/










Text
ПРОЕКТИРОВАНИЕ
САМОЛЕТОВ
ИЗДАНИЕ ТРЕТЬЕ, ПЕРЕРАБОТАННОЕ И ДОПОЛНЕННОЕ
Под редакцией
д-ра техн, наук проф. С. М. Егера
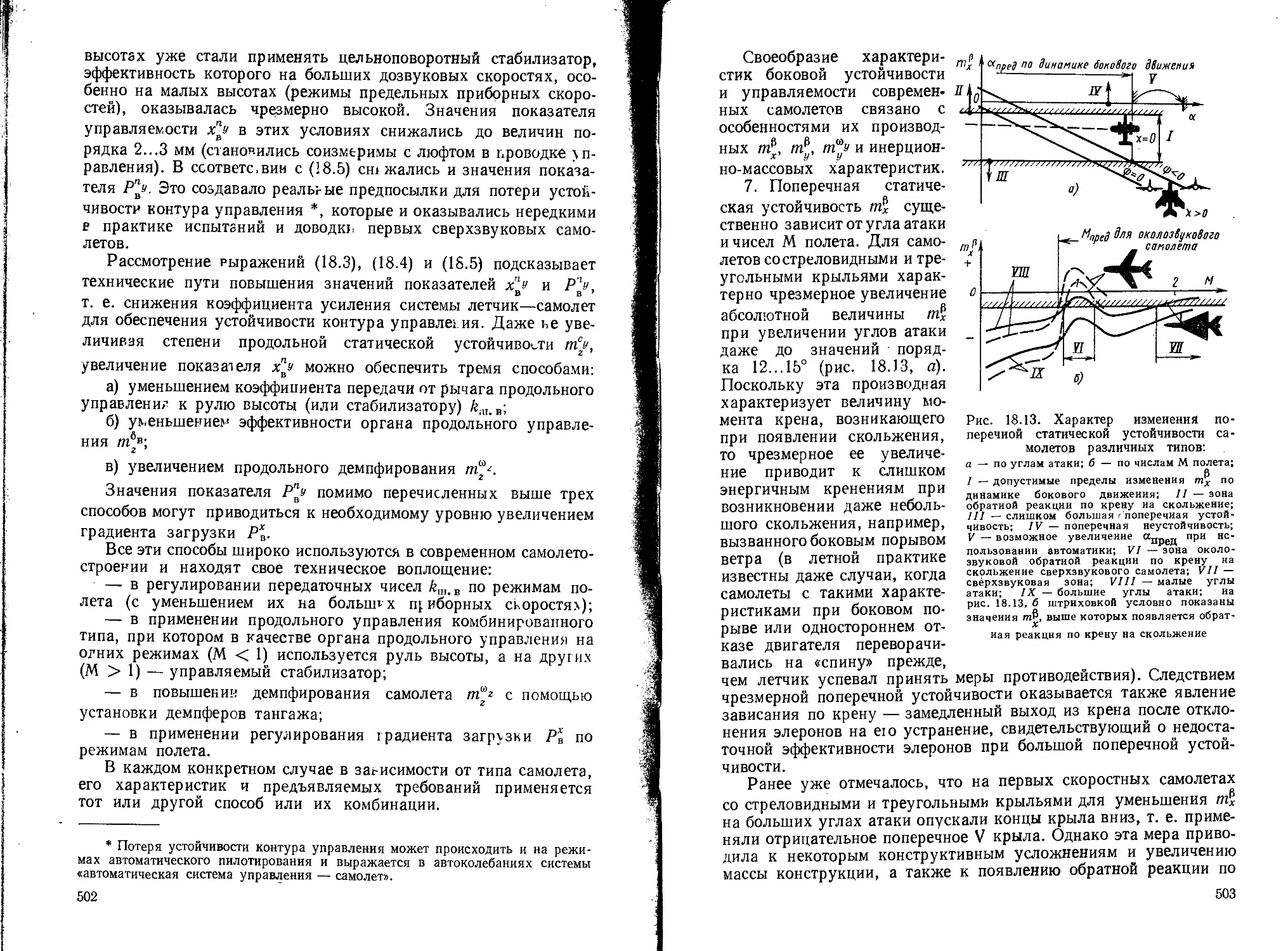
Допущено
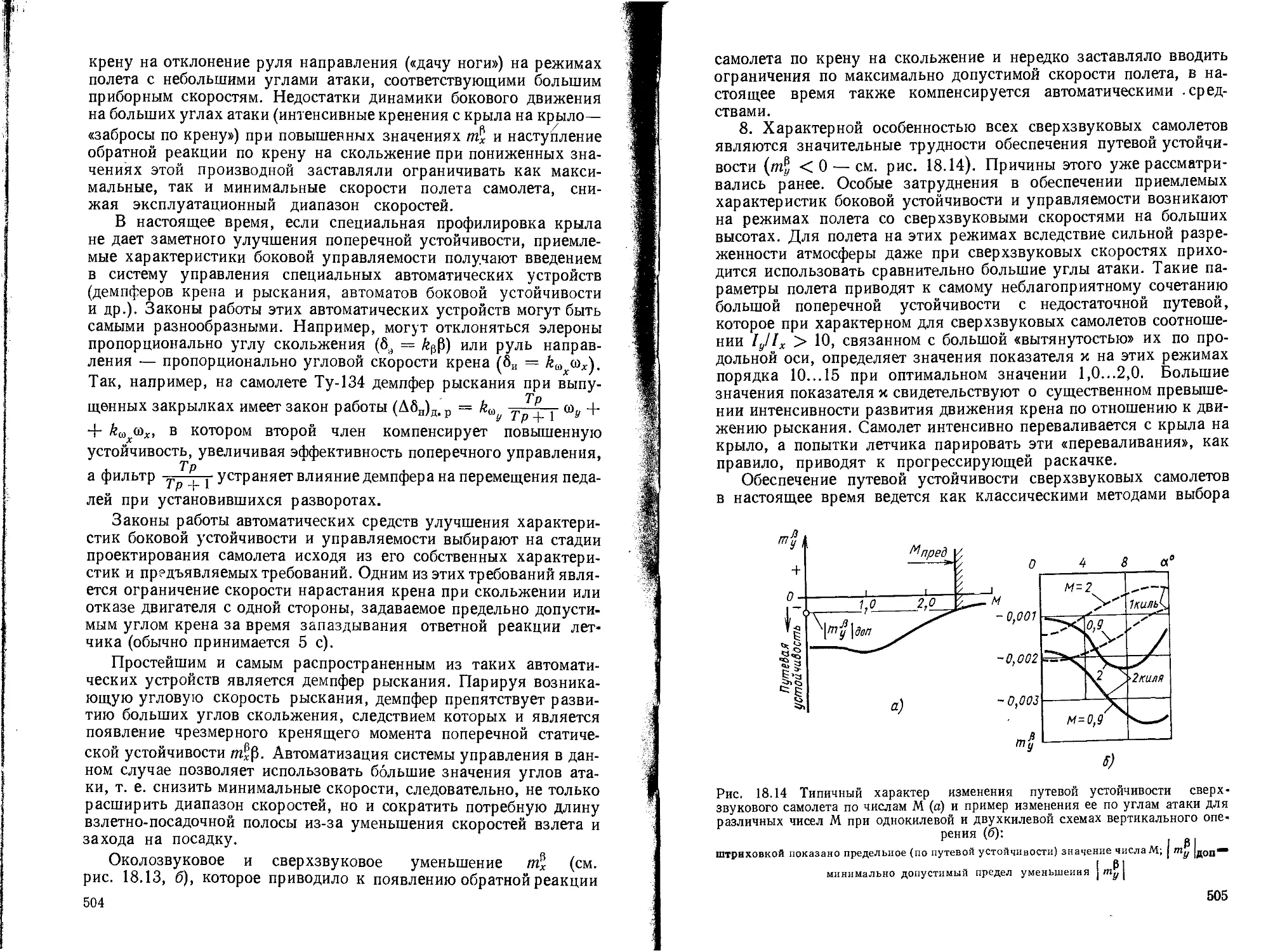
Министерством высшего и среднего
специального образования СССР
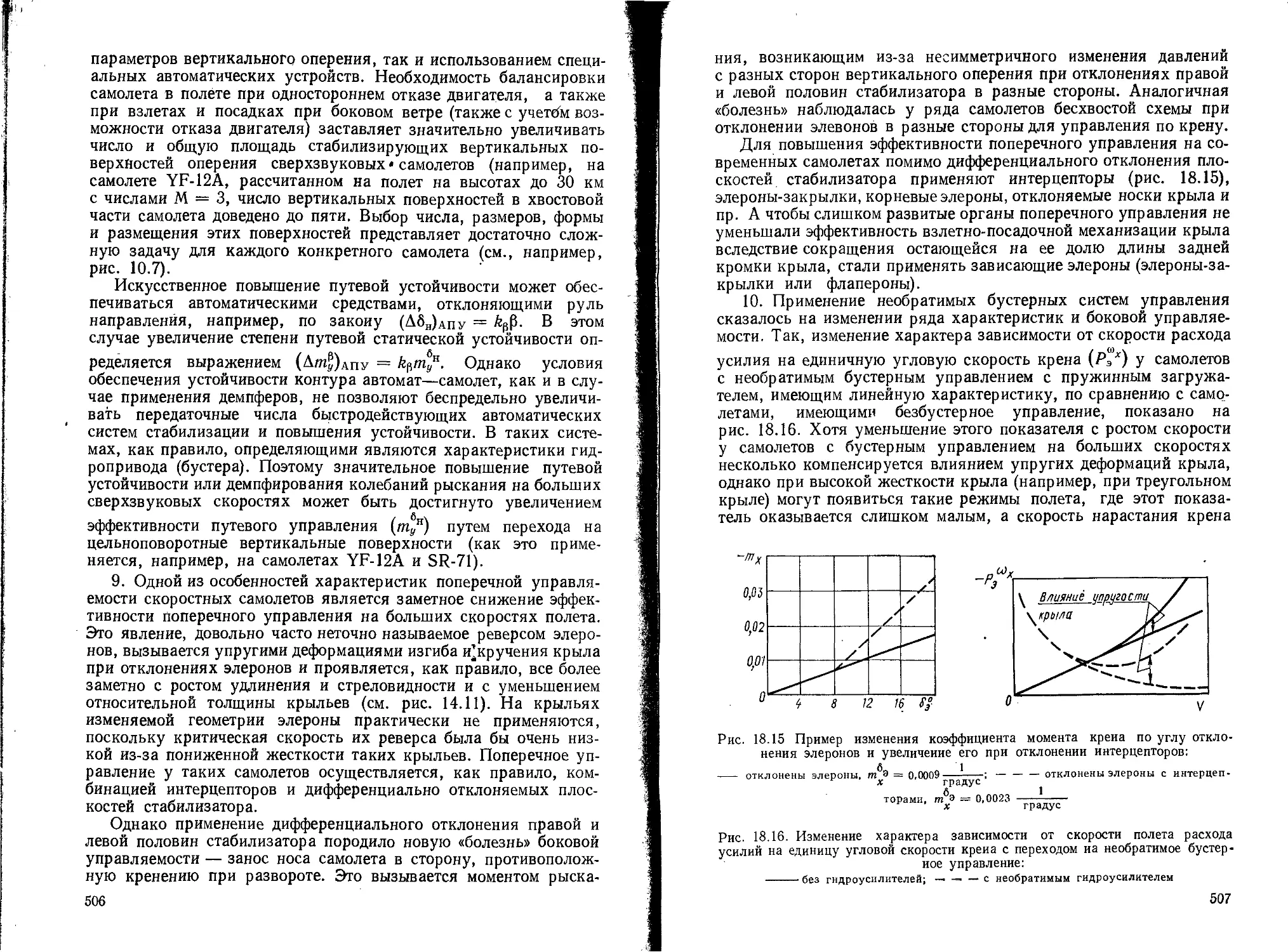
в качестве учебника для студентов
авиационных специальностей
высших технических учебных заведений
МОСКВА «МАШИНОСТРОЕНИЕ» 1983
ББК 39.53
П79
УДК 629.735.33 (07)
Авторы: С. М. Егер, В. Ф. Мишин, Н. К- Лисейцев,
А. А. Бадягин, В. Е. Ротин, Ф. И. Склянский,
Н. А. Кондрашов, В. А. Киселев, Н. А. Фомин.
Рецензент: кафедра конструкции самолетов Харьковского
ордена Ленина авиационного института им. Н. Е. Жуковского
Проектирование самолетов: Учебник для вузов/
П79 С. М. Егер, В. Ф. Мишин, Н. К. Лисейцев и др.
Под ред. С. М. Егера. — 3-е изд., перераб. и доп. —
М.: Машиностроение, 1983. — 616 с.
В пер.: 1 р. 60 к.
„3606030000-416 О11 ББК 39.53
11 --on---------- Z11“OZ.
038(01)-83
6Т5.1
ИБ № 2867
Сергей Михайлович Егер, Владимир Федорович Мишин,
Николай Константинович Лисейцев и др.
ПРОЕКТИРОВАНИЕ САМОЛЕТОВ
Редактор Д. Д. Чернис
Художественный редактор В. В. Лебедев. Оформление художника Е. В. Бекетова.
Технический редактор В. И. Орешкина. Корректоры А. А. Снастина и А. М. Усачева
Сдано в набор 30.06.82. Подписано в печать 31.12.82. Т-21449. Формат бОХЭО1/^.
Бумага типографская № 1. Гарнитура литературная. Печать высокая.
Усл. печ. л. 38,5. Уч.-над. л. 40,52. Тираж 12 700 экз. Заказ 57. Цена 1 р. 60 к.
Ордена Трудового Красного Знамени
издательство «Машиностроение», 107076, Москва, Б-76, Стромынский пер., 4
Ленинградская типография № 6 ордена Трудового Красного Знамени
Ленинградского объединения «Техническая книга» им. Евгении Соколовой
Союзполнграфпрома прн Государственном комитете СССР
по делам издательств, полиграфии и книжной торговли.
193144, г. Ленинград, ул. Моисеенко, 10.
© Издательство «Машиностроение», 1972 г.
Издательство «Машиностроение», 1983 г., с изменениями.
ОСНОВНЫЕ ОБОЗНАЧЕНИЯ, СОКРАЩЕНИЯ И ИНДЕКСЫ
Аг.о, Ав.о — статический момент площади горизонтального и вертикаль-
ного оперения;
а — скорость звука, расходы на 1 тонна-километр;
а — угол атаки крыла;
В — колея шасси;
b — хорда крыла;
Ьо — длина корневой хорды крыла;
Ьк — длина концевой хорды крыла;
6 А — средняя аэродинамическая хорда крыла (САХР,
_С — стоимость;
Со — относительная толщина крыла у корня;
Ск — относительная толщина крыла на его конце;
С; — аэродинамический коэффициент трення;
Ст — коэффициент аэродинамического продольного момента про-
филя крыла;
Сто — коэффициент ст при суа = 0;
c*ai — коэффициент индуктивного сопротивления *;
Схар — коэффициент профильного сопротивления *;
Суа — коэффициент аэродинамической подъемной силы *;
ср — удельный расход топлива ТРД;
се — удельный расход топлива ТВД или ПД;
Сха — коэффициент лобового сопротивления *;
сХао ~ коэффициент сха при суа = 0 *;
йф — диаметр фюзеляжа;
о — угол отклонения органа управления;
F — площадь омываемой потоком поверхности;
f — коэффициент трения, коэффициент безопасности;
g — ускорение свободного падения;
Н — высота полета;
% — угол стреловидности по х/4 хорд;
К. — аэродинамическое качество;
k — коэффициент;
с“а — производная с по углу атаки а’;
gi = mtlSt — поверхностная плотность конструкции какой-либо части само-
лета;
/ — размах крыла;
/ф — длина фюзеляжа;
L — дальность полета, длина разбега;
к — удлинение крыла;
X, — удлинение какой-либо части самолета;
т] — сужение крыла в плане;
т]0 — КПД винта;
ф — угол поперечного V крыла;
Фо — угол установки крыла;
I*
3
М — число М полета;
V — скорость полета;
Vу — вертикальная скорость;
т — масса самолета, степень двухконтурности ТРДД;
т0 — масса самолета при взлете;
щ — масса какой-либо части (агрегата) самолета;
mt — отношение массы какой-либо части самолета к т0;
mg — сила тяжести (в даН);
Р — суммарная тяга двигателей;
Ро — стартовая тяга двигателей;
Ро — стартовая тяговооружеиность;
Pi0 — стартовая тяга одного двигателя;
Тдв= tn^BglP^ — удельный вес двигателя;
N — суммарная мощность двигателей;
No — стартовая мощность двигателей;
Nt0 — стартовая мощность одного двигателя;
Уо = No/fm^g) — стартовая энерговооруженность; •
S — площадь крыла (с подфюзеляжной частью);
SM — площадь миделя;
Si — относительная площадь какой-либо части самолета, отнесен-
ная к площади крыла;
Ро — tn^glS — удельная нагрузка на крыло при взлете;
р — текущее значение удельной нагрузки на крыло, давление;
q — скоростной напор;
р — плотность воздуха (р0 — у земли);
А = р/р0 — относительная плотность воздуха;
zip, «э — расчетный и эксплуатационный коэффициенты перегрузки;
пдв — число двигателей;
«пас — число пассажиров;
Т — температура, ресурс;
т, t — время;
О — угол наклона траектории полета к горизонту;
Ха — сила лобового сопротивления *;
хт — расстояние от центра масс самолета до носка САХ;
хр — расстояние от фокуса самолета до носка САХ;
Ya — аэродинамическая подъемная сила *.
Сокращения
ВО — вертикальное оперение;
ВПП — взлетно-посадочная полоса;
ГО — горизонтальное оперение;
ГТД — газотурбинный двигатель;
даН = ЮН«1 кгс;
ТРД — турбореактивный двигатель;
ТРДД — двухконтуриый турбореактивный двигатель;
ТРДФ — турбореактивный двигатель с форсажной камерой;
ТВД — турбовинтовой двигатель;
ПД — поршневой двигатель;
СА — стандартная атмосфера;
СВВП — самолет вертикального взлета и посадки;
СПС — сверхзвуковой пассажирский самолет;
УПС — управление пограничным слоем.
Индексы
бал — балансировочный;
в. о — вертикальное оперение;
* Для упрощения написания в тексте учебника индексы «а» в обозначениях
проекций результирующей аэродинамической силы и их безразмерных коэффи-
циентов на оси скоростной системы координат опущены.
4
г. д — гондола двигателя;
г. о — горизонтальное оперение;
г — груз, гондола;
дв — двигатель;
доп — допустимый;
з — закрылки;
з. к — задняя кромка;
з. п — заход на посадку;
кон — конструкция;
кач — качение;
ком — коммерческий;
кр — крыло;
крейс — крейсерский;
Крит — критическое (значение);
м — мидель;
мт — материал;
м. ф — мидель фюзеляжа;
О — начальное или стартовое значение величины;
н — нагрузка;
ц. н. — целевая нагрузка;
н. в — набор высоты;
н. з — навигационный запас;
об. упр — оборудование и управление;
омыв — омываемая поверхность;
оп — оперение;
отр — отрыв;
пас — пассажирский;
п. к — передняя кромка;
пл — планер;
пос — посадочный;
прерв — прерванный;
проб — пробег;
пуст — пустой;
р — расчетный;
разб — разбег;
расп — располагаемый;
р. в — руль высоты;
рейс — рейсовый;
р. н — руль направления;
сл. — служебный;
сн — снижение;
с. у — силовая установка;
т — топливо;
ф — фюзеляж;
ш — шасси;
эк — экипаж
ПРЕДИСЛОВИЕ
Настоящая книга является третьим изданием учебника по
курсу «Проектирование самолетов», читаемому для студентов
авиационных институтов (второе издание—в 1972 г.).
За годы, прошедшие со времени выпуска второго издания,
в авиационной науке и технике произошли существенные измене-
ния. Эти изменения касаются прежде всего самого объекта проек-
тирования — самолета. Эволюция в развитии весовых и геометри-
ческих параметров, повышение требований к летно-техническим
характеристикам, совершенствование оборудования и снаряжения
привели к дальнейшему существенному усложнению самолетов,
увеличению цикла и стоимости их разработки. Применение тра-
диционных методов проектирования уже не могло обеспечить
создание высокоэффективных авиационных комплексов.
Стремление разрешить противоречие между возрастающей
сложностью проектируемых самолетов и необходимостью сокра-
щения сроков разработки проектов и повышения их технико-
экономических показателей стимулировало развитие и все более
широкое практическое применение методов автоматизированного
проектирования с использованием ЭВМ.
Авторы отдавали себе отчет, что в условиях научно-техниче-
ской революции, бурного развития авиационной науки и техники
фактический материал быстро морально устаревает.
Несомненно, что методы проектирования самолетов будут
развиваться и совершенствоваться и в дальнейшем, однако фун-
даментальные методические положения остаются неизменными.
В связи с этим в учебнике основное внимание уделяется изложе-
нию основ проектирования, методологии разработки и принятия
проектно-конструкторских решений. Вместе с тем, где это воз-
можно, в учебнике приводятся алгоритмы решения задач. Значи-
тельное внимание уделено изложению узловых проблем проекти-
рования перспективных самолетов.
Предлагаемый учебник состоит из трех частей.
В первой части (гл. 1 ... 12) рассматриваются вопросы общего
проектирования самолетов и особенности проектирования са-
молетов различного назначения, во второй (гл, 13 19) изла-
6
гаются материалы, связанные с проектированием отдельных
частей самолета, позволяющие уточнить, оптимизировать пара-
метры, полученные в процессе общего проектирования. В третьей
части книги (гл. 20 и 21) показаны особенности применения мето-
дов автоматизированного проектирования.
В приложении даны справочные материалы, которые могут
помочь студентам авиационных вузов при работе над дипломными
проектами.
Расположение глав учебника в основном соответствует после-
довательности изложения лекционного курса, а также сложив-
шейся технологической цепочке разработки проекта самолета.
Гл. 4, 8 (кроме разд. 8.1.4 и 8.1.5), 9 и 13 написаны С. М. Еге-
ром; гл. 3 и 6 — А. А. Бадягиным; гл. 5 (кроме разд. 5.4) и 14 —
В. Е. Ротиным и С. М. Егером; введение и гл. 1, 2, 11, 20 и 21 —
Н. К. Лисейцевым; гл. 10, 12, 16 и разд. 5.4 — В. Ф. Мишиным;
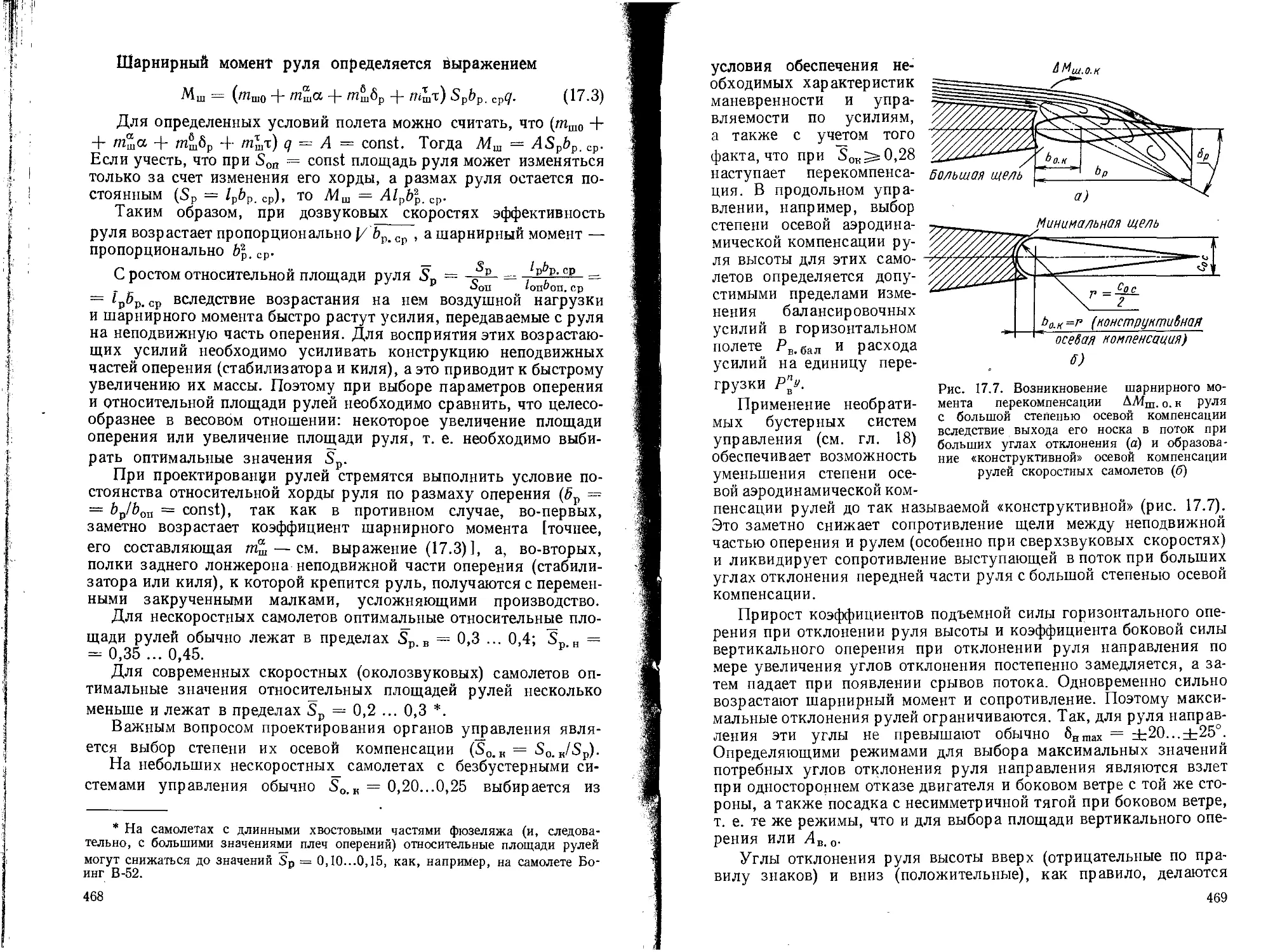
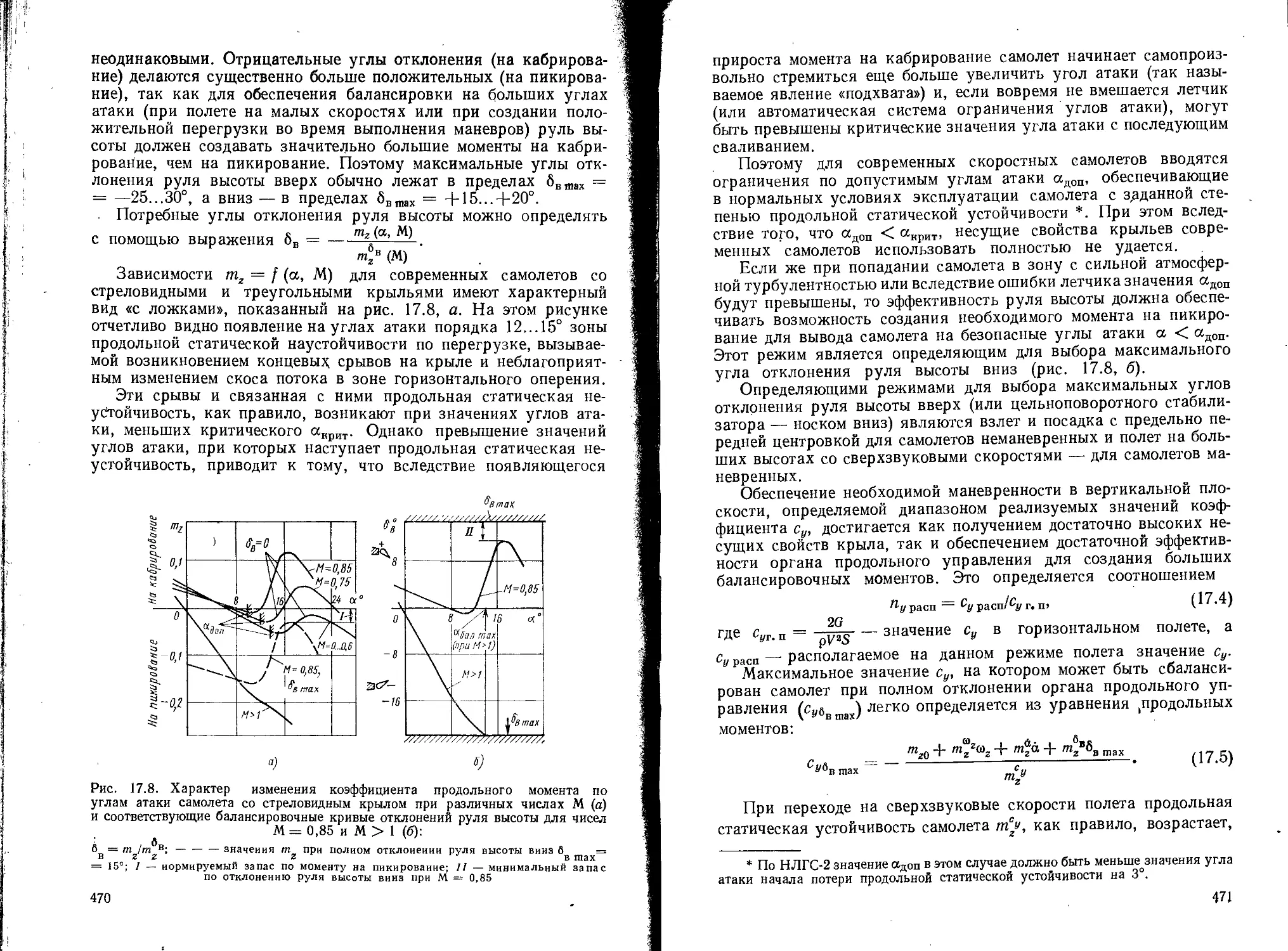
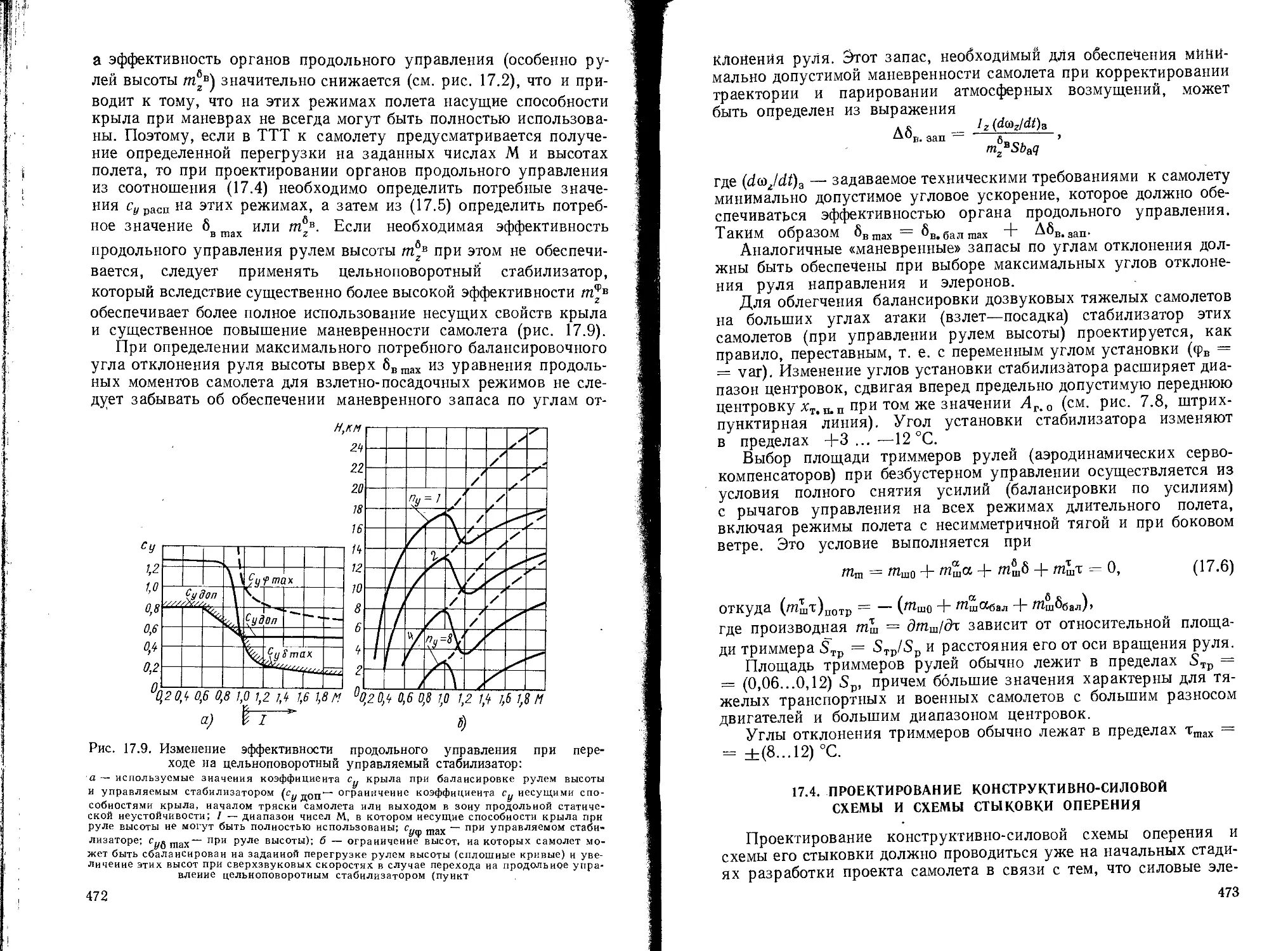
гл. 7 — В. Е. Ротиным; гл. 17, 18 и разд. 8.1.4, 8.1.5 —
Ф. И. Склянским, гл. 15 — В. А. Киселевым, гл. 19 — Н. А. Кон-
драшовым. При написании гл. 8, 11, 14 использованы материалы
Н. А. Фомина .
Приложения к учебнику подготовлены А. А. Бадягиным,
В. Ф. Мишиным и Н. А. Кондрашовым.
ВВЕДЕНИЕ
РАЗВИТИЕ САМОЛЕТОСТРОЕНИЯ В СССР
Более трех четвертей века отделяет нас от’полетов первых прак-
тически пригодных самолетов. Их появлению предшествовали
многовековые попытки изобретателей многих стран покорить
воздушный океан с помощью летательных аппаратов тяжелее
воздуха. К концу XIX — началу XX столетия, благодаря
работам многих выдающихся ученых, среди которых видное
место занимали члены Российской Академии наук М. В. Ло-
моносов, Л. Эйлер, Д. И. Менделеев, был разработан
ряд положений теории полета летательных аппаратов тяжелее
воздуха. Творцами этой теории являются Н. Е. Жуковский,
С. А. Чаплыгин и др. Их труды заложили реальную основу для
создания самолетов. Неоценимый вклад в развитие практического
самолетостроения внесли выдающиеся русские конструкторы
А. Ф. Можайский, С. В. Гризодубов, И. И. Стеглау и др. Построен-
ные в России в начале XX столетия самолеты «Русский витязь»
и «Илья Муромец» И. И. Сикорского, «Святогор» В. А. Слесарева,
самолеты Я- М. Гаккеля обладали уникальными для своего времени
х ар актер истиками.
Подлинный расцвет отечественной авиации неразрывно связан
с победой Великой Октябрьской социалистической революции,
с именем В. И. Ленина, который стоял у колыбели советской авиа-
ции. Прозорливо увидев потенциальные возможности использо-
вания авиации для организации обороны молодой Советской рес-
публики и развития ее экономики, В. И. Ленин уделял постоян-
ное внимание созданию научной и производственной базы авиа-
строения, организации воздушного флота.
Несмотря на невероятно трудные условия, вызванные послед-
ствиями первой мировой и гражданской войн, уже в 1923—1924 гг.
появляются советские самолеты оригинальной конструкции. Среди
них: И-1 Н. Н. Поликарпова — первый в мире истребитель —
свободнонесущий моноплан, АНТ-2 А. Н. Туполева — первый
отечественный цельнометаллический самолет. В 1925 г. начались
испытания самолета АНТ-4 (ТБ-1) — цельнометаллического сво-
боднонесущего моноплана с двигателями, расположенными на
крыле, ставшего эталоном для всех самолетов аналогичного
класса.
8
В годы первой пятилетки благодаря ленинской политике ин-
дустриализации продолжались реконструкция существующих и
строительство новых авиационных предприятий. Укреплялись
научно-исследовательские учреждения. В этот период советские
авиаконструкторы создали такие широко известные самолеты,
как У-2, И-3, И-4, И-5, Р-5, ТБ-3, АНТ-9, АНТ-14, К-5, «Сталь-2»,
«Сталь-3», Ш-2 и др. Эти самолеты составляли основу воздушного
флота страны в конце 20-х и первой половине.30-х годов. На них
были осуществлены рекордные полеты, показавшие, что советская
авиация уверенно выходит на передовые рубежи в мире. Так,
самолет Р-5 Н. Н. Поликарпова на международном конкурсе
самолетов-разведчиков в Тегеране, проходившем в 1930 г., занял
первое место.
Необычна судьба самолета У-2 (По-2) конструкции Н. Н. Поли-
карпова. Построенный в 1928 г. как самолет первоначального
обучения летного состава, он также широко использовался для
нужд народного хозяйства в качестве транспортного, санитарного
и сельскохозяйственного. Благодаря своим уникальным свой-
ствам он оказался одним из самых долговечных самолетов в мире.
Около 40 тысяч самолетов У-2 построили наши заводы.
Выдающимся достижением советской конструкторской мысли
явилось создание в 1930 г. и серийное производство тяжелого
бомбардировщика ТБ-3 (АНТ-6). Этот цельнометаллический сво-
боднонесущий моноплан с четырьмя двигателями А. А. Мику-
лина, являвшийся дальнейшим развитием самолета ТБ-1, обладал
непревзойденными для своего времени характеристиками.
В 30-е годы на базе достижений первой пятилетки, обеспечив-
ших создание отечественных авиационных двигателей различной
мощности, производство высокопрочных авиационных материа-
лов, а также успехов в развитии авиационной науки были созданы
самолеты И-15, И-16, АНТ-25 (РД), «Максим Горький» (АНТ-20),
«Сталь-7», «Родина» (АНТ-37 БИС), ДБ-3 (Ил-4), УТ-2, Пе-8
(АНТ-42), И-153 «Чайка». На них были установлены международ-
ные рекорды скорости, высоты и дальности полета.
В предвоенные годы и годы Великой Отечественной войны
были созданы знаменитые самолеты Пе-2, Ил-2, Як-1, Як-3,
Ла-5, Ла-7, ЛаГГ-3, МиГ-3, Ту-2, обеспечившие превосходство
советской авиации над авиацией противника. Отечественная
авиация, советская конструкторская школа с честью выдержали
суровые испытания войны.
В послевоенные годы в кратчайшие сроки наша авиация осу-
ществила переход на реактивные двигатели. Появляются само-
леты с изменяемой геометрией крыла, укороченного и вертикаль-
ного взлета и посадки.
В нашей стране создаются первый в мире реактивный пасса-
жирский самолет Ту-104, самолеты ИЛ-18, Ан-10, турбовинтовые
гиганты Ту-114, Ан-22 «Антей». С советского аэродрома в декабре
9
1968 г. взлетел первый в мире сверхзвуковой пассажирский са-
молет Ту-144. В настоящее время завершается переоснащение
парка Аэрофлота реактивными самолетами третьего поколения.
Воздушные лайнеры Ту-154, Як-42 и первый отечественный аэро-
бус Ил-86 отвечают самым высоким требованиям, предъявляемым
к современным самолетам.
Постоянная забота Коммунистической партии и Советского
правительства о развитии авиации, талант советских ученых и
авиационных конструкторов, всенародная любовь — вот те сла-
гаемые, которые вывели отечественную авиацию на передовые
рубежи в мире.
Советский строй воспитал целую плеяду выдающихся ученых
и конструкторов, без деятельности которых трудно себе пред-
ставить современные достижения авиационной науки и техники.
Всемирную известность получили самолеты, созданные конструк-
торскими коллективами, возглавляемыми А. Н. Туполевым,
Н. Н. Поликарповым, Д. П. Григоровичем, А. С. Яковлевым,
С. В. Ильюшиным, А. И. Микояном, П. О. Сухим, С. Л. Лавочки-
ным, О. К. Антоновым, Г. М. Бериевым, В. М. Мясищевым в тес-
ном сотрудничестве с коллективами двигателестроителей, возглав-
ляемыми А. А. Микулиным, А. Д. Швецовым, В. Я. Климовым,
С. К. Туманским, А. М. Люлька, А. Г. Ивченко, Н. Д. Кузнецо-
вым, П. А. Соловьевым, и коллективами научно-исследователь-
ских институтов.
Огромны заслуги в развитии фундаментальных и прикладных
авиационных дисциплин — аэродинамики, гидрогазодинамики,
теории управления полетом, прочности и аэроупругости — таких
советских ученых, как М. В. Келдыш, А. И. Макаревский,
С. А. Христианович, В. В. Струминский, И. В. Остослав-
ский, Б. С. Стечкин, А. Н. Журавченко, А. И. Черемухин
И др.
Советская школа проектирования самолетов опирается на
научный, диалектический метод. Характерными чертами этой
школы являются:
постоянное стремление к простоте, надежности и высокой
технологичности разрабатываемых конструкций;
новаторский, творческий подход к решению возникающих
задач;
умение рационально сочетать технический риск с трезвыми
расчетами, постоянная опора на достижения науки;
нацеленность на решение сложнейших инженерно-техниче-
ских проблем ценой минимальных затрат.
Успехи этой школы во многом определяются продуманной
системой подготовки кадров авиационных конструкторов. Особую
роль в формировании авиационного образования^инженера играет
курс «Проектирование самолетов».
10
Становление проектирования самолетов как научной дисцип-
лины относится ко второй половине 30-х годов. В это время по-
являются первые работы по выбору рациональных параметров
самолета, первые учебники по проектированию самолетов. Авто-
рами их были советские ученые и конструкторы П. М. Крейсон,
П. Д. Самсонов, Н. Н. Фадеев, Л. И. Сутугин, Н. Н. Поликарпов.
Дальнейшее развитие теоретических основ проектирования
связано с именами таких ученых, как В. Ф. Болховитинов,
Н. А. Фомин, А. Л. Гиммельфарб и др. Работы этих ученых зало-
жили тот фундамент, который позволил, опираясь на достижения
прикладных авиационных наук и общей теории проектирования
сложных систем, на развитие численных методов оптимизации,
создать подлинно научный курс «Проектирование самолетов».
Часть первая
ОБЩЕЕ ПРОЕКТИРОВАНИЕ САМОЛЕТА
Глава 1
ПРОЦЕСС СОЗДАНИЯ САМОЛЕТА
1.1. САМОЛЕТ КАК ОБЪЕКТ ПРОЕКТИРОВАНИЯ
Самолеты относятся к классу летательных аппаратов, исполь-
зующих аэродинамический принцип полета. Они расходуют энер-
гию запасенного топлива для создания движущей, подъемной и
управляющих сил с помощью воздушной среды. В настоящее
время это самый распространенный тип летательных аппаратов
с огромным потенциалом дальнейшего развития, так как освоенная
область скоростей и высот полета, в которой возможна реализация
аэродинамического принципа полета, очень мала, а потребности
общества в таких летательных аппаратах постоянно возрастают.
Как объект проектирования современный самолет представ-
ляет собой сложную техническую систему с развитой иерархи-
ческой структурой, большим числом элементов и внутренних
связей, возрастающих примерно пропорционально квадрату числа
элементов. Так, планер современного широкофюзеляжного само-
лета состоит более чем из миллиона деталей.
В любом самолете можно выделить ряд функциональных
подсистем, определяющих в совокупности его полезные свойства.
Это подсистема создания подъемной силы, подсистема, обеспечи-
вающая устойчивость и управляемость самолета на заданной
траектории, подсистема обеспечения движущей силы, подсистемы
обеспечения целевой функции, жизнеобеспечения, обеспечения
управления и навигации в различных условиях полета и др.
Каждая из таких подсистем может включать в себя комплекс про-
стых и сложных систем и отдельных элементов.
Расчленение самолета на подсистемы, удобное для изучения
и анализа, отнюдь не означает, что они полностью автономны.
Системы самолета взаимосвязаны и взаимообусловлены. Напри-
мер, в настоящее время для сверхзвуковых маневренных самолетов
широкое применение находят так называемые интегральные схемы,
основанные на объединении крыла, фюзеляжа, силовой установки,
систем управления и устойчивости с целью достижения максималь-
ной эффективности.
С другой стороны, самолет сам по себе — это техническое
устройство, средство, мертвое вне действия, вне производства.
И только как элемент более сложной системы, включающей само-
летные парки и летные экипажи, технические средства и персонал
12
ЛВиоциониый
комплекс
для подготовки самолета к полету, технические средства и персо-
нал для обеспечения полета, самолет способен выполнять опреде-
ленные задачи. Следовательно, самолет является подсистемой
сложной системы более высокого иерархического уровня — авиа-
ционного комплекса, под которым понимается органическое соче-
тание людских и материальных ресурсов и действиями которого
вырабатывается определенный полезный для общества эффект.
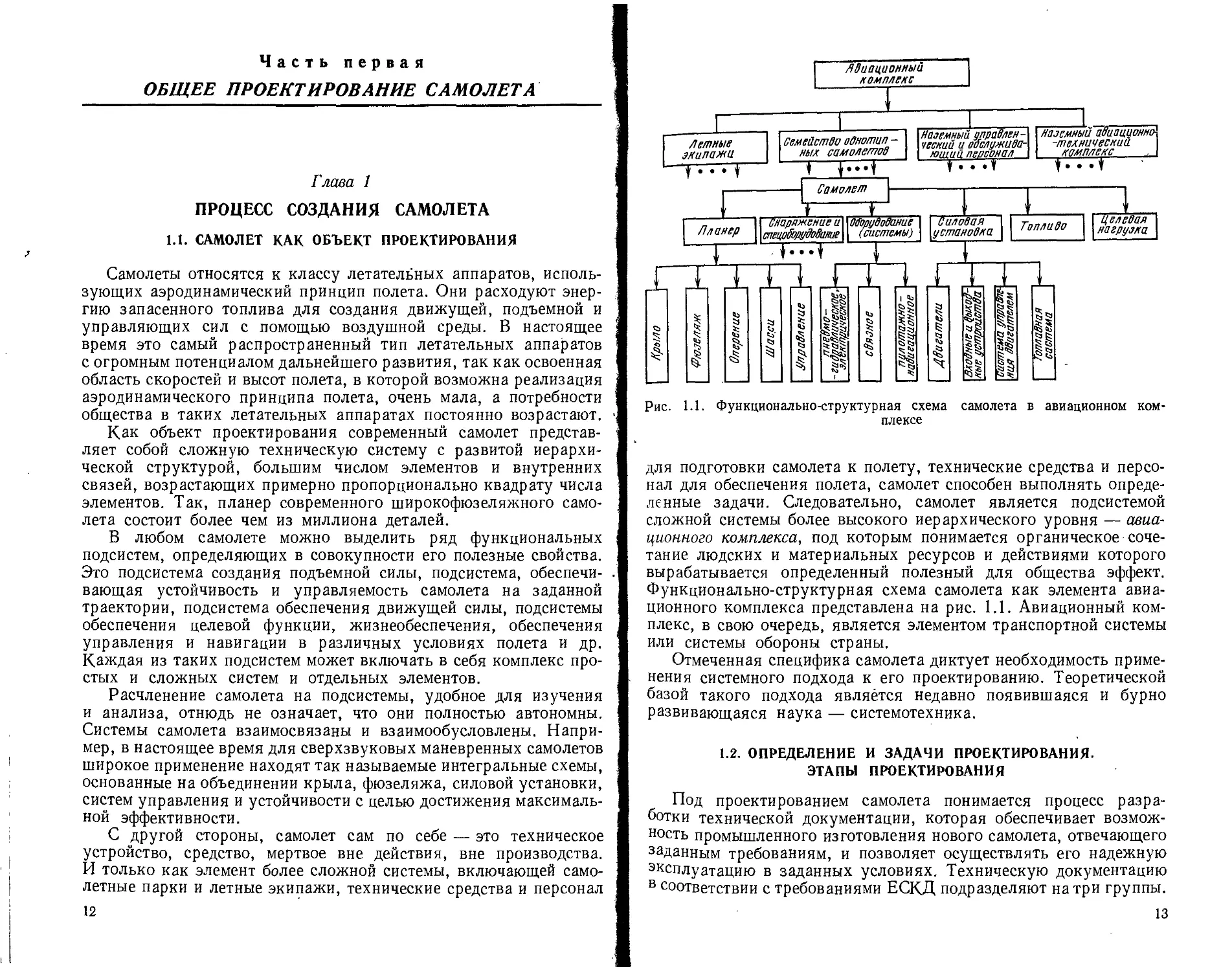
Функционально-структурная схема самолета как элемента авиа-
ционного комплекса представлена на рис. 1.1. Авиационный ком-
плекс, в свою очередь, является элементом транспортной системы
или системы обороны страны.
Отмеченная специфика самолета диктует необходимость приме-
нения системного подхода к его проектированию. Теоретической
базой такого подхода является недавно появившаяся и бурно
развивающаяся наука — системотехника.
1.2. ОПРЕДЕЛЕНИЕ И ЗАДАЧИ ПРОЕКТИРОВАНИЯ.
ЭТАПЫ ПРОЕКТИРОВАНИЯ
Под проектированием самолета понимается процесс разра-
ботки технической документации, которая обеспечивает возмож-
ность промышленного изготовления нового самолета, отвечающего
заданным требованиям, и позволяет осуществлять его надежную
эксплуатацию в заданных условиях. Техническую документацию
в соответствии с требованиями ЕСКД подразделяют натри группы.
13
Первая группа включает в себя схемную, конструкторскую, мон-
тажную и текстовую документацию. Эта документация отражает
идеи и принципы, заложенные в проектируемый самолет, отвечая
на вопрсс, что должно быть изготовлено. Вторая группа — это
технологическая документация, регламентирующая методы и
средства изготовления самолета. И, наконец, третья группа —
эксплуатационная документация, обеспечивающая правильную
эксплуатацию самолета.
Задачей проектирования является разработка схемы, струк-
туры и конструкции будущего самолета и составляющих его эле-
ментов, которая должна обеспечить при определенных ограниче-
ниях наиболее эффективное выполнение поставленных целей.
Решение этой задачи требует четкого определения целей проекти-
рования и установления критериев оценки результатов проекти-
рования, поскольку достижение целей проектирования «любой
ценой», естественно, неприемлемо.
Упомянутые при определении задач проектирования ограниче-
ния, помимо чисто физических, могут включать в себя ограниче-
ния, накладываемые сроками проектирования, возможностями
имеющихся в распоряжении проектировщиков экспериментальной
базы, лабораторного оборудования и вычислительной техники.
Не менее существенные ограничения при проектировании дик-
туются производственно-технологическими аспектами. Они опре-
деляются наличием необходимых материалов и комплектующих
изделий, возможностями лабораторного и производственного обо-
рудования, а также уровнем производственных навыков персо-
нала авиационного предприятия. Опыт разработки принципи-
ально новых самолетов свидетельствует, что успех их создания
зачастую зависел от коренной реконструкции не только экспери-
ментальной и производственно-технологической базы авиацион-
ного предприятия. Создание таких самолетов иногда требовало
реконструкции целых отраслей промышленности страны, являясь
мощным стимулом научно-технического прогресса.
Сложность самолета как объекта проектирования определяет
специфику процесса его разработки. Для реализации процесса
проектирования потребовалось создание специализированных про-
ектных организаций — ОКБ, включающих большое число спе-
циалистов в различных технических областях, сложные лабора-
торные и производственные подразделения. ОКБ представляют
собой большие организационно-технические системы, развива-
ющиеся и совершенствующиеся по мере усложнения объекта и
средств проектирования. Эти организации в своей деятельности
опираются на работу отраслевых научно-исследовательских инсти-
тутов, занимающихся разработкой перспектив развития авиации
в различных ее направлениях (ЦАГИ, ГосНИИ ГА, ЦИАМ,
ВИАМ и т. д.) и на опыт производства и эксплуатации самолетов
на серийных заводах и в летных подразделениях^ Авиастроение —
сложнейшая отрасль отечественной индустрии, вобравшая в себя
14
все передовые достижения отечественной и мировой науки и тех-
ники. Это в известной мере барометр уровня научно-технического
развития общества (наряду с космонавтикой, радиоэлектроникой,
атомной энергетикой).
Из всего длительного процесса создания самолета, от зарожде-
ния идеи до запуска в серийное производство и эксплуатацию,
мы будем рассматривать лишь проектирование. Это сложный
процесс, требующий огромного объема вычислений, графических
работ и различного рода исследований. В нем можно выделить
ряд этапов, отражающих сложившуюся технологию процесса
проектирования.
Рассмотрим этапы этого процесса и дадим характеристику
задач, решаемых на каждом из них.
Непосредственному проектированию предшествует этап вы-
работки требований к самолету, осуществляемый совместно за-
казчиком и ОКБ. На этом этапе (иногда его называют внешним
проектированием) на основе параметрических исследований пер-
спективных самолетов как элементов транспортной или боевой
системы, анализа их взаимодействия с компонентами комплекса,
в котором они будут функционировать, прогнозируются потребные
общие характеристики будущего самолета. При этом осуще-
ствляются многовариантные расчеты по определению и оптими-
зации технико-экономических показателей эксплуатации пред-
полагаемого самолета на намеченной сети авиамаршрутов. В ре-
зультате этой работы определяются необходимые технико-эконо-
мические и тактико-технические характеристики самолета, позво-
ляющие сформулировать требования на его проектирование
(ТЗ). Следует подчеркнуть, что обоснованное задание требований
во многом определяет успех программы создания нового само-
лета.
Целью следующего этапа проектирования, называемого раз-
работкой технических предложений (предварительное проекти-
рование), является выбор схемы и определение н айвы годнейшего
сочетания основных параметров самолета и его систем, обеспечива-
ющих выполнение заданных требований, либо обоснование не-
обходимости их корректировки. На этом этапе на основе анализа
ТЗ, идей главного конструктора, опыта конструкторского бюро
и рекомендаций НИИ формируется концепция самолета, разраба-
тывается его аванпроект. При этом определяются в первом прибли-
жении основные геометрические, весовые и энергетические ха-
рактеристики проектируемого самолета, а также формируются
законы управления им на различных участках траектории для
различных, предусмотренных требованиями, профилей полета.
Это этап синтеза облика и определения основных размеров само-
лета, в процессе которого связываются воедино различные аспекты
проектирования самолета, касающиеся исследования его геоме-
трических, весовых, аэродинамических характеристик, высотно-
скоростных и дроссельных характеристик двигателей, структуры
15
оборудования и снаряжения, летно-технических данных и траек- I
торий полета. I
Выходной информацией этого этапа являются чертежи общих 1
видов рационального варианта самолета, а также документация I
о его летно-технических, экономических и эксплуатационных 1
характеристиках. На основании этих материалов компетентные |
органы принимают решение о целесообразности дальнейшей раз- 1
работки проекта. 1
В процессе эскизного проектирования полученные ранее геоме- I
трические, весовые и энергетические параметры самолета вопло- i
щаются в конкретную конструктивную компоновку, отвечающую 1
различным, весьма противоречивым требованиям, в том числе I
эксплуатационным и технологическим. I
В процессе компоновки уточняют центровку самолета, расчету I
которой предшествует составление весовой сводки на основе проч- 1
ностных и весовых расчетов агрегатов планера и силовой уста- I
новки, ведомостей оборудования, снаряжения, грузов и т. д. I
В процессе эскизного проектирования обычно проводят широкие |
теоретические и экспериментальные исследования агрегатов и
систем самолета. Изготавливают и продувают в аэродинамических
трубах модели самолета и его отдельных агрегатов. По результа- •
там этих исследований уточняют аэродинамический расчет, рас-
четы устойчивости и управляемости, а также характеристик аэро- 1
упругости. На основании этих расчетов вносят соответствующие 1
исправления в компоновку самолета, уточняют весовые расчеты.
Строят макет самолета, позволяющий произвести взаимную про-
странственную увязку агрегатов и систем самолета, размещение- I
оборудования, оценить удобство размещения экипажа и пасса- I
жиров.
Итог этого этапа — эскизный проект; он дает информацию об !
уточненных характеристиках самолета, а также о форме, размерах
и взаимном расположении основных агрегатов и функциональных
элементов самолета. Макетная комиссия производит комплексную
оценку проекта, необходимую для принятия решения о разработке
рабочего проекта и его реализации.
Заключительный этап собственно процесса проектирования —
рабочее проектирование-, он направлен на практическую реализа-
цию заявленных характеристик и параметров самолета. На этом
этапе выпускается вся техническая документация, необходимая
для изготовления, сборки, монтажа как отдельных агрегатов и
систем, так и самолета в целом. Разрабатываются чертежи общих
видов агрегатов самолета, сборочные и деталировочные чертежи
отдельных его частей. Проводятся: экспериментально-исследова-
тельские работы, связанные с внедрением новых материалов, типов
конструкций; статические и динамические прочностные и ресурс-
ные испытания конструкций; стендовые испытания систем обору-
дования, управления, жизнеобеспечения. При этом уточняются
весовые расчеты и расчеты на прочность всех элементов конструк-
16
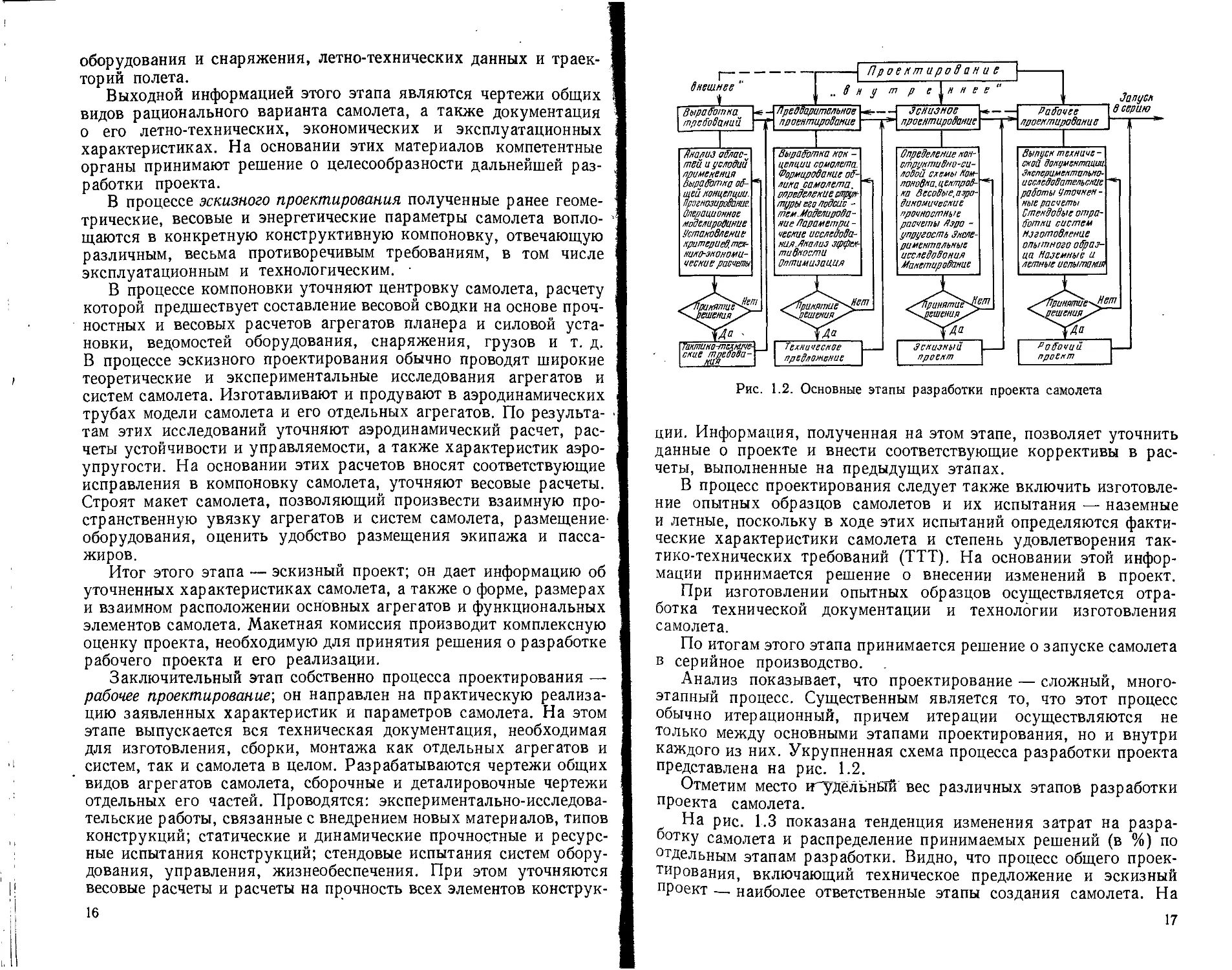
Рис. 1.2. Основные этапы разработки проекта самолета
ции. Информация, полученная на этом этапе, позволяет уточнить
данные о проекте и внести соответствующие коррективы в рас-
четы, выполненные на предыдущих этапах.
В процесс проектирования следует также включить изготовле-
ние опытных образцов самолетов и их испытания — наземные
и летные, поскольку в ходе этих испытаний определяются факти-
ческие характеристики самолета и степень удовлетворения так-
тико-технических требований (ТТТ). На основании этой инфор-
мации принимается решение о внесении изменений в проект.
При изготовлении опытных образцов осуществляется отра-
ботка технической документации и технологии изготовления
самолета.
По итогам этого этапа принимается решение о запуске самолета
в серийное производство.
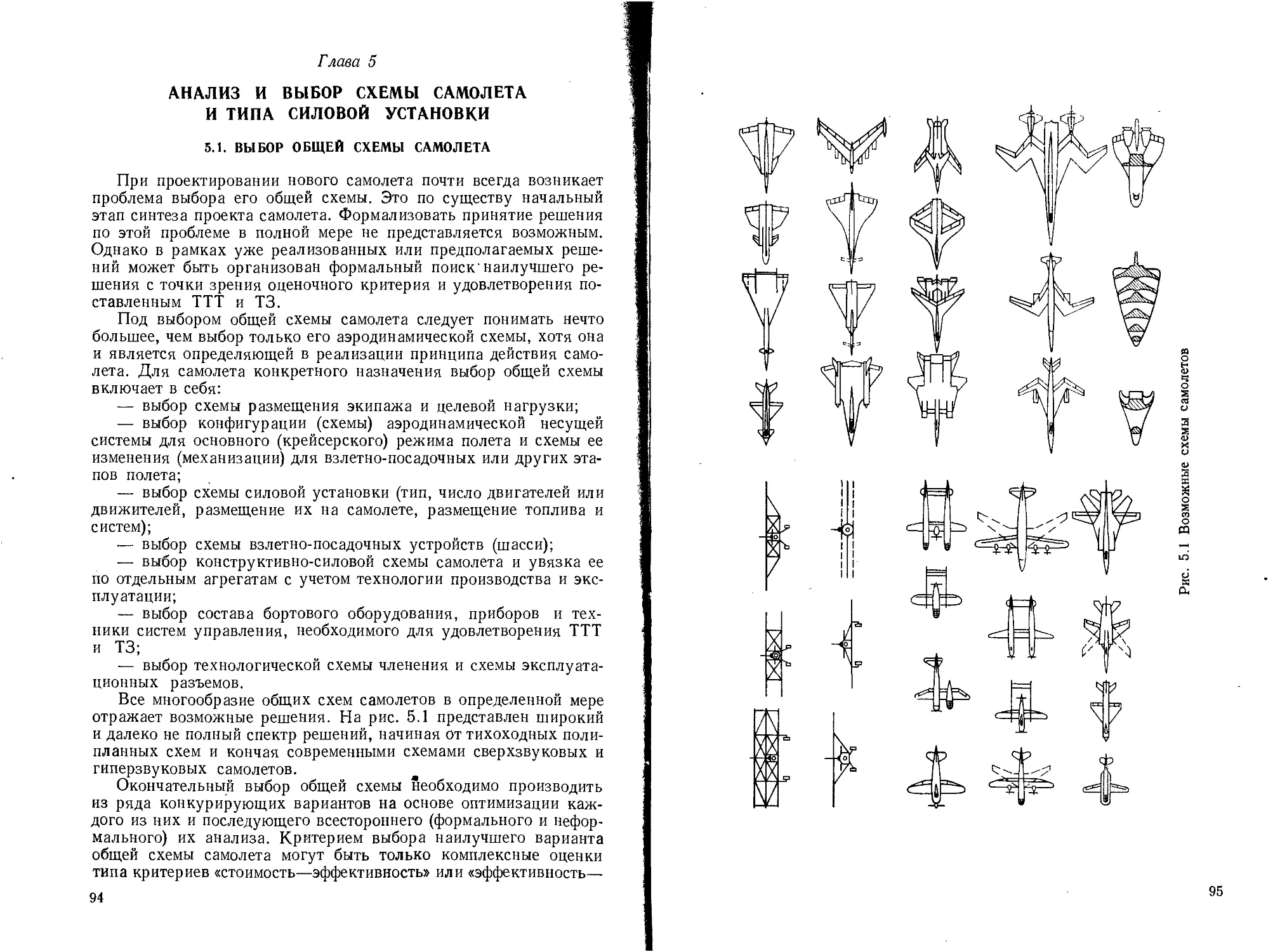
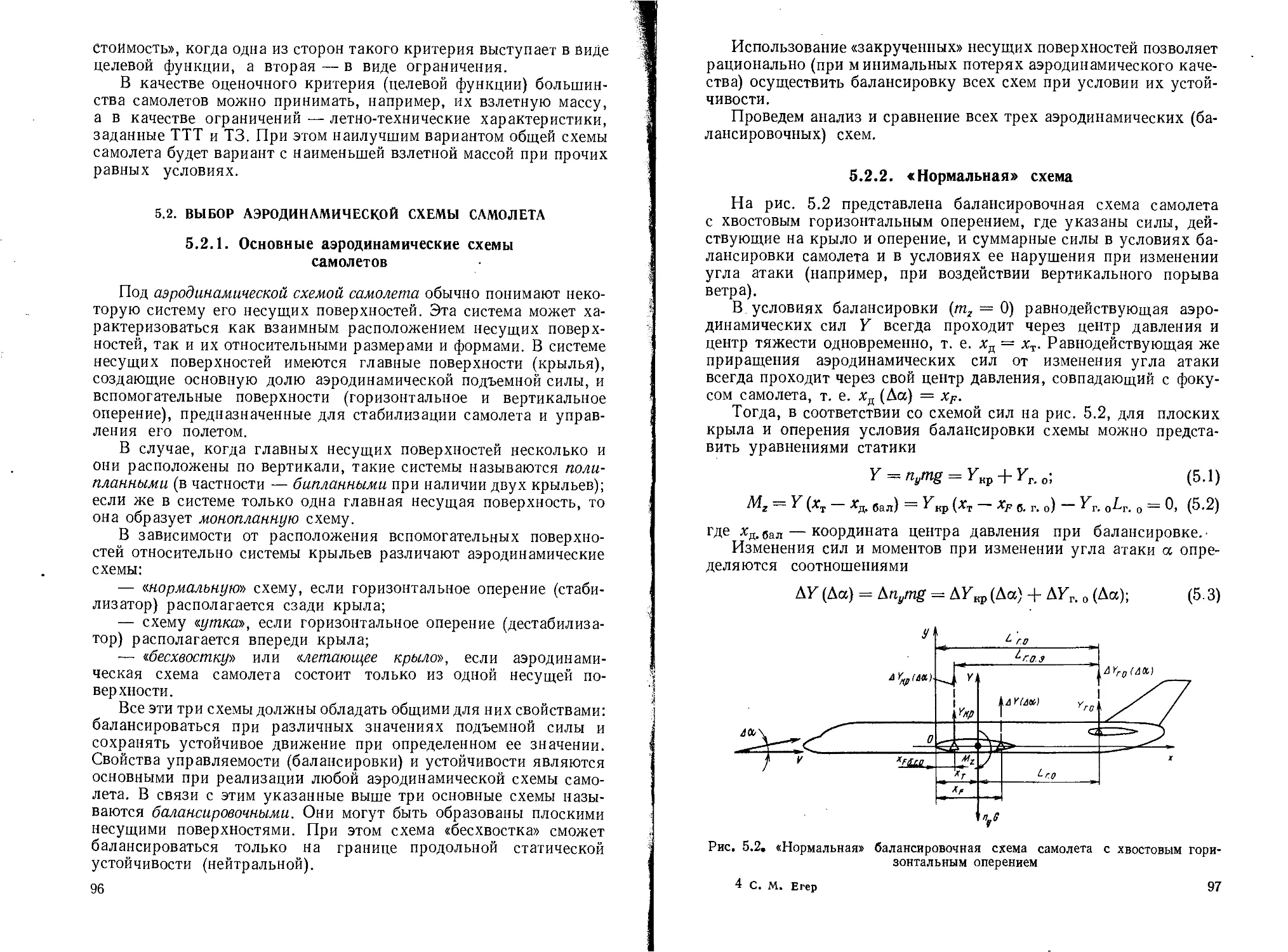
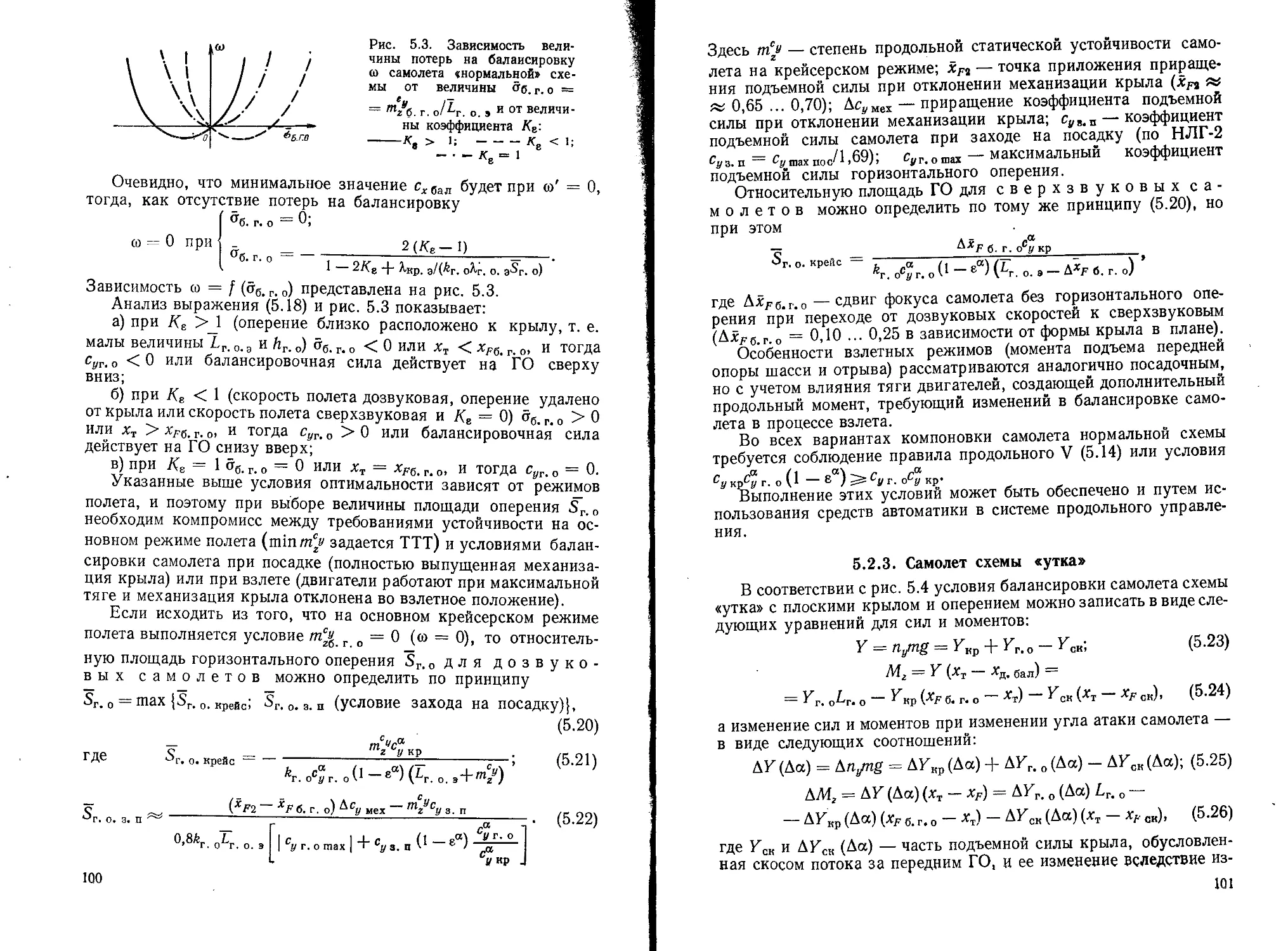
Анализ показывает, что проектирование — сложный, много-
этапный процесс. Существенным является то, что этот процесс
обычно итерационный, причем итерации осуществляются не
только между основными этапами проектирования, но и внутри
каждого из них. Укрупненная схема процесса разработки проекта
представлена на рис. 1.2.
Отметим место и"удельньш вес различных этапов разработки
проекта самолета.
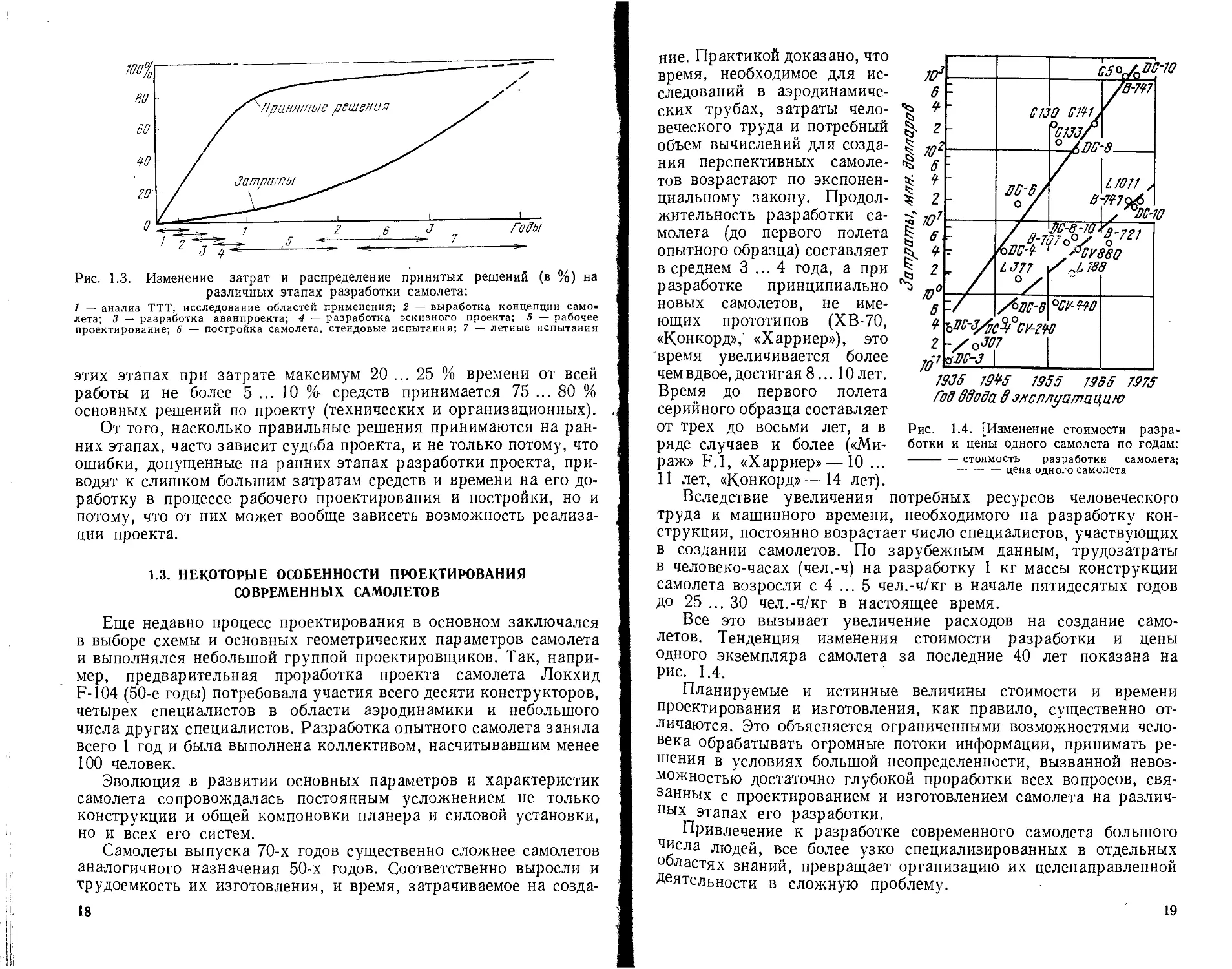
На рис. 1.3 показана тенденция изменения затрат на разра-
ботку самолета и распределение принимаемых решений (в %) по
отдельным этапам разработки. Видно, что процесс общего проек-
тирования, включающий техническое предложение и эскизный
проект — наиболее ответственные этапы создания самолета. На
17
Рис. 1.3. Изменение затрат и распределение принятых решений (в %) на
различных этапах разработки самолета:
/ _ анализ ТТТ, исследование областей применения; 2 — выработка концепции само-
лета- з _ разработка аванпроекта; 4 — разработка эскизного проекта; 5 — рабочее
проектирование; 6 — постройка самолета, стендовые испытания; 7 — летные испытания
этих' этапах при затрате максимум 20 ... 25 % времени от всей
работы и не более 5 ... 10 %- средств принимается 75 ... 80 %
основных решений по проекту (технических и организационных).
От того, насколько правильные решения принимаются на ран-
них этапах, часто зависит судьба проекта, и не только потому, что
ошибки, допущенные на ранних этапах разработки проекта, при-
водят к слишком большим затратам средств и времени на его до-
работку в процессе рабочего проектирования и постройки, но и
потому, что от них может вообще зависеть возможность реализа-
ции проекта.
1.3. НЕКОТОРЫЕ ОСОБЕННОСТИ ПРОЕКТИРОВАНИЯ
СОВРЕМЕННЫХ САМОЛЕТОВ
Еще недавно процесс проектирования в основном заключался
в выборе схемы и основных геометрических параметров самолета
и выполнялся небольшой группой проектировщиков. Так, напри-
мер, предварительная проработка проекта самолета Локхид
F-104 (50-е годы) потребовала участия всего десяти конструкторов,
четырех специалистов в области аэродинамики и небольшого
числа других специалистов. Разработка опытного самолета заняла
всего 1 год и была выполнена коллективом, насчитывавшим менее
100 человек.
Эволюция в развитии основных параметров и характеристик
самолета сопровождалась постоянным усложнением не только
конструкции и общей компоновки планера и силовой установки,
но и всех его систем.
Самолеты выпуска 70-х годов существенно сложнее самолетов
аналогичного назначения 50-х годов. Соответственно выросли и
трудоемкость их изготовления, и время, затрачиваемое на созда-
18
ние. Практикой доказано, что
время, необходимое для ис-
следований в аэродинамиче-
ских трубах, затраты чело-
веческого труда и потребный
объем вычислений для созда-
ния перспективных самоле-
тов возрастают по экспонен-
циальному закону. Продол-
жительность разработки са-
молета (до первого полета
опытного образца) составляет
в среднем 3 ... 4 года, а при
разработке принципиально
новых самолетов, не име-
ющих прототипов (ХВ-70,
«Конкорд»,' «Харриер»), это
время увеличивается более
чем вдвое, достигая 8... 10 лет.
Время до первого полета
серийного образца составляет
1935 139-5 1955 1965 7975
Год ввода в эксплуатацию
Рис. 1.4. [Изменение стоимости разра-
ботки и цены одного самолета по годам:
------- стоимость разработки самолета;
-------цена одного самолета
от трех до восьми лет, а в
ряде случаев и более («Ми-
раж» F.1, «Харриер» — 10 ...
11 лет, «Конкорд»—14 лет).
Вследствие увеличения потребных ресурсов человеческого
труда и машинного времени, необходимого на разработку кон-
струкции, постоянно возрастает число специалистов, участвующих
в создании самолетов. По зарубежным данным, трудозатраты
в человеко-часах (чел.-ч) на разработку 1 кг массы конструкции
самолета возросли с 4 ... 5 чел.-ч/кг в начале пятидесятых годов
до 25 ... 30 чел.-ч/кг в настоящее время.
Все это вызывает увеличение расходов на создание само-
летов. Тенденция изменения стоимости разработки и цены
одного экземпляра самолета за последние 40 лет показана на
Рис. 1.4.
Планируемые и истинные величины стоимости и времени
проектирования и изготовления, как правило, существенно от-
личаются. Это объясняется ограниченными возможностями чело-
века обрабатывать огромные потоки информации, принимать ре-
шения в условиях большой неопределенности, вызванной невоз-
можностью достаточно глубокой проработки всех вопросов, свя-
занных с проектированием и изготовлением самолета на различ-
ных этапах его разработки.
Привлечение к разработке современного самолета большого
числа людей, все более узко специализированных в отдельных
областях знаний, превращает организацию их целенаправленной
Деятельности в сложную проблему.
19
При современных все ускоряющихся темпах научно-техниче-
ского прогресса динамика процесса проектирования является
одной из важнейших его характеристик и всемерное сокращение
сроков проектирования становится одним из главных требований.
Действительно, при увеличении сроков проектирования новизна
и оригинальность решений, используемых в проекте, теряются.
Еще не будучи реализованным, проект может морально устареть
и потерять смысл.
Чтобы обеспечить гарантию успеха программы создания со-
временного самолета в условиях ограниченных материальных
ресурсов и сроков разработки, нужна более высокая степень точ-
ности прогнозирования характеристик самолета при его проекти-
ровании. Это одна из трудноразрешимых задач разработки обшир-
ных и сложных авиационных программ.
В настоящее время наметились следующие пути преодоления
отмеченных выше сложных проблем. Одним из путей повышения
точности прогнозирования, а следовательно, снижения риска
из-за принятия необоснованных решений, является более широкое
проведение научно-исследовательских и опытно-конструкторских
работ по перспективным направлениям авиастроения. Целью
таких работ является создание научно-технического задела. По за-
рубежным данным для создания конкурентоспособного самолета,
который бы не устарел к моменту начала его эксплуатации, не-
обходимо использовать в его разработке от 50 до 150 новых тех-
нических решений. При этом важно, чтобы не менее 2/3 из них
были отработаны и проверены уже к началу проектирования.
В этих условиях также возрастает роль моделирования, полу-
натурных и натурных экспериментов на возможно более ранних
этапах разработки проекта. Например, можно испытать новый
двигатель или какую-либо систему самолета, установив их на
серийный самолет или летающую лабораторию. Это тем более
важно, что циклы создания отдельных подсистем самолета, на-
пример планера и двигателя, значительно отличаются.
Второй путь связан с разработкой и использованием фунда-
ментальных методов анализа и принятия решений на базе матема-
тических моделей, адекватно отображающих характер и закономер-
ности исследуемых объектов и процессов. Реализация этого на-
правления в значительной степени связана с дальнейшим разви-
тием теории проектирования самолетов, а также с применением
ЭВМ в их проектировании.
В настоящее время с целью сокращения сроков и стоимости
разработки проекта при одновременном повышении качества
проектирования ставится задача использования ЭВМ и средств
машинной графики при решении всех задач проектирования, не
связанных с проявлением неповторимых человеческих качеств
(интуиция, воображение, исследовательские способности).
Известно, что проектирование сложного технического объ-
екта — итерационный процесс последовательного приближения
20
Рис. 1.5. ‘Преимущества автоматизированного проектирования:
обычные методы проектирования;--------автоматизированное проектирование;
Л — выигрыш во времени; В — выигрыш в качестве
к заданным или оптимальным характеристикам. Широкое приме-
нение ЭВМ позволит существенно расширить вариантность проек-
тирования, степень приближения к наилучшему решению за более
короткое время, т. е. повысить качество проектирования и снизить
сроки разработки проекта. Схематично это иллюстрируется гра-
фиком, представленным на рис. 1.5.
Разработка теоретических основ проектирования, значитель-
ные успехи в области вычислительной техники позволяют говорить
о возможности автоматизации большинства операций процесса
проектирования в ближайшем будущем. Успехи, достигнутые
в разработке методов, алгоритмов и программ расчета аэродина-
мических, весовых, прочностных характеристик, параметров си-
ловых установок, оценок летно-технических, экономических и эф-
фективностных данных, уже привели к созданию целого ряда ком-
плексных программ и автоматизированных систем проектирования
самолетов, применяемых на различных этапах разработки проекта.
Использование ЭВМ при разработке проектов самолетов
оказывает влияние на организацию процесса проектирования,
предъявляет новые требования к квалификации проектировщиков.
От них теперь требуется не только знание физических процессов,
обусловливающих создание самолета, его эксплуатацию, но и зна-
ние математических приемов, позволяющих формализовать эти
процессы, то есть представить их в виде, позволяющем получить
требуемое решение на ЭВМ.
Глава 2
ТЕОРЕТИЧЕСКИЕ И МЕТОДОЛОГИЧЕСКИЕ ОСНОВЫ
ПРОЕКТИРОВАНИЯ САМОЛЕТОВ
Разработка проекта самолета требует интеграции знаний
в области физики, математики, аэродинамики, устойчивости и
Управляемости, технологии и материаловедения, экономики, дви-
гателестроен ия, черчения и конструирования, строительной ме-
ханики и других прикладных и .фундаментальных наук. Вместе
21
с тем проектирование самолета не может базироваться только на
сумме знаний перечисленных выше дисциплин. Это самостоятель-
ная научно-техническая дисциплина, имеющая свою внутреннюю
логику, свои законы и методы.
Ведущиеся до сих пор дискуссии о том, что же такое проекти-
рование — наука или искусство — лишь отражают уровень наших
знаний о законах, формирующих облик самолета, типы и пара-
метры его подсистем.
2.1. ПРОЕКТИРОВАНИЕ — ТВОРЧЕСКИЙ ПРОЦЕСС
Целью инженерного проектирования . является разработка и
создание новых, ранее не существовавших объектов, процессов
или систем. Хотя эта цель может быть достигнута на основе исполь-
зования известных элементов либо принципов, всегда требуется
творческий поиск такого сочетания этих элементов и процессов
новым, оригинальным способом, который бы приводил к дости-
жению новых качественных либо количественных результатов.
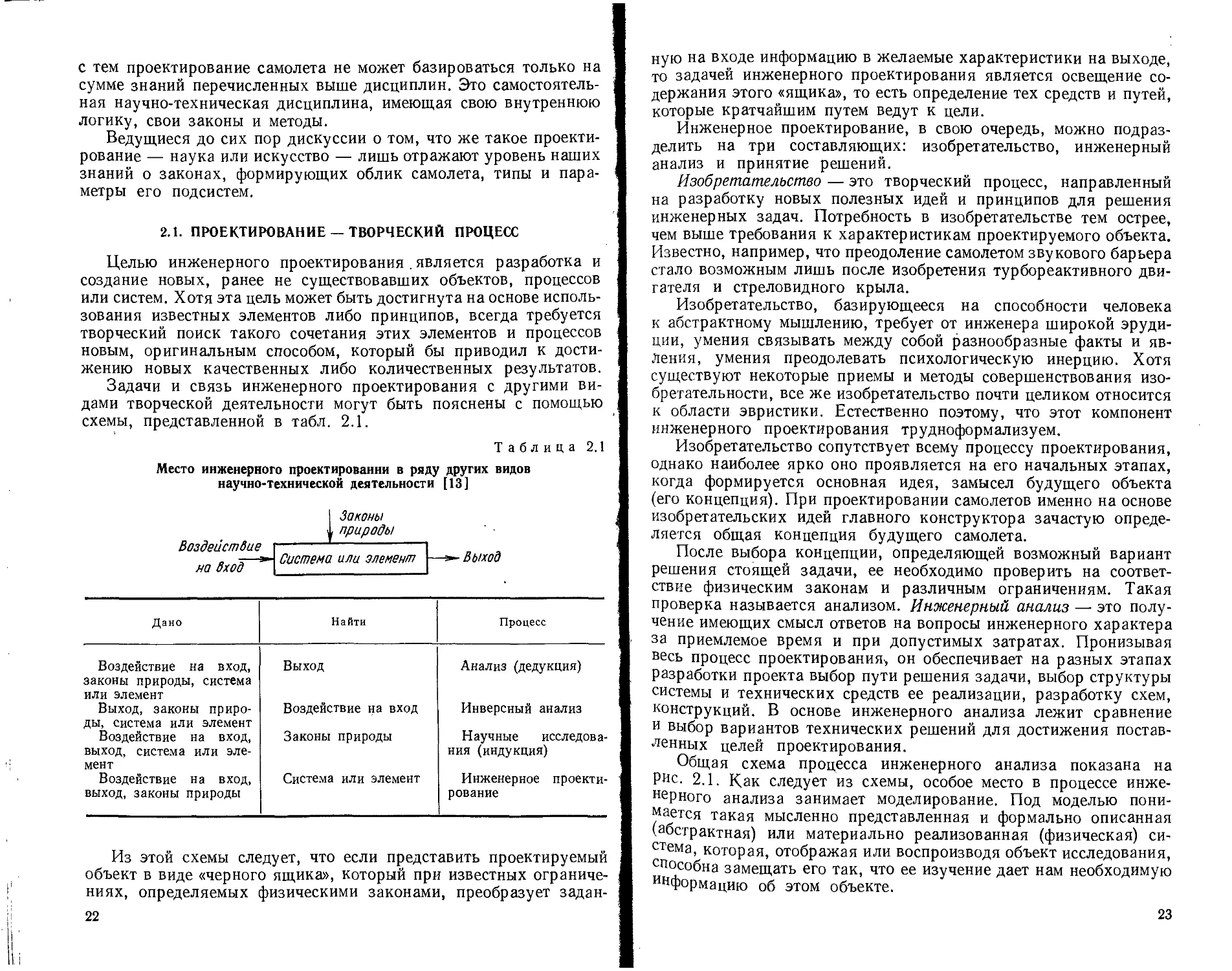
Задачи и связь инженерного проектирования с другими ви-
дами творческой деятельности могут быть пояснены с помощью
схемы, представленной в табл. 2.1.
Таблица 2.1
Место инженерного проектировании в ряду других видов
научно-технической деятельности [13]
| Законы I природы
Система или элемент —Выход
Воздействие
на Вход
Дано Найти Процесс
Воздействие на вход, законы природы, система или элемент Выход, законы приро- ды, система или элемент Воздействие на вход, выход, система или эле- мент Воздействие на вход, выход, законы природы Выход Воздействие на вход Законы природы Система или элемент Анализ (дедукция) Инверсный анализ Научные исследова- ния (индукция) Инженерное проекти- рование
Из этой схемы следует, что если представить проектируемый
объект в виде «черного ящика», который при известных ограниче-
ниях, определяемых физическими законами, преобразует задан-
22
ную на входе информацию в желаемые характеристики на выходе,
то задачей инженерного проектирования является освещение со-
держания этого «ящика», то есть определение тех средств и путей,
которые кратчайшим путем ведут к цели.
Инженерное проектирование, в свою очередь, можно подраз-
делить на три составляющих: изобретательство, инженерный
анализ и принятие решений.
Изобретательство — это творческий процесс, направленный
на разработку новых полезных идей и принципов для решения
инженерных задач. Потребность в изобретательстве тем острее,
чем выше требования к характеристикам проектируемого объекта.
Известно, например, что преодоление самолетом звукового барьера
стало возможным лишь после изобретения турбореактивного дви-
гателя и стреловидного крыла.
Изобретательство, базирующееся на способности человека
к абстрактному мышлению, требует от инженера широкой эруди-
ции, умения связывать между собой разнообразные факты и яв-
ления, умения преодолевать психологическую инерцию. Хотя
существуют некоторые приемы и методы совершенствования изо-
бретательности, все же изобретательство почти целиком относится
к области эвристики. Естественно поэтому, что этот компонент
инженерного проектирования трудноформализуем.
Изобретательство сопутствует всему процессу проектирования,
однако наиболее ярко оно проявляется на его начальных этапах,
когда формируется основная идея, замысел будущего объекта
(его концепция). При проектировании самолетов именно на основе
изобретательских идей главного конструктора зачастую опреде-
ляется общая концепция будущего самолета.
После выбора концепции, определяющей возможный вариант
решения стоящей задачи, ее необходимо проверить на соответ-
ствие физическим законам и различным ограничениям. Такая
проверка называется анализом. Инженерный анализ — это полу-
чение имеющих смысл ответов на вопросы инженерного характера
за приемлемое время и при допустимых затратах. Пронизывая
весь процесс проектирования', он обеспечивает на разных этапах
разработки проекта выбор пути решения задачи, выбор структуры
системы и технических средств ее реализации, разработку схем,
конструкций. В основе инженерного анализа лежит сравнение
и выбор вариантов технических решений для достижения постав-
ленных целей проектирования.
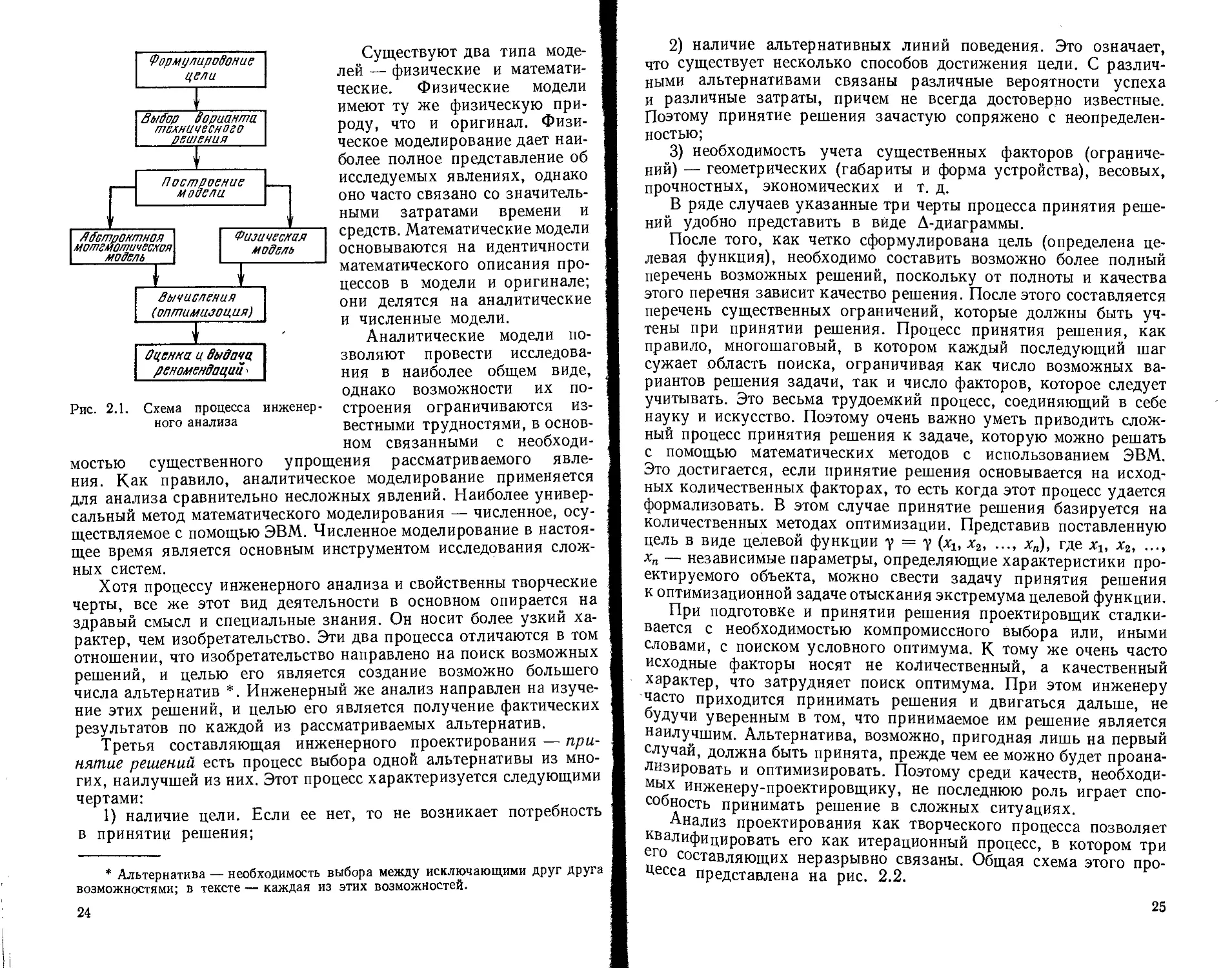
Общая схема процесса инженерного анализа показана на
Рис. 2.1. Как следует из схемы, особое место в процессе инже-
нерного анализа занимает моделирование. Под моделью пони-
мается такая мысленно представленная и формально описанная
(абстрактная) или материально реализованная (физическая) си-
стема, которая, отображая или воспроизводя объект исследования,
способна замещать его так, что ее изучение дает нам необходимую
информацию об этом объекте.
23
Рис. 2.1. Схема процесса инженер-
ного анализа
Существуют два типа моде-
лей — физические и математи-
ческие. Физические модели
имеют ту же физическую при-
роду, что и оригинал. Физи-
ческое моделирование дает наи-
более полное представление об
исследуемых явлениях, однако
оно часто связано со значитель-
ными затратами времени и
средств. Математические модели
основываются на идентичности
математического описания про-
цессов в модели и оригинале;
они делятся на аналитические
и численные модели.
Аналитические модели по-
зволяют провести исследова-
ния в наиболее общем виде, ;
однако возможности их по- I
строения ограничиваются из-
вестными трудностями, в основ-
ном связанными с необходи-
мостью существенного упрощения рассматриваемого явле-
ния. Как правило, аналитическое моделирование применяется
для анализа сравнительно несложных явлений. Наиболее универ-
сальный метод математического моделирования — численное, осу-
ществляемое с помощью ЭВМ. Численное моделирование в настоя-
щее время является основным инструментом исследования слож-
ных систем.
Хотя процессу инженерного анализа и свойственны творческие
черты, все же этот вид деятельности в основном опирается на
здравый смысл и специальные знания. Он носит более узкий ха-
рактер, чем изобретательство. Эти два процесса отличаются в том
отношении, что изобретательство направлено на поиск возможных
решений, и целью его является создание возможно большего
числа альтернатив *. Инженерный же анализ направлен на изуче-
ние этих решений, и целью его является получение фактических
результатов по каждой из рассматриваемых альтернатив.
Третья составляющая инженерного проектирования — при-
нятие решений есть процесс выбора одной альтернативы из мно-
гих, наилучшей из них. Этот процесс характеризуется следующими
чертами:
1) наличие цели. Если ее нет, то не возникает потребность
в принятии решения;
* Альтернатива — необходимость выбора между исключающими друг друга
возможностями; в тексте — каждая из этих возможностей.
24
2) наличие альтернативных линий поведения. Это означает,
что существует несколько способов достижения цели. С различ-
ными альтернативами связаны различные вероятности успеха
и различные затраты, причем не всегда достоверно известные.
Поэтому принятие решения зачастую сопряжено с неопределен-
ностью;
3) необходимость учета существенных факторов (ограниче-
ний) — геометрических (габариты и форма устройства), весовых,
прочностных, экономических и т. д.
В ряде случаев указанные три черты процесса принятия реше-
ний удобно представить в виде Д-диаграммы.
После того, как четко сформулирована цель (определена це-
левая функция), необходимо составить возможно более полный
перечень возможных решений, поскольку от полноты и качества
этого перечня зависит качество решения. После этого составляется
перечень существенных ограничений, которые должны быть уч-
тены при принятии решения. Процесс принятия решения, как
правило, многошаговый, в котором каждый последующий шаг
сужает область поиска, ограничивая как число возможных ва-
риантов решения задачи, так и число факторов, которое следует
учитывать. Это весьма трудоемкий процесс, соединяющий в себе
науку и искусство. Поэтому очень важно уметь приводить слож-
ный процесс принятия решения к задаче, которую можно решать
с помощью математических методов с использованием ЭВМ.
Это достигается, если принятие решения основывается на исход-
ных количественных факторах, то есть когда этот процесс удается
формализовать. В этом случае принятие решения базируется на
количественных методах оптимизации. Представив поставленную
цель в виде целевой функции у = у (хъ х2, ..., хп), где х2, ...,
хп — независимые параметры, определяющие характеристики про-
ектируемого объекта, можно свести задачу принятия решения
к оптимизационной задаче отыскания экстремума целевой функции.
При подготовке и принятии решения проектировщик сталки-
вается с необходимостью компромиссного выбора или, иными
словами, с поиском условного оптимума. К тому же очень часто
исходные факторы носят не количественный, а качественный
характер, что затрудняет поиск оптимума. При этом инженеру
часто приходится принимать решения и двигаться дальше, не
будучи уверенным в том, что принимаемое им решение является
наилучшим. Альтернатива, возможно, пригодная лишь на первый
случай, должна быть принята, прежде чем ее можно будет проана-
лизировать и оптимизировать. Поэтому среди качеств, необходи-
мых инженеру-проектировщику, не последнюю роль играет спо-
собность принимать решение в сложных ситуациях.
Анализ проектирования как творческого процесса позволяет
квалифицировать его как итерационный процесс, в котором три
его составляющих неразрывно связаны. Общая схема этого про-
цесса представлена на рис. 2.2.
25
L___
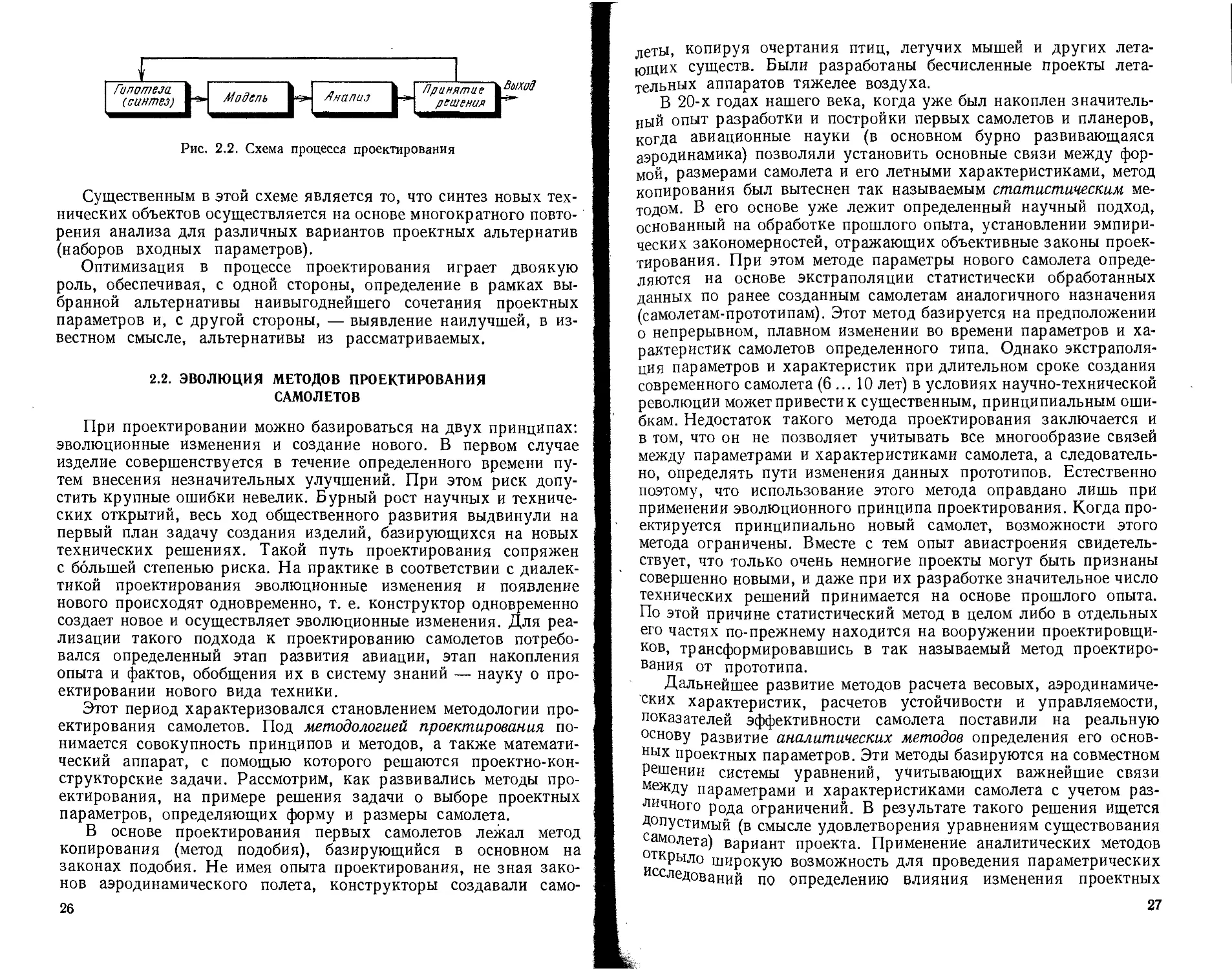
Гипотеза. b .. , b b Принятие bВыход
(синтез) p* Модель Анализ |-а- решения р*~
Рис. 2.2. Схема процесса проектирования
Существенным в этой схеме является то, что синтез новых тех-
нических объектов осуществляется на основе многократного повто-
рения анализа для различных вариантов проектных альтернатив
(наборов входных параметров).
Оптимизация в процессе проектирования играет двоякую
роль, обеспечивая, с одной стороны, определение в рамках вы-
бранной альтернативы наивыгоднейшего сочетания проектных
параметров и, с другой стороны, — выявление наилучшей, в из-
вестном смысле, альтернативы из рассматриваемых.
2.2. ЭВОЛЮЦИЯ МЕТОДОВ ПРОЕКТИРОВАНИЯ
САМОЛЕТОВ
При проектировании можно базироваться на двух принципах:
эволюционные изменения и создание нового. В первом случае
изделие совершенствуется в течение определенного времени пу-
тем внесения незначительных улучшений. При этом риск допу-
стить крупные ошибки невелик. Бурный рост научных и техниче-
ских открытий, весь ход общественного развития выдвинули на
первый план задачу создания изделий, базирующихся на новых
технических решениях. Такой путь проектирования сопряжен
с большей степенью риска. На практике в соответствии с диалек-
тикой проектирования эволюционные изменения и появление
нового происходят одновременно, т. е. конструктор одновременно
создает новое и осуществляет эволюционные изменения. Для реа-
лизации такого подхода к проектированию самолетов потребо-
вался определенный этап развития авиации, этап накопления
опыта и фактов, обобщения их в систему знаний — науку о про-
ектировании нового вида техники.
Этот период характеризовался становлением методологии про-
ектирования самолетов. Под методологией проектирования по-
нимается совокупность принципов и методов, а также математи-
ческий аппарат, с помощью которого решаются проектно-кон-
структорские задачи. Рассмотрим, как развивались методы про-
ектирования, на примере решения задачи о выборе проектных
параметров, определяющих форму и размеры самолета.
В основе проектирования первых самолетов лежал метод
копирования (метод подобия), базирующийся в основном на
законах подобия. Не имея опыта проектирования, не зная зако-
нов аэродинамического полета, конструкторы создавали само-
26
леты, копируя очертания птиц, летучих мышей и других лета-
ющих существ. Были разработаны бесчисленные проекты лета-
тельных аппаратов тяжелее воздуха.
В 20-х годах нашего века, когда уже был накоплен значитель-
ный опыт разработки и постройки первых самолетов и планеров,
когда авиационные науки (в основном бурно развивающаяся
аэродинамика) позволяли установить основные связи между фор-
мой, размерами самолета и его летными характеристиками, метод
копирования был вытеснен так называемым статистическим ме-
тодом. В его основе уже лежит определенный научный подход,
основанный на обработке прошлого опыта, установлении эмпири-
ческих закономерностей, отражающих объективные законы проек-
тирования. При этом методе параметры нового самолета опреде-
ляются на основе экстраполяции статистически обработанных
данных по ранее созданным самолетам аналогичного назначения
(самолетам-прототипам). Этот метод базируется на предположении
о непрерывном, плавном изменении во времени параметров и ха-
рактеристик самолетов определенного типа. Однако экстраполя-
ция параметров и характеристик при длительном сроке создания
современного самолета (6 ... 10 лет) в условиях научно-технической
революции может привести к существенным, принципиальным оши-
бкам. Недостаток такого метода проектирования заключается и
в том, что он не позволяет учитывать все многообразие связей
между параметрами и характеристиками самолета, а следователь-
но, определять пути изменения данных прототипов. Естественно
поэтому, что использование этого метода оправдано лишь при
применении эволюционного принципа проектирования. Когда про-
ектируется принципиально новый самолет, возможности этого
метода ограничены. Вместе с тем опыт авиастроения свидетель-
ствует, что только очень немногие проекты могут быть признаны
совершенно новыми, и даже при их разработке значительное число
технических решений принимается на основе прошлого опыта.
По этой причине статистический метод в целом либо в отдельных
его частях по-прежнему находится на вооружении проектировщи-
ков, трансформировавшись в так называемый метод проектиро-
вания от прототипа.
Дальнейшее развитие методов расчета весовых, аэродинамиче-
ских характеристик, расчетов устойчивости и управляемости,
показателей эффективности самолета поставили на реальную
основу развитие аналитических методов определения его основ-
ных проектных параметров. Эти методы базируются на совместном
Решении системы уравнений, учитывающих важнейшие связи
между параметрами и характеристиками самолета с учетом раз-
личного рода ограничений. В результате такого решения ищется
Допустимый (в смысле удовлетворения уравнениям существования
самолета) вариант проекта. Применение аналитических методов
открыло широкую возможность для проведения параметрических
исследований по определению влияния изменения проектных
27
параметров и ограничений на технико-экономические характери-
стики самолета. Отсюда оставался один шаг до решения задач по
отысканию наивыгоднейших (оптимальных) параметров самолета,
удовлетворяющих выбранному критерию оценки совершенства
проектных решений. Это дало толчок к развитию так называемых
методов оптимального проектирования самолетов. Первой отече-
ственной работой, посвященной оптимизации параметров само-
лета, является работа советского инженера Н. Н. Фадеева «Изыска-
ние рациональных размеров самолета» (Труды ЦАГИ, вып. 461,
1939). Практическая реализация методов оптимального проек-
тирования длительное время затруднялась чисто вычислитель-
ными трудностями, особенно при решении многопараметрических
задач. Применение последовательной оптимизации по отдельным
параметрам не давало ощутимых результатов.
Примерно к середине 60-х годов сложились объективные пред-
посылки для дальнейшего развития теории проектирования само-
лета. Важнейшие из них:
— развитие общей теории сложных технических систем (си-
стемотехники);
— развитие прикладных авиационных наук, раскрывающих
сущность явлений, определяющих законы формирования самолета
и его подсистем;
— успехи в области математики, в первую очередь теории
оптимизации и численных методов;
— появление ЭВМ.
По мере накопления опыта решения различных задач оптими-
зации отдельных элементов самолета, все более широкого исполь-
зования ЭВМ при решении таких задач постепенно увеличивалось
число параметров, вовлекаемых в процесс одновременной оптими-
зации. Совершенствовались критерии оценки проектно-конструк-
торских решений в направлении учета многоцелевого характера
применения самолета и динамики изменения требований к нему
за период эксплуатации.
Наряду с этим развивалась общая теория проектирования
больших систем, на базе которой практика и теория проектиро-
вания самолетов постепенно обретают логическую завершенность,
обеспечивая подлинно научный подход к прогнозированию пара-
метров и характеристик будущего самолета. Идеи системного
проектирования интуитивно использовались при проектировании
самолетов и ранее. Они нашли отражение в расчленении процесса
проектирования на этапы, а самолета — на подсистемы и агре-
гаты. Системное проектирование базируется на строго упорядочен-
ном комплексном подходе, учитывающем сложные связи и вза-
имное влияние между элементами системы. Включая в себя как
составную часть метод оптимального проектирования, оно отли-
чается от широко распространенных процедур оптимизации от-
дельных устройств и характеристик систем применением систем-
ных, в частности комплексных (обобщенных), критериев оптималь-
28
ности, использованием математических моделей, описывающих
существенные черты системы в целом, математическим аппаратом
оптимизации, широким применением ЭВМ.
2.3. МЕТОДОЛОГИЯ СИСТЕМНОГО ПРОЕКТИРОВАНИЯ
Теоретической базой проектирования больших технических
систем (к которым, как мы показали, относится самолет) является
сравнительно недавно появившаяся наука — системотехника, ко-
торая ставит своей целью создание и изучение наиболее общих
способов описания законов функционирования и методов анализа
и синтеза больших систем. В отличие от проектно-технических
дисциплин (аэродинамика, динамика, строительная механика
и т. д.), изучающих отдельные процессы, объекты, элементы и
устройства, системотехника изучает поведение больших совокуп-
ностей определенным образом взаимосвязанных процессов, объек-
тов и устройств.
- Системотехника тесно переплетается с теорией исследования
операций (ТИО). В ТИО излагаются критерии оптимальности и
оценки эффективности различных решений, операций, проектов,
рассматривается теория моделирования операций и проектов,
а также даются математические методы оптимизации различных
решений. Таким образом, ТИО, наряду с концепциями системного
подхода, является методологической основой проектирования опти-
мальных технических систем.
После формализации на основе математического моделирова-
ния задача проектирования системы может быть сведена к задаче
нахождения глобального экстремума функции многих переменных
(параметров) при ограничениях на эти параметры в виде функцио-
нальных равенств и неравенств. Область вычислительной матема-
тики, занимающаяся решением таких задач (математическое про-
граммирование), является математической основой проектирова-
ния оптимальных систем.
Системное исследование — это изучение системы и ее поведе-
ния в целом как единого объекта, выполняющего определенные
функции в конкретных условиях. Системный подход — это учет
всего, что влияет на выполнение системой поставленных перед
нею задач и достижение определенных целей.
В основе системного подхода лежит предположение о возмож-
ности расчленения сложных систем и процессов на составляющие
их относительно самостоятельные элементы (подсистемы, подпро-
цессы). Это существенно облегчает анализ и синтез сколь угодно
сложных систем. При этом очень важно правильно выбрать объект
системного исследования, чтобы системное его изучение давало
значительный эффект по сравнению с рассмотрением системы по
частям. Обладая достаточной масштабностью, чтобы имело смысл
его отдельное исследование, такой объект должен допускать
хотя бы приближенное описание его структуры и функционирова-
29
ния математическими методами. При определении масштаба ис-
следуемой системы необходимо учитывать вычислительные воз-
можности современных ЭВМ. Поэтому весьма важными задачами
системного проектирования являются обоснованное расчленение
(декомпозиция) системы на подсистемы, а процесса проектирова-
ния на подпроцессы (этапы) и определение существенных струк-
турно-функциональных связей между расчлененными элементами
(определение «входов» и «выходов»).
Системное проектирование всегда направлено на поиск пара-
метров системы, оптимальных в смысле выполнения ею своего
функционального назначения с учетом возможной многофункцио-
нальности и взаимосвязи с другими подсистемами. При этом опре-
деление взаимосвязанного комплекса критериев, позволяющих
на каждом уровне расчленения системы отыскивать с помощью
формальных методов ее оптимальные параметры, а также иметь
возможность объективно оценивать результаты проектирования,
также является одной из важнейших задач системного проекти-
рования.
Поскольку системное проектирование опирается на широкое
использование математических методов исследования и ЭВМ для
решения проектных задач, не менее важна разработка приемлемых
математических моделей исследуемых систем и процессов. Такие
модели должны позволять применение формальной логики и
элементарных арифметических операций для решения весьма
сложных задач. Последующие задачи системного проектирования
направлены на разработку алгоритма и программы для решения
задачи на ЭВМ, анализ результатов и подготовку материалов для
принятия решений.
Раскроем содержание отмеченных выше задач системного
проектирования применительно к самолету. Изучение системы
начинается с выявления ее структуры и установления связей
между элементами. Как отмечалось выше (см. гл. 1), самолет
является сложной системой, входящей в большие авиационные
системы (комплексы). В авиационном комплексе (АК) самолет
проявляет себя через технико-экономические характеристики
(ТЭХ), включающие в себя летно-технические характеристики
(ЛТХ), характеристики надежности и живучести, а также харак-
теристики целевой нагрузки. Совокупность этих характеристик
определяет эффективность использования самолета в авиационном
комплексе.
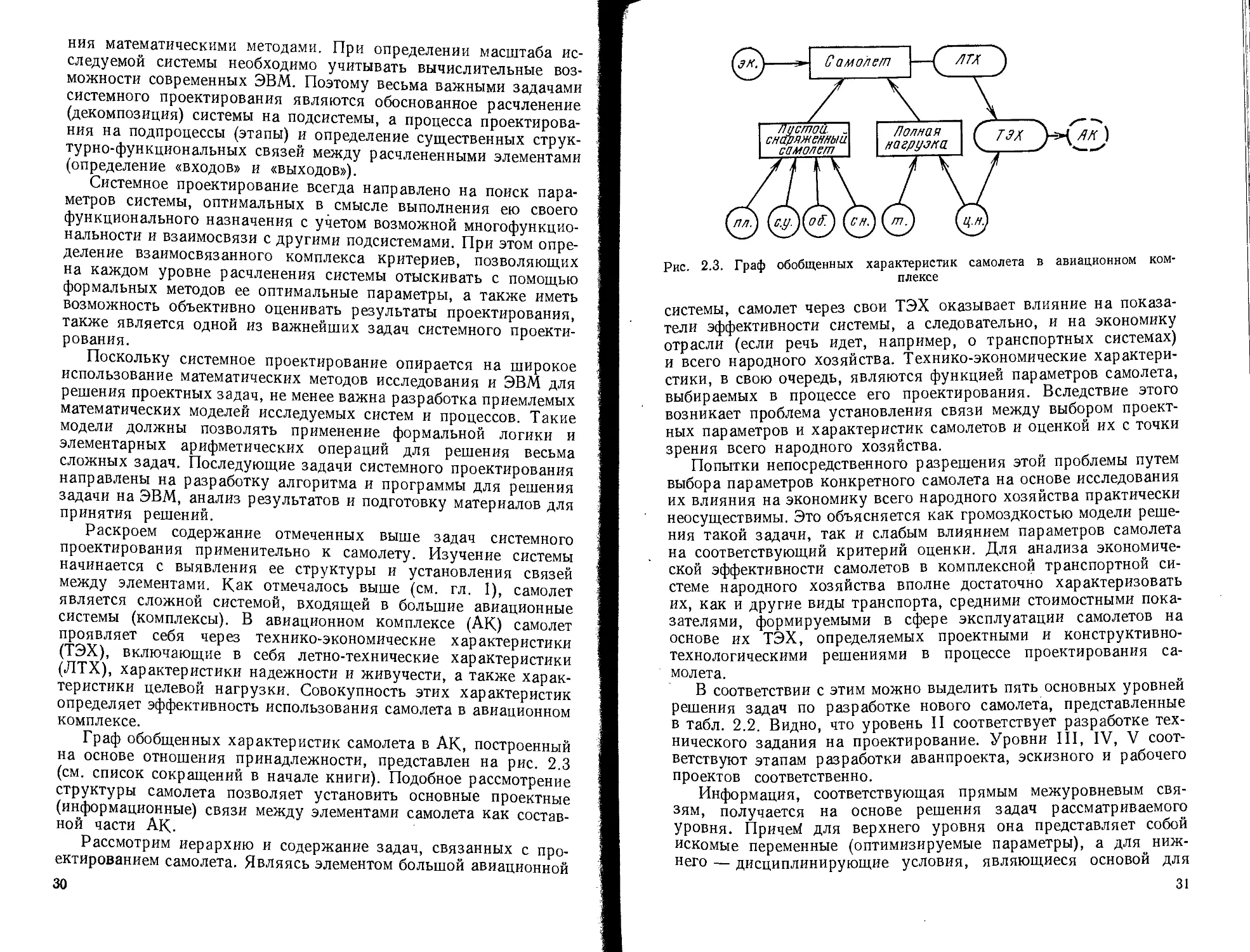
Граф обобщенных характеристик самолета в АК, построенный
на основе отношения принадлежности, представлен на рис. 2.3
(см. список сокращений в начале книги). Подобное рассмотрение
структуры самолета позволяет установить основные проектные
(информационные) связи между элементами самолета как состав-
ной части АК.
Рассмотрим иерархию и содержание задач, связанных с про-
ектированием самолета. Являясь элементом большой авиационной
30
Рис. 2.3. Граф обобщенных характеристик самолета в авиационном ком-
плексе
системы, самолет через свои ТЭХ оказывает влияние на показа-
тели эффективности системы, а следовательно, и на экономику
отрасли (если речь идет, например, о транспортных системах)
и всего народного хозяйства. Технико-экономические характери-
стики, в свою очередь, являются функцией параметров самолета,
выбираемых в процессе его проектирования. Вследствие этого
возникает проблема установления связи между выбором проект-
ных параметров и характеристик самолетов и оценкой их с точки
зрения всего народного хозяйства.
Попытки непосредственного разрешения этой проблемы путем
выбора параметров конкретного самолета на основе исследования
их влияния на экономику всего народного хозяйства практически
неосуществимы. Это объясняется как громоздкостью модели реше-
ния такой задачи, так и слабым влиянием параметров самолета
на соответствующий критерий оценки. Для анализа экономиче-
ской эффективности самолетов в комплексной транспортной си-
стеме народного хозяйства вполне достаточно характеризовать
их, как и другие виды транспорта, средними стоимостными пока-
зателями, формируемыми в сфере эксплуатации самолетов на
основе их ТЭХ, определяемых проектными и конструктивно-
технологическими решениями в процессе проектирования са-
молета.
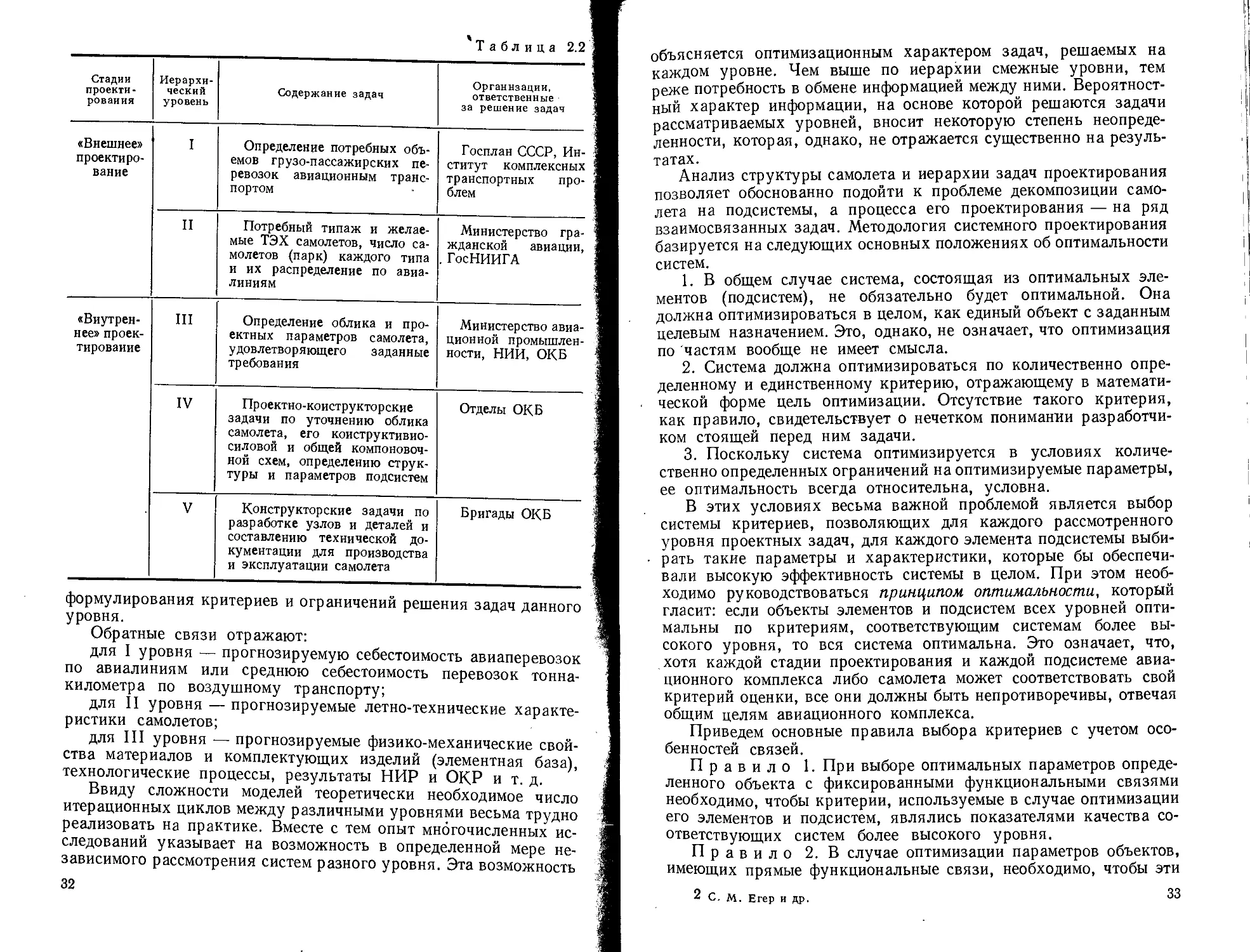
В соответствии с этим можно выделить пять основных уровней
решения задач по разработке нового самолета, представленные
в табл. 2.2. Видно, что уровень II соответствует разработке тех-
нического задания на проектирование. Уровни III, IV, V соот-
ветствуют этапам разработки аванпроекта, эскизного и рабочего
проектов соответственно.
Информация, соответствующая прямым межуровневым свя-
зям, получается на основе решения задач рассматриваемого
Уровня. Причем для верхнего уровня она представляет собой
искомые переменные (оптимизируемые параметры), а для ниж-
него — дисциплинирующие условия, являющиеся основой для
31
Таблица 2.2
Стадии проекти - роваиия Иерархи- ческий уровень Содержание задач Организации, ответственные за решение задач
«Внешнее» проектиро- ванне I Определение потребных объ- емов грузо-пассажирских пе- ревозок авиационным транс- портом Госплан СССР, Ин- ститут комплексных транспортных про- блем
II Потребный типаж и желае- мые ТЭХ самолетов, число са- молетов (парк) каждого типа и их распределение по авиа- линиям Министерство гра- жданской авиации, . ГосНИИГА
«Внутрен- нее» проек- тирование III Определение облика и про- ектных параметров самолета, удовлетворяющего заданные требования Министерство авиа- ционной промышлен- ности, НИИ, ОКБ
IV Проектно-коиструкторские задачи по уточнению облика самолета, его коиструктивио- силовой и общей компоновоч- ной схем, определению струк- туры и параметров подсистем Отделы ОКБ
V Конструкторские задачи по разработке узлов и деталей и составлению технической до- кументации для производства и эксплуатации самолета Бригады ОКБ
формулирования критериев и ограничений решения задач данного
уровня.
Обратные связи отражают:
для I уровня — прогнозируемую себестоимость авиаперевозок
по авиалиниям или среднюю себестоимость перевозок тонна-
километр а по воздушному транспорту;
для II уровня — прогнозируемые летно-технические характе-
ристики самолетов;
для III уровня — прогнозируемые физико-механические свой-
ства материалов и комплектующих изделий (элементная база),
технологические процессы, результаты НИР и ОКР и т. д.
Ввиду сложности моделей теоретически необходимое число
итерационных циклов между различными уровнями весьма трудно
реализовать на практике. Вместе с тем опыт многочисленных ис-
следований указывает на возможность в определенной мере не-
зависимого рассмотрения систем разного уровня. Эта возможность
32
г
объясняется оптимизационным характером задач, решаемых на
каждом уровне. Чем выше по иерархии смежные уровни, тем
реже потребность в обмене информацией между ними. Вероятност-
ный характер информации, на основе которой решаются задачи
рассматриваемых уровней, вносит некоторую степень неопреде-
ленности, которая, однако, не отражается существенно на резуль-
татах.
Анализ структуры самолета и иерархии задач проектирования
позволяет обоснованно подойти к проблеме декомпозиции само-
лета на подсистемы, а процесса его проектирования — на ряд
взаимосвязанных задач. Методология системного проектирования
базируется на следующих основных положениях об оптимальности
систем.
1. В общем случае система, состоящая из оптимальных эле-
ментов (подсистем), не обязательно будет оптимальной. Она
должна оптимизироваться в целом, как единый объект с заданным
целевым назначением. Это, однако, не означает, что оптимизация
по частям вообще не имеет смысла.
2. Система должна оптимизироваться по количественно опре-
деленному и единственному критерию, отражающему в математи-
ческой форме цель оптимизации. Отсутствие такого критерия,
как правило, свидетельствует о нечетком понимании разработчи-
ком стоящей перед ним задачи.
3. Поскольку система оптимизируется в условиях количе-
ственно определенных ограничений на оптимизируемые параметры,
ее оптимальность всегда относительна, условна.
В этих условиях весьма важной проблемой является выбор
системы критериев, позволяющих для каждого рассмотренного
уровня проектных задач, для каждого элемента подсистемы выби-
рать такие параметры и характеристики, которые бы обеспечи-
вали высокую эффективность системы в целом. При этом необ-
ходимо руководствоваться принципом оптимальности, который
гласит: если объекты элементов и подсистем всех уровней опти-
мальны по критериям, соответствующим системам более вы-
сокого уровня, то вся система оптимальна. Это означает, что,
хотя каждой стадии проектирования и каждой подсистеме авиа-
ционного комплекса либо самолета может соответствовать свой
критерий оценки, все они должны быть непротиворечивы, отвечая
общим целям авиационного комплекса.
Приведем основные правила выбора критериев с учетом осо-
бенностей связей.
Правило 1. При выборе оптимальных параметров опреде-
ленного объекта с фиксированными функциональными связями
необходимо, чтобы критерии, используемые в случае оптимизации
его элементов и подсистем, являлись показателями качества со-
ответствующих систем более высокого уровня.
Правило 2. В случае оптимизации параметров объектов,
имеющих прямые функциональные связи, необходимо, чтобы эти
2 С. М. Егер и др. 33
объекты были оптимальны по критерию оценки системы, функции
которой они выполняют. '
Правило 3. При выборе оптимальных параметров объекта,
определяющих иерархические функциональные связи, в качестве
критерия следует принимать показатель качества системы высшего
уровня, ограничивающий рамки влияния этих параметров.
Под функциональными связями здесь понимаются такие,
которые определяют возможность выполнения системой своих
функций.
Математическое моделирование проектных задач с использо-
ванием ЭВМ является важнейшей составной частью методологии
системного проектирования. О роли моделирования в инженерной
деятельности и видах моделей говорилось в разд. 2.1.
Моделирование предполагает построение модели и ее исследо-
вание, включающее отыскание допустимых решений, анализ
чувствительности модели и оптимизацию. Построить модель си-
стемы — это значит дать ее количественное описание с помощью
системы уравнений, связывающих параметры и характеристики
системы. Под параметрами системы мы понимаем независимые пе-
ременные и их численные значения. Синонимом слова «параметр»
является слово «аргумент». Характеристики — это переменные
и их численные значения, зависящие от значений пара-
метров, а также от значений параметров и самих характеристик.
Например, геометрические параметры самолета, такие как удли-
нение, относительная толщина, стреловидность крыла и т. д.,
определяют важную аэродинамическую характеристику — коэф-
фициент лобового сопротивления. Он, в свою очередь, зависит от
скорости полета самолета, являющейся его характеристикой.
Синонимом слова «характеристика» является слово «функция».
Отметим, что в иерархических системах понятия «параметр» и
«характеристика» имеют относительный характер, поскольку па-
раметры верхнего уровня при переходе к нижнему уровню обычно
превращаются в характеристики.
Построение математической модели начинается с формализо-
ванного описания проектируемого объекта, которое в общем слу-
чае представляет собой смысловое выражение его модели. Для
этого вначале целесообразно выявить параметры, которые могут
оказать существенное влияние на результаты моделирования.
Это весьма ответственный этап деятельности проектировщика,
носящий творческий характер, поскольку определение суще-
ственности в значительной степени зависит от стадии проектиро-
вания, типа решаемой задачи (ее постановки), а также в не мень-
шей степени от опыта проектировщика и наличия априорных
сведений о проектируемом объекте.
Количество таких параметров на определенном этапе проекти-
рования должно быть таким, чтобы набор их конкретных значений
давал достаточную информацию для принятия необходимых на
рассматриваемом уровне разработки проекта решений.
34
После составления перечня существенных параметров при-
ступают к следующему этапу разработки модели — установлению
отношения (связей) между параметрами, а также между пара-
метрами и характеристиками. При этом важно из всего многооб-
разия таких отношений выделить наиболее существенные, позво-
ляющие получить необходимую информацию о возможности реа-
лизации тех или иных проектных концепций для удовлетворения
целей проектирования, а также меру эффективности этих кон-
цепций.
При рассмотрении отношений может выясниться, что некоторые
параметры не удается при существующем уровне знаний связать
отношениями с характеристиками и другими параметрами. В этом
случае их приходится исключать из формализованного описания
модели, оставляя для последующего рассмотрения. Следующим
этапом построения модели является ее математическое описание.
Для математического описания самолета обычно используются
конечные алгебраические и трансцендентные уравнения, обыкно-
венные дифференциальные уравнения и уравнения в частных про-
изводных. Алгебраические и трансцендентные уравнения обычно
применяются для описания геометрических, массовых, аэродина-
мических и частично энергетических отношений между характе-
ристиками и параметрами самолета. Обыкновенными дифферен-
циальными уравнениями описываются траекторные параметры
и динамические характеристики. Для описания некоторых дина-
мических и прочностных характеристик, в частности связанных
с определением тепловых потоков на поверхности самолета,
используются дифференциальные уравнения в частных произ-
водных.
В зависимости от того, учитывается ли фактор времени в пара-
метрической модели, различают динамические и стационарные
модели. Последние, естественно, более просты для исследования
и поэтому используются чаще.
Заключительный этап построения модели — разработка вы-
числительного алгоритма, т. е. определенной последовательности
расчетов и логических процедур для решения поставленной за-
дачи, проводимых на основе определенных методов и математиче-
ской модели системы.
Осуществив программную реализацию алгоритма, математи-
ческую модель необходимо проверить на соответствие моделируе-
мому объекту путем решения тестовой задачи. В процессе испыта-
ния модели устраняют возможные ошибки, уточняют и при воз-
можности упрощают математическое описание, сокращают число
независимых (управляющих) параметров.
2.4. ТИПЫ ПРОЕКТНЫХ МОДЕЛЕЙ САМОЛЕТА
В соответствии с методологией системного проектирования
бессмысленно пытаться разработать некую универсальную модель
проектирования самолета, охватывающую все типы задач, свя-
2* 35
Рис. 2.4. Технико-экономические ха
рактеристики пассажирского само'
лета
занных с разработкой проекта.
Типы моделей, их полнота и до-
стоверность зависят как от
этапа разработки проекта, по-
становки задачи проектирова-
ния, так и от типа разрабаты-
ваемого самолета.
При разработке проектных
моделей самолета используется
блочный принцип моделирова-
ния. Суть этого принципа за-
ключается в том, что отдель-
ные группы связей, характе-
ризующие геометрические, ве-
совые, аэродинамические, эко-
номические, компоновочные и
другие свойства самолета, объединяются в отдельные си-
стемы уравнений — блоки. Достоинством такого подхода являет-
ся возможность параллельной разработки модели специа-
листами, компетентными в определенных областях, большая
гибкость в построении расчетных моделей при различных поста-
новках задачи проектирования, а также определенные преиму-
щества при программной реализации моделей для решения задачи
на ЭВМ (см. гл. 21).
На этапе «внешнего» проектирования, где роль математиче-
ского моделирования особенно велика, в основном используются
модели эффективности и экономические модели, описывающие
функционирование большого числа различных систем и элемен-
тов — от систем административного управления до отдельных
технических устройств. Так, например, на этапе «внешнего»
проектирования транспортного самолета рассматривается модель
всей системы воздушных перевозок, включающая субмодели су-
ществующего и прогнозируемого грузооборота (распределение
грузов по массе, габаритам, по временной и пространственной
шкалам); субмодели, имитирующие пропускную способность аэро-
портов и возможности аэродромных служб, служб управления
воздушным движением, ремонтно-эксплуатационной базы; суб-
модели, описывающие программу серийного производства вновь
создаваемого самолета с учетом ее реализуемости промышлен-
ностью и т. д. Самолет в этих моделях представляется набором
технико-экономических характеристик, пример графического пред-
ставления которых дан на рис. 2.4. Экономические характеристики
самолета моделируются зависимостью себестоимости авиаперевозок
от дальности полета a (L), Техническое функциониро-
вание самолета на авиалинии моделируется зависимостями массы
коммерческой нагрузки и рейсовой скорости от дальности. На гра-
фике также приведена зависимость взлетной массы от дальности
36
полета. В задачах «внешнего» проектирования независимыми
переменными (параметрами) являются летно-технические харак-
теристики самолета, а критерии оптимальности формируются
из характеристик системы в целом (степень эффективности выпол-
нения поставленной задачи при ограниченных ресурсах). В рас-
сматриваемом примере транспортной системы определяются такие
характеристики, как общее количество самолетов (потребный парк),
диапазон дальностей полета, крейсерская скорость, грузоподъем-
ность, длина взлетно-посадочной полосы и некоторые другие,
позволяющие сформулировать ТЗ на проектирование.
Как правило, на этом уровне весовые характеристики самолета
моделируются относительной величиной массы пустого снаряжен-
ного самолета; аэродинамические — полетным аэродинамическим
качеством; характеристики силовой установки — удельным рас-
ходом топлива. Все эти характеристики определяются на основе
статистической обработки данных по прототипам с учетом прогноза
развития к определенному сроку.
Модели самолета, используемые на этапах «внутреннего» про-
ектирования, отличаются гораздо большей степенью детализации
и полнотой учета разнообразных факторов, влияющих на выбор
проектно-конструкторских решений.
В соответствии с блочным принципом моделирования отдельные
группы отношений между параметрами и характеристиками само-
лета, отражающие различные стороны его структуры и функциони-
рования и базирующиеся на различных научно-технических дисци-
плинах, объединяются в ряд субмоделей. Назовем основные из них.
Геометрические модели описывают отношения между пара-
метрами самолета и характеристиками его формы и размеров.
С их помощью по выбранной компоновочной схеме и некоторым
обобщенным параметрам определяется геометрия самолета — его
обводы, площади, объемы, сечения крыла, оперения и фюзеляжа.
Данные этой модели используются для весовых, аэродинамических
и прочностных расчетов, компоновки самолетов, графического
отображения результатов проектирования, а также разработки
технологической оснастки и программ для станков с числовым
программным управлением.
Весовые модели объединяют систему отношений между гео-
метрией самолета и особенностями его конструктивно-силовой
схемы, структурой и размещением оборудования и снаряжения,
условиями нагружения и массой всего самолета и отдельных
его элементов.
Аэродинамические модели связывают геометрию самолета и его
аэродинамические характеристики (коэффициенты аэродинамиче-
ского сопротивления, подъемной силы, моментов и величины сил
и моментов для различных условий полета).
Модели силовой установки описывают отношения между га-
баритами, рабочими параметрами двигателя и его тягой и расхо-
дом топлива для различных условий полета.
37
Динамическая модель самолета описывает его летные и мане-
вренные характеристики (диапазон скоростей, дальность, скоро-
подъемность, потолок и т. д.) в функции его аэродинамических,
весовых характеристик и характеристик силовой установки.
Модели устойчивости и управляемости связывают характери-
стики статической и динамической устойчивости и управляемо-
сти самолета относительно трех осей с его аэродинамическими, ве-
совыми (инерционными) и геометрическими характеристиками.
Прочностные модели позволяют выявить связи между аэро-
динамическими, весовыми и геометрическими характеристиками
самолета и характером нагружения силовых элементов конструк-
ции, уровнем напряжения в них и величинами деформации.
Модели компоновки и центровки позволяют произвести взаим-
ную пространственную увязку основных компонентов самолета.
Они отражают сложные связи характеристик устойчивости и
управляемости, аэродинамических и весовых с характеристиками,
диктуемыми эксплуатационными и другими требованиями.
Экономические модели отражают связи технических параме-
тров самолета с затратами на его проектирование, изготовление
и эксплуатацию.
Перечисленные модели базируются на различных методах ве-
сового, аэродинамического расчета самолета, прочностных рас-
четов и расчетов устойчивости и управляемости, расчетов силовой
установки и т. д. Применение тех или иных методов, отличающихся
степенью точности, зависит от стадии разработки проекта и типа
решаемой задачи. При этом решающими факторами, определя-
ющими выбор того или иного метода, является, с одной стороны,
наличие исходной информации, позволяющей применить для реше-
ния рассматриваемой задачи тот или иной метод, и, с другой сто-
роны, целесообразные масштабы модели. При этом учитываются
затраты машинного времени при реализации задачи на ЭВМ и
трудоемкость обработки и анализа результатов расчета за при-
емлемое время. Поскольку информация о проектируемом объекте
появляется в процессе проектирования по мере углубления дета-
лизации проработки проекта, модели проектирования самолета
развиваются и уточняются как на различных этапах проектиро-
вания, так и внутри каждого этапа.
На начальном этапе проектирования, когда информация о про-
ектируемом самолете в основном ограничена его потребными ха-
рактеристиками и прошлым опытом проектирования самолетов
аналогичного назначения, применяются полуэмпирические методы
расчета самолета, базирующиеся на упрощенных теоретических
формулах и аппроксимации, отражающих важнейшие параметри-
ческие связи. В некоторых случаях в эти формулы вводят попра-
вочные коэффициенты, получаемые на основе обработки стати-
стического и экспериментального материала.
Так, в основе методов весового расчета лежит вычисление
с помощью приближенных параметрических уравнений массы
38
материала силовых конструкций, воспринимающих изгибающий
момент и перерезывающую силу. Масса остальных элементов (сты-
ковые узлы, вырезы, механизация и т. д.) определяется с помощью
статистических зависимостей и эмпирических коэффициентов, при-
нятых по характеристикам реальных конструкций.
Предварительные методы аэродинамического расчета бази-
руются на упрощенных теоретических формулах, связывающих
аэродинамические характеристики наиболее крупных частей са-
молета (крыла, фюзеляжа, гондол двигателей, оперения) с основ-
ными геометрическими параметрами этих агрегатов (X, с, %, т],
Ц, 5МИД, ...), а также числом М полета. Интерференция учиты-
вается приближенно с помощью эмпирических соотношений,
полученных по результатам эксперимента.
Упрощенный подход к определению характеристик силовой
установки состоит в аппроксимации тяг и удельных расходов
Р, сР = f (М, Н, пДр, ...), рассчитанных достаточно строгими тео-
ретическими методами для семейства однотипных двигателей,
имеющих одинаковый уровень технического совершенства. Полу-
ченные в результате аппроксимации простые параметрические
соотношения затем корректируются в соответствии с характери-
стиками силовых установок реальных самолетов.
Достаточно хорошо разработаны инженерные методы расчета
летных характеристик самолета и оценок эффективности.
Наименее изучены методы математического описания компо-
новки самолета, особенно «внутренней» компоновки. Это объяс-
няется трудностью формализации учета весьма большого числа
факторов, учитываемых в процессе компоновки самолета.
Применение перечисленных выше методов в рамках единой
модели позволяет осуществлять поиск комбинаций параметров,
формирующих облик самолета. Когда определены параметры са-
молета первого приближения, появляется возможность уточнить
расчетную модель путем использования более строгих теоретиче-
ских зависимостей, отражающих физику моделирующих процес-
сов, а также возможность учета дополнительных факторов, инфор-
мация о которых появилась в процессе разработки проекта.
Отметим, что при разработке принципиально новых самолетов,
то есть в условиях отсутствия прошлого опыта либо результатов
предварительных исследований, без физического моделирования за-
дача формирования облика самолета подчас становится неразреши-
мой. Имея модель, адекватно отображающую реальный объект,
можно перейти к решению задач, связанных с поиском допустимых
или оптимальных параметров проектируемого объекта.
Как следует из приведенного выше краткого описания методо-
логии системного проектирования, практическая реализация ее
невозможна без широкого применения ЭВМ. Эта методология
стимулировала развитие методов автоматизированного проекти-
рования и конструирования на базе систем автоматизированного
проектирования.
39
Глава 3
КРИТЕРИИ И МЕТОДЫ ОЦЕНКИ ПРОЕКТНЫХ
И КОНСТРУКТОРСКИХ РЕШЕНИЙ
3.1. КРИТЕРИИ ОЦЕНКИ ПРОЕКТНЫХ
И КОНСТРУКТОРСКИХ РЕШЕНИЙ
Важнейшей составной частью оптимального проектирования
является выбор критериев оценки решений. Он возникает каждый
раз, когда необходимо сделать оценку вариантов и выбрать один
из них. От того какой принят критерий зависит не только числен-
ное значение параметров и характеристик, но и судьба проекти-
руемого или построенного самолета вообще. Неудачно выбранные
критерии могут привести к неправильной оценке самолета.
Первые самолеты оценивались по отдельным характеристикам.
Самолет считался лучшим, если имел по сравнению с прототи-
пами большую скорость, лучшую весовую отдачу при равной
дальности полета и т. д. Распространенным в 30-х годах было
сравнение самолетов по числам Эвер/шнга (числам скорости,
дальности, высоты). В дальнейшем советским ученым В. С. Пыш-
новым были предложены аналогичные числам Эверлинга коэф-
фициенты, позволяющие судить о величине полезной нагрузки,
массе конструкции, аэродинамическом совершенстве самолета,
о том, стремился ли конструктор к получению максимальной
скорости, максимальной грузоподъемности или принимал ком-
промиссное решение. Коэффициенты Пышнова давали также воз-
можность оценить расход топлива на тонна-километр перевози-
мого груза и качество воздушного винта.
Числа Эверлинга, как и коэффициенты Пышнова, использова-
лись при проектировании самолета на основе статистического
выбора основных его параметров и характеристик и в свое время
играли прогрессивную роль.
Числа Эверлинга и коэффициенты Пышнова давали возмож-
ность оценивать и сравнивать самолеты по различным критериям
(кроме экономических), но не давали возможности оценить само-
лет в целом.
Для такой оценки необходим единый, достаточно общий крите-
рий, где будут отражены все интересующие конструктора и экс-
плуатационника характеристики и параметры самолета. Этот
критерий не должен быть искусственным. Необходимо, чтобы он
выражал главную задачу, ради которой создается летательный
аппарат. Для военного самолета это боевая эффективность или
степень (полнота) выполнения боевого задания, для гражданского
самолета — экономичная перевозка пассажиров и грузов при
заданном уровне комфорта и выполнении всех требований безопас-
ности и регулярности полетов.
'Ъ качестве критерия сравнительной оценки самолетов гра-
жданской авиации Е. А. Овруцкий принимает себестоимость тон-
40
на-километра как величину, непосредственно отражающую не-
обходимые издержки на создание и эксплуатацию самолета. Этот
критерий является достаточно общим и в то же время не слишком
сложным, вполне доступным при проектировании самолета. Себе-
стоимость тонна-километра учитывает весовые характеристики
самолета и его частей, характеристики двигателей (тягу, удель-
ный расход топлива, стоимость, ресурс), аэродинамические харак-
теристики самолета (через массу топлива), режим-полета (V, Н, L),
стоимость и ресурс конструкции самолета, расходы на проекти-
рование самолета, на содержание летного состава и бортпровод-
ников, цену топлива, аэропортовые расходы, среднегодовой коэф-
фициент загрузки (см. ниже).
Более общим экономическим критерием, по сравнению с себе-
стоимостью тонна-километра, является критерий, предложенный
Д. Л. Томашевичем. Он имеет вид
т| = Р/В,
где Р — величина, определяющая общественную полезность или
целевую отдачу летательного аппарата; В — затраты на изготов-
ление летательного аппарата и поддержание его работоспособ-
ности в период эксплуатации.
Критерий Томашевича применим к любым летательным аппа-
ратам. В приложении к самолетам для народного хозяйства рас-
сматриваемый критерий представляет не что иное как величину,
обратную полной себестоимости тонна-километра.
Одним из распространенных заблуждений является оценка
и сравнение самолетов без учета их взлетно-посадочных харак-
теристик, от которых в значительной мере зависят взлетная масса
и размеры крыла. О. К- Антоновым предложен критерий, который
призван исправить этот недостаток. Критерий имеет вид
а* = п/Авпп>
где а — некоторый коэффициент, равный 30 коп/(т-км); Бвпп —
потребная длина взлетно-посадочной полосы в км.
В случае сравнения самолетов при постоянных значениях
дальности полета, крейсерской скорости, полезной нагрузки,
стоимости и ресурса частей, а также при заданной длине взлетно-
посадочной полосы, экономические критерии трансформируются
в более простой критерий — взлетную массу самолета. Наилучший
вариант соответствует минимуму взлетной массы самолета при
прочих равных условиях. Во многих случаях весовой критерий
существенно упрощает решение задач по оптимизации параметров
и проектно-конструкторских решений.
Изложенное позволяет сформулировать следующие основные
требования к критериям оценки вообще и самолетов в частности:
— критерий должен быть измеряемой (счетной) величиной,
способ расчета которой известен;
41
— критерий должен учитывать основную цель, ради которой^
создается объект (самолет), а также условия и ограничения экс- j
плуатации;
— критерий должен включать те параметры и характеристики
объекта, влияние которых требуется оценить или которые необ-
ходимо оптимизировать;
— необходимо, чтобы на каждом уровне принятия решения
(на каждой стадии проектирования) критерии были непротиворе-
чивыми;
— желательно, чтобы на всех стадиях проектирования кри-
терий был единственным.
Последнее требование выражено в виде пожелания, так как
иногда трудно отдать предпочтение какому-либо единственному
критерию и желательно знать решения по нескольким возможным
критериям. Принятие компромиссного решения в этих случаях
представляет самостоятельную проблему. Один из первых мето-
дов решения многокритериальных задач предложил итальянский
математик Парето. Его метод основан на следующих допущениях:
— эффективность системы возрастает, если возрастает эффек-
тивность по всем критериям (по сравнению с некоторым начальным
состоянием);
— эффективность системы увеличивается, если улучшаются
значения одного или нескольких критериев, а значения остальных
не изменяются.
Состояние, при котором нельзя больше улучшить значение
хотя бы одного из критериев оценки, не ухудшая значения хотя бы
одного из других критериев, свидетельствует о достижении опти-
мума Парето.
Все известные критерии можно систематизировать по различ-
ным признакам, например, по содержанию (технические, экономи-
ческие, военные, социальные, смешанные, и т. д.), по способу
исчисления (детерминированные, вероятностные), по структуре
(в виде суммы, произведения, дроби).
Одним из наиболее распространенных критериев в самолето-
строении является критерий типа «стоимость—эффективность».
Требуется найти параметры самолета, соответствующие либо
наибольшей эффективности его при заданной стоимости, либо,
наоборот, соответствующие минимальной стоимости (самолета,
программы, операции и т. п.) при фиксированном уровне эффек-
тивности системы (самолета или парка самолетов с учетом назем-
ных средств обеспечения). Требование найти максимальную эффек-
тивность при минимальных затратах не может быть реализовано.
Рассмотрим расчет критерия оценки транспортных самоле-
тов — приведенных затрат, в основе которых лежат себестои-
мость тонна-километра и капитальные вложения.
Приведенные затраты в коп/(т-км), выраженные относительно
одного самолета:
Апр — А Ц- Алан, вл-
42
Здесь а — себестоимость перевозок, коп/(т-км); акап>вл— ПРИ'
веденные капиталовложения, коп/(т-км).
Себестоимость перевозок рассчитывается по формуле
k т Ум’ ' '
лкомшком v рейс
где А — расходы на эксплуатацию самолета в течение летного
часа, руб/ч; тком — коммерческая нагрузка, соответствующая
данной дальности полета, т; Урей0 — рейсовая скорость самолета,
км/ч; kK0M — коэффициент коммерческой нагрузки, учитывающий
среднегодовую неполную загрузку самолета из-за сезонности пере-
возок.
Значения kKCM даны в табл. 3.1.
Рейсовая скорость самолета или скорость полета по расписанию
учитывает потери времени на следующие этапы полета: запуск и
прогрев двигателей, рулежка до ВПП перед взлетом и после
посадки, взлет и набор высоты, маневрирование в воздухе после
взлета и перед посадкой, снижение и посадка. Для сверхзвуковых
самолетов дополнительно учитывается время на разгон самолета
до крейсерской сверхзвуковой скорости полета и на торможение.
Рейсовая скорость определяется по следующей формуле:
у__________________L_______________
РеЙ0“ Д-^.пУ^рейс + 'в.п + Д'м ~
£^крейс ,о
~~ L — L -A-It 4-ДМУ * ’
в.п~(.в.п~ м/ крейс
где L — расстояние между аэропортами взлета и посадки, км;
/в>п — время, затрачиваемое на взлет, набор высоты, снижение
и посадку, ч; Лв.п — горизонтальная проекция пути, проходимого
самолетом за время /в.п, км; Укрейс— крейсерская скорость
полета, км/ч; Д/м — время, затрачиваемое на запуск и прогрев
двигателей, на рулежку и маневрирование после взлета и перед
посадкой, ч.
Время на набор высоты и снижение, на разгон самолета до
крейсерской скорости и торможение и соответствующая этому
времени горизонтальная проекция пути самолета берутся из
аэродинамического расчета. Для реактивных магистральных само-
летов Д/м = 0,167 ч (10 мин).
Для приближенных расчетов можно принимать (в км/ч)
у_______________________7Укрейе ..
реЙС £/У«рейс + Д' ~ i + Д/Укрейс ' 1 }
Для дозвуковых самолетов (в ч) Д/= 0,16 + 1,85-10-4 №
(Н — высота полета, км).
Для сверхзвуковых пассажирских самолетов Д/ — 0,37 ...
0,40 ч, если Мкрей0 = 2,2 ... 2,3.
43
Рис. 3.1. Типовая зависимость величины
коммерческой нагрузки пассажирского само-
лета от дальности полета (Драсч соответ-
ствует минимуму себестоимости перевозок):
1 — ограничение по числу пассажирских мест
и объему багажных и грузовых помещений; 2 —
ограничение по максимально допустимой взлетной
массе; 3 — ограничение по максимально возмож-
ному запасу топлива
Максимальная коммер- -
ческая нагрузка (кг) опре-
деляется в зависимости от
числа пассажирских мест
и емкости багажных и
грузовых помещений на
самолете:
^ком — 90/гпас 4~
+290(v6ar-^V
(3-5)
где ппас — число пасса-
жирских мест; 90 — сред-
няя масса пассажира(75 кг)
и личного багажа пасса-
жира (15 кг); 290 — сред-
няя удельная масса почты
и груза, кг/м3; V6ar —
объем багажных и грузовых помещений, м3; 120 — средняя удель-
ная масса багажа пассажиров, кг/м3.
Максимальную коммерческую нагрузку пассажирский самолет
может перевозить на определенную, так называемую расчетную
дальность, зависящую от максимальной взлетной массы и от запаса
топлива на самолете. При заданной максимальной взлетной массе
полет на дальность, большую расчетной, выполняется с уменьшен-
ной коммерческой нагрузкой вследствие соответствующего увели-
чения запаса топлива.
Типовой график, показывающий зависимость величины коммер-
ческой нагрузки пассажирского самолета от дальности полета,
показан на рис. 3.1.
Расходы на эксплуатацию самолету в течение одного летнего
часа А состоят из расходов на амортизацию самолета Ла, с и дви-
гателей Ла.д, расходов на текущий ремонт и техническое обслу-
живание самолетов Лт. 0. с и двигателей Лт>0. д, стоимости расхо-
дуемого топлива Лт, заработной платы экипажа с начислениями
Л3. п и косвенных («аэропортовых») расходов Вап, учитывающих
затраты на содержание аэропортов и различных административно-
технических служб авиакомпании. Таким образом, в руб./ч
— Ла. с + Ла. д + Лт. о. 0 4- Лт. о. д + Лт 4- Л3. п 4- Вая. (3.6)
Расходы на амортизацию самолета (руб/ч):
ла. 0 = ^с0-1 + йр-с(Г^-Я- , (3.7)
где ki — 1,05 — коэффициент, учитывающий непроизводственный
налет (тренировки, обучение, облет и т. п.); Сс — стоимость (руб.)
самолета без двигателей:
С с = fecep. ckV [тдуст (40 4- 4 Ю'^пу^) -у- 1 +500/тпуСт
13. п
4-Ю4
44
Здесь шпуст в кг; йсер. с и kv — коэффициенты, учитывающие
серийность и расчетную скорость полета проектируемого самолета,
, _ / 35-105 \о,4
#сер. с — ( I
капуст /1 Дс /
(3-9)
^=4-<1+к«^/80°)’ (зл°)
где J] пс — число самолетов в серии; Ркрейс — крейсерская ско-
рость, км/ч.
В формуле (3.7) коэффициент &р>0— отношение стоимости
одного капитального ремонта к первоначальной стоимости само-
лета,
йр. с = 0,11 + 2-104/Со. (3.11)
В (3.7) Тс — амортизационный или полный срок службы самолета,
ч; /с — срок службы самолета между капитальными ремонтами, ч.
Для магистральных самолетов в среднем Тс — 30 000 ч, tc =
= 5000 ч. Для самолетов местных воздушных линий Тс = 25 000 ч,
tc ~ 5000 ч.
По аналогии с (3.7) рассчитываются и расходы (руб./ч) на
амортизацию двигателей
4. д = Мдвсдв , (3.12)
1 ДВ
где k2 = 1,07 — коэффициент, учитывающий непроизводственный
налет; пдв — число двигателей, установленных на самолете;
СдВ — стоимость одного двигателя, руб.
Для ТРДД можно принимать
Сдв “ ^сх^сер. дв^0$ (34 - 0,4 (3.13)
где Рщ — взлетная тяга одного двигателя, даН; йсх и &сер.дв —
коэффициенты, учитывающие тип (схему) двигателя и серийность,
йсх = 0,85 для ТРД; /гсх = 1 — для ТРДД при М < 1; йсх =
= 1,5 — при М > 1;
£Оер.да = [1500/(2 ПдВ)]0-25. (3.14)
Здесь J] лдв — число двигателей в серии.
Стоимость одного ТВД вместе с воздушным винтом в среднем равна
Ствд = 1,36&оер. даУ0< (40 - 0,52 ЖГ), (3.15)
где Noi — взлетная мощность одного двигателя, кВт.
В формуле (3.12) коэффициент &р.д — отношение стоимости одного
капитального ремонта двигателя к его первоначальной стоимости.
Для ТРД и ТРДД
^р. д = 0,15 +4,15-10-8[1 -0,2(Тдв//дв-1)]Тдв, (3.16)
где Удв — амортизационный или полный срок службы двигателя;
/дв — срок службы двигателя между капитальными ремонтами.
45
Для расчетов принимается Тяв = 6000 ч и /дв = 3000 ч, т. е.
считается, что за свой срок службы двигатель ремонтируется один
раз.
Для ТВД можно принимать /гр. д 0,6.
Расходы на текущий ремонт и техническое обслуживание само-
лета, руб./ч:
Ат. о. с = ^зтпуСТ- Ю"3 (4,4 — 0,1 VmnyoT 4- 0,15- (3.17)
где k3 = 1 — для дозвуковых самолетов с ТРД и ТРДД; k3 =
= 1,13 — для самолетов с ТВД; k3 = 2 — для сверхзвуковых
пассажирских самолетов.
Расходы на текущий ремонт и техническое обслуживание
двигателей, руб./ч:
Д ______ 0, 16^2^4^ДВ jApgi . q,
нт.о.д- 1+7.10~5Тдв ’ Vх10/
где k2 = 1,07; ~ 1 для ТРД и ТРДД дозвуковых самолетов;
/г4 = 1,5 — для двигателей СПС, а также для ТВД.
Расходы на заработную плату экипажа Л3. п (руб./ч) рассчиты-
вают исходя из числа членов летно-подъемного состава (летчики,
штурманы, бортинженеры и радисты) пл. п. с и числа бортпроводни-
ков пва: _ _
А3. п = Сд. П. С^Л. П. С + ^бгЛ>П‘ (3> 19)
Здесь Сл. я.о и Сбп — средняя часовая заработная плата летно-
подъемного состава и бортпроводников. Значения Сл.п. с и Сбп
при среднем налете экипажа 550 ч в год даны в табл. 3.1.
Таблица 3.1
Тип самолета ^ком Сл. п. С’ руб./ч Сбп- руб./ч fee kl
Магистральный дозвуко- вой Магистральный сверхзву- ковой 0,58 11 4 2700 0,42
0,65 20 7,5 2700 0,42
Местных авиалиний 0,65 11 4 2600 0,53
Легкий многоцелевой (^пас 6) 0,75 8 — 2000 0,61
Стоимость расходуемого в полете топлива, руб./ч:
Лт = 0,051feBmT. расх^рейс/£расч, (3.20)
где щт.Расх — масса расходуемого в полете топлива, кг; ее значе-
ние берут из аэродинамического расчета с учетом дополнительного
расхода за время Д/ [см. формулу (3.4)]; 0,051 — цена топлива
(с учетом непроизводственных затрат на опробование двигателей,
на тренировочные и контрольные полеты), руб./кг; /?в = 1,0 —
46
для дозвуковых самолетов с ТРД и ТРДД, 1,03 — для самолетов
с ТВД, 1,06 — для сверхзвуковых пассажирских самолетов.
Косвенные (аэропортовые) расходы, руб./ч:
5ап = 0,083mg-7, (3.21)
где т0 — в кг.
Приведенные капиталовложения [коп./(т-км) ], входящие
в (3.1),
_ 10»£ (1,05Сс4- 1,03Сдв«дв6) /о 29\
кап. вл Йком^ком^рейс^год
Здесь Е — нормативный коэффициент эффективности капитало-
вложений; Е — 0,12 1/год (Е — 1/Ток, гДе Т'ок— нормативный
срок окупаемости капиталовложений в годах); Сс и Сдв — стои-
мость (руб.) самолета и двигателя [формулы (3.8), (3.13), (3.15)];
&КОМ, mK0M, ^peiic — см (3.2); b — отношение числа двигателей,
предназначенных для эксплуатации самолета с учетом замен,
к числу двигателей, установленных на самолете; по формуле
Е. А. Овруцкого
Ь = 1,17 + 0,295ГОД//ДВ. (3.23)
Здесь и в (3.22) Вгод — налет часов на самолет в год:
R — h..- LpaC4
год %асч+*7Урейс’
(3.24)
где Ьрасч — расчетная дальность полета для проектируемого само-
лета, км; Vneitc — рейсовая скорость, км/ч; k6, — коэффициенты
(см. табл. 3.1).
3.2. МЕТОД ГРАДИЕНТОВ ВЗЛЕТНОЙ МАССЫ.
ВЕСОВАЯ И ЭКОНОМИЧЕСКАЯ ОЦЕНКА ПРОЕКТНЫХ
И КОНСТРУКТОРСКИХ РЕШЕНИЙ
3.2.1. Понятие о коэффициентах роста и градиентах
взлетной массы самолета
В процессе проектирования самолета постоянно приходится
сталкиваться с решением задач на противоречия массы и аэродина-
мического сопротивления, массы и ресурса, массы и стоимости кон-
струкции и т. д. Изложению методики решения подобных задач и
посвящен разд. 3.2.
На всех стадиях проектирования самолета обычно вносятся раз-
личные изменения и улучшения, сравниваются варианты конструк-
торских решений. Вопрос состоит в том, как достаточно корректно
произвести эти операции, как связать частные изменения различ-
ных величин с общим изменением критерия оценки самолета?
Решение может дать приближенный метод, основанный на
линеаризации малых (конечных) приращений. Наиболее просто
задача решается в тех случаях, когда за критерий оценки прини-
мается величина взлетной массы самолета.
47
Метод основан на следующих допущениях:
— частные (локальные) изменения, если они вносятся одновре-
менно, непосредственно не связаны между собой, являются неза-
висимыми и определяются конструктором;
— внося какие-либо изменения в проект, конструктор стре-
мится сохранить заданную целевую нагрузку и основные летные
данные согласно ТЗ или ТТТ; <^В
— изменения малы, не превышают 10 ... 15 % исходного значе-
ния (чем больше величина изменения, тем больше погрешность
метода — см. ниже).
На основании первого из этих допущений полный дифференциал
критерия оценки (а) имеет вид: 1Н
*=<* + <*•+••+<“«»• О-!») I
где i — параметр.
Считая, что дифференциалы и конечные приращения эквива-
лентны, уравнение (3.25) можно записать так: Щ
А“=<"+<"» +-•-+<"» о-26) 1
Возьмем в качестве критерия взлетную массу самолета (т0), Я
а в качестве изменяемых независимых параметров — дополнитель- Я
ную массу какой-либо части самолета (Дтдоп), приращение силы Д’
лобового сопротивления (ДХ0), приращение еще некоторого пара- Я
метра (Дг„), влияющего на т0. Тогда уравнение (3.26) примет вид: Щ,
Am"=^;Am»™+'§’AX"+•••+тт7а‘“- <3-27) |1
Здесь слагаемые правой части и есть градиенты взлетной массы В
самолета: -Ж
д-—°- ДтгдоП = grad/и0 — в связи с появлением дополни- Д
тельной массы; Я
•4^- ДХ0 = grad/По — в связи с появлением дополнитель- Ж
</Ао Ж
ного лобового сопротивления, и т. д. Ж
В данном случае grad m0 являются однонаправленными вектора- Ж
ми. Производные принято называть коэффи- Ж
циентами роста взлетной массы. «
Простота и удобство метода градиентов взлетной массы состоит I
в том, что на всех стадиях проектирования самолета коэффициенты 1
роста являются константами и могут быть заранее вычислены,
а конечные приращения (Дтдоп, ДХ0 и т. д.) целиком определяются *
конструктором. U
Метод градиентов позволяет решать весьма большой круг задач,- ;г
1) определять влияние на критерий оценки самолета каждого
из переменных параметров, выявить, какой из них оказывает
48
Рис. 3.2. Зависимость взлетной мас-
сы самолета от дополнительной
массы:
1 — точное решение по уравнению весо-
вого баланса самолета; 2 — решение
методом градиентов взлетиой массы само-
лета
наибольшее влияние, чтобы направить усилия в первую очередь на
улучшение этой величины. Для решения данной задачи необходимо
найти соответствующие частные производные и принять, что конеч-
ные приращения переменных должны составлять одинаковую,
сравнительно небольшую часть первоначального значения каждой
из них (например, 1 %);
2) определять суммарное, зачастую противоречивое, влияние на
критерий оценки какого-либо числа величин. Практический инте-
рес эта задача имеет при анализе различных вариантов технических
решений, связанных, например, с изменением массы, силы лобо-
вого сопротивления, ресурса и стоимости.
Очевидно, что наилучшим будет тот вариант решения, для
которого имеет место экстремум критерия, например, экстремум
приведенных затрат, т. е. [£(—Аа)]шах или IS (+Аа) ]mln;
3) находить эквиваленты различных пар величин, например
весовые эквиваленты стоимости или ресурса агрегата и т. д. Эта
задача имеет весьма большое практическое значение при исследо-
вании целесообразности проектно-конструкторских решений, свя-
занных, например, с применением более легкой, но более дорогой
конструкции, с уменьшением аэродинамического сопротивления
за счет увеличения массы и т. п. Для решения таких задач необ-
ходимо приравнять нулю пару каких-либо частных приращений
критерия (данная задача рассмотрена ниже). Заметим, что в общем
случае пользуются формулой
2«Аг‘)=0- (3-28)
Решение этой задачи рассмотрено в разд. 3.2.4;
4) пересчитывать значение взлетной массы на новое значение,
пользуясь простой формулой
(Ш(>)н0В = (то)исх ± Ai. (3.29)
Степень погрешности при определении значения (т0)нов зависит
от абсолютной величины приращения параметра Ai (рис. 3.2).
Если величина Ai не превышает 10 % от первоначального
значения параметра, что часто имеет место при рассмотрении
различных модификаций характеристик и параметров самолета, то
с помощью линеаризации уравнения т0 (Ai) по формуле (3.29)
49
значение (т0)нов можно определить с точностью до 1 %. Такая
точность при приближенных расчетах обычно вполне удовлетво-
ряет конструктора.
Таким образом, метод градиентов взлетной массы позволяет
при меньших затратах труда по сравнению с обычным расчетом
новых вариантов самолета найти в процессе проектирования связи
между частными и общими изменениями характеристик, сравнить
между собой частные изменения характеристик при одинаковом
конечном результате, дать оценку целесообразности проектно-
конструкторских решений.
Указанные задачи могут решаться на любом этапе проектирова-
ния опытного образца или при модификациях уже построенного и
эксплуатируемого самолета. При этом ограничения (условия
решения) задач на каждой стадии могут быть различными. Напри-
мер, на стадии предварительных изысканий и эскизного проекти-
рования опытного самолета основными ограничениями являются
как заданные параметры (ЬраОч, тц. н) = const, так и обычно при-
нимаемые (р0, Ро) — const. На более поздней стадии проектирова-
ния или при модификации существующего образца самолета, когда
определены характеристики двигателей, размеры и форма самолета,
ограничением может служить (S, Ро) = const. Кроме того, на
каждой стадии проектирования известно, какие летные данные
должны быть сохранены при изменении других характеристик
самолета. Например, при появлении дополнительной массы агре-
гата или детали, когда требуется сохранить не только прочность
конструкции и расчетную дальность полета, но также и крейсер-
скую скорость, увеличение взлетной массы будет различным при
(р0, Ро) = const и при (S, Ро) = const.
Остановимся на определении некоторых наиболее важных
производных взлетной массы в простейших случаях, когда изме-
няется только какая-либо одна частная характеристика агрегата
(например, масса), а остальные частные характеристики (аэроди-
намические, объем и т. п.) остаются неизменными.
3.2.2. Производная взлетной массы (коэффициент
роста) по дополнительной массе
частей самолета
В процессе проектирования самолета нередко встречается сле-
дующая задача: решено изменить массу какого-либо агрегата,
группы оборудования или нагрузки, сохранив аэродинамические
и другие характеристики самолета. Насколько при этом надо
изменить взлетную массу, чтобы основные летные характеристики
и прочность самолета остались прежними?
Такие задачи характерны для стадии эскизного проектирова-
ния, когда на основе вариаций различных параметров выбираются
основные размеры и рассчитывается масса самолета. Однако и на
последующих стадиях разработки проекта (даже при модифика-
50
циях построенного самолета) эти задачи не исключаются, так как
детальная проработка конструкции самолета обычно сопровожда-
ется некоторыми отклонениями массы агрегатов от их значений,
установленных при эскизном проектировании.
Итак, допустим, что на какой-либо стадии проектирования само-
лета появилась необходимость ввести дополнительную массу тдоП.
Если при изменении массы какого-либо агрегата на (тдоп)1 нужна
еще дополнительная масса (тдОП)2 для исправления возможного
изменения центровки самолета, увеличения жесткости конструк-
ции и т. п., то будем считать, что дополнительная масса тдоп
является суммой всех этих составляющих, т. е. тдоп = (тдоп)1 +
4* (^доп)а 4" • •
Пусть известны зависимости массы всех составляющих от
взлетной массы самолета, а также величины, которые конструктор
считает нужным оставить неизменными, например (р0, Ро) = const
или (S, Ро) = const, или mT = const и пр.
Требуется определить увеличение взлетной массы, необходимое
для выполнения поставленных ограничений (от которых зависит
сохранение летных характеристик), а также для сохранения
прочности конструкции.
Запишем уравнение весового баланса самолета при появлении
дополнительной массы:
/710 = /7? пуст -j- /72т /72ц, в 4" 272сл 4“ 27?доп> (3.30)
где тПуст — масса пустого самолета, тПуст == Л (то); тт — масса
топлива, /72т = (m0); /72ц.н, тсл — целевая и служебная нагруз-
ки, (Шц.н, тсл) да const. Из (3.30) следует, что
272доп — 771ц /72пуст 772т 772ц. н 772сл.
Возьмем частную производную по т0:
<?Шдоп
дпц
дтд
Так как требуется определить производную дт(11дтдГт, то на
основании предыдущего имеем
------------!--------. (3.31)
Л°П 1 —дтд (тпуСТ 4- тт)
Найденная производнаяТиХесть коэффициент роста взлетной
массы в связи с появлением дополнительной массы. Обозначим
для краткости
9т<> _ v
d/пдоп ~ т‘
Численные значения нт могут изменяться от единицы до
бесконечности. Последнее возможно, когда (тпуот 4- тТ) = 1.
51
Если же (тпуот + тт) = 0, то ит = 1. При этом
(/«пуст- пгТ) = const и (т0)нов = (т0)иох ± тдОп, что соответствует
случаю, когда изменяются все летные характеристики самолета и
прочность его агрегатов (этот случай возможен при модификации
построенных самолетов). Важно отметить, что величина хт может
быть больше единицы лишь в том случае, когда с введением допол-
нительной массы конструктор стремится сохранить неизменными
какие-либо свойства самолета — летные данные, прочность и т. п.
Рассмотрим физическую сущность возникновения производной
хт, когда хго > 1.
Допустим, что на проектируемом самолете потребовалось уста-
новить дополнительное оборудование массой тдОп, которое не
ухудшает аэродинамику и не требует увеличения объема самолета.
Необходимо, сохранив основные летные характеристики, полезную
нагрузку, а также прочность агрегатов, модифицировать самолет.
Для сохранения летных характеристик, очевидно, нужно сохра-
нить нагрузку на 1 м2 крыла р0 и тяговооруженность Ро при взлете.
С увеличением массы самолета на тдоп возрастает и нагрузка
на крыло, фюзеляж, шасси и оперение. Следовательно, для сохра-
нения прочности этих агрегатов требуется увеличить размеры
и массу их силовых элементов. Однако для выполнения условия
Ро ~ molS = const необходимо с изменением т0 соответственно
изменить размеры крыла, а при Ро = const — тягу двигателей, что
само по себе повлечет за собой изменение массы крыла и силовой
установки. Далее, с увеличением размеров крыла приходится
увеличить также размеры и массу оперения для сохранения неиз-
менными характеристик устойчивости самолета. Наконец, для
сохранения дальности полета потребуется, очевидно, увеличить и
первоначальный запас топлива, учитывая условие mT = const.
Приведенное увеличение массы отдельных частей самолета и
исходного запаса топлива приведет к увеличению взлетной массы
самолета, которое, в свою очередь, повлечет за собой повышение
нагрузки на агрегаты и увеличение их массы. В результате потре-
буется новое, вторичное увеличение массы агрегатов и топлива.
Процесс заканчивается тогда, когда взлетная масса достигает
значения, полученного из решения уравнения весового баланса.
Таким образом, приращение массы самолета тдоп повышает
взлетную массу на значительно большую величину хттдоп.
Производная dmnyOT/dm0> входящая в (3.31), определяется
по формуле:
дгппуст _ dmKp . дтф . дтоп дтш . дтс. у , дтод, упр
дт0 дт0 '' дт$ дт0 dm0 ~г i
Здесь mKp, тф, топ, тш, тс, у, тоб. упр — масса крыла, фюзеляжа,
оперения, шасси, силовой установки, оборудования и управления.
Весовые формулы крыла и других агрегатов в зависимости от т0
обычно известны (см. гл. 6).
52
При определении производной 6mT/dm0, также входящей
в (3.31), следует учитывать, что масса топлива линейно связана
с взлетной массой, и поэтому дтт1дтй = тт. Для приближенных
расчетов можно использовать следующую зависимость, вытекаю-
щую из формулы Бреге:
Lc р
= +mH,3. (3.32)
Если tnT с 0,2, то формулу (3.32) можно упростить. Раскладывая
второе слагаемое в ряд и ограничиваясь двумя первыми членами
разложения, получим с погрешностью ±2 %
dm l,HcD
+ <3-33>
где 1,1 — поправочный коэффициент; L — расчетная дальность
полета, км; сР, К — средние за полет значения удельного часового
расхода и аэродинамического качества; Урей0 — рейсовая ско-
рость, км/ч.
Приближенно можно считать, что дтпусТ1дт0 ях тпуст. Тогда
формула (3.31), учитывая (3.32), примет простой расчетный вид:
хт = ----=-. (3.34)
д/Пдрп * — ^пуст—
Эта формула может применяться на ранних стадиях проектирова-
ния самолета.
Коэффициент роста хт можно определить также, исходя из
принципа линейного подобия:
1
(3.35)
т 1 — 0,5Йп^пуст — Лт 9
где kn = 2,2 ... 2,6 — коэффициент линейного подобия.
Формула (3.35), как и (3.34), может применяться на ранних стадиях
проектирования.
В табл. 3.2 приведены значения коэффициента роста взлетной
массы хт для пассажирских реактивных самолетов. При (S,
Ро) = const величина хт значительно меньше, чем при (р0, Ро) =
= const. Это объясняется тем, что дополнительная масса при
(ро, Ро) = const влечет за собой увеличение массы всех входящих
в т0 составляющих, кроме коммерческой /иКом и служебной тсл
нагрузок, так как обычно (тком, тсл) ~ const. При (S, Ро) = const
масса силовой установки и часть массы крыла, зависящая от его
площади, остаются неизменными.
Приведенная методика расчета хт не учитывает происхождения
дополнительной массы тДОп. В каком бы агрегате самолета (крыло,
фюзеляж и т. д.) не образовалась дополнительная масса, изменение
взлетной массы будет одинаковым и равным хттДОп. При более
точном расчете хт можно учесть и место образования дополнитель-
ной массы. Расчеты показывают, что чем дальше от центра масс
53
Таблица 3.2
Значения коэффициента роста взлетной массы пассажирских самолетов
Тип самолета Практическая дальность полета при максимальной коммерческой нагрузке, км (Ро. Р«) — = const (5, Рп) = = const
Местных авиалиний 600 . . 1200 2,1 .. 2,2 1,5 ... 1,6
Средний магистральный 1600 . . 2200 2,3 .. 2,6 1,7 ... 1,8
Тяжелый магистральный 4500 . . 5500 3,2 .. 3,8 2,2 ... 2,6
Сверхзвуковой пассажирский 6000 . . 6500 8 ... 10 3,5 ... 4,0
самолета возникает дополнительная масса, тем больше значение
хт. По сравнению с приведенными формулами значение хт можёт
увеличиться на 15 ... 20 %, если дополнительная масса появилась
на конце крыла или фюзеляжа.
Производная хт не только упрощает определение новой взлет-
ной массы на любой стадии проектирования, но и позволяет
судить о весовом совершенстве проектируемого самолета. Оче-
видно, что чем больше величина ит, тем больше требуется затрат
времени и средств на уменьшение массы каждого агрегата, узла и
детали.
3.2.3. Производные взлетной массы (коэффициенты
роста) по аэродинамическим
характеристикам самолета
Рассмотрим, как влияют аэродинамическое качество К, сила
лобового сопротивления Хо (при су = 0) и коэффициент сх0 на
взлетную массу самолета.
Основные исходные условия, как и прежде:
(£расч> тц.н) = const, а также (р0, Ро) = const или (S, Ро) =
— const. Нетрудно показать, что при вариациях Хо, К и сх0
крейсерская скорость за счет изменения высоты полета может
остаться неизменной, т. е. Ркрейс = const, что означает Ррейс =
= const, так как LpaC4 = const.
Задача состоит в том, чтобы подобно найденной в разд. 3.2.2
производной дт0/дт№п определить дт0!дК, дт01дХ0, дт()!дсх0.
Для этого воспользуемся уравнением весового баланса самолета
в относительных величинах (все составляющие массы отнесены
к величине взлетной массы):
1 = /ИПуст -р Щт -р Щц. н -р /йсл,
где тт — как в формуле (3.32).
Следовательно,
Lcp
1 = «пуст + «ц. и + «сл + 1 - е Fpe»c* -Р /Пн. 3,
54
откуда среднее потребное значение аэродинамического качества
равно
Л = -р----—г. (3.36)
Урейс 1п (йПуСТ + Отц. н + «ел + йн. з) ' '
Аэродинамическое качество здесь является не только явной
функцией величин, стоящих в правой части равенства (3.36), но
зависит также и от размеров самолета. Масштабный эффект
проявляется, если изменение т0 связано с изменением размеров
самолета. Масштабный эффект является следствием зависимости
аэродинамического качества от числа Рейнольдса, куда входит
характерный размер самолета (хорда крыла).
Для дозвуковых самолетов К — К,ср ж 12, 5 + 0,0331 то’344 и,
следовательно, (dK/dm0)^. = 0,0114/т£'656, где m0 в кг; для сверх-
звуковых (dKJdmo)* л; О,173/то/3, где т0 в т.
Подъем и снижение дозвуковых самолетов ведутся, как пра-
вило, при аэродинамическом качестве, которое мало отличается от
крейсерского. Поэтому для дозвуковых самолетов с достаточной
ТОЧНОСТЬЮ МОЖНО ПрИНИМаТЬ К = Ккрейс-
Возьмем частную производную К по т0 и запишем ее в виде
обратной, интересующей нас, величины дт01дК. В результате
получим, считая = const,
f T-Ср
хк = дт01дК = -п----х
I vрейс
_______________(д/дт0) (тпуст + йц. н + тсл)___________
[In (ЙпуСт Йц, н + йсл 4- Йн. з)]2 (ЙпуСТ 4" Йц. л + йсл 4- Йн. 3)
— (дК/дт^
(3.37)
В случае, когда размеры самолета не изменяются при измене-
нии аэродинамического качества, т. е. при условии (S, Ро) =
— const производная (дК1дт0)* = 0 и
v _ Урейс
LCD Х
[In (йцуст ~4~ йц, а 4~ йрл ~Р йн. з)]2 (отпуст 4~ йц. д йел 4~ йд, з)
(д/дтд) (ГПцуст 4" йц. д + йсл)
(3.38)
Если относительная масса топлива тт с 0,2, то, учитывая
(3.33), получим более простую формулу
__ Урейс # (1 — йпуст — йц. н — Йел — Йн. 3)2 __
1,1£Ср (<?/дйо) (Йпуст 4~ йц. н 4~ йСл)
Найдем теперь, как изменяется взлетная масса при изменении
илы лобового сопротивления самолета Хо (при си — 0). В этом
55
случае*, как нетрудно показать, можно сохранить скорость полета,
если (сх, су, р, X) = const при М < 1 или (сх, су, р, с“) = const
при М > 1.
Частная производная дт0!дХй выражается через хк:
дт0 __ дт0 1__________нк п
дХв ~ дК ' дХв/дК ~ дХв/дК • Р '
При дозвуковой скорости
X, = X-X,=c,S<i-C.tS4 = ^-S^.
где т, Л; — средние за время полета масса самолета и аэродина-
мическое качество, т At т0 — 0,5тт. раох; (Хаф, сх) — const.
При этих условиях и числе М < 1
(3-41)
(3.42)
числе
(3.43)
(3-44)
массы
а при числе М > 1
дХв / 1 , сх \
дК ~ т № с“ )'
\ у )
Подставляя в (3.40) дХв1дК из (3.41), получим при
М < 1
Это _ ___________.
дХв /п [1/№ 4-сж/(лХэф)] ’
при числе М > 1
= =__________нк
дХ° Х“ т(1/К2 + сх/су) •
Иногда более удобно определять изменение взлетной
не в зависимости от изменения силы лобового сопротивления Хо,
а в зависимости от изменения ее коэффициента сх0.
В этом случае, принимая, как и ранее, при числе М < 1 (сх,
су, Р, ^) — const, а при числе М > 1 (сх, су, р, с“) = const, не-
трудно получить
дтв _ дт0 дК _ „ дК
дсх0 ~ дК дсхв ~ дсхВ •
При М < 1 из уравнения поляры имеем
сх = сх0 + Су1 (лХэф),
откуда су = |/ лХэф (сх — сх0).
* Здесь имеется в виду средняя за время полета сила Хо = cxoS^=(Xo)CP,
так как (сх0, q) « const в течение всего полета.
56
Следовательно, при М < 1
/<• = 4- = /(лЬэф/с,) (1 - сх0/сх). (3.46)
сх
По аналогии при М > 1
К — (с“/сх) (1—сх01сх} . (3-47)
Учитывая, что при числе М < 1
Атах = V лХдф/С^о ,
(здесь /Сшах — исходное значение качества до изменения сх0,
при котором сх — сх0 = cxt — сх0), из (3.46) имеем
дК________1 “I / Я>-эФ _____ Атах / о дох
дсхо %СХ г Сх — СХ0 СХ
Соответственно и при М > 1 получаем
дК 1 1 f су ________________ К max
дсхо у Сх — Схо Сх
Подставив в (3.45) dKJdcx0 из (3.48) и обозначив
получим при числе М < 1
X = — 1 / пЛэФ
схо 2сх у сх — cxq
при числе М > 1
(3.49)
дсх0 схо
(3.50)
(3.51)
В табл. 3.3 приведены примерные расчетные значения производ-
ных хк, Ххо и иСхд для пассажирских самолетов.
Из сравнения значений хт и Их, (см. табл. 3.2 и 3.3) видно, что
увеличение Хо на 1 даН влечет за собой при прочих равных усло-
виях значительно большее увеличение взлетной массы, чем пере-
тяжеление на 1 кг какого-либо агрегата. Этот вывод особенно
нагляден для тяжелых самолетов.
Следует заметить, что возможен случай, когда изменение
массы агрегата или узла связано с изменением его объема, причем
известна зависимость силы вредного аэродинамического сопро-
тивления Хо от объема U. Тогда формула для определения хт
с учетом изменения объема агрегата примет вид:
__ дт0 ' дт0 ди дт0 дХ0 dU ~ ДХ0 &U
т d/Пдоп dU dtn^oxi дХо dU дтдои &U Д^доп
Аналогично могут быть получены формулы для хт в случаях,
когда изменение массы и объема агрегата связано с изменением
57
Таблица 3.3
Значения коэффициентов роста взлетной массы
(кг/единица качества), (кг/даН), х
° сх0
Тип самолета X (Ро. Ро) — const (S. Ро) = const
Местных авиали- —(300 .. 700) —(200 .. 400)
НИИ X 2,0 ... 3,0 1,3 .. 1,8
И. 1°0-§ 2 .. 6 1,2 .. 4,0
Средний маги- нк —(2500 .. 3000) —(1700 .. 1900)
стральный Kv 11 .. 12 7 .. 8
х, „• сх0 25... 30 17 .. 19
Тяжелый маги- нк —(14-Ю3 .. 19-10s) -(7-10s .. 9-10s)
стральный X 19 .. 26 11 .. 13
И- ’О"5 сх0 140 .. 220 80 .. 110
Сверхзвуковой НК —(6-10* .. 7-104) -(3-104 .. 3,5-104)
пассажирский ХХо 22 .. 27 10 .. 11
%/10"5 250 .. 280 120 .. 130
каких-либо других аэродинамических характеристик (аэродина-
мического качества и'т. д.).
Аналогично рассмотренным в разд. 3.2.2. и 3.2.3 коэффициен-
там роста взлетной массы можно получить расчетные формулы и
для других коэффициентов роста т0, например в связи с измене-
нием удельного часового расхода топлива, тяговооруженности и
других интересующих конструктора величин.
3.2.4. Весовая и экономическая оценка проектных
и конструкторских решений
Как и прежде, при использовании метода градиентов взлетной
массы самолета принимаем (L, Отд. 8, УКрейс) = const, что позволяет
упростить оценку проектных и конструкторских решений. В основе
такой оценки лежит понятие о весовых эквивалентах различных
величин.
Весовые эквиваленты и условия целесообразности проектных
и конструкторских решений. Известно, что улучшение одних
характеристик проектируемого самолета (например, аэродинами-
ческого качества, удельного часового расхода топлива, ресурса
и т. п.) нередко достигается лишь ценою ухудшения других (напри-
мер, весовых характеристик, стоимости и т. п.). В этом случае
в процессе проектирования требуется найти границу целесообраз-
ности улучшения одних параметров за счет ухудшения других.
58
Две величины будем считать эквивалентными, если одновремен-
ное их изменение приводит к равному по величине, но противо-
положному по знаку изменению критерия оценки самолета (т. е.
не приводит к изменению критерия оценки). Аналитически экви-
валентность величин можно выразить так:
S Ааг = о, (3.52)
1>2
где а — критерий оценки самолета; i — число параметров.
Рассмотрим весовые эквиваленты следующих наиболее харак-
терных параметров самолета:
— аэродинамического качества;
— силы лобового сопротивления;
— коэффициента лобового сопротивления сх0;
— стоимости самолета;
— ресурса самолета.
Условия получения перечисленных весовых эквивалентов,
вытекающие из формулы (3.52), следующие (в том же порядке):
Aam -j- Aflx — 0» (3.53)
\ат + Аах„ = 0; (3.54)
&ат + \аСхв = 0; (3.55)
Aam -j- Аясс = 0; (3.56)
\ат + ЬаТс = 0. (3.57)
Очевидно, что проектно-конструкторское решение целесо-
образно, если оно приводит к улучшению критерия оценки само-
лета.
Ради простоты будем считать, что для осуществления того или
иного конструкторского решения не требуются или требуются
весьма малые затраты в виде дополнительных капиталовложений.
Рассмотрим, как определяются приведенные выше весовые
эквиваленты основных характеристик самолета.
Весовые эквиваленты аэродинамического качества. Противо-
речия между массой и аэродинамическим качеством, массой и со-
противлением воздуха не новы. Они возникли вместе с первыми
самолетами. Сущность противоречий состоит в том, что уменьше-
ние сопротивления агрегатов и деталей самолета, находящихся
в потоке, может быть достигнуто, как правило, лишь за счет
увеличения массы. Поэтому логичным является вопрос: на какое
увеличение массы следует идти для определенного увеличения
аэродинамического качества или уменьшения сопротивления?
Задача нахождения весового эквивалента аэродинамического
качества самолета формулируется следующим образом. Допустим,
что для увеличения аэродинамического качества самолета требуется
увеличить массу детали, узла или агрегата. Найти рациональный
59
предел увеличения массы частей самолета для увеличения аэроди-
намического качества *, при котором величина критерия оценки i
самолета остается неизменной.
Если для простоты считать, что изменения массы и аэродинами-
ческих характеристик не влияют на стоимость и ресурс какого-либо
узла или агрегата, то при (L, тд. н, Екрейс) = const критерием
оценки проектных решений будет величина изменения взлетной
массы.
В этом случае весовой эквивалент аэродинамического качества ,
выражается так:
(Am0)m + (Am0)K = 0. (3.58)
Здесь (Am0)m — прирост взлетной массы самолета в связи с изме-
нением массы узла или детали; (Ат0)к — прирост взлетной массы
в связи с изменением аэродинамического качества самолета..
Если учесть, что
(Am0)m = zm Атдоп; (Ат0)к = АК,
то из (3.58) получим, что весовой эквивалент среднего за время
полета аэродинамического качества самолета
Атдоп = —(Мит) &К. (3.59)
Когда требуется получить прирост среднего аэродинамического
качества (+АК), то по формуле (3.59) получаем -|-АтдОП, так как
производная всегда отрицательна.
При решении обратной задачи, когда требуется найти, на-
сколько следует снизить массу детали, узла или агрегата для
компенсации уменьшения качества (—А К), формула (3.59) дает
рациональный минимум снижения массы со знаком минус
( АШд0П)
Если формулу (3.59) записать в виде неравенства
Атдоп —(xx/xm) АК, (3.60)
то получим условие целесообразности проектно-конструкторского
решения. Знак «меньше» соответствует прямой задаче (+АК),
а знак «больше» — обратной задаче (—А К). Из неравенства
(3.60) следует, что если увеличение среднего аэродинамического
качества связано с увеличением массы детали, узла или агрегата,
то величина Атдоп должна быть меньше, чем (|хц|/хт) А К.
Аналогичное рассуждение можно провести и в отношении обратной
задачи.
При сравнении нескольких вариантов решения критерием их
выгодности будет величина снижения взлетной массы самолета
Ат0==хтАтдоп + хкАК. (3.61)
* Здесь имеется в виду среднее за полет аэродинамическое качество самолета.
Заметим, что возможна и обратная формулировка: с помощью какого уменьшения
массы детали, узла или агрегата можно компенсировать уменьшение аэродина-
мического качества самолета?
60
Отклоняемая носебая чаете
фюзеляжа Ту -144
Рис. 3.3. Варианты изменяемой геометрии носовой части фюзеляжа:
а — схемы изменения геометрии носовой части фюзеляжа (1 — при М < 1; 2 — при
М > 1); б — зависимость наибольших допустимых потерь массы фюзеляжа, связанных
сизмеиеинем геометрии его носовой части (мрасч=2,2: тком=1^'^т; ~ 0>®4), отт,
Здесь АтдоП и АЛ — фактические приращения массы агрегата
и среднего аэродинамического качества самолета.
Сумма (3.61) является отрицательной, так как производная
хк всегда отрицательна, а|хкАЛ| >|хтАтд0П| (в прямой задаче
-j-АЛ, + Атд0П). В обратной задаче сумма (3.61) также отрица-
тельна, потому что Атдоп и АЛ имеют знак минус, а |хтАтдОП| >
>|хкАЛ|.
Решение будет наивыгоднейшим при (—Am0)max.
Пример. Продувками установлено, что аэродинамическое качество сверх-
звукового пассажирского самолета (СПС) при конфигурации носовой части фю-
зеляжа 2 (рис. 3.3) на 0,64 единицы выше в крейсерском полете, чем при кон-
фигурации 1, соответствующей взлету — посадке. Устройство специальной
рампы, закрывающей фонарь при М> 1, или механизмов для отклонения носо-
вой части фюзеляжа (для улучшения обзора) требует определенных весовых
затрат.
Необходимо определить максимально допустимую дополнительную массу
фюзеляжа, компенсируемую увеличением аэродинамического качества СПС.
Иначе говоря, требуется определить весовой эквивалент увеличения аэродина-
мического качества СПС иа 0,64 единицы.
Будем считать, что средний за полет прирост качества также равен 0,64 еди-
ницы.
Решим пример, касающийся СПС с Мрасч = 2,2.
Чтобы получить весовой эквивалент прироста качества на 0,64 единицы,
воспользуемся формулой (3.59) и данными табл. 3.2 и 3.3. В результате получим
максимально допустимый прирост массы фюзеляжа Д/Пф = Дтагр = Дтдоп при
устройстве рампы или системы поворота носовой части фюзеляжа. Относительная
масса (Диф/Дт^тах дОП составляет около 3 %. По приближенной оценке потреб-
ное увеличение массы фюзеляжа СПС не превысит 0,5...0,7 % от взлетной массы
СПС. Поэтому уже иа стадии эскизного проектирования, не производя сложных
вычислений, можно сделать вывод о целесообразности рассмотренного конструк-
тивно-проектировочного решения.
Весовые эквиваленты лобового сопротивления и коэффи-
циента сх0 самолета. Задача формулируется так: насколько можно
61
увеличить массу агрегата, узла или детали для уменьшения силы
лобового сопротивления самолета или коэффициента сх0 с тем, чтобы
величина критерия оценки самолета не изменилась?
В этой формулировке задачу условно назовем прямой, в отли-
чие от обратной, которая формулируется иначе: насколько надо
уменьшить массу агрегата, узла или детали, чтобы компенси-
ровать увеличение силы лобового сопротивления самолета или ее
коэффициента сх0?
Здесь средние за полет значения силы лобового сопротивления
Ха и коэффициента лобового сопротивления сх0 можно найти по
следующим формулам:
(Х0)ср = (1/L) J XodL- (3.62)
(Схо)ср = (1/Ь) J Cxf>dL. (3;63)
Эти формулы применяются в основном для сверхзвуковых
самолетов, у которых Хо и сх0 существенно отличаются при М < 1
и М > 1. Что касается дозвуковых неманевренных самолетов, то
без ущерба для точности определения весовых эквивалентов
можно принимать (Х0)ср = (^о)крейс, а также (ех0)ср = (cx0)KpeRc,
так как полет этих самолетов от взлета до посадки ведется практи-
чески на режиме q та const. В дальнейшем ради краткости записи
индексы «ср» и «крейс» опускаются.
Как и прежде, будем считать, что (L, /лц.н, V) = const. Тогда
условия (3.54) и (3.55) для получения весовых эквивалентов силы
Хй и коэффициента сх0 будут иметь вид
(Дт0)т + (Дт0)Хо = 0; (3.64)
(Дт0)т + (Дт0)сх0 = 0, (3.65)
или, по аналогии с предыдущим,
х^Дтдоп 4- хх,ДХ0 = 0; (3.66)
хтДшцоп 4" х^^Дс^о ~ 0- (3.67)
Из уравнений (3.66) и (3.67) получим искомые весовые экви-
валенты:
— весовой эквивалент силы Хо
Д^Идоп = (хх0/хт) ДХц; (3.68)
— весовой эквивалент коэффициента сх0
= — (хСх0/хт) Дсх0. (3.69)
При решении прямой задачи ДХ0 и ксх0 берутся со знаком
минус, а Лтдоп по формулам (3.68) и (3.69) получается со знаком
плюс, так как хХ|), и хт всегда положительны. При решении
обратной задачи (уменьшение массы при увеличении сопротивле-
ния) имеем (4~ДХ0), (-|-Дсх0) и соответственно (—Дтдоп).
62
Если (3.68) и (3.69) записать в виде неравенств, то получим
условия целесообразности проектно-конструкторских решений:
М V
(3.70)
Л/Ц
Атдоп^--^-Асх0. (3.71)
Знак «меньше» соответствует прямой задаче (—АХ0), а знак
«больше» — обратной задаче (+АХ0).
Приращение АХ0 равно l(Ac%0) S, ] q, где St — характерная
площадь, к которой отнесено приращение Асх0. Так как (Acv0) S, =
= const и q = const, то численное значение АХ0 не изменится от
того, отнесено АХ0 к агрегату, узлу, детали или к самолету в целом
(т. е. к площади крыла).
В формуле (3.71) принято
Асх0 — ±(cxo)iSt/S,
где (сх0)г — добавочный коэффициент вредного аэродинамического
сопротивления агрегата, узла или детали, отнесенный к характер-
ной площади 5г; S — площадь крыла.
При сравнении нескольких вариантов решений наилучшим
будет вариант, который дает наибольшее снижение взлетной
массы:
Ат0 = (хтАтД0П + ххоАХ0)тах. (3-72)
Здесь сумма хтАтД0П + хх0АХ0 всегда отрицательна при
целесообразных вариантах и положительна — при нецелесообраз-
ных; А/т?доп — наибольший допустимый прирост массы агрегата,
узла или детали (в кг), оправдываемый уменьшением силы Хо
на 1 даН.
В табл. 3.4 даны значения весовых эквивалентов силы вредного
аэродинамического сопротивления некоторых типов самолетов.
Из табл. 3.4 видно, что только на легком самолете изменение
массы узла или детали на 1 кг влияет на взлетную массу самолета
Таблица 3.4
Весовые эквиваленты Лтдоп силы лобового сопротивления
Условие tn0, кг ^крейс» км/ч ^расч» км Основные исходные данные
12 500 750 800 25 000 800 1 200 50 000 850 2 000 140 000 900 5 000 160 000 2 300 6 500
(р0> Ро) = const Л/Идоп, КГ 1,03 1,20 5,25 6,3 2,6
(S, Ро) = const 0,97 1,06 4,60 4,8 —
63
примерно так же, как изменение на 1 даН силы лобового сопротив-
ления (Лтагр/ЛХ0 » !)• На тяжелых дозвуковых самолетах
изменение на 1 даН силы лобового сопротивления эквивалентно
изменению массы агрегата, узла или детали на 4 ... 6 кг, т. е.
Лтагр/ЛХ0 = 4 ... 6.
Весовые эквиваленты ресурса конструкции самолета. Определим
наибольшее допустимое (по соображениям себестоимости пере-
возок) увеличение ресурса конструкции транспортного самолета,
когда оно связано с приростом массы (например, в результате
создания резервных силовых элементов, ограничителей распро-
странения трещин, местных усилений, снижения действующих
напряжений для увеличения усталостной прочности и т. п.), т. е.
найдем весовой эквивалент ресурса конструкций.
Для упрощения решения полагаем, что исходная удельная
стоимость самолета Сс не зависит от исходного ресурса самолета
Тс, т. е. дСс!дТс = 0.
Из условия (3.57) имеем
Лтагр + \ТС = 0,
где а — себестоимость тонна-километра.
Производная да/дт.^ = да/дтдоп определяется следующим
образом.
На ранней стадии проектирования, когда для сохранения за-
данных значений скорости и дальности принимается (р0, Ро) =
= const,
dfl _____________ । Хт
дтцГр ’ £ком
— СявРо . 1 ~1~^р. дКТ’двДдв)— 1] .
тком^рейс Т дв ’
__ Сс_______. 1 ~Ь ftp, с [(7с/^с) — 1] .
^комй рейс
Ь —-----------.
тком*-расч
Значения коэффициентов, входящих в формулы (3.75) ... (3.77),
указаны в разд. 3.1, размерность f, h и b — коп/(т2-км).
На более поздней стадии проектирования, когда (S, Ро) — const
= + <3'78>
Производную да!дТс, входящую в (3.73), можно определить
по формуле
дТс *ком ТХом^рейс L Р V tc
Здесь Сс в коп/т; Тс в ч; mnyCT и тком в т.
64
(3.73)
If 4" (t ^т) 4~ pacxl>
(3.74)
где
Tc
(3.75)
(3.76)
c.
(3.77)
Подставляя значения daldtnaTV и да!дТс в (3.73),-после преобра-
зований получим весовые эквиваленты ресурса конструкции
самолета:
при (ро, Ро) = const
Amarp = —-----------ce.JH-fep.c(7V/^c- l)]Arc --------. (3 8Q)
(тком/тлуст) ^рейс]^ расх]
при (S, Ро) = const
_ __________Сс [1 + &р. с (Tc/tc — 1)] АТ1 с__. (3 81)
аГР 7’Кг(тком/тпуСт)1/рейС[/г(1-'йт)+6'«т. расх] ’
В (3.75) Сдв и в (3.76) Сс — стоимость двигателей, отнесенная
к взлетной тяге, и стоимость самолета без двигателей, отнесенная
к массе пустого самолета без двигателей (в коп./т); Ст =
= 5200 коп./т — удельная стоимость топлива; Тс — исходный
ресурс конструкции самолета (в ч).
Сравнив фактические затраты массы для увеличения ресурса
на заданную величину \ТС (в ч) с наибольшими допустимыми
затратами, определяемыми по формулам (3.80) и (3.81), можно
сделать вывод о целесообразности данного проектно-конструктор-
ского решения.
В табл. 3.5 даны весовые эквиваленты увеличения ресурса
гражданских самолетов на 1000 ч при исходном ресурсе 40000 ч. Из
таблицы видно, что наибольший допустимый прирост массы кон-
струкции агрегата с целью увеличения его ресурса при (S, Ро) —
= const примерно вдвое больше, чем при (р0, Ро) = const. Это
объясняется меньшим влиянием массы конструкции агрегатов на
себестоимость 1 т-км при (S, Ро) = const.
Весовые эквиваленты стоимости конструкции самолета. При
проектировании самолетов нередко приходится решать, при каких
условиях целесообразно применить более легкую, но более дорогую
Т а б л и ц а 3.5
Наибольший прирост массы конструкции самолета АтЭгР (кг).
оправдываемый увеличением ее ресурса на 1000 ч (Тс. исх = 40000 ч)
Условие Основные исходные данные
т0, кг ^крейс’ км/4 ^расч’ км 12500 750 800 25000 800 1200 50000 850 2000 140000 900 5000
<Ро> -Ро) = const ДлгагР, кг 10,3 24,5 42,5 135
(S, Ро) = const 20,3 44,5 75,0 250
3 М.С. Егер и др.
65
Конструкцию агрегата, узла или детали *. Известно, например, что
монолитные фрезерованные конструкции, конструкции из титана
или стеклопластиков в настоящее время значительно дороже, чем
аналогичные сборные узлы, узлы из алюминиевых сплавов или
стали. Однако монолитные детали, детали из дорогостоящих
материалов могут дать значительную экономию массы. Это проти-
воречие массы и стоимости приводит к необходимости определить
весовой эквивалент стоимости, найти границу, разделяющую целе-
сообразные варианты решений от нецелесообразных.
При решении данной задачи принимаем, как и раньше, (L,
V) = const. Считаем также, что изменение стоимости само-
лета не приводит к изменению ресурса его конструкции, т. е.
считаем Тс = const.
Из условия (3.56) имеем
^-А/пагр + -^АСо=0, (3.82)
шПагр р оСс,
где А/пагр — изменение массы агрегата, узла или детали; АСс —
изменение удельной стоимости самолета.
Производная daldmaTV = daldtnKOa применительно к самолетам
гражданской авиации определяется по формуле (3.74) при (р0,
Ро) = const или по формуле (3.78) при (S, Ро) = const. Производ-
ная да!дСс определяется по формуле
ди___1,4 1 + fep, с (ТсДс — 1)_Отпуст
дСс &ком Тс тком^рейс
Подставим значения производных в (3.56). Тогда получим абсо-
лютное значение отношения АСс/А/пагр (руб./кг) при условии, что
АСс = АСс/ипуст.
Полагая (р0, Ро) = const, получим
I АСс I Ус/Кком^рейсКт [/ 4- h (1 — mT) -f- 6йт_ расх] /Ч ЯЧ1
|А/пагр|~ 105[1+6р.с(Ус//с- 1)1 ’ ( ’
При (S, Pg) = const
I АСс I _ Ус^комУрейсКт [h (1 — mT) -f- bin?. pacx] /9 од\
|А/пагр|“ 105 [1 +fep. с (Tc/tc - 1)] •
В формулах (3.83) и (3.84) тком в т, а многочлен в квадратных
скобках (в числителе) имеет размерность коп./(т2-км).
Стоимость конструкции самолета составляет по статистике
65 ... 75 % от стоимости пустого самолета с оборудованием. По-
этому при определении дополнительной стоимости конструкции
самолета, оправдываемой уменьшением ее массы на 1 кг, значения
* Возможна и обратная задача, которая ставится следующим образом:
при каких условиях целесообразно применить более тяжелую, но более дешевую
конструкцию?
66
] АСс/А/пагр|, определяемые по формулам (3.83) и (3.84), надо
умножить на коэффициент 0 = Скон/Сс = 0,65 ... 0,75.
В примерах расчета будем принимать 0 = 0,7.
Обозначим
АСс = | АСс/А/пагр 10, (3.85)
где СаГр — стоимость 1 кг исходного агрегата, узла или детали;
/иагр — масса исходного агрегата, узла или детали; Сагр.нов.
т,,Гр. нов —стоимость 1 кг и масса нового агрегата, узла или
детали (взамен исходных).
Рассмотрим для определенности случай, когда /пагр.нов < тагр,
а Сагр.нов > Сагр. Стоимость (руб.) исходной конструкции агре-
гата, узла или детали _
Сагр = Сагр/иагр. (3.86)
Стоимость новой конструкции с меньшей на Атагр массой
Сагр. нов — Carp (/Harp А/Пагр) -f- АСс Afflarp> (3.87)
где АСс — экономия (руб.) от уменьшения массы конструкции
на 1 кг.
Разделим левую и правую части (3.87) на произведение
ш — С*
'>агр"£'агр '-'агр*
Сагр. нов _ ^агртагр СзгрАтагр + ДСсДтагр ___
Сагр СагрМагр
__ Сагртагр + Атагр (АС; - Сагр) =
Сагртагр
_ 1 I Атагр ( АСс _ 1 \
«агр \ Сагр Г
Но Атагр = тагр — тагр. нов- Тогда
Сагр. нов _ J 1 ^агр — /Иагр, нов / АС с _ 1 | —
Сагр «агр \ Сагр /
1 I / 1 тагр.нов\ ( АСс Д _______
=
__ с ____ fflarp. нов / с _ । \
^агр* ^агр \ Сагр /
откуда . (М8)
агр* нов А^с/^агр ^агр. нов/^агр
Формула (3.88) определяет весовой эквивалент стоимости
конструкции агрегатов, узлов или деталей самолета. Из этой
формулы следует:
3* 67
1) еСЛИ Carp. нов/O^arp
когда
ACJ/Carp, то снижением массы уже
невозможно компенсировать увеличение стоимости агрегата, узла
или детали (рис. 3.4);
2) могут быть два случая, когда для компенсации относитель-
ного увеличения стоимости новой конструкции требуется такое же
по величине относительное снижение ее массы, т. е.
^агр/^агр. нов = ^*агр. нов/Сагр-
Кроме тривиального случая, когда
^агр/^агр. Нов ~ ^агр. нов/^агр ~ 1,
возможен еще такой, когда
^агр/^агр. нов — Carp. нов/СаГр — ДСс/СаГр
Если известны не абсолютные стоимости Сагр
а относительные. Сагр === E,,1pp/fn[irp и Сагр. нов С;)Гр, нов
то формула (3.88) принимает вид
Сагр, нов/Сагр
1.
(3.89)
И Сагр. нов,
i^arp. нов,
ffiar Р
^агр.нов
— 1
ЖАрр
(3.90)
Записывая формулу (3.88) в виде неравенства
тагр ______А^с/^агр ~ *____
«агр.нов ЛС*/Сагр-Сагр Н0В/Сагр ’
(3.91)
68
получим условие целесообразности проектно-конструкторского
решения. В формуле (3.91) тагр/тагр.Нов— отношение фактиче-
ских значений масс новой и исходной конструкции. Зоны целесо-
образных решений видны из рис. 3.4.
При решении данной задачи экономию (руб./кг) от уменьшения
массы конструкции на 1 кг можно найти по следующей формуле:
ДС* == zm [26ЕР0 + 0,53Сс (1 - тт) + 400 (сР/^крейс], (3.92)
где £ = 1, если (р0, Ро) = const; £ = 0, если (S, Ра) = const.
Удельная стоимость самолета Сс, входящая в (3.92), находится
с помощью формулы (3.8) (следует Сс разделить на тпуот).
Для прикидочных расчетов ДСс (руб./кг) можно пользоваться
следующими простыми зависимостями:
при (р0, Ра) = const ДС* « 47zm;
при (S, Рй) = const ДСс « 38z,„.
В заключение рассмотрим примеры, иллюстрирующие метод
весовых эквивалентов стоимости конструкции.
Пример 1. Целесообразно ли детали из алюминиевого сплава Д16-Т, работа-
ющие в основном на растяжение, заменять деталями из стеклопластиков АГ-4С
или ВФТ-2СТ, если последние легче на (17...25) %, но в/2,4...6,4 раза дороже?
Предполагается, что по жесткостным, усталостным и другим характеристи-
кам указанные стеклопластики удовлетворяют требованиям, предъявляемым
к конструкции.
Основные данные сравниваемых материалов приведены в табл. 3.6, где р —
плотность; Е — модуль упругости; <тв — временное сопротивление разрыву;
о0,2 — нормальное напряжение при относительном удлинении 0,2 %.
Рассмотрим задачу применительно к четырем типам дозвуковых пассажир-
ских самолетов, основные данные которых даны в табл. 3.7. Исходная удельная
стоимость агрегата, узла или детали Сагр = 2,2 руб./кг (себестоимость изго-
товления из Д16-Т). Найдем по формуле (3.90) относительный весовой эквива-
Таблица 3.6
Характеристики материалов и деталей (к примеру 1)
Характеристики Д16-Т АГ-4С ВФТ-2СТ
р, кг/см3 2,8-10~3 1,8-10-» 1,9-10-э
Е, даН/см2 7,2-106 1,2-106 4-Ю6
ов, даН/см2 4,5-10s 4-10» 6-10»
о0.2, даН/см2] (ао,2/р)' Ю 6> даН-см/кг 2700 2100 3200
9,65 11,7 16,9
Стоимость материала, руб./кг 1,0 4,5 8
Средняя себестоимость деталей, руб./кг 2,2 5,24 14
Относительная себестоимость дета- лей, % 100 238 636
Относительная масса, % 100 82,5 70 ... 75
69
Таблица 3.7
Экономия от уменьшения массы агрегата, узла или детали
на 1 кг для дозвуковых пассажирских самолетов (к примеру 1)
Основные исходные данные № самолета
1 2 3 4
/Ло> КГ ^КРейс, км/ч 7-расч, км 12500 750 800 25000 800 1800 50000 850 2000 140000 900 5000
(S, Ро) = const (Ро, Ро) = const АС* руб./кг 74,0 150,0 72,0 138,5 79,5 150,5 102,5 200,0
лент стоимости. Например, для материала АГ-4С применительно к самолету № 1
имеем
тагр _____, । ^агр. нов/Сагр — 1 , 2,38— 1 ___ , П4)
тагр. нов АС*/Сагр " 74/2,2
Фактическое отношение
(тагр/тагр. нов)факт = 100/82,5 = 1,21.
Результаты расчетов даны в табл. 3.8, из которой следует, что во всех рас-
смотренных случаях замена сплава Д16-Т стеклопластиками АГ-4С и ВФТ-2СТ
целесообразна.
Если узлы или детали из стеклопластика АГ-4С будут дороже не н 2,38 раза
(как в табл. 3.8), а в 8...10 раз, но легче на 17,5 % по сравнению с узлами из
Д16-Т, то й в этом случае переход на стеклопластик будет оправдай.
Таблица 3.8
Результаты расчетов (к примеру 1)
Характеристика Номер самолета
1 2
АГ-4С ВФТ-2СТ АГ-4С ВФТ-2СТ
Относительный весовой экви- валент (3.90) ( тагр \ \ znarP. нов / факт 1,041 1,21 1,159 1,33 ... 1,43 1,042 1,21 1,163 1,33 ... 1,43
Характеристика Номер самолета
3 4
АГ-4С ВФТ-2СТ АГ-4С ВФТ-2СТ
Относительный весовой экви- валент (3.90) / тагр \ X /ПагР. нов / факт 1,038 1,21 1,149 1,33 ... 1,43 1,03 1,21 1,15 1,33 ... 1,43
70
Таблица 3.9
Характеристики материалов (к примеру 2)
Характеристики материалов ЗОХГСНА ВТ-14
р, г/см3 7,85 4,52
Е, даН/см2 21-10® 11-10®
о в, даН/см2 18 000 14 000
о0,2, даН/см2 9 500 13 000
(ов/р)-105, даН-см/кг 22,9 31
(<WP)’I(^5> даН-см/кг 12,1 28,8
Пример 2. Целесообразно ли заменить болты из стали ЗОХГСНА болтами
из титана ВТ-14, если стоимость болтов возрастет с 2 руб./кг до 25 руб./кг,
а масса их уменьшится на 26 %?
Основные характеристики рассматриваемых материалов при нормальной
температуре даны в табл. 3.9.
Предполагается, что удельная усталостная прочность титановых болтов не
хуже, чем стальных.
Возьмем для примера те же типы дозвуковых самолетов, что и в предыду-
щем примере (см. табл. 3.7). Тогда Сагр = 2 руб./кг; Сагр.Нов = 25 руб./кг,
тагр/шагр. нов = 1,35.
Определим далее по формуле (3.88) минимально допустимое отношение массы
стальных и титановых болтов (/ис. б'тт. б)т1п-
Результаты расчета таковы:
Номер самолета
(Шс.б/№т.б)п11П
12 3 4
1,311 1,318 1,290 1,225
Так как фактическое отношение масс в 1,35 раза больше, чем минимально
допустимое для всех рассматриваемых типов самолетов, то можно сделать вывод
о целесообразности применения титановых болтов, исходя из рассмотрения про-
тиворечия масса — стоимость (если АСс = 115 руб./кг).
Следует подчеркнуть, что полезный эффект будет тем больше, чем раньше
реализуется его внедрение в процессе проектирования.
Применение нелегированного титана (например, ОТ-4-1) в качестве жаро-
прочного материала вместо стали в несиловых конструкциях (выхлопные трубы,
противопожарные перегородки, трубопроводы обогрева и т. п ) еще более оправ-
данно, чем применение силовых титановых конструкций, так как несиловые
титановые конструкции, хотя они и значительно дороже, получаются примерно
вдвое легче стальных.
Пример 3. Целесообразно ли пол пассажирской кабины из алюминиевого
сплава Д-16Т заменять на пол из углепластика, если он будет вдвое легче, но
в 10 раз дороже?
Допустим, что Сагр = 5 руб./кг и Сагр. Нов = 50 руб./кг. Проделан те же
операции, что и в предыдущем примере, получим ответ: если АС* > 100 руб./кг,
то замена целесообразна.
Пример 4. Целесообразно ли в колесных тормозах тяжелых пассажирских
самолетов применять бериллиевый сплав взамен стали, если при этом конструк-
ция будет вдвое легче, но в 65 раз дороже?
Исходные данные: Сагр = 2 руб./кг; Сагр. нов = 130 руб./кг; Сагр. Нов/Сагр«
~ Сагр. нов/СаГр=65’> АСс = 440 РУб./кг.
71
Пользуясь формулой (3.88) получим, что замена стали на бериллий в данном
примере оправдана. Однако для самолетов с взлетной массой 5S200 т, у которых
ЛСс < 250...260 руб./кг, такая замена нецелесообразна (если нет уверенности
в снижении стоимости бериллиевого сплава ко времени постройки самолета).
Глава 4
ИСХОДНЫЕ ДАННЫЕ ДЛЯ ПРОЕКТИРОВАНИЯ.
ВЫБОР ОСНОВНЫХ ПАРАМЕТРОВ
И СВЯЗЬ ЭТИХ ПАРАМЕТРОВ С ЛЕТНЫМИ
ТЕХНИЧЕСКИМИ ХАРАКТЕРИСТИКАМИ САМОЛЕТА
4.1. ИСХОДНЫЕ ДАННЫЕ ДЛЯ ПРОЕКТИРОВАНИЯ
В гл. 2 говорилось о том, что в проектировании самолета име-
ется две стадии: «внешнее» проектирование и «внутреннее» проекти-
рование. В дальнейшем рассматриваются проблемы внутреннего
проектирования.
Высший иерархический уровень внутреннего проектирования,
соответствующий этапу разработки технического предложения
(этапу предварительного проектирования), имеет своей задачей
формирование облика самолета: выбор схемы самолета и определе-
ние наивыгоднейшего сочетания основных параметров самолета и
его систем, удовлетворяющих заданным тактико-техническим
требованиям (см. уровень III в табл. 2.2).
Исходными данными для проектирования самолета могут быть:
— тактико-технические требования заказчика к данному само-
лету;
— идеи главного конструктора;
— рекомендации НИИ промышленности.
Кроме того, исходными данными для проектирования являются
и ограничения на условия эксплуатации и на особенности приме-
нения самолета (ограничения на результаты проектирования) и
ограничения, обусловливаемые методами проектирования.
Ограничения на результаты проектирования вместе с ТТТ
к данному самолету являются по существу связями с внешним
проектированием, так как определяют условия функционирова-
ния самолета в более высокой по иерархии системе (в случае пасса-
жирского самолета — в системе гражданской авиации) и условия
изготовления самолета в серийном производстве. К этим ограни-
чениям относятся:
— ограничения общих тактико-технических требований (для
самолетов гражданской авиации — «Нормы летной годности пас-
сажирских самолетов СССР»);
— физические ограничения;
— наличие и технический уровень оборудования;
72
— уровень производственных навыков или производствен-
ной технологии.
Ограничения, обусловленные методами проектирования, вклю-
чают:
— уровень знаний;
— сроки проектирования;
— возможности имеющегося лабораторного оборудования;
— возможности имеющейся вычислительной техники.
Рассмотрим в качестве примера физические ограничения.
Атмосфера. Существует таблица международной стандартной
атмосферы (MCA), в которой приведены данные о температуре
(£н. в), Давлении (рн. в), удельном весе (у), плотности (р) воздуха, об
отношении плотности воздуха на данной высоте к плотности
воздуха на уровне океана (Л), о скорости звука в воздухе (а)
и о других физических характеристиках воздуха в зависимости от
высоты над уровнем океана.
При проектировании самолетов обычно используют три харак-
терных условия атмосферы (см. табл. 4.1):
— нормальные условия (НУ),
— расчетные условия (РУ), которые применяются при расчетах
взлетно-посадочных характеристик.
— условия в стратосфере.
Климатические условия (предельные). При проектировании
самолетов необходимо учитывать, что:
— в тропических условиях неметаллические материалы пора-
жаются плесенью и насекомыми (термитами, личинками), что особо
следует учитывать при изоляции электропроводки, так как пора-
жение этой изоляции приводит к коротким замыканиям и выходу
оборудования и управления из строя;
— в тропических условиях задается 10 %-ная влажность при
высокой температуре наружного воздуха (4-40 °C). Это определяет
расчетное условие для всех систем охлаждения.
Ветер. Для расчета взлетно-посадочных характеристик при-
нимается скорость бокового ветра — ±15 м/с.
Таблица 4.1
Основные данные о характерных условиях атмосферы
Параметры атмосферы Обозна- чение Размерность Нор - мальиые условия Рас- чети ые условия Условия в стратосфере
Высота и М 0 0 Н > 11 000
Температура в °C + 15 +30 —56,5
Давление Ря. в мм рт. ст. 760 730 —
Ря. в ГПа 1013,25 973,35 —
Плотность воздуха р кг/м3 1,225 1,120 —
Скорость звука а м/с 340,294 350 295,069
73
Таблица 4.2
Основные данные о климатических условиях
Тип климата Условия Температура, °C Относитель- ная влаж- ность, %
max min
Пустынный Сухая жара, интенсивная солнечная радиация, песча- ная пыль Воздух ДО +60, земля ДО +75 Ночью до —10 5
Тропический Влажная жара, высокая относительная влажность, рост плесени, разрушающее действие насекомых Воздух до +40, земля до +70 Ночью до +25 100
Морской Влажная соленая пыль +50 —40 100
Арктический Низкая температура, ле- дяная пыль —25 До -70 —
Большие высоты Низкая температура, низ- кое давление, конденсация водяных паров, обусловлен- ная быстрым изменением температуры До —90
Нагрузки при болтанке рассчитываются при индикаторной
Wi0\
скорости вертикального порыва ветра Wyi = ±15 м/с ( Wyi =
4.2. ОГРАНИЧЕНИЯ, НАКЛАДЫВАЕМЫЕ «НОРМАМИ
ЛЕТНОЙ ГОДНОСТИ ГРАЖДАНСКИХ САМОЛЕТОВ СССР»
(Н Л ГС-2)
4.2.1. Требования к взлету
В НЛГС-2 рассмотрен взлет с одним отказавшим двигателем и
дана схема, приведенная на рис. 4.1.
При этом должны выполняться следующие условия:
а) скорость самолета в момент подъема носовой опоры шасси
на разбеге Уп.н.ш2& l,05Vminвзл,
б) скорость при отрыве самолета от земли на взлете Уотр
1>1^т1пвзл—для самолетов с двумя и тремя двигателями;
VOtP=s 1,О7УП11ПЮЛ—для самолетов с четырьмя двигателями;
в) скорость V2 в конце первого этапа взлета в первой взлетной
конфигурации самолета (механизация крыла во взлетном поло-
жении, шасси выпущено): V2 5? 1,2Vmln взл —Для самолетов с двумя
и тремя двигателями; V2 1,15Уга1пВзл—для самолетов с че-
тырьмя двигателями.
Проанализируем эти требования. Так как в СИ вес самолета
при взлете (Н)
mQg = CySpV2/2
74
Нормируемая траектория Взлета и набора Высоты
Начало уоорки механизации крыла
Vj '^пнш [
Щ7м
0-й зтап
2-йзтап
З-йзтоп
7-й зтап
Начальный навор Высоты
Ненец у Рорки шасси
Отрыв
Подъем передней
опоры шосси
Отказ одного
двигателя
ГШ////М7Г/МЛ
КПБ
ВПП
Разрег
взлет
Рис. 4.1. Схема взлета самолета с одним отказавшим двигателем по НЛГС-2
КПБ — концевая полоса безопасности
и при высоте аэродрома, соответствующей уровню океана (Я 0),
р0 = 1,225 кг/м3, то
2 2*10 I/? qq Ро
ПИП ВЗЛ — 1 лае "7 — 10,00 .
I ,Z4O Су max взл су max взл
(4-1)
Здесь с^шахвзл — значение с^тах при взлетном положении
механизации крыла; т0 — масса самолета при взлете, кг; pQ —
нагрузка на один квадратный метр площади крыла, даН/м* I 2 * * * * * В.
В расчетных условиях (РУ) р ~ 1,120 кг/м3 и
V2 2-10 ос
V min взл - , ,9П ~ 1 ' ,ОО ~ ~
i,izu Су max взл Ly max Взл
(4.2)
Примечание. В системе МКГСС величина р0 = 0,125 кг-с2/м* и фор-
мулы (4.1) и (4.2) имеют вид
Prn in взл ~ 16--- И Vmin взл == 17,5-—--
су шах взл су max взл
Это необходимо учитывать при сравнении формул, приведенных в настоящем
учебнике, с формулами в старых изданиях.
В формулах 4.1 и 4.2 значение cymsx взл соответствует с^ша/при
взлетном положении механизации крыла (рис. 4.2). Тогда при
/гДн = 2 или 3
Vl = (1,27min взл)2 = 1 ,44Vmin взл =
«23,5——(в РУ Vl«25,7——V (4.3)
Су max взл \ су max взл /
а при идв = 4
Р2 = (1 > 15Vminвзл)2 = 21,6 —(в РУ ^«23,6 —\ (4.4)
г^шах взл \ Ly max взл/
и ^yVi Су шах взл/1,44 или Суу2 Су max взл/1,3225, соответственно
для самолетов с двумя и тремя или с четырьмя двигателями.
75
Рис. 4.2. Зависимость коэффициента
подъемной силы су от угла атаки а при
различных положениях механизации
крыла:
1 — механизация крыла убрана; 2 — за-
крылки выпущены во взлетное положение;
3 — закрылки выпущены в посадочное
положение; 4 — дополнительно выпущены
предкрылки во взлетное положение; 5 —
дополнительно выпущены предкрылки в по-
садочное положение
Выражения (4.2) и (4.3) пока-
зывают, что при одной и той же
величине скорости V2 чем) больше
величина с^щахвзл, тем большая
удельная нагрузка на крыло р0
может быть допущена. На рис. 4.2
показано, какое большое значение для увеличения р0 (а следова-
тельно, и уменьшения площади крыла S) имеет установка на кры-
ле предкрылков (растет сушах).
4.2.2. Условия обеспечения
длины разбега
В тактико-технических требованиях к
ется длина разбега самолета при взлете. С
длина разбега (м) может определяться с
выражения:
заданной
самолету обычно зада-
достаточной точностью
помощью следующего
,___ VoTp
разб = 2а
1______________
moS ^ср 2 ^раз6 2ЛГразб
где Р — суммарная тяга двигателей, даН; = ^ср —
средняя тяговооруженность самолета за время разбега; Р,:р а;
О,95Ро, Яразб — аэродинамическое качество самолета при раз-
беге, Лразб = 5 ... 6 для сверхзвуковых самолетов; /<рязб =
= 8 ... 10 для дозвуковых самолетов; /разб — коэффициент трения
колес шасси при разбеге.
Обычно принимаются следующие величины /разб:
Укатанный снег и лед .... 0,02
Сухое бетонное покрытие . . 0,02
Мокрое бетонное покрытие 0,03
Если мы примем, что Уотр = 1,15Ут1___
(по РУ), то формулу (4.5) можно представить в виде
1'2 pg'
СУ max взл Н 1 /си । 1 \
гср й- ( “/разб’т к_ к J
(4-5)
Твердый грунт...............0,07
Мокрый травяной покров. . . 0,06
Травяной покров ........... 0,08
. min взл и ^тр = 23,6р0/£у max взл
разб
(4-6)
Легко видеть,
пропорциональна
76
что длина разбега самолета при взлете прямо
величине удельной нагрузки на крыло р0
Рис. 4.3. Изменение длины разбега само- Л1Г,АЗБ,%
лета из-за изменения на 20 % аэродинами-
ческого качества самолета на разбеге (ЛА'разб) -до
и из-за изменения на 20 % тяговооруженно-
сти самолета (ДР) в зависимости от величины
начальной тяговооруженности (Ро): -gn
I — зона тяговооруженности современных до-
звуковых пассажирских самолетов -50
-40
-30
и обратно пропорциональна величи- -20
не Су шах взл- Влияние изменения тяго- - /с
вооруженности Ро и аэродинамиче- д
ского качества самолета при разбе-
ге Кразб тем больше, чем меньше начальная (стартовая)
тяговооруженность (рис. 4.3).
Из рис. 4.3 следует, что в диапазоне значений Ро у современных
пассажирских самолетов (Ро = 0,25 ... 0,40) увеличение тягово-
оруженности на 20 % сокращает длину разбега на 36 ... 25 %,
а увеличение аэродинамического качества самолета при разбеге
на 20 % уменьшает длину разбега соответственно на 18 ... 8 %.
Поэтому тяговооруженность самолета является наиболее суще-
ственным фактором, определяющим длину разбега при взлете, и
непрерывное увеличение тяговооруженности у современных само-
летов является характерной закономерностью, связанной с пробле-
мой уменьшения размеров аэродромов.
4.2.3. Требования к набору высоты
Н Л ГС-2 определяют, что полный градиент набора высоты с не-
работающим («критическим») двигателем должен быть
Пп.н> tg 0я-100 %, (4.7)
a tg 0я по отдельным этапам набора высоты задан в табл. 4.3.
Таблица 4.3
Значения tg 0 при наборе высоты с одним отказавшим двигателем *
пдв Этапы набора высоты
1 2 3 4
2 0,000 0,005 0,024 0,012
3 0,003 0,011 0,027 0,015
4 0,005 0,013 0,030 0,017
* Расчетным является этап 3 (механизация крыла отклонена во взлетное
положение; шасси убрано).
77
При всех работающих двига-
телях полный градиент набора
высоты должен быть:
— на этапе 3 набора высо-
ты Пп.н += 5,0 %;
— на этапе 4 набора высо-
ты Г|п.н > 3,0 %.
Из рис. 4.4 видно, что
^наб — mQa sin 0 = X = cxSpV72;
(4-8)
' mog cos 0 = У = CySp V72. (4.9)
Учитывая, что значения 0 при наборе высоты малы (см. табл. 4.3),
можно принимать cos 0 « 1 и sin 0 « tg 0. Тогда, поделив (4.8)
на (4.9), получим:
Ркаб/(то5) — tg 0 = Сх!Су = Шнаб, или Р,'1аб = 1/Кнаб + tg 0. (4.10)
Так как величина Р,'1аб учитывает, что набор производится
с одним отказавшим двигателем, то полная стартовая тяговоору-
женность самолета должна быть
Здесь ЛдВ — число двигателей на самолете; kv — коэффициент,
учитывающий, что набор высоты идет в расчетных условиях
(/н. в = +30 °C, ря. в =1730 мм рт. ст.) и при скорости набора
высоты, соответствующей М — 0,3 ... 0,4. Величина берется либо
по соответствующей высотно-скоростной характеристике реаль-
ного двигателя, либо приближенно:
kv » 1,5. (4.12)
На основании выражения (4.11) стартовая тяговооруженность
самолета должна иметь следующие значения:
— при двух двигателях
Ро = 1,5-2 (1/Кпаб + 0,025) = 3(1//СНаб + 0,025); (4.13)
— при трех двигателях
Ро= 1,5-^-(1/Кпаб+ 0,027) = 2,25(1/Кнаб+ 0,027); (4.14)
— при четырех двигателях
Ро = 1,5- 4 (1/Кнаб + 0,030) = 2 (1/Кпаб + 0,030). (4.15)
Сравнивая (4.6), (4.13), (4.14) и (4.15), получаем следующие
выводы:
а)_ самолеты с двумя двигателями, имеющие наибольшее значе-
ние Ро, целесообразно создавать в случае, когда задаются малые
длины разбега самолета при взлете;
78
Рис. 4,5 Схема посадки самолета по требованиям НЛГС-2:
/ — нормируемая траектория посадки
б) при равной тяговооруженности, при обеспечении нормируе-
мой безопасности набора высоты пассажирские самолеты с большим
числом двигателей позволяют иметь меньшее аэродинамическое
качество на наборе высоты и, следовательно, применять более
эффективную механизацию крыла (см. раздел 14.6.1), которая,
значительно увеличивая \сутах, одновременно уменьшает вели-
чину /Снаб. . _
Например, при стартовой тяговооруженности Р = 0,346 ...
0,349 самолет с двумя двигателями должен иметь КНчб 11,
с тремя двигателями Кпаб Сз 7,8 и с четырьмя двигателями 7<наб
^7.
4.2.4. Требования к посадке
Схема траектории движения самолета при посадке показана на
рис. 4.5. «Нормы летной годности пассажирских самолетов СССР»
определяют, что скорость захода на посадку (м/с) должна быть
И3.П>1,ЗИт1пЯОС, (4.16)
где Vminnoc — минимальная скорость полета при механизации
крыла, отклоненной в посадочное положение. Тогда в нормальных
условиях
Pmin пос = 16,33рпос/с</ max пос
И Из, п“ 1,69И^|П пос = 27,6рПос/^у max пос, (^-17)
или в расчетных условиях
VI п = 30,2р ПОС /СУ max пос- (4. 18)
Здесь рпо0 — удельная нагрузка на крыло при посадке, даН/м2.
Так как скорость захода на посадку обычно задается в ТТТ
к самолету, и ее величина (И3.п 210 ... 230 км/ч) определяет
условия автоматизированного захода на посадку, то из (4.18)
следует:
Рпос — Су max посИз. п/30,2 (4.19)
ИЛИ
^кр — 3,02/Hnocg/(C/max посИз. п)- (4.20)
79
Для перехода от величины /?„ос к р9 (удельной нагрузке на
крыло при взлете) примем, что
шпоо = т0 — mT = m„(l — тт),
где тТ = тТ1т0 — относительная масса расходуемого топлива.
Тогда
с V2
f/t \ „ утахпос з, п /л сц\
Ро Рпос/0 тт) Ро 30 2 (1 йг)~‘ (4.21)
Для военных самолетов, если задана величина У3.п,
с V2
__ ____ //max пос'з. п_
/о ~ 30,2 (1 - тт -/пр. гр/«о) ’ ' ' ’
где т.р. гр — масса расходуемых грузов.
Если задана величина посадочной скорости Уцос, то, принимая,
что Vnoc 0,9V3.n = l,17Vmlnnoc и что в расчетных условиях
Епос = 24,5/7Пос/С(/max пэс> получаем
с V2
у max пос пос ,д nq,
Уй 24,5(1 -тт-/пр. гр/т0)-
Анализируя (4.19), (4.20), (4.21), (4.22) и (4.23), можно сделать
следующие выводы:
— величина максимально допустимой удельной нагрузки на
крыло при взлете и посадке определяется величиной скорости
захода на посадку (или величиной посадочной скорости) и макси-
мальной ВеЛИЧИНОЙ Коэффициента ПОДЪеМНОЙ СИЛЫ С,/тахпос при
полностью отклоненной механизации по передней и задней кром-
кам крыла;
— чем больше величина с,/п1аХ11ос, тем большая величина /?пос
может быть допущена и тем меньше может быть площадь крыла S
(и все остальные геометрические параметры самолета).
Согласно НЛГС-2 потребная длина ВПП в сухую погоду должна
быть
7-Впп сух ~ 1,67АПОС = 1,67 (/возд ^проб)>
а в мокрую погоду
[7-впп мокр = 11157.gpjj-j сух — 1,92 (/возд г ^про
Взлетно-посадочная полоса (ВПП) —это дорогостоящая бетон-
ная конструкция с системой дренажа подстилающего грунта.
Крайне необходимо, чтобы новые самолеты имели минимально
возможную потребную величину ЕВпп.
Коэффициенты 1,67 и 1,92 в формулах (4.24) и (4.25) учитывают
возможность либо обледенения поверхности ВПП, либо образова-
ния на ней настолько большого слоя воды, что колеса шасси при
движении по ВПП выходят на режим глиссирования.
80
(4.24)
(4.25)
Торможение самолета (уменьшение скорости полета) на воздуш-
ном участке определяется перегрузкой
______ __ СХ ПОС^Я? — ^Х. X / СХ ПОС _ ЮРх. X \ __
хвозд — тпоаё/10 ~__________________\ Су поо_«пос^ /
= — (--------10Рх-И , (4.26)
X К.Т1ОС тпосё /
где Рх.х— тяга двигателей на холостом ходу, даН; Кпос —
аэродинамическое качество самолета в посадочной конфигурации.
В реальных условиях величина пхвозд -- —(0,12 ... 0,15).
Минимально возможная величина /В03д в случае, когда самолет
подходит к ВПП без выравнивания, равна
(4озд)ш1п = 15/tg 2°50' = 15/0,05 = 300 м.
Однако при этом вертикальная скорость снижения самолета (без
учета «воздушной подушки»):
Vy = V3. п sin 2°50' = 0,051/д. п.
Здесь 2° 50' — средний угол нормируемой траектории подхода
пассажирского самолета к ВПП (см. рис. 4.5).
При величине У3. п = 250 км/ч = 70 м/с величина Vy3,5 м/с.
Обычно перед приземлением летчик выравнивает самолет
в почти горизонтальный полет и снижает скорость до 1/пос
l-l^minnoc при Vy « 0,1 ... 0,3 м/с. Длина воздушного участка
при этом увеличивается до 500 ... 750 м в зависимости от высоты
выравнивания.
Торможение самолета при пробеге после посадки определяется
перегрузкой
пх проб - - [(PpeB^-Pxgx),1° + 4- (кЧ + 3^роб) 1 > (4-27)
L ^nocg * хлпроб / J
где Ррев — обратная тяга двигателей с включенным реверсом
тяги, даН; Рх.х —прямая тяга двигателей, не имеющих реверса
тяги, даН; /проб — коэффициент трения
при пробеге.
Величина коэффициента трения за-
висит от состояния поверхности ВПП
и от работы автомата тормозов. Обычно
величина /прОб = 0,15 ... 0,25, но при
совершенствовании тормозной системы
величина /проб может быть доведена
до 0,4 ... 0,5. Величина /проб зависит
от наличия на самолете интерцепто-
ров, открывающихся в момент при-
земления самолета. На рис. 4.6 пока-
зано, что на пробеге (a w 1°) откры-
Рис. 4.6. Посадочные по-
ляры самолета (закрылки
и предкрылки в посадоч-
ном положении):
1 — интерцепторы закрыты;
2 — интерцепторы открыты
тие интерцепторов уменьшает величину
аэродинамического качества приблизи-
тельно в 10 раз.
81
Открытие интерцепторов, уменьшая примерно в 4 раза вели-
чину су, обеспечивает значительное увеличение тормозной силы,
так как эта тормозная сила (Н) равна
Т = /проб (^nocg - ^SpV2/2). (4.28)
В реальных условиях величина nznpo6 = — (0,5 ... 0,6)
Сравнение (4.26) и (4.27) показывает, что уменьшение £пос
наиболее эффективно вести за счет уменьшения /проб. Длина про-
бега при посадке /„роб на основании (4.27) может быть определена
по эмпирической формуле
1 ~ °’94__________________________________ /4 OQ\
пР°б Cl/max пос Ю (Ррев — Р-ц. х) . 1 / 1 _г_ог \
-------------+ “Г к +«)
Из (4.29) следует, что для уменьшения величины /проб необхо-
димо:
— увеличивать величину с^тахпос введением механизации
крыла и особенно установкой предкрылков;
— увеличивать коэффициент трения при посадке /прОб повыше-
нием эффективности системы торможения колес;
— увеличивать величину обратной тяги двигателей с ревер-
сивными устройствами (см. разд. 16.3.2);
— уменьшать удельную нагрузку на крыло при посадке рпос;
— уменьшать аэродинамическое качество и величину су при-
менением интерцепторов.
4.3. ОСНОВНЫЕ ПАРАМЕТРЫ САМОЛЕТА И ИХ СВЯЗЬ
С ЛЕТНЫМИ ХАРАКТЕРИСТИКАМИ
4.3.1. Абсолютные и относительные параметры
Абсолютными основными параметрами самолета в процессе
проектирования являются: взлетная масса пг0 (кг), площадь крыла
S (м2) и суммарная стартовая тяга двигателей Ро (даН) или стар-
товая мощность силовой установки Na (кВт).
В большинстве случаев, особенно в начальной стадии проекти-
рования, удобнее пользоваться относительными основными пара-
метрами самолета: удельной нагрузкой на площадь крыла р =
= mg/()()S) (даН/м2) и тяговооруженностью Р = lOP/(mg).
Эти параметры изменяются в течение полета из-за изменения
массы, поэтому при проектировании в первую очередь опреде-
ляются их стартовые значения (значения в начале полета, в начале
разбега при взлете), т. е. р0 = mogl(\QS) и Ро = lOPo/(mog).
Связь этих параметров с летными, аэродинамическими и компо-
новочными характеристиками самолета частично уже рассматри-
валась в предыдущем разделе [Zpa36 f (р0, Ро); Ро_== f пдв);
У8.п = f (Ро)1- Рассмотрим связи параметров р0 и Ро с характери-
стиками самолета на других этапах или режимах полета,
82
4.3.2, Максимальная скорость полета
Из основного уравнения горизонтального полета на высоте
Рн = cvSpHl/2/2 (4.30)
можно получить выражение.для 7шах в м/с:
2РН = •. /~ 2Рнтн8 =
сх5рн |/ cxS ^pomHg
= /
или в км/ч:
(4.31)
где А’— относительная плотность воздуха на высоте Н.
В формулах (4.30) и (4.31) удельная нагрузка на крыло рн
дана в Па (Н/м2). Если эта нагрузка дается в даН/м2, то формула
(4.31) принимает следующий вид:
Vmax~ 14,56 (4.32)
Тяга воздушно-реактивных двигателей (ТРД и ТРДД) зависит
от скорости и высоты полета. В диапазоне чисел М = 1,0 ... 3,5
эта зависимость выглядит следующим образом:
для Н< 11000 м Рн = £А0’85Р0; (4.33)
для 11000 м Рн = 1,2£АР0; (4.34)
здесь коэффициенты А0’85 и 1,2А учитывают изменение тяги по
высоте полета, а коэффициент | учитывает изменения тяги по ско-
рости полета,
g = 1 — 0,32М + 0,4М2 —
Приближенная зависимость коэффици-
ента £ от числа М полета показана на
рис. 4.7 (см. также приложение IV).
Подставив выражения (4.33) и (4.34)
в формулу (4.32), получим для высот
Н 11 000 м
vmax-15,94 1/^1; (4.36)
Г Сх
Мтах~0,015 1/^-. (4.37)
" сх
коэффициента £ от чис-
ла М полета
83
Для высот Н < 11 000 м
v„~ 14,56 |/^s; (4.38)
(4-39)
где l^max — в км/ч; а — скорость звука на высоте полета (Н <
< 11 000 м) в м/с.
4.3.3. Статический потолок полета
Для самолетов с ТРД статический потолок Нс.т определяется
величиной относительной плотности на максимальной высоте по-
лета («потолке»); относительную плотность можно получить по
формуле
Апот= * 1’67ty°c^, (4.40)
вытекающей из очевидного равенства, Р = 0/<max). Исполь-
зуя (4.34) и полагая Кшах = , получаем
\ сх /тах 2 DocxO
(4.40), где Do — коэффициент отвала поляры в выражении сх =
— схо + DoCy.
В соответствии с (4.40) можно принимать для дозвуковых са-
молетов
Апот = 1,67 (4.41)
о
и для сверхзвуковых самолетов
Апот = 0,83 -р'с^^2-1-. (4.42)
s* о
4.3.4. Максимальная дальность при скорости Укрейс
При предварительном проектировании для расчета дальности
полета (км) используются известные выражения
L = 3,6 (ЛТкрейс/Ср) In (m0/mKOH), (4.43)
или L = 1065 (КМкрейс/бЛ.) In (m0/mKOH), (4.44)
где К. — аэродинамическое качество самолета; Ркрейс и Мкрейс —
крейсерская скорость (м/с) и крейсерское число М полета; сР —
средняя за полет величина
лями, даН/ч.
Величина - = ——— =
ткон т0 — тТ
удельного расхода топлива двигате-
1 ,1 т?
, a In т-г— .
1 — /Пт 1 % у 1 — /ит
84
Формулы (4.43) и (4.44) были бы достаточно точными, если бы
весь полет выполнялся на Якрейс. Если учесть потери топлива на
взлет, набор высоты и разгон до крейсерской скорости, то эти фор-
мулы будут иметь ВИД (для Мкрейс<1)
Л « 3,45 In = 3,45^ирейс- , (4.45)
тк ’ * ср /1 - znT v 7
или
L 1020 КМкрей^ In — = 1020--ИРейс — . (4.46)
Ср тк сР УI — тТ ’
Максимальная величина дальности Lmax будет иметь место
при максимальном значении (AV/oOmax- Учитывая (4.36),
KV = (c,/cx) V = 15,94 (^0>74’5) У рЛ, (4.47)
откуда следует, что, поскольку величина р0Р0 для данного само-
лета может быть принята неизменной, (КУ)т!а будет иметь место
при [(СгЛх5)^’5]^ или при [d’5/(c^°’5)jmin-
Определим величину су, соответствующую этому режиму.
Возведя [4’7(с^°’5)] в степень 2/3 и используя аналитическое вы-
ражение поляры сх = сХ1) -j- Docy, получим:
IWT - <W(№) + Ш D„. (4.48)
Для дозвукового самолета коэффициент £ по скорости изме-
няется мало и можно в первом приближении принять, что £ = 1,
Do — 1/(лА,эф) = const и что сх зависит только от су. Продиффе-
ренцируем выражение (4.48) по су, приравняем нулю и получим
наивыгоднейшее значение су KpeflC для режима Атах:
су «рейс = 1 >252 ]/А,ЭфСх0, (4.49)
Известно, что величина , соответствующая максималь-
ному качеству, равна
Сг/Кшах ~ Л^эФс.гО — 1,773 И ^эфС’хО- (4.50)
Следовательно,
су крейс = 1>773 С/Кшах = 0>71С/Кшах- (4-51)
Таким образом, полет на максимальную дальность дозвуко-
вого самолета должен производиться на режиме, при котором
Су крейс = 0,71 сУк . Для сверхзвукового самолета су крейс =
= 0,73cv/<
’ -ухтах
Если мы подставим значение сркрейс (см. 4.49) в уравнение
поляры сх = сх0 + су, то получим
Сх крейс 1>5схо. (4.52)
Выражения (4.50) и (4.52) характеризуют оптимальный режим
для полета на дальность.
85
4.4. ВЫБОР РАСЧЕТНЫХ УСЛОВИЙ
Существуют ограничения при проектировании, которые на-
кладываются самим конструкторским бюро. Примером таких
ограничений является выбор расчетных условий, главным образом
расчетного скоростного напора <7тах и расчетного числа Мшах, ко-
торые в значительной мере определяют облик самолета.
Рассмотрим порядок выбора расчетных условий для маги-
стрального пассажирского самолета, которому задана максималь-
ная скорость полета 950 км/ч. На рис. 4.8 показано изменение
возможных скоростей полета в зависимости от высоты полета.
Максимальная скорость полета (значительно превышающая за-
данную) получается на высоте Н = 0 (у земли). Скоростной напор
при этом равен
q =* 11802/(16,33 3,62) « 6580 даН/м2.
Однако высота полета магистрального пассажирского самолета
в основном превышает 8000 м. Более низкие высоты он проходит
либо при наборе высоты, либо при снижении. Целесообразно
ограничить скорость полета на высотах менее 8000 м, приняв
за расчетную точку А. В этом случае скорости полета в зоне высот
нормальной эксплуатации самолета (Н = 8000 ... 12 000 м) равны
или больше заданной скорости.
В точке А
Рдуа PoAV2 1,225 0,429-998а ,
Я = -о-m- = %?" - ----=2013 даН/м2,
что соответствует индикаторной скорости полета Vt = 655 км/ч.
Рис. 4.8. Пример выбора расчетных условий
ского самолета:
В — зона высот нормальной эксплуатации
для магистрального пассажир-
пассажирских самолетов
86
Ограничение максимальной скорости полета по Vinux =
= 655 км/ч и <7тах = 2013 даН/м2 показано на рис. 4.8. Расчетный
скоростной напор при этом ограничении уменьшается в 6580/2013 =
= 3,26 раза!
Ограничение по числу М может быть установлено Мтах « 0,9,
так как при высоте полета Н 11 000 м это обеспечивает скорость
полета около 960 км/ч, т. е. обеспечивает полет с заданной макси-
мальной скоростью.
Нормы НЛГС-2 задают и значения Vmaxmax иМшахшах, которые
должны обеспечиваться характеристиками прочности, устойчи-
вости и управляемости в случае, если по непредвиденным обстоя-
тельствам будут превзойдены 1/тах и Мтах:
i max max Vi max 4“ 50; (4.53)
max Mfflax + 0,05. (4.54)
В рассматриваемом примере I7; max max ~ 700 км/ч и Мшах =
= 0,95.
Подобный подход к выбору расчетных условий с учетом особен-
ностей эксплуатации самолета может быть выполнен при установ-
лении исходных данных для проектирования любого самолета.
4.5. ВЫБОР ОСНОВНЫХ ПАРАМЕТРОВ САМОЛЕТА
На основании изложенного в предыдущих разделах данной
главы может быть установлен следующий порядок выбора основ-
ных параметров самолета.
1. Вычисляется относительная масса расходуемого в полете
топлива пгт из формулы (4.46):
£пасч = 1020 ^РейрМкрейс (Операция 1)
СР крейс И 1 — «т
Здесь величины Арасч и Мкрейс определяются заданием, а ве-
личины Ккрейс и ср крейс берутся по статистике.
2. Определяется величина удельной нагрузки на крыло р'й из
условий посадки самолета либо по формуле (4.21):
с V2
= (°пеР^ия 2)
либо по формуле (4.23):
р'= . ^поЛос.......... (Операция 2')
24,5 (1 — mT — mp, rp/m0) v 1 >
87
Здесь величины У3>в или Упос и тр. гр определяются заданием,
а величина сршахпос берется по статистике в зависимости от си-
стемы механизации крыла:
для эффективной I суШахпос = 3,0 ... 3,2 при % = 0 ... 25 ;
механизации ( Сушахпос = 2,7 ... 2,9 при % = 25 ... 35°;
для слабой механизации сршахпос — 2,2 ... 2,3
Для сверхзвуковых самолетов нормальной схемы можно при-
нимать с^шахпос = 1,3 ... 1,5 и для самолетов бесхвостовой схемы
— 0,7 ...0,9.
3. Определяется величина удельной нагрузки на крыло ро из
условия обеспечения заданной крейсерской скорости полета
Укрейс (Мкрейс), ИСХОДЯ ИЗ СТЭНДарТНОГО Выражения р = Cyq:
Ро = । q 6m~ кРейс7м=11^крейс- (Операция 3)
Здесь </м=1 берется для скорости, соответствующей числу М = 1
на заданной высоте полета (или соответствует величине а — ско-
рости звука на этой высоте); сркрейс берется по статистике или
по формуле (4.51), т. е. сркрейс =' 0,71срктах, если известна по-
ляра самолета. Величина может определяться и выраже-
нием
С^Кшах = КлЧфсхО-
4. Для маневренного самолета нагрузка на крыло определяет-
ся и с учетом полета на допускаемых коэффициентах подъем-
ной силы и эксплуатационной перегрузки (см. также разд. 10.3):
РО^Х° 9маненр’ (Операция 4)
где срдоп определяется либо по срыву обтекания, либо по тряске,
либо по бафтингу. В предварительных расчетах величину сРд0В
можно принимать по значению су, соответствующему началу от-
клонения кривых су = f (а) или тг = f (су) от зоны линейного
протекания.
Величина иудов определяется либо прочностью самолета
(«</доп ~ 0,5»р тах), либо физиологическими возможностями лет-
чика. Величины пу доп и <7маневР — маневренная перегрузка и
скоростной напор на «рабочих» скорости и высоте полета задаются
обычно в ТТТ к маневренному самолету.
5. Производится выбор величины удельной нагрузки на крыло:
р0 = min
Ро — см. операции 2 или 2';
р'о — см. операцию 3; (Операция 5)
Ро — см. операцию 4.
88
6. Определяется тяговооруженность самолета PJ из условия
набора высоты при одном отказавшем двигателе по формуле (4.11):
Р1 = + tge), (Операция 6)
"дв — 1 \ Лнао '
где tg 0 задается НЛГС-2 (см. табл. 4.3) для соответствующего
числа двигателей; Кнаб — берется по статистике.
7. Определяется тяговооруженность самолета Р” из условия
обеспечения горизонтального полета, исходя из того, что в гори-
зонтальном полете Р = 1/К. Тогда, в соответствии с формулами
(4.33) и (4.34), при полете на высотах Н 11 000 м
Р" = -7-^—Ц-г--------, (Операция 7)
0 1>2Лкре9сё Афруд ' 1
а при полете на высоте Я < 11 000 м
Р" =--------. (Операция 7')
Величина Ккрейс берется то статистике, Ккрейс (0,85 ...
... 0,90) /Стах- Коэффициент <рРуд учитывает степень дросселиро-
вания двигателя в крейсерском полете до режима, соответствую-
щего неограниченному времени работы двигателя, или до режима,
соответствующего оптимальному расходу топлива. Обычно он при-
нимается равным 0,8 ... 0,9.
Если неизвестна величина Ккрейс, но по статистике может быть
принята величина сх0 и при заданной Укрейс и заданной высоте
полета
р”-1,8СхоАо’,5^рейс/(Ы- (Операция 7")
Значение величины р0 см. в операции 5.
8. Определяется тяговооруженность самолета Pjn из условия
обеспечения заданной длины разбега самолета при взлете /разб.
Преобразуя формулу (4.6), получим
р'" - 1'05 [ + i(3^ + 8>
89
ЗдвСЬ Су max взл, Хразб И
Можно принимать
/разб берутся
по статистике.
Су max взл
2,1 ...2,3 —при эффективной механизации крыла;
1,5 ...1,7 —при средней механизации крыла;
0,8 ...0,9 —для сверхзвуковых самолетов нор-
мальной схемы;
0,60.. .0,65 — для самолетов бесхвостовой схемы.
Значения Кразб и fpa36 приведены в разд. 4.2.2.
Если задана не длина разбега, а сбалансированная длина
ВПП, то величина Р”1 может быть определена по эмпирической
формуле:
Ро 1 = °^ППСу таХ ВЗЛ + °Г?Р0 • (Операция 8')
X Ядв — 1 / 0,68ьвпП£^ max взл —
9. Тяговооруженность маневренных самолетов должна опреде-
ляться с учетом дополнительных условий:
а) из условия заданной скороподъемности
где Vy — заданная вертикальная скорость; V — заданная или
наивыгоднейшая скорость полета;
г до-85 — для высоты 11000 м;
[ 1,2А —для высоты Я^гИООО м;
б) из условия заданной максимальной скорости полета на за-
данной высоте (заданная величина дшах)
р V сх0<7тах
л 0 -ё-------->
Ро^Н^уя
(Операция 9')
в) из условия полета с заданной установившейся эксплуата-
ционной перегрузкой пэу при заданных V и Н (см. разд. 10.3)
-pVi
*0
2и^таХ?ФнЧ’руд
(Операция 9")
90
*
Во всех этих случаях (а, б, в) <рруя = 1, если полет идет на
бесфорсажном режиме, и <рруд = 1,5 ... 2,0, если полет происходит
с форсажем двигателей.
10. Производится выбор тяговооруженности самолета Рв^как
1—0 <— о •— о leu, К |о.
Ро — max —iV . (Операция 10) Р 0 Ро Ро1
11. По данным, изложенным в гл. 6, определяются относитель-
ные массы конструкции самолета (йкон), силовой установки
(тс>у) и оборудования и управления в первом приближении.
(Операция 11).
12. В зависимости от заданной массы целевой нагрузки (ком-
мерческой нагрузки) и массы служебной нагрузки (снаряжения)
определяется величина взлетной массы самолета в первом
приближении
____________тц. н -1- тслуж_______
° 1 — «К — Й1С, у — /Йоб. упр —
(Операция 12)
13. Зная выбранные величины р0 и Рои вычисленную величину
ml, получим основные абсолютные параметры самолета:
площадь крыла, м2: S = mJg/(10p0); (Операция 13)
взлетная тяга двигателей, даН: Ро = PomogllO. (Операция 14)
Здесь р0 имеет размерность даН/м2.
Таким образом заканчивается первая итерация выбора основ-
ных параметров самолета. После выбора схемы самолета (см. гл. 5)
и выбора основных характерных параметров агрегатов (частей)
самолета (^-кр, Хкр, Лир, Тг, о, ^в. о> ^г. о> ^в. о> Aj>> ® ДР-)
производится расчет массы самолета во втором приближе-
нии и весь процесс выбора основных параметров повторяется
вновь.
Определенные при этом параметры самолета отвечают задан-
ным выходным характеристикам и налагаемым ограничениям.
Однако это не означает, что эти параметры являются оптималь-
ными.
В гл. 7 показаны методы определения оптимальных значений
основных параметров самолета как следующая итерация в про-
цессе проектирования самолета.
91
Алгоритм выбора основных параметров самолета
Исходные данные: £расч -*• ТТТ; Мкрейс -*• ТТТ; f Ккрейс -*• ТТТ; ср данные двигателя;
Уз.п-^ТТТ; ЯКРейс ТТТ; Ркрейс -* ТТТ; <^крвйс-> статистика;
су шах пос “** статистика; Су шах взл —* статистика; 1разб “* ТТТ;
*Наб -* статистика; пД0П->ТТТ; ?маневр-> ТТТ; тц н -> ТТТ;
тр. грТТТ; Kmax -+• статистика; сл0-> статистика;
Vnoc -+• ТТТ; су доп -► статистика; /ра3б -+• статистика;
Уу -> ТТТ; пэу -> ТТТ.
тт
Операция 1. Вычисление пгт -» £расч = 1020 ^кРей£^крейс--- .
СР крейс У 1 — тт
с
у max посv пос
3. п
с V2
Операция 2. Определение рд->- Pg = или Ро = ;—Г~.
30,2(1 —тт) и 24,5(1—/пт— mp.rp/mo)
Операция 3. Определение -* р"а = -----_ си l;pq.
Операция 4. Определение р'”-> р” = --- -Су дод- «/маневр-
1 — и,о/Ит Пу доп
Операция 5. Выбор р0 ->• р0 = min (p'Q, p'Q или рр).
Операция 6. Определение Рр-» Рр = 1,5 —2Д.Р_ (—}-----1- tg 0
пдв — 1 \ Анаб
Операция 7. Определение pP -* Pi1 = .------ или -
АкрейсМё Дфруд
Операция
8.
Определение
^о" -* роП = 1-05 Г --------^5--------+ 4
L Су Шах взл^разб
SIII
-Ml.
/Сразб / J
Операция
9.
Определение
piv_ pIV
_J_\_____?_
1(щах / Вфнфруц
Операция
9'.
Определение
„V р V _ схо<?тах
0 0 Ро^фнфруд
Операция 9".
Определение
pVi Р Vi = — У У1
^р^тах^ФнФруд
Операция 10.
Выбор Ро-Ро= max (pj, Р’1, Р*П, Р™, Р* илиР^1).
Операция
11.
Определение относительных масс ткон, тс,у и тоб.упр-
Операция
12.
„ . I тц. н “Ь тслуж
Определение взлетной массы, I приближение тп = s
r и 1—тк — тс. у — mo6.ynp — тт
Операция
о moq
13. Определение площади крыла 5 = —
юро
— UltQ
Операция 14. Определение тяговооружеиности Ро = Pg —.
и>
Глава 5
АНАЛИЗ И ВЫБОР СХЕМЫ САМОЛЕТА
И ТИПА СИЛОВОЙ УСТАНОВКИ
5.1. ВЫБОР ОБЩЕЙ СХЕМЫ САМОЛЕТА
При проектировании нового самолета почти всегда возникает
проблема выбора его общей схемы. Это по существу начальный
этап синтеза проекта самолета. Формализовать принятие решения
по этой проблеме в полной мере не представляется возможным.
Однако в рамках уже реализованных или предполагаемых реше-
ний может быть организован формальный поиск'наилучшего ре-
шения с точки зрения оценочного критерия и удовлетворения по-
ставленным ТТТ и ТЗ.
Под выбором общей схемы самолета следует понимать нечто
большее, чем выбор только его аэродинамической схемы, хотя она
и является определяющей в реализации принципа действия само-
лета. Для самолета конкретного назначения выбор общей схемы
включает в себя:
— выбор схемы размещения экипажа и целевой нагрузки;
— выбор конфигурации (схемы) аэродинамической несущей
системы для основного (крейсерского) режима полета и схемы ее
изменения (механизации) для взлетно-посадочных или других эта-
пов полета;
— выбор схемы силовой установки (тип, число двигателей или
движителей, размещение их на самолете, размещение топлива и
систем);
— выбор схемы взлетно-посадочных устройств (шасси);
— выбор конструктивно-силовой схемы самолета и увязка ее
по отдельным агрегатам с учетом технологии производства и экс-
плуатации;
— выбор состава бортового оборудования, приборов и тех-
ники систем управления, необходимого для удовлетворения ТТТ
и ТЗ;
— выбор технологической схемы членения и схемы эксплуата-
ционных разъемов.
Все многообразие общих схем самолетов в определенной мере
отражает возможные решения. На рис. 5.1 представлен широкий
и далеко не полный спектр решений, начиная От тихоходных поли-
планных схем и кончая современными схемами сверхзвуковых и
гиперзвуковых самолетов.
Окончательный выбор общей схемы необходимо производить
из ряда конкурирующих вариантов на основе оптимизации каж-
дого из них и последующего всестороннего (формального и нефор-
мального) их анализа. Критерием выбора наилучшего варианта
общей схемы самолета могут быть только комплексные оценки
типа критериев «стоимость—эффективность» или «эффективность—
94
Рис. 5.1 Возможные схемы самолетов
95
Стоимость», когда одна из сторон такого критерия выступает в Виде
целевой функции, а вторая — в виде ограничения.
В качестве оценочного критерия (целевой функции) большин-
ства самолетов можно принимать, например, их взлетную массу,
а в качестве ограничений — летно-технические характеристики,
заданные ТТТ и ТЗ. При этом наилучшим вариантом общей схемы
самолета будет вариант с наименьшей взлетной массой при прочих
равных условиях.
5.2. ВЫБОР АЭРОДИНАМИЧЕСКОЙ СХЕМЫ САМОЛЕТА
5.2.1. Основные аэродинамические схемы
самолетов
Под аэродинамической схемой самолета обычно понимают неко-
торую систему его несущих поверхностей. Эта система может ха-
рактеризоваться как взаимным расположением несущих поверх-
ностей, так и их относительными размерами и формами. В системе
несущих поверхностей имеются главные поверхности (крылья),
создающие основную долю аэродинамической подъемной силы, и
вспомогательные поверхности (горизонтальное и вертикальное
оперение), предназначенные для стабилизации самолета и управ-
ления его полетом.
В случае, когда главных несущих поверхностей несколько и
они расположены по вертикали, такие системы называются поли-
планными (в частности — бипланными при наличии двух крыльев);
если же в системе только одна главная несущая поверхность, то
она образует монопланную схему.
В зависимости от расположения вспомогательных поверхно-
стей относительно системы крыльев различают аэродинамические
схемы:
— «нормальную» схему, если горизонтальное оперение (стаби-
лизатор) располагается сзади крыла;
— схему «утка», если горизонтальное оперение (дестабилиза-
тор) располагается впереди крыла;
— «бесхвостку» или «летающее крыло», если аэродинами-
ческая схема самолета состоит только из одной несущей по-
верхности.
Все эти три схемы должны обладать общими для них свойствами:
балансироваться при различных значениях подъемной силы и
сохранять устойчивое движение при определенном ее значении.
Свойства управляемости (балансировки) и устойчивости являются
основными при реализации любой аэродинамической схемы само-
лета. В связи с этим указанные выше три основные схемы назы-
ваются балансировочными. Они могут быть образованы плоскими
несущими поверхностями. При этом схема «бесхвостка» сможет
балансироваться только на границе продольной статической
устойчивости (нейтральной).
96
Использование «закрученных» несущих поверхностей позволяет
рационально (при минимальных потерях аэродинамического каче-
ства) осуществить балансировку всех схем при условии их устой-
чивости.
Проведем анализ и сравнение всех трех аэродинамических (ба-
лансировочных) схем.
5.2.2. «Нормальная» схема
На рис. 5.2 представлена балансировочная схема самолета
с хвостовым горизонтальным оперением, где указаны силы, дей-
ствующие на крыло и оперение, и суммарные силы в условиях ба-
лансировки самолета и в условиях ее нарушения при изменении
угла атаки (например, при воздействии вертикального порыва
ветра).
В условиях балансировки (тг — 0) равнодействующая аэро-
динамических сил Y всегда проходит через центр давления и
центр тяжести одновременно, т. е. хд = хт. Равнодействующая же
приращения аэродинамических сил от изменения угла атаки
всегда проходит через свой центр давления, совпадающий с фоку-
сом самолета, т. е. хд (Аа) = хР.
Тогда, в соответствии со схемой сил на рис. 5.2, для плоских
крыла и оперения условия балансировки схемы можно предста-
вить уравнениями статики
Y = nymg = Укр + Уг. 0; (5.1)
Мг — Y (хт Хд< рал) = Укр (Xj Хр б. г. о) Гг. о^-г. о = (^-2)
где хд.бал — координата центра давления при балансировке.-
Изменения сил и моментов при изменении угла атаки а опре-
деляются соотношениями
АК (Аа) = \nymg = АКкр (Аа) + АУГ. 0 (Аа); (5.3)
Рис, 5.2» «Нормальная» балансировочная схема самолета с хвостовым гори-
зонтальным оперением
4 С. М. Егер
97
&MZ = ДУ (Да) (хт — Хр) —
= (хт — Хр б. г. о) АУкр (Да) — Lr. 0 ДУГ. 0 (Да), (5.4)
где ДУГ. 0 (Да) берется с учетом скоса потока за крылом, т. е.
ДУг. о (Д®) = Су г. о (1 — в“) kr. oqSr. 0 Да.
Из уравнения (5.2) следует, что при положительной подъемной
силе крыла (Укр > 0) направление действия (знак) подъемной
силы на оперении зависит от взаимного положения центра тяжести
самолета (хт) и фокуса самолета без горизонтального оперения
(^б.г.о), т. е.
X — X
Уг.0 = т-Г2'б-г- - УКр. (5.5)
ьг. о
Из (5.5) видно, что при Укр >0 Уг<0 > 0, если хт > Хрб, г. 0, и
Уг. о < 0, если хт < Хрь г. 0.
С помощью соотношений (5.3) и (5.4) можно выразить фокус
Хр и степень продольной устойчивости самолета с горизонтальным
оперением через такие же характеристики самолета без гори-
зонтального оперения (xF6 г о и nty г о):
Хр — Хр б. г. 0 4- Дхр г. 0; (5.6)
тси = тсд. —
г г б. г. о “ F г. о>
Д^Г г. о
где
fer.o^r.oO-^)Sr.0br.2.9
^Kp + W“r.o(l-Sa)Sr.o’
(5-7)
(5.8)
Здесь вместо относительного плеча горизонтального оперения
£г. о = L^JbA использовано относительное межфокусное рас-
стояние 7/г<ОвЭ о.э/^д» где Т.ГвОвЭ Хрг< о г. о
расстояние между фокусом оперения и фокусом самолета без го-
ризонтального оперения.
Влияние скоса потока за крылом учитывается производной
2с“
_ ^СЖ^КР. Эф I 1 _|2/-г, о, э
V ^кр. эф 4" 4hr. о L V ^кр. эф + 4Lr. о. э + 4hr. о
X f 1 4- V ^Р- ЭФ 4~4Яг. о \ .
\ 2 J/ Lf. о. э 4- Лг. о/ .
/Кр.эф ~ ^/(1 + 5яесж) — эффективный размах крыла (определе-
ние величины 6яесж дано в гл. 14); йг. 0 — высота оперения над
крылом в потоке;
98
kcm € \ксж =1 при M< 1 и kcm = 0 при 1}.
Из уравнения (5.2) следует, что
m\ =k с S L /с , (5.10)
z б. г. о г. о у г. о г. о г. о/ у кр ’ ' /
так как х, - xf6 г 0 = тсвб г 0.
Исключив тсУ6 г 0, можно получить выражение для степени
продольной устойчивости самолета ® оперением в форме:
тсд =—k S Т ^кР^г-..0-(1~±а)~СУ-г-0^кР, (5.11)
в "г. о г. о г. о, * „ м * X J
СУСУ
где Су и с“ — коэффициент подъемной силы и его производная по
углу атаки для схемы в целом,
Су = Су кр 4" ^г. <£у г. о^г. о, (5> 12)
Су — Су кр Ч~ ^г. осу г. о (1 —8a)Sr. о- (5.13)
Из выражения (5.11) следует, что для устойчивости баланси-
ровочной схемы (тУ < 0) необходимо выполнить условие
с у ктРу Г. о (1 — 8 ) — Су г 0Су Кр 0 (5.14)
или
с 1са
^дкр/Уд кр
— ®кр ®г. о
= ^г. Жг.о(1-8а)].
Это и есть известное в самолетостроении «правило продольного
V»: угол атаки крыла (аир) должен быть больше угла атаки хво-
стового оперения аг.о. Это правило является критерием продоль-
ной статической устойчивости данной схемы.
Используя (5.10) и (5.12), можно записать:
С^кр = СЛ1 ~т^б.г.о/^г.о.э)=С/1 -СТб.г.о)> (5-11 * * * 15)
Су Г. О Су (Тр. г. 0/(^т. О^г. о)|
(5.16)
где ок = тедЛ / L
м б. г. о г б. г. о / г. о. э
Выражение для балансировочной поляры можно записать в виде
Сх бал ~ CxQ б. г. о 4" kp. о^хО г. о^г. о 4 лХцр э 4" ®), (5.17)
где со = об. г. 0 [2 (К8—1) + об. г. 0 (1 + - Хк-Р-3-^
. \ *Г. оАг. О.
(5.18)
ИЛИ (0 =
11
=-^-4- fcr.o^.oO -8a)Sr.o 2(Кв-1) +
. ^-г. о. э J '
[сх 1
=^~ + К. оС“г. о (1 - 8“) S, о ( 1 + /КР - - -2Ке) .
о. э J \ «Г, сАг. о. Э*^Г. о / J
(5.19)
99
Рис. 5.3. Зависимость вели-
чины потерь на балансировку
со самолета «нормальной» схе-
мы от величины Об. г. о =
= тЛ г JL- „ , и от величи-
ны коэффициента К8:
-----К, >1;---------Ке < 1;
-----Ке - 1
Очевидно, что минимальное значение сх бал будет при о/ = О,
тогда, как отсутствие потерь на балансировку
®б. Г. О = 0>
со = 0 при
°б. г. О
___________2(Ке-1)
1 — 2Kg Хцр_ э/(^г. <Лг. о. э^г. о)
Зависимость со = f (аб. г. 0) представлена на рис. 5.3.
Анализ выражения (5.18) и рис. 5.3 показывает:
а) при Кг > 1 (оперение близко расположено к крылу, т. е.
малы величины Lr. о.э и hr. 0) аб. г.о < 0 или хт < л>б. г. 0, и тогда
суГ. о <0 или балансировочная сила действует на ГО сверху
вниз;
б) при Ке < 1 (скорость полета дозвуковая, оперение удалено
от крыла или скорость полета сверхзвуковая и Ке = 0) аб. г. 0 > 0
или хт > Хр$' г. о, и тогда суг. 0 > 0 или балансировочная сила
действует на ГО снизу вверх;
в) при Ке = 1 бд. г. о = 0 или хт = хРб, г# 0, и тогда суг. о = 0.
Указанные выше условия оптимальности зависят от режимов
полета, и поэтому при выборе величины площади оперения 5Г. 0
необходим компромисс между требованиями устойчивости на ос-
новном режиме полета (min tncv задается ТТТ) и условиями балан-
сировки самолета при посадке (полностью выпущенная механиза-
ция крыла) или при взлете (двигатели работают при максимальной
тяге и механизация крыла отклонена во взлетное положение).
Если исходить из того, что на основном крейсерском режиме
полета выполняется условие г о — 0 (ю = 0), то относитель-
ную площадь горизонтального оперения 8Г,О д л я дозвуко-
вых самолетов можно определить по принципу
5Г. 0 = max {Sr. 0. крейс; Sr. 0. з. п (условие захода на посадку)},
где
,Jr. о. крейс —
kT. ос“г. о(1 -е“) (Ч. о. 3 + mz0
(5.20)
(5.21)
- (^2-^б.г.о)Дс»меХ-тХз.п
г. о. з. п -
0.4. оЧ. о. э | % г. о max | + % з. П (1 ~ «“)
Ч/ИР -
(5.22)
100
Здесь тсу — степень продольной статической устойчивости само-
лета на крейсерском режиме; xFa — точка приложения прираще-
ния подъемной силы при отклонении механизации крыла (хп &
яг 0,65 ... 0,70); &суМех — приращение коэффициента подъемной
силы при отклонении механизации крыла; cyt,n— коэффициент
подъемной силы самолета при заходе на посадку (по НЛГ-2
cys. п = Су шах поо/1,69); СуГ, о max — максимальный коэффициент
подъемной силы горизонтального оперения.
Относительную площадь ГО для сверхзвуковых са-
молетов можно определить по тому же принципу (5.20), но
при этом
С Д*Г б. г. оС“кр
°г.о. крейс — „ /, ант- - \»
Яг. о^у г. о V 6 ) \ г. о. э — &XF б. г. о)
где Дх/?б.г.о — сдвиг фокуса самолета без горизонтального опе-
рения при переходе от дозвуковых скоростей к сверхзвуковым
(Дхрб.г. о = 0,10 ... 0,25 в зависимости от формы крыла в плане).
Особенности взлетных режимов (момента подъема передней
опоры шасси и отрыва) рассматриваются аналогично посадочным,
но с учетом влияния тяги двигателей, создающей дополнительный
продольный момент, требующий изменений в балансировке само-
лета в процессе взлета.
Во всех вариантах компоновки самолета нормальной схемы
требуется соблюдение правила продольного V (5.14) или условия
крс’у г. о (1 — е ) Су г. 0Су кр.
Выполнение этих условий может быть обеспечено и путем ис-
пользования средств автоматики в системе продольного управле-
ния.
5.2.3. Самолет схемы «утка»
В соответствии с рис. 5.4 условия балансировки самолета схемы
«утка» с плоскими крылом и оперением можно записать в виде сле-
дующих уравнений для сил и моментов:
Y = nytng = Ккр + Гг. 0 - Гск; (5.23)
Мг — У (Хт Х&, дал) =
— Гг. о Аг. о ^кр (%F б. г. о -^т) ^ск (^т %F ск)> (5.24)
а изменение сил и моментов при изменении угла атаки самолета —
в виде следующих соотношений:
ЬУ (Да) = \njng = ДГкр (Да) + ДГГ. 0 (Да) - ДГСК (Да); (5.25)
Д/И2 = ДК (Да) (хт — Хр) = ДКГ- 0 (Да) Lr, 0 —
АКкр (Ла) (Хр б. г. о -^т) АКск (Ао) (хт Хр ок), (5.26)
где Хск и ДКск (Да) — часть подъемной силы крыла, обусловлен-
ная скосом потока за передним ГО, и ее изменение вследствие из-
101
Рис. 5.4. Балансировочная схема самолета с передним горизонтальным
оперением (схема «утка»)
менения угла атаки; xFcK— координата приложения этой части
подъемной силы (фокус от скоса).
При дозвуковых скоростях полета часть подъемной силы крыла
от скоса за оперением примерно равна и противоположно направ-
лена подъемной силе на горизонтальном оперении (FCK та —Кг.о),
а при сверхзвуковых скоростях она практически равна нулю
(Уск 0). Поэтому в общем случае можно получить:
V — k V
1 СК — Лсж2 г. о»
(5.27)
1 при М<0
ГДС л г/ л
сж 0 при М^О.
Если ввести понятие эффективного плеча ГО Lr. о.э> то направ-
ление (знак) подъемной силы на ГО при положительной подъемной
силе на крыле (Укр > 0) будет зависеть от взаимного расположе-
ния центра масс самолета хт и фокуса самолета без горизонталь-
ного оперения xF6.r.o, т. е.
Гг. о = б.Г О О. э» (5.28)
где Гг, Оф э = Z/r> о &сж (хт Хр ск).
Следует отметить очень важное обстоятельство: эффективное
плечо ГО (£г. о. э) на дозвуковых скоростях полета (йсж = 1) рав-
но расстоянию между фокусом ГО и фокусом крыла от скоса по-
тока за оперением, и тогда Гг.0.3 <£г.о Для большинства
наиболее часто используемых форм крыла (треугольное и стрело-
видное); на сверхзвуковых скоростях полета (£сж = 0) £г. о.э та
та Lr.o. Это обстоятельство может быть использовано при проек-
тировании самолетов схемы «утка» с так называемым «близким рас-
положением» ГО, когда оперение располагается практически в фо-
кусе крыла от скоса и его эффективность на дозвуковых скоростях
мала. При переходе к сверхзвуковым скоростям полета эффек-
тивность ГО возрастает (Гг. о.э ~ 7.г. 0 > 0), что при соответ-
ствующей площади оперения Sr, 0 может привести практически
102
к совпадению общего фокуса самолета (xF) на дозвуковых и сверх-
звуковых скоростях.
Этот эффект использован на французском экспериментальном
самолете «Грифон» и на шведском самолете SAAB-37 «Вигген».
Проявление эффекта близкорасположенного ГО имеет место,
хотя и в меньшей степени, и для самолетов схемы «утка» с большим
плечом ГО.
С помощью соотношений (5.25) и (5.26) можно получить выра-
жение для фокуса и степени продольной устойчивости самолета
схемы «утка» через параметры его оперения. Так же, как и у само-
лета «нормальной» схемы,
Ах„ „ : trfy — rrfy., „ „ — Ai-,
Г лб.г.о ‘ Г Г. О* Z SO. Г. О Г Г, О’
но здесь Ахяг 0 — Су г. о^т. оГг. о!^у кр- (5.29)
Воспользовавшись уравнением (5.24), имеем
с S L — пгсул с =0.
(Г.о г. о г.о.э z б. г. о. у кр
Исключив шсу6 Г 0, получим следующее выражение для степени
продольной статической устойчивости всей системы:
л С -— fi
mJ = -Sr. oLr. О.э (5.30)
еу крсу кр
Из этого выражения следует, что для обеспечения продольной
статической устойчивости данной схемы (ш^у < 0) в условиях ее
балансировки необходимо выполнить требование «правила про-
дольного V», обобщив его в следующем виде: для продольной ста-
тической устойчивости любых аэродинамических схем, состоящих
из двух тандемно расположенных плоских поверхностей в условиях
их балансировки (М- = 0), необходимо, чтобы угол атаки перед-
ней поверхности ах был больше угла атаки задней несущей по-
верхности а2. Таким образом, для схемы «утка» это правило выра-
жается соотношением аг. 0 > анр, в то время как для нормальной
схемы акр > аг. о.
При одинаковых относительных геометрических параметрах
крыла и оперения (с“кр с“г. о) и при соблюдении «правила
продольного V» (аг. о>акр) горизонтальное оперение в схеме
«утка» должно быть более нагруженным в аэродинамическом отно-
шении, и это предрасполагает к преждевременному (относительно
крыла) срыву потока с оперения при увеличении его подъемной
силы либо вследствие увеличения угла атаки от вертикального
порыва ветра, либо вследствие управляющего воздействия для
кабрирования самолета при маневрировании в плоскости про-
дольного движения. Этот недостаток схемы «утка», известный как
тенденция к «клевку», в особенности на взлетно-посадочных режи-
103
| Рис. 5.5. Возможные схемы переднего горизонтального оперения:
а — «плавающий» дестабилизатор с серворулем; б — фиксированный (переставной)
дестабилизатор со свободным рулем высоты, снабженным сервокомпенсатором-тримме-
ром; в — дестабилизатор с автоматической системой управления; 1 — флюгирующий
стабилизатор; 2 — серворуль; 3 — дестабилизатор; 4 — свободный руль высоты;
5 — сервокомпенсатор; 6 — автобустер
мах, привел к тому, что эта схема, широко применявшаяся в начале
развития авиации, впоследствии практически не использовалась.
Устрайить этот недостаток можно либо подбором геометрии ГО
(например, с тем, чтобы Хг. 0 Хкр для уменьшения с“г. 0 у до-
звуковых самолетов), либо механизацией или автоматизацией
функционирования ГО. Примером механизации функционирова-
ния переднего ГО может служить флюгирующий («плавающий»)
дестабилизатор с серворулем, у которого с“г. 0 « 0 при сут,0 >0
(рис. 5.5, а), либо фиксированный (переставной) дестабилизатор
со свободным рулем высоты, снабженным сервокомпенсатором-
триммером (триммером-флетнером), у которого также с“г.о«0
прис„г.о>0.
Схема механизированного переднего ГО, показанная на
рис. 5, а, может быть применена на сверхзвуковом самолете для
уменьшения потерь аэродинамического качества от балансировки
устойчивого самолета, так как основными органами продольного
управления такого самолета могут быть элевоны. С этой целью
при переходе к сверхзвуковому полету флюгирующий де-
стабилизатор фиксируется с помощью специальных устройств
(типа замков), вследствие чего общий фокус схемы на сверхзву-
ковых скоростях остается примерно равным фокусу самолета на
дозвуковых скоростях, т. е. компенсируется сдвиг фокуса крыла
(самолета без оперения) назад при переходе к сверхзвуковым скоро-
стям, так как при фиксированном стабилизаторе с“г. 0 > 0.
Во взлетно-посадочной конфигурации такое ГО позволяет ис-
пользовать элевоны частично и как закрылки (зависящие элевоны)
с целью улучшения взлетно-посадочных характеристик самолета
(увеличения суз.п и суотр). Однако возможности такого оперения
невелики вследствие ограниченности его размеров 5^ест и £г.о,
определяемых сдвигом фокуса самолета без оперения (крыла) от
сжимаемости воздуха. Размер 5дест определяется из условия вы-
бора величины
^г. о = ^дест ~ ‘-'дест (^г. о Хр ск) ~ &Хр g. г< 0. сж. (5.31)
104
Например, при Lr>0 = 1,0; Здест = 0,1 и xFcK=s—0,2 получаем
Лг.о’=0,12,
Величины б.г.о.сж — сдвига фокуса крыла от сжимаемости
и хР ск — фокуса от скоса могут лежать в следующих пределах:
&Хрб' г, 0. сж«=» 0,10 ... 0,15; Хр ск 0 ... 0,25.
Вследствие малости Лг>0 прирост подъемной силы на режиме
взлета—посадки при отклонении элевонов как закрылков невелик,
и порядок этого прироста можно оценить по приближенной фор-
муле _
мех г. о тах^дест^г. о. %F б. г. о), (5.32)
где Хр2 — фокус крыла по отклонению элевонов (например, при
Хр2 0,65, -^Гб.г.о 0,33, Pj/r.omax 1,0, ЗдВст 0,1,
1г. о.э = 1г.о + Хр ск аг 0,8 получим Дс?меХ «=, 0,2).
Увеличить площадь переднего оперения сверх размеров, опре-
деленных соотношением (5.31), невозможно. При большей площади
Здест на сверхзвуковых скоростях полета (при фиксированном
дестабилизаторе) самолет станет неустойчивым. Поэтому общие
характеристики самолета схемы «утка» в варианте, показанном на
рис. 5.5, а, незначительно отличаются от характеристик самолета
схемы «бесхвостаа».
Схема механизированного оперения, приведенная на рис. 5.5, б,
значительно улучшает характеристики самолета схемы «утка».
Дестабилизирующая часть площади такого оперения Здест опре-
деляется теми же соображениями, что и для предыдущей схемы.
Однако общая площадь такого оперения значительно больше, чем
в первом случае, так как она включает и площадь свободного руля
высоты, которая может быть равна или даже больше площади де-
стабилизирующей части оперения. Прирост подъемной силы само-
лета с таким оперением на режимах взлета—посадки будет значи-
тельно больше (примерно в 2 раза) за счет большего момента от
оперения и соответствующего ему большего отклонения элевонов
как закрылков. Такую оценку можно получить по формуле_(5.32),
в которую вместо величины Здест нужно подставить Зг. 0 =
— Здест + Зр. в. Теоретически величина Зр.в неограниченна.
При любой площади руля высоты Зр.в может быть подобран такой
коэффициент сервокомпенсации &ск, что на дозвуковых скоростях
ГО будет иметь с“г.о = 0- Определить его можно по формуле
- -ОС гцб f «..ОС
дб атсК _____ су г. ошш. р. в тсуг. omm. р. в
ск — rfSp. в ~ с“ тх
a
cy г. о"*ш. p. в
где тш.р в — коэффициент шарнирного момента руля высоты;
6 — угол отклонения руля высоты; т — угол отклонения серво-
компенсатора.
105
Преимущество такого оперения состоит еще и в том, что в нем
не требуется фиксировать свободный руль при переходе на сверх-
звуковые скорости, так как действие его постепенно, по мере сжи-
маемости воздуха, уменьшается и на сверхзвуковых скоростях
практически пропадает (влияние руля не передается вперед по
сверхзвуковому потоку на дестабилизатор, а эффективность серво-
компенсатора /Пщ.р. в становится при этом практически равной
нулю). Таким образом, фокус самолета остается практически по-
стоянным во всем диапазоне чисел М полета (1 > М > 1), что зна-
чительно облегчает балансировку самолета в крейсерском полете
с помощью элевонов при минимальных потерях аэродинамиче-
ского качества. “
Кардинально все вопросы устойчивости и балансировки само-
лета схемы «утка» решаются при использовании средств автома-
тики в управлении дестабилизатором, как это показано на
рис. 5.5, в. Самый простой и очевидный закон управления таким
дестабилизатором будет иметь вид
Афдвст = ka Да,
где Дфдест и Да — изменение угла отклонения дестабилизатора и
угла атаки соответственно, a ka — статический коэффициент уси-
ления автомата. Для обеспечения с“г. о — 0 для дозвуковых ско-
ростей коэффициент усиления может быть определен по формуле
ж —су г. o/cj? г. о*
При изменении числа М полета ka может программироваться так,
что нейтральная центровка (приведенный фокус) самолета будет
сохраняться постоянной или изменяться в соответствии с измене-
нием центровки самолета при расходовании топлива и грузов.
В данной схеме функционально не накладывается каких-либо
ограничений на размеры оперения, и поэтому могут быть реализо-
ваны хорошие взлетно-посадочные характеристики самолета.
Основным препятствием в использовании оперения данной схемы
является проблема обеспечения гарантированной надежности
(безотказности) средств автоматики.
Использование аэродинамической схемы «утка» с «жестким»
горизонтальным оперением наиболее вероятно для маневренных
самолетов со сверхзвуковыми скоростями полета в вариантах
с близко- и среднерасположенным оперением. Шведский самолет
SAAB-37 «Вигген» использует полезный эффект близкорасполо-
женного оперения (компенсацию сдвига фокуса от сжимаемости
воздуха) и достаточную эффективность ГО на режимах взлета и
посадки, усиленную сдувом пограничного слоя и суперциркуля-
цией.
Минимальное индуктивное сопротивление самолета схемы
«утка» с учетом его балансировки при дозвуковых скоростях по-
лета получается при неустойчивом самолете без ГО (а следова-
106
тельно, и с ГО, если не приме-
няется автоматическая система устой-
чивости). При сверхзвуковых скоро-
стях минимальное балансировочное
индуктивное сопротивление полу-
чается только у самолета при ней-
тральной устойчивости без ГО. По-
вышение устойчивости схемы приво-
дит к увеличению ее индуктивного
сопротивления с учетом баланси-
ровки (рис. 5.6). Следует иметь
в виду, что при дозвуковых ско-
ростях полета потери на баланси-
ровку (при аб. г. о = const < 0) у
схем с -близкорасположенным ГО меньше, чем у схем с дале-
корасположенным ГО; при сверхзвуковых скоростях потери
у обоих вариантов примерно одинаковы. Если же эти схемы рас-
сматривать при шсу6 г 0 = const, то меньшие потери на балан-
сировку будут у схем самолетов с большим плечом оперения.
Оценку изменения отвала поляры или величины Kmzx от ба-
лансировки можно сделать по коэффициенту, определенному по
формуле
®бал 6g. г. о 6g, г. о
^иг.о
Рис. 5.6. Зависимость величи-
ны потерь на балансировку ч>
самолета схемы «утка» от вели-
чины ®g. г. о = тгб. г. о/^т.о.э’
— . — далекорасположеииое ГО;
— — — близкорасположенное ГО;
где К..р-‘а-=
у *к
А.КР. э
^Т. О. 9^Г. о
/кр. э
2(лвкр+*вг.о5^^
2Lr, о. э
'Г. о. э^г. о
, (5.33)
кр. э 4" 4ft|. о _
1------z ~~г-ц-в X
V /кр. э 4- 4/.г. о. э 4" 4Аг. о
/кр. э 4~ 4/tr. о
2 Y ^г. о. э 4“ Аг. о
(5.34)
„ V- ______ ^СЖ_____^кр. 3
Депо 2
2Lr. о, э
Кр. 3 4" 4ftr. о _
___________________ X
Y/кр. » 4" 4 Аг. о. э 4- а
/кр. Э 4~ 4ftr. о
(5.35)
х и ,1/Р—
\ 2 Y ьг. о. э + hr. о
Для сохранения высокого аэродинамического балансировоч-
ного качества самолетов схемы «утка» необходимо применять
крутку крыла.
5.2.4. Самолет схемы «бесхвостка»
На рис. 5.7 представлена балансировочная схема самолета
«бесхвостка» с «плоским» крылом, в соответствии с которой можно
записать уравнения равновесия
Y = nymg = Ккр + У8В (5.36)
и Мг = Y (хт - хд) = Ккр (х, - х^) - F9BL9B = 0, (5.37)
где ДэВ = Хр2 — хт — плечо элевонов.
107
Риа. 5.7. Балансировочная схема самолета
«бесхвостка» с «плоским» крылом
При изменении угла атаки силы и моменты изменятся в соот-
ветствии с соотношениями
ЛК (Ла) = &numg = ЛУкр (Ла); (5.38)
ЛЛ12 (Ла) = ЛУ (Ла) (хт — х?) = ЛУкр (Ла) (хт — xF). (5.39)
Если перейти к безразмерным аэродинамическим коэффициен-
там, то из (5.38) и (5.39) можно получить выражение для степени
продольной статической устойчивости схемы «бесхвостка»
= ^7 = *т ~ хР. (5.40)
Из условий балансировки (5.36) и (5.37) при заданной подъем-
ной силе самолета Y = nymg можно определить балансировочную
силу от элевонов
К8В = Y____
£эв +(*t“*f)
или Су эв сутгу! Ьэъ.3, (5-41)
где £вВ.э = — Хр — относительное расстояние от фокуса са-
молета по углу атаки до фокуса самолета по углу отклонения эле-
вонов.
Из (5.41) видно, что при тсг« < 0 или при хт < xF, су9ъ < 0 и
КвВ < 0, т. е. при балансировке устойчивого самолета подъемная
сила от элевонов будет направлена вниз. Потери подъемной силы
(Гвв < 0) при балансировке устойчивого самолета схемы «бес-
хвостка» связаны с явлением «просадки» самолета при выравнива-
нии самолета на посадке или при выводе из пикирования, а также
с потерей максимального аэродинамического качества.
Эти потери на балансировку можно характеризовать величиной
®бал «= —26(1 — а), (5.42)
где 5 = £эв. >•
108
Тогда изменение максимального аэродинамического качества
по запасу устойчивости самолета будет характеризоваться зави-
симостью вида
Лтах бал = = . 1 1 - 1 П (5.43)
Ктах (0) - 25 (1 - oj 1
Для уменьшения потерь на балансировку необходимо приме-
нять крутку крыла, на которой обеспечивается т:Л} > 0 и на крей-
серском режиме полета не требуется отклонять элевоны. Крутку
крыла по величине mz0 можно определить из условия балансировки
/71г0 — тгУСу крейс-
(5.44)
С целью уменьшения разбежки фокуса самолета по числу М
полета и уменьшения балансировочного сопротивления наряду
с круткой крыла применяются передние наплывы. Работа таких
наплывов по характеру своему сходна с работой близкорасполо-
женного переднего оперения у самолета схемы «утка», установ-
ленного в фокусе от скоса. Для определения величины переднего
наплыва с целью компенсации сдвига фокуса крыла от сжимае-
мости воздуха можно воспользоваться следующей эмпирической
формулой:
tg Хп. Н = tg Хп. к 1 +
1 — 2х?. к \
^б. А. н tg %п. к у
(5.45)
где Хп. н — угол стреловидности по передней кромке наплыва;
Хп. к—угол стреловидности по передней кромке базового крыла;
Хб. к — удлинение базового крыла; к — фокус базового крыла
на дозвуковой скорости; = 2zn. „// — относительный размах
координаты наплыва (точки излома передней кромки крыла),
2п.н = 0,3 ... 0,4.
Для улучшения взлетно-посадочных характеристик на само-
летах схемы «бесхвостка» принимается иногда моментная механи-
зация (для создания кабрирующего момента) в виде выдвижного
переднего оперения, выполненного как многощелевое крыло и
устанавливаемого в выдвинутом положении на большой угол
атаки, близкий к критическому, при которомcyv.о = const (с“г.о~
л; 0). Это, как и у схемы «утка» с плавающим оперением (с’'г,о~0),
позволяет несколько отклонить элевоны, как закрылки, и полу-
чить дополнительный прирост подъемной силы. Однако целесооб-
разность такого конструктивного мероприятия должна быть до-
казана на основе технико-экономических оценок, так как допол-
нительная масса и сопротивление от установки такого убирающе-
гося оперения могут оказаться столь значительными, что целесо-
образнее окажется пойти на незначительное увеличение площади
крыла.
109
5,2.5. Дополнительные соображения
по выбору схемы
При выборе одной из трех аэродинамических балансировочных
схем следует иметь в виду, что из-за затруднения в получении
больших значений &су мех (особенно у самолетов схемы «бесхвост-
ка») самолеты схемы «бесхвостка» и схемы «утка» при взлете и по-
садке вынуждены выходить на большие углы атаки а. Конструк-
тивно это делает невозможным (или затруднительным) примене-
ние на таких самолетах стреловидных крыльев большого и сред-
него удлинения, так как применение таких крыльев и больших
углов атаки связано с очень большой высотой опор шасси.
Вследствие этого для скоростных самолетов в схемах «утка»
и «бесхвостка» могут использоваться только крылья малого удли-
нения треугольной, готической, оживальной или серповидной
формы в плане. Из-за малого удлинения такие крылья имеют
малое аэродинамическое качество на дозвуковых режимах по-
лета.
Эти соображения определяют целесообразность использова-
ния схем «утка» и «бесхвостка» для самолетов, у которых основным
режимом полета является полет на сверхзвуковой скорости. И есте-
ственно, что «нормальная» схема наиболее целесообразна для до-
звуковых самолетов или самолетов, у которых режим полета на
дозвуковой скорости преобладает над режимами сверхзвукового
полета.
5.3. ВЫБОР СХЕМЫ САМОЛЕТА ПО ОТДЕЛЬНЫМ
ЕЕ ПРИЗНАКАМ
Выбор аэродинамической балансировочной схемы произво-
дится одновременно с выбором схемы самолета по ее отдельным
признакам. В первую очередь выбирается форма крыла в плане,
размеры оперения и его размещение на самолете. Материалы для
этого выбора даны в гл. 8, 14 и 17.
Затем выбирается схема шасси и размещение шасси на самолете.
Материалы для этого даны в гл. 19.
В той части аэродинамического сопротивления самолета, кото-
рое называется сопротивлением интерференции и обусловлено
взаимным влиянием частей самолета друг на друга, наиболее зна-
чительную долю составляет интерференция между крылом и фю-
зеляжем.
Наименьшим сопротивлением интерференции обладает средне-
план. Большинство военных самолетов имеют схему среднеплана,
если только средняя часть крыла — центрсплан — не мешает
либо грузовому отсеку в фюзеляже, либо воздушным каналам,
идущим от носа самолета к двигателям, размещенным в хвостовой
части фюзеляжа.
У пассажирских и транспортных самолетов эта схема практи-
чески не применяется, так как центроплан, проходя в середине
по
• фюзеляжа, мешает созданию еди-
ной пассажирской или грузовой
кабины. В недавно появившихся
широкофюзеляжных пассажир-
ских самолетах с диаметром фюзе-
ляжа более 5 м возникает воз-
можность поднятия крыла вверх
так, чтобы между верхней по-
верхностью центроплана и верх-
ним обводом фюзеляжа было не
менее 3,5 м.
Почти такими же характери-
стиками интерференции, как сред-
неплан, обладает и самолет-высо-
коплан (рис. 5.8). Схема высоко-
плана обладает следующими ком-
поновочными и конструктивными
недостатками:
— шасси невозможно разме-
стить на крыле, либо (на неболь-
Рис. 5.8. Поляры самолетов
при различном положении крыла
по высоте фюзеляжа
ших самолетах) основные опоры шасси получаются высокими и
тяжелыми. В этом случае шасси размещается, как правило, на
фюзеляже, нагружая его большими сосредоточенными силами.
Эти силы вместе с нагрузками, возникающими при герметизации
фюзеляжа, значительно понижают живучесть его конструкции,
уменьшая и срок службы;
— при аварийной посадке крыло (особенно если на нем установ-
лены двигатели) стремится раздавить фюзеляж и грузовую или
пассажирскую кабину, находящиеся в нем. Для устранения такой
возможности приходится усиливать конструкцию фюзеляжа
в районе крыла и значительно утяжелять ее;
— при аварийной посадке на воду фюзеляж уходит под по-
верхность воды, затрудняя тем самым аварийную эвакуацию пасса-
жиров.
Наряду с этим самолеты с верхним расположением крыла
имеют большое достоинство — малую высоту от низа фюзеляжа
до земли. Это обстоятельство заставляет все существующие военно-
транспортные самолеты делать по схеме высокоплана. При этом
обеспечивается возможность легкой и быстрой погрузки в самолет
и выгрузки из самолета боевой техники, грузов и людей по трапу
или по рампе, встроенной в нижнюю часть фюзеляжа сзади или
спереди.
Наибольшее сопротивление интерференции имеет низкоплан.
На рис. 5.8 показано, что установка в местах сочленения крыла
с фюзеляжем зализов позволяет существенно уменьшить это со-
противление.
Достоинство низкорасположенного крыла заключается в воз-
можностц'размещения на нем шасси и в обеспечении большей безо-
Ш
пасности самолета при аварийной посадке. Недостатками схемы
«низкоплан» являются-затруднения (из-за близости крыла к земле)
в размещении под крылом установок турбореактивных двигателей
и на крыле установок турбовинтовых двигателей и необходимость
в связи с этим делать у крыла положительное «поперечное V»,
требующее на современных самолетах введения автоматики в
управление по курсу и крену.
Подобным образом рассматриваются и другие признаки схемы
самолета, например при выборе схемы по особенностям фюзеляжа
(выбор формы его поперечного сечения, длины его носовой и хво-
стовой частей и т. п.), о чем дальше говорится в гл. 15.
5.4. ВЫБОР ТИПА И ЧИСЛА ДВИГАТЕЛЕЙ
ДЛЯ ПРОЕКТИРУЕМОГО САМОЛЕТА
5.4.1. Типы двигателей
Для силовой установки современных самолетов применяются
следующие типы двигателей: воздушно-реактивные двигатели
(ВРД), поршневые двигатели (ПД) и жидкостно-ракетные двига-
тели (ЖРД)- Воздушно-феактивные двигатели, в свою очередь, де-
лятся на газотурбинные (ГТД) и прямоточные (ПВРД).
Наибольшее распространение в авиации в настоящее время
имеют ГТД. К этому классу авиационных двигателей относятся:
— турбореактивные двигатели (ТРД);
— турбореактивные двигатели с форсажной камерой (ТРДФ);
— двухконтурные турбореактивные двигатели (ТРДД);
— двухконтурные турбореактивные двигатели с форсажной
камерой (ТРДДФ);
— турбовинтовые двигатели (ТВД);
Поршневые двигатели сейчас устанавливаются только на очень
легкие самолеты.
Жидкостно-ракетные двигатели (ЖРД) применяются на экспе-
риментальных самолетах.
Прямоточные воздушно-реактивные двигатели (ПВРД), оче-
видно, найдут применение на гиперзвуковых самолетах.
Простота газотурбинного двигателя, основанного на использо-
вании лишь вращательного движения, обеспечивает ему высокую
надежность и большой межремонтный ресурс. Современные ГТД
на порядок и более превосходят по мощности и межремонтному ре-
сурсу поршневые двигатели. Все это и привело к тому, что ГТД
стали основными двигателями в авиации.
5.4.2. Двигатели для дозвуковых самолетов
Традиционным типом двигателя для дозвуковых самолетов яв-
ляется, как известно, поршневой. В настоящее время выпускаются
только маломощные поршневые двигатели, и устанавливаются они
на очень легких самолетах: туристических, спортивных, сельско-
112
. хозяйственных и т. д. Маломощный ПД все еще превосходит мало-
мощные ГТД по удельному расходу топлива, но это преимущество
постепенно уменьшается, и ПД стал заменяться другими типами
двигателей (ТВД и ТРДД) и на легких самолетах.
Турбовинтовой двигатель (ТВД) до последнего времени нахо-
дил в авиации все меньшее применение, так как при больших ско-
ростях полета этот двигатель имеет недостаточную удельную мощ-
ность и создает повышенный уровень шума и вибраций на самолете.
Однако существенно меньший удельный расход топлива, чем
у ТРДД (примерно в 1,5 раза), в условиях резко возрастающей
цены углеводородного топлива (керосина) заставляет вновь рас-
сматривать возможность использования ТВД на дозвуковых само-
летах со скоростями полета, соответствующими М = 0,75 ... 0,80.
При этом рассматриваются различные варианты ТВД с многоло-
пастными винтами типа вентиляторных.
Наиболее перспективным для силовой установки дозвуковых
самолетов является двухконтурный турбореактивный двигатель.
Современный ТРДД развивает тяговую мощность на 1 кг массы
двигателя в 3 ... 5 раз больше, чем ПД. Это преимущество стано-
вится особенно важным, если учесть тот факт, что потребная мощ-
ность силовой установки возросла более чем в 20 раз по сравнению
с самолетами конца 40-х годов, когда была достигнута предельная
мощность ПД.
Удельный расход топлива (расход топлива на 1 даН тяги в час)
является важнейшей характеристикой любого авиационного дви-
гателя. Например, для пассажирских самолетов себестоимость
перевозок в значительной степени определяется расходом топлива,
так как в величине затрат на эксплуатацию самолета в течение од-
ного летного часа затраты на топливо составляют 50 ... 65 %.
Стремление уменьшить удельный расход топлива для крей-
серского полета дозвукового самолета послужило главной при-
чиной появления двухконтурного двигателя. Степенью двухкон-
турности двигателя называется отношение расхода воздуха
через второй контур к расходу воздуха через первый (внут-
ренний) контур.
На величину удельного расхода топлива в крейсерском полете
оказывает влияние и такой параметр самолета, как тяговооружен-
, ность. При недостаточной тяговооруженности самолета необходи-
мая для горизонтального полета тяга обеспечивается лишь при ча-
стоте вращения ротора, превышающей частоту вращения на
крейсерском режиме, что и приводит к увеличению удельного
расхода топлива (рис. 5:0).
( ТРДД первого поколения были разработаны на базе существо-
вавших ТРД и имели сравнительно небольшую степень двухкон-
турности т — 0,6 ... 1,2. Современные ТРДД характеризуются
* более высокой степенью двухконтурности т = 3 ... 6. На
рис. 5.10 показано влияние степени двухконтурности ТРДД на
удельный расход топлива.
ИЗ
Рис. 5.9. Дроссельная характеристика ТРДД (т = 5, Н = 11 км, М =
= 0,85):
«крейс- чаСтота вращения ротора при крейсерском режиме; «н0М— частота враще-
ния при номинальном режиме; «тах—максимальная частота вращения
Рис. 5.10. Влияние степени двухконтурности ТРДД на удельный расход
топлива при взлете и в крейсерском полете на высоте Н = 11 км
Удельный расход топлива, естественно, зависит не только от
степени двухконтурности ТРДД. На него определенное влияние
оказывают и такие параметры двигателя, как степень повышения
давления в компрессоре и температура газа перед турбиной.
По величине стартовой тяги современные ТРДД для дозвуко-
вых самолетов делятся на шесть классов — от класса тяги Ро <
< 1150 даН до класса Ро — 18 400 ... 36 500 даН (самые большие
ТРДД). Из существующих в настоящее время самых маленьких
ТРДД можно назвать, например, ТРДД WR19-3 фирмы «Уильямс
Рисерч» (США), стартовая тяга которого Ро — 260 даН (двигатель
установлен на самолете «Фоксджет»). Наибольшую стартовую тягу
имеют современные ТРДД фирмы «Роллс-Ройс» RB.211-524 G
(Ро = 25 500 даН) и ТРДД фирмы «Дженерал Электрик» GF 6-55
(Ро — 26 000 даН). Оба двигате-
ля устанавливаются на самолете
Боинг-747.
Основными габаритными разме-
рами авиационного двигателя яв-
ляются длина и максимальный диа-
метр, причем диаметр двигателя яв-
ляется наиболее важным размером,
определяющим возможность компо-
новки двигателя на самолете. При
Рис. 5.11. Влияние степени
двухконтурности ТРДД на ма-
ксимальный диаметр двигате-
ля (по вентилятору)
прочих равных условиях всегда от-
дается предпочтение, естественно,
двигателю с меньшими габаритными
размерами.
114
Диаметр ТРДД зависит главным образом от величины старто-
вой тяги и степени двухконтурности. В первом приближении диа-
метр ТРДД можно определить по графической зависимости, пока-
занной на рис. 5.11.
Дальнейшее развитие авиационных двигателей для дозвуковых
самолетов будет направлено главным образом на снижение удель-
ного расхода топлива, уменьшение затрат на эксплуатацию двига-
теля и снижение уровня шума и дымления.
5.4,3, Двигатели для сверхзвуковых самолетов
Сверхзвуковые самолеты можно разделить на два типа: само-
леты, совершающие значительную часть крейсерского полета на
большой дозвуковой скорости (истребители различного назначе-
ния и др.) и самолеты, крейсерский полет которых выполняется
в основном на сверхзвуковой скорости (СПС и др.).
Для первого типа сверхзвуковых самолетов наибольшее при-
менение в настоящее время имеет двухконтурный двигатель с фор-
сажной камерой (ТРДДФ).
Как и ТРДД целесообразно применять ТРДДФ на больших
дозвуковых скоростях. Для достижения сверхзвуковой скорости
полета (вплоть до соответствующей числу т ж 2,5) необходимо
значительное увеличение тяги двигателя, что достигается вклю-
чением форсажной камеры. При этом тяга возрастает на 30 ... 50 %,
однако удельный расход топлива увеличивается в 2,0 ... 2,5 раза.
Другими словами, большую дальность полета на сверхзвуковой
скорости получить трудно.
В отличие от современных дозвуковых ТРДД сверхзвуковые
ТРДДФ имеют сравнительно небольшую степень двухконтурности
М = 0,5 ... 1,3. Для лучшей экономичности (снижения удельного
расхода топлива) на дозвуковом полете и для ТРДДФ желательна
большая степень двухконтурности. Однако уменьшение удельной
тяги двигателя с ростом степени двухконтурности приводит к уве-
личению его диаметра, что вызывает значительный рост лобового
сопротивления силовой установки на трансзвуковых и сверхзву-
ковых скоростях полета (см. гл. 16).
Стартовая тяга и удельный расход топлива сверхзвуковых
ТРДДФ для современных многоцелевых самолетов располагаются
в следующем диапазоне значений:
Л)Ф = 3000 ... 15 000 даН — полный форсаж;
Ро = 2000 ... 10 000 даН — без форсажа;
Сроф = 2,1 ... 2,8 кг/даН-ч — полный форсаж;
сР0 — 0,55 ... 0,9 кг/даН-ч — без форсажа.
Указанным, значениям тяги соответствует диаметр ТРДДФ
£>дв = 0,5 ... 1,5 м *.
* Характеристики авиационных двигателей, необходимые для выполнения
дипломного проекта, приводятся в приложении IV.
115
Для длительного полета на сверхзвуковом режиме сущест-
вуют два диапазона скоростей: диапазон скоростей, соответствую-
щих числу М як 2, преимущество которого состоит в том, Что пла-
нер самолета может иметь конструкцию из обычных алюминиевых
сплавов, и диапазон скоростей, соответствующих числу М як 3,
который хотя и создает определенные проблемы, но позволяет по-
лучить более высокую эффективность полета.
Для первого диапазона скоростей используются как ТРДФ,
так и ТРДДФ. Отсутствие существенного различия в характери-
стиках одноконтурного и двухконтурного двигателей на сверх-
звуковых скоростях объясняется тем, что при увеличении степени
двухконтурности от 0 до 0,5 удельный расход топлива уменьшается
незначительно (примерно на 1 %). Дальнейшее увеличение сте-
пени двухконтурности ухудшает характеристики силовой уста-
новки.
Для диапазона крейсерских скоростей полета, соответствующих
числу М « 3, лучшим двигателем является ТРДФ с невысокой
степенью повышения давления в компрессоре = 3 ... 4 (при
числе М > 3,5 компрессор вообще становится практически
не нужным).
5.4.4. Двигатели для гиперзвуковых
самолетов
Применение газотурбинных двигателей для самолетных сило-
вых установок ограничивается числом М а? 3,5. Для полета на
больших скоростях лучшей экономичностью будет обладать ПВРД
с дозвуковым сгоранием (М < 6) и ПВРД со сверхзвуковым сго-
ранием (М >6).
Экономичность двигателя в первом приближении можно оце-
нить по величине его удельного импульса по топливу /т (так как
сР = 3600//, кг/даН-ч). Зависимость величины /т от числа М по-
лета для авиационных двигателей показана на рис. 5.12.
Жидкостные реактивные двигатели (ЖРД)> работающие на хи-
мическом топливе, достигли сейчас такого уровня развития, когда
дальнейшее увеличение удельного импульса становится все более
медленным и дорогостоящим. К тому же удельный импульс ЖРД
остается недостаточным для установки его на гиперзвуковом само-
лете с более или менее длительным полетом.
Следует заметить, что, несмотря на возрастание удельного рас-
хода топлива на сверхзвуковых скоростях, полный КПД воздушно-
реактивного двигателя значительно увеличивается. Полный КПД
двигателя, как известно, учитывает все потери в процессе преобра-
зования энергии топлива в полезную тяговую работу. Для угле-
водородного топлива (керосина) выражение полного КПД воз-
душно-реактивного двигателя можно записать в виде
т]п = 0,00082К/сР.
(5.46)
116
Полный КПД двигателя до-
звукового самолета (М = 0,85)
составляет приблизительно
24%. При скорости полета, со-
ответствующей числу М = 2j
он возрастает уже до 38 % (что
превышает термический КПД
лучших современных электро-
станций), а при М = 3 г]п «
~46 %. Рост КПД продолжает-
ся и при полете на гиперзвуко-
вых скоростях с ПВРД.
Наиболее перспективными
Рис. 5.12. Зависимость удельного
импульса по топливу /т от числа М
полета для различных типов двига-
телей, работающих на керосине (/;
2; 3) и водороде (1а; 2а; За):
1, 1а — ГТД; 2, 2а — ПВРД с дозвуковым
сгоранием; 3, За — ПВРД со сверхзву-
ковым сгоранием
для гиперзвуковых самолетов
представляются комбинирован-
ные двигатели — турбопрямо-
точные (ТРДФ + ПВРД). ТРДФ
должен работать до скорости,
соответствующей числу М»3,5,
затем газотурбинный тракт за-
крывается, и на гиперзвуковых скоростях двигатель будет
работать как ПВРД.
5.4.5. Выбор необходимого числа двигателей
Необходимое число двигателей для силовой установки самолета
зависит от ряда факторов, обусловленных как назначением само-
лета, так и его основными параметрами и летными характеристи-
ками.
Противоречивость влияния числа двигателей на безопасность,
экономичность и регулярность полетов приводит к тому, что выбор
числа двигателей до сих пор остается недостаточно разработанным
вопросом проектирования самолетов.
В ранний период развития авиации, когда появились первые
многомоторные самолеты, выяснилось, например, что регулярность
полетов на таких самолетах значительно ниже, чем на легких одно-
моторных самолетах. Причиной тому (хоть это и звучит парадок-
сально в наше время) было относительно большое число двигателей
на этих самолетах, ибо частота отказов двигателей прямо пропор-
циональна их числу.
В настоящее время положение существенно изменилось. Сило-
вая установка современного самолета проектируется с учетом неза-
висимой работы двигателей. Межремонтный ресурс газотурбинных
двигателей достигает нескольких тысяч часов. Поэтому вероятность
отказа современного двигателя в полете значительно понизилась.
117
Если обеспечено продолжение и завершение полета при отказе од-
ного двигателя, то даже пассажирский самолет с двумя двигате-
лями считается вполне пригодным к эксплуатации (например,
Ту-134, ДС-9, Боинг 757 и др.).
При увеличении числа двигателей безопасность полета совре-
менных самолетов увеличивается (такого мнения придерживается
большинство специалистов).
Каковы же основания для выбора числа двигателей на проекти-
руемом самолете? В общих чертах требования ко всем самолетам
при выборе числа двигателей можно сформулировать так:
— самолет должен обладать необходимой стартовой тяговоору-
женностью;
— самолет должен обладать достаточной надежностью и эконо-
мичностью;
— эффективная тяга силовой установки должна быть возможно
большей;
— относительная стоимость двигателя должна быть возможно
меньшей.
Определив стартовую тяговооруженность проектируемого
самолета, можно найти число двигателей из соотношения
лДв - 'P^glPat,
где Рй1 — стартовая тяга одного двигателя.
При формальном подходе обеспечить нужную величину Ро
можно каким угодно числом двигателей (в зависимости от вели-
чины Poi). Поэтому при решении данного вопроса необходимо
учитывать еще и требования по надежности и экономичности само-
лета, специфику назначения самолета и требования, предъявляе-
мые к его компоновке и силовой установке. Немаловажную роль
в этом вопросе также играет степень готовности двигателя к мо-
менту завершения проектирования самолета.
Очевидно, нельзя предъявлять совершенно одинаковые требо-
вания по надежности и экономичности ко всем самолетам без учета
их назначения, типа и размеров.
Поэтому нельзя дать и какой-то единый критерий по выбору
числа двигателей, который в более или менее одинаковой степени
соответствовал бы требованиям, предъявляемым ко всем самоле-
там. В первом приближении число двигателей можно лишь свя-
зать со взлетной массой самолета.
На легких самолетах военного и гражданского назначения
число двигателей часто определяется наличием двигателя, сооб-
ражениями живучести самолета (штурмовики, истребители-бом-
бардировщики), а также особенностями компоновки самолета.
На современных легких самолетах устанавливается 1 или 2 дви-
гателя (однако можно привести примеры, когда на легких само-
летах устанавливается 3 двигателя).
118
Одним из определяющих требований при выборе числа двига-
телей для тяжелых самолетов является безопасность на взлете:
должна обеспечиваться безопасность взлета при отказе одного
двигателя.
Требования к обеспечению должной безопасности в зависимости
от числа двигателей изложены в разд. 4.2.3, а в разд. 4.5 показан
алгоритм выбора тяговооруженности современных самолетов на
начальной стадии проектирования.
Из 4.2.3 следует: чем больше двигателей установлено на само-
лете, тем меньше может быть его тяговооруженность и тем, следо-
вательно, более легкой может быть его силовая установка.
Означает ли это, что для тяжелого самолета следует прини-
мать возможно большее число двигателей? Нет, не означает:
большое число двигателей ведет к уменьшению экономичности само-
лета (растут расходы по обслуживанию и ремонту двигателей).
Кроме того, большее число двигательных гондол, установленных
на крыле или фюзеляже, может привести к снижению эффектив-
ной тяги силовой установки по сравнению с меньшим числом гон-
дол более мощных двигателей, так как при увеличении числа дви-
гателей возрастает суммарный мидель двигательных гондол, что
приводит к увеличению коэффициента сх0.
На современных тяжелых самолетах, как правило, устанавли-
ваются 3 или 4 двигателя.
Возможность устанавливать нечетное число двигателей появи-
лась в связи с компоновкой ТРД на хвостовой части фюзеляжа.
Для пассажирских самолетов число двигателей можно связать еще
и с дальностью полета. Для малой дальности полета рациональное
число двигателей равно двум, для средней — трем, для большой
(свыше 5000 км) — четырем.
5.4.6. Размещение двигателей на самолете
Турбореактивный двигатель при компоновке самолета позво-
ляет рассматривать целый ряд принципиально различных вариан-
тов размещения двигателей: в фюзеляже; в корне крыла; на
пилонах под крылом; под крылом (с непосредственным креплением
гондолы двигателя к крылу); на пилонах над крылом; над крылом
(с непосредственным креплением гондолы к крылу); на концах
крыла; на хвостовой части фюзеляжа и др.
Все перечисленные схемы установки двигателей использова-
лись в компоновках реактивных самолетов (дозвуковых и сверх-
звуковых, гражданских и военных). Каждая схема имеет опреде-
ленные преимущества и недостатки, проявляющиеся в той или
иной степени в зависимости от типа и назначения с иолета.
Рассмотрим наиболее распространенные схемы ус ановки дви-
гателей.
Размещение двигателей в фюзеляже применяется практически
на всех легких военных самолетах (многоцелевые истребители и
119
др.). Тонкое крыло небольшого удлинения не позволяет устанавли-
вать двигатели на крыле или в крыле без ущерба для механиза-
ции крыла. Двигательные гондолы заняли бы слишком много ме-
ста, не только значительно сократив размах закрылков, но и лик-
видировав возможность подвешивать к крылу боевую нагрузку.
Как известно, значительная часть боевой нагрузки самолетов по-
добного типа подвешивается под крылом.
Кроме того, если самолет имеет один большой воздушно-реактив-
ный двигатель (тяговооруженность истребителей наиболее высо-
кая), то фюзеляж является единственным местом для установки
такого двигателя.
Размещение двигателей в корне крыла широко применялось
на тяжелых дозвуковых реактивных самолетах военного и граж-
данского назначения (Ту-16, Ту-104, Ту-124 и др.; английские са-
молеты «Вулкан», «Виктор», «Комета» и др.). Такая схема уста-
новки двигателей, обладая определенными положительными ка-
чествами (отказ одного или двух двигателей, размещенных с од-
ной стороны, не вызывает резких разворачивающих и кренящих
моментов, высокое расположение воздухозаборников, низкое
аэродинамическое сопротивление двигательной установки и др.)
имеет ряд существенных недостатков (особенно для пассажирских
самолетов). К недостаткам относятся:
а) близость реактивной струи к обшивке фюзеляжа, сильный
шум в пассажирской кабине;
б) длинные воздухозаборники на 5 ... 6 % уменьшают тягу
двигателей;
в) пожар, возникший в двигателях, может распространиться
на пассажирскую кабину и топливные баки (требуется усиленная
противопожарная защита);
г) в случае разрушения лопаток компрессора или турбины воз-
можно поражение пассажирской кабины и топливных баков (тре->
буется специальное бронирование);
д) наличие заборников на передней кромке крыла и выхлоп-
ных труб на задней кромке уменьшает возможности механизации
крыла;
е) создание устройств для реверсирования тяги затрудняется;
направляемые вниз вперед реактивные струи газов, отражаясь
от поверхности аэродрома, могут засасываться в воздухозабор-
ники двигателей, вызывая помпаж этих двигателей;
ж) плохие условия эксплуатации двигателей из-за трудности
подхода к ним;
з) существенно уменьшается объем крыла для размещения топ-
лива;
и) увеличение массы конструкции самолета вследствие утяже-
ления крыла (из-за вырезов в лонжеронах и наличия съемных
панелей) и вследствие длинных воздухозаборников или выхлоп-
ных труб.
120
Размещение двигателей на пилонах под крылом широко при-
меняется на современных тяжелыхЪамолетах (дозвуковых и сверх-
звуковых).
Такая схема имеет следующие преимущества:
а) двигатели разгружают конструкцию в полете, уменьшая
изгибающий момент от внешних нагрузок, что приводит к умень-
шению массы конструкции крыла;
б) двигатели демпфируют колебания крыла при полете в тур-
булентной атмосфере и являются противофлаттерными баланси-
рами;
в) обеспечивается удобство замены двигателя другим (с боль-
шими размерами);
г) создаются хорошие условия по обслуживанию двигателя;
д) возможно надежное изолирование двигателя от крыла при
помощи противопожарных перегородок в пилоне;
е) обеспечивается меньший шум от двигателей в пассажирской
кабине;
ж) обеспечивается лучшая, чем на двигателях, установленных
в корне крыла, изоляции конструкции самолета от воздействия
звуковых пульсирующих давлений реактивных струй двигателей;
з) обеспечивается удобство установки на двигатели приспособ-
лений для реверса тяги и шумоглушения.
Наряду с указанными выше преимуществами, размещение дви-
гателей на пилонах под крылом имеет следующие недостатки:
а) в случае остановки двигателя, особенно внешнего, создается
большой разворачивающий момент в горизонтальной плоскости;
б) чтобы при посадке с креном (до 4°) внешние двигатели не
касались земли, требуется создание большого угла поперечного V
крыла, что ухудшает характеристики устойчивости и управляе-
мости самолета и требует введения автоматики в систему управ-
ления;
в) при низком расположении двигателей относительно поверх-
ности аэродрома возможно попадание в воздухозаборники посто-
ронних мелких предметов;
г) пилонная подвеска двигателей затрудняет использование
закрылков по всему размаху крыла, так как при взлете реактив-
ные струи двигателей могут их разрушить.
Размещение двигателей на хвостовой части фюзеляжа получило
широкое распространение на отечественных и зарубежных пас-
сажирских самолетах.
На тяжелых самолетах, когда для обеспечения необходимой ве-
личины тяговооруженности требуется четыре двигателя, на бор-
товых пилонах устанавливается по два двигателя с каждой сто-
роны (например, самолет Ил-62).
Если для данной взлетной массы самолета требуемая тягово-
оруженность обеспечивается нечетным числом двигателей (три
двигателя), то один из двигателей должен устанавливаться в плос-
кости симметрии самолета. В данном случае этот двигатель раз-
121
мещается внутри хвостовой части фюзеляжа, а его воздухозабор-
ник выносится в корневую часть вертикального оперения над
фюзеляжем. По такой схеме установлены двигатели на самолетах
Боинг 727, Локхид L-1011, Де Хэвилленд «Трайдент» и на совет-
ских самолетах ЯК-40, Як-42 и Ту-154.
Размещение двигателей на хвостовой части фюзеляжа, когда
двигательная гондола крепится к фюзеляжу посредством неболь-
шого пилона, позволяет:
а) обеспечить аэродинамически «чистое» крыло, что повышает
его аэродинамическое качество;
б) максимально использовать размах крыла для размещения
средств механизации (закрылки, предкрылки ит. д.), что улучшает
взлетно-посадочные характеристики самолета;
в) определять поперечное V крыла из условий обеспечения
оптимальных характеристик поперечной и путевой устойчивости
и управляемости;
г) улучшить характеристики продольной, путевой и попереч-
ной устойчивости самолета:
— работой гондол двигателей и их пилонов как дополнитель-
ного горизонтального оперения;
— выносом горизонтального оперения из зоны торможения
потока за крылом;
— малым разворачивающим моментом при остановке одного
из двигателей;
д) улучшить комфорт пассажиров (по сравнению с установкой
двигателей в корне крыла) за счет уменьшения шума, так как гон-
долы двигателей в данном случае устанавливаются позади герме-
тической кабины;
е) повысить (по сравнению с установкой двигателей в корне
крыла) эксплуатационные характеристики силовой установки
и всего самолета в целом:
— созданием достаточно хороших условий для подхода к дви-
гателям;
— обеспечением возможности замены гондолы двигателя при
установке двигателя с большими размерами;
— истечением реактивной струи на большой высоте относи-
тельно поверхности аэродрома (меньший износ покрытия взлет-
ных полос и рулежных дорожек);
ж) предохранить двигатели от попадания в них посторонних
предметов при взлете и посадке благодаря высокому располо-
жению воздухозаборников;
з) улучшить работу устройств для реверсирования тяги дви-
гателей (по сравнению с двигателями, размещенными в корне
крыла);
и) создать лучшие условия аварийной посадки самолета.
Однако наряду с указанными преимуществами схема установки
двигателей на хвостовой части фюзеляжа имеет следующие суще-
ственные недостатки:
122
а) увеличивается масса конструкции самолета вследствие:
— усиления конструкции хвостовой части фюзеляжа из-за
дополнительных весовых и инерционных нагрузок от двигателей
(масса конструкции фюзеляжа увеличивается примерно на 10 ...
... 15 %);
— увеличения массы крыла (примерно на 10 ... 15^ %) из-за
отсутствия разгрузки крыла;
— увеличения массы вертикального оперения, несущего на
себе горизонтальное оперение;
б) центр масс пустого самолета сдвигается назад, а центр
масс полностью загруженного самолета — вперед, чем создаются
трудности в центровке и балансировке самолета (см. гл. 8);
в) носовая часть фюзеляжа выдвигается вперед, что отрица-
тельно сказывается на путевой и продольной устойчивости само-
лета;
г) при попадании самолета в обледенение создается возмож-
ность попадания в двигатели обломков льда, сбрасываемых про-
тивообледенителями с крыла;
д) необходимо прокладывать топливопроводы от баков к дви-
гателям вблизи пассажирской кабины, что вызывает опасность
попадания паров керосина в кабину и увеличивает массу трубо-
проводов;
е) несколько затрудняется обслуживание двигателей, высоко
расположенных над поверхностью аэродрома.
Перечисленные недостатки приводят к тому, что на самолетах
третьего поколения двигатели устанавливаются в основном на
пилонах под крылом.
Размещение двигателей под крылом (с непосредственным
креплением гондол двигателей к крылу) встречается на тяжелых
сверхзвуковых самолетах. В данном случае двигатели могут уста-
навливаться либо в одной гондоле, расположенной в плоскости
симметрии самолета (самолет «Норт Америкен» ХВ-70), либо
попарно в двух гондолах (пассажирские самолеты Ту-144 и «Кон-
корд»).
Размещение двигателей в гондолах на нижней поверхности
крыла объясняется стремлением использовать или даже усилить
поля повышенных давлений под крылом. Когда на двигательной
гондоле со специально спрофилированными внешними обводами
образуется система скачков уплотнения, то на нижнюю поверх-
ность крыла действует повышенное давление — дополнительная
подъемная сила (отсюда термин «подъемная сила от сжатия»).
В результате взаимодействия систем скачков уплотнения с по-
верхностью крыла аэродинамическое качество самолета на сверх-
звуковой крейсерской скорости существенно увеличивается (на
самолете ХВ-70 приблизительно на 20 %). Кроме того, угол атаки
крыла в крейсерском полете уменьшается (так как величина Кшах
сдвигается на меньшие углы), что также уменьшает лобовое со-
противление.
123
Другие преимущества и недостатки аналогичны свойствам пи-
лонной подвески двигателей под крылом.
Установка двигателей над крылом на пилонах позволяет не-
сколько уменьшить вредную интерференцию между крылом и дви-
гательной установкой вследствие того, что струя от двигателей
несколько увеличивает циркуляцию потока на крыле в зоне дви-
гательной установки, а не создает провала в циркуляции, как
при установке двигателей под крылом. Однако главными недостат-
ками такой схемы являются сохранение увеличенного шума на
местности, если заборники двигателя находятся впереди передней
кромки крыла, и трудности в создании реверса тяги.
Установка двигателей над крылом с непосредственным разме-
щением гондол на крыле осуществлена на экспериментальных
самолетах короткого взлета и посадки (СК.ВП) с тем, чтобы вых-
лопная струя двигателей, обтекая верхнюю поверхность крыла,
создавала эффект Коанда — эффект увеличения подъемной силы
крыла за счет суперциркуляции (см. гл. И).
5.5. ПОДХОД К ВЫБОРУ СХЕМЫ САМОЛЕТА
Как уже говорилось выше, выбор схемы самолета начинается
с выбора аэродинамической балансировочной схемы, а затем про-
изводится выбор конкретной схемы по ее отдельным признакам,
разнообразие которых лишь частично показано на рис. 5.1. В пре-
дыдущих разделах этой главы показан подход к этому выбору пу-
тем оценки каждого из признаков схемы на примере выбора схемы
по положению крыла относительно фюзеляжа, по числу двигате-
лей и размещению их на самолете. Так же рассматриваются и оце-
ниваются варианты схемы по другим признакам. При этом:
а) оцениваются тактические свойства схемы, ее способность
выполнять основную поставленную задачу. Для пассажирских
самолетов это означает обеспечение перевозки заданного числа
пассажиров, получение заданных летно-технических характери-
стик и использование указанного в ТТТ класса или типа аэро-
дрома;
б) производится аэродинамическая оценка схемы с точки зре-
ния получения максимального аэродинамического качества и воз-
можно больших значений сутлх при взлете и посадке (и с^доп при
маневрировании);
в) оцениваются варианты схем по массе с учетом требований
к жесткости и прочности конструкции и к сроку службы;
г) рассматриваются эксплуатационные качества самолета
в данной схеме с точки зрения удобства обслуживания самолета
в эксплуатации.
В конечном итоге оценивается способность той или иной схемы
наиболее полно удовлетворять ТТТ и ТЗ. В большинстве случаев
конструкторским бюро учитывается и опыт предыдущих работ по
той или иной схеме (производится анализ прототипов), оцени-
124
Общая компоновка
Балансировочная схема | «Ж л ж .
Расположение крыла. «ж ' !
Характер провальной, устойчи- вости •* — — U^
Степень продольной устойчи - вости тр/ „ о * Силовые Тип двигателей .-0,05 yemanot ТВД -0,20 • 1ки ТРД ~025 * •Ж ТРДД
висло двигателей. 2 3 •* о-
Расположение боковых 0^0 —- - £ ж
двигателей средних Ирьь Фарма в плане ж СО -^^•Ж
Угол стреловидности х,° 25 35 •* 0-5 во
Удлинение А Горизонт Размещение б ильное ол 8 •* прение 20 -J- *
Форма в плане Вертин Размещение альное <? 1 ” 4 •* перение
Шасси.
Схема * jt £
Размещение основных опор шасси во крыле J В фюзеляже на говдМОх двигателей
Число основных опор шасси 7 2 «ж 3 Ч
Ударна опор основных Вперев вдох внутрь* Вдох наружу Назад *
(направление) передней. Вперед • Назад *
Тип тележки основной опоры -ф- АА • 'W ффф *
Число колес на опоре 2 ч • б Ч 8
Фюзеляж
Форма лоперечносо сечения ф •* ф-
Число пассажиров в ряду В * 7 8 • 9
Размещение Багажа военовппм помещении Подпилом J
Размещение кухни Вурста в основном * помещении Подполом •
* Ту^ЧбУелсчв
Рис. 5.13. Матрица признаков компоновочных схем
125
вается степень риска при использовании новой, непроверенной
схемы.
Оценку и анализ схемы легче всего проводить с помощью ма-
трицы признаков компоновочных схем, составляемых на основе
ТТТ, опыта КБ, исследований и рекомендаций НИИ и, конечно,
на основе идей и творческих замыслов главного конструктора.
На рис. 5.13 в качестве примера приведена матрица признаков
компоновочных схем для пассажирских самолетов и проведен
выбор схем для самолетов класса Ту-154 и класса Макдоннел-
Дуглас ДС-10.
В условиях системы автоматизированного проектирования
матрица признаков компоновочных схем позволяет синтезировать
компоновочные схемы самолетов по характерным геометрическим
и техническим признакам, т. е. является классификатором компо-
новочных решений. Матрица может служить основой для построе-
ния программ распознавания прототипов самолетов по их геоме-
трическому признаку. При этом каждой клетке матрицы должен
соответствовать определенный массив числовых и описательных
данных, хранящихся в банке инженерной информации и содер-
жащих характеристику частного компоновочного решения (на-
личие прототипа, повторяемость, рекомендуемый диапазон при-
менения, аэродинамическая, весовая, конструктивная и эксплуа-
тационная характеристики).
При отсутствии программы распознавания матрица является
справочным материалом для выбора концепции компоновочной
(общей) схемы нового самолета методом экспертных оценок.
В процессе создания компоновки нового самолета больше, чем
в каком-либо другом, присутствуют интуиция и воображение
конструктора. Особенно это относится к стадии разработки кон-
цепции компоновочной схемы, т. е. к стадии появления первого
рисунка самолета. Рисунок создается на основе матрицы альтер-
нативных компоновочных схем, которая подсознательно сущест-
вует в памяти конструктора-проектировщика. Даже беглое зна-
комство с матрицей показывает, что число схем самолетов одина-
кового тактического назначения может быть очень большим. Об
этом же говорит и опыт создания самолетов по конкурсам. Про-
ектирующиеся в разных фирмах, но по одним и тем же ТТЗ само-
леты могут иметь существенное различие в схемах. Все это яв-
ляется косвенным подтверждением того, что, очевидно, пока нельзя
поручить ЭВМ синтез первого рисунка самолета. Попытка игно-
рировать элементы творчества приводит к появлению программ
синтеза, не учитывающих очень многих функциональных связей
(их просто невозможно учесть, ибо разум — всегда впереди физи-
ческих моделей, им же созданных) и синтезирующих жестко детер-
минированные компоновочные схемы, отражающие уже пройден-
ный этап в развитии авиации.
126
Глава 6
РАСЧЕТ МАССЫ САМОЛЕТА
6.1. КЛАССИФИКАЦИЯ МАССЫ САМОЛЕТА
Сложность расчета массы самолета в процессе проектирова-
ния объясняется тем, что на начальных этапах проектирования
самолета, особенно не имеющего прототипов, трудно или не-
возможно учесть все требования к конструкции и условия ее экс-
плуатации. Трудность усугубляется еще и тем, что масса кон-
струкции и масса других составляющих сами зависят от вели-
чины взлетной массы. Конструктору с самого начала приходится
иметь дело с противоречием: взлетную массу нельзя определить,
не определив массы всех составляющих, а массу каждого из со-
ставляющих невозможно найти, не имея взлетной массы.
Приходится идти методом последовательных приближений
(итераций), применять вначале приближенные, а затем все более
уточненные методы и формулы для расчетов.
Чтобы рассчитать взлетную массу и с единых позиций ее анали-
зировать, надо прежде всего установить, из каких слагаемых она
состоит, т. е. необходимо классифицировать массу самолета.
Классификация массы самолета (весовая классификация),
как и любая другая, является условной.
К группе «конструкция самолетов» относятся:
— крыло с герметизацией топливных отсеков;
— фюзеляж, включая тормозные аэродинамические щитки,
полы и перегородки, герметизацию отсеков;
— оперение, включая форкиль, гребни и шайбы;
— взлетно-посадочные устройства (шасси) со створками и ци-
линдрами уборки — выпуска шасси, обтекатели шасси, тормозные
парашюты;
— окраска поверхности самолета.
К группе «силовая установка» относятся:
— двигатели (основные и вспомогательные, подъемные, не-
сбрасываемые разгонно-тормозные, дополнительные) с системами
реверсирования, шумоглушения, самолетными агрегатами двига-
телей;
— воздушные винты и коки;
— пилоны, капоты, моторамы;
— воздухозаборники *;
— системы двигателей (запуска, регулирования заборников
и сопл, охлаждения, огнетушения, управления, противообледе-
нения и маслосистема);
— топливная система, включая баки с протекторами, устано-
вочную арматуру баков, систему подачи топлива, систему аварий-
* На самолетах с двигателями внутри фюзеляжа массу воздуховодов, кон-
структивно связанных с фюзеляжем, следует относить к группе «конструкция
самолета».
127
ного слива топлива, систему нейтрального газа, систему автомати-
ческого управления расхода топлива, систему заправки топлива
в воздухе и на земле.
Подгруппу «управление самолета» относят теперь, как правило,
к группе «оборудование и управление», так как основными эле-
ментами системы управления самолета являются теперь элементы
бустерного управления и автоматики.
Масса нерасходуемых в полете жидкостей и газов в си-
стеме оборудования и управления относится к массе данной
группы.
Расходуемые в полете технические жидкости, например про-
тивообледенительная, входят в группу «снаряжение и служеб-
ная нагрузка». В эту же группу, кроме того, входят:
— экипаж (летно-подъемный и стюардессы);
— парашюты экипажа (на военных и спортивных самолетах);
— личные вещи и багаж экипажа;
— невырабатываемое топливо;
— масло для силовых установок;
— съемное оборудование буфетов, гардеробов, туалетов, по-
суда, ковры, шторы и т. п.;
— аварийно-спасательное оборудование (лодки, пояса, ава-
рийные пайки, переносная аппаратура, аварийные трапы);
— служебная нагрузка (трапы, лестницы, чехлы, инструмент,
запасные части, сигнальные ракеты и т. п.);
— дополнительное снаряжение (подвесные и дополнительные
баки без топлива, подвески специальных грузов, съемная
броня).
К полезной нагрузке следует относить только целевую на-
грузку, ради транспортировки которой и создается самолет.
Расчетная взлетная масса состоит из массы пустого самолета
и полной нагрузки (рис. 6.1). Весовая сводка с разбивкой на
группы, соответствующие данной классификации, приведена в при-
ложении.
Рис. 6.1 Разбивка взлетной массы самолета
128
6.2. РАСЧЕТ МАССЫ САМОЛЕТА В ПЕРВОМ
ПРИБЛИЖЕНИИ
Взлетная масса самолета представляет собой сумму:
/7Z0 = ^кон “Ь ™с. у “Ь «об. упр + тт + /тгц. н + /тгол, (6.1)
где /тгКОн = fi («о, параметры крыла) — масса конструкции;
m0.y = fz (т0, параметры силовой установки) — масса силовой
установки; тОб. упр = /з (то, параметры оборудования управле-
ния и всего самолета) — масса оборудования и управления;
тт = fi (т0, V, L, Н, сР, К = су/сх, режим полета) — масса топ-
лива; /Иц,н — const — заданная целевая нагрузка; тсл =
= const — известная служебная нагрузка и снаряжение.
Зависимость ткон. «с. у, «об. упр от «о весьма сильная и слож-
ная (см. разд. 6.3), зависимость тТ от т0 практически линейная.
В результате получается сложное трансцендентное уравнение,
которое невозможно решить относительно т0 в явном (конечном)
виде. Выход из этого затруднения при расчете взлетной массы
первого приближения следующий.
Чтобы уменьшить влияние т0 на ткт, тс,у> тоб.упр, /тгт,
разделим обе части (6.1) на т0:
1 = «кон + «с. У + «об. упр + «т + /гец‘тсл • (6-2)
Относительные величины ткон, т0.у, тоб. упр слабее зависят
от т0, чем абсолютные их значения; тТ не зависит от т0.
Если принять («кон, т0. у, ог0б.упр, тТ) — const по статистике
(табл. 6.1), то из (6.2) получим взлетную массу самолета в первом
приближении:
(/7Z0)i = 1-=----/гец-н + ,ге_сл-• (6.3)
\ on 1 _ mKOlI — тс.у — /иоб. упр — тт ' >
При проектировании самолетов-истребителей вертикального взле-
та и посадки относительную массу силовой установки, указанную
в табл. 6.1, следует в первом приближении увеличить на 25 ...
... 30 %, а относительную массу оборудования и управления —
на 15 ... 20 %.
Значения /йт в табл. 6.1 сугубо ориентировочные, так как относи-
тельная масса топлива зависит от расчетных значений дальности Lp
или времени полета tv. Поэтому данные табл. 6.1 в отношении тТ
рекомендуется корректировать в каждом конкретном случае по
формуле первого приближения:
«т —|— Ир = а -(- H'p/Vnpgflc, (6-4)
где в ч; Lp в км; Екрейс в км/ч; а = 0,04 ... 0,05 для легких не-
маневренных самолетов (т0 < 6000 кг) и а — 0,06... 0,07 для всех
других самолетов; b = 0,05 ... 0,06 для дозвуковых самолетов и
b = 0,14 ... 0,15 для сверхзвуковых самолетов. Меньшие значе-
ния коэффициента b соответствуют самолетам большего тоннажа.
5 С. М. Егер и др. 129
Таблица 6.1
Относительные массы конструкции, силовой установки, оборудования
и управления, а также топлива самолетов с обычным взлетом и посадкой
Назначение самолета ткон ^с. у тоб. упр тт
Дозвуковые пассажирс.кие магистральные легкие средние тяжелые 0,30 ... 0,32 0,28 ... 0,30 0,25 ... 0,27 0,12 ... 0,14 0,10 ... 0,12 0,08 ... 0,10 0,12 ... 0,14 0,10 ... 0,12 0,09 ... 0,11 0,18 ... 0,22 0,26 ... 0,30 0,35 ... 0,40
Сверхзвуковые пасса- жирские 0,20 ... 0,24 0,08 ... 0,10 0,07 ... 0,09 0,45 ... 0,52
Многоцелевые для мест- ных авиалиний 0,29 ... 0,31 0,14 ... 0,16 0,12 ... 0,14 0,12 ... 0,18
Спортивно-пилотажные 0,32 ... 0,34 0,26 ... 0,30 0,06 ... 0,07 0,10 ... 0,15
Сельскохозяйственные специализированные 0,24 ... 0,30 0,12 ... 0,15 0,12 ... 0,15 0,08 ... 0,12
Легкие гидросамолеты 0,34 ... 0,38 0,12 ... 0,15 0,12 ... 0,15 0,10 ... 0,20
Мотопланеры 0,48 ... 0,52 0,08 ... 0,10 0,06 ... 0,08 0,08 ... 0,12
Истребители 0,28 ... 0,32 0,18 ... 0,22 0,12 ... 0,14 0,25 ... 0,30
Бомбардиров- щики легкие средние тяжелые 0,26 ... 0,28 0,22 ... 0,24 0,18 ... 0,20 0,10 ... 0,12 0,08 ... 0,10 0,06 ... 0,08 0,10 ... 0,12 0,07 ... 0,10 0,06 ... 0,08 0,35 ... 0,40 0,45 ... 0,50 0,55 ... 0,60
, Военно- транспортные и грузовые легкие средние тяжелые 0,30 ... 0,32 0,26 ... 0,28 0,28... 0,32 0,12 ... 0,14 0,10 ... 0,12 0,08 ... 0,10 0,16 ... 0,18 0,12 ... 0,14 0,06 ... 0,08 0,20 ... 0,25 0,25 ... 0,30 0,30 ... 0,35
6.3. РАСЧЕТ МАССЫ САМОЛЕТА ВО ВТОРОМ ПРИБЛИЖЕНИИ
6.3.1. Методика расчета
Изложенный ниже расчет массы самолета во втором приближе-
нии (/тг0)п предназначен в основном для студентов авиационных
вузов и факультетов. Он может быть также использован в предва-
рительном (предэскизном) проектировании самолетов, при состав-
лении ТЗ, аванпроектов и т. п.
Методика расчета (т0)п состоит в следующем.
Для решения уравнения (6.1) задаются некоторым значением тй
и подсчитывают сумму справа при фиксированных значениях пара-
130
метров агрегатов и летных харак-
теристик. Расчет повторяют до
тех пор, изменяя значение /т?0,
пока т0 слева и сумма справа не
будут равны (с некоторой допу-
стимой погрешностью). Для этой
цели полезно составить програм-
му итераций и определять взлет-
ную массу (ш0)п с помощью ЭВМ,
хотя без большой затраты вре-
мени расчет (/тг0)п можно вести и
Рис. 6.2. Схема расчета взлетной
массы самолета во втором при-
ближении
без ЭВМ: достаточно по трем точ-
кам (i = 3, рис. 6.2) построить плавную кривую и найти решение.
В качестве первого значения т0 при расчете (ш0)п следует брать
(m0)i, найденное предварительно по формуле (6.3).
Таким образом, основное отличие расчета (ш0)п от расчета (m0)i
состоит в том, что во втором приближении учитывается зависи-
мость масс конструкции, силовой установки, оборудования и уп-
равления от взлетной массы, в результате чего не удается найти
(ш0)ц в явном (конечном) виде (как и в первом приближении)
и приходится применять метод итераций.
Рассмотрим определение (т0)п по элементам. Для простоты
расчетов ниже приведены только основные рекомендуемые весо-
вые формулы применительно к самолетам различного назначения
и тоннажа. При более подробных весовых расчетах и анализах
необходимо использовать специальную литературу, например
[7, 33].
6.3.2. Масса конструкции
Эту величину составляют массы крыла, фюзеляжа, оперения
и шасси. В относительных величинах
mK0H = mKoH/m0 = mKp + тф + топ + тш.
Относительная масса крыла. В среднем ткр & 0,08...0,12,
что составляет 30 ... 40 % массы конструкции самолета.
При проектировании дозвуковых неманеврен-
ных самолетов с взлетной массой т0 104 кг
/й = р» ................... Д +4- / 1 ~.t^+±5^ + 0,0I5,
р 1О4ро (c0)0’75cos1,5v И + 1 \ Л + 3/ Ра
(6-5)
где kY зависит от ресурса крыла:
Ресурс крыла, тыс. ч ........... 15 ... 20 25 ... 30 40 ... 50
К .............................. 0,96 1,00 1,05
пр — заданная нормами прочности расчетная перегрузка,
1 с 1 1685 о л е
п? ~ ’н0 не менее 3’45,
8* 131
Ро = gtnJ(lOS) — нагрузка на 1 м2 крыла при взлете даН/м2;
% — стреловидность крыла по 1/4 хорд, градус; X — удлинение
крыла; ф — коэффициент, учитывающий разгрузку,
Ф ~ 0,92 — 0,83 (гт. кр)2 огт- кр — 3,5 [(гГр. кр)2 гйгр. кр]. (6.6)
Здесь z.r. кр = 2zT,Kp// — относительная наибольшая координата
топлива в крыле (от оси симметрии самолета); I — размах крыла;
zrp. кр = 2zrp.Kp// — относительная координата какого-либо
груза на (в) крыле; тт.кр — относительная масса топлива в двух
половинах крыла; тгр.кр — относительная масса груза, связан-
ного с крылом (двигатели, шасси и т. п.); берется масса груза на
обеих половинах крыла. Если целевая нагрузка размещается
не в крыле, то
Ф^0,92-0,5тт.кр-0,1/гс.у, (6.7)
где kc, у = 1, когда двигатели установлены на крыле; в остальных
случаях kc, у = 0.
В формуле (6.5) т0 — взлетная масса (кг); с0 — относительная
толщина крыла у борта фюзеляжа (по потоку); р, = с0/ск; ск —
относительная толщина крыла на конце; т] — сужение крыла
в плане (ц = bolb^).
Значения коэффициента
Крыло без наплывов, предкрылков и интерцепторов, закрылки двух-
щелевые ..................................................... 1,0
Крыло с наплывами в корневой части, предкрылками и интерцепторами,
закрылки трехщелевые.............................................. 1,6
Крыло с наплывами и интерцепторами, но без предкрылков; закрылки
двухщелевые....................................................... 1,4
Крыло без наплывов и предкрылков, но с интерцепторами; закрылки
двухщелевые....................................................... 1,2
Значения коэффициента 6$
В крыле установлены мягкие баки................................. 1,0
Баки-кессоны имеют поверхностную герметизацию................... 1,2
Баки-кессоны имеют внутришовную герметизацию.................... 1,05
При проектировании сверхзвуковых неманеврен-
ных самолетов с взлетной массой тй 105 кг
KAS (X + ) + А. + 0,02, (6.8)
где сср = (с0 + ск)/2, kt — температурный коэффициент (табл. 6.2);
Ф — по формуле (6.6) или (6.7). Другие обозначения в формуле
(6.8) те же, что и в формуле (6.5).
Относительную массу бесподкосного крыла легких
дозвуковых самолетов (маневренных и
132
Таблица 6.2
Значении температурного коэффициента kt в формуле (6.8)
Материал 100 °C 150 °C 200 °C
д-16 1,030 1,06 1,14
Д-18 1,015 1,05 1,10
неманевренных) с взлетной массой т0 <
С 7-Ю3 кг можно найти по формуле
/ЙКр — 1,15' 10 ^мех^кон^мтФ^р
_____X К -8______ Т] -J” 4 / j
]/9с0 cos1,5% Т1 + 1 X
И - Ц
н+з/
(6.9)
Значения коэффициента Лмех
Механизация отсутствует (закрылки, предкрылки)...............0,90
Применяются щитки или однощелевые шарнирные закрылки .... 1,00
Применяются закрылки Фаулера и предкрылки перед элеронами. . . 1,15
Значения коэффициента kK0H
Конструкция с широким применением монолитных элементов * и со-
товых конструкций..............................................0,90
Клееклепаная конструкция, а также конструкция с ограниченным
применением монолитных силовых элементов.......................0,95
Обычная клепаная конструкция.................................1,00
* На легких самолетах небольшой ресурс и применение монолитных элемен-
тов вполне допустимы исходя из концепции «безопасно разрушающейся кон-
струкции».
В формуле (6.9) kMT = 1,0, если основной материал конструк-
ции Д-16, и km = 1,2, если основной материал конструкции
АМГ6 (гидросамолеты); &кон£мт = 0,8 ... 0,85, если для силовых
элементов крыла применяются угле- или боропластики; 0 =
= 1,0 — для однолонжеронного, трехлонжеронного или кессон-
ного крыла; 0 = 0,9 — для двухлонжеронного крыла.
Коэффициент <р, учитывающий разгрузку, для легких самоле-
тов определяется формулой
Ф 0,93 - 0,014£с.у — 6,3- 10^ш - кр(гт.кр)2. (6.10)
Здесь kc, у = 1,0, если двигатели установлены на крыле, и kc, у = 0
в остальных случаях; km = 1,0, если основные стойки шасси уста-
новлены на крыле, и km = 0 в остальных случаях. Другие обозна-
чения в формулах (6.9) и (6.10) см. у формул (6.5) и (6.6).
Расчетная перегрузка для легких самолетов: пр = 12 ... 13,5
для спортивных акробатических самолетов и пр = 5,5 ... 6,0
для легких неманевренных самолетов.
133
Относительная масса крыла сверхзвуковых манев-
ренных самолетов:
/йкр = k((pnpj/xs (3,6-10” А- + + 1,7-10-4) 4- AL,
(6.11)
где пр = 12; ф = 0,7 ... 0,8; kt = 1,03; остальные обозначения
те же, что в формуле (6.5).
Для перехода от /пир к массе 1 м2 крыла служит зависимость
^кр = — ^крРо> (6.12)
где в кг/м2.
Методика вывода формул для определения массы
крыла наиболее полно изложена в [33, 34].
Анализ весовых формул крыла показывает,
что относительная масса крыла увеличивается с ростом расчет-
ной перегрузки, удлинения (Л > 2) и стреловидности крыла
(% < 60°) и уменьшается с ростом нагрузки на 1 м2 при взлете, от-
носительной толщины крыла у корня, с увеличением сужения
в плане и спереди. С ростом т0 при (пр, р0, ф) = const и прочих
неизменных параметрах значение /пкр увеличивается.
Если с ростом т0 нагрузка на 1 м2 крыла растет по закону ли-
нейного подобия (р0 = 10 р^/По), то ткр также увеличивается.
Рост площадшкрыла при прочих неизменных параметрах ве-
дет к увеличению ткр.
Масса 1 м2 крыла растет с увеличением т0.
Типовое распределение массы крыла по элементам для лонже-
ронных крыльев легких самолетов (mosg3-103 кг) и кессонных
крыльев тяжелых самолетов (т0 20-103 кг) приведено в табл. 6.3 .
Важнейшие способы снижения массы крыла,
зависящие от конструктора:
Таблица 6.3
Состав массы крыла по элементам (%)
Элементы Лонжеронное крыло Кессонное крыло
Силовая и несиловая обшивка (без элеронов 35 ... 40 27 ... 32
и механизации)
Лонжероны 23 ... 28 7 ... 11
(стенки)
Стрингеры 4 ... 8 25 ... 30
Нервюры 8 ... 10 8 ... 12
Узлы, стыки 3 ... 4 6 ... 8
Элероны, закрылки, предкрылки, интерцеп- 10... 15 10 ... 15
торы
Крепеж и прочее 4 ... 6 4 ... 6
134
— разгрузка с помощью размещения целевой нагрузки по раз-
маху (особенно большое снижение шкр таким методом можно по-
лучить на тяжелых и сверхтяжелых грузовых самолетах);
— снижение расчетных перегрузок с помощью ограничения
режимов полета, а также применения «активных» поверхностей
управления, снимающих пики воздушных нагрузок и уменьшаю-
щих перерезывающие силы, изгибающие и крутящие моменты;
— применение новых материалов с более высокой удельной
прочностью, жесткостью, более выносливых к повторным нагруз-
кам (например, угле- и боропластики и т. п.);
— оптимизация силовой схемы и параметров крыла.
Массу крыла в процессе проектирования можно снизить также
при заданных (известных) размерах и силовой схеме крыла, за-
данных нагрузках и ресурсе с помощью комплекса конструктив-
ных и технологических мероприятий, основными из которых яв-
ляются:
— уточнение методов расчета, приводящих к уменьшению за-
пасов «на недостаточную уверенность»;
— повышение уровня напряжений (главным образом крити-
ческих напряжений потери устойчивости) и жесткости тонкостен-
ных силовых элементов крыла, что может быть достигнуто приме-
нением композиционных конструкций и т. п.;
— снижение объемной плотности материала несиловых эле-
ментов крыла с помощью применения магниевых сплавов, пласт-
масс, стеклопластиков и т. п.;
— отказ от конструктивных разъемов крыла по размаху или
уменьшение числа разъемов;
— уменьшение числа деталей и стыков;
— поверхностное упрочнение панелей кессона и других сило-
вых элементов, например с помощью специальных дробеструйных
машин;
— ужесточение допусков, более широкое применение минусо-
вых допусков;
— удаление технологических излишков массы конструкции,
например с помощью химического фрезерования.
Тщательная конструктивно-технологическая проработка кон-
струкции крыла, применение новых материалов и другие меро-
приятия могут привести в сумме к снижению массы крыла на
15 ... 20 % (без учета эффекта от разгрузки и активного управле-
ния).
Массу крыла, которую дают формулы (6.5) ... (6.11), следует
рассматривать в качестве верхнего среднестатистического зна-
чения.
Относительная масса фюзеляжа. Масса фюзеляжа состоит из
массы его конструкции с полами, перегородками, гермоднищами,
люками, окнами и фонарем пилотской кабины, узлами стыка с кры-
лом и оперением, узлами подвески двигателей и целевой нагрузки,
а также вооружения.
135
Если двигатели установлены внутри фюзеляжа и воздухозабор-
ники конструктивно связаны с фюзеляжем, то их масса также вклю-
чается в массу фюзеляжа.
В среднем да 0,08 ... 0,12, что составляет 30 ... 40 %
массы конструкции самолета.
При проектировании дозвуковых магистраль-
ных пассажирских самолетов относительную
массу фюзеляжа можно найти по следующей эмпирической фор-
муле Шейнина [34]:
1 + fe kt, (6.13)
где т0 в кг, с1ф в м. Коэффициенты учитывают: — положение
двигателей; — положение стоек главного шасси; k3 — место
уборки колес главного шасси; fe4 — вид транспортировки багажа.
Показатель степени i учитывает размеры фюзеляжа.
Значения коэффициентов и показателя степени в формуле (6.13)
kx = 3,63—О.ЗЗЗйф, если двигатели соединены с крылом, a d$ < 5 м;
ki = 4,56—0,441йф, если двигатели установлены на кормовой части фюзе-
ляжа, а t/ф < 5 м;
fei = 3,58—0,278с£ф, если двигатели расположены на крыле, или в случае
смешанной компоновки (двигатели на крыле и фюзеляже), a > 5 м;
k2 — 0,01, если стойки главного шасси крепятся к фюзеляжу;
= 0,00, если стойки главного шассн крепятся к крылу;
k3 = 0,004, если стойки главного шасси убираются в фюзеляж;
fe3 = 0,00, если стойки главного шасси убираются в крыло;
= 0,003, если багаж перевозится в контейнерах;
kt = 0,00 в случае бесконтейнерной перевозки багажа;
i = 0,743, когда d$ sC 4 м;
i = 0,718, когда d$ > 5,5 м.
При более подробном расчете и анализе массы фюзеляжа до-
звуковых магистральных пассажирских самолетов (например,
в третьем приближении) рекомендуется использовать теоретиче-
скую формулу Киселева [15]:
“ф = ъ^{1'6М10'*<А' + ^-’тг +
+ 1,14£/ф(ркаб + 0,46 I/ М0/т0) j 4- 5,32 (ркаб + 1)^Ф X
10£фон
с
+ 2,42 • 10’2Ц + 0,Зб/ф + 2,78
т~
+ 6,4<ф1ф + 3- 10-3m0(feCO4 + 1,67)),
(6-14)
где 1Ф и йф в м; т0 в кг, Л40 — изгибающий момент в месте заделки
заднего лонжерона крыла, даН-м; p^i6 — эксплуатационное из-
быточное давление в гермокабине, даН/см2;
k = а + Ьт0.
(6.15)
136
Таблица 6.4
Значения поправочных коэффициентов а и b в формуле (6.15)
Положение двигателей z/ф, м а Ь
На крыле <5 0,691 3,7-10-’
На фюзеляже <5 0,853 1,7-10'’
На крыле >5 0,856 0,4-10"’
Значения коэффициентов а и b указаны в табл. 6.4.
+ = (6.16)
“Ф “ф
Значения а, 0Х, 03 указаны в табл. 6'5.
Если поперечное сечение фюзеляжа отличается от круглого,
то в формулах (6.14) и (6.16) берется эквивалентный диаметр, со-
ответствующий миделю.
В формуле (6.14) коэффициент йфон учитывает разновидность
фонаря пилотской кабины: k$0B = 1,0, если кабина пилотов имеет
один фонарь, и k$oa = 1,5, если в нижней носовой части фюзеляжа
имеется фонарь для штурмана.
Значение коэффициента kco4 в формуле (6.14) зависит от рас-
положения двигателей (РД), места крепления стоек главного
шасси (КС) и места уборки главных стоек шасси (УС):
РД
КС
УС
^соч
На крыле
Крыло
Не в фюзеля-
же
1,0
На крыле
Крыло
В фюзеля-
же
2,0
На крыле
Одна из стоек
на фюзеляже
В фюзеляже
2,5
На фюзеляже
Крыло
В фюзеляже
3,5
На крыле
Фюзеляж
В фюзеля-
же
4,0
Формула для определения
лах (6.14) и (6.16) имеет вид
ляжа)
Мо = ОДвт^ф/у
изгибающего момента Мо в форму-
(двигатели в хвостовой части фюзе-
(1 + п + 1 )
&2f2 cos х
AL J xj + AM- y. (6.17)
Если двигатели расположены на крыле, то АМ£'у ~ 0.
Таблица 6.5
Значения коэффициентов a, Pi, 02 в формуле (6.16)
X, градус Положение двигателей а Pi ₽.
0 На крыле 2,68 0,727 1,5
20 ... 35 На крыле 1,91 0,486 0,7
20 ... 35 На фюзеляже 2,08 0,473 1,0
137
В формуле (6.17)
ДМ§-у - 1,2т0/ф/110,22 (fec. у - 1) [1 + 0,11 (fcc. у - 1)] +
+ [А - 0,11 (fe,y - 1)] х
' /Г (1 + 1/(т) +1)] 1 V, 3,07 П
ЗЛ------- vrtgx“3o-(i + w2 JJ (6,18)
Изгибающий момент фюзеляжа в месте расположения перед-
него лонжерона крыла
М - 1 1т 1 f I [1 ( П + МСп + О]
/Ип.л - Мто-ф/1Ц1 — 82f2cos%
~’217L)x10’4 + 0’22^-'-1))-
ЛФ / J J
(6.19)
Коэффициенты ft, f2, f3 в формулах (6.17) ... (6.19) имеют сле-
дующие значения: Д = 0,49 — 1,37-10"® т0; f2 = 1,33 10"® т0 +
+ 2,8; если двигатели на фюзеляже, то f3 = 0,15 — 0,3-10-® /тг0;
если двигатели на крыле, то f3 = 0.
Коэффициент kc. у имеет такие значения: kc.y = 1,6, если дви-
гатели на фюзеляже и kc,y = 1,0, если двигатели на крыле.
При проектировании сверхзвуковых пассажир-
ских самолетов относительную массу фюзеляжа можно
определить по формуле
тф = 0,00212КФ + -А (б^ф + 5d| + 400М + 500) + 0,0125. (6.20)
Здесь t/ф в м; т0 в кг; М — расчетное число М полета.
Относительная масса фюзеляжа легких самолетов
для народного хозяйства, спортивных и т. п. (сухопутных) (т0 <
< 7-103 кг)
ТЙф — 1,14&дв (1 + 0,4ркаб) 1ф W() ’ (6.21)
где йдв = 1,0, если двигатели не соединены с фюзеляжем и /?дв =
= 1,14 ,если двигатели установлены на фюзеляже; ркаб в даН/см2;
1ф в м; т0 в кг.
При проектировании тяжелых грузовых и воен-
но-транспортных дозвуковых самолетов
1зЧ5 \
/^7 /
г«ф = (1 — 0,6-10 ®т0)
0,014 [31+ (Хф</ф)1’5] 11 +
V то cos %
Ц + 25^ф
т0
+ 0,018.
+
(6.22)
гдейф « 1,52 |^/тггр-10 3 в м; тгр — наибольшая масса грузов, кг;
X — стреловидность крыла по 1/4 хорд; ш0 в кг.
138
Относительную массу фюзеляжа сверхзвуковых ма-
невренных самолетов можно определить по формуле
/йф = 0,003Л,ф——— (ЮсГф. экв^-ф -J- Зс/ф.эквЧ- 150М + 300) + 0,03йш,
(6.23)
где t/ф.экв — эквивалентный диаметр фюзеляжа, м; т0 в кг;
М — расчетное число М полета; /гш — 1, если главные стойки шас-
си присоединяются к фюзеляжу и убираются в него; = 0,5,
если главные стойки шасси не присоединяются к фюзеляжу.
Формула (6.23) касается самолетов с двигателями в хвостовой
части фюзеляжа. Предполагается, что продольные силовые эле-
менты крыла проходят напрямую через фюзеляж.
При проектировании самолетов вертикального
взлета и посадки масса фюзеляжа определяется по приведен-
ным выше формулам с учетом особенностей расположения двига-
телей 133].
Анализ массы фюзеляжа, как и расчет ее, часто
требует определения массы 1м2 его омываемой поверхности (Гф. ом):
йф = ф. ом = тф^о/^ф. ом. (6.24)
где (в м2)
^ф. ом = ^ф^ф^ф*
Значение коэффициента формы k$ зависит от удлинения носовой
и хвостовой частей фюзеляжа:
^нос.ч! ^хв.’ч.................................... 2 ... 3 <2
йф........................................ 2,4 2,5 2,6
Анализ весовых формул фюзеляжа показывает, что относитель-
ная масса фюзеляжа уменьшается с ростом взлетной массы само-
лета. Увеличение 1$, d$, при прочих неизменных параметрах
приводит к росту шф.
Масса 1 м2 омываемой поверхности фюзеляжа увеличивается
с ростом т0 и %ф и несколько снижается с ростом d$ при /ф =
= const.
Типовое распределение массы фюзеляжа по элементам для лег-
ких (с негерметичным фюзеляжем) и тяжелых дозвуковых пас-
сажирских самолетов приведено в табл. 6.6.
Для снижения массы фюзеляжа в процессе его проектирова-
ния следует применять те же конструктивно-технологические меры,
что и при проектировании крыла (см. выше). Масса фюзеляжа
весьма значительно зависит от его длины и диаметра, от общих
компоновочных особенностей самолета. Поэтому при компоновке
самолета необходимо проанализировать все возможные решения
и найти оптимальное.
Относительная масса оперения. Несмотря на то, что масса
оперения значительно меньше массы крыла или фюзеляжа (в сред-
нем она составляет 1,5 ... 2,5 % от то), в начале проектирования
139
Таблица 6.6
Состав массы фюзеляжа по элементам (%)
Элементы Легкие самолеты, ?-ф = 6 ... 8 Тяжелые самолеты, Лф = 9... 12
Обшивка 25 . . 30 25 . . 30
Стрингеры и лонжероны 12 . . 15 15 . . 20
Шпангоуты 20 . . 25 22 . . 27
Полы 6 . . 9 8 . . 12
Фонарь пилотов 10 . . 12 2 . . 3
Окна пассажирской кабины 3 . . 5 4 . . 5
Двери, трапы, люки 6 . . 8 3 . . 4
Прочее (перегородки, соединения, багаж- ники, герметизация, крепеж) 7 . . 9 9 . . 11
самолетов стремятся возможно точнее определить тоа. Такое вни-
мание к массе оперения объясняется большим ее влиянием на цен-
тровку самолета.
При проектировании дозвуковых неманеврен-
ных самолетов классической схемы (т0
104 кг) относительную массу оперения можно определить по
следующей статистической формуле:
топ = МопРо'6 ($г. о + SB. о)1’16, (6.25)
где т0 в кг; Ап = 1,0, если р0 < 450 даН/м2; ka = 0,84, если ра >
> 450 даН/см2, £мт — см. формулу (6.26);
гСХ 1,564 — 0,001 lSon
«оп ~ —зТ-|-о 038ро— в слУчае низкорасположенного ГО;
гСХ 1,333 — 0,0032SOB
коп = - j~2950,0028ро в случае Т-образного оперения.
Относительная масса горизонтального оперения для рассма-
триваемого класса самолетов
= ferXofeMT [ У^г.оЧ. о \0,6.
Г-° ffloCOSXr. О \ Ю8сг. о )
Значения коэффициеитов в формуле (6.26);
ft” 0 = 0,844—0,00188Sr 0 — для низкорасположенного ГО;
А£хо = 1,17—0,006Sr 0 — для Т-образного оперения;
ймт = 1,0, если применяется обычный материал (в основном Д-16Т);
£мт = 0,95 при ограниченном применении новых материалов;
£мт = 0,85 при широком применении композиционных материалов;
лр — см. формулу (6.5).
Относительная масса вертикального оперения
о ~ тоП — /йг. 0,
где йоп — по формуле (6.25); /йг. 0 — по формуле (6.26).
(6.26)
140
При проектировании легких дозвуковых само-
летов (тос7-103 кг) для народного хозяйства, спортивных
и т. п.
ъ k
тоа = (4,4 + 0,8 • 10-зто) Son, (6.27)
/HQ
где коэффициент kv учитывает скорость (км/ч) полета,
^ = 0,643 + 1,02-10-3Укрейс,
коэффициент учитывает маневренность самолета; &м = 1,0
для неманевренных самолетов и kM = 1,5 для маневренных;
/п0 в кг; Son в м2.
Относительная масса оперения сверхзвуковых ма-
невренных самолетов классической схемы:
— (^Гт/Ро) (ёг. <Д. о Н- ёв. о*^в. о)> (6.28)
где Рмт — см. формулу (6.26); р0 = gmo/(l_0S) даН/м2, gr. 0 и gB, 0 —
масса 1 м2 ГО и ВО; gr.o = 3 + 7,2-10 3 <?maxmax — для цельно-
поворотного ГО; gB.o = 2 + 6-10*3^шахшах для неподвижного
ВО с рулем направления; 9шахтах—расчетный скоростной на-
пор, даН/м2; Sr.0 = Sr. 0/S; SB. о = ^в. со-
относительная масса неподвижного вертикального оперения
сверхзвуковых неманевренных и манев-
ренных самолетов, имеющих схему «бес-
хвостка» _
»*в. о = (^мт/Ро) ёв. О^Е. о> (6.29)
где gB.o — см. формулу (6.28); km — см. формулу (6.26).
Если известна величина тОп и требуется найти массу 1 м2
оперения (кг/м2), то можно воспользоваться соотношением
ёоп = ^опА)Ооп- (6.30)
Анализ формул для топ показывает, что относительная масса
оперения снижается с ростом взлетной массы, если Son = const,
а площади крыла и оперения растут по закону линейного подобия
(при прочих неизменных параметрах). С увеличением площади,
удлинения, а также стреловидности горизонтального и вертикаль-
ного оперения относительная масса оперения растет. Увеличение
относительной толщины ГО и ВО ведет к снижению тоа.
Т-образное оперение значительно тяжелее оперения с низко-
расположенным ГО (на 50 ... 60 %) при прочих неизменных пара-
метрах (Sr.о, SB.o, Ро и др.), так как вертикальное оперение до-
гружается силами и моментами от горизонтального оперения.
К тому же и горизонтальное оперение в Т-образной схеме тяжелее
низкорасположенного, так как рассчитывается на несимметричную
нагрузку, которая на 1/3 больше симметричной.
Распределение массы оперения дозвуковых самолетов по эле-
ментам приведено в табл. 6;7. В этой таблице предполагается, что
141
Таблица 6.7
Состав массы оперения по элементам (%)
Элементы т0 < 7* 10я кг т0 > 10* кг
Стабилизатор и киль:
лонжероны и стрингеры 25 ... 30 25 .. 30
обшивка 30 ... 35 32 .. 37
нервюры 5 ... 7 9 .. 12
узлы крепления 2 ... 3 6 .. 8
Рули с балансирами, триммерами, узлами 20 ... 25 15 .. 18
подвески и др.
Прочее (законцовки, крепеж, детали креп- 6 ... 10 . 3 .. 6
лении оборудования)
оперение легких самолетов двухлонжеронное, а тяжелых самоле-
тов — кессонное.
Относительная масса шасси. Относительная масса колесного
шасси современных самолетов составляет в среднем 0,03 ... 0,05.
Как правило, с увеличением тоннажа самолетов (до 250 ... 300 т)
тш уменьшается. Значительное влияние на величину тш оказывает
требование проходимости по грунтовым аэродромам (см. гл. 18).
В этом случае масса шасси увеличивается вследствие необходи-
мости увеличения ширины и диаметра колес, снижения давления
в пневматиках.
Ниже рассматривается определение относительной массы шасси
сухопутных самолетов, имеющих масляно-пневматические аморти-
заторы. В качестве основной принята схема трехопорного шасси
с носовой стойкой.
При проектировании самолетов всех типов, ис-
ключая палубные, с взлетной массой т0 > 104 кг отно-
сительную массу шасси можно определить по следующей статисти-
ческой формуле Шейнина [33]:
— /йгл. ш -ф- тн. ш -] — ,
TTIQ
где /йн. ш — относительная масса носовой опоры шасси (без колес);
/йгл. ш— относительная масса главных опор шасси (без обтекате-
лей для шасси в убранном положении и без колес); ткол — масса
колес, кг (по каталогу);
/йгл. ш = (0,93 — 0,64 • 10“®/np. пэс) [kCx (tnC' э л + Шк. 9л) + ///оси!;
(6.31)
trip,пос — расчетная (допустимая) масса самолета при посадке
(кг),
тр. пос = 0,9 lm0 + 0,38^ •
142
Здесь L — наибольшая возможная дальность беспосадочного
полета в км (шр. пос ^о);
Значения коэффициента feCx в формуле (в. 31),
учитывающего схему главных стоек шасси
Телескопическая схема..................................1,0
Рычажная схема без выноса амортизационного цилиндра 1,06
Рычажная схема с выносом амортизационного цилиндра 1,20
В формуле (6.31) та, эл, тк, эл, тоСИ — масса силовых элемен-
тов, конструктивных элементов и осей (или тележки) главных
опор шасси,
т0.эл = /7СТ [4,6-Ю'3тр. Пос (1 - то. я. ш) + 52,5], (6.32)
где Яст — габаритная высота (м) стойки главной опоры шасси
при необжатом амортизаторе (от оси колес до шарнира поворота
стойки при уборке шасси); /й0.н>ш = tno.-a,mltn0 — доля взлетной
массы, приходящаяся на носовую опору шасси (на стоянке);
обычно /и0.н. ш та 0,1;
™к..эл = М6,52-10-Зтр.пос(1 - т0. н. ш) + 28], (6.33)
где коэффициент kn учитывает число главных стоек шасси:
«ст гл .......... 2 3 4 5 6 7 8
fen ............. 1,0 1,1 1,15 1,12 1,23 1,27 1,30
ягОси = 11,44- 10-Зшр.пос(1 - /й0.н.ш) + 5] iK5K, (6.34)
где tK — число всех колес главных стоек шасси (для шасси с те-
лежкой — число пар колес); Ьк — ширина колеса (шины) в м.
Относительная масса носовой опоры шасси:
^я. ш = (1^сх/^о) (^с. эл ^к. эл), (6.35)
где коэффициент £ учитывает число главных стоек шасси:
£ = 0,594 + 0,31 • 10~5тр.пос, если пст.гл = 2,
£ = 0,370 + 0,30• 10~5тр. пос, если пст. гл > 2;
kcx — см. формулу (6.31); та в кг.
Масса силовых элементов носовой стойки:
тс.эл = (1,62Р2.ш + 20)йст, (6.36)
где hC7 — высота (м) носовой стойки (от оси колес до оси поворота).
Рн. ш — эксплуатационная нагрузка (т) на носовую стойку шасси
при торможении. Приближенно
Рн.ш= 2-10-3тр.пос(0,1 +0,27/1ц.м/В)^0,21-10-3тр. пос, (6.37)
где йц,м — расстояние от центра масс самолета до земли, м;
/Яр. пос в кг; В —база шасси, м.
143
Масса конструктивных элементов носовой стойки, кг:
тк.эл =4,1PL ш + 54, (6.38)
где Рн. ш — по формуле (6.37).
Приведенная методика расчета йш исходит из того, что все
стойки шасси убираются в крыло или фюзеляж и не требуют спе-
циальных обтекателей или гондол в убранном положении. Если
же такие обтекатели требуются (как, например, на самолетах
Ту-134, Ту-154, Ан-22, Ил-76 и др.), то необходимо их массу вклю-
чить в массу шасси.
Масса обтекателей (гондол) шасси составляет 10. .. 12 % от
суммарной массы шасси. Таким образом, с учетом обтекателей
^oi. обт ~ (1,10 • •• 1»12) Шщ.
При проектировании самолетов с вертикальным
взлетом и посадкой значение тш, полученное по при-
веденным выше формулам, следует уменьшить на 30... 35 %,
если самолет рассчитывается на аэродромы с искусственным по-
крытием, и на 10 %, если самолет рассчитывается на грунтовые
аэродромы.
Для прикидочных расчетов относительную
массу шасси можно определять по формуле Арефьева:
тш (0,25М + 0,5 • 10-3) + 0,025, (6.39)
где Яш — высота шасси в м (от поверхности аэродрома до конца
главной стойки шасси или до оси поворота ее); т0 — в т.
Влияние давления в пневматиках на относительную массу
шасси видно из следующей формулы (при тэ = const):
= 0,055*» (2 + +
+ (6Л0>
где + 12 (Яш//ф — 0,06); Нш и /ф — высота шасси и длина
фюзеляжа, м; рпя.гл и рпн.п— давление в пневматиках главных
стоек и носовой стойки шасси, даН/см2; Мгл.ш и ш0, н. ш — доля
взлетной массы, приходящаяся на главные опоры и носовую опору
(в среднем Мгл.ш = ОД; гп0.н.ш = 0,1). Например, при =
= 13 даН/см2 и рпн.я = 7 даН/см2 относительная масса шасси на
19 % меньше, чем при рпн. гл = 5 даН/см2 и рПн.н = 2,5 даН/см2.
При проектировании легких самолетов (т0 < 7 х
X103 кг) для народного хозяйства, спортивных и т. п. относитель-
ная масса шасси
М = /?мЛбт (6#ш + 11,3) Ю~3 + 0,0625£nBTfesb£2_ + 0,005,
1 Т Рпн. гл
(6.41)
где коэффициент kMT учитывает материал основных стоек шасси;
коэффициент /?обт учитывает наличие обтекателей; Нш — высота
144
шасси, м; рпн. гл—давление в пневматиках главных колес,
даН/см2.
Значении коэффициентов в формуле (6.41)
Амт = 1,0 — основные стойки шасси из стали средней удельной прочности
(например ЗОХГСА);
Амт = 0,65...0,70 — основные стойки шасси из металла высокой удельной
прочности (ЗОХГСНА, ВТ-20, ВТ-22 и т. п.);
^обт = 1,0 — не имеется обтекателей;
^обт — 1,05 — на колесах неубирающегося шасси имеются обтекатели;
^обт =1,2 — обтекатели для шасси установлены на фюзеляже (по типу са-
молетов Л-410, GAF-24 «Номад» и др.);
&пн =1,0 — пневматики с обычными камерами;
&пн = 0,93 — бескамерные пневматики.
Для лыжного варианта легкого самолета расчет массы шасси
ведут следующим образом. Из массы шасси вычитается масса колес
(известная по каталогам) и добавляется масса лыж:
тлыж = Дпыж^лыяо
где £лы® — 30 ... 35 кг/м2 — масса 1 м2 лыжи; ЗЛМж — площадь
лыж в плане, м2; 5ЛЫж = та/рлиук; рЛыж= 1000 кг/м2 — для снега.
Таким образом, /плыж = 0,030 ... 0,035.
При проектировании поплавкового варианта легкого самолета
масса поплавков в первом приближении определяется так:
^попл = ё'попл^поп.ч,
где gnonji = 40. .. 50 кг/м3 — масса поплавков, приходящаяся
на 1 м3 их объема упопл; упопЛ = &з. пто> где т0 — взлетная масса
самолета, т; k3.п — запас плавучести. Обычно /?3.п = 1,75 ... 2,0.
Тогда тпопл = 0,07 ... 0,10.
Анализ массы шасси. Зави-
симость/пш(т0) приведена- на рис. 6.3.
Распределение массы самолетного шас-
си по элементам (без обтекателей для
убранного положения) дано в табл. 6.8.
Данные табл. 6.8 касаются самолетов, ко-
торые эксплуатируются на бетонирован-
ных аэродромах.
На основные стойки шасси прихо-
дится обычно 80 ... 85 % массы шасси,
на носовую 15 ... 20 %.
Шасси для грунта, как уже упомина-
лось, тяжелее, чем шасси для бетониро-
ванного аэродрома вследствие увеличен-
ной массы колес больших размеров.
Диаметр dK и ширина Ьк (см) колес этих
самолетов должны удовлетворять соот-
ношению
Рис. 6.3. Относитель-
ная масса шасси в зави-
симости от взлетной мас-
сы самолета:
1 — колесное шасси для
бетонированного аэродро-
ма; 2 — колесное шасси
для грунтового аэродрома
145
Таблица 6.8
Состав массы шасси по элементам (%)
Элементы Главные стойки Носовая стойка
С двумя колесами С четырех- колесной тележкой
Колеса 55 ... 60 45 ... 50 20 . . 25
Амортизационные стойки с шлиц- шарнирами 14 ... 16 16 ... 19 20 . . 25
Детали тележки, оси колес Кинематические детали и механиз- мы, замки, детали управления и авто- матики 3 ... 4 9 ... 11 3 . . 4
20 ... 24 20 ... 24 45 . . 48
Створки с управлением и прочее 2 ... 3 2 ... 3 3 . . 4
где т0 в кг; iK — суммарное количество всех колес (включая но-
совые); стусл — заданная условная прочность грунта (даН/см2);
kT — коэффициент тандемности,
Число колес, проходящих по колее ... 1 2 3 и более
/?т.............................. 0,6 1,6 2,2
Для уменьшения массы шасси необхо-
димо:
— стремиться к уменьшению высоты шасси;
— уменьшать диаметр колес и ширину, увеличивать их число
и давление в шинах (в пределах, до которых обеспечивается про-
ходимость по грунту или по бетону);
— применять бескамерные пневматики, которые на 7 %
легче пневматиков с камерами;
— применять новые (проверенные) материалы с высокой удель-
ной прочностью, а для дисков тормозов — с высокой теплоемко-
стью (в пределах целесообразности снижения массы при росте
стоимости);
— применять прогрессивную технологию изготовления дета-
лей шасси, в частности сварку встык оплавлением (без уменьше-
ния прочности в месте сварки и практически без шва);
— избегать рычажной схемы шасси с разделением стойки и амор-
тизатора;
— применять титановые болты в шарнирах и соединениях;
— уменьшать число деталей и их размеры, объединять их
функции.
6.3.3. Масса силовой установки, оборудования
и управления
Масса силовой установки. Рассмотрим маршевую силовую
установку с турбореактивными двигателями и запишем массу
ее в виде
у = ^с. у^дв = ^с. уУдв-^О,
146
где kc, у — коэффициент, показывающий, во сколько раз масса
силовой установки больше массы двигателей (двигателя); удв =
= тяв§/Р0 — удельный вес двигателей; Ро — стартовая тяга.
В относительных величинах
"1о.у = Л0.у7дВРо. (6.42)
где Ро — стартовая тяговооруженность.
Если при проектировании отсутствует фактическое значение
удельного веса турбореактивных двигателей, то его можно вычис-
лить по формуле (см. также приложение табл. IV-1)
10^V'/2[l,69 + l,4(n*-3)T юо „ ,,,
уДв =-------° - --— + -Б~ + 0,05m1/3 + 0,06,
™ (l+m2)3/4 Poi
(6.43)
где Poi — стартовая тяга одного двигателя без форсажа;
Лк — степень повышения давления в компрессоре (лк = 5 ... 20,
обычно Лк = 10 ... 15); т — степень двухконтурности ТРД.
Коэффициент kc.у в формуле (6.42) имеет следующее выраже-
ние (без ограничения на стартовую массу реактивных самолетов):
^с. у = (1 4“ 0,1Идв. рев/^дв) Ч- (^2/Удв) X
X (1,62 + 0,275m0’75)2], (6.44)
где — коэффициент, зависящий от компоновки самолета и числа
двигателей (табл. 6.9); k2 — коэффициент, зависящий от числа М
полета, формы воздухозаборников и сопел (см. ниже); п№ — число
двигателей на самолете (без вспомогательных); пдв. рев— число
двигателей, оборудованных реверсорами тяги; кф — коэффициент,
учитывающий наличие у. двигателей форсажных камер; кф =
= 1 — без форсажа; кф = 1,5 — с форсажем.
Значения коэффициента k2 в формуле (6.44)
Число М полета. . . <1 >1
Воздухозаборники Круглые Круглые
Сопла................Круглые Круглые
k2 .................. 0,0236 0,0315
>1 >1 >1
Плоские Плоские Плоские
короткие длинные
Круглые Плоские Плоские
0,0354 0,049 0,051
Таблица 6.9
Значения коэффициента ki в формуле (6.44)
Расположение двигателей Число двигателей
1 2 3 4 >4
В хвостовой части На крыле 0,95 1,0 0,95 1,02 1,03 1,0 1,04 1,02
147
При проектировании легких самолетов для на-
родного хозяйства, спортивных и т. п., оборудо-
ванных поршневыми или турбовинтовыми двигателями, относи-
тельная масса силовой установки определяется по аналогии
с (6.42): _ __
тс. у = 1,36£с. Уудв^ о» (6.45)
где No = Ng/mg — стартовая энерговооруженность самолета.
При отсутствии фактического значения удельного веса ПД
можно воспользоваться формулой
упд kg — 0,014Л^о< > (6.46)
где Ngt—взлетная мощность одного двигателя,. кВт; ^ = 0,9
для ПД воздушного охлаждения; kt = 1,0 для ПД жидкостного
охлаждения.
Удельный вес ТВД утвд == 0,13 ... 0,17 даН/кВт.
Коэффициент kc,y в формуле (6.45) определяется следующим
образом:
^с.у^ 1,1 +(1,36/7дв) (0,1+0,WV?) - для ТВД,
&с. у 1,6 + 0,4 • 10“3Мог — для ПД.
Относительная масса силовой установки самолетов
вертикального взлета ипосадкис реактивными
двигателями
^С. У = (^С. уУдВ^3о)м Н- (^С. уУдВ^о)п 4“ (АШдв)м, (6-47)
где величины с индексом «м» характеризуют маршевую силовую
установку, а величины с индексом «п» — подъемную; (А/йдв)м л;
« (0,1 ... 0,15) (тдв)м — увеличение относительной массы мар-
шевых двигателей, если они используются для создания подъем-
ной силы при взлете и посадке; (АтдВ) = 0, если маршевые двига-
тели не используются для создания подъемной силы.
Массу маршевой силовой установки определяют по формулам
(6.42) ... (6.46). Для специальных подъемных двигателей
^с. у. п (1,2 . . . 1,25) ^с. у. м;
Уд. в.п. = 0,05 . . . 0,07;
Лп = (1,15 . . . 1,25)[1 -Л.мМ],
где Т’в.м — подъемная сила, создаваемая маршевыми двигателями.
Из приведенных формул видно, что относительная масса сило-
вой установки зависит от взлетной массы, так как удв = f (Poi
или Noi), a Poi и Noi зависят от т0.
Зависимость утрдд от стартовой тяги и степени двухконтурности
весьма сложная, с минимумом. Наименьшее значение утрдд
получается при Poi = 1500 ... 3000 даН, если т — 1 ... 3.
Если степень двухконтурности т — 6 ... 8, то (Pei)7=min ==
= 8-103 ... 104 даН.
148
Наименьшая удельная масса ТРДД соответствует /и* — 4 ... 6
в широком диапазоне стартовой тяги двигателей.
Относительная масса оборудования и управления. Для расчетов
второго приближения могут быть использованы следующие ста-
тистические формулы.
Пассажирские магистральные самолеты
(т0 > Ю4 кг):
^ос.упР^(1М)(250 + 30ппас) + (Г,06, (6.48)
где т0 в кг; ппас — число пассажирских мест.
Грузовые самолеты:
/йОб. упР — 0,2 — O,OO85/zzo/2> (6.49)
где тй в т.
Легкие многоцелевые самолеты для на-
родного хозяйства (т0 < 7-103 кг):
^об. упр - 200/то + 0,2/йц. и(1+ 0,1Тр/Урейс) + 0,08. (6.50)
Существенной частью тоС.упр является относительная масса
бытового оборудования:
тбыт. об = 12 («пас + Пэк)М- (6-51)
В формулах (6.50) и (6.51) т0 в кг; /йп.н — относительная масса
целевой нагрузки; Lp — расчетная дальность полета; км; Грейс —
рейсовая скорость, км/ч; ппас и «эк — число пассажирских мест
и число членов экипажа.
Номенклатура оборудования военных самолетов
задается ТТТ, а масса определяется в основном по каталогам.
При их отсутствии рекомендуется использовать осредненные дан-
ные (см. табл. 6.1).
6.3.4. Относительная масса топлива
Масса топлива, потребного для полета в течение времени t:
t
тТ = j сРР di. (6.52)
о
Если время полета разбить на характерные участки, осреднив
на каждом из них сР и Р, то формулу (6.52) можно записать в виде
mT = t (cPPt)t, (6.53)
i=l
где i = 1 ... п — число участков.
Поделив (6.53) на т0, получим
«-1Ж <6-54>
4=1
149
,, gma Ya
где д = -2р— = -------среднее аэродинамическое качество на
данном участке полета, приведенное к взлетной массе самолета.
Раскроем формулу (6.54) для самолетов с выраженным крей-
серским участком полета:
/Йт /Йт> Нф р СН- п -|- 7ЙТ, TIe g -|- /Йт, Пр -ф- /Ит< КрейС. (6.55)
Здесь индексы означают: «н. р» — взлет, набор высоты и разгон
до крейсерской скорости; «сн. п» — снижение и посадка; «н. з» —
навигационный запас, «пр» — прочее (для маневрирования по
аэродрому, опробования двигателей, несливаемый остаток).
При расчете взлетной массы самолета во втором приближении
можно использовать следующие формулы для составляющих тт.
Удозвуковыхсамолетов с ТРД или ТРДД
(с обычным взлетом и посадкой):
л О,ОО35Яо(1-0,03m)
т- н- Р ~ 1 - 0,004Яо
(6.56)
где Но — начальная высота крейсерского полета (км); т — сте-
пень двухконтурности ТРДД;
тт.сн.п^0,002Як(1 -0,023Як)(1 -0,03m), (6.57)
где Нк — конечная высота крейсерского полета перед снижением
самолета (км);
"Ч. Н. 3 ОМ/Ягпах — на режиме йг. пр 0,006.
На режиме (V, К) = const
тт. крейс О «Ь. н. р)
(L Ln. Сн) СР
е Гкрейс-»7) *
(6.58)
Здесь L—дальность полета без расходования навигационного
запаса (км). Для военных самолетов L = 2R, где R — радиус дей-
ствия; LH. сн « 40Нср (где Яср — средняя высота крейсерского
полета в км) — горизонтальная дальность при наборе высоты,
разгона и снижении; W — расчетная скорость встречного ветра:
Н, км .......................... 3 ... 6 7 ... 9 10 ... 12
W, км/ч ........................... 30 50 70
Если заведомо йгт. крейс <0,2, то с погрешностью
^7, крейс
2 ... 3 %
= (1-
т 1 (L ~ Lh. сн) СР
т> н-р'(Т«рейс-ЮК
(6.59)
При отсутствии значения сР конкретного двигателя можно вос-
пользоваться приближенной формулой
। 0,4М
Ср - Сро + £ + 0,027Я ’
(6.60)
150
где Н в км; М — число М полета (М < 1); сРО = 0>8/(1 + 0,5 |/ /и) —
стартовое значение удельного часового расхода топлива, когда
(Я, V) = 0; т — степень двухконтурности ТРДД.
На режиме (Я, К) — const скорость полета медленно умень-
шается по мере расходования топлива. Для этого случая, интег-
рируя уравнение движения при допущении dV/dt 0, получим:
^крейс = -2-^на-^Г)^ (1 - V'1-тт.крейс); (6.61)
Р средн
г L с I2
т — 1 1 _ «Рейс Р средн /с cq1)
крейс - 1 2(Унач-Г)’
Для сверхзвуковых самолетов
т н р«^2,1-10"в (н0 + ^^\ _, (6.63)
’•Н,Р \ 2g ) P0Kmax_l V
где Н в м, Укрейс в м/с; Ро — стартовая тяговооруженность само-
лета; Ктах — максимальное аэродинамическое качество самолета
при расчетном числе М полета; g = 9,81 м/с2;
йгт. сн. П — /сн. п/(1,6Лм<1) 0-025 . . . 0,035;
тТ. н. з (('Р//'Стах)м< 1; ^т. пр = 0,006;
"/т. крейс — п0 формуле (6.58), где
Lu сн = 0,014 (нср + _р°^х— . (6.64)
. \ СР 2* / PoKtnax - 1 К
Здесь Яср — средняя высота крейсерского полета (м); 1+рейс
В М/с, Тн. сн в км.
Для сверхзвуковых самолетов в формуле (6.58) W = 50 км/ч.
При проектировании реактивных самолетов с
вертикальным взлетом и посадкой к /пт,н.р
и «т. Сн. п необходимо добавить относительную массу топлива,
расходуемую при вертикальном взлете и посадке:
Лтт cPOPot,
где сРй = 0,8/(1 + 0,5 К^); Ро = 1,1 1,25; t = 0,08... 0,1 ч.
При проектировании легких спортивных само-
летов, самолетов для народного хозяй-
ства с П Д или Т В Д принимают
+-7SJT----(-—э ) +0,006, (6.65)
т \ 270 Т]вК /крейс 1 75/Сшах \ Щ / Kmax V '
где V в км/ч; се — удельный часовой расход топлива; т]в — КПД
винта (т]в — 0,75 ... 0,80), 7(крейС — Су!сх, Ктах ~ ~2~ Р' лХэф/схо,
/н. з = 0,5 ч для самолетов, у которых время между посадками не
более 1 ч; /н<3 = 0,75 ч, если при визуальном полете t 1 ...2 ч.
151
Формула (6.58) соответствует режиму полета (V, су) = const,
когда по мере выгорания топлива самолет медленно набирает
высоту (полет «по потолкам»). Если из удобства управления воз-
душным движением гражданских самолетов требуется, чтобы в
крейсерском полете сохранялась высота, т. е. необходим режим
(Н, V) = const, то при М < 1
^т. крейс О ^т. н. р)
| ( ^^шах
X tg arctg
СуО ^н. сн) СР
. (V - W) Ким
где (Сг/)дшах = VСхоя^эф — коэффициент подъемной силы, со-
ответствующий КтаХ; Ср0 = (р0/<?) (1 — ^т.н.р) — коэффициент
подъемной силы в начале крейсерского полета;
<7 = 47,1 • 10-4 ~ g- (V + F)2 в даН/м2. Здесь Н в км, V и W
в м/с; р0 = g-/no/(10S) в даН/м2.
Следует учитывать, что режим (Н, V) = const менее экономи-
чен по расходу топлива, чем режим (V, су) — const («по потолкам»)—
см. табл. 6.10.
При полете на дальность более 3 ... 4 тыс. км нередко поль-
зуются ступенчатым увеличением высоты крейсерского полета
вместо полета «по потолкам». В этом случае относительную массу
потребного топлива можно найти по формуле
Л м Л (L -/-н.Сн)[1 -0,256.10-*(L-Lfl.cH)l Ср
крейа И тт- н. р) (у__W) К
«Ступенчатый режим» крейсерского полета мало уступает ре-
жиму «по потолкам» и экономичнее режима (Н, V) = const.
Прирост относительной массы топлива в зависимости от даль-
ности и режима крейсерского полета показан для примера
в табл. 6.10.
Таблица 6.10
Прирост относительной массы топлива + Д»1Т. крейс
в зависимости от дальности и режима крейсерского полета
[по сравиеиию с режимом (V, су) == const]
Режим полета Дальность полета L, км
1000 2000 3000 5000 7000
Ступенчатый полет * 0,009 0,014 0,018 0,023 0,026
(Н, V) = const 0,028 0,045 0,055 0,064 0,074
* Ступени дальностью 1000 км.
152
6.4. О ТОЧНОСТИ ВЕСОВЫХ РАСЧЕТОВ
При выводе формул для расчета массы конструкции агрегатов
самолета следует стремиться к тому, чтобы весовые формулы были
по возможности компактными и простыми и в то же время учиты-
вали влияние всех основных параметров, особенностей конструк-
ции и ограничений, разгрузку или догрузку агрегата сосредоточен-
ными и распределенными грузами, чтобы они количественно, а не
только качественно правильно учитывали влияние параметров,
принимая во внимание, что масса силовых конструкций (из рас-
чета статической прочности) существенно меньше суммарной массы
агрегата. Опыт показывает, что громоздкие и сложные весовые
формулы не всегда оказываются лучшими по точности.
Точность весовых расчетов должна быть соизмеримой с точностью
исходных данных и предпосылок. На стадии технического пред-
ложения или аванпроекта достаточной точностью расчета массы
самолета считается ±6 ... 10 %, на стадии эскизного проекта
±3 ... 5 %, в процессе рабочего проектирования ±1 ... 2 %.
В качестве базы, эталона принимается взлетная масса первого
летного образца *.
Поскольку эта масса до изготовления самолета еще не известна,
то в качестве базы при оценке точности весовых расчетов и формул
принимают массу изготовленных ранее аналогичных самолетов
и агрегатов.
Точность весовых расчетов и формул чаще всего оценивается
величиной средней квадратичной погрешности
, / £ (Amz)2
—п--------
г "расч
ИЛИ
от = 100 l/"-------—У 1У,
I/ ирасч \ тфакт /
где Amt—величина несовпадения (ошибки), Д/йг = [(ттеор —
—/пфакт)//пфакт] 100%; Штеор, /пфакт — теоретическое и факти-
ческое значения массы; прасч — число контрольных расчетов,
в результате которых найдены значения /птеор.
Иногда для оценки точности весовых расчетов и формул поль-
зуются дисперсией — средним значением квадрата отклонения
случайной величины от ее среднего значения:
£ (Д^)2
-----г-
ирасч — 1
* В процессе проектирования масса самолета, как правило, увеличивается
(см. разд. 6.6).
153
Для увеличения точности весовых расчетов и, следовательно,
качества проектирования самолета рекомендуется:
— систематически проверять и уточнять весовые формулы
по данным однотипных самолетов, имеющих высокую весовую
культуру;
— массу каждого агрегата и каждой системы оборудования
рассчитывать по нескольким формулам, имеющим примерно оди-
наковую точность;
— разрабатывать новые методы и формулы весового расчета,
учитывающие новые требования, ограничения и условия, приме-
нение новых материалов и т. п.;
— совершенствовать систему весового контроля (см. разд. 6.6)
и прогнозирования.
Только на основе тщательного весового анализа и контроля,
на основе систематической весовой проработки конструкции
с учетом всех аспектов проектирования (прочности, жесткости,
ресурса, аэродинамики, стоимости) можно создать самолет с вы-
сокой весовой отдачей и эффективностью.
6.5. ПЕРЕСЧЕТ ВЕСОВЫХ ХАРАКТЕРИСТИК САМОЛЕТА
[.При изменении одного-двух параметров самолета или его ча-
стей новое значение взлетной массы или массы агрегатов (крыла,
фюзеляжа и т. п.) проще и быстрее находить методом пересчета
с исходного на новое значение, а не методом итераций. Такой
пересчет целесообразно делать при весовом анализе самолета,
при оценке влияния отдельных параметров, при модификациях
агрегатов, когда имеется прототип. Основная формула пересчета
взлетной массы, основанная на методе конечных приращений,
имеет вид
п
^Онов = "гОисх ± 2 (6-66)
fe=l
где i — изменяемый параметр; k — число изменяемых параметров.
В случае появления дополнительной массы Атдоп имеем
^ОноВ = ^Оисх ~Ь АШдоп, (6.67)
где хт — коэффициент роста взлетной массы по дополнительной
массе (xm = const, см. гл. 3).
Можно пользоваться при пересчете т0 и удельными показа-
телями gi‘.
^Онов = ^0 исх (6.68)
где gt = mlrp/i const.
Например, если изменяется длина фюзеляжа (А/ = А/ф), то
т0 нов = ^Онсх А/ф), (6.69)
где §1ф = тфСХДфСХ const.
154
Если увеличивается площадь крыла (Ai = AS), то
т0нов = т0иОХ+ M&AS), (6.70)
где gs = ткрХ/5 « const — масса 1 м2 крыла; хт — коэффициент
роста т0 при заданных ограничениях.
При изменении взлетной массы относительная масса кон-
струкции самолета может быть пересчитана по следующей формуле:
^кон = «р (о,ОО5/^ + ^Ц + 0,061. (6.71)
Формула (6.71) применима к неманевренным самолетам класси-
ческой схемы и имеет ограничения: и? = 3,5 ... 5,5; та = 10 ...
... 103 т. При пользовании формулой (6.71) сначала корректируют
численные коэффициенты ее по данным исходной относительной
массы конструкции, затем производят расчет ткон с новым зна-
чением т0.
При изменении площади крыла и нагрузки на 1 м2 крыла
новое значение массы крыла может быть найдено по формуле [33]
тнов _ тнсх ^нов
"‘кр — ''‘кр. б. мех 25
+ т
нсх
мех
снов
^мех
сисх
^мех
(6.72)
Сх
где т”рХб. мех — исходная масса крыла без учета массы механи-
зации; 5мех, 5мех — исходная и новая площадь средств меха-
низации.
Если изменяется только стартовая масса, то расчет массы
крыла удобно вести по формуле, которая для тяжелого немане-
вренного самолета имеет вид
ткр «0,0147/^ + 0,0275. (6.73)
Здесь т0 в т.
Формулой (6.73) пользуются таким же способом, как и форму-
лой (6.71).
Пересчет массы крыла удобно также вести, пользуясь прибли-
женным постоянством массы 1 м2 при сравнительно небольшом
изменении его площади (<15) %. В этом случае
<°pB=<pCX±+pAS, (6.74)
где £кр = /ПкрХ/5НСх const.
Таким же образом можно пересчитать массу оперения или фюзе-
ляжа. Например, при увеличении длины фюзеляжа
/40В = /4сх + £А/ф, (6.75)
где gZ(J) = tnfx/l$ х « const.
Относительная масса фюзеляжа тяжелого неманевренного
самолета в функции взлетной массы
тф - 0,005 /тГ + 0,2т//3 + 0,03, (6.76)
155
где т0 в т. Формулой (6.76) можно пользоваться при пересчете
йф таким же образом, как и формулой (6.71).
При расчете массы конструкции в третьем приближении,
когда известны все нагрузки и силовые схемы агрегатов, нередко
пользуются различными теоретическими методами определения
массы силовой конструкции. Одним из таких методов является,
например, метод конечных элементов [31 ].
Для перехода от силовой (теоретической) массы пг* к расчетной
(полной) массе вводят коэффициент &агр:
^агр = ^агр^ •
Например, для крыла неманевренного самолета по статистике
ь _ ь _______________________45 2000 т»,
«агр - «кр — 2ооо+то
Здесь т0 в т.
Для фюзеляжа неманевренного самолета
k ~k ~ Р 2000 ~т«
«агр-Кф —0 2000 + то
С увеличением т0 растет нагруженность конструкции, а число
несиловых элементов уменьшается. Поэтому с ростом т0 значение
коэффициента &агр уменьшается.
Численное значение &агр можно найти не только эмпирически
(с использованием статистики), но и теоретически, если опреде-
лить массу несиловой конструкции агрегата, массу, связанную
с «данью» технологии, эксплуатации и стоимости изготовления,
а также массу, затрачиваемую на обеспечение ресурса, жесткости,
надежности и на выполнение других требований.
Эта нелегкая задача стоит в ряду актуальных проектно-тео-
ретических исследований.
6.6. О ВЕСОВОМ ПРОЕКТИРОВАНИИ И КОНТРОЛЕ
МАССЫ САМОЛЕТА
Рассмотренный выше расчет массы самолета является состав-
ной частью более общего понятия «весовое проектирование»,
куда входят еще и такие операции, как анализ массы, весовое
планирование, весовой контроль, расчет центра масс и моментов
инерции самолета.
При анализе массы самолета и его частей изучаются закономер-
ности и связи между размерами, нагрузками и массой элементов
конструкции, изучается наиболее благоприятное распределение
массы конструкции, оборудования и целевой нагрузки. Результа-
том этой части весового проектирования является разработка
теории весового проектирования, алгоритмов весовых расчетов,
выработка рекомендаций для выбора схемы, компоновки и основ-
ных параметров самолета, объединяемых понятием «облик само-
лета».
156
В задачу весового планирования входят [331:
— разработка технических концепций и методов оптимального
проектирования, в частности методов минимизации массы кон-
струкции и взлетной массы самолета;
— разработка исходных данных, ограничений и системы
лимитов для весовых расчетов.
Задачами весового контроля являются:
— составление планов мероприятий в области проектирования,
конструирования, расчета прочности и жесткости, а также тех-
нологии изготовления самолета с целью снижения массы;
• — контроль за выполнением указанных выше планов;
— контроль за выполнением весовых лимитов;
— разработка системы оперативного учета изменений массы
в процессе проектирования самолета;
— разработка системы весового контроля в опытном и серий-
ном производстве самолета;
— разработка системы материального и морального стимули-
рования с целью снижения массы деталей, узлов и агрегатов
самолета.
Весь этот сложный аппарат весового планирования и кон-
троля приходится создавать для того, чтобы сдержать увеличе-
ние массы, удержать ее в заданных (проектируемых) пределах.
Дело в том, что фактическая масса пустого самолета, как правило,
превышает проектное (теоретическое) ее значение. Это обстоя-
тельство, вообще говоря, является объективной закономерностью,
отражающей диалектический характер процесса проектирования,
итеративность его.
Объективными причинами роста массы пустого самолета в про-
цессе его создания являются:
— недостаточная глубина проработки вследствие ограничен-
ной или неточной информации на начальной стадии проектиро-
вания, когда определяется масса самолета;
— дополнительные требования заказчика;
— уточнение расчетных данных, отклонения от проекта
с целью улучшения общей эффективности самолета (чаще всего
сопровождаемые ростом массы);
— трудности реализации новых разработок (новые двигатели,
материалы, технология, оборудование и т. п.);
— доработки после статических и динамических испытаний
на прочность, доводка после летных испытаний.
При весовом проектировании следует учитывать, что:
— рост массы и перетяжеление — явления различные;
— совпадение фактического и проектного значений массы
пустого самолета возможно в пределах некоторого допуска;
— недостаточная точность весовых расчетов может привести
к перетяжелению.
Для снижения роста массы самолета стремятся отделить
перетяжеление, в основе которого субъективные факторы, не-
157
достаток опыта или времени, от объективных причин роста
массы.
Опыт свидетельствует о том, что взлетная масса самолета
увеличивается в среднем на 6 ... 8 % в процессе проектирования
и изготовления опытного образца и еще на 1,5 ... 2 % — во время
внедрения в серию, итого — на 7,5 ... 10 % (по сравнению с пер-
воначальной теоретической массой).
Для сдерживания роста массы самолета применяются различ-
ные методы, в частности:
— проектирование с весовым резервом, когда заранее пла-
нируется рост массы пустого самолета. Резерв в этом случае
используется для корректировки весовых лимитов;
— планирование модификаций самолета на. ранних стадиях
проектирования;
— использование резервов прочности, которые в большинстве
случаев выявляются при испытаниях. В соответствии с этим ме-
тодом прочность самолета рассчитывается на несколько занижен-
ные нагрузки;
— метод повторного проектирования, когда без значительных
затрат времени и средств, без кардинальных изменений перераба-
тываются рабочие чертежи агрегатов, узлов и деталей (известно,
что любая конструкция может быть усовершенствована и об-
легчена путем уточнения нагрузок, более тщательного конструи-
рования, внедрения новых конструктивных схем, новых материа-
лов, технологии и т. п.).
В процессе контроля массы на всех стадиях проектирования
разрабатываются весовые лимиты для каждого агрегата самолета,
причем по мере продвижения проекта лимиты корректируются.
Разработка лимитов ведется инженером-весовиком совместно
с конструктором данного агрегата. В начале конструирования
агрегата выполнение лимитов требуется обычно с точностью
3 ... 5 % (завышение массы), затем требования становятся более
жесткими: перетяжеление допускается не более чем на 1,5 ... 2% .
Глава 7
ОПТИМИЗАЦИЯ ПРОЕКТНЫХ ПАРАМЕТРОВ САМОЛЕТА
7.1. ОПТИМИЗАЦИЯ ПРОЕКТА САМОЛЕТА НА ЭТАПЕ
РАЗРАБОТКИ ТЕХНИЧЕСКОГО ПРЕДЛОЖЕНИЯ.
ОБЩИЕ МЕТОДИЧЕСКИЕ ПОЛОЖЕНИЯ
Проект нового самолета на этапе технического предложения
должен отражать результаты проектно-конструкторских изыска-
ний рациональных параметров самолета. Под рациональными па-
раметрами понимаются такие, которые наилучшим образом отве-
чают назначению самолета.
158
Разработка технического предложения — наиболее ответствен-
ный этап процесса проектирования, так как главные технические
концепции и примерно 80 % основных решений по проекту при-
нимаются именно на этом, самом раннем этапе. Результатом его
является техническая документация, содержащая чертеж общего
вида самолета и перечень его летно-технических характеристик
(ЛТХ). Именно чертеж общего вида отражает общую и аэродина-
мическую схемы самолета, размеры и формы его основных частей,
которые в совокупности характеризуются геометрическими пара-
метрами. Они выступают в качестве независимых, искомых пере-
менных. Можно найти такое сочетание их значений, что проект
самолета будет удовлетворять поставленным ТТТ и ТЗ (или огра-
ничениям), но при этом основной оценочный критерий (целевая
функция) будет иметь экстремальное (наименьшее или наиболь-
шее) значение, а соответствующие ему значения проектных пара-
метров будут оптимальными.
Если решение по выбору отдельных проектных параметров
обосновано не формальными методами, то в целом все проектные
параметры называются рациональными.
Процесс принятия оптимального или рационального решения
по выбору проектных параметров самолета не является одно-
шаговым. В качестве первого шага на основе ТТТ и ТЗ делаются
приближенные оценки значений основных геометрических про-
ектных параметров и технических характеристик самолета (глав-
ным образом весовых). Приближенные оценки значений безраз-
мерных геометрических параметров, характеризующих формы
частей самолета, принимаются на основе -имеющегося опыта
строительства самолетов, т. е. с использованием статистики. и
фундаментальных знаний специальных авиационных наук (аэро-
динамики, строительной механики, динамики полета и т. п.).
Такой подход к приближенным оценкам проекта нового самолета
вполне правомерен, если технические концепции самолета не
выходят далеко за рамки известных прототипов.
Однако в случае разработки проекта принципиально нового
самолета, технико-экономические или тактико-технические ха-
рактеристики которого весьма далеко выходят за рамки имеющихся
прототипов (например, по величине целевой нагрузки или скорости
полета и т. п.), необходимо делать приближенные оценки прогноз-
ного характера по ожидаемым величинам его технических харак-
теристик и вероятности возможной реализации (или риска) про-
екта в целом.
Методы и результаты приближенных оценок проектных пара-
метров нового самолета имеют двойное назначение: во-первых,
они важны сами по себе (познавательно) и могут носить закон-
ченный характер в условиях крайне ограниченного времени для
принятия предварительных проектных решений; во-вторых, они
могут служить начальной (или пусковой) точкой для последу-
ющих уточнений в итерационном процессе вычисления техниче-
159
ских характеристик самолета и в процессе поиска рациональных
значений проектных параметров.
По результатам первого приближения оцениваются не только
проектные параметры, но и все взаимосвязанные основные тех-
нические характеристики самолета, определяющие расчетные ус-
ловия для последующих их уточнений. К таким характеристи-
кам следует отнести прежде всего расчетную взлетную массу
и расчетную нормальную перегрузку, что весьма характерно
для неманевренных самолетов.
Разделение проектных параметров на две категории: на глав-
ные и второстепенные, или на параметры первой очереди и пара-
метры второй очереди, несмотря на некоторую условность, вполне
правомерно и даже необходимо с точки зрения методологии при-
нятия «точного» (или уточненного) решения на последующих
шагах по выбору их оптимальных или рациональных зна-
чений.
В качестве искомых проектных параметров первой очереди
могут быть размеры крыла самолета и его двигателя, характери-
зуемые, например, величинами площади крыла и миделя двигатель-
ной установки {S, 5М.Д.У} или величинами площади крыла и
стартовой тяги (эффективной мощности) силовой установки:
{S, Ро\ или {S, ДГОэ}.
Параметрами второй очереди могут являться удлинение крыла,
его средняя относительная толщина, стреловидность, сужение
ит. п.: (к, с, х» Л, •••}> то же и Для оперения; диаметр и удлинение
фюзеляжа, удлинения его носовой и хвостовой частей: {D$,
кф, Хн.ф, %л.ф, ...}; степень двухконтурности ТРДД т или диа-
метр винта DB ПД или ТВД и т. д.
Следует отметить, что поиск рациональных проектных пара-
метров и соответствующих им технических характеристик самолета
должен вестись на основе физических зависимостей (имитационных
моделей), существенно отличающихся от зависимостей, исполь-
зуемых в приближенных расчетах, причем эти последние после
определения начальной точки должны быть исключены из итера-
ционного цикла определения допустимых или оптимальных зна-
чений всего множества проектных параметров.
Однако прежде чем оптимизировать проектные параметры,
необходимо выбрать схему самолета, что является самой сложной
проблемой в проектировании. Решена она может быть на основе
сравнения возможных вариантов схем, оптимизированных по
своим параметрам. Выбор наилучшей из оптимизированных схем
на основе единого для них объективного критерия при прочих
равных условиях может служить основанием для принятия реше-
ния о дальнейшей проработке проекта.
При наличии конкурирующих или равноценных схем среди
оптимальных необходимо продолжить более детальные разра-
ботки каждой из них на этапе эскизного проекта и провести по-
вторное их сравнение.
160
Следует заметить, что такой конкурсный подход при выборе
схемы, если это сразу не очевидно, полезно проводить не только
для равноценных, но также и для резервных вариантов, занима-
ющих вторые места: при последующих детальных проработках
резервные варианты могут оказаться более предпочтительными.
Проблему выбора, например, аэродинамической схемы само-
лета можно свести к параметрической оптимизационной задаче,
если искомые параметры будут характеризовать аэродинамиче-
скую схему.
Вполне очевидно, что организовать и реализовать полноцен-
ные вычислительные процедуры выбора схемы самолета с опти-
мальными параметрами «ручными» методами за приемлемое время
практически невозможно. Сделать это можно только с использо-
ванием ЭВМ — либо в режиме пакетной обработки информации,
либо в рамках автоматизированной системы проектирования
с использованием диалога проектировщик (пользователь) — ЭВМ.
В настоящей главе излагается материал, который может слу-
жить методологической основой для построения формального и
неформального (с использованием диалога) процесса выбора ра-
циональных проектных параметров самолета заданной схемы.
Наиболее близко этот материал отвечает методике диплом-
ного проектирования, когда основные абсолютные размеры и не-
которые геометрические формы самолета должны быть определены
оптимальным образом на основе полученного дипломантом зада-
ния и принятой им схемы.
7.2. АНАЛИЗ ВЛИЯНИЯ ИЗМЕНЕНИЯ ПРОЕКТНЫХ
ПАРАМЕТРОВ ПРИ ИХ ОПТИМИЗАЦИИ
НА ЛЕТНО-ТЕХНИЧЕСКИЕ ХАРАКТЕРИСТИКИ САМОЛЕТА
В практике проектных исследований чаще всего решаются за-
дачи определения летно-технических характеристик самолета
при заданных значениях параметров планера самолета и его дви-
гательной установки. Результаты решения именно этих задач
соотносятся с требованиями к самолету по его летно-техническим
характеристикам, и на основании полученного или экстремального
значения оценочного критерия делается вывод о приемлемости
или неприемлемости проектных параметров, а также о возмож-
ных путях их улучшения.
При выборе проектных параметров необходимо не только вы-
яснить, как они влияют на летно-технические характеристики
самолета, но и определить, в какой мере эти характеристики могут
соответствовать значениям, заданным ТТТ. Анализ такого влия-
ния должен производиться с помощью независимого изменения
каждого параметра, подлежащего оптимизации. Поэтому в число
рассматриваемых (рассчитываемых) вариантов проекта, соответ-
ствующих заданным значениям свободных параметров, могут
входить и такие, которые не будут удовлетворять ни условиям
6 С. М. Егер и др. 161
физической реализации, ни заданным значениям летно-техниЧе-
ских характеристик по ТТТ. Вполне очевидно, что такие варианты
должны быть исключены из рассмотрения при последующем
параметрическом анализе.
Отмеченное обстоятельство отражает тот простой факт, что
параметрический анализ (а точнее — сопутствующие ему пара-
метрические расчеты) проводят в такой момент, когда процесс
проектирования еще не замкнут принятием проектно-конструк-
торского решения, т. е. выбором рациональных значений проект-
ных параметров.
Работы, связанные с такими проектными параметрическими рас-
четами и с последующим их анализом, являются сердцевиной всех
проектных изысканий. Независимо от того, как выполняется
процедура выбора проектных параметров (формально или нефор-
мально), результаты параметрических расчетов и основанного
на них анализа являются ядром всех процедур оптимизации
проектных параметров.
Диапазон изменения значений проектных параметров с наи-
большей степенью вероятности должен включать и ожидаемые их
оптимальные значения. Для выбора такого диапазона лучше всего
ориентироваться на значения, получаемые на основе прибли-
женных проектных расчетов (см. гл. 4).
Так, например, по расчетам первого приближения можно опре-
делить ожидаемые значения различных проектных параметров
(площадь крыла S = Sll> и стартовую тягу двигательной уста-
новки Ро — Ро’), а также ожидаемые значения безразмерных
параметров (удлинение крыла X = Л(1>, его среднюю относитель-
ную толщину с = ё(1), стреловидность %п к = Xn.L сужение ц =
= ц11’ и т. п.). Приближенные значения таких же параметров
могут быть определены или приняты для оперений (горизонталь-
ного и вертикального), которые могут быть дополнены их относи-
тельными размерами в виде Sr. о = Sr.o и SB. о = Sb.’o. Для
фюзеляжа могут быть определены значения его параметров первого
приближения в виде абсолютного или относительного размера
диаметра фюзеляжа = D1^ или соответственно,
его полного удлинения Хф = Ц1’ и удлинений его носовой и хво-
стовой частей, т. е. Хн. ф = Хнпф и Хх. ф = ^нпф соответственно.
Число свободных проектных параметров может быть значи-
тельно сокращено, если часть из них принять постоянными в силу
того, что их изменение практически не оказывает влияния на ре-
зультат проектирования или их значения уже установились
в практике проектирования самолетов данного типа.
Другой путь сокращения числа свободных проектных пара-
метров состоит в том, что на часть параметров накладывают про-
ектные связи и они становятся зависимыми от свободных пара-
метров. Так, можно получить связь между сужением крыла и его
удлинением и стреловидностью по передней кромке при заданной
162
стреловидности задней кромки, или можно связать удлинение
фюзеляжа с его диаметром и удлинениями его носовой и хвостовой
частей при заданном уровне комфорта для пассажиров, или —
выдержать определенное соотношение размеров, характеризующих
общий вид самолета, и т. п. Такие зависимые проектные геометри-
ческие параметры можно отнести к категории компоновочных
технических характеристик самолета.
В число постоянных параметров можно включить параметры
двигательной установки с конкретным двигателем, определенным
по результатам расчетов первого приближения. Целесообразность
этого вытекает из того факта, что, если параметры двигательной
(или силовой) установки принимать переменными и использовать
в параметрических расчетах ее имитационную модель, то после
определения ее оптимальных параметров (совместно с оптималь-
ными параметрами планера) все равно необходимо будет перейти
к конкретному двигателю, который будет отличаться от оптималь-
ного. Тогда, чтобы не потерять всех преимуществ оптимизации,
необходимо будет повторно провести оптимизацию параметров
планера самолета, наилучшим образом отвечающих принятому
конкретному двигателю.
Совместная оптимизация параметров планера и двигательной
установки должна проводиться только в том случае, когда пред-
полагается одновременное проектирование нового самолета и со-
ответствующего ему специального нового двигателя. Если же
принимать изменения параметров двигательной установки в со-
ответствии с перечнем каталога конкретных двигателей (дис-
кретно), то оптимизация проекта самолета сведется к многократ-
ной оптимизации только параметров планера и к последующему
выбору наилучшего варианта самолета из всех оптимизированных.
Это и определит конкретный оптимальный двигатель из всего
перечня по каталогу.
Таким образом, типичным для оптимизации проектных пара-
метров самолета является случай, когда двигатель задан.
Для анализа влияния проектных параметров на летно-техни-
ческие характеристики самолета прежде всего проводятся пара-
метрические расчеты его технических характеристик. В число
основных технических характеристик проекта самолета на уровне
технического предложения входят:
— геометрические характеристики;
— инерционно-массовые или весовые характеристики;
— аэродинамические характеристики;
— характеристики силовой установки;
— характеристики взлетно-посадочных устройств;
— компоновочные характеристики.
Геометрические характеристики самолета определяют его раз-
меры и форму. Вычисляются они через заданные значения свобод-
ных проектных параметров и компоновочных характеристик са-
молета. Геометрические характеристики являются исходными
6* 163
данными для определения других технических характери-
стик.
Инерционно-массовые или весовые характеристики включают
взлетную массу самолета т9 и все ее компоненты такие,
что т0 = £mz. Под аэродинамическими характеристиками само-
лета следует понимать прежде всего поляру самолета на крейсер-
ском и взлетно-посадочных режимах полета сх (су, М, Н, V,
бзакр) И соответствующие этим режимам значения сутах как
для всего самолета, так и для его оперений, а также положения
фокусов на крыле и оперениях как по углу атаки, так и по откло-
нению рулей или механизации (xFli и xF2i).
В качестве характеристик силовой установки выступают ха-
рактеристики двигательной установки и топливной системы в виде
абсолютных их масс, а также в виде геометрических размеров
двигателя, его весовых данных, степени двухконтурности, вы-
сотно-скоростных и дроссельных характеристик: тс. у — тя.у +
+/nT.c; DnB; Ьдз; ОР.Д; Ьг.д, тдз, т\ Р (V, Н)-, сР (V, Н) и
сР (Р) при (V, Н) — const.
Характеристики взлетно-посадочных устройств (шасси) вклю-
чают данные по их схеме, габаритам, проходимости в зависимости
от условий базирования и эксплуатации самолета.
Под компоновочными характеристиками самолета (в рамках
чертежа его общего вида) следует понимать прежде всего коорди-
наты взаимного расположения основных компоновочных групп
относительно одной из них, принимаемой за базовую, обеспечива-
ющие нормированную безопасность эксплуатации самолета в воз-
духе и на земле. Следует заметить, что компоновочные характери-
стики связаны практически со всеми проектными параметрами и
остальными техническими характеристиками самолета. Некоторые
компоновочные характеристики по существу являются и гео-
метрическими.
В связи с этим необходимо отметить общую особенность тех-
нических характеристик: они зависят не только от проектных
параметров и расчетных случаев, т. е. от летных характеристик,
но и от самих себя. Указанная особенность наиболее наглядно
проявляется на примере определения (вычисления) взлетной массы
самолета, носящего итерационный характер:
I
//to — Zj mi у
i=l
где m\h} — mt k — номер итерации, k = 1, Л. Здесь Л —
номер последней итерации, определяемый заданной точностью
вычислений для всех компонентов взлетной массы:
max {е^К)} с ет; [1, /]; е.-к' =
164
Вычисление других технических характеристик при заданных
значениях свободных проектных параметров и летных характе-
ристик носят также итерационный характер. Основные соотноше-
ния для их вычислений приведены в гл. 14 ... 19.
Определение летных характеристик для проведения того же
параметрического анализа производится в соответствии с переч-
нем, который условно можно представить состоящим из трех
основных групп, отражающих проектные связи или расчетные
условия проектирования, основные условия реализации полета
и гарантии его безопасности и, наконец, условия нормальной
эксплуатации самолета конкретного назначения.
В общем случае этот перечень можно представить следующим
образом. В первую его группу можно включить определение
максимальной эксплуатационной и расчетной перегрузок
И = Муэ •
Во вторую группу войдет определение потребных тяг Рпотр
или избытков тяг (АРизб = ^рзсп — Рпотр) Для наиболее ха-
рактерных установившихся режимов полета, а также избытков
подъемной силы при су — сулои и пу = пуэ на основном рабочем
режиме полета А У = Удоп — gmnya.
В третью группу перечня летных характеристик войдут рас-
четы по определению:
— характеристик крейсерских режимов полета (7крейс. #Нрейс,
^-расч> ^тах И Т. П,);
— характеристик набора высоты (скороподъемности) и сниже-
ния (Vh.b> Ти,в, LBtB, VyCH, Тсн, Lc„ и т. п.),
— взлетно-посадочных характеристик (Уотр, Ьразб, Люс,
Кз. п, Епос> ^Biin И Т. П.),
— маневренных характеристик (пу доп, пхтю, ®гтах, #виР>
^вир И Т. П ),
— характеристик устойчивости и управляемости (ст„, cv,
Л Ткол> S?> SB бал ИЛИ ф”* И Фбал- Х’ «зат И Т’ П>
Здесь Ткол — время затухания колебаний, нзат — число ко-
лебаний до затухания; £ — относительный коэффициент демпфи-
рования колебаний; к = | max |/| ®утах |.
Если первые две группы перечня летных характеристик яв-
ляются наиболее общими и используются при проектировании
самолета практически любого назначения, то третья группа этого
перечня должна составляться в соответствии с перечнем ТТТ,
предъявляемых к самолету конкретного назначения.
Необходимо отметить, что в зависимости от методологической
концепции проектирования самолета некоторые летные характе-
ристики могут взаимно исключать одна другую из указанного
перечня. Например, если ведется проектирование самолета с за-
данным двигателем, то достаточно определить зависимость по-
требных тяг при заданной максимальной скорости полета от
проектных параметров самолета (планера), и при этом нет необ-
165
ходимости в определении зависимости максимальной скорости
(при Н = const) от тех же проектных параметров. И, наоборот,
если ведется проектирование самолета с «переменным» двигателем,
то необходимо определять зависимость максимальной скорости
от проектных параметров самолета, в число которых включены
и параметры двигателя. Однако при этом не следует специально
определять зависимость потребной тяги от проектных параметров.
Следует заметить, что в первом случае определение потребных
тяг не сопряжено с какими-либо вычислительными трудностями,
в то время как во втором случае определение зависимости макси-
мальной (или минимальной) скорости полета может быть сделано
только с помощью итерационного процесса вычисления. Это
видно из формулы
V — I /" Р (Утах) ( 1 । 1 _ Г_______gm_________I2 I
тах у Р/Ло (Утах) I ' *• ^тах (Утах) Р (Утах) J I ’
которая для практических итерационных вычислений будет иметь
вид
т Я АН-1)
у max
Р(У^х) с
Рнсхо(Ута’х) I
где k — номер итерации, k — 1, К-
Процесс вычисления Vmax может быть остановлен, как только
k = К при условии, ЧТО I Vmax — |/Vmax < eV, ГДе 8;/ —
заданная точность вычисления 7max.
Итерационный характер вычислений для проведения полно-
ценного параметрического анализа приводит к необходимости
использования мощной вычислительной техники типа ЭЦВМ.
При отсутствии ЭЦВМ приходится выбирать такую методологи-
ческую концепцию параметрического анализа, которая не преду-
сматривает использование итерационных процессов вычислений,
практически не выполнимых при «ручных» расчетах.
Для обобщения задачи параметрического анализа множество
свободных проектных параметров можно представить вектором х,
хг={хг}, i = 1, /; множество технических характеристик —
вектором у, ут = \yj], j = 1, J; множество рассматриваемых лет-
ных характеристик — вектором z, zT = \z;\, I = 1, L. Тогда
параметрические зависимости технических и летных характери-
стик можно представить вектор-функциями у — ср (х, z, у) и z =
= ф (х, у, z) соответственно, а параметрическую зависимость
оценочного критерия — скалярной функцией f (х, у, г).
Из вида вектор-функций ср и ф следует, что вычисление значе-
ний у и z связано как с внутренними итерационными циклами
(вычисление у при х = const и z = const и вычисление z при х =
= const и у = const), так и со смежными циклами (вычисление у
при х = const и z = var и вычисление z при х = const и у = var).
166
Полезно сохранить именно такую структуру вычислений, так как
она позволит автономно вычислять характеристики у и z, несмотря
на то, что она может потребовать несколько большее число ите-
раций, чем при структуре общесистемного цикла. Более того,
при использовании ЭВМ это позволит сохранить блочно-модуль-
ную структуру программного обеспечения.
Параметрический анализ представляет собой систему проект-
ных расчетов летно-технических характеристик самолета при не-
которой заданной последовательности значений свободных пара-
метров, включающей и наиболее подходящие (или наиболее
вероятные) для реализации проекта. Такая последовательность
значений свободных параметров может строиться либо произ-
вольно, т. е. по интуиции или опыту проектирования, либо упо-
рядоченно, т. е. по определенной методике, формально. Второй
подход наиболее эффективен для построения анализа при любой
квалификации проектировщика и при использовании ЭЦВМ для
расчетов.
В общем случае анализ производится в некотором интервале
значений свободных проектных параметров [xmln; хшах]. Изме-
нение каждого параметра хг, i £ [1, /] можно производить,
в общем случае, с некоторым произвольным шаго.м Ах; относи-
тельно xmin или хтах, например, в виде: x’fe) = х*1’ + | Ах’*-1)|,
если х<п = Xi min, или в виде x(ik> = х'1’— |Лхр-'1)|, если
Х;п = Xi max, где Ах(г0) = 0; k = 1, Д'; причем х? = х-11 ±
±]Ах</<-,)| = {х£ тах, хг ттЬ Однако для того, чтобы объективно
оценивать изменение значений летно-технических характеристик
{у, z\ в зависимости от изменения значений свободных проектных
параметров х, необходимо равномерно изменять параметры, т. е.
изменение х, нужно производить с равномерным изменением
шага: I Ах|*’ | = (k — 1) | Ахг |, где | Ахг | = const = | хг max —
— MninlA-K — 1)- Очевидно также, что для упрощения вычисле-
ний желательно иметь значение | Ахг | целочисленным или содержа-
щим только одну значащую цифру {...; 0,1; 1,0; 10,0; ...), или
округленным.
Тогда число шагов изменения параметра х, для анализа
определится соотношением Kt = 1 + intgr lfx(-max —
— тт И ^xi IL где символ intgr а означает операцию округле-
ния числа а до целого путем отбрасывания его дробной части.
Анализ характеристик самолета при этом будет производиться для
значений свободного проектного параметра, определяемых соотно-
шением x\k} = Xi min + (k — 1) I Axz I или x^ = Xi max — (k — 1) | Ax,1.
Опорные значения каждого свободного параметра х; ш1п или
max МОЖНО ПрИНЯТЬ ЛИбО ПРОИЗВОЛЬНО (пО ЛИЧНОМу ОПЫТу),
либо на основе расчетов первого приближения, т. е. с использова-
нием практики самолетостроения или статистики. Поэтому, если
вычислены или определены другим путем значения свободных
проектных параметров первого приближения х)1’, то для определе-
167
йия интервалов их изменений, необходимых для анализа харак-
теристик, можно воспользоваться простыми соотношениями:
х, min = О.бх/1’ и х( тах = 2х^\ Целесообразные округления этих
опорных значений можно сделать на основе простых соотношений
Xi min = Ю**-1 intgr(0,5- Ю’-М0) и Ximax = Ю11-1 intgr (2-1О1-**х!1)),
где p, = intgr (igxP).
При большом числе значений каждого i-ro параметра K.t
(или при мелком шаге задания х() значительно возрастает число
I
рассчитываемых вариантов проекта: Л4 = П/(г, где / — число
<=1
свободных проектных параметров, a /Q — число значений («точек»)
каждого i-ro параметра. При К, = const — /( М = К1. Напри-
мер, если анализ ведется по пяти свободным параметрам (/ = 5)
и каждый параметр будет иметь десять значений (К = 10), то
число вариантов проекта будет равно 100 000. Общее же количе-
ство чисел, которое необходимо будет запомнить для проведения
/
анализа, составит N = UL^lKt- Тогда для приведенного выше
1
примера при J = L ~ 10 N = 50-10® чисел.
Поэтому вполне естественно, что при проектных параметриче-
ских исследованиях (анализе) всегда встает вопрос о целесообраз-
ном числе параметров и шагов их изменений, а также о целесооб-
разном числе рассматриваемых характеристик, даже тогда, когда
предполагается использовать мощную вычислительную технику —
ЭЦВМ.
Наиболее остро этот вопрос встает при производстве параме-
трических расчетов «ручным» способом (с использованием счетной
линейки или миникалькулятора). В таких случаях величины /
и Kt должны быть минимально возможными. Во всех случаях,
если есть затруднения в выборе интервалов варьирования свобод-
ных параметров, то формально можно поступить так, как было
указано выше: Х;т1п=0,5х1г1) и Х1тах=2х”’ (с учетом округлений).
Очевидно также, что минимальное число значений каждого
параметра не должно быть меньше четырех (JQ 4), иначе будет
невозможно сколько-нибудь четко представить протекание за-
висимости характеристики при изменении параметров. В этом
случае изменения параметров можно производить с шагом Дхг =
= 0,5xJ-1\ т. е. можно задавать им дискретные значения в соответ-
ствии с соотношением хН = 0,ЫгХ11\ k = 1, 4.
С целью облегчения расчетов, построения графиков у = ср (х),
z = ф (х) и чтения результатов можно использовать округленные
задаваемые значения свободных параметров, например, в соот-
ветствии с соотношением
х|А) = 10*** 'й intgr (о,5-10* ’V’)» 6 = 1, 4,
где p,t- = intgr (1g х)1’).
Итак, используя заданные значения свободных проектных
параметров и полученные зависимости от них летно-технических
характеристик, в конечном счете можно найти и зависимость оце-
ночного критерия от тех же свободных параметров f (х), необхо-
димую для завершения параметрического анализа принятием
решения по выбору их оптимальных значений. В качестве оценоч-
ного критерия могут быть использованы технико-экономические
стоимостные или эффективностные показатели, а также любая
летно-техническая характеристика самолета (например, в качестве
оценочного критерия может быть использована взлетная масса
самолета, которая минимизируется).
Принятие решения по выбору оптимальных проектных пара-
метров самолета должно производиться с учетом как естественных
(физических) ограничений, так и ограничений, накладываемых на
параметрические зависимости летно-технических характеристик
значениями их по ТТТ. Именно эти ограничения, переносимые \
с параметрических зависимостей летно-технических характери-
стик на параметрическую зависимость оценочного критерия,
определяют область допустимых значений проектных параметров.
Точка этой допустимой области (если эта область существует),
доставляющая экстремум (минимум или максимум) оценочному
критерию, является оптимальной точкой, а значения проектных
параметров в этой точке — оптимальными.
Таким образом, обобщенная задача параметрического анализа
может быть сформулирована следующим образом: на упорядочен-
ном множестве значений вектора свободных параметров X вы-
числить множество значений векторов технических и летных ха-
рактеристик Y и Z соответственно и множество значений скалярной
функции оценочного критерия F.
Очевидно, что после окончания итерационных процессов вы-
числений будут иметь место функциональные соответствия мно-
жеств Y = Ф (X), Z = Т (X) и F (X).
Однако задача выбора оптимальных значений свободных про-
ектных параметров может быть решена только после того, как
будут заданы ограничения У0 и Z0 на множества значений Y
и Z или Ф (X) и Ф^Х). Тогда из обобщенных отношений Ф (X) э
= Y° и Y (X) з Z° будут следовать обобщенные обратные отно-
шения Ху Ф-1 (У0) и X. з Т-1 (Z°), откуда следует, что допу-
стимое множество параметров определится отношением Хдоп
з Ху П Хг, а оптимальные значения параметров Xopt 6 ХДОп
определятся, например, соотношением / (xopt) =fmln = nun F (X).
'^допСТ x
В зависимости от наличия тех или иных вычислительных
средств параметрический анализ и построенная на его основе
оптимизация проектных параметров могут выполняться’различ-
ными методами. При отсутствии мощной вычислительной’техники
может быть применен упрощенный графоаналитический метод;
при использовании ЭЦВМ — различные численные методы. Пре-
16^
имущество первого метода — его наглядность и простота, преиму-
щество второго — многомерность, большая точность и быстрота
получения результата. Недостаток первого — одно-двухмерность
задачи и недостаточная точность; недостаток второго — отсут-
ствие наглядности получаемого результата.
7.3. ГРАФОАНАЛИТИЧЕСКИЙ МЕТОД ОПТИМИЗАЦИИ
ПРОЕКТНЫХ ПАРАМЕТРОВ
При отсутствии мощных вычислительных средств типа ЭЦВМ,
оптимизировать проект можно и с помощью «ручных» средств,
используя счетную линейку или микрокалькулятор для таблич-
ных расчетов по параметрам и последующее построение графиков
на миллиметровой бумаге. Однако число параметров при этом
может быть взято небольшим I = {1, 2, 3}. При ограниченном
времени для решения поставленной задачи «вручную» достаточно
ограничиться двумя параметрами (/ = 2). При этом один параметр
должен характеризовать абсолютные размеры самолета, а дру-
гой — какой-нибудь безразмерный параметр — характеризовать
форму самолета или его крыла.
В качестве первого параметра целесообразно взять площадь
крыла S, а в качестве второго, например, удлинение крыла X
или относительную толщину крыла с, или стреловидность крыла
и т. п., т. е. такой безразмерный параметр, который наиболее
важен для проекта или наименее очевиден.
Таким образом двухмерная оптимизационная задача может
характеризоваться такими парами параметров: х = {Sx, X};
х = {S, с\; х = {S, x.J и т. п.
Иногда может представлять большой интерес оптимизация
двух параметров, характеризующих абсолютные размеры самолета
и его силовой установки. Такими параметрами могут быть, прежде
всего, площадь крыла S и стартовая тяга двигателей Ро или их
стартовая эффективная мощность Natj:
х = {S, /%); х — (S, АХОэ}.
Однако после такой оптимизации, согласующей планер с дви-
гательной установкой, необходимо будет перейти к подбору реаль-
ного двигателя (ближайшего по каталогу), параметры и характе-
ристики которого могут отличаться от оптимального (гипотетиче-
ского). Вполне очевидно, что при таком переходе прежние опти-
мальные соотношения нарушатся; это потребует повторной оптими-
зации параметров планера (S) при заданном двигателе (Ро).
Чтобы избежать этой излишней проектной итерации, можно
подобрать реальный двигатель на основе приближенных оценок
технических характеристик самолета (см. гл. 4), а оптимизацию
проекта провести с выбранным (заданным) двигателем по двум
проектным параметрам планера самолета, характеризующим его
абсолютные размеры и форму, как было сказано выше. В таком
170
случае согласование параметров планера с реальной двигатель-
ной установкой будет более полным.
Поскольку вычислительные возможности «ручных» способов
весьма ограниченны, то параметрические расчеты необходимо
производить для минимально возможного числа заданных значений
каждого параметра. Этому положению могут отвечать четыре зна-
чения для каждого из двух параметров, что даст шестнадцать зна-
чений технических и летных характеристик или шестнадцать
вариантов проекта.
Выбор диапазонов или интервалов и шагов изменения каждого
параметра можно производить на основе приближенных их оценок
в соответствии с правилом, указанным в разд. 7.2.
Учитывая, что при «ручных» параметрических расчетах за-
труднительно или практически невозможно организовать итера-
ционный вычислительный процесс, следует проделать некоторые
специальные предварительные аналитические преобразования и
принять некоторые вычислительные ограничения.
В качестве такого предварительного аналитического преобразо-
вания необходимо отметить использование новых формул, полу-
чаемых из решения системы линейных уравнений, связывающих
ряд технических характеристик самолета. Важнейшими из них
являются весовые характеристики и соотношение между ними.
Так, например, взлетная масса самолета т0 и масса его крыла
ткр могут быть определены из системы двух линейных уравнений:
(1 - S пг0 - ткр = Л; (а)
— komo + йкрткр = В, (б)
где (а) — уравнение весового баланса самолета, в котором выде-
лена масса крыла и массы, пропорциональные взлетной массе
самолета; (б) — уравнение массы крыла.
Коэффициенты при т0 и ткр и правые части в уравнениях
(а) и (б) являются функциями параметров и могут быть вычислены
заранее. В общем случае они имеют вид: А = Ёт1 — сумма всех
компонентов массы самолета, кроме массы крыла и масс, пропор-
циональных взлетной массе самолета; В = ksS—kT. ctnT, с—
— S kt гр. „рта гр. кр — сумма несиловой массы крыла (ksS) за
вычетом силовой массы от разгрузки крыла топливом с топливной
системой (—/гт. сшт. с) и сосредоточенными грузами на крыле
( Zj гр. кр222; гр. ир) •
Таким образом из системы уравнений (а) и (б) можно получить
конечные расчетные формулы вида
"2о = + B)/[kKp (1 - £ fhj) — £0J;
^кр = IB(1 - + й0Л]/[йнр(1 -
Результат расчета по этим формулам эквивалентен результату
расчета по итерационным формулам вида
m^+I) = (пг$ + А)/(1 - £ т}-); = (В + kom$)/kKp
171
при бесконечном количестве итераций, т. е. при k -> оо (верхний
индекс k — номер итерации).
Использование конечных расчетных формул, полученных ана-
литически, значительно упрощает и облегчает расчеты и повышает
их точность. Однако такой прием не всегда удается применить,
особенно когда соотношения между характеристиками трансцен-
дентны или существенно нелинейны. Так, например, коэффициенты
в уравнении (б) зависят от расчетной нормальной перегрузки пур,
которая для неманевренных самолетов может определяться болтан-
кой и связана с расчетной (взлетной) массой самолета т0 соот-
ношением
п — f [ 1 4- k са Ро VWy mfllS . < R\
%p -1 [1 + gma M • (в)
Поскольку разрешить аналитически систему уравнений (а), (б)
и (в) затруднительно, а полученные конечные формулы могут
оказаться громоздкими и неудобными для расчетов, то целесооб-
разно ограничиться только формулами для т0 и гикр, полученными
из усеченной системы уравнений (а) и (б), и вести расчеты т0
и /икр в предположении, что пур является величиной постоянной,
определенной при значениях взлетной массы и площади крыла
по первому приближению; т0 = и S = S(1). Тогда, опреде-
ляя по параметрам т0 (S...) на основании формулы, полученной
из системы уравнений (а), (б) при пур = const = пур, и подстав-
ляя значение т0 (S, ...) в формулу (в), можно определить пара-
метрическую зависимость пур (S, ...).
Приравнивая далее пур (S, •••) = можно определить
множество значений параметров, при которых будут выполняться
расчетные условия по прочности конструкции крыла. Вместо
равенства пур (S, ...) = пур можно рассматривать менее жесткое
ограничение в виде неравенства пур (S, ...) < п^р’, откуда сле-
дует, что все варианты проекта, отвечающие условию пур (S, ...) <
< пур, могут быть несколько перетяжелены, поскольку т0 и ткр
определялись при пур = п$.
Независимо от того, какого вида ограничение будет рассматри-
ваться при оптимизации параметров, видно, что возможности
«ручных» методов не позволяют получить полноценного результата:
либо допустимая область проектных параметров будет весьма
ограниченна, либо оптимизация будет до некоторой степени
условной.
Наряду с ограничениями такого расчетного типа при оптими-
зации параметров должны быть рассмотрены и ограничения
функционального типа
(5, ...)< Ррасп И Kmax (S, . ..)
где левые части этих неравенств являются параметрическими
зависимостями.
Определив параметрические зависимости весовых и аэродина-
мических характеристик самолета, можно определить и пара-
172
метрические зависимости эффективностного типа или летных дан-
ных самолета Lt (S, ...), которые в сопоставлении с ТТТ определят
остальные проектные ограничения типа Lt (S, ...) LiTTT.
Зная параметрические зависимости ЛТХ самолета, можно рас-
считать и оценочный критерий, который тоже будет параметриче-
ской зависимостью. В ряде случаев в качестве оценочного крите-
рия может быть принята любая параметрическая зависимость
из числа ЛТХ. Чаще всего в качестве оценочного критерия при-
нимается взлетная масса самолета т0 (S, ...), которая часто ока-
зывается эквивалентной экономическим (стоимостным) характе-
ристикам.
Для решения задачи оптимизации параметров графическим
методом все технические характеристики (весовые и аэродинами-
ческие), летные данные (потребные тяги, максимальные и расчет-
ные перегрузки, дальности полетов, высоты и скорости) строятся
в виде изопараметрических графиков на миллиметровой бумаге.
Принцип построения изопараметрических графиков («гама-
ков») состоит в том, что по оси абсцисс выбирают два масштаба
(желательно в двоичной, пятеричной и десятеричной системе счис-
ления) по каждому параметру. Далее строят график по одному из
параметров при постоянном другом параметре. Затем со сдвигом
(вправо или влево, куда удобнее) на величину шага второго пара-
метра строят аналогичную зависимость по первому параметру при
постоянном значении второго, увеличенного на величину первого
шага. Таким образом вычерчивают по четыре линии для каждой
ЛТХ. Точки с одноименным значением второго параметра соеди-
няют второй серией линий, получается изопараметрический гра-
фик типа «гамака» с узлами, равноотстоящими на величины шагов
по каждому параметру в соответствующих им масштабах. Эти
графики дают наглядное представление о зависимости каждой
характеристики самолета сразу от двух параметров в виде неко-
торой поверхности. Они позволяют точно (с точностью до наимень-
шего деления миллиметровой бумаги) интерполировать по двум
параметрам, а также они допускают некоторую экстраполяцию
зависимостей по двум параметрам.
Проводя горизонтальные линии, соответствующие значениям
характеристик, принятым либо по условиям расчета (Пур), либо
по условиям функционирования (Рр;1сп)> либо по ТТТ, можно по-
лучить связи между параметрами, отвечающие этим условиям.
Затем горизонтальные линии и соответствующие им связи пара-
метров можно перенести (отобразить) на параметрическую зави-
симость оценочного критерия.
Поскольку каждая такая горизонтальная линия представляет
границу условия, то на ней, если это условие типа неравенства,
наносится штриховка в сторону неприемлемых значений или, если
это условие типа равенства, то наносится штриховка с двух сторон
(равенство эквивалентно двум неравенствам). Эти же штриховки
в соответствующую сторону наносятся на соответствующие линии
173
Рис. 7.1. Некоторые типичные изопараметрические зависимости («гамаки»)
летно-технических характеристик самолета и их ограничения:
а — для расчетной перегрузки «yp(S, М; б — для потребной тяги Ха = ₽потр (S, %);
в — для /-й летной характеристики самолета L- (S, %); г — для’ оценочного критерия
f (S, М
ограничений, перенесенные на график оценочного критерия.
На «поверхности» оценочного критерия эти линии совместно с на-
несенной на них штриховкой выделяют допустимую область про-
ектных параметров.
Оптимальное решение, соответствующее экстремуму (наиболь-
шему или наименьшему значению) оценочного критерия, нахо-
дится либо внутри этой области, либо на ее границе. Значения
параметров, при которых достигается этот экстремум, являются
оптимальными, т. е. они и представляют собой оптимальное
решение.
На рис. 7.1 представлены параметрические зависимости для
расчетных (а), функциональных (б), эффективностных (в) и кри-
териальной (а) зависимостей. На первых трех проведены горизон-
тальные линии, изображающие ограничения. На четвертой за-
висимости оценочного критерия показаны отображения этих
ограничений и оптимальные значения проектных параметров.
Аналогичное представление может быть сделано и для оптими-
зации трех параметров. Тогда каждая такая поверхность должна
быть сдвинута вправо или влево (куда удобнее) в масштабе третьего
параметра и все узлы этих поверхностей должны быть соединены.
В результате получится трехмерное представление параметриче-
ских зависимостей в виде некоторых «объемов», разделенных по-
верхностями постоянных значений параметров. Указанные выше
процедуры графических построений позволяют оптимизировать
проект по трем параметрам.
Оптимизация проекта графоаналитическим методом по че-
тырем и более параметрам весьма затруднительна. При большом
числе оптимизируемых проектных параметров необходимо исполь-
зовать современные вычислительные средства типа ЭЦВМ.
После определения оптимальных параметров с помощью па-
раметрических зависимостей можно получить соответствующие
им значения всех ЛТХ самолета и провести укрупненную компо-
новку общего вида оптимального самолета (см. гл. 8).
174
Полученные параметры компоновки, которые заранее точно
не были известны, могут повлиять на последующие уточнения
оптимальных параметров, но эти уточнения практически невоз-
можно произвести с использованием «ручных» графоаналитиче-
ских методов оптимизации: для этого нужно использовать ЭЦВМ.
Пример * графоаналитического метода оптимизации проектных параметров
самолета.
Исходные данные для проектирования (ТТТ):
— самолет пассажирский;
— масса коммерческой нагрузки тк. н = 19 000 кг;
— масса экипажа и оборудования тэ. Об = 4100 кг;
— крейсерская скорость полета Укрейс = 900 км/ч;
— крейсерская высота полета Якрейс — Ю ООО м;
— практическая расчетная дальность полета £Пр = 2800 км;
— сбалансированная длина ВПП Ьвпп = 4800 м;
— скорость захода на посадку У3 п = 210 км/ч.
Оптимизации подлежат:
— площадь крыла S;
— удлинение крыла К.
Постоянными параметрами принимаются:
— нормальная схема с двигательной установкой на хвосте (три двигателя);
— оперение Т-образное;
— относительная площадь горизонтального оперения Sr. 0 = 0,25;
— относительная площадь вертикального оперения SB. 0 = 0,15;
— угол стреловидности крыла по передней кромке %п.к = 30°;
— средняя относительная толщина крыла с = 0,11;
— сужение крыла т| = 3,5;
— удлинение горизонтального оперения Хг. 0 = 4,5;
— угол стреловидности горизонтального оперения о = 30°;
— сужение горизонтального оперения т]г. 0 = 3,0;
— удлинение вертикального оперения 7-в. 0 — 1,5;
— угол стреловидности вертикального оперения 0 — 40°;
— сужение вертикального оперения т]в. 0 — 2,0;
— удлинение фюзеляжа Хф = 7;
— удлинение носовой части фюзеляжа А,н ф = 1,5;
— удлинение хвостовой части фюзеляжа А,х. ф — 2,5;
— диаметр фюзеляжа Оф= 4,82 м (из расчета 0,55 м2 на одного пассажира
или на 100 кг массы коммерческой нагрузки).
Результаты расчетов первого приближения.
Тяговооруженность самолета
Р<1>= тах{РОкрейс; Р0взл; Ровпп) = тах [0,213; 0,373; 0,228} =
= 0,373 = Ро взл-
Относительная масса планера тпл = 0,304;
Относительная масса топлива тт = 0,254;
Относительная масса двигательной установки тд. у = 0,112;
Взлетная масса самолета в первом приближении
(1,_______тэк. об 4~ тк, и (I + ^сп) _
0 1 — ЙГпд — "«С. У — (1 + kt. с)
_ 4100+ 19 000 (1+0,12)__________ 25 400 _ „
1- 0,304 - 0,112 — 0,254(1+0,02) 1 -0,676 /й4иикг-
* Приводятся результаты курсового проекта по общему проектированию
самолетов студентки Т. А. Петруниной •
175
Вес самолета в первом приближении G.l = = 77 000 даН,
Выбор двигателя:
— потребная стартовая тяга одного двигателя
Р01 = 0,373-77 000.1/3 = 9600 даН;
— стартовая тяга одного двигателя (по каталогу) Р01 = 9500 даН;
— масса двигателя т1дв = 23Ь0 кг;
— диаметр входа двигателя Одв = 1,44 м;
— габаритная длина двигателя = 5,29 м;
— степень двухконтурности т = 1,0;
— удельный расход топлива (стартовый) ср — 0,58 даН/ч.
У точнение взлетной массы первого приближения;
_ 4100+19000(1+0.15)+3-2350-1.5 _ 35 900 _
о 1 -0,304-0,254 (1+0,02) 1- 0,564 83000 кг-
Стартовый вес самолета в первом приближении G,)1’ = m^l)g = 81 300 даН.
Определение площади крыла в первом приближении:
= щах (5крейс; 5Д. п; Sy/т} = max (99; 133; 121} = 133 м2 = S3. п-
Удлинение крыла в первом приближении Х<*> = 7,0.
Определение расчетной перегрузки в первом приближении:
Ч'р = тах \ПУ Р маневр". +-р болт} =тах 1712,94} =3,171.
Выбор расчетных вариантов:
по площади {S} = {75; 125; 175; 225);
по удлинению {X} = {6; 7; 8; 9).
Результаты весовых расчетов по указанной выше методике (см. гл. 6) пред-
ставлены на рис. 7.2...7.6.
На рис. 7.2 представлена изопараметрическая зависимость взлетной массы
самолета от площади и удлинения крыла m0 (S, X). На рис. 7.4...7.7 предста-
влены зависимости относительных масс топлива mT (S, X), пустого снаряженного
самолета тп. РН (S, X), планера тпл (S, X) и крыла mKp (S, X).
На рис. 7.8, 7.9 для иллюстрации результатов представлены только две
аэродинамические зависимости в виде «гамаков» сх0 (S, X) и Kmax (S, X), рассчи-
танные для крейсерского режима полета.
На рис. 7.10 и 7.11 представлены изопараметрические зависимости расчет-
ной перегрузки пур (S, X) и потребной тяги РП0Тр (S, X) для крейсерского ре-
жима полета.
На рис. 7.12...7.15 представлены зависимости летных характеристик, рас-
считанных в соответствии с перечнем задания (ТТТ): практическая расчетная
дальность Lnp(S, X), сбалансированная длина ВПП LBnn (•$, X), скорость за-
хода на посадку V3. п (S, X) и угол наклона траектории иа втором участке взлета
0ц (S, X).
На графики летных данных (рис. 7.12...7.15) нанесены заданные значения
(по ТТТ). Точки пересечения заданного значения летной характеристики с кри-
выми S = const и (или) X = const перенесены соответственно иа параметриче-
скую зависимость оценочного критерия, за который принята взлетная масса
самолета то (S, X) (см. рис. 7.2).
На параметрической зависимости расчетной перегрузки пур (S, X) (см.
рис. 7.10) нанесено значение, заложенное в весовой расчет по данным первого
приближения (п<1> = 3,171) и отмеченное двусторонней штриховкой, изобража-
ющей ограничительное расчетное условие типа равенства. Зависимость=пур (S, X)
3,171 перенесена на зависимость оценочного критерия (S, X).
На зависимости потребной тяги от параметров РПотр (S, X) нанесено огра-
ничение по располагаемой тяге двигательной установки с принятым по резуль-
татам расчета первого приближения двигателем (см. рис. 7.11). Это ограничение
также перенесено на параметрическую зависимость оценочного критерия
176
р0,дан/нг
700
600
500
400
Рис. 7.2. Зависимость взлетной массы (оценочного критерия) от S и X крыла
с нанесенными ограничениями по ЛТХ самолета
Рис.
7.3 Зависимость нагрузки на крыло от его параметров S и X
Рис. 7.4. Зависимость относительной массы топлива от параметров крыла
mT (S, X)
Рис. 7.5. Зависимость относительной массы пустого снаряженного само-
лета от параметров крыла сн (S, X)
177
Рис. 7.6 Зависимость относительной массы планера самолета от параметров
крыла тп:, (S, X)
Рис. 7.7. Зависимость относительной массы крыла самолета от его пара-
метров ткр (S, А)
Рис. 7.8. Зависимость коэффициента лобового сопротивления от параметров
крыла самолета схо (S, А)
Рис. 7.9. Зависимость максимальг j аэродинамического качества само-
лета от параметр его крыла Kniax (S, А)
178
Рис. 7.11. Зависимость потребной тяги самолета от его параметров Рпотр(5, X)
перегрузки самолета от его параметров
(S, X)’
Рис. 7.12. Зависимость расчетной практической дальности полета от пара-
метров самолета Lnp (S, X)
Рис. 7.13. Зависимость сбалансированной длины ВПП от параметров само-
лета Z-впп (S, X)
Рис. 7.15. Зависимость угла наклона траектории на втором участке взлета
с одним отказавшим двигателем от параметров самолета 0ц (S, X)
Рис. 7.16. Эскиз компоновочной группы фюзеляжа (базовая компоновочная
группа)
180
Все эти построения легко выполнимы на миллиметровой бумаге, когда на
каждом графике масштабы по соответствующим параметрам выбраны одина-
ковыми.
Выбор оптимальных значений проектных параметров S* и X* производится
по графику т0 (S, А) в допустимой области. За допустимую область можно при-
нять небольшой отрезок линии n(/p (S, X) = const — = 3,171, заключенный
между ограничениями его по практической дальности и скорости захода на по-
садку (см. рис. 7.2).
Наименьшая взлетная масса самолета получилась в допустимой области
на границе, определяемой скоростью захода на посадку.
Допустимую область можно расширить, если принять расчетное условие
в виде неравенства п (S, А) пр’= 3,171. Однако, как легко убедиться,
в данном случае это не изменит полученного результата (область Хдоп на рис. 7.2).
Оптимальные параметры (S*, А*) будут иметь значения: S* = 164 м2 и
А* = 8,0.
Отметив эту оптимальную точку на всех изопараметрических зависимостях,
можно получить соответствующие значения всех остальных летно-технических
характеристик самолета.
В соответствии с представленными зависимостями можно получить:
— взлетная масса самолета m() = niomin = 76 500 кг;
— нагрузка на крыло р0 = 467 даН/м2;
— относительная масса топлива гпт = 0,233;
— относительная масса пустого снаряженного самолета йп.сп= 0,518;
— относительная масса планера самолета тпл = 0,34;
— относительная масса крыла ткр = 0,0853;
— коэффициент вредного лобового сопротивления самолета сх0 = 0,0255;
— максимальное аэродинамическое качество самолета /Стах = 14,7;
— потребная тяга на крейсерском режиме Рпотр = 5600 даН Ррасп=
= 6800 даН;
— практическая расчетная дальность Lnp = 2730 > Lnp. зад = 2400 км;
— сбалансированная длина ВПП Авпп = 1450 м < Авпп зад = 1800 м;
— скорость захода на посадку К3.п = 210 км/ч = К3. п. зад!
— угол наклона траектории на втором участке взлета 0ц =0,07 > 0ц =
= 0,025 (значение 0,025 соответствует требованиям ИКАО).
В соответствии с полученными значениями геометрических, весовых и аэро-
динамических характеристик на основе методики, изложенной в гл. 8, аналити-
ческим методом, из условия заданной степени продольной статической устойчи-
вости = —0,1 о) рассчитана компоновка общего вида оптимального само-
лета.
На рис. 7.16...7.18 представлены эскизы компоновочных групп [фюзеляж-
ной (базовая группа) и крыльевой], а также эскиз компоновки общего вида само-
лета, полученный на основе рассчи-
танного местоположения крыла отно-
сительно фюзеляжа, характеризуемого
размером х*р= 17,2 м (см. рис. 7.18).
Рис. 7.17. Эскиз компоновочной группы крыла
Рис. 7.18. Эскиз компоновки общего вида самолета
181
Центровка н фокус самолета соответственно следующие: хт. с — 46 % САХ
и хре= 56 % САХ; при этом параметры горизонтального оперения, определя-
ющие продольную устойчивость и управляемость самолета, будут характеризо-
ваться величинами Lr, 0 = 2,74 н Аг. 0 = 0,686.
Таким образом, полученные результаты могут служить основанием для
продолжения эскизного проектирования: уточнения обводов, конструктивной
компоновки и всех летно-технических характеристик самолета.
В заключение следует отметить, что удобство графоаналити-
ческого метода состоит в том, что изменение задания (кроме вели-
чины коммерческой нагрузки) не требует повторных расчетов,
так как новый оптимальный результат может быть получен только
путем графических построений (отображение новых ограничений
по летным характеристикам на параметрическую зависимость
оценочного критерия).
Численные методы оптимизации рассмотрены в разд. 21.4.
Глава 8
КОМПОНОВКА И ЦЕНТРОВКА САМОЛЕТА
Компоновка самолета — это заключительный этап синтеза
проекта самолета как на стадии предварительного проектирова-
ния, так и на стадии эскизного проектирования. На этом этапе
проект на базе выбранной схемы, на базе выбранных и оптимизи-
рованных основных параметров самолета и определения весовых
характеристик принимает законченную форму как по внешнему
оформлению, так и по размещению внутри самолета основных
грузов и объемов и установлению силовой конструктивной схемы
всех частей самолета.
В связи с этим процесс компоновки объединяет в себе три
параллельно текущих и взаимосвязанных процесса: аэродинамиче-
скую компоновку, объемно-весовую компоновку и конструктивно-
силовую компоновку.
8.1. АЭРОДИНАМИЧЕСКАЯ КОМПОНОВКА
8.1.1. Задачи аэродинамической компоновки
1. Решая поставленную экономическую или тактическую за-
дачу, правильно скомпонованный самолет должен
иметь минимальные размеры.
2. В крейсерском полете с заданной скоростью самолет
должен иметь максимальное аэродинами-
ческое качество, чтобы обеспечить минимальный расход
топлива. В связи с этим у самолета должно быть минимальное
сопротивление и, в частности, минимальные потери на балан-
сировку.
182
3. При взлете и при посадке самолет должен обла-
дать возможно большей величиной сутах при
обеспечении нормируемых запасов безопасности.
4. На всех режимах полета самолет должен обла-
дать нормируемыми (требуемыми) запасами
устойчивости и управляемости.
5. На самолете должны быть обеспечены наи-
более благоприятные условия для работы
силовой установки, определяемые минимально возмож-
ными потерями на входе воздуха в двигатели и на выходе газов из
выходных сопл двигателей.
6. Выход самолета на предельные ре-
жимы полета (например, большие скорости или большие
углы -атаки) не должен сопровождаться опас-
ными последствиями (флаттер, бафтинг, глубокий
срыв, штопор и т. п.); должны быть предусмотрены меры, преду-
преждающие вход в такие режимы и допускающие выход из этих
режимов на нормальные.
8.1.2. Уменьшение потерь на балансировку
Одной из первостепенных проблем аэродинамической компо-
новки является, как сказано выше, обеспечение минимальных
потерь на балансировку. Эти потери имеют место, как только на
горизонтальном оперении самолета возникает уравновешивающая
сила, независимо от того, куда она направлена (вверх или вниз).
В гл. 5 при рассмотрении аэродинамических балансировочных
схем самолета показано, что уравнение балансировочной поляры
для нормальной схемы имеет вид
I 1 <0 9
Сх бал = CxQ —j Су,
ЛЛкр. э
(8-1)
где со = об. г. 0 [ 2(К- 1) + аб.г.0f 1 ~2Ке + , (8.2)
\ оЛ-Г. о. Э^Г. о /
ИЛИ СО — I L,? .о,з ^г. г. о ® о X
X {2(^—1) + [/«г^г. о. э +^г.о<’“г. о(1 — 8a)Sr. о] X
X [ 1- 2А'е + Хкр. Ж-Л. о. Э«8Г. 0)] }•
Очевидно, что минимальное значение слбал будет при со" = 0;
со = 0 при
2 (Ке-1)
1 — 2/Се -р ^Кр. э/(^г. (Лг. о. э^г. о)
(8.3)
183
В формулах (8.2) и (8.3)
°б. г. о — г 0/Д. о. э = П1гУ/Д. о. э + Д. а-у г. о 0 — 8 ) Д. оСу
Для самолета схемы «утка»
® = ^б. г. о Дб. г. о^кр. э/(Д. о. э^г. о)
2 [ Д кр + Д Г. сЛкр. э/(Д. о. э^г. о)В
рб.г.о =0
и и — 0 при — _о //г ; ~ё г/ 1
Г. о \^Е кр^г. О^г. О г ^8Г. o'vKp. э'Мкр. Э’
(8-4)
(8-5)
(8-6)
ГДе также Об. г. о — ^Zg г 0/Д. о — t/lz^l о — (су г. о/Сукр) Зг. о-
(8.7)
Значения величин Ks, Д. о.э, 7<екр, КЕГ, 0, входящих в вы-
ражения (8.1) ... (8.1), даны в гл. 5.
Выражение (8.1) позволяет построить балансировочные поляры
для самолетов нормальной схемы и схемы «утка» (рис. 8.1).
Анализируя выражения (8.1), (8.2), (8.6) или (8.7), можно сде-
лать следующие выводы:
1. Балансировка самолета приводит к увеличению отвала по-
ляры и, таким образом, к уменьшению аэродинамического ка-
чества.
2. Величина потерь на балансировку определяется степенью
продольной статической устойчивости тсу или г о и параме-
трами горизонтального оперения (Sr. о, Д о, аГ. 0 = с“г. 0).
3. В схеме «утка» уменьшена величина сукр вследствие раз-
грузки крыла подъемной силой оперения, что приводит к умень-
шению индуктивного сопротивления крыла и к уменьшению
потерь на балансировку.
Второй вывод объясняет то, что с развитием средств автома-
тического управления и с появлением возможности обеспечивать
продольную устойчивость самолета этими средствами конструк-
торы современных самолетов идут на резкое уменьшение вели-
чины тсу (до —0,02 ... —0,03), на создание самолетов с нейтраль-
ной устойчивостью {тс« = 0) и даже статически неустойчивых
самолетов (ш^ > 0).
Третий вывод объясняет то, что хотя самолеты схемы «утка»
имеют ряд существенных недостатков, к схеме «утка», облада-
ющей меньшими балансировочными потерями (см. рис. 8.2), кон-
структоры самолетов периодически возвращаются, и варианты
самолетов этой схемы рассматриваются наряду с вариантом нор-
мальной схемы.
184
Рис. 8.1. Построение балансировочных поляр для самолетов нормальной
схемы и схемы «утка»:
1 — самолет без ГО; 2 — самолет с ГО при tn У ~ 0; 3 — балансировочная поляра схемы
<утка>; 4 — балансировочная поляра при нормальной схеме и тСУ < 0
Рис. 8.2. Потери Лтах в различных схемах в зависимости от величины
--------нормальная схема;-------— — схема «утка»; 1 — 5Г 0 0,12; Lp 0 = 1,5;
2 - sr. о = 0-08; ^г.о = 1’5- 3 - $г.о = °’15: Гг.о ’’°
т; ^тах бал
Лтах с
К при т У = 0
max z
Как видно из рис. 8.2, при нормируемом запасе статической
устойчивости для пассажирских магистральных самолетов trfy =
= —0,15 при нормальной схеме потери в аэродинамическом ка-
честве достигают 9 ... 10 %, а при крайней передней центровке,
когда она сдвигается от предельно задней на 15 ... 20 % ЬА, эти
потери могут увеличиваться до 30 % и более.
Соответственно этому уменьшается дальность полета и увели-
чиваются часовые или километровые расходы топлива.
8.1.3. Правило площадей
При выполнении процесса аэродинамической компоновки сле-
дует помнить одно из положений проектирования сложных систем,
гласящее, что система, состоящая из оптимальных частей, не яв-
ляется в общем случае оптимальной. Это означает, что самолет,
скомпонованный из оптимизированных в отдельности частей
(крыла, фюзеляжа, оперения, силовых установок и гондол шасси),
может оказаться не оптимальным из-за отрицательного влияния
этих частей друг на друга, из-за интерференции.
Однако эта интерференция может быть существенно снижена,
и взаимное влияние отдельных частей самолета может создавать
уменьшение общего аэродинамического сопротивления самолета
и увеличение аэродинамического качества. Примером этого служит
185
Рис. 8.3. Комбинация «крыло — фюзеляж», выполненная без учета правила
площадей (/) и с учетом этого правила (2):
о — комбинация «крыло — фюзеляж»; б — эквивалентное тело вращения; в — распре-
деление площадей поперечных сечений
Рис. 8.4. Влияние поджатия фюзеляжа на величину коэффициента лобо-
вого сопротивления комбинации «фюзеляж — крыло»
Рис. 8.5. Влияние «поджатия» фю-
зеляжа на аэродинамическое каче-
ство самолета:
Кривые соответствуют оптимальным са-
молетам для расчетных чисел М полета:
---- с учетом правила площадей;
— _ __ без учета правила площадей
186
Рис. 8.6. Диаграмма распределения площадей поперечных сечений по длине
самолета В-58 «Хаслер» (США):
1 — фюзеляж; 2 — крыло; 3 — внутренние гондолы двигателей; 4, 6 — пилоны; 5 —
внешние гондолы двигателей; 7 — зализ; 8 — оперение
использование правила площадей. Это правило может быть
сформулировано следующим образом: для обеспечения минималь-
ного сопротивления самолета при больших дозвуковых скоростях
и в трансзвуковой зоне скоростей эпюра поперечных сечений всех
элементов самолета вместе должна соответствовать эпюре эк-
вивалентного тела вращения наименьшего сопротивления.
Смысл правила площадей наглядно представлен на рис. 8.3,
где сравнены эпюры поперечных сечений обычного самолета и
самолета, спроектированного по правилу площадей.
Результаты применения правила площадей показаны на
рис. 8.4 и на рис. 8.5, где представлены кривые, каждая точка
которых соответствует оптимальному самолету, рассчитанному на
полет со скоростью, соответствующей данному числу М.
Как видно из этих рисунков, применение правила площадей
дает уменьшение прироста сх волн в зоне трансзвуковых скоростей
на 25 ... 30 %. С дальнейшим ростом скоростей влияние правила
площадей уменьшается, и при числе М = 1,8 ... 2,0 оно уже прак-
тически не чувствуется. Все это относится к полету при су =
=0,05 ... 0,5. При больших значениях су из-за существенного уве-
личения величины cxi (индуктивного сопротивления) влияние
правила площадей уменьшается.
Практическое использование правила площадей показано на
опыте аэродинамической компоновки сверхзвукового бомбарди-
ровщика В-58 «Хаслер» (США), представленной на рис. 8.6.
8.1.4. Размещение горизонтального оперения
Одной из важнейших задач аэродинамической компоновки яв-
ляется размещение горизонтального оперения.
Для обеспечения продольной статической устойчивости само-
лета по перегрузке его центр масс должен находиться впереди
187
фокуса самолета и расстояние между этими точками, отнесенное
к величине САХ крыла, определяет степень продольной устой-
чивости
т/ = хт — хе < 0.
В нормальной схеме самолета (оперение позади крыла) фокус
комбинации «крыло—фюзеляж» при установке горизонтального
оперения сдвигается назад, в схеме «утка» (оперение впереди
крыла) — вперед. Величина этого сдвига оценивается выражением
с“г.о
AxFr.0 = fer.0Ar.0^^-(l -е“), (8.8)
су
где 8“ — изменение скоса потока в зоне горизонтального оперения
при единичном изменении угла атаки крыла; kr,o = qr,olq —
коэффициент торможения потока в области горизонтального опе-
рения.
При некоторой потребной или заданной степени продольной
статической устойчивости т^потр и при известной центровке
(положении ц. м. самолета относительно САХ) хт необходимый
сдвиг фокуса комбинации «крыло—фюзеляж» за счет горизон-
тального оперения определяется по формуле
-j- АХу? г. о ~ ^гпотр Хт Ху? б. г. о* (8.9)
Минус перед AxFr-0 относится к нормальной схеме, а
плюс — к схеме «утка».
Сравнивая выражения (8.8) и (8.9) и зная величины тс«потр,
хт и xF6.r.o (определяемые по параметрам крыла, фюзеляжа,
гондол двигателей и др.), можно определить необходимое значение
величины Аг 0. Коэффициенты kr о, с“, с“г-° и е“ берут на осно-
вании статистики, из продувок аэродинамических моделей само-
летов близких схем или из аэродинамического расчета (см. гл. 14).
Значения коэффициентов статических моментов и плеч опере-
ний для ориентировочных расчетов указаны в табл. 8.1.
Так как величина Аг. 0 = Зг, ОАГ.О, т. е является произ-
ведением величины Зг. о и Lr, 0, то ее необходимое значение может
быть получено либо за счет большей площади горизонтального
оперения и меньшего плеча ГО или, наоборот, за счет большего
плеча ГО и меньшей площади Зг. 0-
При этом следует иметь в виду, что с ростом плеча Lr.o эф-
фективность горизонтального оперения и продольная управляе-
мость самолета пропорционально увеличиваются и что коэффи-
циент демпфирования и степень затухания продольных колебаний
самолета пропорциональны £?.о. Однако увеличение плеча го-
ризонтального оперения вызывает увеличение длины фюзеляжа,
а это всегда связано с большими весовыми затратами, чем увели-
188
Таблица 8.1
Значения коэффициентов статических моментов и плеч оперений
Типы самолетов ^Г. О ^В. О ^Г. о ^В. О
ЬА ЬА
Магистральные пассажир- 0,80 ... 1,1 0,05 ... 0,08 2,0 .. 3,0
ские с ТВД
Магистральные пассажир- 0,65 ... 0,80 * 0,08 ... 0,12 2,5 .. 3,5
ские с ТРД и ТРДД
Тяжелые неманевренные 0,50 ... 0,60 0,06 ... 0,10 2,5 ... 3,5
со стреловидным крылом
Тяжелые неманевренные 0,45 ... 0,55 0,05 ... 0,09 2,0 ... 3,0
с прямым крылом
Скоростные маневренные 0,40 ... 0,50 0,05 ... 0,08 1,5 ... 2,0
* Значения Дг. о У некоторых пассажирских самолетов с ТРД и ТРДД
следующие: Ту-1О4 — 0,768; Ту-154 — 0,720; Боинг 707 (США) — 0,764; ВАС
VC-10 (Англия) — 0,710; Макдоннел-Дуглас DC-8 (США) — 0,667.
чение площади оперения. Вследствие этого процесс выбора сомно-
жителей, определяющих величину Лг. 0, итеративен и подлежит
оптимизации.
После предварительной компоновки самолета и после предва-
рительного выбора геометрических параметров оперения (Хг. 0,
Лг. о, сг.о и Хг.о — см. гл- 1^) величина Лг,0 уточняется. При
этом используется метод «граничных линий». Этот метод позволяет
при проектировании сразу ответить на вопрос, в каких пределах
можно выбирать величину Аг, 0 для обеспечения требований по
характеристикам устойчивости и управляемости и по обеспече-
нию необходимого эксплуатационного диапазона центровок.
Для продольной устойчивости и управляемости важнейшими
из этих требований являются:
— обеспечение минимально допустимой степени продольной
статической устойчивости по перегрузке (при предельно задней
центровке хт.п. 3);
— обеспечение необходимой эффективности органа продоль-
ного управления для балансировки самолета на взлетно-посадоч-
ных режимах на больших углах атаки с отклоненной механиза-
цией крыла при максимально передней центровке.
С учетом выражения (8.8) условие выполнения первого тре-
бования можно записать в виде:
xT.n.3-XF6.r.o-^.o^r.o^^(l - 8“)< тсУ (8.10)
«Кп Ш1П 4
Здесь аг. 0 с“гг-°; пкр = с“. При составлении неравенства
следует иметь в виду, что т^ш1п < 0.
Значение необходимой эффективности органа продольного
управления для балансировки самолета на взлетно-посадочных
189
режимах полета (большие углы атаки) с соответственно отклонен-
ной механизацией крыла при предельно передней центровке хт. п. п
может быть получено из уравнения продольных моментов на этих
режимах. Например, для случая балансировки на взлете
- Ш2об. г. о Ч~ Аш2мех Ч- Л/^гдв Ч- Су (хт п. п — Xf б. г. о) ®отр —
— kr. о^г. о-^г. о (®отр £0б. мех — мех^отр —
А^мех А^эем Ч~ ‘^ст’Рв Ч- ^р. в^в) = 0. (8.11)
В этом уравнении индексом «мех» отмечены изменения аэроди-
намических параметров при отклонении механизации крыла;
индексами «б. г. о» и «б. мех» — без горизонтального оперения
и с неотклоненной механизацией крыла; индексом «зем» — изме-
нение параметров от влияния близости земной поверхности;
3Ст — SCT/Sr. о — отношение площади стабилизатора, находя-
щейся в потоке, к общей площади горизонтального оперения;
«р. в ~ Зр. в = V Зр. в/$г. о — коэффициент эффективности ру-
лей высоты (в случае применения цельноповоротного управляе-
мого стабилизатора член пр. В6В выпадает, а для угла отклонения
стабилизатора обычно принимают значения <рв = 0,8<рвтах; если
на самолете предполагается использовать переставной в полете
стабилизатор, то для взлетно-посадочных режимов принимают
Ч>В = Ч>В. взл или фв. пос соответственно); Атг дв = ----
<?отрг,ОЛ
коэффициент момента тяги двигателей.
Из неравенства (8.10) получим следующее условие для выбора
коэффициента статического момента горизонтального оперения:
д ___ mz^tnin Ч- *т. п. з *Е б. г. о aKP ,q j п\
Лг. о ---------- Т— , (»• 12)
1 — 8 оаг. о
а из уравнения (8.11) — условие
д mz б. г. о Ч~ &тг мех Ч~ Ч~ Су (*т, п п *F6. г. о) котр
^г. о°г. о (аотр ®0 б. мех ®б. мехаотр ^®мех ^езем Ч~
4“ ^стфв Ч~ Ир. в^в)
(8.13)
Построенные по выражениям (8.12) и (8.13) в координатах
хт—АГ' о граничные линии образуют так называемый «крест»,
ограничивающий область выбора значений Аг, 0 в зависимости
от диапазона разбега центровок хт. п з — хт. п. u (рис. 8.7).
Если значения хт. п.3 и хт. п. п уже определились при компо-
новке самолета (см. разд. 8.2), то по соответствующим граничным
линиям определяют потребные значения Лг. 0 для каждой из
этих центровок и принимают наибольшее значение. Если значе-
ния хт. п. з и хт. п. п еЩе не определены, то, задавшись некоторым
190
значением Лг. 0 > Лг.0 т1п,
получают допустимый при
этом диапазон разбега
центровок, а затем соот-
ветствующей компоновкой
стараются его обеспечить.
Увеличение допусти-
мого диапазона разбега
центровок при выбранном
значении Дг. о можно до-
стигнуть также с помощью
увеличения коэффициен-
та аг. о (например, путем
увеличения удлинения опе-
рения, как это показано
на рис. 8.7 пунктиром).
Однако не следует забы-
вать, что конечной целью
проектирования является
выбор таких параметров
Рис. 8.7. Характер граничных линий
(«крест»), ограничивающих область выбора
Дг. о и хт из условий обеспечения минималь-
но допустимой степени продольной стати-
ческой устойчивости по перегрузке mzymjn
(/) и балансировки самолета на больших уг-
лах атаки (2):
— — — расширение области выбора прн уве-
а
лнченин производной 0 — с у г 0; “ ' ~~ * —
расширение области выбора при применении
стабилизатора с изменяемым углом установки срв
оперения, при которых
масса конструкции оперения получилась бы наименьшей (а при
увеличении удлинения масса растет). Поэтому при компоновке не-
обходимо оптимизировать по критерию наименьшей массы выбор со-
ответствующих геометрических параметров горизонтального опе-
рения или величины площади Sr. 0.
Для тяжелых скоростных самолетов определяющим условием
при выборе 4Г. 0 в случае передней центровки может оказаться
условие обеспечения достаточной эффективности органа продоль-
ного управления для отрыва передней стойки шасси от ВПП и
увеличения угла атаки до взлетного значения ссотр при V =
= 0,85УОтр в пределах ограниченной длины ВПП.
Для маневренных сверхзвуковых самолетов определяющим
условием при выборе 4Г. 0 в случае передней центровки, как пра-
вило, оказывается обеспечение заданной маневренности самолета,
т. е. достаточной эффективности органа продольного управления
для балансировки самолета на максимальной перегрузке, особенно
при сверхзвуковых скоростях на больших высотах.
Для нескоростных самолетов с безбустерными системами
управления область выбора коэффициента Аг. 0 определяется
дополнительно граничными линиями, построенными из условий
допустимых пределов:
— декремента затухания собственных продольных колебаний
самолета;
— изменения усилий на рычаге продольного управления;
— изменения расхода усилий на единицу перегрузки (показа-
теля управляемости Р^у), и др.
191
192
На скоростных самолетах с необратимыми бустер-
ными системами управления потребные характеристики
управляемости обеспечиваются, как правило, автома-
тизацией системы управления и искусственным фор-
мированием этих характеристик (см. гл. 18).
Одной из задач аэродинамической компоновки са-
молета нормальной схемы является выбор положения
горизонтального оперения по высоте.
Как известно, в полете за крылом образуется зона
заторможенного и скошенного потока. Скоростной
напор и углы атаки горизонтального оперения опре-
деляются параметрами этого потока: коэффициентом
торможения kr,0 = qMe(yiB/q и углом скоса потока е,
которые зависят от взаимного расположения крыла
и оперения, а также от режима полета (рис. 8.8).
При попадании горизонтального оперения в зону
сильного торможения и неблагоприятного скоса потока
характер аэродинамических сил на горизонтальном
оперении при изменении угла атаки крыла может
существенно измениться, и самолет может потерять
статическую устойчивость по перегрузке (при увели-
чении угла атаки крыла продольный пикирующий
момент вместо увеличения начнет уменьшаться или
даже изменится на кабрирующий). Это наглядно по-
казано на рис. 8.9.
У самолетов с крылом малых удлинений и доста-
точно длинной хвостовой частью фюзеляжа (сверхзву-
ковые самолеты) зона максимальных скосов у хвосто-
вой части фюзеляжа, где располагается оперение, как
правило, смещается вверх. Поэтому у таких самолетов
горизонтальное оперение размещается на фюзеляже
(рис. 8.10).
У сверхзвуковых самолетов всех типов можно
располагать горизонтальное оперение ниже линии
продолжения бортовой хорды крыла, у нижней по-
верхности хвостовой части фюзеляжа.
Для дозвуковых самолетов с относительно неболь-
шими скоростями полета (У < 800 км/ч) и сравни-
тельно длинными хвостовыми частями фюзеляжа
(Lr.0 = 2,7 ... 3,0) можно рекомендовать устанавли-
вать горизонтальное оперение с выносом вверх на
величину /гг.о = (0,15 ... 0,20) 6борт, где 6борт — вели-
чина хорды крыла у борта фюзеляжа.
Особо следует остановиться на самолетах, у ко-
торых вследствие их компоновочных особенностей
(например, при расположении двигателей на хво-
стовой части фюзеляжа) приходится предусматривать
верхнее расположение горизонтального оперения на
7 С. М. Егер и др
193
/7?г
Рис. 8.9. Влияние высоты расположения горизонтального оперения на ха-
рактер протекания зависимостей тг = f (су)
Г. 02 у 01
^"гоз hr oi
Су
hr 02
hr оз
Устойчивость \ Неустойчивость по
перегрузке (т^>0)
Рис. 8.10. Характер изменения по высоте величины скоса потока е и выбор
месторасположения горизонтального оперения:
а — за стреловидным крылом среднего удлинения самолета с коротким фюзеляжем (ГО
вверху); б — за крылом малого удлинения самолета со сравнительно длинным фюзеля
жем (ГО внизу)
киле (Т-образное оперение). При превышении допустимых значе-
ний углов атаки возможно попадание таких самолетов в режим
глубокого срыва, в результате которого самолет как бы зависает
на большом угле атаки, не имея возможности уменьшить его,
начинает терять скорость и сваливается. Сущность явления за-
ключается в том, что при случайном превышении допустимых зна-
чений угла атаки (например, при сильном вертикальном порыве),
спутная струя сорванного с крыла и сильно заторможенного по-
тока поднимается вверх и охватывает оперение. При этом скос
потока на оперении изменяется таким образом, что появляется
дополнительный момент на кабрирование, вызывающий дальней-
шее увеличение угла атаки. Так как оперение находится в сильно
заторможенном потоке, то эффективность рулей высоты, даже при
полном отклонении их вниз, может оказаться недостаточной
для преодоления возникающего момента на кабрирование.
Характер протекания зависимости тг = f (а) для самолета
с Т-образным оперением показан на рис. 8.11.
У самолетов с низкорасположенным горизонтальным оперением
(пунктир на рис. 8.11) после возникновения срыва на крыле и
ухода вверх спутной струи скос потока в зоне горизонтального
оперения уменьшается. Это вызывает появление пикирующего
момента, способствующего переводу самолета на меньшие углы
атаки, тем более, что рули высоты не находятся в сильно затормо-
женном потоке и сохраняют свою эффективность.
Чтобы предупредить возможность попадания самолета с Т-
образным оперением в режим глубокого срыва, в системах про-
дольного управления обычно предусматривают специальные авто-
матические сигнализаторы подхода к опасному режиму (например,
тряска штурвала).
195
194
Т
Устранению развития глубокого срыва способствует увеличе-
ние удлинения горизонтального оперения (\,_ 0) с тем, чтобы концы
этого оперения выходили как можно больше из зоны воздушного
потока, сорванного гондолами двигателей и увеличивающего
торможение потока, обтекающего горизонтальное оперение.
У самолета, спроектированного по схеме «утка», расположен-
ное впереди горизонтальное оперение находится практически в не-
возмущенном потоке, и для него можно принимать kr 0 = 1 и
е“ л; 0.
8.1.5. Выбор параметров вертикального оперения
и поперечного V крыла
Для обеспечения необходимых характеристик боковой устой-
чивости и управляемости самолета без применения средств авто-
матизации управления при выбранных основных параметрах
крыла у конструктора остается возможность соответствующего
выбора коэффициента статического момента вертикального опе-
рения Лв. о = SB. <Лв. о /(SI) и угла поперечного V крыла, так
как изменение этих параметров оказывает наиболее существенное
влияние на изменение производных т®, т® и т“»,. в наибольшей
степени определяющих характеристики боковой устойчивости и
управляемости.
Для нескоростных самолетов с безбустерными и неавтоматизи-
рованными системами управления выбор параметров вертикаль-
ного оперения, угла поперечного V крыла, а также эффективности
органов путевого и поперечного управления обусловливается
следующими основными требованиями:
1) показатель % = тах ], определяющий соотношение угло-
I max I
вых скоростей крена и рыскания в развитии бокового движения,
должен лежать в определенных пределах. При больших значениях
% самолет в полете на возмущения отвечает раскачкой с крыла на
крыло; при малых значениях % проявляется склонность к спи-
ральной неустойчивости (сверхзвуковые самолеты без автомати-
зации управления имели бы значения х?«10 и более);
2) степень затухания боковых короткопериодических колеба-
ний должна быть достаточной;
3) запаздывание реакции самолета на отклонение рычагов
управления не должно превышать допустимых пределов;
4) возможность балансировки и достаточная боковая управ-
ляемость самолета при посадке с заданным боковым ветром и при
взлете с односторонним отказом двигателя (т. е. при неполной
и несимметричной тяге у многодвигательного самолета) должны
быть обеспечены;
5) эффективность органов поперечного и путевого управления
должна быть достаточной для выполнения заданных маневров на
196
всех возможных режимах полета и для надежного вывода само-
лета из штопора;
6) спиральное движение самолета не должно иметь сильно
выраженной неустойчивости (ограничивается допустимое время
удвоения отклонения параметров от исходных значений в спираль-
ном движении).
Для скоростных самолетов с бустерными системами управления
выполнение пунктов 1,2 и 6, как правило, обеспечивается примене-
нием специальных автоматических систем, независимо от летчика
воздействующих на органы управления (демпферов рыскания и
автоматов скольжения).
Выбор параметров вертикального оперения и эффективности
органов путевого управления (руля направления) при проектиро-
вании самолета осуществляется путем последовательных прибли-
жений с применением метода граничных линий. Эти линии после
завершения предварительной компоновки и определения аэроди-
намических характеристик (например, производной ав. 0 = с2в. о)
и плеча Лв. 0 вертикального оперения строятся в координатах
SB. о — или Пр.в — ЛВ(0 (где на дозвуковых скоростях коэффици-
ент эффективности руля направления «р. KSp, H/SB. о)•
Применение метода граничных линий можно показать на при-
мере определения выбора значений коэффициентов Лв.о и пр.н
из условий обеспечения балансировки самолета при односторон-
нем отказе двигателя на взлете и при посадке с боковым ветром,
а также из условия обеспечения приемлемой величины показа-
теля и в боковом движении.
Режим посадки с боковым ветром выбирается как один из основ-
ных расчетных случаев при выборе степени поперечной статиче-
ской устойчивости самолета т%. Угол скольжения в этих условиях
определяется задаваемой в требованиях к самолету величиной
максимальной скорости бокового ветра U7-,max, при которой
должна обеспечиваться посадка (ртах а; №2тах/УПос)-
Из уравнения равновесия боковых сил и моментов в прямоли-
нейном полете со скольжением можно получить условия для
построения линии, ограничивающей область выбора Яв. 0 и /гр.н:
р
а ___________ V б- в- °____ (8 14)
В‘0 йв. о (1 —Лр. нбн/Pmax) ’
где бн = 0,8бнтах.
При одностороннем отказе двигателя при взлете (на самолете
с несколькими двигателями, разнесенными от оси симметрии)
создается разворачивающий момент от несимметричной тяги Му^.
Этот момент получается наибольшим, когда двигатели работают на
взлетном режиме. Этот режим также является определяющим для
выбора геометрических параметров вертикального оперения и
эффективности руля направления, поскольку эти органы должны
обеспечить уравновешивание момента несимметричности тяги при
197
достаточно невысокой скорости (обычно принимается V= Уотр =
= 2m°p g )' И3 условия балансировки самолета в прямо-
линейном полете с несимметричной тягой уравнение линии,
ограничивающей область выбора значений 0 и т]р. н, имеет вид
А,.о>~ -аГб ’ <8-15)
ftp. HUB. QVH
"дв 1
У РоЛ
где myr = ~q0^si
оси симметрии.
Соотношение максимальных угловых скоростей крена и рыска-
ния при боковых колебаниях самолета определяется показателем
% ! Йх щах | ^х__________
I toy max I mJ) Г
У 1 / 1
г,- — расстояние от оси двигателя до
(8.16)
Г Р т?
где п£ = т®/гх; тхх = m“v/гх-, = т$/г2у.
Для ориентировочных расчетов приведенное выше выражение
для показателя х может быть упрощено:
тхг у =_ mx'1 У
тУх mfyx ’
У .
(8-17)
X
—о 4</v —о
так как п = —и rl ~ .
х ml2 у ml2
Отсюда можно приближенно определить потребную степень
путевой статической устойчивости, необходимую для выполнения
требований % < хдоп (напомним, что ту
„в
ft /П v I
идОП j X
Отношение моментов инерции Jy/Jx для каждого класса
самолетов достаточно устойчиво и может быть принято либо по
статистическим данным, либо определено расчетом по предвари-
тельной компоновке.
.Величина производной Шх, характеризующей степень попереч-
ной устойчивости (ту < 0), меняется при изменении форм и разме-
ров крыла и вертикального оперения, а также в значительной мере
при изменении угла поперечного V крыла Чг. Это хорошо видно из
приближенного выражения, определяющего значение mf
Wx — ™х кр "V" в. о = ^хО-----2~ Су ^ст'Р COS у —
"--g-zc Тсу sinх - ^в,оав.о
4/
(8.18)
(8-19)
198
где % — угол стреловидности
крыла; Т •— угол попереч-
ного V крыла, г/в. 0 — коорди-
ната точки приложения боко-
вой силы на вертикальном
оперении относительно оси ОХ
самолета (рис. 8.12); £ст— рас-
стояние от плоскости симмет-
1
Рис. 8.12. Определение геометри-
ческих параметров самолета, входя-
щих в выражение для производных
и т£, характеризующих боковую ста-
тическую устойчивость
рии самолета до центра тяже-
сти площади полукрыла, отне-
сенное к полуразмаху; для
трапециевидного крыла zCT =
1 п + 2 ,
= -у л+Т to “ сужение кры-
ла); I — размах крыла.
Как следует из выражения (8.19) на самолете, основные пара-
метры которого (5, х, 5В. о, с“) уже выбраны, для уменьшения
абсолютных значений ml и улучшения тем самым динамики боко-
вого движения на больших углах атаки проще всего применять
отрицательное поперечное V крыла (Т < 0), как это сделано,
например, на самолетах Ту-104 и Ту-Г14. При этом в выражении
(8.19) второй член становится положительным и отрицательное
значение производной ml уменьшается. Однако, как это видно из
рис. 8.13, а, при малых углах атаки (полет на больших скоростях)
эта мера может привести к чрезмерному уменьшению абсолютной
величины ml, в результате чего может появиться обратная реак-
ция по крену на отклонение руля направления («дачу ноги»).
Наряду с этим опущенные вниз концы крыла приводят к труд-
ностям при компоновке шасси самолета: приходится увеличивать
длину стоек. Вследствие этого в настоящее время проблема обеспе-
чения динамических характеристик самолета в боковом движении
решается применением различных автоматических средств (авто-
матов скольжения и демпферов рыскания), а поперечное V делается
положительным.
Производная т^, характеризующая путевую статическую
устойчивость, в основном зависит от соотношения площадей
проекций на плоскость симметрии самолета носовой части фюзе-
ляжа и вертикального оперения (см. рис. 8.12):
— 0,06с,, tg у — (тх)кр — kB. oas, ОЛВ. о -ф /ф —> (8.20)
где 0,32 (Хф — 0,25) + 1,5/Фф’®;
•^ф — *ф/^; ^-ф — ^ф//ф-
Характерное увеличение длин фюзеляжей /ф и их носовых
частей Хф у современных скоростных самолетов, связанное с особен-
ностями их компоновки и необходимостью максимального сниже-
199
Рис. 8.13. Влияние изменения поперечного V крыла (’P'cO; Ч*1 = 0; Чг>0) на
статические и динамические характеристики самолета в боковом движении:
а — характер изменения зависимости тх — f (с Л самолетов со стреловидным крылом;
б — изменение характеристик боковой динамической устойчивости самолета Боинг В-47
(США) иа режимах захода иа посадку (Н = 0, V — 240 км/ч, закрылки отклонены);
Т период боковых короткопериодических колебаний; t.t — время уменьшения ам-
плитуды колебаний вдвое); / — зона поперечной неустойчивости; II — зона слишком
большой поперечной устойчивости
нця волнового сопротивления, приводит к возрастанию «дестаби-
лизирующего» последнего члена в выражении (8.20) и, следова-
тельно, к уменьшению абсолютной величины т$. Наряду с этим вы-
ражение (8.20) показывает, что с ростом углов атаки (заход на по-
садку или полет на больших высотах) путевая устойчивость снижа-
ется вследствие неблагоприятного влияния т£кр <0 и увеличения
затенения вертикального оперения фюзеляжем, в результате
которого уменьшается коэффициент торможения потока в зоне
оперения kB. 0 — Ув.о/И2 < 1-
При больших числах М полета производная niy уменьшается
вследствие снижения эффективности вертикального оперения
(ав. о = дС^' ° убывает) .
Все это приводит к необходимости соответствующего увеличе-
ния площади вертикального оперения для обеспечения путевой
устойчивости, особенно в условиях сверхзвукового полета на
больших высотах (рис. 8.14).
Решение вопросов общего проектирования скоростных самоле-
тов невозможно и без обеспечения необходимой степени затухания
боковых колебаний, определяемых в основном значениями произ-
водной п^у.
Из приближенного выражения этой производной
= -2,4Лв.оав.о Чг2° (8.21)
следует, что она быстро уменьшается при больших сверхзвуковых
скоростях (вследствие уменьшения ав. 0) и при больших углах атаки
200
в,о в.о
в)
5)
Рис. 8.14. Влияние изменения площади
вертикального оперения на статические и
динамические характеристики бокового
движения самолета:
а — изменение путевой статической устойчи-
вости самолета иа сверхзвуковых скоростях;
б — изменение производной характери-
зующей демпфирование колебаний рыскания,
при различных углах атаки; ------ осреднен-
иые даииые испытаний фирмы <Бристоль>;
----— осредненные даииые испытаний RAE;
в — изменение характеристик боковой дина-
мической устойчивости самолета Боинг В-47
на режимах захода иа посадку (Н ~ 0; V —
= 240 км/ч; закрылки отклонены). Начало осей
координат на рис. 8.14, б, в соответствует исходному варианту самолета. / — исходный
вариант; 2 — площадь киля увеличена на 50 %; 3 — площадь киля увеличена иа 100 %;
4 — киль отсутствует
(вследствие торможения потока и уменьшения kB- 0). Наиболее
эффективным способом ее увеличения при выбранных параметрах
крыла являются увеличение плеча вертикального оперения и его
площади. Так как и то, и другое связано с увеличением массы
конструкции, то проблема обеспечения необходимых значений
производной т^у на современных самолетах решается установкой
демпфера рыскания.
Возвращаясь к методу граничных линий для определения
области выбора Дв. 0 и пр. н, преобразуем выражения (8.19) и (8.20):
тР _ тр ь п А Уп-0 •
,пк Г'^Х кр Л-Ь. оив. о^в. О j »
/7?^ —- tnf/ б. в. о “Ь в. о :== б. в. о ~~~ ^в. о^в. о-^в. о*
Если поставить выражения для т* и т$у в условие (8.18), то оно
примет вид
л ______Ь л A Г___________________ Ь (] А У**. о_ 1 У
1,1У б. В. О «В. О^В. О-'ТВ. о faX кр - кв. оив. О-^В. о / I 7 v
L t J «/ х^доп
201
Рис. 8.15. Выбор параметров вертикального оперения (ВО) и угла попе-
речного V крыла:
а — область выбора коэффициентов статического момента ВО и эффективности руля
направления из условий: 1 — обеспечения посадки с боковым ветром, соответствующим
углу скольжения Ртах; 2 — обеспечение балансировки самолета прн взлете с несимме-
тричной тягой; 3 — обеспечение заданной степени гармоничности колебаний по креиу
н рысканию /х < хдоп)’ — выбор относительной площади ВО по рекомендованным пре-
3 3 „
делам значений производных тх н Шу-, в — пример построения граничных линий и полу-
чения области выбора относительной площади ВО 0 — н угла поперечного
V крыла для легкого дозвукового самолета со стреловидным крылом из условий: 1 —
максимально допустимого времени затухания, за которое амплитуда боковых коротко-
пернодических колебаний уменьшается в два раза; 2 — максимально допустимого значе-
ния показателя хтах; 3 — предельно допустимого отклонения руля направления при
посадке с заданным боковым ветром; 4 — предельно допустимого отклонения элеронов
при посадке с боковым ветром; 5—минимально допустимого значения показателя
6 — максимально допустимой степени спиральной неустойчивости (минимально допу-
стимое время увеличения в два раза первоначальной амплитуды в спиральном движе-
нии); 7 — механизация крыла отклонена; I — минимальный диапазон эффективности
руля направления; II — диапазон выбора Зв 0 при 'V = 0; III — рекомендуемые пре-
делы изменения mJ; IV — рекомендуемые пределы изменения т$-, V ~ диапазон выбора
*$В. о
202
Отсюда
Ав. о
&В. ОаВ. О
„В „В
^бв'° /хХдоп ХКР
У в. о
(8.22)
____ J и \
/___.1хКррП /
Построенные по условиям (8.15), (8.16) и (8.22) граничные
линии имеют вид, показанный на рис. 8.15, а. Эти линии ограничи-
вают область выбора коэффициентов Лв. 0 и пр.н.
В условиях автоматизированного проектирования с использо-
ванием ЭВМ уже на стадии предварительного проектирования
могут быть получены такие значения производных т® и т®,
которые обеспечат оптимальные характеристики бокового движе-
ния. После этого параметры вертикального оперения и углы попе-
речного V крыла могут выбираться с помощью выражений (8.19)
и (8.20). В этом случае удобнее, приняв по предварительной компо-
новке ориентировочные значения £в. ои других геометрических
параметров проектируемого самолета, входящих в выражения для
в в
производных тх и ту, строить зависимость этих производных от
параметра SB. 0, как показано на рис. 8.15, б.
8.2. ОБЪЕМНО-ВЕСОВАЯ КОМПОНОВКА
8.2.1. Центровка самолета. Расчеты первого приближения
Одной из важнейших задач компоновки самолета является
определение центра масс (ц. м.) самолета и приведение его в такое
положение относительно средней аэродинамической хорды крыла
ЬА, при котором:
в варианте наиболее заднего положения ц. м. обеспечивалось
бы условие
ХТ. п. з Хр =
в варианте наиболее переднего положения ц. м. обеспечива-
лось бы условие достаточности отклонения рулей высоты или ста-
билизатора для балансировки самолета на режиме взлета или
посадки при отклоненной механизации крыла.
Этот процесс называется центровкой самолета. Процесс цен-
тровки итеративен и имеет по крайней мере три приближения.
При центровочных расчетах определяющим является условие
(8.1), согласно которому
Хт. п. 3 = Хр + т^пп (8.23)
(следует помнить, что величина тс« < 0).
При дипломном проектировании можно принимать следующие
значения тс«-.
для дозвуковых пассажирских самолетов......................... —0,15
для сверхзвуковых пассажирских и тяжелых военных самолетов —0,05
для маневренных самолетов..................................... —0,03
203
Рис. 8.16. Расположение осей ОХ и OY
при расчете центровки самолета:
ха — абсцисса носка средней аэродинамиче-
ской хорды крыла (отрицательна, если носок
дд находится впереди начала координат —
точки О)
Центровка определяет- !
ся по двум осям: гори-
зонтальной ОХ и верти-
кальной OY (рис. 8.16).
За начало координат при
расчете центровки прини-
мают:
— либо носок фюзеля-
жа, с тем, чтобы все ко-
ординаты грузов были по-
ложительны и этим исклю-
чались ошибки при сум-
мировании статических
моментов. Однако если
в процессе центровки при-
ходится сдвигать вперед или назад носовую часть фюзеляжа, то
выбранная точка начала координат оказывается оторванной от
какой-либо физической точки конструкции самолета (или весь
процесс центровки приходится делать заново);
— либо начало корневой хорды крыла или (лучше) какого-либо
конструктивного элемента крыла (ось переднего или заднего
лонжерона центроплана). В этом случае грузы, находящиеся
спереди от начала координат, будут иметь отрицательную величину
абсцисс.
Ось ОХ обычно совмещают со строительной осью (строительной
горизонталью) фюзеляжа.
Расчету центровки обязательно предшествует составление
весовой сводки или ведомости. При центровочных расчетах первого
приближения за исходные массы принимают массы второго прибли-
жения (см. гл. 6). Подсчитываются статические моменты массы
основных элементов (грузов) относительно начала координат;
частное от деления суммы этих статических моментов на сумму
масс и дает координату положения ц. м. Образец центровочной
ведомости показан в табл. 8.2.
После подсчета 2 (mgx)t, 2 (mgy)i и 2 (mg)i получаем коорди-
наты центра масс
хт
2 (mgx)j 2 (mgy)i
^(mg)i т 2 ("*£)/
(8.24)
а значение центровки
определяется по следующей формуле:
*А
(8.25)
где хА — расстояние от начала координат до начала ЬА; ЬА —
средняя аэродинамическая хорда крыла (определение величины
ЬА дано ниже).
Обычно величина хт дается в процентах, для чего значение,
полученное по формуле (8.25), умножают на 100.
204
Таблица 8.2
Центровочная ведомость самолета
Агрегат, груз mgx, даН*м X, м mg, даН у, м mgy, даН-м
I. Конструкции Крыло Фюзеляж Горизонтальное оперение Вертикальное оперение Переднее шасси (убрано) Стойки заднего шасси (убраны) Колеса заднего шасси (убраны) П. Силовая установка Двигатели средние Двигатели крайние Гондолы двигателей сред- них Гондолы двигателей край- них Топливная система III. Оборудование и управление IV. Снаряжение Летчики Бортинженер Стюардессы Специальное оборудова- ние V. Топливо Группа I Группа II Группа III VI. Нагрузка Пассажиры Багаж
Сумма XI Ml У! Mfr
Положение центра масс самолета по высоте г/т имеет большое
значение при расчетах динамики движения самолета; знание его
необходимо при определении необходимого положения колес
основного шасси в выпущенном положении. Положение центра
масс самолета по высоте необходимо учитывать и в том случае,
если он находится далеко от крыла, например в схеме высокоплана
(рис: 8.17).
х'т = ~ ~ tg sin ф- (8-26>
205
Рис. 8.17. Схема определения центровки
при большом расстоянии центра масс само-
лета от плоскости средней аэродинамиче-
ской хорды:
ф — угол между Ьд и горизонтальной плоско-
стью ХОХ
Координаты грузов берутся с компоновочного чертежа (рис.
18.18 и 18.19), который представляет собою боковую проекцию
самолета или продольный разрез самолета по оси симметрии
в возможно большем масштабе. На этом чертеже наносятся все
грузы, все агрегаты самолета. В процессе компоновки взаимное
положение агрегатов и грузов меняется, и поэтому процесс созда-
ния компоновочного чертежа также итеративен, как и сам процесс
компоновки.
При центровочных расчетах первого приближения принима-
ется: -•
а) положение центра масс крыла на 40 ... 42 % ЬА;
б) положение центра масс оперения на 45 ... 50 % ЬАг.о или
в. о>
в) положение центра масс фюзеляжа приблизительно на 50 %
длины фюзеляжа при прямом крыле или на 60 % при стреловидном
крыле;
г) центр масс топлива и топливной системы в центре масс
площади топливных отсеков крыла на плановой проекции само-
лета; для топливных отсеков (баков) в фюзеляже подсчитывается
объем и центр масс объема каждого бака в отдельности.
Максимальный объем топлива в крыле (м3)
ё s3/2
VT.KP~O,7^-. (8.27)
Плотность топлива для ТРД равна 0,8 (0,78 ... 0,83) г/см3 или
800 кг/м3;
д) центр масс оборудования и управления в центре масс фюзе-
ляжа, т. е. на 50 ... 60% длины фюзеляжа;
Рис. 8.18. Пример компоновки легкого самолета (гипотетический самолет)
206
е) масса летчиков — 100 кг на военных самолетах и 80 кг на
гражданских; бортпроводников — 70 кг, масса пассажира —
75 кг и его багажа — 15 кг.
В результате расчета первого приближения центровки необхо-
димо иметь следующие значения хт (положения центра масс
самолета относительно йА):
самолеты с прямым крылом.......................0,20—0,25
самолеты со стреловидным крылом (% = 35 ... 40°) 0,26—0,30
самолеты со стреловидным крылом (% = 50 ... 55°) 0,30—0,34
самолеты с треугольным крылом малого удлинения 0,32—0,36
Если эти значения не получаются, то необходимо перемещать
центр масс самолета. Это возможно двумя путями:
а) перемещением отдельных (наиболее весомых) грузов. Тогда
сдвиг центра масс самолета
где mt — масса сдвигаемого груза; тс — масса самолета в цен-
труемом варианте; xia — первоначальная координата груза; x't —
новая координата груза;
б) перемещением всего фюзеляжа с размещенными на нем гру-
зами относительно крыла. С этой целью все массы самолета делятся
на две группы:
— масса группы крыла, куда входит масса собственно крыла,
масса всех грузов, находящихся на крыле (двигатели, топливо и
т. п.), и масса основного шасси, независимо от того, где это шасси
закреплено (на фюзеляже или на крыле);
— масса группы фюзеляжа, включающая остальную массу
самолета.
Тогда необходимый сдвиг фюзеляжа относительно крыла
Л г , =___________У А
£ЛЛгр- Ф .
и1ГР. ф
(8.29)
где тгр. ф — суммарная масса группы фюзеляжа; Ах* — величина
необходимого сдвига центра масс самолета.
8.2.2. Центровка самолета. Расчеты второго
и последующих приближений
При центровочных расчетах второго приближения:
— уточняется весовая сводка самолета с разбивкой масс по
более мелким группам. Типовая весовая сводка второго приближе-
ния дана в приложении I;
— рассчитывается фокус самолета;
— в соответствии с принятой величиной /n^min пересчитывается
центровка для обеспечения необходимого положения центра масс
самолета.
207
208
Рис. S.19. Пример компоновки пассажирского самолета (Ту-154):
Геометрические данные: размах крыла 37,55 и; длина самолета 47,9 м; высота самолета 11,4 м; длина фюзеляжа 42,33 м;
диаметр фюзеляжа 3,8 м; площадь крыла (с наплывом) 201,45 м2; средняя аэродинамическая хорда крыла 5,285 м; ширина колеи шасси
11,5 м; продольная база шасси 19,08 м; размеры дверей и люков: входные двери 1725X800 мм; служебная дверь 1280Х
X 610 мм; аварийная дверь 1280 X 640 мм; аварийные выходы передние 480 X 900 мм; задние 480 X 1070 мм
Центровка выполняется для следующих основных
вариантов:
а) максимально допустимая масса самолета с полной
нагрузкой (коммерческой или боевой); баки заполнены
соответствующим количеством топлива;
б) максимально допустимая масса самолета с полной
заправкой топливом и соответственно уменьшенной на-
грузкой;
в) самолет с полной заправкой топливом без нагрузки
(перегоночный вариант);
г) самолет с полной нагрузкой без топлива (предель-
ный посадочный вариант);
д) пустой самолет без нагрузки и топлива •
— со снаряжением (с экипажем)
— без снаряжения.
Последний вариант необходим для оценки поведения
самолета на стоянке (отсутствие переваливания на хвост).
Все остальные варианты рассматриваются с убранным
и выпущенным шасси.
В результате этих расчетов выявляется диапазон
разбега эксплуатационных и летных центровок. Диапазон
разбега летных центровок определяет размеры оперения,
и, следовательно, массу самолета.
Если полученный диапазон разбега центровок меньше
допустимого при данной величине Ат. 0, то имеется возмож-
ность уменьшить величину Дг. 0 путем уменьшения пло-
щади горизонтального оперения и тем самым уменьшить
массу самолета.
Если полученный диапазон разбега центровок больше
допустимого, то необходимо:
— либо расширить допустимый диапазон разбега
центровок увеличением предельно задней центровки путем
увеличения Sr. 0 или уменьшения запаса устойчиво-
сти mсгУ, например, при введении в систему управления
соответствующей автоматики;
— либо расширить допустимый разбег диапазона
центровок уменьшением предельно передней центровки
при увеличении эффективности оперения (увеличении
углов отклонения рулей высоты или стабилизатора);
— либо сократить полученный диапазон разбега
центровок.
В целях получения минимального диапазона центро-
вок необходимо размещать:
— ц. м. топлива вблизи ц. м. самолета так, чтобы при
расходе топлива центровка смещалась не более чем на 5 % 6А;
— сбрасываемые в полете грузы так, чтобы при их
сбросе центровка менялась не более чем на 3 % ЬА;
209
— переменные грузы (например, пассажиров) как можно ближе
к ц. м. самолета, чтобы они давали минимальные изменения
центровки в любых вариантах по количеству (массе) этих грузов.
С учетом этих мероприятий диапазон разбега летных центровок
должен быть не более 10 % ЬА для военных самолетов и 20 % ЬА
для пассажирских и транспортных самолетов.
Обычно в результате расчета всех вариантов строится центро-
вочный график (см. рис. 8.22 и 8.23).
Третье приближение центровки проводится после того, как
проработана конструкция самолета и имеется возможность уточ-
нить массы отдельных элементов конструкции, и после того, как
уточнены схемы и конструктивные элементы систем самолета,
а размещение этих элементов уточнено в соответствии с производ-
ственно-технологическими и эксплуатационными требованиями.
Обычно это связано с окончанием разработки эскизного про-
екта. Однако итерации процесса продолжаются и на всех после-
дующих этапах создания самолета.
8.2.3. Определение величины средней
аэродинамической хорды
Как сказано выше, центровка — это определение положения
ц. м. самолета относительно средней аэродинамической хорды
крыла ЬА (ЬА — это хорда прямоугольного крыла, эквивалентного
данному крылу по моментным характеристикам относительно
поперечной оси Z, проходящей через начало корневой хорды дан-
ного крыла).
В общем случае величина
1/2
ЬА = -|-j b2dz, (8.30)
о
а ее положение (начало) относительно оси Z:
XA==_±_j xbdz, (8.31)
о
где S — площадь крыла, м2; Z/2 — половина размаха крыла, м;
b и х — текущие размеры хорды крыла и расстояния от начала
данной хорды до оси.
В том случае, если крыло имеет большое поперечное V, возни-
кает необходимость определения положения ЬА по высоте от
плоскости XOZ и величина уА определяется по аналогичной
формуле:
1/2
= (8.32)
О
210
Если крыло имеет геометриче-
скую крутку концевой хорды отно-
сительно корневой, то угловое по-
ложение ЬА относительно хорды
корневого сечения крыла опреде-
ляется как
Z/2
(fbdz. (8.33)
о
Рпс. 8.20. Схема расчета ЬА
для трапециевидного крыла
Величины у и ср в формулах (8.32)
и (8.33) — текущие значения поло-
жения хорды по высоте и по углу
закручивания.
Для трапециевидного крыла (рис. 8.20) эти формулы приобре-
тают следующий вид:
(8.34)
. 2 b0 + Vk. + &К 2 , 1 + П + П2 .
Л - 3 й0 + йк “ 3 '° i](l +л) ’
хк + -j- 26к П+2
xX - 3 Ьр + ьк — 3 п + I
Ук Ьр 4- 26к Ук П+2
Ух 3 Ьр + ьк 3 ч + 1
фк Ьр 4- 2ЬК фк П + 2
Фл 3 Ьр + ьк 3 п + 1
(8.35)
(8.36).
(8.37)
где Ьо — корневая хорда трапециевидного крыла; Ьк — концевая
хорда трапециевидного крыла; т] = Ь0/Ьк — сужение крыла; хк,
ук и <рк — соответствующие величины, характеризующие положе-
ние концевой хорды.
В случае необходимости знать положение ЬА по размаху трапе-
циевидного крыла ее координата от оси X равна:
Ьр Ч~ ____________ I т] —[- 2
6 Ьр -|- Ьк 6 т) —|— 1
(8.38)
Если крыло составлено из двух и более трепеций, то определя-
ются значения bAi, xAi, уА, и <рАг для каждого участка крыла
(каждой трапеции), а соответствующие величины для всего крыла
в целом определяются по формулам
S' + S" + —р s'
(8.39)
x'as' + « + 4) s" « + 4 + —н 4) s‘
S' + s” 4----------------------p s'
211
Так же определяются и зна-
чения уА и <рА (рис. 8.21).
Все приведенные выше фор-
мулы применяются и для опре-
деления величины средней аэро-
динамической хорды горизон-
тального и вертикального опе-
рений. При этом площадь
горизонтального оперения бе-
рется вместе с внутр ифюзеляж-
ной частью, образованной про-
должением передней и задней
кромок оперения до оси сим-
метрии самолета; в пересечении этих линий с осью самолета
образуется и корневая хорда.
Корневая хорда вертикального оперения берется по верхнему
обводу фюзеляжа и проводится обычно параллельно оси фюзеляжа
(оси X) через точку пересечения задней кромки вертикального
оперения с верхним обводом фюзеляжа.
8.2.4. Особые варианты компоновок
Некоторые компоновки самолетов имеют отличительные особен-
ности центровки. Характерны центровки больших пассажирских
самолетов в зависимости от места установки двигателей.
Установка двигателей на хвостовой части фюзеляжа создает
большой статический момент относительно центра масс самолета,
и чтобы уравновесить этот момент, т. е. получить хотя бы пре-
дельно допустимую заднюю центровку, приходится носовую часть
фюзеляжа выносить далеко вперед. Вследствие этого пассажирская
кабина (центр масс ее объема и центр масс пассажиров и пасса-
жирского оборудования) оказываются впереди центра масс пустого
самолета. При загрузке пассажиров центр масс самолета сдвига-
ется вперед — появляются «ножницы» между очень задней цен-
тровкой пустого самолета и очень передней центровкой полностью
нагруженного самолета (рис. 8.22).
В результате этого:
а) задняя центровка пустого самолета во избежание опрокиды-
вания самолета на хвост требует соответствующего выноса колес
основного шасси назад. При таком заднем положении колес шасси
обеспечение взлета полностью загруженного самолета с передней
центровкой требует либо увеличения площади горизонтального
оперения, либо отклонения стабилизатора и рулей высоты на очень
большие углы, что увеличивает отрицательную нагрузку на опере-
ние, потребную подъемную силу крыла и длину разбега при
взлете;
б) полет полностью загруженного самолета с передней центров-
кой из-за большой величины шсу происходит с большими потерями
212
25
20
50
45
40
БакП 1
3300кг
-750 14800
А НЗ
^5 БакП 2и N3 N 2 Пассажиры(160ул) Снаряжение
~'47оЬ\^ 12000
450 кг
11 центровка переваливания на земле_
I ir
Топливо
Полет
S:
й
Предельно 0 опус-
A/J
тимая передняя центровка
на взлете х=21°/оСАХ
(шасси выпущено')
N2uN3 ,\?2,
Загрузка
Предельно допустимая задняя центровка на
взлете, В полете и на посадке х=32°/0САХ
I
(шасси убрано)
Предельно допустимая
'передняя центровка на
Выпцск шасси
посадке к^в’/о САХ
'(шасси Выпущено)
Ъаш
3300кг 3450 14800 4700кг
5 0 55 6 0 65 70 75
SO 85 Масса самолета, г
Рис. 8.22. Центровочный график самолета с двигателями на хвостовой части
фюзеляжа
на балансировку и, следовательно, с увеличенными расходами
топлива;
в) полет в перегоночном варианте без пассажиров и их багажа
для получения максимально допустимой центровки, обеспечиваю-
щей минимально допустимый запас устойчивости, требует либо
установки центровочного груза, либо заполнения передних топлив-
ных баков балластным, нерасходуемым топливом.
Установка двигателей под крылом с большим выносом их вперед
от передней кромки крыла и размещением впереди центра масс
самолета требует выноса назад хвостовой части фюзеляжа. Пасса-
жирская кабина сдвигается назад, центр объема ее оказывается
позади центра масс пустого самолета и при загрузке пассажиров
центровка уходит назад. Таким образом, и в этом случае образу-
ются «ножницы» между очень задней центровкой полностью загру-
женного самолета и очень передней центровкой пустого самолета
(рис. 8.23).
Однако при этом:
а) взлет полностью загруженного самолета происходит при
малом статическом плече центра масс самолета относительно колес
основного шасси, что уменьшает нагрузки на горизонтальное
оперение;
213
Предельно задняя цснтродка
[Рис. 8.23. Центровочный график самолета с двигателями под крылом
б) полет полностью загруженного самолета происходит при
малых (нормируемых) значениях nfu, и потери на балансировку
при этом минимальные;
в) взлет самолета в перегоночном варианте с передним положе-
нием ц. м. в очень редких случаях требует установки центровоч-
ного груза для обеспечения необходимой эффективности оперения
при взлете и посадке.
8.2.5. Расчет моментов инерции самолета
Знание величины моментов инерции необходимо при расче-
те устойчивости и управляемости самолета, расчете инерционных
нагрузок, возникающих в процессе вращения самолета, при реше-
нии ряда задач проектирования шасси, рулей управления и т. п.
Для расчета осевых моментов инерции, например относительно
оси X, пользуются зависимостью
п
Jx = \ (8.41)
о >=1
где Jx — момент инерции тела относительно оси X; dm — элемен-
тарная масса тела; Ат, — масса конечного элемента тела; гх,
rxi — расстояние элементарной массы до оси X и расстояние от
центра масс конечного элемента до оси X соответственно; v —
объем.
Осевой момент инерции является мерой инертности тела при
вращении вокруг оси, так же как масса является мерой инертности
в прямолинейном движении.
214
Для расчета момен-
тов инерции самолета
относительно осей X,
Y, 2 пользуются цен-
тровочными ведомостя-
ми. В первом прибли-
жении осевые моменты
инерции самолета можно
найти по следующим
формулам [1 I (кг-м2):
Jy = -JJ- G2 + 4) Фг/’
(8.43)
Л = -^Фг,(8.44)
^ = ^ФХ;(8.42)
Рис. 8.24. Коэффициенты к расчету моментов
инерции самолета:
а — обычные самолеты; б — самолеты с вертикаль-
ным взлетом и посадкой
где — взлетная масса самолета (кг); I, 1$ — размах крыла и
длина фюзеляжа (м); фг, ц>у. m — коэффициенты (см. рис. 8.24).
8.2.6. Размещение экипажа
Второй главной задачей объем но-весовой компоновки является
размещение экипажа. Служебная кабина, или кабина экипажа,
размещается в передней части фюзеляжа. Ее размеры и компоновка
зависят от состава экипажа.
Экипаж современных пассажирских магистральных самолетов
обычно состоит из трех человек: командира корабля — первого
пилота, второго пилота и бортинженера. Для специальных рейсов
Вариант 1
Рис. 8.25. Возможные схемы размещения экипажа в служебной кабине:
1 — первый пилот; 2 — второй пилот; 3 — бортинженер; 4 — штурман; 5 — отсек
радиолокатора
215
to
о
Рис. 8.26. Компоновка носовой части фюзеляжа и кабины экипажа современного магистрального пассажирского само-
лета:
1 — левый пульт пилота; 2 — педали левого пилота (командира корабля); 3 — штурвал левого пилота; 4 — приборная доска пилотов;
5 — центральный пульт пилотов с РУД; 6 — штурвал правого пилота; 7 — педали правого пилота; 8 — правый пульт пилота; 9 — эле-
менты проводки управления под полом кабины; 10 — тяги связи рычагов управления левого и правого пилотов; 11 — выход тяг
к органам управления; 12 — пульт бортового инженера с РУД; 13 — приборная доска штурмана
to
й состав экйпажа включаются иногда штурман, специальный
радист; для них предусматривается место, которое используют и
для размещения в кабине инструктора или инспектора, проверяю-
щего работу членов экипажа. Возможные схемы размещения эки-
пажа в служебной кабине показаны на рис. 8.25.
На рис. 8.26 показана компоновка носовой части и кабины эки-
пажа современного магистрального пассажирского самолета. Раз-
мещение в кабине экипажа органов управления показано в гл. 18.
Важно обеспечить экипажу необходимый обзор. Требования
к обзору летчика следующие:
1. Зона беспрепятственного обзора для левого летчика:
— влево 20°;
— вправо 30°;
— вниз (по оси сиденья летчика) не менее 16°;
— вверх (по оси сиденья летчика) 20°.
2. В диапазоне углов 20 ... 45° влево по азимуту допускается
в конструкции фонаря наличие одной силовой стойки.
3. Обзор назад—влево должен обеспечивать видимость поло-
вины концевого обтекателя крыла (на самолете Ил-86 это потребо-
вало иметь обзор назад по азимуту до 145° вместо нормируемых
135°).
4. Ширина затенения обзора конструкцией основных силовых
стоек фонаря не должна быть более 70 мм.
5. От глаза летчика до внутренней поверхности стекла в пло-
скости сиденья летчика (размер £с на рис. 8.27) должно быть не
менее 500 мм.
Рис. 8.27. Требуемый нормами летной годности пассажирских самолетов
обзор из кабины летчика:
С — положение глаза летчика при взлете и посадке самолета; С2 — положение глаза
летчика в крейсерском полете; ---- зона обязательного обзора, — — — зона жела-
тельного обзора
218
6. При снятии диаграмм обзора из точки С± допускается пере-
мещение головы Р = 100 ... 120 мм (в пределах хода привязных
ремней).
Требуемая диаграмма обзора левым летчиком из кабины пасса-
жирского магистрального самолета показана на рис. 8.27.
При компоновке носовой части фюзеляжа и фонаря летчиков
рекомендуется наряду с требованиями НЛГС-2 учитывать и
желание летчиков:
— видеть в момент касания поверхности ВПП колесами полосу
посадки на удалении от самолета не более 50 ... 70 м;
— видеть в момент захода на посадку ночью на высоте «приня-
тия решения» (на высоте 30 м при посадке по второй категории
ИКАО) не менее 5 ... 6 огней подхода к ВПП.
Выполнение этих условий требует обзора вниз прямо перед
летчиком до 19 ... 22°. На самолете Боинг 747 этот угол равен
18,5°, а на самолете ИЛ-86 — 20°.
8.3. КОНСТРУКТИВНО-СИЛОВАЯ КОМПОНОВКА
8.3.1. Задачи конструктивно-силовой
компоновки
Основной задачей конструктивно-силовой компоновки является
создание или выбор такой силовой схемы частей самолета, в кото-
рой обеспечивались бы:
а) минимальная масса конструкции частей самолета и всего
самолета в целом;
б) органическое сочетание силовых элементов конструкции и
полезных объемов внутри или снаружи этой конструкции, исполь-
зуемых для размещения целевой нагрузки, экипажа, оборудова-
ния, силовой установки;
в) учет требований эксплуатационной и производственной
технологичности;
г) необходимая жесткость конструкции с учетом динамической
нагрузки и средств демпфирования в целях статической и динами-
ческой устойчивости конструкции в потоке воздуха;
д) получение требуемого ресурса и безопасности при локальных
усталостных разрушениях.
8.3.2. Закон «квадрата—куба» и проблема
оптимизации силовой конструкции самолета
Развитие авиационной техники, усложнение задач, которые
должна решать эта техника, требование повышения экономичности
эксплуатации гражданских самолетов влекут за собой неуклонный
рост размеров самолетов и увеличение их взлетной массы и массы
конструкции самолетов.
219
При увеличении размеров самолета площади (крыла, оперения)
и поверхности (фюзеляжа и других элементов) растут пропор-
ционально квадрату коэффициента линейного увеличения. Если
силовая конструкция при этом не меняется, т. е. все ее элементы
увеличиваются в том же соотношении в ширину, высоту и длину, то
масса силовых элементов растет пропорционально кубу коэффи-
циента линейного увеличения. При этом, естественно, принимается,
что уровень напряжений в силовых частях и распределение аэро-
динамических и массовых нагрузок по конструкции не меняются.
Если полагать, что основные взлетно-посадочные и скоростные
характеристики самолета, определяемые удельной нагрузкой
на крыло р, и дальность полета, определяемая относительным
запасом топлива /йт, сохраняются на том же уровне, то закон
«квадрата—куба» может быть сформулирован в следующем виде.
При увеличении линейных размеров самолета взлетная масса растет
пропорционально квадрату коэффициента линейного увеличения,
а масса силовой конструкции — кубу коэффициента линейного
увеличения и относительная величина полезной нагрузки линейно
уменьшается.
Это теоретическое положение. На самом деле относительная
масса конструкции самолета возрастает, но возрастает очень
медленно. Причины, препятствующие возрастанию массы:
— применяются все более оптимальные силовые схемы отдель-
ных частей самолета и создаются более оптимальные конструкции
Рис. 8.28. Схема оптимизации силовой конструкции самолета
220
с меньшей массой дополнительной несиловой части этой кон-
струкции;
— в конструкции применяются новые материалы с большим
уровнем допустимых напряжений (если этот уровень допускается
и требованиями усталостной прочности);
— совершенствуются методы расчета самолета на статическую,
динамическую и усталостную прочность;
— совершенствуются методы уменьшения аэродинамических
нагрузок.
Несмотря на все эти мероприятия, с увеличением размеров
самолета относительная масса конструкции самолета все-таки
растет. Это придает особо важное значение проблеме оптимизации
силовой конструкции и выполнению оптимальной конструктивно-
силовой компоновки самолета на самых начальных стадиях
проектирования.
Схема оптимизации силовой конструкции самолета приведена
на рис. 8.28 [7].
Детально решение задач выбора и оптимизации силовой кон-
струкции самолета и его частей рассматривается в специальной
литературе [7, 14, 35] и в курсе «Проектирование конструкций
самолета».
8.3.3. Учет производственной технологичности
при конструктивно-силовой компоновке
Одной из первых задач конструктивно-силовой компоновки
является установление эксплуатационных и технологических
(производственных) разъемов частей самолета. Задача эта оптими-
зационная. С одной стороны, условия организации крупносерий-
ного производства требуют максимального членения конструкции
самолета на отдельные агрегаты с тем, чтобы сократить циклы
сборки самолета. С другой стороны, каждый эксплуатационный
разъем и производственно-технологический стык элементов кон-
струкции — это дополнительная масса, а иногда и дополнительный
очаг концентрации напряжений с последующим очагом усталост-
ного разрушения. Например, на самолете Ту-154 эксплуатацион-
ный разъем между средней частью крыла и отъемными концевыми
частями крыла дает увеличение массы крыла на 350 ... 400 кг.
И может оказаться, что повышение экономичности эксплуатации
самолета при уменьшении массы конструкции за счет уменьшения
числа разъемов будет таким, что экономически целесообразнее
построить новые цеха или заводы с большими размерами сбороч-
ных пролетов, чем сделать дополнительные разъемы конструкции.
Одновременно с процессом конструктивно-силовой компоновки
обычно ведется разработка директивной технологии изготовления
частей самолета и сборки самолета в целом, так как выбираемые
технологические процессы могут определять и особенности силовой
схемы конструкции. Например, размеры листов силовой обшивки
221
крыла зачастую определяют расстояние между лонжеронами крыла
и наличие технологических стыков панелей обшивки крыла по
размаху. ^Директивная технология отражает, наряду с новыми
достижениями в области производства самолета, с вновь разрабо-
танными технологическими процессами, особенности конкретного
опытного и серийного заводов (его производственные возможности
по площадям, размерам цехов и составу оборудования), серийность
самолета (ориентировочное число заказываемых самолетов) и
предполагаемые особенности эксплуатации самолета (например,
эксплуатация в тропическом климате и т. п.). В директивной
технологии даются и ограничения в номенклатуре используемых
при проектировании самолета материалов, сортамента профилей и
листов, крепежных изделий (болтов, заклепок и т. п.).
8.3.4. Учет эксплуатационной технологичности
при конструктивно-силовой компоновке
В процессе конструктивно-силовой компоновки должен быть
обеспечен эксплуатационный подход в зоны, где размещены агре-
гаты и проводка систем оборудования и управления самолетом, и
подход к участкам конструкции, подлежащим осмотру в процессе
эксплуатации самолета. Это требует создания соответствующих
люков или съемных панелей в конструкции самолета помимо лю-
ков, обеспечивающих размещение целевой нагрузки (для пасса-
жирских самолетов — помимо входных и служебных дверей,
багажных и аварийных люков и оконных проемов).
В целях уменьшения массы конструкции самолета силовые
окантовки всех вырезов для люков и съемных панелей должны
органически входить в силовую схему агрегатов самолета.
8.4. УВЯЗКА ФОРМЫ И ПОСТРОЕНИЕ ВНЕШНИХ
ОБВОДОВ САМОЛЕТА
8.4.1. Увязка формы самолета
Все три процесса компоновки в конечном счете объединяются,
завершаются построением внешних обводов самолета, приданием
проектируемому самолету конкретной, законченной формы.
^Формирование, построение внешних обводов самолета обычно
производится в два этапа. На первом этапе выполняется предвари-
тельная увязка формы и определяется положение основных кон-
структивно-силовых элементов агрегата. На втором этапе произво-
дится окончательное задание формы агрегата в теоретическом
чертеже с помощью различных математических методов.
Под увязкой формы понимают графическое или аналитическое
определение координат обводов агрегата и его сечений по ряду
плоскостей с последующей графической проверкой взаимного соот-
ветствия обводов и сечений в различных проекциях. Как правило,
222
Рис. 8.29. Увязка формы фюзеляжа графическим способом батоксов и го-
ризонталей:
а — боковая проекция; б — проекция в плане; в — эпюра совмещенных сечений; / —
строительная горизонталь; 2 — шпангоуты; 3 — нулевой батокс; 4 — батоксы; 5 —
полушнроты; 6 — следы плоскостей горизонталей; 7 — следы плоскостей батоксов;
8 — ось симметрии н плоскость нулевого батокса; 9 — полуширота
предварительную увязку формы агрегата проводят с помощью
метода батоксов и горизонталей, и хотя для окончательного зада-
ния поверхности метод батоксов и горизонталей в настоящее время
не применяется, на самых начальных этапах проектирования
поверхности он продолжает сохранять свое значение. Этот способ
основан на методике начертательной геометрии. Обводы агрегата,
форму которого следует увязать (например, фюзеляж), вычерчи-
вают в боковой и плановой проекциях. Затем приступают к увязке
с помощью эпюры совмещенных сечений, эпюр линии батоксов на
боковой проекции и линии горизонталей на плановой проекции
(рис. 8.29). Процесс увязки состоит в том, что на эпюре совмещен-
ных сечений откладывают по вертикальной и горизонтальной осям
точки, определяемые обводами в боковой и горизонтальной проек-
циях (нулевыми батоксами и полуширотами), а затем эти точки
соединяют кривыми, дающими обводы шпангоутов. Одновременно
в боковой проекции и в плане строят линии батоксов и горизонта-
лей и производят взаимную коррекцию их с эпюрой совмещенных
сечений.
Увязку крыла, оперения, пилонов и других агрегатов, имеющих
конический закон образования поверхности, можно, используя
свойства трапецеидальных сечений, произвести как графическим,
так и аналитическим способами.
Для увязки должны быть заданы: форма крыла в плане, раз-
бивка нервюр, профили крыла у корня и на конце крыла, профили
промежуточные, если форма крыла образуется не одним или двумя
профилями, и длины переходных зон (от одного профиля к дру-
гому).
223
Рис. 8.30. Определение ординат промежуточного профиля крыла или опе-
рения:
1 — корневая хорда; 2 — промежуточная хорда; 3 - концевая хорда
По каждому заданному профилю должны быть известны
семейство, хорда и относительная толщина.
Графический способ увязки основан на построении эпюры
совмещенных сечений (рис. 8.30). На эпюре вычерчивают корневой
профиль (в простейшем случае) таким образом, чтобы плоскости
нервюр были параллельны плоскости эпюры. После этого проводят
линии равных долей (равных процентов) хорды, т. е. образующие
конической поверхности крыла. Линии равных процентов и соот-
ветствующие ординаты корневого и концевого профилей состав-
ляют трапецию, поэтому легко определить ординаты всех профи-
лей, расположенные на том же относительном расстоянии от их
носков, что и ординаты корневого и концевого профилей.
Все линии равных процентов хорды делят пропорционально
расстоянию между нервюрами, и через полученные таким образом
точки проводят плавные кривые промежуточных профилей. Графи-
ческий способ малоупотребителен вследствие недостаточной точ-
ности получаемых результатов.
При аналитическом способе увязки агрегатов, имеющих кони-
ческие поверхности, используются геометрические свойства тра-
пеций, составленных образующими и ординатами корневого и
концевого профилей, при этом все искомые размеры определяются
расчетом. Обычно определяют верхнюю (ув) и нижнюю (ун) орди-
наты в отдельности.
Результаты заносят в таблицы. Ординаты определяют по
формуле
Ул = У*. к.. 2М + ув. крн (1 - 2аг/1), (8.45)
где Ув.кв — ордината концевого профиля; ув, Крн — ордината
корневого профиля; — расстояние от корневого профиля до
нервюры.
224
В наиболее совершенных автоматизированных системах проек-
тирования летательных аппаратов предварительная увязка обводов
производится конструктором в режиме диалога с ЭВМ, осуществ-
ляемого с помощью дисплея и «светового пера». Конструктор
с учетом различных аэродинамических и конструктивных требова-
ний может скорректировать очертание поверхности ЛА непосред-
ственно на экране дисплея, а ЭВМ учтет эту коррекцию при
аппроксимации поверхности одним из математических методов.
В этом случае опыт и интуиция конструктора дополняются боль-
шим объемом памяти и огромными вычислительными возможно-
стями современных ЭВМ.
8.4.2. Математические методы описания
обводов самолета
После окончания предварительной увязки поверхности лета-
тельного аппарата необходимо зафиксировать ее форму в теорети-
ческом чертеже, описав с помощью одного или нескольких мате-
матических методов. Рассмотрим основные требования, предъявля-
емые к этим методам.
Аэродинамическая гладкость продольных контуров (сечений)
большинства агрегатов обеспечивается сохранением в этих сече-
ниях непрерывности первой производной. Для особо ответственных
агрегатов, существенно влияющих на характер обтекания самолета
в целом (крыло, носовые части, гондолы двигателей и т. п.) необхо-
димо обеспечить в продольных сечениях непрерывность второй
производной и ограниченные величины третьей производной. Как
общее правило можно отметить, что требование к гладкости по-
перечных сечений ЛА обычно на порядок ниже, чем к гладкости
продольных. Например, если профили крыла по полету выглажи-
ваются до непрерывности второй производной, то в сечениях крыла
по лонжеронам желательно иметь непрерывной первую производ-
ную.
При проработке формы поверхности самолета с точки зрения
эксплуатационных, конструктивных и технологических требований
математические методы описания обводов должны обеспечивать:
— плавное включение в создаваемую поверхность самолета
цилиндрических, конических, параболических и других аналити-
чески описанных поверхностей, таких как лобовые цилиндриче-
ские стекла пилотских кабин, элементы поверхности крыла и опе-
рение с коническим образованием, обтекатели специальных антенн
заданной формы и т. д.;
— плавное включение в проектируемую поверхность плоских
участков, представляющих собой люки под стекла фотоаппаратов
и астронавигационных приборов, остекление кабин, плиты спе-
циальных датчиков;
— прямолинейность заданных сечений некоторых силовых эле-
ментов, например сечения по сжатой верхней полке лонжерона
крыла.
8 С. М. Егер и др.
225
Наряду с указанными требованиями математические методы
формирования обводов ЛА должны полностью и однозначно описы-
вать поверхность летательного аппарата, не допуская зон, своди-
мых «на плавность» на плазах или сглаживаемых на макетах
поверхности. Это требование стало обязательным в последнее время
в связи с широким внедрением в практику самолетостроения обра-
ботки деталей, связанных с обводами, а также шаблонов, рубиль-
ников стапелей и других деталей оснастки на станках с числовым
программным управлением.
Следует отметить и такие требования к математическим методам
задания поверхности летательного аппарата, как наглядность и
графоаналитичность, т. е. возможность получить на каждом этапе
проектирования наглядное представление о форме создаваемой
поверхности либо в виде эскиза, полученного на графопостроителе,
либо в виде изображения на экране дисплея в случае работы
конструктора с ЭВМ в режиме диалога.
Разнообразие требований к математическим методам задания
поверхности агрегатов летательного аппарата, а также разно-
образие типов самих агрегатов породили множество методов описа-
ния обводов, из которых наиболее употребительными в настоящее
время являются:
— метод кривых второго порядка;
— метод задания контура самолета дугами окружностей;
— задание продольных контуров самолета степенными уравне-
ниями;
— методы задания поверхности самолета с помощью сплайн-
функций;
— аналитическое задание контура самолета с помощью поли-
номов.
Прежде чем приступить к описанию математических методов
аппроксимации контуров самолета, следует дать определение
весьма распространенному в настоящее время кинематическому
способу задания поверхности.
Поверхность считается кинематически заданной, если в про-
странстве заданы основные продольные линии агрегата — направ-
ляющие (нулевые батоксы верха и низа и полуширота), вдоль
которых перемещается его поперечное сечение, причем известен
закон изменения формы сечения в зависимости от положения по
длине агрегата.
При кинематическом способе задания поверхности для аппрок-
симации продольных линий и для задания закона изменения формы
поперечного сечения могут использоваться различные математи-
ческие методы, причем допускается использование разных методов
для задания отдельных линий одного агрегата. Последнее,
впрочем, нежелательно из-за необходимости использовать разные
программы при расчете на ЭВМ координат поверхности одного
агрегата.
226
8.4.3. Метод задания поверхности с помощью
кривых второго порядка
Этот наиболее распространенный в настоящее время метод явля-
ется графоаналитическим, поскольку кривые второго порядка
могут быть как построены чисто графическим способом, так и полу-
чены расчетным путем.
Метод базируется на положениях проективной геометрии (тео-
рема Паскаля). Для построения кривой второго порядка необхо-
димо, чтобы были заданы три точки, например А, В, С (рис. 8.31),
и так называемый дискриминант кривой f = BD/ED; ED — меди-
ана хорды АС.
Увязка с помощью этого графического способа начинается
с того же, с чего начинается увязка с помощью способа батоксов
и горизонталей — в боковой проекции и в плане очерчивают на
глаз линии нулевого батокса и полушироты. Каждую из этих
линий разбивают на отрезки кривых. Используя на каждом
отрезке кривой,по три точки А, В, С и задаваясь дискриминантом
f, строят кривые второго порядка, близкие к кривым, очерченным
на глаз. Получив таким образом линии нулевого батокса и полу-
широт, начинают аналогично способу батоксов и горизонталей
увязку поперечных сечений (шпангоутов).
Графоаналитический способ увязки основан на вычислении
координат кривых второго порядка с использованием так называе-
мого графика единичных кривых, аффинно соответствующих иско-
мым кривым. График единичных кривых второго порядка (рис.
8.32) вычерчивают в относительных прямоугольных координатах
для ряда «стандартных» дискриминантов, например, 0,30; 0,31;
0,32 и т. д., до значения, определяемого потребностью, причем за
оси принимаются стягивающая кривую хорда ас и медиана ed.
Координаты кривой
второго порядка опреде- г
ляют следующим образом.
На чертеже увязки нано- / <\
сятоси ОХ и OY (рис. 8.33), / |
относительно которых за- /
меряют координаты задан- —'/
ных точек А, С и Е и точ-
ки В, положение которой iL
можно определить по за- М'/
данному дискриминанту f. I
Ордината некоторой А
точки К с абсциссой х
кривой АВС выразится Рис- 8-31- Построение кривой второго
так. порядка, заданной точками А, В, С и ди-
скриминантом f = BD/ED".
У = У к + <х - т, п — базовые лучи; г — произвольный луч
(дает точку S на луче т); / — промежуточный
V I (Я ЛУЧ (даст точку t на луче п); р — строительный
ЛА/ Ч> °*~г луч (дает искомую точку К на Луче г)
8*
227
Рис. 8.32. Единая кривая второго порядка
Координаты даны в относительных величинах (х, у)
Рис. 8.33. Схема для определения координат точек кривой второго порядка,
заданной точками А, В, Си дискриминантом f — BD/ED
где а — угол наклона хорды АС к оси ОХ; тК — отрезок, взятый
по графику единичной кривой (рис. 8.34); р — масштабный мно-
житель для перехода от единичной кривой к увязочной кривой.
Отрезок тК можно найти, отложив от точки d (начало коорди-
нат единичной кривой) отрезок
DC (хс-ха)/2
и отрезок
Если соединить т0 и е прямой и провести прямую, параллель-
ную ет0, через точку т, соответствующую точке М увязочного
чертежа, то можно замерить величину отрезка тК-
Масштабный множитель р определяют по соотношению
г ет^
где ЕМ0 — замеряют на увязочном чертеже (мм), а ет0 — в долях
единицы чертежа единичной кривой (за единицу принимают
обычно отрезок de, равный отрезку ed).
Можно также найти отрезок ЕМ0
по формуле
ЕЛ40 = уЕ- \Уа + (хЕ - хА) tg а],
а ет0 по формуле
„ е/щ = J/1 +
Рис. 8.34. Единичная кри-
вая для расчета координат Этим способом определяют ординаты
кривой второго порядка С г
(случай прямоугольного ко- кривых нулевых батоксов, полуши-
ординатного угла) рот и шпангоутов.
228
Возможно и полностью аналитическое (без привлечения единич-
ной кривой) определение координат кривой второго порядка. Так
для простейшего случая прямоугольного координатного угла
(см. рис. 8.34) ординаты кривой могут быть определены по формуле
Д[(/«+2/-1)(х-Л) + 2/Г(2/-1)^-Л(^ + 2/-1)х+Л^] ,о 47ч
у- Л(1 —/)2 ' ;
Обычно расчеты координат кривой второго порядка проводят
ввиду их значительной трудоемкости с помощью стандартных
программ на ЭВМ.
8.4.4. Метод задания контура самолета дугами окружностей
Часто для увязки и задания поперечных сечений агрегатов
используют дуги окружностей. При этом методе, получившем
название радиусографии, необходимо задать в каждом сечении
величины и центры радиусов, а также точки сопряжения дуг
окружностей, образующих данное сечение. В случае необходи-
мости недостающие данные для построения сечения могут быть
получены с помощью аппарата аналитической геометрии (рис. 8.35).
Основные продольные линии агрегата, такие как нулевые ба-
токсы верха и низа, полуширота, графики линий сопряжения и
изменения величины радиусов, при этом методе также могут быть
заданы комбинацией дуг окружностей или специальными степен-
ными уравнениями.
Метод применяется для задания поверхностей, включающих
в себя в качестве составных частей тела вращения (фюзеляж,
гондолы двигателей и т. п.)
8.4.5. Метод задания поверхности самолета
степенными уравнениями
Метод применяется в основном для задания продольных конту-
ров агрегатов самолета, но может использоваться и для образова-
ния поперечных сечений. При этом методе контур в заданной
системе координат рассчитывается с помощью уравнений вида
* = (8Л8)
Обозначения показаны на рис. 8.36.
Рис. 8.35. Задание поперечного сечения агрегата ЛА методом радиусографии
Рис. 8.36. Образование продольного контура ЛА с помощью степенного уравнения
229
Сущность метода степенных уравнений заключается в подборе"»
показателя степени т, при котором задающая кривая соответство-
вала бы исходной, полученной при увязке, в пределах установ-
ленного допуска.
Метод обеспечивает высокую гладкость контуров и, как след-
ствие этого, хорошие аэродинамические характеристики агрегата;
он используется для описания поверхности таких ответственных
агрегатов, как лобовые части фюзеляжей, носовые обечайки гондол
двигателей и воздухозаборников, профили пилонов и т. п.
8.4.6. Метод задания поверхности самолета
с помощью сплайн-функций
Еще на ранних этапах развития авиации было отмечено, что
наиболее гладкие, обладающие хорошими аэродинамическими
свойствами контуры агрегатов получаются при вычерчивании их
с помощью гибких реек, прижатых грузами в некоторых узловых
точках. Было установлено, что рейка при этом принимает между
грузами очертания, близкие к кривым, описываемым полиномами
третьей степени. Кубический полином на участке между узлами,
имеющими абсциссы xj_r и Xj (рис. 8.37), описывается выражением
п,-
(8.49)
где х — текущая абсцисса; Xj_lt yj_lt Xj, ys — координаты узлов;
Mj — коэффициенты полинома (коэффициенты сплайна);
П} = Xj Xj_£.
Таким образом, конструируемая кривая может быть аппрокси-
мирована набором кубических полиномов, проходящих через
заданные узлы и имеющих на [а, Ь] непрерывные первую и вторую
производные. Полученная линия называется сплайном.
Воспользовавшись свойством непрерывности производных и
введя дополнительные граничные условия в виде наклона каса-
Рис. 8.37. Аппроксимация
кривой набором кубических
СПЛайКОВ
тельных к кривой в точках а и Ь,
можно получить систему линейных
уравнений, подстановкой в которую
координат узлов вычисляются коэф-
фициенты сплайна для каждого из
участков отрезка (а, Ь).
Теперь при необходимости рас-
считать ординату конструируемой
кривой по известной абсциссе х на-
ходим интервал отрезка (а, Ь), ко-
торому принадлежит х, подставляем
соответствующие, ранее найденные
230
значений коэффициентов сплайна в выражение (£.49) и опреде-
ляем искомую величину ординаты у. Как правило, вычисление
коэффициентов сплайна и координат искомых точек выполняется
на ЭВМ.
Контуры, спроектированные с использованием сплайн-функ-
ций, обладают, как уже отмечалось, хорошими аэродинамическими
свойствами благодаря непрерывности первой и второй производи
ных. Кроме того, детали ЛА, описанные этими контурами, можно
изготавливать давлением из плоских балок или панелей, по-
скольку линия деформации нагруженной панели также доста-
точно точно описывается кубическими сплайн-функциями.
Поверхность агрегата самолета может быть задана с помощью
сплайн-функций описанным выше кинематическим способом, так
как сплайнами можно описать не только образующую перемещаю-
щегося контура, но и его направляющие.
8.4.7. Аналитическое задание контура самолета
с помощью полиномов
Сущность метода заключается в определейии коэффициентов
уравнения такого полинома, график которого проходит через все
заданные критические точки конструируемого контура:
у = а0 + + а2х2 + ... + апхп.
Степень полинома определяется числом заданных исходных крити-
ческих точек, координаты которых являются исходной информа-
цией при использовании данного метода:
Мъ Уо** х±, Уъ Уг> •••> хп, Уп-
Подстановкой каждой пары координат в исходное уравнение
получаем систему линейных уравнений для определения коэффи-
циентов полиномов, решаемую с использованием ЭВМ:
У\ = «о Ч~ aiXi Ч~ Ч~ • •• Ч- an%i *
z/2 = ао Ч- а\Х, + a2xl Ч~ • • • + апх'2,
Уп-^ап \- аххп Ч- Ч- апх".
Переход от контуров к поверхности также осуществляется кинема-
тическим способом.
8.4.8. Построение теоретического чертежа
После того, как выбран математический метод описания
поверхности и с его помощью заданы и рассчитаны на ЭВМ обводы
агрегата самолета, можно приступить к оформлению теоретиче-
ского чертежа (рис. 8.38). В теоретическом чертеже обычно дают
разбивку конструктивно-силовой схемы агрегата и условным
231
Рис. 8.38. Пример теоретического чертежа
пунктиром показывают крупные функциональные элементы,
вокруг которых формируется проектируемая поверхность.
К теоретическим чертежам предъявляются следующие требо-
вания:
— чертеж должен содержать схему агрегата, выполненную
с достаточным числом сечений, проекций, видов;
‘ — поверхность агрегата должна быть задана математически
с однозначным определением любой точки поверхности;
— при задании агрегата в местной системе координат должна
быть указана связь местной системы с основной системой коорди-
нат ЛА;
— должна содержаться цифровая информация, позволяющая
построить основные сечения агрегата без привлечения ЭВМ
и графопостроений;
— для агрегатов типа крыла и оперения должны быть приве-
дены данные исходных аэродинамических профилей в безразмерном
(процентном) виде;
— в качестве дополнительной информации должны быть при-
ведены геометрические параметры агрегата, необходимые для
аэродинамических расчетов (величины удлинения, сужения, САХ
крыла, относительного диаметра входа и миделя гондол двигате-
лей, удлинения носовой и хвостовой частей фюзеляжа и т. п.);
— должны быть указаны индексы программоносителей (перфо-
лент, перфокарт, магнитных лент), позволяющих воспроизвести
обводы данного агрегата на чертежных автоматах.
Последнее требование вызвано тем, что в настоящее время при
передаче обводообразующей документации из конструкторских
бюро в серийное производство наряду с теоретическими чертежами
и основными плазами передаются машинные носители графической
информации (программоносители), содержащие математические
модели поверхности и позволяющие не только автоматически
вычерчивать контуры агрегата, но и изготавливать его детали на
станках с числовым программным управлением.
232
8.5. ОФОРМЛЕНИЕ РЕЗУЛЬТАТОВ КОМПОНОВКИ
8.5.1. Общие виды самолета
После определения в первом приближении основных размеров
и параметров самолета вычерчивается предварительный чертеж
общего вида самолета в трех проекциях. В процессе компоновки
самолета, особенно в процессе центровки, а также в результате
аэродинамического расчета и расчета устойчивости и управляе-
мости, в чертеж общего вида самолета вносят необходимые измене-
ния и дополнения, после чего чертеж, являющийся одной из
важнейших составных частей предварительного (аванпроекта) и
эскизного проектов (или дипломного проекта), оформляется окон-
чательно.
Пример такого чертежа общего вида показан на рис. 8.39.
В процессе рабочего проектирования чертеж общего вида
в трех проекциях дополнительно уточняется и в него вносят дан-
ные, необходимые для расчетов по самолету (площади поверх-
ностей отдельных частей самолета, их «плечи» до базовых линий), —
создается расчетный общий вид самолета.
В производственную (рабочую) и эксплуатационную докумен-
тацию по самолету вводят нивелировочно-регулировочный чертеж,
который содержит данные по взаимному положению частей само-
лета, а также и по предельным отклонениям рулей, элеронов,
стабилизатора, триммеров и т. п. Взаимное положение частей
Рис. 8.39. Чертеж общего вида самолета
233
самолета в нивелировочно-регулировочном чертеже определяется'
вертикальными и горизонтальными размерами между характер-
ными точками конструкции (точки носков нервюр, оси лонжеронов
крыла или стабилизатора, оси стыковых болтов и т. п.) или спе-
циально намеченными на поверхности агрегата так называемыми
реперными точками и базовыми плоскостями. Указанные точки
выбирают с таким расчетом, чтобы вертикальные размеры, обычно
Асимметри,
поперечного
Разница в углах атаки крыла, измеряемая
камн 9—10 и 13—14 и
Рис. 8.40. Пример нивелировочно-
превышением соответствующих нивелиро
1 мм между точками 4—5 (прямоугольные
234
задаваемые от базовой плоскости, проходящей через строительную
горизонталь фюзеляжа, удобно было определять на готовом само-
лете с помощью нивелира и рейки, а горизонтальные размеры,
задаваемые между указанными точками — с помощью отвесов и
измерительной рейки.
Угол установки крыла и стабилизатора относительно базовой
плоскости задают вертикальными размерами от этой плоскости до
Угол установки стабилизатора 33±10'
В~Л = 2О±2
Правый I I
Левый I 1
В-С =10,5+1
Правый^^З
Левый t I
I Правый Левый
I I 11 \1536±Ю
Ось нижнего сты- g
ковочного болта
Нерв. Н
верхнего киля
30
634
25+1
463±10
3360 ±20
Руль поворота
Вправо Влево
О 21
Смещение точки 2 относительно оси I- —I Правый
\Правый носовой части фюзеляжа 30+3 I \ Левый
\Левый
Левый
Левый i 1 i I i I Левый i 1 > 1 (_ J Левый 1 I t_ .J I .1
22,5±2 105,5±2 95±2 29+2 41,5+2 105,5±2 14±2 61±2 56,5±2
Вертикальное < L- Нейтральное
положение j [ положение
I Отклонение ручки
- 1Б>5±1° 1Б’5±Г
* \2Б + 2
Отклонение
Педалей
положение 6°30't!p,
6)
регулировочного чертежа • самолета
вочных точек, между правым н левым крылом не должна превышать 2 мм между точ»
клетки на чертеже предназначены для замеренных значений)
235
реперных точек по нижней или верхней поверхности крыла или
стабилизатора по оси нервюр. Отклонение рулей, элеронов и т. д.
задают углами (градус) вверх и вниз от нейтрального положения
и одновременно размерами (мм), проставляемыми между положе-
ниями какой-либо точки задней кромки руля в нейтральном и
в отклоненном положениях.
Все размеры и углы задают в нивелировочно-регулировочном
чертеже с плюсовыми и минусовыми допусками. Величина этих
допусков устанавливается исходя из аэродинамических соображе-
ний (например, допустимого момента крена в полете из-за несим-
метричности установки крыльев или допустимого разворачиваю-
щего самолет момента Му из-за искривления хвостовой части
фюзеляжа и т. п.) и исходя из технологических возможностей
производства (точности при изготовлении агрегатов и при общей
сборке самолета). Часто в нивелировочно-регулировочном чертеже
дают таблицу допусков на отклонения обводов агрегата от теорети-
ческого чертежа.
Пример нивелировочно-регулировочного чертежа показан на
рис. 8.40.
8.5.2. Компоновочный чертеж самолета
/
В процессе предварительного проектирования и при дипломном
проектировании вычерчивается компоновочный чертеж самолета.
Как правило, он делается в двух проекциях и возможно большего
масштаба. Компоновочный чертеж в первую очередь необходим
для выполнения центровки самолета, для чего на нем изображается
положение возможно большего числа основных грузов (экипажа,
целевой нагрузки, агрегатов оборудования и т. п.) и основных
элементов конструкции (двигателей, топливных баков, шасси,
оперения, механизации крыла, тормозных щитков, фонарей и т. п.).
Примеры компоновочных чертежей представлены на рис. 8.18
и 8.19.
Глава 9
ОСОБЕННОСТИ ПРОЕКТИРОВАНИЯ ПАССАЖИРСКИХ
И ГРУЗОВЫХ САМОЛЕТОВ
9.1. ОСНОВНЫЕ ТЕНДЕНЦИИ РАЗВИТИЯ ПАССАЖИРСКИХ
И ГРУЗОВЫХ САМОЛЕТОВ
В гл. 3 показано, что критерием оценки эффективности граждан-
ских самолетов являются приведенные затраты, в основе которых
лежит себестоимость тонна-километра при перевозках пассажиров
и груза. Эта себестоимость рассчитывается по формуле (3.2).
Анализ этой формулы показывает, что гражданский самолет тем
эффективнее (себестоимость перевозок тем меньше):
— чем больше величина коммерческой нагрузки шКон;
236
— чем больше рейсовая скорость полета Урейс;
— чем меньше расходы на эксплуатацию самолета в течение
одного летного часа А.
Эти три вывода и показывают три возможных пути развития
пассажирских и грузовых самолетов:
— увеличение коммерческой нагрузки,
— увеличение рейсовой скорости полета,
— уменьшение расходов на эксплуатацию самолета.
Первые два вывода справедливы и первые два пути целесо-
образны, если
|^-1 >1 ^-| и I *L-|>| *±-|, (9.1)
| диком I I д/Иком I I д У рейс I | дУрейс I
т. е. если относительное изменение себестоимости при увеличении
коммерческой нагрузки или при увеличении рейсовой скорости
больше, чем относительное изменение расходов на эксплуатацию
самолетов, связанное с увеличением коммерческой нагрузки или
с увеличением рейсовой (крейсерской) скорости полета самолета.
Уменьшение расходов на эксплуатацию самолетов в первую
очередь связано с уменьшением расхода топлива за час полета.
Величина этого расхода определяется формулой
Qt = ^cp, (9.2)
где т, К и сР — соответственно средние за полет значения массы
самолета, аэродинамического качества и удельного часового
расхода топлива двигателями.
Из (9.2) следует, что уменьшение расхода топлива связано
с уменьшением средней полетной массы самолета (в основном за
счет уменьшения массы пустого самолета), с увеличением аэроди-
намического качества самолета и с уменьшением удельного расхода
топлива двигателями. Эти выводы также определяют пути дальней-
шего развития и совершенствования пассажирских и грузовых
самолетов.
9.2. КОМПОНОВКА ПАССАЖИРСКОЙ КАБИНЫ
Размещение на пассажирском самолете полезной (коммерче-
ской) нагрузки в первую очередь связано с компоновкой пасса-
жирской кабины. При компоновке пассажирского самолета важно
обеспечить размещение заданного числа пассажиров и грузов при
наименьшей массе пустого самолета. Однако при этом должна
учитываться и возможность модификации самолета в сторону
увеличения коммерческой нагрузки (увеличения числа пасса-
жиров).
В настоящее время в практике воздушных пассажирских пере-
возок применяются три различных класса кабин, отличающихся
друг от друга комфортом размещения пассажиров и условиями
обслуживания пассажиров в полете.
237
В высшем, I классе, увеличены ширина сидений и расстояние i
между рядами (шаг сидений), пассажиры чаще получают питание ;
(увеличен объем кухонь) и т. п. Во II, или туристском, и в III,
или экономическом, классах ставятся соответственно более узкие
сидения и делается меньший шаг между рядами сидений.
9.2.1. Определение потребной ширины
пассажирской кабины
Основные размеры пассажирских сидений показаны на рис. 9.1
и приведены в табл. 9.1.
Таблица 9.1
Основные размеры пассажирских сидений
Классы пас- j сажирских сидений Расстоя- ние между подло - котиика- ми В, мм 1 ' Ширина 1 ПОДЛОКОТИИ- . ков Ь, мм Длина подушки сидения до спин- ки L, мм Высота сидения иад по- лом h, мм Высота сидеиия со спин- кой Н, мм Угол откло- нения спинки от вер- тикали, градус Ширина блока сиде- иий, мм
в, в»
I 500 70 500 445 1140 45 1260 —
III 440 50 470 445 1120 36 1030 1520
Примечание. В блоках сидений I класса расстояние между сидениями
равно 120 мм; в сидениях повышенного комфорта этот размер увеличивается
до 300 мм, а общая ширина блока В3 увеличивается до 1480 мм.
Основные требования к конструкции и размещению пассажир-
ских сидений следующие.
1. Пассажирские сидения обычно делают в виде блоков из
двух или трех сидений. Для салонов I класса применяют только
блоки с двумя сидениями; для II и III классов возможны блоки как
с двумя, так и с тремя сидениями.
2. Сидения в салонах I класса должны иметь спинку, откиды-
вающуюся назад на угол до 45° от вертикали, и съемную площадку-
Рис. 9.1. Основные размеры пассажирских сидений
238
подножку, чтобы обеспечить полулежачее положение пассажира
для отдыха; спинки сидений II и III класса должны откидываться
назад на угол до 36° и 25° соответственно.
3. Сидения салонов II и III классов должны иметь спинку,
свободно откидывающуюся вперед, с тем, чтобы при аварии пасса-
жир заднего ряда не мог удариться головой о спинку переднего
сидения.
4. Подушки сидения в салонах III класса должны быть откид-
ными (как сидения в театральных залах) из-за малого шага между
сидениями.
5. Каждое сидение I класса обязательно должно иметь два
подлокотника шириною не менее 70 мм. В блоках сидений салонов
II и III классов средние подлокотники делаются по одному между
сидениями; ширина их не менее 50 мм.
6. При установке в одном ряду нескольких блоков сидений
ширина прохода между этими блоками на высоте от пола 635 мм
(зона размещения подлокотников сидений) и более должна быть
при числе пассажиров от 20 до 299 не менее 510 мм и при числе
пассажиров 300 и более — не менее 650 мм.
7. На самолетах, имеющих только один основной продольный
проход в пассажирской кабине, следует помещать не более трех
сидений с каждой стороны прохода. Следовательно, при числе
пассажиров в ряду более шести в пассажирской кабине должны
быть два продольных прохода.
8. Зазор между внутренней обшивкой пассажирской кабины и
конструкцией сидения (по подлокотнику или по верху спинки)
должен быть не менее 50 мм при сидениях салонов I класса и не
менее 30 мм при сидениях II и III классов.
9. Толщина стенки пассажирской кабины, включая силовую
конструкцию, теплозвукоизоляцию и декоративную отделку, при
компоновке принимается равной 120 ... 130 мм,
Приведенные выше условия позволяют определить потребную
ИЗ компоновочных соображений ширину фюзеляжа на уровне
635 ... 650 мм выше пола пассажирской кабины. Она определяется
по формуле:
Вф = В2п2 + В3п3 + сппп + 26j + 2б2, (9.3)
где В2 и п2, В3 и и3 — соответственно ширина и число двухместных
и трехместных блоков сидений; сп и пв — соответственно ширина
и число основных проходов; 6] — зазор между сидением и внутрен-
ней поверхностью стенки кабины; 62 — толщина стенки кабины.
Подставляя в (9.3) числовые значения из приведенных выше
условий, можно получить потребную ширину фюзеляжа для
различных значений числа сидений II класса (туристских) в ряду.
В табл. 9.2 учитывается, что при компоновке в ряду десяти
сидений между средними двухместными блоками делается вставка
шириною 250 ... 260 мм. На самолете Боинг 747 при девяти сиде-
ниях в ряду компоновка делается по схеме 3 + 2x24-2. Знак
239
Таблица 9.2
Размещение сидений в пассажирском салоне
Число сиде- ний в ряду Число и тип блоков Ширина прохода, мм Зазор между подло - котии- ком и стенкой, мм Ширина фюзеляжа в зоне сидений или его диаметр, мм Диаметр фюзеляжа у конкретных пассажирских самолетов, мм
3 1 + 2 510 30 2380
4 2 + 2 510 30 2870 Ту-124, Ту-134 — 2900
5 2 + 3 510 30 3360 Ту-104, Ил-18 — 3500
6 з + з 510 30 3850 Ту-154, Ил-62 — 3800
7 2 + 3+2 650X2 40 5200 Боинг 707 — 3760
8 3+2 + 3 650X2 45 5700 Локхид-1011 — 5970 Дуглас ДС-10 — 6020 Ил-86 — 6080
9 з + з+з 650X2 50 6200 Боинг 747 — 6490X 6800
10 3+2X12+3 650X2 50 7050 —
«X», как и в нижней строке таблицы, означает наличие вставки
в 250 мм. Тогда по формуле (9.3) ширина фюзеляжа будет равна
6500 мм (на самолете Боинг 747 — 6490 мм).
Потребная ширина фюзеляжа совпадает с его диаметром (при
круглом сечении фюзеляжа) лишь в том случае, если подлокотники
кресел находятся в зоне центра окружности (линия пола на
550 ... 600 мм ниже максимальной ширины или диаметра фюзе-
ляжа).
Выше показан метод выбора диаметра фюзеляжа только из
компоновочных соображений. Однако на выбор диаметра оказы-
вают влияние и соображения аэродинамики (обеспечение макси-
мального аэродинамического качества самолета в целом) и проч-
ности (обеспечение минимальной массы конструкции). Эта оптими-
зационная задача рассмотрена в гл. 15.
9.2.2. Определение потребной длины
пассажирской кабины
Длина пассажирской кабины находится с учетом следующих
условий.
1. По заданному числу пассажиров и выбранному числу сиде-
ний в одном ряду определяется потребное число рядов сидений.
Как правило, в хвостовой части пассажирской кабины ширина
кабины сужается из-за придания фюзеляжу формы, хорошо обте-
каемой воздушным потоком. Вследствие этого последние ряды
приходится делать с уменьшенным числом сидений, и для разме-
щения заданного числа пассажиров потребное число рядов сидений
приходится увеличивать на 1-2 ряда (в кабинах с двумя прохо-
дами — на 3-4 ряда);
240
Рис. 9.2. Схема установки пассажирских сидений относительно передней
и задней перегородок кабины:
1 — передняя стенка пассажирской кабины; 2 — передний ряд сидений; 3 — второй
ряд сидений; 4 — последний ряд сидений; 5 — задняя стенка пассажирской
кабины
2. Расстояние t между рядами сидений (шаг) делают кратным
30 мм (в Западной Европе и США — кратным одному дюйму —
25,4 мм):
Класс салона .................... I II III
t, мм ...................... 980... 1080 840 ...870 780 ... 810
3. Минимальное расстояние Zx от плоскости передней пере-
городки кабины до первого ряда сидений:
Класс салона ........ I II III
I, мм ............... 630 615 585
4. Минимальное расстояние Z2 от плоскости задней перегородки
кабины до переднего крепления последнего ряда сидений:
Класс салона ....... I II III
/2, мм.............. 1000 800 750
Размер Z2 необходим, чтобы при полностью отклоненной спинке
зазор между конструкцией сидения и перегородкой был не менее
20 мм; требования пп. 2 ... 4 показаны на рис. 9.2.
5. Отношение длины пассажирской кабины к ее ширине &ф
(коэффициент формы кабины) должно выбираться так, чтобы оно
находилось в пределах k$ = 0,2 ... 0,5. Если !гф < 0,2, то пасса-
жирская кабина становится похожей на «трубу», а если 6Ф > 0,5,
то создается впечатление «зажатого» объема.
В связи с этим условием при большом числе пассажиров при-
ходится делить пассажирскую кабину на два и более салонов.
6. Высота пассажирской кабины должна быть не менее 1900 мм
и не более 2500 мм, чтобы помещение не напоминало ангар.
Исходя из этого выбранная компоновка (длина и ширина ка-
бины или отдельных салонов) проверяется по величине удельного
241
Таблица 9.3
Минимальные значения удельного объема пассажирской кабины уф,
м3/человек
Диаметр фюзеляжа, мм Продолжительность полета, ч
До 1 1 ... 2 2 ... 4 4 ... 6 6 ... 8 8 ... 10
<4000 * 0,84 0,85 0,92 0,98 1,2 1,2
>5000 0,96 0,98 1,06 1,13 1,27 1,36
* Данные для кабин III класса. У кабин I и II классов значения фф выше.
объема кабины (салона) уф, приходящегося на одного пассажира
(табл. 9.3).
На основании приведенных выше условий потребная длина
пассажирской кабины (мм) определяется по формуле
потр = G “I- (^ряд 1) t “I- ^2, (9.4)
где гряд — число рядов кресел.
.Пример. Определить потребную длину пассажирской кабины, вмещающей
180 пассажиров, принимая компоновку туристского (П-го) класса с размещением
по 6 сидеиий в ряду.
Согласно (9.4)
i-К потр =-615 + — 1) 840 + 800 = 25775 мм.
В соответствии с формулой (9.3) и данными табл. 9.2 при 6-ти сидениях
в ряду будем иметь наружную ширину фюзеляжа 3850 мм, а внутреннюю ши-
рину (без учета толщины стенок, т. е. без 252) — 3550 мм.
Тогда коэффициент формы йф будет равен
/гф = Вк. ВНутР/Тк = 3550/25 775 = 0,138.
Поскольку минимально допустимое значение йф = 0,2, разделим кабину на 2 са-
лона по 90 человек в каждом. Тогда длина переднего салона
и kb
840 + 800 = 13 175 мм
т. е. значение величины &ф лежит в допустимых пределах.
Потребная длина заднего салона, учитывая сужение фюзеляжа в хвостовой
части, будет больше (следует разместить еще один ряд кресел, так как в задних
трех рядах будут установлены не тройные, а двойные блоки сидений):
£;ал = 13 175 + 840 = 14 015 мм.
Проведем контрольную проверку на соответствие требованиям по удельному
объему уф. Для внутреннего диаметра фюзеляжа 3550 мм и для высоты кабины
(высоты сегмента) 2100 мм площадь внутреннего поперечного сечения кабины
будет равна 6,6 м2. Удельный объем в переднем салоне:
, = 13-175 X 6.6 87 м»
"Уф 90 90 ~ ’ человек ’
т. е. при продолжительности полета до 4 ч такую компоновку можно считать
допустимой.
242
9.3. АВАРИЙНО-СПАСАТЕЛЬНЫЕ МЕРОПРИЯТИЯ
9.3.1. Размещение аварийных выходов
На компоновку пассажирской кабины очень большое влияние
оказывает размещение аварийно-спасательных средств. Эти сред-
ства должны обеспечить:
— аварийную эвакуацию всех пассажиров и экипажа на земле
за время не более 90 с при выпущенном и убранном положении
шасси, а также в случае, когда шасси убрано только с одной
стороны;
— аварийную высадку пассажиров и экипажа в бортовые
аварийные плавающие средства (надувные плоты при вынужден-
ной посадке самолета на водную поверхность).
Эти требования в первую очередь обеспечиваются созданием
аварийных выходов. Число аварийных выходов пассажирского
самолета, предусмотренное НЛГС-2, указано в табл. 9.4.
Таблица 9.4
Число аварийных выходов с каждой стороны фюзелижа
пассажирского самолета
Число пассажирских мест (не включая места бортпроводников) Тип I Тип II Тип III Тип IV
1 ... 10 1
11... 19 — — 1 —
20 ... 39 1 1
40 ... 79 1 — 1
80 ... 109 1 — 2
НО ... 139 2 — 1
140 ... 179 2 — 2
При числе пассажиров свыше 179 и до 299 требуются дополни-
тельные пары аварийных выходов из расчета применения люков
типа III на 35 пассажиров (сверх 179), люков типа II на 40 допол-
нительных пассажиров, люков типа 1 на 45 дополнительных пас-
сажиров и люков типа «А» на 100 дополнительных пассажиров.
При числе пассажирских мест более 299 каждый аварийный
выход в борту фюзеляжа должен быть выходом типа «А» или типа I.
На каждую пару выходов типа «А» разрешается иметь не более
100 пассажирских мест, а на каждую пару выходов типа I — не
более 45.
Если предусмотрен подфюзеляжный или хвостовой выход,
обеспечивающий скорость эвакуации пассажиров, по крайней мере
равную скорости эвакуации через выход типа III, когда самолет
находится в наиболее неблагоприятном положении для открытия
люка, то этот выход может рассматриваться как дополнительный
для 12 ... 15 пассажиров.
243
Выходы должны быть прямоугольной формы с радиусом за-
кругления, равным 1/6 ширины выхода для типа «А» и 1/3 ширины
выхода — для остальных типов. Размеры выходов следующие:
Тип выхода. . . . . «А» I II III IV
Ширина, мм . . . . 1070 610 510 510 480
Высота, мм . . . . 1830 1220 1120 915 660
Выходы типов «А», 1 должны быть на уровне пола. Выходы ос-
тальных типов также должны быть на уровне пола, если они не
расположены над крылом. Если же они располагаются над крылом,
то пороги не должны превышать следующих значений:
Тип выхода..................................... II III IV
Высота порога внутри самолета, мм.......... 250 510 740
Высота порога снаружи, мм ................... 430 690 910
При размещении аварийных выходов на самолете и при компо-
новке пассажирской кабины (размещение рядов кресел по длине
кабины) следует иметь в виду, что к аварийным выходам типа I,
II должен быть обеспечен свободный проход шириной не менее
510 мм, а к аварийному выходу типа «А» — шириной не менее
910 мм.
В непосредственной близости от аварийных выходов типа «А»,
I и II, не находящихся в зоне крыла, должны размещаться ава-
Рис. 9.3. Размещение аварийного надувного трапа;
I — полетное положение (крышка пиши для трапа закрыта); II — трап в положении
«Готов к сбросу»; III — дверь открыта, трап выброшен; IV — трап автоматически надут
и готов для спуска пассажиров; 1 — крышка ниши для трапа
244
рийные резиновые трапы, автоматически надувающиеся при вы-
брасывании (рис. 9.3). У аварийного выхода типа «А» надувной
аварийный трап должен допускать два одновременных параллель-
ных потока эвакуируемых пассажиров.
9.3.2. Аварийные мероприятия при посадке
на воду
Современные сухопутные пассажирские и грузовые самолеты
с герметической кабиной допускают аварийную посадку на вод-
ную поверхность и достаточно длительное пребывание на плаву
после такой посадки (не менее 15 ... 20 мин). В процессе создания
самолета строят динамически подобную его модель, которую ката-
пультируют на воду, имитируя аварийную посадку самолета на
водную поверхность. При этом отрабатываются рекомендации для
такой аварийной посадки и устанавливается безопасная для по-
садки степень (балльность) волнения моря.
Если полет происходит над водой не более часа, то каждый
пассажир снабжается спасательным надувным жилетом, разме-
щаемым обычно в пассажирском сидении. При более длительном
полете над водой на борту самолета вблизи аварийных выходов
устанавливаются надувные аварийные плоты, обеспечивающие
размещение в них всех пассажиров и экипажа (число плотов оп-
ределяется их несущей способностью).
Если аварийные люки, о которых говорилось в разд. 9.3.1,
находятся ниже ватерлинии, то на самолете должны быть не менее
двух легкодоступных верхних люка размером не менее вы-
хода типа III.
9.3.3. Двери и окна пассажирской кабины
На пассажирских самолетах с числом пассажиров более 80
должно быть не менее двух входных дверей, при этом желательно,
чтобы они размещались в переднем и заднем концах пассажирской
кабины. Входные двери должны быть расположены по левому
борту самолета. Самолеты с числом пассажирских мест более
250 могут иметь входные двери, расположенные по обоим бортам.
Каждая входная дверь для пассажиров может классифициро-
ваться как аварийный выход, если ее размеры соответствуют или
превосходят требования к аварийным выходам типов I и «А».
Входная дверь не должна иметь порога над полом кабины.
Входные двери должны открываться наружу. Это требование
создает очень большие трудности в разработке конструкции
двери, так как эта конструкция должна обеспечивать герметиза-
цию дверного проема после закрытия двери, невозможность от-
крытия двери в полете, малые усилия при открытии двери на земле
и небольшую ветровую нагрузку в открытом положении при сто-
янке на аэродроме.
245
Следует иметь в виду, что на дверь с размерами выхода типа •
«А» действует нагрузка в 120 ...150 кН от внутреннего избыточ-
ного давления в кабине.
Окна в пассажирской кабине должны обеспечивать возможность
удобного пользования ими с мест, расположенных у борта, при
изменении шага установки сидений. Конструктивно это выполня-
ется в виде отдельных небольших окон (ширина 200...230 мм,
высота 320...350 мм), расположенных между шпангоутами кар-
каса кабины (шаг окон 500...510 мм).
9.4. РАЗМЕЩЕНИЕ БОРТПРОВОДНИКОВ. КОМПОНОВКА
БЫТОВЫХ И БАГАЖНЫХ ПОМЕЩЕНИЙ
9.4.1. Размещение бортпроводников
В состав экипажа для поддержания порядка в пассажирском
помещении, приготовления и раздачи питания пассажирам в по-
лете, инструктажа по пользованию различными средствами пас-
сажирского оборудования и аварийными системами и оказания
медицинской помощи входят бортпроводники. Число их в са-
молете определяется следующими требованиями:
•а) на салон I класса с числом пассажиров до 30...32 — два
бортпроводника. Если число пассажиров I класса более 30...
..32 — один бортпроводник на 15...16 пассажиров;
б) в салонах II и III классов — один бортпроводник на 25...
30 пассажиров.
Каждый бортпроводник должен иметь место с привязным рем-
нем; сидение может быть откидным, и размещать его желательно
так, чтобы бортпроводник мог видеть всех пассажиров салона.
9.4.2. Компоновка багажно-грузовых отсеков
Для размещения багажа пассажиров и груза в пассажирском
самолете должны быть багажно-грузовые помещения. У самолетов,
эксплуатируемых на высотах более 3000 м, эти помещения необ-
ходимо располагать в герметизированной части фюзеляжа.
При бесконтейнерной погрузке багажа и грузов потребный объ-
ем багажно-грузовых помещений (м3) определяется заданными для
самолета числом пассажиров и массой почты или груза по формуле
15геПас max । ^ком — 90пас шах /п г\
= ~Т2б------1------290------•
Здесь «пас шах — максимальное число пассажиров; щком — задан-
ная величина коммерческой нагрузки; 120 и 290 — соответственно
плотность багажа и почты или груза, кг/м3.
При загрузке багажа и груза в самолет в контейнерах потреб-
ный объем (м3) контейнеров
1/ _ 1бМпас шах , ^ком — 90гаПастах /п
17 к — 250 ' 350 ’
246
д-з I
V-4,5«J A
1562,5
2337
Phc. 9.4. Размеры багажных контейнеров, применяемых на международ-
ных линиях
где 250 и 350 — соответственно плотность багажа и почты или груза
кг/м3.
Увеличение плотности по сравнению с бесконтейнерной погруз-
кой связано с возможностью более плотной укладки.
На самолетах с диаметром фюзеляжа более 3000 мм багажно-
грузовые помещения располагаются обычно под полом пассажир-
ских салонов и делятся на отсеки так, чтобы загрузкой этих отсе-
ков можно было регулировать положение центра масс самолета.
Высота багажно-грузовых отсеков должна быть не менее 1100 мм.
Багажные люки для каждого из отсеков размещаются с. учетом того,
чтобы к ним был обеспечен подъезд грузовых автомобилей. Раз-
меры багажных люков выбираются из условия погрузки в них
контейнеров либо специально создаваемых для данного самолета,
либо соответствующих применяемым на международных линиях
(рис. 9.4).
9.4.3. Компоновка буфетов-кухонь
Для обеспечения питанием пассажиров в полете в пассажирском
помещении предусматривается одна или две кухни, в которые на
аэродроме загружаются контейнеры с расфасованной пищей и на-
питками. В полете бортпроводники лишь разогревают необходимое
количество пищи и разносят или развозят на специальных тележ-
ках сервированные подносы к пассажирам.
Одна кухня в самолете делается в том случае, если имеется
однотипная компоновка пассажирской кабины и число пассажи-
ров не превышает 100 человек. Если в пассажирской кабине име-
ются салоны, то независимо от числа пассажиров в самолете
должны быть две кухни, общий объем которых (м3)
Укух^(0,12.. .0,14) нпас, (9.7)
а площадь пола (м2)
SKyx <=« (0,1.. .0,05) нпас, (9.8)
247
где коэффициент 0,10 относится к кухням для салонов I класса,
а 0,05 — к кухням для салонов II и III классов.
На широкофюзеляжных самолетах кухню целесообразно раз-
мещать в нижнем этаже под полом пассажирского помещения,
подавая для раздачи сервированные подносы в контейнерах или
тележках вверх на специальных лифтах.
При составлении весовой сводки самолета следует иметь в виду
следующее:
а) масса кухни с оборудованием составляет 11... 12 кг на од-
ного человека, в том числе 4...5 кг/человек — масса съемного
оборудования;
б) масса продуктов питания составляет 2,5 кг на одного пас-
сажира I класса и 1, 2... 1,6 кг на одного пассажира II и III
классов при времени полета более 6...8 ч.
Загрузка кухни осуществляется через служебные двери, разме-
щаемые на самолетах с числом пассажиров менее 250 по правому
борту самолета. Размеры служебных дверей должны быть не менее
1220x610 мм.
9.4.4. Компоновка туалетных помещений
Число туалетов на самолете зависит от продолжительности по-
лета и числа пассажиров;
Продолжитель-
ность полета, ч Менее 2 2 ... 4 2 ... 4 Более 4 Более 4 Более 4
Число пассажи-
ров самолета. . . До 120 Более Менее 120 ... 200 Более
120 120 200
Расчетное число
пассажиров на
1 туалет .... 50 40 45 ... 50 30 40 45 ... 50
Площадь пола туалетного помещения должна быть не менее
1,5...1,6 м2, ширина — не менее 1 м.
Самолет перед полетом заправляется водой для бытовых нужд
(в буфеты-кухни) и для гигиенических нужд (в туалеты). Потреб-
ное количество воды, дм3:
^воды = 9.3 -ф ОД^^полета («пас + нэк + «бп), (9.9)
где Тподета — время полета, ч; «|К, габп — число членов экипа-
жа и бортпроводников соответственно. Емкости для воды должны
иметь объем на 10 % больше.
Сливные емкости должны вмещать количество воды, определен-
ное по формуле (9.9), и иметь дополнительный объем из расчета
~0,15 дм3 в час на человека, а также вмещать химическую жид-
кость для дезинфекции из расчета 12 % от суммарного объема,
т. е. потребный объем сливных емкостей, дм3,
^слив 1,12(0,3 + 0,ЗТПолета)
(«пас + «эк + «бп)- (9.10)
248
9.4.5. Компоновка гардеробов
Наиболее неопределенной в компоновке пассажирских самоле-
тов является проблема гардеробов.
Требуется, чтобы для гардеробов отводилось помещение с
площадью пола, м2,
Srap« ^(0,035... 0,050) ппас, (9.11)
а объем этого помещения (м3) должен соответствовать
Vrap«^(0,05...0,08)Hnac. (9.12)
Рациональным решением этой проблемы является организация
гардеробов со съемными перегородками с тем, чтобы в летнее время
вместо гардероба в самолете можно было бы устанавливать допол-
нительные пассажирские места. Гардеробы следует размещать
либо в вестибюлях у входных дверей, либо в зонах, где шум внутри
пассажирской кабины является наибольшим.
9.5. ОСОБЕННОСТИ АЭРОДИНАМИЧЕСКОЙ КОМПОНОВКИ
ПАССАЖИРСКИХ САМОЛЕТОВ.
ВЫБОР ЭНЕРГОВООРУЖЕННОСТИ
9.5.1. Выбор площади крыла
Как показано в гл. 4, площадь крыла пассажирского самолета
выбирается из условий обеспечения заданной скорости захода на
посадку
с 30,2/Ппос^
д ~ у2
з. п у max пос
где тпос — масса самолета при посадке (кг) при заданной массе
коммерческой нагрузки и при нормированном аэронавигационном
запасе топлива; V,. п— заданная скорость захода на посадку,
м/с; С[/Шахпос — максимальное значение коэффициента су при
посадочной конфигурации крыла.
Это условие ставит первой задачей аэродинамической компо-
новки пассажирского самолета обеспечение максимально возмож-
ной величины б',/шахпос- Одним из обязательных мероприятий
в этом направлении является установка на крыле предкрылков.
9.5.2. Выбор оптимальной крейсерской скорости
полета и основных параметров крыла
Выбор наивыгоднейшей крейсерской скорости полета дозвуко-
вого пассажирского самолета и выбор таких параметров крыла,
как удлинение и угол стреловидности, осуществляется в процессе
решения оптимизационной задачи отыскания экстремума функции,
зависящей от нескольких противоречивых параметров.
(9.13)
249
С одной стороны, крейсерская скорость У^ейс полета Определи1
ет величину себестоимости перевозок, и чем больше Укрейс, тем ме’
ньше себестоимость перевозок а и тем экономичнее пассажирский
самолет.
Для дозвуковых пассажирских самолетов, например, в целях
обеспечения полета со скоростями, соответствующими числам
М. = 0,85...0,9, это требует создания крыла со стреловидностью
X = 37...40°.
С другой стороны, в величине расходов на эксплуатацию само-
летов в течение одного летного часа А, представляющих собою
сумму
~ ^а. с + Аа. д + Ат. о. с + ^т. о. д + Ат -|- Л3. п + В (9.14)
(обозначения и методика определения слагаемых в этом выраже-
нии даны в гл. 3), наибольшую величину имеют расходы на топ-
ливо Лт, которые в зависимости от цены топлива составляют от
35...40 % до 70...75 % от суммарной величины А.
Минимизация величины А в первую очередь требует минимиза-
ции величины Ат, которая является функцией от расхода топлива
самолетом в течение одного летного часа QT:
= (9.15)
где mcp, /Сср и ср — средние за время полета величины массы
самолета, аэродинамического качества самолета и удельного расхо-
да топлива двигателями соответственно.
Таким образом, задача минимизации величин а и А в части
аэродинамической компоновки пассажирского самолета сводится
к обеспечению максимальной величины аэродинамического каче-
ства самолета в крейсерском полете (вторая задача аэродинамиче-
ской компоновки). Конкретно это означает поиск минимальной
величины сопротивления самолета, а так как
сх = Схо + су> (9-16)
(где со — коэффициент потерь на балансировку самолета; %эф —
эффективное удлинение крыла), то, помимо всегда стоящей перед
проектировщиками задачи создания самолета с минимальным зна-
чением величины сх0, задача аэродинамической компоновки пас-
сажирского самолета сводится, в частности, к уменьшению вели-
чины потерь на балансировку (см. гл. 8) и к созданию крыла с
возможно большим удлинением.
При большой стреловидности крыла увеличение % связано
со значительным ростом массы крыла и обострением проблем аэро-
упругости (реверса элеронов, флаттера). Вследствие этого возни-
кает необходимость уменьшения угла стреловидности крыла, и,
как следствие, уменьшения величины VKp. При меньшем угле
стреловидности крыла легче решается первая задача аэродинамиче-
ской компоновки — обеспечение максимально возможной вели^
250
чины Су max пос- Процесс оптимизации в свете этих двух противоре-
чий приводит, как правило, к тому, что с ростом цены топлива
оптимальные величины VKp и х уменьшаются, а оптимальная вели-
чина удлинения крыла X увеличивается.
9.5.3. Выбор тяговооруженности дозвукового
пассажирского самолета
В гл. 4 показано, что для пассажирского самолета определяю-
щим условием в выборе тяговооруженности является, в соот-
ветствии с НЛГС-2, обеспечение продолжения взлета самолета при
отказе одного двигателя при расчетных значениях температуры и
давления наружного воздуха (+30 °C, 730 мм рт. ст.).
Потребная взлетная тяга при всех работающих двигателях
в расчетных условиях ((и.в = +30 °C, Рн, в = 730 мм рт. ст.)
равна (см. разд. 4.2.3):
— для самолета с двумя двигателями
Р° = Зт°ё + °’025) ; (9‘17)
— для самолета с тремя двигателями
Po = 2,25mog(-^—+0,027); (9.18)
— для самолета с четырьмя двигателями
Po = 2mog(-^-+0,030). (9.19)
Минимальная потребная тяговооруженность Ро = P0/(meg) по-
лучается у пассажирских самолетов с четырьмя двигателями, что
обеспечивает у таких самолетов меньшие величины относительной
массы силовой установки тс. у и относительной массы пустого са-
молета тпуст. Это определяет наиболее целесообразное применение
четырехдвигательной схемы для дальних магистральных самолетов.
Максимальная потребная тяговооруженность получается у са-
молетов с двумя двигателями. Это обеспечивает у таких самолетов
лучшие взлетные характеристики (меньшую длину разбега и
длину взлетной дистанции), что делает целесообразным использо-
вание таких самолетов как ближних магистральных или как
самолетов для местных авиалиний с укороченными длинами ВПП.
9.6. ОСОБЕННОСТИ ПРОЕКТИРОВАНИЯ СВЕРХЗВУКОВЫХ
ПАССАЖИРСКИХ САМОЛЕТОВ (СПС)
Как показано в начале данной главы, одним из путей дальней-
шего развития пассажирского самолетостроения является увели-
чение крейсерских скоростей полета. Рано или поздно на авиали-
251
ниях начнется систематическая эксплуатация сверхзвуковых пас-
сажирских самолетов. Неудачи первых сверхзвуковых пассажир-
ских самолетов типа «Конкорд» связаны не с их летно-техниче-
скими характеристиками, а с тем, что в условиях резкого повыше-
ния цен на топливо эксплуатационные расходы на топливо увеличи-
лись с 60...65 % до 75...80 %, а величина себестоимости перевозок
увеличилась примерно вдвое.
9.6.1. Выбор величины крейсерской скорости
Дальность полета самолета может определяться с помощью
выражения
L = Ю20 —1п^-, ' (9.20)
Ср тк v >
где Д, М и сР — средние за время полета значения аэродинами-
ческого качества самолета, числа М полета и удельного расхода
топлива двигателями соответственно; т0 и тк — начальная
K,KMtKM/cp
Рис. 9.5. Изменение величин К,
™ КМ.
дм и —-— по числу М в полете
Ср
Кривые соответствуют оптимально спро-
ектированным самолетам для конкрет-
ных чисел М полета: 1 — учет изменения
1п--- вследствие применения теплоизоля-
WK
ции, систем охлаждения и вследствие по-
терь давления на входе в двигатели; 2 —
влияние перехода на титановые сплавы
и сталь
(взлетная) и конечная (поса-
дочная) величины массы само-
лета.
Изменение возможных зна-
чений Д, ДМ и К^/ср в зави-
симости от числа М полета для
самолетов, оптимально спроек-
тированных для каждого соот-
ветствующего числа М, показа-
но на рис. 9.5.
Из рис. 9.5 видно:
— в зоне сверхзвуковых
скоростей полета резко сни-
жается величина аэродинами-
ческого качества самолетов;
ДМ , та
— значения -ш —- оди-
ср тк
наковы при числах М полета,
равных 1,1...1,2 и 2,0...2,5.
Как будет показано ниже,
использование в конструк-
ции СПС сплавов на алюминие-
вой основе возможно лишь до
чисел М = 2,5...2,7. Для СПС,
в конструкции которых ис-
пользованы алюминиевые спла-
вы, могут быть выбраны крей-
серские скорости, соответству-
ющие числам М = 1,1...1,2
или М = 2,0...2,5.
252
9.6.2. Аэродинамический нагрев
При проектировании и эксплуатации СПС возникает ряд
трудностей. Первой является аэродинамический нагрев конструк-
ции самолета, происходящий вследствие адиабатического сжатия
воздуха перед летящим самолетом. Температура полного тормо-
жения воздуха перед передней кромкой крыла, оперения, фюзе-
ляжа и т. д. /торм (градус Цельсия) равна
^орм = Тн + Тн0,2М? - 273,2, (9.21)
где Тн — абсолютная температура воздуха на высоте полета, К.
Для полета в стратосфере (Н 11000 м)
/торм = 216,7 + 43,ЗМ2 - 273,2 = 43,3 М2 - 56,5.
Значения /торм для различных чисел М полета на высоте
11000 м таковы:
Число М . . . 1,0 1,2 1,3 1,5 1,7 2,0 2,2 2,5 2,7 3,0
/торм, °C . . . —13,3 6,0 16,7 41,0 68,5 116,5 159,0 214,0 259,0 336,0
Температура на поверхности обшивки Tw находится из урав-
нения теплового баланса
«(7„ - 7.) - « [(-Ьу - (^)‘] > 0, (9.22)
где а — коэффициент теплоотдачи; Тс — температура погранич-
ного слоя, К; Tw — температура стенки, К; о — коэффициент
лучеиспускания; е — степень черноты; Тн — температура на-
ружного воздуха, К-
Для участка на удалении в 1 м от передней кромки (где Tw w
« Т’торм) при полете самолета с полированной поверхностью
обшивки из алюминиевого сплава (е = 0,8; ое = 3,92) на высоте
Н = 12000 м значения tw даны ниже:
Число М . . . 1,0 1,2 1,3 1,5 1,7 2,0 2,2 2,5 2,7 3,0
tw, °C .... —17,5 —1,0 8,0 30,0 52,0 94,0 124,0 174,0 210,0 271,0
При аэродинамическом нагреве возникают проблемы исполь-
зования материалов, стойкости неметаллических элементов кон-
струкции, ползучести металлов (удлинение под нагрузкой при
нагреве), термоусталостной прочности конструкции из-за мест-
ных напряжений при неравномерном нагреве (при разгоне после
взлета) и неравномерном охлаждении (при торможении перед по-
садкой). В частности, использование в качестве основных кон-
структивных материалов сплавов на алюминиевой основе возможно
лишь до температуры 150...180 °C, что, как выше уже отмечалось,
соответствует полету с числом М = 2,0...2,5.
Титановые сплавы допустимы к использованию до температур
280...300 °C, что определяет их применение до М = 3,0...3,2.
При больших скоростях полета необходимо применение сталь-
ных сплавов.
253
Следует иметь в виду, что в зоне чиселМ = 1,1... 1,2темпера-
тура самолета в полете находится около О °C и не возникает ни-
каких проблем, связанных с нагревом конструкции, не требуется
специальных систем или мероприятий для охлаждения; рейсовая
же скорость по сравнению с полетом при М = 0,85...0,9 возра-
стает приблизительно на 30 %.
9.6.3. Звуковой удар
У самолета, летящего со сверхзвуковой скоростью, образуются
ударные волны (головная и замыкающая). Когда эти волны до-
стигают земной поверхности (при числе М > 1,2), то изменение
давления за фронтом этих волн воспринимается как удар грома,
что и определило название «звуковой удар» (рис. 9.6).
Интенсивность этого удара Ар зависит от скорости и высоты
полета, от массы и формы самолета. Она рассчитывается (даН/м2)
по следующим выражениям:
Ар = /(Ap0)2j-(Apm)2, (9.23)
д„ _ о 436 k 1)1/8 • °9КВ 1/' п~п~ Г COS(M- + 9)~13/4. /п 944
арэ — окотрка tf3/i // РйРну cos^ J ,
\Рт = 0,363feOTpfem -(М2 ~ 1)3/8 • Г col.^-+g.)l3/4, (9.25)
отр m ДО //3/4 61/4 |_ sin р J ’ ' '
где /готр — коэффициент отражения от земной поверхности (6отр =
= 1,6...2,0); kv — коэффициент формы тела (kv = 1,5... 1,6 для
самолетов с крылом малого удлинения); km — коэффициент рас-
Рис. 9.6. Схема образования «звукового удара» и «ударного шлейфа»
Сечение по шлейфу дано для самолета с массой т0 = 180... 200 т, летящего на высоте
18.,.20 км со скоростью, соответствующей числу М — 2,2...2,5
254
пределения подъемной силы (km = д? дан/мг
=^1,4... 1,63); Н — высота полета;
£эКВ — эквивалентный диаметр са-
молета; I — длина самолета; b —
корневая хорда крыла; р0 — давле-
ние воздуха у земной поверхности
(Н = 0); рн — давление воздуха на
высоте полета; sin р = 1/М; 0 —
угол наклона траектории полета.
Расчетные данные по величи-
не А/? могут изменяться в преде-
лах ±(30...50 %) в зависимости от
величины 0, маневра самолета в го-
ризонтальной плоскости и метеоро-
логических условий из-за возмож-
ности фокусировки звукового удара.
Воздействие этого удара на
человека, животных и строения
ориентировочно показано на рис. 9.7.
Воздействие это очень субъективно.
Существуют и другие трудно-
сти в эксплуатации СПС, такие,
как опасность космической радиа-
ции при усилении солнечной актив-
ности, воздействие на обшивку
самолета акустических нагрузок от пульсаций в пограничном
Рис. 9.7. Характер измене-
ния интенсивности звукового
удара у поверхности земли в за-
висимости от высоты полета Н
и от массы самолета при числе
М полета, равном 2,0...2,2:
I — впечатление отдаленного взры-
ва; II — ощущение близкого уда-
ра; III — возможны поврежде-
ния больших зеркальных стекол,
болезненные ощущения в ушах
слое и ряд других, но степень изученности их пока не-
достаточна.
9.7. ОСОБЕННОСТИ ПРОЕКТИРОВАНИЯ ГРУЗОВЫХ
САМОЛЕТОВ
9.7.1. Конвертируемые самолеты
По мировой статистике объем перевозок грузов самолетами
в последние 20...25 лет растет быстрее, чем объем пассажирских
перевозок (средний годовой прирост объема грузовых перевозок
12...15 %, пассажирских 8...10 %). В связи с этим для грузовых
авиаперевозок используют модификации пассажирских самолетов.
С самолета снимают пассажирское оборудование, пол пассажирской
палубы усиливают, исходя из удельной нагрузки 400 даН/м2,
и в левом борту носовой части фюзеляжа на уровне пола делают
большую грузовую дверь высотой 2200...2300 мм и шириной
3300...3500 мм. Усиление конструкции недостаточно для обеспе-
чения прочности фюзеляжа при таком большом вырезе и поэтому
дверь грузового люка делают силовой: в закрытом положении
она замками включается в работу силовой конструкции фюзеляжа.
В зависимости от объема грузовых перевозок модифицируют
либо полностью всю пассажирскую кабину, либо ее переднюю
255
Рис. 9.8. Вариант
грузо-пассажирского
темнен)
самолета (грузовой отсек за-
Рис. 9.9. Грузовой вариант самолета Боинг 747
Рис. 9,10. Военно-транспортный самолет Локхид С-141 (США)
256
часть, как это показано на рис. 9.8. Размещение грузов в передней
части фюзеляжа связано с обеспечением безопасности пассажиров,
перевозимых в заднем помещении, так как в случае аварии груз
может сдвинуться вперед. На этот случай экипаж может быть раз-
мещен выше пассажирского помещения, как это сделано на са-
молете Боинг 747 (см. рис. 9.9).
Такие модифицированные самолеты могут быть использованы
и для грузовых и пассажирских перевозок. В этом случае пасса-
жирские сидения крепят на специальных площадках, которые
в свою очередь крепят к узлам на силовом грузовом полу; внутри
самолета сохраняется часть бытового оборудования (туалеты, кух-
ни и т. п.). Самолет при этом можно быстро переоборудовать (кон-
вертировать) из грузового в пассажирский или сделать грузо-пас-
сажирским.
9.7.2. Специальные грузовые самолеты
Подобно тому, как на других видах транспорта (автомобиль-
ном, железнодорожном и водном) пассажирские и грузовые сред-
ства (вагоны, корабли) делаются специальными, так и при раз-
витии воздушных перевозок естественно появление специальных
грузовых самолетов.
Особенностью грузовых самолетов является то, что они делают-
ся высокопланами, чтобы фюзеляж мог быть максимально приб-
лижен к поверхности аэродрома для облегчения погрузочно-
разгрузочных работ. Желательно, чтобы уровень грузового пола
при стоянке самолета на земле находится на уровне площади
кузова грузового автомобиля.
Для погрузки в хвостовой части фюзеляжа делают люк, от-
клоняющаяся вниз часть которого является погрузочной рампой
(рис. 9.10). На некоторых грузовых самолетах для обеспечения по-
грузки и выгрузки делают отклоняющуюся в сторону хвостовую
(самолет Канадэр CL-44) или носовую часть фюзеляжа.
Глава 10
ОСОБЕННОСТИ ПРОЕКТИРОВАНИЯ
МАНЕВРЕННЫХ САМОЛЕТОВ *
10.1. КОНЦЕПЦИИ СОВРЕМЕННЫХ ИСТРЕБИТЕЛЕЙ
10.1.1. Эволюция концепций
Проектирование маневренного самолета, рассчитанного на вы-
полнение нескольких заданий, является сложным процессом,
требующим увязки и решения широкого круга вопросов из мно-
гих областей науки и техники. Значительные отличия некоторых
самолетов, даже разработанных на основе одних и тех же требо-
* По материалам иностранной печати.
9 С. М. Егер и др. 257
Ваний (например, легкие опытные истребители Дженерал Дайнэ-
микс YF-16 и Нортрон YF-17), говорят о возможности решения за- -4
дачи различными способами: самолеты могут иметь неодинаковые
внешние конфигурации, конструктивно-силовые схемы, число
двигателей и т. д. Немаловажную роль играют и традиции фирмы,
заставляющие проектировщиков ради уменьшения технического
риска принимать уже проверенные аэродинамические схемы и
конструктивные решения. Поэтому свести проектирование таких
самолетов к четкому однозначному алгоритму в настоящее время
не представляется возможным.
В течение многих лет после второй мировой войны ВВС тех-
нически развитых стран стремились иметь в своем арсенале так-
тический самолет с большой сверхзвуковой скоростью полета,
способный с помощью управляемых снарядов различного класса
решать широкий диапазон боевых задач (концепция многоцелево-
го истребителя). Однако практика показала, что многоцелевой
истребитель не может соперничать со специализированным само-
летом, рассчитанным на выполнение какой-либо конкретной за-
дачи. Установлено, что основной характеристикой истребителя
следует считать маневренность, а не максимальную скорость
полета, и что способность эффективно вести ближний воздушный
бой является главной особенностью современного истребителя.
Так родилась концепция истребителя, способного завоевать превос-
ходство в воздухе и сохранить его на протяжении воздушного боя.
Термин «завоевание превосходства в воздухе» истолковывается
по-разному, но его основная сущность заключается в контроли-
ровании воздушного пространства при тесном взаимодействии
с наземными войсками с тем, чтобы не допустить поддержки про-
тивника с воздуха. В концепции истребителя для завоевания
превосходства в воздухе основное внимание уделяется воздушному
бою (истребитель F-16), применению стрелкового оружия и управ- ,
ляемых реактивных снарядов (УРС) малой дальности действия.
Три основные особенности присущи эффективному истребите-
лю воздушного боя: большая тяговооруженность, малая нагруз-
ка на крыло и объединенная система управления огнем и полетом,
обеспечивающая применение снарядов «воздух—воздух» и пушеч-
ного вооружения в ближнем воздушном бою в условиях визуаль-
ной видимости. Исследования ВВС США показали, что воздушные
бои современных истребителей ведутся при скоростях, соответст-
вующих числам М = 0,4... 1,6 (в основном в интервале чисел М —
=0,6... 1,0), и на высотах от 3000 до 12000 м (в основном ниже 9000 м)
независимоотмаксимальной скорости участвующих в бою самолетов.
10.1.2. Боевые задачи и требования
к самолету тактической авиации
Основные задачи, которые должен выполнять самолет тактиче-
ской авиации: завоевание превосходства в воздухе, тактические
ударные операции, непосредственная поддержка наземных войск
258
(изоляция поля боя), использование в системе ПВО, тактическая
разведка и нанесение ударов по морским целям.
Завоевание превосходства в воздухе считается главной боевой
задачей для большинства современных истребителей. Наиболее
важными характеристиками самолета являются хорошая маневрен-
ность на малых и средних высотах и способность длительного пат-
рулирования в районе боевых действий.
Например, основные требования к самолету F-15 и F-16 (США):
М 1,7; радиус действия в полете на //«11 км и М = 0,9—
400...600 км (с подвесными топливными баками — 900...1200 км);
предельная перегрузка пу = 9...10; перегрузка установившегося
маневра пу = 6...8 (Л4 « 0,8; Н « 3 км); патрулирование в те-
чение 20...30 мин; воздушный бой при числе М = 0,8 (с исполь-
зованием полного форсажа) в течение 2...5 мин; вооружение —
пушка (300...500 снарядов для легких истребителей, 650...1000
снарядов для тяжелых истребителей), 4...8 УРС класса «воздух—
воздух» ближней и средней дальности действия; посадочная ско-
рость — 220...230 км/ч; посадочная дистанция (высота препятст-
вия 15 м) около 800 м.
Тактические ударные операции наиболее эффективно выпол-
няются при полете самолета на малой высоте с околозвуковой
скоростью. Отличительной особенностью самолета является
способность достигнуть, опознать и атаковать различные по
характеру цели днем и ночью, в любых метеорологических усло-
виях.
Например, требования к английскому самолету Панавча
200MRCA: скорость проникновения к цели на высоте около 150 м
должна соответствовать числу М = 0,7, с возможностью «броска»
при М = 0,9 на последних 150 км до цели; радиус действия в по-
лете по профилю «малая—малая высота» — 50...650 км; предель-
ная перегрузка пу = 9; перегрузка установившегося маневра на
малой высоте (при М = 0,7) пу = 5; продолжительность маневра
и уход от цели (возможно, при М > 1) 5 мин; вооружение, со-
ответствующее выполняемому заданию, — бомбы, контейнеры с
неуправляемыми реактивными снарядами (НУРС), пушка и т. д.;
общая масса грузов на внешних узлах подвески;—4500...7000кг;
посадочная скорость около 230 км/ч; эксплуатация с относи-
тельно коротких, элементарно подготовленных ВПП.
Непосредственная поддержка наземных войск состоит в нане-
сении ударов по небольшим точечным и площадным целям, нахо-
дящимся в непосредственной близости от войсковых подразделе-
ний, которым оказывается авиационная поддержка. Характерной
особенностью самолета в данном случае является длительное па-
трулирование (барражирование) в зоне боевых действий, хорошие
характеристики управляемости при дозвуковых скоростях, вы-
сокая точность нанесения удара по небольшим целям в условиях
минимальной видимости. Кроме того, самолет должен обладать
повышенной живучестью.
9* 259
Основные требования к самолету в данном случае близки
к требованиям при выполнении тактических ударных операций:
так, для самолета F-15 скорость полета к цели на малой высоте —
околозвуковая; радиус действия в полете по профилю «большая —
малая—большая высота» — 450...800 км; перегрузка установи-
вшегося маневра пу = 5; ведение боевых операций в течение
5 ...10 мин; боевая нагрузка, отличающаяся высокой поражаю-
щей способностью, общей массой 3500...6500 кг.
Использование в системе ПВО современного истребителя
может иметь успех только в случае сочетания необходимых харак-
теристик самолета, радиолокационной станции, установленной на
нем, и управляемых реактивных снарядов. Эффективность пере-
хвата в конечном счете зависит от таких факторов, как дальность
обнаружения цели и маневренность самолета на сверхзвуковых
скоростях. Особенностью истребителя-перехватчика является боль-
шая скороподъемность, быстрый разгон и полет в зону перехвата
на большой сверхзвуковой скорости.
Основные требования к самолету: Панавна 200 MRCA: М 5=
5=2,5; длительный сверхзвуковой полет при М = 2,20...2,35;
радиус действия (рубеж перехвата) — 350...950 км; предельная
перегрузка пи = 9...10; перегрузка установившегося маневра при
числе М = 2,0 пу > 2,0; вооружение —2...8 УРС средней и
большой дальности действия (40...165 км); посадочная скорость —
220...240 км/ч.
Тактическая разведка с помощью истребителей выполняется
на очень малых высотах. ВВС Англии полагают, что высота 80...
...90 м является пределом для относительно безопасного полета.
Чем ниже высота полета, тем более точной должна быть система
навигации самолета (вплоть до применения радиолокатора следо-
вания рельефу местности). Особенностью истребителя, используе-
мого в качестве самолета фото- и радиоразведки, является большой
радиус действия в полете по профилю «большая—малая—большая
высота», что достигается применением подвесных топливных ба-
ков. Главные требования к самолету в основном такие же, как и
при выполнении тактических ударных операций. Вместо бомбовой
нагрузки в данном случае истребитель Панавна 200 MRCA несет
специальный контейнер, который вмещает фотокамеры, радиоло-
катор бокового обзора, инфракрасную систему и другую аппа-
ратуру для ведения всепогодной разведки.
Нанесение ударов по морским целям является одной из задач
истребителей флота F-14 и F-18, базирующихся на авианосцах. Эти
палубные истребители, как и истребитель ВВС, предназначены для
решения целого ряда боевых задач: завоевания превосходства в
воздухе при сопровождении ударных самолетов и высадке десанта,
нанесения ударов по морским и наземным целям, использования в
системе ПВО для защиты соединений флота, ведения тактической
разведки и т. д.
260
По мнению специалистов фирмы Грумман, ограниченные раз-
меры палубы авианосца диктуют дополнительные жесткие требова-
ния к палубным истребителям. Взлет с помощью катапульты и осо-
бенно посадка с применением задерживающих устройств (причем
в плохих метеоусловиях без выдерживания и с вертикальной ско-
ростью около 4,6 м/с) требуют существенного увеличения прочности
шасси; для размещения самолета на лифте и в ангаре концы
крыльев необходимо отклонять вверх, а киль вбок (при большой
высоте киля) и т. д.
Таким образом, даже беглое знакомство с боевыми задачами са-
молетов тактической авиации говорит о большом разнообразии
и противоречивости требований, которым должен удовлетворять
самолет, выполняющий эти задачи. В идеальном случае конфигу-
рация самолета должна была бы объединить в себе достоинства
различных аэродинамических схем: хорошие пилотажные и ма-
невренные характеристики на дозвуковых скоростях самолета
с прямым крылом большого удлинения; хорошие характеристики
на трансзвуковых скоростях самолета со стреловидным крылом
умеренного удлинения; хорошие характеристики на сверхзвуко-
вых скоростях и небольшую массу конструкции самолета с высо-
конагруженным треугольным крылом малого удлинения и т. д.
Воплотить все положительные качества различных аэродинамиче-
ских схем в одном самолете невозможно, следовательно, необ-
ходимо искать приемлемое компромиссное решение.
10.2. ОСОБЕННОСТИ АЭРОДИНАМИЧЕСКОЙ КОМПОНОВКИ
САМОЛЕТА
10.2.1. Внешняя конфигурация самолета
При выборе аэродинамической схемы самолета в целом и от-
дельных его частей важно верно определить какому режиму полета
и в какой степени отдать предпочтение, дозвуковому или сверх-
звуковому. Правильный ответ на поставленный вопрос пред-
определяет оптимальное компромиссное решение проблем, свя-
занных с аэродинамической компоновкой.
При дозвуковых скоростях компонентами лобового сопротив-
ления являются сопротивление трения, пропорциональное пло-
щади смачиваемой поверхности, сопротивление давления и ин-
дуктивное сопротивление, пропорциональное квадрату отношения
подъемной силы к размаху крыла.
При сверхзвуковых скоростях полета большую роль в создании
сопротивления играют скачки уплотнения. При этом основным
компонентом сопротивления является волновое сопротивление.
Идеальная аэродинамическая схема сверхзвукового самолета,
удовлетворяющая условию минимизации волнового сопротивле-
ния, зависит от расчетного числа М полета. Поскольку, в отличие
от сверхзвуковых самолетов других типов, современный истреби-
261
тель должен обладать высокой
эффективностью в весьма широ-
ком диапазоне чисел М и углов
атаки (также влияющих на кон-
фигурацию самолета), исполь-
зование «правила площадей»
(см. гл. 8) при его аэродина-
мической компоновке затрудне-
но. Тем не менее повышенная
важность характеристик мане-
вренности на трансзвуковых
и сверхзвуковых скоростях обя-
зывает использовать это пра-
вило, которое в данном случае
сводится к минимизации миде-
левого сечения и сглаживанию
эпюры распределения площа-
дей поперечных сечений по
длине фюзеляжа.
Рис. 10.1. Аэродинамические схе-
мы истребителей F-5 и YF-17:
а — F-5 (обычное правило площадей.
Схема оптимальна для разгона прн
сверхзвуковых скоростях); б — YF-17
(дифференциальное правило площадей.
Схема оптимальна для виража при
сверхзвуковых скоростях)
На некоторых истребителях применяется так называемое диф-
ференциальное правило площадей, при котором «поджатие» фю-
зеляжа над и под среднерасположенным крылом имеет различный
характер. Ценою некоторого увеличения лобового сопротивления
при нулевой подъемной силе обеспечивается полезная интерферен-
ция, приводящая к увеличению подъемной силы при заданном
угле атаки. Области сильного разрежения, которые образуются
над крылом в результате уменьшения площадей верхней части се-
чений, распространяются вдоль линий Маха на обширную поверх-
ность крыла, создавая дополнительную подъемную силу. Кроме
того, возникает благоприятный продольный момент, способствую-
щий уменьшению балансировочного сопротивления. Примером
использования обычного и дифференциального «правила площадей»
в аэродинамической компоновке самолета могут служить истре-
бители фирмы «Нортроп» F-5 и YF-17 (рис. 10.1).
В проектировании современных сверхзвуковых самолетов все
чаще используется интегральная аэродинамическая схема, отличи-
тельной особенностью которой является плавное сочленение крыла
с фюзеляжем как в плане, так и в поперечных сечениях. Интеграль-
ная аэродинамическая схема позволяет снизить лобовое сопротив-
ление на трансзвуковых скоростях (благодаря лучшему исполь-
зованию правила площадей) и увеличить подъемную силу при
больших углах атаки (вследствие большей несущей способности
фюзеляжа).
Одной из фундаментальных проблем проектирования истреби-
теля, связанной с его внешней конфигурацией и общей компонов-
кой, является выбор числа двигателей (один или два). Число дви-
гателей в значительной степени определяет форму фюзеляжа, раз-
мещение оборудования, вооружения, баков с топливом и тем самым
262
оказывает значительное влияние на распределение площадей по-
перечных сечений и аэродинамическое качество самолета.
Данная проблема, к сожалению, до сих пор не имеет однознач-
ного решения. Например, на фирме «Макдоннелл-Дуглас» в ре-
зультате исследований, выполненных при проектировании ис-
требителя F-15, пришли к выводу о целесообразности установки
двух двигателей, несмотря на увеличение стоимости самолета.
На истребителях серии F-5 фирмы «Нортроп» устанавливали один
двигатель, а истребитель YF-17 (разрабатывавшийся на основе
тех же требований, что и самолет F-16) спроектировали по двух-
двигательной схеме.
Определяющую роль в решении данного вопроса играет нали-
чие подходящего двигателя для проектируемого истребителя
(обеспечение необходимой тяговооруженности самолета, степень
надежности двигателя, его стоимость и т. д.). Можно констатиро-
вать, что двумя двигателями обычно оснащаются относительно
тяжелые истребители с большой боевой нагрузкой и большим ра-
диусом действия, поскольку один двигатель из числа выпускае-
мых, как правило, не в состоянии обеспечить требуемую тяго-
вооруженность самолета.
Другой важной проблемой аэродинамической компоновки ис-
требителя является выбор типа воздухозаборника и его размеще-
ние на самолете. Рекомендации по решению данной проблемы из-
ложены в гл. 16.
10.2.2. Геометрические параметры крыла
Одним из главных вопросов, который должен быть решен на
ранней стадии эскизного проектирования современного самолета,
является выбор геометрии крыла в соответствии с требованиями
к летным характеристикам (геометрия фюзеляжа в меньшей сте-
пени определяет летные характеристики самолета). Ниже приво-
дится качественный анализ некоторых проблем, возникающих
обычно при решении этого вопроса в процессе проектирования сов-
ременного истребителя*.
За основной критерий при выборе параметров крыла истреби-
теля в большинстве случаев принимаются характеристики манев-
ренности при заданной массе самолета. Однако могут быть и дру-
гие критерии в зависимости от боевой задачи, которая считается
главной для проектируемого истребителя.
При выборе значений угла стреловидности крыла % и отно-
сительной толщины профиля необходимо учитывать влияние мно-
гих факторов на эти параметры. Прежде всего, для эффективного
полета на сверхзвуковых скоростях, как известно, необходимы
стреловидные и (или) сравнительно тонкие крылья. Однако умень-
шение толщины крыла ограничивается прогрессивным увеличением
* Подробно о проектировании крыла современных самолетов см. гл. 14.
263
Рис. 10.2. Допустимые значения параметров с и х для современных истре-
бителей:
1 — срыв потока при околозвуковых скоростях; 2 — отсутствие срыва потока; 3 — об-
ласть вероятных значений сих современных истр’ебителей
Рис. 10.3. Схема конической крутки крыла истребителя F-15 (относитель-
ная толщина крыла у корня 6%, на концах — 3%).
массы конструкции. С этой точки зрения предпочтительными пред-
ставляются утолщенные крылья большой стреловидности. Такие
факторы, как взлетно-посадочные характеристики, летные харак-
теристики на дозвуковых скоростях, бафтинг и срыв потока при
маневрировании в области трансзвуковых скоростей накладывают
дополнительные ограничения на параметры с и %, заставляя идти
на компромиссное решение при выборе их значений (рис. 10.2).
Характеристики установившегося дозвукового маневра, как
правило, ограничиваются равенством располагаемой тяги силовой
установки и лобового сопротивления самолета при больших зна-
чениях нормальной перегрузки пу. Доминирующим компонентом
лобового сопротивления в этих условиях является индуктивное
сопротивление (около 75 %). Первое требование при минимизации
индуктивного сопротивления — снижение нагрузки по размаху
крыла путем увеличения его удлинения %.
Увеличение подъемной силы (углов атаки) приводит к воз-
никновению срыва потока с передней кромки тонкого крыла,
сопровождаемого более резким возрастанием индуктивного со-
противления, которое больше не зависит непосредственно от на-
грузки по размаху крыла, а возрастает обратно пропорционально
производной коэффициента подъемной силы по углу атаки с“.
Повлиять на срыв потока можно изменением различных геометри-
ческих параметров крыла.
Коническая крутка крыла обеспечивается искривлением к ни-
зу участков хорд между передней кромкой и воображаемой ли-
нией, соединяющей носок корневого сечения с задней точкой кон-
цевой хорды, образуя фиксированную кривизну крыла (рис. 10.3).
Крыло с фиксированной кривизной (при умеренном значении
параметра f) обладает несколько большим профильным сопро-
тивлением сх0 на дозвуковых и сверхзвуковых скоростях, но дает
264
БезотрыВное "
оБтекание крыла,
при Больших
ролах атаки
Рис. 10.4. Крыло истребителя F-16 с изменяемой кривизной:
1 — иоски и закрылки, отклоняемые для улучшения маневренности
существенный выигрыш при маневрировании на больших углах
атаки.
Эффективное изменение кривизны крыла для маневрирования
на больших углах атаки можно обеспечить и отклонением механи-
зации крыла — носков (или предкрылков) и закрылков
(рис. 10.4).
Крейсерский полет на дозвуковых скоростях и патрулирова-
ние требуют больших значений % и с и малых значений %.
При броске на малой высоте с большой дозвуковой скоростью
профильное сопротивление составляет около 90 % полного со-
противления, в силу чего предпочтительно тонкое крыло с боль-
шой стреловидностью и большой удельной нагрузкой.
При полете на малой высоте в условиях повышенной турбу-
лентности атмосферы приращение нормального ускорения пропор-
ционально величине Vc^/p. Следовательно, для снижения реак-
ции самолета («тряски») необходимо увеличить параметры р
и х и уменьшать параметр X. Крыло с изменяемой кривизной (от-
клонением механизации при маневрировании на больших углах
атаки), но с повышенным значением параметра р в данном случае
будет иметь явное преимущество перед крылом большей площади
и фиксированной геометрии (без предкрылков).
Следует отметить положительное влияние на летные и проч-
ностные характеристики самолета и такого геометрического пара-
метра крыла, как сужение т). Большое сужение крыла (малая
концевая хорда) позволяет использовать большие углы стреловид-
ности по передней кромке для уменьшения сопротивления на
сверхзвуковых скоростях в сочетании с малой стреловидностью
задней кромки для повышения эффективности закрылков и эле-
ронов. Большое сужение крыла позволяет также уменьшить
изгибающие нагрузки, а следовательно, массу конструкции.
С другой стороны, слишком большое сужение приводит к обра-
зованию на концах крыла пиков в распределении нагрузки по
размаху и тем самым к усилению тенденции концевого срыва,
вызывающего продольную и поперечную неустойчивость.
265
Таблица 10.1
Влияние геометрических параметров крыла
иа летные характеристики истребителя
Режим полета Параметр крыла
с л f р
Установившийся дозвуковой ма- .— (+) + — + —
невр Максимальное число М + + +
Установившийся сверхзвуковой + — — + — (-)
маневр Дозвуковой крейсерский полет и — + + • — (+) (-)
патрулирование Бросок на малой высоте с большой + — 0 + — +
дозвуковой скоростью Полет в турбулентной атмосфере + 0 + 0 +
Взлет и посадка — + + — + —
Примечание. Знак «+» означает необходимость увеличения проект-
ного параметра для улучшения характеристик соответствующего режима полета
«—» означает необходимость уменьшения параметра; «0» означает незначитель-
ное влияние; «( )» означает улучшение характеристик в ограниченных пре-
делах.
ность для
проектируемого
Рис. 10.5.
сходящего с
Схема вихря,
передней части
наплыва
В табл. 10.1 суммируются результаты изложенного анализа.
Одним из путей разрешения противоречия требований к до
звуковому и сверхзвуковому режимам полета является примене-
ние крыла изменяемой стреловидности, которое в сочетании с
использованием механизации крыла позволяет выполнять эф-
фективную максимизацию аэродинамического качества самолета.
Однако сложность конструкции и увеличение массы самолета
(а следовательно, и стоимости) делает оправданным применение
крыла изменяемой стреловидности лишь в том случае, когда на-
ряду с главной (определяющей) боевой задачей повышенную важ-
истребителя имеют еще несколько бое-
вых задач (т. е. приближение к кон-
цепции многоцелевого самолета).
Другим компромиссным реше-
7 нием противоречивых требований
являются так называемые наплывы
(выдвинутые вдоль фюзеляжа корне-
вые части крыла). Наплывы, исполь-
зуемые на крыльях умеренной стре-
ловидности и удлинения, служат для
предотвращения срыва- потока на
крыле при больших углах атаки во
время боевого маневрирования. Это
266
достигается образованием
вихрей (рис. 10.5) и, сле-
довательно, областей низ-
кого давления, способст-
вующих разгону потока
на центральных участках
крыла. Таким образом,
наплывы позволяют в опре-
деленной степени объеди-
нить преимущества крыла
большого и малого удли-
нения, создавая на боль-
ших углах атаки прирост
подъемной силы и умень-
шение индуктивного со-
противления, а также за-
держивая резкое возраста-
ние волнового сопротивле-
ния в полете на транс-
звуковых скоростях. На
Рис. 10.6. Влияние наплывов крыла
на аэродинамические характеристики:
1 — крыло с наплывами; 2 — крыло без на-
плывов; 3 — увеличение подъемной силы на
больших углах атаки; 4 — уменьшение ин-
дуктивного сопротивления на больших углах
атаки; 5 — задержка роста волнового сопро-
тивления на трансзвуковых скоростях
рис. 10.6 показаны аэродинамические характеристики и форма
в плане типичного крыла с наплывами современного истре-
бителя, спроектированного для завоевания превосходства в воз-
духе.
10.2.3. Требования к вертикальному оперению *
Параметры вертикального оперения выбираются, как известно,
из условия обеспечения путевой устойчивости на всех режимах
полета, свойственных проектируемому самолету. Для истребите-
лей 1960-х годов вертикальное оперение рассчитывалось в соот-
ветствии с требованиями устойчивости при малых и умеренных
углах атаки (обычно до 10°). В настоящее время требования
эффективности истребителя в ближнем воздушном бою приводят
к необходимости обеспечения устойчивости самолетов с крылом ма-
лого удлинения до углов атаки порядка 25...30° и более.
Уменьшение путевой устойчивости на больших углах атаки
и появление скольжения вызывается вихрями, формируемыми пе-
редней частью фюзеляжа, которые увеличивают дестабилизирую-
щий эффект носовой части фюзеляжа и снижают эффективность за-
тененной крылом нижней части вертикального оперения.
Ослабление указанных дестабилизирующих эффектов может
быть достигнуто следующими средствами:
— выбором более плоской (сплюснутой) формы носовой части
фюзеляжа и (или) применением на ней наплывов для опускания
траектории вихрей (прижатия к фюзеляжу) и снижения тем самым
их влияния на вертикальное оперение;
* Подробно о проектировании оперения современных самолетов см. в гл. 17.
26
Рис. 10.7. Влияние больших углов атаки на путевую устойчивость:
а влияние вихрей (сбегающих с носовой части фюзеляжа при больших углах атаки)
на вертикальное оперение при скольжении; б — методы минимизации эффекта вихрей;
/ — центры вихрей; 2 — поле течения, образованное под влиянием вихрей; 3 — ста-
билизирующее влияние; 4 — дестабилизирующее влияние; I — сплюснутая носовая
часть фюзеляжа и (или) наплывы; II — двухкилевое оперение; III — увеличение высоты
киля н (или) использование подфюзеляжных гребней
Рис. 10.8. Схема палубного истребителя Макдоннелл-Дуглас-Нортроп F-18:
1 — пилоны для подвески УРС «Спэрроу»; 2 — пилоны для подвесных т.опливных баков
емкостью по 1136 л или бомб; 3 — пилоны для подвески УРС «Спэрроу» или «Сайдуин-
дер»; 4 — УРС «Сайдунндер»
— применение двухкилевого вертикального оперения с до-
статочно большим разнесением килей для уменьшения неблагопри-
ятного влияния вихрей (и даже достижения положительного
эффекта);
— увеличением высоты киля для минимизации площади, под-
верженной дестабилизирующему влиянию вихрей, и (или) ис-
пользованием подфюзеляжных гребней.
На рис. 10.7 показана схема влияния больших углов атаки
на путевую устойчивость самолета.
Выделить какой-либо один метод минимизации эффекта вих-
рей не представляется возможным, ибо все они имеют как опре-
деленные преимущества, так и недостатки. Поэтому окончатель-
ное решение по компоновке вертикального оперения в значитель-
ной степени определяется общей конфигурацией самолета.
Двухкилевое вертикальное оперение более целесообразно для
истребителя с крылом верхнего расположения и двумя двигателя-
ми (широкий фюзеляж); подфюзеляжные гребни являются эф-
фективным средством повышения путевой устойчивости и могут
использоваться в любом случае.
268
При аэродинамической компоновке самолета в целях умень-
шения площади, а следовательно, и массы киля обычно стремятся
к получению максимального плеча вертикального оперения
(LB.o). Однако фирма «Нортроп», нарушив это классическое ре-
шение, значительно уменьшила величину LB, 0 на палубном ис-
требителе F-18 (а еще раньше на YF-17), расположив два киля
между крылом и горизонтальным оперением (рис. 10.8). Исследуя
динамику движения и роста вихрей, сходящих с носовой части
фюзеляжа, специалисты фирмы «Нортроп» пришли к выводу, что
в данном положении на кили воздействуют меньшие по размерам
вихри, которые создают меньшие дестабилизирующие силы (по
этим соображениям кили также несколько отклонены на-
ружу).
Другая причина такого размещения килей заключалась в стрем-
лении сдвинуть вперед силовые элементы конструкции хвостовой
части фюзеляжа, что позволило упростить установку двигателей.
На истребителе F-18 двигатели могут сниматься всего за 21 мин
опусканием вниз через эксплуатационные люки на нижней части
фюзеляжа.
В результате принятой компоновки килей более плавной стала
также эпюра площадей поперечных сечений самолета F-18.
10.3. ПОВЫШЕНИЕ БОЕВОЙ МАНЕВРЕННОСТИ САМОЛЕТА
10.3.1. Критерии маневренности и параметры
самолета, влияющие на них
Одним из наиболее важных аспектов проектирования самолета
тактической авиации является необходимость выполнения непре-
рывно растущих требований к характеристикам маневренности,
играющих значительную роль в оценке боевой эффективности
самолета. Особенно трудно этот вопрос решается при проектиро-
вании самолета, способного успешно выполнять несколько бое-
вых задач.
Маневренность самолета характеризуется его способностью
изменять по времени высоту, скорость и направление полета.
Главным критерием маневренности, определяющим первые два
условия, является удельная избыточная мощность V*y (м/с),
величина которой в каждой точке траектории полета выражается
как произведение удельной избыточной тяги на скорость:
<1о1)
р _ V
где ——------удельная избыточная тяга (вектор тяги совпадает
по направлению с вектором скорости).
Удельная избыточная мощность, характеризуя способность
самолета изменять свою энергию за счет изменения высоты и
269
(или) скорости полета, равна производной по времени от удельной
энергии самолета (энергетической высоты):
V*y = Ё = nxV,
(10.1а)
где Е = Н 4- У2/(2^) — удельная энергия самолета. При постоян-
ной скорости полета Vy — Vy.
Изменение направления полета по времени характеризуется
таким критерием, как угловая скорость (либо радиус) разворота.
Угловая скорость разворота в вертикальной плоскости в общем
случае
‘,0-2>
где 0 — угол наклона траектории полета; g — ускорение свобод-
Рис. 10.9. Влияние параметров Р9 и р,> на удельную избыточную мощность
Рис. 10.10 Влияние параметров Ро и рп на перегрузку установившегося
разворота на высоте Н = 10 км
270
Представленные критерии маневренности можно выразить
через проектные параметры самолета следующим образом:
Vt=(P—Cfq) V,
или (10-4)
0 = (riy + Р sin а — cos 0);
Ф = у- У (Пу 4- Р sin а)2 — 1,
где Р — тяговооруженность самолета; р — удельная нагрузка
на крыло; q — скоростной напор; К. — аэродинамическое качество
самолета; пу — нормальная перегрузка.
Нормальную перегрузку, главным образом определяющую
угловую скорость разворота, также можно выразить через удель-
ную нагрузку на крыло:
ny = ^-q, (10.5)
или, при установившемся развороте в горизонтальной плоскости
через тяговооруженность самолета:
пу — К.Р cos а. (10.6)
Величина и характер изменения удельной избыточной мощно-
сти в основном зависят от тяговооруженности самолета и практи-
чески не накладывают ограничений на выбор параметров крыла
(так как сх/р изменяется слабо), за исключением общих требова-
ний минимизации лобового сопротивления, рассмотренных выше.
Преимущество в характеристиках разворота при прочих рав-
ных условиях будет иметь самолет, обладающий большей вели-
чиной тяговооруженности и комплексного параметра Су/р. При
достижении значения с71Пах (с помощью средств, позволяющих за-
тянуть наступление срыва потока при увеличении угла атаки)
параметр су!р можно повысить только путем уменьшения удель-
ной нагрузки на крыло.
На рис. 10.9 и 10.10 показан пример количественного влияния
параметров Рй и р0 на критерии маневренности.
10.3.2. Весовой баланс маневренного самолета
Выбор тяговооруженности и удельной нагрузки на крыло
маневренных самолетов следует выполнять с особой осторож-
ностью на ранних этапах эскизного проектирования. Недостаточно
обоснованное желание получить высокие значения характеристик
маневренности может в дальнейшем поставить проектировщика
перед фактом катастрофического увеличения взлетной массы
самолета. Дело в том, что изменение тяговооруженности и удель-
271
ной нагрузки на крыло существенно отражается на весовом ба-
лансе самолета, а следовательно, и на его взлетной массе.
Для анализа взлетную массу истребителя удобно представить
в виде четырех составляющих:
-- /Икон + ™с. у 4~ mT "I- mconst,
(10.7)
где ткон — масса конструкции планера (и системы управления);
тс.у — масса силовой установки; тт;— масса топлива; mcOnst —
постоянная составляющая взлетной массы.
Величина mcOnst определяется оперативно-тактическими тре-
бованиями (боевой задачей) и не зависит от взлетной массы само-
лета (масса экипажа, систем жизнеобеспечения, радио-электрон-
ного оборудования и вооружения).
Взлетная масса истребителя, определяемая из «уравнения
существования»:
та = —-j—, (10.8)
1 — (WKOH + тС. у 4” тт) '
где ткоп = тКОн/то; тс. у = тс. y/moi й*Т = тч!тй — относительные
массы.
На величину ткон влияет параметр р0: чем меньше удельная
нагрузка на крыло, тем больше относительная масса конструкции
планера.
Величина /йс. у определяется главным образом тяговооружен-
ностью самолета и удельным весом двигателя. Для истребителей
в период предварительных расчетов можно принимать:
тс. 1,43удвР0, (10.9)
где удв — — удельный вес двигателя.
Рис. 10.11. Влияние удельной нагрузки на крыло на относительную массу
конструкции н относительную массу необходимого запаса топлива
Рис. 10.12. Влияние стартовой тяговооруженности на взлетную массу
истребителя:
• — исходный самолет
272
Рис. 10.13 Влияние па-
раметра р0 на взлетную 'мас-
су истребителя:
• — исходный самолет
Величина mT определяется дально-
стью полета (радиусом действия), вре-
менем патрулирования и условиями
ведения воздушного боя. Однако на
относительную массу топлива, потреб-
ного для выполнения той или иной
боевой задачи, также влияют пара-
метры Ро и р0, так как при их из-
. менении изменяется величина 5МИД, что
в свою очередь приводит к изменению
аэродинамического качества? самолета,
а следовательно, и величины тт. Дру-
гими словами, при увеличении Ро по-
требная величина тт увеличивается, при уменьшении р0 — умень-
шается (рис. 1Q.11).
Таким образом, параметры Ро и р0 влияют на все относитель-
ные массы в уравнении существования истребителя, вызывая при
определенных условиях чрезмерное изменение его взлетной массы
(рис. 10.12 и рис. 10.13).
Уменьшение удельной нагрузки на крыло в пределах р0 =
= 500...350 даН/м2 вызывает меньше осложнений, чем необходимое
из условий высокой маневренности увеличение тяговооруженности
самолета (так как при этом увеличение ткон частично компенси-
руется уменьшением тт см. рис. 10.11). Однако при р0 <350 даН/м2
взлетная масса истребителя начинает прогрессивно возрастать
(см. рис. 10.13).
Компенсировать увеличение взлетной массы истребителя при
изменении его проектных параметров можно, естественно, и за
счет величины mCOnst [см. (10.8) ], если установить новую РЛСс мень-
шей массой, новое вооружение с меньшей массой, новую систему
жизнеобеспечения с меньшей массой и т. д. При этом
А/Пц = km AmcOnst, (10.10)
где km = l/mconst — коэффициент изменения взлетной массы
самолета.
Коэффициент изменения взлетной массы не является постоян-
ной величиной. Так, для легкого истребителя завоевания превос-
ходства в воздухе km & 8, для самолета непосредственной под-
держки наземных войск, несущего большую бомбовую нагрузку,
4.
Таким образом, окончательный выбор тяговооруженности,
удельной нагрузки на крыло и других основных параметров ма-
невренного самолета можно сделать только после комплексного
анализа влияния этих параметров на характеристики маневрен-
ности и взлетную массу самолета. Например, подробное параметри-
ческое исследование, проведенное при разработке истребителя
F-16, позволило принять следующие оптимальные значения ос-
273
новных параметров: Ро — 1,1; р0 = 370 даН/м2; А, = 3; %п к =
= 40°, с = 0,04; т) = 4,4.
Задача минимизации взлетной массы ставится при проектиро-
вании самолета любого типа, однако при проектировании совре-
менных высокоманевренных самолетов эта задача имеет особенно
большую остроту. Дело в том, что для таких самолетов значения
важнейших параметров (Ро и р0), определяющих характеристики
маневренности, находятся на пределе, после которого дальнейшее
их изменение приводит к чрезмерному увеличению взлетной мас-
сы самолета.
10.3.3. Пониженная продольная устойчивость
самолета
Дальнейшее повышение характеристик маневренности при
выбранных тяговооруженности, удельной нагрузке на крыло и ге-
ометрических параметрах можно получить снижением баланси-
ровочного сопротивления (и повышением аэродинамического ка-
чества) самолета, которые также непосредственно определяют
величины V*y и пу, а следовательно, 9 и ф [см. формулы (10.4)
и (10.6)].
При переходе от дозвуковых к сверхзвуковым скоростям
полета аэродинамический фокус смещается примерно с 25 %
до 50 % САХ, что приводит к значительному увеличению запаса
продольной статической устойчивости самолета. При этом резко
увеличивается балансировочное сопротивление. Однако выбор
слишком малого запаса устойчивости для снижения этого вида
сопротивления может привести к возникновению ряда проблем,
связанных с управляемостью самолета (см. гл. 18).
Кроме того, при малом запасе устойчивости изгибные дефор-
мации крыла при больших перегрузках могут привести к продоль-
ной неустойчивости самолета. На рис, 10.14 приводится схема,
поясняющая уменьшение продольной устойчивости при дефор-
мации конструкции самолета.
Рнс. 10.14. Уменьшение продоль-
ной устойчивости самолета прн боль-
ших перегрузках вследствие упру-
гости конструкции:
1 — ъе.ъ жесткости; 2 — корневая хор-
да; 3 — уменьшение углов атаки конце-
вых сечеиий; 4 — деформированное кры-
ло; 5 — иедеформироваиное крыло; 6 —
упругая конструкция; 7 — жесткая кон-
струкция; 8 — смещение вперед точки
приложения подъемной силы (уменьше-
ние устойчивости); 9 — изгиб фюзеляжа
увеличивает эффективность горизонталь-
ного оперения (увеличение устойчиво-
сти); 10 — уменьшение эффективности
горизонтального оперения (уменьшение
устойчивости)
274
Поэтому на обычном (устойчивом) самолете при дозвуковых
скоростях необходима отрицательная величина запаса устойчи-
вости не менее 3 %, которая на трансзвуковых скоростях увели-
чится (примерно до 7 % при М = 0,9 и до 22...25 % при М =
= 1,2), что и приведет к значительному увеличению балансировоч-
ного сопротивления.
Избежать этого явления можно, если скомпоновать самолет
неустойчивым при дозвуковых скоростях и с небольшим запасом
устойчивости при М > 1. Например, истребитель F-16 благодаря
большему сдвигу ц. м. назад, чем это возможно на самолете обыч-
ной конфигурации (устойчивом при М < 1) при числе М = 0,9
еще неустойчив, а при М = 1,2 запас его статической устойчи-
вости увеличивается лишь до 8 %. Отрицательная подъемная сила
горизонтального оперения в этом случае значительно уменьша-
ется, соответственно уменьшается и балансировочное сопротив-
ление.
Однако подобное снижение продольной статической устойчи-
вости самолета должно быть компенсировано активным управле-
нием с помощью горизонтального оперения, т. е. в основе проек-
тирования самолета должна быть так называемая концепция лета-
тельного аппарата с конфигурацией, определяемой системой уп-
равления. Эта концепция требует использования проводной (элек-
тродистанционной) системы управления. Устойчивость самолета
искусственно обеспечивается бортовым вычислителем, а команды
летчика по электрическим цепям, заменившим обычные механи-
ческие связи, передаются непосредственно к серводвигателям,
приводящим поверхности управления. Преимущества в харак-
теристиках маневренности самолета с конфигурацией, определя-
емой системой управления, считаются бесспорными.
Следует заметить, что при искусственной продольной устой-
чивости схема «бесхвостка» с треугольным крылом вновь привле-
кает разработчиков боевых самолетов. Эта конфигурация была
выбрана для нового французского истребителя «Мираж-2000».
10.3.4. Кабина экипажа высокоманевренного
самолета
Маневренные возможности современного истребителя подошли
к такому пределу, когда ограничивающим фактором становится
физиологическая способность летчика переносить большие пере-
грузки. Поэтому дальнейшее повышение характеристик манев-
ренности неизбежно связано с повышением этой способности. Дру-
гими словами, современному высокоманевренному истребителю
необходима кабина, снижающая воздействие на летчика значитель-
ных установившихся перегрузок.
Считается, что возникшую проблему можно решить (правиль-
нее сказать — отодвинуть), если летчик в кабине истребителя
будет находиться в наклонном положении во избежание действия
275
на его позвоночник полных перегрузок. Кабина с отклоненным
назад креслом позволит изменить действие перегрузок от направ-
ления «голова—ноги» и приблизить к направлению «грудь—спина»,
что увеличит на 2...4 единицы перегрузки, при которых появля-
ется ограниченное («туннельное») видение и последующее потем-
нение в глазах. Исследования фирмы «Макдоннелл-Дуглас»
показывают, что если на обычных истребителях порог потемнения
в глазах близок к перегрузке пи — 7,5, то при отклоненном кресле
он может быть увеличен до пу = 11,5.
Таким образом, наклон кресла (в сочетании с хорошим об-
зором из кабины) увеличивает маневренные возможности совре-
менного истребителя и повышает эффективность действий летчика
в ближнем воздушном бою.
Например, на истребителе F-16 для этих целей обычный угол
наклона кресла летчика 13° был увеличен до 30°. Конструкция
фонаря каплевидной формы обеспечивает круговой обзор в пре-
делах 360°, обзор вбок на 40° ниже борта и вперед на 15° ниже
носовой части фюзеляжа. Ручка управления с очень малым пере-
мещением установлена на подлокотнике кресла, который регули-
руется по высоте в соответствии с ростом летчика. Замена обычной
ручки управления боковой ручкой обеспечивает более точное уп-
равление самолетом в условиях больших перегрузок, когда
предплечье покоится на подлокотнике и от летчика требуется лишь
обеспечить давление на ручку для управления самолетом. Система
покидания с тройным резервированием позволяет производить
катапультирование при Н = 0 и при скоростях полета до 1110 км/ч
в условиях больших вертикальных скоростей снижения.
10.4. НЕКОТОРЫЕ ОСОБЕННОСТИ ПЕРСПЕКТИВНЫХ
ИСТРЕБИТЕЛЕЙ СЛЕДУЮЩЕГО ПОКОЛЕНИЯ
Основное внимание в исследованиях, связанных с проектиро-
ванием перспективных истребителей следующего поколения, уде-
ляется дальнейшему повышению маневренности и сверхзвуковой
крейсерской скорости полета.
Повысить характеристики маневренности современного истре-
бителя обычной конфигурации соответствующим выбором его ве-
совых и геометрических параметров становится все труднее и до-
роже. Например, для увеличения тяговооруженности до Р >
>1,2 необходимы новые ТРДДФ с удв <0,1. Поэтому даль-
нейшее повышение маневренности истребителей следующего по-
коления наиболее вероятно лишь на основе комплексного исполь-
зования последних достижений в области аэродинамики, систем
управления, конструкционных материалов, двигателестроения
и т. д.
Наибольшего внимания в программе комплексного повышения
маневренности будущих истребителей заслуживают следующие
технические нововведения и усовершенствования:
276
— непосредственное управление подъемной и боковой силами;
— пониженный запас статической устойчивости самолета;
— управление лобовым сопротивлением и реверсирование
тяги в полете;
— кабина, способствующая дальнейшему ослаблению воздей-
ствия на летчика больших перегрузок;
— перспективные композиционные материалы (20...25 % массы
конструкции самолета должно приходиться на композиционные
материалы);
— эффективные металлические конструкции и т. д.
Непосредственное управление подъемной и боковой силами
осуществляется одновременным приложением соответствующих
аэродинамических сил спереди и сзади центра тяжести самолета.
Конструктивное воплощение данной концепции можно осущест-
вить различными способами (в зависимости от аэродинамической
схемы самолета): совместным отклонением переднего и заднего
горизонтального оперения либо концевых частей крыла и руля
высоты; одновременным отклонением заднего киля и переднего
подфюзеляжного киля и т. д.
На рис. 10.15 показано решение этой задачи на эксперимен-
тальном самолете, разработанном на фирме «Макдоннелл-Дуглас»
по программе AFTI.
Система непосредственного управления подъемной и боковой
силами без необходимости отклонения самолета по углам тангажа,
рыскания и крена должна обеспечить летчику возможность изме-
нять траекторию полета без переходных режимов, запаздывания
и забросов, а также выполнять необычные маневры, основанные
на разделении поступательного и вращательного движений.
Считается, что способность поступательного перемещения
самолета в боковом и вертикальном направлениях (рис. 10.16)
Рис. 10.15. Схема экспериментального самолета Макдоннелл-Дуглас AFTI-I:
1 » поворотные части крыла; 2 — руль высоты; 3 — поворотные задние кили; 4 — по-
воротный передний киль
Рис. 10.16. Поступательное перемещение истребителя в горизонтальной
и вертикальной плоскостях при непосредственном управлении подъемной и бо-
ковой силами
277
Рис. 10.17. Использование режима «ориентирование фюзеляжа на цель»
при стрельбе из пушки по наземным целям:
а — обычный истребитель; б — истребитель с непосредственным управлением подъем-
ной и боковой силами; 1 — траектория полета; 2 — первая атака с-углом пикирования
около 10°; 3, 6, 9 — участок прицельного обстрела; 4 — выход из пикирования с углом
набора высоты 30°; 5 — вторая атака; 7 — ориентирование фюзеляжа на цель под углом
около 10° к вектору скорости; 8 — атака с бреющего полета
обеспечит ему очевидные тактические преимущества в боевых
операциях.
При атакующих действиях основным преимуществом истреби-
теля с непосредственным управлением подъемной и боковой си-
ламй должна явиться повышенная способность сопровождения ма-
неврирующей цели, что улучшит возможности для пуска
снарядов и увеличит время стрельбы из пушки в воздуш-
ном бою.
Система непосредственного управления подъемной и боковой
силами позволяет наводить оружие на цель («ориентирование фю-
зеляжа на цель») независимо от траектории полета истребителя.
По сигналам объединенной системы управления полетом и огнем
направление оси фюзеляжа может изменяться в диапазоне при-
близительно 20° по тангажу и 10° по курсу. В этом случае из по-
ложения горизонтального полета на малой высоте истребитель
сможет сконцентрировать огонь из пушек на одной точке либо
подвергнуть обстрелу зону большой длины, например колонну
войск противника. Обычному истребителю для этого необходимо
пологое пикирование, причем участок обстрела будет примерно
в 2,5 раза короче (рис. 10.17), а вероятность поражения сред-
ствами ПВО противника (при входе и выходе из пикирования)
существенно больше.
При оборонительных действиях истребитель с непосредствен-
ным управлением подъемной и боковой силами сможет легко выйти
из поля прицела истребителя противника, более эффективно ук-
лоняться от зенитного огня и снарядов класса «земля—воздух»
и т. д.
Дополнительным выигрышем можно считать повышение эф-
фективности работы систем самолета при заправке топливом в по-
лете, при следовании рельефу местности в полете на малых высо-
тах, при заходе на посадку и посадке и т. д.
278
Рис. 10.18. Схема работы плоско-
го сопла на экспериментальном само-
лете AFTI-I фирмы «Фэрчайлд —
Рипаблик»:
а — управление вектором тяги; б — ре-
версирование тяги
Необходимо отметить еще один немаловажный факт, связанный
с использованием системы непосредственного управления подъ-
емной и боковой силами: для повышения характеристик манев-
ренности не требуется дальнейшего увеличения тяговооруженности
самолета и уменьшения удельной нагрузки на крыло, ибо данная
система дополнительно обеспечивает Дпу = ±4; Дпг = ±1;
Длх = —1.
Управление вектором тяги наиболее просто может быть реа-
лизовано при использовании на двигателе самолета двухмерного
(плоского) сопла (рис. 10.18). Реверс тяги в полете дает возмож-
ность летчику получить эффективное торможение самолета в про-
цессе ведения воздушного боя.
Для увеличения физиологического предела переносимой лет-
чиком перегрузки необходим еще больший наклон кресла (по
сравнению с современными высокоманевренными самолетами).
Как видно из рис. 10.19, истребитель следующего поколения дол-
жен иметь катапультируемое кресло с углом наклона ср = 60...
...65°, что позволит при больших углах атаки (а = 15...25°)
изменить направление воздействия на летчика перегрузки пу
практически на 90°.
Однако при больших углах наклона кресла возникают трудно-
сти пилотирования самолета в нормальных условиях; кроме того,
катапультирование становится невозможным, так как при этом
не-обеспечивается безопасная высота пролета кресла с летчиком
над килем самолета. Выход один — необходимо кресло с изменя-
Рис. 10.19. Влияние угла наклона
кресла на пределы переносимой лет-
чиком длительно действующей пере-
грузки:
1 — направление действия перегрузки;
2 — наклон кресла к вертикали; 3 —
истинный иаклои кресла к вектору пере-
грузки (с учетом угла атаки); 4 — пере-
грузка, переносимая в противоперегру-
зочиом костюме; 5 — перегрузка, пере-
носимая без противоперегрузочного ко-
стюма; б — истребители 1960-х годов;
7 — современные высокомаиевреииые
истребители; 8 — в кабине истребителя
следующего поколения, рассчитанной
на воздействие больших перегрузок
279
Рис. 10.20. Схема изменения угла наклона кресла:
1 — границы, необходимые для безопасного пролета кресла с летчиком при катапуль-
тировании; 2 — угол катапультирования; 3 — регулируемый заголовник; 4 — регу-
нруемый подлокотник; 5 — шарнир поворота спинки; 6 — нейтральная реперная точка
кресла
емым углом наклона. Например, в кабине эксперименталь-
ного самолета AFTI фирмы «Макдоннелл—Дуглас» установлено
кресло, угол наклона которого может увеличиваться до 65°
(рис. 10.20).
Глава 11
ОСОБЕННОСТИ ПРОЕКТИРОВАНИЯ САМОЛЕТОВ
КОРОТКОГО И ВЕРТИКАЛЬНОГО ВЗЛЕТА
И ПОСАДКИ
11.1. ВВОДНЫЕ ЗАМЕЧАНИЯ
Стремление повысить экономику эксплуатации постоянно сти-
мулировало увеличение коммерческой нагрузки тк<н дальности
полета L, а следовательно, взлетной массы самолета т0, а также
скорости полета V. Это достигалось в основном ростом удельной
нагрузки на крыло р0, применением более тонких стреловидных
крыльев, совершенствованием аэродинамики и силовой установки
самолетов. Так, удельная нагрузка увеличилась с р0 =50...
...100 даН/м2 (1925... 1930 гг.) до р0 — 450...70 даН/м2 у совре-
менных пассажирских и транспортных самолетов. Следствием
этого явилось резкое увеличение размеров и стоимости аэродро-
мов. Увеличение массы самолета приводило к увеличению нагру-
зок на колеса шасси, что наряду с повышением давления в пневма-
тиках снижало проходимость шасси по аэродрому и потребовало
280
создания бетонированных ВПП. Аэродромы превратились в слож-
ные технические сооружения, строительство и эксплуатация ко-
торых требуют огромных затрат. Значительные размеры совре-
менного аэродрома (потребная площадь около 900 га), а также огра-
ничения по допустимому уровню шума на местности вынуждают
строить аэродромы на значительном расстоянии от городов.
С ростом объема воздушных перевозок возникла проблема пере-
груженности аэропортов из-за напряженного движения в зоне
аэродрома, как в воздухе, так и на земле, что привело к значитель-
ному увеличению непроизводительного времени на ожидание раз-
решения на взлет и посадку. Значительные затраты времени
на доставку пассажиров и грузов к аэропорту, ожидание раз-
решения на взлет и посадку приводят к уменьшению скорости
доставки «от двери до двери» и снижению экономичности пере-
возок.
Преодоление указанных трудностей и противоречий многие
авиационные специалисты связывают с созданием воздушно-
транспортных и боевых систем на базе вертикально взлетающих
или с малой длиной разбега и пробега самолетов.
Специфическими свойствами самолетов этого класса являются:
малые потребные размеры ВПП, крутые траектории при взлете
и посадке, малые скорости и ускорения при взлете и посадке,
возможность выбора параметров крыла, исходя из условий крей-
серского полета. СВВП/СКВП обладают потенциальными возмож-
ностями, реализация которых позволит решить ряд актуальных
народно-хозяйственных задач, важнейшими из которых явля-
ются:
— развитие сети авиалиний и увеличение объема воздушных
перевозок в труднодоступных районах, особенно Сибири и Даль-
него Востока;
— повышение эффективности использования существующих
аэродромов вследствие увеличения регулярности полетов, сниже-
ния шума на местности и более рационального использования воз-
душного пространства;
— увеличение скорости доставки пассажиров и грузов между
крупными административно-промышленными центрами путем
приближения аэродромов к центру города.
Вполне очевидны преимущества использования СВВП/СКВП
в военных целях как по возможностям базирования, так и по опе-
ративно-тактическим возможностям.
Отмеченные выше особенности СВВП/СКВП обусловливают спе-
цифические особенности проектирования как самолетов корот-
кого взлета и посадки, к которым в настоящее время принято от-
носить самолеты с потребной длиной ВПП порядка 600 м, так и
самолеты вертикального взлета и посадки, которым необходимы
размеры полосы, соизмеримые с размерами летательного аппа-
рата.
281
11.2. САМОЛЕТЫ КОРОТКОГО ВЗЛЕТА И ПОСАДКИ
11.2.1. Особенности короткого взлета и посадки
Рассмотрим, от каких параметров зависят взлетно-посадочные
характеристики самолета.
Длина разбега определяется следующей формулой:
Аразб ~ Vотр/(2йх). (11.1)
Здесь ах — среднее ускорение при разбеге. Оно определяется соот-
ношением сил разгона и торможения. В первом приближении,
пренебрегая влиянием аэродинамических сил при разбеге, можно
записать
ax=S (рсР — А — 2Дразб ) •
Здесь Рср = РСрКтоё) — средняя тяговооруженность при раз-
беге; Д — коэффициент сопротивления качению колес.
Аналогично для длины пробега можно записать
V2
^ро* = 2ЦГ1’ (11-2)
где |ах| — среднее замедление при пробеге. Для него справедливо
следующее приближенное выражение:
где Ррев, Рх.х — тяга двигателей реверсивная и холостого хода;
/(проб — аэродинамическое качество на пробеге; f2 — коэффи-
циент трения при пробеге.
Скорости Уотр и Vnoc определяются минимальной скоростью
установившегося полета или скоростью сваливания Ус.
Для самолета с горизонтальным вектором тяги
ус = 1/-----. (11.3)
т рсу шах взл споо)
По НЛГС-2 Уотр 1,1 Vc При пдв = 2; 3 и Уотр is 1,07 при п№ =
= 4. Скорость захода на посадку У3. п = 1,3 Ус.
Анализ формул (11.1) и (11.2) показывает, что существуют два
пути сокращения длины разбега и пробега самолета. Первый
путь — увеличение ускорения при разбеге и замедления при про-
беге. На взлете это достигается повышением Рср путем форсиро-
вания тяги двигателей либо путем установки стартовых ускори-
телей. На посадке применяются реверс тяги двигателей, воздуш-
ные тормоза, торможение колес шасси, а также различные за-
держивающие устройства на посадочной полосе. Отметим, что
параметры самолета по-разному влияют на ах. Так, при разбеге
желательно иметь минимальное сопротивление при большой подъ-
емной силе, а при пробеге, наоборот, как можно большее сопро-
282
Ч^даН/м2
283
Рис. 11.2. Влияние удельной нагрузки
на крыло и Суз.п на длину посадочной ди-
станции:
А — приемлемый диапазон рпОс; — легкие
самолеты; II — винтовые СКВП; /// — ре-
активные самолеты нормального взлета и по-
садки; IV — реактивные СКВП; V — при-
мерная граница обычного управления
тивление при малой подъем-
ной силе. По-разному вли-
яют на длину разбега и
пробега тяговооружен-
ность и коэффициенты
трения ft и f2-
Второй путь — умень-
шение минимальной ско-
рости самолета. Подставив
в формулу (11.1) значе-
ние Уотр, получим прибли-
женное выражение для
определения длины раз-
бега:
г ______Ро_____
разб~ р^о^Рер-Л) •
(Н-4)
Оно справедливо при по-
стоянном угле атаки кры-
ла, отсутствии ветра и на-
клона полосы. Коэффи-
циент подъемной силы при
отрыве
отр 0,827су Шах взл (^дв — 2, 3).
Построенная с помощью формулы (11.4) номограмма (рис. 11.1)
позволяет проанализировать влияние параметров самолета на
Аразб. Из рис. 11.1 видно, что обеспечение требования укорочен-
ного взлета накладывает очень жесткие ограничения на допусти-
мую величину = Ро^отр- Так, для обеспечения Lpa36 ~
т 200 м требуются значения q0 в диапазоне 45... 235 даН/м2,
в зависимости от величины стартовой тяговооруженности.
Не менее жесткие ограничения на величину р0 и су отр наклады-
вает режим короткой посадки. Зависимость потребной длины по-
садочной дистанции от удельной нагрузки на крыло и коэффи-
циента подъемной силы при заходе на посадку суз. п представлена
на рис. 11.2. При применении обычной механизации в виде щелей
и отклоняемых поверхностей на крыле с учетом отказа двигателя
и порывов ветра величина используемого на посадке су обычно не
превышает 1,6 ... 1,9. Это значение соответствует скорости при
заходе на посадку, приблизительно в 1,3 раза превышающей ско-
рость срыва при отказе двигателя. Это определяет потребные для
обеспечения короткого взлета значения удельной нагрузки на
крыло в диапазоне 90 ... 175 даН/м2.
Высокие значения с„тах могут быть реализованы при наличии
механизации по всему размаху крыла. С этой целью на ряде само-
летов применены закрылки по всему размаху крыла, причем внеш-
284
ние секции закрылков одновременно выполняют функции эле-
ронов. Низкая удельная нагрузка на крыло самолетов приводит
к снижению комфорта пассажиров и экипажа при полете в турбу-
лентной атмосфере, усложняет посадку при боковом ветре и утяже-
ляет конструкцию. Из рис. 11.2, видно, что для обеспечения тре-
бований короткого взлета и посадки при приемлемых значениях
удельной нагрузки на крыло (360 ... 490 даН/м2) и при условии
обеспечения возможности использования обычного управления
(заштрихованная на рис. 11.2 область) и наличии располагаемой
мощности силовой установки потребное значение су.л_ п должно
лежать в пределах 4 ... 5. Дальнейшее увеличение суэ,п, видимо,
потребует применения реактивного управления, аналогичного
управлению СВВП. Обеспечение столь высоких значений суъ.и
требует применения более эффективных средств механизации, ос-
нованных на использовании мощности силовой установки и полу-
чивших название энергетической механизации.
Рассмотрим основные особенности проектирования СКВП с та-
кой механизацией, уделив особое внимание сравнительному ана-
лизу и выбору параметров несущей системы самолета при различ-
ных методах энергетической механизации. Классификация таких
методов обеспечения короткого взлета и посадки представлена
на рис. 11.3. По способу обеспечения дополнительной подъемной
силы на малых скоростях методы можно разделить на три группы.
В первую группу входят методы, основанные на увеличении несу-
щей способности крыла путем управления пограничным слоем.
Рис. 11.3. Классификация энергетических методов обеспечения короткого
взлета и посадки
286
Ко второй группе отнесены комбинированные методы, использую-
щие явление суперциркуляции и отклонение реактивной струи от
двигателей с помощью средств механизации крыла. Методы тре-
тьей группы основаны на принципе прямого бесциркуляционного
создания подъемной силы с помощью различных источников тяги.
Этот путь позволяет осуществить взлет и посадку при сколь угодно
малых Уга1п, вплоть до Уга1п = 0, т. е. вертикальные взлет и по-
садку.
11.2.2. Управление пограничным слоем
Суть этого метода заключается в обеспечении безотрывного
обтекания крыла в достаточно большом диапазоне углов атаки
за счет увеличения энергии пограничного слоя. В этом смысле
управление пограничным слоем (УПС) не отличается от принципа
работы предкрылков и закрылков. Различие состоит лишь в источ-
нике и величине энергии, сообщаемой пограничному слою.
Идея ввода воздуха, обладающего большой энергией, в верх-
нюю зону поверхности крыла для устранения срыва потока была
выдвинута давно. Однако ее практическая реализация стала воз-
можной лишь с появлением ТРДД, позволяющих осуществить от-
бор необходимого количества воздуха без значительных потерь
тяги.
Из различных способов УПС наибольшее распространение полу-
чил способ, основанный на выдуве через щель или систему щелей
тонкой струи воздуха, вытекающей с большой скоростью танген-
циально к поверхности крыла. Место выдува соответствует зоне
наиболее вероятного появления отрыва потока, т. е. в районе
носка крыла и на «колене» закрылка. УПС с помощью отсоса по-
граничного слоя применяется реже из-за трудностей его реализа-
ции. Эффективность сдува характеризуется коэффициентом им-
пульса выдуваемой струи
msVs
~ qS •
(Н-5)
Здесь тъ = GB/g — массовый расход воздуха в системе сдува;
Vs — скорость струи; q — pooVL/2 — скоростной напор невоз-
мущенного потока; S — площадь крыла, обслуживаемого системой
сдува.
Приращения коэффициента подъемной силы при УПС в основ-
ном определяются двумя параметрами — величиной коэффициента
импульса выдуваемой струи и углом отклонения закрылка 63.
Кривые \су = f (cj (рис. 11.4) имеют характерный излом, за
которым интенсивность приращения \су резко уменьшается.
Точка излома определяет величину коэффициента импульса сцА,
при которой еще обеспечивается безотрывное обтекание профиля.
Представляет интерес определить величину коэффициента им-
пульса Сцд, соответствующего собственно управлению погранич-
ным слоем. В общем случае СцА зависит не только от угла отклоне-
286
ния закрылка, но и от ширины щели, угла
атаки а и соотношения скоростей Ус/Уоо.
Для приближенных расчетов можно вос-
пользоваться следующей формулой:
сцА^(1,5. . .2,0)623.10-5. (11.6)
Здесь 63 — угол отклонения закрылка
в градусах. Более высокие значения сцЛ
соответствуют большему значению отно-
сительной ширины щели.
Зная величину с^, можно опреде-
лить величину импульса mBVs, обеспе-
чивающую при выбранной удельной на-
грузке на крыло потребное значение су.
т, mglS
Используя выражения су =—— и
Рис. 11.4. Зависимость
приращения коэффициен-
та подъемной силы от Ср.
и б3
mBVs
qs ’
получим
= mgc^/Cy. (11.7)
Связь между величиной импульса и параметрами воздуха, вы-
дуваемого через щель, при условии изэнтропического расширения
определяется следующим соотношением:
X—1
^=^1^(1--^) * Тв$щ, (11.8)
где х — cp/cv — отношение теплоемкостей (для воздуха х = 1,4);
R — газовая постоянная (для воздуха 7? = 29,27 м/К); Та —
абсолютная температура воздуха в канале, подводящем воздух
к соплу, К; р<х> — давление воздуха в свободном потоке; р& —
полное давление воздуха в канале перед соплом; ув — удельный
вес воздуха (в стандартных условиях ув = 1,224 даН/м3); —
площадь щели, м2.
Варьируя величину давления в канале, а также площадь
щели, можно получить потребную величину импульса при умерен-
ных количествах воздуха, отбираемого от компрессора двигателя.
Потери тяги двигателя за счет отбора воздуха можно оценить
с помощью следующей приближенной формулы:
P=1-AGB, (11.9)
где Р = PmRP — отношение тяги при отборе к тяге без отбора;
GB = CB/GBS — отношение весового расхода отобранного воздуха
к суммарному расходу; k — 1,5 ... 2,0 — коэффициент, зависящий
от степени двухконтурности двигателей; большие значения k
соответствуют большей степени двухконтурности двигателя.
Следует учитывать, что использование высокого давления воз-
духа в канале при большой скорости истечения является наивыгод-
нейшим путем достижения заданного значения импульса струи,
так как это позволяет обойтись меньшим количеством воздуха
287
(меньшие потери тяги), облегчает проблему размещения трубопро-
водов в крыле, а также ведет к повышению эффективности сдува
вследствие увеличения отношения Vc/Voo. Применение УПС поз-
воляет получить с^тах = 4 ... 5. Реализация столь высоких зна-
чений септах крыла требует соответствующего повышения эффектив-
ности оперения, в частности, вследствие применения на нем УПС.
Для применения УПС важно обеспечить равномерность выдува
на левой и правой половинах крыла и оперения, как при нормаль-
ной работе, так и при отказах двигателей.
11.2.3. Комбинированные методы
К этим методам можно отнести отклонение спутной струи от
винтов с помощью закрылков, внешнюю и внутреннюю обдувку
закрылков струей от ТРДД, а также повышение несущей способ-
ности крыла с помощью струйного закрылка.
Первый метод является весьма эффективным средством сокра-
щения взлетно-посадочных дистанций для винтовых самолетов.
Суть его заключается в предотвращении срыва потока при весьма
больших углах отклонения закрылков за счет энергии струи вин-
тов, в увеличении эффективной скорости обдувки крыла и повороте
с помощью механизации вектора тяги.
В качестве примера может быть назван самолет Бреге 941,
крыло которого имеет трехщелевой закрылок, обдуваемый пото-
ком от четырех винтов, приводимых во вращение четырьмя ТВД.
При отклонении закрылка на угол 63 = 45° можно получить
сушах >5,5 (рис. 11.5). Применение такой механизации на само-
лете Бреге 941 при взлетной массе 21 т обеспечивает взлетную ди-
станцию Лвзл = 285 м и посадочную £пос = 255 м.
Если количество движения воздуха, вводимого в пограничный
слой, превышает требуемое для поддержания безотрывного обте-
кания при умеренных углах атаки, возникает явление, известное
под названием суперциркуляции, в результате чего су возрастает до
очень большой величины, зависящей от количества движения воз-
духа, отводимого от силовой установки в крыло. Выхлопные газы
двигателя направляются в крыло и выбрасываются поверх за-
крылков, что позволяет для самолета обеспечить су > 7. Такая
схема реактивного закрылка, объединяющая несущую систему
самолета с силовой установкой в единое целое, была реализована
в Англии на экспериментальном самолете HS.126. Подобная схема
дает наибольший аэродинамический эффект, однако ее практиче-
ское применение представляет трудную инженерную проблему,
связанную с конструированием протоков, изоляцией и использо-
ванием^ внутреннего объема крыла.
Применение закрылка с внешним обдувом струей ТРДД снизу
исключает необходимость усложнения конструкции крыла вну-
тренними протоками, но вводит некоторые новые проблемы. При
взлете и посадке реактивная струя от подвешенных под крылом дви-
288
Рис. 11.5. Характер поляры для крыла при б3 = 45°:
1 —I с обдувом крыла; 2 — без обдува потоком от винтов
Рис. 11.6. Зависимость су от величины Сц, при внешнем обдуве закрылка
струей ТРДД снизу
гателей направляется на отклоненные закрылки. При этом подъ-
емная сила создается не только вследствие изменения направле-
ния вектора тяги, но также и суперциркуляцией, обусловленной
распространением влияния потока, обдувающего закрылок, на
всю поверхность. Эффективность закрылка повышается за счет
сходящей с него вихревой пелены. Срыв потока предотвращается,
так как часть струи проходит через щели в закрылках и сообщает
энергию пограничному слою.
Коэффициент подъемной силы крыла с таким закрылком мо-
жет быть представлен в виде суммы:
су = сус + т]Сц sin (6стр + а) -ф AcyY, (11.10)
где Сус =о — коэффициент подъемной силы крыла без выдува
реактивной струи; г] — статический коэффициент восстановления
тяги; 6стр — угол отклонения струи реактивного закрылка;
а — угол атаки; АсуГ — приращение подъемной силы из-за супер-
циркуляции. Типичная зависимость су = f (си) представлена
на рис. 11.6.
При рассматриваемом способе механизации крыла изменяется
и продольная сила. Коэффициент продольной силы от выдува
реактивной струи на закрылке может быть определен по следую-
щей формуле:
= т]Ср cos (а + 6стр) — уГ^----сх0. (11.11)
•ь/*Эф
Исследования показали, что при рационально выбранных пара-
метрах закрылка и положения сопла двигателя статический
коэффициент восстановления тяги г] может достигать величин по-
рядка 0,85 ... 0,90 при максимальных углах отклонения струи.
Практическая реализация данной концепции, возникшей в сере-
дине 50-х годов, стала возможна лишь в последнее время (само-
Ю С. М. Егер и др. 289
лет YC-15) в связи с появлением двига-
телей с большими степенями двухкон-
турности, обеспечивающих приемлемое
соотношение тяги на взлетном и крей-
серском режимах и имеющих сравни-
тельно низкую температуру струи.
Обдув струей реактивного двига-
теля верхней поверхности крыла и за-
крылка для увеличения подъемной
силы основан на использовании эффек-
та Коанда — «прилипания» струи к
обдуваемой тангенциально криволиней-
ной поверхности. Это явление впервые
систематически было исследовано в кон-
це тридцатых годов. Хотя усилия
Коанда были направлены главным об-
разом на улучшение эжекторов, этот
эффект использовался во всех систе-
мах УПС посредством сдува. Позже
было показано, что этим способом
можно отклонять мощные выхлопные
струи ТРДД с большой степенью
Рис. 11.7. Аэродинамиче-
ские характеристики мо-
дели самолета YC-14 (ре-
жим посадки, все двигате-
ли работают, модель без
ГО, несбалансированная,
сдув с носка отсутствует):
1 — ст =^0 (при неработающих
двигателях; 2 — ст = 1,0, г =
= 0,039; 3 - ст = 2,0, с* =
= 0,067; 4 — ст — 0; 5 — ст =
= 1,0; 6 — ст = 2,0; 7 — сх ™
=
двухконтурности, причем на большие углы и без чрезмерных
потерь.
Выхлопная струя ТРДД протекает по верхней поверхности
крыла, обдувая закрылок, отклонение которого меняет направле-
ние вектора тяги двигателя. Установлена плодотворность идеи
повышения несущей способности крыла вследствие обдувки его
верхней поверхности в районе закрылка. Приращение подъемной
силы происходит как вследствие суперциркуляции, так и за счет
отклонения вектора тяги двигателей. При этом реализуется доста-
точно высокий коэффициент восстановления тяги т]. На рис. 11.7
представлены аэродинамические характеристики модели самолета
YC-14 на малых скоростях, полученные в аэродинамической трубе.
Из графиков видно, что применение дополнительного сдува по-
граничного слоя в районе носка крыла существенно увеличивает
критические углы атаки и примерно на 20 % величину ситвах при
умеренных значениях отбираемого от двигателя воздуха.
При оценке характеристик подъемно-тяговых систем, в основу
которых положены методы внешней обдувки закрылка струей от
двигателя, когда в создании нормальной и продольной силы уча-
ствует все количество движения струи двигателей, вместо коэффи-
циента импульса выдуваемой струи надо пользоваться экви-
валентным ему коэффициентом тяги ст, который может быть оп-
ределен по следующей формуле:
с
т ~ qS ’
(11.12)
290
где Р (V) — суммарная тяга двигателей, зависящая от скорости
полета.
При проектировании самолетов КВП, имеющих закрылки
с внешним обдувом, необходимо решить ряд сложных проблем.
Одной из таких проблем является обеспечение требуемых характе-
ристик устойчивости и балансировки самолета. Создание большой
подъемной силы в задней части профиля крыла вызывает большой
момент пикирования и, следовательно, ведет к необходимости иметь
мощное горизонтальное оперение для поддержания прбдольной
балансировки. Кроме этого, по экспериментальным данным, про-
изводная скоса потока де/да может достигать критических значе-
ний, при которых хвостовое оперение в нормальной схеме стано-
вится дестабилизатором.
Исследования показали, что применение Т-образного опере-
ния с площадью порядка 0,255кр позволяет обеспечить баланси-
ровку и устойчивость до значений cffinax та 6.
Существенной проблемой является также обеспечение необхо-
димых характеристик при отказе одного двигателя, так как при
этом возникает несимметричная подъемная сила и, следовательно,
моменты крена. Это требует разработки аэродинамического управ-
ления, обеспечивающего достаточную мощность управления по
крену для устранения асимметрии, вызванной отказом двигателя,
без дополнительной потери подъемной силы. Момент крена может
быть сбалансирован путем уменьшения угла отклонения закрылка
на стороне с работающими двигателями и увеличения его на сто-
роне с отказавшим двигателем. Возможен также метод управления
по крену, основанный на отборе воздуха высокого давления от
компрессора двигателя и отводе его к элеронам для обеспечения
УПС. При отказе двигателя к отклоненному элерону (на стороне
отказавшего двигателя) должно подаваться в два раза больше воз-
духа, чем к элерону на стороне с работающим двигателем.
Крыло с закрылком с внутренним потоком (эжекторным за-
крылком) является развитием реактивного закрылка. При таком
крыле тонкая струя выхлопных газов вытекает вдоль размаха
в канал, образованный верхними и нижними секциями отклонен-
ного закрылка (см. рис. 11.3). Канал по размаху крыла выступает
над верхней поверхностью, что позволяет части потока с верхней
поверхности крыла протекать через канал. Стенки канала в форме
диффузора образуются частями закрылка, когда он отклонен ча-
стично (при взлете) или полностью (при посадке). Количество
протекающего через канал воздуха зависит от эффективности сме-
шения первичного потока газов с потоком воздуха, эжектируе-
мым с верхней поверхности крыла. Вторичный поток, индуцируе-
мый эжектирующим действием первичного потока газов, увеличи-
вает его тягу, а следовательно, создает подъемную силу. Эффектив-
ный коэффициент системы равен коэффициенту тяги первичной
струи минус потери в канале и сопле плюс прирайхение тяги вслед-
ствие подсасывания воздуха из потока. Коэффициент увеличе-
10* 291
Рис. 11.8. Схема струйного за-
крылка
ния тяги (отношение тяги на вы-
ходе из канала к тяге первичного
потока), достигнутый в настоящее
время, равен 1,4. Исследования
показали, что концепция крыла
с таким типом закрылков может
удовлетворить основным требова-
ниям к транспортному реактив-
ному самолету КВП.
Такой закрылок более эффек-
тивен, чем закрылок с внешним
обдувом, так как поток от двигателя может быть более равно-
мерно распределен по размаху. Кроме того, концепция такого
закрылка кажется особенно многообещающей для уменьшения ин-
дуктивного сопротивления, а также для обеспечения управляе-
мости при отказах двигателей. Последнее вытекает из возможности
управления распределением увеличенной подъемной силы по раз-
маху крыла посредством закрылка с внутренним потоком. Если
для ТВД проблема отказа двигателей решается механической
связью валов, то для самолета с ТРДД может быть использована
связь между газовыми каналами.
Струйный закрылок представляет собой плоский поток воздуха,
вытекающего с большой скоростью через заднюю кромку крыла
под углом 0 к нижней поверхности крыла (рис. 11.8). Струйный
закрылок создает подъемную силу изменением поля скоростей
вокруг крыла и перераспределением давления на верхней и ниж-
ней его поверхностях; кроме того, за счет импульса вытекающей
струи mBVs создается вертикальная составляющая силы
mnVs sin 0, которая, однако, существенно меньше аэродинамиче-
ского приращения. Эффективность реактивного закрылка зависит
от коэффициента импульса выдуваемой струи и угла 0. Для при-
ближенных расчетов приращения коэффициента подъемной силы
при реактивном закрылке можно воспользоваться следующей ин-
терполяционной формулой:
ксу = 3,9 sin 0. (11.13)
Применение струйных закрылков позволяет получить довольно
большие значения коэффициента подъемной силы, однако при
этом требуются с^, существенно большие, чем для УПС. Эффек-
тивность струйного закрылка значительно снижается с уменьше-
нием удлинения крыла; кроме этого, вблизи земной поверх-
ности струйный закрылок не обеспечивает получение расчетных
значений.
И.2,4. Методы бесциркуляционного создания
подъемной силы
Рост тяговооруженности самолетов, появление двигателей с от-
клоняемым в большом диапазоне углов вектором тяги, а также
легких подъемных двигателей и вентиляторов создает предпосылки
292
Рис. 11.9. Влияние отклонения вектора тяги на величину ymin
для улучшения взлетно-посадочных характеристик самолетов бла-
годаря использованию тяги двигателей непосредственно для соз-
дания подъемной силы при малых скоростях.
Вертикальную составляющую тяги Рв можно получить либо
отклоняя на угол <р вектор тяги маршевого двигателя, либо уста-
новкой специальных подъемных агрегатов. Возможна также ком-
бинация указанных способов. При наличии Рв минимальная ско-
рость становится равной
1 - РЕ)
'-у щах
(11.14)
где Рв = Рв/(тоа). ________
Таким образом, при этом Kmin в V 1 — Рв раз меньше, чем
при отсутствии вертикальной составляющей тяги, а при Рв та 1
она приближается к нулю, т. е. становится возможным взлет и
посадка с небольшим разбегом и пробегом.
Для взлета с отклоненным на угол <р вектором тяги
V ____1 /" О Psin <р) ...
min |/ Ростах * ( • )
Влияние отклонения вектора тяги на величину скорости отрыва
можно оценить с помощью отношения
^ш1п ~ ^min o/^min <р-
Зависимость Уш1п от угла ф для различных значений тягово-
оруженности представлена на рис. 11.9. Видно, что эффективность
293
Рис. 11.10. Зависимость
(<7oTp/?o)opt от рд
отклонения особенно существенна при
больших значениях тяговооруженности
и больших углах <р. При наличии подъем-
ных двигателей длина разбега может быть
определена по следующей приближенной
формуле, аналогичной формуле (11.4):
J _________________Ро__________
ра3° Pogc</ OTP [Рс₽/(1 -Рв) - fl] '
(11.16)
При отклонении вектора тяги маршевого
двигателя величина взлетной дистанции
в значительной степени зависит от приня-
той программы отклонения. Расчеты показали, что минимальная
взлетная дистанция получается при следующей программе: самолет
разбегается при ср = 0 до наивыгоднейшей скорости отрыва УоТр,
зависящей от q0 и Р самолета, затем вектор тяги поворачивается
на угол фов. = arccos [ (5 1, обеспечивающий
р L \ <7о /opt Л отр* о J
набор высоты без траекторного ускорения. Типичная зависи-
мость (^oTp^o)opt от стартовой тяговооруженности Ро представ-
лена на рис. 11.10.
При таком способе взлета длина разбега определяется следую-
щим уравнением:
^отр
1 I р _________________________________
VdV
(И-17)
Если принять ранее оговоренные допущения о характере измене-
ния тяги двигателя по скорости, то получим следующие уравне-
ния для определения длины разбега:
т _________Ро____
раз6 1П
или приближенно
Т-разб
1 (1 ~ РСР sin <Popt) (Лгу — сх)
(Рср — Л) Су отр
Ро (1 — Pep sin <p0Pt)
Ро&Су отр (РСР — /1)
(11.18)
(11.19)
Длину набора заданной высоты препятствия Япр можно опре-
делить, исходя из следующих соображений.
Набор высоты осуществляется за счет постоянного превышения
подъемной силы Y' = cyorpqOTpS + Рср sin <р над силой тяжести
самолета mog:
= Y' - mog = mog (qorP/q0 + Pcp sin <p - 1).
Зная избыточную силу ДУ и массу самолета, можно вычислить
время набора заданной высоты Япр, а затем, умножив его на ско-
рость при отрыве, определить длину набора высоты,
294
Из уравнения
d*H _ ДУ
___________________________ dt2 tn
получаем /йаб =» j/ ^т°^,пр , а длина набора
^иаб Кзтр^наб ~ Кэтр 1/" ", ". . р-Р , ~ Г, •
У g (?отр/?о + Р ср sin Ф ~ 1)
Подставив значение <pOpt и произведя преобразования, получим
^-иаб 2
?OTptfnp____
?отр 1
, 9о КотрРср
(11.20)
— 1
Общая длина взлетной дистанции Ьвзл = Lpa36 + £йаб- На
рис. 11.11 представлен график зависимости взлетной дистан-
ции от q0 для различных значений стартовой тяговооруженности.
Расчет производился по приближенным формулам для случая
/г = 0,05, /<отр = 4 при взлете
в стандартных условиях до высоты
препятствия Япр = 15. При по-
строении графика не учитывались
затраты на балансировку и потери
при отклонении вектора тяги, по-
этому полученные значения взлет-
Рис. 11.11. Зависимость взлетной дистанции от основных параметров само-
лета
Рис. 11.12. Поляры, полученные на малых скоростях различных систем
увеличения подъемной силы, использующих энергию двигателя для самолета
четырехдвигательиой схемы, имеющего УПС на передней кромке крыла, с ср =
= 0,08:
J — реактивный закрылок; 2 — эжекторный закрылок; 3 — внешний обдув поверх-
иостн крыла и закрылка сверху. 4 — отклонение вектора тяги двигателя;
5 — внешний обдув вакрылка снизу; 6 — двухщелевой необдуваемый закрылок; 7 —
КПД в 100 %, = 2; в сх ^/(яХэф)
295
ной дистанции необходимо рассматривать как предельно дости-
жимые.
На рис. 11.12 представлены поляры, полученные в результате
экспериментальных исследований различных систем увеличения
подъемной силы, позволяющие судить об их сравнительной аэро-
динамической эффективности. Выбор приемлемой системы улучше-
ния взлетно-посадочных характеристик для проектируемого
СКВП определяется требованиями к самолету и может быть сделан
лишь на основе комплексной оценки проекта.
11 .3. САМОЛЕТЫ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ
11.3.1, Анализ схем СВВП .
В настоящее время существует значительное количество лета-
тельных аппаратов вертикального взлета и посадки (АВВП),
использующих различные способы создания подъемной и движу-
щей сил. В табл. 11.1 представлена классификация АВВП, в ос-
нову которой положен способ создания подъемной силы на режи-
мах горизонтального и вертикального полета, а также способ соз-
дания тяги. В зависимости от способа создания подъемной силы
на режимах горизонтального полета АВВП подразделяются на че-
тыре типа — вертолеты, винтокрылы, преобразуемые летательные
аппараты и самолеты. Этот классификационный признак в значи-
тельной степени определяет величину максимального аэродинами-
ческого качества летательного аппарата. По способу создания
движущей силы в горизонтальном полете можно выделить винто-
вые, комбинированные и реактивные АВВП. Этот признак позво-
ляет определить примерные диапазоны максимальных скоростей
полета различных АВВП. Существенное влияние на эксплуата-
ционные, летные и экономические характеристики АВВП оказы-
вают способы обеспечения подъемной силы на вертикальных ре-
жимах полета, основные из которых представлены на классифи-
кационной схеме. Эффективность различных способов создания
подъемной силы, начиная от несущего винта до подъемных и подъ-
емно-маршевых ТРД, отличающихся способом создания необхо-
димого импульса mBVs для обеспечения вертикальной тяги, можно
оценить с помощью следующих обобщенных параметров:
PB/N — отношение вертикальной тяги на режиме висения
к мощности, затрачиваемой на ее создание (для случая создания
подъемной силы тягой ТРД (ТРДД) N соответствует кинетиче-
ской энергии газовой струи);
PB/F — удельная нагрузка на ометаемую винтом площадь или
площадь струи реактивного двигателя на срезе сопла.
Зависимость PB/N от PJF для различных типов АВВП пред-
ставлена на рис. 11.13, где нанесены точки, соответствующие не-
которым существующим АВВП. Из рис. 11.13 видно, что при пере-
ходе от несущего винта к подъемному ТРДД PB/N изменяется
296
Таблица 11.1 Тип ЛА Вертолет Винтокрыл 1 Преобразуемый ЛА Самолет
ю сТ
И
е
к ю ю ю о о
я; со
S § и о о о о ю
о ю ю to
с 2 а со ю QO
Ж
св 4) ч X Я 280 . 450 750 650
т
св
О
о 3
ж 43 2 о о и с-> _
5 ° ° 2
ж о 5 ” IM
ж Зч£ а о 2 Ж.
о. 09 09 О н с 5 « к о Н Я 2 U сс Ч О 03 ф Ли W
О. " —
св С S 3 ж ж и
св я ж и о
Ж к ж ж ж 'ж4 ж
S Я R Ь « ж 3 и »ж - ’S 9S ж и
Ж S Я ж s а1 о
Ж •& Ж св я & 3 о § С ИЛИ ] а & К t* 2 о и о с
Ч о
« S • S
о ж
л
2 0) & 5* Ж Ж »ж 3 ж d »Ж х-ч 2 м <у
цания ш :й полет Тяга св X S о а и >, я ч п п о са к а. н о Ж ~ д «®
« 3
о а
о 2 Ж
з 5 ж и О ч
о а к »S 3
о е> га ж о.
Спо Гориз' ц,ъемн сила »ж Bs В о >> < ч 3 S’
о К о о <Р CQ К я X & Ж
И
с
297
Продолжение табл. 11.1
Способы создания подъемной силы н тягн Возможные схемы летательного аппарата vmax' км/4 ^тах Тип ЛА
Горизонтальный полет Подъемная тяга
Подъемная сила Тяга
Крыло Воздушный винт (винт в кольце) Поворот двига- тельной установки Поворот крыла с двигательной установкой Подъемные ТРД (ТРДД) 650 ... 750 10 ... 14 Самолет
Турбо- реактивный двигатель (ТРД, ТРДД) Подъемные (подъ- емно-маршевые) вен- тиляторы Эжекторные уси- лители тяги 1 >М> 1
Продолжение табл. 11.1
Способы создания подъемной силы и тягн Возможные схемы летательного аппарата Vmax- км/4 ^тах Тип ЛА
Горизонтальный полет Подъемная тяга
Подъемная сила Тяга
Крыло Турбо- реактивный двигатель (ТРД, ТРДД) Подъемно-ма рше- вый ТРД (ТРДД) 1 > М> 1 10 ... 14 Самолет
Подъемные ТРД (ТРДД) 9
Подъемные ТРД (ТРДД), поворот маршевого двига- теля
Подъемные (подъ- емно-разгонные) ТРД (ТРДД), от- клонение вектора тяги маршевого дви- гателя
665
W HlBm
в отношении 100 : 1, a PBIF— в отношении 1 : 1000. Это озна-
чает, что для получения тяги с единицы затраченной мощности
вертолетный несущий винт является наилучшей системой. По
этой причине вертолет не имеет конкурентов среди АВВП на ре-
жимах висения. Отметим также, что величина PB/N обратно про-
порциональна скорости струи. Так, для несущего винта эта ско-
рость примерно равна 25 м/с, а для подъемного двигателя —
600 м/с. Скорость струи является важнейшим параметром, влияю-
щим на шум, эрозию поверхности аэродрома и другие характе-
ристики АВВП. Эффективность различных способов создания
вертикальной тяги можно оценить с помощью коэффициента по-
лезного действия т|, который принят равным единице для идеаль-
ного воздушного винта в кольцевом канале и т) = 0,707 — для
идеального свободного воздушного винта. Из рис. 11.13 видно,
что т] винтовых систем, вентиляторных и двухконтурных ТРД
имеют примерно равный КПД (т) — 0,450 ... 0,427).
Важнейшим параметром, характеризующим различные способы
создания вертикальной тяги, является суммарная сила тяжести
устройства, создающего тягу, и топлива, реализуемого за время t
работы такого устройства на вертикальных режимах, отнесенные
к Рв, т. е. =
GC.7.T = -^±^L, (11.21)
* в
где Суд — удельный секундный расход топлива.
Значения Gc,y. т для различных типов подъемных устройств
представлены на рис. 11.14. По этому параметру ТРД, ТРДД
и ТВА имеют преимущество перед ТВД и вертолетными силовыми
300
установками. Однако при увеличе-
нии времени висения это преиму-
щество уменьшается. На рис. 11.14
показан график изменения отно-
сительного диаметра подъемной
системы DlPv, характеризующий
ее габариты, а следовательно,
в значительной степени аэро-
динамическое качество летатель-
ного аппарата в крейсерском
полете. Наименьший относитель-
ный диаметр имеют подъемные
ТРД (0,05 ... 0,07 м/кН). Для
винтовых систем эта величина ко-
леблется в диапазоне 0,10 ...
0,54 м/кН.
На основе приведенных дан-
ных можно произвести ориентиро-
вочную оценку различных спо-
собов создания вертикальной тяги
в зависимости от условий эксплуа-
тации АВВП. Очевидно, что если
60 Суд, кгКрН-с)
1hs,M/c
Рис. 11.14. Зависимость Ge. у. т
и относительного диаметра сило-
вых установок от удельного рас-
хода топлива и скорости струи
летательный аппарат предназначается для выполнения операций,
связанных с наличием длительных режимов висения, то преи-
мущество будет на стороне вертолета. Однако большой удельный
вес силовой установки вертолета, низкое аэродинамическое ка-
чество, резко уменьшающееся с ростом крейсерской скорости,
существенно ограничивают области целесообразного применения
вертолетов по скорости и дальности полета.
Винтокрыл, обладая достоинствами вертолета на режимах
висения, может иметь в 1,5 ... 2 раза большие скорость и даль-
ность, однако сложность конструкции винтокрыла и низкая весо-
вая отдача объясняют тот факт, что этот тип АВВП в настоящее
время еще не вышел из стадии экспериментов. Самолеты верти-
кального взлета и посадки, в отличие от двух предыдущих типов
АВВП, могут иметь скорость и дальность полета, свойственные
обычным самолетам. Это и определяет перспективу их применения.
Определенный интерес вызывают преобразуемые летательные ап-
параты, обладающие достоинствами вертолетов на режимах ви-
сения и самолетов — на режимах горизонтального полета, однако
реализация этой концепции требует решения целого ряда слож-
ных проблем.
В данной главе рассматриваются ’’самолеты вертикального
взлета и посадки (СВВП). При этом основное внимание уделено са-
молетам с силовыми установками на базе турбореактивных дви-
гателей.
Отличительной особенностью СВВП является наличие двух
систем, не свойственных обычному самолету. Это система созда-
301
ния подъемной силы и система обеспечения устойчивости и управ-
ляемости при нулевых и малых скоростях, когда обычные, аэро-
динамические способы создания подъемной и управляющих
сил не эффективны.
Для осуществления вертикального взлета и посадки самолет
должен обладать силовой установкой (СУ), обеспечивающей соз-
дание вертикальной составляющей тяги Ръ, превышающей силу
тяжести самолета tnog. В зависимости от способа создания тяги Ръ
СВВП можно разделить на следующие основные группы: самолеты
с единой СУ, самолеты с раздельной СУ, самолеты, с комбиниро-
ванной СУ, самолеты с агрегатами усиления тяги (АУТ).
Самолеты с единой силовой установкой характеризуются тем,
что необходимая для горизонтального полета, а также вертикаль-
ных и переходных режимов тяга создается с помощью одного или
нескольких двигателей одного типа (ТВД, ТРД, ТРДД). Созда-
ние единым двигателем горизонтальной и вертикальной составляю-
щих тяги может быть обеспечено либо поворотом самолета, либо
поворотом двигательной установки относительно самолета, либо
отклонением выхлопных струй двигателя. В первом случае вер-
тикальные взлет и посадка осуществляются при вертикальном
положении фюзеляжа, что требует решения ряда труднопреодоли-
мых проблем.
Большое распространение получили схемы с поворотом двига-
тельной установки (либо двигателя). По этой схеме построен ряд
винтовых СВВП, у которых для создания вертикальной тяги при-
меняется поворот винтов или всей двигательной установки, либо
поворот крыла вместе с установленными на нем двигателями
(рис. 11.15).
Для реактивных СВВП наиболее привлекательной оказалась
схема с горизонтально установленными ТРД (ТРДД), снабженными
устройствами для отклонения вектора тяги на 90° и более
(рис. 11.16). Двигатели самолетов с единой силовой установкой
относятся к классу подъемно-маршевых. В отличие от
обычных двигателей они имеют устройства отклонения вектора
тяги. У поворотных двигателей должна быть обеспечена работа
при любом угле поворота.
У самолетов с раздельной силовой установкой вертикальная
'тяга создается с помощью специальных подъемных двига-
телей, устанавливаемых вертикально или с небольшим наклоном
в фюзеляже, либо в гондолах двигателей на крыле. Горизонталь-
ная тяга создается обычным способом с помощью маршевых
двигателей (рис. 11.17).
В качестве подъемных используются малоресурсные ТРД и
ТРДД сравнительно небольшой тяги, обладающие малым удель-
ным весом и небольшими габаритами.
Описанным выше способом создания подъемной силы свойст-
венны некоторые негативные особенности, обусловленные допол-
нительными затратами на обеспечение вертикального взлета и
302
Рис. 11.15. Винтовой СВВП с поворотным крылом
Рис 11 16. Реактивный СВВП с единой СУ:
j - переднее сопло; 2 - заднее сопло
303
Рис. 11.17. Реактивный СВВП с раздельной СУ:
1 — подъемные двигатели; 2 — створки с направляющими жалюзи; 3 — створки люков
подъемных двигателей; 4 — воздуховод маршевого ТРД; 5 — маршевый ТРД; 6 — тру-
бопровод струйного управления; 7 — сопло струйного руля
посадки. Действительно, поскольку тяговооруженность, потреб-
ная из условий крейсерского полета, особенно для дозвуковых
неманевренных самолетов, существенно меньше тяговооружен-
ности, необходимой для обеспечения вертикального взлета и по-
садки, то в схемах с единой силовой установкой требуется специаль-
ная система мер, направленная на согласование характеристик
СУ на вертикальных и горизонтальных режимах. Эти меры обычно
включают применение сложной системы регулирования воздухо-
заборников, глубокое дросселирование либо отключение части
подъемно-маршевых двигателей. Все эти мероприятия связаны
с дополнительными объемами, увеличением массы СУ^и конструк-
ции, а также потребного топлива.
На самолетах с раздельной силовой установкой вся необхо-
димая для вертикального взлета и посадки тяга создается подъ-
емными двигателями. А это означает, что, например, при потреб-
ной вертикальной тяговооруженности РОв = 1,25 и удельном весе
подъемной СУ г0 = 0,1 /йс.у.в та 12,5 %, т. е. более 12 % взлет-
ной массы самолета на режимах горизонтального полета являются
«мертвым» грузом. Если к этому добавить увеличение объемов са-
молета, связанное с установкой подъемных двигателей, то станет
очевидной цена такого на первый взгляд естественного решения
проблемы вертикального взлета и посадки.
Компромиссным решением является применение схем с комби-
нированной силовой установкой. У самолетов этой схемы для
создания вертикальной тяги наряду с подъемными двигателями
используются подъемно-маршевые (рис. 11.18). В свою очередь,
подъемные двигатели в целях улучшения характеристик переход-
ных режимов могут использоваться для создания части горизон-
тальной тяги. В этом случае они называются подъемно-
разгонными. Для создания горизонтальной тяги подъемно-
।
304
1
Рис. П.18. Реактивный СВВП с комбинированной СУ (DO.31E) и схема
его управления:
1 — подъемные двигатели; 2 — подъемно-маршевые двигатели; 3 — струйные рули
продольного управления
разгонными двигателями используются либо их установка на ка-
чающихся опорах, либо поворот сопла двигателя, что обеспечи-
вает отклонение вектора тяги на 12 ... 15° от вертикали.
Разработка СВВП потребовала создания специальных подъемно-
маршевых и подъемных двигателей. Основные характеристики
некоторых построенных и перспективных зарубежных двигателей
для реактивных СВВП представленьР в табл. IV-2 (см. приложе-
ние).
Весьма перспективным направлением решения проблемы со-
гласования характеристик СУ на вертикальных и горизонтальных
режимах полета является применение схем реактивных СВВП
с агрегатами усиления тяги (АУТ) маршевых двигателей. Такие
агрегаты, обеспечивающие значительное увеличение тяги основ-
ного двигателя, выбранного в основном из условий крейсерского
режима, позволяют обеспечить вертикальный взлет и посадку,при
сравнительно небольшой установленной мощности СУ. В каче-
стве АУТ могут применяться либо турбовентилятор-
ные агрегаты, либо эжекторные усилители
тяги. Силовые установки с АУТ могут быть выполнены на ос-
нове ТВД, ТРД, ТРДФ, ТРДД и ТРДДФ. При этом каждый из
двигателей может быть использован для привода одного или не-
скольких АУТ.
305
2
Рис. 11.19. Реактивный СВВП с подъемными вентиляторами:
1 — носовой вентилятор для балансировки самолета; 2 — маршевые ТРД; 3 — подъем-
ный вентилятор; 4 — трубопровод подвода газов к турбине вентилятора
В силовых установках с турбовентиляторными агрегатами
усиления тяги (ТВА) подъемный вентилятор может иметь либо
механический привод с помощью вала привода вентилятора
через редуктор от свободной турбины основного двигателя, либо
газовый привод, либо трубопривод. В двух последних случаях
включение и отключение ТВА осуществляется с помощью заслонки
поворота газового потока на входе в выхлопное сопло двигателя.
Заслонка направляет газ либо на турбину ТВА, расположенную
по периферии подъемного вентилятора, либо на специальную тур-
бину, осуществляющую привод вентилятора с помощью вала. При
этом режим работы двигателя не изменяется. ТВА обеспечивают
коэффициент увеличения тяги (отношения тяги вентилятора к тяге
двигателей), теоретически равный трем. Достоинством силовых
установок с ТВА является их сравнительно малая удельная масса
(Ус. у = 0,125 кг/даН), высокая экономичность [ст а* 0,4 кг/(даН X
Хч)] и, что не менее важно, сравнительно малые вертикальные
скорости струй (Vs а* 100 м/с). На рис. 11.19 показана схема экс-
периментального СВВП с тремя ТВА, два из которых, расположен-
ные в крыле, служат для создания подъемной силы, а один но-
совой — для управления по тангажу. Газовый привод вентилято-
ров осуществляется от двух ТРД, объединенных таким образом,
что подъемная система может работать от одного двигателя. При
этом вертикальная тяга уменьшается только на 40 %. На входе
в вентилятор установлены жалюзи и спрямляющий аппарат, а
на выходе — спрямляющий аппарат и поворотные лопатки,
позволяющие создавать момент для управления по крену и рыс-
канию, а также изменять направление вектора тяги для улуч-
шения характеристик переходного режима.
Значительный интерес представляют схемы самолетов с эжек-
торными усилителями тяги. Достоинства низконапорных эжекто-
ров в качестве агрегатов усиления тяги основных двигателей
306
Рис. 11.20. СВВП с эжекторными усилителями тяги (ЭУТ):
а — ЭУТ в фюзеляже; б — ЭУТ в крыле; I, //, III — конфигурация горизонтального,
переходного и вертикального режимов соответственно
объясняются тем, что они обеспечивают довольно значительный
коэффициент усиления тяги. При этом эжекторы не имеют вращаю-
щихся элементов, они сравнительно просты по конструкции. Низ-
кая скорость и температура струи, истекающей из эжектора, сни-
жают эффекты эрозии и уровень шума, создаваемого на местности.
Вместе с тем при проектировании СВВП с эжекторными усилите-
лями тяги возникают проблемы компоновки, обусловленные
большими потребными габаритами установки для обеспечения оп-
тимальных соотношений площадей входа и выхода и необходимой
длины камеры смешения.
Эжекторные усилители тяги могут размещаться либо
в фюзеляже, либо в крыле (рис. 11.20). Схема классического
307
Рис. 11.21. Схема классического эжектора
ф
Рис. 11.22. Коэффициенты усиления тяги авиационных эжекторов:
— — — теоретические данные; О экспериментальные данные
эжектора представлена на рис.
тяги
11.21. Коэффициент усиления
~ с+1
где с = Fi/F2; f = F^HF-l + F2); F^ — площадь сопла эжектирую-
щего газа; F2 — площадь сопла эжектируемого газа; Р4 — пло-
щадь выходного сечения диффузора; п — коэффициент эжекции.
•Величина коэффициента эжекции при одинаковой плотности
смешиваемых газов может быть определена по следующей прибли-
женной формуле:
_ f (1 + 1/С)Г2с+^(/2-1) -(14-/8)
П0--------------i _|_ ----------- (11.20)
Различие в плотностях учитывается следующим образом:
п = «оКра/рь
где pi и р2 — плотности эжектирующего и эжектируемого газов
соответственно.
Анализ приведенных формул показывает, что для эжекторной
установки без диффузора при условии отсутствия потерь и при
полном смещении газовых потоков Фшах = 2. Однако получить
на практике такие величины коэффициента усиления тяги эжек-
торной установки пока не удается. Для повышения эффективности
эжектора в условиях ограниченной длины камеры смещения при-
меняются сопла с принудительным смещением. С этой целью можно
использовать разделение основной струи на ряд мелких струек,
как это показано на рис. 11.20, а. Этой же цели можно добиться
приданием основному потоку, истекающему из сопла, нормальных
к плоскости щели составляющих, способствующих турбулизации
потока. Реальные значения коэффициента усиления тяги эжектора
зависят также от различного рода потерь в трактах подвода воз-
духа к соплам эжектора и потерь в диффузоре вследствие отрыва
потока. Достигнутые значения Ф для некоторых исследованных
эжекторов представлены на рис. 11.22.
308
11,3,2, Системы управления СВВП
Для обеспечения управления и стабилизации на вертикальных
и переходных режимах СВВП должен иметь специальную систему
реактивного управления, управляющие усилия в которой созда-
ются с помощью энергии силовой установки. Способы полу-
чения управляющих усилий зависят от типа, числа, расположе-
ния двигателей и движителей на самолете, то есть от его компо-
новочной схемы. Схематично эти способы можно разделить на три
группы, представленные на рис. 11.23.
К первой группе (см. рис. 11.23, а) относятся способы обеспе-
чения управляющих усилий с помощью системы струйных рулей,
представляющих собой либо реактивные сопла, либо управляющие
вентиляторы, расположенные на концах крыла и фюзеляжа.
Воздух или газ для струйных рулей может отбираться от компрес-
сора или за турбиной подъемных,^подъемно-маршевых или мар-
шевых двигателей, либо от специальных газогенераторов. Стаби-
лизирующие и управляющие моменты создаются путем диффе-
ренциального изменения площадей сечений реактивных сопл
(или перестановкой лопаток вентилятора) и соответствующего из-
менения расхода рабочего тела. Такие способы применимы для
самолетов, у которых двигатели или группы двигателей располо-
жены в районе центра масс самолета. Типичная схема системы
управления таких самолетов представлена на рис. 11.24. Для
управления по курсу, тангажу и крену на концах крыла и фюзе-
ляжа установлено пять управляющих сопл, работающих на воз-
духе, отбираемом от компрессора подъемно-маршевого двигателя.
Сопла закреплены неподвижно, а регулирование расхода воздуха
через каждое сопло и, следовательно, создаваемых ими тяг и мо-
ментов осуществляется с помощью подвижных створок, перекры-
вающих выхлопное отверстие. Крыльевые сопла используются
для управления по крену, носовое и хвостовое для управления
по тангажу. Управление по курсу осуществляется с помощью
пятого сопла, установленного в хвостовой части фюзеляжа.
Вторая группа способов применяется в случае эксцентричного
расположения двигателей (см. рис. 11.23, б). В этом случае для
Рис. 11.23. Способы реактивного управления СВВП:
1 — струйный руль; 2 — подъемный двигатель
309
Рис. 11.24. Схема системы реактивного управления самолета «Харнер»:
а — схема расположения управляющих сопл (УС) и подвода к ним воздуха; б — си-
стема управления рулями н соплами; 1, 3 — переднее и заднее сопла управления по
тангажу; 2, 5 — сопло управления по крену; 4 — сопло управления по курсу; 6 — глав-
ный клапан
управления относительно продольной и поперечной осей может
быть использовано дифференциальное изменение тяги подъемных
двигателей (модуляция тяги), а для управления относительно
вертикальной оси — отклонения вектора тяги.
Если двигатели расположены на одной из’ главных осей само-
лета, но имеют большое плечо относительно его центра масс
(см. рис. 11.23, в), используется третья группа способов, пред-
ставляющая собой комбинацию двух предыдущих. Пример такой
комбинированной системы управления представлен на рис. 11.18.
Поперечное управление самолета осуществляется с помощью
модуляции тяги подъемных двигателей. Для продольного управле-
ния используются струйные рули, расположенные в хвостовой
части фюзеляжа. Их привод осуществляется с помощью воздуха,
отбираемого от подъемно-маршевых двигателей. Путевое управле-
ние осуществляется отклонением вектора тяги подъемных двига-
телей с помощью специальных насадков. Для повышения безопас-
ности на самолете применена автоматическая система управления,
включающая автостабилизатор, вычислитель сил и моментов, груп-
повые компенсаторы тяги, систему переключения и приводы.
310
Рис. 11.25 Потребные угловые ускорения относительно оси X:
1 — размах крыла / = 5 м; 2 — / » 10 м; $ — / = 20 м; 4 — / = 40 м
При проектировании СВВП важнейшей задачей является вы-
бор такой системы управления, которая бы обеспечивала не-
обходимую управляемость при минимальной собственной массе
и минимальных затратах мощности силовой установки. При от-
боре воздуха от двигателей на управление (6 ... 13 % от общего его
расхода через двигатель) падает тяга и увеличивается расход топ-
лива. Применение для управления модуляции тяги или отклоне-
ния вектора тяги также связано с неизбежными потерями.
Рассмотрим основные пути снижения затрат на управление.
Мощность системы управления определяется величиной сил
и моментов, потребных для обеспечения необходимых линейных
и угловых ускорений, а также потребной степенью одновремен-
ности воздействия максимальных управляющих моментов по трем
каналам управления. Потребные угловые ускорения ех, е,у и ег
зависят от типа самолета и его взлетной массы. Для их определе-
ния на предварительном этапе проектирования можно восполь-
зоваться графиками на рис. 11.25 ... 11.27. Потребный управляю-
щий момент относительно одной из осей определяется произведе-
нием момента инерции на угловое ускорение относительно рас-
сматриваемой оси, т. е. Л1упр = /е. Тогда потребная величина
тяги струйных рулей определяется по формуле
Рупр = /е/Лр, (11.24)
где Lp — плечо струйного руля.
В общем случае реактивная тяга струйного руля опреде-
ляется выражением
/’упр = tnBVs(f> + Fo (р0 - рн), (11.25)
где тв — секундная масса воздуха, вытекающего через сопло;
V3 — скорость истечения струи; ф — коэффициент, учитывающий
изменение скорости при реальном истечении по сравнению с адиа-
311
Рис. 11.26. Потребные угловые ускорения относительно оси Z:
1 — длина фюзеляжа Дф = 5 м; 2 — Дф = 10 м; 3 — Дф = 20 м; 4 — Дф •- 40 м
батическим; Fc — площадь поперечного сечения на срезе сопла;
Рс, Рн — полное давление на срезе сопла и атмосферное давление
соответственно.
Следовательно, для уменьшения количества отбираемого от
двигателя воздуха необходимо наряду с рациональным выбором
параметров сопла стремиться максимально увеличить плечи струй-
ных рулей и добиваться снижения моментов инерции самолета
путем размещения наиболее тяжелых грузов в районе центра масс
самолета.
Величину потерь тяги при отборе воздуха от двигателя можно
примерно оценить по формуле (11.9).
Рис. 11.27. Потребные угловые ускорения относительно оси К:
I — I = 5 м, Дф = 10 м; 2 — I = 10 м, Да = 20 м; 3 — I = 20 м, Дф = 30 м; 4 —
I = 30 м, £ф = 40 м Ф
312
11.3.3. Выбор Схемы и определение основных
параметров СВВП
При проектировании СВВП необходимо учитывать ряд специ-
фических особенностей таких самолетов, вытекающих из следую-
щих предпосылок.
Создание подъемной силы, а также обеспечение работы системы
управления на вертикальных и переходных режимах требуют
определенных затрат мощности силовой установки и, следователь-
но, связаны с увеличением массы конструкции, силовой уста-
новки и топлива. Для размещения подъемных агрегатов на само-
лете необходимы дополнительные объемы, что может привести
к ухудшению аэродинамических характеристик самолета. Кроме
того, специфика взлета и посадки изменяет функции некоторых
агрегатов СВВП. Например, к крылу не предъявляется требова-
ние создания большой подъемной силы на- малых скоростях.
Изменяются требования, предъявляемые к шасси СВВП. Все
это сказывается на выборе таких важнейших параметров самолета,
как удельная нагрузка на крыло и его стартовая тяговооружен-
ность.
При выборе схемы СВВП необходимо также учитывать ряд
специфических проблем, возникших в связи с разработкой СВВП.
Это прежде всего проблема эрозии поверхности
аэродрома. При вертикальном взлете и посадке выхлопные
струи двигателей, обладающие большой скоростью и температу-
рой, разрушают поверхность аэродрома. Степень разрушения
зависит от вида покрытия аэродрома, параметров струи, опреде-
ляемых типом двигателя, и времени воздействия струи. Влияние
перечисленных факторов поясняется рис. 11.28. Графики спра-
ведливы при кратковременном (несколько секунд) воздействии
одиночной струи. Для уменьшения эрозии необходимо выбирать
двигатели с возможно меньшей скоростью и температурой струи,
увеличивать расстояние между срезом сопла и поверхностью
аэродрома, а также максимально сокращать время воздействия
струи на ВПП.
трава
ТРДФ
Вентц- лтрп
лятор м м
таль.
ТРДФ
Алюминиевый сплав
О 2500 5000 7500 10000 Р/Р,даН/мг 0 250 500 750 1000 1250 t’C
а) 5)
Рис. 11.28. Области возможного использования двигателей в зависимости
от типа покрытия ВПП:
а = давление струи; б — температура струн
313
Рис. 11.29. Уровень шума, создаваемый различными двигателями:
т — степень двухконтурности
Второй путь борьбы с эрозией — повышение прочности грунта
с помощью различных покрытий, а также применение специаль-
ных решеток, позволяющих отвести струю в стороны.
Для самолетов вертикального взлета и посадки, обладающих
большой мощностью двигателей, особенно остро стоит проблема
достижения приемлемого уровня шума. На рис. 11.29
представлены типичные значения общего уровня шума, склады-
вающегося из шума струи, компрессора и турбины, для турбо-
реактивных двигателей с различной степенью двухконтурности
(различной нагрузкой на площадь сечения струи PB/F) при оди-
наковой тяге 30 000 даН. Для сравнения показан уровень шума,
создаваемого винтами. Из графиков следует, что уровень шума
падает по мере уменьшения нагрузки на площадь струи. Это об-
стоятельство может оказаться решающим при выборе типа двига-
теля для СВВП. Проблема облегчается тем, что крутизна траек-
тории взлета и посадки СВВП позволяет ограничить зону с повы-
шенным уровнем шума, а также возможностью захода на аэро-
дром практически с любого направления.
При проектировании СВВП необходимо учесть влияние
струй от подъемных двигателей на само-
лет. Истекающие из двигателей струи увлекают окружающий
воздух, вследствие чего образуются воздушные потоки, которые,
обтекая самолет, порождают вторичные аэродинамические силы
и моменты. Знак вторичной аэродинамической силы зависит от
количества струй, их расположения на самолете и расстояния
среза сопла от поверхности земли. Характер изменения этой силы,
314
Рис. 11.30. Влияние компоновки двигателей на характер вторичных аэро-
динамических сил и моментов
отнесенной к тяге подъемных двигателей, представлен на
рис. 11.30 для трех вариантов компоновок подъемных двигателей
в зависимости от h/l высоты среза сопла над землей, отнесенной
к размаху крыла. Из рис. 11.30 видно, что при групповом распо-
ложении двигателей в середине крыла образуется вторичная аэро-
динамическая сила, прижимающая самолет к поверхности земли.
Если двигатели разнесены по контуру крыла в плане, можно до-
биться получения положительной подъемной силы. Это объяс-
няется эффектом «фонтана», возникающим при взаимодействии
нескольких струй.
Вторичные воздушные потоки, индуцируемые струями двига-
телей, оказывают существенное влияние и на моментные характе-
ристики самолета. В частности, на рис. 11.30 показан характер
изменения относительного продольного момента для рассматри-
ваемых конфигураций самолетов. Вторичные аэродинамические
силы и моменты возникают и на переходном режиме полета. Ве-
личина потерь тяги от действия этих сил зависит от компоновки
Самолета, в частности от расположения источников тяги,
315
и от параметра струи р:
Н = (11.26)
где ро» Vco — плотность воз-
духа и скорость в свободном
потоке; р0, Vc — плотность
и скорость струи. Типичная
зависимость потерь тяговой
подъемной силы от параметра р
для различных компоновок
представлена на рис. 11.31.
При неблагоприятной компо-
новке потери подъемной силы
могут быть весьма существен-
ными.
Струи от двигателей, переме-
шиваясь с окружающим возду-
двигателей на вторичные аэродина-
мические силы и моменты вблизи
земной поверхности
хом, нагреваютего, в результате чего температура на входе в двига-
тель увеличивается и тяга двигателя падает. Это явление назы-
вается рециркуляцией. Величина потерь тяги вследствие рецир-
куляции зависит от размещения двигателей на самолете. Ее можно
существенно уменьшить, применяя различные перегородки, пре-
пятствующие попаданию горячих газов на вход двигателей. Кроме
того, для уменьшения рециркуляции можно отклонить струю на
10 ... 15° от вертикали, что скажется благоприятно и на вели-
чине эрозии аэродрома. Следует отметить, что строгая количе-
ственная оценка перечисленных выше факторов возможна лишь
на основе физического моделирования.
Схему СВВП в значительной степени определяет тип си-
ловой установки, выбор которой является центральной
задачей проектирования.
Применение специальных малогабаритных подъемных двига-
телей у самолетов с раздельной и комбинированной СУ приводит
к усложнению СУ, а также увеличению объемов, потребных для
ее размещения. Вместе с тем наличие большого числа двигате-
лей позволяет повысить безопасность в случае отказов двигате-
лей при взлете и посадке, что особенно важно для пассажирских
и транспортных самолетов. Достоинством единой СУ является
ее компактность, сравнительная простота. Кроме того, возмож-
ность гибкого изменения направлений вектора тяги позволяет
при выбранной стартовой тяговооруженности осуществить пере-
ходный режим за кратчайшее время.
Сравнение характеристик переходного режима самолетов с еди-
ной и комбинированной СУ для различных типов двигателей
представлено на рис. 11.32. Видно, что единая силовая установка
имеет преимущество перед комбинированной. Из графика также
следует, что с увеличением степени двухконтурности т расстоя-
316
ние, пролетаемое самолетом до достижения эволютивной ско-
рости Lnep, существенно возрастает, особенно для самолетов
с комбинированной СУ. Плохими характеристиками переходных
режимов обладают самолеты с раздельной силовой установкой.
Поскольку у СВВП векторы скоростей воздушного потока на
входе в двигатель и газового потока на выходе из сопла суще-
ственно не параллельны, то разность количества движения выте-
кающей и входящей масс газа и воздуха (эффективную тягу) не-
обходимо вычислить в векторной форме (рис. 11.33). Вектор вход-
ного импульса 7В1 = GBV, а вектор выходного импульса (при
условии полного расширения) 7ВЫХ = GrVs. Тогда вектор тяги оп-
ределяется выражением Р = (/вых — 7ВХ), а вертикальная и го-
ризонтальная тяги могут быть вычислены по следующим фор-
мулам:
PD = GrVs slncp; (11.27)
Pr = GTVS cos <p - GBV, (11.28)
где Gr, GB — секундный расход газа и воздуха соответственно;
Vs — скорость истечения струи; V — скорость набегающего по-
тока; <р — угол отклонения струи.
Отметим также, что применение в качестве подъемных двига-
телей ТРДД вместо ТРД, а тем более агрегатов усиления тяги
позволяет снизить скорость и температуру струи, а также на-
грузку на площадь сечения струи, что благоприятно сказывается
на величине шума и степени эрозии ВПП. Однако при этом увели-
чиваются потребные размеры для размещения подъемных агрега-
тов, а также импульсные потери.
Взлетную массу СВВП в первом приближении определяем, как
и в общем случае, по формуле пг0 — н + -----—
J ч- г j о 1 _ mK — тс- у — т0. у — «т
тк и т0. у определяются так же, как для обычного самолета. Од-
нако при этом необходимо учи-
L"eP’км _____________тывать некоторое увеличение
массы оборудования СВВП
(на 10 ... 15 %) вследствие
, установки приборов и автома-
Рис. 11.32. Влияние типа СУ и стартовой тяговооруженности на характе-
ристики переходного режима:
1 — единая силовая установка; 2 — комбинированная силовая установка
Рис. 11.33. График определения тяги силовой установки СВВП
317
тики для управления и балансировки самолета на вертикаль-
ных и переходных режимах, а также возможные изменения
массы конструкции, например за счет разгрузки крыла гондо-
лами подъемных двигателей.
Определение массы силовой установки СВВП рассмотрим для
общего случая самолета с комбинированной СУ:
У = ^Ог^Ог 4* ^Ов^Ов* 0 1.29)
Здесь РОг, Ров — стартовая тяговооруженность по подъемно-
маршевым и подъемным двигателям соответственно; гог, гов —
стартовый удельный вес подъемно-маршевой и подъемной сило-
вой установки (г0 = GC^IPO = £уудв).
Для определения гОв и гОг можно принять следующие значе-
ния удельного веса удв различных двигателей, достигнутые на
современном уровне развития двигателестроения (см. табл. IV-2
приложения):
Подъемные ТРД . . ..................0,05 ... 0,07
Подъемные ТРДД .....................0,05 ... 0,08
Маршевые ТРД .......................0,15 ...0,22
Маршевые и подъемно-маршевые ТРДД 0,18 ... 0,25
Турбовентиляторные агрегаты........0,08 ... 0,12
Величину коэффициента £у, учитывающего затраты массы на уста-
новку двигателей, можно принимать в следующих пределах:
Подъемные двигатели................... 1,6 ... 1,8
Маршевые двигатели.................... 1,3 ... 1,5
ТВА................................... 1,4... 1,6
Возможно более корректное определение стартовой тяговоору-
женности Ро — особенно важная задача при проектировании
СВВП, поскольку занижение Ро может привести к тому, что само-
лет не сможет взлететь вертикально, т. е. не будет отвечать своему
назначению. Завышение же Ро ведет к перетяжелению самолета.
При этом цена ошибки здесь весьма существенна, поскольку от-
носительная масса СУ СВВП, как правило, вдвое больше, чем
у обычного самолета.
Обеспечение безопасности на вертикальных режимах при
отказе двигателей диктует особенно жесткие требования к СУ.
Вместе с этим силовая установка СВВП должна обладать необхо-
димым запасом тяги для осуществления переходных режимов
с учетом ограничений, накладываемых на траекторию взлета и
посадки. Эти ограничения могут быть продиктованы характе-
ристиками аэродрома, допустимым уровнем шума в зоне аэродрома,
величиной перегрузки и т. д. При этом должны быть учтены им-
пульсные потери тяги, потери на поворот вектора тяги, а также
потери на преодоление вторичных аэродинамических сил и момен-
тов, возникающих при взаимодействии струй от двигателя с набе-
гающим потоком. Некоторые из перечисленных факторов и их
влияние на величину стартовой тяговооруженности схематично
318
представлены на рис. 11.34. Старто-
вая тяговооруженность СВВП в зна-
чительной мере зависит также от
назначения самолета и его компо-
новки, в частности от типа и числа
двигателей (вентиляторов) и их раз-
мещения на самолете.
Из сказанного следует, что стар-
товая тяговооруженность СВВП —
функция большого числа перемен-
ных, зависящих от выбранных ис-
ходных условий. Расчетное значе-
ние Ро определяется потребной тягой,
обеспечивающей наиболее тяжелые
условия взлета и посадки с учетом
Рис. 11.34. Влияние раз-
личных факторов на величину
стартовой тяговооруженности
СВВП:
АН — высота аэродрома над уров-
нем моря; 1 — АР = 10... 12 % —
ускорение, стабилизация, рецир-
куляция, влияние экрана; 2 —
ДР — 2,5...7,5 % — потери иа вхо-
де; 3 — нормальный день; 4 —
жаркий день (+30 °C)
отказа двигателей.
Поскольку требование безопас-
ности является основным при проек-
тировании любого самолета, вначале
определяется потребная величи-
на Ро из условия отказа двигателей
при вертикальном взлете.
Это условие выполняется, если
при отказе двигателей тяга рабо-
тающих позволяет совершить безопасную посадку, т. е. само-
лет в этом случае располагает вертикальной составляющей тяги,
уравновешивающей силу тяжести самолета, и удовлетворяет тре-
бованиям управляемости и устойчивости.
Затем, проведя расчет переходных режимов, необходимо выя-
вить потребный минимум Ро, удовлетворяющий требованиям пере-
ходных режимов. За искомую величину Ро принимается большая
из двух рассмотренных.
Определим Ро для комбинированной СУ, состоящей из подъ-
емно-маршевых (ПМД) и подъемных двигателей (ПД).
Если Pf — номинальная тяга одного ПМД, то его эффективная
тяга, используемая для создания подъемной силы, равна Р$=
= Р г^ф^а^упр?-
Здесь £ф 5г 1 — коэффициент форсирования тяги; k'3 < 1 —
коэффициент, учитывающий отличие условий на входе двигателя
от стандартных; £уПр < 1 — коэффициент затрат тяги на
управление; £ — коэффициент потерь при отклонении вектора
тяги.
Аналогично для ПД можно записать
Р\ = Р»н*ж„р.
319
Если на самолете установлено пг ПМД и пв ПД, то их суммарная
стартовая тяга будет равна Ро = nrPf + а стартовая тяго-
вооруженность самолета
п.Раг + пвР1
I __ Г Г ' о о
0 — тёё
— Рог + Р Ов-
Здесь РОг — стартовая тяговооруженность по ПМД; РОв — стар-
товая тяговооруженность по ПД.
В случае отказа или отключения ir и iB двигателей эффективная
вертикальная тяговооруженность будет равна
Ро = (11 -30)
ftp 7*В
Здесь = &ф&в&упр*
Для предварительных расчетов величину коэффициентов k$
и &упр можно принимать в следующих пределах: k$ = 1,07 ... 1,1;
&Удр — 0,95 ... 1,0. Коэффициент рассчитывают обычным спо-
собом.
Величина Pq может быть определена, исходя из следующих
соображений. Если из условий безопасности требуется, чтобы
самолет в аварийной ситуации мог висеть, то Рэ0 — 1. Если при
этом допускается спуск с некоторой скоростью, то Ро = 0,95 ...
... 0,98.
Величина РОг может быть определена обычным способом, на-
пример, из условия обеспечения заданных характеристик на
крейсерском режиме
Р°г = Kf (V, Н) ’ (11.31)
где т — тср/т0 — коэффициент, учитывающий изменение взлет-
ной массы самолета к началу крейсерского полета; К — аэроди-
намическое качество на крейсерском режиме; f (V, Н) — функция,
характеризующая изменение тяги двигателя по скорости и высоте.
Величина РОг может быть определена и из других соображе-
ний, в частности из условия обеспечения оптимального соотно-
шения между долями вертикальной тяги, создаваемой подъем-
ными и подъемно-маршевыми двигателями.
Решив уравнение (11.30) относительно Ров, получим
РОв = _pS-poAyr-»r)/"r _п^_. (11.32)
Йп «в — ‘в
Полагая, что вероятность отказа подъемных двигателей больше,
так как таких двигателей на самолете обычно больше, в дальней-
шем можно ограничиться случаем, когда /Е = 0; тогда
Р
0в —
П —PpiAifc Пв
Й* ив — 1в
(11.33)
320
Приведенные уравнения позво-
ляют определить стартовую тягово-
оруженность СВВП в зависимости
от типа и числа источников тяги, их
компоновки на самолете, способа
управления на вертикальных режи-
мах, уровня требований безопасно-
сти. На рис. 11.35 представлены
типичные зависимости РОв от пв, рас-
считанные по формуле (11.33). Гра-
фики построены для случая взлета
при рн = 730 мм рт. ст. и tH = 30 °C
при различных значениях коэффи-
циентов. При этом было принято,
что РОг = 0,37, а Ро = 1,0. Посколь-
ку по теории вероятностей одновре-
менный отказ двух двигателей при
п < 50 не происходит, расчетным
является случай, когда iB = 1.
Однако при некоторых компонов-
ках СУ для парирования несбалан-
сированного момента при отказе
вертикальной стартовой тяго-
вооруженности СВВП с ком-
бинированной СУ от числа и
расположения подъемных дви-
гателей:
РОэ = 1,0; пог = 0,37, *„=1,1;
k”n = 0,9; 5 = 0,97
одного двигателя приходится отключать симметрично располо-
женный двигатель, тогда iB = 2.
Графики показывают, что величина стартовой тяговооружен-
ности СВВП изменяется в довольно широком диапазоне. Рацио-
нальным выбором типа и числа источников тяги, их размерности
и компоновки на самолете можно существенно снизить Ро без
ущерба для безопасности полета на вертикальных режимах.
Рассматривая раздельную и единую СУ как частный случай
комбинированной, можно, используя уравнение (11.32) для раз-
дельной СУ, записать:
РОВ=4~1Г^Г- (1L34>
kn ПВ -
Тяговооруженность по маршевым двигателям определяется,
как и в первом случае.
Для единой СУ
Ро = -^----(11.35)
М «-1 v ’
Для самолетов с агрегатами усиления тяги
где Ф — коэффициент усиления тяги.
11 С. М. Егер и др.
321
Если потребная стартовая тяговооруженность определена из ,
каких-либо других соображений, например из условия разгона
на переходном режиме, то приведенные выше формулы могут быть
использованы для определения потребного числа двигателей из
условия обеспечения безопасности. Для этого достаточно решить
уравнения (11.32) ... (11.35) относительно пг или пв.
Относительную массу топлива следует определять как сумму
относительных масс топлива для вертикального взлета и посадки
и горизонтального полета:
mT = йт в йт г.
При этом для комбинированной СУ
/пт< в = (гр0Г/^0Г 4“ ^ров^ов) > (1Е37)
где Срог> Сров — стартовые удельные расходы топлива ПМД
и ПД соответственно (см. табл. IV-2 приложения); t' — суммар-
ное время, затрачиваемое на взлетно-посадочный и переходный
режим (/' = 1,5 ... 3,0 мин).
• Для раздельной СУ
^т. в = ^Ров-^ов^ • (11.38)
Для единой СУ
(11.39)
Относительную массу топлива тт. г определяют как для обыч-
ного самолета с заданной дальностью или продолжительностью
полета.
Особенность выбора удельной нагрузки на крыло СВВП заклю-
чается в том, что при этом не учитываются некоторые ограниче-
ния, существенные при проектировании обычных самолетов ана-
логичного назначения.
Так, величина удельной нагрузки на крыло р0 транспортного
СВВП должна удовлетворять следующим требованиям:
1) обеспечение заданной скорости крейсерского полета на за-
данной высоте;
2) обеспечение заданной минимальной скорости завершения
переходного режима Уп при ограниченном значении сЙДОП.
Исходя из первого требования удельная нагрузка может быть
определена по формуле
Ро = 3960МкРЛкр У (11.40)
Удельная нагрузка на крыло, удовлетворяющая второму требо-
ванию, может быть вычислена по формуле
Ро ~ 0,5р/уГ^ д0ПВв. (11.41)
322
Для предварительных расчетов можно принимать Уп = 50 ...
...60 м/с для дозвуковых неманевренных самолетов; Уп = 65 ...
...70 м/с для сверхзвуковых самолетов; сУдОП = (0,75 ... 0,85)х
X Су гаах-
При проектировании самолетов с вентиляторами в крыле
выбор удельной нагрузки на крыло следует осуществлять с учетом
обеспечения площади крыла, необходимой для размещения в нем
вентиляторов заданного диаметра.
Таковы основные особенности проектирования самолетов ко-
роткого и вертикального взлета и посадки. Оптимизация пара-
метров этих самолетов должна производиться на основе крите-
риев оптимальности, включающих в себя факторы, учитывающие
особенности их взлета и посадки. К. числу этих факторов не-
обходимо отнести стоимость аэродромов и их расстояние от центра
города, регулярность воздушных сообщений, безопасность.
Заключительные замечания. 1, Вертикальные взлет и посадка
самолета не являются самоцелью, а поскольку укороченные
взлет и посадка СВВП позволяют существенно увеличить даль-
ность полета и величину полезной нагрузки, то концепция
СВВП/СКВП в ряде случаев оказывается предпочтительной.
Однако при проектировании СВВП/СКВП необходимо учитывать,
что обеспечение укороченного взлета и посадки диктует повы-
шенные требования к шасси, требует увеличения площади крыла,
а также необходимых объемов для размещения дополнительного
топлива и полезной нагрузки. Все это ведет к увеличению взлет-
ной массы самолета.
2. Большая мощность силовой установки СВВП может и дол-
жна быть использована не только для улучшения взлетно-посадоч-
ных характеристик самолета. Управление вектором тяги в полете,
применение системы струйных рулей открывают широкие возмож-
ности для улучшения маневренных характеристик самолета.
3. Из-за сложности конструкции СВВП, вызванной наличием
дополнительных систем, вероятности отказов, ведущих к аварий-
ным ситуациям, у СВВП выше, чем у обычного самолета. Однако,
поскольку для СВВП снижаются требования к некоторым пара-
метрам, выдерживаемым пилотом при взлете и посадке, а также
к погодным условиям, допускающим их осуществление, приме-
нение СВВП должно привести к повышению безопасности при
взлете и посадке — на участках траектории, на которых вероят-
ность летных происшествий наиболее высока. Эти соображения
позволяют надеяться, что использование СВВП не приведет к сни-
жению уровня безопасности воздушных перевозок.
Учет перечисленных выше факторов позволяет определить
рациональные параметры и области применения СКВП и СВВП
различных схем, а также оценить их конкурентоспособность в об-
ластях, где возможно применение различных типов самолетов.
ц*
323
Глава 12
ОСОБЕННОСТИ ПРОЕКТИРОВАНИЯ ВОЗДУШНО-
КОСМИЧЕСКИХ И ГИПЕРЗВУКОВЫХ САМОЛЕТОВ*
12.1. ЗАДАЧИ, РЕШАЕМЫЕ ВОЗДУШНО-КОСМИЧЕСКИМИ
И ГИПЕРЗВУКОВЫМИ САМОЛЕТАМИ
Увеличение интенсивности космических полетов остро ставит
вопрос стоимости доставки в космос полезного груза, что приводит
к поиску принципиально новых систем, которые позволили бы
получить экономически приемлемое решение данного вопроса.
Одной из таких систем является многоразовый воздушно-косми-
ческий аппарат (МВКА), а главным звеном системы (орбиталь-
ной и возвращаемой ступенью) служит воздушно-космический са-
молет (ВКС). Стоимость доставки 1 кг полезной нагрузки на гео-
центрическую орбиту (Н = 185 км), выводимой с помощью ВКС,
понизится в 10 ... 12 раз по сравнению с современными ракет-
ными системами. На первой стадии развития системы ВКС выво-
дится в космос с помощью ракетных ускорителей. В будущем стар-
товой платформой для ВКС, возможно, станет гиперзвуковой са-
молет-разгонщик, что приведет к дальнейшему снижению затрат
на космические полеты.
Чтобы выполнить поставленные задачи ВКС должен удовле-
творять следующим основным требованиям.
1. ВКС должен быть многократно используемым летательным
аппаратом.
. 2. ВКС должен выводить полезную нагрузку на орбиту высо-
той Н — 150 ... 500 км. Продолжительность полета по орбите мо-
жет длиться от нескольких часов до 20 ... 30 суток (в зависимости
от цели запуска).
3. ВКС должен обладать достаточной маневренностью в кос-
мосе, чтобы совершить встречу на орбите и осуществить стыковку
с заданным объектом.
4. ВКС должен обладать хорошей маневренностью в атмосфере
для ликвидации возможного параллакса орбиты (смещения плос-
кости орбиты по отношению к точке старта) и для выполнения по-
садки на заданный аэродром (как обычный самолет).
Использование аэродинамической подъемной силы позволяет
существенно снизить перегрузки и выбрать траекторию гипер-
звукового планирования ВКС, приемлемую по аэродинамическому
нагреву. Расчеты показывают, что даже при гиперзвуковом аэро-
динамическом качестве аппарата Кг = 0,5 ... 1,0 спуск с орбиты
можно осуществить с перегрузкой меньше 2, при этом не требуется
специальной ориентации экипажа относительно вектора пере-
грузки и снижается удельный тепловой поток по сравнению
с баллистическим входом в плотные слои атмосферы.
* По материалам иностранной печати.
324
Проблема обеспечения посадки ВКС в назначенном месте Зем-
ли сводится к обеспечению необходимой боковой дальности в про-
цессе гиперзвукового планирования, так как обеспечение про-
дольной дальности не вызывает осложнений. Выбор момента со-
общения тормозного импульса при движении ВКС на орбите поз-
воляет в больших пределах управлять продольной дальностью.
12.2. ОСОБЕННОСТИ ПОЛЕТА ВКС
И ГИПЕРЗВУКОВОГО САМОЛЕТА
12.2.1. Область возможных полетов ВКС
При проектировании ВКС и гиперзвукового самолета все
классические вопросы, связанные с разработкой современного
сверхзвукового самолета, должны быть решены совместно с до-
полнительными задачами, вытекающими из более суровых условий
гиперзвукового полета. Профиль полета ВКС значительно отли-
чается от профиля полета современных самолетов. Специфич-
ность отдельных участков траектории полета ВКС необходимо
учитывать на ранней стадии проектирования летательного ап-
парата, так как в некоторых случаях для изменения того или иного
параметра траектории требуются большие затраты топлива, что,
естественно, будет отражаться на уравнении весового баланса
ВКС и МВКА в целом.
Траектории полета воздушно-космического самолета распо-
лагаются в определенной области полетов в атмосфере и в кос-
мосе. Верхняя граница полетов (равновесного планирования)
в атмосфере для ВКС как крылатого летательного аппарата оп-
ределяется совместным действием силы тяжести, аэродинамиче-
ской силы и центробежной силы, обусловленной сферической по-
верхностью Земли. Нижняя граница полетов определяется проч-
ностью конструкции и допустимой температурой аэродинамиче-
ского нагрева (рис. 12.1).
Нижняя граница области полетов является общей для всех
крылатых летательных аппаратов. Верхняя граница области за-
висит от особенностей схемы (от величины удельной нагрузки
на крыло и коэффициента аэродинамической подъемной силы).
Определить верхнюю границу полетов ВКС в атмосфере мож-
но, рассматривая условия горизонтального полета (планирова-
ния) на данной высоте. В горизонтальном полете, как известно,
сила тяжести, действующая на крылатый летательный аппарат,
уравновешивается двумя силами — аэродинамической подъем-
ной силой и центробежной силой, возникающей в результате
движения аппарата по криволинейной траектории относительно
центра Земли:
mg=K+Pu. (12.1)
Это равенство и будет определять верхнюю границу полетов ВКС.
325
Рис. 12.1. Область возможных полетов ВКС:
1 — область полетов современных самолетов; II — область полетов гнперзуковых
самолетов; 1 — одна из возможных траекторий выхода ВКС в космос (а — при старте
с Земли, б — при старте с гиперзвукового сямолета-разгонщика); 2 — одна из возмож-
ных траекторий возврата ВКС из космоса; 3 — синхронная орбита (вращаясь вокруг
Земли по дайной орбите, ЛА будет постоянно оставаться над одной точкой экватора);
4 — недопустимое повышение температуры конструкции; И0^р — минимальная ско-
рость, при которой ВКС может совершать полет в космосе, двигаясь по круговой или
эллиптической орбите; У1к — первая космическая скорость (круговая); V2K —- вторая
космическая скорость (параболическая)
Выражение для аэродинамической подъемной силы общеиз-
вестно;
Y = cyS-~~.
Выражение для центробежной силы в горизонтальном полете:
р _ m(Vr.n± VB.3cos<p)2
(R + H) ’ 1 ’
где Уг.п — скорость горизонтального полета; Ув. 3— скорость
вращения Земли; <р — угол наклона плоскости полета (орбиты)
к плоскости экватора (наклонение орбиты); ±VB,3 cos <p — по-
правка, учитывающая действие силы Кориолиса; Н — высота
полета над поверхностью Земли (над уровнем моря); R — средний
радиус Земли, 7? « 6370 км.
Для высоты полета, на которой аэродинамическая сила еще
имеет существенное значение (Н < 100 км), выражение для цен-
326
I — полет в плоскости экватора в сторону суточного вращения Земли (ф = 0°); 2 —
полет в плоскости полюсов Земли (ф = 90°); 3 — полет в плоскости экватора в противо-
положную от вращения Земли сторону (ф = 0°)
Рис. 12.3. Зависимость верхней границы полетов ВКС от скорости
тробежной силы с достаточной степенью точности можно записать
тау
р т (Кг.п± 463 cos <р)2 ,19
~ 6,32.10е ‘ >
Здесь Уг>п в м/с.
При полете обычных самолетов (V < 1 км/с) центробежной
силой можно пренебречь (рис. 12.2). При выходе в космос необ-
ходимо учитывать не только центробежную силу, йо и угол ор-
биты <р, если орбита будет значительно отличаться от полярной,
то запускать летательный аппарат выгоднее в сторону суточного
вращения Земли. Возможный угол наклона плоскости орбиты
к плоскости экватора при старте с любой точки Земли будет на-
ходиться в диапазоне
Фместн Ф 90 >
где фместн — местный угол широты (северной или южной) точки
старта.
Решая уравнение (12.1) относительно величины р, определим
значение массовой плотности воздуха, а следовательно, найдем
необходимую высоту, на которой при данной скорости возможен
горизонтальный полет:
__ р 62 10е — (Уг. п ± 463 cos ф)а (12 4)
Р ~ су 31 • 106у2 п ’ V ’
327
где р = mg!S. — удельная нагрузка на несущую поверх-
ность.
Выражение (12.4) определяет так называемую равновесную
высоту полета, другими словами, траекторию планирования любого
космического аппарата, обладающего тем или иным значением
величины р/с,у, минимальное значение которой, очевидно, будет
определять верхнюю границу области полетов данного летатель-
ного аппарата.
На рис. 12.3 показано влияние скорости (а для величины
plCy = 1000 и угла наклона орбиты) на верхнюю границу области
полетов ВКС.
При полете в космосе воздушно-космический самолет стано-
вится искусственным спутником Земли. Движения любых небес-
ных тел (в том числе и искусственных), как известно, выпол-
няются по законам небесной механики, в основе которой лежит
закон всемирного тяготения Ньютона. Поэтому область установив-
шихся полетов ВКС в космосе не имеет принципиальных отличий
от подобной области полетов искусственных спутников Земли.
12.2.2. Траектории полета ВКС
Движение воздушно-космического самолета в общем случае
описывается системой шести дифференциальных уравнений, три
из которых отражают условие равновесия сил в проекциях на
оси инерциальной системы координат, а три — условие равновесия
моментов относительно этих осей:
т = F;
^(4r + ^-lX) = Z;
Здесь X, Y и Z — проекции всех внешних сил (в том числе и реак-
тивной силы) на соответствующие оси координат; Мх, М.у и Mz —
моменты внешних и реактивных сил относительно осей координат.
Так как масса и моменты инерции ВКС с течением времени из-
меняются, то при решении уравнений движения надо принимать
m = m(t); Ix = Ix(ty, Iy = Iy(ty =
328
при полете в вертикальной плоскости
Решить указанную си-
стему уравнений движения
можно, если представить
в развернутом виде вы-
ражения проекций внеш-
них сил и моментов, вхо-
дящих в правые части
уравнений.
На летательный аппарат
действуют следующие силы:
— массовые силы, обу-
словленные притяжением
Земли, Солнца и Луны;
—аэродинамические си-
лы (при полете в достаточ-
но плотных слоях атмо-
сферы);
— тяга двигателя (при
работе двигателя).
При подробном анализе
при навигационных расчетах) в процессе решения дифферен-
циальных уравнений движения необходимо учитывать все силы,
действующие на летательный аппарат. Однако в период предвари-
тельного проектирования ВКС (при выборе схемы и основных
параметров) можно ввести ряд допущений, которые позволят
значительно упростить систему уравнений движения. На-
пример, если не рассматривать межпланетный полет аппа-
динамики полета ВКС (например,
рата, то можно ограничиться учетом только силы притяжения
Земли.
Вывод ВКС на орбиту должен производиться в одной верти-
кальной плоскости (по соображениям минимального расхода
топлива). Если будет иметь место параллакс орбиты, то последний
необходимо ликвидировать на дозвуковом и сверхзвуковом уча-
стках полета, ибо изменение плоскости орбиты при гиперзвуковом
полете приводит к значительным затратам топлива.
Расход топлива на балансировку самолета и на компенсацию
случайных моментов крена и рыскания будет составлять несуще-
ственную долю от топлива, потребного для сообщения ВКС не-
обходимой кинетической и потенциальной энергии.
Поэтому, приняв указанные 'допущения, определить пара-
метры траектории полета с достаточной степенью точности можно,
рассматривая полет ВКС как движение материальной точки пере-
менной массы в одной вертикальной плоскости.
В данном случае на ВКС будут действовать сила тяжести mg,
аэродинамическая подъемная сила Y, сила аэродинамического
сопротивления X и тяга двигателя Р, которую в общем случае
принимают направленной по оси двигателя и наклоненной к оси
самолета (к хорде крыла) под углом ф (рис. 12.4).
329
При больших скоростях полета (см. рис. 12.2) необходимо
также учитывать центробежную силу Рц.
Кроме перечисленных сил на летательный аппарат будет
действовать еще сила Кориолиса, обусловленная суточным вра-
щением Земли. При V л: 3 км/с эта сила составляет около 0,02mg,
а при V = У1К достигает примерно 10 % силы тяжести. Сила
Кориолиса зависит от места старта и направления полета, и ее
необходимо учитывать при навигационных расчетах. Для прибли-
женного анализа движения летательного аппарата силой Корио-
лиса можно пренебречь.
. Проецируя силы, действующие на ВКС, на оси скоростной
системы координат и добавляя к полученным уравнениям движе-
ния кинематические связи (связь изменения высоты и дальности
полета со скоростью и углом наклона траектории), получим не-
обходимую систему дифференциальных уравнений, позволяющую
определять основные параметры траектории движения ВКС:
dV Г Р cos (а + tb) — X . . V2 cos2 6 sin 0
-yr- = ----------i---------------sin 9 g H---------n , „—;
dt [ mg J R + H ’
(12.5)
d0 = rPsin(a + ip)+r _cos9l g VcgG
dt L mg J V 1 R + H v ’
dHIdt = V sin 9; (12.7)
dL/dt = V cos 9, (12.8)
где а — угол атаки; 9 — угол наклона траектории полета к местному
горизонту.
Данную систему уравнений можно решать методами числен-
ного интегрирования.
Для определения параметров траектории движения ВКС при
возврате из космоса весь участок полета можно рассматривать
как равновесное планирование, при этом справедливы следующие
допущения: ।
Р = 0; sin 9 as 9 = 0; cos 9 = 1; mg = const.
Движение ВКС на участке планирования будет описываться
уравнениями (12.1) и (12.5). Последнее в данном случае примет вид
dVldt = —Xlm. (12.9)
Интегрируя уравнение (12.9), получим
^к. пл
/пл= J ~^dV, (12.10)
у
ин. пл
где Кн.пл — скорость в начальный момент планирования (при
/пл = 0), Кк. пя — скорость в конце планирования. Решая со-
330
ймесТно уравнения (12.1) и (12.16), получим выражение для опрё-
деления времени планирования:
± L' | п (Ун. ПЛ + У1к) (Ук. ПЛ У1к) /]С> ||\
Гпл-Аг 2У1К Ш(Ун.пл-У1к)(Ук.пл + У1к)’ 1 '
где Кт = cjcx — гиперзвуковое аэродинамическое качество ВКС;
У1К — первая космическая скорость.
Чтобы перейти от орбитального полета к режиму равновесного
планирования, необходимо приложить тормозной импульс, обес-
печивающий ДУТ = 30 ... 40 м/с. Скорость в начале планиро-
вания
у н. пл= У1к — ду т-
Режим равновесного планирования наступает на высоте Н =
= 90 ... 100 км (см. рис. 12.3). Для предварительных расчетов,
полагая Д = 6370 км, У1К = 7850 м/с; Ук.пл 0, полное время
планирования (с) можно определить по приближенной зависимо-
сти, полученной из (12.11):
/п. пл = 2300Кг.
(12.12)
Следует заметить, что 75 ... 80 % времени планирования при-
ходится на гиперзвуковой полет при V > 5 км/с (рис. 12.5).
Можно считать, что планирующий полет на отдельных участках
проходит на режиме Кг = const, тогда дальность планирования
найдем, интегрируя (12.9), предварительно умножив его левую и
правую части на V и выра-
зив т из (12.1):
^пл — Кг (£+#) j у2 — у2 ’
'и. пл
(12.13)
откуда
г ___ к R + Н | У]к Ук. пл
ьпл — Аг 2 у2 ,,2
¥ 1к v н. пл
(12.14)
Уравнения (12.11) и (12.14)
позволяют определять время и
дальность планирования на
любом участке траектории (т. е.
Для любых значений Ун. пл>
Ук. пл И Кг).
Рис. 12.5. Зависимость времени
планирования от скорости и гипер-
звукового аэродинамического каче-
ства ВК.С
331
Рис. 12.6. Зависимость дальности
планирования от скорости и гипер-
звукового аэродинамического каче-
ства ВКС
^-п. бок =
Для предварительных рас-
четовТполную дальность плани-
рования ВКС (км) с момента
схода с орбиты до приземле-
ния [аналогично (12.12)] мож-
но определять по формуле
Ап.пл= 13800Кг. (12.15)
Заметим, что приблизитель-
но 90 % всего планирования
(по дальности) происходит при
скорости V > 5 км/с (рис. 12.6).
Таким образом, время и
дальность равновесного плани-
рования являются линейными
функциями гиперзвукового
аэродинамического качества ле-
тательного аппарата. Дальность
бокового маневра зависит от
величины Кг’5. В предвари-
тельных расчетах полную даль-
ность бокового маневра (км)
можно определить по формуле
1400KJ’5. (12.15а)
Анализ траектории планирования показывает, что при аэро-
динамическом качестве Кг « 3,6 ВКС может совершить посадку
в любую точку Земли. Для обеспечения требуемого значения
Тп. бок 2500 км величина гиперзвукового аэродинамического
качества должна быть Дг 1,4.
Задача по определению траектории полета ВКС в космосе совпадает с задачей
определения орбит небесных тел (задача Кеплера). Движение тела в данном слу-
чае рассматривается в полярной системе координат с полюсом в центре Земли.
Уравнения движения летательного аппарата в полярной системе координат
можно получить, проецируя внешние силы, действующие на аппарат, на напра-
вление радиуса-вектора и касательную к окружности, описываемой радиусом-
вектором. В частности, уравнения движения ВКС в космосе (при, отсутствии
аэродинамических сил и тяги) будут иметь вид:
^Г + ^ДГ = °:
где К — тангенциальная составляющая скорости; Vr — радиальная составля-
ющая скорости; х — угол поворота радиуса-вектора (полярный угол), отсчиты-
ваемый от полярной оси — некоторого начального неизменного в пространстве
направления радиуса-вектора; г — расстояние от ВКС до центра Земли (радиус-
вектор).
Теория движения тела в условиях космоса под действием сил гравитации
иосит название эллиптической теории. Наибольшее применение в настоящее
332
время эллиптическая теория находит при решении таких основных задач космо-
навтики, как определение орбит искусственных спутников Земли, орбит меж-
планетных летательных аппаратов и т. д. Эта теория определяет и траектории
полета ВКС в космосе. Так, уравнение орбиты в полярных координатах можно
получить, решая систему дифференциальных уравнений (12.16) и (12.17):
1 е cos (х — х0) ’
(12.18)
где р — фокальный параметр орбиты; е — эксцентриситет орбиты; х0 — началь-
ное значение угла х.
При движении в земном поле тяготения, когда фокус орбиты расположен
в центре Земли, значения фокального параметра и эксцентриситета будут равны:
_ УИ cos2 0о .
Р fM3
2V,-,r0cos'j е0 KHcos^O,,
/М3 ^2М2
(12.19)
(12.20)
Подставляя эти значения в (12.18), получим окончательное выражение уравне-
ния орбиты ВКС (искусственного спутника Земли):
V2rj cos2 0о
г --------- - — - --------:-----------, (12.21)
,, /, 2 cos2 Op У'Arg cos2 0
‘ + y 1-------7ИГJL+J7йГC0S(’‘-’‘",
где r0 = R + H — начальное расстояние от центра Земли; Уо — начальная ско-
рость на орбите (на высоте Н над поверхностью Земли); 0о — угол наклона тра-
ектории к местному горизонту в начальной точке; fM3 — константа поля тяготе-
ния Земли; f — гравитационная постоянная; М3—масса Земли.
Согласно закону всемирного тяготения сила тяжести, действующая на тело,
масса которого т, на высоте Н над поверхностью Земли определяется равенством
mg = f
М3т
(R + ну~
(12.22)
Константа поля тяготения, следовательно,
fM3 = gaR2-
Известно, что вид кривой второго порядка обусловлен величиной ее экс-
центриситета. При е — 0 уравнение (12.18) представляет собой уравнение окруж-
ности, при 0 < е < 1 — уравнение эллипса, при е = 1 — уравнение параболы
и, наконец, при е > 1 — уравнение гиперболы.
Одним из условий выведения на орбиту ВКС будет равенство 0О = 0, поэтому
в данном случае можно считать, что эксцентриситет орбиты определяется ско-
ростью и высотой в начальной точке орбиты е = е (Уо, Н)-
Найдем необходимую начальную скорость для движения по круговой орбите.
Эта скорость носит название круговой, или первой космической (Ущ).
Для случая е= 0 из (12.20) получим
Ко = Ухк = У - (12.23)
Круговая орбита является особым случаем. Для ее осуществления необхо-
димо выполнение определенных условий (Уо = У1К и 0о = 0). Кроме того, вслед-
ствие возмущений, вызываемых главным образом сплюснутостью формы Земли,
возникают отклонения, искажающие форму орбиты. Поэтому строго круговую
орбиту можно получить лишь в экваториальной плоскости. Однако при опре-
333
делении параметров ВКС форму Земли можно считать сферой и первую косми-
ческую скорость определять по формуле (12.23)Л
Например, для высоты Н = 100 км численное значение первой космической
скорости (при ф = 90°)
Ухи = 7,85 км/с.
При значениях эксцентриситета 0<е< 1 уравнение (12.18) представляет
собой уравнение эллипса. Эллипс, как известно, кроме эксцентриситета и фокаль-
ного параметра характеризуется еще большой (а) и малой (6) полуосью:
а = —_ге2- ; ь = а К1 - е2 •
Уравнения (12.19) и (12.20) позволяют найти большую ось эллиптической
орбиты
I + Н) •
2goR*
При движении по эллиптической орбите высота полета будет непрерывно
изменяться от минимальной Н (перигей орбиты) до максимальной Н + А Я
(апогей орбиты).
Из выражения (12.24) видно, что при Уо = У1к большая ось эллипса будет
равна 2а = 2 (R + Н), т. е. орбита превращается в окружность.
Для движения по эллипсу, следовательно, необходимо иметь > У1к.
Если в начальной точке орбиты скорость окажется несколько меньше V1K,
то при достаточно больших высотах летательный аппарат и в этом случае будет
двигаться по эллиптической орбите, так как при снижении скорость его будет
возрастать и на какой-то высоте (перигей новой орбиты) превысит местную круго-
вую скорость. Однако при небольших высотах недостаточная скорость полета
приведет к входу в плотные слои атмосферы, торможению и сходу с орбиты.
Поэтому для небольших высот (Н < 120 км) скорость выведения ВКС на
орбиту не должна быть меньше первой космической на данной высоте.
При скорости, равной параболической, или второй космической (У2К), траек-
тория полета становится параболой. Летательный аппарат, развивший скорость
полета V > V2K, на Землю не возвращается.
Вторая космическая скорость определяется так:
Кк = КГ У1К = У - ^У~н- . (12.25)
Например, для высоты Н = 100 км У2К =11,1 км/с.
На рис. 12.7 показаны возможные орбиты космического летательного аппа-
рата (связь высоты и скорости при полете в космосе см. на рис. 12.1).
Время одного оборота ВКС вокруг Земли на круговой орбите на высоте Н
_2n(R+tf) 2л „з/2 112 261
<круг~---------------y=-(R + tf) • (12.26)
Для эллиптических орбит период обращения определяется аналогично,
только вместо R + Н в выражение (12.26) надо подставить величину большой
полуоси эллиптической орбиты:
(|227)
При полете в космосе может возникнуть необходимость в некотором изме-
нении параметров орбиты. Изменить параметры орбиты (т. е. перейти с круго-
вой орбиты на эллиптическую и обратно, или изменить угол наклона плоскости
орбиты) можно, меняя величину и направление скорости полета.
334
Рнс. 12.7. Схема выведения лета-
тельного аппарата на экваториаль-
ную орбиту (<р = 0°) при максималь-
ном использовании суточного враще-
ния Земли:
П — перигей орбиты; А — апогей ор-
биты; П* — перигей новой орбиты (при
< V и при достаточно большом
значении Н)
\ 4 о ^2 к
Если потребуется, например, увеличить высоту полета на величину ДЯ,
то необходимо сообщить летательному аппарату дополнительную скорость ДЕ;/.
= (.2.28)
Орбита в данном случае будет эллиптической, и скорость полета будет ме-
няться от Vmax на высоте Н (перигей орбиты) до Ут1п на высоте Н+ &Н (апогей
орбиты).
При движении тела по орбите изменение кинетической энергии равно изме-
нению потенциальной энергии:
d [mV2/?. — mg (R + h) ] = 0,
где/г — высота точки орбиты, скорость полета в которой равна V- Так как масса
летательного аппарата остается постоянной, то
4--TTT=const- (*2-29>
Данное выражение, называемое интегралом энергии, показывает, что ско-
рость полета будет зависеть только от высоты траектории в данной точке.
Из уравнения (12.29) получим скорость в апогее орбит (на высоте Н + Д Ну.
Vmin у Vmax (R 4-Я) (R 4-яДД) ’ (12.30)
гДе Vmax — скорость в перигее орбиты.
Скорость в перигее орбиты (т. е. новая скорость на высоте Я), будет равна
Vmax = ViK + Д Ун-
На высоте (Я 4- ДД) имеет место неравенство Vmin<Virt, поэтому если
требуется увеличить высоту полета, сохранив при этом круговую орбиту, то
скорость полета на высоте (Я+ Д/7) необходимо увеличить до значения И1к
на данной высоте.
Простейший маневр по изменению угла наклона орбиты на угол Дф, не
меняя высоту полета, можно выполнить изменением направления скорости по-
лета на угол Дд>. Для подобного маневра летательному аппарату необходимо сооб-
щить дополнительную скорость ДЕ^, направленную под углом ^90°4-~-^
3»
Рис. 12.8. Изменение плоскости орбиты при Н = const:
/ — исходная орбита; 2 — новая орбита
к плоскости исходной орбиты (рис. 12.8). Величина дополнительной скорости
в этом случае будет равна
ДУф — Ро — 2Posin —g—. (12.31)
cos -f-
При проектировании ВКС возможное изменение скорости для того или иного
маневра в космосе необходимо учитывать на ранних этапах проектирования,
так как оно требует дополнительного расхода топлива, иногда весьма суще-
ственного.
12.2.3. Область полетов гиперзвуковых самолетов
Траектории полета гиперзвуковых самолетов не будут суще-
ственно отличаться от траекторий полета современных сверх-
звуковых самолетов, так как и в этом случае уравновешивание
массы летательного аппарата также будет выполняться главным
образом аэродинамической подъемной силой. Центробежная сила,
определяющая специфику траектории полета ВКС, при гипер-
звуковых скоростях, соответствующих числам М = 4 ... 9, будет
еще мала (см. рис. 12.2). Следовательно, параметры траектории
будут определяться общеизвестными зависимостями.
Однако фазы траектории полета (разгон и набор высоты,
крейсерский полет, планирование и посадка) при проектировании
гиперзвукового самолета преобретают существенно большую са-
мостоятельность и значимость для решения таких вопросов, как
выбор типа двигателя и топлива, определение необходимого за-
паса топлива, теплоизоляция конструкции, особенности аэроди-
намической схемы самолета и т. д.
Область полетов гиперзвуковых самолетов на теоретически
возможных этапах их развития (рис. 12.9) ограничена кривыми
установившегося планирования (верхняя граница), скоростного
напора q яз 7500 даН/м2 (нижняя граница) и температурных
336
Рис. 12.9. Область полетов гиперзвуковых самолетов:
1 — потолок планирования; 2 — траектория набора высоты и разгона до числа М = 9
3 — температурные ограничения для сплава «Рене-41»: 4 — температурные ограииче
ния для сплава «Инконель-718»; 5 — температурные ограничения для титана; 6 — огра-
ничения по скоростному напору q — 7500 даН/м2
ограничений; указанные границы будут определяться конкретным
назначением самолета. Крейсерский полет и планирование при
максимальном аэродинамическом качестве выполняются вблизи
верхней границы области, маневры, связанные с быстрым тормо-
жением, — у нижней границы. Крейсерские числа М полета и
температурные ограничения конструкционных материалов по су-
ществу определяют правую границу области полета каждого
варианта самолета.
12.2.4. Термические и акустические нагрузки
Отличительной особенностью полета ВКС и гиперзвукового
самолета является полет в условиях высоких температур, а также
динамических нагрузок, вызванных флуктуациями давления (аэро-
динамическим шумом) в зонах срыва потока и скачков уплот-
нения.
Рассматривая воздух как идеальный газ (при Т < 2000 К)
и учитывая теплообмен в пограничном слое, можно найти темпе-
ратуру на внутренней границе ламинарного (л. п. с.) и турбулент-
ного (т. п. с.) пограничных слоев:
7,л.п.с = 7,н(1+0,17М2); Тт. п. с = Тн (1 + 0,18М2). (12.32)
Здесь Тн — температура воздуха на высоте Н.
При условиях, когда теплообмен определяется совместным
действием конвекции, теплопроводности и лучеиспускания, тем-
337
пература поверхности летательного аппарата может быть опреде-
лена из уравнения баланса тепла
?п.с-дизл = ^-^5-, (12.33)
где <7п. с — удельный тепловой поток из пограничного слоя,
т. е. количество тепла, поступающего к поверхности на единицу
(ккал)
площади в единицу времени 2 с , Яязл — удельный тепловой
поток, излучаемый обшивкой в окружающее пространство; с —
удельная теплоемкость материала поверхности 1 —г к ); у —
удельный вес материала поверхности ЛА (даН/м3); 6 — толщина
поверхности (м); t — время (с); ТОбш — температура внешней
поверхности (обшивки), К.
Уравнение (12.33) описывает нестационарный тепловой про-
цесс, при котором температура поверхности летательного аппарата
изменяется с течением времени (гиперзвуковое планирование
BKQ. Решение этого нелинейного дифференциального уравнения
можно получить методами численного интегрирования.
Наибольшая температура поверхности будет при dTo&Jdt = 0.
В этом случае имеет место установившийся теплообмен и так на-
зываемая равновесная температура поверхности, которая уста-
навливается при длительном полете в неизменных условиях
(крейсерский полет гиперзвукового самолета). При этом qa.c =
~ Яизл.’
Излучаемый поверхностью летательного аппарата удельный
тепловой поток определяется по закону Стефана—Больцмана:
?изл = впТ'обш, (12.34)
где е — коэффициент излучения, или степень черноты поверх-
ности; а = 1,37-1СГ11 ккал/(м2-с-К4)— коэффициент излучения
абсолютно черного тела.
Коэффициент б оценивает излучающую способность поверх-
ности (обшивки) по сравнению с абсолютно черным телом, он
зависит от материала поверхности и ее обработки, а также от
температуры.
Удельный тепловой поток, поступающий к поверхности из
пограничного слоя, в соответствии с законом Ньютона, опреде-
ляется так:
<7п. с — а (Т'п. с T’oto), (12.35)
где а — местный коэффициент конвективной теплопередачи на
границе воздух—поверхность в ккал/(м2-с-К).
Учитывая равенство и <?п. с, получим уравнение, позво-
ляющее определить равновесную температуру поверхности ле-
тательного аппарата при установившемся теплообмене:
еоТ'рбц! + аГобщ — с = 0, (12.36)
338
Н,км
100
Рис. 12.10. Равновесная температура плоской поверхности (е = 0,8) на рас-
стоянии х= 1,5 м от передней кромки (для небольших углов атаки)
На рис. 12.10 приводятся приближенные значения равновесной
температуры для вероятной области полетов ВКС и гиперзвуко-
вых самолетов.
Распределение температуры по поверхности летательного аппа-
рата зависит от многих факторов, и дать точное описание термиче-
ских нагрузок безотносительно к конкретной схеме аппарата
весьма трудно. Интенсивность аэродинамического нагрева поверх-
ности существенно уменьшается при увеличении расстояния от
передней кромки крыла (от носка фюзеляжа), при увеличении
угла стреловидности крыла (оперения), при увеличении радиуса
носка фюзеляжа, носка крыла и т. д. Однако может наблюдаться
и значительное повышение температуры на отдельных участках
поверхности летательного аппарата. Важной задачей из этих
соображений является герметизация щелей, например между
крылом и элевонами, между килем и рулем направления, а также
створок лючков и выходных отверстий различных бортовых
систем самолета. Возникающие в этих зонах вихри могут вызвать
интенсивный местный нагрев.
Расчеты и испытания показали, что температура поверхности
ВКС фирмы «Рокуэлл» (США) при входе в атмосферу достигает
1440 °C на носке фюзеляжа и 1340 °C на носке крыла. Температура
других участков поверхности значительно меньше, например,
верхняя поверхность фюзеляжа нагревается только до 316 °C
(рис. 12.11).
На поверхности гиперзвукового самолета, несмотря на мень-
шие скорости полета, могут возникать температуры более высо-
кие, чем на поверхности ВКС (влияние внешней конфигурации
339
Рис. 12.11. Изотермы на поверхности ВКС (температура в градусах Цель-
сия)
аппарата и большей плотности воздуха). На рис. 12.12 показаны
примерные изотермы на поверхности гиперзвукового самолета
в крейсерском полете на высоте 34 км при М = 8. Следует обра-
тить внимание на распределение температур по нижней плоскости
воздухозаборника (распределение температур на плоскости
с острой передней кромкой при постоянном угле атаки и нулевом
угле стреловидности).
Для минимизации аэродинамического шума идеальный лета-
тельный аппарат должен иметь форму, обеспечивающую сохране-
ние присоединенного пограничного слоя на большей части по-
верхности аппарата.
Результаты расчетов и испытаний в аэродинамических трубах
моделей ВКС фирмы «Рокуэлл» показали, что наибольшие аку-
стические нагрузки будут иметь место на хвостовой части фюзе-
ляжа (165 дБ), на хвостовом оперении (165 дБ), на элевоне
Рис. 12.12.. Установившаяся температура на поверхности самолета в гра
дусах Цельсия при длительном полете (У == 2400 м/с; Н = 34 км)
340
(164 дБ), на нижней поверхности крыла (163 дБ), на створках
грузового отсека (159 дБ), на носовой части фюзеляжа (154 дБ).
Высокие уровни шума на поверхности ВКС снижают усталостную
долговечность плит теплозащитного покрытия, она обратно про-
порциональна продолжительности воздействия шума.
12.3. АНАЛИЗ ВОЗМОЖНЫХ СХЕМ И ОПРЕДЕЛЕНИЕ
ОСНОВНЫХ ПАРАМЕТРОВ МВКА
12.3.1. Возможные схемы МВКА
Для доставки полезного груза на околоземную орбиту суще-
ствует несколько различных концепций многоразового воздушно-
космического !аппарата. 'Исследования, ^выполненные NASA и
авиационными фирмами США, включали схемы МВКА одноступен-
чатые (т. е. МВКА состоит лишь из ВКС), двухступенчатые и
трехступенчатые, с вертикальным стартом и горизонтальной по-
садкой, с горизонтальным стартом и горизонтальной посадкой,
с горизонтальным стартом (с использованием ракетной тележки)
и горизонтальной посадкой, с последовательным и параллельным
расположением разгонной и орбитальной ступеней, с дозаправкой
топлива в полете и т. д. Каждая концепция имеет существенные
эксплуатационные и конструктивные особенности, а следовательно,
и различную полную стоимость ее осуществления.
Для анализа эффективности той или иной схемы’МВКА в ка-
честве критерия часто используется такой параметр, как относи-
тельная масса полезной (целевой) нагрузки, выводимой на около-
земную орбиту
«П. Н ~ ^П.
где тп.н — масса полезной нагрузки; т0 — стартовая масса
МВКА. При заданном значении массы полезной нагрузки крите-
рием оценки эффективности летательного аппарата будет вели-
чина т0. Хотя критерий та. н не является исчерпывающим (более
общим критерием при небольшом сроке службы ВКС может
стать полная стоимость системы), все же он играет важную роль
в сравнении различных схем МВКА, поскольку от величины тп-н
(при прочих равных условиях) зависит стоимость доставки 1 кг
полезного груза на орбиту.
При оценке эффективности одноразовых ракет-носителей под
полезной нагрузкой понималась нагрузка, выводимая на орбиту.
В таком случае для МВКА полезной нагрузкой будет масса ВКС
при достижении скорости У1к, а для одноступенчатого МВКА его
масса за вычетом массы топлива, израсходованного при выходе
на орбиту. Однако такую полезную нагрузку следует считать
чисто условной, так как ее масса значительно отличается от массы
истинной полезной нагрузки. Например, масса полезной нагрузки
для МВКА фирмы «Рокуэлл» «Спейс Шаттл» равна 29,5 т, а масса
ВКС при выходе на орбиту — около 114 т.
•
341
12.3.2. Определение необходимого запаса топлива
для выхода на орбиту
Главным требованием, которому прежде всего должна отвечать
любая схема МВКА, является обеспечение минимально необхо-
димой скорости полета ВКС на орбите Уорб (для высоты полета
Н < 500 км УОрб ~ Vik> см. рис. 12.1). Строгое обеспечение
заданной скорости полета ни для одного летательного аппарата
не имеет такого важного значения, как для космических аппара-
тов. Например, если самолет проектировался на скорость полета
V = 3185 км/ч (М = 3), а в действительности скорость оказалась
на 0,5 % меньше, т. е. V = 3169 км/ч (М = 2,99), то это практи-
чески никак не отразится на эффективности данного самолета.
Для орбитального аппарата ошибка в скорости на 0,5 % (т. е.
вместо 7,85 км/с получить 7,81 км/с) означает запуск вхолостую,
так как аппарат не будет держаться на орбите и совершит посадку,
не выполнив даже одного витка вокруг Земли. Поэтому важнейшим
и необходимым условием выхода на орбиту для любой схемы
МВКА является обеспечение запаса топлива, необходимого для
достижения орбитальной скорости полета. Это условие будет
в значительной степени определять схему и основные параметры
МВКА.
В процессе разгона и набора высоты летательный аппарат
приобретает скорость, которая в общем случае может быть за-
писана так:
V = Va- АУП + Уот, (12.37)
где Уи — идеальная скорость аппарата, т. е. скорость, которую
аппарат получил бы при отсутствии силы земного притяжения
и силы аэродинамического сопротивления; АУП — суммарные по-
тери скорости от действия гравитации и аэродинамического со-
противления; Уот — стартовая скорость аппарата (для одноступен-
чатых аппаратов при старте с Земли Уот = 0).
Идеальная скорость летательного аппарата определяется по
известной формуле Мещерского
уи = 1УЛп
^нач
^кон
где We — эффективная скорость истечения продуктов сгорания
топлива; тнач — начальная масса аппарата; ткОН — конечная
масса аппарата (после выгорания топлива).
Выражая эффективную скорость истечения через удельный
импульс (удельную тягу двигателя), а конечную массу летатель-
ного аппарата через начальную массу и массу израсходованного
топлива, получим
уи = г0Л1Пт-^-, (12.38)
342
Рис. 12.13. Влияние скорости старта на суммарные потери скорости от
действия сил гравитации и аэродинамического сопротивления (для орбит Н —
= 120...150 км)
Рис. 12.14. Зависимость относительной массы топлива, потребного для
выхода на орбиту (Н = 120... 150 км), от удельного импульса двигателя
где 7Т — удельный импульс двигателя (по топливу); тт =
= mT/mHa4 — относительная масса топлива.
Суммарные потери скорости от действия сил гравитации
и аэродинамического сопротивления АКП зависят от многих
параметров и характеристик летательного аппарата, однако, как
показали исследования, особенно существенное влияние на вели-
чину АУп оказывает скорость старта (в конечном счете это влияние
высоты и угла наклона траектории при старте).
Для конкретной схемы летательного аппарата при выходе
на орбиту по определенной траектории величину АУП можно
определить, интегрируя уравнения движения (12.5) ... (12.8).
В период предварительного проектирования эту величину
с достаточной степенью точности можно снять с графика
(рис. 12.13).
Выход на орбиту с Н > 150 км можно разбить на два этапа:
выход на Н ж 150 км и маневр по увеличению высоты орбиты на
величину А Я [см. (12.28)].
Принимая в (12.37) V = VXK и решая совместно (12.37) и (12.38)
относительно величины тт, получим очень важный параметр лю-
бой схемы МВКА — относительную массу топлива тт. потр>
потребного для выхода на орбиту:
In ____1____ _ V1K 4~ ЛУп — Уст
1 — ^т. потр 9,81»/т
ИЛИ
WT. ПОТ = 1 ~ViK+AVn-vCT ’ (12.39)
вЖ
А т
343
где mT. пот = mT. пот/тнач; тнач — начальная масса аппарата
(при V = Уот), для одноступенчатых аппаратов 7СТ = 0 и тнач =
= т0.
На рис. 12.14 представлена графическая интерпретация урав-
нения (12.39) для нескольких значений стартовой скорости.
12.3.3. Сравнение эффективности возможных
схем МВКА
Определив параметр тт. потр, можно оценить эффективность
той или иной схемы МВКА по критерию тп>н. Как видно из
рис. 12.14, для осуществления концепции одноступенчатого
МВКА (он же ВКС), использующего в качестве силовой уста-
новки ЖРД с удельным импульсом JT л: 450 с, летательный ап-
парат должен иметь относительную массу топлива (жидкий во-
дород + жидкий кислород), потребного для выхода на околозем-
ную орбиту, не менее тт. пот = 0,89.
Техническая осуществимость одноступенчатого МВКА в бли-
жайшем будущем представляется маловероятной, так как потре-
бовалось бы создать воздушно-
космический самолет многоразо-
вого действия, относительная мас-
са которого при выходе на орбиту
не превышала бы величину =
= 0,11 при mrr.H«0,02. Даже
тг,70;Е,70
О 2 4 6 V,km/c
Рис. 12.15. Зависимость отно-
сительного расхода топлива и от-
носительной энергии, сообщаемой
массе ВКС, выводимой на орбиту,
от скорости (в качестве горючего
для всех двигателей используется
жидкий водород):
---------тТ = т^/тц, — •------£ =
= £/£Qpg; 1 — одноступенчатый
МВКА; 2 — двухступенчатый МВКА
(разгонщик и ВКС с ЖРД); 3 —
двухступенчатый МВКА (разгонщик
с ВРД, ВКС с ЖРД); А — старт вто-
рой ступени
самые оптимистические расчеты
показывают, что относительная
масса конструкции такого само-
лета должна быть не более
тк » 0,05 (для ВКС фирмы
«Рокуэлл» тк = 0,25).
Одноступенчатому МВКА не-
обходима силовая установка
с удельным импульсом, значи-
тельно превышающим величину
JT 450 с (см. рис. 12.14).
Как видно из рис. 12.15, для
двухступенчатого МВКА, состоя-
щего из ступени-разгонщика и ВКС
(обе ступени с ЖРД, /т « 450 с),
величина /йТеП0Тр = 0,85. Раз-
ница АтТеП0Тр = 0,04 означает,
что при равных с одноступен-
чатым МВКА условиях (т. е.
если допустить возможность со-
здания самолета, сухая масса
которого будет составлять около
10 % от стартовой массы) двух-
344
Рис. 12.16. Схема МВКА фирмы «Рокуэлл» «Спейс Шаттл»:
1 — ВКС; 2 — внешний топливный бак; 3 — стартовые РДТТ (стартовая масса МВКА —
2020 т; стартовая тяговооруженность — 1,45); L = 56 м; Н =23,1 м, I = 23,8 м;
стартовая масса ВКС 114 т; масса полезной нагрузки, выводимой на орбиту, 29,5 т;
масса внешнего топливного бака с топливом 739 т, без топлива — 33 т; диаметр бака
8,9 м; масса жидкого кислорода 604 т; масса жидкого водорода 102 т; масса двух стар-
товых РДТТ 1167 т
ступенчатый МВКА сможет выводить на орбиту полезную
нагрузку с относительной массой тп. 0,06. Для одинаковой
полезной нагрузки стартовая масса двухступенчатого МВКА
в этом случае будет примерно в три раза меньше. При таком
значительном изменении стартовой массы летательного аппарата
будет иметь место существенное проявление закона «квадрата—
куба», причем этот закон будет способствовать осуществлению
концепции двухступенчатого аппарата. Таким образом, при
сравнении в равных условиях одноступенчатый МВКА явно про-
игрывает двухступенчатому по критерию /ип. н-
Если в качестве первой ступени МВКА использовать гипер-
звуковой самолет-разгонщик с ВРД, то (благодаря большому
удельному импульсу ВРД) выигрыш в величине /йп.н станет еще
значительнее. Поэтому в будущем разгонной ступенью для ВКС,
возможно, послужит гиперзвуковой самолет-разгонщик с комби-
нированным ВРД (ТРД + ПВРД). Однако следует заметить, что
масса силовой установки с ВРД будет в 12 ... 15 раз больше
массы силовой установки с ЖРД-
345
При скорости старта ВКС VCT «г 1,4 км/с для выхода на около-
земную орбиту необходима величина йт. потр » 0,8 (от стартовой
массы ВКС, см. рис. 12.14). Такой самолет создать в настоящее
время также нельзя. Однако можно разместить топливо ВКС,
потребное для выхода на орбиту, в отдельном внешнем баке.
Современный уровень авиационно-космической техники позволяет
создавать подобные баки с относительной массой топлива ~96 %.
Правда, ВКС с таким баком не сможет пройти через плотные
слои атмосферы при возврате из космоса, поэтому бак необходимо
сбрасывать .непосредственно перед выходом на орбиту. По такому
принципу спроектирован МВКА фирмы «Рокуэлл» «Спейс Шаттл»
(рис. 12.16).
Более эффективное расходование топлива двухступенчатым
МВКА (по сравнению с одноступенчатым аппаратом), естественно,
поднимает вопрос о большем, а точнее, об оптимальном числе’
ступеней МВКА, а следовательно, и об оптимизации ряда допол-
нительных параметров летательного аппарата.
12.3.4. Оптимизация основных параметров МВКА
Требование строгой оптимизации основных параметров всех
ступеней МВКА ставится с самого начала предварительных изы-
сканий. На рис. 12.17 в качестве примера приведена одна из
возможных схем системы автоматизированного проектирования
МВКА, математическая модель которой обеспечивает выполнение
всех заданных требований и с учетом реальных ограничений опти-
мизирует параметры аппарата по выбранному критерию, напри-
мер по минимуму сухой массы аппарата (или по минимуму стар-
товой массы).
Многоступенчатый МВКА в общем случае можно представить
как аппарат состоящий из разгонной ступени (или самолета-раз-
гонщика), промежуточных ступеней-ускорителей (или топливных
баков) и ВКС. Стартовая масса аппарата в этом случае будет
равна
m0 = тс. р myi + • • + + твкс> (12.40)
где mc.p — масса ступени-разгонщика (самолета-p аз гонщика);
ту1 — масса первого ускорителя; тук — масса k-ra ускорителя;
твкс — масса ВКС; k — число ускорителей (если несколько уско-
рителей начинают и кончают работать, а также сбрасываются одно-
временно, то эти ускорители в данном случае рассматриваются как
единая ступень).
Для определения “оптимальных значений параметров подоб-
ного летательного аппарата необходимо прежде всего ответить
на следующие вопросы:
1) какую полезную нагрузку и до какой скорости целесообразно
разгонять с помощью ступени-разгонщика;
2) какая часть от этой нагрузки способна выйти на околозем-
ную орбиту.
346
Рис. 12.17. Схема системы автоматизированного проектирования МВКА
Другими словами, необходимо, обеспечивая максимум крите-
рия тп. н> найти минимальную стартовую массу МВКА, если за-
дана конкретная величина тВкс, или, если имеется в виду конкрет-
ный самолет-раз гонщик (например, гиперзвуковой самолет с ВРД),
найти максимально возможную массу ВКС, способного выйти на
орбиту при старте с данного самолета-p азгонщика.
Введем следующие дополнительные понятия и обозначения:
Щ; — масса i-й ступени (без разгоняемой нагрузки); trini — масса
нагрузки, разгоняемой i-й ступенью до скорости У — УСт/ + АУг-
и высоты Н = НСт1 + АЯ; (УСтг и HCTi — соответственно ско-
рость и высота старта i-й ступени; А/г и АЯг — дополнительные
скорость и высота, приобретаемые нагрузкой mwi при сгорании
топлива i-й ступени); mri — масса топлива i-й ступени, потребная
для разгона нагрузки массой mHt (на величину АУг и &Ht),
rfht = triviHmi Н- mH(-); т*с =
347
Для ступени-раз гонщик а будем иметь:
тн. с. р = myi + • • • + myk + mDKc;
/П, с. р = тт. с. р/(^с. р 4“ тн. с. р) ^т. с. р/^0>
Я1т. с. р ~ ^т. с. р/^Лс. р.
Для первого ускорителя:
тн. yl = ту2 + • • • + myh + mBK<>
^т. yl = ™т. yl/(^yl 4“ тн. у1)>
т*_ У1 = mT. yi/myi.
Для й-го ускорителя:
^Н. у& = ^ВКС> ^т. yk = ^т. у&/(/^уй 4“ ^ВКс)>
Щт. у k = ^т. у kl^yk*
Дополнительная скорость, сообщаемая i-й ступенью разгоня-
емой нагрузке, в общем случае будет равна
АУг = Уиг - Д Упь
где ¥и1 — идеальная скорость, которую сообщает i-я ступень на-
грузке mHi; ДУпг — потери скорости от действия сил гравитации
и аэродинамического сопротивления на участке разгона от Тстг
ДО VCT г +1 •
Г" Величину mTi можно преобразовать следующим образом:
mT/ = mriHmi 4- mHf) = т*( [1 — mnii(mi 4- mH(-)],
а следовательно, согласно уравнению (12.39), будет иметь место
равенство:
m*(- [1 — m^Hrni 4- /пН()] = 1 — 1/е 9,817тг .
Из этого равенства найдем массу аппарата при УОтг, т. е.
в момент включения двигателей i-й ступени (после отделения от
i — 1-й ступени),
/п*(-
mi 4" mHi ~ ДКг+ДКп; (12.41)
mTi — 1 4- 1/е тг
Так как для каждой предыдущей ступени разгоняемой нагруз-
кой является сумма всех последующих ступеней, то на основании
зависимости (12.41), стартовая масса многоступенчатого летатель-
ного аппарата
т- \
Ш° I П----------------Нду:+дкпг ’ j твкс> (12.42)
\ <=1 fh\ - 1 + 1/е 9'81'тг /
348
n=f
где n — число ступеней аппарата; знак П означает произведение
>=1
(п — 1) членов; п — 1 = k -f- 1 — число «работающих» ступеней
аппарата (топливо которых расходуется в процессе разгона).
Скорость У1К достигается в конце работы й-го ускорителя.
Если ВКС на конечном участке траектории выходит на орбиту
за счет собственного топлива, то k-vt ускоритель в данном случае
будет разгонять ВКС до скорости
У = К1к — АУВКС.
Величина АУВКС определяется как
Л^вкс = 9,81/тВКС1п ।----------АУпвкс> (12.43)
1 — ^тВКС
Ат
где ДттВКС = —— относительная масса топлива ВКС,
твкс
расходуемого в процессе выхода на орбиту; АКпвкс = / (Ю>
при V >6,5 км/с АУпвкс ~ О (см. Рис- 12.13).
Величину ДУВКС нецелесообразно принимать слишком боль-
шой, так как это увеличивает массу конструкции ВКС.
Уравнение (12.42) показывает, что стартовая масса МВКА
зависит от многих параметров, которые сами являются функциями
многих переменных (параметров и характеристик отдельных сту-
пеней аппарата). В процессе оптимального проектирования один
из важных этапов параметрических исследований — это вычисле-
ние частных производных минимизируемого параметра по варьи-
руемым параметрам. Такое вычисление фактически определяет
пути дальнейшего совершенствования проектируемого аппарата.
Расчеты показывают, например, что изменение массы конструкции
на 1 % приводит к изменению сухой массы МВКА на 0,65 %,
изменение системы теплозащиты на 1 % дает соответственно
0,42 % и т. д. Другими словами, решение задачи на оптимизацию
параметров МВКА по.минимуму значения величины т0 при задан-
ной величине твкс сводится к решению системы dmQ/dii...п = 0
(здесь i — параметр).
В процессе предварительного проектирования данную задачу
можно решить приближенным методом, который значительно
упрощает решение и вместе с тем дает необходимую для эскизного
проектирования точность.
Сущность метода заключается в том, что в уравнении (12.42)
переменные фиксируются. Значения одних переменных с достаточ-
ной точностью можно определить на основании опыта проектиро-
вания идентичных летательных аппаратов, для других перемен-
ных, как будет показано ниже, отклонение от оптимума дает не-
значительную погрешность для решения задачи в целом.
При предварительном проектировании можно принимать
тт’.у = 0,94 ... 0,96 (такое значение весовой отдачи по топливу
имеют ускорители с ЖРД одноразового использования, для
349
РДТТ величина т*_ у » 0,85); JT = const (например, для топлива
Н2 + О2, 7Т « 450 с); АУу1 = АУу2 = • • • = AVyk =
или, если значительная часть топлива ВКС затрачивается на раз-
V —V — AV
гон АУу1 = АУу2 = • • • = АУуь = ——-----(здесь
УСт.У1 — скорость старта первого ускорителя, т. е. скорость,
которую сообщает ступень-разгонщик разгоняемой ею нагрузке);
AKni =/(VcTi) берется из графика на рис. 12.13.
Число всех ступеней МВКА найдем, определив число ускори-.
телей, так как п = k + 2.
Критерий /йп. н будет тем больше, чем больше величина /йвкс =
= твк<Уто, т. е. чем большую долю будет составлять масса ВКС
от массы нагрузки, разгоняемой ступенью-разгонщиком (и, со-
ответственно, меньшую долю будет составлять масса ускорителей^)
Из этого условия и следует определять необходимое число уско-
рителей.
Величину /йвкс можно представить как
™вкс = твкс(1-/пс.р), (12.44)
где Отвкс = mBKC/mH. с. р, р = тс. р/(тс. р + тн. с. Р) = тс. р/ш0.
Величину твкс легко определить из уравнения (12.42), кото-
рое в данном случае примет вид
ЙЬкс=П^1±^Д27. (12.45)
Уравнение (12.45) отвечает на поставленный выше вопрос,
какая часть от нагрузки, разгоняемой ступенью-разгонщиком,
способна выйти на околоземную орбиту.
Варьируя скорость старта первого ускорителя и число ускори-
телей k, определим соответствующие значения величины твкс.
На рис. 12.18 показан результат решения уравнения (12.45).
Анализируя полученную зависимость, можно сделать вывод:
для современных ускорителей с высокой конструктивной эффек-
тивностью (т*. у « 0,95) даже при сравнительно небольших
значениях Уст. у1 увеличение числа k > 1 практически не при-
водит к увеличению величины йВКс- Поэтому для многоступен-
чатого МВКА следует принимать число ускорителей (или внешних
топливных баков) k = 1, и, следовательно, число всех ступеней
м = 3.
Уравнение (12.42), определяющее стартовую массу МВКА,
в таком случае примет вид:
«т. с. р «Т у
т°~ №с.р+^д.с.р~ : ' дуу+дуп,У твкс’
т*ср—l-f-1/е 9,817т-с-Р <у- 1-4-1/е 9’81'Т-У
350
Рис. 12.18. Влияние числа ускорителей и скорости старта первого
ускорителя на величину йдКС (топливо Н2 + О2; -Л. у450 с):
---------------------mJ. у = 0,95;----------------mJ у = 0,85
Рис. 12.19. Влияние скорости старта второго ускорителя иа величи-
НУ "’вкС1
---- т* у = 0,90;--------------т*_ у = 0,85; • - Гст. у2 = -1К +-^т- у1 ;
v __ yopt
ст. у2
Если весовая отдача по топливу, например, для ускорителей
многоразового применения будет недостаточно высокой, более
эффективным может оказаться МВКА с двумя ускорителями
(см. рис. 12.18, /nJ. у = 0,85). В этом случае, очевидно, для
каждого значения Уст.у1 будет существовать оптимальное зна-
чение Ест.уг, определяющее оптимальное распределение суммар-
ной массы ускорителей (между первым и вторым ускорителем).
Однако погрешность в определении максимума величины /Пвкс>
получаемая при замене оптимального значения ЕСт. у2 рекомен-
дуемой величиной
Vст. уг = Ест. yi АКУ1
V1K Ч~ ЕСт • У1
2
будет незначительна (рис. 12.19).
Определяя из уравнения (12.41) оптимальную массу i-й
ступени
(Й*; \
ду._|_дупг 1 (12.47)
-* ill/ 9,81 тг /
tnTl — 1 + 1/e /
найдем массы отдельных ступеней МВКА.
Если задана масса нагрузки, выводимой на орбиту (/ивкс),
и требуется определить минимальную стартовую массу МВКА
351
(т0), то последовательность определений массы отдельных ступе-
ней должна быть такой: масса ускорителя (или внешнего топлив-
ного бака), а затем масса ступени-p азгонщика (самолета-p аз гон-
щика).
. Из уравнения (12.47) получим:
— масса ускорителя
/ К. у Д
“ I AVy+AVn у 1 j твкс>
\ - • 1 , 1 , 9.81J /
\mT. У - 1 + !/е т> у /
— масса ступени-разгонщика
тс-р — ( ду „+д|/п с И(ту + твкс)-
Wc.p-l+Ve 9,81 zt.c. р /
Из уравнения (12.49) найдем ответ еще на один поставленный
выше вопрос — какую нагрузку и до какой скорости способна
разогнать первая ступень:
дус. р+дуп,с.р
< с р-1-Ы/е 9'817т.с.р
тт. с. р
(12.48)
(12.49)
. (12.50)
Ио
•й _ тн. с. р _
1Г1Н. с. Р----------
Рис. 12.20. Влияние скоро-
сти старта ускорителя на ве-
личину твкс (7Т у = 450 с;
й* у = 0,955; ступень-разгон-
щик с ЖРД 7т. с. р = 450 с):
---- т* с. р ~ 0.95; — . — -
тт с р ~ 0,925; — _ _ — _
__* „ ont
тт. с. р ~ 0»90» X VCT у* ®
МКВА «Спейс Шаттл» (разгонная
ступень с РДТТ)
Таким образом, предлагаемый
метод позволяет быстро и с до-
статочной точностью решать ряд
важных вопросов в процессе проек-
тирования воздушно-космических
самолетов, не прибегая к нахо-
ждению экстремума функции мно-
гих переменных. Варьируя в при-
веденных уравнениях величину
AVC. р и значения параметров
т*.
С. Р j *^т. с. р» /Дт. у И 7т. у,
можно определить влияние этих
параметров на величину твкс,
найти оптимальное значение VCT.y
(рис. 12.20), другими словами,
найти оптимальное распределение
массы между сту пенью-р азгонщи-
ком и ускорителем (топливным
баком), обеспечивающее получе-
ние величины йвкс (т. е. m™in)
для тех или иных значений указан-
ных параметров и т. д.
352
12.3.5. Весовой баланс ВКС
Одним из основных параметров ВКС и определяющим крите-
рием при его проектировании является относительная масса по-
лезной нагрузки (транспортируемый груз и космонавты), выводи-
мой на орбиту с помощью данного ВКС. Этот параметр можно
определить, пользуясь уравнением существования ВКС
^п.нВкС = 1 (^ВКСпуст + ^тВКс)’ (12.51)
где йп. нВкс =/пп.нвкс//пвкс — относительная масса полез-
ной нагрузки ВКС; тВКСпуСт = тВКсПусУтвкс — относитель-
ная масса пустого ВКС (без полезной нагрузки и топлива);
тт вкс = ттвкс/твкс — относительная масса полного запаса
топлива ВКС; твкс — масса полностью заправленного ВКС.
Относительная масса пустого ВКС может быть представлена как
сумма:
^ВКСпуСт = ^конВКС + ^с. у ВКС + ^об ВКС “1“ ^т. пВКС>
где ткОнВКС = тконВкс//ивкс — относительная масса конструк-
ции ВКС; Й2с.увкс = тс. увкс/твкс — относительная масса
силовой установки ВКС; тОбвкс = ^обвкс^вкс— относи-
тельная масса оборудования ВКС; тт.пВКС = mT.nBKC//nBKC —
относительная масса теплозащитного покрытия ВКС.
Относительная масса силовой установки ВКС, как и самолета
любого другого типа, зависит от величины стартовой тяговоору-
женности. Однако тяговооруженность ВКС не будет лимитиро-
ваться чрезмерным увеличением величины й0<уВКС, так как
удельная масса современных ЖРД значительно меньше удельной
массы ВРД (Тдвжрд = 0,012 ... 0,015).
Поэтому тяговооруженность ускорителей и ВКС, не опасаясь
перетяжеления силовой установки, следует выбирать из условия
обеспечения приемлемой перегрузки при разгоне и потерь ско-
рости на преодоление сил гравитации и аэродинамического со-
противления, которые при прочих равных условиях будут опре-
делять величину /йВкс (рис. 12.21).
В период предварительного проектирования, учитывая воз-
можные ограничения по перегрузкам и скоростному напору,
следует принимать
РУ1~Руа~Рвкс = 1» 4-..1, 8.
Расчеты показывают, что можно обеспечить следующие зна-
чения относительной массы компонентов тВКСпуСт:
Крыло............................... 0,045—0,055
Фюзеляж ............................ 0,14—0,16
Оперение (киль).....................0,010—0,012
Шасси............................... 0,035—0,045
Основная силовая установка.......... 0,10—0,12
Вспомогательная силовая установка 0,02—0,025
Оборудование ....................... 0,08—0,09
Теплозащитное покрытие.............. 0,07—0,09
12 С. М. Егер и др.
353
товой тяговооруженности пер-
вого ускорителя на величину
™вкс (VCT. yi = 2000 м/е)
Таким образом, относительная
масса пустого ВКС йгВКСп от —
= 0,50 ... 0,60.
Относительная масса полного
запаса топлива ВКС
ВКС «т. кор "Ь «т. м «т. в,
где mT. кор = mT. кор/швкс — относи-
тельная масса топлива на коррек-
цию скорости при выходе на орби-
ту ; mT. м = mT. м/твкс — относитель-
ная масса топлива, потребного для
выполнения маневров в космосе;
/йТфВ = тт. в/^вкс — относительная
масса топлива для возврата ВКС
из космоса.
Необходимый расход топлива на изменение той или иной
характеристики орбиты можно найти, воспользовавшись уравне-
нием (12.38), так как изменение характеристик орбиты в конеч-
ном счете определяется соответствующим изменением скорости
летательного аппарата:
АУвкс
AmT = 1 _ 1/е9’8итвсУ, (12.52)
где А/йт = А/тгт//тгвкс — относительная масса топлива, израс-
ходованного на изменение скорости ВКС на величину АУВКС;
/тВсу — удельный импульс двигателя вспомогательной силовой
установки ВКС.
Жидкий водород и жидкий кислород, по всей вероятности,
еще долго будут наиболее распространенным топливом МВКА,
так как обеспечивают удельный импульс ~450 с (в то время
как удельный импульс керосина равен только ~280 с). Жидкий
водород и жидкий кислород сравнительно дешевы в производстве,
нетоксичны, не вызывают коррозию, а при сгорании образуют
пар. Однако они чрезвычайно летучи, и это осложняет их хранение
и исключает их использование в системах ориентации и маневри-
рования ВКС на орбите.
Коррекция скорости ВКС связана с тем, что внешний топлив-
ный бак должен отделяться незадолго до выхода ВКС на расчетную
орбиту, когда скорость меньше орбитальной на 30 ... 45 м/с.
В этом случае отпадает необходимость в использовании дополни-
тельных тормозных двигателей для схода бака с орбиты. Для
определения величины /йт,кор достаточно принимать ДУкор «
лг 40 м/с. Подставляя в уравнение (12.52) АУВКС = АУкор =
= 40 м/с, получим тт.кор = 0,013.
Количество топлива, потребного для выполнения того или
иного маневра в космосе, существенно зависит от вида маневра,
который в свою очередь определяется величиной АУМ — измене-
354
нием вектора скрости ВКС [см. уравнения (12.28) и (12.31)].
Подставляя требуемые значения АУМ в уравнение (12.52), получим
необходимую величину /йт. м.
Представление о численном значении величины АКМ и соответ-
ствующем значении тт-м дают следующие затраты топлива (при
/тВСУ = 312 с) на увеличение высоты АН или изменение угла
наклона орбиты А<р (исходная орбита: Н = 150 км; Vo — У1к =
= 7810 м/с):
ЛЯ, км............ 15 150 350 Лф° 1 7 15
ДУм=ЛУя, м/с 4 47 НО Л Ум = ЛУФ, 137 954 2040
м/с
/йт.м........... 0,001 0,015 0,035 йт.м 0,044 0,268 0,487
Как видно из этих данных, значительное изменение угла
наклона орбиты сопряжено с большими затратами топлива ВКС.
Эффективный сход летательного аппарата с орбиты наступает
при тормозном импульсе, обеспечивающим АУТ = S0 ... 45 м/с.
Поэтому относительную массу топлива для возврата ВКС из
космоса можно принимать тт-в = йт, кор = 0,013.
Следует заметить, что относительную массу полного запаса
топлива можно получить непосредственно из уравнения (12.52),
если известна (задана) величина АУВКС для всего комплекса
маневров в космосе. Например, для ВКС фирмы «Рокуэлл» общий
запас топлива обеспечивает приращение скорости ВКС до 305 м/с
(при полезной нагрузке 29,5 т). Для такой величины АУВКС
необходимо иметь т^вкс = 0,10.
Определив относительную массу полного запаса топлива
ВКС, из уравнения (12.51) можно найти величину та. иВКС.
Для величины твкспуст = 0,5 ... 0,6 получим соответственно
^п.нвкс — 0,4 ... 0,3.
Таким образом, двухступенчатый МВКА с разгонной ступенью
с ЖРД и ВКС с внешним-топливным баком, двигатели которых
работают на жидком водороде и жидком кислороде, способен
выводить на околоземную орбиту высотой до Н = 500 км полез-
ную нагрузку с величиной тц н = тп нвкс^вкс — 0,035 ...
...0,025.
12.4. ОСОБЕННОСТИ АЭРОДИНАМИЧЕСКОЙ СХЕМЫ ВКС
И ГИПЕРЗВУКОВЫХ САМОЛЕТОВ
12.4.1. Воздушно-космический самолет
Основное влияние на аэродинамическую схему ВКС и гипер-
звукового самолета оказывают такие факторы, как интенсив-
ность и продолжительность аэродинамического нагрева в целом,
интенсивность теплообмена в зонах интерференции, переход по-
граничного слоя в турбулентное состояние, эффективность орга-
нов управления (в частности, применение систем активного
управления при уменьшенном запасе статической устойчивости
приведет к снижению размеров и массы самолета) и т. д. Слож-
12* 355
О 4 8 12 1Goc°
Рис. 12.22. Влияние шероховатости поверхности ВКС на аэродинамическое
качество и коэффициент момента тангажа в зависимости от угла атаки:
---- ВКС с треугольным крылом; —-------ВКС с несущим корпусом; 1 — шерохова-
тость на 0,08 хорды; 2 — шероховатость на 0,04 длины фюзеляжа; 3 — участки с шеро-
ховатой поверхностью; 4 — гладкая поверхность; 5 — шероховатая поверхность; 6 —
гладкая или шероховатая поверхность
ность выбора геометрических параметров в данном случае усу-
губляется еще и необходимостью значительных компромиссов
мёжду аэродинамическими характеристиками аппарата при ги-
перзвуковых и дозвуковых скоростях полета.
Минимизация теплового потока в точке торможения достигается
при входе аппарата в атмосферу на больших углах атаки с макси-
мальной подъемной силой. На большей части нижней поверхности
тепловой поток значительно меньше, чем на передней кромке.
Эти преимущества, которыми не обладают траектории баллисти-
ческих аппаратов, привлекли внимание конструкторов к схеме
ВКС в виде аппарата с несущим корпусом.
Преимуществом аппарата с несущим корпусом (в сравнении
с крылатым) является менее сложное решение проблемы теплоизо-
ляции конструкции. Однако ВКС такой схемы обладает недоста-
точным аэродинамическим качеством при дозвуковых скоростях.
Это усугубляется” воздействием на поверхность ВКС аэродина-
мического нагрева, в результате которого она становится шерохо-
ватой (носок фюзеляжа и носок крыла), что приводит к значи-
тельному снижению дозвуковых аэродинамических характеристик
аппарата (рис. 12.22).
Эволюция аэродинамической схемы ВКС показана на рис. 12.23.
Одним из наиболее важных изменений в схеме ВКС по сравнению
с более ранними вариантами является использование низкорас-
положенного крыла с двойной стреловидностью по передней
кромке (Л, « 2,3; угол стреловидности корневой части консоли
приблизительно равен 80°, концевой части — 45°). Такая форма
крыла в плане обеспечивает лучшие возможности балансировки
при сверхзвуковых и гиперзвуковых скоростях полета, чем
треугольное крыло.
356
Рис. 12.23. Эволюция аэродинамической схемы ВКС:
1 — затупленный полуконус с углом раствора 60°; 2 — затупленный полуконус с углом
раствора 30°; 3 — полуконус с концевыми шайбами; 4 — ВКС с несущим корпусом (ниж-
няя поверхность овальная); 5 — ВКС с несущим корпусом (нижияя поверхность пло-
ская); б — крылатый ВКС
Схема м > 10 м < 1 Схема м > 10 М < 1
1 Кг» * 0,5 К « 0,8 4 Кг» ° 1,2 К « 3
2 Кг» * 1,2 К ~ 2 5 Кг» 5 2 К~ 8
3 Кг « * 1,2 К «з 6 Кг> ► 2 К> 6
Рис. 12.24. Зависимость аэродинамического качества при посадке от сба-
лансированного коэффициента подъемной силы для ВКС и других самолетов:
1 — ВКС с выпущенным шасси; 2 — угол отклонения панелей Воздушного тормоза 25°;
3 — то же, 55°; 4 — самолет F-104, шасси выпущено и закрылки отклонены, включен
воздушный тормоз; 5 — экспериментальный аппарат Х-15, закрылки отклонены на 40°,
шасси выпущено
Применение крыла с двойной стреловидностью позволяет
улучшить аэродинамические характеристики ВКС при гипер-
звуковых и сверхзвуковых скоростях и обеспечивает приемлемое
аэродинамическое качество во время захода ВКС на посадку и
при посадке (рис. 12.24). Следует, однако, отметить, что отсут-
ствие средств механизации (схема «бесхвостка» не позволяет при-
менять закрылки) делает величину посадочной скорости довольно
высокой: Упоо = 340 ... 360 км/ч. Такая посадочная скорость
и посадка без двигателя требуют создания для ВКС специальной
ВПП (в космическом центре им. Кеннеди построена посадочная
полоса длиной 4,5 км и шириной 91 м).
Одним из важнейших геометрических параметров летатель-
ных аппаратов является удельная нагрузка на крыло или на
несущую поверхность (для аппаратов с несущим корпусом, когда
под несущей поверхностью понимается площадь проекции аппа-
рата в плане). Для ВКС при гиперзвуковом полете удельная на-
грузка на несущую поверхность будет обусловливаться уравне-
нием (12.1), следовательно, величину этого параметра, необходи-
мую для равновесного полета (планирования), при данной ско-
рости на данной высоте, можно определить из уравнения (12.4).
Особенность формы вертикального оперения ВКС обусловлена
стремлением получить более эффективное управление энергией
357
Рис. 12.25. Влияние изменения формы профиля вертикального оперения
на аэродинамическое качество ВКС с треугольным крылом:
1 — ромбовидное сечение; 2 — клиновидное сечение (нормальное положение); 3 — хво-
стовая часть расширена
в процессе планирования летательного аппарата. Для этой цели
необходимо иметь киль с клиновидным профилем, а руль направ-
ления выполнить из двух расщепляющихся панелей, отклонение
которых позволит регулировать лобовое сопротивление и наклон
посадочной траектории ВКС (рис. 12.25).
12.4.2. Гиперзвуковой самолет
Будущие гиперзвуковые самолеты пока определены лишь
в общих чертах. Однако уже сейчас можно утверждать, что глав-
ная особенность аэродинамической схемы гиперзвукового самолета
будет вытекать из строгой необходимости объединения планера
и силовой установки самолета, продиктованной условиями работы
ПВРД. Одним из возможных вариантов является схема «бес-
хвостка» с треугольным крылом двойной стреловидности. Крыло
должно иметь отрицательный угол установки, равный 3 ... 5°,
что позволит увеличить углы атаки фюзеляжа при гиперзвуковых
скоростях и повысить предварительное сжатие потока в воздухо-
заборнике ПВРД. Из этих соображений необходимо выбирать
и форму поперечных сечений носовой части фюзеляжа.
Контуры хвостовой части фюзеляжа должны обеспечивать
ее использование в роли выхлопного сопла ПВРД со сверхзвуко-
вым горением (рис. 12.26).
Рис. 12.26. Возможная кон-
фигурация будущего гипер-
звукового самолета инте-
гральной схемы:
1 — носовая часть фюзеляжа,
служащая для предваритель-
ного сжатия воздуха; 2 —ПВРД
иа водородном топливе; 3 —
хвостовая часть, служащая
соплом силовой установки
358
Влияние аэродинамического нагрева на внешнюю конфигура-
цию гиперзвукового самолета будет проявляться не в меньшей
(если не в большей) степени, чем для ВКС. Будущий гиперзвуко-
вой самолет должен иметь аэродинамическое качество в крейсер-
ском полете (М 6) не менее 4 ... 5. Поэтому поиски оптимальной
аэродинамической схемы значительно усложняются.
12.5. ОСОБЕННОСТИ КОНСТРУКЦИИ ВКС
И ГИПЕРЗВУКОВЫХ САМОЛЕТОВ
Силовая конструкция ВКС и гиперзвуковых самолетов прин-
ципиально не отличается от конструкции обычных самолетов.
Однако при проектировании конструкции ВКС и гиперзвуковых
самолетов необходимо учитывать такие факторы, связанные со
скоростью полета, как интенсивность и продолжительность аэро-
динамического нагрева, а также расчетное число полетов или
срок службы. Все эти факторы определяют главную особенность
конструкции ВКС и гиперзвуковых самолетов, а именно способ-
ность работать в условиях высоких температур.
Система теплозащиты силовой конструкции зависит от кон-
кретных условий полета. В случае интенсивного, но кратковре-
менного нагрева (экспериментальный гиперзвуковой самолет)
существует возможность использования абляционной теплоза-
щиты, часто применяющейся ранее на космических аппаратах,
однако требования достаточно длительного полета заставляют
искать иные решения, например пленочное или конвективное
Материалы обшивки.
Рис. 12.27. Влияние скорости полета йа возможности конструкции лета-
тельных аппаратов:
1 — алюминий; 2 — тнтан; 3 — высокотемпературные сплавы; 4 — теплоизолирующие
и абляционные материалы; 5 — <Конкорд»; 6 — высокотемпературная конструкция;
7, 8 — гиперэвуковые самолеты; 9 — охлаждаемая конструкция; 10 — ВКС <Спейс
Шаттл»; 11 — КК <Аполлон»
359
1
3
Рис. 12.28. Возможные системы теплозащиты ВКС и гиперзвуковых само,
летов:
1 *- многоразовая наружная изоляция; 2 — несущая панель- 3 — айляпипиипо
тие малой плотности; 4 — теплоотражающие экраны вафельной конструкции- 5 —
изолирующий слой; б - теплопоглощающий экран (алюминиевый или
бериллиевый сплав локаллой)
— абляционное покры-
...........- - тепло-
алюминиево-
Рис.
1 — материал
Жой от 19 ...........
7000 плиток размером 203 X 203 мм, тилщииа
гКЫ состоит из листов размером 0,9 X 1,2 м,
12.29.
RCC; 2
ла .... /‘— ------иии пенник размером ioz х 152мм и тол-
>азмером 203 X^OS*™'™ °Т локальног° нагрева); 3 - покрытие LRSI,
Схема теплозащитного покрытия ВКС «Спейс Шаттл»:
7 X 152 мм и тол-
толщииа меняется от 5 до 25 mm^Z- покрытие
1лгим. "с" * 1,2 м’ Т0Л1Дииа которых варьируется от 4 до
10 мм, 5 — металл или стекло д
360
охлаждение расходуемым охладителем (активная система тепло-
защиты). В случае кратковременного и сравнительно умеренного
нагрева возможно применение теплопоглощающей конструкции
(самолет Х-15). Для длительного интенсивного нагрева необходима
установка внешней изоляции в форме теплозащитных экранов
(ВКС). Возможности конструкции самолетов различного типа
показаны на рис. 12.27. Примеры конструктивного вы-
полнения различных систем теплозащиты представлены на
рис. 12.28.
Расположение теплозащитного покрытия на поверхности ВКС
показано на рис. 12.29.
Часть вторая
ПРОЕКТИРОВАНИЕ ЧАСТЕЙ САМОЛЕТА
Глава 13
ОБЩИЕ ОСНОВЫ ПРОЕКТИРОВАНИЯ
ЧАСТЕЙ САМОЛЕТА
13.1. ВЫБОР КРИТЕРИЯ ОПТИМИЗАЦИИ
ПРИ ПРОЕКТИРОВАНИИ ЧАСТЕЙ САМОЛЕТА
Ниже, в гл. 14... 19, будут показаны особенности проектирования отдель-
ных частей самолета: крыла, фюзеляжа, оперения, силовой установки, систем
управления и шасси. Главной задачей этого проектирования является обеспече-
ние оптимальности данной части самолета. Однако из теории проектирования
сложных систем известно, что система, состоящая из локально оптимальных
частей, в общем случае не является оптимальной. Из этого не следует, что опти-
мизация по частям не имеет смысла. Во-первых, оптимизация по частям совпадает
с оптимизацией системы в целом, если параметры отдельных частей независимы.
Во-вторых, в ряде случаев оптимизация в целом невозможна или затруднена
из-за сложности или неопределенности ее математической модели и тогда при-
ходится оптимизировать систему по частям, надеясь, что результат будет не-
далек от оптимального. И наконец, в-третьих, оптимизация по частям имеет
смысл в том случае, если критерий оптимизации либо является единым для ча-
стей системы и для системы в целом, либо является частью общего критерия
оптимизации, хорошо реагирующей на изменение независимых параметров
данной части самолета.
Например, единым критерием оптимизации для самолета в целом может
быть получение наименьшей массы самолета' при взлете. Для отдельной части
самолета, например крыла, может быть либо этот же критерий оптимизации,
либо более совершенный критерий W'up, имеющий следующую структуру:
I^Kp — AmKp — ВКкр -j- CS — Drrit,
где ткр — масса крыла; Ккр — аэродинамическое качество крыла; S — площадь
крыла; тт — масса топлива, размещаемого в крыле. Коэффициенты А, В, С
и D являются индивидуальными для каждого проектируемого самолета, отражая
тактико-технические требования к самолету (дальность полета, крейсерскую
скорость и скорость захода на посадку, величину полезной нагрузки и снаря-
жения и т. п.).
Такой критерий для оценки оптимальности отдельно взятой части самолета,
имея простой вид, может дать возможность оптимизировать части самолета без
обращения к математической модели самолета в целом и принять более сложную
математическую модель данной части, позволяющую оптимизировать ее «вну-
треннюю структуру», с учетом необходимого при этом изменения параметров,
определяющих ее внешние формы. Составляющие части критерия показывают
рациональное направление дальнейшей работы по совершенствованию данной
части самолета и позволяют оценить влияние связей между отдельными частями
самолета, отбрасывая несущественные.
13.2. ОСНОВНЫЕ ЗАДАЧИ ПРОЕКТИРОВАНИЯ ЧАСТЕЙ САМОЛЕТА
В процессе проектирования отдельной части самолета решаются следующие
основные задачи:
а) выбор оптимальных величин основных параметров и геометрических
размеров;
362
б) выбор оптимальной формы, оптимальных внешних обводов;
в) выбор оптимальной конструктивно-силовой схемы данной части само-
лета как развитие и уточнение схемы, сделанной в процессе конструктивно-
силовой компоновки всего самолета (см. разд. 8.3);
г) выбор оптимальных материалов и технологических процессов, имея
целью обеспечение минимальной массы данной части самолета при выполнении
требований по характеристикам аэроупругости, термостойкости, статической,
динамической и усталостной прочности и минимальной стоимости изготовления
данной части самолета в серийном производстве при соблюдении заданных форм
и требуемого качества поверхности;
д) обеспечение удобства и минимальных затрат на эксплуатационное обслу-
живание данной части самолета, имея в виду возможность свободного подхода
для осмотра и ремонта всех жизненно важных мест в конструкции и оборудова-
нии данной части самолета и свободного выполнения необходимых нивелиро-
вочно-регулировочных работ.
В гл. 4 и 7 был показан метод определения основных параметров самолета:
удельной нагрузки на крыло р0, тяговооруженности Ро, площади крыла S и сум-
марной взлетной тяги двигателей Ра, а в гл. 6 — метод определения взлетной
массы самолета т0 в первом приближении. В зависимости от величины этих пара-
метров и от заданных летно-технических характеристик выбираются и оптими-
зируются основные параметры и геометрические размеры частей самолета:
— для крыла: удлинение X, угол стреловидности х, сужение г], относитель-
ные толщины профилей у корня н на конце крыла с, угол поперечного V, харак-
теристики геометрической н аэродинамической крутки и выбор механизации;
— для фюзеляжа: мидель SM. ф, удлинение Лф, длина фюзеляжа /ф, удли-
нения носовой и хвостовой частей фюзеляжа;
— для оперения: плечи горизонтального (£г. о) и вертикального (Лв. о)
оперения, площади этих оперений Sr 0 и SB. о> площади рулей Sp в и Sp. н.
сужения т)г. о и т)в. о, удлинения Хг. 0 и Хв. 0;
— для шасси и силовых установок: размеры стоек и колес шасси, размеры
воздухозаборников и сопел, мидели гондол двигателей или гондол обтекателей
шасси и др.
Выбор этих параметров и размеров позволяет уточнить величину взлетной
массы самолета во втором приближении и провести вторую итерацию, уточнение
основных параметров самолета и основных параметров и размеров крыла, фюзе-
ляжа, оперения и других частей самолета.
Выбор оптимальной формы частей самолета связан с выбором:
— профилей крыла и оперения и с законом их распределения по размаху;
— положения крыла и оперения относительно фюзеляжа и взаиморасполо-
жения ГО и ВО;
— поперечного сечения фюзеляжа и обводов носовой и хвостовой частей
фюзеляжа;
— положения шасси и возможности уборки шасси в крыло или фюзеляж
(с требованием наличия или отсутствия специальных обтекателей);
— формы воздухозаборников, гондол двигателей, пилонов, на которых эти
гондолы установлены, и сопловых устройств.
В выборе форм возникает необходимость взаимной увязки отдельных частей
самолета в целях уменьшения взаимного влияния этих частей на характер совме-
стного обтекания их воздушным потоком, имея в виду возможность появления
отрицательной интерференции (увеличения сх0) или, наоборот, создания поло-
жительной интерференции' (например, использования «правила площадей» или
создания дополнительных «скачков уплотнения» перед воздухозаборниками
на сверхзвуковых скоростях полета).
Когда формы выбраны, то построение обводов самолета и его частей выпол-
няется в соответствии с методами, приведенными в разд. 8.4.
Выбор оптимальных конструктивно-силовых схем частей самолета, выбор
материалов и возможных технологических процессов изучается студентами авиа-
ционных высших учебных заведений в курсах «Проектирование конструкции
самолета», «Строительная механика самолета», «Технология производства само-
летов» и «Материаловедение».
363
Развитие авиационной техники, рост скоростей полета и скоростных напо-
ров, необходимость увеличения срока службы самолетов до 30 000, 40 000 и даже
до 60 000 летных часов обостряет такие проблемы, как обеспечение статической
и динамической устойчивости конструкции в полете, усталостной прочности
Конструкции (B-том числе в условиях аэродинамического нагрева и в условиях
коррозии материалов), акустической прочности конструкции (от шума двига-
телей и турбулентного потока, обтекающего самолет). Все они предъявляют
противоречивые требования как к форме, так и к конструктивно-силовой схеме
данной части самолета (например, снижение уровня допустимых напряжений
на растяжение для повышения усталостной прочности). Это определяет итера-
тивность процесса проектирования отдельных частей самолета: выбранные в ре-
зультате предыдущей итерации формы, обводы, размеры и конструктивно-сило-
вая схема данной части самолета после проверки их путем расчетов на удовлетво-
рение указанным выше противоречивым требованиям, после проверки их на вза-
имную увязку с другими частями самолета уточняются, и. этот процесс вновь
повторяется до достижения оптимального решения.
Ниже (в гл. 14... 19) дается выбор основных схем, размеров н форм отдель-
ных частей самолета; выбор других характеристик этих частей (конструктивных,
прочностных, технологических и др.) рассматривается в специальных курсах.
Глава 14
ПРОЕКТИРОВАНИЕ КРЫЛА САМОЛЕТА
14.1. ОСНОВНЫЕ ГЕОМЕТРИЧЕСКИЕ ПАРАМЕТРЫ КРЫЛА
14.1.1. Удлинение крыла
Геометрическое удлинение крыла является безразмерным гео-
метрическим параметром и определяется выражением
% = Г18, (14.1)
где I — размах крыла, м; S — площадь крыла, м2.
При определении аэродинамических характеристик крыла
пользуются не геометрическим, а эффективным удлинением. На
малых скоростях, при Мполета < Мкрит, когда воздушный поток
принимается несжимаемым,
л X
М.несж= 1+бнесж;
S«.» = 0,027A_(3,l—а + (14.2)
где % — угол стреловидности крыла по линии 1/4 хорд; т] ==
= Ьй1Ьк — сужение крыла или отношение корневой хорды
крыла Ьо к концевой хорде Ьк.
Следует помнить, что замена Хэф на К при расчете аэродинами-
ческих характеристик крыла может дать большие ошибки. Напри-
мер, для крыла с т)=4 и %=35° (cos % = 0,82) при геометрическом
удлинении X = 8 эффективное удлинение Хэф = 7, а при X = 10
Хэф = 8,5; ошибка может составить 12,5 ... 15 %.
364
В условиях закритического обтекания в околозвуковом диа-
пазоне скоростей полета, когда сказывается сжимаемость воздуха
а _____________________________ ^эф. несж
Лэф. сж - [ + 6сж И
10Х(сСр)/ (М — Мкрит) при 1 4> М 4> Мкрит; jj)
О при М < МкрИт,
где ёср — средняя относительная толщина крыла.
При су > О
м" — м' __________с2,12(с 1,/2
^**крит - 1¥’крит - ''У V'Cp/ J
а Мкрит — критическое число М для крыла при су = О,
1 I (* + P4/3(W4/3 (x + i)2/3fep)2/3 ]
2cos2/3Xc cos1/3%c ’
(14.4)
(14.5)
M' — 1
МкРит~ cosxc
где %с — Угол стреловидности крыла по линии максимальных
толщин; х = 1,4 — показатель адиабаты воздуха.
14.1.2. Средняя относительная толщина крыла
Средняя относительная толщина крыла определяется как
ёСр = 5M_Kp/S = SM. кр> (14.6)
где S'm.kp—площадь крыла при виде спереди (мидель), м2.
Для конического трапециевидного крыла
- 0,5 (ho + hK) I _ h0 -f- hK _ bffio 4~ bKcK _ cot] 4~ /14 71
C<=P - 0,5(&o4-&k)Z ~44A“ &o + &k ~ »1+1 ’ 1 '
где h0= boco — абсолютная толщина корневого сечения, м; hK =
= bKcK — абсолютная толщина концевого сечения, м.
Нельзя определять среднюю толщину крыла как среднеарифме-
тическую величину между с0 и ск, так как относительная толщина
профилей в коническом крыле меняется нелинейно. Например,
для крыла с корневой хордой bt =10 м и са = 15 % и с концевой
хордой Ьк = 4 м и ск = 5 % средняя относительная толщина
крыла будет не 10 % (как среднеарифметическая), а
10 0,15 4-4 0,05 1,7 п 1014 Ю14А/
Сср =----i0-^4 =0,1214 или 12,14%.
14.1.3. Форма срединной поверхности
Геометрической характеристикой крыла является также форма
его срединной поверхности. Она определяется как полусумма
ординат верхней и нижней поверхностей крыла, образованных
верхними и нижними обводами профилей:
Уср (*> z) = 4- [Ув (х, 2) 4- уя (х, г)].
365
Для некоторых крыльев срединная поверхность характери-
зуется набором вогнутых профилей, повернутых на угол <р (z)
относительно корневого сечения (z = 0). В соответствии с этим
различают аэродинамическую крутку, характеризуемую распре-
делением вогнутостей профилей по размаху f (z), и геометриче-
скую крутку, определяемую законом углов поворота сечений
(хорд) по размаху крыла ср (z). Средними параметрами, характе-
ризующими аэродинамическую и геометрическую крутки крыла,
могут служить:
__ 1
~ s
'+Z/2
j f(z)b(z)dz
-U1
Фер — з
-Н/2
J <p(z)fc(z)dz
.-//2 •
В качестве обобщенного параметра крутки можно принять
величину
Фер — Фер 4/ ср-
В общем случае для крыла, произвольного по форме в плане,
обобщенным параметром крутки, характеризующим искривлен-
ность срединной поверхности, может быть принята величина
Фер = 4" I i 47 dx dz ’
, \ дусг> (х, у)
где <р (х, z) = ——------угол между касательной в пло-
скости Y0X к срединной поверхности крыла и координатной
плоскостью XOZ.
14.1.4. Объем крыла
Очень важной геометрической характеристикой крыла яв-
ляется его объем, который может быть использован для размеще-
ния топлива. Для крыльев с прямолинейными образующими по
передней и задней кромкам максимальный теоретический объем
всего крыла (м3) может быть вычислен по формуле
^нрПИХ = ^тах-!^-, (14.8)
где
, _ 4 2гщс + т] + Т]с + 2 ,UCh
шах - -у -(г) + 1)(Т]с-+1) ’ (14.У)
^оСо — Со
т]с = -rV- = л -----сужение крыла при виде спереди.
0rCk ск
Обычно для размещения топлива используется не весь объем
крыла, а только часть его между лонжеронами, особенно если эта
часть является силовым кессоном. По размаху крыла кессон
также используется не полностью: исключаются концевые части
366
крыла, имеющие малую тол-
щину, и корневая часть вну-
три фюзеляжа (у некоторых
пассажирских самолетов).
Весь кессон-бак может быть
разделен на отдельные от-
секи или отдельные баки.
Когда оси переднего и
заднего лонжеронов (стенок
баков) проходят вдоль кры-
ла по постоянным значениям
долей (процентов) текущих Рис мд Расчетная
схема определе-
ХОрД, Т. е. Ркс (2) — const ния объема топливных баков в крыле
(бкс — относительная хор-
да i-го кессон-бака), бн (2) = const (5Н — относительная хорда
«носиков» крыла, не занятых топливом), как это показано на
рис. 14.1, объем кессон-бака может быть определен по формуле:
г;0 = 44.^2,
где
1=п
= <И10>
6£ = 25кс£ [5КС1- (1 -25н< - -|~5кс£) +2бн( (1 -би()] , (14.11)
k'u = (ZKl- - ZHi) [1 - “ /и/) +
+ (Tj~1^'~-1-)(^ + hil»i + P8.)l • (14.12)
очПс -I
Здесь ?Ki = 2zK/Z — относительная координата конца кессон-бака
по размаху; — 2zn/l — относительная координата начала кес-
сон-бака по размаху.
Масса заливаемого в кессон-баки топлива
^ = Лб = 800Гкб, (14.13)
так как обычно применяемый на самолетах с ТРД и ТВД в ка-
честве топлива керосин имеет удельный вес у « 800 даН/м3.
14.2. АЭРОДИНАМИЧЕСКИЕ ХАРАКТЕРИСТИКИ КРЫЛЬЕВ
УМЕРЕННЫХ И БОЛЬШИХ УДЛИНЕНИЙ (X » 3)
14.2.1. Несущая способность крыльев
(определение величины с“)
Несущая способность крыльев умеренных и больших удлине-
ний на малых дозвуковых скоростях полета при безотрыв-
ном обтекании характеризуется зависимостью коэффициента
367
подъемной силы от угла атаки и его производной по углу
атаки:
Су = Су (а — а0), (14,14)
где а0 — угол атаки при су = 0;
где р — отношение полупериметра крыла к его размаху.
Для крыльев с прямолинейными передними и задними кромками
и с концевыми хордами, параллельными потоку,
+ 04.16)
гдехп.ки Хз. к — соответственно углы стреловидности по перед-
ней и задней кромкам крыла. Они связаны друг с другом сле-
дующим образом:
tgb.K = tgXn.K-4^fl"- (14Л7)
Формулы (14.14) и (14.15) применимы практически для крыльев
любой формы в плане.
Влияние сжимаемости воздуха при дозвуковых скоростях
полета на подъемную силу крыла может быть учтено с помощью
дозвукового закона подобия, если вместо величин су, Хуи tg %
в формулах для Су (а) подставить величины су V1 — М2 ,
X К1 — М2 и tg x//Zl — М2 . В формуле (14.15) влияние сжимае-
мости может быть учтено через безразмерный параметр р. Для
крыльев с прямолинейными кромками вместо р принимается
Рсж = 4-(|/i-M2 + tg2Xn.R + ri-M* + tg2xa.K) +
2
+ -ЩЧЙ)- <14-18)
Формулы (14.15 ... 14.18) неприменимы для расчетов в около-
звуковом (трансзвуковом) диапазоне скоростей (М « 0,85 ... 1,15).
При таких скоростях полета обтекание крыла является смешан-
ным, т. е. на поверхности крыла имеются зоны местных дозвуко-
вых и сверхзвуковых скоростей. Общего метода расчета несущих
свойств крыльев в этом диапазоне скоростей (особенно при М ж
х 1) не существует. На основании обработки и обобщения экспе-
риментальных материалов, используя правила подобия, с доста-
точной для практики точностью можно определить величину с“
крыла при М = 1 по формуле
2лХ
Су рк (с)1'3 + 2 ’
(14.19)
368
Для крыльев с прямолинейными передними и задними кромками
и концевой хордой, параллельной потоку (для стреловидных
крыльев с сужением),
рК (с)‘/з - X (с)‘/з у l+tg2Xn.R +
tav ^Ч-1)
i-Cn-D-
’ /l+tg2Xn.K
Число М, при котором с“ будет иметь максимальное значение,
определяется зависимостью
___2
4 + 1
. (14.20)
М а « 1 / 1 - (С)2/3 [2-------,
су max |/ [ X (с)1/ J
а отношение с“тах к с“ при М = 1 выражением
а
су max _ < | о 1 Р
+
Несущие свойства крыльев, различных по форме
на сверхзвуковых скоростях полета не могут быть описаны ка-
кой-нибудь одной зависимостью, так как границы крыла опреде-
ляют характер взаимного влияния отдельных его участков.
Например, в зависимости от того, являются ли кромки крыла (пе-
редние и задние) дозвуковыми (tg %г > J/M2 — 1 ) или сверхзву-
ковыми (tg Xi < КМ2 — 1 ) могут быть получены те или иные
формулы для зависимости с“ (М). Для прямого крыла при
X //М2 — 1 >1 имеем
са = 4 (1________1
е /М2-1 \ 2Х/М2-1
При X J/M2 — 1 <1 получается более сложная и громоздкая
зависимость. Для прямого крыла с наклонными боковыми кром-
ками в случае, если они дозвуковые (| tg Хб. к I > У"М2 — 1 ), при
X ]/№ — 1 > 1 _______
„а 4 (. /М2-1 — tgX6.K
у - v '
В случае, если они сверхзвуковые,
са =______________________4____
у /М2-1 ’
т. е. такая же, как у крыла бесконечного размаха или при двух-
мерном обтекании плоской пластины.
Большой интерес для проектирования представляют характе-
ристики стреловидных крыльев на сверхзвуковых скоростях
полета. Однако теоретическое определение их несущей способ-
369
2Х
(14.21)
(14.22)
в плане,
(14.23)
(14.24)
(14.25)
ности очень сложно: зависимости с® (М) получаются весьма гро-
моздкими. Приближенно эти зависимости могут быть представ-
лены в следующем виде:
— для дозвуковых передних кромок
СУ
4
Е (*) tg Хп. к
<1 И . 2arccos (—g) . 1 4-л
1+S (2 - |) (1 + g)1/2 J + 2т>
(14.26)
а для сверхзвуковых
С® — 8 I1 ~ (Уп) Г arccos (—E//n) , I arccos (1/m) ~l
у ~ Л tg Хп. к I 1 + g Km2 — g2 ' Km2 — 1 J '
arccos (l/m)) 4
г] Km2 — 1 J
Здесь E (k) — полный эллиптический интеграл второго рода
с модулем k = J/1 — /и2, где т = —~ 1 ; |
ig Хп. к ls Хп. к
Приведенные выше зависимости с® (М) охватывают широкий
класс крыльев по форме в плане, наиболее часто применяемых
на практике. Для этих крыльев зависимости с® (М) могут быть
построены во всем летном диапазоне скоростей от дозвуковых до
сверхзвуковых, включая и трансзвуковую зону. Кривая с® (М)
в околозвуковом диапазоне чисел М должна пройти через точки
С® (Мкрит < 1), С® = Сушах (Mg 1) И С® = С® (М = 1), ПЛЭВНО
сопрягаясь с кривыми с® (М) для дозвуковых и сверхзвуковых
скоростей.
Зависимость с® (М) необходима для проектирования крыла при
определении максимальной эксплуатационной и расчетной пере-
грузок в случае вертикального порыва ветра (если эти перегрузки
становятся больше маневренных, как, например, для тяжелых
и большинства пассажирских самолетов).
14.2.2. Максимальная несущая способность крыла
Максимальная несущая способность крыла характеризуется
величиной Сушах, которая зависит от набора профилей по размаху,
крутки и формы крыла в плане, т. е. от его аэродинамической
компоновки. Аэродинамическая компоновка крыла должна учи-
тывать особенности обтекания крыла. Для стреловидных крыльев
эти особенности таковы:
а) концевые части крыла несут относительно большую на-
грузку, чем корневые, и это при увеличении углов атаки а (при
увеличении с.у) приводит к концевым «срывам» потока, если крыло
плоское и не имеет аэродинамической крутки;
370
Рис. 14.2. Зависимости
су шах (г) и су местн (г) для
стреловидного крыла
б) пограничный слой на крыле дви-
жется, перетекает от корня к концам
крыла, и это усиливает тенденцию стре-
ловидного крыла к концевым срывам
потока вследствие накопления на верх-
ней поверхности заторможенного по-
граничного слоя и вследствие боль-
ших положительных градиентов давле-
ния по оси ОХ в концевых сечениях;
в) появление концевых срывов по-
тока на стреловидном крыле вызывает
появление кабрирующих продольных
моментов (уменьшение величины пики-
рующих продольных моментов) и по-
явление нелинейности в зависимости^ яг (а)' или тг (су), что
затрудняет управление самолетом.
На рис. 14.2 представлено распределение по размаху значений
Умести Для стреловидного крыла, имеющего трапециевидную
форму и составленного из однотипных профилей. Так как профили
крыла в корне имеют обычно большую относительную толщину,
то из-за влияния этой толщины значения сутах профилей, из кото-
рых составлено крыло, к концу крыла уменьшается. При увели-
чении углов атаки и при увеличении су крыла в целом значения
Умести вначале достигают значений с^щах (при а2), а затем при
а > а2 должны были бы превосходить его, но это невозможно,
так как в зоне, где должно было бы быть сут(Лп > сутак, за-
рождается и развивается срыв. На рис. 14.2 видно, что он возни-
кает у конца крыла.
Зависимость распределения циркуляции по размаху стрело-
видного крыла от величины сужения крыла ц и угла стреловид-
ности крыла х представлена на рис. 14.3.
и от величины угла стреловидности крыла х
371
Рис. 14.4.’ Образование
с„
«ложки» в зависимости тгу =
~ f (Су)'
1 — концевое сечение (~8 %);
2 — корневое сечение (~14 %);
3 — «ложка»; А, В — срыв
потока
На рис. 14.4 показано протекание
зависимости величины продольного мо-
мента стреловидного крыла тг по
углу атаки а. При увеличении углов
атаки крыла до угла cq кривая т2 (а)
имеет отрицательный наклон, харак-
теризующий устойчивое поведение са-
молета. При появлении срыва на конце
крыла (а = «1) несущие свойства кон-
цов крыла с дальнейшим увеличением
углов атаки не растут, а несущие
свойства корневых участков крыла
увеличиваются (там срыва нет), по-
этому пикирующий момент крыла на-
чинает уменьшаться. Кривая т2 (а)
приобретает положительный наклон (на
кривой появляется «ложка»), и самолет
становится неустойчивым по углу ата-
ки. С дальнейшим увеличением углов атаки, когда срывное обте-
кание охватывает большую часть крыла, отрицательный наклон
кривой может восстановиться.
Появление срыва потока на прямом крыле приводит к тому,
что после достижения сутах происходит резкое падение су, а ли-
нейное протекание зависимости су (а) сохраняется до су, близких
к Супя*- На стреловидном крыле после появления срыва потока на
концах начинается отклонение протекания су (а) от линейного,
но еще продолжается рост су до с,/шах, падение су после сугпах про-
исходит медленнее. Чем больше угол стреловидности крыла %,
тем раньше начинается отход зависимости су (а) от линейной и
тем плавнее изменение величины су в зоне с,/шах. Сама величина
тах подчиняется условию
Су max х > 0 = Су тах х = О COS /. (14.28)
Большое влияние на сутах оказывает сжимаемость воздуха.
Для современных умеренно толстых профилей (с = 10 ... 15 %),
которые имеют турбулентный тип срыва, влияние сжимаемости
начинает сказываться уже при числах М = 0,2 ... 0,3. Углы
атаки, при которых еще только начинается отрыв на хвостике
профиля, т. е. когда на профиле появляется зона сверхзвуковых
скоростей при су = 0, заканчивающаяся скачком уплотнения,
почти монотонно убывают по числам М до нуля при М = Мкрит.
14.2.3. Конструктивные мероприятия по повышению
несущих свойств стреловидных крыльев ,
Для повышения величины cymsx. стреловидных крыльев и
увеличения величины су доп, соответствующей началу нелиней-
ности в зависимостях тг (а) или су (а) (в целях уменьшения ве-
372
личины «ложки» и сдвига ее на большие значения а), при аэроди-
намической компоновке крыла могут быть проведены следующие
мероприятия.
1. Создается аэродинамическая крутка крыла путем установки
на концах крыла вогнутых профилей, обладающих высоким
значением с,/тах, и установки в корне крыла малонесущих про-
филей с уплощенной верхней поверхностью и даже с отрицатель-
ной вогнутостью. При такой компоновке крыла пунктирная кри-
вая cymax (г) на рис. 14.3 меняет свой наклон: ее правая часть
поднимается, а левая часть (соответствующая корневым профи-
лям) опускается. При увеличении су всего крыла кривая распреде-
ления су Местн (г), поднимаясь вверх, касается кривой сутах (г)
где-то в середине полуразмаха: срыв начинает развиваться в сред-
ней части крыла при значительно больших значениях су шах крыла,
«ложка» в кривой тг (а) уменьшается и (или) сдвигается в сторону
больших значений углов атаки.
2. Создается геометрическая крутка крыла с установкой кон-
цевых сечений крыла на некоторый отрицательный угол (носик
профиля вниз) относительно корневых сечений. При увеличении
су крыла и а концевые сечения позже подходят к тем местным
углам атаки, при которых с этих сечений может начаться срыв,
и суммарный Су крыла при этом растет по сравнению с плоским
крылом.
Следует отметить, что при изгибе стреловидного крыла в полете
под влиянием аэродинамической нагрузки происходит за-
кручивание концов крыла в сечениях по полету, как это
показано на рис. 14.5.
3. Для уменьшения
вредного влияния стека-
ния пограничного слоя
к концам крыла на верх-
ней поверхности крыла
устанавливаются перего-
родки, образующие вихри,
Рис. 14.5. Изменение углов атаки сечений стреловидного крыла при изгибе
крыла в плоскости хорд:
А — вид на крыло в плоскости изгиба; 1 — ось жесткости и плоскость чистого
изгиба крыла (без кручения аэродинамическими силами); 2 — изогнутая плоскость хорд;
3 — положеииесечеииядоизгиба; 4 — положениесечеиия после изгиба; Ф — угол
крутки сечеиия крыла при изгибе
Рис. 14.6. Схема установки перегородок на стреловидном крыле
373
которые препятствуют преждевременному отрыву пограничного
слоя (рис. 14.6).
Вместо перегородок на крыле может создаваться скачкооб-
разное изменение хорд с изменением профиля носка крыла («клюв»).
В районе «клюва» создается вихрь, который также препятствует
преждевременному отрыву пограничного слоя; дополнительное
сопротивление при этом (по сравнению с перегородками) умень-
шается, так как исключается трение воздуха о поверхность пере-
городок.
Вредное действие отрыва пограничного слоя может быть
уменьшено при установке одного или двух рядов турбулизаторов,
представляющих собою отдельно установленные перпендикулярно
поверхности крыла обтекаемые профили-лопатки. Турбулизаторы
создают за собой вихри, перемешивающие пограничный слой со
свежим потоком и увеличивающие его кинетическую энергию,
предотвращая преждевременный срыв потока.
14.2.4. Сопротивление крыла
Из курса «Аэродинамика самолета» известно, что суммарное
лобовое сопротивление крыла может быть представлено уравне-
нием поляры самолета
сх = схо cxi — схо + (14.29)
где сх0 — коэффициент вредного лобового сопротивления; cxi —
коэффициент индуктивного сопротивления; Do — коэффициент от-
вала поляры.
Коэффициент вредного лобового сопротивления может быть
представлен в виде
Сх0 — Схр “Ь схв> (14.30)
где схр — коэффициент профильного сопротивления; сЛВ — ко-
эффициент волнового сопротивления, возникающий на скоростях
полета, превышающих Мкрит;
схР = 2Cf пл (1 + Зс) [1 + с(5М - 3)] SOM + 0,001 Гщ, (14.31)
где с} пл — коэффициент трения плоской пластины,
„ _ 0,455 /. - . 40 -5/8W5. ...
Упл (1 +0,lM2)2/3(lgRe)2'58 ( Хп”^ Re3/8 ” )
S0M — относительная площадь омываемой части крыла,
*-*оМ = 1 ^инт^пф!
5Пф — относительная площадь подфюзеляжной части крыла;
йинт — коэффициент интерференции, имеющий следующие зна-
чения:
Схема ......... Высокоплан Среднеплан Низкоплан
бинт........... 0,9 0,7 0,5
374
1Щ — относительная суммарная длина (размах) щелей на крыле
(между крылом и элеронами, крылом и закрылками и т. п.);
Re — число Рейнольдса; хп — относительная координата на хорде
профиля точки перехода ламинарного пограничного слоя в тур-
булентный,
10п .
Re ’
хп — min или у xcxf,
бпр-
Здесь хс и Xf — относительные координаты местоположения ма-
ксимальной толщины и вогнутости профиля; бпр — относитель-
ная хорда предкрылка.
п = 5 + (1,3 + 0,6М(1 - О,
где — средняя высота бугорков шероховатости поверхности
крыла, /гш л; (5 ... 15)-1О'в м.
Волновое сопротивление на околозвуковых скоростях можно
определить по формуле
с = 2лХ (с)2 cos Хс / м - Крит Y Л _ з м - мкрит \
Схв 2 + %(c)1/3cos5Kc|m х-м;рит1 I м -Крит)’
\ л Шал с / \ X шах /
(14.33)
где Хс — стреловидность по линии максимальных толщин;
Мирит — критическое число М для крыла при су = 0 [см. (14.5)];
Мс— число М, Соответствующее бритах,
мс =——(1 + 0,4 (с~^2 [2 — А. (с)1/3COS2/3 Хей•' (14.34)
max C0SXc [ COS2/3Xc V J
Волновое сопротивление на сверхзвуковых скоростях (М >•
>1,2)' и+(Ч-1)Ф1. (14.35)
где йпр = 1 для ромбовидного профиля; йпр = 4/3 для профиля,
образованного дугами окружности; йпр = 3 ... 4 для дозвукового
профиля;
при J/M2 — 1 > tg Хс
О,16(Х/М2 - l-XtgХс)2
I + 0,16 (X /М2- 1 — X tg Хс)2
о
Ф =
при КМ2—letgxc-
Таким образом, вредное лобовое сопротивление может быть
определено по (14.30) с помощью зависимостей (14.31) и (14.33)
или (14.35) во всем диапазоне чисел М полета. Более того, эти за-
375
висимости включают геометрические параметры крыла (с, %, %, f
и др.), что позволяет использовать их при определении оптималь-
ных параметров самолета. ;
Индуктивное лобовое сопротивление крыла также можно
рассматривать состоящим из двух видов сопротивлений: вихре-
вого и волнового. Первое имеет место на всех скоростях полета,
второе — на околозвуковых и сверхзвуковых.
На малых скоростях индуктивное сопротивление определяется
выражением
xi ~ лХаф несж V
где %аф.неож —эффективное удлинение крыла в несжимаемом по-
токе 1см. (14.2)].
В условиях закритического обтекания (по числам М) в около-
звуковом диапазоне скоростей, когда сказывается сжимаемость
воздуха (при М > Мкрит)
' с2'
<14-37>
где %аф. ож определяется по (14.3).
Для крыльев со сверхзвуковыми передними кромками индук-
тивное сопротивление
cxi = ^/c“, (14.38)
где соответствующая производная с“ определялась ранее.
В случае дозвуковых передних кромок для крыльев стрело-
видных и других форм в плане индуктивное сопротивление с уче-
том подсасывающей силы может быть определено с помощью
выражения
cxi = ^у!су -Втст> (14.39)
где ст — коэффициент подсасывающей силы, |т — коэффициент
ее реализации. Для острых передних кромок £т = 0 для скруглен-
ных |т = 0,8 ... 1,15.
Коэффициент подсасывающей силы
_ лХ /1 — т2 с2
8с“ Е2 (k)
где Е (k) и т — см. выражение (14.27).
Обратную величину эллиптического интеграла Е (k) можно
2/2
аппроксимировать выражением Е-1 (/г) — arccos/г +
+ arcsin k).
Тогда коэффициент индуктивного сопротивления крыльев
с дозвуковыми передними кромками при полете на сверхзвуковых
скоростях определится выражением
с • = 1—£ — и21 /14
с“ [ “т 8С“ E2(k) ]• (14Л0)
376
Рис. 14.7. Оптимальная форма срединной поверхности [крыла с аэродина-
мической и геометрической круткой (пример)
Следует заметить, что подсасывающая сила может быть ча-
стично реализована и на профиле с острым носком, если только
он будет отогнут вниз на угол, несколько превышающий угол
атаки крыла на данном режиме полета.
С этой целью для повышения максимального аэродинамиче-
ского качества на стреловидных и треугольных крыльях приме-
няют так называемую «коническую» крутку крыла (см. рис. 10.3).
Такая крутка эффективна на околозвуковых скоростях; на боль-
ших сверхзвуковых скоростях она может дать некоторое снижение
максимального аэродинамического качества. Для того чтобы
обеспечить минимальное индуктивное сопротивление, необходимо
применять крылья с неплоской срединной поверхностью. Закон
изменения срединной поверхности у = у (х, г) или крутки крыла
определяется при решении вариационной или экстремальной
задачи на минимум индуктивного сопротивления при заданных
изопериметрических условиях и условиях связи, определяющих
либо только заданную подъемную силу (min cxi при су = const),
либо силу и нулевой продольный момент при заданной степени
продольной статической устойчивости (min cxi при су = const
и тг0 = —тгусу = const).
На рис. 14.7 представлен один из возможных законов крутки
для неплоской срединной поверхности, состоящей из аэродинами-
ческой f (z) и геометрической <р (z) круток крыла.
Выбор оптимальной крутки крыла является актуальной зада-
чей не только при проектировании крыльев сверхзвуковых тяже-
лых или пассажирских самолетов, но и при проектировании
дозвуковых и околозвуковых самолетов со стреловидными
крыльями.
Из выражения максимального качества Кшах = лХЭф. С>к1сха
следует, что для его повышения необходимо подбирать удлинение,
форму в плане и крутку крыла, но также тщательно подбирать
форму профилей и их распределение по крылу, так как за счет
этого можно значительно уменьшить сх0; без этого немыслимо
освоение околозвуковой зоны скоростей.
На величину Кшах оказывает влияние продольная баланси-
ровка самолета, особенно на сверхзвуковых скоростях полета
(см. разд. 8.1.2).
377
14.2.5. Моментные характеристики крыла
Продольный момент крыла тг зависит от аэродинамической
компоновки крыла и от режима полета (су и М).
В первом приближении mz = mzQ + mzycy, где нулевой мо-
мент /пг0 зависит от аэродинамической и геометрической круток
крыла, а также от числа М полета; степень продольной статиче-
ской устойчивости тгу = хт — Хгкр кроме центровки хт зависит
от положения фокуса крыла хРкр, который в свою очередь за-
висит от формы крыла в плане и от числа М.
Для дозвуковых скоростей он может быть приближенно опре-
делен по формуле
Хг кр = XF проф + 0,033 (% tg Х1/2 + , (14.41)
где X/. проф 4" Ч ~ 2 (ёср)а] — фокус профиля со средней
толщиной крыла.
Изменение фокуса от сжимаемости воздуха в диапазоне чисел
Мкрят <М < 1,2 может быть определено тоже приближенно
по формуле
\xF = \xF maxkF (М), (14.42)
где ' ДхГшах = 4(о,12 + О,ОЗ-^^)-Д+1421. ; (14.43)
0 при
^(М) =
м—м' \2 С м—м' \
-----3-2- T--j при
1’2 Мкрит ) 1,2 — Мкрит у
1 при
М *+ Мкриг;
Мкрит^- М *+ 1,2;
1,2.
(14.44)
Формулы (14.41) и (14.44) могут быть использованы для ши-
рокого класса крыльев.
Наибольший вклад в степень поперечной устойчивости само-
лета тх вносит крыло. Момент крена от крыла на единицу угла
скольжения характеризуется производной дтхкр1д$ = тх пр. Ве-
личину этой производной можно оценить по формуле
1 " / pCtAf АА \
/nxKP = -g- ^l+’^a Ч^Х1/2+с“ф 1 ’ (14.45)
где саум = Xi/2 — угол стреловидности крыла по 1/2 хорд;
ф — угол поперечного V крыла (все углы в радианах).
378
Из (14.45) видно, что на сверхзвуковых скоростях (при <
< 0) или на закритических углах атаки (с“ < 0) крыло может
иметь обратную реакцию по крену.
Для самолета в целом моментные характеристики тг и тх
должны учитывать интерференцию крыла с фюзеляжем и другими
агрегатами самолета, а также работу хвостового оперения. На ха-
рактеристики тг и тх существенное влияние оказывают упругие
деформации крыла и других агрегатов самолета.
14.2.6. Выбор параметров крыла на начальной
стадии предварительного проектирования
Выбор геометрических параметров крыла производится на
основе компромиссов между аэродинамическими, весовыми и
объемными характеристиками в процессе оптимизации всех пара-
метров самолета при условии выполнения им заданных тактико-
технических или технико-экономических требований.
Приведенные в предыдущих разделах данной главы зависи-
мости дают возможность выполнять этот процесс оптимизации.
Однако в начальной стадии предварительного проектирования при
выборе схемы самолета встает задача предварительного выбора
параметров крыла, которые в последующих стадиях и будут уточ-
няться и оптимизироваться. Это относится в первую очередь
к выбору формы крыла в плане.
В выборе формы крыла для дозвуковых самолетов решающим
условием является обеспечение полета на крейсерской скорости
при М « Мкрит- Выражения (14.4) и (14.5) показывают, что
величина Мкрит зависит от средней относительной толщины крыла
сср и от угла стреловидности крыла %. Так как величина сср может
изменяться в очень ограниченных пределах и определяется усло-
виями статической и динамической прочности, а также возмож-
ностью размещения в нем горючего, то определяющим в выборе
форм крыла в плане является выбор угла стреловидности.
Приближенно можно считать, что
Мкритх>0 ~ МКрит x=o/COS % ИЛИ МКритх>оС05% = МКритх=0 = COBSt.
Это дает возможность, приняв определенные значения для Мкрчт
прямого крыла (% = 0), выбирать предварительные значения
угла % исходя из заданной величины крейсерской скорости и со-
ответствующего ей числа М = Мкрит-
В первом приближении можно полагать, что в зависимости
от профилей крыла МКритх=о принимает следующие значения:
Нормальные высоконесущие профили...................0,65
Скоростные профили.................................0,70
Суперкритические профили............................0,75 и более.
Однако при этом выборе следует учитывать, что сртахх>о
яг fymaXx=o cos % и с увеличением угла % величина сршах умень-
379
Рис. 14.8. [Схемы зализов и наплывов на
крыле:
а — зализы; б — наплывы
1 — передний залнз; 2 — задний залнз
шается; уменьшается и
величина аэродинамиче-
ского качества. Это об-
стоятельство непосред-
ственно влияет на взлет-
но-посадочные характери-
стики самолета и на
характеристики дальности .
полета.
При компоновке само-
лета в корне крыла часто
применяются зализы и
корневые . наплывы (зад-
ние и передние). Для до-
звуковых самолетов со
стреловидным крылом:
— зализы уменьшают
вредную интерференцию
между крылом и фюзеляжем, особенно у самолетов с нижним
расположением крыла;
— передние наплывы уменьшают сопротивление крыла вслед-
стВие уменьшения «срединного эффекта» (стреловидное крыло
в своей центральной части имеет свойство прямого крыла с соот-
ветствующим увеличением cj;
— передние и задние наплывы позволяют при сохранении от-
носительной толщины крыла увеличить его абсолютную (строи-
тельную) высоту для размещения, например, шасси в убранном
положении.
Относительное увеличение площади крыла за счет наплывов
может быть подсчитано по формулам (рис. 14.8):
— для переднего наплыва
Sn. н = <$п. н/S = Zn, н (tg Хп. в — tgXn. к); (14.46)
— для заднего наплыва
S3. н = S3, H/S = z3. н (tg Хз. н — tg хз. к)> (14,47)
где zD. н и z3' я — относительные размахи наплывов; хп.н и Хз. н—
углы стреловидности нацлывов по передней и задней кромкам;
Хп. к и Хз. к — углы стреловидности передней и задней кромок
базового крыла.
_ В расчетах для дозвуковых самолетов, если площадь наплывов
SD. н + «з. н < 0,15, то обычно наплывы не учитываются ни
в площади крыла, ни в расчете средней аэродинамической хорды.
Если SD.H + 5,. 0,15, то в расчетах принимается
S = S6.K(l+Sn.H + S3.H), (14.48)
где Зб. к — площадь базового крыла.
380
Величина САХ (ЬА) в этом случае рассчитывается как для со-
ставного крыла по формулам (8.39) и (8.40).
Для сверхзвуковых самолетов передние корневые наплывы
имеют большое значение. На дозвуковых скоростях полета поло-
жение фокуса крыла (xF) рассчитывается по САХ базового крыла,
учитывая, что наплывы мало влияют на это положение. При пере-
ходе на сверхзвуковые скорости полета работает вся площадь
крыла одинаково и положение фокуса (л>) меньше сдвигается назад
по сравнению со сдвигом его без наплыва. Можно так подобрать
площадь и стреловидность переднего наплыва, что положение
фокуса базового крыла без учета наплывов на дозвуковых скоро-
стях полета и положение фокуса крыла с наплывами на сверхзву-
ковых скоростях будут почти совпадать и величина тсу =
= хТ — х^ практически останется постоянной.
Следует иметь в виду, что применение передних наплывов уве-
личивает «ложку» в кривой mz (су) и сдвигает ее на меньшие углы
атаки.
При выборе величин %, %, т] и ёср следует учитывать и влияние
их на массовые характеристики крыла. Расчет массы крыла при-
веден в гл. 6 [см. выражения (6.5), (6.8), (6.9) и (6.11)]. В общем
виде зависимость массы крыла от его геометрических параметров
может быть представлена для прямого крыла в следующем виде:
mKp = А kx\ + ВХ’/2 + С + D, (14.49)
где = 45,5 (1 + 1/л) — (т| + 1) — коэффициент, учитывающий
влияние сужения крыла; А, В, С, D — коэффициенты, не завися-
щие от X, Со ИТ].
Формула (14.49) дает возможность судить о влиянии к, с0 и т]
на массу крыла. Подставив в формулу (14.49) вместо к выражение
Vcos2 х, получим формулу для массы стреловидного крыла!
„ =A'^-\ + B-^- + e^L + D; <>4б0)
КР cosax «о cosx X1/2
Эта формула дает возможность судить о влиянии угла стреловид-
ности х на массу.
Формулы (14.49) и (14.50) позволяют сделать следующие вы-
воды:
1) увеличение к ведет к существенному увеличению ткр;
2) увеличение с0 приводит к уменьшению ткр;
3) увеличение сужения ц приводит к уменьшению ткр;
4) увеличение угла стреловидности х влечет за собой увеличе-
ние тК„.
к у
381
14.3. АЭРОДИНАМИЧЕСКИЕ ХАРАКТЕРИСТИКИ КРЫЛЬЕВ
МАЛОГО УДЛИНЕНИЯ (А < 3)
14.3.1. Особенности обтекания и несущие
свойства крыльев малого удлинения
Обтекание крыльев малого удлинения, различных по форме
в плане, является существенно пространственным даже при неболь-
ших углах атаки. Оно характеризуется интенсивным перетеканием
воздуха с нижней поверхности на верхнюю через боковые или
передние (большой стреловидности) кромки. Образующиеся на
этих кромках пространственные вихревые пелены (вертикальные
или наклоненные внутрь крыла) сворачиваются в мощные вихре-
вые жгуты над крылом по его концам вдоль потока. Далее по
потоку они соединяются с концевыми вихрями, образующимися от
основной вихревой пелены крыла (рис. 14.9). Такая пространствен-
ная вихревая система индуцирует на верхней поверхности крыла
вдоль хорд дополнительную скорость. В соответствии с законами
гидродинамики на верхней поверхности крыла возрастает разре-
жение, которое создает дополнительную подъемную силу, с из-
бытком компенсирующую потери от местных срывов потока вдоль
боковых или передних стреловидных кромок.
' Такой аэродинамический эффект у крыла малого удлинения
усиливается с увеличением угла атаки. Он затягивает полный
срыв потока до больших углов атаки, которые практически даже
не всегда могут быть достигнуты.
Коэффициент подъемной силы крыла, учитывающий и образую-
щуюся при пространственном обтекании крыла малого удлинения
дополнительную подъемную силу,
(И.51)
где р — отношение полупериметра крыла к его размаху — опре-
деляется выражениями (14.16) и (14.18)
Эту зависимость можно применять для крыльев умеренно ма-
лых удлинений (1 < А < 3). Для крыльев очень малых удлинений
(А < 1) зависимость су (а) на малых углах имеет вид
Су = (лА/2) (а — а0) и с“ = лА/2.
Нелинейность по углам атаки для таких крыльев можно
учесть с помощью выражения (14.51); если иметь в виду,
что при А -> О р -> 2/А, тогда
Су = (лА/2) (а — а0) [ 1 + 2 (а — а0)].
(14.52)
Необходимо отметить, что влия-
ние срывов потока на уменьшение
Рис. 14.9. Схема вихревых жгу- нелинейного прироста су (а) будет
тов на крыле малого удлинения происходить на одних И тех же
382
истинных углах атаки с учетом
скоса потока, т. е. примерно
при одних и тех же значе-
ниях с^щах независимо от удлине-
ний крыльев. При одинаковых
профилях максимальные значе-
ния су шах крыльев будут также
примерно равны при любых удли-
нениях (рис. 14.10).
При сверхзвуковых скоростях
полета для треугольных крыльев
со сверхзвуковой передней кром-
кой величина с“ вычисляется по
формуле (14.25). При дозвуковых
передних кромках (tg %п. к <
< I/ М2 — 1 ) для треугольных
крыльев имеет место зависимость
Рис. 14.10. Зависимость с у. (а)
для крыльев различных удлине-
ний:
_ . _ --------линейная теория;
— — — — нелинейная теория;
"— ' с учетом срывов
2л
« = <14-S3>
где Е (k) — полный эллиптический интеграл второго рода с моду-
лем
, ----S /М2-1
k = ]/ 1 — т2, т = .
г tg Хп. к
В качестве универсальной зависимости для с“ треугольных
крыльев можно принять простую полуэмпирическую формулу
а = — 4Х ----------------------------. (14.54)
« k/М2 — 1 + 0,3 v
Следует заметить, что нелинейность су (а) у крыльев малых
удлинений на сверхзвуковых скоростях практически исчезает.
14.3.2. Сопротивление и моментные
характеристики крыльев малого удлинения
Вредное лобовое сопротивление схй крыльев малого удлинения
определяется по тем же формулам, что и для крыльев умеренного
и большого удлинения на дозвуковых скоростях полета. Вихревое
индуктивное сопротивление для крыльев малых удлинений (А < 3)
определяется по формуле
+ ф (14.55)
На сверхзвуковых скоростях полета общее индуктивное сопро-
тивление (вихревое и волновое) этих крыльев при оптимальном
(эллиптическом) распределении нагрузки по размаху и хордам
определится выражением
2 tgXn.K
(14.56)
383
Для уменьшения сопротивления крыльев малого удлинения,
как и для крыльев большого удлинения, применяют аэродинами-
ческую и геометрическую крутку.
Протекание кривой тг (су) на дозвуковых скоростях для
крыльев малого удлинения зависит от их формы в плане:
— «оживальные» крылья имеют нелинейную характеристику
типа «ложка»;
— «готические» крылья, наоборот, имеют возрастание степени
продольной устойчивости ПО Су,
— треугольные крылья имеют практически линейную зависи-
мость тг (су).
На сверхзвуковых скоростях нелинейность тг (су) практически
отсутствует на крыльях любой формы.
Форма крыла в плане, в том числе наличие и размеры перед-
него наплыва, и крутка крыла особенно важны для самолетов
бесхвостовой схемы, аэродинамическая компоновка крыльев кото-
рых определяется соотношением тг0 = —тСгсу Для основного
режима полета.
14.4. ХАРАКТЕРИСТИКИ АЭРОУПРУГОСТИ КРЫЛА
Работа реальной конструкции самолета вообще, и крыла в част-
ности, характеризуется взаимодействием аэродинамических сил,
сил упругости и массовых сил. При проектировании крыла необ-
ходимо учитывать это важнейшее обстоятельство. Такой учет
предполагает соответствующий выбор геометрических параметров
крыла в сочетании с выбором его конструктивно-силовой схемы
и рационального размещения масс конструкционного материала.
Рассмотрение взаимодействия только аэродинамических сил и сил
упругости связано с решением задач статической аэроупругости.
К ним относятся вопросы дивергенции крыла, реверса элеронов,
потери запаса продольной статической устойчивости от упругих
деформаций крыла.
При добавлении к этим силам сил инерции масс конструкции
возникают задачи динамической аэроупругости.
При решении таких задач рассматриваются явления флаттера
(динамическая устойчивость конструкции), бафтинга (динами-
ческое поведение конструкции при срывном обтекании), динамиче-
ских реакций в конструкции на внешние возмущения (порыв ветра,
посадки и т. п.).
14.4.1. Статическая аэроупругость
При современных скоростях полета жесткость крыла при из-
гибе и при кручении часто определяет выбор основных параметров
крыла. Общее выражение для максимального относительного
прогиба свободнонесущего крыла:
'-4 = 8^^- (14-57)
384
где Вг — некий коэффициент, зависящий от закона распределения
нагрузки и моментов инерции сечений лонжерона по размаху.
Из формулы (14.57) следует, что при увеличении X относитель-
ный прогиб на конце крыла увеличивается, а при увеличении с0
прогиб уменьшается; при увеличении ц относительный прогиб
уменьшается.
Общее выражение для угла закручивания для контура (нагру-
женного моментом на конце) имеет следующий вид:
_ -Мирут Г dS
Фо - 4GPi б ’
где <р0 — угол закручивания на конце крыла; Мкрут — крутящий
момент, приложенный к концу крыла; G — модуль упругости вто-
рого рода; F — площадь контура сечения; dS — элементарный
отрезок контура; 6 — толщина оболочки.
Относительный угол закручивания на конце крыла с ц = 1
будет
Фо// = В2МКрут^/Со. (14.58)
Таким образом, относительные углы закручивания растут при
увеличении удлинения А. и уменьшаются при увеличении с0-
Недостаточная жесткость крыла при изгибе и кручении сказы-
вается в полете самым неблагоприятным образом. Большие изгиб-
ные и крутильные деформации крыла приводят к тому, что крыло
вследствие изменения углов атаки сечений крыла и угла попе-
речного V значительно меняет свои аэродинамические характери-
стики.
Очень большие крутильные деформации при малой жесткости
кручения приводят к явлению частичной и даже полной потери
эффективности элерона, называемому реверсом элеронов.
Рассмотрим это явление для наглядности упрощенно для эле-
мента крыла длиной dz. При отклонении элерона на абсолютно
жестком крыле на угол коэффициент подъемной силы элемента
крыла длиной dz может быть выражен следующим образом:
с'у = ^-(ао + а) + ^су(8^-
При отклонении элерона на упругом крыле на тот же угол 6Э
коэффициент подъемной силы элемента крыла длиной dz выразится
так (рис. 14.11):
с’у = (“о + «) + (бэ) - <Р> (14-59)
где <р — угол, на который элемент крыла повернется в результате
действия момента от элерона.
Угол ф определится из условия равенства момента кручения
от действия элерона, отклоненного на угол 6Э, и момента от дей-
ствия внутренних сил упругости крыла и зависит от скоростного
напора q.
13 С. М. Егер и др.
385
Рис. 14.11. Влияние f закручивания нежесткого крыла на угол <р при воз-
действии на него силы создаваемой элероном, на величину су (явление ре-
. dcy \
верса элеронов; асу = ~~ <р )
Если угол закручивания <р при некотором значении ско-
ростного напора, называемом скоростным напором реверса элеро-
нов (д — qp), будет настолько велик, что
-^-<p = ACj,(6J,
то прирост подъемной силы элемента крыла от действия отклонен-
ного элерона будет погашен уменьшением подъемной силы вслед-
ствие поворота элемента крыла на угол <р (см. рис. 14.11), при
этом, следовательно, эффективность элерона будет равна нулю.
Можно построить график изменения момента МХэ, создаваемого
отклонением элеронов относительно оси ох, по скоростному на-
пору q (рис. 14.12).
При некотором значении q = qp, как видно из графика, МХэ =
= 0. Следовательно, при q = qp начинается явление реверса эле-
ронов — элероны полностью теряют свою эффективность, и при
дальнейшем увеличении q самолет начнет крениться в противопо-
ложную сторону.
Стреловидность крыла весьма значительно влияет на его из-
гибную и крутильную жесткость. Чем больше угол стреловидно-
сти, тем больше деформации при прочих равных условиях. На
рис. 14.13 показана зависимость прогибов /стр на конце стреловид-
ных кессонных крыльев и углов закручивания <рстр концевых се-
чений от х- Прогибы и углы закручивания здесь отнесены к проги-
бам и углам закручивания прямых крыльев со всеми прочими дан-
ными, равными данным стреловидных крыльев.
Упругие деформации конструкции крыла необходимо учиты-
вать при его проектировании.
Для самолетов большой дальности полета в целях сохранения
высокого аэродинамического качества (обеспечения минимального
индуктивного сопротивления или эллиптичности распределения
циркуляции по размаху крыла на крейсерском режиме полета)
необходимо к оптимальной аэродинамической (геометрической)
386
Рис. 14.12. Зависимость эффективности элеронов от скоростного напора
для абсолютно жесткого (!) и упругого (2) крыльев
Рис. 14.13. Зависимость стрелы прогиба fCTp и угла закручивания <рстр от
величины угла стреловидности % ([стр и <рСтр — стрела прогиба и угол закручи-
вания конца стреловидного крыла; /Пр и <рПр — то же соответственно прямого
крыла)
крутке крыла <ра (г) добавить расчетную крутку от упругих де-
формаций крыла с обратным знаком, т. е. A<ppaC4(z) = — ФРпРч (z).
Суммарная расчетная крутка ненагруженного крыла
<pF4(z) = <pa (z) — фРпрЧ (z)
должна быть отражена в конструктивных чертежах крыла и в чер-
тежах на производственную оснастку. Тогда действительная
крутка крыла в полете может быть равна (или почти равна) задан-
ной оптимальной крутке, т. е.
ФГСТВ (г) = Фа (Z) - фРаСрЧ (Z) + <1СрСТВ ® - Фа
так как фупрСТВ « ФРпРч (z), если действительные деформации будут
примерно равны расчетным.
Для маневренных самолетов учет упругости крыла может быть
связан с требованием сохранения его аэродинамической эффек-
тивности (су упр » Су жестк или АсууПр^0) или продольной
устойчивости и управляемости (mz упр » mz жестк или Атгупр «
w 0). Для крыла произвольной формы в плане можно записать:
//2
Асу упр J 1фкруч (^) cos Хц. ж 9Изг (^) sin Хц ж] Су (zj b (z) dz
о
(14.60)
или
z/2
упр J [фкруч (^) COS %ц. ж ' 9нзг (^) Sin %ц. ж] Су (^) Ь (^) X
X [Хц.д(з) — Xa]dz, (14.61)
где фкруч (г) и 0ИЗГ (z) — соответственно угол закручивания и угол
наклона упругой линий крыла по строительному размаху вдоль
13* 387
линии центров жесткости в сечении крыла с координатой z; хц. ж —
= Хц. ж (z) — стреловидность линии центров жесткости в данном
сечении крыла; с“ (г) — производная коэффициента подъемной
силы сечения по углу атаки; b (?) — закон изменения длины хорд
по размаху крыла; хд. д (?)—зависимость положения центра
давления по сечениям крыла; ха — координата носка САХ крыла.
14.4.2. Динамическая упругость
Вибрационные свойства крыла характеризуются величиной
критической скорости, флаттера УкрИТ. Общее представление
о влиянии основных конструктивных параметров на Укрит изгиб-
но-крутильного флаттера можно составить на основании следую-
щей приближенной формулы * для крыла с сужением ц = 1 и
с постоянными по размаху г, G, /круч, dcy!da = с“ [14]:
20/цруч
гс“рясозх
(14.62)
где S — площадь двух консолей; г = ----относительное
расстояние между фокусом и центром масс сечения (Ь — хорда
крыла, взятая по потоку).
Формула (14.62) дает очевидную зависимость Укрит флаттера
от крутильной жесткости крыла GJKpy4, от относительного рас-
стояния между фокусом и центром масс г и от плотности воздуха
на высоте полета рн.
Из формулы (14.62) видно, что Укрит увеличивается при умень-
шении производной сау. Выше приводились зависимости произ-
водной с“ от удлинения крыла А. и от угла стреловидности %. Зна-
чение с“ увеличивается при увеличении А, а при увеличении
X — уменьшается. Следовательно, Укрит увеличивается при умень-
шении X и при увеличении х-
На рис. 14.14 изображена кривая Укрит = / (х), построенная
по экспериментальным данным [31]. Эксперимент проводился
на модели, на которой угол стреловидности одного и того же крыла
мог изменяться в диапазоне от 0 до 50° (т. е. аэродинамический
размах крыла I по мере увеличения % уменьшался, а строительный
размах был постоянен).
Представление о влиянии сужения крыла ц на Укрит можно
получить с помощью следующей формулы:
T]g ч- 0,8т] + 0.4
у __ Ч'-Г и,от]-Г ил 1/ ^/круч
К₽ИТ “ 6сгх п2 (*т -0,1) И 0,6/p/f/ (М) ’
(14.63)
* Формула может быть получена из формулы для потребной жесткости
крыла, приведенной в [31].
3§8
Рис. 14.14. Влияние угла стреловидности % на критическую скорость флат-
тера Ркрит при относительном положении центра масс сечения крыла хц.м —
= 0,45 и т] =4
Рис. 14.15. Влияние относительного положения центра масс сечения крыла м
на величину Ркрит флаттера при заданном положении фокуса^крыла хЛ=0,25
где хт — относительное расстояние от передней кромки до оси
центров масс; G/круч — осреднеиная крутильная жесткость крыла
на участке между корнем и сечением на 0,75 от полуразмаха; / —
размах крыла; / (М) = 1 — М , если 0 < М < 0,75; f (М) =
= 0,67, если М > 0,75.
Следует иметь в виду, что увеличение сужения ц влечет за
собой также и увеличение крутильной жесткости GJKpy4.
Величина Укрит в значительной степени зависит от взаимного
расположения в крыле оси фокусов и оси центров масс, а также
от величины крутильной жесткости конструкции крыла (от изгиб-
ной жесткости Крит зависит очень слабо). Смещение оси центров
масс по хорде относительно оси фокусов может резко изменить
величину Укрит (рис. 14.15). Совмещение осей фокусов и центров
масс приводит к увеличению критической скорости флаттера до
Укрит — °°- Практически, однако, осуществить конструкцию
с совмещением указанных осей невозможно. В практике проекти-
рования для смещения оси центра масс сечений в сторону оси фо-
кусов (т. е. вперед) часто применяются балансировочные грузы,
закладываемые в носки крыла (ближе к концам крыла) или раз-
мещаемые в специальных обтекаемых кронштейнах, закреплен-
ных в носке по концам крыла. Однако существенное увеличение
благодаря применению балансирующих грузов может быть полу-
чено лишь ценой довольно значительного прироста общей массы
крыла, достигающей 10 % и более от массы его конструкции.
Имея в виду сказанное, можно сделать важный вывод о том,
что суждение о влиянии того или иного параметра крыла на 7крит,
флаттера может быть справедливо лишь при условии, что с изме-
нением параметра крутильная жесткость крыла G/Kpy4, а также
взаимное расположение осей фокусов и центров масс сечений
остаются без изменения. Таким образом, изменение величины основ-
ных параметров А,, ц,си% приводит к изменению аэродинамиче-
ских, массовых, жесткостных и аэроупругих характеристик крыла.
Из всего сказанного выше можно сделать ВЫВОДЫ, которые
удобно представить В виде табл. 14.1,
Э§9
лица 14.1 Вибрацион- ная харак- теристика Критическая скорость флаттера Умень- , шается 1 Возрастает Возрастает
Т а к . я Д. О ® § gg» л о а меиь- гся зна- гельно ® н S8 еличи- ается мень- ается
& ф сб ф к >ь О s 0 S В £ ш Ув в 3
К
м я U X « 8g S я а о Ч S з иичи- я зна ;льно £5 0 0 ень- ется личи- гтся
t ® й.5 CQ & к ® н н Ь® 0 к Рй СО ЕГ S та >= 3 S та >> 3 Уве. ва<
« 0
о.
X
0) ф 3 м , X < х
X « п Ч В Ч В
а »х ИЗ | 1 и*> ф ьс К Й* 2
0) X X о о X ВГП А Sk ® 3
та
О
ла на ег я а я я СХ. ф су max 1 Увеличи вается « * * * Умень- шается
3 я
& Гх.
Я
а о £ X Ф а а ф а а 2 а * * Увеличи- вается 1 Умень- шается
с
а
X 3 а tc о л 5 X н *
«н 0 0 | * |
о 2 0 *
X >= 3
о
V
X X ® 5
S я са о. * X £ Ч 0 0 та 0 та 1 |
>»
<ь х S 5^
я 0 О ь ч
X Ь 0 0
а та 0
а . . 0 0
а X К
а та -г и
S « а ф 2 0 S ? я Р- [ДНО тся
Характер Я А Я С к х ф и к £ м 0 ® та 5 и . S >& S о ,и н « О § Сужение вается Стрелови еличивае
X ч а X ЕГ £
* схр при больших удлинениях, при очень малых хордах и скоростях (при малых Re) увеличивается.
** сха при очень малых X С 2,5 уменьшается на околозвуковых скоростях.
*** cxt при т] = 2,0 ... 2,5 имеет минимальное значение.
*♦** До т)=2,0...2,5 значение с^тах увеличивается, а затем уменьшается.
390
14.5. КРЫЛЬЯ ИЗМЕНЯЕМОЙ ГЕОМЕТРИИ
Для увеличения диапазона высот и скоростей полета за послед-
ние годы большое внимание уделяется крыльям изменяемой гео-
метрии и, в частности, крыльям с изменяемой стреловидностью.
Такие крылья обладают тем положительным свойством, что при
изменении стреловидности от % « 0° до % « 90° у них в широком
диапазоне изменяются и все другие геометрические параметры,
а это вызывает желаемое изменение основных аэродинамических
характеристик крыла и самолета в целом.
За характеристические размеры крыла изменяемой стреловид-
ности могут быть приняты общая теоретическая площадь (S) САХ
(ЬА) и размах крыла (/) одной из возможных его конфигураций,
например, при наименьшем (х = х' = Хтш) или наибольшем
(X — — Хтах) Угле стреловидности поворотной консоли. Анали-
тические зависимости для геометрических параметров такого крыла
от угла стреловидности поворотной консоли х в общем случае
получить трудно. Учитывая важность этих зависимостей для проек-
тирования самолета, они могут быть получены приближенно.
Хорды консоли поворотной части будут изменяться по закону
Ьк (х) = = b’K -cos х' , (14.64)
к cos % COS % v '
где — хорда консоли при х = х' = Хтш-
Поскольку строительная высота консоли не зависит от ее по-
ворота, то относительная толщина профилей будет изменяться
по закону
Mz) = w = 5okCOSZ==^^?f“’ (14-65)
где Ск — относительная толщина профилей при - х = х' = Хтш-
Аналогично будет изменяться и относительная вогнутость профи-
лей.
। Основные характеристические размеры крыла могут быть вы-
ражены следующими соотношениями:
S-=SU+SK; (14.66)
I = 2zra 4- /к, с cos х; (14.67)
^(5цЬа.ц + 5к&а.к), (14.68)
где 5Ц — площадь центроплана; SK — площадь консолей; 2гш —
размах между шарнирами; /к. с — строительный размах кон-
солей (двух), Ь/>п и ЬЧк — средние аэродинамические хорды
центроплана и консолей соответственно. Величины SK и Ьл. к яв-
ляются функциями угла стреловидности консолей.
Другой важной характеристикой крыла является величина
смещения его центра масс при повороте консолей. Это смещение
391
Рис. 14.16. Влияние наплывов на гпги при изменении % консоли:
о. в — ось вращения
в долях САХ исходной конфигурации крыла можно определить по
простой приближенной формуле:
А*ц. и. к = 2ц. м. к (sin X - sin х'), (14.69)
"а
. где /йк = mK/mKP да SK = 1 — 5Ц — масса поворотных консолей,
отнесенная к массе всего крыла; гц. м. к =£ /к. с — расстояние
от центра масс консолей до оси шарнира.
Из формулы (14.67) легко видеть, что при малых значениях
X величины / (х), а стало быть и X (х), меняются мало и нет большой
необходимости в уменьшении х' менее 15 ... 20°. Это дает сущест-
венное конструктивное облегчение. Максимальный угол стрело-
видности поворотных консолей х* делается в пределах 65 ...72°.
Величины с“, сх0 и cxi для крыльев с изменяемой стреловид-
ностью могут быть подсчитаны с помощью формул, приведенных
в разд. 14.2 и 14.3.
На характеристики продольной устойчивости самолета с кры-
лом изменяемой стреловидности большое влияние оказывают по-
ложение оси шарнира гш и наличие передних корневых наплывов.
Влияние наплывов на изменение тсу при повороте консолей
показано на рис. 14.16.
Следует учитывать, что упругая деформация крыла в полете
(увеличение прогиба крыла и закручивание концевых сечений
крыла) приводит к сдвигу фокуса крыла вперед, как это показано
на рис. 14.17, где изображена зависимость сдвига фокуса крыла
назад при переходе с дозвукового режима полета на сверхзвуковой
режим от угла поворота консолей для жесткого и упругого крыльев.
392
Таким образом, подбирая
форму крыла в плане с кор-
невыми наплывами и выбирая
необходимую жесткость крыла
(в основном консолей) на изгиб
и кручение (обеспечивая мини-
мальный запас по Укрит флат-
тера), можно получить почти
неизменную величину тгУ во
всем диапазоне скоростей (до-
звуковых и сверхзвуковых).
В соответствии с формулой
(14.65) при повороте консоли
Рис. 14.17. Влияние упругой де-
формации крыла на положение фо-
куса крыла в зависимости от угла стре-
ловидности консоли при М = 2:
--- жесткое крыло; — — — упругие
деформации в полете учтены
уменьшаются ' относительная
толщина и относительная во-
гнутость профилей консоли. Это ведет к уменьшению величи-
ны схй, в результате чего поляры самолета меняются так, как это
показано на рис. 14.18.
Анализ этих поляр показывает, что поворот консолей на мак-
симальный угол стреловидности х* обеспечивает самолету с кры-
лом изменяемой стреловидности лучшие скоростные характери-
стики на сверхзвуковых скоростях полета, а поворот консолей на
минимальный угол %' — лучшие взлетно-посадочные характери-
стики.
Полет на предельно малых высотах характерен тем, что число
встречаемых самолетом вертикальных порывов ветра в 10s раз
больше, чем при полете на высотах Н — 10 000... 14 000 м. Пере-
Рис. 14.18. Поляры самолета при различных углах поворота кон-
соли:
а — иа дозвуковых скоростях полета; б — на сверхзвуковых скоростях полета
393
Рис. 14.19. Влияние стре-
ловидности консоли % на пере-
грузки самолета при верти-
кальном порыве воздуха
грузка, которую испытывает самолет
при встрече с вертикальным поры-
вом ветра, равна
=k0^- = k0 ACyPo^S -
у mg и
— ^0 "
2т£ I
caW-V- 1
__________ = h ч 11 |
2-mg/S 0 16,33р ’ j
(14.70) |
где k0 — коэффициент, учитывающий
градиент нарастания скорости верти-
кального порыва (обычно k0 =
= 0,88...0,95); W; — индикаторная скорость вертикального по-
рыва, м/с; Vt — индикаторная горизонтальная скорость по-
лета, м/с; р — нагрузка на 1 м2 площади крыла, даН/м2.
Выше было показано, что удлинение крыла с изменяемой стре-
ловидностью при увеличении угла % уменьшается и,? следователь-
но, на основании формул (14.15) и (14.51), уменьшается величина
с“. Это позволяет при полете на малых высотах и при % = % =
— Хтах существенно уменьшить величины перегрузок (рис. 14.19),
обеспечивая при этом и повышение работоспособности экипажа и
значительное увеличение ресурса самолета по усталостной проч-
ности.
14.6. МЕХАНИЗАЦИЯ КРЫЛА И ЭЛЕРОНЫ
Механизация является неотъемлемой принадлежностью крыла
почти каждого современного самолета. С помощью механизации
различного типа решаются следующие задачи.
1. Увеличение су и СуШах крыла при взлете и посадке и при по-
лете в условиях сильной турбулентности (применение закрылков
и особенно предкрылков).
2. Предотвращение потери боковой устойчивости и управляе-
мости и улучшение эффективности элеронов на больших углах
атаки, особенно при использовании механизации, необходимой
для решения задачи п. 1.
3. Кратковременное уменьшение подъемной силы крыла для
увеличения крутизны снижения самолета и для повышения эффек-
тивности торможения колес при посадке (применение интерцепто-
ров).
4. Обеспечение поперечной управляемости самолета в условиях,
когда трудно предотвратить реверс элеронов (применение интер-
цепторов и внутренних элеронов).
14.6.1. Механизация задней кромки крыла
Для решения первой задачи применяются разнообразные
виды механизации по задней кромке крыла. Наиболее употреби-
тельные из них показаны на рис. 14.20.
394
Рис. 14.20. Различные виды механизации крыла:
а — обыкновенный щиток; б — обыкновенный закрылок; в — щелевой закрылок; г —
выдвижной щиток; д — выдвижной однощелевой закрылок; е — выдвижной много-
щелевой закрылок
Величина прироста подъемной силы \су от применения этих
видов механизации соответствует порядку, в котором они пока-
заны (от а до е). В том же порядке увеличивается сложность и масса
их конструкции, уменьшается угол атаки а соответственно их cyJBax
(рис. 14.21),. а также увеличивается сх крыла и уменьшается вели-
чина аэродинамического качества.
Последнее обстоятельство особенно важно учитывать при
проектировании пассажирских самолетов с двумя двигателями,
когда обеспечение безопасности самолета на начальном наборе
высоты связывает тяговооруженность самолета с аэродинамиче-
ским качеством выражением (см. разд. 9.5.3).
Лхотр = тоё -^2-р + tg е) . (14.71)
Возникает оптимизационная задача, когда появляются два
противоречивых требования:
— применять максимально эффективную механизацию с целью
увеличения cymsx и уменьшения длины разбега и взлетной дистан-
ции в целом (но уменьшается /СВзл);
— применять механизацию, обеспечивающую максимальную
величину /<взл. чтобы обеспечить min Рпотр и уменьшить тем самым
взлетную массу самолета тй (но уменьшается сутах — рис. 14.22).
В результате решения такой оптимизационной задачи обычно
Для самолетов с Тремя и четырьмя двигателями выбирается меха-
395
Рис. 14.21. Характер зависимости су\ (а) для различных видов механиза-
ции крыла:
1 — крыло без механизации; 2 — крыло с предкрылком; 3 — крыло с обыкновенным
щитком; 4 — крыло с многощелевым выдвижным закрылком; 5 — то же с пред-
крылком Крюгера; 6 — то же с щелевым предкрылком
Рис. 14.22. Влияние типа закрылков на зависимость аэродинамического
качества самолета при наборе высоты от величины су ДОп = су шах взд/М4:
1 — одиощелевые закрылки; 2 — трехщелевые закрылки; 3 — трехщелевые закрылки
и предкрылки
низация в виде многощелевых выдвижных закрылков, а для само-
летов с двумя двигателями — в виде выдвижных однощелевых
закрылков.
Другие виды механизации задней кромки в настоящее время
применяются редко.
На механизированном крыле прирост Асетах зависит от сле-
дующих факторов:
— тип и размах механизации;
— сужение крыла тр,
— удлинение крыла X;
— стреловидность крыла %;
— хорда щитка или закрылка Ь3;
~ тип профиля крыла и его относительная толщина с;
— угол отклонения поверхности механизации <53;
— величина сдвига выдвижного закрылка;
— форма щели между закрылком и крылом и наличие вырезов
в передней части закрылка.
Большие т] и А усиливают эффект механизации. Малые с дают
меньший прирост сутлх. Следует иметь в виду, что при отклоне-
нии закрылков резко увеличивается величина продольного мо-
мента крыла на пикирование, что требует для балансировки соот-
ветствующего отклонения вниз носка стабилизатора или отклоне-
ния вверх хвостиков рулей высоты. На оперении в этом случае
создается отрицательная подъемная сила —Y, которая значи-
тельно уменьшает (в сумме) прирост подъемной силы на крыле
из-за отклонения закрылков. На стреловидном крыле для умень-
шения абсолютной величины —тг закрылки делаются только до
65...70 % размаха крыла, т. е. Г3 = 0,65...0,70.
396
Рис. 14.23. Схема для расчета величины су тах крыла с механизацией не по
всему размаху
Рис. 14.24. Влияние угла стреловидности крыла на относительную вели-
чину с^шах-
/ — простые щитки; 2 — выдвижные закрылки
При расположении механизации не по всему размаху вели-
чину с^щах крыла с механизацией можно определить по следую-
щей формуле (рис. 14.23):
> _ Sup. м „
су max —
где с'у тах — коэффициент подъемной силы крыла с механизацией
не по всему размаху; SKP. м — площадь крыла, обслуживаемая
механизацией; с^тах — коэффициент подъемной силы крыла с ме-
ханизацией по всему размаху.
Обычно выбирают относительную величину хорды щитков и
закрылков по следующим соотношениям:
— для щитков Ьщ!Ъ^ « 0,25;
— для закрылков й3/Ькр я» 0,30;
— для выдвижных закрылков b3lbKV 0,30...0,40.
Максимальные углы отклонения назначают следующие:
— для щитков бщ = 55...60° (по потоку);
— для закрылков б3 = 40 ... 50° (по потоку);
— для выдвижных многощелевых закрылков б3 50... 60°
(по потоку для последней секции).
Большие углы отклонения не дают прироста Дс/7 и лишь услож-
няют конструкцию закрылков. Для тонких крыльев углы откло-
нения закрылков делают меньше.
Стреловидность значительно снижает эффект механизации
(рис. 14.24). Чем больше угол стреловидности крыла %, тем меньше
будет соотношение су шах х/су тах х = о, где су тах х — коэффициент
подъемной силы стреловидного крыла с отклоненной механиза-
цией; с^гаахх = о — коэффициент подъемной силы прямого крыла
с отклоненной механизацией. Для простых щитков и закрылков
снижение ^тах вследствие стреловидности гораздо ощутимее
(кривая /), чем для выдвижных (кривая 2).
397
Рис. 14.25. Влияние
угла стреловидности
задней кромки крыла
на Су тах-
-----крыло без меха-
низации;
— — — — крыло с вы-
движными закрылками
Эффект от механизации стреловидных
крыльев в значительной степени зависит от
угла стреловидности задней кромки кры-
ла Хз. к- Чем больше угол %3-к, тем меньше
величина су тах. На рис. 14.25 представлена
зависимость сугтх крыльев с углом стрело-
видности по передней кромке /п. к = 60° и
с различными значениями углов стреловид-
ности по задней кромке от %3 к = 0 до %3 к=
= 60°.
Для иллюстрации невыгодности простых
закрылков (или щитков) на стреловидных
крыльях по сравнению с выдвижными могут
служить следующие данные:
— для % = 35° при выдвижных многоще-
левых закрылках с относительной хор-
дой й3/йкр = 0,30...0,35 и с относительным
размахом 1аИ = 0,6 можно получить
Ас^тах ж 0,90... 1,00;
— для того же крыла при тех же разме-
рах простых закрылков величина Ас^тах
получается значительно меньше: Левшах «
0,35...0,40.
В предварительных расчетах для прямого крыла можно при-
нимать следующие значения Асугпах и величины углов а, соответ-
ствующих сутах:
— для обыкновенных щелевых закрылков Ас„тах = 0,8... 1,0;
а = 13...14°;
— для выдвижных однощелевых закрылков Ас„тах = 1,4...
...1,5; а = 12°;
— для выдвижных многощелевых закрылков Ас„тах = 1,6...
...1,8; а = 12...13°.
Более эффективной механизацией крыла, чем закрылки и
щитки, являются управление пограничным слоем или реактивные
закрылки с выдувом струи воздуха из задней кромки крыла.
Такая механизация описана в гл. 11.
14.6.2. Механизация передней кромки
Механизация передней кромки направлена на устранение или
затягивание срыва обтекающего крыло потока на большие углы
атаки и тем самым на увеличение cymax. При размещении механи-
зации передней кромки на концах крыла затягивание срыва обеспе-
чивает повышение боковой устойчивости и управляемости и улуч-
шение эффективности элеронов на больших углах атаки.
Для механизации передней кромки крыла используются:
предкрылки с профилированной щелью, щитки Крюгера, откло-
няемые носки крыла.
398
Рис. 14.26. Схема крыла и конструкция предкрылков на самолете Бо-
инг 727:
/ — интерцепторы, служащие для управления в полете; 2 — щелевые предкрылки; 3 —
щитки Крюгера; 4 — передний лонжерон; 5 — задний лонжерон; 6 — люк главных опор
шасси; 7 — спойлеры — воздушные тормоза; 8 — внутренний двухщелевой закрылок;
9 — внутренний элерон; 10 — внешний двухщелевой закрылок; 11 — внеш-
ний элерон
Предкрылки с профилированной щелью имеют наиболее слож-
ную конструкцию и наибольшую массу. Однако они обеспечивают
безотрывное обтекание крыла до больших углов атаки и тем самым
обеспечивают наибольшую величину Асетах (до 1,0... 1,2) при
а = 25...30°. Основным недостатком предкрылков с профилиро-
ванной щелью является то, что в полете основное крыло и пред-
крылки деформируются (изгибаются) по-разному. Вследствие этого
между задней кромкой предкрылка и верхней поверхностью крыла
(в убранном положении предкрылка) образуется щель-ступенька,
значительно увеличивающая сх0 самолета и уменьшающая аэроди-
намическое качество.
Щитки Крюгера (рис. 14.26) обеспечивают безотрывное обте-
кание только до определенного угла атаки, после чего начинается
более резкий срыв потока с их передней кромки и со всего крыла.
Это свойство используется в целях предотвращения выхода само-
летов со стреловидным крылом на опасные большие закритические
углы атаки. При установке в корневой части крыла щитков Крю-
гера, а в средней и концевой частях — щелевых предкрылков по
399
мере увеличения углов атаки срыв потока начинается у корня
крыла. Вследствие того, что в середине и на конце крыла еще идет
безотрывное обтекание, создается пикирующий момент, возвра-
щающий самолет на меньшие углы атаки.
Отклоняемые носки применяются на самолетах с тонкой перед-
ней кромкой и с малой относительной толщиной. На таких крыльях
установка предкрылков сложна (нет места для размещения меха-
низмов). Отклоняемые носки дают меньший прирост Асутах,
чем предкрылки или щитки Крюгера, и имеют резкое падение
су = (а) после начала срыва.
14.6.3. Обеспечение поперечной управляемости самолета
Наиболее часто применяемым средством поперечной управляе-
мости являются элероны, размещаемые на концах крыла. Площадь
элеронов обычно составляет от площади крыла 3ЭЛ/3 а? 0,05...0,07.
При эскизном проектировании величину площади элеронов
можно подбирать по приближенной формуле для статического мо-
мента элерона Лэ
А3 --= = 0,05 . . . 0,07,
О 4
где 30б.э — площадь крыла, обслуживаемая элероном (рис. 14.27);
а — расстояние между центрами масс половинок площади 30б.э;
3 — площадь крыла; I — размах крыла.
Рис. 14.27. Схема осевой аэродинамической компенсации органов упра-
вления и площадей, вводимых в расчет эффективности этой компенсации:
о. в — ось вращения; bQ к — хорда осевой компенсации алерона; — хорда элерона
400
Рис. 14.28. Влияние уг-
лов отклонения элеронов 6Э
и относительного размаха
элеронов 1д/1 на коэффи-
циент поперечного момента
Производная коэффициента момента
крена по углу отклонения элеронов или
эффективность элеронов для обычных
соотношений IJI и 6э/6кр может быть
выражена приближенно:
= А3Ь~У(14.72)
где 1Э ~ размах элерона; Ьа — хорда
элерона.
Величина коэффициента момен-
та при относительных хордах элеро-
на Ьд/Ькр > 0,25 растет очень медленно,
поэтому обычно берут Ьэ/Ькр=0,20...0,25.
При увеличении относительного размаха элеронов IJI до вели-
чин, близких к IJI 0,5, рост коэффициента тхэ замедляется
(см. рис. 14.27), а так как протяженность механизации по размаху
определяет величину с„тах, то обычно принимают LJI = 0,30...
...0,40.
При углах отклонения элерона, близких к 8Э = 25°, тх растет
очень медленно, поэтому максимальные углы отклонения элеронов
целесообразно брать не более 6Э = 25...30°. При этом следует
учитывать, что отклонение элерона вниз увеличивает угол атаки
крыла, и если полет происходит уже на достаточно больших углах
а, то большое отклонение элерона вниз может вывести данную по-
ловину крыла на закритические углы атаки (больше и
вызвать срыв с этой части крыла — самолет вместо того, чтобы
выправить крен, начнет его увеличивать. С целью предупреждения
такого явления применяют дифференциальное отклонение элеро-
нов: вверх (6Э = —25°) и вниз (6а = +15°).
Для элеронов применяют следующие виды аэродинамической
компенсации:
— осевая с профилированной щелью, когда элероны исполь-
зуются и для увеличения сутах («зависающие» элероны);
— осевая с непрофилированной щелью (рис. 14.28),
— внутренняя с мягкой диафрагмой (рис. 14.29).
При осевой компенсации принимают
So. |;/+« 0,25 . . . 0,28,
где S0.K — площадь осевой компенсации (площадь элерона, рас-
положенная впереди линии оси вращения); S,, — площадь эле-
рона.
При внутренней компенсации
5o.k/S^O.30 . . . 0,31.
Внутренняя компенсация особенно желательна при больших
скоростях, однако осуществление ее при тонких профилях за-
401
Рис. 14.29. Схема внутренней аэродинамической компенсации:
1 — крыло; 2 — передняя компенсационная камера; 3 —• элерон; 4 — герметизирующая
диафрагма
е)
Рис. 14.30. Схема интерцептора:
а — теоретическая схема; б — конструктивная схема интерцептора; I — зона подпора
(увеличения давления), уменьшающая подъемную силу крыла; II — зона срыва потока,
уменьшающего подъемную силу крыла
труднено, так как очень ограничивает углы отклонения элерона
(бэтах = ±15...18°).
В разд. 14.4 было показано влияние аэроупругости крыла на
характеристики самолета. В целях увеличения VKpUT элероны
должны иметь полную весовую компенсацию, т. е. центр масс их
402
конструкции должен лежать
на оси вращения элерона.
При применении в управле-
нии необратимых схем гидро-
усилителей (особенно если
гидроусилитель стоит непо-
средственно у элерона) весо-
вая компенсация (и аэродина-
мическая) может быть умень-
шена.
Решение об устранении
реверса элеронов только уве-
личением изгибной и кру-
тильной жесткостей крыла
приводит к очень большому
увеличению массы крыла
(у стреловидных крыльев).
Рис. 14.31. Сравнение эффективно-
сти различных органов поперечного
управления самолетом в зависимости от
индикаторной скорости полета Vi:
axi
— ——----безразмерная угловая скорость
Л 2V
крена; 1 — интерцепторы и внутренние эле-
роны; 2 — внешние элероны; 3 — средние
закрылкн-элероны; 4 — внутренние элероны;
5 — начало реверса внешних элеронов
С целью устранения или уменьшения эффекта реверса элеронов
применяют:
— установку на крыле двух элеронов: внутреннего (в средней
части крыла), работающего во время всего полета, и внешнего
элерона, включающегося только при взлете и посадке или при
полете с выпущенными закрылками;
— установку на крыле интерцепторов (см. рис. 14.26 и 14.30), ра-
ботающих или вместе с элеронами, или полностью заменяющих их.
Эффективность применения интерцепторов показана на
рис. 14.31.
Интерцепторы размещаются обычно и в корневой{ищентраль-
ной (средней) части крыла. Однако в этом случае они имеют другое
назначение. Они открываются в момент касания самолетом земли
при посадке и срывают обтекание с крыла. Подъемная сила крыла
сразу резко уменьшается, что обеспечивает при торможении само-
лета колесами создание большой тормозной силы — пробег само-
лета сокращается. Интерцепторы в этом случае называются спой-
лерами (конструкция их одинакова).
Глава 15
ПРОЕКТИРОВАНИЕ ФЮЗЕЛЯЖА
15.1. МЕСТО ПРОЕКТИРОВАНИЯ ФЮЗЕЛЯЖА
В ОБЩЕМ ПРОЕКТИРОВАНИИ САМОЛЕТА
По назначению и по функциональным признакам фюзеляж
представляет собой один из наиболее сложных агрегатов самолета.
Назначения его многообразны: в большинстве случаев фюзеляж
является вместилищем полезной нагрузки, экипажа, оборудова-
ния, снаряжения, а иногда и силовой установки и топлива; с дру-
403
Рис. 15.1. Схема параметрического расчета фюзеляжа
гой стороны, фюзеляж соединяет в единое целое важнейшие части
самолета: крыло, оперение, шасси, двигатели. Такая функцио-
нальная сложность обусловливает определенные трудности как
выбора параметров, размеров и формы фюзеляжа в процессе проек-
тирования, так и определения внешних нагрузок, действующих на
него. Фюзеляж воспринимает не только силы тяжести собственной
конструкции и всего содержимого фюзеляжа, но и нагрузки, при-
ходящие на фюзеляж от других агрегатов самолета.
Определение основных параметров и характеристик фюзеляжа
следует производить совместно с параметрическими расчетами дру-
гих частей самолета. Весь,этот расчет удобно представить в виде
итерационного цикла определения взлетной массы самолета. При-
мерная схема такого цикла представлена на рис. 15.1. Исходными
данными при этом являются содержащиеся в техническом задании
величины расчетной дальности £р (или радиуса действия)'самолета,
массы полезной (коммерческой) нагрузки тн, значения скорости
V (максимальной, крейсерской) и высоты полета Н, условия ба-
зирования (класс аэродрома, длина ВПП); в большей или меньшей
404
степени известны габариты и массы содержимого фюзеляжа: на-
грузки, оборудования, снаряжения, двигателей и т. д.; как
правило,* известны применяемые конструкционные материалы.
В соответствии с исходными данными разрабатываются ва-
рианты компоновки фюзеляжа и всего самолета, выявляются их
основные размеры и параметры как из условия размещения всего
содержимого фюзеляжа, так и из условия объединения других
частей самолета.
Для каждого сравниваемого компоновочного варианта нужно
правильно, с учетом всех требований выбрать конфигурацию но-
совой и хвостовой частей фюзеляжа, форму его поперечного сече-
ния, реальные сочетания параметров, конкретную конструктивно-
силовую схему. Эти и другие вопросы проектирования фюзеляжей
рассматриваются в настоящей главе.
15.2. ПАРАМЕТРЫ ФЮЗЕЛЯЖА, ИХ ВЛИЯНИЕ
НА ЕГО ХАРАКТЕРИСТИКИ
В качестве параметров фюзеляжа могут выступать его размеры
(рис. 15.2): длина /ф, диаметр d$, площадь миделевого (наиболь-
шего) сечения SM. ф, а также безразмерные величины удлинений:
%ф = — удлинение фюзеляжа, Хн-Ч = lN.4/d^ — удлинение
носовой части, %хв, ч = /хв> ч/г/ф — удлинение хвостовой части.
В случае некруглой формы поперечного сечения характерными
размерами его являются наибольшая ширина В и высота Н, часто
также определяется эквивалентный по площади миделя фюзеляжа
диаметр
^Ф. э = 2 F 5М- ф/л.
Следует отметить, что параметры фюзеляжа (А,ф, /ф, йф) не яв-
ляются независимыми, и оптимизации подлежит, как правило,
один из них (например, в соответствии со схемой рис. 15.1), а осталь-
ные определяются однозначно, особенно с учетом ограничений,
накладываемых на них назначением фюзеляжа.
Как отношение двух геометрических размеров удлинение фю-
зеляжа Хф может изменяться либо за счет изменения только одного
из них, либо при их одновременном изменении. Наиболее типичны
следующие два варианта изменения Хф. При неизменной площади
миделя или диаметра фюзеляжа (SM. ф, d$) = const изменение Хф
происходит за счет изменения его длины. В этом случае диаметр и
мидель фюзеляжа могут однозначно определяться из условий ком-
поновки в фюзеляже двигателя (одного
или нескольких), например для неко-
торых типов истребителей, или из усло-
вия расположения в фюзеляже кабины
экипажа, или же из условия размеще-
ния в фюзеляже бомбардировщика
бомбоотсека заданных габаритов, ИЛИ Рис. 15.2. Размеры фюзеляжа
405
Рис. г 15.3. Зависимость аэродииамиче-
ского^.сопротивления^ фюзеляжа от его
удлинения^при^различных способах изме-
нения %ф:
(М, Я) = const; М <Мкрит; Хф ^схфЧ8м_ф;
> — при _Fn ф = const; 2 — Хф при
(SM. <рф) = const; 3 -
же груза определенного сечения в грузовой кабине транспорт-
ного ^самолета и т. д.|Х ар актер ным пр имеромл второго варианта
изменения Хф является многоместный пассажирский самолет, где
заданное число пассажиров можно разместить по-разному: от ва-
риантов, соответствующих широкому и короткому фюзеляжу
малого удлинения, до вариантов размещения их в узком и длин-
ном фюзеляже большого удлинения.
При докритических числах М профильное сопротивление фю-
зеляжа складывается из сопротивления трения и сопротивления
формы, причем основную часть составляет сопротивление трения,
величина которого зависит от площади поверхности фюзеляжа.
Поэтому при увеличении Хф по первому варианту, то есть за счет
возрастания длины 1ф, площадь поверхности фюзеляжа Fn. ф>
а следовательно, и его аэродинамическое сопротивление Хф будут
также возрастать. При этом будет увеличиваться и коэффициент
сопротивления схф — Хф/д8м, ф, взятый по отношению к скорост-
ному напору q и неизменной в данном случае площади миделя
(рис. 15.3). Однако при уменьшении Хф до очень малых значений
Хф <3,5 аэродинамическое сопротивление вновь возрастает уже
из-за увеличения сопротивления формы и даже из-за возникнове-
ния явлений отрыва потока.
Иначе изменяется аэродинамическое сопротивление фюзеляжа
при увеличении Хф по второму варианту — за счет уменьшения (1Ф
и увеличения /ф при заданном числе мест пассажирского самолета
или неизменной площади грузового пола. Для различных вариан-
тов компоновки фюзеляжей, отвечающих этим условиям, при
(Д}), ^ф) — var> как правило, постоянны не только число мест или
площадь грузового пола, но и площадь поверхности фюзеляжа':
Гп.ф« const. В этом случае с увеличением Хф сопротивление тре-
ния можно считать неизменным, а сопротивление формы будет па-
дать, обеспечивая уменьшение полного сопротивления Хф. Коэф-
фициент схф и в этом варианте увеличения Хф будет возрастать по
причине интенсивного уменьшения миделя фюзеляжа, по отноше-
нию к которому он вычисляется. Таким образом, во втором ва-
рианте изменения Хф по аэродинамическим^характеристикам вы-
годно выбирать наибольшие значения удлинения фюзеляжа (но
возрастание Хф здесь ограничено весовыми характеристиками).
Оба рассмотренных варианта изменения Хф иллюстрируются
рис. 15.3, где для исходного фюзеляжа с Хф исх показано изменение
406
Рис. 15.5. Изменение изгибающих моментов по фюзеляжу при переносе
двигателей с крыла на хвостовую часть фюзеляжа:
1 — перемещение назад центроплана крыла прн переносе двигателей; 2 — силовая уста»
новка
Рис. 15.4. Изгибающие моменты фюзеляжа при прямом и стреловидном
крыле:
1 — перемещение вперед центроплана прн увеличении стреловидности крыла
аэродинамического сопротивления Хф = c^qSM, ф при двух ва-
риантах увеличения удлинения %ф.
Возникающее при сверхзвуковых скоростях полета волновое
сопротивление может быть снижено увеличением Аф и особенно
повышением удлинения носовой части фюзеляжа Хд-ч. В первом
приближении
Мкр11т. ф лф (0,17 — 0,0076Хф).
Проблема увеличения Мкрит.ф менее остра, чем для крыла, так
как для фюзеляжа, являющегося телом вращения или близким
к нему, характерно пространственное обтекание, приводящее
к большим значениям Мнрит по сравнению с крылом.
Весовые характеристики фюзеляжа зависят от параметров
как самого фюзеляжа, так и других частей самолета. При расчете
на прочность фюзеляж рассматривается как балка, лежащая на
двух опорах, которыми являются передний и задний лонжероны
центроплана крыла (рис. 15.4, рис. 15.5). Сечения фюзеляжа по
этим лонжеронам крыла являются корневыми, в них изгибающие
моменты по носовой и хвостовой частям фюзеляжа достигают наи-
больших значений. Носовая и хвостовая части фюзеляжа предста-
вляют собой как бы консольные балки, заделанные по сечениям,
соответствующим переднему и заднему лонжеронам крыла, и на-
груженные массовыми силами конструкции фюзеляжа, установлен-
ных на нем агрегатов (оперение, двигатели, передняя опора шасси),
содержимого фюзеляжа и силами, передаваемыми на фюзеляж
перечисленными агрегатами. Поэтому увеличение длины фюзе-
ляжа /ф при (SM. ф, d$) ~ const приводит к удлинению этих кон-
сольных балок, что повышает не только габаритные размеры фю-
407
зеляжа, но и величины корневых изгибающих моментов, а следо-
вательно, и площади сечений силового набора фюзеляжа; в ко-
нечном итоге растет масса конструкции фюзеляжа.
Если рассматривать увеличение 1ф при одновременном умень-
шении или SM. ф, например, из условия размещения постоян-
ного числа пассажиров, то в этом случае, как правило, имеет место
минимум величины массы конструкции фюзеляжа при соответ-
ствующих оптимальных (по минимуму массы) значениях йф и /ф,
а следовательно, и Хф (см. разд. 15.5). Наличие этого минимума
массы фюзеляжа объясняется тем, что в случае перехода от опти-
мальных йф и 1ф к очень узким и длинным фюзеляжам утяжеление
происходит из-за увеличения плеч и изгибающих моментов по
фюзеляжу. В случае же короткого и широкого' фюзеляжа сни-
жается уровень нагруженности конструкции (и напряжения в ней),
а возрастают избытки прочности и масса. Кроме того, с увеличе-
нием диаметра быстро растет доля массы конструкции, обусловлен-
ная избыточным давлением в гермокабине.
Увеличение угла стреловидности крыла существенно увеличи-
вает массу фюзеляжа, даже в большей степени, чем самого крыла.
Чтобы сохранить центровку самолета относительно САХ крыла
при возрастании его стреловидности, необходимо центроплан кры-
ла, а следовательно, и корневые сечения фюзеляжа (по крайним
лонжеронам крыла) передвинуть к носу фюзеляжа. В результате
хвостовая консольная часть его удлинится на величину этого пере-
мещения центроплана (за счет укорочения носовой части). Но на
длине этого перемещения хвостовая консольная часть фюзеляжа
будет нагружена большим изгибающим моментом (эпюра изги-
бающих моментов продлевается до нового корневого сечения —
в первом приближении как квадратная парабола) и масса фюзе-
ляжа растет (см. рис. 15.4). Следует заметить, что при стреловид-
ном крыле корневой изгибающий момент хвостовой части фюзе-
ляжа в сечении по заднему лонжерону крыла Мо существенно
превышает изгибающий момент носовой части фюзеляжа в сечении
по переднему лонжерону Л1П, л. При прямом крыле значения этих
моментов близки.
Расположение двигателей на хвостовой части фюзеляжа значи-
тельно повышает его массу. Это объясняется тем, что при переносе
двигателей, например, с крыла на хвостовую часть фюзеляжа на-
груженность хвостовой части изгибающим моментом от силы тя-
жести силовой установки существенно возрастает, и масса хвосто-
вой части растет, несмотря на ее укорочение, вызванное переме-
щением крыла назад вслед за центром масс самолета (это переме-
щение обусловлено переносом назад двигателей — см. рис. 15.5).
Увеличивается масса и носовой -консольной части фюзеляжа
в результате ее удлинения (вследствие перемещения назад
крыла).
Количественно оценить влияние параметров на весовые ха-
рактеристики можно с помощью весовых формул фюзеляжа, пред-
408
Таблица 15.1
Значения удлинений фюзеляжа
Удлинение Дозвуковые самолеты (М < 0,7) Околозвуковые самолеты (М = 0,8 ... 0,9) Сверхзвуковые самолеты
Аф ^и. ч Ахв.ч 6 ... 9 1,2 ... 2,0 2 ... 3 8 ... 13 1,7... 2,5 3 ... 4 10 ... 20 (до 23) 4 ... 6 5 ... 7
ставленных в гл. 6 и в работах [15, 16, 33]. В табл. 15.1 приводятся
статистические данные по удлинениям фюзеляжа.
Существуют приближенные, выведенные на основе статистики
формулы, связывающие различные размеры и параметры фюзе-
ляжа:
/ф = (0,25 ...0,30)-^,
где I и X — размах и удлинение крыла;
/ф^Г1,ЗУфХ^ф,
где коэффициент формы k$ = 0,75...0,80 для дозвуковых и /гф =
= 0,70...0,75 для сверхзвуковых самолетов; объем фюзеляжа
Уф ж 0,2л площадь поверхности фюзеляжа Fn. ф »
2,85/ф I/ SZ7.
15.3. ФОРМА ПОПЕРЕЧНОГО СЕЧЕНИЯ ФЮЗЕЛЯЖА
Круглая форма поперечного сечения фюзеляжа представляется
наивыгоднейшей как обеспечивающая минимальный периметр для
постоянной площади сечения или минимальную площадь поверх-
ности фюзеляжа при постоянном его объеме и, как следствие этого,
наименьшее сопротивление трения. Круглая форма предпочти-
тельна также для герметизированных частей фюзеляжа, нагру-
женных избыточным давлением, так как исключает появление зна-
Рис. 15.6. Поперечные сечения фюзеляжа, образованные пересекающимися
окружностями, с балками пола, работающими от избыточного давления Арэ на
растяжение (самолет DC.9) или сжатие (Ан-24)
409
Рис. 15.7. Поперечные сечения фю-
зеляжа самолета F-4 «Фантом» (США)
читальных изгибных напряже-
ний в оболочке, подкрепленной
шпангоутами, а следовательно,
обеспечивает наименьшую мас-
су конструкции. Если условия
компоновки не позволяют при-
менить круглое сечение или
делают его невыгодным, то все
же следует стремиться прибли-
зить форму сечения к круг-
лой или образовать потреб-
ную форму сечения с помощью пересекающихся окружно-
стей. В этом случае точки пересечения окружностей на противо-
положных сторонах контура соединяются между собой силовыми
элементами (например, балками пола), которые разгружают обо-
лочку фюзеляжа от изгиба, а сами воспринимают растягивающие
или сжимающие нагрузки в зависимости от конкретной формы се-
чения фюзеляжа (рис. 15.6; см. также рис. 15.14).
Бульбообразная форма сечения с увеличенной нижней частью
применяется для повышения объема багажников под полом пасса-
жирской кабины. Сечения со срезанной дугой окружности нижней
частью используются при < 2,9 м (где из-за малости объема
багажники под полом не разместить) и в основном у самолетов-
высокопланов, у которых такое «срезание» низа фюзеляжа позво-
ляет уменьшить длину стоек шасси и расстояние от поверхности
аэродрома до пола кабины. Однако для негерметичных фюзеляжей
своеобразие формы их содержимого (нагрузки) может привести
к выгодности (даже по наименьшей площади миделя) формы, су-
щественно отличающейся от круга. Весьма своеобразную форму
имеют поперечные сечения фюзеляжей в случае расположения
в них нескольких двигателей или каналов воздухозаборников
(рис. 15.7).
При выборе формы сечения следует обратить внимание на необ-
ходимость «обжатия» сечения, то есть на стремление в каждом
конкретном варианте размещения содержимого фюзеляжа достиг-
нуть минимальной площади сечения с целью снижения аэродина-
мического сопротивления, а иногда и массы конструкции.
15.4. ОСОБЕННОСТИ ФОРМЫ НОСОВОЙ И ХВОСТОВОЙ
ЧАСТЕЙ ФЮЗЕЛЯЖА
Форма носовой и хвостовой частей, как и форма всего фюзе-
ляжа, определяется из условий аэродинамики (наименьшего со-
противления), назначения (тактические и эксплуатационные тре-
бования), компоновки, технологии.
Если учитывать только аэродинамические требования, то фю-
зеляж должен представлять собой осесимметричное тело враще-
ния с плавно сужающимися носовой и хвостовой частями (имею-
410
щими удлинения, зависящие от
скорости полета самолета). Для
носовой части фюзеляжа до-
звуковых самолетов характерна
значительно большая криволи-
нейность образующих по срав-
нению с хвостовой частью. Это
связано с меньшим удлинением
и меньшей заостренностью (вы-
Рис. 15.8. Согласование формы но-
совой части фюзеляжа и остекле-
ния фонаря с условиями обзора из ка-
бины
с. 15.2) диктуются стремле-
годна каплевидная форма) но-
совой части. Большая удлинен-
ность и характерная прямоли-
нейность образующих хвосто-
вой части фюзеляжа (см. ]
нием не допустить повышения аэродинамического сопротивления
из-за отрыва потока, который мог бы произойти в случае большой
кривизны образующих хвостовой части и возникающего при этом
положительного градиента давления.
Условия обзора из пилотской кабины придают боковому виду
носовой части фюзеляжа современных самолетов своеобразное очер-
таниег характеризуемое значительным выступанием вперед ее
нижней части. Эта особенность присуща и гражданским, и воен-
ным самолетам различных размеров. Она обусловлена тем, что
ниже прямой, проведенной от глаза летчика вперед—вниз через
нижнюю границу остекления, помещается зона, где можно распо-
лагать без ущерба для обзора удлиненную носовую часть фюзе-
ляжа (рис. 15.8). И эта возможность всегда используется, так как
она выгодна и аэродинамически (заостряется нос), и компоновочно
(в удлиненной носовой части размещают антенны радиолокаторов
или другого оборудования и даже дополнительные багажники
у небольших пассажирских самолетов, не имеющих двигателей
в носовой части фюзеляжа).
Чтобы снизить аэродинамическое сопротивление, следует
максимально наклонить лобовые стекла кабины от вертикального
положения (см. рис. 15.8). Но такое отклонение ограничено прояв-
лением при значении угла 0 > 70° эффекта полного внутреннего
отражения (падающий под таким углом луч не проходит сквозь
стекло, то есть летчик будет видеть в остеклении только отражение
внутренностей кабины). Поэтому для дозвуковых самолетов реко-
мендуемое значение 0 = 50...55°, а для сверхзвуковых оно повы-
шается до 0 = 60...65°.
Выступающие в виде надстройки фонари пилотских кабин
выполняются для снижения аэродинамического сопротивления со
значительным удлинением Хфон 4...6 (Хфон — отношение длины
фонаря к ширине или высоте). Поперечное сечение фонаря
выгодно образовывать дугой окружности — для лучшего
восприятия конструкцией избыточного давления в гермока-
бине.
411
Рис. 15.9. Уменьшение дли-
ны стоек шасси (Дйш) откло-
нением вверх хвостовой части
фюзеляжа (<р = const)
Хвостовую часть фюзеляжа
целесообразно отклонять вверх,
чтобы на взлетно-посадочных
режимах (наибольшие углы атаки)
обеспечить достижение потребного
угла <р (угла переваливания на
переднюю опору) при наименьшей
длине главных стоек (рис. 15.9).
Многие грузовые и военно-тран-
спортные самолеты имеют в хво-
стовой части фюзеляжа большой
люк с опускаемой на землю гру-
зовой рампой для автономной погрузки и выгрузки всевозможных
грузов и техники без использования аэродромных средств. В фор-
мообразовании хвостовой части фюзеляжа таких самолетов можно
выделить два направления. Первоначальным решением было рез-
кое отклонение вверх плоского низа хвостовой части фюзеляжа
для того, чтобы обеспечить потребные габариты грузового проема
при наименьшей длине выреза и использовать в качестве рампы
значительную часть крышки люка. Недостатком такого решения
является увеличение (на 10...15 %) аэродинамического сопротив-
ления фюзеляжа. Подобная форма хвостовой части фюзеляжа ха-
рактерна, например, для военно-транспортных самолетов Локхид
С. 130 (США), Трансаль С. 160 (Франция, ФРГ, Голландия). На
более современных самолетах (Ил-76, Локхид С.141А, С5А,
Боинг YC.14) для снижения аэродинамического сопротивления
удлиняют и искривляют всю хвостовую часть фюзеляжа. В резуль-
тате нижняя поверхность ее оказывается скошенной вверх под
минимальным углом, уменьшается сопротивление, удлиняется
плечо хвостового оперения, но потребная длина выреза увеличи-
вается (рис. 15.10).
Некоторые самые крупные транспортные и грузовые самолеты
(С.5А, Боинг 747F) имеют грузовой люк и в носу фюзеляжа, для
чего его нижняя часть (ниже пилотской кабины) выполняется от-
кидывающейся вверх (в некоторых проектах она поворачивается
в сторону). Такое решение влияет на конфигурацию всей носовой
части фюзеляжа. Так, на самолете Боинг 747 для обеспечения по-
Рис. 15.10. Сравнение конфигурации хвостовой части фюзеляжа военно?
транспортных самолетов Локхид С-130 и Боинг YC-14
413
требных габаритов грузового л. _____________
проема в носу фюзеляжа ка- [ j
бина экипажа поднята вверх I I г 1 1
и выполнена в виде надстрой- г'хч z/ п
ки над фюзеляжем (рис. 15.11). ТГ 1—I
Следует отметить, что для об- ---$-----°--------'
разования больших грузовых п .. D
к Рис. 15.11 Выполнение грузового
люков нашли применение толь- люка в носовой части фюзеляжа само-
ко такие конструктивные реше- лета Боинг 747F
ния, которые не связаны с не-
обходимостью при выгрузке-погрузке производить разъеди-
нение проводок систем оборудования и управления.
15.5. ВЫБОР ПАРАМЕТРОВ ФЮЗЕЛЯЖА МНОГОМЕСТНЫХ
ПАССАЖИРСКИХ САМОЛЕТОВ
С возрастанием размеров и вместимости пассажирских самоле-
тов увеличилось число возможных вариантов размещения в кабине
заданного количества пассажиров с определенным уровнем ком-
форта (размеры кресел, шаг их расположения, ширина прохода
и т„ д.). А так как внутренняя компоновка пассажирской кабины
тесно связана с конфигурацией фюзеляжа, то весьма актуальными
стали проблемы выбора наивыгоднейших размеров и формы по-
перечного сечения фюзеляжа, его длины, а также числа пасса-
жирских палуб. Как отмечалось в разд. 15.2, в этом случае из-
меняется за счет одновременного варьирования длины и диаметра
фюзеляжа при неизменном числе пассажирских мест. Следова-
тельно, различные варианты размещения пассажиров, имея не-
одинаковые длины фюзеляжей, форму и площадь их поперечного
сечения, будут отличаться и такими важнейшими характеристи-
ками, как масса конструкции и аэродинамическое сопротивление
фюзеляжа. Поэтому целесообразно выбирать те значения его
длины и диаметра, да и форму сечения, которые были бы оптималь-
ными, т. е. обеспечивали бы достижение экстремума принятого
критерия оценки.
Вначале рассмотрим решение этой задачи на примере фюзе-
ляжа дозвукового пассажирского самолета со следующими дан-
ными: вместимость — 500 пассажиров; шаг кресел 810 мм; расчет-
ная дальность полета 2500 км; крейсерская скорость соответствует
числу Мкрейс = 0,85 на высоте/7Крейс = Юкм; длина ВПП соответ-
ствует аэродрому класса «Б»; стартовая тяговооруженность Ро =
— 0,3; удельная нагрузка на крыло р0 — tn0§/S = 550 даН/м2;
низкорасположенное крыло с четырьмя ТРДД, имеющее X = 7,5,
q = 3,5, х = 30°, с0 = 0,12 (максимальная высота кессона в кор-
невом сечении 1,3 м); трехщелевые закрылки; предкрылки; интер-
цепторы.
Для нахождения возможных сочетаний значений длины и диа-
метра однопалубного фюзеляжа круглого сечения проработано
413
Рис. 15.12. Изменение массы конструкции фюзеляжа при «пас = 500, (</ф,
/ф) = var:
— • — наибольшая и наименьшая ширина кабины; --- средняя ширина
кабины
несколько вариантов компоновок пассажирской кабины (получен-
ные соотношения между диаметром и длиной фюзеляжа фигури-
руют в данных рис. 15.12). Для всех вариантов приняты постоян-
ными удлинения носовой и хвостовой частей фюзеляжа (2 и 3 соот-
ветственно). Так как при изменении длины фюзеляжа меняются
плечи горизонтального Лг 0 и вертикального Ав. 0 оперения, то
их площади Sr. 0 и SB. 0 определяются величинами их относитель-
ных статических моментов Sr,oLrt0/(SbA) = 1,0 и SB. OLB. JSI =
= 0,1, где S, I, ЬА — площадь, размах и средняя аэродинамиче-
ская хорда крыла. Изменение длины фюзеляжа связано с измене-
нием длины стоек шасси из условия постоянства угла перевалива-
ния на носовую стойку шасси <р — 10 ... 12°. При увеличении
диаметра фюзеляжа удлиняется подфюзеляжная часть крыла и
уменьшается длина консолей крыла при неизменном размахе.
В каждом варианте определяется масса фюзеляжа, крыла, опере-
ния, шасси, топлива, находятся аэродинамическое сопротивление
сх min, качество /С, себестоимость тонно-километра. Для упроще-
ния расчетов (чтобы избежать итераций) взлетная масса самолета
т0 = 186,5 т, полученная для варианта размещения 500 пассажи-
ров по 10 в ряду с двумя проходами при диаметре фюзеляжа 6,4 м
и длине 70 м, принята постоянной; при этом изменения составля-
ющих взлетной массы компенсируются небольшими отклонениями
в массе коммерческой нагрузки /пком, возможными за счет различ-
ного количества багажа, почты, грузов, размещаемых под полом
кабины.
В качестве критерия оценки выгодности рассматриваемых ва-
риантов компоновок принята себестоимость тонно-километра а,
’ Алгоритм расчета можно записать так:
Су (-^крейс^крейс) “Ср (-^крейс^крейс) Сх mjB —> /С —О,
414
где сР — удельный расход топлива; т7 — масса топлива, mt —-
составляющие взлетной массы самолета, в том числе масса фюзе-
ляжа, определяемая по методике [15, 16]. Следует учитывать, что
для узких длинных фюзеляжей (Хф > 14) важно знать, не будут ли
они иметь слишком малую жесткость, не будут ли их прогибы пре-
вышать допустимые. Влияние деформации фюзеляжа на характе-
ристики устойчивости и управляемости самолета по существующим
нормам следует учитывать, если показатель
Сф = Рт.о!^- >0,1,
где РТ' 0 — сила от горизонтального оперения, изгибающая фюзе-
ляж; X — сила, приложенная в фокусе горизонтального оперения
ияприводящая вследствие изгиба фюзеляжа к изменению угла
атаки оперения на Г.
Если требования устойчивости и управляемости покажут, что
в случае сф >0,1 нужно повысить жесткость фюзеляжа (для сни-
жения Сф), то при неизменных параметрах его и оперения достиг-
нуть этого можно только увеличением сечения и массы силовых
элементов конструкции фюзеляжа. Весовые формулы позволяют
вычислить массу фюзеляжа, обеспечивающую снижение сф до 0,1
(на рис. 15.12 эти возросшие значения массы показаны пунктир-
ной кривой).
Потребные согласно приведенному алгоритму формулы пред-
ставлены в работе [16].
Как видно из рис. 15.12, наименьшая масса конструкции
фюзеляжа тф — 26,5 т получена для <1ф = 5,4 м, 1ф = 79 м (8 мест
в ряду с двумя проходами). Наличие минимума массы фюзеляжа
при ппас = const и (с1ф, /ф) = var уже объяснено в разд. 15.2.
На практике одному и тому же числу мест в ряду соответствуют
разные диаметры фюзеляжей у различных самолетов с различным
уровнем комфорта. Поэтому на рис. 15.12 штрих-пунктирными
кривыми показаны границы отклонения величин диаметров в боль-
шую или меньшую стороны при постоянном Числе мест в ряду.
Линии, пересекающие основную кривую, соответствующую сред-
ней ширине*пассажирской кабины, построенные при постоянном
числе мест вдэяду и 1ф = const, показывают, каков в этих условиях
будет эффект изменения диаметра фюзеляжа от изменения ширины
кресел и проходов. Причем наклон этих линий постепенно сни-
жается по мере уменьшения диаметра фюзеляжа, что объясняется
существованием минимума массы фюзеляжа по диаметру при
/ф = const (например, кривая, соответствующая 1ф = 96 м и 6 ме-
стам в ряду, имеет минимум при йф та 3,5 м).
Совокупность кривых рис. 15.12 дает полную картину, позво-
ляющую проектировщику выбрать наивыгоднейшие параметры
фюзеляжа. Так, хотя для основной кривой минимум тф имеет
место при с/ф = 5,4 м (8 кресел в ряду, 1ф = 79 м), можно рассма-
тривать выгодность перехода, к примеру, на диаметр 5,75 м при
несколько уплотненном размещении 9 пассажиров в ряду, что
415
Рис. 15.13. Оптимизация диаметра фюзе-
ляжа
немного снизит массу фюзе-
ляжа и позволит уменьшить
его длину до 74 м (последнее
может быть выгодным для
последующей модификации
фюзеляжа с целью увеличе-
ния его длины и вместимости).
На рис. 15.13 предста-
влены относительные вели-
чины составляющих взлет-
ной массы т0 самолета в функ-
ции диаметра фюзеляжа и
показано изменение себе-
стоимости тонно-километра
для различных вариантов
основного сочетания диа-
метра и длины фюзеляжа.
Минимум массы конструкции
самолета соответствует тому
же варианту, что и минимум
массы фюзеляжа. Это объяс-
няется тем, что рассматри-
ваемые изменения массы
других частей самолета имеют
различные знаки и их сум-
марные Ат значительно мень-
ше, чем изменения массы
фюзеляжа. Поэтому при ре-
шении данной задачи основ-
ное значение имеет точное
определение массы фюзеляжа,
которая оказывает наибольшее влияние на положение оптимума.
Минимум по себестоимости тонно-километра и максимум по коммер-
ческой нагрузке практически одинаковы для вариантов с d$ =
= 5,4 м (1ф 79 м) и с = 4,9 м (/ф = 84 м), т. е. эти экстре-
мумы смещаются в сторону некоторого уменьшения d,it и возраста-
ния /ф, если не учитывать упомянутого увеличения тф для ком-
пенсации снижения жесткости в этих вариантах (для уменьшения
Сф до 0,1). В противном случае оптимальным остается вариант
с ^ф = 5,4 м, при котором а = 6,8 .
Однако полученные результаты соответствуют конкретным ис-
ходным данным, в том числе по пассажировместимости, дальности
полета, форме сечения, числу палуб. Чтобы выявить наивыгодней-
шие конструктивно-проектировочные решения в широком диапа-
зоне значений пассажировместимости и дальности полета много-
местных самолетов, а также для различных форм поперечного се-
чения фюзеляжа с различным числом пассажирских палуб, можно
416
Однопалубное
Двухпалубное
Рис. 15.14. Рассматриваемые поперечные сечения фюзеляжей:
а — круглое одно- и двухпалубное сечение; б — двухпалубное сечение, имеющее форму
вертикальной восьмерки (бульбообразное); в — однопалубное сечение в форме гори-
зонтальной восьмерки; fc — высота салона; ftg — высота багажного помещения
рассмотреть варианты компоновок фюзеляжей, вмещающих
300 ...700 пассажиров и имеющих расчетные дальности полета
2000...8000 км; типы поперечных сечений фюзеляжа показаны на
рис. 15.14. Для всех сочетаний пассажировместимости, дальности
полета, форм поперечного сечения следует определять массу фю-
зеляжа, крыла, оперения, шасси, топлива, находить аэродинами-
ческое сопротивление и качество самолета, его взлетную массу,
а в роли критерия оценки можно использовать себестоимость тон-
на-километра. Решить поставленную задачу ввиду множествен-
ности обсчитываемых вариантов можно только с помощью ЭВМ
в соответствии со схемой на рис. 15.1.
Как известно, с возрастанием дальности полета усиливается
влияние на критерий оценки (себестоимость тонно-километра)
аэродинамического совершенства самолета по сравнению с влия-
нием весовых характеристик, и наоборот, на малых дальностях
роль весового совершенства возрастает. Этим объясняется умень-
шение оптимального значения миделя фюзеляжа при увеличении
расчетной дальности. Так, для мпас = 300 при расчетных дально-
стях Lp = 2000...4000 км оказываются выгодны однопалубные
фюзеляжи круглого сечения, имеющие 7...8 мест в ряду с двумя
проходами (с!ф = 5,02...5,51 м); при дальности же Lp = 8000 км
выгодным становится размещение 6 мест в ряду с одним проходом.
Наглядным примером к этому правилу может служить изменение
выгодности одно- и двухпалубных фюзеляжей при вариации пасса-
14 С. М. Егер и др. 417
Рис. 15.15. Сравнение оптимальных (для каждой формы сечения) фюзеляжей:
а — L.Q = 3000 км; б — Lp = 8000 км
жировместимости и дальности полета. Однопалубные фюзеляжи
обладают меньшим аэродинамическим сопротивлением, но в то же
.время они длиннее и тяжелее двухпалубных фюзеляжей равной
вместимости, причем весовые преимущества последних возрастают
с увеличением пассажировместимости. Это подтверждается гра-
фиками amln = f (пПас), приведенными на рис. 15.15, где предста-
влены только оптимальные варианты фюзеляжей для каждого
типа поперечного сечения. Для вариантов, при которых сф >0,1,
дополнительно построены кривые, соответствующие фюзеляжам
с Сф = 0,1 (пунктирные кривые). При наименьшей из рассматри-
ваемых вместимостей лпэ0 = 300 и наибольших расчетных дально-
стях 6000...8000 км преимущества однопалубного фюзеляжа круг-
лого сечения максимальны (см. рис. 15.15, б), а при наибольшей
вместимости ппас = 700 и наименьших расчетных дальностях
2000...3000 км максимальны преимущества двухпалубных фюзеля-
жей (см. рис. 15.15, а). Однако для малых, средних и больших зна-
чений и пассажировместимости, и дальности полета заранее не
ясно, какая из компоновок фюзеляжа будет выгодной, так как
показатели их сближаются. Графики показывают, что с увеличе-
нием расчетной дальности однопалубные фюзеляжи круглого сече-
ния становятся оптимальными для все большей и большей пасса-
жировместимости. Так, при Lp = 2000...3000 км они выгодны до
вместимости пп„с = 350 (см. рис. 15.15, а), при Lp = 6000 км —
до nuac = 450, а при Lp = 8000 км — до ппас = 575 (рис. 15.15, б).
При больших пассажировместимостях на соответствующих рас-
четных дальностях наивыгоднейшими уже становятся двухпалуб-
ные фюзеляжи. Сечения в форме горизонтальной восьмерки, как
правило, имеют недостаточную жесткость (сф >0,1) и становятся
невыгодными по массе при увеличении жесткости и достижении
сф = 0,1. Показатели двухпалубных фюзеляжей круглого сечения
418
Рис. 15.16. Зоны выгодности одно- и двухпалубных фюзеляжей:
/ — зона выгодности однопалубных фюзеляжей; // — зона выгодности двухпалубных
фюзеляжей
и имеющих форму вертикальной восьмерки сближаются с увели-
чением дальности полета.
Полученные результаты позволяют выявить границу выгод-
ности между однопалубными и двухпалубными фюзеляжами в за-
висимости от числа пассажирских мест и расчетной дальности
полета. На рис. 15.16 кроме границы, разделяющей зоны рацио-
нальности одно- и двухпалубных фюзеляжей, нанесены точки, соот-
ветствующие значениям пассажировместимости и дальности полета
современных многоместных самолетов (Ил-86, А.300В, ДС.10,
Локхид 1011 «Тристар», Боинг 747). Выбор для них однопалубных
фюзеляжей, как следует из рис. 15.16, оправдан. Точки, лежащие
на границе, соответствуют случаям равной выгодности одно- и
двухпалубных фюзеляжей. Хотя до сих пор полностью двухпалуб-
ных самолетов нет (у самолета Боинг 747 вторая палуба располо-
жена только в носовой части фюзеляжа), можно предположить,
что двухпалубные пассажирские самолеты появятся, когда их
данные по дальности и вместимости будут лежать в зоне II.
Глава 16
ПРОЕКТИРОВАНИЕ СИЛОВОЙ УСТАНОВКИ САМОЛЕТА
16.1. СИЛОВАЯ УСТАНОВКА КАК СИСТЕМА САМОЛЕТА
16.1.1. Логика проектирования силовой установки
В силовую установку самолета входят:
1) двигатели с их агрегатами и системами;
2) входные и выходные устройства;
3) топливная система и др. (см. приложение I).
Теория и проектирование отдельных систем силовой установки
подробно освещаются в специальной литературе. В данной главе
14* 419
рассматриваются в основном вопросы проектирования силовой;
установки, непосредственно связанные с общим проектированием
современного самолета.
Для проектирования
силовой
установки
необходимы
прежде
всего следующие основные исходные данные: назначение самолета,
требуемые летные характеристики и взлетная масса самолета.
Главные требования, предъявляемые к силовой установке:
обеспечить наименьший удельный расход топлива (особенно для
самолетов большой дальности полета), иметь наименьший удель-
ный вес (особенно для самолетов с большой тяговооруженностью),
а также иметь необходимую надежность и малую стоимость.
Успешный результат проектирования современного самолета
с высокими характеристиками в значительной степени зависит от
удачного объединения планера и силовой установки. Теперь недо-
статочно спроектировать планер, обладающий высоким аэродина-
мическим и весовым совершенством, и поставить на него двигатель
с малым удельным расходом топлива и малым удельным весом.
Необходимо согласовать характеристики планера и силовой уста-
новки, т. е. по тому или иному критерию, определяющему совер-
шество самолетов данного типа, выбрать оптимальные режимы
Рис. 16.1. Логическая схема проектирования силовой установки самолета
420
полета самолета и работы силовой установки. Другими словами,
наряду с оптимизацией характеристик планера выбрать оптималь-
ную схему двигателя и такие главные параметры (определяющие
высотно-скоростные характеристики двигателя), как т — степень
двухконтурности, Т* — температура газа перед турбиной, —
степень повышения давления (степень сжатия) в компрессоре и др.
Согласованные характеристики планера и силовой установки
обеспечивают получение максимума (или минимума) целевой
функции, а следовательно, более полное выполнение ТТТ, предъ-
явленных к проектируемому самолету.
На рис. 16.1 показана примерная последовательность проекти-
рования силовой установки современного самолета.
При проектировании современного самолета могут иметь место
два случая:
1) двигатель уже разработан к началу проектирования самолета
(самолет проектируется под готовый двигатель);
2) требуется разработать новый двигатель, специально пред-
назначенный для проектируемого самолета.
Если проектирование самолета ведется под готовый двигатель,
то вопрос о выборе типа двигателя и его параметров, естественно,
не ставится. В данном случае определяется требуемая тяговоору-
женность самолета, необходимое число двигателей и т. д.
Если для проектируемого самолета разрабатывается новый
двигатель, то в процессе эскизного проектирования самолета
уточняются все необходимые характеристики будущего двигателя
(выполняется согласование характеристик планера и силовой
установки). По результатам проведенной работы конструкторы
самолета совместно с конструкторами двигателя составляют ТТТ
на проектирование двигателя (и сопла).
16.1.2. Характеристики авиационных двигателей
Основными характеристиками авиационных двигателей, по
которым осуществляется их сравнительная оценка, являются:
высотно-скоростные характеристики Р = / (М, Н)ксР = f (М, Н),
секундный расход воздуха тв, удельная тяга Руд, удельный вес
двигателя у7,„ и его габаритные размеры (длина и максимальный
диаметр) *.Эти характеристики определяются главным образом
такими параметрами двигателя, как температура газа перед тур-
биной, степень повышения давления в компрессоре и степень
двухконтурности.
Удельная тяга двигателя (тяга, приходящаяся на 1 кг расхода
воздуха) является не только мерой экономичности силовой уста-
новки, но и одним из главных параметров, определяющих шум
двигателя, а также хорошим критерием для сравнения аэродина-
* Характеристики авиационных двигателей, необходимые для дипломного
проектирования, см. в приложении IV.
421
Рис. 16.2. Влияние удельной
тяги двигателя на лобовое сопро-
тивление силовой установки с из-
менением числа М полета
мического сопротивления (и мае*)
сы) силовой установки (рис. 16.2)4
Лобовое
вой
сопротивление
установки на дозвуковых ско-)
ростях полета слабо зависит от'
удельной тяги двигателя,
поэтому
для дозвуковых самолетов можно
принимать небольшие значения
удельной тяги (другими словами,
большую степень двухконтурно-
сти двигателя).
Задачи, выполняемые совре-
менной авиацией, требуют от авиа-
ционного двигателя высокой эко-
номичности в широком диапазоне
скоростей и высот полета. Одна-
ко наибольшая экономичность
обеспечивается именно в том случае, если двигатель рассчитан на
сравнительно небольшой высотно-скоростной диапазон (этим и
объясняется деление авиационных двигателей на дозвуковые,
сверхзвуковые и гиперзвуковые). Конкретные значения тех или
иных характеристик, естественно, зависят от типа двигателя.
Современные ТРДД для дозвуковых самолетов, в зависимости
от степени двухконтурности двигателя т, имеют слудующие значе-
ния стартового удельного расхода топлива сРо и удельного рас-
хода топлива в крейсерском полете сР1!рейг;
т............................ Высокая Низкая
срй, кг/(даН-ч)............ 0,3 ... 0,4 0,5 ... 0,6
сРкРейс’ кг/(ДаН-ч) .... 0,6 ...0,7 0,7 ...0,8
В период предварительных расчетов (а также при дипломном
проектировании) удельный расход топлива для дозвуковых само-
летов можно определить по следующей приближенной зависимоси:
Сркрейс= о,95Г- \8 2 -= + М (0’494 -0,014577)], (16.1)
1 + 0,525 у т J
где т — степень двухконтурности двигателя; М — число М полета;
Н — высота полета (км).
Наряду со степенью двухконтурности на удельный расход
топлива оказывают существенное влияние и такие параметры дви-
гателя, как степень повышения давления в компрессоре и темпе-
ратура газа перед турбиной (рис. 16.3).
Удельный расход топлива в кг/(даН-ч) для сверхзвуковых
ТРДФ и ТРДДФ на различных режимах полета в первом
422
приближении можно определить по следующей формуле:
сР - [о,3 + (-^ + 0,2) +
+ —б+^з^ + (°-27 + °’01М2)v - °’02Я] • <16-2)
Здесь сР0 — стартовый удельный расход топлива; /гф = 1 при бес-
форсажном режиме, /гф = Г+ 0,008/7 + 0,017 м2 — 0,17 М при
режиме полного форсажа; Т* в К; М — число М полета; Н — вы-
сота полета (км).
Следует заметить, что на сверхзвуковых крейсерских скоростях
полета, соответствующих числам М = 2,0...2,5, экономичность
одноконтурного двигателя и двухконтурного двигателя с неболь-
шой степенью двухконтурности примерно одинакова. Причем оба
типа двигателей должны иметь невысокую (по сравнению с дозву-
ковыми двигателями) степень повышения давления компрессора.
Важной характеристикой, определяющей конструктивное со-
вершенство авиационного двигателя, является его удельный вес
(по стартовой тяге), т. е. отношение сухого веса двигателя к макси-
мальной стартовой тяге удв = тдв£/Р0- Первые ТРД с центробеж-
ным компрессором имели удв w 0,5. Современные ТРДД для до-
звуковых самолетов имеют удельный вес удв = 0,16...0,19, а
ТРДДФ для сверхзвуковых самолетов — удв = 0,1...0.17.
Следует отметить, что удельный вес двигателя практически не
зависит от степени двухконтурности и величины стартовой тяги,
например, ТРДД CF 700-2D-2 (т = 1,93; Ро — 2020 даН) имеет
удв = 0,166; ТРДД CF6-55 (т = 4,2; Ро = 25 400 даН) имеет
удв = 0,161; ТРДД TF-39 (т = 8; Ро = 18 640 даН) имеет удв =
= 0,177 (все двигатели разработаны фирмой «Дженерал Электрик»)
Такая важная геометрическая характеристика двигателя, как
максимальный диаметр, напротив, зависит главным образом от сте-
пени двухконтурности и стартовой тяги.
В первом приближении диаметр ТРДД (м) можно определить
по следующей зависимости:
£>двММ + 0,04m0-75) у Ро-10‘3 • (16.3)
16.2. ВОЗДУХОЗАБОРНИКИ СОВРЕМЕННЫХ САМОЛЕТОВ
16.2.1. Работа воздухозаборника
Функции воздухозаборника в системе силовой установки совре-
менного самолета сводятся к следующему:
— обеспечить устойчивую работу двигателя на всех режимах
полета;
— обеспечить сжатие поступающего в воздухозаборник воз-
духа, преобразуя кинетическую энергию набегающего потока
в давление.
423
Рис. 16.3. Крейсерские характеристики ТРДД при М = 0,85, Н = 11 [км
При дозвуковых скоростях полета повышение давления воз-
духа в двигательном тракте происходит в основном в компрессоре
газотурбинного двигателя (приблизительно в пять раз больше,
чем в воздухозаборнике). По мере увеличения скорости полета
функции компрессора постепенно переходят к воздухозаборнику;
при числе М = 1,2... 1,4 воздухозаборник и компрессор в одинако-
вой степени сжимают поток. При больших сверхзвуковых скоро-
стях полета (М > 3) роль компрессора становится уже несущест-
венной, а степень сжатия во входном устройстве достигает порядка
40 : 1, т. е. более целесообразным становится воздушно-реактив-
ный двигатель без компрессора (ПВРД).
Степенью сжатия воздуха в турбореактивных двигателях при-
нято называть отношение давления воздуха в конце процесса сжа-
тия, т. е. за компрессором, к атмосферному давлению:
где р* — полное давление за компрессором (перед камерой сго-
рания); рн — атмосферное давление; р". — полное давление на вхо-
де в компрессор; л*х — степень сжатия в воздухозаборнике; —
степень сжатия в компрессоре.
При торможении потока всегда имеют место потери давления,
обусловленные трением, вихреобразованием (отрыв потока при
неравномерном поле скоростей), теплообменом, а при торможении
424
сверхзвукового потока появляются и волновые потери, обуслов-
ленные возникновением скачков уплотнения. В результате потерь
в воздухозаборнике реально достижимые величины л’х оказы-
ваются меньше теоретически возможных. Например, при числе
М = 3 можно получить лвх ж 30, вместо лЕх. нд т 38, которое
было бы в идеальном случае (без потерь).
Потери давления, возникающие при сжатии воздуха во вход-
ном устройстве, принято оценивать величиной коэффициента вос-
становления полного давления (в теории двигателей для удобства
расчетов часто пользуются не статическими, а полными давле-
ниями). Коэффициент восстановления полного давления:
Овх — ЛЕХ/ЛВХ. Ид — Рп!Рн,
где рн — полное давление набегающего потока воздуха.
Для того чтобы воздухозаборник современного самолета эффек-
тивно выполнял свои функции, он должен обеспечивать:
— возможно более высокие значения коэффициента восстанов-
ления полного давления;
— достаточно равномерное поле скоростей на входе в компрес-
сор;
— устойчивую (без сильных срывов потока и пульсаций давле-
ния) работу на всех режимах эксплуатации;
— возможно меньшее внешнее сопротивление.
16.2.2 . Дозвуковые воздухозаборники
Накопленный опыт проектирования и эксплуатации дозвуко-
вых воздухозаборников позволяет получать весьма высокие зна-
чения коэффициента восстановления полного давления в подобных
входных устройствах: овх = 0,97...0,98.
При проектировании дозвуковых воздухозаборников их пара-
метры выбираются для основного режима полета.
Размеры входного отверстия диффузора определяются расходом
массы воздуха через площадь входа. Согласно закону сохранения
массы секундный расход воздуха в сечениях Н—Н и вх—вх
(рис. 16.4) будет одинаковый:
«в ~ ^вх^вхРвх»
где V — расчетная скорость полета на высоте Я.
Площадь входа, следовательно, можно выразить так:
где тв — секундный расход воздуха через двигатель, под ко-
торый проектируется воздухозаборник (задан в характеристи-
ках двигателя); VBX — скорость воздуха на входе в воздухо-
заборник; рЕХ — плотность воздуха на входе.
425
L
Рис. 16.4. Схема дозвукового воздухозаборника
Величину УЕХ в первом приближении можно записать как
произведение: VBX = VVBX, где VEX = 0,3 ... 0,7 — относитель-
ная скорость воздуха на входе в воздухозаборник. Меньшие
значения величины УЕХ принимаются для длинных и искрив-
ленных каналов (чтобы иметь небольшие гидравлические потери),
большие значения Увх — для коротких каналов и ГТД с боль-
шими скоростями на входе в компрессор.
Увеличение плотности воздуха рвх при торможении от V
до VBX определяется по специальным газодинамическим табли-
цам.
В период предварительных расчетов (а также при дипломном
проектировании) размеры входного отверстия можно определить
через относительный диаметр входа
_ (.6.5)
Здесь Dex = DBX/D ; DEX — диаметр входа воздухозаборника;
Рг. я — максимальный наружный диаметр гондолы двигателя,
причем
Ц..д^(1,2 ... 1,3) Deh,
где £>ен — максимальный внутренний диаметр гондолы; М —
число М полета. Можно принимать, DBH я» D.,B (Лдв — диаметр
двигателя по компрессору).
Профилирование входной кромки осуществляется для того,
чтобы получить плавное обтекание гондолы и избежать срывов
потока на входе.
Угол притекания внешнего контура потока ко входу в воз-
духозаборник относительно его оси 0ЕХ (градус) в первом прибли-
жении можно определить через относительную скорость входа:
₽ЕХ = 22/ l/VBX - 1 . (16.6)
426
Радиус кривизны входной кромки (губы обечайки) воздухо-
заборника, обеспечивающий плавное обтекание, можно принимать
rmin = (0,04 ... 0,05))/F^. (16.7)
Профилирование воздушного канала предусматривается для
получения наибольшего значения величины оЕХ и равномерного
поля скоростей на входе в компрессор (сеч. в—в), что дости-
гается при безотрывном течении в канале.
Обеспечить безотрывность течения можно, выбрав такой про-
филь, чтобы степень повышения давления по длине канала имела
постоянное значение. В этом случае полуугол раствора канала
а с 4 ... 5°.
Если канал имеет повороты и изгибы, то изменение площади
поперечных сечений канала должно быть плавным, а на послед-
нем участке (перед двигателем) ось канала должна совпадать с
осью компрессора. Эта цилиндрическая часть канала выпол-
няется длиной не менее (0,5 ... 1,0) D;,B.
Профилирование внешних обводов воздухозаборника должно
обеспечить ему минимальное лобовое сопротивление. Поэтому
наружные обводы воздухозаборника профилируются независимо
от внутренних.
Относительная наружная длинам входа, целесообразная из
условия минимизации лобового сопротивления гондолы двига-
теля, может быть выражена как функция числа М полета:
L = L/Dr.a^ 1,5М2, (16.8)
где L — расстояние от носка гондолы до цилиндрической части.
Следует заметить, что приведенные выше зависимости, опре-
деляющие основные параметры воздухозаборника, являются при-
ближенными. Теоретически весьма сложно учесть все особенности
реального течения, поэтому окончательные рекомендации по
профилированию воздухозаборника устанавливаются экспери-
ментально.
16.2.3 . Сверхзвуковые воздухозаборники
При обтекании сверхзвуковым потоком пространственных тел,
как известно, образуются скачки уплотнения. При переходе по-
тока через скачок параметры потока (скорость, давление, плот-
ность, температура) резко (скачком) меняются с той или иной ин-
тенсивностью в зависимости от угла наклона скачка. Это явление
и используется в сверхзвуковых воздухозаборниках.
Повышение давления и температуры в скачках уплотнения,
образовавшихся на входе в воздухозаборник, является частью
цикла сжатия в силовой установке сверхзвукового самолета.
Потери, возникающие при сжатии воздуха, складываются из вол-
новых потерь (в системе скачков), вихревых потерь и потерь от
трения. Однако основную величину составляют волновые потери:
Рвх = (0,9 . . . 0,95) оск,
427
Рис. 16.5. Способы обра-
зования скачков уплот-
нения:
а — воздухозаборник
с внешним сжатием (все
косые скачки расположе-
ны снаружи); б — возду-
хозаборник смешанного
сжатия (косые скачки рас-
положены и снаружи, и
внутри воздухозаборника);
в — воздухозаборник с вну-
тренним сжатием (все ко-
сые скачки расположены
внутри)
Сжатие
п
где асв = ... == П — коэффи-
i=i
циент восстановления полного давления
в системе скачков; <тг — коэффициент вос-
становления полного давления в одном
скачке.
В зависимости от формы поперечного
сечения входа сверхзвуковые воздухоза-
борники могут быть разделены на два
типа: двухмерные (плоские) и трехмер-
ные (круглые, полукруглые и др.).
В зависимости от положения косых
скачков воздухозаборники делятся на воз-
духозаборники [внешнего, внутреннего
и смешанного сжатия; все три типа могут
быть и двухмерными, и трехмерными
(рис. 16.5).
Воздухозаборники внешнего сжатия
по сравнению с заборниками внутрен-
него сжатия имеют несколько большее
аэродинамическое сопротивление и мень-
ший к. п. д.; например, при скорости
полета, соответствующей числу М = 2,2,
можно получить:
Внешнее Внутреннее Смешанное
овх............................. 0,91 0,95 0,93
Однако воздухозаборники внешнего сжатия достаточно просты
в регулировании, не требуют сложной системы запуска, обладают
весовыми преимуществами, поэтому они нашли широкое приме-
нение в сверхзвуковой авиации.
Воздухозаборники с внутренним сжатием требуют очень слож-
ной системы регулирования, трудно запускаются (выходят на рас-
четный режим) и т. д. Поэтому, несмотря на более высокие зна-
чения коэффициента оЕХ, они пока не получили практического
применения.
Воздухозаборники смешанного сжатия также очень чувстви-
тельны к изменению режима работы и различного рода возмуще-
ниям, которые могут быть вызваны, например, значительным из-
менением угла атаки при маневре самолета или включением (вы-
ключением) форсажной камеры двигателя и т. д. Этот тип воздухо-
заборника целесообразно использовать на однорежимных сверх-
звуковых самолетах.
Параметры и размеры сверхзвукового воздухозаборника вы-
бираются из условия обеспечения бесперебойной работы двига-
теля во всем диапазоне скоростей полета, на который рассчитан
данный самолет.
428
Рис. 16.6. Схема сверхзвукового воздухозаборника смешанного сжатия
(расчетный режим работы)
Площадь входа. Пропускная способность воздухозаборника
оценивается коэффициентом расхода ср, представляющим собой от-
ношение действительного расхода воздуха к максимально воз-
можному, т. е.
ф — тв/тк тах.
Коэффициент расхода ср численно равен отношению площади
струи воздуха в невозмущенном потоке (рис. 16.6, сеч. Н—Н)
к площади входа в воздухозаборник:
ф = Ду/^вх,
причем площадью входа сверхзвукового воздухозаборника счи-
тается полная площадь сеч. вх—вх. Площадь непосредственно
входной щели:
— FBX Ft,
где FT — площадь сечения тела, создающего систему скачков
уплотнения.
Для создания системы скачков в воздухозаборниках могут
применяться как плоские тела (клин) — для плоских воздухо-
заборников, так и круглые тела (конус, полуконус, четверть
конуса) — для трехмерных воздухозаборников соответствующей
формы. Однако геометрические параметры всех воздухозаборни-
ков аналогичны, поэтому продольное сечение, например, полу-
круглых и плоских воздухозаборников будет практически одина-
ковым (см. рис. 16.6), а продольное сечение круглого воздухоза-
борника будет отличаться только симметричностью нижней и
верхней частей сечения.
На расчетном режиме работы воздухозаборника внешние
косые скачки уплотнения фокусируются на передней кромке
обечайки, т. е.
„ тв Гц vI>h ,
Ф =• ---- = “В—J7 = 1 >
«вшах FbxVPh
откуда FBx= -у*—-, (16.9)
429
где тв — секундный расход воздуха; V — скорость полета само- j
^лета; рн — плотность воздуха на высоте полета.
Полный расход воздуха через воздухозаборник:
"W = та + тв. п. с + тв. Пер,
где тв— расход воздуха через двигатель; тв>п. с— масса воз-
духа пограничного слоя, сливаемого с поверхностей сжатия
(клина, конуса и т. д.); тв, пер — масса воздуха, перепускаемого
из диффузора в атмосферу через перепускные (противопомпаж-
ные) створки. Однако с достаточной для эскизного проектирова-
ния точностью можно принимать тв2 « тв.
Расход воздуха через двигатель:
<16Л0)
гДе тв. пр — приведенный расход воздуха; рв = рн<г)!Х; Ро, То —
соответственно давление и температура окружающего воздуха
при Н = 0; V = 0.
Выразим давление и температуру полного торможения через
число М полета:
Рн = рн(Д + 0,2М2)3-5; Т*н = ТН(\+ 0,2М2),
где р*н, Тн — соответственно давление и температура полного
торможения набегающего потока на высоте полета; рн, Тн —
соответственно давление (статическое) и температура окружаю-
щего воздуха на высоте полета.
Получим
«W/H1 +0,2M2)3 j/~288'
ГПВ /7?в. пр 1,033 г Тн ' (16.11)
Окончательно выражение для определения площади входа
сверхзвукового воздухозаборника будет иметь вид
Р «W/; (‘+ °’2М2)3 1/W .1Д1О.
FBX тв.пр 10,14VpH V Тн ’ (16.12)
где FBX — в м2; шв_ пр — в кг/с (значения приведенного расхода
воздуха даны в приложении IV); рн — в даН/см2; V — в м/с;
Тн - в К.
Число поверхностей сжатия на клине (конусе), т. е. число
косых скачков уплотнения в воздухозаборнике, должно обеспечи-
вать получение максимального коэффициента восстановления пол-
ного давления в системе скачков (значение о,.1; тем больше, чем
больше число косых скачков, рис. 16.7).
Углы ступенчатого клина (конуса) alt а2, а3 и т. д. (см.
рис. 16.6) выбирают таким образом, чтобы на расчетном режиме
работы воздухозаборника наружные косые скачки фокусировались
430
на передней кромке обечайки. Наиболь-
шее значение коэффициента оск полу-
чается только при одинаковой интен-
сивности скачков, которая определяет-
ся как отношение скорости потока перед
скачком к скорости потока за скачком.
Поэтому углы ах, а2, а3 и т. д. должны
обеспечить равенство:
7/Их = 7х/% = И2/К3 = •••,
где V — скорость невозмущенного по-
тока (скорость полета); — скорость
потока за первым косым скачком; —
скорость потока за вторым косым скач-
ком и т. д.
Чтобы коэффициент восстановления
полного давления в системе скачков
имел большое значение, скорость по-
тока перед прямым (замыкающим)
скачком не должна превышать ско-
рость, соответствующую числу М =
1,20 ... 1,25.
Скорость потока за i-м косым скачком Vt связана со ско-
ростью потока перед скачком следующей зависимостью:
COS Pt
i-1 cos (3,— ai)
Рис. 16.7. Зависимость
коэффициента оСк от числа
М полета:
/ — прямой скачок; 2 — ко-
сой скачок прямой; 3 ~ два
косых скачка + прямой; 4 —
три косых скачка -J- прямой
(16.13)
где — скорость потока перед i-м косым скачком.
Для первого косого скачка, следовательно, будем иметь
Vx = V-----, (16.14)
1 COS (Pi — ИХ) v '
где V — скорость полета.
Число М потока за i-м косым скачком определяется так:
5 М2 , 5Л12 , cos2 ₽t
1 I — 1 I I — 1
7М2_] sin2 Pt — 1 5 + М2_, sin2 ₽< ’
(16.15)
где Мг-_х — число М потока перед i-м косым скачком (для первого
косого скачка — число М полета).
Соотношение между углом поворота потока (углом клина,
конуса) и углом наклона скачка выражается формулой
tg аг = ctg Р;
M?_i sin2 р, - 1
1 + M2_j (1,2- sin2 р,.) ’
(16.16)
Зная число косых скачков, из уравнений (16.13) ... (16.16)
можно определить необходимые значения углов ступенчатого кли-
на (конуса), обеспечивающие одинаковую интенсивность в скач-
ках.
431
Особое внимание следует обратить на угол наклона первой
поверхности сжатия так как он фактически определяет вынос
конуса (клина) — расстояние от вершины клина до плоскости
входа.
Для современных сверхзвуковых воздухозаборников (в зави-
симости от расчетного числа М полета) угол а° принимает следую-
щие значения:
М.......................... <2,5 2,5... 3,5
Клин....................... ~9° —7°
Конус ..................... -15° ~11°
Длина ступеней конуса (клина) легко определяется, если
известны углы а и 0 и размер h.
Расстояние по оси от плоскости входа до вершины конуса
(клина):
4 = A/tg Pi- (16.17)
Расстояние от плоскости входа до начала второй ступени
(на рис. 16.6 — размер /2) найдем, проведя из точки фокусирова-
ния второго скачка луч под углом (ах -ф 02) к набегающему по-
току. Аналогично определяются размеры l3, и т. д.
Площадь горла воздухозаборника Fr (в сеч. г—г) должна
уменьшаться при увеличении скорости полета. Физически это
вполне очевидно: с увеличением числа М полета возрастает сте-
пень повышения давления воздуха в системе скачков, а следова-
тельно, повышаются давление и плотность воздуха в горле, что
и приводит к необходимости уменьшения его площади (в против-
ном случае воздух в горле расширится и лвх снизится).
Обычно рассчитывается необходимая относительная площадь
горла
Я = Fr/FEX.
Значение величины Fr в зависимости от числа М полета в пер-
вом приближении можно принимать:
М........................ 1,5 2,0 2,5 3,0 3,5
Fr....................... 0,5 0,42 0,35 0,32 0,3
Найденные в результате эскизного проектирования параметры
сверхзвукового воздухозаборника обязательно проверяются и
корректируются в процессе экспериментальных испытаний.
16.2.4 . Совместимость воздухозаборника
и двигателя
Важной задачей в согласовании характеристик планера и си-
ловой установки является обеспечение совместимости воздухо-
заборника и двигателя. Совместимость в данном случае означает
устойчивую работу двигателя с заданными характеристиками на
установившихся и переходных режимах при наличии всевозмож-
ных дестабилизирующих факторов.
432
Изменения частоты вращения двигатели, углов атаки и сколь-
жения, включение (выключение) форсажной камеры и т. д. вызы-
вают изменение пропускной способности воздухозаборника и дви-
гателя, а также приводят к нарушению равномерности поля ско-
ростей потока на входе в двигатель, что, естественно, нарушает
его устойчивую работу. Существенная неравномерность поля ско-
ростей потока, например, может вызвать вибрацию лопаток ком-
прессора и их поломку. При нарушении согласованности пропуск-
ной способности воздухозаборника и двигателя возникает неустой-
чивая пульсирующая работа силовой установки (помпаж, «зуд»
воздухозаборника). При этом значительно уменьшается коэффи-
циент восстановления полного давления <твх, т. е. снижается тяга
двигателя и увеличивается удельный расход топлива.
Характерной особенностью в работе дозвуковых воздухозабор-
ников является автоматическое согласование расхода воздуха,
проходящего через двигатель и входное устройство. Поэтому до-
звуковые воздухозаборники не нуждаются в системе регулирова-
ния расхода воздуха. Иногда, для лучшей равномерности поля
скоростей на режимах максимальной тяги, по периферийной ок-
ружности обечайки заборника устанавливаются дополнительные
впускные створки (самолеты Боинг 747, Ту-154 и др.). Схема ра-
боты впускных створок показана ниже (см. рис. 16.23).
Воздухозаборники самолетов, рассчитанных на большие сверх-
звуковые скорости полета, чтобы избежать вредного влияния
указанных выше дестабилизирующих факторов на работу силовой
установки и сохранить высокое значение <тРХ в большом диапазоне
скоростей, должны иметь специальную систему регулирования
(невзирая на увеличение сложности, массы и стоимости воздухо-
заборника).
Задача системы регулирования по обеспечению согласованной
работы воздухозаборника и двигателя сводится к тому, чтобы на
сверхзвуковых скоростях удержать систему скачков (особенно
замыкающий прямой скачок за горлом) в заданном положении.
Это можно сделать изменением площади горла и перепуском лиш-
него воздуха в окружающую атмосферу. Перепуск воздуха в ат-
мосферу осуществляется открытием специальных створок, уста-
новленных на поверхности канала (за горлом) воздухозаборника.
Эти створки получили название противопомпажных или пере-
пускных. При сверхзвуковом крейсерском полете створки пере-
пуска воздуха непрерывно приоткрыты и часть воздуха стравли-
вается в атмосферу, предотвращая тем самым возникновение
«помпажа» воздухозаборника.
При взлете и небольших дозвуковых скоростях полета потреб-
ная площадь горла оказывается больше величины Ггшах, опреде-
ляемой конструктивными возможностями (это объясняется относи-
тельно малой плотностью воздуха в горле). Поэтому, несмотря
на полностью раскрытое горло, двигателю для нормальной ра-
боты не хватает воздуха. Чтобы не нарушать режим работы дви-
433
Рис. 16.8. Схема регулирования воздухо-
заборника истребителя Макдоннелл-Дуглас F-15:
1 — отверстия для отвода пограничного слоя; 2 —
силовой цилиндр отклонения передней части воз-
духозаборника; 3 — шарнирно-связанные рампы,
регулируемые с помощью одного гидропривода; 4 —
створки перепуска воздуха;- 5 — ось поворота пе-
редней части воздухозаборника; 6 — отверстия от-
соса воздуха с боковых поверхностей канала воздухо-
заборника
гателя, при взлете и
при малых дозвуковых
скоростях полета от-
крываются дополни-
тельно вспомогатель-
ные (взлетные) створки
и дополнительный воз-
дух поступает к двига-
телю, минуя горло.
Для изменения площади
горла конструкцией мо-
жет быть предусмотрено
перемещение конуса
вперед — назад (круг-
лые воздухозаборники)
или перемещение по-
движных рамп (плоские воздухозаборники). Для дополнитель-
ного всасывания или перепуска воздуха открываются допол-
нительные отверстия в канале за горлом (вспомогательные и
перепускные створки на сверхзвуковых воздухозаборниках).
.Регулирование работы воздухозаборника осуществляется авто-
матической системой.
На сверхзвуковых высокоманевренных самолетах (для которых
характерно значительное изменение углов атаки) передняя часть
воздухозаборника может поворачиваться на 13 ... 15° как единое
целое (рис. 16.8). Такой воздухозаборник позволяет эффективно
изменять площадь сечения захватываемого потока.
16.2.5 . Компоновка воздухозаборников
на самолете
Выбор места установки воздухозаборника на самолете играет
важную роль в решении вопросов совместимости воздухозабор-
ника и двигателя (в конечном счете в согласовании характеристик
планера и силовой установки), так как характеристики изолиро-
ванного входного устройства могут существенно измениться при
установке его на самолете.
Компоновка воздухозаборника в значительной степени опреде-
ляется общей аэродинамической схемой самолета и требованиями
к его летным характеристикам (маневренный или неманевренный
самолет, рабочий диапазон высот и скоростей полета, предельные
углы атаки и скольжения, грунтовая ВП или бетонированная
и т. д.). При неудачной компоновке воздухозаборника взаимовлия-
ние крыла и фюзеляжа может стать одной из главных причин
искажения поля течения, особенно при изменении углов атаки и
скольжения.
Другим источником неравномерности поля скоростей в воз-
духозаборнике является трение (обусловленное вязкостью воз-
434
Рис. 16.9. Схема отвода пограничного слоя
духа). Наличие трения, как известно, вызывает появление погра-
ничного слоя на обтекаемой поверхности, скорость в котором
резко падает от скорости невозмущенного потока до нуля.
При сверхзвуковом обтекании пограничный слой, взаимодей-
ствуя со скачками уплотнения, нарушает их четкость: появляются
местные отрывы потока от стенок; пограничный слой, проходя
через скачки, еще больше увеличивает свою толщину; в местах
вздутия пограничного слоя образуются новые слабые косые скачки
(Л-скачки) и т. д.
Отклонение от расчетной схемы течения, вызванное вязкостью
воздуха, в конечном счете и приводит к неравномерности поля ско-
ростей и снижению авх. Поэтому воздухозаборники всех совре-
менных самолетов должны иметь систему отвода (слива) погранич-
ного слоя. Удаляется как пограничный слой, образовавшийся на
поверхности фюзеляжа (или крыла), так и пограничный слой, воз-
никший на поверхностях сжатия — конусе (клине) и внутренней
поверхности обечайки (рис. 16.9).
Толщина пограничного слоя зависит^от скорости потока,
от коэффициента вязкости воздуха и длины зоны контакта потока
с омываемой поверхностью. При компоновке воздухозаборника для
удаления пограничного слоя высоту сливных щелей (hlt h2, ...)
в первом приближении можно принимать по соотношению h т
ш 0,01 Z, где Z — длина поверхности, на которой образуется по-
граничный слой. Если воздухозаборник будет вплотную приле-
гать к поверхности фюзеляжа (т. е. ht = 0), то, например, при
М = 2 коэффициент восстановления полного давления умень-
шится на 25 ... 30 %, что приведет в конечном счете к снижению
тяги двигателя примерно на 45 % и к увеличению удельного рас-
хода топлива на 15 %.
При выборе места для установки воздухозаборника на само-
лете необходимо учитывать и положительное влияние поверхно-
стей самолета на работу входного устройства. Крыло и фюзеляж
на некоторых режимах полета могут быть использованы для
существенного сглаживания течения и уменьшения неоднород-
ности поля скоростей потока перед воздухозаборником. Воздухо-
заборник на достаточном удалении от передней кромки находится
435
Рис. 16.10. Зависимость угла атаки нижней губы воздухозаборника ан. г
от угла атаки самолета а (М = 0,8)
Рис. 16.11. Основные особенности компоновки нерегулируемого воздухо-
заборника истребителя F-16 (воздухозаборник выполнен в виде отдельного мо-
дуля и может быть заменен другим воздухозаборником):
I — зазор между фюзеляжем и воздухозаборником для слива пограничного слоя; 2 —
дульный срез пушки, удаленный от входного сечения воздухозаборника; 3 — плавное
увеличение площадей воздушного канала (обеспечивает почти линейное изменение числа
М); 4 — выступающая вперед пластина для предотвращения попадания пограничного
слоя в воздухозаборник; 5 — тупая губа обечайки (выполнена в виде отдельного компо-
нента и может быть заменена, если потребуется улучшить характеристики воздухоза-
борника); 6 — положение прямого скачка уплотнения; 7 — нижняя поверхность фюзе-
ляжа, выполняющая роль поверхности предварительного сжатия
/ 2 3
в потоке, угол скоса которого из-за влияния крыла (фюзеляжа)
значительно меньше угла атаки самолета, что и приводит к сгла-
живанию потока перед воздухозаборником. Этот эффект имеет
большое значение для высокоманевренных самолетов, углы атаки
которых могут превышать 40°. На рис. 16.10 для подобной компо-
новки воздухозаборника показано влияние крыла на уменьшение
скоса потока при дозвуковых скоростях (аналогичный эффект имеет
место и при сверхзвуковых скоростях).
При сверхзвуковых скоростях крыло (фюзеляж) затормажи-
вает поток, работая фактически как первая ступень сжатия сверх-
звукового потока. В результате такого предварительного сжа-
тия коэффициент восстановления полного давления <твх в воздухо-
заборнике повышается. Этот эффект особенно значителен при чис-
лах М >1,2, что и позволяет с успехом использовать нерегули-
руемый воздухозаборник с дозвуковой геометрией до чисел М =
= 1,5 ... 1,7 (рис. 16.11).
В зависимости от места их размещения на самолете воздухо-
заборники можно разделить на следующие основные типы: лобо-
вые (главным образом, круглые), боковые и подкрыльные (или
подфюзеляжные).
Лобовые воздухозаборники размещаются либо в носовой части
фюзеляжа на легких самолетах, либо в носовой части гондолы дви-
гателей, установленной на крыле тяжелых самолетов.
Основное преимущество лобовых воздухозаборников состоит
в том, что они, встречаясь с невозмущенным потоком, обеспечи-
вают высокую равномерность поля скоростей, а при сверхзвуко-
вом крейсерском полете на расчетном режиме, кроме того, позво-
ляют строго выдерживать заданное положение системы скачков
уплотнения.
436
Однако лобовые воздухозаборники
имеют и ряд недостатков. Если на
тяжелых неманевренных самолетах
в течение всего крейсерского полета
угол атаки практически не меняется,
а следовательно, система ^скачков на
входе . в воздухозаборник сохраняет
заданное положение, то на легких са-
о
0,01
0,03
0,05
Рис. 16.12. Влияние угла
атаки на коэффициент вос-
становления полного давле-
ния в лобовом осесиммет-
ричном воздухозаборнике
этого лобовые воздухоза-
молетах при выполнении маневра с боль-
шой перегрузкой, когда угол атаки
значительно увеличивается, фокуси-
ровка скачков нарушается, что приво-
дит к неравномерности поля скоростей
и к снижению коэффициента восстано-
вления полного давления. Вследствие
борники на больших углах атаки работают недостаточно эффек-
тивно (рис. 16.12).
Второй недостаток: размещая воздухозаборник в носовой части
фюзеляжа, приходится занимать большие внутренние объемы
в фюзеляже под воздушный канал (фактически весь фюзеляж
от носа до хвоста прорезан воздушным и двигательным трактом),
что, естественно, усложняет компоновку самолета. Кроме того,
лобовой воздухозаборник не позволяет размещать в носу фюзе-
ляжа антенну радиолокатора большого диаметра (антенна ограни-
чивается размерами конуса воздухозаборника).
Боковые воздухозаборники по форме входа отличаются большим
разнообразием — круглые, полукруглые, прямоугольные и др.
На дозвуковых самолетах в основном применяются круглые воз-
духозаборники.
Рис. 16.13. Гондола двигателя самолета Ту-134
Рис. 16.14. Воздухозаборник истребителя-бомбардировщика «Фантом II».
437
Наличие пограничного слоя на поверхности фюзеляжа, как
было отмечено выше, требует создания сливных щелей при ком-
поновке воздухозаборников на самолете, а в случае размещения
двигателей на хвостовой части фюзеляжа вся гондола двигателя
отодвигается и крепится к фюзеляжу на пилоне (рис. 16.13).
Следует заметить, что пилон в данном случае позволяет лишь
организовать слив пограничного слоя, не обеспечивая, однако,
условий работы лобового воздухозаборника.
На сверхзвуковых самолетах в основном применяются боковые
воздухозаборники прямоугольной формы либо близкие к этой
форме (рис. 16.14) (хотя встречаются и другие формы входа).
Рис. 16.15. Компоновочная схема гондолы двигателей тяжелого сверх-
звукового самолета:
а — общее устройство; б—крейсерский полет; в—взлет; г—остановка двигателя; д—ре-
версер тяги; /— щель для слнва пограничного слоя с поверхности крыла; 2—неподвижная
плоскость клниа; 3 — подвижные рампы; 4 — дозвуковой канал воздухозаборника; 5 —
дополнительные заборники воздуха; 6 — первичное сопло; 7—реверсер тяги; 8 — регу-
лируемое вторичное сопло; 9 — глушитель; 10 — форсунки форсажной камеры; 11 —
стенка под двигателем; 12 — пропускная (противопомпажная) створка; 13 — вспомо-
гательная (взлетная) створка; 14 — обечайка; 15 — вертикальная перегородка, раз-
деляющая заборники двух двигателей; А — щель для слива пограничного слоя с пло-
скости клина; В — воздух пограничного слоя
438
Размещение воздухозаборников по бокам фюзеляжа не только зна-
чительно сократило длину воздушного канала, но и полностью
освободило нос фюзеляжа для установки радиолокационной стан-
ции. При четкой организации слива пограничного слоя боковые
воздухозаборники работают весьма эффективно.
Подкрыльные (подфюзеляжные) воздухозаборники на суще-
ствующих самолетах имеют плоский либо овальный вход (см.
рис. 16.11). На тяжелых сверхзвуковых самолетах воздухозабор-
ники, как правило, являются передней частью гондол двигателей,
установленных под крылом. На рис. 16.15 показано продольное
сечение гондолы самолета «Конкорд».
Недостатком подкрыльных воздухозаборников является пло-
хая работа на больших отрицательных углах атаки.
16.3. СИСТЕМА ВЫХЛОПА
16.3.1. Минимизация донного сопротивления
Хвостовая часть фюзеляжа (или гондолы двигателя) должна
так профилироваться, чтобы сопротивление на дозвуковой скоро-
сти было минимальным и при этом удовлетворялись требования
сверхзвукового полета.
Если объединение сопла с хвостовой частью фюзеляжа выпол-
нено неудачно (особенно при установке нескольких двигателей,
расположенных рядом), то большая площадь донного среза вызо-
вет появление значительного донного сопротивления. На некото-
рых режимах полета (при максимальном сужении сопла) донное
сопротивление может достигать 30 % полного сопротивления само-
лета, что приводит к серьезному ухудшению летных характери-
стик.
Донное сопротивление определяется главным образом, формой
внешних обводов хвостовой части самолета. Чем плавнее обводы
хвостовой поверхности, тем более равномерным будет поле давле-
ний на ней, и внешний поток останется присоединенным к обте-
каемой поверхности, т. е. донное сопротивление будет небольшим.
На рис. 16.16 показано влияние удлинения хвостовой части
фюзеляжа (или гондолы двигателей) на распределение коэффи-
циента давления, выраженного как отношение
СР = (кД2/2 ’ (16.18)
где р — давление на хвостовой поверхности; рн — статическое
давление на высоте полета; p/YУ2/2 — динамическое давление на
высоте полета.
Координаты образующей линии хорошо обтекаемой хвостовой
поверхности можно определить по следующей зависимости:
г = 0,5 [Омид - (£мид - Оср) X2//U (16.19)
439
Рис. 16.16. Распределение коэффици-
ента давления вдоль образующих
тел вращения при скорости полета,
соответствующей числу М = 0,9
где г — радиус текущего сече-
ния хвостовой части; 7)мид —
диаметр миделевого сечения
хвостовой части; £)ср — диа-
метр хвостового среза; х — рас-
стояние от текущего сечения
до миделя (см. рис. 16.16);
/хв — длина хвостовой части.
При скоростях полета, со-
ответствующих числам М < 0,7,
струя газа, вытекающего из
сопла реактивного двигателя,
практически не’влияет на рас-
пределение давления по внеш-
ней поверхности хвостовой
части фюзеляжа (или гондолы
двигателя). При числе М^0,8
и малой длине профилирован-
ной хвостовой части возникает
отрыв потока, в зоне которого
наблюдается существенное раз-
режение. Донное сопротивление в данном случае значительно
увеличивается.
Нерегулируемые сопла двигателей дозвуковых самолетов не
вызывают больших проблем при минимизации донного сопротив-
ления. Однако современные сверхзвуковые самолеты нуждаются
в более эффективных выхлопных системах. На таких самолетах
устанавливают выхлопные сопла с регулируемой геометрией, ко-
торые отвечают циклам работы двигателей с форсажной камерой и
высокой степенью сжатия, разработанных для быстрого разгона
и полета с большими числами М.
Чтобы сопло реактивного двигателя обладало небольшим дон-
ным сопротивлением на бесфорсажном режиме, оно должно иметь
вторичные створки возможно большей длины (рис. 16.17). Внеш-
ний поток, обтекающий
хвостовую часть фюзе-
ляжа (гондолы), при
небольшом угле накло-
на вторичных створок
(10 ... 15°) остается при-
соединенным к ним, что
и снижает донное со-
противление. Однако
Рис. 16.17. Сечение сопла с малым донным со-
противлением:
1 — приводное кольцо первичного сопла; 2 — при-
водное кольцо вторичного сопла; 3 — положение
при форсаже; 4 — положение при бесфорсажном
режиме
пр актически все типы
сверхзвуковых регули-
руемых сопел в дозву-
ковом полете обладают
повышенным сопроти-
440
Рие. 16.18. Дополнительное сопротивление возможных сверхзвуковых сопел:
1 — аэродинамический эжектор; 2 — изоэнтропическая рампа; 3 — сужающееся рас-
ширяющееся сопло с длинными створками; 4 — центральное тело
влением по сравнению с регулируемым сужающимся соплом,
рассчитанным лишь на дозвуковой полет. На рис. 16.18 показано
дополнительное сопротивление возможных типов сопел совре-
менного сверхзвукового самолета, выраженное в виде отношения
ДХ/Рид = Х/Рия - (Х/Рид)н. с. с,
где X — сопротивление сверхзвукового регулируемого сопла;
Рид — идеальная тяга изоэнтропического сопла; с. с — сопро-
тивление нерегулируемого сужающего сопла. .
На величину донного сопротивления большое влияние оказы-
вает также взаимное расположение нескольких двигателей на са-
молете: сопротивление всех типов сопел уменьшается при увели-
чении относительного расстояния между ними.
16.3.2. Реверс тяги ВРД
Выхлопные системы многих современных самолетов оборудо-
ваны устройством для реверсирования тяги двигателя. Необхо-
димость в отрицательной тяге возникла в связи с увеличением
длины пробега при посадке современных реактивных самолетов
(на самолетах с ТВД отрицательную тягу получают с помощью
реверсивных винтов; на военных реактивных самолетах для этой
цели применяется, как правило, тормозной парашют).
Особенно эффективен реверс тяги при посадке на мокрый или
обледенелый аэродром, когда коэффициент трения мал и длина
пробега значительно возрастает.
441
Рис. 16.19. Влияние вре-
мени получения ма-
ксимальной отрицатель-
ной тяги при включении
реверсивного устройства
на длину пробега (УПос=
= 250 км/ч, Ро = 0,25...
, ...0,30, /тр = 0,2)
В зависимости от степени двухконтур*
ности ТРДД и конструкции реверсивного
устройства для создания реверса тяги
струя реактивного двигателя исполь-
зуется полностью или частично (при
большой степени двухконтурности ТРДД
для реверса тяги может использоваться
только контур вентилятора).
Эффективность применения реверса
тяги определяется не только величиной
отрицательной тяги двигателя, но и такими
факторами, как: /н — время начала дей-
ствия максимальной отрицательной тяги;
Р — тяговооруженность самолета; Упос —
скорость посадки самолета, Д,р — коэф-
фициент трения колес о поверхность ВПП
при пробеге.
В общем случае отрицательная тяга
при включении реверсивного устройства
может быть выражена следующим об-
разом:
^рев ^дв [^рев^рев Ф .(^г ^рев) ^с1> (16.20)
где идв — число двигателей на самолете, оборудованных устрой-
ством для реверсирования тяги; трев — расход массы газа на
выходе из реверсивного устройства; №рев — скорость истечения
газа на выходе из реверсивного устройства; <р — угол между век-
тором скорости газа и осью двигателя; тг — полный массовый
расход газа; Wc — скорость истечения газа на выходе из сопла.
Эффективность конструкции реверсивного устройства оцени-
вается величиной относительной тяги реверса Ррев = Ррек/Р0,
где Ро — максимальная взлетная тяга двигателя (без форсажа).
Для современных ТРДД Ррев = 0,3 ... 0,6. Получить вели-
чину Ррев > 0,6 практически невозможно.
Время начала действия максимальной отрицательной тяги ts
определяется такими факторами, как время принятия решения на
включение реверса тяги (реакция летчика), время срабатывания
механизма реверсивного устройства и время перехода двигателя
с режима малого газа на максимальную тягу (приемистость дви-
гателя).' В идеальном случае /н — 0, т. е. максимальная отрица-
тельная тяга двигателя образуется в момент касания колес шасси
при посадке самолета, однако в реальных условиях tB — 5 ...
... 10 с (например, для двигателя НК-8-2, установленного на само-
лете Ту-154, время получения максимальной отрицательной тяги
равно 6 с).
Как видно из рис. 16.19 особенно эффективное влияние на
длину пробега реверс тяги оказывает при малых значениях /н
442
Рис. 16.20. Аэродинамический эжектор, объединенный с реверсером тяги
двигателя RM-8A, установленного на многоцелевом истребителе «Вигген» (Шве-
ция):
а — входной канал открыт; б — входной канал закрыт; в — реверсер включен
Рис. 16.21. Реверсер тяги самолета «Гольфстрин-П»
а — створки убраны; б — створки в рабочем положении
(даже при /эрев = 0,3). При большом значении tH влияние вели-
чины Ррев на длину пробега снижается. Другими словами, по-
высить эффективность реверсивного устройства можно главным
образом за счет снижения величины tn (за счет уменьшения приеми-
стости двигателя, которая оказывает определяющее влияние на
величину („).
По конструктивным особенностям все реверсивные устройства
можно разделить на два типа: реверсивные устройства, осуществ-
ляющие поворот газовой струи до среза основного сопла, и ревер-
сивные устройства, отклоняющие струю за срезом основного сопла.
В реверсивных устройствах первого типа на режиме реверса тяги
специальные створки перекрывают путь газа к основному соплу,
направляя его к отклоняющей решетке (см. рис. 16.15). Вместо
отклоняющей решетки возможны и другие конструктивные реше-
ния для поворота струи газа (рис. 16.20).
В реверсивных устройствах второго типа створки реверсера
на режиме прямой тяги располагаются над соплом, образуя
наружные обводы гондолы двигателя (рис. 16.21).
16.4. УСТАНОВКА ДВИГАТЕЛЕЙ НА СОВРЕМЕННЫХ
САМОЛЕТАХ
Установка двигателей на современных самолетах должна удов-
летворять следующим основным требованиям:
— обеспечивать минимальное приращение массы и аэродина-
мического сопротивления самолета;
443
4
Рис. 16.22. Конструкция крепления ТВД к крылу самолета:
1 — двигатель; 2 — подкосы; 3 — демпфер; 4 — ферма крепления двигателя
— обеспечивать удобство монтажа и демонтажа двигателей,
а также легкий доступ ко всем агрегатам в процессе технического
осмотра и обслуживания;
— обеспечивать возможность локализации и быстрого туше-
ния пожара, возникшего в двигателе.
Конструкция крепления двигателя должна обеспечивать ком-
пенсацию температурных деформаций и поглощение вибраций дви-
гателя (и винта). Виброперегрузки во всех узлах крепления не
должны превышать нормируемых значений. Снижение вибраций
особенно необходимо при установке двигателей на фюзеляже
(или внутри фюзеляжа) самолета, когда резонансная вибрация
недостаточно сбалансированных двигателей может передаваться
по опорам двигателей к обшивке кабины, где она вследствие «эф-
фекта мембраны» может превратиться в усиленные звуковые
колебания (такой случай имел место на некоторых серийных само-
летах Дуглас ДС-9).
Конструкции крепления авиационных двигателей весьма раз-
нообразны и зависят как от типа двигателей, так и от их располо-
жения на самолете.
Турбовинтовые двигатели обычно устанавливают на крыле
и крепят к конструкции крыла при помощи пространственной сте-
ржневой системы (фермы) через демпферы (рис. 16.22).
На современных самолетах турбореактивные двигатели часто
размещают в специальных гондолах, представляющих собой тонко-
стенные конструкции (с продольным и поперечным силовым набо-
ром), аналогичные конструкциям фюзеляжа.
Устанавливают двигательные гондолы на крыле или фюзеляже
с помощью пилонов. Все коммуникации в плоскости пилона выпол-
няют разъемными. В пилоне размещается противопожарная пере-
городка, изолирующая конструкцию крыла (или фюзеляжа)
от зон топливной и масляной систем.
444
Рис. 16.23. Установка ТРДД Пратт Уитни JT9D и схема работы реверсе-
ров тяги и впускных створок (Боинг 747):
1 — вал привода вспомогательных агрегатов; 2 — соосный привод постоянной скорости;
3 — генератор мощностью 60 кВ*А; 4 — насос и блок управления; 5 — центрифуга;
6 — масляный бак; 7 — привод реверса тяги газогенератора; 8 — тросовая проводка
к реверсеру; 9 — пиевмомотор привода реверсера тяги вентилятора; 10 — гибкий при»
водной вал; 11 — решетка реверсера; 12 — перемещающееся кольцо; 13 — роли-
ковые направляющие; 14 — узел крепления двигателя; 15 — звено, воспринимающее
тягу; 16 — перепуск воздуха; 17 — обратный клапан отбора от 15-й ступени; 19 —
первичный теплообменник; 20 — воздух от вентилятора к теплообменнику; 21 — выпуск-
ной клапан воздуха от вентилятора; 22 — клапан сбрасывания давления; 23 — блок
регулирования температуры перепускаемого воздуха; 24 — отсечной и регулирующий
клапан; 25 — магистраль воздушной системы; *26 — пиевмостартер; 27 — гидронасос>
приводимый пневмомотором; 28 — гидробак; 29 — статор;^ 30 — болты; 31 — решетка
реверсера; 32 — створки реверсера; 33 — впускные створкн; 34 — акустические (звуко-
поглощающие) панели; 35 — одноступенчатый вентилятор
Основные размеры и масса гондолы определяются размерами
двигателя, воздухозаборника и выхлопного сопла; некоторое
влияние на размеры и массу гондолы оказывает также конструк-
ция звукопоглощающей облицовки.
На рис. 16.23 показана установка гондолы ТРДД с большой
степенью двухконтурности на крыле современного самолета.
Возможная конструкция крепления двигателя при пилонной
подвеске под крылом показана на рис. 16.24.
Если необходимая тяговооруженность самолета обеспечивается
тремя двигателями, то внешние двигатели устанавливаются либо
на пилонах под крылом, либо на горизонтальных пилонах на
хвостовой части фюзеляжа, а средний двигатель — внутри хвосто-
вой части фюзеляжа. Установка среднего двигателя с S-образным
каналом требует его тщательного объединения с фюзеляжем.
На рис. 16.25 представлены общие требования для проектиро-
вания S-образного канала и установки двигателя внутри хвосто-
вой части фюзеляжа. Положение двигателя и его выхлопного сопла
по вертикали определяется величиной угла тангажа, необходи-
мого для выполнения взлета и посадки самолета.
445
Рис. 16.24. Пилонная подвеска двигателя под крылом:
1 — передний узел крепления двигателя; 2 — кессон пилона; 3 — задний узел крепле-
ния двигателя; 4 — узлы крепления пилона к крылу; 5 — гондола двигателя; 6 — подкос
Рис. 16.25. Установка ТРДД внутри хвостовой части фюзеляжа:
DB — внешний диаметр кожуха вентилятора; f с) — размер, зависящий от длины
поверхности образования пограничного слоя; 1 — линия пола в пассажирской кабине
Монтаж и демонтаж двигателя, установленного внутри фюзе-
ляжа, производится обычно простым подъемом (спуском) двига-
теля через большой несиловой люк, который используется также
для подхода к агрегатам двигателя при техническом обслужива-
нии в процессе эксплуатации самолета.
Возможная конструкция крепления двигателей при установке
на хвостовой части фюзеляжа показана на рис. 16.26.
Вид fl
Рис. 16.26. Крепление двигателей на хвостовой части фюзеляжа с помощью
подкосов:
1, 2, 3, 4, 5, б — подкосы; 7,8,9 — усиленные шпангоуты гондолы двигателя;
10 — балка боковая; 11, 12, 13, 14 — усиленные шпангоуты фюзеляжа; 15, [16 —
балка
446
1 — вентилятор двигателя F-100; 2 — усиленный шпангоут; 3 — передний узел подвески
двигателя; 4 — форсажная камера; 5 — регулируемое выхлопное сопло; 6 — главный
узел подвески двигателя; 7 — многолонжеронная конструкция крыла
Крепление двигателя в гондоле и фюзеляже осуществляется
в трех точках и представляет собой сочетание нескольких подко-
сов в гондоле (или в фюзеляже). Такая конструкция крепления
позволяет компенсировать изменение длины двигателя из-за
температурных ресширений. Положение двигателя может изме-
няться регулированием длины подкосов и т. д.
На современных истребителях один или два турбореактивных •
двигателя устанавливаются внутри хвостовой части фюзеляжа
и крепятся к усиленным шпангоутам (рис. 16.27). i
Для улучшения обслуживания истребителя вспомогательные
агрегаты двигателей могут размещаться на планере, а не на двига-
телях, что упрощает установку и обеспечивает взаимозаменяемость
правого и левого двигателей (например, истребитель Макдоннелл-
Дуглас F-15).
16.5. ШУМ РЕАКТИВНЫХ САМОЛЕТОВ
16.5.1. Уровень шума
Возросшая интенсивность воздушного движения и увеличение
размеров пассажирских самолетов породили новую проблему
в современном самолетостроении — проблему снижения шума си-
447
ловой установки реактивных пассажирских самолетов. Большая I
пропускная способность крупных аэропортов (свыше 1000 самоле-.
тов в сутки) привела к тому, что шум от турбореактивных двига-
телей стал оказывать вредное физиологическое воздействие на на-
селение районов, прилегающих к аэропортам, и обслуживаю-
щий персонал аэродромов. Поэтому при проектировании пасса-
жирских самолетов задача снижения шума силовой установки
теперь считается такой же важной, как и достижение хороших
летных характеристик и высокой экономичности проектируемого
самолета.
Сила (интенсивность) монозвука, т.'е. звука одной частоты,
определяется количеством энергии/переносимой звуковой волной
за 1 с через площадку в 1 см2, перпендикулярную направлению дви-
жения волны. Сила звука и звуковое давление (избыточное по
отношению к атмосферному среднеквадратичное давление, порож-
даемое звуковыми волнами) связаны соотношением
/=р!в/(ра), (16.21)
где I — сила звука в данной точке пространства; /?зв — звуковое
давление; р — плотность среды; а — скорость звука в данной сре-
де.
Уровень силы монозвука L измеряется в децибелах (дБ) и
выражается как
L = 10 1g (Z/Zo), (16.22)
где 10 — сила звука на пороге слышимости (при L = 0).
Шум, издаваемый реактивным двигателем, представляет со-
бой беспорядочные колебания воздуха, состоящие из ряда простых
звуковых колебаний различной интенсивности и частоты.
Так как ухо человека обладает неодинаковой чувствительно-
стью к звукам различной частоты, то уровень воспринимаемого
человеком шума является в определенной степени понятием субъ-
ективным и не всегда точно характеризуется объективными аку-
стическими показателями. Например, одинаково неприятным
воспринимается шум с уровнем L = 101 дБ и частотой / =
— 100 Гц и шум с L = 82 дБ и / = 4000 Гц, несмотря на то, что
их интенсивности отличаются в 80 раз.
Поэтому для более точной оценки уровня воспринимаемого
шума была введена единица РМдБ (от англ. Perceived Noise —
воспринимаемый шум). Общий уровень шума от турбореактивного
двигателя пересчитывается в единицы РЫдБ для отдельных
участков частотного спектра шума по специальным таблицам,
в основу которых положены линии равной шумности.
Однако единица РЫдБ оказалась недостаточно совершенной
для правильной оценки уровня шума реактивных самолетов.
Как показали дальнейшие исследования, при одинаковом уровне
воспринимаемого шума дополнительное раздражающее действие
на человека оказывает продолжительность шума, зависящая от
448
скорости самолета и траектории полета. Кроме продолжительности
шума, единица РЫдБ не учитывает влияние дискретных тонов
в спектре шума (отдельные всплески уровня шума в узком диапа-
зоне частот), которые также оказывают дополнительное раздра-
жающее действие по сравнению с широкополосным шумом (шум
с плавным изменением уровня по частоте). Для учета этих факто-
ров предложена новая единица оценки шума реактивных самоле-
тов — ЕРМдБ (эффективные РМдБ), в основу которой положена
единица РЫдБ с поправками на продолжительность воздействия
шума и наличие в спектре шума дискретных тонов.
16.5.2. Нормы на допустимый уровень шума
Диапазон уровней шума, воспринимаемый ухом человека,
весьма широк: L = 0 ... 140 ЕРМдБ, что соответствует изменению
интенсивности шума в 1014 раз. Область воспринимаемых частот
распространяется от 20 до 20 000 Гц (примерно десять октав).
В практических анализах обычно ограничиваются более узким
диапазоном частот f = 45 ... 11 000 Гц (восемь октав). Следует
заметить, что не все воспринимаемые шумы утомляют человека.
Раздражают и утомляют шумы, уровень которых превышает
80 ЕРМдБ. Особенно сильное воздействие на человека оказывают
шумы при L > 110 ЕРМдБ с частотами f = 2000 ... 5000 Гц
(более высокие и более низкие частоты действуют менее раздра-
жающе).
Уровни воспринимаемого шума некоторых обычных источни-
ков в ЕРМдБ таковы:
Порог слышимости......................... 0
Лес при безветрии....................... 10
Разговор вполголоса..................... 40
Машинописное бюро ...................... 80
В вагоне метро ......................... 90
Железнодорожный экспресс (в тамбуре) ... 110
Болевой порог ........................... 140
Пассажирский самолет Боинг 707 (взлетная масса 151 т,
начало эксплуатации 1957 г.) при наборе высоты создает на ме-
стности шум с уровнем L = 114 ЕРМдБ, а при заходе на посадку
L = 120 ЕРМдБ. Если учесть диапазон частот шума современных
ТРДД (f = 50 ... 10 000 Гц) и тот факт, что взлетная масса лас-
сажирских самолетов превысила 350 т, то станет ясным появле-
ние специальных норм на допустимый уровень шума от реактивных
пассажирских самолетов.
Допустимые уровни шума указаны в ГОСТ 17228—78. Анало-
гичные нормы установлены в США, Англии и ряде других стран.
Все они близки к нормам ИКАО, согласно которым шум, созда-
ваемый пассажирскими самолетами, замеряется в трех контроль-
ных точках:
при взлете — на расстоянии 0,65 (0,45) км в стороне от ВПП (0,65 км —
для существующих самолетов и 0,45 км — для вновь создаваемых);
15 с. м. Егер и др. 449
Рис. 16.28. Расположение контрольных пунктов (КП) для замера уровня
шума
ЕРНдБ
Рис. 16.29. Нормы на допустимый уровень шума и фактические уровни
шума некоторых современных пассажирских самолетов:
I —.при взлете и заходе на посадку; II — при наборе высоты; 1 — <Джет Коммаидэр»,
2 —«Лирджет»; 3 — ДС-9-30; 4 — Боинг 727-100; 5 — Боинг 727-200; 6 — А -300В;
7 — Боинг 707; 8 —«Конкорд»; 9 — L-1011; 10 — ДС-10; 11 — Боинг 747; 12 — аэро-
динамический шум самолета (а — механизация крыла и шасси выпущены; б — полет-
ная конфигурация)
450
при наборе высоты — иа расстоянии 6,5 км от начала разбега;
при заходе на посадку — на расстояние 2 км от начала ВПП (рис. 16.28).
Допустимый уровень шума в принятых нормах выражается
через взлетную массу самолета (так как тяговооруженность пас-
сажирских самолетов примерно одинакова).
При взлете и при заходе на посадку
L = 6,6 1g m0 + 91,6 ЕРЫдБ; (16.23)
при наборе высоты
L = 16,6 1g т0 + 65,8 ЕРМдБ, (16.24)
где т0 — взлетная масса самолета (т).
При уменьшении взлетной массы самолета требования по шуму
становятся жестче — допустимый уровень шума снижается, что
связано с более частыми полетами самолетов небольшого размера.
Однако для самолетов с взлетной массой менее 37,5 т, а также бо-
лее 350 т, допустимый уровень шума принимается постоянным
(рис. 16.29).
Следует заметить, что для наблюдателя на земле уменьшение
шума от реактивного самолета на 10 ЕРИдБ соответствует кажу-
щемуся снижению шума приблизительно на 50 %.
16.5.3. Возможные методы снижения шума
На современных реактивных самолетах основными источни-
ками шума являются реактивный двигатель и нестационарный по-
ток, обтекающий планер самолета (аэродинамический шум). В пер-
вом случае шум генерируют: реактивная струя, вентилятор, тур-
бина и компрессор (рис. 16.30).
Одним из наиболее интенсивных источников шума реактивного
двигателя является струя. В настоящее время шум реактивной
струи достаточно изучен. Наличие
на границе струи большого гра-
диента скорости приводит к эжек-
ции воздуха из окружающего про-
странства и образованию вихрей
в зоне смешения, что и порождает
шум. Наибольшее влияние на шум
реактивной струи оказывает скорость
истечения струи (уровень шума
пропорционален ~1Г®). Следователь-
но, самым эффективным методом
уменьшения шума струи является
Рис. 16.30. Относительная ин-
тенсивность и направленность
шума различных источни-
ков на ТРД и ТРДД:
1 — компрессор* 2 — турбина; 3 —
реактивная струя; 4 — вентилятор
снижение ее скорости.
Успехи в снижении шума реак-
тивной струи связаны прежде всего
с созданием двухконтурных тур-
бореактивных двигателей, скорость
15*
451
струи которых значительно меньше, чем на одноконтурных.
Когда на пассажирских самолетах вместо ТРД были устано-
влены первые ТРДД с небольшой степенью двухконтурности
(т 1), уровень шума был понижен примерно на 15 ЕРМдБ.
Разработка ТРДД с большой степенью двухконтурности (т —
— 4 ... 6) позволила уменьшить шум реактивной струи еще на
13 ... 17 ЕРМдБ. Дальнейшее увеличение степени двухконтурности
нецелесообразно, так как шум струи практически не уменьшается,
а уровень шума вентилятора прогрессивно увеличивается, значи-
тельно перекрывая уровень шума реактивной струи. У ТРДД
с большой степенью двухконтурности вентилятор стал основным
источником шума, распространение которого происходит как впе-
ред, так и назад, подобно шуму компрессора и турбины ТРД.
Компрессор промежуточного давления, турбина и две струи (от
вентилятора и от газогенератора) являются дополнительными
источниками шума ТРДД.
Дальнейшее снижение шума вентилятора, компрессора и тур-
бины ТРДД достигается использованием внешнего глушения шума,
для чего внутренние поверхности гондолы двигателей покрыва-
ются звукопоглощающей (акустической) облицовкой. Звуко-
поглощающая облицовка представляет собой слоистую конструк-
цию, внешний слой которой состоит из пористого материала, а под
внешним слоем располагается слой ячеистой конструкции. Ячейки
в данном случае работают как акустические полости.
Благодаря применению акустической облицовки гондолы уда-
лось снизить уровень шума современных ТРДД на 10 ... 13
ЕРМдБ. Дополнительное глушение шума на 3 ... 5 ЕРМдБ (свя-
занное, однако, с увеличением массы гондолы) можно получить
удлинением воздухозаборника и выхлопного сопла (рис. 16.31).
Перфорированная
облицовка
6 7 8 9 10
Рис. 16.31. Особенности компоновки и расположения акустической обли-
цовки гондолы ТРДД:
/ — гондола современных ТРДД с большой степенью двухконтурности; 2 — односту-
пенчатый вентилятор без входного направляющего аппарата; 3 — спрямляющий аппа-
рат; 4 — отклоняющая решетка реверсера тяги вентилятора; 5 — створки реверсера
тягн; 6 — возможная модифицированная гондола; 7 — акустическая облицовка удли-
ненного воздухозаборника; 8 — облицовка удлиненного канала внешнего контура; 9 —
облицованный смеситель; 10 — облицованное удлиненное выхлопное сопло; 11 — кон-
струкция акустической облицовки
452
Рис. 16.32. Влияние степени двухкон-
турности ТРДД на уровень воспринима-
емого Шума:
1 — шум реактивной струи; 2 — сопло с глу-
шителем; 3 — шум многоступенчатого вен-
тилятора, компрессора и турбины; 4 — вен-
тилятор одноступенчатый; 5 — гондола дви-
гателя со звукопоглощающей облицовкой;
6 ~ удлиненные воздухозаборник и выхлопное
сопло; 7 — ТРДД Роллс-Ройс RВ-211
Следует заметить, что целесообразность использования того
или иного метода снижения шума зависит от степени двухконтур-
ности реактивного двигателя.'Например, акустическая облицовка
гондолы ТРД и ТРДД с небольшой степенью двухконтурности
бессмысленна, так как для этих двигателей доминирующим яв-
ляется шум выхлопной струи. В данном случае для снижения
шума используется специальное шумоглушащее сопло (гофриро-
ванное, лепестковое, многотрубчатое и др.), нашедшее широкое
применение в эксплуатации первых пассажирских реактивных
самолетов. При степени двухконтурности tn > 1 примене-
ние сопла с глушителем становится уже нецелесообразным
(рис. 16.32).
Следует упомянуть еще об одном методе снижения шума,
который позволит снизить шум самолета при заходе на посадку.
Использование микроволновой системы посадки даст возможность
самолетам заходить на посадку по траектории планирования с уг-
лом наклона 6° вместо 3°, по которой планируют современные са-
молеты. Увеличение высоты пролета над прилегающей к аэродрому
местностью, естественно, понизит уровень шума, создаваемого
самолетом.
Дальнейшее снижение шума силовой установки позволит сни-
зить шум всего самолета только до некоторого предела, опреде-
ляемого шумом обтекания планера, или, как его часто называют,
аэродинамическим шумом. Шум планера современного самолета
приблизительно на 6 ... 10 ЕРЫдБ ниже шума силовой установки
(см. рис. 16.29). Этот шум определяется такими факторами, как
турбулентный пограничный слой, обтекание выпущенных стоек
шасси, закрылков и предкрылков, а также турбулентным следом
за крылом и фюзеляжем.
Интенсивность шума планера пропорциональна скорости по-
лета в пятой-шестой степени. Аэродинамический шум в ближай-
шие годы может оказаться основной составляющей общего шума
самолета при заходе на посадку.
453
16.6. ТОПЛИВНАЯ СИСТЕМА
16.6.1. Размещение топлива на самолете
Топливная система современного самолета включает в себя
следующие основные элементы: топливные баки, трубопроводы,
насосы, клапаны, краны, фильтры, систему различных автоматов,
датчиков, измерительных приборов и т. д.
Назначение топливной системы — обеспечить подачу топлива
к двигателям на всех возможных для данного самолета режимах
полета (по высоте, скорости и перегрузкам) в нужном количестве
и с необходимым давлением. На сверхзвуковых самолетах, осо-
бенно предназначенных для длительного сверхзвукового полета,
топливная система выполняет еще ряд других важных функций,
обеспечивая охлаждение некоторых частей и систем самолета
(гидравлической, кондиционирования и др.). Кроме того, с по-
мощью перекачки топлива (вперед—назад) можно изменять цен-
тровку самолета, парируя сброс боевой нагрузки, сдвиг фокуса
при переходе от дозвукового полета к сверхзвуковому и т. д. При
этом, естественно, уменьшается запас устойчивости самолета,
а следовательно, снижается балансировочное сопротивление.
. На рис. 16.33 показана схема топливной системы современного
самолета.
Размещение топлива в значительной мере определяет общую
весовую Компоновку самолета; так как запас топлива на совре-
менных дозвуковых и сверхзвуковых самолетах может превышать
топливная магистраль 'ТРЛН
топливная магистраль ВСУ
. дренажная система
ет.система заправки и слива
=о= обратный клапан
-+ пластинчатый откидной клапан
а> топливные насосы
и обратный клапан
9
Рис. 16.33. Принципиальная
схема топливной системы современного само-
лета:
1 — вход дренажа; 2 — датчик заправки; 3 — эжектор; 4 — дреиажиые поплавковые
клапаны; 5 — клапаны заправки — слива; 6 — кран низкого давления; 7 — разгрузоч-
ный клапан (применяется только на земле); 8 — соединения системы слива; 9 — краны
изоляции баков; 10 — кран перекрестного питания; 11 — топливный клапан и насос ВСУ
454
50% от взлетной массы
самолета (на самоле-
те «Конкорд» величина
шах 0,52).
Размещается топливо
в специальных топливных
баках, которые по своему
назначению делятся на
основные, расходные и
балансировочные (в зави-
симости от типа самолета
балансировочные, а иногда
и расходные ьбаки в топ-
ливной системе могут не
предусматриваться).
Питание двигателей
Рис. 16.34. Размещение топливных ба-
ков _‘на сверхзвуковом пассажирском само-
лете «Конкорд»:
1, 2, 8 — балансировочные баки; 3, 7 ~ расход-
ные баки; 4, 5, 6, 9, 10 — основные баки
топливом можно осуще-
ствлять из любых топливных баков, но чаще всего для этого
используют специальные расходные (коллекторные) баки, в ко-
торые в определенной последовательности перекачивается топливо
из основных баков.
Топливная система с расходным баком имеет определенные
преимущества (особенно для самолетов военного назначения):
она обладает большей надежностью, так как при выходе из строя
основных баков в запасе остается расходный бак (до 20 % всего
топлива), защиту которого можно обеспечить бронированием;
один расходный бак (или несколько) легче оборудовать специаль-
ными устройствами для бесперебойного питания двигателя при
выполнении маневров с положительными и отрицательными пере-
грузками и т. д.
Топливные баки могут размещаться как в фюзеляже, так и
в крыле самолета (симметрично по отношению к центру масс).
И та, и другая компоновки имеют определенные преимущества
и недостатки. Крыльевые топливные баки имеют большую пло-
щадь поражаемой поверхности, что приводит к меньшей живу-
чести топливной системы. Это основной недостаток такого распо-
ложения топливных баков. Однако при размещении топлива в
крыле его масса разгружает крыло в полете от изгибающего мо-
мента, благодаря чему получается определенный выигрыш в мас-
се конструкции крыла. Кроме того, при размещении топлива в кры-
ле фюзеляж практически полностью можно занять под полезную
нагрузку, что имеет большое значение в первую очередь для
пассажирских и транспортных самолетов. Поэтому на всех пасса-
жирских, транспортных и тяжелых военных самолетах топлив-
ные баки размещаются главным образом в крыле (рис. 16.34).
Размещение топлива в фюзеляже может оказаться более целе-
сообразным для военных самолетов (особенно в боевых операциях
на малых высотах). Располагая топливные баки в фюзеляже над
455
центропланом, двигателем, шасси и т. д., которые служат как бы
защитным экраном от зенитного огня, можно повысить живу-
честь самолета.
По конструктивным признакам топливные баки делятся на
три типа: жесткие, мягкие и баки-отсеки, являющиеся частью
конструкции самолета. Основное преимущество мягких резино-
вых баков состоит в том, что они позволяют лучше, чем жесткие
баки, использовать объем, более технологичны и удобны в про-
изводстве и эксплуатации (их можно свертывать и' монтировать
через небольшие люки). Мягкие баки, кроме того, не боятся виб-
раций, не дают рваных краев при простреле (небольшие пробоины
даже затягиваются специальным слоем резины), обладают хоро-
шими теплоизоляционными свойствами.
Жесткие лаки легче мягких (вместе с контейнерами), их можно
сравнительно легко демонтировать.
Герметичные баки-отсеки (бак-конструкция) позволяют наи-
более рационально использовать внутренние объемы самолета,
потому что топливного бака как такового нет, а топливо зали-
вают в отсек крыла или фюзеляжа, покрытый изнутри керосино-
стойким и температуростойким герметиком. Применение баков-
отсеков позволяет увеличить запас топлива на борту.самолета.
Однако баки-отсеки обладают повышенной поражаемостью, что
снижает надежность топливной системы; их трудно ремонтировать.
Топливо в баках-отсеках непосредственно подвергается воздейст-
вию низких температур при полете на дозвуковых скоростях и
высоких температур при полете на больших сверхзвуковых ско-
ростях.
В зависимости от назначения самолета преимущество указан-
ных типов топливных баков проявляется в большей или меньшей
степени. На современных самолетах часто устанавливаются не-
сколько типов топливных баков одновременно.
16.6.2. Управление расходом топлива
Сохранение положения центра масс самолета при выработке
топлива в допустимых пределах обеспечивается не только сим-
метричной компоновкой топливных баков. Для того чтобы запас
устойчивости самолета тсу не изменялся в значительных преде-
лах, в топливной системе современного самолета устанавливают
специальную автоматическую систему измерения запаса топлива
и управления расходом по заданной программе без вмешательства
экипажа. Автоматическое управление достигается с помощью
редукционных клапанов, включением (отключением) подкачиваю-
щих насосов и т.д.
Топливо, как правило, расходуется сначала из внутренних,
а затем из внешних (по размаху крыла) баков. Такая схема ра-
боты системы управления расходом обеспечивает максимальное
уменьшение изгибающего момента крыла.
456
Если самолет предна-
значен для длительного
сверхзвукового полета, то
в топливной системе для
уменьшения запаса устой-
чивости на сверхзвуковой
скорости обычна установ-
ка специальных баланси-
ровочных баков (баки,
расположенные на воз-
можно большем удалении
вперед и назад от цент-
ра масс самолета, см.
рис. 16.34). Перекачива-
нием топлива из передних
балансировочных баков в
задние можно приблизить
ц. м. к фокусу самолета.
На рис. 16.35 показано
типичное поведение поло-
Рис. 16.35. Возможное изменение поло-
жения центра масс и аэродинамического фо-
куса самолета в процессе полета:
— предельно переднее положение ц. м.;
хТ2 — предельно заднее положение ц. м.;' Дхт—
допустимый диапазон центровок самолета.
Лхр — сдвиг аэродинамического фокуса прн
переходе от дозвукового к сверхзвуковому по-
лету; хт Кр — возможное положение ц. м.
в сверхзвуковом крейсерском полете (после
перекачки топлива из передних балансировоч-
ных баков в задние)
жения центра масс и
фокуса самолета в зависимости от скорости (или времени полета).
Может возникнуть вопрос: нельзя ли для уменьшения вели-
чины т^у обеспечить такой порядок выработки топлива, чтобы
центр масс на сверхзвуковой скорости перешел установленное
предельно заднее положение хт? и приблизился к фокусу самолета,
например за счет выработки топлива только из передних баков?
Этого сделать нельзя по двум причинам: во-первых, если топливо
из передних баков будет вырабатываться (а не перекачиваться
в задние), то центр масс будет сдвигаться назад очень медленно
и эффект от уменьшения запаса устойчивости значительно сни-
зится; во-вторых, когда центр масс будет находиться сзади поло-
жения хт2 и по какой-либо причине потребуется быстро снизить
скорость и снова перейти на дозвуковой полет, то при этом необхо-
димо также быстро вернуть центр масс самолета в дозвуковое
положение (в противном случае самолет станет неустойчивым),
а быстро вернуть центр масс в дозвуковое положение можно только
перекачкой топлива в передние баки.
16.6.3. Характеристики авиационных топлив
В качестве основного топлива для двигателей современных
самолетов применяются углеводородные топлива: для воздушно-
реактивных двигателей — керосины; для поршневых двигателей—
бензины.
Массовая (весовая) теплотворная способность керосина того же
порядка, что и у бензина, но плотность керосина больше, поэтому
его объемная теплотворная способность на 10 ... 15 % выше,
457
чем у бензина. Температура вспышки у керосинов — порядка
+ 30 °C, у бензинов она составляет — 35 ... 40 °C (как известно,
чем ниже температура вспышки, тем легче запускается двигатель
при низких температурах).
Для гиперзвуковых самолетов, а в будущем, возможно, для
сверхзвуковых и дозвуковых самолетов будут применяться крио-
генные топлива (в основном жидкий водород), которые позволят
получить повышенную дальность полета (пропорциональную при
прочих равных условиях теплотворной способности топлива).
Использование водорода связано с определенными трудностями,
так как температура его кипения не превышает —253 °C. В то же
время водород имеет наибольшие теплотворную способность и
удельную теплоемкость, т. е. наибольший хладоресурс. Эти ка-
чества позволяют рассматривать водород как одно из наиболее
перспективных топлив для двигателей самолетов больших скоро-
стей полета, требующих интенсивного охлаждения конструкции
самолета. |
В качестве перспективного топлива для ВРД рассматривается ]
и жидкий метан, имеющий несколько большую массовую (весо- J
вую) теплотворную способность и в три раза больший хладоре- I
сурс, чем керосин. \
На больших скоростях полета, когда направление теплового 3
потока в конструкции самолета изменяется на противоположное, |
топливо (особенно размещенное в крыльевых баках-отсеках) на- =
гревается. Например, в крейсерском полете со скоростью, соот- ;
ветствующей числу М-3, тепловой поток, исходящий от обшивки, 1
становится уже настолько существенным (средняя температура j
обшивки около 260 °C), что он мог бы нагреть керосин до темпера- '
туры кипения. Применение теплоизоляции (слоистая конструк-
ция с сотовым заполнителем значительно снижает тепловой по-
ток) позволяет избежать чрезмерного нагрева топлива, однако
температура его при больших скоростях (М > 3) все же настолько
повышается, что углеводородное топливо не может выполнять роль
хладагента для охлаждения конструкции и систем самолета. Кро-
ме того, недостатком углеводородного топлива является его тер-
мическая неустойчивость при высоких температурах (например,
для керосина этот предел равен приблизительно 200 °C). Если
указанный предел достигается даже на короткое время, то может
образоваться некоторое количество отложений твердых частиц
в теплообменниках, фильтрах, (Ьорсунках двигателей и т. д.
с возможным их блокированием. Таким образом, можно говорить
о превосходстве криогенного топлива для гиперзвуковых само-
летов.
На гиперзвуковых скоростях водород перед подачей в двига-
тель может быть использован для охлаждения конструкции само-
лета (удельная теплоемкость у водорода в 15 раз больше, чем
у керосина). Тогда значительные трудности, связанные с его
458
Рис. 16.36. Схема сверхзвукового пассажирского самолета на водородном
топливе (зарубежный проект):
Взлетная масса — 376 т; масса топлива — 106 т; масса коммерческой нагрузки —30 т
(300 пассажиров); дальность полета 7400 км; крейсерская скорость соответствует числу
М -- 2.5; 1 -- балласт (вода); 2 -- пассажирская кабина; 3 — баки с жидким водородом
применением, будут в какой-то степени компенсированы. Жид-
кий водород, обладая неоспоримым преимуществом перед кероси-
ном по массовой теплотворной способности и удельной теплоем-
кости, имеет плотность, составляющую всего 0,086 плотности керо-
сина. Энергосодержание на единицу объема у водорода пример-
но в 4 раза меньше, чем у керосина. Поэтому самолеты с таким топ-
ливом должны иметь значительно большие объемы, причем топ-
ливо необходимо размещать в криогенных баках, дополнительно
увеличивающих размеры, а следовательно, и массу самолета
(рис. 16.36). Таким образом, конструктивное воплощение само-
лета на водородном топливе значительно усложняется.
Глава 17
ПРОЕКТИРОВАНИЕ ОПЕРЕНИЯ
17.1. ОСНОВНЫЕ ПОНЯТИЯ. ЗАДАЧИ
ПРОЕКТИРОВАНИЯ ОПЕРЕНИЯ
Аэродинамические поверхности, образующие оперение само-
лета, предназначаются для обеспечения его устойчивости и уп-
равляемости. До последнего времени наиболее часто встречав-
шейся схемой размещения поверхностей оперения была так назы-
ваемая нормальная, или классическая, в которой вертикальные
и горизонтальные поверхности оперения размещались в хвостовой
части самолета, образуя хвостовое оперение самолета. Однако
459
Рис. 17.1. Новые поверхности опе-
рения и органы управления, условно со-
вмещенные на гипотетическом само-
лете:
1 — горизонтальные поверхности стабилиза-
ции кабины экипажа от упругих колебаний;
2 — носовое вертикальное оперение автома-
тической путевой стабилизации и непосред-
ственного управления боковой силой; 3 —
носовое горизонтальное оперение продольной
балансировки прн непосредственном упра-
влении подъемной силой и автоматической
стабилизации; 4 — отклоняемый носок кры-
ла для непосредственного управления подъ-
емной силой и повышения тах; 5 — интер-
цептор (управление по крену и торможение);
6 — закрылок непосредственного управле-
ния подъемной силой илн элерон-закрылок;
7 — концевой элерон; 8 — элерон; 9 — цель-
ноповоротиый стабилизатор с возможностью
Дифференциального отклонения правой нуле-
вой поверхностей для управления по крену;
10 — вертикальное оперение с рулем напра-
вления или цельноповоротное (обеспечение
путевой статической устойчивости, путевой
стабилизации, управления углом скольже-
ния и непосредственного управления боко-
вой силой)
в схеме «утка» горизонталь-
/// ное оперение перемещается
///-—в носовую часть фюзеляжа,
"у >4^ а в хвостовой части остается
лишь вертикальное. Разви-
тие сверхзвуковой авиации
и поиски способов улучше-
ния маневренности сверх-
звукового самолета привели
к повышению интереса авиа-
ционных специалистов к не-
посредственному управлению
аэродинамическими силами
без изменения углов атаки
и скольжения самолета.
Непосредственное упра-
вление аэродинамическими
силами самолета (подъемной
и боковой) может быть осу-
ществлено путем отклонения
установленных в потоке спе-
циальных аэродинамических
поверхностей: закрылков на
крыле и дополнительных
горизонтальных и вертикаль-
ных поверхностей в носовой
и хвостовой частях самолета,
обеспечивающих изменение
аэродинамических сил без
нарушения балансировки
(рис. 17.1). Успешное решение технических проблем, возника-
ющих при разработке систем непосредственного управления
аэродинамическими силами, позволит существенно повысить эф-
фективность самолета с такой системой, поскольку обеспечит:
1) значительное повышение энергичности маневрирования за
счет более быстрого изменения аэродинамических сил, чем при
«классическом» способе изменения этих сил путем поворота всего
самолета для изменения углов атаки, крена или скольжения;
2) возможность изменения траектории самолета без изменения
его положения (угловой ориентации) в пространстве;
3) возможность ослабления аэродинамических нагрузок, воз-
никающих при ветровых порывах («болтанке»);
4) возможность перераспределения маневренных аэродинами-
ческих нагрузок по крылу для уменьшения изгибающих моментов
в корне крыла.
Последние два фактора позволят повысить эффективность
самолета вследствие повышения как весовой отдачи, так и ресурса
планера.
460
Проектирование оперения должно обеспечить получение не-
обходимых характеристик устойчивости и управляемости само-
лета на всех возможных режимах полета, а также достаточную
эффективность органов управления для вывода самолета в нормаль-
ный режим полета после непроизвольного превышения критиче-
ских значений углов атаки, сваливания и попадания самолета
в режим пикирования после сваливания или штопора. Поэтому
основные относительные параметры оперения Лг. 0 и Лв.о, а также
потребную эффективность рулевых поверхностей приходится выби-
рать в процессе общего проектирования самолета после выбора
его схемы, компоновки и центровки (см. гл. 5 и 8).
Эффективность поверхностей оперения как органов обеспече-
ния статической устойчивости может быть оценена изменением
безразмерных коэффициентов моментов тх, ту, тг при единич-
ном изменении соответствующих поточных углов а и 0, т. е. про-
изводными:
о — “г. ОЛ о Т _ “г. ОЛ Л
,lt-Z Г. О Ly Г. О^Г. О^Г. О-^Т. О '-у Г. рКг. О'1!'. 0>
ffly в. о = С? в. о^-в. о^в. о^-в. о — С? в. о^в. о-^в.о, (И.1)
в. о = Cz в. сЛв. о^в. оУв. о»
где S, 0 = SB. 0/S и jib.o = ур. 0/1.
Эффективность расположенных на оперении рулей высоты и
направления оценивается производными, характеризующими из-
менение соответствующих коэффициентов моментов при единич-
ном отклонении этих рулей:
6В бв Ь ё Т вв h Л
П1г ~ Су Г.О^Г. О*^Г. О^-Г. О == Су Г. О*^Г. о^г. о,
Шу Сгв.о^в. о^в. оЕв. о ~ Сгв, о&в. оЛв. о", (17.2)
Шд. — Сгв. о&в. о$в. оУв. о*
Если «классические» рулевые поверхности, расположенные
в хвостовых частях поверхностей оперения, не могут обеспечить
самолету необходимой маневренности, что практически всегда
имеет место у самолетов при сверхзвуковых скоростях на боль-
ших высотах, то применяются цельноповоротные поверхности опе-
рения, эффективность которых намного выше (рис. 17.2) и оце-
нивается изменением коэффициентов соответствующих момен-
тов при единичном угле их поворота, т. е. производными ш’>Е,
m^H, mJ”.
Как следует из выражений (17.1) и (17.2), эффективность опе-
рения определяется не только его относительной площадью Son
и плечом Лоп, но и аэродинамическими характеристиками
сбв , ср и сбн , которые в значительной степени зависят от
yr. о’ гв. о гв. о* ~
461
Рис. 17.2. Сравнение изменения эф-
фективности руля высоты т^в
и цельноповоротиого управляемо-
го стабилизатора По числам
М полета при одинаковых разме-
рах оперения
формы оперения, его удлинения X,
стреловидности сужения л,
формы и относительной толщины
профилей с, площади и относи-
тельной хорды расположенных
на оперении рулей Sp. в, SP.H,
бр.в, бр.н. Величина максималь-
ных моментов управления зависит
также от величины максимально
возможных углов отклонения
рулей, например, (т2Г.0)у11р1Пах =
“ бв тах-
Таким образом, после выбо-
ра схемы самолета, размещения
поверхностей оперения и опреде-
ления потребных значений его
относительных параметров в задачу непосредственного проекти-
рования оперения входят: выбор его оптимальной формы, опреде-
ление геометрических размеров, определение действующих на-
грузок, проектирование конструктивно-силовой схемы и схемы
увязки ее с силовыми элементами фюзеляжа, предварительный рас-
чет массы оперения и учет влияния оперения на центровку само-
лета.
17.2. ВЫБОР ФОРМЫ ОПЕРЕНИЯ
Как следует из выражений (17.1) и (17.2), эффективность опе-
рения и расположенных на нем рулевых поверхностей зависит
не только от площадей оперения S0I( и расстояний от центров дав-
лений оперения до центра масс самолета (так называемых плеч
оперений Lon), но и от его аэродинамических характеристик.
Важнейшими из этих характеристик являются производная
подъемной силы горизонтального оперения по его углу атаки аг. 0 —
= с“г.о и производная боковой силы на вертикальном оперении
по углу скольжения ав. 0 = cfB. 0. Эти производные в значитель-
ной степени зависят от геометрических параметров оперения
(X, Л, X, ё)оп. Выбор формы в плане и профиля оперения в извест-
ной мере зависит от выбранной формы и толщины профиля крыла.
В настоящее время наиболее часто применяется трапециевидная
прямая и стреловидная форма оперения, иногда — треугольная.
На околозвуковых и сверхзвуковых самолетах, проектируе-
мых по нормальной схеме, чаще всего применяют стреловидное
оперение. Такая форма оперения позволяет получить достаточно
высокие значения МКрИТ при сравнительно небольшом приросте
сопротивления, высокие значения коэффициента а: о = с“г. о
(вследствие относительно большого удлинения), а также позволяет
несколько увеличить величину плеча, расположенного сзади
462
CMg.o
_______1-г.о.стр
Lr.o-np
САХГО. пр _
0,?5СЛХг,апр^
0,25 САХ'о, стр
Lg.o
0,25CAXgo
a)
3,0
2,0
Рис. 17.3. Схема для определения
геометрических параметров опе-
рения:
а — изменение параметров гори-
зонтального оперения при увели-
чении его стреловидности (двой-
ной штриховкой показана фюзе-
ляжная часть оперения $гоф! ПО’
точная площадь оперения Sp
= 5г. О - 5Г. о. ф! 6 -‘пара-
метры вертикального оперения;
в — зависимость эффективного
удлинения вертикального опере-
ния ХЕ оэ от истинного удлинения 0; /• — форкиль; 2 — иосок
САХГ о; 3 — бортовая нервюра крыла; Zr 0= 0/5г 0; Хв 0 =
1,0
?2 /.$
В. О/ в. о
оперения, благодаря сдвигу назад концевой части его поверх-
ности (рис. 17.3, а).
При выборе угла стреловидности оперения %оп, удлинения %оп
и относительной толщины профилей оперения соп необходимо стре-
миться обеспечить достаточную эффективность оперения при всех
возможных углах атаки крыла, а также обеспечить при около-
звуковых скоростях Мкрит. оп > Мкрит. вр. Поэтому для опере-
ния, как правило, выбирают симметричные профили с относитель-
ной толщиной несколько меньшей, чем принятая для профилей
крыла, небольшое удлинение и больший угол стреловидности.
Относительная толщина профилей оперения для нескорост-
ных самолетов с нестреловидными крыльями и оперением прини-
мается в пределах соп = 10 ... 12 %. Для скоростных самолетов
со стреловидным оперением эта толщина принимается на 1 ... 2 %,
меньше, чем относительная толщина профилей крыла, и состав-
ляет, как правило, соа = 5 ... 6 % (хорды замеряются по потоку).
Если для сверхзвукового самолета применено нестреловидное
оперение, то достаточно высокие значения Мкрит обеспечиваются
небольшим удлинением (Хоп — 1 ... 2) и очень малой относитель-
ной толщиной профилей (соп = 3 ... 4 %). Приблизительно та-
кая же относительная толщина профилей (соп — 4 ... 5 %) при-
нимается и для треугольных оперений.
463
Достаточно существенное влияние на повышение значений Мкрит
профилей и, следовательно, всего оперения оказывает положение
максимальной толщины профиля по длине его хорды (хс =
= хс/&). Наибольшее значение Мкрит имеют профили, у которых
максимальная толщина приходится приблизительно на середину
хорды (хс = 40 ... 50 %). Именно такие профили выбираются для
оперения.
Для повышения эффективности оперения и расположенных
у его задних кромок органов управления особенно при около-
и сверхзвуковых скоростях полета довольно существенное зна-
чение имеет такая модификация профилей, при которой умень-
шается угол схода линий, образующих хвостовую часть профиля
(рис. 17.4). С этой целью профили оперения нередко модифици-
руются таким образом, чтобы дугообразные образующие хвосто-
вой части профиля были заменены прямыми (показано вверху
на рис. 17.4).
На самолетах с большими сверхзвуковыми и особенно гипер-
звуковыми скоростями для повышения эффективности оперения
профили его иногда даже делают с тупыми задними кромками
(как, например, элевоны на шведском самолете SAAB-35) или кли-
новидными (как, например, профили вертикального опере-
ния на экспериментальном гиперзвуковом самолете Норт-Амери-
кен Х-15).
При выборе стреловидности оперения околозвуковых самоле-
тов для выполнения условия МкрИт. оп > Мврит. кр можно исполь-
зовать следующие эмпирические выражения для определе-
ния Мкрит оперения:
м «=> м 2
1 ‘Крит. оп ~ '’‘Крит, проф 1 [ Cos ^оп ’
Рнс. 17.4. Изменение эффективности руля в зависимости от чисел М при
различных углах схода профиля у задней кромки
Вверху справа пунктиром показана модификация профиля для уменьшения угла схода
464
где Хоп — Угол стреловидности оперения по линии фокусов
(приближенно можно считать по линии 1/4 хорд профилей), а
Мкрит.Проф определяется по формуле
Мкрит. проф 1 0,7 И Con 3,2ConCf/ оп»
значения суоп в которой принимаются соответствующими тем ре-
жимам полета, для которых определялись значения Мкрит для
крыла.
Для сверхзвуковых самолетов обычно стараются получить
«дозвуковую переднюю кромку» оперения, т. е. кромку, лежащую
внутри конуса возмущений. Это условие выполняется при %в.к >
> arcsin . Практически угол стреловидности оперения обыч-
мФа’с о со
но превышает угол стреловидности крыла на 3 ... 5 .
Выбор удлинения X и сужения ц горизонтального и вертикаль-
ного оперений осуществляется с учетом влияния этих параметров
на массу конструкции и эффективность оперения.
При увеличении удлинения эффективность оперения возра-
стает как вследствие увеличения «. 0 = (рис. 17.5, а), так
и за счет уменьшения части площади оперения, находящейся
в спутной струе заторможенного потока (рис. 17.5, б). Вследствие
этого при увеличении удлинения оперения его площадь, потреб-
Рнс. 17.5. Влияние параметров
оперения на его эффективность:
а — зависимость производной о
«г. о
уг. о
от удлинения
оперения
при
докритических числах М (аг о, СТр =
— 0 cos %); б — уменьшение от-
носительной части площади опере-
ния, находящейся в заторможенном
потоке, при увеличении удлинения
(площади оперения одинаковы); в —
происхождение оптимального зна-
чения удлинения оперения, при ко-
тором масса оперения получается
наименьшей (при заданной эффек-
тивности); 1 — зависимость, характеризующая увеличение массы конструкции при
увеличении удлинения; 2 — зависимость, характеризующая уменьшение массы опере-
ния вследствие уменьшения потребной площади
465
ную для создания определенных моментов устойчивости и управ-
ляемости, можно уменьшать [см. (17.1) и (17.2)]. При этом, есте-
ственно, можно ожидать уменьшения массы конструкции опере-
ния. Однако при увеличении удлинения масса конструкции опе-
рения и узлов его крепления возрастает вследствие увеличения
изгибающих и крутящих моментов (при той же величине нагрузки
на онерение). Кроме того, при увеличении удлинения оперения
существенно увеличивается неблагоприятное влияние упругих
деформаций оперения на характеристики устойчивости и управляе-
мости, а также ухудшаются флаттерные характеристики (крити-
ческая скорость флаттера уменьшается).
Очевидно, что существует какое-то оптимальное значение XOI(Opt,
при котором масса конструкции получается наименьшей
(рис. 17.5, в).
При увеличении сужения оперения масса его конструкции
уменьшается благодаря уменьшению изгибающих моментов, но
уменьшается также и эффективйость части оперения, находящейся
в заторможенном потоке. Последнее обстоятельство заставляет
увеличивать площадь оперения, что, естественно, приводит к уве-
личению его массы. Отсюда вытекает уже приводившееся выше
положение о том, что правильный выбор сочетания параметров
оперения, при котором масса его конструкции получается наи-
меньшей, аналогично выбору параметров крыла, может произво-
диться только методом решения задачи оптимизации.
Обработка статистических данных по современным самолетам
дает следующие значения удлинения и сужения горизонтального
и вертикального оперений:
Хг, о = 3,5 ... 4,5 — для нескоростных самолетов с большим
удлинением крыла (X > 4.5);
Хг-О = 2 ... 3 — для скоростных самолетов с малым удлине-
нием крыла;
т]г.о = 2,0 ... 3,5 (для самолетов с треугольной формой опере-
ния т]г.о = оо);
ко = 0,8 ... 1,2;
т]в.о = 2,0 ... 3,5 — для самолетов с горизонтальным опере-
нием, расположенным на фюзеляже или на нижней части
киля.
При расположении горизонтального оперения на конце киля
Яв. о ~ 1, т. е. вертикальное оперение проектируется практически
без сужения. Это делается для получения достаточно большой
строительной высоты профиля киля у его конца с тем, чтобы обес-
печить размещение узлов крепления горизонтального оперения и
механизмов управления.
Коэффициент торможения потока для полетных случаев при
докритических значениях чисел М приближенно может быть опре-
делен по графику (рис. 17.6). Для самолетов с Т-образным опе-
рением для этих случаев можно принимать kr_ о « 0,95.
466
Рис. 17.6. Приближенная зависимость
коэффициентов торможения, потока
в зоне горизонтального оперения от
относительной величины фюзеляжной
части оперения (при докритических
значениях чисел М)
Коэффициент аг о = с“г°о для прямых и стреловидных опере-
ний с относительной толщиной профилей соп = 8 ... 10 % при до-
критических числах М полета можно приближенно определять по
графикам, приведенным на рис. 17.5, а.
17.3. ВЫБОР ФОРМЫ И ПАРАМЕТРОВ ОРГАНОВ
УПРАВЛЕНИЯ
Выбор параметров органов управления, расположенных на
оперении (рули высоты и направления) и крыле (элероны или эле-
воны), осуществляется уже на начальной стадии проектирования,
так как от этого зависят многие другие этапы проработки проекта.
В частности, эффективность руля высоты, зависящая от его пара-
метров, определяет предельную переднюю центровку и выбор
параметров горизонтального оперения (см. рис. 8.7).
Выбор параметров органов управления на ранней стадии про-
ектирования необходим также для определения их шарнирных мо-
ментов и потребных скоростей отклонения, которые являются важ-
нейшими исходными данными для проектирования системы управ-
ления. _
При выборе параметров органов управления (Sp = Sp/Son,
5р — 6р/6оП, SO.K = S0.K/Sp) следует учитывать, что с увеличе-
нием относительных размеров руля шарнирный момент его возра-
стает быстрее, чем эффективность.
Отношения zn®rB Jwfr- ° = cj= 0/с“г- ° и nA qWb 0 =
= с®® 0/с^в 0 называют обычно коэффициентами эффективности
руля высоты и руля направления и соответственно обозначают пр. в
и пр.н *•
При дозвуковых скоростях коэффициенты эффективности рулей
определяются приводившимися ранее выражениями: пр. в та
« |/Sp. B/Sr. о и пр. н та у Sp. H/SB. о. При сверхзвуковых скоро-
стях эффективность рулей существенно снижается и выражения
для этих коэффициентов приобретают вид пр. в та Sp<B/Sr. 0 и
Ир. И “8р. о-
* Для цельноповоротных управляющих поверхностей (стабилизатора или
киля) понятие «коэффициентэффективности» не теряет свой смысл, так как с^'
467
Шарнирный момент руля определяется выражением
Мш = (лгш0 + «ш» + Шш6р 4- Шшт) Spbp. cpq. (17.3)
Для определенных условий полета можно считать, что (тш0 +
+ т“а + Шшбр + /и£1Т) q = А = const. Тогда Мш = ASpbp. ср-
Если учесть, что при Soa = const площадь руля может изменяться
только за счет изменения его хорды, а размах руля остается по-
стоянным (Sp = /рйр. Ср), то Мш = Alpb2p.cp.
Таким образом, при дозвуковых скоростях эффективность
руля возрастает пропорционально J/ 6Р. Ср , а шарнирный момент —
пропорционально 6Р. ср.
С ростом относительной площади руля S_ = /р^р~ср —
Р «Ьоп ‘ОП&ОП. ср
= /рбр. ср вследствие возрастания на нем воздушной нагрузки
и шарнирного момента быстро растут усилия, передаваемые с руля
на неподвижную часть оперения. Для восприятия этих возрастаю-
щих усилий необходимо усиливать конструкцию неподвижных
частей оперения (стабилизатора и киля), а это приводит к быстрому
увеличению их массы. Поэтому при выборе параметров оперения
и относительной площади рулей необходимо сравнить, что целесо-
образнее в весовом отношении: некоторое увеличение площади
оперения или увеличение площади руля, т. е. необходимо выби-
рать оптимальные значения Sp.
При проектировании рулей стремятся выполнить условие по-
стоянства относительной хорды руля по размаху оперения (5р =
— bp/b01J = const), так как в противном случае, во-первых,
заметно возрастает коэффициент шарнирного момента [точнее,
его составляющая тщ— см. выражение (17.3)1, а, во-вторых,
полки заднего лонжерона неподвижной части оперения (стабили-
затора или киля), к которой крепится руль, получаются с перемен-
ными закрученными малками, усложняющими производство.
Для нескоростных самолетов оптимальные относительные пло-
щади рулей обычно лежат в пределах Sp в = 0,3 ... 0,4; Sp н =
= 0,35 ... 0,45.
Для современных скоростных (околозвуковых) самолетов оп-
тимальные значения относительных площадей рулей несколько
меньше и лежат в пределах Sp = 0,2 ... 0,3 *.
Важным вопросом проектирования органов управления явля-
ется выбор степени их осевой компенсации (So.к = So. K/Sp).
На небольших нескоростных самолетах с безбустерными си-
стемами управления обычно So.к = 0,20...0,25 выбирается из
* На самолетах с длинными хвостовыми частями фюзеляжа (и, следова-
тельно, с большими значениями плеч оперений) относительные площади рулей
могут снижаться до значений Sp = 0,10...0,15, как, например, на самолете Бо-
инг В-52.
468
а Мш.О.К
ро.х =г {конструктивная
осевая компенсация)
б)
Рис. 17.7. Возникновение шарнирного мо-
мента перекомпенсации АЛ?Ш. о. к руля
с большой степенью осевой компенсации
вследствие выхода его носка в поток при
больших углах отклонения (а) и образова-
ние «конструктивной» осевой компенсации
рулей скоростных самолетов (б)
условия обеспечения не-
обходимых характеристик
маневренности и упра-
вляемости по усилиям,
а также с учетом того
факта, что при SOK^0,28
наступает перекомпенса-
ция. В продольном упра-
влении, например, выбор
степени осевой аэродина-
мической компенсации ру-
ля высоты для этих само-
летов определяется допу-
стимыми пределами изме-
нения балансировочных
усилий в горизонтальном
полете РЕ.бал и расхода
усилий на единицу пере-
грузки
Применение необрати-
мых бустерных систем
управления (см. гл. 18)
обеспечивает возможность
уменьшения степени осе-
вой аэродинамической ком-
пенсации рулей до так называемой «конструктивной» (рис. 17.7).
Это заметно снижает сопротивление щели между неподвижной
частью оперения и рулем (особенно при сверхзвуковых скоростях)
и ликвидирует сопротивление выступающей в поток при больших
углах отклонения передней части руля с большой степенью осевой
компенсации.
Прирост коэффициентов подъемной силы горизонтального опе-
рения при отклонении руля высоты и коэффициента боковой силы
вертикального оперения при отклонении руля направления по
мере увеличения углов отклонения постепенно замедляется, а за-
тем падает при появлении срывов потока. Одновременно сильно
возрастают шарнирный момент и сопротивление. Поэтому макси-
мальные отклонения рулей ограничиваются. Так, для руля направ-
ления эти углы не превышают обычно 6нтах = ±20...±25°.
Определяющими режимами для выбора максимальных значений
потребных углов отклонения руля направления являются взлет
при одностороннем отказе двигателя и боковом ветре с той же сто-
роны, а также посадка с несимметричной тягой при боковом ветре,
т. е. те же режимы, что и для выбора площади вертикального опе-
рения или Дв. 0.
Углы отклонения руля высоты вверх (отрицательные по пра-
вилу знаков) и вниз (положительные), как правило, делаются
469
неодинаковыми. Отрицательные углы отклонения (на кабрирова-
ние) делаются существенно больше положительных (на пикирова-
ние), так как для обеспечения балансировки на больших углах
атаки (при полете на малых скоростях или при создании поло-
жительной перегрузки во время выполнения маневров) руль вы-
соты должен создавать значительно большие моменты на кабри-
рование, чем на пикирование. Поэтому максимальные углы отк-
лонения руля высоты вверх обычно лежат в пределах 6вшах =
= —25...30°, а вниз — в пределах 6вшах — +15...+20°.
Потребные углы отклонения руля высоты можно определять
е tn, (а, М)
с помощью выражения ов =--------—-.
(М)
Зависимости mz — f (а, М) для современных самолетов со
стреловидными и треугольными крыльями имеют характерный
вид «с ложками», показанный на рис. 17.8, а. На этом рисунке
отчетливо видно появление на углах атаки порядка 12...15° зоны
продольной статической наустойчивости по перегрузке, вызывае-
мой возникновением концевых срывов на крыле и неблагоприят-
ным изменением скоса потока в зоне горизонтального оперения.
Эти срывы и связанная с ними продольная статическая не-
устойчивость, как правило, возникают при значениях углов ата-
ки, меньших критического акрит. Однако превышение значений
углов атаки, при которых наступает продольная статическая не-
устойчивость, приводит к тому, что вследствие появляющегося
Рис. 17.8. Характер изменения коэффициента продольного момента по
углам атаки самолета со стреловидным крылом при различных числах М (а)
и соответствующие балансировочные кривые отклонений руля высоты для чисел
М = 0,85 и М > 1 (б):
б = т /т$в;--------значения т при полном отклонении руля высоты вниз б ==
в г z z J в max
= 15°; / — нормируемый запас по моменту на пикирование; II —минимальный запас
по отклонению руля высоты вниз при М — 0,85
470
прироста момента на кабрирование самолет начинает самопроиз-
вольно стремиться еще больше увеличить угол атаки (так назы-
ваемое явление «подхвата») и, если вовремя не вмешается летчик
(или автоматическая система ограничения углов атаки), могут
быть превышены критические значения угла атаки с последующим
сваливанием.
Поэтому для современных скоростных самолетов вводятся
ограничения по допустимым углам атаки адоп, обеспечивающие
в нормальных условиях эксплуатации самолета с заданной сте-
пенью продольной статической устойчивости *. При этом вслед-
ствие того, что адОП < акрит, несущие свойства крыльев совре-
менных самолетов использовать полностью не удается.
Если же при попадании самолета в зону с сильной атмосфер-
ной турбулентностью или вследствие ошибки летчика значения адоп
будут превышены, то эффективность руля высоты должна обеспе-
чивать возможность создания необходимого момента на пикиро-
вание для вывода самолета на безопасные углы атаки а < адоп.
Этот режим является определяющим для выбора максимального
угла отклонения руля высоты вниз (рис. 17.8, б).
Определяющими режимами для выбора максимальных углов
отклонения руля высоты вверх (или цельноповоротного стабили-
затора — носком вниз) являются взлет и посадка с предельно пе-
редней центровкой для самолетов неманевренных и полет на боль-
ших высотах со сверхзвуковыми скоростями — для самолетов ма-
невренных.
Обеспечение необходимой маневренности в вертикальной пло-
скости, определяемой диапазоном реализуемых значений коэф-
фициента су, достигается как получением достаточно высоких не-
сущих свойств крыла, так и обеспечением достаточной эффектив-
ности органа продольного управления для создания больших
балансировочных моментов. Это определяется соотношением
Пу расп — Су расп/^р г. п>
(17-4)
2G
где суг. п = ---значение су в
горизонтальном полете, а
Су расп — располагаемое на данном режиме полета значение су.
Максимальное значение су, на котором может быть сбаланси-
рован самолет при полном отклонении органа продольного уп-
равления (Срввшах) легко определяется из уравнения продольных
моментов:
w2q + wzZ<Bz + + «гВ6в max
max Су
т,у
(17-5)
При переходе на сверхзвуковые скорости полета продольная
статическая устойчивость самолета тСу, как правило, возрастает,
* По НЛГС-2 значение адОп в этом случае должно быть меньше значения угла
атаки начала потери продольной статической устойчивости на 3°.
471
а эффективность органов продольного управления (особенно ру-
лей высоты т®в) значительно снижается (см. рис. 17.2), что и при-
водит к тому, что на этих режимах полета насущие способности
крыла при маневрах не всегда могут быть полностью использова-
ны. Поэтому, если в ТТТ к самолету предусматривается получе-
ние определенной перегрузки на заданных числах М и высотах
полета, то при проектировании органов продольного управления
из соотношения (17.4) необходимо определить потребные значе-
ния су расп на этих режимах, а затем из (17.5) определить потреб-
ное значение 6в тах или т®в. Если необходимая эффективность
продольного управления рулем высоты т®в при этом не обеспечи-
вается, следует применять цельноповоротный стабилизатор,
который вследствие существенно более высокой эффективности т^в
обеспечивает более полное использование несущих свойств крыла
и существенное повышение маневренности самолета (рис. 17.9).
При определении максимального потребного балансировочного
угла отклонения руля высоты вверх бЕтах из уравнения продоль-
ных моментов самолета для взлетно-посадочных режимов не сле-
дует забывать об обеспечении маневренного запаса по углам от-
Рис. 17.9. Изменение эффективности продольного управления при пере-
ходе на цельноповоротный управляемый стабилизатор:
а — используемые значения коэффициента Су крыла при балансировке рулем высоты
и управляемым стабилизатором (су дОП” ограничение коэффициента Су несущими спо-
собностями крыла, началом тряски самолета или выходом в зону продольной статиче-
ской неустойчивости; / — диапазон чисел М, в котором несущие способности крыла прн
руле высоты не могут быть полностью использованы; Су^ тах — при управляемом стаби-
лизаторе; ^gmax“ ПРИ РУЛе высоты); б — ограничение высот, на которых самолет мо-
жет быть сбалансирован на заданной перегрузке рулем высоты (сплошные кривые) и уве-
личение этих высот при сверхзвуковых скоростях в случае перехода на продольное упра-
вление цельноповоротиым стабилизатором (пункт
472
КЛойенйя руля. Этот запас, необходимый для обеспечения мини-
мально допустимой маневренности самолета при корректировании
траектории и парировании атмосферных возмущений, может
быть определен из выражения
as Iz (dtUzIdt)^
пип. зап — л >
где (dfajdt)3 — задаваемое техническими требованиями к самолету
минимально допустимое угловое ускорение, которое должно обе-
спечиваться эффективностью органа продольного управления.
Таким образом бЕтах = бв>далшах А6в-зап.
Аналогичные «маневренные» запасы по углам отклонения дол-
жны быть обеспечены при выборе максимальных углов отклоне-
ния руля направления и элеронов.
Для облегчения балансировки дозвуковых тяжелых самолетов
на больших углах атаки (взлет—посадка) стабилизатор этих
самолетов (при управлении рулем высоты) проектируется, как
правило, переставным, т. е. с переменным углом установки (<рв =
= var). Изменение углов установки стабилизатора расширяет диа-
пазон центровок, сдвигая вперед предельно допустимую переднюю
центровку хт#п>п при том же значении Лг. 0 (см. рис. 7.8, штрих-
пунктирная линия). Угол установки стабилизатора изменяют
в пределах +3 ... —12 °C.
Выбор площади триммеров рулей (аэродинамических серво-
компенсаторов) при безбустерном управлении осуществляется из
условия полного снятия усилий (балансировки по усилиям)
с рычагов управления на всех режимах длительного полета,
включая режимы полета с несимметричной тягой и при боковом
ветре. Это условие выполняется при
= тш0 + + тшб + ШшТ = 0, (17.6)
откуда (Шшт)п0Тр = — (тш0 + Ш^Обал + Шшббал),
где производная ml = дтш/дт зависит от относительной площа-
ди триммера STp = STp/Sp и расстояния его от оси вращения руля.
Площадь триммеров рулей обычно лежит в пределах STp =
= (0,06...0,12) Sp, причем большие значения характерны для тя-
желых транспортных и военных самолетов с большим разносом
двигателей и большим диапазоном центровок.
Углы отклонения триммеров обычно лежат в пределах ттах —
= ±(8...12) °C.
17.4. ПРОЕКТИРОВАНИЕ КОНСТРУКТИВНО-СИЛОВОЙ
СХЕМЫ И СХЕМЫ СТЫКОВКИ ОПЕРЕНИЯ
Проектирование конструктивно-силовой схемы оперения и
схемы его стыковки должно проводиться уже на начальных стади-
ях разработки проекта самолета в связи с тем, что силовые эле-
473
Менты горизонтального й вертикального оперений должны быть
увязаны друг с другом и с силовыми элементами фюзеляжа, рас-
положение которых зависит также от компоновки хвостовой (или
носовой при схеме «утка») части фюзеляжа — от наличия в ней
силовых элементов для крепления двигателей, днищ герметиче-
ских кабин, окантовок люков и пр.
Расположение двигателей в хвостовой части фюзеляжа вы-
двигает новое требование по расположению основных силовых эле-
ментов фюзеляжа и оперения, связанное с обеспечением безопас-
ности полета в случае рузрушения дисков турбин двигателей.
Все основные силовые элементы фюзеляжа и оперения должны быть
расположены таким образом, чтобы при разрушении турбины дви-
гателя они либо совсем не могли быть повреждены разлетающи-
мися с большой скоростью осколками, либо вероятность этого пов-
реждения была бы наименьшей. Особенно трудно это требование
выполняется при наличии в хвостовой части фюзеляжа третьего
(центрального) двигателя, устанавливаемого в настоящее время
на многих околозвуковых пассажирских самолетах [Ту-154,
Я'к-40, Боинг 727 и Локхид L-1011 «Трйстар» (США), DH-121
«Трайдент» (Англия), рис. 17.10].
•Остановимся сначала на конструктивно-силовых схемах и
схемах стыковки поверхностей оперения, состоящих из неподвиж-
ных частей (стабилизатора и киля) и шарнирно навешенных на
них рулей.
Рис. 17.10. Расположение двигателей и основных силовых элементов хво-
стовой части английского пассажирского самолета Де Хевилленд DH.121 «Трай-
дент», обеспечивающее минимальную вероятность разрушения основных сило-
вых элементов конструкции разлетающимися осколками дисков турбин двига-
телей:
1 — передний лонжерон киля; 2 — главный лонжерон киля; 3 — центральный двига-
тель; 4 — днище герметической кабины; 5 — боковые двигатели; / — плоскости дисков
турбин двигателей; // — сечение лонжерона; III — зона возможного разрушения лон-
жерона осколками турбины
474
При таком оперении конструктивно-силовые схемы стабили-
затора и киля практически не отличаются от соответствующих
схем крыльев, рассмотренных ранее. В конструкции этих агрега-
тов на легких самолетах применяется, как правило, двухлонжерон-
ная схема, на тяжелых самолетах — кессонная или многолон-
жеронная схема.
Рули, как правило, выполняют по однолонжеронной схеме
с нервюрами, расположенными перпендикулярно лонжерону.
Часто в хвостовой части рулей вместо нервюр используют клееные
или сварные конструкции с сотовым заполнителем или пеноза-
полнителем.
При расчленении рулей на секции с независимыми приводами,
применяемыми на тяжелых самолетах для повышения безопасности
полета, каждая из секций подвешивается на двух опорах и не
связывается с соседними. Количество секций в этом случае вы-
бирается, исходя из принятой в проекте степени резервирования
и допустимого числа отказов бустеров.
Наиболее легкой получается конструкция в том случае, если
удается пропустить через фюзеляж основные Лиловые элементы
оперения, работающие на изгиб (лонжероны или кессон). Однако
такую конструкцию не всегда удается выполнить на легких само-
летах с двигателями, расположенными в хвостовой части фюзе-
ляжа.
Если горизонтальное оперение на таких самолетах нельзя
перенести в верхнюю или нижнюю часть сечения фюзеляжа, то
лонжероны стабилизатора так же, как и киля, крепятся стыковыми
узлами к усиленным шпангоутам фюзеляжа. Во избежание перетя-
желения конструкции необходимо стремиться к тому, чтобы сты-
ковые узлы киля и стабилизатора всегда располагались на одних
и тех же усиленных шпангоутах фюзеляжа (рис. 17.11). При
5
Рис. 17.11. Конструктивно-силовая схема стыковки опереиия с усиленными
шпангоутами фюзеляжа, внутри которого установлен двигатель:
I — усиленные продольные элементы; 2 — стыковые узлы; 3 — двигатель; 4 — коль-
цевой силовой шпангоут; 5 — вариант установки наклонных шпангоутов
475
такой схеме крепления стреловидного оперения (так же как и кры-
ла) изгибающий момент, воспринимаемый продольным элементом
оперения (изображен вектором Л4ИЗГ. оп), у борта фюзеляжа рас-
кладывается на две составляющие, действующие вдоль плоскости
наибольшей жесткости шпангоута Л4кр. ш и перпендикулярно ей
Мизг. ш.
При установке стабилизатора с неразрезанными продольными
элементами в верхней части сечения фюзеляжа средняя часть
(кессон) стабилизатора пропускается между двумя силовыми
шпангоутами фюзеляжа (рис. 17.12). Задний лонжерон стабили-
затора крепится к заднему из этих шпангоутов, передний — к пе-
реднему. Если стабилизатор проектируется переставным, то не-
подвижными узлами, относительно которых происходит поворот
стабилизатора, как правило, делают задние, а передние узлы креп-
ления заменяют кронштейном крепления механизма привода,
как это показано на рис. 17.12.
Для более равномерного распределения нагрузок на передний
и задний усиленные шпангоуты фюзеляжа при несимметричном
нагружении правой и левой половин горизонтального оперения
узел крепления механизма привода переставного стабилизатора
может выполняться с направляющими рельсами или с двухзвенни-
ком (типа шлиц-шарнирного, применяемого на стойках шасси),
Рис. 17.12. Схема установки стабилизатора с изменяемым углом установки
в верхней части сечения фюзеляжа:
/ — передний лоижерои киля; 2 — продольные элементы (усиленные стрингеры), вое*
принимающие составляющую ш, возникающую при передаче изгибающего момента
со стреловидного киля иа прямые шпангоуты фюзеляжа (см. рис. 17.11); 3 — гайка
с шарнирной подвеской; 4 — ходовой винт механизма перестановки стабилизатора; 5 —
привод механизма перестановки (гидро-или электродвигатель с редуктором); 6 — перед-
ний усиленный шпангоут фюзеляжа (иа поперечном сечении показан условным конту-
ром); 7 — полушпангоуты (со срезаииой верхней частью); 8 — бортовые продольные эле-
менты (усиленные стрингеры, окантовывающие вырез для кессона стабилизатора); 9 —
задний силовой шпангоут фюзеляжа; 10 — узлы крепления стабилизатора к фюзеляжу;
11 — задний лоижерои киля; 12 — секторные пластины-обтекатели, закрывающие про-
рези в борту фюзеляжа (коитур выреза обшивки в бортах фюзеляжа для обеспечения воз-
можности изменения угла установки кессона стабилизатора показан пунктиром, кессои
стабилизатора заштрихован); I — полетное положение; 11 — взлетно-посадочное поло»
женне; III — прорезь в борту фюзеляжа
476
воспринимающими часть нагрузок от изгибающего момента.
Примеры таких конструкций показаны на рис. 17.13, б, в. Для
сравнения на рис. 17.13, а приведена схема, в которой изгибающий
момент от несимметричной нагрузки на правой и левой консолях
горизонтального оперения воспринимается только задними узлами
крепления кессона стабилизатора; балансировочная и маневрен-
ная нагрузка (Yr, 0) воспринимается задними узлами и ходовым
винтом привода.
В схеме рис. 17.13, б, благодаря установке у переднего узла
шлиц-шарнирного двухзвенника, задний узел крепления кессона
стабилизатора частично разгружается от изгибающего момента;
сила Уг> о, как и при схеме рис. 17.13, а, воспринимается задними
узлами и ходовым винтом привода.
Изменение угла установки стабилизатора, как правило, осу-
ществляется с помощью винтовового механизма (подъемника),
приводимого во вращение от гидро- или электромоторов, а иногда
и вручную с помощью аварийной механической системы, связы-
вающей подъемник со специальным штурвальчиком в кабине.
Винтовой подъемник может крепиться непосредственно к крон-
штейну стабилизатора. Но в этом случае вся нагрузка с горизон-
тального оперения (за исключением части, приходящейся на зад-
ние узлы крепления стабилизатора) должна восприниматься
Рис. 17.13. Различные варианты выполнения переднего узла привода ста-
билизатора с изменяемым углом установки:
а — без дополнительных силовых элементов; б — с шлиц-шариириым трехзвеиииком;
в — с шлиц-шариирным трехзвеиииком с кинематическим замком; 1 — кессон стабили-
затора; 2 — гайка с шарнирной подвеской; 3 — ходовой винт; 4 — привод механизма
перестановки; 5 — задние узлы крепления стабилизатора (к фюзеляжу или килю); 6 —
кронштейн подвески гайки 2; 7 — звенья шлиц-шариира; 8 — звенья кинематического
замка, выполненные в виде шлиц-шарнирного механизма; 9 — предохранительный упор
кинематического замка; / — полетное положение; II — взлетио-посадочное положение;
III — звенья кинематического замка распрямлены, нагрузка иа ходовой вннт не пере-
дается
477
подъемником (рис. 17.13, а, б). Для разгрузки подъемника в по- и
лете на больших скоростях, когда стабилизатор отклонен носком 1
вверх (положительные углы установки) и аэродинамические на- 1
грузки максимальны, может применяться специальный шлиц- 1
шарнирный механизм с кинематическим замком, воспринимающим |
эти нагрузки и разгружающим подъемник. Звенья этого механизма |
также частично разгружают задние углы крепления стабилизатора |
от изгибающего момента (рис. 17.13, в). 1
При Т-образной схеме оперения возникает ряд особых кон- 1
структивных задач, отличных от задач размещения горизонталь- ]
кого оперения на фюзеляже. ‘
Для уменьшения вредной интерференции потоков, обтекающих J
горизонтальное и вертикальное оперение, рекомендуется гори-
зонтальное оперение устанавливать таким образом, чтобы линия
максимальных толщин его профилей была сдвинута назад отно- '
сительно этой линии вертикального оперения на величину е а? ?
« (0,10...0,15) &в,0.
Установка горизонтального оперения на вертикальном при-
водит к существенно более высокой загрузке последнего, чем в рас- <
смотренных ранее схемах. Эти дополнительные нагрузки на
вертикальное оперение возникают как при скольжении (вследствие
неравномерного обтекания правой и левой консолей горизонталь-
ного оперения на вертикальное оперение действует изгибающий
момент перпендикулярно его плоскости), так и в полете без сколь-
жения (балансировочная и маневренная нагрузки на горизонталь-
ном оперении создают для неподвижной части вертикального опе-
рения дополнительный изгибающий момент в его плоскости).
Для восприятия этих дополнительных нагрузок конструкция
вертикального оперения должна выполняться более мощной, что
заметно сказывается на увеличении ее массы (на 50...70 %) по
сравнению с массой свободного вертикального оперения той же
площади. Однако увеличение эффективности вертикального опе-
рения из-за установки на нем горизонтального, играющего в дан-
ном случае роль концевой шайбы, позволяет уменьшить потреб-
ное значение 8В. 0. Вследствие этого общее увеличение массы кон-
струкции Т-образного оперения снижается до 15...20 %.
При выборе положения лонжеронов киля с расположенным на
нем горизонтальном оперении приходится искать оптимальное рас-
стояние между лонжеронами киля, при котором масса конструк-
ции получается наименьшей. Обычно это достигается при распо-
ложении переднего лонжерона в пределах (0,15...0,20) ЬВ10,
а заднего — в пределах (0,60...0,65) Ьв.о.
Шарнирный узел поворота стабилизатора, как правило, ус-
танавливается на заднем лонжероне киля. Механизм привода ста-
билизатора крепится к переднему лонжерону и усиленным нервю-
рам. - к
Место стыка горизонтального и вертикального оперений за-
крывается обтекателем, конструкции которого могут быть раз-
478
Рис. 17.14. Различные варианты оформления внешних обводов при уста-
новке переставного стабилизатора на киле:
а — применение неподвижного обтекателя прн небольших изменениях угла установки
стабилизатора; б — обтекатель стыка горизонтального и вертикального оперений с не-
подвижной передней и подвижной задней частью; в — подвижный обтекатель, связанный
со стабилизатором (схема позволяет максимально увеличить хорду иеразрезиой части
стабилизатора-кессона); 1 — контур выреза обшивки по бокам обтекателя; 2 — кессон
стабилизатора; 3 — механизм перестановки стабилизатора; 4 — передний лонжерон
киля; 5 — силовая концевая нервюра киля; 6 — задний лонжерон киля; 7 — шарнир-
ный узел крепления стабилизатора к килю; 8 — обтекатель; 9 — подвижные скользя-
щие пластины, перекрывающие прорези в боковых панелях обтекателя; 10 — подвижная
(связанная со стабилизатором) задняя часть обтекателя; 11 — линия сочленения подвиж-
ной и неподвижной частей обтекателя; 12 — кронштейн привода стабилизатора; 13 —
передняя неподвижная часть обтекателя, закрепленная на киле; 14 — подвижный об-
текатель, связанный со стабилизатором; 15 — верхняя закоицовка киля, охватываемая
обтекателем при взлетно-посадочном положении стабилизатора; 16 — линия перехода
обвода киля в обвод охватываемой обтекателем верхней закоицовки; / — потребное уве-
личение обтекателя при закрывании верхних щелей при взлете и посадке В
делены на три типа. Если обтекатель достаточно большой
на (рис. 17.14, а), конструкция стыка напоминает соединение под-
вижного стабилизатора с фюзеляжем. В конструкции, показанной
на рис. 17.14,6, хвостовая часть обтекателя подвижна, так как
связана со стабилизатором, передняя — неподвижно крепится
к килю.
На тяжелых самолетах, где из-за большой площади горизон-
тального оперения нагрузки весьма велики и кессон стабилизатора
479
вследствие этого Имеет
значительные размеры,
применяется схема сты-
ка с подвижным обте-
кателем, передняя часть
которого охватывает но-
сок верхней части киля
(рис. 17.14, в).
Рассмотрим теперь
конструктивно-силовые
схемы, схемы стыковки
и привода цельнопово-
ротных поверхностей
управления. В кон-
струкциях этих поверх-
ностей применяются две
схемы размещения под-
шипников оси враще-
ния, которые во многом
определяют конструк-
тивно-силовые схемы
этих повепхностей.
Рис. 17.15. Установка подшипников оси
вращения стреловидного стабилизатора:
а — подшипники установлены на силовых шпан-
гоутах фюзеляжа, ось жестко связана с конструк-
цией стабилизатора; б — подшипники установлены
в стабилизаторе, ось жестко связана с конструкцией
фюзеляжа (силовыми шпангоутами); 1 — контур
двигателя; 2 — подшипник оси; 3 — рычаг при-
вода; ГТК — плоскость качания рычага привода
В первой схеме (рис. 17.15, а) подшипники устанавливают на
силовых шпангоутах фюзеляжа (или лонжеронах киля), ось не-
подвижно связана с конструкцией стабилизатора. Во второй
схеме (рис. 17.15, б) ось неподвижно связана с конструкцией
фюзеляжа, а подшипники устанавливают в самом стабилизаторе.
Конструктивные особенности первой схемы связаны с тем,
что все виды нагрузок (изгибающий и крутящий моменты, перере-
зывающая и нормальная силы), действующих на стабилизатор,
передаются на фюзеляж только через одну ось, которую поэтому
вне стабилизатора выполняют трубчатого сечения. У бортовой нер-
вюры внутри стабилизатора трубчатое сечение оси переводится
в двутавровое сечение лонжерона стабилизатора, которое лучше
воспринимает изгиб, а крутящий момент воспринимается конту-
ром стабилизатора. Очевидно, что для обеспечения наименьшей
массы оси при ее наибольшей жесткости необходимо проектировать
ось максимально большого диаметра. Для этого ее необходимо уста-
навливать в месте наибольшей толщины профилей стабилизатора.
Однако, как следует из рис. 17.16, а, при таком положении пря-
мой оси (Л) расстояние от нее до центра давления стреловидного
стабилизатора, особенно на сверхзвуковых скоростях, получается
очень большим и, следовательно, большим будет шарнирный
момент стабилизатора. Если для уменьшения шарнирного момента
установить прямую ось стреловидного стабилизатора таким обра-
зом, чтобы она проходила приблизительно посередине между поло-
жениями центра давления при дозвуковых и сверхзвуковых ско-
ростях (В), то шарнирные моменты стабилизатора существенно
480
уменьшатся, но обеспечить прочность (и особенно жесткость)
оси вследствие малой строительной высоты в хвостовой части про-
филя практически невозможно.
Поэтому при проектировании цельноповоротных поверхностей
урпавления с большим углом стреловидности их ось часто уста-
навливают с некоторым углом стреловидности хОс, как показано
на рис 17.16, а (положение С), а также в схемах, приведенных
на рис. 17.15. При таком положении оси обеспечиваются как раз-
мещение ее приблизительно по линии максимальных толщин про-
филей, так и наименьшие значения шарнирных моментов.
Однако выбор стреловидности оси вращения цельноповорот-
ных поверхностей управления не настолько прост, как это может
показаться из приведенных выше элементарных соображений. Де-
ло в том, что при этом выборе приходится учитывать и ряд других
важных факторов (потребную мощность привода, эффективность
поворотной поверхности и создаваемое ею сопротивление, кон-
структивную сложность выполнения узлов крепления и привода
и др.).
Потребная мощность привода определяется выражением
^потр = max^max
где Мщ шах — максимальный шарнирный момент поворотной по-
верхности относительно ее оси вращения, а бшах — (d8/dt)mail
максимальное значение потребной скорости поворота этой оси,
определяемое управляемостью самолета.
С увеличением угла стреловидности оси, как это показано
на рис. 17.16, б слева вверху, расстояние от этой оси до центров
давлений поверхности управления первоначально уменьшается,
(17-7)
Зона максимальных
о)
Рис. 17.16. Различные варианты положения оси вращения стреловидного
стабилизатора (а) и выбор оптимальной стреловидности оси вращения из усло-
вия минимальной потребной мощности привода (б)
16 С. М. Егер и др.
481
а затем вновь начинает увеличиваться. Также меняется и шарнир- 1
ный момент (штрихпунктирные линии на рис. 17.16, б). 1
Изменение действующих на поверхность управления аэроди- |
намических сил, а следовательно, и ее эффективность как органа 1
управления, определяется изменением угла установки этой по- 1
верхности в набегающем потоке (Д<р), а не угла поворота оси (Дб). j
Эти углы связаны соотношением 1
tg Дер tg Дб cos %ос, (17.8)
из которого следует, что при увеличении угла стреловидности ;
оси %ос для сохранения неизменными характеристик управля- \
емости необходимо увеличить как сами углы поворота Дб оси, *
так и скорость их изменения б. Вследствие этого увеличивается
и потребная мощность привода, что на рис. 17.16, б иллюстриру-
ется пунктирной кривой
Таким образом, для каждой формы стреловидной поверхности
управления определяется оптимальный угол стреловидности оси
ее вращения из условия минимальной потребной мощности при-
вода (%ooopt на рис. 17.16, б).
Аэродинамическое качество поверхности управления харак-
теризуется соотношением между составляющими аэродинамиче-
ских сил, направленными перпендикулярно потоку (полезная
подъемная сила, используемая для создания управляющих момен-
тов) и вдоль него (вредная сила сопротивления). Сростом стрело-
видности оси вращения эта характеристика заметно ухудшается,
что вполне объяснимо, поскольку с ростом стреловидности оси
отклоняемая поверхность все больше поворачивается не «в потоке»,
а «поперек потока».
Наряду с ухудшением аэродинамического качества примене-
ние поверхностей управления со стреловидной осью вращения вы-
зывает ряд конструктивных трудностей, связанных с необходи-
мостью разделения осей для правой и левой половин стабилиза-
тора, а также с ростом потребных углов поворота этих осей при
увеличении их стреловидности.
Если ось общая, то изгибающие моменты с правой и левой по-
ловин стабилизатора замыкаются на ней и на фюзеляж не пере-
даются. Поэтому, если ось прямая, конструкция стыковых узлов
и шпангоутов получается наиболее легкой. Кроме того, в этом
случае легко осуществляется компоновка привода стабилизатора,
так как закрепленный на оси рычаг качается в плоскости, парал-
лельной оси самолета. Поэтому силовые приводы стабилизатора
(гидроусилители) легко компонуются даже в достаточно узком
пространстве между бортом фюзеляжа и расположенным внутри
двигателем, что часто бывает на легких сверхзвуковых самолетах.
Выполнение стреловидных осей неразрезными невозможно,
в этом случае конструкция стыковых узлов и шпангоутов полу-
чается тяжелее конструкции с общей прямой осью вследствие пе-
редачи на шпангоуты изгибающих моментов с каждой из двух
482
половин стабилизатора. При этом усложняется также компоновка
приводов половин стабилизатора, так как рычаги, связанные со
стреловидными осями, качаются в пересекающихся плоскостях,
расположенных под углами %ос к продольной оси самолета (см.
рис. 17.15). Поэтому гидроусилители могут устанавливаться го-
ризонтально только либо выше, либо ниже установленных в хво-
стовой части фюзеляжа двигателей (рис. 17.17, а). Если стабили-
затор установлен в среднем положении, компоновка гидроусили-
телей в достаточно узком пространстве между бортами фюзеляжа
и двигателями весьма затруднена и единственным практически
возможным их положением является вертикальное (рис. 17.17, б).
Перечисленные выше недостатки схем цельноповоротных по-
верхностей управления со стреловидными осями вращения за-
частую практически сводят на нет выигрыш от уменьшения шарнир-
ных моментов. В связи с этим на новых сверхзвуковых самолетах
все большее распространение получает схема цельноповоротных
поверхностей управления с нестреловидной осью вращения (на-
пример, самолеты F-15, F-16). Для уменьшения шарнирных момен-
тов при нестреловидной оси вращения цельноповоротных поверх-
ностей управления применяется специальная форма этих поверх-
ностей в плане (треугольная или трапециевидная малого удлине-
ния с весьма тонкими профилями, как, например, на рис. 17.18, в,
г, д, е).
Поскольку ось вращения цельноповоротных поверхностей уп-
равления для уменьшения величин шарнирных моментов, как пра-
Рис. 17.17. Компоновка гидроусилителей привода управляемого стабили-
затора при стреловидных осях:
а — размещение гидроусилителей выше двигателя с креплением их на общем кронштейне,
связанном с усиленными продольными элементами между силовыми шпангоутами фю-
зеляжа; / — подшипники полуосей правой и левой половин стабилизатора; 2— рычаги
привода половин стабилизатора; 3 — гидроусилители; 4 — кронштейн крепления гидро-
усилителей; б — вариант установки гидроусилителей в вертикальных плоскостях с кре-
плением на силовом шпангоуте; / — силовые шпангоуты заделки подшипников полуосей
правой и левой половин стабилизатора; 2 — рычаги привода правой и левой половин;
3 — подшипники полуосей; 4 — кронштейн крепления гидроусилителей на силовом
шпангоуте; 5 — гидроусилители
16*
483
Рис. 17.18. Конструктивно-силовые схемы, применяемые при проектиро-
вании цельноповоротных поверхностей управления с заделанной осью (подшип-
ники в фюзеляже):
а — прн стреловидной форме с большим углом стреловидности (внизу показан вариант
оформления законцовки при недостаточной жесткости н возникновении вибраций); б —
прн сравнительно небольшой стреловидности; в — при треугольном оперении; г, д —
различные варианты силовых схем оперения малого удлинения с небольшой стреловид-
ностью (иа схеме г пунктиром показана применяемая иногда в подобных схемах косая
нервюра); е — нестреловидное оперение малого удлинения
вило, располагается между центрами давления при до- и сверх-
звуковых скоростях, то на режимах полета с дозвуковыми скоро-
стями такие поверхности оказываются перекомпенсированными
(статически неустойчивыми, так как шарнирный момент стреми-
тся все дальше отклонять их от исходного положения). Это исклю-
чает возможность использования перехода на аварийное безбу-
стерное управление и для повышения безопасности полета заста-
вляет применять более высокие степени резервирования приво-
дов.
Наиболее часто применяемые конструктивно-силовые схемы
цельноповоротных поверхностей управления с заделанной осью
(подшипники в фюзеляже) показаны на рис. 17.18.
Глава 18
ПРОЕКТИРОВАНИЕ СИСТЕМ УПРАВЛЕНИЯ
САМОЛЕТОМ
Основные отличия проектирования системы управления само-
лета от проектирования других его агрегатов и систем связаны
с той особенностью системы управления, что она является следя-
щей системой, связывающей летчика с органами управления
самолета. Поэтому при проектировании этой системы, выборе ее
параметров и характеристик приходится в значительной мере учи-
тывать «человеческий» фактор, который практически не прини-
мался во внимание при проектировании других агрегатов и систем.
Помимо этого, чтобы проектирование оказалось успешным, т. е.
чтобы спроектированная система управления обеспечивала необ-
ходимые характеристики управляемости проектируемого самолета,
приходится учитывать также не только характеристики приводн-
484
мых этой системой рулевых поверхностей, их шарнирные моменты,
инерционно-массовые, жесткостные и др. характеристики, но и
аэродинамические, инерционные и динамические характеристики
самого самолета.
18.1. КОНТУР УПРАВЛЕНИЯ. ЕГО ОСНОВНЫЕ ЭЛЕМЕНТЫ
И ИХ ХАРАКТЕРИСТИКИ
Управление самолетом может осуществляться либо летчиком,
либо автоматическими системами.
Большую роль в информации летчика об изменении режима
полета и о действии органов управления играют физические ощу-
щения перегрузок и изменения усилий на рычагах управления.
Сравнение текущих значений параметров полета с потребными поз-
воляет летчику на основании определенных навыков пилотирова-
ния формировать управляющие сигналы в виде перемещений рыча-
гов управления. Эти перемещения рычагов преобразуются систе-
мой управления в соответствующие отклонения органов управле-
ния (рулей) самолета. Отклонение органов управления приводит
к тому, что самолет начинает менять параметры полета. С помо-
щью органов чувств летчик контролирует результаты своих воз-
действий на органы управления (т. е. изменение параметров поле-
та самолета), стремясь устранить рассогласование между теку-
щими и потребными их значениями, и прекращает воздействие
на рычаги управления, если эти значения соответствуют друг
другу.
Таким образом, в полете, образуется замкнутый контур управ-
ления, состоящий из трех основных связанных друг с другом
элементов (звеньев): летчика, системы управления и самолета
(рис. 18.1, а).
Летчик как элемент контура управления, в свою очередь,
упрощенно может рассматриваться как система автоматического
регулирования, образующаяся тремя основными связанными
между собой элементами (рис. 18.1, б): органами чувств (вос-
принимающие органы — «датчики»); центральной нервной систе-
мой, выполняющей функции обработки информации и выработки
решения, и исполнительными органами — мускулами рук, ног,
спины. Движения исполнительных органов летчика и развивае-
мые ими усилия являются «выходными сигналами» («выходом»)
человека как звена контура управления.
Возможность дозирования усилий и перемещений исполнитель-
ных органов позволяет летчику, знакомому с характеристиками
управляемости данного самолета, осуществлять потребные изме-
нения режима полета путем соответствующего перемещения ры-
чагов управления, прилагая к ним определенные усилия.
Изменение усилий ощущается летчиками лучше, чем переме-
щения, и точность дозирования усилий существенно выше точ-
ности дозирования перемещений.
485
a)
Исполни тель ные
органы (мускулы)
По перемещениям
6)
Рис. 18.1. Схема замкнутого контура управления «летчик — система упра-
вления — самолет» (а) и структурная схема оператора-летчика как командного
звена контура управления, устраняющего рассогласование между потребным
и текущим значениями какого-либо параметра путем воздействия на рычаг упра-
вления (б):
е (i) — рассогласование между текущими и потребными значениями параметров полета;
Р (i), X (i) —усилия, прилагаемые к рычагам управления, и их перемещения; в — от-
клонения органов управления; V, Н, ®, п, а, у — параметры полета; вх. — входные
восприятия (зрительные, слуховые, ощущения ускорений); вых. — выходные воздей-
ствия иа рычаги управления
полном отсутствии из-
при изменении регули-
слишком малом или
Это связано с тем,
перемещения рычагов
Как показывают исследования, потеря устойчивости контура
управления происходит не только при
менения усилий на рычаге управления
руемого параметра полета, но и при
слишком большом таком изменении,
что летчики наиболее точно дозируют
управления и прикладываемые к ним усилия в определенном ди-
апазоне их значений, как это видно из рис. 18.2. На этом рисунке
знаком А обозначена относительная ошибка Г А = —~х) или
-— L ^Потр
Д == (ДР)/Рпотр J в перемещении рычага управления и приклады-
ваемом к нему усилий при различных их потребных значениях
(Л-потр> ^потр)-
Оптимальные значения перемещений рычагов управления и
прикладываемых к ним усилий, необходимые для выполнения опре-
деленных маневров (например, для изменения нормальной пере-
грузки на единицу — показатели продольной статической управ-
ляемости х^и и определяются из длительной практики
эксплуатации и задаются в соответствующих требованиях к про-
486
Рис. 18.3. Характер реакции летчика на ступенчатое изменение (рассогласо-
вание е0) регулируемого параметра при работе простым усилителем с инер-
ционностью и запаздыванием (а) и при применении форсирования для сокра-
щения времени регулирования (б)
Рис. 18.2. Характер зависимости относительной ошибки в перемещениях
рычага управления и прикладываемых к нему усилиях от величины их по-
требных значений
ектируемому самолету или же определяются в процессе его проек-
тирования с помощью моделирования процессов управления
на специальных стендах с использованием ЭВМ. Эти значения по-
казателей управляемости и должны обеспечиваться при проекти-
ровании системы управления.
Летчик как командное (или управляющее) звено контура управ-
ления обладает рядом свойств, влияющих на процесс управления.
Из этих свойств можно отметить следующие;
1. Запаздывание ответной реакции на внешние сигналы. Эта
величина в значительной степени зависит от тренированности лет-
чика и его психологического и физического состояния. Для обыч-
ных условий можно принимать время запаздывания реакции лет-
чика средней квалификации т = 0,2...0,3 с.*.
2. Инерционность, проявляющуюся в том, что летчик в своих
действиях не может мгновенно (т. е. «ступенчато») выйти на необ-
ходимый уровень ответной реакции (рис. 18.3, а).
3. Некоторую зону нечувствительности.
4. Способность к фильтрации внешних сигналов.
5. Способность к изменению собственной передаточной функции
в широких пределах (см., например, рис. 18.3, б), включая диф-
ференцирование и интегрирование, т. е. способность к реагирова-
нию не только на отклонения какого-либо параметра полета от
* Не следует путать это запаздывание реакции летчика на понятный для него
сигнал рассогласования между текущим и потребным значениями регулируемого
параметра полета и запаздыванием реакции на неожиданное изменение характера
поведения самолета, причина которого ему не сразу ясна. Так, например, как
показывает практика, летчики распознают отказ двигателя многодвигательного
самолета и начинают предпринимать меры противодействия лишь через 3...5 с.
487
потребного значения, но и на первую и вторую производные
(скорость и ускорение) этого отклонения, а также и на интеграл
этого отклонения.
6. Способность к формированию выходных командных сигна-
лов с определенной ограниченной точностью, зависящей от вели-
чины этих сигналов и их частоты.
7. Способность слежения за сигналами, поступающими с ча-
стотой не свыше 2,5...3,0 Гц (наличие полосы пропускания).
Несмотря на способность к изменению собственной передаточ-
ной функции в широких пределах, наиболее точно летчик работает
в контуре управления как одноканальный усилитель, последо-
вательно устраняющий рассогласование е (/) между текущим и
потребным значениями какого-либо одного параметра полета.
Однако запаздывание начала ответной реакции и инерцион-
ность в отработке корректирующего воздействия на внешний сиг-
нал удлиняют время устранения возникшего рассогласования, а
при большой частоте изменения сигнала рассогласования создают
и значительное запаздывание по фазе выходного сигнала летчика
по сравнению с необходимым. Так, например, при частоте измене-
ния входного сигнала рассогласования 0,5 Гц только запаздыва-
цие начала ответной реакции летчика на 0,2 с создает запаздыва-
ние его ответной реакции по фазе 36°, а при частоте 1 Гц—72°.
Если учесть, что собственные частоты колебаний современных са-
молетов, особенно на некоторых режимах полета, значительно уве-
личиваются и даже у тяжелых самолетов могут достигать 1 Гц
и более, то причина раскачки самолета летчиком на этих режимах
становится очевидной. В реальных условиях пилотирования лет-
чик, зная о наличии своего запаздывания и инерционности, начи-
нает форсировать свои действия, как это показано, например,
на рис. 18.3, б.
Самолет как объект управления имеет в пространстве шесть
степеней свободы, и его движение описывается шестью дифферен-
циальными уравнениями движения (Эйлера). Решение этих урав-
нений в общем случае позволило бы определять характер простран-
ственного движения самолета в любой момент времени и, в част-
ности, после воздействия летчика на органы управления, и также
позволило бы судить об устойчивости этого движения. Однако
непосредственное решение этих уравнений представляет извест-
ные трудности даже при применении современных ЭВМ. Если же
за исходный режим полета принять прямолинейный установив-
шийся полет без скольжения и считать отклонения параметров
движения от исходных значений достаточно небольшими (приме-
нить метод «малых возмущений»), то благодаря симметрии самолета
систему шести уравнений движения можно разделить на две не-
зависимые системы уравнений, с известной степенью точности опи-
сывающих движение самолета в плоскости симметрии (так называ-
емое продольное движение) и в двух других плоскостях (боковое
движение).
488
При использовании уравнений кинематических связей каждое
из движений (продольное и боковое) описывается системой че-
тырех дифференциальных уравнений. Система четырех уравнений
продольного движения описывает два колебательных движения,
развивающихся после прекращения воздействия на самолет внеш-
него возмущения (атмосферного воздействия, отклонения органа
управления, изменения тяги двигателей и пр.). Одно из этих дви-
жений (называемое короткопериодическим) развивается быстро
и имеет небольшой период (порядка 1...5 с), другое развивается
сравнительно медленно и имеет существенно больший период
(порядка нескольких десятков секунд). Это движение называют
длиннопериодическим.
Решение системы уравнений бокового движения показывает,
что у современных самолетов боковое движение, как правило,
представляет собой сумму двух апериодических и одного колеба-
тельного движения.
Длиннопериодическое продольное движение легко парируется
летчиком и не вызывает особого интереса. Апериодические боко-
вые движения, из которых одно является быстро затухающим дви-
жением крена, а другое — достаточно медленно развивающимся
«спиральным» движением, также не представляют особого инте-
реса для исследования, так как не оказывают серьезного влияния
на оценку летчиками управляемости самолета.
Другое дело — короткопериодическое продольное и колеба-
тельное боковое движения. Характер развития этих движений по-
сле действия внешних возмущений или отклонения рулей в решаю-
щей степени является критерием оценки летчиками устойчивости
и управляемости самолета. Эти движения самым подробным обра-
зом исследуются в процессе проектирования самолета с тем, чтобы
заранее разработать соответствующие мероприятия в случае,
если параметры этих движений оказываются неудовлетворитель-
ными. На стадии проектирования самолета эти исследования
проводятся с помощью ЭВМ (аналоговых и цифровых), реша-
ющих уравнения движения при варьировании проектных пара-
метров.
Примеры изменения параметров полета в продольном коротко-
периодическом движении при внешнем воздействии (ветровой по-
рыв) и при отклонении органа продольного уравнения показаны
на рис. 18.4. Аналогичный вид имеют переходные процессы и в
боковом колебательном движении. Поскольку параметры полета
в этих движениях связываются дифференциальными уравнениями
второго порядка, то характер переходных процессов целиком оп-
ределяется коэффициентами при соответствующих производных
рассматриваемых параметров. Так, затухание колебаний определя-
ется коэффициентом при первой производной, а их частота — коэф-
фициентом при нулевой производной. Если в качестве примера
рассмотреть изменение угла атаки в продольном короткопериоди-
489
Q)
Рнс. 18.4. Примеры изменения параметров полета в продольном коротко-
периодическом движении:
а — реакция устойчивого по перегрузке самолета на восходящий порыв; б — характер
переходного процесса установления нового значения нормальной перегрузки после сту-
пенчатого отклонения руля высоты и показатели продольной динамической устойчивости
н управляемости; Т — период собственных короткоперноднческнх колебаний; /Ср—
время срабатывания; 3ag— начальный заброс регулируемого параметра (в данном
случае — перегрузки); Дп ст—установившееся значение изменения регулируемого
у 33б
параметра; v = -------относительный начальный заброс — перерегулирование;
уст
/Ват ““ время затухания переходного процесса; %ат — число периодов колебаний до
момента затухания
ческом движении, то демпфирование этих колебаний определяется
коэффициентом а «“* + "7 , (18.1) Г2
а частота — коэффициентом
а Н + m“7r) п2 — Су г— . (18.2) Г 2
"о 2/71
В этих выражениях ц -------------относительная плотность само-
лета; пг — масса самолета; г-г = ----квадрат безразмерного ра-
диуса инерции самолета относительно поперечной оси О7г; 1г —
момент инерции самолета относительно той же оси.
Устойчивость самолета в короткопериодическом движении,
т. е. затухание колебаний определяется условиями аг > 0 и
а2 > 0.
Условие > 0 всегда выполняется, так как невозможно соз-
дать самолет, не обладающий положительным демпфированием,
ибо он имеет несущие поверхности (крыло, оперение и даже фю-
зеляж), вращение которых в воздушной среде создает некоторые
дополнительные аэродинамические силы, моменты которых всегда
будут препятствовать этому вращению. Другое дело, что на не-
которых режимах полета, особенно на больших высотах при
490
М > 1, это демпфирование оказывается недостаточным для полу-
чения хороших отзывов летчиков о динамической устойчивости
самолета, так как колебания самолета после возмущения доста-
точно долго не затухают.
Условие п2 > 0 выполняется, если
Оп = ГПги + WzZ/p- < 0. (18.3)
Коэффициент продольной статической устойчивости по пере-
грузке <т„ играет весьма существенную роль в формировании харак-
теристик продольной устойчивости и управляемости, по которым
оценивается возможность эксплуатации самолетов. Так, например,
этот коэффициент определяет значения важнейших показателей
продольной статической управляемости — расход рычага про-
дольного управления на единицу нормальной перегрузки
и расход усилия на рычаге продольного управления на единицу
перегрузки
(18.5)
Здесь в = dbB/dxB — коэффициент кинематической передачи
от рычага к органу продольного управления; Рхв = dPB/dxB —
градиент нарастания усилия на рычаге продольного управления
по его отклонению.
Из выражения (18.4) следует, что нулевой расход рычага
продольного управления на единицу перегрузки будет иметь ме-
(О
сто при <т„ = 0, т. е. при центровке хт. н = хР — тг /р. Она
называется нейтральной по перегрузке центровкой и обозначается
хт. н. Поскольку пилотирование при нулевом расходе рычага про-
дольного управления на перегрузку оказывается невозможным,
приходится ограничивать возможность смещения центровок назад
до некоторого предела, называемого предельно задней [центровки,
при которой обеспечиваются нормируемые минимально допусти-
мые ДЛЯ ДаННОГО Класса СамОЛеТОВ Величины | tTnlmln и
(рис. 18.5).
Выполнение условия (18.3), а также получение необходимых
характеристик управляемости, например (18.4) и (18.5), на
самолетах с неавтоматизированными системами управления до-
стигается при проектировании исключительно обеспечением соот-
ветствующей степени продольной статической устойчивости по
перегрузке тсу = хт — xF в процессе компоновки и центровки
самолета, поскольку значения члена т“г/ц у современных само-
летов достаточно невелики (порядка —0,02...0,03 на небольших
высотах, а с подъемом на большие высоты они уменьшаются до
491
-xs*
устойчивости (па пере-
грузке) -бп
минимальный
максимальный
Рис. 18.5. Характер зависимости расхода рычага продольного управления
на единицу перегрузки от центровки самолета (а) и взаимное расположение
центра масс (ц. м.), фокуса и нейтральной центровки у самолета, обладающего
продольной статической устойчивостью по перегрузке (б):
хт. п. з — предельно задняя центровка; хТ п п — предельно передняя центровка; тгУ =
= ^т-^;‘^ = хт-хтн
о
(18.6)
пренебрежимо малых величин). Степень продольной статической
устойчивости тсу в значительной мере определяет и характер та-
кого важного показателя продольной статической управляемости,
как балансировочные отклонения рычага продольного управления
по скорости и высоте полета, получаемые из известного уравнения
продольной балансировки (тг = 0):
тг0 + тСгси
*в. бал л
Аш. зтгЪ
Подводя итог изложенному выше, можно отметить, что харак-
теристики продольной устойчивости и управляемости самолета
определяются в основном следующими его характеристиками:
tng/S, гг, с*, тгу, тгг, т?.
Характеризующая продольное демпфирование производная
= дтг!да>г (где юг = ®zbA/V) складывается из частей, оп-
ределяемых крылом, фюзеляжем, гондолами двигателей и горизон-
тальным оперением. Основную часть производной момента про-
дольного демпфирования создает горизонтальное оперение; эту
часть с учетом влияния фюзеляжа можно определять по прибли-
женной формуле
S L?
т“гг.о+ф^-1,2С“г.о-^-Ь^. (18.7)
492
Относительная доля крыла в составе производной момента
продольного демпфирования самолета быстро возрастает с ростом
стреловидности крыла:
/Иг кр ~ - с" (А + 5Х tg а + CZ2 tg2 Х) - D*. (18.8)
У самолетов бесхвостой схемы весь момент продольного демп-
фирования создается крылом и фюзеляжем. Поэтому для полу-
чения достаточного демпфирования у самолетов такой схемы мо-
гут применяться только стреловидные (или треугольные) крылья.
Продольное демпфирование на дозвуковых скоростях заметно
увеличивается вследствие запаздывания скоса потока в зоне го-
ризонтального оперения. Это увеличение оценивается производной
d dfti? ct ds ct
ftlz —- — Си г о Си
z да у 1 ° дсу у
(18.9)
Sr, Л
Sb\
гдеа = -^-у------безразмерная скорость изменения угла атаки
при вращении самолета.
Для дозвуковых самолетов с крыльями умеренной стреловид-
ности величина производной т“ имеет значения порядка (0,4...
...0,6)
Исследования бокового колебательного движения, которое
отличается тесной взаимосвязью движений рыскания и крена, пока-
зывают, что, как уже отмечалось ранее (см. разд. 8.1.5), характер
этого движения определяется в основном производными **
т^х,
и туу, а также инерционно-массовыми характеристиками
4/х 2 = 4/у -
m/2 ’ у ml2
/х
'
18.2. ОСНОВНЫЕ ОСОБЕННОСТИ ХАРАКТЕРИСТИК
УСТОЙЧИВОСТИ И УПРАВЛЯЕМОСТИ СОВРЕМЕННЫХ
СКОРОСТНЫХ САМОЛЕТОВ И МЕТОДЫ ИХ УЛУЧШЕНИЯ
1. Прежде чем рассматривать особенности этих характеристик,
необходимо напомнить, что общей особенностью всех скоростных
самолетов является резкое увеличение шарнирных моментов орга-
нов управления при сверхзвуковых скоростях, связанное как
с ростом скоростного напора и перераспределением давлений по
поверхности органов управления при превышении Мьр, так и
* Выражения для коэффициентов А, В, С, D, зависящих от сужения крыла
и координаты центра масс (хТ), а также графики для их определения приведены,
например, в [24], с. 319...322. Там же показано, что увеличение угла стрело-
видности крыла, имеющего % = 5 и г) = 2, от % = 0° до % = 45° увеличивает
И. с
значение mzJp почти в о раз.
** Выражения для определения этих производных приведены в гл. 8.
493
Рис. 18.6. Пример измене-
ния коэффициента шарнирного
момента рулевой поверхности
по числам М
с увеличением размеров этих орга-
нов [см. выражение (17.3)]. Пример
изменения коэффициента шарнир-
ного момента тш по числам М по-
казан на рис. 18.6.
Резкое возрастание шарнирных
моментов органов управления ско-
ростных самолетов привело к суще-
ственному возрастанию мощностей,
потребных для привода этих органов.
Физические возможности летчиков
оказались для этого недостаточ-
ными, и в проводку управления стали
устанавливать гидравлические усили-
телимощности управляющих сигналов—гидроусилители (бустеры).
Первоначально гидроусилители устанавливали по так называемой
обратимой схеме, при которой они помогали летчику, воспринимая
часть шарнирного момента. Однако дальнейший рост скоростей по-
лета и развитие конструкций гидроусилителей привели к повсе-
местному переходу на необратимую схему их установки, облада-
ющую рядом бесспорных преимуществ и позволяющую решать
ряд дополнительных задач помимо усиления мощности. Примене-
ние необратимой схемы установки гидроусилителей (т. е. переход
от чисто механического к гидромеханическому приводу рулевых
поверхностей) потребовало введения в систему управления самоле-
та специальных загрузочных устройств для создания усилий на
рычагах и восстановления «чувства управления».
2. Важнейшей особенностью сверхзвуковых самолетов явля-
ется существенная зависимость продольной статической устойчи-
вости по перегрузке от режима полета (рис. 18.7). При дозвуковых
скоростях (особенно на малых высотах) коэффициент о„ заметно
убывает с ростом скорости вследствие упругих деформаций крыла.
С ростом угла стреловидности и удлинения крыла это уменьшение
о„ проявляется все более заметно (абсолютная величина о„ мо-
жет уменьшаться на 0,06...0,08 при стреловидности крыла по-
рядка % = 50...60°). Особенно значительным оказывается это
уменьшение у самолетов с крыльями изменяемой геометрии вслед-
ствие их меньшей жесткости (уменьшение абсолютной величины оп
может превышать 0,10). При превышении критического значения
числа М коэффициент оп начинает быстро расти вследствие пере-
распределения давлений по хордам профилей, приводящего к ин-
тенсивному смещению назад фокуса самолета. Это смещение про-
исходит до значений чисел М. порядка 1,15... 1,25. Смещение фо-
куса и соответствующее возрастание абсолютной величины <Jn
в зависимости от параметров крыла может достигать значений
(0,15...0,25).У самолетов с изменяемой геометрией крыла смещение
фокуса при изменении угла стреловидности может быть сущест-
венно больше.
494
l',0
Влияние перераспределения
давлений при М>Мкр
(сдвиг фокуса назад)
Влияние упругости крыла
\ (сдвиг фокуса вперед)
’ на больших высотах
на малых высотах
О
Рис. 18.7. Характер изменения коэффициента продольной статической устой-
чивости по перегрузке по числам М полета и высоте;
в = тУ 4- /л(02/ц: ----малые высоты; — — — большие высоты (на рисунке даны
n z z /
отрицательные значения
Ранее уже отмечалось, что резкое увеличение продольной ста-
тической устойчивости по перегрузке при переходе на сверхзвуко-
вые скорости приводит к ухудшению маневренности и увеличению
потерь качества на балансировку. Поэтому при проектировании
сверхзвуковых самолетов, помимо перехода на продольное управ-
ление цельноповоротным стабилизатором, о чем уже говорилось
ранее (см. гл. 17), как правило, используются какие-либо средства
для уменьшения роста устойчивости (рис. 18.8). Поскольку степень
продольной устойчивости определяется разностью хт — xF, эти
средства должны воздействовать на положение фокуса самолета
(сдвигать его вперед при М > 1) или положение центра масс
(сдвигать его назад при М > 1). К первым (рис. 18.8, а) отно-
сится использование передних наплывов в корневой части_крыла
Рис. 18.8. Конструктивные мероприятия по уменьшению продольной стати-
ческой устойчивости по перегрузке на сверхзвуковых скоростях:
а — аэродинамические средства сдвига фокуса вперед; б — перемещение центра масс
при перекачке топлива назад; 1 — применение передних наплывов в корневой части
крыла; 2 —выдвижение в поток носового дестабилизатора (или уборка хвостового го-
ризонтального оперения)
495
(как, например, на самолетах Ту-144,
«Конкорд», F-16, F-18, YF-12A и др.)
и выдвижного «дестабилизатора» в но-
совой части фюзеляжа (как, например,
на самолете F-14A «Томкат»).
Средством перемещения назад центра
масс самолета при переходе к сверх-
звуковой скорости полета является ис-
пользуемая практически на всех сверх-
звуковых самолетах с большой дально-
стью полета перекачка топлива из
центральных в специальные баланси-
ровочные баки, расположенные в хво-
стовой части самолета. Необходимо об-
ратить внимание на тот факт, что при
применении перекачки топлива в хво-
стовые балансировочные баки, послед-
ние должны быть оборудованы систе-
мой аварийного слива, так как в слу-
чае отказа системы обратной перекачки
при торможении до дозвуковой ско-
рости самолет может оказаться не-
устойчивым (см. рис. 18.8, б).
Рис. 18.9. Возникновение
«ложки» на балансиро-
вочной кривой Хв = f (М)
в околозвуковом диапазоне
скоростей и ее исправление
с помощью автомата балан-
сировки или АБСУ:
Дбв = f (М, Н) — рассогласова-
ние, вводимое автоматом ба-
лансировки или АБСУ
3. Следствием интенсивного смещения назад фокуса самолета
в околозвуковом диапазоне скоростей является околозвуковая
неустойчивость по скорости, проявляющаяся в «затягивании в пи-
кирование» при разгоне до сверхзвуковой скорости и в стремлении
самолета к самопроизвольному увеличению перегрузки («заброс
по перегрузке») при торможении от сверхзвуковой до дозвуковой
скорости. Околозвуковая неустойчивость по скорости иллюстри-
руется изменением положительного градиента наклона балансиро-
вочной кривой хв = f (М) на отрицательный в околозвуковом ди-
апазоне скоростей, т. е. появлением так называемой «ложки»
на балансировочной кривой (рис. 18.9). В зоне околозвуковой
неустойчивости по скорости движения рычага продольного управ-
ления для балансировки при изменениях скорости изменяются
на обратные: «на себя» — при разгоне (вместо обычных — «от
себя») и «от себя» — при торможении (вместо обычных — «на
себя») *.
На некоторых сверхзвуковых самолетах первых поколений
этот недостаток управляемости устранялся установкой в систему
управления так называемого автомата балансировки, вводившего
рассогласование между положениями рычага и органа продоль-
* Не следует путать это изменение движений при управлении по скорости
с остающимися при этом неизменными направлениями движения рычага при
управлении перегрузкой: «на себя» — для увеличения перегрузки, «от себя» —
для уменьшения.
496
ного управления в некотором диапазоне чисел М, в котором про-
явилась околозвуковая неустойчивость по скорости (обычно в ди-
апазоне М » 0,9...1,2). При этом обеспечивался неизменный ха-
рактер движения рычага при управлении по скорости, в то время
как орган продольного управления отклонялся по закону «кри-
вой с ложкой». На современных сверхзвуковых самолетах около-
звуковая неустойчивость по скорости проявляется менее заметно
вследствие «сглаживания» интенсивности роста устойчивости дру-
гими средствами, о которых говорилось выше. В случае же необ-
ходимости управляемость по скорости улучшается введением соот-
ветствующих законов управления [типа Абв = f (М, Н) ] в ав-
томатическую бортовую систему управления (АБСУ).
4. Четвертая особенность — потеря продольной статической
устойчивости по перегрузке при выходе на углы атаки порядка
12...15° — была достаточно подробно рассмотрена в гл. 17 (см.
рис. 17.8). Здесь необходимо только добавить, что для повышения
безопасности полета выход на такие углы атаки в нормальной
эксплуатации предупреждается соответствующими указаниями
инструкций, средствами сигнализации (звуковой, световой, тряс-
кой рычага продольного управления), а также специальными авто-
матическими устройствами (системы ограничения предельных ре-
жимов — ОПР), ограничивающими движения рычага «на себя»
или даже принудительно отклоняющими его вперед для ухода от
опасного режима («толкатели»). Системы ОПР, как правило, обе-
спечивают и соответствующую индикацию на приборной доске
летчика, показывающую, какие запасы по перегрузке, а также по
углам скольжения и атаки имеются на данном режиме полета.
На самолетах последних поколений предупреждение попадания
на опасные режимы является одной из задач, решаемых АБСУ.
При наличии систем искусственного обеспечения продольной
устойчивости располагаемый диапазон углов атаки может сущест-
венно расширяться и, следовательно, расширяются маневренные
возможности самолета на тех режимах полета, где они ограничи-
вались несущими свойствами крыла. Так, например, максимальное
эксплуатационное значение угла атаки у самолета F-16 составляет
30°, при достижении которого стабилизатор автоматически от-
клоняется носком вверх для создания момента на пикирование и
увода самолета от опасного режима. На самолете F-18 нормальные
характеристики управляемости и работы воздухозаборников обе-
спечиваются, по сообщениям зарубежной печати, до а = 60°.
5. Общей «болезнью» всех скоростных самолетов является
ухудшение демпфирования собственных колебаний относительно
всех трех осей самолета. Это связано как со свойственным всем
скоростным самолетам уменьшением производных с“ и 4 (осо-
бенно при М > 1 — см. рис. 18.10, а), в значительной мере оп-
ределяющих величины характеризующих демпфирующие свойства
самолета вращательных производных tn®*, rtf и и т“г [см.,
497
Рнс. 18.10. Характер изменения по числам М производных с“ и сверх-
звукового самолета в сравнении с нескоростным самолетом (а), вращательных
производных т“г и т®(б), а также переходных процессов установления нового
значения перегрузки при одинаковом отклонении органа продольного управле-
ния без демпфера и с демпфером продольных колебаний при дозвуковых и сверх-
звуковых скоростях (в)
например, выражения (18.7) и (18.8)1, так и с характерными для
скоростных самолетов полетами на больших высотах, где мала
плотность воздуха. Ухудшение демпфирования собственных ко-
лебаний приводит к большим начальным забросам регулируемых
параметров полета при отклонениях рулевых поверхностей и дол-
го незатухающим колебаниям самолета, затрудняющим точное пи-
лотирование (см. рис. 18.10, в). В продольном канале управления
ухудшение демпфирования сопровождается на сверхзвуковых ско-
ростях существенным ростом частоты этих колебаний, связанным
с увеличением статической устойчивости. Математически эти яв-
ления иллюстрируются уменьшением определяющего затухание
колебаний коэффициента аг [см. формулу (18.1)1 и увеличением
определяющего частоту колебаний коэффициента а2 [см. формулу
(18.2)1 при первой и нулевой производных в уравнении коротко-
периодического движения. Поскольку частота собственных коле-
баний даже тяжелых современных сверхзвуковых самолетов в про-
дольном канале может приближаться к 1 Гц, а в поперечном даже
превышать это значение, то вследствие наличия запаздывания и
инерционности летчика создаются реальные предпосылки к рас-
качке им самолета. Практика подтверждает это, так как в реаль-
ных условиях пилотирования на этих режимах полета летчики не
справляются с задачей парирования колебаний самолетов и начи-
нают их «раскачивать».
Конечно, при проектировании самолета можно было бы поста-
вить задачу получения необходимых значений вращательных про-
изводных с помощью увеличения площадей и относительных плеч
демпфирующих поверхностей, в основном оперения — см., напри-
мер, выражения (18.7) для производной m“z. Однако это потребо-
вало бы непомерного увеличения Лг.о и Лв. 0, что, с одной стороны,
повлекло бы за собой значительное утяжеление конструкции,
498
а с другой стороны, могло бы вызвать трудности обеспечения при-
емлемых характеристик управляемости на других режимах полета
(на малых высотах), где эти поверхности оказались бы чрезмерно
эффективными. Последнее создавало бы предпосылки для потери
устойчивости контура управления и раскачки самолета летчиком,
но уже на данных режимах полета.
Поэтому с момента появления первых серийных сверхзвуковых
самолетов обеспечение необходимой степени демпфирования их
колебаний возлагается на устанавливаемые в систему управления
специальные автоматические устройства — демпферы, работающие
параллельно с летчиками и независимо от них (см. рис. 18.10, в).
Принцип действия демпфера колебаний самолета основан на за-
мере угловой скорости вращения самолета и отклонении соответ-
ствующего органа управления против этого вращения. Испол-
нительные механизмы демпферов на скоростных самолетах
первых поколений выполнялись в виде электрических раздвижных
тяг (см. поз. 14 и 19 на рис. 18.20). На новых самолетах эти ме-
ханизмы выполняют в виде многократно резервированных электро-
гидравлических агрегатов, входящих в комплект АБСУ.
В зависимости от того, относительно какой из осей самолета
демпфер должен гасить его колебания, различают демпферы тан-
гажа, крена и рыскания. Устройство их совершенно одинаково,
а отличаются они только установкой своих чувствительных эле-
ментов — гироскопов.
Простейшими законами работы демпферов являются отклоне-
ния рулевых поверхностей пропорционально соответствующим уг-
ловым скоростям вращения самолета:
(Дбв)д. т = — для демпфера тангажа; (18.10)
(Д6э)д. к = — для демпфера крена; (18.11)
(Дбн)д. р = — Для демпфера рыскания. (18.12)
В этих выражениях k№z, k(,>x, k(1>u — передаточные числа
демпферов, определяющие, на сколько градусов отклоняется ру-
левая поверхность самолета на 1 градус/с угловой скорости вра-
щения самолета (размерность передаточных чисел [с]). При ра-
боте демпферов по таким законам прирост определяющих демпфе-
рование вращательных производных определяется выражениями:
(Дт“г)д.т=т'°Ц^-; (18.13)
(Дт“х)д.к = tnx3kax^~-, (18.14)
(Дш^)д.р = тХ^- (18.15)
Приращение производной т“г при работе демпфера тангажа
по закону (18.10) приводит к соответствующему приращению коэф-
499
Рис. 18.11. Примеры изменения характеристик продольной статической
управляемости при работе демпфера тангажа по закону (Д6в)д, т = &a>2<oz:
а — изменение нейтральной центровки по перегрузке на различных режимах полета;
- „ п„
о — прирост показателях^; штриховкой показано ограничение прироста хъУ макси-
мально возможным ходом штока раздвижной тяги
фициента и определяемых им показателей управляемости. Так
изменение нейтральной центровки по перегрузке (рис. 18.11, а)
определяется выражением
kv> n&pSV
(Ахт.н)д.т = -^------, (18.16)
а изменение расхода рычага продольного управления на единицу
нормальной перегрузки (см. рис. 18.11, б) выражением
(Ах?)д.т = 57,3. (18.17)
Следствием приращения абсолютной величины производной
/и“2 (т“г < 0) при работе демпфера тангажа является также уве-
личение определяющего затухания колебаний коэффициента
[выражение (18.1)].
Аналогичные приращения при работе демпферов по приведен-
ным выше законам получают и показатели боковой устойчивости
и управляемости. Свойство демпферов увеличивать расходы рыча-
гов управления при маневрах может быть использовано на тех
режимах полета, на которых эти расходы становятся недопустимо
малыми (большие дозвуковые скорости на малых высотах).
6. Для всех самолетов свойственно уменьшение расхода ор-
гана и соответственно рычага продольного управления на еди-
ницу перегрузки с ростом скорости полета [см. выражение (18.4) ],
где значение cyVi п изменяется обратно пропорционально квадрату
скорости. Однако на самолетах с безбустерной системой управ-
ления это уменьшение потребных для совершения маневров от-
клонений рулей высоты и рычагов продольного управленья со-
провождалось ростом шарнирных моментов рулей пропорциональ-
но квадрату скорости [см. выражение (17.3)1. Составляющая шар-
500
нирного момента на руле вы-
соты, определявшая прира-
щение усилия на рычаге про-
дольного управления при
его отклонении для соверше-
ния маневров с одинаковой
перегрузкой (m6*ty&nySp вх
х&р Bq), оставалась примерно
постоянной на всех режи-
мах полета, так как в этом
выражении согласно (18.4)
6^ = kjq, где ki— на до-
звуковых скоростях пример-
но постоянный коэффициент.
Следовательно, на самоле-
тах с безбустерными систе-
мами управления независимо
от режима полета сохра-
нялся примерно постоянным
более важный показатель
Рис. 18.12. Примеры изменения по
числам М и высотам показателя Рпу у са-
В
молетов с безбустерной (Ту-104 н
Ту-134) и необратимой бустерной си-
стемами управления с простым пру-
жинным загружателем (без демпфера
и с демпфером тангажа):
— Ту-134;----------Ту-104; — • — сверх-
звуковой самолет с необратимой бустерной
системой управления стабилизатором и
демпфером таигажа; — • — то же бе»
демпфера
продольной управляемости — расход усилия на единицу пере-
грузки Р*у (рис. 18.12) *.
Другими словами, при безбустерной системе продольного
управления в выражении (18.5) для показателя Р*у градиент
нарастания усилия по отклонению рычага продольного управления
увеличивался пропорционально скоростному напору Рв — k^q
(где k2 — также примерно постоянный коэффициент).
С переходом на необратимые бустерные системы управления
с первоначальным применением простейших пружинных загружа-
телей рычагов управления с постоянной характеристикой градиент
Р* становился постоянным (независимо от режима полета), а ха-
рактер изменения показателя х"у оставался прежним. Это опре-
деляло непривычное для летчиков быстрое уменьшение расходов
усилий на единицу перегрузки Р"у с ростом скоростного напора
(приборной скорости). На режимах полета с большими скорост-
ными напорами в дозвуковой зоне величины характеристик управ-
ляемости х"у и Р"у значительно уменьшались и попадали в зону
наибольших ошибок управления (см. рис. 18.2). Это положение
усугублялось еще и тем, что в продольном управлении для по-
вышения маневренности на сверхзвуковых скоростях на больших
* Некоторое увеличение этого показателя управляемости с ростом скорости
у самолетов с безбустерной системой управления объясняется влиянием упругих
деформаций конструкции, а также началом влияния сжимаемости.
501
высотах уже стали применять цельноповоротный стабилизатор,
эффективность которого на больших дозвуковых скоростях, осо-
бенно на малых высотах (режимы предельных приборных скоро-
стей), оказывалась чрезмерно высокой. Значения показателя
управляемости хп&у в этих условиях снижались до величин по-
рядка 2...3 мм (становились соизмеримы с люфтом в проводке уп-
равления). В ссответс.вии с (18.5) сю жались и значения показа-
теля Рпъу. Это создавало реалы-ые предпосылки для потери устой-
чивости контура управления *, которые и оказывались нередкими
₽ практике испытаний и доводка первых сверхзвуковых само-
летов.
Рассмотрение выражений (18.3), (18.4) и (18.5) подсказывает
технические пути повышения значений показателей х"у и Р'^у,
т. е. снижения коэффициента усиления системы летчик—самолет
для обеспечения устойчивости контура управления. Даже ье уве-
личивая степени продольной статической устойчивости тсу,
увеличение показателя х^у можно обеспечить тремя способами:
а) уменьшением коэффициента передачи от рычага продольного
управление к рулю высоты (или стабилизатору) &iU. в;
б) уменьшением эффективности органа продольного управле-
ния шев;
в) увеличением продольного демпфирования
Значения показателя Р”у помимо перечисленных выше трех
способов могут приводиться к необходимому уровню увеличением
градиента загрузки Рхв.
Все эти способы широко используются в современном самолето-
строении и находят свое техническое воплощение:
— в регулировании передаточных чисел k„,tP по режимам по-
лета (с уменьшением их на больших приборных скоростям);
— в применении продольного управления комбинированного
типа, при котором в качестве органа продольного управления на
одних режимах (М < 1) используется руль высоты, а на других
(М >1) — управляемый стабилизатор;
— в повышении демпфирования самолета с помощью
установки демпферов тангажа;
— в применении регулирования градиента загрузки Рв по
режимам полета.
В каждом конкретном случае в зависимости от типа самолета,
его характеристик и предъявляемых требований применяется
тот или другой способ или их комбинации.
* Потеря устойчивости контура управления может происходить и на режи-
мах автоматического пилотирования и выражается в автоколебаниях системы
«автоматическая система управления — самолет».
502
Своеобразие характери-
стик боковой устойчивости
и управляемости современ-
ных самолетов связано с
особенностями их производ-
ных т^, т$, т®у и инерцион-
но-массовых характеристик.
7. Поперечная статиче-
„ в
ская устойчивость т* суще-
ственно зависит от угла атаки
и чисел М полета. Для само-
летов со стреловидными и тре-
угольными крыльями харак-
терно чрезмерное увеличение
абсолютной величины т%
при увеличении углов атаки
даже до значений поряд-
ка 12... 15° (рис. 18.13, а).
Поскольку эта производная
характеризует величину мо-
мента крена, возникающего
при появлении скольжения,
то чрезмерное ее увеличе-
ние приводит к слишком
энергичным кренениям при
возникновении даже неболь-
шого скольжения, например,
вызванного боковым порывом
ветра (в летной практике
известны даже случаи, когда
самолеты с такими характе-
ристиками при боковом по-
рыве или одностороннем от-
казе двигателя переворачи-
Рис. 18.13. Характер изменения по-
перечной статической устойчивости са-
молетов различных типов:
а — по углам атаки; б — по числам М полета;
Т 3
I — допустимые пределы изменения тх по
динамике бокового движения; II — зона
обратной реакции по крену иа скольжение;
III — слишком большая ^поперечная устой-
чивость; IV — поперечная неустойчивость;
V — возможное увеличение ацред ПРИ нс"
пользовании автоматики; VI — зона около-
звуковой обратной реакции по крену на
скольжение сверхзвукового самолета; VII —
сверхзвуковая зона; VIII — малые углы
атаки; IX — большие углы атаки; иа
рис. 18.13, б штриховкой условно показаны
значения выше которых появляется обрат-
ная реакция по крену на скольжение
вались на «спину» прежде,
чем летчик успевал принять меры противодействия). Следствием
чрезмерной поперечной устойчивости оказывается также явление
зависания по крену — замедленный выход из крена после откло-
нения элеронов на ею устранение, свидетельствующий о недоста-
точной эффективности элеронов при большой поперечной устой-
чивости.
Ранее уже отмечалось, что на первых скоростных самолетах
со стреловидными и треугольными крыльями для уменьшения
на больших углах атаки опускали концы крыла вниз, т. е. приме-
няли отрицательное поперечное V крыла. Однако эта мера приво-
дила к некоторым конструктивным усложнениям и увеличению
массы конструкции, а также к появлению обратной реакции по
503
крену на отклонение руля направления («дачу ноги») на режимах
полета с небольшими углами атаки, соответствующими большим
приборным скоростям. Недостатки динамики бокового движения
на больших углах атаки (интенсивные кренения с крыла на крыло—
«забросы по крену») при повышенных значениях пРх и наступление
обратной реакции по крену на скольжение при пониженных зна-
чениях этой производной заставляли ограничивать как макси-
мальные, так и минимальные скорости полета самолета, сни-
жая эксплуатационный диапазон скоростей.
В настоящее время, если специальная профилировка крыла
не дает заметного улучшения поперечной устойчивости, приемле-
мые характеристики боковой управляемости получают введением
в систему управления специальных автоматических устройств
(демпферов крена и рыскания, автоматов боковой устойчивости
и др.). Законы работы этих автоматических устройств могут быть
самыми разнообразными. Например, могут отклоняться элероны
пропорционально углу скольжения (6Э = &рР) или руль направ-
ления — пропорционально угловой скорости крена (6И =
Так, например, на самолете Ту-134 демпфер рыскания при выпу-
щенных закрылках имеет закон работы (Д6н)д.р = ka„ t +
+ ka в котором второй член компенсирует повышенную
устойчивость, увеличивая эффективность поперечного управления,
а фильтр устраняет влияние демпфера на перемещения педа-
лей при установившихся разворотах.
Законы работы автоматических средств улучшения характери-
стик боковой устойчивости и управляемости выбирают на стадии
проектирования самолета исходя из его собственных характери-
стик и предъявляемых требований. Одним из этих требований явля-
ется ограничение скорости нарастания крена при скольжении или
отказе двигателя с одной стороны, задаваемое предельно допусти-
мым углом крена за время запаздывания ответной реакции лет-
чика (обычно принимается 5 с).
Простейшим и самым распространенным из таких автомати-
ческих устройств является демпфер рыскания. Парируя возника-
ющую угловую скорость рыскания, демпфер препятствует разви-
тию больших углов скольжения, следствием которых и является
появление чрезмерного кренящего момента поперечной статиче-
ской устойчивости /ПхР. Автоматизация системы управления в дан-
ном случае позволяет использовать большие значения углов ата-
ки, т. е. снизить минимальные скорости, следовательно, не только
расширить диапазон скоростей, но и сократить потребную длину
взлетно-посадочной полосы из-за уменьшения скоростей взлета и
захода на посадку.
Околозвуковое и сверхзвуковое уменьшение пгх (см.
рис. 18.13, б), которое приводило к появлению обратной реакции
504
самолета по крену на скольжение и нередко заставляло вводить
ограничения по максимально допустимой скорости полета, в на-
стоящее время также компенсируется автоматическими .сред-
ствами.
8. Характерной особенностью всех сверхзвуковых самолетов
являются значительные трудности обеспечения путевой устойчи-
вости <0 — см. рис. 18.14). Причины этого уже рассматри-
вались ранее. Особые затруднения в обеспечении приемлемых
характеристик боковой устойчивости и управляемости возникают
на режимах полета со сверхзвуковыми скоростями на больших
высотах. Для полета на этих режимах вследствие сильной разре-
женности атмосферы даже при сверхзвуковых скоростях прихо-
дится использовать сравнительно большие углы атаки. Такие па-
раметры полета приводят к самому неблагоприятному сочетанию
большой поперечной устойчивости с недостаточной путевой,
которое при характерном для сверхзвуковых самолетов соотноше-
нии 1уНх > 10, связанном с большой «вытянутостью» их по про-
дольной оси, определяет значения показателя х на этих режимах
порядка 10...15 при оптимальном значении 1,0...2,0. Большие
значения показателя х свидетельствуют о существенном превыше-
нии интенсивности развития движения крена по отношению к дви-
жению рыскания. Самолет интенсивно переваливается с крыла на
крыло, а попытки летчика парировать эти «переваливания», как
правило, приводят к прогрессирующей раскачке.
Обеспечение путевой устойчивости сверхзвуковых самолетов
в настоящее время ведется как классическими методами выбора
Рис. 18.14 Типичный характер изменения путевой устойчивости сверх-
звукового самолета по числам М (а) и пример изменения ее по углам атаки для
различных чисел М при однокилевой и двухкилевой схемах вертикального опе-
рения (б):
штриховкой показано предельное (по путевой устойчивости) значение числаМ; j (доп-*
I ₽1
минимально допустимый предел уменьшения j Шу [
505
параметров вертикального оперения, так и использованием специ-
альных автоматических устройств. Необходимость балансировки
самолета в полёте при одностороннем отказе двигателя, а также
при взлетах и посадках при боковом ветре (также с учетом воз-
можности отказа двигателя) заставляет значительно увеличивать
число и общую площадь стабилизирующих вертикальных по-
верхностей оперения сверхзвуковых«самолетов (например, на
самолете YF-12A, рассчитанном на полет на высотах до 30 км
с числами М = 3, число вертикальных поверхностей в хвостовой
части самолета доведено до пяти. Выбор числа, размеров, формы
и размещения этих поверхностей представляет достаточно слож-
ную задачу для каждого конкретного самолета (см., например,
рис. 10.7).
Искусственное повышение путевой устойчивости может обес-
печиваться автоматическими средствами, отклоняющими руль
направления, например, по закону (А6н)апу = В этом
случае увеличение степени путевой статической устойчивости оп-
ределяется выражением (А/п^)Апу = Однако условия
обеспечения устойчивости контура автомат—самолет, как и в слу-
чае применения демпферов, не позволяют беспредельно увеличи-
вать передаточные числа быстродействующих автоматических
систем стабилизации и повышения устойчивости. В таких систе-
мах, как правило, определяющими являются характеристики гид-
ропривода (бустера). Поэтому значительное повышение путевой
устойчивости или демпфирования колебаний рыскания на больших
сверхзвуковых скоростях может быть достигнуто увеличением
эффективности путевого управления (туп) путем перехода на
цельноповоротные вертикальные поверхности (как это приме-
няется, например, на самолетах YF-12A и SR-71).
9. Одной из особенностей характеристик поперечной управля-
емости скоростных самолетов является заметное снижение эффек-
тивности поперечного управления на больших скоростях полета.
Это явление, довольно часто неточно называемое реверсом элеро-
нов, вызывается упругими деформациями изгиба и’кручения крыла
при отклонениях элеронов и проявляется, как правило, все более
заметно с ростом удлинения и стреловидности и с уменьшением
относительной толщины крыльев (см. рис. 14.11). На крыльях
изменяемой геометрии элероны практически не применяются,
поскольку критическая скорость их реверса была бы очень низ-
кой из-за пониженной жесткости таких крыльев. Поперечное уп-
равление у таких самолетов осуществляется, как правило, ком-
бинацией интерцепторов и дифференциально отклоняемых плос-
костей стабилизатора.
Однако применение дифференциального отклонения правой и
левой половин стабилизатора породило новую «болезнь» боковой
управляемости — занос носа самолета в сторону, противополож-
ную кренению при развороте. Это вызывается моментом рыска-
506
ния, возникающим из-за несимметричного изменения давлений
с разных сторон вертикального оперения при отклонениях правой
и левой половин стабилизатора в разные стороны. Аналогичная
«болезнь» наблюдалась у ряда самолетов бесхвостой схемы при
отклонении элевонов в разные стороны для управления по крену.
Для повышения эффективности поперечного управления на со-
временных самолетах помимо дифференциального отклонения пло-
скостей стабилизатора применяют интерцепторы (рис. 18.15),
элероны-закрылки, корневые элероны, отклоняемые носки крыла и
пр. А чтобы слишком развитые органы поперечного управления не
уменьшали эффективность взлетно-посадочной механизации крыла
вследствие сокращения остающейся на ее долю длины задней
кромки крыла, стали применять зависающие элероны (элероны-за-
крылки или флапероны).
10. Применение необратимых бустерных систем управления
сказалось на изменении ряда характеристик и боковой управляе-
мости. Так, изменение характера зависимости от скорости расхода
усилия на единичную угловую скорость крена (Рэх) у самолетов
с необратимым бустерным управлением с пружинным загружа-
телем, имеющим линейную характеристику, по сравнению с само-
летами, имеющими безбустерное управление, показано на
рис. 18.16. Хотя уменьшение этого показателя с ростом скорости
у самолетов с бустерным управлением на больших скоростях
несколько компенсируется влиянием упругих деформаций крыла,
однако при высокой жесткости крыла (например, при треугольном
крыле) могут появиться такие режимы полета, где этот показа-
тель оказывается слишком малым, а скорость нарастания крена
Рис. 18.15 Пример изменения коэффициента момента креиа по углу откло-
нения элеронов и увеличение его при отклонении интерцепторов:
--- отклонены элероны, mN = 0,0009----!--;--------отклонены элероны с интерцеп-
х градус
торами, = 0,0023 ------------
х градус
Рис. 18.16. Изменение характера зависимости от скорости полета расхода
усилий на единицу угловой скорости креиа с переходом иа необратимое бустер-
ное управление:
-----без гидроусилителей; —, — — с необратимым гидроусилителем
507
маневра отклонения рычага упра-
вления при применении нелинейной пе-
редачи в проводке управления к рулю:
х — ход рычага управления; 6 — отклоне-
ние руля;---------— линейная передача;
---- нелинейная передача; 6п0Тр — потреб-
ное отклонение руля; *Потр. л' *потр. Нл~
потребные отклонения рычага при линейной
и нелинейной передачах
даже при небольшом откло-
нении рычага управления
слишком высокой, йтобы
летчик мог справиться с пра-
вильным ее регулированием.
Другими словами, аналогич-
но рассмотренному ранее
продольному управлению на
некоторых режимах полета
коэффициент усиления си-
стемы летчик — самолет и в
поперечном управлении ста-
новится слишком большим,
в результате чего система
теряет устойчивость. Начи-
нается «раскачка» самолета
в креновом движении. Ме-
тоды борьбы с этим явле-
нием аналогичны рассмотрен-
ным выше для продольного
управления. Можно только
добавить, что в ряде слу-
чаев (это зависит от кон-
кретных характеристик данного типа самолета) для умень-
шения коэффициента усиления системы летчик — самолет путем
снижения эффективности поперечного управления может
оказаться достаточным применение в проводке поперечного
управления нелинейной кинематической передачи (рис. 18.17).
Это достигается установкой в проводку специальных кинема-
тических механизмов (см., например, поз. 25 на рис. 18.20),
обеспечивающих существенное уменьшение выходного пере-
мещения (к элеронам) при небольших смещениях рычага
управления. Такие механизмы благодаря их простоте и высокой
надежности довольно часто применяются и в других каналах уп-
равления (по тангажу и рысканию).
18.3. СОСТАВ СИСТЕМЫ УПРАВЛЕНИЯ И ЗАДАЧИ
ЕЕ ПРОЕКТИРОВАНИЯ
На самолетах, рассчитанных для полета с небольшими дозвуко-
выми скоростями, задачей системы управления является только
обеспечение передачи управляющих сигналов от летчика (или ав-
топилота) к органам управления. Эта задача выполняется посред-
ством механической проводки от рычагов управления в кабине
к рулям самолета, подобной показанной на рис. 18.18.
На скоростных самолетах задачи системы управления сущест-
венно усложняются, а ее состав в связи с этим значительно рас-
508
Рис. 18.18. Безбустерное управление рулями нескоростного самолета:
а — принципиальная схема механического привода руля; б — пример компоновки про-
водки управления и органы управления легкого нескоростного самолета; / — рычаг
управления рулем? ? — штурвальчик управления триммером; 3 — проводка управления
рулем; 4 — качалка подключения рулевой машины (РМ) автопилота; 5—муфта отключе-
ния РМ от проводки} 6 — рулевая машина автопилота; 7 — руль; ^—аэродинамиче-
ский триммер; 9 — проводка управления триммером; 10 — тяги проводки управления
элеронами; 11 — педали управления рулем направления; 12 — элерон (правый); 13 —
триммер элерона; 14 — ручка управления рулем высоты и элеронами; 15 — руль вы-
соты; 16 — киль; 17 — руль направления; 18 — триммер руля направления; 19 — трим-
мер руля высоты; 20 — стабилизатор; 21 — тяги проводки управления рулем напра-
вления; 22 — тяги управления рулем высоты? 23 — элерон (левый)
ширяется. Системы управления на этих самолетах решают следую-
щие задачи:
1) передают управляющие сигналы от летчика к органам уп-
равления (режим пилотирования летчиком);
2) передают управляющие сигналы от исполнительных меха-
низмов систем автоматического управления к органам управления;
3) обеспечивают необходимую мощность для отклонения орга-
нов управления;
4) обеспечивают статическую и динамическую устойчивость
(стабилизацию);
5) формируют необходимые характеристики управляемости;
6) формируют управляющие сигналы для автоматического тра-
екторного управления;
7) формируют сигналы на директорные приборы при режимах
Полуавтоматического пилотирования;
509
8) обеспечивают повышение безопасности пилотирования летчи-
ком путем соответствующей сигнализации и ограничения отклоне-
ния органов управления при подходе к предельно допустимым
значениям параметров полета (V, М, пу, а, [3, у и др.).
На скоростных самолетах первых поколений эти задачи реша-
лись введением в систему управления целого ряда новых механи-
ческих, гидравлических, электромеханических устройств и авто-
матических систем, каждая из которых решала какую-либо кон-
V
Рис. 18.19. Примерный состав систем управления сверхзвуковых самолетов
первых поколений (а) и образование дополнительных связен и корректирующих
контуров в контуре управления (б):
1 — рычаг управления; 2 — механизм автомата регулирования загрузки; 3 — загру-
зочный механизм; 4 — механизм трнммерного эффекта (МТЭ) с электроуправленнем;
5 — механизм регулирования передаточного отношения от рычага управления к рулю,
б — механизм нелинейной передачи; 7 — автомат балансировки или устойчивости; 8 —
автоматическая система траекторного управления (СТУ) или автопилот (рулевая ма-
шина с муфтой подключения к проводке при включении); 9 — демпфер; 10 — двухкамер-
ный гидроусилитель с гидросистемами питания; 11 — руль; 12 — ограничитель скорости
перемещения рычага (может быть совмещен с «толкателем» системы ограничения пре-
дельных режимов ОПР); 13 — ограничительный загружатель системы ОПР и его ха-
рактеристика; 14 — механизм стопорения движения рычага системы ОПР; 15 — меха-
низм тряски рычага из системы ОПР; 16 — указатель текущих значений параметров
полета и располагаемых запасов на маневры с системой световой сигнализации
510
кретную задачу. Поэтому наряду с механической проводкой си-
стемы управления этих самолетов включали (рис. 18.19):
— гидравлические усилители мощности — силовые приводы
рулей (бустеры) и гидросистемы их питания;
— системы загрузки рычагов управления (при необратимом
бустерном управлении);
— системы обеспечения необходимых характеристик стати-
ческой и динамической устойчивости и управляемости (регуляторы
передаточных чисел в проводке от рычагов управления к рулям,
демпферы колебаний, автоматы устойчивости, автоматы скольже-
ния, автоматы балансировки, автоматы тяги и др.);
— систему директорных приборов с вычислителями командных
сигналов;
— систему автоматического пилотирования (автопилот или
другие автоматические системы, выполняющие задачи автомати-
ческого поиска и наведения, автоматической посадки и др.);
— системы сигнализации и ограничения предельных режимов
(ОПР).
На конкретном самолете могли быть установлены не все пере-
численные выше системы. Вопрос о необходимости применения
той или иной системы решался в процессе проектирования само-
лета и его системы управления в зависимости от характеристик
самолета и его назначения. Пример размещения элементов меха-
нической проводки и исполнительных механизмов автоматических
систем на легком маневренном самолете показан на рис. 18.20.
При установке в систему управления различных автомати-
ческих устройств (в законах работы которых используются теку-
щие параметры полета), обеспечивающих решение перечисленных
выше задач, контур управления (см. рис. 18.1, а) скоростных само-
летов значительно усложняется вследствие возникновения в нем
дополнительных корректирующих контуров (см. рис. 18.19, б).
Работа этих корректирующих контуров и обеспечивает опти-
мальные характеристики управляемости, устойчивость всего кон-
тура управления на всех режимах полета, а также повышение
безопасности полета.
Развитие электронной техники и разработка многоканальных
приводов высокой надежности в последние годы создали техни-
ческую базу для замены многочисленных автоматических и полу-
автоматических систем (с их датчиками, вычислителями и исполни-
тельными механизмами) единой мощной, многократно резервиро-
ванной автоматической бортовой системы управления (АБСУ),
выполняющей все их функции. Исполнительный механизм АБСУ —
многократно резервированный (модульной конструкции) электро-
гидравлический агрегат — подключается дифференциально к про-
водке управления, заменяя многочисленные исполнительные меха-
низмы старых систем (рис. 18.21). Безопасность полета при исполь-
зовании таких приводов, которые для выполнения своих задач
должны иметь возможность отклонять рулевые поверхности на
511
Си
ND
Рис. 18.20. Схема размещения основных элементов механической части необратимой бустерной системы управления рулями
легкого скоростного самолета:
£ “ Р;',ка пР°Д°льиого н поперечного'управления; 2 — тяга управления элеронами; 3 — педаль управления рулем направления- 4 — па-
рал ле логр аммный механизм; 5 — тяга управления рулем направления; 6 — тяга управления стабилизатором; 7 — защитный чехол от
я ® проводку посторонних предметов; 8 — тяга управления элеронами; 9 - загрузочный механизм педалей; 10 — центральный
У?Равлення элеронами в правое и левое к; ыло; 11 — проводка управления элеронами в крыле; 12 — гидроусилитель при-
Л» — э‘,еро" (левый); 14 — «раздвижная тяга» демпфера тангажа; 15 — ось вращения стабилизатора; /6—управляемый ста-
зат°р (левая половина); 17 - гидроусилитель привода руля направления; /« — руль направления; 19 — -раздвижная тяга» демп-
фера Р“Скания; 20 — гидроусилитель привода стабилизатора; 21 —механизм триммерного эффекта продольного управления; 22 — загру-
3°чн“и механизм продольного управления; 23 — механизм изменения передаточных чисел в продольном управлении; 24 — роликовые на-
правляющие тяг управления стабилизатором и рулем направления; 25 — механизм нелинейной передачи в управлении элеронами- 26 —
герметические выводы тяг из герметической кабины: 27 — загрузочный механизм поперечного управления
514
Ч ® В ч
сп i я о
। ° о «
я
Я
X
О
в§5^
я X я
< я «
о я |
g и
О £
S.5
о "Я
О Я
Я я Ч Я
“ « о
§.gt,o£|«CS,S
§K..hs&sg°
в 3 Й m &о« я с в
Д.И Ч. S ав ч о я
ko*SS!!«» 2
rj. я *4. м«
<U О Я
2 К ЛЕ
<я
ч о Л в*
в В.« « S
ч
я
ч
<U S
оЙ о
>О s
я
я
I 3
Я » №
hs5>
с ч
Н <У
° t
я »с Я
*, Я
5°Ss*
S
Е « ч S«
!>.Н S о S г-
*ч
sg
*
к
ч
я
5„
Я
ч
я
я
<У
ЕС
а.®
X
s « S
Q S
я
х <3
® СО
я о
si
* ®
?9.=
03 s
M
н сх =
4) н >»
х
я
я
<U
*
О Я
я я
<U s
п. **
о
я
к
о
у
s
О
С
О
к
s
к
(V
ч
я
в о.1 “ в
к В«5 .3
™ я 3
Э<8 >-<В
u§=5g,0c
S 9 я В Я О к
в £•£•« о Ч я я
«
О
Я
я2иЙз-лаЗЬ s
° я - 5 я &&BCQ
=—.нбчдВВЯ в
2 I = а ° 5 ® Ч 3 г ' “
5 = 2 = S я <и 3-й. к -
Рх.Я?оХп.Н 55 <U л. СХ
о
;:5
s
у с я Я 3 s
X о В и я х 2
3 -*оS«
к 3 _, X о х «
§«Sg“&3
S*
В Я
si i®s
^о£Н
.. в ° в
к ч в
я >>ё я
м и, 5 ч
X
«с
о
я
ж *5
Q>
С S
я 3 в
я х
gas
«
s к
E ®
§2«|я
Ь fflS в
о S 4
° L <D
се
X
V
X
о
к
се
к
к
&
о
Q.
С
>>
?,B
о
S
СХ
2 °
Я л,
§с
Я U
Я я
* Я л •*. U я
о t- « и >,в
сх я к _ к
= у ®« <ц ® =
К ^я 3 ° = Я
ЯЯ§‘
и о ”
X s
к
<« ® ,.х 3
П и О < к 9
я
<U
ч
т
« = о<
г я
я 03
я ч
в
Л в
в з
«
О
Я s о я
я 2 « = S
g ® 8 “
® 4> ® О О
О X « О.Х
S оо
5 * ё * в
ч
_ т
X s
< 03 о
’"’ЕЕ
2 ••>>5.
я 4S -
i я
00 К
.. я
О Е
»>• j- ш =• .я **
еЬЙ£ с в.в
О о
я
я
а ° в о
PS&8
Я«
4) g < 1 Ч«
tr Ьч Q I ®
X
о я 2
<я ь
О ч
СХ Л я
ЕЮ 3
м
S
О.— Е В
ЭТ5 в
°“|ч
ч о-в’р я | < |
я си £ х 1 в
В S ®4>OO>C’3V
°ч _ г"-'
Ив
2 = 27
X
В » «
>5о’ о Sgl
«|3в“Ь!Ч§&и’
П.Ол> дЯй. _ ±-
Я 2 ® а У О
§.232®2S
S я
-—8» щ
е..з£в = 3
г . Л S у В Я
X
достаточно большие углы, обеспе-
чивается применением нового прин-
ципа резервирования. Это принцип
суммирования усилий резервиру-
ющих подканалов (модулей) и «го-
лосования большинством» (т. е. «пере-
силивания» отказавшего подканала
оставшимися в большинстве исправ-
ными) вместо старого принципа сум-
мирования перемещений резервиру-
ющих подканалов (рис. 18.22).
Насыщение системы управления
современного самолета различного
рода автоматическими и вычисли-
тельными устройствами, использу-
ющими в своей работе электрические
сигналы, а также трудности обеспе-
чения необходимых достаточно высо-
ких точностных характеристик ме-
ханической передачей управляющих
сигналов от рычагов управления
к рулевым поверхностям создали
предпосылки к повышению интереса
авиационных специалистов к элек-
тродистанционным системам упра-
вления. Подобные системы нашли
применение в авиационной технике
уже в конце второй мировой войны,
например, для централизованного
управления оборонительными стрел-
ковыми установками. В настоящее
время системы дистанционного
управления рулевыми поверхностя-
ми появились на ряде современных
самолетов («Конкорд», F-18 «Хонит»
и др.). Однако механическая про-
водка управления на современном
этапе развития техники пока еще
сохраняется в качестве резервного
(аварийного) канала управления
(рис. 18.23). Отказ основной элек-
тродистанционной системы упра-
вления на этих самолетах, как пра-
вило, приводит к необходимости
ограничения ряда режимов полета,
на которых, очевидно, харак-
теристики механической системы
не могут обеспечить приемлемых
515
s
u M<V И Тх, 2}
° К S О Я В
О зв . » X
X Яв О 5 s я
- 3 &cx<u °
<и я я =оз 5 3 я н = I
SH2iSs-nO у М 00
^»S о I
<®~. В I
я
я а
»«з«..
4> s -г Я
s«5g„
я s „
ч 3 °
я = я
ё§§
«т=
= О ?
В
S
я я
с к 8 о в
_ в 5 й
с В
Ьк ®
*4
я
Я Я
м«=
В ®
О
3
S.X 4) - О Щ ।
®вв I
«ч *
« Ч
Ч л
°-Ч
и = S
Е К
СО
О
в "
о
= X
V)
я
в
О
о я
Я S
я я □
aj в- X
У X 2 м,щ ч
у О» Ч В Я 4> я X
си2 ох е си 1
О •§• < <D О Е I
B’S- о S я х
^^-иОкаЗх
ййХу5Чс
S ь s
3 « О <*1
« о U R
я ч ° я
17*
характеристик управляемости и устойчивости контура упра-
вления.
Насыщение систем управления скоростных самолетов автома-
тическими системами стабилизации и повышения устойчивости,
использующими сигналы угловых скоростей и перегрузок, создало
новую проблему проектирования этих систем — необходимость
учета влияния упругих колебаний конструкции фюзеляжа на
устойчивость контуров стабилизации и повышения устойчивости
самолета. Эта проблема особенно сильно проявляется у больших
самолетов, у которых вследствие большой длины фюзеляжей
собственные частоты их упругих колебаний могут оказаться доста-
точно близкими к частотам колебаний всего самолета (как твердого
тела) в воздухе. При изгибных колебаниях фюзеляжа в зависи-
мости от их тонов в различных участках по его длине образуются
«пучности» и «узлы» (рис. 18.24). В узлах будут возникать макси-
мальные местные угловые скорости, а в пучностях — перегрузки.
Эти перегрузки и угловые скорости воспринимаются датчиками
перегрузок и угловых скоростей, если они окажутся установлен-
ными неудачно. Отфильтровать эти ложные сигналы при близости
их частот к частотам колебаний всего самолета в воздухе оказы-
вается чрезвычайно сложной задачей, а они-то и могут послужить
причиной того, что автоматическая система вместо стабилизации
начнет «разбалтывать» самолет. Поэтому поиск места установки
датчиков угловых скоростей и перегрузок на самолете оказывается
важной задачей проектирования автоматизированной системы
управления. Примерные места установки этих датчиков показаны
на рис. 18.24.
Проектирование автоматических й электродистанционных си-
стем управления самолетом представляет достаточно сложную
самостоятельную задачу. Эта задача является предметом рассмо-
трения специальных курсов.
Рис. 18.24. Схема упругих колебаний фюзеляжа и размещение датчиков угло-
вых скоростей и акселерометров для обеспечения отсутствия влияния вибраций
и прогибов конструкции иа работу автоматических устройств стабилизации и
повышения устойчивости:
Q — датчик угловой скорости; □ — датчик перегрузки; пунктиром показано неверное
размещение датчиков
516
Глава 19
ПРОЕКТИРОВАНИЕ ШАССИ
19.1. ВЫБОР СХЕМЫ ШАССИ
Шасси является взлетно-посадочным устройством, которое
обеспечивает самолету разбег, взлет, посадку, послепосадочный
пробег и маневрирование по аэродрому. Оно воспринимает при
этом действующие на самолет нагрузки и рассеивает после посадки
на пробеге большую часть его кинетической энергии.
Под схемой (типом) шасси понимается число опор и особен-
ности их расположения относительно центра масс самолета.
В настоящее время на самолетах применяются шасси четырех схем:
трехопорное с хвостовой опорой (рис. 19.1, а); трехопорное с перед-
ней опорой (рис. 19.1, б); велосипедное с подкрыльными опорами
(рис. 19.1, в); многоопорное.
19.1.1, Трехопорное шасси с хвостовой опорой
Трехопорное шасси с хвостовой опорой широко применялось
до середины 40-х годов. В этой схеме главные опоры расположены
впереди центра масс самолета, а хвостовая опора сзади. Такое
расположение опор шасси порождает следующие недостатки.
1. Приходится ограничивать посадочные скорости самолетов:
пассажирских до 80 ... 120 км/ч, истребителей и бомбардировщиков
до 130 ... 150 км/ч, сельскохозяйственных самолетов до
60 ... 90 км/ч. Увеличить же эти скорости невозможно. С увеличе-
нием Епоо пилоту труднее выдерживать посадочную траекторию
движения самолета, увеличивается высота парашютирования
в момент посадки, а на участках выравнивания или выдерживания
самолет может преждевременно, на скорости, превышающей поса-
дочную, коснуться ВПП главными опорами. Образующиеся при
этом на опорах лобовые силы создают относительно центра масс
самолета пикирующий момент. Если этот момент больше кабри-
рующего, создаваемого оперением и силой тяжести, самолет пере-
вернется на спину («скапотирует»), опираясь на главные опоры.
Если же момент лобовых сил не будет достаточен для капотирова-
ния, самолет под действием момента, создаваемого силой тяжести,
начнет опускать хвост и переходить на большие углы атаки.
В связи с тем, что скорость самолета больше посадочной, подъемная
сила крыльев становится больше силы тяжести самолета, и самолет
взмывает на некоторую высоту, с которой в дальнейшем из-за
потери скорости парашютирует. Такое поведение самолета носит
название «козел». Если «козел» происходит на скорости, значи-
тельно превышающей посадочную, высота парашютирования может
быть значительной и падение с нее самолета в таких случаях
приводит к поломкам.
517
518
Следовательно, для самолетов, имеющих шасси с хвостовой
опорой, касание ВПП колесами главных опор на скорости, превы-
шающей посадочную, недопустимо. Нормальная посадка таких
самолетов обеспечивается лишь в случае одновременного касания
ВПП тремя опорами на скорости, равной посадочной. Для обеспе-
чения условий совершения такой посадки и ограничивается вели-
чина Vn0G до приведенных выше небольших значений.
2. Самолеты, имеющие шасси с хвостовой опорой, неустойчивы
при разбеге и пробеге. На разбеге разность между силой тяжести
самолета и подъемной силой крыльев и горизонтального оперения
воспринимается главными опорами, относительно которых осуще-
ствляется балансировка самолета. В процессе этого движения
различного рода возмущения (боковой ветер, наезды на неровности
и т. д.) вызывают разворот самолета относительно оси на угол 0,
а образующиеся при этом на опорах силы трения создают момент
относительно центра масс самолета, который стремится развернуть
его на еще больший угол (рис. 19.2).
Величина дестабилизирующего момента определяется уравне-
нием
Л1деОТ = Тгла81п0; (19.1)
Tra = (rng-Y^-YF'0)iv, (19.2)
Мдест = (tng — Укр — Уг. 0) pa slop, (19.3)
где р — коэффициент трения скольжения.
Парирование разворотов самолета при действии возмущений
и дестабилизирующего момента пилот производит рулем поворотов,
обдуваемым потоком воздуха от винта. Кроме того, силы трения
создают и пикирующий момент, который нарушает балансировку
самолета по тангажу и усложняет пилотирование.
При действии больших возмущений пилот создает дополнитель-
ные управляющие моменты с помощью тормозных сил, затормажи-
вая колесо или колеса на одной из опор при разбеге или расторма-
живая их при пробеге. Силы торможения колес являются эффек-
тивным средством парирования возмущений, однако их действие
приводит к увеличению длины разбега и пробега.
Некоторое улучшение путевой устойчивости таких самолетов
при движении на ВПП достигается образованием развала колес
в плане (рис. 19.3). Эта конструктивная мера в пределах угла
развала, величина которого делается равным 3 ... 4°, делает само-
лет устойчивым, так как образующаяся на одной из опор сила
трения действует против разворота, образованного возмущением.
Однако угол развала колес в плане приводит к увеличению износа
протектора пневматиков колес и увеличивает длину разбега из-за
наличия постоянных сил трения на колесах, направленных против
движения самолета.
Для уменьшения действия дестабилизирующего момента на
пробеге осуществляется стопорение хвостовой опоры в плоскости
519
Рис. 19.2. Образование дестабилизиру-
ющего момента при движении само-
лета на ВПП (хвостовая опора ие нахо-
дится в контакте с ВПП)
симметрии самолета. При начавшемся развороте самолета это кон-
структивное мероприятие обеспечивает образование момента,
направленного на парирование возмущения. На начальном участке
пробега сила, создаваемая горизонтальным оперением, прижимает
хвостовую опору к ВПП и этим способствует повышению устой-
чивости движения. На конечном участке пробега сила горизон-
тального оперения, прижимающая хвостовую опору, пропадает, и
этот участок является самым опасным: если в конце пробега при
начавшемся развороте пилот не успевает с помощью тормозных сил
создать на главных опорах нужные управляющие моменты, спра-
виться с начавшимся разворотом невозможно.
Неустойчивость самолетов с хвостовой опорой также является
одним из факторов, действие которого приводит к уменьшению
посадочной скорости и ограничению применения шасси этой
схемы.
При маневрировании самолетов с хвостовой опорой ее необхо-
димо расстопоривать и делать свободно ориентирующейся, так как
иначе на хвостовой опоре при выполнении самолетом разворота
будут возникать силы, затрудняющие разворот и разрушающие
пневматики, срывая их с обода колеса.
3. На самолетах, имеющих шасси с хвостовой опорой, не
применяются реактивные двигатели (затруднен разбег). До ско-
рости, при которой становится эффективным горизонтальное
оперение, пилот не может управлять самолетом по тангажу и
осуществлять его балансировку относительно главных опор, и
самолет вследствие этого имеет возможность капотировать.
Поэтому схема шасси с хвостовым колесом и применяется
только на самолетах, на которых устанавливают винтомоторные
или турбовинтовые двигательные установки. Горизонтальное опе-
520
рение на таких самолетах обдувается потоком воздуха, отбрасы-
ваемого винтом, и вследствие этого создает необходимые моменты
для балансировки и управления самолетом.
19.1.2. Трехопорное шасси с передней опорой
Для самолетов, имеющих шасси с передней опорой, касание
ВПП главными опорами не сопровождается неприятными послед-
ствиями. Под действием лобовых сил, возникающих на главных
опорах, самолет опускает нос и становится на все опоры. В про-
цессе этого движения уменьшаются угол атаки и подъемная сила
крыльев и, если амортизатор на опорах должным образом поглотил
энергию самолета, самолет уже не имеет возможности оторваться
от ВПП.
Вследствие этого для самолетов, имеющих шасси с передней
опорой, стало возможным резко увеличить посадочную скорость,
которая не только на военных, но и на пассажирских самолетах,
эксплуатирующихся на бетонных ВПП (БВПП), достигает
240 ... 280 км/ч и более.
Возможные ошибки пилотирования таких самолетов на по-
садке, связанные с увеличением посадочной скорости, не опасны.
Большие посадочные скорости приводят к росту нагрузок на
шасси, а следовательно, и его массы, однако это оказывается
оправданным, так как можно значительно увеличить удельную
нагрузку на крыло, уменьшить его площадь и соответственно уве-
личить скорость полета.
Самолеты, имеющие схему шасси с передней опорой, устойчивы
на разбеге и пробеге. Их носовая опора делается свободно ориенти-
рующейся, колеса или лыжи опоры имеют возможность вращаться
относительно вертикальной оси, расположенной в плоскости сим-
метрии самолета. Вследствие этого при действии возмущений,
когда самолет разворачивается на угол 0, на передней опоре не
возникает сила трения скольжения, так как передняя опора
свободно ориентируется в направлении движения, а сила трения
Тгл, возникающая на главных опорах, создает относительно
центра масс самолета стабилизирующий момент (рис. 19.4), вели-
чина которого определяется уравнением
Мстаб = Тгз1е sin 0, (19.4)
или Мстаб = mg (а — Н<Л) (е/6) Ртл sin 0, (19.5)
где рс — коэффициент трения опор самолета; ргл — коэффициент
трения главных опор. Величина a, b,euh приведены на рис. 19.1, б.
Расположение носовой опоры впереди центра масс самолета
позволяет применять на них и реактивные двигатели. Помимо этого
самолеты, имеющие шасси с передней опорой, обладают и рядом
следующих дополнительных преимуществ:
> а) более простой техникой пилотирования на разбеге, посадке
и пробеге;
521
Ось SpautttUlL—
поВоротной части
шибай anopti
мстай
/2
Тгл
Образование
Рис. 19.4.
стабилизирующего момента
при движении самолета на
ВПП
б) улучшенным обзором из кабины
летчика на разбеге, пробеге и при мане-
врировании, так как фюзеляж самолета
занимает горизонтальное или близкое
к нему положение;
в) более интенсивным торможением
на пробеге для сокращения его длины
и возможностью совершать посадку
с заторможенными колесами. На само-
летах же с хвостовой опорой тормоз-
ные силы в начале пробега ограничи-
ваются из-за возможности капотирова-
ния, а это приводит к увеличению
длины пробега;
г) возможностью совершать посадку
с планирования без участков выравни-
вания и выдерживания. Такая траек-
тория посадки применяется на само-
летах, базирующихся на авианосцах,
и на самолетах КВП, и она дает воз-
можность уменьшить длину ВПП, так
как гашение скорости торможением
колес более эффективно в сравнении
с гашением сопротивлением воздуха
на участках выравнивания и выдер-
живания.
Недостатком схем шасси с передней опорой является возмож-
ность возникновения самовозбуждающихся колебаний с возрастаю-
щей амплитудой свободно ориентирующейся носовой опоры,
которые носят название «шимми». Гашение колебаний произво-
дится с помощью специально устанавливаемого гидравлического
демпфера. Демпфер «шимми» при наличии на самолете системы
управления поворотами носовой опоры выполняет одновременно
и функции гидравлического силового привода этой системы. Гид-
равлическая система, подводящая энергию для поворота носовой
опоры, компенсирует возможные утечки жидкости из демпфера и
этим значительно повышает надежность его работы.
19.1.3. Велосипедное шасси с подкрыльными опорами
На самолетах, имеющих велосипедную схему шасси, передняя
опора расположена впереди центра масс, и вследствие этого они
аналогично самолетам с трехопорным шасси и передней опорой
имеют возможность совершать посадки с большими посадочными
скоростями и обладают путевой устойчивостью на разбеге и
пробеге.
Применение велосипедной схемы шасси с подкрыльными вспо-
могательными опорами обусловливается главным образом компо-
522
ковочными решениями самолета. Необходимость создания в районе
центра масс самолета отсека большой вместимости приводит к уда-
лению от него главной опоры на значительное расстояние. При этом
нагрузка на нее составляет до 55 % силы тяжести самолета.
Однако применение велосипедного шасси приводит и к возникнове-
нию следующих существенных недостатков.
1. Требуется более высокая техника пилотирования самолета
при разбеге.
При достижении самолетом взлетной скорости выход его на
взлетный угол может быть осуществлен лишь с помощью специаль-
ной системы, обеспечивающей «вздыбливание» передней опоры
(увеличение ее высоты) или «приседание» задней (уменьшение ее
высоты), так как горизонтальное оперение на взлетной/скорости
еще не обладает необходимой эффективностью и не обеспечивает
балансировку самолета по тангажу относительно главной опоры,
находящейся на большом расстоянии от центра масс.
2. Увеличивается дистанция пробега самолета вследствие
ограничения тормозной силы, создаваемой колесами на носовой
опоре, до 60 ... 70 % от тормозных сил главной опоры, так как
силы трения носовой опоры при возмущениях по курсу
создают относительно центра масс дестабилизирующий мо-
мент.
3. Возрастает масса фюзеляжа на 15 ... 20 % вследствие необ-
ходимости создания усиленных шпангоутов и бимсов в районе
центрального отсека и в местах крепления шасси.
4. Масса велосипедного шасси, несмотря на его небольшую
высоту, получается большей, в сравнении с трехопорным шасси
с носовой опорой, из-за наличия подкрыльных опор и более мощ-
ной системы управления разворотами.
5. В убранном положении подкрыльные опоры обычно не впи-
сываются в обводы и на них устанавливают обтекатели, которые
увеличивают лобовое сопротивление самолета.
Вследствие отмеченных недостатков велосипедная схема шасси
не получила распространения.
19.1.4. Многоопорное шасси
Появление самолетов с большими взлетными массами привело
к применению многоопорных схем шасси. Такие схемы позволяют
уменьшить нагрузку, приходящуюся на каждую из опор, и обеспе-
чивают неповреждаемость бетонного покрытия при эксплуатации.
Многоопорные схемы шасси применены: на советском аэробусе
Ил-86, имеющем взлетную массу 206 т, и на самолетах США
Боинг 747 и Локхид С-5А «Гелакси» с взлетными массами порядка
350 т (схемы расположения опор приведены на рис. 19.5).
Применение многоопорных схем шасси на таких самолетах
создает и более выгодные компоновочные условия для их размеще-
ния в убранном положении.
523
Рис. 19.5. Схемы многоопорных шасси
На самолетах с многоопорным шасси носовая опора располо-
жена впереди центра масс, и вследствие этого они обладают до-
стоинствами и недостатками, перечисленными в разд.- 19.1.2,
которые присущи самолетам, имеющим трехопорную схему шасси
с носовым колесом.
19.1.5. Маневренные характеристики
при движении самолетов по аэродрому
Самолеты, имеющие шасси с носовой опорой, велосипедное и
многоопорное, обладают значительно лучшими маневренными
характеристиками, которые обеспечиваются системой управления
поворотами носовой опоры. Отклонения носовой опоры на углы от
60 до 80° от нейтрального положения позволяют создавать малые
радиусы разворотов самолета. Одновременно эта система позволяет
парировать возмущения на ВПП, не прибегая к образованию
управляющих моментов с помощью тормозных сил, и этим дости-
гается сокращение дистанций разбега и пробега. Следует отметить,
что использование этой системы позволяет осуществлять маневри-
рование с меньшими тягами, создаваемыми двигательными уста-
новками, и достигнуть некоторой экономии в расходе горючего.
19.2. ВЫБОР ОСНОВНЫХ ГЕОМЕТРИЧЕСКИХ
ПАРАМЕТРОВ ШАССИ
В данном разделе рассматривается выбор параметров для
трехопорной схемы шасси с передней опорой, получившей распро-
странение на подавляющем большинстве современных самолетов.
524
Обоснования, принимаемые для определения параметров этой
схемы могут быть использованы и при рассмотрении других схем
шасси.
Геометрические параметры схемы шасси определяют располо-
жение опор относительно центра масс самолета. Вследствие этого
определению геометрическиxs параметров шасси должен пред-
шествовать весовой расчет, определяющий положение центра масс
самолета и выполнение чертежа его общего вида в трех проекциях
с нанесением на него положения САХ крыла и его угла заклинения
азкл (см. РИс- 19.1, б). Геометрические параметры^ шасси выбира-
ются из условия обеспечения необходимого положения самолета
в процессе совершения посадки, минимальных дистанций разбега
и пробега и устойчивости движения на ВПП и маневрировании.
Основными геометрическими параметрами схемы шасси с носо-
вым колесом являются:
— продольная база шасси b (расстояние при виде сбоку между
осями колес, установленных на носовой и главных опорах);
— колея шасси В (расстояние при виде спереди между точками
касания ВПП колесами главных опор);
— вынос главных колес е (расстояние при виде сбоку между
вертикалью, проходящей через центр масс самолета, и осью глав-
ных колес);
— вынос переднего колеса а (расстояние при виде сбоку между
вертикалью, проходящей через центр масс самолета, и осью перед-
него колеса);
— угол выноса колес главных опор у;
— угол опрокидывания <р (угол касания хвостовой части фюзе-
ляжа или его предохранительной опоры поверхности ВПП);
— стояночный угол ф (угол между строительной горизонталью
фюзеляжа и поверхностью ВПП).
Параметры шасси определяются при необжатых колесах и
амортизаторах. Положение центра масс самолета выбирается пре-
дельно заднее, возможное при взлете или посадке. При установке
на опоры многоколесных тележек размеры определяются от осей,
на которых вращаются тележки. Для обеспечения необходимого
положения самолета при совершении посадки параметры шасси
определяются исходя из следующих соотношений:
«пос = %шах — Да; (19.6)
«пос = Ф + Ф + аа, (19.7)
где Да — угол запаса, гарантирующий от выхода самолета на
критический угол атаки, при котором начинается срыв потока
с крыла.
Значение стояночного углаф принимается обычно равным от О
до 4°. Оптимальное значение этого угла соответствует минимуму
лобового сопротивления самолета на разбеге, который сокращает
его длину. На пробеге стояночный угол уменьшается, так как
525
тормозные силы догружают носовую опору и разгружают главные,
и если стояночный угол при этом становится отрицательным,
дистанция пробега сокращается.
Зная значение угла заклинения крыла азкл, который принима-
ется равным углу атаки при полете на основном режиме, из уравне-
ния (19.7) можем определить угол опрокидывания самолета. Для
различных по назначению самолетов угол tp — 10 ... 18°.
Угол выноса главных колес у не позволяет самолету при по-
садке переваливаться на хвост, и вследствие этого его значение
принимают равным
У = <Р + (1° ... 2°). (19.8)
С помощью параметров, входящих в уравнения (19.6) и (19.7),
на боковой проекции общего вида самолета в первом приближении
определяется вынос главных опор е и высота Н (см. рис. 19.1, б).
Величина выноса е обычно находится в пределах
е = (0,15 ... 0,20) ЬА. ‘ (19.9)
При этом следует иметь в виду, что при большом значении выноса
затрудняется отрыв передней опоры во время выхода самолета на
взлетный угол атаки. Отрыв при этом будет происходить на
большей скорости и, следовательно, будет возрастать длина
разбега. Уменьшение величины е будет обеспечивать легкий отрыв
передней опоры, однако при малом выносе возможно перевалива-
ние самолета на хвост, так как при посадке центр масс самолета
может зайти за точку опоры, когда <р = 0.
Величина е должна выбираться и из условия эксплуатации
самолета во время стоянки. Предельно заднее положение центра
масс не должно заходить за ось колес или тележки, установленных
на главной опоре. Для пассажирских самолетов наиболее задняя
центровка имеет место при приложении груза с массой 500 кг на
хвосте, когда обслуживающий персонал с инструментом работает
в районе оперения или когда при наличии задней двери в пустой
самолет началась посадка пассажиров и в хвостовой части сосредо-
тачивается до 30 % всего их числа. Если при этом центр масс все же
лежит за линией опоры основных колес, необходимо предусмотреть
специальную хвостовую опору типа опоры, установленной на
самолете Ил-62.
Вынос передней опоры а выбирается таким образом, чтобы при
стоянке самолета нагрузка на нее составляла 6 ... 12 % от массы
самолета. Из этого условия следует:
а = (0,94 ... 0,88) (19.10)
е = (0,06 ... 0,12) Ь, (19.11)
где b — продольная база шасси.
При слишком малой нагрузке на переднюю опору ухудшается
управляемость самолета при рулежке. При увеличении нагрузки
увеличивается масса опоры и масса носовой части фюзеляжа.
526
Одно из условий выбора базы шасси Ь — обеспечение хороших
эксплуатационных качеств самолета при маневрировании по
аэродрому, поэтому она зависит от длины фюзеляжа Ьф. Статисти-
ческие данные по современным самолетам различных схем и назна-
чений показывают, что
Ъ = (0,3 ... 0,4) £ф. (19.12)
Если база будет небольшой (<£ф/4), то при рулежке самолет испы-
тывает значительные колебания в вертикальной плоскости, вызы-
вая неприятные ощущения у пилота и пассажиров.
Высота шасси определяется из условия обеспечения минималь-
ного зазора 200 ... 250 мм между поверхностью ВПП и конструк-
цией самолета (фюзеляжем, крылом, двигателями, винтами,
подфюзеляжными гребнями и т. д.) при раздельном и одновремен-
ном обжатии пневматиков и амортизаторов, установленных на
главных и носовой опорах.
Этот зазор необходимо определять и при посадке самолета
с креном, тангажный угол самолета при этом равен посадочному,
а величина крена устанавливается 4°. Для самолетов, имеющих
низко расположенные стреловидные крылья с отрицательным
поперечным V, эти условия обычно и определяют высоту шасси.
Расчеты движения самолета при крене в 4° с учетом всех дей-
ствующих сил и практика эксплуатации показывают, что при
касании ВПП одной из опор возникающая на ней сила уменьшает
крен, и вследствие этого установленный зазор между концом крыла
и ВПП обеспечивается без учета обжатий колес и амортизатора,
а это позволяет существенно уменьшить высоту шасси. При необ-
жатых колесах и амортизаторах следует определять и зазор между
подфюзеляжными хвостовыми гребнями и ВПП, так как силы,
возникающие на главных опорах, обжимая пневматики и аморти-
заторы, уменьшают угол тангажа самолета.
Высота шасси зависит и от схемы самолета (высокоплан, сред-
неплан, низкоплан), места крепления шасси и компоновочных
условий его размещения в убранном положении.
Колея шасси В выбирается из условия обеспечения устойчи-
вости движения самолета по ВПП во время разбега и пробега и
при маневрировании на рулежке. Колея В зависит главным обра-
зом от высоты центра масс самолета Н, и если колея не соответ-
ствует высоте, самолет в процессе движения по ВПП может опро-
кинуться на бок. Поэтому минимальная колея шасси с носовой
опорой выбирается из условия предотвращения опрокидывания
относительно линии 1—2, соединяющей переднюю и главную
опоры (рис. 19.6). Опрокидывание (боковое капотирование) будет,
очевидно, невозможно, если момент, создаваемый силой тяжести
самолета относительно этой линии, будет больше момента, созда-
ваемого силами трения:
mgc FTpH; (19.13)
с^иН, (19.14)
527
Вид А
Рис. 19.6. Схема для определения минимальной колеи В
где FTp — сила трения при боковом скольжении самолета; р —
коэффициент бокового трения, принимаемый при определении
колеи равным 0,85.
Расстояние между передней и одной из главных опор (по диаго-
нали 1—2) равняется j/b2 + 52/4. Отрезок с находится из подобия
треугольников 1—4—5 и 1—3—2'.
аВ
С = ---т--— .
2Кб’ + 5*/4
(19.15)
Подставляя значение с в уравнение (19.14), определяем колею
шасси В:
2НЬи.
Ка2 - Я2(13 ’
(19.16)
. Если в этом уравнении пренебречь величиной №р2 по сравнению
с а2, колею шасси в первом приближении можно принимать равной
В 2Н, так как а « 0,9b.
Для самолетов, имеющих большие полетные массы, колею сле-
дует стараться делать больше ширины плит бетонного покрытия
аэродромов, размер которых равен семи метрам, что приводит
к снижению действующей на плиты нагрузки, так как на них
в этом случае будет приходиться только одна опора самолета.
Максимальный же размер колеи В следует ограничивать двенад-
цатью метрами, чтобы обеспечить возможность безопасной ру-
лежки самолетов по рулежным дорожкам аэродромов, ширина
которых 15 м.
Следует отметить, что на некоторых самолетах носовую опору
размещают не в плоскости симметрии самолета XOY, а в парал-
лельной плоскости на небольшом от нее расстоянии. Такое разме-
щение носовых опор применено на самолете Хаукер-Сиддли
«Трайдент», штурмовике Фэрчайлд-Рипаблик А-10А и других
самолетах. Смещение носовых опор относительно плоскости сим-
метрии (параллельно ей) позволяет при определенных условиях
создать более рациональные компоновочные решения. На самолете
«Трайдент» смещение на 610 мм позволило сократить потерю
объема багажника, расположенного под полом, позади отсека
528
носовой опоры, а на самолете А-10А разместить в носовом отсеке
скорострельную многоствольную пушку большого калибра. Такое
размещение носовых опор при наличии на самолетах системы
управления поворотами носовой опоры практически не оказывает
влияния на управление самолетом при движении на ВПП и манев-
рировании .5,
При выборе продольной базы b и колеи В следует определить
возможность разворота самолета на 180° на ВПП заданного
класса аэродрома, на котором будет производиться его эксплуата-
ция (размеры ВПП для каждого класса аэродрома приведены
в табл. 19.1).
Из геометрической схемы выполнения самолетом разворота
(рис. 19.7) следует, что разворот самолета на 180° при заданной
ширине ВПП может быть осуществлен при следующих условиях:
Ширина
ВПП В + Б>вв + 7?ноо + 2А, (19.17)
где 7?вн — радиус окружности, по которой движутся внутренние
главные опоры; 7?ноо — радиус окружности, по которой движется
передняя опора; А — расстояние от кромки ВПП до колес, А =
= 1,5 ... 2,0 м.
Существенное влияние на ширину полосы, потребную для
осуществления разворота, оказывает угол отклонения носовой
опоры (Зяоо. Из приведенных на рис. 19.7 построений следует, что
Рис. 19.7. Схема выполнения самолетом разворота на ВПП:
О. ось вращения носовой опоры; О,Д±О„Б, О'А'^ОаБ"
I К 6 i, &
529
Ось Вращения носовой опоры
Рис. 19.8. Образование угла уво-
да колес
деформированная
контактная площадь
пневматика
уменьшение максимального значе-
ния угла Риос до Рнос приводит
к увеличению ширины полосы
вследствие увеличения Рвн и Rma>
входящих в правую часть уравне-
ния (19.17). Следовательно, угол
Рнос при проектировании системы
управления поворотами перед-
ней опоры следует делать как
можно большим. Однако при
эксплуатации наблюдается неко-
торое отступление от рассмотрен-
ной схемы выполнения самоле-
том разворота, которое является
следствием деформаций пневмати-
ков, возникающих от сил, дей-
ствующих на них в процессе раз-
ворота. Деформации пневматиков
сопровождаются возникновением явления «увода» колес. Колеса,
установленные на передней опоре, при возникновении увода ка-
тятся уже не в плоскости угла рнос, а в плоскости, находящейся
к ней под углом 6, называемым углом увода, который уменьшает
максимальный угол рнос (рис. 19.8), а увод колес на главных опо-
рах приводит к увеличению Двн. Наибольшее влияние на величину
угла увода колес оказывают: скорость движения самолета при
выполнении разворота и коэффициент трения пневматиков о ВПП.
Увеличение скорости и коэффициента трения приводят к увеличе-
нию угла увода. Вследствие этого радиус разворота центра масс
самолета, определяемый по схеме, данной на рис. 19.7, следует
увеличивать примерно на 20 ... 30 %.
Конструктивной мерой, позволяющей уменьшить ширину
полосы разворота с целью обеспечения эксплуатации самолетов
больших размеров на заданном классе аэродромов, является обра-
зование вертикальной дополнительной оси, относительно которой
при развороте ориентируются колеса многоколесных тележек
главных опор. Такое конструктивное решение применено на
самолетах Ту-154 и Дуглас ДС-8. На ДС-8 разворачивается
задняя ось двухосной тележки, а на Ту-154 — передняя ось
трехосной.
Рассмотренные конструктивные меры одновременно позволяют
уменьшить величину расчетного крутящего момента, действую-
щего на опору в процессе разворота самолета.
При выборе геометрических параметров шасси следует всегда
иметь в виду, что, несмотря на необходимость выполнения боль-
шего числа условий, наиболее важным из них для самолета
является обеспечение посадочного угла, уменьшение кото-
рого будет приводить к увеличению посадочной скорости само-
лета.
530
19.3. ВЫБОР ЧИСЛА ОПОР И КОЛЕС
Выбор числа опор и типа, размера и числа колес, устанавли-
ваемых на них, зависит от требований, предъявляемых к прохо-
димости самолета и к его взлетно-посадочным характеристикам.
Под проходимостью понимается возможность длительной
эксплуатации самолета на грунтовом или бетонированном аэро-
дроме без повреждения его поверхности.
Для самолетов, предназначенных к эксплуатации на бетонной
взлетно-посадочной полосе (БВПП), необходимое число колес и
их взаимное расположение на опоре для выполнения требований
по проходимости (возможность эксплуатации без повреждения
плит бетонного покрытия) выбирается в зависимости от эквивалент-
ной одноколесной нагрузки Рэкв, соответствующей заданному
классу аэродрома, на котором должен эксплуатироваться самолет.
Эквивалентная одноколесная нагрузка представляет собою нагрузку
от одноколесной опоры самолета, равную по силовому эффекту
воздействию на покрытие нагрузки от реальной опоры самолета
(с учетом числа, размера и схемы расположения колес на этой
опоре). Понятие об эквивалентной одноколесной нагрузке необ-
ходимо для определения увеличения суммарной рнесосредоточен-
ной нагрузки на бетонную плиту в сравнении с нормируемой сосре-
доточенной нагрузкой.
Аэродромы с бетонированными взлетно-посадочными полосами
разделяют на несколько классов в зависимости от длины, ширины
и толщины покрытия. Для каждого класса аэродромов устанавли-
вается наибольшее значение РэКВ. В табл. 19.1 приведены характе-
ристики классов аэродромов.
Из табл. 19.1 следует, что если на самолете, имеющем трехопор-
ное шасси с носовой опорой, на каждой опоре установлено по
одному колесу, то взлетная масса самолета при его эксплуатации
на аэродроме класса А не должна превышать 100 000 кг (если
принимать, что на носовую опору приходится около 10 % взлетной
массы), а при эксплуатации на аэродроме класса G взлетная масса
не должна быть более 4400 кг.
Таблица 19.1
Класс аэродрома Длина ВПП, м Ширина ВПП, м Рэкв, мн
А Более 2550 45 0,45
В 2150 . . 2550 45 0,35
С 1800 . . 2150 45 0,27
D 1500 . . 1800 45 0,20
Е 1280 . . 1500 45 0,13
F 1080 . . 1280 30 0,07
G 900 . . 1080 30 0,02
531
1. Восьнтшная
тспсжка
Рис. 19.9. Влияние диаметра колес и типа опоры на коэффициент йш:
/, = 1,009 DK: zs = DK
Однако взлетные массы современных самолетов доходят до
350 000 кг и более, и эксплуатация их на аэродромах с бетонным
покрытием обеспечивается рассредоточением нагрузки увеличе-
нием числа опор и колес, устанавливаемых на опорах.
Если опоры шасси представляют четырехколесную или восьми-
колесную тележку, эквивалентная одноколесная нагрузка в пер-
вом приближении определяется по формуле
Рэкз = 0,04344?^ взл х
J [1 + 0,04(1 -ЗЛО-6Рст.взл)](ро-10-5-4)0-8Х V’75 /10
1 + 0,0534 (ро-Ю-s — 4)0,675 J ’ (
где Рст. взл — стояночная нагрузка на одно колесо четырехколес-
ной или на два колеса восьмиколесной тележки, Н; р0 — давление
в пневматике шасси, Па; 1гш — конструктивный коэффициент,
зависящий от типа опоры и диаметра колеса (рис. 19.9).
Для опоры со спаренными колесами
Рэкв = 0,2831Рст.6взл ( tl+ 0,0352 (ро-Ю-5-4)2/3Мш 1175 (19 19)
[ 1 + 0,0488 (ро -Ю-6 — 4)2/3 j
где Рот. взл — стояночная нагрузка на одно колесо, Н, остальные
обозначения те же, что и в формуле (19.18).
Формулы (19.18) и (19.19) применимы при р0 4-105 Па и при
условии, что на одну бетонную плиту ВПП приходится только
одна опора самолета. Если на одной плите одновременно нахо-
дятся две основные опоры шасси, то проходимость самолета резко
532
снижается. В этом случае величину Р8КВ, рассчитанную по фор-
мулам (19.18) и (19.19), следует увеличивать на 25 ... 30 %.
Для того чтобы не снижать проходимость самолетов, расстояние
между основными опорами шасси при Р8КВ > 0,25 МН должно
превышать ширину плиты, равную 7 м.
Формулы (19.18) и (19.19) показывают, что применение на
самолете большего числа колес меньшего диаметра приво-
дит к улучшению его проходимости. Наиболее эффективными
средствами увеличения проходимости самолетов с взлетными
массами, превышающими 200 000 кг, являются:
— установка трех или четырех основных опор;
— переход на шестиколесные и восьмиколесные тележки;
— применение раздвижки колес на осях многоколесных тележек»
При эксплуатации самолета на грунтовом аэродроме необхо-
димо, чтобы тяговооруженность самолета обеспечивала возмож-
ность страгивания с места, маневрирование и взлет, используя
только тягу двигательной установки, и чтобы глубина колеи на
грунте не превышала определенного значения. Условие проходи-
мости самолета по грунту определяется формулой
ЦТ > gmoiicrp, (19.20)
где Xj Т — суммарная тяга двигательных установок самолета;
рстр — коэффициент сопротивления качению при страгивании
с места. Можно принимать рстр = 1,4ркач, где цкач — коэффи-
циент сопротивления качению при скорости 1 м/с. Примерные
значения цкяч в зависимости от давления в пневматике приведены
на рис. 19.10.
Минимальную прочность грунта, обеспечивающую проходи-
мость, можно в первом приближении рассчитать по формуле
где Рст. взл — стояночная взлетная нагрузка на одно колесо, Н;
Нк — допустимая глубина колеи (0,05 м); Вк — ширина колеса, м;
DK — диаметр колеса, м; бк — коэффициент, учитывающий дефор-
мацию пневматика в зоне контакта с грунтом (рис. 19.11).
Рис. 19.10. Изменение коэффициента сопротивления качению в зависи-
мости от давления в пневматике:
1 — в распутицу; 2 — в период просыхания; з — сухой и плотный грунт
Рис. 19.11. Зависимость 6К от о
533
Найденное по формуле (19.21) значение стт1п сравнивают
с заданным в ТТТ значением и делают вывод о проходимости само-
лета по грунту. Необходимо, чтобы соблюдалось условие
*^mln расч *^mln норм- (19.22)
Из формулы (19.21) следует, что для уменьшения глубины
колеи необходимо уменьшить нагрузку, приходящуюся на колесо,
и увеличить его ширину и диаметр.
Проходимость по грунту можно улучшить, если применить
лыжное или колесно-лыжное шасси. Однако применение таких
шасси приводит к следующим проблемам:
— требуется большая тяговооруженность (не- менее 0,6) для
страгивания самолета с места;
— ухудшается маневренность на земле, вследствие чего самолет
по существу лишается автономности передвижения;
— увеличивается масса шасси и усложняется его уборка;
— увеличивается мощность энергетической системы уборки и
выпуска шасси.
В связи с этим, несмотря на большое число разработанных
конструкций лыжного или колесно-лыжного шасси, они применя-
ются в основном на самолетах, эксплуатирующихся в особых усло-
виях.
Для определения типа и размера колеса, устанавливаемого
на опору, следует рассмотреть существующую номенклатуру ко-
лес, которая условно разделена на четыре группы (табл. 19.2).
Таблица 19.2
Номер группы Наименование группы Давление в пневма- тике, Па Допустимые скорости посадки и взлета, км/ч
I Сверхнизкого давления (2,5 ... 3,5)- 10е 200
II Низкого давления (3,5 ... 6,5)-106 250
III Высокого давления (6,5 ... 10)-105 300
IV Сверхвысокого давления 10-10е >300
Предъявляемые к самолету требования по проходимости и
величины взлетной и посадочной скоростей позволяют определить
принадлежность колеса к определенной группе. Для самолетов,
эксплуатирующихся на БВПП, выбирают пневматики высокого и
сверхвысокого давления. Для самолетов, эксплуатирующихся на
грунтовой взлетно-посадочной полосе (ГВПП), в зависимости от
прочности грунта выбирают пневматики низкого и сверхнизкого
давления.
Для обеспечения надежной и безаварийной эксплуатации
самолета, параметры и характеристики устанавливаемых на нем
534
колес не должны выходить за пределы определенных значений.
Этими параметрами являются:
•Рет.пос — нагрузка на колесо при посадочной массе самолета;
Рст. взл — нагрузка на колесо при взлетной массе самолета;
Рм. д — максимальная допустимая нагрузка на колесо при
поглощении эксплуатационной работы Лэкс;
— предельная нагрузка на колесо при поглощении макси-
мальной работы Лтах;
Рг — боковая разрушающая нагрузка на колесо;
Рдин — максимально допустимая динамическая нагрузка для
колес, устанавливаемых на носовых опорах;
Кюс — посадочная скорость самолета;
Увзл — взлетная скорость самолета;
Л)т — максимальный тормозной момент колеса;
Лк — кинетическая энергия, поглощаемая колесом за одну
посадку;
t — минимально допустимое время между посадками;
N — гарантируемое число посадок.
Минимально допустимое время между посадками устанавли-
вается для обеспечения охлаждения колес после торможения.
Особенно большое значение это имеет для самолетов, эксплуати-
рующихся на местных линиях с небольшой продолжительностью
полета и небольшими интервалами между взлетами и посадками.
Время остывания негерметичных колес составляет 1,5 ... 2,0 ч,
а герметичных еще больше, и оно накладывает определенные
ограничения на эксплуатацию самолета.
Динамические нагрузки для колес, устанавливаемых на носо-
вых опорах, определяются по формулам, приведенным в НЛГС-2.
Большая часть параметров колеса определяется характеристи-
ками самого самолета, его весовыми, компоновочными и эксплуа-
тационными данными. Параметры же Рм. д, Рпр и Pz могут быть
согласованы лишь после выбора схемы шасси и построения диа-
грамм работы колеса и амортизатора при поглощении определяе-
мых НЛГС-2 эксплуатационной работы Аэ и максимальной ра-
боты Лгаах, которыми определяются величины этих параметров.
Колеса, устанавливаемые на главные опоры шасси, выбираются
из сортамента тормозных колес. Тормозные колеса выбираются и
для установки на носовые опоры велосипедного шасси. Колеса,
предназначенные для установки на носовые и хвостовые опоры и на
подкрыльные опоры велосипедного шасси обычно являются нетор-
мозными и выбираются из сортамента тормозных колес с арочными
пневматиками. С целью облегчения этих колес они применяются
без тормозов и тормозных рубашек.
При выборе колес в процессе проектирования необходимо
знать связь числа устанавливаемых на опору колес с соответствую-
щими весовыми затратами. Статистические зависимости, устанав-
ливающие связь между массой колес, их числом и взлетной массой
самолета, показывают, что увеличение числа колес с увеличением
535
взлетных масс самолетов приводит к существенному сокращению
весовых затрат на колеса.
Помимо этого, увеличение числа колес на опорах позволяет
в большинстве случаев:
— уменьшить объем, занимаемый колесами в убранном поло-
жении;
— уменьшить мидель занимаемого объема;
— уменьшить вырезы в планере и площади створок;
— увеличить надежность и живучесть шасси.
При определении числа колес, устанавливаемых на опору,
следует учитывать компоновочные условия самолета, которые
накладывают определенные ограничения на выбор, связанные
с их размещением в убранном положении.
19.4. СИЛОВЫЕ И КИНЕМАТИЧЕСКИЕ СХЕМЫ
УБИРАЮЩЕГОСЯ ШАССИ
Большинство современных самолетов, обладающих скоростями
более 250 км/ч. делают с убирающимся в полете шасси. Неубираю-
щееся шасси создает значительное лобовое сопротивление и сни-
жает летные данные. Существует большое разнообразие способов
уборки шасси в зависимости от компоновочного решения самолета.
Носовые опоры убираются в переднюю часть фюзеляжа, а главные
опоры в крыло, в крыло и фюзеляж, в фюзеляж, в гондолы двига-
телей или в специальные гондолы.
Силовые и кинематические схемы убирающихся шасси обладают
рядом характерных свойств:
1) силовые схемы шасси выполняются по балочной схеме;
2) силовые схемы шасси при нагрузках, действующих в пло-
скостях уборки и выпуска, являются, согласно законам строитель-
ной механики, статически определенными системами;
3) кинематические схемы шасси в процессе уборки и выпуска
образуют, согласно теории механизмов и машин, четырехзвенный
механизм или четырехзвенный шарнирный механизм с присоеди-
нением к нему по классификации Ассура—Артоболевского двух-
поводковых групп, которые служат для обеспечения геометри-
ческой неизменяемости силовых схем и пропесса уборки и выпуска.
Рассмотренные свойства убирающихся шасси дают возмож-
ность разделить конструкции на четыре группы. В приводимых
ниже схемах (см. рис. 19.12 ... 19.15, 19.18 и 19.21) узлы крепле-
ния шасси к планеру обозначены арабскими цифрами, механизмы
уборки и'выпуска обозначены заглавными буквами русского алфа-
вита А, Б, а замки, обеспечивающие геометрическую неизменяе-
мость силовой схемы, обозначены словом «замок».
Первая группа (рис. 19.12).
1. Геометрическая неизменяемость силовой схемы в выпущен-
ном положении обеспечивается нулевыми стержнями с замками
или замками, заменяющими нулевые стержни.
536
Рис. 19.12. Схемы шасси I группы
2. Механизмы уборки и выпуска не являются силовыми стерж-
нями силовой схемы.
Характерной особенностью шасси этой группы являются
небольшие величины нагрузок, действующих на замки выпущен-
ного положения, в сравнении с нагрузками, действующими на
складывающиеся подкосы, так как замки воспринимают усилия
в направлении нулевых стержней. Вследствие этого схемы этой
группы получили небольшое распространение в начальный период
537
создания убирающегося шасси, когда еще не были созданы меха-
нические замки, надежно работающие под значительными нагруз-
ками.
Большое разнообразие схем этой группы, являющееся след-
ствием комбинации силовых элементов, узлов и их взаимного
расположения, делает эти схемы неравноценными по массе и
занимаемым объемам в убранном положении. Схемы, приведенные
в среднем ряду рис. 19.2, встречаются уже довольно редко:
— увеличивается масса шасси из-за наличия большого числа
узлов, крепящих шасси к планеру;
— объем, занимаемый шасси в убранном положении, больше
объема, занимаемого при других схемах этой группы;
— увеличивается масса конструкции из-за переразмеренности
гидравлической системы вследствие значительного изменения
усилия, создаваемого силовым цилиндром в процессе уборки;
— увеличивается масса конструкции из-за сложности определе-
ния точного значения расчетного усилия, воспринимаемого сило-
вым цилиндром при нагружении шасси Это усилие зависит от
деформации силовых элементов и узлов, к которым в процессе
эксплуатации добавляются износы в шарнирных соединениях.
Наиболее рациональными из приведенных на рис. 19.2 яв-
ляются схемы, в которых:
— усилие, создаваемое механизмом уборки и выпуска, изме-
няется незначительно (с увеличением момента, создаваемого
силами тяжести относительно шарнира 1, увеличивается и плечо
силы механизма уборки и выпуска); число узлов наименьшее,
что приводит к снижению массы;
— шасси в убранном положении размещается компактнее и
занимает меньший объем.
Вторая группа (рис. 19.13).
1. Геометрическая неизменяемость силовой схемы в выпущен-
ном положении обеспечивается с помощью силовых замков,
Рис. 19.13. Схемы шасси II группы
538
которые крепят балку или
силовые подкосы шасси не-
посредственно к конструк-
ции самолета.
2. Механизмы уборки
и выпуска не являются
силовыми стержнями си-
ловой схемы.
По схемам этой группы
созданы конструкции но-
совой и главных опор
шасси на ряде самолетов
«Ил» и «МиГ». Схемы этой
Рис. 19.14. Схемы шасси III группы
группы позволяют занять небольшие объемы в планере.
Третья группа (рис. 19.14).
1. Геометрическая неизменяемость силовой схемы в выпущен-
ном положении обеспечивается механическими замками, устанав-
ливаемыми в механизмах уборки и выпуска.
2. Механизмы уборки и выпуска являются силовыми стерж-
нями силовой схемы.
Схемы этой группы обладают рядом существенных преимуществ
перед конструкциями других групп. Эти преимущества являются
следствием:
— наименьшего числа силовых элементов (всего два — подкос-
ная балка и силовой цилиндр, подкос, который является одновре-
менно механизмом уборки и выпуска);
— наименьшего числа шарниров (три);
— наименьшего числа узлов (три);
— защищенности силовых механических замков от воздействия
внешних неблагоприятных факторов (песок, пыль, вода, лед
и т. д.);
— отсутствия влияния на расчетную силовую схему деформа-
ций и зазоров в узлах и шарнирах, что приводит к уменьшению
массы конструкции из-за более точного определения расчетных
усилий, действующих в элементах схемы;
— возможности резервирования в некоторых случаях силового
механического замка в цилиндре гидравлическим замком;
— большей степени надежности конструкции, которая дости-
гается уменьшением общего числа деталей, защищенности механи-
ческого замка и меньшей трудоемкости, затрачиваемой на профи-
лактические работы в эксплуатации.
Общим недостатком, присущим схемам третьей группы, явля-
ется переразмеренность гидравлической системы вследствие зна-
чительного изменения усилия, создаваемого силовым цилиндром
в процессе уборки.
Четвертая группа (рис. 19.15).
1. Геометрическая неизменяемость силовой схемы в выпу-
щенном положении обеспечивается способами, применяемыми
539
Рис. 19.15. Схемы шасси IV группы
в конструкциях первой, второй и третьей классификационных
групп.
2. Балка шасси состоит из двух частей (звенья В—Г и Д—Г).
Схемы шасси этой группы применяют на самолетах, когда
шасси имеет большую высоту; использование же схем шасси дру-
гих групп в этом случае будет увеличивать занимаемые объемы и
перерезать силовые элементы конструкции планера. Однако сле-
дует иметь в виду, что выигрыш в объеме приводит к утяжелению
конструкции, так как деление подкосной балки на две части увели-
чивает число шарниров, узлов и силовых элементов.
В настоящее время для рационального размещения шасси
в убранном положении, уменьшения занимаемого им объема и
увязки силовой схемы шасси и планера применяют различные
способы перемещения и разворота амортизаторов и колес с травер-
540
сами относительно балки шасси и устанавливают вторые меха-
низмы уборки и выпуска. Перечисленные мероприятия могут
быть использованы в схемах любой из четырех рассмотренных
групп.
Следует также отметить, что при установке в схеме шасси двух
механизмов уборки и выпуска значительно повышается надеж-
ность и живучесть основной и дублирующей энергетических
систем, обеспечивающих выпуск шасси. Повышение надежности и
живучести является следствием полного разобщения систем,
исключающего возможное их взаимное влияние при повреждениях
и выходе из строя. Два механизма уборки и выпуска применены на
главных опорах шасси сухопутного варианта самолета Бак-Бреге
«Ягуар», в носовой опоре пассажирского самолета А300В, главных
опорах самолетов Бристоль В175 «Британия», Хейндли-Пейдж
НР88 «Виктор» и на других самолетах.
При выборе силовой схемы следует уделить большое внимание
обеспечению надежности выпуска шасси и фиксации шасси на
замки в выпущенном положении. Когда выпуск шасси обеспечива-
ется аэродинамическими силами и силами тяжести, а геометри-
ческая неизменяемость в выпущенном положении обеспечивается
самими действующими силами, надежность всегда будет значи-
тельно выше.
Одновременно с выбором силовой схемы шасси выбирается и
схема установки амортизатора. Если шасси имеет достаточную
высоту и не накладываются ограничения на величину хода аморти-
затора и начальную базу между его буксами, консольно-телескопи-
ческая схема позволяет получить снижение массы шасси.
Консольно-телескопические амортизаторы нецелесообразно
применять на самолетах, эксплуатирующихся на ГВПП, так как
такие амортизаторы плохо воспринимают нагрузки от лобовых
ударов в колесо на неровностях. На самолетах с ограниченной или
небольшой высотой шасси следует применять амортизаторы, уста-
новленные по рычажной схеме или выносные амортизаторы. В этом
случае даже небольшая высота шасси позволяет получить значи-
тельные перемещения колес при амортизации, что приводит к сни-
жению действующих нагрузок и компенсирует увеличение массы
самих амортизаторов. В конструкциях шасси используются и дру-
гие схемы установки амортизаторов. Амортизаторы по двухрычаж-
ной схеме установлены в конструкциях главных опор шасси само-
летов «Каравелла» и Конвер B36D. Установка качающегося амор-
тизатора применена в конструкциях главных опор шасси самолетов
Ту-134 и Ту-154 Достоинством схемы является восприятие кон-
сольно-телескопическим амортизатором действующих на шасси
лобовых нагрузок. Присоединение подкоса к шарниру двухзвен-
ника позволяет амортизатору при обжатии отклоняться в направ-
лении действия лобовых нагрузок.
При установке в схемы шасси многоколесных тележек их сле-
дует располагать так, чтобы в выпущенном положении шасси
541
первоначальный удар о ВПП при посадке воспринимался задними
колесами, что способствует уменьшению лобовых нагрузок, возни-
кающих от раскрутки колес.
19.5. КОНСТРУКТИВНЫЕ РЕШЕНИЯ, УМЕНЬШАЮЩИЕ
ОБЪЕМЫ ШАССИ В УБРАННОМ ПОЛОЖЕНИИ
При разработке компоновки современных самолетов все труд-
нее становится выделить объемы, необходимые для размещения
шасси в убранном положении. Особенно большие трудности возни-
кают на самолетах КВП вследствие необходимости устанавливать
на них дополнительные подъемные двигатели и на транспортных
самолетах, предназначенных для эксплуатации, на ГВПП, из-за
увеличения числа и габаритов устанавливаемых колес.
В последнее время разработаны и стали применяться конструк-
тивные решения для уменьшения объемов, занимаемых шасси
в убранном положении. Одним из таких решений является обжатие
амортизатора на величину его максимального хода в процессе
уборки, которое осуществляется следующими способами.
1. Обжатие амортизатора на величину его максимального
хода самим амортизатором, который в этом случае выполняет
функции силового цилиндра и соединяется для этого с гидравли-
ческой системой самолета (рис. 19.16). Такой способ сокращения
длины амортизатора может быть применен в случае, если давление
в газовой камере в конце хода при обжатии амортизатора, его
геометрические размеры £>цил и 4т и давление в гидравлической
системе, с помощью которой производится обжатие, связаны
следующим неравенством:
Рам шах п£>1ил/4 < рг. с (л0цил/4 — лсРШт/4) Т], (19.23)
где Рам max —максимальное давление в газовой камере амортиза-
тора при его обжатии на весь ход; dmT — наружный диаметр
штока амортизатора; Опил — внутренний диаметр цилиндра амор-
тизатора; рг.с — располагаемое давление в гидравлической системе;
т] — коэффициент полезного действия механизма обжатия.
В случае необходимости снижения величины левой части нера-
венства (19.23) перед сокращением длины амортизатора, может
быть достигнуто путем соединения воздушной камеры амортиза-
тора с передаточно-разделительными емкостями (рис. 19.17),
которые перед обжатием амортизатора увеличивают объем его воз-
душной камеры и снижают давление. Плавающие поршни в пере-
даточно-разделительной емкости изолируют сжатый газ и жидкость,
находящуюся в амортизаторе, от жидкости гидросистемы.
2. Обжатие амортизатора на какую-то часть его хода или
максимальный ход с помощью телескопической тяги, соединяющей
подвижную часть амортизатора с конструкцией планера самолета.
Такое конструктивное решение применено на самолете Скай-Хоук
A4D, схема шасси которого показана на рис. 19.18. Точка
542
Рис. 19.16. Схема амортизатора с его обжатием при уборке:
I — подвод гидравлической жидкости для обжатия амортизатора; II — к передаточио-
разделительиой емкости
Рис. 19.17. Передаточно-разделительная емкость:
I — подвод гидравлической жидкости при уборке шасси; II — подвод к воздушной
камере амортизатора; III — подвод гидравлической жидкости при выпуске
шасси
Рис. 19.18. Схема амортизатора с его обжатием телескопической тягой при
уборке
крепления телескопической тяги к планеру выбирается таким
образом, чтобы при уборке шасси происходило сокращение длины
амортизатора. В выпущенном положении при обжатии амортиза-
тора обжимается и телескопическая тяга, не оказывая влияния на
работу амортизатора.
3. Перемещение амортизатора внутри подкосной балки с по-
мощью специального привода (рис. 19.19). Такой способ сокраще-
ния длины консольно-телескопического амортизатора применен
в конструкции главных опор шасси самолета «Конкорд».
При применении выносного амортизатора, закрепленного сна-
ружи подкосной балки, и крепления колес к ней с помощью рычага
543
544
сокращение объема, занимаемого шасси перед уборкой, может быть
произведено:
— подтягом к подкосной балке амортизатора и рычага с закреп-
ленными на нем колесами с помощью специального привода
(рис. 19 20);
— подтягом к подкосной балке рычага с закрепленными на
нем колесами с помощью кинематической передачи в процессе
уборки шасси (рис. 19.21).
Кинематическая передача для уменьшения объема шасси
в убранном положении применена на самолете КВП Хоукер-
Сиддли «Хариер».
Одним из способов, позволяющих сократить объем шасси
в убранном положении, является применение расширяющихся
пневматикой. Такие пневматики в убранном положении спущены
(d — диаметр спущенного пневматика) и заполняются газом
после выпуска шасси перед посадкой. Ниже приводятся характе-
ристики расширяющихся пневматиков:
DHap> м ................................ 1,45 0,406
d, м ................................. 0,965 0,318
(D— d);D ............................... 33,5 21,7
Пневматик с наружным диаметром, равным 1,45 м, разрабо-
тан для транспортного самолета и имеет зарядное давление
(5 ... 6)-105 Па Пневматик с£>нар = 0,406 м, пневматик высокого
давления с зарядным давлением более 106 Па, изготовлен для
главных опор шасси военно-транспортного самолета С-134.
Уменьшение наружного диаметра пневматика позволяет умень-
шить занимаемый им объем в соответствии с отношением их диа-
метров во второй степени. Для колеса £>нор = 1,45 м занимаемый
объем уменьшен в 2,2 раза, а для колеса с £>нар = 0,406 —
в 1,6 раза.
1/а18 С. М. Егер и др.
Часть третья
ОСНОВЫ АВТОМАТИЗАЦИИ ПРОЕКТИРОВАНИЯ
Глава 20
ПРИНЦИПЫ ПОСТРОЕНИЯ и СТРУКТУРА СИСТЕМ
АВТОМАТИЗИРОВАННОГО ПРОЕКТИРОВАНИЯ
> САМОЛЕТОВ
20.1. НАЗНАЧЕНИЕ И ПРИНЦИПЫ ПОСТРОЕНИЯ САПР
Электронные вычислительные машины (ЭВМ) уже свыше 20 лет довольно
широко применяются в практике проектирования самолетов. С момента появле-
ния ЭВМ они были использованы как средство, позволяющее существенно по-
высить производительность труда при выполнении трудоемких вычислений, свя-
занных с расчетами траекторий самолета, его аэродинамических характеристик,
расчетами на прочность и др.
Разработка теоретических основ оптимального проектирования, успехи
в области вычислительной техники и программирования (практически неограни-
ченный объем машинной памяти, режим разделения времени, средства диалого-
вого взаимодействия человека и ЭВМ, модульный принцип программирования
н т. д.) поставили на реальную почву проблему создания систем автоматизиро-
ванного проектирования (САПР), позволяющих реализовать такие важнейшие
достоинства применения ЭВМ в проектировании как:
— возможность быстрого и эффективного выполнения большого объема
математических операций по многоразовым и легко генерируемым программам;
— возможность хранения и передачи большого объема информации в виде,
доступном для быстрого извлечения и засылки данных;
— возможность визуализации результатов проектирования (как оконча-
тельных, так и промежуточных) с помощью средств машинной графики;
— возможность общения проектанта с ЭВМ в режиме диалога, обеспечива-
ющем непрерывность творческого процесса, свойственного проектированию.
Накопленный опыт использования вычислительной техники при решении
сложных научно-технических задач показал, что решение актуальной проблемы
сокращения сроков и повышения качества проектирования возможно только
на базе комплексного подхода, объединяющего достижения в области вычисли-
тельной техники s успехами в развитии теории и методов проектирования. Именно
такой путь привел к разработке САПР в их современном понимании. При соз-
дании САПР предусматривается возможность их взаимосвязи с другими автома-
тизированными системами, используемыми при разработке и производстве новой
техники (автоматизированными системами управления, автоматизированными
системами технологической подготовки производства и др.).
САПР — это организационно-техническая система, состоящая из комплекса
средств автоматизации проектирования, взаимосвязанного е подразделениями
проектной организации, и выполняющая автоматизированное проектирование*.
Назначение САПР — повышение качества и технико-экономического уровня
проектируемых изделий, сокращение сроков и уменьшение трудоемкости проек-
тирования, а также повышение качества проектной документации.
Разработка и внедрение САПР позволяют преодолеть диалектическое про-
тиворечие между усложнившимся содержанием процесса проектирования совре-
менных объектов авиационной техники н существующими методами проектиро-
вания и организационными формами, в которых осуществляется процесс про-
ектирования.
* Приведенное определение и терминология по САПР соо!ветствуют
ГОСТ 22487—77 и ГОСТ 23501.0—79.
546
Основная цель внедрения САПР — повышение производительности труда
в проектно-конструкторских организациях за счет сокращения сроков разработки
и затрат на создание самолета прн одновременном повышении технико-экономи-
ческих показателей проектируемого самолета. К повышению производитель-
ности труда приводят:
— значительное ускорение расчетных операций и операций по обработке
графической информации;
— увеличение скорости передачи информации между подразделениями
проектной организации и сокращение сроков ее согласования;
— ускорение процесса подготовки проектной документации;
— частичная замена натурных экспериментов и макетирования моделирова-
нием на аналого-цифровых вычислительных комплексах;
— совершенствование организации груда специалистов, занятых рутинной
работой (вычисления, обработка текстовой и графической информации), а также
специалистов информационно-справочных служб;
— уменьшение объема испытаний и доводки опытных образцов авиационной
техники вследствие повышения качества проектирования и уровня прогнозиро-
вания ожидаемых результатов проектирования.
Перспективы повышения качества разрабатываемых проектов при исполь-
зовании САПР основываются на использовании методов многовариантного про-
ектирования и оптимизации для поиска рациональных вариантов и принятия
решений, на совершенствовании управления процессом разработки проектов
и повышении творческой активности проектировщиков вследствие освобождения
их от работы, не требующей высокой квалификации.
Исходя из указанных выше задач САПР и целей ее внедрения, можно сфор-
мулировать основные требования к таким системам [19, 22]. Они должны обес-
печивать:
1) участие САПР в проектировании на всех стадиях разработки самолета
для: получения и обработки информации о проектируемом объекте, генерирова-
ния вариантов проектных решений и оценки их эффективности, обеспечения
иерархической процедуры координации, согласования и принятия решений
в рамках единого проекта, выдачи комплекта технической документации на изго-
товление элементов самолета;
2) возможность реализации различных концепций процесса проектирования
и процедур принятия решения в нем, совершенствование процесса проектиро-
вания;
3) максимальные удобства для работы пользователя в системе за счет следу-
ющих возможностей:
— общение с ЭВМ с помощью привычных для проектировщика входных языков;
— диалоговая работа пользователя в системе при наличии режима пакетной
обработки в качестве фоновой;
— обработка и вывод графической информации;
— работа в реальном масштабе времени;
— обеспечение пользователей всей необходимой информацией (справочной,
оперативной, архивной и т. д.);
4) параллельное ведение нескольких проектных задач с автоматическим
распределением ресурсов системы между заданиями;
5) высокую надежность системы и легкость поддержания ее работоспособ-
ного состояния;
6) возможность обучения пользователей в рамках системы.
Указанные требования могут быть реализованы, если при разработке САПР
следовать определенным принципам, которые можно разделить на две группы:
системные и функциональные. Поскольку САПР является сложной системой,
то при ее разработке необходимо руководствоваться принципами системного
подхода. Важнейшими из них являются: принцип включения, принцип систем-
ного единства, принцип развития, принцип комплексности, принцип информа-
ционного единства, принцип совместимости и принцип стандартизации.
Принцип включения предусматривает возможность включения САПР в более
сложную систему — проектную организацию, которая и определяет требования
к ее созданию, функционированию и развитию.
547
Принцип системного единства заключается в том, что при создании, функ-
ционировании и развитии САПР связи между входящими в иее подсистемами
обеспечивают целостность системы.
Принцип развития состоит в том, что САПР разрабатываетси с учетом воз-
можности ее постоянного развития путем расширения, совершенствования и
обновления компонентов САПР и связей между ними.
Принцип комплексности предполагает обеспечение согласования и связ-
ности проектирования отдельных элементов и всего объекта в целом на всех
стадиях проектирования с помощью соответствующих компонентов САПР.
Принцип совместимости заключается в обеспечении совместного функци-
онирования всех подсистем САПР и сохранении открытой структуры системы
в целом. Это достигается соответствующим согласованием языков, символов,
информационных и структурных связей между подсистемами и компонентами
САПР.
Принцип информационного единства состоит в том, что в подсистемах и ком-
понентах САПР необходимо использовать единую систему терминов, символов,
условных обозначений, проблемно-ориентировочных языков программирования
и способов представления информации, установленных в отрасли соответству-
ющими нормативными документами.
Принцип стандартизации заключается в проведений унификации, типиза-
ции и стандартизации подсистем и компонентов, инвариантных к проектируемым «
объектам и отраслевой специфике, а также в установлении правил с целью упо-
рядочения деятельности в области создания и развития САПР.
Функциональные принципы требуют от САПР таких свойств, как эргатич-
ность, коллективность пользования, доступность и легкость освоении, произ-
вольность осуществляемых стратегий проектирования, полная автоматизация
рутинных работ.
Эргатичность системы обеспечивает возможность человеку играть активную
роль в ней, т. е. в режиме оперативного диалога изменять входные данные и
получать ответы иа интересующие его вопросы, принимать решения по ходу
выполнения задачи. Коллею явность использования системы позволяет одновре-
менную работу большого числа пользователей, причем как на индивидуальной
основе, так и в рамках группы разработчиков, объединенных одной проектной
задачей. Остальные функциональные принципы очевидны без разъяснений.
20.2. СТРУКТУРА И СОСТАВ СРЕДСТВ САПР
Рассмотрим кратко типовую структуру и состав средств САПР в объеме,
необходимом пользователям и разработчикам прикладного программного обес-
печения для эффективной работы В рамках САПР и определения направлений
ее дальнейшего совершенствования.
Рис. 20.1. Укрупненная структура САПР
548
По определению основу САПР составляет комплекс средств автоматизиро-
ванного проектирования. Этот комплекс состоит из средств технического, про-
граммного, информационного, методического и организационного обеспечения.
Функционирование системы и выполнение ею проектных задач осуществляется
на основе взаимодействия комплекса с коллективом разработчиков проекта
и коллективом обслуживающего персонала.
Детальная структура САПР и состав средств, на которых она реализуется,
зависит от специфики организационной структуры предприятия или организа-
ции, иа которой оиа создается, и класса разрабатываемых ими объектов. Общая
же, укрупненная структура САПР представлена на рис. 20.1.
Коллектив разработчиков проекта включает в себя всех пользователей си-
стемы, осуществляющих операции по проектированию, конструированию и тех-
нологической подготовке производства самолета. Коллектив обслуживающего
персонала обеспечивает нормальное функционирование комплекса средств авто-
матизированного проектирования и совместно с коллективом разработчиков
проекта его дальнейшее развитие в целях совершенствования процесса проек-
тирования.
Рассмотрим назначение и структуру средств автоматизированного проекти-
рования.
20.2,1. Средства технического обеспечения
Средства технического обеспечения САПР, образующие комплекс ее техни-
ческих средств (КТС), включает в себя набор аппаратных средств вычислитель-
ной и организационной техники, предназначенных для ввода информации в си-
стему, обработки, передачи и хранения информации, а также для ее вывода во
внешнюю среду. В состав КТС входит также вспомогательное оборудование,
предназначенное для обеспечения нормального функционирования комплекса
(ремонтно-диагностическое оборудование, блоки энергопитания, системы кон-
диционирования и т. д.).
Ядром КТС является центральное обрабатывающее устройство ЭВМ, в кото-
рое входят центральные процессоры, системы памяти и аппаратура связи и теле-
коммуникации (каналы связи). Посредством канального оборудования к цен-
тральному процессору может подключаться в различных комбинациях следующее
периферийное оборудование, предназначенное для ввода — вывода, передачи
и хранения информации:
— накопители на магнитных барабанах;
— накопители иа магнитных дисках;
— накопители на магнитных лентах;
— устройства ввода — вывода с перфокарт;
— устройства ввода — вывода с перфолент;
— алфавитно-цифровые печатающие устройства;
— электрические пишущие машинки для связи операторов с ЭВМ;
— графопостроители планшетного и рулонного (барабанного) типов;
— алфавитно-цифровые и графические дисплеи с дополнительным оборудова-
нием для ввода символьной и графической информации (например, клавиатуры,
световые перья, ручки управления);
— устройства телеобработки данных, включая мультиплексоры (устройства,
осуществляющие управление и переключение внешних каналов ЭВМ), комплекты
аппаратуры передачи данных (модемы, осуществляющие модуляцию и демодуля-
цию сигналов в аппаратуре передачи данных по каналам связи, устройства за-
щиты от ошибок, вызывные устройства), абонентские пульты (включая абонент-
ские пульты на базе мини-ЭВМ).
К этому же типу оборудования относятся устройства подготовки данных
для различных машинных носителей (перфокарт, перфолент, магнитных лент)
и их расшифровки.
Часть из названных средств входит в состав стандартного периферийного
оборудования ЕС ЭВМ, другая — включается в состав КТС САПР из номен-
клатуры средств, разрабатываемых специально дли систем автоматизированного
проектирования. К таким средствам относятся графопостроители, дисплеи,
устройства оптического считывания документов, устройства считывания графи-
18 с. м. Егер и др. 849
Рис. 20.2. Структура комплекса технических средств САПР:
1 — центральный процессор; 2 — основная оперативная память; з — дополнительные
процессоры; 4 — устройства расширения памяти ЭВМ; 5 — каналы ввода — вывода
информации; 6 — консоль оператора ЭВМ; 7 — накопители на магнитных лентах; 8 —
внешняя память на магнитном диске; 9 — устройства выдачи данных на перфоленту;
10 — дисплеи; И — графопостроители, управляемые непосредственно от ЭВМ; 12 —
вспомогательная мини-ЭВМ или устройства буферной памяти; 13 — графические дисплеи
без буферной памяти; 14 — телетайпы; 15 — устройства выдачи данных на микрофильм;
16 — алфавитно-цифровое печатающее устройство; 17 — устройства выдачи данных
на перфокарты и ввода данных с перфокарт; 18 — контрольная приставка для получе- ч
ния изображения на дисплее; 19 — автономные графопостроители; 20 — средства автома-
ткческого программирования; 21 — выносные дисплеи для отображения графической .
информации
ческой информации (диджитайзеры), устройства ввода — вывода речевой ин-
формации.
Устройства, включаемые в состав КТС САПР, объединяются в многома- -
шинный вычислительный комплекс, структура н состав которого определяются ’
конкретными условиями разработки и использования САПР.
Устройства подготовки информации ее ввода и вывода, а также хранения
оперативной информации образуют автоматизированные рабочие места (АРМ)
конструктора или терминальные пункты САПР.
На рнс. 20.2 в качестве примера представлена типовая структура комплекса
технических средств системы автоматизированного проектирования третьего '
поколения. ВЛ*:®?’-'
Для успешной'реализации задач автоматизированного проектирования КТС
должен удовлетворять ряду^требований. Так, центральная ЭВМ должна обла-
дать производительностью не менее 1 млн. операций в секунду, оперативной
памятью не менее 1 мегабайта н памятью на устройствах прямого доступа не
менее 200 мегабайт. Должна быть предусмотрена возможность наращивания кон-
фигурации комплекса путем организации многопроцессорных комплексов н
увеличения номенклатуры периферийных устройств. Указанным требованиям
отвечают вычислительные комплексы на базе единой системы электронных вы-
числительных машин (ЕС ЭВМ) н агрегатной системы средств вычислительной
техники (АСВТ). Они обладают широкой номенклатурой программносовместнмых
ЭВМ н различного периферийного оборудования. Отличительной особенностью
этих ЭВМ являются универсальность, адаптируемость к применению, способ-
ность к наращиванию вычислительной мощности в большом диапазоне, что очень
важно для САПР.
550
20.2.2. Средства программного обеспечения
Средства программного обеспечения (ПО) — это комплекс программ, обеспе-
чивающих функционирование КТС САПР, рациональное использование ресур-
сов вычислительной системы и ее адаптируемость к условиям различных при-
менений для подготовки, отладки и решения проектных задач. Программное
обеспечение САПР принято делить на стандартное (базовое) ПО и нестандартное
(прикладное) ПО.
В состав стандартного ПО входяг программные средства, поставляемые
вместе с ЭВМ или находящиеся в рамках пользователей вычислительных машин,
например ЕС ЭВМ. Они предназначены для организации работы вычислитель-
ного комплекса как универсальной системы обработки данных. В их число вхо-
дят операционные системы, системы программирования, комплексы программ
технического обслуживания и диагностики КТС, сервисные Программы, а также
пакеты прикладных программ. Операционные системы осуществляют планиро-
вание вычислительного процесса и общение пользователя с ЭВМ. Задачей систем
программирования является перевод записи программ с языка пользователя на
машинный язык. Сервисные программы предназначены для облегчения отладки
программ и решения организационных вопросов. К пакетам прикладных про-
грамм относятся:
— пакеты, расширяющие возможности основных операционных систем,
например, для обеспечения работы ЭВМ в новых режимах (режим разделения
времени, режим реального времени);
— пакеты общего назначения для решения типовых научных, инженерных
и экономических задач;
— пакеты специального назначения (например, для обеспечения работы
мультипроцессорных и многомашинных систем, обслуживания специальных
периферийных устройств).
Стандартное ПО, представляя собой базу САПР, не позволяет, однако,
решать конкретные проектно-конструкторские задачи.
Нестандартное ПО включает в себя программные средства, реализующие
функциональные возможности САПР и являющиеся предметом разработки в рам-
ках создания конкретной САПР.'
В состав нестандартного ПО входят: пакеты программ, реализующие отдель-
ные проектные операции и процедуры, связанные с разработкой проекта самолета
(расчет аэродинамических характеристик, весовой расчет, прочностные расчеты
и т. д.); пакеты программ диалогового взаимодействия пользователя с ЭВМ;
операционная система (управляющая программа) автоматизированного проек-
тирования, объединяющая пакеты программ в единый комплекс и осуществли-
ющая управление процессом проектирования.
Структура и состав нестандартного ПО САПР самолета будут рассмотрены
в следующей главе.
20.2.3. Средства информационного обеспечения
Проектирование — это прежде всего целенаправленная обработка инфор-
мации, и одной из важнейших функций САПР является создание и поддержание
средствами вычислительной техники динамической информационной модели
проектируемого объекта и обеспечение удобного доступа к ней со стороны поль-
зователя или коллектива пользователей с целью исследования модели и получе-
ния отчетности о ее состоянии.
Информационное обеспечение САПР — это совокупность всех необходимых
для проектирования данных, оформленных в виде документов, содержащих
описания стандартных проектных процедур, типовых проектных решений, ти-
повых элементов, материалов, комплектующих изделий и т. д.
Информация вне ЭВМ циркулирует и хранится в виде информационных
документов. Информация в ЭВМ хранится в базах данных. Для управления ба-
зами данных разрабатывается специальный программный аппарат — система
управления базами данных (СУБД). СУБД обеспечивает выполнение функций
нормирования и преобразования баз данных и накопление в них информации,
18* 551
а также поиск информации по запросам пользователей и выдачу ее в виде опре-
деленных документов. Наиболее перспективной формой организации информа-
ционного обеспечения САПР являются специализированные автоматизирован-
ные банки данных (БД). Их можно определить как систему программных, язы-
ковых, технических и организационных средств и самих хранимых данных,
обеспечивающую целенаправленное и коллективное использование информации,
а также ее пополнение, хранение и защиту от несанкционированного исполь-
зования.
20.2.4. Методическое и организационное
обеспечение
Методическое обеспечение САПР — это набор необходимых документов,
регламентирующих состав, правила отбора и эксплуатации средств автомати-
зированного проектирования. Сюда же можно отнести лингвистическое (языко-
вое) и математическое обеспечение. Математическое обеспечение включает в себя
теорию, методы, математические модели и алгоритмы проектирования. При соз-
дании математического обеспечения САПР необходимо ориентироваться на ис-
пользование передовых достижений теории и методов проектирования, эффек-
тивных моделей, адекватно описывающих те или иные стороны поведения объекта
проектирования и его элементов, применение методов многоварнантного проек-
тирования и оптимизации на базе системного подхода.
Организационное обеспечение САПР представляет собой совокупность пра-
вовых, руководящих и инструктивно-методических материалов, регламентиру-
ющих порядок разработки, эксплуатации и развития САПР. К этим документам
относятся: положения, инструкции, приказы, штатные расписания, квалифика-
ционные требования, обеспечивающие взаимодействие подразделений проектной
организации с комплексом средств автоматизированного проектирования при
решении проектно-конструкторских задач; комплекс методических положений
по созданию и стыковке подсистем САПР; комплекты документации по всем
компонентам САПР; методика расчета экономической эффективности от внедре-
ния САПР и др.
В нашей стране организация работ по созданию и внедрению САПР регла-
ментируется директивными документами. Терминология, определения, основные
положения по САПР утверждены ГОСТ 22487—77, ГОСТ 23501.0—79 и др.
Глава 21
МЕТОДЫ АВТОМАТИЗИРОВАННОГО
ПРОЕКТИРОВАНИЯ САМОЛЕТОВ
Успех автоматизации проектирования в значительной мере
зависит от возможности и умения проектировщика корректно
поставить задачу проектирования и дать завершенный алгоритм ее
решения, т. е. формализовать ее. При этом необходимо учитывать,
что три составляющие инженерного проектирования — изобрета-
тельство, анализ и принятие решений — не в одинаковой степени
поддаются формализации. Это обстоятельство делает невозможным
создание полностью автоматических систем проектирования,
оставляя в качестве единственно возможного пути создание
человеко-машинных систем автоматизированного проектиро-
вания.
В основе анализа и принятия решений, которые в значительно
большей степени, чем изобретательство, подвержены формализа-
552
ции, лежит математическое и физическое моделирование. Мате-
матическое моделирование базируется на известных физических
законах, описывающих отдельные аспекты проектирования самоле-
тов. Физическое же моделирование направлено на исследование
новых закономерностей, либо непредсказуемых теоретически,
либо требующих экспериментальной проверки для подтверждения
выдвигаемых гипотез. При этом, когда разрабатывается принци-
пиально новый самолет, базирующийся на еще не апробированных
технических концепциях, роль и объем физического моделирования
возрастает, а следовательно, уменьшается возможная степень
автоматизации проектирования таких самолетов.
В данной главе на примере задачи формирования облика
пассажирского самолета на этапе разработки технических предло-
жений дается математическая постановка этой задачи, приводится
физическое описание алгоритма ее решения, описываются прин-
ципы разработки и структура прикладного программного обеспе-
чения, позволяющего реализовать этот алгоритм в рамках САПР.
В заключительном разделе описываются методы решения задач
оптимизации.
21.1. ОБОБЩЕННАЯ МАТЕМАТИЧЕСКАЯ ПОСТАНОВКА
ЗАДАЧИ ПРОЕКТИРОВАНИЯ
Задача проектирования (на примере формирования облика
транспортного самолета на этапе разработки технических предло-
жений) формулируется следующим образом: найти такой вектор
параметров, характеризующих форму, структуру и размеры
самолета, который бы обеспечивал удовлетворение требований и
ограничений, предъявляемых к проектируемому самолету, и дости-
жение минимума (максимума) целевой функции.
При проектировании самолетов применяется символьное (число-
вое) представление их облика набором (вектором) параметров.
Число параметров, с достаточной степенью подробности харак-
теризующих структуру, архитектуру и размеры самолета и
подлежащих определению в процессе формирования облика, доста-
точно велико. Вместе с тем, как показывает практика и теорети-
ческие исследования, наряду с такими показателями, как схёма
самолета (нормальная, «утка», «бесхвостка», высокоплан и др.),
схема силовой установки (тип двигателей и воздухозаборников и
др.), основными размерными параметрами, определяющими облик
самолета, являются проектное значение взлетной массы самолета
/и0; площадь крыла S; стартовая тяга двигателей Ро.
Набор этих параметров можно свести к двум относительным
параметрам: удельной нагрузке на крыло р — m^g/S и стартовой
тяговооруженности Ро = PJ(mog)-
Отметим, что в процессе проектирования взлетная масса
самолета играет двоякую роль. С одной стороны, масса — это
размерный параметр самолета, с определения которого зачастую
553
начинается процесс выбора и согласования остальных параметров
самолета. С другой стороны, она является важнейшей обобщенной
характеристикой самолета, выступая в качестве результата про-
ектирования.
Анализ связей между параметрами и летными характеристи-
ками самолета показывает:
1) значение летных характеристик зависит только от его
относительных (удельных) параметров: р, Ро, су, сх, К., сР, тт.
2) независимо от размеров самолета, чтобы удовлетворить
требованиям ТЗ по летным характеристикам, самолет должен
обладать строго определенным набором потребных относительных
параметров.
При этом такие параметры, как р, су, сх, К. в обобщенном виде
отражают внешнюю форму самолета и его размеры, а параметры
Ро, сР, т? выражают удельные тяговые усилия, которые должны
развивать двигатели (преобразователи энергии), и удельный
запас энергии.
Это определяет особое значение параметров р и Ро, которые
иногда называют параметрами «завязки» самолета. Названные
аэродинамические и энергетические параметры су, сх, К, т?, сР
в то же время являются функциями геометрических параметров
планера и газодинамических параметров двигателя, важнейшими
из которых являются:
— удлинения крыла, оперения, фюзеляжа Хкр, Хоп, %ф (Хн. ф,
^хв. ф)>
— относительные толщины крыла и оперения скр, ёоп;
— углы стреловидности крыла и оперения %кр, %оп;
— сужение крыла и оперения т|кр> Лоп;
— относительные площади горизонтального и вертикального
оперения Sr.o, SB. 0 и их расстояния от центра масс самолета
о> LB' о,
— мидель фюзеляжа и гондол двигателей SM. ф> SM. д;
— степень двухконтурности двигателя /п;
— степень сжатия в компрессоре Лк!
— температура газов перед турбиной 7\.
Отмеченные выше схемные признаки и параметры дают только
обобщенное представление об облике самолета. По каждому агре-
гату самолета имеется целый ряд дополнительных параметров
(факторов), от рационального выбора которых в значительной
степени зависит совершенство облика проектируемого самолета.
Так, для крыла такими факторами могут быть величина и форма
корневых наплывов и законцовки крыла, стреловидность по задней
кромке, законы деформации срединной поверхности и крутки
крыла, тип механизации и т. д. Для фюзеляжа — это форма
поперечных сечений по его длине, форма фонаря и воздухозаборни-
ков И т. Д
554
Йе менее существенное влияние на характеристики самолёта,
и прежде всего на сопротивление интерференции и балансировоч-
ное сопротивление, оказывают взаимное расположение и способы
соединения'^крыла, фюзеляжа,' оперения и воздухозаборников,
компоновка шасси.
Увеличение числа искомых параметров на начальном этапе
проектирования, в процессе поиска оптимального облика самолета,
вследствие учета их взаимодействия может привести к улучшению
характеристик самолета, однако это связано с усложнением
вычислительного алгоритма и трудностями реализации его на
ЭВМ. К тому же в настоящее время мы не располагаем достаточно
точными и надежными алгоритмами, описывающими все много-
образие связей между параметрами и характеристиками самолета,
особенно на ранних этапах его разработки. По мере развития наших
представлений о таких связях, а также совершенствования ЭВМ.
и вычислительных методов анализа и оптимизации многопара-
метрических моделей, описывающих облик самолета, число иско-
мых параметров будет увеличиваться.
Число параметров, в наибольшей степени характеризующих
облик самолета и подлежащих определению и оптимизации,
составляет 15 ... 20, в зависимости от схемы самолета.
Совокупность этих параметров образует вектор
X == (хх, х2, .... хт). (21.1)
С точки зрения заказчика самолет определяется набором
характеристик, задаваемых или определяемых 13-аа.проектирова-
ние. Так, характеристиками пассажирского самолета являются:
— масса коммерческой нагрузки или число пассажиров т*к. и ,
(Мпас);
— расчетная дальность полета
— класс аэродрома базирования Ьвпп, °гР;
— крейсерская скорость полета, Укр и др.
Совокупность характеристик самолета, которые зависйт““бт
его параметров, обозначим вектором
Y = (t/i> 1/2, •••, Уп)- (21.2)
Параметры и характеристики связаны между собой определенными
зависимостями:
У1 =- У1 (хи хг, ..., хт);
Уз = 1/2^1, х2, хт); (21.3)
Уп == Уп U1, *2, хт).
Равенства (21.3) называют уравнениями связи. Они отображают
структуру самолета и алгоритм его функционирования, являясь
математическим описанием объекта проектирования. Тогда мате-
матической моделью самолета будет вектор параметров самолета и
уравнения связи (21.3).
555
Итак, характеристики задаются ТЗ (или получаются из него), Я
а значения параметров, которые с математической точки зрения Я
представляют независимые переменные, подлежат определению Л
в процессе проектирования. При этом численные значения пара- Я
метров стремятся выбрать таким образом, чтобы удовлетворить Я
разнообразным требованиям, диктуемым следующими основными Я
факторами: > Я
— техническим заданием на характеристики (/nK.H Ss ^к.и, Я
Lp :> Lp, УКрейс V* • ••), а иногда и на параметры самолета '
(т0 < то, I < I* ит. д.)
— нормами прочности, летной и эксплуатационной годности; я
— условиями физической реализуемости самолета. Я
Нормы прочности учитываются при определении проектной Я
массы агрегатов планера и силовой установки. Основные требова- 9
ния норм летной годности можно записать в виде системы нера- Я
венств: Я
Лзл - (пн + ^0; 1
Lsnn — max ^Lpa36. сб +-g-LByB^ J l,67Lnoc|^0; (21.4) ,«
^ВПП+КПБ — maX {^-взл. сб> 2,5Lnoc} 0;
Су пос. допРо^пос 2/7 (1 — fhT) 0.
Здесь Рвзл — располагаемая тяговооруженность на взлете; Lpa30. сб, д/
LB3JI. сб — сбалансированная длина разбега и взлетной дистанции, <
соответственно; LByB — длина воздушного участка взлетной
дистанции; Упос — 1,ЗУ3.П — (20 ... 30) км/ч. |
Условия физической реализуемости для самолета требуют 5;
удовлетворения фундаментальным соотношениям, которые харак- 'Д
теризуют любой проектируемый самолет как летательный аппарат
тяжелее воздуха, способный летать в определенном диапазоне
скоростей и высот, совершать маневры, взлетать и садиться на
аэродромы заданного класса.
Основные из этих соотношений можно записать в следующем
виде:
— 1 = 0;
путд — Y = 0; (21-5)
Хт — хр + тгу = 0;
тг = 0.
Первое из этих уравнений — уравнение весового баланса,
второе — уравнение «гравитационного» баланса, третье — урав- А
некие энергетического баланса. Два последних уравнения отра-
жают условия продольной устойчивости и балансировки самолета. Д|
556 Ж
(21.6)
Назовем уравнения (21.5) основными уравнениями существования
самолета.
При математической формулировке задачи проектирования
удовлетворение перечисленным выше требованиям обеспечивается
выполнением системы ограничений, которые накладываются как
на параметры самолета X, так и на его характеристики Y. В общем
виде эти ограничения записываются в виде системы неравенств:
xf с Xi «: х®, i = 1, 2, . . . т
У] j=l, 2, ... п
Индексы «н» и «в» означают нижнюю и верхнюю допустимые гра-
ницы изменения параметров и характеристик. Ограничения (21.6)
определяют допустимую область изменения проектных параметров
X. Эта область в сокращенной записи определяется следующим
соотношением:
ХДоп = И/£(Я) 5*0). (21.7)
Любой вектор X, принадлежащий допустимой области (X £
€^Доп)> определяет допустимый вариант проекта самолета. Сле-
дует подчеркнуть, что определение допустимой области изменения
проектных параметров в условиях многообразия и противоречи-
вости требований и ограничений, предъявляемых к самолету, пред-
ставляет одну из чрезвычайно сложных и ответственных задач
проектирования.
Предположим, что эффективность разрабатываемого проекта
можно выразить скалярной величиной у, являющейся функцией
проектных параметров у = у (X). Эта функция называется крите-
рием оптимальности или целевой функцией оптимального проекти-
рования. Так, например, критерием оптимальности пассажирского
самолета может быть приведенная себестоимость перевозки тонно-
километра (см. гл. 3). Тогда среди допустимых вариантов проекта
самолета может существовать проект, параметры которого достав-
ляют экстремум величины критерия оптимальности. В зависимости
от выбранного критерия ищется либо минимум, либо максимум
этого критерия. Предположим, что мы ищем минимум целевой
функции. Тогда задача оптимизации проекта может быть сформу-
лирована следующим образом: найти оптимальный вектор проект-
ных параметров X* = (хъ х2, ..., хт), доставляющий ^минимум
величине критерия оптимальности^у|= у’(х1( х2, ..., хт) при
выполнении системы неравенств (21.7). В краткой записи эта
задача формулируется следующим образом:
min у(Х). (21.8)
х € '^доп
В такой постановке задача оптимального проектирования
представляет собой задачу математического программирования.
557
Рис. 21.1. Графики параметрического анализа самолета:
а — R — const; тпл = const; б — Ро = const;
/ — ограничение по объему топливных баков в крыле
Краткий анализ методов решения таких задач рассмотрен в разд.
21.4. Здесь же мы отметим, что процесс выбора оптимальных пара-
метров практически трудно, а порой и невозможно осуществить
формальными методами поиска экстремума целевой функции на
допустимом множестве изменения параметров. При исследовании
параметрической модели зачастую требуется применение нефор-
мального анализа, поиск компромиссных решений.
Исследование параметрической модели предполагает сочетание
расчетов с их разумной интерпретацией. Такой процесс осу-
ществляется путем последовательных приближений, когда рас-
сматриваются различные проектные концепции, для которых
выполняются заданные требования и ограничения к проекту. Ре-
зультаты таких исследований удобно представить в виде графиков,
например, в координатах т0, S, Ро либо р, Ро, нанося на них
сетки постоянных значений основных летных характеристик и
различного рода ограничений, определяющих область существова-
ния самолета. Примеры таких графиков представлены на рис. 21.1.
Они дают проектировщику значительный объем информации,
необходимый для принятия решений.
Когда расчетные летно-технические характеристики соответ-
ствуют потребным, проведен анализ чувствительности самолета
выбранной конфигурации к изменению проектных параметров и
ограничений, то появляется возможность, выделив из всего много-
образия параметров наиболее существенные, провести их оптими-
зацию по выбранному критерию. Важной задачей является иссле-
дование поведения целевой функции в окрестностях оптимума,
определение влияния ограничений на величину математического
оптимума. Наличие такой информации облегчает принятие реше-
ний в компромиссных ситуациях.
558
21.2. ОПИСАНИЕ АЛГОРИТМА ФОРМИРОВАНИЯ
ОБЛИКА САМОЛЕТА
В рамках САПР описанную выше задачу можно реализовать
на основе алгоритма, схема которого представлена на рис. 21.2.
Алгоритм имеет двухуровневую иерархическую структуру с ра-
циональным распределением функций между ЭВМ и проектиров-
щиком, являющимся высшим звеном иерархии. Операции, выпол-
няемые проектировщиком, на схеме очерчены окружностью, а ма-
шинные операции изображены прямоугольником.
На первом этапе проектировщик осуществляет подготовку и
ввод в ЭВМ входных данных. Входными данными алгоритма явля-
ются прежде всего числовые величины, определяющие значения
летно-технических характеристик самолета, диктуемые ТЗ на
проект. Вторая группа входных данных формируется из назначае-
мых проектировщиком схемных решений. На основе анализа тре-
бований к самолету, опыта разработки самолетов аналогичного
назначения, изучения результатов научных исследований по пер-
спективным направлениям авиастроения, личных творческих
способностей проектировщик намечает ряд проектных альтернатив,
касающихся:
— балансировочной схемы самолета (нормальная, «утка»,
«бесхвостка» и т. д.);
— схемы крыла (высокоплан, среднеплан, треугольное и
т. д.);
— схемы оперения (обычная, Т-образная и т. д.);
— схемы шасси (основные стойки на крыле, убираются либо
в гондолы на крыле, либо в фюзеляж, основные стойки на фюзе-
ляже и т. д.);
— размещения двигателей (двигатели на крыле, двигатели на
фюзеляже, двигатели на крыле и фюзеляже);
— типа механизации крыла по передней и задней кромкам
(наличие либо отсутствие предкрылков, тип закрылков);
— типа управления (ручное, бустерное) и др.
Каждой альтернативе в алгоритме соответствует определенное
число — «ключ».
Числовые значения входных данных выступают в качестве
констант модели для одного варианта расчета. Их ввод осущест-
вляется пользователем с пульта алфавитно-цифрового дисплея.
На основе этих данных, используя информацию, хранящуюся
в банке данных, вычисляются или задаются:
— параметры стандартной атмосферы на расчетных высотах
полета и расчетное число М полета;
— параметры аэродромов взлета и посадки (LBnn, ^впп>
Рэкв. и т. д.);
— избыточное давление в пассажирском салоне;
— прогнозируемые значения аэродинамических характеристик
самолета (с^Отр> Суз.п> Ккреас, КВзл, схо •••)>
559
Рис. 21.2. Схема алгоритма формирования облика самолета
560
— коэффициенты, характеризующие изменение тягй дйигатеЛя
по скорости и высоте, а также некоторые другие статистические
коэффициенты, необходимые для начального приближения про-
екта;
— начальные значения искомых параметров (X, %, с, г], т, Та ...).
В алгоритме предусмотрена возможность замены статисти-
ческой информации на расчетную по мере развития проекта,
а также возможность назначения проектировщиком значений и
диапазона изменения проектных параметров.
В основу определения основных параметров положен тради-
ционный подход (см. гл. 4), в соответствии с которым вначале
определяются параметры «завязки» проекта — удельная нагрузка
на крыло р и потребная стартовая тяговооруженность самолета Ро.
В алгоритме предусмотрена возможность задания р проектиров-
щиком.
Далее осуществляется определение составляющих уравнения
весового баланса. Для этого вначале проводятся расчеты, связан-
ные с определением массы, геометрических параметров и рабочих
характеристик силовой установки. Если самолет проектируется под
заданный двигатель, его характеристики могут быть непосред-
ственно введены пользователем. Затем последовательно определя-
ются масса топлива, расчетные перегрузки, масса крыла, оперения,
фюзеляжа, шасси, оборудования, снаряжения и управления.
В алгоритме предусмотрена возможность задания пользователем
массы готовых изделий, входящих в комплектацию проектируемого
самолета. Уравнение баланса масс записывается в следующем
виде:
д тв. н
(21.9)
где ти.н — масса коммерческой нагрузки; /й2 — сумма относи-
тельных масс конструкции, топлива, силовой установки, оборудо-
вания, снаряжения, управления; т0 — взлетная масса самолета;
А — результат решения.
Уравнение (21.9) считается решенным, если выполняется усло-
вие А = 1 ± 0,001. Решение его осуществляется итерационным
способом. Используя начальное статистическое значение взлетной
массы т; и задаваясь некоторой величиной Ат, несложно найти
расчетное значение взлетной массы, при которой решается уравне-
ние баланса масс. Для ускорения сходимости алгоритма приме-
няется прием деления приращения массы Ат пополам в случае,
если знак разности (Л — 1) меняется на противоположный.
Полученное значение взлетной массы позволяет определить
размерные параметры самолета и перейти к реализации итерацион-
ных циклов, связанных с удовлетворением условий энергетиче-
ского баланса самолета. Для этого уточняются геометрические
параметры самолета, соответствующие определенному значению
взлетной массы и расчетным значениям нагрузки на крыло и
561
стартовой тяговооруженности. Затем осуществляется расчет аэро* л
динамических характеристик самолета. Эти расчеты позволяют ’
заменить статистические данные по аэродинамике, повторить
циклы расчетов по определению основных параметров самолета,
начиная с определения удельной нагрузки на крыло. Число итера-
ций зависит от того, насколько правильно были выбраны аэроди-
намические характеристики самолета на этапе формирования
начальной информации. В рассматриваемом алгоритме условием
выхода из итерации является удовлетворение неравенству
I |< 0,001, (21,10)
I m0i I
где mot — значение взлетной массы самолета, определенное на
i-м шаге итерации.
Следующий цикл расчетов связан с коррекцией параметров
самолета из условия удовлетворения основным требованиям
компоновки и центровки. Здесь решается задача определения
рационального взаимного расположения крыла, фюзеляжа, опере-
ния и шасси, а также размещения грузов в самолете. Эта цель
достигается решением системы уравнений компоновки, отражаю-
щих следующие условия и ограничения:
— условие продольной статической устойчивости на крей-
серском режиме;
— условие балансировки самолета на взлетно-посадочных
режимах;
— условие подъема переднего колеса шасси на скорости
0,95VOTp при взлете;
— условие несваливания на «хвост» пустого снаряженного
самолета при стоянке на земле;
— условие незадевания ВПП хвостовой частью фюзеляжа при
отрыве;
— условие незадевания ВПП концом крыла при посадке
с максимально допустимым креном;
— условие неопрокидывания на крыло при рулежке по земле
с заданным радиусом разворота;
— условие незадевания ВПП «носом» фюзеляжа при резком
торможении;
— условие незадевания ВПП гондолами двигателей (при их
размещении под крылом);
— условие минимального разбега центровок в летном диапа-
зоне;
— конструктивные ограничения на базу и колею шасси.
Эти расчеты связаны с определением характеристик устойчи-
вости и управляемости самолета. Они позволяют уточнить аэроди-
намические и массовые характеристики самолета и осуществить
в итерационном процессе согласование его параметров по приве-
денному выше алгоритму. Они также дают возможность осущест-
562
вить коррекцию таких конструктивных параметров самолета, как
угол поперечного V крыла, угол «заклинения» двигателей, угол
установки стабилизатора, балансировочные углы отклонения
поверхностей управления и т. д.
Описанный выше алгоритм формирования облика самолета
обеспечивает проектанта необходимой информацией о параметрах
самолета, обеспечивающих удовлетворение заданных требований и
ограничений к проекту и уравнений существования самолета. По
сути дела, он осуществляет формирование допустимой области
существования проектных параметров самолета в рамках задавае-
мых проектных концепций.
Однако проектант не может удовлетвориться полученными
результатами, не убедившись, что фактические (расчетные) летно-
технические характеристики самолета полностью удовлетворяют
ТЗ на проект, а его экономические показатели являются опти-
мальными. £ ft* Г*
Необходимую по этим вопросам информацию он может полу-
чить, проведя проверочные расчеты по определению летно-техни-
ческих характеристик самолета и его экономических данных по
общепринятым методикам. Оценивая результаты этих расчетов,
проектант в случае необходимости изменяет «входы», прежде
всего, связанные с задаваемыми проектными альтернативами,
добиваясь соответствия расчетных характеристик требуемым зада-
нием на проект либо их корректировки по согласованию с заказчи-
ком.
Решение этой задачи связано с реализацией режима параметри-
зации, то есть исследования влияния изменения проектных
параметров на интересующие проектанта выходные величины,
характеризующие результат проектирования. Осуществляя по-
строение графиков изменения выходных величин (критериев
оценки) при изменении параметров, проектант на основании их
анализа принимает решение о продолжении либо завершении
проектирования.
Процесс параметризации тесно связан с процессом оптимизации •
параметров самолета, который представляет собой не что иное,
как упорядоченный процесс многомерной параметризации. Зафик-
сировав ряд выходных величин и выбрав одну из них в качестве
критерия оптимальности, с помощью формальной стратегии,
определяемой выбранным методом оптимизации, можно найти
вектор параметров самолета, при которых обеспечивается достиже-
ние экстремума заданного критерия. В качестве критериев могут
выступать либо взлетная масса самолета, либо его экономические
показатели, либо какая-нибудь из летно-технических характе-
ристик. Оптимизация параметров самолета одновременно по
нескольким критериям связана с трудноформализуемыми пробле-
мами векторной оптимизации (см. разд. 21.4).
Программная реализация описанной выше системы взаимосвя-
занных расчетов по формированию облика самолета на этапе раз-
563
работки технических предложений осуществляется с помощью
комплекса прикладных программ, структура и принципы которого
описаны ниже.
21.3. СТРУКТУРА И ПРИНЦИПЫ РАЗРАБОТКИ
ПРИКЛАДНОГО ПРОГРАММНОГО ОБЕСПЕЧЕНИЯ
Прикладное программное обеспечение, отражающее специфику
задач, решаемых в процессе проектирования самолета, является
частью нестандартного программного обеспечения. Как отмеча-
лось в гл. 20, в состав нестандартного программного обеспечения,
укрупненная схема которого показана на рис. 21.3, помимо
библиотеки прикладных программ входят системы управления
пакетами прикладных программ (мониторы), программные сред-
ства обеспечения диалогового взаимодействия проектировщика
с ЭВМ, программы управления банком данных. Они образуют
общесистемное ядро программного обеспечения, в значительной
мере инвариантное к объекту проектирования и типу решаемых
задач. Как видно из схемы, монитор является ядром системы,
обеспечивая связь между стандартным программным обеспечением
ЭВМ и пакетами прикладных программ, с одной стороны, и через
средства диалогового взаимодействия с проектировщиком — с дру-
гой стороны. По инструкциям, поступающим от проектировщика
через средства диалогового взаимодействия (например, алфа-
витно-цифровой дисплей), определяющим постановку задачи и вид
потребного отображения результатов проектирования, монитор
осуществляет формиро-
вание и анализ расчет-
ной модели для задан- ,
ной задачи. Он выби-
рает из библиотеки
прикладных программ
необходимые расчетные
модули, запрашивает
у пользователя или из
банка данных недоста-
ющую информацию,
определяет последова-
тельность вычислений,
посредством чего по-
ставленная задача мате-
матически моделирует-
ся и решается ЭВМ.
В настоящее время
для САПР разрабатыва-
ются и используются
два типа мониторов.
Первый, более простой
про-
Рис. 21.3. Структура нестандартного
граммного обеспечения САПР
564
тип монитора, получивший
название вызывающий, ис-
пользуется для решения за-
ранее оговоренного круга за-
дач, оформленных в виде па-
кетов программ, работающих
под управлением собственных
управляющих программ. Мо-
нитор второго типа, назы-
ваемый гибким, выполняет
функции автоматического
формирования из набора
модулей требуемой вычисли-
тельной схемы и генерации
ее управляющей программы.
Ниже рассмотрим в каче-
стве примера организацию
управления пакетами при-
кладных программ с по-
мощью вызывающего мони-
тора. Располагая определен-
ным набором модулей, либо
управляющих программ,
оформленных в виде загрузоч-
ных модулей, пользователь
сообщает системе имя требу-
Рис. 21.4. Схема работы вызывающего
монитора
емого для решения задачи
модуля. Информация по модулю, необходимая для работы системы,
содержится в так называемом паспорте модуля. Паспорт представ-
ляет собой совокупность внутренних и внешних характеристик
модуля, позволяющих использовать его как автономно, так и
в более сложных вычислительных процедурах. Паспорта всех
модулей образуют каталог паспортов, хранящийся в памяти
системы (на внешних запоминающих устройствах ЭВМ) и состав-
ляющих библиотеку пользователя. Общение проектировщика
с системой осуществляется в форме вопросов и ответов. Реализация
диалогового режима позволяет проектировщику оперативно изме-
нять входные данные для сформированной вычислительной про-
граммы и варьировать их.
Схема работы диалоговой системы на базе вызывающего мони-
тора представлена на рис. 21.4.
Рассмотрим более подробно организацию прикладного про-
граммного проектирования, разработка которого является сферой
деятельности проектировщиков самолета.
Многообразие задач, решаемых в процессе предварительного
проектирования, не позволяет формализовать их в виде единого
замкнутого алгоритма. Последовательность расчетов, типы связей
между параметрами и характеристиками, информационная обеспе-
565
Рис. 21.5. Структура комплекса
прикладных программ формирования
облика самолета
ценность решаемой задачи за-
висят 'как от постановки за-
дачи, так и от стадии разра-
ботки проекта. Поэтому, при-
ступая к разработке приклад-
ного программного обеспече-
ния, необходимо провести
классификацию связей по сте-
пени их универсальности для
различных задач проектирова-
ния, а также по их информа-
ционной обеспеченности. Задача
состоит в том, чтобы, не услож-
няя чрезмерно параметрическую
модель самолета, выделить из
всего многообразия связей, опи-
сывающих совместимость пара-
метров самолета, его аэродина-
мических, весовых и j прочно-
стных характеристик, динамику
движения, показатели эффек-
тивности, характер взаимодей-
ствия с окружающей средой
ит. п., наиболее существенные,
характеризующие самолет с до-
статочной степенью достоверности в целом, чтобы получить надеж-
ную информацию о возможности реализации тех или иных проект-
ных концепций для удовлетворения поставленных целей проекти-
рования, а также меру эффективности этих концепций.
В соответствии с описанным в разд. 21.2 алгоритмом много-
образие задач, решаемых на этапе разработки технических предло-
жений, можно свести к трем основным типам:
— задачи формирования допустимой области существования
проекта и определения размерных параметров самолета, удовлет-
воряющих предъявляемым к проекту требованиям и ограниче-
ниям;
— задачи исследования влияния изменения проектных пара-
метров и ограничений на облик самолета и его характеристики;
— задачи оптимизации параметров самолета по выбранному
критерию или системе критериев.
Такой перечень задач определяет рациональную структуру
построения и основные режимы работы комплекса прикладных
программ: режим формирования облика, режим параметризации и
режим оптимизации. Возможная структурно-функциональная
схема построения комплекса представлена на рис. 21.5.
Комплекс включает в себя главные управляющие программы
режимов работы, управляющие программы для решения отдельных
проектных задач и пакеты прикладных программ.
566
При разработке пакета прикладных программ (ППП) необхо-
димо выполнить ряд специфических требований. Эти требования
сводятся в основном к обеспечению:
— максимальной универсальности и гибкости использования,
т. е. адаптируемости программ к различным постановкам задач
анализа и синтеза проекта;
— возможности расширения ППП и замены отдельных разделов
программы в зависимости от объекта проектирования и применяе-
мых методов расчета;
— достаточной точности и достоверности результатов расчета
при приемлемых для целей практического использования времени и
стоимости расчетов.
В соответствии с блочным принципом моделирования (см.
гл. 2) пакеты объединены в функциональные блоки, соответствую-
щие традиционным научно-техническим дисциплинам, привлекае-
мым в процессе предварительного проектирования самолета.
Для обеспечения гибкости программного комплекса при раз-
работке пакетов принят модульный принцип программирования,
который делает комплекс открытым для дальнейшего развития,
позволяя производить замену отдельных модулей, расширение их
состава в зависимости от типа решаемой задачи и используемых
методов расчета. В соответствии с этим принципом каждая про-
грамма, входящая в состав пакета, представляет собой набор моду-
лей простой и сложной структуры *, решающий отдельные задачи
процесса предэскизного проектирования как в рамках системы, так
и автономно.
Условно эти блоки разделены на три группы.
Первая группа блоков предназначена для согласования весо-
вых, аэродинамических параметров самолета и характеристик
силовой установки, определения основных размерных параметров
самолета, взаимной пространственной увязки основных компонен-
тов самолета, формирования информации для отображения резуль-
татов проектирования, а также необходимых входов в расчетные
и оценочные блоки.
К этой группе отнесены: блок определения размеров самолета
(БОР), блок геометрии (БГ) и блок компоновки (БК).
В БОРе осуществляется решение системы уравнений, связы-
вающих основные параметры с потребными по ТЗ летно-техниче-
скими характеристиками, а также решение уравнения баланса масс
самолета. В результате работы блока определяются важнейшие
относительные проектные параметры самолета — удельная на-
грузка на крыло р, стартовая тяговооруженность Ре — и основные
* Под модулем понимается упорядоченнее множество операторов, имеющее
уникальное имя и хранящееся как раздел библиотечного набора данных. Он
оформляется в виде подпрограммы, например, типа SUBROUTINE
(ФОРТРАН-IV). Простой модуль не содержит в себе операторов, имеющих соб-
ственное имя.
567
размерные йараметры самолета—взлетная масса т0, суммарная
стартовая тяга силовой установки Ро и площадь крыла S. В блоке
также вычисляются потребная стартовая тяга одного двигателя и
массы основных компонентов самолета.
В БГ выполняются все необходимые расчеты, связанные
с определением геометрических параметров самолета и его компо-
нентов (линейные размеры, площади, объемы). В нем формируется
информация, необходимая для решения задач компоновки само-
лета, аэродинамических расчетов, расчетов масс, устойчивости и
управляемости самолета. По данным этого блока, а также блока
компоновки осуществляется отображение результатов проектиро-
вания *на графопостроителе.
В БК производится пространственная увязка положения кры-
ла, фюзеляжа, горизонтального и вертикального оперения, двига-
телей, грузов, стоек шасси из условия обеспечения требований
компоновки. Эта задача сводится к решению системы уравнений,
с помощью которых определяются взаимные координаты основных
компоновочных групп самолета, обеспечивающие минимальный
диапазон центровок, необходимую степень продольной статиче-
ской устойчивости и балансировку самолета, необходимый запас
боковой статической устойчивости и ряд других компоновочных
ограничений.
Входами в блок являются данные по геометрии, массам и
аэродинамике агрегатов, из которых компонуется самолет.
Вторая группа блоков объединяет блок аэродинамики (БА),
блок весовых расчетов (БВ), блок силовой установки (БСУ) и
блок продольной устойчивости и управляемости (БРУУС).
Назначение этих блоков — определение вектора внешних
сил и моментов, действующих на самолет на всех режимах
полета.
В БА производятся расчеты аэродинамических характеристик
самолета и его частей при выбранных конфигурации и размерах.
Расчеты осуществляются для двух конфигураций самолета: взлет-
но-посадочной и полетной. Блок обеспечивает информацией реше-
ние задач компоновки самолета, расчета потребных тяг, расчета
летно-технических и взлетно-посадочных характеристик, а также
характеристик продольной устойчивости и управляемости.
В основу алгоритмов блока положены инженерные методы
расчета аэродинамических коэффициентов дозвукового транспорт-
ного самолета, базирующиеся на результатах теории пограничного
слоя, теории тонкого тела, а также эмпирических и полуэмпири-
ческих формулах, обеспечивающих приемлемую точность для
расчета рассматриваемого класса самолетов на этапе предвари-
тельного проектирования.
БВ предназначен для расчетов, связанных с определением
взлетной массы самолета и ее составляющих. Он состоит из отдель-
ных модулей, дающих возможность в зависимости от качества и
количества исходной информации, определяемого уровнем про-
568
работки проекта, получать относительные и абсолютные значения
масс отдельных составляющих самолета.
Задача определения массы самолета сводится к решению
уравнения тй = 2 mt, где mt — масса компонентов самолета,
число которых зависит от назначения самолета и этапа проектиро-
вания. Поскольку большинство членов правой части этого уравне-
ния Ш] — f (т0), то его решение осуществляется итерационным
методом.
В блоке предусмотрено наличие алгоритма нахождения массы
начального приближения (первый уровень), позволяющего опре-
делить значения составляющих уравнения баланса масс и массу
самолета на основе данных, обусловленных ТЗ (mK#H, Lp, Нярейс,
Уирвйс)> статистических данных, касающихся типа силовой уста-
новки, аэродинамической схемы, а также значений удельной
нагрузки и стартовой тяговооруженности, вычисляемых из условия
обеспечения заданных летных и взлетно-посадочных характе-
ристик.
Для определения массы самолета и его частей в функции
варьируемых параметров при решении задач параметрических
исследований и оптимизации в блоке имеется алгоритм, основан-
ный на полуэмпирических зависимостях (второй уровень). В част-
ности, масса составляющих конструкции самолета определяется
в зависимости от геометрических параметров, условий нагруже-
ния, компоновочных особенностей.
Для проведения проверочных, уточненных расчетов в блоке
предусмотрен также более сложный алгоритм определения массы
конструкции самолета по формулам, основанным на определении
действующих на конструкцию нагрузок с учетом особенностей ее
конструктивно-силовой схемы (третий уровень).
В БСУ осуществляются все необходимые расчеты, связанные
с определением массы и габаритов двигателя, воздухозаборников,
гондол двигателей, а также высотно-скоростных и дроссельных
характеристик двигателя. Эти величины вычисляются по опре-
деляемой в БОР потребной тяге двигателя Ро и задаваемым (варьи-
руемым) газодинамическим параметрам т, Т3 и Информация,
получаемая на выходе из этого блока, используется для согласова-
ния параметров планера и силовой установки при формировании
облика, а также для расчета взлетно-посадочных и летных харак-
теристик самолета.
БРУУС предназначен для определения показателей устойчи-
вости и управляемости самолета выбранной конфигурации с задан-
ным набором параметров. В нем решаются следующие задачи:
— определение моментных характеристик самолета, приведен-
ных к его центру масс;
— определение статических показателей устойчивости и управ-
ляемости самолета и характеристик балансировочного режима
в горизонтальном полете и при маневре с постоянной пере-
грузкой;
569
— определение характеристик динамической устойчивости и
управляемости в коротком периоде, реакции на «дачу» руля и
ветровое возмущение.
Для решения этих задач используются алгоритмы, основанные
на приближенном аналитическом определении соответствующих
показателей устойчивости и управляемости самолета на базе
общепринятых упрощений.
Третья группа блоков включает в себя блок расчета взлетно-
посадочных и летных характеристик (БЛТХ) и блок оценки целе-
вой функции (БЦФ).
БЛТХ состоит из двух разделов, предназначенных для опре-
деления взлетно-посадочных и летных характеристик самолета.
Первый раздел предназначен для определения посадочной ско-
рости и дистанции, длины участка пробега, скорости отрыва,
длины разбега, взлетной дистанции и угла наклона траектории,
безопасной скорости набора высоты, сбалансированной длины
ВПП и др.
Во втором разделе осуществляется расчет летно-технических
характеристик на участках набора высоты, крейсерского полета
и снижения.
Входами в блок являются массивы данных, получаемых в БСУ,
БА, БДК, а также переменные, получаемые в блоках аэродинамики
и весовых расчетов.
В БЦФ осуществляется расчет экономических показателей
проектируемого самолета по стандартной методике. В нем рассчи-
тывается стоимость планера, двигателей, стоимость самолета
в целом, себестоимость перевозки тонн а-километр а, себестоимость
капитальных вложений, приведенная себестоимость перевозки
тонна-километр а, суммарная стоимость производства парка само-
летов и стоимость их эксплуатации, общая стоимость программы.
В случае необходимости состав пакета прикладных программ
может быть расширен, например, включением в него блока «Аку-
стика» для расчета характеристик шума, блока «Аэроупругость»
и др.
При работе программного комплекса в режиме оптимизации
такой показатель, как приведенная себестоимость перевозки
тонна-километра используется в качестве критерия оптимальности.
Для реализации этого режима осуществляется подключение модели
к блоку оптимизации (БО), который включает в себя набор про-
грамм численных методов поиска экстремума многопараметри-
ческих функций с ограничениями (см. разд. 21.4).
В случае отсутствия в САПР развитого банка данных, спра-
вочно-нормативные данные, а также статистические коэффициенты
и зависимости, используемые при формировании облика самолета
начального приближения, могут быть объединены в специальный
блок программ — банк данных конструктора (БДК).
Управление пакетами прикладных программ осуществляется
с помощью главных управляющих программ, которые определяют
570
последовательность обращений к блокам или их модулям, обмен
данными между ними, организуют необходимые итерационные
циклы в зависимости от режима работы комплекса. Управляющая
программа состоит из обращений к модулям, а также логических
операторов. Обмен информацией между управляющей программой
и модулями осуществляется через формальные параметры.
В целях расширения возможностей комплекса некоторые его
блоки могут работать в автономном режиме под управлением
собственных управляющих программ. При этом они могут решать
такие задачи, как определение весовых, аэродинамических, летно-
технических, экономических характеристик, показателей устой-
чивости и управляемости либо самолета-прототипа, либо любого
самолета, по которому имеются необходимые данные.
Рассмотренная структура программного комплекса и состав его
пакетов обеспечивают автоматизацию расчетов и обработку инфор-
мации на этапе предварительного проектирования самолета,
позволяя разработчику проекта сконцентрировать усилия на
интерпретации результатов и решении творческих задач проекти-
рования.
Пакеты прикладных программ и управляющие программы
записаны на магнитных дисках в библиотечный набор данных и
вызываются оттуда стандартными средствами языка управления
заданиями ЕС ЭВМ.
Для работы программного комплекса рассмотренной конфигу-
рации требуется около 150 К оперативной памяти. Время счета
одного варианта в режиме формирования облика не превышает
1 мин.
21.4. МЕТОДЫ РЕШЕНИЯ ЗАДАЧ ОПТИМИЗАЦИИ
В данном разделе дается краткий обзор численных методов оптимизации
и приводятся некоторые практические рекомендации по постановке и решению
оптимизационных задач проектирования на ЭВМ.
Запишем задачу оптимального проектирования (21.8) в следующем виде:
min у (X);
К € Хдоп (21-11)
Хдоп = {Xlgi (X) < 0, i = 1, 2, ..., т}.
Здесь у (X) — целевая функция; gt (X) — ограничения. Эта запись означает, что
подмножество проектных параметров «-мерного евклидова пространства Rn
состоит из всех тех векторов X = (Xj, х2, ..., хп), для которых выполняются за-
данные ограничения. Как отмечалось, в такой постановке задача оптимизации
проектных параметров представляет собой задачу математического программи-
рования.
Когда поставлена оптимизационная задача, перед конструктором возникает
проблема выбора метода, по возможности однозначно определяющего порядок
операций, приводящих к решению. В настоящее время разработано много чис-
ленных методов оптимизации. Оформленные в виде стандартных процедур и
хранящиеся в библиотеке прикладных программ вычислительного центра совре-
менных проектно-конструкторских организаций, они являются достоянием лю-
бого инженера. Однако выбор приемлемого метода и его практическая реализа-
ция все же представляют определенную проблему. В связи с этим дадим краткий
571
анализ областей применения численных методов оптимизации и укажем те из
них, которые могут найти применение при проектировании самолетов.
В зависимости от вида целевой функции и ограничений различают задачи
линейного программирования и нелинейного программирования (выпуклого
и невыпуклого).
Задача (21.11) называется задачей линейного программирования, если целе-
вая функция и ограничения являются линейными функциями параметра X.
Численные методы решения задач такого типа достаточно хорошо разработаны.
Задача решается стандартным или модифицированным симплекс-алгоритмом,
позволяющим найти оптимальное решение за конечное число итераций. Если
у (X) — квадратичная функция, а ограничения являются линейными функ-
циями, то задача (21.11) называется задачей квадратичного программирования.
Для большинства таких задач также разработаны универсальные алгоритмы,
обеспечивающие получение оптимального решения за конечное число шагов
итерационного процесса.
Разработана также методика оптимизации для других классов частных
задач нелинейного программирования, в которых целевая функция и ограни-
чивающие уравнения являются полиномами относительно неотрицательных
переменных xj, х2, ..., хп с положительными коэффициентами следующего вида:
k
/(*)= S Р/(Х),
<=1
где р{ (Х) = сг>0; Ху>0; /= 1, .... п, а показатели степени
ац, а1г> .... ain — произвольные вещественные числа.
Такие задачи, называемые задачами геометрического программирования,
часто встречаются в практике технического проектирования.
В общем случае задачи нелинейного программирования, т. е. задачи, в кото-
рых и целевая функция и ограничения представляют собой нелинейные зависи-
мости от X, не имеют единого алгоритма или даже класса алгоритмов, облада-
ющих универсальной пригодностью. Трудность решения задач нелинейного
программирования объясняется тем, что при нелинейных ограничениях допусти-
мая область изменения параметров Хдоп может не быть выпуклым множеством
или даже состоять из ряда несвязанных областей. Для выпуклой функции у (X)
и выпуклого множества Хдоп локальный минимум в то же время является и гло-
бальным. Для невыпуклой области Хдоп даже при выпуклой функции у(Х)_задача
нелинейного программирования может оказаться многоэкстремальной, что
существенно усложняет ее решение. Эти и ряд других причин приводят к тому,
что большой класс практически встречающихся при проектировании сложных
технических объектов задач нелинейной оптимизации не имеет строгого решения.
При решении задач нелинейного программирования используют ряд фундамен-
тальных подходов. Один из них заключается в сведении нелинейной задачи к ли-
нейной путем замены нелинейной целевой функции и ограничивающих уравне-
ний'последовательностью аппроксимирующих линейных функций.
Второй подход основан на обобщении метода множителей Лагранжа для
отыскания условного экстремума.
Наиболее общий подход к решению задач нелинейной оптимизации основан
на попытках преобразования задач с ограничениями к более простым задачам
без ограничений. Этой цели можно достигнуть заменой переменных либо видо-
изменением целевой функции с помощью некоторых функций ограничивающих
уравнений. Наиболее распространенным методом является метод штрафных
функций, основная идея которого состоит в сведении задачи на условный экстре-
мум к последовательности задач на безусловный экстремум, решения которых
сходятся к решению исходной задачи. Это достигается добавлением к целевой
функции специально составленной из ограничивающих условий функции штрафа
таким образом, что минимизация вновь полученной функции препятствует лю-
бому нарушению ограничений [1].
572
Рассмотрим методы отыскания экстремума действительной функции от п
Действительных переменных, не содержащих ограничений, т. е. задачи вида
miny(X). (21.12)
Владение методами решения таких задач необходимо потому, что алгоритмы
минимизации с ограничениями строятся на основе алгоритмов минимизации
без ограничений. Кроме того, как мы видели, задача оптимизации с ограниче-
ниями часто решается путем преобразования ее в задачу оптимизации без огра-
ничений.
Решение задачи (21.12) в общем виде затруднено. Можно найти только не-
которую точку X*, удовлетворяющую необходимым условиям оптимальности,
а именно
ГЗу(Л*) Зу(Х*)\
VT(X*)=(—................
Если, кроме того, мы считаем, что у (X) — выпуклая функция, т. е. для любых
двух векторов X* и X? справедливо неравенство
у [(1 - X) XI + XX?] < (1 - X) у (XI) + Ху (X2)
при О < 1, то X* действительно будет решением.
В большинстве практических задач выпуклость либо не имеет места, либо
не поддается проверке. В этом случае для решения задачи рекомендуется выбрать
несколько начальных точек поиска и затем взять наинизшую из всех конечных
точек. Такая стратегия рекомендуется для любого алгоритма оптимизации с огра-
ничениями и без них, когда условия, гарантирующие минимум, либо не выпол-
няются, либо проверяются с трудом.
Рассмотрим численные методы решения задачи (2.12), в основе которых ле-
жат процедуры систематического получения последовательности векторов, т. е.
точек Х°, X1, ..., Xk в Rn таких, что
у (Х°) > у (X1) > ... > у (X*) > ....
и оценки их эффективности при локализации точек минимума. Такие методы
получили название методов спуска или методов возможных направлений [1].
Решение задачи начинается с выбора начальной точки (Х°). При этом стре-
мятся использовать любую имеющуюся информацию о поведении функции у
с тем, чтобы выбрать Х° не слишком далеко от точки минимума. После выбора
начальной точки необходимо принять решение, в каком направлении предпола-
гается располагать следующие точки, и затем — какой величины шаг должен
быть сделан в выбранном направлении.
При любом методе спуска последовательность {Х/г} подчиняется условию
Xk+l = Хк + tkdk, k = 0, 1, . ...
где dk есть направление, а || Z/;d/e |] — величина шага. Если dk нормализовано,
|ldft[| = 1, то величина шага будет равна |4|. Изменяя процедуру выбора dk
и ik, можно варьировать методы спуска.
Механизм образования последовательности точек и его эффективность в ло-
кализации точки минимума в значительной степени зависит от минимизируемой
функции, а также от имеющейся в распоряжении проектировщика информации,
которая может быть использована для следующего прогноза точки минимума.
Методы спуска подразделяют на три группы:
I группа — методы, использующие только значения функций, их назы-
вают прямыми методами;
II группа — методы, использующие, кроме того, первые производные
функций;
573
Рнс. 21.6. Графическая интерпретация двух методов отыскания экстремума
целевой функции:
а — прямые методы; б — методы, использующие значения производной целевой функции
III группа — методы, которые требуют знания вторых производных
функций.
Часто эти методы называют методами нулевого, первого и второго порядка
соответственно.
Графическая интерпретация прямых методов и методов, использующих
значения производных, представлена на рис. 21.6.
Рассмотрим прямые методы безусловной минимизации многопараметрнче-
ских функций. Эта методы в ряде случаев являются единственными практически
применимыми. Например, если функция у (Л) имеет разрывы первой производ-
ной, то методы группы III оказываются неприемлемыми. Если функция у (X)
задана не в явном виде, а системой уравнений, относящихся к различным под-
системам некоторой системы (что и имеет место при построении моделей реальных
систем или процессов), то аналитическое или численное определение производ-
ных становится очень сложным нлн даже невозможным. Другим случаем, когда
методы группы I (особенно метод случайного поиска) могут конкурировать с ме-
тодами других групп, является случай, когда функция у (X) обладает несколь-
кими локальными экстремумами.
Среди многих методов этого типа отметим наиболее часто применяемые.
Это, прежде всего, метод конфигураций. Согласно этому методу
для выбранной начальной точки Xй путем изменения одного или нескольких
значений компонент вектора Х° обследуется ее окрестность. После нахождения
приемлемого направления производятся (в этом направлении) вычисления функ-
ции прн постепенно увеличивающемся шаге. Это продолжается до тех пор, пока
поиск продолжает приводить к точкам X с меньшими значениями функции у (X).
Если в принятом направлении не удается найти точку с меньшими значениями
функции, размер шага уменьшается. После нескольких последовательных сокра-
щений размера шага от принятой конфигурации (направления) отказываются
и предпринимается новое обследование окрестности.
Несомненным достоинством метода конфигурации по сравнению с методами
групп II и III, а также более сложными методами прямого поиска является то,
что он не требует знания целевой функции в явном виде. Это очень важно при
решении сложных экономических н технических задач, в которых система, как
правило, описывается рядом связанных между собой уравнений подсистем, из
которых составлена вся система в целом. Метод требует лишь описания динамики
подсистем н связей между ними.
Прн этом методе достаточно просто можно учесть ограничения, накладыва-
емые как на отдельные переменные, так и на область поиска, как, например,
нерегулярные границы и изолированные запрещенные области. Хотя этот метод
и не имеет строгого обоснования, он с успехом применялся для решения слож-
574
ных задач в самых различных областях. Недостатком метода конфигурации яв-
ляется то, что он может «застревать» вблизи локального минимума.
Укажем также другие методы, подобные методу конфигураций. Это м е-
тод Розенброка, согласно которому в каждом цикле производится
поиск вдоль п взаимно ортогональных направлений, а также более сложный
метод Пауэла, в котором поиск производится вдоль сопряженных, а не
ортогональных направлений, а также усовершенствован линейный поиск, кото-
рый локализует действительно минимум, а не точки с меньшими значениями
функций.
Особую группу среди прямых методов занимают методы случай-
ного поиска [27].
Применение этих методов позволяет избежать «застревания» в точках, не
являющихся оптимальными, что особенно опасно прн оптимизации сложных
функций, обладающих большим числом локальных экстремумов. В методах
случайного поиска выбор точек в области определения целевой функции осуще-
ствляется случайным образом. Вероятность достижения успеха при этом зависит
от априорного знания возможного расположения оптимальных точек. Методы
могут оказаться особенно эффективными прн решении задач оптимизации с ди-
скретными переменными (т. е. задач целочисленного программирования), а также
смешанных задач с дискретными и непрерывными переменными. Средн методов
случайного поиска наиболее известны поиск по случайным точкам и поиск по
случайным лучам.
Методы групп II н III, использующие значение первой и второй произ-
водных, вообще гоиоря, обладают большей скоростью сходимости, чем метод
группы I. Однако это не означает, что они всегда являются более эффективными
в смысле затрат машинного времени, необходимого для решения задачи. Эти
методы неэффективны, когда у (X) — сложная функция, значения первой или
второй производной которой не могут быть получены аналитически. Численное
же определение производных может потребовать больше машинного времени,
чем вычисление значений функций в необходимом для отыскания минимума числе
точек. К тому же численное приближение может оказаться слишком грубым.
К методам группы II относятся различные модификации градиентных мето-
дов, т. е. методов, в которых точка Хк+1 выбирается по отношению к Хк в напра-
влении гк, т. е.
Xk+' =Хк — trk,
где г* = vf (X*) — вектор-градиент в точке Хк\ I — некоторая положительная
скалйрная величина.
К ним же относится метод сопряженных направлений и его частный слу-
чай — метод сопряженных градиентов. Средн методов группы III назовем метод
Ньютона — Рафсона, метод Дэвндона — Флетчера — Пауэла (метод переменной
метрики) и их модификации. Методы переменной метрики и сопряженных напра-
влений обладают суперлннейной сходимостью, поэтому их применение является
предпочтительным.
Общим для всех методов группы II и III является то, что все они предусма-
тривают поиск локальных минимумов на последовательности направлений (лу-
чей). Этот поиск является составной частью общей процедуры минимизации.
Поиск локального минимума целевой функции у (X) вдоль заданного направле-
ния представляет собой задачу одномерной минимизации. Это простейшая из
задач оптимизации, которая формулируется следующим образом: минимизиро-
вать у (х) при условии а х Ь. Здесь у — действительная функция действи-
тельной переменной х; а н b — заданные границы. Разработано достаточное
число алгоритмов решения этой задачи. Назовем три из них, наиболее часто
употребляемые. Это метод золотого сечения, метод Фибоначчи и метод хорд.
Опыт показывает, что не существует универсального метода, который можно
успешно применять к широкому кругу практических задач оптимизации облика
самолета и его конструктивно-силовой схемы. В связи с этим при разработке
оптимизационных программ проектирования самолетов пошли по пути приме-
нения в таких программах комбинации различных методов, например, несколь-
575
Рис. 21.7. Связь мо-
ких прямых методов и нескольких методов
групп II и III. Это позволяет для начальной
и конечной фазы решения задачи использовать
различные методы. Характерным примером про-
грамм такого типа является разработанная
специалистами фирмы «Боинг» программа AESOP
(Automated Engineering and Scientific Opti-
misotion Program). Она включает в себя девять
различных методов поиска экстремума, объе-
диненных специальной управляющей програм-
мой, осуществляющей переход к различным
методам в зависимости от поведения целевой
функции при различных шагах итерации.
Опыт применения программ оптимизации
дели с программами оп-
тимизации
торые доработки модели
показал, что их подключение к модели пара-
метрического анализа самолета не требует
существенной доработки последней. Схема такого
подключения показана на рис. 21.7. Неко-
в основном связаны с необходимостью нормализа-
ции варьируемых параметров, ограничений и целевой функции, а также
с обеспечением свободы манипулирования проектными параметрами на входе
модели.
Для того чтобы подчеркнуть роль оптимизации в процессе проектирования
самолета, приведем один пример использования программы AESOP при опти-
мизации параметров проекта гиперзвукового пассажирского самолета. Совме-
стная оптимизация только пяти параметров самолета (р, Р, Хкр, %ф, избыточное
давление в кабине) позволила увеличить целевую функцию (число пассажиров)
на 15 % по сравнению с номинальным значением, полученным при традиционном
проектировании.
Отметим некоторые другие методы математического программирования,
которые могут найти применение при решении проектных задач на различных
этапах проектирования. Оптимизация многошаговых процессов, описываемых
конечными и дифференциальными уравнениями, осуществляется методом
динамического программирования. Он представляет собой
алгоритм определения оптимальной стратегии управления на всех шагах про-
цесса. Оптимальное решение на каждом шаге устанавливают с помощью методов
дифференциального исчисления или нелинейного программирования.
Сюда же примыкает дискретный принцип максимума,
являющийся распространением принципа максимума Понтрягина на дискрет-
ные процессы. Эти методы находят применение в некоторых задачах,
связанных с оптимизацией траектории полета, а также с расчетом систем
управления.
Рассмотренные выше методы оптимизации относятся к области исследования
детерминированных (неслучайных) функций и процессов, одиако в практике
проектирования приходится решать оптимизационные задачи, в которых необ-
ходимо учитывать случайные факторы. Такие задачи решают методами стоха-
стического программирования. Обычно при решении подоб-
ных задач рассматривают математические ожидания величин, т. е. сводят сто-
хастическую задачу к детерминированной, что не является строгим, либо при-
влекают линейное программирование для решения стохастических задач. Эти
методы применяют при анализе моделей, описывающих конфликтные
ситуации.
В заключение отметим, что в практике проектирования самолетов могут воз-
никать задачи многокритериальной оптимизации. Допустим, мы хотим получить
наилучшие значения для нескольких характеристик самолета, например, макси-
мизировать дальность полета, минимизировать потребную длину ВПП и взлет-
ную массу самолета. Как правило, эти характеристики, выбираемые в качестве
критериев, противоречивы, и оптимизация по каждому из них привела бы к раз-
ным значениям проектных параметров X. При многокритериальной задаче в об-
576
щем случае решение не является оптимальным ни для одного из частных случаев,
В то же время оно является компромиссным для векторного критерия
у(Х)= [?1(Х).....?СТ(Х)].
Такое решение называется областью компромиссов или областью решений, опти-
мальных по Парето [17]. Такая оптимальность означает, что нельзя дальше
улучшить значение одного из частных критериев, не ухудшая значение хотя бы
одного из остальных. Для определения минимума по Парето необходимо перейти
от задачи векторной оптимизации к задаче нелинейной оптимизации со специально
сконструированной скалярной целевой функцией, т. е. решить задачу сверты-
вания векторного критерия оптимальности.
Способы свертывания векторного критерия оптимальности зависят от ин-
формации о степени сравнимости частных критериев оптимальности [9],
ПРИЛОЖЕНИЯ
3
I. ТИПОВАЯ ВЕСОВАЯ СВОДКА САМОЛЕТА
Й
I. Конструкция самолета.
1. Крыло (включая герметизацию топливных отсеков). 1
2. Фюзеляж (включая герметизацию отсеков). J
3. Оперение (включая форкили и шайбы).
4. Шасси (включая створки и обтекатели). У
5. Окраска. S
II. Силовая установка. 1
1. Двигатели (основные и вспомогательные).
2. Воздушные винты с коками и креплением (для самолетов с ПД и ТВД). /
3. Средства установки двигателей:
а) гондолы двигателей с воздухозаборниками, воздушными каналами и ре-
активными соплами (если двигатель конструктивно не связан с фюзеляжем);
б) пилоны;
в) капоты;
г) моторы и узлы крепления;
д) механизмы поворота двигателей (для самолетов вертикального взлета
и посадки).
4. Системы двигателей:
а) система регулирования воздухозаборников;
б) система выхлопа;
в) система реверсирования тяги;
г) маслосистема;
д) система охлаждения;
е) система огнетушеиия;
ж) система управления двигателями;
з) система контроля работы двигателей;
и) противообледенительная система силовой установки.
5. Топливная система:
а) топливные баки с протекторами;
б) установочная арматура баков;
в) система подачи топлива (топливопроводы и насосы);
г) система наддува (инертным газом);
д) система автоматического управления расходом топлива;
е) система заправки;
ж) система аварийного слива;
з) система заправки в полете.
III. Оборудование и управление.
1. Гидросистема:
а) источники энергии;
б) арматура, баки, коммуникации;
в) рабочая жидкость;
г) крепления и эксплуатационные устройства.
578
Ч. Пневмосистема!
а) *источники энергии;
б) арматура, баллоны, коммуникации;
в) сжатый воздух;
г) детали крепления и эксплуатационные устройства.
3. Электрооборудование: ,
а) генераторы и аккумуляторы;
б) преобразователи энергии;
в) электропроводка, аппаратура, детали крепления и эксплуатационные
устройства.
4. Управление самолетом:
а) управление рулями и элеронами;
б) управление закрылками, предкрылками, интерцепторами;
в) управление другими механизмами и агрегатами (кроме силовой уста-
новки).
5. Радиооборудование:
а) аппаратура радиосвязи;
б) радионавигационное оборудование;
в) радиолокационное оборудование;
г) системы автоматического взлета и посадки.
Примечание. Радиооборудование включает коммуникации, антенны,
аппаратуру и устройства крепления.
6. Аэронавигационное оборудование:
а) аэронавигационные приборы;
б) приборы контроля работы систем и механизмов (кроме силовой уста-
новки);
в) автопилот;
г) вычислительные устройства, пульты, приборные доски.
7. Противообледенительная система.
8. Система теплозвукоизоляции кабин и приборных отсеков.
9. Оборудование жизнеобеспечения и бытовое оборудование:
а) сиденья экипажа;
б) сиденья пассажиров;
в) система кондиционирования;
г) кислородная система;
д) туалеты;
е) кухни и буфеты (для пассажирских самолетов);
ж) гардеробы и багажники (для пассажирских самолетов);
з) противопожарное оборудование кабин;
и) система катапультирования экипажа.
10. Специальное оборудование, вооружение и бронирование:
а) система автоконтроля работы оборудования и конструкции самолета;
б) пушки, пулеметы с установкой (без боезапасов);
в) детали установки и оборудования ракетного вооружения;
г) оборудование бомбардировочное, крепление устройств активной н пас-
сивной защиты;
д) бронирование экипажа и оборудования;
е) фотооборудование, системы обнаружения и т. п.;
ж) швартовочное (несъемное) оборудование.
IV. Пустой самолет.
1. Конструкция самолета.
2. Силовая установка.
3. Оборудование и управление.
579
V. Снаряжение н служебная нагрузка.
1. Экипаж:
а) летно-подъемный состав с личными вещами;
б) вспомогательный состав (бортпроводники н т. п.).
2. Водами буфете н умывальниках (пассажирские самолеты).
3. Невырабатываемое топливо.
4. Масло.
5. Расходуемые в полете технические жидкости (например, противообле-
денительная жидкость).
6. Продукты в буфете пассажирского самолета (с контейнерами).
7. Литература для пассажиров, ковры, чехлы для сидений, аптечка н т. п.
8. Спасательное оборудование (лодки, аварийные трапы н т. д.).
9. Запасные части, бортннструмент, чехлы для агрегатов самолета, сиг-
нальные ракеты.
10. Подвесные баки (без топлива), комплекты съемных подвесок для спец-
грузов, съемное санитарное оборудование.
11. Контейнеры для багажа, грузов н почты.
VI. Снаряженный самолет.
1. Пустой самолет.
2. Снаряжение.
3. Служебная нагрузка.
VII. Топливо.
1. Расходуемое топливо.
2. Навигационный запас.
3. Топливо в дополнительных и подвесных баках.
VIII. Целевая нагрузка.
1. Бомбы, торпеды, ракеты. 2. Боезапас (патроны, снаряды). 3. Спецгрузы. 4. Снаряжение для фоторазведки. 5. Десантники с вооружением и пара- шютами. 6. Боевая техника, включая вытяжные и основные парашюты, платформы. 7. Пассажиры. 1 8. Багаж, грузы, почта. J 9. Химикаты (сельскохозяйственный самолет) IX. Полная нагрузка. 1. Снаряжение и служебная нагрузка. 2. Топливо. 3. Целевая нагрузка. X. Взлетная масса самолета. 1. Масса пустого самолета. 2. Масса полной нагрузки. Истребители, бомбардировщики, раз- ведчики Военно- транспортные самолеты Пассажирские само- леты.
580
II. ХАРАКТЕРИСТИКИ АВИАЦИОННЫХ КОЛЕС
Диаметр X X ширина, мм Стояночная нагрузка, кН Максималь- ная нагруз- ка, кН Давление в шине, МПа Масса колеса, кг Работа шины, кДж
Тормозные колеса (пневматики высокого давления)
570Х 140 12,0 52,5 0,7 41,1 1,9
600X155 18,0 68,0 0,8 50,6 2,75
600Х 155 21,0 58,0 0,68 50,8 2,45
600Х 160 28,5 83,0 0,87 ... 0,92 53 3,15
660Х 160 35,0 100,0 1,25 42 4,00
660Х 200 38,400 120,0 1,1 55,4 5,50
800X200 44,5 165,0 1,05 107,4 9,30
800Х 200 55,0 184,0 1,25 104,5 .10,30
800Х 225 42,0 142,0 0,8 ... 0,9 80,8 8,00
880Х 230 51,0 160,0 1,1 128,5 9,10
930X305 72,0 190,0 0,8 121,5 14,50
950Х 250 46,0 140,0 0,9 127 8,20
1000Х 280 62,0 254,0 1,1 ... 1,2 158 16,90
1050X300 63,0 190,0 0,65 144 15,70
1100X330 105,0 340,0 1,0 225 30,00
1150X355 120,0 360,0 0,85 251,7 32,20
1160Х 290 110,0 360,0 1,45 272,5 26,00
1230X260 14,0 350,0 1,4 328,0 22,00
1300X380 240,0 640,0 2,0 395,0 49,00
1500X500 200,0 680,0 0,92 446,3 89,00
1500X500 260,0 815,0 1,1 339,8 109,00
1700Х 550 230,0 780,0 0,95 556,0 100,00
Тормозные колеса (пневматики арочного типа)
500Х 180 13,5 47,0 0,6 ... 0,7 31,0 1,50
700X 250 29,7 65,0 0,4 36,0 3,60
840X300 38,0 110,0 0,52 84,0 6,80
865X280 38,0 120,0 0,55 121,0 7,45
950X350 48,0 153,0 0,52 118,0 12,00
1100X400 79,2 244,0 0,65 200,0 18,40
1325X480 150,0 390,0 0,6 211,5 43,70
Тормозные колеса (пневматики полубаллонного типа)
500Х 150 4,80 18,0 0,25 15,1 0,60
600Х 180 13,0 45,0 0,45 23,7 2,00
800Х 260 28,0 89,0 0,45 58,5 6,70
900X300 38,3 123,0 0,47 84,5 10,55
1200X450 60,0 208,0 0,38 132,0 26,00
Нетормозные колеса (пневматики высокого давления)
600Х 155 14,9 51,5 0,6 21,5 2,20
660Х 160 22,5 61,0 0,75 29,0 2,27
660X 200 15,0 65,0 0,6 26,4 2,75
660X200 41,0 130,0 1,2 31,9 6,10
900Х 275 31,5 130,0 0,55 58,5 8,80
1100X330 95,0 310,0 0,9 119,0 22,60
Нетормозные колеса (пневматики арочного типа)
480Х 200 7,0 41,5 0,45 11,7 1,90
700Х 250 31,0 75,0 0,45 29,2 4,10
581
III. ПОЛЯРЫ САМОЛЕТОВ НЕКОТОРЫХ ТИПОВ
Ниже приведен расчет и графики типовых поляр дозвуковых и сверхзвуко-
вых самолетов (рис. II1-1...II1-6). Эти данные могут быть использованы при вы-
полнении дипломных проектов. Поляры дозвуковых самолетов даны при числе М
полета <Мкрит. Уравнение поляры при М < Мкрит имеет вид (механизация
крыла и шасси убраны)
= • О11'1)
Здесь с— коэффициент подъемной силы, соответствующий сх min. Если ср0=
= 0, то mIn =см, где сх0 соответствует Су — 0. В первом приближении
сх min =* (0,9 + 0.15М) [3Q (1 + 3,3cCp) cos % +
+ 0,0095оп/5 + (0,008Хф + 0,5Д|))5м ф/5 + схг. д5г/д/5 + 0,0002]. (Ш-2)
„ „ 0,455
Здесь Gf =------j-gg — коэффициент трения крыла в случае обычного
1 328
лентного обтекания (по Шлихтингу); С; = ——----коэффициент трения
К Re
турбу-
крыла
в случае ламинарного обтекания (по Блазиусу, если имеется, например, отсоа
пограничного слоя); число Рейнольдса
пе ________________• крейс _____________ I/ о
1,46 + 0,25- 10~4Я + 1,94- 10'8№ Г X ’ (Ш-3)
где Укрейс в м/с; Н — высота полета, м; Sr. д — площадь миделя гондол всех
двигателей.
Рио. Ш-1. Поляры легкого самолета о двумя ТВД:
S = 40 М*; X = 9; х == 0°; == 0,17; ск = 0,12; <7ф = 2 м; механизация крыла: пред-
крылки и одиощелевые закрылки Фаулера; 1 -^Су(а) без механизации; 2 прн
взлете (б3 = 20°, без предкрылков); 3 —при посадке (в3 =•= 40°, о предкрылками);
4 — Су (сх) без механизации (шасси убрано); 5 — Су (сх) при взлете (шасси выпущено);
S ~ ct, (сх) при посадке (шасси выпущено); 7 — срОтр; 8 — Суао0
582
Рис. Ill-2. Поляры легкого дозвукового самолета с двумя ТРДД:
S » 32 м2; = 9; X = 20°; с0 = 0,14; ск = 0,10; d, 2 м; механизация крыла: пред-
крылки и двухщелевые закрылки Фаулера. Пояснения к кривым— см. рис. ПЫ
Рис. Ш-3. Поляры среднего магистрального пассажирского самолета
с двумя ТРДД:
S = 100 м2, К = 8; X = 25°; с0 = 0,14; ск = 0,10; </ф = 3,4 м; механизация крыла как
на рис. Ш-2, Пояснения к кривым — см. рис, 1П-1
19*
583
Рис. Ill-4. Поляры дозвукового аэробуса с четырьмя ТРДД:
S = 350 м2; К == 7,5; % == 30°; с0 = 0,14; ск = 0,10; d$ — 6 м; механизация крыла}
предкрылки и трехщелевые закрылки Фаулера. Пояснения к кривым — см. рис. Ш-1
Рис. III-5. Поляры сверхзвукового маневренного самолета (с учетом потерь
на балансировку):
Исходный самолет: ZJo = O,7; ро=5ОО даН/м2; х=40°; Х=3; гср = 4 %; mcV = = 0,04
Рис. III-6. Зависимость по числу М полета для сверхзвукового мане-
вренного самолета
584
В формуле (Ш-2) сср — средняя (эквивалентная) относительная толщина
крыла (по полету),
//2
2 f _ , On -j- ёк
J cdz~---------2—• (HI-4)
“ф/2
Коэффициент аэродинамического сопротивления гондол двигателей, входя-
щий в (Ш-2), зависит от степени двухконтурности турбореактивных двигателей
(точнее — от формы гондол двигателей):
т........................... О 2 4 6
схг.д .................... 0,1 0,1 0,085 0,065
Эффективное удлинение крыла в формуле (Ш-1) можно найти по следующей
формуле:
X,
Хэф = 1 + 1,53Храя (М - 0,4) + (0,018 + 0,152Храя) X ’ (111 ’5)
где X — геометрическое удлинение (X > 5); Храд — угол стреловидности крыла
по 1/4 хорд, радиан; М — число М полета.
При построении линейной зоны графика су (а) (для X > 3; без учета влияния
экрана) можно воспользоваться производной
1 2 \-1
- <ш-6)
где Х — стреловидность по 1/4 хорд, градус.
Типовые поляры сверхзвукового маневренного самолета (см. гл. 10) даны
на рис. Ш-5. Для пересчета поляры на различные значения тяговооруженно-
сти (определяющей мидель фюзеляжа) и нагрузки на 1 м2 крыла при взлете
(определяющей площадь крыла) можно воспользоваться следующей формулой:
с“° «0,106 (
с”сх — см. рис. Ш-5; c“qX — см. рис. Ш-6.
IV. ХАРАКТЕРИСТИКИ ТУРБОРЕАКТИВНЫХ
АВИАЦИОННЫХ ДВИГАТЕЛЕЙ
Предлагаемые ниже характеристики двигателей (табл. IV-1, IV-2
и рис. IV-1...IV-5) предназначены для расчетов в процессе предварительного
проектирования самолетов. В табл. IV-1 приводятся основные характеристики
ТРДФ, ТРДД и ТРДДФ с различной величиной тяги. Для взлетного режима
даются значения максимальной тяги, соответствующего ей удельного расхода
топлива, степени двухконтурности, степени сжатия в компрессоре, темпера-
туры газа перед турбиной и секундного расхода воздуха. Кроме того, дается
значение удельного расхода топлива в крейсерском полете, длина двигателя,
максимальный диаметр, масса и удельный вес. Указывается самолет, на кото-
ром установлен данный двигатель.
р* Высотно-скоростные характеристики. Рекомендуемые зависимости (см.
рис. IV-1...IV-5), не являясь характеристиками каких-либо конкретных двига-
телей, с достаточной степенью точности отражают влияние высоты и скорости,
полета на тягу и удельный расход топлива современных авиационных двигате-
лей (на графиках приведены относительные значения величины Р и ср}.
19 С. М. Егер и др.
585
Рис. IV-1. Высотно-скоростные характеристики ТРДД (m = 0,5 ... 1,5),
рассчитанного на дозвуковые скорости полета
Рис. IV-2. Падение тяги ТРДД и увеличение удельного расхода топлива
по скорости при Н = 0
Рис. IV-3. Высотно-скоростные характеристики ТРДД (т = 4...6), рас-
считанного на дозвуковые скорости полета
586
19*
587
т6пц / mlo
Рнс. IV-5. Зависимость приведенного расхода воздуха для различных ТРД
и ТРДД от температуры полного торможения:
тво — стартовый секундный расход воздуха (см. табл. IV-1)
Как было показано в гл. 16, характеристики ГТД имеют определенные от-
личительные особенности, обусловленные типом двигателя, максимальной ско-
ростью полета н т. д., но прн выполнении расчетов к дипломному проекту этими
особенностями в высотно-скоростных характеристиках можно пренебречь. По-
этому приведенные выше характеристики сверхзвукового ГТД (рассчитанного
на М < 3,3) можно в данном случае рассматривать как характеристики ТРД
(и ТРДФ), а также ТРДДФ, предназначенные для современных истребителей,
многоцелевых самолетов и самолетов с крейсерской скоростью, соответствующей
числу М = 2,0...3,0. Высотно-скоростные характеристики дозвуковых ТРДД
приводятся отдельно. Высотно-скоростные характеристики подъемных двига-
телей для СВВП и СУВП можно отождествить с характеристиками дозвукового
ТРДД.
На графиках даны относительные значения тягн и удельного расхода то-
плива (отнесенные к стартовым значениям указанных величин), следовательно,
зависимости Р (М, Н) н ср (М, Н) можно получить для любой выбранной вели-
чины Ро и сро.
Прн Н > 11 км, неизменном режиме работы двигателя и М = const удель-
ный расход топлива остается постоянным, а тяга двигателя изменяется пропор-
ционально плотности или давлению атмосферного воздуха, поэтому она опре-
деляется простым пересчетом. Например, для какого-либо значения числа М
Р13 = Р11Р1з/Рц ИЛН ₽20 = Р1Ло/Р13’ СР11 = СР1з = СР1Ъ = СР20-
Переход от режима набора высоты к режиму крейсерского полета (значения
СР «рейс см. в табл. IV-1) осуществляется дросселированием двигателя (снижением
частоты вращения ротора). В крейсерском полете число оборотов ротора п =
= (0,8...0,9) Яшах.
Для сверхзвукового’крейсерского полета на больших высотах применяется
обычно режим частичного форсажа (как правило, малый форсаж). Частота вра-
щения ротора прн этом также несколько снижается.
Удельный расход криогенного топлива (жидкий водород) определяется про-
стым пересчетом о удельного расхода углеродного топлива (керосин):
СР вод ср кер/2’5'
588
Т а б л и Ц а IV-1 Основные характеристики современных ТРДФ, ТРДД и ТРДДФ ЭИИЭЬЕ ИСВН С-. и. С-1 та С-1 г Я
Самолет «Фоксджет» «Супер- Мажистер» «Корвет», «Ситейшн»-2 Як-40 «Фалькон»-20 | «Ягуар» VFW-614 «Гольф- стрим»-П Локхид S-3A
а4/Л 0,2 0,23 0,22 0,19 1 6Г0 i 0,21 0,19 о
JM <м 143 253 290 1 1 430 I 1 710 1 663 | 1 661
И 0,3 S9‘0 0,69 0,82 0,85 СО о 1 1,09 1,33
и ,aV7 QO о 1,98 1,6 66'1 2,34 2,8 СО of 2,54
(ь-нвЮ/ля •оцэая <7Э 0,82 0,67 1 1 0,73 0,84 1 ' 0,72 0,96 о СО со о
1 Взлетный режим Э/JJi '°аш сч СО 00 ю со О ю О) о 1 153 i
~Я 'di * 1280 1244 1 1289 : 1143 । 1448 1427 1355 1498
Н1Г * сч О? । 10,1 8,0 । по сч 16,1 OJ
ш 7,4 оГ 2,0 2,8 0,8 со г‘9
0,65 0,39 i 0,56 0,56 СО о 1,52* 0,74 0,46 0,36
HBtf 1 ' 260 620 1 155 1 500 | 1 1 2 280 3 350* 2 340 3 570 4 210 1
Фирма, страна, марка Уильямс Ри- сёрч W R19-3 Турбомека «Астафан» IIG Пратт-Уитни 1 JT15D-4 СССР АИ-25 Гаррет Эри- сёрч ATF3-6 Роллс-Ройс «Адур» RB-172 i । Роллс-Ройс М45Н-01 I Джен ер ал - Электрик TF-34
Класс тяги, ДаН S V/ 1 150 ... 2 300 2 300 ... 4 600
589
СЛ о & Продолжение табл. IV-1
Класс тягн, ДаН Фирма, страна, марка Взлетный режим СР крейс кг/(даН-ч) £ да да м да Ё* да Самолет Назначение
Ро, даН Ср , кг/(даН-ч) £ * * к X "!в„- кг/с
4 600 ... 9 200 Роллс-Ройс, «Спей» 25 5 250 0,65 0,7 21 1330 94 0,82 2,78 0,94 1170 0,22 В АС-1 И г
СССР Д-30 6 800 0,62 1 18,4 1120 140 0,77 3,98 1,05 1550 0,23 Ту-134А г
Роллс-Ройс R В-199-02 6 850* 3 800 2,17* 0,61 1,2 23,5 1550 71 0,78 3,2 0,87 860 0,13 Панавиа 200 в3
Пратт-Унтни JT8D-209 8 390 0,56 1,66 18,5 1290 218 0,73 4,41 1,25 1860 0,22 Боинг 737 DC-9 г
9200 ... 18400 Дженерал- Электрнк CFM.56 10 890 0,36 6,1 24,9 1560 376 0,65 3,43 1,74 2090 0,19 Боинг 707-500 г
Пратт-Уитни F-100 11 350* 6 900 2,25* 0,68 0,7 24 1590 102 0,82 4,85 1,18 1371 0,12 F-15; F-16 В 4
СССР Д-30КУ 11 500 0,49 2,4 18,2 1390 340 0,7 4,6 1,46 2400 0,21 Ил-62М Ту-154М г
Продолжение табл. IV. 1
Класс тягн, ДаН Фирма, страна, марка Взлетный режим £ да £ СР крейс кг/(даН-ч) S да X •q S да X Q JH да X Самолет Назначение |
Ро. даН £ cd - 5 £ * fed К » U
Пратт-Уитнн J58 14 740* 10 430 1,9* 0,75 0 12 1200 140 1,5 4,57 1,27 2950 0,2 SR-71 в5
9 200 ... 18 400 Дженерал- Электрик CF6-32 16 700 0,37 4,9 23,3 1535 484 0,66 3,73 1,93 3110 0,19 Боинг 757 г
Роллс-Ройс «Олимп» 593 17 260* 15 940 1,75* 0,7 0 14,8 1410 204 1,19 4,75 1,21 3390 0,2 «Конкорд» г6
— Пратт-Уитни JT9D-1 19 000 0,35 5,1 24,5 1510 542 0,64 3,55 2,1 3550 0,19 DC-10; L-1011 г
18 400... 36500 Роллс-Ройс RB-211-524B 22 700 0,39 4,4 28 1550 645 0,65 3,63 2,17 • 3950 0,17 Боинг 747; DC-10-30 г
Дженерал- Электрик CF6-80C 26 300 0,34 4,7 26 1595 754 0,59 4,2 2,5 4600 0,18 Боинг 747-200В г
П р и м е ч сл 1 Мшах = 1>7> яннЯ т_ степень двухконтурности ТРДД; Г - гражданский; В-военный; * М^х = 0,85; 3 Мшах = 2,1; 4 Мшах = 2,5 (на самолете F-15); Мшах - 3,3, Мшах — форсажный режим; = 2,3.
Основные характеристики ТРД и ТРДД для СВВП
сч
>
нн
CQ
Я
S
ч
ХО
CQ
Н
Страна, фирма, модель Р, даН Дв’ V \ твр’ т я* ^дв^-^дв* Летательный аппарат кг Дв кг/(даН-ч) кг/с мм Подъемно-маршевые ТРДД
592
V. ОБЩИЕ ВИДЫ И ХАРАКТЕРИСТИКИ
САМОЛЕТОВ
Ниже приведены основные характеристики и общие виды (в произвольном
масштабе) военных н гражданских самолетов (рис, V-1...V-29; табл. V-1...V-4).
Эти данные могут быть полезны прн дипломном проектировании.
Рис. V-1. Истребитель «Мираж» 2000 (Франция)
593
Рис. V-4. Многоцелевой истребитель
SAAB-37 «Вигген» (Швеция)
Рис. V-5. Многоцелевой палубный ис-
требитель Грумман F-14 (США)
S94
Рис. V-9. Многоцелевой
самолет Дженерал-Дайнемнкс F-ША (США)
Рис. V-10. Вертикально-взлетающий истребитель Хоукер-Свддли «Ха-
рнер» Мк. 4 (Англия)
596
Рис. V-11. Штурмовик Фэрчайлд-Рипаблнк А-10А (США)
Рис. V-12. Стратегический бомбардировщик Рокуэлл В-1 (США)
597
Рис. V-13. Военно-транспортный самолет Локхид С-5А (США)
Рис. V-14. Транспортный и грузовой самолет Ил-76Т (СССР)
598
Рнс. V-15. Транспортный и грузовой самолет Ан-72 (СССР)
Рис. V-16. Экспериментальный военно-транспортный самолет Макдон
нелл-Дуглас YC-15 (США)
599
Рис. V-18. Пассажир-
ский самолет для
авиалиний большой
протяженности Ил-62
(СССР)
Рис. V-I9. Пассажир-
ский самолет для
авиалиний средней
протяженности Ту-154
(СССР)
600
601
Рис. V-23. Широкофюзе-
ляжный самолет боль-
шой дальности Боинг 747
(США)
Рис. V-24. Сверхзвуковой пассажирский самолет «Конкорд» (Франция—
Англия)
Рис. V-25. Легкий' пассажирский самолет с ТРДД Цессна «Сайтейшн» III
(США)
603
Рис. V-26. Легкий пассажирский самолет с ТВД Ан-28 (СССР)
Рис. V-27. Легкий пассажирский самолет с ТВД Дорнье LTA (ФРГ)
604
Рис. V-28. Экспериментальный и спортивный самолет МАИ «Квант» (СССР)
Рис. V-29. Сельскохозяйственный самолет PZL-106 «Крук» (ПНР)
605
909
Истребители и многоцелевые самолеты
Таблица V-1
Параметры и характеристики «Мираж» 2000 (Франция) «Супер Мираж» 4000 (Франция) «Ягуар» (Англия — Франция) «Виггеи» (Швеция) F-14A (США)
i •? - 4
Взлетная масса, кг (9 ... 15) 103 (25 ... 28) 103 14 500 16 000 24 900
Тяга двигателей на старте без форсажа (с форсажем), даН (9000) (18 000) 5 100 (7 650) 7 000 (12 000) (19 000)
Число двигателей 1 2 2 1 2
Тяговооруженность без форсажа (с фор- сажем) (1,0 ... 0,6) (0,64 ... 0,72) 0,352 (0,528) 0,44 (0,75) (0,764)
Площадь крыла, м2 41 73 24 35 58,7
Нагрузка на крыло при взлете, кг/м2 220 ... 366 342 ... 383 604 457 424,7
Размах крыла, м 9 12 8,69 10,61 11,6 ... 19,5
Длина самолета, м 15,33 18,7 16,83 16,31 18,9
Угол стреловидности крыла по передней кромке, градус 61 61 45 42 ... 58 20 ... 68
Масса пустого самолета, кг (%) 13 000 (46,5 ... 52) 7 000 (48,3) 16 300 (65,4)
Масса топлива во внутренних баках, кг (%) 7 460 (30)
Число М полета на Н == 0; на Н 2а 11 км —1,0 — 1,0 1,1 1,1 1,0
2,2 2,2 1,5 2,0 2,35
Дальность полета без подвесных баков, км 700 1 100
Дальность перегоночная, км 1500 4 210
Статический потолок, км Разбег, м 20 —20 580 400 19
Пробег, м Вооружение (П — пушки; УРС— управ- П-2Х30; 470 500 П-1 (6)Х20
ляемые реактивные снаряды; Б — бомбы) УРС; Б УРС; Б УРС (6) Б
Продолжение табл. V-1
Параметры и характеристики F-15 (США) F-16 (США) SR-71 (США) F-111A (США) «Хариер» МК4 (Англия)
Взлетная масса, кг 18 195 10 250 77 000 31 800 <11 340
Тяга двигателей на старте без форсажа (с форсажем), даН 13 800 (22 700) 6 900 (11 350) 20860 (29 480) (18 000) 9 560
Число двигателей 2 1 2 2 1
Тяговооруженность без форсажа (с фор- сажем) 0,76 (1,24) 0,67 (1,11) 0,27(0,38) (0,565) 2^0,845
Площадь крыла, м2 56,5 28 167 48,8 ... 58,74 18,68
Нагрузка на крыло при взлете, даН/м2 322 370 460 542 ... 652 С608
Размах крыла, м 13,1 9,45 16,9 9,74 ... 19,2 7,7
Длина самолета, м 19,5 14,18 32,7 22,4 17
Угол стреловидности крыла по передней кромке, градус 45 40 60 16 ... 72,5
Масса пустого самолета, кг (%) 12 250 (67,3) 6 377 (52) 27 200 (35) 17 870 (56,2) 5,9 (52,1)
Масса топлива во внутренних баках, кг (%) 5 200 (28,6) 40 000 (52)
Число М полета на Н ~ 0; на Н 5а 11 км 1,2 1,2 1,1 1,3
2,5 2,0 3 2,3
Дальность полета без подвесных баков, км 1 250 1 100 7000 3 200
Дальность перегоночная, км 6 300 6 400 5 560
Статический потолок, км 21 30 — 18 15,25
Разбег, м 270 535 1645 500 —0
Пробег, м 760 810 1100 600 0
Вооружение (П — пушки; УРС — управ- ляемые реактивные снаряды; Б — бомбы) П-1 (6)Х20 УРС (6) П-1Х20 УРС (2) П; УРС; Б
Т а б л и ц a V-3
Пассажирские самолеты средней и большой дальности полета
Параметры и характеристики Ил-86 (СССР) ИЛ-62М (СССР) Ту-154 (СССР) Як-42 (СССР) L-1011 «Тристар» (США) Боинг-737-200 (США) Боинг 747-200В (США) «Конкорд» (Франция — Англия)
Взлетная масса, т 206 165 90 52 186 52,39 372 181,5
Число пассажирских мест 350 198 164 120 345 130 550 144
Число реактивных двига- телей 4 4 3 3 3 2 4 4
Тяга двигателей на стар- те, даН 52 000 46 000 28 500 19 500 53 800 14 060 105 000 69 040 с форсажем
Тяговооруженность 0,252 0,279 0,317 0,375 0,290 0,268 0,282 0,381
Площадь крыла, м2 361 282 180 150 321 91,05 511 358,25
Нагрузка на крыло при взлете, даН/м2 570 585 500 347 575 575,6 700 506
Размах крыла, м 48,06 43,3 37,55 34,2 47,0 28,35 59,8 25,6
Длина самолета, м 59,54 47,9 36,38 53,34 30,48 70,5 61,7
Удлинение крыла 6,4 6,63 7,0 7,8 6,88 8,9 7,0 1,7
Угол стреловидности кры- ла по 1/4 хорд, градус 35 35 35 20 35 25 37,5 Переменная
Диаметр фюзеляжа, м 6,08 3,93 (средн.) 3,8 3,94 5,97 3,8 —6,5 ~3
О Продолжение табл. V-3
Параметры и характеристики Ил-86 (СССР) ИЛ-62М (СССР) Ту-154 (СССР) Як-42 (СССР) L-1011 «Тристар» (США) Боииг-737-200 (США) Боинг 747-200В (США) «Кои корд» (Фраи ция — Англия)
Масса пустого самолета, т (%) 95 (51,2) 29,94 (57,2) 167 (45,7)* 79,3 (43,8) *
Коммерческая нагрузка, т (%) 42 (20,4) 23 (13,9) 18 (20,0) 14,5 (27,9) 40 (21,5) 13 (24,9) 75 (20,3) 12,7 (7)
Крейсерская скорость по- лета, км/ч 950 900 900 820 • 960 890 950 М = 2,02
Высота полета, км 9 ... 10 10 ... 12 10 ... 12 9 ... 11 9 ... 12 9 ... 11 10 ... 13 15,3 ... 18,$
Расчетная дальность поле- та с максимальной коммер- ческой нагрузкой, км 3 600 8 000 2 450 1 000 3 800 9 000 6 000
Скорость захода на посад- ку, км/ч 240 240 230 260 280
Разбег, м
Пробег, м
Длина ВПП, м 2 600 3 000 3 400 3 500
* Масса снаряженного самолета.
Таблица V-4
Легкие гражданские самолеты
Параметры и характеристики «Сайтейши» III (США) Аи-28 (СССР) Дорнье LTA (ФРГ) «Квант» (СССР) PZL-106 «Крук» (ПНР)
Взлетная масса, кг 7780 5800 6500 920 3000
Число и тип двигателей 2 ДТРД 2 ТВД 2 ТВД 1 пд 1 ПД
Взлетная тяга (даН) или мощность, кВт (л. с.) 3250 1385 (1880) 1304 (1770) 265 (360) 442 (600)
Стартовая тяго- (энерго) вооруженность 0,418 (0,33) 0,2 (0,272) 0,288 (0,392) 0,1475 (0,20)
Число членов экипажа и пассажиров 2/15 2/15 ... 19 2 ... 3/24 1 1
Площадь крыла, м2 29,0 39,8 33,93 8,55 33,4
Нагрузка на крыло при взлете, кг/м2 268 145,7 192 107,8 89,8
Размах крыла, м 16,26 22,06 17,81 7,5 15
Длина самолета, м 16,9 12,98 16,6 5,7 8,9
Угол стреловидности крыла по 1/4 хорд, градус 22 0 0 0 5
Удлинение крыла 9,14 12,23 9,34 6,58 6,74
Масса пустого самолета, кг (%) 4282 (55) 3500 (60) 3544 (54,6) 676 (73,4) 1600 (53,3)
Скорость полета, км/ч 870 350 410 390 120 ... 160
Высота полета, км/ч 10 ... 13 <3 8 ... 10 <^з
Дальность полета с наибольшей целевой нагрузкой, км 4440 1300 1500 350 650
Разбег, м 190 675 150
Пробег, м 180 150
Посадочная скорость, км/ч 172 115 ~100 100
СПИСОК ЛИТЕРАТУРЫ
1. Аоки М. Введение в методы оптимизации. М.: Наука, 1977. 344 с.
2. Аржаников Н. С., Садекова Г. С. Аэродинамика больших скоростей.
М.: Высшая школа, 1965. 559 с.
3. Астахов М. Ф. и др. Справочная книга по расчету самолетов на проч-
ность. М.: Оборонгиз, 1955. 710 с.
4. Бадягии А. А., Мухамедов Ф. А. Проектирование легких самолетов.
М.: Машиностроение, 1978. 208 с.
5. Бадягии А. А., Овруцкий Е. А. Проектирование пассажирских самоле-
тов с учетом экономики эксплуатации. М.: Машиностроение, 1964. 295 с.
6. Бирюк В. И., Липин Е. К., Фролов В. М. Методы проектирования кон-
струкции самолетов. М.: Машиностроение, 1977. 227 с.
7. Бисплиигхофф Р. Л., Эшли X., Халфмэи Р. Л. Аэроупругость. М.: ИЛ,
1958. 799 с.
8. Болховитинов В. Ф. Пути развития летательных аппаратов. М.: Оборои-
гиз, 1962. 130 с.
9. Гермейер Ю. Б. Введение в теорию исследования операций. М.: Наука,
1971. 383 с.
10. Гоииодский В. И., Скляиский Ф. И., Шумилов И. С. Привод рулевых
поверхностей самолетов. М.: Машиностроение, 1974. 315 с.
11. Горощеико Б. Т., Дьяченко А. А., Фадеев Н. Н. Эскизное проектиро-
вание самолета. М.: Машиностроение, 1970. 327 с.
12. Диксон Дж. Проектирование систем. М.: Мир, 1969 . 440 с.
13. Егер С. М. Проектирование пассажирских реактивных самолетов. М.:
Машиностроение, 1964. 417 с.
14. Кан С. Н., Свердлов А. И. Расчет самолета на прочность. М.: Оборон-
гиз, 1966. 519 с.
15. Киселев В. А. Проектировочный расчет веса и прочности фюзеляжей
пассажирских самолетов. —Труды ЦАГИ, вып. 1263, М.: 1970. 88 с.
16. Киселев В. А. Вопросы компоновки пассажирских самолетов. М.: Изд.
МАИ, 1977. 74 с.
17. Ланге О. Д. Оптимальные решения. М.: Прогресс, 1967. 286 с.
18. Лебедев А. А., Чернобровкин Л. С. Динамика полета. М.: Оборонгиз,
1962. 548 с.
19. Лисейцев Н. К., Самойлович О. С. Вопросы машинного проектирова-
ния и конструирования самолетов. М.: Изд. МАИ, 1977. 84 с.
20. Лисейцев Н. К- Подсистема автоматизированного формирования облика
дозвукового транспортного самолета. М.: Изд. МАИ, 1980. 54 с.
21. Мартынов А. К. Экспериментальная аэродинамика. М.: Оборонгиз,
1958. 345 с.
22. Основы построения систем автоматизированного проектирования/Под
ред. И. Т. Белякова и Л. С. Чернобровкина. М.: МАИ, 1979. 66 с.
23. Остославский И. В., Стражева И. В. Динамика полета. Траектории
летательных аппаратов. М.: Машиностроение, 1969. 425 с.
24. Остославский И. В., Стражева И. В. Динамика полета. Устойчиво сть
и управляемость летательных аппаратов. М.: Машиностроение, 1965. 463 с.
612
25. Павленко В. Ф. Самолеты вертикального взлета и посадки. М.: Воен-
издат, 1966. 344 с.
26. Пашковский И. М. Устойчивость и управляемость самолета. М.: Ма-
шиностроение, 1975. 323 с.
27. Расстригии Л. А. Статистические методы поиска. М.: Наука, 1968. 376 с.
28. Скляиский Ф. И. Управление сверхзвукового самолета. М.: Машино-
строение, 1964. 382 с.
29. Скрипиичеико С. Ю. Оптимизация режимов полета самолета. М.: Ма-
шиностроение, 1975. 189 с.
30. Теория и практика проектирования пассажирских самолетов. М.-. Наука,
1976. 439 с.
31. Фомин Н. А. Проектирование самолетов. М.: Оборонгиз, 1961. 360 с.
32. Фролов В. С. Человек в системе управления самолетом. М.: Воениздат,
1970. 126 с.
33. Шейнин В. М., Козловский В. И. Весовое проектирование и эффектив-
ность пассажирских самолетов. Т. 1 и Т. 2. М.: Машиностроение, 1977. 339 с.
и 204 с.
34. Шейнин В. М. Весовая и транспортная эффективность пассажирских
самолетов. М.: Оборонгиз, 1962. 357 с.
35. Шэнли Ф. Р. Анализ веса и прочности самолетных конструкций. М.:
Оборонгиз, 1957. 406 с.
ОГЛАВЛЕНИЕ
Стр.
Основные обозначения, сокращения и индексы............................ 3
Предисловие .......................................................... 6
Введение. Развитие самолетостроения в СССР............................ 8
Часть первая. Общее проектирование самолета
Глава 1. Процесс создания самолета.................................... 12
1.1. Самолет как объект проектирования........................... 12
1.2. Определение н задачи проектирования. Этапы проектирования 13
1.3. Некоторые особенности проектирования современных самолетов 18
Глава 2. Теоретические и методологические основы проектирования само-
летов ............................................................... 21
2.1. Проектирование — творческий процесс......................... 22
2.2. Эволюция методов проектирования самолетов ...".............. 26
2.3. Методология системного проектирования....................... 29
2.4. Типы проектных моделей самолета............................. 35
Глава 3. Критерии и методы оценки проектных и конструкторских ре-
шений ............................................................... 40
3.1. Критерии оценки проектных и конструкторских решений . ... 40
3.2. Метод градиентов взлетной массы. Весовая и экономическая
оценка проектных н конструкторских решений................... 47
Глава 4. Исходные данные для проектирования. Выбор основных пара-
метров и связь этих параметров с летными и техническими ха-
рактеристиками самолета............................................. 72
4.1. Исходные данные для проектирования......................... 72
4.2. Ограничения, накладываемые «Нормами летной годности гра-
жданских самолетов СССР» (НЛГС-2)................................ 74
4.3. Основные параметры самолета и их связь с летными характери-
стиками ......................................................... 82
4.4. Выбор расчетных условий..................................... 86
4.5. Выбор основных параметров самолета.......................... 87
Глава 5. Анализ и выбор схемы самолета и типа силовой установки ... 94
5.1. Выбор общей схемы самолета.................................. 94
5.2. Выбор аэродинамической схемы самолета...................... 96
5.3. Выбор схемы самолета по отдельным ее признакам............. 110
5.4. Выбор типа и числа двигателей для проектируемого самолета 112
5.5. Подход к выбору схемы самолета............................. 124
Глава 6. Расчет массы самолета...................................... 127
6.1. Классификация массы самолета............................... 127
6.2. Расчет массы самолета в первом приближении................. 129
6.3. Расчет массы самолета во втором приближении................ 130
6.4. О точности весовых расчетов................................ 153
6.5. Пересчет весовых характеристик самолета.................... 154
6.6. О весовом проектировании и контроле массы самолета....... 156
Глава 7. Оптимизация проектных параметров самолета.................. 158
7.1. Оптимизация проекта самолета на этапе разработки техниче-
ского предложения. Общие методические положения................. 158
7.2. Анализ влияния изменений проектных параметров при их опти-
мизации на летно-технические характеристики самолета .... 161
7.3. Графоаналитический метод оптимизации проектных параметров 170
Глава 8. Компоновка и центровка самолета............................ 182
8.1. Аэродинамическая компоновка................................ 182
8.2. Объемно-весовая компоновка................................. 203
614
8.3. Конструктивно-силовая компоновка.......................... 219
8.4. Увязка формы и построение внешних обводов самолета......... 222
8.5. Оформление результатов компоновки.......................... 233
Глава 9. Особенности проектирования пассажирских н грузовых само-
летов ............................................................... 236
9.1. Основные тенденции развития пассажирских и грузовых само-
летов .......................................................... 236
9.2. Компоновка пассажирской кабины............................. 237
9.3. Аварийно-спасательные мероприятия........................... 243
9.4. Размещение бортпроводников. Компоновка бытовых и багаж-
ных помещений................................................... 246
9.5. Особенности аэродинамической компоновки пассажирских са-
молетов. Выбор энерговооруженности.............................. 249
9.6. Особенности проектирования сверхзвуковых пассажирских са-
молетов (СПС)................................................... 251
9.7. Особенности проектирования грузовых самолетов.............. 255
Глава 10. Особенности проектирования маневренных самолетов .... 257
10.1. Концепции современных истребителей......................... 257
10.2. Особенности аэродинамической компоновки самолета .... 261
10.3. Повышение боевой маневренности рамолета . ................. 269
10.4. Некоторые особенности перспективных истребителей следу-
ющего поколения................................................ 276
Глава 11. Особенности проектирования самолетов короткого и верти-
кального взлета и посадки................................ 280
11.1. Вводные замечания........................................ 280
11.2. Самолеты короткого взлета и посадки....................... 282
11.3. Самолеты вертикального взлета и посадки................... 296
Глава 12. Особенности проектирования воздушно-космических и гнпер-
звуковых самолетов....................................... 324
12.1. Задачи, решаемые воздушно-космическими н гиперзвуковыми
самолетами .................................................... 324
12.2. Особенности полета ВКС и гиперзвукового самолета....... 325
12.3. Анализ возможных схем и определение основных параметров
МВКА........................................................... 341
12.4. Особенности аэродинамической схемы ВКС и гнперзвуковых
самолетов ............................................. 355
12.5. Особенности конструкции ВКС и гнперзвуковых самолетов . . 359
Часть вторая. Проектирование частей самолета
Глава 13. Общие основы проектирования частей самолета................ 362
13.1. Выбор критерия оптимизации при проектировании частей сд-
молета..................................................... 362
13.2. Основные задачи проектирования частей самолета............ 362
Глава 14. Проектирование крыла самолета.............................. 364
14.1. Основные геометрические параметры крыла................... 364
14.2. Аэродинамические характеристики крыльев умеренных н боль-
ших 'удлинений (X 3)............................ 367
14.3. Аэродинамические характеристики крыльев малого удлинения
14.4. Характеристики аэроупругостн крыла....................... 384
14.5. Крылья изменяемой геометрии............................. 391
14.6. Механизация крыла и элероны............................ 394
615
Глава 15. Проектирование фюзеляжа................................... 403
15.1. Место проектирования фюзеляжа в общем проектировании са-
молета ......................................................... 403
15.2. Параметры фюзеляжа, их влияние на его характеристики . . . 405
15.3. Форма поперечного сечення фюзеляжа........................ 409
15.4. Особенности формы носовой и хвостовой частей фюзеляжа . . 410
15.5. Выбор параметров фюзеляжа многоместных пассажирских са-
молетов ........................................................ 413
Глава 16. Проектирование силовой установки самолета................. 419
16.1. Силовая установка как система самолета.................... 419
16.2. Воздухозаборники современных самолетов.................... 423
16.3. Система выхлопа.......................................... 439
16.4. Установка двигателей на современных самолетах............. 443
16.5. Шум реактивных самолетов.................................. 447
16.6. Топливная система....................•.................... 454
Глава 17. Проектирование оперения................................... 459
17.1. Основные понятия. Задачи проектирования оперения........ 459
17.2. Выбор формы оперения...................................... 462
17.3. Выбор формы и параметров органов управления............... 467
17.4. Проектирование конструктивно-силовой схемы и схемы сты-
ковки оперения.................................................. 473
Глава 18. Проектирование систем управления самолетом............... 484
18.1. Контур управления. Его основные элементы и их характери-
стики .......................................................... 485
18.2. Основные особенности характеристик устойчивости и управля-
емости современных скоростных самолетов и методы их улуч-
шения .......................................................... 493
18.3. Состав системы управления и задачи ее проектирования . . . 508
Глава 19. Проектирование шасси...................................... 517
19.1. Выбор схемы шасси......................................... 517
19.2. Выбор основных геометрических параметров шасси............ 524
19.3. Выбор числа опор и колес................................. 531
19.4. Силовые кинематические схемы убирающегося шассн......... 536
19.5 Конструктивные решения, уменьшающие объемы шасси в убран-
ном положении................................................... 542
Часть третья. Основы автоматизации проектирования
Глава 20. Принципы построения и структура систем автоматизирован-
ного проектирования самолетов....................................... 546
20.1. Назначение и принципы построения САПР..................... 546
20.2. Структура и состав средств САПР........................... 548
Глава 21. Методы автоматизированного проектирования самолетов . . . 552
21.1. Обобщенная математическая постановка задачи проектирова-
ния ............................................................ 553
21.2. Описание алгоритма формирования облика самолета......... 559
21.3. Структура и принципы разработки прикладного программного
обеспечения .................................................... 564
21.4. Методы решения задач оптимизации.......................... 571
Приложения ......................................................... 578
Список литературы................................................... 612