию
для объектов класса MISO, если они реализуют многозначные отобра-
жения по отношению к своему выходу у (см. рис. 7.53).
Из рис. 7.53 видно, что в качестве основы для определения частичной
инверсии была выбрана только одна часть поверхности (которая отвеча-
ет положительным значениям координат x(k — 1), х(к), у(к)). В случае
использования частичной инверсии при реализации алгоритма управле-
ния существует возможность столкнуться с «опасными» ситуациями. Эту
проблему поясняет рис. 7.54.
Возмущающие воздействия d изменяют значение выхода объекта у.
Небольшую ошибку е — уо~у можно компенсировать введением в систе-
му обратной связи, как это показано на рис. 7.54. Однако если возмуще-
ния велики, то существует риск перехода состояния системы из подпро-
странства I в подпространство II (рис. 7.54), где требуется отрицательный
управляющий сигнал и. Конечно, регулятор, построенный на основе по-
7.3. Формирование структур и настройка параметров регуляторов 601
а) Модель б) Частичная инверсия
Рис. 7.52. Модель объекта (а) и ее частичная инверсия (б) для целей управле-
У(к)
в) Частичная инверсия
Рис. 7.53. Частичная инверсия динамического объекта типа MISO, реализую-
щая многозначное отображение по выходу y(k)
602
Глава 7. Нечеткое управление
а) Регулятор Объект
б) Частичная инверсия
модели объекта
Рис. 7.54. Смещение состояния объекта из квадранта I в квадрант II простран-
ства состояний, обусловленное возмущением d, ur — реальный входной сигнал
объекта управления
ложительной частичной инверсии объекта
U = у/ао - У
(рис. 7.54, б) не справится с управлением в подобной ситуации. Он бу-
дет работать некорректно. Это обстоятельство имеет простое объяснение.
Если состояние объекта принадлежит подпространству I, то возрастаю-
щим значениям входа и будут отвечать убывающие значения выхода у
(см. рис. 7.54, в). Если состояние объекта принадлежит подпространству
II, то характер приведенного выше соотношения между приращениями
входных и выходных сигналов изменится на противоположный.
Таким образом, частичную инверсию можно применять в случае
управления объектами, работающими без воздействия на них «значи-
тельных» возмущений, т. е. возмущений, изменяющих подпространство,
которому принадлежат состояния объекта. Если возмущения поддаются
измерению, то можно вычислить и исполнить требуемую коррекцию вы-
ходного сигнала и, используя данные измерений, даже в случае «значи-
тельных» возмущений. Если можно определить, какое подпространство
входов соотносится с текущим состоянием работающего объекта (иг < О
или иг > 0), то влияние возмущений можно компенсировать для управля-
7.3. Формирование структур и настройка параметров регуляторов 603
ющих действий, основываясь на модифицированной частичной инверсии,
задаваемой в виде ______
u = sgn(ur)yao — У ~ d.
Вернемся теперь назад, к исходному вопросу о том, «можно ли ин-
вертировать неинвертируемую модель»? Соображения, изложенные выше,
приводят к следующему ответу на этот вопрос: неинвертируемую модель
нельзя инвертировать полностью, однако ее инвертируемые части можно
инвертировать успешно, особенно если возможностей инверсии для ее
инвертируемой части достаточно для целей управления. Если реальные
состояния объекта можно наблюдать непрерывно, то можно предложить
другое решение. Управление объектом можно реализовать с помощью
многозонального регулятора, основанного на некотором числе частичных
инверсий. Регулятор подстраивает свои управляющие действия под теку-
щее состояние объекта (текущий алгоритм управления всегда представ-
ляет собой ту частичную инверсию, которая отвечает текущему состоя-
нию объекта).
7.3.3.3. Настройка нечеткого регулятора с заранее выбранной
структурой
Многолетний опыт показывает, что типичные традиционные алгоритмы
управления (ПИД, ПИ, ПД, П, ПДД2) можно во многих случаях с успе-
хом использовать для управления объектами.
Соотношение между характеристиками системы управления и пара-
метрами регулятора обычно бывает нелинейным. Соответственно, если
ввести в «классические» алгоритмы (ПИД, ПИ, ПД, П, ПДД2) перемен-
ные параметры регулятора, можно добиться удовлетворения нелинейных
условий, порождаемых нелинейным критерием управления. Нечеткие ре-
гуляторы могут очень хорошо отвечать данным условиям, поскольку они
сами имеют нелинейную природу. На практике широко распространены
нечеткие ПИД-регуляторы. Проблемам, связанным с нечеткими ПИД-
регуляторами, посвящено большое число статей и технических отчетов
(Kahlert 1994,1995; Yager 1995; Brown 1994; Koch 1993,1996; Driankov
1996; Lichtenberg 1994; Altrock 1993; Kuhn 1994,1996; Pfeiffer 1995;
Wang 1995; Isermann 1995,1996; Fisher 1996; Pulaczewski 1997; Piegat
1995,1996,1997,1997a,1997b; Palega 1996; Domahski 1997).
Если известен конкретный вид регулятора (пусть это будет ПИД-
регулятор), то можно указать соответствующее число нечетких множеств
для каждого из входов и выходов регулятора (возможная «кривизна» по-
верхности управления непосредственно зависит от этого числа нечетких
604
Глава 7. Нечеткое управление
Рис. 7.55. Настройка нечеткого регулятора в структуре с эталонной моделью,
обеспечивающей отслеживание задающего сигнала у0(1)
множеств). После этого можно произвести подбор значений (настройку)
параметров рассматриваемого регулятора. Если подходящий вид регу-
лятора заранее не известен, то выбор его осуществляется эксперимен-
тально.
Настройку регулятора можно выполнять согласно схеме, показанной
на рис. 7.55. Эталонная модель отражает представление разработчика о
предпочтениях и требованиях к характеристикам управления. Для на-
стройки нечеткого регулятора можно воспользоваться методом обратного
распространения ошибки.
В качестве эталонной модели для непрерывных систем часто выбира-
ется передаточная функция порядка (n — m) некоторого интегрирующего
элемента:
(7.67)
Здесь (п — тп) — разность порядков знаменателя и числителя результиру-
ющей передаточной функции, полученной как произведение передаточ-
ных функций, представляющих объект (после его линеаризации) и регу-
лятор (так называемая «передаточная функция разомкнутой системы»),
а Ть — постоянная времени системы управления с обратной связью (за-
мкнутой системы).
Для дискретной системы часто используется эталонная модель вида
п—тп
(7.68)
где 0 < с < 1.
7.3. Формирование структур и настройка параметров регуляторов 605
Рис. 7.56. Настройка нечеткого регулятора в структуре с эталонной моделью,
задающей желаемый характер парирования возмущений
Эталонную модель
Gw(s) = 1 или Gw(z) — 1
можно использовать только для статических или скачкообразных моде-
лей объекта и регуляторов (см. разд. 7.3.3.2). По этой причине использо-
вание таких моделей является исключением, так как большинство объ-
ектов должны рассматриваться как динамические.
Если основной задачей регулятора является парирование возмущений,
то его настройку можно выполнять с помощью структуры, показанной на
рис. 7.56.
Итак, для упомянутой выше задачи регулирования эталонную модель
можно выбрать в виде дифференцирующего звена (элемента) с инерци-
онностью порядка (п — 7/1):
= (1+Л>-" (769)
или дискретного аналога этого элемента. Эталонная модель (7.69) огра-
ничивает влияние возмущений d вплоть до их полного подавления. Этот
процесс протекает тем быстрее, чем меньше значение постоянной време-
ни Ть.
Пример 7.3.3.3.1. Математическая модель углового движения подвод-
ного аппарата Krab II приводится в (Piegat 1997а). Эта модель выражает
соотношения между курсовым углом (курсом) <ф и управляющим сигна-
лом Мг (моментом рысканья, порождаемым гребными винтами аппарата).
Данная модель представлена в виде рекуррентной нейронной сети, пока-
606
Глава 7. Нечеткое управление
занной на рис. 7.57, где z 1 обозначает оператор, выражающий «единич-
ную» задержку, которая равняется времени выборки (времени замера) Т,
(2, 6, М\ mjn = 7Vfmin, М] max — Л/max
представляют собой константы и известные параметры рассматриваемой
модели. Интеграл в модели является дискретным, вычисляемым согласно
выражению
I dt : с(к) = ^У2{М1(к) + М1(к-1)]. (7.70)
о i=1
Соответствующий нейронечеткий регулятор показан на рис. 7.58. Упо-
мянутая модель углового движения подводного аппарата является нели-
нейной. Линеаризация этой модели для продольной скорости [7 = 0 при-
водит к получению следующего соотношения:
_ fa
M^s) ~ s-(l + s7o) ’
(7.71)
Дискретизация передаточной функции (7.71) (выполненная с приме-
нением метода аппроксимации входного сигнала объекта, ориентирован-
ного на «сохранение нулевого порядка») приводит к нейросетевой модели,
показанной на рис. 7.57. База правил рассматриваемого нечеткого регу-
7.3. Формирование структур и настройка параметров регуляторов 607
лятора задается следующими соотношениями:
R1 : ЕСЛИ (ер = р) И (е/ = р) И (ер = р)
ТО [Мг = Mmax(fclp ИЛИ -fcln)],
R2 : ЕСЛИ (ер = р) И (е/ = р) И (ер = п)
ТО [Мг - Mmax(fc2p ИЛИ -fc2n)],
R3 : ЕСЛИ (ер = р) И (е/ — п) И (ер = р)
ТО \Mr - Afmax(fc3p или -fc3n)],
Z?4 : ЕСЛИ (ер = р) И (е/ = п) И (ер = п)
ТО [Мг = Л/тах(/с4р ИЛИ —&4П)],
R5 : ЕСЛИ (ер = п) И (ej = р) И (ер = р)
ТО [Mr = Mmax(fe5p ИЛИ -/с5п)],
R6 : ЕСЛИ (ер = п) И (е/ = р) И (ер = п)
ТО \МГ — АТтах(/сбр ИЛИ — /сбп)]?
R7 : ЕСЛИ (ер = п) И (е/ = п) И (ер = р)
ТО [Мг = Мш^(к7р ИЛИ
Л8 : ЕСЛИ (ер = п) И (ej = п) И (ер = п)
ТО \Mr — Мтах(к^р ИЛИ — &8п)]'
(7.72)
Функции принадлежности отрицательного (п) и положительного (р)
видов для входов показаны на рис. 7.59. Дефаззификация в этом случае
выполняется согласно выражению
Мг(к) = Afmax, (7.73)
у Jр ' Jn /
где /р — результирующая степень активации заключения (следствия)
Мг = Мтах,
fn — результирующая степень активации заключения Мг = — Мтах.
Имеется 11 параметров, представляющих нейронечеткий регулятор
(Кр, Кр Кр, к\р... kgp). Значения всех этих параметров можно под-
бирать (настраивать). Однако использование дополнительных условий
(7.74), обеспечивающее симметрию работы регулятора для положитель-
ных и отрицательных значений сигнала ошибки е, означает, что настраи-
вать следует только 6 параметров (Кр, Кр Кр, к^р, кзр, к^р). Разумеется,
уменьшение числа настраиваемых параметров с 11 до 6 сокращает время,
Рис. 7.58. Структура нейронечеткого ПИД-регулятора
7.3. Формирование структур и настройка параметров регуляторов 609
Рис. 7.59. Фаззификации входов нейронечеткого ПИД-регулятора
требуемое на обучение системы
^ip 1 ^(9—i)p-)
kin — 1 ^ip'
k\p — 1,
7‘gp — 0-
(7.74)
Моделью дискретного нечеткого регулятора является скачкообразная
модель, а дискретная модель рассматриваемого аппарата (рис. 7.57) не
является таковой, поскольку п — m — 1. Имея в виду сказанное выше
про скачкообразные модели, была выбрана следующая форма эталонной
модели Gw, отражающая желаемый характер обработки сигнала iMt):
Gw(s) =
'00 (5)
1
1 + 0.2s ’
(7.75)
При настройке рассматриваемого регулятора был использован тре-
угольный желаемый сигнал 0О(0 и соответствующий задающий сигнал
0w(t) (см. рис. 7.60).
Для настройки данного регулятора применялся метод обратного рас-
пространения ошибки и структура с эталонной моделью, показанная на
рис. 7.55. Реакция системы управления 0 на ступенчатое возбуждающее
воздействие = 1(0(рад) показанная на рис. 7.61, а, была получе-
на до проведения настройки регулятора, при случайном выборе началь-
ных значений параметров данного регулятора. Реакция системы управ-
ления полученная после выполнения настройки регулятора, показана
на рис. 7.61,6. Задающий сигнал требуемый для вычисления ошибки
е также показан на рис. 7.61,6.
Реакции системы управления 0 и эталонной модели '(pw на желаемые
сигналы 0о синусоидальной и треугольной формы приведены на рис. 7.62.
610
Глава 7. Нечеткое управление
¥
* U
Рис. 7.60. Сигнал “00(0» требуемый от системы управления и соответствующий
выходной сигнал эталонной модели, используемый для настройки ПИД-
Время.
0 0.5 1 1.5 2 2.5 3 3.5 4
Рис. 7.61. Реакция системы управления с нейронечетким регулятором на
возмущающее воздействие = l(t) и реакция эталонной модели на то же
самое возмущение
Результаты экспериментов, представленные на рис. 7.61 и рис. 7.62,
показывают, что регулятор с параметрами, подобранными согласно реша-
емой задаче, успешно справляется не только с желаемыми сигналами тре-
угольной формы (эти сигналы ранее были использованы при обучении),
но и с сигналами других видов (синусоидальными, в виде единичного
скачка и т. д.). Эксперименты, нацеленные на настройку регулятора для
эталонной модели Gw(s) = 1, потерпели неудачу. Требование идеального
отслеживания желаемого сигнала оказалось слишком трудно дости-
жимым. Сходимость процесса настройки не была достигнута. Наблюда-
лась быстрая потеря устойчивости (дестабилизация) процессов обучения
(настройки).
7.3. Формирование структур и настройка параметров регуляторов 611
Рис. 7.62. Сравнение реакции полученной от эталонной модели, и реакции
Vs полученной от системы управления с настроенным нейронечетким регулято-
ром: (а) — на синусоидальную форму требуемого сигнала т^о; (б) — на треуголь-
ную форму этого сигнала
7.3.3.4. Нечеткое управление, основанное на структуре с внутренней
моделью
Структура системы управления, включающая внутреннюю модель объ-
екта управления (называемая структурой с внутренней моделью или, для
краткости, ВМ-структурой), была предложена, по-видимому, в 1957 г.,
хотя конкретного автора этой идеи назвать трудно (Garcia 1982). Идея
ВМ-структуры развивалась и пропагандировалась, в основном, усилиями
таких авторов, как Morari, Garcia и Zifiriou (Garcia 1982; Morari 1989).
Представление о ВМ-структуре очень полезно, особенно для управ-
ления нелинейными объектами. Разумеется, ее можно применять и для
линейных объектов. К числу весьма эффективных средств моделирова-
ния нелинейных объектов относятся нечеткая логика и нейронные се-
ти. Поэтому вполне естественным выглядит стремление использовать
их и для разработки нечетких и нейросетевых регуляторов (Hunt 1992;
Edgar 1997; Hack 1997; Neumerkel 1992; Narendra 1990a,b; Ullrich 1997b;
Piegat 1998b).
Идея управления на основе ВМ-структуры выглядит очень интерес-
ной. Рассмотрим разомкнутую систему, показанную на рис. 7.63, где G
и Q представляют собой линейные операторы (они могут быть как дис-
кретными, так и непрерывными).
Если Q = G-1 и операторы G, Q устойчивы, а помехи (возмуще-
ния) не оказывают воздействия на объект, то у = у$. Реальный объ-
ект управления подвержен воздействию возмущений в ходе своей рабо-
ты. По этой причине в структуру системы требуется ввести обратную
612
Глава 7. Нечеткое управление
a)Q=G-nv = G~l -+у=у0 б)у*у0
Рис. 7.63. Применение инверсии объекта для управления им в двух случаях:
(а) — при отсутствии возмущений; (б) — в присутствии возмущений
а) ВМ-структура
б) Традиционная структура
Рис. 7.64. Структура системы управления: (а) включающей внутреннюю мо-
дель G*, которая представляет объект управления G; (б) традиционная струк-
тура системы управления
связь (см. рис. 7.64, а). Влияние обоих возмущающих воздействий, di
и с?2 (рис. 7.63), можно представить через единственное возмущение ви-
да d = diG + d2 (рис. 7.64).
Замечания относительно ВМ-структур для линейных объектов
1. Если модель объекта G* является точной (G = G*), а возмущение
d — 0, то сигнал обратной связи ei = 0. Это значит, что данная систе-
ма управления работает аналогично разомкнутой системе, показанной
на рис. 7.63, а. Если d Ф 0, то ei = d.
2. Если G* представляет собой неточную модель объекта (G G*), а
выход объекта подвержен влиянию возмущения (d 0), то сигнал
обратной связи определяется выражением вида
ex - (G — G*)u + d. (7.76)
Таким образом, сигнал ei зависит от ошибки модели (G — G*) и воз-
мущения d.
3. Если модель объекта G* является точной (G = G*), то система управ-
ления с ВМ-структурой устойчива, если G и Q устойчивы (Morari
1989). Это значит, что можно по отдельности проверять устойчи-
вость составных частей системы взамен анализа устойчивости систе-
7.3. Формирование структур и настройка параметров регуляторов 613
Рис. 7.65. Последовательность шагов по преобразованию ВМ-структуры (а)
в традиционную структуру управления (в)
мы в целом. Это свойство упрощает анализ устойчивости системы,
что очень важно, особенно для нелинейных систем управления.
4. ВМ-структуру управления можно преобразовать в эквивалентную ей
классическую структуру (рис. 7.64). Регулятор R данной классиче-
ской структуры, соответствующий требуемой ВМ-структуре, вычис-
ляется согласно соотношению
(7-77>
Приведенное выше преобразование означает, что модель объекта G*
становится внутренним элементом регулятора R. Отсюда и про-
исходит наименование «структура с внутренней моделью» (ВМ-
структура). Если G и G* устойчивы, а модель является точной
(G = G*), то классический регулятор R, полученный из (7.77), обес-
печивает устойчивость классической (традиционной) системы управ-
ления.
5. Ошибка е ВМ-структуры (рис. 7.65) зависит от величины разности
(уо - d):
' = T7<?(C - G") ' (778)
Если модель объекта G* является точной (G = G*), a Q представ-
ляет собой точную инверсию объекта, т. е. Q = (G*)-1, то е — О
для любого эталонного (задающего) сигнала и возмущения d. Та-
ким образом, ВМ-структура становится «идеальной» (Morari 1989), а
614
Глава 7. Нечеткое управление
рассматриваемый регулятор R принимает вид
u _ Q __ G*-1
е ~ 1-QG* “ 1 - G*-1G*
(7.79)
Из выражения (7.79) следует, что коэффициент усиления регулятора
равен бесконечности, что можно трактовать как объяснение «идеаль-
ности» характеристик регулятора. Реализация «идеального» регуля-
тора в виде реальной системы управления невозможна. Даже для
чрезвычайно малого сигнала ошибки е регулятор начнет немедлен-
но формировать управляющий сигнал и с бесконечной амплитудой
(в противном случае условие е = 0 не будет удовлетворяться для
всех t). Вследствие того, что любые реальные приводы (сервомото-
ры, вентили, рулевые машины) имеют конечную мощность, сигналы
управления с бесконечной амплитудой не существуют в реальности. С
другой стороны, идеальные модели объектов G* и соответствующие
им идеальные инверсные модели G*nv обычно не удается получить.
Таким образом, в реальности имеет место соотношение
G*^G, G*m G*~l.
Ясно, однако, что более точная модель и ее инверсия обеспечат управ-
ление с более высоким качеством, чем менее точная модель и ее ин-
версия.
6. Рассматриваемая ВМ-структура может применяться для минимально-
фазовых объектов. Если нули модели G* положительны, то полюса
инверсной модели G*-1 неустойчивы. Это значит, что регулятор Q,
как и ВМ-система в целом, могут оказаться неустойчивыми для
минимально-фазовых объектов.
7. ВМ-структуры обычно используются для устойчивых объектов. Их,
однако, можно использовать и для неустойчивых объектов, но разра-
ботка регулятора в таких случаях становится сложнее. Метод разра-
ботки линейных регуляторов Q представлен в работе (Morari 1989).
Для нелинейных нечетких или нейросетевых регуляторов и неустой-
чивых объектов можно применять ВМ-структуры путем введения до-
полнительной обратной связи, обозначенной К на рис. 7.66. Контур
обратной связи К стабилизирует объект G и создает «новый», моди-
фицированный объект Gk, являющийся устойчивым. Коэффициенты
усиления корректирующего элемента К не должны быть слишком
большими. В теоретическом плане выбор больших значений коэффи-
циентов усиления К означает, что и значения амплитуды входного
сигнала объекта Uk (рис. 7.66) также очень велики. Следовательно,
7.3. Формирование структур и настройка параметров регуляторов 615
а) полная структура
б) упрощенная структура
Рис. 7.66. Стабилизация неустойчивых объектов введением обратной свя-
зи К для организации ВМ-структуры
Рис. 7.67. ВМ-структура с фильтром нижних частот Gf, повышающим
устойчивость (робастность) системы
приводы реальной системы управления не смогут сформировать тре-
буемые входные сигналы и новый объект может оказаться неустой-
чивым. Такая потеря устойчивости системы означала бы, что основная
задача, для которой вводилась коррекция К, не может быть решена.
8. Точность модели G* убывает при увеличении частоты сигналов (полу-
ченные модели являются точными для статических состояний или для
медленно изменяющихся сигналов). Указанная черта нарушает фун-
даментальные предположения, положенные в основу ВМ-структуры,
что ведет к потере устойчивости системы. Эту проблему позволяют
решить дополнительные фильтры нижних частот Gf со значениями
статического коэффициента усиления, равными 1 (см. рис. 7.67). Эти
фильтры подавляют высокочастотные компоненты сигналов. Поэто-
му сигналы, проходящие через систему, становятся более медленно
изменяющимися. Такой фильтр уменьшает значения амплитуды сиг-
налов и, формируемых регулятором Q, а также снижает скорость
нарастания сигнала. Это позволяет сохранить линейность операции
616
Глава 7. Нечеткое управление
Q(s)G(s) и линейность системы в целом, если сигнал и не достигает
значений насыщения. Фильтр Gf может быть полезен также и для
решения других задач, таких, например, как:
• устранение установившейся ошибки системы,
• асимптотическое отслеживание изменяющихся сигналов yo(t),
• одновременная оптимизация и стабилизация системы.
В качестве простейшей технической реализации Gf для постоянного
задающего сигнала (уо = const) можно использовать интегрирующий
(инерционный) фильтр
<7-80’
или его дискретный эквивалент (Morari 1989). Регулятор Q должен
быть собственным. Это можно обеспечить выбором инерционности
порядка р. Известное свойство фильтра нижних частот состоит в том,
что увеличение значения постоянной времени Tf улучшает подавле-
ние высокочастотных составляющих сигналов. Если модели G* и ин-
версии G*nv относительно точны, а амплитуды насыщения для сигна-
ла и велики, то значение Tf можно выбрать малым. Для задающих
сигналов вида уо(£) = рекомендуется использовать фильтр, опре-
деляемый следующим соотношением:
(7'81)
Если фильтр используется для решения дополнительных задач, влия-
ющих на качество управления, то может оказаться полезным фильтр
с увеличенным числом степеней свободы. В этих условиях рекомен-
дуется использовать фильтр следующего вида:
СД.,) - (1 + яГ>),/ - • г < <7.82)
Дополнительные принципы выбора фильтров содержатся в работе
(Morari 1989). Разработку ВМ-структур можно разделить на два эта-
па. На первом этапе осуществляется разработка ВМ-структуры без
учета проблем, связанных с фильтром Gf. Основное внимание при
этом уделяется обеспечению высокого качества управления. В ходе
второго этапа полученная ранее ВМ-структура «оснащается» филь-
тром Gf. Этот фильтр, отвечающий особенностям сформированной
структуры, должен обеспечить устойчивость системы при всех воз-
можных режимах работы системы. Качество регулирования при этом
обычно несколько ухудшается (по сравнению с результатами, полу-
7.3. Формирование структур и настройка параметров регуляторов 617
Рис. 7.68. ВМ-структура, содержащая фильтр низких частот Gf (а) и ее
преобразование в традиционную структуру (б)
ценными на первом этапе) вследствие инерционности фильтра. Разу-
меется, опытный разработчик может начинать процедуру проектиро-
вания системы прямо со второго этапа.
9. Ошибка е для ВМ-структуры, включающей фильтр (см. рис. 7.68),
дается выражением
(1 - GfQG)(yp - d)
l + GfQ(G-G*)
Если регулятор Q представляет собой такую неидеальную инверсию
G*nv модели объекта, что Q — G*nv только для статических состо-
яний системы управления, а система в целом является устойчивой,
то сигнал ошибки асимптотически стремится к нулю для единичного
ступенчатого входного воздействия у0 и возмущения d, т. е.
lim e(t) = О,
t—>оо
если выполняется одно из следующих двух условий:
lim Gy(s)Q(s)G(s) = 1,
s^° (7.84)
limG/(z)Q(^)G(z) = 1.
z—>1
Результирующее значение коэффициента усиления для последова-
тельно соединенных фильтра Gy, регулятора Q и объекта G должно
быть равно 1. Если статический коэффициент усиления фильтра рав-
няется 1, то статический коэффициент усиления инверсной модели
G*nv = Q должен быть равен величине, обратной значению статиче-
ского коэффициента усиления объекта G.
Приведенные выше замечания 1-9 относятся к разработке ВМ-
структур для случая линейных объектов. А как будет обстоять дело
в случае нелинейных объектов? Передаточные функции G(s), G*(s),
618
Глава 7. Нечеткое управление
Рис. 7.69. ВМ-структура, представленная нелинейными операторами (а)
и ее традиционный эквивалент, включающий нелинейный регулятор Rn (б)
G*nv(s), Q(s\ использующиеся в линейных ВМ-структурах, требуется
заменить нелинейными операторами:
G F — объект,
G* —> F* — модель объекта,
G*nv —> F*nv — инверсная модель объекта,
Q Qn — ВМ-регулятор,
R —> Rn — регулятор в традиционной структуре,
Gf Gf — фильтр (в нелинейных ВМ-структурах используются ли-
нейные фильтры).
На рис. 7.69, а показана нелинейная ВМ-структура. Согласно (Есо-
nomou 1986; Hack 1997; Morari 1989), многие свойства линейных ВМ-
структур сохраняются и для нелинейных ВМ-структур, если d = 0.
Замечания относительно нелинейных ВМ-структур
1. Если модель объекта F* является точной, а регулятор Q и объект F
устойчивы, то рассматриваемая ВМ-структура устойчива.
2. Если существует точная инверсная модель объекта F*nv и она исполь-
зуется в качестве регулятора (Q = F*nv), то данная ВМ-структура
обеспечивает идеальное управление у = t/О-
З. Если статическое состояние регулятора Qn равняется статическому
состоянию инверсной модели объекта Fnv, а ВМ-структура устойчива
в целом, то статическая точность управления (устранение установив-
шейся ошибки) достигается для постоянных значений возбуждающего
воздействия уо = const и возмущения d = const.
4. Идеальное управление, как и в случае линейной ВМ-структуры, мож-
но получить только для статических состояний. Ухудшению качества
управления сопутствует увеличение частоты сигналов, проходящих
через ВМ-структуру.
7.3. Формирование структур и настройка параметров регуляторов 619
5. Модель объекта F*, ее инверсия F*nv и регулятор Qn нет необхо-
димости представлять в виде обычных математических выражений.
Они могут быть также нечеткими моделями или нейронными сетями
(«черными ящиками»), может быть, с заданными заранее структурой
и параметрами, например, на основе данных, полученных путем из-
мерения входных и выходных сигналов.
6. Если регулятор Qn представляет собой точную инверсную модель F*nv
нелинейного объекта F, то последовательное соединение объекта
и регулятора можно трактовать как некоторый линейный элемент
(Neumerkel 1992). Нелинейные компоненты объекта компенсируются
регулятором, а ВМ-структура в целом приобретает свойства линейной
структуры, откуда следует, что можно улучшить качество процессов
управления. Если инверсную модель можно рассматривать как точ-
ную только для статических состояний, то компенсация будет рас-
пространяться на статические нелинейности.
7. Полезность нелинейных ВМ-структур с нечеткими или нейросете-
выми регуляторами подтверждается многочисленными примерами их
практического применения (Morari 1989; Hunt 1992; Edgar 1997;
Hack 1997; Neumerkel 1992; Narendra 1990a,b; Ullrich 1997b; Piegat
1998b). Это значит, что теоретические соображения относительно то-
го, что преимущества линейных ВМ-структур будут проявляться и в
случае нелинейных ВМ-структур, можно считать подтвержденными,
т. е. к ним можно относиться как к полезному источнику информации
для практических целей.
Пример 7.3.3.4.1. Пусть F — нелинейный оператор, описывающий си-
стему, показанную на рис. 7.70. Система F составлена из элемента ZOH,
привода с насыщением (его рабочей характеристики) — 1 < и? < 1 и объ-
екта управления G(s). Для простоты всю систему F в целом будем име-
новать «объект».
Объект
Рис. 7.70. Составные элементы объекта управления. Здесь ZOH (Zero-
Order Hold) — экстраполятор нулевого порядка, формирующий кусочно-
постоянный сигнал
620
Глава 7. Нечеткое управление
y(k)
1.5
1
—।—।—।—।—।—।—।—।—।—।—t—►
012345 6789 10 11 А:
Рис. 7.71. Реакции объекта управления на ступенчатые входные сигналы вида
u(k) = полученные для a = 1 и a > 1
Дискретная модель последовательного соединения ZOH-элемента
и G(s), полученная для момента времени Т = 0.1 (с), определяется выра-
жением вида
. 0.9г-1 — 0.8г-2
6(з) = 0.6-0.5^-
(7.85)
Отображение «вход-выход», реализуемое объектом, описывается та-
кими соотношениями:
y(k + 1) = 0.83333т/(/с) + 1.5Ц/с) - 1.33333tz(fc - 1)
при — 1 < u < 1, (7.86)
y(k + 1) - 0.83333?/(А;) + 0.166667 при u > 1, (7.87)
у(к + 1) - 0.83333?/(fc) - 2.83333 при и < -1. (7.88)
Реакция рассматриваемого объекта на ступенчатый входной сигнал
и(к) = l(fc), для всех начальных состояний, равных нулю, показана на
рис. 7.71.
Рассматриваемый объект управления симметричен. Это значит, что
данный объект реагирует на любой сигнал и таким образом, что удо-
влетворяется условие у (и) = —у(—и). По этой причине нечеткая модель
объекта F* также должна быть симметричной. Результаты настройки мо-
дели, т. е. функции принадлежности для входов модели и(к), и(к — 1),
у (к), а также функция принадлежности для выхода модели у (к + 1) по-
казаны на рис. 7.72.
По отношению к переменной у(к) была применена экстраполяция ис-
тинности (extrapolation truth) (см. разд. 5.6), чтобы предотвратить насы-
щение выхода модели у(к + 1), для у(к) > 1 и у(к) < —1. Нечеткая
модель рассматриваемого объекта представляется 8 правилами Ri, кото-
рые определены в табл. 7.3 и табл. 7.4.
Операции И в приведенных правилах реализованы с использованием
оператора PROD. Структурная схема, иллюстрирующая процесс настрой-
ки обратной модели F*nv, показана на рис. 7.73. Удовлетворить требование
7.3. Формирование структур и настройка параметров регуляторов 621
а(у(*+1))
4 Около 2 Около 3.666
---1---------X-----1—I--------Z—I----- ---------- ------►
-3.666 -2 -1 -0.666 0.666 1 2 3.666 y(k+V)
Рис. 7.72. Функции принадлежности для входов и выхода модели объекта F*
Таблица 7.3
Правила Rl—RA
Я*) U (к) около - 1 около +1
ОКОЛО -1 около -1 около + 0.66666
около + 1 около + 2 около + 3.66666
R1 - Л4 : ЕСЛИ [u(k - 1) = около - 1] И [u(k) = около ...]
И [у(к) — около ...] ТО [у(к + 1) = около ...]
Таблица 7.4
Правила /?5—R8
У(к) и (к) около - 1 около + 1
около -1 около -3.66666 около -2
около + 1 около -0.66666 около + 1
R5 - R8 : ЕСЛИ [u(k - 1) = около 1] И [и(к) = около ...]
И [у(к) = около ...] ТО [у(к + 1) = около ...]
у {к) = У2(к) невозможно. По этой причине данное нереализуемое усло-
вие ослабляется до формы у (к) = у2(к—1), что приводит к соотношениям
622
Глава 7. Нечеткое управление
e(k) = y2(k-l)-y(k)-> О
Рис. 7.73. Схема системы для настройки обратной модели F*nv
вида:
у(к + 1) = у2(к), у(к) = у2(к - 1). (7.89)
Чтобы получить нечеткую инверсную модель, требуется изменить
правила (R1-R8) согласно соотношениям (7.89). Затем эти модифици-
рованные правила преобразуются в такую форму, при которой перемен-
ная и(к), представляющая собой выход инверсной модели, должна быть
введена в заключение каждого из правил. В качестве примера проделаем
эту процедуру для правила R2.
Основное правило:
R2 : ЕСЛИ [и(к — 1) = около — 1] И [и(к~) = около — 1]
И [у(к) = около + 1] ТО [у(к + 1) = около 0.66666].
Основное правило после замены переменных:
R2* : ЕСЛИ [и(к — 1) = около — 1] И [и(к) = около — 1]
И [у2(А: — 1) = около + 1] ТО [з/з(^) = около 0.66666].
Правило инверсной модели, соответствующее правилу R2:
R*nv : ЕСЛИ [и(к - 1) = около - 1] И [у2(к - 1) = около + 1]
И [уг(&) = около 0.66666] ТО [и(к) = около - 1].
В качестве результата прямого инвертирования 8 правил модели F*
получены 8 правил для инверсной модели. Полученные правила перечис-
лены в табл. 7.5 и 7.6.
Чтобы завершить построение инверсной модели, требуется сформи-
ровать 32 правила. Дополнительные правила можно получить на том
основании, что выходная переменная у(к + 1) вместе с ее 8 функциями
принадлежности переходит в состав набора входных переменных. База
правил, определяемая табл. 7.5 и 7.6, неполна, и ее требуется расширить.
7.3. Формирование структур и настройка параметров регуляторов 623
Таблица 7.5
Правила Д1-Е8 инверсии модели объекта
У2<к) около -3.6666 около -2 около -1 около - 0.6666 около + 0.6666 около + 1 около + 2 около +3.6666
ОКОЛО -1 около -1 около + 1
около + 1 около -1 около + 1
RI - R8 : ЕСЛИ [u(k - 1) = около - 1] И [y2(k - 1) = около ...]
И [у2(к) = около ...] ТО [и(к) = около ...]
Таблица 7.6
Правила R9-R16 инверсии модели объекта
У1(к) У2(к-\) около -3.6666 около -2 около -1 около -0.6666 около + 0.6666 около + 1 около + 2 около +3.6666
ОКОЛО -1 около -1 около + 1
около + 1 около -1 около + 1
1
u(k)
R9 - R16 : ЕСЛИ [u(k - 1) = около + 1] И [у2(к - 1) = около ...]
И \у2(к) = около ...] ТО [и(к) = около ...]
Есть два способа сделать данную базу правил полной. Инверсию можно
настроить путем применения к схеме, показанной на рис. 7.73, метода
обратного распространения ошибки, которая содержит модель объекта.
Второй способ заключается в настройке инверсной модели на основе дан-
ных о входах и выходах объекта, с использованием подстановки
у(к + 1) = у2(к), у(к) = у2(к - 1)
(см. разд. 7.3.3.2). Если принять, что насыщение выхода имеет вид
-1 < и < +1, получим результат настройки инверсной модели в фор-
ме базы правил, определяемой табл. 7.7 и 7.8.
Функции принадлежности для переменных инверсной модели показа-
ны на рис. 7.74. Для завершения синтеза рассматриваемой ВМ-структуры
624
Глава 7. Нечеткое управление
Таблица 7.7
Правила /? 1 —/?16 инверсии F*nv модели объекта F*
Уг(к) У2(к-1) около -3.6666 около -2 около -1 около -0.6666 около 4-0.6666 около + 1 около + 2 около +3.6666
ОКОЛО -1 около -1 около -1 около -1 около -0.7777 около + 0.1111 около + 0.3333 около + 1 около + 1
около + 1 около -1 около -1 около -1 около -1 около -1 около -0.7777 около + 0.1111 около + 1
Rl - R16 : ЕСЛИ [u(k - 1) = около - 1] И [т/2(^ - 1) = около ...]
И lyz(k) = около ...] ТО [u(k) = около ...]
Таблица 7.8
Правила F17-F32 инверсии F*nv модели объекта F*
У1(к) У1(к-1) около -3.6666 около -2 около -1 около -0.6666 около + 0.6666 около + 1 около + 2 около +3.6666
ОКОЛО -1 около -1 около -0.7777 около + 0.1111 около + 1 около + 1 около + 1 около + 1 около + 1
около + 1 около -1 около -1 около -0.3333 около -0.1111 около + 0.7777 около + 1 около + 1 около + 1
F17 - R32 : ЕСЛИ [u(k - 1) = около + 1] И [у?(к - 1) = около ...]
И [у?(к) = около ...] ТО [и(к) — около ...]
(рис. 7.75) требуется выбрать фильтр Gf. Следуя рекомендациям, приво-
димым в (Morari 1989), выбирается инерционный фильтр вида
1 1 _ e~T/Tf
= <мо>
Разумеется, надо еще выбрать и значение постоянной времени Tf
фильтра. Получаемая постоянная времени обратной связи рассматривае-
мой системы приближенно равна (Tf FT). Первый из возможных вари-
антов состоит в том, чтобы величина Tf была как можно меньшей. Это
ускоряет быстродействие системы. Однако этот метод повышения быст-
родействия вызывает необходимость формировать сигналы управления и
с большими значениями амплитуды, в то время как используемый в си-
стеме привод имеет ограничение —1 и < 1.
Принимая во внимание сказанное выше, положим Tf — 0.3 с. Тогда
дискретный аналог передаточной функции фильтра Gf(s) дается соотно-
7.3. Формирование структур и настройка параметров регуляторов 625
//O2(fc-1))
а(л(*))
Около 2 Около 3.666
-3.666 -2 -1-0.666 0.6661 2 3.666 y2(k)
Д(и(£))
f Около 0.777 Около 1
- 1 -0.777 -0.333 -0.111 0.111 0.333 0.777 1 u(k)
Рис. 7.74. Функции принадлежности для входов u(k — 1), у%(к — 1), у?(к) и вы-
хода и(к) нечеткой инверсной модели F*lv (определяемой базой правил, пред-
ставленной в таблицах 7.7 и 7.8)
Рис. 7.75. Элементы и сигналы разрабатываемой ВМ-структуры
шением вида
ч 0.28347 0.28347г"1 /7П1Ч
Gf[z) = ----= i—п 71 .-1 (7-91)
J z — 0.71653 1 — 0.71653г 1
или соответствующим разностным уравнением:
у2{к} = 0.71653т/2(^ - 1) + 0.28347?/!(/с - 1). (7.92)
Итак, все элементы, входящие в рассматриваемую ВМ-структуру, из-
вестны. Резюмируя излагаемую процедуру разработки этой структуры,
напомним, что нечеткая модель F* объекта определяется табл. 7.3 и 7.4
вместе с рис. 7.72, нечеткая инверсная модель i7*v — табл. 7.7 и 7.8 вме-
сте с рис. 7.74, а фильтр — соотношением (7.92).
626
Глава 7. Нечеткое управление
Уо 1
0.
012 3456789
10
11 к
б)
а)
012 34 56 7 89 10 11 А;
и
0.1
012 34 56 7 89 10 11 А:
в)
Рис. 7.76. Реакция у (б) ВМ-структуры на ступенчатый входной сигнал
г/о(&) = 0.1(&) (а) и управляющий сигнал и(к) — вход объекта (в)
Реакция у рассматриваемой ВМ-структуры на «малые» значения вход-
ного сигнала уо(к) — 0.1(fc) и управляющий сигнал iz(fc), формируе-
мый обратной моделью F*nv, для нулевых начальных условий показа-
на на рис. 7.76. Из рис. 7.76 видно, что сигнал и(к) не достигает на-
сыщения — вследствие небольшой величины входного сигнала. Сигналы
у (к) и и(к) для большого задающего сигнала у о (к) = 1(/с) показаны
на рис. 7.77. В этом случае сигнал и(к) достигает уровня насыщения
(-1 < и < 1).
Если амплитуда задающего сигнала продолжает нарастать или ес-
ли уменьшается постоянная времени Tf фильтра, то управляющий сиг-
нал и(к) по форме будет стремиться к единичному скачку. В предель-
ном случае процесс управления вырождается в процесс «включения-
выключения».
Процесс подавления (гашения) возмущения d(k) = 0.1(fc), влияющего
на вход объекта (см. рис. 7.75), показан на рис. 7.78. Видно, что ВМ-
система исключает (в смысле полной статической компенсации, т. е. для
к —> оо) влияние возмущений. Если амплитуды возмущающих воздей-
ствий больше по величине, но все еще удовлетворяют условию (\d\ < 1),
то время, требуемое для полной компенсации воздействия, существенно
больше, что обусловлено насыщением сигнала и (—1 < и < 1).
7.3. Формирование структур и настройка параметров регуляторов 627
Уок
Ук
ооооооооооо
-1-1-1-1-1-1-1-1-1-1-1—►
012 3456789 10 11 к
| -------О—о—о—0-0— о—
о
о
о
012 34567891011*
б)
-1-1-1-1-1-1-1-1-1-1-
012 3456789 10 11 к
в)
Рис. 7.77. Реакция у ВМ-структуры (б) на ступенчатый задающий сигнал
Уо(к) = 1(А?) (а), и сигнал управления и(к) — вход объекта (в)
0.
012 34 56 7 89 10 11 *
У(кЦ
О
о
о
0.1 О
о
о
о
--1--г—।-1-1--1-1-?—Q—Q—Q ►
012 34 56 7 89 10 11 *
б)
Рис. 7.78. Демпфирование (6) воздействия возмущения d(k) = 0.1(Ат) (а), вли-
яющего на вход объекта
Пример 7.3.3.4.2. Рассмотрим задачу управления курсом подводного
аппарата KRAB II (см. рис. 7.79).
Выходной сигнал (угол курса ф (град)) управляется путем приложе-
ния момента рысканья М (Нм), формируемого двумя гребными винтами
бокового расположения. Отображение М —> ф выражается с помощью
нелинейных соотношений. При постоянной скорости аппарата и неболь-
ших отклонениях задающего сигнала (курса ф) можно использовать ли-
нейное приближение отображения М ф, представленное в виде пере-
628
Глава 7. Нечеткое управление
Рис. 7.79. Дистанционно управляемый подводный аппарат KRAB II (Техниче-
ский университет Щецина)
даточной функции вида
(7.93)
С (к\ - - кР
’ M(s) s(l + sTp) '
Идентификация параметров этой модели, основанная на эксперимен-
тальных данных для средних значений скорости (Pluciriski 1996), дает:
кр = 0.04 град с/Нм, Тр = 1 с.
Для других значений скорости эти параметры принимают значения
из следующих диапазонов:
0.015 < кр < 0.063, 0.5 < Тр < 11 с.
Один из полюсов передаточной функции (7.93) равен нулю. Нелиней-
ная статическая характеристика гребных винтов (привода) показана на
рис. 7.80.
Рис. 7.80. Статическая характеристика гребных винтов подводного аппарата
7.3. Формирование структур и настройка параметров регуляторов 629
Рис. 7.81. Статическая характеристика коррекции гребного винта
Зона нечувствительности характеристики гребного винта имеет вид
(-1.12 < U < 1.12). Характеристика насыщения гребных винтов несим-
метрична: (—18.20 < М < 28.31). Чтобы устранить зону нечувстви-
тельности, использовалась корректировка характеристики гребного винта
(см. рис. 7.81).
Объект, управляемый с использованием ВМ-структуры, должен быть
устойчивым. Чтобы выполнить это требование, рассматриваемый объект
был «оснащен» стабилизирующей обратной связью, представленной ко-
эффициентом усиления ks.
Результаты экспериментальной проверки (Piegat 1998b) показали, что
если этот коэффициент имеет значение ks = 8.6, это обеспечивает устой-
чивость аппарата для всех возможных значений параметров кр, Тр из диа-
пазонов их изменения, приведенных выше. Объект F (рис. 7.82) является
Гребные
Корректор винты Аппарат
Рис. 7.82. Расширенный объект F, состоящий из подводного аппарата, коррек-
ции гребного винта и стабилизирующей обратной связи
630
Глава 7. Нечеткое управление
Рис. 7.83. Функции принадлежности для переменных, представляющих нечет-
кую модель F* подводного аппарата
неустойчивым. Нечеткая модель этого объекта F в форме
+ 1) = F*[^(A;),Цк - 1), М^(к)\
была определена на основе измеренных значений выходного сигнала V’
и входного сигнала Mq. Функции принадлежности переменных этой мо-
дели показаны на рис. 7.83.
Для получения этих функций принадлежности была использована
процедура экстраполяции истинности, описанная в (Piegat 1997с,1998а)
и в разд. 5.6. Поэтому модель аппарата F* можно использовать при лю-
бых значениях курсового угла i/j (на функции принадлежности не нало-
жены ограничения). В табл. 7.9 и 7.10 определены 8 правил, составляю-
щих базу правил модели аппарата F*. Операция И при этом реализуется
через оператор PROD.
Анализ этой базы правил показывает, что модель объекта F* моно-
тонна. Следовательно, она является обратимой. В данном разделе содер-
жится изложение метода получения инверсной модели для F*. Число
правил в обратной модели больше, чем в исходной модели. Вследствие
7.3. Формирование структур и настройка параметров регуляторов 631
Таблица 7.9
Правила #1-724, представляющие нечеткую модель F* для Мо(к) = N
4>(к- 1)\ N Р
N N3 #1
Р F4 N2
ЕСЛИ [MQ(k) = TV] И [ф(к) = .. •] И [ф(к - 1) = ...] ТО [ф(к + 1) = ...]
Таблица 7.10
Правила #5-#8, представляющие нечеткую модель F* для Мо(к) — Р
Рис. 7.84. Структура с эталонной моделью G^ef для настройки инверсии F*nv
модели F*
этого для настройки требуемых новых функций принадлежности требу-
ется использовать структуру, показанную на рис. 7.84.
Эталонная модель определяется следующими выражениями:
Ginv
ref
V;ref (^) _____ -1
V’ref(fc) = t^k - 1).
(7-94)
Следовательно, при е 0 имеют место соотношения
^(к + 1) = V’W = V;2(& - !)• (7.95)
Приведенные выше соотношения используются для замены перемен-
ных при получении инверсной модели. Функции принадлежности для
инверсной модели показаны на рис. 7.85.
Экстраполяция истинности применялась также в отношении функций
принадлежности инверсной модели F*nv. Таким образом, ограничения на
632
Глава 7. Нечеткое управление
N7 N4
7V97V8tV6 7V57V3 F2Fln
М/ ф
-32.94 -23.44 -13.44 -3.45
-28.19 - 182 -8.21
-22.95 -12.96
РЗ Р6
Pl Р2 Р4Р5 Р7Р8Р9
_ЬОЛ.| V I мй{к)
13.56 23.07 33.54 43.05 7
18.32 28.32 38.4
23.56 33.06
Рис. 7.85. Функции принадлежности для входов ф(к—2), ^(к— 1), ф(к) и выхода
М(к) инверсной модели F*lv
Таблица 7.11
Правила R1-R16 инверсной модели F*nv для — 2) = N
N4 N3 N2 N1 Р1 Р2 РЗ Р4
N N6 N5 N3 N2 Р4 Р5 Р7 Р8
Р N9 F8 N6 N5 Р1 Р2 Р4 Р5
ЕСЛИ [ф2(к - 2) = N] И [ф2(к - 1) = ...] И [ф2(к) = ...] ТО [MQ(k) -= ...]
выходной сигнал Мо(к) инверсной модели отсутствуют. Отсюда следует,
что рассматриваемый подводный аппарат может поворачивать на любой
курсовой угол z/Z База правил, состоящая из 32 правил, представлена для
данного случая в табл. 7.11 и 7.12.
Принимая во внимание правила из табл. 7.11 и 7.12, а также функции
принадлежности, показанные на рис. 7.85, можно просто проверить, что
инверсная модель, так же, как и исходная, является монотонной. Полная
7.3. Формирование структур и настройка параметров регуляторов 633
Таблица 7.12
Правила #17-#32 инверсной модели F*1V для - 2) = Р
7V4 N3 N2 771 Р1 Р2 РЗ Р4
N W5 W4 N2 Р5 Р6 Р8 Р9
Р 7V8 7V7 N5 N4 Р2 РЗ Р5 Р6
ЕСЛИ [ip2(k - 2) = Р] И [ф2(к - 1) - ...] И [ф2(к) = ...] ТО [Мо(к) = ...]
Рис. 7.86. ВМ-структура для управления подводным аппаратом Krab II
ВМ-структура с нечеткой моделью F* и ее обращением F*nv показана на
рис. 7.86.
Применялся интегрирующий (инерционный) фильтр Gf, заданный со-
отношением: , . .
67(г) = = . (7.96)
(г) z — с
где с = е --m. Tj — постоянная времени фильтра, Т — время выбор-
ки, равное 0.1 с. Упрощенно говоря, приближенное значение получае-
мого в результате значения постоянной времени системы в целом рав-
но постоянной времени Tf включенного в нее фильтра. Таким образом,
значение параметра Tf определяет время реакции системы. Сокращение
времени реакции за счет уменьшения значения величины Tf означает,
что значения амплитуды управляющего сигнала Mq становятся больше.
Наконец, большие значения управляющего сигнала Mq порождают эф-
фект насыщения, и процесс управления приобретает релейный характер
(«включить-выключить»). Одновременно с этим нарастает различие меж-
ду реакциями реального объекта F и его нечеткой модели F*, что может
привести к потере устойчивости системой. При относительно больших
значениях Tf сигналы в системе относительно медленные и амплитуды
634
Глава 7. Нечеткое управление
Рис. 7.87. Курсовой угол (непрерывная линия) и заданный угол кур-
са гд (пунктирная линия) (а), момент рысканья М, порождаемый гребными
винтами (б)
Время, с
0
сигналов Mq слишком малы, чтобы вызвать эффект насыщения. Тогда
работу системы можно трактовать как линейную.
Было экспериментально найдено оптимальное значение для посто-
янной времени —оно равно Tf = 17 с. Реакция ф(1) ВМ-структуры на
задающий сигнал определенный в форме прямоугольной волны
с меняющимися значениями амплитуды (+20°,—20°), а также момент
рысканья М (управляющий сигнал), вырабатываемый гребными винта-
ми, показаны на рис. 7.87.
Сигналы, показанные на рис. 7.87, подтверждают хорошее качество
управления. Для большей части отрезка времени, на котором определен
сигнал, момент рысканья М «удерживает» экстремальные значения (мак-
симальное или минимальное). По этой причине состояние ^о(^) =
достигается быстро, и перерегулирование очень невелико (если характе-
ристика гребного винта симметрична, это перерегулирование исключают-
ся вообще). Гребные винты используются без излишних переключений
режима их работы.
Процесс подавления возмущения d показан на рис. 7.88. Возмущения
курсового угла вызванные воздействием d в виде прямоугольной
волны, показаны на рис. 7.88, а, при этом на рис. 7.88, б показан сигнал d
(пунктирная линия) и момент рысканья М (сплошная линия). Кривые,
приводимые на рис. 7.88, подтверждают, что парирование возмущающего
воздействия d осуществляется плавно и быстро, не внося колебательных
составляющих в сигнал ф. Изменение режимов работы гребных винтов
также производится быстро и без излишних переключений.
7.3. Формирование структур и настройка параметров регуляторов 635
Рис. 7.88. Угол курса (курс) ф в процессе компенсации (парирования) возму-
щения (а), компенсирующий момент рысканья М (непрерывная линия), а также
возмущение d в форме прямоугольной волны (пунктирная линия) (б)
Приведенный пример подтверждает предположение о том, что ВМ-
структуры можно успешно использовать также и для управления
неустойчивыми объектами. Однако вначале следует несколько изменить
(подстроить) объект, чтобы обеспечить возможность его совместной ра-
боты с ВМ-структурой, путем введения внешней стабилизирующей об-
ратной связи.
7.3.3.5. Нечеткое управление, основанное на структуре с инверсной
моделью объекта (ИМ-структура)
Существуют теоретические возможности осуществлять «идеальное»
управление с использованием системы управления со структурой, рас-
смотренной в разд. 7.3.3.4 (Morari 1989). Если модель G* объекта G и ее
инверсия G*nv идеально точны, т. е.
G = G* и G*nvG = 1 (G*1V = G-1).
то получающаяся в результате передаточная функция равна 1. Это озна-
чает, что задающий сигнал всегда равен выходному сигналу объекта
и возмущения подавляются немедленно (см. рис. 7.89).
Рассмотрим теперь структуру, показанную на рис. 7.90, которая содер-
жит инверсную модель объекта G*-1, но не включает модель рассмат-
риваемого объекта. Если рассматриваемая система содержит абсолютно
точную инверсную модель (идеальный случай), то она точно следует вво-
димому задающему сигналу (уо = у). То есть, результаты работы этой
системы будут такими же, как и для идеальной ВМ-структуры, показан-
636
Глава 7. Нечеткое управление
Gyo=V
Уо
G — G , G 1(7=1,у=уо
1 +ooG ~
Рис. 7.89. ВМ-структура с идеальной моделью объекта G* и ее идеальной
инверсией G*~r
GyQ = = — =1,
Го l+G'-'G
У=Уо
Рис. 7.90. Система управления с регулятором, представляющим собой идеаль-
ную инверсную модель объекта G*-1
ной на рис. 7.89. Однако этот идентичный результат получен с использо-
ванием меньшего числа элементов в цепи обратной связи. Единственное
требование состоит в наличии инверсной модели G*-1, поскольку ВМ-
структура «требует» наличия как модели объекта G*, так и ее инверсии.
Обе структуры, т. е. ВМ-структура и структура с идеальной инверс-
ной моделью объекта, формируют бесконечно большие сигналы управле-
ния и. В случае идеального управления эталонная модель (см. рис. 7.91)
должна быть представлена передаточной функцией Gw = 1.
Имеется целый ряд причин, из-за которых реализация такого идеаль-
ного управления (Gw = 1) невозможна. Таким образом, требуется ввести
более реалистичную эталонную модель. Какого рода эталонные модели
7.3. Формирование структур и настройка параметров регуляторов 637
Рис. 7.91. Структурная схема системы управления с эталонной моделью Gw
для идеального управления (у = уо)
Рис. 7.92. Структурная схема системы управления, включающая инверсную мо-
дель объекта G*nv, пререгулятор (предварительный регулятор) Gr и эталонную
модель Gw (ИМ-структура)
Gw можно «имитировать» с помощью реализуемой обратной связи? Рас-
смотрим структуру, показанную на рис. 7.92.
Пусть передаточная функция G(s) определяется выражением
z-// \ y(s) bo + bis 4-... 4- bm-^sm 1 4- bmsm Z7 n7A
G(s) = —=--------------------------—;--------, n > m. (7.97)
u(s) 4- &1S 4- • • . 4- 4- ansn
Тогда идеальная инверсная модель G'^s) принимает вид
х-г-1/ Щ) + ais + ... 4- aTI~]Sn 1+arisn /7 qq\
h I h q I I k Qrn — 1 1 l \ - 7
Oq 4- Ois 4~ ... 4~ orn-is 4- 0^8
Отметим, что все замечания, высказанные в разд. 7.3.3.4 относительно
процесса получения инверсной модели, остаются в силе.
Если идеальная инверсная модель G*-1(s) не является собственной
(n > т), то последовательно с ней требуется соединить дополнительный
инерционный (интегрирующий) элемент порядка (n —т), чтобы получить
физически реализуемую инверсию G*nv вида
ао 4- ftis + ... 4- ari-isrl 1 4- avs7) (7 99)
invlS' - (bo + 61s + ... + kn-is™-1 + bmsm)(l + sTb)"-"1 '
Получаемую в результате передаточную функцию, отвечающую по-
следовательному соединению реализуемой инверсной модели G*nv и мо-
дели объекта G (см. рис. 7.92), можно аппроксимировать (отметим, что
638
Глава 7. Нечеткое управление
инверсия G*nv является обычно неточной) с помощью инерционного эле-
мента порядка (п — тп):
G*M G(s) ---------Ц----. (7.100)
mvV / v ) G+sTb)n~m
При убывании Ть произведение G*nvG стремится к 1. Это значит, что
процесс управления ускоряется. Следует добавить, что при уменьшении
значения величины Ть значения амплитуды вырабатываемого управляю-
щего сигнала и увеличиваются. Таким образом, технические характери-
стики приводов определяют выбор минимального значения постоянной
времени Т^.
Примем теперь, что инверсная модель G*nv в системе, показанной на
рис. 7.92, определяется с использованием выражения (7.99), а эталонная
модель Gw задается соотношением
Gw = 7------------тт (7.101)
(1 + sTw)n~m+1 v 7
Конечно, можно использовать и другие виды эталонных моделей. На-
пример, эталонную модель можно представить мульти-инерционным эле-
ментом с различными постоянными времени:
e~sTQ
(1 + sTwi) • ... • (1 + sTw(n_w_|_i))
Реализуемая эталонная модель для объекта с задержками должна
включать часть с запаздыванием, как это имеет место в следующем со-
отношении:
Gw =
Дадим теперь определение
решать в предположении, что
обеспечивает управление, отвечающее эталонной модели Gw. Сравнивая
эту модель Gw с полученной в результате передаточной функцией между
сигналами уо и у, получаем следующее выражение:
(7.103)
(1 + sTw)n~m^ ‘
пре-регулятора Gr. Эту задачу следует
ИМ-структура, показанная на рис. 7.92,
(7.104)
_______________
r ~ (1 - Gw)G*nvG •
Если передаточная функция объекта задана в виде (7.97), а инверсная
модель определяется соотношением (7.99), то разность (1 — Gw) будет
иметь вид
1 Gw{s) 1 (1 + s7^K_m+1
s(ci + c2g + . .c„_m+i.sra m)
(1 + sTw)n~m+1
(7.105)
7.3. Формирование структур и настройка параметров регуляторов 639
(1 + sTw')n~m+1 = 1 + CIS + c2s2 + ... cn-m+1Sn~m+1
Частное Gw/(1 — Gw) в (7.105) включает интегрирующий элемент, кото-
рый в более наглядной форме можно представить выражением
Gw(s) =_______________1___________
1 - Gw(s) s(ci + c2s + ... cn_m+isn-m) ’
(7.106)
Подставляя соотношения (7.105) и (7.106) в формулу (7.104), получим
передаточную функцию пре-регулятора:
(l + sTb)n~m
s(ci + c2s + . . . Cn_w+iSn-m) ’
(7.107)
Коэффициенты в этом выражении зависят от постоянной времени Tw
(или от постоянных времени Twi) эталонной модели (7.105). Тогда, если
эти коэффициенты выбраны «разумно», то многие элементы числителя
и знаменателя в формуле (7.107) можно сократить. При благоприятных
обстоятельствах передаточную функцию пре-регулятора можно получить
в очень простой форме:
Gr(s) = ^. (7.108)
Резюмируем сказанное выше: регулятор R состоит из двух частей, а
именно, из пре-регулятора Gr и инверсной модели G*nv. Если выполняет-
ся соотношение (7.108), то настройка регулятора упрощается, поскольку
придется подбирать значение единственного параметра kr.
Следующая важная проблема связана с подавлением возмущений d.
Как видно из рис. 7.92, компоненту у, порождаемую возмущением d, мож-
но вычислить, используя передаточную функцию Gd вида
= <7109’
Если G задается соотношением (7.97), G*nv — соотношением (7.99),
a Gr — соотношением (7.104), то Gd определяется выражением вида
Gd(s) = G(s)[l - Gw(s)] =
_ (&О + &1S + ... + 6„tsm)s(ci + c2s + ... cn_m+1sn~m)
(do + dis + ... + a„sn)(l + sTw)" m+1
Статический коэффициент усиления kd такой передаточной функции
равен нулю, поскольку
kd = lira Gd(s) = 0. (7.111)
s—>оо
Таким образом, стационарные компоненты возмущений d подавляют-
ся (демпфируются) полностью, это демпфирование является статическим
640
Глава 7. Нечеткое управление
(переходный режим системы не принимается во внимание). Следует от-
метить, что данный вывод относится к собственным объектам. Если объ-
ект G является несобственным и содержит, например, интегрирующую
часть, как в выражении (7.112), то требуется разработать соответствую-
щий регулятор Gr, чтобы осуществлять полное подавление (в статиче-
ском смысле) стационарных компонент возмущений:
G(s) = ^ + ^s + --- + 6'»gm . (7.112)
s(a0 + ars + ... -F UnS11)
Инверсная модель для приведенной выше передаточной функции за-
дается выражением
р* / \ ___________s(ap 4- ciis + . • • + пп8п)_ /у 114^
i,,v A ~ (Ьо + bis + ... + + зТьу'-т+1 ' V ’
Пусть передаточная функция регулятора Gr определяется выражением
Gr(s) = k,'° У'15 . (7.114)
Подставляя соотношения (7.112), (7.113) и (7.114) в формулу (7.110),
получим Gd в виде
G =
' > (1 4-Gr(s)G*nv(s)G(s)
(bo + 61S + ... + bm.sm)s(l + sTb)"
(do 4~ + ... + <znsn)[s^(l 4- 3Т1/У1 4- kr\s 4~ Go]
Используя теорему об окончательном значении, несложно проверить,
что
kd= lim Gd(s) = 0. (7.116)
<$—>ос
Это значит, что регулятор (7.114) полностью подавляет возмущения
статического характера. Вычисляя вход-выходную передаточную функ-
цию Gyo, для Gr задаваемой соотношением (7.114), получим следующее
выражение:
Г _
> y0(s) 1 4-Gr(s)G*nv(s)G(s) (7П7)
kpQ 4* kr^s
~ krG + krls s2(l -У sTb)n~m^1
Таким образом, на устойчивость системы, а также на ее характе-
ристики управляемости можно воздействовать с помощью параметров
регулятора krQ и kri, а также с помощью постоянной времени Ть инверс-
ной модели. Значения этих подстраиваемых параметров можно устано-
вить (назначить) с помощью процесса настройки, либо вычислительным
7.3. Формирование структур и настройка параметров регуляторов 641
0
Рис. 7.93. Структура с эталонной моделью Gw, представляющей желаемый
характер действий по отслеживанию (а), а также вариант этой структуры с эта-
лонной моделью Gwd, представляющей желаемый характер подавления возму-
щения (б)
путем, на основе структур, показанных на рис. 7.93. Очевидно, что эта-
лонные передаточные функции Gw и Gwd (см. рис. 7.93) должны быть
реализуемыми.
Отметим, что для объекта с интегрирующей компонентой (7.112)
числитель передаточной функции регулятора R = GrG*nv (выражение
(7.118)) не должен иметь корень, равный нулю. Итак, неустойчивый по-
люс объекта ($1 — 0) (выражение (7.112)) не сокращается (не редуциру-
ется). Редукция подобного рода запрещена (Morari 1989):
ВД = Gr(S)G*nv(«) =
(krQ + kris)((lo + Q1S + . . . + flr(5n)
s(bQ + M + • • • + ’
(7.118)
Если полюса объекта размещаются в правой полуплоскости комплекс-
ной величины <s (объект является неустойчивым), то данный объект мож-
но стабилизировать с помощью дополнительной стабилизирующей обрат-
ной связи. Некоторые соображения по поводу стабилизации объектов
рассматриваемого вида обсуждаются в разд. 7.3.3.4. После стабилизации
объекта можно разработать (построить) регулятор с инверсией. Анализ
ИМ-структур приводит к интересным наблюдениям. Они обсуждаются
в примере 7.3.3.5.1.
642
Глава 7. Нечеткое управление
Рис. 7.94. Система управления с инверсной моделью для объекта
второго порядка
Пример 7.3.3.5.1. Пусть рассматриваемый объект представляет собой
колебательную или инерционную систему второго порядка:
G(s) =-------------5 . (7.119)
a0 + ai s + аге
Система управления с инверсной моделью, разработанной на основе
правил, обсуждаемых в данной главе, принимает вид, показанный на
рис. 7.94.
Регулятор R для рассматриваемого объекта представлен в виде пере-
даточной функции
«<’> = G-<s>G-<»> - [(ОТ + Ст? + ст?] (7Л2О)
Это типичный, широко используемый и общеизвестный ПИД-
регулятор (такой регулятор, кстати, как-то назвали «ломовой лошадью»
автоматического регулирования (Franklin 1986)). Если значение постоян-
ной времени Тъ стремится к нулю, то передаточная функция регулятора
(7.120) стремится к стандартному виду ПИД-регулятора. Следователь-
но, ПИД-регулятор можно трактовать как оптимальный регулятор для
объектов второго порядка. Сказанное выше дает убедительное объясне-
ние распространенности применений ПИД-регуляторов в промышленно-
сти. Аналогичные рассуждения для объектов первого порядка приводят
к заключению о том, что для таких объектов оптимальным будет ПИ-
регулятор (а2 = 0).
Для дискретных ИМ-структур рекомендуется применять нескачко-
образный вариант пре-регулятора, описываемый передаточной функцией
вида ( \ L
= = (7.121)
е(г) z - 1
Представленной выше передаточной функции соответствует разност-
ное уравнение вида
ei(fc) = kre(k — 1) 4- ei(k — 1).
(7.122)
7.3. Формирование структур и настройка параметров регуляторов 643
Очень быстрые, даже ступенчатые изменения задающего сигнала уо
не приводят к формированию ступенчатых отклонений выходного сиг-
нала регулятора ei(fc), поскольку передаточная функция (7.121) описы-
вает дискретный вариант интегрирования. Из-за такого свойства пре-
регулятора амплитуды значений управляющего сигнала и, вырабатыва-
емого следующим элементом регулятора R, т. е. инверсной моделью, не
будут иметь значений, слишком больших для приводов (напомним, что
инверсная модель обычно содержит дифференцирующие компоненты).
Таким образом, состояние насыщения привода может быть исключено.
Если удается устранить состояния насыщения, потеря устойчивости си-
стемой менее вероятна.
Приведенный выше анализ свойств ИМ-структур побуждает сделать
вывод о том, что рассматриваемая структура может успешно приме-
няться в случае линейных объектов. С использованием концепции ИМ-
структуры достаточно просто разрабатывать квазисовершенные регуля-
торы. Обсудим теперь в контексте ИМ-структур проблему управления
нелинейными объектами. В этом случае модели в виде передаточных
функций требуется заменить нелинейными операторами, определяющи-
ми отображения «вход-выход»:
G F — объект,
G* —> F* — модель объекта,
G*nv —> F*nv — инверсная модель объекта,
R —» Rn — регулятор, составленный из пре-регулятора и инверсной
модели.
ИМ-структура для нелинейного объекта показана на рис. 7.95. Как
и в предыдущих, линейных случаях, для нелинейных объектов нельзя
найти идеальной инверсии, имитирующей требуемую эталонную модель
Gw = 1 (см. рис. 7.96).
Рис. 7.95. ИМ-структура для нелинейных объектов
644
Глава 7. Нечеткое управление
Рис. 7.96. Настройка нелинейной инверсной модели объекта Е*пу в системе
с эталонной моделью
(7.123)
(7.124)
Путем тщательного выбора инверсной структуры (нечеткой или ней-
росетевой) и точной настройки ее параметров можно получить более или
менее точную компенсацию нелинейных явлений, как статических, так
и динамических, используя прямое (непосредственное) описание моде-
ли F* и косвенное (непрямое) описание рассматриваемого объекта F.
Такую компенсацию будем считать эффективной, если отношение между
выходом объекта у и входом инверсной модели (см. рис. 7.95) будет
близким к линейному. Этими свойствами обладает мульти-инерционное
выражение одного из следующих двух видов:
у(з) 1
ei(s) (l + sTb)n-m ’
УИ _________________1_____________
^i(s) (1 + •... • (1 + sTb(n_m))
Поскольку значения статического коэффициента усиления для обоих
этих выражений равны 1, после переходного процесса будет выполняться
соотношение у — еь Предположение (7.123) или (7.124) означает, что
регулятор Gr, как и эталонная модель Gw также могут быть линейны-
ми. Таким образом, приемы проектирования, полученные для линейных
объектов, можно применять и для разработки регулятора Gr в случае
нелинейного объекта. Разумеется, для получения регулятора Gr мож-
но также использовать и другие методы синтеза линейных регуляторов.
Следует помнить, что полученную в результате составную модель, вклю-
чающую F*nv и F, можно трактовать как линейную, если инверсная мо-
дель F*nv не формирует слишком больших сигналов и, т. е. таких сигна-
лов, которые вызывали бы насыщение привода.
Компенсацию возмущения d нельзя рассматривать как линейный опе-
ратор, поскольку d прямо (непосредственно) воздействует на вход объ-
екта, минуя инверсную модель (см. рис. 7.95). Точно то же самое можно
сказать и о ВМ-структуре. Однако, если известна точная модель F*
объекта, тогда эту модель объекта можно вставить в ИМ-структуру
(рис. 7.95) вместо объекта F. После такой замены можно попытаться
7.3. Формирование структур и настройка параметров регуляторов 645
Рис. 7.97. Применение структуры с эталонной моделью подавления возмущений
(помех) Gwd для настройки регулятора Gr
эффективно подавить возмущение d путем настройки регулятора Gr на
основе схемы, показанной на рис. 7.97 (инверсную модель F*nv можно
настроить в системе, показанной на рис. 7.96).
Рассмотрим пример нечеткого управления на основе ИМ-структуры.
Пример 7.3.3.5.2. Совокупность последовательно включенных элемен-
тов, состоящую из ZOH-элемента, привода с симметричными верхним
и нижним пределами насыщения, а также из объекта, описываемого дис-
кретной передаточной функцией (см. рис. 7.98), можно трактовать как
объект управления. Время выборки (замера) здесь равняется Т = 0.1 с.
Таким образом, объект управления в данном примере в точности тот же
самый, что и в примере 7.3.3.4.1.
Теперь нечеткую инверсную модель F*nv объекта зададим с помощью
правил, определяемых табл. 7.13 и 7.14. Функции принадлежности для
них показаны на рис. 7.99. Операция И здесь реализуется с использова-
нием оператора PROD.
Синтез ИМ-структуры управления включает также и выбор пре-
регулятора Gr (см. рис. 7.100). Этот пре-регулятор выберем в виде
Gr(z) = . (7.125)
Видно, что рекомендации (7.101) учтены и удовлетворяются.
Эксперименты с характеристиками системы, нацеленные на выбор
наилучшего значения коэффициента усиления регулятора, приводят к его
Mj
0.9z_1 -0.8z’2
> G(z) =----------—
0.6-0.5Г1
Рис. 7.98. Объект и привод
646
Глава 7. Нечеткое управление
Таблица 7.13
Правила R1-R16 инверсной модели F*1V
e,(fc) е^-1) около -3.6666 около -2 около -1 около -0.6666 около + 0.6666 около + 1 около + 2 около +3.6666
ОКОЛО -1 около -1 около -1 около -1 около -0.7777 около + 0.1111 около + 0.3333 около + 1 около + 1
около + 1 около -1 около -1 около -1 около -1 около -1 около -0.7777 около -0.1111 около + 1
RI - F16 : ЕСЛИ [u(k - 1) = около - 1] И [ei(fc - 1) = около ...]
И [d(fc) = около ...] ТО [-u(fc) = около ...]
Таблица 7.14
Правила В17-В32 инверсной модели F*nv
ei(£) е1(к- 1) около -3.6666 около -2 около -1 около -0.6666 около + 0.6666 около + 1 около + 2 около + 3.6666
около -1 около -1 около + 0.1111 около + 0.7777 около + 1 около + 1 около + 1 около + 1 около + 1
около + 1 около -1 около -1 около -0.3333 около -0.1111 около + 0.7777 около + 1 около + 1 около + 1
u(k)
R17 - R32 : ЕСЛИ [u(k - 1) = около + 1] И [ei(fc - 1) = около ...]
И [ei(fc) = около ...] ТО [u(k) = около ...]
значению, равному kr = 0.25. Сигналы в системе управления для задаю-
щего входного сигнала yo(k) — O.l(fc) показаны на рис. 7.101.
Сигналы в системе управления для возмущающего сигнала в форме
единичного скачка (d = O.l(fc)) показаны на рис. 7.102. Эти результаты
были получены при нулевых начальных условиях.
Если амплитуды ступенчатых сигналов уо(к) или d(k) больше 0.1, то
значения амплитуды управляющего сигнала и(к) также растут и условие
\u\ 1 более не выполняется. Это приводит к выходу на насыщение
в приводе.
Чтобы исключить нежелательные выбросы значений сигнала у, в ин-
тегрирующие регуляторы часто включается так называемый ограничи-
7.3. Формирование структур и настройка параметров регуляторов 647
около 2 около 3.666
/<(“(£))
4 около 0.777 около 1
-1 -0.777 -0.333 -0.1110.111 0.333 0.777 1 w(^)
Рис. 7.99. Функции принадлежности для входов u(k - 1), ei (к - 1), ei(fc) и вы-
хода и(к) инверсии F*nv нечеткой модели с базой правил, определяемой табли-
цами 7.13 и 7.14
Рис. 7.1OO. Структура системы управления с компенсацией нелинейности типа
«насыщение»
вающий элемент-интегратор, не допускающий перегрузки интегратора
(Franklin 1986). Метод применения такого элемента иллюстрируется
рис. 7.100.
Как показано на рис. 7.102, ступенчатые возмущения d полностью
компенсируются ИМ-структурой, если значения амплитуды этих сигна-
лов не очень велики, т. е. если привод не выходит в состояние насыщения
|u| < 1. Аналогично, по тем же самым причинам, система отслеживает за-
дающий сигнал |уо| С 1- Слишком большие значения коэффициентов уси-
ления пре-регулятора кг дестабилизируют рассматриваемую систему.
648
Глава 7. Нечеткое управление
У(к)
О
Л W
О
0123456789 10 11
0123456789 10 11 к
0123456789 10 11 к
Рис. 7.101. Сигналы в системе управления для задающего сигнала
yo(fc) = O.l(fc)
и (Л) А
0.1
ф—I—I—I—I—I—I—I—I—I—I—I—►
0123456789 10 11 А:
Рис. 7.102. Сигналы в ИМ-структуре для ступенчатого возмущающего сигнала
d(k) = 0.1(А:)
7.3. Формирование структур и настройка параметров регуляторов 649
В примере 7.3.3.5.3 выполняется сравнение результатов, получен-
ных при управлении одним и тем же объектом с использованием ИМ-
структуры и ВМ-структуры.
Пример 7.3.3.5.3. Для управления курсом подводного аппарата была
использована ИМ-структура. Как ВМ-структура, так и ИМ-структура
показаны на рис. 7.103.
Объект F, его нечеткая модель F* и инверсная модель F*nv детально
рассматриваются в примере 7.3.3.4.2. Регулятор с ИМ-структурой состав-
лен из пре-регулятора Gr и инверсной модели объекта (см. рис. 7.103, б).
Передаточная функция пре-регулятора определяется следующим выра-
жением: ( .
G^z} = . (7.126)
2-1
Значительное число проведенных вычислительных экспериментов по-
казало, что наилучшие характеристики управления будут получены, если
кс = 3. Сравнение обеих структур при отслеживании прямоугольного за-
дающего сигнала представлено на рис. 7.104.
Время установления (успокоения) является более коротким для ИМ-
структуры. Реакции ИМ-структуры на сигнал в виде прямоугольной вол-
ны идентичны этому сигналу по форме, они следуют задающему сигналу
и в положительной, и в отрицательной его части. Для ВМ-структуры
видно, что реакция ^(t) в ходе отслеживания положительной полувол-
ны прямоугольной волны отличается от реакции на отрицательную часть
а)
Рис. 7.103. Сравниваемые структуры: (а) ВМ-структура; (б) ИМ-структура
650
Глава 7. Нечеткое управление
Рис. 7.104. Сравнение реакций для ВМ-структуры (а) и для ИМ-
структуры (б) на задающий сигнал в виде прямоугольной волны (пунк-
тирная линия)
Рис. 7.105. Сравнение сигналов управления Л/, формируемых ВМ-
структурой (а) и ИМ-структурой (б) для задающего сигнала V;oW’ представ-
ленного на рис. 7.104
задающего сигнала. В первом из этих двух случаев можно видеть пе-
ререгулирование, тогда как во втором случае такое перерегулирование
отсутствует.
Значения момента рысканья М, вырабатываемого гребными винта-
ми для обеих управляющих структур, показаны на рис. 7.105. Эти кри-
вые были получены для задающего сигнала 0о(О> представленного на
рис. 7.104.
Можно видеть, что кривая, относящаяся к моменту для ВМ-
структуры, более плавная и гладкая, чем для ИМ-структуры. Значитель-
ная часть задающего сигнала состоит из максимально или мини-
7.3. Формирование структур и настройка параметров регуляторов 651
Время, с
я)
Время, с
б)
Рис. 7.106. Компенсация воздействия ступенчатого возмущения d в ВМ-
структуре (а) и в ИМ-структуре (б)
мально доступных значений момента рысканья М. Это приводит к тому,
что переходные процессы, вызванные ступенчатыми изменениями задаю-
щих сигналов, относительно непродолжительны.
Реакции ^(t) на «ступенчатое» возмущение d (—10 (Нм), +10 (Нм)),
воздействующее на вход объекта, показаны на рис. 7.106.
Видно, что ИМ-система более эффективно парирует воздействие воз-
мущения d. Требуемое для этого время составляет примерно 10 с, тогда
как ВМ-системе для решения той же самой задачи необходимо поряд-
ка 60-70 с. Максимальное отклонение курса ^(£), вызванное возмуще-
нием d, составляет 0.18° для ИМ-системы и 1.18° —для ВМ-системы.
Таким образом, если принимать во внимание эффективность парирова-
ния возмущений, между этими двумя системами имеется существенное
различие.
Более детальное сравнение данных систем дает анализ результатов,
представленных на рис. 7.107. Кривые на этом рисунке показывают значе-
ния момента рысканья М для обеих упомянутых управляющих структур
при воздействии на них одного и того же возмущения d (пунктирная
линия).
Время переключения момента рысканья с его максимального положи-
тельного значения на минимальное отрицательное значение составляет
примерно 1 с для ИМ-структуры и около 7-8 с для ВМ-структуры. Для
обеих структур характерно, что большую часть времени задающий сиг-
нал ^о(О имеет значение, равное максимально или минимально доступ-
ному значению момента рысканья М. Это значит, что переходные про-
652
Глава 7. Нечеткое управление
Рис. 7.107. Момент рысканья М, формируемый в ВМ-структуре (а) и в ИМ-
структуре (б) в процессе компенсации воздействия возмущения d (пунктирная
линия)
цессы, порожденные ступенчатыми возмущениями, относительно непро-
должительны и отклонения курса уД£) быстро устраняются.
Таким образом, оценивая приведенные выше результаты, можно сде-
лать вывод, что ИМ-структура предпочтительнее для управления курсом
подводного аппарата — ее быстродействие выше, поскольку она не
содержит инерционной модели объекта. Однако обобщать данное утвер-
ждение неправомерно. Для каких-то других задач управления лучшей
может оказаться ВМ-структура. Результаты экспериментов показыва-
ют, что ИМ-структура, рассмотренная для управления курсом, будет
устойчивой в следующих диапазонах изменения параметров передаточ-
ной функции объекта (подводного аппарата):
0.015 < кр < 0.065, 0.5 < Тр < 11.
Хорошие результаты применения инверсной модели для нелиней-
ного объекта (ректификационной колонны) представлены в работе
(Lawrynczuk 2000).
7.3.3.6. Адаптивное нечеткое управление
В разд. 6.3.3 были рассмотрены методы идентификации нечетких моделей
объектов, а также способы определения инверсных моделей, с использо-
ванием измеренных значений входов и выхода объекта. Если параметры
объекта меняются, можно воспользоваться методами оперативной (on-
line) идентификации. На этой основе можно осуществлять непрерывную
подстройку параметров нечеткого регулятора или отдельных его частей
7.3. Формирование структур и настройка параметров регуляторов 653
Рис. 7.108. Схема адаптивного управления для ВМ-структуры
(наподобие модели F* или инверсной модели F*nv, рассматриваемых как
элементы регулятора R — см. разд. 7.3.3.4, 7.3.3.5). Такого рода подстрой-
ка характера действий, выполняемых регулятором, вызываемая измене-
нием значений параметров объекта управления, называется «адаптивным
управлением» (Astrom 1989).
Если значения параметров объекта меняются очень медленно, или же
если такие изменения происходят лишь время от времени, тогда иден-
тификацию объекта и настройку регулятора можно осуществлять перио-
дическим образом. Адаптацию элементов регулятора для нечеткой ВМ-
структуры (разд. 7.3.3.4) можно реализовать, основываясь на схеме, по-
казанной на рис. 7.108. Выбор значений параметров фильтра Gf должен
обеспечивать устойчивость системы для всех возможных значений пара-
метров объекта F. С практической точки зрения это значит, что следует
увеличить значения постоянных времени инерционного (интегрирующе-
го) фильтра.
Схема адаптивного управления для ИМ-структуры (разд. 7.3.3.5) по-
казана на рис. 7.109. Постоянное обновление значений параметров нечет-
кой модели F* и ее инверсии F*nv улучшает качество линеаризации
операторов F*nvF и F*nvF*, включенных в структуры, показанные на
рис. 7.108 и 7.109, если значения параметров объекта меняются во вре-
мени. Использование описанного выше подхода к адаптации позволя-
ет пренебречь обновлением значений параметров фильтра Gf и пре-
регулятора Gr. При быстром изменении значений параметров объекта
точность идентификации значений параметров модели F* и ее инвер-
сии F*nv будет невысокой. По этой причине постоянные времени филь-
тра Gf в ВМ-структурах следует увеличить, а значения коэффициентов
654
Глава 7. Нечеткое управление
Рис. 7.109. Схема адаптивного управления для ИМ-структуры
усиления регулятора Gr в ИМ-структурах — уменьшить по сравнению со
значениями упомянутых параметров, рекомендованными для объекта F
с фиксированными параметрами. Если следовать этим рекомендациям,
система управления получается более робастной.
Адаптивные ВМ-структуры и ИМ-структуры, показанные на
рис. 7.108 и 7.109 можно сделать и более сложными, если настраивать
и параметры фильтра Gf, а также регулятора Gr. С другой стороны, ес-
ли число подстраиваемых при адаптации параметров слишком велико,
возникают серьезные трудности с обеспечением устойчивости системы
(Astrom 1989, Anderson 1986). Увеличение числа контуров адаптации па-
раметров приводит к появлению значительных трудностей при выполне-
нии аналитических вычислений, предназначенных для определения обла-
сти устойчивости рассматриваемой системы. Следовательно, число пара-
метров, настраиваемых в процессе адаптации, надо свести до минимума.
Помимо ВМ-структур и ИМ-структур можно использовать также
и адаптивную структуру общего вида, где нечеткий регулятор (FC)
может иметь любой вид (например, это может быть нечеткий ПИД-
регулятор). Пример такой структуры для адаптации регулятора пока-
зан на рис. 7.110. Нижняя часть данной структуры представляет собой
классическую замкнутую систему управления, состоящую из объекта F
и регулятора FC. Верхняя часть этой структуры — это модель реальной
системы управления, включающая модель F* рассматриваемого объекта
и модель FC* регулятора. Модель объекта F* настраивается на осно-
ве текущих значений замеров входного сигнала и выходного сигнала у.
Обновленные значения параметров передаются в модель F*, находящу-
юся в модели системы управления (адаптация параметров). Такая мо-
дификация (адаптация) параметров модели F* активизирует алгоритм,
настраивающий параметры модели регулятора FC*. Для адаптации па-
раметров модели регулятора FC* можно воспользоваться методом обрат-
ного распространения ошибки s, которая представляет собой разность
между задающим (опорным) сигналом yw, вырабатываемым эталонной
7.3. Формирование структур и настройка параметров регуляторов 655
Рис. 7.110. Адаптивная система с нечетким регулятором FC
моделью Gw (она определяет желаемое поведение системы управления
в целом) и выходом у* модели объекта.
В конечном счете модифицированные значения параметров модели F*
и регулятора FC* передаются в регулятор (FC), который управляет рас-
сматриваемым реальным объектом (F). Описанную адаптацию можно
осуществлять непрерывно (оперативный режим), либо периодически. От-
метим, что структура, изображенная на рис. 7.110, состоит из двух после-
довательно соединенных и одновременно настраиваемых подсистем (на-
стройка модели объекта F* и модели регулятора FC*). Таким образом,
система может потерять устойчивость, особенно при быстром изменении
значений параметров объекта. Следовательно, по соображениям безопас-
ности, рассмотренную выше структуру адаптации можно применять для
«медленных» объектов, в смысле изменения значений их параметров, или
же в случае изменений параметров рассматриваемого объекта, проявляю-
щихся от случая к случаю. Хорошим примером объектов такого рода яв-
ляются транспортные суда, для которых динамические параметры замет-
ным образом изменяются нерегулярно, при их загрузке в гавани. После
отхода из гавани параметры судна меняются очень медленно, вследствие
расхода топлива, питьевой воды и т. д.
Кроме тех трех структур, которые были рассмотрены в данном разде-
ле, могут применяться также и другие адаптивные структуры, включаю-
щие нечеткие регуляторы. Примеры решения задач нечеткого адаптивно-
го управления можно найти в работах (Brown 1994; Fischle 1997; Koch
1996; Serac 1996; Sousa 1995; Wang 1994a).
656
Глава 7. Нечеткое управление
7.3.3.7. Многомерное нечеткое управление (MIMO)
Структурная схема многомерной ИМ-структуры показана на рис. 7.111.
Векторы и операторы на рис. 7.111 определяются следующим образом:
Yo = [уоь---,Уор]Т’
Er = [eri,..., е,.р] ,
Y =
[^<71 5 • • ; tlrfp] ,
Eq — [и.......(Jp]1 •
U = [ну,... , up]1,
D = [db...,dp]T7
Суп • • • Gr]_p
G
(7.127)
Grp[ • • • Grpp
Многомерный нелинейный оператор, представляющий модель F* объ-
екта F, описывает отображение «входы-выходы» вида
Y*(fe) - F*[Urf(/c-n + m),... ,Ud(fc-n), Y(fc-1),... , Y(fc-n)]. (7.128)
Рисунок 7.111 и связанные с ним соотношения (7.127) были получе-
ны для одинаковой размерности (равной р) всех векторов. Существует,
однако, много реальных объектов, для которых число входов отличается
от числа выходов. В этом случае разработка системы управления может
оказаться намного более сложной.
d\ dp
a)
D
6)
Рис. 7.111. Структурная схема многомерной системы управления (М1М0)
с инверсной моделью (а) и ее упрощенный вариант (б)
7.3. Формирование структур и настройка параметров регуляторов 657
Объект
Рис. 7.112. Система для настройки модели объекта F*
Рис. 7.113. Настройка инверсной модели F*nv на основе
структуры с эталонной моделью G“1V
Методы, рассмотренные в разд. 7.3.3.1, можно с успехом использо-
вать для определения нечеткой модели объекта F*. Принимая = U,
можно настроить данную модель объекта, используя схему, показанную
на рис. 7.112.
Аналогичным образом, для определения инверсной модели F*nv мож-
но воспользоваться многомерными вариантами методов, обсуждавшихся
в разд. 7.3.3.2. Пример такого подхода показан на рис. 7.113.
Отображение «вход-выход», реализуемое инверсной моделью, опреде-
ляется выражением
U(fc) = F*nv[Er(Ar),..., Er(fc - n), U(fe - 1),..., V(k - m)]. (7.129)
Эталонную модель для данной инверсной модели можно выбрать в ви-
де следующей матрицы, элементами которой будут передаточные функ-
ции: G-- = r^inv 0 0 z^inv ^w22 • • ’ 0 0 (7.130)
0 0 z^inv ^Jwpp _
Передаточные функции-компоненты GJ™- можно представить интегри-
рующими (инерционными) элементами порядка (п — тп). Конкретные зна-
чения постоянных времени передаточных функций-компонент могут быть
как одинаковыми, так и различными, в зависимости от выбора, сделан-
658
Глава 7. Нечеткое управление
Рис. 7.114. Результат упрощения системы, показанной на рис. 7.111, б, получен-
ный заменой отображения (F*nvF*) его приближенным вариантом G’(;nv
ного разработчиком. Статические коэффициенты усиления этих переда-
точных функций G™. должны быть равны 1.
Тогда для непрерывного варианта можно сделать такой выбор:
7 (l + sT?)n-m ’
а для дискретного варианта
\ п—m
’ (7-131)
где Ci = е~т/т\ Т — время выборки, Тг — постоянная времени,
г = 1,... ,р.
Идентификация многомерной инверсной модели и ее настройка на-
много сложнее в сравнении с системами класса SISO (см. также
разд. 7.3.3.2). Если модель F* объекта F и ее инверсия F*nv достаточ-
но точны, то последовательное соединение F*nv и F* (рис. 7.113) можно
приближенно представить линейной эталонной моделью G^v. Предпо-
лагая достаточно точную аппроксимацию в смысле приведенного выше
утверждения, можно упростить структуру, приведенную на рис. 7.111, б,
представляя ее так, как показано на рис. 7.114.
Система управления, показанная на рис. 7.114, является линейной.
Чтобы определить регулятор Gr, можно воспользоваться хорошо извест-
ными методами разработки регуляторов для линейных многомерных си-
стем управления. Это может быть, например, метод, нацеленный на син-
тез робастного регулятора (Weinmann 1991), метод управления на основе
структуры с эталонной моделью Gu, (рис. 7.115) и т. д.
Чтобы не было недоразумений, надо понимать, что эталонная мо-
дель Gw на рис. 7.115 определяет желаемые динамические свойства си-
стемы управления в целом, тогда как эталонная модель G“1V, показанная
на рис. 7.113, представляет выбранный базис (последовательное соедине-
ние F*1VF*) для определения инверсной модели объекта F*nv. Эталонная
модель для системы управления Gu, выбирается обычно в виде диаго-
нальной матрицы, включающей инерционные элементы Gwa (7.132). Ста-
тические коэффициенты усиления этих элементов равны 1 (как для G“lv),
7.3. Формирование структур и настройка параметров регуляторов 659
Рис. 7.115. Разработка многомерного регулятора Gr на основе структуры с эта-
лонной моделью Gw
но порядок инерционности, присвоенный элементам Gw, выше по срав-
нению с порядком элементов G^v:
Таким образом, в зависимости от того, какой вариант рассматривает-
ся, непрерывный или дискретный, примем, соответственно:
Gwj/s) = (1+ sTu .,
(\ п—т+1
й") ’ (7.132)
где с7 = e-T/TW), Г —время выборки, Twj — постоянная времени,
Регулятор системы, показанной на рис. 7.115, можно найти из соотно-
шений
GrGtnv(I - GrG”v)-1 = Gw, (7.133)
где I — единичная матрица порядка р.
Общий вид выражений, определяющих компонентные передаточные
функции Grij многомерного регулятора Gr (7.127), можно получить
из соотношения (7.133). Далее, полученные передаточные функции Grij
можно использовать как основу для начального выбора приближенных
значений параметров регулятора. Отметим, что упрощенная управляю-
щая структура (рис. 7.114 и 7.115) не учитывает возмущения D, оказыва-
ющие воздействие на вход нелинейного объекта F, а также, как линейная
структура, не учитывает ограничений на работу приводов. Таким обра-
зом, после предварительного выбора параметров регулятора их значения
660
Глава 7. Нечеткое управление
Рис. 7.116. Полная нелинейная структура с эталонной моделью Gw, обеспечи-
вающая окончательную настройку многомерного регулятора Gr
Рис. 7.117. Структура с эталонной моделью Gw для настройки нечеткого регу-
лятора FC представляющего любую заранее заданную управляющую структуру
следует вновь подвергнуть настройке, на этот раз в исходной, не упро-
щенной структуре, показанной на рис. 7.116.
Нечеткую модель F* и ее инверсию F*nv можно представить посред-
ством нейронечеткой сети, а регулятор Gr — посредством нейронной сети
динамического типа. Для настройки регулятора можно воспользоваться
методом обратного распространения ошибки е.
Если имеется потребность использовать другие структуры для нечет-
кого регулятора (FC), то вид такой структуры следует определить зара-
—>
нее. Параметры, характеризующие такой регулятор FC, можно настро-
ить, используя показанную на рис. 7.117 структуру с эталонной моделью.
Рассмотрим многомерную ИМ-структуру, показанную на рис. 7.118.
Если можно определить достаточно точную модель F* объекта и ее ин-
версию F*nv, а последовательное соединение (F*nvF*) можно рассматри-
вать как эквивалентное требуемой эталонной модели для инверсии G^v
(рис. 7.113), то выбор компонентных передаточных функций Gftj много-
мерного фильтра Gf и начальную настройку параметров фильтра (для
D = 0) можно осуществить на основе структуры с эталонной моделью
(для управления), показанной на рис. 7.119.
7.3. Формирование структур и настройка параметров регуляторов 661
Рис. 7.118. Многомерная ВМ-система управления, включающая фильтр нижних
частот G f
Рис. 7.119. Система для определения вида фильтра Gf и предварительных зна-
чений его параметров
Непосредственно из рис. 7.119 вытекают следующие соотношения:
GzGLnv = Gw, (7.134)
G/ = Gw(GLnv)”1- (7-135)
Основываясь на этих соотношениях, можно выбрать правильный вид
компонентных передаточных функций Gfij фильтра Gy, а также опре-
делить предварительные значения параметров фильтра. Окончательную
настройку параметров фильтра можно выполнить на основе полной ВМ-
структуры, показанной на рис. 7.120, где представлены нелинейные огра-
ничения и возмущения. Для настройки параметров фильтра можно при-
менить метод обратного распространения ошибки е, а также другие ши-
роко известные методы.
Ошибку г следует «прогнать» через модель G* объекта, что можно
осуществить с использованием нейронной сети. Инверсную модель F*nv
и фильтр Gf можно представить аналогичным образом, т. е. также по-
средством соответствующих нейронных сетей.
Многочисленные примеры многомерных нечетких систем управления
обсуждаются в работах (Соггпас 1997; Dias 1997; Lacrose 1997; Lopez
1997; Serac 1996; Soria 1996). Большей частью речь в них идет об управ-
662
Глава 7. Нечеткое управление
Рис. 7.120. Структура с многомерной эталонной моделью Gw, рекомендуемая
для настройки параметров фильтра Gf
лении объектами при р = 2 (два входа и два выхода). При возрастании
числа входов и выходов объекта как при его нечетком моделировании,
так и при разработке нечетких регуляторов для них сложность проблемы
существенно возрастает. То же самое верно, если принимать во внима-
ние еще и процессы настройки. Именно по этой причине не рекомен-
дуется разрабатывать нечеткие регуляторы, если число входов объекта
превышает четыре (Brown 1994, 1995а). Это не значит, однако, что дан-
ная проблема при р > 4 не может быть решена вообще. Существуют
специальные структуры нейросетевых регуляторов, которые полезны для
моделирования многомерных отображений, если размерность задачи дей-
ствительно велика. Структуры такого типа подробно рассматриваются
в работе (Lin 1995). Они были также кратко представлены в разд. 6.3.
Глава 8
Устойчивость
нечетких систем управления
Согласно обязательным для исполнения промышленным нормативам,
устанавливаемым органами власти во многих странах, требуется обос-
новать устойчивость системы управления с входящим в нее регулятором
предлагаемого типа. Это требование рассматривается как необходимое
условие для использования системы управления. Существует много при-
кладных задач, для которых проверка устойчивости системы управления
расценивается как проблема критической важности. Это случаи, когда
системы управления влияют на безопасность использующих их людей
(стабилизация полета самолета и т. п.), управляют дорогостоящими объ-
ектами и сложными производственными процессами, подверженными по-
тере устойчивости. Такого рода нормативы должны соблюдаться незави-
симо от того, является ли регулятор нечетким или обычным.
Операции, реализуемые нечеткими регуляторами, обычно можно ин-
терпретировать как сложные нелинейные отображения входных сигналов
в выходные. Существует много прекрасных методов анализа устойчиво-
сти линейных систем управления, но, к сожалению, обоснование устой-
чивости сложных нелинейных систем до сих пор остается трудной про-
блемой. Не так давно, в 1992 г., высказывалась даже пессимистическая
точка зрения (Preuss 1992), согласно которой методы проверки устойчи-
вости нечетких систем управления вообще не могут быть созданы.
В 1996 г., в рамках научно-технической выставки The German
Technology Fairs в Германии, были представлены новейшие разработки
в области нечетких регуляторов. Присутствие на этом мероприятии зна-
чительного числа видных специалистов в данной области обеспечило воз-
можность серьезного обсуждения важнейших аспектов нечеткого управ-
ления. В отчете о состоявшейся дискуссии было сказано: «До сих пор
остается открытым вопрос о том, можно ли вообще применять нечеткие
регуляторы в критических условиях, когда обязательно должна обеспе-
чиваться устойчивость системы управления» (Dobrich 1996).
Трудности, возникающие при попытках подтвердить устойчивость
нечетких регуляторов, сужают область их практических применений.
Чтобы изменить эту ситуацию, ведется интенсивная работа, нацеленная
664
Глава 8. Устойчивость нечетких систем управления
на преодоление указанных трудностей. Более или менее успешно рабо-
тающие методы проверки устойчивости нечетких систем были получены
к концу прошлого десятилетия. Некоторые из них были позаимствова-
ны в доработанном виде из классической теории управления. Наиболее
известные из методов, созданных для проверки устойчивости нечетких
систем, перечисляются ниже:
• критерий устойчивости Попова (Kahlert 1995; Bohm 1993; Opitz 1993;
Buhler 1994; Cook 1986; Khalil 1992; Follinger 1993),
• круговой критерий (Kahlert 1995; Driankov 1993; Opitz 1993; Cook
1986; Khalil 1992),
• прямой метод Ляпунова (Kahlert 1995; Hung 1995; Bohm 1993; Kiendl
1993; Weinman 1991; Cook 1986; Khalil 1992; Follinger 1993; Marin
1995; Sheel 1995; Tanaka 1990,1992),
• анализ устойчивости системы в фазовом пространстве (пространстве
состояний) (Kahlert 1995; Driankov 1993; Cook 1986; Maeda 1991),
• анализ устойчивости с использованием компьютерной модели систе-
мы,
• метод описывающей функции (Kahlert 1995; Kiendl 1992,1993; Cook
1986; Aracil 2000),
• метод показателей устойчивости и робастности системы (метод би-
фуркаций) (Driankov 1993; Kahlert 1995),
• методы, основанные на теории вход-выходной устойчивости (теорема
о малых значениях коэффициента усиления) (Driankov 1993; Malki
1994; Noisser 1994; Cook 1986; Khalil 1992; Suykens 1995; Aracil 2000),
• критерий конусности (Driankov 1993; Aracil 1991,2000),
• методы, основанные на теории гиперустойчивости Попова (Opitz
1986,1993; Bohm 1993; Schmitt 1996, Bindel 1995; Piegat 1997b,1997d;
Han 1970; Li 1991; Popov 1963,1973; Anderson 1968),
• эвристические методы (Ying 1994; Wang 1996; Sommer 1993,1994;
Rumpf 1994; Singh 1992; Aracil 2000).
Этот список методов изучения устойчивости нечетких систем посто-
янно пополняется за счет новых предложений. Большинство из них мож-
но отнести к методам эвристического характера. Зачастую эти эвристиче-
ские методы основываются на очень интересных, но трудных для понима-
ния идеях. Например, в работе (Wang 1996) было предложено выполнять
стабилизацию нечеткой системы с использованием известной нечеткой
модели объекта следующим образом: каждому правилу вывода, связан-
ному с этим объектом, ставится в соответствие единственное специально
Глава 8. Устойчивость нечетких систем управления
665
разработанное правило для регулятора. Аналогичный подход предложен
в (Aracil 2000) для нечетких систем типа Такаги—Сугено.
Большое число методов, предназначенных для исследования устойчи-
вости нечетких систем, порождает своего рода «информационный шум».
Этот феномен довольно типичен для наших дней. Нет необходимости
тщательно анализировать все эти методы. Надо вначале оценить сте-
пень полезности того или иного конкретного метода и на этой основе
осуществлять выбор одного из них. После того, как отобрано некото-
рое количество «лучших» методов, их следует подвергнуть тщательному
анализу.
В качестве критериев для оценки методов можно предложить следу-
ющие:
1) возможность получения строгого доказательства устойчивости
системы,
2) «объем» трудностей, которые надо преодолеть при проверке устойчи-
вости системы,
3) простота понимания сути метода,
4) степень общности метода (возможность его применения для различ-
ных классов систем),
5) возможность компьютерной поддержки операций, связанных с про-
веркой устойчивости системы.
Анализ систем в фазовом пространстве, метод описывающей функ-
ции, анализ устойчивости с использованием компьютерной модели систе-
мы — эти методы, вообще говоря, не дают строгого обоснования устойчи-
вости системы, а скорее обеспечивают возможность проверки ее работо-
способности для случая, когда точно известен вид возмущающих и вход-
ных воздействий на систему, вид начальных условий и т. д. Очень важен
анализ устойчивости с использованием компьютерных моделей систем,
поскольку с его помощью можно изучать очень сложные многомерные
системы, независимо от числа воздействующих на них сигналов. Это,
однако, метод экспериментального (эмпирического) характера, т. е. его
результаты не поддаются обобщению. Он просто подтверждает устой-
чивость системы применительно к конкретным условиям, рассматривав-
шимся в ходе моделирования.
Широко известный метод Ляпунова для исследования устойчивости
нелинейных систем позволяет получить строгое математическое обосно-
вание устойчивости. У этого метода, однако, есть ряд недостатков:
• Чтобы подтвердить устойчивость, требуется найти так называемую
функцию Ляпунова. Это непростая задача творческого характера.
666
Глава 8. Устойчивость нечетких систем управления
Рис. 8.1. Типичный пример «расщепления» на секторы для области рабочих
режимов нечеткой системы (Р — точка равновесия)
Разработка компьютерной программы, реализующей решение задачи
подобного вида, также сопряжена с определенными трудностями.
• Метод Ляпунова позволяет оценить устойчивость системы для тех
секторов области ее рабочих режимов, которые лежат вблизи состо-
яния равновесия данной системы (Bohm 1993). А как быть с осталь-
ными секторами?
Согласно результатам, полученным в работе (Bohm 1993), метод Ля-
пунова не может эффективно использоваться за пределами сектора, при-
мыкающего к точке равновесия рассматриваемой системы. Функция Ля-
пунова должна быть непрерывно дифференцируемой. По этой причине
для данной функции была избрана квадратичная форма представления,
чтобы она отображала обобщенную энергию. «Смягченный» вариант ме-
тода Ляпунова предлагается в (Kiendl 1993). В этом варианте упомянутое
выше условие не обязательно должно удовлетворяться (оно нарушается
на границах секторов). Данный вариант рассматриваемого метода осно-
ван на упрощенной модели нечеткого регулятора, приведенной к поли-
линейной форме. Кроме того, необходимо принять, что область рабочих
режимов регулятора составлена из некоторого числа прямоугольных па-
раллелепипедов, оси которых параллельны. Данный метод представля-
ется интересным, но вводимые в нем упрощения сужают область его
возможных применений. Попытки улучшить применимость метода Ляпу-
нова для изучения устойчивости нечетких систем предпринимаются до
сих пор. Вполне возможно, что в близком будущем удастся преодолеть
недостатки данного метода. Следует отметить еще, что существующие
Глава 8. Устойчивость нечетких систем управления
667
Рис. 8.2. Система управления с обратной связью и дополнительным входом
варианты метода Ляпунова являются непростыми и трудоемкими в ис-
пользовании (Bohm 1995).
Методы, основанные на теории вход-выходной устойчивости, не га-
рантируют нулевого значения установившейся ошибки системы (Driankov
1993). Основные результаты, получаемые с помощью этих методов, ос-
новываются на следующей теореме: система управления с обратной свя-
зью устойчива, если произведение коэффициентов усиления ее элемен-
тов, т. е. объекта g(G) и регулятора р(Н), удовлетворяет неравенству
5(G)-5(Н) <1. (8.1)
Аналитически определить коэффициенты усиления элементов систе-
мы с обратной связью в общем случае — непростая задача. Процедура
нахождения коэффициентов усиления g(G) объекта и р(Н) регулятора
относительно проста только для случаев линейных стационарных объек-
тов, управляемых с помощью статических регуляторов без гистерезиса
(см. рис. 8.2).
В этом случае коэффициенты усиления можно найти с помощью сле-
дующих соотношений:
5(H) = sup , |е|/0,
I lel J (8.2)
5(G) = sup <5{G(jw)} ,
и
где обозначает максимальное сингулярное значение матрицы А,
полученной для уравнения, представляющего состояние объекта. Ос-
новываясь на максимальных значениях коэффициентов усиления g(G)
и д(Н), данная теорема дает «консервативные» результаты, обеспечивая
для системы наличие некоторого запаса устойчивости, который не обяза-
тельно будет большим. Коэффициенты усиления объекта и регулятора не
обязаны быть максимальными одновременно. Следовательно, в отдель-
ных случаях может получиться так, что применение рассматриваемого
метода исследования не позволит оценить устойчивость системы, даже
когда данная система будет несомненно устойчивой.
668
Глава 8. Устойчивость нечетких систем управления
Метод бифуркаций определяет, насколько далеко рассматриваемая
система находится от состояния, где она теряет устойчивость. Данный
метод анализирует условия потери устойчивости и способы стабилиза-
ции системы в окрестности точек неустойчивого равновесия. Стабили-
зация осуществляется за счет соответствующего подбора характеристик
регулятора. Для успешного применения этого метода требуется глубо-
кий теоретический анализ свойств рассматриваемой системы. Это значит,
что автоматизация использования данного метода чрезвычайно трудна.
Существует вариант этого метода (Driankov 1993) для нелинейных си-
стем, но, как представляется, он будет полезен только в случаях, когда
системы описываются простыми математическими моделями. Если про-
странство состояний системы является двумерным (фазовая плоскость),
то настоятельно рекомендуется использовать именно метод бифуркаций,
поскольку теоретический анализ свойств такой системы и ее поведения —
относительно простая задача.
Критерий конусности разрабатывался на основе теоремы о малых
значениях коэффициента усиления. Недостатки, перечисленные выше
применительно к идее вход-выходной устойчивости, остаются в силе
и для метода, использующего критерий конусности.
Проведенное сопоставление методов изучения устойчивости систем
приводит к выводу, что для случая SISO-систем можно рекомендовать
критерий Попова и круговой критерий, а для случая MIMO-систем —
методы, основанные на использовании теории гиперустойчивости. Они
позволяют получить строгое математическое обоснование устойчивости
и при этом сводятся к использованию относительно несложных вы-
числительных алгоритмов. Особое внимание следует обратить на тео-
рию гиперустойчивости. Она позволяет проверять устойчивость систем
с многочисленными точками равновесия. При таком подходе устойчи-
вость можно оценивать не только вблизи этих точек (как в случае ме-
тода Ляпунова), но и глобально, включая секторы, не примыкающие к
точкам равновесия. Эти свойства метода обеспечивают ему практичность
использования. По этой причине в разд. 8.2 и 8.3 подробно рассматрива-
ются теория гиперустойчивости и круговой критерий (как сходный по
идее, но более простой, чем критерий Попова).
Разделам 8.2 и 8.3 предшествует разд. 8.1, в котором рассматривается
устойчивость нечетких систем для случая неизвестной модели объекта
управления. Нечеткий регулятор можно применять как в случае извест-
ной модели объекта, так и при неизвестной модели.
Если математическая модель объекта управления неизвестна, то нет
возможности получить оценку устойчивости системы в аналитической
8.1. Устойчивость нечетких систем управления
669
форме. Подходящие методы для этой цели пока еще не созданы (Ying
1994; Opitz 1993). Они, однако, могут появиться в будущем. В работе
(Hung 1995) получены условия устойчивости, согласно которым можно
получить большое число нечетких регуляторов, обеспечивающих устой-
чивую работу систем с объектами P-типа в случае, если этим Р-объектом
можно устойчиво управлять с помощью регулятора С-типа (таким ре-
гулятором может быть, например, человек). В (Ying 1994) представлен
регулярный алгоритм для проектирования нечетких регуляторов, обеспе-
чивающих устойчивое управления объектами, модели которых неизвест-
ны. На первом шаге этого алгоритма определяются параметры линейно-
го ПИ-регулятора, обеспечивающего устойчивое управление требуемым
объектом. Это значит, что для настройки регулятора можно использовать
даже метод Циглера—Никольса, который позволяет решить сформулиро-
ванную выше задачу.
Интерес представляет также и подход, предложенный в (Wang 1994b).
Здесь дается строгое доказательство устойчивости системы управления
для случая неизвестной модели объекта. Устойчивость управляемой си-
стемы обеспечивается за счет использования двух регуляторов (нечетко-
го регулятора R± и управляющего регулятора Rz). Проблема стабилиза-
ции нечетких систем посредством применения управляющих регуляторов
рассматривается в разд. 8.1.
8.1. Устойчивость нечетких систем управления
с неизвестными моделями объектов
Нечеткие регуляторы для объектов с неизвестными математи-
ческими моделями разрабатываются на основе знания опытного
человека-оператора (эксперта по рассматриваемой проблеме), кото-
рый успешно освоил управление соответствующим объектом пу-
тем обучения. Существует, однако, риск того, что знания экспер-
та неполны. Иногда получается так, что оператору не приходи-
лось иметь дело с некоторыми редко встречающимися режима-
ми работы объекта, которые могут оказаться критическими. По
этой причине для обеспечения устойчивости системы целесообраз-
но использовать управляющий регулятор, показанный на рис. 8.3
(Opitz 1993).
Управляющий регулятор наблюдает состояние и вход объекта управ-
ления. Если состояние объекта выходит за некоторые установленные гра-
ницы (становится потенциально опасным), то управляющий регулятор за-
670
Глава 8. Устойчивость нечетких систем управления
vi - сигнал, включающий или выключающий нечеткий регулятор
V2 - стабилизирующий сигнал, d - возмущение
Рис. 8.3. Идея введения диспетчерского (супервизорного) управления для обес-
печения устойчивости нечетких систем управления
пускает стабилизирующее действие чтобы вернуть объект в область
допустимых состояний. Если результат выполнения стабилизирующего
действия неудовлетворителен, то сигнал щ осуществляет отключение
входного сигнала и.
Метод, основанный на использовании нечеткого и управляющего ре-
гуляторов и позволяющий осуществить стабилизацию систем управле-
ния, включающих нелинейные объекты некоторых классов, описывается
в (Wang 1994b). В этой работе устойчивость понимается в том смыс-
ле, что состояние системы не выходит за границы, установленные про-
ектировщиком. Введение управляющего регулятора здесь представляет-
ся весьма выгодным, поскольку на этапе разработки системы появляет-
ся возможность отказаться от многих достаточно жестких ограничений,
вытекающих из критериев устойчивости. Это значит, что можно проек-
тировать нечеткий регулятор с более высоким значением коэффициен-
та усиления и более высокими характеристиками реализуемого процес-
са регулирования, что обеспечивает «подтвержденную устойчивость» си-
стемы в целом. Критерии устойчивости наподобие получаемых согласно
вход-выходному методу и методу Ляпунова дают возможность обосновать
устойчивость систем управления в основном при небольших значениях
коэффициентов усиления. По мере того как частота выполняемых регу-
лятором действий увеличивается, проверка устойчивости становится все
более и более трудной.
Работу управляющего регулятора, рассматриваемого в этом разделе,
можно описать следующим образом:
• если нечеткий регулятор обеспечивает устойчивое управление объек-
том (состояние объекта находится внутри области допустимых значе-
ний), то управляющий регулятор находится в режиме ожидания;
8.1. Устойчивость нечетких систем управления
671
Мх - граница области допустимых состояний объекта
Mq - область состояний объекта
Рис. 8.4. Структурная схема нечеткой системы управления с супервизорным
управляющим регулятором для обеспечения устойчивости системы
• если состояние системы, состоящей из объекта и нечеткого регуля-
тора, выходит за границы области безопасных состояний, то управ-
ляющий регулятор начинает выполнение стабилизирующих действий,
призванных вернуть состояние системы в область допустимых значе-
ний.
В данном разделе основное внимание будет уделено разработке управ-
ляющего регулятора с использованием метода, предложенного в (Wang
1994b). Структурная схема системы с управляющим регулятором показа-
на на рис. 8.4.
Управляющий регулятор Ванга обеспечивает устойчивость нечеткого
управления для некоторого класса нелинейных объектов, описываемых
уравнением вида
X" = f(x) + g(x)u, (8.3)
где х е R —выход объекта, a u е R —его вход. Предполагается, что
вектор состояния
X = |jr, х,...,
можно вычислить или измерить, а /, д — неизвестные нелинейные функ-
ции. Математические модели многих нелинейных объектов можно с успе-
хом представить в виде (8.3). Примем, что нечеткий регулятор (получен-
ный с помощью любого из методов) реализует управление wr(x), а грани-
ца Мх задает те состояния объекта, которые можно считать безопасными
и устойчивыми.
Момент активизации управляющего регулятора зависит от значе-
ния Мх, определяемого соотношением
Мх: |х(^)| ^>0, (8.4)
где |x(t)| —модуль вектора состояния.
672
Глава 8. Устойчивость нечетких систем управления
Входной сигнал рассматриваемого объекта определяется выражением
и = иг(х.) + I • ws(x), (8.5)
где функция инициализации I
воздействия на нечеткий регулятор опре-
деляется соотношением:
( 1, если |х| > Мх.
[ 0, если |х| < Мх.
(8.6)
При этом us обозначает сигнал, формируемый управляющим регулятором
согласно формуле
где
(8.8)
В выражении (8.7) Р представляет собой симметричную положитель-
но определенную матрицу, удовлетворяющую уравнению Ляпунова:
Л;гР + РАс = —Q, (8.9)
где Q > 0 задается проектировщиком системы. Матрица Ас имеет вид
’ 0 1 0 0 0 0 '
0 0 1 0 0 0
Ас = , (8.10)
0 0 0 0 0 0 1
^п — 1 ^п—2 ^п—3 ~к2 -А'| _
где вектор к = (&п,..., Ац)т е R71 содержит такие коэффициенты ki,
что все корни полинома sn + Ацз71-1 + • • • + kn принадлежат левой
полуплоскости комплексной плоскости переменной s.
Проверка устойчивости системы, управляемой с помощью нечетко-
го регулятора и управляющего регулятора согласно правилам, опреде-
ляемым выражениями (8.5)-(8.7), представлена в работе (Wang 1994b).
Чтобы обосновать устойчивость системы такого рода, Ванг принял, что
известны значения верхнего предела fu функции / и нижнего предела gi
функции д. Требования для функций fu и gi определяются соотношени-
ями
Г(х): |/(хКГ(х),
5/(х) : 0 < р/(х) р(х).
(8.П)
8.1. Устойчивость нечетких систем управления
673
Рис. 8.5. Колебания в системе (а), которые могут быть вызваны при использо-
вании возмущающей функции I (б), а также способ предотвращения колебаний
за счет использования возмущающей функции другого вида Г (в)
Функция I вида (8.6), активизирующая управляющий регулятор, яв-
ляется ступенчатой. Эта функция переключает сигнал us между зна-
чениями «включено» и «выключено», если состояние объекта достигает
границы области допустимых значений |х| = Мх. Это значит, что воз-
действие на объект будет довольно резким (рис. 8.5,6). По этой причине
в окрестности состояния Мх могут возникнуть периодические колебания
(см. рис. 8.5, а).
Использование функции инициализации I* (рис. 8.5, в) позволяет
предотвратить возникновение этих колебаний. Такая функция /* опре-
деляется соотношением
О,
|х| - а
Мх — а 1
1,
если |х| < а,
если а < |х| < Мх,
если |х| > Мх,
(8.12)
где параметр а задается разработчиком системы. Небольшое (в сопостав-
лении с Мх) значение параметра а означает, что воздействие управля-
ющего регулятора на объект будет частым, но умеренным по величине.
Если значение параметра а близко к Мх, тогда управляющий регулятор
будет предпринимать воздействия на объект довольно редко, но по вели-
чине эти воздействия будут значительными. Соответственно, вероятность
порождения колебаний в данном случае будет выше, чем в предыдущем
варианте (при небольшом значении а). Итак, переключающая функция /*
обеспечивает устойчивость рассматриваемой нечеткой системы (в смыс-
ле, указанном выше). На рис. 8.5 показано, что управляющий регуля-
тор не «удерживает» состояния объекта вблизи множества состояний Mq
(обычно это задача успешно решается нечетким регулятором), но пре-
674
Глава 8. Устойчивость нечетких систем управления
пятствует работе объекта при опасных для него состояниях. Представ-
ленная идея разделения алгоритма управления на две части является хо-
рошим решением рассматриваемой проблемы. Очевидно, что использова-
ние управляющего регулятора может оказаться также эффективным и в
случае обычной системы управления, включающей ПИД-регулятор. До-
казательство устойчивости для регуляторов традиционного вида выпол-
нить намного проще. Однако при проверке устойчивости систем с ПИД-
управлением для нелинейных объектов обычно предполагается использо-
вание упрощенных линейных моделей. Это значит, что из рассмотрения
исключаются такие дестабилизирующие феномены, как нелинейности,
зоны нечувствительности (трение), гистерезис и т. д. В этих условиях не
существует надежного ответа на вопрос, обеспечит ли ПИД-регулятор
устойчивость реальной системы во всех возможных для нее режимах
работы. Возможность оснащения нечетких систем управления управля-
ющими регуляторами представляет собой важный фактор, расширяющий
область применения нечетких регуляторов в промышленности.
8.2. Круговой критерий устойчивости
Круговой критерий устойчивости (называемый иногда критерием
Кудревича—Цыпкина) (Markowski 1985) применяется преимущественно
к тем системам SISO-типа, которые можно преобразовать к стандартному
виду, представленному в виде структурной схемы на рис. 8.6 (Driankov
1993; Opitz 1993; Kahlert 1995; Cook 1986; Khalil 1992).
Линейная часть G(s) системы стандартного вида, показанной на
рис. 8.6, удовлетворяет следующим условиям L1 и L2:
— LI: G(s) является рациональной (порядок знаменателя выше, чем по-
рядок числителя);
— L2: G(s) является асимптотически устойчивой (все полюса распола-
гаются в левой полуплоскости плоскости переменной $, на мнимой
оси полюса не размещаются).
u = F(e)
Рис. 8.6. Система управления типа SISO стандартного вида со статической
нелинейностью
8.2. Круговой критерий устойчивости
675
а) б)
Рис. 8.7. Введение фиктивной степени свободы к в первичную (исходную)
систему (а), а также полученная в итоге система, преобразованная к стандарт-
ному виду (б)
Нелинейная часть F удовлетворяет условиям N1-N3:
— Nl: F(e) представляет собой статическое однозначное отношение
(данному значению входной величины е ставится в соответствие един-
ственное значение выходной величины F(e), т. е. F(e) не может пред-
ставлять гистерезис и другие отношения «запоминающего типа»);
— N2: характеристика F(e) состоит из прямолинейных сегментов;
— N3: F(0) = 0 (данная характеристика пересекает начало координат,
т. е. точку пересечения осей е и F(e)).
Если исходная (первичная) передаточная функция G(s) не удовлетво-
ряет условию L2, то можно ввести добавочные фиктивные степени свобо-
ды, чтобы преобразовать исходную систему в эквивалентную ей вторич-
ную систему, удовлетворяющую условию L2. Функция первоначальных
входов и выходов линейной и нелинейной частей исходной системы при
введении добавочных степеней свободы должна быть сохранена неизмен-
ной (см. рис. 8.7).
Действия, реализуемые системой, показанной на рис. 8.7,6, описыва-
ются следующими соотношениями:
(8.13)
k F* : п* - F(e) - к • е.
Соответствующим выбором значения коэффициента к обычно мож-
но получить асимптотически устойчивую форму передаточной функ-
ции G*(s). Приводимый ниже пример демонстрирует эту возможность.
Круговой критерий устойчивости позволяет сделать выводы относи-
тельно устойчивости системы путем анализа принадлежности нелиней-
ной характеристики семейству характеристик, ограниченному прямыми
линиями u = k2'enu — ki-e (см. рис. 8.8).
676
Глава 8. Устойчивость нечетких систем управления
Рис. 8.8. Ограничения «сверху»
и «снизу» для семейства
статических характеристик
Система управления стандартно-
го вида с линейной и нелинейной
частями, удовлетворяющими усло-
виям Ы и Nz, является глобально
и асимптотически устойчивой, если
круг с центром на вещественной оси
в точке
с = -0.5 (+ 1") (8.14)
\ ki k'2 J
и радиусом
Г = 0.5 ( (8.15)
\ kr к2 J
размещается целиком в области,
Рис. 8.9. Пример размещения круговых ограничений, наложенных на нелиней-
ную часть согласно диаграмме Найквиста G(jw) для линейной части асимпто-
тически устойчивой системы управления
Рис. 8.10. Круговой критерий для критического значения ограничения снизу
кг - О
8.2. Круговой критерий устойчивости
677
примыкающей к левой части частотной характеристики (диаграммы Най-
квиста) линейной части системы G(jco), не соприкасаясь с ней (см.
рис. 8.9).
Величины «нуль» и «бесконечность» также можно использовать в ка-
честве значений коэффициентов к\ и /с2 (Markowski 1995). Например,
если fci = 0, то круг, отображающий ограничения, преобразуется в по-
луплоскость, показанную на рис. 8.10. Чтобы упростить вид кругового
критерия, принимается (Driankov 1993), что
к\ > 0, 0.
Пример 8.2.1. Пусть нечеткая система управления состоит из линейного
элемента
G{s) = ТТЛ
и нечеткого регулятора F(e). Характеристика элемента фаззификации,
база правил и характеристика элемента дефаззификации показаны на
рис. 8.11. Рассмотрим условия устойчивости для данной системы.
Выбирая логические переменные wz в виде
0, если е < —ер,
1 в остальных случаях,
f 0, если — еТ) < е < еп.
w2 = < .. р р
[ 1 в остальных случаях,
Рис. 8.11. Фаззификация (а), база правил (б) и дефаззификации (в), реализуе-
мые нечетким регулятором
678
Глава 8. Устойчивость нечетких систем управления
Рис. 8.12. Статическая характеристика нечеткого регулятора
для элемента фаззификации можно получить следующие функции при-
надлежности:
Р-р(е) = ( ) w2 + W3,
\ ^р у
/Аг(е) = W1 + (Ц------W2,
у ^^р у
Рп И- Мр ~ 1 •
(8.17)
Из базы правил следует (рис. 8.11), что степень принадлежности рр(е)
активирует синглетон (+1), тогда как рп(е) — синглетон (—1). Следова-
тельно, выход нелинейной части определяется соотношением вида
Рр ' 1 4~ Мп ( 1) , е
U — —------:------ = —W1 4----W2 + W3 .
Ср
Рп 4“ Рр
(8.18)
Характеристика нечеткой нелинейной части показана на рис. 8.12.
Линейная часть G(s) имеет полюса si = 0 и s<2 = —1. Это значит, что
линейную часть требуется стабилизировать, поскольку имеется полюс,
принадлежащий мнимой оси (si = 0). Если использовать метод стабили-
зации, показанный на рис. 8.7, то, воспользовавшись выражением (8.13),
можно получить вторичную передаточную функцию G* вида
zn*/ \ _ 1___
1 4- kG(S) s2 4- s 4- k
Теперь полюса для G*(s) определяются выражениями
(8.19)
51 = -0.5 • (1 + V1 - 4/с) , s2 = -0.5 • (1 - %/1 - 4fc) .
Если к > 0, то G*(s) является асимптотически устойчивой. Тогда
первое условие выбора значения для к принимает вид
к > 0.
(8.20)
8.2. Круговой критерий устойчивости
679
Рис. 8.13. Первичная статическая характеристика нечеткого регулятора F(e), а
также статическая характеристика F*(e) регулятора после введения фиктивной
степени свободы к
F(e) F\e)
а)
Рис. 8.14. Исходная система управления (а) и эквивалентная ей система (б),
обеспечивающая возможность применения кругового критерия устойчивости
Вторичную нелинейную часть F* можно задать на основе выраже-
ния (8.13). Результат вычислений дается соотношением
u* = —wi + — W2 + шз — ке . (8.21)
ер
Первичная и вторичная характеристики нелинейной части показаны
на рис. 8.13. Первичная (исходная) система управления и ее эквивалент
с фиктивной степенью свободы представлены на рис. 8.14.
Как упоминалось, коэффициенты усиления к± и определяемые кру-
говым критерием, имеют обычно положительные значения или равны ну-
лю. Это значит, что устойчивость рассматриваемой системы обеспечива-
ется для следующего диапазона значений входного сигнала:
1 1
- С е С — .
к к
(8.22)
Чем меньше значение к, удовлетворяющее критерию устойчивости,
тем больше диапазон значений входов (8.22). Как следует из рис. 8.13,
ограничения снизу и сверху на значения коэффициента усиления, обо-
680
Глава 8. Устойчивость нечетких систем управления
Рис. 8.15. Результат применения кругового критерия устойчивости, представля-
ющего в графической форме требование (8.26) к устойчивости системы управ-
ления с нечетким регулятором
значаемые соответственно как к± и к2, определяются условиями:
fci=0, к2 = - - к. (8.23)
бр
Поскольку значением к2 должно быть неотрицательное число
(к2 0), соотношение между значением коэффициента к и параметром
ер, определяющим коэффициент усиления нечеткого регулятора можно
выразить в виде неравенства
еР < | • (8.24)
К
Минимум действительной части частотной характеристики С*(ущ)
определяется соотношением
Remin[G*(jW)] = --47F • (8-25)
Принимая во внимание условия (8.23) и (8.25), получим условие
(8.26), определяющее устойчивость рассматриваемой системы (рис. 8.15):
жЬ'ТЖ (826)
Объединение (конъюнкцию) условий (8.24) и (8.26) можно предста-
вить в виде:
--------7= <ер^^. (8.27)
1 + к + 2\/к Р к
8.3. Применение теории гиперустойчивости
681
Если принять, что к имеет малое положительное значение, например,
к = 1О-100, то приближенное преобразование выражения (8.27) дает:
1 < ер < ос . (8.28)
Приведенное выше условие определяет параметры ер, характеризую-
щие функцию принадлежности фаззификации /х(ер), которая гарантирует
устойчивую работу системы управления. Проверка устойчивости заклю-
чается в сопоставлении с указанным диапазоном значений (см. рис. 8.13):
1 1
” к 6 к ’
Указанный диапазон стремится стать бесконечно большим для очень
малых положительных значений к. При увеличении значений коэффици-
ента к коэффициент усиления регулятора (1/ер) также увеличивается, но
область устойчивой работы системы сужается за счет того, что допусти-
мыми становятся меньшие значения амплитуд входного сигнала е.
Имеются варианты кругового критерия для систем М1МО-типа
(Driankov 1993). Однако по мнению специалистов (Opitz 1993), прием-
лемые для практики результаты можно получить лишь для относительно
простых случаев, когда многомерную характеристику нелинейной части
можно привести (с помощью набора линейных операций) к простой ре-
зультирующей форме
u = /(е) = /(кт • е), (8.29)
где к —вектор коэффициентов усиления. Если условие (8.29) не выпол-
няется, то круговой критерий в случае систем MIMO-типа «порождает»
результаты, существенно ограничивающие возможности получаемой си-
стемы. Из этого следует, что польза от кругового критерия в случае
систем MIMO-типа невелика.
8.3. Применение теории гиперустойчивости
для анализа устойчивости нечетких систем
Основы теории гиперустойчивости были созданы румынским математи-
ком В. М. Поповым и опубликованы в (Popov 1963,1973)*. В том вари-
анте, как она была построена Поповым, теория гиперустойчивости не
* См. на русском языке: Попов В.М. Гиперустойчивость автоматических систем.—
М.: Наука, 1970.— 464 с. — (Серия «Теоретические основы технической кибернетики»);
перевод с румынского книги: Popov V. М. Hiperstabilitatea systemelor automate. — Editura
Academiei Republicii Socialiste Romania, 1966. — Прим. ped.
682
Глава 8. Устойчивость нечетких систем управления
была рассчитана на анализ всех возможных видов систем. Она ориенти-
ровалась только на системы, удовлетворяющие довольно большому числу
требований. Однако препятствия, создаваемые этими требованиями, бы-
ли постепенно устранены. И теперь уже можно утверждать, что теория
гиперустойчивости перешла в «зрелый» этап своего развития, что позво-
ляет использовать ее для анализа устойчивости широкого класса нели-
нейных систем, включая и нейронечеткие системы управления. Много
интересных результатов в данной области содержится в работах послед-
них лет, например, в (Schmitt 1996; Opitz 1986,1993; Bohm 1995; Bindel
1995; Follinger 1993; Piegat 1997b,1997d).
Можно утверждать, что недавние результаты, связанные с примене-
ниями теории гиперустойчивости, выглядят весьма обнадеживающими.
Методы, построенные на базе теории гиперустойчивости, можно рассмат-
ривать в качестве конкурентоспособной альтернативы другим методам
анализа устойчивости. В данном разделе содержится подробное обсуж-
дение этого утверждения. У подхода, основанного на теории гиперустой-
чивости, имеется много преимуществ. Данный метод обеспечивает на
регулярной основе проверку устойчивости, позволяя лучше понять воз-
никающие проблемы, поскольку располагает возможностями их визуали-
зации. Более того, этапы используемой аналитической процедуры можно
заменить их численными аналогами, рассчитанными на использование
компьютера (т.е. данный метод поддается автоматизации). Что же такое
гиперустойчивость? Этому понятию можно дать следующее определение
(Anderson 1968):
«Гиперустойчивость представляет свойство системы, состоящее в том,
что вектор состояния системы будет удовлетворять условию ограниченно-
сти, если значения входных величин принадлежат некоторому заданному
подмножеству всех возможных значений этих величин».
Наиболее простой, в сравнении с другими случаями, задачей являет-
ся математическая формулировка условий гиперустойчивости для линей-
ных систем (рис. 8.16). Но имеются такие формулировки и для некото-
U
х(0)
х=Ах+Ви
y-Cx + Du
Рис. 8.16. Многомерная стационарная линейная система
8.3. Применение теории гиперустойчивости
683
рых классов нелинейных систем (Нап 1970), билинейных систем (lonescu
1978) и систем с распределенными параметрами (Jumaire 1983).
Если размерность входного вектора и совпадает с размерностью вы-
ходного вектора у, а система является полностью управляемой (это за-
висит от матриц А и В) и наблюдаемой (это определяется матрицами С
и D), то рассматриваемая система будет гиперустойчивой, если для всех
u(t), удовлетворяющих интегральному неравенству
t
I = У ит(т)у(т)с1т < /Зо, Vt >0, /Зо > о, (8.30)
о
справедливо неравенство
||x(i)|| </Зо + /31||х(0)||, Vf > 0, (8.31)
где х(0) обозначает начальное значение вектора состояния x(t), /Зо и /31 —
некоторые положительные константы, ||... || обозначает евклидову норму.
Система, удовлетворяющая соотношениям (8.30) и (8.31), может счи-
таться гиперустойчивой в обычном смысле. Если для всех входных век-
торов и, удовлетворяющих неравенству (8.30), наряду с неравенством
(8.31) справедливо условие
lim x(t) = 0, (8.32)
t—>оо
то рассматриваемая система будет асимптотически гиперустойчивой.
Идею гиперустойчивости систем в общих чертах можно пояснить на
примере системы SISO-типа. Предположим, что рассматриваемая система
активируется входным сигналом и, который действует в течение ограни-
ченного промежутка времени (рис. 8.17, а). Энергия, доставляемая в си-
стему сигналом и, ограничена. Примем, что это входное воздействие и
вызывает ограниченный рост значений переменных состояния х (этот
рост оценивается по норме ||x(t)||), как это показано на рис. 8.17,6.
Рис. 8.17. Иллюстрация идеи гиперустойчивости: входной сигнал u(t) (а), пе-
ременная состояния гиперустойчивой системы для х(0) = 0 (б) и я(0) / 0 (в),
переменная состояния для асимптотически гиперустойчивой системы (а)
684
Глава 8. Устойчивость нечетких систем управления
Разумеется, рост значений переменных состояния сопровождается уве-
личением энергии системы. Если увеличение энергии системы зависит
исключительно от энергии, поступающей с входным сигналом (ее можно
оценить с помощью /Зо), а в конечном счете от потенциальной энергии,
определяемой начальными условиями (оцениваемой по норме ||х(0)||), см.
рис. 8.17, в, тогда данную систему можно считать гиперустойчивой.
Таким образом, гиперустойчивая система не содержит внутренних ис-
точников энергии. Это значит, что нарастание амплитуды переменных
состояния х, порождаемое входным сигналом и, зависит от энергии, по-
ступающей с входным сигналом. По этой причине значения переменных
состояния не могут стремиться к бесконечности, если значения уровня
входного сигнала ограничены. Если состояние системы x(t) стремится к
нулю, удовлетворяя условию (8.32) (см. рис. 8.17, г), то система называ-
ется асимптотически гиперустойчивой.
Отметим, что выходной сигнал у — Cx+Du линейно зависит от вход-
ного сигнала и состояния системы (рис. 8.16). Ограничения на значения
векторов х и и приводят к ограничениям на значения выходного векто-
ра у.
8.3.1. Представление условий гиперустойчивости
в частотной области для систем управления
со стационарной нелинейной частью
Были сформулированы условия устойчивости для системы управления
стандартного вида, показанной на рис. 8.18. Такая система имеет в своем
составе линейную стационарную подсистему, описываемую матрицей пе-
редаточных функций G(s) или некоторым ее эквивалентом, полученным
из уравнений состояния:
G(s) = C(sl — А)-1В + D, (8.33)
Рис. 8.18. Стандартная структурная схема системы управления, рассматривае-
мая при обсуждении гиперустойчивости
8.3. Применение теории гиперустойчивости
685
(где I —единичная матрица), а также статическую нелинейную подси-
стему F(y). Теорию гиперустойчивости можно распространить также на
случай, когда система включает нестационарную нелинейную часть.
Матрица G(s) представляет собой описание объекта управления
и других линейных частей системы, взаимодействующих с данным объек-
том. Эти элементы можно объединить, используя правила эквивалентных
преобразований структурных схем. Таким образом, можно рассматривать
G(s) как результирующую матрицу передаточных функций линейной
подсистемы для рассматриваемой системы. Аналогичным образом, F(y)
можно трактовать как результирующий набор статических нелинейных
операций. Теорию гиперустойчивости можно применять ко всем систе-
мам, которые представимы в стандартной форме, показанной на рис. 8.18.
Чтобы применить метод гиперустойчивости к линейной части G(s)
системы управления, а также к ее нелинейной части, должен удовлетво-
ряться ряд условий.
Предварительные условия для линейной подсистемы G(s)
PL1: Матрица передаточных функций G(s) должна быть квадратной.
Это значит, что число входов линейного блока (размерность век-
тора и) должно совпадать с числом его выходов (размерность век-
тора у). Если «первичная» система не удовлетворяет этому тре-
бованию, то надо ввести добавочные сигналы, всегда сохраняю-
щие нулевые значения, чтобы привести размерности матрицы G(s)
к требуемым значениям. Пример процедуры такого рода иллюстри-
рует рис. 8.19.
PL2: Линейный блок G(s) должен быть полностью управляемым и на-
блюдаемым. В ряде случаев это условие управляемости можно
ослабить (Popov 1973; Landau 1979). Если все собственные значе-
ния матрицы А, не связанные с входами, представлены комплекс-
Рис. 8.19. «Первичная» система (а), не удовлетворяющая требованию PL1 и эк-
вивалентная ей «вторичная» система (б), удовлетворяющая требованию PL1
686
Глава 8. Устойчивость нечетких систем управления
б) в)
Рис. 8.20. Стабилизация неустойчивых полюсов исходной линейной под-
системы G(s) (а) путем введения фиктивной степени свободы К (б)
и новая, вторичная, стандартная форма системы (в), эквивалентная рас-
сматриваемой исходной форме (а)
ними числами с отрицательными вещественными частями, а ча-
стичная матрица передаточных функций, описывающая полностью
управляемую и наблюдаемую часть линейной подсистемы, явля-
ется строго положительной, тогда рассматриваемая система будет
гиперустойчивой, если удовлетворяются и остальные требования.
PL3: Все передаточные функции GZJ(s), являющиеся элементами матри-
цы G(s), должны быть устойчивыми (полюса всех Gij(s) должны
представляться комплексными числами, вещественные части кото-
рых отрицательны). Если указанное выше условие не удовлетворя-
ется, то можно ввести в исходную систему такие фиктивные сте-
пени свободы kij, чтобы «законсервировать» входы первичных ли-
нейных блоков. Такие степени свободы вводятся в форме контуров
(цепей) обратной связи для линейного блока G(s) и параллель-
ных связей, охватывающих нелинейную подсистему F(y), таким
образом, чтобы сигналы, исходящие из введенных связей, взаим-
но компенсировали бы друг друга в рассматриваемой системе (см.
рис. 8.20). Соотношение между первичной и вторичной система-
ми, представленными в стандартной форме, дается выражениями
следующего вида:
G*(s) = [I + G(s)K]-1G(s),
F*(y) : v* = v - Ку = F(y) - Ку. (8.34)
Число ненулевых элементов в матрице К должно быть достаточ-
ным для стабилизации всех неустойчивых полюсов. Однако в ряде
8.3. Применение теории гиперустойчивости
687
случаев требуемое число ненулевых элементов меньше, чем число
неустойчивых полюсов. Тогда обосновать устойчивость труднее.
Диапазон подходящих (доступных) значений коэффициентов kij
в матрице К оказывается весьма большим. Следует, однако, иметь
в виду, что значения этих коэффициентов оказывают влияние на
преобразование первичного оператора F(y) во вторичный опера-
тор F*(y), который также должен удовлетворять ряду требований,
определяемых теорией гиперустойчивости. Удовлетворение этих
требований может оказаться невозможным при неудачном выбо-
ре коэффициентов матрицы К. Из опыта рекомендуется выбирать
значения этих коэффициентов после формулирования всех условий
гиперустойчивости системы, имея в виду оба блока — линейный
G(s) и нелинейный F(y). Примеры, рассматриваемые в данном
разделе, поясняют способ формирования матрицы К.
PL4: Порядок числителя каждой отдельной передаточной функции
в Gv(s), принадлежащей матрице передаточных функций G(s),
должен быть выше, чем порядок ее знаменателя. Реальные объек-
ты управления всегда удовлетворяют этому условию.
Предварительные условия для нелинейной подсистемы F(y)
PN1: Операция v = F(y) должна осуществлять однозначное отображе-
ние у в v. Нелинейные элементы с памятью гистерезисного типа
(рис. 8.21) не удовлетворяют этому условию.
PN2: Отображение v = F(y) должно удовлетворять условию обнуления
(см. рис. 8.22):
F(0) = 0. (8.35)
Рис. 8.21. Пример нелинейности гистерезисного типа; отображение, реализуе-
мое элементами с такой нелинейностью, является неоднозначным
688
Глава 8. Устойчивость нечетких систем управления
Рис. 8.22. Пример отображения F(y), которое удовлетворяет требованию обну-
ления PN2: v(0) = F(0) = О
Если требования PL1-PL4 для линейного блока и PN1-PN2 для нели-
нейного блока удовлетворяются, то можно переходить к проверке основ-
ных условий для линейного блока (ML) и нелинейного блока (MN).
Основные условия гиперустойчивости (достаточные условия). Систе-
ма управления стандартного вида, показанная на рис. 8.20, а, а также эк-
вивалентная ей система, полученная таким введением фиктивных степе-
ней свободы в первичную систему, чтобы входы и выходы ее линейного
и нелинейного блоков оставались неизменными после преобразования,
будут асимптотически устойчивыми, если:
ML: стационарная линейная часть G(s) является строго положитель-
ной;
MN: нелинейная часть (блок) F(y) удовлетворяет интегральному нера-
венству Попова
t
I = У vT(r)y(r)clT > -/?о, Vt > 0,/?о > о. (8.36)
о
Если рассматриваемый нелинейный блок удовлетворяет условию
(8.36), то линейный блок «автоматически» удовлетворяет условию гипе-
рустойчивости (8.30) (поскольку u = —v). Таким образом, условие (8.36)
определяет устойчивость линейного блока системы стандартного вида и,
в конце концов, устойчивость такой системы в целом. Если примене-
ние условия ML к линейному блоку позволяет классифицировать дан-
ный блок как положительно определенный (вместо строго положительно
определенного), то систему стандартного вида можно считать нормально
устойчивой или устойчивой.
8.3. Применение теории гиперустойчивости
689
Разъяснения относительно условия ML, определяющего гиперустой-
чивость линейного блока. Матрица передаточных функций G(s) явля-
ется строго положительно определенной, если:
1) полюса всех компонентных передаточных функций Gij(s) размеща-
ются слева от мнимой оси комплексной плоскости переменной s,
2) матрица вида
Н(» = 0.5[G(» + GT(-M (8.37)
положительно определенная эрмитова для всех > 0.
Матрица является эрмитовой положительно определенной, ес-
ли она одновременно будет положительно определенной и эрмитовой.
Матрица называется эрмитовой, если (Schmitt 1996):
НСН = Нт(->). (8.38)
Матрица будет положительно определенной, если (Zurmiihl 1964):
Q — ZTHZ > 0 для каждого вектора Z е (8.39)
Другой способ проверить, будет матрица положительно определенной
или нет, состоит в анализе ее главных миноров Mi с помощью теоремы
Сильвестра (Opitz 1986). Обозначим через hzj элементы матрицы H(j»\j):
Н(» = (^),
а через Mi — ее главные миноры:
АД = ^h(Jcj),
м = М» ^12 (»
2 h^ju) h22(joj)
(8.40)
(8.41)
/ziiO’u;) ...
hnl(j^ • • • ^nn(j^)
Матрица H(jcu) будет положительно определенной, если удовлетво-
ряется следующее условие:
Mi(jcj) > 0, Vcj, i = (8.42)
Условие (8.39), как и эквивалентные ему условия (8.41) и (8.42), вы-
ражается обычно в форме системы неравенств, содержащих элементы
стабилизирующей матрицы К. Чаще всего получается так, что матри-
ца H(jcj) не является положительно определенной. Однако не следует
690
Глава 8. Устойчивость нечетких систем управления
Рис. 8.23. Сдвиг диаграммы Найквиста (6) исходной линейной части
в результате добавления подходящего значения константы d к исходной переда-
точной функции (а) (SISO-случай)
воспринимать этот факт слишком пессимистически. Остается еще воз-
можность использовать теорию гиперустойчивости. Введением фиктив-
ных степеней свободы можно заменить первичную систему такой вторич-
ной системой, для которой условия положительной определенности мат-
рицы будут выполняться. В качестве наиболее простого примера можно
рассмотреть систему с линейным блоком G(s) SISO-типа, что позволя-
ет показать, какими свойствами должны обладать добавочные степени
свободы. Для такой SISO-системы матрица H(Jcj) будет положительно
определенной, если все полюса линейного блока устойчивы, а матрица
H(Jcj), получаемая для G(Jcj) = G(Jcj), удовлетворяет неравенству
Я(уш) = 0.5[G(^) + GT(~M = Ке(уш) > 0. (8.43)
Условие (8.43) удовлетворяется, если представление для G(joj) в ком-
плексной плоскости (диаграмма Найквиста) целиком принадлежит пра-
вой полуплоскости (см. рис. 8.23, б). Реальные системы, не подвергавши-
еся корректировке, обычно этому требованию не удовлетворяют. Что-
бы выполнить данное требование, диаграмму Найквиста первичного
линейного блока G(Jcj) следует сдвинуть вправо. При этом величи-
на сдвига должна удовлетворять неравенству d > | Re G(Jcj)| для всех
Re G(Jcj) < 0 (см. рис. 8.23).
Преобразование первичной передаточной функции G(jcS) во вторич-
ную G*(ju) должно быть увязано с модификацией первичного нелиней-
ного блока F. Эта модификация должна быть проделана таким образом,
чтобы входные и выходные сигналы линейного и нелинейного блоков
остались бы неизменными. Степени свободы системы типа MIM0 можно
представить с помощью матрицы D. Способ введения матрицы D, позво-
ляющий выполнить сдвиг вправо для всех компонентных передаточных
функций Gij(s') матрицы G(s), показан на рис. 8.24.
8.3. Применение теории гиперустойчивости
691
а) б) в)
Рис. 8.24. Исходная система управления (а) и ее вторичные эквиваленты (б)
и (в), полученные путем введения добавочных степеней свободы (представлен-
ных матрицей D), сдвигающие вправо диаграммы Найквиста для передаточных
функций-компонентов, принадлежащих матрице G(s)
Отношения между первичной системой и вторичной системой, пока-
занные на рис. 8.24, можно выразить в виде
G*(s) - G(s) +D, (8.44)
F*(y*) : v = F*(y*) - F(y + Dv). (8.45)
Выбор коэффициентов dij матрицы D не представляет собой слож-
ной задачи. Выбор очень больших значений для коэффициентов, напри-
мер, d = 1О1000, можно трактовать как простейший вариант получения
матрицы D. Для больших коэффициентов d нет необходимости вычис-
лять значения Remin[G^(jcj)], поскольку сдвиги, определяемые такими
коэффициентами, заведомо достаточны для размещения всех элементов
диаграммы Найквиста Gij(jw) в правой полуплоскости.
Проблема усложняется, если вспомнить, что матрица D изменяет так-
же нелинейный блок F(y), приводя его к виду F*(y*), и что получен-
ный таким образом вторичный вариант данного блока не удовлетворя-
ет части требований. Рекомендуется осуществлять окончательный выбор
матрицы D после формулирования всех условий гиперустойчивости для
обеих частей (блоков), линейной и нелинейной, рассматриваемой систе-
мы. Выбор D на основе условия ML только для линейного блока может
привести к тому, что условие MN для нелинейного блока окажется не
выполненным. В таком случае всю процедуру выбора матрицы D при-
692
Глава 8. Устойчивость нечетких систем управления
дется повторить еще раз. Таким образом, на начальном этапе целесо-
образно обсудить условия, при которых линейная часть системы будет
строго положительной, основываясь на соответствующих неравенствах,
записанных в общем виде, когда коэффициенты dij еще не представлены
их числовыми значениями.
Сформулировать упомянутые выше условия относительно просто, ес-
ли компонентные передаточные функции G^-(s), принадлежащие матрице
передаточных функций G(s) первичного линейного блока, имеют устой-
чивые полюса, а стабилизирующие степени свободы, представленные мат-
рицей К (рис. 8.20), в исходную систему управления не вводились. В та-
ком случае значения Remin[G^(jcj)] можно определить в аналитической
форме или же вычислительным путем. Существуют специализированные
методы, позволяющие выполнить требуемый анализ. В качестве хороше-
го примера здесь можно упомянуть интересный метод, основанный на
использовании кривых гиперустойчивости (Schmitt 1996).
Если в процесс формулирования условий, при которых линейный блок
будет положительно определенным, вовлечены элементы матриц К и D,
то можно воспользоваться методом редукции Re(a>) к подфункции вто-
рого порядка.
Если условие, определяющее, когда вещественная часть Re(cj) будет
положительно определенной, имеет вид функции второго порядка
Re(cj) = + Еул + Eq 0,
где Ег = E^(K,D), то удовлетворение следующих условий
1:Е2 > 0,
П:4^2Е0-(^1)2 >0,
гарантирует, что Re(cu) будет положительно определенной для всех си:
[—ОО, (X)].
Функцию третьего порядка
Re (и) = Ез&3 -|_ -Г E-yv Ч- Eq
можно преобразовать в функцию второго порядка, если ввести условие
Е3 = 0. Таким образом, приведенные условия I, II и Ез — 0 можно ис-
пользовать для формулирования требований к положительно определен-
ной функции Re(cu) третьего порядка.
Функцию четвертого порядка
Re(cu) — Едш^ + Е3Ш3 Ч- Еул^ Ч~ Е^со Ч~ Eq
8.3. Применение теории гиперустойчивости
693
можно свести к функции второго порядка, если принять Е3 = Е3 = 0.
Задавая Ei = Е3 — 0 и cj2 = х, опять получаем Re(x) второго поряд-
ка. Функцию пятого порядка Re(cj) можно редуцировать до четвертого
порядка, вводя условие Е3 = 0. Условия, позволяющие продолжить ре-
дукцию и получить в итоге функцию второго порядка, аналогичны тем,
что использовались выше для функции Re(cj) четвертого порядка. Для
функции Re(cj) шестого порядка можно осуществить ее декомпозицию
на функции второго порядка и /2^)-
Re(cj) — Eqoj6 -j- E3iaj5 -j- Едсо^ -|- E3cu^ + Е2(х^ + E\co + Eq —
— uj^^Equj^ + E3uo -f- £4) Ч- E3uX> + (£2tj2 “b Epjj + £q).
Теперь, вводя функции
/i(cj) — Еэсо^ + Е]Ш + Eq и /2^) — £б^2 E3CO -T £4,
можно решить рассматриваемую задачу, применяя условия положитель-
ной определенности функций второго порядка к следующим соотноше-
ниям:
£з = 0,
fl (о>) = £2^2 + Е]СО + Eq > 0,
/2(^) — EqCX^ -j- Е3Х) + £4 0.
Аналогичные методы можно применить и к функциям Re (о?) более
высоких порядков, хотя такие функции для практических целей исполь-
зуются довольно редко.
Первичная система управления стандартного вида и ее эквивалент-
ное вторичное представление показаны на рис. 8.25. Вторичная система
управления «оснащена» контурами обратных связей, описываемыми мат-
рицами К и D. По этой причине условия гиперустойчивости линейного
и нелинейного блоков обычно формулируются на основе вторичных форм,
показанных на рис. 8.25, б. Соотношения между первичной системой и ее
вторичным эквивалентом можно выразить в виде
G*(s) = [I + G(.s)K]-1G(s) + D,
F*(y*) : v* = v-Ky = F(y* + Dv*)-K(y*+Dv*)- (8.46)
Введение фиктивных степеней свободы (матрицы К и D) выглядит
неким математическим приемом. Эти степени свободы, однако, очень
важны и необходимы. Они связывают вместе линейный блок G(s) и нели-
нейный блок F(y) и позволяют сделать так, чтобы проверка устойчиво-
сти основывалась на одновременном (совместном) изучении линейного
694
Глава 8. Устойчивость нечетких систем управления
Рис. 8.25. Исходная система управления (а) и полная структурная схема для
ее эквивалентной вторичной формы, которая содержит добавочные степени сво-
боды K,D (б), а также результат ее преобразования в систему со стандартной
структурой (в)
и нелинейного блоков. Устойчивость системы зависит от того, насколько
хорошо все элементы системы соответствуют друг другу, именно по этой
причине оба блока должны рассматриваться совместно.
Разъяснения относительно условия MN, определяющего гиперустой-
чивость нелинейного блока. Исходная форма интегрального неравен-
ства Попова (8.36) неудобна для ее использования в качестве средства
проверки гиперустойчивости нелинейного блока. Однако, если подынте-
гральное выражения неотрицательно, то условие (8.36) удовлетворяется.
Это значит, что вместо (8.36) можно рассматривать вторичное условие:
vT(£)y(^) 0? Vt > 0. (8.47)
Разумеется, условие вида (8.47) вводит добавочные ограничения на
нелинейный блок (по сравнению с неравенством (8.36)), которые сужают
используемый класс нелинейных функций, однако это плата за суще-
ственное упрощение необходимого анализа. Условие (8.47) должно удо-
влетворяться для всех t 0. Если нелинейный блок является статиче-
ским, то выражение (8.47) не зависит от времени.
Нелинейное отображение v = F(y) для нечеткой системы представ-
ляет собой секторное отношение, т. е. вид функции F(y) зависит от того,
какому сектору входного пространства принадлежит текущее значение
вектора у. По этой причине надо сформулировать и проверить вторич-
8.3. Применение теории гиперустойчивости
695
ное условие для нелинейного блока (8.47) в каждом секторе входного
пространства. Если размерности для v и у имеют вид
v: (р,1),
у- 0,1),
то условие (8.47) можно выразить как сумму вида
р р
> 0, (8.48)
i=l i=l
где Fi(y) = Vi.
Вторичная форма условия Попова обычно формулируется для вторич-
ной системы управления, которая имеет фиктивные степени свободы К
и D. Следовательно, ее можно выразить в пространстве {v*,y*} вторич-
ной системы с помощью соотношения
v*Ty* = f>*y*^O. (8.49)
г=1
Точно такое же условие Попова, выраженное в пространстве {v,y}
исходной (первичной) системы, дается соотношением
[F(y) - Ку]т {у - D[F(y) - Ку]} > 0. (8.50)
Если матрица К выражается через вектор-строки К?:
кп kip Ki
к = kpi • • крр — . КР.
где К = -- [кц,-. • ? kip\ , i ~ 1
а матрица D — через вектор-строки D;:
D = du • • • dip dpi ••• dpp ' Di ' . Dp .
где Df = [du,... ,dip], i = 1,...,р, то условие (8.50) для нелинейного
блока принимает вид суммы всех р выходов гц = Fi(y):
р
52(Гг(у) - Кгу] {у, - Dt[F(y) - Ку]} > 0. (8.51)
?=1
696
Глава 8. Устойчивость нечетких систем управления
Преобразование вторичной формы условия Попова для нелинейно-
го блока к входному пространству исходной (первичной) системы (век-
тор у — единственная переменная в (8.51)) очень полезно, поскольку
входное пространство делится на I секторов, связанных с операциями
нечеткого регулятора, а это значит, что условие (8.51) можно непосред-
ственно сформулировать в исходном пространстве для каждого из секто-
ров. Таким образом, нет необходимости переносить секторы в исходном
пространстве во вторичное пространство входов у*.
Чтобы упростить требуемый математический анализ, условие (8.51)
можно разделить на р условий, связанных с конкретными выходами нели-
нейного блока Vi = Fi(y) (Bohm 1995):
[Fi(у) - К1У] {У1 - D1[F(y) - Ку]} > О,
(8.52)
[Fp(y) - Кру] {ур - Dp[F(y) - Ку]} 0.
Конкретное неравенство из системы (8.52) можно трактовать как эле-
мент составного условия (8.51). Удовлетворение требований, обеспечива-
ющих положительную определенность всех этих элементов, является бо-
лее трудным, чем та же самая задача для суммы (8.51), порожденной ком-
понентами (8.52). Рекомендуется, однако, проверить возможность удовле-
творения условий гиперустойчивости (8.52) за счет подходящего выбора
матриц К и D. Если эти попытки окажутся неудачными, следующий шаг
состоит в том, чтобы попытаться проверить условия, задаваемые полной
суммой (8.51).
Оба условия, т. е. (8.51) и (8.52), являются функциями стабилизирую-
щей матрицы К, а также матрицы D, которые обеспечивают положитель-
ную определенность линейного блока (его диаграмма Найквиста значи-
тельно сдвинута вправо). Матрицы К и D обычно состоят из небольшо-
го числа элементов (степеней свободы). Например, если линейный блок
системы имеет 2 входа и 2 выхода, то общее число степеней свободы
равняется 8, тогда как полное число условий гиперустойчивости для си-
стемы в целом обычно намного больше. Данное обстоятельство являет-
ся результатом того, что имеется большое число рабочих секторов для
нечетких регуляторов. Один из примеров, приводимых далее, показывает,
что общее число условий гиперустойчивости равняется 70 (!). Нетрудно
понять, что задача решения 70 неравенств путем подбора значений 8 пе-
ременных будет очень непростой. Иногда данная задача может вообще
не иметь решения. Итак, введение большого числа фиктивных степеней
8.3. Применение теории гиперустойчивости
697
Рис. 8.26. Вторичная система управления, которая содержит максимальное чис-
ло фиктивных степеней свободы — результат первого этапа расширения линей-
ной и нелинейной частей системы: а) развернутая форма, б) свернутая форма
свободы во вторичную систему может оказаться единственным способом,
который дает возможность подтвердить устойчивость системы.
Если число степеней свободы, «поставляемых» матрицами К и D,
недостаточно для доказательства устойчивости системы, то в этом случае
можно ввести добавочные фиктивные степени свободы гц, i = 1,...,р;
это осуществляется в матричной форме:
(гц) = diag(m,... ,грр).
(8.53)
Способ введения добавочных степеней свободы во вторичную систему
управления иллюстрирует рис. 8.26.
Соотношение между исходной (первичной) и вторичной системами
определяется следующими зависимостями:
G**(s) = (ггг)[1 + G(s)K]-1G(s) + (nJD
(8.54)
F**(y**) : v* = v — Ку =
I-KD
698
Глава 8. Устойчивость нечетких систем управления
Если число рабочих секторов, принадлежащих входному простран-
ству нечеткого регулятора, очень велико (это число быстро растет в двух
ситуациях: при увеличении числа входов нечеткого регулятора и при уве-
личении числа нечетких множеств, сопоставленных входам и выходам
каждого из регуляторов), то может случиться так, что потребуется вве-
сти еще большее число фиктивных степеней свободы. Точно такая же
необходимость может возникнуть, если не удается доказать гиперустой-
чивость системы даже после «употребления» всех степеней свободы, по-
казанных на рис. 8.26 (матрицы К, D, (1/г^), (г^)). Это не надо вос-
принимать как свидетельство неустойчивости рассматриваемой системы
управления, поскольку рассматриваемая теория устойчивости порож-
дает так называемые достаточные условия устойчивости.
Это означает, что система, удовлетворяющая условиям устойчивости,
будет несомненно устойчивой. Если же данная система этим условиям
не удовлетворяет, то она может оказаться как устойчивой, так и неустой-
чивой (окончательное решение по этому вопросу не может быть выне-
сено). Таким образом, если условия гиперустойчивости не выполнены,
не следует пренебрегать дальнейшими попытками доказать устойчивость
системы. Шансы на успех в этом случае остаются, особенно если наблю-
дения за работой реальной системы позволяют предположить ее возмож-
ную устойчивость. Чтобы добиться успеха при обосновании устойчивости
в следующей попытке, можно попытаться расширить пространство вве-
дением второго уровня фиктивных степеней свободы (см. рис. 8.27).
Читателям, усомнившимся в том, что расширение пространства введе-
нием второго уровня степеней свободы представляет собой эффективный
метод, следует принять во внимание, что гиперустойчивость для боль-
шинства исходных (первичных) систем (рис. 8.18, а) доказать нельзя, по-
скольку обычно не удовлетворяются даже предварительные требования,
обеспечивающие допустимость применения данного метода (одинаковое
число входов и выходов для линейного блока, устойчивость всех полюсов,
представляющих линейный блок, требование о том, что система должна
быть положительно определенной). Несмотря на эти затруднения, можно
успешно доказывать гиперустойчивость системы посредством введения
фиктивных элементов, взаимно компенсирующих друг друга. Для срав-
нения, нельзя решить уравнение
х2 + а2 — 0, (8.55)
в одномерном пространстве X, но решение может быть найдено в дву-
мерном пространстве, определяемом действительной и мнимой осями (см.
рис. 8.28).
8.3. Применение теории гиперустойчивости
699
Рис. 8.27. Система, «оснащенная» степенями свободы первого уровня (а),
и ее расширение путем введения степеней свободы второго уровня (б)
Ajlmx
XO+jtz
Re х
0-ja
(x+ja)(x-ja) = Q
Рис. 8.28. Корни уравнения х2 + а2 = 0 в комплексной плоскости
Если реальная задача выглядит неразрешимой, то согласно так на-
зываемому «общему принципу математического моделирования» (Bezdek
1993) рекомендуется расширить пространство решений. Введение доба-
вочных степеней свободы означает, что математическая форма условий
гиперустойчивости все более и более усложняется. Существуют специ-
ализированные компьютерные программы, которые могут оказаться по-
700
Глава 8. Устойчивость нечетких систем управления
лезными при подготовке и проверке условий устойчивости, так как они
позволяют осуществлять преобразования сложных математических вы-
ражений, записанных в общем виде.
Добавочные степени свободы означают, что вторичный линейный
блок G**(s), а также вторичный нелинейный блок F**(y**) содержат
больше переменных (степеней свободы), чем соответствующие исходные
блоки G(s) и F(y) (в сущности, G(s) и F(y) вообще не имеют степеней
свободы). По этой причине добавочные степени свободы дают возмож-
ность сформировать вход-выходные отображения таким образом, чтобы
удовлетворялись условия гиперустойчивости (эта задача будет реализуе-
мой, если реальная система является устойчивой). Расширение простран-
ства системы путем введения более высоких уровней степеней свободы
дает шанс доказать гиперустойчивость каждой из (гипер)устойчивых ре-
альных систем.
Подведем итог, перечислив следующие шаги a-f, которые определя-
ют последовательность рекомендуемых действий при исследовании гипе-
рустойчивости непрерывной системы управления в частотной области:
а) Преобразовать схему системы управления к стандартному виду (пер-
вичная система), включающему линейный и нелинейный блоки.
Ь) Проверить, удовлетворяются ли предварительные требования, обеспе-
чивающие возможность применения теории гиперустойчивости. Если
да, то выполнить действия, предусмотренные шагом с), если нет, то
перейти к шагу d).
с) Проверить главные условия гиперустойчивости системы. Если эти
условия выполнены, то доказательство завершено, в противном слу-
чае перейти к шагу е).
d) Ввести фиктивные степени свободы и сформулировать предваритель-
ные требования, задаваемые в виде уравнений и неравенств, содер-
жащих вводимые степени свободы в качестве переменных. Перейти
к шагу е).
е) Ввести фиктивные степени свободы и сформулировать предваритель-
ные требования, задаваемые в виде уравнений и неравенств, в которые
введенные степени свободы входят как переменные.
f) Найти такие значения степеней свободы, которые будут одновремен-
но удовлетворять предварительным требованиям и основным услови-
ям гиперустойчивости. Если такие значения найдены успешно, это
значит, что гиперустойчивость системы доказана. В случае неудачи
дальнейшие попытки можно прекратить. В этих условиях заключение
8.3. Применение теории гиперустойчивости
701
Рис. 8.29. Система стандартного вида, на которую воздействует задающий сиг-
нал w = 0 и ее состояние равновесия (а); воздействие на систему сигнала w = 1
и ее состояние равновесия (б); воздействие на систему сигнала w = 1 после
введения новых переменных и ее состояние равновесия (в); расположение новой
статической характеристики нелинейной части объекта щ = F(?/i) в сравнении
с исходной характеристикой v = F(y) (г)
об устойчивости системы сформулировать нет возможности. Если на-
блюдения, проведенные над реальной системой, показывают, что она
устойчива, то процесс следует продолжить, вернувшись к шагу d).
После того как для вторичной системы определены значения степеней
свободы, удовлетворяющие условиям гиперустойчивости, можно исследо-
вать также некоторые начальные требования, например, управляемость
и наблюдаемость линейного блока.
Если гиперустойчивость исследуется для сигнала w 0, то следует
ввести новые координаты (переменные). Эти «новые» координаты должны
представлять новую точку равновесия для рассматриваемой системы. Та-
кая замена переменных связана с необходимостью сдвинуть нелинейную
характеристику F(y). Характерный пример представлен на рис. 8.29.
702
Глава 8. Устойчивость нечетких систем управления
Рис. 8.30. Система управления, включающая статический регулятор (а), а так-
же ее преобразование к стандартному виду (б)
Значения переменных, представляющих состояние равновесия, можно
вычислить путем решения дифференциальных уравнений, описывающих
работу рассматриваемой системы. Рассматривая пример, приведенный на
рис. 8.29, можно сделать вывод, что система стандартного вида, на ко-
торую воздействует ненулевой задающий сигнал w 0, эквивалентна
системе, на которую действует сигнал гщ = 0, со смещенной характери-
стикой ее нелинейного блока (начало новой системы координат должно
быть смещено в новую точку равновесия системы [uriyrivr]).
Пример 8.3.1.1. Исследование гиперустойчивости нечеткой системы
типа SISO
Вернемся вновь к системе, которая рассматривалась в примере 8.2.1.
В нем для проверки устойчивости системы использовался круговой кри-
терий. Эта система показана на рис. 8.30. Нечеткий регулятор здесь реа-
лизует статическое отображение, которое можно представить с помощью
некоторой нелинейной характеристики, составленной из отрезков прямых
линий.
Проверка условия PL1 (число входов линейного блока должно быть рав-
но числу его выходов). Условие удовлетворяется.
Проверка условия PL2 (линейный блок должен быть полностью управ-
ляемым и наблюдаемым). Данное условие будет проверено позже, после
введения (если потребуется) фиктивных степеней свободы.
Проверка условия PL3 (вещественные части полюсов передаточных
функций должны быть отрицательными). Имеется два полюса: si = -1
и S2 = 0. Из-за значения второго полюса §2 условие PL3 не удовле-
творяется. Чтобы преодолеть данное затруднение, можно ввести фиктив-
ную степень свободы k как в линейный блок, так и в нелинейный (см.
рис. 8.31).
8.3. Применение теории гиперустойчивости
703
Рис. 8.31. Система стандартного вида после введения добавочной степени сво-
боды к: развернутое представление (я) и частично свернутое представление (б)
Теперь полюса si, §2 вторичного линейного блока G*(s) принимают
значения
S1 = 0.5 (-1 + V1 — 4к) , «1 = 0.5 (-1 - V1 -4А:) . (8.56)
Вещественные части обоих полюсов отрицательны, если к удовлетво-
ряет условию
к > 0. (8.57)
Проверка условия PL4 (порядок числителя передаточной функции
G*(s) не должен быть выше порядка знаменателя). Условие удовлетворя-
ется.
Проверка условия PN1 (отображение v* = F*(y) должно быть однознач-
ным). Как следует из рис. 8.32, отображение, представляемое «новой»
характеристикой нелинейного блока, является однозначным. Это значит,
что условие PN1 удовлетворяется.
Рис. 8.32. Статическая характеристика нелинейной части системы после вве-
дения фиктивной степени свободы к
704
Глава 8. Устойчивость нечетких систем управления
Проверка условия PN2 (отображение v* = реализуемое нели-
нейным блоком, должно удовлетворять условию F*(0) = 0). Из рис. 8.32
видно, что это условие выполняется.
Проверка основного условия PL (линейный блок G*(.s) должен быть
строго положительным вещественным). Это условие можно разделить на
несколько отдельных требований, предъявляемым к различным компо-
нентам.
1. Полюса передаточной функции G*(s) должны размещаться слева
от мнимой оси комплексной плоскости переменной s. Для к > 0 дан-
ное условие выполняется.
2. Матрица H(jco) линейного блока G*(s) должна быть положительно
определенной для всех ш > 0 и эрмитовой.
Величины G*(Ju) и G*(—Ju) можно выразить, соответственно, сле-
дующим образом:
ч к — U2 Ju
G*(ju) = -----------? - ----=
(к — и2)2+и2 (к — и2)2+и2
= Re* (и) + Jim* (и),
-i Л — k-u2 , =
; - (fc - W2)2 W (fe - W2)2 W
— Re*(—ш) + j Im*(—lo).
(8.58)
(8.59)
Согласно (8.37) матрица принимает вид
ь _ , .2
Я*(>) = 0.5 [G^jcv) + G*T(-jw)] = 2 2 2 = Re»,
Ш у ~Т LV
Я*(7и)=Я*(-7и).
(8.60)
т.е. она является эрмитовой.
Рассматриваемая матрица будет положительно определенной (форму-
ла (8.39) или (8.42)), если Re*(u) > 0. Грубо говоря, частотная характе-
ристика G*(Ju) должна размещаться в правой полуплоскости комплекс-
ной плоскости. Из рис. 8.33 видно, что это условие не удовлетворяется.
Анализ выражений (8.60) позволяет сделать утверждение о том, что
Re* (и) < 0 для w у/к, а максимум для |Re*(u)| в рассматриваемом
частотном диапазоне равен 11/(1 + 2%/fc)|. Таким образом, для удовле-
творения рассматриваемых требований необходимо добавить фиктивную
степень свободы d (см. рис. 8.34).
8.3. Применение теории гиперустойчивости
705
Рис. 8.33. Частотная характеристика G*(jcu) до введения степени свободы вто-
рого уровня d (а) и результат введения степени свободы второго уровня (б)
После добавления фиктивной степени свободы d вещественную часть
для можно записать в виде
к — ш2
Re*-» = ./1---. + d = Re*(u) + d. (8.61)
v 7 (к — ш2)2 + ш2 v 7
В силу того, что Re*(си) > —1/(1 + 2д//с), частотную характеристику
следует сдвинуть вправо, за мнимую ось. При этом величина сдвига d
будет удовлетворять условию
(8.62)
1 + 2VA;
Рис. 8.34. Система управления, включающая степени свободы к и d, представ-
ленная развернутой схемой (и) и частично свернутой схемой (б)
706
Глава 8. Устойчивость нечетких систем управления
Рис. 8.35. Нелинейная часть, включающая фиктивные степени свободы
Отметим, что минимальная величина (8.62) сдвига d зависит от к. Ес-
ли значение к уже определено ранее (сразу после анализа устойчивости
полюсов для G*(s)), то минимальное значение d можно найти заранее.
Однако степени свободы d и к должны также удовлетворять и условиям
для нелинейного блока. Поэтому может потребоваться менять значения d
и к в широких пределах.
Основное условие MN для нелинейного блока
Здесь вторичное условие Попова (8.47) принимает вид
v*y* > 0. (8.63)
Условие (8.63) после его преобразования к первичному пространству
[и, у] приводит к выражению
v*y* = (v — ку)[у — d(v — ку)] 0. (8.64)
Данное условие можно привести к виду
v*y* = — dv2 — (к + dk2)y2 + (1 + 2kd)yv 0. (8.65)
Выражение (8.65) будем, для удобства, именовать параболой Попова.
Неравенство (8.64) можно, однако, упростить. Если обозначить
v — ку — А, то (8.64) можно переписать в виде
А(у - dA) = Ay- dA2 > 0,
следовательно,
Ay > dA2.
Так как А2 > 0, получим в итоге:
d , А ± 0. (8.66)
8.3. Применение теории гиперустойчивости
707
Условие (8.66) имеет место как для положительных, так и для отри-
цательных А. Его можно также представить в более удобном виде, если
разделить на два неравенства:
у - dA 0 для А > 0, у - dA 0 для А < 0.
Подставляя исходные значения вместо А, получим преобразованную
форму условия Попова:
v-ky" F(y) — ку ‘
Анализ устойчивости системы можно выполнить с использованием
параболы Попова (8.65) или, в упрощенном варианте, на основе выраже-
ния (8.67).
Из (8.18) получается, что статическую характеристику нелинейного
блока F(y) можно представить в виде
v = F(y) = -wi + — w2 + w3, (8.68)
Ср
где wi, w2, w3 представляют собой логические переменные, которые
определяют принадлежность текущего значения у одному из отдель-
ных подпространств, составляющих пространство для переменной у
(см. рис. 8.36). Условие (8.67) должно удовлетворяться для каждого сек-
тора нелинейного блока F(y).
Для первого сектора гщ = 1, где v = — 1, получим условие Попова
(8.65) в виде
Л (у) = -(к + dk2)y2 - (1 + 2dk)y - d 0. (8.69)
Рис. 8.36. Статическая характеристика нелинейной части
(нечеткого регулятора) F(y)
708
Глава 8. Устойчивость нечетких систем управления
1/160
Рис. 8.37. Графическое представление условия Попова для нелинейной части
сектора иц = 1
Графическое представление данного условия показано на рис. 8.37.
Из рис. 8.37 следует, что устойчивость системы можно обосновать для
следующего диапазона, принадлежащего сектору = 1:
У1 < У < -ер.
Ширина данного диапазона увеличится, если найти подходящие зна-
чения для к и d, удовлетворяющие всем условиям гиперустойчивости.
Эти условия для первого сектора можно получить, используя параболу
Попова (рис. 8.37) или упрощенный вид критерия Попова (8.67). Для пер-
вого сектора v = F(y) = — 1. Тогда упрощенное условие Попова можно
записать следующим образом:
d < , для у < 0, к ± . (8.70)
1 + ку у
Графическое представление этого условия в пространстве [k,d] пока-
зано на рис. 8.38. Из рис. 8.38 ясно видно следующее ограничение: жела-
ние показать устойчивость системы на более широком диапазоне значе-
ний переменной у приводит к тому, что подпространство [к, d], представ-
ляющее возможные значения коэффициентов к и d, становится меньше
(заштрихованное поле на рис. 8.38).
Если диапазон значений при доказательстве устойчивости в простран-
стве [у] слишком велик, может случиться так, что устойчивость системы
не удастся показать вообще. По этой причине принимается, что область
проверки устойчивости выглядит так, как это представлено на рис. 8.37:
бр 1 у Ср.
8.3. Применение теории гиперустойчивости
709
Рис. 8.38. Графическое представление упрощенного условия Попова для перво-
го сектора нелинейного объекта
Для ер = 1 имеет место неравенство
-2^у^-1. (8.71)
В силу неравенства
к + dk2 > 0,
ветви параболы Попова направлены вниз (см. рис. 8.37). Из соотношения
между точками, порождающими данную параболу, можно сделать заклю-
чение о том, что удовлетворение условия Попова в двух точках у — —ер
ну — — ер — 1 означает выполнение этого условия во всех точках, принад-
лежащих области (8.71). Тогда условия Попова для всей области (8.71)
принимают вид
d<—Ц-, для у =-ер =-1, к 1, (8.72)
1 — к
2
d < -—— , для у = —ер - 1 = —2, к 7^ 0.5. (8.73)
Эти условия можно представить в графическом виде так, как это по-
казано на рис. 8.39. В конечном итоге можно сделать вывод, что оба
условия, (8.72) и (8.73), удовлетворяются, если к и d принадлежат под-
пространству, определяемому неравенствами
0 < к < 0.5, d < —. (8.74)
1 ГЪ
Для второго сектора w% — 1, где v = F(y) = у/ер (см. рис. 8.36),
получим условие Попова (8.65) в виде
710
Глава 8. Устойчивость нечетких систем управления
Рис. 8.39. Графическое представление условий Попова для первого сектора
нелинейного части объекта
Рис. 8.40. Графическое представление условия Попова для второго сектора
нелинейного части объекта
что может быть графически представлено так, как это показано на
рис. 8.40.
Упрощенная форма условия (8.75) получается из (8.67):
(у/еР) - ку ’ ер '
Для выбранного значения ер = 1 получим
d < —, к ± 1. (8.76)
1 — к
Это значит, что вид условия (8.76) для второго сектора идентичен ви-
ду условия (8.72) для первого сектора. Условие (8.72) графически пред-
ставлено на рис. 8.39.
8.3. Применение теории гиперустойчивости
711
Рис. 8.41. Графическое представление условия Попова для третьего сектора
нелинейной части объекта
Для третьего сектора W3 = 1, где v = F(y) = 1, условие Попова
(8.65) принимает вид
/з(?/) = -(к + dk2)y2 + (1 + 2kd)y - d > 0. (8.77)
Графически оно может быть представлено так, как это показано на
рис. 8.41.
Согласно неравенству
(к + dk2) > 0,
вершина параболы Попова в третьем секторе размещается над ее ветвя-
ми, как это видно из рис. 8.41. Из соотношения, полученного для точек,
порождающих данную параболу, следует вывод о том, что удовлетворение
условия Попова в двух точках у = е р н у = е р У- 1 означает выполнение
этого условия для всех точек, принадлежащих области проверки в целом:
fp У “Г 1 •
Таким образом упрощенные условия Попова (8.67), определенные на
всей проверяемой области, можно выразить в виде
d< 1 — кер ,, 1 для у — ер, к у- , Ср
d < ер +1 для у = ер + 1, к —Ст • (8.78)
1 — к(ер + 1) р ер + 1
Если подставить выбранное значение ер = 1 в (8.78), получим:
для у = 1, к 1, (8.79)
для у = 2, к ф 0.5. (8.80)
712
Глава 8. Устойчивость нечетких систем управления
Рис. 8.42. Графическое представление всех условий гиперустойчивости в зави-
симости от выбора значений коэффициентов к и d, для ер = 1 (коэффициент
усиления регулятора 1/ер = 1)
Условия (8.79) и (8.80) для третьего сектора идентичны соответствую-
щим условиям (8.72) и (8.73) для первого сектора. Условия (8.72) и (8.73)
графически представлены на рис. 8.39. Все условия, сформулированные
как для линейного, так и для нелинейного блока, были собраны воедино
с тем, чтобы получить окончательный результат:
к > 0,
0 < к < 0.5,
1
1 + 2^’
1
1 -к '
(8.81)
Графическое представление соотношения (8.81) показано на рис. 8.42.
Как видно из рис. 8.42, для всех условий имеется общее подпростран-
ство, позволяющее сделать соответствующий выбор значений для к и d.
Например, выбор
к = 0.1 и d = 1
(рис. 8.42) удовлетворяет всем условиям окончательного вида, задавае-
мым соотношениями (8.81). Однако изучение устойчивости регулятора,
коэффициент усиления которого имеет более высокое значение во вто-
ром секторе (ер — 0.2, 1/ер = 5) приводит к противоположному выводу.
А именно, не существует общего подпространства, обеспечивающего вы-
бор значений коэффициентов, удовлетворяющих всем условиям устойчи-
вости (см. рис. 8.43).
Можно вновь повторить, что рассматриваемые условия гиперустойчи-
вости должны трактоваться как достаточные условия. Это значит, что
отсутствие общего подпространства для выбора значений к и d в случае
8.3. Применение теории гиперустойчивости
713
Рис. 8.43. Графическое представление условий устойчивости системы в зависи-
мости от выбора степеней свободы к и d для больших значений коэффициента
усиления 1/ер — 5 (ер = 0.2) рассматриваемого регулятора
больших значений коэффициента усиления регулятора 1/ер = 5 не сви-
детельствует о неустойчивости системы. Согласно предложенной ранее
рекомендации, можно попытаться доказать устойчивость системы путем
добавления новых степеней свободы. Исследование системы со многими
степенями свободы обычно представляет собой достаточно трудоемкую
задачу, однако зачастую это единственный шанс обосновать устойчивость
системы. А такое обоснование обязательно при реализации нечетких ре-
гуляторов для промышленных применений.
Для приемлемых значений степеней свободы к и d (к — 0.1, d = 1)
можно довольно просто проверить управляемость и наблюдаемость ли-
нейного блока G**(s) (см. рис. 8.34):
G** (s) = G* (s) + d = -а-2—- + d. (8.82)
s -j- s к
Для выбранных значений к = 0.1 и d = 1 передаточная функция
G**(.s) принимает вид
1 _ 1.291 1.291
s2 + S + 0.1 + “ s +0.1127 ~ S + 0.8873 +
(8.83)
Представление переменных состояния на рис. 8.44 показывает, что
все эти переменные xi, Х2, хз являются управляемыми по входу и* и на-
блюдаемыми по выходу у* (Markowski 1985). Точно такой же результат
можно получить и применением для проверки управляемости и наблюда-
емости системы строгих теоретических правил (Giinther 1984).
714
Глава 8. Устойчивость нечетких систем управления
Рис. 8.44. Модальное представление линейной части G**(s) через переменные
СОСТОЯНИЯ ЗЦ, Т2, Х‘3
Рис. 8.45. Сдвиг частотной характеристики (а) в результате введения
степени свободы d = 1 (б)
Из рис. 8.45, а видно, что характеристика G*(Jlj) содержит только
одну степень свободы к, введенную для стабилизации. Как показывает
рис. 8.45, б, характеристика G**(ju) включает степень свободы к и доба-
вочную степень d, введенную для того, чтобы вещественная часть харак-
теристики G**(jcj) стала положительно определенной.
8.3.2. Условия во временной области для гиперустойчивости
непрерывных нелинейных систем управления,
включающих стационарную нелинейную часть
Пусть уравнения для линейного блока системы в ее пространстве состо-
яний имеют вид
x(t) = Ax(t) + Bu(t), y(t) = Cx(t) + Dou(t). (8.84)
8.3. Применение теории гиперустойчивости
715
Рис. 8.46. Система управления стандартного вида, описываемая уравнениями
состояния
Система управления стандартного вида (рис. 8.46) будет (асимпто-
тически) гиперустойчивой (Opitz 1993), если выполняются следующие
условия.
PL1: Число входов щ линейного блока равняется числу его выходов у{,
т. е. векторы и и у должны быть одной размерности.
ML: Уравнения Калмана—Якубовича вида (8.85) имеют решение, вклю-
чающее положительно определенную матрицу Р, некоторую (регу-
лярную) матрицу L и некоторую матрицу V:
АТР + РА = — LLT,
С-ВТР = VT LT,
Dj + Do = VTV. (8.85)
Пояснения
Квадратная матрица называется регулярной (неособенной, невырожден-
ной), если ее строки или столбцы линейно независимы (Zurmiihl 1964).
Определитель det L невырожденной матрицы L удовлетворяет условию
det L 0.
Условия для нелинейного блока F(y) идентичны рассмотренным ра-
нее, где линейный блок представлялся в частотной области матрицей
передаточных функций G(s).
Чтобы доказать гиперустойчивость, используя условие ML (8.85), на-
до найти три таких матрицы Р, L, V, которые будут удовлетворять урав-
нениям Калмана—Якубовича. Обычно получается так, что эти уравнения
для первичной системы решения не имеют и требуется вводить фиктив-
ные степени свободы в виде матриц К, D, (г^), (1/г^). Метод введения
таких степеней свободы рассматривался в разд. 8.3.1. Наличие добавоч-
ных степеней свободы изменяет исходный вид уравнений состояния для
716
Глава 8. Устойчивость нечетких систем управления
линейного блока (8.84), а также первичный вид уравнений Калмана—
Якубовича (8.85).
Похоже, что анализ условий гиперустойчивости в пространстве состо-
яний представляет собой трудоемкую проблему, а «прозрачность» данной
проблемы оставляет желать лучшего. Чтобы упростить данный анализ
и сделать его более наглядным, можно заменить представление во вре-
менной области для линейного блока представлением в частотной обла-
сти, используя известное соотношение
G(s) = C(sl - AF’B + Dq. (8.86)
что обеспечивает последующий анализ согласно правилам, представлен-
ным в разд. 8.3.1.
8.3.3. Условия гиперустойчивости в частотной области для
дискретных нелинейных систем управления,
содержащих стационарную нелинейную часть
Схема рассматриваемой системы управления стандартного вида показана
на рис. 8.47.
Если линейная часть системы описывается уравнениями состояния
х/,+1 = АФ^ + Нщ,
Ук = Схк + D0Ub (8.87)
то матрицу передаточных функций G(z) можно вычислить, используя
выражение
G(z) = С(Я - Ф^Н + Do. (8.88)
Прежде чем переходить к проверке гиперустойчивости системы, сле-
дует удостовериться в том, что выполнен ряд предварительных условий.
Условия, схожие с этими, были сформулированы для непрерывной систе-
мы в разд. 8.3.1.
Рис. 8.47. Система управления стандартного вида с линейной частью, представ-
ленной матрицей дискретных передаточных функций G(^)
8.3. Применение теории гиперустойчивости
717
Рис. 8.48. Исходная система (а) с различающимся числом входов и выходов
(условие PL1 не удовлетворяется) и ее вторичный эквивалент (б), удовлетворя-
ющий PL1
Предварительные условия для линейного блока G(z)
PL1: Матрица передаточных функций G(z) должна быть квадратной,
т. е. число входов линейного блока (размерность вектора U&) долж-
но быть равно числу его выходов (размерности вектора у&). Если
для первичной системы эти условия не выполняются, то можно
ввести добавочные сигналы, всегда равные нулю, как это показано
на рис. 8.48.
PL2: Линейный блок должен быть полностью управляемым и наблюда-
емым.
PL3: Все полюса всех компонентных передаточных функций со-
ставляющих матрицу G(z), должны размещаться внутри единич-
ного круга (компонентные передаточные функции должны быть
устойчивыми). Если первичная система не обладает устойчиво-
стью, то в нее можно ввести фиктивные степени свободы kij. Вве-
дение фиктивных степеней свободы, представляемых матрицей К,
не должно изменять значения входов и выходов первичного ли-
нейного блока. Введение новых степеней свободы осуществляется
за счет того, что линейный блок G(^) охватывается контурами
обратной связи, для нелинейной подсистемы F(y/~) вводятся ана-
логичные связи. Сигналы, исходящие из введенных таким образом
связей, должны взаимно компенсировать друг друга (см. рис. 8.49).
Для проверки устойчивости системы полюсов можно воспользоваться
процедурой экспертных испытаний (Leigh 1985; Keel 1999). В математиче-
ском виде условия, получаемые таким путем, выражаются относительно
просто.
718
Глава 8. Устойчивость нечетких систем управления
а) б) в)
Рис. 8.49. Исходная линейная часть G(z) с неустойчивыми полюсами (а) и ста-
билизация ее путем введения фиктивных степеней свободы К (б), которое при-
водит к новой, вторичной, форме системы (в), эквивалентной исходной форме (а)
Экспертные испытания. Если знаменатель второго порядка для рас-
сматриваемой передаточной функции приравнять нулю:
/(г) = d2Z2 + aiz + «о — 0, (8.89)
где а>2 > 0, то выполнение условий (8.90) означает, что все нули функции
/(г) принадлежат внутренности единичного круга:
/(1) > 0, /(-1) > 0, Ы < (8.90)
Если знаменатель третьего порядка для рассматриваемой передаточ-
ной функции приравнять нулю:
/(г) = а3г3 + a,2Z2 + aiz + а0 _ 0, (8.91)
где аз > 0, то выполнение условий
/(1) > 0, У(—1) > 0, |а0|<аз, |а^ - а|| > |а0а2 - aia3| (8.92)
означает, что все нули функции /(г) принадлежат внутренности единич-
ного круга.
Анализ устойчивости корней /(г) можно также выполнить, используя
критерий Гурвица. Подстановка
преобразует внутренность единичного круга в комплексной плоскости z
в правую полуплоскость комплексной плоскости w (Leigh 1985).
8.3. Применение теории гиперустойчивости
719
Рис. 8.50. Пример многозначного неединственного отображения, реализуемого
нелинейными элементами с гистерезисом
Взаимосвязь между первичной и вторичной формой представления
системы стандартного вида выражается следующими соотношениями:
G*«) = [I + G(2)K]-1G(z),
F*(yfc) : v£ = v - Kyfc = F(yfc) - Kyfc. (8.93)
PL4: Для каждой из компонентных передаточных функций Gij(s), со-
ставляющих матрицу передаточных функций С(г), порядок ее чис-
лителя должен быть не выше, чем порядок знаменателя. Реальные
объекты управления удовлетворяют этому требованию.
Предварительные условия для нелинейного блока F(y&)
PN1: Операция = F(y&) должна осуществлять однозначное отобра-
жение у на v. Нелинейные элементы, «оснащенные» памятью на
основе эффекта (рис. 8.50), не удовлетворяют данному условию
(поскольку они реализуют многозначное отображение).
PN2: Отображение = F(y^) должно быть обнуляющего типа, т. е. об-
ладать свойством (8.94) (см. рис. 8.51):
F(0) - 0. (8.94)
Если начальные требования PL1-PL4 для дискретного линейного бло-
ка удовлетворяются, то следует переходить к проверке основных условий
гиперустойчивости ML и MN для линейной и нелинейной частей, соот-
ветственно.
Основные условия гиперустойчивости (достаточные условия).
Дискретная система управления стандартного вида, показанная на
720
Глава 8. Устойчивость нечетких систем управления
Рис. 8.51. Пример отображения = F(y>), удовлетворяющего условию (8.94)
рис. 8.49, а, а также ее эквивалент, вторичная система (полученная та-
ким введением фиктивных степеней свободы в первичную систему, чтобы
входы и выходы ее линейного и нелинейного блоков оставались неизмен-
ными, а эффекты, обусловленные наличием добавочных степеней свобо-
ды, взаимно компенсировали бы друг друга) будут асимптотически гипе-
рустойчивыми при выполнении следующих условий:
ML: линейный блок G(z) рассматриваемой дискретной системы являет-
ся строго положительным вещественным;
MN: нелинейный блок F(y^) удовлетворяет условию в форме суммы По-
пова для всех ki > 0:
ki
Vfci>0. (8.95)
/с—0
Если применение условия ML к линейному блоку G(z) позволяет
классифицировать этот блок как положительный вещественный (вместо
строго положительного вещественного), то данная система стандартного
вида является нормально устойчивой.
Пояснения, связанные с условием ML, определяющим гиперустой-
чивость дискретного линейного блока G(z). Матрица передаточных
функций G(z) будет строго положительной вещественной, если:
• полюса всех компонентных передаточных функций Gij(z) принадле-
жат внутренности единичного круга в комплексной плоскости пере-
менной Z,
• матрица
Н(^) - 0.5 [G(eJ^ 4- Ст(е“^)] (8.96)
является положительно определенной и эрмитовой для всех ш > 0.
8.3. Применение теории гиперустойчивости
721
Рис. 8.52. Исходная система управления стандартного вида (а) и ее эквивалент,
вторичное представление, содержащее фиктивные степени свободы D, показан-
ное в развернутой форме (б) и в свернутой форме (в)
Значение использованных здесь определений объясняется
в разд. 8.3.1. Матрицу передаточных функций G(z) обычно нельзя
классифицировать как строго положительную вещественную. Отсюда
следует, что в систему придется вводить фиктивные степени свободы,
представленные матрицей D, с тем чтобы преобразовать линейный блок
в строго положительную вещественную форму (см. рис. 8.52).
Соотношения между первичной системой и ее вторичной формой, по-
казанной на рис. 8.52, выражаются следующим образом:
С*(г) = G(^) + D,
F*(yA*) : vfc = F*(y£) = F(yfc + Dvfc). (8.97)
Если первичная система «оснащена» двумя матрицами — стабилизи-
рующей К и матрицей D, гарантирующей, что передаточные функции
Gij имеют положительные вещественные части (см. рис. 8.53), то со-
отношения между первичной и вторичной системами принимают более
сложный вид:
G*(z) = [I + G(z)K]“1G(z) + D,
F’(yA.): Vfc = vfc - Kyfc = F(yfe) - Kyfc =
= F(y£ + Dv£) - K(y£ + Dv£). (8.98)
Пояснения, связанные с условием MN, определяющим гиперустой-
чивость нелинейного блока. Основное условие для нелинейной части
(блока) дискретной системы управления представляется в виде так назы-
ваемой суммы Попова (8.95). С практической точки зрения сумма Попо-
722
Глава 8. Устойчивость нечетких систем управления
Рис. 8.53. Исходная система управления вида (а) и ее эквивалент, вторичное
представление, содержащее фиктивные степени свободы К и D, показанное
в развернутой форме (б) и в свернутой форме (в)
ва — очень неудобное средство исследования нелинейного блока. Поэто-
му для анализа данного блока обычно применяется вторичное условие
Попова:
rfyk О, W > 0. (8.99)
Однако результаты, полученные из (8.99), сужают получаемую об-
ласть в сравнении с результатами, которые можно получить теоретически
из (8.95). Если размерности векторов и уд.
vk:(p,P, Ук-(р,Ч,
то (8.99) приобретает вид суммы:
р р
Е FkVik = Е F^jC)yik > 0, (8.100)
i—1 2=1
где Н(ук) = vik .
Вторичные условия Попова, формулируемые для вторичной системы,
расширенной за счет введения фиктивных степеней свободы D и К, мож-
но записать в виде:
р
Vfc>0. (8.101)
2 = 1
8.3. Применение теории гиперустойчивости
723
Преобразование соотношения (8.101) в пространство первичной си-
стемы [vfe,yfc] дает (8.102):
[F(yfc)-Kyfc]T{yfc-D[F(yfc)-Kyfc]} > 0, Ук > 0, (8.102)
или (8.103):
52^(у^)-К^]Ш-П4Г(уО-Ку^]} >0, V/с > 0. (8.103)
г=1
ЗдеСЬ К? — [^г1? • • • *> ^ip\, i — 1,. . .,p, представляют собой строки матри-
цы К: fell . • • kip кх'
К = .. крР = . КР. 1
a Df = [du,..., dip], i — 1 являются строками матрицы D:
du • • • d±p Di '
D - dpi • • dpp = Dp
Определение матриц К и D, удовлетворяющих всем условиям гипе-
рустойчивости для линейных и нелинейных систем, означает, что дока-
зательство гиперустойчивости рассматриваемой системы успешно завер-
шено. Рекомендации, касающиеся выбора матриц К и D для дискретных
систем идентичны тем, что рассматривались в разд. 8.3.1 применительно
к случаю непрерывных систем.
Ниже даются примеры анализа устойчивости систем типа SISO
и MISO, управляемых с использованием нейронечетких регуляторов ПД-
типа. Исследование гиперустойчивости для многомерных систем настоль-
ко труднее в сравнении с системами SISO-типа, что есть потребность
в поиске других подходов к решению данной проблемы. Высокий уровень
сложности математического анализа и визуализации для этой проблемы
означает, что требуется использовать специализированные методы, в том
числе и вычислительный эксперимент. Ниже будет рассматриваться «ме-
тод характеристических точек», который представляет собой хороший
пример такого рода специализированного метода.
Пример 8.3.3.1. Исследование гиперустойчивости нечеткой системы
управления SISO-типа
Рассмотрим дискретную систему управления, включающую непре-
рывный объект
724
Глава 8. Устойчивость нечетких систем управления
ЕСЛИ (e = n) ТО (u= - 1)
ЕСЛИ (е=р) ТО (м= 1)
—1----------►
-1 1 U
б)
Рис. 8.54. Фаззификация (а), база правил (б) и дефаззификация (в), реализу-
емые нечетким регулятором
Рис. 8.55. Статическая характеристика нечеткого регулятора
и нечеткий регулятор SISO-типа. Блок фаззификации, база правил и блок
дефаззификации показаны на рис. 8.54.
Как следует из примера 8.2.1, реализуемое нечетким регулятором
вход-выходное отображение можно представить функцией F(e), задавае-
мой выражением
щ = -wi + — W2 + W3, (8.104)
Ср
и представленной графически на рис. 8.55, где Wi — логические перемен-
ные, которые содержат информацию, показывающую, в каком секторе
входного пространства регулятора размещается текущее значение вхо-
да е. Структурная схема рассматриваемой дискретной системы управле-
ния показана на рис. 8.56.
Система, показанная на рис. 8.56, преобразуется в систему стандарт-
ного вида, приведенную на рис. 8.57, где линейный блок представлен в s-
области посредством G(s) или в г-области с помощью G(z).
8.3. Применение теории гиперустойчивости
725
Рис. 8.56. Дискретная система управления, состоящая из нечеткого регуля-
тора F(e), ограничительного ZOH-элемента Gzoh(s) и непрерывного объекта
управления Go(s) для времени выборки Т
Рис. 8.57. Система управления в стандартной форме, рассматриваемая с линей-
ной частью в виде непрерывной передаточной функции G(s) (а) и дискретной
передаточной функцией G(z) (б), для времени выборки Т
Дискретная модель непрерывного блока была получена с применением
аппроксимации по методу обратных разностей:
Такая аппроксимация дает дискретную передаточную функцию ли-
нейного блока в виде
( 1 — p~sT 1 т3
С(2) = Z{Gzo„(S)G„(«)) = =
T3z2 Г3г2
= (Т + 1)(с-1)[(г-1)/(Т+1)] = (Т + 1)г2 - (Т + 2)з + 1 ’ <8Л05)
Проверка условия PL1 (число входов должно быть равно числу вы-
ходов). Данное условие удовлетворяется.
Проверка условия PL2 (линейный блок должен быть управляе-
мым и наблюдаемым). Применение известных методов (Franklin 1986;
Markowski 1985) к дискретной передаточной функции G(z) подтверждает
управляемость и наблюдаемость для G(z), заданной в виде (8.105).
726
Глава 8. Устойчивость нечетких систем управления
Рис. 8.58. Дискретная система управления после введения стабилизирующей
степени свободы к\ расширенная структурная схема (а), частично свернутое
представление (б)
Проверка условия PL3 (полюса передаточной функции G(z) долж-
ны размещаться внутри единичного круга). Первый полюс z± = 1 не
принадлежит внутренности единичного круга. Это значит, что требуется
стабилизация линейного блока путем введения фиктивной степени сво-
боды к (рис. 8.58). Второй полюс
Z2 ~ Т + 1
всегда размещен внутри единичного круга, т. е. стабилизировать его необ-
ходимости нет.
Вторичная передаточная функция линейного блока G*(z) определяет-
ся выражением
г-,* / \ _ G(z) ____ __________T3z2_____________
Т U ~ 1 + fcG(z) ~ (fcT3 + Г + l)z2 - (Т + 2)z + 1 ' ’
Применяя метод экспертных испытаний (8.90), получим условия
устойчивости всех полюсов рассматриваемой передаточной функции:
/(1) = кТ3 > о,
/(-1) = кТ3 + 2Т + 4 > 0,
|1| <кТ3 + Т + 1. (8.107)
Если
к > 0, (8.108)
то все условия (8.107) удовлетворяются, откуда следует, что все полюса
передаточной функции G(z) устойчивы.
8.3. Применение теории гиперустойчивости
727
Рис. 8.59. Статическая характеристика нелинейной части после введения фик-
тивной степени свободы к
Проверка условия PL4 (порядок числителя функции G*(z) не может
быть выше порядка знаменателя). Данное условие удовлетворяется.
Проверка условия PN1 (функция = F*(yk) должна представлять
собой однозначное отображение). Функция = F*(yk) показана на
рис. 8.59. Свойства функции = F*(yk) обсуждались в разд. 8.3.1. Рас-
сматриваемая функция реализует однозначное отображение.
Проверка условия PN2 (отображение vk = F*(yk) должно удовле-
творять условию F*(0) = 0). Из рис. 8.59 видно, что данное условие
выполняется.
Проверка основного условия ML (линейный блок G*(z) должен быть
строго положительным вещественным). Данное условие можно разде-
лить на несколько более простых условий:
• Полюса передаточной функции G*(z) должны размещаться внутри
единичного круга. Если к > 0, то данное условие удовлетворяется.
• Матрица
Н(е^) = 0.5[G*(e^7') + G*T(e-^r)]
должна быть эрмитовой и положительно определенной для всех
и; > 0.
Передаточную функцию G*(z) можно переписать в виде
V ~ (кТ3 + Т + 1)г2 - (Г 4- 2)z + 1 a2z2 - arz + 1 ’
где
Т = 0.1, ?2 = 10~3, а2 = 1.1 + 10“Д, at = 2.1.
Используя тождество Эйлера
— cos соТ 4- j sin ljT,
728
Глава 8. Устойчивость нечетких систем управления
получим выражения
G*(ejVr) = Re* +JIm*, (8.110)
G*(e“JwT) = Re*—Jim*, (8.111)
где
Re* - dj2 coscjT + /2(d2 - 1) zg цр)
4ft2 cos2 ujT — 2ai(1 + a2) coscjT 4- (di — I)2 4- aj
Im* ___________—/2 sinoiT — (Q1 -2cos^T)______ (8 113)
4(i2 cos2 ccT - 2di(l 4- d2) cosuiT + (di - I)2 4- g2 ’
Согласно (8.37), матрицу можно записать в виде
Я*(е^) = 0.5[G*(e^T) + G*T(e^T)] - Re*. (8.114)
Матрица Н* будет положительно определенной, если удовлетворяется
соотношение:
Re* - 2^2 cos2 ~ coso/T 4- /2(а2 - 1) > Q (8 115)
4d2 cos2 ujT — 2di(l 4- d2) coscjT 4- (di — I)2 4- d2
Определение минимума функции Re*(cosuT) аналитическим путем
представляется весьма сложным. Более того, оно приводит к получению
существенно нелинейных условий. Таким образом, выбор коэффициен-
тов к и (/ — непростая задача. Существует другой путь решения рассмат-
риваемой задачи.
Знаменатель Л/(Re*) можно записать в виде:
M(Re*) = [2cos2uT — di cosuT 4- (a2 — I)]2 4-
4- [sincoT(ai — 2 coso;T)]2 .
Данная сумма квадратов всегда положительна. Тогда, если числи-
тель также положителен, то условие (8.115) удовлетворяется. Нетрудно
видеть, что числитель функции Re* представляет собой квадратичную
функцию от переменной w = coscjT, а свойства этой функции зависят
от значений коэффициентов
= Т + 2, cl‘2 — кТ3 4- 4- 1.
(8.116)
Значение степени свободы к пока еще не выбиралось. На данном эта-
пе рассуждений можно не задаваться точной формой функции Re*(w)
и ее расположением в пространстве. Это значит, что значения функции
могут быть отрицательными. Чтобы сделать данную функцию положи-
тельно определенной, добавляется фиктивная степень свободы d, как по-
казано на рис. 8.60.
8.3. Применение теории гиперустойчивости
729
Рис. 8.60. Вторичная система после введения фиктивной степени свободы d,
показанная в развернутой форме (а) и в частично свернутой форме (б)
Добавляя степень свободы d, получаем новую передаточную функцию
С**(г), задаваемую в виде
G**(z) = G*(z) + d=—---------------+ d. (8.117)
v 7 V7 a2z2 - a^z 4- 1
Вычисление вещественной части для G**(z) дает следующий резуль-
тат:
Re** = ------222 C°g2 “Т ~ а11-2 СУшТ~ ------------j + d. (8.118)
4(22 COS2 СсТ — 2(21(1 4- (Z2) COSLjT -h (di — I)2 4- a2
Для неотрицательности вещественной части Re** должно удовлетво-
ряться неравенство
(2Z2 + da2) cos2cjT — [ail2 + 2aid(l + «2)] cosuT4-
+ р2(а2 - 1) + d(a2 - I)2 + da\] > 0. (8.119)
Обозначения
w = cos cjT,
E2 = 2l2 + da2 = 2 • KT3 + l.ld + 10“3(tt,
Er = avl2 + 2aid(l + a2) = 2.1 • IO-3 + 8.82d + 4.2 10 3г//г,
Eq — h(a2 — 1) + d(a2 — I)2 + dal =
= 0.1 • 1(Г3 + ПГ6А- + 4.42d + 0.2 • 10~3kd + 10“6fc2d, (8.120)
позволяют переписать условие (8.119) в более простой форме:
f = E2w2 - E1W + Ео 0. (8.121)
730
Глава 8. Устойчивость нечетких систем управления
Рис. 8.61. Выбранное представление функции / = E2w2 — Еуш + /Го с учетом
требования положительной определенности вещественной части Re**
Парабола f, задаваемая левой частью неравенства (8.121), имеет ми-
нимум, если коэффициент Е2 > 0. Если к > 0 и d 0, то Е2 > 0.
Определение «полярности» коэффициентов Eq, Е\, Е2 в общем случае
может оказаться невозможным, поскольку требуемые преобразования ве-
дут к очень сложным математическим выкладкам, определяемым коэф-
фициентами. Более того, в анализ полярности коэффициентов обычно
вовлечены и численные значения степеней свободы d и к. На рис. 8.61
показаны три кривые, представляющие некоторые из классов функций /,
задаваемых соотношением (8.121). Вещественная часть функции Re** бу-
дет положительно определенной, если минимум функции f положителен
(достаточное условие):
Ео-^^О, Е2>0. (8.122)
Условия (8.122) существенно сужают допустимую область значений
при выборе к и d. Как видно из рис. 8.61, в, условие Re** > 0 также
может быть удовлетворено, если парабола f отрицательна. Необходимое
условие для f можно выразить в виде: /(ш) > 0, для всех возможных
w — cosa/T, т. е. w: [—1,1].
Принятие последнего из упомянутых выше условий расширяет об-
ласть для выбора значений фиктивных степеней свободы к и d в сравне-
нии с (8.122). Если рассмотреть более сложные отображения F(y), значи-
мой можно сделать большую часть допустимого пространства значений
для к и d. Дальнейший анализ показывает, что достаточно жесткое и су-
щественно нелинейное условие (8.122) можно заменить менее сложными
условиями вида:
/(-1) = е;2 + е;1 + Ео>о,
У(0) = Ео > 0,
fQ) = E2-E1+E0^Q. (8.123)
8.3. Применение теории гиперустойчивости
731
Рис. 8.62. «Выгодная» форма функции /(w) (а) и ее «невыгодная» форма (б),
для которой условие положительной определенности Re** не удовлетворяется
ДЛЯ W. [—1,1]
Высока вероятность того, что эти три условия позволят получить по-
ложительно определенную функцию /(w) для всех ш: [—1,1]. Может,
однако, случиться так, что /(w) не является положительно определен-
ной между точками w = 0 и w = 1 (см. пример кривой, показанной на
рис. 8.62, б). Чтобы исключить «неблагоприятные» случаи, условия типа
/(w) > 0 можно уточнить, используя более трех точек. Конечно, все-
гда можно пренебречь этим советом и проверять, будет ли выполняться
условие /(w) > 0 для всех w: [—1,1], после успешного завершения ана-
лиза всех остающихся условий и выбора числовых значений для к и d.
Следуя приведенной рекомендации, можно выразить условия (8.123) как
зависимости от к и d в виде:
/(-1) = 4.2 • 10“3 + 14.34(7 + 10"6А: + 5.4 • 10"3fc(7 + 10“6fc2(7 > О,
/(0) = 0.1 • 10-3 + 4.42(7 + 10—6/с + 0.2 • 10 3А:<7 + 10“6fc2(7 > 0,
/(1) = -3.3(7 + 10“6fc - 3 • 10“3fc(7 + 10-6fc2(7 > 0. (8.124)
Основные условия MN для нелинейного блока. Эти условия идентич-
ны рассмотренным в примере 8.3.1.1. Тогда для первого и третьего сек-
торов они представляются неравенствами:
(7<-J-, (8.125)
1 - к
2
d<^Tk- (8126)
Основное условие для второго сектора рассматриваемого нелинейного
блока (см. рис. 8.58) представляется неравенством (8.125). Из рис. 8.39
следует, что оба неравенства, (8.125) и (8.126), удовлетворяются, если
выполняются условия (8.125). В дальнейшем анализе надо принимать
732
Глава 8. Устойчивость нечетких систем управления
Рис. 8.63. Графическое представление условий гиперустойчивости и допусти-
мых значений фиктивных степеней свободы d и к
во внимание условие (8.125). Соберем вместе все условия для линейного
блока (8.124) и нелинейного блока (8.125):
а) 0 < к < 0.5,
Ь) 4.2 • 1СГ3 + 14.34d + 10"6А; + 5.4 • КГ3Ы + 10“6A:2d > 0,
с) 0.1 10“3 + 4.42с? + 10“6fc + 0.2 • ПГ3Ы + 10“6A;2d > 0,
d) - 3.3d + ИГ6к - 3 ПГ3Ы + 10“6А:2с/ > 0,
е) d <. (8.127)
1 Гъ
Поскольку все положительные значения к и d удовлетворяют усло-
виям (Ь) и (с), можно пренебречь дальнейшим анализом соотношений,
представленных выше. Условие (d) можно преобразовать в новую форму:
0 < к < 0.5, d > 0,
-----ft-о, d<-—-. (8.128)
-З.З-З-10~Ч + 10-6/с2 ’ 1 — к v 7
Условия гиперустойчивости (8.128) графически представлены на
рис. 8.63.
Например, коэффициенты
к = 0.4 и d = 10~8
(точка Р на рис. 8.63) удовлетворяют всем условиям гиперустойчивости
для рассматриваемой системы. Условие (8.121), которое определяет, будет
ли требуемая вещественная часть положительно определенной, удовле-
8.3. Применение теории гиперустойчивости
733
Рис. 8.64. Графическое представление функции / = Re** показывает, что Re**
не всегда является положительно определенной (соответствующее условие на-
рушается между точками w = 0.2 и w = 1)
творяется для w = coscoT = —1, 0 и 1, но между точками w — 0 и w = 1
оно не удовлетворяется (см. рис. 8.64).
Для преодоления этого затруднения можно ввести дополнительное
условие типа (8.121) для значения w, размещенное вблизи минимума
функции f(w). Хорошим выбором при этом может быть значение w = 0.6
(см. рис. 8.64). Следовательно:
/(0.6) - 0.36Е2 - 0.6Е1 + Eq > 0,
/(0.6) = -0.44 10-3 + 10~6fc + d(—0.476 - 1.96/с + 10“6/?) > 0. (8.129)
Условие (8.129) можно разделить на эквивалентный ему набор усло-
вий, представляемый в виде системы неравенств:
d< 0.44 • 10-3 - 10-6fc
-0.476- 1.96/с + 10-6/г2 ’
- 0.476 - 1.96А: + 10 6А;'2 < 0, (8.130)
или:
d > 0.44- 10~3- 10~6к
-0.476- 1.96^ + 10~6/с2 ’
- 0.476 - 1.96/с + 10“6fc2 > 0. (8.131)
Условие (8.131) не может быть удовлетворено для 0 < к < 0.5. Это
означает, что дальнейшее исследование гиперустойчивости будет основы-
ваться на условии (8.130). Это новое, «дополнительное», условие выра-
734
Глава 8. Устойчивость нечетких систем управления
Рис. 8.65. Графическое представление условий гиперустойчивости (8.132)
жается соотношениями
О < к < 0.5, d > 0,
< -ю-Ч-
-3.3-3 - 10”3k + 10“6fc2 ’
< 0.44 • 10-3 - 10-6fc
-0.476- 1.96А: + 10~6А-2 ’
-0.476 - 1.96k+ 10“6k2 <0
(8.132)
и представляется графически так, как это показано на рис. 8.65.
Не существует такого общего подпространства [к, d\, в котором удо-
влетворялись бы все условия гиперустойчивости (см. рис. 8.65). Это
значит, что гиперустойчивость системы все еще не доказана. Возника-
ет следующий вопрос: надо ли следовать рекомендации, высказанной
в разд. 8.3.1, и повторить процедуру проверки после введения новых сте-
пеней свободы?
Шансы на успех существуют, если функционирование реальной си-
стемы является устойчивым. Если предположить, что рассматриваемая
система работает в некотором промежуточном секторе, где W2 = 1
8.3. Применение теории гиперустойчивости
735
(рис. 8.54), а ошибки е невелики, то работа рассматриваемого нечеткого
регулятора имеет сходство с работой некоторого линейного регулятора
П-типа с коэффициентом усиления, пропорциональным сигналу ошибки
fcr = - = l (F(yk) = l).
Ср
Для того чтобы оценить устойчивость рассматриваемой системы, ра-
ботающей в промежуточном секторе W2 = 1, можно воспользоваться из-
вестными методами исследования дискретных систем. Из рис. 8.57 следу-
ет, что характеристическое уравнение для данной системы при Т — 0.1с
имеет вид:
1 + F(yk)G(z) = 0 1.101г2 — 2.1г + 1 = 0.
Решая данное характеристическое уравнение, получим: z\ — 1.0887
и = 1.0113. Оба корня размещаются вне требуемого единичного круга.
Это значит, что рассматриваемая система неустойчива во втором секто-
ре. Полученный результат объясняет, по какой причине доказательство
гиперустойчивости завершилось неудачей.
Следующий пример относится к системе, которой управляет несколь-
ко более сложный нечеткий регулятор ПД-типа. Этот пример показывает,
что объем работы по проверке гиперустойчивости системы резко возрас-
тает даже при незначительном росте сложности нечеткого регулятора.
Пример 8.3.3.2. Исследование устойчивости цифровой системы на
основе нейронечеткого регулятора, используемой для управления
курсом подводного аппарата Krab II
Рассматриваемый подводный аппарат Krab II показан на рис. 8.66.
Система управления данного аппарата подробно описана в работе (Piegat
1996). Структурная схема этой системы представлена на рис. 8.67.
Рассматриваемый аппарат управляется с использованием самообуча-
ющегося нейронечеткого регулятора ПД-типа. Схема этого регулятора
приведена на рис. 8.68. Данный регулятор не имеет параллельной связи
с сигналом m как на рис. 6.33, поскольку сумма заключений для возбуж-
дающих воздействий fp и всегда постоянна.
В динамической части регулятора вычисляются следующие сигналы:
— сигнал ошибки
Ср — е,
— интеграл сигнала ошибки
к
ei = [ e(t) [e(J) + e(j - 1)],
о J=1
736
Глава 8. Устойчивость нечетких систем управления
Рис. 8.66. Необитаемый подводный аппарат Krab II
Рис. 8.67. Структурная схема цифровой системы, управляющей курсом под-
водного аппарата Krab II: ^ — курсовой угол аппарата (рад); ZOH-элемент —
экстраполятор нулевого порядка
— производная сигнала ошибки
de 1
где Т — время выборки.
Фаззификация, вывод на правилах и дефаззификации — это задачи,
которые решаются статической частью регулятора, а сигналы ер, е/, ер
рассматриваются как входы статической части регулятора. Выходной сиг-
нал регулятора Мг проходит через ZOH-элемент и управляет моментом
гребного винта Mi (Нм). Данный момент Mi воздействует на значение
курсового угла аппарата ф> (рад). Типичное свойство статической характе-
ристики гребного винта — асимметричное насыщение выходного сигнала
винта (см. рис. 8.69).
Экспериментально была найдена следующая передаточная функция
для рассматриваемого аппарата:
м _ ^(5) _ 0.021929 _ bQ f рад
~ АД(з) ~ 5(1 + 0.30372s) ” <z2s2 + s \Н • м
Настройка нейронечеткого регулятора осуществлялась с использова-
нием так называемой «структуры с эталонной моделью», показанной на
(8.133)
Рис. 8.68. Нейронечеткий ПИД-регулятор
738
Глава 8. Устойчивость нечетких систем управления
Рис. 8.69. Статическая характеристика гребных винтов подводного аппарата
после разделения входного пространства на секторы
Рис. 8.70. Настройка нейронечеткого регулятора (NFC) в рамках структуры
с эталонной моделью
рис. 8.70. Результаты такой настройки имеют вид:
кР = 1.11312,
kip — 1,
кьр = 0.038005,
kin = 1 - kip,
kD = 0.0084089,
к2р = 0.461995,
к6р = -2.96078,
i = 1,...,8.
ki = 0,
к3р - 3.96078,
к7р = 0.538005,
к4р = 0.961995
к3р — 0,
Использование соотношений
kjp — 1 /и(9 ^)Р1 к^ 1 kip, i — 1,..., 8,
(8.134)
дает возможность уменьшить число настраиваемых параметров.
Уменьшение числа настраиваемых параметров позволяет ускорить
процесс настройки. В итоге настройка выполнялась для следующих ше-
сти параметров: кр, кр, кр к2р, к3р, к±р. Остальные параметры вычисли-
8.3. Применение теории гиперустойчивости
739
Рис. 8.71. Разделение входного пространства нейронечеткого регулятора на сек-
торы, определяемое логическими переменными Wi, Vj
лись с использованием соотношений (8.134). Как завершающий результат
процесса обучения был получен нелинейный ПД-регулятор (kj = 0). Вы-
числяя сигналы в последовательных ветвях сети, представляющей рас-
сматриваемый регулятор (рис. 8.68), получим следующую функцию, реа-
лизуемую данным нейронечетким регулятором:
Mr = -20.689wi + 23.029ePw2 + 20.689w3 - 1.969щ +
+ 0.101epi?2 + 11.96917з,
где wi и Vi — логические переменные. Значения этих переменных показы-
вают, какие из секторов отвечают текущим значениям сигналов ер и ер
(см. рис. 8.71).
Согласно формуле (8.135), каждый из 9 секторов входного простран-
ства регулятора реализует свою «собственную» управляющую функцию.
Выходной сигнал регулятора Мг получает свое максимальное зна-
чение Мг = 32.658 в секторе W3V3 = 1, а минимальное значение
Мг = —32.658 — в секторе wyvi — 1. Из рис. 8.69 следует, что греб-
ные винты способны развивать максимальный момент, равный только
28.31 Н-м. По этой причине разделение входного пространства для на-
бора нейронечетких регуляторов и гребных винтов было преобразовано
к окончательному виду, показанному на рис. 8.72.
На рис. 8.72 показаны координаты, характеризующие конкретные сек-
торы и выражения, определяющие выходные сигналы Mi набора «нейро-
нечеткий регулятор + гребные винты», формируемые в соответствующих
секторах. Максимальный момент, порождаемый таким набором, равняет-
ся 28.31 Н-м (сектор g3 = 1), а минимальный равняется —18.30 Н-м (сек-
тор qi = 1). Значения логических переменных показывают тот сектор
740
Глава 8. Устойчивость нечетких систем управления
118.922
v2
-118.922
V1
(-1.2/130)
£2^3=1
М1=-8.72
^(-0.898/130) (0.71/130)
(0/125)
V3 = 1
М\ = 23.02
9еР+11.969
(-1.2/118.922) (-0.898/118.922) (0.71/118.922)
(-1/70) ! \
q2wxv2=\
Мх = -20.689 + 0.101eD
Л/1 = 23.029еР + 0.101в£)
(-1.2/23.653) (-0.898/23.653) (0*0)
(-0.7/-80)
(-0.275/- 118.922)
(0.898/-118.922)
(1.2/130)
43= 1
Мх =28.31
• (1/100)
(0.898/75.455) (1.2/75.455)
(1.05/-20)
^2w3v2=l
=20.689+ 0.10 leD
(1.2/-118.922)
^1 = 1
Mi = -18.3
(-1.2/-150)
^2w2vi= 1 ;
Mj = 23.029вр - 11.9691
•
(-0.275/-150) (0.898/- 150)
• (1.05/- 135)
^2w3vi = 1
M1 = 8.72
(1.2/-150)
wi -0.898
0.898 eP
v3
^2W2V2 ~ 1
Рис. 8.72. Секторы входного пространства нелинейной части системы, состоя-
щей из нейронечеткого регулятора и гребных винтов (окончательный вариант
разделения)
входного пространства, который отвечает данному текущему значению
входного сигнала, управляющего гребными винтами. В центральном сек-
торе Q2^2^2 = 1, для ер = 0 и ер = 0, формируемый сигнал равняется
М\ = 0. Доказательство устойчивости для нелинейных систем обычно
становится все более и более трудным по мере расширения используе-
мой области во входном пространстве. Таким образом, рассматриваемую
область следует сузить до размеров, отвечающих фактическому размеру
рабочей области для рассматриваемой реальной системы. Чтобы избе-
жать такого рода затруднений, были выбраны области —1.2 < ер < 1.2
и —150 < ер < 130 (см. рис. 8.72). После успешного завершения дока-
зательства устойчивости для упомянутых «узких» областей, их можно
расширить, после чего попытаться получить доказательство устойчиво-
сти в новых условиях.
8.3. Применение теории гиперустойчивости
741
Рис. 8.73. Схема системы управления подводного аппарата (представление
в непрерывном пространстве состояний); ZOH-элемент — экстраполятор нуле-
вого порядка
Рис. 8.74. Квазистандартная форма системы управления в непрерывном про-
странстве (а) и в дискретном пространстве (б)
Рассматриваемый нейронечеткий регулятор состоит из двух блоков
(рис. 8.73): линейного, который динамически формирует выходы ер, ер, а
также статического Fi(ep,ep), реализующего отображение (8.135). Объ-
единение элементов Fi и F2 в нелинейный блок F, а линейных элемен-
тов — в линейный блок, приводит к системе управления квазистандарт-
ного вида, показанной на рис. 8.74.
Поверхность, изображенная на рис. 8.75, была получена как результат
вход-выходных отображений, реализуемых нелинейным блоком F, пред-
ставляющим действия нейронечеткого регулятора и гребных винтов. Эта
поверхность определяется главным образом выражением (8.135). Допол-
нительно следует принять во внимание насыщение статической характе-
ристики гребного винта (см. рис. 8.69).
Поверхность, показанная на рис. 8.75, состоит из большого числа сег-
ментов. Усложненная форма этой поверхности вызвана главным образом
сложностью и нелинейностью нейронечеткого регулятора (число правил,
число функций принадлежности и т. д.). Этой поверхности управления
нейронечеткого регулятора отвечает большое число степеней свободы.
Тогда поверхность управления можно сформировать в ходе процесса на-
стройки регулятора, нацеленного на минимизацию критерия эффектив-
742
Глава 8. Устойчивость нечетких систем управления
Рис. 8.75. Поверхность, представляющая отображение входов в выходы нели-
нейной частью F системы стандартного вида
Рис. 8.76. Пример плоской поверхности, реализуемой обычным
линейным ПД-регулятором
8.3. Применение теории гиперустойчивости
743
ности (показателя качества) системы управления. Плоские поверхности
соответствуют действиям обычных ПД-регуляторов (рис. 8.76). Применяя
нечеткие регуляторы, можно оптимизировать систему по нелинейному
показателю качества намного лучше, чем это можно сделать для тра-
диционных регуляторов, т. е. нечеткие регуляторы более эффективны
с точки зрения качества процессов управления. Растущая популярность
нечетких регуляторов тесно связана с этим обстоятельством.
Аппроксимация линейного блока с помощью дискретного представ-
ления осуществлялась с использованием аппроксимации обратными раз-
ностями (Leigh 1985), т. е. с использованием подстановки:
т
Т = 0.05(s).
(8.136)
Дискретная передаточная функция, аппроксимирующая функции
G\(z) и G^z), была получена в соответствующих видах:
, . _ 7.749 • 10~6z2 _ h- z2
G |( ' ) ~ (z - 1)(г - 0.859) “ (z-l)(z-/2) ’
_ , . 1.805- 10“4z 13 z
аА:> = = “7
(8.137)
Обе передаточные функции (8.137) содержат полюс z\ — 1, который
принадлежит единичному кругу |г| = 1, заключающему область устой-
чивости системы. По этой причине для стабилизации системы были
добавлены степени свободы к\ и &2 (рис. 8.77). Для стабилизации систе-
мы может быть достаточно и одной степени свободы. Была добавлена,
однако, и вторая степень свободы, которая упрощает удовлетворение
вводимых далее условий устойчивости. Вещественные части обеих пе-
редаточных функций должны быть положительно определенными. Эта
цель может быть достигнута введением добавочных степеней свободы d\
и ^2 (см. рис. 8.77). Введение фиктивных степеней свободы преобразует
передаточные функции линейных блоков к виду
= = ______________________________________________1 =
(^) (1 4" kill 4- к‘21з}^ — (1 + Z2 + ^2^2^з)^ 4“ ^2
= GUzHdi,
_ e*D(z) _ ______________l3z2 - I2I3Z_____________d —
Л/2 (^) (I 4“ kdi 4- к21з)%2 — (1 4- I2 4~ &2^з)^ 4- I2
= G*2(z)+d2. (8.138)
744
Глава 8. Устойчивость нечетких систем управления
а) в)
Рис. 8.77. Система управления после введения в нее добавочных степеней сво-
боды ki, dj (а) и свернутые схемы для нее (б), (в)
Исследование условий гиперустойчивости
Предварительные условия для линейного блока G**(z)
Условие PL1 (матрица передаточных функций G**(z) должна быть
квадратной). Для удовлетворения условия PL1 были добавлены фиктив-
ные сигналы Nkk = 0 и Nf. = 0, показанные на рис. 8.78. Поскольку
сигнал N?k всегда равен нулю, к этому сигналу можно «прикрепить»
любую передаточную функцию, например, Gf, Gf. Согласно рис. 8.78,
для линейного блока можно сформулировать следующее уравнение:
е*Рк
. eDk .
Gf Gf Г М*к
Gf Gf ] ' [ N*k '
G”G) U*
(8.139)
Условие PL2 (линейный блок G**(z) должен быть полностью управ-
ляемым и наблюдаемым). Это условие будет проверяться самым послед-
8.3. Применение теории гиперустойчивости
745
Рис. 8.78. Система управления стандартного вида после добавления фиктивных
сигналов N^k = N^k = О
ним из всех, после того, как будут определены значения коэффициентов
ki,dj, удовлетворяющие остальным условиям гиперустойчивости.
Условие PL3 (полюса всех компонентных передаточных функций
Gij(z) должны быть устойчивы). Это требование можно выразить
в виде
/ci + 3.2925&2 > О,
fci 4- 43.292fc2 + 47968.221 > О,
fci -4- 23.292fc2 + 18240.72 > 0, (8.140)
получаемом в результате использования метода экспертной оценки (8.90).
Теперь важно, чтобы новые значения или /с2 могли принимать от-
рицательные значения. В случае примера 8.3.3.1, для объекта SISO-типа,
такая возможность отсутствует. Теперь же область выбора значения для
ki и /с2 расширилась. В конечном итоге, доказательство гиперустойчиво-
сти можно существенно упростить.
Условие PL4 (порядок числителя для каждой из компонентных пе-
редаточных функций бг7(г) не может превышать порядка числителя
для них). Данное условие удовлетворяется.
Предварительные условия для нелинейного блока F**(Y£)
Условие PN1 (функция V£ = F**(Y£) должна представлять собой
однозначное отображение). Из соотношения (8.135) и рис. 8.72 следует,
что реализуемое первичным нелинейным блоком F отображение можно
выразить в виде
М± = mo + птрер + mpep, (8.141)
где значения коэффициентов mo, mp, тр зависят от текущего активи-
руемого сектора (рабочей области) нелинейного блока. Например, если
746
Глава 8. Устойчивость нечетких систем управления
i?2W2^2 = 1, то отображение приобретает вид
Mi = 23.029еР + 0.101eD.
Соответствующие значения коэффициентов то, тр, тр перечислены на
рис. 8.72.
Можно продолжить процесс получения уравнений, описывающих ра-
боту нелинейного блока F**. Так, основываясь на рис. 8.77, получим
соотношения вида:
eP = e*P + diM^
eD = e*D + d2M*,
М* = ЛД - kiep - k2eD. (8.142)
Наконец, из (8.141) и (8.142) можно получить:
то 4~ (тр ~ ki)ep Н~ (тр — к2}ер__(8143)
1________________________________________1 - (тр - ki)di - (тр - k2)d2 1
Итоговый результат (8.143) представляет собой однозначное отобра-
жение, реализуемое вторичным нелинейным блоком F**.
Условие PN2 (функция V£ = F**(Y£) должна отображать Y;. = О
в Ук = 0 —условие обнуления). Если значения первичных сигналов
ер и ер равняются нулю, то, согласно рис. 8.72, значение У1\ ~ 0
(Mi — 23.029ер 4- O.lOlep = 0). Используя эту информацию для анализа
выражений (8.142), получим:
Mi =0, е*Р = 0, е*р = 0.
Поскольку — 0 независимо от того, какие значения принимают
е*р и e*D, условие PN2 удовлетворено.
Исследование основных условий гиперустойчивости системы
Условие ML (дискретный линейный блок должен быть строго по-
ложительным вещественным). Рассматриваемое условие можно разде-
лить на некоторое число более простых условий-компонент.
Условие МЫ (среди полюсов всех компонентных передаточных
функций Gij(z) отсутствуют неустойчивые полюса). Если значения
ki и к2 удовлетворяют неравенствам (8.140), то условие ML1 удовлетво-
ряется.
8.3. Применение теории гиперустойчивости
747
Условие ML2 (матрица H(jcu) = 0.5[G(e^))4-GT(e(~7(^)] является по-
ложительно определенной эрмитовой для всех ш > 0). Передаточная
функция G**(eJ^r) представляется следующим выражением:
= G*1(ej“T) + d1 = (Re? +dx) + j ImJ. (8.144)
Передаточную функцию G!2*(e-7u;r) можно записать в виде
%%'Т) = G*2(e^T) + d2 = (Re%d2) + M (8.145)
Элементы из соотношений (8.144) и (8.145) определяются выражени-
ями вида
Re, = F2 cos2 u>T - Ff cos шТ + Fo* Im? = sinccT(Ai cosET + A2)
Z?2 cos2 шТ — ££ cos ldT % Dq D2 cos2 шТ — D± coso/T + Dq
1% = E% cos2 ЕГ - E{ cos wT + Eq Tm* — sinccT(Bi cosccT + B2)
£>2 cos2 ЕГ - Di cosET + Bq ’ im2 — D2 cos2 cjT — Di cosuiT + Dq (8.146)
Коэффициенты Л2, Bi, В2, Do, D^, D2, Е%, Е*, Е$, F%, F*,
Eq, выражаемые соотношениями (8.147), представляют собой функции
степеней свободы fci и
Ai = 3.09976 • 10“4,
А2 = 14.40342 • 10“6 + 12.01067 • 10-1%,
Bi = 3.09976 • 10“4.
В2 = 3.57399 • 10“4 + 12.01067 • 10-1% + 5.59516 • 10“8к2,
DQ = 0.01998 + 2.19084 10“% + 0.5103 • 10"4к2 + 27.97587 • 10“10A-iA-2+
= 60.0535 • 10“‘% + 3.25813 Ю-8^,
Dx = 6.90912 + 28.80528 • 10~6Ац + 12.47097 • 10“%+
= 24.01964 • 10“4%А;2 + 5.59497 10^8Л:|,
D2 = 3.43458 + 26.616 • 10“% + 6.19952 • 10“%,
Eq = 3.13582 • 10“4 + 13.98794 • 10-1% + 5.66026 • 10“%,
Ei = 6.23558 • 10“4 + 12.01067 • 10“1(% + 5.59516 • 10“%,
Е2 = 3.09976 • 10“4,
Fo* = 1.09538 • 10“6 + 60.05351 • 10“4% + 13.98794 • 10-1%,
F* = 14.40342 • 10“6 + 12.01067 • 10“1ОА;2,
В2* = 13.308 • 10“6. (8.147)
748
Глава 8. Устойчивость нечетких систем управления
Соотношения (8.148) следуют из (8.146) и из свойств тригонометри-
ческих функций (cos^ = cos(—</>), sin<^ = —sin(—</>)):
Re**(eJu,T) = Re*(e-^T), i = 1,2,
Im**(e^T) = -Im*(e~^T), i = 1.2. (8.148)
Используя соотношения (8.139) и (8.148), можно вычислить матрицу
Н(»:
Н(» = 0.5 [G(e(juj)) + GT(e(~Jaj))] =
= 0.5
+ 0.5
(Re? +cJi + jlm?)
(Re? +^2 + j Im?)
(Re? +di - jlm?)
(Re* +<i2 —Jim?)
(Re? +c?2 + j Im?)
(Re? +di + j Im?)
(Re? +c?2 - j Im?)
(Re? +di - Jim?)
(ReJ+di) (Re?+c!2)
(Re2+d2) (Ret+di)
(8.149)
Соотношения (8.148) означают, что передаточные функции Re? и Re?
представляют собой четные функции угла (шТ). Следовательно,
Н(шТ) = Нт(-с+Г), (8.150)
откуда получаем, что матрица Н(шТ) является эрмитовой.
Из теоремы Сильвестра следует (Kaczorek 1981), что для положи-
тельно определенной матрицы Н(шТ) должны удовлетворяться условия:
(Re?+di) > 0, (8.151)
(Re? +di)2 - (Re? +d2)2 > 0. (8.152)
Неравенство (8.152) можно преобразовать в форму
[(Ret +di) + (Re^ +d2)] [(Ret +^i) - (Re^ +d2)] > 0. (8.153)
Неравенство (8.153) довольно просто можно заменить двумя неравен-
ствами. В итоге, рассматриваемая положительно определенная матрица
H(ojT) должна удовлетворять следующим трем условиям:
(Ret +di) = Ret* >0, Уш > 0, (8.154)
(Ret 4-rfi) + (Re^ +d2) = Ref + Re2* >0, Уш > 0, (8.155)
(Ret +di) - (Re^ +d2) = Ret* - Re^* >0, Уш > 0. (8.156)
Анализ приведенных выше условий приводит к очень интересным
заключениям. Система SISO-типа, имеющая одну передаточную функ-
цию G(z), как в примере 8.3.3.1, приводит к единственному условию
8.3. Применение теории гиперустойчивости
749
jlm(z)
7Im(z)
Re(z)
7Im(z)
Рис. 8.79. Возможные варианты размещения полюсов G2*(eJu/r) в зависимости
от полюсов Gi*(eJu;T) для положительно определенной матрицы H(jcu) (чтобы
гарантировать это свойство матрицы, | Re^* | должно быть меньше, чем Re**,
для всех > 0)
вида (8.154). Если условие такого вида удовлетворяется, то частотная
характеристика G(jwT) обязательно будет расположена в правой полу-
плоскости системы комплексных координат. Для системы М1МО-типа,
как в текущем примере, условие (8.154) приводит к требованию, чтобы
характеристика G^(eJ^T) размещалась в правой полуплоскости, а усло-
вия (8.155), (8.156) ставили в зависимость положение характеристики
от положения характеристики Gl*(e^T). Это не значит, что
характеристика G^[eJ^'r) должна размещаться в правой полуплоско-
сти. Примеры кривых G**(e?a/r) и G^{e^T\ удовлетворяющих условиям
(8.154)—(8.156), показаны на рис. 8.79.
Подстановка
е1^1 — cos шТ 4- j sin шТ
преобразует условия (8.154)—(8.156) к виду, когда они зависят от аргу-
мента cosuT. Последующий анализ поведения системы с использова-
нием условий в этой новой форме проще, поскольку область изменения
аргументов ограничена диапазоном [—1,1]. Числитель и знаменатель ве-
щественных частей рассматриваемых передаточных функций Gj* и Gif
представляются параболическими функциями. Знаменатели обеих ве-
щественных частей идентичны. Более того, этот знаменатель всегда
750
Глава 8. Устойчивость нечетких систем управления
положителен и представляет собой сумму квадратов двух выражений:
R ** _ F^W^T-Ffcos^T + F* _ >V(Re")
ei ~ r>2 cos2ljT - Dt cosuT + Do ~ D(Re**) ’
R ** _ D2 cos2 ~ E, coswT + Eq _ A'(R(\*) .
2 “ D2cos2^T-Dicos^F+Do “ D(Re;*) ’ 1 ’
Здесь Dq, Di, определяются соотношениями (8.147), a E2, Ei, Eq,
F2, Fi, Fq — следующими выражениями:
Eq = 3.13582 • 10“4 + 13.98794 • 10-1% + 5.66026 • 10“% + 3.47454d2+
+ 2.19084 10~6M2 + 6.27165 • 10“%d2 + 60.05351 • 10“12ф2+
+ 5.66026 10“%d2 + 27.97587 1Q-Wk1k2d2,
Ег = 6.23558 10“4 + 12.01067 • 10“x% + 5.59516 • 10“% + 6.90912d2 +
+ 28.80684 • 10“%d2 + 12.47117 • 10“%d2 + 24.02134 • l(T10kik2d2+
+ 5.59516 • 10“%d2,
E2 = 3.09976 • 10“4 + 3.43458 d2 + 26.616 • 10“%d2 + 6.19952 • 10“%d2,
Fo = 1.09538 • 10“6 + 60.0535 • 10“12fci + 13.9879 • 10“х% + 3.47454dx +
+ 2.19076 • 10“%di + 6.27165 • 10“%^ + 27.97587 • 10“10A'iF</| +
+ 60.0535110“'%% + 5.66026 • 10“%%,
Fi = 14.4034 • 10“6 + 12.0106 10-1% + 6.90912^ + 28.8068 10“%di +
+ 12.47117 • 10“%c?i + 24.02134 10“x%Mi + 5.59552 • 10“%%,
F2 = 13.308 10“6 + 3.43458с?! + 26.616 • 10“%idi + 6.19952 • 10“%2di.
(8.158)
Идентичные и положительные знаменатели вещественных частей
Re** и Re^* позволяют упростить выражения (8.154)—(8.156), приведя их
к виду:
A"(Re**) > 0, (8.159)
TV(Ref) + Ar(Re^*) >0, ШО 0, (8.160)
7V(Ref) - N(ReD >0, 0, (8.161)
где 7V(Rei*) и A^Re^*) представляют собой числители вещественных
частей Re|* и Re^*, соответственно.
Если значения функции A^Re^*) для области изменения аргумента
[—1,1] положительны, то Re^* является положительно определенной (см.
рис. 8.80).
8.3. Применение теории гиперустойчивости
751
Рис. 8.80. Пример функции TV(Rep) = /(cosu/Г) для положительно опреде-
ленной вещественной части Re^*
Удовлетворить условие (8.159) можно за счет подходящего выбора
значений коэффициентов Fi в формуле (8.157). Однако эти коэффици-
енты выражаются посредством сложных функций (8.158), зависящих
от параметров первичной системы, а также от степеней свободы ki, di.
Аналитическое представление условий положительной определенности
для 7V(Rei*) можно было бы получить с использованием формул Виета
для корней квадратных уравнений. Это, однако, была бы очень трудоем-
кая задача, не говоря уже о возможных ошибках. Более того, несложно
предвидеть, что конечный вид получаемых таким способом соотношений
был бы очень сложным. При таких обстоятельствах могут появиться
серьезные ограничения на выбор значений коэффициентов ki, di. Для
упрощения всей процедуры в целом можно сформулировать условие
(8.159) для выбранных точек Pi, размещенных в пределах диапазона зна-
чений аргумента [—1,1] (см. рис. 8.80). Для дальнейшего рассмотрения
были отобраны точки —1, —0.5, 0, 0.5, 1.
Таким образом, соотношение (8.159) и выбор точек Pi приводит
к появлению пяти условий (8.162)—(8.166), которые гарантируют, что
A^Re^*) > 0:
28.8068 • 10"6 + 60.05351 • 10“12A:i + 25.99861 • 10“ 10Л-2+ (8.162)
+ А(13.81824 + 57.6136 • 10~6А:, + 24.94234 • 10“4А2+
+ 51.99721 • Ю-10/^ + 60.05351 • 10“12fc'f + 11.25578 • 10“8к%) > 0,
46.49636 • Ю“6 + 240.21404 • Ю-12^ + 79.97331 • 10"1ОА+ (8.163)
+ dj(31.15098 + 93.18588 • 10“% + 56.22846 • 10“%+
+ 159.94616 10“10ALA2 + 240.21404 • 10"12^ + 33.83208 • 10“ 8А:|) > 0,
752
Глава 8. Устойчивость нечетких систем управления
1.09538 • 10“6 + 60.05351 • 10“ 12fcx + 13.98794 • 10“10fc2+ (8.164)
+ di(3.47545 + 2.19076 • 10“% + 6.27165 • 10“%+
+ 27.97587 • 10“x%fc2 + 60.05351 • 10“х% + 5.66026 • 10“%) > 0,
- 11.11732 • 10“6 + 240.21404 • 10“12/ci + 31.96264 • 10“'%+ (8.165)
+ di(3.5125 - 22.04148 • 10“6Агг + 6.34378 • 10“%+
+ 63.8608 10“х%к2 + 240.21404 • 10“’% + 11.45 • 10“%) > 0,
60.0535 • 10“х% + 1.97727 • 10“х% + di(-0.19324 • 10“% + (8.166)
+ 3.95453 • 10-1%fc2 + 60.05351 • 10“х% + 0.06474 10“%) > 0.
Аналогичную процедуру можно применить к условию (8.160). Так,
соотношение (8.160), суженное до точек Рг, относящихся к значениям
аргумента
COS(PT = -1, -0.5, 0, 0.5, 1,
можно разделить на пять неравенств:
12.75923 • 10“4 + 26.59914 10“1(% + 11.51541 • 10“%+ (8.167)
+ (dx + d2)(13.81824 + 57.6136 • 10“% + 24.94234 • 10"%+
+ 51.99721 • 10“x%fc2 + 60.05351 10“12А:? + 11.25578 • 10“%) > 0,
28.57916 10“4 + 82.37524 • 10“1С%1 + 34.63109 • 10“%+ (8.168)
+ % + d2)(31.15098 + 93.18588 • 10“% + 56.22846 • 10“%+
+ 159.94616 • 10“х%к2 + 240.21404 • 10-1% + 33.83208 • 10“%) > 0,
3.14677 • 10“4 + 14.59324 10-1% + 5.80014 10“%+ (8.169)
+ (<Л + d2)(3.47454 + 2.19076 • 10“% + 6.27165 • 10“%+
+ 27.97587 • 10-1%fc2 + 60.5351 • 10“х% + 5.66026 • 10“%) > 0,
3.06071 • 10“4 + 34.33256 • 10“х% + 11.77035 • 10“%+ (8.170)
+ (di + d2)(3.5125 - 22.04148 • 10“% + 6.34378 10“4к2+
+ 63.8606 10“x%fc2 + 240.21404 • 10”х% + 11.45 • 10“%) > 0,
2.5778 10“х% + 0.08487 • 10~% + % + d2)(3.95453 10“х%А:2+
60.05351 • 10“х2А:2 + 0.0631 • 10“%) > 0. (8.171)
8.3. Применение теории гиперустойчивости
753
Условие (8.161) можно разделить на неравенства следующего вида:
- 12.18309 • 10“4 - 25.39808 1010/^ - 10.99543 • 10“%+ (8.172)
+ (di - d2)(13.81824 + 57.61368 • 10“% + 24.94234 10“%+
+ 51.99721 • 10“ 10/с1/с2 + 60.05351 • 10“12/с? + 11.25578 10“%) > О,
- 27.64924 • 10“4 - 77.57096 • 10-1% - 33.03163 • 10“%+ (8.173)
+ (di - d2)(31.15098 + 93.18588 • 10“% + 56.22846 10“%+
+ 159.94616 10-1%A:2 + 240.21404 • 10-1% + 33.83208 • 10“%) > 0,
- 3.12487 • 10“4 - 13.38264 10-1% - 5.52038 • 10"%+ (8.174)
+ (di - d2)(3.47454 + 2.19076 • 10“% + 6.27165 10“%+
+ 27.97587 10_1%/c2 + 60.5351 • 10-1% + 5.66026 • 10“%) > 0,
- 3.28305 10”4 - 29.52828 10-1% - 11.13109 10“%+ (8.175)
+ (di - d2)(3.5125 - 22.04148 • 10“% + 6.34378 • 10“%+
+ 63.8606 10“4%fc2 + 240.21404 • 10“x% + 11.45 10“%) > 0,
- 1.37674 10-1% - 0.04533 • 10“% + (di - d2)(3.95453 • 1O“10kik2+
+ 60.05351 10“12fc2 + 0.0631 • 10“%) > 0. (8.176)
Основные условия MN для нелинейного блока. Вторичное условие
Попова (8.101) принимает теперь вид
%% = 52 игкУгк > 0, VA: > 0,
2=1
где векторы V/. и у/. определяются следующим образом:
М^к J
ерк
e-Dk
(8.177)
У к =
v£ — вектор выходов нелинейного блока, у£ — вектор входов нелинейного
блока.
Применение уравнения (8.141)
М\ = то + трер + трер,
представляющего собой общую формулу для выхода Mi первичного
нелинейного блока, а также уравнения (8.142), представляющего свой-
754
Глава 8. Устойчивость нечетких систем управления
ства вторичного нелинейного блока F**,
ерь — е*рк + diM*k,
eDk = eDk + ^2^7^,
Mik — М1к ~ kiepk - kzeDk,
N^k = 0,
к вторичному условию Попова (8.101) преобразует его к пространству
[ер, ер] первичной системы. Результат этого преобразования дается со-
отношениями вида:
f = ep(mo + mpep 4- mpep) - kie2P - k2ePeD - di[m$ 4- т2Ре2Р+
4- Шрер 4- 2m^mpep + 2mompep 4- 2mpmpepmp+
4- 2fciep(m0 4- mpep 4- mpep) 4- 2fc2ep(m0 4- rnPep 4- mpep)-
- k^e2p — k%e2D — 2kik2epep] 0. (8.178)
Из рис. 8.72 видно, что коэффициенты mo, тр, тр зависят от рабоче-
го сектора рассматриваемого нелинейного блока. Это значит, что условия
Попова требуется исследовать отдельно для каждого сектора. Условие
Попова (8.178) использует поверхность / = f(ep,ep) в трехмерном
пространстве. На форму этой поверхности влияют значения указанных
коэффициентов. Таким образом, можно получить геометрическое пред-
ставление условия Попова как параболоид, гиперболоид или эллипсоид.
До тех пор, пока значения степеней свободы ki, dj неизвестны, существу-
ют серьезные трудности, связанные с точным анализом условия Попова.
Мы просто не знаем, какую форму принимает поверхность над каждым
из конкретных секторов, как расположена эта поверхность, существует
ли минимум или максимум функции / = /(ер, ер) в пределах данного
сектора и т. д.
Поскольку точное исследование условия Попова для всех секторов
так затруднительно (оно может быть и не реализуемым), следует найти
некий разумный компромисс. Таким образом, на первом этапе исследо-
вания можно сузить до некоторого набора характеристик, внешних точек
и одной внутренней точки каждого сектора. Соответствующий такому
подходу пример показан на рис. 8.81, б.
Введение условия для внутренней точки каждого из секторов (см.
рис. 8.81) уменьшает вероятность получения нежелательных результа-
тов, сходных с теми, что показаны на рис. 8.81, а (здесь условие Попова
удовлетворяется для внешних точек сектора F1-F4, но не выполняется
для значительной части внутренности данного сектора). В случае, когда
сектор имеет большой размер, условие Попова следует проверить для
8.3. Применение теории гиперустойчивости
755
Параболоид Попова
Рис. 8.81. Нарушение (а) и удовлетворение (б) условия Попова для выбранного
сектора нелинейной части
нескольких точек из внутренности этого сектора и сторон сектора. Ра-
зумеется, функция / = /(ер, ер) должна быть неотрицательной во всех
точках рассматриваемого сектора.
Характеристические точки, выбранные для исследования нелиней-
ного блока, показаны на рис. 8.72. Номера, которыми помечены точки,
значения параметров ер и ер, а также коэффициентов то, тр, т^ при-
ведены в табл. 8.1. Основываясь на данных из табл. 8.1, можно вычислить
выходы Mi первичного нелинейного блока F. Для каждой из 49 точек
с использованием формулы (8.178) формируются условия Попова. Данное
условие, полученное для точки с номером 4, дается соотношением вида:
/4 = 5.032 - 0.076/q - 41.25fe2 + di(-334.89 + 10.065Ац + 5490fc2~
- 82.5/ci к2 - 0.076/г? - 22500Аг|) 0. (8.179)
Условия Попова для остальных 48 точек также принимают вид функ-
ций от ki и di. Выражения для них здесь не приводятся в целях экономии
места.
Имеется 18 условий, задаваемых неравенствами (8.140) и (8.162)-
(8.176), для линейного блока и 49 условий для нелинейного блока.
Таким образом, общее число условий для рассматриваемой системы со-
ставляет 67. Эти 67 условий требуется удовлетворить путем подстройки
всего 4 степеней свободы (!). Эти числа ясно показывают, насколько важ-
ным является выбор достаточного числа степеней свободы для успеха
доказательства гиперустойчивости системы.
Для сформулированных выше нелинейных условий типичным явля-
ется наличие большого числа локальных экстремумов. Была подготов-
лена специальная компьютерная программа, чтобы находить решения
[fci, k2,d[, dz\, удовлетворяющие всем 67 рассматриваемым ограничени-
756
Глава 8. Устойчивость нечетких систем управления
Таблица 8.1
Параметры характеристических точек для секторов
нелинейной части системы
№ точки т0 тР mD eD
1 -18.3 0 0 -1.2 -150
2 -18.3 0 0 -1.2 23.653
3 -18.3 0 0 -0.898 23.653
4 -18.3 0 0 -0.275 -118.922
5 -18.3 0 0 -0.275 -150
6 -18.3 0 0 -0.7 -80
7 28.31 0 0 0.71 130
8 28.31 0 0 1.2 130
9 28.31 0 0 1.2 75.455
10 28.31 0 0 0.898 75.455
11 28.31 0 0 0.71 118.922
12 28.31 0 0 1 100
13 -8.72 0 0 -1.2 130
14 -8.72 0 0 -1.2 118.922
15 -8.72 0 0 -0.898 118.922
16 -8.72 0 0 -0.898 130
17 -8.72 0 0 -1 125
18 -20.689 0 0.101 -1.2 118.922
19 -20.689 0 0.101 -0.898 118.922
20 -20.689 0 0.101 -0.898 23.653
21 -20.689 0 0.101 -1.2 23.653
22 -20.689 0 0.101 -1 70
23 11.969 23.029 0 -0.898 130
24 11.969 23.029 0 0.71 130
25 11.969 23.029 0 0.71 118.922
26 11.969 23.029 0 -0.898 118.922
27 11.969 23.029 0 0 125
28 0 23.029 0.101 -0.898 118.922
29 0 23.029 0.101 0.71 118.922
30 0 23.029 0.101 0.898 75.455
31 0 23.029 0.101 0.898 -118.922
32 0 23.029 0.101 -0.275 -118.922
33 0 23.029 0.101 -0.898 23.653
34 0 23.029 0.101 0 0
35 -11.969 23.029 0 -0.275 -118.922
36 -11.969 23.029 0 0.898 -118.922
37 -11.969 23.029 0 0.898 -150
38 -11.969 23.029 0 -0.275 -150
39 -11.969 23.029 0 0.3 -135
40 20.689 0 0.101 0.898 75.455
41 20.689 0 0.101 1.2 75.455
42 20.689 0 0.101 1.2 -118.922
43 20.689 0 0.101 0.898 -118.922
44 20.689 0 0.101 1.05 -20
45 8.72 0 0 0.898 -118.922
46 8.72 0 0 1.2 -118.922
47 8.72 0 0 1.2 -150
48 8.72 0 0 0.898 -150
49 8.72 0 0 1.05 -135
8.3. Применение теории гиперустойчивости
757
Рис. 8.82. Система управления после введения 8 степеней свободы
(db d2, кг, к2, п, г2, г3, г4)
ям. Подход, реализуемый данной программой, был построен на базе
градиентного метода и генетических алгоритмов. Несмотря на много-
численные попытки, решить проблему для четырех степеней свободы
пока не удалось. Эти неудачи привели к переформулированию проблемы
путем введения в нее 8 степеней свободы вместо первоначальных 4.
Система, «оснащенная» 8 степенями свободы, показана на рис. 8.82.
Условие МЫ. Применение процедуры экспертных испытаний (8.90)
(Leigh 1985) приводит к следующим условиям, обеспечивающим устой-
чивость передаточных функций G**, G%* (рис. 8.82 и выражение (8.192)):
(ггг2 4- kir2li 4- пМз) ~ [rir2(1 -4 Z2) 4- ггк21213] 4- nr2Z2 > 0,
(rir2 4- Ацг2/1 4- rik2l3) + [rir2(1 4- Z2) 4- nfc2Z2Z3] 4- rxr2l2 > 0,
(г]Г2 4- kyr2l\ 4- nfc2Z3) - |г]r2l21 > 0, (8.180)
где Z] - 7.749 • 10~6, l2 = 0.859, Z3 = 1.805 • IO’4.
758
Глава 8. Устойчивость нечетких систем управления
Рис. 8.83. Графическое представление условия Rei*(^) > О
(Дг — плотность расположения значений zi в заданной области)
Условие ML2. Матрица H(jcu) = 0.5[G(ejVr) 4- GT(e“-7u;T)] должна
быть положительно определенной и эрмитовой для всех > 0. Условие
ML2 должно удовлетворяться для всех = coso^T из области [—1,1]
(рис. 8.83).
Была написана компьютерная программа, позволяющая проверять
условие ML2 для заданной области изменения значений zT и плотно-
сти Дг расположения этих значений в данной области. Условие ML2,
применительно к каждой из точек можно разделить на два условия:
Ref(^) > 0,
[Ref (гг)]2 - [НеГ(^г)]2 > 0.
(8.181)
Эта компьютерная программа проводила формирование и проверку
обоих условий для всех zi из рассматриваемой области. Вещественные
части передаточных функций определяются соотношениями:
-о ** 7 C*i(Ar)2 - AD1Zi) + Adi(1 — ^2)(Bi — 2В0^)
Re2 = <h +--------------------cTTcl---------------------
Ci = В2 — BiZi + Bg(2zf — 1),
Cl = (1 - zl)(Bi - 2BoZi)\
&D2 = Г1Г41з,
ADi = Г1Г4121з,
B2 = (пт’2 + kiT2k + rikzh),
Bi = [rir2(l + /2) + Г1к2121з],
Bq = rir2l2,
Ap2 = r2r^li,
(8.182)
8.3. Применение теории гиперустойчивости
759
где значения li, I2, I3 были определены ранее выражением (8.180). Ре-
зультат (8.180) означает, что условия ML2 представляются сложными
функциями, которые зависят от всех 8 степеней свободы di, Ад,
П, г2, г-з, г4.
Основные условия MN для нелинейного блока. Исследование рассмат-
риваемого сейчас условия означает, что условие Попова (8.101), преобра-
зованное в форму (8.183), проверяется для всех 49 точек Рг из табл. 8.1:
f(Pi) = Мр*р* = еР • М* - ch • Мр 0, (8.183)
где
„ г кл к2
Мл = Mi-------------ер-ер,
ri г2
Mi = mo + mpep 4- mpep.
Параметры mo, mp, тр, ер, ер &ля точек Pi, i = 1,... ,49, собраны
в табл. 8.1.
Допущение Дг = 0.125 дает в результате 70 условий, которые долж-
ны удовлетворяться посредством выбора значений степеней свободы.
Решение рассматриваемой задачи теперь существует. Всем 70 условиям,
представленным нелинейными неравенствами, удовлетворяют следующие
значения:
кА = - 0.1, А2 = 0.172354, ^= 0.00095, d2 = 0, Z01Qn
П = 1, Г2 = 1.8, r3 = 101. r4 = l. (8184)
Существуют также и другие наборы значений степеней свободы, удо-
влетворяющие указанным условиям. Они также должны быть выявлены.
Располагая известными числовыми значениями степеней свободы (8.184),
можно точно проверить, соблюдается ли условие Попова для любых то-
чек, принадлежащих заданному сектору. Ранее проверка условия Попова
проводилась лишь приближенно, для нескольких точек из заданного
сектора. Теперь же можно обнаружить возможные «скрытые» нарушения
условия Попова, если они имеются, как на рис. 8.81, а.
Дальнейшие исследования показывают, как пример, способ точной
проверки условия Попова для сектора #3 = 1 (рис. 8.72). Уровни входных
сигналов ер и ер, поставленных в соответствие этому сектору, даются
соотношениями:
0.71 > еР 1.2, 75.455 > ер > 130. (8.185)
760
Глава 8. Устойчивость нечетких систем управления
Выходной сигнал нелинейного блока для рассматриваемого сектора
дает постоянное значение М\ — 28.31. Сигнал дается соотношением
= 28.31 + 0.1ер - 0.14363ер. (8.186)
Подставляя значения степеней свободы (8.184) в условие Попова
(8.183), получим:
f = Mfe*p* = [101ер - 0.00095^*]^* > 0. (8.187)
Подставляя (8.186) в (8.187), соотношение (8.187) можно преобразо-
вать к виду:
/ = (-0.02689 -Г 100.99999еР -h 0.00014ер)х
х (28.31 -h 0.1ер - 0.14363ер) > 0,
/ = А-В>0. ‘ (8.188)
Совершенно не трудно установить, когда произведение двух отдель-
ных факторов А и В, представленное выражением в скобках, будет по-
ложительным. Ограничивая исследования прямоугольником на рис. 8.72,
представленным с помощью (8.185), можно найти минимальные значения
для А и В:
Amin = 71.69366 для еР = 0.71иеп - 75.455,
Bmin = 9.70936 для еР = 0.71иер = 130. 1 '
Поскольку А и В положительны, условие Попова (8.187) удовлетво-
ряется для всех точек сектора = 1. Чтобы проверить условие Попова
в более сложной ситуации, например, один из факторов (А или В) прини-
мает отрицательные значения для ер и ер, приписанных к исследуемому
сектору, можно использовать широко известные методы исследования
функций. Условие Попова (8.188) можно преобразовать к виду:
f = -0.76138 + 2859.30426еР + 0.00773eD-
- 14.5066ePeD + 10.09999е^ - 0.00002е^ > 0. (8.190)
Функция /, задаваемая выражением (8.190), определяет гиперболоид.
Подставляя f — 0, получим уравнение такой кривой в плоскости [ер,ер],
где положительный знак функции / «переключается» на отрицательный
и наоборот. Графическое представление «переключающей кривой»
- 0.76138 + 2859.30426еР + 0.00773еп-
- 14.5066еРео + 10.099994 - 0.000024 = 0 (8.191)
дается на рис.8.84.
8.3. Применение теории гиперустойчивости
761
Рис. 8.84. Поперечное сечение плоскости [ер, ер] в точке пересечения гипербо-
лоида, представляющего условие Попова (8.190) для сектора g3 = 1 и диапазона
положительных и отрицательных значений рассматриваемого условия
Рис. 8.85. Типичный пример для случая, когда условия положительной опреде-
ленности линейной части удовлетворяется в характеристических точках Р1-Р5,
в то время как между этими точками (окрестность точки Рб) они нарушаются
Аналитическое исследование условия Попова (8.190) можно заме-
нить численной проверкой. Конечно, ранее выбранное число характер-
ных точек (5) придется существенно увеличить. Как и для нелинейного
блока, надо найти способ точно проверять, удовлетворяются ли условия,
поставленные в соответствие линейному блоку (8.159)—(8.161) между
выбранными точками Д, i = 1,..., 5 (см. рис. 8.85).
Точно так же, как и в предыдущей задаче, аналитическое исследо-
вание можно заменить численной проверкой, если расстояние Дг между
изучаемыми точками достаточно мало. Для многочисленных значений
762
Глава 8. Устойчивость нечетких систем управления
Рис. 8.86. Линейная часть G**(z) исследуемой системы
расстояния Дг из области Дг < 0.125 был проведены численные иссле-
дования. Они подтвердили, что условия (8.159)—(8.161) удовлетворяются.
Условие PL2 (рассматриваемый линейный блок должен быть пол-
ностью управляемым и наблюдаемым). Линейный блок исследуемой
системы управления, показанный на рис. 8.86, составлен из 4 компонент-
ных передаточных функций G**.
Из рис. 8.82 следует, что частные передаточные функции G** за-
висят от значений степеней свободы (8.184) и могут быть выражены
в следующей общей форме:
_ ерД2) _ , (r3/ri)Gi(z)
(z) - м* - «1 +-------------------------т-------,
2А' l + (/ci/r1)G1(z) + — G2(z)
Г-2
= d2 +---------_ (8.192)
2fc 1 + (fci/rj)Gi(z) + — G2(z)
Г2
Первичные передаточные функции определяются соотношениями
(8.137). Если подставить в (8.137) значения всех коэффициентов, то даль-
нейшие преобразования приводят к так называемым модальным формам:
0.4618
г - 0.8655
__ 7 । Щ । 02
— «1 4------------1-------,
Z — Zi Z — Z2
G^(z) = 0.0001 +
0.6066
г - 0.9925
0.4612
г - 0.8655
(8.193)
= d2 +
сз
Z — Z1
04
Z - г2
Представление линейного блока в пространстве состояний показано
на рис. 8.87.
8.3. Применение теории гиперустойчивости
763
Из рис.8.87 следует, что на состояния ii, х? можно воздействовать
через вход ui, тогда как на состояния жз, Ж4 — через вход и?. Следова-
тельно, можно исследовать управляемость состояний х\, ж2, используя
модель на основе уравнений состояния вида:
Xj (к + 1) = A Xi (к) + Bui (к),
Х1(к + 1)
ж2(А: + 1)
О
Управляемость состояний жз, Ж4 можно изучать
такого вида:
X2(fc+1) = AX2(fe) + Bu2(fc),
ж3(А: + 1)
х±(к + 1)
z\ 0 ж3(А:)
О Z2 Ж4(&)
1
1
г*1 (£).
(8.194)
при помощи модели
«2(&)-
(8.195)
764
Глава 8. Устойчивость нечетких систем управления
Линейная, дискретная, стационарная система будет управляемой то-
гда и только тогда, когда матрица S, определяемая соотношением (8.196),
имеет максимальный ранг п, где п —порядок системы (Guenther 1984):
S= В:АВ:А2В:. .. :А"-1В . (8.196)
Матрицы управляемости
1 Z1
rank S = 2,
(8.197)
поставленные в соответствие переменным состояния хц, Х2 и хз,
идентичны, поскольку обе модели (8.194) и (8.195) создаются с исполь-
зованием одних и тех же матриц А и В.
Матрица S имеет максимальный ранг, равный 2, и имеет два различ-
ных собственных значения (zi = 0.9925, — 0.8655).
Хотя матрицу управляемости для переменных состояния хз, х± можно
классифицировать как матрицу с максимальным рангом, в действитель-
ности переменные состояния хз и х^ не управляются посредством пере-
менной и?,. Согласно принятым правилам, пустой (фиктивный) вход U2
всегда равняется нулю (u2 = 0) (см. рис. 8.84). Это, однако, не означает,
что условие управляемости PL2 нарушается. Поясним это утвержде-
ние следующей цитатой (Opitz 1986): «Если все собственные значения
матрицы системы, на которые нельзя повлиять, имеют отрицательные ве-
щественные части, а матрица передаточных функций оставшейся части
полностью управляемой и наблюдаемой системы строго положитель-
на и вещественна, то такая система асимптотически гиперустойчива».
Процитированное условие можно назвать «смягченным условием управ-
ляемости и наблюдаемости».
Переменные состояния хз, х^ не возбуждаются воздействием U2, по-
скольку U2 = 0 (рис. 8.87). Если начальные значения этих переменных
состояния равны а?з(0) 0, £4(6) 7^ 0, то после некоторого переход-
ного процесса эти переменные затухают до значений хз 0, Х] 0
(это «гарантируется» отрицательными собственными значениями z±, Z2
системной матрицы). Следовательно, переменные хз, х^ могут влиять
только на выходы линейного блока т/i, т/2 в течение начального периода
работы системы. Таким образом, выходы у1у у2 зависят главным образом
от переменных состояния х\ и х*2. Если пренебречь изменениями состо-
яний в переходном процессе, вызванном начальными условиями #з(0),
8.3. Применение теории гиперустойчивости
765
#4(0), то можно записать следующие уравнения:
У1(к) = Уи(к) = Ci Xi(fc) + di«i(fc),
У2(к) У12(к) = C2Xi(fc) + d2ui(k),
(8.198)
(8.199)
где
C'i = [ci,c2], С2 = [с3,с4], Х^ = [х1,х2].
Переменные состояния х4, х2 можно наблюдать с обоих выходов yj, у2.
Матрицу наблюдаемости Oi для выхода у4 можно записать в виде
(Guenther 1988)
Oi =
сЧатсЧ ...; (ат)п-1 ст
Cl CiZ!
С2 C2Z2
(8.200)
Рассматриваемая подсистема будет наблюдаемой, если ранги матрицы
Oi и матрицы состояний А совпадают и максимальны.
Матрица Oi имеет ранг 2, поэтому подсистема, представляемая пере-
менными состояния Xi, Х2, является полностью наблюдаемой (за исклю-
чением начального периода работы системы). Переменные яц, Х2 можно
также наблюдать из выхода у2- Состояния хз, равняются нулю или
«эффективно» затухают до нуля (при ненулевых начальных условиях),
так что установившиеся значения состояний хз и хд известны.
Линейный блок G** (см. рис. 8.87) удовлетворяет «смягченному»
условию наблюдаемости. Условие PL2 для линейного блока выполняется,
поскольку подсистеме переменных состояния х±, х% поставлены в соот-
ветствие строго положительные вещественные передаточные функции
Gf и Gf (8.193).
Представленный пример исследования гиперустойчивости для нели-
нейной системы MIMO-типа показывает, что уровень трудностей, свя-
занных с доказательством устойчивости системы, существенно выше,
чем в случае линейных систем. Анализируя этот пример, можно ви-
деть, насколько важен выбор подходящего числа фиктивных степеней
свободы. При небольшом числе степеней свободы гиперустойчивость не
будет доказана. К счастью, увеличение числа этих степеней свободы да-
ет хорошее решение, ведущее к доказательству. Некоторые специалисты
в области нечеткого управления отстаивают мнение о том, что метод
гиперустойчивости консервативен, другими словами, он позволяет полу-
чить доказательство устойчивости только для тех систем управления,
запас устойчивости которых достаточно велик. Рассматриваемая система
может быть охарактеризована, несомненно, как глобально нелинейная, но
локально, в индивидуальных секторах входного пространства (рис. 8.72),
766
Глава 8. Устойчивость нечетких систем управления
Рис. 8.88. Расположение полюсов zi, z2 для центрального сектора (g2w2t?2 = 1)
входного пространства нелинейной части F
ее работа имеет сходство с работой линейной системы. В центральном
секторе ^2w2f2 = 1 нелинейный блок F реализует линейное отображение:
Mi = 23.029еР + 0.101eD.
Следовательно, имея в виду передаточные функции линейного блока,
задаваемые выражением (8.137) (см. также рис. 8.74), получаем следу-
ющие полюса, представляющие рассматриваемую систему управления
(с замкнутыми контурами обратной связи):
= 0.000008 + 0.926731;,
z2 = 0.000008 - 0.926731;.
Расположение этих полюсов в плоскости Z показано на рис. 8.88.
Как следует из рис. 8.88, полюса располагаются поблизости от гра-
ницы единичного круга, отделяющей область устойчивости. Несмотря
на такое критическое расположение полюсов, устойчивость системы
доказана. Это служит опровержением мнения о том, что теория гипе-
рустойчивости консервативна.
Список литературы
[1] Abdelnour G., Chang F. and others (1992) Design of a fuzzy controller using input
and output mapping factors. IEEE Transactions on Systems, Man and Cybernetics.
№21, pp. 952-960.
[2] Abel D. (1991) Fuzzy Control — eine Einfiihrung ins Unscharfe. Automatisierungs-
technik, vol. 39, №12, pp. 433-438.
[3] Ader W., Norling A., Hollatz J. (1996) Datalyzer, a tool for fuzzy data analysis.
Proceedings of the International Conference EUFIT’96, vol.3. Aachen, Germany,
pp. 1541-1545.
[4] Akaiwa E. (1990) Hardware and software of fuzzy logic controlled cardiac pacemaker.
Proceedings of the First International Conference on Fuzzy Logic and Neural
Networks. lizuka, Japan, pp. 549-552.
[5] von Altrock C., Krause B., Zimmermann H. J. (1992) Advanced fuzzy logic control of
a model car in extreme situations. Fuzzy Sets and Systems, vol. 48, №1, pp. 41-52.
[6] von Altrock C. (1993) Fuzzy logic. Band 1 — Technologie. R. Oldenburg Verlag
GmbH, Miinchen, Germany.
[7] von Altrock C. (1995) Fuzzy logic. Band 3 — Werkzeuge. R. Oldenburg Verlad GmbH,
Miinchen, Germany.
[8] Anderson B. (1968) A simplified viewpoint of hyperstability. IEEE Transactions on
Automatic Control, №13, pp. 292-294.
[9] Anderson B., Bitmed R. and others (1968) Stability of adaptive systems: passivity
and averaging analysis. MIT Press, Cambridge, USA.
[10] Angstenberger J., Walesch B. (1994) ATP-Marktanalyse: Entwicklungswerkzeuge
und Spezialprozessoren fur Fuzzy-Anwendungen. Automatisierungstechnische Praxis,
vol. 36, №6, pp. 62-72.
[11] Aoki S., Kawachi S. (1990) Application of fuzzy control for dead-time processes in a
glas melting furnace. Fuzzy Sets and Systems, vol. 38, №5, pp. 251-256.
[12] Aracil J., Garcia-Cerezo A., Ollero A. (1991) Fuzzy control of dynamical systems.
Stability analysis based on the conicity criterion. Proceedings of the 4th Iternational
Fuzzy Systems Association Congress, Brussels, Belgium, pp. 5-8.
[13] Aracil J., Gordillo F. (2000) Stability issues in fuzzy control. Physica-Verlag,
Heidelberg-New York.
[14] Arita S., Tsutsui T. (1990) Fuzzy logic control of blood pressure through inhalational
anesthesia. Proceedings of the First International Conference on Fuzzy Logic and
Neural Networks. lizuka, Japan, pp. 545-547.
[15] Arita S. (1991) Development of an ultrasonic cancer diagnosis system using fuzzy
theory. Japanese Journal of Fuzzy Theory and Systems, vol.3, №3, pp. 215-230.
[16] Assilian S. (1974) Artificial intelligence in the control of real dynamical systems.
Ph.D. Thesis, London University.
[17] Astrom K.J., Wittenmark B. (1989) Adaptive control. Addison-Wesley, New York,
USA.
[18] Babuska R., Verbruggen H. B. (1995a) A new identification method for linguistic
fuzzy models. Proceedings of the International Conference FUZZ-IEEE/IFES’95.
Yokohama, Japan, pp. 905-912.
[19] Babuska R. (1995b) Fuzzy modeling a control engineering perspective. Proceedings of
the International Conference FUZZ-IEEE/IFES’95. Yokohama, Japan, pp. 1897-1902.
768
Список литературы
[20] Babuska R., Verbruggen H.B. (1995c) Identification of composite linear models via
fuzzy clustering. Proceedings of the 3rd European Control Conference. Rome, Italy,
pp. 1207-1212.
[21] Babuska R. (1995d) Fuzzy modeling and cluster analysis toolbox for MATLAB.
Proceedings of the International Conference EUFIT’95, vol.3. Aachen, Germany,
pp. 1479-1483.
[22] Babuska R., Sousa J., Verbruggen H.B. (1995e) Modelbased design of fuzzy control
systems. Proceedings of the International Conference EUFIT’95, vol. 1. Aachen,
Germany, pp. 837-841.
[23] Babuska R., Setnes M., Kaymak U., von Nauta Lemke H. R. (1996) Simplification
of fuzzy rule bases. Proceedings of the International Conference EUFIT’96, vol. 2.
Aachen, Germany, pp. 1115-1119.
[24] Baldwin J. F. (1995a) Fril method for soft computing, fuzzy control and classification.
Proceedings of the International Conference FUZZ-IEEE/IFES’95, vol. 1. Yokohama,
Japan, pp. 309-316.
[25] Baldwin J. F., Martin T. P. (1995b) Fuzzy modelling in an Intelligent Data Browser.
Proceedings of the International Conference FUZZ-IEEE/IFES’95, vol. 4. Yokohama,
Japan, pp. 1885-1890.
[26] Baglio S., Fortuna L., Graziani S., Muscato G. (1994) Membership function shape and
the dynamic behaviour of fuzzy systems. International Journal of Adaptive Control
and Signal Processing, vol. 8, pp. 369-377.
[27] Bartolan G., Pedrycz W. (1997) Reconstruction problem and information granularity.
IEEE Transactions on Fuzzy Systems, vol. 5, №2, pp. 234-248.
[28] Bastian A. (1996) A genetic algorithm for tuning membership functions. Proceedings
of the International Conference EUFIT’96, vol. 1. Aachen, Germany, pp. 494-498.
[29] Becker M., von Recum S. (1994) Verfahren zur bedarfsgesteuerten Abtauerkennung
in Kalteanlagen unter Einsatz eines Fuzzy Entscheiders. Proceedings of the 39th
Internationales Wissenschaftliches Kolloquium. Ilmenau, Germany, pp. 316-323.
[30] Beigy H., Eydgahi A. M. (1995) Fuzzy modelling of two-dimensional linear systems.
Proceedings of the International Symposium on Methods and Models in Automation
and Robotics MMAR’95, vol. 2. Miedzyzdroje, Poland, pp. 775-780.
[31] Bellon C., Bose P., Prade H. (1992) Fuzzy boom in Japan. International Journal of
Intelligent Systems, №7, pp. 293-316.
[32] Bellman R. E. (1961) Adaptive control processes. Princetown: Princetown University
Press.
[33] Berenji H.R., Khedkar P. (1992) Learning and tuning fuzzy logic controllers
through reinforcements. IEEE Transactions on Neural Networks 1992, vol.3, №5,
pp. 724-740.
[34] Bertram T., Svaricek F. (1993) Zur Kompensation der trockenen Reibung mit Hilfe
der Fuzzy-Logik. Automatisierungstechnik, vol. 41, №5, pp. 180-184.
[35] Bertram T., Svaricek F. and others (1994) Fuzzy Control. Zusammenstellung
und Beschreibung Wichtiger Begriffe. Automatisierungstechnik, vol. 42, №7,
pp. 322-326.
[36] Bezdek J.C. (1981) Pattern recognition with fuzzy objective function algorithms.
New York: Plenum Press.
[37] Bezdek J.C., Ehrlich R., Full W. (1984) FCM: the fuzzy c-means clustering
algorithm. Computer and Geosciences, №10, pp. 191-203.
Список литературы
769
[38] Bezdek J. С. (1993) Editorial. Fuzzy models-what are they, and why? IEEE
Transactions on Fuzzy Systems, vol. 1, №1, pp. 1-6.
[39] Bedzak M. (1992) Algorytmy sterowania cyfrowego bazujace na logice rozmytej i
sztucznych sieciach neuronowych. Ph.D. Thesis. Technical University of Szczecin,
Poland.
[40] Bien Z., Hwang D. H., Lee J.H., Ryu H.K. (1992) An automatic start-up and
shut-down control of a drum-type boiler using fuzzy logic. Proceedings of the
Second International Conference on Fuzzy Logic and Neural Networks. lizuka, Japan,
pp. 465-468.
[41] Bindel T., Mikut R. (1995) Entwurf, Stabilitatsanalyse und Erprobung von Fuzzy-
Reglern am Beispiel einer Durchflussregelung. Automatisierungstechnik, vol. 43,
№5, pp. 249-255.
[42] Bork P., Selig M., Krummen H., Schiller E. (1993) Fuzzy Control
zur Optimierung der Kiihlwasseraufbereitung an einer Chemie-Reaktoranlage.
Automatisierungstechnische Praxis, vol. 35, №5, pp. 306-309.
[43] Bossley K.M., Brown M., Harris C.J. (1995) Neurofuzzy model construction for
the modelling of non-linear processes. Proceedings of the 3rd European Control
Conference. Rome, Italy, pp. 2438-2443.
[44] Bohm R., Krebs V. (1993) Ein Ansatz zur Stabilitatsanalyse und Synthese von Fuzzy-
Regelungen. Automatisierungstechnik, vol. 41, №8, pp. 288-293.
[45] Bohm R., Bosch M. (1995) Stabilitatsanalyse von Fuzzy-Mehrgrssenregelungen mit
Hilfe der Hyperstabilitatstheorie. Automatisierungstechnik, vol. 43, №4, pp. 181-186.
[46] Broel-Plater B. (1995) DSP system using fuzzy-logic technik. Proceedings of the
International Conference ACS’97. Szczecin, Poland, pp. 401-406.
[47] Bronsztejn I.N., Siemiendiajew K. A. (1996) Matematyka. PWN, Warszawa, Poland.
[48] Brown M., Harris C. (1994) Neurofuzzy adaptive modelling and control. Prentice
Hall, New York, USA.
[49] Brown M., Bossley K.M., Mills D.J., Harris C.J. (1995a) High dimensional
neurofuzzy systems: overcoming the curse of dimensionality. Proceedings of the
International Conference FUZZ-IEEE/IFES’95. Yokohama, Japan, pp. 2139-2146.
[50] Brown M., An P. E., Harris C.J. (1995b) On the condition of neurofuzzy models.
Proceedings of the International Conference FUZZ-IEEE/IFES’95, vol. 2. Yokohama,
Japan, pp. 663-670.
[51] Brown M., Ullrich T. (1997) Comparison of node insertion algorithms for Delaunay
networks. Proceedings of the IMACS 2nd Mathmod Conference. Vienna, Austria,
pp. 775-780.
[52] Buhler H. (1994) Stabilitatsuntersuchung von Fuzzy-Regelungen. GMA-
Aussprachetag Fuzzy-Control, Langen BRD, VDI-Bericht Nr 1113, pp. 309-318.
[53] Cao S. G., Rees N.W., Feng G. (1997a) Analysis and design for a class of complex
control systems. Part I: Fuzzy modelling and identification. Automatica, vol. 33, №6,
pp. 1017-1028.
[54] Cao S.G., Rees N.W., Feng G. (1997b) Analysis and design for a class of
complex control systems. Part II: Fuzzy controller design. Automatica, vol. 33, №6,
pp. 1029-1039.
[55] Carpenter G.A., Grossberg S., Markuzon N., Reynolds J.H., Rosen D. B. (1992)
Fuzzy ARTMAP: a neural network architecture for incremental supervised learning
770
Список литературы
of analog multidimensional maps. IEEE Transactions on Neural Networks, vol.3,
№5, pp. 698-713.
156] Chen H., Mitzumoto M., Ling Y. F. (1992) Automatic control of sewerege
pumpstation by using fuzzy controls and neural networks. Proceedings of the
Second International Conference on Fuzzy Logic and Neural Networks. lizuka, Japan,
pp. 91-94.
[57] Cho K.B., Wang B. FL (1995) Radial basis function based adaptive fuzzy systems.
Proceedings of the International Conference FUZZ-IEEE/IFES’95, vol. 1. Yokohama,
Japan, pp. 247-252.
[58] Cipriano A., Kamos M., Briseno FL, Montoya F. (1995) Comparative analysis of
two fuzzy models identification methods. Proceedings of the 3rd European Control
Conference, vol.3. Rome, Italy, pp. 1213-1218.
[59] Cook P. A. (1986) Nonlinear dynamical systems. London: Prentice Hall International.
[60j Me Cormac S. E., Ringwood J. V. (1997) Neural and fuzzy modelling and fuzzy
predictive control of a non-linear coupled multi-variable plant. Proceedings of the
International Conference EUFIT’97, vol. 2. Aachen, Germany, pp. 1311-1315.
[61] Czogala E., Pedrycz W. (1981) On identification of fuzzy systems and its applications
in control problems. Fuzzy Sets and Systems, №6, pp. 73-83.
[62] Czogala E., Pedrycz W. (1984) Identification and control problems in fuzzy systems.
TIMS Studies in the Management Sciences, № 20, pp. 437-446.
[63] Czogala E. (1993a) Fuzzy logic controllers versus conventional controllers.
Proceedings of the 16th Seminar on Fundamentals of Electrotechnics and Circuit
Theory, vol. 1. Gliwice-Ustrori, Poland, pp. 23-29.
[64] Czogala E. (1993b) On the modification of rule connective in fuzzy logic controllers
using Zimmermann’s compensatory operators. Proceedings of the International
Conference EUFIT’93, vol. 2. Aachen, Germany, pp. 1329-1333.
[65] Czogala E. (1994) On modelling knowledge bases for fuzzy and rough fuzzy
controllers using the concept of an input image. Proceedings of the International
Conference EUFIT’94. Aachen, Germany.
[66] Culliere T., Titli A., Corrieu J.M. (1995) Neuro-fuzzy modelling of nonlinear
systems for control purposes. Proceedings of the International Conference FUZZ-
IEEE/IFES’95, vol. 4. Yokohama, Japan, pp. 2009-2016.
[67] Cytowski J. (1996) Algorytmy genetyezne. Podstawy i zastosowania. Akademicka
Oficyna Wydawnicza PLL Warszawa, Poland.
[68] Daca W, Bedzak M., Efner T. (1994) Fuzzy Logic fiir Temperaturregelung.
Proceedings of the 13th IAESTED International Conference MIC. Grindelwald,
Switzerland, pp. 400-401.
[69] Dave R. N., Krishnapuram R. (1997) Robust clustering methods: a unified view. IEEE
Transactions on Fuzzy Systems, vol. 5, №2, pp. 270-293.
[70] Davis L. (1991) Handbook of genetics algorithms. New York: Van Nostrand Reinhold.
[71] Delgado M. (1995) Generating fuzzy rules using clustering-based approaches.
Proceedings of the International Conference EUFIT’95, vol. 2. Aachen, Germany,
pp. 810-814.
[72] Delgado M., Gomez-Skarmeta A. F., Martin F. (1997) A fuzzy clustering-based rapid
prototyping for a fuzzy rule-based modeling. IEEE Transactions on Fuzzy Systems,
vol. 5, №2, pp. 223-233.
Список литературы
771
[73] Dias J.M., Correia A. D. (1997) Multivariable decoupling and control by a self-
organizing fuzzy system with real-time learning. Proceedings of the Inter national
Conference EUFIT’97, vol. 2. Aachen, Germany, pp. 1233-1237.
[74] Domariski P. D., Brdys M. A., Tatjewski P. (1997) Fuzzy logic multi-regional
cont rollers-design and stability analysis. Proceedings of the European Control
Conference EEC 97, paper TU-EG5 (679) on disc. Brussels, Belgium.
[75] Dobrich U., Pfeifer В. M. (1996) Technologiemarkt «Angewandte Forschung».
Automatisierungstechnische Praxis, vol. 36, №4, pp. 80-83.
[76] Driankov D., Hellendoorn H., Reinfrank M. (1993) An introduction to fuzzy control.
Berlin: Springer-Verlag.
[77] Driankov D., Hellendoorn H., Reinfrank M. (1996) Wprowadzenie do sterowania
rozmytego. Wydawnictwo Naukowo-Techniczne. Warszawa, Poland.
[78] Dubois D., Grabisch M., Prade H. (1992) Gradual rules and the approximation of
functions. Proceedings of the Second International Conference on Fuzzy Logic and
Neural Networks. lizuka, Japan, pp. 629-632.
[79] Dunn J.C. (1973) A fuzzy relative of the ISODATA process and its use in detecting
compact well-separated clusters. Journal of Cybernetics, №3, pp. 32-57.
[80] Economou C. G. (1986) Internal model control. Extension to nonlinear systems. Ind.
Eng. Chem. Process Des. Dev., vol. 21, pp. 403-411.
[81] Edgar C. R., Postlethwaite B E. (1997) A fuzzy internal model controller (FIMC)
for nonlinear systems. Proceedings of the International Conference EUFITT97, vol. 2.
Aachen, Germany, pp. 1217-1221.
[82] Eklund P., Klawonn F. (1992) Neural fuzzy logic programming. IEEE Transactions
on Neural Networks, vol.3, №5, pp.815-818.
[83] Empacher A. (1970) Maly slownik matematyczny. Wiedza Powszechna. Warszawa,
Poland.
[84] Feuring T. (1996) Developing algorithms for fuzzy neural networks. Proceedings of
the 15th IASTED International Conference «Modelling, Identification and Control».
Insbruck, Austria, pp. 133-136.
[85] Fijiwara Y. (1991) Image processing using fuzzy logic for video print systems.
Proceedings of the International Conference IFEST91, vol. 2. Tokyo, Japan,
pp. 1003-1012.
[86] Fiordaliso A. (1996) A prunning method for the self-structuring of fuzzy systems
applied to function approximation. Proceedings of the International Conference
EUFIT’96, vol. 1. Aachen, Germany, pp. 581-586.
[87] Fischle K., Schroder D. (1997) Stabile adaptive Fuzzy-Regelung ohne Differentiation
der Regelgrosse. Automatisierungstechnik, vol. 45, №8, pp. 360-367.
[88] Fisher M., Nelles O., Fiissel D. (1996) Tuning of PID-controllers for nonlinear
processes based on local linear fuzzy models. Proceedings of the International
Conference EUFIT’96, vol. 2. Aachen, Germany, pp. 1891-1895.
[89] Follinger O. (1993) Nichtlineare Regelungen. Oldenburg Verlag. Munchen, Germany.
[90] Franke H., Priber U. (1994) Echtzeit-Fuzzy-Klassifikation in Bild und
Signalverarbeitung. Proc. 39 Internationales WissenschaftItches Kolbqium, vol.3,
Ilmenau, Germany, pp. 308-315.
[91] Fujimoto J., Nakatani T., Yoneyama M. (1989) Speaker-independent word recoqnition
using fuzzy pattern matching. Fuzzy Sets and Systems, vol. 32, №7, pp. 181-191.
772
Список литературы
[92] Fujiyoshi М., Shiraki Т. (1992) A fuzzy automatic-combustion-control-system of
refuse incineration plant. Proceedings of the Second International Conference on
Fuzzy Logic and Neural Networks. lizuka, Japan, pp. 469-472.
[93] Fukumoto S., Miyajima H., Kishida K., Nagasawa Y. (1995) A destructive learning
method of fuzzy inference rules. Proceedings of the International Conference FUZZ-
IEEE/IFES’95, vol. 2. Yokohama, Japan, pp. 687-694.
[94] Garcia С. E., Morari M. (1982) Internal model control. A unifying review and some
new results. Ind. Eng. Chem. Process Des. Dev, vol. 21, pp. 308-323.
[95] Goldberg D. E. (1995) Algorytmy genetyczne i ich zastosowania. Wydawnictwo
Naukowo-Techniczne. Warszawa, Poland.
[96] Gonzales A., Perez R. (1995) Structural learning of fuzzy rules from noised examples.
Proceedings of the International Conference FUZZ-IEEE/IFES’95, vol.3. Yokohama,
Japan, pp. 1323-1330.
[97] Gorez R., Carels P. (1996) A structure and a tuning procedure for PID-like fuzzy
control. Proceedings of the International Conference EUFIT’96, vol. 2. Aachen,
Germany, pp. 974-979.
[98] Gorrini V., Salome T., Bersini H. (1995) Self-structuring fuzzy systems for function
approximation. Proceedings of the International Conference FUZZ-IEEE/IFES’95,
vol. 2. Yokohama, Japan, pp. 919-926.
[99] Gottwald S. (1993) Fuzzy sets and fuzzy logic. Foundations and application — from a
mathematical point of view. Vieweg Verlag. Braunschweig, Germany.
[100] Gruszecki J., Mieszkowicz-Rolka A., Rolka L. (1994) Automatyzacja procesu
oceny pilotow szkolnych na symulatorze lotow. Materialy XII Krajowej Konferencji
Automatyki. Gdynia, Poland, pp. 213-219.
[101] Gupta M., Qi J. (1991) Design of fuzzy logic controllers based on generalized T-
operators. Fuzzy Sets and Systems, vol. 40, pp. 473-489.
[102] Gupta M., Rao D. H. (1994) On the principles of fuzzy neural networks. Fuzzy Sets
and Systems, vol. 61, pp. 1-18.
[103] Gwiazda T. D. (1995) Algorytmy genetyczne. Wstep do teorii. «Т. D. G.» Sp. Cyw.
Warszawa, Poland.
[104] Hajek M. (1994) Optimization of fuzzy rules by using a genetic algorithm.
Proceedings of the Third International Conference on Automation, Robotics and
Computer Vision ICARV’94, vol. 4. Singapore, pp. 2111-2115.
[105] Hajek M. (1995) Multivariable fuzzy control-genetic optimization of fuzzy rules.
Proceedings of the International Conference ICAUTO-95. Indore, India, pp. 783-786.
[106] Hakata T., Masuda J. (1990) Fuzzy control of cooling system utilizing heat storage.
Proceedings of the First International Conference on Fuzzy Logic and Neural
Networks. lizuka, Japan, pp. 77-80.
[107] Halgamuge S., Glesner M. (1996) Fast transparent neuro-fuzzy classifiers.
Proceedings of the 15th IASTED International Conference «Modelling, Identification
and Control». Insbruck, Austria, pp. 407-410.
[108] Han C. D. (1970) Sufficient conditions for hyperstability of a class of nonlinear
systems. IEEE Transactions on Automatic Control, vol. 15, pp. 705-706.
[109] Hanakuma Y. (1989) Ethylen plant destination column bottom temperature control.
Keisi, vol. 32, №8, pp. 28-39.
[110] Hanss M. (1994) Ein Fuzzy-Pradiktor fiir Bioprozesse. Proceedings of the Conference
Dortmunder Fuzzy-Tage. Dortmund, Germany, pp. 206-213.
Список литературы
773
[111] Hanss М. (1996а) Eine Methode zur Identifikation von Fuzzy-Modellen. Automati-
sierungstechnik.
[112] Hanss M. (1996b) Design and optimization of a nonlinear fuzzy controller using
fuzzy process models. Proceedings of the International Conference EUFIT’96, vol.3.
Aachen, Germany, pp. 1875-1880.
[113] Hathaway R.J., Bezdek J.C., Pedrycz W. (1996) A parametric model for fusing
heterogeneous fuzzy data. IEEE Transactions on Fuzzy Systems, vol. 4, №3,
pp. 270-281.
[114] Hauptmann W., Heesche K. (1995) A neural net topology for bidirectional fuzzy-neuro
transformation. Proceedings of the International Conference FUZZ-IEEE/IFES’95,
vol.3. Yokohama, Japan, pp. 1511-1518.
[115] Haykin S. (1994) Neural networks —a comprehensive foundation. Macmillan College
Publishing Company, Inc. USA.
[116] Hack M., Kohne M. (1997) Internal Model Control mit neuronalen Netzen zur
Regelung eines Prozessanalysators. Automatisierungstechnik, vol. 45, № 1, pp. 14-23.
[117] Heider H., Tryba V. (1994) Energiesparen durch einen adaptiven Fuzzy-Regler
fiir Heizungsanlagen. Proceedings of the Conference Dortmunder Fuzzy-Tage.
Dortmund, Germany, pp. 282-288.
[118] Heilbronn R. (1995) Reibkraftkompensation mittels Fuzzy-Logik. Automatisierungs-
technische Praxis, vol. 37, №5, pp. 50-60.
[119] Hensel H., Holzmann H., Pfeifer В. M. (1995) Optimierung von Fuzzy-Control mit
Hilfe Neuronaler Netze. Automatisierungstechnische Praxis, vol. 37, №11, pp. 40-48.
[120] Higgins C.M., Goodman R. M. (1994) Fuzzy rule-based networks for control. IEEE
Transactions on Fuzzy Systems, vol. 2, №2, pp. 82-88.
[121] Hishida N. (1992) Development of the operator support system applying fuzzy
algorithms for glass tube molding equipment. Proceedings of the Second International
Conference on Fuzzy Logic and Neural Networks. lizuka, Japan, pp. 1097-1100.
[122] Hiyama T., Sameshima T. (1991) Fuzzy logic control scheme for on-line stabilisation
of multi-machine power system. Fuzzy Sets and Systems, vol. 39, pp. 181-194.
[123] Horikawa S.I., Furuhashi T., Uchikawa Y. (1992) On fuzzy modeling using fuzzy
neural networks with the back-propagation algorithm. IEEE Transactions on Neural
Networks, vol.3, №5, pp.801-806.
[124] Hohmann J., Nerlich H.G., Steinmeister C., Linzenkirchner K. (1993) Fuzzy Control:
Regelung eines Chemiereaktors. Automatisierungstechnische Praxis, vol. 35, №9,
pp. 514-521.
[125] Hsieh L. H., Groth H. C. (1994) Fuzzy Sensordatenauswertung fiir das automatisierte
Entgraten. Proceedings of the Conference Dortmunder Fuzzy-Tage. Dortmund,
Germany, pp. 173-180.
[126] Hung T., Sugeno M., Tong R., Yager R. R. (1995) Theoretical aspects of fuzzy control.
New York: John Wiley and Sons Inc.
[127] Hunt K. J., Sharbaro D., Zbikowski R., Gawthrop P. J. (1992) Neural networks for
control systems —a survey. Automatica, vol. 28, №6, pp. 1083-1112.
[128] Isaka S., Sebald A. (1993) An optimization approach for fuzzy controller design. IEEE
Transactions on System, Man and Cybernetics, pp. 1469-1473.
[129] Isermann R. (1996a) On fuzzy logic applications for automatic control, supervision
and fault diagnosis. Proceedings of the International Conference EUFIT’96, vol. 2.
Aachen, Germany, pp. 738-753.
774
Список литературы
[130] Isermann R. (1996b) Zur Anwendung der Fuzzy-logic in der Regelungstechnik.
Automatisierungstechnische Praxis, vol. 38, №11, pp. 24-35.
[131] Ishibuchi H., Tanaka H., Fukuoka N. (1989) Discriminant analysis of fuzzy data
and its application to a gas sensor system. Japanese Journal of Fuzzy Theory and
Systems, vol. 1, №1, pp. 27-46.
[132] Ishibuchi H., Fujioka R., Tanaka H. (1993) Neural networks that iearn from fuzzy
if-then rules. IEEE Transactions on Fuzzy Systems, vol. 1, №2, pp. 85-97.
[133] Ishibuchi H., Murata T., Trksen I.B. (1995a) A genetic-algorithm-based approach
to the selection of linguistic classification rules. Proceedings of the International
Conference EUFIT’95, vol.3. Aachen, Germany, pp. 1415-1419.
[134] Ishibuchi H., Nozaki K., Yamamoto N., Tanaka H. (1995b) Selecting fuzzy if-then
rules for classification problems using genetic algorithms. IEEE Transactions on
Fuzzy Systems, vol.3, №3, pp.260-270.
[135] Iwasaki T., Morita A. (1990) Fuzzy auto-tuning for PID controller with model
classification. Proceedings of the International Conference NAFIPS’90. Toronto,
USA, pp. 90-93.
[136] Jacoby E., Zimmermann C., Bessai H. (1994) Fuzzy Control in der Diabestherapie.
Proceedings of the Conference Dortmunder Fuzzy-Tage. Dortmund, Germany,
pp. 214-223.
[137] Jantzen J. (1997) A robustness study of fuzzy control rules. Proceedings of the
International Conference EUFIT’97, vol. 2. Aachen, Germany, pp. 1223-1227.
[138] Jaszczak S., Plucinski M., Piegat A. (1996) Identyfikacja parametrow nieliniowego
napedu systemu dynamicznego. Materialy Konferencji Naukowo-Technicznej
«Wspolczesne problemy w budowie i eksploatacji maszyn» Szczecin, Poland,
pp. 103-112.
[139] Jakel J. (1997) Fuzzy model identification based on a genetic algorithm and
optimization techniques. Proceedings of the International Conference EUFIT’97,
vol. 2. Aachen, Germany, pp. 774-778.
[140] Kacprzyk J. (1977) Control of a nonfuzzy systems in a fuzzy enviroment with a fuzzy
termination time. Systems Science, №3, pp. 320-334.
[141] Kacprzyk J. (1978) A branch-and-bound algorithm for the multistage control of a
nonfuzzy system in a fuzzy enviroment. Control and Cybernetics, №7, pp. 51-64.
[142] Kacprzyk J. (1986) Zbiory rozmyte w analizie systemowej. Panstwowe Wydawnictwo
Naukowe. Warszawa, Poland.
[143] Kacprzyk J.,Fedrizzi M. (1992) Fuzzy regression analysis. Warszawa: Omnitech
Press, Heidelberg: Physica-Verlag.
[144] Kacprzyk J. (1996) Multistage control under fuzziness using genetic algorithms.
Control and Cybernetics, vol. 25, №6, pp. 1181-1216.
[145] Kacprzyk J. (1997) Multistage fuzzy control. New York: John Wiley and Sons, Inc.
[146] Kaczorek T. (1981) Teoria sterowania. Tom 2. Panstwowe Wydawnictwo Naukowe.
Warszawa, Poland.
[147] Kageyama S. (1990) Blood glucose control by a fuzzy control system. Proceedings
of the First International Conference on Fuzzy Logic and Neural Networks. lizuka,
Japan, pp.557-560.
[148] Kahlert J., Frank H. (1994) Fuzzy-Logik und Fuzzy-Control. Vieweg Verlag.
Braunschweig, Germany.
Список литературы
775
[149] Kahlert J. (1995) Fuzzy Control fiir Ingenieure. Vieweg Verlag. Braunschweig,
Germany.
[150] Kandel A., Langholz G. (1994) Fuzzy Control Systems. London: CRC Press.
[151] Kang G., Lee W. (1995) Design of fuzzy state controllers and observers. Proceedings
of the International Conference FUZZ-IEEE/IFES’95, vol.3. Yokohama, Japan,
pp. 1355-1360.
[152] Katebi S. D. (1995) Fuzzy rules generation: a learning process. Proceedings of the
International Conference ICAUTO-95, vol. 1. Indore, India, pp. 63-66.
[153] Kaufmann A., Gupta M. (1985) Introduction to fuzzy arithmetic-theory and
applications. New York: Van Nostrand Reinhold.
[154] Kawai H. (1990) Engine control system. Proceedings of the First International
Conference on Fuzzy Logic and Neural Networks. lizuka, Japan, pp. 929-937.
[155] Keel L.H., Bhattacharyya S. P. (1999) A new proof of the Jury test. Automatica 35,
pp 251-258.
[156] Khalil H.R. (1992) Nonlinear systems. New York: Macmillan Publishing Company.
[157] Kiendl H. (1992) Stabilitatsanalyse von mehrschleifigen Fuzzy-Regelungssystemen
mit Hilfe der Methode der harmonischen Balance. Proceedings of the International
Conference 2 Workshop «Fuzzy Control», Dortmund, Germany, pp. 315-321.
[158] Kiendl H., Rugger J. J. (1993) Verfahren zum Entwurf und Stabilitatsnachweis
von Regelungssystemen mit Fuzzy-Reglern. Automatisierungstechnik, vol. 41, №5,
pp. 138-144.
[159] Kiendl H. (1997) Fuzzy Control methodenorientiert. Oldenburg Verlag. Miinchen,
Germany.
[160] Kiriakidis K., Tzes A. (1995) Application of implicit self-tuning fuzzy control to
nonlinear systems. Proceedings of the International Conference FUZZ-IEEE/IFES’95,
vol.3. Yokohama, Japan, pp. 1419-1426.
[161] Kinnebrock W. (1994) Optimierung mit genetischen und selektiven Algorithmen.
Oldenburg Verlag. Miinchen, Germany.
[162] Kitamura T. (1991) Design of intelligent support system for artificial heart control.
Japanese Journal of Fuzzy Theory and Systems, vol.3, №3, pp.231-240.
[163] Knappe H. (1994) Nichtlineare Regelungstechnik und Fuzzy-Control. Expert Verlag.
Renningen-Malmsheim, Germany.
[164] Koch M., Kuhn T., Wernstedt J. (1993) Ein neues Entwurfskonzept fiir Fuzzy-
Regelungen. Automatisierungstechnik, vol. 41, №5, pp. 152-158.
[165] Koch M., Kuhn T., Wernstedt J. (1994) Methods for optimal design of fuzzy
controllers. Proc. 39 Internationales Wissenschaftliches Kolloqium, vol.3. Ilmenau,
Germany, pp. 275-282.
[166] Koch M., Kuhn T., Wernstedt J. (1996) Fuzzy Control. Oldenburg Verlag. Miinchen,
Germany.
[167] Kolios G., Aichele P., Nieken U., Eigenberger G. (1994) Regelung eines
instationar betriebenen Festbettreaktors mit Fuzzy-Kontrollregeln. Proceedings of
the Conference Dortmunder Fuzzy-Tage. Dortmund, Germany, pp. 429-436.
[168] Korbicz J., Obuchowicz A., Ucinski D. (1994) Sztuczne sieci neuronowe. Podstawy i
zastosowania. Akademicka Oficyna Wydawnicza PLJ. Warszawa, Poland.
[169] Korzeri M. (2000) Conversion of a neural model of a MISO system into a fuzzy
model with the method of «important» points of the input/output mapping surface.
Diploma thesis. Institute of Control Engineering, Technical University of Szczecin.
776
Список литературы
[170] Kosko В. (1992) Neural networks and fuzzy systems. Englewood Cliffs: Prentice Hall
Inc.
[171] Kouatli I., Jones B. (1991) An improved design procedure for fuzzy control systems.
International Journal Mach. Tools Manufact., vol. 31, pp. 107-122.
[172] Koczy L. T., Hirota K. (1993) Interpolative reasoning with insufficient evidence in
sparse rule bases. Information Sciences, №71, pp. 169-201.
[173] Krieger H.J., Kratsch T., Kuhn H., Wachter H. (1994) Das Thiiringen-Fuzzy-
Modul der Modularen Kommunikativen Steuerung MKS 16. Proc. 39 Internationales
Wissenschaftliches Kolloqium, vol.3. Ilmenau, Germany, pp.332-339.
[174] Krone A., Back T., Teuber P. (1996a) Evolutionares Suchkonzept zum Aufstellen
signifikanter Fuzzy-Regeln. Automatisierungstechnik, vol. 44, №8, pp. 405-411.
[175] Krone A. (1996b) Advanced rule reduction concepts for optimising efficiency of
knowledge extraction. Proceedings of the International Conference EUFIT’96, vol. 2.
Aachen, Germany, pp. 919-923.
[176] Krone A., Teuber P. (1996c) Applying WINROSA for automatic generation of fuzzy
rule bases. Proceedings of the International Conference EUFIT’96, vol. 2. Aachen,
Germany, pp. 929-932.
[177] Kruse R., Gebhard J., Klawonn F. (1994) Foundations of Fuzzy Systems. New York:
John Wiley and Sons.
[178] Kuhn T., Wernstedt J. (1994) SOFCON-Eine Strategic zum optimalen Entwurf von
Fuzzy-Regelungen. Automatisierungstechnik, vol. 42, №3, pp. 91-99.
[179] Kuhn T., Wernstedt J. (1996) Robust design of fuzzy control. Proceedings of the
International Conference EUFIT’96, vol. 2. Aachen, Germany, pp. 970-973.
[180] Kwon T.M., Zervakis M. E. (1994) A self-organizing KNN fuzzy controller and
its neural network structure. International Journal of Adaptive Control and Signal
Processing, vol. 8, pp. 407-431.
[181] Lacrose V., Titli A. (1997) Multivariable fuzzy control using bi-dimensional fuzzy
sets. Application to a mixing tank. Proceedings of the International Conference
EUFIT’97, vol. 2. Aachen, Germany, pp. 1259-1263.
[182] Langari R., Wang L. (1995) Fuzzy models, modular networks, and hybrid learning.
Proceedings of the International Conference FUZZ-IEEE/IFES’95, vol.3. Yokohama,
Japan, pp. 1291-1308.
[183] Lee К. C., Min S. S., Song J. W., Cho К. B. (1992) An adaptive fuzzy current controller
with neural network for field-oriented controlled induction machine. Proceedings of
the Second International Conference on Fuzzy Logic and Neural Networks. lizuka,
Japan, pp. 449-452.
[184] Leichtfried L, Heiss M. (1995) Ein kennfeldorientiertes Konzept fiir Fuzzy-Regler.
Automatisierungstechnik, vol. 43, №1, pp. 31-40.
[185] Leigh J.R. (1985) Applied digital control. London: Prentice Hall.
[186] Lewis F. L., Liu K. (1996) Towards a paradigm for fuzzy logic control. Automatica,
vol. 32, pp. 167-181.
[187] Li Y., Yonezawa Y. (1991) Stability analysis of a fuzzy control system by the
hyperstability theorem. Japanese Journal of Fuzzy Theory and Systems, vol.3, №2,
pp. 209-214.
[188] Li H.X., Gatland H. B. (1995) Enhanced methods of fuzzy logic control. Proceedings
of the International Conference FUZZ-IEEE/IFES’95. vol.l. Yokohama, Japan,
pp. 331-336.
Список литературы
777
[189] Liao S.Y., Wang H.Q., Liu W. Y. (1999) Functional dependences with null values,
fuzzy values, and crisp values. IEEE Transactions on Fuzzy Systems, vol. 7, №1,
pp. 97-103.
[190] Lichtenberg M. (1994) Generierung kennliniengleicher Fuzzy-Regler aus den
Parametern konventioneller (PID-) Regler. Automatisierungstechnik, vol. 42, №12,
pp. 540-546.
[191] Lin С. T., Lee G. (1991) Neural-network-based fuzzy logic control and decision
system. IEEE Transactions on Computers, vol. 40, №12, pp. 1320-1336.
[192] Lin Y., Cunningham G.A. (1995) A new approach to fuzzy-neural system modeling.
IEEE Transactions on Fuzzy Systems, vol.3, №2, pp. 190-198.
[193] Lin C. L, Lin C.T. (1996) Reinforcement learning for an ART-based fuzzy adaptive
learning control network. IEEE Transactions on Neural Networks, vol. 7, №7,
pp. 709-731.
[194] Lin Y., Cunningham G.A., Coggeshall S.V., Jones R. D. (1998) Nonlinear system
input structure identification: two stage fuzzy curves and surfaces. IEEE Transactions
on Systems, Man and Cybernetics — Part A: Systems and Humans, vol. 28, №5.
[195] Locher G., Bakshi B., Stephanopoulos G., Schugerl K. (1996a) Ein Einsatz
zur automatischen Umwandlung von Rohdaten in Regeln. Teil 1: Prozesstrends,
Wavelettransformation und Klassifizierungsbaiime. Automatisierungstechnik, vol. 44,
№2, pp. 61-70.
[196] Locher G., Bakshi B. (1996b) Ein Einsatz zur automatischen Umwandlung von
Rohdaten in Regeln. Teil 2: Eine Fallstudie. Automatisierungstechnik, vol. 44, №3,
pp. 138-145.
[197] Lofti A., Howarth M., Thomas P. D. (1996) Non-interactive model for fuzzy rule-
based systems. Proceedings of the International Conference EUFIT’96, vol. 1. Aachen,
Germany, pp. 597-601.
[198] Lopez A. S. (1996) Tuning of a multivariable fuzzy logic controller using optimization
techniques. Proceedings of the International Conference EUFIT’96, vol. 2. Aachen,
Germany, pp. 965-969.
[199] Lopez A.S., Lafont J.C. (1997) Tuning of a decentralized multivariable fuzzy
controller. Proceedings of the International Conference EUFIT’96, vol. 2. Aachen,
Germany, pp. 1254-1258.
[200] Lawryhczuk M., Tatjewski P. (2000) Neural inverse modelling for disturbance
compensation in nonlinear plant control. Proceedings of Sixth International
Conference on Methods and Models in Automation and Robotics MMAR’2000 vol. 2.
Miedzyzdroje, Poland, pp. 721-726.
[201] Maeda M., Murakami S. (1991) Stability analysis of fuzzy control systems
using phase planes. Japanese Journal of Fuzzy Theory and Systems, vol.3, №2,
pp. 149-160.
[202] Magdalena L., Monasterio F. (1995) Evolutionary-based learning applied to fuzzy
controllers. Proceedings of the International Conference FUZZ-IEEE/IFES’95, vol.3.
Yokohama, Japan, pp. 1111-1118.
[203] Malki H.A., Li H., Chen G. (1994) New design and stability analysis of fuzzy
proportional-derivative control systems. Transactions on Fuzzy Systems, vol. 2, №4,
pp. 245-254.
[204] Mamdani E. H. (1974) Applications of fuzzy algorithms for control of simple dynamic
plant. Proceedings IEEE, №121 (12), pp. 1585-1588.
778
Список литературы
[205] Mamdani Е.Н. (1977) Application of fuzzy logic to approximate reasoning using
linguistic synthesis. IEEE Transactions on Computers, vol. C-26, № 12, pp. 1182-1181.
[206] Marin J.P., Titli A. (1995) Necessary and sufficient conditions for quadratic
stability of a class of Takagi-Sugeno fuzzy systems. Proceedings of the International
Conference EUFIT’95, vol. 2. Aachen, Germany, pp. 786-790
[207] Masters T. (1996) Sieci neuronowe w praktyce. Wydawnictwo Naukowo-Techniczne.
Warszawa, Poland.
[208] Mannle M., Richard A., Dorsam T. (1996) Identification of rule-based fuzzy
models using the RPROP optimization technique. Proceedings of the International
Conference EUFIT’96, vol.l. Aachen, Germany, pp. 587-591.
[209] Michalewicz Z. (1996) Genetic algorithms + data structures = evolution programs.
Springer Verlag, 3rd edition.
[210] Mitchell M. (1996) An introduction to genetic algorithms. MIT Press. Cambridge,
MA.
[211] Moody J., Darken C. (1989) Fast learning in networks of locally-tuned processing
units. Neural Computation, vol.l, №2, pp.281-294.
[212] Morari M., Zafirion E. (1989) Robust process control. New York: Prentice Hall.
[213] Murakami S. (1989) Weld-line tracking control of arc welding robot using fuzzy logic
controller. Fuzzy Sets and Systems 1989, vol. 32, pp. 221-237.
[214] Murata T., Ishibuchi H. (1995) Adjusting membership functions of fuzzy classification
rules by genetic algorithms. Proceedings of the International Conference FUZZ-
IEEE/IFES’95, vol. 4. Yokohama, Japan, pp. 1819-1824.
[215] Narazaki H., Ralescu A. L. (1993) An improved synthesis method for multilayered
neural networks using qualitative knowledge. IEEE Transactions on Fuzzy Systems,
vol.l, №2, pp. 125-137.
[216] Narazaki H., Shigaki I., Watanabe T. (1995) A method for extracting approximate
rules from neural networks. Proceedings of the International Conference FUZZ-
IEEE/IFES’95, vol. 4. Yokohama, Japan, pp. 1865-1870.
[217] Narendra K.S. (1990a) Neural networks for control. Cambridge: MIT Press.
[218] Narendra K.S., Parthasarathy K. (1990b) Identification and control for dynamic
system using neural networks. IEEE Transactions on Neural Networks, vol.l, №1,
pp. 4-27.
[219] Nelles O. (1996) FUREGA — fuzzy rule extraction by a genetic algorithm.
Proceedings of the International Conference EUFIT’96, vol. 1. Aachen, Germany,
pp. 489-493.
[220] Nelles O., Ernst S., Isermann R. (1997) Neuronale Netze zur Identifikation
nichtlinearer, dynamischer Systeme: Ein Uberblick. Automatisierungstechnik, vol. 45,
№6, pp. 251-261.
[221] Nelles O., Hecker O., Iserman R. (1998) Automatische Strukturselektion fuer Fuzzy-
Modelle zur Identifikation nichtlinearer dynamischer Prozesse (Subset selection for
nonlinear system identification with fuzzy models). Automatisierungstechnik, vol. 46,
№6, pp.302-312.
[222] Nelles O., Fink A., Babuska R., Setnes M. (1999) Comparison of two construction
algorithms for Takagi-Sugeno fuzzy models. Proceedings of 7th European Congress
on Intelligent Techniques and Soft Computing —on CD-ROM. Aachen, Germany.
Список литературы
779
[223] Neumerkel D., Lohnert F. (1992) Anwendungsstand Kiinstlicher Neuronaler Netze
in der Automatisierungstechnik. Automatisierungstechnische Praxis, vol. 34, №11,
pp. 640-645.
[224] Nguyen Т.Н., Sugeno M., Tong R., Yager R. R. (1995) Theoretical aspects of fuzzy
control. New York: John Wiley and Sons, Inc.
[225] Nobre F. S. (1995) Genetic-neuro-fuzzy systems: a promising fusion. Proceedings
of the International Conference FUZZ-IEEE/IFES’95, vol. 1. Yokohama, Japan,
pp. 259-266.
[226] Noisser R. (1994) Beurteilung der Stabilitat und der Stabilitatsreserve von
Fuzzy-Regelungen mittels L2-Stabilitatskriterium. Proceedings of the Conference
Dortmunder Fuzzy-Tage. Dortmund, Germany, pp. 322-329.
[227] Nomura H., Hayashi I., Wakami N. (1994) A self-tuning method of fuzzy reasoning
by genetic algorithm. Chapter in the book «Fuzzy Control Systems» by Kandel A.,
Langkolz G. London: CRC Press, pp. 337-354.
[228] Ohki M., Shikata T., Moriyama T., Ohkita M. (1997) A genetic algorithm with
modified bit-selection probability for optimizing the fuzzy reasoning. Proceedings of
the International Conference EUFIT’97, vol. 1. Aachen, Germany, pp. 694-698.
[229] Ohnishi T. (1991) A self-learning fuzzy control system for an urban refuse incineratoin
plant. Japanese Journal of Fuzzy Theory and Systems, vol.3, №2, pp. 187-200.
[230] Opitz H. P. (1986) Die Hyperstabilitatstheorie — eine systematische Methode zur
Analyse und Synthese nichtlinearer Systeme. Automatisierungstechnik, vol. 34, №6,
pp. 221-230.
[231] Opitz H. P. (1993) Fuzzy Control-Stabilitat von Fuzzy-Regelungen. Automatisie-
rungstechnik, vol. 41, №8, PP.A2I-A24.
[232] Osowski S. (1996) Sieci neuronowe. Wydawnictwo Naukowo-Techniczne. Warszawa,
Poland.
[233] Otto P. (1995) Fuzzy modelling of nonlinear dynamics systems by inductive
learned rules. Proceedings of the International Conference EUFIT’95, vol. 2. Aachen,
Germany, pp. 858-864.
[234] Palega A. (1996) Neuro-fuzzy-PID regulator kursu pojazdu podwodnego z fuzyfikacja
potrdjna. Praca dyplomowa. Technical University of Szczecin, Poland.
[235] Park M.K.. Ji S. H., Kim M.J., Park M. (1995) A new identification method for
a fuzzy model. Proceedings of the International Conference FUZZ-IEEE/IFES’95,
vol. 4. Yokohama, Japan, pp. 2159-2164.
[236] Pedrycz W. (1984) An identification algorithm in fuzzy relational systems. Fuzzy Sets
and Systems, №13, pp. 153-167.
[237] Pedrycz W. (1993) Fuzzy control and fuzzy systems. New York: John Willey and
Sons.
[238] Pedrycz W. (1995) Fuzzy control engineering: reality and challenges. Proceedings
of the International Conference FUZZ-IEEE/IFES’95, vol. 1. Yokohama, Japan,
pp. 437-446.
[239] Pedrycz W. (1996) Fuzzy multimodels. IEEE Transactions on Fuzzy Systems, vol. 4,
№2, pp. 139-148.
[240] Pedrycz W., Reformat M. (1997) Rule-based modeling of nonlinear relationships.
IEEE Transactions on Fuzzy Systems, vol. 5, №2, pp. 256-269.
780
Список литературы
[241] Pfeiffer В.М. (1995а) Symbolische Analyse und Synthese von Fuzzy-Reglern durch
Transformationen zwischen unscharfer und scharfer Darstellung. Automatisierungs-
technik, vol. 43, №11, pp. 514-124.
[242] Pfeiffer В. M. (1995b) Imitation of human operators by «neuro-fuzzy» structures.
Proceedings of the International Conference EUFIT’95, vol. 2. Aachen, Germany,
pp. 804-809.
[243] Pfeiffer В. M. (1996) 5.Workshop «Fuzzy Control». Automatisierungstechnik, vol. 44,
№3, pp. 141-142.
[244] Piegat A., Baccari M. (1995a) Shortcomings of the control with fuzzy controllers.
Proceedings of the International Symposium on Methods and Models in Automation
and Robotics MMAR’95, vol. 2. Miedzyzdroje, Poland, pp. 759-762.
[245] Piegat A., Plucinski M., Skdrski W. (1995b) Technical system and control algorithms
of underwater vehicle Krab II. In the book «Marine Technology and Transportation»,
editors Graczyk T., Jastrzebski T., Brebbia C.A., Southampton: Computational
Mechanics Publications.
[246] Piegat A., Plucinski M. (1995c) Application of the radial basis-function in modelling
and identification of linear and nonlinear systems. Proceedings of the XII International
Conference on Systems Science, vol. 1. Wroclaw, Poland, pp. 266-274.
[247] Piegat A., Jaszczak S., Plucinski M. (1996) Selflearning neuro-fuzzy PID controller
without simplifications. Proceedings of the International Symposium on Methods
and Models in Automation and Robotics MMAR’96 vol.3. Miedzyzdroje, Poland,
pp. 1195-1200.
[248] Piegat A., Plucinski M. (1997a) Fast-learning neuro-fuzzy PID-controller with
minimal number of fuzzy regions. Applied Mathematics and Computer Science, vol. 7,
№1, pp. 171-184.
[249] Piegat A. (1997b) Stability checking of a real digital control system with a neuro-
fuzzy PD-controller. Proceedings of the European Control Conference ECC 97.
Brussels, Belgium, paper №TU-AG4 (141) on disc.
[250] Piegat A. (1997c) Extrapolation truth. Proceedings of the International Conference
EUFIT’97, vol. 1. Aachen, Germany, pp. 324-329.
[251] Piegat A. (1997d) Hyperstability of fuzzy-control systems and degrees of freedom.
Proceedings of the International Conference EUFIT’97, vol. 2. Aachen, Germany,
pp. 1446-1450.
[252] Piegat A. (1997e) Rule base reduction in fuzzy models. Proceedings of the
International Conference ACS’97. Szczecin, Poland, pp. 395-400.
[253] Piegat A. (1998a) Regulator rozmyty. Patent Ai(21)315 399. Biuletyn Urzedu
Patentowego, №3(629), p. 64.
[254] Piegat A., Plucinski M. (1998b) Fuzzy internal model control of an underwater
vehicle. Proceedings of the International Symposium on Methods and Models in
Automation and Robotics MMAR’98 vol. 2. Miedzyzdroje, Poland, pp. 691-695.
[255] Piegat A., Plucinski M. (1998c) Fuzzy inverse model control (InvMC) of an
underwater vehicle. Proceedings of the International Conference EUFIT’98, vol. 2.
Aachen, Germany, pp. 834-838.
[256] Piegat A., Plucinski M. (1998d) Modeling of nonlinear systems with application
of delinearized Delaunay nets. Proceedings of the International Conference SCM.
Zakopane, Poland, on disc.
Список литературы
781
[257] Piegat А. (1998е) Nonregular nonlinear sector modelling. Applied Mathematics and
Computer Science, vol. 8, No 3, pp 101-123.
[258] Piegat A., Pluciriski M. (2000) Firm evaluation with 2-dimensional projection
method. Proceedings of the Fifth International Conference «Neural Networks and
Soft Computing». Zakopane, Poland, pp. 361-367.
[259] Piegat A., Kraszewski P., Stoicman S. (2000) Conception of geometric-neural
modeling and its employment to determination of the optimal setting path of the
controlled pitch propeller ship propulsion system. Proceedings of the International
Symposium on Methods and Models in Automation and Robotics MMAR’2000 vol. 1.
Miedzyzdroje, Poland, pp. 447-453.
[260] Piliriski M. (1997) Sterowniki rozmyte z wykorzystaniem sieci neuronowych. Ph.D.
Thesis. Technical University of Czestochowa, Poland.
[261] Pluciriski M. (1996) Adaptacyjny uklad sterowania kursem bezzalogowego pojazdu
podwodnego, wykorzystujacy rozmyta baze wiedzy о obiekcie. Ph.D. Thesis.
Technical University of Szczecin, Poland.
[262] Pluciriski M. (1997) Adaptive control system with a fuzzy data base. Proceedings of
the International Symposium on Methods and Models in Automation and Robotics
MMAR’97 vol. 2. Miedzyzdroje, Poland, pp. 809-814.
[263] Popov V. M. (1963) The solution of a new stability problem for controlled systems.
Automatic and Remote Control, vol. 24, pp. 1-23.
[264] Popov V. M. (1973) Hyperstability of control systems. Berlin: Springer Verlag.
[265] Praca zbiorowa (1971) Poradnik inzyniera-matematyka. Wydawnictwo Naukowo-
Techniczne. Warszawa, Poland.
[266] Preuss H.P. (1992) Fuzzy Control-heuristische Regelung mittels unscharfer Logik.
Automatisierungstechnische Praxis, vol. 34, №4, pp. 176-184.
[267] Preuss H.P., Tresp V. (1994a) Neuro-Fuzzy. Automatisierungstechnische Praxis,
vol. 36, №5, pp. 10-24.
[268] Preuss H.P. (1994b) Methoden der nichtlinearen Modellierung-vom
Interpolationspolynom zum Neuronalen Netz. Automatisierungstechnik, vol. 42,
№10, pp. 449-457.
[269] Preuss H. P., Ockel J. (1995) Lernverfahren fiir Fuzzy-Regler. Automatisierungstech-
nische Praxis, vol. 37, №7, pp. 10-20.
[270] Preut К. H., Braun H., Hohfeld M. (1995) Optimierung von Neuro-Fuzzy Netzwerken
mit evolutionaren Strategien. Proceedings of the International Conference Fuzzy-
Neuro-Systeme’95. Darmstad, Germany, pp. 365-372.
[271] Pulaczewski J. (1997) Fuzzy PID digital control algorithm using Takagi-Sugeno
models. Proceedings of the International Symposium on Methods and Models in
Automation and Robotics MMAR’97 vol. 2. Miedzyzdroje, Poland, pp. 815-818.
[272] Piltz A., Weber R. (1996) Automatic adjustment of weights in fuzzy rule bases.
Proceedings of the International Conference EUFIT’96, vol. 2. Aachen, Germany,
pp. 933-937.
[273] Rehfeld D., Schmitz T. (1994) Schweissprozessanalyse und Qualitatssicherung mit
Fuzzy-Logik. Proceedings of the Conference Dortmunder Fuzzy-Tage. Dortmund,
Germany, pp. 189-197.
[274] Roffel B., Chin P. A. (1991) Fuzzy control of a polymerisation reactor. Hydrocarbon
Processing, №6, pp. 47-50.
782
Список литературы
[275] Rovatti R., Guerieri R. (1996) Fuzzy sets of rules for system identification.
Transactions on Fuzzy Systems, vol. 4, №2, pp. 89-101.
[276] Rumelhart A., Me Clelland LL. (1986) Parallel Distributed Processing. Cambridge:
MIT Press.
[277] Rumpf O. (1994) Anwendung der Methode der konvexen Zerlegung zur
Stabilitatsanalyse dynamischer Systeme mit neuronalen Komponenten. Proceedings
of the 39th Internationales Wissenschaftliches Kolloquim, vol. 3. Ilmenau, Germany,
pp. 367-374.
[278] Rutkowska D. (1996) On application of genetic algorithm to fuzzy neural network
learning. Proceedings of the Second Conference on Neural Networks and Their
Applications. Szczyrk, Poland, pp. 420-425.
[279] Rutkowska D., Piliriski M., Rutkowski L. (1997) Sieci neuronowe, algorytmy
genetyezne i systemy rozmyte. Wydawnictwo Naukowe PWN. Warszawa-Lodz,
Poland.
[280] Rzepka A. (2000) Visualization program of the tuning process of multidimensional,
symmetric, rotable RBF-neurons with infinite support. Diploma thesis. Faculty of
Computer Science and Information Systems, Technical University of Szczecin.
[281] Saito Y., Ishida T. (1990) Fuzzy PID hybrid control —an application to burner
control. Proceedings of the First International Conference on Fuzzy Logic and Neural
Networks, vol. 1. lizuka, Japan, pp. 65-69.
[282] Sasaki T., Akiyama T. (1988) Traffic control process of expressway by fuzzy logic.
Fuzzy Sets and Systems, vol. 26, pp. 165-178.
[283] Schmitt G., Gunther S. (1996) Das Hyperstabilitatskurven-Verfahren als
graphisches Frequenzbereichskri terium zur Stabilitatspriifung nichtlinearer
Mehrgrossenregelkreise. Automatisierungstechnik, vol. 44, №6, pp. 281-288.
[2.84 ] Serac A., Roth H., Gardus V. (1996) Adaptive fuzzy controller for a MIMO system.
Proceedings of the International Conference EUFIT’96, vol. 2. Aachen, Germany,
pp. 901-905.
[285] Sheet T., Kiendl H. (1995) Stability analysis of fuzzy and other nonlinear systems
using integral Lyapunov functions. Proceedings of the International Conference
EUFIT’95. Aachen, Germany, pp. 765-770.
[286] Shmilovici A., Maimon O. (1996) Best fuzzy rule selection with ortogonal matching
pursuit. Proceedings of the International Conference EUFIT’96, vol. 1. Aachen,
Germany, pp. 592-596.
[287] Simpson P. K. (1992) Fuzzy min-max neural networks — part 1: classification. IEEE
Transactions on Fuzzy Systems, vol. 1, №1. pp. 32-45.
[288] Singh S. (1992) Stability analysis of discrete fuzzy control systems. Proceedings of
the First IEEE Conference on Fuzzy Systems, pp. 527-534.
[289] Sommer H.J.. Hahn H. (1993) Ein einfaches Verfahren zum Test der Bibo-
Stabilitat bei Systemen mit Polynomialen Nichtlinearitaten und Fuzzy-Komponenten.
Proceedings of the 3rd Workshop «Fuzzy Control* des GMA-UA 1.4.2., pp. 13-26.
[290] Sommer H. J.. Hahn H. (1994) Ein einfaches Verfahren zum Test der BIBO-Stabilitat
bei Systemen mit Polynomialen Nichtlinearitaten und Fuzzy-Komponenten. GMA-
Aussprachetag Fuzzy-Control. Langen, VDI-Bericht Nr 1113. pp. 13-26.
|291j Soria L. A (19961 Tuning of a multivariable fuzzy logic controller using optimization
techniques. Proceedings of the International Conference EUFIT’96, vol. 2. Aachen,
Germany, pp. 965-969.
Список литературы
783
[292] Sousa J., Babuska R., Verbruggen H.B. (1995) Adaptive fuzzy model-based control
Proceedings of the International Conference EUFIT'95, vol 2. Aachen, Germany,
pp. 865-869.
[293J Stoicman S., Piegat A., Szczesniak J. (1999) Effectiveness investigation of the RBF-
neural network applied to modeling of the ship propulsion systems with controllable
pitch propeller (CCP). Polish Maritime Research, vol. 6, №2(20), pp. 11-16.
[294] Su M.C., Kao C.J., Liu K.M., Liu C.Y. (1995) Rule extraction using a novel class
of fuzzy degraded hyperellipsoidal composite neural networks. Proceedings of the
International Conference FUZZ-IEEE/IFES’95, vol L Yokohama, Japan, pp. 233-238.
[295] Sugeno M., Yasukawa T. (1993) A fuzzy-logic-based approach to qualitative modeling.
IEEE Transactions on Fuzzy Systems, vol. 1, № 1, pp.7-31.
[296] Sugiura T. (1991) Fuzzy control of a rate-adaptive cardiac pacemaker with multiple
indicators. Japanese Journal of Fuzzy Theory and Systems, vol.3, №3, pp. 241-249.
[297] Suykens J. A., De Moor B., Vandewalle J. (1995) Stability criteria for neural
control systems. Proceedings of the 3rd European Control Conference. Rome. Italy,
pp. 2766-2771.
[298] Szwedko J. (2000) Program for significance evaluation of inputs of multidimensional
systems. Diploma thesis. Faculty of Computer Science and Information Systems.
Technical University of Szczecin.
[299] Tadeusiewicz R. (1993) Sieci neuronowe. Akademicka Oficyna Wydawmicza R. M
Warszawa, Poland.
[300] Takagt T., Sugeno M. (1985) Fuzzy identification of systems and its applications to
modeling and control. IEEE Transactions on Systems, Man and Cybernetics, vol. 15,
№1, pp. 116-132.
[301] Takahashi M. (1990) Biomedical applications of fuzzy logic controllers. Proceedings
of the First International Conference on Fuzzy Logic and Neural Networks, vol. 1
lizuka, Japan, pp. 553-556.
[302] Tan S., Yu Y. (1995) Fuzzy modeling: an adaptive approach. Proceedings
of the International Conference FUZZ-IEEE/IFES’95, vol. 2. Yokohama, Japan,
pp. 889-896.
[303] Tanaka K., Sugeno M. (1990) Stability analysis of fuzzy systems using Lyapunov’s
direct method. Proceedings of the International Conference NAFIPS’90, vol 1.
Toronto. USA, pp. 133-136.
[304] Tanaka K., Sugeno M. (1992) Stability analysis and design of fuzzy control systems.
Fuzzy Sets and Systems, vol. 45, pp. 135-156.
[305] Tilli T. (1991) Fuzzy-Logik. Franzis Verlag. Munchen. Germany.
[306] Tobi T.. Hanafusa T. (1991) A practical application of fuzzy control for an
air-conditioning system. International Journal of Approximate Reasoning, №5,
pp. 331-348.
[307] Tomera M., Morawski L. (1996) Neural-network-based fuzzy logic marine autopilot.
Proceedings oi the International Symposium on Methods and Models in Automation
and Robotics MMAR’96 vol.3. Miedzyzdroje. Poland, pp. 1207-1212.
[308] Ullrich T. (1997a) Datengetriebene Modellierung nichtlinearer Strecken mit
Delaunay-Netzen. Automatisierungstechnik, vol. 45, № 5. pp. 236-245.
[309] Ullrich T., Brown M. (1997b) Delaunay-based nonlinear internal model control.
Proceedings of the International Conference ACS’97. Szczecin. Poland, pp. 387-394.
784
Список литературы
[310] Ullrich Т., Tolle Н. (1997с) Delaunay-based local model networks for nonlinear
system identification. Proceedings of the IASTED International Conference on
Applied Modeling and Simulation. Banff, Canada, pp. 1-12.
[311] Ullrich T. (1998) Untersuchungen zur effizienten interpolierenden Speicherung von
nichtlinearen Prozessmodellen und Vorsteuerungen. Shaker Verlag, Aachen.
[312] Voit F. (1994) Fuzzy Control versus konventionelle Regelung am Beispiel der Metro
Mailand. Automatisierungstechnik, vol. 42, №9, pp. 400-410.
[313] Wagner S. (1997) A specialized evolutionary method for the creation of fuzzy
controllers. Proceedings of the International Conference EUFIT’97, vol. 1. Aachen,
Germany, pp. 699-704.
[314] Wakabayashi T. (1995) A method for constructing of system models by fuzzy flexible
interpretive stuctural modeling. Proceedings of the International Conference FUZZ-
IEEE/IFES’95, vol. 2. Yokohama, Japan, pp. 913-918.
[315] Wang L. X. (1994a) Adaptive fuzzy systems and control, design and stability analysis.
Englewood Cliffs: Prentice Hall.
[316] Wang L. X. (1994b) A supervisory controller for fuzzy control systems that
guarantees stability. IEEE Transactions on Automatic Control, vol. 39, №9,
pp. 1845-1847.
[317] Wang L. X. (1995a) Design and analysis of fuzzy identifiers of nonlinear dynamic
systems. IEEE Transactions on Automatic Control, vol. 40, №1, pp. 11-23.
[318] Wang L. X., Jordan J.R. (1995b) The robust step performance of PID and fuzzy
logic controlled SISO systems. Proceedings of the International Conference FUZZ-
IEEE/IFES’95, vol. 1. Yokohama, Japan, pp. 325-330.
[319] Wang H.O., Tanaka K., Griffin M. (1996) An approach to fuzzy control of nonlinear
system: stability and design issues. IEEE Transaction on Fuzzy Systems, vol. 4, №1,
pp. 14-23.
[320] Watanabe T. (1990) AI and fuzzy-based tunel ventilation control system. Proceedings
of the First International Conference on Fuzzy Logic and Neural Networks, vol. 1.
lizuka, Japan, pp. 71-75.
[321] Watanabe T., Ichihashi H. (1991) Iterative fuzzy modelling using membership function
of degree n and its application to crane control. Japanese Journal on Fuzzy Theory
and Systems, vol.3, №2, pp. 173-186.
[322] Weinmann A. (1991) Uncertain models and robust control. Springer Verlag, Wien.
[323] Werntges H.W. (1993) Partitions of unity improve neural function approximation.
Proceedings of the International Conference on Neural Networks, vol. 2. San
Francisco, USA, pp. 914-918.
[324] Wu Q., Boning D., Schnieder E. (1994) Realisierung von Fuzzy-Reglern mit Hilfe
von Relationsmatrizen. Automatisierungstechnik, vol. 42, №4, pp. 162-169.
[325] Yager R., Filev D. (1994) Essentials of fuzzy modeling and control. New York: John
Wiley and Sons.
[326] Yager R., Filev D. (1995) Podstawy modelowania i sterowania rozmytego.
Wydawnictwo Naukowo-Techniczne. Warszawa, Poland.
[327] Yamashita R., Yamakawa T. (1992) Application of fuzzy control to a localized
cleanroom. Proceedings of the Second International Conference on Fuzzy Logic and
Neural Networks. lizuka, Japan, pp. 1101-1102.
Список литературы
785
[328] Yao С. С., Kuo Y. Н. (1995) A fuzzy neural network model with three-layered stucture.
Proceedings of the International Conference FUZZ-IEEE/IFES’95, vol.3. Yokohama,
Japan, pp. 1503-1510.
[329] Ying H. (1993) The simplest fuzzy controllers using different inference methods are
different nonlinear proportional-integral controllers with variable gains. Automatica,
vol. 29, №6, pp. 1579-1589.
[330] Ying H. (1994) Practical design of nonlinear fuzzy controllers with stability analysis
for regulating processes with unknown mathematical models. Automatica, vol. 30,
№7, pp. 1185-1195.
[331] Yu C., Cao Z., Kandel A. (1990) Application of fuzzy reasoning to the control of an
activated sludge plant. Fuzzy Sets and Systems, vol. 38, №1, pp. 1-14.
[332] Zadeh L. A. (1965) Fuzzy sets. Information and Control, vol. 8, pp. 338-353.
[333] Zadeh L. A. (1973) Outline of a new approach to the analysis of complex systems
and decision processes. IEEE Transactions on Systems, Man and Cybernetics, vol.3,
pp. 28-44.
[334] Zadeh L. A. (1979) Fuzzy sets and information granularity. In Advances in Fuzzy Set
Theory and Applications. Editors: Gupta M., Ragade R., Yager R., Eds. Amsterdam:
North-Holland, pp. 3-18.
[335] Zadeh L. A. (1996) Fuzzy logic = computing with words. IEEE Transactions on Fuzzy
Systems, vol. 4, №2, pp. 103-111.
[336] Zell A. (1994) Simulation neuronaler Netze. Addison-Wesley (Deutschland) GmbH.
[337] Zengh X.J., Singh M. G. (1996) Decomposition property of fuzzy systems and its
applications. IEEE Transactions on Fuzzy Systems, vol. 4, №2, pp. 149-163.
[338] Zhou J., Eklund P. (1995) Some remarks on learning strategies for parameter
identification in rule based systems. Proceedings of the International Conference
EUFIT’95, vol.3. Aachen, Germany, pp. 1911-1916.
[339] Zimmermann H.J., Thole U. (1979) On the suitability of minimum and product
operators for the intersection of fuzzy sets. Fuzzy Sets and Systems, №2, pp. 167-181.
[340] Zimmermann H. J. (1987) Fuzzy sets, decision making, and expert systems. London:
Kluwer Academic Publishers.
[341] Zimmermann H.J. (1994a) Fuzzy set theory and its applications. London: Kluwer
Academic Publishers.
[342] Zimmermann H.J., von Altrock C. (1994b) Fuzzy logic. Band 2. Anwendungen.
Oldenburg Verlag. Munchen, Germany.
[343] Zurmuhl R. (1964) Matrizen und ihre technischen Anwendungen. Berlin: Springer
Verlag.
[344] Zuchowski A., Papliriski J. P. (1998) The simplification of linear models of dynamics
by decomposition to zeros and poles. Proceedings of the International Symposium on
Methods and Models in Automation and Robotics MMAR’98 vol.l. Miedzyzdroje,
Poland, pp. 225-230.
[345] Zizka J. (1996) Learning control rules for Takagi-Sugeno fuzzy controllers using
genetic algorithms. Proceedings of the International Conference EUFIT’96, vol. 2.
Aachen, Germany, pp. 960-964.
Предметный указатель
L-R-представление нечеткого числа
(L-R representation of a fuzzy
number), 83, 93
S-нормы (s-norms), 150
SISO-система управления
стандартного вида (standard
SISO control system), 676
Т-нормы (t-norms), 141
Адаптивное (adaptive)
ИМ-управление, управление на
основе ИМ-модели (adaptive
InvMC control), 654
нечеткое управление (adaptive
fuzzy control). 653
агрегирование условий (aggregation
of premises), 188
аккумуляция (accumulation), 196
аксиомы Шваба (Schwab axioms), 54
алгебраическая сумма (algebraic
sum), 151
ассоциативность операций над
множествами (associativity
of sets), 133, 148, 151
База правил (rule base), 179
лингвистически полная
(linguistically complete rule
base), 240
совместная (consistent rule base),
244
численно полная (numerically
complete rule base), 241
базисный диапазон (basic range), 29
базовая модель (base model), 464
ближайшая окрестность (closest
neighborhood), 452
быстрое вычисление инверсии (quick
inverse), 579
Вербальная модель (verbal model),
404
виды функций принадлежности
(kinds of membership
functions), 50
ВМ-структура, структура с
внутренней моделью
объекта управления (IMC
structure), 612, 650
вход-выходная устойчивость
(input/output stability), 669
вывод (inference), 179, 183, 203
максиминный, типа MAX-MIN
(MAX-MIN inference), 197
максимультипликативный, типа
MAX-PROD (MAX-PROD
inference), 200
высота нечеткого множества (height
of a fuzzy set), 37
Гауссова функция (Gaussian
function), 57, 424, 466
асимметричная (asymmetrical
Gaussian function), 60
симметричная (symmetrical
Gaussian function), 57
принадлежности с ограниченным
носителем (finite-support
Gaussian function), 59
генетические алгоритмы (genetic
algorithms), 440, 532
гены (genes), 533
Предметный указатель
787
гиперустойчивость (hyperstability),
684
асимптотическая (asymptotic
hyperstability), 685
условия (hyperstability conditions),
690
в обычном смысле (hyperstability
in the ordinary sense), 685
гистерезис (hysteresis), 359, 689
гранулированность информации
(granularity of information),
14
гребные винты подводного аппарата
(underwater vehicle
propellers), 630
Декартово произведение (Cartesian
product), 160
денормирование модели
(denormalization of a model),
271
дефаззификация (defuzzification), 182,
208
механизм (defuzzification
mechanism), 182
динамика человека как регулятора
(dynamics of a man as a
controller), 563
дискретная, -oe (discrete)
функция принадлежности (discrete
membership function), 31
отношение (discrete relation), 172
пространство, область (discrete
space), 30
Закон логического противоречия
(exclusive contradiction). 133
Идеальное обращение,
инвертирование (perfect
inversion) , 637
динамических моделей (perfect
inversion of dynamic models),
573
статических моделей (perfect
inversion of static models),
572
идеальное управление (perfect
control), 615
идемпотентность (idempotency), 133,
148
идентификация моделей
динамических объектов
(identification of models of
dynamic plants), 569
избыточность базы правил
(redundancy of the rule
base), 249
ИМ-структура, структура с
инверсной моделью объекта
управления (InvMC
structure), 636, 650
информационная гранула (granule of
information), 14
истинность (truth)
интерполяционная (interpolation
truth), 292
экстраполяционная (extrapolation
truth), 292, 621, 632
Кардинальное число (мощность)
нечеткого множества
(cardinal number of a fuzzy
set), 41
качественная оценка (quality
evaluation), 25
кластеризация (clustering), 498
код структуры модели (model
structure code), 538
коммутативность операций над
множествами (commutativity
of sets), 132, 141, 148, 150
компенсирующий оператор
(compensatory operator), 155,
157
композиционное правило вывода Заде
(Zadeh’s compositional rule
of inference), 192
788
Предметный указатель
коэффициент скорости обучения
(learning rate coefficient),
416
критерий (показатель) качества
системы управления
(performance criteria of
control system), 553
критическая точка функции
принадлежности (critical
point of a membership
function), 57
кроссинговер (crossover), 443, 534
круговой критерий устойчивости
(circle stability criterion), 676
Лексическая неопределенность
(lexical uncertainty), 74
лингвистическая, -oe, -ие (linguistic)
модель Мамдани (linguistic
Mamdani model), 322
модификаторы нечетких множеств
(linguistic modifiers of fuzzy
sets), 42
терм-множество (linguistic
term-set), 29
значение (linguistic value), 27
переменная (linguistic variable), 27
логические, -ая, -oe (logical)
логические связки, операторы
агрегирования нечетких
множеств (logical
connectives), 131
логическая сумма множеств
(logical sum of sets), 148
логическое произведение
множеств (logical product of
sets), 132
локальные нечеткие модели (local
fuzzy models), 350
Метод (method)
k средних (k-means method), 507
бифуркаций (bifurcation method),
670
взвешенных средних (weighted
mean method), 487
высот (Height method), 220
локальных моделей (local model
method), 268
Ляпунова (Lyapunov’s method),
667
максимума абсолютной ошибки
(maximum absolute error
method), 462
одномерной кластеризации (single
dimension clustering
method), 499
первого максимума (First of
Maxima method), 211
полноразмерной кластеризации
(full-dimensional clustering
method), 510
последнего максимума (Last of
Maxima method), 211
среднего максимума (Middle of
Maxima method), 208
Тастина (Tustin’s method), 463
точек максимума абсолютной
ошибки (method of
maximum absolute error
points), 216
центра сумм (Center of Sums
method), 216
центра тяжести (Center of Gravity
method), 212
механизм вывода (inference
mechanism), 181
многомерное нечеткое управление
(multivariable fuzzy control),
657
модальное значение нечеткого
множества (modal value of a
fuzzy set), 48
модель (model)
без скачкообразного перехода
(non-jump model), 585
Мамдани (Mamdani model), 312
ментальная (mental model), 403
co скачкообразным переходом
(jump model), 585
Предметный указатель
789
Такаги—Сугено (Takagi—Sugeno
model), 334
модифицированная функция
принадлежности заключения
(modified conclusion
membership function), 193
момент (momentum), 417
монотонность операций над
множествами (monotonicity
of sets), 141, 151
мощность (power)
нечеткого множества (power of а
fuzzy set), 31, 41
числовой области значений (power
of the numerical universe of
discourse), 30
мультимодели (multimodels), 356
мутация (mutation), 443, 534
Наблюдаемость (observability), 767
набор, пакет (bag), 35
набор элементов, не являющийся
нечетким множеством
(non-fuzzy bag), 35
недостаточно обоснованное решение
(insufficiently grounded
decision), 245
неинвертируемая модель
(non-invertible model), 599
нейронные сети с радиальными
базисными функциями,
RBF-сети (RBF neural
networks), 424
нелингвистическая модель Мамдани
(non-linguistic Mamdani
model), 322
нелинейное отображение (non-linear
mapping), 569
непараметризованные
(non-parameterized)
операторы s-нормы
(non-parameterized s-norm
operators), 151
операторы t-нормы
(non-parameterized t-norm
operators), 142
неполнота нечеткой модели
(incompleteness of a fuzzy
model), 234
непрерывная, -oe (continuous)
область (continuous space), 30
отношение (continuous relation),
172
несовместность правил (inconsistency
of the rules), 245
нечеткая модель (fuzzy model), 400
глобальная (global fuzzy model),
350
самонастраивающаяся (self-tuning
fuzzy model), 400
самоорганизующаяся
(self-organizing fuzzy model),
400
нечеткий, -ая, -oe, ие (fuzzy)
арифметика (fuzzy number
arithmetic), 79
импликация (fuzzy implication),
175
лингвистическая модель (fuzzy
linguistic model), 404
логика (fuzzy logic), 14
метод с средних, FCM-метод
кластеризации (fuzzy
c-means method), 519
множество (fuzzy set), 25, 30
набор, пакет (fuzzy bag), 35
нуль (fuzzy zero), 109, 122
отношение (fuzzy relation), 163
теория множеств (fuzzy set
theory), 14
числа (fuzzy numbers), 28
число неопределенного знака
(undefined sign fuzzy
number), 113
экстраполяция (fuzzy
extrapolation), 279
нечеткий ПИД-регулятор (fuzzy PID
controller)
790
Предметный указатель
в варианте инкрементного
регулирования (incremental
version of a fuzzy PID
controller), 547
в варианте прямого регулирования
(direct version of a fuzzy PID
controller), 547
нечеткое множество (fuzzy set), 25,
30
выпуклое (convex fuzzy set), 42
невыпуклое (non-convex fuzzy set),
42
нормальное (normal fuzzy set), 35
пустое (empty fuzzy set), 33
типа 1 (type 1 fuzzy set), 70
типа 2 (type 2 fuzzy set), 72
универсальное (universal fuzzy
set), 33
нормализованная RBF-сеть
(normalized RBF network),
426
нормирование модели (normalization
of a model), 271
носитель нечеткого множества
(support of a fuzzy set), 37
Область (universe)
значений (universe of discourse),
29
значений входов модели (universe
of discourse of a model), 251
рассуждений (domain of
discourse), 29
обобщающее правило (generalizing
rule), 535
обобщенное правило рассуждений
Modus Ponens (generalized
Modus Ponens), 185
обоснованность кластера (cluster
validity), 525
обратимость модели (model
invertibility), 572
обратное нечеткое число (inverse
fuzzy number), 83
обратное распространение ошибки
(error back-propagation), 416
объединение (union)
множеств (union of sets), 148
с дополнением множества (union
with the complementary set),
149
с пустым множеством (union with
the empty set), 149
объект (plant)
собственный (proper plant), 575, 577
строго собственный (strictly proper
plant), 575, 577
ограниченная, -ый (bounded)
вывод SUM-MIN (bounded
SUM-MIN inference), 206
вывод SUM-PROD (bounded
SUM-PROD inference), 206
разность (bounded difference), 142
ограничивающий элемент, элемент
компенсации нелинейностей
типа «насыщение»
(anti-windup element), 546
оператор (operator)
MAX (МAX-operator), 151, 152
MIN (MIN-operator), 135, 142
PROD (PROD-operator), 142
sub-MIN (sub-MIN operator), 140
алгебраической суммы (algebraic
sum operator), 153
«жесткий» MIN (“hard MIN”
operator), 136
«жесткий» sgn (“hard” signum),
136
концентрирования (concentration
operator), 43
«мягкий» MIN (“soft
MIN’operator), 136
«мягкий» sgn (“soft” signum), 136
обобщенного среднего (generalized
mean-operator), 146
объединения Гамахера
(Hamacher-union operator),
152
Предметный указатель
791
объединения Ягера (Yager-union
operator), 152
пересечения Гамахера
(Hamacher-intersection
operator), 143
пересечения Дюбуа
(Dubois-intersection
operator), 143
пересечения Ягера
(Yager-intersection operator),
143
повышения контрастности
(intensification operator), 45
понижения контрастности
(contrast decreasing
operator), 47
растяжения (dilatation operator),
45
среднего арифметического
(arithmetic mean-operator),
145
среднего гармонического
(harmonic mean-operator),
146
среднего геометрического
(geometric mean-operator),
146
операторы (operators)
импликации (implication
operators), 177
super-MAX
(super-MAX-operators), 153
опорные точки поверхности модели
(support points of a model
surface), 251
остаточная ошибка (residuum error),
468
относительная мощность нечеткого
множества (relative power of
a fuzzy set), 41
Параметризованный, -ые
(parameterized)
оператор пересечения на основе
среднего (mean intersection
operator), 145
операторы s-нормы (parameterized
s-norm operators), 152
операторы t-нормы (parameterized
t-norm operators), 143
персептронные сети (perceptron
networks), 413
ПИД-регулятор (PID controller), 544
пересечение множеств (intersection of
sets), 132
поглощение, пересечение с пустым
множеством (set absorption),
133, 149
полилинейная функция (multi-linear
function), 320
полное, -ая (complete)
разбиение области значений
(complete partition of the
universe of discourse), 235
база правил (complete rule base),
244
полнота нечеткой модели
(completeness of a fuzzy
model), 234
популяция (population), 533
правило рассуждений (тавтология)
Modus Ponens (Modus
Ponens tautology), 184
предварительные условия
гиперустойчивости
(preliminary conditions of
hyperstability), 687, 689
представление нечеткого множества
(representation of a fuzzy
set), 39
вертикальное (vertical
representation of a fuzzy set),
38
горизонтальное (horizontal
representation of a fuzzy set),
39
преконтроллер (pre-controller), 639
принцип (principle)
792
Предметный указатель
компенсации (compensatory
principle), 156
несовместимости (principle of
incompatibility), 18
проекция (projection), 170, 474
прозрачность модели (transparency of
a model), 254
произведение (product), 142
произведение Гамахера (Hamacher
product), 142
произведение Эйнштейна (Einstein
product), 142
усиленное произведение (drastic
product), 142
проклятие размерности (curse of
dimensionality), 371, 482
простая RBF-сеть (ordinary RBF
network), 426
пространство (область) рассуждений
(space of discourse), 29
противоположное нечеткое число
(opposite fuzzy number), 82
Радиальные базисные функции
(radial basis functions), 424
разбиение входного пространства
(input space partition)
бессеточное (non-grid input space
partition), 255
гиперпрямоугольное
(hyper-rectangular input
space partition), 370
гипертреугольное (hyper-triangular
input space partition), 370
непрямоугольное (non-rectangular
input space partition), 371
прямоугольное (rectangular input
space partition), 369
разрывность метода дефаззификации
(discontinuity of a
defuzzification method), 210
расширение области рассуждений
(extension of the universe of
discourse), 484
реализуемая инверсия (realizable
inverse), 580
регулятор действий (action controller)
двухпозиционный (two-position
action controller), 541
трехпозиционный (three-position
action controller), 545
регулятор с гистерезисом (controller
with a hysteresis), 542
результирующая функция
принадлежности вывода из
базы правил (resulting
membership function of the
rule-base conclusion), 196
реляционная модель (relational
model), 344
Связность базы правил (continuity of
the rule base), 246
сети Делоне, триангуляция Делоне
(Delaunay networks), 372
сетка разбиения входного
пространства (partition grid
of the input space), 251
сигмоидная (sigmoid)
функция (function), 414
функция принадлежности
(membership function), 61
синглетон, одноточечное
(одноэлементное) множество
(singleton), 13, 38, 221
система (system)
типа MIM0, с несколькими
входами и несколькими
выходами (MIMO system),
657
типа MISO, с несколькими
входами и одним выходом
(MISO system), 86
типа SISO, с одним входом и
одним выходом (SISO
system), 79
система управления (control system)
вторичная (secondary control
system), 693, 699
Предметный указатель
793
общего вида (general control
system), 544
первичная, исходная (primary
control system), 693
с внутренней моделью объекта
(internal model control
system, 612
сокращение базы правил (reduction of
the rule base), 255
специализированные структурные
схемы идентификации
(specialized structures for
identification), 599
специалист по нечеткому
моделированию (expert in
fuzzy modeling), 405
среднеквадратическое отклонение
(mean square deviation), 355
стабилизация неустойчивого объекта
(stabilization of an unstable
plant), 616
статический регулятор (static
controller), 540
степень выполнения (значение
истинности) условия
(premise evaluation), 186
степень принадлежности (grade of
membership), 31
стохостическая неопределенность
(stochastic uncertainty), 74
структура с эталонной моделью
подавления возмущений
(structure with the reference
model of disturbance
rejection), 646
структурная схема прямой
идентификации (direct
structure of identification),
595
структурная хромосома (structure
chromosome), 538
субнормальное нечеткое множество
(subnormal fuzzy set), 35
сумма (sum)
Гамахера (Hamacher sum), 151
ограниченная (bounded sum), 151
Эйнштейна (Einstein sum), 151
существенные (значимые) входы
модели (significant model
inputs), 447
Тавтология (tautology), 184
тождественность, пересечение с
универсальным множеством
(identity), 133
традиционный, классический, -ая
(classical)
структура системы управления
(classical control system
structure), 544
импликация (classical implication),
172
отношение (classical relation), 160,
162
Уменьшение числа используемых
нечетких множеств
(reduction of a fuzzy sets
number), 258
управляемость (controllability), 766
управляющий регулятор (supervisory
controller), 671
упрощенное (simplified)
денормирование (simplified
denormalization), 275
нормирование (simplified
normalization), 272
уравнения Калмана-Якубовича
(Kalman-Jakubowich
equations), 716
усиленная сумма (drastic sum), 151
условие Попова (Popov condition),
722, 724, 755
условие разбиения единицы (partition
of unity condition), 48
Фаззификация (fuzzification), 179
фиктивная степень свободы (fictitious
degree of freedom), 700, 706
фильтр нижних частот (low-pass
filter), 616, 625
794
Предметный указатель
фильтрация результатов измерений
(filtering of measurement
samples), 452, 487
функция принадлежности
(membership function), 13,
31, 50
внутренняя (inner membership
function), 67
гармоническая (harmonic
membership function), 63
интуитивная (intuitive membership
function), 54
левая (left membership function),
66
многомерная (multi-dimensional
membership function), 471
непрерывная (continuous
membership function), 31
полиномиальная (polynomial
membership function), 65
правая (right membership
function), 66
функция приспособленности (fitness
function), 533
Хромосома (chromosome), 533
Цилиндрическое продолжение
(cylindrical extension), 165
Частичная инверсия модели (partial
model inversion), 600
чувствительность метода
дефаззификации (sensitivity
of a defuzzification method),
210
Экспертные испытания (Jury’s test),
719
экспоненциальная эллиптическая
вращаемая функция
(exponential rotatable elliptic
function), 481
экстраполяция (extrapolation)
нулевого порядка (zero-order
extrapolation), 283
первого порядка (first-order
extrapolation), 283
эталонная модель (reference model),
605
Ядро нечеткого множества (core of a
fuzzy set), 38
Оглавление
Предисловие редактора перевода.................................. 5
Вступление...................................................... 9
Предисловие.................................................... 11
Глава 1. Введение.............................................. 13
1.1. Сущность теории нечетких множеств.................... 13
1.2. Развитие теории нечетких множеств.................... 19
Глава 2. Основные понятия теории нечетких множеств........... . 25
2.1. Нечеткие множества................................... 25
2.2. Характеристические параметры (показатели) нечеткого множе-
ства ..................................................... 37
2.3. Лингвистические модификаторы нечетких множеств....... 43
2.4. Типы функций принадлежности нечетких множеств........ 50
2.5. Нечеткие множества типа 2............................ 70
2.6. Два вида неопределенности — нечеткость и вероятность. 74
Глава 3. Нечеткая арифметика................................... 78
3.1. Принцип обобщения.................................... 79
3.2. Сложение нечетких чисел.............................. 87
3.3. Вычитание нечетких чисел............................. 95
3.4. Умножение нечетких чисел............................ 100
3.5. Деление нечетких чисел.............................. 116
3.6. Особенности нечетких чисел.......................... 121
3.7. Различия между нечеткими числами и лингвистическими значе-
ниями ................................................... 128
Глава 4. Нечеткая математика.................................. 131
4.1. Основные операции над нечеткими множествами......... 131
4.1.1. Оператор пересечения (логическое произведение) нечет-
ких множеств......................................... 132
4.1.2. Объединение (логическая сумма) нечетких множеств ... 148
4.1.3. Компенсирующие операторы...................... 155
4.2. Нечеткие отношения.................................. 158
4.3. Импликация.......................................... 172
796
Оглавление
Глава 5. Нечеткие модели......................................... 179
5.1. Структура, основные элементы и операции в нечетких моделях. 179
5.1.1. Фаззификация..................................... 182
5.1.2. Вывод............................................ 183
5.1.2.1. Оценка степени выполнения условия....... 186
5.1.2.2. Определение активизированных функций
принадлежности заключений отдельных пра-
вил при заданных входных значениях нечет-
кой модели............................ 190
5.1.2.3. Определение результирующей функции при-
надлежности вывода из базы правил...... 196
5.1.3. Дефаззификации результирующей функции принадлеж-
ности вывода из базы правил 208
5.1.4. Пример нечеткого моделирования.................. 223
5.2. Важные свойства правил, баз правил и нечетких моделей. 225
5.2.1. Локальный характер правил....................... 227
5.2.2. Зависимость числа правил от числа входных параметров
и нечетких множеств..................................... 229
5.2.3. Полнота нечеткой модели......................... 233
5.2.4. Непротиворечивость базы правил.................. 241
5.2.5. Связность базы правил........................... 246
5.2.6. Избыточность базы правил........................ 248
5.3. Рекомендации по построению базы правил................ 249
5.4. Сокращение базы правил................................ 254
5.5. Нормирование (масштабирование) входов и выхода нечеткой мо-
дели........................................................ 270
5.6. Экстраполяция в нечетких моделях...................... 277
5.7. Типы нечетких моделей................................. 311
5.7.1. Модели Мамдани................................ 311
5.7.2. Модели Такаги—Сугено.......................... 332
5.7.3. Реляционные модели.............................. 343
5.7.4. Глобальные и локальные нечеткие модели.......... 349
5.7.5. Нечеткие мультимодели........................... 356
5.7.6. Нейронечеткие модели............................ 362
5.7.7. Альтернативные модели........................... 365
5.7.8. Принципы подобия систем и моделей систем........ 373
5.7.9. Нечеткая классификация.......................... 374
Глава 6. Методы нечеткого моделирования......................... 399
6.1. Нечеткое моделирование на основе экспертных знаний о системе 402
6.2. Построение самонастраивающихся нечетких моделей на основе
измеренных данных о входах и выходах системы............... 409
6.2.1. Применение нейронечетких сетей для настройки пара-
метров нечеткой модели........................... 411
6.2.1.1. Структуризация и обучение нейронных сетей 412
Оглавление 797
6.2.1.2. Преобразование нечеткой модели Мамдани
в нейронечеткую сеть................... 427
6.2.1.3. Преобразование в нейронечеткую сеть нечет-
кой модели Такаги—Сугено......................... 436
6.2.2. Настройка параметров нечеткой модели с помощью гене-
тического алгоритма.................................... 439
6.3. Построение самоорганизующихся и самонастраивающихся
нечетких моделей на основе измеренных данных о входах и вы-
ходах системы............................................... 445
6.3.1. Выявление существенных и несущественных входов мо-
дели ............................................ 446
6.3.2. Определение нечетких кривых................... 451
6.3.3. Самоорганизация и самонастройка параметров нечеткой
модели........................................ 458
6.3.3.1. Самоорганизация и настройка нечеткой мо-
дели с применением геометрического метода
точек максимума абсолютной ошибки................ 461
6.3.3.2. Самоорганизация и самонастройка нечетких
f моделей методами кластеризации......... 494
6.3.3.3. Самоорганизация и самонастройка нечетких
моделей методом поиска................. 530
Глава 7. Нечеткое управление..................................... 539
7.1. Статические нечеткие регуляторы........................ 539
7.2. Динамические нечеткие регуляторы....................... 542
7.3. Формирование структур и настройка параметров нечетких регу-
ляторов .................................................... 555
7.3.1. Проектирование нечетких регуляторов на основе экс-
пертного знания об объекте управления............ 556
7.3.2. Разработка нечеткого регулятора на основе модели экс-
перта, управляющего объектом........................... 561
7.3.3. Разработка нечеткого регулятора на основе модели объ-
екта управления........................................ 567
7.3.3.1. Некоторые замечания относительно иденти-
фикации моделей динамических объектов... 568
7.3.3.2. Некоторые замечания относительно иденти-
фикации инвертированных моделей динами-
ческих объектов.................................. 571
7.3.3.3. Настройка нечеткого регулятора с заранее
выбранной структурой............................. 603
7.3.3.4. Нечеткое управление, основанное на струк-
туре с внутренней моделью........................ 611
7.3.3.5. Нечеткое управление, основанное на струк-
туре с инверсной моделью объекта (ИМ-
структура) ...................................... 635
798
Оглавление
7.3.3.6. Адаптивное нечеткое управление........ 652
7.3.3.7. Многомерное нечеткое управление (MIMO). 656
Глава 8. Устойчивость нечетких систем управления .............. 663
8.1. Устойчивость нечетких систем управления с неизвестными мо-
делями объектов........................................... 669
8.2. Круговой критерий устойчивости........................ 674
8.3. Применение теории гиперустойчивости для анализа устойчиво-
сти нечетких систем....................................... 681
8.3.1. Представление условий гиперустойчивости в частотной
области для систем управления со стационарной нели-
нейной частью................................... 684
8.3.2. Условия во временной области для гиперустойчивости
непрерывных нелинейных систем управления, включаю-
щих стационарную нелинейную часть...................... 714
8.3.3. Условия гиперустойчивости в частотной области для дис-
кретных нелинейных систем управления, содержащих
стационарную нелинейную часть.......................... 716
Список литературы.............................................. 767
Предметный указатель........................................... 786
ВУЗОВСКАЯ И ПРОФЕССИОНАЛЬНАЯ ЛИТЕРАТУРА
ВЫСШАЯ МАТЕМАТИКА
ИМЕЕТСЯ В ПРОДАЖЕ:
Кохонен Т. Самоорганизующиеся карты / Т. Кохонен ;
пер. 3-го англ. изд. - 2008. - 655 с. : ил. - (Адаптивные
и интеллектуальные системы).
Самоорганизующиеся карты, вместе с их разновидностями,
представляют собой одну из наиболее популярных нейросетевых
архитектур, ориентированных на обучение без учителя. Они
широко используются в таких областях, как статистика, обработка
сигналов, теория управления, финансовый анализ, экспериментальная
физика, химия, медицина, для решения сложных, многомерных,
нелинейных задач, связанных с извлечением признаков, обработкой
и классификацией изображений, адаптивным управлением и т. п. В книге
дается детальное изложение математического аппарата и применений
для самоорганизующихся карт.
Для специалистов в области теории и применений нейросетевого
моделирования, а также студентов и аспирантов соответствующих
специальностей.
1 ИЗДАТЕЛЬСТВО
«БИНОМ
Лаборатория знаний»
125167, Москва, проезд Аэропорта, д. 3
Телефон: (499)157-5272
e-mail: binom@Lbz.ru, http://Www.Lbz.ru
Оптовые поставки:
(499)174-7616, 171-1954, 170-6674
ВУЗОВСКАЯ И ПРОФЕССИОНАЛЬНАЯ ЛИТЕРАТУРА
ВЫСШАЯ МАТЕМАТИКА
ИМЕЕТСЯ В ПРОДАЖЕ:
Обучение
с подкреплением
Саттон Р. С. Обучение с подкреплением / Р. С. Саттон,
Э. Г. Барто ; пер. с англ. -2011.-399 с. : ил. - (Адаптивные
и интеллектуальные системы).
Обучение с подкреплением является одной из наиболее активно
развивающихся областей, связанных с созданием искусственных
интеллектуальных систем. Оно основано на том, что агент пытается
максимизировать получаемый выигрыш, действуя в сложной среде
с высоким уровнем неопределенности. Дается исчерпывающее и ясное
изложение идей, методов и алгоритмов обучения с подкреплением,
при этом диапазон излагаемого материала - от истоков возникновения
рассматриваемых концепций до современных результатов в данной
области.
Для специалистов в области искусственного интеллекта,
нейросетевого моделирования и управления, а также студентов
и аспирантов соответствующих специальностей.
9 ИЗДАТЕЛЬСТВО
Bt «БИНОМ
Лаборатория знаний»
125167, Москва, проезд Аэропорта, д. 3
Телефон: (499)157-5272
e-mail: binom@Lbz.ru, http://www.Lbz.ru
Оптовые поставки:
(499)174-7616, 171-1954, 170-6674
При отсутствии достаточно точного знания об объекте
управления традиционные методы решения задач управления
оказываются неэффективными или могут быть вообще непри-
менимы. В этом случае можно строить нечеткие системы управ-
ления с применением аппарата нечетких множеств, нечеткой
логики, нечеткого моделирования. Еще большая эффектив-
ность достигается сочетанием указанных методов с аппаратом
искусственных нейронных сетей и генетических алгоритмов.
Именно этот круг вопросов рассматривается в книге «Нечеткое
моделирование и управление». Ее автор, Анджей Пегат, профес-
сор Щецинского технического университета (Польша) - видный
специалист в области мягких вычислений и теории управления.
Одна из интересных особенностей книги состоит в том, что
методы мягких вычислений излагаются и трактуются с позиций
специалиста по системам управления.
Книга будет полезна студентам старших курсов, аспирантам,
научным работникам и инженерам, специалистам по системам
управления при решении задач моделирования в различных
прикладных областях.
9 785996 314959